/














































































































































































































































































































Text
P* eANNÉE/^?s
******
e
20l4
COURS
EXERCICES CORRIGÉS
CHRISTOPHE ANTONINI
< de boeck
supérieur
RLGèGRG
Collection Prépas scientifiques
Dirigée par Olivier Rodot
N. BASBOIS et P. ABBRUGIATI, Algèbre. lre année
C. ANTONINI, Algèbre. 2e année
G. COSTANTINI, Analyse. lre année
0. RODOT, Analyse. 2e année
K. DAO DUC, D. DELAUNAY, Probabilités. lre et 2e année.
Chez le même éditeur
C. JAN, Mathématiques. Une approche imagée et synthétique. 2e éd
p- p*2eANNÉEfe
**£?*
e
e 2014
LGeBRG
COURS
EXERCICES CORRIGÉS
CHRISTOPHE ANTONINI
£^ de boeck
supérieur
Pour toute information sur notre fonds et les nouveautés dans votre domaine de
spécialisation, consultez notre site web: www.deboecksuperieur.com
© De Boeck Supérieur s.a., 2015 1re édition
Fond Jean Pâques, 4 - 1348 Louvain-la-Neuve
Tous droits réservés pour tous pays.
Il est interdit, sauf accord préalable et écrit de l'éditeur, de reproduire (notamment par photocopie)
partiellement ou totalement le présent ouvrage, de le stocker dans une banque de données ou de
le communiquer au public, sous quelque forme et de quelque manière que ce soit.
Imprimé en Belgique
Dépôt légal :
Bibliothèque nationale, Paris : septembre 2015
Bibliothèque royale de Belgique, Bruxelles : 2015/13647/111 ISBN : 978-2-8041 -8170-3
Rvant-pro-pos
Cet ouvrage traite d'algèbre générale, d'algèbre linéaire et bilinéaire, avec pour fil
directeur le nouveau programme des classes préparatoires MP-MP* qu'il suit
scrupuleusement. L'auteur s'est efforcé de rédiger un traité autonome, accompagné d'applications,
d'exemples et d'exercices entièrement corrigés.
Afin d'être adapté au public d'aujourd'hui, l'ouvrage a essayé de trancher avec le style
parfois austère utilisé dans ce type d'ouvrage, en essayant autant que faire se peut
d'introduire avec beaucoup de soin les concepts, et d'en proposer de nombreuses applications.
Ce livre s'adresse également à tout étudiant de premier cycle, ou préparant des concours
d'enseignement. En outre, les chapitres sur lesquels le programme met l'accent comptent
en général une introduction historique, ou établissent le lien avec d'autres domaines
scientifiques. Plus généralement, l'ensemble du livre est émaillé d'indications historiques :
notices biographiques, datation de certains théorèmes.
Cette part belle faite à l'histoire des mathématiques est une spécificité de cette collection.
Enfin, l'auteur a tenu à illustrer différents résultats à l'aide d'algorithmes implémentés
sous Python 3.
Je commence naturellement par remercier Fabrice Chrétien, des éditions De Boeck, pour
m'avoir proposé de participer à ce projet. Mes remerciements vont également à Olivier
Rodot, directeur de la collection et auteur de l'ouvrage d'analyse de seconde année, pour
son soutien, ses conseils et critiques avisés et sa grande disponibilité, et pour avoir été le
premier à me contacter.
Je remercie très vivement Guillaume Euvrard et Guillaume Goron pour leur relecture.
J'ai une pensée pour l'ensemble de mes collègues de travail pour leur soutien amical.
Enfin, je remercie tout particulièrement mes collègues Nicolas Basbois et Pierre Abbru-
giati, auteurs de l'ouvrage d'algèbre de première année, pour toute l'aide qu'ils m'ont
apportée.
Christophe Antonini.
labU des matières
1 Structures algébriques usuelles 7
1.1 Groupes 8
1.1.1 Généralités 8
1.1.2 Sous-groupes 16
1.1.3 Morphismes de groupes 21
1.1.4 Sous-groupes engendrés 28
1.1.5 Le groupe Z/nZ 30
1.1.6 Ordre d'un groupe, ordre d'un élément 34
1.1.7 Le groupe symétrique 39
1.2 Anneaux 51
1.2.1 Généralités 51
1.2.2 Idéaux 54
1.2.3 Anneaux principaux 55
1.2.4 L'anneau Z/nZ 57
1.2.5 L'anneau K[X] . . 67
1.3 Corps 69
1.4 Algèbres 73
1.4.1 Polynômes dans une algèbre 74
1.4.2 Idéal annulateur et polynôme minimal 77
1.5 Exercices corrigés du chapitre 1 79
TABLE DES MATIERES
2 Compléments d'algèbre linéaire 93
2.1 Sur les bases 93
2.1.1 Rappels et compléments sur les combinaisons linéaires 93
2.1.2 Familles libres, familles génératrices et bases 96
2.1.3 Le cas des polynômes 101
2.1.4 Lien avec les applications linéaires 102
2.2 Sommes, sommes directes 106
2.3 Trace 114
2.4 Déterminant 116
2.4.1 Formes multilinéaires 116
2.4.2 Premières propriétés 122
2.4.3 Définition et formule du déterminant 124
2.4.4 Propriétés « calculatoires » 129
2.4.5 Cas particuliers et exemples classiques 139
2.4.6 Méthode algorithmique de calcul du déterminant 144
2.5 Interpolation de Lagrange 147
2.6 Orientation des espaces réels de dimension finie 154
2.7 Polynômes de matrices carrées et d'endomorphismes 156
2.7.1 Définitions et propriétés algébriques 156
2.7.2 Puissances et polynômes des matrices diagonales 164
2.7.3 Idéal des polynômes annulateurs et polynôme minimal 165
2.7.4 Lemme des noyaux 170
2.8 Compléments 172
2.8.1 Matrices à diagonale strictement dominante 172
2.8.2 Dualité 175
2.9 Exercices corrigés du chapitre 2 186
3 Réduction 213
3.1 Stabilité, endomorphismes induits 215
3.1.1 Définitions et premières propriétés 215
3.1.2 Signification en terme de stabilité d'une matrice triangulaire . . . 220
3.1.3 Cas d'endomorphismes commutant 220
3.2 Éléments propres 222
3.2.1 Définitions 222
TABLE DES MATIÈRES
3.2.2 Somme directe 231
3.2.3 Quelques liens avec la stabilité 233
3.2.4 Cas de la dimension finie : le polynôme caractéristique 234
3.3 Matrices et endomorphismes diagonalisables 242
3.3.1 Définition et premiers résultats 242
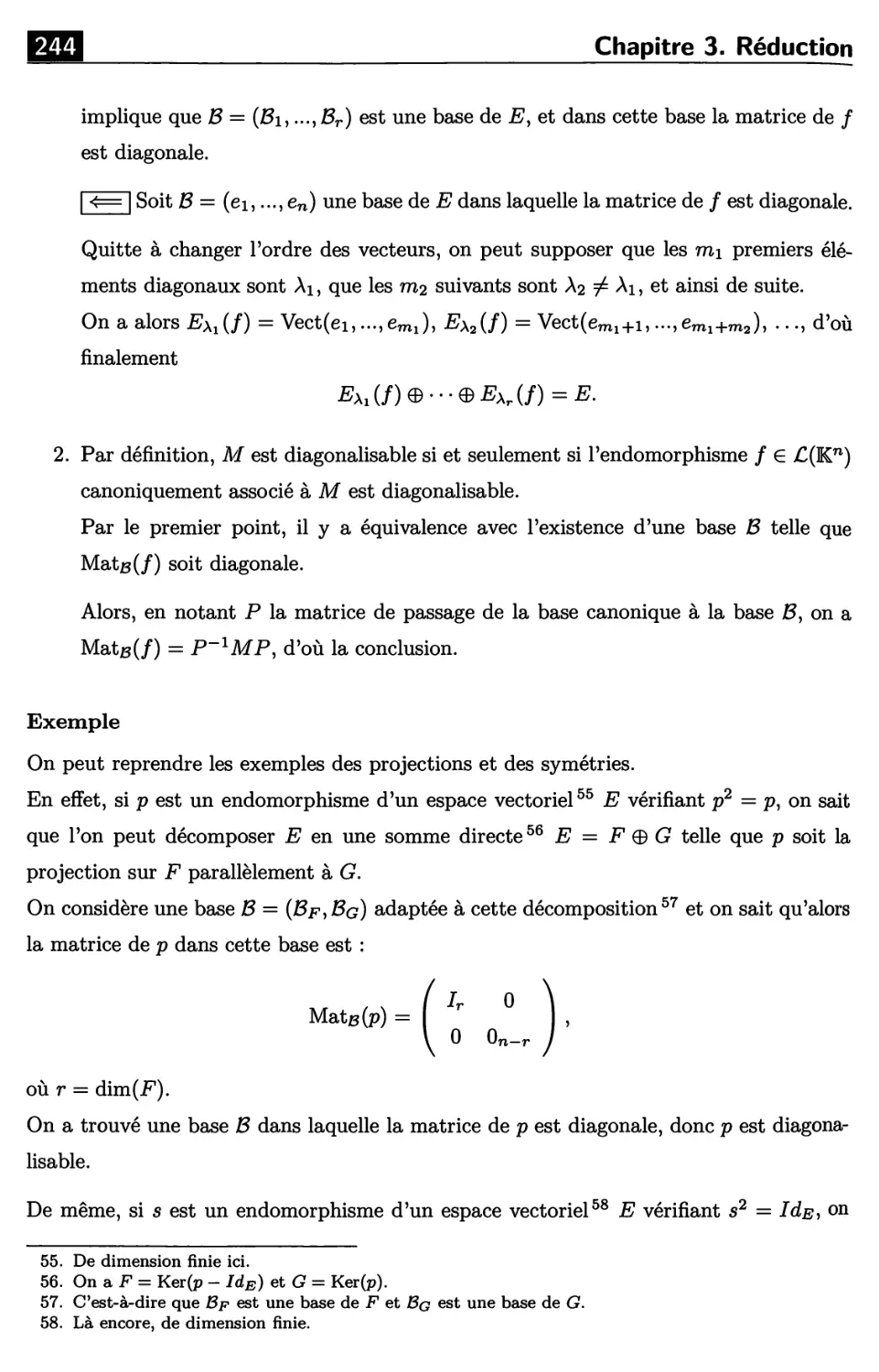
3.3.2 Diagonalisation et ordre des valeurs propres 246
3.3.3 Diagonalisation et polynômes annulateurs 253
3.3.4 Diagonalisation simultanée 258
3.4 Trigonalisation 261
3.5 Théorème de Cayley-Hamilton 265
3.6 Exponentielle de matrices 270
3.7 Applications de la réduction 277
3.7.1 Systèmes différentiels 278
3.7.2 Équations différentielles scalaires 289
3.7.3 Équations différentielles scalaires d'ordre 2 290
3.7.4 Méthode de variation des constantes 298
3.7.5 Calculs de polynômes d'une matrice 300
3.8 Compléments 304
3.8.1 Localisation des valeurs propres 304
3.8.2 Sous-espaces caractéristiques et décomposition de Dunford .... 306
3.8.3 Réduction de Jordan 309
3.9 Exercices corrigés du chapitre 3 312
4 Espaces préhilbertiens 339
4.1 Produit scalaire 340
4.1.1 Définitions 340
4.1.2 Exemples classiques 343
4.2 Norme euclidienne 358
4.2.1 Inégalité de Cauchy-Schwarz 359
4.2.2 Inégalité de Minkowski 363
4.2.3 Convexité stricte 366
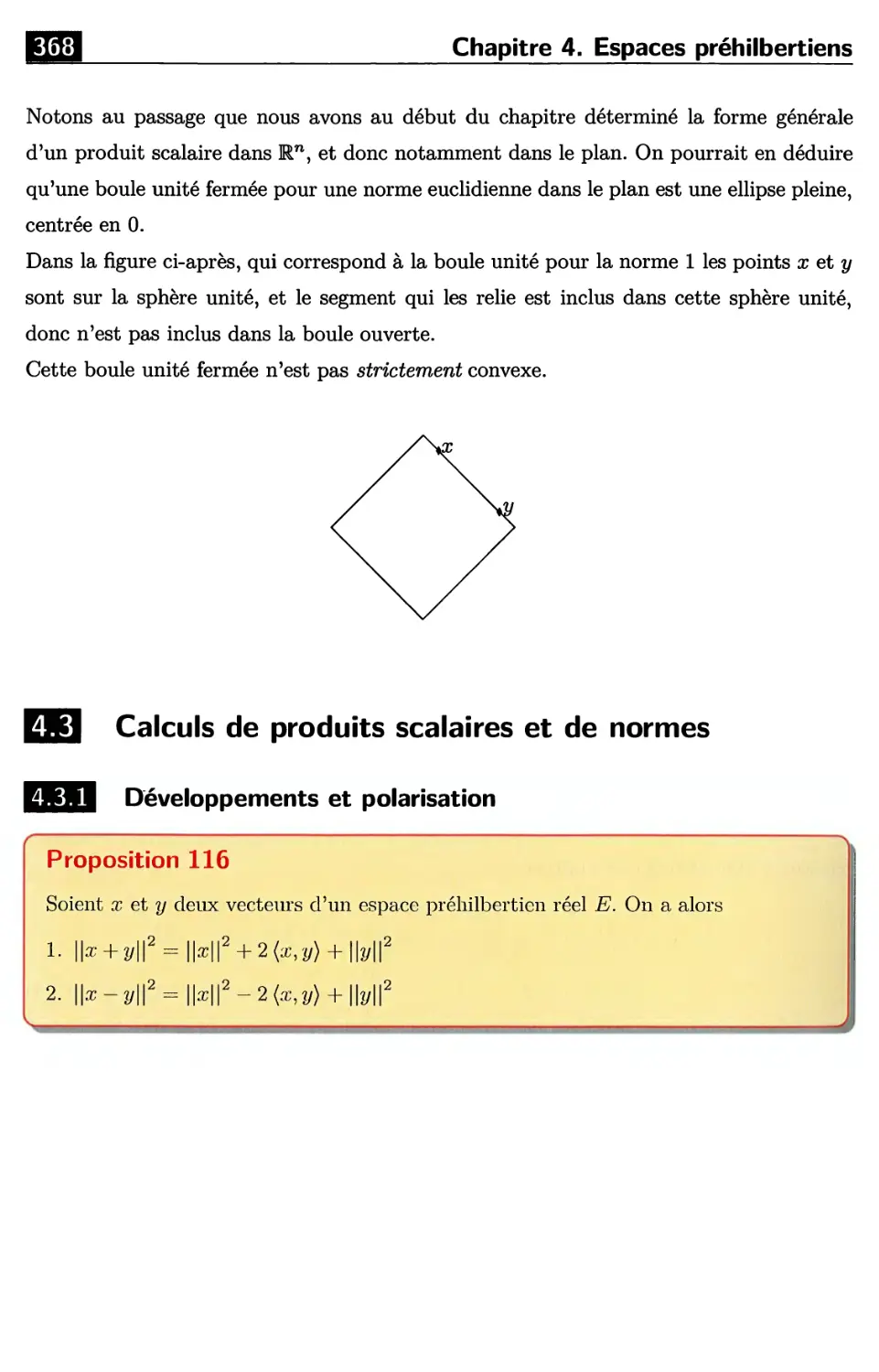
4.3 Calculs de produits scalaires et de normes 368
4.3.1 Développements et polarisation 368
4.3.2 Orthogonalité 370
□
TABLE DES MATIÈRES
4.4 Bases orthonormées 373
4.4.1 Généralités 373
4.4.2 Projections orthogonales et inégalité de Bessel 382
4.4.3 Orthonormalisation de Gram-Schmidt 389
4.5 Sous-espaces orthogonaux, sommes directes orthogonales 396
4.6 Représentation des formes linéaires 397
4.7 Endomorphismes orthogonaux, matrices orthogonales 399
4.7.1 Endomorphismes orthogonaux 399
4.7.2 Matrices orthogonales 405
4.7.3 Vision matricielle des changements de base orthonormee 409
4.7.4 Vision matricielle des endomorphismes orthogonaux 410
4.7.5 Étude de 0(2) et de 50(2) 413
4.7.6 Isométries vectorielles du plan 415
4.8 Produit mixte, produit vectoriel 424
4.8.1 Produit mixte 424
4.8.2 Produit vectoriel (dimension 3) 427
4.8.3 Isométries vectorielles d'un espace euclidien de dimension 3 . . . . 436
4.9 Endomorphismes symétriques 447
4.10 Réduction des endomorphismes et matrices symétriques 450
4.11 Compléments 458
4.11.1 Théorème de Riesz-Fréchet 458
4.11.2 Produit scalaire complexe 461
4.11.3 Endomorphismes hermitiens et matrices hermitiennes 483
4.12 Exercices corrigés du chapitre 4 485
CHAPITRE 1
Structures algébriques
usuelles
Les ensembles de nombres avec lesquels nous travaillons usuellement en mathématiques
sont apparus progressivement, d'abord avec les entiers (strictement) positifs pour
dénombrer les objets, mesurer les récoltes, commercer,... Sont ensuite venues les fractions pour
établir des liens de proportionnalité et des nombres irrationnels tels que \/2 qui apparaît
géométriquement comme longueur de la diagonale d'un carré de côté 1. Plus tard sont
apparus d'autres réels comme tt ou e et relativement plus récemment au XVIe siècle les
nombres complexes ont vu le jour.
Avec ces ensembles (même si ces termes n'étaient pas nécessairement employés) sont
venues des opérations (que Ton appelle lois) : addition, multiplication, ...
L'étude des structures algébriques a pour but de formaliser ces concepts à travers les
notions de groupes*, d'anneaux2, de corps et d'algèbres notamment, dans le but de dégager
des résultats généraux.
1. À la suite de Lagrange, Évariste Galois a utilisé au XIXe siècle des permutations de racines de
polynômes, mais n'a pas formalisé la définition des groupes.
La première définition générale d'un groupe a été écrite (pour un cardinal fini) par Arthur Cayley en
1854, cf. On the theory of groups, as depending on the symbolic équation 6n = 1, Philosophical Magazine
and Journal of Science 7 (1854), pp. 40-47. Dans cet article se trouvent notamment des tables de l.c.i.
pour des groupes à 4 et à 6 éléments.
Le lecteur est invité à se référer à la notice biographique d'Arthur Cayley page 223.
2. Anneaux et corps ont été progressivement introduits notamment par Leopold Kronecker (1823-
1891), spécialiste de la théorie des nombres, Richard Dedekind (1831-1916) et Ernst Kummer (1810-
1893), tous deux spécialisés en arithmétique, ainsi que David Hilbert (1862-1943), et plus généralement
toute l'école des mathématiciens allemands de la seconde moitié du XIXe siècle et de la première moitié
du XXe siècle.
Q
Chapitre 1. Structures algébriques usuelles
Commençons ce chapitre par une définition générale qui servira aux différentes structures.
Définition 1
Soit E un ensemble.
plication * : E2
(x,y)
On
—»
->
appelle
£
x *y
loi de
composition
interne
(i.
ci.)
sur
E toute
^v
ap-
j
Groupes
Généralités
Définition 2
On dit que (G, *) est un groupe si G est un ensemble non vide et si * est une loi de
composition interne sur G, vérifiant les trois propriétés suivantes :
1. La loi * est associative, c'est-à-dire :
V(a;, y, z) G G3, (x * y) * z — x * (y * z).
On notera alors x * y * z cette quantité commune.
2. La loi * possède un élément neutre, c'est-à-dire :
3e G G : \/x £ G, e*x = x * e = x.
3. Tout élément de G possède un inverse3 pour *, c'est-à-dire :
Va; G .E, 3x' G E : a; * x' = x' * a; = e.
Proposition 1
Soit (G, *) un groupe. Alors
1. Il existe un unique élément neutre ;
2. Pour tout x dans G, il existe un unique élément x' G G tel que a;*a;/ = a;/*a, = e
3. On pourra également parler d'élément symétrique.
1.1 Groupes
s1
Démonstration
Supposons ei et e2 deux éléments neutres. Calculons e\ * e2 de deirx façons différentes.
D'une part, comme e\ est un élément neutre, e\ * e2 = e2.
D'autre part, comme e2 est un élément neutre, e\ * e2 = e\.
On en déduit immédiatement e\ = e2, d'où l'unicité annoncée de l'élément neutre.
On note maintenant e l'unique élément neutre.
Soit x £ G, montrons que x a un unique inverse. Supposons que x[ et x'2 vérifient
X ^ Xi ^— Xi % X —— C et X % Xo ^ Xo ^ X ^— C
Alors on calcule cette fois x[ * x * x'2 de deux façons par associativité :
D'une part,
Xi * x * x2 = Xi * (x * x2) = a?! * e = a?!-
D'autre part,
Xj * X * X2 ^ v^l * *£) * ^2 ^ ^ * 3?2 ~~ *^2*
On en déduit immédiatement x'x = x2, d'où l'unicité annoncée de l'inverse de x.
Définition 3
Soit x un élément d'un groupe (G, *).
L'unique élément x' de G vérifiant £ * x' = x' * x = e est appelé l'inverse4 de x et
a/.
Proposition 2
Soit (G, *) un groupe, d'élément neutre e.
Alors :
1. e est son propre inverse, c'est-à-dire e-1 = e.
2.\/{x,y)eG2, {xxy)-1 = y'1 * x~l.
3. Soient x et y deux éléments de G.
Alors £ * y — e implique que y est l'inverse de x, c'est-à-dire que a;-1 = ?/.
De même, y * x = e implique a;-1 —y.
4. Voir note 3.
UJ] Chapitre 1. Structures algébriques usuelles
Démonstration
Montrons que e est son propre inverse. Le fait que e est l'élément neutre implique e*e = e,
égalité signifiant justement que e-1 = e.
Soit maintenant (x,y) G G2.
Posons z = x * y et z' = y-1 * x-1.
Alors l'associativité du produit permet d'écrire
z*z' = (x *?/) * (y-1 *x_1)
= x * (y * y- ) * x~
=e
= (x * e) * x-1
= x*x_1
= e,
et on montrerait de même que z' * z = e.
Ainsi z admet z' comme inverse, c'est-à-dire z~x = z'.
Le deuxième résultat est ainsi démontré5.
Enfin, considérons (x, y) G G2 vérifiant x * y = e.
On a alors en multipliant à gauche par x-1 :
x-1 * (x * y) = x-1 * e.
Or par associativité6,
x-1 * (x *?/) = (x-1 *x)*2/ = e*2/ = 2/.
L'autre membre de l'égalité x-1 * e vaut simplement x-1, donc on obtient bien y = x-1.
De façon parfaitement analogue7, on déduit de y * x = e que y = x-1.
Remarque
Il est à noter que ce résultat n'est valable que dans un groupe. Il existe des ensembles A
munis d'une l.c.i. * et possédant un élément neutre e et deux éléments x et x' de A tels
que x * x' = e sans que x ne soit inversible.
Considérons en effet A = ^(N, N) ensemble des fonctions de N dans N.
5. Notons qu'en utilisant le troisième résultat, il aurait suffi de montrer que z * zf = e.
6. On utilise également le fait que ce-1 est l'inverse de ce, et que e est l'élément neutre.
7. À ceci près qu'il faut multiplier l'égalité à droite par ce-1.
1.1 Groupes
m
La composition o est une l.c.i. de A.
Il est clair que Id® est un élément neutre8 de (A,o).
Définissons / : N —> N et g : N —> N
n i—> 2n m i—> E(m/2)
Nous avons ainsi f et g qui sont éléments de A avec g o f = Idf$ et pourtant ni /, ni g
n'est inversible9.
Définition 4
Un groupe (G,*) est dit abélien10,11 si
V(a;,y) G G2, x *y = y*x.
v
^v
y
Notation
Dans les groupes commutatifs, la l.c.i. est généralement notée +.
Dans ce cas, le symétrique d'un élément x de G se note — x . On choisit en outre de
l'appeler opposé de x et non plus inverse.
Exemples (et contre-exemples)
1. (Z,+), (Q,+), (M,+), (C,+) sont des groupes abéliens.
2. En revanche, (N, +) n'est pas un groupe : à part 0, les éléments n'ont pas de
symétrique (c'est-à-dire pas d'opposé).
3. (M*,.), (C*,.), (Q*,.) sont des groupes abéliens (nous verrons que ce résultat se
généralise à tout corps privé de 0).
De même, (]0, +oo[,.) est un groupe abélien.
4. En revanche, (M,.) n'est pas un groupe, car 0 n'a pas d'inverse.
Et c'est pour une autre raison que (]—oo,0[,.) n'est pas un groupe, notamment
car la multiplication n'est pas une loi de composition interne, le produit de deux
nombres strictement négatifs n'étant pas un nombre strictement négatif.
8. On peut même écrire que Idf$ est l'élément neutre, car la démonstation précédente de l'unicité
d'un élément neutre reste valable grâce à l'associâtivite de la l.c.i. o.
9. / inversible signifierait / bijective, or / n'est pas surjective. De même, g n'est pas bijective car non
injective : p(0) = 0 = p(l).
10. Ce qualificatif rend hommage à Niels Abel (1802-1829), cf. la notice biographique page 12.
11. Un tel groupe est également appelé groupe commutatif. On dit aussi que la loi * est commutative.
Chapitre 1. Structures algébriques usuelles
Le norvégien Niels Abel est l'un des mathématiciens I
. -^., les plus remarquables du XIXe siècle, ayant laissé une
^ K "4 empreinte indélébile sur le développement ultérieur des
mathématiques malgré son décès très prématuré ".
Le parcours d'Abel dans son pays natal est
profondément influencé par le professeur Bernt Michael Holmboe
(1795-1850), guère plus âgé que lui, qui sait reconnaître
• '.-. et encourager ses talents de mathématicien.
La situation de la famille d'Abel est modeste mais le
IV' 1 TT -L al î génie de Niels lui permet d'avoir quelques protecteurs,
1 e qui subviennent en partie à ses besoins et lui permettent i
[î 02 î 29J ainsi de se consacrer à la recherche mathématique. Per- j
sonne en Norvège, à commencer par Holmboe bien sûr, ne doute des capacités
d'Abel mais il n'a pas facilement accès à des bourses du fait de la situation géopo- ]
litique complexe de son pays natal à cette époque-làb.
Abel fait néanmoins rapidement des découvertes fondamentales, la principale étant
l'impossibilité de la résolution algébrique de l'équation générale du cinquième
degréc. Il obtient enfin, en 1825, le financement adéquat pour partir en Allemagne
et en France. Son voyage en Allemagne se révèle extrêmement fécond, couronné
par une relation étroite nouée avec August Leopold Crelle, qui s'apprête à lancer la
première revue mathématique en Allemagne : Abel est un des principaux contribu-
teurs des premiers numéros du Journal de Crelle, ce qui étend beaucoup sa
renommée.
En revanche, le voyage en France une déception. Abel partage difficilement ses
découvertes, ses travaux rencontrant notamment auprès de Cauchy le même destin
funeste que ceux de Galois : Cauchy ne prend guère le temps de les lire, les égare
ou en rédige un rapport rapide et peu enthousiaste.
On doit également à Abel des travaux en analyse. Citons la transformation d'Abelrf
permettant l'étude de certaines séries semi-convergentes.
Abel revient en Norvège en mai 1827. Malgré de nombreuses sollicitations de Crelle
pour travailler en Allemagne, il a le mal du pays et sent ce retour nécessaire.
Malheureusement sa situation financière en Norvège n'est pas florissante et, s'il
n'exclut pas de rejoindre Crelle, sa santé commence à s'altérer.
Abel meurt de la tuberculose sans atteindre ses 27 ans, à peu près au moment où
Crelle lui annonce sa nomination comme professeur à l'université de Berlin.
a. Pour les détails biographiques, cf. 0ystein Ore, Niels Henrik Abel, Mathematician Extraordinary, University of
Minnesota Press (1957), dont on a fait un usage très large ici.
b. La Norvège fut cédée en 1814 par le Danemark à la Suède suite à son implication aux côtés de Napoléon : ceci incita
les Norvégiens à proclamer leur indépendance...
c. cf. le Mémoire sur les équations algébriques, où l'on démontre l'impossibilité de la résolution de l'équation générale du cinquième
degré de 1824, accessible dans les Œuvres complètes de Niels Henrik Abel aux éditions Jacques Gabay, Tome I, pp. 28-33.
Rappelons que les formules de Cardan pour les équations du troisième degré et la méthode de Ferrari pour celle du
quatrième degré étaient connues depuis le XVIe siècle !
d. cf. O. Rodot, Analyse seconde année, De Boeck (2014).
5. Si E est un ensemble quelconque, alors S(E), ensemble des bijections de E dans E,
que Ton appelle groupe des permutations de E, est un groupe pour la loi o, définie
\'.
1.1 Groupes
par
fog : E —► E
x ■—► fog(x) = f(g(x)).
Nous verrons (cf. proposition 24 page 42) que si E est un ensemble de cardinal
supérieur ou égal à 3 (a fortiori si i£ est un ensemble infini), alors le groupe (S(E), o)
n'est pas commutatif.
Un groupe particulièrement étudié est le groupe Sn des permutations de [l,n].
6. De nombreux exemples de groupes sont issus de la géométrie.
Nous reviendrons dans cet ouvrage sur le groupe orthogonal d'un espace
euclidien12, c'est-à-dire l'ensemble des applications conservant une norme euclidienne.
Ces groupes sont non commutatifs (à part en dimension 1) ; en revanche, l'ensemble
des rotations du plan (qui correspond à l'ensemble des automorphismes
orthogonaux de déterminant 1 dans le plan) est abélien.
L'étude de certains sous-groupes du groupe orthogonal en dimension 3 a permis de
prouver qu'il n'existe que 5 solides platoniciens, c'est-à-dire des polyèdres réguliers
convexes : le tétraèdre régulier (4 faces), l'hexaèdre régulier, ou cube (6 faces),
l'octaèdre régulier (8 faces), le dodécaèdre régulier (12 faces) et enfin l'icosaèdre
régulier (20 faces).
7. L'étude des groupes laissant invariante une molécule a aussi un intérêt en chimie.
Citons la notion de chiralité, correspondant à l'absence de symétrie indirecte d'une
molécule.
Les deux molécules différentes obtenues (l'une et son symétrique), une lévogyre et
une dextrogyre, dites énantiomères, peuvent posséder des propriétés distinctes.
8. L'exercice 1.1 est un exercice classique sur certains groupes, qui sont alors abéliens.
En remarque suivent des exemples d'applications géométriques de cette situation.
9. Soit c > 0. On note G = ]— c, c[ et on définit
V(vi,t>2) £ G2, Vi *V2
Vi +V2
1 +
ViV2
12. cf. définition 79 page 402.
Chapitre 1. Structures algébriques usuelles
À vi G G fixé, on étudie la fonction p : v i—> „-„ sur ]—c,c[.
On observe13 que cette fonction est strictement croissante, et en calculant les limites
de p aux bornes14 de G, on conclut que
1 +J2~
c2
Ainsi, * est une l.c.i. sur G.
En outre, 0 est clairement un élément neutre de (G, *).
Enfin, étant donné v dans G et en notant v' = —v (l'opposé usuel dans R) on a
v' e G et
v *v' = v' *v = 0
puisque le numérateur s'annule de manière évidente, donc v' = —v est l'inverse de
v pour *.
Ainsi, (G, *) est un groupe. On pourra noter que, grâce à la commutativité de la
somme et du produit dans M, on a clairement
V(vi,V2)éG2, ^1*^2 = ^2*^1,
c'est-à-dire que le groupe (G, *) est commutatif.
Remarque
Ce dernier exemple ne saurait se restreindre aux mathématiques. Faisons référence aux
transformations de Lorentz15 pour la vitesse.
On note c> 0 la vitesse de la lumière.
On considère des déplacements le long d'une même droite.
Si un objet se déplace, à la vitesse V2 (avec \v2\ < c) par rapport à un référentiel 7?/,
lui-même en mouvement à la vitesse v\ (avec |t>i | < c) par rapport à un référentiel 11, la
théorie de la relativité restreinte prévoit une vitesse de déplacement de cet objet égale
à vi * V2 par rapport au référentiel 1Z.
Rappelons que la loi de composition des vitesses, en mécanique galiléenne, fournirait une
vitesse égale à v\ + v?,.
13. Le lecteur vérifiera aisément que p est dérivable sur G avec Vv G (2, p'(v) > 0.
14. On trouve lim p(v) = — c et lim p(v) = —c.
v—►(—c)+ v—tc-
15. Hendrik Lorentz (1853-1928), physicien néerlandais, co-lauréat (avec Pieter Zeeman) du prix Nobel
de physique en 1902.
1.1 Groupes
En mathématiques, cet exemple est presque toujours traité avec c = 1, ce qui correspond
à un adimensionnement.
Définition 5
Soit x un élément d'un groupe (G, *). On définit la suite (xn)ne^ par :
x° = e ; VneN, x71*1 =x*xn.
On notera pour n G N*
- - (*-)"•
Remarques
1. On a x1 = x, x2 = x * x, x3 = x * x2 = x * (x * x) = (x * x) * x = x2 * x par
associativité.
Ainsi, il aurait également été possible de définir la même suite en posant x° = e et
pour tout n G N, xn+1 = xn * x.
2. Si le groupe G est commutatif et sa loi notée additivement +, alors on notera ces
itérés de x sous la forme nx au lieu de xn.
r
Proposition 3
Soit x un élément d'
1. VneN, xn*x~n
un groupe
= e.
(G,*).
Alors :
2. V(m,n) G Z2, xm+n = xm * xn.
Démonstration
Il s'agit de résultats se démontrant aisément par récurrence (à m fixé pour le second)16.
Remarque
On notera que le deuxième point implique que pour tous entiers relatifs n et m, les
éléments xn et xm de G commutent, puisque n + m = m + n implique
xm * xn = xm+n = xn+m = xn * xm.
16. La récurrence s'effectuera normalement pour n G N, et pour n^Oon effectue la récurrence sur
k = —n.
Chapitre 1. Structures algébriques usuelles
Mais ce deuxième point signifie également qu'en définissant
tp : Z —> G
n i—> xn
on a la relation V(m, n) eZ2, (p(m + n) = (p(m) * (p(n).
Ainsi17, l'application (p est un morphisme de groupes.
Sous-groupes
r
Définition 6
Soient (G, *) un
groupe (d'élément neutre e)
On dit que H est un sous-groupe de (G, *) si
1. e G H (l'élément neutre est dans H) ;
2. \/(x,y)eH2,
x * y G H (H est stable par
et H une
la l.c.i.) ;
pai
tie de G.
3. V# G H, x x G H (H est stable par inversion).
Proposition 4
Soient (G, *) un groupe et H une partie de G.
Alors i7 est un sous-groupe de G si et seulement si
1. eeH-
2. \/{x,y) G#2, Z*?/-1 eiî.
Démonstration
On trouvera cette démonstration dans l'ouvrage d'algèbre de première année de la même
collection18.
Remarque
On peut remplacer l'hypothèse 1 par l'hypothèse H non vide (H ^ 0), car en considérant
alors y = x G H le point 2 implique
e = x * x-1 G jET.
17. cf. la définition 8.
18. N. Basbois et P. Abbrugiati, Algèbre première année, De Boeck (2013).
1.1 Groupes
ED
Proposition 5
Soit H un sous-groupe d'un groupe (G, *).
Alors (H, *) est un groupe.
>*^m_m ■ ■ m m ■ ^ ■ ^m ■ ■■■■■■ ■■■ ! ~ ~
Démonstration
La loi * est une loi de composition interne19 à H par la définition 6.
L'hypothèse d'associativité de la loi * dans G s'écrit
V(x, y, z) G G3, (x * y) * z = x * (y * z).
L'inclusion H G G implique alors
V(x, 2/, z) G jET3, (x * ?/) * z = x * (?/ * z),
c'est-à-dire que la loi * est associative sur H.
L'élément neutre e de G est élément de H par hypothèse.
Comme
\/x £ G, x*e = e*x = x,
l'inclusion H <zG implique
Vx E H, x*e = e*x = x.
Enfin, l'existence d'un inverse (dans H) pour tout élément x de H est directement imposée
dans la définition 6.
Exemples
1. (Z, +) est un sous-groupe de (Q,+), qui est un sous-groupe de (M, +), qui est un
sous-groupe de (C, +).
On en déduit20 que Z, Q et M sont des sous-groupes de (C, +).
2. {-1,1}, ]0, +oo[, Q*, R* sont des sous-groupes de (C*, .)•
19. On parlera de loi induite sur H.
20. On admettra en effet (la preuve étant évidente) que si H est un sous-groupe d'un groupe (G, *) et
que K est un sous-groupe de (H, *), alors K est un sous-groupe de (G, *).
Chapitre 1. Structures algébriques usuelles
3. Soit n G N*. On note Un = {z G C, zn = 1} et U = {z G C, \z\ = 1}.
Alors (Un,.) est un sous-groupe de (U,.), qui est lui-même un sous-groupe de (C*,.).
4. Dans le groupe GLn(K) des matrices carrées inversibles, il existe différents sous-
groupes classiques, comme le groupe spécial linéaire
SLn(K) = {Me GLn(K), det(M) = l},
ou encore le groupe orthogonal21 0(n) et le groupe spécial orthogonal22 SO(n).
r
Proposition 6
Soient H\ et H2 deux
Alors Hi H H2 est un
sous
sous-
-groupes d
-groupe de
'un
(G,
groupe
*)•
a
(G,*).
Démonstration
1. Puisque H\ est un sous-groupe de G, l'élément neutre e de G appartient à H\.
De même, e appartient à H?,.
On en déduit immédiatement que e G H\ fl #2-
2. Soient h et h' dans H\C\H2, montrons que h * h'-1 G H\ H H2.
H\ étant un sous-groupe de G, on sait que h et h1 dans H\ implique h * h'-1 G ifi-
De même, /i * h'~l G #2 du fait que H2 est un sous-groupe de G.
On en déduit que h * /&'"1 G #1 fl #2.
Définition 7
Soient g un élément d'un groupe (G,*), A et B deux parties de G. On définit les
parties g * A, A*getA*BdeG par
1. g * A — {g * rc, x G A} et A * g — {x * g, a; G A} ;
2. A * B = {a; * y, (a;, y) £ Ax B).
Proposition 7
Soient Hi et #2 deux sous-groupes d'un groupe commutatif (G, +).
Alors l'ensemble H = H\ -\- H2 est un sous-groupe de (G, +).
21. cf. définition 81 page 406.
22. cf. définition 82 page 408.
Démonstration
1. Puisque H\ est un sous-groupe de G, l'élément neutre e de G appartient à H\.
De même, e appartient à H2.
En posant Ai = e G #1 et A2 = e G H2, on obtient
e = e + e = Ai + A2 G #1 + H2 = H,
donc jET contient bien e.
2. Soient A et A' dans jET, montrons que h — h' £ H.
Par définition, il existe (Ai, h2) £ H\ x H2 tel que h = hi + h2.
De même, il existe (Ai, A2) £ Hi x H2 tel que h' = h[ + A2.
On a alors
A — A = (Ai + A2) — (Ai + A2) = Ai + A2 — A2 — Ai = (Ai — Ax) + (A2 — A2)
par commutativité et associâtivite.
H\ et H2 étant des sous-groupes, on sait que
Ai = Ai — h1 G jHi et A2 = A2 — A2 G #2,
ce qui permet de conclure que h — h' = hl[ + Ag G H.
Remarque
Ces résultats nous resserviront lors de l'étude des idéaux, et notamment de leurs sommes.
Contre-exemple
Ce résultat devient faux dans un groupe non commutatif, comme le montre le contre-
exemple suivant.
On se place dans (5n, °), groupe des permutations23 de [l,n], pour n ^ 3.
On définit H\ le sous-groupe engendré24 par la transposition n = (12), c'est-à-dire
ffi = {Id,Ti}.
On définit de même H2 le sous-groupe engendré par la transposition r2 = (2 3), c'est-à-
dire
H2 = {Id,T2}.
23. On retrouvera la définition des p-cycles et des transpositions dans la définition 18 (p. 42).
24. Ce terme sera précisé dans la définition 10 (p. 28).
|gl] Chapitre 1. Structures algébriques usuelles
Le produit H = H1.H2 contient alors les 4 éléments suivants :
Ido Id = Id, Id o T2 = T2, r\ o Id = r\, et ri o T2 = (1 2 3).
Il ne s'agit pas d'un sous-groupe, puisque l'inverse du 3-cycle (12 3), qui est le 3-cycle
(1 3 2), n'appartient pas à H.
s
Proposition 8
I Soit H un sous-groupe de (Z,+). ,
Alors il existe un unique no G N tel que H = n§L = {no/c, k G Z}.
Démonstration
Si H = {0}, alors le résultat est vérifié, avec no = 0, et seul 0 convient.
Sinon, il existe n G jET\{0}. Quitte à remplacer n par —n qui appartient également à H,
on peut supposer n > 0.
On peut alors définir no, le plus petit élément de N* n H, puisqu'il s'agit d'une partie
non vide de N.
Vérifions que H = noZ.
D'une part, puisque no G H, alors le sous-groupe de (Z, +) engendré25 par no est contenu
dans H : n0Z c H.
Démontrons l'autre inclusion. Soit donc h G H. En effectuant la division euclidienne de
h par no, on peut affirmer qu'il existe un unique couple (ç,r) G Z2 tel que
h = qno + r avec 0 ^ r ^ no — 1.
Or h et qno sont dans H, donc r = h — qno G H.
Si r ^ 0, alors 0 < r < no, et ainsi r est un élément de N* n H strictement inférieur à
no, ce qui contredit la définition de no-
On a ainsi r = 0, et par suite h = qno G noZ, d'où
H C n0Z,
l'égalité est ainsi prouvée.
Pour l'unicité, supposons no et n'Q éléments de N vérifient noZ = n^Z.
25. Le sous-groupe de Z engendré par no est évidemment noZ, cf. la remarque page suivante.
1.1 Groupes
Alors no G uqL = n^Z, donc n^ divise no et comme ces nombres sont strictement positifs,
on a n^ ^ no-
En échangeant les rôles de no et nj, on a de même no ^ n^, d'où no = n'0 et l'unicité
annoncée est démontrée.
Notons que cette preuve resservira pour l'étude des idéaux de l'anneau (Z, +,.).
Remarque
Réciproquement, il est aisé de vérifier que pour tout entier no, l'ensemble noZ est un
sous-groupe de (Z, +).
On utilise cette propriété dans la démonstration de la proposition 8, en affirmant que
noZ est le sous-groupe de (Z, +) engendré par no-
Morphismes de groupes
Définition 8
Soient (G,*) et (G",.) deux groupes.
On appelle morphisme de groupes de G dans G' toute application / : G —> G'
compatible avec les lois, c'est-à-dire vérifiant
Vfv'JeG2, f(x*x') = f(x).f{x').
On dira aussi que :
1. /est un isomorphisme (de groupes) si / est bijective;
2. / est un endomorphisme2® du groupe (G, *) si (G7,.) = (G, *) ;
3. /est un automorphisme du groupe (G,*) si / est à la fois un isomorphisme et
un endomorphisme, c'est-à-dire si / : (G, *) —> (G, *) est un morphisme (de
groupes) bijectif.
26. Pour un endomorphisme, il ne faut pas seulement que l'ensemble soit le même au départ et à
l'arrivée (ce qui correspondrait seulement à G' = G comme hypothèse), mais aussi que la loi soit la
même.
Chapitre 1. Structures algébriques usuelles
Proposition 9
Soient (G,*) et (G7,.) deux groupes et / un morphisme de groupes de (G,*) dans
(G ,.).
On note e et e7 les éléments neutres respectifs de G et G7. On a alors :
1. /(e) = e';
2. VxeG,/(x-1)=(/(x))-1.
Remarque
Pour mémoriser de tels résultats, on pourra utiliser des phrases du type « l'image de
l'élément neutre par un morphisme est l'élément neutre », ou encore « l'image (par un
morphisme) de l'inverse d'un élément est l'inverse de l'image ».
Démonstration
1. On part de l'égalité e * e = e.
On en déduit /(e)./(e) = /(e * e) = /(e), soit
/(e)./(e) = /(e).
On multiplie cette égalité à gauche par /(e)-1 (comme tout élément de G7, /(e)
possède un inverse), on en déduit
/(e)-1./(e)./(e) = /(c)-1./(c)
et ainsi /(e) = e7.
2. Soit x £ G. On part de x * x"1 = x~x * x = e, on en déduit grâce au premier point
f(x).f(x-1) = f(x*x-1) = f(e) = e',
et de même f(x~1).f(x) = e7.
Ainsi, /(x-1) est l'inverse de /(x), c'est-à-dire : (/(#)) = /(x-1).
Proposition 10
Soient (G,*), (G7,
(G,*) dans (G7,.)
Alors go f est un
.) et (G",*)
trois groupes, / est un
et g est un morphisme de groupes de
morphisme de
groupes de (G, *) dans
moi
(G',
(G"
•phisme
.) clans
,*).
de
(G
groupes
",*).
de
J
1.1 Groupes
El
Démonstration
Soit (x,x') G G2.
On sait que f(x * x') = f(x).f(x').
Notons y = f(x) et y' = /(#')• O*1 sa^ également que g(y.y') = g{y)*g{y')-
On peut alors affirmer que
gof(x*x') = g(f(x*x'))
= g(f(x).f&))
= g(y-y')
= g(y)*g(y')
= (9of(x))*(gof(x')).
Proposition 11
| Soit /un isomorphisme d'un groupe (G, *) dans un groupe (G ', .). |
Alors /_1 est un isomorphisme de groupes de (G ', .) dans (G, *).
Démonstration
On sait que /_1 est bijective, la question est uniquement de montrer que f~l est un
morphisme de groupes.
Soit (y,yf) G G'2, il faut montrer que f-\y.yT) = f'^y) * /"V)-
On note x = f_1{y) et x' = /_1(2/')> donc on a x et x' dans G tels que
f(x) = y et f(x')=y'.
Le fait que / est un morphisme de groupes s'écrit
f(x * x') = f(x).f(x') = y.y'.
Ainsi, x * x' est un antécédent de y.y' par / bijectif, d'où
f-1(y.y')=x*x' = f-1(y)*f-1(y').
Chapitre 1. Structures algébriques usuelles
Exemples
1. L'égalité :
V(£, t') G M2, exp(* +t') = exp(£). exp(*')
signifie que l'application
/ : R —> ]0,+oo[
t .—► f(t)=exp(t)
est un morphisme du groupe (M, +) dans le groupe (]0, +oo[,.).
Cette application est connue comme étant bijective ; on peut alors affirmer que son
application réciproque, qui n'est autre que le logarithme népérien, est un morphisme
de groupes de (]0, +oo[,.) dans (M, +), donc on a aussi l'égalité
v(2/, y') g ]o, +oo[2, în^V) = Hv) + Mv')
2. Pour a G M, les applications
fa : (R,+) —> (R,+)
x i—> ax
et
ga : (]0,+oo[,.) —> (]0,+oo[,.)
X l > Xa
sont des morphismes de groupes.
Il y a d'ailleurs un rapport avec l'exemple précédent, dans la mesure où
ga = exp ofa o In
(cf. la formule : Vy > 0, ya = exp (aln(x)) J.
En outre, si a G M*, fa et ga sont même des isomorphismes de groupes, les
isomorphismes réciproques étant respectivement fi/a et g\/a.
3. Si k G Z, l'application z i—> zk est un endomorphisme de (U,.).
La même expression définit un endomorphisme27 de (C*,.) ou aussi de (Un,.).
27. Ces applications sont des automorphismes si et seulement si k = ±1.
1.1 Groupes
Définition 9
Soit / un morphisme d'un groupe (G, *) dans un groupe (G7,.).
On appelle noyau de f l'ensemble Ker(/) défini par :
Ker(/) = /"^{e'}) = {x G G, f(x) = e'},
où e' désigne l'élément neutre de (G',.).
On appelle image de f l'ensemble Im(/) défini par :
Im(/) = f(G) = {/(a;), x G G} = {y G G7 ; 3x G G, y = /(*)}.
Proposition 12
Soit / un morphisme d'un groupe (G, *) dans un groupe (G7,.). Alors :
1. Ker(/) est un sous-groupe de (G, *) ;
2. / est injectif si et seulement si Ker(/) C {e}, où e désigne l'élément neutre de G;
3. Im(/) est un sous-groupe de (G7,.) ;
4. / est surjectif si et seulement si G' C Im(/).
Démonstration
1. Nous avons précédemment démontré (cf. le premier point de la proposition 9) que
/(e) = e', et ainsi e G Ker(/).
Soit maintenant (x, x') G (Ker(/)) .
On a alors28
f(x * x'-1) = f{x).f{x'-1) = /(x)./^)"1 = e'.e'"1 = e'.e' = e',
donc x * x'~x G Ker(/).
2. Supposons / injectif29.
Si x G Ker(/), alors /(x) = e' = /(e), et donc par Finjectivité de /, on a x = e,
d'où30 Ker(/) C {e}.
28. Cette fois, on utilise le second point de la proposition 9.
29. Notons que puisque /(e) = e7, on peut affirmer e G Ker(/), c'est-à-dire : {e} C Ker(/). Mais cette
inclusion, toujours valable, est inutile.
30. Ou, si l'on préfère, Ker(/) = {e}.
Chapitre 1. Structures algébriques usuelles
Réciproquement, supposons Ker(/) C {e} et montrons que / est injectif.
Soient x et x' dans G tels que f(x) = f(x'). Alors
/(* * x"1) = m.fix'-1) = m.fixT1 = /(^./(x)"1 = e',
soit x * x'~l G Ker(/) = {e}, ou encore x * x'"1 = e.
On en déduit31 que x = x*e = x* x'-1 * x' = e * x' = x1, d'où x = x'.
Ainsi, Tinjectivité de / est démontrée.
3. On a déjà e' = /(e) G Im(/).
Soit maintenant (y, y') G (lm(/)) , montrons que y.y1-1 G Im(/).
Or il existe (x,xf) G G2 tel que y = f(x) et y = f(x').
Alors
y.y'-1 = m.fixT1 = f(x) * /(x'-1) = f(x * x''1).
Ainsi, en notant x" = x * x/_1, on a un élément x" dans G tel que y.y'-1 = /(#")»
ce qui signifie bien que y.y'-1 G Im(/) et achève de prouver que Im(/) est un
sous-groupe de (G7,.).
4. Ce point est évident, puisque / surjective équivaut par définition à G7 C /(G), et
que Im(/) = /(G).
Proposition 13
Soit / un morphisme d'un groupe (G, *) dans un groupe (G7,.).
1. Si H' est un sous-groupe de (G7,.), alors /_1(iJ7) est un sous-groupe de (G, *) ;
2. Si H est un sous-groupe de (G, *), alors f(H) est un sous-groupe de (G7,.) ; 1
Démonstration
La preuve 32 est analogue à celle du fait que Ker(/) et Im(/) sont des sous-groupes de G
et G7 respectivement.
Exemple
Soient (G, *) un groupe, H un sous-groupe de G et # un élément de H.
On considère alors H = g-1 * H * g, montrons que H est un sous-groupe33 de G.
31. Il suffit de multiplier à droite par x'.
32. cf. N. Basbois et P. Abbrugiati, Algèbre première année, De Boeck (2013).
33. On dit que H est obtenu par conjugaison de g sur H.
1.1 Groupes
Soit l'application
p : G —► G
x i—> g-1 *x * g
Vérifions que p est un endomorphisme 34 du groupe G. On a (notamment par associati-
vité)35
V(x, y) e G2, p{x) * p(y) = (g'1 * x * g) * (g-1 * y * #)
= g"1 * x * (g* #^) * 2/ * d)
=e
= g-1 * (x * e) * y * g
= 0"1 * (x * ?/) * g
= p(x*y).
Il suffit alors de constater que
H = p(H)
pour conclure que H est un sous-groupe de G.
Proposition 14
Soient (G,*) et (G7,.) deux groupes et / un morphisme de groupes de (G,*) vers
(G',.). On suppose G fini.
Alors le cardinal36 du groupe G est le produit des cardinaux de Ker(/) et de Im(/) :
Card(G) = Card(Ker(/)) • Card(lm(/))
Démonstration
Étant donné g' G Im(^), on note Ag> = /_1 ({#'}).
Or il existe go G G tel que g1 = f(go). On a alors37 Agi = go* Ker(/).
34. Il s'agit même d'un automorphisme de G, le lecteur pourra aisément vérifier que x i—> g*x*p-1
est la réciproque de p.
35. On remarquera que pour démontrer que p(x*y) = p(x)*p(y), il est plus simple de partir du second
membre.
36. On parlera également d'ordre du groupe G.
37. Comme dans la preuve du deuxième point de la proposition 12, on a
f(x) = g' = f(g0) ^=î> /(p"1 *i) = e'^p0"1*ïG Ker(/) ^iG90* Ker(f).
EU
Chapitre 1. Structures algébriques usuelles
Comme l'application x \—> go * x est bijective38 de G dans lui-même, on en déduit
Card(^/) = Card(Ker(#)).
Or il est évident que Ton peut partitionner G en
G= U Agl,
g'elm(g)
d'où en calculant le cardinal
Card(G) = J2 Card(iV)
Y^ Card(Ker(^))
g'elm(g)
= Card(lm(flf)) • Card(Ker(^)).
Remarques
1. Ce résultat est lié au théorème du rang ; en effet, si E est un espace vectoriel sur un
corps fini K et si dim(E) est finie, alors Card(i£) = (Card(K)) im . Le théorème
du rang équivaudrait au résultat ci-dessus après passage au logarithme39.
2. Cette proposition implique au passage que Card(Ker(/)) divise Card(G), ce qui
sera généralisé à tout sous-groupe de G, dans le théorème 140 page 35.
3 Sous-groupes engendrés
Définition 10
Soit A une partie d'un groupe (G, *). On appelle sous-groupe engendré par A le plus
petit41 sous-groupe de G contenant A.
38. Le lecteur vérifiera aisément que y i—> g^ y en est la réciproque.
39. Et après division par ln(Card(K)).
40. Le lecteur pourra noter quelques similitudes entre les deux démonstrations.
41. Au sens de l'inclusion.
1.1 Groupes
Proposition 15
Soit x un élément d'un groupe (G, *). Alors le sous-groupe de G engendré par x est
l'ensemble noté (x) défini par
{x) = {x7\ neZ}.
Démonstration
Soit H un sous-groupe de G contenant x.
Alors H contient x * x = x2. On déduit de même que H contient x * x2 = xs et une
récurrence simple permet d'en déduire que pour tout n G N, xn G H.
De plus, on sait42 que Vn G N, x~n = (xn) G H, ce qui prouve que H contient
forcément l'ensemble noté (x).
Par ailleurs, l'application
<p : (Z,+) —► (G,*)
n i—» xn
vérifie V(n, m) G Z2, (p(n + m) = </?(n) * </?(ra).
Ainsi, </? est un morphisme de groupes et son image (x) est un sous-groupe43 de G.
Ainsi, tout sous-groupe de G contenant x contient (x), et (x) est lui-même un sous-groupe
de G contenant x. C'est donc bien le plus petit. Ce qui précède permet de conclure que
(x) est bien le plus petit sous-groupe de G contenant x.
Remarque
Ce résultat se généralise.
Si A est une partie d'un groupe (G, *), alors le sous-groupe de G engendré par A est44
{ejujx?1 *X22*-••*££*; fceN*, (xi,x2,...,xfc) G Afc, (m,n2,...,nfc) G Zfc|.
42. Car un sous-groupe est stable par inversion.
43. Grâce à la proposition 12 (p. 25).
44. Le singleton {e} est ajouté uniquement pour parer au cas particulier où A serait vide.
Chapitre 1. Structures algébriques usuelles
Le groupe Z/nZ
Définition 11
Soit B l'ensemble des booléens. On appelle relation d'équivalence sur un ensemble E
toute application45
n : E2 —■> B
(x, y) i—> xTZy
qui est :
1. réflexive :Mx G E, xlZx ;
2. symétrique : \/(x,y) G E2, xlZy <=> ylZx ;
3. transitive : \/(x,y,z) G E13, (£7£î/ et y7£z) => a;7£z.
Définition 12
Soit E un ensemble muni d'une relation d'équivalence 7£.
Si a; G .E, on appelle classe d'équivalence de x (sous-entendu pour la relation 1Z) et
l'on note x, ou cl(x)> l'ensemble des éléments équivalents à x :
x = cl(x) = {y E E, xlZy}.
Tout élément46 y de ïc, c'est-à-dire tout élément y de E tel que xlZy est un
représentant de x.
Enfin, l'ensemble des classes d'équivalences de E est appelé ensemble quotient, on le
note
E/K = {x, x G E}.
Proposition 16
Soit E un ensemble muni d'une relation d'équivalence 1Z.
L'ensemble des classes d'équivalences de E forme une partition de E.
45. Pour (x,y) G E2> on écrit xVjy pour signifier que le booléen xVjy est vrai.
46. On notera que tout naturellement, grâce à la réflexivité, x est un représentant de x.
1,1 Groupes
Démonstration
Soit x G E.
Puisque x G x par réflexivité, on a x G |^J x'.
x'eE
On en déduit E c (J x7.
L'autre inclusion est immédiate47, d'où
E= IJF.
Il reste à montrer que les ensembles x sont égaux ou disjoints.
Soient x et x' dans i£ tels que x H x7 ^ 0.
En notant ?/ G x H x', on a x7?# et x7??,?/ donc par transitivité x7£x'.
On en déduit alors aisément x = x7 par double inclusion.
Remarque
Réciproquement, si l'on se donne une partition (Ai)iei d'un ensemble E, alors la relation
Il définie par
V(x,?/)g£2, xKy ^=> (3t G / : (x,2/)gA?)
est une relation d'équivalence, dont les classes d'équivalences sont les Ai.
En d'autres termes, se donner une relation d'équivalence sur E équivaut à se donner une
partition de E.
Définition 13
Soit n G N*. Pour x et y dans Z, on dit que x est congru à y modulo n, que l'on note
x = y [n] (ou parfois x = y (mod n))
si x — y est divisible par n, c'est-à-dire si
3k G Z : x — y = /en.
47. Car chaque ce7 est une partie de E.
Chapitre 1. Structures algébriques usuelles
Remarque
On pourrait considérer n G Z.
Mais si n = 0, la relation est simplement l'égalité.
Et dans le cas n < 0, la congruence modulo n équivaut à la congruence modulo —n.
C'est pourquoi seul le cas n > 0 (c'est-à-dire n G N*) a été retenu ci-dessus.
Proposition 17
Soit n G N*.
La relation « ctre congru modulo n » est une relation d'équivalence sur Z.
Démonstration
Nous vérifions les trois points dans l'ordre de la définition 11.
1. Réflexivité : soit x G Z. Alors n divise x — x = 0 (il suffit de prendre k = 0), donc
x = x [n].
2. Symétrie : soit (x,y) G Z2. Supposons x = y [n].
Alors il existe k G Z tel que x — y = kn.
En posant k' = —k G Z, on a y — x = fc'n, donc y = x [n].
En échangeant les rôle de x et y, on a aussi y = x [n] => x = y [n], d'où finalement
x = y [n] <é=> ?/ = x [n]
3. Transitivité : soit (x,y,z) G Z3. On suppose x = y [n] et ?/ = z [n].
Ainsi, il existe k\ et &2 dans Z tels que x — y = k\n et y — z = k^n.
On note fc = k\ + &2 £ Z. En additionnant les deux égalités précédentes, on a
x — z = fcn, soit x = z [n].
Définition 14
Soit ne N*.
On note Z/?iZ l'ensemble quotient de Z par la relation de congruence modulo n.
1.1 Groupes
§Q
Proposition 18
L'application
(z/nZ) —> Z/nZ
I (x,y) i—> x + y = x + y \
définit une loi de composition interne dans Z/raZ.
Démonstration
II faut vérifier que le résultat est indépendant des représentants choisis48.
Soient donc x, x' et y, y' dans Z tels que x = x'ety = y', c'est-à-dire tels que
x = x' [n] et x = x' [n].
Il faut montrer que x + y = xf + yf [n].
Par hypothèse, il existe k\ et k^ dans Z tels que
x — x' = k\n et y — yf = k^n.
On note fc = k\ + fe G Z.
En additionnant les égalités précédentes, on obtient (x + y) — (x' + y1) = fcn, on a donc
bien
x + y = x' + y' [n],
c'est-à-dire
x-\-y = x' +y'.
I Proposition 19 ]
(Z/nZ, +) est un groupe 49 commutatif à ?2 éléments50.
Démonstration
Le fait que 0 G Z est un élément neutre pour + implique sans difficulté que
Vx G Z, x + U = x~+~Ô = x,
48. On dit parfois que la relation d'équivalence modulo n est compatible avec l'addition.
49. La loi + est celle qui a été définie dans la proposition 18.
50. On dira que (Z/nZ, +) est d'ordre n.
Chapitre 1. Structures algébriques usuelles
et de même pour 0 + x.
Ainsi, 0 est élément neutre de Z/nZ pour la loi +.
On montrerait de même l'associativité, la commutativité, et l'existence d'un opposé (—x
est l'opposé de x).
Enfin, il est aisé de voir que Z/nZ possède exactement n éléments, et que l'on peut par
exemple écrire
= {Ô,ï,...,n~^T}.
Ordre d'un groupe, ordre d'un élément
Définition 15
Soient (G, *) un groupe fini et x un élément de G.
1. On appelle ordre du groupe G le cardinal de G.
2. On appelle ordre de x l'ordre du sous-groupe (x) engendré par x.
Proposition 20
L'ordre d de x est également défini par d = inf{/c G N*, xk = e}.
Démonstration
Introduisons le morphisme de groupes </? : (Z, +) —> (G,.) .
n i—y xn
Si G est fini, (p ne peut pas prendre une infinité de valeurs, donc ne peut être injectif.
On a donc Ker(</?) qui est un sous-groupe de (Z, +), non réduit à {0}.
Il existe donc no G N, no > 1, tel que Ker(</?) = noZ.
Si Ton reprend la preuve de la proposition 8, on sait que no est le plus petit élément
strictement positif de Ker(</?), c'est-à-dire le plus petit élément k de N* tel que
cp(k) = xk = e,
donc no = d, défini dans la proposition.
Puisque (p est no = d-périodique,
(x)=Tm(<p) = MO), V(l), ».,¥>(<*- 1)},
1.1 Groupes
d'où Card(x) ^ d.
Par ailleurs, les éléments </?(0), ..., (p(d — 1) sont deux à deux distincts51.
On conclut que (x) = {</?(0),</?(l), ...,</?(d — 1)} est de cardinal Card((x)) = d.
( Proposition 21
Si d est l'ordre d'un élément x d'un groupe (G, *), alors xn — e équivaut à d divise n.
Démonstration
On utilise le morphisme précédemment défini </?, alors xn = e équivaut kn e Ker(</?) = d
qui équivaut bien à d divise n.
Théorème 1
Soit H un sous-
(Lagrange52
(1771) 53>54)
groupe d'un groupe fini (G,.).
Alors l'ordre de H divise l'ordre
de G.
Démonstration
Pour g G G, on note gH = {g.h, h G H}.
Montrons que ces ensembles sont soit disjoints, soient égaux.
Soient donc #i, g<i G G, montrons que g\H H giH = 0 ou g\H = g^H.
Supposons g\H H g^H ^ 0. Ainsi, il existe go G g\H H #2#-
Comme #o £ <7i#, il existe h\ £ H tel que #o = 9ih\.
De même, il existe h,2 € H tel que #0 = #2^2-
On peut alors écrire #2 = doh^1 = gihih^1.
On peut en déduire g^H C g\H.
En effet, soit g G #2#- Ainsi, il existe h e H tel que # = g^h.
Alors g = gihih^h e giH, et l'inclusion est démontrée.
g//
De même, en partant de g\ = g^h^1 = g2^2h\X on arrive à prouver g\H C g^H.
51. Sinon il existe 0 ^ a <b ^ d— ltel que y?(6) = y>(a), et alors b — a G Ker(y?), d'où 6 — a multiple
de no = dt ce qui est absurde puisque 0 < b — a < d.
52. Voir notice biographique page 148.
53. Initialement publié dans les Nouveaux mémoires de l'Académie royale des sciences et belles-lettres
de Berlin (1771), pp. 138-254, réédité dans les Œuvres de Lagrange, tome 3, Paris (1869), pp. 369 et
suivantes.
54. La preuve de Lagrange, antérieure à la définition formelle des groupes, concernait les sous-groupes
de Sny dont il parvint à démontrer qu'ils divisent Card(Sn) = n\.
Chapitre 1. Structures algébriques usuelles
Finalement, on aboutit à g\H = g^H.
Ainsi, les ensembles gH sont bien disjoints ou égaux.
Comme tout élément g E G vérifie g G gH (il suffit de prendre h = e G #), on en déduit
qu'il existe #1, ..., #& : k éléments de G tels que g\H, ...,gkH forment une partition de G,
c'est-à-dire : G = g\H U ... U gkH et les giH sont deux à deux distincts.
k
Ce résultat se note G = | |(ffiiJT).
On en déduit alors Card(G) = Card(#i H) H h Cardai/).
Or si l'on fixe g G G, on a Cardai/) = Card(jET) puisque l'application
H -+ gH
h 1—> gh
est bijective.
On arrive ainsi à Card(G) = fc.Card(jET).
On peut bien conclure que Card(jET) divise Card(G).
Corollaire 1
Soit x un élément d'un groupe fini G et iV = Card(G) l'ordre de G. Alors
1. l'ordre de x divise l'ordre de G;
2. xN = e.
Démonstration
Il suffit d'appliquer le théorème précédent à H = (x), sous-groupe de G engendré par x.
Il existe une autre preuve, suggérée par le programme officiel, et qui est plus courte
(et qui n'utilise pas le théorème précédent), mais qui n'est valable que dans le cas d'un
groupe commutatif.
On note N = Card(G) et #1,..., #tv les N éléments deux à deux distincts de G.
On fixe également x e G.
On calcule
^=11»=n».
k=l geG
1.1 Groupes
le produit des N éléments de G.
Comme g \—> gx est une bijection de G dans G, on peut écrire
P= Y[x9 = (x^) ' ' * (x9n)-
geG
Par commutativité, on réécrit
P = x• • ■ x.(gi --gN)= xNP.
Il suffit de multiplier cette égalité par P~l (dans un groupe, tout élément est inversible)
pour en déduire xN = e.
Par la proposition 21, on en déduit que Tordre de x divise N = Card(G).
Définition 16
On dit qu'un groupe est monogène s'il existe xq G G tel que G = (xq).
Proposition 22
Soit G un groupe monogène. Alors deux cas se présentent :
1. Si G est infini, alors G est isomorphe à Z.
2. Si G est d'ordre fini n, alors G est isomorphe à Z/nZ.
Démonstration
Le groupe G étant monogène, il existe xo G G tel que G = (xo) = {xok, k eZ}.
1. Supposons G infini.
On considère l'application (p : Z —> G
k i—> xok
Il est clair que </? est un morphisme de groupes de (Z, +) dans (G, *).
Le fait que xo engendre G signifie que (p est surjectif.
Il reste à démontrer Pinjectivité de (p. Il s'agit de vérifier55 que Ker(</?) C {0}.
Soit donc no G Ker(</?), c'est-à-dire no G Z tel que (p(no) = xn° = e.
Quitte à remplacer no par —no, on peut supposer no ^ 0.
Supposons no > 0.
55. D'après la proposition 12 (p. 25).
Chapitre 1. Structures algébriques usuelles
Pour tout élément n de Z, on effectue la division euclidienne de n par no-
Il existe alors (g, r) G Z2 tels que n = n^q + r et 0 ^ r < no-
Et on a y?(n) = x0no<7+r = (x0n°)9 * x0r = eq * x0r = x0r.
Ainsi, G = Im(</?) C {x0,^1, ...,xno_1}, ce qui contredit le fait que G est infini.
Nous pouvons donc affirmer que no = 0, et par suite Ker(</?) C {0}, donc (p est bien
injectif et réalise ainsi un isomorphisme de groupes de (Z, +) dans (G, *).
2. Supposons G fini, notons n le cardinal de G.
On sait que si n divise k — k\ alors xk = xk .
Ainsi, dans Z/nZ, si fc = fc7, on peut noter ^(fc) = xok = xok = il)(k').
On arrive donc à définir une application56 sur Z/nZ.
On sait que V# G G, 3fc G Z tel que # = ^(fc), donc i\) est surjective.
Les égalités xvk+k = xvk.XQk « passent à la classe » et font que ij) est un morphisme
de groupes.
Enfin, l'application i\) étant surjective entre deux ensembles de même cardinal fini,
elle est bijective et donc i\) est un isomorphisme de groupes.
Exemple
Soit n G N*.
On rappelle que Un = {z G C, zn = 1} = {e2ifc7r/n, k G Z}.
Le groupe (Un,.) est isomorphe à (Z/nZ, +).
En effet, si Ton note uj = e2z7r/n, alors
(Z/nZ,+) —► Un
x i—> ujx = e2ixn/n
réalise un isomorphisme.
Il faut notamment vérifier que cette application est bien définie : si x = x' alors il existe
k G Z tel que x' = x + kn.
On a alors -^ = -^ + 2ikir, et comme k G Z, e2ifc7r = 1 et ainsi e2ix7r/n = e2ix'n/n.
n n
Mais il est inutile de prouver quoi que ce soit, puisque Un est un groupe monogène d'ordre
n engendré par u.
56. La valeur de ip{k) dépend de k mais pas du choix de son représentant k.
1.1 Groupes
Remarque
La proposition se généralise ainsi : si tjj est un morphisme de (Z, +) dans un groupe
(G,*), alors :
• Si ip est injectif, ip réalise évidemment un isomorphisme de (Z, +) sur (im(^), *).
• Si ^ n'est pas injectif, alors Ker(^) est un sous-groupe de (Z, +), donc il existe
n0 G N* tel que Ker(^) = n0Z.
On peut montrer que l'on peut définir
ip' : Z/n0Z —> G
k i—► ^(k)=^(k)
ip' réalise alors un isomorphisme de (Z/noZ, +) sur Im(^).
Le groupe symétrique
Le but de cette partie est l'étude du groupe symétrique, avec un objectif notable : la
définition d'un morphisme, appelé signature, qui trouvera une application capitale dans
la définition et le calcul des déterminants.
Définition 17
Soit n G N*. On appelle groupe symétrique d'ordre n, et l'on note Sn, l'ensemble des
permutations de [1, n], c'est-à-dire l'ensemble des bijections de [1, n] dans lui-même,
muni de la loi de composition.
Proposition 23
Le groupe (Sn,°) est d'ordre n!.
Plus généralement, si n ^ p, l'ensemble des injections d'un ensemble à p éléments
n!
dans un ensemble à ?? éléments a pour cardinal n(n — l)...(n — » + l) = -, rr-
(n-p)\
Remarque
Le terme « d'ordre n » dans la définition du groupe symétrique est trompeur, puisque
l'ordre (c'est-à-dire le cardinal) de ce groupe est n! et pas n.
ETil
Chapitre 1. Structures algébriques usuelles
n
La figure d'Evariste Galois est mythique dans le monde
, • ~ » des mathématiques.
Entré au collège Louis-le-Grand en 1823, en classe de
V-..{'. quatrième", il se distingue en classe de troisième; mais il
v; commence à connaître une crise morale profonde. Son tra-
è!l;iL va^ commence alors à se dégrader et après un début de
%/' ^ ^ première médiocre, il doit retourner en seconde. Toutefois
' " il peut intégrer la classe de première année de mathéma-
Évariste Galois tiques supérieuresb. Dès qu'il prend conscience de ses ca-
(1811-18^2) pacités, il entreprend la lecture des grands maîtres : Le-
gendre, Lagrange, Gauss... Il étudie les questions de
résolutions algébriques des équations.
Il a pour but d'entrer à l'École polytechnique. Il s'y présente un an trop tôt, est
refusé, ce qu'il trouve injuste. En 1829, il publie son premier Mémoire et présente un
premier travail à l'Académie des sciences par l'intermédiaire de Cauchy qui
l'aurait perdu. C'est pour Evariste une seconde injustice. Il vivra son second échec au
concours d'entrée de Polytechnique comme une troisième injustice.
Galois réussit son entrée à l'Ecole préparatoiref. Il y poursuit ses recherches et en
communique les résultats à l'Académie des sciences en 1830.
Joseph Fourier, secrétaire perpétuel de l'Académie emporte le manuscrit chez lui et
meurt sans avoir rendu son jugement. Le manuscrit n'ayant pas été retrouvé,
Galois ne peut entrer en compétition. Il est renvoyé de l'École normale en décembre
1830 après avoir fait publier par un journal une critique sur l'attitude du directeur
de l'École. Ses recherches aboutissent à un mémoire sur les conditions de resolubilité
des équations par radicauxd.
C'est un militant actif, emprisonné à plusieurs reprises jusqu'à sa mort. En raison
de sa mauvaise santé, il lui est permis de sortir de prison. Il connaît un amour cruel
qui semble être à l'origine d'un duel inévitable.
Durant sa dernière nuit, il rédige une lettre, destinée à son ami Auguste Chevalier,
dans laquelle il résume ses découvertes. Evariste Galois meurt le 31 mai 1832 : il
n'avait pas encore 21 ans.
Ce n'est qu'en 1843 que le mathématicien Joseph Liouville a la volonté et la patience
de démêler ses travaux. Il parvient à les publier en 1846 dans sa revuee.
À partir de ce moment, les idées novatrices de Galois et leur puissance sont
reconnues. Le concept phare introduit par Galois, celui de groupe, a profondément
influencé l'algèbre durant de nombreuses décennies.
a. Pour les éléments biographiques mentionnés ici et de nombreux autres, cf. le travail de P. Dupuy : la vie d'Evariste
Galois, annales scientifiques de l'E.N.S., 3ème série 13 (1896), pp. 197-266
b. Le programme du lycée de l'époque, menant au baccalauréat, était essentiellement littéraire. Il se concentrait en effet
sur les disciplines suivantes : langues anciennes, rhétorique, logique, morale, philosophie, sciences mathématiques,
physiques. Il était alors possible, sans avoir le baccalauréat, de suivre en parallèle les études correspondant aux classes
préparatoires scientifiques actuelles.
c. Nom de l'École normale de 1826 jusqu'à la Révolution de Juillet, date à laquelle l'École retiouve son appellation
originelle de 1794.
d. Journal de mathématiques pures et appliquées, tome 11 (1846), pp. 417-433. Le manuscrit est daté de 1831.
e. Œuvres mathématiques d'Evariste Galois, Journal de mathématiques pures et appliquées, tome 11 (1846), pp. 381-445.
1
1.1 Groupes Ql
Démonstration
On note E = {xi,X2,X3, ...,xp} un ensemble à p éléments. Pour définir une injection /
de E dans un ensemble F an éléments :
• On choisit la valeur de /(#i) quelconque dans F, il y a donc n possibilités.
• On choisit la valeur de /(a^), Qm doit être différente de /(xi), donc appartenir à
F\{/(xi)}, il y a donc n — 1 possibilités.
• On choisit la valeur de /(a^), qui doit être différente de f(x\) et de /(a^), c'est-à-
dire appartenir à F\{/(xi), /(a^)}, il y a donc n — 2 possibilités.
• On continue ainsi de suite avec /(a^), ..., /(xp_i).
• Enfin, on choisit la valeur de f(xp) dans F\{/(xi), /(a^), •••> /(#p-i)}> ce Qui laisse
n— (p—1) choix.
On arrive finalement bien à n(n — l)(n — 2) • • • (n — p + 1) possibilités.
Dans le cas de 5n, on sait qu'une application entre deux ensembles de même cardinal fini
(n en l'occurrence) est bijective si et seulement si elle est injective, ce qui correspond à
prendre p = n dans le résultat précédent, et donne bien les n! éléments annoncés.
Chapitre 1. Structures algébriques usuelles
Certaines permutations jouent un rôle particulier. Il s'agit des cycles que l'on définit
ci-après.
/ x
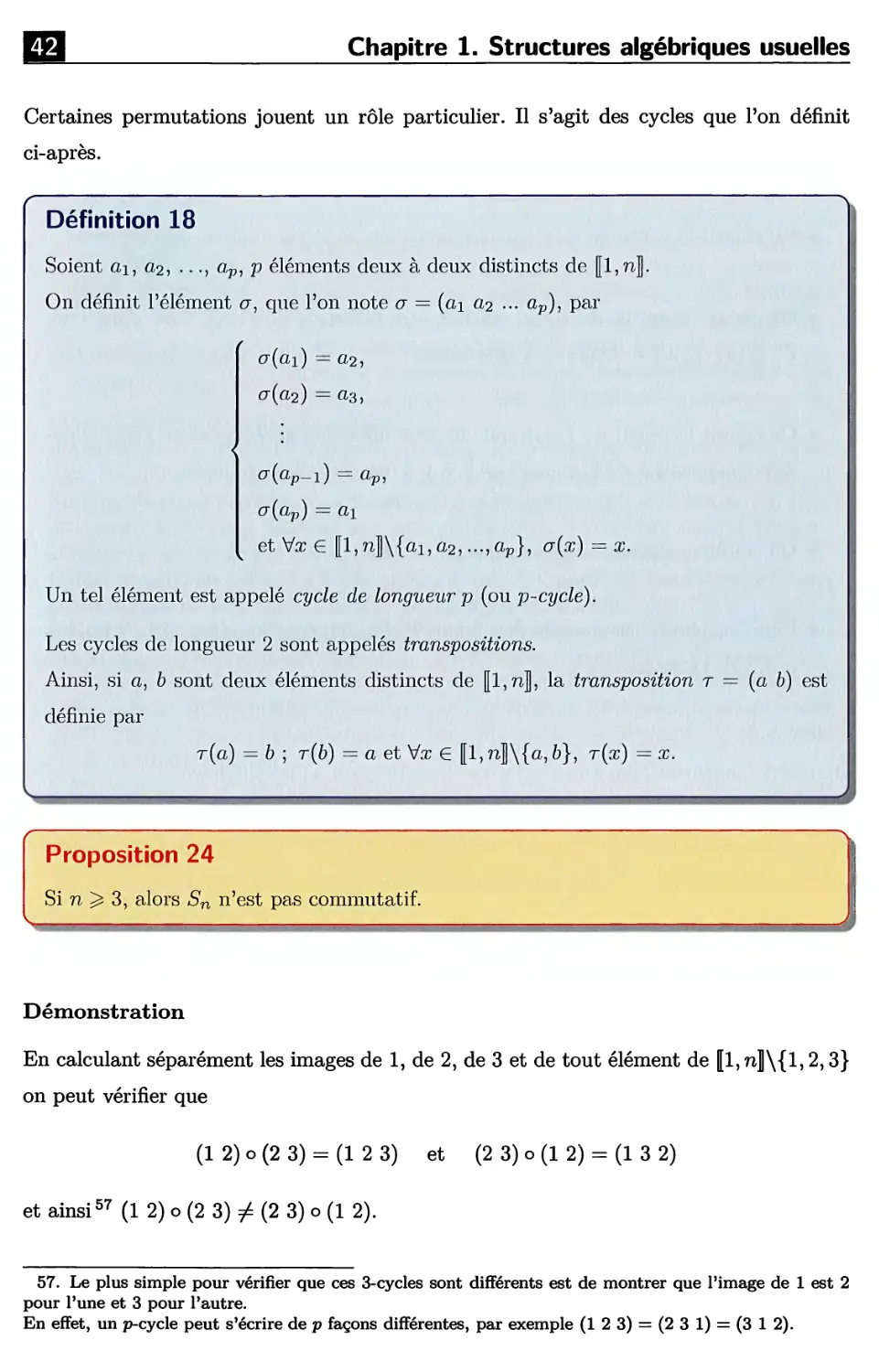
Définition 18
Soient ai, a2, • • -, ap, V éléments deux à deux distincts de |l,nj.
On définit l'élément a, que l'on note a = (ai a2 ... %,), par
o-(ai) =a2,
a(a2) = a3,
a{ap-1) = ap,
a(ap) = ai
[ et Va; G |l,n]\{ai,a2,...,ap}, a(x) = x.
Un tel élément est appelé cycle de longueur p (ou p-cycle).
Les cycles de longueur 2 sont appelés transpositions.
Ainsi, si a, b sont deux éléments distincts de |l,n], la transposition r = (a b) est
définie par
r(a) = b ; r(b) = a et Va; G [1, n]\{a, 6}, r(a;) = a;.
Proposition 24
Si n ^ 3, alors 5n n'est pas commutatif.
Démonstration
En calculant séparément les images de 1, de 2, de 3 et de tout élément de [1, n]\{l, 2,3}
on peut vérifier que
(1 2) o (2 3) = (1 2 3) et (2 3) o (1 2) = (1 3 2)
et ainsi57 (1 2) o (2 3) ^ (2 3) o (1 2).
57. Le plus simple pour vérifier que ces 3-cycles sont différents est de montrer que l'image de 1 est 2
pour l'une et 3 pour l'autre.
En effet, un p-cycle peut s'écrire de p façons différentes, par exemple (1 2 3) = (2 3 1) = (3 1 2).
1.1 Groupes
Remarque
Il est évident que si E est un ensemble fini de cardinal Card(i£) ^ 3 ou un ensemble
infini, alors de même (S(i£),o) n'est pas commutatif
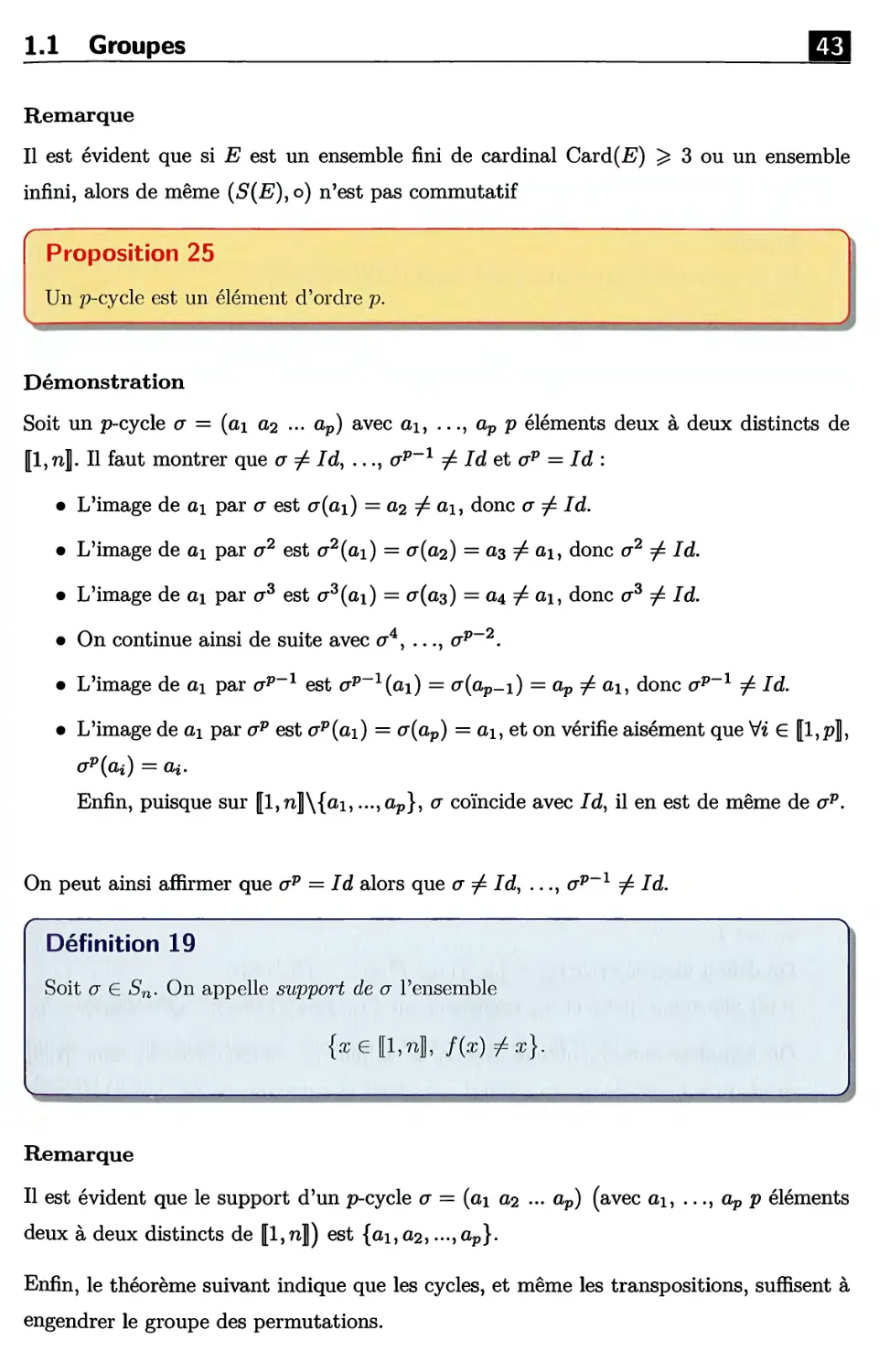
[ Proposition 25 I
Un p-cycle est un élément d'ordre p.
Démonstration
Soit un p-cycle a = (ai a<i ... ap) avec ai, ..., av p éléments deux à deux distincts de
[1, n]. Il faut montrer que a ^ Id, ..., ov~x ^ Id et a9 = Id :
• L'image de ai par a est a(a{) = a^ ^ ai, donc a ^ Id.
• L'image de ai par a2 est <r2(ai) = 0(0,2) = a$^ ai, donc a2 ^ Id.
• L'image de ai par a3 est <r3(ai) = 0(0,$) = a±^ a\, donc a3 ^ Id.
• On continue ainsi de suite avec a4, ..., ap~2.
• L'image de ai par ap_1 est 0"p-1(ai) = a(ap_i) = ap ^ ai, donc ap_1 ^ Id.
• L'image de ai par av est ap(ai) = c(av) = ai, et on vérifie aisément que Vz G [l,p]|,
ap(ai) = ai.
Enfin, puisque sur [l,nj\{ai, ...,ap}, a coïncide avec Id, il en est de même de ap.
On peut ainsi affirmer que ap = Id alors que a ^ Id, ..., ap_1 ^ Id.
Définition 19
Soit a G Sn. On appelle support de a l'ensemble
Remarque
Il est évident que le support d'un p-cycle a = (ai a^ ... ap) (avec ai, ..., ap p éléments
deux à deux distincts de [l,nj) est {ai, a^ ...,ap}.
Enfin, le théorème suivant indique que les cycles, et même les transpositions, suffisent à
engendrer le groupe des permutations.
nRI
Chapitre 1. Structures algébriques usuelles
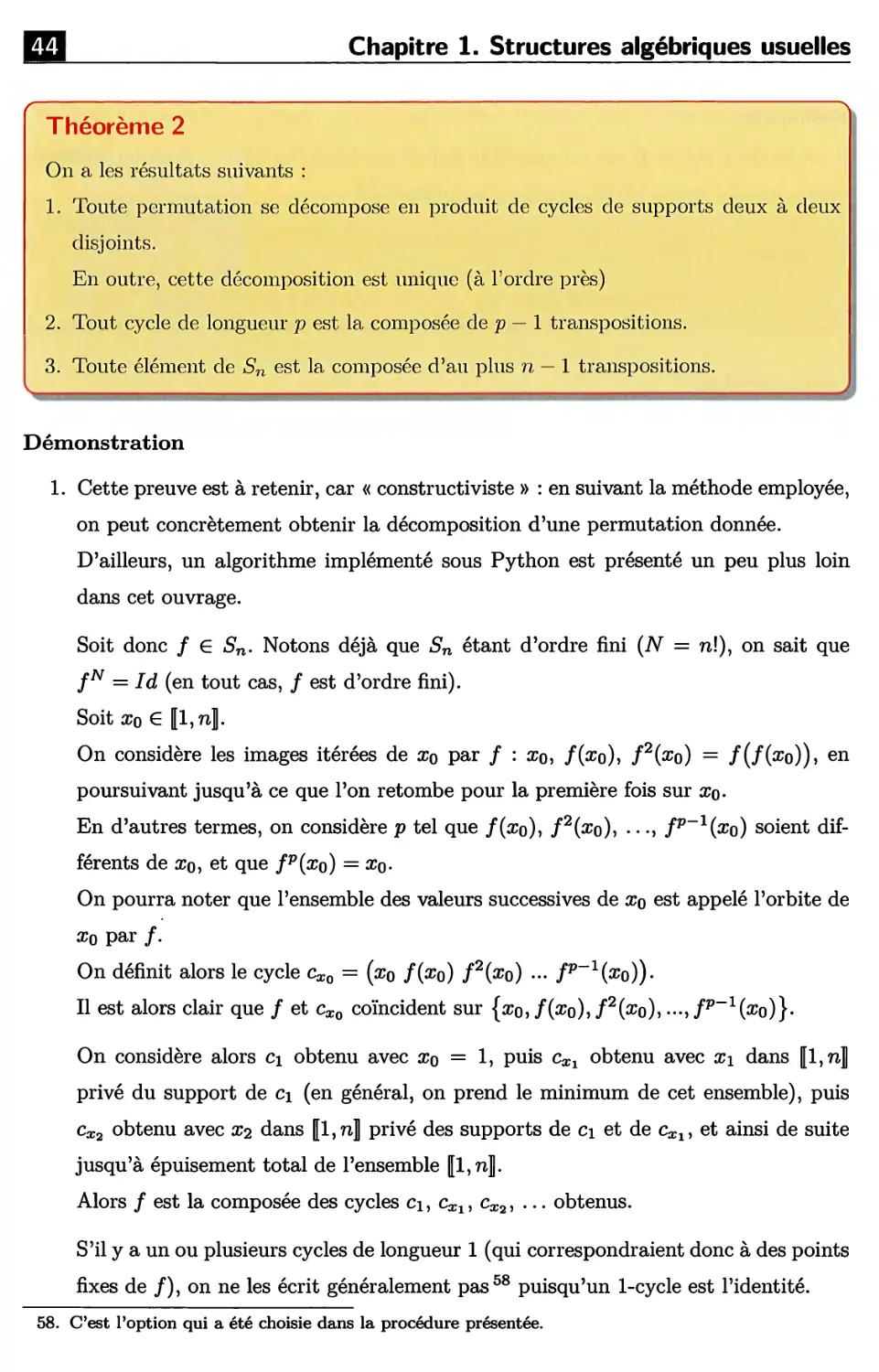
Théorème 2
On a les résultats suivants :
1. Toute permutation se décompose en produit de cycles de supports deux à deux
disjoints.
En outre, cette décomposition est unique (à l'ordre près)
I 2. Tout cycle de longueur p est la composée de p — 1 transpositions. |
3. Toute élément de Sn est la composée d'au plus n — 1 transpositions.
Démonstration
1. Cette preuve est à retenir, car « constructiviste » : en suivant la méthode employée,
on peut concrètement obtenir la décomposition d'une permutation donnée.
D'ailleurs, un algorithme implémenté sous Python est présenté un peu plus loin
dans cet ouvrage.
Soit donc / G Sn. Notons déjà que Sn étant d'ordre fini (N = n!), on sait que
fN = Id (en tout cas, / est d'ordre fini).
Soit x0 e [l,n].
On considère les images itérées de xo par / : #o, /(#o)> /2(#o) = /(/(#o))> en
poursuivant jusqu'à ce que l'on retombe pour la première fois sur #o-
En d'autres termes, on considère p tel que /(#o), /2(#o)> • • •> /p_1(#o) soient
différents de xo, et que /p(#o) = #o-
On pourra noter que l'ensemble des valeurs successives de xo est appelé l'orbite de
xo par /.
On définit alors le cycle cXo = (x0 /(x0) /2(#0) - /p_1(^o))-
Il est alors clair que / et cXo coïncident sur {#o,/(#()),/2(#o), •••>/P~1(x°)}-
On considère alors C\ obtenu avec xo = 1, puis cXl obtenu avec x\ dans [l,n]
privé du support de C\ (en général, on prend le minimum de cet ensemble), puis
cX2 obtenu avec #2 dans [l,nj privé des supports de c\ et de cXl, et ainsi de suite
jusqu'à épuisement total de l'ensemble [l,n|.
Alors / est la composée des cycles Ci, cXl, cX2, ... obtenus.
S'il y a un ou plusieurs cycles de longueur 1 (qui correspondraient donc à des points
fixes de /), on ne les écrit généralement pas58 puisqu'un 1-cycle est l'identité.
58. C'est l'option qui a été choisie dans la procédure présentée.
Quant à l'unicité de la décomposition, nous l'admettons.
2. Soit un p-cycle a = (ai a^ as ... ap_i ap).
Il est aisé de vérifier59 que a = (ai 02) o (0,2 03) o • • • o (ap_i ap).
3. Il suffit de combiner les deux points précédents.
Exemple
Dans 5g, on considère la permutation notée
/l23456789
f =
^784653921
Cette écriture se lit par colonne et signifie /(l) = 7, /(2) = 8, ..., /(9) = 1 (sous un k
de la première ligne, il y a /(&))•
Les images successives de 1 sont
li-A7i-A9i-Al,
donc / coïncide avec le 3-cycle (1 7 9) sur l'ensemble60 {1,7,9}.
Les images successives de 2 sont
2hA8hA2,
qui correspond au 2-cycle (c'est-à-dire à la transposition) (2 8).
Les images successives de 3 sont
3hA4hA6hA3,
qui correspond au 3-cycle (3 4 6).
Enfin, 5 est un point fixe (le 1-cycle (5) correspond à l'identité).
On peut donc écrire
/ = (17 9) o(2 8) o(3 4 6),
ou éventuellement
/ = (1 7 9) o(2 8) o(3 4 6) o(5).
59. Il ne faut pas omettre de vérifier qu'il y a égalité sur [l,n]\{ai,a2, ...,ap}. Ce point est évident
car chaque permutation qui apparaît coïncide avec l'identité sur cet ensemble.
60. Cet ensemble des valeurs successives prises par les itérées de / en 1 s'appelle l'orbite de 1 par la
permutation f.
|jj] Chapitre 1. Structures algébriques usuelles
Si Ton veut passer aux transpositions, on sait que
(17 9) = (1 7) o (7 9)
et
(3 4 6) = (3 4) o (4 6),
d'où finalement
/ = (l 7) o (7 9) o (2 8) o (3 4) o (4 6).
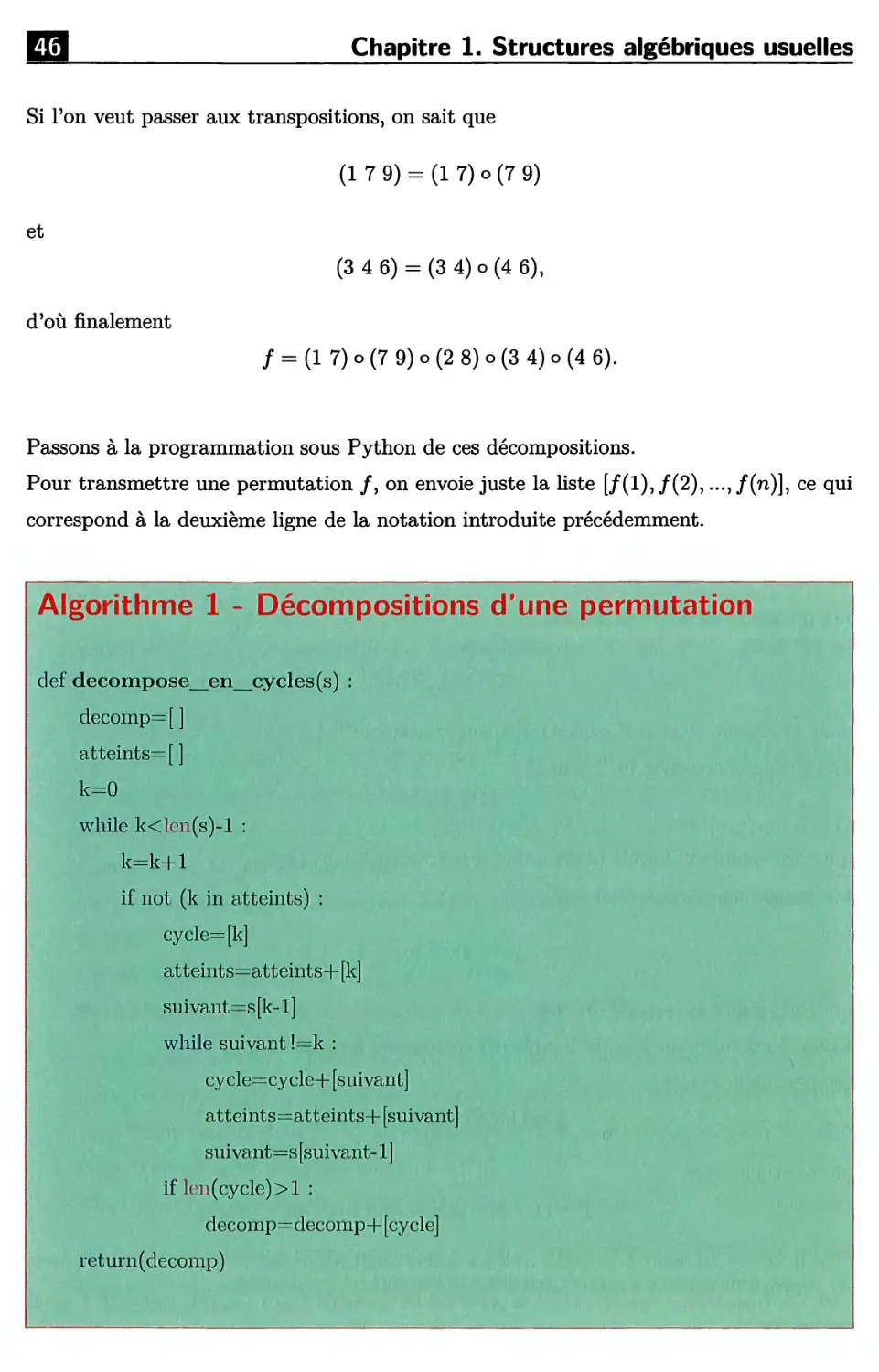
Passons à la programmation sous Python de ces décompositions.
Pour transmettre une permutation /, on envoie juste la liste [/(l), /(2),..., /(n)], ce qui
correspond à la deuxième ligne de la notation introduite précédemment.
Algorithme 1 - Décompositions d'une
def décompose en cycles (s) :
decomp=[ ]
atteints=[ ]
k=0
while k<len(s)-l :
k=k+l
if not (k in atteints) :
cycle=[k]
atteints=atteints+ [k]
suivant=s[k-l]
while suivant !=k :
cycle=cycle+ [suivant]
atteints=atteints+ [suivant]
suivant=s [suivant-1]
if len(cycle)>l :
decomp=decomp+ [cycle]
return(decomp)
permutation
1.1 Groupes
m
def décompose cycle en
res=[]
if len(c)>=2 :
for k in range (0,len
res=res+[[c[k],c
return(res)
def décompose permut
decomp_f=[ ]
decomp=decompose__en
for c in decomp :
decomp_f=decomp.
r eturn (decomp_f )
__transpos(c) :
;c)-l) :
*+l]]]
en transpos(s) :
_cycles(s)
_f+decompose_cycle_en_
_transpos(c)
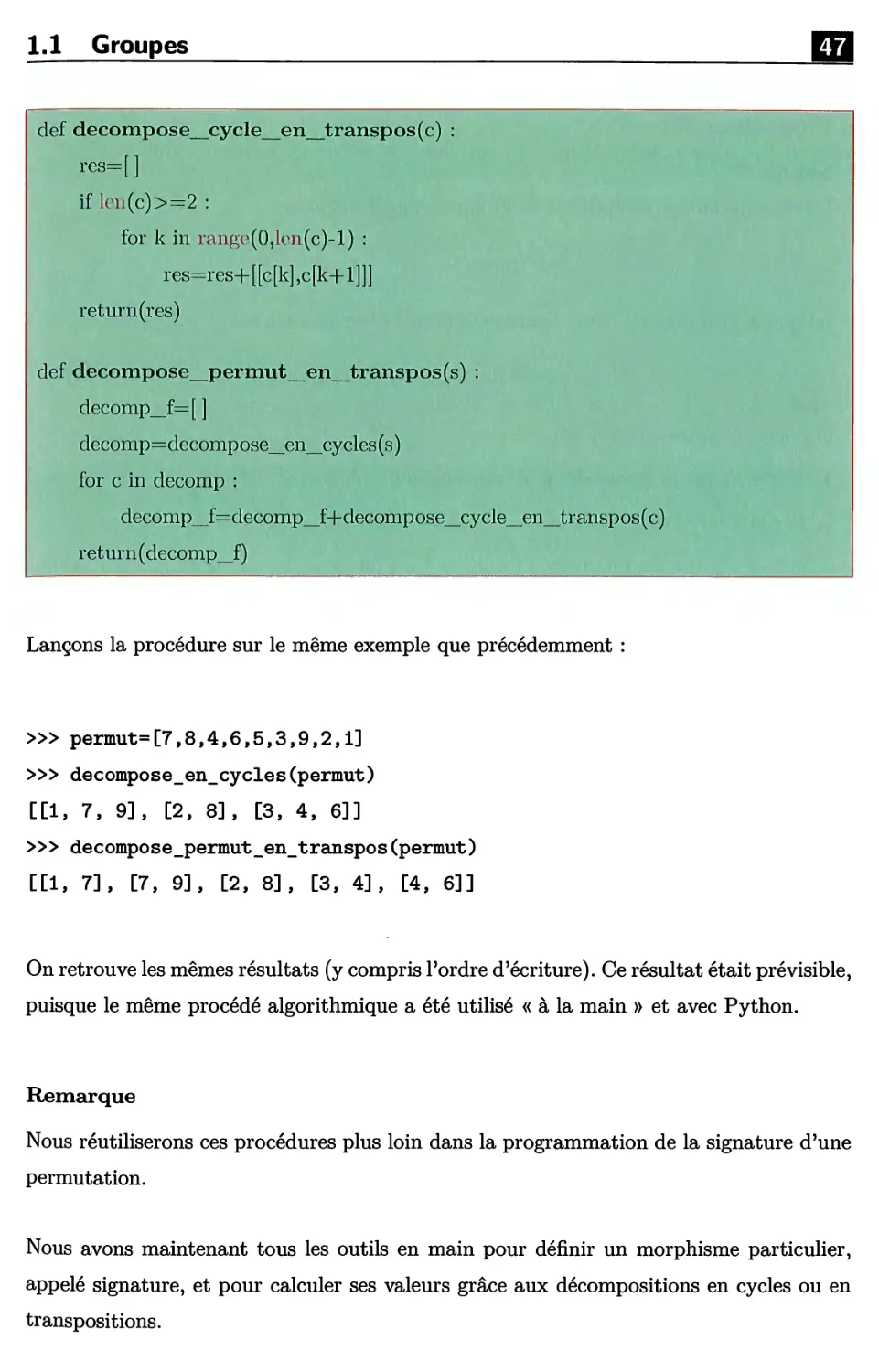
Lançons la procédure sur le même exemple que précédemment :
>» permut=[7,8,4,6,5,3,9,2,l]
>» decompose_en_cycles(permut)
[[1, 7, 9], [2, 8], [3, 4, 6]]
»> decompose_permut_en_transpos(permut)
[[1, 7], [7, 9], [2, 8], [3, 4], [4, 6]]
On retrouve les mêmes résultats (y compris l'ordre d'écriture). Ce résultat était prévisible,
puisque le même procédé algorithmique a été utilisé « à la main » et avec Python.
Remarque
Nous réutiliserons ces procédures plus loin dans la programmation de la signature d'une
permutation.
Nous avons maintenant tous les outils en main pour définir un morphisme particulier,
appelé signature, et pour calculer ses valeurs grâce aux décompositions en cycles ou en
transpositions.
Chapitre 1. Structures algébriques usuelles
Proposition 26
Soit n e N*.
Il existe un unique morphisme de groupes, appelé signature
e : (S„,o)—►({-1,1},.)
tel que la signature de toute transposition est — 1, c'est-à-dire
Va^b, e((a6)) = -l.
On peut en outre affirmer que :
1. si a G Sn est la composée de r transpositions, alors e(a) = (—l)r ;
2. la signature d'un p-cycle (ai a^ ... ap) est e((ai a^ ... ap)) = (—l)p_1 ;
3. si a G Sn est la composée d'un pi-cycle, d'un p2-cycle, ..., d'un ps-cycle, alors
e(a) = (-l)Pl-1.(-l)P2-1...(-l)p--1 = (_i)Pi+P2+-+F--a>
Démonstration
• Pour tout a G Sn, on pose
e{o)= n a°')~CT(i)-
Le fait que e(a) = ±1 s'explique car les facteurs sont les mêmes au numérateur
et au dénominateur, à Tordre et au signe près, donc en réarrangeant un des deux
produits, e(a) apparaît comme un produit de facteurs valant ±1, d'où une valeur
de±l.
• On admet le fait que e est bien un morphisme de groupes.
Soit a ^ b. Montrons que e((a b)) = — 1.
Quitte à échanger a et b (puisqu'il est évident que les transpositions (a b) et (b a)
sont égales), on peut supposer a <b.
Le résultat se démontre en distinguant alors dans le produit (au numérateur) les
cas selon que i et/ou j vaut (valent) a et/ou b.
La preuve n'est pas détaillée ici, c'est un « jeu » peu intéressant sur les indices.
• L'unicité est en revanche plus intéressante, elle vient d'un résultat précédent :
Soit a e Sn. Par le théorème 2 (p. 44), a est la composée de permutations ri,
1.1 Groupes
. . ., Tr.
On a alors forcément, en utilisant le fait que e est un morphisme (puis le fait qu'en
une transposition, e doit valoir — 1) :
e(a) =e(ri or2o-oTfc) = e(n) .e{r2) • • -efa) = (-l)fc.
Il existe donc bien une unique valeur.
• Nous avons vu (cf. théorème 2 page 44) qu'un p-cycle est la composée de p — 1
transpositions : (ai a2 a$ ... ap_i ap) = (ai a2) o (a2 as) o • • • o (ap_i ap), dont on
déduit (e étant un morphisme) que
e(ai a2 a% ... ap_i ap) = e(a\ a2).e(a2 as)...e(ap-i av)
= (_i).(_i)...(-i)
= {-iy-\
• Le point restant utilise simplement le fait que e est un morphisme, et les valeurs
déterminées pour les transpositions et les cycles.
Remarque
Au lieu de donner la formule de e, on pourrait démontrer l'existence de la signature en
disant : si a est la composée de r transpositions, alors e(a) = (—l)r.
Mais il faut alors justifier que e est ainsi bien défini.
En effet, la décomposition de a en transpositions n'est pas unique; il faudrait alors
justifier que si a est la composée de r transpositions ou de r' transpositions, alors r et r'
ont la même parité, ce qui équivaut à (—l)r = (—l)r .
Passons à la programmation sous Python de la signature.
On utilise les décompositions en cycles ou en transpositions déjà programmés plus haut.
La première version utilise la décomposition en cycles, et le fait que e est un morphisme,
et que e(c) = (—l)p_1 si c est un p-cycle.
En d'autres termes, si a = C\ o • • • o c*;, où Vi G [1, fcj, c» est un pf-cycle, alors
e{&) = (-1)*-1 • (-1)*»-1 • • • (-l)P*-1.
La seconde version utilise aussi le fait que e est un morphisme, mais cette fois utilise
la décomposition en transpositions, et le fait que la signature d'une transposition est
y Chapitre 1. Structures algébriques usuelles
toujours —1. Ainsi, la signature vaudra (—l)r, où r est le nombre de transpositions
obtenu dans la décomposition.
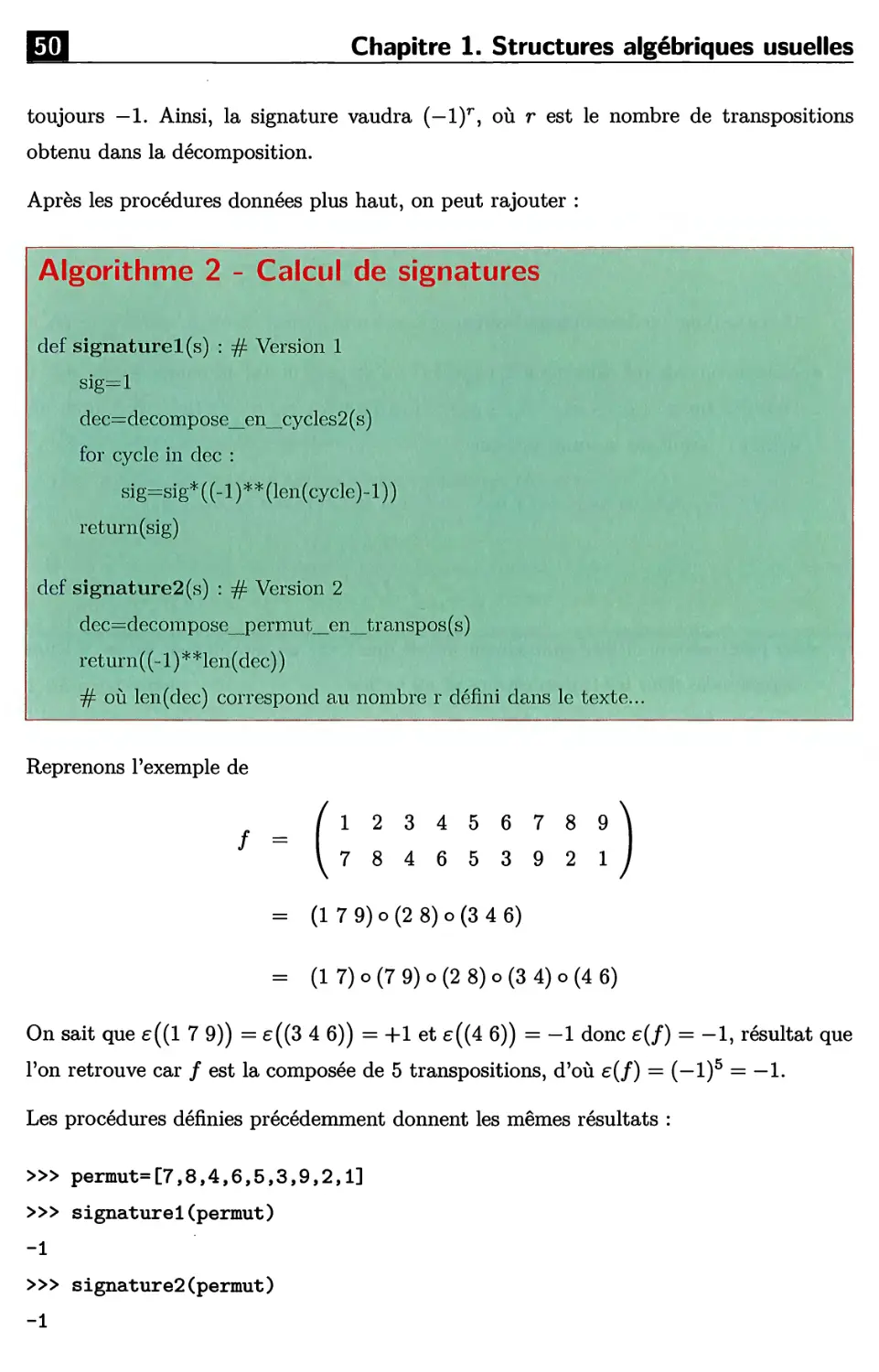
Après les procédures données plus haut, on peut rajouter :
Algorithme 2 - Calcul de signatures
def signature!.(s) : # Version 1
sig=l
dec=decompose_en_cycles2 (s)
for cycle in dec :
sig=sig*((-l)**(len(cycle)-l))
return(sig)
def signature2(s) : # Version 2
dec=decompose_permut_en__transpos(s)
return((-l)**len(dec))
■#■ où len(dec) correspond au nombre r défini dans le texte.,
Reprenons l'exemple de
/l23456789
f =
\^784653921
= (1 7 9) o (2 8) o (3 4 6)
= (1 7) o (7 9) o (2 8) o (3 4) o (4 6)
On sait que e((l 7 9)) = e((3 4 6)) = +1 et e((4 6)) = -1 donc e(f) = -1, résultat que
Ton retrouve car / est la composée de 5 transpositions, d'où e(f) = (—l)5 = —1.
Les procédures définies précédemment donnent les mêmes résultats :
>» permut=[7,8,4,6,5,3,9,2,l]
>» signature!, (permut)
-1
>» signature2(permut)
-1
1.2 Anneaux
1.2 Anneaux
Généralités
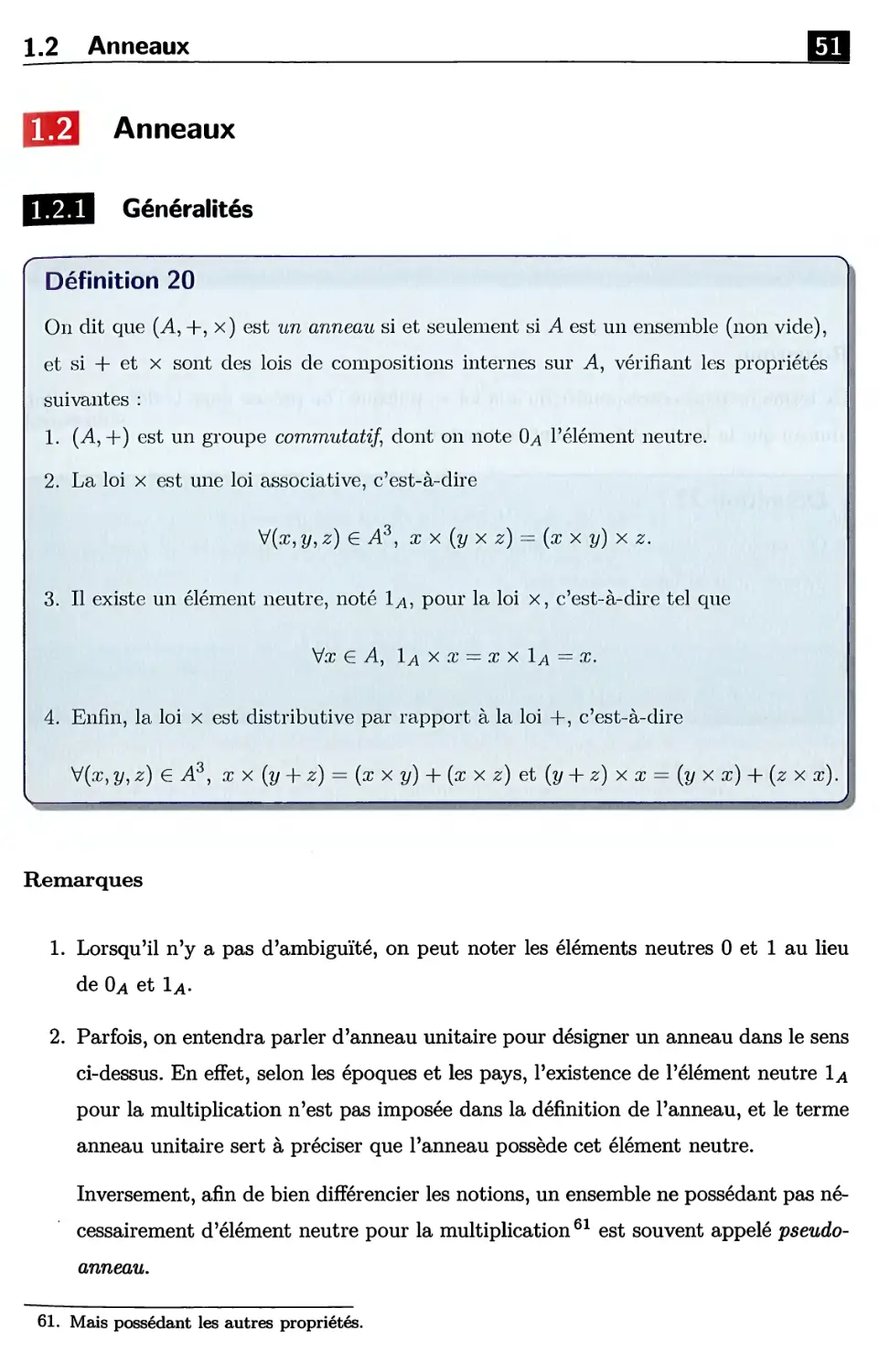
Définition 20
On dit que (A, +, x) est un anneau si et seulement si A est un ensemble (non vide),
et si + et x sont des lois de compositions internes sur A, vérifiant les propriétés
suivantes :
1. (-A,+) est un groupe commutatif, dont on note CU l'élément neutre.
2. La loi x est une loi associative, c'est-à-dire
V(a;, y, z) G A3, x x (y x z) — [x x y) x z.
3. Il existe un élément neutre, noté 1^, pour la loi x, c'est-à-dire tel que
Va; G A, 1a x x = x x 1a = x.
4. Enfin, la loi x est distributive par rapport à la loi +, c'est-à-dire
V(x}y,z) G A3, x x (y + z) = (x x y) + (x x z) et (y + z) x x = (y x x) + (z x a;).
Remarques
1. Lorsqu'il n'y a pas d'ambiguïté, on peut noter les éléments neutres 0 et 1 au lieu
de 0a et 1^.
2. Parfois, on entendra parler d'anneau unitaire pour désigner un anneau dans le sens
ci-dessus. En effet, selon les époques et les pays, l'existence de l'élément neutre 1a
pour la multiplication n'est pas imposée dans la définition de l'anneau, et le terme
anneau unitaire sert à préciser que l'anneau possède cet élément neutre.
Inversement, afin de bien différencier les notions, un ensemble ne possédant pas
nécessairement d'élément neutre pour la multiplication61 est souvent appelé
pseudoanneau.
61. Mais possédant les autres propriétés.
Chapitre 1. Structures algébriques usuelles
Définition 21
Un anneau (A, +, x) est dit commutatif si la loi x est commutative, c'est-à-dire si
V(z,y) £ A2, x x y = y x x.
Remarque
Ce terme ne peut correspondre qu'à la loi x, puisque l'on précise dans la définition d'un
anneau que la loi + est forcément commutative.
Définition 22
On dit d'un élément x d'un anneau (A, +, x) qu'il est inversible s'il possède un
inverse pour la loi x, c'est-à-dire si
3y G A : x x y = y x x — 1a-
On notera Ax l'ensemble de ces éléments inversibles.
Proposition 27
L'ensemble (Ax, x) est un groupe, appelé le groupe des inversibles de l'anneau A.
Démonstration
Le fait que 1a-1a = 1a implique que 1a est inversible (d'inverse 1a), donc 1a appartient
à Ax, et il s'agit d'un élément neutre.
Si x G Ax, alors par hypothèse il existe y tel que x xy = y x x = 1a-
Mais on en déduit que y est aussi inversible (d'inverse x, d'ailleurs) donc y G Ax et on
a trouvé un inverse pour x dans Ax.
Enfin, la loi x étant associative sur tout A, elle l'est sur Ax.
Il est à noter que Ax est stable par x, le produit d'éléments inversibles étant inversible.
Exemples
R*, Q*, Zx = {—1,1}, C*, GLn(K) sont des groupes pour les lois multiplicatives.
1.2 Anneaux
Définition 23
Un anneau (A, +, x) est dit intègre si
V(z, y) e A2, xxy = 0A =^> (s = 0A ou y = 0A).
Exemples
Les anneaux Z, Q, i2, C, K[X] sont intègres.
Pour n ^ 2, l'anneau des matrices carrées .Mn0&) n'est pas intègre (en notant Eij la
matrice ayant un 1 en place (iyj) et des 0 ailleurs, on a £1,2^1,1 = 0 alors que Eiy2 ^ 0
et Ehl î 0).
Définition 24
On appelle morphisme d'anneaux
fiant
1. / : (A,+)—>
2. / est également
3. f{lA) = 1b-
de (A,+,
(-B, +) est un morphisme
V(a,î/)€
A2, f(x -+
compatible avec la loi x
V(a,î/) G
A2, f(x x
x)
de
■y)
y)
vers (£?,
groupes,
= /(*) +
= m x
+,x)
une
c'est-à-dii
/(y)-
m-
n
application véri-
*e que
J
Remarque
On a automatiquement /(O^) = 0#, ce que l'on sait déjà pour les morphismes de groupes.
En revanche, l'hypothèse /(1a) = 1# ne pourrait se déduire systématiquement des deux
premières propriétés.
Chapitre 1. Structures algébriques usuelles
Idéaux
Définition 25
Soit (A, +, x) un anneau commutatif.
On appelle idéal de A toute partie / de A vérifiant :
1. /est un sous-groupe de (A, +) ;
2. V(z,a) e I x A, ix a£ I.
Proposition 28
Soit/ : (A,+,x)-
Alors Ker(/) = {x G
->(£,+,
A /(s)
x) un
= 0B}
moi
est
rphisme d'anneaux,
un
idéal de A.
A étant commutatif.
Démonstration
• On sait déjà que / est un morphisme de groupes de (A, +) dans (B, +), donc par
la proposition 12 on peut d'ores et déjà affirmer que Ker(/) est un sous-groupe de
• Soit maintenant i G Ker(/) et a G A.
Alors f(i) = Ob et ainsi f(i x a) = f(i)f(a) = 0# x f(a) = Os, donc ixae Ker(/).
Exemple
On verra dans la définition 34 page 77 que l'ensemble des polynômes annulant une
matrice (ou un endomorphisme) est un idéal de K[X].
Ces résultats trouveront des applications dans le chapitre étudiant la réduction,
notamment dans la proposition 109.
1.2 Anneaux
Anneaux principaux
Définition 26
Soit (A, +, x) un anneau commutât if, et soit a un élément de A.
On appelle idéal engendré par a, et on note (a), l'ensemble
(a) = a x A = {a x z, a; e A}.
On appelle également un tel idéal un idéal principal.
On laissera au soin du lecteur la vérification du fait que (a) est effectivement un idéal
de A
Remarque
Dans les anneaux non commutatifs, il existe des notions différentes62.
Proposition 29
Dans (Z, +, x), tous les idéaux sont principaux, c'est-à-dire si I est un idéal de Z,
alors63
3a eZ : I = (a) = {afc, fc G Z}.
On dit alors que Vanneau Z est principal.
Démonstration
Soit donc I un idéal de Z.
Etant donné qu'il s'agit d'un sous-groupe de (Z, +), i" contient déjà 0.
Si / = {0}, alors en prenant a = 0GNona/= (a).
Sinon, il existe fi G I tel que /3 ^ 0.
Et comme i" est un sous-groupe de (Z, +), on a aussi —fi G /.
Un des deux nombres /3 ou —(3 est forcément strictement positif, donc I n N* est non
vide.
62. On parle alors d'idéaux à gauche ou à droite, et il faut distinguer a x A et A x a.
63. On notera (via la preuve) que l'on peut choisir a G N tel que / = (a).
Chapitre 1. Structures algébriques usuelles
On peut alors définir a = min(J n N*). Nous allons vérifier qu'alors I = (a).
Naturellement, nous allons raisonner par double inclusion.
• D'une part, soit n £ (a).
Ainsi, il existe k G Z tel que n = ak.
Mais alors n est le produit de a G I par k G Z, et I étant un idéal, on a n G I.
Nous venons de vérifier que (a) C I.
• D'autre part, soit n £ I.
En effectuant la division euclidienne de n par a, on aboutit à
3!(<?, r) G Z2 ; n = aq + r et 0 ^ r < a.
Puisque a e I idéal, on sait que aq G i".
Ainsi, r = n — (aq) G I car / est un sous-groupe de Z.
On arrive à r G /, et r ^ 0.
Supposons r ^ 0. Alors r G / fl N*, ce qui implique r ^ min(J H N*), c'est-à-dire
r ^ a.
Il y a ainsi contradiction avec la définition de r dans la division euclidienne.
On a donc forcément r = 0, donc n = aq £ (a), d'où l'inclusion Je (a).
On a bien démontré que i" = (a), où a G N.
Proposition 30
Soient 7i et l<i deux idéaux d'un anneau (A, +, x).
Alors 7i D 72 est un idéal de A.
Démonstration
Notons J = I2r\I2.
• D'après la proposition 6 (p. 18), on sait que J est un sous-groupe de (A, +).
• Soit maintenant i G J et a G A, montrons que za G J.
Par définition de J, z G I\ qui est un idéal, donc ia G ii.
Et de même, z G /2 qui est un idéal, donc ia G h-
On en déduit m G ii fl I2 = «7.
1.2 Anneaux
Proposition
Soient I\ et I2
On note I = I\
Alors / est un
31
deux idéaux d'un anneau A.
+ h = {h +Ï2,
idéal de A.
(h
,'2) G Ji
x h}-
Démonstration
• D'après la proposition 7 sur les groupes commutatifs, puisque (A, +) est un groupe
commutatif dont I\ et I2 sont des sous-groupes, on peut affirmer que I = I\ +12
est un sous-groupe de (A, +).
• Soit maintenant i G / et a G A, montrons que ia G J.
Par définition de I, il existe (£1, £2) G A x J2 tel que z = zi + 22-
On peut alors par distributivité écrire ia = i\a + 12a.
Or I\ est un idéal, donc on peut noter i[ = i\a G ï\. De même, ^ = Î2Q> £ ^2-
Finalement, za = i'x + 22 avec (zi,^) ^1 x i permet de conclure que
iae I = h 4-/2-
Exemple
Dans (Z,+,,), on a64
(m) H (n) = (ppcm(m,ri) )
et
(m) + (n) = (p#cd(ra,n)J.
1.2.4 L'anneau Z/nZ
Définition 27
L'application
(Z/nZ)2 —> Z/nZ
(œ,2/) 1—> xxy = x.y
définit une loi de composition interne dans Z/nZ.
64. Il s'agirait même d'un moyen de définir le ppcm et le pgcd de deux nombres.
La première de ces deux égalités signifie : être divisible par m et par n équivaut à être divisible par le
ppcm de m et de n.
Chapitre 1. Structures algébriques usuelles
Démonstration
Comme pour l'addition, il y a effectivement une démonstration à faire : il faut vérifier
que le résultat est indépendant des représentants choisis.
Soient donc x, x' et y, y' dans Z tels que x = x' et y = y\ c'est-à-dire tels que x = x' [n]
et x = x' [n].
Il faut montrer que x.y = x'.y' [n].
Par hypothèse, il existe k\ et k^ dans Z tels que x — x' = k\n ety — y' = k^n.
On note k = x'k^ + y'k\ + k\kv,n G Z.
On trouve rapidement x.y—x'.y' = fcn, on a donc bien x+y = x'+y' [n], donc x.y = x'.y'.
/ N
Proposition 32
(Z/?iZ, +, x) est un anneau commutatif.
Démonstration
Comme pour le groupe (Z/nZ, +), toutes les propriétés (associativité, distributivité,
éléments neutres, ...) se déduisent des lois correspondantes sur Z.
I Proposition 33 ]
Si l'anneau Z/nZ est intègre, alors n est premier.
Démonstration
On effectue une démonstration par contraposée.
Supposons n non premier. On sait alors qu'il existe a,b € ([2,n — 1]) tel que n = ab.
Alors â ^ Ô, b ^ 5, et
âb = n = 0.
Ainsi, l'anneau Z/nZ n'est pas intègre.
Proposition 34
Un élément x G Z/nZ est inversible si et seulement si x est premier avec n.
Démonstration
x inversible équivaut à l'existence de y G Z/nZ tel que x.y = xy = 1, qui équivaut à
l'existence de k £ Z tel que xy = kn + 1.
1.2 Anneaux
Ainsi x inversible équivaut à l'existence de y et k dans Z tels que xy — nk = 1, qui
équivaut à x premier avec n (noté x A n = 1) par le théorème de Bézout65.
Définition 28
Étant donné n G N, n ^ 2, on note
(^(n)-Card((Z/nZ)X)
le nombre d'éléments inversibles dans Z/nZ.
La fonction y? est la fonction indicatrice d'Eider.
Proposition 35
On a
(p(ri) = Ceax\({x G [0,71-1], xAn= l}Y
Démonstration
Puisque Z/nZ = {0,1, ..,n — 1}, le nombre d'éléments inversibles dans Z/nZ est le
nombre d'éléments entre 0 et n — 1 qui sont premiers avec n par la proposition
précédente.
Corollaire 2
Si p est un nombre premier et a G N*, alors
v(pa)=Pa-Pa-1=P°-1(p-i) =
,a-l_^a-l/ i\_^ 1 a
Démonstration
Les éléments non-inversibles de Z/(paZ) sont les éléments de la forme k (0 ^ k < pa)
qui ne sont pas premiers avec pQ, ce qui équivaut à être multiple de p.
Ainsi, les éléments non-inversibles de Z/(paZ) sont 0, p, 2p, ..., pa —p. Ces éléments
sont au nombre de pa_1, donc il reste dans Z/paZ exactement pa — pa_1 éléments qui
sont inversibles, ce qui achève la démonstration.
65. cf. N. Basbois et P. Abbrugiati, Algèbre première année, De Boeck (2013).
ou
Chapitre 1. Structures algébriques usuelles
Théorème 3 (Euler (1761)66)
Soient n ^ 2 et a G Z deux entiers tels que a A n = 1.
Alors a*<n> = 1 [ra].
Démonstration
Le fait que a est premier avec n implique que â est inversible dans Z/nZ d'après la
proposition 34, d'où ô G (Z/nZ)x.
Or ((Z/nZ)x, x) est un groupe d'ordre iV = </?(n), et alors d'après le corollaire 1 on sait
que
âN = ï, ou encore a^n) = ï.
On a donc bien a^n) = 1 [n].
Corollaire 3 (« Petit théorème de Fermât67 »)
Soient p un nombre premier et a un entier premier avec p.
Alors a*5"1 = 1 [p\.
Démonstration
Il s'agit d'une conséquence immédiate du théorème 3 puisque (p(p) = p — 1.
Théorème 4 (dit « des restes chinois » 68)
Soient m et n sont deux entiers premiers entre eux.
Alors l'anneau produit (Z/raZ) x (Z/mZ) est isomorphe à Z/(nm)Z.
Plus précisément, on peut définir un isomorphisme par69
i\) : Z/(nm)Z —> (Z/nZ) x (Z/raZ)
(fe) i—> (c/n(fe),dm(fe))
66. Leonhard Euler aurait découvert ce résultat en 1755, et l'a publié en 1761 dans l'article Theoremata
circa residua ex divisione potestatum relicta, Novi Commentarii academiae scientiarum Petropolitanae 7,
pp. 49-82.
67. Pierre de Fermât annonce ce résultat sous sa forme générale dans une Lettre de Fermât à Frénicle
du 18 octobre 1640 mais ne donne pas de démonstration, seulement un exemple.
Ce résultat se trouve p. 209 dans les Œuvres de Fermât, publiées par les soins de MM. Paul Tannery et
Charles Henry, Tome deuxième, Correspondance, Gauthier-Villars et fils, Paris (1894).
1.2 Anneaux
Si Pierre de Fermât demeure célèbre dans l'histoire des
mathématiques, il était avant tout un juriste français
du XVIIe siècle" et sa pratique des mathématiques était,
- comme la plupart des hommes de science de son temps,
celle d'un amateur.
Originaire de Beaumont-de-Lomagneb il fit sa carrière
dans le Sud-Ouest, entre Bordeaux, Toulousec, Beaumont-
de-Lomagne et Castres.
Il vint aux mathématiques via les travaux de Viète, dont
l'introduction d'une symbolique algébrique est le fonde-
Pierre de Fermât ment de notre calcul littéral. La maîtrise du système algé-
( 1601-166O brique de Viète est une composante essentielle des succès
de Fermât. Fermât lut aussi plusieurs classiques de
l'Antiquité dont les traductions latines se multipliaient depuis la fin du XVIe siècle.
Bien que moins mis en avant que Descartes, Fermât est cependant un des artisans
de l'algébrisation de la géométrie. Il est aussi un des premiers à avoir proposé
une méthode de détermination des tangentes. On lui attribue également le
principe physique selon lequel « la nature agit toujours par les voies les plus courtes
et les plus simples ». C'est néanmoins par ses travaux d'arithmétique que Fermât
est demeuré le plus célèbre, son nom étant attaché à plusieurs théorèmes
(démontrés ou non par ses soins) qu'il a énoncés dans ce domaine, ainsi qu'à une suite de
nombresd.
a. La date de naissance exacte de Fermât fait débat mais 1601 semble le plus sûr. cf. sur ce point et de nombreux
autres mentionnés ici le traité de M. S. Mahoney, The Mathematicnl Career of Pierre de Fermât, 1601-1665,2ème éd. (1994),
Princeton University Press.
b. Commune du Tarn-et-Garonne
c. D'ailleurs le lycée historique de la ville de Toulouse porte le nom de Fermât depuis 1957.
d. On appelle nombre de Fermât tout entier de la forme 22 | 1, où n 6 N. Fermât avait conjecturé que tous ces
nombres sont premiers, ce qui s'est révélé faux (22 + 1 n'est pas premier par exemple). Ces nombres étant rapidement
très grands, on ne sait que pour un très petit nombre d'entre eux s'ils sont premiers ou non.
Démonstration
1. Commençons par vérifier que ip est bien définie.
Soient donc k et k' dans Z tels que
~\
C*"nm\k) — Ctnrn^/C J,
68. Des textes chinois du IIIe siècle font mention de ce résultat (évidemment, sous une autre forme).
La motivation de l'étude de ces problèmes reste néanmoins mystérieuse.
Leonhard Euler (1707-1783) s'est depuis intéressé à ce problème, cf. les Solutio problematis arithmeticœ,
Commentarii academiae scientiarum Petropolitanae 7 (1740), pp. 46-66.
Nous pouvons également citer Cari Friedrich Gauss (1777-1855), et notamment son livre Disquisitiones
artihmeticœ (1801), p. 23.
69. Pour k G Z et N G N*, cln(k) représente la classe d'équivalence de k modulo N.
On préfère ici cette notation à k car on étudie des congruences modulo différents entiers (m, n et mn).
g Chapitre 1. Structures algébriques usuelles
il faut vérifier que
(cln(k),clm(k)) = (dn(k'),dm{k')).
Or par hypothèse, il existe q G Z tel que k — k' = q.nm.
En écrivant #i = gra, on obtient #i G Z tel que k — k' = çin, donc
dn(fc) = cln(k').
De même, en écrivant #2 = qn £ Z, on a k — k1 = #ira, donc
On a bien
(cZn(fc),dm(fc)) = (cin (*;')> cim (*/))>
c'est-à-dire que le résultat est indépendant du choix du représentant fc, donc V> est
bien définie.
2. Les égalités : V(fc,fc') G Z2,
cln(k + A;7) = c/n(fc) + cln(k') et cln(k.k') = cln(k).cln(k')
(et idem pour m au lieu de n) ainsi que
V>(cZnm(l)) = (dn(l),dm(l))
font que i/j est bien un morphisme d'anneaux.
3. Il reste à montrer que i/j est bijectif.
Comme ip est défini entre deux ensembles de même cardinal fini (nra), il suffit de
montrer que i\> est injectif.
Soit donc clnm(k) G Ker(/0), c'est-à-dire que
(dn(k),clm(k)) = (dn(0),dm(0)).
Ce résultat équivaut à n divise fc et m divise k.
Les entiers m et n sont premiers entre eux, on sait qu'alors mn divise fc, donc
et la preuve de l'injectivité de i/j est terminée.
1.2 Anneaux
E3
[ Corollaire 4 ]
Si ?i et m sont des entiers tels que n /\m — 1, on a ip(nm) = (p(n)(p(m).
Démonstration
Par l'isomorphisme d'anneaux du théorème 4, on peut affirmer que le groupe des
inversibles (Z/(nra)Z)x est isomorphe à (Z/nZ)x x (Z/raZ)x.
Le résultat est alors immédiat en passant au cardinal.
>^
Proposition 36
Soient n G N\{0,1} et pi, p23 ■ ■ ■■> Pr r nombres premiers deux à deux distincts et
cti, a2, ..., ov dans N* tels que la décomposition piïmale de ?i s'écrive
Alors
Pi - 1 P2 ~ 1 Pr ~ 1
I = • ■ n. '
Pi P2 Pr
Démonstration
II suffit d'appliquer le corollaire précédent70 aux nombres pj51, ..., p?r qui sont premiers
entre eux deux à deux, pour en déduire ce résultat.
Implémentons un algorithme permettant de calculer l'indicatrice d'Euler.
On commence par écrire l'algorithme du crible d'Eratosthène71, qui permet d'établir la
liste des nombres premiers inférieurs ou égaux à un nombre N fixé.
On peut alors déterminer la décomposition en produit de facteurs premiers de tout
nombre inférieur ou égal à N2.
Enfin, la proposition 36 nous permet d'obtenir la valeur de </?(n) pour tout nombre
n^N2.
Rappelons le principe du crible d'Eratosthène : on considère la liste des nombres de 2 à
70. Avec une récurrence sur le nombre r de facteurs premiers de n.
71. Mathématicien, astronome ainsi que philosophe et géographe grec du IIIe siècle avant notre ère.
On lui doit une mesure réaliste de la circonférence de la Terre.
|fjjj Chapitre 1. Structures algébriques usuelles
N. On sait que 2 est premier, mais pas ses multiples (4, 6, 8, ...) que Ton enlève donc
de la liste72.
On sait alors que le premier nombre suivant qui reste, en l'occurrence 3 est premier, mais
pas ses multiples (6, 9, 12, ...) que l'on enlève également de la liste.
On recommence avec tous les nombres premiers obtenus. On s'arrête quand on atteint
\/~N car si un nombre n ^ N n'est pas premier, un de ses diviseurs est inférieur à y/N,
donc a fortiori un de ses facteurs premiers est inférieur à y/N.
Algorithme 3 - Le crible d'Eratosthène
# Détermination des nombres premiers <=N
def crible(N) :
L=[2]
for k in range(3,N+l,2) :
L.append(k) # Initialement, on prend 2 et tous les
# ce qui évitera d'enlever les pairs...
b=3
while b**2<=N :
if (b in L)==True : # sinon, c'est mutile...
for c in range(2*b,N+l,b) :
if (c in L)==True : # remove ne fonctionne
L.remove(c)
b=b+2
return(L)
impairs
de 3 à N,
que si c est dans la liste
Exemple
>» explel=crible(100)
>» expie 1
[2, 3, 5, 7, 11, 13, 17, 19, 23, 29, 31, 37, 41, 43, 47, 53, 59, 61, 67,
71, 73, 79, 83, 89, 97]
On obtient ainsi la liste des nombres premiers inférieurs ou égaux à 100.
72. Ici, pour simplifier, on ne met initialement dans la liste que 2 suivi des nombres impairs de 3 à TV.
1.2 Anneaux
Algorithme 4 - Décomposition d'un nombre en produit de
facteurs premiers
# Procédure qui renverra la décomposition de N en produits de facteurs premiers, sous
la forme [[pl,ml],[p2,m2],...]]
# où les pi sont les facteurs premiers de N, et les mi leurs multiplicités respectives.
# Nota Bene : la liste doit être vide pour N=l.
def decomp prem(N) :
L=[]
N2=N
k=0 # indice (dans la liste Premiers) du 1er nombre 1er
p=2 # valeur du premier nombre premier !
while p*p<^N2 :
if (N2%p)==0 :
mult=0
while (N2%p)==0 :
mult=mult+l
N2=N2//p # on simplifie le plus possible, l'intérêt réside à la fin :
# si le N2 qui reste n'est pas 1, alors c'est le dernier
# facteur 1er (à la puissance 1) de N
L=L+[[p,mult]]
k=k+l
p=Premier s [k] # on passe au premier suivant
# Il peut rester un facteur premier> racine de N ; alors sa multiplicité=l
ifN2!=l :
L=L+[[N2,1]]
return(L)
def affiche decomp prem(N) : # sert à faire un "bel affichage" du résultat.
L=decomp_prem (N)
chaine=str (N)+"=1"
for [p,m] in L :
chaine=chaine+ " * "+str(p)+"~"+str(m)
print (chaîne)
IJJjJ Chapitre 1. Structures algébriques usuelles
Exemple
On choisit 10000 dans la commande Premiers, ce qui nous permet de travailler dans
l'intervalle [1,108].
>» Premiers=crible( 10000)
>» affiche_decomp_prem(50960)
50960=1*2~4*5~1*7~2*13~1
On trouve la décomposition de 50960 en produit de facteurs premiers, le résultat est aisé
à vérifier.
On peut en déduire le calcul de l'indicatrice d'Euler :
Algorithme 5 - Calcul de l'indicatrice d'Euler
def phi(N) :
# renverra la valeur de phi(N) (indicatrice
# on parcourt la liste donnée par decomp_
# et on fait le produit des pr(alphai-l)(p
# (notations de la dernière proposition)
L=decomp_prem(N)
f=l # initialisation
for C in L : #C est de la forme [p,m] avec
£=f*C[0]**(C[l]-l)*(C[0]-l)
return(f)
d'Euler)
_prem(N)
.-i)
donc p=C[0] et m=C[l]
Remarque
Il faut avoir lancé Premiers=crible (N) et défini la procédure decomp_prem pour que
cet algorithme puisse fonctionner.
Exemple
>» phi (50960)
16128
Il est aisé de vérifier que </?(50960) = -•-•-. — . 50960 = 16128.
1.2 Anneaux
m
L'anneau K[X]
Théorème 5
Soit K un corps.
Alors l'anneau (K[X],+, x) est principal, c'est-à-dire que tous les idéaux de K[X]
sont principaux.
Ainsi, pour tout idéal / de K[X],
3P0 E K[X] : / = (P0) = {PoQ, Q e K[X]}.
En outre73, le polynôme Pq peut être choisi de manière unique en imposant qu'il
soit unitaire, c'est-à-dire tel que son coefficient dominant soit égal à 1.
Démonstration
Soit donc I un idéal de K[X]. Comme dans la proposition précédente, I contient 0.
Si J = {0}, alors en prenant P0 = 0 G K[X] on a / = (P0).
Sinon, on choisit Po G I de degré minimal, c'est-à-dire tel que
VP G /\{0}, deg(P) ^ deg(Po).
Nous allons vérifier qu'alors I = (Po)-
Là encore, nous allons raisonner par double inclusion.
• Comme dans la proposition 29 (p. 55), on déduit immédiatement de Po G J
l'inclusion (Po) C I.
• Soit maintenant P e I.
En effectuant la division euclidienne de P par P0, on aboutit à
3!(Q, R) G (K[X])2 ; P = P0Q + R et deg(R) < deg(Q).
Puisque Po G / idéal, on sait que PoQ G I.
Ainsi, R = P — (PoQ) G / car I est un sous-groupe de K[X].
On arrive à i? G J.
Supposons jR 7^ 0. Alors par définition de Po, on a deg(jR) ^ deg(Po).
Il y a ainsi contradiction avec la définition de R dans la division euclidienne.
73. À l'exception du cas où / = {0}.
Kg] Chapitre 1. Structures algébriques usuelles
On a donc forcément i? = 0, donc P = PoQ G (Po), et l'inclusion I C (Po) est
démontrée.
On a bien démontré que I = (Po), où Po G K[X].
Il reste à prouver que Po est unique si on le choisit unitaire.
Soient donc Po et Q0 tels que X = Po.K[X] = Qq.K[X], avec Po et Qo unitaires.
On a alors Po G Qo-I^[^], donc il existe Q tel que Po = Q.Qo, d'où deg(Po) ^ deg(Qo)-
De même, Qo G Po-K[X] implique deg(Qo) ^ deg(P0), et ainsi deg(Po) = deg(Q0)-
On en revient à P0 = QQo, qui implique deg(Po) = deg(Q) +deg(Qo), donc deg(Q) = 0.
Ainsi, Q est un polynôme constant (non nul) : Q = c G K*.
Mais alors, en identifiant les coefficients dominants dans l'égalité Po = QQo, on a (comme
Po et Qo unitaires) 1 = cl, donc Q = c = 1, et ainsi Po = QQo = Qo-
Exemple
Si on note xo G K, alors il est aisé de voir que
IX0 = {PeK[X], P(xo) = 0}
est un idéal de K[X].
Soit P G IXo. Alors P(#o) = 0 équivaut k X — xo divise P, donc
3QeK[X] : P(X) = (X-x0).Q(X).
En d'autres termes, P G (X — xo) (l'idéal engendré par X — #o), et l'autre inclusion étant
évidente on a
De même, si xo^xi,
{P G K[X], P(z0) = 0, P(zi) = P'(zi) = 0}
est l'idéal engendré par (X — xo)(X — x\)2.
Une application plus générale de ce principe sera de s'intéresser, dans le chapitre réduc-
1.3 Corps
tion, à l'idéal annulateur74 d'endomorphismes ou de matrices carrées75.
1.3 Corps
Définition 29
On appelle corps tout anneau (K, +, x) commutatif tel que tout élément autre que Ok
est inversible, c'est-à-dire tel que
Kx = K\{0K}.
Exemples
C, Q, M sont des corps.
En revanche, Z n'est pas un corps (par exemple, 2 n'est pas inversible dans Z).
Remarque
Parfois, on ne place pas l'hypothèse de commutativité dans la définition d'un corps.
Le théorème suivant stipule que tout corps (en ce sens) fini est commutatif.
Théorème 6 (Wedderburn76 (1905)77)
Soit K un anneau dans lequel tout élément non nul est inversible78.
Si l'ensemble K est fini, alors K est un corps (commutatif), c'est-à-dire que la loi
multiplicative est commutative.
74. Cette notion est d'abord introduite dans la définition 34 page 77.
Cette définition concernera les algèbres, structure ayant justement comme principaux exemples les
matrices carrées et les endomorphismes.
75. cf. notamment la proposition 109 (p. 301).
76. cf. la notice biographique page 70.
77. cf. A Theorem on Finite Algebras, Transactions of the American Mathematical Society 6, No. 3
(1905), pp. 349-352.
78. On dira que K est un corps gauche, c'est-à-dire un corps auquel on enlève l'axiome de
commutativité du produit. Le théorème de Wedderburn établit donc que cet axiome de commutativité est
inutile dans le cas fini pour définir un corps. Notons qu'il existe par contre des corps gauches infinis et
non commutatifs, comme celui des quaternions, largement étudiés par William Hamilton (cf. la notice
biographique page 265).
m
Chapitre 1. Structures algébriques usuelles
■>
k
Né à Forfar (comté d'An-
gus en Ecosse) en 1882 J. H.
M. Wedderburn se distingue
dès son entrée à l'université
d'Edimbourg en 1898 par ses
* progrès rapides en mathéma-
t tiques. Il publie son premier
article" dès 1903.
Porté sur l'algèbre, Wedder-
T 1TT tv/t! xTTiii burn affine ses réflexions dans
Joseph Henry Maclagan Wedderburn œ domaine lors d,un voyage
(1882 1948) en Allemagne au cours des
années 1903-1904, y rencontrant le chef de file de l'époque, Ferdinand Frobeniusb,
ainsi qu'Issaï Schurc. Mais le début de carrière de Wedderburn prend un tournant
décisif avec la possibilité qui lui est offerte d'aller étudier à Chicago. Il y passe
l'année scolaire 1904-1905 auprès notamment de Léonard E. Dickson et s'accapare les
sujets de réflexion de l'école algébriste américaine.
Dans la foulée, à peine revenu en Ecosse, il publie l'articleA prouvant un de ses
résultats les plus connus, à savoir le théorème 6, stipulant que tout corps gauche fini
est commutatif.
Le mémoire peut-être le plus important* de Wedderburn paraît peu après : il traite
des algèbres de type fini.
Wedderburn retourne aux États-Unis en 1909, étant nommé à Princeton. Il y
effectue le reste de sa carrière mais celle-ci connaît cependant une longue parenthèse
lorsqu'il s'engage dans la British Army lors de la première guerre mondiale. La fin
de la carrière de Wedderburn est moins prolifique : il semble que Wedderburn
souffrait de dépression. Il meurt dans une solitude complète.
Wedderburn se pose néanmoins, par ses travaux de jeunesse, comme un chef de
file de la théorie des anneaux, des algèbres et des matrices du début du XXe siècle.
a. On the isoclinal Unes of a differentinl équation ofthefirst order, Proceedings of the Royal Society of Edinburgh 24 pp.
400-408.
b. Ferdinand Georg Frobenius (1849-1917), mathématicien allemand.
c. Issaï Schur (1875-1941), mathématicien d'origine russe, ayant étudié à Berlin sous la direction de Frobenius.
d. cf. la note 77 page 69.
e. Il s'agit de On Hypercomplex Numbers, Proceedings of the London Mathematical Society, 2d ser. 6 (1907), pp. 77-118.
Démonstration
On admet ce résultat79.
79. Ce théorème est cité ici pour des raisons purement culturelles.
Nous pouvons néanmoins donner les idées d'une démonstration.
Il s'agit de la preuve due au mathématicien allemand Ernst Witt (1911-1991), dans l'article Uber die
kommutativitdt endlicher schiefkôrper, Abhandlungen aus dem Mathematischen Seminar der Universitât
Hamburg 8 (1931), p. 413.
On note Z le centre de K", à savoir Z = {x G K", Vy G K", xy = yx). Le but est de démontrer que Z = K.
Comme dans la preuve du corollaire 5 que l'on trouvera page 72, K est un espace vectoriel sur Z, de
dimension finie d. Il suffit de montrer que cette dimension vaut 1.
1,3 Corps Q|
Outre les exemples sus-cités, nous allons déterminer des corps particuliers, notamment
finis.
Commençons par une généralité.
^^
Proposition 37
Tout corps est un anneau intègre.
Démonstration
Soient a; et y deux éléments d'un corps K vérifiant xy = 0.
Si x ^ 0, on sait que x est inversible, donc on peut multiplier l'égalité xy = 0 k gauche
par a;"1, on en déduit immédiatement par associativité que y = 0.
Remarque
Nous allons voir une forme de réciproque à cette proposition dans l'exercice 1.6 dans le
cadre des anneaux finis.
f Proposition 38 ]
L'anneau Z/nZ est un corps si et seulement si n est un nombre premier.
Démonstration
Si n est premier, alors tous les nombres entre 1 et n — 1 sont premiers avec n, donc par la
proposition 34, 1, ..., n — 1 (tous les éléments autres que 0) sont inversibles, donc Z/nZ
est bien un corps.
Réciproquement, montrons que Z/nZ corps implique n premier.
On a déjà montré (cf. la proposition 33 page 58) que si n n'est pas premier, alors l'anneau
Z/nZ n'est pas intègre.
Et par la proposition 37, si Z/nZ n'est pas intègre, alors il ne s'agit pas d'un corps.
Ainsi, par contraposée, on en déduit que Z/nZ est un corps implique que p est premier.
On peut généraliser ce résultat avec la notion suivante.
On raisonne par l'absurde (on suppose d ^ 2), et on obtient une contradiction en utilisant des arguments
de dénombrement et les polynômes cyclotomiques qui sont les facteurs irréductibles de Xd — 1 dans Z[X].
Chapitre 1. Structures algébriques usuelles
Définition 30
Si K est un corps, on appelle caractéristique de K le plus petit entier n G N*5 s'il
existe, tel que n.l^ = 0^.
Si un tel nombre n'existe pas, on dit que K est de caractéristique 0.
Proposition 39
Soit K un corps. On considère le morphisme /
Alors :
1. La caractéristique de K est alors
l'entier
n0
: (Z,+)
n
G N tel que
—> (K,+)
i—> n.lK
Ker(/) = n0Z.
2. Si elle est non nulle, la caractéristique d'un corps est un nombre premier. j
Démonstration
Le premier résultat vient du fait que l'élément no de N tel que Ker(/) = noZ est le plus
petit entier no > 0 tel que /(no) = 0k, ce qui est la définition de la caractéristique.
La preuve du fait qu'il s'agit d'un nombre premier est parfaitement semblable à la preuve
par l'absurde de l'implication : Z/nZ est un corps implique n premier.
Remarque
Si un corps K est de caractéristique nulle, alors le morphisme / défini dans la
proposition 39 est injectif ; on peut dire ainsi que Z s'injecte dans K.
L'existence d'inverses implique alors que Q s'injecte dans K80.
I Corollaire 5 ]|
Si K est un corps fini, alors il existe p premier et cl G N* tel que Card(K) = pd.
Démonstration
Puisque {nlnç, n G Z} ne peut prendre qu'un nombre fini de valeurs, le corps K ne peut
être de caractéristique nulle, donc est de caractéristique p, un nombre premier.
Mais on peut voir Fp = Z/pZ comme un sous-corps de K.
Alors K est un Fp-espace vectoriel, et puisque l'ensemble des éléments de K est une
80. En identifiant 1q et 1k, on peut voir Q comme un sous-corps de K.
1.4 Algèbres
famille finie clairement génératrice de K, K est un espace vectoriel de dimension finie
d G N* sur Fp.
On sait qu'alors K est isomorphe à (Fp)d, d'où Card(K) = Card((Fp)d) = pd.
Remarque
Réciproquement81, si on se donne un nombre premier p et un entier d G N*, alors il
existe un corps de cardinal pd.
En outre, un tel corps est unique à isomorphisme près.
1.4 Algèbres
Définition 31
Soit K un corps. On appelle K-algèbre tout ensemble A muni de deux lois de
composition internes + et x et d'une loi . sur K x A à valeurs dans A, telles que :
1. (^4, +, x) est un anneau ;
2. (A,., +) est un K-espace vectoriel ;
3. il y a « compatibilité » entre les deux lois multiplicatives :
VA G K, V(a, b) G A2, A. (a x b) = (A.a) x b = a x (A.6).
Exemples
Soient K un corps, n un entier naturel et E un K-espace vectoriel. Alors :
1. l'ensemble des polynômes à coefficients dans K, à savoir K[X], est une K-algèbre,
2. l'ensemble des matrices carrées à n lignes et n colonnes et coefficients dans K, noté
Mn(K), est une K-algèbre,
3. l'ensemble des endomorphismes de J5, noté C(E), est une K-algèbre, la loi interne
de multiplication étant la composition.
81. Évariste Galois s'est intéressé dès 1830 à l'étude des corps finis (cf. Sur la théorie des nombres,
Bulletin des sciences mathématiques de M. Férussac 13 (1830), pp. 428-435, repris dans le Journal de
mathématiques pures et appliquées 11 (1846), pp. 398-407).
El
Chapitre 1. Structures algébriques usuelles
Définition 32
Soient A et A' deux K-algèbres. On appelle morphisme d'algèbres de A dans A'
toute application
/ : A^A'
qui est à la fois une application linéaire et un morphisme d'anneaux.
Exemple
Soit E un espace vectoriel de dimension finie n sur un corps K et soit B une base de E.
Alors l'application
* : C(E) —> Mn{K)
f ►-> Mats(/)
est un isomorphisme d'algèbres.
Cet isomorphisme permet de travailler indistinctement sur les matrices carrées ou sur les
endomorphismes en dimension finie82.
Polynômes dans une algèbre
Un des intérêts notables des algèbres est de pouvoir calculer un polynômes à coefficients
dans K en un élément de l'algèbre.
C'est ainsi que nous pourrons définir les polynômes en une matrice carrée ou en un
endomorphisme dans les chapitres suivants.
Définition 33
Soient A une K-algèbre, u un élément de A et P un
Si P = aQ + (nX + a2X2 + •
P(u) =
—h awXN, on pose
clqIa + ciiu + a2u2 + •
polynôme à
• • + cinuN•
\
coefficients dans K.
_ J
Remarque
On rappelle que les puissances de u, toutes éléments de A, sont définies par la relation
de récurrence
u° = 1A et VA; G N, uk+1 =uxuk
82. Les passages d'un point de vue à un autre seront fréquents dans le chapitre portant sur la réduction.
1.4 Algèbres
Proposition 40
Soit u un élément fixé d'une K-
<Pu
est un morphisme d'algèbres.
V
algèbre A.
: K[X]
P
Alors
-►
—>
l'application
.4
P(«)
Démonstration
La linéarité est assez simple à montrer. En effet, soient Q\ et Q2 deux éléments de K[X]
et soit A G K.
En notant N un majorant des degrés de Q\ et Q2, on peut trouver des éléments a^o,
..., CL\tN et Q2,o» • • •» û^2,jv dans K tels que
TV N
Qi = Yl <*hkXk et Q2 = J2 <*2,kXk.
Le polynôme Q\ + AQ2 est alors défini par
Qi + AQ2 = 5^(aifjb + Xa2tk)Xk.
k=0
La définition de y>u(Qi + AQ2) donne alors
¥>u(Qi + AQ2) = (Qi + AQ2)(ti) = 53(ai|jb + Xa2ik)uk
k=0
Les lois dans A font que Ton peut alors écrire
u
<Pu(Ql + AQ2) = J2 (ahkUk + Ac*2,*t**)
fc=0
k=0 k=0
= Ql(ti) +
= ¥>u(Ql)
AQ2(u)
+ A^(Q2),
donc <pw est bien linéaire.
H«j Chapitre 1. Structures algébriques usuelles
Montrons que V(Qi, Q2) G (K[X])2, ^(QiQ2) = <pu(Qi) x ^«(62).
Commençons par vérifier que V(m, n) G N2, ^m+n = um xun.
Ce résultat se démontre par récurrence sur m,hn fixé.
Soit n G N. Notons donc Hm la proposition um+n = um xun.
Pour l'initialisation, on a par définition u° = I.4 donc u0+n = un = 1a x un = u° x un.
La proposition iJo est vraie.
Quant à l'hérédité, supposons la propriété Hm vraie pour un certain entier m.
On a alors par définition M(™+i)+» = u(™+»)+i = u. x um+n.
Grâce à l'hypothèse de récurrence (um+n = um x un) on en déduit
^(m+l)+n = M x ^m x uny
Par associativité il vient
^(m+l)+n = (M x ^m) x ^
et on reconnaît donc
u(m+l)+n = um+l x ^n
Ainsi, on a prouvé iJm+i.
Par principe de récurrence on a donc Vra G N, iJm vraie. Nous avons donc finalement
démontré
Vn G N, Vra G N, um+n = um x un.
Avec la notation de la proposition, cette égalité s'écrit
V(ra, n) G N2, ^(Xm.Xn) = ^(Xm+n) = ^(Xm) x ^(Xn).
Au lieu de faire des calculs pour en déduire l'égalité sur tout couple de polynômes, on
définit les deux applications F et G suivantes, sur (K[X]) :
F : {K[X])2 —► A et G : {K[X])2 —► A
(QiM i—> <Pu(QiQ2) (QiM i—> Vu(Qi) x Va(Q2)
Le fait que ipu est linéaire sur K[X] implique aisément que F et G sont bilinéaires sur
(K[X})2.
Et l'on a montré précédemment que V(ra,n) G N2, F(Xm,Xn) = G(Xm,Xn).
Tout comme on sait que deux applications linéaires égales sur une base sont égales par-
1.4 Algèbres Q]
tout, cette égalité des applications bilinéaires F et G sur (Xrn)rnen x (Xn)nGN, produit
d'une base de K[X] par une base de K[X], implique que F = G sur K[X] x K[X].
On a ainsi prouvé que F = G, c'est-à-dire :
V(Qi, Q2) e (KM)2, Vu(QiQ2) = Vu(Qi).^(Q2),
ou encore
V(Qi, Q2) G (K[X])2, (QiQ2)(ti) = Qi(ti) x g2(ti).
Il ne faut pas oublier de calculer l'image de 1 (le polynôme constant égal à 1).
Or par définition, ipu(X) = ipu(X°) =u° = 1^.
Remarque
Une conséquence générale intéressante est que deux polynômes en u e A commuteront
systématiquement, puisque83 on a V(Qi, Q2) £ 0&[-X"]) ,
Qi(u) x Q2(u) = (QiQ2)(ti) = (Q2Qi)(u) = Q2(ti) x Q^u).
1.4.2 Idéal annulateur et polynôme minimal
c
Définition 34
Soit u un élément d'une K-algèbre A.
1. On appelle polynôme annulateur de w tout polynôme P G
2. On appelle idéal annulateur de w l'ensemble
lu = [pe K[X], P(U)
3. Si Ju =£ {0}, on appelle polynôme minimal de u '.
plus petit degré annulant u.
v
-»}•
K[X]
tel que
e polynôme unitaire
P{u)-
X
= 0.
non nul de
J
Démonstration
Le fait que <pu est un morphisme d'algèbres implique a fortiori que ipu est un morphisme
d'anneaux, donc son noyau Iu est un idéal de K[X] d'après la proposition 28.
Ainsi, on justifie le terme d'idéal employé pour Iu.
83. Grâce à la commutativité du produit dans K[X].
m
Chapitre 1. Structures algébriques usuelles
Quant au cas où Iu ^ {0}, par le théorème 5 (p. 67) on sait qu'il existe un unique
polynôme unitaire Po tel que Iu = Po.K[X], et que Po est de degré minimal dans Ju\{0}.
Exemple
Soit p une projection non triviale84 d'un espace vectoriel E, c'est-à-dire que l'on considère
un endomorphisme p de E tel que
p2 = p avec p 7^ 0 et p ^ Ids-
Alors le polynôme minimal de p est X2 — X.
En effet :
1. L'égalité p2 = p équivaut à p2 — p = 0.
Ainsi, en notant Qo = X2 — X, on a Qo{p) = p2 — p = 0.
Ainsi, Qo appartient à l'idéal annulateur de p, donc le polynôme minimal de p est
un diviseur de Qo = X2 — X = X(X — 1), donc le polynôme minimal85 de p est
l'un des 4 polynômes suivants :
1, I, 1-1 ou X(X-l).
2. Le polynôme 1 n'est dans aucun idéal annulateur86, puisqu'avec Qi = 1 on a
Q1(p) = ld^0.
3. Le polynôme Q2 = X n'est pas annulateur de p car Q2(p) =Pz£0e par hypothèse.
De même, le Q3 = X — 1 n'est pas annulateur de p car Qzijp) =p — Id,E ^ 0# par
hypothèse.
4. Tous les autres cas étant exclus, on peut conclure que le polynôme minimal de p
est bien Qo-
Remarque
Un travail parfaitement similaire permet de montrer que si s est une symétrie non triviale
(s2 = Id et s ^ /d, s ^ — Id) alors le polynôme minimal de s est X2 — 1 = (X — 1)(X +1).
84. C'est-à-dire que l'on ne projette ni sur E entier, ni seulement sur {0^}.
85. Il faut se rappeler que l'on cherche un polynôme unitaire.
86. Dans une algèbre quelconque A, on obtient 1^.
1.5 Exercices corrigés du chapitre 1
1.5 Exercices corrigés du chapitre 1
1.1 Éléments d'ordre 2
Soit (G, *) un groupe d'éléments d'ordre
Va; G G,
Montrer qu'alors G est commutât if.
32
x2
(sauf e),
= x * x
c'est-
= e.
-à-dire
tel
que
Remarque
En multipliant l'égalité x*x = e par a;"1, elle implique x = a;-1.
Réciproquement, en multipliant l'égalité x = x~x par a;, on en déduit x*x = e.
Ainsi, l'hypothèse de l'énoncé87 équivaut à Va; G G, a;"1 = x, ou encore :
tout élément (de G) est son propre inverse.
QQQ
Soient donc a; et y deux éléments de G. Il faut montrer que x*y = y*x.
On applique l'hypothèse :
Vz e G, z* z = e
à z = x * y, ce qui implique
(x * y) * (x * y) = e.
On multiplie alors à gauche par a; et à droite par y, et on utilise l'associativité, d'où
(x * x) *(y *x) * (y *y) = x * e * y,
=e =e
ce qui donne bien y*x = x*y.
Si l'on préfère, on peut utiliser l'hypothèse Vz E G, z = z~x.
En l'appliquant à z = x * y, on sait que z-1 = (a; * y)-1 = y-1 * x~x.
L'hypothèse devient ainsi y-1 * x~x = x * y.
Mais l'hypothèse écrite en z = a; (resp. z = y) implique x~x = x (resp. y"1 = y) et on
aboutit ainsi ky*x = x*y.
La commutativité de la loi * est ainsi démontrée.
87. Il est bon d'avoir conscience qu'un même exercice peut être posé de différentes façons.
jjlj] Chapitre 1. Structures algébriques usuelles
Remarque
Si G est un sous-groupe de GL(E) (où E est un espace vectoriel), les éléments /
vérifiant f2 = e = Me (l'élément neutre de GLn(E)) sont des symétries.
Ainsi, un sous-groupe de GL(E) uniquement constitué de symétries est
automatiquement commutatif.
On peut considérer deux exemples de ce type :
1. dans GL(R2), on considère les applications de M2 dans M2 :
Id : (x,y) ■—> (x,y)
/i : (x,y) i—> (-x,y)
h : (x,y) i—> (x,-y)
h ' (x,y) ■—> (-x,-y)
Alors ({/d,/i,/2,/3},o) est un groupe commutatif.
On notera que Ton a des égalités du type
h ° h = h ° h = /3, h ° fs = h ° h = Ï2,
et ainsi de suite.
2. dans GL(M3), on considère l'identité et les symétries orthogonales par rapport
aux axes et aux plans de base, on obtient alors un groupe commutatif de 8
éléments.
3. Évidemment, ces exemples sont aisément généralisables (par exemple, en
changeant de dimension ou de base).
Nous allons généraliser ce que Ton peut constater sur les cardinaux rencontrés (4, 8) dans
les exemples rajoutés à la fin de cet exercice.
1.2 Un classique aux oraux des Mines
Soit (G, +) un
On note Oc =
Montrer que si
groupe 88 dont tous les éléments 89
e son élément neutre.
sont d'ordre
G est de cardinal fini, alors 3m G N Card(G) =
2.
= 2m.
88. Dans l'exercice 1.1, nous avons vu qu'un tel groupe est forcément commutatif, c'est pourquoi on
note sa loi +.
89. (autres que l'élément neutre)
1.5 Exercices corrigés du chapitre 1
On considère le corps à deux éléments K = Z/2Z.
Tout comme dans la preuve du corollaire 5 (p. 72), on peut démontrer que G est un
K-espace vectoriel, la loi externe étant définie par
{0G si A = Ô,
g si A = 1
Il est alors aisé de vérifier que G est un K-espace vectoriel, notamment avoir 90 M g G G,
Tg + \g = g + g = 0 G = Ôg = (T + T) g,
permet de justifier
V(A,M) e K2,\/g € G, (A + //)<? = M + (w)-
Si l'on suppose que l'ensemble G est fini, alors la famille (x)xec de tous les éléments
de G est une famille finie génératrice de G, donc G est de dimension finie.
On sait qu'alors G possède une base finie B, de cardinal m G N.
On peut ainsi affirmer que G est isomorphe à Km (il s'agit d'un isomorphisme d'espaces
vectoriels).
Nous venons d'établir une bijection entre G et Km, d'où91 :
Card(G) = Card(Km) = (Card(K))m = 2m
1.3
Soit
Sous-groupes distingués
(G, *) un
groupe.
On dit d'un sous-groupe H de G qu'il est distingué dans G si
1.
2.
Soit/ :
Montrer
un sous-
Montrer
Vs G G, g-1HgdM{g-^hg, h G H} C .
G —> G' un morphisme de groupes.
que si H' est un sous-groupe distingué de G',
groupe distingué de G.
que Ker(/) est un sous-groupe distingué de G.
et seulement
H.
alors
H =
f
si
^(H') est
90. Puisque 1 + 1 = 2 = 0.
91. Puisque Card(K) = 2.
Chapitre 1. Structures algébriques usuelles
Remarque
Dans un groupe abélien G, tout sous-groupe H est distingué. En effet, si g G G, alors
V7i G H, g~x *h*g = g"1 *g*h = e*h = h
et ainsi g~1Hg = H.
La notion de sous-groupe distingué n'a donc de véritable intérêt que dans les groupes
non commutât ifs.
1. On sait déjà92 que H est un sous-groupe de G, il reste à montrer le caractère
distingué.
Soit g G G, il faut montrer que g~xHg C H.
Soit donc g G G et k G g~1Hg.
Ainsi, il existe h G H tel que k = g~xhg.
Mais on a alors f(k) = /(g^fWfig).
On peut noter h' — f(h) G H' par définition de h G H.
Notons également g' = f(g) G G.
On constate que
f(k) = g'-1h'g'eg'-1H'g'cH'
par définition du fait que H' est distingué.
Finalement, f(k) G H' signifie que k G /~1(iJ/) = iJ, et le résultat est prouvé.
2. Puisque Vg' e G\ g,~1e,gf = e7, on peut affirmer que {e7} est un sous-groupe
distingué de G7.
Le résultat précédent implique alors que Ker(/) = /~1({e/}) est un sous-groupe
distingué de G.
1.4
Soit (G, *) un groupe
Montrer que / est un
(G, *) est commutatif.
et/ :
G —>
x i—>
endomorphisme
G
x2
du
= X * X
groupe
(G,*)
si
et seulement
si
le
groupe
92. cf. la proposition 13.
1.5 Exercices corrigés du chapitre 1
1. Supposons que / est un endomorphisme du groupe (G, *).
Considérons alors (x,y) G G2. On sait que f(x * y) = f(x) * /(y), c'est-à-dire
(z*y)2 = (z2)*(y2),
ou encore
x*y*x*y = x*x*y*y.
En multipliant à gauche par a;"1 et à droite par y-1 on obtient
y *x = x*y,
ce qui prouve la commutativité de la loi *.
2. Supposons la loi * commutative. On a alors
V(z, y) €G2, f(x * y) = (x*y)*(x*y)
= x*(y *x) *y par associativité
= x*(x*y)*y par commutativité
= (x*x)* (y*y) par associativité
= f(x) * /(y),
donc / est un endomorphisme du groupe (G, *).
1.5 Une équation aux classes
.' x = 3 [?]
Déterminer l'ensemble des éléments x G Z tels que
' x=14 [18].
La question est donc de déterminer les entiers a; tels que
(d7(aO,cii8(aO) = (c/r(3),di8(14)).
Comme 7 est premier avec 18, Tisomorphisme donné par le théorème 4 nous permet
d'affirmer que x sera alors déterminé par 0/7.18(2:) = cli2e(x).
Chapitre 1. Structures algébriques usuelles
On cherche une solution particulière.
On trouve93 que -5.7 + 2.18 = 1 (*).
En multipliant (*) par 3, on trouve que 6.18 = 108 vérifie
108 = 3 [7]
108 = 0 [18]
En multipliant (*) par 14, on trouve que —70.7 = —490 vérifie
-490 = 0 [7]
-490 = 14 [18]
En additionnant ces relations, on constate que xo = 108 — 490 = —382 vérifie
-382 = 3 [7]
-382 = 14 [18]
Comme on trouve —382 = —382+4.126 = 122 [126], on trouve que 122 est une solution,
et que l'ensemble des solutions est
{122+126&, keZ}.
1.6 À propos de corps finis
Montrer que si (^4, +, x) est un anneau commutatif fini94 intègre, alors A est un corps.
Il suffit de montrer que tout élément non nul est inversible.
Soit donc a G ^{0^}.
On définit l'application
h : A —► A
x i—> ax x
On cherche à montrer qu'il existe x G A tel que h(x) = a x x = 1a-
Dans ce but, nous allons montrer que h est surjective, et même bijective.
93. Grâce à l'algorithme d'Euclide étendu
94. Au sens où son cardinal est fini.
1.5 Exercices corrigés du chapitre 1 ^
La distributivité implique
V(z, y) G A2, h(x + y) = ax(x + y) = axx + axy = h(x) + h(y).
L'application h est donc un endomorphisme du groupe (A, +).
Soit x G Ker(/i). On a h(x) = a x x = 0 avec a ^ 0, donc Panneau A étant intègre, on
en déduit x = 0.
Ainsi, Ker(/i) C {0a}, donc /i est injectif.
h est donc une application injective d'un ensemble A de cardinal fini dans un ensemble
de même cardinal fini, donc h est bijective.
Ainsi, 1,4 G Im(h), ou encore il existe x G A tel que h(x) = ax x = 1^.
Or l'anneau est commutatif, donc on a trouvé x G A tel que
ax x = x x a= 1a,
donc a est bien inversible.
1.7 Groupe des automorphismes
Soit (G,
On note
Montrer
*) un groupe.
Aut(G) l'ensemble des automorphismes
que (Aut(G),o} est un groupe.
de
groupes
de G.
Illi
Au lieu de chercher à redémontrer toutes les propriétés (associativité, existence d'un
élément neutre, existence d'un inverse pour tout élément) on peut se demander si
Aut(G) ne serait pas un sous-groupe d'un groupe déjà connu95.
Or ici, on sait que l'ensemble des permutations d'un ensemble quelconque, muni de la
loi o, est un groupe.
Montrons donc que Aut(G) est un sous-groupe de (S(G),o).
Par définition, un automorphisme est un morphisme de groupes et une application
bijective, d'où l'inclusion Aut(G) C S (G).
1. Il est évident que Id G Aut(G).
2. Soit (f,g) e(Aut(G))2.
Alors / o g est bijective comme composée d'applications bijectives.
95. Tout comme en algèbre linéaire où, au lieu de montrer que certains ensembles sont des espaces
vectoriels, on s'attache à démontrer qu'ils sont des sous-espaces vectoriels d'espaces vectoriels déjà connus.
Efil Chapitre 1. Structures algébriques usuelles
Par ailleurs96 la composée de morphismes de groupes étant un morphisme de
groupes, / o g est un morphisme de groupes de (G, *) dans lui-même, et ainsi
fogeAut(G).
3. Soit / G Aut(G).
Nous avons démontré (cf. la proposition 11 (p. 23).) que l'application /-1 est
également un isomorphisme de (G,*) dans lui-même, ou encore /-1 G Aut(G).
Les points de la définition 6 page 16 sont vérifiés, donc Aut(G) est bien un sous-groupe
de (S(G),o) et finalement (Aut(G),o) est bien un groupe.
1.8
Soit p un nombre
Montrer
que l'on
; premier. On note Kp le
peut factoriser
Xp -X--
corps
Z/pZ.
Xp-X dans KP[X] par
n-l
= IÏ(*
A;=0
-*) =
= ik*-
\eKp
-A).
SE3
Notons P = XP - X e KP[X].
Par le petit théorème de Fermât, on sait que pour tout fce{l,2,...,p—1},
fcp-i = i [p^ c'est-à-dire que k =1 dans Kp.
En multipliant par fc, on en déduit
et ce résultat est évident pour k = 0.
Ainsi, nous avons montré
VA = k e Kp, P(X) = 0,
c'est-à-dire que tous les éléments de Kp sont racines de P.
On sait qu'alors on peut factoriser P par chaque X — À, donc
3Q G KP[X] : P(X) = Q(X) • ]J {X - A). (*)
AeKp
96. cf. la proposition 10 (p. 22).
1.5 Exercices corrigés du chapitre 1 ^
Or Kp possédant p éléments, le produit TT (X — A) est de degré p, comme P.
\eKp
On en déduit deg(Q) = 0, donc Q est un polynôme constant (non nul).
On note c G K* tel que Q = c. En identifiant les coefficients dominants (donc de Xp)
dans l'égalité (*) il vient 1 = cl.
Alors Q = c = 1 donc (*) donne le résultat.
1.9
On considère
1.
2.
l'ensemble
Q[x/2] =
Démontrer l'égalité
Q[x/2]
= {P(v/2), PGQ[X}}
= {a\/2 + ^, {a,p)e
On munit Q[\/2] des lois usuelles + et x de M.
Montrer
qu'alors Q[\/2] est un corps.
Q2}-
1. Pour faciliter la rédaction, notons A l'ensemble
A={aV2 + f3, (a,/?)GQ2}.
Démontrons l'égalité A = Q[\/2] par double inclusion.
• Soit x e A.
Alors il existe (a, P) G Q2 tel que x = ol\/2 + /?.
On note P(X) = aX + p.
Il est alors clair que P G Q[X] et que x = P(\/2), d'où x G Q[\/2].
On a démontré A C Q[\/2].
• Soit y G Q[\/2].
Alors il existe P G Q[X] tel que y = P(\/2).
Puisque X2 — 2 annule 9T \/2, on effectue la division euclidienne de P par X2 — 2
dans Q[X], donc
3!(Q, #) G (Q[X])2 : P(X) = (X2 - 2).Q(X) + #(X) avec deg(R) < 2.
97. Le lecteur pourra démontrer que X2 — 2 est le polynôme minimal de \/2 dans Q[X].
mH Chapitre 1. Structures algébriques usuelles
On peut donc trouver (a, 0) G Q2 tel que R(X) = aX + 0.
Le résultat de la division euclidienne donne alors
y = p{y/2) = (V22-2).Q(V2) + R(V2)
= 0 + ay/2 + /?,
ce qui permet d'affirmer que y G A et achève de démontrer la seconde inclusion.
2. Nous allons utiliser l'expression de Q[V2] sous la forme de A pour démontrer que
cet ensemble est un corps.
Nous allons montrer que A est un sous-corps de M, c'est-à-dire que A :
• est stable par somme ;
• est stable par produit ;
• contient 1 ;
• est stable par inversion.
Vérifions donc ces points, dans le même ordre.
• Soit (x,y) G A2.
Alors il existe (a, /?, 7, ô) G Q4 tels que
x = ay/2 + fi et y = jy/2 + ô.
En sommant ces égalité, on constate
x + y=(a + 1)y/2 + (l3 + 5).
En posant À = a + 7GQetjU = /? + <$GQ, l'égalité
x + y = Av^ + M
permet d'affirmer que x + y G A.
• Soit (x,y) G A2.
On utilise les mêmes notations que dans le point précédent.
En développant le produit98 x.y on trouve rapidement
x.y = (a.S + /3/y)>/2 + (2a-7 + 0.6).
98. Et en utilisant \/2.\/2 = 2 ainsi que les propriétés de distributivité et de commutativité des lois
dans E.
1,5 Exercices corrigés du chapitre 1
En posant A = a.ô + £.7 G Q et n = 2a.7 + fi.ô G Q, l'égalité
x.y = Àv2 + fi
permet d'affirmer que x.y G A.
• Il suffit de prendre (a, fi) = (0,1) G Q2 pour affirmer que 1 = a\/2 + fi G A.
• Soit x G A\{0}-
Il existe donc (a, /?) G Q2 tels que x = a\/2 + /?.
L'hypothèse x + 0 implique" (a,/?) ^ (0,0).
On calcule 10° l'inverse de x en multipliant numérateur et dénominateur par la
quantité conjuguée ol\/2 — fi.
La quantité101 2a2—/?2 est non nulle, c'est-à-dire que fi2 ^ 2a2, car la puissance
de 2 dans la décomposition en facteurs premiers des numérateurs et
dénominateurs est un entier (relatif) pair dans fi2 et impair dans 2a2.
Il est donc possible de définir
a> = ^^ et ft= ~P
2ol2 -P2 H 2a2-/?2'
On obtient ainsi un couple (a', fi') G Q2, donc x' = o!\/2 + fi' G A.
Le développement du produit x.x' donne rapidement x.x' = 1, d'où
x"1 =x' eA,
et la preuve de A = Q[\/2] sous-corps de R est achevée.
1.10
Soit n un entier. Montrer que
d/n
où (p désigne l'indicatrice d'Euler.
Noter que cl décrit l'ensemble des diviseurs positifs de n.
99. Grâce à l'irrationalité de \/2, il y a même équivalence.
100. Le lecteur est invité à refaire ces calculs, le résultat est donné plus loin.
101. Il s'agit du produit apparaissant au dénominateur.
|[2I] Chapitre 1. Structures algébriques usuelles
Notons Dn l'ensemble des diviseurs positifs de n, c'est-à-dire :
Dn = {deN) 3d' eN, n = dd'}.
La formule à démontrer est donc
deDn
Soit k e Z/nZ. Le pgcd de n et de fc est un diviseur de n.
Ainsi, si l'on définit
Ad = {k e Z/nZ, k A n = d},
on peut affirmer que les ensembles {Ad)d/n forment une partition de Z/nZ :
Z/nZ = |J Ad.
d/n
On a donc
Card(Z/nZ) = ^Card(Ad).
d/n
Étudions Ad afin de déterminer son cardinal.
Puisque d divise n, il existe un entier d' tel que n = dd'.
Or si k G Ad, alors d divise k donc il existe k' tel que k = dk!'.
En divisant k A n = d par d, il vient k' /\d' = 1.
Ainsi, choisir k e Ad équivaut à choisir k' modulo d' tel que k' A d' = 1.
Le nombre de possibilités est de if(d,)i c'est-à-dire par définition de d' :
Card(Ad) = ¥.Q).
On aboutit ainsi à
Card(Z/nZ) = J2 ^ (l)'
deDn
1.5 Exercices corrigés du chapitre 1
Mais l'application qui à un diviseur d G Dn de n associe — est une bijection102 de Dn.
a
Tl
Il est ainsi possible d'effectuer le changement d' = — dans l'égalité précédente, d'où
a
d'eDn
Il suffit de renommer d ' en d pour avoir le résultat annoncé.
102. Il s'agit d'une involution de Dn, c'est-à-dire que cette application est sa propre réciproque.
CHAPITRE 2
I Compléments I
d'algèbre linéaire
QQ Sur les bases
Wl Rappels et compléments sur les combinaisons linéaires
Nous allons rappeler1 la définition des combinaisons linéaires, des familles libres, des
familles génératrices et enfin des bases, afin de regrouper dans une même définition le
cas des familles finies ou infinies, donc des espaces de dimension finie ou infinie.
Commençons par introduire un ensemble particulier, à savoir (pour un ensemble I
quelconque) l'ensemble des éléments de K1 dont seul un nombre fini est non nul.
Comme souvent, même si ce n'est pas évident à première vue, l'introduction de cet
ensemble a pour but de simplifier de nombreuses preuves par la suite.
1. Avec une présentation légèrement différente de ce qui est généralement choisi en première année.
BEI
Chapitre 2. Compléments d'algèbre linéaire
^^
Définition 35
Si / et X sont deux ensembles, on appelle famille d'éléments de X indexée2 par I
toute application
I —> X
i '—» fi
Cette famille est alors notée {fi)iei.
Remarques
1. L'ensemble des familles d'éléments de X indexées par I est l'ensemble des fonctions
de I dans X, que l'on peut noter X1.
2. Une suite à valeurs dans un ensemble X est ainsi une famille d'éléments de X
indexée par N.
- —
Définition 36
Une famille (A.;)^G/ d'éléments d'
a
un corps K est dite presque toute nulle s'il existe
un nombre fini de termes non nuls dans cette famille.
On note J-}(K) l'ensemble de ces
à-dire :
J>(K) = {(Xi) g
V
familles indexées par un même ensemble /,
K1 / {iel : A, ^ 0}
est fini >.
c'est-
J
Remarque
On notera que dans le cas où l'ensemble I est fini, l'ensemble Jv(K) désigne tout
simplement K1 ; c'est ainsi que toutes les définitions ultérieures sur les familles libres, les
sous-espaces vectoriels engendrés, les bases etc. généralisent les notions vues pour les
familles finies.
I Proposition 41 j
L'ensemble Jv(K) est un sous-espace vectoriel de K7.
2. On dira également que I est l'ensemble des indices de la famille (/i)ie/-
2.1 Sur les bases
Démonstration
Il est évident que la famille nulle (yijiei = (O)iej est un élément de .Fj(K), puisque
l'ensemble {i G I : Vi ^ 0} est vide, donc fini.
Soient maintenant \i G K et À = (\i)iti et À7 = (\'i)iei deux éléments de Jv(K).
Nous devons montrer que À + ii.W G Ti(K).
Il est évident que Vz G J, (A* = 0 et A< = 0) => (A + /u.A')i = A* + ^.A< = 0.
Par contraposée, (A + fjb.X^) ^ 0 => (A^ ^ 0 ou A^ 0).
En terme d'ensembles, on peut écrire :
{i G I : (A + A*.V)i ^ 0} C {z G / : Ai ^ 0} U {z G / : Aj ^ 0}
Par définition de A G .Fj(K) et A7 G .Fj(K), les deux ensembles
{tel : K^O} et {zG/ : Aj ^ 0}
sont finis, donc leur union aussi.
On en déduit immédiatement que {ile I : (A + fjb.X')i ^ 0} est fini, donc on a bien
A + ^.A'G J>(K).
Ainsi, Jv(K) est bien un sous-espace vectoriel de K1.
Définition 37
Soit (fi)iei une famille d'éléments d'un K-espace
On appelle combinaison linéaire
famille finie de la famille (fi)iei>
des (fi)& une
vectoriel E.
combinaison linéaire
c'est-à-dire toute somme de la forme
/ ^ Aj/j,
d'
une
A
sous-
où (Xi)iei G J>(K).
Remarque
Il faut bien noter que la somme est bien définie, et qu'il ne s'agit en rien d'une série,
puisqu'il n'y a qu'un nombre fini de termes non nuls.
En effet, il suffit (avec les notations de la définition) de noter J = {i G / ; A^ ^ 0},
et alors on peut confondre /_]Ai/i et /"JA»/», qui est une somme d'un nombre fini de
iei ieJ
termes.
Chapitre 2. Compléments d'algèbre linéaire
Rappelons qu'une telle somme est nulle si l'ensemble J est vide.
Familles libres, familles génératrices et bases
Définition 38
On dit qu'une famille (fi)tel d'un K-espace vectoriel est libre3 si pour toute famille
(Ai)ïG/ G J/(K), on a
^2^fi = 0 => Vt G/, A* = 0.
Une famille qui n'est pas libre et dite liée4.
Remarques
1. Par rapport à la définition sur les familles finies, on voit qu'une famille quelconque
est libre si et seulement si toutes ses sous-familles finies sont libres.
2. Dans le cas d'une famille indexée par N, c'est-à-dire une famille du type (/i)ieN, la
famille sera libre si et seulement si pour tout AT G N, la famille (/o,/i, ---j/tv) est
libre, donc si et seulement si
TV
ViVeN, V(Ao,Ai AnJgK^1, $>*.£ = 0 =* A0 = Ai = • • • = XN = 0.
i=0
Définition 39
Soit T — (fi)iei une famille d'éléments d'un K-espace vectoriel E.
1. On appelle sous-espace vectoriel engendré par ?\ et on note Vect(Jr), l'ensemble
des combinaisons linéaires d'éléments de T.
2. On dit que T est une famille génératrice^ de E si tout élément de E est
combinaison linéaire d'éléments de T', c'est-à-dire si E C Vect(Jr).
Remarques
3. On dit aussi que les vecteurs de la famille sont linéairement indépendants.
4. On dit aussi que les vecteurs de la famille sont linéairement dépendants.
5. On dit aussi que la famille T engendre E.
2.1 Sur les bases |5£|
1. Il est évident que Vect(Jr) C E, donc l'inclusion E C Vect(Jr) équivaut à l'égalité
VectOF) = E.
2. Il faut justifier le terme de sous-espace vectoriel, donc vérifier que pour toute famille
T = (fi)iei d'un K-espace vectoriel de j£, l'ensemble Vect(Jr) est un sous-espace
vectoriel de E.
Illustrons ce qui a été écrit avant la définition de l'ensemble ^/(K), c'est-à-dire que
l'introduction de cet ensemble sert à simplifier certaines démonstrations.
Voici la preuve classique :
En prenant la famille (\i)iei E K1 telle que Vz e i", A» = 0, la famille des (\i)iei
est presque toute nulle et donc on obtient
0 = ^Ai/iEVect(^).
iei
Soient maintenant \i E K et x et x' deux éléments de Vect(Jr).
Nous devons montrer que x + \ix' E Vect(Jr).
Par définition, il existe (Xi)iei et (tyiei dans K1 des familles d'éléments presque
tous nuls telles que
x = ^2 Xifi et x' = ^2 KU
iei iei
Posons Vz E J, Vi = Xi + fiX^ E K.
Il s'agit6 d'une nouvelle famille constituée d'éléments presque tous nuls de K.
Et l'on a alors
X + /JLX* = ^Xifi + fl^Xifi
iei iei
= ^"ifi e VectOF),
iei
ce qui achève la preuve du fait que Vect(Jr) est un sous-espace vectoriel de E.
Voici maintenant ce que devient la preuve en utilisant l'espace vectoriel .Fj(K).
On définit l'application
$ : 7>(K)
(Xi)iei
E
iei
6. cf. la proposition 41 (p. 94) et sa démonstration.
Chapitre 2. Compléments d'algèbre linéaire
L'application $ est linéaire sur l'espace vectoriel Jj(K), et l'on a Vect(Jr) = Im($),
ce qui fait de Vect(Jr) un sous-espace vectoriel de E.
Les idées utilisées sont les mêmes dans les deux preuves, mais si on lit la première on se
rend compte que l'on y reprend des éléments de démonstration classique, comme le fait
que l'image d'une application linéaire est un sous-espace vectoriel de l'espace d'arrivée, ce
qu'il est inutile de refaire. C'est d'ailleurs l'objet de la « conceptualisation », c'est-à-dire
de l'introduction générale d'un grand nombre d'ensembles et de structures.
La proposition suivante apporte des précisions par rapport à la définition 39.
s \
Proposition 42
Soit T — (fi)iei une famille d'éléments d'un K-espace vectoriel E.
Alors Vect(Jr) est le plus petit7 sous-espace vectoriel de E contenant T.
Démonstration
Il a été démontré précédemment que Vect(Jr) est bien un sous-espace vectoriel de E.
Vérifions que Vect(Jr) contient T.
En effet, soit zo G I. On considère la famille (Xijiei G K1 définie par
\i0 = 1 et Vz ^ zo, \{ = 0.
L'ensemble {z G / ; À^ ^ 0} est alors égal au singleton {zo}, d'où (Xi)iei G J/(K).
Et il est évident que la combinaison linéaire TjAi/i vaut /i0, ce qui prouve que
iei
fio G Vect(J-).
Enfin, soit G un sous-espace vectoriel de E contenant T. Alors 8 G est stable par
combinaisons linéaires, c'est-à-dire que toute combinaison linéaire d'éléments de G est dans G.
Mais comme les éléments de T sont dans G, on en déduit que toute combinaison linéaire
d'éléments de T est dans G, ce qui équivaut à l'inclusion Vect(Jr) C G.
Ainsi, au sens de l'inclusion, Vect(Jr) est bien le plus petit sous-espace vectoriel de E
contenant T.
7. Au sens de l'inclusion.
8. Via une récurrence sur le nombre de termes dans la somme.
2.1 Sur les bases
jjJI
Définition 40
Soit B = (ei)iei une famille d'un K-espace vectoriel E.
On dit que B est une base de E si la famille B est à la fois libre et génératrice.
Proposition 43
Soit B = (ei)i,ej une famille d'un K-espace vectoriel E.
Alors B est une base de E si et seulement si tout vecteur de E se décompose de façon
unique comme combinaison linéaire d'éléments de S, c'est-à-dire si et seulement si :
VxeE, 3!(Ai)iG/ G 7>(K) : œ = ^Aiei.
Les nombres {Xi)iei sont alors appelés coordonnées du vecteur x dans la base B.
Démonstration
L'équivalence entre le caractère générateur de la famille B et l'existence de la combinaison
linéaire est évidente, mais l'équivalence entre le caractère libre de B et l'unicité de la
décomposition doit être vérifiée. Le lecteur trouvera cette démonstration dans l'ouvrage
d'algèbre de première année de la même collection9.
Définition 41
Soit B = (ei)iej une base d'un K-espace vectoriel E.
On définit l'application G qui à un vecteur associe la famille de ses coordonnées dans
la base S, c'est-à-dire :
G : E —► J/(K)
x i—> (^i)iei telle que x = 2_.^iei
À ?" G / fixé, on définit l'application
G, : E —> K
x -► (e(x))i
Les fonctions G^ portent le nom de fonctions coordonnées dans la base B.
9. N. Basbois et P. Abbrugiati, Algèbre première année, De Boeck (2013).
gftîtl
Chapitre 2. Compléments d'algèbre linéaire
Proposition 44
On se place dans le même cadre que la définition 41. Alors
1. l'application O est linéaire de E dans J-j(K) ;
' 2. pour tout iG/, l'application Qi est linéaire de E dans K, c'est-à-dire que Qi est '
une forme linéaire sur E.
Démonstration
Soient donc x et x' deux éléments de E et [i G K.
On note (À;)i€J = 9(z) et (AJ)iei = Q(x').
On note aussi (ii)iei = ©(# + A^')-
De manière équivalente, on a donc Vz G J,
Ai = 6i(fc), Aj = 9i(a^) et 7i = 9i(a; + jua;'),
ou encore
a; = ^ À^ei, a;7 = ^ À^e* et a; + jua;' = ^ 7^.
iG/ iG/ iel
On déduit sans difficulté des deux premières égalités10 :
x + fjix' = ^2(Xi + nK)ei-
iG/
Les deux familles (li)iei et (À^ + fJiX^iei sont des coordonnées du vecteur a;, donc par
l'unicité (voir la définition d'une base) ces deux familles sont égales.
On notera que l'on aurait pu faire la différence entre les deux expressions de x + [ix' et
obtenir
5^[(Ai+MAj)-7i]ci = 0.
iei
On en déduit que tous les coefficients sont nuls car la famille (ei)iei est libre.
En tout cas, on arrive à
ViG/, 7i = Ai + MAj.
Ainsi,
G(x + fjLx') = (7i)ieJ = (Ai)ieJ + A*(AÎ)iej = G(x) + ^e(a;').
10. En se rappelant que dans toutes les sommes écrites, il n'y a qu'un nombre fini de termes non nuls.
2.1 Sur les bases
BEI
L'application 0 est bien linéaire.
Et à i G / fixé, l'égalité 7^ = À* + fiX^ correspond à
Gi(x + nx') = Gi(x) + iJL®i(?'),
donc à la linéarité de 0^.
QQ Le cas des polynômes
On rencontre assez fréquemment l'espace vectoriel K[X] en algèbre linéaire11, il est donc
intéressant de pouvoir en déterminer aisément certaines bases.
Commençons par rappeler sans preuve le résultat suivant12.
Proposition 45
Soit (Pk)kei une famille de polynômes
Alors la famille (Pk)kei est libre.
On en déduit alors le résultat suivant :
de degrés
deux à
^v
deux distincts.
)
Proposition 46
Soit (Pk)ken une famille d'éléments de K[X] telle que
Vfc G N5 deg(Pfe) = k.
Alors la famille (Pk)ken est une base de K[X].
Démonstration
Par la proposition précédente, nous savons déjà que la famille (Pk)ken est libre, montrons
donc qu'elle est génératrice.
Soit donc Q G K[X], il faut montrer que Q est combinaison linéaire d'un nombre fini
d'éléments de la famille (Pk)ken-
Or en notant N le degré de Q (ou un majorant de ce degré) on sait qu'il existe N G N
tel que Q G KN[X].
Mais alors Po» • • •» Pn étant de degrés inférieurs ou égaux à AT, on peut affirmer que
11. Nous le retrouverons à travers les suites de polynômes orthogonaux dans le chapitre sur les espaces
préhilbertiens.
12. La démonstration de cette proposition se retrouve dans N. Basbois et P. Abbrugiati, Algèbre
première année, De Boeck (2013).
IBEI
Chapitre 2. Compléments d'algèbre linéaire
(Po» ---j-P/v) est une famille libre de Ktv[X].
Ainsi, (Po> •••> -P/v) est une famille libre de N +1 éléments de Ktv[X] qui est de dimension
AT + 1, donc (Po> ••-, -P/v) est une base de Kw[X].
Comme Q G Kjvpf], on sait alors qu'il existe un (unique) (N + l)-uplet (ao» •••»ûJiv) £
KN+1 tel que Q = a0P0 + ■ ■ ■ + aNPN.
On constate ainsi que Q G Vect(Po» •••> -P/v)» donc Q G Vect((Pfc)fceN)-
Nous venons de démontrer que K[X] C Vect((Pk)keN), donc que la famille (Pk)ken est
génératrice de K[X]. Étant également libre, il s'agit d'une base de K[X].
Exemple
Ce résultat sera notamment utilisé dans l'exercice 2.7
^£Q Lien avec les applications linéaires
Théorème 7
Soient E et F deux K-espaces vectoriels, B = (e?)^/ une base de E et (yi)iei une
famille de F indexée par le même ensemble.
Alors il existe une unique application linéaire / : E —> F envoyant la base B sur
cette famille, c'est-à-dire telle que pour tout i clans J, /(e^) = yi-
En d'autres termes, l'application
C(E,F) —> F1
| / -> (/(*))ie/ I
est un isomorphisme.
Remarque
Lorsque E et F sont de dimension finie, Card(J) = dim(JS), et alors F1 est de dimension
Card(J) x dim(F) = dim(E) x dim(F). Grâce à Fisomorphisme de ce théorème, C(E,F)
est alors de même dimension finie. On retrouve ainsi dim(£(i£, F)) = dim(E) x dim(F).
Notons qu'un autre moyen (mais basé sur ce théorème) d'aboutir à ce résultat est de
voir Fisomorphisme entre C(E,F) et A4dim(F),dim(£?)0&), qui à une application linéaire
associe sa matrice dans des bases fixées.
2.1 Sur les bases IBE1
Démonstration
Le début de cette preuve est toujours la définition de /.
Souvent, on lit d'abord : soit x G E.
Comme la famille B = (ei)iei est génératrice, il existe un sous-ensemble fini J C I et
une famille d'éléments (\i)iej G KJ telle que x = ^J Xiei.
ieJ
On pose alors13 f(x) = ^ À*?/;.
ieJ
Il faut alors vérifier que l'application est ainsi bien définie14, puis démontrer la linéarité
de/.
Mais en utilisant ce qui précède, on peut aller plus vite et « surtout » travailler plus
simplement.
Commençons par l'unicité de /. En effet, elle nous donnera la définition de /, et son
unicité.
Notons qu'il s'agit typiquement d'un raisonnement par analyse-synthèse.
Analyse : Soit donc / une application linéaire vérifiant Vz G J, /(e*) = yi.
Soit maintenant x e E. On sait que l'on peut écrire x = ^J Qi(x)ei, les formes linéaires
iei
Qi sur E ayant été définies précédemment15.
Comme il s'agit d'une somme finie (car les termes non nuls sont en nombre fini), la
linéarité de / impose
/(x)=x;©iW/(ci).
iei
Et puisque l'on doit avoir Vz G J, /(e*) = yi, on voit que l'on a forcément
\/xeE, /(a?) = 5^9i(a:)tfi.
iei
Ainsi, puisque / ne peut être définie qu'ainsi, on a déjà prouvé l'unicité de l'application
linéaire / ayant les valeurs imposées aux e^.
Synthèse : Il faut maintenant passer à l'existence de /.
Pour définir /, nous allons tout naturellement utiliser la formule ci-dessus : on pose
Vxg£,
f(x) = ^2Qi(x)yi-
iei
13. Car la linéarité impose f(x) = ^Ai/(ei), et on veut Vî G /, /(e*) = yi.
14. Que se passe-t-il si on prend un autre ensemble J et une autre famille (A$) ?
15. cf. la définition 41 (p. 99)
jgj Chapitre 2. Compléments d'algèbre linéaire
Il nous reste à vérifier que / est une application linéaire de E dans F, et que Vz G J,
/(et) = Vi-
Pour le premier point, on utilise le fait que Vz G /, l'application 6* est linéaire.
Soient donc a;, x' dans E et /j, eK. On a alors
f(x + jza/) = ^ Qi(x + ixa;7)^
iG/
iei
= I ^ Qi(x)yi I + M I 5Z A*©i(z')î/i
ViG/ / \iel )
= fW+fifix').
L'application / est donc bien linéaire de E dans F.
Passons au tout dernier point. Soit donc zo G J, montrons que /(e;0) = yi0.
Calculons donc 0(eio).
Or si l'on définit À en posant
{1 si z = zo
0 sinon
alors (Xi)iei est bien une famille dans J>(K) (un seul élément est non nul) et on a
/ j ^i^i = Ai0 6iQ + y ^ Ai &i = 6i0.
iG/ _, iG/,i#io =q
Ainsi, on a par définition
e^) = a.
On peut alors écrire
f(eio) = ^2 ^ = ^o^Vio + ^2 ^^Vi = Vie
iei ^ ^ ^
=1
i^i0
2.1 Sur les bases
usa
Corollaire 6
Soient E et F deux K-espaces vectoriels de dimension finie.
Alors l'espace vectoriel C(E,F) est de dimension finie égale à :
dim(C(E,F)) = dim(E) x dim(F)
Démonstration
On note n = dim(E) et on considère une base B = (ei,..., en) de E.
Avec J = [l,n], le théorème précédent permet d'affirmer que l'application
$ : C(E,F) —> F1
f *-+ (/(e,))^
est un isomorphisme.
L'espace d'arrivée est de dimension finie
dim(F7) = dim(F).Card(J) = n.dim(F) = dim(JE) x dim(F),
donc l'espace de départ est de même dimension finie.
Remarque
On notera que ce théorème est aussi à l'origine du fait qu'en dimension finie, on peut
représenter une application linéaire par une matrice. En effet, soit B = (ei,...,en) une
base de E et B' = (ei,..., em) une base de F, où l'on a noté n = dim(E) et m = dim(F).
Par le théorème, connaître un élément / G £(J3, F) équivaut à connaître /(ei), ..., f(en)
dans F.
Et pour connaître chacun de ces éléments f(ej) de F, il suffit de connaître ses coordonnées
dans la base B' ; ce sont justement ces nombres qui sont représentés dans la j-ème colonne
deMatJBjjB/(/).
îïïl Chapitre 2. Compléments d'algèbre linéaire
Sommes, sommes directes
Définition 42
Soient £i,£2, ...,£r des sous-espaces vectoriels d'un K-espace vectoriel E.
r
On appelle somme de £1, £2,..., £7^ et on note F = E\ + £2 + ■ • • + Er = \JEi
2=1
l'ensemble
^ = {œi+a^H hxr ; xi G £i,rc2 G £2,...,xr G £r}
= {2/ G £, E3(£i,£2,..-,2V) G £1 x £2 x ••• x £r : 2/ = x1 + £2 H \-xr).
On dit que cette somme est directe si tout élément î/ de £ se décompose de façon
unique en somme d'éléments des £i, c'est-à-dire si :
\/x G £, 3!(rci5x2j...,av) G £1 x £2 x • ■ • x £r : y = x1 + x2 H h av.
Dans ce cas, on note £ = £1 0 £2 0 • • • 0 Er = ^ £z.
î=i
Proposition 47
Soient £1, £2,..., £r des sous-espaces vectoriels d'un K-espace vectoriel £ et (p
l'application linéaire définie par :
if : £1 x £2 x • • • x Er —> E
(£i,X2, ...,Xr) I > Xi +X2 H h#r
On a alors
1. Ei + £2 + • • • + Er = Im(<p),
2. la somme £1 + £2 + • • • + Er est directe si et seulement si (p est injective, ce qui
équivaut à : V(ar 1,2:2, ...,av) G £1 x £2 x • • • x Er :
X1+X2 + \-xr = 0 => (rci,x2,...5.Tr) = (0,0, ...,0).
3. £1 0 £2 0 • • • 0 Er = £ si et seulement si y? est bijective.
Démonstration
1. Le premier point correspond à la définition de la somme E\ + E2 H \- Er
2.2 Sommes, sommes directes RE
2. La définition d'une somme directe est que tout élément de E\ + E2 H h Er s'écrit
de manière unique comme somme d'un élément de #1, d'un élément de #2, • • » d'un
élément de Er.
Cette propriété équivaut au fait que tout élément de E\ + E2 H h Er = Im(<p)
possède un unique antécédent par </?, ce qui est la définition de l'injectivité de <p.
L'application ip étant linéaire, on peut affirmer que ip injective équivaut à
Ker(<p) C {0},
donc à : V(xi,x2, ...,xr) G Ex x E2 x • • • x Er :
ip(x) = xi + x2 H hzr = 0 => (zi,a;2,...,av) = (0,0, ...,0).
3. Il suffit de regrouper les deux premiers points.
En effet, avoir E\(BE2(B • •-(BEr = E équivaut à la fois à avoir
E1 + E2 + • • • + Er = Im(y>) = E,
c'est-à-dire à avoir <p surjective, et à avoir Ei + E2 H \- Er directe, qui équivaut
à ip injective, d'où la conclusion.
Proposition 48
Soient £1, E2i..., Er des sous-espaces vectoriels d'un K-espace vectoriel E.
Il y a alors équivalence entre les trois propositions suivantes :
1. La somme E\ + E2 + • • • + ET est directe.
/ \
2. Vie [!,?■], Eill
c{0}
V &* )
3. E2nExc {0}, E3 H (#! + E2) C {0}, ..., Er n (Ei + E2 + • • • + £r_i) C {0},
ce qui peut se résumer par16
' 2-1
ViG[2,rI, ^n [E^] C W
16. On notera que l'on a écrit inclus dans {0} au lieu de égal à {0}. Il y a équivalence puisque des sous-
espaces vectoriels contiennent toujours le vecteur nul ; le choix de l'inclusion sert à alléger les rédactions.
Ifiïïl
Chapitre 2. Compléments d'algèbre linéaire
Démonstration
La démonstration est présente dans l'ouvrage d'algèbre de première année de la même
collection1T et n'est donc pas reprise ici.
Rappelons simplement que l'idée de départ est la suivante : si l'on suppose par exemple
la somme Ei + E2 H \- Er directe, considérons x G Er C\ (E\ H h Er-\).
Puisque x G E\ H \- Er-\, il existe (rci,..., xr-i) G Ei x • • • x Er-i tel que
x = x\ + • • • -\-xr-\.
En notant xr = —x on trouve alors
xi H h #r_i + a;r = 0
avec (#i,..., a;r_i, a;r) G #1 x • • • x J£r_i x j£r, et le fait que la somme est directe implique
xi = — - = xr-i = xr = 0, donc x = 0.
Remarques
1. Il faut bien noter la différence avec le cas particulier de deux sous-espaces Ei et
#2, pour lesquels il suffit que Ei C\ E2 = {0} pour qu'ils soient en somme directe.
Il ne faut surtout pas penser que r sous-espaces vont être en somme directe si et
seulement si leurs intersections deux à deux sont toutes réduites à {0}.
Voici un contre-exemple complet : dans M2, on considère
E1 = Vect((l,0)) ; E2 = Vect((0,1)) et E3 = Vect((l, l)).
Il est alors évident que
E1 n E2 = E1 n E3 = E2 n E3 = {0}.
Pourtant, la somme n'est pas directe. Par exemple, on a
(1,0) + (0,1) +(-1,-1) = 0,
ce qui signifie l'application <p définie dans les propositions précédentes n'est pas
injective, donc que la somme Ei + E2 + E$ n'est pas directe.
2. Le troisième point sera utilisé dans le chapitre « Réduction » pour montrer que les
sommes de sous-espaces propres d'un endomorphisme sont toujours directes.
17. N. Basbois et P. Abbrugiati, Algèbre première année, De Boeck (2013).
2.2 Sommes, sommes directes
ma
Proposition 49
Soient Ei,E2i...,Er des sous-espaces vectoriels de E, K-espace vectoriel de
dimension finie. Alors :
1. la somme E\ + E2 + • • • + Er est directe si et seulement si
dim(£i + E2 + • • • + Er) = dim(-Bi) + dim(E2) + h dim(£r).
2. E\ 0 Ei 0 • • ■ 0 Er = E si et seulement si deux des trois points suivants sont
vérifiés :
i) E1+E2 + -- + Er = E
iï) la somme E\ + E2 + h Er est directe
m) dim(Ei) + dim(£2) + • • • + dim(£r) = dim(-B)
Démonstration
Pour le point 1, on note que la somme est directe si et seulement si ip est injective
(voir proposition 47). L'injectivité de cp équivaut par le théorème du rang à l'égalité
dim(J^i x E2 x • • • x Er) = dim(lm(</?)), qui équivaut à son tour à
dim(JBi) + dim(£2) + • • • + dim(Er) = dim(E1 + E2 + • • • + Er).
Pour le point 2, notons que la définition de J5i, E2, • •., Er supplémentaires dans E
correspond aux points i) et ii).
Le lien entre ces trois points est le théorème du rang appliqué à l'application ip
précédemment définie. En effet,
1. le premier point correspond à (p surjective, ou encore à rg(<p) = dim(E).
2. Le second point correspond à (p injective, c'est-à-dire à dim(Ker(</?)) = 0.
3. Enfin, le troisième point signifie dim(JEi x E2 x • • • x Er) = dim(JS).
Or Ei x E2 x • • • x Er est l'espace de départ de <p, et
dim(£i x E2 x • • • x Er) = dim(JBi) + dim(£2) + ■ ■ ■ + dim(I5r),
donc le théorème du rang appliqué à (p s'écrit
dim(JBi) + dim(£2) + • • • + dim(Er) = dim(Ker(</>)) + rg(y>). (*)
m(] Chapitre 2. Compléments d'algèbre linéaire
Ainsi, les deux premiers points signifiant dim(Ker(</?)) = 0 et rg(</?) = dim(E) on en
déduit dim(JEi) + dim(E2) H h dim(JEr) = dim(JE), donc on a le troisième point.
Si on a les points i) et m) alors
dim(£i) + dim(£2) + • ■ • + dim(£r) = dim(£) = rg(<p)
donc la relation (*) impose dim(Ker(</?)) = 0 et donc on a le point ii), et ainsi on a i) et
ii) et alors
Ei 0 E2 0 • • • 0 Er = E.
Enfin, Si on a les points ii) et iii) alors dim(2?i) + dim(JS2) H h dim(JEr) = dim(JE) et
dim(Ker(</?)) = 0 donc la relation (*) impose rg(</?) = dim(JS) et donc on a le point z),
et ainsi on a i) et ii) et là encore
Ei 0 £2 0 * • • 0 Et = E.
Nous avons bien démontré que deux des trois points imposent le troisième, donc que
Ei 0 E2 0 • • • 0 ET = E.
ç
Définition 43
Soient £1,
que
Soit x G E
tel que x =
Pour tout'
E2i • • •, Er des sous-espaces
E =
. Puisqu'il existe un unique
= Xi + x2 + h œr, on pose
\ dans [1,7'], l'application pi
la décomposition en somme directe E -
V
vectoriels d'
= ©*■
élément (zi,
18 ViG [l,r]
un K-espace
Z2, ...,av) £ -
î Pi\£) •&!'
est appelée projection su
= Ei e £2 e
•-•@Er.
>v
vectoriel de E tels
Ei x E2 x • • • x Er
y Ei relativement à
)
18. On définit ainsi r applications de E dans E. On note que l'on choisit E comme espace d'arrivée
pour tous les pi et non pas E\ pour pi, ..., Er pour pr.
2.2 Sommes, sommes directes
HO
c ^
Proposition 50
On a les propriétés suivantes :
1. Pour tout i G [1, ri], Pi est un endomorphisme de £", c'est-à-dire que pi est linéaire.
2. Pour tout i G [l,n], p\ est un projecteur, c'est-à-dire : pf = pi opi =pj.
Plus précisément, p} est la projection sur Ei parallèlement à• E\ + • • • + Ei-\ +
Ei+i H + Er.
3. On a aussi V(i,j) G [1, n]2, ? =£ j => p^ op; = 0.
Démonstration
Commençons19 par la linéarité des r applications pi, p2i • • -, Pr-
Soient donc a; et y deux éléments de E et soit A G K.
Comme E = Ei 0 E2 0 • • • 0 Er, on sait que
3\(xi,X2,...,xr) G Ei x JE2 x ••• x Er : a; = a;i+a;2H \-xr (a),
et 3!(yi,y2,...,yr) e E1 x E2 x ••• x Er : y = yi + y2 + • • • + yr (&)•
Par définition, les applications pi,p2, • • •» Pr sont telles que Pi(a;) = Xi et £>i(y) = y% pour
tout z G [l,r].
De même, on sait que
3\(zi,z2,...,zr) G Ei x E2 x ••• x Er : x + \y = Z!+z2-) Y zT,
et là encore pi(x + \y) = zi pour tout i G [1, r\.
Mais en additionnant (a) et À(6) on trouve
x + Ay = (zi + Ayi) + (z2 + Ay2) + • ■ ■ (xr + Ayr).
N v ' v v ' * v '
eEi eE2 eEr
Mais il y a unicité de la décomposition des vecteurs dans la somme directe.
Par identification, on a Vz G [1, r], zi = xi + Ay^, ce qui peut se réécrire
Vz G [1, r], pi(z + Ay) = pi(x) + Ap*(y).
Cette famille d'égalités signifie que les applications Pi, p2, • • -, Pr sont bien linéaires.
19. Le lecteur notera que cette démonstration est fort semblable à celle de la linéarité des fonctions
coordonnées dans une base.
Chapitre 2. Compléments d'algèbre linéaire
Passons aux deux derniers points. Soit i G [l,r] et soit x un élément de Ei.
On peut décomposer x dans la somme directe tout simplement ainsi :
x= 0 +•••+ 0 + x + 0 +---+^.
eEi eEi-i eEi eEi+i eEr
Par unicité de la décomposition en somme directe, on peut identifier et donc écrire
Pi(x) =x et pj(x) = 0 si j G [1, r], j ^ i.
Ces égalités seront d'ailleurs utilisées dans la preuve du théorème 8, après cette
proposition.
Montrons le deuxième point.
Si on considère X G E, on note x = Pi(X) G Ei.
Puisqu'on a x G Ei, on vient de prouver que Pi(x) = x.
En remplaçant x par Pi(X), on a donc Pi(Pi(X)) = Pi(X).
Cette égalité étant vérifiée pour tout X G E, on a bien pj =Pi.
Passons au dernier point. Soit donc j G [l,r] tel que j ^ z.
On considère de même un élément quelconque X G E et a; = Pi(X) E E^
Là encore, grâce à ce qu'on a prouvé précédemment, on a Pj(x) = 0.
En remplaçant x par Pi(X), on a donc Pj(pi(Jf)) = 0.
Comme précédemment, cette égalité étant vérifiée pour tout X G E, on en déduit
PjOPi = 0.
Tout comme on peut définir une application à travers les images des vecteurs d'une base
(cf. le théorème 7 page 102) on a le résultat suivant.
Théorème 8
Soient E et F deux K-espaces vectoriels, et E\, £2, • ■ -, Er des sous-espaces vectoriels
de E tels que
E = E1®E2®---®Er.
Soient r applications linéaires /1, /2, • ■ ■> fr avec pour tout i dans [1, r], fi : Ei —> F.
Alors il existe une unique application linéaire / : E —> F telle que
Vte[l,r], flEi = fi.
2.2 Sommes, sommes directes
ira
Démonstration
Effectuons un raisonnement par analyse-synthèse.
Analyse : commençons par l'unicité d'une telle application.
Supposons donc que / : E —> F linéaire vérifie Vz G [l,rj, f\Et = fi.
Soit x e E. Puisque E = E\ 0 E2 0 • • • 0 Er, on sait qu'il existe un unique r-uplet
(#i,a;2,...,2v) £ E\ x E2 x • • • x Er tel que a; = a?i +#2 H \-xr.
Puisque / est linéaire, on doit avoir f(x) = f(x\) + f(x2) H h f(xr).
Et alors, pour tout z G [l,rj, comme xi G J5», on a f(xi) = f\Ei(x%) = fi(xi) par
hypothèse.
Ainsi, on a forcément f(x) = /i(a?i) + /2OE2) H h fr(xr).
On prouve ainsi l'unicité (pour tout x fixé) de la valeur de /(#), donc la définition de /
est forcément unique.
Synthèse : réciproquement, définissons / comme ci-dessus. Nous allons montrer que /
vérifie les conditions demandées, c'est-à-dire que / est bien linéaire, et que Vz G [l,rj,
f\Ei = fi'
Reprenons les notations de la proposition précédente. Pour un vecteur x e E, les éléments
xi G J5i, X2 G #2, • • -, xr G Er tels que x = x\ + X2 H h av sont les projetés de x sur
les J5i, c'est-à-dire que l'on axi= _Pi(#), a?2 = £2(2), • • -, %r = Vr(x).
Ainsi, la définition de f(x) est
f(x) = /i(pi(aO) + /2(p2(a0) + ' ' ' + /r(Pr(*))-
Finalement, / est définie sur E par / = /1 o px + f2 o p2 H h fropr.
Pour tout z G [l,r], l'application p^ est linéaire de E dans E (et à valeurs dans 2%), et
/i est linéaire de Ei dans F, donc par composition fi o p{ est une application linéaire de
E dans F. La somme de ces p composées fait donc de
/ = fl ° V1 + h ° #2 + ' ' ' + fr O pr
une application linéaire de JE dans F.
Il ne reste donc qu'à prouver que Vi e [l,rj, /|£?i = /i.
Soit donc z G [l,r] et a; G JE*.
En reprenant la preuve de la proposition précédente, on sait que Pi(x) = x et Pj(a;) = 0
pour j g [1, r] tel que j ^ z.
Chapitre 2. Compléments d'algèbre linéaire
Ainsi, dans la somme f(x) = fi(pi(x)) + f2(p2(x)) H h fr{pr(x)), on peut affirmer
que :
• le terme d'indice i vaut fi(pi(x)) = fi(x).
• tous les autres termes sont nuls car20 pour tout j ^i,
Pj(x) = 0 =*- fifaip)) = /,(0) = 0.
Ainsi, la somme donne simplement f(x) = fi(x), et l'on a bien f = fi sur i%, c'est-à-dire
f\Ei = fi-
Trace
Définition 44
Soit n un entier naturel non nul et A = (ûi,j)(ij)e|[i,n]|2 ^ A4n(K).
On appelle trace de A, et on note tr(^4), la somme des éléments diagonaux de ^4,
c'est-à-dire
n
ti'(A) = ^oM.
Proposition 51
Soit n un entier naturel non nul.
L'application trace est une forme linéaire sur A4;1(IK).
Démonstration
Soient donc A et B dans ,Mn(K) et À G K.
Le coefficient général de A + AI? est (A + XB)ij = a^ + À&i,j, donc la trace de A + Ai?
est
n n
i=l i=l
= f è°i.* )+( è ***.* )=tr^+Atr(jB)-
^i=i / \i=i
20. Par linéarité de /.
2.3 Trace
Proposition 52
Soient n un entier naturel non nul, A et D dans A4n(K). Alors
tr(AB) = tY(BA).
Démonstration
n
On note C = AB. Le coefficient général de la matrice C est Cij = Y^a^è^.
On a donc21
n
tr(AB) = tr(C) = 5>M
i=l
n / n \
= 2^ a>i,kbk,i
(i,k)eliM2
En échangeant le rôle de A et de B, on a donc aussi22 :
tv(BA) = ^2 h>yk'Q>k'yi'
(i\k')eliM2
Or23 on a V(z',À/), &«/,*'a*',? = a>k',i'bi',k', d'où
tr(BA) = ^2 a>k\i'h',k'-
(i',k')eliM2
Enfin, lorsque (i',k') décrit [l,n]2, on a (k',i') parcourt aussi [l,n]2. Ainsi, si Ton pose
i = k' et k = i' dans la dernière somme on trouve
tr(BA) = ^2 ai,kh,i,
(i,k)eliM2
et Ton reconnaît que Ton a bien tr(BA) = tr (AB).
Corollaire 7
Deux matrices carrées semblables ont même trace.
21. Pour la dernière somme, on utilise la commutativité (et l'associativité) de l'addition dans K.
22. On change le nom des paramètres i et Je en i' et k'
23. Par commutativité du produit dans K.
Chapitre 2. Compléments d'algèbre linéaire
Démonstration
Soient donc M et M' dans ,Mn(K) deux matrices semblables.
Il existe alors une matrice P G GLn(K) telle que M' = P~XMP.
On pose A = P'1 et B = MP.
On a alors AB = M' et BA = (MP)P'1 = M(PP"1) = MIn = M.
Le résultat tr(AB) = tr(BA) donne donc directement tr(M') = tr(M).
Grâce à ce résultat, on peut donner la définition suivante.
Définition 45
Soit / un endomorphisme d'un K-espace vectoriel E de dimension finie.
On appelle trace de /, et on note tr(/)5 la trace de la matrice de / dans une base
quelconque24 de E.
Remarque
Il faut s'assurer de la cohérence de cette définition, c'est-à-dire du fait que le résultat
ne dépend pas de la base choisie. Or si B et B' sont deux bases de E, les matrices
M = MatJg(/) et M' = MatJg/(/) seront semblables entre elles (si on note P la matrice
de passage de B à B7, la matrice P est inversible et M' = P~1MP).
Donc, par le corollaire précédent, tr(M) = tr(M').
Déterminant
Formes multilinéaires
Avant de pouvoir définir le déterminant d'une famille de vecteurs, nous allons nous
intéresser à des applications particulières définies non pas sur E, mais sur Ek pour k G N
(et plus particulièrement pour k = dim(E) dans un second temps).
24. Si B est une base de E, on pose tr(/) = tr(Matjg(/)).
2.4 Déterminant
Définition 46
Soient Fi, F2, ..., Ev et F, p + 1 espaces vectoriels sur le corps K.
On dit que / : E\ x E2 x ■ • • x Ep —> F est p-linéaire si / est « linéaire par rapport
à chacune de ses coordonnées », c'est-à-dire si
Vi G [l,p], V(xi,...,Xi_i,Xi+i,...,xp) GEiX- •x^_ixEi+iX- • -x^p, l'application
Ei —y F
JLi i )■ j{Xi)...,Xi—i)JLi)Xi-\-i)...)Xp)
est linéaire, c'est-à-dire
Vz G [l,p], V(xi,..., rci_i, xi} x\, Xi+i,..., rcp) G -Bi x ■ • • x ^_i x^x £!i+1 x • • • x Fp,
VAgK,
J\Xli ..., X^—i, 2^ + AX^i ^i+1) •••> #pj = J (Xli •••) ^i—1) ^ij %i+lj •••, #pj
+ A / (^1, ..., Xi—i, X^ Xi+i) ..., Xp).
On note £p(Fi, F2,..., Fp, F) l'ensemble des applications p-linéaires
/ : Fi x E2 x • • • x Ep —y F.
Comme pour l'ensemble des applications linéaires entre deux K-espaces vectoriels, on a
naturellement le résultat suivant.
r
Proposition 53
Soient E\, E2, ...,
L'ensemble £p(Fi,
Ep
E2,
et F,
...,ET
p+1
espaces
vectoriels
,,F) est un sous-espace
HEi
x E2 x
• • • x Ep,
5 sur le corps K.
vectoriel de l'ensemble
F)
des fonctions de Ei x E2 x • • • x Ev à valeurs dans F.
Démonstration
La preuve est parfaitement analogue à celle de première année montrant que C(E, F) est
un sous-espace vectoriel de .F(F, F), elle ne sera donc pas réécrite ici.
Un cas particulièrement intéressant des formes multilinéaires est celui où les p espaces
Ei sont égaux. Un autre cas est celui où l'espace d'arrivée est le corps :
Chapitre 2. Compléments d'algèbre linéaire
Définition 47
1. Si E et F sont des K-espaces vectoriels, on appellera application p-linéaire sur E
à valeurs dans F une application p-linéaire deExEx---xE — Ep —> F.
2. Si F = K, une application p-linéaire sera appelée forme p-linéaire.
3. Enfin, en combinant ces deux cas, on appelle forme p-linéaire sur E une application
p-linéaire de Ep à valeurs dans K.
On note AP(E) l'ensemble des formes p-linéaires sur le K-espace vectoriel E.
[ Proposition 54 ]
Avec les notations de la définition précédente, AP(E) est un K-espace vectoriel.
Démonstration
Il s'agit d'un corollaire de la proposition précédente, puisque AP(E) sera un sous-espace
vectoriel de l'ensemble des fonctions de Ep vers K.
Proposition 55
Soient £1, E<i, ..., Ep et F des K-espaces vectoriels de dimension finie.
Alors l'espace Cp(E\yE2, ...>EP,F) est de dimension finie égale à :
dim(Cp(EuE2, ...,EP,F)) = dim(£i) x dim(£2) x • • • x dim{Ep) x dim(F).
Notamment, si E est de dimension finie, alors AP(E) est de dimension :
dim(Ap(E)) = [dim(E)]p.
Démonstration
Pour i e [l,p], notons ni = dim(Ei). Il existe alors une base de JS», notée (e^i, ...,ei>ni).
En s'inspirant du théorème 7 page 102 et de sa preuve, on pourrait aisément démontrer
que pour toute famille (2/j1,...,jp)(j1,...,Jp)G|[i,n1].-|[i,np] G Fnin2-np, il existe une unique
application p-linéaire / : Ei x E^ x • • • x Ev —> F telle que
V(ji,...,jP) e [l,nil x '•• x [l»Wpl> /(ei,j!,-,epJp) = yju...7Jp.
2.4 Déterminant
Ainsi, l'application
(p: £p(£i,...,£p,F) —► pru...^
f ' ^ ^(ei^1,,*,,6p^^(ii,...,ip)G|[l,n1]x.-.x|[l,np]
est un isomorphisme.
On en déduit immédiatement que
dim(Cp(Eu...,Ep,F)) = dim(Fni'n^)=n1...npdim(F)
= dim(JEi) x • • • x dim(JSp) x dim(F).
Rapprochons-nous de la question du déterminant. Parmi les formes p-linéaires, certaines
sont particulières, il s'agit des formes alternées, ou antisymétriques.
Définition 48
Soient E un K-espace vectoriel et / G AP(E).
On dit que la forme / est alternée si et seulement si lorsque deux vecteurs de la
famille (#i,#2, •••,&>) sont égaux, f(x±,X2, ...,xp) = 0, c'est-à-dire
\/(x1,x2i...,xp)eEp, 3{iJ) e [l5p]2,i 7e 3 et Xi =Xj =^ f(xux2,...,xp) = 0.
Par ailleurs, on dit que la forme / est antisymétrique si l'échange de deux vecteurs
de la famille multiplie la valeur de / par — 1, c'est-à-dire que
V^!,^,...,^!^, V(m)e[1,P]2,
l =F J V J \X\ , •..Xj , ..•, Xi, ..., Xp) = — J [X\ , ...Xi, ..., Xj , ..., Xp).
Ces deux définitions ont l'air différentes, mais en réalité elles sont équivalentes (sauf dans
les corps de caractéristique 2).
Proposition 56
Soient K un corps de caractéristique25 différente de 2, E un K-espace vectoriel et
/ e AP(E). On a alors
/ alternée <=> / antisymétrique.
Chapitre 2. Compléments d'algèbre linéaire
Augustin-Louis Cauchy" est indubitablement
~~~ l'un des mathématiciens les plus connus de
l'histoire.
'v* Malgré une petite enfance compliquée par les
"N événements entourant la Révolution Française,
Cauchy prend des cours intensifs de mathéma-
j tiques et entre à l'École polytechnique dès 1805.
Diplômé en 1807, il intègre les Ponts et
Chaussées.
Ensuite, parallèlement à son travail sur la for-
Augustin-Louis Cauchy tification d'installations portuaires, il poursuit
(1780-18^7) l'étude des mathématiques en travaillant sur les
polyèdres convexes.
Cauchy est finalement engagé comme professeur assistant à l'Ecole polytechnique
en 1815 et intègre l'Académie des sciences l'année suivante. Il donne un cours
d'analyseb à l'École polytechnique chaque année jusqu'en 1830 en traitant (ce qui
est une nouveauté) avec le plus de rigueur et de clarté possible les questions liées à
la continuités
Cauchy effectue des travaux théoriques sur le déterminant en s'intéressantd aux
applications (notamment multilinéaires) qui « ne changent pas de valeur, mais tout
au plus de signe en vertu des transpositions opérées entre les variables qu'elles
renferment » (sic). Il définit ainsi les formes antisymétriquesc, ce qui permet d'aboutir
à la définition théorique du déterminant f.
Concernant la réduction, il emploie le terme d'équation caractéristique*, pour
désigner l'équation'' xm{X) = 0, dont les racines sont les valeurs propres' d'une
matrice M.
Les retournements politiques du pays ont compliqué sa carrière (il a dû quitter, puis
reprendre, certains postes d'enseignement notamment) mais il n'a jamais négligé la
recherche en mathématiques.
Ses œuvres complètes représentent 789 documents et ont été publiées en 27
volumes.
a. Voir également la notice biographique dans l'ouvrage de N. Basbois et P. Abbrugiati, Algèbre première année, De
Boeck (2013), p. 905.
b. Cours d'analyse de l'École royale polytechnique, qui forme le tome 3 de la deuxième série des Œuvres complètes d'Augustin
Cauchy, Gauthier-Villars, Paris (1897).
c. À l'époque, ces questions étaient mal identifiées, voire totalement ignorées.
d. cf. Mémoire sur les fonctions qui ne peuvent obtenir que deux valeurs égales et des signes contraires par suite des transpositions
opérées entre les variables qu'elles renferment, Œuvres complètes, série 2, tome 1, pp. 91-169.
e. cf. définition 48 (p. 119).
/. cf. théorème 9 (p. 125).
g. cf. Mémoire sur l'intégration des équations linéaires, Œuvres complètes, série 2, tome 11, pp. 75-133.
h. Écrite ici avec les notations de ce livre.
i. cf. définition 64 (p. 234) pour le polynôme caractéristique xm (X) et le corollaire 14 (p. 241) pour le lien avec les
valeurs propres.
25. L'hypothèse signifie que K doit être un corps dans lequel 1 + 1 = 2/0. La caractéristique a été
introduite dans la définition 30 (p. 72).
2.4 Déterminant Iwl
Démonstration
[=» | Supposons / alternée, nous devons montrer que / est antisymétrique.
On se donne (xi,X2, ...,xp) G Ev et (z,j) G [l,p]2 tel que z ^ j, par exemple (sans perte
de généralité) i < j.Le but est de montrer que
/ (Xl, ...,Xj, ..., Xi, ..., Xp) = — J(Xl, .-.,Xi, ..., Xj, ..., XpJ.
On part de /(xi,..., Xi + Xj,..., Xi + Xj,..., xv) = 0 (puisqu'il y a le même vecteur dans la
z-ème et la j-ème coordonnée).
En développant par linéarité par rapport à la z-ème puis par rapport à la j-ème
coordonnée, on en déduit
,..., X{ ~r Xj,..., X{ ~r Xj,..., Xp j
= / \X\ » • • • » Xi, • • •, Xi ~r Xj, • • •, Xp) ~r / \X\, ..., Xj, • • •, Xi -\- Xj,
= / v^l » • ••> Xi, •••> Xi, • ••> XpJ ~r / \X\, • ••> Xi, • ••> Xj, • ••> XpJ
H-/ l«£i •> • • • > Xj,..., Xi,..., Xp J + / ^Xi, ..., Xj,..., Xj,..., xp J
/(*!,...,*i, ....S,, ...,3p)
/(x1)...,xi)...,xj,...,xp)
donc il reste seulement dans l'égalité
" = / V*'1 » • • • » %i » • * * » *^J » • • • » *^P/ ~r / v^l » "">Xj, ..., Xj , ..., Xp J,
dont on déduit bien /(xi, ...,Xj, ...,Xi, ...,xp) = —/(xi, ...,Xf, ...,Xj, ...,xp).
|<= | Supposons / antisymétrique, nous devons montrer que / est alternée.
Soient donc (xi,X2, ...,xp) G Ep et (z,j) G [l,p]2 tel que z ^ j et Xi = Xj.
Il nous faut montrer que /(xi, ...,Xi, ...,Xj, ...,xp) = 0.
En appliquant le caractère antisymétrique, on a
J\Xl, ..., Xj, ..., X^, ..., Xp) = /^Xi, ..., Xi, ..., Xj, ..., XpJ.
Mais comme on a x^ = Xj, on peut écrire
J\Xi,..., x^,..., Xj,..., XpJ = jyxi,..., Xi,..., Xj,...,XpJ.
Évidemment, E et C (ainsi que tous les sous-corps de C) ne sont pas de caractéristique 2 (leur
caractéristique est nulle).
..., Xp)
= o
= o
Or, toujours par le caractère alterné, on a
Chapitre 2. Compléments d'algèbre linéaire
En passant tous les termes dans le membre de gauche, on trouve évidemment
C'est là qu'intervient la caractéristique de K : on a 2 ^ 0, donc on peut diviser26 la
relation précédente par 2 et en déduire f(xi,...,Xi,...,Xj,...,xp) = 0, d'où le caractère
alterné de /.
Notation
Soient K un corps de caractéristique différente de 2 et E un K-espace vectoriel.
On note alors A*P(E) l'ensemble des formes p-linéaires alternées (c'est-à-dire p-linéaires
antisymétriques) sur E.
I Proposition 57 |
L'ensemble A*P(E) est un sous-espace vectoriel de AP(E).
Démonstration
La preuve est immédiate : en considérant deux éléments de A*P(E), on montre aisément
que leurs combinaisons linéaires sont alternées27.
Premières propriétés
Proposition 58
Soient / une forme p-linéaire alternée sur un K-espace vectoriel E et (#i,#2, •••j^p)
une famille liée de E. Alors
f(xi,x2,-,xp) = 0.
Démonstration
Le fait que la famille est liée équivaut au fait qu'un des vecteurs est combinaison linéaire
des autres.
Quitte à échanger deux vecteurs28, on peut supposer que xp est une combinaison linéaire
26. C'est-à-dire multiplier cette relation par l'inverse de 2 dans K.
27. Il ne faut pas omettre de préciser, même si ce point est évident, que l'application nulle de Ep dans
K est élément de A*p(E).
28. Ce qui multiplierait la valeur de f(xi,X2, ...,xp) par —1 et ne changerait donc pas le fait que cette
quantité est nulle.
2.4 Déterminant
de £i,£2>—>£p-i-
p-i
Ainsi, il existe (ai,a2,.--,ap_i) G Kp_1 tel que xp = y^g^a^.
On a alors par linéarité par rapport à la p-ième coordonnée :
f(xi,X2, ...,Xp-i,xp) = f [xi,x2,...,xp-i,y^akxk I
p-i
= 22 akf(Xli x2i •••> Xp-1 , ^)-
Pour fc G [l,n- 1], le vecteur xk apparaît deux fois dans (#i,a;2,...,arp_i,a:^) et donc
f(xuX2,...,Xp-i,Xk) = 0.
Tous les termes de la somme sont nuls, on a donc bien f(xi,X2, ..nxp-i,xp) = 0.
Corollaire 8
Si E1 est un K-espace vectoriel de dimension finie n et si p > n, alors la seule forme
;>linéaire alternée est nulle, c'est-à-dire A*P(E) = {0}.
Démonstration
A*P(E) étant un espace vectoriel, il contient évidemment la forme nulle (0), il s'agit
évidemment de montrer seulement l'autre inclusion.
Soit donc / G A*p(j£), c'est-à-dire soit / une forme p-linéaire alternée sur E.
Soit (#i, #2,..., xp) G Ep. La famille (#i, #2,...,%) est alors une famille de p > n éléments
dans l'espace E de dimension n, elle est donc forcément liée.
La proposition précédente implique alors f(x\,X2, ...,xp) = 0.
Ainsi, / est nulle en tout élément de Ev, c'est-à-dire que / est la forme nulle.
L'objet de la section suivante est de s'intéresser au cas particulier p = n, qui correspond
au déterminant29.
29. On verra qu'on regarde toujours le déterminant d'une famille de n vecteurs dans un espace de
dimension n.
Chapitre 2. Compléments d'algèbre linéaire
Définition et formule du déterminant
/
Lemme 1
i
Soient y? G A*P(E) et a G 6^, le groupe des permutations de |[l,p]. On a alors
V(.ti,...,xp) G £p, y(xa{l),...,xa{v)^ =e(a).(p(x1,...,xp),
où e(a) représente la signature de la permutation o.
Démonstration
On rappelle (cf. théorème 2 page 44) que toute permutation est composée d'un nombre
fini de transpositions : il existe k transpositions ri, ..., rk telles que a = t\ o • • • o rk.
Or si r est une transposition quelconque, on peut écrire r = (i j) avec 1 ^ i < j^ p, et
on a alors : ^(a?T(i),...,zT(i),...,a?Ty),..., zT(p)) = V>(xi> •••>^ji —» s», —> ^p)
== _VH^l» •••J«^tJ '"I «^JJ •••)Xp)
= -ip(xu...,xp).
Comme la signature d'une transposition vaut —1, on peut simplement écrire
</>(zt(i),-,Zt(p)) =e(r).(p(xli...,xp).
Ainsi, on a d'abord </?(zTfc(i), ...,zTfc(p)) = ^(^)-^(^i, -.,%), puis
^(^Tfc-iOrfcC^j-^rfc-xorfcCp)) = ^(^-l).^(^Tfc(l), »-, Zrfc(p)) = e(Tk-l).e(Tk).<p(xi, ..., Zp),
et ainsi de suite jusqu'à
^(^r1o...orfc_1orfc(l)>-,^r1o...orfc_1orfc(p)) = £{ri)...e(rk-i).£(rk).(p(xU ...,Xp).
Mais on reconnaît ri o ... o r^_i o tj = a.
Et comme e est un morphisme de groupes30, on a
e(Ti)...e(Tk-i).e(Tk) = e(n o ... o rfc_i o rk) = e(a).
Ainsi, l'égalité précédente devient bien
¥>0mi)i —i xa(P)) = e(a).(p(xi,..., xp).
30. e est un morphisme de (5p,o) dans ({—1,1}, x).
2.4 Déterminant
Théorème 9
Soit E un K-espace vectoriel de dimension finie n. Alors A*n(E) est une droite.
Plus précisément, si B = (ei,...,en) est une base de £", il existe un unique
élément (noté dettf) dans A*n(E) tel que det#(Z3) = det#(ei, ...,en) = 1, et on a ainsi
A*n(£) = Vect(dettf).
Enfin, si on écrit pour (xi, ...,xn) G En :
n
Vj G [l,n], Xj =^?ni}jei,
c'est-à-dire si J\I = (m2,.7')(*,.7)e|Ii,nP es^ ^a niatricc de la famille (xi, ...,xn) dans la
base S, alors on a
detB(xu...,xn) = ^2 e{a)ma{1)il...ma(<n)^= J^ f e(a) Y[ma{i)yi J .
aesu aesn V i=i /
Démonstration
Soit donc F G A*n(E). On considère (zi,...,a;n) G JEn et on note M = (™,i,j)(i,j)eii,n]2
la matrice de (x\, ...,£n) dans la base B. On a donc par définition
Y? G [1,n], Zj = ^m^e*.
i=i
Ainsi, on peut affirmer31 que
n n n
F(Xl,...,xn) = F [^2 mii,leii> 5Z m*2,2ei2, -, ^Z m^n^
\2i=l 22=1 in=l
n / n n
~~ "in
%\=\ \ 22 = 1 ïn = l
n n / n
21=1*2 = 1 \ *n = l
n n n
= JZ X! •* X! mii,imi2,2-^2n,ni?(ei1,ei2,...,ein).
ti=lt2 = l *n = l
31. On utilise successivement la n-linéarité de F m la linéarité par rapport à la première coordonnée,
puis la deuxième, ..., puis la dernière.
U£(| Chapitre 2. Compléments d'algèbre linéaire
On écrit cette quantité avec une seule somme :
F(xi,..nxn) = ^^ miiAmi2,2''-min,nF(ei1,ei2,...,ein).
(*i,.»,»»)€ll,nl»
En notant a l'application qui à j associe Zj, c'est-à-dire en écrivant cr(l) au lieu de zi, ...,
a(n) au lieu de zn, on peut écrire
F(xi,...,Xn) = ^ ^cr(l),l^c7(2),2---^c7(n),n^1(ec7(l),eC7(2),...,eC7(n)).
aell.nll1-"!
Il y a a priori nn termes dans cette somme, mais nous allons voir que nombre d'entre
eux sont automatiquement nuls.
En effet, si a n'est pas injective, il existe 1 ^ i < j ^ n tel que a(i) = a(j). Mais alors
le caractère alterné de F implique que F(eC7(1),..., e^),..., ea^, ...ea(n)) = 0.
Ainsi, seuls les termes pour a injective peuvent être non nuls.
Mais a allant d'un ensemble fini à n éléments dans lui-même, a injectif équivaut à a
bijectif, c'est-à-dire a G Sn. On se rapproche du résultat demandé, puisque l'on arrive à
F(xi,...,Xn) = ^ rna^)ilma^)12''^a(n)inF{^a(l)^a(2)^''^a(n))'
vesn
On applique alors le résultat du lemme 1 (p. 124) qui donne
Va G Sn, F(ea(i),ea(2),...,ea(n)) = e(a)F(eue2, ...,en) = Cte(a),
où l'on a noté C la constante C = F(ei, e2,..., en).
On arrive ainsi à l'expression
F(xi,...,Xn)= ^ m^(l),l^c7(2),2"-^c7(n),n-C^(^)-
aeSn
Notons maintenant Fo l'application correspondant à la formule du théorème :
F0(x) = J2 <°)
aeSn
On vient de démontrer que F G A*n(E) => 3 C G K : F = C F0.
Ainsi, A*n(i£) est une droite, sauf si Fo est nulle ou n'appartient pas à A*n(E).
Il nous reste donc à prouver que Fq G A*n(i£)\{0}.
2.4 Déterminant |2j
Le second point32 est le plus facile. Nous allons montrer que
i7b(ei,...,en) = 1^0.
Le fait de trouver 1 sera également utile pour le dernier point du théorème33.
Prenons donc x\ = ei, ..., xn = en. La matrice de (#i,..., xn) dans la base B est
simplement la matrice identité, c'est-à-dire que les coordonnées valent rriij = Sij = 1 si i = j,
0 sinon.
Quand on calcule la quantité Fo(ei, ...,en), on doit sommer des produits de la forme
£(cr)77V(i)>i...ra<7(n)>n. On voit que s'il existe j tel que a(j) ^ j, alors ma(j)j = 0 et alors
le produit mff(i)fi...mff(n)fn = 0.
Ainsi, le seul terme (éventuellement) non nul est pour a = Id = Jd[i>n]|, et vaut
e(Id).mlil.m2l2..-mnin = 1.1.1...1 = 1.
On arrive donc bien à Fo(ei,..., en) = 1^0, donc notamment Fo non nulle.
Il reste à montrer que Fo est bien une forme n-linéaire alternée.
Le caractère n-linéaire est évident, attachons-nous à démontrer que Fo est antisymétrique.
Si l'on échange deux vecteurs Xi et Xj avec i ^ j, notons r la transposition r = (i j).
On doit donc montrer que i*b(:cT(i),:cT(2), ...,£r(n)) = — F(xi,X2, ...,a;n).
Or par construction,
-Fo(»t(1)»^t(2)»—»»T(n)) = 22 £(C7)-m^or(l),l^c7or(2),2-"^c7or(n),n-
vesn
Mais l'application a i—> a or est une bijection de Sn dans lui-même, donc on peut dans
la somme effectuer le changement de variable & = a o r.
Mais on aura alors e(a') = e(a).e(r) = — e(cr), la signature d'une transposition valant —1.
On obtient ainsi
-Fb(»T(l)»^T(2)»—»»T(n)) = 22 (_£(Cr/))-mc7'(l),l^c7'(2),2---^c7'(n),n,
crfesn
et l'on reconnaît à droite34 l'opposé de Fo(x\,X2, ...,a;n).
Ainsi s'achève la démonstration du théorème.
32. C'est-à-dire montrer Fo / 0.
33. En effet, la fonction detg choisie dans A*n(E) telle que detg(iB) = 1 sera tout simplement
l'application Fo.
34. En renommant g' en o\
Chapitre 2. Compléments d'algèbre linéaire
Remarque
En suivant la même idée de démonstration, on pourrait démontrer que si 1 ^ p ^ n, la
dimension de l'ensemble des formes p-linéaires alternées sur un espace E de dimension n
est dim(A*p(£)) = (n\
Définition 49
Soient n un entier naturel non nul et AI = (rriij) G A4n(K).
On note Bq la base canonique de A4n?i(K) = E et on note (Ci, C2,..., Cn) G En les
colonnes de i\/.
On appelle alors déterminant de la matrice i\/, et on note det(i\V), la quantité
det£0(Ci,C2, ...,Cn).
7711,1 ••• rniiri
Enfin, on note det(M) sous la forme
mnji
mn
Proposition 59
1. det(/n) = 1.
2. Si M = (mij)W)e[i)n]2, alors
dct(M) = 5Z e(t7)ma(i)ii...ma(n)>n= J^ ( e(tr) J^m^)^
aGS„
creSn
2=1
N=-
I
Démonstration
1. Avec les notations précédentes, det(Jn) = detJg0(Bo) : déterminant de la base
canonique de E dans elle-même, qui vaut 1.
2. Puisque les coordonnées de Cj dans la base Bq sont tout simplement les coefficients
(mt,i)i^t^n de M, la formule de la proposition précédente donne directement le
résultat.
2.4 Déterminant
Propriétés « calculatoires »
Proposition 60
Soit M £ Mn(K).
1. L'échange de deux colonnes différentes de AI (opération notée Ci <—> Cj) pour
deux indices (i,j) G |[l,rc]]2 tels que i ^ j multiplie le déterminant de AI par —1.
2. Multiplier une colonne de M par un scalaire À G K, multiplie le déterminant de
AI par ce nombre A.
3. Si l'on ajoute à une colonne de AI une combinaison linéaire des autres, c'est-à-
dire si on effectue une opération35 de la forme Ci i— C? + VJ A j Cj, alors le
déterminant de AI n'est pas modifié.
Démonstration
1. Le premier point vient du caractère antisymétrique du déterminant. On peut
supposer i < j, on note M = (Ci,..., Ci,..., Cj,...,Cn), alors rechange des colonnes Ci
et Cj donne la matrice (Ci, ...,Cj, ...,Ci, ...,Cn), et justement le caractère
antisymétrique du déterminant donne
det(Ci,...,Ci,...,Ci,..:,Cn) = -det(Ci,..,Ci,...,Cj,...,Cn) = -det(M).
2. Il s'agit d'une utilisation directe de la linéarité par rapport à la colonne concernée.
3. Quant au second point, il utilise à la fois le caractère n-linéaire (ici, linéarité par
rapport à la i-ème colonne) et le caractère alterné. En effet,
det(Ci,...,Ci + 2^AJC7-,...,Cn) = det(Ci,...,Ci,...,Cn)
+ z2 -\? det(Ci,..., Cj,..., Cn)
= det(Ci,...,Ci,...,Cn) = det(M).
En effet, dans det(Ci, ...,Cj, ...,Cn), la colonne Cj se trouve en place i, mais elle
est aussi en place j ^ i, donc cette même colonne se trouve à deux emplacements
différents. Le caractère alterné fait qu'alors det(Ci, ...,Cj, ...,Cn) = 0.
35. Avec des coefficients (\j)j±i G Kn_1.
y Chapitre 2. Compléments d'algèbre linéaire
Proposition 61
Soit M G Mn(K). Alors la matrice M et sa transposée ont même déterminant,
c'est-à-dire :
det(fA/) = det(A/).
Démonstration
On utilise la formule utilisant les permutations et la signature.
On part de
det(M)= £ (e(<0n»Mo,«)
aeSn \ i=l /
et donc
det(*M)= ]T KWllWi = S (^n^m)
On sait que l'application 5n —> Sn est bijective.
r .—> r"1
Ainsi, on peut poser cr = r-1 dans la somme précédente, donc
det(*Af)= £ Mr-^nf^^-ip))
On sait que e est un morphisme de groupes de (5n, o) dans ({—1,1}, x) et donc
WeSn, e(r-1) = [e(T)]-\
Comme e(r) = ±1 est égal à son propre inverse, on a £(t_1) = [s(t)] = e(r).
Maintenant, toujours à r G Sn fixé, comme r est une bijection de [l,n] dans lui-même,
on peut dans le produit sur la variable i poser i = t(J), c'est-à-dire j = r-1(i). On a
n
alors n^.r-Mi) = Il m^)>i
t=l j=l
En regroupant ces deux points il vient
det(4M) = Yl I^II^WJ
r€Sn \ j=l
2.4 Déterminant
Il suffit de renommer r en cr et j en i pour reconnaître l'expression de det(M) donnée au
début de la démonstration. On a donc bien det(*M) = det(M).
Remarque
On peut se rassurer sur la connaissance « par cœur » de la formule : on peut mettre
comme indice de m aussi bien rrii^^ que m^)^. Une formule correspond à det(M) et
l'autre à det(*M), mais comme ces deux nombres sont égaux, cette distinction importe
peu en pratique.
Définition 50
Soient M G Mn(K) et (ij) G [l3n]2.
On note A^j le déterminant de la matrice de taille n — 1 obtenue en enlevant de M
sa z-ème ligne et sa j-ème colonne, c'est-à-dire la ligne et la colonne passant par le
coefficient (itj).
Enfin, on appelle cofacteur36 de M en place (i,j), et Ton note 7^, le nombre
7i,i = (-l)i+iAij.
Proposition 62
Soient M G A4n(K) et j G [l,n]. Le déterminant de M vérifie alors la formule37 :
n n
det(M) = ^miji-iy+'Aij = ^>^7^-.
2=1 2=1
36. Ce terme de cofacteur s'explique par le fait que dans les formules de développement du déterminant
de M par rapport à une colonne (ou par rapport à une ligne), c'est le coefficient par lequel se retrouve
multiplié mitj.
37. On dit que le déterminant de M est développé par rapport à la j-ième colonne.
Quand on effectue des calculs de déterminants, il est toujours bon de préciser les opérations effectuées.
Chapitre 2. Compléments d'algèbre linéaire
Démonstration
La démonstration38 a été vue en première année39, elle n'est donc pas reproduite dans
ce livre.
Proposition 63
Soit M G ^Wn(K).
1. On fixe i G [l,n]. Le déterminant de il/ vérifie alors la formule40 :
n n
det(M) = X)m*^(-1)i+J'A^ = J2mi^ij-
2. L'échange de deux lignes de il/ (opération notée Li i—> Lj (avec i ^ j)), le
déterminant obtenu est l'opposé du déterminant de la matrice il/.
3. Multiplier une ligne de il/ par un scalaire À G K, multiplie le déterminant de M
par ce nombre À.
4. Si l'on ajoute à une ligne une combinaison linéaire des autres lignes (opération
notée Li i— Li + Y^o^Lfc), alors le déterminant reste inchangé.
Démonstration
On applique les résultats sur les colonnes à *M et on utilise le fait que M et sa transposée
ont même déterminant.
Théorème 10
Soient A et B dans Mn(K).
Alors det(AB) = det(A).det(B).
38.
. L'idée de la démonstration est de partir de la formule det(M) = \ £(^)r^a(i)ti-'-7na(n)tn-
<resn
On partitionne alors Sn par la famille (^t)t€li,n]i ou M = {<? € Sn '• <r(j) = i}.
n
On peut alors écrire det(M) = N N £(0")wV(i)1i---77V(n)1n-
i=l aEAi
On peut mettre rriij en facteur dans N £(0)™>o(i),\'--mo(n),n> on trouve ce terme égal à mijlfij
<reAi
39. cf. N. Basbois et P. Abbrugiati, Algèbre première année, De Boeck (2013).
40. On parle ici du développement par rapport à la i-ème ligne.
2.4 Déterminant
IE51
Démonstration
On fixe en fait une seule matrice carrée A d'ordre n.
Quand on considère une matrice M, on l'écrit sous la forme M = (Ci, C2,..., Cn) où les
Cj sont les colonnes de M.
On note aussi E = Mn,i(ïï£) l'ensemble des matrices colonnes.
On définit alors l'application
<p : En —-> K
(Ci,C2,...,Cn) ^ det(AM)
En notant Bq la base canonique de E, on sait que par définition
</>(Ci,C2, ...,Cn) = det{AM) = detBo{KuK2, ...Kn),
où (7^1,^2, •••> Kn) sont les colonnes de AM.
Mais un rapide calcul permet de constater que V? G [l,n], Kj = ACj.
Ainsi, ^(Ci,C2,...,Cn) = detjBo(ACi,AC2,...,ACn).
Cette application apparaît clairement comme n-linéaire grâce à la n-linéarité de detg0.
Mais en outre, cette application est alternée.
En effet, s'il existe i ^ j tel que Ci = Cj, alors on aura Ad = ACj, donc deux vecteurs
de la famille (AC\, AC2, •-., ACn) seront égaux, donc par le caractère alterné de detg0 on
aura<p(Ci,C2,...,Cn) = det£0(.ACi, AC2,..., ACn) = 0.
Ainsi, <p est une forme n-linéaire alternée sur E qui est de dimension n, c'est-à-dire
ip e A*n{E).
Mais cet espace est une droite, dirigée par detg0.
Il existe donc une constante A G K telle que
V(Ci,C2,...,Cn), <p(Ci,C2,...,Cn) = Adet£0(Ci,C2,...,Cn).
Or det^0(Ci,C2,...,Cn) = det(M).
Et comme (ACi, AC2, ■-, ACn) sont les colonnes de la matrice AM, on a
<f(C1,C2, ...,Cn) = detBo(^Ci,^C2).... ACn) = det{AM).
Finalement, on a prouvé l'existence d'une constante A € K telle que
VM e Mi(K), det(AM) = A.det(M).
Chapitre 2. Compléments d'algèbre linéaire
Il suffit de choisir M = Jn, qui donne det(M) = 1 et donc l.A = det(AIn) = det(A).
On arrive ainsi à VM G Mi(K), det(AM) = det(A).det(M).
Corollaire 9
Si A G Mn(K) est inversible, alors det(A) ^ 0 et det(A_1) = [det(A)]"1.
Démonstration
Par le théorème précédent41, on a
det^.det^"1) = det^.A"1) = det(J„) = 1,
donc on a à la fois det(A) non nul, et det(A_1) est l'inverse de det(A).
Corollaire 10
Dans .Mn(K), deux matrices semblables ont même déterminant.
Démonstration
Soient donc M et M' dans Mn(K) deux matrices semblables.
Ainsi, il existe une matrice P G GLn(K) telle que M' = P~rMP.
On a alors det(M') = detiP-1).det(MP) = det(P-1).det{M).det{P).
Or detCP"1) = [det(P)]~\ donc on a bien
det(M') = [det(P)]_1.det(M).det(P) = det(M).
Définition 51
Soit / un endomorphisme d'un K-espace vectoriel E de dimension finie.
On appelle déterminant de /, et on note det(/), le déterminant de la matrice de /
dans une base quelconque de E : si B est une base de E, on pose
det(/) = det(MatB(/)).
41. En posant B = A~1.
2.4 Déterminant
Remarque
Il faut s'assurer42 de la cohérence de cette définition, c'est-à-dire du fait que le résultat
ne dépend pas de la base choisie. Et justement, si B et B' sont deux bases de E, les
matrices M = Matg(/) et M' = Matg/(/) seront semblables entre elles, donc, par le
corollaire précédent, det(M) = det(M').
Si l'on a affaire à une application linéaire entre deux espaces vectoriels différents (mais
de même dimension finie) ou à un seul espace mais que l'on souhaite travailler avec des
bases différentes, on a également la définition suivante.
Définition 52
Soient E et F deux K-espaces vectoriels de même dimension finie, Be une base de
E et Bp une base de F.
Alors pour / G £(E,F), on appelle déterminant de f dans les bases Be, Bf-> et on
note detBE,BF(f)> la quantité
detBElBF(f) = det(MatjBB>BF(/))-
Remarque
La valeur de cette quantité dépendra des bases choisies43.
Théorème 11
Soit il/ G A4n(K). Alors la matrice il/ est inversible si et seulement si det(i\/) ^ 0.
En outre, si det(7\/) ^ 0 (c'est-à-dire, si ]\I est inversible) l'inverse de ]\I est donnée
par
où com(il/) désigne la comatrice de la matrice il/, c'est-à-dire la matrice des cofac-
teurs (jij) de il/.
La démonstration du théorème utilise le lemme suivant.
42. Comme pour la trace.
43. Mais sa nullité éventuelle sera indépendante des bases.
Chapitre 2. Compléments d'algèbre linéaire
( \
Lemme 2
La matrice M et la transposée de sa comatrice tcom(M) commutent, et l'on a
M.Lcom(AI) = *com(il/).il/ = det(il/)I„. ;
Démonstration du lemme
Notons P le produit P = M.*com(M). Commençons par calculer les coefficients
diagonaux de P. Soit donc i6[l,n].
n n
On a pij = y^ mj)fc.tcom(M)fcii = ^m^/y^ puisque tcom(M)iik = cam(M)k,i.
Mais la formule du développement de det(M) par rapport à la i-ème ligne est
n
det(M) = ^T m», */#,*.
Ainsi, on reconnaît directement p^i = det(M).
Calculons maintenant les termes non diagonaux. Soit maintenant (i,j) G [l,n]2 tel que
n n
On a cette fois pij = ^2rnt^tcom(M)kj = ^2rrti>k'7j>k'
k=l k=l
On note M* la matrice obtenue à partir de M en remplaçant la j-ème ligne par la i-ème.
La formule du développement de det(M') par rapport à la j-ème ligne donne
n
det(M,) = ^m^-^'
où les 7' sont les cofacteurs de la matrices M'.
Les matrices M et M' ne diffèrent que par leur j-ème ligne. Mais comme le cofacteur
lj,k et 7J k s'obtiennent comme des déterminants de matrices extraites de M et M' en
enlevant la j-ème ligne (et la fc-ème colonne). On enlève donc la seule ligne qui différait
entre M et M', donc ce qui reste est la même chose, c'est-à-dire 7J,k = 7^.
On obtient donc pij = det(M').
Mais la matrice M' possède deux lignes identiques (c'est ainsi qu'on l'a construite) et a
donc un déterminant nul, donc finalement
Pij = det(M') = 0.
■Kfil
2.4 Déterminant
Finalement la matrice P a ses coefficients diagonaux tous égaux à det(M), et ses autres
coefficients sont nuls.
P est donc tout simplement la matrice det(M).Jn.
On a ainsi bien démontré
M.'com(M) = det(M).Jn.
Il suffirait de faire la même chose en travaillant sur les colonnes au lieu des lignes pour
démontrer que
<com(M).M = det(M).Jn.
et ainsi achever la preuve du lemme. Les analogies sont si grandes que Ton ne rédige pas
la preuve.
Démonstration du théorème 11
On peut maintenant revenir à la démonstration du théorème.
D'après le corollaire 9, si M est inversible, alors det(M) ^ 0.
Réciproquement, supposons que det(M) ^ 0.
On pose alors N = -—-—fcom(M).
det(M) v '
En divisant les égalités du lemme par det(M) ^ 0, on trouve immédiatement
M.N = N.M = Jn,
ce qui prouve à la fois que M est inversible, et que son inverse est
M"1 = N= , * • 'com(M).
det(M) v ;
Ainsi s'achève la preuve du théorème.
Remarques
1. Il est à noter que si l'on utilise fréquemment le fait que det(M) ^ 0 <& M inversible,
l'inversion à l'aide de la transposée de la comatrice est moins souvent utilisée.
Une des applications classiques44 en est l'inversibilité des matrices à coefficients
dans Z.
2. Ces résultats45 peuvent mener aux formules de Cramer, cf. l'exercice 2.8 page 203.
44. cf. l'exercice 2.2 page 188.
45. Ainsi que les méthodes de la démonstration
lEïïl
Chapitre 2. Compléments d'algèbre linéaire
Corollaire 11
Soit / un endomorphisme d'un espace vectoriel E de dimension finie.
I Alors / est un automorphisme46 de E si et seulement si det(/) ^ 0. I
En outre, on aura alors det(/_1) = (det(/))
Démonstration
On fixe une base B de E, et on note M = Mats(/).
On sait que / est un automorphisme de E si et seulement si M est inversible.
Or d'après le théorème 11 on sait que M est inversible si et seulement si det(M) ^ 0.
Enfin, par définition, det(/) = det(M).
On arrive ainsi aux équivalences
/ automorphisme <& M inversible <& det(M) ^ 0 <& det(/) ^ 0,
ce qui démontre le premier point.
Pour le second, on sait que si / est bijectif, alors
MatsCT1) = M"1 et det(M_1) = (det(M))"1,
d'où
detCT1) = det(MatB(/-1)) = (det(M))"1 = (det(/))~\
et le corollaire est ainsi totalement démontré.
( ^
Proposition 64
Soient E et F deux K-espaces vectoriels de même dimension finie, Be une base de
E et Bp une base de F.
I Si / G C(E,F) est représentée par M = Mat^^^/), alors :
/ bijective si et seulement si det(il/) ^ 0 (c'est-à-dire detBE,BF(f) ^ 0).
Démonstration
Comme pour le corollaire précédent, / bijective équivaut à M inversible, qui équivaut à
det(M) ^ 0.
46. C'est-à-dire que / est bijectif.
2.4 Déterminant
Cas particuliers et exemples classiques
Proposition 65
Le déterminant de toute matrice triangulaire (inférieure ou supérieure) est égal au
produit de ses éléments diagonaux.
A fortiori, le déterminant de toute matrice diagonale est égal au produit de ses
éléments diagonaux.
Démonstration
Commençons la démonstration dans le cas d'une matrice triangulaire supérieure.
La preuve s'effectue par récurrence sur la taille n de la matrice.
Pour l'initialisation, si n = 1, alors on a une matrice A de la forme A = (a^i) avec
ai,i G K alors det(A) = a^i et le résultat est valable.
On peut aussi étudier le cas n = 2, on a une matrice de la forme ^4=1
y 0 a2,2
On a alors det(A) = 01,102,2 — Oa^ = ai,ia2,2 et le résultat est là encore vérifié.
Supposons maintenant le résultat vrai à un certain rang n. On considère une matrice
/
triangulaire supérieure de taille n + 1 : A =
ûi,i
0
0
ûl,n û-l.n+l
\
V 0
Un développement par rapport à la dernière ligne donne
det(A) = (-i)("+1)+('l+1)
oi,i
0
0
Q"n,n Ûnjn+i
0 ûn+ijn+i J
ûl,r]
*n,ri
Puisqu'il apparaît un déterminant d'une matrice triangulaire supérieure de taille n,
l'hypothèse de récurrence permet d'affirmer qu'il vaut le produit des éléments diagonaux,
c'est-à-dire aiji...anj7l.
On en déduit
det(A) = aiji...anjnan+ijn+i,
c'est-à-dire que det(A) est égal au produit des éléments diagonaux de A.
La propriété est ainsi démontrée au rang n + 1, et la preuve s'achève (dans le cas des
Chapitre 2. Compléments d'algèbre linéaire
matrices triangulaires supérieures) par le principe de récurrence.
Si A est une matrice triangulaire inférieure, alors lA est une matrice triangulaire
supérieure, donc det(*A) est égal au produit des éléments diagonaux de * A
Mais on a prouvé det(A) = det(*A), et les éléments diagonaux de lA sont aussi ceux
de A
On vient donc de prouver le résultat pour les matrices triangulaires inférieures.
Enfin, si A est diagonale, alors A est triangulaire (supérieure ou inférieure, on peut
choisir) donc le résultat reste valable.
On peut noter qu'avec la n-linéarité il y a plus simple pour les matrices diagonales : si
. o \
D =
I Ai 0
0 A2
0
, alors en mettant Ai en facteur sur la première colonne, A2
\ 0 ... 0 An /
sur la deuxième, et ainsi de suite on trouve
det(L>) = Ai
1 0
0 A2
0
0
0 A„
= A1A2
1
0
0
0
1
0
0
0
An
= ... = AiA2...Andet(jTnj = AiA2-..An,
et le résultat est ainsi démontré. Il est à noter qu'une récurrence (évidente) est « cachée »
dans les points de suspension avant l'expression Ai...Andet(/n).
Remarque
Il est à noter que l'initialisation aurait en réalité pu être effectuée à n = 0, le déterminant
d'une matrice de taille nulle pouvant être considéré égal à 1, et le produit sur l'ensemble
vide valant 1.
2.4 Déterminant
ua
i
Né à Paris le 28 février 1735, Alexandre-
p Théophile Vandermonde entreprend dans un
v * premier temps une carrière de musicien avant
* * ■ de venir, relativement tardivement, aux
mathématiques. Ses premiers travaux dans ce do-
*\ ' -v maine surviennent alors qu'il a déjà 35 ans
\ ^ :" et portent sur la résolution des équations
|\ ,\"! v ~ algébriques", ce qui le place avec Lagrange
^ s parmi les grands précurseurs d'Evariste Galois.
, ., T , , Vandermonde est élu à l'Académie des sciences
Alexandre Vandermonde en mh à peu près sur k seule base de œ mé_
U735 ^19 ) moire sur les équations algébriques, ce qui est
assez surprenant !
Éclectique, il se fait également connaître pour des questions de combinatoire,
comme le « problème du cavalier » dans ses Remarques sur des problèmes de situation \
La question de ce problème est de savoir si un cavalier peut parcourir toutes les
cases d'un échiquier sans passer deux fois sur la même case : c'est une question
ancienne, dont une solution est connue depuis fort longtemps (il y en a des milliards
en fait). Vandermonde en donne une interprétation arithmétique.
11 participe aussi au fondement théorique de la notion de déterminant, mais il se
trouve que le déterminant qui porte son nom ne figure pas explicitement dans ses
travaux, regroupés à l'Académie des sciencesc.
La suite de sa carrière se partage entre divers domaines, l'économie, la chimie (il
côtoie notamment Alexandre Lavoisier), et la musique toujours.
La politique l'absorbe également : avec un autre mathématicien célèbre, Gaspard
Monge, probablement un ami, il participe à un mouvement pro-révolutionnaire, la
« Société patriotique du Luxembourg ». Une santé relativement fragile l'a
probablement empêché d'accorder le temps nécessaire à tous ses centres d'intérêt, et sa
production mathématique est au final peu volumineuse.
Reconnu néanmoins pour ses compétences en tant que mathématicien, Alexandre
Vandermonde est nommé à la fin de sa vie professeur à l'Ecole normale supérieure,
examinateur à l'École polytechnique, ainsi que membre du Conservatoire National
des Arts et Métiers.
n. cf. A.-T. Vandermonde, Mémoire sur la résolution des équations, Histoire de l'Académie royale des sciences. Année 1771.
Avec les mémoires de mathématique et de physique pour la même année (Paris, 1774, in-4°), pp. 365-416.
b. Ibid., pp. 566-574.
c. cf. N. Basbois et P. Abbrugiati, Algèbre première année, De Boeck (2013), pp. 946-947.
Soit n G N et soient ai,02, ...,an_i,an G Kn. On définit le déterminant47 suivant, qui
est celui d'une matrice carrée de taille n lignes et n colonnes.
47. Connu sous le nom de déterminant de Vandermonde
Chapitre 2. Compléments d'algèbre linéaire
Vn(ai, 02,..., an-i, un)
Ol
tt2
Û2
r.n-2 „n-2
,,71—1 ^7i—l
0>n—\ Ûn
<C"? o«-2
^n—1 n
"'n—1 **n
Pour calculer ce déterminant, on établit une relation de récurrence.
Voici une première méthode, calculatoire. Supposons n ^ 2. Pour mettre n — 1 termes
nuls sur la première ligne, on commence par enlever la dernière colonne à toutes les
autres48, ce qui donne
Fn(ai,...,an) =
0
ai — an
0
Û2 — Un
0
0>n—1 Q"n
ai i — û?
**n—1 7i
a
n-2 „n-2 „n-2
a:
aô — a:
n-2
a?"1 - a;
n-1 „n-l
-a;
n-1
nn-2
an-l
„n-l
— a;
n-2 „n-2
*n-l - fl
n—1 „n—1
*1 _ "n "2
On peut mettre a,j — an en facteur sur la j-ème colonne pour j < n, mais on le fera
ensuite. On commence par agir sur les lignes.
Il faut faire attention à Tordre des opérations : on effectue
1. Z/2 <— 1/2 — Ûn^l»
2. puis L3 <- £3 - ûn^2,
3. ...
4. puis Ln_i <- Ln_i - anLn_2,
5. puis enfin Ln <— Ln — anLn-\.
Pour z ^ 3 et j'^ n — 1 le coefficient en place (i,j) devient
J-l A-\
an -a^a^ - an ) = a^- - a^- = a^- (% - an).
Quant aux termes des deux premières lignes et ceux de la dernière colonne, ils sont
simples à calculer directement.
48. C'est-à-dire que l'on effectue les opérations C\ «- Ci — Cn, C2 «- C2 — Cn,..., Cn-i «- Cn-i — Cn-
2.4 Déterminant
IEH
On aboutit ainsi à
Fn(ai,...,an) =
0 0
ai (ai - an) a2(a2 - an)
°]l~3(0l _ °n) Û2~3(°2 - °n)
°]l~ (°1 _ °n) Û2~ (°2 - °n)
0 1
an_i — an 0
ûn-l(ûn-l - un) 0
a^Ii(an_i - an) 0
a^I1(an_i - an) 0
Un développement par rapport à la première ligne49 donne alors un unique terme :
Vn{ai,...,an) = (-1)
1+n
ai (ai - an) a2(a2 - an)
an—i an
ûn-l(ûn-l — un)
a^_i(an_i - an)
a^Ii(an_i - an)
an 3(ai - an) an 3(a2 - an)
0?~ (°1 — °n) Û2~ (°2 — °n)
Par n — 1 linéarité 50 on peut mettre ai — an en facteur sur la première colonne, a2 — an
sur la deuxième, ..., et an_i — an sur la dernière. Ainsi, on arrive à
Vn{au ..., an) = (-l)1+n(ai - an)...(an_i - an)
1
ai
1
Û2
r.n-3 „n-3
r.n-2 „n-2
1
ûn-1
an"3
an-l
„n-2
°n-l
On reconnaît que ce déterminant est T^-i(ai,a2, ...,an_i).
Quant au coefficient en facteur, puisqu'il y a n — 1 facteurs de la forme a,j — an pour
j allant de 1 à n — 1, et qu'il y (—l)1+n = (—l)n_1, on multiplie chaque terme par —1,
ce qui donne
(-l)1+n(ai - an)...(an_i - an) = (an - ai)...(an - an_i)
Finalement, on a obtenu la formule de récurrence :
Vn(ai,a2,...,an_i,an) = (an - ai)...(an - an_i)Fn_i(ai,a2, ...,an_i).
49. Ou par rapport à la dernière colonne, peu importe ici.
50. Car le déterminant est maintenant de taille n — 1.
IEE1
Chapitre 2. Compléments d'algèbre linéaire
Et comme pour n = 1, on a V\(a\) = det(l) = 1, on peut montrer par une récurrence
dont on se passe ici que
n (%-\ \
Vn{ai, a2,..., an-i, Q>n) = JJ I JJ(ûi - a>j) I = Il (a* ~ aj)-
Il existe une autre méthode, utilisant un polynôme et surtout le fait qu'il y a des cas
évidents où le déterminant s'annule. En effet, si par exemple a\ = 02, alors les deux
premières colonnes sont égales, donc le déterminant est nul51.
On se référera à l'exercice 2.3 page 189 pour voir cette méthode.
Méthode algorithmique de calcul du déterminant
Si l'on ne reconnaît pas de forme particulière, si l'on ne voit pas de relation entre les
lignes (ou entre les colonnes), on peut procéder ainsi, méthode qui rappelle la méthode
du pivot52 :
1. Si la première colonne est nulle, le déterminant est nul.
2. Sinon, quitte à échanger la première ligne avec une ligne dont le premier
coefficient est non nul (et donc en multipliant donc le déterminant par —1) on place un
coefficient non nul en place (1,1).
3. On soustrait alors aux lignes suivantes un multiple de la première ligne, de sorte
que le premier coefficient des lignes 2 à n soit nul.
4. Alors, on développe le déterminant par rapport à la première colonne, on trouve
aifi multiplié par la matrice constituée des n — 1 dernières lignes et colonnes.
Ou, si l'on préfère, on garde la matrice de taille n, mais on recommence avec le
bloc de taille (n — 1) x (n — 1) sus-mentionné.
5. Il ne reste qu'à réitérer le procédé jusqu'à obtention d'un déterminant de taille 153
sachant que si on ne trouve pas de pivot non nul, la matrice n'est pas inversible,
donc le déterminant est nul.
Pour résumer, on applique la méthode du pivot si on le peut : le déterminant vaut le
produit des éléments diagonaux si on a pu rendre la matrice triangulaire.
Sinon, le déterminant est nul.
51. Plus généralement, il est évident que le déterminant s'annule quand deux coefficients a* d'indices
différents sont égaux.
52. cf. N. Basbois et P. Abbrugiati, Algèbre première année, De Boeck (2013).
53. Ou d'une matrice triangulaire si on ne développe pas au fur et à mesure.
2.4 Déterminant
IEE1
Remarque
Avant de voir Timplémentation de cet algorithme sous Python, il faut réaliser que parfois,
un coefficient peut être en réalité nul, mais que les calculs approchés effectués par un
processeur donnent une valeur certes proche de 0, mais non nulle.
C'est pourquoi, afin d'éviter ce risque, et aussi de diminuer les erreurs dues aux calculs
approchés successifs, on ne choisit pas numériquement un pivot non nul quelconque, mais
le pivot dont le module soit maximal.
Cette idée se retrouve dans l'algorithme ci-dessous, cf. la procédure pivotjmax.
Algorithme 6 - Deux opérations sur les lignes
# Echange des lignes il et i2 de la matrice A
def échange lignes(A,il,i2) :
L=A[il]
A[il]=A[i2]
A[i2]=L
return(A)
# Ajout de a*ligne i2 à la ligne il de la matrice A
def ajout ligne(A,il,i2,a) :
for k in range(0,len(A[il])) :
A[il][k]=A[il][k]+a*A[i2][k]
On notera qu'ici, une matrice est vue comme une liste de lignes, chaque ligne étant elle-
même une liste de nombres.
/ 1 S\
Ainsi, la matrice I I sera donnée par [[1,3] , [-8,7]].
V-8 7)
Algorithme 7 - Calcul du déterminant
# Recherche pivot maximum sur kème colonne, forcément à partir de la ligne k
def pivot_max(A,k) :
k0=k
for i in range(k,len(A)) :
I if abs(A[i][k])>abs(A[kO][k]) :
k0=i
return kO
IEH1
Chapitre 2. Compléments d'algèbre linéaire
# Calcul du déterminant
def det(A2) :
# On définit la taille n de la matrice
n=len(A)
# On copie la matrice pour ne pas la modifier
I=rangc(0,len(A2))
A=[[A2[i][j] for j in I] for i in I]
# On initialise le déterminant à 1
d=l
# On commence par rendre A triangulaire...
for k in range(0,n-l) :
km=pivot__max(A,k)
if km!=k : # (échange inutile si le pivot max
echange_lignes ( A ,k,km)
d=-d
if A[k][k]==0:
déjà en ligne k)
# Si pivot nul, le dét vaut 0 et on arrête les calculs
d=0
return(d)
for p in range(k+l,n) :
coeff=-A[p][k]/A[k][k]
ajout_ligne(A,p,k,coefF)
# La matrice est devenue triangulaire
# Déterminant = le produit des éléments diagonaux fois le signe dans d
for k in range(0,n) :
d=d*A[k][k]
# On peut renvoyer le déterminant
return(d)
2.5 Interpolation de Lagrange
aboutit aisément54 à det(M) = 6.
Exemple
/ 1 4 7 \
Le calcul du déterminant de M = —2 6 4
\ 2 3 8/
Vérifions-le à l'aide de l'algorithme ci-dessus.
>» M=[[l,4,7] , [-2,6,4] , [2,3,8]]
>» det(M)
6.000000000000011
Remarque
Il y a une erreur due aux calculs approchés, lors des divisions notamment.
Il est aisé de vérifier que pour une matrice de taille n pour calculer un déterminant à
Paide de cet algorithme, le nombre d'opérations effectué est en 0(n3).
Si Ton implémentait un algorithme basé sur la formule utilisant les permutations, ou un
algorithme récursif basé sur un développement par rapport à une ligne ou une colonne55,
le nombre d'opérations serait de l'ordre respectivement de (n + 1)! et de n!.
Interpolation de Lagrange
Théorème 12 (Lagrange)
Soient un entier n et Ai, A2, ..., An n éléments de K deux à deux distincts.
Alors pour tout n-uplet (2/1,2/2, •••,2/?i) £ I&n, il existe un unique polynôme P de
degré au plus n — 1 tel que
P(Ai) = yu P(A2) = î/2, -, P(An) = yni
c'est-à-dire que Vi G |[l,n]], P(Xi) = y%.
Démonstration
Nous allons démontrer ce résultat de trois façons différentes, chacune ayant son intérêt56.
Le début est commun aux différentes preuves.
54. On laisse le lecteur le vérifier par lui-même.
55. Qui transformerait donc le calcul d'un déterminant d'une matrice carrée de taille n en n calculs
de déterminants de taille n - 1
56. L'intérêt de la méthode peut dépendre du cadre du problème dans lequel on se place.
mu
Chapitre 2. Compléments d'algèbre linéaire
Né à Turin (alors dans le royaume de Piémont-
Sardaigne), Joseph-Louis Lagrange est nommé
_ ^ dès l'âge de 19 ans enseignant à l'école d'artillerie
■ » * \ de Turin ! Ayant jeté les bases du calcul varia tion-
nel, il est connu dans ses jeunes années pour ses
nombreux travaux en mécanique.
Lagrange s'intéresse au problème à n points".
Dans le cas particulier du problème à 3 pointsb,
et pour une troisième masse négligeable, il
démontre l'existence de cinq points fixesc dans
Joseph-Louis Lagrange le repère suivant la rotation des deux astres.
(1736-1813) L'intérêt de ces points est encore d'actualité. On
y recense des satellites naturels, et des satellites
artificiels (dont SoHO) y ont été envoyés.
Leonhard Euler ayant un conflit de personnalité avec le roi Frédéric II de Prusse, il
quitte son poste à Berlin en 1766. C'est Lagrange qui en hérite : on peut mesurer
ainsi la notoriété de Lagrange, invité par le monarque éclairé Frédéric II qui
se faisait fort de s'entourer de la fine fleur intellectuelle de son temps, et ce en
remplacement du plus grand mathématicien du XVIIIe siècle.
Il reste à Berlin jusqu'en 1787, rejoignant finalement Paris, convaincu par 1 offre de
l'Académie des sciences de Paris. Il enseigne un peu plus tard à l'École
polytechnique et à l'Ecole normale.
Son œuvre est prépondérante et couvre de très nombreux domaines : de l'algèbre
aux probabilités, en passant par le calcul infinitésimal, la théorie des nombres,
et de nombreux travaux liés à la physique. Plus concrètement, on lui doit le
calcul du reste à l'aide d'une intégrale dans les formules de Taylor ou encore le
principe de moindre action. Et si l'on doit retenir un mémoire dans le cadre de
ce cours d'algèbre, citons ses Réflexions sur la résolution algébrique des équations,
in Œuvres complètes, tome 3, pp. 205-421 : c'est un travail majeur dans l'étude
de la résolubilité algébrique des équations, un incontournable parmi les lectures
ultérieures d'Abel et de Galois.
Lagrange reste peut-être comme le mathématicien français (si on peut réellement le
considérer français) majeurd du XVIIIe siècle : en témoigne le fait qu'il est inhumé
au Panthéon, qu'une rue de Paris porte son nom et à titre d'anecdote, qu'il a été
retenu dans la liste des 72 scientifiques dont le nom a été inscrit sur la Tour Eiffel,
non loin de Laplace, Chasles et Ampère.
a. C'est-à-dire à l'évolution de n masses ponctuelles uniquement soumises à leurs interactions gravitationnelles.
b. cf. Essai sur le problème des trois corps, in Œuvres complètes, tome 6, pp. 229-331
' c. Ces points portent le nom de points de Lagrange et sont notés Li à L5. Euler avait déjà découvert les points Lia
Z/3, et ces points portent également le nom de points d'Euler.
d. Ce qui explique qu'une biographie de Lagrange est présente dans les quatre ouvrages de cette collection.
On définit l'application
tp : Kn-i[X] —► Kn
P —> (P(Ai)lP(A2)l...,P(An))
2.5 Interpolation de Lagrange EHU
Si on se donne (2/1,2/2, -",2/n) £ Kn, alors les n égalités
P(Ai)=2/i, P(A2) = 2/2, -.., P{K) = Vn
se résument à
<P(P) = (2/1,2/2,-,2/n).
Ainsi, l'énoncé du théorème est : si Ai, A2, ..., An sont n éléments deux à deux distincts
de K, alors
Vr = (2/i,2/2,...,2/n)eKn, 3!PGKn_i[X] : <p(P) = Y.
On reconnaît la définition exacte de la bijectivité de (p. C'est ce point que nous allons
démontrer57.
Notons au passage que (p est clairement linéaire. Nous pouvons maintenant aborder les
différentes preuves :
1. Méthode la plus courte, et aussi la plus « élégante » :
Montrons que (p est injective.
Soit donc P G Ker(cp).
Ainsi, P e Kn_i[X] vérifie (p{P) = O^n, c'est-à-dire
(P(A1),P(A2),...,P(An)) = (0,0)...,0).
Donc .P(Ai) = P(A2) = • • • = .P(An') = 0, c'est-à-dire que P possède (au moins) n
racines distinctes (puisque les Ai sont distincts).
Si P était non nul, comme deg(P) ^ n — 1, P aurait au plus n — 1 racines distinctes,
d'où une contradiction.
On a ainsi P = 0.
Finalement, Ker((p) C {0}, donc, comme (p est linéaire, (p est injective.
L'application linéaire (p allant entre deux espaces (Kn_i[X] et Kn) de même
dimension finie (n), on a l'implication ip injective => (p bijective58, ce qui conclut
la démonstration.
2. Via les déterminants59 :
On note B = (1,-X", ...,Xn_1) la base canonique de Kn_i[X] et B' = (ei,e2, ..,en)
57. De trois façons différentes.
58. Si on préfère, on peut dire que ip est un isomorphisme.
59. Cette méthode sera pratique dans un problème traitant auparavant des déterminants de Vander-
monde.
3 Chapitre 2. Compléments d'algèbre linéaire
la base canonique de Kn.
Exprimons la matrice de (p dans les base S, S'.
Les colonnes correspondent aux coordonnées (dans la base B') de <p(l), <p(X), ...,
Si (pour k G [0, n — 1]) on prend P = Xk, on voit que
<p(Xk) = {P(X1), P(A„),.... P(Xn)) = (A{, A*,.... A^) = A*ei + A* e2 + • • • + \knen.
La (A; + l)-ème colonne, correspondant à <p(Xk), est donc *(A{ Xk ••• A*).
Finalement,
/ 1 Ai ... Aï-1 \
1 A2 ... AJ-1
MatB,8'(<fi) = M = I
V 1 An ... AS"1 /
Le déterminant60 de (p dans ces bases est donc
àetBtB'(<p) = det(M) = det('M)
= Vn(Xii\2i ..., An)
= II (Ai-A^O
l^i<.7^n
car les A* sont distincts deux à deux.
Finalement, det/^g/(cp) ^ 0 implique61 que (p est un isomorphisme de Kn_i[X]
dans Kn, et la preuve est achevée d'une deuxième façon.
3. Méthode certes un peu moins élégante62 que la première, mais ayant l'avantage de
donner l'antécédent P de Y" par ip.
Pour commencer, on cherche un antécédent à chaque élément de (ei, e2,..., en), la
base canonique de Kn. Ces éléments sont généralement notés63 (Li,Z/2, ...,Ln).
Ainsi, pour i G [l,n], on cherche Li G Kn_i[X] tel que <p{Li) = e*, c'est-à-dire tel
60. D'après la définition 52 du déterminant d'une application linéaire dans des bases, grâce au fait que
det(M) = det(*M) (cf. la proposition 61), et grâce au résultat sur le déterminant de Vandermonde (voir
à partir de la page 141)
61. D'après la proposition 64.
62. Préférer une méthode à une autre ne se fait pas de façon purement objective.
63. La lettre « L » a été choisie en hommage à Joseph-Louis Lagrange.
2.5 Interpolation de Lagrange
que
(Li(Ai),..., Li(Ai-i), Li(Ai), Li(Ai+i),..., Li(An)) = (0,.., 0,1,0,.., 0).
On veut donc déjà Li(Ai) = • • • = Li(Xi-i) = Li(Ai+i) = • • • = Li(Xn) = 0, donc
comme ces n — 1 racines sont distinctes il existe Q G K[X] tel que
Li(X) = Q(X).(X - Ai)...(X - Ai_i)(X - Ai+i)...(X - An).
Mais deg(Li) ^ n — 1 impose Q constant.
Et la condition Li(Xi) = 1 impose la constante égale à
(Ai — Ai)...(Ai — Ai_i)(Ai — Ai+i)...(Ai — An)
Ainsi, on a forcément
j / y\ _ (^ ~ Al)...(X — \j-l)(X — \j+l)...(X — An) _ T-T X — Xj
(Ai — Ai)...(Ai — Ai_i)(Ai — Ai+i)...(Ai — An) .*! Ai — Xj
Réciproquement, il est aisé de vérifier qu'avec ces polynômes64, on a bien
{1 si i ^= i
0 sinon.
et ainsi \/i G [l,n], (f{Li) = e\.
On arrive ainsi a ei, e2,..., Cn £ Im(y?), donc par linéarité
Vect(ei,e2,...,en) C Im(<p).
Mais comme (ei, e2,..., en) est une base de Kn, on en déduit que Kn C Im(<p), donc
<p est surjective.
On conclut là encore grâce à un argument de dimension.
L'application linéaire (p allant entre deux espaces (Kn_i[X] et Kn) de même
dimension finie (n), on a l'implication (p surjective => (p bijective65.
Remarques
64. Notez que l'on pouvait directement définir ces polynômes et vérifier sans difficulté que l'on a
P(£i) = ei, mais l'intérêt est d'avoir ici l'explication de leur construction, qui peut aider à les retrouver.
65. Si on préfère : y? est un isomorphisme.
Chapitre 2. Compléments d'algèbre linéaire
1. Au lieu de se contenter de montrer que <p est surjective, on peut préciser
explicitement un antécédent de tout élément Y = (2/1,2/2, ---,2/71) de Kn.
En effet, si on pose P = y\L\ + 2/2^2 H 1- 2/n^n, on aura par linéarité de (p :
<f{P) = 2/l^(^l)+2/2^(^2) + - ' -+2/n<£(£n) = 2/1^1+2/262 + - * *+2/nen = (2/1,2/2, .-,2/n).
Et comme la surjectivité de (p implique sa bijectivité, on sait que cet antécédent
est le seul.
On peut ainsi préciser le résultat du théorème : V(2/i,2/2, ---^n) € Kn, il existe un
unique polynôme P G Kn_i[X] tel que P(Ai) = 2/1, -P(A2) = 2/2, • • -, P{K) = 2/n,
et ce polynôme est donné par
n ( X — X
P = yiLi + y2L2 + • • • + ynLn = ^2\yi- Yl \ - X-
1=1 \ J€|[l,nll % 3
2. L'exercice 2.4 page 191 généralise dans ses premières questions l'interpolation de
Lagrange.
Corollaire 12
Soient / une fonction d'une partie A de K à valeurs dans K et Ai, A2, ..., Xn des
éléments deux à deux distincts de A.
Alors il existe un unique polynôme66 P de degré au plus n — 1 tel que
V*G[l,n], P(Ai) = /(Ai).
Démonstration
Il suffit d'appliquer le théorème précédent avec Vi G [l,n], yi = f{Xi).
Exemple
Prenons un exemple concret : appliquons cette interpolation à la fonction exponentielle
aux points Ai = —1, A2 = 0 et A3 = 1.
66. Ce polynôme P est appelé polynôme interpolé (de Lagrange) de f aux points Ai, ..., An-
2.5 Interpolation de Lagrange
On sait qu'il existe un unique polynôme P = ao + ol\X + oc^X2 G R2pf] tel que
P(—1) = ao — <*\ + où2 = exp(—1) = e-1
P(0) = a0 = exp(O) = 1
[ P(l) = ao + ai + ai = exp(l) = e
La résolution du système est aisée et donne (comme unique solution)
ao = 1 ; oc\ =
e — e
-î
e + e"1 ^
C*2 = 1
Voici une représentation graphique de la fonction exp et de son polynôme interpolé P
courbe représentative de l'exponentielle
courbe représentative de son interpolé P
Chapitre 2. Compléments d'algèbre linéaire
Orientation des espaces réels de dimension finie
c
Définition 53
Soient deux bases B et B' d'un M-espace vectoriel E.
On dit que B' est de même orientation que B si det^f?') > 0.
Si ce déterminant est négatif, on dit que B1 est d'orientation contraire®1 à B.
Proposition 66
Soit E l'ensemble des bases d'un IR-espace vectoriel E de dimension finie.
Le fait d'être de même orientation est une relation d'équivalence sur £, c'est-à-dire
que cette relation est réflexive, symétrique et transitive68.
Ainsi, étant données deux bases B et B' de E, on préférera dire « B et B' ont la
même orientation » en lieu et place de « B' a la même orientation que B ».
Démonstration
1. Soit B e£.
On a alors detb{B) = 1 > 0, donc B est de même orientation que B, la relation
est bien réflexive.
2. Soient B et B' dans £ telles que B' a la même orientation que B.
Ainsi, detb(B') > 0, et alors
detB>{B) = (detB{B'))-1>0,
donc B est de même orientation que B\ la relation est bien symétrique.
3. Soient enfin B, B' et B" dans £ telles que B' a la même orientation que B, et B"
a la même orientation que B'.
Ainsi, detB{B') > 0 et detB'{B") > 0, et alors
detB(£") = detB(B').detB*(B") > 0,
donc B" est de même orientation que £, la relation est bien transitive.
67. On dit aussi parfois que B' est d'orientation opposée à B.
68. Les définitions de ces notions ont été rappelées dans le chapitre 1, cf. la définition 11 (p. 30).
2.6 Orientation des espaces réels de dimension finie &3î£l
Remarque
La phrase « B est de même orientation que B » a l'air d'une évidence qu'il serait inutile
de démontrer. Mais c'est uniquement car le choix du vocabulaire sous-entend qu'il y a
déjà réflexivité.
On peut enfin se donner la proposition suivante.
Proposition 67
L'ensemble £ des bases de E se partitionne en deux ensembles non vides £\ et £2,
c'est-à-dire tels que £ 1 U £2 = £ et £\ D £2 = 0, vérifiant :
1. Toutes les bases de £\ sont de même orientation, et
| toutes les bases de £2 sont de même orientation. |
2. Toute base de £\ est d'orientation contraire à toute base de £2.
Démonstration
On commence par fixer arbitrairement une base Bq = (ei,..., en) de E.
On note alors £\ l'ensemble des bases ayant même orientation que Bq et £2 l'ensemble
des bases ayant une orientation contraire à Bq.
En d'autres termes,
£1 = {B e £ ; detBo{B) > 0} et £2 = {B e £ ; detBo{B) < 0}.
• Il est alors évident que £\ H £2 = 0 car si B appartient à cette intersection, alors
dets0 (B) serait à la fois strictement positif et strictement négatif, ce qui est absurde.
Et si l'on considère B G £, on a detB0{B) ^ 0, donc le nombre detB0{B) est
strictement positif ou strictement négatif, donc B appartient à £\ ou à £2, c'est-à-
dire à £\ U£2-
On a ainsi £ C £\ U £2» et l'autre inclusion étant triviale, on a l'égalité.
• Prenons B et B1 dans £\.
Alors
detB(£') = detB(^0).detBo(JB/) = (det^^^.det^^) > 0
car dets0 (B) et dets0 (B') sont strictement positifs.
Or detb(B') > 0 signifie bien que B' a même orientation que B.
Chapitre 2. Compléments d'algèbre linéaire
• On a exactement le même résultat si B et B' sont dans £2, mais ici car detb0{B)
et det £<,(£') sont strictement négatifs.
• Enfin, si B est élément de £\ et B' est élément de £2» la formule
detB(B') = (detBo(B)y\detBo(B)
reste valable. Mais ici detb0(B) > 0 et detb0{B') < 0 donc det^B') < 0 et ainsi
B et B' sont bien d'orientation contraire.
• Notons aussi que £\ n'est pas vide car il contient la base Bq = (ei, e2,..., en) et que
£2 n'est pas vide car il contient la base (—ei, e2,..., en).
^^
Définition 54
Orienter l'espace E, c'est choisir l'une des deux parties £-\ ou £2 précédemment
définies 69.
Les bases de la partie choisie sont alors dites directes, et les bases de l'autre partie
sont dites indirectes.
Exemple
Dans Rn, l'orientation usuellement choisie est celle qui fait de la base canonique une base
directe. Naturellement, cette orientation est appelée orientation canonique de Rn.
fjQ Polynômes de matrices carrées et d'endomorphismes
Q29 Définitions et propriétés algébriques
Les puissances et polynômes de matrices carrées et d'endomorphismes sont définis par
la définition 33 page 74, puisque les ensembles .Mn(K) et C(E) (si E est un K-espace
vectoriel) sont des K-algèbres.
Rappelons le principe : si M G ,Mn(K), les puissances de M sont définies par
M0 = In et Vfc G N, Mfc+1 = M.Mk.
69. En d'autres termes, c'est choisir l'une des bases de E.
|Ejï
2.7 Polynômes de matrices carrées et d'endomorphismes Hgg|
N
Si un élément Q de K[X] s'écrit Q = Y^ a,kXk = ao + aiX H h a^XN, alors on pose
fc=0
TV
Q(M) = ]T afcMfc = a0/n + aiM + • • • + aNMN.
De même, si / est un endomorphisme d'un K-espace vectoriel E, alors les puissances de
/ sont définies par
f = IdE et Vfc G N, fM = fofk.
N
Avec Q élément de K[X] de la forme Q = ^ a,kXk = ao + a\X -\ h a^XN, on pose
fc=0
N
Q(f) = Yl akfk = a°IdE + fli/ + • • • + aNfN.
k=0
Remarques
1. Il faut faire attention en pratique au coefficient constant.
Si par exemple Q = 3 + 5X — SX2, et si M G Mn(K) est une matrice carrée alors
on aura70 Q{M) = 3/n + 5M - 8M2 et pas Q(M) = 3 + 5M - 8M2.
2. Si / est un endomorphisme de E, l'application f2 est donc définie71 par
Vxe£, /2(*) = (/o/)(*) =/(/(*))
et l'application /3 par
Vxe£, /3(x) = /(/(/(x))),
et ainsi de suite.
Rappelons que nous avons vu dans la proposition 40 page 75 que, si l'on fixe une
matrice carrée M G ,Mn(K) ou un endomorphisme / d'un K-espace vectoriel E, alors les
70. Il « suffit » de remplacer X par M, mais il ne faut pas oublier que le coefficient constant est en
fait multiplié par X° qui se remplace donc par M0 = In.
•71. Evidemment, il n'est pas question d'écrire f2(x) = f(x)2 = f(x).f(x). Le produit de 2 vecteurs de
E n'est même pas défini dans un espace vectoriel quelconque.
Chapitre 2. Compléments d'algèbre linéaire
applications
K[X] —► .M„(K)
Q —> Q(M)
K[X] —► £(£)
Q —> Q(/)
sont des morphismes d'algèbres.
Une conséquence utile qui en découle est que deux polynômes en une même matrice72
M commuteront systématiquement.
En effet, pour tout couple (<2i,<22) dans (K[X]) , on peut écrire
Q1(M).Q2(M) = (QiQ2)(M) = (Q2Qi)(M) = Q2(M).Q1(M)
Ces résultats se généralisent avec les deux propositions suivantes.
Proposition 68
Soient f et g deux endomorphismes73 d'un K-espace vectoriel E. Si f et g
commutent, c'est-à-dire sifog = gofi alors tout polynôme en / commute avec tout
polynôme en #, c'est-à-dire
V(QuQ2)e{K[X})\ Qi{f)oQ2(g) = Q2(g)oQ1(f).
Évidemment, un résultat analogue existe pour les matrices carrées.
Proposition 69
Soient ]\I et M' deux éléments de A4n(K). Si M et M' commutent, c'est-à-dire si
7\/7\/' = il/'il/, alors tout polynôme en ]\I commute avec tout polynôme en J\I\
c'est-à-dire que
V(Qi,Q2) G (K[X])2, Q1(W).Q2(M/) = Q2(M').Q1(M).
72. Naturellement, il en est de même pour un endomorphisme.
73. C'est-à-dire deux éléments de C(E).
2.7 Polynômes de matrices carrées et d'endomorphismes
IEB1
Démonstration
Écrivons la preuve dans le cas des endomorphismes74.
Commençons par le cas où Q\ et Q2 sont des monômes. Montrons tout d'abord que pour
tout fceN, fkog = gofk.
Démontrons ce point par récurrence sur k.
Pour k = 0, puisque fk = Id,E, il s'agit de vérifier que Ids o g = g o lés- C'est bien le
cas, les deux membres de l'égalité correspondent à l'endomorphisme g.
Supposons maintenant le résultat vrai pour un certain entier k.
Alors
/fc+1 ° 9 = fk ° (/° 9) par associativité de la composition
= fk ° (9° f) Par hypothèse
= (fk o g) o f par associativité
= 9 ° {fk ° f)° f Par hypothèse de récurrence puis associativité
= gof»\
donc la propriété est vraie au rang k + 1.
Par principe de récurrence, on en déduit fk o g = g o fk pour tout k G N.
On a alors75 V(fc, k') G N2, fk o gk' = gk' o fk.
Notons que l'on a prouvé le résultat dans le cas Q\ = Xk et Q2 = Xk .
On va l'étendre à deux polynômes quelconques par bilinéarité.
En effet, soient Q\ et Q2 dans K[X\.
On note N un majorant des degrés de Q\ et Q2, on sait alors qu'il existe des éléments
ai,o, • • -, &itN et #2,0, • • -, Oi2tN dans K tels que
N N
Qi = X>i,fc*fc et Q2 = Y,^kXk.
k=0 k=0
74. Le lecteur l'adaptera aisément au cas des matrices carrées.
75. On pourrait aussi démontrer ce résultat par récurrence (sur fc', àfc fixé) mais il suffit en fait
Rappliquer le résultat précédent avec k' au lieu de fc, p au lieu de / et fk au lieu de g.
Chapitre 2. Compléments d'algèbre linéaire
On peut alors déduire de tout ce qui précède
(N \ / N >
fc=o / \jfe'=o y
]T aiifca2,jfe' /fc o gk'
(fc,fc')e[0,7vp X^?
(fc',fc)€[0,7V]2
\fc'=0 / \fc=0
= Q2(g)oQ1(f).
Proposition 70
Soient M et il/' deux matrices semblables dans Mn(K).
Alors pour tout Q G K[X], les matrices Q(i\/) et Q(]\If) sont semblables.
Plus précisément, soit P G GLn(K) telle que il/' = P_1il/P. Alors
-i/
VQ G K[X], Q(A/') = P-XQ{M)P
Démonstration
Soient M et M7 deux matrices semblables.
Il existe donc P G GLn{K) telle que M7 = P_1il//P.
Soit Q G K[X\. Il est évident que si Ton montre que Q{M') = P_1<2(M)P, alors
matrices Q(M) et Q{M') seront semblables.
La première chose à démontrer est que
Vfc G N, M'k = P~1MkP
Notons que ce résultat est intéressant en soi76.
Ce premier point se démontre par récurrence sur k.
76. Il sert par exemple à calculer des puissances d'une matrice, par exemple si on la diagonalise : si D
diagonale, Dk est facile à calculer.
2.7 Polynômes de matrices carrées et d'endomorphismes
Pour l'initialisation, on a par définition M0 = In donc
P~1M°P = P-^InP = P_1P = In = M'0.
La proposition est donc vraie au rang 0.
Passons à l'hérédité. Supposons la propriété vraie à un certain rang k.
On calcule alors M/fc+1 :
= (P~1MP)(P~1MkP) (par hypothèse de récurrence)
= P~1M{PP~1)MkP (par associativité)
= p-1MInMkP
= p-\M.Mk)P
= p-rMk+1P,
ce qui achève de prouver le premier résultat par le principe de récurrence.
Passons maintenant au cas du polynôme Q. Il existe77 N + 1 éléments ao, ..., oln de
tels que
N
Q = ^akXk.
fc=0
On a alors
N
Q{M') = Y,a*M'k
k=0
N
k=0
(N \
= P 1. I 2_\akMk 1 .P par distributivité du produit matriciel sur la somme
u=o /
P-*.Q(M).P.
77. En appelant N un majorant du degré de Q.
H2J Chapitre 2. Compléments d'algèbre linéaire
On sait que les matrices carrées servent à représenter les endomorphismes dans une base.
Nous allons voir qu'il existe un lien naturel entre les polynômes d'un endomorphisme et
de sa matrice dans une base donnée.
Proposition 71 [
Soient E un K-espace vectoriel de dimension finie ??, B une base de E et f un
endomorphisme de E.
On a alors
VQ G K[X], Q(MatB(/)) = MatB(Q(/)).
I En d'autres termes78, la matrice du polynôme Q pris en / est égale au polynôme '
de la matrice de /.
Remarques
1. Cette proposition permet aussi d'expliquer la précédente. En effet, deux matrices
M et M' sont semblables si et seulement si elles représentent le même
endomorphisme / dans deux bases B et B'. Ainsi, Q{M) et Q(M') représenteront le même
endomorphisme Q(f) dans les bases B et S', donc Q{M) et Q{M') seront
semblables (et la matrice de passage sera la même, puisque correspond à la matrice de
passage entre ces deux bases).
2. On peut vouloir lire la proposition sous la forme suivante : les polynômes commutent
avec l'application / i—> Matg(/), mais ce n'est pas correct.
En effet, Q n'est pas une fonction, et il agit sur des espaces différents dans les deux
membres de l'égalité.
Démonstration
Prouvons maintenant la proposition.
Rappelons que si l'on a trois K-espaces vectoriels E, F et G de dimensions finies, si Be,
Bf et Bq représentent respectivement une base de E, une base de F et une base de G,
et si enfin u G C(E, F) et v e £(F, G), alors le lien entre produit matriciel et composée
d'applications linéaires s'écrit
M&tBE,Ba(vou) = Mat^^c^.Mat^,^^).
78. Si on écrit toutes les matrices dans une même base B.
2.7 Polynômes de matrices carrées et d'endomorphismes
Dans le cas particulier d'endomorphismes, si l'on fixe une base B de E, alors 79
V(w, v) G (C{E))2, Mat/?(u ov)= Mat/3 (u).Mat/3 (u)
Soit donc / un endomorphisme de E. On a alors
Vfc G N, Mat/?(/*) = (Mat/3(/))fc.
Ce résultat se prouve par récurrence sur k :
Pour l'initialisation, on a par définition f° = Ids donc Mat/3 (/°) = In = (Mat/3 (/)) .
La proposition est donc vraie au rang 0.
Quant à l'hérédité, supposons la propriété vraie à un certain rang k.
Alors en appliquant le résultat précédent à u = f et v = fk on a
Mat/3(/o/fc) =Mat/3(/).Mat/3(/fc) = Mat/3 (/). (Mat/3 (/))*,
et l'on reconnaît donc
Mat8(/fc+1) = (MatB(/))fc+1,
ce qui achève la récurrence.
Passons finalement à un polynôme quelconque Q G K[X\. Comme précédemment, il
N N
existe AT G N et ao, ..., oln dans K tels que Q = Y^afcXfc, et alors Q(f) = V^q^/*1.
fc=0 fc=0
L'application qui à / G C(E) associe Mat/3(/) étant linéaire, on a alors
Mat/3(Q(/)) = Mat/3 (f>fc/M
U=o /
n
= 5>fcMat/3(>)
fc=0
n ,
= ]Tafc(MatB(/))
fc=0
= Q(Mat^(/)).
On notera au passage que pour beaucoup de preuves, on a d'abord effectué la
démonstration dans le cas où Q = Xk, puis on a généralisé par linéarité.
^. Profitons-en pour rappeler que Mat#(u) désigne Mat#,/3(u).
Chapitre 2. Compléments d'algèbre linéaire
Puissances et polynômes des matrices diagonales
Proposition 72
/ Ai 0 ... 0 \
0 As '■• :
: '■. '•■ 0
V 0 ... 0 A?l /
/ A* 0 ... 0 \
Soit D =
une matrice diagonale. Alors
1. V/c € N, Dk =
0 A|
0
2. VQ € K[X], Q(D)
V o ... o a* y
( <2(Ai) 0
o g(A2)
V o
o \
0 Q{Xn) J
\
Démonstration
1. On effectue naturellement la démonstration par récurrence sur k.
L'initialisation pour k = 0 est évidente, puisque D° = In par définition et que
/a; o ... o \ /1 o ... o \
0 A§ •
V o ••• o \°n J
0 1
= /«.
Vo ... o \)
2.7 Polynômes de matrices carrées et d'endomorphismes
Quant à l'hérédité, si l'on suppose la propriété vraie à un certain rang k, alors
f Xk 0 ... 0 \
Dk+i = Dk D =
0 A§
V 0 ..
( A*+1 0
0 A*+1
0
0 A£ )
( Ai 0
0 A2
V 0
0 \
\
0 An j
0
\ 0 ... 0 AJS+1 /
et la propriété est ainsi vérifiée au rang k + 1.
Le résultat est donc démontré pour tout entier k par principe de récurrence80.
2. On considère un polynôme Q G K[X\.
Il existe alors un entier N et ao, ai, ..., aw dans K tels que
N
Q = ao + aiX + • • • + a^" = ]T afcXfc.
fc=0
TV
On a alors par définition Q{D) = }^akDk.
k=o
Il suffit de multiplier l'égalité du point 1 par ajt et de sommer pour k allant de 0
à N pour obtenir directement le résultat annoncé.
Idéal des polynômes annulateurs et polynôme minimal
Rappelons que nous avons défini dans le premier chapitre les polynômes annulateurs d'un
endomorphisme ou d'une matrice carrée81.
Soit / un endomorphisme d'un K-espace vectoriel E (de dimension finie ou infinie).
Si un polynôme Q G K[X] vérifie Q{f) = 0 (l'endomorphisme nul), on dit que Q est un
polynôme annulateur de /.
De même, si M G ^Wn(^) et si Q G K[X] vérifie Q{M) = 0n (la matrice nulle), on dit
que Q est un polynôme annulateur de M.
On dit parfois plus simplement que le polynôme Q annule / (resp. M).
80. Si l'on suppose les A$ tous non nuls, alors la propriété est même valable pour tout fc€Z.
81. cf. la définition 34 page 77.
IEE1
Chapitre 2. Compléments d'algèbre linéaire
Il existe un résultat très simple, très pratique dans des exercices concrets (notamment
avec des questions intermédiaires posées pour faciliter la démarche) auquel on ne pense
pas assez souvent.
Proposition 73 []
Soit / un endomorphisme d'un K-espace vectoriel E.
S'il existe un polynôme annulateur Q de /, tel que le coefficient constant de Q soit |
non nul82, alors / est bijectif et on peut expliciter f~x comme un polynôme en /.
• De môme, si M G A4n(K) possède un polynôme annulateur Q de coefficient constant '
non nul, alors M est inversible et il/-1 est un polynôme en M.
Démonstration
Plaçons-nous dans le cas d'un endomorphisme /.
Par hypothèse, il existe Q = a0 + ol\X + a2X2 + • • • + aNXN G K[X] tel que Q(f) = 0,
avec olq ^ 0.
Cette égalité s'écrit aolds + c*i/ + a2f2 H h &NfN = 0.
Comme f = f o IcIe = Id>E ° />•••> fN = f ° Z^-1 = /N-1 ° /> on peut écrire après
avoir passé le oloIcIe dans le second membre :
aifoIdE+a2fof-\ how/o/^"1 = aiIdE°f+Où2f°f-\ haw/N_1o/ = -a0IdE,
ou encore
/ o (aiIdE + a2f + • • • + aNfN-x) = faldE + a2f + • • • + aw/N_1) o / = -a0IdE.
Comme a0 ^ 0, on peut définir g = — ( a\IdE + ot2f H h a^/^-1 ) •
Ce qui précède implique fog = gof = IdE-
Ainsi, / est bijective, en outre /_1 = g = R{f) est un polynôme en /, avec
R(X) = — f ai + a2X + • • • + ^I^"1) G K[X].
ao V /
La preuve est parfaitement analogue dans le cas matriciel.
82. C'est-à-dire que Q(0) ^ 0.
2.7 Polynômes de matrices carrées et d'endomorphismes
ici un petit énoncé concret et classique83. Soit
M =
( 2 -2 1 \
2-3 2
[-1 2 o)
Calculer M2 + 2Af - 3/3.
En déduire que M est inversible, et déterminer M"1.
On trouve rapidement84 M2 + 2M - 3/3 = 03.
En utilisant la méthode de la preuve de la proposition, on arrive à M inversible, et
1
M~
(M + 2/3).
Ainsi, sans calcul supplémentaire, on obtient
M-1 = -
( 4
2
V-i
-2 l\
-1 2
2 2 /
Il serait dommage sur un tel exemple de calculer M-1 à l'aide de la méthode du pivot85.
Nous verrons dans le chapitre « Réduction » qu'un tel résultat (X2 + 2X — 3 annule M)
suffit pour justifier que M est diagonalisable86, simplement car le polynôme X2 + 2X — 3
est scindé à racines simples.
Passons maintenant à une notion plus délicate.
Nous avons vu dans le premier chapitre que l'ensemble des polynômes annulant une
matrice ou un endomorphisme est un idéal, appelé idéal annulateur87 et noté88 Xm ou Xf.
En dimension infinie, il se peut qu'un endomorphisme n'ait pas d'autre polynôme
annulateur que le polynôme nul, c'est-à-dire que son idéal annulateur peut être réduit à {0}.
La proposition suivante montre qu'une telle situation est impossible en dimension finie.
83. Pour un début d'exercice.
84. Le lecteur pourra aisément vérifier ce calcul.
85. Ou de toute autre méthode calculatoire.
^6. cf. le théorème 16 page 253
~*fO cf. la définition 34 page 77.
o§) Selon qu'il s'agit de l'idéal annulateur d'une matrice M ou d'un endomorphisme /.
Chapitre 2. Compléments d'algèbre linéaire
Proposition 74
Soit ?7 un entier naturel non nul et soit ]\I G A4n(K).
Alors l'idéal annulateur Xj\/ de M n'est pas réduit à {0}, c'est-à-dire qu'il existe
Q0 G K[X], Q0 7e 0, tel que Q0{M) = 0.
Démonstration
Cette preuve est élémentaire, mais peut donner des idées dans d'autres exercices de ce
type. On part de la constatation qu'un polynôme en M est une combinaison linéaire de
/n,M,M2, ...
Or l'espace Mn(K) est de dimension n2.
Si l'on considère la famille (M0 = I^M1 = M,M2,...,Mn ), on constate qu'il s'agit
d'une famille à n2 + 1 éléments. Ainsi, la famille (M0,M\M2,...,Mn2) est forcément
liée.
Il existe donc une famille de coefficients non tous nuls (ao, oli,a2> •••»^n2) € I&n +1 telle
que
a0M° + aiM1 + a2M2 + • • • + an2Mn2 = 0.
On définit alors le polynôme Qo = olqX0 + aiX1 + o^A"2 H h an2Xn .
Le fait que les (cei)i€[0,n2]| sont n°n t°us nuls implique que le polynôme Qo est non nul.
Et l'égalité a0M° + aiM1 + a2M2 + • • • + an2Mn2 = 0 s'écrit simplement Q0(M) = 0.
Ainsi, on a bien trouvé un polynôme non nul qui annule M.
Remarque
Il existe une manière rapide de démontrer l'existence d'un polynôme autre que 0 annulant
M : citer le théorème de Cayley-Hamilton89, qui affirme qu'un polynôme particulier,
noté xm{X) (de degré exactement n), est élément de Xm, donc cet idéal n'est pas réduit
à{0}.
Notons tout de même qu'avec cette preuve de la proposition on trouve un polynôme
annulateur dont le degré peut valoir jusqu'à n2, alors que le degré de xm{X) est de n, le
théorème de Cayley-Hamilton est donc un résultat plus puissant que cette proposition.
En outre, il a l'avantage d'expliciter un polynôme annulateur (non nul) alors que cette
proposition assure uniquement son existence.
9. cf. le théorème 19 page 266.
2.7 Polynômes de matrices carrées et d'endomorphismes
Corollaire 13
Soient E un K-espace vectoriel de dimension finie et / un enclomorphisme de Ey ou
soient n un entier naturel non nul et il/ G A4n(K)
On appelle polynôme minimal de / ou de il/ le polynôme (non nul), minimal au sens
de la division et unitaire90 appartenant à Xf ou Xm- On le notera jif ou jim selon
le cas.
On aura alors Xf = ^if.K[X] ou Xm = /ij\/.K[X].
Remarque
Lorsque l'idéal annulateur est non nul, ce qui est le cas en dimension finie, alors le
polynôme minimal correspond également au polynôme annulateur non nul et unitaire de
degré minimum.
Démonstration
On applique le théorème 5 à l'idéal X = Xf ou Xm selon le cas : on appelle /// ou \lm
l'unique polynôme unitaire Po tel que X = Po.K[X], et le résultat vient immédiatement91.
Exemples
1. Nous avons vu au chapitre 1 (page 78) que le polynôme minimal d'une projection
non triviale est X2 — X, et par la suite que le polynôme minimal d'une symétrie
non triviale est X2 — 1.
2. Reprenons l'exemple de la page 167.
/ 2 -2 1 \
On a vu que Qo{X) = X2 + 2X - 3 annule la matrice M = \ 2 -3 2.
V-l 2 o)
Alors Qo{X) = (X - 1)(X + 3) est le polynôme minimal de M.
En effet, comme Qo annule M, on a Qo G Im donc le polynôme minimal de M
divise Qo-
Mais aucun diviseur strict de Qo» c'est-à-dire ni 1, ni X — 1, ni X + 3 n'annule M.
90. C'est-à-dire de coefficient dominant valant 1.
91. Le fait que \i est de degré minimal correspond à une étape de la démonstration du théorème 5.
Chapitre 2. Compléments d'algèbre linéaire
3 Lemme des noyaux
Le résultat qui vient permet de résoudre de nombreux exercices, comme l'exercice 2.1.
Mais il permet également de simplifier la démonstration de plusieurs théorèmes
importants du chapitre « Réduction ».
Proposition 75
Soit / un endomorphisme d'un K-espace vectoriel E.
1. Si P et Q sont deux éléments de K[X] tels que P A Q = 1 92 alors
Ker((PQ)(/)) = Ker(P(/)) 0 Ker(Q(/)).
2. Plus généralement, si Pi, ..., Pr sont r éléments de K[X] premiers entre eux
deux à deux alors
Ker((P1P2...Pr)(/)) = Ker(Pi(/)) 0Ker(P2(/)) 0 • • • 0 Ker(Pr(/)).
Démonstration
1. On commence par rappeler que d'après le théorème de Bézout, il existe deux
éléments U et V de K[X] tels que PU + QV = 1.
En évaluant cette égalité en X = f on obtient l'égalité suivante (dans C(E)) :
PU) ° u(f) + QU) « v(f) = u(f) o P(f) + v(f) o Q(f) = idE
Cette égalité correspond à Va: G E,
x = P(f) o U(f)(x) + Q(f) o V(f)(x) = U(f) o P(f)(x) + V{f) o Q(f)(x) (*)
• Montrons que Ker(P(/)) H Ker(Q(/)) c {0^}.
Soit donc x G Ker(P(/)) flKer(Q(/)).
En écrivant z = U(f) o P(f)(x), l'hypothèse x G Ker(P(/)) implique z = 0e-
De même, y = V(f) o Q(f)(x) = 0E.
L'égalité (*) implique alors x = 0#, d'où l'inclusion recherchée.
92. C'est-à-dire que P et Q sont premiers entre eux.
2.7 Polynômes de matrices carrées et d'endomorphismes ttU
• Montrons que Ker(P(/)) + Ker(Q(/)) C Ker((PQ)(/)).
Si x e Ker(P(/)), le fait que ((PQ)(/)) = P(f) ° Q(/) = Q(f) o P(/) implique
(PQ)(/)(x) = Q(f)(P(f)(x)) = Q(f)(0E) = 0E.
Nous venons de démontrer l'inclusion Ker(P(/)) C Ker((PQ)(/)).
L'inclusion Ker(Q(/)) C Ker((PQ)(/)) se prouve de façon parfaitement similaire.
Enfin, comme Ker((PQ)(/)) est un sous-espace vectoriel, on en déduit
immédiatement l'inclusion
Ker(P(/)) +Ker(Q(/)) C Ker((PQ)(/)).
• Montrons enfin que Ker((PQ)(/)) C Ker(P(/)) + Ker(Q(/)).
Soit x e Ker((PQ)(/)). On pose y = V(f) o Q(f)(x). Comme précédemment, le
fait que (PQ)(f)(x) = 0 implique que P(f)(y) = 0, c'est-à-dire y G Ker(P(/)).
De même, si l'on pose z = U(f) o P(/)(a:), on trouve z G Ker(Q(/)).
Finalement, l'égalité (*) s'écrit x = y + z et implique donc
zeKer(P(/))+Ker(Q(/)).
Les deux derniers points correspondent à l'égalité
Ker(P(/)) +Ker(P(/)) = Ker((PQ)(/)),
et l'on peut conclure la démonstration du premier point de la proposition.
2. On raisonne par récurrence sur r ^ 2.
Le point 1 ci-dessus correspond à l'initialisation.
Quant à l'hérédité, il suffit d'appliquer le résultat du point 1 avec P = PiP2...Pr
et Q = Pr+i pour passer du rang r au rang r + 1.
Chapitre 2. Compléments d'algèbre linéaire
Compléments
Matrices à diagonale strictement dominante
Le but est d'étudier les matrices dites « à diagonale strictement dominante93 ».
Dans cette optique, commençons par rappeler un résultat simple mais néanmoins
pratique.
Proposition 76
Soit A G Mn(K) une matrice carrée.
On a alors équivalence entre les deux points suivants :
1. A est inversible ;
2. VX e Mntl(K), (AX = 0 => X = 0).
Démonstration
Supposons A inversible.
Considérons une matrice colonne X G Mn,i(^) telle que AX = 0.
On multiplie cette égalité à gauche par A-1, il vient par associativité
(A~1A)X = InX = 0,
soit X = 0.
Supposons que A vérifie l'hypothèse 2.
On considère alors Tendomorphisme / de E = Kn canoniquement associé à A.
L'hypothèse se réécrit alors
Vze£, (f(x) = 0E =» x = 0E),
c'est-à-dire que Ker(/) C {0#}.
Ainsi, / est un endomorphisme injectif de E, de dimension finie.
93. Voir la définition dans la proposition 77.
2.8 Compléments
On sait qu'alors / est un automorphisme de E, et donc que la matrice94 de / est
inversible.
On en déduit donc que A est inversible.
Proposition 77 (Lemme d'Hadamard95 (1903)96)
Soit A G Mn(K) une matrice vérifiant97
Mi G [l,n]|, |aM| > J^Kjl
Alors la matrice A est inversible.
Démonstration
Nous allons appliquer la proposition 76 pour justifier l'inversibilité de A.
Il faut montrer que \/X G Mi.iQK), (AX = 0 => X = 0).
Raisonnons par l'absurde.
On suppose qu'il existe X = t(xi,...,xn) G .Mn)i(K), X ^ 0, tel que AX = 0.
Puisque X ^ 0, la norme infinie98 de X vérifie H-X"^ = max(|a;i|,..., \xn\) > 0.
On peut considérer i0 G [l,raj tel que |a;»01 = H-^lloo > 0.
On choisit alors d'écrire la io-ème coordonnée de l'égalité AX = 0. On obtient ainsi
n
2_^aio,jxj = 0
i=l
On passe les termes pour j ^ i$ dans le second membre, d'où
a,io^ioxio = — / ; aioJxj-
94. Dans une base quelconque.
95. Nous verrons dans le chapitre « Réduction » une conséquence importante de ce résultat, le théorème
de Gershgorin (théorème 24 page 304), qui permet la localisation des valeurs propres d'une matrice.
96. Jacques Hadamard a écrit une preuve de ce résultat (d'ailleurs très semblable à celle proposée
ici) dans son livre Leçons sur la propagation des ondes et les équations de l'hydrodynamique. Hermann,
Paris.
Ce résultat avait déjà été découvert par Lucien Lévy, cf. Sur la possibilité de l'équilibre électrique^
Comptes Rendus de l'Académie des sciences de Paris, 93 (1881), pp. 706-708, ainsi que par J.
Desplanques, cf. Théorème d'algèbre^ Journal des mathématiques spéciales, 9 (1887), pp. 12-13 ainsi que
par Hermann Minkowski, cf. Zur Théorie der Einheiten in den algebraischen Zahlkôrpern^ Nachrichten
von der Gesellschaft der Wissenschaften zu Gôttingen, Mathematisch-Physikalische Klasse (1900), pp.
90-93.
97. Une matrice A vérifiant cette hypothèse est dite à diagonale strictement dominante.
98. Pour plus de détails, cf. O. Rodot, Analyse seconde année, De Boeck (2014).
Chapitre 2. Compléments d'algèbre linéaire
i
Né à Versailles le 8 décembre 1865, Jacques Hadamard
connaît une vie familiale douloureuse". Il doit partager
les privations sévères des Parisiens lors de la guerre de
** v- 1870, puis a le malheur de perdre ses deux premiers fils
^ lors de la Première Guerre mondiale, et son troisième
lors de la Seconde Guerre mondiale.
Ses malheurs personnels ne sont pas sans expliquer
l'ardeur qu'il met dans son travail, probablement un
des seuls moyens d'avancer face à tant de coups durs. Il
Jacques Hadamard se distingue aussi par son combat politique lors de l'af-
(1865-1963) faire Dreyfus : ayant saisi toutes les irrégularités ayant
entaché le procès de l'officier Alfred Dreyfus, il déploie
une grande énergie à combattre cette injustice et à convaincre son entourage de
l'aspect trouble de cette affaire.
Sa carrière très longue et prolifique intervient après des études au Lycée Louis-le-
Grand et une entrée major à l'École normale supérieure. Il enseigne notamment à
l'université de Bordeaux, puis à Paris, et au Collège de France, ainsi qu'à l'École
polytechnique et à l'École centrale.
Ses travaux en algèbre et en théorie des nombres sont encore utilisés, notamment en
cryptographie. C'est peut-être pour sa preuve du théorème des nombres premiersb
qu'il reste le plus connu. Abordable en classes préparatoires, notons la règlec
d'Hadamard, qui stipule qu'étant donnée une série entière Yl anZn, son rayon de
convergence R vérifie :
lim (sup|a/c|M = —.
n->+oo\fc^n ) R
a. Pour les détails biographiques et une étude approfondie de l'œuvre de ce mathématicien, cf. Vladimir Maz'ya et
Tatyana Shaposhnikova, Jacques Hadamard, un mathématicien universel, EDP Sciences (2005)
b. Pour x réel, si l'on note tt(x) le nombre de nombres premiers inférieurs ou égaux à x, le théorème des nombres
premiers affirme que l'on a tc{x) ~ ln^ ■ Ce théorème a été démontré au même moment et indépendamment
.T —* -f- OO
par Hadamard et La Vallée Poussin. La preuve d'Hadamard se trouve dans Sur la distribution des zéros de la fonction
C(s) et ses conséquences arithmétiques, Bulletin de la Société Mathématique de France, 24 (1896), pp. 199-220.
c. qu'il démontre dans sa thèse de doctorat, Essai sur l'étude des fonctions données par leur développement de Taylor (c'est-
à-dire des fonctions développables en séries entières). Il soutient sa thèse en mai 1892, devant le jury composé par
Hermite, Picard et Joubert.
On écrit l'égalité des modules de ces nombres, et on applique l'inégalité triangulaire, d'où
|0*0i*oa'*o| ^ / y Pio.j^JI = X v l°*Oijl * \xj\'
Or par choix de i0, on a V? G [l,n], \xj\ ^ \xi0\.
On trouve alors
l°io,iol * \xio\ ^ 2^f lai°.il ' l^ol-
2.8 Compléments
En divisant par \xio\ > 0 on aboutit à |ai0jio| < ^ lai0,jl-
On reconnaît la négation (en i = io) de l'hypothèse".
Nous venons ainsi de démontrer (par l'absurde) que
VXeM„1i(K)> AX = 0 => X = 0.
On en déduit 10° l'inversibilité de A.
Dualité
Définition 55
Soit E un K-espace vectoriel. On appelle espace dual101 de E et on note E* le
K-espace vectoriel des formes linéaires sur E^ c'est-à-dire que E* = C(E^'K).
Définition 56
Soit E un espace vectoriel E. On appelle hyperplan de E tout sous-espace H de E
tel que H possède un supplémentaire de dimension 1, c'est-à-dire tel qu'il existe une
droite D C E telle que H <£> D = E.
99. A à diagonale strictement dominante.
100. Grâce à la proposition 76 (p. 172).
101. On précise fréquemment qu'il s'agit du dual algébrique de E.
Si le corps est K = R ou C et que (J5, || . ||) est un K-espace norme, on appelle dual topologique de E
l'espace vectoriel des formes linéaires continues sur E.
Notons que si E est de dimension finie, on sait que toutes les formes linéaires sur E sont continues, donc
les deux notions de dualité se confondent.
irai
Chapitre 2. Compléments d'algèbre linéaire
Proposition 78
Soit E un espace vectoriel et H un sous-espace vectoriel de £.
Alors H est un hyperplan de E si et seulement s'il existe une forme linéaire non
nulle / sur E dont H soit le noyau, c'est-à-dire si et seulement si
3feE*\{0} : H = Kev(f).
En outre, toutes ces formes linéaires sont uniques à multiplication par une constante102
près, c'est-à-dire si H = Ker(/) = Ker(g) avec /, g G £*\{0}, alors 3c G K* : g = cf.
I Enfin, si l'espace vectoriel E est de dimension finie n, alors H est un hyperplan de '
E si et seulement si dim(H) —n—\.
Remarque
On pourrait également noter qu'il est équivalent de demander qu'il existe un
supplémentaire qui soit une droite ou de demander que tous les supplémentaires soient des
droites.
Démonstration
Commençons par la première équivalence. Supposons H hyperplan de E. On sait alors
qu'il existe une droite D de E telle que E = H 0 D.
Notons u ^ 0 un vecteur directeur de Z}, c'est-à-dire tel que D = K.u. On définit alors
Tunique forme linéaire103 fo sur D telle que /d(w) = 1- L'existence et l'unicité de fo
telle que /d(^) = 1 est assurée par le théorème 7 page 102, puisque (u) forme une base
de£>.
On définit également fn = 0, l'application nulle sur H à valeurs dans K.
D'après le théorème 8 page 112, on sait qu'il existe une et une seule application linéaire
/ : E —> K (c'est-à-dire / G E*) telle que les restrictions de f k D et H soient
respectivement fo et fn •
Notons qu'au lieu d'appliquer le théorème, on peut directement redéfinir / ainsi :
Soit x G E = H 0 D. Il existe un unique couple (y,z) G H x D tel que x = y + z.
Comme z G D = K.u, il existe un unique A G K tel que z = \.u. On pose alors f(x) = A.
II faudrait alors démontrer la linéarité de /. L'intérêt d'appliquer le théorème est qu'il
102. Naturellement, cette constante est non nulle.
103. Si x G D, il existe un unique A G K tel que x = Au, on pose alors /d(œ) = A.
2.8 Compléments
donne ce résultat.
Terminons la preuve de la première implication. L'application / est une forme linéaire
sur E, non nulle puisque f(u) = 1.
Et avec les notations ci-dessus,
x G Ker(/) <é=> A = 0 <é=> x = ye H.
Ainsi, on a bien trouvé / G i£*\{0} telle que Ker(/) = H.
Passons à l'implication réciproque. Supposons que H est le noyau d'une forme linéaire
non nulle /.
Nous devons montrer que H est un hyperplan de E, c'est-à-dire qu'il existe une droite
D telle que E = H © D.
En s'inspirant de la première implication, on considère uq G E tel que104 f{uo) ^ 0.
On pose alors u = ——-uq, de sorte que par linéarité, f(u) = 1.
On définit alors la droite D = K.tx, nous allons vérifier qu'il s'agit d'un supplémentaire105
de H.
Montrons que H H D = {0}. Soit donc x e DnH.
Puisque x E D, il existe A G K tel que x = X.u.
On a alors f(x) = X.f(u) = A. Mais comme x G H = Ker(/), on a aussi f(x) = 0. On
en déduit A = 0 et par suite x = X.u = 0. Ainsi, H H D C {0}. L'autre inclusion étant
triviale, on a H H D = {0}.
Montrons maintenant que H + D = E. Soit donc x G E. On pose A = f(x) (là encore,
on s'inspire de la première implication) puis z = X.u G D et enfin y = x — z = x — X.u.
On a alors f{y) = f{x) - Xf{u) = A - A.l = 0, soit y G Ker(/) = H.
Ainsi, on a trouvé y G H et z G D tels que x = y + z, ce qui prouve x G H + D.
On en déduit E C H + D, et l'autre inclusion étant triviale, on a E = H + D.
Ces deux points prouvent que l'on a bien décomposé E selon la somme directe E = H®D.
Démontrons l'unicité (à constante multiplicative près) des deux formes. Supposons / et
g deux éléments non nuls de E* ayant le même noyau H.
On construit u et D = K.u comme ci-dessus, c'est-à-dire tels que f(u) = 1.
104. L'existence d'un tel élément est assurée car la forme / n'est pas nulle.
105. Il est à noter que le choix du supplémentaire est très large, puisqu'on peut prendre toute droite
dirigée par un vecteur n'appartenant pas au noyau de /, c'est-à-dire toute droite n'étant pas contenue
dans H.
irai
Chapitre 2. Compléments d'algèbre linéaire
On pose ensuite tout simplement c = g(u).
Par linéarité, le fait que g(u) = c = c.f(u) implique que g = c.f sur D.
Et sur if, g = c.f est évidente, puisque g et f sont nulles.
On en déduit aisément (on pourrait réutiliser le théorème 8) que g = c.f sur D + H = E.
Enfin, il est évident que c ^ 0, car sinon g(u) = 0 implique u G Ker(g) = H, alors que
u £ Ker(/) = H.
Il reste à étudier le cas de la dimension finie.
Supposons que H est un hyperplan de E.
Alors par le début de la proposition, il existe une forme linéaire / G i£*\{0} telle que
H = Ker(/).
Comme Im(/) c K qui est de dimension 1, le rang de / ne peut être que 0 ou 1. Mais
comme / ^ 0, on a naturellement rg(/) = 1.
Il suffit alors d'appliquer le théorème du rang à / pour obtenir
dim(if ) = dim(Ker(/)) = dim{E) - rg(/) = n - 1,
donc la première implication est démontrée.
Réciproquement, soit H un sous-espace vectoriel de E de dimension n — 1. Comme on
est dans E de dimension finie, on sait que H possède un supplémentaire106 D.
Puisque dim(E) = dim(if ) + dim(D), on a dim(D) = n — (n — 1) = 1, donc on a bien
trouvé une droite D telle que E = H 0 D, donc H est bien un hyperplan de E.
Ainsi s'achève la preuve de la proposition.
On se référera à l'exercice 2.7 pour une application de ce résultat.
Proposition 79
Soit E un K-espace vectoriel de dimension finie n.
Alors son dual E* est de même dimension finie dim(E*) = dim(E) = n.
106. Rappelons comment ce point se démontre : on considère une base (ei, ...,en_i) de H. Il s'agit
d'une famille libre de J5, donc par le théorème dit « de la base incomplète » on peut compléter cette
famille en (ei, ...,en_i,en) base de E. Alors D = Vect(en) est un supplémentaire de H.
2.8 Compléments
Démonstration
Il suffit de se rappeler que si E et F sont des K-espaces vectoriels de dimension finie,
alors C{E, F) est de dimension finie, et que
dim(£(£,F)) = dim(£).dim(F).
On applique ici ce résultat avec F = K qui est de dimension 1, et on obtient donc
dim(£*) = dim(£(£,K)) = dim(£).dim(K) = dim(£).
Proposition 80
Soient E un K-espace vectoriel de dimension n et S = (ei, e2,..., e„) une base de E.
Étant donné i G [1, nj, on définit e* G E* par107
{1 si 7 = i,
0 sinon.
La famille (e*,^, ...,e*) est alors une base de E*. On l'appelle la base duale de la
base B, et on la note B*.
Remarques
On reconnaît les fonctions 6* définies dans la proposition 41.
En d'autres termes, si i G [l,n] et a: G i£, le nombre e*(x) représente simplement la
ï-ème coordonnée du vecteur x dans la base B.
Attention, la base duale dépend de toute la base.
Par exemple, si on a deux bases B = (ei, ez) et B' = (/i, /b) de R2, on peut avoir e\ = f\
mais eî ^ /f.
En effet, considérons ei = /i = (1,0) et e2 = (0,1), /2 = (1,1).
Les familles (ei,e2) et (/i,/2) étant clairement (chacune) des familles libres de deux
éléments dans un espace de dimension 2, chacune est une base de R2.
Si Ton considère u = (x, y) G M2, les coordonnées de u dans la base108 (ei, e^) sont tout
simplement x et y, donc e\{u) = x.
Maintenant, notons (a,/3) les coordonnées de u dans la base (/i, /2).
107. Rappelons que le terme 6ij est connu sous le nom de symbole de Kronecker.
Cette appellation rend hommage au mathématicien et logicien allemand Leopold Kronecker (1823-1891).
108. Qui n'est autre que la base canonique de R2
IJJI Chapitre 2. Compléments d'algèbre linéaire
a + j3 = x
Les trouver revient à résoudre (x,y) = a(l,0) + /?(l,l), soit le système ^
P = V
La solution de ce système est clairement (a,/?) = (x — y,y).
Ainsi, la première coordonnée de u dans la base (/i, /b) est f{{u) = x — y.
On constate bien que /j* ^ e^ alors que les vecteurs ei et /i sont les mêmes.
Il existe un cas particulier, celui des bases orthonormées des espaces euclidiens. Dans ce
cadre, nous verrons109 que la coordonnée de u selon e* est donnée par e*(u) = (ei,u).
Mais on masque ainsi la dépendance par rapport au reste de la base, car celle-ci ne doit
pas être quelconque.
Démonstration
Puisque E* est de dimension n et que la famille {e^e^ •••,£*) est une famille de n
éléments dans E*, il suffit de montrer que cette famille est libre.
Soit donc (Ai, A2,..., An) G Kn tel que AieJ + A2er| H h Ane* = 0.
On a affaire à une égalité entre formes linéaires, qui s'écrit alors
Va: G E, Xie{{x) + A2e2(z) + • • • + \ne*n{x) = 0.
Pour i G [1, n], on spécialise cette égalité en x = e*, d'où
Ai eî(ei) +A2 elfe) + • • • + Ai ejfe) + • • • + An e^a) = 0.
=0 =0 =1 =0
Il reste tout simplement Ai = 0, égalité valable pour tout i dans [l,n].
Ainsi, la famille S* est libre dans E*, donc S* est bien une base de E*.
Nous verrons ultérieurementn0 que cette construction est « réversible », c'est-à-dire que
toute base de E* est la base duale d'une base de E.
Remarque
Si l'on considère deux bases différentes de l'espace de départ E , on peut leur associer
deux bases différentes du dual E*.
On peut naturellement se demander quel lien existe entre le changement de bases dans
E et celui dans E*, notamment sous la forme des matrices de passage. Le résultat est
donné par la proposition suivante.
109. cf. la proposition 121 page 379.
110. cf. le théorème 13 page 184
2.8 Compléments
flj3
Proposition 81
Soit E un K-espace vectoriel de dimension finie n. Soient B et B' deux bases de E.
On note B* et B'* leurs bases cluales respectives.
Alors, si l'on appelle P la matrice de passage de la base B à la base B\ et Q la
matrice de passage de la base B* à la base Bf*, ces deux matrices vérifient la relation
Q = tP~1.
Démonstration
Il s'agit donc de montrer que Ton a une des 4 égalités suivantes : lQ P = In ou Q lP = In
ou PfQ = In ou enfin lPQ = In.
En effet, une matrice de passage entre deux bases est toujours inversible, donc Tune des
égalités lPQ = In ou Q lP = In suffit pour affirmer que lP est l'inverse de Q. Quant à
PlQ = In ou lQP = jTn, en transposant ces égalités, on retrouve les précédentes, d'où
la même conclusion.
Nous allons choisir parmi ces égalités celle qui vient la plus naturellement.
Voyons déjà comment lire les matrices P et Q.
Notons B= (ei,e2,...,en) et B' = (ei,e'2, ...,<).
La matrice P = (Pij)(i,i)€|[i,nl2 étant la matrice de passage de la base S à la base S7, sa
j-ème colonne correspond aux coordonnées de e^- dans la base S, c'est-à-dire
n
k=i
De même en notant Q = fej)(i,i)€[i,np, S* = (eî,e5,...,e*) et B'* = (ei*,e£*,...,0,
on a
n
Vie[l, ni, ej* = £*.,«<£
Il faut bien noter que ces deux familles de relations ont lieu dans des espaces différents,
à savoir respectivement dans E et dans E*.
Pour faire apparaître la matrice identité, nous allons utiliser la définition de B'* par
rapport à B' (et plus tard celle de B* par rapport à B).
Chapitre 2. Compléments d'algèbre linéaire
On sait que V^j) G [l,n]2, e'*(ej) = Sij. Par les relations précédentes, on en déduit
n / n \
V(t, j) G [l,n]2, ]P ( Qrjei(jTpktjek) ) = ôi>i-
r=l \ k=l /
Or pour tout r, e* est une forme linéaire donc
n n
e*(X!^^efc) = ]LP*^:?e*(efc)•
Mais on sait111 que e*(efc) = 5rjjt donc
n n
er[^2PkJekJ = $^Pfc,A,fc = Pr,j-l + ^2pk,j Ôr,j =Pr,j-
k=l k=l k^r ^^
L'égalité précédente se résume ainsi à
n
V(t, j) G [l,nl2, ]T (qr,iPr,j) = ôij.
r=l
Comparons ce calcul avec un produit matriciel. On a pour tout (i,j) G [l,n]2,
n n
r=l q=l
L'égalité précédente devient ainsi
V(i,J) e [l,n]2, CQP)y = ^ = {In\p
c'est-à-dire tQP = In.
Les matrices PetQ étant inversibles on en déduit que l'on a lQ = P_1, ou en transposant
que Q = *P_1, ce qui achève la démonstration.
Définition 57
On appelle bidual de E le dual du dual de E. On le note E** = (E*)*.
111. Il s'agit du lien entre B et B*.
2.8 Compléments
IES1
Proposition 82
On définit l'application linéaire
Y : E —> E**
X I 7 1 x
où112 VxeE, Fx : E* —> K
/ —> rx(f) = f(x).
Alors l'application F est injective, on l'appelle injection canonique de E dans E**.
Démonstration
La preuve de la linéarité de T, qui est évidente, n'est pas rédigée.
Soit x G E. Montrons par contraposée que T(x) = 0 implique x = 0.
Supposons x ^ 0. Alors Rx est une droite, donc il existe113 H hyperplan de E tel que
E = H © Rx.
On peut alors définir une unique application h de E dans R linéaire à travers ses
restrictions à if et à Rx par :
h\H = 0 et VA G M, h{\x) = A.
On a ainsi construit une forme linéaire h sur E telle que h(lx) = 1, et alors
T(x){h) = h{x) = 1^0,
donc T{x) ^ 0.
On a donc bien par contraposée Va: G E, T(x) = 0 => x = 0, ou encore Ker(r) c {0e}.
L'application T étant linéaire, on en déduit bien son injectivité.
Proposition 83
Si E est un K-espace vectoriel de dimension finie ?z, alors :
1. Le bidual E** de E est de même dimension finie n.
2. L'application114 V est un isomorphisme.
112. À x donné, Tx est une application linéaire de E* vers K et est donc bien un élément de (E*)* = E**.
113. Noter qu'en dimension quelconque, ce résultat n'est pas évident, il fait appel à l'axiome du choix.
Chapitre 2. Compléments d'algèbre linéaire
Démonstration
Nous avons déjà démontré que si E de dimension finie, alors son dual est de même
dimension finie : àim(E*) = dim(E).
Mais alors comme E* est de dimension finie, son dual est de même dimension finie :
dim(£**) = dim(£*).
On arrive ainsi à dim(E**) = dim(E*) = dim(E).
Par la proposition précédente, T est alors une application linéaire injective entre deux
espaces de même dimension finie n.
On sait qu'alors T est un isomorphisme.
Théorème 13
Soient E un K-espace vectoriel de dimension finie n et C = (/i, /2, ••■, fn) une base
de£*.
Alors il existe une unique base B = (ei, e2,..., en) de E telle que C soit la base duale
de B, c'est-à-dire telle que C = B*.
On dit que la base B est la base antéduale115 de la base C.
Démonstration
On cherche une base B = (ei,e2,...,en) de E telle que (/i,/2,---,/n) soit la base duale
de S, ce qui implique notamment que V(i,i7') G [l,n]2, fi{ej) = 5^, c'est-à-dire avec les
notations précédentes que Tej(fi) = ôij.
Mais si on note C* = (#i,#2, •••> <7n) la base duale de C = (/1, /2, •••> /n)» on aura
V(M)e[l,n]2, 9j{fi)=5ij.
Noter que comme C est une base de E*, sa base duale est une base de (E*)*, c'est-à-dire
une base du bidual E** de E.
Comme T est un isomorphisme de E dans E**, si on définit Vj G [l,n], e^ = r-1(<fr),
alors on aura automatiquement C* base de E** implique
B = (ex = T-1(g1),e2 = T-1(g2),^en = T"1^))
114. Il s'agit de l'application T introduite dans la proposition 82.
115. Étymologiquement, cette expression signifie « la base avant le dual ».
2.8 Compléments
base de E.
Et on aura
V(i,j) e [l,n]2, fi(ej) = rCi(/i) = fc-(/i) = 5U,
c'est-à-dire que C est la base duale de la base B.
H reste à prouver l'unicité de la base B. On veut V(i,i7'), fi{ej) = Tej(fi) = ôij.
Fixons j. Si on pose hj = T(ej)i on veut Vi, hj(fi) = Sij, ce qui fait que hj est forcément
le j-ème vecteur de la base C*, c'est-à-dire que hj = gj, d'où comme T bijectif, forcément
tj = T~1(gj). L'unicité en découle.
Exemple
On se donne n éléments deux à deux distincts ai, ..., an de K.
On note Vt G [1, n], & : E = Kn_i[X] —> K
P .—> P(oi)
Les éléments </?i, ..., (pn sont éléments de E*, et forment une famille libre116 de E*.
Ainsi, (</?i,..., (pn) est une famille libre à n éléments dans un espace de dimension n, donc
(y?i,..., </?n) est une base de E*.
On sait alors que E possède une base (Lo> •••> ^n) telle que <fi{Lj) = 5^ pour tout couple
(ij) dans [l,n]2.
Étant donnée la définition des ^, on a construit une base (Li, ...,Ln) de E = Kn_i[X]
telle que
V(i,j)G[l,n]2, Lj(ai)=6iJ.
On a ainsi reconstitué la base (Li, ...,Z/n) utilisée pour l'interpolation de Lagrange, voir
page 151.
116. Pour s'en convaincre, on suppose que (ai, ...,an) € Kn vérifie l'égalité ai<pi + ■ • • + an<Pn = 0.
On considère alors cette égalité en P = (X - ai)...(X - ai-i)(X - ai+i)...(X - an) G E et l'on obtient
directement a* = 0 pour chaque i.
mf(] Chapitre 2. Compléments d'algèbre linéaire
H3 Exercices corrigés du chapitre 2
2.1
Soit u €
£(£)
vérifiant ii3 =
Ker(it
Id. Justifier
- IdE) 0 Ker(ti2
+ w + IdE) =
= E
QQQ
1. Montrons que Ker(tx - IdE) H Ker(tx2 + tx + icf^) = {0^}.
Comme Ker(tx — Ids) et Ker(tx2 + u + Jd^) sont des sous-espaces vectoriels, ils
contiennent 0# donc leur intersection contient {0#}.
Il suffit donc de montrer l'inclusion Ker(tx — IdE) H Ker(tx2 + u + Me) C {0#}.
Considérons a: G Ker(tx — Ids) H Ker(tx2 + tx + /d^). On a donc un élément x de
i£ qui vérifie à la fois
u(x) — x = 0e et u2(x) + u(x) + a: = 0.
En partant de u(x) = x et en composant par tx, il vient
u2(x) = u(u(x)) = u(x) = x,
et alors u2(x) + u(x) + x = 0e implique 3a: = 0# et ainsi x = 0#.
L'intersection Ker(tx — Ids) H Ker(tx2 + u + Jd^) est donc bien réduite à {0^}.
2. Montrons que Ker(tx — Ids) + Ker(tx2 + u + Jd^) = i£. Comme on considère la
somme de deux sous-espaces vectoriels de E, l'inclusion
Ker(tx - IdE) + Ker(tx2 + u + IdE) C £
est évidente, il reste uniquement l'inclusion réciproque à démontrer.
Soit x G E. On cherche y G Ker(tx - IdE) et z G Ker(tx2 + tx + id^) tels que
a: = 2/ + z.
On suppose ce résultat vérifié. On a alors u(y) = y, qui implique u2(y) = y (cf.
ci-dessus).
2.9 Exercices corrigés du chapitre 2
ffsgl
En appliquant l'endomorphisme u2 + u + Jd^ à l'égalité x = y + z, il vient
(îx2 + îx + jTd£?)(aO = u2{x) + îx(z) + x = u2(y) + ^(y) + y + (îx2 + îx + IdE){z).
On sait que (tx2 + u + IdE)(z) = 0# par choix de z, il reste donc
32/=(tx2+îx + /d£;)(a:).
Il ne reste qu'à vérifier que ce choix convient.
On pose donc y = - (u2 + u + IdE) {x), et z = x — y.
o
On peut alors vérifier les trois points suivants :
• L'égalité x = y + z est évidente puisque l'on a posé z = x — y.
• Par linéarité de u — IdE, on a
{u - IdE)(y) = 3 ({u - IdE) o (îx2 + u + IdE)){x) = -{u3 - IdE){x) = 0E,
puisque par hypothèse, u3 = IdE.
On a donc y G Ker(tx — IdE).
• De même, on a z = — - (u2 + u — 2IdE) (x).
o
On peut factoriser le polynôme X2 + X - 2 en X2 + X - 2 = (X - 1)(X + 2)
et ainsi écrire
(tx2 + u + IdE)(z) = -- ((tx2 + u + Jd2) o (tx - Jd£?) o (u + 2Jd£?))(aO
= -^((îx3-/d£;)o(îx + 2/d£;))(a:)
= 0E,
là encore grâce à l'hypothèse u3 = IdE.
On a donc z G Ker(tx2 + u + id^).
On a bien démontré a: G Ker(tx — jTd#) + Ker(tx2 + u + Jd^) d'où la preuve de
l'inclusion E C Ker(?x —Jd£) + Ker(?x2+?x+Jd^), ce qui achève la démonstration
du résultat.
Remarque
On pouvait directement appliquer le lemme des noyaux (proposition 75 page 170) aux
polynômes P = X-letQ = X2 + X + l.
[gjjj Chapitre 2. Compléments d'algèbre linéaire
Ces polynômes étant premiers entre eux, le résultat s'applique et Ton a donc
Ker((PQ)(u)) = Ker(P(u)) 0 Ker(Q(u)) (*)
Or PQ = X3 - 1 donc {PQ){u) =u3-IdE=0 par hypothèse, donc
Ker((PQ)(u)) = E.
Enfin, on a P(tx) = u — Me et Q(u) = u2 + tx + Jd^ donc la relation (*) donne
directement le résultat de l'exercice.
2.2
Soit n G N*. On dit d'une matrice M G A4n(Z) (c'est-à-dire d'une matrice carrée
à éléments entiers relatifs) qu'elle est inversible dans A471(Z) s'il existe TV G A471(Z)
telle que MN = 7VM = Jn, c'est-à-dire si et seulement si M est inversible et que
M-1 G Mn(Z).
Soit M G Mn{Z).
Montrer que M est inversible dans MnC^) si et seulement si det(M) = ±1.
MMU
L'implication directe est assez simple. Supposons M inversible dans Mn(Z). Il existe
donc N e Mn{%) telle que MN = In.
On a alors det(M).det(iV) = In.
Or d'après la formule det(M) = Y^ I e(cr) TT^a(i),i I » on v°it Que det(M) est une
somme (et différence) de produits de coefficients de la matrice, donc d'éléments de Z.
On en déduit que det(M) G Z.
De même, det(iV) e Z.
Ainsi, det(M) est un élément de Z dont l'inverse117 est aussi dans Z.
On en déduit det(M) = ±1.
Réciproquement, soit M G ,Mn(Z) telle que det(M) = ±1.
Considérons la matrice *com(M), c'est-à-dire la transposée de la matrice des cofacteurs
de M.
Les coefficients de com(M) sont, au signe près, des déterminants de matrice de taille
117. Qui n'est autre que det(N).
2.9 Exercices corrigés du chapitre 2
n— 1 extraits de M, donc de matrices à coefficients dans Z. Tout comme le déterminant
de M (cf. la première partie de la preuve), les coefficients de com(M) sont des entiers
naturels.
On a donc *com(M) dans .Mn(Z). Et comme det(M) = ±1, on en déduit que
iV=d^M)tc0m(M)e-M"(Z)-
Or on a vu118 que M.*com(M) = M.*com(M) = det(M).Jn, donc en divisant par
det(M) on a MN = NM = In.
On a bien trouvé N e Mn{%) telle que MN = NM = Jn, donc M est bien inversible
dans .Mn(Z), ce qui achève la démonstration.
Remarque
Dans de nombreux exercices concrets, on a des matrices à coefficients entiers à inverser
(matrices de passage par exemple).
Ainsi, si Ton commence à calculer le déterminant de la matrice pour vérifier qu'il est
non nul pour que la matrice soit inversible, et que ce déterminant vaut en fait ±1,
alors on trouvera une matrice inverse qui sera elle-même à coefficients entiers.
Mais en pratique on n'utilise pas la formule M-1 = -——— *com(M) pour inverser
M, mais la méthode du pivot.
2.3
Voici une preuve « plus élégante » de la formule
Vrn(ai,a2,...,an) = J\ {(H-aj),
où le déterminant de Valider monde Vn a été défini page 141.
On effectue toujours la preuve par récurrence sur n.
On notera que par convention ce produit vaut 1 lorsque n = 0 ou n = 1 puisque l'on
effectue le produit sur l'ensemble vide, d'où l'initialisation de la récurrence .
On suppose la propriété vraie à un rang n — 1 G N* et on souhaite la prouver au rang n
On fixe (ai, ...,an_i) G Kn_1 et on pose
P(X) = Vn(au...,an-UX).
H8. cf. le lemme 2 page 136.
FEIil
Chapitre 2. Compléments d'algèbre linéaire
1. Montrer que P G Kn_i[X].
Quel est le coefficient de Xn~l dans P?
2. Justifier que ai, ..., an_i sont des racines de P.
3. On suppose dans cette question que les nombres ai, ..., an_i sont deux à deux
différents.
Justifier alors à partir des questions précédentes que
P(X) = Vn-^au ..., ûn_i).(X - ai)...(X - an_i).
En déduire que Van G K,
yn(a1,...3an_i,an) = (an - ai)...(an - an-1)Vn-i(au ...,an_i).
4. On suppose dans cette question que les nombres ai, ..., an_i ne sont pas deux à
deux distincts.
Que valent alors les quantités Ki-i(&i} •■•,&n-i) et T4,(ai, ...,an_i,an) ?
En déduire que l'on a encore Van G K,
yn(ai,...,an_i,an) = (an — a\)...(an - an_i)V^_i(ai, ...,an_i).
5. Conclure.
QQEI
1. Un développement du déterminant Vn(ai, ...,an_i,X) par rapport à la dernière
colonne donne directement Vn comme combinaison linéaire de 1, X, ..., Xn_1 ;
les coefficients sont des constantes (éléments de K) car il n'y a pas de terme en X
dans les n — 1 premières colonnes, donc pas de X dans les cofacteurs des éléments
de la dernière colonne.
Le coefficient de X71-1 est (—l)n+n multiplié par le déterminant de la matrice
constituée des n — 1 premières lignes et colonnes, donc ce coefficient est
simplement Fn_i(ai,...,an_i).
2. Si X = ai, alors dans le déterminant P{a\) = V(ai, ...,an_i,ai) la première et
la dernière colonne sont égales, donc le déterminant P(ai) est nul.
De manière plus générale, si X = ai avec i ^n — 1, ilya égalité des colonnes i
et n (avec i ^ n) ce qui implique P{ai) = 0.
2.9 Exercices corrigés du chapitre 2 |J8£]
3. Par hypothèse de récurrence, T^-i(ai, ...,an_i) est non nul (aucun des facteurs
ai — dj n'est nul).
Par la première question, on sait qu'alors P est un polynôme de degré exactement
n-1.
Et comme on connaît n — 1 racines distinctes (ai, ..., an_i) de ce polynôme, on
peut le factoriser directement en
P(X) = Vn-^au.-, o„_i).(X - ai)...(X - an_i)
(le terme Vn-i(...) correspondant au coefficient dominant).
Il suffit alors d'appliquer cette formule en X = an pour en déduire
Vn(aii...ian-iian) = (an -ai)...(an - an_i)VÇl_i(ai,...,an_i).
4. S'il existe i et j dans [l,n — 1] avec i ^ j et ai = a^ alors aussi bien dans
T^_i(ai,...,an_i) que dans T^(ai,...,an_i,an), les colonnes i et j sont égales,
donc les déterminants sont nuls.
On a alors immédiatement
Vn(aii..nan-i,an) = 0 = (an -ai)...(an - an_i)Fn_i(ai, ...,an_i).
5. En remplaçant Vn-i(ai, ...,an_i) par l'expression donnée par l'hypothèse de
récurrence, on obtient
l^i(ai,...,afl_i,ofl) = JJ {an-aj)- JJ (ai-a,j)= JJ (ai-aj).
Nous venons de prouver l'hérédité de la relation de récurrence, et l'initiation
étant acquise, on en déduit la formule pour tout n.
2.4
Cet exercice est une forme de généralisation de l'interpolation de Lagrange.
1. Soit n G N* Soient n éléments deux à deux différents de K : Ai, À2, ..., An.
Alors pour tous (ai, 0:2,. -., an) et (/?i3/?23 • • • >/?n) dans Kn, il existe un unique
polynôme P G K^-ipf] tel que
Vz G |ri,nj P{Xj) = aj et P,(Xi) = fc.
Chapitre 2. Compléments d'algèbre linéaire
2. Encore plus généralement, soient n entiers naturels maintenant /xi, ..., fin.
On définit un ensemble d'indices I = {(z, j) / 1 ^ i ^ n et 0 ^ j ^ ^}.
n
Enfin, on se donne Card(J) = in = n + /J Mi éléments de K : (yij)(ij)ei-
2=1
Montrer qu'alors il existe un unique polynôme P G Km_i[X] tel que
V(i,j)el, i^(A4) = Kj.
3. Si Ton se donne trois points Ai, À2, A3 deux à deux distincts dans K et un triplet
(a,b,c) G K3, peut-on affirmer :
3!P G K2[X] : P(Ai) = a, P'(A2) = 6 et P(A3) = c?
1. Introduisons
V : K2n_i[X] —> K2n
P .-> (P(A1),P/(A1),P(A2),P/(A2),...,P(An),P/(An))
Notons également U = (ai, /3i,a2,/?2, •••j^n)i9n) G K2n.
Les égalités P(A*) = a* et P'(K) = Pi pour i G [l,n] se résument à tp{P) = U.
Ainsi, la première question de l'exercice équivaut à montrer que
VC/GK2n, 3!P6K2n-i[I] : <p{P) = U,
c'est-à-dire que (p est bijective.
L'application (p est clairement linéaire.
Montrons Pinjectivité de (p. Soit donc P G K2n_i[X] tel que (p{P) = 0.
Ce résultat équivaut aux égalités P(A*) = P'{\i) = 0, pour tout i G [l,n].
Ainsi, les nombres (K)ieii nj sont des racines (au moins) doubles de P.
Ces nombres étant deux à deux différents, on en déduit que P possède au moins
2n racines119 .
Le polynôme P étant élément de K2n_i[X], si P était non nul, P aurait au plus
119. En comptant les racines avec leir multiplicité.
2.9 Exercices corrigés du chapitre 2
2n — 1 racines120, d'où une contradiction.
Ainsi, P = 0, d'où l'injectivité de (p.
Finalement, (p est une application linéaire injective entre deux espaces (K2n-i [X]
et K2n) de même dimension finie (2n), donc (p est un automorphisme, c'est-à-dire
que (p est bijective.
2. On définit de manière analogue
1> : Km-ilX]
P
(p{J)M)^ei
rtV = (yi,j)(i,j)ei'
Là encore, les égalités recherchées se résument à i/)(P) = V, il faut donc prouver
que ip est bijective.
La linéarité de ip est encore une fois évidente ; montrons son injectivité.
Si P G Km_i[X] vérifie ip{P) = 0, c'est-à-dire \/{iJ) G /, PU)(\i) = 0, alors :
• pour i = 1 : P(Ai) = P'(\i) = ... = P^^(Xi) = 0, c'est-à-dire que Ai est racine
de P avec une multiplicité (au moins) ti\ + 1,
• plus généralement, pour tout z G [l,nj, A» est racine de P avec une multiplicité
(au moins) //» + 1.
Ainsi, les nombres A* étant deux à deux distincts, le nombre de racines de P
comptées avec multiplicité est d'au moins
n
Oui + 1) + (a*2 + 1) + • • • + ilhi + 1) = n + J^ Mi = m.
Comme P G Km_i[X], on en déduit P = 0.
On arrive une nouvelle fois à i/)(P) = 0 => P = 0, donc avec la linéarité de ij) :
ip est injective.
Finalement, -0 est une application linéaire injective entre deux espaces (Km_i[X]
et K1) de même dimension finie (m = Card(jT)), donc ij) est un automorphisme,
c'est-à-dire que ip est bijective.
3. La réponse est négative en général, car on peut trouver des points pour lesquels
le résultat est faux. Ainsi, dans II&2[^], on Peut trouver des valeurs des Ai pour
lesquelles les applications P \—> P(Ai), P "—> P'fa) et P \—> P(Xz) sont liées.
120. Toujours en les comptant avec leur multiplicité.
Chapitre 2. Compléments d'algèbre linéaire
Prenons un cas très simple : Ai = — 1, A2 = 0 et A3 = 1.
La question est de savoir si l'application O : R2[X] —> R3
P —► (P(-1),P'(0),P(1))
est bijective.
On pourrait essayer d'écrire la matrice de © dans les bases canoniques, mais en
fait on se rend compte très rapidement que ©(1) = (1,0,1) = Q(X2).
Ainsi, 0 n'est pas injectif (et donc pas surjectif non plus, pour des raisons de
dimension).
On peut répondre plus précisément à l'exemple proposé. Soit (Ai, A2,As) G K3,
et considérons l'application O : M2pf] —► R3
P —► (P(A1))P'(A2),P(A3))
La matrice de O dans les bases canoniques (1, X, X2) de K2pf] au départ et de
K3 à l'arrivée est
/l Ai A? \
0 1 2A2
V 1 A3 A§ /
On trouve assez rapidement121 que le déterminant de O dans ces bases est
(A3-Ai)(A3 + Ai-2A2).
Ainsi, O est bijectif si et seulement si A3 ^ Ai et 2A2 ^ Ai + A3.
Finalement, dans le cas réel ou complexe, outre le fait qu'il faut évidemment
Ai 7^ A3, le point A2 ne doit pas être le milieu du segment [Ai, A3]. C'est ce qui
fait qu'on a eu un contre-exemple avec le choix Ai = — 1, A3 = 1 et A2 = 0.
Notons122 que dans le cas Ai = — 1, A2 = 0 et A3 = 1, on peut préciser que le système
f P(-l) = a
(d'inconnue P € K2pf]) < P'(0) = b
{ P(l) = c
a comme ensemble de solutions :
0 si c - b ^ 2a,
iaX2 + bX + (a + b - a) ; a G R j si c - b = 2a.
121. En commençant par l'opération L3 <— L3 — L\ par exemple.
122. Le lecteur est invité à le vérifier par lui-même.
2.9 Exercices corrigés du chapitre 2
2.5
Soient E un K-espace vectoriel de dimension
E, on note p =
1.
2.
Montrer
Montrer
= dim(F).
qu'il existe n -
- p hyperplans H
F = Hxn
finie n et F un sous-espace vectoriel de
i,..., Hn-P de E tels que
.. D Hn-P.
que le nombre minimum d'hyperplans dont F est l'intersection est n-
-P-
1. On est en dimension finie, il est naturel de penser à introduire des bases.
On considère une base Bp = (ei, ...,ep) de F.
On la complète123 en Be = (ei,..., ep, ep+i,..., en) base de E.
Pour x e E, on note (#1,... , iCp, Xp^. i, ..., X72 ) G Kn les coordonnées de x dans la
n
base i?£, c'est-à-dire les éléments de K tels que x = 2_\^k^k •
fc=i
Avec les notations introduites à propos des bases duales124, on a Xi = e^(x) où
ei est une forme linéaire non nulle sur E.
I Xp+i = 0,
Montrons que x e F ^=> < \
I xn = 0.
v
Si £p+i = ... = xn = 0, alors on a
p n p
z = ^zjfcefc+ ^2 Oejt = ^xjfcefc G Vect(ei,...,ep) = F.
fc=i Jt=p+i fc=i
Réciproquement, si x e F, on peut écrire ses coordonnées dans la base Bf- Il
existe (yi,..., yp) G Kp tel que x = 2/iei H h 2/pep.
En rajoutant des zéros, on peut alors écrire
X = X\C\ ~\~ ' ' ' ~\~ XpCp -\- Xp+\Cp+\ ~\~ ' ' ' ~\~ Xn€fi
= Viei H h Vvev + 0ep+i H H 0en-
123. Autrement dit, on choisit une base de E adaptée à F.
124. cf. la proposition 80 page 179.
HJJjj Chapitre 2. Compléments d'algèbre linéaire
Comme (ei, ...,en) est une base, on peut identifier les deux expressions, d'où125
Xp^-i = U, . . ., Xji = U.
L'équivalence entre £ G F et les équations xp+\ = 0, ..., x = n = 0 est ainsi
démontrée.
Or Xi = 0 équivaut à e*(x) = 0, donc k x £ Ker(e*).
Si l'on note Fi = Ker(e*), alors Fi est un hyperplan, car noyau d'une forme
linéaire non nulle.
Nous venons de démontrer que
xeF <=> x e Fp+i n... nF„.
Il suffit de décaler les indices, on note Hk = Fk+P et ainsi F = H\ n ... n Hn_p,
intersection de n — p hyper plans.
Notons qu'il existe un autre moyen d'arriver au résultat, que l'on donne ici sans
preuve.
On introduit Vi € [l,ra], Fi = Vect(ei, ...,ei_i,ei+i, ...,en).
On a clairement dim(Fi) = n — 1, donc chaque Fi est un hyperplan.
On montre alors que F = Fp+\C\...r\Fn est donc intersection de n—p hyperplans.
Remarque
Les ensembles Fi décrits par les deux méthodes sont les mêmes, c'est pourquoi ils sont
notés de la même façon.
2. Au vu de la première question, on sait que ce nombre minimum est inférieur ou
égal à n — p, il faut donc montrer qu'il est également supérieur ou égal à n — p.
Ainsi, si F est l'intersection de m hyperplans if{, ..., H'm il nous faut montrer
m ^ n — p.
Supposons donc que F est l'intersection de m hyperplans iî{, ..., H'm.
Alors on sait qu'il existe m formes linéaires toutes non nulles y?i, ..., (pm telles
que H[ = Ker(ifi).
Afin de regrouper les m égalités en une seule126, on définit l'application suivante :
$ : E —> Km
x y—> *(x) = (y>i(aO,...,y>m(aO)
125. On a aussi les égalités x\ = 2/1, ..., xp = yp, mais elles sont inutiles ici.
126. Il s'agit d'une idée que l'on a déjà eue avec l'interpolée de Lagrange par exemple.
2.9 Exercices corrigés du chapitre 2
On a alors x e F <=> y>i(x) = 0, ..., x € <£m(z) = 0 <$=> $(x) = 0.
Plus simplement, F = Ker(<I>).
Comme on s'intéresse à la dimension de F = Ker($), on utilise le théorème du
rang.
L'application $ étant à image dans Km, il est évident que rg(<I>) ^ m.
On en déduit immédiatement
p = dim(F) = dim(Ker(<I>)) = n - rg($) ^ n-m.
Il en découle instantanément le résultat m^n — p.
On notera qu'il est nécessaire et suffisant de prendre les formes ipi linéairement
indépendantes pour avoir rg($) = m.
Remarque
Notons que ce résultat généralise un résultat connu : une droite dans le plan est
caractérisée par 2 — 1 = 1 équation linéaire, une droite dans l'espace est caractérisée
par 3 — 1 = 2 équations linéaires, un plan dans l'espace est caractérisé par 3 — 2 = 1
équation linéaire.
2.6
Soit A e
Mn(K).
On identifie une matrice M G .Mn(K) à ses n colonnes (Ci
On définit alors l'application
U :
Montrer
Mn(K) —»
M ►—>
que
VM e Mn(K),
K
Îa{M) =
Îa{M)
-- det(i4Ci,C2,..
+ h det(Ci
= tr(A).det(Ci,.
,C») +
C2,...,
••> Cn) :
1 ■■;Cn)
det(Ci
ACn)
e(Mn,
AC2,...
= tr(A).det(il/).
i(K))".
ï Cn)
Il faut travailler en deux temps. On va commencer par montrer que /a(Ci,..., Cn) est
une forme n-linéaire alternée sur (.Mn,iO&)) •
Chapitre 2. Compléments d'algèbre linéaire
Chaque terme (Ci,..., Cn) ■-)• det(Ci,..., Ad,..., Cn) est clairement n-linéaire, car det
est n-linéaire et Ci ■-)• ACi est linéaire.
Il reste à prouver le caractère antisymétrique, dont on rappelle qu'il équivaut au
caractère alterné.
Au lieu de rédiger ce travail avec deux colonnes quelconques, nous allons démontrer
que ./U(C2,Ci,C3,...,Cn) = -/a(Ci,C2,C3, ...,Cn).
Étudions donc127 les n termes apparaissant dans /a(C2, Ci, C3,..., Cn) :
• det(AC2,Ci,C3,...,Cn) = -det(Ci,AC2,C3,...,Cn),
• det(C2,ACi,C3,...,Cn) = -det(ACi,C2,C3,...,Cn),
• et Vt € [3, n], det(C2, Ci,..., ACU..., Cn) = -det(Ci, C2,..., ACU ..., Cn).
En sommant ces n égalités, il vient rapidement
/A(C2,Ci,C3,...,Cn) = -(det(Ci,AC2,C3,...,Cn) + det(ACi,C2,C3,...,Cn)
+ det(Ci,C2,AC3,...,Cn) + --- + det(Ci,C2,...,ACn)).
On reconnaît immédiatement128
/A(C2,Ci,C3,...,Cn) = -/A(Ci,C2,C3,...,Cn).
La même méthode fonctionne avec deux colonnes quelconques, on peut donc affirmer
que Ja est bien une forme n-linéaire alternée sur Mn,iQ&)-
Mais on sait que l'ensemble de ces formes est une droite, dirigée par det.
Il existe donc une constante À G K telle que
VM € Mn(K), fA(M) = A.det(M).
Reste à montrer que cette constante À est égale à tr(A).
Or le choix de det parmi l'ensemble des formes n-linéaires alternées correspond à
det(/n) = 1.
Afin de déterminer À, on choisit donc M = 7n, c'est-à-dire que l'on choisit
(Ci,...,Cn) = (Eifi,...,jBnji)
la base canonique de .Mn,i(IK) pour déterminer À.
Calculons chacun des n termes de la somme définissant /^(^n)-
127. En utilisant systématiquement le caractère antisymétrique de det.
128. Seul l'emplacement des deux premiers termes a été échangé.
■CEI
2.9 Exercices corrigés du chapitre 2
rata
Ainsi, étant donné i G [l,n], calculons det(jEifi,..., AjE^i, ..., En^).
Puisque AjE^i est la i-ème colonne de A, ce déterminant vaut
I 1 (0) ahi (0) I
1 :
: 1
I (0) an,i (0) 1 |
Un déterminant par bloc donne ce déterminant égal au produit
aiyi 0 (0) I
Q>n,i (0) 1 |
Le premier déterminant vaut 1, et le second vaut a* car la matrice est triangulaire
inférieure.
Ainsi, det^i,!,...,^,!,...,^!) = aiyi.
On en déduit immédiatement
= det(AEhUE2,u...,EnA)+det(EhUAE2,u...,Enyl)
+ .-- + det(£M,£2,i,...,A£n,i)
= ^1,1 +^2,2 ^ ^an,n
= tv(A)
L'exercice est alors terminé.
Remarque
Cet exercice sera utile pour étudier la notion de wronskien129 apparaissant pour les
systèmes différentiels linéaires.
Ii-i
!29. cf. page 314.
ETtTil
Chapitre 2. Compléments d'algèbre linéaire
2.7
Soit ip l'endomorpliisme de M\X] défini par
VP G R[X], ip(P) = P(X) + P(l - X) - 2P(2X)
1. Déterminer le degré de ip(P) en fonction du degré de P ^ 0.
En déduire le noyau de ip.
2. Soit P0 = 1 et Vn G N*, P?7 = <^(Xn).
Montrer que (Pn)neN est une base de R[X}.
3. En déduire que Im(<^) est un hyperplan de R[X].
4. Soit ^ la forme linéaire sur R[X] définie par
,1/2
VPGR[JC], ^(P)= / P{t)dt.
Calculer vjj o (p.
En déduire que Im(<^) = Ker(^).
QQQ
1. Notons iV = deg(P) et apj ^ 0 le coefficient dominant de P. Alors
P(X) = aNXN + Ri(X), P(2X) = aN(2X)N + Rx(2X) = 2NaNXN + i?2(X),
où R\ et i?2 sont de degré inférieur ou égal à N — 1.
Enfin, en développant (1—X)N par la formule du binôme, on trouve (—X)N et des
termes de degré strictement inférieur à iV, d'où P(l—X) = {—\)Na^XN-\-R^(X)
avec deg(#3) ^ N - 1.
On en déduit
^(P) = (l + (-1)" - 2N+1)aNXN + i?(X),
où deg(R) ^N-l.
Deux cas se présentent :
• Si N ^ 1, on vérifie aisément que 1 + (-1)N - 27V+1 ^ 0, donc y>(P) a même
degré N que P,
• Si iV = 0, alors P(X) est un polynôme constant : P(X) = c G M, et on trouve
y>(P) = c + c - 2c = 0.
2.9 Exercices corrigés du chapitre 2 ^
On constate ainsi que
• P non constant implique ip(P) ^ 0,
• P constant implique <p(P) = 0,
et Ton peut donc immédiatement affirmer que Ker(y?) = Ropf], c'est-à-dire que
Ker(y>) est l'ensemble des polynômes constants.
2. Le polynôme Po = 1 est de degré 0.
Et si n > 1, on sait par la question précédente que <p(Xn) a même degré que Xn,
donc Pn est de degré n.
Ainsi, on a Vn € N*, deg(Pn) = n.
On en déduit que (Pn)neN est une base de R[X] grâce à la proposition 46 (p. 101).
3. Par ailleurs, comme (Xn)ne^ est une base de R[X], on sait que (ip(Xn)) N est
une famille génératrice de Im(<£>).
Mais tp(X°) = 0, donc on peut ôter ce vecteur de la liste.
La famille (ip(Xn))n N = (Pn)neN* est donc une famille génératrice de Im(<£>).
Or cette famille est libre (les degrés des polynômes sont deux à deux différents)
donc on peut conclure que (Pn)neN* est une base de Im(y?).
Ainsi, si l'on partitionne la base de R[X] : (Pn)neN en ((Po), (Pn)neN*), on peut
alors affirmer que Vect(Po) et Vect((Pn)neN*) sont des supplémentaires dans
R[X].
On voit ainsi que la droite D = R.l = R.X° est un supplémentaire de Im(<£>), ce
qui signifie bien que Im(y?) est un hyperplan de K[X].
Notons que D correspond à Ker(y>), nous avons donc démontré que Im(y?) est un
supplémentaire de Ker(y>) dans K[X], c'est-à-dire que
Tm(<p)®Kei(<p)=K[X].
4. Soit P G K[X]. On peut directement écrire
/•1/2
$ o tp(P) = / (P(t) + P(l -t)- 2P(2t)) dt.
Jo
Par linéarité, on obtient immédiatement
/•1/2 /»l/2 /.1/2
$ o tp(P) = l P(t) dt + P(l - t) dt - / 2P(2t) dt.
Jo Jo Jo
Chapitre 2. Compléments d'algèbre linéaire
On effectue naturellement le changement de variable s = 1 — t (dt = —ds) dans
la seconde intégrale :
,1/2 ,1/2 ,1
/ P(l-t)dt = - P(s)ds = + P(s)ds,
JO J\ Jl/2
et le changement de variable s = 2t (2dt = ds) dans la troisième intégrale :
,1/2 ,1
/ 2P(2t)dt = / P(s)ds.
Jo Jo
Enfin, on renomme t en s dans la première intégrale.
On conclut alors aisément130 :
,1/2 ,1 ,1
i>oip(P) = / P(s)ds + / P(s)ds- / P(s)ds
J0 Jl/2 JO
= [ P(s)ds- [ P(s)ds
Jo Jo
= 0.
L'application ipocp est donc nulle sur tout R[X].
On en déduit l'inclusion Im(y?) C Ker(^).
En effet, soit Q € Im(y?).
Il existe donc P € K[X] tel que Q = ip(P). On a alors ip(Q) = ip o ip(P) = 0,
donc on a bien Q € Ker(^).
L'inclusion est donc démontrée (remarquons qu'en fait, il y a même équivalence
entre Im(y?) C Ker(^) et ip o y = 0).
Si l'on était en dimension finie, on conclurait en vérifiant que les deux espaces
ont même dimension. Mais une telle méthode est inapplicable ici.
Nous allons utiliser les résultats de dualité, sur les hyperplans notamment.
Nous avons vu131 que Im(y?) étant un hyperplan, il alors existe une forme linéaire
non nulle / sur K[X] telle que Im(y?) = Ker(/).
On peut alors constater que Ker(/) C Ker(^).
Mais nous avons vu qu'alors / et ip étant des formes linéaires, il existe À G M tel
que i\> = A/.
130. Grâce à la relation de Chasles.
131. cf. la proposition 78.
2.9 Exercices corrigés du chapitre 2
Or la forme ip est non nulle, puisque i/)(X°) = tp(l) = - ^ 0.
On en déduit À ^ 0, donc Ker(^) = Ker(/), ou encore Ker(tp) = Im(<£>).
Remarque
En reprenant ce que nous venons d'étudier, on constate que si un hyperplan est inclus
dans un autre, alors ils sont égaux.
Ce résultat se généralise : si dans un espace vectoriel E, on a deux sous-espaces
vectoriels F et G tels que F C G et F, G ont des supplémentaires de même dimension
finie132, alors F = G.
2.8 Les formules de Cramer
On considère une matrice A — («i,j)(i,j)G|i,nJ2 £ A^77(K) et une colonne B — (pi)^^^.
On considère le système
{S) : AX = B
alyixi H h ai,nxn = 6i
^n.l^l t" " " " i Q>ri n^n — On
(*A
d'inconnue X
G^fnfl(K).
\Xn J
On suppose det(^4) ^ 0.
1. Montrer que le système S possède une unique solution133.
2. Pour i dans [l,n], on note AU la matrice A dans laquelle on remplace la z-ème
colonne134 par la colonne B.
Montrer que la solution de (S) est alors donnée par les formules135
det(Mi)
ViG[l,n], Xi
det(A)
132. La dimension d'un supplémentaire de F s'appelle la codimension de F ; tous les supplémentaires
de F ont la même dimension.
BTigl
Chapitre 2. Compléments d'algèbre linéaire
Q2j]
1. La question est aisée. Ayant un déterminant non nul, la matrice carrée A est
inversible.
On a alors de manière évidente136
AX = B <=> X = A~lB,
ce qui signifie que X = A-1 B est Tunique solution de (5).
2. Les preuves proposées ici ont l'élégance de jouer sur l'unicité de la solution
prouvée à la première question.
On considère la solution X du système.
• Notons (Ci,..., Cn) les colonnes de la matrice A.
Par définition137 on a
det(A) = detB(Ci,...,C„) et Vie[l,n], det(Mi) = detB(Ci, ...,B, ...,C„).
Mais le produit AX s'écrit AX = x\C\ H h#nCn, donc on peut remplacer138
B par xiCi H \-xnCn dans le calcul de det(M$).
Soit i un élément de [l,n|.
On peut alors écrire par n-linéarité139 :
det(Mi) = detB(Ci,..., B,..., Cn)
= detB(Ci, ...,xiCi H h#iCï H hxnCn,...,Cn)
= xidetB(Ci,...,Ci,...,Cn) H hXtdetB(Ci,...,Ci,...,C„)
H hxndetB(Ci,...
133. On dit alors que le système est un système de Cramer.
134. C'est-à-dire la colonne des coefficients de Xi.
135. Ces formules sont connues sous le nom de formules de Cramer, en hommage au mathématicien
suisse Gabriel Cramer (1704-1752).
Il faut noter que ces formules sont très peu utilisées pour résoudre concrètement des systèmes, dans la
mesure où la résolution requière plus d'opérations que la méthode de Gauss.
Mais il peut y avoir un intérêt en terme de résultats théoriques, comme dans l'exercice 2.2 page 188. Si
par exemple tous les coefficients de A et de B sont des entiers relatifs et que det(A) = ±1, alors les x%
seront dans Z.
136. Pour | =» | on multiplie l'égalité à gauche par A~l. Et pour | <= \ on multiplie l'égalité à gauche
par A.
137. En notant 3 la base canonique de -Mn,i(K).
138. Puisque l'on suppose que X est la solution de AX = B.
139. On utilise la linéarité par rapport à la z-ème colonne.
2.9 Exercices corrigés du chapitre 2 ^
Le i-ème terme est £idet#(Ci,..., Ci,..., Cn) = Xidet(A), et tous les autre termes
sont nuls140 car la i-ème colonne est égale à une des autres.
Il reste donc det(Mi) = Xidet(A), et comme det(A) ^ 0 on peut bien écrire
_ det(Mj)
Xi " det(A) '
et ce résultat est valable pour tout i dans [l,n|.
• Voici une autre démonstration, qui consiste141 à remplacer A-1 par -—7-rtcom(A)
det(A)
dans l'expression X = A~lB.
La i-ème coordonnée de cette égalité se lit
^ = di^4)g<COm^fc6fc-
Or les matrices A et Mi ne diffèrent que sur la i-ème colonne, donc les cofacteurs
de la i-ème colonne sont les mêmes.
Ainsi, *com(A)i>fc = com(A)kyi = com(Mi)kyi, et bj = (Mi)kyii donc
n
^*com(A)i>fc6fc = det(Mi)
par développement de det(Mi) par rapport à sa i-ème colonne.
det(Mi)
On retrouve bien l'expression de Xi =
det(A)
2.9
Soient a, b e1
On note E =
Pour a G M,
j c trois i
= «3 [A-]-
réels deux
on définit la forme
<£a '
à deux distincts.
linéaire
E -
P h-
cpc.eE* =
C(E,R)
= P{a)
par
140. Par caractère alterné du déterminant.
141. Le lecteur notera les similitudes entre cette démonstration et celle de la formule (que l'on réutilise
d'ailleurs ici) : *com(M)M = M*com(M) = det(M)/n, cf. le lemme 2 (p. 136).
Chapitre 2. Compléments d'algèbre linéaire
On définit également v/j G E* par
^ : E
P
Donner une condition nécessaire
liée dans E*.
—> R
—> ^(P) = / P(t)dt.
./a
et suffisante pour que la famille ((pa,<Pb,<Pc,il>) soit
Il existe différentes façons de traiter cet exercice, nous allons en voir trois.
1. On commence par revenir à la définition d'une famille liée. Ainsi,
(<Pa,<Pb,<Pc,il>) liée (dans E*)
t
3(a, /3,7, S) e R4\{0} : o% + /fy>6 + 7<^c + <fy> = 0^*
t
3(a, /3,7, S) e M4\{0} : VP € E, aVa(P) + M(P) + 1Ve{P) + ty(P) = 0
Mais on sait qu'une application linéaire est nulle sur E si et seulement si elle
est nulle sur tout élément d'une base de E. En choisissant la base canonique
(1,X,X2,X3) de jE7, on peut affirmer
(^a,^6,^c,^) liée (dans E*)
t
' œpa(l) + M(l) + 7¥>c(l) + «0(1) = 0
œpa{X) + fob(X) + wdX) + 6i>(X) = 0
a<pa(X2) + M(*2) + 7¥>c(*2) + W(X2) = 0
aVa(X3) + 0<pb(X3) + Wc(X3) + ôi>(X3) = 0
3(a,0,ltô)eR4\{O} : l
Il s'agit d'un système linéaire homogène de 4 équations à 4 inconnues (a,/3,7,<5).
Le fait que ce système homogène possède une solution autre que la solution
nulle équivaut à dire que le système n'est pas de Cramer, ou encore que son
2.9 Exercices corrigés du chapitre 2
déterminant, que je Ton va noyer A, est nul. Ainsi, on peut affirmer que
(<Pa,<Pb,<Pc,il>) liée dans E* <f> A =
<pa(l) <pb(ï) y>c(l) V(l)
<pa(X) MX) MX) *{X)
MX2) MX2) MX2) ï>(x*)
MX3) MX3) MX3) V(*3)
= 0
Il faut donc calculer ce déterminant. On a déjà de manière évidente <^a(l) = 1,
ipa(X) = a, ipa(X2) = a2 et ipa(X3) = a3, et de même pour les colonnes 2 et 3.
pb pb 12 _ J2
Pour la dernière colonne, on a tp(l) = / 1 dt = b— a, ip(X) = tdt = —-—,
Ja Ja ^
et ainsi de suite.
On peut donc affirmer que A =
a
„2
1 b-a
C 2
>3 3
b2 c2 6!^
b3 C3
b4-a4
On peut déjà mettre b—a en facteur dans la 4ème colonne, et comme on reconnaît
dans le bloc 3 x 3 « en haut à gauche » un déterminant de Vandermonde, on peut
s'inspirer de la méthode de calcul vue page 141. Ainsi, on a tout d'abord :
A = (b - a)
1
a
a2
a3
1
b
b2
b3
1
c
c2
c3
1
6+a
2
b2+ab+a2
3
63+62a+6a2+a3
4
On effectue alors les opérations C% <— Ci — C4 pour i ^ 4 (c'est-à-dire que l'on
soustrait la quatrième colonne aux trois autres), et on effectue un développement
par rapport à la première ligne. On obtient alors (le —1 venant d'un (—1)1+4) :
A = (-l).(6-o)
a—b
2
2a2-b2-ab
Za*-b*-abz-azb
b—a
2
2b2-ab-a
3
1.3 3 2
_2 _ fr2+afr+a2
C 3
3fr3_a3_a2b_ab2 3 fr3+b2a+ba2+a3
4 C 4
4 4
On constate que l'on peut encore mettre a — b en facteur dans la 1ère colonne142.
De même, on peut mettre b— a en facteur dans la 2ème colonne, et grâce au —1
en facteur on arrive143 à
142. Car 2a?-b2-ab = a2-b2+a2-ab = (a-b)(a+b)+a(a-b) = (a-6)(2a+6), et 3a3-b3-ab2-a2b =
o3 - 63 + a3 - ab2 + a3 - a2b = (a - b)(a2 + ab + b2 + a(a + 6) + a2) = (a - 6)(3a2 + 2a6 + b2).
143. La dernière égalité s'obtient grâce à l'opération Cz <— C3 — (2c — (a + b))C2
Chapitre 2. Compléments d'algèbre linéaire
A = (b -a)3
= (b-a)3
c —
b+a
1 I
2 2
2a+fr 2fr+q ^2 _ b2+ab+a2
3 3 C 3
3a2+2afr+fr2 3fr2+2afr+q2 3 _ fr3+fr2a+fra2+a3
4 4 C 4
c —
0
a—6
3
a2-b2
2
1
2
26+a
3
362+2a6+a2
4
_2 _ b2+ab+a2
C 3
3 _ fr3+fr2a+fra2+a3
4
On peut à nouveau mettre a — b= —(b — a) en facteur dans la première colonne.
On ne détaille pas tous les calculs, on arrive assez aisément144 à
A =
24
• (4c3 + 2a3 + 46a2 + 2b2a - 6a2c - 4abc - 2b2c
- 2(a + 6)(3c2 + a2 + 2ab - 4ac - 26c))
I(c-6)(c-a)(6-a)4(c-^)
6
Or on a supposé a, 6 et c deux à deux différents, donc (c — 6)(c — a) (6 — a)4 ^ 0.
On en déduit que
a + b
A = i(c-6)(c-a)(6-a)4(c-^)=0
c —
= 0.
La conclusion de tout ce qui précède est que la famille (<^a, ipb,Vo VO est liée dans
E* si et seulement si145 c = —-—.
2
De toutes façons, rappelons qu'il est évident que a = b implique que la famille
est liée, puisqu'alors on trouve que les deux premiers éléments de la famille (<^a
et <^b) sont égaux. De même si a = c ou b = c, la famille est trivialement liée.
2. Dans cette seconde méthode, qui correspond encore plus aux compléments sur
la dualité, nous allons calculer le déterminant de la famille dans la base duale de
(1,X,X2,X3).
Ce déterminant a un sens puisque Ton a affaire à une famille de 4 éléments dans
un espace (E*) de dimension 4.
Soit donc B* = (/o,/i,/2,/3) la base duale de (1,X,X2,X3). Cette famille est
144. On trouve la factorisation en constatant qu'il est évident que A = 0 lorsque c = a ou c = b puisqu'il
y a alors égalité entre les colonnes Ci et Cz (ou Ci et Cz) dans le déterminant original.
145. Toujours dans l'hypothèse où les trois réels a, 6 et c sont deux à deux distincts.
2.9 Exercices corrigés du chapitre 2
Bref, la colonne des coordonnées de / dans la base B* est
définie par fi(X^) = ôiyj pour tout (i,j) G [0,3]2.
Calculons les coordonnées de y?a, y?a, ipa et ^ dans la base B*. Si / € E* se
décompose en / = c0/o + ci/i + C2/2 + c3/3, alors :
• on a /(l) = c0/o(l) + ci/i(l) + c2/2(l) + c3/3(l) = lc0 + Oci + 0c2 + 0c3 = c0,
• puis f(X) = c0fo(X)+c1f1(X)+c2f2(X)+c3f3(X) = 0c0 + lci+0c2+0c3 = cu
• et de même c2 = f(X2) et c3 = f(X3).
( /(i) ^
/w
/(*2)
V /(*3) J
Ainsi, la matrice de la famille (<^a, ipb,<Pa VO dans la base B* est
/ v>0(i) ¥>6(i) <pcQ) tpd(\) \
MX) <pb(X) MX) MX)
MX2) MX2) MX2) MX2)
\ MX3) MX3) MX3) MX3) J
Comme il s'agit d'une famille de 4 éléments dans un espace (à savoir E*) de
dimension 4, on sait que la famille (<pa,<Pb,<Pciil>) est liée si et seulement si
det#* (<£a> <#>> <£c> VO = 0) donc si et seulement si det(M) = 0.
Mais on reconnaît exactement le déterminant det(M) = A calculé lors de la
première méthode.
À partir de là, les méthodes deviennent les mêmes, et on arrive146 à
(<pa,<Pb,<Pc,il>) liée <=> A = 0 <=> c=——.
M =
3. Voyons une autre méthode, sans calcul de déterminant.
Commençons par montrer que la famille {jfa^b^c) est libre147.
Soit donc (a, /3,7) G M3 tel que atpa + fiipb + npc = 0e* •
Ainsi, VP € E, o%(P) + P<Pb(P) + 7<£c(P) = 0, ou encore
VP € E, aP(a) + /3P(6) + jP(c) = 0.
On peut choisir P = (X - b)(X - c) € E = R3[X], puisque P est de degré 2.
On obtient alors (a—b)(a—c)a = 0. Comme a^fteta^c,ona (a—6)(a—c) 7^ 0
146. Toujours en supposant que a, b et c sont deux à deux distincts.
147. Même remarque.
Chapitre 2. Compléments d'algèbre linéaire
et donc cette égalité implique que a = 0.
De même, en choisissant P = (X - a)(X — c) on obtient (b — a)(b — c)fî = 0 d'où
/3 = 0, et toujours par le même principe le choix P = (X — a) (X — b) aboutit à
7 = 0.
On arrive ainsi à (a, /3,7) = 0, donc la famille (<^a, <£&, ipc) est libre.
On sait qu'alors, si (<pai<Pbi<Pciil>) est liée, c'est que ip est combinaison linéaire
de (ipa,ipb,Vc)-
Il existe donc (A, B, C) G M3 tel que ip = Aipa + Bipb + &pc.
Là encore, on applique cette égalité en un polynôme particulier (on a droit à tout
élément de E, c'est-à-dire à tout polynôme de degré inférieur ou égal à 3).
On choisit un polynôme qui annule <^a, tpb et <^c, c'est-à-dire un polynôme qui
s'annule en a, b et c.
Bref, on choisit naturellement le polynôme Pq = (X — a)(X — b)(X — c) € E.
L'égalité ip = Aipa + Bipb + &pc donne en Po
V>(Po) = A.P0(a) + B.P0(b) + C.P0(c) = 0,
c'est-à-dire
rb pb
I P0(t)dt= / (t-a)(t-b)(t-c)dt = 0
Ja J a
Il existe différents moyens de calculer (par exemple le changement affine qui
transforme l'intégrale sur [a, b] en intégrale sur [—1,1]), mais on trouve aisément
(q-b)3(q + b-2c) _
12 " *
Comme a — b ^ 0, on en déduit a + b — 2c = 0, ou encore c = —-—.
On retrouve naturellement le même résultat qu'avec les deux premières méthodes.
Celle-ci est plus élégante, moins calculatrice, fait appel à des notions rappelant
l'interpolation de Lagrange.
Il y a néanmoins un défaut : ici, on n'a qu'une implication. Il reste à vérifier que
si c = —-—, alors la famille est liée.
On peut reconnaître là une idée vue en analyse148, lors du calcul approché
d'intégrales.
148. Algèbre et analyse ne sont pas à dissocier totalement.
2.9 Exercices corrigés du chapitre 2
La méthode de Simpson149'150 consiste à approcher l'intégrale151 / /(£)d£par
J a
/(«) + 4/(^)+/(6)
. , b — a
la quantité —-—
6
Revenons à l'exercice. En fait, il y a égalité si / est une fonction polynomiale de
degré inférieur ou égal à 3.
En d'autres termes, on a
VP e E, Ç P(t) dt=b-^ [P(a) + 4P (^±*) + P(b)
On peut traduire cette propriété avec les notations de l'exercice par
~6
VP G E, tf(P) = h—^ [<pa(P) + 4^(o+6)/2(P) + <pb(P)} ,
c'est-à-dire par
V> = "g" [^a + 4^(a+6)/2 + <Pb] •
Ainsi, dans le cas c = —-—, on a
V> = —g— [<Pa + 4y>c + <#>] •
Bref, ip apparaît comme une combinaison linéaire de <^a, tpb et <^c, ce qui fait que
la famille (<^a, <£&, <^c, ^) est bien liée.
Naturellement, penser à la méthode de Simpson n'est pas automatique - et de
toutes façons, on ne l'a pas redémontrée ici.
Il faudrait donc la démontrer, c'est-à-dire montrer qu'avec c = —-— on a bien
VP € E, J" P(t) dt = ^ [P(a) + 4P(c) + P(bj\.
Ce point est hors de propos ici, donc n'est pas redémontré152.
149. Thomas Simpson, mathématicien anglais (1710-1761).
150. cf. par exemple G. Costantini, Analyse première année, De Boeck (2013).
151. Plus précisément, on subdivise un intervalle, et on fait cette approximation sur chaque intervalle
de la subdivision.
152. Le lecteur pourra le vérifier pour P dans {1,X, X2,X3} et conclure par linéarité.
CHAPITRE 3
Réduction
En dimension finie, la réduction a pour but la recherche de bases dans lesquelles la matrice
d'un endomorphisme soit « la plus simple possible ».
Le début du chapitre s'intéresse à l'étude des sous-espaces stables. Il est en effet plus
simple, pour prendre un exemple concret, d'étudier un endomorphisme sur deux sous-
espaces de dimension 2 que sur un seul espace de dimension 4.
L'étape suivante est l'étude des éléments propres. Outre leur grand intérêt en algèbre
linéaire, ces éléments ont un rôle dans de nombreux domaines de la physique :
• Dans une équation d'onde, sur une corde vibrante de longueur L par exemple.
d2u d2u
Quand on cherche une solution de -^ = c2Au = c2^-^, on constate que pour
tout paramètre k € M+, les fonctions du type (£, x) i—> uo sin(kx + i/j) sin(kct + tp)
sont des solutions.
Mais si la corde est fixée en ses extrémités *, il faut : Vt € M, u{t^ 0) = u(t, L) = 0,
ce qui impose ip = 0 [ir] et kL multiple entier de 7r.
Le nombre k ne peut alors prendre qu'un nombre dénombrable de valeurs. Il en est
alors de même pour la pulsation fcc, ou encore pour la fréquence.
Ces fréquences correspondent aux différentes harmoniques du son produit par une
corde vibrante.
En effet, sachez qu'il est possible de démontrer que u est combinaison linéaire2 de
fonctions du type ci-dessus, notamment à l'aide des séries de Fourier.
1. C'est-à-dire en x = 0 et en x = L.
2. Ou plus précisément une série.
Chapitre 3. Réduction
Dans ce cas et dans le suivant, les fonctions qui apparaissent (ici x i—> sin(kx + ip))
sont des vecteurs propres du laplacien.
• On peut faire une étude similaire pour une peau de tambour au lieu d'une corde
vibrante. Au lieu de sinusoïdes, c'est une fonction de Bessel 3'4 (calculable à l'aide
d'une série entière notamment) qui apparaît dans le cas des solutions à symétrie
radiale.
• En mécanique quantique, le fait que les niveaux d'énergie d'un atome
d'hydrogène ne peuvent prendre que des valeurs discrètes vient du fait que l'opérateur de
l'équation de Schrôdinger5'6 possède des valeurs propres discrètes.
• L'utilisation du terme de « spectre » dans les domaines de la lumière et du son
est donc liée à l'emploi de ce terme pour désigner l'ensemble des valeurs propres,
définition que nous allons utiliser dans ce chapitre.
Quant à la trigonalisation et la diagonalisation, elles permettent notamment de faciliter
l'étude des endomorphismes et des matrices carrées et d'effectuer certains calculs, comme
par exemple leurs puissances successives.
On considère dans tout le chapitre un corps K qui, sans mention contraire, peut être
quelconque. Cependant, il sera parfois précisé quand les résultats en dépendront.
3. Friedrich Bessel (1784-1846). Mathématicien et astronome allemand, notamment réputé pour les
premières mesures de distance entre la Terre et certaines étoiles. Il introduit les fonctions (qui portent
aujourd'hui son nom) pour étudier les perturbations des trajectoires des astres.
4. Parmi les fonctions de Bessel, celles dites de première espèce sont des solutions développables en
série entière d'équations différentielles de la forme x2y"{x) + xy'{x) + (x2 — a2)y(x) = 0. Lorsque a est
un entier, il est appelé ordre de la fonction.
5. Erwin Schrôdinger (1887 - 1961), physicien autrichien né d'un père catholique et d'une mère
luthérienne; il travaille notamment aux universités de Breslau (l'actuelle Wroclav), d'Oxford, de Graz,
de Zurich et de Dublin. Réprouvant le nazisme et l'antisémitisme, il quitte l'Allemagne à l'arrivée au
pouvoir d'Hitler.
6. L'équation apparaît dans l'article « An Ondulatory Theory of the Mechanics of Atoms and
Molécules », dans Physical Review 28 (décembre 1926), pp. 1049-1070. Il s'agit d'une équation déterministe
dont la solution est une fonction d'onde complexe ^>, de sorte que \tp\2 correspond à une densité de
probabilité de présence. Erwin Schrôdinger reçoit le prix Nobel en 1933 pour la découverte de cette
équation ; il partage son prix avec Paul Dirac (1902-1984).
3.1 Stabilité, endomorphismes induits
Stabilité, endomorphismes induits
3.1.1 Définitions et premières propriétés
Définition 58
Soit / un endomorphisme d'un K-espace
vectoriel E.
On dit qu'un sous-espace vectoriel F de E est stable par f si
âVx e E, x e F => f(x) e F.
Dans ce cas, on définit l'endomorphisme
If : F —►
V
induit par f sur F,
F
fF(x) = f(x)
f(F) c F, c'
noté fp, par
est-
à-dire
Remarque
Attention à ne pas confondre avec /|ir, restriction de / à F, qui serait une application
linéaire définie sur F à valeurs dans E. En fait, fp est à la fois la restriction et la
co-restriction de / à F (on change l'espace de départ et celui d'arrivée).
Dans le cas de la dimension finie, on peut donner une vision matricielle du fait qu'un
sous-espace vectoriel est stable.
Proposition 84
Soient E un K-espace vectoriel de dimension finie n, / un endomorphisme de E1,
F un sous-espace vectoriel de E de dimension m et B une base de E adaptée à F,
c'est-à-dire une base de la forme B = (S/?, B') où Bf est une base de F.
Alors F est stable par / si et seulement si la matrice de / dans la base B est de la
forme
f A (*)
Ma^ / =
V ° (*)
oùAeMm(K).
En outre, on a dans ce cas A = Matj^ (//?). 7
7. C'est-à-dire que A est la matrice dans la base Bp de l'endomorphisme induit par / sur F.
Chapitre 3. Réduction
Démonstration
On note (ei,..., ep) la base Bf de F et B' = (ep+i,..., en).
| => | Supposons que F est stable par /.
Soit j G [l,p]. La j-ème colonne de Mat^C/) correspond aux coordonnées de f(ej) dans
la base B.
Plus précisément, notons /f l'endomorphisme induit par / sur F, et A = Mat#F(/F) sa
matrice dans la base Bf-
La j-ème colonne de A correspond aux coordonnées de Îf{^j) = f(^j) dans la base Bf.
Ainsi, on peut écrire f(ej) = aijei H h apjep.
On en déduit immédiatement que f(ej) = aijei H h apjep + Oep+i H h 0en, c'est-
à-dire que les coordonnées de f(ej) dans la base B sont (ai j,..., ap j, 0,..., 0), ou encore
que la j-ème colonne de Mat#(/) est
hV,3
\ ° /
On n'a a priori aucune information sur /(ep+i), ..., /(en), donc la matrice Mat#(/)
s'écrit
/
MatB(/) =
Ol.l • • • ûl,p
\
V
ap,l
o
0
VtV
0 *
/
On constate en outre que l'on a bien réussi à écrire Matg(/)
i4 = MatB,(/p).
A (*)
0 (*)
, avec
Réciproquement, supposons la matrice de / de cette forme.
3.1 Stabilité, endomorphismes induits
On a8 pour tout j dans [l,p]
f(ej) = J>2 rni1j^i = aij6i H H ap,iej + O^p+i H h 0en.
Comme ei, ..., ep G F on en déduit9 f(ej) G F, et ce pour tout j dans [l,p|.
Soit enfin x G F. Comme Bf = (ei, ...,ep) est une base de F, il existe (a?i, ...,xp) € Kp
tel que X = xiei H h xpep.
On en déduit par linéarité de / que f(x) = xif(e\) H \-xpf(ep), c'est-à-dire que f(x)
est combinaison linéaire de /(ei), ..., f(ep) qui sont éléments de F. On a donc f(x) G F.
Nous venons de prouver que Va; € F, /(x) € F : le sous-espace vectoriel F est bien stable
par/.
Notons au passage que pour montrer qu'un sous-espace vectoriel F est stable par un
endomorphisme /, il suffit qu'une base de F (ou seulement une famille génératrice de F)
ait toutes ses images par / dans F.
Proposition 85
Soient E un K-espace vectoriel de dimension finie, Fi, ..., Fr des sous-espaces
vectoriels de E tels que E — F\ 0 F2 0 • • • 0 Fr, et S une base de F adaptée à cette
décomposition en somme directe10.
Alors, Fi est stable par / pour tout i dans [1,7'], si et seulement si la matrice de /
dans la base B est de la forme
( A, (0) ... (0)\
(0) A2 ■-. i
: ••■ ••• (o)
V (0) ... (0) Ar j
où 11 chaque Ai est une matrice carrée dont le nombre de lignes12 égale la dimension
de Fj.
En outre, on a alors13
Vie|[l, r], Ai=UatBi(fFi).
MatB(/) -
8. En lisant la j-ème colonne de M = Matjg(/).
9- F étant un sous-espace vectoriel de E.
Chapitre 3. Réduction
Démonstration
La démonstration est analogue à celle de la proposition 84. Pour tout i dans [l,r], on
note rrii la dimension de jFJ.
On écrit alors chaque base Bi = (e^i, ...,ei,mi), et donc en les regroupant on obtient
B = (el,l> •••) el,mi j ^2,1, •••, ^2,7712) •••) er,lj •••> &rymrJ-
Si Ton suppose que pour tout i dans [l,r], F» est stable par /, alors :
> Pour j G [l,rai], la j-ème colonne de Mat#(/) correspond aux coordonnées dans la
base B de f(eij). Comme eij G Fi qui est stable par /, on a f(eij) = fFi(ei,j)> qui14
s'écrit a\jelyl + • • + a^lfieiimi.
On a donc f(eij) = a\ j-ei.H hajni jei,mi+0e2,iH hOe2,m2H h0er,iH hOer,mr.
La j-ème colonne de Mat#(/) est donc
»wiij
v ° /
Pour j € [1,7712], la (j + rai)-ème colonne de Mat^C/) correspond aux coordonnées dans
la base B de /(e2j). Comme e2,j € F2 qui est stable par /, on a /(e2j) = fF2(e2j),
qui15 s'écrit af^.i + • • • + a^2 ^2,7712-
On a donc
/(e2,j) = Oei,i + • • • + Oei,mi
+a1Je2,i H h am2)je2)mi
+0e3,i + • • • + Oe3,m3 + • • • + 0er,i + • • • + 0er,mr.
10. C'est-à-dire une base de la forme B = (#i,#2, ...,#r) où pour tout i dans [l,r], #i est une base
de Fi.
11. C'est-à-dire pour tout i dans [l,r].
12. Et donc de colonnes.
13. C'est-à-dire que Ai est la matrice de l'endomorphisme induit par / sur Fi.
14. D'après la j-ème colonne de A\, dont on écrit a\ . le coefficient en place (z, j).
15. D'après la j-ème colonne de ^2, dont on écrit o? . le coefficient en place (z, j).
3.1 Stabilité, endomorphismes induits
/ n \
La (j + rai)-ème colonne de Mat^C/) est donc
*U
a:
0
• Après r itérations, on arrive finalement à
V ° /
/ ni
MatB(/) =
*M
X77ll,l
xl,mi
ai, m 0
77li,77li
0 a
i,i
0 a;
7712,1
0
a? ™
1,7712
2
7712,7712
0
0
0
0
0
0
0 0
*1.1
y o ... o o ... o
ce qui correspond plus simplement à l'écriture diagonale par blocs
/ Ax (0) ... (0) \
77lr ,1
MatB(/) =
(o) a2 ••. ;
; ••. ••. (o)
V (0) ... (0) Ar J
ll,mr
Remarque
On pourra faire le lien entre ce résultat et le théorème 8 page 112 qui montre que connaître
un endomorphisme équivaut à connaître ses restrictions à des sous-espaces vectoriels en
BFTil Chapitre 3. Réduction
somme directe ; mais ici les zéros viennent de la stabilité, qui n'était pas considérée dans
ce théorème.
QQQ Signification en terme de stabilité d'une matrice triangulaire
( \
Proposition 86
Soient E un K-espace vectoriel de dimension finie n, Z3 = (ei, e2,..., en) une base de
E et f un endomorphisme de E.
Alors la matrice M — Mat#(/) est triangulaire supérieure si et seulement si les
I sous-espaces F\ — ULei = Vect(ei), F2 — Vect(ei,e2), F3 = Vect(ei,e2,e3), ..., I
Fn_i = Vect(ei,e2, ...,en_i) et Fn = Vect(ei,e2, ...,en) = E sont stables par /.
Remarque
Citer Fn se fait par cohérence mais est inutile, puisque Fn = E est stable par tout
endomorphisme / de E.
Démonstration
La méthode est similaire à celle des propositions précédentes et n'est donc pas détaillée.
Le fait que /(e^) G Fk = Vect(ei, ...,efc) équivaut au fait que les coefficients de la fc-ème
colonne sont nuls de la ligne k + 1 à la ligne n.
Exemple
Soit / un endomorphisme de Rn[-X] tel que Vfc ^ n, Mfc[^] est stable par /.
Alors la matrice de / dans la base (X0,^*1, ...,Xn) est triangulaire supérieure16.
ESK] Cas d'endomorphismes commutant
On est parfois amené à étudier deux endomorphismes en même temps.
En général, leurs interactions peuvent être fort complexes, mais il existe un cas particulier
où l'on a plus de résultats, c'est quand les deux endomorphismes commutent (on ira assez
loin avec le théorème de diagonalisation simultanée17).
Commençons par énoncer un premier résultat.
16. Le lecteur s'en convaincra aisément, en écrivant par exemple la matrice de l'endomorphisme
P(X) —* P(X) + (X + l)P'(X).
17. cf. théorème 17 page 259.
3.1 Stabilité, endomorphismes induits
jggj
Proposition 87 j
Soient f et g deux endomorphismes qui commutent18 d'un K-espace vectoriel E. |
I Alors le noyau et l'image de chaque endomorphisme sont stables par l'autre endo-
morphisme19.
Démonstration
Étant donnée la symétrie de l'énoncé, on montre seulement que Ker(/) et Im(/) sont
stables par g (le reste se démontrerait en échangeant partout f et g).
Cette preuve n'est pas difficile, mais illustre (comme souvent en algèbre) l'importance
de bien écrire au fur et à mesure les hypothèses (et d'avoir à l'esprit ce que l'on veut
prouver).
L'hypothèse est que / o g = g o /, c'est-à-dire que
Vxe£, f{g(x))=g(f(x)).
Montrons pour commencer que Ker(/) est stable par g.
Soit donc x G Ker(/), on veut montrer que g(x) G Ker{/).
Calculons donc f(g(x)).
Grâce à l'hypothèse, f(g(x)) = g[f(x)). Or a; € Ker(/) signifie que f(x) = 0, donc
f(g(x)) = g(f(x)) = #(0) = 0 par linéarité de g.
Ainsi, on aboutit à f(g(x)) = 0, ce qui signifie que l'on a bien g(x) G Ker(/).
La stabilité de Ker(/) par g est ainsi démontrée.
Montrons maintenant que Im(/) est stable par g.
Soit donc y G Im(/), on veut montrer que g(y) G Im(/).
Le fait que y G Im(/) signifie qu'il existe x G E tel que y = f(x).
On sait alors par hypothèse que g(y) = g(f(x)) = f(g(x)).
On note alors x' = g(x) £ E. On a, ainsi g(y) = f(x'), ce qui signifie que g(y) € Im(/).
Ainsi, Im(/) est bien stable par g.
Nous verrons que la stabilité du noyau se généralise à la stabilité de sous-espaces
particuliers20, les sous-espaces propres (que l'on va définir ci-après).
18. C'est-à-dire tels que / o g = g o /.
19. C'est-à-dire que Ker(/) et Im(/) sont stables par g> et Ker(#) et Im(^) sont stables par /.
20. Ce sera justement une étape clé de la preuve du théorème 17 page 259.
Chapitre 3. Réduction
Éléments propres
Définitions
Définition 59
Soient E un K-espace vectoriel et / G C(E) un endomorphisme de E. Alors :
1. Soit À G K. On dit que À est une valeur propre21 de f si
3a; eE, x^Oe ' f(x) = Xx.
2. Si À G K est une valeur propre de /, on appelle vecteur propre de f associé à la
valeur propre X tout vecteur x G E, x ^ 0^; tel que f(x) — Xx.
3. Si À G K est une valeur propre de /, on appelle sous-espace propre de f associé à
la valeur propre X la réunion de {0 e} et de l'ensemble des vecteurs propres de /
associés à À. Cet ensemble est noté E\(f), et il est clair que
Ex(f) = {x&E, f{x) = \x}.
J
Remarque
Le lecteur doit noter le fait que l'hypothèse x ^ 0# est capitale22.
Définition 60
Dans les mêmes conditions, le terme d'éléments propres désigne l'ensemble des
valeurs propres et des vecteurs propres (ou sous-espaces propres associés).
Remarque
Ainsi, si un énoncé vous demande de déterminer les éléments propres d'un
endomorphisme, il faudra déterminer ses valeurs propres et les sous-espaces propres
correspondants.
Remarque importante
On notera bien que 0^ n'est jamais un vecteur propre.
21. Le terme français de valeur propre semble avoir été introduit par Camille Jordan (1838-1922).
22. Si l'on autorise x = 0.e, alors l'égalité f(x) = Xx serait valable pour tout À 6 K.
3.2 Éléments propres
i
r
U"
;t
Encouragé à poursuivre des études en mathématiques du
fait des capacités qu'il y montra à la King's Collège School,
Cayley entra au Trinity Collège de Cambridge en 1838. Il
obtint à la fin de ses études un poste de chercheur à
Cambridge, mais d'une durée limitée, et au bout de quatre ans
il s'orienta vers de nouvelles études à l'issue desquelles il
fut admis au barreau en 1849. Il avait déjà publié de
nombreux articles de mathématiques et continua à en produire
une grande quantité malgré son métier d'avocat. Il devint
finalement professeur de mathématiques à Cambridge en
1863 et put alors se consacrer pleinement à cette carrière
de chercheur, faisant fi de la dirninution substantielle de
ses revenus.
Arthur Cayley est surtout connu pour ses travaux en algèbre" et en géométrie''.
Son nom reste attaché aux célèbres octonions (aussi appelés octaves), qui se placent
dans la lignée des quaternions comme construction d'une algèbre de dimension
finie sur R s'efforçant de conserver un maximum des propriétés de R et de C (les
quaternions perdent la commutativité du produit, les octonions perdent en plus
l'associativité).
a. Comme On the Thcory of Linear Transformations, Cambridge Mathematical Journal 4 (1845), pp. 193-209.
b. cf. par exemple A Sixth Memoir upon Quantics, Philosophical Transactions of the Royal Society of London 149 (1859),
pp. 61-90.
Arthur Cayley
(1821-1895)
Proposition 88
Soient E un K-espace vectoriel, / G C(E) un endomorphisme de E et À G K. On a
alors :
1. À est une valeur propre de / si et seulement si Ker(/ — XMe) ^ {0e}, c'est-à-dire
si et seulement si / — XMe n'est pas injectif.
2. Si À est une valeur propre de /, alors le sous-espace propre de / associé à À est
ExU) = Ker(/ - XIdB).
§gy Chapitre 3. Réduction
Démonstration
La démonstration est à retenir, notamment l'équivalence suivante.
Soient x G E et A G K, alors
f(x) = Xx <=> f(x) - Xx = 0
<=* /(x) - XIdE(x) = 0
<=* (/-A/^)(x) = 0
<=> x € Ker(/ - XIdE)
Une fois cette équivalence établie, les deux points se démontrent rapidement.
Soit donc A G K.
1. A est une valeur propre de / si et seulement s'il existe x € jE7, x ^ 0# tel que
f(x) = Ax, c'est-à-dire si et seulement s'il existe x ^ Oe tel que x G Ker(/ — Xlds).
Ce résultat équivaut à Ker(/ - XIdE) <J- {0^}, c'est-à-dire23 à
Ker(/ - XldE) î {0^}.
2. Soit x e E. Grâce à l'équivalence établie précédemment,
x e Ex(f) <=> f(x) = Xx<=>xe Ker(/ - XI dE),
ce qui permet de conclure que E\(f) = Ker(/ — XI ds)
Remarque
On peut noter E\(f) = Ker(/ — XMe) pour tout24 A dans K. Alors A sera valeur propre
de / si et seulement si E\(f) ^ {0 e}-
Les définitions de valeurs et vecteurs propres (et de sous-espaces propres) peuvent être
étendues aux matrices carrées.
23. Car on a toujours {0^} C Ker(/ — XIcLe)-
24. C'est-à-dire sans savoir si A est une valeur propre de /.
3.2 Éléments propres
Définition 61
Soient n G N* et M G Mn(K). On note E = Kn et on considère / G C(E) l'endo-
morphisme canoniquement associé25 à M.
On appelle alors valeurs propres, vecteurs propres associés et sous-espaces propres
associés de il/ respectivement les valeurs propres, vecteurs propres associés et sous-
espaces propres associés de l'endomorphisme /.
Remarque
En identifiant Kn et l'ensemble des matrices colonnes .Mn>i(K), l'endomorphisme /
correspond à X i—> MX.
Pour cette raison, on utilisera souvent pour les matrices la notion suivante, à la place de
celle de vecteurs propres26.
Définition 62
Soit n G N* et il/ G Mn(K).
Si À G K est une valeur propre27 de i\/, alors on appelle colonne propre de il/
associée à la valeur propre À un élément X G A/(77)i(K), X ^ 0, tel que MX — XX.
Définition 63
Si / est un endomorphisme d'un K-espace vectoriel de dimension finie, on appelle
spectre de f et l'on note28 Sp(/) l'ensemble des valeurs propres de /.
De même, si M est une matrice carrée29 on appelle spectre de M et l'on note Sp(M)
l'ensemble des valeurs propres de M.
25. Rappelons que cela signifie que la matrice de / dans la base canonique de E = Kn est M.
26. Qui seraient des éléments de Kn.
27. On démontrerait aisément, grâce à la remarque précédente, que A est une valeur propre de M si
et seulement s'il existe une colonne X ^ 0 telle que MX = XX.
28. Parfois, la notation a remplace Sp.
29. C'est-à-dire M élément de Mn(K).
U£Jj| Chapitre 3. Réduction
Remarque importante
Il faut une précision importante dans le cas des matrices.
Quand on parle d'un endomorphisme /, il est défini sur un espace vectoriel jE7, qui est
lui-même défini sur un corps K. Les valeurs propres sont donc cherchées dans K.
De même, si on donne M G Mn(K), on cherche a priori les valeurs propres dans K.
Lorsque K = C, on travaille dans C
Mais si on donne une matrice n x n k coefficients réels, cette matrice peut être vue
comme un élément de Mn(M) ou comme un élément de .Mn(C), et donc on peut chercher
l'ensemble de ses valeurs propres réelles ou de ses valeurs propres complexes.
Dans ce cas, pour préciser, on placera le corps en indice, c'est-à-dire que l'on notera
• SpK(M) l'ensemble des valeurs propres réelles de M ;
• Spc(M) l'ensemble des valeurs propres complexes de M.
On notera que l'on a évidemment SpR(M) C Spc(M), et en fait on verra que
SpR(M) = MnSpc(M).
Remarque
La notion de spectre n'est ici définie qu'en dimension finie.
En dimension infinie, le spectre de / désigne généralement l'ensemble des À tels que
/ — XI dp ne soit pas inversible.
En dimension finie, À valeur propre équivaut à / — Xldp non injectif donc à / — XMe
non bijectif, mais cette équivalence disparaît en dimension infinie.
Dans ce cas-là, on parlera simplement de l'ensemble des valeurs propres.
Avant d'étudier de premiers exemples, voyons un résultat simple concernant les endo-
morphismes induits.
Proposition 89 '
Soit / un endomorphisme d'un espace vectoriel E1, et soit F un sous-espace vectoriel
de E qui soit stable par /.
On note fp l5 endomorphisme (de F) induit par /.
On peut alors affirmer que
1. Sp(/F) c Sp(/).
2. Si A e Sp(/F), alors Ex(fF) =Fr\Ex(f).
3.2 Éléments propres
Démonstration
1. Soit A G Sp(/f).
Ainsi, À est une valeur propre de /f, donc il existe x € F, x ^ 0 tel que /f(#) = Ax.
Mais on a aussi x € jE7, et /f(#) = /(#) par définition de /.
On a ainsi trouvé x G i£, x ^ 0 tel que /(x) = Ax, donc A est une valeur propre de
/, c'est-à-dire que A G Sp(/).
L'inclusion Sp(/f) C Sp(/) est ainsi démontrée.
2. Soit A une valeur propre de /f-
On sait que si g est un endomorphisme de E tel que F est stable par #, alors
Ker(0F) = GnKer(0).
Il suffit d'appliquer ce résultat à g = f — XI dp (et alors gp = /f — A/cIf) pour
obtenir le résultat.
Exemples
Nous verrons dans la suite30 comment calculer d'abord les valeurs propres d'une matrice
ou d'un endomorphisme en dimension finie, puis comment déterminer les sous-espaces
propres associés.
Mais dans certains cas31 le plus simple est de revenir à la définition.
Cherchons sur quelques exemples l'ensemble des valeurs propres et vecteurs propres32
associés à des endomorphismes classiques.
1. Soit E = C°°(IR,]R) le M-espace vectoriel de l'ensemble des fonctions réelles,
indéfiniment dérivables sur R.
On considère l'endomorphisme de dérivation :
D : E —* E
f —► D(f) = f>
Déterminons les éléments propres33 de D.
Soit A € M (comme dit précédemment, E étant un M-espace vectoriel, on ne cherche
que des valeurs propres dans K = R)
Alors A est une valeur propre de D si et seulement s'il existe / € E, / ^ 0, telle
30. Notamment à l'aide du polynôme caractéristique.
31. Notamment pour les endomorphismes en dimension infinie.
32. Ou des sous-espaces propres.
33. On notera bien qu'ici, la variable est la fonction /.
gjj Chapitre 3. Réduction
que D(f) = Xf.
Ainsi, il « suffit » de résoudre l'équation D(f) = Xf et de voir s'il existe (ou pas)
d'autres solutions que / = 0.
Soit / G E. Ici, D(f) = Xf équivaut à f = Xf, c'est-à-dire Vz G M, f'(x) = Xf(x).
Nous aboutissons ainsi à une équation différentielle. La solution générale en est
Vz € M, f(x) = CeXx (C e R).
On constate par exemple que la fonction g\ : x \—> eXx vérifie g\ € E, g\ ^ 0 et
D(gx) = A^a.
Ainsi, À est valeur propre de D.
Ce résultat est valable avec À quelconque, c'est-à-dire que tous les réels sont valeurs
propres de -D, donc Sp(D) = R.
Notons que nous verrons qu'un tel résultat n'est possible qu'en dimension infinie.
En effet, dans un espace vectoriel de dimension n, un endomorphisme a au plus n
valeurs propres.
Quant au sous-espace propre associé à À, il s'agit de l'ensemble des solutions de
l'équation différentielle, c'est-à-dire l'ensemble des multiples de #a-
En d'autres termes34, VA € M, EX(D) = R.g\ = Vect(g\).
Comme dans d'autres exemples, on pourra en déduire ultérieurement la liberté de
la famille des (g\)\eR-
2. En identifiant polynôme et fonction polynomiale, on peut voir F = R[X] comme
un sous-espace vectoriel de E = C°°(IR,IR).
Et la dérivée d'un polynôme étant un polynôme, on peut affirmer que F est stable
par l'endomorphisme D défini dans l'exemple précédent.
On peut ainsi étudier l'endomorphisme induit d = Dp défini par
d = DF : F —> F
P t—> d(P) = Pf
Grâce à l'exemple précédent, on sait que Sp(d) C Sp(-D) = M, ce qui ici n'est guère
intéressant.
Mais si À est une valeur propre de d, on sait aussi que E\(d) = F C\ E\(D).
Or E\(D) est la droite dirigée par la fonction g\, et si À ^ 0, cette fonction n'est
34. Ici, l'espace propre associé à A est toujours une droite.
3.2 Éléments propres
EPE1
pas polynormale.
Ainsi, si À 7^ 0, E\(d) = {0f}, donc À n'est pas valeur propre.
Si en revanche À = 0, alors go = 1 est un polynôme et ainsi
E0(d) = F H Vect(l) = Vect(l) ^ {0F}.
On peut conclure que Sp(d) = {0} (c'est-à-dire que 0 est l'unique valeur propre de
d) et que E0(d) = Ker(d) = Vect(l).
3. On considère maintenant le C-espace vectoriel des suites complexes, c'est-à-dire
E = CN.
On définit alors ce que l'on appelle fréquemment un « shift », ou décalage, de la
façon suivante.
On considère l'endomorphisme S de E défini par
S : E —> E
u = (v>n)neN '—> S(u) = v, où Vn e N, vn = îzn+i
Si l'on préfère, 5(^0,^1,^2,^3, •••) = (^1,^2,^3, •••)•
Pour chercher valeurs et vecteurs propres, on considère À € C et l'on cherche à
résoudre l'équation S(u) = Xu d'inconnue u € E.
Cette égalité équivaut à Vn € N, (S(u))n = \un ou encore à
Vn e N, îzn+i = \un.
On reconnaît directement une suite géométrique de raison À.
La solution générale de S(u) = Xu est donc
3C £ C : Vn € N, un = CXn.
En notant v\ € E la suite définie par Vn € N, (^A)n = Àn, on a
Ker(5-A/dB)=Vect(t;A).
On notera que cet espace n'est jamais réduit à {0^} (car si À = 0, avec 0° = 1, la
suite vo vaut v0 = (1,0,0,0,...) ^ 0#).
On peut conclure que tout nombre complexe À est valeur propre (c'est-à-dire
Sp(5) = C) et que VA € C, EX(S) = C.vx (une droite).
KETtl Chapitre 3. Réduction
4. Continuons sur cet exemple, mais sur un sous-espace stable.
On constate que si la suite u = (un)ne^ est bornée, alors la suite S(u) est aussi
bornée.
Considérons donc l'ensemble des suites bornées dans C, c'est-à-dire l'ensemble £°°
défini par
e°° = {u = (iin)n€N eCN : 3Me R+> Vn € N, \un\ ^ M}.
On sait que H°° est un sous-espace vectoriel de .E, et que ce sous-espace est stable
par S.
Posons35 S' = Se°o l'endomorphisme induit par S sur £°°.
Si À est une valeur propre de S", les calculs précédents impliquent qu'un vecteur
propre associé u est de la forme u = (CXn)neN.
La constante C est non nulle36 et u doit être élément de t°°.
Ainsi, la suite (Xn)neN doit être bornée, ce qui équivaut à |À| ^ 1.
On peut déjà affirmer que À valeur propre de S' implique
XeD= {zeC, |z|< !}•
Réciproquement, si A G D, alors la suite géométrique v\ définie précédemment
appartient à £°° et vérifie S'(v\) = S(v\) = X.v\ avec v\ ^ 0, donc À est valeur
propre de S'.
On peut maintenant conclure Sp(5/) = D et que VA € D, E\(S') = C.v\.
5. Si l'on considère encore E = CN l'ensemble des suites réelles, on peut définir un
décalage « dans l'autre sens » par
T : E —* E
u = (îXn)neN '—> T(u) = w, où Wo = 0 et Vn € N*, wn = un-\
Autrement dit, l'endomorphisme T de E est défini par
T(îi0,ÎAl,ÎA2,î*3,—) = (0,îiO,^l,t42,..-)-
35. Pour alléger les notations.
36. Par définition d'un vecteur propre, u^O.
3.2 Éléments propres
Pour À € C, si Ton cherche à résoudre T(u) = Xu d'inconnue u G E, on a les
équations
0 = Xuo et Vn G N*, un-\ = Xun
On distingue deux cas :
• Si À = 0, alors Vn € N*, un-\ = 0un = 0, ce qui implique Vn G N, un = 0.
On a donc u = 0e-
• Si À 7^ 0, alors la première égalité donne uq = 0 et la seconde se réécrit
Vn€N*, un = -un-i.
On reconnaît une suite géométrique de raison —, et comme uq = 0 on a
A
i, «»=(!)
Vn € N, un = [ - ) u0 = 0.
Là encore, on a u = 0#.
Ainsi, quel que soit À € C, l'unique solution de T(u) = Xu est u = 0e-
L'endomorphisme T ne possède aucun vecteur propre, ni donc aucune valeur propre.
Ainsi, Sp(T) = 0.
Remarque
Nous verrons en dimension finie qu'un spectre peut être vide pour des endomorphismes
sur des R-espaces vectoriels réels, mais pas sur des C-espaces vectoriels.
Somme directe
Une propriété essentielle des sous-espaces propres d'un endomorphisme est donnée par
le théorème ci-après.
Théorème 14
Soient E un espace vectoriel et u G C(E). Alors
1. Si Ai, ..., Ar G K sont r valeurs propres de u deux à deux distinctes, alors les
sous-espaces propres associés E\l (u)t ..., E\v(u) sont en somme directe.
2. Toute famille de vecteurs propres37 associés à des valeurs propres deux à deux
distinctes est libre.
Chapitre 3. Réduction
Remarque
On pourra noter que ce théorème est aussi bien valable en dimension infinie qu'en
dimension finie.
Démonstration
1. Pour le premier point, on raisonne par récurrence sur r :
Pour r = 2, il faut montrer que, si Ai ^ A2, alors EXl(f) n E\2(f) C {0^}.
Soit donc x e EXl (/) H Ex2 (/).
Par définition des sous-espaces propres, on a f(x) = \\x et f(x) = À2#, d'où en
faisant la différence, (À2 — \i)x = 0e-
Puisque À2 — Ai ^ 0, on en déduit x = 0e et l'initialisation est démontrée.
Pour l'hérédité, soient r +1 valeurs propres de / deux à deux distinctes : Ai, ..., Ar,
Ar+i, on suppose que la somme EXl (/) H h E\r(f) est directe, on veut montrer
que EXl (/) + ••• + EXr (f) + #Ar+1 (/) est directe.
Il suffit de montrer38 que (EXl (/) + ■■■ + EXr(/)) H EXr+1 (f) C {0^}.
Soit donc x £ (EXl(f) + ■ • • + EXr(f)) HEXr+1(f).
D'une part, on sait qu'il existe x\ € EXl(f), ..., xr € EXr(f) tels que
X — X\ i~ • • • I Jjf •
D'autre part, on sait que x € EXr+1(f).
En appliquant / à l'égalité x = x\ H h xr, il vient39
/(x) = /(xi) + ..- + /(xr),
et par appartenance aux sous-espaces propres on en déduit
Ar+iz = Ai^i + • • • + Xrxr.
On remplace x par x\ H h xr et en faisant la différence des termes il reste
(Ai — Ar+i)a;i H h (Ar — Ar+i)a;r = 0#
37. Il est à noter que ces vecteurs seront donc non nuls, par définition d'un vecteur propre.
38. cf. la proposition 48 page 107.
39. Par linéarité de /.
3.2 Éléments propres
On a une somme nulle d'éléments de E\(/),..., Er(f) qui sont en somme directe40
donc on peut affirmer que
Vz€ [l,rl, (\i-\r+i)xi=0E.
Comme les Ai — Ar+i sont tous non nuls, on en déduit Vz G [l,r], Xi = Oe et
finalement x = 0^, ce qui achève la preuve de l'hérédité, donc la preuve du premier
théorème par principe de récurrence.
2. C'est une conséquence générale : si Fi, ..., Fr sont des sous-espaces de E tels que
la somme Fi H hFr est directe, alors si x\ G Fi, ..., xr G Fr sont tous non nuls,
la famille (xi, ...,£r) est libre.
Exemples
Reprenons les familles de vecteurs propres trouvées précédemment.
1. Dans CN, la famille des suites géométriques ((^n)nGN) dont le premier terme
est égal à 1 est libre.
2. Dans C°°(R,R), si l'on pose,
VA G M, V* G M, g\(t) = eAt,
alors la famille de fonctions (g\)\eR est libre.
Quelques liens avec la stabilité
Proposition 90
Une droite est stable par un endomorpliisme si et seulement si ses vecteurs directeurs
sont des vecteurs propres de l'endomorpliisme.
Démonstration
Soit D = Kv avec v ^ 0.
Si D est stable par / € £(#), alors v e D implique f(v) € -D, donc il existe A € K tel
que f(v) = Xv.
Puisque v ^ 0, on en déduit que A est une valeur propre de /, et que v est un vecteur
propre associé.
40. C'est l'hypothèse de récurrence.
Chapitre 3. Réduction
Réciproquement, si v est un vecteur propre de /, il existe A € K tel que f(v) = \v€D
et alors il est évident que f(D) C D.
Un autre résultat peut s'avérer utile (par exemple, dans l'exercice 3.1).
Proposition 91
Si A est une valeur propre non nulle d'un endomorphisme /, alors le sous-espace
propre associé à A est contenu dans l'image de /, c'est-à-dire :
Ex(f)dm(f).
Démonstration
Il s'agit d'une preuve élémentaire.
Soit x e E\(f). On sait donc que f(x) = Xx.
Puisque A ^ 0, on peut diviser par A et on obtient par linéarité
■-'GO
En notant t = -x € E> on a x = f(t) € Im(/).
A
3 Cas de la dimension finie : le polynôme caractéristique
Définition 64
Si / est un endomorphisme d'un K-espace vectoriel de dimension finie, on appelle
polynôme caractéristique de f et on note Xf l'application41 définie par
Xf(X)=det(XIdE-f).
De même, si M G Mn{^) on appelle polynôme caractéristique de M et on note xm
l'application définie par
XM(X)=det(XIn-M).
41. Parfois, la notation Pf{X) est préférée à x/(^).
3.2 Éléments propres
Remarque
Selon les pays (et les « époques »), on peut trouver une définition légèrement différente
du polynôme caractéristique, à savoir det(/ — Xlds)- Ce choix correspond à multiplier
la quantité définie ci-dessus par (—l)n.
Nous allons vite réaliser que le plus important est la valeur des racines, les conséquences
du choix seront donc faibles42.
D'ailleurs, il faut au moins valider le nom de polynôme caractéristique, c'est-à-dire vérifier
que Xf e^ Xm sont effectivement des polynômes.
Proposition 92
Soient M G Ain(K) et / un endomorphisme d'un K-espace vectoriel E de dimension
finie n. Alors :
1. xm est un polynôme unitaire43 de degré n vérifiant
Xm(X) = Xn - trCil/)*""1 + ■ • ■ + (-l)ndet(M).
2. Si B est une base de E, et M = Mat^f/) désigne la matrice de / dans la base By
alors
Xf = Xm.
3. \f est un polynôme unitaire de degré n vérifiant
Xf(X) = Xn - M/)*"-1 + • • • + (-l)»det(/).
Remarque
Le deuxième point est loin d'être anodin.
Sil 'on a besoin du polynôme caractéristique d'un endomorphisme44 /, il suffira de fixer
une base B de E, d'écrire M = Mat#(/) et enfin de calculer xm-
42. Mais il faut bien fixer une définition. Celle du programme officiel concerne un polynôme unitaire,
voyons que c'est ce que nous obtenons avec le choix de la définition ci-dessus.
43. Si l'on choisit la définition xm(X) = det(M — XIn)} alors xm(X) est un polynôme de degré n,
mais on a xm(X) = (-l)nXn + (-l)n_1tr(M)Xn-1 + ... + det(M), et un résultat analogue dans le cas
d'un endomorphisme.
44. D'un espace E de dimension finie.
Chapitre 3. Réduction
Dans des espaces comme Kn ou Kn[X] par exemple, on choisira quasi systématiquement
la base canonique.
Démonstration
1. Pour le premier point, on raisonne par récurrence sur n € N*.
Dans le cas de la dimension n = 1, on a M = (m) et alors
Xm(X) = det(X - m) = X — m,
qui est bien un polynôme de la forme annoncée45.
Supposons le résultat vrai en dimension n, on considère alors une matrice M
élément de M n+i(K).
On l'écrit sous la forme
On a alors \m(X) =
M =
où N e Mn0&)i et où C et L sont respectivement une colonne et une ligne de n
éléments.
' XIn-N -C
—L X — ran+i)n+i
On effectue un développement par rapport à la dernière colonne.
Ce développement fait alors apparaître des termes de la forme ±Ci.det(Qi), où Qi
( XIn-N
est la matrice carrée obtenue en enlevant sa 2-ème ligne à I
V ~L
Dans cette matrice Qi, il ne reste que n — 1 lignes où se trouve l'indéterminée X.
Comme on sait que le déterminant est une combinaison linéaire de produits des
coefficients de la matrice, det(Qi) est forcément un polynôme en X de degré au
plus n — 1.
La somme des termes de la forme ±Ci.det(Qi) est ainsi un polynôme R € Kn_i[X].
Il reste un terme à étudier, qui est (-l)(n+1)+(n+1).det(X/n - N).(X - ran+i,n+i).
Par hypothèse de récurrence, det(XIn — N) = xn est un polynôme qui s'écrit
det(XIn -N) = Xn- tr(A0Xn_1 + • • •
(pour le moment, on ne s'intéresse pas au coefficient constant).
45. Le coefficient — m correspond à la fois à — tr(M)Xn x et à (—l)ndet(M).
3.2 Éléments propres
Ainsi, la formule du développement par rapport à la dernière colonne donne
XM = R+ (Xn - tr(Ar)^-1 + ...)(*- mn+1,n+1).
En développant, il vient
XM = Xn.X - tiiN)Xn-\X + Xn(-mn+iin+i) + Ru
OÙR! eKn-i[4
En regroupant les termes par degré on constate que
Xm(X) = X^1 - (tr(JV) + mn+i.n+i)Xn + Ri.
Comme tr(iV) + ran+i)n+i = tr(M), on a bien la forme annoncée.
Le principe de récurrence permet de conclure que pour tout entier n € N* et toute
matrice M G Mn(K), \m est un élément de K[X], unitaire, de degré n, dont le
coefficient en Xn~l vaut —tr(M).
Il reste à déterminer le coefficient constant.
Mais pour ce terme, il n'est point besoin de calcul : on prend X = 0, on trouve le
coefficient constant égal à Xm(0) = det(0Jn - M) = det(-M) = (-l)ndet(M).
2. Pour le deuxième point, rappelons46 que si N = Mat#(#), alors det(iV) = det(#).
En appliquant ce résultat à g = Xlds — f et donc
N = Mntt3(XIdE -f) = XMa,tB(IdE) - MatB(/) = XIn - M,
on a immédiatement \f = Xm-
Notons au passage que le résultat est indépendant de la base choisie, comme pour
la définition 51.
3. Pour le cas de l'endomorphisme, en se reportant aux définitions 45 page 116 et 51
page 134, on sait que si M = Mat#(/) (où B est une base quelconque de E) alors
det(/) = det(M) et tr(/) = tr(M), et on a vu ci-dessus que Xf = Xm-
Ainsi, l'écriture démontrée au point 1 pour M est immédiatement valable pour /.
Nous venons de voir que le polynôme caractéristique d'une matrice dans Mn(K) est
un polynôme unitaire de degré n. Une question peut se poser : y a-t-il réciproque ? En
d'autres termes, tout polynôme unitaire de degré n est-il le polynôme caractéristique
46. cf. définition 51 page 134.
Chapitre 3. Réduction
d'une matrice dans MnQfc)'? La réponse est affirmative, donnée par la proposition
suivante.
r N
Définition 65
Soit P G K[X] un polynôme unitaire de degré n. Il existe (un unique) (ao, ai,..., an-i) ^
Kn tel que P = Xn - an-iXn~l aiX - a0.
On appelle alors matrice compagnon de P la matrice
/ 0 1 0 ... 0 \
AI--
\ CLq Cil
0
0 1
... an-i )
Remarque
En d'autres termes, il y a des 1 sur la sur-diagonale, les coefficients ai sur la dernière
ligne, et des 0 partout ailleurs.
Nous allons maintenant vérifier ce que nous avons annoncé précédemment :
Proposition 93
Soit P un polynôme
unitair
caractéristique de M est P,
\
e et M la mati
c'est-à-dire :
\M =
ice
P.
compagnon
de P.
Alors
\
le polynôme
-J,
Démonstration
La preuve s'effectue par récurrence.
Pour n = 1, on a M = (ao) et xm = X — ao.
0 1
Pour n = 2, on a M
d'où
ao ai
Xm =
X -1
—ao X — ai
= X — a\X — ao
3-2 Éléments propres
par un calcul direct.
La récurrence n'est pas détaillée ici; si l'on suppose le résultat vrai pour les matrices
de taille n, en effectuant un développement par rapport à la dernière colonne dans la
matrice de taille n + 1 on tombe rapidement sur le résultat.
Remarque
Ces matrices47 pourront s'avérer utiles pour l'étude de suites récurrentes ou d'équations
différentielles.
Une autre manière d'expliquer l'indépendance vis-à-vis du choix de la base se retrouve
dans le résultat suivant.
Proposition 94
Soient J\I et il/' deux matrices semblables dans Mn{^)- Alors
\m = XM' ■
Démonstration
Par hypothèse, il existe P G GLn(K) telle que M' = P~lMP.
Alors, puisque In = P~lInP on a XIn-M' = X.P^InP-P^MP = P-1(XIn-M)P
par associativité du produit.
On peut alors conclure que
XM' = det(XJn-M')
= det(p-1(XIn-M)P)
= det(p-1).det(X/n-M).det(P)
= det(XIn -M) = xm,
puisque det(P-1) est l'inverse de det(P).
On notera que l'on aurait pu conclure plus rapidement.
En effet, l'égalité XIn - M' = p-1{XIn - M)P signifie que les matrices M' - XIn et
M — XIn sont semblables, et ç>n sait alors qu'elles ont le même déterminant.
Remarques
47. Ainsi que leurs polynômes caractéristiques
EE| Chapitre 3. Réduction
1. On dit que le déterminant, la trace et le polynôme caractéristique sont des
invariants de similitude, c'est-à-dire qu'ils sont égaux pour deux matrices semblables.
C'est ce qui permet d'étendre leur définition aux endomorphismes (en dimension
finie) : on les définit comme leurs équivalents pour la matrice de Pendomorphisme
dans une base quelconque, et le résultat est intrinsèque à l'endomorphisme car
indépendant de la base48.
2. La réciproque de ce résultat est fausse, c'est-à-dire qu'il existe des matrices non
semblables possédant le même polynôme caractéristique49.
En effet, considérons les deux éléments suivants de .M2OR) •
Il est alors évident que M et M' ont le même polynôme caractéristique, à savoir
XM = XM> = (X- 2)2.
En revanche, M et M' ne sont pas semblables50, car VP G GL2(M),
P~lMP = P-12I2P = 2P~XP = 2/2 = MÏ M'.
Proposition 95
Soit M dans MnQ&). Alors
Xni = \M-
Démonstration
On pose N = XIn- M, alors *N = XIn - lM.
On sait que det(*iV) = det(iV), le résultat est alors immédiat.
Le lien entre polynôme caractéristique et éléments propres est fort. En effet, on a lé
résultat suivant.
48. Car dans deux bases différentes les matrices seront semblables.
49. Et a fortiori, même trace et même déterminant.
50. On notera au passage qu'une matrice d'homothétie n'est semblable qu'à elle-même.
3.2 Éléments propres
Proposition 96
Si / est un endomorphisme d'un K-espace vectoriel de dimension finie E1, alors51
pour tout ÀeK,
AeSp(/) <=* \/(A) = 0.
Démonstration
Le fait que A G Sp(/) signifie qu'il existe x G jE7\{0^} tel que f(x) = Xx, ou encore tel
que (XIdE - f)(x) = 0. Ainsi,
A e Sp(/) ^=> Ker(XIdE - /) ^ {O^} <=> XIdE - f non injectif.
Comme on a affaire à un endomorphisme en dimension finie, Pinjectivité équivaudrait à
la bijectivité. Par contraposée,
XIdE — f non injectif «<=> XIdE — f non bijectif <é=> det(XIdE — /) = 0,
ce qui signifie bien Xf(X) = 0.
L'équivalence est ainsi prouvée.
Corollaire 14
Soit M e A4n(K). Alors pour tout A G K,
XeSp(M) <=> Xm(A)=0.
Démonstration
On note / Pendomorphisme de E = Kn canoniquement associé à M.
Par définition, A G Sp(M) équivaut à A € Sp(/), et on vient de voir que cette
appartenance équivaut à Xf(X) = 0.
Or par la proposition 92, comme M représente / dans une base, on a %/ = xm- Ainsi,
Xf(X) = 0 équivaut à xm(A) = 0, et le corollaire est démontré.
Remarque importante
Il a déjà été dit de faire attention au corps sur lequel on travaille. Si on se donne une
matrice à coefficients réels, on peut la'voir comme élément de Mnfà) ou de Mn(f£>).
51. Un autre moyen de se rappeler ce résultat est de se dire que l'ensemble des valeurs propres de /,
c est-à-dire le spectre de /, est l'ensemble des racines du polynôme caractéristique de /.
Chapitre 3. Réduction
Son polynôme caractéristique xm sera le même dans R[X] et dans C[X], et l'ensemble
des valeurs propres sera l'ensemble des racines de ce polynôme.
Mais le spectre réel sera l'ensemble des racines réelles de xm, alors que le spectre complexe
sera l'ensemble des racines complexes de %m, c'est-à-dire :
SpR(M) = {À€M, Xm(à)=0}
SPc(M) = {À€<C, XM(À)=0}.
On notera que l'inclusion entre ces deux spectres peut être stricte.
/
Corollaire 15
Soit M G A4n(K). Alors M et sa transposée ont le même spectre, c'est-à-dire :
Sp('M) = Sp(M).
Démonstration
Par la proposition 95, xm et %tM sont égaux, donc ont les mêmes racines, d'où le résultat
puisque les racines de ces polynômes sont les valeurs propres.
Remarque
En revanche, il n'existe pas de lien évident entre les colonnes propres de M et de *M.
Matrices et endomorphismes diagonalisables
Définition et premiers résultats
Définition 66
1. Soit / un endoniorphisme d'un K-espace vectoriel E de dimension finie.
On dit que / diagonalisable si la somme 52 de ses sous-espaces propres vaut E.
2. Soit A G fAn(K). On dit que A est diagonalisable si l'enclomorphisme de Kn
canoniquement associé à A est diagonalisable.
52. On rappelle que cette somme est systématiquement directe par le théorème 14.
3.3 Matrices et endomorphismes diagonalisables
sa
Exemple
Toute projection est diagonalisable.
En effet, si un endomorphisme p de E vérifie p2 = p, on sait53 que
E = Ker(p) 0 Ker(p - IdE).
Avec les notations introduites dans ce chapitre, ce résultat s'écrit E = Eo(p) 0 jEa(p), ce
qui signifie que p est diagonalisable.
De même, toute symétrie est diagonalisable.
En effet, si 5 € C(E) vérifie s2 = Id,E, on sait que E = Ker(s — Me) 0 Ker(s + Jd^), ce
qui s'écrit
jB = jBi(s)0jB_i(s),
et on a le résultat.
Remarque
Pour une matrice, il faut être attentif au corps sur lequel on travaille.
Si M € Mn(ïïk)i M peut avoir des valeurs propres complexes non réelles, auquel cas M
pourra être diagonalisable sur C sans être diagonalisable sur R.54
^^
Proposition 97
1. Un endomorphisme / d'un K-espace vectoriel de dimension finie est diagonalisable
si et seulement s'il existe une base B de E telle que Mat/3 (/) est diagonale.
I 2. Une matrice M G fAn(K) est diagonalisable si et seulement s'il existe P G GLn(K) I
telle que P~lMP est diagonale.
Démonstration
1. | =» | Supposons / diagonalisable, et notons Ai, ..., Ar ses valeurs propres deux à
deux distinctes.
Si on considère pour tout i € [l,r] une base Bi de Ex^f), l'hypothèse
EXl(f) © • • • © EXr(f) = E
53. N. Basbois et P. Abbrugiati, Algèbre première année, De Boeck (2013).
54. Néanmoins, si une matrice réelle est diagonalisable sur C avec des valeurs propres réelles, alors elle
est diagonalisable sur R.
EEE1
Chapitre 3. Réduction
implique que B = (Bi,..., Br) est une base de E, et dans cette base la matrice de /
est diagonale.
| <= | Soit B = (ei,..., en) une base de E dans laquelle la matrice de / est diagonale.
Quitte à changer l'ordre des vecteurs, on peut supposer que les rai premiers
éléments diagonaux sont Ai, que les 7712 suivants sont À2 7^ Ai, et ainsi de suite.
On a alors jBai(/) = Vect(ei,...,emi), E\2(f) = Vect(e
mi+l) •••» £7711+7712 ),..., d'où
finalement
2. Par définition, M est diagonalisable si et seulement si l'endomorphisme / G C(Kn)
canoniquement associé à M est diagonalisable.
Par le premier point, il y a équivalence avec l'existence d'une base B telle que
Mat5(/) soit diagonale.
Alors, en notant P la matrice de passage de la base canonique à la base B, on a
Mat5(/) = P~lMP, d'où la conclusion.
Exemple
On peut reprendre les exemples des projections et des symétries.
En effet, si p est un endomorphisme d'un espace vectoriel55 E vérifiant p2 = p, on sait
que l'on peut décomposer E en une somme directe56 E = F ® G telle que p soit la
projection sur F parallèlement à G.
On considère une base B = (Bf,Bq) adaptée à cette décomposition57 et on sait qu'alors
la matrice de p dans cette base est :
Mats(p) =1 Ir ° j ,
\ 0 0n-r J
où r = dim(F).
On a trouvé une base B dans laquelle la matrice de p est diagonale, donc p est
diagonalisable.
De même, si s est un endomorphisme d'un espace vectoriel58 E vérifiant s2 = Id,E, on
55. De dimension finie ici.
56. On a F = Ker(p - IdE) et G = Ker(p).
57. C'est-à-dire que Bf est une base de F et Bq est une base de G.
58. Là encore, de dimension finie.
3.3 Matrices et endomorphismes diagonalisables
peut décomposer E en une somme directe 59 E = F ® G telle que s soit la symétrie par
rapport à F parallèlement à G.
En considérant une base adaptée comme pour la projection, la matrice de s est :
MatB(s) =
Ir 0
U J-n—r
ce qui prouve bien que s est diagonalisable.
Nous verrons ultérieurement des critères pratiques de diagonalisabilité d'une matrice ou
d'un endomorphisme en dimension finie.
Voici une figure représentant l'action d'un endomorphisme diagonalisable en dimension 2.
On suppose qu'il existe deux valeurs propres distinctes Ai et À2 et que / est
diagonalisable, c'est-à-dire que R2 = EXl(f) ® E\2(f).
59. On a ici F = Ker(s - IdE) et G = Ker(s + IdE)-
Chapitre 3. Réduction
Précisons que sur la figure, on a Ai = - et À2 = —2.
Étant donné x dans le plan, (xi,x2) est défini par
(xi, x2) e EXl (/) x E\2 (/) : x = X! + x2.
On a alors f(x\) = Ài^i = -x\ et f(x2) = \2x2 = —2x2.
Enfin, on obtient f(x) = f(xi) + f(x2) par linéarité.
Diagonalisation et ordre des valeurs propres
Définition 67
On appelle ordre60 d'une valeur propre61 À l'ordre de multiplicité de À en tant que
racine du polynôme caractéristique62.
Cet ordre est lié à la dimension de l'espace propre associé à À via une inégalité, donnée
par le résultat suivant.
Proposition 98 n
Soient / un endomorphisme d'un K-espace vectoriel E de dimension finie et À G K
une valeur propre de /. Alors, si 011 note m\ l'ordre63 de À, on a l'encadrement :
1 ^ dim(Ex{f)) ^ mx.
De même, soient AI G Ain(K) une matrice carrée d'ordre 72, À G K une valeur propre
de J\I et 7?iA l'ordre de multiplicité de À, alors :
1 ^ dim(Ex{M)) ^ mA.
Démonstration
On sait qu'une matrice et son endomorphisme canoniquement associé ont à la fois les
mêmes éléments propres (donc les mêmes valeurs propres, avec la même dimension pour
60. Ou ordre de multiplicité de la valeur propre.
61. Dans le cadre d'une matrice carrée M ou d'un endomorphisme / d'un espace vectoriel E de
dimension finie.
62. De la matrice M ou de l'endomorphisme /.
63. Comme valeur propre de /.
3.3 Matrices et endomorphismes diagonalisables
les sous-espaces propres associés) et le même polynôme caractéristique, donc le même
ordres de multiplicité pour les valeurs propres. Il suffit donc de prouver le résultat pour
les endomorphismes (en dimension finie), le résultat pour les matrices s'en déduira
immédiatement.
Soit donc E un K-espace vectoriel de dimension finie, et soit / un endomorphisme de E.
Soit également À une valeur propre de /. On considère F = E\(f) le sous-espace propre
de / associé à À.
Il est évident que F est stable par E, puisque Va; G F, f(x) = Xx G F.
Et si on note Bf une base quelconque de F et d = dim(F) = dim(.EA(/)), on aura
. o\
Mat£F(/F) = Xld =
( x
0
0
A
0
Soit maintenant B = (Bf, B') une base de E adaptée à F. Par la proposition 84, on sait
que la matrice de / dans la base B est de la forme
MatB(/) =
A C
0 D
où4 = MatsF(/) = A/d.
Ainsi, par les résultats sur les déterminants par blocs on peut affirmer que
Xf = Xua.tB(f)
XId - XId C
0 XIn.d - D
= det ({X - A)/d) .det (xin.d - £»)
= (X-\)d.XD(X).
On constate ainsi que \f est divisible par (X — X)d.
Ainsi, Tordre de multiplicité de À comme valeur propre de /, c'est-à-dire en tant que
racine de X/(^)> est supérieure ou égale à d.
En d'autres termes, avec les notations de la proposition,
mx>d = dim(Ex(f)).
Il ne reste à prouver que l'inégalité dim(E\(f)) ^ 1. Mais comme À est une valeur propre
de /, l'ensemble E\(f) = Ker(/ — Xlds) n'est pas réduit à {0^}, donc sa dimension est
Chapitre 3. Réduction
supérieure ou égale à 1.
On a ainsi démontré que
l^dim(£A(/)) ^raA.
On en déduit un premier cas particulier.
Corollaire 16
Soit / G C(E) un endomorphisme d'un K-espace vectoriel de dimension 7?.
Si / possède n valeurs propres distinctes64, alors / est diagonalisable.
De même, si A G Mn(K) possède n valeurs propres distinctes, alors A est
diagonalisable.
Démonstration
On note Ai, ..., Àn les n valeurs propres; elles sont forcément simples65.
Par la proposition 98, on en déduit
Vi€[l,n], l^dim(£Ai(/))0,
d'où
Vt€[l,n], dim(jBAi(/))=l.
On peut conclure66 que
dirn^/Je — e^
et ainsi
EXl(f)®---®EXn(f) = E,
ce qui signifie bien que / est diagonalisable.
64. C'est-à-dire que \f est un polynôme scindé (sur K) à racines simples.
65. Sinon, comptées avec multiplicité, leur nombre dépasserait n = deg(x/).
66. Rappelons que la somme des sous-espaces propres est toujours directe, cf. le théorème 14 (p. 231)-
3.3 Matrices et endomorphismes diagonalisables
Remarque
Dans le cadre de ce corollaire, on peut en outre affirmer67 que tous les sous-espaces
propres sont des droites68.
Exemple
/ -1 3 5 \
Soit T=\ 0 2 -8 .
\ 0 0 4 /
On sait que \t = (X + 1)(X — 2)(X — 4) car T est triangulaire, donc on peut directement
affirmer que T G M3ÇR) possède trois valeurs propres simples (—1, 2, et 4).
On peut alors affirmer, sans avoir besoin de calculer les sous-espaces propres, que T est
diagonalisable dans M3(M).
Mais il faut réaliser que ce corollaire 16 ne décrit qu'un cas particulier, par exemple
/ 1 0 0 \
est diagonale, donc diagonalisable, et M possède une valeur propre
M =
0 1 0
\ 0 0 2 /
double (1).
Pour pouvoir conclure dans le cas général, on a le résultat suivant.
Théorème 15
Soit / G C(E) un endomorphisme d'un K-cspace vectoriel E.
Alors / est diagonalisable si et seulement si les deux conditions suivantes sont
réalisées :
1. Le polynôme caractéristique de / ,Xf » es^ scindé sur K ;
2. Pour toute valeur propre À de /, la dimension du sous-espace propre associé69
est égale à l'ordre de cette valeur propre.
Naturellement, le même résultat est valable pour une matrice de Ain(K).
67. Il s'agit d'un résultat de la démonstration.
68. Il peut être utile de se rappeler ce résultat, car si l'on connaît un vecteur propre xq associé à une
valeur propre A, on pourra sans calcul supplémentaire affirmer que l'espace propre associé à A est la
droite dirigée par xq.
69. C'est-à-dire l'ensemble Ex(f).
3 Chapitre 3. Réduction
Démonstration
|"^»1 On écrit70 Sp(/) = {Ai,..., Ar} et on note m = dim (EXi(f)).
r
On se place dans une base adaptée à la décomposition E = ^^ EXi(f).
i=l
La matrice M de f dans cette base est diagonale, les éléments diagonaux étant ri\ fois
Ai, ..., nr fois Ar.
On trouve alors immédiatement
r
Xf = XM = X[{X-\i)ni,
i=l
ce qui prouve à la fois que Xf est scindé, et aussi que Tordre de multiplicité de A* est
égal à n^, qui est la dimension du sous-espace propre associé à A*.
| <= | Avec les mêmes notations pour les valeurs propres, on sait que
dim(£Al(/) 0 • • • 0 EXr(f)) = dim(£Al(/)) + • • • + dim(£Ar(/)).
Or on suppose71 que dim(.EAi(/)) = ra*, où ra* désigne Tordre de multiplicité de A*
comme racine de x/> c'est-à-dire Tordre de la valeur propre.
Mais le fait que Xf est scindé implique que rai H h mr = deg(x/) = dim(jEJ).
On trouve ainsi
dim(£Al (/) 0 • • • 0 EXr (/)) = rai + • • • + mr = E,
dont on déduit que
EXl{f)®---®EXr(f) = E,
ce qui signifie bien que / est diagonalisable.
Exemple 1
/ 2 -2 1 \
Soit M = 2 -3 2.
V-l 2 0/
On calcule le polynôme caractéristique de M.
On constate que dans M, la somme des éléments de chaque ligne vaut la même quantité,
en l'occurrence 1.
70. Les Xi étant deux à deux distincts.
71. Pour chaque valeur propre A*.
3.3 Matrices et endomorphismes diagonalisables
En additionnant les colonnes entre elles, nous allons en déduire que xm est divisible par
X — 1, donc que 1 est valeur propre de M.
Mais on pourrait en outre affirmer que
est aisé de vérifier que
M
1
V1/
/l\
1
V1/
est un vecteur propre associé, puisqu'il
/i\
= i
i
V1/
Revenons au calcul72 de xm •'
X-2 2 -1
Xm = I -2 X + 3 -2
1 -2 X
X-l 2 -1
X-l X + 3 -2
X-l -2 X
X-l 2 -1
0 X + l -1
0 -4 X + l
Un développement par rapport à la première colonne donne alors
73
Xm = (X - 1)
X + l -1
-4 X + l
= (X- 1)((X + l)2 - 4) = (X - 1)2(X + 3).
On peut affirmer ainsi que Sp(M) = {1,-3}, et plus précisément que 1 est une valeur
propre double de M et que —3 est une valeur propre simple.
On sait qu'alors74 dim(.E_3(M)) = 1, qui est l'ordre de multiplicité de —3.
Il faut donc voir si la dimension de E\(M) est bien égale à l'ordre de multiplicité de 1,
qui vaut 2.
72. La première égalité s'obtient par l'opération C\ <— C\ + Ci + C3.
La deuxième se déduit des opérations L2 <— L2 — L\ et L3 <— L3 — L\.
73. En écrivant simplement (X + l)2 - 4 = (X + l)2 - 22 = (X + 1 + 2)(X + 1-2).
74. Le lecteur est invité à noter que si la question posée est celle de la diagonalisabilité, il est inutile
pour les valeurs propres simples d'effectuer la recherche du sous-espace propre, sa dimension vaudra
toujours 1, donc sera bien égale à l'ordre de multiplicité.
Chapitre 3. Réduction
Mais il est inutile75 d'expliciter Ei(M), c'est-à-dire de résoudre l'équation MX = X
d'inconnue X e M3,i(M).
Il suffit d'appliquer le théorème du rang.
En effet, la matrice
/ 1 -2 1 \
M - h = 2 -4 2
\-l 2 -l)
est clairement76 de rang 1, donc par le théorème du rang,
dim(£i(M)) = dim(Ker(Af - h)) = 3 - rg(M - J3) = 2.
Ainsi, on sait que xm est scindé et que pour toute valeur propre, la dimension de l'espace
propre est égale à l'ordre de multiplicité, donc le théorème 15 permet de conclure que M
est diagonalisable.
Notons que si on veut effectuer la diagonalisation, il faut aller plus loin, et alors utiliser
le théorème du rang devient superflu.
En résolvant MX = —3X d'inconnue X e Ms(R) on trouve que le sous-espace propre
( x ^
associé à —3 est la droite dirigée par le vecteur 2
v-i/
Et de même, en résolvant MX = X, on trouve que E\{M) est le plan :
£i(M) = Vect
/ 1 \
0
W-1/
1
V2/
On peut alors conclure qu'en posant
P =
/ 1 1 0\
2 0 1
V-l -1 2/
75. Nous effectuerons des calculs dans les exercices, mais on les évite si possible.
76. Dans cette matrice, C\ ^ 0, Ci = -2C\ et Cz=C\.
3.3 Matrices et endomorphismes diagonalisables
on a P G GL3(M) et
P~XMP =
( -3 0 0 \
0 10
\ 0 « 1/
Exemple 2 (« contre-exemple » : l'hypothèse x scindé est insuffisante)
Considérons tout simplement la matrice triangulaire
/ 1 0 0 \
T= 0 2 1 .
\ 0 0 2 J
On trouve aisément \t = {X — l)(X — 2)2 scindé, avec 1 valeur propre simple et 2 valeur
propre double.
Mais on a T — 2I2 =
( -1 0 0 \
0 0 1
de rang 2, donc E2(T) est de dimension 1, et Ei(T)
\ 0 0 0/
également puisque 1 est valeur propre simple.
Ainsi, jBi(r) 0 E2(T) est de dimension 2, donc £i(T) 0 E2(T) ^ R3, et la matrice T
n'est pas diagonalisable.
Diagonalisation et polynômes annulateurs
Il existe d'autres caractérisations que le théorème 15 (p. 249) pour démontrer la diago-
nalisabilité d'une matrice ou d'un endomorphisme.
Théorème 16 (Jordan (1870) 77)
Une matrice M G Mn(K) est diagonalisable (sur K) si et seulement si J\I admet un
polynôme annulateur scindé à racines simples.
Démonstration
Qff>J Supposons M diagonalisable. On note À i, ..., A.r ses valeurs propres deux à deux
distinctes.
77. cf. Traité des substitutions et des équations algébriques, Gauthier-Villars, Paris (1870).
Chapitre 3. Réduction
Par hypothèse, il existe une matrice Q € GLn(K) telle que
/ M
Q-^MQ = D =
mi
(0) \
X2I
2*H2
\ (0)
Klflr )
où \±i représente la dimension de l'espace propre 78 de M associé à À$
On pose alors P = (X — Xi)...(X — Xr).
On a alors 79
/ P(Ai)/w (0) \
PiD)-' P(X^
\ (0) P(K)I^ )
Comme pour tout i, P(Xi) = 0, on en déduit immédiatement P(D) = 0.
Alors on déduit80 de Q~lMQ = D que Q~1P(M)Q = P(D) = 0 donc finalement
P(M) = 0 : on a bien trouvé un polynôme scindé à racines simples (dans K) tel que
P(M) = 0.
| <j= | Supposons que le polynôme P = (X — Xi)...(X — Xr) annule M, où les nombres
Ai, ..., Ar sont deux à deux distincts.
Il faut montrer que M est diagonalisable, c'est-à-dire que E = Kn est somme directe
des sous-espaces propres de M, ou encore des sous-espaces propres de l'endomorphisme
/ canoniquement associé à M.
Par hypothèse, P(M) = 0, ce qui équivaut à P(f) = 0, c'est-à-dire que
(/ - XJcLe) o • • • o (/ - XrIdE) = 0.
On note que les endomorphismes / — Xilds commutent entre eux, donc on peut écrire
pour tout i entre 1 et r :
(/ " XiIdE) o ((/ - XJdE) o • • • o (/ - X^Me) o (/ - Xi+1IdE) o . . . o (/ - XrIdE)) = 0
78. Ou encore l'ordre de multiplicité de Ai comme valeur propre de M.
79. cf. la proposition 72 page 164.
80. cf. la proposition 70 page 160.
3.3 Matrices et endomorphismes diagonalisables
On en déduit que si, pour x € jE7, on pose
Vi = (f ~ Ai/dtf) o (/ - Ài_iJdtf) o • • • o (/ - \i+1IdE) o • • • o (/ - \rIdE)(x),
on aura (/ - \iIdE)(yi) = 0, c'est-à-dire yi G Ker(/ - XiIdE) = EXi(f).
On reconnaît81 les polynômes82 intervenant dans la base de l'interpolation de Lagrange.
X — À
En effet, on sait que si l'on pose Vi G [1, r], Li = J| -^, alors (Li,..., Lr) est
une base de Kr_i[X] et que :
Vi2 € Kr_i[X], # = i2(Ai)Li + • • • + R(Xr)Lr.
Ainsi, yi = aLi(f)(x), où c* = JJ (Ai - Àj) G K*.
On applique le résultat de l'interpolation de Lagrange au polynôme constant égal à 1,
qui est bien83 dans Kr_i[X].
Ainsi, on peut affirmer que 1 = lLi H h lLr.
On applique cette égalité en /, on en déduit
IdE = L1(f) + ...+Lr(f)
Soit maintenant x G E. L'égalité ci-dessus appliquée au vecteur x donne
x = ^(f^x) + • • • + Lr(f)(x)
Notons Vz G [l,r], a* = Li(f)(x). On a
Li{f) = -(/ - XiIdE) o • • • o (/ - ViWb) o (/ - \i+1IdE) o • • • o (/ - Ar/ds),
Ci
donc
1 1
Xi = — (/ - XiIdE) o • • • o (/ - Ài_iJdtf) o (/ - Ài+i/dtf) o • • • o (/ - Ar/d£?) = —2/i-
Ci Ci
Par les explications qui précèdent, y» G Exi(f) qui est un sous-espace vectoriel de E,
donczi€£A.(/).
Ainsi, on a réussi à écrire x = x\ H h xr avec Vz, Xi G Exi(f). On en déduit
81. À une constante multiplicative près.
82. cf. page 151.
83. Car P scindé implique que son nombre de racines r vaut au moins 1.
j^yj Chapitre 3. Réduction
et l'autre inclusion étant évidente, on a E = E\x (/) ® • • • ® E\r(f).
On peut rappeler84 que la somme E\1(f) H h E\r(f) est toujours directe, d'où
E = EXl(f) + .-. + EXr(f),
et ainsi l'endomorphisme / est bien diagonalisable.
Corollaire 17 [
Soit / un endomorphisme d'un K-espace vectoriel E de dimension finie. Alors / est
I diagonalisable si et seulement si / possède un polynôme annulateur scindé à racines >
simples.
Démonstration
On fixe une base B de E et on note M la matrice de / dans la base B.
On sait que M diagonalisable si et seulement si / est diagonalisable, et on vient de voir
que M est diagonalisable si et seulement s'il existe P G K[X] scindé à racines simples tel
que P(M) = 0.
Mais comme (pour tout P e K[X]) P(M) = 0 équivaut à P(f) = 0, on en déduit le
résultat.
Exemples
1. On peut expliquer d'une nouvelle façon que toutes les projections et toutes les
symétries sont diagonalisables.
En effet, si un endomorphisme p est une projection, on a p2 = p, ou encore p2—p = 0.
Ainsi, le polynôme Q = X2 — X annule p.
Or Q = X(X — 1) est scindé à racines simples, donc on peut appliquer le corollaire
17 pour conclure que p est diagonalisable.
De même, si s est une symétrie, alors s2 — Id,E = 0, donc que le polynôme X2 -1
annule s.
Or X2 - 1 = (X - 1)(X + 1) est scindé à racines simples, donc de nouveau le
corollaire 17 donne la diagonalisabilité de s.
84. cf. le théorème 14 page 231.
3.3 Matrices et endomorphismes diagonalisables
2. On reprend un exemple déjà donné85 : soit M ■
/ 2 -2 1 \
2 -3 2
V-l 2 0/
Calculer M2+ 2M-3/3.
En déduire que M est diagonalisable.
On trouve aisément que M2 + 2M — 3/3 = 0, c'est-à-dire que le polynôme P =
X2 + 2X-3 annule M.
Mais on voit aisément que l'on peut factoriser le polynôme en P = (X + 3)(X — 1),
c'est-à-dire P est scindé à racines simples.
La proposition donne alors directement M diagonalisable.
Notons que même si l'énoncé ne demande pas de calculer M2 + 2M — 3/3, cette
méthode peut s'avérer plus pratique (tout dépend de l'énoncé).
• Si l'on demande dans une première question si M est diagonalisable, et si la
question suivante est de diagonaliser M (ou si une question ultérieure le nécessite) :
- on calcule xm, on trouve xm = (X + 3)(X — l)2, donc Sp(M) = {-3,1}.
- on cherche Es(M), on trouve une droite ; on cherche E\{M)) on trouve un plan.
- on a (pour des raisons de dimension) E-s(M) ® E\(M) = M3, donc M est
diagonalisable.
Et la réunion des bases de ces deux sous-espaces propres donne une base qui dia-
gonalise M (ou, présentée autrement, une matrice Q € GLs(R) telle que Q~1MQ
soit diagonale)
• Si l'on demande uniquement si M est diagonalisable :
- on calcule xm, on trouve xm = {X + 3)(X — l)2.
- on pose P = (X + 3)(X - 1) = X2 + 2X - 3. On trouve aisément que P(M) = 0,
donc M possède un polynôme annulâteur scindé à racines simples, ce qui suffit
pour affirmer que M est diagonalisable.
Remarques
1. Il existe une autre preuve directe de ce corollaire, beaucoup plus rapide - mais qui
contrairement à celle utilisant l'interpolation de Lagrange, ne donne pas les
projections de x dans les sous-espaces propres.
Supposons que P = (X — Xi)...(X — \r) annule /, avec les À* deux à deux différents.
85. Voir pages 167 et 169.
Chapitre 3. Réduction
Si l'on note Vz € [l,r], Pi = X — À*, alors les Pi sont premiers entre eux deux à
deux.
Il est alors possible d'appliquer le lemme des noyaux86, qui s'écrit :
Ker((J\...Pr)(/)) = Ker(Pi(/)) 0 • • • 0 Ker(Pr(/)).
Or (Pi...Pr)(/) = P(/) = 0 par hypothèse, donc Ker((Pi...Pr)(/)) = E.
Par ailleurs, Vz € [l,r]], P<(/) = / - À*/^ donc Ker(Pi(/)) = EXi(f).
On obtient ainsi directement
c'est-à-dire que / diagonalisable.
2. Notons qu'il se peut qu'un (ou plusieurs) des À* ne soit pas valeur propre de /,
auquel cas E\i (/) = {0^} et on peut enlever le facteur X — Xi de P, mais il est
inutile de le préciser dans la démonstration.
3. Il existe d'autres théorèmes assurant (parfois sans le moindre calcul) qu'une matrice
est diagonalisable, comme le théorème spectral87 qui assure que toute matrice
symétrique réelle est diagonalisable (dans une base orthonormée) et un théorème
du même type dans le cas complexe88. Pour résumer, il est vivement conseillé de
vérifier si la matrice n'est pas « particulière » si l'on vous demande d'étudier sa
diagonalisabilité, avant de se lancer dans le calcul du polynôme caractéristique.
Diagonalisation simultanée
Proposition 99 |
Soit E un K-espace vectoriel et soient f et g deux endomorphismes de E qui
commutent, c'est-à-dire tels que / o g = g o /. Alors les sous-espaces propres de chaque
endomorphisme sont stables par l'autre endomorphisme 89.
86. cf. la proposition 75 page 170.
87. cf. le théorème 32 page 455.
88. cf. le théorème 35 page 483.
89. C'est-à-dire que VA G Sp(/), E\(f) est stable par g> et vice versa.
3.3 Matrices et endomorphismes diagonalisables |£g]
Démonstration
Si g commute avec /, alors g commute également avec h = f — A/d^, donc par la
proposition 87 (p. 221), Ker(/i) est stable par g.
La conclusion est immédiate puisque Ker(/i) = E\(f).
Nous pouvons maintenant énoncer le résultat suivant :
Théorème 17
Soient f et g deux endomorphismes d'un K-espacc vectoriel E de dimension finie n
tels que
1. f et g commutent (f ° g — g ° f)\
2. f et g sont diagonalisables.
I Alors f et g sont simultanément diagonalisables, c'est-à-dire qu'il existe une base B
telle que Mat#(/) et Mat/3 (g) sont diagonales.
, , J
Démonstration
On note Ai,..., Àr les valeurs propres deux à deux distinctes de /.
On sait par la proposition 99 page 258 que, comme f et g commutent, les espaces propres
de / sont stables par g.
On peut alors définir les endomorphismes induits par g sur les Exf (/) * on pose
V»G[i,rl, gi = gExiuy
Le fait que g est diagonalisable implique que les endomorphismes induits 90 sont
diagonalisables91.
Le moyen le plus rapide pour ce point est d'utiliser la caractérisation donnée par le
corollaire 17. En effet, puisque g est diagonalisable, il existe P G K[X], P scindé à racines
simples, tel que P(g) = 0.
Mais il est alors évident92 que P(gi) = 0 avec encore P € K[X], scindé à racines simples,
donc par l'autre implication du corollaire 17, on a bien gi diagonalisable.
Ainsi, on peut constituer Bi, base de Ex^f), telle que Di = Mat^^i) soit diagonale.
r
On sait que / est diagonalisable, c'est-à-dire ^Ex^f) = E, et alors B = (Bu ...,Br)
i=l
90. Sur tout sous-espace stable.
91- Notez que ce résultat peut être utile par ailleurs.
92. Pour tout i dans [1, r].
Chapitre 3. Réduction
constitue une matrice de E.
D'après la proposition 85 page 217, la stabilité des E\t(f) par g implique
/ Dx (0) \
MatB(s) =
\ (0) Dr )
Comme chaque bloc Di est diagonal, la matrice Mats(^) est diagonale.
Et pour /, par définition de Exf (/), ce sous-espace est stable par / et fEx (/) = XiIdEx ^.
Ainsi, MatBf(/£;A.(/)) = Ai/Pi, où pi représente la dimension de Ex^f).
Finalement, par la stabilité (comme pour g) on a
/ X1IP1 (0) \
MatB(/) =
\ (0) KIpr )
On a finalement trouvé une base B dans laquelle les matrices de / et de g sont diagonales,
ce qui achève la démonstration.
Remarque
Réciproquement, si f et g sont simultanément diagonalisables, alors f et g commutent.
En effet, il existe une base B de E et des scalaires Ai, ..., An, /xi, ..., jin tels que
MatB(/) =
/Ai
\(0)
(0)\
K )
(
et Mate (g) =
(
Mi
(0)
\
On trouve alors MatB(/ ° g) = MatB(/).MatB(5) =
V(o)
Ai^i
V (0)
Mn /
(0)
XnHn I
et on trouve le même produit pour Mats(<7 o /).
Le fait que f og et go f aient la même matrice dans la même base B signifie que Ton a
bien fog = gof.
3-4 Trigonalisation
Corollaire 18
Soient A et B deux éléments de Mn(K) tels que
1. A et B commutent (AB = BA)
2. A et B sont diagonalisables.
Alors A et B sont simultanément diagonalisables, c'est-à-dire qu'il existe P G GLn(K)
telle que P~lAP et P~1BP sont diagonales.
Démonstration
On appelle f et g les endomorphismes de E = Kn canoniquement associés à A et B
respectivement.
Les hypothèses donnent immédiatement que f et g commutent et sont diagonalisables.
Par le théorème, il existe une base B dans laquelle les matrices de / et g sont diagonales.
Notons alors P la matrice de passage de la base canonique à la base B.
On a ainsi P~1AP = Mat#(/) diagonale et P~XBP = Ma,t&(g) diagonale, donc on a
prouvé le corollaire.
Trigonalisation
Théorème 18
Une matrice M G Mn(K) est trigonalisable (sur K) si et seulement si son polynôme
caractéristique \m est scindé (sur K).
Démonstration
Supposons que M est trigonalisable. La matrice M est donc semblable à une matrice
triangulaire supérieure T.
Les matrices M et T auront alors même polynôme caractéristique93.
Or T est de la forme T =
( tu ... tln \
\ (0) tnn )
93. cf. la proposition 94 page 239.
Chapitre 3. Réduction
On arrive ainsi à \m = Xt
X-tn ..
—tin
= n(X-fe)car94ledéter-
i=l
(0) X-tnn
minant d'une matrice triangulaire est le produit de ses éléments diagonaux.
n
Ainsi, l'écriture \m{X) = Y\(X — tu) signifie que le polynôme caractéristique \m de M
i=l
est scindé.
Il nous reste à démontrer la réciproque.
Nous allons raisonner par récurrence sur la dimension. Pour n G N*, on note (Hn) la
proposition :
(Hn) : VM G Mn(K), Xm{X) scindé sur K
M trigonalisable.
Pour n = 1, le résultat est évident : la matrice M s'écrit M = (m) avec m G K, son
polynôme caractéristique est \m = (X — m) scindé, et la matrice M est déjà triangulaire
supérieure, donc trigonalisable.
Supposons maintenant la propriété {Hn) prouvée pour un certain n G N*.
On veut démontrer (ifn+i).
Soit donc M G Mn+i(K) telle que \m est scindé sur K. Nous devons montrer que M
est trigonalisable.
Le fait que \m(X) est scindé implique que \m possède au moins une racine À, qui
est alors une valeur propre de M. On note / l'endomorphisme de Kn+1 canoniquement
associé à M. Le nombre À est une valeur propre de /, donc il existe un vecteur propre u
de / associé à À, c'est-à-dire qu'il existe u G Kn+1\{0} tel que f(u) = u. Comme u ^ 0,
on peut compléter la famille libre (e[ = u) en une base B' = (e^, e^,..., e'n+i) de Kn+1.
Comme f(e[) = Àe^, la matrice de / dans la base B' est de la forme
M' = Matfî/(/)
/ A *
0
Vo
\
N
94. cf. la proposition 65 page 139.
3.4 Trigonalisation
où les coefficients notés * sont quelconques a priori et où N G M.n(^£).
On constate aisément95 que
Xf = Xm>
X-X *
0
0
XIn-N
(X - X)det(XIn -N) = (X- X)Xn.
Le fait que xm = Xf est scindé implique alors que xn est scindé, avec N G Mn(K).
L'hypothèse de récurrence (Hn) nous permet alors d'affirmer que N est trigonalisable.
Ainsi, il existe une matrice Q G GLn(K) telle que Q~rNQ = Tn G Mn(K) avec Tn
triangulaire supérieure.
/ 1 0 ... 0 \ / 1 0 ... 0 \
On définit alors les matrices Q =
Un produit par blocs donne
/l 0
0
\o
Q
etQ'
)
0
Vo
Q
-1
QQ'=- =
0
\0
0 \ / 1 0 ... 0 \
0
QQ-1
/
\o
A»+i»
et de même Q'Q = 7n+i.
Ainsi, Q est inversible d'inverse Q-1 = Q'.
Et on trouve, encore avec des produits par blocs,
/ 1 0 ... 0 \
Q-^M'Q
\0
Q"1
/ A *'
IX * ... * \
N
\0
/ 1 0 ... 0 \
\o
*'\
Q~lNQ
\0
/
/ A *'
Vo
Q
*'\
Tn
— 3n+i,
95. Grâce à un développement par rapport à la première colonne.
Chapitre 3. Réduction
avec Tn+i clairement triangulaire supérieure96.
Or M est semblable à M' car M et M' représentent le même endomorphisme / dans
deux bases différentes.
En d'autres termes, si Ton note B la base canonique on a
M = MatB(/) et M' = Matfî/(/),
donc avec P G GLn+i(K) la matrice de passage de la base B à la base B' on a
P^MP = M'.
Et la matrice M' est semblable97 à la matrice Tn+i, donc98, sachant que M semblable
à M' et M' semblable à Tn+i, on a M est semblable à Tn+i.
Voyons que Ton peut également redémontrer ce résultat sans utiliser l'argument de la
transitivité de la relation de similitude : on a Q~XM'Q = Tn+i où M' = P~1MP et
donc Q^P^MPQ = Tn+1.
On pose R = PQ G GLn+i(K) avec i?"1 = Q~1P~1, donc l'écriture précédente donne
R~1MR = Tn+i, c'est-à-dire M semblable à Tn+i : triangulaire supérieure.
Ce résultat achève de prouver que toute matrice M G Mn+i(K) dont le polynôme ca-
ractéristique est scindé est trigonalisable, donc on a prouvé (Hn+i).
Par principe de récurrence, (Hn) est prouvée pour tout n G N*, et finalement la preuve
du théorème est achevée.
Corollaire 19
Tout endomorphisme ip d'un K-espace vectoriel E de dimension finie est
trigonalisable" si et seulement si le polynôme caractéristique de ip est scindé sur K.
Démonstration
Supposons Xip scindé. On fixe une base B$ de E et on pose M = Mat£0(y>). On a100
X<p = Xm, donc xm est scindé. Par le théorème 18, il existe P inversible telle que
P~XMP = T triangulaire supérieure.
Si l'on note B\ la base de E telle que P soit la matrice de passage de Bq à Si, on a
96. Puisque Tn est triangulaire supérieure.
97. C'est le point qui a été le plus long à démontrer.
98. Comme la similitude est une relation d'équivalence, cette relation est notamment transitive.
99. C'est-à-dire qu'il existe une base dans laquelle la matrice de y? est triangulaire supérieure.
100. Par définition du polynôme caractéristique d'un endomorphisme.
3.5 Théorème de Cayley-Hamilton
Mat^iC^) = P_1MatB0(<^)P = P_1MP = T triangulaire supérieure.
Et réciproquement, si dans une base B la matrice de tp est une matrice T triangulaire,
alors101 on aura x<*> = Xt qui est scindé sur K.
/ ■—
Corollaire 20
Toute matrice M G .A/[7Ï(C) est tiïgonalisable, ou encore tout endoniorphisnie d'un
C-espace vectoriel de dimension finie n est trigonalisable.
Démonstration
Le polynôme caractéristique de la matrice M (ou de Tendomorphisme) sera un élément de
C[X] de degré supérieur ou égal à 1, donc sera scindé grâce au théorème de d'Alembert-
Gauss, on peut ainsi appliquer le théorème 18.
Théorème de Cayley-Hamilton
Né à Dublin (Irlande), William Rowan Hamilton a été
considéré comme un enfant précoce.
Notamment, son oncle, le révérend James Hamilton,
également linguiste, lui a enseigné le latin et le grec à
partir de sept ans.
\ On pense qu'il parlait une quinzaine de langues aux
alentours de ses 13 ans.
Dès ses 17 ans, il repère une erreur dans un traité de
mécanique céleste de Laplace.
Il entre au Trinity Collège de Dublin à l'âge de 18 ans.
William Hamilton ^ est nommé professeur d'astronomie dès 1827.
(1805-1865) Hamilton reste surtout connu pour ses travaux en
algèbre, en particulier les quaternions ", qu'il a développés
au travers de nombreux articles. La reconnaissance de ses travaux en
mathématiques et en physique ont notamment fait de lui le premier étranger admis à
l'Académie nationale des sciences des Etats-Unis, et il reste à ce jour considéré comme
un des plus grands scientifiques irlandais.
n. Il s'agit d'un corps gauche, que l'on peut construire comme un espace vectoriel réel de dimension 4 Pour plus de
détails, cf. N. Basbois et P. Abbrugiati Algèbre piemière année, De Boeck (2013), p. 595.
101. cf. le début de la preuve du théorème 18.
EEfil
Chapitre 3. Réduction
Théorème 19 (de Cayley-Hamilton 102)
Soit M G Mn(K) une matrice carrée d'ordre n. Alors le polynôme caractéristique
de M annule M, c'est-à-dire xm(AI) = 0.
Démonstration
Cette preuve du théorème de Cayley-Hamilton est valable dans les cas103 K = R ou
K = C.
Voici comment va s'organiser la preuve (on va ici « du plus simple au plus compliqué ») :
1. On commence par le cas le plus simple, lorsque la matrice est diagonale.
2. On passe ensuite au cas où la matrice est triangulaire supérieure, on se ramène
alors au cas précédent par un passage à la limite.
3. Enfin, on démontre le résultat pour M G A4n(C) quelconque, en utilisant le fait
que M est trigonalisable.
4. On justifiera enfin le fait que le résultat est aussi valable dans le cas où K est un
sous-corps quelconque de C.
Soit D G Mn(C) une matrice diagonale, c'est-à-dire telle qu'il existe Ài,À2,...,An G C
tels que
/ Ai (0) \
A2
D
\ (0) An )
102. Arthur Cayley démontre ce résultat en dimension 2, c'est-à-dire pour n = 2, dans l'article A
Memoir on the Theory of Matrices, Philosophical Transactions of the Royal Society of London 148
(1858), pp. 17-37.
Sa preuve correspond d'ailleurs à la remarque présentée page 269.
Cayley affirme également sans détailler les calculs que le résultat est valable pour n = 3, et aussi qu'il
se généralise à toute dimension finie.
Ferdinand Probenius prend connaissance de l'article de Cayley en 1896. Il attribue la paternité du
théorème à ce dernier, mais il est le premier à avoir démontré le résultat général en 1878, dans son
mémoire On linear substitutions and bilinear forms.
William Hamilton semble avoir seulement beaucoup utilisé ce résultat sans l'avoir démontré.
103. Plus généralement, K peut être un sous-corps de C, comme Q, ou aussi Q[\/2], étudié dans l'exercice
1.9 page 87.
3.5 Théorème de Cayley-Hamiiton
On sait qu'alors xd = (X - Xi)...(X - Xn) et donc VA; € [l,n], Xo(Afc) = 0.
Et l'on sait aussi104 que VQ € C[X],
Q{D) =
( Q(Ai)
V (0)
Q(A2)
On en déduit immédiatement
/ Xo(Ai)
Xd(D)
(0) \
Xo(A2)
V (0)
(0) \
Q(A„) ^
/ 0
\(o)
0
(0)\
o /
o,
Xd(K) )
le résultat a donc été aisément prouvé dans ce cas particulier.
Soit maintenant T € JWn(C) une matrice triangulaire supérieure, c'est-à-dire de la forme
( *1,1
0
l (0)
*1,2 •
^2,2
• *l,n )
En—l,n
^n,n y
On note Va G C,
0 t2|2 + «
V (0)
tl,n
tn—l,n
^n,n + (n - l)a y
c'est-à-dire la matrice T à laquelle on a rajouté 0, a, ..., (n — l)a sur la diagonale.
Il existe alors e G R+ tel que Va G C, |a| < e et a ^ 0 (c'est-à-dire 0 < \a\ < e) implique
que les coefficients diagonaux de Ta sont deux à deux différents.
Comme TQ est triangulaire supérieure, ses coefficients diagonaux sont également ses
valeurs propres.
Ainsi, si 0 < \a\ < £, la matrice Ta G Mn(C) possède n valeurs propres deux à deux
104. cf. la proposition 72 page 164.
g££jj Chapitre 3. Réduction
différentes, on sait qu'alors TQ est diagonalisable105.
Il existe donc des matrices Pa G GLn(C) et Da G Mn(C), telles que
Da est diagonale et P~lTaPa = Da.
On peut alors affirmer par le premier point106 que XDa{Da) = 0.
Et les matrices TQ et PQ étant semblables, on a107 xtq = Xdq •
Enfin, toujours grâce à cette similitude108 on peut affirmer que
VQeC[X], p-1Q(TQ)PQ=Q(Da).
On en déduit avec Q = xra = Xdq Que :
XTa (Ta) = Pa XDa (Da) P~l = 0
=0
Ce résultat est donc valable pour tout a tel que 0 < |a| < e.
Mais les coefficients du polynôme xra sont des polynômes en a, il en est donc de même
de tous les coefficients de la matrice XTa{Ta)-
L'application a \—> Xra(TQ) est donc continue de C dans A1n(C).
On peut donc passer à la limite lorsque a —> 0 dans l'égalité109 XTQ(Ta) = 0 et l'on
obtient XTo(îo) = 0.
Nous venons ainsi de prouver que Xt{T) = 0, c'est-à-dire que le résultat est valable pour
les matrices triangulaires.
Soit enfin une matrice quelconque M G A1n(C).
Nous avons déjà démontré110 que M est trigonalisable, c'est-à-dire :
3PGGLn(C), 3TeMn(C), T triangulaire supérieure : P~1MP = T.
Par ce que nous avons déjà rappelé ci-dessus, on sait qu'alors xm = Xt et pour tout
Q G C[X], P~lQ(M)P = Q(T).
Avec Q = Xm = Xt on obtient ainsi xm(M) = PXm{T)P~1 = Pxt(T)P-\
Or par le point précédent, T étant triangulaire supérieure, Xt{T) = 0.
105. cf. le corollaire 16 page 248.
106. Valable car Da est diagonale.
107. D'après la proposition 94 (p. 239).
108. cf. la proposition 70 page 70.
109. qui est valable au voisinage de 0 par ce qui précède.
110. cf. le corollaire 20 (p. 265).
3.5 Théorème de Cayley-Hamilton
On en déduit \m{M) = 0, et le théorème est totalement démontré dans le cas K = C.
Si on considère M G Mn(K) où K est un sous-corps de C (par exemple R), alors on peut
considérer M comme élément de Mn(C), et l'expression de xm est la même dans K[X]
et dansC[X].
Ainsi, le résultat prouvé ci-dessus : xm{M) = 0 dans Mn(C) devient une égalité dans
Mnfà)i ce Qui achève la démonstration.
Remarques
1. Il existe des preuves valables dans tout corps, mais elles sont différentes et utilisent
des notions hors programme, contrairement à celle présentée ci-dessus.
2. Par exemple111, le lecteur pourra considérer112 une matrice
a b
M:
c d
G M2(K).
Un calcul aisé donne
Xm(X) =
a-X b
c d-X
(a-X)(d-X)-bc = X2 - ti(A)X + det(A)
X2-(a + d)X + (ad-bc).
Enfin, en calculant
M2
a2 + bc ab + bd
ac + cd bc + d2
on peut vérifier113 que
Xm(M) = M2 - (a + d)M + (ad - bc)In = 0.
111. Il s'agit de la preuve donnée (avec les notations usées actuellement) par Arthur Cayley dans A
Memoir on the Theory of Matrices, Philosophical Transactions of the Royal Society of London 148
(1858), pp. 17-37.
112. Dans un corps K quelconque.
113. Il s'agit d'une formalité pour le lecteur.
Chapitre 3. Réduction
Exponentielle de matrices
Proposition 100
Soient K = R ou C et il/ G Mn(K).
+00
Alors la série Yj 77Mk converge, c'est-à-dire que la suite (SW)jvgn définie par
Ar=0
N 1
ViVGN, SN = y^—Mk
k=o
est convergente dans .Mn(IK), .
On appelle exponentielle de la matrice il/, et on note exp(il/) ou eM G .Mn(K), la
somme de cette série, c'est-à-dire la limite de la suite (Sn)nen-
Démonstration
Soit II . Il une norme sur Mn(K) qui soit une norme matricielle, c'est-à-dire qui vérifie
\f{M,M') e (-Mn(K))2, IIMM'H < ||M||.||M'||.
Notons que pour obtenir une telle norme, il existe (au moins) deux possibilités :
1. On peut définir une norme sur Mn{^) dite subordonnée à une norme N sur
A4n,i(K), en posant VM G Mn^),
insu N{MX)
\W\\ = sup " '
xeMntl(K)\W Iy/\A)
sup N(MX)
XGJMn,i(K),N(X)=l
sup N{MX)
X€Mn,i(K),N(X)^l
= inf {k G M+ ; VX G Mn,i(K), JV(MX) ^ fcJV(X)}.
On laisse le soin au lecteur de montrer qu'une telle norme sera alors matricielle.
2. De manière moins « constructiviste », soit Ni une norme quelconque sur Mn
Mn(K))2 —► Mn(l
(M, M') 1—► MM'
L'application (.À4n(K)) —> .À4n(K) est bilinéaire en dimension finie donc
3.6 Exponentielle de matrices
continue, et on sait même114 qu'il existe une constante C > 0 telle que
M{M,M') G (Mn(K))2, N^MM') ^ CN^M).^^').
Alors ||M|| = CiVi(M) définit une norme sur Mn%).
Et en multipliant l'inégalité précédente par C il vient
M(M,M') G (.Mn(K))2, CN^MM') ^ CN1(M).CN1(M/),
c'est-à-dire
V(M,M') € (Mn(K))\ \\MM'\\ ^ ||M||.||M'||,
et ainsi || . || est bien une norme matricielle sur Mn(K).
3. Il est possible d'être bien plus concret.
On considère la norme || . H^ définie pour toute matrice M = {™>i,j)(i}j)eii}nl2 par
HMlloo = ma?Kjl-
Alors la définition du produit matriciel permet rapidement de justifier que
V(M,M')e (Mn(K))2, lIMM'H^nlIMIUlM'IL.
En effet, on a par inégalité triangulaire V(i, j) G [l,n]2,
\(MM')ij
^2rni}km'k}3
k=i
n
^ ^2\mhkl\mkj\
k=l
< ÈllMiL.pf'iu
< nllMl^.HM'IU
Par ce qui précède, on voit aisément qu'en définissant la norme ||.|| = 77-||.||00 on
obtient une norme matricielle.
Soit maintenant M G Mn(K).
114. cf. O. Rodot, Analyse seconde année, De Boeck (2014).
Chapitre 3. Réduction
On déduit par récurrence de ce qui précède que VA; € N, | \Mk\ | < \\M\\ .
Ainsi, en notant c = ||M||, on a
VfceN,
—Mk
k\
^ kV
OO U
— converge116.
k=0
Nous allons en déduire que la série des —.Mk converge.
k\
Pour montrer que la suite (Sn) converge, montrons que cette suite est de Cauchy dans
(M»(K),||.||).
N 1
On note TN = £ - ||M||fc.
fc=0
oo 1
Nous venons de rappeler que la série ^ 77 II^IT converge, ce qui signifie que la suite
(Tn) est convergente.
La suite (Tn) est alors une suite de Cauchy; ce point est abordé dans l'ouvrage d'ana-
lyse117, redémontrons-le néanmoins rapidement ici.
Soit e > 0. On note £ la limite réelle de (Tn) lorsque N —> +00.
Par définition, il existe No tel que
ViV^JVo, |TN-*|<|.
Mais alors, par inégalité triangulaire, on a
\/N>M> JVo, \TN-TM\ = \(TN-t) - (TM-£)\ ^ \TN -1\ + \TM-t\ ^ 2£- =e.
Ainsi, nous venons de démontrer que
Ve > 0, 3JVo e N : VJV ^ M ^ iV0, \TN - TM\ ^ e.
On reconnaît la définition du fait que la suite (Tn) est de Cauchy dans R.
Montrons qu'alors la suite (Sn) est une suite de Cauchy dans (Mn(K), || . ||).
115. Ibid., à propos des séries numériques et des séries entières.
116. La somme de cette série étant exp(c) = ec.
117. cf. O. Rodot, Analyse seconde année, De Boeck (2014).
3.6 Exponentielle de matrices
Pour tout couple (N, M) G N2 tel que N ^ M, on a
N 1 Af - N
fc=0 * fc=0 " fc=M+l "
Par inégalité triangulaire, on en déduit
N
N
\\sK-su\\< £ Um"\U £ h\M\k-
Mais la même simplification que pour Sn — Sm fait que Ton reconnaît dans ce dernier
terme la valeur de Tn — Tm-
Soit maintenant e > 0.
Nous avons prouvé l'existence de No tel que ViV ^ M ^ iVo, T/v — Tm ^ e, et alors
MN>M> JVo, ||SW - 5m II ^ TN - TM ^ e.
Ainsi, la suite (Sn) est bien de Cauchy dans (A4n(K), || . ||).
Nous sommes dans un espace de dimension finie qui est donc complet118'119 , ce qui
signifie que les suites de Cauchy y convergent.
oo 1
Ainsi, la suite (Sn) converge, c'est-à-dire que la série ^J 17\Mk converge.
fc=0
Proposition 101
La fonction exponentielle possède les propriétés suivantes :
1. exp(0n) = In.
2. Si A et B sont deux éléments de Mn{K) vérifiant AB = BA, alors
exp(>4. + B) = exp(A). exp(B).
3. Pour tout M G Mn(K), la matrice exp(i\/) est inversible, d'inverse
(exp(A/))_1 = exp(-M).
Démonstration
118. cf. O. Rodot, Analyse seconde année, De Boeck (2014).
119. Notons que l'on pourrait aussi travailler coordonnée par coordonnée, mais c'est inutile.
Chapitre 3. Réduction
1. Ce point est évident.
En effet, en choisissant M = 0n, la suite Sn définie dans la proposition précédente
vérifie
ViVeN, SN = In + ^01n + ±02n + --- + j^0% = In>
cette suite converge donc évidemment vers 7n, la conclusion est bien
exp(On) = lim Sn = In-
N-*+oo
2. Cette preuve est similaire à celle de l'exponentielle complexe définie par la série
entière.
On commence par admettre120 le résultat suivant sur les produits de Cauchy de
deux séries.
Si Y^ Uk et Y^ Vk sont des séries de matrices qui convergent absolument121, alors
k k
v
en notant Vp G N, Wp = ^^UkVp-k, la série ^Wp converge absolument (donc
fc=o v
converge) et vérifie
oo / oo \ / oo \
p=0 \fc=0 / \fc=0 /
On applique ce résultat k Uk = ^\Ak et Vk = -j^B1*, dont on a prouvé
précédemment que les séries convergent absolument, respectivement vers exp(A) et exp(B).
On calcule alors Wp, en cherchant à reconnaître le terme général de la série
définissant exp(A + B).
120. La preuve serait parfaitement similaire à celle dans R ou C que l'on trouvera dans l'ouvrage
d'analyse.
121. C'est-à-dire telles que Y^ \\Uk\\ et Y^ HV^II convergent.
k k
3.6 Exponentielle de matrices
VpeN, Wp = Y^UkVp-k
fc=0
-k
p i i
i p „\
= V P' AkBp-k
En effet, on peut appliquer la formule du binôme de Newton, car on a supposé que
A et B commutent.
Ainsi, le résultat sur les produits de Cauchy s'écrit
oo
k
p=0 F \k=0 / \fc=0
p
résultat qui signifie directement
exp(A + B) = exp(A). exp(B)
3. On applique le résultat précédent avec A = M et B = —M (qui commutent) et on
en déduit immédiatement
exp(M). exp(-M) = exp(M - M) = exp(On) = 7n,
et de même122 que
exp(-M).exp(M) = In.
On peut en conclure immédiatement que exp(M) est inversible, d'inverse exp(—M).
Remarquons qu'alors, exp(A) et exp(B) commutent nécessairement, puisque
exp(A) exp(B) = exp(A + B) = exp(B + A) = exp(B) exp(A).
122. En échangeant le rôle de A et B.
Chapitre 3. Réduction
Dans le cours d'analyse123 il est prouvé que si l'on fixe a G C, la fonction
OO j
ea : t1—► exp(otf) = ^ — (ta)n
n=0
est définie et de classe C°° sur M, et vérifie W G M, e'a(t) = aea(t) = aexp(ai).
Ce résultat se généralise pour l'exponentielle de matrices.
Proposition 102
Soit A e Mn{K).
On définit la fonction
eA : R —> Mn(K)
t i—> exp(tA)
Alors eA est une fonction de classe C°° sur M, et vérifie
V£ e R, e'^) = AeA(t) = eA(0^-
>
Démonstration
On admet le résultat, la preuve valable dans le cas a G M basée sur le théorème de
dérivation terme-à-terme s'adapte sans difficulté124.
Proposition 103 I
Soit M e Mn{C). Alors det(exp(A)) = etr^).
Remarque
On peut mémoriser cette formule sous la forme « Le déterminant de l'exponentielle (d'une
matrice) est l'exponentielle de la trace (de cette matrice) ».
Démonstration
On sait que l'on peut trigonaliser M dans C, c'est-à-dire qu'il existe P G GLn(C) telle
que P~XMP est une matrice triangulaire supérieure T, d'éléments diagonaux les valeurà
propres Ai, ..., Àn de M.
123. cf. O. Rodot, Analyse seconde année, De Boeck (2014).
124. Il y a convergence normale sur tout segment de R pour la série de fonctions et pour la série des
dérivées n-èmes à n fixé.
3.7 Applications de la réduction
N l
Les coefficients diagonaux de V^ TïTk (qui sont toutes triangulaires supérieures) sont
fc=0
N
les y^ TT\^i> Quantité qui converge vers eXi.
fc=0
Ainsi, exp(T) est triangulaire supérieure, d'éléments diagonaux eAl, ..., eAn.
Le déterminant de cette matrice triangulaire supérieure est le produit de ses éléments
diagonaux, soit
det(exp(T)) = eAl...eAn = eAl+"""+An.
Mais d'une part, Ai H h An = tr(T) = tr(M) puisque M est semblable à T.
Et le passage à la limite dans125
f N 1 \ N 1
ViVGN, P-1 Efcî^* P = Efcîrfc
\fc=0 ' / fc=0
donne
P"1exp(M)P = exp(T),
donc les matrices exp(M) et exp(T) sont semblables.
Il est alors immédiat que
det(exp(M)) = det(exp(T)) = cAl+""+A» = etr<M>.
Une remarque à la suite de l'exercice 3.2 propose une autre démonstration de cette
formule126.
Applications de la réduction
Comme décrit au début du chapitre, de nombreux problèmes d'origine physique,
chimique, ou bien entendu mathématique se résolvent à l'aide de l'étude des éléments propres
de certains opérateurs (dont le laplacien).
Nous allons voir ici que d'autres problèmes utilisent la réduction de matrices.
Dans l'étude de phénomènes discrets, on peut être amené à étudier des suites de n-uplets
vérifiant des relations de récurrence linéaires, que l'on peut écrire sous une forme matri-
125. cf. la proposition 70 page 160, utilisable car ces sommes partielles sont des polynômes en M et en
T respectivement.
126. Cet exercice est basé sur la notion de wronskien.
Chapitre 3. Réduction
cielle C/n+1 = AUn. Pour expliciter les solutions, il pourra s'avérer nécessaire de calculer
les puissances de A (et plus généralement, un polynôme en A).
Dans l'étude de phénomènes continus, ce sont des systèmes différentiels linéaires qui
peuvent apparaître (d'autant que pour certaines équations, les physiciens ont besoin de
linéariser les équations, comme pratiqué pour le pendule simple).
Nous allons voir que de tels systèmes (même quand ils sont initialement d'ordre 2) peuvent
s'écrire matriciellement sous la forme Y' = AY. Pour résoudre ce système, c'est d'une
exponentielle de matrice que nous pouvons avoir besoin.
Nous verrons tout de même qu'en pratique, il n'est pas forcément nécessaire de faire un
calcul explicite de An ou de exp(L4), mais connaître les éléments propres pour une matrice
diagonalisable (ou savoir trigonaliser la matrice sinon) seront essentiels à la résolution de
ces deux types de calculs.
Systèmes différentiels
Il existe de nombreux théorèmes d'existence et d'unicité de solutions d'équations
différentielles, notamment lorsque l'espace contenant l'inconnue est de dimension finie.
Commençons par rappeler la définition des solutions des équations différentielles.
Définition 68
Soit K = M ou C et soit E un K-espace vectoriel de dimension finie.
Soit / une fonction continue sur un ouvert U de R x E à valeurs dans E.
Soit / un intervalle de R et y une fonction définie sur / à valeurs dans E.
On dit que (I,y) est une solution de Véquation différentielle y' = f(t^y) si et
seulement si
y est dérivable sur /
Vie/, (t,y(t))£U
[Vie/, y'(t) = f(t,y(t)).
Remarque
Les deux premiers points sont absolument nécessaires pour que le troisième ait un sens.
3-7 Applications de la réduction
fHj|
Définition 69
On reprend les i^otations^d©^
X&.ij et z^^Vi alors I,=4.:- :^:V*vfe^---V ■^7-v^j o5yh-c..-,..i-r»..,ï /::.,i .-, ■ /■
Remarque
En langage courant, une solution est dite maximale s'il est impossible de la prolonger en
une solution sur un intervalle strictement plus grand.
Né à Kônigsberg (à l'époque en Allemagne), Lipschitz a
(comme de coutume en Allemagne à l'époque) étudié dans
i diverses universités, notamment à Kônigsberg et Berlin.
» * Malgré une santé fragile, il obtint son de doctorat en 1853.
Une des constatations les plus flagrantes à son égard est la
diversité des sujets qu'il a étudiés, notamment la théorie
\ . des nombres, les séries de Fourier, les fonctions de Bessel,
^ et autres.
Rudolf Lipschitz est passé à la postérité en mathématiques
-p , if t ■ Vi#* pour la définition des fonctions dites lipschitziennes ; il se
Kudolt Lipschitz trouye qu,n g,agit d,une condition suffisante pour l'unicité
U 32 ^^j rïes solutions de certaines équations différentielles, ce qui
justifie que son nom soit accolé à celui d'Augustin Cauchy dans le théorème qui
nous intéresse ici.
Lipschitz introduisit" des conditions plus générales, en étudiant les fonctions /
pour lesquelles il existe des constantes M > 0 et a G]0,1] telles que
V(*,2/), \f{x)-f(y)\^M\x-y\a.
Ces fonctions sont néanmoins connues sous le nom de fonctions hôlderiennes.
a. De expHcatione per séries trigonometricas instituenda fiinctiomim unius variabilis arbitrariarum, et praecipue earum, quae per
variablis spatium finitum valorum maximorum et minimorinn mimerum habent infinitum disquisitio Journal fiir die reine und
angewandte Mathemahk (ou Journal de Crelle) 63 (1864), pp. 296-308.
ïïil Chapitre 3. Réduction
Théorème 20 (Cauchy 127-Lipschitz) I
Soit K = M. ou C et soit E un K-espace vectoriel de dimension finie.
Soit / une fonction de classe C1 définie sur un ouvert U de M. x E à valeurs dans E.
Alors pour tout couple (£o>Z/o) £ f> Ie problème de Cauchy
2/(*o) = 2/o
possède une unique solution maximale.
Démonstration
On admet le résultat.
Il est notamment basé sur la complet ude des espaces £ = C([to — a, to + a], E) munis de
la norme infinie.
On applique alors le théorème du point fixe de Picard à l'application
F : £ —> £
y ^ F(y) = Y
où Vs G [to — a, to + a], y(5) =2/0+/ /(s, 2/(5)) ds (on peut appliquer le théorème du
Jto
point fixe à condition de choisir a > 0 suffisamment petit pour que F soit contractante).
Un cas particulier est le suivant :
Proposition 104
Soit K = R ou C et soit E un K-espace vectoriel de dimension finie.
Soit / un intervalle de R.
Soit / : / —> £{E) une application continue.
Alors pour tout couple (£o>Z/o) G / x E, le problème de Cauchy
y'(t) = f(t){y(t))
Z/(*o) = 2/o
possède une unique solution sur /.
127. Voir notice biographique page 120
3.7 Applications de la réduction
Démonstration
Admis.
La résolution générale de ces systèmes est difficile, mais intéressons-nous au cas où / est
constante (on parle de système à coefficients constants).
En effet, si Ton fixe une base B de E et que Ton écrit A = (o>ij)(ij)eiitn'i2 la matrice de
( m® \
f dans cette base, yi{t) la i-ème coordonnée de y dans cette base et Y(t) =
alors l'équation y' = f(y) s'écrit
{y[(t) = a1}1yx + • • • + ahnyn
\
y'n(t) = anji2/iH h an,nyn.
L'exponentielle de matrices permet la résolution générale d'un tel système.
\ Vn(t) )
Proposition 105
Si Ton fixe X0 e M,
i,i (K) et £o £ M, alors le pr
possède une unique solution,
| Vie M,
l Y(to) =
qui est t ^
Y'(t) =
-x0
->K(0
oblème de Cauchy
AY(t)
= et-WXo.
J
Démonstration
Vérifions déjà que la formule proposée est une solution.
Comme t \—> eA{t) est de classe C°° sur R, t \—> eA{t — £o) est aussi de classe C°° sur R
par composition.
On en déduit que Y : t \—> e^~to^AXo = e^ - to)Xo est dérivable, et que \/t G R,
Y'{t) = e'A(t - t0)X0 = AeA(t - t0)X0 = AY(t), donc Y est solution de l'équation
différentielle.
On a aussi Y(to) = eOAXo = e0nXo = InXo = Xq, donc la condition initiale est
également respectée, et ainsi Y est bien solution du problème de Cauchy.
Respectivement, soit Y une solution du problème de Cauchy.
On pose alors Vfc G R, Z(t) = e^-^^YH).
Chapitre 3. Réduction
On sait alors que Z est dérivable sur M, et \/t G R,
Z'(t) = -e-(t-to)AY(t) + e-(t-to) Y'(t) = 0,
=AY{t)
donc Z est constant. Or Z(to) = e0nXo = InXo = Xo, donc
Vt G M, Z(t) = e-(*-*o)Ay(t) = X0.
En multipliant à gauche par e^*"*0^ (qui est l'inverse de e-^-*0^) on obtient
Vt G M, y(t) = e(t-*o)AX0.
Nous avons bien démontré l'existence et l'unicité de la solution de ce problème de Cauchy.
Le lecteur notera que la preuve est adaptée de celle des équations différentielles scalaires,
c'est-à-dire dont l'inconnue est une fonction à valeurs dans K.
Remarque
En pratique, on ne calcule pas l'exponentielle d'une matrice pour résoudre un tel système.
On le transforme pour découpler autant que possible les équations, en diagonalisant la
matrice A si possible, et sinon (ce qui est toujours faisable si l'on travaille dans C) en la
trigonalisant.
Théorème 21 |
Soit A e Mn(K).
L'ensemble des solutions définies sur128 R de l'équation Y'(t) = AY(t) forme un
K-espace vectoriel de dimension n.
Démonstration
On considère l'application <p définie sur Mn(K) qui à Xo G Mntifà) associe la solution
du problème de Cauchy, c'est-à-dire :
Y'(t) = A.Y(t)
Y(to) = Xo
128. Ou sur un intervalle non trivial / de R.
3.7 Applications de la réduction
où to est un élément fixé de R (resp. de I).
Alors (p est linéaire129 et l'existence et l'unicité de la solution au problème de Cauchy
pour tout Xo signifie que </? est un isomorphisme, ce qui explique que la dimension de
l'espace des solutions est égale à la dimension de A1nji(K), c'est-à-dire à n.
Soit A =
" 1 0
Calculer exp(tA) pour tout t G R et en déduire la solution générale du système différentiel
x' = -y
y' = x.
1. Les puissances successives de A donnent A2 = —I2, puis A3 = — A et A4 = J2, donc
la suite (Afc)fceN est 4-périodique.
Regardons coefficient par coefficient : en place (1,1), il y a dans Ak : 0 si k est
impair, et (—l)p si k est pair, k = 2p.
2N 1
Ainsi, dans ^ Tr(^)fc» ^e coefficient en place (1,1) est
A (-l)ptP
^ (2p)! '
P=o v ^'
et on sait que cette quantité converge vers130 cos(t) lorsque N —> +00.
En travaillant de même avec les quatre coefficients, on arriverait à W G M,
tA I cost — sint
l sint cost
Mais131 Mais technique particulière n'étant en pratique utilisable que sur des cas
particuliers, appliquons ici une méthode plus générale, en réduisant A.
On trouve aisément \A = X2 + 1 = (X — i)(X + i) scindé à racines simples dans
C, et alors A est diagonalisable dans C.
i\ ( -i
On trouve que [ ) et I ) sont des colonnes propres respectivement asso-
129. cf. l'expression Y(t) = e^-^^Xo.
130. On reconnaît un développement bien connu en série entière.
131. Cette méthode n'étant pas facile à généraliser.
Chapitre 3. Réduction
ciees a i et -i.
On pose donc P = I I, on trouve P_1 = - I I et
11/ 2 1*1
P_1AP = D
0 -i
. it 0 \ / eu 0 .
On a finalement Vt G M, exp(££>) = exp = et en
0 -it 10 e-u
calculant le produit :
W G M, exp(tA) =
cos t — sin £
sin t cos t
2. La solution générale du système est
ou encore
: exp(tA)
2/o
x(t) = xo cos t — yo sin t
y(t) = xosint + yocost.
Mais calculer l'exponentielle de la matrice est en réalité inutile pour résoudre le système
différentiel.
La proposition suivante s'intéresse au cas particulier d'un système diagonalisable.
3.7 Applications de la réduction
fllfi
Proposition 106
Soit un système différentiel linéaire à coefficients constants, qui s'écrit donc
Y' = MY
avec Y : fGM^ Y{t) G .M„,i(K) dérivable et M G Mn{K).
Supposons M diagonalisable, on note Ai, ..., A„ les valeurs propres de M 132 et
(Ci, ...,Cn) une base de À47lii(K) constituée de colonnes propres de M
respectivement associées à Ai, ..., An.
On note I
Vi G [1,711, Vf G R, Yi(t) = eXitCi.
Alors (Yi,..., Y„) forme une base de l'ensemble des solutions133 de Y' = MY.
Démonstration
Soit i G [l,nj. Il est évident que la fonction t \—> eXit est dérivable, de dérivée AieAi* ce
qui implique
Vt e M, Y((t) = XiYi(t).
Par ailleurs, on a MC\ = XiCi donc
\ft e M, MYi(t) = XieXitCi = XiYi{t).
On constate donc que Yi est bien solution de Y' = MY.
Par ailleurs, on sait que l'ensemble des solutions de ce système est un espace de dimension
n, et (Yi,..., yn) est libre.
En effet, si (ai,...,an) G Kn vérifie ol\Y\ + ••• + anYn = 0, on obtient en t = 0 :
&\C\ H h anCn = 0, qui implique134 ai = • • • = an = 0.
On constate que (Yï,..., Yii) est une famille libre dans un espace de dimension n, donc
est une base de cet espace des solutions.
, 132. Éventuellement multiples.
133. On parle aussi de système fondamental de solutions.
134. Puisque (Ci,...,Cn) est libre.
Chapitre 3. Réduction
Exemple
Résolution de
On pose alors X
f x\
w
(S) : {
et M
2x-2y + z
2x - 3y + 2z
-x + 2y
/ 2 -2 1 \
2 -3 2
V-l 2 0/
On a vu135 que M est diagonalisable, que ses valeurs propres sont
Ai = -3 et À2 = À3 = 1,
et qu'une base de colonnes propres associées est donnée par
/ i \
Ci
2
/ 1 \
, c2 =
et C3
(o\
1
V2/
: aie
st
( 1 )
2
V"1 )
+ aie
( l \
0
l-1 )
+ a3et
(o\
1
U/
0
V-1/
On peut directement conclure que (x, y, z) est une solution de (S), c'est-à-dire X est une
solution de l'équation X' = MX, si et seulement si
3!(ai,a2,a3)e]R3 :
/ x(t) \
W 6 M, X(t) = y{t)
\ z{t) )
Remarque
L'exercice 3.2 page 314 introduira la notion de wronskien, qui permet de vérifier si une
famille de solutions est une base de l'ensemble des solutions.
Voyons maintenant sur un exemple comment résoudre un tel système différentiel lorsque
la matrice est trigonalisable136.
Considérons
x' = 2x + 2y-z
y7 =■ 9x + 3y-5z
z' = 9x + 5y — 5z
135. Voir l'exemple 1 page 250.
136. Rappelons que si l'on travaille dans C, toute matrice est trigonalisable
3.7 Applications de la réduction
On note donc M
l 2 2 -1 \
9 3-5-
\ 9 5 -5 /
On trouve rapidement \m = (X + l)2(X - 2).
Ainsi, —1 est valeur propre double, et 2 est valeur propre simple.
Mais M +13 est de rang 2, donc E-i(M) est de dimension 1, alors que —1 est valeur
propre double.
Ainsi, M n'est pas diagonalisable.
/1\
et E-i{M) = K
On trouve E2(M) =R\ 1
On complète en une base de
( * ^
-i
\ 1 !
Mais on peut, en cherchant P inversible sous la forme P
tel que
/l 1 a\
1-16
V2 1 c)
, trouver P
P-XMP
( a\
Cela revient à résoudre M
/ a \ ( -1 \
/ 2 0 0 \
0-1 1
^0 0 -l)
( a\
b
+
( x \
-1
V i /
et on trouve comme solution
particulière
6
V « 7
/l 1 -l\
On pose donc137 P
137 p _
6 GL3(M).
1 -1 2
\2 1 0 /
Le système X' = MX — PTP-1X devient équivalent, en multipliant à gauche par P-1,
kP-lX' = T.p-1X.
Sil 'on pose Y = P 1X, le système est finalement équivalent à Y' = TY.
137. Le lecteur vérifiera aisément que P est inversible, par exemple car son déterminant est non nul.
La manière dont les colonnes de P ont été choisies impose l'égalité P~1MP = T sans calcul.
Chapitre 3. Réduction
On écrit Y =
\7/
, on a le système
a
2a
F = -0 + 7
La solution générale de la première équation est a = aoe2t et pour la troisième équation,
7 = 7oe"*.
On peut alors résoudre la seconde équation138.
La solution générale de l'équation homogène est /3oe~*, et une solution particulière de
/3'=-/3 + 7oe-< est7o*e-*.
La solution générale est donc fi = (fio + 7o£)e~*-
Finalement, la solution générale de Y' = TY est
Y(t)
(
\
Q2t
OLQC
(A) + 7o*)e-<
7oe
-t
\
!
Il suffit alors de multiplier à gauche139 par P pour en déduire la valeur de X = PY.
Remarque
On notera qu'il n'est pas nécessaire de calculer P-1.
Le résultat peut se généraliser de deux façons. En effet, il est possible d'une part
d'introduire un second membre au système différentiel, et d'autre part il est possible de faire
intervenir des coefficients non constants dans le système.
138. Qui est une équation différentielle avec second membre.
139. On laisse le soin au lecteur de faire ce simple produit matriciel.
3.7 Applications de la réduction
Théorème 22
Soient A une fonction continue sur un intervalle i" de R et à valeurs dans Mn(K),
B une fonction continue sur / et à valeurs dans A^n,i(K), £0 un élément de / et Xo
un élément de Mn)i(K). Alors
1. L'ensemble So des solutions de X'(i) = A(t)X(t) sur / est un sous-espace vectoriel
de dimension n de Cl(l,Mn^\{K)).
2. L'ensemble Si des solutions de X'{t) = A(i)X(i) + B{t) sur / est un sous-espace
affine de C1(/,.Mn>i(K)), dirigé par <So.
3. Le problème de Cauchy
' X'(t) = A(t).X(t)
X(t0) = X0
possède une unique solution.
On admet ce résultat.
L'existence et l'unicité de solutions maximales du problème de Cauchy peut être vue
comme une conséquence du théorème 20, il resterait à montrer que les solutions sont
valables sur tout /.
On peut noter que contrairement au cas des équations différentielles scalaires d'ordre 1 et
au cas des systèmes différentiels à coefficients constants, la solution de X'(t) = A(t).X(t)
fl A(s) ds
vérifiant X(to) = Xq n'est pas nécessairement X(t) = eJto Xo car la dérivée de
f' A(s)ds , . ... f A(s)ds
11-> eJto n est pas forcement A (t)eJto
Néanmoins, un cas particulier pour lequel la solution de l'équation homogène est de cette
forme est le cas où V(M') € /2, A(t)A(t') = A(t')A(t).
Équations différentielles scalaires
On peut étudier une équation différentielle à coefficients constants d'ordre p ^ 2 et
/ » \
d'inconnue y en étudiant Y =
y1
„(p-i)
Chapitre 3. Réduction
Y'
L'équation y^> = aoy + ai H h ap_ij/(p ^ est alors équivalente au système différentiel
/ 0 1 (0) \
0 '••
(0) ••• i
y ao ai ... ap_i J
On peut alors résoudre ce système à l'aide des méthodes évoquées précédemment.
On peut également noter que la matrice qui apparaît est une matrice compagnon, dont
le polynôme caractéristique est Xp — ao — • • • — ap-iXp_1.
Par exemple, si l'on étudie l'équation y" = ay'+by, on a comme polynôme caractéristique
X2 — aX — 6, et l'on retrouve l'équation caractéristique140 étudiée en première année.
Équations différentielles scalaires d'ordre 2
On peut déduire du théorème 22 le résultat suivant sur les équations d'ordre 2.
Théorème 23
Soient a, b et c trois fonctions continues sur un intervalle / de R et à valeurs dans
K, £q un élément de / et t/o, Vi deux éléments de K. Alors
1. L'ensemble So des solutions de y"(t) = a(t)yf(t) + b(t)y(t) + c(t) sur / est un
sous-espace vectoriel de dimension 2 de C2(/,K).
2. L'ensemble Si des solutions de y"{t) = a(t)y'(t) + b(t)y(t) 4- c(t) sur / est un
sous-espace affine de C2(/,K), dirigé par So-
3. Le problème de Cauchy
' y"(t)=a(t)yf(t) + b(t)y(t) + c(t)
2/(*o) = 2/o
[ y'(to) = 2/i
possède une unique solution.
140. Et l'on comprend ainsi pourquoi le même terme de « caractéristique » a été choisi dans deux
domaines qui pouvaient sembler différents.
3.7 Applications de la réduction
Démonstration
Il suffit d'appliquer le théorème 22 avec la fonction A définie par A(t)
1 b(t) a(t)
. 0
et la fonction B définie par Bit)
' c{t)
En notant X(t) = [ J et Xq = I ), alors l'équation différentielle équivaut
x ï/W / \ 2/i
au système X'(t) = A(t)X(t) + B(t), et les conditions initiales du problème de Cauchy
sont équivalentes à X(to) = Xq.
Remarque
Les équations sont parfois présentées sous la forme a(t)y"(t) + /3(t)y'(t) +i(t)y(t) = ô(t).
Les résultats du théorème restent alors valables, à condition que la fonction a ne s'annule
en aucun point de l'intervalle /.
Définition 70 (Wronskien 141)
Soient deux fonctions y\ et y 2 de classe C2 sur un intervalle /.On appelle wronskien
de y\ et 7/2 la quantité définie par
V*éJ, Wyuy2(t)
2/i W 2/2(0
2/iW 2/2(0
= 2/1 (%2(0-2/i (*)2/2W-
S'il n'y a pas ambiguïté, on notera plus simplement cette fonction W.
L'intérêt de cette notion est que son évolution est particulière si y\ et 2/2 sont solutions
d'une même équation différentielle homogène.
141. Il s'agit ici d'un cas particulier pour les équations différentielles d'ordre 2. Cette notion sera vue
de façon plus étendue dans l'exercice 3.2 page 314.
ecei
Chapitre 3. Réduction
Proposition 107
Soient y\ et y2 deux solutions sur / de l'équation différentielle y" = ay' + by, où a
et b sont des fonctions continues sur / et à valeurs dans K. Alors le wronskien W de
î/i et 2/2 satisfait une équation différentielle d'ordre 1, à savoir
\ftel, W{t) = a(t)W(t)
Démonstration
Puisque y\ et 2/2 sont de classe C2 sur /, a ors W = y\y'2 — y[y2 est de classe C1 sur I et
l'on a
W 6 /, W'{t) = yiïUit) + yi{t)y2'{t) - y'{{t)y2{t) - y[{t)y'2{t).
D'une part, les termes en 2/1(^)2/2 W se simplifient et d'autre part, on peut remplacer y"(t)
par a(t)y^(t)+6(t)yi(t), puisque yi est solution de cette équation différentielle (i G {1,2}).
Ainsi,
W 6 I, W"(*) = yi(t).(a(t)y'2(t) + b(t)y2(t)) - (a(t)yi(f) + b(t)yi(t))y2(t)
= a(t)yi{t)y'2(t) + b(t)yi(t)y2{t) - a(t)y[{t)y2{t) - b(t)yi(t)y2(t)
= a(*).(vi(t)î£(<)-Vi(*)w(*))
= a(t)W(t).
.
Proposition 108 I
Soient 2/1 et y2 deux solutions sur / de l'équation différentielle d'ordre 2 et homogène I
(H) : y" = ay' + 62/, où a et b sont des fonctions continues sur / et à valeurs I
dans K. On note W leur wronskien. Alors, les quatre propositions suivantes sont I
équivalentes : I
!■• (2/1*2/2) est une famille libre de C2(/,R), I
2. (1/1,2/2) est une base142 de l'ensemble des solutions de (il), I
I 3. il existe t0 e I tel que W(tG) 7^ 0, |
4. W G /, ÏV(*) + 0.
142. On parle alors de système fondamental de solutions de (H).
3.7 Applications de la réduction
Démonstration
Il s'agit d'un cas particulier de la démonstration effectuée dans l'exercice 3.2 page 314.
Le wronskien a un autre intérêt. Si l'on connaît une solution y\ (non identiquement nulle)
d'une équation différentielle homogène (if), alors il est possible à l'aide du wronskien de
déterminer une autre solution 2/2, telle que (2/1,2/2) soit libre.
Exemple
Résoudre l'équation différentielle (E) : 2xy" + y' + y = 0 sur ]0, +00[.
On commencera par trouver une première solution développable en série entière, puis on
trouvera l'ensemble des solutions à l'aide du wronskien.
Commençons donc par supposer l'existence d'une suite {un)ne^ G Rn telle que la série
+00
entière V^unxn possède un rayon de convergence R > 0 et que y(x) = 2_\unxn soit
n^O n=0
solution de (E) sur ]0, R[.
On sait alors que y est de classe C°° sur ] — R,R[ et que Va: G] — iî, i?[,
+00 +00
y'(x) = ^ nunxn l = y^ nunxn 1
71=0 71=1
+ OO
= ^(n + lK+izn
71=0
+ OO +OO
et y"{x) = ^2 n(n ~ l)^n^n"2 = ^2 n(n - l)unxn~2
71=0 71=1
+ OO
= ^n(n + l)un+1xn~1
71=0
+ OO +OO
= ^2 n(n - l)unxn-2 = ^2(n+l)(n + 2)un+2xn
71=2 71=0
(on a enlevé des termes nuls et décalé les indices de 1 ou 2)
Le fait que y est solution de (E) sur ]0, R[ implique que Va: G]0, iî[,
+00 +00 +00
2x ^ n(n + l^n+lZ71"1 + ^2(n + l)^n+ia:n + ^2 UnxTl = °-
71=0 71=0 71=0
^j Chapitre 3. Réduction
Les décalages d'indice effectués à l'avance font que l'on peut réécrire ce qui précède sous
la forme Vx G]0, R[,
+°° r 1
y^ 2n(n + l)un+i + (n + l)un+i + un kn = 0.
n=0
Il est alors possible d'identifier les coefficients et d'affirmer que
Vn G N, 2n(n + l)un+i + (n + l)un+i + un = 0.
Les deux premiers termes se factorisent en (n+l)(2n-|-l)^n+i et comme (n+l)(2n-|-l) ^ 0
on obtient la formule de récurrence
(2n + l)(n+ 1)
Une astuce est alors de multiplier au numérateur et au dénominateur par 2 afin d'écrire
-2
Vn G N, un+\ =
(2n + l)(2n + 2) ll
(on voit ainsi apparaître au dénominateur des entiers consécutifs).
On déduit alors rapidement de cette relation que
Vn G N, un = VtT^o-
(2n)!
^n+l
tend vers 0, donc par
On peut déjà noter que le rapport , , — , „Wrt „N
J H \ un \ (n + l)(2n + l)
le critère de d'Alembert, le rayon de convergence est R = -foo. Mais une vérification
ultérieure rendra cette remarque inutile.
On obtient y{x) = u0 Y^ , N xn.
n=o v '
On note une forte ressemblance avec le développement en série entière de la fonction
cosinus. Il est aisé de vérifier qu'avec le changement de variables t = y/2x (possible,
puisque x > 0) on a
y t^Lxn = y izlL^ = cos,
soit y(x) = uo cos (y/2x).
Il reste à vérifier que yi : x *-¥ yi(x) = cos (y/2x) est bien solution de (E) sur ]0, +oo[.
Ce calcul aisé est laissé au lecteur.
3.7 Applications de la réduction
Notons également que cette méthode pourrait s'effectuer par ailleurs pour x < 0. Il
faudrait poser t = yj—2x et on aboutirait à y(x) = ^ocosh (y/—2x).
Mais sur ]0, -foo[, la résolution n'est pas terminée. En effet, l'ensemble des solutions est
un espace de dimension 2, mais les solutions développables en série entière ne donnent
que la droite R.yi.
Utilisons le wronskien pour déterminer une autre solution y2.
On sait que si 2/2 est une autre solution, alors W vérifiera143 W'{x) = —W(x).
2x
On peut chercher une solution 2/2 telle que W(l) = 1. La solution générale de W = — W
2x
Q
est W'(x) = —=. sur ]0, +oo[, donc le choix de la donnée initiale impose C = 1.
"y X
On peut ainsi écrire
Va: e]0, +oo[, W(x) = yi(x)y'2(x) - y'l{x)y2{x) = —=,
yJX
ou encore
Va: GlO, +oo[, cos (V2x)y'2(x) + —7== sin (V2x)y2(x) = —~
V2a: yjx
Il s'agit d'une équation différentielle linéaire d'ordre 1. La solution générale de l'équation
homogène associée est simplement c.y\ avec c G M.
Pour résoudre l'équation avec second membre, on applique la méthode de variation de la
constante et on aboutit (les calculs ne sont pas détaillés ici) à la solution générale
2/2 (x) = \/2sin (V2x) + ccos
Par linéarité, on peut choisir c = 0 et diviser par y/2 pour trouver une autre solution.
Ainsi, en définissant Mx > 0, 2/1 (a:) = cos (V2x) et 2/2(2) = sin (V2x), la famille (2/1,2/2)
est une base de solutions de (E) sur ]0, +oo[.
Remarques
Notons que le wronskien est également utile si l'on connaît deux solutions et que l'on
veut vérifier que l'on a bien une base.
Reprenons l'équation (E), mais sur ] — 00,0[. Le développement en série entière donne
Zi(x) = cosh (y/—2x) solution.
143. Sur ]0, +oo[, l'équation (E) équivaut à y" = —^y' — t^V, donc a(x) = -^
Chapitre 3. Réduction
On conjecture alors que Z2(x) = sinh (>/—2x) est également solution144.
Il est aisé de vérifier que z\ et z<i sont bien solutions de (E) sur ] — oo, 0[.
Enfin, on trouve Va: < 0,
W(x) = -j=L= (cosh2 (>/=2â) - sinh2 (x/^)) = -^L= £ 0
\J—ZiX ^ ' \J &X
On en déduit que (21,22) est bien un système fondamental de solutions de (E) sur ]—00,0[.
On notera qu'il existe également une toute autre manière de résoudre cette équation sur
]0,+oo[.
Il s'agit d'effectuer un changement de variable. On considère un C2 difféomorphisme <p
de ]0, -foo[ vers un intervalle inconnu J. On pose t = ip(x) et y{x) = z(t) = z(ip(x)).
On cherche </? tel que l'équation différentielle devienne (si possible) plus simple, par
exemple à coefficients constants.
On trouve Va: G ]0, +oo[,
y'(x) = ip'{x)z'(ip(x))
et
y"{x) = (ip'{x))2z"(ip{x))+ip"{x)z'(ip{x)).
L'équation différentielle (E) devient alors
2a:(^,(a:))2z,,(^(a:)) + (2xt//'(x) + <(J (x)) z'(tp(x)) + z(<p(x)) = 0.
Pour que l'équation soit à coefficients constants, il faut notamment que 2x{y>'{x)) soit
constant.
Ce nombre est clairement positif sur ]0, +oo[, on le choisit égal à +1.
On choisit donc tp tel que (tp'{x)) = —.
£iX
Pour cela, on choisit ip'(x) = + , et plus particulièrement on choisit ip(x) = y/2x.
y/2x
On constate qu'alors tp est un C2-difféomorphisme de ]0,+oo[ dans lui-même, et après
simplifications l'équation équivaut à
z"(t)+z(t) = 0.
144. Cette idée ne fonctionne pas systématiquement... on s'inspire du fait que pour les équations du type
y" + cy = 0 avec c ^ 0, les solutions générales sont selon le signe de c de la forme A cos(ljx) + B sin(a/#)
ou Ccosh(aa;) + Dsinh(aa;).
3.7 Applications de la réduction
WEfi
Cette équation est aisée à résoudre, sa solution générale étant
z(t) = Acos(t) + B sin(t) ((A, B) G M2).
À l'aide du changement de variable t = y/2x, cela équivaut à affirmer que
y(x) = A cos (V2x) + B sin (V2x) ((A, B) G M2)
est la solution générale de (E) sur ]0, +oo[.
Exemple
Une équation différentielle d'ordre 2 classique est l'équation d'Euler, de la forme
at2y" + bty' + cy = 0,
où(a,6,c) G K3.
La résolution sur ]0, +oo[ s'effectue à travers le changement de variable s = Int.
En effet, si y est deux fois dérivable sur ]0, +oo[, on peut définir z de sorte que
W>0, y(t) = z(\nt),
ce qui équivaut à
VsGM, z(s)=y(es).
On constate alors que y est deux fois dérivable sur ]0, -foo[ si et seulement si z est deux
fois dérivable sur M.
En outre, on obtient aisément Wt > 0,
y'(t) = j-z'(lnt)
y"{t) = I.z"(ln*)-I.z'(lnf).
On observe ainsi que l'on a
V* > 0, at2y"(t) + bty'(t) + cy(t) = 0 «=► W > 0, az"(\nt) - az'Qnt) + &z'(mt) + cz(lnt) = 0
<î=> Vs G M, >z"(s) + (b - a)z'(s) + cz(s) = 0.
gjjjj Chapitre 3. Réduction
L'équation vérifiée par z est à coefficients constants, sa résolution nous est connue.
Prenons l'exemple concret de l'équation
t2y" - ty' - 3y = 0.
À l'aide du changement de variable ci-dessus, cette équation pour t G]0, -foo[ équivaut à
z" -2z'-3z = 0
sur M.
L'équation caractéristique associée est r2 — 2r — 3 = 0, possédant deux racines simples 3
et -1.
La solution générale est
z(s) = Ae3s + Be~s ((A, B) G M2).
Puisque l'on a défini z de sorte que Mt > 0, y(t) = z(\nt), la solution générale de
t2y" - ty' - 3y = 0 sur ]0, +oo[ est
y(t) = Ae3 ln * + Be~ln * = At3 + - ((A, B) G M2).
Q21 Méthode de variation des constantes
Pour tout système différentiel de la forme Y'(t) = A(t)Y(t) + B(t), une fois que l'on a
trouvé un système fondamental (Yî,..., Yn) de solutions du système différentiel homogène
Y'(t) = A(t)Y(t), on peut résoudre le système avec second membre par la méthode de
variation des constantes.
Si Y{t) est une solution, on peut écrire Y{t) = Xi(t)Yi(t) + ... + Xn(t)Yn(t) puisque
(ïï(t), ...,Yn(t)) est une base de Mn,i{K).
En dérivant cette égalité et en l'injectant dans le système, il subsiste après simplification
\[{t)Y1(t) + ... + W)Yn(t) = B{ty
Par identification, on en déduit les A^(£), puis les Xi(t) par intégration.
Cette méthode est appliquée dans l'exercice 3.7 (p. 321).
Voyons ce que devient cette méthode dans le cas particulier des équations différentielles
scalaires d'ordre 2.
Soit donc à résoudre une équation de la forme y" = a(t)y'(t) + b(t)y(t) + c(£), où a, b et
c sont trois fonctions continues sur un intervalle /.
3.7 Applications de la réduction
On appelle (2/1,2/2) un système fondamental de solutions, c'est-à-dire que la solution
générale de l'équation homogène est C12/1 + C22/2, avec (ci,C2) G K2.
Il faut prendre garde au fait que la méthode de variations des constantes ne se résume
pas à chercher y(t) sous la forme y(t) = Xi(t)yi(t) + \2(t)y2(t).
I y(t)
Il faut se rappeler que l'inconnue est en fait la colonne
V M)
On cherche donc Xi(t) et À2(£) tels que l'on ait
»'«) / \ si«) I \ ié(«)
Cela est toujours possible, puisque la famille ( ( , ) ) est une base de
A^2,i(^) (car son déterminant, qui est le wronskien de (2/1,2/2) en £, est non nul).
Ainsi, il existe un unique couple Ai, À2 de fonctions telles que
Vf € / / (1) V{t) = Al(f)3/l(f) + Aa(*)»(*)
' \ (2) y'(t) = X1(t)y'1(t)+X2(t)y'2(t)
En dérivant la première égalité et en faisant la différence avec la seconde, il vient
X'1(t)y1(t) + X'2(t)y2(t) = 0.
Par ailleurs, en dérivant l'égalité (2) et en injectant les valeurs de y, y' et y" dans
l'équation différentielle, il vient après simplifications
K{t)y[{t) + X'2{t)y'2{t) = c{t).
Ainsi, on a
Wel { (3) AiW^W + ^W»W = 0
' \ (4) K(t)y[(t) + X'2(t)y2(t) = c(t)
À nouveau, on constate qu'il s'agit d'un système de Cramer, puisque son déterminant
^ Wyuy2(t) ? 0.
On en déduit un unique couple de solutions (Ai(t), A^t)), et après intégration on trouve
les fonctions Ai et A2, et finalement on a résolu l'équation.
KilIII Chapitre 3. Réduction
Exemple
Résoudre145 sur R l'équation différentielle
y" + y = cos3(z)
par la méthode de variation des constantes.
La solution générale de l'équation homogène associée (c'est-à-dire de y" + y = 0) est
y(x) = Acos(x) + Bsin(x) où (A, B) G M2.
En d'autres termes, y\ : x \-¥ cos(x) et 2/2 • x *-* sin(x) forment un système fondamental
de solutions.
Pour résoudre l'équation avec second membre, on cherche Ai et À2 telles que
j (1) y(x) = Ai(x) cos(z) + A2(x) sin(z)
I (2) y'(t) = -Xi(x)sin(ar) + X2(x)cos(z)
On utilise la méthode générale146 pour affirmer que
{(3) Ai (x) cos(z) + XUx) an(ar) = 0
(4) - X[(x) sin(x) + X'2{x) cos(z) = cos3(z)
La résolution est alors aisée.
> On trouve147 X[(x) = — sin(x) cos3(a:), d'où Xi(x) = - cos4(x) + c\ avec c\ G M.
113
► On obtient également148 X'2(x) = cos4(x) = - cos(4x)+- cos(2x) + - après linéarisation,
113
d'où A2(x) = — sin(4x) + - sin(2a;) + -x + C2 avec C2 G M.
32 4 8
La solution générale de y" -\-y = cos3(a:) est donc
y(x) = ci cos(z) + c2 sin(z) + yp(x) ((ci, c2) G M2),
ou
Mx G M, 2/p(x) = - cos5(x) + f — sin(4x) + - sin(2x) + -x 1 sin(x).
Calculs de polynômes d'une matrice
145. Cet exemple est tiré de la banque publique d'oraux CCP-MP.
146. En pratique, il peut être aussi rapide de la retrouver sur un exercice concret
147. Par exemple, avec l'opération cos(x).(3) — sin(x).(4)
148. Avec l'opération sin(z).(3) +cos(z).(4)
3.7 Applications de la réduction
Notation
Lorsque / G C(E), on note K[f] l'ensemble des polynômes en / :
K[/I = {P(f), P e K[X}}.
Naturellement, K[f] est un sous-espace vectoriel149 de C{E).
De même, si A G Mn(K), on définit
= {P(A), P e K[X]},
qui sera un sous-espace vectoriel de A1n(^)-
Proposition 109
Si E est un K-espace vectoriel de dimension finie et si / G C{E) est diagonalisable,
alors en notant Ai, ..., Ar les valeurs propres deux à deux distinctes de / :
1. La famille (/° = IdEJJ2, ...,/r~1) est une base150 de K[f].
2. Si P G K[X], il existe un et un seul polynôme R G Kr_i[X] tel que P(f) = R(f).
r
R est le reste de la division euclidienne de P par /if = YJ(X — Xi).
i=l
On peut également voir que R est l'unique élément de Kr_i[Af] tel que Vz G [1, ?*],
R(Xi) = P(Xi).
Démonstration
Montrons déjà la liberté de la famille (/° = Me, /, /2, ••-, /r_1)-
On sait que le polynôme minimal de / est [i = (X — Xi)...(X — Ar), de degré r.
Ainsi, si (ao,...,ar_i) G Kr est telle que açld + a\f + • • • + ar-\fr~l = 0, alors le
polynôme P = ao + ol\X H h ar-\Xr~l annule /, donc P est un multiple de [i.
P étant de degré strictement inférieur à r = deg(^), [i divise P implique P = 0, c'est-à-
dire œq = ai = • • • = ar-i = 0.
Si P g K[X], on effectue la division euclidienne de P par [i.
On écrit ainsi P = Q[i + R avec deg(R) ^ r - 1.
Alors P(f) = Q(f) o^CQ +R{f) = R(f) G Vect(/d, /,..., T"1).
=o
149. On peut le voir comme l'image de l'application linéaire P G K[X] i—> P(f) G C{E).
150. On en déduit que K[/] est donc de dimension r.
EiEl
Chapitre 3. Réduction
La liberté de la famille (/° = /cfe, /, /2,..., fr *) implique l'unicité des coefficients, donc
du polynôme R.
Remarque
1. Ce résultat peut être un excellent moyen en pratique de calculer les /n, et plus
généralement P(f) pour P G K[X].
2. Ce résultat est également valable pour les matrices diagonalisables.
3. Enfin, si / (ou A) n'est pas diagonalisable, le résultat reste vrai en prenant dans
le point 2 : fif égal au polynôme minimal de /, et dans les deux points, r égal au
degré de ce polynôme minimal.
Les égalités R(\i) = P(K) restent valables, mais ne suffisent plus à caractériser R.
Si par exemple À* est une racine double de ^/, il faudra voir que l'on a aussi
R'(\i) = P7(Ài), et ainsi de suite pour des racines d'ordre supérieur.
Exemples
/ 2 -2 1 \
1. Calculons les puissances de la matrice M = 2 —32
V-l 2 0/
On a vu (voir page 250) que M est diagonalisable de valeurs propres 1 et —3, donc
[i = (X - 1)(X + 3) annule M.
La division euclidienne de Xn par [i donne l'unicité du quotient Qn G R[X] et du
reste Rn = anX + bn G Mi [X] tel que
Xn = Qnn + Rn (*)
On sait qu'alors Mn = Qn(M) fi{M) +Rn{M) = anM + bnI3.
=o
On écrit alors (*) en X = 1 et X = —3, d'où le système
Q>n + bn = ln
-3an + bn = (-3)n
L'unique solution en est
1 - (-3)n . 3 + (-3)n
; on —
4 ' ~T* 4
On en déduit avec ces valeurs de an et bn que Mn = anM + bnIs.
3.7 Applications de la réduction
2. Étudions le triplet de suites ((^n)neN, (vn)neN, (^n)neN) vérifiant
Vn G N, l
un+i = 2un - 2vn + wn
vn+i = 2un - 3vn + 2wn
[ wn+i = -un + 2vn
( un\
On constate qu'en posant Un
équivalentes à
les relations de récurrence deviennent
\ wn J
Vn G N, Un+i = MUn.
Comme pour les suites géométriques scalaires, la solution en est
Vn G N, Un = MnU0.
Il suffit de remplacer Mn par l'expression obtenue plus haut pour obtenir les valeurs
explicites de un, vn et wn en fonction de n, ^o, vo et wq.
3. Comme pour les équations différentielles, les suites récurrentes linéaires d'ordre
p ^ 2 peuvent s'écrire matriciellement.
Là encore va apparaître une matrice compagnon.
Considérons un exemple.
On veut déterminer les suites vérifiant
Vn G N, un+3 = 3^n+i - 2un.
( un \
On pose Vn 6 N, Vn
un+i
\ Un+2 j
Alors la relation de récurrence équivaut à
VneN, Vn+1 = MVn,
ou
M
( 0 1 0 \
0 0 1
\ -2 3 0 /
Σl Chapitre 3. Réduction
La solution en est
Vn G N, Vn = MnV0.
Pour calculer les puissances de M, il faut réduire cette matrice.
Or on trouve \m = X3 - SX + 2 = (X - l)2(X + 2) (on factorise une première fois
par X — 1 car 1 est une racine évidente).
Pour calculer Mn, on effectue le division euclidienne de Xn par \m >
Xn = QnXM + anX2 + bnX + cn (*)
f (*)enX = -2,
On écrit le système obtenu en écrivant < (*) en X = 1,
[ et la dérivée de (*) en X = 1.
On trouve finalement que an, bn et cn sont combinaisons linéaires de 1, n et 2n,
donc un est de cette forme.
On peut aisément vérifier que l'ensemble des suites vérifiant la relation de récurrence
linéaire triple est
|(a + 6n + c(_2)-)nGN, (a,fe,c)GM3}.
Compléments
Localisation des valeurs propres
Théorème 24 (Gershgorin (1931)151152) |
Soit A e M„(C). On note \/i e [l,r], pt = ^ |a£|J-|.
Alors toute valeur propre de A est contenue dans l'union des disques fermés de centre
a^i et de rayons pi.
n
En d'autres termes, en notant Di — {z G C, \z — a^i\ ^ Pi}, on a Sp(.A) C M Dt. |
i=i
151. cf. Uber die Ahgrenzung der Eigenwerte einer Matrix, Izvestiya Akademii Nauk SSSR Otdelenie
Fiz.-Mat. 7, pp. 749-754.
152. Un article de 1994 de Richard Brualdi et Stephen Mellendorf améliore le résultat de Gershgorin.
L'article en question est Régions in the Complex Plane Containing the Eigenvalues of a Matrix, the
American Mathematical Monthly, 101, (Dec. 1994), pp. 975-985.
3.8 Compléments
EÏÏE1
Semyon Aranovich Gershgorin est un mathématicien
russe, né à Proujany dans l'actuelle Biélorussie. Il
étudie à l'Institut technologique de Pétrograd (qui de-
^ ^ viendra Leningrad en 1924 puis retrouvera en 1991
son nom d'origine de Saint-Pétersbourg) et y mène sa
courte carrière.
Gershgorin s'affirme très vite comme un
mathématicien talentueux, surtout versé dans les mathématiques
appliquées, synthèse impressionnante d'un esprit à la
fois abstrait et rigoureux mais aussi ingénieux, pra-
^ , tique et technique. Dès ses premières publications "c
Semyon Lrershgonn qu'apparaissent ies fameux disques dits de Gershgo-
U901_1933J rjn mentionnés dans cette section.
Le monde scientifique connaît une grande perte lorsque meurt Gershgorin avant
même ses 32 ans, des suites semble-t-ilrf d'une maladie contractée à cause du stress
et de la charge trop importante de travail : cet esprit original n'en était alors qu'à
l'aube d'une carrière extrêmement prometteuse.
a. Comme Instrument for the intégration ofthe Laplace équation, Zhurnal Prikladnoi Mekhaniki i Tekhnicheskoi Fiziki 52
(1925), pp. 161-167, ou On the description ofan instrument for the intégration ofthe Laplace équation, Zh. Priklad. Fiz. 3 (1926),
pp. 271-274... on discerne la motivation de Gershgorin à élaborer des systèmes de construction effective de solutions
d'équations, et en plus la capacité à réaliser concrètement de tels systèmes b.
Au final ses recherches portent aussi bien sur l'algèbre et les fonctions de la variable complexe que sur l'élaboration de
méthodes numériques de résolution de divers problèmes, notamment d'équations différentielles. C'est dans son article
jem Ûber die Abgrenzung der Eigenwerte einer Matrix
c. cf. Bulletin de l'Académie des Sciences de l'URSS. Classe des sciences mathématiques et na, 6 (1931), pp. 749-754.
d. cf. Obiruary : Semyon Aronovich Gershgorin (Russian), Applied Mathematics and Mechanics 1 (1) (1933), p. 4.
Démonstration
Il s'agit d'un corollaire du résultat connu sous le nom de lemme d'Hadamard153.
n
L'objet est de démontrer que À G Sp(A) implique À G \^J D\.
i=l
Démontrons ce résultat par contraposée.
Si À n'est pas dans cette union, alors Vz, À £ Di et ainsi Vz, {Xa^i] > pi.
Considérons la matrice M = A — \In.
Ses coefficients diagonaux sont les a^ — À, les autres coefficients sont les a^j.
L'hypothèse
Vz, \\aiyi\ > pi
est ainsi équivalente à
Vi, |mM| > ^Kj|,
153. cf. la proposition 77 page 173
23 Chapitre 3. Réduction
c'est-à-dire que la matrice M est à diagonale strictement dominante.
La proposition 77 nous permet de conclure que M — A — \In est inversible, donc que A
n'est pas valeur propre de A.
Le résultat en découle alors bien par contraposée.
Exemple
/ 2 + i i -1 \
Soit A = 0 2 3 + 4z . Alors pi = |i| + | - 1| = 2, p2 = 5 et p3 = 2^.
\ 1+i 1-i b-i )
On peut affirmer que Sp(A) c D\ U D<2 U D3, union du disque fermé D\ de centre 2 + i
et de rayon 2, du disque fermé D2 de centre 2 et de rayon 5 et du disque fermé D$ de
centre 5 — iet de rayon 2\/2.
Remarque
Nous avons vu que le spectre de A et celui de sa transposée sont les mêmes154.
Ainsi, si Ton pose Vj G [1, r], p'j = ^ \aiyj\ et Dj = {z G C, \z - a,jj\ ^ p^}, on a aussi
n
Sp(M) c U D'ô
Sous-espaces caractéristiques et décomposition de Dunford
Le but de cette section et de la suivante est d'obtenir des réductions « plus fines » que la
trigonalisation dans le cas155 de K = C, en obtenant des matrices diagonales par blocs,
avec des blocs triangulaires simples.
Définition 71
Soit / un endomorphisme d'un C-espace vectoriel E de dimension finie.
r
On sait que Xf est scindé, on écrit Xf = TT (A^ — X)Mi, où les À^ sont deux à deux
k=i
distincts et où les [ii G N* sont leurs ordres de multiplicité.
On appelle sous-espaces caractéristiques de / les espaces Ker((/ — XildY1).
154. cf. le corollaire 15 page 242.
155. Notons que ces résultats restent valables dès que Xf es* scindé.
3.8 Compléments
ET>n
Remarque
H est à noter156 que Ker((/ - Xild)^) contient Ker(/ - Xild) = EXi{f).
Proposition 110
Avec les notations de la définition 71, on a
Ker((/ - Ai Jdy1) 0 • • • 0 Ker((/ - XrIdyh) = E.
Démonstration
On applique le lemme des noyaux (cf. la proposition 75) aux polynômes Pi = (X — Ai)Mi,
qui sont premiers entre eux deux à deux.
On obtient alors, en notant P = P\...Pr :
Kev(P1(f)) © ... © Ker(Pr(/)) = Ker(P(/))
Or P = Xf> et alors P(/) = Xf(f) = 0 par le théorème de Cayley-Hamilton.
Comme par ailleurs pour tout z, P»(/) = (/ — Ai/djj)^*, la relation précédente donne
immédiatement le résultat.
Corollaire 21
Soit / un endomorphisme d'un C-espace vectoriel E de dimension finie.
Alors il existe une base D de E dans laquelle la matrice de / est diagonale par blocs,
les blocs étant de la forme
I Xi * ... * \
0 A
\ 0 ... 0 Xi )
Démonstration
On choisit une base adaptée à la décomposition
Ker((/ - Ai/d)"1) © • • • © Ker((/ - XrIdYr) = E.
On sait alors, ces sous-espaces étant stables par /, que la matrice de / dans une telle
base s'écrit par blocs.
156. On rappelle que si g est un endomorphisme, alors Ker(g) C Ker(<72) C Ker(g3) C ...
Chapitre 3. Réduction
Mais on sait que dans C toute matrice est trigonalisable, donc en changeant chacune des
bases, on peut obtenir des blocs triangulaires.
Les valeurs propres sur Ker((/ - Xild)^) étant toutes À* on obtient la forme désirée.
S —— ■ - ■ ■v
Théorème 25 (Décomposition de Dunford157)
Soit M e Mn{C).
Alors il existe une matrice diagonalisable D et une matrice nilpotente N telles que
1. M = D + N
2. D et TV commutent (DN = ND).
Démonstration
Il suffit d'appliquer le corollaire précédent à Tendomorphisme / de Cn canoniquement
associé à M.
On obtient une base B dans laquelle la matrice de / est de la forme
I A-l (0) ... (0) \
(o) a2 '•• :
; •-. ••. (o)
\ (0) ... (0) Ar )
MatB(/)
avec Ai =
( Xi *
0 Ai
\
\ 0 ... 0 Xi J
Ainsi, il existe P € GLn(C) telle que
P~1MP =
( Ai (0)
(0) A2
(0)
(0)
V (0) ... (0) Ar )
157. Du nom de Nelson Dunford, mathématicien américain (1906-1986) qui a travaillé à l'université de
Yale de 1939 à 1960.
3.8 Compléments
On écrit Ai sous la forme Ai = Xilni + Ni, où ni est la taille du bloc Ai.
On en déduit qu'en posant
( Ai/Bl (0) ... (0) \
(0) A2/n2 ••• :
! ••• ••• (0)
V (0) ... (0) ArJnr J
( Ni (0) ... (0) \
(o) n2 ■•• :
D'
etN'
(0)
V (0) ... (0) Nr )
( \iNx (0)
on a D' diagonale, N' nilpotente et D'N' = N'D' =
(0) A2iV2
V (o) •••
Il suffit de poser D = PD'P~l et N = PN'P-1 pour avoir le résultat
... (0)
"•• (o)
(0) AriVr J
Réduction de Jordan
Théorème 26 (Réduction de Jordan158)
Soit / un endomorphisme d'un C-espace vectoriel de dimension finie.
Alors il existe une base B de E dans laquelle la matrice de / est de la forme
( Ax (0) ... (0) \
(o) a2 ■-. ;
; ••. ••. (o)
\ (0) ... (0) Ar J
( X i (0) \
Ai 1
'•• 1
V (0) Ai /
MatB(/)
chaque Ai étant de la forme Ai
ETTil
Chapitre 3. Réduction
Remarque
Il est à noter :
1. que les À* ne sont pas forcément deux à deux distincts ici.
2. que les blocs Ai peuvent éventuellement être de taille 1 x 1 et alors s'écrire Ai = (Ai).
Démonstration
Admis.
Le résultat est intéressant à connaître, car si on doit étudier une matrice trigonalisable
mais non diagonalisable, il est préférable d'avoir une matrice triangulaire « la plus simple
possible ».
Par exemple, si / G £(C3) a comme valeurs propres Ai simple et A2 double, alors il n'y
a que deux possibilités :
1. si dim(i?A2(/)) = 2, alors / est diagonalisable et il existe une base B de C3 telle
que
/ Ai 0 0 \
Matfî(/)
0 A2 0
V 0 0 A2 )
2. si dim(i?A2(/)) = 1, alors / n'est pas diagonalisable et il existe une base B de C3
telle que
/ Ai 0 0
Matfl(/)
0 A2 1
\ 0 0 A2
158. Théorème attribué à Marie Ennemond Camille Jordan, dit Camille Jordan (1838-1922),
mathématicien français. Camille Jordan a travaillé à la fois sur la théorie des groupes et sur la rédaction d'un
Cours d'analyse. Ce résultat se trouve dans son Traité des substitutions et des équations algébriques,
Gauthier-Villars, Paris (1870).
3.8 Compléments
_. Marie Ennemond Camille Jordan voit le jour au sein d'une
éminente famille lyonnaise. Il est notamment petit-fils d'un
ingénieur en chef des Mines et fils d'un ingénieur des Ponts
- r et Chaussées. Lui-même intègre l'École polytechnique à 17
.,* v ans.
' ' Il poursuit ses recherches mathématiques en parallèle de
' ; i . son activité d'ingénieur et obtient au fil du temps diverses
fonctions académiques et d'enseignant : il est examinateur
à l'École polytechnique à partir de 1873, puis en devient un
, , célèbre professeur d'analyse en 1876. Après son élection à
Camille Jordan rAcadémie des sciences en i881, le Collège de France suit
( 3 922J en 1883. Il est également directeur du Journal de
mathématiques pures et appliquées (anciennement Journal de Liouville) à compter de 1885. Bref,
sa carrière exemplaire va de pair avec la place prépondérante occupée par Jordan
dans les mathématiques françaises de la fin du XIXe siècle.
S'ajoutent à cela sa position d'enseignant à l'X, et l'influence de son fameux Cours
d'analyse de l'École polytechnique, qui s'inscrit dans la jeune lignée de la refonte
rigoureuse de l'analyse initiée notamment par Karl Weierstrass. Ce cours contient
d'ailleurs en partie un célèbre théorème dit de Jordan", intuitif mais de
démonstration non triviale, qui énonce pour faire court que toute courbe fermée sépare le
plan en deux morceauxb.
Jordan a contribué à la topologie comme l'indique ce théorème, ainsi qu'aux
équations différentielles, à l'algèbre multilinéaire, à la théorie des nombres... Mais ce
sont ses travaux en théorie des groupes finis (domaine d'ailleurs non identifié
comme tel à l'époque, mais que les recherches de Jordan ont commencé à dégager)
qui sont les plus conséquents. Une part importante en a été présentée par Jordan
dans sa publication majeure, le Traité des substitutions et des équations algébriques1.
Il y étudie notamment le groupe linéaire sur un corps à p éléments (ce que l'on
noterait aujourd'hui GL(Z/pZ)) et calcule le groupe de Galois associé à diverses
équations, ce qui permet de déterminer si elles sont résolubles par radicaux. C'est
dans ce traité que l'on trouve le théorème de Jordan présenté dans ce coursA.
Jordan est considéré comme le grand continuateur des idées - encore mal comprises
jusque-là - d'Évariste Galois.
a. cf. Cours d'analyse de l'École polytechnique. Tome troisième, Gauthiers-Villars (1887), pp. 587-594.
b. Plus précisément, une telle courbe est définie comme une image continue et injective d'un cercle dans le plan, et le
théorème dit que son complémentaire est la réunion disjointe de deux parties connexes, l'une bornée et l'autre non,
ayant toutes deux la courbe pour frontière.
c. Gauthier-Villars (1870)
d. cf. le paragraphe 5 de la deuxième partie. Mais ici nous le présentons sur C alors que Jordan l'a lui établi sur un corps
fini.
)
Chapitre 3. Réduction
Exercices corrigés du chapitre 3
3.1
1. Soit / un endomorphisme d'un espace vectoriel de dimension finie, et soit À une
valeur propre de / de multiplicité m.
Montrer que 1 < dim(E\(f)) ^ m.
/ 1 1 1 1 \
2. Soit A
2 2 2 2
3 3 3 3
\4 4 4 4/
Trouver les valeurs propres de A. La matrice A est-elle diagonalisable159 ?
Si oui, effectuer la diagonalisation.
1. Il s'agit d'une question de cours, voir la proposition 98 page 246.
2. Les quatre colonnes de A étant égales (et non nulles), le rang de A est clairement
égal à 1.
On en déduit que 0 est une valeur propre de A, et que Tordre m de multiplicité
de 0 vérifie
m ^ dim(£0(^)) = dim(Ker(A)) = 4 - rg{A) = 3.
Si Ton se place dans C, on sait que, comptées avec multiplicités, la matrice A
possède 4 valeurs propres.
On peut les noter Ai = À2 = A3 = 0, et A4 à déterminer.
Mais on sait que la somme des valeurs propres vaut alors tr(A), ce qui donne
immédiatement A4 = 10.
On conclut ainsi que
• 0 est une valeur propre triple, et dim(Eo(A)) = 3, c'est-à-dire égal à Tordre de
multiplicité de 0 comme valeur propre,
159. On pourra noter que l'étude du rang de A peut s'avérer très riche d'enseignements.
3.9 Exercices corrigés du chapitre 3
• 10 est une valeur propre simple, et alors dim[Eio(A)) = 1, c'est-à-dire égal à
Tordre de multiplicité de 10 comme valeur propre.
On pourrait aussi plus simplement constater que la somme des dimensions des
sous-espaces propres est égale à 4.
En tout cas, on conclut que A est bien diagonalisable.
Mais en outre, l'égalité entre les deux premières colonnes de A signifie que l'on
/i\ /o\ / i \ / i \
a A
0
0
V0/
/ 1 \
1
0
V0/
, ou encore A
-1
0
V 0 /
= 0 = 0.
-1
0
V ° /
Ainsi,
-1
0
\ ° /
est une colonne propre de A associée à la valeur propre 0.
De même,
( * 1
0
-1
V o )
et
( l \
0
0
l-1/
sont des colonnes propres de A associées à la
valeur propre 0.
Puisque l'on a trouvé 3 vecteurs linéairement indépendants (car échelonnés) on
a une base de Eq(A).
Enfin, on sait que E\q(A) C Im(A), qui est de dimension 1.
Et effectivement, il est aisé de vérifier que
A.
2
3
V4/
10.
2
3
V4/
Comme
/i\
2
3
est un élément de E\q{A) qui est une droite, on peut conclure
V4/
que ce vecteur forme une base de Eiq(A).
QQ
Chapitre 3. Réduction
La réunion de ces deux familles forme alors une base de M4, et si Ton pose
/ i i i i \
-10 0 2
0-103
\ 0 0-14/
alors on peut sans calcul supplémentaire affirmer que P € GLi{A), et que
/ 0 0 0 0 \
0 0 0 0
P_1AP :
0 0 0 0
0 0 0 10
3.2 Wronskien
Soit A e Mn(C).
d'un système différentiel linéaire
On considère n solutions Yi, Y2, • • -, Yn du système Y' = AX.
On appelle wronskien de cette famille de solutions la fonction
R -
t \-
1. Montrer que
On utilisera
-»• C
-»■ W(t) = WYuy2 Yn(t) = det(Ki(t),y2(t), -,Yn(t)).
la fonction W satisfait l'équation différentielle scalaire :
Vt e R, W'(t) = tr{A).W(t).
les résultats de l'exercice 2.6 page 197.
2. En déduire que les trois propositions suivantes sont équivalentes :
(a) {Yl,Y2,
(b) 3t0 e K
(c) Vi G R,
..., Yn) est une base de l'ensemble des solutions160 de Y1 = AX ;
: W{t0)j=0;
W(t0) £ 0.
1. Les n applications Yî, Y<i,..., Yn sont dérivables par hypothèse161 et l'application
det est n-linéaire en dimension finie, donc on sait que W est dérivable sur E et
161. avec Vi G [l.nj, Vt G M, V/(t) = AY^t).
3.9 Exercices corrigés du chapitre 3 g|g
vérifie :
vteR, w'(t) = det(y/(t),y2(t),...,yn(t))+det(yx(0,^(0^3(0,...,ynW)
+ ... + det(y1(t),...,yn_1(t),KW).
En remplaçant162 chaque Y({t) par AYi(t) il vient (pour tout x réel)
w\t) = det(j4ri(0,r2W>-»>^^
+ ... + det(y1(t),...,yn_1(t),Ayn(t)).
On reconnaît la quantité notée163 /^(Yi^), Y^ (£),..., yn(£)).
Or cet exercice 2.6 démontre que fA(Yi,Y2, •••,Yn) = tr(A).det(Yi,y2, ...,yn),
c'est-à-dire ici ti(A).W(t).
Pour résumer, on a démontré W G M,
W'(t) = fA{Yi{t),Y2{t),...,Yn{t))
= tt(A).det(Y1(t)>Y2(t)>...,Yn(t))
= ti(A).W(t).
2. L'équation W = tr(A)W est extrêmement simple à résoudre.
Sa solution générale est W = c.e""^' (c € C).
Si on a une condition initiale W(to) = Wq, la solution est
W € M, W(*) = W(*0)etr(i4)(t"to).
|W <=> (^1
Comme l'exponentielle ne s'annule jamais, on a W(to) 7^ 0 équivalent à Vt 6 t,
W(t) £ 0.
\(b) =» (oTI
Soit (ai, a2, • ••, «n) G Cn tel que aiYi + a2y2 H h a^n = 0.
On a alors notamment
<*iYi(to) + a2y2(t0) + • • • + anyn(*0) = 0.
162. cf. la note précédente
163. Dans l'exercice 2.6 page 197.
Chapitre 3. Réduction
Mais la famille (Yi(to),Y2(to)y ...,Yn(to)) est libre, car son déterminant164 est
non nul.
On en déduit ai = a2 = • • • = an = 0, donc (Yi, Y2,..., Yn) est libre.
Puisqu'il s'agit d'une famille libre dans l'espace des solutions de Y' = AY qui
est de dimension n, la famille (Yi, Y2, •••,^n) est bien une base de cet espace.
(a) => (b)
Raisonnons par contraposée, supposons que pour tout t réel, W(t) = 0.
Le fait que W(0) = det(yi(0),y2(0), ...,yn(0)) = 0 implique que la famille
(y!(o),y2(o),...,yn(o)) est liée.
Quitte à échanger l'ordre des vecteurs165 on peut supposer que Yn(0) est
combinaison linéaire de (Yi(0),y2(0),...,yn_i(0)).
Ainsi, il existe (ci,C2, ...,cn_i) dans Cn_1 tel que
yn(o) = Clyi(o) + c2y2(o) + • • • + cn_!yn_i(o).
Posons Z(t) = C!Yi(t) + C2Y2(t) + • • • + Cn-l^n-l(*)•
Alors Z(0) = yn(0), et par linéarité Z est solution de Z' = AZ.
Ainsi, Z et Yn sont solutions du même problème de Cauchy, donc Yn = Z.
Nous venons de montrer166 que
Mt e m, Yn(t) = ciyi(t) + 02^2W + • • • + cn_iyn_i(t).
Ainsi, la famille (Yï, Y^, •••, Y^_i,yn) est liée.
Remarque
Si l'on choisit (Yi(0), ...,yn(0)) = (ei, ...,en) la base canonique de A1n,i(C), alors
Vt G [l,nj, Vt G M, ^(t) = exp^e*.
Ainsi, si l'on note M(t) la matrice dont les colonnes sont ((Yi(£), ...,yn (£))), on a tout
simplement M(£) = exp(L4).
Et alors, W(*) = det((yi(t), ...,yn(t))) = det(M(t)).
Ainsi, l'équation W'(t) = tv{A)W(t) et le fait que W(0) = det(exp(0n)) = det(Jn) = 1
164. qui n'est autre que W(to).
165. Ce qui se fait sans perte de généralité.
166. Le lecteur remarquera une utilisation pratique de la notion d'unicité. Pour montrer que deux
quantités sont égales, on montre ici que les deux vérifient un même ensemble de propriétés, dont on sait
qu'il existe (au plus) une solution.
3.9 Exercices corrigés du chapitre 3 g|E
impliquent
Vt e M, det(exp(L4)) = W(t) = ettr(A).
En considérant t = 1 on retrouve la formule167 det(exp(A)) = exp(tr(A)).
[3.3
Soit / un endomorphisme de E1, A une valeur propre de f et x un vecteur propre de /.
1. Calculer P(f)(x) pour tout P G K[X]
2. Qu'en déduire si P est un polynôme annulateur de / ?
1. On a f(x) = A#, f2(x) = f(f{x)) = f{Xx) = Xf{x) = A2#, et par une récurrence
immédiate
VA; G N, fk{x) = Xkx.
Par linéarité, on en déduit
VP€K[X],P(/)(x)*=P(A).x
2. Si P(f) = 0, on trouve P(\).x = 0.
Or x ^ 0 par définition d'un vecteur propre, donc P(A) = 0.
Nous venons de démontrer que si P est un polynôme annulateur de /, alors
Sp(/) est inclus dans l'ensemble des racines de P.
3.4
Soit A e
dule 1.
M
On suppose
Montrer
que
2n+i(M)
en outre
telle que
det(A) =
toutes les valeurs
1.
1 est valeur propre de A.
propres
complexes
de A sont de
mo-
167. cf. la proposition 103 page 276.
Chapitre 3. Réduction
On note Ai, ..., A2n+i les 2n + 1 valeurs propres complexes de A, c'est-à-dire les
2n + 1 = deg(x>i) racines complexes de \A-
Puisque \A est à coefficients réels, les valeurs propres complexes (non réelles) sont
deux à deux conjuguées.
On peut ainsi noter Ai, A2 = Ai,..., A2p-i et A2p = A2p_i les valeurs propres complexes
non réelles. Il reste alors 2n + 1 — 2p ^ 1 valeurs propres réelles, qui valent chacune
±1 puisque de module 1.
Raisonnons par l'absurde, supposons que 1 n'est pas valeur propre de A.
Alors A2p+i = • • • = A2n+i = -1.
On sait que le produit des 2n + 1 valeurs propres de A vaut det(A).
Et par ailleurs, pour tout k G [l,p], A2fc-iA2fc = A2fc_iA2fc_i = |A2fc_i|2 = 1.
On obtient ainsi
Ai.A2 ... A2p_i.A2p . A2p+i... A2n+i = 1
=+1 =+1 =-1 =-1
Mais le nombre de termes — 1 est 2n + 1 — (2p + 1) + 1 = 2(n — p) + 1 impair, et Ton
obtient la contradiction — 1 = +1.
On peut donc affirmer que 1 est valeur propre de A.
3.5
Soit p un projecteur d'un K-espace vectoriel E.
Soit / G C{E). Montrer que / commute avec p si et seulement si Ker(p) et Im(p) sont
stables par /.
Les deux sens seraient-ils toujours valables pour p G C{E) « quelconque » (c'est-à-dire
pas forcément une projection) ?
Si / G C(E) commute avec p, on sait que le noyau et l'image de p sont stables par /,
et cela sans même avoir à supposer que p est un projecteur.
Passons à la réciproque. Si l'on suppose que p est un projecteur, on sait que Im(p)=
Ker(p - Me) et que E = Ker(p) © Ker(p - I<1e)>
On suppose que Ker(p) et Im(p) sont stables par /.
3-9 Exercices corrigés du chapitre 3
• Si x G Ker(p), alors p(x) = 0 donc f(p(x)) = 0; et f(x) G Ker(p) par stabilité,
donc p(f(x)) = 0.
On a a donc / o p = p o / sur Ker(p).
• De même, si # G Im(p) = Ker(p — IcIe), alors p(x) = x donc f{p{x)) = f(x) ; et
f{x) G Im(p) = Ker(p — Me) par stabilité, donc p{f{x)) = Id(f(x)) = f(x).
On a a donc / o p = p o f sur Ker(p — Me)-
Ces deux points nous permettent de conclure que / op = p o f sur la somme (directe)
Ker(p) © Ker(p - IdE) = E.
Si Ton ne suppose plus que p est un projecteur, alors Ker(p) et Im(p) ne sont plus des
supplémentaires ; il existe même des cas où ils sont égaux.
Il est donc possible de créer un contre-exemple.
En effet, soient p et f les endomorphismes de M2 dont les matrices dans la base cano-
(0 1 \ / 1 0
et B = \
o o) \i i
On a Ker(p) = Im(p) = Vect(ei) qui est stable par / car /(ei) = e\.
En revanche, / op(e<2) = /(O) = 0 et p o /(e2) = p{e\ + e<z) = p(e\) + pfa) = ei, donc
fop^pof.
3.6
Soit M e GLn(K). Donner une relation entre les polynômes caractéristiques de M et
de M"1.
En déduire un lien entre les valeurs propres de M et de 7\/-1
On sait que M étant inversible, Xm(0) = det(M) ^ 0, donc 0 n'est pas valeur propre
de M, et il en est de même pour M-1.
CPTîl
Chapitre 3. Réduction
Si x € K*, on trouve en mettant x et M 1 en facteur dans le calcul de xm(x) :
Xm_!(x) = det(xIn-M-1) = det(x(M--In)M-1^
= det f-x(-J„ - M)M~X J
= (-x)ndet f-In - m] det(Af_1)
- (-*)" v fl^
~ det(M)XMU/
On en déduit que Xm-1 ix) = 0 ^=> Xm ( — 1 = 0, donc A est valeur propre de M"1
équivaut à A-1 est valeur propre de M.
Mais sans utiliser les polynômes caractéristiques, on peut démontrer non seulement
que A valeur propre de M-1 équivaut à A-1 valeur propre de M, avec les mêmes sous-
espaces propres associés.
En effet, si A est valeur propre de M"1, alors
3XeMnA^)\{Q} : M~1X = XX.
En multipliant à gauche par M et par A-1, il vient MX = X~1X avec X non nul, donc
A-1 est une valeur propre de M.
Et l'implication M~lX = XX => MX = X~*X équivaut à l'inclusion EX{M~1) c
Ex-i(M).
En réutilisant les résultats avec A-1 et M-1 au lieu de A et M respectivement, on
obtient A"1 valeur propre de M implique A valeur propre de M-1 et Ex-i(M) C
ExiM-1).
On a ainsi démontré l'équivalence
A valeur propre de M"1 <$=> A-1 valeur propre de M
et l'égalité
Ex-i(M) = Ex(M-1).
3.9 Exercices corrigés du chapitre 3
3.7
On considère la matrice A
( -9 -5 16 \
e M*
-2 0 4
\ -6 -3 11 j
1. Calculer le polynôme caractéristique de A et les valeurs propres de A.
Indication : On pourra s'intéresser à la somme des termes de chaque ligne.
2. En déduire sans calcul supplémentaire que A est diagonalisable dans R.
3. Déterminer une matrice P G GLz(R) telle que P~XAP soit une matrice diagonale
D (que l'on précisera).
"Remarque
Un des systèmes n'a pas besoin d'être résolu.
En effet, l'indication de la première question permet d'obtenir un vecteur propre,
et on a un moyen de savoir que le sous-espace propre associé est de dimension 1.
4. Résoudre par la méthode de variation des constantes le système différentiel
/ é + e3t \ ( x(t) \
—2e* + e3t I d'inconnue X(t) =
X'{t) = AX(t) +
\
D3t
y(t)
1. L'indication nous pousse à commencer par l'opération C\ <— Ci + C2 + C3,
d'où168
XA
X + 9 5 -16
2 X -4
6 3 X-\l
X-2 5 -16
0 X - 5 12
0 -2 X + 5
X-2 5 -16
X-2 X -4
X-2 3 X-ll
168. La seconde opération effectuée sera Ci <— Ci + Ci + C3. On terminera par L? <— L2 — L\ et
I*<— L3-L1.
Chapitre 3. Réduction
Le développement par rapport à la première colonne donne
XA = (X-2)
X-5 12
-2 X + 5
= (X-2)(X2-25+24) = (X-2)(X-1)(X+Ï).
Les valeurs propres de A sont —1, 1 et 2.
2. Le fait que A possède trois valeurs propres simples (réelles), ou de manière
équivalente que xa est scindé à racines simples (dans M) permet alors d'affirmer que
A est diagonalisable.
3. Les sous-espaces propres sont tous des droites car les valeurs propres sont simples.
Le fait que la somme des termes sur chaque ligne donne 2 implique que
i
V1/
i
V1/
soit
i
V1/
e E2{A).
Ainsi, on peut conclure sans calcul supplémentaire que E2(À) = M
/l\
V1/
En revanche, la recherche des sous-espaces propres associés à 1 et à —1 nécessite
des calculs.
Or X
appartient à E\{M) si et seulement si MX = X, ou encore
W
(M — h)X — 0, qui équivaut au système
-10z - 5y + 16z = 0
-2x -y + 4z = 0
-6x - 3y + 10* = 0
Les opérations L\ <- L\ — 5L2 et L3 <- L3 — SL2 rendent ce système équivalent à
-4z = 0
-2x -y + 4z = 0
-2z = 0
3,9 Exercices corrigés du chapitre 3
et ce système équivaut clairement à
y = -2x
z = 0
La solution générale est donc X
l x \
-2x
V « I
= X
( * ^
-2
l o /
, soit
E1(A)=R
Un travail analogue nous donnerait
/ i \
-2
V « /
E-1(A) = R
/2\
0
V1/
En concaténant ces trois bases, on obtient une base de M3.
/l 1 2\
En d'autres termes, P ■
-2 0
est inversible.
V1 o i/
Enfin, les formules de changement de bases169 donnent sans calcul
/ 2 0 0 \
P_1AP :
D.
0 1 0
\0 0 -1/
On notera que les colonnes propres dans M sont associées dans le même ordre
aux valeurs propres apparaissant sur la diagonale de D.
4. La résolution du système homogène associé X' = AX s'effectue rapidement grâce
à la diagonalisation, la solution générale en est
X(t) = aé
( x ^
-2
V o )
+ 0e2t
( l\
1
U )
+ 7e_t
(2\
0
U/
169. Pour l'endomorphisme canoniquement associé à M.
Chapitre 3. Réduction
où (a,j0,7) G M3.
Pour résoudre le système avec second membre, on cherche X(t) sous la forme
X(t) = a{t)el
( 1 \
-2
V « J
+ /3(t)e
,2t
î
V1/
+ l(t)e-
(2\
0
V1/
où a, P et 7 sont trois fonctions dérivables de R dans R.
Notons qu'une telle écriture est toujours possible, puisque les 3 colonnes qui
apparaissent forment une base de A^3,i(M).
L'injection de X dans l'équation avec second membre donne après simplification
a'(t)e*
( * ^
-2
\ ° /
i(+\J-t
+ P'(t)e
/2\
tf4\„-t
+ V(*)e
0
V1/
/ e* + e3t \
V
e* + e"
-2e* + e3*
i
V1/
L'identification est aisée ici, elle mène à a'(t) = 1, P'{t) = e* et ^'{t) = 0.
Une solution particulière consiste donc à prendre a(t) = £, fi(t) = e* et 7(2) = 0,
donc une solution particulière est
/ 1 \ /i\
-2
Xp(t) = te*
+ e'
3t
1
V1/
La solution générale est finalement
/ 1 \
X(t) = (t + a)é
-2
V 0 /
+ (e3t + 6e2t)
(l\
1
V1 )
+ ce_t
(2\
0
U/
où (a,6,c) G M3.
On peut aussi l'écrire sous la forme
X(t) = Xp(t)+aet
( * )
-2
V 0 )
\+be2t
(l\
1
U )
+ ce_t
/2\
0
w
3.9 Exercices corrigés du chapitre 3
avec (a,6,c) G M3 et Xp(t)
3t
te* + e
—2tet + e3* I afin de mettre en évidence la
V +e
3t
structure algébrique de l'ensemble des solutions (solution particulière de
l'équation avec second membre + solution générale de l'équation homogène)
3.8
On considère la matrice B =
( 11 -2 -6 \
0 1 0
^ 20 -4 -11 J
G M3(M).
1. Calculer le polynôme caractéristique de B et les valeurs propres de B.
2. Démontrer que B est diagonalisable (c'est moins rapide que dans l'exercice
précédent)
3. Déterminer une matrice P G GL^M) telle que P~XBP soit une matrice diagonale
D (que l'on précisera).
4. Constater que D2 = ^3, en déduire B2 = 13.
1. On ne détaille pas ici les calculs du polynôme caractéristique170, on trouve
rapidement
Xb = {X + 1){X-1)2.
Les valeurs propres de B sont donc —1 qui est simple, et 1 qui est double.
2. Il suffit de montrer que l'espace propre de B associé à 1 est de dimension 2.
On peut par exemple montrer que rg(B — I3) = 1, ce qui est clair puisque dans
B-h
( 10 -2 -6 \
0 0 0
, on a C2 ± 0, d = -5C2 et C3 = 3C2.
\ 20 -4 -12 J
Le théorème du rang (appliqué à B — 1$) permet alors d'affirmer que E\(B) est
de dimension 2, donc B est bien diagonalisable.
Notons que la suite de l'exercice rend ce passage inutile, puisque l'on va expliciter
Ei(B) et ainsi voir qu'il s'agit bien d'un espace de dimension 2.
170. Outre un développement par rapport à la deuxième ligne, une idée assez logique en observant les
coefficients de la matrice est de commencer par l'opération L3 <- L3 — 2L\.
E3E1
Chapitre 3. Réduction
3. La résolution de BX = —X montre que ce système équivaut à y = 0 et z = 2x
donc.E_i(.B) = R
0
\2J
Quant à la résolution de BX = X, on obtient l'équivalence avec l'équation
/l\ / 0 \
5x — y — 3z = 0, soit y = 5x — 3z, ou encore X = x
On peut alors conclure qu'en posant P —
P~XBP = D
5
V°/
/l 1 0 \
0 5-3
{2 o i ;
/ -1 0 0 \
0 10.
+ 2:
-3
V 1 /
, on a
/ (-1)2 0 0 \
0 l2 0
\ 0 0 l2 /
On déduit alors de P^BP = D que B = PDP'1 et finalement
4. Il est évident que D2 =
= h.
B2 = PDP^PDP-1 = PD^P'1 = PhP-1 = h.
Remarque
Si l'on vous avait demandé plus tôt dans l'exercice de calculer171 B2 et que vous
obteniez directement B2 = J3, on aurait conclu que le polynôme scindé à racines
simples X2 — 1 = (X — l)(X +1) annulait B et donc que B est diagonalisable (et aussi
que le spectre de B est inclus dans {—1,1}).
171. (Ou si vous pensez que ce calcul peut être intéressant)
3.9 Exercices corrigés du chapitre 3
3.9
/ 1 0 \ ( a b .
Soient A = I et A/ = deux matrices réelles.
\0 2 J ycd
1. Calculer AM -MA
2. Déterminer les éléments propres de Fendomorphisme (de M2
f : M2W —> -M2(R)
M .—> /(M) = 4M - MA
C3.9
1. On trouve facilement
(0 -b
c 0
2. On remarque que 0 est clairement valeur propre de /, puisque f{In) = 0 par
exemple.
On trouve aisément f(M) = 0M équivaut à b = c = 0, donc
c'est-à-dire que Eo(f) est l'ensemble des matrices diagonales.
/o o\ /o o\ , / 0 0
On constate ensuite aisément que / = h donc
^1 0) \i 0) {1 0
est un vecteur propre de / associé à +1 (et notamment, 1 est valeur propre de
/)•
On constate de même que —1 est valeur propre de / et qu'un vecteur propre
., (01
associe est
^ 0 0
On a ainsi déjà trouvé (avec multiplicité) quatre valeurs propres de /, endomor-
phisme de .M2W qui est de dimension 4.
La conclusion est qu'il n'existe pas d'autre valeur propre, c'est-à-dire
Sp(/) = {0,1,-1},
Chapitre 3. Réduction
et qu'il n'y a pas d'autre vecteur propre, ou encore
E1(f) = R. ( ° ° \ et £?-i(/) =
3.10
Soit D une matrice diagonale ayant n valeurs propres distinctes.
Montrer que toute matrice M commutant avec D est diagonale.
El
Il existe deux moyens différents de traiter cette question.
Notons que si M est diagonale, alors M commute avec D.
Réciproquement, si M commute avec D, alors l'égalité MD — DM = 0 en place (à, j)
donne (Ai — Xj)m,ij = 0, où Ai, ..., An sont les éléments diagonaux de D, donc les
valeurs propres de D.
Or pour i^ j, Xi — Xj ^ 0, d'où rrtij = 0 et M est bien diagonale.
L'autre méthode est d'affirmer que si M commute avec D, alors les sous-espaces propres
de D sont stables par M.
Or les valeurs propres de D étant simples, les sous-espaces propres de D sont les droites
dirigées par les vecteurs e* de la base canonique.
Enfin, la stabilité de chaque Ke^ signifie que e* est un vecteur propre de M.
Le fait que (ei,...,en) est une base de vecteurs propres pour M (c'est-à-dire pour
l'endomorphisme canoniquement associé) signifie directement que M est diagonale.
3.11
1. Soit A G Mn{C). On définit alors la matrice suivante par blocs :
l * A
B=\ G M2n (C .
\0n A J
(a) Calculer les puissances de la matrice B.
(b) En déduire que l'on peut écrire
vpscW, P(B)=|'P(A) AP>W
1 0„ P{A)
3.9 Exercices corrigés du chapitre 3
ESEI
2. On suppose la matrice
(a)
(b)
Montrer
Montrei
qu'alors
; B diagonalisable.
A est diagonalisable.
finalement que A — 0n.
1. (a) Une petite remarque pour commencer : la question suivante généralise celle-
ci, mais en donne la réponse !
En effet, en prenant P = Xk, on voit que XP' = kXk c'est-à-dire APf(A) =
kAk.
Ainsi, on réalise qu'il faut démontrer que
VA; G N, Bk
On aurait aussi pu conjecturer cette expression en calculant explicitement
les premières puissances.
• Voici en tout cas une première justification de cette expression de Bk, que
l'on démontre par récurrence sur k.
On effectue l'initialisation à k = 0. Par définition, B° = lin et comme
/i° 04°\ / /„ 0n \ R0
i" = 4, on a = I = hn = B°, donc la
^ 0n A0 J \ On In )
propriété est vraie pour k = 0.
Il reste à traiter l'hérédité.
Supposons donc la propriété vérifiée pour un certain entier naturel k.
On peut alors calculer Bk+1 = Bk.B en effectuant un produit par blocs :
Bk+i =
Ak kAk \ I Ak kAk
0„ Ak )'\0n Ak
Ak.A Ak.A + kAk.l
0n.A + Al.0n Ak.l
Ak+1 (k + l)Ak+1
0„ Ak+1
La propriété est ainsi démontrée au rang k +1, et on peut conclure qu'elle
est valable pour tout fceN par principe de récurrence.
Bcïïl
Chapitre 3. Réduction
• Il existe une preuve quelque peu différente, qui a l'intérêt de donner la
formule directement, c'est-à-dire sans avoir besoin de la conjecturer.
On note D = \ I et N = I n I éléments de X2n(C), de
\^ 0n A j \ 0n 0n '
sorte que B = D + N.
(0n A2
I = ND.
On On
On peut ainsi appliquer la formule du binôme de Newton pour calculer les
puissances de B = D + N.
On commence par noter que AT2 = 02n-
A fortiori la matrice Np est nulle pour tout p ^ 2.
Ainsi, la formule du binôme s'écrit (Vfc G N)
Bk = {D + N)k
= Y (k) Dk-?Nk = (*) Dk + (k) Dk-XN + Y (k) Dk~r Nk
« \PJ \0y V1/ o \PJ ^^
p=0 x^7 x 7 x 7 p=2 x/v _0
= Dk + kDk~lN
Or DK = par une récurrence évidente, et
On Ak l
Dk~lN
par un produit par blocs.
Ak kAk
Il vient alors immédiatement Bk = (
On Ak
(b) Soit P G C[X]. Il existe ainsi AT G N et (a0,ai, ...,aw) G CN+1 tels que
n
P = a0 + ai X + • • • + aNXN = ^ akXk.
fc=0
3.9 Exercices corrigés du chapitre 3
On sait qu'alors
N
P{A)
et P'(A)
d'où AP'(A)
= Y,akAk
fc=0
N
= j2ka^Ak~l
k=0
N
= j2a>*kAk-
fc=0
Ainsi, d'après la question précédente
N N
p(b) = j2a*Bk = Y,ak
k=0
fc=0
/ N
N
Y^akAk j2a*kAk
k=0 fc=0
N
0n ^akAk
k=0
P(A) AP'{A)
On P(A)
Ak kAk
On Ak
\
2. (a) Utilisons les liens entre diagonalisabilité et polynômes de matrices.
Or B diagonalisable implique qu'il existe un polynôme Po £ C[X], scindé à
racines simples, tel que Po{B) = 02n-
Mais le calcul de la question précédente donne
Po(B)
P0(A) AF0(A)
On Po(A)
Ainsi, Po(B) = 0 équivaut à
Po(A) = On
AP&(A) = On
La seconde égalité servira dans la question suivante.
Mais le fait que Po{A) = 0n suffit pour cette question : le polynôme Po est
un polynôme scindé à racines simples qui annule A, on sait qu'alors A est
diagonalisable.
(b) Utilisons les deux égalités Po{A) = 0n et APq(A) = 0n.
Soit À G C une valeur propre de A.
Chapitre 3. Réduction
On sait qu'alors Po annule A implique P${\) = 0.
De même, le polynôme XPq annule A, donc XPq(X) = 0.
Ainsi, on a P0{X) = 0 et (A = 0 ou P£(X) = 0).
Si À ^ 0, on a alors PoW = P&W = 0» et ainsi À serait une racine (au
moins) double de Po- Ceci est exclu, puisque Po est à racines simples.
On a ainsi À = 0. En d'autres termes, 0 est la seule valeur propre de A.
Mais comme A est diagonalisable, A est semblable à une matrice diagonale,
dont les élément diagonaux sont les valeurs propres de A, donc A est
semblable à 0n.
On en déduit immédiatement A = 0n.
3.12 Produit tensoriel
Étant données deux matrices carrées A G M2Q&) et B G Mq(K), on définit le produit
tensoriel de A et B, que l'on note A® B £ A^qQK), par blocs, de la façon suivante :
A®B =
où l'on suppose172 que A s'écrit A ■
aB PB
7# SB
a p
7 5
1. On considère deux éléments A et A! de A^QK), ainsi que deux éléments B et B'
de Mq(K).
Démontrer que (AA') (g) (BB') = {A® B)(A' (g) B').
2. On suppose P G GL2(K) et Q G GLq(K).
Montrer que R = P ® Q G GL2g(K), et déterminer R~l (en fonction de P~x et
de Q"1).
3. Montrer que si A G A^QK) et -B G Mq(K) sont diagonalisables, alors A x B est
diagonalisable.
/ 1 4 -1 1 4 -1 \
0-100-10
2 0 4 2 0 4
-2-8 2 4 16 -4
0 2 0 0-40
\ -4 0 -8 8 0 16 /
4. Application : Diagonaliser C
dans A^e(
3.9 Exercices corrigés du chapitre 3
Remarque
La matrice A a été choisie dans M.2{^) pour des raisons de commodité, elle aurait pu
être choisie dans MP(K) pour p quelconque, le produit A®B serait alors dans Mpq(K),
et tous les résultats de l'exercice resteraient valables (avec les mêmes démonstrations).
1. On considère (a, /?,7,5) et (a',/?'^',^') dans K4 tels que A = ( ] et
7 6
\i S'
On effectue un calcul direct de AA', qui donne
_ ( olo/ + M aff + 06'
\^ 7a/ + jy jF+ 66'
On en déduit par définition du produit tensoriel 0 que
<**)•<**)-I ^' + ^)BB' W + OT**
1 (7a1 + «7#)BB' (jP' + 66')BBf
aB pB
Par ailleurs, en effectuant un produit par blocs entre A 0 B = I et
75 (SB
. a'£' P'B' \
A' 0 jB' = qui donne immédiatement
7'£' 6'B' j
(A®B)(A'®B')= H1
y ja'BB' + 6j'BB' ^P'BB' + 66'BB'
On constate immédiatement que l'on a bien (AA') 0 {BB') = (^40 B)(A' 0 B').
2. Vu ce qui précède, on pose 5 = (P-1) 0 (Q-1)-
Par la première question avec A = P, B = Q, A' = P-1 et B' = Q-1, on peut
affirmer que
RS = {A 0 B)(A! 0 B') = (AA') 0 (££') = (PP~l) 0 (QQ~l) = h 0 In = hn,
le dernier point étant évident à vérifier.
En échangeant A avec A' et B avec B', on trouve de même SR = î^n-
172. Naturellement, avec (a,/5,7,<5) G K4.
Chapitre 3. Réduction
Cette égalité permet à la fois d'affirmer que R est inversible (c'est-à-dire que
R G GL2q{K)) et que
i2-1 = 5 = (P"1)0(Q-1).
3. Si A et B sont diagonalisables, alors il existe respectivement P G GL2(K) ,
D = I * I et Q G GLq{K), D' G Mq{K), D diagonales, telles que
y 0 À2 I
P~XAP = Det Q^BQ = D'.
On pose alors R = P®Q.
On sait que la matrice R est inversible, et grâce aux questions précédentes on
peut affirmer que
R~\A ®B)R = (P-10Q"1)(^0JB)(P0Q)
= (P-1^Q-1)((AP)0(BQ))
= {P~1AP)®{Q-1BQ)
= D®D'
0n \2D
D".
Cette matrice D" étant clairement diagonale, la diagonalisabilité de A 0 B est
ainsi démontrée.
4. On commence en notant qu'avec A = I | et B =
-2 4
/l 4 -l\
0-1 0
\ 2 0 4 /
alors C = A 0 £.
Il suffit donc de prouver séparément la diagonalisabilité de A et de B pour justifier
celle de C.
Pour j4, on calcule
XA(X) =
X-l -1
2 X-4
= (X-l)(X-4)-(-l).2
= X2-5X + 6 = (X-2)(X-3).
3.9 Exercices corrigés du chapitre 3
Ainsi, A G M2(R) a 2 valeurs propres réelles simples (2 et 3) donc A est diago-
nalisable.
Pour jB, on peut noter outre la particularité de la deuxième ligne (par rapport à
laquelle on va développer le calcul du polynôme caractéristique), que la somme
des coefficients de chaque colonne est la même (3).
Cette constatation nous amènerait à additionner les lignes entre elles, et
justifiera que 3 est valeur propre de B.
Voici donc le calcul173 de xb '-
Xb(X) =
X-l -4 1
0 X + l 0
-2 0 X-4
(-1)2+2(X + 1)
X-l 1
-2 X-4
= (X + l)
X-3 X-3
-2 X-4
X-3 0
-2 X-2
= (X + l)
= (X + l)(X-S)(X-2),
car la dernière matrice est triangulaire.
La matrice B G A^3(M) a ainsi 3 valeurs propres réelles simples (—1, 2 et 3)
donc B est diagonalisable sur R.
Il faut noter qu'il y a plus élégant comme démonstration. Comme on Ta déjà
signalé, le fait que la somme des coefficients de chaque colonne donne 3 implique
que 3 est valeur propre de B.
Par ailleurs, si Ton calcule B — (—1)^3 = B + J3, la deuxième ligne est nulle,
donc B — (—1)^3 n'est pas inversible, donc —1 est valeur propre de B.
Or174 B possède trois valeurs propres complexes : 3, —1, et une inconnue À.
173. On commence par un développement par rapport à la deuxième ligne. Dans le déterminant 2x2
obtenu, on effectue les opérations L\ <— L\ + L2 puis C2 <— C2 — C\.
174. Comptées avec multiplicité.
ESE1
Chapitre 3. Réduction
Alors, sachant que la somme des valeurs propres de B vaut la trace de jB, on
obtient l'équation 3 — 1 + À = 1 — 1+4 de solution À = 2.
Comme précédemment, on conclut que la matrice B G ./^(M) a ainsi 3 valeurs
propres réelles simples (—1, 2 et 3) donc B est diagonalisable sur R.
La question précédente nous permet d'affirmer que, A et B étant diagonalisables,
alors C = A 0 B est diagonalisable.
Pour effectuer la diagonalisation, c'est-à-dire déterminer une matrice R G GLq(R)
telle que R~1CR soit diagonale, il faut trouver les matrices correspondant aux
matrices P et Q de la question précédente, ou encore trouver les bases de vecteurs
propres pour A et B respectivement.
Notons que toutes les valeurs propres sont ici simples, donc les sous-espaces
propres seront des droites.
Si l'on connaît un vecteur propre, alors l'espace propre sera la droite dirigée par
ce vecteur.
• Pour déterminer £2 (-4), on résout le système AX = 2X, dont l'inconnue est
Ce système se résout ainsi
x + y = 2x
<<=> < <<=> y = x
-2x + 4y = 2y
Ainsi, E2{A) = ~ \
Pour déterminer Es(A), on résout maintenant le système AX = 3X, d'inconnue
x
x-{-y = 3x I y = 3x-x 1
^=^> < ^=^> y = 2x ^=^> X = x l
-2x + 4y = 3y \ Ay-3y = 2x \ 2
Ainsi, E3(A) = R. '
' 2
3.9 Exercices corrigés du chapitre 3
• Si l'on pose P = I I, alors on peut affirmer que P est inversible et que
12
P"MP = D =
2 0
0 3
• Passons maintenant aux sous-espaces propres de B.
Pour déterminer E-\(B), on résout le système BX = —X, avec maintenant
comme inconnue X
y
Ce système a comme solution générale
i 2z
Ainsi, E-i(B) =!
X =
/-5
3
V 2
%Z \ = -rZ
/-5\
3
V 2 /
• On montrerait de façon parfaitement similaire que
/-i\
E2{B) = R.
• Si l'on pose Q —
et que
0
V ! /
/-5 -1 -l\
3 0 0
v 2 i 2 ;
Q~XBQ = D' =
et EZ{B) = R.
( -l\
0
\ 2 /
, alors on peut affirmer que Q est inversible
/ -1 0 0 \
0 2 0
\ 0 0 3/
HHU Chapitre 3. Réduction
Il suffit de poser175 R = P 0 Q pour pouvoir affirmer que R G GLq(R) et que,
par la question précédente,
(on/ r\ \
3 =diag(-2,4,6,-3,6,9).
o3 3D7 y
Remarque
On constate que D'\ donc C, possède une valeur propre double (6).
Ainsi, non seulement trouver les valeurs propres de C aurait été bien plus compliqué
que trouver séparément celles de A et de jB, mais en outre justifier la diagonalisabilité
aurait aussi été plus long, puisqu'il aurait fallu justifier que la dimension de l'espace
propre correspondant à 6 était égal à l'ordre de multiplicité de cette valeur propre.
175. On n'écrit pas ici la matrice de taille 6x6 obtenue.
CHAPITRE 4
'Espaces préfiiCBertiens
L'orthogonalité, les angles, les distances sont des notions connues des mathématiciens
depuis des millénaires.
Pourtant, ici encore, l'introduction (relativement) récente du formalisme des produits
scalaires et des normes euclidiennes a permis de généraliser des résultats à de nombreuses
situations.
Notons qu'en couplant ces notions à des résultats de topologie (comme la complétude
de certains espaces1) on obtient des résultats forts puissants, comme le théorème de
représentation de Riesz-Fréchet (cité en compléments de ce chapitre), qui à son tour
donne des résultats intéressants d'existence et d'unicité pour des équations aux dérivées
partielles notamment2.
1. De nombreux résultats d'analyse, comme le théorème de Lax-Milgram cité ci-dessous, ont comme
cadre naturel les espaces de Hilbert. Il s'agit d'espaces non seulement munis d'un produit scalaire, c'est-
à-dire d'une norme euclidienne, mais en outre d'espaces complets pour cette norme.
2. Un résultat important est le théorème de Lax-Milgram, cf. Parabolic équations, Annals of mathe-
matics studies.33 (1954), pp. 167-190. Une conséquence en est l'existence et l'unicité de solutions (en un
sens dit faible) à des équations paraboliques, par exemple pour À > 0 l'équation —Au + Xu = f sur un
domaine D avec u = 0au bord de D (cette hypothèse est connue sous le nom de condition de Dirichlet).
2ÏÏ1 Chapitre 4. Espaces préhilbertiens
Produit scalaire
Définitions
Définition 72
Soient E un R-espace vectoriel et ip une application de E x E —> R. On dit que
1. ip est bilineaire si Va; G E1, l'application y i—> (p(x, y) est linéaire de E dans R et si
\/y G E1, l'application x \—> </?(a;, y) est linéaire de E dans R. En d'autres termes,
</? est bilineaire si
V{x,x\y) G E3, VA G R, tp(x + Xx',y) = yfoy) + \<p(x\y)
et
V(x,y,y7) G E3, VA G R, </?(z, y + Ay') = </?(z, y) + A</?(z,y').
2. y? est symétrique si
V(x, y) eE2, ip{x, y) = </?(?/, x).
3. y? est définie positive si
Va; G E, </?(£, a;) ^ 0.
et
Vx G E, (ip(x,x)=0 => a; = 0).
Enfin, on dit que y? est un produit scalaire sur E si l'application ip est à la fois
bilineaire, symétrique, et définie positive.
Remarque
On peut prouver que y est bilineaire symétrique en démontrant que (p est symétrique et
linéaire par rapport à la seconde variable3, c'est-à-dire que
V(z, y, y') G E3, VA G M, <p(x, y + \y') = <p(x,y) + Xtp(x,y')
En effet, en appliquant la symétrie aux trois apparitions de (p dans cette égalité4, on
obtient la propriété de linéarité par rapport à la première variable.
3. Noter que l'on privilégie la seconde variable vis-à-vis du cas complexe, où la linéarité a lieu «
seulement » par rapport à cette seconde variable, cf. la définition 92 page 462.
4. Et en renommant y' en x'.
4.1 Produit scalaire
En pratique, on commence donc par démontrer la symétrie puis la linéarité par rapport
à la seconde variable, et Ton affirme que l'application est bilinéaire symétrique.
Par ailleurs, puisqu'il est évident grâce à la bilinéarité que <p(0,0) = 0, le dernier point5
équivaut à
Vze£\{0s}, <p(x,x) >0
Notation
Le produit scalaire de deux vecteurs x et y de E (c'est-à-dire la quantité (p(x,y)) est
notée selon les ouvrages (#,2/), {x\y), (x\y) ou {x,y}. C'est cette dernière notation qui a
été retenue dans cet ouvrage.
Définition 73
Soit E un R-espace vectoriel.
1. On dit que (E1, (., . )) est un espace préhilbertien réel6,7 si (., . ) est un produit
scalaire sur E.
2. Si en outre E est de dimension finie, on dit que (E1, (.,.)) est un espace euclidien8.
Un premier résultat très simple est donné par la proposition suivante.
Proposition 111
Soient (E1, (., . )) un espace préhilbertien réel et F un sous-espace vectoriel de E.
Alors la restriction 9 de (., . ) à F2 est un produit scalaire sur F.
On l'appelle produit scalaire induit sur F.
Remarque
On peut lire la proposition autrement : tout sous-espace vectoriel d'un espace
préhilbertien réel est lui-même un espace préhilbertien réel.
5. À savoir le caractère défini positif de (p.
6. Nom donné en hommage à David Hilbert
7. On dit parfois simplement que E est un espace préhilbertien réel, s'il n'y a pas de confusion possible
sur le produit scalaire.
8. De même, on dit parfois simplement que E est un espace euclidien, s'il n'y a pas de confusion
possible sur le produit scalaire.
9. On continuera à noter la restriction (., . ).
Chapitre 4. Espaces préhilbertiens
Né à Kônigsberg, Hilbert prépare sa thèse dans
l'université de cette ville, sous la direction de Lindemann". C'est
à cette même époque qu'il se lie d'une amitié indéfectible
pour Hermann Minkowski.
s* ' • Parmi ses résultats célèbres, citons (dans le domaine de la
,- ,./ géométrie algébrique) le théorème des zéros de Hilbert''
concernant la localisation des racines d'un polynôme de
plusieurs variables.
Hilbert étudie les suites dont les carrés sont sommablesc,
David Hilbert espace noté £2. La première présentation générale et abs-
(1862-104^) traite des espaces de Hilbert est due à John Von Neumannrf.
Ces espaces permettent de résoudre de nombreuses
équations aux dérivées partielles par dualité (on parle de formulation faible). Par
ailleurs, l'état d'un système en mécanique quantique est représenté par un vecteur
dans un espace de Hilbert.
Outre ses travaux, Hilbert s'est demandé quels domaines pourraient être abordés
par les mathématiciens du XXe siècle. Il a élaboré un ensemble de questions, les
23 problèmes de Hilbert qu'il a présenté au congrès des mathématiciens de Paris en
1900. Ces problèmes, non tous résolus à ce jour, ont ouvert la voie à d'innombrables
travaux, voire à des domaines de recherche.
Certains de ces problèmes étaient déjà connus, comme la conjecture des nombres
premiers jumeaux : existe-t-il une infinité de couples de nombres premiers dont la
différence vaut 2 ? Il y a (3,5), (5,7), (11,13), (17,19)... mais leur infinité n'est pas
encore démontrée (ni réfutée).
D'autres problèmes ont été résolus. Par exemple, le mathématicien autrichien Emil
Artin (1898-1962) a démontré en 1927 que toute fonction rationnelle positive peut
s'écrire comme somme de carrés de fonctions rationnelles.
n. Ferdinand von Lindemann (1852-1939) est un mathématicien allemand. Il est notamment réputé pour avoir écrit
la première démonstration de la transcendance de ix (il n'existe aucun polynôme non nul à coefficients rationnels
dont tx soit une racine, cf ïlber die Zaîil Pi, Mathematische Annalen 20 (1882), pp. 213-225. Cela prouve au passage
l'impossibilité de la quadrature du cercle.
b. Ùber die Théorie der algebraischcn Formai, Mathematische Annalen 36 (1890) pp. 473-534. Cet article contient
également le théorème de la base finie.
c. Dans une communication sur les intégrales, Grundziige eiuer aîlgemehien Théorie der Vmenren lutegrnlgleichungen. Vierte
Mitteilung, Nachrichten von der Gesellschaft dei Wissenschaften zu Gôttingen, Mathematisch-Physikalische Klasse
(1906), pp. 157-227
d. Voir la page 55 de l'article AUgemeine Eigemoerttheorie Hermitescher Funktionaloperatoren Mathematische Annalen 102
(1929), pp. 49-131
~\
v
4.1 Produit scalaire
OS Exemples classiques
Sur Rn
Sur Mn, on définit un produit scalaire10 par
Vz = (zi,z2,...,zn)GMn 1 A
> (x, 2/) = Z12/1 + Z22/2 + • • • + a;n2/n = > z*2/i
V2/ = (2/i,2/2,..-,2/n)GMn J Sï
Ce produit scalaire est généralement nommé produit scalaire canonique de M71.
Démonstration
Il faut prouver que (., . ) est bien un produit scalaire sur Rn.
• Commençons par la symétrie.
Soient donc x = (x\,X2i •••,^n) et y = (2/1,2/2, ---,2/71) deux éléments de Rn.
On a alors11 : \/i G [l,n], y%Xi = xiyi.
On en déduit immédiatement
n n
(2/,z) = ^yiXi = ^xiyi = (x,y),
i=i i=i
ce qui assure la symétrie.
• Montrons la linéarité par rapport à la seconde variable.
Soient donc A un réel, x = (zi,z2, ...,zn), y= (2/1,2/2,--,2/n) et y' = (2/1,2/2»---^n)
trois éléments de Rn.
Notons Y = y + \y' G Rn. Ce vecteur est défini par Mi G [1, n], Y* = yi + A2/;.
Ainsi,
Vi G [1,n], 2;^ = Xiyi + Az^-
Les propriétés de distributivité de la somme sur le produit12 font qu'alors
n n
(x, 2/ + \y') = (x, Y) = ^2 XiYi = ^(xiyi + Az^)
i=i i=i
i=i i=i
= (x,2/) + A(a;,2//)-
10. On le désignera sous le terme de produit scalaire canonique de Rn.
11. Par commutativité du produit dans R.
12. Donc de linéarité.
Chapitre 4. Espaces préhilbertiens
On déduit alors de ces deux points que (., . ) est bilinéaire symétrique sur Rn.
• Sur cet exemple, détaillons les deux manières de voir le côté défini positif; vous
pourrez ainsi comparer les méthodes et choisir celle qui vous paraît le plus adaptée
dans un problème selon la situation.
Méthode 1 : on montre séparément les deux sous-parties.
- Soit x = (#i, #2,..., xn) G W1. Avec y = x, on a xiyi = x\ pour tout i G [1, n], et
ainsi
(x,x) = ^2 xf ^0,
donc (., . ) est positif.
- Soit x = (#i,£2,---,£n) € Mn tel que (#,x) = 0.
n
Ainsi, y^zf = 0.
i=i
On a alors une somme nulle de termes positifs, donc chaque terme de la somme
est nul.
Alors Vi G [l,n], xi = 0, donc Vi G [l,n], a* = 0, d'où x = 0.
Ainsi, (., . ) est défini positif.
Méthode 2 : on montre la propriété équivalente.
Soit x = (#i, #2,..., #n) € Mn tel que x ^ 0, il s'agit de montrer que (xy x) > 0.
Le vecteur x étant non nul, il existe io G [l,n] tel que Xi0 ^ 0.
On peut alors affirmer que xfQ > 0.
Par ailleurs, Y^ x\ ^ 0 car tous les termes de cette somme sont positifs ou nuls.
On aboutit ainsi à
n
(x,x) = y,*ï = < + !>?> xl > °>
i=l i^io
donc (x,x) > 0.
Nous pouvons ainsi conclure que (., . ) est bien un produit scalaire sur Rn.
On l'appelle produit scalaire canonique car nous verrons aisément que pour ce produit
scalaire particulier, la base canonique de M71 est une base particulière13.
Voici différentes généralisations de ce produit scalaire.
13. Il s'agit d'une base orthonormée, cf. la définition 77 (p. 378).
4.1 Produit scalaire
E3
1. Soit (ai,a2,...,an) G]0,+oo[n. Alors en posant \/(x,y) G (Mn)2,
n
(x,y) = ^aiXiyu
i=i
on obtient un produit scalaire sur M71.
Démonstration
La preuve est parfaitement analogue à la précédente ; la différence réside
l'implication (#, x) = 0 => x = 0. Ici ce sont les termes a.ix\ qui sont positifs14, et si la
quantité Oiix\ est nulle, comme a* ^ 0, on en déduit toujours Xi = 0.
2. Si l'on considère (ai,a2, ...,an) G Mn et si l'on définit (x,y) par la même formule
que ci-dessus, alors (., . ) sera un produit scalaire si et seulement si
Vt€[l,n], ai>0.
En effet, on a prouvé précédemment qu'il s'agit d'une condition suffisante.
Supposons maintenant que (., . ) est un produit scalaire et que l'hypothèse
Vt€[l,n], ai>0.
n'est pas vérifiée.
Il existe donc io tel que ai0 ^ 0. On considère alors x = e^, le io-ème vecteur de
la base canonique.
Le calcul de (#, x) donne (x,x) = ai0 ^ 0 alors que x ^ 0, ce qui contredit le
caractère défini positif de (., . ).
Ainsi, nous avons prouvé par l'absurde que (., . ) produit scalaire implique bien
ViG [l>n],ai>0.
3. On peut en fait décrire tous les produits scalaires de Rn décrire : une forme bilinéaire
(p se met toujours sous la forme
V(x,y) G (M71) , <p{x,y)= ^ aiyjXiyh
où les coefficients dij sont définis par
V(i, j) G [l,n]2, Oij = ip{euej).
14. En lieu et place des x?.
Chapitre 4. Espaces préhilbertiens
(les ti sont les vecteurs de la base canonique).
Si on note A = (dij) G Mn{M)^ la symétrie de (p implique celle de A, et la
réciproque se démontre aisément.
On peut alors15 prouver que (p est un produit scalaire si et seulement les valeurs
propres de A sont toutes strictement positives.
On pourra le vérifier en se rapportant à l'exercice 4.1 (p. 485).
En effet, avec ce qui précède, (p sera un produit scalaire si et seulement si cp est
défini positif, ce qui correspond à la définition de A G S++ dans l'exercice sus-cité.
Sur Mn,i(
Le produit scalaire canonique de MUyi(M) est défini par
n
VX, Y G Mn,i (R), (X, Y) = J2 XiVù
(X1)
\ Xn )
et Y =
M
\Vn)
si l'on note X =
On notera16 que l'on a aussi (X, Y) = lXY (il s'agit d'une matrice carrée de taille 1,
identifiée à son unique coefficient).
La démonstration du fait que (., . ) est un produit scalaire sur Mn,\(M) est en tout point
identique à celle sur W1 est n'est donc pas donnée.
Là encore, on peut généraliser avec ce que l'on appelle des pondérations17, ou en
considérant une matrice A symétrique réelle dont toutes les valeurs propres sont strictement
positives, en posant (X, Y) = tXAY.
Sur Mn
On définit le produit scalaire canonique de façon analogue, la seule différence étant que
l'ensemble des indices parcourt [l,n]2 au lieu de parcourir [l,n]. Ainsi, en définissant
V(AS)g(KW)2, (A B)= Y, <*****
15. C'est-à-dire si A est symétrique.
16. Le lecteur pourra aisément effectuer ce produit matriciel et ainsi vérifier cette égalité.
17. C'est-à-dire en faisant apparaître un coefficient on > 0 devant xiyi.
4.1 Produit scalaire
EH
l'application (., . ) est un produit scalaire sur Mn,i(M).
Remarque importante
Dans de nombreux exercices, il pourra être utile de remarquer que
V(A B) e (Mn(R))\ (A B) = tif AS).
Vérifions-le.
Notons C = tAB. Les coefficients de C sont définis par
n n
V(i, j) e [l,n]2, aj = ^*ai|fc6fc,j = ^2akyibkyi.
k=\ fe=l
La trace de C vaut alors
n n / n \
tr(C) = ^2 CM = H ( ^2 aMbM ) = H a>k,ibhyi'
i=l i=l \fc=l / (i,fc)G[l,nl2
En renommant (fc,i) en (i, j), on retrouve l'expression de (A,B) donnée précédemment.
Les trois exemples précédents définissent donc des espaces euclidiens.
Voyons maintenant des espaces préhilbertiens réels de dimension infinie.
Un exemple sur Cf[a,6],Rj
Fixons deux réels a et b tels que a <b.
Si l'on pose
V(/,S) € (c([a,6],R))2, </,<?> = J f(t)g(t)dt,
alors (., . ) est un produit scalaire sur C([a, 6],M).
Avant de commencer la preuve de ce résultat, rappelons18 un résultat d'analyse, qui sera
utile à la fin.
18. On ne donne ici qu'une idée de la preuve ; on appelle H une primitive de h sur [a, 6]. Les hypothèses
impliquent que H est croissante, et que H(b) = H (a), d'où H constante et ainsi H' = h = 0.
Chapitre 4. Espaces préhilbertiens
r
Lemme 3
Soit h une fonction continue, positive sur un segment19 [a, 6].
pb
Si / h(t) dt = 0, alors h est nulle sur [a, b), c'est-à-dire Vt G [a, 6], /i(£) =
-'a
\
= 0.
\
y
Démonstration
Nous pouvons maintenant passer à la démonstration du fait que (., . ) est un produit
scalaire.
1. Commençons par la symétrie. Soit donc (/,#) G E2, où E = C([a,6],R).
Par commutativité du produit dans M, on sait évidemment que
Vie [a,b], g(t)f(t) = f(t)g(t).
On en déduit immédiatement
(9,f)= I 9(t)f(t)dt= f f(t)g(t)dt = (f,g),
J a J a
et la symétrie est démontrée.
2. Montrons la linéarité par rapport à la seconde variable.
Soient donc /, g\ et gi trois éléments20 de E.
Soit également À G M.
Notons g = gi+\g2 G E, fonction qui est définie par \/t G [a, 6], g(t) = gi(t)+\g2(t).
On a alors Vi G [a, 6], /(*)$(*) = f{t)9l{t) + Xf(t)g2(t).
Par linéarité de l'intégrale, on peut alors conclure que
(/,5i+A52> = (f,g)= f f(t)g(t)dt
Ja
= I (f(t)gi(t) + Xf(t)g2(t))dt
Ja
= f f(t)gi(t)dt + \f f(t)g2(t)dt
J a J a
= </,0i) + A</,52>.
On déduit alors de ces deux points que (., . ) est bilinéaire symétrique sur ]Rn.
19. Naturellement, on suppose a < b.
20. On évite d'appeler une fonction g' pour ne pas confondre avec une dérivée.
4.1 Produit scalaire EBJJ
3. Passons au caractère défini positif.
• Soit feE. Avec g = /, on a Vt G [a, 6], /(*)$(*) = (/(*))2> d'où
donc (., . ) est positif.
• Soit feE tel que (/, /) = 0.
rb
Ainsi, / (/(*)) dt = 0.
Ja
Notons h = f2. La fonction /i est alors continue et positive sur [a, 6].
Ainsi, on peut appliquer le lemme 3 à la fonction h.
L'hypothèse (/, /) = 0 devient / h(t) dt = 0, et les autres hypothèses du lemme
J a
étant vérifiées, on peut en déduire que h est nulle sur [a, b].
Ainsi, Vt G [a, 6], (/(t))2 = 0, donc W G [a, 6], /(*) = 0, c'est-à-dire / = 0^.
Ainsi, (., . ) est défini positif21, donc (., . ) est bien un produit scalaire sur E.
Généralisons ce premier exemple.
1. Soient a < b et soit p : [a, b) —»]0, +oo[ continue.
Soit E = C ([a, b), R). Alors
(/,</>= / P(t)f(t)g(t)dt
Ja
définit un produit scalaire sur E.
Démonstration
À nouveau, la preuve est analogue à la précédente. La seule différence est que pour le
caractère défini positif, il faut appliquer le lemme 3 à la fonction h = pf2 au lieu de
l'appliquer à la fonction f2.
2. Soit / un « vrai » intervalle, c'est-à-dire un intervalle contenant au moins deux
points distincts. Soit en outre p : / —»]0, +oo[ continue.
21. Il est bon de noter que ce résultat devient faux sur l'ensemble des fonctions continues par morceaux
sur [a, 6]. Dans ce cadre, l'application / i—> \ I (/(*)) dt est une semi-norme^ c'est-à-dire une
application à valeurs dans M+, homogénéité et vérifiant l'inégalité triangulaire, mais pas nécessairement
la séparation.
Il Chapitre 4. Espaces préhilbertiens
On pose E = {/ G C(J,R), p./2 est intégrable sur /}.
Alors
(a) E est un sous-espace vectoriel de C(/,M),
(b) (/,#) = / p(t)f(t)g(t)dt définit22 un produit scalaire sur E.
Démonstration
Pour commencer, rappelons la simple inégalité suivante :
V(a,/?)eK2, a/?<i(a2 + /?2).
Pour la démontrer, on part du fait que (a — fi)2 ^ 0 (carré d'un nombre réel).
En développant il vient a2 - 2a/3 + f32 ^ 0.
Le résultat est alors immédiat en passant le terme 2a/? dans l'autre membre, et en
divisant par 2.
Nous allons nous en servir pour démontrer que E est un sous-espace vectoriel de C(/,R),
et aussi pour montrer que (., . ) existe23.
• Il est évident que la fonction nulle est élément de E.
Soient maintenant deux éléments f et g de E, et X £ M. Montrons que f -{-Xg e E.
La fonction h = f + Xg est évidemment continue sur J, il suffit de montrer que
jP(t)(h(t )) dt converge, sachant que par hypothèse les intégrales
et J p(t){g(t))2 dt sont convergentes.
Or en développant le carré et en multipliant par p(t), il vient
Vt € /, p(t)(h(t))2 = p(t){f(t))2 + X2p(t)(g(t))2 + 2Xp(t)f(t)g(t).
Nous allons commencer par montrer que l'intégrale / p(t)f(t)g(t) dt converge
absolument24.
En utilisant l'inégalité a/3 ^ \{a2 + fi2) avec a = \f(t)\ et fi = \g(t)\, il vient :
Vt G /, 0 ^ \p(t)f(t)g(t)\ ^ w(t) = l(p(t)(f(t))2 + p(t)(g(t))2).
22. L'intégrale définissant (/, g) est une intégrale généralisée.
23. C'est-à-dire que l'intégrale généralisée converge.
24. Ce qui nous sera d'ailleurs encore utile ultérieurement.
4.1 Produit scalaire
Par hypothèse25, on sait que les fonctions t i—> p{t)(f{t)) et t i—> p(t)(g(t))
sont intégrables sur J; w étant combinaison linéaire de ces deux fonctions, w est
intégrable sur I.
On peut alors déduire de W G J, 0 ^ \p(t)f(t)g(t)\ ^ w(t) que / \p{t)f(t)g(t)\dt
converge grâce au théorème de comparaison pour les intégrales de fonctions
positives26.
En d'autres termes, la fonction t \—> p(t)f(t)g(t) est intégrable sur I.
Alors, l'égalité
W € I, P(t)(h(t))2 = p(t){f(t))2 + X2p(t)(g(t))2 + 2Xp(t)f(t)g(t)
montre que la fonction 11—> p{t)(h(t)) est combinaison linéaire des fonctions
*■—>p(*)(/(*))2, *—>P(*)(0(*))2 ^ t^p(t)f(t)g(t)
qui sont toutes intégrables sur /, donc t i—> p(t)(h(t)) est intégrable sur / par
linéarité.
Ainsi h = f + \g e E, donc E est un sous-espace vectoriel de C(/,R).
• Maintenant, on peut poser
V(/, g)€E2, (f, g)= J p(t)f(t)g(t) àt.
En effet, étant donnés deux éléments / et g de E, nous avons démontré que cette
intégrale converge absolument, donc converge.
• Il reste à montrer que (., . ) est bien un produit scalaire sur E.
— La symétrie est évidente, comme dans les autres exemples rencontrés jusqu'ici.
— La linéarité par rapport à la seconde variable se démontre comme dans l'exemple
précédent ; la seule différence est la présence d'un facteur p dans l'intégrale, et
le fait que l'on a affaire à des intégrales généralisées au lieu d'intégrales sur un
segment. Mais comme on a prouvé que toutes les intégrales rencontrées sont
convergentes, la linéarité de l'intégrale s'applique de la même façon.
Ainsi, (., . ) est une forme bilinéaire symétrique sur E.
25. f et g éléments de E.
26. cf. O. Rodot, Analyse seconde année, De Boeck (2014).
Chapitre 4. Espaces préhilbertiens
- Soit /6£.0na alors (f, f) = J p(t)(f(t )) dt. La fonction p étant
(strictement) positive sur J, la fonction 11—> p(t)(f(t)) est positive sur J, donc son
intégrale est positive.
On a ainsi démontré que V/ G E, (/, /) ^ 0.
Soit enfin / G £ tel que (/, /) = 0.
Le lemme 3 a une version un peu plus générale.
Lemme 4
Soit h une fonction continue, positive et intégrable sur un intervalle I.
Si / h(t) dt = 0, alors h est nulle sur J, c'est-à-dire Vt G /, h(t) = 0.
On peut appliquer directement ce lemme à h : 11—> p(t)(f(t)) , intégrable
sur I par hypothèse (/ G E).
L'égalité (/, /) = 0 se traduit par / h(t) dt = 0, donc
VteJ, h(t) = P(t)(f(t))2 = 0.
La fonction p ne s'annulant nulle part, on en déduit / = 0.
Ainsi, (., . ) est un produit scalaire sur l'espace vectoriel i5, c'est-à-dire que (.E, (., . ))
est un espace préhilbertien réel.
Un espace de suites
Notons f2 = < u = (^n)nGN, J^ u^ converge.
Alors
1. £2 est un sous-espace vectoriel de MN (l'ensemble des suites réelles),
+oo
2. (u,v) = Y^ unvn définit un produit scalaire sur £2.
n=0
Plus généralement, soit a = (an)neN une suite de réels strictement positifs.
On note alors £^ = < u = (wn)neN, ^2 anUn converge. >.
[ n^0 J
Alors
1. ^ est un sous-espace vectoriel de MN,
4.1 Produit scalaire
+00
£
n=0
2. (w, v) = Y^ OLnunvn définit un produit scalaire sur t\.
Démonstration
Seule la preuve du cas général est écrite ; pour revenir au premier cas, il suffit de choisir
Vn G N, an = 1.
La preuve est une adaptation au cas des séries de l'exemple précédent avec les intégrales
généralisées.
• Il est évident que la suite nulle est élément de ^2.
Soient maintenant deux éléments u et v de ^2, et À G M. Montrons que la suite
réelle w = u + Xv est élément de f2.
Il suffit de montrer que la série Y^ anw^ converge, sachant que les séries ^ OLnv?n
et Y^ OLnv^ convergent par hypothèse.
Un calcul immédiat donne Vn G N, Q.nw\ = anu^ + X2anv^ + 2Xanunvn.
Par analogie avec l'exemple précédent, nous allons commencer par montrer que la
série Y^ anunvn converge absolument.
En utilisant l'inégalité afi ^ \{a2 + (32) avec a = \un\ et /? = |vn|, il vient :
Vn G N, 0 ^ \anunvn\ ^sn = -{oLnu2n + <*„*£).
Par hypothèse 27, on sait que les séries de termes généraux anw2 et otnv\ convergent.
(sn)neN étant combinaison linéaire de ces deux suites, la série de terme général sn
est convergente.
On peut alors déduire de Vn G N, 0 ^ |anwnun| ^ sn que ^2anunvn converge
absolument grâce au théorème de comparaison pour les séries de termes généraux
positifs28.
Alors, par linéarité, l'égalité
Vn G N, anWn = anv?n + X2anv^ + 2Xanunvn
montre que la série de terme général anw2 est convergente.
Ainsi w = u + Xv € {%, donc t\ est un sous-espace vectoriel de MN.
27. u et v sont éléments de £%.
28. cf. O. Rodot, Analyse seconde année, De Boeck (2014).
Chapitre 4. Espaces préhilbertiens
+00
v2
Maintenant, on peut poser V(u,v) G (^) , (u,v) = 22,anUnVn'
n=0
En effet, étant donnés deux éléments u et v de ^, nous avons démontré que cette
série converge absolument, donc converge.
Il reste à montrer que (., . ) est bien un produit scalaire sur E.
La symétrie est évidente, et la linéarité par rapport à v vient de la linéarité des
séries, sachant que nous avons démontré que toutes les séries qui apparaissent
sont convergentes. Ainsi, (., . ) est une forme bilinéaire symétrique sur £^.
Pour changer quelque peu de manière de voir, considérons uG^ tel que u^O
et montrons (u, u) > 0. L'hypothèse u ^ 0 signifie qu'il existe no G N tel que
uno ^ 0, et alors anou2no > 0.
no —1
Par ailleurs, comme Vn G N, anu^ ^ 0, on peut affirmer que Y^ otnv?n et
+oo
y] anv?n sont des réels positifs (ou nuls).
n=0
n=no+l
On en déduit alors
+oo
(u, u) = ^2 a"ul
n=0
no —1 +oo
= J2 anul +«no^n0 + J2 °^
n=0 n=no+l
V v ' > v '
>0 ^0
> anoul0 > °
On a alors bien (u,u) > 0 pour tout élément u non nul dans t^.
Le caractère défini positif de (., . ) est ainsi démontré.
Ainsi, (., . ) est un produit scalaire sur l'espace vectoriel ^, c'est-à-dire que (E, (., •))
est un espace préhilbertien réel.
4.1 Produit scalaire
Exemples sur R[X]
1. Si l'on s'inspire des suites29, on peut définir un produit scalaire (., . ) par :
min(m,n)
i=0
lorsque P = a0 + axX + • • • + amXm et Q = b0 + hX + • • • + bnXn.
2. De nombreux exemples de produits scalaires sur R[X] s'inspirent des exemples sur
les ensembles de fonctions.
Au lieu de traiter chacun de ces exemples séparément, on peut donner le résultat
suivant.
Proposition 112 '
Soient / un intervalle de M non réduit à un point et p : I —»]0, +oo[ continue telle
que \/n G N, la fonction t i—> tnp{t) soit intégrable sur /.
On peut alors poser
V(P,Q) € (R|X])2, (P,Q) = [ p(t)P(t)Q(t)<)t,
I
et (., . ) définit alors un produit scalaire sur R[X]. r
Démonstration
• Il faut déjà prouver que V(P, Q) G (M[X]) , l'intégrale définissant (P, Q) converge.
Or le produit PQ est un élément de R[X], donc il existe des coefficients 70, 71, ...,
N
7iv réels tels que PQ = 70 + 71-X" H •" 1nXn = ^ 771-^
n=0
N
Alors, la fonction t1—► P(t)Q(t)p(t) s'écrit ^lntnp{t).
n=0
En d'autres termes, cette fonction est combinaison linéaire de fonctions de la forme
t1—> tnp(t), qui sont toutes intégrables sur I.
On peut alors affirmer par linéarité que t \—> P(t)Q(t)p(t) est intégrable sur I.
• La preuve du fait que (., . ) est alors un produit scalaire sur R[X] est alors
parfaitement similaire à celle du cas converge >, sur
29. Ou de Rn.
Chapitre 4. Espaces préhilbertiens
lequel l'expression
(f,g) = Jif(t)g(t)p(t)dt
définit un produit scalaire.
Si l'on se permet d'identifier polynômes et fonctions polynomiales, on peut en fait
dire que R[X) est un sous-espace vectoriel de B, et que (., . ) induit sur R[X) un
produit scalaire d'après la proposition 111 (p. 341).
Sinon, la seule différence est dans le passage
VP G R[X], (P,P) = 0 => P = 0.
La méthode de la preuve précédente permet de conclure que la fonction polynomiale
P vérifiera V* G J, P{t) = 0.
Or l'intervalle I n'est pas réduit à un point et possède donc une infinité d'éléments.
Ainsi, on peut affirmer que P possède une infinité de racines, donc que P = 0.
Exemples
En appliquant30 le principe de Gram-Schmidt31, on obtiendra des familles de polynômes
orthogonaux. C'est pourquoi après chaque exemple de produit scalaire ci-dessous, il est
précisé le nom de la famille de polynômes que l'on peut ainsi créer.
Dans les exemples ci-dessous, les fonctions p sont toutes clairement continues et
strictement positives sur J, ce qui justifie que ce n'est pas précisé dans chaque exemple.
Parmi les exemples classiques, on trouve
• J=[-l,l],p(t) = l.
On a Vn G N, t \—> tnp(t) = tn est continue sur le segment / = [—1,1], donc
intégrable sur /.
On peut donc bien appliquer la proposition 112 et affirmer directement que la
formule
\f(P,Q)€(R[X])2, (P,Q) = j P(t)Q(t)àt
définit un produit scalaire sur R[X].
Ce produit scalaire permet d'obtenir la famille des polynômes de Legendre
32
30. Avec l'un de ces produits scalaires.
31. cf. le théorème 30 page 389, ainsi que sa démonstration.
32. En hommage au mathématicien français Adrien-Marie Legendre (1752-1833).
4.1 Produit scalaire
• /=]-!, l[,p(t)= *
y/ï^fi
\tn\ 1
On a Vn G N, ti—► \tnp(t)\ = . ' ' = =- —- ^ 0 lorsque t -> 1".
Z*1 l
Comme / ^rjô dt converge (intégrale de Riemann) on en déduit par
comparaison que t1—> tnp(t) est intégrable sur [0,1[, donc par parité sur ]—1,1[.
On peut à nouveau appliquer la proposition 112 et affirmer qu'en posant
V(P,Q) € (RM)2, (P, Q) = J^ ^^- dt,
on définit un produit scalaire sur R[X].
Ce produit scalaire permet d'obtenir la famille des polynômes de Tchebychev33.
L'exercice 4.8 est d'ailleurs consacré à l'étude de cette famille de polynômes.
• J = [0,+oo[, p(t) =e_t.
OnaVneN,t^ \tnp(t)\ = tne"* = o(e"'/2) lorsque t -> +oo.
r+oo
Comme / e~*/2 dt converge, on en déduit par comparaison que t1—> tnp(t) est
Jo
intégrable sur I = [0, +oo[.
Ici encore, la proposition 112 nous permet d'affirmer que
V(P, Q) e (R[X])\ (P, Q) = / P{t)Q{t)e-1 dt,
Jo
définit un produit scalaire sur R[X].
Ce produit scalaire permet d'obtenir la famille des polynômes de Laguerre34.
• J = R, p{t) =e"*2.
On a Vn G N, t \—> \tnp(t)\ = \tn\e~t2 = o(e_t) lorsque t -> +oo.
r+oo
Comme / e~l dt converge, on en déduit par comparaison que t i—> tnp(t) est
Jo
intégrable sur I = [0, +oo[, donc sur R par parité.
33. En hommage au mathématicien russe Pafnouti Tchebychev (1821-1894).
34. En hommage au mathématicien français Edmond Laguerre (1834-1886).
Chapitre 4. Espaces préhilbertiens
Comme précédemment, la proposition 112 nous permet d'affirmer que
/+oo
P(t)Q(t)e~t2 àt,
-oo
définit un produit scalaire sur R[X].
Ce produit scalaire permet d'obtenir la famille des polynômes de Hermite35.
Norme euclidienne
La notion de norme euclidienne est historiquement connue depuis des millénaires à travers
la mesure des distances le long d'une droite, sur un plan, ou dans l'espace physique, muni
du produit scalaire canonique.
Comme souvent en mathématiques, l'intérêt est de pouvoir généraliser ces situations à
de nombreux autres espaces, y compris de dimension infinie.
Notation
Si E est un espace préhilbertien réel, on note Va; G .E, ||a;|| = \/{x,x), la quantité étant
bien définie par positivité du produit scalaire.
On sait même que ||0|| = 0 et que Va; G B, x ^ 0 => ||z|| > 0 puisque (x^x) > 0
lorsque x ^ 0.
On utilise dès maintenant la notation d'une norme, elle sera justifiée plus loin36.
35. En hommage au mathématicien français Charles Hermite (1822-1901). Ces polynômes ont été
utilisés (notamment) par Lagrange pour étudier des probabilités. L'explication en est que, à des coefficients
près, le poids intervenant est celui de la loi normale, c'est-à-dire une gaussienne.
36. La démonstration du fait que || . || définit bien une norme sur E est l'objet de cette partie, cf. la
proposition 114 (p. 365).
4.2 Norme euclidienne
m
EEQ Inégalité de Cauchy-Schwarz
Théorème 27 (inégalité de Cauchy-Schwarz37)
Soit E un espace préhilbertien réel. Alors on a
V{x,y)&E\ ((x,y))2^(x,x)-(y,y) = \\x\\\\\y\\\
ou de manière équivalente
v(.T)2/)e£2, |(.t)2/)|<|N|.|M|.
Il y a égalité (c'est-à-dire | (x,y) | = ||rc||. \\y\\) si et seulement si la famille (x,y) est
liée.
Et il y a égalité sans les valeurs absolues38 si et seulement si la famille (x,y) est
I positivement liée, c'est-à-dire si et seulement si x = 0 ou il existe À G 1R+ tel que '
y = \.x
Démonstration
Nous allons présenter deux variantes de la preuve de ce théorème.
1. Voici la démonstration la plus fréquemment rencontrée :
Si x est nul, alors à la fois (x,y) et ||a;||. \\y\\ sont nuls, donc l'inégalité a lieu; et
on a aussi le cas d'égalité : la famille (x, y) est liée, et positivement liée.
On suppose dorénavant x non nul.
On pose Vt G M, P(t) = (tx + y,tx + y).
Par positivité du produit scalaire, on sait que V£ G M, P(t) G M+.
Et en utilisant la bilinéarité du produit scalaire, on peut affirmer que Vt G M,
P(t) = (tx + y,tx + y) =t (x, tx + y) + (y, tx + y)
= t(t(x,x) + (x,y)) + (t(y,x) + (y,y)).
En utilisant la symétrie, il vient finalement
P{t) = (x,x)t2+2(x,y)t+(y,y)
37. Cauchy et Schwarz ont donné leur nom à ce théorème pour en avoir prouvé des cas particuliers,
comme l'expression dans le cas de Rn ou des intégrales sur mais le formalisme des espaces
préhilbertiens n'était pas encore parfaitement défini à l'époque de Cauchy.
38. C'est-à-dire (x,y) = \\x\\. ||y||.
y Chapitre 4. Espaces préhilbertiens
Ainsi, P est une fonction polynomiale de degré exactement39 2.
Ainsi, P est une fonction polynomiale de degré 2 qui reste positive sur R.
Le discriminant A de P est forcément négatif ou nul40.
Ainsi, on a
A=(2(x,y))2-4(x,x).(y,y)^0.
En passant le deuxième terme à droite et en divisant par 4 il vient
((x,y)) ^(x,x)-(y,y).
Il ne reste qu'à appliquer la croissance de la fonction racine carrée pour en déduire
le résultat :
| (x,y) | = y/((x,y))2 ^ ^{x,x) ■ (y,y) = \\x\\.\\y\\.
Il reste à étudier le cas d'égalité : si l'on a | (x,y) | = ||z||. \\y\\, alors41 le
discriminant A est nul et P possède une racine42 to G M.
Comme P{to) vaut (tox + ?/, tox + y) = 0 et comme le produit scalaire est défini
positif, il découle que43 tox + y = 0 : la famille (x,y) est bien liée.
Et enfin, si (x,y) = \\x\\.\\y\\, alors | (#, y) | = ||a;||. \\y\\y et l'on vient de voir qu'il
existe À G M tel que44 y = Xx.
On déduit alors de (x,y) = y/(x,x).^/(y,y) que (#,Xx) = ^(x,x).^(Xx,Xx) ou
encore par bilinéarité À (#, x) = JX2 (#, x) = \X\. | (#, x) |.
Or (x,x) > 0 car x non nul. On peut donc conclure que À = |À| G M+.
2. Passons à une preuve plus géométrique.
Le cas x = 0 se traite à part comme précédemment.
Si x ^ 0, on définit le vecteur z = ; ' ; • x ; nous verrons ultérieurement45 que
(x,x)
39. Le coefficient de t2, qui est (x,x), est strictement positif puisque x ^ 0.
40. S'il était strictement positif, P aurait deux racines distinctes, et P serait strictement négatif entre
les racines, ce qui est exclu.
41. Après élévation au carré.
42. Il s'agit même d'une racine double.
43. Ou si l'on préfère y = —tox.
44. A correspond à — to.
45. cf. le théorème 29 page 385.
4.2 Norme euclidienne
ETfrl
ce vecteur correspond au projeté orthogonal de y sur la droite vectorielle dirigée
par x.
(x zj)
Pour simplifier les écritures, notons À = . ' . .
(x,x)
Le même calcul que dans la première méthode permet de développer
\\y\\2 = \\(y-Xx) + Xx)\\2 = \\y-\x\\2 + 2X{y-Xx,x,+)X2\\x\\2.
On développe par linéarité le produit scalaire suivant46 :
(y - Xx, x) = (y, x)-X (x, x)
= iv,x)-(x,y)
= 0
Il reste ainsi
||y||2 = ||y-Ax||2 + A2||x||2,
d'où (puisque \\y — Xx\\ ^ 0)
INI
En multipliant par ||z||2 > 0 on en déduit que Ton a bien ( (x,y) ) ^ ||a;||2 \\y\\2.
L'inégalité de Cauchy-Schwarz est ainsi démontrée.
Quant au cas d'égalité, il impose \\y — Xx\\ = (y — Àz,y — Xx) = 0.
Ainsi, y — Xx = 0, donc la famille est liée.
Enfin, pour aboutir à {x,y) positivement liée en partant de (x,y) = \\x\\. ||y||, on
procède comme avec la première démonstration.
Réciproquement, on notera que si la famille (#, y) est positivement liée, alors il est évident
qu'il y a égalité dans l'inégalité de Cauchy-Schwarz.
46. En utilisant la valeur explicite de A.
Chapitre 4. Espaces préhilbertiens
■\
*
Né en Silésie en 1843 (dans une ville actuellement située
en Pologne), Hermann Schwarz voulait initialement
travailler dans le domaine de la chimie.
La fréquentation des cours de mathématiciens aussi
brillants que Kummer et que Weierstrass Ta poussé à
s'intéresser aux mathématiques (il a passé un doctorat
sous la direction de Weierstrass).
Ses travaux les plus importants portaient sur les
applications dites conformes ; il est également connu pour la
résolution du problème isopérimétrique en dimension 3
(la surface qui enferme un volume maximal pour une
aire minimale est la sphère).
Hermann Schwarz a continué l'enseignement jusqu'à
l'âge de 75 ans, mais avait arrêté ses recherches depuis longtemps.
Son nom reste associé à l'inégalité de Cauchy-Schwarz (parfois dénommée
inégalité de Cauchy-Bunyakovski-Schwarz) pour en avoir fourni une preuve.
Notons que son nom ne comporte pas de « t », il ne faut pas le confondre avec les
différents « Schwartz », dont l'américain Jacob T. Schwartz et le français Laurent
Schwartz.
Hermann Schwarz
(1843-1921)
Applications
1. Dans le cas E = Rn muni du produit scalaire canonique, l'inégalité de Cauchy-
Schwarz s'écrit
Vx = (xux2,...,xn) eRn
V2/=(2/i,2/2,...,2/n)GMn
^XiVi
i=i
/ n \ 1/2 / n \ 1/2
< te*? ■ te»? -
u=i
^i=i
ou de manière équivalente
47
Va; = (zi,Z2,...,zn) G W
Vy = (2/1,2/2, ...,y„) e w1
J^mVi) < []£*?) * (£1
^i=i
^i=i
u=i
Un cas particulier de cette inégalité consiste à choisir le vecteur y = (1,1,...,1), on
obtient alors
/ <n \ ** / <rt \ / <r» \ / n \
Vx = (x1,x2)..,xn)eRn, 5>i ^ £>? )• (]£la
: H
E<* •
\i=\
\i=\
\i=\
\i=l
47. Après élévation au carré.
4.2 Norme euclidienne
Efficl
^^
Proposition 113 (inégalité de Minkowski (1896)48)
Soit E1 un espace préhilbertien réel. Alors on a
| V{x,y)&E\ \\x + v\\^\\x\\ + \\v\\.
En outre, il y a égalité si et seulement si x et y sont positivement liés.
Remarque
On reconnaît dans ce résultat l'inégalité triangulaire pour || . ||, application dont nous
allons vérifier49 qu'il s'agit d'une norme.
48. cf. le livre Géométrie der Zahlen, réédité en 1910 par B.G. Teubner (Leipzig). Dans les pages 115
à 117, Hermann Minkowski démontre plus généralement l'inégalité triangulaire dans Cn pour la norme p
(avec p > 1) définie par Vx = (xi, ...,x„) G Cn, ||x||p = (|xi|p + ... + |xn|P)1/p.
49. cf. la proposition 114 page 365.
ETîEI
Chapitre 4. Espaces préhilbertiens
]
\
Né dans la ville d'Alexotas ", Hermann Minkowski
est repéré dès le lycée de Kôrugsberg pour ses
capacités en mathématiques. Ses talents sont confirmés lors
de ses études universitaires à Berlin et à Kônigsberg.
Il est notamment l'élève de David HilbertA
À la fois mathématicien et physicien, il a l'idée de
réunir les dimensions de l'espace et du temps en un
seul espace de dimension 4, encore dénommé
aujourd'hui « espace de Minkowskic ». Il s'agit plus
précisément d'un espace affine muni d'une « pseudo-
Hermann Minkowski métrique » cohérente avec la transformation de
(1864-1909) Lorentz'*. Cet espace sera le cadre privilégié des
travaux d'Albert Einstein sur la relativité générale.
Hermann Minkowski poursuit également des recherches en algèbre et en
géométrie des nombres. Il est également connu pour le théorème de Minkowski, qui relie
le nombre de points d'un réseau contenu dans une partie convexe au volume de ce
convexee.
a. En Russie à l'époque et maintenant en Lituanie
b. cf. la notice biographique page 342
c. Raum und Zeit, qui sigiiifie « Espace et Temps ». Il s'agit d'un cours présenté devant la Versammlung Deutscher
Narurforscher und Ârzte à Cologne en 1908 et publié dans Physikalische Zeitschrift 10 (1909), pp. 104-111.
d. Transformation laissant invariante l'équation d'ondes utt = c2Au.
e. Ce théorème a comme formulation première : soient d E N* et C un convexe de Rd symétrique par rapport à
l'origine et de volume strictement supérieur à 2d. Alors, outre l'origine, ce convexe C contient au moins deux points à
coordonnées entières.
Démonstration
Soient donc x et y dans E. On calcule alors le carré de ||a; + y\\ :
lk + 2/||2 = (x + y,x + y) = (x,x + y)+ (y,x + y)
= (x, x) + (x, y) + (y, x) + (y, y)
= ||o;||2 + 2(a;,2/) + |M|2
^ ||z||2 + 2 ||z||. \\y\\ + \\y\\2 grâce à l'inégalité de Cauchy-Schwarz
On reconnaît à droite le carré de ||a;|| + \\y\\. On a ainsi démontré que
ll* + vll2<(IMI + llvll)2
Comme les quantités ||a; + y\\ et ||a;|| + \\y\\ sont positives, on déduit de ce qui précède
que Ton a bien ||x + 2/|| ^ |M| + ||î/||-
50. En utilisant la croissance de la fonction racine carrée.
4.2 Norme euclidienne
L'inégalité de Minkowski est ainsi prouvée.
S'il y a égalité, alors en élevant au carré on voit d'après le calcul ci-dessus que
||z||2 + 2 (x,y) + \\y\\2 = \\x\\2 + 2 ||x||. ||v|| + \\y\\2 ,
soit après simplification que
{x,y) = \\x\\.\\y\\-
D'après l'étude du cas d'égalité dans l'inégalité de Cauchy-Schwarz, on peut alors bien
affirmer que la famille (#, y) est positivement liée.
r
Proposition 114
Si (E1, (., . )) est un espace préhilbertien réel, alors l'application ||
\/xeE, \\x\\ = y/(xix)
est une norme sur E.
On la qualifie de norme euclidienne.
|| définie par
Démonstration
Comme on a Va; G E, (x,x) ^ 0, on sait déjà que l'application || . || est bien définie sur
E et à valeurs dans M+.
Montrons que les trois axiomes des normes51 sont bien vérifiés :
• Homogénéité : Soient À G M et x G E.
Alors (Àz, Xx) = A (#, Xx) = A2 (#,x) et donc52
||Az|| = yJ{Xx,Xx) = VA2 (x,x) = v^.V^) = |A|. ||z||
• Inégalité triangulaire : Soient x et y dans E.
Alors l'inégalité ||a; + y\\ ^ ||a;|| + \\y\\ a été prouvée : c'est l'inégalité de Minkowski.
• Séparation : Soit x G E tel que ||#|| = 0. En élevant au carré on en déduit (x, x) = 0
et donc53 x = 0.
Tous les points sont démontrés, on a bien prouvé que 11 . 11 définit une norme sur E.
51. cf. O. Rodot, Analyse seconde année, De Boeck (2014).
52. On notera bien qu'in fine, le nombre en facteur est |A| et non pas A.
53. Par le caractère défini positif du produit scalaire.
Chapitre 4. Espaces préhilbertiens
Convexité stricte
Proposition 115 i
Soit E un espace préhilbertien réel.
La boule unité fermée pour || . || est strictement convexe, c'est-à-dire qu'en posant
B={xeE, IMIO},
on a :
?2
1. \/(x,y) G B2, Vt G [0,1], tx + (1 - t)y G B
2. V(^)e52, x^y =» V*e]0,l[, ta + (1 - Qy G j? ={!;€£, |H| < 1}
Démonstration
Le premier point54 est valable pour toute norme.
Soit donc x et y deux éléments de jB, c'est-à-dire x et y dans E tels que ||a;|| ^ 1 et
IMI < i.
On a alors55 pour tout t dans [0,1],
||te + (i-t)»||< INI + lia-*)»|| = l*MWI + |i-*l-IMI
Comme t G [0,1], les nombres t et 1 — t sont positifs, donc \t\ = t et |1 — t\ = 1 — t.
On a alors56 :
\\tx + (1 - ty)\\ < t. \\x\\ + (1 - t). |M| < U + (1 - t).l = 1,
et Ton a bien tx + (1 - £)?/ G £.
Notez que Ton peut par une preuve à peine différente montrer que toute boule57 est
convexe.
Montrons le second point58 : soient deux points distincts x et y de B et soit t g]0, 1[.
Nous allons montrer que | \tx + (1 — t)y\ | < 1.
Raisonnons par l'absurde.
54. Qui correspond à la convexité.
55. En utilisant successivement l'inégalité triangulaire et l'homogénéité.
56. Comme ||x|| ^ 1 et \\y\\ ^ 1.
57. Ouverte ou fermée, centrée en un point quelconque, et de rayon quelconque.
58. Qui n'est pas valable avec une norme quelconque
4.2 Norme euclidienne
E3
Passons à une illustration graphique.
Dans la figure ci-après, les points x et y sont sur la sphère unité (ici un cercle) mais le
reste du segment (bleu) qui relie ces points est dans la boule ouverte. Cette boule unité
fermée est dite strictement convexe.
Remarque
Naturellement, il ne s'agit que d'une illustration dans le cas particulier de la norme
euclidienne canonique du plan, mais le résultat est démontré avec toute norme euclidienne.
59. Comme t et 1 — t sont strictement positifs.
Q||| Chapitre 4. Espaces préhilbertiens
Notons au passage que nous avons au début du chapitre déterminé la forme générale
d'un produit scalaire dans Mn, et donc notamment dans le plan. On pourrait en déduire
qu'une boule unité fermée pour une norme euclidienne dans le plan est une ellipse pleine,
centrée en 0.
Dans la figure ci-après, qui correspond à la boule unité pour la norme 1 les points x et y
sont sur la sphère unité, et le segment qui les relie est inclus dans cette sphère unité,
donc n'est pas inclus dans la boule ouverte.
Cette boule unité fermée n'est pas strictement convexe.
BH Calculs de produits scalaires et de normes
QO Développements et polarisation
Proposition 116
Soient x et y deux vecteurs d'un espace préhilbertien réel E. On a alors
1. \\x + y\\2 = \\x\\2 + 2(xty) + \\y\\2
2. \\x-y\\2 = \\x\\2-2(x,y) + \\y\f
4.3 Calculs de produits scalaires et de normes
Démonstration
Par définition de la norme puis bilinéarité du produit scalaire 60 on peut effectuer le calcul
suivant61 :
||z + 2/||2 = (x + y,x + y)
= (x,x + y) + (y, x + y)
= (x, x) + (x, y) + (y, x) + (y, y)
= (x, x) + (x, y) + (x, y) + (y, y) (par symétrie)
= |N|2 + 2(x>») + ||»||2>
ce qui est bien la première égalité annoncée62.
La preuve pour \\x — y\\2 est parfaitement similaire, elle n'est donc pas écrite ici.
Il y a un résultat intéressant63 : si Ton connaît la norme euclidienne, alors on peut
retrouver le produit scalaire.
Ces résultats sont connus sous le nom d'identités de polarisation.
Proposition 117
Soient x et y deux vecteurs d'un espace préhilbertien réel E. On a alors
i- <^!/> = ^(ll^ + »ll2-INI2-llyll2)
2- (xty) = U\\x\\2 + \\y\\2-\\x-y\\2)
3. (x,y) = \(\\x + y\\2-\\x-y\\2)
4. En outre, on a l'identité du parallélogramme64 :
\\x + y\\2 + \\x-y\\2 = 2(\\x\\2 + \\y\\2).
60. On commence par la première variable.
61. Similaire au début de la démonstration de l'inégalité de Minkowski, cf. la proposition 113 (p. 363).
62. Le lecteur pourra noter la ressemblance avec l'identité remarquable (a + 6)2 = a2 + 2ab + 62 dans
K. Mais on verra que ce développement devient faux dans le cas complexe.
63. Que l'on utilisera pour traiter les endomorphismes orthogonaux notamment.
64. Il est intéressant de noter que ce résultat est une équivalence : une norme est euclidienne si et
seulement si elle vérifie cette identité du parallélogramme pour tout couple (x, y) d'éléments de E. Ce
ET71
Chapitre 4. Espaces préhilbertiens
Démonstration
Pour la première, on part de
\\x + y\\2 = \\x\\2+2(x,y) + \\y\\2,
on passe les termes ||a;||2 et \\y\\2 dans l'autre membre de l'égalité, et le résultat est
immédiat après division par 2.
Le travail est absolument similaire pour la deuxième, à ceci près que l'on part de
lk-2/||2-|N|2-2(x)2/) + |M|2.
Pour la troisième65, on effectue la différence des égalités
\\x + y\\2 = \\x\\2 + 2(x,y) + \\y\\2 et ||x -y\\2 = \\x\\2 - 2 (x,y) + \\y\\2 .
On trouve alors après simplification ||a? + 2/|| — \\x — y\\ = 4 (x,y), et le résultat est
alors immédiat.
Quant à l'identité du parallélogramme66, elle s'obtient en sommant ces deux mêmes
égalités.
QQQ Orthogonalité
Définition 74
Dans un espace préhilbertien
si (x,y) = 0. On note alors x
réel E,
JLy.
on
dit
que
deux vecteurs x
et
y sont
^
orthogonaux
)
résultat est l'objet du théorème 1 de l'article de P. Jordan et J. Von Neumann, On inner products in
linear metric spaces, Annals of mathematics 36 (1935), pp. 719-723.
65. Qui a l'avantage d'être plus « symétrique », et surtout qui correspond plus à ce que l'on trouvera
dans le cas complexe.
66. Le nom de cette identité s'explique car géométriquement, elle signifie la chose suivante : dans un
parallélogramme, la somme des carrés des longueurs des deux diagonales est égal à la somme des carres
des longueurs des quatre cotés.
4.3 Calculs de produits scalaires et de normes
\
Pythagore (U/j,'âa^opaa en grec ancien) est un nom célèbre
des mathématiques et de l'Antiquité grecque, connu ainsi
que Thaïes (qui lui est un peu antérieur) de tous les
collégiens pour un théorème de géométrie. Si le nom de
Pythagore est familier à beaucoup de monde, sa vie est mal
connue, bien qu'ayant été relatée à plusieurs reprises...
Il n'y a guère de place ici pour entrer dans les détails d'une
vie dont les reconstructions historiques sont sujettes à de
nombreuses contradictions et controverses, d'une vie qui
fut magnifiée " par les biographies antiquesb que l'on a pu
retrouver. Contentons-nous pour replacer le contexte de
r^ytnagore préciser que Pythagore est né à Samos, une île de la mer
(569-475) Egée, dans la première moitié du VIe siècle av. J.-C. (il y a
débat sur sa date de naissance, entre -580 et -569 notamment) et aurait vécu jusqu'à
un âge avancé, s'éteignant au début du Ve siècle av. J.-C.
Entre les deux, Pythagore, après divers voyages, s'est établi à Crotone (dans la Ca-
labre actuelle) où il a fondé une école dont la renommée est venue jusqu'à nous,
et dont les disciples ont été appelés pythagoriciens. Cette école ayant engendré
pendant quelques décennies divers penseurs, et Pythagore n'ayant lui-même rien
couché par écrit, il est impossible de démêler ce que sont les réflexions originales
de Pythagore de celles de ses successeurs. Aussi finirons-nous simplement par
évoquer quelques découvertes mathématiques des pythagoriciensc : le théorème de
Pythagore, le fait que la somme des angles d'un triangle égale celle de deux angles
droits, la liste des polyèdres réguliers ou encore la découverte des irrationnels.
a. Le mot est faible, Pythagore pouvant parfois apparaître comme une incarnation divine, capable notamment
d'ubiquité et se rappelant ses incarnations précédentes, parmi lesquelles paraît-il celle du héros troyen Euphorbe... cf.
Charles H. Kahn, Pythagoias and the Pythagoreans : A BricfHistory, Hackett Publishing Company (2001).
b. cf. par exemple Vie, doctrines et sentences des philosophes illustres de Diogène Laërce. Il en existe notamment une
traduction française éditée par Garnier-Flammarion en 1993.
c. On peut en avoir un large panorama dans l'ouvrage de référence de Thomas Little Heath, A History of Greek Matlie-
matics, Volume I, Frotn Thaïes to Euclid, Oxford : Clarendon Press (1921).
Vf .i
s —~ ; ■—:—!—: : "
t Théoremë 28 (Pythagore)
js On considère deux vecteurs x
% ■ ■ . ■ • . - ■•;,
h 1. Si x et y sont ôrtHogbnaux
p ■=. .. .• :•■ ■'•■ ■-. - • .
|1 2. On a même l'équivalence :
et y d'un e$pace
alors ||ar-r-y\|*f
^ IJs + 3/ll2
. , . , .. ">
préhilbertien réel E..
^■Mi.*+.fl»H* ■•■>.v< >::,-i--
•■ ■■ ■■ :. : •■• >;,-;.• .'.•;
= |N|;2 + lM!2-,
|; 3. si a?i, a?2, ..., xn sont des vecteurs deux à deux orthogonaux de E, alors
W |jxi+X2 + --
^x^ = )\xi\f
-h ii&ii^ -4- - 4- ,ï!
^
Chapitre 4. Espaces préhilbertiens
Remarque
Dans le cas n ^ 3, il n'y a plus l'équivalence.
Voici un contre-exemple. On se place dans M? muni du produit scalaire canonique.
On considère les trois vecteurs u = v = (2,0) et w = (—1,0).
Ces vecteurs ne sons pas deux à deux orthogonaux67 et pourtant on a d'une part
MI2 + IHI2 + IHI2 = 4 + 4 + i = 9
et d'autre part u + v + w = (3,0) d'où
||u + u + w||2 = 9.
Ainsi, on a |\u + v + w\ |2 = |\u\|2 +1\v\| +1\w\ | sans que les vecteurs soient orthogonaux.
Démonstration
1. On a ||z + 2/||2 = (x + y,x + y) = (x,x) + 2(x,y) + (y,y).
Or si on suppose a; 1 y, on a (#, y) = 0 et alors il reste uniquement
||x + 2/||2 = (x,x) + (y,y) = ||a;||2 + |M|2.
2. Le sens direct | =» | a été démontré ci-dessus.
| <=\ Soient x et y éléments de E tels que \\x + y\\ = \\x\\ +
Grâce au développement rappelé ci-dessus, on en déduit
||x||2 + 2(x,2/) + |M|2 = ||x||2 + ||y||2,
qui se simplifie en 2 (#, y) = 0 et ainsi x _L y.
3. Le résultat se démontre par récurrence sur n.
Le cas n = 2, correspondant à l'initialisation, a été traité précédemment.
Supposons le résultat vrai pour un certain n, et considérons n + 1 vecteurs x\y #2,
..., #n, #n+i deux à deux orthogonaux.
On note x = x\ + x<i H h xn.
Alors
(x,xn+i) = (xi,xn+i) + (x2,xn+i) H h (xn,xn+i) = 0,
c'est-à-dire x _L #n+i.
On sait qu'alors \\x + zn+i||2 = ||z||2 + ||zn+i||2.
67. Ils sont même tous colinéaires.
4.4 Bases orthonormées
fSJ
4.4 Bases orthonormées
£2D Généralités
^^
Définition 75
On dit d'une famille de vecteurs (fi)iei d'un espace préhilbertien réel E qu'il s'agit
d'une famille orthogonale si et seulement si les vecteurs de la famille sont deux à
deux orthogonaux, c'est-à-dire si
V(z,j)G/2, i^j => (fufj)=0.
Proposition 118 I
Dans un espace préhilbertien réel, toute famille orthogonale de vecteurs tous non '
nuls est libre.
Remarque
Il faut prendre garde à ne pas confondre « tous non nuls » qui signifie qu'aucun des
vecteurs n'est nul avec « non tous nuls » qui signifie qu'au moins un des vecteurs est non
nul.
Démonstration
Soit donc (fi)iei une famille orthogonale de vecteurs non nuls.
Soit J un sous-ensemble fini quelconque de J, il faut montrer que (fi)iej est libre.
Quitte à renuméroter les éléments, on peut supposer que l'on a une famille (/i,...,/n)
ETH
Chapitre 4. Espaces préhilbertiens
orthogonale de vecteurs non nuls ; il faut montrer que cette famille est libre.
Soit donc un n-uplet (Ai,..., An) G Rn tel que Ai/i H h An/n = 0 (*).
On choisit i G [l,n] quelconque. En effectuant le produit scalaire des deux membres de
la relation vectorielle (*) par /», il vient par linéarité :
Al (flji) + • • • + Xi (fiJi) + • • • + An (fnJi) = 0.
La famille étant orthogonale, tous les (/j, /i) sont nuls pour j ^ i.
Il ne reste donc que A* (/», fi) = 0.
Mais comme fi^O par hypothèse, on sait que (/», fi) > 0 donc est non nul.
On en déduit A* = 0. Ce résultat étant valable pour i quelconque, la famille (/i,.../n)
est libre.
Le résultat ayant été prouvé pour toute sous-famille finie, la famille (fi)iei est bien libre.
Remarque
C'est par le biais de cette proposition qu'il est le plus facile de montrer la liberté de
certaines familles, de fonctions notamment.
Exemple
On considère dans E = C([0,27r],M) la famille T = ((/n)neN, {9m)men*) où l'on pose
Vn G N, Vt G [0,2?r], fn(t) = cos(nt),
et Vra G N*, Vt G [0,2?r], 0m(t) = sin(mt).
En munissant E du produit scalaire V(<p,V0 £ -E2, (<p,ip) = / ip(i)ip(i) dt, on peut
montrer que la famille J7 est orthogonale.
Comme tous les vecteurs de la famille sont non nuls, la famille est libre ; cette famille
sera utilisée (notamment car elle est orthogonale) dans les séries de Fourier.
Montrons donc que cette famille est orthogonale. Vérifions donc que
V(n,m)GN2, n + m =» (/n,/m)=0,
V(n,m) G (N*)2, n±m => (gn,gm) = 0,
etV(n,m)GNxN*, (/n,0m}=O.
Le dernier point est le plus facile68.
68. Du moins, le moins calculatoire. •
4.4 Bases orthonormées
/.2tt
Ona(/n,#m)= / cos(nt) sm(mt) dt.
Jo
Or la fonction t i—> cos(nt) sin(rat) est 27r-périodique, donc son intégrale est la même
sur tout intervalle de longueur 2tt.
On peut donc écrire (fn^9m) = / cos(nt) sin(rat) dt.
J — 7T
Mais la fonction t i—> cos(nt) sin(rat) est impaire, donc son intégrale sur le segment69
[—7r, 7r] est nulle. On a bien
V(n,m)eNxN*, (fn,9m)=0.
Passons au premier point.
Il faut calculer70 l'expression (/n,/m) = / cos(nt)cos(mt) dt.
Jo
Il faut commencer en linéarisant l'expression. En partant de
V(a, b) e M2, cos(a) cos(6) = - ( cos(a + b) + cos(a - 6)),
on arrive à
(/n, /m) = - / (cos ((n + m)i) + cos ((n - m)t) J dt.
Mais onan/m donc n — m est un entier (relatif) non nul.
Et comme (n, m) G N2 avec n ^ m, au moins un des deux est non nul, donc n + m > 0
et n + m est aussi un entier non nul.
On peut donc écrire que
n27T
\/nj /m) — ~
1 1 1
sin ((n + m)t) H sin ((n — m)t)
n + m v ' n — m K 7J0
Comme n et m sont entiers, les quantités sin ((n + ra).27r), sin ((n — ra).27r) et bien sur
sin(O) sont toutes nulles, et on arrive bien à (/n, fm) = 0.
Il faudrait de même prouver que si (n,ra) G (N*)2, alors
/.2tt
(gn, 9m) = / sin(nt) sin(rat) dt = 0.
69. Qui est symétrique par rapport à 0.
70. Pour tout couple (n,m) G N2 tel que n ^ m.
Chapitre 4. Espaces préhilbertiens
Mais la preuve est quasiment la même que ci-dessus, la seule différence est qu'un signe
moins apparaît dans la formule de linéarisation
V(a, b) G M2, sin(a) sin(6) = - ( - cos(a + b) + cos(a - b)),
donc il est inutile de tout refaire.
La conclusion est que la famille T est bien orthogonale, et comme tous les éléments sont
non nuls, la famille est libre.
On pourra en outre noter que 71 Ton a (/o, /o) = 27r et Vn G N*, (/n, fn) = (gn, gn) = n.
Généralement, le produit scalaire est divisé par 2n lorsque l'on étudie les séries de Fou-
rier 72.
Définition 76
Une famille de vecteurs (fi)iei d'un espace préhilbertien réel E est appelée famille
orthonormée si la famille est orthogonale et si en outre tous les vecteurs sont
unitaires73, c'est-à-dire
Vie/, ||/i|| = l.
On peut résumer les deux points par
V(U)e/2, (fijj)=ôiij = { * Sïl=3
0 si i 7^ j
Exemple
On munit au choix l'ensemble des fonctions continues de R dans R et 27r-périodiques, ou
/•27T
C ([0,2?r], R), du produit scalaire (<p, tp) = / <p(t)ip(t) dt.
On définit la famille T' = ((/n)neN, (<7n)neN*) par
1
Vte[0,27r], f0(t) =
V2n
Vn G N*, Vt G [0, 2tt], fn(t) = -^= cos(nt)
x/tt
et $n(t) = —7= sin(nt)
x/tt
71. Avec cette définition du produit scalaire.
72. En tout cas, le fait que ||/o||2 = 2||/i||2 pour i ^ 1 explique que le terme constant apparaît
différemment des autres dans les séries de Fourier réelles.
4.4 Bases orthonormées
On constate qu'il s'agit des fonctions fn et gn de l'exemple page 374 multipliées par des
constantes.
On avait vu à ce moment que la famille T était orthogonale, on en déduit que la famille
T' est aussi orthogonale74.
Nous allons voir que cette famille T' est orthonormee. Il reste à prouver que tous les
éléments sont de norme 1.
Or on a
. . p2n /»27r i
(foJo) = ]o (7o(*))d* = jf ^dt = l
Et si n ^ 1, on a
t2K - - f2* 1 1 f2n l+cos(2nt)
</»,/»> = / (/nW) àt = / - cos2 (nt) dt = -
Jo Jo n n Jo
dt
et de même
<5n,<7n> = / (fl„(t)) dt = / -sin2(nf)dt = - / -* '-dt
Jo Jo n * Jo 2
Ainsi, la famille est orthogonale et tous les vecteurs sont de norme 1, donc la famille T'
est orthonormee.
Cette famille est couramment utilisée dans les séries de Fourier.
Parfois on met un coefficient — ou — en facteur dans le produit scalaire, ce qui change
seulement la constante de normalisation à mettre pour passer des fn et gn aux fn et gn.
Nous reverrons cette famille orthonormee T' dans ce chapitre lorsque nous aborderons
l'inégalité de Bessel, cf. l'exemple page 388.
I Proposition 119 |
Dans un espace préhilbertien réel, toute famille orthonormee est libre.
74. Par exemple, le passage de (fn,fm) à (/m/m) se fait par multiplication par deux constantes.
Chapitre 4. Espaces préhilbertiens
Démonstration
Il s'agit d'un corollaire évident de la proposition précédente : si la famille (fi)iei est
orthonormée, alors elle est orthogonale. Et si ses vecteurs sont (tous) de norme 1, alors
ils sont tous non nuls.
La famille (fi)iei vérifie les hypothèses de la proposition précédente, donc est libre.
f Définition 77 1
On appelle base orthonormée une base qui est aussi une famille orthonormée.
Exemple
Dans Rn muni du produit scalaire canonique 75 la base canonique est une base
orthonormée.
Proposition 120 |
Dans un espace euclidien E de dimension n, toute famille orthonormée de n éléments '
est une base orthonormée.
Démonstration
Si une famille T de E est orthonormée, alors elle est libre par la proposition précédente.
Ainsi, T est une famille libre à n éléments dans un espace de dimension n, donc T est
une base de E.
Et comme on sait cette famille orthonormée, alors il s'agit bien d'une base orthonormée
deE.
Remarque
Il pourra s'agir d'un moyen très rapide de montrer qu'une famille est une base.
On notera qu'il suffirait que la famille de n vecteurs soit orthogonale et que les vecteurs
soient tous non nuls.
75. On rappelle que (x,y) = xiyi -\ + xnyn-
4.4 Bases orthonormées
pzai
Proposition 121 *
Soit B = (ei, ...,en) une base orthonormée d'un espace euclidien E.
Alors pour tout élément x de Ey les coordonnées de rc dans la base B sont les nombres |^
\(x>ei))ieliMm
En d'autres termes,
Va; e E9 x = (x, e\) a H h (rc, en) en.
Démonstration
On part du fait que B est une base de E.
Si Ton considère un vecteur x de E, alors x possède des coordonnées dans la base B : il
existe un unique n-uplet (Ai,..., Àn) G Rn tel que
x = Aiei H h Anen (*).
Il nous reste à calculer les A^. On utilise la même idée que pour prouver qu'une famille
orthogonale76 est libre.
Pour i G [l,n] donné, on effectue le produit scalaire de l'égalité (*) par e%.
On en déduit par linéarité (e*, x) = Ai (e*, ei) H h A* (e*, e*) H h An (e*, en).
Comme la famille (e^) est orthonormée, on a (e^, e^) = 1 et (e^, e^) = 0 pour k^i.
Ainsi, l'égalité donne (e^x) = Ai.O H h Ai.l H h An.O, et l'on a bien A* = (e», x).
Ce résultat est valable pour tout i dans [l,n], donc la relation (*) donne la proposition.
Proposition 122
Soient B = (ei, ...,en) une base orthonormée d'un espace euclidien E1, x et ?/ deux
vecteurs de £, de coordonnées respectives (#i, ...,£n) et Q/i, ...,2/n) dans la base -B.
Alors leur produit scalaire vaut
(e,2/) =xiyi H hffnZ/n,
et la norme de x est donnée par
INI = y/xî + ---+x*.
76. De vecteurs tous non nuls.
jSjj| Chapitre 4. Espaces préhilbertiens
Démonstration
n n
On part de x = V^a^e* et y = y^Vj^j-
i=l 3=1
Par bilinéarité du produit scalaire, on en déduit
fay)
— ( / ; xi^i » / J Vie:
* t€ Il.nl J€ll,n]
= / v Xiiei , / v 2/i6j
*€ll,n] * J'ell.n]
= / v xiVj \eiiej)
(*J)€ll,nl2
Comme (ei,ej) a une valeur différente selon que z = j ou i ^ j, on coupe la somme en
deux :
(X>V) = ^2 xiyj(ei'ej)
= / j Xi yj {ei,ej)+ / v x%yj \eitej)
(i.j)€ll,nl2 V^T/V VT^ (i.j)€ll.nl2 V ^""^
j=i -î/i =1 j^i =0
= ^2 xiyi
t€ Il.nl
La première formule est ainsi prouvée.
On en déduit en prenant y = x que
n
„2
2=1
d'où la valeur annoncée de ||a;|| = y/(x,x).
Nous avons abordé précédemment les bases orthonormées en en voyant quelques cas,
mais rien ne prouve qu'elles existent systématiquement.
Voici un résultat qui répond à la question77.
I Proposition 123 |
Tout espace euclidien possède 78 une base orthonormée.
77. En dimension finie.
4.4 Bases orthonormées
EÏÏFI
Démonstration
On raisonne par récurrence sur la dimension de l'espace.
Nous allons démontrer pour tout n G N* la proposition :
(Hn) : tout espace euclidien de dimension n possède une base orthonormée
(le cas n = 0 est sans intérêt, même si 0 est une base orthonormée de {0^}).
• Pour l'initialisation, considérons un espace E de dimension 1. L'espace E possède
donc une base constituée d'un seul vecteur e.
Puisque e ^ 0, on a ||e|| ^ 0 et l'on peut donc définir le vecteur / = —-e.
\\e\\
Il est alors clair que Rf = Re = E, donc (/) constitue une base de i5, et / étant
norme, cette base (/) est une base orthonormée de Ey ce qui achève l'initialisation.
• Pour l'hérédité, supposons (Hn) vraie pour un certain entier n G N*. Nous devons
donc montrer que (Hn+\) est vérifiée.
Ainsi, on considère E euclidien de dimension n + 1 et l'on cherche à montrer que
E possède une base orthonormée.
Fixons donc un vecteur e G E\{0e}-
On pose / = Tj-M-e et ainsi ||/|| = 1.
Ilell
On définit alors F = {x e E, (f,x) = 0}.
Si l'on note y : E —> R alors l'application cp est une forme linéaire, et (p
x i—> (/, x)
est non nulle79.
Ainsi, F = Ker(cp) est un hyperplan de E, d'où dim(i7) = dim(E) — 1 = n.
Or F est un espace euclidien (pour le produit scalaire induit). Donc on peut
appliquer l'hypothèse (Hn) et en déduire que F possède une base orthonormée
(ei,...,en).
On considère alors la famille (ei,..., en, /). Les n + 1 vecteurs sont de norme 1, la
famille (ei,..., en) est orthonormée et comme pour tout i, e^ G F on sait que e* _L /.
On conclut ainsi que (ei, ...,en,/) est une famille orthonormée de E de dimension
n + 1, donc (ei,..., en, /) est une base orthonormée de E.
Ainsi s'achève la preuve de l'hérédité, donc de la proposition par principe de
récurrence.
78. Il faut lire possède au moins une base orthonormée.
79. Car ¥>(/) = (/,/> = 1^0.
Eisa
Chapitre 4. Espaces préhilbertiens
QQQ Projections orthogonales et inégalité de Bessel
Définition 78
Soit E un espace préhilbertien réel.
1. Si x est un élément de E et A une partie de E, on dit que x est orthogonal à A si
x est orthogonal à tout vecteur de Ay c'est-à-dire si
VyeA, (x,y) = 0.
On écrit alors x _L A.
2. Si A est une partie de E, on appelle orthogonal de A et on note A1- l'ensemble des
vecteurs de E qui sont orthogonaux à A, c'est-à-dire
A± = {xeE; Vy e A, (x,y) = o}.
3. Si ^4 et B sont deux parties de E1, on dit que A et B sont orthogonales si tout
vecteur de ^4 est orthogonal à B (c'est-à-dire à tout vecteur de B)y c'est-à-dire si
VxeA, VtjeB, (x,y) = 0
On peut alors écrire A _L B.
Remarques
1. Si x est un vecteur de E et A une partie de E, on a x _L A ^=> x G j4x.
2. Pour les parties de E, la relation « être orthogonal à » est symétrique.
Nous pouvons alors affirmer que A et B sont orthogonales et pas seulement que A
est orthogonale à B.
3. En général, les parties considérées A ou B sont des sous-espaces vectoriels de E>
mais ce n'est aucunement obligatoire dans la définition.
Voyons quelques propriétés de ces ensembles.
4.4 Bases orthonormées
ETHcl
Proposition 124
Soit F un espace préhilbertien réel.
1.
2.
3.
4.
5.
6.
{0£;}±=Eet^ = {0£;}.
Si A et -B sont deux parties de E telles que A C B, alors i?-1-
Si ^4 est une partie de F, alors80
Si A est une partie de F, alors
de F.
A1-^ [VectiA)^.
son orthogonal A1-
Si F est un sous-espace vectoriel de F, alors F PI Fx
Si ^4 est une partie de F, alors A
c (^)x.
c>lx.
est un sous-espace
= {(M-
vectoriel
7. Si F et G sont deux sous-espaces vectoriels de F, alors (F + G)1- = F-1- n G
Démonstration
1. Puisque Va; G E, (Os, a;) = 0, on a x G {Os}-1. On en déduit E C {Os}-1, et l'autre
inclusion étant évidente par définition, on a bien l'égalité {Os}-1 = E.
Soit a; G Fx.
On a alors Vy G E, (a;, y) = 0.
On peut spécialiser cette propriété en y = x G F, et ainsi (a;, a;) = 0, dont on déduit
x = 0.
On a ainsi E1- C {0^}.
Réciproquement, on a My G E, (0^,?/) = 0, donc 0^ G E-1, ou encore {0^} C Fx.
On a bien l'égalité81 E± = {0E}.
2. Soit x G B1.
Alors, étant donné ?/ G -A, on a y G jB donc x ± y.
Cette propriété étant vraie pour tout y G A, on a x G j4x, d'où jBx C A-1.
3. Par le point précédent avec B = Vect(^4), on a A C B donc [Vect(^4)] C A*~.
Montrons l'autre inclusion.
Soit donc x G A-1. Nous devons vérifier que \/y G Vect(^4), on a x _L y.
Soit donc y G Vect(^4). Par définition, il existe y\ ,..., yn éléments de A et Ai, ...,
80. cf. la remarque précédente.
81. Le fait que le seul vecteur orthogonal à tout l'espace est le vecteur nul peut permettre (entre autres)
de conclure à l'unicité du vecteur v dans le théorème de Riesz, cf. théorème 31 (p. 397).
Chapitre 4. Espaces préhilbertiens
Àn éléments de R tels que y = ^ XkVk-
fc=i
On a par hypothèse Vfc G [l,n], (x,yk) = 0 car x G A1- et y G A et ainsi par
bilinéarité du produit scalaire
(x,y) = ^Afc(z,2/fc) =0,
fc=i
donc x .Ly.
Ce résultat étant valable pour tout y G Vect(^4), on a bien x G [Vect(^4)] et
l'inclusion A1- C [Vect(^4)] est démontrée, d'où l'égalité.
4. Pour x e A, notons Hx = {x}1- = {y G E, (x,y) = 0}.
Alors Hx est un sous-espace vectoriel de E car iifx est le noyau de la forme linéaire
ipx : E —> R
y i—> (x, y)
Finalement, F est l'intersection des Hx pour x dans A, et en tant qu'intersection
de sous-espaces vectoriels, A1- est un sous-espace vectoriel de E.
Notons que l'on peut aussi effectuer une preuve en revenant à la définition82.
5. Soit x e FC\ F-1. Par définition de a; G F-1-, on peut afHrmer que x est orthogonal
à tous les éléments de F. Mais comme x appartient à F, on peut tout simplement
afHrmer que x est orthogonal à lui-même. Ainsi (#, x) = 0, d'où x = 0.
On a ainsi F D F1- C {0^}. Et comme F et F1- sont des sous-espaces vectoriels
de F, ils contiennent tous les deux 0^, donc {0^} C FD F1- et l'égalité est ainsi
démontrée.
On notera que si l'on prend une partie A quelconque83 de F, on peut « seulement »
afHrmer que A D A1- C {O^}.
6. On considère x e A.
Alors par définition de A1- on peut affirmer que \/y G AL, x _L y.
Ainsi, x est orthogonal à tous les éléments de AL, c'est-à-dire que x est dans
l'orthogonal de AL, ou encore x G (^_L) •
Cette propriété étant vraie pour tout x dans A, on a bien A C (A^ .
7. Comme F C F + G, le point 2 permet d'affirmer que {F + G)1- C F-1.
De même, G C F + G implique (F + G)-1 C G-K
82. 0,e est clairement élément de A-1-, puis on vérifie la stabilité de A1- par combinaisons linéaires.
83. Et non pas un sous-espace vectoriel.
4.4 Bases orthonormées
On a ainsi (F + G)x C F1- H Gx. Montrons l'autre inclusion.
Soit z G Fx D Gx, montrons x G (F + G)x.
Nous devons donc considérer y G F + G et montrer que (#, ?/) =0.
Or il existe yF G F et y g £ G tels que y = yF + Vg-
Comme x G F1- on a (#, t/f) = 0, et comme x G G1- on a (#, yc) = 0.
On a alors {x, y) = (x, yp + 2/g) = (z, 2/f) + (z, 2/g) = 0, et ce pour tout y G F + G,
et ainsi a; G (F + G)-1.
Ainsi Fx n G1- C (F + G)x, et le dernier point est prouvé.
Notons que ce dernier résultat peut également s'écrire, si A et B sont des parties
de F, alors
[Vect(AUB)]X =A±nB±,
en appliquant cette égalité à F = Vect(^4) et G = Vect(jB)
84
Théorème 29
Soit F un sous-espace vectoriel de dimension finie d'un espace preliilbertien réel E.
Alors
1. F1- est un supplémentaire de F, c'est-à-dire que l'on peut écrire85 E = F © F-1-.
2. Si (ei, e2,..., ep) est une base orthonormée de F, alors la projection sur F
parallèlement à F-1, que l'on appelle également projection orthogonale sur F, est définie
par
Va; G F, Pf(^) = (eux) ex + (e2,a) e2 H h (ep,a) ep.
3. Soit a G F.
Le projeté orthogonal pf(x) de £ sur F est l'unique point de F minimisant la
distance à x, c'est-à-dire
||pF(a;)-a;|| = d(x,F)c= mî\\y - x\\,
yeF
et
V?/eF, VÏVf{x) => ||2/-z|| > \\pF{x) -x\\.
84. Car alors Vect(A U B) = F + G.
-L
85. On notera d'ailleurs souvent E = F(BF .
Chapitre 4. Espaces préhilbertiens
Démonstration
Les deux premiers points peuvent se traiter en même temps, par analyse-synthèse.
Analyse : Supposons que x e F se décompose sous la forme x = xp + xF± avec xF G F
et xF± G F^-.
Puisque xF G F dont une base est (ei,..., ep), on sait qu'il existe (#i,..., xp) G M? tel que
xp = X\e\ + h xpep.
On a alors xF± = x — xf = x — {x\e\ H h xpep).
On utilise le fait que ce vecteur est orthogonal à F, en disant que son produit scalaire
avec chacun des vecteurs e^ est nul.
On obtient sans difficulté86 Xi = {e^x).
L'unicité est donc démontrée.
Rappelons également que l'on savait déjà que F fl F1- C {0^}.
v
Synthèse : Réciproquement, étant donné x G E, on note xf = 2^ (efc,#) e^.
fc=i
On constate que xp G Vect(ei,..., ep) = F.
Notons également xF± = x — xF.
Les mêmes calculs que ci-dessus donnent Vi G [l,p], (e*, xF±) = 0.
Ainsi, Vz G [l,p], xF± est orthogonal à e^.
On peut alors affirmer que xF± G [Vect(ei,..., ep)] = F-1-.
On aboutit ainsi à x = xF + #f_l G F + F-1.
Ainsi, onaEcF + F1.
Ces deux points impliquent que F et F1- sont bien supplémentaires dans F, et grâce à
l'unicité de la décomposition, on peut affirmer que le projeté de x sur F parallèlement à
v
F1- est égal à la somme Y^ (efc, x) e^.
k=\
Passons au dernier point.
Étant donné un élément quelconque y de F, on écrit x — y= (x— Pf{x)) + (pf(x) — V)-
Or x — Pf{%) G F1- par construction, alors que Pf{x) — y G F.
Ainsi, x — pF(x) -L Pf{x) — 2/> donc par le théorème de Pythagore :
||z-2/||2 = ||o;-pf(^)||2 + ||pf(^)-2/||2 > ||x-pF(^)||2.
86. Le calcul est le même que pour déterminer les coordonnées d'un vecteur dans une base, il n'est
donc pas redétaillé ici.
4.4 Bases orthonormées
EÏÏF1
En outre, l'égalité ||a; — y\\2 = |\x — pp(x)\\ équivaut à ||pf(#) — y\| = 0, donc à
y = pF(x).
Ainsi, Pf(x) est bien l'unique vecteur de F minimisant la distance de a; à F.
Voici une illustration graphique de cette situation.
x
Remarque
Nous verrons dans l'exercice 4.3 comment écrire la matrice dans une base orthonormée 87
des endomorphismes x \—> {e^x) e* et donc la matrice d'une projection orthogonale.
Corollaire 22 (inégalité de Bessel)
Soit (ei, ...,ep) une famille orthonormée d'un espace préhilbertien réel E.
On a alors Va; G E1,
v
^(efc,z)2 ^ \\x\\2 .
k=i
Démonstration
On appelle F l'espace vectoriel F = Vect(ei,..., ep).
On décompose le vecteur x e E en x = pp(x) + (x — Pf(%))-
Le vecteur Pf(x) est élément de F alors que x — Pf(x) est élément de F-1-, donc ces
deux vecteurs sont orthogonaux entre eux et le théorème de Pythagore permet d'affirmer
INI =||pf(#)| I + |\x ~ Pf(x)\ I , dont on déduit aisément
IM*)II2<ini2-
87. D'un espace euclidien E.
Chapitre 4. Espaces préhilbertiens
Or la famille (ei, ...,ep) est une base orthonormée de F, et alors de l'égalité
v
fc=i
on peut déduire
v
||pH*)||2 = ]£(cfc>z}2-
k=\
L'inégalité de Bessel est ainsi démontrée
Exemple
On considère l'espace E = C2tt(M,1R) des fonctions continues de R dans R qui sont 27r-
périodiques.
On munit E du produit scalaire
/.2tt
On note
/»Z7T
V(/,(/)^2, (/,</>= / f(t)g(t)dt
Jo
Mf) = ^fj: f(t)dt
1 f2*
Vn G N*, an(f) = - / f(t) cos(nt) dt
n Jo
i r2n
VnGN*, bn(f) = - f{t)sm{nt)dt
n Jo
On peut alors affirmer que
• Soit Vn = Vect((l,cos(t),cos(2t),...,cos(iVt),sin(t),sin(2t),...,sin(iVt)). Alors la
projection orthogonale de / G E sur Vn est la fonction SW(/) G E définie par
N
Mx G M, SN{f){x) = ao(/) + ]^ (an(/) cos(nz) + 6n(/) sin(nz)).
n=l
Il s'agit d'une somme (partielle) de Fourier de la fonction f.
• En outre, l'inégalité de Bessçl s'écrit
v*eN, (M/))* + £(M/))MM/))%W'Wd,
n=l ^ ^ ^
Ces résultats viennent des formules de la projection sur une base orthonormée, et de
l'inégalité de Bessel.
4.4 Bases orthonormées
EÏÏE1
Il faut noter que la famille ((l,cos(t),cos(2t), ...,cos(iVt),sin(t),sin(2t),...,sin(iVt)) est
orthogonale (c'est une base orthogonale de Vn) mais pas orthonormée, c'est pourquoi
apparaissent des coefficients comme - et —.
2 2n
Pour aller plus loin, le fait que les sommes partielles de la série ^J f (an(/)) + (bn(f)) J
sont bornées implique que cette série converge, et par un passage à la limite que :
M/))>+gM/))'+M/))%w°-(/(,))V
n=l
Enfin, mais cela dépasse le programme88, il est possible de démontrer que l'on a la
formule de Parseval :
M/)),+gM/))' + (M/))\w'Wd,
n=l
La famille ((cos(nt)) N, (sin(n£))n N„ J engendre ainsi un sous-espace vectoriel dense
de -E, muni de la norme euclidienne.
On dit que cette famille est totale.
Orthonormalisation de Gram-Schmidt
Avec le procédé de Gram-Schmidt, nous allons pouvoir redémontrer l'existence de bases
orthonormées en dimension finie (et avec d'autres exemples comme M[X]). En outre, nous
allons constater qu'il s'agit d'un moyen concret d'obtenir une telle base (ou au moins une
famille orthonormée) qui peut se traduire d'ailleurs sous forme algorithmique.
Théorème 30 (Gram-Schmidt (1907)89)
Soient E un espace préhilbertien réel, I un ensemble de la forme [l,iVj (TV G N*)
ou I = N* et {fi)i<Ei une famille90 libre de E.
Alors il existe une unique famille (ei)iej orthonormée telle que :
1. V?z G /, Vect(ei,...,en) = Vect(/i, ...,/n),
2. \/neI, (enJn) > 0.
88. Et le cadre algébrique de ce livre.
Chapitre 4. Espaces préhilbertiens
1
J0rgen Pedersen Gram est le fils d'un agriculteur
danois : il entre à l'université de Copenhague en
1868 et en ressort en 1873 diplômé de
mathématiques. Dès avant la fin de ses études, il publie
un petit travail sur la théorie des invariants dans
la revue danoise Tidssh ift for Mathematik, dont
A il développe ensuite une version en français qui
est publiée dans la célèbre revue Mathematische
Annalen".
Il ne se consacre pas à une fonction de chercheur
T 13 ^ r* ou d'enseignant de mathématiques mais poursuit
J 0rgen Federsen bram une carrière dans les assurances : [\ est engagé par
^ 15~ltt97J ia compagnie Hafnia en 1875, en gravit
rapidement les échelons puis fonde sa propre compagnie, appelée Skjold, en 1884.
Néanmoins il continue en parallèle à effectuer des recherches mathématiques,
notamment en probabilités du fait de ses problématiques propres aux questions
d'assurance, soutient sa thèse en 1879, travaille plus tard sur la répartition des nombres
premiers, et exerce pendant un temps les fonctions d'éditeur pour la Tidsskrift for
Mathematik et de relecteur pour le Jahrbuch iiber die Fortschritte der Mathematik.
Gram est l'exemple, devenu rare aujourdhui, d'un quasi amateurb des
mathématiques dont la passion et les questionnements propres à sa pratique professionnelle
ont été un moteur suffisant pour produire des contributions fort respectables au
développement des mathématiques. Il passe même à la postérité pour sa contribution
au fameux procédé d'orthonormalisation au programme des CPGE.
a. Volume VII. 2., Leipzig (1874), pp. 230-240.
b. Il n'est pas professionnel de la discipline mais a été formé à un haut niveau néanmoins.
Remarque
La deuxième condition 91 sert à fixer l'unicité.
Il est à noter que cette condition de signe équivaut à demander à ce que Vn G /, (/i,..., fn)
a même orientation que (ei,..., en).
Il existe d'autres moyens d'imposer l'unicité de la famille. Pour les familles de polynômes
orthogonaux par exemple, on peut demander à ce que chaque polynôme soit unitaire (au
89. Erhard Schmidt présente les formules dans l'article Zur Théorie der linearen und nichtlinearen
Integralgleichungen. I. Teil : Entwicklung willkùrlicher Funktionen nach Systemen vorgeschriebenert
Mathematische Annelen 63 (1907), pp. 433-476. Il précise que les formules sont des variantes de celles
obtenues par Jorgen Gram, cf. Ueber die Entwickelung reeler Funtionen in Reihen mittelst der Méthode
der kleinsten Quadrate, Journal fur die reine und angewandte Mathematik 94 (1883), pp. 71-73. On
notera au passage l'apparition de l'expression méthode des moindre carrés, qui signifie que l'on cherche
à minimiser une norme euclidienne. Mais des calculs similaires étaient déjà présents dans les travaux de
Laplace, plus précisément dans son premier supplément (en 1816) de la Théorie analytique des
probabilités.
90. La famille est donc de la forme (/i, /2, •••)> et Peut être finie ou infinie.
91. Ajoutée à la normalisation des vecteurs.
4.4 Bases orthonormées
EEÏI
Démonstration
La démonstration est la même dans le cas où I = [1, AT] et où I = N* : il faut travailler
par récurrence sur n G I.
• Initialisation : puisque (/i) est libre, on a /i ^ 0 donc on peut poser e\ = .. .. f\.
Il/ill
Alors (ei) engendre la même droite92 que (/i) et comme ||ei|| = 1, la famille (ei)
est orthonormée.
Enfin, (euh) = {ex, WhWd) = Il/ill • INI* = ||/i|| > 0.
• Hérédité : On suppose la famille (ei,..., en) construite, on doit déterminer en+i.
On veut que en+i soit orthogonal à ei, à e2, ... et à en, ce qui équivaut à en+i
orthogonal à Fn = Vect(ei,..., en).
n
On introduit alors g = ^ (e^, /n+i) e^, projeté orthogonal de /n+i sur Fn, puisque
k=i
(ei,..., en) est une base orthonormée de Fn.
On sait qu'alors h = /n+i — g est orthogonal à Fn.
Le vecteur h est non nul, car sinon /n+i = g G Fn, d'où /n+i G Vect(/i,..., /n), ce
qui contredirait le fait que la famille (/i,..., /n, /n+i) est libre.
On peut alors poser en+i = 77777 ft.
On a par construction en+i G Vect(/i,..., /n, /n+i) donc
Vect(ei,...,en,en+i) C Vect(/i, ...,/n,/n+i).
Mais ces deux espaces sont de même dimension (n + 1) car les familles de n + 1
éléments qui les engendrent sont libres (par hypothèse pour les (/1,..., /n, /n+i) et
car elle est orthonormée pour (ei,..., en, en+i)).
Enfin, (en+i, /n+i) 7^ 0 car il s'agit de la n + 1-ième coordonnée du vecteur /n+i
dans la base (ei,..., en, en+i).
92. En d'autres termes, on a bien Vect(ei) = Vect(/i).
g££| Chapitre 4. Espaces préhilbertiens
Dans ce cas, /n+i appartiendrait à Vect(ei, ...en) = Vect(/i,..., /n), ce qui est exclu.
Quitte à remplacer en+i par son opposé, il existe un choix et un seul pour lequel
on a (en+i,/n+i) > 0.
On pourrait démontrer que la construction ci-dessus donne directement ce résultat.
L'intérêt de cette méthode est d'être constructive, ou en d'autres termes qu'elle fournit
une méthode concrète de construction de la famille orthonormée (fi)iei-
On peut aisément implémenter ce procédé sous Python dans Rn muni du produit scalaire
usuel.
Algorithme 8 - Procédé de Gram-Schmidt
# Produit scalaire / X et Y sont supposés de même longueur
def prod scal(X,Y) :
S=0
for k in range(0,len(X)) :
S=S+X[k]*Y[k]
return(S)
# division du vecteur X par sa norme
def normalisation (X) :
nor=prod_scal(X,X)**(l/2)
V=[]
for k in range(0,len(X)) :
V=V+[X[k]/nor]
return(V)
# Soustraction de c*Y à X / X et Y sont supposés de même longueui
def différence(X,Y,c) :
D=[]
for k in range(0,len(X)) :
D=D+[X[k]-c*Y[k]]
return(D)
4.4 Bases orthonormées
EES1
# Procédé de Gram-Schmidt / on reçoit une liste de k vecteurs libres de même longueur
def Gram Schmidt (Famille) :
# On commence par normaliser le premier
E0=nor malisation (Famille [0] )
# Ort contiendra la famille orthonormée obtenue...
Ort=[E0]
for k in rango(l,len(Famille)) :
X=Famille[k]
# on enlève à X son projeté orthogonal sur les vecteurs précédents
for p in range(0,k) :
X=difference(X,Ort[p] ,prod_scal (Famille [k] ,Ort[p]))
X=normalisation (X)
# On a trouvé le vecteur suivant de la famille, on le met à la suite :
Ort=Ort+[X]
#Ona fini, on renvoie la famille orthonormée
return(Ort)
Remarque
On peut retrouver à partir du théorème 30 le résultat de la proposition 123. En effet,
il suffit d'appliquer la proposition à une base (/i,...,/n) de E : on obtient ainsi une
famille orthonormée (ei,..., en) de E, et comme il s'agit d'une famille orthonormée ayant
n = dim(E) vecteurs, on obtient bien une base orthonormée de E.
Comme annoncé dans l'étude des produits scalaires classiques sur R[X]y on a le résultat
suivant.
Proposition 125
Soit (., . ) un produit scalaire sur
Alors il existe une unique suite orthonormée de polynômes (Pn)neN telle que
Mn G N, deg(Pn) = n et (Xn, Pn) > 0.
HJ2j Chapitre 4. Espaces préhilbertiens
Démonstration
Il suffit d'appliquer la méthode de Gram-Schmidt à la famille (Xn)ne^, puisque la
condition
VAT G N, Vect(X°, ...,XN) = RN[X] = Vect(P0, ...,Pjv)
équivaut à
Vn G N, deg(Pn) = n.
Remarque
En reprenant la preuve de la proposition décrivant le procédé de Gram-Schmidt, on
constate que les hypothèses ||Pn|| = 1 et (Xn, Pn) > 0 servent à fixer de manière unique
le coefficient de proportionnalité du vecteur directeur de la droite orthogonale à Rn-xpf]
dans Rn[X].
Mais on peut remplacer ces conditions, par exemple en choisissant un coefficient dominant
égal à 1 (ou au n-ième terme d'une suite dépendant de n), ou encore une autre condition
linéaire...
Exemples
Reprenons les exemples cités précédemment, avec les normalisations classiques.
1. On sait que
V(P,Q)e(R[X])2, {P,Q) = J P(t)Q(t)dt
définit un produit scalaire sur R[X].
Alors il existe une unique famille de polynômes (Pn)neN> orthogonale pour (., .),
telle que Vn G N, deg(Pn) = n et Pn(l) = 1.
Il s'agit de la famille des polynômes de Legendre.
Les premiers termes de cette suite sont
P0 = l; Pi=X; P2 = i(3X2-l); P3 = ^(5X3 - SX).
2. On sait que
V(P,Q)G(K[X])2, (P,Q)=J1i^^-dt,
définit un produit scalaire sur R[X].
Alors il existe une unique famille de polynômes (Tn)nGN, orthogonale pour (., •)>
telle que Vn G N, deg(Tn) = n et Tn(l) = 1.
4.4 Bases orthonormées
Il s'agit de la famille des polynômes de Tchebychev (« de première espèce » 93 ).
Les premiers termes de cette suite sont
T0 = 1 ; Ti = X ; T2 = 2X2 - 1 ; T3 = 4X3 - SX.
Rappelons que l'exercice 4.8 est d'ailleurs consacré à l'étude de cette famille de
polynômes.
3. On sait que
V(P, Q) e (R[X])\ <P,Q) = / P(i)Q(i)e-' di,
Jo
définit un produit scalaire sur R[X].
Alors il existe une unique famille de polynômes (£n)neN, orthogonale pour (., . ),
(-l)n
telle que Vn G N, deg(Ln) = n et le coefficient dominant de Ln est :—.
Il s'agit de la famille des polynômes de Laguerre.
Les premiers termes de cette suite sont
Lo = l; Li = -X + 1; L2 = l(X2-4X + 2); L3 = \(-X3 + 9X2 - 18-Y + 6).
4. On sait que
V(P,Q) e (R[X})\ (P,Q) = / P{t)Q{t)e'1 di,
J — oo
définit un produit scalaire sur R[X].
Alors il existe une unique famille de polynômes (ffn)n€N, orthogonale pour (., . ),
telle que Vn G N, deg(iJn) = n et le coefficient dominant de Hn est (—2)n.
Il s'agit de la famille des polynômes de Hermite.
Les premiers termes de cette suite sont
H0 = 1 ; JTx = -2X ; H2 = 4X2 - 2 ; H3 = -SX3 + 12X
93. Les polynômes de Tchebychev de seconde espèce sont obtenus pour le poids \J\ — t2.
EETS1
Chapitre 4. Espaces préhilbertiens
EH Sous-espaces orthogonaux, sommes directes
orthogonales
Proposition 126
Soit E un espace préhilbertien réel et soit Ei, ..., Ep p sous-espaces vectoriels de £",
orthogonaux entre eux deux à deux.
JL _L I
Alors la somme E\ + • • • + E.p est directe, et on pourra la noter E\ © • • • © Er.
Si en outre B\ est une base orthonormée de E\, ..., Bp est une base orthonormée de I
_L _L
£"p, alors (£?i, ...,Bp) est une base orthonormée de E"i © • • • (&Er.
V
Démonstration
Considérons (#i,..., #p) G .Ea x • • • x .Ep tel que x\-\ h xv = Oe-
En calculant le produit scalaire entre cette égalité 94 et x% on obtient
{Xi,Xi)-\ h (Xi, Xi)-\ h (Xp, Xi) = 0.
Or pour tout j ^ i, on a (xi,Xj) =0 par hypothèse95.
Il reste donc (xi.Xi) = \\xi\\2 = 0, dont on déduit Xi = 0.
Ce résultat étant valable pour tout i G [l,p], la démonstration du premier point est
achevée.
Pour le second point, on sait déjà que B = (J?i,..., Bp) est une base de E\ © • • • ©Er.
Enfin, il est évident que tous les vecteurs de B sont de norme 1, et qu'ils sont orthogonaux
deux à deux (soit ils sont dans la même famille Bi et alors ils sont orthogonaux car Bi
est orthogonale, soit l'un est dans un Bi et l'autre dans un Bj pour j ^ z, et ils sont
orthogonaux car Ei ± Ej).
Corollaire 23 []
Soit E un espace euclidien et soit F un sous-espace vectoriel de E.
I Alors la réunion d'une base orthonormée Bp de F et d'une base orthonormée BF±
de F1- donne une base orthonormée B — (Bf,Bf±) de E.
94. Pour un élément i de [l,pj.
95. Les sous-espaces Ei et Ej sont orthogonaux entre eux.
4.6 Représentation des formes linéaires
Démonstration
Il suffit d'appliquer la proposition précédente, sachant qu'en dimension finie F ® F2- = E.
Remarque
Il peut s'agir d'un moyen de compléter une famille orthonormée de E en une base
orthonormée de E.
3 Représentation des formes linéaires
Théorème 31 (de représentation96)
Soit E un espace euclidien. Alors pour toute forme linéaire y? sur E, il existe un
unique vecteur v E E tel que
\/x G E, tp(x) — {v,x)
Démonstration
• Voici une première démonstration, utilisant uniquement les notions de ce chapitre.
Commençons par démontrer l'existence d'un tel vecteur v.
Fixons une base orthonormée (ei,e2, ...,en) de E.
Pour un vecteur x quelconque dans E, notons xi,X2,...,xn ses coordonnées dans
cette base, de sorte que x = x\ei + #2^2 H 1" xnen.
Par linéarité, on a ip(x) = Xiip(ei) + £2</?(e2) H 1- xnip(en).
Notons donc \/i G [l,n], ai = ip(ei) G M, et ainsi :
ip(x) = a\X\ + a2#2 H 1" o,nxn.
On reconnaît là l'expression d'un produit scalaire.
En effet, définissons v = a\e\ + a2e2 + ••• + anen. La base (ei,e2, ...,en) étant
orthonormée, on déduit des coordonnées de x et de v dans cette base 97 que
(v, x) = a\X\ + a2#2 H \~ a>n%n-
96. Il s'agit d'un cas particulier du théorème de représentation de Riesz-Préchet (voir théorème 33
page 459).
97. cf. la proposition 122 page 379.
Chapitre 4. Espaces préhilbertiens
On a donc bien trouvé v G E tel que ip(x) = (v, x), égalité valable pour tout x G E.
Passons à l'unicité du vecteur.
Supposons donc que deux vecteurs v et v' dans E vérifient
Vx G E, ip(x) = (v, x) = (v\ x).
En exprimant la différence, on trouve
Vx eE, (v- v', x) = (v, x) - {v\ x) = 0.
Si on prend x = v — i/, on en déduit98 \\v — v'\\ = {v — v',v — v') = 0, et donc
v - v' = 0.
Il y a donc unicité du vecteur v.
• Voici une autre démonstration, plus rapide".
À v G E on associe la forme linéaire ipv G E* définie par Vx G E, il)v(x) = (v,x).
On peut alors définir l'application linéaire
y . e —► E*
v i—> ty(v) = ipv
Montrons que \I> est injective.
Si v G Ker(\I>), ona^v = 0#* et ainsi Vx G E, ipv(x) = (v, x) = 0.
En spécialisant cette relation en x = v, on obtient (v, v) = 0, d'où v = 0#.
Ainsi, \I> est une application injective de E dans E*.
Mais on a vu que si E est de dimension finie, alors E* est de même dimension finie.
L'application \I> est ainsi un isomorphisme, ce qui équivaut au résultat du théorème.
Remarque
Une question légitime que l'on peut se poser est de savoir s'il existe un résultat similaire
en dimension infinie également, c'est-à-dire dans tout espace préhilbertien réel.
Une réponse positive est donnée sous certaines conditions 10° dans la partie compléments
de ce chapitre, cf. le théorème 33 page 459.
98. On peut aussi simplement remarquer que Vcc G E, v — v' ± x, c'est-à-dire v — v' G E1- = {0e}-
99. Mais qui en contrepartie ne donne pas explicitement le vecteur v.
100. Conditions toujours satisfaites dans le cas euclidien. Elles imposent en particulier la continuité de
la forme linéaire y?, dont il existe des contre-exemples en dimension infinie.
4.7 Endomorphismes orthogonaux, matrices orthogonales
Endomorphismes orthogonaux, matrices orthogonales
Dans toute cette partie, E désignera un espace euclidien. On notera n sa dimension101.
Endomorphismes orthogonaux
Proposition 127
Soit / un endomorphisme de E euclidien.
Il y a alors équivalence entre les quatre assertions suivantes :
1. / conserve le produit scalaire, c'est-à-dire que
\/(x,y)&E2, (f(x),M) = {x,y).
2. f conserve la norme euclidienne, c'est-à-dire que
\/x&E, ||/(a:)|| = |MI-
3. / transforme une base orthonormée en une base orthonormée.
4. / transforme toute base orthonormée en une base orthonormée.
Si l'une de ces propriétés est respectée, on dira que Pendomorphisme f de E est
orthogonal.
Démonstration
On effectue la chaîne d'implications 2 => 1
On remarque que la troisième des implications |4 => 3 | est évidente, on ne la traitera
donc pas.
il Cette première implication est un résultat basé sur la polarisation.
Il est naturel d'y songer102.
Supposons donc que / conserve la norme. Soient alors x et y dans E, on peut affirmer103
101. On supposera naturellement n ^ 1.
102. Car les identités de polarisation permettent de retrouver le produit scalaire à partir de la norme.
103. La première et la dernière égalité sont des identités de polarisation.
BIIII1 Chapitre 4. Espaces préhilbertiens
que
</(*),/(»)> = ^(l|/W + /(2/)||2-||/W||2-||/(2/)||2)
= Kll/(X + 2/)l|2"ll/(x)l|2"ll/(2/)l!2) Parlinéarité
= ^(ll^ + 2/H2-|N|2-|M|2) par hypothèse
1 => 4| Supposons que / conserve le produit scalaire. Soit alors (ei,...,en) une base
orthonormée de E.
Alors,V(z,j)G[l,n]2,
(f(ei), /(«*)) = (ei> eô) Par hypothèse 1
= &ij
par définition de (ei, ...,en) base orthonormée.
Et cette propriété sur les (/(e»), f(ej)) fait que (/(ei),..., /(en)) est une base
orthonormée de E.
On a donc bien notre deuxième implication.
Il ne reste qu'à traiter la quatrième.
=> 2| Soit donc (ei,..., en) une base orthonormée de E telle que (/(ei),..., f(en)) soit
une base orthonormée de E.
Soit alors x G E, on écrit x = x\ei H h xnen et f(x) = Xif(e\) H h xnf(en).
Le fait que (ei, ...,en) est une base orthonormée permet d'exprimer ||z|| en fonction des
coordonnées de x (les Xi) dans cette base :
\\x\\2 = xl + --- + xl
De même, le fait que (/(ei),..., f(en)) est une base orthonormée de E permet d'exprimer
||/(x)|| en fonction des coordonnées de f(x) (les mêmes Xi) dans cette base :
\\f(x)\\2 = xl + ... + xl.
On en déduit que ||/(#)|| = llxll> ce Qui achève la démonstration.
4.7 Endomorphismes orthogonaux, matrices orthogonales gg
Exemples
1. Si dim(E) = 1, il n'existe que deux endomorphismes orthogonaux : Id et — Id.
2. Sur Mn, un endomorphisme permutant les coordonnées104 est un endomorphisme
orthogonal de Rn muni de sa structure euclidienne canonique.
Il est en effet aisé de vérifier que cet endomorphisme conserve la norme, ou aussi
qu'il transforme une base orthonormée (la base canonique) en une autre base or-
thonormée.
/! p(t)Q(t)
) é-dt.
-î v 1 — t2
L'application ip : P(X) i—> P(—X) est un endomorphisme orthogonal.
En effet, le changement de variable s = — t permet aisément de montrer que
ip conserve la norme105.
C'est un cas particulier de symétrie106 orthogonale : en effet, ip est la symétrie par
rapport à l'ensemble des polynômes pairs et parallèlement à l'ensemble des
polynômes impairs, et ces espaces sont clairement orthogonaux.
En effet, si P est un polynôme pair et Q un polynôme impair, le même changement
de variable s = —t dans l'expression de (P, Q) donne rapidement (P, Q) = — (P, Q)
d'où(P,Q)=0.
4. C'est hors-programme, mais un résultat intéressant (pour la géométrie) stipule que
toute application de E dans E conservant le produit scalaire est forcément linéaire,
et donc est un endomorphisme orthogonal.
Le résultat devient faux si / n'est supposé conserver que la norme : un contre-
exemple tout simple dans M? : v i—> (\\v\\ ,0).
Il existe aussi un type général d'endomorphismes toujours orthogonaux (déjà évoqué dans
un des exemples ci-dessus).
, ^
Proposition 128
Dans un espace euclidien, toute symétrie orthogonale est un endomorphisme
orthogonal.
104. C'est-à-dire défini par (cci, ...}ccn) '—» (^a(i)i •••icca(n))) où cr G 5n est une permutation.
105. Ou le produit scalaire.
106. Il est évident que (p2 = Id.
EïïEl
Chapitre 4. Espaces préhilbertiens
Démonstration
Si s est la symétrie orthogonale par rapport à F, on considère une base orthonormée Bi
de F et une base orthonormée B2 de F1-.
Alors (J?i, B2) est une base orthonormée de E.
Et la symétrie s transformera (Bi,B2) en (Si, -J52) qui est également une base
orthonormée, donc s sera bien un endomorphisme orthogonal.
Remarques
1. Réciproquement, il est possible de montrer que toute symétrie qui se trouve être
un endomorphisme orthogonal est alors une symétrie orthogonale.
2. En revanche, les projections orthogonales autres que pe = Id>E ne sont pas des
endomorphismes orthogonaux.
En effet, si F ^ E, la projection orthogonale sur F a comme noyau F1- qui n'est
pas réduit à {O^}. Si Ton prend x G Ker(/)\{0JE?}, on a ||/(#)|| =M IMI- Ainsi,
/ ne conserve pas la norme donc n'est pas un endomorphisme orthogonal.
Cette remarque sur les noyaux suffira à justifier le point 1 de la prochaine proposition.
^^
Définition 79
■ On appelle groupe orthogonal de E l'ensemble noté O(E'), des endomorphismes or- '
tliogonaux de E.
Cette définition est justifiée par la proposition suivante.
>^
Proposition 129
1. Tout endomorphisme orthogonal / de E est un autoinorphisme de E.
2. O(E) est un sous-groupe de (GL(E),o)
Démonstration
Pour le premier point, si / est orthogonal, alors pour x dans le noyau de / on a
NI = ||/(*)|| = l|o*|| = o,
4.7 Endomorphismes orthogonaux, matrices orthogonales EUH
donc x = Oe-
Ainsi, / est un endomorphisme injectif d'un espace de dimension finie donc / est bijectif.
Ce premier point peut aussi se montrer en se rappelant que / transforme une base
(orthonormée) en une base (orthonormée), ce qui implique la bijectivité de /.
On en déduit l'inclusion de O(E) dans GL(E).
Pour le second point, on commence par remarquer que l'élément neutre IcIe appartient
clairement à O(E).
Soient maintenant f et g sont dans O(E).
Il faut montrer que /_1 G O(E) et que / o g g O(E).
Dans ce but, montrons que les endomorphismes /_1 et f o g conservent la norme.
Soit x G E. Comme / est bijectif, il existe un (unique) t G E tel que x = f(t).
Le fait que / est orthogonal implique ||/(£)|| = 11*11-
Or f(t) = x et107 t = f~l{x) donc l'égalité précédente se réécrit ||/_1(^)|| = ||#||> donc
/_1 conserve bien la norme, c'est-à-dire f~l G O(E).
Enfin, toujours avec un élément quelconque x de £", on sait que g orthogonal implique
IWIHMI-
De même, en posant y = g(x), f orthogonal implique ||/(2/)|| = \\y\\.
On a alors ||/off(a:)|| = ||/(y)|| = \\y\\ = \\g(x)\\ = \\x\\.
La conclusion est la même que pour /_1 : Tendomorphisme f o g appartient à O(E).
Remarque
On parlera donc d'automorphismes orthogonaux plutôt que d'endomorphismes
orthogonaux.
Voici quelques propriétés essentielles des endomorphismes orthogonaux.
^^
Proposition 130
Soit / un endomorphisme orthogonal de E. Alors
1. / conserve les angles non-orientés entre vecteurs non nuls ;
2. Le spectre de / est contenu 108 dans { — 1,1};
3. Les sous-espaces [Ker(/ — IcIe)] et [Ker(/ + IcIe)] sont stables par /.
107. / étant bijectif.
108. C'est-à-dire que —1 et 1 sont les seules valeurs propres possibles de /.
EIIEI Chapitre 4. Espaces préhilbertiens
Démonstration
1. Le premier point est une conséquence du fait que / conserve le produit scalaire et
la norme : si x, y non nuls,
2. Il suffit de considérer À G M une valeur propre de /, et x ^ 0 un vecteur propre
associé.
Le fait que
IWI = ||/(*)|| = I|A.*|| = |A|.|N|
avec ||x|| ^ 0 permet109 de montrer que |À| = 1, c'est-à-dire À = ±1.
Notons que X/PO Peut avoir des racines complexes. Il ne s'agirait pas de valeurs
propres de / (mais de sa matrice vue comme élément A4n(C)). Il se trouve que ces
nombres seraient alors de module égal à 1.
Par exemple, si / est une rotation dans le plan d'angle 0, alors les racines de X/PO
sont eiG et e~ie.
3. Montrons la stabilité de [Ker(/ — Me)] • Soit donc x G [Ker(/ — Me)] •
On a alors no, pour y G Ker(/ — Me) (c'est-à-dire y tel que f(y) = y) :
(f(x),y) = (f(x),f(y)) = (x,y) = 0.
On trouve donc que f(x) G [Ker(/ — Me)]^-, et la stabilité de [Ker(/ — Me)] est
ainsi démontrée.
Pour la stabilité de [Ker(/ + Me)] , la preuve est parfaitement similaire m
Remarques
1. On peut généraliser la proposition ainsi : si F est un sous-espace vectoriel de E
stable par / G O(E), alors F-1 est stable par /.
En effet, soit x G F^- : montrons que f(x) G F^-. Soit z G F.
Comme l'endomorphisme induit fp conserve la norme, il s'agit d'un automorphisme
orthogonal de F, donc d'une bijection de F.
109. Car x ^ 0.
110. Par choix de y G Ker(/ — Ids) et ce G [Ker(/ — Ids)] , on a évidemment x JL y.
111. La seule différence est que l'on aura f(y) = —y.
4.7 Endomorphismes orthogonaux, matrices orthogonales Jg
Il existe donc y G F tel que z = /f(2/) = /(!/)•
Alors (f(x), z) = (/(x), f(y)) = (x,y) = 0 car x G F-1 et y G F.
Ainsi, f(x) est orthogonal à tout vecteur z de F donc on a bien f(x) G F-1.
2. Si 1 est valeur propre de f G O(E), on sait que F = [Ker(/ - Me)] est stable par
/, et alors l'endomorphisme induit par / sur F sera un endomorphisme orthogonal
de F (sur tout sous-espace vectoriel stable, un endomorphisme orthogonal induit un
endomorphisme orthogonal puisqu'il continue clairement de conserver la norme).
On a évidemment un résultat semblable lorsque —1 est valeur propre.
Ce résultat nous aidera en dimension 3 notamment pour l'étude des
endomorphismes orthogonaux, en nous permettant de nous ramener à un espace de
dimension inférieure.
Matrices orthogonales
n désignera un entier naturel non nul.
Définition 80
Soient M G A4n(R) et / l'endomorphisme de Rn canoniquement associé à M.
On dira que la matrice M est orthogonale si / est un automorphisme orthogonal112
deMn.
Remarque
Cette définition explique le terme de « matrice orthogonale ».
Mais en pratique, on ne l'utilisera pas. À la place, on utilisera l'un des points d'une
proposition qui vient113.
Proposition 131
1. Si M est une matrice orthogonale, alors M est inversible.
2. L'ensemble noté 0(n) des matrices orthogonales114 est un sous-groupe de GLn(M).
3. L'application de 0(n) dans 0(Mn) qui à une matrice associe son endomorphisme
canoniquement associé est un isomorphisme de groupes.
113. cf. la proposition 132.
114. De taille n.
1
gTiTSl
Chapitre 4. Espaces préhilbertiens
Démonstration
Soitp: Mi(R) —> C(Rn)
M .—► /
où / désigne Pendomorphisme de Rn canoniquement associé à M. On sait que ip est
bijective, et que
V(i4,J3)€(Mi(R))2, <p(AB) = tp(A)otp(B) (*)
Ainsi,
1. Si M est une matrice orthogonale, alors / = tp(M) est un endomorphisme
orthogonal, donc est un automorphisme.
On sait alors que M est inversible, son inverse étant <£>_1(/_1), matrice de /_1
dans la base canonique.
2. et 3. Vu que ip est bijectif, que Ton a la relation (*) et que115 ip(0(n)) = 0(Mn),
les points 2 et 3 sont immédiats.
c —
Définition 81
L'ensemble noté
gonal.
0(n)
des matri
ces orthogonales de taille
n est appelé
groupe
~\
ortho-
J
Voici maintenant le moyen pratique de caractériser les matrices orthogonales
V
Proposition 132
On munit les espaces de matrices colonnes Mn,i(R) et de matrices lignes .Mi,rc(M)
de leurs structures euclidiennes canoniques.
Soit AI E A/(?1(1R). On a alors équivalence entre
1. M est une matrice orthogonale (il/ G 0(n)).
2. les colonnes de M forment une base orthonormée de Mn,i(M).
3. les lignes de M forment une base orthonormée de .Mi^M).
I 4. il/ est inversible et d'inverse il/-1 = fM, "
ce qui équivaut à tMM = Jn, ou aussi à il/*il/ = In.
115. Par définition.
4.7 Endomorphismes orthogonaux, matrices orthogonales ^
Démonstration
1 <=> 2| On considère M G Mn(R) et / G C(Rn) son endomorphisme canoniquement
associé. Alors, en notant Ci,..., Cn les colonnes de M :
M est orthogonale si et seulement si (par définition) / est orthogonal, donc si et seulement
si / transforme la base canonique (ei,...,en) de Rn (qui est orthonormée) en une base
orthonormée.
Ainsi, M est orthogonale si et seulement si (/(ei), ...,/(en)) est une base orthonormée
deMn.
Mais on peut identifier le vecteur /(e^) avec la i-ème colonne Ci de M, et ainsi conclure
que :
M est orthogonale si et seulement si (Ci,..., Cn) est une base orthonormée de A^n,i(^)-
<=> 4| Notons Ci,..., Cn les colonnes de M, A = tMM et (a^) ses coefficients.
Comparons le coefficient a^j avec {C^Cj) : ^(1,3) G [l,n]2,
n n
• aij = 22tmi>kmk>J = /^mMmfc,j,
n n
• (Ci.Cj) = Y2(Ci)k{Cj)k = ^2rnkiimkJ.
k=l k=l
On constate directement que a^j = (Ci,Cj) (pour tous i et j), c'est le point le plus
important à retenir de cette preuve.
Or la famille (Ci,...,Cn) est une base orthonormée de Mn,i(^) ssi V(i,j) G [l,n]2,
(Ci,Cj) = ôiyj, ce qui équivaut à V(iJ) G [l,n]2, a^ = £ifJ-, donc à A = lMM = In, ce
qui achève l'équivalence
116
Effectuer exactement les mêmes calculs sur les lignes au lieu des colonnes permet de
montrer que les lignes de M forment une base orthonormée de A4i)n(M) si et seulement
MlM = In, ce qui signifie que | 3 <=>
Ainsi s'achève la preuve de la proposition.
En pratique, pour vérifier que M est orthogonale, il suffira donc de calculer lMM.
On verra plus loin qu'un endomorphisme est orthogonal si et seulement si sa matrice
dans une base orthonormée est orthogonale ; il suffira donc, pour montrer qu'un
endomorphisme est orthogonal, d'écrire sa matrice M dans une base orthonormée et de vérifier
que lMM = In.
116. Car tMM = In équivaut au point 4.
J2JSJ Chapitre 4. Espaces préhilbertiens
Ce lien entre matrices orthogonales et endomorphismes orthogonaux permettra aussi de
généraliser au cas des endomorphismes la proposition suivante.
I Proposition 133 |
Si M e 0{n), alors det(M) = ±1.
Démonstration
On a lMM = Jn> d'où
1 = det(Jn) = det('MM) = det(*M ).det(M ) = (det(M))2,
et le résultat est alors immédiat.
I Définition 82 |
On appelle groupe spécial orthogonal l'ensemble
SO(n) = {M £ 0(n), det(M) = l}.
I Proposition 134 |
SO(n) est un sous-groupe de 0(n).
Démonstration
Le fait que le déterminant d'un produit est égal au produit des déterminants permet
d'affirmer que det : 0(ri) —> M* est un morphisme de groupes117, donc son noyau, à
savoir SO(ri), est un sous-groupe de 0(n).
Remarque
On pourrait aussi le redémontrer, en vérifiant que In G SO(n), puis en montrant que
SO(n) est stable par produit et inversion.
117. On aurait également pu choisir {—1,1} comme ensemble d'arrivée.
4.7 Endomorphismes orthogonaux, matrices orthogonales Qj^]
EBQ Vision matricielle des changements de base orthonormée
Proposition 135 1
Soient E un espace euclidien de dimension n, B une base orthonormée de E et B'
I une base de E. Alors B' est une base orthonormée de E si et seulement si la matrice
de passage de B à B' est orthogonale. ,
Remarque
II faut faire attention au vocabulaire : les bases sont dites orthonormées, la matrice de
passage est dite orthogonale.
Démonstration
Notons P = (pij)ij la matrice de passage en question. Si Ton a B = (ei,...,en) et
B' = (e^, ...,e£J, alors par définition
n
V?, e'j = y^pkJek,
k=i
c'est-à-dire que (pij, ..npnj) sont les coordonnées de e'j dans la base B.
En raisonnant exactement comme dans la preuve de la proposition 132, on voit que Ton a
n
k=i
Ainsi, B' est orthonormée si et seulement si V(z,i7*), (ej,ej) = ôij, donc si et seulement
si V(*»j)» ^PP)ij = <^,j» c'est-à-dire si et seulement si lPP = Jn, ou finalement si et
seulement si P est orthogonale.
Remarque
L'inverse d'une matrice orthogonale est une matrice orthogonale ; et l'inverse de la matrice
de passage de B k Bf est la matrice de passage de B' à B. On en déduit que
Si B et B' sont deux bases de E et si la matrice de passage de B k B' est orthogonale,
alors : les deux bases sont orthonormées dès que Vune est orthonormée.
2ujj Chapitre 4. Espaces préhilbertiens
N
Corollaire 24
Si l'on a deux bases B et B' orthonormées directes de E, alors les deux applications
77,-linéaires det# et det#/ sont égales.
Démonstration
En effet, si P désigne la matrice de passage de B à S7, on a
detB>(.) = detB>(B) • detB(.).
Or
det^(B) = det(P"1)= 1
det(P) '
avec det(P) = ±1 puisque P est orthogonale.
Mais les deux bases étant directes, det(P) > 0, donc det(P) = 1 et on a le résultat.
Remarque
Au lieu de demander à ce que les 2 bases soient directes, il suffit de les demander de
même orientation118.
Vision matricielle des endomorphismes orthogonaux
i
Proposition 136
Soit / un endomorphisme d'un espace euclidien E.
Il y a alors équivalence entre les trois assertions suivantes :
1. L'endomorphisme / est orthogonal, c'est-à-dire / E O(E)
2. La matrice de / dans une base orthonormée est orthogonale
3. La matrice de / dans toute base orthonormée est orthogonale
Démonstration
Il suffit de se rappeler que / est orthogonal si et seulement si / transforme une certaine
base orthonormée en une base orthonormée, et aussi : si et seulement si / transforme
118. On peut choisir les deux bases directes, ou les deux bases indirectes.
4.7 Endomorphismes orthogonaux, matrices orthogonales
toute base orthonormée en une base orthonormée.
Or si / transforme B (base orthonormée) en B' (base orthonormée), alors la matrice de
/ dans la base B sera égale à la matrice de passage de la base S à la base B', donc sera
orthogonale d'après la partie précédente.
Remarque
Attention, si l'on se place dans une base qui n'est pas orthogonale, alors :
1. On peut avoir des endomorphismes orthogonaux dont la matrice ne sera pas
orthogonale,
2. et aussi des endomorphismes non orthogonaux dont la matrice sera orthogonale.
On peut donc déduire pour les endomorphismes orthogonaux des résultats que l'on
connaît pour les matrices orthogonales.
/
Corollaire 25
Le déterminant d'un endomorphisme orthogonal est élément de { —1,+1}.
On a en outre le résultat suivant.
Corollaire 26
Soient E un espace euclidien et B une base orthonormée de E.
Notons ip T endomorphisme
ip : Mn{R) —> C{E)
M —> /
tel que MatB(/) = M.
Alors
1. La restriction de (p à 0(n) est un isomorphisme de groupes de 0{n) sur O(E).
2. L'ensemble {/ G O(E), det(f) = l} est égal à ip{SO(n)).
Cet ensemble, appelé groupe spécial orthogonal de E, est un sous-groupe de O(E)
isomorphe à SO(n).
Chapitre 4. Espaces préhilbertiens
Démonstration
Il s'agit de conséquences immédiates des résultats sur les matrices et des liens entre
endomorphismes et matrices via ip.
r \
Définition 83
On appellera
1. isométrie vectorielle de E tout élément de O(E),
2. isométrie vectorielle directe de E tout élément de SO(E),
3. isométrie vectorielle indirecte de E tout élément de 0(E)\SO(E).
Pour obtenir une isométrie directe à partir d'une isométrie indirecte (et réciproquement)
il suffit de composer par une isométrie indirecte. Dans ce but, nous allons utiliser la
définition et la proposition suivantes afin d'obtenir une famille d'isométries indirectes, en
l'occurrence les réflexions.
Définition 84
Soit E un espace euclidien. On appelle réflexion de E toute symétrie orthogonale
par rapport à un hyperplan de E.
Proposition 137
Toute réflexion est de déterminant — 1.
Démonstration
Soit g une réflexion. Par définition, il existe un hyperplan H par rapport auquel a est
une symétrie orthogonale.
Écrivons la matrice de o dans une base B adaptée à la décomposition119 E = iJ ® HL :
A = Mattf(a) = diag(l,..., 1, -1)
On a alors det(cr) = det(A) = — 1.
Nous allons maintenant décrire les matrices orthogonales en dimension 2.
119. Le nombre de —1 sur la diagonale est égal à dim(ff-L) = dim(i?) — dim(H) = 1.
4.7 Endomorphismes orthogonaux, matrices orthogonales
Étude de 0(2) et de 50(2)
Proposition 138
On a
, , cos# — esint .
0(2) = { ( | , 6 e R et e = ±1 } ,
sin 6 e cos 6
. , cos 6 — sin 6 ,
so{2) = < I . fl a I , e&
sin 6 cos 0
Démonstration
(a b
), avec (a, 6, c, d) G
c d
On écrit alors que les colonnes de M doivent former une base orthonormée de A^2,i(^)-
Il y a équivalence avec les trois égalités suivantes :
a2 + c2 = 1 ; ab + cd = 0 ; b2 + d2 = 1.
De la première égalité on déduit l'existence de 6 G R tel que a = cos0 et c = sin0.
On déduit alors aisément120 de la deuxième égalité l'existence de e G M tel que
(M) =e(-c,a),
c'est-à-dire tel que 6 = — ec et d = ea.
On a ainsi e G M tel que b = —ecosO et d = esin0. Mais alors la troisième égalité
(b2 + d2 = 1) implique e2 = 1, c'est-à-dire e = ±1.
La matrice orthogonale M est donc de la forme annoncée.
Réciproquement, il serait immédiat de vérifier que toute matrice de cette forme est
orthogonale : on a bien égalité entre 0(2) et l'ensemble écrit dans la proposition.
120. Car on sait que le vecteur (—c>a) est orthogonal à (a,c)7 donc pour des raisons de dimension, la
droite orthogonale au vecteur (a, c) est la droite dirigée par le vecteur (—Cjà).
Chapitre 4. Espaces préhilbertiens
Enfin, étant donnée une matrice de cette forme, son déterminant vaut
ad — bc = cos O.e cos 0 — sin 0.(—e sin 0) = e(cos2 6 + sin2 6) = e.
On a donc bien M G SO(2) si et seulement si e = 1, ce qui achève de démontrer la
seconde égalité de la proposition.
Remarque
SO(2) apparaît donc comme l'ensemble des matrices rotations121 du plan R2.
On sait que de telles rotations commutent122.
Ces résultats sont synthétisés dans la proposition ci-après.
Proposition 139 Jl
SO{2) est un groupe commutatif et
' R —> 50(2)
(cos 6 — sin 6
sin 6 cos 6
est un morphisme surjectif de (M, +) dans (S'0(2), x).
Démonstration
La surjectivité a déjà été prouvée, c'est le résultat de la proposition précédente.
Il suffit donc de vérifier que V0,0'', pe-Pe' = Pe+e1-
On aura alors pe+o' = Po'+o = Pe'-Po, ce qui assurera la commutativité.
Le calcul de pe-Pe' donne immédiatement
(cos 6 cos 61 — sin 6 sin 61 — cos 6 sin 6' — sin 6 cos 0'
cos 0 sin 0' + sin 0 cos ff cos 0 cos 0' — sin 6 sin 0'
On reconnaît alors grâce aux formules de trigonométrie que
cos(0 + 6') - sin(0 + 6')
Po-PO' =1 I = Pe+6'
1 sin(0 + 0') cos(0 + 0O '
121. On ne le précise pas systématiquement, mais il s'agit de rotations vectorielles, c'est-à-dire centrées
en l'origine.
122. Et que la rotation correspondante a pour angle la somme des 2 angles.
4.7 Endomorphismes orthogonaux, matrices orthogonales
Nous avons étudié les matrices orthogonales de taille 2, nous pouvons en déduire des
résultats sur les isométries vectorielles de tout plan euclidien.
Isométries vectorielles du plan
Dans toute cette partie, E sera donc un plan euclidien orienté.
Rappelons qu'avoir orienté l'espace revient à avoir fixé une base de référence J5, et que
l'on appelle bases directes les bases dont le déterminant dans B est strictement positif,
et bases indirectes les autres123.
Etude de SO(E)
I Définition 85
Les éléments de SO(E) sont appelés les rotations de E.
Nous déduisons le résultat suivant de notre connaissance de 0(2) et SO(2).
Proposition 140
Soit / un élément de SO(E). Alors
1. La matrice de / dans toute base orthonormée directe est la même matrice
(cos 6 — sin 6
sin 6 cos 6
Le réel 0 est défini de façon unique modulo 2n et appelé (mesure de) l'angle de la
rotation f.
2. Dans toute base orthonormée indirecte, la matrice de la rotation / est
cos 6 sin 6
P-e = |
- sin 6 cos 6
123. En d'autres termes, dont le déterminant dans B est strictement négatif.
Chapitre 4. Espaces préhilbertiens
Démonstration
Fixons B une base orthonormée directe. On sait que M = Matg(/) G O(E), donc M = pe
pour un certain 0 (clairement unique modulo 2n).
Il ne reste alors qu'à écrire la matrice de / dans les autres bases orthonormées.
1. Si B' est aussi une base orthonormée directe et si P désigne la matrice de passage
de B à B7, alors
M' = Mat/?'(/) = P~lMP.
Or P G 50(2), donc P = pa pour un certain a, et alors P~l = p_Q.
Ainsi,
M' = p-a opeo p+a = p_a+0+a = pe = M,
ce qui achève la preuve du premier point
2. Si B' est une base orthonormée indirecte, alors124 P G 0(2)\SO(2).
Mais, en nous basant sur les réflexions125, on peut penser à écrire P = QD avec
(l 0 \
D = G 0(2) de déterminant -1, de sorte que Q G SO(2).
\° -1)
On aura alors Q matrice de passage entre 2 bases orthonormées directes, donc
Q~lMQ = M = pe par le premier point, et ainsi
M' = P~lMP = (QD)~lMQD = D~1(Q-1MQ)D = D^peD
cos 6 — sin 0
sin 0 cos 0
cos 0 sin 6
— sin 0 cos 6
On déduit du résultat sur le produit126 vue sur les matrices pe le résultat suivant.
Proposition 141
L'application de (M, +) dans (S,0(E'), o) qui à 6 associe la rotation d'angle 6 est un
morphisme de groupes, surjectif et de noyau 27rZ.
124. Avec les mêmes notations.
125. Dont on sait que le déterminant est —1.
126. À savoir la formule "i(9,6') G M2, po-Pe' = Pe+e'-
4.7 Endomorphismes orthogonaux, matrices orthogonales
Démonstration
Si l'on fixe une base orthonormée directe de E, le fait que l'application qui à 0 associe la
rotation d'angle 0 est un morphisme de groupes correspond matriciellement à l'égalité
La surjectivité vient du fait que toute matrice de £0(2) est de cette forme.
Enfin, une telle matrice pe vaut I2 si et seulement si cos0 = 1 et sin0 = 0, donc si et
seulement si 0 G 2nZ.
Il peut être bon de savoir comment retrouver simplement l'angle d'une rotation.
Proposition 142
Si / est la rotation127 d'angle 6 dans un plan euclidien orienté, alors pour tout
vecteur unitaire u, on a
1. cos0 = (u, f(u))
2. sin0 = det& (uy f(u)), où B est une base orthonormée directe.
Démonstration
On sait qu'il existe un unique v G E tel que B\ = (u, v) soit une base orthonormée directe
deE.
(cos0 — sin0 \
I, d'où
sin 0 cos 6 I
1. f(u) = cos(0).u + sin(0)v, ce qui permet de calculer
(u, f(u)) = 1. cos(0) + 0. sin(0) = cos(0)
2. Le déterminant dans la base B\ de (u,f(u)) est
1 cos(0)
0 sin(0)
= sin(0)
Or on sait que le déterminant d'une famille de vecteurs est le même dans toute base
orthonormée directe128, donc on aura bien detb(u, f(u)) = det^ (u, f(u)) = sin0,
pour toute base orthonormée directe B.
127. Sous-entendu, il s'agit d'une rotation vectorielle.
128. cf. le corollaire 24 page 410.
Chapitre 4. Espaces préhilbertiens
Remarque
On démontrerait129 que dans une base orthonormée indirecte, det(^, f(u)) = — sin0.
Proposition 143
Etant donnés deux vecteurs non nuls de E tels que \\u\\ — \\v||, il existe une unique
rotation vectorielle r telle r(u) = v.
Démonstration
On se place dans une base orthonormée directe (ei,e2), dont le premier vecteur est
_ u
ei"iHT
On note v' = 77—77^ = ït~ûv puisque \\v\\ = \\u\\ ^ 0.
INI IMI
Ainsi, si Ton écrit (a, b) G R2 les coordonnées de v' dans la base (ei,e2), c'est-à-dire
v' = ae\ + 6e2, on a \\v'\\ = 1 donc a2 + b2 = 1.
Il existe alors un réel 6 tel que a = cos 6 et b = sin 6.
La rotation / cherchée doit vérifier /(ei) = f(v') par linéarité (division de f(u) = v par
/ a \ I cos#
INI = \\v\\)y d°nc la première colonne de Mat(ei)e2)(/) doit être I ] = I
\ b I \ sin0
Enfin, on sait que cette matrice doit appartenir à £0(2), donc par l'étude faite sur ce
(-sin 6
COS0
On en déduit à la fois que le choix de / vérifiant Mat(eije2)(/) = pe convient, et aussi
qu'il s'agit de l'unique rotation vectorielle qui convienne.
Définition 86
Si E est un plan euclidien, et si u et v sont deux vecteurs non nuls de Ey on note
(u, v) et on appelle angle orienté des vecteurs u et v, l'unique rotation qui transforme
u v
W\en ÎHÎ"
129. De façon analogue.
4.7 Endomorphismes orthogonaux, matrices orthogonales
En pratique, on préfère parler de la mesure de l'angle orienté, qui sera un réel défini de
manière unique modulo 2n.
Définition 87
Si E est un plan euclidien orienté, et si u et v sont deux vecteurs non nuls de E", on
appelle mesure de Vangle orienté (u,v) des vecteurs u et v, toute mesure de l'angle
u v
de l'unique rotation qui transforme -tt—- en 77-77-
IMI IMI
1
Remarque
Il faut noter que la mesure de l'angle orienté nécessite que E soit orienté, alors que la
définition théorique de l'angle ne le nécessitait pas.
En pratique (et c'est ce que l'on va faire dorénavant) on suppose le plan orienté, et on
confond alors l'angle orienté (u, v) avec n'importe laquelle de ses mesures modulo 2n.
Exemple
On se place dans le plan R2 muni du produit scalaire usuel et orienté tel que la base
canonique B est une base orthonormée directe.
Quelle est la mesure de l'angle orienté 6 = (u, v) entre les vecteurs u = (—2, 2\/2) et
v= (-2-v/2,2-V^)?
u v
Si l'on note a = 77—77 et b = tt—tt, alors 6 vérifie
IMI IMI
cos 6 = (a, b) et sin 0 = detB (a, b),
c'est-à-dire que l'angle 0 doit vérifier
cos6= \ et sinfl= , .
INI-IMI NMMI
On trouve aisément (u,v) = 6V% detB(u,v) = 6\/2 et ||u|| = ||v|| = 2\/3.
On obtient alors
\/2 . n y/2
cos0=—— et sin0=——,
2 2 '
ce qui permet d'affirmer que
0 = (uiV) = J[2tt].
U^JJ Chapitre 4. Espaces préhilbertiens
On a les résultats généraux suivants.
"^
Proposition 144
Dans un plan euclidien orienté E, on a
1. Pour tous u et v dans E\{0e},
Ju^v) = 0 [2?r] ;
(w, — w) = 7r [27r] ;
(v,w) = -(u,î;) [2tt].
2. On a aussi la relation de Chasles :
\/(u,v,w) E [E\{0E}}3> (u^w) = {u,v) + (v,w).
Démonstration
1. Pour ces premiers résultats, il suffit :
• de prendre la rotation Id d'angle 0 [2ir] pour la 1ère égalité ;
• de prendre la rotation —Id d'angle n [2tt] pour la 2ème égalité ;
• si r rotation d'angle 0 [27r] transforme m/IMI en V/IMI» al°rs r~1 transforme
w/|H|ent4/||t4||.
On peut conclure en se rappelant que r~l est la rotation d'angle —0 [2ir].
2. On considère ri rotation d'angle 0\ [2tt] qui transforme uj ||^|| en vj ||u|| ainsi que
r2 rotation d'angle 02 [2n] qui transforme v/ \\v\\ en w/ \\w\\.
On sait alors que r = 7*1 o r^ est une rotation, et que la mesure de son angle est
01+02 [2tt].
Or il est évident que r transforme uj ||^|| en w/ ||w||, ce qui implique bien130 que
la mesure de l'angle orienté entre u et w est 0i +02, ce qui correspond bien à la
relation de Chasles (puisque par définition, (u, v) = 6\ [27r] et (v,w) = 02 [27r]).
130. Par définition.
4.7 Endomorphismes orthogonaux, matrices orthogonales
Proposition 145
Soit E un plan euclidien orienté, et soient u et v deux vecteurs non nuls de E. Alors
/ u . \
v = \\v\\ cos (u,v).tt—r? +sin(w,t>).t/ ,
V INI J
u
où u' est l'unique vecteur tel que ( -—-,t/ 1 soit une base ortlionormée directe du
VINI
plan E.
Démonstration
On note 0 = {u,v) [27r], puis on considère la rotation r d'angle 0, et enfin on considère
la matrice M de cette rotation dans la base ortlionormée ( 77-rr»^' I •
VINI /
(cos6 \
I, on a
sin0 J
VIHI / IHI INI
par définition de 0, d'où le résultat.
On peut déduire de l'étude des matrices dans 0(2)\SO(2) la
Proposition 146
1. Dans un plan euclidien E, les isométries vectorielles indirectes sont les réflexions
de E", c'est-à-dire les symétries orthogonales par rapport aux droites.
2. Soient (ei,e2) une base ortlionormée de E et / la réflexion par rapport à une
droite D ayant u = cos ( - j e\ + sin ( - J e<i comme vecteur directeur.
La matrice de / dans la base (ei, e<i) est alors
cos 6 sin 6
sin 6 — cos 6
Démonstration
On démontre les 2 points simultanément : on considère / isométrie vectorielle indirecte
de £?, et on se donne une base ortlionormée B = (ei, e<£) de E.
Chapitre 4. Espaces préhilbertiens
Notons M = Mats(/) : on sait que M G 0(2)\SO(2), donc il existe un réel 6 tel que
, cos 6 sin 0
M= |
sin 6 — cos 6
cos(f) \ / cos(f)
Un calcul assez aisé montre que M. ( I = +1. I ], donc u est un
sin(f) ) \sin(i)
vecteur propre de / associé à +1.
De manière analogue on vérifie que v = — sin ( - J e\ + cos ( - 1 e<i est un vecteur propre
de / associé à —1.
Comme nous avons déjà deux valeurs propres différentes dans un espace de dimension 2,
il n'existe pas d'autre valeur propre, et E\(f) = Ru et E-i(f) = Rv.
On vérifie sans difficulté que u _L v, et on sait alors (puisque E\(f) ® E-i(f) = E) que
/ est la symétrie par rapport à E\(f) et parallèlement à E-i(f) = (Ei(f)) .
Ainsi, / est bien la symétrie orthogonale par rapport à D = E\(f) = Ru.
Remarques
1. Contrairement au cas des rotations, 0 n'est pas intrinsèque à la réflexion : 6 dépend
de la base choisie. En effet, si la base (ei,e2) est directe, on a -0 = (ei,u).
2. La base (ei,e2) n'est pas forcément directe dans cette proposition.
Q
3. Si on remplace u par — u dans le 2, on voit que l'on rajoute n [2n] à -.
Mais on rajoute ainsi un multiple de 2n à 0, et on ne modifie donc pas la matrice
trouvée.
On sait que la composée de deux réflexions est une rotation131. Une réciproque est donnée
par le résultat ci-après.
131. Car la composée de deux isométrie est une isométrie, et son déterminant sera —1.(—!) = +!•
4.7 Endomorphismes orthogonaux, matrices orthogonales
Proposition 147
1. Toute rotation est la composée de deux réflexions.
2. Plus précisément, si r est une rotation et 5 est une réflexion, alors il existe une
unique réflexion Si telle que r = si o s.
De même, il existe une unique réflexion 52 telle que r = s o 52.
Démonstration
Il suffit de prouver le second point.
Soient donc une rotation r et une réflexion s. S'il existe s\ réflexion telle que r = sios,
alors en composant par s à droite on obtient r o s = si o s o s = s\ o Id = si, puisque s
est une symétrie et vérifie donc s o s = Id.
Cette expression si = r o s prouve l'unicité de s\.
Pour l'existence, il suffit de montrer r o s est une réflexion. Or cette application est une
isométrie, et son déterminant vaut det(r).det(s) = l.(—1) = —1, donc c'est une isométrie
indirecte, donc une réflexion par ce qui précède.
Pour l'existence et l'unicité de 52, on procède de façon parfaitement analogue (à ceci près
que l'on compose à gauche par s).
Proposition 148
Soient E un plan euclidien orienté et (ei,e2) une base orthonormée directe de E.
On identifie E à C par l'isomorphisme réel
E —► C
v = (xei+ye2) '—> z = x + yi
Alors, pour tout réel #,
1. L'application z \—> Z = etB z est la rotation vectorielle d'angle 6 ;
2. L'application132 z \—> Z — et6 ~z est la réflexion par rapport à la droite engendrée
par le vecteur
u = cos I - 1 ei + sm I - 1 e2.
Chapitre 4. Espaces préhilbertiens
Démonstration
En identifiant parties réelles et imaginaires, ces égalités dans C correspondent à des
égalités matricielles.
Traitons la première application. En notant133 Z = X + iY>
Z = eiez «=► X+iY = (cos0+isin6)(x+iy) = ((cos0)x-(sin%)+z((sin0)x+(cos%),
Une identification des parties réelles et imaginaires permet d'écrire X = (cos 6)x — (sin 0)y
et Y = (sin 6)x + (cos 0)y, que l'on met sous la forme
X \ _ ( cos6 ~sin0 \ ( x
Y J l sin0 cos(9 J \ y
On reconnaît la matrice de la rotation d'angle 0 dans la base orthonormée directe (ei, e<i).
La preuve dans le second cas est parfaitement analogue et n'est donc pas écrite.
J Produit mixte, produit vectoriel
Il faut bien noter que dans cette section, la notion d'orientation de l'espace (voir définition
54 page 156) est essentielle.
Produit mixte
Proposition 149
Soit E un espace euclidien orienté.
La matrice de passage entre deux bases ortlionormées directes est un élément de Iji
SO(n). j
Démonstration
Considérons donc deux bases orthonormées directes B et B' de E.
Les deux bases étant orthonormées, nous avons vu que la matrice de passage P de B à
B' est élément de 0(ri).
On sait notamment qu'alors det(P) = ±1.
132. Cette application n'est pas C-linéaire, mais elle est R-linéaire.
133. Avec X et Y réels.
4.8 Produit mixte, produit vectoriel
Par ailleurs, la définition du fait que B et B' ont même orientation134, d'où det^J?') > 0,
ou de manière équivalente det(P) > 0.
On trouve ainsi que P G 0(n) vérifie det(P) = +1, ce qui est la définition de P G SO(n).
Remarque
De façon analogue, la matrice de passage entre deux bases orthonormées indirectes est
élément de SO(n), et la matrice de passage entre une base orthonormée directe et une
base orthonormée indirecte est élément de 0(n)\SO(n).
Proposition 150
Soit E un espace euclidien orienté.
On considère deux bases orthonormées directes B et B' de E.
Alors, les applications det^ et dete' sont égales.
Démonstration
La preuve est immédiate, puisque det£/(.) = det£/(J3).detB(.), et que det£/(J3) = 1 par
la proposition précédente.
L'intérêt est de pouvoir se doter de la définition ci-après.
Définition 88
Soit E un espace euclidien orienté.
Pour tout 7i-uplet (ui, i^, ...,wn) de E"71, on appelle produit mixte de (wi,W2, •••, wn),
et on note [wi,^2, ...,wn], la quantité
[Ui, U2, • • •, Un] = detB (Ui, U2, • • •, Un),
où B est une base orthonormée directe quelconque de E.
Remarque
La proposition précédente permet de justifier la cohérence de cette définition, car elle
justifie que la valeur de [^1,^2, .--^n] ne dépend pas du choix de la base orthonormée
directe B.
134. Les deux bases sont directes.
EEE1
Chapitre 4. Espaces préhilbertiens
Proposition 151
Soit E un espace euclidien orienté.
Alors l'application
"X
En —> R
(ui,u2,...,wn) '—> [ui,u2,...,un]
est une forme n-linéaire alternée sur E.
Démonstration
Il suffit de fixer une base orthonormée B de J5, il s'agit alors de propriétés connues de
detB(.).
Remarque
Donnons une interprétation géométrique du produit mixte135.
• En dimension 2, [^i, u2] correspond à l'aire algébrique d'un parallélogramme ABCD
avec ~KÈ = u\ et ÂD = u2.
Si l'on prend l'origine comme sommet, le parallélogramme est l'ensemble
P={tlul+t2u2, (ti,fa)G[0,l]2}.
La surface géométrique (non signée) en est donc |[^i,^2]|-
• En dimension 3, [^1,^2,^3] correspond au volume algébrique d'un parallélépipède
dont les arêtes partant d'un même sommet sont données respectivement par u\^ u2
et ^3.
Là encore, si l'on note
P={tiu1+t2u2 + hu^ (tut2,t3) G [0,1]3},
alors le volume géométrique de P est |[^i,^2,^3]|-
• De la même façon en dimension n finie quelconque on peut généraliser à l'aide du
produit mixte la notion de volume (algébrique) d'une partie comprise entre n paires
d'hyperplans parallèles.
135. En commençant naturellement par les dimensions 2 et 3.
4.8 Produit mixte, produit vectoriel [|||
Naturellement, il suffit de prendre la valeur absolue du résultat pour obtenir l'aire du
parallélogramme ou le volume du parallélépipède au sens géométrique136.
Il est à savoir qu'il s'agit de l'origine du coefficient en valeur absolue du jacobien qui
apparaît dans les formules de changement de variables pour les intégrales multiples.
QIB Produit vectoriel (dimension 3)
Proposition 152
Soient u et v deux éléments de E, espace euclidien orienté de dimension 3.
Alors il existe un unique vecteur X E E tel que
\/w E E, [u, v, w] = (X, w).
On appelle alors produit vectoriel de u et v, et l'on note uAv, le vecteur uAv = X.
On définit ainsi une application A : E2 —> E ayant comme propriétés :
(uy v) i—> u A v
1. A est bilinéaire sur E"2, l
I 2. A est antisymétrique, c'est-à-dire V(w, v) G E2, v A u = — u A v, |
3. u A v = 0 4=> (u, v) est liée.
Remarque
Étant donnés u et v, on peut se permettre d'écrire que u A v est défini par
Vw G E, {uA v, w) = [u, vy w].
Démonstration
La trilinéarité du produit mixte137 en dimension 3 implique, u et v étant fixés, que
l'application
/ : E —► R
w i—> [u, v, w]
est une forme linéaire sur E.
Le théorème de Riesz (cf. le théorème 31 page 397) donne alors directement l'existence
136. C'est-à-dire sans signe.
137. C'est-à-dire du déterminant.
EMS1 Chapitre 4. Espaces préhilbertiens
et l'unicité de X G E tel que
VweE, f(w) = (X,w).
Ainsi, le vecteur u A v = X est bien défini de manière unique.
Passons aux propriétés de l'application A.
1. Soient u, v!, v dans E et À G R.
Par trilinéarité du produit mixte, on a
Ww G E, [u + Xu\ v, w] = [u, v, w] + X[u\ v, w],
qui donne (définition du produit vectoriel)
Ww G Ey ((u + \u') A v , w) = (u A v, w) + À (uf A v, w),
ou encore par bilinéarité du produit scalaire
\/w G E, ((u + \u') A v , w) = {u A v + \v! A v, w).
Par le résultat d'unicité figurant dans le théorème 31, cette relation138 permet
l'identification suivante :
(u + Xuf) Av = uAv + \v! A v,
ce qui signifie que . A . est linéaire par rapport au premier vecteur.
Naturellement, une preuve parfaitement similaire139 montre la linéarité par rapport
au second vecteur, d'où la bilinéarité de . A .
2. Fixons u et v dans E.
Le caractère antisymétrique du produit mixte permet d'écrire
Mw G E, [u, v,w] = — [v,u, w],
ou encore
Mw G E, (uAv,w) = — (vA u, w) = {—v A u, w).
À nouveau, l'unicité figurant au théorème 31 permet de conclure que uAv = —vAu.
3. Montrons les deux implications séparément.
138. Puisqu'elle est vraie pour tout w dans E.
139. On ne l'écrit donc pas.
4.8 Produit mixte, produit vectoriel
| <= | Si (u, v) est liée, alors Ww G E, (u,v,w) est liée et ainsi [^,v,iy] = 0.
On a ainsi
\tweE, (uAVyW) = 0 = (0,iu),
et là encore on peut identifier uAv = 0.
I Supposons uAv = 0.
On calcule alors [u,v,w] enw = u Av.
On obtient ainsi140
0 = [u, v, u A v] = (u A v, u A v) = \ \u A v\ | =0.
Par la propriété de séparation de la norme141 on en déduit uAv = 0.
Proposition 153
Soient (61,62,63) une base orthonormée directe de E, u et v deux vecteurs de E
écrits sous la forme142 u = u\e\ + W262 + ^363 et v = V\e\ + t>2e2 + ^363- Alors
u Av =
U2 V2
U3 V3
6]
Ul
U3
Vl
V3
e2 +
Ul Vi
U2 V2
63
= (U2V3 ~ U3V2)ei - (U1V3 - U3Vi)e2 + (U1V2 - U2Vl)e3
Démonstration
Étudions deux méthodes différentes143.
1. On écrit X = u A v sous la forme X = x\ei + £262 + £363.
La base (ei, 62,03) étant orthonormée, on sait que
xi = (X,ei) = (uAv.ei) = [u,v,ei]
140. H . H désignant naturellement la norme euclidienne associée à (., .).
141. C'est-à-dire par caractère défini positif du produit scalaire.
142. Les nombres ni, 112, ^3 et vi, V2, ^3 étant réels.
143. Les idées sous-jacentes étant assez proches l'une de l'autre.
Chapitre 4. Espaces préhilbertiens
Comme la base B = (ei,e2,e3) est orthonormée directe, on sait144 que
x\ = [u,v,ei] = dett3(u,v,ei) ■
Ui
V>2
y>z
Vi
V2
V3
1
u
u
U2
V>3
V2
V3
= U2Vs -U3V2,
Pavant-dernière égalité s'obtenant grâce à un développement par rapport à la
dernière colonne.
En travaillant de même avec les deux autres coordonnées, on trouve aussi les
formules donnant X2 et £3.
2. L'autre méthode consiste à considérer un vecteur quelconque w de E sous la forme
w = wiei + W262 + w^e^. On calcule alors
[u, v, w] = (uA v, w) = (u A v)\Wi + (u A v)2W2 + (u A ^2^2
^1 V\ w\
U2 V2 W2
U3 V3 W3
W3,
la dernière égalité s'obtenant par développement par rapport à la dernière colonne.
En identifiant145 les coefficients de w\, W2 et ws avec les coordonnées de u A vy on
obtient les formules.
V>2
y>z
V2
vs
W\ —
Ui
U3
Vi
vs
W2 +
Ui
V>2
Vi
V2
Proposition 154
Soit B = (ei, e2, 63) une base orthonormée directe de E. Alors
ei A e2 = e3 ; e2 A e3 = ei ; e3Aei = e2.
Démonstration
Le résultat est immédiat par le calcul grâce à la proposition 153.
144. Par définition du produit mixte, cf. la proposition 152.
145. L'identification est rendue possible par l'unicité donnée par le théorème 31 (p. 397) car l'<
est valable pour tout w dans E.
4.8 Produit mixte, produit vectoriel
EET1
Remarques
1. On peut remarquer que les deux dernières formules se déduisent successivement de
la première par permutation circulaire146.
2. Par antisymétrie, on déduit de la première formule que e^ A e\ = —6$. De même,
^3 A e2 = —ei et ei A e3 = —e^.
Proposition 155
Si (u, v) est une famille libre de E, alors
1. (u, v, u A v) forme une base directe de E.
2. Si ru est un troisième vecteur de E, la famille (u, v, ru) est une base orthonormée
directe147 de E si et seulement si u JL vy \\u\\ = ||t>|| = 1 et w = u A v.
3. Si tu est un vecteur norme de [Vect(t^f)] et si on oriente le plan Vect(uyv) par
ce vecteur w, alors
u A v — ||w||. ||?;||. sin (u, v)w.
4. \/(uyv) G E2, \\u Av|| = ||w||. ||f|| .|sin(t£,i>)|
Démonstration
1. Dans une base orthonormée directe J?o, le déterminant de (u,v,w) vaut
[u, v,u Av] = (uAv,u Av) = \\u Av\\ > 0
car on a vu précédemment que, (u, v) étant libre, u A v est non nul.
Le fait de trouver un déterminant non nul signifie que Ton a bien une base, et avoir
un déterminant strictement positif signifie que (u, v,uAv) a même orientation que
J?o, donc est directe.
2. Si (u, v, w) est une base orthonormée directe, on sait déjà que (u, v) est une famille
orthonormée (on a ainsi ||^|| = \\v\\ = 1 et u _L v), et w = u A v par la proposition
précédente.
146. C'est-à-dire en appliquant le 3-cycle (1 2 3) aux indices de la formule. Une autre explication est la
suivante : si (ei,e2,e3) est une base orthonormée directe, alors (e2,e3,ei) et (e3,ei}e2) sont également
des bases orthonormées directes.
147. Si on a ces hypothèses en remplaçant la dernière par u A v = — iy, alors (w, v, w) est une base
orthonormée indirecte de E.
Chapitre 4. Espaces préhilbertiens
Réciproquement, supposons ||w|| = ||i;|| = letw_Li;et posons w = uAv.
Par ailleurs, puisque (^, v) est une famille orthonormée, alors on peut la compléter
en une base orthonormée (^, v, W) de E. Quitte à remplacer W par — W, on peut
supposer cette base orthonormée directe.
Dans cette base, on sait que le calcul de u A v donne W.
Ainsi, w = W, donc (u,v,w) = (u,v,W) dont on sait qu'il s'agit d'une base
orthonormée directe.
3. On pose e\ = 77—77^ et e2 = w A e\.
NI
On sait qu'alors (ei,e2,w) est une base orthonormée directe de E.
Par définition de l'orientation d'un plan par un vecteur normal (ici w), (ei,e2) est
alors une base orthonormée directe de Vect(^, v) = î/r1.
Par choix de ei, onau= ||^|| e\.
Or la définition de l'angle orienté 0 = (u, v) impose
v = \\v\\ ((cos0)ei + (sin0)e2).
Grâce à la bilinéarité du produit vectoriel et aux égalités e\ Ae\ = 0 et e\ Ae2 = w,
on obtient
uAv = (|M|ei)A(|H|((cosfl)ei + (sinfl)e2))
= ||u|| |H| (cos0)ei A ei + |H| ||v|| (sin0)ei A e2
= |H||HI(sin0)^.
4. Il s'agit d'une simple application de l'homogénéité de la norme, et du fait que
IMI = i.
Remarque
Le second point est souvent la manière la plus simple de prouver qu'une famille de 3
vecteurs de E est une base orthonormée directe.
Et dans le quatrième point, grâce aux valeurs absolues, on peut considérer l'angle non
(lu f) \
défini par cos0 = ,, ,,',, ,, et 0 G [0,ir] 1.
INI-IHI ^ '
Géométriquement, ces résultats sur les angles peuvent s'interpréter en terme de
projection.
4.8 Produit mixte, produit vectoriel
EEE1
Proposition 156
Soit u un vecteur non nul de E
Etant donné v dans Ey on note v' le projeté orthogonal de v sur le plan 148 (JR.ti)-1.
Alors
u A v — u A v '
et
\u Av\\ = \\u\\. Ilf'll.
Démonstration
En posant À = ' 2, la bilinéarité du produit vectoriel permet d'affirmer que
INI
uAv'=uA(v — Xu) = (u A v) — X(u A u) = u A v,
puisque Ton sait que u A u = 0.
On a alors
\\uAv\\ = \\uAv'\\.
7T
Or u _L v', c'est-à-dire (u, v') = 0 donc l'angle non orienté entre u et v' vaut —, d'où
|8in(0)| = 1.
Le dernier point de la proposition précédente donne alors
||fiAt;'|| = ||ti||.||t/||.|8in(él)| = |H|.||t/||.
Donnons encore quelques résultats sur le produit vectoriel.
Commençons par la formule du double produit vectoriel.
w, 149
. (it, v)
148. Le vecteur v est donc défini par v = v ttU.
IMI
149. En notant 0 l'angle orienté entre u et v*.
EEE1
Chapitre 4. Espaces préhilbertiens
Proposition 157 II
Soient u, v et w sont trois vecteurs de E. Alors
(u Av) Aiu = {u, tu) v — (v, t(;) w
et
uA(v A ru) — (u, w) i> — (w, v) w.
S_
Démonstration
Il suffit bien entendu de montrer la première formule150 .
On définit F(u, v, w) = (u A v) A w — [(u, w) v — (v, w) u].
Il s'agit d'une application trilinéaire151.
Pour montrer que F est nulle, il suffit de montrer que F est nulle lorsque u, v et w sont
trois vecteurs d'une base152 de E.
Pour résumer, si (ei, 62,63) est une base orthonormée directe de i5, il suffit de montrer
que les F(ei, e^, e^) = 0, pour z, j et k dans [1,3], sont tous nuls.
Par exemple,
^(ei, e2, ei) = (ei A e2) A ei - [(eu ei) e2 - <e2, ei> d]
= e3 A ei - (l.e2 - Oei) = e2 - ei
= 0E-
Toutes les autres égalités se montreraient de façon semblable.
Remarque
On pourrait faire plus court en choisissant ^ = ^161+ ^2^2 + ^3^3 quelconque dans E et
en ne faisant varier que v et w dans la base (ei, e2, es).
Ainsi, on n'a que 9 égalités à prouver au lieu de 27.
150. La seconde formule se déduit de la première par antisymétrie.
151. Car . A . et (., . ) sont bilinéaires.
152. Attention, il y a donc 33 = 27 égalités à vérifier.
4.8 Produit mixte, produit vectoriel
ESE1
Proposition 158 (identité de Lagrange (1770)153)
Pour tous n et v dans E, on a
(u,v) +\\uAv\\ = \\u\\ .\\w\\ .
Démonstration
Le résultat est évident si un des deux vecteurs est nul.
Sinon, on utilise154 les formules faisant intervenir 6 = (u, v) :
<^,^>2 + ||^ A ^||2 = H^ll2 . II^M2 cos2 ^ + H^ll2 . I^ll2 sin2 ^
Le résultat suivant est connu sous le nom de division vectorielle.
Proposition 159
Soient u et ru deux vecteurs de £", avec u non nul.
On considère l'équation u A x = w, d'inconnue x G E. L'ensemble des solutions de
cette équation est
1. l'ensemble vide si tu n'est pas orthogonal à u,
2. l'ensemble < „ v Aiu -\- ku, k, G M > si u JL w.
UNI2 J
Démonstration
Si u A x = w pour un certain x, on a155 w _L u.
On en déduit le premier point par contraposée.
1
l
Passons maintenant au second point : on suppose u _L w, c'est-à-dire que (u, w) =0.
Notons xn = ô v A w.
INI2
Grâce à la formule sur le double produit vectoriel156, on prouve aisément que xq est une
153. Joseph-Louis Lagrange démontre des égalités de ce type afin de prouver le théorème des quatre
carrés (tout entier est la somme des carrés de quatre entiers), cf. Démonstration d'un théorème
d'arithmétique, Nouveaux Mémoires de l'Académie royale des sciences et belles-lettres de Berlin (1770), et
reproduit dans ses Œuvres complètes, tome 3, pp 189-201. Il est à noter que Lagrange écrit ces identités
en fonction des coordonnées des vecteurs, sans parler de produit scalaire ni de produit vectoriel.
154. Après avoir fixé une orientation quelconque de l'espace et d'un plan contenant u et v.
155. On a également w JL ce, mais ce résultat est inutile ici.
156. cf. la proposition 157.
Chapitre 4. Espaces préhilbertiens
solution particulière de l'équation.
L'équation étant linéaire, on sait que l'ensemble des solutions s'écrit alors xç> + Ker(/),
où / : E —> E est définie par f(x) = uAx.
Or on a déjà expliqué que uAx = 0 équivaut à (u, x) est liée, donc ici Ker(/) = Ru.
Isométries vectorielles d'un espace euclidien de dimension 3
On considère donc toujours un espace euclidien orienté E de dimension 3.
Le but va être de décrire toutes les isométries de J5, notamment les rotations.
Définition 89
On appelle rotation de E tout élément de SO(E).
Proposition 160
1. Toute isométrie de l'espace possède157 une valeur propre réelle, égale à 1 ou à —1.
2. En particulier, toute rotation de l'espace possède 1 comme valeur propre.
Démonstration
1. Le premier point est simple à prouver : la dimension de l'espace (3) étant impaire,
le polynôme X/PO de tout endomorphisme est de degré impair (3), donc possède
une racine réelle par le théorème des valeurs intermédiaires généralisé (la limite de
Xf{%) est de +oo lorsque x —> +oo et de —oo lorsque x —> —oo).
Or on sait que les seules valeurs propres d'une isométrie vectorielle ne peuvent être
que 1 et —1, d'où le résultat.
2. Pour le second point, on considère / G SO(E).
Supposons158 que 1 n'est pas valeur propre de /. Alors, par le premier point, —1 est
valeur propre de /.
157. Au moins.
158. Ainsi, on effectue un raisonnement par l'absurde.
4.8 Produit mixte, produit vectoriel
Le polynôme X/PO G R[X] étant de degré 3, seules deux situations sont
envisageables : soit —1 est racine triple de %/POj soit —1 est racine simple de %/PO, et
alors Xf{X) possède deux racines complexes conjuguées.
Dans les deux cas, le produit des 3 racines de X/PO est strictement négatif. Or ce
produit est égal au déterminant de /.
On se retrouve ainsi avec det(/) < 0, ce qui contredit le fait que / est une isométrie
directe159.
Nous allons maintenant caractériser les éléments de O(E) en fonction de la dimension de
Ker(/ - ME).
Proposition 161
Soit / G 0{E).
1. Si dim(Ker(/ — Me)) — 2, alors / est la réflexion par rapport au plan Ker(/ — Me),
donc une isométrie indirecte.
2. Si dim(Ker(/ - Me)) = 1, alors P = [Ker(/ — Me)] est un plan stable par /.
L'endomorphisme induit par / sur P est alors une rotation160 du plan et / est
une isométrie directe. On dit que / est une rotation d'axe D, où D est la droite
vectorielle Ker(/ — Me)-
Démonstration
1. Si dim(Ker(/ - IdE)) = 2, on note P ce plan : P = Ker(/ - IdE).
On sait qu'alors la droite D = P-1 est stable par /. Si on note w ^ 0 un vecteur
directeur de D, la stabilité de D par / signifie que f(w) G -D, donc 3À G R tel
que f(w) = \w, ou encore que w est un vecteur propre de / associé à la valeur
propre À.
Nous savons que, / étant une isométrie, on a À = ±1.
Mais le cas À = 1 est exclu, car sinon w appartiendrait à P, donc on aurait w G
P n P-1 = {0^}, ce qui est absurde.
Fixons maintenant une base orthonormée (ei,e2) de P.
Alors (ei,e2,iu) est une base de E.
159. C'est-à-dire de déterminant +1.
160. Et cette rotation n'est pas l'identité.
Chapitre 4. Espaces préhilbertiens
Comme e\ G P = Ker(/ — Me) on a /(ei) = ei, de même pour /(e2) = ei-
/ 1 0 0 \
Finalement, Mat(eije2^)(/) = 0 1 0 •
\0 0 -1/
On reconnaît la symétrie par rapport à P parallèlement à D = P-1, c'est-à-dire la
réflexion par rapport au plan P.
2. Si dim(Ker(/ - IdE)) = 1, on note D = Ker(/ - IdE) et P = DL.
On sait que P est stable par /, il est clair161 que / induit une isométrie sur P.
Si cette isométrie était indirecte, grâce à l'étude effectuée dans les isométries du
plan, on sait qu'il s'agirait d'une réflexion, qui posséderait un vecteur propre xq ^ 0
associé à la valeur propre +1.
Mais alors xq appartiendrait à Ker(/ — Me), d'où xç> G P fl D = {0#}, ce qui est
absurde.
Ainsi, fp est forcément une isométrie directe du plan P, c'est-à-dire une rotation.
Corollaire 27
À paît Me y les rotations de E sont exactement les rotations d'axe D, où D est une
droite vectorielle quelconque de E.
Démonstration
Soit / G SO(E), c'est-à-dire que / est une isométrie directe de E, ou encore une rotation
deE.
Par ce qui précède, on sait que 1 est une valeur propre de /.
En notant d = dim(Ker(/ — Me)), on a donc d ^ 1. Alors
• d — 3 signifie / = Me, cas particulier précisé dans la proposition.
• d = 2 est impossible : on a vu dans la proposition précédente que si / G O(E) et si
d = 2 alors / est une réflexion, donc est indirecte, ce qui n'est pas le cas ici.
• d = 1 signifie que / est une rotation d'axe D = Ker(/ — Me) par la proposition
précédente.
On retrouve ainsi tous les cas possibles.
Continuons la caractérisation des rotations.
161. Puisque / conserve la norme de tout vecteur.
4.8 Produit mixte, produit vectoriel
EEïïl
Définition 90
Soit / une rotation d'axe D. Notons P — [Ker(/ — Me)] — D^.
On fixe un vecteur norme iu dans D, et on oriente P par ce vecteur.
On note /' l'endomorphisme162 induit par / sur P.
La mesure de l'angle de cette rotation /' dans le plan P orienté par w est appelée163
la mesure de Vangle de la rotation f d'axe D orienté par ru.
Remarque
Si on se rappelle comment orienter un plan, on comprend que la mesure de l'angle d'une
rotation dépend164 de l'orientation de l'espace, et de celle du choix du vecteur w.
Plus précisément, changer l'une ou l'autre de ces orientations change le signe de l'angle.
Notons également que l'angle de la rotation est défini de manière unique modulo 2n.
Proposition 162
Soit / la rotation d'axe D orienté par le vecteur unitaire w et d'angle 6. Alors
1. Dans toute base orthonormée directe de E de la forme165 (ei, e2, w), la matrice de
/est166
/ cos<9 -sin0 0 \
sin0 cos# 0
V o o i)
2. L'angle 6 de la rotation est déterminé (modulo 2-k) par l'égalité tr(/) = 1 + 2cos#
et par le fait que le signe de sin0 est celui de [x,f(x),iu\, où x est un vecteur
quelconque n'appartenant pas à l'axe D = R.w.
Cette proposition est démontrée en même temps que la suivante.
162. Il s'agit d'une rotation dans le plan P.
163. Mais cette quantité est parfois appelée plus simplement l'angle de la rotation f.
164. En réalité, seul le signe de cette mesure dépend de l'orientation.
165. C'est-à-dire si (ei,e2) est une base orthonormée directe du plan P = D±J orienté par w.
166. On notera bien que cette matrice est indépendante des vecteurs (ei,e2) réalisant les conditions
demandées.
JjHJ Chapitre 4. Espaces préhilbertiens
Proposition 163 I
Dans le même cadre que la proposition précédente, on peut affirmer que :
1. Va; G E,
f(x) = z + (cos 0) y + (sin 6) w A y,
où z = (tu, x) w est la projeté orthogonal de x sur D et où167 y — x — z.
Cette écriture se simplifie en
\/x G E, f(x) = (cos 6) x + (sin 6) w A x + (l — cos 6) {w, x) w.
2. Si en particulier x est un vecteur unitaire de P168, alors
f(x) = (cos 6) x + (sin 6) w A x,
et ainsi
(x 3 fix)) = cosfl et # A f(x) — (sin#) tu.
Démonstration
1. Le premier point de la proposition 162 est une conséquence de l'étude effectuée
préalablement des éléments de £0(2).
En effet, en choisissant es (de norme 1) dans E\(f) ^ {0^}, on a f{es) = e^.
On choisit alors (ei,e2) une base orthonormée directe169 de P = (Res)^-.
(o\
La troisième colonne de la matrice de / dans la base (ei, e2, es) est 0 I
W
Nous avons prouvé précédemment que P est stable par /.
Et alors, / induit une isométrie170 sur P.
Mais alors un développement par rapport à la troisième colonne donne
det(/P)=det(/) = +l.
167. Ainsi, z est le projeté orthogonal de x sur P = D1-.
168. C'est-à-dire un vecteur orthogonal à l'axe.
169. En orientant P par es.
170. Il est évident que si Vx G £, ||/(a?)|| = ||z||, alors Vy G P, \\fP(y)\\ = \\f(y)\\ = I
4.8 Produit mixte, produit vectoriel
Ainsi, fp est une isométrie directe du plan P.
L'étude des isométries directes du plan nous permet alors d'affirmer que fp est
une rotation d'angle171 0 du plan orienté P, et la matrice de fp dans la base
orthonormée directe (ei,e2) est
cos 6 — sin 6
sin 0 cos 0
La stabilité des sous-espaces172 P et de Re^ nous permet alors de conclure173 que
la matrice de / dans la base (ei,e2, es) est
/ cos0 -sin0 0 \
sin0 cos0 0
V o o î)
2. Puisque l'on a une matrice de / dans une base, on sait que la trace de / est la trace
de cette matrice, d'où le résultat.
3. Passons au premier point de la proposition 163.
La projection de x sur D = Rw est donnée par z = (w,x)w car (w) forme une base
orthonormée de Rw.
On sait qu'alors y = x — z est élément de P = D^-.
D'une part, puisque z G Ker(/ — /d), on sait que f(z) = z. Il reste à calculer f(y).
On suppose y ^ 0, on normalise ce vecteur en e\ = tt—^V-
\\y\\
En posant e<i = w A ei, on sait que (ei, e<2) est une base orthonormée directe de P
(orienté par w).
( cos0 — sin0
La rotation dans la base (ei,e2J d'angle 6 a pour matrice ), et
\ sin0 cos0
notamment sa première colonne nous permet d'affirmer que
/(ei) = cos0ei + sin0e2-
En multipliant par \\y\\, on a
IMI/(e1) = /(|M|e1) = /(î/)
171. Défini de manière unique modulo 2n.
172. Qui sont supplémentaires dans E.
173. Via la proposition 85 (p. 217).
J3 Chapitre 4. Espaces préhilbertiens
d'une part, et d'autre part
|\y\| ( cos 0ei + sin 0e2) = (cos 0) \ \y\\ e\ + (sin 6) w A |\y\\ ei
= (cos0) y + (sin6)w Ay.
On a alors immédiatement
f(y) = (cos6) y + (sin6)w Ay.
Par linéarité, on en déduit
/(*) = m+m
= z + cos 6 y + sin 6 w A y.
Si l'on remplace z par {w, x) w et y par x — z, on a
w A y = w A (x — {w, x) w)
= w A x — ((w, x))w A w
= w Ax
puisque w A w = 0.
On en déduit immédiatement la formule annoncée.
4. Le dernier point de la proposition 163 se déduit sans difficulté du précédent,
notamment en utilisant la bilinéarité du produit scalaire ou du produit vectoriel.
4.8 Produit mixte, produit vectoriel
Voici une illustration graphique du principe utilisé à la preuve du point 3.
Remarque
En pratique, on utilise le deuxième point de l'une de ces deux dernières propositions pour
déterminer l'angle 0 de la rotation.
Exemple
On considère l'espace E = M3 muni du produit scalaire et de l'orientation usuels174.
On définit alors / G C(E) tel que la matrice de / dans B est
/ 8 -1 4 \
1-8-4
\ 4 4 -7 /
M-\
Y7A. C'est-à-dire tels que la base canonique B de E = E3 est une base orthonormée directe.
Chapitre 4. Espaces préhilbertiens
1. Montrons que / est une isométrie de E.
Le calcul de lMM est aisé, on trouve immédiatement
/ 8 1 4 \ / 8 -1 4 \
lMM = — -1 -8 4 . 1 -8 -4 = I3.
oi I II I
\ 4 -4 -7 / \ 4 4 -7 /
Notons que dans ce calcul, on peut se contenter de calculer les coefficients sur
la diagonale et au-dessus, puisque Ton sait que tMM est symétrique. On a donc
besoin de ne calculer que 6 des 9 coefficients du produit lMM.
Quant au déterminant det(M), un calcul rapide175 amène à det(M) = 1, d'où
M e SO(S).
Il est à noter que l'on aurait pu, à la place des calculs précédents, vérifier que les
deux premières colonnes C\ et Ci sont de norme 1, orthogonales entre elles, et que
CiAC2 = ±C3.
En outre, on aurait trouvé C\ A Ci = +C3, ce qui signifie que la matrice M est
dans17650(3).
2. Déterminons l'espace propre de / associé à 1, c'est-à-dire D = Ker(/ — Jd#).
(x\ (x\
Dans la base canonique, il faut donc résoudre le système M
y
W
En multipliant par 9, et en passant tous les termes à gauche, on obtient le système
équivalent suivant :
—x — y + 4z = 0
x - 17y - 4z = 0
4x + 4?/ - 16z = 0
La première et la troisième ligne sont équivalentes, et l'opération L<i <— L2 + L\
donne l'équivalence avec :
—x — y + Az = 0
-I82/ = 0
x = 4z
2/ = 0
175. Que le lecteur pourra effectuer aisément.
176. Ce qui équivaut à (Ci,C2,C3) base orthonormée directe de A^3,i(M).
4.8 Produit mixte, produit vectoriel
Ainsi, D = Ei(f) est la droite dirigée par le vecteur
/4
0
V1
3. Cet espace étant de dimension 1, on sait que / est une rotation177 d'axe D.
Fixons un vecteur unitaire w de D :
/4\
W ■
VÏ7
0
V1/
car \[YÎ est la norme euclidienne de
/4\
0
V1/
178
Il est à noter que l'on aurait pu choisir le vecteur w opposé
4. Soit 0 l'angle de la rotation /, en orientant l'axe D par w :
-7
• La formule tr(/) = 1 + 2cos0 donne ici 1 + 2cos0 = —— •
y
—8
On en déduit immédiatement cos0 = — •
• Ainsi, on ne reconnaît pas une valeur remarquable, on peut dire que
6 = iarccos ( — 1 [27r].
• On choisit x =
0
#d.
Par la proposition 162, le signe de sin# est celui de [x, f(x),w], à savoir de
4
i !
• ï
» I
9 y/Vf
0
1
VÏ7
On développe par rapport à la première colonne, on tombe sur un déterminant de
taille 2, qui vaut —-= > 0.
<èy/YÎ
177. Ce calcul rend d'ailleurs inutile la vérification de det(M) = 1.
178. On trouverait alors un angle opposé pour la rotation.
Chapitre 4. Espaces préhilbertiens
• Conclusion : l'angle 6 de la rotation est 6 = -harccos ( — 1 [27r], lorsque l'axe D
de la rotation est orienté par w.
Comme dans le plan, on peut faire le lien entre rotations et composées de réflexions.
Proposition 164
1. Toute rotation est la composée de deux réflexions.
2. Plus précisément, si r est une rotation et 5 est une réflexion par rapport à un
plan contenant l'axe de la rotation, alors il existe une unique réflexion si telle que
r = si o s.
De même, il existe une unique réflexion S2 telle que r = s o s2-
Démonstration
La preuve est la même que dans le cas de R2.
Notons un cas particulier.
Si l'on fixe un vecteur unitaire w, un vecteur u ^ 0 orthogonal à w et un vecteur v ^ 0
■^-^ 6
orthogonal à w tel que l'angle (^, v) soit égal à -, on peut définir le plan Pi = Vect(uyv)
et le plan P2 = Vect(^2,^), c'est-à-dire que Pi et P2 sont deux plans contenant Rw et
formant un angle de -.
Si l'on note si et 52 les réflexions par rapport à Pi et P2 respectivement, alors 52 o 51 est
la rotation d'axe dirigé et orienté par w et d'angle 0.
Remarque
Ce cas est hors-programme, mais il est intéressant de savoir que les isométries indirectes
sont les composées d'une réflexion de plan P et d'une rotation179 d'axe P-1.
Bien évidemment, les résultats précédents permettent de réduire les matrices de SO(S)
sous la forme des matrices de la proposition 162 dans certaines bases orthonormées
directes, c'est-à-dire avec une matrice de passage dans £0(3).
179. Le cas où l'angle de la rotation est n donne — IcLe comme composée avec la réflexion.
4.9 Endomorphismes symétriques QQ
tSJ Endomorphismes symétriques
La proposition suivante est hors-programme. Néanmoins, l'introduction de l'adjoint d'un
endomorphisme peut simplifier l'introduction des endomorphismes symétriques, c'est
pourquoi il est fait ici le choix de définir cette notion qui traduit dans C(E) la notion de
transposée d'une matrice.
Proposition 165 I
Soit / un endomorphisme d'un espace euclidien E.
Alors il existe un unique endomorphisme g de E tel que
| V(x,y)&E2, (ttx),y) = {x,g{y)).
Cet endomorphisme g est appelé adjoint de f et noté /*.
Démonstration
Fixons y G E.
On note tp l'application définie par \/x G E, ip(x) = (f(x), y). La bilinéarité du produit
scalaire et la linéarité de / font de tp une forme linéaire.
En effet, Vfoz') G E2, VA G M,
tp(x + M) = (f(x + \x'),y) = (f(x) + \f(x'),y)
= </(*), y) + A</(*'), y) = <p{x) + Mx').
Par la proposition 31 (p. 397), on sait alors qu'il existe un unique vecteur v G E tel que
VxGE, (f(x),y)=tp(x) = (v,x).
On note alors g (y) = v.
On a ainsi trouvé une application g de E dans E telle que
V(x,y)eE2, (f(x),y) = (x,g(y)),
et l'unicité de g180 provient de l'unicité du vecteur v prouvée dans la proposition 31.
Il reste à montrer la linéarité de g.
180. C'est-à-dire l'unicité de g(y) pour tout élément y de E.
Qfi] Chapitre 4. Espaces préhilbertiens
Soient donc (yy y1) G E2 et A G R.
On a par définition de g (y) et de g {y') :
Mx G E, </(*) ,») = <*, g(y)) et </(*), y') = (x, ^(2/,)>.
En additionnant la première égalité à la seconde multipliée par A, on en déduit
Vx G E, (f(x), y) + A</(s), i/) = (x, (7(2/)) + A(x, 3(1/)),
ou encore
Vx G £7, (/(s), 2/ + Ai/) = (x, sfo) + \g{y')).
Mais la définition de g (y + A?/) est
Vx G E, (/(x), 2/ + \y') = (x, g(y + Ai/)).
L'unicité181 fait qu'alors g(y) + A^j/') = g(y + A?/7), donc g est bien linéaire sur E.
\
Définition 91
Un endomorphisme / d'un espace euclidien E est dit symétrique si
V(x,y)&E2>(f(x),y) = (x,f(y)).
I Une définition équivalente est /* = /, c'est-à-dire que / est égal à son propre '
adjoint182.
Remarque
Les définitions /* = / et
V(x,y)eE\ (f(x),y) = (x,f(y))
sont équivalentes, mais le programme ne retient que cette dernière.
Le choix de cet ouvrage de maintenir la définition de l'adjoint a l'intérêt de justifier le
terme auto-adjoint que l'on rencontre encore en lieu et place de symétrique.
181. Là encore, donnée par la proposition 31 (p. 397).
182. C'est pourquoi on dit également que / est auto-adjoint
4.9 Endomorphismes symétriques
fJ3
Proposition 166 II
Soient E un espace euclidien, jB = (ei. ...,en) une base orthonormée de E et f un
endomorphisme de E".
Alors Mat#(/*) = *(MatB(/)), et on a l'équivalence
/ est symétrique <^=> MatB(/) est symétrique.
i )
Démonstration
Notons A = MatB (/).
Pour j G [1, n], la j-ème colonne de A représente les coordonnées de f(ej) dans la base B.
Ainsi, V(i>j) G [l,n]2, a^- représente la i-ème coordonnée de f(ej) dans la base B.
Or183 si on considère un vecteur quelconque x G E, sa i-ème coordonnée est (x, e*) (car
la base B est orthonormée).
En regroupant ces deux points, on en déduit que
V(^,j)G|[l,n]2, aiJ = (f(ej),ei).
Par le même principe, si on note A' = MatB(/*), on a
V(t,j)e[l,n]2, <ij = (r(ei),ei).
Par symétrie du produit scalaire et définition de l'adjoint /* de /, on en déduit
V(t, j) e [l,n]2, <,- = (a, /*(e,)> = (/(a), e,-) = ajti.
On a bien A7 = *A, c'est-à-dire MatB(/*) = *(MatB(/)).
Quant au deuxième point, il s'en déduit aisément.
En effet,
/symétrique ^=ï /*=/«=> MatB(/*) = MatB(/)
<é=> *MatB(/) = MatB(/) <=> MatB(/) symétrique.
Remarques
183. cf. la proposition 121 (p. 379).
mj Chapitre 4. Espaces préhilbertiens
1. Il est important de bien noter que ces résultats ne sont valable que dans une base
orthonormée.
2. En regroupant les deux points de la démonstration, on peut montrer que (B étant
une base orthonormée) on a l'équivalence
/ est symétrique «=> MatB(/) est symétrique
sans avoir besoin de définir l'adjoint d'un endomorphisme.
Eltlll Réduction des endomorphismes et matrices
symétriques
( \
Proposition 167 I
I Les sous-espaces propres d'une matrice ou d'un endomorphisme symétrique sont '
orthogonaux entre eux.
Démonstration
Soient donc E un espace préhilbertien réel et / un endomorphisme symétrique de E.
Soient À et \i deux valeurs propres différentes de /, on veut montrer que E\(f) et E^f)
sont orthogonaux entre eux.
Soient donc x G E\(f) et y G E^f). On a alors f(x) = Xx et f(y) = \xy.
On en déduit (f(x), y) = {Xx, y) = X {x,y) et (x, f(y)) = {x, fiy) = \x (x, y).
Mais par symétrie de /, on a (f{x) ,y) = (x, f(y)) et on en déduit À (x,y) = \x (#,?/),
d'où en calculant la différence :
(X-ti)(x,y)=0
Or À^/z, donc À — \i ^ 0 et ainsi on a (x, y) = 0, c'est-à-dire que les vecteurs x et y
sont orthogonaux entre eux.
Cette orthogonalité ayant lieu entre tout x dans E\(f) et tout y dans i£M(/), on en déduit
que E\(f) et E^(f) sont bien orthogonaux entre eux.
4.10 Réduction des endomorphismes et matrices symétriques
Remarque
Il peut s'agir d'un moyen pratique de montrer qu'une famille est orthogonale.
Il est également à remarquer que le résultat est vrai dans un espace préhilbertien réel184
E, avec / symétrique au sens
V(x,y)GE2, (f(x)ty) = (x,f(y)).
Exemple
On munit E = R[X] du produit scalaire défini185 par
r+oo
V(P, Q) G E2, (P, Q) = / P(i)Q(i)e-' dt.
Jo
On définit l'endomorphisme f de E par / : E —> E
P(X) .—► X.P"(X) + (l-X).P'(X)
Fixons n G N*. En écrivant le système186 d'inconnues (ao, •••>û:n_i) on constate qu'il
n-l
existe un unique polynôme de la forme187 Qn = Xn + ^ a*Xh tel que
fc=0
f(Qn) + n.Qn = 0.
Ainsi, Qn est un vecteur propre de / associé à la valeur propre —n.
Montrons que / est symétrique dans E muni du produit scalaire (., . ).
Soit donc (P,Q) G E2.
On a alors
n + OO /« + 00
</(P) ,Q)= f(P)(t)Q(t)e-* dt = / (tP"(t) + (1 - *)P'(*))Q(i)e-' di.
Jo Jo
On fixe A > 0 et on effectue une intégration par parties sur / tP"(t)Q(t)e * dt.
Jo
184. Et pas uniquement dans un espace euclidien.
185. cf. un exemple page 357 suivant la proposition 112 pour vérifier qu'il s'agit bien d'un produit
scalaire.
186. Le lecteur est invité à écrire ce système. Il constatera que ce système est triangulaire avec des
coefficients diagonaux tous non nuls, ce qui assure l'existence et l'unicité d'une solution.
187. C'est-à-dire un unique polynôme unitaire de degré n.
Chapitre 4. Espaces préhilbertiens
On intègre le facteur P" en P' et on dérive le facteur tQ(t)e *, ce qui donne
/ tP"(t)Q(t)e-tdt = \p'(t)tQ(t)e-t]t=A - [ P,(t)(tQ(t)e-t)'dt
Jo L J*=0 Jo
= AP'(A)Q{A)e-A-0- P'(t)(Q(t) + tQ'(t) -tQ(t))e"*dt
Jo
En faisant tendre A vers +00, le terme AP'(A)Q(A)e~A tend vers 0 par croissance
comparée, et les intégrales de 0 à A tendent188 vers les intégrales de 0 à +00.
On arrive ainsi à l'égalité
r+00 n+00
/ tP"(t)Q(t)e-tàt = - / P,(t){Q(t)+tQ\t)-tQ(t))e'tàb.
Jo Jo
En incorporant ce résultat dans la quantité (f{P), Q) on arrive à
(f(P) >Q) = £°0{- p' WO W "tp' W«' W + «"(*)«(*) + U - *)p' WQ W)e"* dt.
Les termes -P'(t)Q(t), tP'(t)Q(t) et (1 - t)P'(t)Q(t) s'annulent et il ne reste que
r+00
(/(P),Q> = - / tP/(t)Q/(t)c-*dt.
Si on inverse le rôle de P et de Q, on trouve de même que
r+00
</(Q),P) = - / *Q'(t)P'(t)e-'dt.
Comme (/(Q), P) = (P, /(Q)) par symétrie du produit scalaire, on en déduit que
(f(P),Q) = (P,f(Q)).
Cette égalité étant vraie pour tout (P, Q) dans E2, f est bien un endomorphisme
symétrique de E.
Finalement, pour tout (n, m) avec n/m, Qn et Qm sont des vecteurs propres associés
à des valeurs propres différentes de / (à savoir —n et —m) et sont donc orthogonaux.
Remarque
Il est intéressant de noter que la méthode utilisée ci-dessus pour montrer la symétrie d'un
endomorphisme est souvent pratique.
188. cf. à nouveau l'exemple page 357 qui prouve la convergence des intégrales de cette forme.
4.10 Réduction des endomorphismes et matrices symétriques
Si après calcul de (f(x), y) on tombe sur une expression symétrique en x et 2/, c'est-à-dire
qui a même valeur quand on échange x et y189 alors l'endomorphisme / est symétrique.
Proposition 168
Soient E un espace euclidien, F un sous-espace vectoriel de E et / un endomorphisme
de F.
Si F est stable par /, alors F1- est stable par l'adjoint /* de /.
Si / est symétrique et si F est stable par /, alors F1- est stable par /.
Démonstration
Soit donc E un espace vectoriel euclidien et soit / un endomorphisme de E.
Considérons un sous-espace vectoriel F de E stable par /. Il faut montrer que F1- est
stable par /*.
Soit donc x G F-1, on veut montrer que f*(x) G F-1.
Or par définition de /*, on a \ty G F, (f*(x), y) = (x, f(y)).
Mais y appartient à F stable par /, donc /(y) G F et x G F-1, d'où
(f*(x),y) = (x,f(y)) = 0.
Ainsi, f*(x) est orthogonal à tout élément y de F, donc f*(x) G F-1.
Le second point est une conséquence immédiate du premier, puisque si / est symétrique,
/• = /■
À nouveau, il serait possible de regrouper les deux preuves pour démontrer directement
le deuxième point et ainsi se passer de la définition de l'adjoint /* de l'endomorphisme /.
Voici maintenant un résultat servant à démontrer le théorème spectral, cf. le
théorème 32 (p. 455).
r+00
9. Comme ci-dessus la quantité (f(P), Q) = — / tP'(t)Q*(t)e~l dt reste inchangée quand
Jo
échange P et Q.
Chapitre 4. Espaces préhilbertiens
Lemme 5
Soit A G C une valeur propre d'une matrice M G Mn(M) symétrique. Alors A G M.
En d'autres termes, les valeurs propres d'une matrice symétrique réelle sont toutes
réelles.
Remarque
Ce résultat est généralement considéré comme un « lemme » car il sert à démontrer le
théorème spectral. Néanmoins, il est intéressant par lui-même, et surtout sa
démonstration est à retenir.
Un passage notable est l'introduction et l'utilisation190 de la quantité lXMX. Cette
utilisation sera notamment revue dans l'exercice 4.1.
Démonstration
Soient donc M G Mn{^) symétrique191 et A G Spc(M), c'est-à-dire que A une valeur
propre complexe de M.
Il s'agit de montrer que A G M.
Par définition, il existe une colonne X G A4n,i(C)\{0}, telle que MX = XX.
En multipliant à gauche par *X, il vient
t'XMX = XtJCX (1)
/si \
i X2 i *—
Si on note X = \ \, alors le produit %XX donne
\ xn )
lXX =~x{.x\ +xï.X2 H Vx^,.xn = \xi\2 + |x2|2 H h |sn|2,
et cette quantité est un réel strictement positif192. Notez que l'on reverra apparaître
cette quantité dans les compléments sur les espaces préhilbertiens complexes193.
Si l'on transpose l'égalité194 *XMX = A*!!, il vient tXtMX = J*XX.
190. Ici pour X colonne propre de M.
191. C'est-à-dire telle que *M = M.
192. Tous les termes sont des réels positifs ou nuls ; et comme X ^ 0, il existe io G [1, n] tel que xi0 ^ 0,
et le terme \xi012 est strictement positif.
193. En effet, (XjY) =l XY correspond au produit scalaire (complexe) canonique sur A^n,i(C).
194. Il s'agit d'une égalité entre matrices complexes de taille 1, assimilables à des nombres complexes.
4.10 Réduction des endomorphismes et matrices symétriques
En conjuguant cette égalité, il vient lX MX = À X.X.
Mais la matrice M est à la fois réelle et symétrique, donc lM = lM = M.
On a ainsi
fÏMI = à'ZX (2)
Ainsi, en identifiant les deux égalités (1) et (2), on constate que
^IMI = A*IX = VXX
On peut simplifier dans la dernière égalité par le réel lX.X qui est strictement positif,
donc non nul.
Il reste alors simplement À = À, d'où À G M.
Théorème 32 (Théorème spectral195)
Tout endomorphisme symétrique L9G d'un espace euclidien est diagonalisable dans
une base orthonormée.
En d'autres termes, si E est un espace vectoriel euclidien et si / E C{E) est
symétrique, alors il existe B base orthonormée de E telle que Matjg(/) soit diagonale.
Remarque
Quitte à remplacer le premier vecteur de la base B par son opposé, on peut supposer la
base B orthonormée directe (évidemment, à condition d'avoir orienté l'espace).
Démonstration
On démontre le théorème par récurrence sur la dimension n de E.
L'initialisation de la récurrence (n = 1) est évidente, puisque toute matrice carrée de
taille 1 est déjà diagonale197.
Supposons le résultat prouvé pour tout ordre inférieur ou égal198 à n et démontrons-le
à l'ordre n+ 1.
195. Cauchy a démontré le résultat dans le cas où il n'existe pas de valeur propre multiple, dans
Sur les centres, les plans principaux et les axes principaux des surfaces du second degré. Exercices de
mathématiques, Œuvres 8 (1828), pp. 8-35. Weierstrass a donné la démonstration générale du résultat
dans l'article Uber ein die homogenen Functionen zweiten Grades betreffendes Theorem, Monatsberichte
der Kôniglich Preussischen Akademie der Wissenschaften zu Berlin (1858), pp. 207-220.
196. C'est-à-dire auto-adjoint.
197. Donc la matrice de / dans une base orthonormée quelconque sera diagonale.
198. C'est-à-dire que l'on effectue une récurrence forte.
EETS1
Chapitre 4. Espaces préhilbertiens
Y
Né à Ostenfolde (en Allemagne), Karl Weierstrassa est
poussé par son père à suivre des études de droit et
d'économie alors qu'il a déjà un goût prononcé et des facilités
^ flagrantes pour les mathématiques.
Il se réoriente vers l'enseignement dans le secondaire. Il
^ rencontre Christoph Gudermann qui le conforte dans son
envie d'étudier les mathématiques.
Parallèlement à son travail de professeur, et hors de tout
cadre universitaire, il poursuit des recherches durant une
quinzaine d'années avant de produire un articleb qui le fait
.Karl Weierstrass connaître de la communauté des mathématiques.
(1815-1897) ji devient alors docteur honoris causa de l'université de Kô-
nigsberg et obtient une chaire à Berlin en 1856.
Il démontre notamment l'existence de fonctions continues sur M et dérivables en
aucun pointc.
Participant à la formalisation des concepts analytiques, il reste célèbre notamment
pour le théorèmed affirmant que toute fonction continue sur un segment est limite
uniforme d'une suite de fonctions polynomiales. ^
La fin de vie de Weierstrass est difficile. Il est touché par une attaque en 1861.
En 1877, il se dispute avec son ami Kronecker à propos des travaux de Georg
Cantor1'.
Enfin, il est très atteint par la disparition en 1891 de la mathématicienne Sonia Ko-
valeskaya, qu'il avait aidé et avec qui il a eu de nombreux échanges épistolaires. I
a. Ou Weierstra/3. ]
b. Zur Théorie der Abselschen Fiinctionen, Journal de Crelle 47 (1854), pp. 289-306 J
c. Pour de plus amples détails, cf. O. Rodot, Analyse seconde année, De Boeck (2014), note 44 page 446.
d. cf. Ùber die analytiscfw Darstellbarkeit sogenannter willkiilicher Funktionen reeller Argumente, Sitzungsberichte der Aka-
demie der Wissenschaften Berlin (1885), pp. 633-639
e. Cantor travaille sur la théorie des ensembles.
Soit donc un endomorphisme / symétrique d'un espace euclidien E de dimension n + 1.
On fixe une base orthonormée B$ quelconque de E, et on note M = Mat#0 (/) ; on sait
que M G A4n+i(lR) est symétrique.
On considère le polynôme caractéristique de / ou de M (x/ = Xm) dans C[X].
Grâce au théorème de d'Alembert-Gauss, on sait que xm(X) possède au moins une
racine complexe A.
Mais d'après le lemme 5, on a A est dans R. Il s'agit donc d'une valeur propre réelle de
/•
On note F = E\(f) le sous-espace propre de / associé à A et G = F± son orthogonal.
D'après la proposition 168, puisque F est stable199 par /, on sait que G est stable par
199. Ce point est évident car f\p correspond à l'homothétie de rapport A.
4.10 Réduction des endomorphismes et matrices symétriques ff**!
/•
On peut alors considérer /g, l'endomorphisme induit par / sur G.
G est euclidien pour la restriction du produit scalaire200 de E, et / est clairement
symétrique sur G.
En effet, la proposition
V(x,y)€E2, </(*), ï/) = (z,/(y)),
reste vraie si on choisit (x, y) G G2, auquel cas on peut remplacer f(x) et f(y)
respectivement par /g(#) et /g(y)- D'où
V(x,j/)gG2, (fG(x),y) = (x,fG(y)).
Mais dim(F) ^ 1 puisque A est valeur propre de /, donc
dim(G) = dim(E) - dim(F) = n + 1 - dim(F) ^ n.
On peut donc appliquer l'hypothèse de récurrence : /g est diagonalisable dans une base
orthonormée de G.
Soit Bq une base orthonormée de G dans laquelle Mat#G (/) = D est diagonale.
On considère une base orthonormée quelconque Bp de F.
Comme F = G± (donc G®F = E), B = (Bg,Bf) est alors une base orthonormée de
E.
Les sous-espaces G et F étant stables par / on a 201 :
M.W/)=f'MaW/0) <0) ) = (D ° W,
\^ (0) MatBF(/F) J \0 XIk )
avec k = dim(F). En effet, puisque fp = XIdp, sa matrice dans n'importe quelle base
de F est XIk.
Finalement, D étant elle aussi diagonale, la matrice de / est bien diagonale dans la base
orthonormée B et l'hypothèse de récurrence est démontrée au rang n + 1.
Ainsi s'achève la démonstration du théorème 32.
200. cf. la proposition 111 page 341.
201. cf. la proposition 85 page 217.
EEE1
Chapitre 4. Espaces préhilbertiens
Corollaire 28 (Théorème spectral, cas matriciel)
Toute matrice symétrique réelle est diagonalisable (sur M) dans une base
orthonormée, c'est-à-dire que si A G .Mn(M) est symétrique, alors il existe P G On(^) telle
que P~1AP soit diagonale.
Remarque
Quitte à remplacer la première colonne de P par son opposée, on peut même choisir la
matrice P dans SOn(R) (voir également la remarque suivant le théorème 32).
Démonstration
Soit donc A une matrice symétrique réelle.
On munit Mn de sa structure euclidienne canonique, qui fait de la base canonique B une
base orthonormée.
On appelle / l'endomorphisme de M71 canoniquement associé à A, c'est-à-dire tel que la
matrice de / dans la base canonique soit A.
Cette base étant orthonormée, le fait que la matrice de / est symétrique implique que /
est symétrique.
Le théorème 32 peut donc s'appliquer, et ainsi il existe B' base orthonormée de W1 telle
que Mat#'(/) = D est diagonale (réelle).
De plus, les deux bases B et B' étant orthonormées, la matrice de passage P de B dans
B' est orthogonale, c'est-à-dire P G On(M).
Enfin, les résultats sur les changements de base donnent P~XAP = D : on a bien trouvé
P G On(R) telle que P~lAP soit diagonale.
Compléments
Théorème de Riesz-Fréchet
Comme annoncé après le théorème 31 (p. 397), on peut se demander si le résultat reste
valable en dimension infinie. La réponse est négative en général, mais positive avec
certaines hypothèses supplémentaires.
Il faut déjà noter qu'en dimension infinie, il y a une condition supplémentaire à imposer
à la forme linéaire : celle-ci doit être continue.
4.11 Compléments EiASl
En effet, si (E, (., . )) est un espace préhilbertien réel, notons || . || la norme euclidienne
associée. Si une forme linéaire / est telle que
3v G E : VxeE, f(x) = (v,x),
alors par l'inégalité de Cauchy-Schwarz on a Va; G E, \f(x)\ ^ \\v\\. ||x||.
Ainsi, / est continue de (E, || . ||) dans R (plus précisément, / est ||v||-lipschitzienne).
Ainsi202, si une forme linéaire sur E n'est pas continue, alors il ne peut pas exister de
vecteur v telle que \/x G E, f(x) = (v,x).
Il faut donc se demander si toute forme linéaire continue sur E peut être représentée par
un tel vecteur v.
La réponse est positive, donnée par le théorème connu sous le nom de « théorème de
représentation de Riesz » (ou aussi « théorème de Riesz-Préchet »), mais seulement dans
le cadre d'un espace de Hilbert, c'est-à-dire un espace préhilbertien, qui est en outre
complet (lorsqu'on le munit de la norme euclidienne).
^^
Théorème 33 (Théorème de Riesz-Fréchet (1907)203)
Soient [E, (., . )) un espace préhilbertien réel qui, doté de la norme euclidienne || . ||
associée204, est complet205 et / une forme linéaire continue de [E> || . ||) dans M.
Alors il existe un unique vecteur v G E tel que
VxeE, f(x) = (v,x).
Démonstration
La démonstration complète est longue et n'est pas exposée de façon détaillée.
L'unicité se démontre comme pour le cas d'un espace euclidien, on se rapportera donc
202. Par contraposée.
203. Le mathématicien français Maurice Préchet (1878-1973) a démontré ce théorème dans un cas
particulier (celui des fonctions de carrés intégrables), cf. sa note Sur les ensembles de fonctions et
les opérations linéaires, Comptes rendus de l'Académie des sciences de Paris 144, pp. 1414-1416. Le
mathématicien hongrois Prigyes Riesz (1880-1956) le démontre la même année, dans un autre cadre (à
travers les suites de carrés sommables, via les coefficients de Fourier), cf. Sur une espèce de géométrie
analytique des systèmes de fonctions sommables, Comptes rendus de l'Académie des sciences de Paris
144, pp. 1409-1411. Il reprend le cadre de Préchet dans Sur les opérations fonctionnelles linéaires,
Comptes rendus de l'Académie des sciences de Paris 149 (1909), pp. 974-977.
204. Cette norme est donc définie par Vx G E, \\x\\ = yj(x,x).
205. On dit alors que E est un espace de Hilbert.
H£|J Chapitre 4. Espaces préhilbertiens
au passage équivalent de la démonstration du théorème 31 (p. 397).
La difficulté ici est d'obtenir l'existence. Voici les étapes essentielles.
Considérons donc un espace deHilbert (£, (.,.)) et / une forme linéaire continue sur
E.
1. On suppose / ^ 0 (si / est nulle, le vecteur v = Oe convient trivialement).
2. On note H = Ker(/).
Le fait que / est continue implique que Ker(/) = /_1 ({0^}) est un fermé de E en
tant que pré-image du fermé {0^} par l'application continue /.
On sait alors que H est complet (fermé d'un complet).
3. Par ailleurs, en tant que noyau d'une forme non nulle, H est un hyperplan.
Il existe donc une droite D (dirigée par un vecteur uj^O) telle que E = H 0 D.
4. L'étape suivante consiste à montrer que u possède un projeté orthogonal sur H.
Dans ce but, on considère une suite d'éléments (xn) dans H telle que
n—>oo
11^- xn\\ > d(u,H) = inf \\u — x\\.
On peut alors montrer que cette suite est de Cauchy, c'est ce passage que l'on ne
détaillera pas ici.
H étant complet, la suite (xn) converge vers une limite X dans H.
5. A" est alors un vecteur dans H tel que u — X est orthogonal à H.
On pose alors w = u — X ^ 0, puis on cherche une constante c G M telle que
f(cw) = (cw,cw) et on constate que
c =
NI2
convient.
6. On pose finalement v = cw.
Par choix de c, on a f(v) = (v, v), donc / coïncide avec g : x \—> (v, x) en v, donc
par linéarité sur Rv.
Par ailleurs, / coïncide avec g : x \—> (v,x) sur H, car ces deux formes linéaires
sont nulles sur H.
Ainsi, / = g sur H 0 Rv = E.
4.11 Compléments
EEfl
Remarques
1. Ce résultat permet de démontrer d'autres théorèmes, dont celui de Lax-Milgram206,
qui est lui-même lié à des résolutions d'équations aux dérivées partielles. Mais ceci
n'est qu'une « remarque culturelle » et sort totalement du cadre du programme.
2. À l'aide de ce théorème 33, il est possible de définir l'adjoint d'un endomorphisme
continu d'un espace de Hilbert.
K21&J Produit scalaire complexe
Il s'agit dans cette partie d'étendre dans le cas complexe ce que l'on a vu avec les espaces
euclidiens, et plus globalement avec les produits scalaires. Réciproquement, beaucoup de
démonstrations pourraient être effectuées dans ce cadre général207, et ensuite vérifier que
les résultats précédents sont des cas particuliers des résultats de cette section.
Les espaces vectoriels que nous allons considérer ici ont donc C comme corps de base.
Remarque
De nombreuses démonstrations sont de simples adaptations de celles des résultats
semblables dans le cas réel.
Aussi, pour de nombreux résultats, il n'y aura soit aucune démonstration, soit une simple
phrase pour expliquer comment adapter la preuve vue précédemment dans ce chapitre
dans le cas réel.
206. Théorème dû aux mathématiciens Peter Lax (né en 1926) et Arthur Milgram (1912-1961), cf.
Parabolic équations, Annals of mathematics studies 33 (1954), pp. 167-190.
207. C'est le cas du théorème spectral par exemple.
JEU
Chapitre 4. Espaces préhilbertiens
Définition 92
Soient E un C-espace vectoriel et (p : E x E —> C.
1. On dit que cp est une forme sesquilinéaire sur E si (p est antilinéaire par rapport
à la première composante et linéaire par rapport à la seconde composante, c'est-
à-dire si
V(x,x',y) G E3, VA G C, tp{x + Xx\y) = tpfay) + Jip(x',y)
V{x,y,y') G E3, VA G C, tpfay + Xy') = tp{x,y) + \tp(x,y').
2. Si y? est une forme sesquilinéaire sur £?, on dit que (p est hermitienne si
V(z,2/) G £2, (p(y,x) = y>(z,2/).
3. Si y? est une forme sesquilinéaire hermitienne sur E, on dit
• que (p est positive si Va: G £?, y?(a;, x) ^ 0 ;
• que ty? est définie si Va: G £?, (p(x,x) = 0 => x = 0.
4. Si (p est une forme sesquilinéaire hermitienne définie positive sur E, on dit que
cp est un produit scalaire hermitien sur E.
Remarques
1. Il faut noter que ip est à valeurs complexes, donc tp(x, x) ^ 0 signifie tp(x, x) est un
nombre réel positif208.
2. Si (p est une forme sesquilinéaire hermitienne, (p est définie positive si et seulement si
\/x e E\{0E], <p(x,x) >0.
Cette propriété se déduit par contraposée de la définition, et du fait que 209 il est
évident que ip(0e,0e) = 0.
En pratique, comme dans le cas réel, la proposition suivante permet de limiter le nombre
d'hypothèses à vérifier pour prouver qu'une application est un produit scalaire hermitien.
208. Néanmoins, l'hypothèse (p hermitienne appliquée en choisissant y = x implique que pour tout
x dans E, ip(xy x) = y?(x, x) d'où y?(x, x) est réel.
209. Par sesquilinéarité.
4.11 Compléments
£H
Proposition 169 [
Soient E un C-espace vectoriel et (p : E x E —> C.
Alors (p est un produit scalaire sur E si et seulement si cp est linéaire par rapport à
la seconde composante, hermitienne et définie positive, c'est-à-dire si et seulement si
I 1. V^zm/) g E3, VA g C, tpfay + Xy') = ip{x,y) + XtpM),
I 2. V(a;,2/) G £2, tp{y,x) = <p(x,y)y
i
3. Vx e£\{0E}, ^(a;,a;) > 0. j
Remarque
On peut aussi montrer seulement que ip est antilinéaire par rapport à la première
composante, hermitienne et définie positive.
Démonstration
De façon similaire au cas réel210, en partant de la linéarité par rapport à la seconde
composante et en utilisant le caractère hermitien, on obtient l'antilinéarité par rapport
à la première composante.
Remarque
En général, les produits scalaires ip{x,y) sont notés (x\y), x -y ou encore (x\y).
Nous adopterons, comme dans le cas réel, la notation (x,y).
Notons en outre que, lorsqu'il n'y a aucune ambiguïté, on parlera de produit scalaire au
lieu de produit scalaire hermitien.
^^
Définition 93
On appelle
1. espace préhilbertien complexe, tout C-espace vectoriel muni d'un produit scalaire
hermitien.
2. espace hermitien, tout C-espace vectoriel de dimension finie muni d'un produit
scalaire hermitien, c'est-à-dire tout espace préhilbertien complexe de dimension
finie. I
^ l
210. Avec comme différence ici l'apparition d'un conjugué.
Chapitre 4. Espaces préhilbertiens
Remarque
Si on vous demande de montrer que (E, (p) est un espace préhilbertien complexe (ou un
espace hermitien), il ne faut pas oublier de commencer par montrer211 que E est un
C-espace vectoriel.
Remarque importante
Cette section étant hors programme, les preuves ne sont pas écrites lorsqu'elles sont
parfaitement semblables à celles du cas réel. Des précisions seront apportées seulement
lorsque les preuves diffèrent.
Donnons comme dans le cas réel des exemples classiques de produits scalaires hermitiens.
Sur Cn
Le produit scalaire canonique de Cn est défini par
n
Vx = (xi,...,xn) eCn, Vy = (î/i,...,î/n) eCn, (x,y) = ^xlyi
2=1
On voit apparaître212 une conjugaison sur le Xi, dont on déduit non seulement
l'antilinéarité par rapport à la première coordonnée et le caractère hermitien, mais aussi la
positivité
213
(x,x) =]T|xi|2
2=1
sera un réel positif en tant que somme de réels positifs.
Sur Mn>1(C)
Le produit scalaire canonique de A4n,i(C) est défini par
n
VX, Y € A4n,i(C), (X,Y) = Ys^Vi'
2=1
si l'on note X =
(X1)
\ Xn J
etF =
fm\
\yn )
211. Ou au moins signaler, si c'est évident.
212. Contrairement au cas réel.
213. Un autre intérêt sera l'homogénéité de la norme hermitienne, cf. la proposition 171 (p. 469) ainsi
que sa démonstration.
4.11 Compléments
Noter que l'on a aussi (X, Y) = tX.Y (matrice carrée de taille 1, identifiée à son unique
coefficient)
Sur Mn{C)
V{A,B) G (A<n(C))2, (A,B) = ]T êHjbij = tr?AB).
(i,j)Gttl,n]2
Les trois exemples précédents définissent donc des espaces hermitiens.
Voyons maintenant des espaces préhilbertiens complexes de dimension infinie.
SurC([0,l],C)
1. Si l'on pose
V(/,5) G (C([0,1],C))2, (f,g) = J W)9(t)dt,
alors (., . ) est un produit scalaire sur C([0,1], C).
2. Soient a < b et soit p : [a, b] —> ]0, +oo[ continue.
Soit £7 = C ([a, 6], C). Alors
</,*>= / p{t)W)9{t)àt
Ja
définit un produit scalaire sur E.
3. Soit / un vrai intervalle et soit p : / —> ]0, +oo[ continue.
On pose E=ife C(I,C), p.\f\2 est intégrable sur /}.
Alors
(a) E est un sous-espace vectoriel de C(/,C),
(b) (f,g) = / p{t)f(t)g{t) dt définit un produit scalaire sur E.
On notera que l'intégrale définissant (/, g) est une intégrale généralisée.
Chapitre 4. Espaces préhilbertiens
Sur £(C)
Soit a = (an)n€N une suite de réels strictement positifs.
Notons ^(C) = < u = (wn)n€N G CN, ]Pan|un|2 converge. ^.
Alors
1. ^(C) est un sous-espace vectoriel de CN,
+00
2. (u,v) = 2Z&nûnVn définit un produit scalaire sur £^.
Erhard Schmidt est un mathématicien allemand, né à Dor-
pat (à l'époque dans l'empire russe, maintenant en Esto-
* nie) où il commence ses études sous l'autorité d'Adolf Kne-
ser, avant de partir travailler sous la direction de Hermann
Schwarz à Berlin (de 1899 à 1901)> puis enfin du grand
maître de l'époque, David Hilbert, à Gôttingen. Il y sou-
j . ' < ^ tient sa thèse en 1905 : celle-ci s'intitule Entwicklung willkur-
. ; t * * T licher Funktionen nach Systemen vorgescriebenér" et traite des
■gj ' fc équations intégrales, domaine à partir duquel Hilbert est
en train d'échaffauder tout un nouveau pan des mathéma-
Ji/rnara hcnmiat tiques, l'analyse fonctionnelle, dont provient notamment
(1876-1959) ^ rétude des espaces dits de Hilbert5.
Schmidt occupe ensuite diverses positions en Suisse et en Allemagne, côtoyant les
plus grands mathématiciens de l'époque, avant de succéder à Schwarz en tant que
professeur à l'université de Berlin en 1917. Schmidt poursuit le reste de sa carrière à
l'université de Berlin, dont il fait un centre éminent des mathématiques allemandes
et notamment des mathématiques appliquées.
Grand promoteur des débuts de l'analyse fonctionnelle, Schmidt s'intéresse aussi
par la suite à la topologie et, s'il produit finalement assez peu d'écrits, ses idées ont
un rayonnement important. Il forme aussi de nombreux grands mathématiciensc
participe à la création des revues Mathematische Zeitschrift (1918) et Mathematische
Nachrichten (1948).
a. Les idées de sa thèse sont reprises et développées dans l'article Zut Théorie der linearen und nichtlinearen întegralglei-
chungen, paru dans les Mathematische Annalen en plusieurs parties : tome 63 (1907), pp. 433-476 ; tome 64 (19Û7); pp.
161-174; tome 65 (1908), pp. 370-399.
b. À ce sujet, oh doit d'ailleurs un article important à Schmidt : Uber die Auflôsung linearer Gleichungen mit Unendlich
vielen unbékannten, Rendiconti del Circolb Matematico di Palèrmo 25.1. (1908), pp. 53-77. Il y introduit l'espace, que
nous noterions £2'(N*), des suites complexe {zn)n^i telles que \ \zn\2 converge. Il transfère également dans de
tels espaces des idées géométriques, comme celle de produit hermitien (z, w) = y znwn (analogue complexé du
produit scalaire), de norme | \z\ | = -v/y^0^ \zn |2, et y établit le théorème de projection sur les sous-espaces fermés.
c. Il dirige ou codirige notamment les thèses de Salomon Bochner, Richard Brauer, Heinz Hopf, Martin Kneser...
4.11 Compléments
fg|
Sur C[X]
1. Si l'on s'inspire des suites (ou de Cn), on peut définir
min(m,n)
2=0
lorsque P = a0 + axX + • • • + amXm et Q = b0 + 6iX + •
2. Si l'on s'inspire des fonctions, on peut définir
{P,Q) = J p{t)Tïf)Q{t)àt,
où / est un intervalle de M non réduit à un point et où p
fonction continue.
Remarque
Comme dans le cas réel, pour que ce produit scalaire ait un sens, il faut (et il suffit)
que Vn G N, t \—> tnp(t) soit intégrable sur I.
Théorème 34 (inégalité de Cauchy214-Schwarz215)
Soit E un espace préhilbertien complexe. Pour tout x G E, on note \\x\\ = ^J(x,x).
Alors
1. \/(x,y)eEM(x,y)\t:\\x\\.\\y\\
2. Il y a égalité (c'est-à-dire que l'on a |(^,2/)| = IMI-IMI) si ct seulement si la
famille (x,y) est liée,
v
Démonstration
Si y = 0, le résultat est évident.
Sinon, on commence par remarquer qu'il existe 6 G M tel que216 e~%e (x,y) appartienne
àR+.
214. cf. la notice biographique page 120.
215. cf. la notice biographique page 362.
216. On prend comme valeur de 0 un argument de (x, y), ou 6 quelconque si (x, y) = 0. Si l'on effectuait
la même preuve que dans le cas réel, c'est-à-dire si l'on n'introduisait pas ce nombre 0, on obtiendrait
seulement l'inégalité |Re(x,2/)| ^ ||b||.|M|.
+ bnXn.
I —> ]0, +oo[ est une
Chapitre 4. Espaces préhilbertiens
On travaille alors comme dans le cas réel en utilisant le polynôme de degré ^ 2 qui reste
à coefficients réels 217 :
P(t) = \\x + te~i8y112 = (x + te'^y,x + te~i0y) .
On trouve, en développant ce produit scalaire, que pour tout t dans R,
P{t) = (x + te-iey,x + te-iey)
= (x, x + te~i8y) + te~ie (y, x + te~i0y)
= (x, x) + te~ie (x, y) +1e~ie (y, x) +te-iete~i0 (y, y)
=<s.y>
= (y, y)t2 + 2 Re(te-ie (x, y)) + (x, x)
V
= \(x,y)\eR
Cette quantité est positive pour tout réel t, on en déduit que le discriminant du trinôme
est négatif, c'est-à-dire que
k2
(2|(x,y>|) -4(y>y).(x>x><0>
d'où le résultat.
Exemple
Si x = (xi,...,xn) G Cn, on a
J2Xi
2=1
^n^|xi|2.
2=1
et il y a égalité si et seulement si tous les xi sont égaux ; la preuve est similaire à celle
du cas réel.
Remarque
Lorsque l'on a égalité dans l'inégalité de Cauchy-Schwarz sans les modules (c'est-à-dire
lorsque (x,y) = \\x\\. \\y\\), alors les vecteurs x et y sont positivement liés218. Nous
l'utilisons ci-après en évoquant le cas d'égalité dans l'inégalité de Minkowski.
217. Le développement ci-après le démontre.
218. C'est-à-dire que l'un des deux vecteurs est égal l'autre fois une constante réelle positive ou nulle.
4.11 Compléments
EEC1
Proposition 170
Soit E un espace préhilbertien complexe. Alors219
1. \/(x,y)eE*,\\x + y\\^\\x\\ + \\y\\.
2. \/(x:y) G E2, on a égalité (\\x + y\\ = \\x\\ -\- \\y\\) si et seulement si la famille (x, y)
est positivement liée, c'est-à-dire si x = 0 ou s'il existe A G M+ tel que y — Xx.
Démonstration
Contrairement au cas réel, le calcul de ||a; + 2/|| est un peu plus délicat (à cause des
conjugaisons), on notera que l'on a
lk + 2/ll2 = (x + y,x + y)
= (x, x) + (x, y) + (y, x) + (y, y)
= (x, x) + (x, y) + (x, y) + (y, y) (caractère hermitien)
= \\x\\2 + 2Re({x,y)) + \\y\\2 (car Re(«) = *±!)
< ||x||2 + 2|(x)î/)| + ||î/||2 (car |Re(*)| < |*|)
^ N|2 + 2||x||.||2/|| + ||y||2 (inégalité de Cauchy-Schwarz)
< (INI + IMI)2
Quant au cas d'égalité, il faut qu'il y ait égalité dans Cauchy-Schwarz (d'où (x,y) liée),
et aussi que Re((a;,y)) = \{x,y)\, ce qui signifie qu'en fait le complexe (x,y) appartient
à M+. On en déduit que le coefficient de proportionnalité entre x et y est un réel positif.
Proposition 171
Soit E un espace préhilbertien complexe.
Alors l'application || . || : E —> M+ définie par ||#|| = \J{x,x) est une norme sur E,
appelée norme hermitienne sur E associée au produit scalaire (., . ).
219. L'inégalité correspond comme dans le cas réel à l'inégalité triangulaire pour la norme || . ||. Cette
inégalité porte également dans le cas hermitien le nom d'inégalité de Minkowski, cf. la note 48 (p. 363).
KHJJ Chapitre 4. Espaces préhilbertiens
Démonstration
La preuve ressemble au cas réel. Ici aussi, le fait que || . || a un sens et vérifie l'hypothèse
de séparation vient du caractère défini positif de (., . ).
En revanche, l'homogénéité est un peu plus intéressante à écrire ; elle provient du
caractère sesquilinéaire de (.,.). En effet, si l'on considère A G C et x G E, on a
||Ax||2 = (Xx,Xx) =\(\x,x) = \.\(x,x) = |A|2. ||x||2
Noter que ce calcul a déjà été utilisé lors de la preuve du théorème de Cauchy-Schwarz.
La dernière hypothèse à vérifier est l'inégalité triangulaire, mais elle a déjà été écrite plus
haut220.
Exemples
Tous les exemples de produits scalaires vus précédemment permettent de définir des
normes hermitiennes.
Citons notamment
1. Sur Cn,
si y= (î/i,...,î/n)
2. SurC([a,6],C),
3. Sur A<n(C),
Il peut être intéressant, une fois que l'on a une norme hermitienne, de savoir si elle permet
de retrouver le produit scalaire. Comme dans le cas réel, la réponse est positive, elle est
donnée par une identité de polarisation.
\ k=i
-/i(W*
\\M\\ = Jtr(tMM\
220. cf. l'inégalité de Minkowski, proposition 170.
4.11 Compléments
ffH
Proposition 172
Soient x et y deux cléments d'un espace prehilbertien complexe E. Alors
1. Identité de polarisation221 :
(x,y) = -y\\x-\-y\\2- \\x - y\\2 - i\\x + iy\\2 + i\\x - iy\\2)
4 y
2. On peut calculer les parties réelles et imaginaires de (x,y) :
\\x + v\\2 = \\x\\2 + \\y\\2 + 2Kc({x,y))
\\x + iy\\2 = \\x\\2 + \\y\\2-21m((x,y))
3. Identité du parallélogramme : \\x + y\\ + \\x — y\\ = 2 ||a:|| + 2 \\y\
Démonstration
Il suffit de développer222 \\x + y\\2 = (x + y,x + y) = • • • = ||x||2 + \\y\\2 + 2Re((x,y))>
ainsi que ||x-2/||2, ||z + Z2/||2 et ||x-z2/||2.
On définit l'orthogonalité entre vecteurs ou entre parties d'un espace prehilbertien
complexe E exactement comme dans le cas réel.
Les résultats suivants restent valables, avec des preuves parfaitement similaires, qui ne
sont donc pas reprises ici :
1. Si G est une partie de E, on note encore G± = {x G E ; Vy G G, (x,y) = 0}
l'ensemble des vecteurs de E orthogonaux à tous les vecteurs de G.
Alors G± est un sous-espace vectoriel de E, et on l'appelle l'orthogonal de G.
2. On a E1- = {0^}. En d'autres termes, si xq G E, on a
x0 = 0 «=* (VyeE, (xo,î/) = 0).
Par exemple, soient f et g éléments de C([0,1],C) tels que
V<p e C([0,1],C), f f(t)<P(t)dt = f g(t)<p(t)dt.
Jo Jo
221. La seconde formule est plus facile à mémoriser pour certains étudiants.
222. Et l'on pourra se rappeler que V2 G C, Re(Î2) = — Im(z).
[jQ Chapitre 4. Espaces préhilbertiens
On peut en déduire que / = g.
En effet, en posant h = f — g, on constate que l'hypothèse devient
W>eC([0,l],C), / (f(t)-g(t))<p(t)dt = (h,<p) = 0,
Jo
où (., . ) désigne le produit scalaire hermitien vu précédemment sur C([0,1], C).
Le résultat est alors une conséquence immédiate de ce qui précède.
3. Tous les résultats de la proposition 124 page 383 restent valables.
4. Si (xi)iç.i est une famille de vecteurs de E, cette famille sera dite orthogonale si et
seulement si les vecteurs de la famille sont deux à deux orthogonaux, c'est-à-dire si
V(U)e/2, i^*=> (xi,xj) = 0.
Notamment, la base canonique de Cn est une famille orthogonale pour le produit
scalaire usuel.
On pourra noter que changer l'ordre des vecteurs ne change rien au fait qu'une
famille est orthogonale ou non.
5. Si (xi)iç.i est une famille orthogonale de vecteurs tous non nuls, alors cette famille
est libre.
6. Soient F\, F2, ..., Fp des sous-espaces vectoriels de E.
Si les Fi sont deux à deux orthogonaux, alors leur somme est directe. La somme
est alors notée
f= ê *■«.
et on l'appelle la somme directe orthogonale de la famille (^i)ie[i,p]|-
7. Le théorème de Pythagore reste valable223 : si x, y sont deux vecteurs de E, on a
x±y =► Hx + yll^rf + IMI2
Cette fois, le développement de \\x + y\\ ne fait plus apparaître que la partie réelle
de (x, y) et on n'a plus l'équivalence que l'on constatait dans le cas réel.
223. Uniquement dans le sens direct.
4.11 Compléments
8. Plus généralement, si (a^ieli.pj est une famille orthogonale finie de vecteurs de E,
on a encore la relation de Pythagore :
.2 p
= £lNI2
2=1
2=1
À plus forte raison que pour deux vecteurs, il n'y a toujours pas équivalence224.
9. Si x G E, x est dit unitaire (ou norme) si ||x|| = 1.
10. Une famille (xi)i^i de vecteurs de E est dite orthonormée (ou orthonormalé) si et
seulement si c'est une famille orthogonale dont tous les vecteurs sont unitaires.
Ainsi, (xi)iç.i est orthonormale si et seulement si
V(i,j) G/2, (xi,Xj) =ôij.
11. Le fait que toute famille orthogonale de vecteurs tous non nuls est libre permet
d'affirmer que toute famille orthonormée est libre.
Exemple
Notons pour n G Z, en(t) = etnt. Alors la famille (en)nez est une famille
orthonormale de l'ensemble des fonctions 2tt périodiques sur M et à valeurs dans C, noté
E = C2tt(M,C) muni du produit scalaire
Cette famille est donc libre.
En effet, pour tout n^m éléments de Z on a
r2w
1 r**
(CniCm) = 2~ / en(*)em(*)
= _L / ei(m-n)tdt
2tt \_i(m — n)
= o,
1 ~l27r
pi(m—n)t |
JO
224. On peut avoir égalité sans que les vecteurs soient deux à deux orthogonaux.
Chapitre 4. Espaces préhilbertiens
et pour tout n G N,
r2?r
eotdt=l
i r
(en,en) = —^
Cette famille orthonormée est à l'origine des séries de Fourier 225 complexes.
12. Si E est un espace hermitien de dimension n, on appelle base orthonormée (ou
base orthonormale) de E toute base (ei,e2, ...,en) de # constituée d'une famille
orthonormée, c'est-à-dire vérifiant
V(z,j)G|[l,n]2, (ci>ci)=*ili = <{
0 si i ?= j
Exemples
Dans Cn, dans A4n(C) : les bases canoniques sont des bases orthonormees pour le
produit scalaire usuel.
13. Si E est un espace hermitien de dimension n, les base orthonormees de E sont les
familles orthonormees de E constituées d'exactement n vecteurs.
Proposition 173 ■
n n
Soient B — (ei,...,en) une base orthonormée de E, x = 2_\XiCi et V = /^Z/j6^
deux vecteurs de E. On appelle respectivement X et Y les matrices colonnes des
coordonnées de x et y dans la base226 B. Alors
1. (xiy) = Yt^yi = tXY
n
2. \\x\\2 = J2\xi\2 = tXx
î=\
225. Les sommes partielles de ces séries correspondent par définition aux projections orthogonales sur
les espaces VN = Vect((en)n€tt-^.^l)'
4.11 Compléments
Démonstration
n n
On part de x = \J a^e^ et y = 2_] Vjej-
2=1 j=l
Par sesquilinéarité du produit scalaire, on en déduit
^€|[l,n] j€ttl,nl '
(i,i)Gttl,n]2
Le calcul se termine comme dans le cas réel, en séparant la somme en deux
On ne détaille donc pas plus cette démonstration.
Quant à la seconde formule, elle se déduit aisément de la première228.
227
Proposition 174
Si B = (ei,..., en) est une base orthonormée de E: on a
n
\/x G E, x = y^j{ei,x)ei,
ï=\
c'est-à-dire que les coordonnées de x dans la base sont les produits scalaires des
vecteurs de la base avec x.
Démonstration
On écrit que x possède des coordonnées dans la base B :
3(xi,...,xn) G Cn : x = x\e\-\ \-xnen
En considérant i G [l,n] et en calculant (ei,x), on trouve immédiatement (e^x) = x^
la preuve est d'ailleurs parfaitement semblable à celle du cas réel.
227. On distingue les couples d'indices selon que i = j ou i / j, cf. la démonstration de la
proposition 122 (p. 379).
228. Il suffit de choisir y = x.
Chapitre 4. Espaces préhilbertiens
Remarque
Il faut prendre garde à ne pas écrire229 (x,ei).
Un moyen de se rappeler que le x doit être à droite dans le produit scalaire est de penser
au fait que les fonctions coordonnées doivent être linéaires par rapport à x.
Corollaire 29 *■
Soient B — (ei,...,en) une base orthonormée d'un espace hermitien [E, (., .)), ,
/ G C{E) et AI = Matfî(/). Alors *
Vm e [l,n]2, rriij = (e*, f{ej)) = (f(ej), a).
j
Démonstration
La preuve est similaire au début de celle de la proposition 166 (p. 449).
Nous venons d'évoquer des résultats utilisant des bases orthonormees. mais il faut à
nouveau s'assurer qu'il en existe.
Justement, comme dans le cas réel, on peut affirmer 230 que tout espace hermitien possède
(au moins) une base orthonormée.
On a encore un résultat de représentation des formes linéaires.
Corollaire 30
Soient E un espace hermitien et / une forme linéaire sur E.
Il existe alors un unique vecteur v de E tel que
VxeE, f(x) = (v,x).
Démonstration
Une fois de plus, la preuve est assez semblable à celle du cas réel. On considère une base
orthonormée (ei,..., en) de E, et on pose
v = S£2,f(ek)ek,
k=i
229. Il faudrait conjuguer l'expression, mais il y aurait des risques de confusion.
230. La même démonstration par récurrence sur la dimension de l'espace fonctionnerait.
4.11 Compléments |2jg|
en prenant garde de penser aux conjugués.
La vérification du fait que ce vecteur convient est similaire à celle du théorème 31 (p. 397)
est n'est donc pas écrite.
Quant à l'unicité de v, c'est231 une conséquence immédiate du fait que E1- = {0^}.
L'existence de bases orthonormées a d'autres corollaires :
1. Soient E un espace préhilbertien complexe232 et F un sous-espace vectoriel de
dimension finie de E.
Alors F et F± sont supplémentaires, c'est-à-dire que
±
Si en outre E est de dimension finie, alors on a dim(E) = dim(F) + dim(F±).
Il est alors possible de définir une projection orthogonale pf sur F.
Comme dans le cas réel, si (ei,..., er) désigne une base orthonormée de F, ce projeté
est donné par l'expression
r
Vx e E, pF(x) = ]P (ek, x) ek
k=i
Exactement comme dans le cas réel, ce résultat peut devenir faux si F est de
dimension infinie.
2. Si E est un espace hermitien, on peut compléter toute famille orthonormée (ei,..., er)
de E en une base orthonormée de E.
3. Soient E un espace hermitien et F un sous-espace vectoriel de E.
Alors (F-1)"1 = F.
Là encore, le résultat devient faux en dimension infinie.
4. Soient E un espace hermitien, dont B = (ei,..., en) est une base orthonormée et H
un hyperplan d'équation a\X\ + cl^x^ H h Oùnxn = 0.
Alors H1- est la droite engendrée par v = âïei + 0262 H + c^en.
En effet, l'espace E étant hermitien, H1- est de dimension dim(F) — dim(iJ) = 1
231. Comme dans la démonstration du théorème 31 dans le cas réel.
232. E pouvant donc être de dimension infinie.
Chapitre 4. Espaces préhilbertiens
par ce qui précède : c'est donc une droite.
Il suffit de vérifier que v ^ 0 appartient à H± : c'est facile car si x = x\ei H \-
xnen G if, alors
(v, x) = cnxi H h ci^xn = aixi H h anxn = 0
On voit clairement dans la preuve apparaître la nécessité d'avoir conjugué les o^
dans la définition de v.
Ici233 on comprend que plutôt qu'apprendre uniquement par cœur les résultats,
il peut être préférable de savoir refaire les preuves (très) rapidement afin de
déterminer par exemple si on écrit (x,e) ou (e, x), ou encore s'il faut conjuguer tel
coefficient (problèmes qui n'apparaissent pas dans le cas réel).
Exemples
• On munit E = Mn(C) de son produit scalaire canonique, c'est-à-dire
V(AB) e (Mn(C))\ (A,B) = tif AS).
On considère F = Sn(C) l'ensemble des matrices symétriques.
Il est alors aisé de vérifier234 que VM G E, pF(M) = \{lM + M).
• La projection orthogonale sur une droite D dirigée par v ^ 0 (D = M.i>) est donnée
par
Vx G E, pD(x) = ^l.v.
INI2
Comme pour les coordonnées, si vous hésitez entre (v, x) et (x, v), dites-vous qu'une
projection est une application linéaire ; or le produit scalaire hermitien est linéaire
par rapport à la seconde coordonnée, ce qui explique que le x apparaît dans la
seconde coordonnée.
5. Avec les notations précédentes (F étant un sous-espace vectoriel de dimension finie
de E préhilbertien complexe), on a
(a) ||MaO-z|| = int 11^-2/11 =d(x,F)
y£F
233. Comme à d'autres endroits.
234. Comme dans le cas réel.
4.11 Compléments
(b) Pf(x) est l'unique vecteur de F tel que cL(x,pf(x)) = \\pf{x) — x\\ soit égale
à la distance235 de a; à F.
Une conséquence en est
Vxe£, \\x\\2 = \\pF(x)\\2 + [d(x,F)}2,
qui se démontre grâce au théorème de Pythagore, après avoir écrit
x = pF(x) + [x-pF(x)],
et en notant que pf(x) _L [x — Pf(x)] •
6. On peut encore concrètement construire des familles 236 orthonormées à partir de
familles libres grâce au procédé de Gram-Schmidt : si T = (fi)içi une famille libre,
avec J = [l,r] ou J = N*, alors il existe au moins une famille orthonormée de
vecteurs S = (ei)iç.j telle que
Vpel, Vect({e1,...,ep})=Vect({/1,...,/p}).
Ce résultat se démontrerait comme dans le cas réel.
En pratique, il faut faire attention à l'ordre des composantes quand on calcule les
produits scalaires.
7. L'inégalité de Bessel tient toujours.
Soit (ei, ...,er) une famille orthonormale de E préhilbertien complexe.
Alors
r
MxeE, ]T(ei,2;)2^||a;||2
\ei,x; ^ \\x\x
2=1
À nouveau, la démonstration est similaire à celle du cas réel.
Exemple
On munit l'ensemble des fonctions 27r-périodiques de M dans C, noté E = C2tt(M, C),
du produit scalaire hermitien
r2ir
{î,9) = ^JJf(t)g(t)dt.
235. C'est-à-dire que l'infimum écrit est atteint en pf(x) et nulle part ailleurs.
236. Au plus dénombrables.
JgJJj Chapitre 4. Espaces préhilbertiens
On définit Vn G Z, en G F par V* G M, en(t) = eint.
Il est alors aisé de montrer que la famille (en)nez est une famille orthonormée de E.
Étant donné / G E, on pose
/•2tt
1 C
VneZ, cn(f) = (en,f) = —j e—*/(t)
di.
L'inégalité de Bessel donne alors ViV e N,
Comme dans le cas réel, on en déduit que la famille ( |cn(/)| J est sommable,
et il serait possible de montrer la formule de Parseval :
8. Si F désigne un sous-espace vectoriel de dimension finie de E espace préhilbertien
complexe, de sorte que E = F 0 F-1, on peut définir la symétrie orthogonale sp
par rapport à F comme étant la symétrie par rapport à F et parallèlement à F±.
Si on note sf la symétrie orthogonale par rapport à F, alors
sf = %Pf — IdE = Ià>E — ^Pf-l
Les symétries orthogonales par rapport à des hyperplans H (si E est hermitien)
sont les réflexions.
Notons que si l'on écrit l'hyperplan H sous la forme H = w1- (w ^ 0), alors on a
VxGF, sh(x) =x-2^^lw.
INI2
Dans le cas euclidien, on avait vu que deux vecteurs (différents) de même norme
étaient images l'un de l'autre par une unique réflexion. Nous affirmons ici237 que,
étant donnés deux vecteurs distincts x et y de E hermitien tels que ||x|| = \\y\\,
alors il existe une réflexion a telle que a(x) = y si et seulement si (x, y) G M.
Cette réflexion est alors unique : il s'agit de la symétrie orthogonale par rapport à
l'hyperplan {x — y}± = [Vect(a; — y)] .
237. Sans preuve, le lecteur pourra la retrouver en adaptant celle du cas réel
4.11 Compléments
Remarque
La différence avec le cas réel n'est pas simple à comprendre ici ; mais il faut réaliser
que si les droites complexes sont des droites 238 au sens algébrique, il s'agit en un
sens géométrique classique de plans239 ; c'est pourquoi il peut comme ici y avoir
quelques différences.
Vous aurez parfois affaire à des matrices de certains types 240 particuliers.
Définition 94
On appelle groupe unitaire l'ensemble U(n) = {AI G .Mn(C), tMM = 7n}.
Il est aisé de voir qu'il s'agit d'un sous-groupe de (GLn(C), x) ; tous ses éléments ont un
déterminant de module 1. Il s'agit d'une généralisation du groupe orthogonal étudié dans
le cas réel.
Ainsi, si M est une matrice à coefficients réels telle que M G 0(n) (c'est-à-dire telle que
lMM = Jn), alors M appartient241 à U(n).
Le résultat suivant montre aussi, en terme de propriétés, en quoi U(ri) est une
généralisation dans le cas complexe de 0(ri).
Proposition 175
Les éléments de U(n) (que l'on appelle les matrices unitaires) sont
1. les matrices dont les colonnes forment une base orthonormée de l'ensemble des
matrices colonnes.
2. les matrices de / dans une base orthonormée quelconque, où / est un endomor-
phismc qui conserve le produit scalaire242, c'est-à-dire tel que
V(x,y)eE2, (f(x),f(y)) = (x,y).
3. les matrices de passage entre bases orthonormées.
238. C'est-à-dire de dimension 1.
239. Ce sont des M-espaces vectoriels de dimension 2.
240. Si M est une matrice à coefficients complexes, on note M la matrice obtenue en conjuguant tous
ses coefficients.
241. On peut se permettre d'écrire 0(n) C U{n)> à condition de voir «Mn(]R) comme un sous-ensemble
deJWn(C).
Chapitre 4. Espaces préhilbertiens
Parmi les propriétés des matrices unitaires, outre le fait que le déterminant est de module
1, on peut affirmer que toute valeur propre est de module 1, tout comme on a vu que les
valeurs propres réelles d'une matrice orthogonale ne peuvent être que 1 et —1.
La preuve est similaire : il suffit de prendre A une valeur propre, puis de considérer un
vecteur propre (donc non nul) ; on conclut en utilisant la conservation de la norme :
|AMN| = ||A.x|| = ||/(x)|| = |MI>
d'où243 |A| = 1.
Remarque
Puisque toute matrice orthogonale est une matrice unitaire, on peut montrer que les
valeurs propres réelles ou complexes d'une matrice orthogonale sont toutes de module 1.
Définition 95
Soit n G N*. On dit d'une matrice M G Mn{C) qu'elle est hermitienne si
M* =tI7 = M.
On note Hn l'ensemble des matrices hermitiennes 244 :
Hn = {MeMn(C), '11 = M}.
Nous verrons que, comme pour les matrices réelles symétriques, toute matrice de ce type
est diagonalisable dans une base orthonormée.
Remarque
L'ensemble Hn est un sous-espace vectoriel de A4n(C) seulement si on le considère comme
un M-espace vectoriel (et pas comme un C-espace vectoriel).
Par exemple, la matrice In est hermitienne, alors que la matrice iln ne l'est pas.
243. Après simplification par \\x\\ > 0.
244. Cet ensemble est une généralisation des matrices symétriques.
4.11 Compléments
Endomorphismes hermitiens et matrices hermitiennes
Définition 96
Soient E un espace préhilbertien complexe et / un endomorphisme de E.
On dit que / est hermitien si \/(x,y) G E2, (f(x), y) — (x, f(y)).
Proposition 176
Soit E un espace hermitien. Un endomorphisme / de E est hermitien si et seulement
si sa matrice dans une base orthonormée de E est hermitienne.
Démonstration
Si on note M la matrice de / dans une base orthonormée (ei,..., en), on sait que
V(m) e [1, n]2, rmj = (e*, f{eô)).
L'hypothèse / hermitien avec x = e^ et y = ej donne alors V(i,j) G [l,n]2,
™>ij = (et, f(ej)) = (fia), ej) = (ej , /(e*)) = mifi
qui équivaut bien à M = lM.
Réciproquement, cette condition M = lM équivaut à
V(m) G [l,n]2, (e,, /(e,)> = (/(e,), e,),
dont on peut déduire par sesquilinéarité que
M{x,y)eE\ (x,f(y)) = (f(x),y).
Théorème 35 (Théorème spectral complexe)
Tout endomorphisme hermitien d'un espace hermitien est diagonalisable dans une
base orthonormée, c'est-à-dire que si E est un espace vectoriel hermitien et si
/ G C(E) est hermitien, alors il existe une base orthonormée B de E dans laquelle
Mat^/) est diagonale réelle.
H[£J Chapitre 4. Espaces préhilbertiens
Démonstration
Notons qu'il s'agit d'une adaptation au cas complexe de la démonstration du théorème
spectral, cf. le théorème 32 (p. 455).
Par exemple, on montrerait de la même façon que si Ai ^ A2 sont deux valeurs propres
distinctes de /, alors E\i(/) -L E\^{f).
Montrons seulement que si A G C est valeur propre d'une matrice A G À4n(C) telle que
A* = l~Â = A alors A G M.
En effet, il existe X G Aln,i(C)\{0} tel que AX = XX.
En multipliant à gauche par lX on obtient
t~XAX = \t~XX.
Si on transpose et conjugue cette égalité, on trouve
tJCirÂX = \*XX.
L'hypothèse sur A implique alors
l~XAX = Â'XX
On peut identifier les deux expressions et conclure que
\t'XX = \t'XX.
Or *XX = \\X\\2 > 0 puisque X ^ 0.
On a finalement A = A, c'est-à-dire A G M.
^^
Corollaire 31 (Théorème spectral complexe, cas matriciel) M
Toute matrice lier mi tienne est diagonalisable (dans M) dans une base ortlionormée,
I c'est-à-dire que si A G Mn(C) vérifie A* =*A = A, alors il existe P G Un(£) telle I1
que P~XAP soit diagonale (réelle). '
Démonstration
Là encore, le passage du cas des endomorphismes au cas des matrices s'effectue comme
dans le cas réel.
4.12 Exercices corrigés du chapitre 4
ESBJ Exercices corrigés du chapitre 4
4.1 Matrices positives
Il s'agit d'un exercice classique sur les matrices symétriques positives, qui apparaît
notamment dans de nombreux problèmes en questions préliminaires.
1. On fixe un entier n. On dit d'une matrice symétrique réelle A G <Sn(M) qu'elle
est positive si et seulement si \/X G -Mn,i W> lXAX ^ 0.
On note <S+ l'ensemble de ces matrices, c'est-à-dire
<S+ = {A G Sn(R) ; \/X G Mntl(R), lXAX ^ 0}.
Montrer alors qu'une matrice symétrique M réelle est dans <S+ si et seulement si
toutes les valeurs propres de M sont positives (ou nulles), c'est-à-dire que pour
toute matrice A G <Sn(M), on a l'équivalence
AeS+ ^ SP(A)cR+.
2. De manière analogue, on définit
<S++ = {A G Sn{R) ; VX G ^TCli(R)\{0}, lXAX > 0}.
Montrer alors qu'une matrice symétrique A réelle est dans S^"*" si et seulement
si toutes les valeurs propres de A sont strictement positives, c'est-à-dire que pour
toute matrice A G <Sn(M), on a l'équivalence
AeS++ <=> Sp(A)cR*+.
3. Corollaire (de la première question) : montrer que toute matrice symétrique réelle
positive possède une unique « racine carrée » qui soit elle-même symétrique réelle
positive, c'est-à-dire
WlG<S+, 3!il/G5+ : M2 = A.
Chapitre 4. Espaces préhilbertiens
1. Commençons par une implication. Supposons A G S+, montrons que les valeurs
propres de A sont toutes positives. Soit donc A une-valeur propre de A. Notons
que par le théorème spectral, on sait déjà que A est réelle.
Cette précision est apportée car il est bon de se rappeler que les idées des preuves
de théorèmes se retrouvent dans les preuves d'exercices. Ici, on va réutiliser un
passage de la preuve du théorème spectral, plus particulièrement du lemme 5 page
454. En effet, il existe X G Mnji(M) une colonne propre, c'est-à-dire vérifiant
X ^ 0 et AX = XX. En multipliant à gauche par lX cette égalité, on obtient
lXAX = \lXX.
Or on sait que si on note xi,..., xn les composantes de A", on a lXX = x\ H h
x\ > 0 du fait que X ^ 0. Notez que si l'on n'utilisait pas A G M, on aurait pris
X G A4n>i(C)\{0} et c'est par lX qu'on aurait multiplié la relation AX = XX.
En tout cas, on a \.lXX = lXAX, avec lXX > 0 et lXAX ^ 0 par hypothèse.
On en déduit immédiatement A ^ 0, d'où l'implication
A e <S+ =► Sp(il) C R+.
Passons à la réciproque. Soit donc A G Sn (M) une matrice symétrique réelle dont
toutes les valeurs propres sont positives (ou nulles). Montrons que A G S+, c'est-
à-dire que \/X G Ain,i(R), lXAX > 0.
Par le théorème spectral, on sait qu'il existe une matrice orthogonale diagonali-
sant A, c'est-à-dire qu'il existe P G On(R) telle que P~1AP soit diagonale.
Plus précisément, P lAP = D =
( Ai (0) \
A2
, où Ai,..., An sont les
\ (0) An /
valeurs propres de A, donc Vi G (1, n], A» ^ 0 par hypothèse.
On a alors A = PDP~X, donc pour toute matrice colonne X G Mn,i{
lXAX = lXPDP-lX.
Mais comme P est orthogonale, P~l = lP.
4.12 Exercices corrigés du chapitre 4
Notons alors Y = tPX, de sorte que lY = lXP. On voit qu'alors
lXAX = lYDY.
Bien noter que l'on vient d'utiliser « fortement » le théorème spectral : on n'utilise
pas seulement le fait qu'une matrice symétrique réelle est diagonalisable sur M,
mais aussi qu'elle est diagonalisable dans une base orthonormée, c'est-à-dire avec
une matrice de passage orthogonale245.
Notons 2/1,2/2, ---,2^1 € ^ les composantes de Y, c'est-à-dire Y =
2/2
Si on développe le produit DY on trouve aisément DY =
\Vn /
( Aiî/i \
A22/2
, et donc
en multipliant à gauche par lY = (2/1 2/2 ••• 2/n) on trouve finalement
lXAX = lYDY = Aiy? + A22/| + ■ ■ ■ + An2/2.
Comme Vi G [1, n], A^ ^ 0 et yi G M, on a Ai2/| ^ 0. Ainsi, lXAX est une somme
de termes positifs, donc lXAX ^ 0, résultat valable pour tout X G A4n,iW-
Ainsi est démontrée (pour A G iSn(M)) l'implication
Sp(i4) C MH
AeSj.
2. On commence par la même implication qu'à la question 1, en allant évidemment
plus vite.
Soit A G iS^"1", montrons que les valeurs propres de A sont toutes strictement
positives. Soit donc A une valeur propre de A, forcément réelle.
Il existe alors X G A4nji(M)\{0} telle que AX = XX. Là encore, en multipliant
cette égalité à gauche par lX, on obtient lXAX = XlXX.
Mais on a à nouveau lXX > 0 car X ^ 0, et cette fois l'hypothèse A G 5rJ"+
implique lXAX > 0. On en déduit immédiatement A > 0, donc on a prouvé
245. Sans cela, le remplacement de P l par lP aurait été impossible.
Chapitre 4. Espaces préhilbertiens
l'implication
Ae«S++
Sp(A) c k;.
Passons à la réciproque. Soit donc A G <Sn(R) une matrice symétrique réelle dont
toutes les valeurs propres sont strictement positives. Montrons que A G «S++,
c'est-à-dire que VX G .M„,i(R)\{0}, *XAX > 0.
Comme à la question précédente, par le théorème spectral, on sait qu'il existe
/ Ai (0) \
A2
P G 0„(R) telle que P~lAP = D =
, où Ai,...,An sont
V (0) K )
les valeurs propres de A, donc Vi E [l,n], A» > 0 par hypothèse.
Là encore, soit X E Mn i(M), mais cette fois avec X ^ 0.
/in \
Toujours en notant lPX = Y
2/2
, on trouve
V Vn J
lXAX = lYDY = Aiy? + A2y| + • • • + Kvl-
Comme Vi E [1, n], Ai > 0 et yi E M, on a À^2/^ ^ 0. Ainsi, lXAX est une somme
de termes positifs, donc lXAX ^ 0.
Mais plus précisément, X ^ 0 et P inversible impliquent246
Y = lPX = P~lX £ 0.
Ainsi, il existe un indice Îq E [l,n] pour lequel yi0 ^ 0, et alors Xi0y?0 > 0.
Finalement, tous les termes de la somme sont positifs ou nuls, mais (au moins)
l'un d'entre eux est strictement positif, de sorte que la somme est strictement
positive.
Finalement, pour tout X E A4nji(M)\{0}, on a lXAX > 0.
Ainsi est démontrée (pour A E 5n(R)) l'implication
sp(A)cm; =>ae<s++.
246. Sinon, en multipliant à gauche par P, on en déduirait X = 0, ce qui est exclu.
4.12 Exercices corrigés du chapitre 4
Noter qu'il existe une variante permettant une « estimation » plus précise de
*XAX.
En effet, on a Ai,..., An > 0, donc on peut noter m = min(Ai,..., An) > 0.
On a alors
Vi G [l,n], Xiyl >™>vh
donc finalement
lXAX = Aiy? + ' ' ' + Kvl> rn{y\ + ■ ■ ■ + y2n)
Or on sait que y\-\ h y\ = lYY.
Et en revenant à Y = *PX, on a lYY = tXPtPX = lXX car P orthogonale,
donc lPP = In.
Ainsi, y\ H h y\ = x\ H Y x\ > 0 car A" ^ 0, et finalement
*XAX ^ m(x? + • • • + x2n) > 0.
3. En s'inspirant de la première question, une idée vient assez naturellement.
Soit A e S+. On note Ai,..., An les valeurs propres de A. D'après la question 1,
on sait que Vi G [1, n], A^ ^ 0.
Avec les notations du corrigé de la question 1, il existe P G On(M) telle que
P"1 AP = D
( Ai
V (0)
(0)\
An /
, c'est-à-dire A = PDP'1
On note alors simplement D' =
( \AT (0) \
puis M = PD'P-\
V (0) VK J
On peut alors affirmer que
• On a P'1 = *P, et D' symétrique, donc M = PDnP et tM = t(tP)tDnP =
PDnP = M, c'est-à-dire que M est symétrique réelle.
• Les matrices M et D' sont semblables, donc les valeurs propres de M sont celles
de D7, donc sont \AT, •••, VKî - toutes positives (ou nulles).
On sait alors d'après la première question que M G S^.
JgJU Chapitre 4. Espaces préhilbertiens
• Enfin, il est évident que D'2 = D, et donc
M2 = (PD'P-1)2 = PD'P-1PD'P-1 = PD'2P~l = PDP-1 = A.
On a donc trouvé une matrice M G <S+ telle que M2 = A.
Pour démontrer l'unicité de M, on sait que si M2 = A, alors AM = M2M = M3
et de même MA = MM2 = M3.
Ainsi, A et M commutent, et sont diagonalisables par le théorème spectral.
On sait alors que l'on peut simultanément diagonaliser A et M, cf. le
théorème 17 (p. 259).
Mais dans cette base commune, on voit que les valeurs propres de M doivent
être positives pour avoir M G <S+, et leurs carrés doivent être les valeurs propres
de A
Les valeurs propres de la matrice diagonale sont alors définies de manière unique,
d'où l'unicité de M.
4.2 Attention au vocabulaire...
On reprend les notations de l'exercice précédente.
Dans certains problèmes, il est noté
cients de A sont positifs, c'est-à-dire
pour A G Mn(R) :
que
V('U)G[l,n]2, Oij^O.
Montrer que, si A G <Sn(M), il n'y a pas d'implication
pourra chercher un contre-exemple à
A ^ 0 lorsque tous les coeffi-
entre A G <S+ et A ^ 0 (on
chacun des deux cas, dès la dimension n= 2).
Plaçons nous en dimension 2 ; les contre-exemples donnés ici se généralisent aisément
à toute dimension n ^ 2, il suffit de compléter les matrices choisies par un bloc identité
de taille n — 2 après.
Dans un premier temps, cherchons une matrice symétrique réelle dont les coefficients
soient positifs, mais qui ne soit pas dans 5^", c'est-à-dire, d'après l'exercice 4.1 dont
les valeurs propres ne sont pas toutes positives.
(o i
Il suffit de considérer A = I
V1 °.
Il est évident que A G <S2(M) et que A ^ 0.
4.12 Exercices corrigés du chapitre 4
Pourtant, on trouve aisément son polynôme caractéristique xa(X) = X2 — 1, donc son
spectre est Sp(A) = {-l,l}£M+.
Ainsi, A £ S} d'après la première question.
D'ailleurs, il suffit de considérer X = I I qui donne aisément lXAX = — 2 < 0
v-1
pour justifier A £ S} •
En tout cas, l'existence de cette matrice A prouve que A ^ 0 n'implique pas A G <S+.
Réciproquement, cherchons une matrice B G S} (c'est-à-dire une matrice symétrique
réelle de valeurs propres positives) dont les coefficients ne soient pas tous positifs.
Si on prend l'opposé de la matrice précédente, ses valeurs propres seront +1 et —1.
En rajoutant 2/2, on ajoute 2 aux valeurs propres, qui deviennent donc 3 et 1 et sont
donc positives.
( 2 -i\
Ainsi, si on considère B = I , on a B G <S2(K), et xb{X) = (X - 2)2 - 1
V"1 2 /
d'où Sp(£) = {1,3} CR+.
On a donc B G iS^" (même dans S^*)- En revanche, comme Bi^ = — 1, on n'a
clairement pas B ^ 0.
Cette fois, l'existence de cette matrice B prouve que A G <S+ n'implique pas A ^ 0.
Il n'y a donc aucune implication entre A G <S+ et A ^ 0 (sauf évidemment pour n = 1).
4.3 Matrice d'une projection orthogonale
On considère E = M4 muni de sa structure euclidienne canonique et le sous-espace
vectoriel
F = {x = (xi,X2,xs,x4) G M4, xi — x2 + £3 — X4 = 0 et x\ — 2^2 + 3^3 - 4^4 = 0}.
Déterminer la matrice de la projection orthogonale pp sur F dans la base canonique
B0 de E.
On commence par déterminer une base orthonormée de F.
Tout d'abord, il faut construire une base quelconque de F.
Chapitre 4. Espaces préhilbertiens
Si x = (xi,X2,X3,X4) est élément de M4, on a247 :
„ . Xi — X2 + Xs — X4 = 0
xeF ^=> {
X\ — 2^2 + 3^3 — 4^4 = 0
X\ — X2 + Xs — X4 = 0
—X2 + 2X3 — 3X4 = 0
Xi = X2 — X3 + X4
X2 = 2X3 — 3X4
Xi = 2X3 — 3X4 — X3 + X4 = X3 — 2X4
X2 = 2X3 — 3X4
x = (x3 - 2x4,2x3 - 3x4, X3, X4) = x3 (1,2,1,0) +x4 (-2, -3,0,1)
«• V..
=/l =/2
Ainsi, (/1, /2) est une base de F.
On applique alors le procédé de Gram-Schmidt pour obtenir une base orthonormée de
F :
• On pose ei = 77777/1 = -^=(1,2,1,0).
• On enlève à /^ son projeté orthogonal selon ei, c'est-à-dire que l'on pose
e2 = h ~ (eu /2> ei = h ~ „ '2 h
ll/ill
= (-2,-3,l,0) + |(l,2,l,0) = |(-2,-1,4,3).
. On pose e2 = ^e'2 =-^(-2,-1,4,3).
On sait qu'alors (ei,e2) est une base orthonormée de F, et qu'alors la projection
orthogonale sur F est donnée par
Vx G E, Pf(x) = (ei,x)ei + (e2,x)e2.
247. La première opération étant L2 <— L2 — L\.
4.12 Exercices corrigés du chapitre 4
Notons Ci = —=
\/6
2
1
, la colonne de ei dans la base canonique Bq.
Comme Bo est une base orthonormée de E, on sait que (ei,x) = tC\X, où X est la
colonne des coordonnées de x dans la base Bq.
Ainsi248, on peut écrire que la colonne de (ei,x) e\ est :
(*CiA-)d = Ci(*dX) - (d'd)*.
Par identification, la matrice de l'endomorphisme x i—» (ei,x) e\ dans la base Bo est
doncCi'Ci.
De même, la matrice de l'endomorphisme x i—> (e2,x) e-i dans la base Bq est C-^Ci.
Ainsi, la matrice de pp : x i—^ (ei,x) ei + (e2,x) e2 dans la base Bq est la somme
des matrices de x \—> (ei,x) e\ et de x \—> (e2, x) e2, soit :
MatBo(PF) = Ci'Ci+d'^
2
1
(1 2 1 0) + -
/-2\
-1
4
V 3 /
(-2 -14 3)
/ 1 2 1 0 \
2 4 2 0
12 10
0 0 0 0
1
+ 3Ô
/ 4 2 -8 -6 \
2 1-4-3
-8 -4 16 12
-6 -3 12 9
30
/ 9 12 -3 -6 \
12 21 6 -3
-3 6 21 12
y -6 -3 12 9 /
Remarques
248. Comme tC\X est une matrice carrée de taille 1 assimilable à un réel.
Chapitre 4. Espaces préhilbertiens
1. Il faut prendre garde à ne pas confondre CfCi, qui ici est une matrice carrée de
taille 4 avec tCiCi, matrice carrée de taille 1, assimilée à un réel et valant ||ei|| .
2. Si l'on a une matrice A € Mn(R) symétrique vérifiant A2 = A, alors l'endomor-
phisme / canoniquement associé à / dans W1 (muni de sa structure euclidienne
canonique) sera une projection, donc vérifiera Rn = Eo(f) 0 Ei(f)-
Mais en plus, la symétrie de A (et donc de /) implique l'orthogonalité de ses sous-
espaces propres.
Ainsi, / est la projection orthogonale sur E\(f).
De même, si A est une matrice symétrique vérifiant A2 = Jn, alors l'endomorphisme
canoniquement associé à A est une symétrie orthogonale.
4.4 Étude d'une isométrie de l'espace
On munit M3 du produit scalaire et de l'orientation canoniques.
On considère l'endomorphisme / canoniquement associé à la matrice
M =
( 0 1 0 \
0 0 1
V1 « o)
Caractériser géométriquement /.
On notera que montrer que M G 0(3) est simple : les colonnes de M correspondent
aux vecteurs de la base canonique de M3fi(R), à ceci près qu'ils sont dans le désordre.
Ils forment tout de même une base orthonormée de A^3,i(M), ce qui suffit à affirmer
que M est orthogonale.
On trouve rapidement que D = E\ (M) est la droite dirigée par I 1 I, donc M
W
correspond à une rotation. Si on note 6 son angle, on a 1 + 2cos0 = tr(M) = 0, d'où
cos0 = —- et 8 = ±—-.
2 3
On remarquera que l'on pouvait trouver cet angle autrement : M3 = ^3, donc M
correspond forcément à un tiers de tour.
4.12 Exercices corrigés du chapitre 4
Si l'on oriente l'axe par w =
v/3
( 1
1 | et que l'on fixe x $. D, on sait que le signe
V1
de sin0 est donné par [x, /(#), w]. Avec x le premier vecteur de la base canonique, ce
produit mixte vaut
1 ° A
0 ° Ta
0 i A
\/3
2tt
Finalement, M est la matrice d'une rotation d'angle — — autour de l'axe dirigé et
o
orienté par w.
4.5 Matrice d'une rotation
On considère à nouveau E
et on note g la rotation d'
Quelle est la matrice de g
= M3 muni de sa structur
axe M..w orienté par w =
dans la base canonique ?
e usuelle d
>■-'■
'espace
1) et d
euclidien
'angle 6 =
orienté,
7T
" "3 "
On calcule l'image par g des trois vecteurs de la base canonique.
On se base sur la formule donnée par la proposition 163.
• Pour ei = (1,0,0), on sait que
/(ei) = cos0ei +sin6 w Aei + (w,e±) (1 — cos0)w
1
2
1 VS 1 ,
= ôei + ~2 7^(ei ~ e2 + ^3) A ci
+^ • -7= (ei - e2 + e3, ci) • -7=(ei - e2 + e3)
2 x/3
x/3V
= 2Cl + 2^2 + C3^ + ë^1 ~62+ e*>
= 3(2ei+e2 + 2e3).
On trouve de façon parfaitement analogue
/(e2) = cos0e2 +sm9w Ae2 + (w,e2) (1 -cos0)w = • •• = -(-2ei + 2e2 + e3)
et
/(e3) = cos0 e3 + sin0 w A e3 + (tu, e3) (1 — cos0)it;
-(-ei-2e2 + 2e3)
Chapitre 4. Espaces préhilbertiens
On en déduit immédiatement que la matrice de g dans la base canonique est
/ 2 -2 -1 \
12-2
\2 1 2/
4.6
Soient (£,(.,
On note || . ||
Montrer que f
•»
un espace euclidien et p une projection de E.
la norme euclidienne associée au produit scalaire.
> est
une projection orthogonale si et seulement si
\/xeE: \\p(x)\\^\\x\\.
| => | Il s'agit d'un résultat de cours, rappelons rapidement la démonstration.
Si p est la projection orthogonale sur un sous-espace vectoriel F de £", on peut écrire
pour tout x de E
x = Pf(x) + z
avec pf(x) e F et z e F±, donc Pf(%) -L z.
Le théorème de Pythagore implique alors
IWI2 = IM*)II2 + IMI2,
d'où
|bF(x)||2=||x||2-|N|2<||x||2,
et le résultat est alors immédiat.
| <= | On suppose que p est une projection 249 sur F parallèlement à G, on veut montrer
que F et G sont orthogonaux.
On considère donc (y, z) G FxG, on veut montrer que y _L z, c'est-à-dire que (y, z) = 0.
Le résultat étant évident si y = 0, on suppose 2/^0.
On va calculer le projeté d'une combinaison linéaire de y et z.
249. Naturellement, F et G sont des sous-espaces vectoriels supplémentaires de E.
4.12 Exercices corrigés du chapitre 4 gj|j
On note V* G M, xt = y + tz G £.
Puisque 2/ G F et tz G G, on a évidemment
v* g m, p(x*) = y-
L'hypothèse donne alors
wgk, lb(xt)|| = |MK|N| = ||j/ + MI-
En élevant au carré, il vient
V* G M, (y,y) ^(y + tz,y + tz) = (y,y) + 2t (y,z) + t2 (z,z).
Il faut en déduire la nullité de (y, z).
Puisque l'hypothèse est une inégalité, on réalise que l'on va séparément démontrer que
ce produit scalaire est positif et négatif.
1. Après simplification des (y,y) et division250 par t, il vient
V*gM;, 0^2(y,z)+t(z,z).
Le passage à la limite t —> 0+ impose alors
(V,z)>0>
2. Avec les mêmes étapes mais pour t < 0, l'inégalité change de sens et donne
VteKL, 0>2(y,z)+t(z,z).
Le passage à la limite t —ï 0~ impose alors
G/,*} <0.
On conclut bien (2/, 2) = 0, d'où l'orthogonalité de F et G.
L'idée géométrique sous-jacente est qu'une projection selon un angle obtus peut
augmenter les distances.
250. Dans un premier temps, pour t > 0.
Chapitre 4. Espaces préhilbertiens
m
On fixe un entier n
E =
1.
2.
Rn[X] l'espace
On pose
Montrer que 1
G N et n + 1 réels
vectoriel des polyn
V(P,Q)eE\
on définit ainsi un
ao, ûi,
5mes de
{P,Q)
..., an deux à deux distincts.
degré inférieur ou égal à n.
k=0
produit scalaire sur E.
Déterminer une base orthonormée de (£?,
<■,.»•
On note
1. Le caractère bilinéaire symétrique de (., . ) est évident.
Considérons maintenant P G E.
n
On a alors (P, P) = \^ P(ak)2 ^ 0 puisque Ton a affaire à une somme de termes
k=o
positifs.
Il reste à prouver que si (P, P) = 0, alors P = 0.
n
Or (P,P) = 0 équivaut à y^(P(afc)) = 0, et l'on a ainsi une somme nulle de
fc=0
termes positifs.
On en déduit que chaque terme est nul, c'est-à-dire que
VfcG[0,n], (P(afc))2 = 0.
Ainsi,
VfcG[0,n], P(afc) = 0,
c'est-à-dire que les nombres ao, ai, ..., an sont des racines de P.
Le polynôme P a ainsi (au moins) n + 1 racines distinctes, et comme P est de
degré au plus n, on en déduit immédiatement que P = 0.
Ainsi, (., . ) est bien un produit scalaire251 sur E.
2. On pourrait tenter d'appliquer le procédé de Gram-Schmdit à la base canonique
(1, X,..., Xn) de E, mais on va utiliser une méthode plus rapide et moins calcu-
latoire.
251. Notons que la même expression de (., . ) ne définirait pas un produit scalaire sur M[X], puisqu'avec
Po = (X — ao)(X — a\)...(X — an), ou tout polynôme s'annulant en chaque Oi, on a Po ^ 0 mais
<Po,Po>=0.
4.12 Exercices corrigés du chapitre 4 |j5jg
On constate que si l'on se donne une famille (Po,Pi, ...,Pn) de E telle que
V(z,fc) G [0,n]2, Pi(ak) = ôi,k, alors on aura
n
Vî G [0,n], (PuPi) = ^(P,(afc))2 = 1
fc=0
puisque tous les termes sont nuls, sauf le terme pour k = i qui vaut 1.
Et on a aussi pour tous i et j dans [0, n] tels que i ^ j,
n
(P<,Pi>=5^fl(afc)Pi(afc) = 0
fc=0
car lorsque Pi(a&) ^ 0, on a fc = i ^ j et alors Pj(dk) = 0, donc Vfc G |[0,n],
Pt(ofc)Pi(ofc) = 0.
Ainsi, une telle famille de n + 1 vecteurs serait orthonormée dans E qui est de
dimension n + 1, donc serait une base orthonormée de E.
Or nous avons déjà rencontré une telle famille de polynômes lors de l'étude de
l'interpolation de Lagrange252.
On définit donc pour tout i G [0, n] le polynôme
xx Ken — dk J
fc€|[0,n]|, ^ * */
et le travail effectué précédemment permet de conclure que (Po,Pi, ...,Pn) est
une base orthonormée de (E, (., . )).
4.8 Polynômes de Tchebychev
1. Soit la suite de polynômes à coefficients réels (Tn)ne^ définie par
T0(X) = 1, TipQ = X et Vn G N*, Tn+1(X) = 2XTn{X) - Tn^(X).
Montrer que l'on a
\/n G N, \/x G M, Tn(cos(a:)) = cos(na;).
Montrer (pour tout n) que Tn est Vunique polynôme vérifiant cette propriété.
252. cf. page 151.
ïïil Chapitre 4. Espaces préhilbertiens
2. Soit n G N. Déterminer le coefficient dominant et le degré de Tn.
On pourra commencer par écrire To, 7\, T2, T3 et T4.
3. Déterminer la parité de Tn en fonction de n.
4. Montrer qu'en posant V(P, Q) E (M[X])2, (P, Q) = / ^H^ d£, on définit
J-i v 1 ~£
un produit scalaire sur M.[X].
5. Montrer que la famille (Tn)nG^ est une base orthogonale (pour le produit scalaire
(.,.)) de R[X\.
6. En déduire une base orthonormée de M[X] pour ce même produit scalaire (., . ).
1. Étant donné que la suite (Tn)n€N est définie par une relation de récurrence
double, on démontre la propriété par récurrence double. Naturellement, la
propriété à démontrer est
(Hn) : VxGM, Tn(cos(x)) =cos(nx).
• Initialisation : il faut montrer Ho et Hi.
Puisque T0(X) = 1, on a Vx G M, To(cos(x)) = 1 = cos(Ox), donc (Ho) est
vraie.
De même, puisque T\(X) = X, on a \/x G M, Ti(cos(x)) = cos(x) = cos(lx),
donc (H\) est vraie.
• Hérédité : Supposons (pour un certain entier n G N* que (Hn-\) et (Hn) sont
vraies, et montrons que (Hn+i) est alors vraie.
On a par construction de Tn+i et par les hypothèses de récurrences supposées :
\/x G M, Tn+i ( cos(x)) = 2 cos(x)Tn( cos(x)) - Tn_i (cos(x))
= 2 cos(x) cos(nx) — cos ((n — l)x).
En appliquant les formules du développement de cos(a + b) et de cos(a — b) avec
a = nx et b = x, on a
{cos ((n + :
cos ((n — :
l)x) = cos(nx) cos(x) — sin(nx) sin(x),
Vx G M, <
- — l)x) = cos(nx) cos(x) + sin(nx) sin(x).
4.12 Exercices corrigés du chapitre 4
EH
On en déduit en sommant
Vx G M, cos ((n + l)x) + cos ((n — l)x) = 2 cos(x) cos(nx),
ou encore
Va; G M, 2 cos(x) cos(nx) — cos ((n — l)x) = cos ((n + l)x).
On reconnaît le terme trouvé plus haut, et en identifiant on peut affirmer que
\/x G M, Tn+i ( cos(x)) = cos ((n + l)x).
Ainsi, (Hn+i) est vérifiée.
La propriété (Hn) est donc vraie pour tout entier n par le principe de récurrence
(double).
Montrons maintenant l'unicité de Tn.
Soit n G N, supposons qu'il existe un polynôme S tel que
Vx G M, 5(cos(x)) = cos(nx).
On a alors \/x G M, 5(cos(x)) = Tn(cos(a;)).
Mais pour tout t G [—1,1], il existe x réel tel que cos(x) = t, et ainsi
S(t) = S(cos(x)) = Tn(cos(x)) = Tn(t).
Nous venons de prouver que V£ G [—1,1], S(t) — Tn(t) = 0.
Le polynôme S — Tn a une infinité 253 de racines, donc c'est le polynôme nul.
On a forcément S = Tn, l'unicité est donc prouvée.
2. On trouve aisément à l'aide de la formule de récurrence :
• T0(X) = 1
• T1(X) = X
• T2(X) = 2X2 - 1
• T3(X) = 4X3 - 3X
• T4(X) = SX4 - SX2 + 1
253. Tous les nombres de l'intervalle [—1,1]-
Chapitre 4. Espaces préhilbertiens
En voyant ces premiers termes, il est naturel de conjecturer que Tn est un poly-
{1 si n = 0,
2n"1 si n ^ 1.
Ce résultat se démontre lui aussi par récurrence double sur n.
L'initialisation est évidente : Tq(X) = 1 est de degré 0 et de coefficient
dominant 1, et Ti(X) = X est de degré 1 et de coefficient dominant 1 = 21_1.
Pour l'hérédité, supposons la propriété démontrée aux rangs n — 1 et n pour un
certain n ^ 1, et démontrons-la au rang n + 1.
Par hypothèse, 2XTn(X) est de degré 1 + deg(Tn) = n + 1, et de coefficient
dominant 2cn = 2.2n_1 = 2(n+1)"1.
Quant à Tn_ipO, il est de degré n - 1< deg(2XTn(X)).
Ainsi, Tn+i(X) = 2XTn(X) - Tn-i(X) est de degré n + 1, et de coefficient
dominant 2(n+1)-1 = cn_|_i, donc la propriété est vraie au rang n + 1, et la preuve
est achevée par récurrence.
3. En étudiant les premiers termes (n ^ 4), on constate que le polynôme Tn est
pair si n est pair et que Tn est impair si n est impair254.
Nous allons démontrer que cette propriété demeure vraie à tout ordre.
Au lieu de refaire une récurrence double comme précédemment, nous allons
effectuer une récurrence simple, mais avec l'hypothèse suivante :
(Pfc) : le polynôme T<ik est pair et le polynôme T^k-^x est impair
• Initialisation (k = 0) : le polynôme To(X) = 1 est pair et Ti(X) = X est impair,
donc (Po) est vraie.
• Hérédité : Supposons la propriété (P&) vraie pour un certain entier k.
On utilise la définition des polynômes (Tn) par récurrence avec n = 2k + 1 qui
s'écrit
^2(fc+i) = 2XT2k+i(X) - T2k(X).
Or par hypothèse de récurrence, T2k+i{X) est un polynôme impair, donc le
produit 2XT2k+\(X) est un polynôme pair.
Par la même hypothèse de récurrence, T2k{X) est pair.
254. En d'autres termes, Tn a la même parité que n.
4.12 Exercices corrigés du chapitre 4 g|
La différence T2^k+^{X) = 2XT2k+i(X) — T2k(X) est ainsi un polynôme pair.
On a alors de même
T2(fc+i)+ip0 = 2XT2(k+i)(X) - T2fc+iP0,
où 2XT2(k+\)(X) est impair (produit de 2X impair par T2(k+i)(X) pair) et où
T2k+i(X) est aussi impair, donc T2(fc+i)+i(A') est impair.
Ainsi, la propriété (Pfc+i) est vérifiée.
On peut alors conclure que la propriété (P&) est vraie pour tout entier fc, et ainsi
que Tn a même parité que n, pour tout entier n.
Ce résultat peut se résumer ainsi, en évitant de distinguer le cas n pair / n
impair :
VneN, Tn(-X) = (-l)nTn(X).
On aurait pu démontrer directement ce résultat par une récurrence (double).
4. D'après le résultat de la proposition 112, il suffit de montrer que la fonction p :
t i—> t est continue et à valeurs strictement positives sur / =1—1, lf et
que Vn G N, 11—> tnp(t) est intégrable sur /.
Il est absolument évident que p est bien continue et à valeurs dans ]0, +oo[.
Soit n G N. Puisque sur / on a |£n| < 1 on peut affirmer que 0 ^ Knp(*)l ^ pM
pour tout t dans /.
Il suffit donc de montrer que p est intégrable sur /.
Or p est continue sur [0,1[, et comme au voisinage de 1, p(t) =
y/T+t.y/T^t
1/V5
^ 0, elle est intégrable sur [0,1[ par comparaison aux intégrales de
(1-*)1/2
Riemann255.
La fonction p est clairement paire, on en déduit immédiatement que p est
intégrable sur /.
On peut donc conclure que (., . ) est bien un produit scalaire sur M[X].
255. Au lieu de cette comparaison, on peut dire que l'on connaît une primitive de p, à savoir la fonction
arcsin, sur [0,1[. Le fait que arcsin a une limite en 1" donne alors l'intégrabilité de p sur [0,1[.
7FI Chapitre 4. Espaces préhilbertiens
Notez que dans un problème, outre la preuve ci-dessus, vous pourriez être amené
à démontrer les résultats de la proposition 112 sus-mentionnée.
5. Soit (n, m) G N2 tels que n^m.
/1 Tn(t)Tm(t)
n t m - dt = 0.
-i Vl -12
On applique le changement de variable ]0,7r[ —> /=]—1,1[ au calcul de
x i—> t = cos(x)
l'intégrale.
On sait par construction que
Vx G M, Tn(cos(a;)) = cos(nx) et Tm(cos(a;)) = cos(mx).
On a aussi 1 — t2 = 1 — cos2 (a;) = sin2 (a;), et sin(x) > 0 car x G]0,7r[ donc
VT^¥ = +sm(x).
Enfin, dt = — sin(x) dx.
Le changement de variables256 donne
im m v /*° cosinx) cosimx) , . , N\ , /^ , x , x ,
(Tn, Tm) = / ——j-^- ( — sin(x)) dx = + / cos(nx) cos(mx) dx.
Jn sin(x) J0
Par linéarisation, on trouve cos(nx) cos(mx) = - ( cos ((n + m)x) + cos ((n —
Comme de plus n + m^0etn-m^0on arrive à
(T„, Tm) = - / ( cos ((n + m)x) + cos ((n - ra)z) J dx
1 T 1 1 ~T
= - sin ((n + m)x) H sin ((n — m)x)
2 [n + ra v ' n — m v 7J0
= 0,
ce qui achève de démontrer que la famille (Tn)ne^ est orthogonale.
Comme par ailleurs, on a Vn G N, deg(Tn) = n on sait257 que (Tn)n€N est une
base de M[X], et donc finalement on peut affirmer que (Tn)n€N est une base
orthogonale de R[X].
256. Qui est valide car l'intégrale est absolument convergente.
257. cf. la proposition 46 page 101.
4.12 Exercices corrigés du chapitre 4
6. Il suffit de normaliser les vecteurs de la base orthogonale.
Il faut donc calculer la norme de chaque Tn.
Or le même calcul que précédemment donne
Vn G N, ||Tn||2 = (Tn,Tn) = [ cos2(nx)dx.
Jo
Par linéarisation, on trouve (Tn,Tn) =
/o
7r si n = 0,
On pose donc Q0(X) = \J\tq{X) = ^ et Vn G N*, Qn(X) = \J^Tn{X).
La famille (Qn)n€N est alors de manière évidente une base orthonormée de R[X]
pour le produit scalaire (., . ).
4.9 Polynômes de Hermite
On note h la fonction de M dans lui-même définie par Va: G M, h(x) = e~x .
La fonction h étant clairement de classe C°° sur M, on peut, en notant h^ sa dérivée
n-ième, poser
Vn G N, Va: G M, Pn(z) = eœ2fc(n>(a;).
1. Calculer /i', ft" et h^s\ En déduire Pi, P2, P3 et préciser également Po-
2. En dérivant l'égalité h^n\x) = Pn(x)e~x (valable Va: G M) déterminer une
relation entre Pn+i et Pn (ainsi que P^).
En déduiie que Pn est une fonction polynomiale, que l'on identifiera à un
polynôme.
Déterminer également le degré et le coefficient dominant de Pn en fonction de n.
3. Montrer que la formule
/+00
P(t)Q(t)e-t2 dt
-OO
définit un produit scalaire sur '
4. À l'aide d'intégrations par parties, montrer que (pour tout n G N*) on a
Pni_Mn_![X].
En déduire que (Pn)neN est une base orthogonale de R[X].
|g|Ij| Chapitre 4. Espaces préhilbertiens
QEE1
1. On trouve aisément à l'aide de dérivations successives que Vx G M,
h<®(x) = h(x) = e~x2
ti(x) = -2xe~x2
h"(x) = -2e~x2+4x2e~x2 = (4x2-2)e~x2
hW(x) = Sxe~x2 - 2x(4x2 - 2)e~x2 = (Sx3 + 12x)e-x2
2
En multipliant par ex on en déduit sans peine que Vx G M,
PoO*) = 1
Pi(x) = -2x
P2(x) = Ax2-2
P3(x) = -Sx3 + 12x
On constate que, conformément à l'énoncé de la question suivante, les fonctions
obtenues sont polynomiales, et l'on peut ainsi écrire
P0 = 1 ; p1 = -2X ; P2 = 4X2 - 2 ; P3 = -SX3 + 12X
2. En dérivant l'égalité suggérée, on trouve (à n fixé)
VxgM, Pn+i(x) = ex2hSn+l\x)
= ex* {P'n{x)e-*2 - 2xPn(x)e-x2)
= P^{x)-2xPn{x).
On démontre alors par récurrence sur n que Pn est un polynôme.
Mais on ne se contente pas de cette propriété. Comme les premières valeurs de
Pn trouvées ci-dessus nous permettent de le conjecturer, on montre que Pn est
un polynôme de degré n et de coefficient dominant (—2)n.
L'initialisation est évidente avec Po = 1 de degré 0 et de coefficient dominant
1 = (-2)°.
Si l'on suppose Pn polynomiale (et de terme dominant (—2)nxn), alors
X —> Pn+l{x) = KM ~ 2xPn{x)
4.12 Exercices corrigés du chapitre 4 ES
est aussi polynomiale. Pn+i se déduit de Pn : Pn+i = P'n — 2XPn.
Quant au degré, on a deg(—2XPn) = 1 + deg(Pn) = n + 1 alors que le degré de
P'n est inférieur à deg(Pn) = n, donc deg(Pn+i) = n + 1.
Enfin, le coefficient dominant, c'est-à-dire de Xn+1, n'apparaît que dans le terme
-2XPn.
Ce coefficient dominant vaut donc —2 fois le coefficient de Xn dans Pn, c'est-à-
dire (-2). (-2)n = (-2)n+1.
Ainsi s'achève la preuve (par principe de récurrence).
3. Le résultat se trouve dans le cours, il s'agit d'un des exemples de la page 357 à
la suite de la proposition 112.
4. On repart de l'égalité Vx G M, e~x2 Pn(x) = hSn\x).
Ainsi, si l'on fixe un polynôme Q quelconque dans M[X], on aura
Vx G M, Pn(x)Q(x)e-x2 = hM(x)Q(x).
C'est ce qui nous incite à effectuer une intégration par partie, en intégrant
naturellement le terme dérivé, c'est-à-dire le h^.
Ainsi, on a (en fixant un réel positif A quelconque)
f Pn(x)Q(x)e-x2dx=[h^n-1\x)Q(x)\A_A- f h^-1\x)Q'(x)dx
Or h^n~l\x)Q{x) est le produit d'une fonction polynomiale par e~x , donc est
de limite nulle en ±oo par croissance comparée.
Toutes les intégrales convergent, donc en faisant tendre A vers +oo on obtient
/+oo /»+oo
ft(n)(x)Q(x)dx = - / h(n-V(x)Q'(x)dx.
-oo J—oo
On fait encore n — 1 intégrations par parties et l'on arrive ainsi à
/+oo
h(x)Q^(x)dx.
-oo
Cette égalité est valable pour tout polynôme Q.
Mais si l'on suppose Q G Mn-ipf], alors Q^ est nul et l'on a bien (Pn, Q) = 0.
Montrons que (Pn)n€N est orthogonale.
Soient donc n et m dans N avec n^m. Quitte à les échanger, on peut supposer
n> m.
ïïsl Chapitre 4. Espaces préhilbertiens
On a alors n G N*, et comme deg(Pm) = m ^ n — 1, on a Pm G Mn-ifA"].
Il suffit d'appliquer ce qui précède à Q = Pm pour en déduire (Pn, Pm) = 0.
La famille (Pn)n€N est donc bien orthogonale. Le fait qu'il s'agit d'une base est
une conséquence258 du fait que Vn G N, deg(Pn) = n.
Remarque
/+oo
h(x)QM(x)dx à Q = Pn, on peut
-oo
calculer ||Pn|| •
Comme Pn est de degré n, sa dérivée n-ième Pn est une constante. Plus précisément,
Pn est égale à n! fois le coefficient dominant de Pn (à savoir (—2)n).
Il vient ainsi
||Pn||2 = (-l)" f °° h(x)n\(-2)ndx = 2nn\ [ e'** dx
J -oo JR
Or la valeur de cette intégrale est connue, et finalement on peut affirmer
||Pn||2 = 2"n!V^.
258. cf. la proposition 46 page 101.
Inde?t
A
Abel (notice biographique), 12
abélien (groupe —), 11
adjoint d'un endomorphisme, 447
algèbre (s)
définition d'une —, 73
morphisme d'—, 74
algorithme
de calcul d'une signature, 50
de calcul de déterminant, 145
de calcul de l'indicatrice d'Euler, 66
de décomposition d'une permutation, 46
de décomposition primale d'un nombre, 65
de Gram-Schmidt, 392
du crible d'Eratosthène, 64
alternée (application —), 119
angle orienté (mesure d'un —), 418
anneau (x)
commutatif, 52
définition d'un —, 51
intègre, 53
inversibles d'un —, 52
morphisme d'—, 53
principal, 55, 67
pseudo ,51
annulateur
idéal —, 77
polynôme —, 77
antéduale (base —), 184
antisymétrique (application —), 119
application
alternée, 119
antisymétrique, 119
multilinéaire, 117
auto-adjoint (endomorphisme—), 448
automorphisme
de groupes, 21
orthogonal, 403
axe d'une rotation dans l'espace, 438
B
base
antéduale, 184
coordonnées dans une — orthonormee, 379
définition d'une —, 99
directe, 156
duale, 179
indirecte, 156
orthonormee, 378, 474
produit scalaire dans une — orthonormee, 379
Bessel
fonction de —, 214
inégalité de —, 387, 479
notice biographique, 214
bidual, 182
bilinéaire (forme —), 340
c
canonique (produit scalaire —), 343
caractéristique
d'un corps, 72
polynôme —, 234
Cauchy
inégalité de Schwarz, 359, 467
Cfflîl
INDEX
notice biographique, 120
théorème de Lipschitz, 280
Cayley
notice biographique, 223
théorème de Hamilton, 266
chinois (théorème des restes —), 60
classes d'équivalence, 30
cofacteur(s), 131
matrice des —, 135
colonne propre, 225
comatrice, 135
combinaisons linéaires, 95
commutatif
anneau —, 52
groupe —, 11
composition (loi de — interne), 8
congruence (relation de —), 31
conjugaison, 26
convexité, 366
stricte, 366
coordonnée (s)
d'un vecteur, 99
dans une base orthonormée, 379
du produit vectoriel, 429
fonctions —, 99
corps
caractéristique d'un —, 72
définition d'un —, 69
gauche, 69
crible d'Eratosthène (algorithme du —), 64
cycle (s)
décomposition en —, 44
définition d'un —, 42
cyclotomiques (polynômes —), 71
D
décomposition
algorithme de — d'une permutation, 46
algorithme de — primale d'un nombre, 65
d'une permutation, 44
définie
forme bilinéaire — positive, 340
forme sesquilinéaire — positive, 462
déterminant
algorithme de calcul d'un —, 145
d'un endomorphisme, 134
d'une matrice diagonale, 139
d'une matrice triangulaire, 139
d'une transposée, 130
définition du — pour une application linéaire,
135
définition du — pour une famille, 125
de Vandermonde, 141
définition du — d'une matrice carrée, 128
diagonale
déterminant d'une matrice —, 139
matrice à — strictement dominante, 172
diagonalisable
endomorphisme —, 242
matrice —, 242
diagonalisation
d'une projection, 243, 244, 256
d'une symétrie, 243, 244, 256
théorème de — simultanée, 259
directe
base —, 156
isométrie —, 412
isométrie — de l'espace, 436
somme — de sous-espaces, 106
somme — orthogonale, 396, 472
distingué (sous-groupe —), 81
division vectorielle, 435
dominante (matrice à diagonale strictement —), 172
double produit vectoriel, 434
dual(e)
base —, 179
espace — (algébrique), 175
espace — (topologique), 175
E
élément (ordre d'un —), 34
élément neutre d'un groupe, 8
éléments propres
d'un endomorphisme, 222
d'une matrice, 225
endomorphisme
adjoint d'un —, 447
auto-adjoint, 448
de groupes, 21
déterminant d'un —, 134
diagonalisable, 242
éléments propres d'un —, 222
hermitien, 483
induit, 215
orthogonal, 399
sous-espace propres d'un —, 222
symétrique, 448
trace d'un —, 116
INDEX
valeur propre d'un —, 222
vecteurs propres d'un —, 222
engendré
idéal —, 55
sous-espace vectoriel —, 96
sous-groupe—, 28
ensemble quotient, 30
équivalence
classes d'—, 30
relation d'—, 30
Eratosthène (algorithme du crible d'—), 64
espace
de Hilbert, 339, 459
dual (algébrique), 175
dual (topologique), 175
euclidien, 341
hermitien, 463
préhilbertien réel, 341
préhilbertien complexe, 463
euclidien (ne)
espace —,341
norme —, 365
Euler
algorithme de calcul de l'indicatrice d'—, 66
fonction indicatrice d'—, 59
théorème d'—, 60
exponentielle de matrice, 270
famille
d'éléments d'un ensemble, 94
génératrice, 96
libre, 96
liée, 96
orthogonale, 373, 472
orthonormée, 376, 473
presque toute nulle, 94
totale, 389
Fermât
notice biographique, 61
Fermât
petit théorème de —, 60
fonction (s)
coordonnées, 99
de Bessel, 214
indicatrice d'Euler, 59
fondamental (système — de solutions), 285, 292
forme
bilinéaire, 340
multilinéaire, 118
sesquilinéaire, 462
forme linéaire
représentation d'une — dans un espace
euclidien, 397
Fréchet (théorème de Riesz ), 459
G
Galois (notice biographique), 40
gauche (corps —), 69
génératrice (famille —), 96
Gershgorin
notice biographique, 305
théorème de —, 304
Gram
algorithme de Schmidt, 392
notice biographique, 390
procédé de Schmidt, 389
groupe (s)
abélien, 11
automorphisme de —, 21
commutatif, 11
définition d'un —, 8
des inversibles, 52
des permutations, 12, 39
endomorphisme de —, 21
isomorphisme de —, 21
monogène, 37
morphisme de —, 21
ordre d'un —, 27, 34
orthogonal, 13, 18, 402, 406
sous ,16
sous distingué, 81
spécial linéaire, 18
spécial orthogonal, 18, 408
symétrique, 39
unitaire, 481
H
Hadamard
lemme d' —, 173
notice biographique, 174
Hamilton
notice biographique, 265
théorème de Cayley , 266
Hermite (polynômes de —), 358, 395
hermitien(ne)
nn
INDEX
endomorphisme, 483
espace —, 463
forme sesquilinéaire —, 462
matrice —, 482
norme —, 469
Hilbert
espace de —, 339, 459
notice biographique, 342
hyperplan, 175
I
idéal
annulateur, 77
définition d'un —, 54
engendré, 55
principal, 55
identité (s)
de Lagrange, 435
de polarisation, 369, 471
du parallélogramme, 369, 471
image d'un morphisme de groupes, 25
indicatrice d'Euler
algorithme de calcul de 1'—, 66
fonction —, 59
indices d'une famille, 94
indirecte
base —, 156
isométrie —, 412
isométrie — du plan, 421
induit
endomorphisme —, 215
produit scalaire —, 341
inégalité
de Bessel, 387, 479
de Cauchy-Schwarz, 359, 467
de Minkowski, 363, 469
triangulaire, 363, 469
intègre (anneau —), 53
interne (loi de composition —), 8
interpolation de Lagrange (théorème d'—), 147
inverse dans un groupe, 9
inversibles
d'un anneau, 52
groupe des —, 52
isométrie
directe, 412
directe de l'espace, 436
indirecte, 412
indirecte du plan, 421
vectorielle, 412
isomorphisme de groupes, 21
J
Jordan
notice biographique, 311
théorème de —, 309
K
Kronecker (symbole de —), 179
L
Lagrange
identité de —, 435
notice biographique, 148
théorème d'interpolation de —, 147
théorème de —, 35
Laguerre (polynômes de —), 357, 395
Legendre (polynômes de —), 356, 394
lemme
d'Hadamard, 173
des noyaux, 170
liée (famille —), 96
libre (famille —), 96
linéaire (s)
combinaisons —, 95
groupe spécial —, 18
Lipschitz
notice biographique, 279
théorème de Cauchy , 280
loi de composition interne, 8
M
matrice (s)
à diagonale strictement dominante, 172
des cofacteurs, 135
diagonalisable, 242
éléments propres d'une —, 225
exponentielle de —, 270
hermitienne, 482
orthogonale, 405
sous-espace propres d'une —, 225
trace d'une —, 114
valeur propre d'une —, 225
INDEX
vecteurs propres d'une —, 225
mesure d'un angle orienté, 418
minimal (polynôme —), 77, 169
Minkowski
inégalité de -, 363, 469
notice biographique, 364
mixte (produit —), 425
modulo (relation —), 31
monogène (groupe —), 37
morphisme
d'algèbre, 74
d'anneaux, 53
de groupes, 21
image d'un — de groupes, 25
noyau d'un — de groupes, 25
multilinéaire
application —, 117
application — alternée, 119
application — antisymétrique, 119
forme —, 118
N
norme
euclidienne, 365
hermitienne, 469
norme (vecteur —), 376, 473
noyau(x)
d'un morphisme de groupes, 25
lemme des —, 170
nulle (famille presque toute —), 94
o
opposé, 11
orbite, 45
ordre
d'un élément, 34
d'un groupe, 27, 34
d'une valeur propre, 246
orientation, 154, 156
orthogonal
automorphisme —, 403
endomorphisme, 399
groupe —, 13, 18, 402, 406
groupe spécial —, 18, 408
orthogonale
famille —, 373, 472
projection —, 385, 477
somme directe —, 396, 472
symétrie —, 480
orthogonales
matrices —, 405
parties —, 382
orthogonaux
polynômes —, 393
supplémentaires —, 385
vecteurs —, 370
orthonormalisation
procédé d' — de Gram-Schmidt, 389
orthonormée
base —, 378, 474
coordonnées dans une base —, 379
famille —, 376, 473
produit scalaire dans une base —, 379
parallélogramme (identités du —), 369, 471
parties orthogonales, 382
permutation (s)
algorithme de décomposition d'une —, 46
définition d'une —, 39
groupe des, 12, 39
signature d'une —, 48
support d'une —, 43
polarisation (identités de —), 369, 471
polynôme (s)
annulateur, 77, 165
caractéristique, 234
cyclotomiques, 71
d'une matrice diagonale, 164
dans une algèbre, 74
de Hermite, 358, 395
de Laguerre, 357, 395
de Legendre, 356, 394
de Tchebychev, 357, 395, 499
minimal, 77, 169
orthogonaux, 393
positive
forme bilinéaire définie —, 340
forme sesquilinéaire définie —, 462
préhilbertien
espace — complexe, 463
espace ->— réel, 341
presque tout nulle (famille —), 94
primale (algorithme de décomposition —), 65
principal
anneau —, 55, 67
QQ
INDEX
idéal —, 55
procédé d'orthonormalisation de Gram-Schmidt,
produit
mixte, 425
scalaire complexe, 462
scalaire réel, 340
vectoriel, 427
produit scalaire
canonique, 343
dans une base orthonormée, 379
induit, 341
produit vectoriel
coordonnées du —, 429
double —, 434
projection
définition d'une —, 110
diagonalisation d'une —, 243, 244, 256
orthogonale, 385, 477
propre
colonne —, 225
valeur — d'un endomorphisme, 222
valeur — d'une matrice, 225
vecteur — d'un endomorphisme, 222
vecteur — d'une matrice, 225
pseudo-anneau, 51
puissances des éléments dans un groupe, 15
Pythagore
notice biographique, 371
théorème de —, 371, 472
Q
quotient (ensembles —), 30
R
réflexion, 412
réflexive (relation —), 30
relation
d'équivalence, 30
de congruence, 31
modulo, 31
réflexive, 30
symétrique, 30
transitive, 30
représentant, 30
restes (théorème des — chinois), 60
Riesz
théorème de —, 397
théorème de Fréchet, 459
rotation
axe d'une — dans l'espace, 438
dans l'espace, 436
dans le plan, 415
S
scalaire
produit — complexe, 462
produit — réel, 340
Schmidt
algorithme de Gram , 392
notice biographique, 466
procédé de Gram , 389
Schrôdinger
équation de —, 214
note biographique, 214
Schwarz
inégalité de Cauchy , 359, 467
notice biographique, 362
semi-norme, 349
sesquilinéaire (forme —), 462
signature
algorithme de calcul d'une —, 50
d'une permutation, 48
simultanée (théorème de diagonalisation —), 259
somme
de sous-espaces, 106
directe de sous-espaces, 106
directe orthogonale, 396, 472
sous-espace (s)
caractéristique, 306
propres d'un endomorphisme, 222, 225
stable, 215
supplémentaires, 109
vectoriel engendré, 96
sous-groupe (s)
définition d'un —, 16
de (Z,+), 20
distingué, 81
engendré, 28
spécial
groupe — linéaire, 18
groupe — orthogonal, 18, 408
spectral
théorème — (cas complexe), 483
théorème — (cas matriciel complexe), 484
théorème — (cas matriciel), 458
théorème — (cas réel), 455
INDEX
stable (sous-espace —), 215
stricte (convexité —), 366
suite, 94
supplémentaires
orthogonaux, 385
sous-espaces —,109
support d'une permutation, 43
symbole de Kronecker, 179
symétrie
diagonalisation d'une —, 243, 244, 256
orthogonale, 480
symétrique
endomorphisme —, 448
forme bilinéaire —, 340
groupe —, 39
relation --, 30
système fondamental de solutions, 285, 292
Tchebychev (polynômes de —), 357, 395, 499
théorème
d'Euler, 60
d'interpolation de Lagrange, 147
de Cauchy-Lipschitz, 280
de Cayley-Hamilton, 266
de décomposition des permutations, 44
de diagonalisation simultanée, 259
de Gershgorin, 304
de Jordan, 309
de Lagrange, 35
de Pythagore, 371, 472
de représentation des formes linéaires, 397
de Riesz, 397
de Riesz-Fréchet, 459
de Wedderburn, 69
des restes chinois, 60
petit — de Fermât, 60
spectral (cas complexe), 483
spectral (cas matriciel complexe), 484
spectral (cas matriciel), 458
spectral (cas réel), 455
totale (famille —), 389
trace
d'un endomorphisme, 116
d'une matrice, 114
transitive (relation —), 30
transposée d'une matrice (déterminant de la —), 130
transposition (s)
décomposition en —, 44
définition d'une —, 42
triangulaire
déterminant d'une matrice —, 139
inégalité —, 363, 469
u
unitaire
groupe —, 481
vecteur —, 376, 473
valeur propre
d'un endomorphisme, 222
d'une matrice, 225
ordre d'une —, 246
Vandermonde
déterminant de —, 141
notice biographique, 141
vecteur (s)
norme, 376, 473
orthogonaux, 370
propre d'un endomorphisme, 222
propre d'une matrice, 225
unitaire, 376, 473
vectoriel
coordonnées du produit —, 429
double — produit, 434
produit —, 427
sous-espace — engendré, 96
vectorielle (division —), 435
w
Wedderburn
notice biographique, 70
théorème de —, 69
Weierstrass (notice biographique), 456
wronskien, 199, 277, 291, 314
et ouvrage développe le programme d'algèbre de deuxième année
des classes préparatoires scientifiques, de façon originale,
approfondie et fidèle.
• Le texte écrit dans un style aéré permet à tous les étudiants, quel que soit
leur niveau, de suivre pas à pas les démonstrations. De nombreuses figures
facilitent la compréhension et l'assimilation des notions abordées.
• Des exercices, dont les corrigés sont très détaillés, permettent de vérifier
l'acquisition des points clés de chaque chapitre.
• L'auteur a pris soin de replacer les résultats présentés dans leur contexte
historique : les théorèmes sont datés, leurs sources précises indiquées et
des notices biographiques évoquent les faits marquants de la vie des
mathématiciens cités.
• L'ouvrage aborde également, dans les compléments de chaque chapitre, des
théorèmes plus difficiles ou moins connus, destinés aux lecteurs souhaitant
un approfondissement des sujets classiques.
L'ouvrage intéressera également les candidats au CAPES et à l'agrégation.
\
l + Conforme au nouveau programme 2014
l + De nombreux exercices corrigés
■ + Texte abondamment illustré
1 pour faciliter la compréhension
* + Tout en couleur
t
Christophe Antonini, ancien élève de l'École normale supérieure de Lyon, est professeur
agrégé en PSI au lycée Stanislas de Cannes.
initias courts
<£>deboeck
ANALYSE RLG6QR6
fl% 2' ANNÉE /^^Tl
RNRLYS6
PR0GRGILIT6S
«HMeboeck
«tfMeboeck
^fr d^boeck
< Dans la
même
collection
dirigée par
Olivier Rodot
ISBN : 978-2-8041-8170-3
9"782804"181703
PREALGE2
www.de i oecksuperieur.com