/





































































































































































Text
ТЕОРИЯ
П ОЛЕ ТА
огиз- гостехиздХт- 1947
м. А. ИСАКОВИЧ
ТЕОРИЯ
ПОЛЁТА
огиз
ГОСУДАРСТВЕННОЕ ИЗДАТЕЛЬСТВО
ТЕХНИКО-ТЕОРЕТИЧЕСКОЙ ЛИТЕРА 1У1 ы
МОСКВА 1947 ЛЕНИНГРАД
Редактор А. В. Гермогенов. Техн, редактор Н. А. Тумаркина. Подписано к пе-
чап- 8 VII 1947 г. 20,25 печ. л. 16,10 авт л. 16,85 уч.-изд. л. 34 200 тип. зн.
в печ. л. Тираж 6000 экз. А02248 Цена книги 10 руб. Переплёт 1 р. 50 к.
^аказ № 6944.
1-я Образцовая типография гресга сПолиграфкни. а» Огиза при Совете
Министров СССР. Москва, Валовая, 28.
ОГЛАВЛЕНИЕ.
Предисловие.................................. .........
ЧАСТЬ I. МЕХАНИКА.
Глава 1. Кинематика.
s 1. Относительность движения............................. 9
§ 2. Виды движения тел.................. 11
§ 3. Скорость.................. 13
§ 4. Единицы скорости .. 17
§ 5. Сложение скоростей................ 20
§ 6. Ускорение................ 23
§ 7. Вращение тела................ 28
Глава 2. Динамика.
§ 8. Силы.............................................. 32
§ 9. Сложение сил.......................................35
§ 10. О равномерном прямолинейном движении.............. 39
§11. Давление и силы давления........................... 41
§ 12. Масса............................................. 44
§ 13. Закон Ньютона..................................... 45
§ 14. Касательные и нормальные силы..................... 47
§ 15. Пары сил. Моменты................................. 49
§ 16. Закон действия" и противодействия................. 51
§ 17. Устойчивость равновесия и движения ......... 56
§ 18. Работа............................................ 61
§ 19. Мощность......................................... 66
§ 20. Энергия...............•........................... 68
§ 21. Потери механической энергии....................... 71
§ 22. Закон сохранения энергии.......................... 72
§ 23. Упругие тела.......................................74
§ 24. Силы инерции.................................... 77
Глава 3. Статика.
§ 25. Установившиеся режимы полёта...................... 84
§ 26. Равновесие сил и равновесие моментов.............. 85
§ 27. Сложение параллельных сил..........................86
§ 28. Центр тяжести......................................89
1»
4
Оглавление
ЧАСТЬ II. АЭРОДИНАМИЧЕСКИЕ СИЛЫ И РАБОТА
ВИНТОМОТОРНОЙ ГРУППЫ.
Глава 4. Атмосфера.
§ 29. Силы, действующие на самолёт в полёте......... 90
§ 30. Общие свойства жидкостей и газов.............. 93
§ 31. Атмосфера..................................... 95
§ 32. Атмосферное давление.......................... 95
§ 33. Температура воздуха......................... 99
§ 34. Плотность воздуха.............................100
§ 35. Международная стандартная атмосфера...........101
Глава 5. Движение воздуха и лобовое сопротивление.
§ 36. Обтекание тел потоком воздуха......................104
§ 37. Линии тока и спектры установившегося движения ... 105
§ 38. Лобовое сопротивление и подъёмная сила.............108
§ 39. Две составляющие лобового сопротивления.............ПО
§ 40. Закон Бернулли.....................................113
§ 41. Влияние трения на поток.............................П9
§ 42. Обтекание тел потоком идеальной жидкости . . • . . . 123
§ 43. Пограничный слой .................................126
§ 44. Величина лобового сопротивления. Число Рейнольдса . . 133
§ 45. Аэродинамические испытания.........................138
Глава 6. Аэродинамические силы крыла.
§ 46. Подъёмная сила....................................140
§ 47. Циркуляция скорости...............................145
§ 48. Возникновение циркуляции..........................149
§ 49. Величина подъёмной силы и лобового сопротивления для
крыла..................................................157
§ 50. Угол атаки крыла и распределение давлений по поверх-
ности крыла............................................'58
§51. Зависимость су и сх от угла атаки.................162
§ 52. Индуктивное сопротивление.........................164
§ 53. Кривая Лилиенталя.................................168
§ 54. Лобовое сопротивление самолёта в целом............171
§ 55. Кривая Лилиенталя для самолёта в целом............172
§ 56. Аэродинамическое качество.........................173
§ 57. Боковая сила......................................178
Глава 7. Винтомоторная группа.
§ 58. Мотор и винт.......................•..............180
§ 59. Характеристики моторов............................182
§ 60. Высотные моторы...................................188
§ 61. Воздушные вчнты...................................191
§ 62. Движение элемента лопасти винта и аэродинамические
силы, действующие на него..............................196
§ 63. Коэффициент полезного действия винта.............199
§ 64. Аэродинамические силы, действующие на винт в целом . 205
Оглавление
5
§
65. Совместная работа винта и мотора. Характеристики вин-
томоторной группы......................................211
66. Потери при работе винта............................214
67. Винты изменяемого шага.............................2*6
ЧАСТЬ III. ПОЛЁТ САМОЛЁТА.
Глава 8. Горизонтальный полёт.
§ 68. Изучение режимов полёта........................
§ 69. Условия равновесия сил при горизонтальном полёте . .
§ 70. Потребная скорость.................................
§ 71. Потребная тяга.....................................
§ 72. Потребная мощность...............•.................
§ 73. Влияние полётного веса на потребные величины ....
§ 74. Влияние высоты полёта на потребные величины ....
§ 75. Графики тяги и мощности............................
§ 76. Графики тяги и мощности при различном полётном весе
и различной высоте полёта...............................
§ 77. Изменение скорости в горизонтальном полёте. Два режи-
ма горизонтального полёта ..............................
220
221
223
227
229
232
233
238
245
248
Глава 9. Набор высоты.
§ 78. Равновесие сил при наборе высоты...................252
§ 79. Потребная скорость и лобовое сопротивление при наборе
высоты...................................................254
§ 80. Потребная тяга и угол набора.......................256
§ 81. Потребная мощность и вертикальная скорость при наборе 258
§ 82. Указательница траекторий подъёма...................259
§ 83. Зависимость вертикальной скорости подъёма от высоты
полёта...................................................261
Глава 10. Планирование.
§ 84. Равновесие сил при планировании....................265
§ 85. Спуск с работающим мотором.........................267
§ 86. Угол планирования..................................268
§ 87. Вертикальная скорость снижения.....................269
§ 88. Дальность планирования.............................270
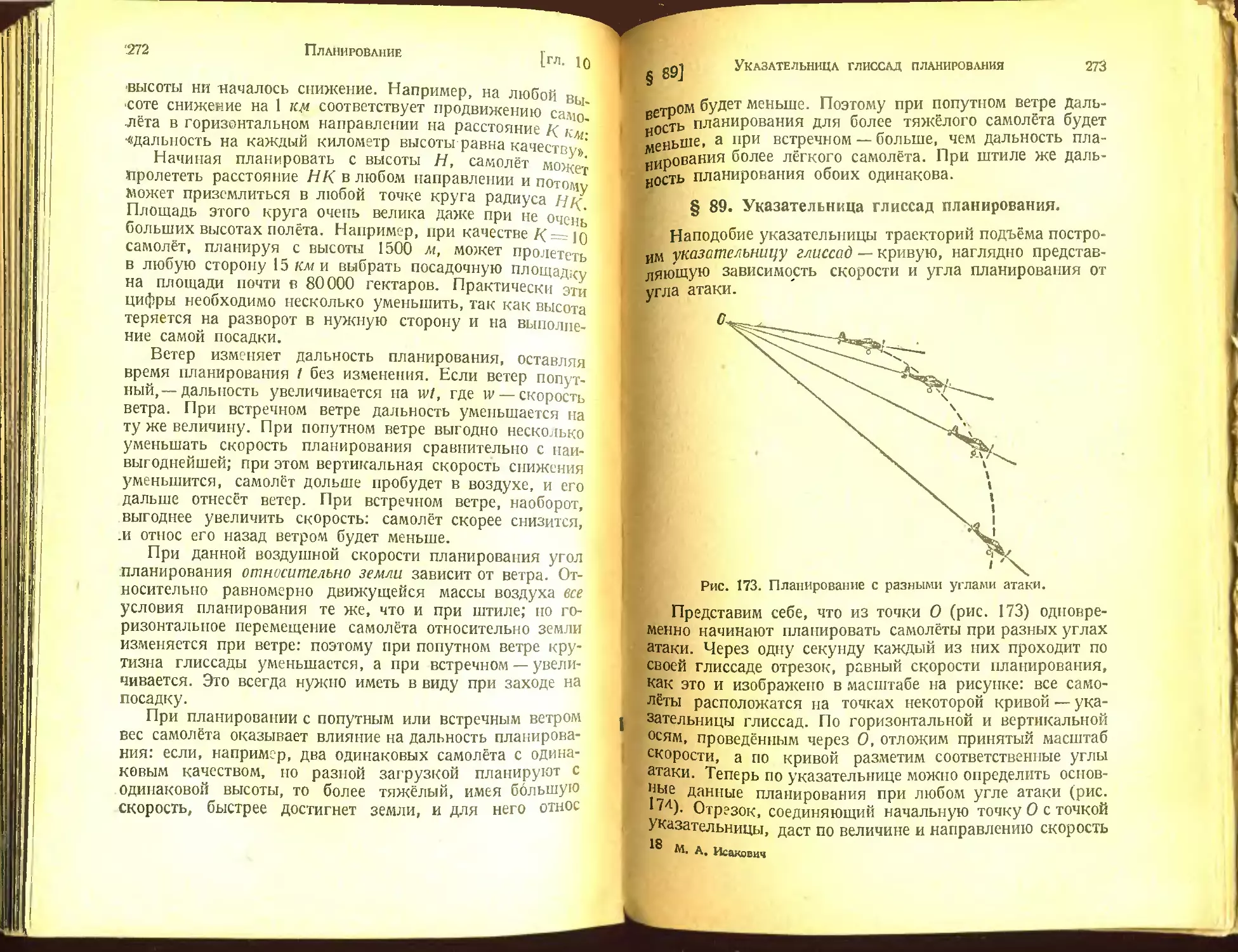
§ 89. Указательница глиссад планирования.................273
Глава 11. Равновесие моментов в полёте.
Устойчивость и управляемость.
§ 90. Главные оси самолёта и вращение вокруг главных осей 276
§91. Центровка самолёта..................................282
§ 92. Продольное равновесие и устойчивость................285
§ 93. Продольная управляемость............................291
§ 94. Влияние центровки на устойчивость и управляемость са-
молёта ...................................................294
§ 95. Давление на ручку............................• . . . 297
§ 96. Моменты вокруг продольной и нормальной осей . . . . 3QJ
6 Оглавление
§ 97. Поперечная устойчивость...........................302
§ 98. Потеря устойчивости. Штопор.305
§ 99. Поперечная управляемость...........................307
§ 100. Путевая устойчивость и управляемость..308
§ 101. Реактивный момент...........................• . . 311
Глава 12. Вираж.
§ 102. Разворот без крена........................................................312
§ 103. Правильный вираж..........................................................314
§ 104. Перегрузка на вираже......................................................317
§ 105. Потребные величины при вираже.............................................319
§ 106. Предельный вираж..........................................................321
§ 107. Вираж со скольжением......................................................322
§ 108. Равновесие моментов и работа рулей на вираже .... 325
ПРЕДИСЛОВИЕ.
Техническое развитее авиации тесно связано с на-
учными исследованиями, среди которых исключительно
важное место занимает теоретическая аэродинамика.
Интерес к основным, принципиальным чертам теории
проявляется как авиационными работниками, так и
широким кругом лиц, не связанных с работой в области
авиации. Но теоретическая аэродинамика носит в зна-
чительной степени математический характер. Поэтому
обычное изложение важнейших теоретических вопросов,
обременённых сложным математическим аппаратом,
остаётся практически недоступным читателю, не полу-
чившему специального образования. Представляется,
однако, возможным, опираясь на общеобразовательную
подготовку в объёме средней школы, последовательно
изложить известную часть круга идей классической аэро-
динамики крыла и других вопросов теории полёта
самолёта. Настоящая книга и является попыткой такого
изложения. Она рассчитана на инженерно-технический
и лётный состав авиации, на учащихся авиатехникумов
и первых курсов авиационных институтов, а также на
всех лиц, интересующихся основами науки о полёте
самолёта.
Автор не стремился к возможно более полному осве-
щению обширного предмета теории полёта. В книге
отсутствует экспериментальный материал, не затронуты
вопросы аэродинамического расчёта. Приводимые гра-
фики не относятся к какому-либо из существующих
самолётов, а носят примерный, иллюстративный харак-
тер. Главное внимание уделено вопросам, определяющим
физическую картину явлений, при этом, по возможности,
р той форме, в какой они подвергаются математической
Предисловие
обработке в более подробных курсах. Желательной
здесь являлась, если можно так сказать, первоначаль-
ная выработка «аэродинамического образа мыслей».
Для того чтобы облегчить чтение книги более широко-
му кругу читателей, изложению главных вопросов теории
полёта предпосланы главы, отчасти напоминающие важ-
ные для дальнейшего сведения из школьного курса
механики, а отчасти углубляющие их в требуемом на-
правлении.
Заметим, наконец, что предполагается хотя бы общее
знакомство читателя с самолётом и мотором внутрен-
него сгорания. Включение первоначальных сведений
по авиации не представлялось целесообразным как ввиду
обилия литературы, так и ввиду назначения этой книги.
ЧАСТЬ I.
МЕХАНИКА.
ГЛАВА 1.
КИНЕМАТИКА.
'§ 1. Относительность движения.
Движением в механике называется изменение поло-
жения данного тела относительно каких-либо других
тел. Например, когда говорят: «поток воздуха набегает
на крыло самолёта», это значит, что рассматривается
движение воздуха относительно летящего самолёта-, в то
же время воздух в целом покоится относительно земли.
Воздушный шар при ветре движется относительно земли;
в то же время он покоится относительно воздуха. Само-
лёт, летящий в строю эскадрильи, практически непо-
движен относительно других самолётов строя; но он дви-
жется с большою скоростью, например, 400 км/час, отно-
сительно земли, а в движении относительно самолёта,
идущего встречным курсом, скорость его равна 800 км1час.
Движение данного тела можно рассматривать отно-
сительно разных тел; тогда, очевидно, и движение будет
представляться по-разному. Одно и то же движение,
например, полёт самолёта, будет иметь тот или другой
вид, в зависимости от «точки зрения», т. е. от того,
по отношению к каким телам рассматривается движе-
ние: с «точки зрения» лётчика ведущего самолёта — ведо-
мый самолёт покоится; с «точки зрения» зенитчика —са-
молёт проносится над ним со скоростью 400 км/час; с «точ-
ки зрения» лётчика встречного самолёта — эскадрилья
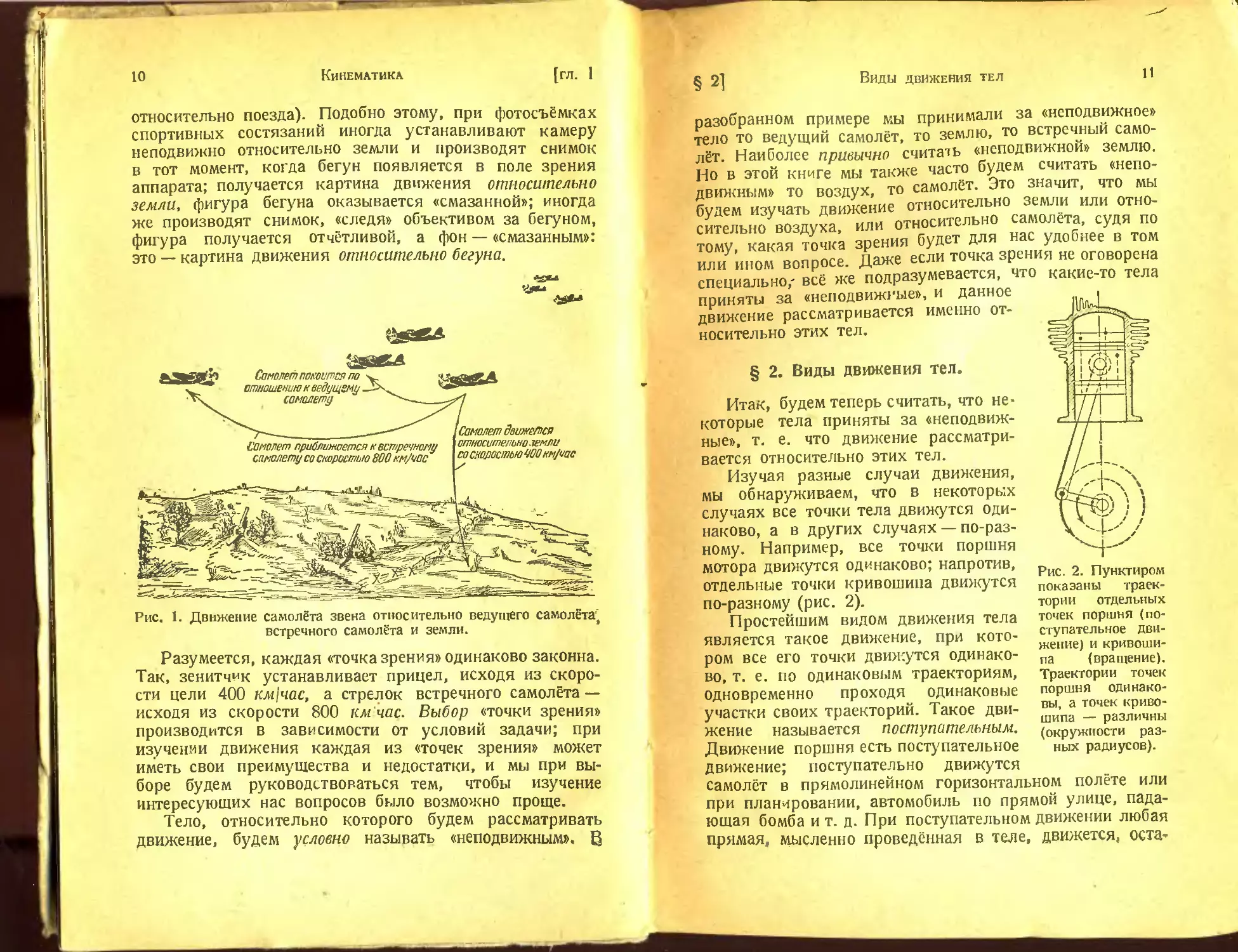
приближается к нему со скоростью 800 км/час (рис. 1).
В кинокартинах часто показывают одно и то же
движение с разных «точек зрения»: например, один кадр
изображает движущийся поезд на фоне пейзажа (дви-
жение рассматривается относительно земли), а следую-
щий кадр — сцену в купэ вагона, за окном которого
видны мелькающие деревья (движение рассматривается
10
Кинематика
[гл. 1
относительно поезда). Подобно этому, при фотосъёмках
спортивных состязаний иногда устанавливают камеру
неподвижно относительно земли и производят снимок
в тот момент, когда бегун появляется в поле зрения
аппарата; получается картина движения относительно
земли, фигура бегуна оказывается «смазанной»; иногда
же производят снимок, «следя» объективом за бегуном,
фигура получается отчётливой, а фон — «смазанным»:
это — картина движения относительно бегуна.
Самолет покоится по
отношению к ведущему -Зх
самолету
Самолет движется
Самолет приближается к встречному относительно земли
самолету со скоростью 800 км/час со скоростью ООО км/час
Рис. 1. Движение самолёта звена относительно ведущего самолёта
встречного самолёта и земли.
Разумеется, каждая «точка зрения» одинаково законна.
Так, зенитчик устанавливает прицел, исходя из скоро-
сти цели 400 км!час, а стрелок встречного самолёта —
исходя из скорости 800 км час. Выбор «точки зрения»
производится в зависимости от условий задачи; при
изучении движения каждая из «точек зрения» может
иметь свои преимущества и недостатки, и мы при вы-
боре будем руководствоваться тем, чтобы изучение
интересующих нас вопросов было возможно проще.
Тело, относительно которого будем рассматривать
движение, будем условно называть «неподвижным». В
§ 2]
Виды ДВИЖЕНИЯ ТЕЛ
11
разобранном примере мы принимали за «неподвижное»
тело то ведущий самолёт, то землю, то встречный само-
лёт. Наиболее привычно считать «неподвижной» землю.
Но в этой книге мы также часто будем считать «непо-
движным» то воздух, то самолёт. Это значит, что мы
будем изучать движение относительно земли или отно-
сительно воздуха, или относительно самолёта, судя по
тому, какая точка зрения будет для нас удобнее в том
или ином вопросе. Даже если точка зрения не оговорена
специально/ всё же подразумевается, что какие-то тела
приняты за «неподвижные», и данное
движение рассматривается именно от-
носительно этих тел.
§ 2. Виды движения тел.
Итак, будем теперь считать, что не-
которые тела приняты за «неподвиж-
ные», т. е. что движение рассматри-
вается относительно этих тел.
Изучая разные случаи движения,
мы обнаруживаем, что в некоторых
случаях все точки тела движутся оди-
наково, а в других случаях — по-раз-
ному. Например, все точки поршня
мотора движутся одинаково; напротив,
отдельные точки кривошипа движутся
по-разному (рис. 2).
Рис. 2. Пунктиром
показаны траек-
тории отдельных
точек поршня (по-
ступательное дви-
жение) и кривоши-
па (вращение).
Траектории точек
Простейшим видом движения тела
является такое движение, при кото-
ром все его точки движутся одинако-
во, т. е. по одинаковым траекториям,
поршня одинако-
вы, а точек криво-
шипа — различны
(окружности раз-
ных радиусов).
одновременно проходя одинаковые
участки своих траекторий. Такое дви-
жение называется поступательным.
Движение поршня есть поступательное
движение; поступательно движутся
самолёт в прямолинейном горизонтальном полёте или
при планировании, автомобиль по прямой улице, пада-
ющая бомба и т. д. При поступательном движении любая
прямая, мысленно проведённая в теле, движется, оста-
12
Кинематика
[гл. 1
Рис. 3. Все точки крестовины движутся
по одинаковым криволинейным траек-
ториям — окружностям.
ваясь параллельной самой себе, не меняя своего направ-
ления. Например, на рис. 3 видно, что при движении
одна ось крестовины остаётся всё время вертикальной,
а другая — горизонтальной. Поэтому поступательное
движение называют иначе движением без вращения. Посту-
пательное движение может быть и криволинейным: так,
все точки крестовины шарнирного механизма на рис. 3
описывают дуги окружностей равных радиусов. Для
изучения поступательного движения тела достаточно изу-
чить движение какой-нибудь одной точки этого тела;
все остальные точки
будут двигаться точ-
но так же. За такую
точку — «представи-
тельницу» всего те-
ла—выбирают обыч-
но его центр тяжести.
Другой вид дви-
жения есть вращение
вокруг оси, т. е. та-
кое движение тела,
при котором некото-
рая прямая в теле
(«ось вращения») ос-
таётся неподвижной.
Все точки, не лежа-
щие на оси, описывают окружности; радиусы окруж-
ностей равны расстояниям точек от оси. Угол по-
ворота за какой-нибудь промежуток времени одина-
ков для всех точек вращающегося тела. Скорости отдель-
ных точек различны: чем дальше точка от оси, тем
больше её скорость. Поэтому, например, спицы вращаю-
щегося маховика можно различить у ступицы, но у
обода они сливаются для глаза.
Наконец, встречаются и более сложные случаи дви-
жения тела, не представляющие собою ни поступатель-
ное движение, ни вращение вокруг какой-либо опреде-
лённой оси. В таких случаях, как доказывается в
теоретической механике, движение может быть пред-
ставлено как комбинация поступательного движения
и вращения. Таково, например, движение относительно
Скорость
13
§ 3]
СКОЛЬЗКОЙ
на
Наоборот, при
дороге колесо
жения вагона; С — положение вагона
в том случае, если бы он перемешался
поступательно.
емли колеса автомобиля. Его можно представить себе, как
воащение колеса вокруг оси (движение колеса относи-
тельно автомобиля), скомбинированное с поступательным
движением всего автомобиля в целом. Резко затормозив
колесо, прекратим его вращение, и колесо будет сколь-
зить по грунту, двигаясь поступательно. Наоборот, при
резком трогании с места
только вращается
(«буксует»), а посту-
пательное движение
отсутствует.
Другой пример-
движение железно-
дорожного вагона на
повороте (рис. 4). На
рисунке изображено
пунктиром одно из
положений вагона
ка его траектории
в том случае, если
бы он двигался по-
ступательно (конеч-
но, такое движение
в действительности
невозможно). Дей-
ствительное положение вагона (сплошная линия) полу-
чается из положения при поступательном движении
вращением вокруг вертикальной оси.
Аналогично можно представить установившийся вираж
самолёта при неизменном угле крена, как комбинацию
поступательного движения по окружности и вращения
вокруг вертикальной оси.
§ 3. Скорость.
Ограничимся пока поступательным движением тела:
тогда достаточно будет изучать движение одной точки.
Начнём с рассмотрения прямолинейного движения.
Равномерным называется такое движение, при котором
за равные промежутки времени тело проходит равные
расстояния.
14
Кинематика
[гл. 1
Скоростью называется путь, пройденный точкой в
единицу времени.
Скорость характеризуется не только числовым зна-
чением (пути, пройденного точкой в единицу времени),
но и направлением (в котором произошло перемещение
точки). Величины, характеризующиеся числовым значе-
нием и направлением, называются векторами. Векторы
будем изображать соответственно направленными отрез-
ками. Длина вектора скорости представляет, в некотором
масштабе, числовое значение скорости, а направление
его — направление перемещения точки (рис. 5). В даль-
Рис. 5. Векторы скоростей автомашин. По масштабу ско-
ростей находим, что скорость автомашины А равна 30 км/час,
грузовика — 20 км/час, а обгоняющей его машины —
50 км/час.
нейшем мы встретимся и с другими векторами: ускоре-
нием, силой. Примерами же невекторных величин (ха-
рактеризующихся только числовым значением, но не
имеющих направления) могут служить масса тела, время,
температура и т. д.
Зная вектор скорости, мы можем сказать, какое
расстояние проходит точка в единицу времени и куда
движется точка.
§ 3]
Скорость
15
Важность понятия скорости в том, что, зная ско-
рость, можно найти перемещение точки (пройденный
путь) за данный промежуток времени: пройденный путь ра-
вен скорости, умноженной на промежуток времени; нап-
равление перемещения совпадает с направлением скорости.
Зная скорость точки v и промежуток времени /, най-
дём путь $, пройденный за это время, по формуле
S=vt. (1)
Отсюда можно вывести ещё две часто применяющиеся
формулы:
v=j, (2)
М- О)
Формула (2) позволяет дать для скорости ещё и другое
определение (конечно, равноценное первоначальному):
скорость есть отношение пути, пройденного телом, к
соответственному промежутку времени.
Сказанное выше относится только к равномерному
прямолинейному движению, — иначе величина скорости
данного движения, вычисленная, например, по формуле
(2), не имела бы никакого определённого значения, а
получалась бы различной в зависимости от выбора того
или иного участка пути или промежутка времени. Если
же движение было бы непрямолинейным, то нельзя
было бы говорить об определённом направлении движе-
ния. Однако часто приходится встречаться именно с
неравномерными и непрямолинейными движениями. На-
пример, самолёт при разбеге проходит в каждую сле-
дующую секунду всё большие и большие расстояния,
а при различных эволюциях движется криволинейно.
Поэтому нам нужно теперь так дополнить понятия о
величине и направлении скорости, чтобы они подходили
для любых случаев движения.
Займёмся сначала неравномерностью движения. Ра-
зобьём мысленно пройденный точкою путь на достаточно
малые участки, проходимые за достаточно малые про-
межутки времени. В течение каждого малого промежутка
времени движение будет мало отличаться от равномер-
ного; в пределах одного такого участка можно прибли-
Ifl
Кинематика
[гл. 1
экённо считать движение равномерным (и, в частности,
пользоваться формулами (1), (2), (3), не делая практи-
чески заметной ошибки). Скоростью здесь будем считать
отношение пути, пройденного на этом участке, к соот-
ветственному промежутку времени. Переходя к сосед-
нему промежутку времени, будем снова считать движение
равномерным, но уже с несколько изменённой скоростью,
и т. д. для всех участков движения. Таким образом,
движение будет представлено в виде ряда равномерных
движений, изменяющихся от одного участка к другому.
Чем большим берётся число участков и чем меньше
сами участки, тем точнее изображено данное движение.
Скоростью данного неравномерного движения и будем
считать скорости равномерных движений на участках,
на которые разбито всё движение. В разные моменты
времени, на разных участках скорость движения будет
различна: здесь скорость — переменная величина. Для рав-
номерного же движения новое определение не вносит
никаких изменений сравнительно с первоначальным.
Поясним ещё выражение «достаточно малые» участки
и промежутки времени. Это значит, что дальнейшее
уменьшение промежутка времени, начинающегося с дан-
ного момента, уже не меняет практически величины
скорости, рассчитанной как отношение перемещения к
промежутку времени. Для разных случаев достаточно
малыми могут оказаться промежутки различной величины.
Для медленно изменяющегося движения промежутки
можно брать сравнительно большими, а для быстро
меняющегося — их нужно брать меньшими. Например,
промежуток времени в 0,1 сек достаточно мал при опре-
делении скорости поезда (так как за 0,1 сек движение
его мало изменяется), для движения же пули в канале
ствола винтовки при выстреле промежуток времени в
0,0001 сек уже слишком велик.
Перейдём теперь к рассмотрению криволинейности
движения. Чтобы ввести и для криволинейной траекто-
рии понятие направления движения (направления ско-
рости), и здесь разобьём траекторию на достаточно
малые участки, — такие участки, чтобы каждый из них
мало отличался от своей хорды. Перемещения вдоль
каждого участка происходят приблизительно вдоль хорды.
17
Единицы скорости
Рис. 6. Самолёт на вираже. Скорость
при криволинейном движении на-
правлена по касательной к траекто-
рии.
§ 4] ------------
Представляя себе движение происходящим вдоль ломаной,
составленной из хорд, изобразим приближённо данное
криволинейное движение как ряд прямолинейных дви-
жений, причём направление скорости этих прямолиней-
ных движений будет
меняться малыми скач-
ками от одного проме-
жутка к другому. На-
правлением скорости на
данном участке будем
считать направление
хорды, стягивающей
этот участок.
Но, при достаточно
малых участках, на-
правление хорды прак-
тически совпадает с
направлением касатель-
ной в любой точке участка, стягиваемого этой хордой.
Поэтому направлением скорости криволинейного дви-
жения считается направление касательной в соответ-
ственной точке траектории (рис. 6). Направление скоро-
сти в криволинейном движении переменное.
§ 4. Единицы скорости.
Величина скорости какого-либо данного движения
выражается различными числами в зависимости от того,
какие единицы приняты для измерения длины (пройден-
ного пути) и времени. Пусть, например, самолёт проле-
тает 180 км в течение одного часа; скорость самолёта
равна 180 км,час. Здесь за единицу длины принят кило-
метр и за единицу времени — час. Примем теперь за
единицу длины —метр и за единицу времени — секунду.
Скорость того же движения выразится теперь другим
числом. В самом деле, в новых единицах путь 180000 м
проходится за 3600 сек. По формуле (2) найдём величину
скорости:
зл
2 м. А. Исакович
Н А
180000 _п
-ЗббГ^50-
18 Кинематика [гл. 1
Значит, в своём движении самолёт проходит 50 метров
за одну секунду:, его скорость равна 50 м/сек. Мы ви-
дим, что скорость одного и того же движения выра-
жается разными числами, в зависимости от выбранных
единиц. Поэтому выбранные единицы обычно указыва-
ются (сокращёнными обозначениями) в формулах и при
самых величинах. Обозначения пишутся в том же по-
рядке, со знаками тех же действий, что и величины,
входящие в%формулу, например:
skm
v — -----
t час
или
Г = y — ,
t час ’
или
и •= 4 — ‘ >
t сек
а также
1 QIX км р- м , миль
V —— , I оО —, 50 — , 150----- и Т. Д.
сек час сек час м
Такая запись позволяет легко переходить от одних единиц
к другим: для этого достаточно заменить старые еди-
ницы соответственным числом новых единиц:
। км__1 км___ 1000 м _ 1 м
час 1 час 3600 сек 3,6 сёк '
Это значит: если величина скорости определённого дви-
жения задана при единицах км и час, то, для того чтобы
получить число, выражающее величину скорости этого
же движения при единицах м и сек, достаточно данную
величину умножить на
Обратно:
1
1 :_т1 <ооо КМ о с км
* CDV 1 СО1Г 1 0,0 у
_ ,1 Единицы СКОРОСТИ 19
§
е Для перехода от единиц м и сек к единицам км и
час достаточно заданную величину скорости умножить
на 3,6. Эти соотношения можно рассматривать и как
зависимость между разными единицами скорости', ско-
ростью в один километр в час и скоростью в один метр
в секунду. Сами же обозначения (м/сек, км час, миля час)
отвечают единицам скорости, соответствующим выбран-
ным единицам длины и времени.
Основными величинами в механике считаются: длина
(км или м), время (час или сек) и сила (кг или т).
С помощью' этих величин вычисляются и через их еди-
ницы выражаются единицы всех других механических
величин, с которыми в дальнейшем мы будем встречать-
ся: ускорение, масса, работа, плотность и т. д. Как
мы увидим, обозначения единиц для всех этих величин
будут составлены из обозначений единиц трёх основных
величин, подобно тому как составлены единицы скоро-
сти. Способ составления обозначения единицы той или
иной величины указывается в каждом отдельном случае
формулой, служащей для вычисления данной величины
через основные.
Итак, имея обозначение единицы той или иной вели-
чины, можно установить, во-первых, какие единицы
были выбраны при измерении или вычислении данной
величины, и, во-вторых, как изменяется число, выража-
ющее данную величину при переходе от одних единиц
для основных величин к другим (или установить соот-
ношение между разными единицами для данной вели-
чины).
Заметим, что в формулах следует пользоваться для
всех величин их значениями, вычисленными при по-
мощи одного и того же выбора единиц для основных
величин, иначе говоря, пользоваться соответственными
единицами для этих величин. Например, если в фор-
муле (I) скорость задана в км час, а время в часах,
то полученное число выразит пройденный путь в км.
В дальнейшем нам будут встречаться и так назы-
ваемые «безразмерные» или «отвлечённые» величины (на-
пример, радиан, коэффициенты аэродинамических сил
и т- Д-). Это — величины, значения которых не зависят
от принятого выбора единиц.
2*
20
Кинематика
[гл. 1
§ 5. Сложение скоростей.
Часто приходится рассматривать движение данного
тела относительно разных тел, которые сами движутся
одно относительно другого. Возьмём, например, движе-
ние самолёта относительно воздуха (при ветре) и отно-
сительно земли. Движение самолёта относительно земли
можно представить себе следующим образом: самолёт
движется относительно воздуха, а воздух в целом дви-
жется относительно земли. В этом случае движение са-
молёта относительно воздуха назовём относительным
движением; движение воздуха относительно земли — пере-
носным движением; и, наконец, движение самолёта от-
носительно земли — результирующим движением. Резуль-
тирующее движение иногда будем называть суммой
относительного и переносного движений, а эти послед-
ние — составляющими движениями.
Поставим вопрос: как по скоростям составляющих дви-
жений найти скорость результирующего движения?
Допустим, что известны скорости составляющих дви-
жений: скорость самолёта относительно воздуха (воздуш-
ная скорость) пвозд км[час и скорость ветра w км)час.
Требуется найти скорость самолёта относительно земли
(путевую скорость) упуг км)час. Пусть, например, ве-
тер— попутный со скоростью 1V — 30 км] час, a увозд =
= 180 км]час. Тогда за один час самолёт пролетит
относительно воздуха расстояние 180 км; за это же время
воздух в целом переместится относительно земли на 30 км
в том же направлении (рис. 7). Общее перемещение са-
молёта относительно земли за один час будет равно
180 юн-[-30 км и, значит,
1 ГЛЛТ КМ 1 ОА КМ /ч 1 г\ Kf/l
уПут= 180 —-4-30— = 210 —.
у час 1 час час
Общая формула для скорости результирующего движения
в случае попутного ветра имеет, таким образом, вид:
Упут == Увозд —[~ W.
Легко видеть, что при встречном ветре перемещение са-
молёта относительно земли уменьшается, и формула при-
нимает вид:
V пут” ^ВОЗД — IV.
§ 5] Сложение скоростей 21
формулы показывают, что результирующая скорость
оаВна сумме или разности составляющих скоростей. Если
приписывать скорости встречного ветра знак минус («отри-
цательная скорость»), то результирующая скорость в
обоих случаях оказывается равной сумме (взятой с учё-
том знаков — алгебраической сумме) составляющих скоро-
Рис. 7. Сложение скоростей. Случай полёта при
попутном ветре.
стей. Это правило сложения скоростей можно условно
представить себе так, будто точка по очереди совершает
перемещения соответственно каждой составляющей ско-
рости. Конечно, в действительности перемещения совер-
шаются одновременно, но результирующее перемещение
будет то же, что и при последовательных перемещениях.
Представим себе теперь, что переносная скорость на-
правлена под углом к относительной: составляющие ско-
рости не лежат на одной прямой. Например, найдём
путевую скорость самолёта, зная его воздушную ско-
рость и скорость бокового ветра. Здесь также представим
себе условно, что перемещения самолёта происходят по-
следовательно: сперва — относительно воздуха, затем —
вместе со всей массой воздуха. На рис. 8 показаны со-
ставляющие (АВ и ВС) и результирующее (АС) пере-
мещения самолёта за единицу времени. Векторы АВ,
ВС и АС изображают, в некотором масштабе, векторы
22
Кинематика
[гл. 1
в г.
Воздушноя страсть
симолешс!
Рис. 8. Сложение скоростей по правилу
параллелограмма и правилу треуголь-
ника. Случай полёта с боковым ветром.
составляющих и результирующей скоростей. По чертежу
видно, что результирующая скорость есть сторона тре-
угольника, две другие стороны которого — векторы со-
ставляющих скоростей.
Нахождение результирующей скорости по составляю-
щим скоростям мы называем сложением скоростей. Та-
ким образом, ско-
рости складываются
по «правилу тре-
угольника» («геомет-
рическое» или «век-
торное» сложение).
Если оба вектора
составляющих ско-
ростей отложить от
точки А, то резуль-
тирующая скорость
получится как диаго-
наль параллелограм-
ма, сторонами кото-
рого служат составляющие скорости АВ и AD (при-
чём AD — ВС). Этот способ называется сложением ско-
ростей по «правилу параллелограмма»; он даёт, конечно,
тот же результат, что и правило треугольника. Из чер-
тежа ясно, кроме того, что векторная сумма не зависит от
порядка слагаемых.
Нужно особенно обратить внимание на то, что вели-
чина результирующей скорости зависит не только от
величины, но и от направления составляющих. Это —
важное свойство сложения векторов, отличающее его от
сложения обычных чисел.
Правило треугольника заключает в себе, как частный
случай, и сложение скоростей, направленных по одной
прямой. Здесь треугольник «сплющивается» в отрезок
прямой.
Иногда бывает удобно представить данное движение
как сумму двух движений: это действие называется раз-
ложением движений. Данная скорость раскладывается
при этом на две составляющие, являясь их результи-
рующей. Например, скорость планирования самолёта гПл
можно разложить на скорость горизонтального переме-
§ 6]
Ускорение
23
- , (рис. 9): i^rop пока-
вдоль поверхности земли про-
времени, уСн показывает высоту,
единицу времени. Аналогично
щения Угор и скорость снижения ^Усн
зывает, какое расстояние
летает самолёт за единицу
теряемую самолётом за
Рис. 9. Разложение скорости планирования на
горизонтальную и вертикальную скорости.
можно разложить скорость набора высоты на горизон-
тальную и вертикальную скорости и т. п.
В дальнейшем мы обычно будем производить разло-
жение скоростей по двум взаимно перпендикулярным
направлениям, как и в указанных примерах.
§ 6. Ускорение.
Ускорение есть изменение скорости за единицу вре-
мени. Так как скорость есть вектор, то изменяться мо-
жет как её величина, так и её направление. Поэтому разли-
чают два вида ускорения: касательное — соответствующее
изменению величины скорости, и нормальное или центро-
стремительное— соответствующее изменению направле-
ния скорости.
Понятие касательного ускорения выясним на примере
прямолинейного движения. Пусть скорость самолёта при
разбеге равна в некоторый момент 5 м/сек, через две
секунды—11 MiceK, ещё через две секунды—17 мсек.
Скорость самолёта изменяется (в данном примере — воз-
24 Кинематика [гл. 1
растает) на 6 м/сек каждые 2 сек. За одну секунду изме-
нение скорости равно у — 3 м/сек. Значит, ускорение рав-
но 3 м]сек за секунду. Это — случай неизменного уско-
рения или так называемого равномерно ускоренного
движения.
Единица для ускорения указывается тем способом
вычисления ускорения, который мы здесь применили;
изменение скорости делится на время:
6 —
сек
2 сек
_ ~ М
' сек2
Таким образом, единица ускорения при выбранных еди-
ницах м и сек есть м/ сек-. Выражением для единицы какой-
либо величины можно, как мы видели, воспользоваться
и для перехода к другим основным единицам. Напри-
мер, выбирая единицы км и мин, найдём:
1
„ м _ „ 1000 КМ
6 сек2 ~/ 1 \
\60 мин)
О О С КМ । л г, КМ
„—3-3,6----н= 10,8---
2 мин2 мин2
Однако, мы будем пользоваться для ускорения только
единицами м и сек, так как не встречаются случаи, когда
скорость в течение долгого времени изменяется так же,
как и в первые секунды.
Итак, для равномерно ускоренного движения ускоре-
ние есть изменение или приращение скорости за 1 сек.
Приращение скорости за 2 сек равно удвоенному уско-
рению, за 3 сек — утроенному, за 0,1 сек — одной деся-
той ускорения и т. д. Вообще, если ускорение равно
а м/сек2, то приращение скорости за промежуток времени
t сек равно at м/сек. Если, к тому же, известна скорость
в начале промежутка времени («начальная скорость»)
и0 м сек, то можно найти скорость через t сек (конечную
скорость, т. е. скорость в конце промежутка времени) v
м/сек по формуле:
и — ий at.
(4)
§ 6]
Ускорение
25
Эта формула пригодна как для случая возрастания
скорости (ускорение берём положительным), так и для
случая убывания скорости (ускорение отрицательно).
формула (4) может быть представлена и графически
(рис. Ю) аналогично рис. 7 для сложения скоростей.
Можно условно считать и0 и at составляющими ско-
ростями; тогда v — результирующая скорость. Но здесь
надо иметь в виду, что хотя рисунки 10 и 7 одинаковы,
но на рис. 10 скорости о0 и и относятся к разным мо-
ментам времени: конечная скорость получается из на-
чальной скорости прибавле- v at
нием изменения скорости за
истекший промежуток време-
ни. В случае же сложения
скоростей рассматривается
один и тот же момент времени.
Мы разобрали тот слу-
чай, когда скорость меняется
на одну и ту же величину
<-------
v
Рис. 10. Конечная скорость v
получается из начальной ско-
рости о(| и изменения скорости
at так же, как результирующая
скорость (рис. 7) получается
из составляющих скоростей.
за каждую единицу времени
(и, вообще, за равные промежутки времени изменения
скорости равны между собой). Это — случай равномерно
ускоренного движения или движения с постоянным уско-
рением (напоминаем, что ускорение может быть как по-
ложительным, так и отрицательным). Когда же скорость
сама изменяется неравномерно, то, разбивая движение
на достаточно малые участки, можно в каждом из них
считать движение равномерно ускоренным; ускорение же
будет различным в разные моменты времени,—будет пе-
ременной величиной. Ход рассуждений здесь такой же,
как и в § 3.
Наибольшую важность представляет равномерно уско-
ренное движение как с положительным (увеличение ско-
рости), так и с отрицательным (уменьшение скорости)
ускорением.
Приведём формулу для длины пути, пройденного точкой
при равномерно ускоренном движении. Время движения
обозначим через /, начальную скорость через v0, конечную
скорость через и и ускорение через а. Искомую длину
пути обозначим через s. Так как скорость меняется рав-
номерно, то, как доказывается в механике, для вычи-
26 Кинематика [гл. 1
слепня длины пути можно воспользоваться средним ариф-
метическим значений скорости в начале и конце пути —
«средней скоростью» оср:
__t>o+y.
^р— 2 •
Подставляя сюда вместо v его значение из формулы (4),
найдём:
fcp — и0 + у.
Точка, имеющая постоянную скорость иср, пройдёт за
время t то же расстояние, что и при данном равномерно
ускоренном движении. Воспользуемся теперь форму-
лой (1), подставляя вместо v величину рср. Тогда по-
лучим:
или
5— (уо + у) 1
s = vuf + ^аР.
(5)
Если начальная скорость равна нулю, т. е. тело на-
чинает двигаться с постоянным ускорением от состояния
покоя, то формула принимает вид:
s = y at2.
(б)
По этой формуле можно, например, вычислить путь,
пройденный за данный промежуток времени свободно
падающим телом. Ускорение падающих тел постоянно
и равно 9,8 м'сек21). Значит, начавшее падать тело прой-
дёт за первую секунду расстояние 1 /2-9,8• 12 = 4,9 м, за
две секунды — расстояние 1 2-9,8 -22 = 19,6 м и т. д.
Заметим, что в действительности законы падения тел
сложнее, так как сопротивление воздуха нарушает по-
стоянство ускорения падающего тела.
Если траектория точки — кривая линия, то измене-
ние величины скорости за единицу времени называется
1) Ускорение свободного падения обозначается буквой g
£—9,8 MjceKа.
§ 6]
Ускорение
27
касательным ускорением. Направление касательного уско-
рения принимается совпадающим с касательной к тра-
ектории, т. е. тем же, что и для скорости. Если скорость
оастет, то ускорение обращено в ту же сторону, что и
скорость, если же скорость уменьшается, то в проти-
воположную сторону.
Итак, касательное ускорение характеризует изменение
величины скорости с течением времени. Рассмотрим теперь
ускорение, характе-
ризующее изменение
направления Скорос-
ти, так называемое
нормальное ускоре-
ние. Ограничимся
частным случаем:
равномерным движе-
нием точки по ок-
ружности. Хотя ве-
личина скорости и
постоянна, но уско-
рение не равно нулю,
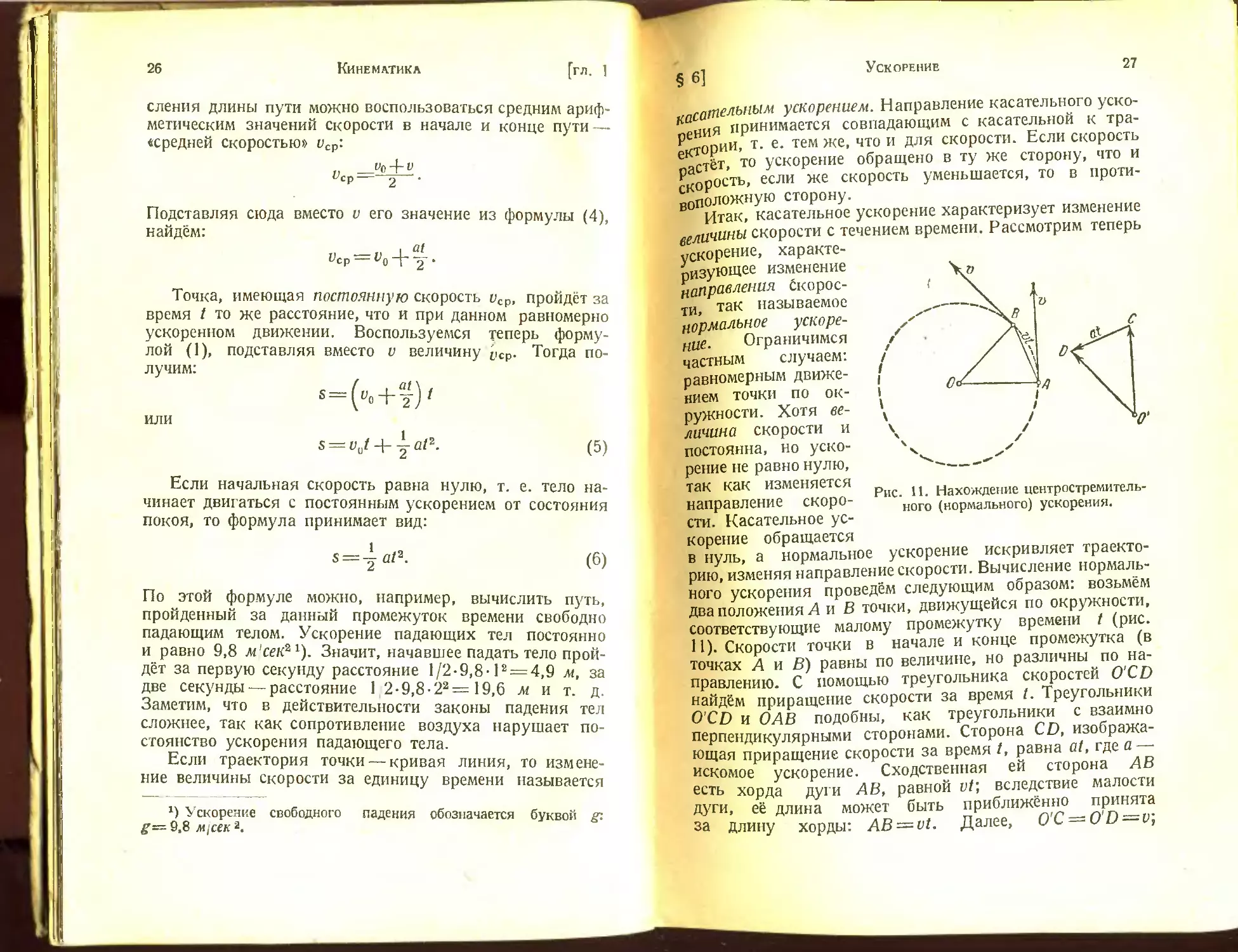
Рис. 11. Нахождение центростремитель-
ного (нормального) ускорения.
так как изменяется
направление скоро-
сти. Касательное ус-
корение обращается
в нуль, а нормальное ускорение искривляет траекто-
рию, изменяя направление скорости. Вычисление нормаль-
ного ускорения проведём следующим образом: возьмём
Два положения Л и В точки, движущейся по окружности,
соответствующие малому промежутку времени t (рис.
Н). Скорости точки в начале и конце промежутка (в
точках А и В) равны по величине, но различны по на-
правлению. С помощью треугольника скоростей О'CD
найдём приращение скорости за время I. Треугольники
O CD и ОАВ подобны, как треугольники с взаимно
перпендикулярными сторонами. Сторона CD, изобража-
ющая приращение скорости за время /, равна at, где а —
искомое ускорение. Сходственная ей сторона АВ
есть хорда дуги АВ, равной vt; вследствие малости
дуги, её длина может быть приближённо принята
за длину хорды: AB — vt. Далее, O'C = OD — U',
28
Кинематика
[гл. I
ОА = ОВ = R (радиус окружности). Но из подобия тре-
угольников следует, что отношения сходственных сторон
у них равны: CD __АВ О'С — ОА
или и ~~~R ’
откуда находим п2 a=R- (?)
Это и есть формула для нормального (центростреми-
тельного) ускорения. Единица нормальною ускорения,
конечно, та же, что и для касательного ускорения:
/ м
У -- у2 —s
__ \ сек)____ сек2____ и2 м
Rm Rm R Тёк2 ’
Направление нормального ускорения есть направле-
ние отрезка CD; оно перпендикулярно к хорде АВ. Для до-
статочно малого промежутка времени («в данный момент»)
хорда и касательная к дуге практически совпадают.
Поэтому нормальное ускорение считаем направленным
перпендикулярно к касательной в соответственной точке
траектории, — т. е. по радиусу к центру окружности.
Если траектория — любая кривая линия, и движение
неравномерно, то точка имеет и касательное и нормаль-
ное ускорения. Они вычисляются по вышеуказанному
способу, но вместо радиуса окружности в формуле (7)
берётся радиус кривизны кривой в данной точке, т. е.
радиус такой окружности, которая ближе всего подхо-
дит к траектории в данной точке.
§ 7. Вращение тела.
Разберём теперь более сложный случай движения —
вращение тела вокруг оси. Здесь уже недостаточно рас-
сматривать движение только одной точки, так как от-
дельные точки тела движутся по-разному и имеют раз-
ные скорости. Например, при вращении колеса на оси
§ 71
Вращение тела
29
точки лежащие на оси, неподвижны, а остальные точки
описывают окружности, радиусы которых равны рас-
гтояниям точек от оси вращения. За время поворота
Солеса на 360° каждая точка описывает полную окруж-
КосТь. Чем больше расстояние точки от оси, тем
больше длина окружности; поэтому точки, лежащие
дальше от оси, проходят за то же время большее рас-
стояние и имеют большую скорость.
Несмотря на то, что отдельные точки вращающегося
тела имеют различные скорости, всё же можно одной
величиной охарактеризовать движение тела в целом. Для
этого достаточно задать, например, число оборотов за
единицу времени (обычно за одну минуту) либо угловую
скорость — угол поворота за единицу времени (обычно
за одну секунду). Так, например, на указателе оборо-
тов, устанавливаемом в кабине лётчика, стрелка прибора
прямо указывает на циферблате число оборотов вала мотора
в минуту. Число оборотов в минуту обычно обозначают
буквой л об/мин.
При вычислении угловой скорости угол поворота бе-
рётся в радианах. Радианом называется центральный
угол, опирающийся на дугу, длина которой равна ра-
диусу окружности. Полная окружность имеет длину
2гг/?, а потому угол 360° заключает в себе 2п радианов.
Угол в 1 радиан содержит приблизительно 573,3. Итак,
угловая скорость есть угол, описанный за 1 сек и вы-
раженный в радианах. Между угловой скоростью <о и
числом оборотов в минуту л есть простая приближён-
ная зависимость:
= 0,105л или л —“=9,5ю.
60
(8)
Единицей угловой скорости является 1,-сек, так как ра-
диан — величина безразмерная.
Зная угловую скорость ю вращения тела, можно
найти скорость v каждой его точки. В самом деле, если
расстояние данной точки вращающегося тела от оси вра-
щения равно г, то она описывает окружность радиуса г.
Описав по своей окружности угол, равный одному ра-
30
Кинематика
[гл. 1
диану, точка пройдёт расстояние г; угловая же скорость
показывает, сколько радианов описывается за одну се-
кунду. Значит,
v = юг, (9)
т. е. скорость точки равна угловой скорости, умножен-
ной на расстояние её от оси вращения.
Рис. 12. Угловая скорость вращающегося колеса и угловая
скорость автомобиля при правом развороте.
Угловую скорость обычно изображают вектором, от-
ложенным по оси вращения (рис. 12). Длина его
изображает, в неко-
тором масштабе, ве-
личину угловой ско-
рости, а стрелка
обращена в ту сторо-
ну, глядя с которой
на тело, видим вра-
щение происходя-
щим против часовой
стрелки.
Аналогично сло-
жению поступатель-
ных движений тела
Рис. 13. Разложение угловой скорости приходится ветре-
вращения самолёта на вираже на вра- чаться и со сложе*
щения вокруг поперечной и нормальной нием вращений> на.
пример, вокруг двух
пересекающихся осей. В этом случае, как показывается
§ 71 Вращение тела
в механике, результирующее движение можно расгмя
тривать в каждый момент как вращение вокруг нрип
торой оси (мгновенной оси вращения), причём угловая
скорость результирующего движения получается пн,
сложении составляющих угловых скоростей по пиаам\>
параллелограмма. Также по правилу параллелогпяммя
можно производить и разложение угловой₽скорост Ня
пример, вращение самолета на установившемся ви'тХ’
происходит вокруг вертикальной оси (Оис ,^.раже
может быть представлено как сумма вращений L °"°
поперечной оси самолёта и вокруг оси пеп^т ? ВО,<РУГ
к ней («нормальной оси») (рис. 13) ’ окулярной
Глава 2.
ДИНАМИКА.
§ 8. Силы.
Рассмотрим ряд примеров движения тел:
1. Снаряд, покоившийся в канале ствола орудия,
получает при выстреле большую скорость под действием
пороховых газов.
2. Бомба, сброшенная с самолёта, падает, притяги-
ваемая землёй, с возрастающей скоростью.
3. Скорость полёта пули уменьшается под действием
встречного воздуха.
4. Санки, съехав с ледяной горы, постепенно замед-
ляют своё движение и останавливаются на горизонталь-
ной поверхности. Остановка наступает тем быстрее, чем
рыхлее поверхность снега.
5. Камень, вращающийся на верёвке, описывает окруж-
ность под действием натянутой верёвки.
6. Натянутые резинки рогатки сообщают скорость
камню; в игрушечных пушках шарик выбрасывается
сжатой пружинкой.
7. Боец своими мускулами сообщает скорость бро-
саемой гранате.
Что общего в приведённых примерах? В одних слу-
чаях тело, бывшее в покое, приобретает или увеличи-
вает свою скорость; в других случаях скорость умень-
шается; в третьих — скорость меняет только своё напра-
вление. Каждый раз изменяется или величина, или
направление скорости, т. е. тело получает ускорение.
Кроме того, во всех этих примерах можно указать, под
действием каких других тел возникло ускорение.
Такое действие одних тел на другие, при котором
возникает ускорение, называется силой; мы говорим:
«одно тело действует на другое с некоторой силой».
§ 8]
Силы
33
Далее, опыт показывает, что если одно тело действует
на другое с некоторой силой, то и второе тело дей-
ствует на первое: силы являются взаимодействиями меж-
ду телами. Этот вопрос будет разобран подробнее в § 16.
Мы будем встречаться с силами следующих трёх
типов:
1. Силы тяготения; например, сила притяжения тел
землёй. Эти силы действуют на каждую частицу тела.
2. Силы упругости; это—силы, возникающие при де-
формации тел: при их сжатии, растяжении, изгибании,
скручивании, и т. д. Они действуют на поверхность тел,
соприкасающихся с деформированным телом. Характер-
ным примером здесь может служить сила, действующая
на тело со стороны соприкасающейся с ним сжатой пру-
жины. К этому же типу относятся и силы давления со
стороны жидкостей и газов на соприкасающиеся с ними
тела (например, аэродинамические силы). Они также
вызваны деформацией — степенью сжатия жидкости или
газа. К числу сил упругости относятся и силы, разви-
ваемые мускулами живых существ.
3. Силы трения; они также возникают на поверх-
ности соприкосновения тел; но, в противоположность
силам упругости, силы трения не зависят от деформации
тела в целом, а лишь от состояния тел и их движения
вблизи самой поверхности соприкосновения. Пример —
сила трения между бандажом колеса железнодорожного
вагона и прижатой к нему тормозной колодкой. Сюда же
частично относятся и силы сопротивления воздуха при
движении в нём тел.
В приведённых примерах сила веса фигурирует в при-
мере 2, силы упругости — в примерах 1, 5, 6, 7 и силы
трения—в примерах 3 и 4.
Итак, при действии на тело силы, оно получает уско-
рение. Но на практике обычно на данное тело действует
не одна только сила (со стороны другого тела), а целая
система сил (со стороны многих тел). Здесь особую
важность имеет случай, когда на тело действуют две
силы, и при их совместном действии тело остаётся в по-
кое— не получает ускорения. Примером может явиться
гРУз, подвешенный к подставке на пружине. На него
Действуют две силы: сила веса и сила упругости растя-
о
13 М. А. Исакович
84
Динамика
[гл. 2
нутой пружины. Каждая из этих сил, действуя в от-
дельности, сообщила бы грузу ускорение: сила веса
сообщила бы ускорение, направленное вниз, а сила
упругости пружины — ускорение, направленное вверх.
При совместном же действии обеих сил ускорение
отсутствует. В таких случаях говорят, что силы взаимно
уравновешиваются.
Как показывает опыт, силы, которые взаимно урав-
новешиваются при совместном действии, сообщают телу,
действуя на него в отдельности, равные, но противопо-
ложные по направлению ускорения.
Уравновешивание сил подсказывает нам выбор спо-
соба сравнения и измерения сил. За единицу силы при-
нимается вес определённой гири (примерно равный весу
одного литра воды); эта сила называется килограмм
(кг). Вес двух одинаковых килограммовых гирь прини-
мается за силу 2 кг, вес трёх гирь — за 3 кг и т. д.
Теперь, сравнивая силу любого происхождения с весом
гирь (так, чтобы силы уравновешивались), сможем изме-
рить любую силу.
Итак, величина силы определяется нами из сравне-
ния с весом определённых гирь. Кроме величины, каждой
силе приписывается и направление: то направление,
которое будет иметь ускорение тела при действии на
него одной этой силы. Так как сила характеризуется
величиной и направлением, то она является вектором,
и мы впредь будем изображать силы направленными
отрезками. В следующем параграфе мы увидим, что сло-
жение сил производится по правилу сложения векторов,
т. е. по правилу параллелограмма.
Изображая силы направленными отрезками, мы будем
выбирать длину отрезка равной величине силы в неко-
тором масштабе, а направление его — по направлению
силы. Например, векторы взаимно уравновешивающихся
сил будут изображаться равными по величине и проти-
воположно направленными отрезками. Сила веса любого
тела всегда будет изображена вектором, направленным
вертикально вниз. Векторы сил упругости, с которыми
действует сжатая или растянутая пружина или растя-
нутая нить, будут изображены направленными по оси
пружины или вдоль нити.
Сложение сил
86
§ 91
[Наконец, силы имеют точку приложения (например,
1<а закрепления натянутой нити); вектор силы обычно
0°гдем откладывать от точки приложения силы.
§ 9. Сложение сил.
Если на данное тело действуют одновременно две
какие-нибудь силы, линии действия которых лежат в од-
ной плоскости, то их действие на тело можно заменить
действием одной силы'). Такая замена называется сло-
жением сил. Дре данные силы называются составляющими,
а заменяющая их сила — равнодействующей. Правила
сложения сил устанавливаются из опыта.
Эта замена двух сил одной равнодействующей отно-
сится к движению тела в целом-, под действием равно-
действующей тело получит то же ускорение, что и при
совместном действии обеих составляющих. Например,
при уравновешивании двух сил их равнодействующая
равна нулю (ускорение отсутствует). Но, конечно, рав-
нодействующая не заменяет составляющих с точки зре-
ния, например, возникающих деформаций. Достаточно
указать на такой пример: растянем пружину двумя ру-
ками. Силы, действующие на пружину, равны и прямо
противоположны; ускорение пружины отсутствует, зна-
чит, равнодействующая сил — нуль (случай уравновеши-
вания сил). Но если бы на пружину вообще не действо-
вали никакие силы, то хотя равнодействующая попреж-
нему равнялась бы нулю, однако, растяжения пружины не
было бы.
Простейший случай сложения сил есть сложение
сил, направленных по одной прямой. Если составляю-
щие направлены в одну и ту же сторону, то в ту же
сторону направлена и равнодействующая, и величина её
равна сумме величин составляющих. Если силы напра-
влены в противоположные стороны, то равнодействующая
направлена в сторону большей силы и по величине
равна разности составляющих. Обычно в случае
сил, лежащих на одной прямой, одно направление на
гма/2, За исключением одного случая «пары сил», который будет рас-
смотрен отдельно в § 15
3*
36 Динамика [гл. 2
прямой считается положительным, а другое — отрицатель-
ным. Тогда для получения равнодействующей доста-
точно всегда брать алгебраическую сумму составляющих.
Если силы, приложенные к данному телу, направлены
под углом, то равнодействующая находится по правилу
параллелограмма или по правилу треугольника. Величина
равнодействующей в этом случае не равна ни сумме, ни
разности величин составляющих: она больше разности,
но меньше суммы.
При сложении сил по правилу параллелограмма ве-
личина равнодействующей находится по величинам соста-
вляющих или графически, или с помощью тригонометри-
ческого расчёта. Чаще всего нам придётся встречаться
со сложением двух взаимно перпендикулярных сил;
в этом случае величина F равнодействующей находится
по величинам Ту и F., составляющих по формуле Пифа-
гора:
Если на тело действует одновременно целый ряд сил,
то, пользуясь последовательно несколько раз правилом
параллелограмма, можно найти равнодействующую всех
сил, действующих на тело. Сложив таким образом все
силы, мы заменим их действие на тело действием одной
силы — равнодействующей. От того, чему равна эта сила
и как она направлена, и будут зависеть величина и на-
правление ускорения, получаемого телом в целом.
Если, например, равнодействующая равна нулю (все
силы взаимно уравновешиваются), то и ускорение будет
равно нулю, т. е. скорость тела будет постоянна по ве-
личине и по направлению: движение будет прямолиней-
ное и равномерное; как частный случай, при этом возмо-
жен и покой тела. Таково же было бы движение тела
и в том случае, если бы на него не действовали вообще
никакие силы. Случаев отсутствия всех сил, действую-
щих на тело, практически не встречается; сила веса,
например, действует на всякое тело. Но случаи полного
взаимного уравновешивания всех сил, действующих на
тело, встречаются часто. Каждый раз, когда тело нахо-
дится в покое или движется без ускорения, т. е. пря-
§ 91
Сложение сил
37
„ппинейно и равномерно, равнодействующая всех сил,
пействующих на тело, равна нулю. Примерами могут
явиться хотя бы равномерный прямолинейный пол т
самолёта, равномерное прямолинейное движение поез-
да автомобиля и т. д.
’ Иногда возникает задача, обратная сложению сил.
одну силу нужно заменить двумя силами, иначе говоря,
нужно найти две такие силы (составляющие), равнодеи-
Рнс. 14. Сложение сил, приложенных к
точке О. Жирной стрелкой показана равно-
действующая.
ствующей которых явилась бы данная сила. И здесь ответ
даётся тем же правилом параллелограмма: составляющие
будут являться сторонами параллелограмма, а данная
сила — его диагональю. Такая замена называется разло-
жением сил.
Важно заметить, что разложение данной силы на две
составляющие может быть выполнено разными способами:
одну и ту же силу можно заменить разными комбина-
циями двух сил. Задача разложения сил — не однознач-
ная задача. Определённое же, однозначное разложение
получится, например, если:
1. Задать направления обеих составляющих. Такое
разложение и будет всегда применяться нами в дальней-
шем, причём направления составляющих будем выбирать
перпендикулярно друг к другу, в одной плоскости с
данной силой; в этом случае разложение всегда возможно
(рис. 15).
2. Задать величину и направление одной из составля-
ющих. Такое разложение тоже всегда возможно (рис. 16а).
3. Задать величину обеих составляющих. Это разло-
жение возможно, если величина данной силы больше
Динамика
[гл. 2
разности величин составляющих, но меньше их суммы
(рис. 166).
Данную силу можно разложить не только на две, но
и на три и даже на большее число составляющих.
Рис. 15. Пунктиром показаны заданные направ-
ления, по которым производится разложение
данной силы F.
Практически применяются почти исключительно разло-
жения по двум или по трём взаимно перпендикулярный!
направлениям. Так, например, аэродинамические силы,
действующие на самолёт, будем разлагать обычно по
Рис. 16а. F]—составляю-
щая, заданная по вели-
чине и по направлению.
Вторая составляющая F2
находится как вторая
сторона параллелограм-
ма с диагональю — дан-
ной силой F и одной
стороной Fp
Рис. 166. Построение па-
раллелограмма произ-
водится подобно тому,
как в геометрии строится
треугольник по трём сто-
ронам: данной её силе
и двум составляющим.
трём взаимно перпендикулярным направлениям: по ли-
нии полёта (этому направлению соответствует лобовое
сопротивление), перпендикулярно к линии полёта в плос-
кости симметрии самолёта (подъёмная сила) и перпен-
дикулярно к этим двум направлениям (боковая сила).
Говоря о составляющей данной силы по какому-либо
направлению, мы всегда будем подразумевать, что сила
О равномерном прямолинейном движении
39
разложена по этому направлению и по направлениям,
к нему перпендикулярным.
разложение сил позволяет заменить силы, имеющие
какие угодно направления, силами, направленными по
выбранным взаимно перпендикулярным направлениям.
Если все данные силы лежат в одной плоскости, то их
можно разложить по двум взаимно перпендикулярным
направлениям; в общем лее случае сил, направленных
как угодно, потребуется три направления.
§ 10. О равномерном прямолинейном движении.
рассмотрим подробнее случай равномерного прямо-
линейного движения тела. Как мы видели, в этом слу-
чае сумма всех сил, действующих на данное тело, должна
быть равна нулю. Здесь надо иметь в виду следующее.
Среди сил, действующих на движущееся тело, обычно
есть силы, которые мы создаём намеренно, например:
сила тяги винта, вращаемого мотором при полёте само-
лёта, или сила мускулов человека, везущего тачку.
Это —силы, действующие в направлении движения; на
них мы обращаем внимание в первую очередь и в обыч-
ном разговоре, называя их «движущими силами», даже
указываем: самолёт летит, так как на него действует
сила тяги винта, тачка катится, так как на неё дей-
ствует усилие тянущего человека и т. д.
При этом, однако, часто упускается из виду другая
группа сил: силы сопротивления, т. е. силы, направлен-
ные противоположно движению: сопротивление воздуха
для летящего самолёта, трение колёс тачки и т. п. Для
равномерности и прямолинейности движения необходимо,
чтобы «движущие силы» как раз уравновешивали силы
сопротивления ’).
*) Иногда говорят, что тело движется равномерно и прямоли-
нейно, если на него не действуют никакие силы. Ио на практике
так не бывает: силы всегда действуют на тело, хотя может слу-
читься, что мы их не сразу замечаем. Поэтому правильнее говорить:
тело движется равномерно и прямолинейно, если на него не дей-
ствуют никакие силы, кроме тех, которые друг друга уравновеши-
40
Динамика
[гл. 2
Причина того, что силы сопротивления часто усколь-
зают от внимания обучающегося, в противоположность
с бросающимися в глаза движущими силами, заключается
в следующем: чтобы создать силу тяги винта, на само-
лёт нужно поставить мотор, расходовать на него бензин,
масло; чтобы двигать тележку, нужно тянуть за оглобли,
утомлять свои мускулы. В то же время силы сопротив-
ления возникают, так сказать, «бесплатно», благодаря
лишь наличию движения. Для их возникновения, коль
скоро мы приведём тело в движение, не нужно ни мо-
торов, ни мускульных усилий; их источник или в неви-
димом воздухе, или в частицах грунта, соприкасающихся
с колёсами. Чтобы обратить на эти силы внимание, их
нужно ещё обнаружить, в то время как «движущие
силы» — предмет нашей специальной заботы и затраты
энергии и материалов.
Различное «происхождение» обеих групп сил (наме-
ренное и желаемое создание движущих сил и автомати-
ческое возникновение сил сопротивления при движении)
в течение долгого времени затемняло вообще весь вопрос
о действии сил на тело, в частности, вопрос о равно-
мерном движении. До Галилея считалось, что для равно-
мерного движения необходимо, чтобы равнодействующая
всех сил не была равна нулю и всё время действовала
на тело в направлении его движения; здесь, конечно,
упускалась из виду сила трения. Непрерывное действие
движущей силы действительно необходимо, но именно
для того, чтобы равнодействующая всех сил была равна
нулю. Лишь после работ Галилея и затем Ньютона
вопрос о действии сил на тело был разрешён в механике
до конца.
Для лучшего уяснения сказанного рассмотрим ещё,
как возникает равномерное движение из состояния по-
коя и как, обратно, равномерно движущееся тело оста-
навливается, приходит в состояние покоя. Возьмём, на-
пример, самолёт. Движущая сила—это сила тяги винта.
В первый момент, когда самолёт ещё стоит на месте, а
мотор уже заработал, сила тяги велика и превосходит
трение колёс о землю. Поэтому равнодействующая не равна
нулю, и самолёт начинает двигаться вперёд с ускорением.
По мере увеличения скорости силы сопротивления растут,
§ ц) Давление и силы давления 41
«о пока они остаются меньше силы тяги, равнодействую-
’я направлена вперёд, и скорость возрастает. Однако при
посте скорости силы сопротивления растут быстро, и
поэтому избыток тяги над сопротивлением будет делаться
g меньше и меньше, и, наконец, эти силы сравняются
пруг с ДРУГ0М- Тогда исчезнет и ускорение: дальнейшее
движение будет равномерным, пока винт будет давать
тягу, уравновешивающую сопротивление при данной
скорости; равнодействующая сил при этом равна нулю.
Если увеличить число оборотов мотора (увеличив доступ
горючего в мотор), то тяга винта возрастёт; равновесие
сИл нарушится, и самолёт снова получит ускорение
вперёд. Скорость снова начнёт расти, пока возросшее
с увеличением скорости сопротивление не уравновесит
новую, увеличенную силу тяги. Обратно, если уменьшить
силу тяги винта, ослабив работу мотора, то равнодейст-
вующая сил будет направлена против движения, созда-
вая отрицательное ускорение, т. е. уменьшая скорость
самолёта. Но при этом будет уменьшаться и сопротивле-
ние и, когда оно сравнится с уменьшенной силой тяги,
движение снова станет равномерным (при меньшей ско-
рости). Когда самолёт приземляется и мотор выклю-
чается — тяга отсутствует, и движение самолёта непреры-
вно тормозится силами сопротивления, пока он не остано-
вится. Заметим, что самолёт может лететь и при отсут-
ствии тяги винта: в этом случае он движется по наклонной
книзу траектории — планирует, — и «движущей силой»,
уравновешивающей силы сопротивления, является со-
ставляющая его собственного веса в направлении по-
лёта.
§ 11. Давление и силы давления.
При взаимодействии твёрдых тел возникающие силы
обычно являются сосредоточенными, т. е. действуют на
небольших участках, в точках соприкосновения тел; эти
точки и являются точками приложения сил. В противо-
положность этому, силы, действующие со стороны жидко-
стей и газов на твёрдые тела (и обратно, со стороны
твёрдых тел на жидкости и газы), являются распределён-
ными, т. е. действуют сразу на значительную поверхность
твёрдого тела; здесь нет никаких определённых отдельных
42
Динамика
[гл. 2
точек приложения действующих сил. Например, плаваю-
щее на воде тело испытывает со стороны воды силы,
приложенные по всей погружённой поверхности тела;
воздух действует с определёнными силами на всю поверх-
ность находящегося в нём тела; горючая смесь в цилиндре
мотора, воспламеняясь, действует на всю рабочую по-
верхность поршня, и т. д.
Силы, распределённые, как и в приведённых приме-
рах, по большой части поверхности данного тела, назы-
ваются, в отличие от сосредоточенных тел, силами дав-
ления. Мы говорим о силах давления атмосферного
воздуха, пороховых газов, воды в глубине моря и т. д.
Силы давления направлены перпендикулярно к поверх
ности тела, на которое они действуют.
Для распределённых сил очень удобным оказывается
понятие давления.
Давлением называется сила, рассчитанная на единицу
площади поверхности тела.
Силы давления могут быть распределены по поверх-
ности данного тела как равномерно, так и неравномерно.
При равномерном распределении сил давления на равные
по площади участки поверхности тела действуют равные
силы давления. Поэтому, если известна сила давления
Екг, действующая на площадь Sm2, то давление р
найдётся по формуле
(10)
Очевидно, единица давления есть кг/м2. Давление
воздуха на уровне моря (атмосферное давление) равно,
примерно, 10000кгл/2; давление пороховых газов в стволе
винтовки в момент выстрела доходит до 20000000 KetM2;
своими лёгкими человек может создать давление воз-
духа (сверх давления окружающего воздуха) до 500 кг:м2.
Давление в ЮОООкгл/2 (в других единицах это давление
равно 1 кг1, см2) называют обычно технической атмосфе-
рой; давление газов в винтовке составляет, таким обра-
зом, около 2000 атмосфер, а своими лёгкими человек
создаёт давление, примерно, в 0,05 атмосферы. Для
сравнения укажем, что давление пара в наиболее рас-
пространённых котельных заводских установках, на
§ Ц] Давления и силы давления 43
паровозах, на морских судах составляет 10—15 ат-
мосфер, доходя в новейших системах прямоточных кот-
лов до 150 атмосфер. Давление в глубине моря растёт,
примерно, на одну атмосферу на каждые 10 м по-
гружения.
Происхождение давления в жидкости или в 1азе
объясняется изменением их объёма, сжатием. Так, на-
пример воздух в камере пневматика сжат до 3 атмосфер;
будучи’ выпущен в_ окружающую атмосферу, он занял бы
втрое больший ооъём.
Зная величину давления на данной поверхности,
легко подсчитать и силу давления на неё. Если поверх-
ность плоская, то все силы давления одинаково направ-
лены (перпендикулярно к поверхности) и их равнодей-
ствующая равна давлению, умноженному на площадь
поверхности:
F = pS. (И)
Направление равнодействующей также перпендику-
лярно к поверхности. Если поверхность, на которую
действуют силы давления, не плоская, то можно, разде-
лив мысленно поверхность на достаточно малые участки,
приближённо считать каждый из них плоским и для
каждого из них подсчитать силу давления по формуле
(11); так как полученные для каждого участка силы
будут иметь разные направления, то для нахождения
равнодействующей нужно будет складывать эти силы
по правилу параллелограмма.
Если силы давления распределены по данной поверх-
ности неравномерно, то и в этом случае можно опре-
делить давление, разбивая поверхность на столь малые
участки, чтобы в пределах каждого из них можно было
считать силы распределёнными равномерно. Для каждого
из участков давление найдётся по формуле (10), но
величины F и S здесь будут обозначать уже соответ-
ственно силу, приходящуюся только на данный участок
и его площадь; давление будет различным для разных
Участков, изменяясь от точки к точке. Таково, напри-
мер, давление на подводный борт корабля: оно возра-
стает от поверхности воды в глубину. В случае неодинако-
вых давлений в разных местах поверхности усложнится
44
Динамика
[гл. 2
и подсчёт силы давления на всю поверхность: здесь при-
дётся снова, разбивая поверхность на достаточно малые
участки, подсчитывать силу давления для каждого из
них в отдельности и затем складывать полученные силы,
находя таким образом равнодействующую для всей по-
верхности.
§ 12. Масса.
Будем действовать с одной и той же силой на разные
тела. Например, будем приводить в движение тележку
силою своих мускулов. В тележку будем класть разные
грузы. Мы обнаружим, что чем больше груз, тем мед-
леннее тележка приобретает скорость, тем меньшее уско-
рение она получает. Подобную же картину можно на-
блюдать, когда паровоз берет с места железнодорожный
состав: паровоз, везущий порожняк, быстро набирает
скорость; тяжёлый состав разгоняется медленно.
Это свойство разных тел получать различные ускоре-
ния под действием одних и тех же сил называется
инертностью. Оно характеризуется физической величи-
ной — массой тела.
Масса и вес тела близко связаны: чем тяжелее тело,
тем больше и его масса, т. е. тем меньшее ускорение
оно получит под действием данной силы. Более того,
тело, имеющее вдвое, втрое и т. д. больший вес, имеет
и вдвое, втрое и т. д. большую массу (т. е. получает
вдвое, втрое и т. д. меньшее ускорение).
Однако масса тела — это величина совсем другого
рода, чем вес, хотя между ними и есть близкая зависи-
мость. Действительно, в разобранных примерах сила
веса была полностью уравновешена упругостью грунта
или рельсов и потому не оказывала влияния на дви-
жение тела. Можно привести и другие примеры: вес
качелей полностью уравновешивается натяжением верёвок,
но раскачать качели труднее, когда на них сидят двое,
чем с одним человеком. Приводя рукою во вращение
переднее колесо велосипеда и переднее колесо мотоцикла
(приподнявши их от пола), заметим, что имеющее боль-
шую массу мотоциклетное колесо получит при той же
силе меньшую скорость; вес же колёс уравновешивается
р обоих случаях силой, действующей со стороны оси.
§ 131 Закон Ньютона 45
Итак, масса характеризует некоторое новое свойство
тед: способность получать то или иное ускорение под
действием данных сил1). Величина массы тела прини-
мается прямо пропорциональной его весу. Но следует
помнить, что вес и масса характеризуют совершенно
различные физические величины: коротко говоря, вес —
это сила притяжения тела землёй, масса же характери-
зует способность тела получать ускорение под действием
силы. Масса тела полностью сохранилась бы, если бы
земли и не было, хотя вес в этом случае отсутствовал бы.
В следующем параграфе мы выберем единицу массы.
§ 13. Закон Ньютона.
Между силой, действующей на тело (если на тело
действует несколько сил, то здесь подразумевается их
равнодействующая), массой этого тела и ускорением, со-
общаемым телу данной силой, всегда есть, как показы-
вает опыт, вполне определённая зависимость. Она выра-
жается в законе Ньютона: сила пропорциональна массе,
умноженной на ускорение. Если подобрать единицы со-
ответственным образом, то вместо пропорциональности
можно получить равенство; при таком выборе единиц
сила равна массе, умноженной на ускорение.
За единицу силы примем килограмм, за единицу
ускорения 1 MjCeK2; единицу же массы нужно выбрать
так, чтобы между силой F кг, ускорением а м:сек2 и мас-
сой т имело место равенство
F=ma. (12)
Выбор единицы для массы сделаем, воспользовавшись
хорошо изученным случаем движения: падением тел на
землю. Как известно, при падении все тела имеют, под
действием силы веса, одно и то же ускорение (практи-
чески, сопротивление воздуха изменяет ускорение падаю-
щего тела, уменьшая его), а именно 9,8 м/сек2. Возьмём,
например, тело весом в 1 кг и дадим ему свободно па-
9 Можно было бы сказать: «неспособность» тел получать уско-
рения— так как чем больше масса, тем меньше ускорение (под
действием той же силы).
46
Динамика
[гл. 2
дать: ускорение тела будет 9,8 м сек2-, оно вызвано весом
тела, т. е. силой в 1 кг. Подставим эти числа в фор-
мулу (12):
1 = т-9,8.
Чтобы равенство выполнялось, нужно принять т==къ,
т. е. выбрать единицу массы так, чтобы тело весом
в 1 кг имело масс}' т = д^- Значит, массу, равную еди-
нице, будет иметь тело, весящее 9,8 кг. Итак, за единицу
массы принимается масса тела, вес которого равен 9,8 кг.
Эта единица называется технической единицей массы.
Чтобы найти массу т какого-нибудь тела, выражен-
ную в технических единицах массы, достаточно вес его G,
выраженный в кг, разделить на 9,8.
”=й- СЗ)
Обратно, вес тела, выраженный в кг, равен массе его,
выраженной в технических единицах массы, умноженной
на 9,8:
0 = 9,8т. (14)
Выражение для единицы массы через основные еди-
ницы находится по формуле (12). В самом деле, фор-
мулу (12) можем записать в виде
F
т — ~
а
и, вводя обозначения единиц силы и ускорения, найдем
F кг F кг-сек2
т=——-„ =----------------.
а м сек2 а м
Итак, техническая единица массы есть кг-сек2,м.
С помощью формулы (12), выражающей закон Нью-
тона, можно решать два основных типа задач механики.
1. Зная силу, действующую на тело, и массу тела,
найти его движение. Ускорение определяется по фор-
муле
F
а = — ,
т
Касательные и нормальные силы
47
§ ’4]
получаемой из формулы (12). Направление ускорения
совпадает с направлением силы. Если, далее, заданы
начальная скорость и начальное положение тела, то по
найденному ускорению можно, методами теоретической
механики, полностью определить движение тела.
2. Известны масса тела и ускорение, которое тре-
буется сообщить телу. Найти необходимую для этого
силу- Ответ даётся самою формулой (12).
рассматривая закон Ньютона и вообще связь между
силами и возникающими под их действием ускорениями
тел, мы не оговаривали, относительно каких тел рас-
сматривается 'движение. Укажем теперь, что всё выше-
сказанное предполагает, что движение рассматривается
относительно земли или относительно тел, которые, если
и движутся относительно земли, то без ускорения, т. е.
равномерно и прямолинейно. Вопрос о движении, рас-
сматриваемом относительно ускоренно движущихся тел,
будет разобран в § 23.
§ 14. Касательные и нормальные силы.
Силы, действующие на движущееся тело, можно под-
разделить, по характеру их действия на движение, на
две группы: касательные силы и нормальные или центро-
стремительные силы.
Касательными силами называются силы, направлен-
ные вдоль траектории, по касательной к ней. Они вы-
зывают касательное ускорение тела, т. е. изменяют
только величину скорости. Если на тело действуют
только касательные силы, то тело движется прямоли-
нейно, не изменяя направления движения; величина же
скорости будет меняться: если равнодействующая этих
сил направлена в ту же сторону, что и скорость, то
ускорение положительно, и скорость растёт; если она
направлена противоположно, то ускорение отрицательно,
и скорость убывает.
Нормальными силами называются силы, перпенди-
кулярные к траектории. Они вызывают нормальное
(центростремительное) ускорение, т. е. изменяют только
направление скорости. Если на тело действуют только
нормальные силы, то величина скорости не меняется,
48
Динамика
[гл. 2
тело движется равномерно; но направление скорости
будет изменяться, и траектория будет искривляться,
обращаясь вогнутостью в сторону равнодействующей
нормальных сил.
Может оказаться, что равнодействующая сил, дей-
ствующих на тело, имеет и касательную, и нормальную
составляющие. В этом случае касательная составляющая
будет изменять только величину, а нормальная состав-
ляющая — только направление скорости, независимо
друг от друга. Касательное ускорение можно найти
по формуле закона Ньютона, написанной отдельно
для касательной составляющей:
где Ft есть касательная составляющая равнодействующей,
a at — касательное ускорение. Нормальное ускорение
найдётся по той же формуле, но написанной для нор-
мальной составляющей:
Fn = man.
Здесь Fn есть нормальная составляющая равнодействую
щей силы, а ап — нормальное ускорение. Применив фор-
мулу (7), можем написать последнее равенство в виде
Эта формула позволяет найти радиус кривизны траекто-
рии R, зная нормальную составляющую равнодействую-
щей силы, скорость тела и его массу.
При полёте самолёта основными силами, действую-
щими на него, являются: вес самолёта, тяга винта, подъ-
ёмная сила крыльев, лобовое сопротивление самолёта и
боковая аэродинамическая сила. Сопротивление направ-
лено всегда противоположно скорости: оно является
касательной силой. Тяга винта направлена вперёд при-
близительно вдоль траектории, составляя с ней обычно
незначительный угол. Поэтому в большинстве случаев
тягу тоже можно считать, с достаточной степенью точ-
ности, касательной силой. Подъёмная сила перпенди-
кулярна к траектории: она всегда является центро-
стремительной силой, так же как и боковая сила. На-
Пары сил. Моменты
49
§ 15]
конец вес самолёта может быть как центростремительной,
так и касательной силой, а иногда иметь и нормальную,
и касательную составляющие, в зависимости от направ-
ления полёта. При горизонтальном полёте вес есть
нормальная сила; при прохождении вертикальных уча-
стков траектории (например, при пикировании) вес —
касательная сила. При наклонной же к горизонту
траектории вес можно разложить на касательную и
нормальную составляющие.
В полёте (кроме случаев, когда вес является каса-
тельной силой) касательные силы составляют не более
20—30% от веса самолёта. Поэтому и касательные уско-
рения обычно не больше 2—3 м/сек2. Напротив того,
подъёмная сила при некоторых фигурах (вираж, пере-
вороты, вывод из пикирования) в несколько раз (в 4—5
раз и более) больше веса самолёта. Поэтому центро-
стремительные ускорения могут достигать величины
40—50 MjceK1 и более. Эти ускорения направлены по ли-
нии действия подъёмной силы, т. е., примерно, по нор-
мальной оси самолёта.
достаточно знать вели-
Рис. 17. Пара сил.
§ 15. Пары сил. Моменты.
Если мы рассматриваем движение тела в целом как
движение одной точки, то нам
чину и направление сил, дей-
ствующих на тело; точки при-
ложения их не играют роли.
Можно, например, считать все
силы приложенными к какой-
нибудь одной точке тела и к
этой же точке считать прило-
женной и равнодействующую
всех сил. Но если нас интере-
сует и вращение тела, то необходимо знать и точки при-
ложения сил. В самом деле, пусть, например, к телу
приложены две равные и прямо противоположные силы,
не лежащие на одной прямой (рис. 17). Под действием
этих сил тело в целом не получит ускорения, но рав-
новесия всё же не будет: тело начнёт вращаться, при-
обретая угловую скорость. Такие две силы называются
4 М. А. Исакович
50
Динамика
[гл. 2
парой сил. Угловая скорость, приобретаемая телом в
единицу времени, пропорциональна как величине F
сил, составляющих пару, так и плечу пары /—расстоя-
нию по перпендикуляру между силами пары. Поэтому
пару сил характеризуют моментом пары М — произ-
ведением силы на плечо:
М = FI кг-м.
Угловая скорость, приобретаемая телом за единицу
времени, пропорциональна моменту пары, действующей
на тело, подобно тому как линейная скорость, приобре-
таемая телом в единицу времени, пропорциональна
силе.
Действие пары на тело определяется величиной её
момента. Две разные пары, лежащие в одной плоскости,
вызовут, каждая в отдельности, одинаковое вращение
тела, если только моменты их одинаковы, хотя бы сами
пары и были составлены из сил другой величины и на-
правления.
Если на тело действует несколько пар, лежащих
в одной плоскости, то их можно заменить одной резуль-
тирующей парой; момент результирующей пары равен
сумме моментов отдельных пар, причём моментам пар,
вращающих тело в одну сторону, приписывается один
знак, а моментам пар, вращающих в противоположном
направлении —обратный знак. Две пары, равные по
величине моментов и противоположные по направлению
вращения, взаимно уравновешиваются: результирующий
момент равен нулю. Если две такие пары приложены
к телу, то вращение не возникает; если тело уже вра-
щалось, то угловая скорость вращения не изменяется.
Вращение тела может возникать не только при дей-
ствии на него пары сил, но и при действии одной силы.
Если сила приложена в центре тяжести, то тело в це-
лом получает ускорение, но вращение не возникает.
Если же сила приложена не в центре тяжести, то, кроме
ускорения, возникает и вращение.
На рис. 18 изображена сила, приложенная к телу.
Моментом силы относительно какой-нибудь точки О на-
зывается произведение этой силы на её плечо относи-
тельно точки, — т. е. на расстояние от точки до линии
§ 16] Закон действия и противодействия
51
действия силы. Если в точке О поместить ось, на кото-
рой тело может свободно вращаться, то тело будет при-
обретать, под действием силы, такую же угловую ско-
рость, как под действием пары с моментом, равным
моменту силы. Сумма моментов сил, составляющих пару,
вокруг какой-нибудь точки равна
моменту пары и, следовательно,
не зависит от выбора точки. \
В механике доказывается, что ' ; |
силу, приложенную к телу, мож- / Л1 /
но заменить, не изменяя движе- . I________I D I
ния тела, равной ей силой, при- f \ /
ложенной к другой точке, и па- /
рой с моментом, равным моменту
данной силы относительно новой Рис. 18. Z —плечо силы
точки приложения силы. Если относительно точки о.
перенести силу в центр тяжести
тела, то перенесённая сила будет вызывать только ус-
корение тела, а дополнительная пара — вращение его.
Момент этой пары равен моменту силы относительно
центра тяжести. Таким образом, вращение тела опреде-
ляется моментами относительно центра тяжести дей-
ствующих на тело сил. Поэтому мы обычно будем за-
менять силы, действующие на самолёт, равными им си-
лами, приложенными в центре тяжести, и добавлять
пары с соответственными моментами.
Пары, действующие на тело, могут лежать в разных
плоскостях; соответственно этому и тело может вра-
щаться вокруг разных осей (перпендикулярных к пло-
скостям пар). Мы будем обычно рассматривать моменты,
вращающие тело вокруг главных осей, самолёта: продоль-
ной, поперечной и нормальной.
В механике доказывается, что момент равнодействую-
щей нескольких сил равен сумме моментов состав-
ляющих.
§ 16. Закон действия и противодействия.
Опыт показывает, что все виды сил (силы тяготения,
силы упругости, трение и т. д.) обладают следующим
свойством: они никогда не возникают «в одиночку», а
всегда по две сразу: если одно тело действует на другое
4*
52 Динамика [гл. 2
с некоторой силой, то второе тело, в свою очередь,
действует на первое с силой, равной по величине и про-
тивоположной по направлению.
Это и есть так называемый закон действия и проти-
водействия. Одна из этих двух сил (всё равно какая)
обычно называется «действием», а вторая — «противо
действием» (иногда — «реакцией»).
Закон можно кратко сформулировать ещё и так
действие равно и прямо противоположно противодей-
ствию. Важно отметить, что «действие» и «противодей-
ствие» приложены к разным телам: действие приложено
со стороны одного тела ко второму, а противодействие —
со стороны второго тела к первому. Как показывает
опыт, обе силы лежат на одной прямой (это относится,
впрочем, только к силам механического происхождения;
силы взаимодействия электрического происхождения мо-
гут и не лежать на одной прямой, но и они будут равны
по величине и противоположны по направлению).
Приведём примеры: если, стоя в лодке, отталкивать
багром другую лодку, то в движение приходят обе лодки;
направления их движения противоположны. Если двое
стоят в лодках и каждый держится за верёвку, протя-
нутую между лодками, то, кто бы ни тянул за верёвку,
двигаться начинают опять-таки обе лодки и снова на-
правления их движения противоположны. В большем
масштабе этот опыт можно осуществить с двумя
кораблями, присоединив два конца троса к лебёдкам на
каждом корабле. Какую бы из лебёдок ни пустить в ход,
при наматывании троса будут двигаться оба корабля.
Применим закон Ньютона к силам действия и про-
тиводействия. Силу, действующую на первое тело со
стороны второго, обозначим через Fp массу первого
тела — через т, и ускорение, получаемое им под дей-
ствием силы Fp — через ор соответственные величиныдля
второго тела обозначим через Г2, т2, а... По закону
действия и противодействия
Л = Га.
Но по закону Ньютона
F1 = m1u1, F2 — m.a.,.
§ 16] Закон действия и противодействия 53
Следовательно,
т1а1 = т2аг.
Отсюда получим:
at__т2
°2 т1 ’
Значит, ускорения, получаемые телами при их взаимо-
действии (конечно, здесь предполагается, что никаких
других сил, действующих на два данных тела, нет),
обратно пропорциональны их массам. Так, в нашем при-
мере корабль, имеющий большую массу, получит мень-
шее ускорение, а корабль, имеющий меньшую массу, —
большее ускорение ’)•
Если взаимодействие двух тел длилось t сек, то ско-
рости тел изменятся на величины:
v^aj, v2 — a2t.
Отсюда видно, что возникающие изменения (прираще-
ния) скорости, так же как и ускорения, обратно про-
порциональны массам взаимодействующих тел:
£1__т2
Как и ускорения, эти приращения скорости противопо-
ложно направлены. Если вначале тела находились
в покое, то п, и и2 суть приобретённые ими скорости,
и эти скорости обратно пропорциональны массам тел и
противоположно направлены. Последнее равенство можно
записать ещё и так:
Произведение массы тела на его скорость называется
количеством движения. Количество движения есть век-
тор, направленный так же, как и скорость. Из написан-
ной формулы следует, что возникающие при взаимодей-
ствии двух тел количества движения равны по величине
и противоположно направлены.
х) Практически, кроме сил взаимодействия между кораблями,
па них будут действовать и силы сопротивления воды, которые
могут нарушить точное соотношение между ускорениями.
54
Динамика
[гл. 2
Рис. 19. Реакция
струи заставляет те-
лежку откатываться
в обратном направ-
лении.
Пользуясь понятием количества движения, можно
выразить закон Ньютона в несколько видоизменённой
форме. Поскольку ускорение есть изменение скорости
за секунду, то произведение массы на ускорение та
равно изменению количества движения то за секунду.
Следовательно, сила, действующая на тело, равна се-
кундному изменению его количества движения.
Пользуясь законом Ньютона, выраженным в таком
виде, удобно решать некоторые задачи гидродинамики
и аэродинамики. Например, рассмотрим такой опыт: из
сосуда, установленного на тележке
(рис. 19), через отверстие вытекает
струя воды со скоростью о. При этом
тележка будет откатываться в про-
тивоположном направлении: дей-
ствие сосуда на воду и вытекающей
воды на сосуд — это силы действия
и противодействия, следовательно,
они равны. Но силу, действующую
на воду, легко подсчитать. В самом
деле, за одну секунду из сосуда вы-
текает объём воды So, где S — пло-
щадь отверстия. Следовательно, мас-
равна pSn, где р — масса единицы
объёма. Скорость этой массы изменяется от нуля (в со-
суде вода покоится) до и, значит, секундное изменение ко-
личества движения разно pSu2, и этой величине равна
сила, действующая на воду. По закону действия и
противодействия этой же силе равна и реакция струи,
т. е. сила, действующая на сосуд, которая и вызывает
откатывание тележки.
Приведём ещё примеры. При выстреле из пушки
снаряд получает некоторое количество движения, а
ствол пушки — равное количество движения в противо-
положном направлении (отдача) и откатывается на ла-
фете. Отдача ощущается и плечом стрелка при выстреле
из винтовки. Найдём, с какой скоростью начала бы дви-
гаться назад винтовка, если бы приклад при выстреле
не упирался в плечо. Скорость пули во столько же раз
больше скорости, получаемой винтовкой, во сколько
раз масса пули меньше массы винтовки. Отношение
са вытекшей воды
Закон действия и противодействия
55
§ 16]
масс пули и винтовки равно отношению их весов (так
как масса пропорциональна весу). Пуля весит 9 г—
— 0,009 кг, а винтовка — 4,5 кг; отношение масс равно
1/5ог>; значит, скорость, приобретаемая винтовкой, в
500 раз меньше скорости пули. Начальная скорость
пули — около 800 м/сек; значит, начальная скорость
винтовки равна 800 - = 1,6 м, сек.
г эОО '
В известной морской игре «перетягивание каната»
каждая партия действует на другую (через канат) с
одинаковой Силой, — как это следует из закона действия
и противодействия. Следовательно, выиграет (перетянет
канат) не та партия, которая сильнее тянет, — тянут обе
партии с одинаковой силой, — а та, которая сильнее
упирается в палубу.
При изучении закона действия и противодействия
у учащихся иногда встречается характерное недо-
разумение, которое разъясним на следующем при-
мере. Лошадь тянет телегу вперёд; по закону действия
и противодействия телега тянет лошадь с той же
силой назад. Почему же телега всё-таки начинает дви-
гаться, а не остаётся в равновесии, поскольку силы
равны и прямо противоположны? Здесь допущена ошиб-
ка в самой постановке вопроса. Силы действия и проти-
водействия действительно равны и противоположны.
Но действие приложено к телеге, испытывающей на своих
колёсах лишь небольшое трение; поэтому она и прихо-
дит в движение. К лошади же, кроме силы противодей-
ствия со стороны телеги, приложена со стороны грунта,
в который она упирается всеми четырьмя копытами,
сила, направленная вперёд. Эта сила больше силы про-
тиводействия, и поэтому лошадь также начинает дви-
гаться вперёд. Если же поставить лошадь на лёд, то
сила со стороны скользкого льда не превзойдёт трения
колёс о землю, и лошадь не сдвинет телегу. То же про-
изойдёт и с очень тяжело нагружённой телегой. И
здесь лошадь, упираясь в грунт, не сможет получить от
него достаточной силы, чтобы сдвинуть телегу с места.
Подобный же вопрос возникает при разборе движения
поезда. Паровоз, беря с места, тянет вагоны вперёд
с такой же силой, с какой вагоны тянут его назад. Но
56 Динамика [гл. 2
ведущие колёса паровоза испытывают со стороны рель-
сов силу трения, направленную вперёд. Колёса вагонов
испытывают силу трения, направленную назад. Тяга
паровоза должна быть больше этого трения; тогда па-
ровоз сдвинется с места и начнёт двигаться ускоренно.
Если же трение ведущих колёс недостаточно, то колёса
«буксуют», и поезд остаётся на месте. Мы видим, что
в обоих приведённых примерах возникновение движения
возможно лишь благодаря тому, что, кроме сил взаи-
модействия между тянущим телом и «прицепкой», на
тянущее тело действуют силы, направленные вперёд со
стороны грунта или рельсов. На идеально скользкой
поверхности, не представляющей никакого трения, ни
телега с лошадью, ни поезда, ни автомобили не могли бы
сдвинуться с места.
Приведём теперь примеры из области теории полёта.
Поясним с помощью закона действия и противодействия
работу воздушного винта и крыла самолёта. Воздушный
винт, вращаясь, отбрасывает назад большую массу воз-
духа, сообщая ей значительную скорость. Следовательно,
он действует на воздух с силой, направленной назад,
а потому противодействие отбрасываемого воздуха на
винт направлено вперёд. Это и есть сила тяги винта.
При полёте самолёта крыло отклоняет вниз набегающий
поток воздуха, т. е. действует на воздух с силой, на-
правлен! ой вниз. Поэтому сила противодействия со сто-
роны отклоняемого потока на крыло направлена вверх.
Это и есть подъёмная сила крыла. Более подробно воз-
никновение силы тяги и подъёмной силы будет рас-
смотрено во второй части книги.
§ 17. Устойчивость равновесия и движения.
Мы говорим, что тело находится в равновесии, если,
во-первых, скорость тела равна нулю, а, во-вторых, силы,
действующие на тело, взаимно уравновешиваются. В
этом случае ускорение тела также равно нулю, и тело
не приобретает скорости с течением времени, а потому
и остаётся в покое. Не всякое положение тела является
положением равновесия; например, шарик на горизон-
тальной поверхности находится в положении равнове-
§ 17J Устойчивость РАВНОВЕСИЯ И ДВИЖЕНИЯ 57
сия, а на наклонной поверхности — нет. Но практически
и не во всяком положении равновесия тело будет дей-
ствительно оставаться в покое. В самом деле, в реаль-
ных условиях, на любое тело, помимо учитываемых нами
сил, действуют и случайные, неучитываемые силы: не-
большие толчки, колебания воздуха и т. д. Под дей-
ствием таких сил тело будет, хотя бы немного, отклоняться
от положения равновесия, и в этом случае дальнейшее
поведение тела может быть различным.
При выходе тела из положения равновесия силы,
действующие на него, вообще говоря, изменятся и их
равновесие может нарушиться. Их равнодействующая не
будет равна нулю и будет вызывать движение тела.
Если возникающие силы таковы, что под их действием
тело возвращается к положению равновесия, тогда тело,
несмотря на «случайные» толчки, будет всё же оста-
ваться вблизи положения равновесия, хотя бы и коле-
блясь около этого положения. В этом случае мы гово-
рим об уст°йчивом положении равновесия или просто
об устойчивом равновесии. В других случаях возника-
ющие силы таковы, что они увеличивают отклонение
тела от положения равновесия. Тогда достаточно
самого малого толчка, чтобы возникшие при откло-
нении силы всё более отдаляли тело от положения
равновесия: тело уже не будет оставаться вблизи поло-
жения равновесия, а уйдёт далеко от него. Это—-слу-
чай неустойчивого равновесия.
Итак, для устойчивости необходимо, чтобы при от-
клонении тела от положения равновесия возникали
восстанавливающие силы, возвращающие тело к перво-
начальному положению.
Таково, например, равновесие шарика на вогнутой
подставке (рис. 20,а). В нижней точке подставки
Шарик находится в равновесии, так как его вес урав-
новешен реакцией подставки. Равновесие устойчиво,
так как при отклонениях шарика равнодействующая
веса и реакции (мы пренебрегаем трением и считаем
поэтому, что реакция перпендикулярна поверхности
подставки) возвращает шарик обратно. Наоборот, в верх-
ней точке выпуклой подставки шарик находится в не-
устойчивом равновесии: при нарушении равновесия воз-
58
Динамика
[гл. 2
никает не восстанавливающая, а отклоняющая сила
(рис. 20,6). Если же взять горизонтальную подставку,
то на ней шарик находится в равновесии, а при его
смещении не возникают ни восстанавливающие, ни от-
клоняющие силы: равнодействующая остаётся равной
нулю, и шарик может оставаться в покое в любом по-
ложении на подставке. Это — случай безразличного рав-
новесия.
Силы, возникающие при отклонении от различных
видов положений равновесия, можно наглядно изобра-
зить графически. На оси абсцисс графика будем от-
Рис. 20. а —устойчивое равновесие,
б — неустойчивое равновесие.
кладывать отклонения тела от положения равновесия,
например, смещения шарика в предыдущем примере;
положительными будем считать, например, отклонения
вправо. По оси ординат будем откладывать возникающую
при отклонении силу. Положительной будем считать та-
кую силу, которая вызывала бы увеличение положи-
тельного отклонения (в нашем примере — силу, направ-
ленную также вправо). При устойчивом равновесии
каждое отклонение вызывает появление силы, направ-
ленной противоположно, т. е. положительным отклоне-
ниям соответствуют отрицательные силы, и обратно. Сле-
довательно, график для случая устойчивого равновесия
идёт сверху вниз (рис. 21 ,а), для неустойчивого же равнове-
сия получается график, идущий снизу вверх (рис. 21, б).
Для безразличного равновесия получилась бы линия,
идущая горизонтально.
Такой ход графиков характерен для рассмотренных
видов равновесия. В качестве примера рассмотрим ещё слу-
чай тела, подвешенного на горизонтальной оси. Равновесие
будет в том случае, если центр тяжести лежит на одной вер-
§ 17] Устойчивость РАВНОВЕСИЯ И ДВИЖЕНИЯ
59
тикали с подвесом. Если центр тяжести ниже подвеса,
то равновесие устойчиво; если центр тяжести находится
над подвесом, то равновесие неустойчиво. Наконец, при
Рис. 21. Графики сил, возникающих при отклонении от
положения равновесия, а — устойчивое равновесие, б —
неустойчивое равновесие.
совпадении центра тяжести с подвесом равновесие без-
различное. При отклонении от положения равновесия
возникает момент силы веса относительно оси подвеса.
Рис. 22. а — устойчивая, б — неустойчивая подвеска тела
и соответственные графики возникающих при отклонении
моментов.
При устойчивом равновесии этот момент является вос-
станавливающим, а при неустойчивом — отклоняющим;
при безразличном равновесии никакого момента не воз-
никает. На рис. 22 изображены соответственные гра-
60
Динамика
[гл. 2
фики. По оси абсцисс отложены углы отклонения тела
от вертикали (положительное направление оси абсцисс
соответствует отсчёту углов против часовой стрелки).
По оси ординат отложены возникающие моменты, при-
чём положительными также считаются моменты, вращаю-
щие тело против часовой стрелки. И здесь «падаювщя»
кривая соответствует устойчивости, а «поднимающаяся» —
неустойчивости.
Понятие устойчивости применимо и для движения
тела ’). Благодаря случайным толчкам и т. п. движение
тела может нарушаться. Если силы или моменты, воз-
никающие при отклонении от первоначального движения,
таковы, что они возвращают тело к первоначальному
движению, то мы говорим об устойчивости движения,
в противном случае — о неустойчивости. Примером здесь
может служить шарик, катящийся по вогнутому же-
лобку (устойчивое движение) и по выпуклой стороне
перевёрнутого желобка (неустойчивое движение). Для
движения тела также можно вычертить графики зави-
симости между отклонением и возникающими силами
или моментами, как и для случая покоя. «Падающая»
кривая будет указывать на устойчивость, а «поднимаю-
щаяся»— на неустойчивость движения.
Практически в большинстве случаев приходится
встречаться именно с положениями устойчивого равно-
весия, так как только вблизи таких положений тело,
предоставленное самому себе, остаётся сколько угодно
времени. В противоположность этому тело, помещённое
в положение неустойчивого равновесия, удаляется от
этого положения.
Однако можно так управлять условиями, в которых
находится тело, что оно будет длительно оставаться и
вблизи неустойчивого положения равновесия, колеблясь
около него. Например, палка, поставленная вертикально
на пол, находится в неустойчивом равновесии и падает,
как только мы отнимем от неё руку. Однако палкой
можно «балансировать», удерживая её вблизи неустой-
!) В этой книге будет рассматриваться устойчивость только
для равномерного прямолинейного движения, при котором, как и
₽ случае покоя тела, силы взаимно уравновешиваются.
Работа
61
§ ’8]
чивого вертикального положения на конце пальца: для
этого нужно только слегка двигать рукой в ту же сто-
рону, куда в данный момент наклоняется палка. Этим
мы смещаем точку опоры и соответственно изменяем мо-
мент силы веса, который начинает отклонять палку в
противоположном направлении. Конечно, такие движе-
ния нужно производить непрерывно, давая палке слегка
отклоняться то в одну, то в другую сторону, чтобы она
колебалась около положения равновесия под действием
изменяющегося момента. При тренировке можно до-
биться такого точного управления моментами, что уда-
ётся удерживать вблизи неустойчивого положения рав-
новесия целые конструкции (жонглёры в цирке). Следя
за игрой ножных мускулов, можно заметить, что, стоя
на одной ноге, мы находимся в положении неустойчи-
вого равновесия: для того чтобы не упасть, приходится
всё время «переносить вес тела» то на пятку, то на
носок.
Точно так же оказывается возможным поддерживать
заданное движение в случае его неустойчивости. Здесь
примерами могут явиться: езда на велосипеде, ходьба
акробата по проволоке, да и обычная ходьба человека.
То, что и ходьба есть неустойчивое движение, поддер-
живаемое только нашим «управлением», становится ясным,
если вспомнить, как «учится ходить» и как часто падает
годовалый ребёнок, не умеющий ещё владеть своими
мускулами, или каковы первые шаги неопытного конь-
кобежца!
Случаи неустойчивости движения могут встретиться
и при полёте самолёта: и тогда выдержать заданный ре-
жим полёта удаётся, только непрерывно действуя рулями,
в то время как устойчивый самолёт может длительно
лететь на одном режиме даже с брошенным управлением.
§ 18. Работа.
Когда какая-нибудь сила поднимает кверху груз,
то сила совершает работу; когда пороховые газы вы-
талкивают пулю из канала ствола, то сила давления
газов совершает работу; когда тяга винта поддержи-
вает равномерное движение самолёта, то тяга совершает
Динамика
Ггл. 2
работу. Вообще, когда тело, к которому приложена
сила, перемещается, то сила при этом совершает ра-
боту. Работа есть физическая величина, характеризую-
щая одновременно и действующую силу, и путь, на
протяжении которого она действовала. Мы дадим этой
величине следующее определение:
Работа есть произведение силы на длину пути, прой-
денного точкой приложения силы.
Это краткое определение нуждается в уточнении.
Если перемещение тела и направление силы не совпа-
дают, то длина пути учитывается в направлении силы,
т. е. берётся составляющая пути в направлении силы.
Например, при скатывании шарика по наклонной пло-
скости работа силы веса равна произведению веса ша-
рика на высоту наклонной плоскости. Тот же результат
получится, если брать произведение пути на составляю-
щую силы в направлении перемещения. Если сила на-
правлена всё время по касательной к траектории точки
её приложения, то работа равна силе, умноженной на
полную длину пути.
Далее, работа считается положительной, если сила
(или её составляющая) и перемещение направлены в одну
и ту же сторону, и отрицательной, если они направлены
противоположно. Например, поднимая груз рукой, мы
совершаем силой мускулов положительную работу,
сила же веса совершает при этом отрицательную работу.
При равномерном движении тела «движущая» сила
равна сопротивлению. Обе они совершают работу: «дви-
жущая» сила — положительную, а сопротивление — отри-
цательную; по величине обе работы равны друг другу.
В таких случаях говорят, что работа движущей силы
идёт или тратится на преодоление сопротивления, или
совершается против сил сопротивления.
Единица работы составлена с помощью единиц силы
и длины: это работа, совершаемая силой в 1 кг на пути
в 1 м (сила предполагается направленной по перемеще-
нию тела). Эта единица называется килограммометром,
её обозначение — кгм.
Подсчёт работы производится по формуле
A — Fs,
Работа
63
§ 181
где А обозначает работу, F (кг) — силу, a s (м) — путь,
пройденный точкою приложения силы. Например, если
самолёт весом в 2000 кг поднялся на высоту 1000 м,
то сила тяги совершила работу
Д = 2О00 • 1000 = 2000000 кг-м.
Эта работа совершена против силы тяжести. Конечно,
кроме этой работы, сила тяги всё время совершала ра-
боту и против сил сопротивления.
Если на тело действует только одна сила, то в ре-
зультате её 'действия на некотором пути тело получает
скорость. Пусть на тело массы т действует сила F и
допустим, что вначале тело находилось в покое. При
действии силы тело получит ускорение а, причём по
закону Ньютона
F = ma.
Найдём выражение для работы, которую совершит сила
за определённый промежуток времени /. По формуле (Ь)
для равномерно ускоренного движения путь s, прой-
денный за время /, равен
s = l at2.
Следовательно, работа А силы F равна
А = Fs = та • 1 at- = 1 т (at)2.
Но at — v, где и — скорость, приобретённая телом за
время /, а потому
A =~mv2.
Эта формула связывает произведённую работу и возник-
шую под действием этой силы скорость. Например, при
падении тела с высоты Н работа силы веса равна GH,
где G — вес тела. Если v — скорость в конце падения,
то
GH = 1 nw2.
64
Динамика
[гл. 2
Но вес тела равен массе его т, умноженной на уско-
рение свободного падения g:
G — mg.
Следовательно,
tngH=-^mv1 2
или
гн=4^.
Отсюда следует:
Мы получили формулу для скорости, приобретае-
мой телом при падении с данной высоты (без учёта со-
противления воздуха). Например, при падении с вы-
соты 5 м тело достигает скорости 10 ж, сек, при падении
с высоты 500 м — скорости 100 м[сек и т. д. В дей-
ствительности сопротивление воздуха значительно умень-
шает рассчитанную таким образом скорость.
Формула А=~5- /пр2 даёт и величину работы, кото-
рую совершит сила, останавливая тело массы т, движу-
щееся со скоростью v. Но в этом случае работа силы
будет отрицательной.
Работа силы может затрачиваться не только на пре-
одоление сопротивления и других сил, направленных
противоположно движению (например, силы веса при
поднимании тела), или на изменение скорости тела, но
и на сообщение деформации телам. Рассмотрим, напри-
мер, следующий случай. Пусть сила приложена к концу
пружины (или вообще к упругому телу), сжимая или
растягивая её. Тогда, при деформации пружины, точка
приложения силы будет перемещаться, и сила будет
совершать работу.
При постепенной деформации, например, при сжатии
пружины, требуемая для этого сила не постоянна, но
возрастает пропорционально сжатию ’)• Поэтому при
1) Для всех упругих тел справедлив в широких пределах закон
Гука: сила упругости пропорциональна деформации тела.
Работа
65
§ 18]
подсчёте работы, затраченной на деформацию, возьмём
среднее значение силы от начала до конца сжатия,
допустим, что укорочение пружины, считая от её не-
сжатого состояния, равно I. Согласно закону Гука, сила,
уравновешивающая возникающую силу упругости, будет
равна
н F=kl.
Здесь к есть коэффициент пропорциональности, так
называемый коэффициент упругости пружины. Чем
больше к, тем, «жёстче» пружина, т. е. тем меньше её
деформация под действием данной силы.
Сила F возрастает от нуля (начало сжатия) до ве-
личины к! (полное сжатие). Значит, среднее значение силы
равно
F ср = kl.
Для вычисления работы это среднее значение нужно
умножить на перемещение I точки приложения силы:
A = Fcp-l=±kF.
Эту же формулу можно записать и иначе:
Отсюда видно, что, сжимая пружины с разными коэф-
фициентами упругости одной и той же силой, мы затра-
тим разную работу. Чем жёстче пружина, тем меньше
затраченная работа. Это имеет большое значение, на-
пример, при устройстве амортизаторов шасси, смягча-
ющих толчки при посадке самолёта. При ударе о землю
амортизатор должен произвести определённую отрица-
тельную работу, погашая вертикальную скорость само-
лёта. В амортизаторе с малым коэффициентом упругости
сжатие амортизационных стоек будет больше, зато воз-
никающие силы будут меньше, и конструкция самолёта
будет лучше предохранена от повреждений. По той же
причине при слабо надутых пневматиках толчки на не-
ровностях аэродрома ощущаются слабее.
5 М. А, Исакович
66
Динамика
[гл. _
§ 19. Мощность.
Определённая величина работы может быть произвс.
дена в течение разных промежутков времени, а за один
и тот же промежуток времени может быть произведена
разная работа. Например, за один час лошадь может
произвести большую работу, чем человек, а парован
машина — большую работу, чем лошадь.
Важнейшим свойством той или иной машины явля-
ется работа, которая может быть ею совершена за опрс
делённый промежуток времени, иначе говоря, быст
рота производства работы. Для характеристики этого
свойства вводится новая физическая величина: мощность.
Мощностью называется работа, произведённая в еди-
ницу времени.
Чем больше мощность, тем большую работу может
произвести машина за данный промежуток времени.
Мощность будем обозначать буквой N. Если за время
t сек произведена работа А кг-м, то мощность найдётся
по формуле
N=f. (15)
Очевидно, единица мощности есть кгм!сек— килограм-
мометр в секунду, т. е. такая мощность, при которой
за одну секунду совершается работа в один килограм-
мометр. На практике обычно пользуются другой едини-
цей мощности— лошадиной силой. Лошадиная сила есть
мощность 75 кгм{сек. Мощность, выраженная в л. с.
определяется по формуле
N= 1 Л. с. (16)
Покажем, как вычисляется мощность в двух случаях:
когда работа производится силой, точка приложен!!'
которой движется прямолинейно, и когда работа про
изводится моментом, т. е. силой, имеющей момент отно-
сительно оси вращающегося тела.
Если точка приложения силы F кг движется в на-
правлении силы со скоростью о м\сек, то за одну
секунду точка приложения силы пройдёт путь о, и.
§ ’91
Мощность
67
следовательно, работа, совершённая за одну секунду,
т. е. мощность, будет равна
N =Fv кгмсек
или, если мощность выражена в л. с.,
N=^*.c. (17)
Это —формула, которая часто будет нам встречаться
при изучении полёта самолёта.
Если на вращающееся тело, например вал мотора,
действует сила, имеющая определённый момент относи-
тельно оси вращения, то можно представить себе, что
этот момент создаётся постоянной по величине силой F,
перпендикулярной к радиусу, проведённому к точке
f её приложения. При вращении тела вращается и сама
сила, занимая неизменное положение относительно вра-
щающегося тела.
При вращении точка приложения силы описывает
окружность радиуса г, где г — плечо силы относительно
оси вращения. Путь, пройденный ею за секунду, есть
скорость этой точки; по формуле (9) скорость и выра-
жается формулой
и = юг,
где <о — угловая скорость вращения. С другой стороны,
так как сила направлена всё время по касательной
к описываемой окружности, т. е. по направлению дви-
> жения точки приложения силы, то работа, совершаемая
за одну секунду, т. е. мощность, равна
N=F(s>r кгм/сек.
Но Fr есть момент М силы относительно оси враще-
ния, следовательно,
N = Afw кгм, сек
или, если мощность выражена в лошадиных ситах,
Если вместо угловой скорости дано число оборотов в
минуту, то, пользуясь формулой (8), получим выраже-
6*
68
Динамика
(гл. 2
ние для мощности в виде
или, после вычисления,
ы~£л.с. <18)
Из этой формулы следует, что для получения данной
мощности при разном числе оборотов требуются разные
моменты, а значит, в конечном счёте, и разные силы.
Чем больше число Оборотов, тем меньше моменты, и об-
ратно. Поэтому в высокооборотных моторах вал испыты-
вает значительно меньшие усилия, чем в тихоходных
машинах, а потому быстроходные моторы могут быть сде-
ланы меньших размеров и габаритов. Отсюда и стрем-
ление авиационных конструкторов к повышению числа
оборотов моторов.
§ 20. Энергия.
При некоторых условиях тела могут производить ра-
боту. Так, сжатая пружина, распрямляясь, производит
работу (точнее говоря, работу производит при этом сила
упругости). Например, боевая пружина, разжимаясь
при спуске курка, сообщает значительную скорость удар-
нику винтовки. Груз, опускаясь, совершает работу (и
здесь точнее будет сказать, что работу совершает сила
тяжести при опускании груза). Например, при спуске
парашютиста сила тяжести совершает работу против
сил сопротивления воздуха, поддерживая равномерное
движение парашюта. Движущееся тело, уменьшая свою
скорость, также производит работу. Например, железно-
дорожный вагон, подтолкнутый паровозом к составу,
останавливаясь, сжимает пружины буферов; пуля, попа-
дая в препятствие, совершает работу разрушения мате-
риала и т. п.
Во всех этих случаях работа совершается при изме-
нении состояния тела: при распрямлении пружины, при
опускании груза, при остановке движущегося тела. Пока
эти изменения не наступили, работа не произведена;
в теле имеется некоторый запас ещё не совершённой
Энергия
69
§ 20]
работы. При совершении же работы этот запас расхо-
дуется.
Запас работы, которую может совершить тело, изме-
няя своё состояние, называется энергией. Энергия дви-
жущегося тела называется кинетической энергией или
энергией движения. Энергия тела, поднятого над зем-
лёй, называется потенциальной энергией или энергией
положения. Энергия сжатой пружины (и вообще дефор-
мированного тела) называется упругой энергией или
опять-таки потенциальной энергией. Вообще, энергия,
обусловленная положением тела (или взаимным распо-
ложением его частей), называется в механике потен-
циальной энергией.
Энергия тела измеряется работой, которую может
совершить тело, переходя из одного состояния в другое.
Единица для энергии та же, что и для работы, г. е.
килограммометр.
Энергия может переходить из одного вида в другой.
Например, кинетическая энергия подброшенного вверх
тела переходит в потенциальную энергию его поднятия
над землёй; при этом тело, уменьшая свою скорость,
совершает работу против силы тяжести, и его кинети-
ческая энергия уменьшается. Обратно, при падении те-
ла на землю его потенциальная энергия поднятия над
землёй расходуется на приобретение телом кинетической
энергии. Во время своего падения тело обладает одно-
временно и кинетической, и потенциальной энергией.
Когда сила, действующая на тело, совершает работу,
то энергия тела изменяется. Например, сила, направ-
ленная в сторону движения тела, совершает положи-
тельную работу, и при этом скорость тела растёт, т. е.
увеличивается его кинетическая энергия. Сила, подни-
мающая тело вверх, совершает положительную работу,
и при этом увеличивается энергия поднятия тела над
землёй. Вообще, сила, совершающая при своём действии
на тело положительную работу, увеличивает его энер-
гию. При этом образуется запас работы, равный рабо-
те, произведённой силой: работа силы переходит в энер-
гию тела. Возвращаясь к первоначальному состоянию
(например, к первоначальной скорости или к первона-
чальной высоте над землёй), тело может произвести та-
70
Динамика
[гл. 2
кую же работу, какая была затрачена для сообщения
телу энергии. Поэтому энергию тела можно измерять
и работой, затраченной на соответственное изменение
скорости тела, высоты его поднятия и т. д. Наоборот,
если сила, приложенная к телу, совершает отрицатель-
ную работу, то энергия тела уменьшается на величину
этой работы.
В предыдущем параграфе мы видели, что для сооб-
щения телу массы т скорости v необходимо произвести
работу
А = ~та2. (19)
Следовательно, кинетическая энергия движущегося тела
равна этой же величине, т. е. половине произведения
массы тела на квадрат его скорости. Если тело весит
G кг, то при опускании его на Н м сила тяжести совер-
шит работу GH кгм. Поэтому потенциальная энергия
поднятого тела равна GH, где Н — высота тела над не-
которым заданным уровнем.
Потенциальная и кинетическая энергии могут, как
было сказано, переходить одна в другую: при этом ве-
личина израсходованной потенциальной энергии равна
величине приобретённой кинетической энергии, и обрат-
но (если не учитывать сил сопротивления; их влияние
на переход энергии из одного вида в другой рассмо-
трим в следующем параграфе). Таким образом, сумма
потенциальной и кинетической энергий остаётся посто-
янной. Это — закон сохранения механической энергии. До-
казательство этого закона приводится в курсах механи-
ки. Энергия переходит из одного вида в другой; она
может переходить от одного тела к другому, но общий
запас работы остаётся без изменения. Проследим закон
сохранения энергии на следующем примере: стальной
шарик, приподнятый над горизонтальной стальной пли-
той, обладает некоторой потенциальной энергией подня-
тия. Если дать шарику падать, то потенциальная энер-
гия его будет переходить в кинетическую. К моменту,
когда шарик достигнет плиты, его потенциальная энер-
гия целиком перейдёт в кинетическую. Далее, ударяясь
о плиту, упругий шарик деформируется (сплющивается);
§ 21] Потери механической энергии 7[
„сформируется (прогибается) и плита. Правда, деформа-
ции шарика и плиты очень малы, но благодаря боль-
шому коэффициенту упругости стали при деформации
возникают большие силы. При ударе шарик на мгнове-
ние теряет свою скорость: его кинетическая энергия пере-
шла в потенциальную энергию упругости деформиро-
ванных шарика и плиты. Но как только шарик
останавливается, силы упругости, возникшие при дефор-
мации стали, снова сообщают ему скорость: шарик от-
скакивает вверх, приобретая теперь кинетическую энер-
гию взамен энергии упругости. При движении вверх
шарик затрачивает свою кинетическую энергию и при-
обретает потенциальную энергию поднятия. Когда он
достигнет той высоты, с которой был сброшен, вся ки-
нетическая энергия снова перейдёт в потенциальную —
ту же энергию, с какой шарик начал своё движение.
Далее картина будет повторяться: шарик будет падать,
ударяться о плиту и отскакивать обратно, а энергия
поочерёдно будет переходить из одного вида в другой.
§ 21. Потери механической энергии.
В действительности, при переходе энергии из одного
вида в другой, часть её всегда безвозвратно затрачи-
вается на преодоление сил сопротивления. Поэтому за-
кон сохранения механичёской энергии выполняется не-
точно: сумма потенциальной и кинетической энергий
убывает при превращениях энергии, так как силы со-
противления совершают над телом отрицательную рабо-
ту, уменьшающую запас работы тела. Так, в примере
предыдущего параграфа не вся потенциальная энергия
поднятого шарика будет переходить в кинетическую:
часть её потратится на преодоление сил сопротивления
воздуха. Поэтому кинетическая энергия шарика в кон-
це падения будет меньше, чем потенциальная энергия в
начале падения. Произошла потеря энергии в виде ра-
боты, затраченной на преодоление сопротивления воз-
духа. Потери энергии произойдут и при ударе шарика
о плиту и при его отскоке и движении вверх. Поэтому
шарик не будет достигать прежней высоты, и каждый
следующий прыжок будет всё ниже и ниже. Энергия
12 Динамика [гл. 2
шарика будет постепенно рассеиваться вплоть до полного
её израсходования и остановки шарика. Подобно этому
при снижении парашютиста скорость неизменна, а
потому кинетическая энергия постоянна; потенциальная
же энергия всё время убывает (высота над землёй умень-
шается), затрачиваясь на преодоление сопротивления
воздуха.
Потери энергии на преодоление сил сопротивления
происходят при любом переходе механической энергии
из одного вида в другой, а кинетическая энергия тела
всё время рассеивается во время его движения, даже
если превращения энергии в потенциальную не проис-
ходит. Общая механическая энергия движущегося тела,
предоставленного самому себе, может только умень-
шаться; чтобы поддерживать её неизменной или увели-
чивать её, необходимо прилагать к телу силы, которые
совершали бы положительную работу, пополняя раст-
рачиваемую энергию. Так, например, при равномерном
полёте самолёта сила тяги должна совершать положи-
тельную работу, компенсируя отрицательную работу,
совершаемую силами сопротивления воздуха.
§ 22. Закон сохранения энергии.
Запас работы, которую может совершить тело при
изменении своего состояния, может заключаться в теле
не только в виде механической энергии, которую мы
рассматривали в § 20. Рассмотрим некоторые другие
виды энергии, понимая под словом энергия попрежнему
запас работы, которую может совершить тело при из-
менении своего состояния.
Взрывчатые вещества обладают химической энергией;
при химической реакции взрыва выделяется большое
количество механической энергии. Например, снаряд,
вылетая из канала ствола орудия, приобретает кинети-
ческую энергию именно за счёт освободившейся хими-
ческой энергии заряда, превратившейся в работу. Один
килограмм пороха, взрываясь, освобождает около
400 000 кал/ энергии. Когда при взрыве снаряда химическая
энергия взрывчатого вещества быстро переходит в рабо-
ту, возникают огромные силы, производящие механи-
§ 22] Закон сохранения энергии 73
ческую работу разрушения. Ещё большая химическая
энергия заключается в горючих веществах; она выде-
ляется при их сгорании. Например, один килограмм
бензина, сгорая, выделяет свыше 4 500000 кем энергии.
Химическая энергия горючего используется, при её
превращении в механическую работу, во всех тепловых
двигателях — от паровой машины до дизеля и до ракет-
ного самолёта.
В двигателях химическая энергия не переходит не-
посредственно в механическую энергию: переходным
этапом здесь служит тепловая энергия. В паровых ма-
шинах химическая энергия топлива переходит в тепло-
вую энергию нагретого пара, тепловая энергия пара,
переходя в механическую энергию упругости пара, про-
изводит работу: двигает поршни, вращает ротор турби-
ны. В двигателях внутреннего сгорания (моторах и ди-
зелях) работу производят сами газы, образующиеся при
сгорании топлива и имеющие высокую температуру.
Обратно, механическая энергия легко переходит в те-
пловую: при всяком трении исчезает некоторое количе-
ство механической энергии и появляется некоторое
количество тепла. Так, тормоза, останавливающие же-
лезнодорожный состав, переводят кинетическую энергию
движения поезда в тепловую энергию нагрева тормозных
колодок и колёсных бандажей. Доисторический способ
добывания огня трением, применяющийся, впрочем, ещё
и сейчас у некоторых племён Австралии, представляет
собой пример перехода механической энергии в тепловую.
Потери механической энергии представляют на самом
деле переход её в форму тепловой энергии окружающей
среды.
В динамомашинах, магнето, электромоторах механиче-
ская энергия переходит в электрическую и магнитную
энергию и обратно. В свече цилиндра мотора электри-
ческая энергия превращается в тепловую энергию искры,
зажигающей горючую смесь. В электролампе электриче-
ская энергия переходит в тепловую и световую энер-
гии.
Мы видим, что энергия в телах может накопляться
в самых различных формах, причём энергия может пере-
ходить из одного вида в другой, Когда количество
74
Динамика
[гл. 2
энергии одного вида убывает, количество энергии других
видов растёт.
Опыт показывает, что общее количество энергии всех
видов не изменяется. Общая энергия не может ни уве-
личиваться, ни уменьшаться; могут произойти — и всё
время происходят — лишь превращения энергии из одно-
го вида в другой, переход её от одних тел к другим.
Это и есть общий закон сохранения энергии.
Однако полезная для нас энергия может уменьшать-
ся и в действительности постоянно уменьшается. Именно,
потери энергии (хотя мы знаем теперь, что это не нас-
тоящие потери, а только превращение энергии в другую
форму) представляют собой переход энергии в бес-
полезную для нас форму. Чаще всего это — нагревание
окружающей среды, трущихся поверхностей и т. д.
Часто эти потери не только невыгодны, но даже вредно
отзываются на самих механизмах: например, в моторе
специально приходится охлаждать трущиеся части во
избежание их перегревания. •
§ 23. Упругие тела.
До сих пор мы рассматривали движение тела (и част-
ный случай движения — покой), не учитывая возникаю-
щих деформаций, т. е. считая, что тела не меняют свою
форму. Однако все реальные тела деформируются в
большей или меньшей степени под действием приложен-
ных к ним сил. При этом в телах возникают внутрен-
ние !) силы — силы упругости: это — силы, возникающие
при деформации между частицами данного тела.
Для целого ряда веществ, например, для всех авиа-
ционных материалов, деформации исчезают при устра-
нении внешних сил: тело возвращается к своей перво-
начальной форме; вместе с деформациями исчезают
и силы упругости. Такие тела называются упругими.
Сталь, дерево, резина представляют примеры упругих
тел. Примером тел неупругих может служить свинец:
!) Внутренними силами называются силы, действующие между
отдельными частями рассматриваемого тела. В отличие от этого
внешними силами называем силы, приложенные со стороны дру-
гих тел к данному телу.
§ 23]
Упругие тела
75
деформация, сообщённая куску свинца, не исчезает
после прекращения действия силы, и он не восстанав-
ливает свою форму.
Заметим, что и упругие тела способны восстанавли-
вать свою форму только в тех случаях, когда деформа-
ция не превосходит определённой величины — предела
упругости. Если деформация оказалась больше предела
упругости, то первоначальная форма тела не восста-
навливается. Например, стальная проволока выпрям-
ляется после небольшого изгибания, но если её сильно
согнуть, то она уже не распрямится полностью. В тех-
нических сооружениях и конструкциях, например, в кон-
струкции самолёта,
деформации никогда ---------|-----------|—«
не доходят до пре- 0}
дела упругости. По-
этому мы будем в , р ц \—. | , -t г——। ; г
дальнейшем считать, ‘ 1——-------------
что рассматриваемые л
тела совершенно уп-
руги.
Силы упругости
в телах возникают
Рис. 23. Действие мысленно отрезанной
части растянутого стержня заменено
силой упругости, действующей со сто-
роны этой части.
как в случаях равно-
весия тел под действием сил, так и при ускоренном
их движении. Рассмотрим сперва силы упругости,
возникающие при равновесии тела. Возьмём простейшую
деформацию: растяжение стержня. Приложим к концам
стержня две равные и прямо противоположные силы F,
и А, (рис. 23, а). Равнодействующая этих сил равна
нулю, и стержень в целом останется в покое, но концы
стержня начнут двигаться под действием приложенных
сил, и стержень будет растягиваться. Разрежем мыслен-
но стержень на две части. При растяжении между эти-
ми частями начнут действовать силы упругости. Когда
по величине эти силы станут равны силам Fx и Р2,
растяжение прекратится; каждая часть стержня будет
находиться в равновесии под действием внешней силы и
силы упругости, действующей со стороны второй части
стержня (рис. 23,6). Аналогичная картина получится и
при сжатии стержня двумя равными силами.
76
Динамика
[гл. 2
Итак, равновесие отдельных частей тела наступает
тогда, когда соответственная сила упругости становится
равной внешней силе, приложенной к рассматриваемой
части тела. Очевидно, что где бы ни провести мыслен-
ный разрез в стержне, сила упругости бу.
дет одинакова для каждого сечения: стер,
жень растянут в данном случае равномерно.
Иначе распределятся упругие силы, если
одной из внешних сил является сила тя-
жести. Представим себе стержень, подве-
шенный к стойке одним концом и находя-
щийся в равновесии под действием силы
тяжести. Снова проведём мысленно разрез
поперёк стержня. Так как имеет место рав-
новесие, то возникшие силы упругости
должны уравновешивать внешнюю силу, в
данном случае внешняя сила есть вес части
стержня, лежащей ниже разреза. Ясно, что
чем выше проведён разрез, тем больше в этом
। месте должна быть сила упругости. Особенно
наглядно это неравномерное распределение
Рис. 24. мо- сил упругости можно показать на «модели»
гоЛЬстер>кня' стеРжня> составленной из отдельных гру-
растянутого зиков, соединённых пружинками. Весом и
собственным массой пружинок будем пренебрегать срав-
весом. нительно с весом и массой грузиков. Рас-
тяжение пружины соответствует возни-
кающим силам упругости. Если подвесить такую мо-
дель стержня за один конец, то растяжение каждой
данной пружинки будет таково, что возникшая в ней
сила упругости будет уравновешивать вес грузов, рас-
положенных ниже этой пружинки (рис. 24). Растяже-
ние наибольшее у точки подвеса и уменьшается к сво-
бодному концу. Сила упругости в каждом сечении
стержня (или для каждой пружинки на модели) равна
весу мысленно отрезанной части стержня. Иначе можно
сказать, что сила упругости пропорциональна массе той
части тела, вес которой она уравновешивает.
Рассмотрим теперь силу упругости, возникающую
в теле при его ускоренном движении. И здесь возьмём
для примера стержень и представим себе, что его уско-
§24]
Силы ИНЕРЦИИ
77
рение вызывается силой, приложенной к концу стерж-
ня. Снова мысленно разрежем стержень. Внешняя сила
приложена к одной части стержня, а для другой
части единственной внешней силой является сила
упругости со стороны первой части. Следователь-
но, эта сила и должна сообщать отрезанной части
требуемое ускорение. Но по закону Ньютона си-
ла, сообщающая телу данное ускорение, пропорцио-
Рис. 25. Модель стержня, растянутого при
ускоренном движении.
нальна массе этого тела. Следовательно, сила упруго-
сти должна быть пропорциональна массе отрезанной
части стержня, которой она сообщает ускорение. Наи-
большая сила упругости будет вблизи точки приложе-
ния внешней силы; далее, к концу стержня, силы упру-
гости будут убывать.
И в этом примере распределение сил упругости де-
лается наглядным на модели стержня, где ясно видно
растяжение отдельных пружинок (рис. 25).
§ 24. Силы инерции.
Обратим теперь внимание на сходство в распреде-
лении сил упругости в двух разобранных случаях: рав-
новесие под действием силы тяжести и ускоренное
движение под действием приложенной силы. В обоих
случаях сила упругости пропорциональна массе выде-
ленной части тела. С точки зрения возникающих в те-
ле сил упругости, картина получается одинаковой в
обоих случаях: те же самые силы упругости, что и в
случае ускоренного движения, получились бы в случае
равновесия тела под действием данной внешней силы
и сил, действующих на каждую частицу тела, пропор-
ционально её массе (подобно силе тяжести). По величи-
не эти силы должны быть равны произведению массы
частиц на их ускорение при фактическом движении,
78
Динамика
Ггл. 2
а направлены должны быть противоположно ускорению.
Такие силы называются силами инерции. Пока мы вво-
дим их совершенно условно, как такие силы, которые
вместе с обычными силами, приложенными к телу, на-
ходились бы в равновесии и действие которых вызывало
бы в теле те же силы упругости, что возникают факти-
чески в ускоренно движущемся теле. Конечно, силы
инерции не приложены к телу, имеющему ускорение,
но если бы приложить к телу такие силы, то под дей-
ствием этих сил и внешних приложенных сил тело бы-
ло бы в равновесии, а возникающие силы упругости были
бы те же, что и при данном ускоренном движении тела.
Величина сил инерции равна — та; здесь т — масса
тела или той его части, на которую действует данная
сила инерции; а — соответственное ускорение; знак ми-
нус показывает, что сила инерции направлена противо-
положно ускорению.
Введение сил инерции позволяет (пока условно) за-
менять рассмотрение данного ускоренного движения под
действием данных сил рассмотрением равновесия тела
под действием тех же сил и сил инерции.
Разберём для примера движение грузика, подвешен-
ного на нити на ускоренно движущейся тележке. Спер-
ва проведём рассмотрение, не вводя сил инерции.
В первый момент движения сумма сил, действующих
на грузик, равна нулю, вес грузика G уравновешен
натяжением Т нити: G — T. Поэтому грузик будет от-
ставать от начавшей двигаться тележки, и нить откло-
нится от вертикали назад. Но тогда появится горизон-
тальная составляющая Т2 натяжения нити, направлен-
ная вперёд, которая будет сообщать ускорение грузику.
Нить отклонится настолько, чтобы эта составляющая
сообщила грузику ускорение а, равное ускорению те-
лежки; значит, Тг = та, где ш—масса грузика. С дру-
гой стороны, вертикальная составляющая Т\ натяжения
нити должна попрежнему уравновешивать вес грузика.
Следовательно, натяжение нити Т увеличится и будет
равно равнодействующей сил T. = G и Т., — та
(рис. 26, с).
Рассмотрим теперь эту же задачу, приложив к гру-
зику силу инерции J — — ma и считая, что под дей-
§ 24]
Силы ИНЕРЦИИ
79
ствием данных сил и силы инерции грузик находится
в равновесии (рис. 26, б). Сложив силы G и J, найдём
их равнодействующую Gn. -Для того чтобы грузик был
в равновесии, необходимо, чтобы нить была направлена
Рис. 26- Схема сил, действующих на груз, подвощенный на уско-
ренно движущейся тележке, а — схема сил, построенная для дви-
жения относительно земли; б—то же для движения относительно
тележки.
по линии действия силы Gn, а натяжение нити Т должно
равняться этой силе: Т = Сп. Разложив силу Т на вер-
тикальную и горизонтальную составляющие, увидим,
что для равновесия должно быть:
1\ = G, T2 = ma.
Эти условия, как, конечно, и должно было быть, те же,
что и при предыдущем рассмотрении.
Мы видим на этом примере, как введение сил инер-
ции позволяет заменить изучение случая ускоренного
движения случаем условного равновесия сил. Выгод-
ность такой замены в первую очередь в том, что во-
просы равновесия проще для понимания и нагляднее
вопросов ускоренного движения.
Но мало того: условному равновесию можно придать
и реальный смысл: в нашем примере грузик находится
в равновесии относительно самой ускоренно движущейся
тележки.
Таким образом, здесь мы отказываемся от рассмо-
трения движения тела относительно земли, а рассма-
триваем его относительно тела, которое само движется
80
Динамика
[гл. 2
относительно земли с ускорением а. В этом случае
обычные условия равновесия, конечно, не применимы, так
как тело, покоящееся относительно земли, будет иметь
ускорение относительно движущегося тела, и обратно, в
то время как силы, действующие на данное тело, одни
и те же. Однако, как мы видим, достаточно добавить
условные силы инерции J— — та, чтобы снова получить
возможность пользоваться обычными условиями равно-
весия, но уже по отношению к движущемуся телу.
Рис. 27. Схема сил, действующих на груз, подвешенный к вращаю-
щейся подставке, а — схема сил для движения относительно земли;
б — то же для движения относительно подставки.
Рассмотрим ещё пример груза, подвешенного на ни-
ти к вращающейся подставке (рис. 27, о). При вращении
груз движется по окружности, следовательно, имеет
центростремительное ускорение; оно создаётся, как и в
предыдущем примере, горизонтальной составляющей на-
тяжения отклонённой нити. Полное натяжение нити рав-
но и здесь, как видно из схемы сил на рисунке, равно-
действующей вертикальной составляющей, равной весу
груза, и горизонтальной составляющей, равной массе
груза, умноженной на ускорение. Если же рассматри-
вать груз как находящийся в равновесии относитель-
но подставки, то получим условия равновесия, добав-
ляя силу инерции; она будет по величине равна центро-
стремительной силе, но направлена в противоположную
сторону от центра. Силу инерции при вращательном дви-
жении будем называть центробежной силой. Натяжение
нити Т уравновешивает равнодействующую GH веса гру-
Силы ИНЕРЦИИ
81
§ 24]
за G и центробежной силы J (рис. 27, б). Центробеж-
ная сила равна m , где т — масса груза, v — его
скорость, а /? — радиус окружности, описываемой
грузом.
Условия равновесия в обоих разобранных примерах
таковы, как если бы вес груза увеличился и стал бы
равным Gn, а направление этого нового веса отклони-
лось бы в сторону действия силы инерции, т. е. в сто-
рону, противоположную ускорению.
Итак, движение в данных случаях можно рассматри-
вать двумя методами. При первом методе движение рассма-
тривается как ускоренное относительно земли; тогда не
вводятся никакие силы инерции, и равнодействующая
всех «действительных» сил, приложенных к телу, создаёт
его ускорение относительно земли, которое можно рассчи-
тать по закону Ньютона. Другой метод — рассмотрение
равновесия данного тела относительно ускоренно движу-
щегося тела. При этом в условия равновесия вводятся
«условные» силы инерции, вместе с которыми «действи-
тельные» силы дают равнодействующую, равную нулю.
Из сказанного ясна особая роль рассмотрения дви-
жения относительно земли: там всегда достаточно рас-
сматривать только «действительные» силы. Но если
движение рассматривается относительно ускоренно (по
отношению к земле) движущихся тел, то силы инерции
необходимо принять в расчёт «на равных правах» с
«действительными» силами. Введя силы инерции,
можем дальнейшее рассмотрение проводить, как
обычно.
Показательно разобрать подробнее следующие при-
меры: человек, находящийся в движущемся теле (авто-
машине, самолёте и т. д.), находится в покое отно-
сительно движущегося тела. Ощущаемые силы на-
пряжения, испытываемые мускулами, проще и на-
гляднее всего объясняются при помощи «сил инерции».
Например, когда автомашина берёт с места (полу-
чает ускорение вперёд), человек, стоящий в кузове,
может упасть на спину. Объясняется это тем, что
«новый вес» (равнодействующая «настоящего» веса и
силы инерции) отклоняется назад от вертикали и опроки-
6 М. А. Исакович
82
Динамика
[гл. 2
дывает человека. Наоборот, при торможении автома-
шины (ускорение направлено назад) «новый вес» откло-
нён в сторону силы инерции, вперёд, и валит человека
вперёд. Если же рассматривать движение с «земной»
точки зрения, то объяснение проводится без всяких сил
инерции: при трогании машины с места трение подошв
стоящего в кузове человека увлекает его ноги вперёд;
на тело же человека не действуют в горизонтальном
направлении никакие силы, оно «отстаёт», и человек
падает на спину. Наоборот, при остановке машины ноги
тормозятся трением подошв, тело же продолжает дви-
гаться и падает вперёд. Ещё пример: при повороте авто-
машины человека «прижимает» к борту. И здесь, рас-
сматривая движение относительно автомашины, вводим
центробежную силу инерции, направленную к наружному
борту, которая и прижимает человека к этому борту.
Давление борта уравновешивает центробежную силу,
и человек остаётся в равновесии относительно автома-
шины. Рассматривая -кг движение относительно земли,
наолюдаем центростремительное ускорение человека под
действием центростремительной силы давления борта:
если бы борт вдруг сломался, центростремительное уско-
рение человека исчезло бы, и он стал бы двигаться
прямолинейно, в то время как автомашина, для которой
ускорение сохранилось, ушла бы из-под него в сторо-
ну — человек вылетел бы из машины.
Рассмотрение движения относительно движущегося
тела позволит нам упростить изучение разных случаев
движения самолёта; поэтому мы будем, особенно для
случаев криволинейного движения самолёта, вводить
силы инерции, в том числе и центробежные силы, и
таким образом заменять изучение ускоренного движения
изучением равновесия. При этом мы будем, отдельно от
других сил, складывать силы веса и силы инерции ввиду
сходства их действия на тело: и те и другие силы дей-
ствуют на каждую частицу тела пропорционально её
массе. Равнодействующую силы веса G и силы инерции
J будем называть перегрузочным весом Gn данной части
тела. Равнодействующая всех остальных сил должна ура-
вновешивать перегрузочный вес. Число п, показывающее,
во сколько раз перегрузочный вес больше обыкновенного
§ 24] Силы инерции
веса, называется перегрузкой:
83
(20)
Таким образом, упругие напряжения, возникающие
в теле при его ускоренном движении, таковы, каковы
они были бы при действии данных сил и при замене
«обыкновенного» веса перегрузочным весом. Важно от-
метить, что перегрузочный вес вообще не направлен
вертикально, так как он является равнодействующей
вертикального «обыкновенного» веса и силы инерции,
которая может иметь разное направление в разных слу-
чаях движения. Наконец, и перегрузка, и направление
перегрузочного веса могут быть различны для разных
частей тела, так как эти части могут иметь разные
ускорения. В случае же поступательного ускоренного
движения ускорения одинаковы, и перегрузка, и направ-
ление перегрузочного веса одинаковы для всех частей
тела. Тогда равнодействующая силы веса и сил инерции
приложена к центру тяжести тела, и перегрузочный вес
тела в целом есть повёрнутый и увеличенный в п раз
«обычный» вес тела.
6*
ГЛАВА 3.
СТАТИКА.
§ 25. Установившиеся режимы полёта.
Среди всех видов движения самолёта большую важ-
ность имеют установившиеся движения, так называемые
режимы полёта. К числу режимов относится, во-пер-
вых, равномерный прямолинейный полёт (при поступа-
тельном движении самолёта, т. е. без вращения), напри-
мер: горизонтальный режим, режим набора высоты,
режим планирования. Во-вторых, режимами называются
и некоторые криволинейные движения с постоянной
скоростью и при постоянной угловой скорости враще-
ния самолёта. Таковы, например, установившийся вираж,
спираль, установившийся штопор.
Каковы должны быть силы и моменты, действующие
на самолёт при установившемся движении? В случае
прямолинейного режима равнодействующая всех сил
должна быть равна нулю. Напомним, что если бы равно-
действующая не равнялась нулю, а была бы направ-
лена, например, вдоль траектории, то она изменяла бы
величину скорости движения; если бы равнодействую-
щая была перпендикулярна к линии полёта, она искрив-
ляла бы траекторию. Кроме того, так как вращение
самолёта отсутствует, то и моменты всех сил, действую-
щих на самолёт, должны взаимно уравновешиваться.
В случае криволинейного режима равнодействующая
всех сил не равна нулю: она направлена перпендику-
лярно к линии полёта, создавая центростремительное
ускорение, искривляющее траекторию. Но мы знаем
уже, что, добавляя к силам, действующим на самолёт,
силы инерции, мы можем рассматривать самолёт и
в этом случае как находящийся в равновесии, т. е.
считать равнодействующую сил (включая силы инерции)
Равновесие сил и равновесие моментов
85
§ 26]
равной нулю. Моменты попрежнему должны уравнове-
шиваться, как и в случае прямолинейных режимов, так
как вращение равномерное.
Итак, при изучении режимов полёта мы имеем дело
с равновесием сил и равновесием моментов. Поэтому
выясним теперь подробнее условия равновесия сил и
равновесия моментов. Для этого нужно научиться скла-
дывать силы и складывать моменты, действующие на
данное тело. Некоторые случаи сложения сил и момен-
тов мы уже рассматривали; теперь изучим другие ин-
тересующие, нас случаи.
Складывая силы, будем считать их все приложен-
ными к центру тяжести тела1), а моменты будем рас-
сматривать относительно осей, проходящих через центр
тяжести тела.
§ 26. Равновесие сил и равновесие моментов.
Пусть все силы, приложенные к центру тяжести
тела, расположены на одной прямой. Сложим в отдель-
ности силы, направленные в одну сторону, и силы, на-
правленные в противоположную сторону. Тогда все
силы, приложенные к телу, будут заменены двумя си-
лами Хг и Х2, направленными в противоположные сто-
роны, и условием равновесия этих сил будет, как мы
знаем, равенство их по величине:
Xt=X2. ‘ (21)
Более сложным будет случай, когда все силы лежат
в одной плоскости. Здесь для составления условий
равновесия удобно применить следующий способ: через
центр тяжести С проведём две взаимно перпендикуляр-
ные оси Сх и Су и каждую силу разложим на две со-
ставляющие по направлениям этих осей. Тогда все силы
будут заменены двумя группами сил; силы каждой
группы (составляющие данных сил) направлены по одной
прямой (в одну и в другую стороны). Для каждой
группы в отдельности условие равновесия составляется,
смотрим'отд6 слУчая сложения параллельных сил, который рас-
86
Статика
[гл. 3
как и в предыдущем случае:
Хг=Х2, Уг = У2. (22)
В этом случае имеем два условия равновесия.
Наконец, в общем случае, когда силы не лежат
в одной плоскости, разложим каждую силу на три со-
ставляющие по трём взаимно перпендикулярным направ-
лениям, проходящим через центр тяжести: Сх, Су и Cz.
В результате получим три условия равновесия для
составляющих, взятых по каждому из этих направлений:
Л = У2, Z1=Z2. (23)
Для самолёта направления осей х, у, z выбираются
обычно следующим образом: ось х направлена по линии
полёта; ось у перпендикулярна к ней и к размаху
крыла, ось z перпендикулярна к обеим осям х и у.
Условие равновесия моментов вокруг данной оси
аналогично условию равновесия сил, направленных по
одной прямой: сложим моменты сил, вращающих тело
вокруг данной оси в одну сторону, и отдельно сложим
противоположные моменты. Полученные суммарные мо-
менты Мг и имеют противоположное направление,
и, следовательно, для равновесия должно выполняться
равенство
МХ=М2. (24)
Если такие равенства выполняются для всех трёх
осей х, у и Z, то моменты всех сил взаимно уравнове-
шиваются.
§ 27. Сложение параллельных сил.
Пусть на данное тело действуют две параллельные
силы, направленные в одну сторону (рис. 28). Чтобы
найти их равнодействующую, воспользуемся переносом
сил согласно § 15. Соединим точки А и В приложения
данных сил и Е2. Перенесём обе силы в точку О,
лежащую на прямой АВ; при этом, чтобы не изменить
движение тела, нужно добавить пары сил с моментами,
равными моментам данных сил вокруг оси, проходящей
через точку О перпендикулярно плоскости данных сил.
§ 271
Сложение параллельных сил
87
Пля краткости будем в этом случае говорить о моменте
сил вокруг точки О. Эти моменты равны соответственно
р р и F.J2 и противоположно направлены (/х и 12 —
плечи сил F, и F2 относительно точки О). Если подо-
брать положение точки О так, чтобы дополнительные
моменты •
чине:
были равны по вели-
FJj—. F2/2> (25)
взаимно уравновесятся.
то пары
Следовательно, силы F1 и F2 мож-
но заменить равными им силами,
приложенными к соответственно
подобранной точке О. Эти две
силы, в свою очередь, можно за-
менить одной силой F, равной
сумме этих сил:
28. Сложение па-
Рис.
раллельных сил, направ-
ленных в одну сторону.
Таким образом, равнодейству-
ющая двух параллельных сил
равна их сумме и имеет то же
данные силы. Положение точки приложения равно-
действующей определяется из условия
A___
Z2 Ft
направление, что обе
(26)
Это условие получается из равенства (25).
Так как треугольники, заштрихованные на рисунке,
подобны, то равенство (26) можно заменить следующим:
АО __ F2
ОВ —Ft •
(27)
Следовательно, точка приложения равнодействующей
делит отрезок, соединяющий точки приложения данных
сил, в отношении, обратном отношению сил. «Во
сколько раз одна из сил больше другой, во столько же
Раэ точка приложения равнодействующей ближе к боль-
шей силе».
Если две параллельные силы обращены в противо-
положные стороны, то равнодействующая находится ана-
88
Статика
[гл. 3
логичным путём (рис. 29). Она равна разности данных
сил, обращена в сторону большей силы, а точка её
приложения О лежит
Рис. 29. Сложение парал-
лельных сил, направленных
в разные стороны.
на продолжении отрезка АВ
в сторону большей силы. Отно-
шение расстояний между точ-
ками приложения данных сил
и точкой приложения равно-
действующей снова равно об-
ратному отношению сил:
ао_ ра
О В ~ F, '
Таким образом, две парал-
лельные силы могут быть за-
менены одной равнодействующей, за исключением уже
известного нам случая пары сил, которую нельзя заме-
нить одной равнодействующей.
Положение точки приложения равнодействующей
двух параллельных сил зависит от величины этих сил
и от точек их приложения, но не зависит от их напра-
вления. Это следует из формулы (27), из которой видно,
что положение точки О на отрезке АВ (или на его про-
должении) зависит только от отношения данных сил.
Поэтому при повороте обеих сил на один и тот же угол
вокруг точки их приложения положение точки прило-
жения равнодействующей не меняется: она только пово-
рачивается на тот же угол. Также не изменяется точка
приложения равнодействующей, если изменить в одном
и том же отношении величину обеих сил.
Если закрепить или опереть тело в точке О, то равно-
действующая уравновесится реакцией опоры, и тело будет
находиться в равновесии. При этом расстояния действу-
ющих сил от точки опоры обратно пропорциональны
действующим силам. Это — всем известный закон рычага.
Если на тело действует целый ряд параллельных сил, то
можно найти их равнодействующую последовательным
сложением сил. Точка приложения равнодействующей
и здесь зависит только от точек приложения отдельных
сил и от их величины, но не от их направления. Изме-
нение величины всех сил в одном и том же отношении
также не меняет точки приложения равнодействующей.
Центр тяжести
89
§ 28]
§ 28. Центр тяжести.
Особо важный случай сложения параллельных сил
представляет сложение сил тяжести, действующих на
отдельные части данного тела. Точка приложения равно-
действующей сил тяжести называется центром тяжести
тела. Величина равнодействующей — полный вес тела —
равна сумме весов отдельных частей тела. Если повер-
нуть тело, то все силы веса отдельных его частей по-
вернутся относительно тела на один и тот же угол, не
изменяя своей величины; поэтому точка приложения
равнодействующей останется на месте: положение центра
тяжести не зависит от положения данного тела относи-
тельно земли.
Положение центра тяжести оказывает большое влия-
ние на лётные свойства самолёта. Более подробно этот
вопрос будет разобран в III части книги.
Для тел простой формы положение центра тяжести
легко определяется. Например, центр тяжести однород-
ного стержня лежит на середине его длины; центр тя-
жести диска или кольца — в его центре. Центр тяжести
двух грузов лежит на прямой, соединяющей грузы, и
делит расстояние между ними в отношении, обратном
отношению весов грузов. Если грузы имеют большой
размер, то за расстояние между грузами нужно при-
нять отрезок, соединяющий центры тяжести обоих гру-
зов.
Если опереть или подвесить тело в его центре тя-
жести, то под действием силы тяжести тело будет нахо-
диться в равновесии, так как равнодействующая сил
веса, проходя через точку опоры, будет уравновеши-
ваться реакцией опоры. Это равновесие безразличное,
так как оно не нарушается при повороте тела вокруг
точки опоры.
ЧАСТЬ II.
АЭРОДИНАМИЧЕСКИЕ СИЛЫ И РАБОТА
ВИНТОМОТОРНОЙ ГРУППЫ.
ГЛАВА 4.
АТМОСФЕРА.
§ 29. Силы, действующие на самолёт в полёте.
Познакомившись с основными сведениями из меха-
ники, перейдём теперь к самому предмету «Теории полёта».
Здесь можно различить два отдельных вопроса. С одной
стороны, мы будем изучать силы, действующие на са-
молёт при тех или иных условиях, происхождение этих
сил и их зависимость от различных обстоятельств.
С другой стороны, зная силы, возникающие в различ-
ных случаях, будем изучать движение самолёта под
действием этих сил.
В этой части мы займёмся первым вопросом. Мы
считаем, что читатель хотя бы немного знаком с само-
лётом, его главными частями и их назначением.
Полёт самолёта происходит под действием на него
силы веса, тяги винта и аэродинамических сил х). Само-
лёт практически симметричен: плоскость симметрии
(рис. 30) разделяет его на две одинаковые по весу и
по форме части. Поэтому центр тяжести — точка прило-
жения равнодействующей сил веса отдельных частей
самолёта — лежит в плоскости симметрии. Эту равнодей-
ствующую — вес самолёта в целом — мы будем обозна-
чать буквой G и будем считать, что G не меняется
в полёте: медленным изменением веса вследствие рас-
ходования горючего можно пренебречь в интересующих
нас вопросах; поведение же самолёта при внезапном
изменении веса (например, при сбрасывании бомб) по-
требовало бы особого рассмотрения.
’) Собственно, тяга винта тоже является аэродинамической си-
лой, действующей на винт самолёта. Однако её удобнее рассматри-
вать отдельно.
§ 29] Силы, ДЕЙСТВУЮЩИЕ НЛ САМОЛЁТ В ПОЛЁТЕ 91
Сила тяги развивается винтом, вращаемым мотором.
Лишь в последнее время практически осуществлены
ракетные установки для продвижения самолёта (са-
молёты-снаряды и ракетные самолёты). В них
тяга создаётся существенно иначе, чем в обычных уста-
новках с винтами. В этой книге вопрос о ракетном
продвижении разбираться не будет.
Рис. 30. а — разрез самолёта плоскостью симметрии ху; б — глав-
ные оси самолёта: х — х — продольная ось, у— у — нормальная
ось; z — г — поперечная ось.
Изменение силы тяги достигается изменением работы
мотора: «дачей» и «убиранием» газа, т. е. большим или
меньшим открытием дроссельной заслонки, регулирую-
щей подачу горючего в цилиндры мотора. Кроме того,
силу тяги можно регулировать, изменяя шаг винта,
если его конструкция позволяет это делать.
Аэродинамические силы представляют собою силы
трения воздуха о поверхность самолёта и силы давле-
ния воздуха на эту поверхность. Их суммарное дей-
ствие можно представить как действие трёх взаимно
перпендикулярных сил: подъёмной силы, лобового со-
противления и боковой силы.
Подъёмная сила направлена перпендикулярно к ско-
рости полёта (точнее — скорости движения центра тя-
92
Атмосфера
[гл. 4
жести относительно воздуха) в плоскости симметрии.
Это — «желательная» сила: при горизонтальном полёте
Траектория полета
Рис. 31. В горизонтальном полёте тяга винта Т
уравновешивает лобовое сопротивление Л, а подъ-
ёмная сила У уравновешивает вес самолёта G.
подъёмная сила вертикальна и уравновешивает вес
самолёта (рис. 31).
Лобовое сопротивление направлено прямо противопо-
ложно скорости полёта. Это — «нежелательная», но неиз-
Рис. 32. При полёте со
скольжением возникает бо-
ковая сила Z.
бежная сила. В полёте она
уравновешивается силой тяги
(рис. 31).
Наконец, боковая сила на-
правлена перпендикулярно к
линии полёта и к подъёмной
силе. Она возникает только
при несимметричном обте-
кании самолёта — при сколь-
жении, когда скорость полёта
направлена под углом к плос-
кости симметрии («угол сколь-
жения», рис. 32). В горизон-
тальном полёте боковая сила
горизонтальна1).
В следующих главах этой
части мы выясним, как воз-
никают и от чего зависят аэро-
1) Конечно, аэродинамические силы можно было бы разложить
по любым другим трём взаимно перпендикулярным направлениям.
В теории полёта применяется иногда и другой выбор этих направ-
лений, но в этой книге будем придерживаться указанного выбора
как наиболее удобного для нашего изложения.
§ 30] Общие свойства жидкостей и газов
93
динамические силы и тяга винта. Для этого нам при-
дётся начать с напоминания об основных свойствах
воздуха.
§ 30. Общие свойства жидкостей и газов.
Хотя нас интересуют главным образом только свой-
ства воздуха, но во многих случаях жидкости и газы ведут
себя одинаково. Поэтому в ряде вопросов можно не
различать, с жидкостью или газом мы имеем дело;
в таких случаях мы будем всегда писать «жидкость»,
подразумевая, что всё сказанное о жидкостях будет
относиться и к газам, в частности, к воздуху. Разли-
чия же в поведении жидкостей и газов будем оговари-
вать особо.
Основное свойство жидкостей и газов, отличающее
их от твёрдых (упругих) тел, есть их лёгкая подвиж-
ность. Так, чтобы изменить форму упругого тела, необ-
ходимо приложить к нему определённые силы и удер-
живать его этими силами от возвращения к первоначаль-
ной форме: упругие тела «сопротивляются» взаимному
перемещению их частей, «сопротивляются» деформации.
Перемещение же частей жидкости или газа можно
получить, действуя сколь угодно малой силой: проводя
рукой в воздухе, мы перемешиваем его, и отдельные
слои не возвращаются после этого на свои прежние
места.
При деформации данной массы жидкости или газа
не возникают силы упругости. Это выражают, говоря,
что жидкости и газы не обладают упругостью по отно-
шению к изменению формы.
Однако и жидкости и газы обладают упругостью
по отношению к изменению объёма, по отношению
к сжатию. Даже для незначительного сжатия жид-
кости необходимо применить очень большие силы. Так,
например, вода уменьшает свой объём на 1°/0 только
при давлении в 200 атмосфер. Жидкости настолько
мало сжимаемы, даже под действием больших сил, что
при решении большинства вопросов сжимаемостью
жидкости можно пренебречь. Газы гораздо более сжи-
маемы: при увеличении давления вдвое объём газа
94 Атмосфера [гл. 4
уменьшается вдвое; но и для сжатия газа необходимо
приложить силы; по устранении этих сил газ вернётся
к прежнему объёму.
Подчеркнём главное различие в механических свой-
ствах жидкостей и газов. Если уменьшать внешние
силы, действующие на данную массу жидкости, то она
примет определённый объём и дальше расширяться не
будет: границей жидкости явится её свободная поверх-
ность. Газы же никогда не образуют свободной поверх-
ности: при уменьшении внешних сил данная масса
газа будет занимать всё больший и больший объём.
Малым количеством газа можно равномерно заполнить
большой сосуд, в то время как малое количество жид-
кости образует лишь каплю на дне сосуда.
Жидкость можно сравнить с очень жёсткой пружи-
ной, для которой возможно несжатое состояние. Г аз же
подобен гораздо более слабой пружине, но пружине,
способной безгранично расширяться, никогда не доходя
до несжатого состояния; в газе, какой бы большой
объём он ни занимал, всегда сохраняется давление, и
он всегда сможет расшириться ещё больше.
Мы видим, что и характер и величина сжимаемости
у жидкостей и газов различны. Но в тех вопросах,
с которыми мы будем здесь сталкиваться — движение
самолёта в воздухе, — газы практически сжимаются
мало. При полёте современного самолёта относительные
сжатия и разрежения окружающего воздуха достигают,
в среднем, величины порядка всего нескольких про-
центов. Поэтому в вопросах аэродинамики самолёта дви-
жение воздуха не только не проявляет особенностей срав-
нительно с движением жидкости, но, в большинстве
случаев, сжатиями и расширениями можно совсем пре-
небречь и учитывать только изменение давления, свя-
занное с этими изменениями объёма1).
При изучении же гораздо более быстрых движений
пуль и снарядов сжимаемость воздуха учитывается как
основной фактор.
!) Влияние сжимаемости сказывается, однако, на концах ло-
пастей быстро вращающихся воздушных винтов и при предельных
скоростях современных самолетов.
Атмосферное давление
95
§ 32]
§ 31. Атмосфера.
Общее количество атмосферного воздуха, окру-
жающего землю, составляет в круглых числах
5 000000000000000 тонн. Это, примерно, 0,000001 часть
массы всей земли.
Состав атмосферного воздуха по всей поверхности
земли и на всех высотах, достигнутых человеком, чрез-
вычайно постоянен. Сильно меняется лишь количество
водяных паров — влажность воздуха. От влажности
зависит целый ряд метеорологических явлений, имею-
щих большое значение для авиации: образование обла-
ков, туманов, гроз, выпадение осадков; при определённом
сочетании влажности и низкой температуры самолёт
обледеневает в полёте.
Атмосферу условно разбивают на тропосферу — ниж-
ний слой воздуха до высоты 11 км (в среднем) и стра-
тосферу— выше 11 км. Большинство метеорологических
явлений разыгрывается в тропосфере облака, туманы,
грозы характерны именно для нижних слоёв атмосферы.
В тропосфере температура и влажность уменьшаются
при поднятии вверх. В стратосфере влажность мала и
почти неизменна; конденсация водяного пара не проис-
ходит, следовательно, ни туманов, ни облачности не
образуется. Температура же в стратосфере мало зави-
сит от высоты. Эти особенности стратосферы имеют
большое положительное значение для высотной авиации.
Затрудняет полёты в стратосфере лишь малое давление
воздуха. Впрочем, в настоящее время самолёты проник-
ли уже на несколько километров в стратосферу. Рекорд
высоты, достигнутой человеком, — 22000 м — принадле-
жит пока ещё воздушному шару — стратостату.
Остановимся теперь вкратце на основных физиче-
ских свойствах воздуха, имеющих значение в авиации.
§ 32. Атмосферное давление.
Воздух действует на все погружённые в него тела
с некоторыми силами, распределёнными по поверхности
тел. Это — силы давления воздуха, силы его упругости.
В обычных условиях мы часто не замечаем давления
96
Атмосфера
[гл. 4
Рис. 33. Схема
барометра-анеро-
ида.
воздуха, так как оно действует равномерно на всю по-
верхность тел: силы давления, приходящиеся на одина-
ковые площади, одинаковы для любого места тела, на-
ходящегося в воздухе. Но, например, в барометрах-
анероидах давление воздуха проявляется наглядно.
Анероид состоит из запаянной короб-
ки, одна из стенок которой — гибкая
мембрана (рис. 33). Воздух из ко-
робки частично выкачан, так что дав-
ление оставшегося в коробке воздуха
меньше наружного давления. Таким
образом, снаружи на мембрану дей-
ствует большая сила, чем изнутри, и
мембрана прогибается внутрь коробки.
Чем больше наружное давление, тем
сильнее прогнута мембрана. Прогиб
мембраны передаётся на стрелку,
передвигающуюся по циферблату, на котором размечены
давления соответственно разным положениям стрелки.
Первоначально атмосферное давление было обнару-
жено и измерено помощью ртутного барометра («трубка
Торричелли»), До сих пор ещё принято измерять дав-
ление в мм ртутного столба — соответ-
ственно высоте поднятия ртути в торричел-
лиевой трубке.
Почему атмосферный воздух, не будучи
заключён в сосуд, остаётся в сжатом со-
стоянии, не расширяясь беспредельно? При-
чина этого — вес воздуха: воздух сжат соб-
ственным весом. Для лучшего уяснения
этого представим себе «модель» атмосферы
в виде слабой пружины, поставленной вер-
тикально на подставку (рис. 34). Нижние
витки пружины сжимаются до такой степени, что их
упругость уравновешивает вес всей пружины. Проме-
жуточные витки, уравновешивающие лишь вышеле-
жащую часть пружины, сжаты слабее; чем выше рас-
положен виток, тем меньше он сжат, тем меньше сила
упругости в данном месте пружины.
С такой пружиной мы можем сравнить вертикальный
столб воздуха, опирающийся на поверхность земли
Рис. 34.
Пружина,
сжатая соб-
ственным
весом.
§ 32]
Атмосферное давление
97
(рис. 35). Нижние слои воздуха сжимаются до тех пор,
пока возникающая при сжатии сила упругости не урав-
новесит веса всего столба воздуха. На некоторой вы-
соте над землёй воздух
сжат уже в меньшей
степени: его упругость
уравновешивает лишь
вес вышележащей части
столба. Таким образом,
давление воздуха не-
прерывно падает при
поднятии на высоту.
Рис. 35. В мыс-
ленно выделен-
ном вертикаль-
ном столбе воз-
духа степень
сжатия (и зави-
сящее от неё
давление) убы-
вает с подняти-
ем на высоту.
Рис. 36. Зависимость давления
воздуха от высоты.
На высоте около 5500 м давле-
ние падает, примерно, вдвое; это
значит, что до высоты 5500 м ле-
жит около половины всего атмос-
ферного воздуха. Выше 20000 м
остаётся уже всего около 5,5°/0
всего воздуха.
На рис. 36 изображён график зависимости давления
воздуха от высоты поднятия над уровнем моря. График
составлен по средним, «стандартным» данным. В дей-
ствительности, давление колеблется вблизи указанных
величин, изменяясь для данного места на земле в зави-
симости от условий погоды, времени года и т. п.
«Стандартным» давлением на уровне моря считается
давление в 760 мм ртутного столба. Это соответствует
М. А. Исакович
98
Атмосфера
[гл. 4
величине 10330 кг/л*®. Колебания давления на уровне
моря не превышают 70—80 мм рт. ст.
Каждой высоте поднятия над землёй соответствует
определённое давление воздуха. Этим пользуются для
определения высоты полёта самолёта.
В числе приборов, которыми оборудо-
вана кабина лётчика, имеется высото-
мер (альтиметр) — барометр-анероид,
показывающий наружное давление,
(рис. 37). По давлению, показывае-
мому прибором, можно судить о вы-
уровнем моря.
Рис. 37. Высото-
мер.
соте поднятия над
Шкала высотомера проградуирована
сразу по высотам, соответствующим
тому или иному давлению.
Силы давления покоящегося воздуха на тела назы-
ваются аэростатическими силами. Мы видели, что аэро-
статические силы убывают с под-
нятием на высоту. Это уменьше-
ние аэростатических сил делает
возможным полёт воздушных ша-
ров и дирижаблей. Давление на
нижнюю поверхность оболочки
воздушного шара больше, чем
давление на верхнюю поверхность
(рис. 38). Равнодействующая
аэростатических сил (аэростати-
ческая подъёмная или поддержи-
вающая сила) равна, как из-
вестно, весу воздуха в объёме,
вытесненном телом, и направлена
вверх. Если аэростатическая подъ-
Рис. 38. Возникновение
аэростатической подъ-
ёмной силы: давление на
нижнюю часть оболочки
воздушного шара боль-
ше, чем на верхнюю.
ёмная сила превысит вес воздуш-
ного шара вместе с лёгким га-
зом, наполняющим оболочку, то
шар взлетит вверх (закон Архи-
меда для воздуха). Как мы уви-
дим в дальнейшем, подъёмная сила крыльев самолёта
имеет совсем другое происхождение: она представляет
собой аэродинамическую силу, т. е. силу, возникающую
при движении в воздухе.
Температура воздуха
99
§ 33J
Аэростатическими силами мы будем в дальнейшем
пренебрегать: для самолёта они очень малы (порядка
нескольких сотых долей процента веса самолёта).
§ 33. Температура воздуха.
Благодаря своей прозрачности воздух мало нагре-
вается от проходящих через него лучей солнца. Нагре-
вание воздуха происходит главным образом от нагретой
солнечными лучами земной поверхности: прогревание
воздуха происходит снизу вверх. Более лёгкий нагре-
тый воздух поднимается кверху, холодные слои опу-
скаются книзу: происходит вертикальное перемешивание
воздуха. Горизонтальное перемешивание воздуха соз-
даётся ветрами, дующими от тех мест, где по каким-
либо причинам образовалось повышенное давление, к ме-
стам с пониженным давлением. Постоянство состава
воздуха по всей земной поверхности объясняется именно
непрерывным перемешиванием воздуха. Интенсивное
вертикальное перемешивание ограничивается первым
десятком километров от земной поверхности; оно и
определяет границу тропосферы.
При поднятии на высоту температура воздуха па-
дает: летом— быстрее, зимой — медленнее. Падение тем-
пературы при поднятии на высоту — так называемый
температурный градиент — равно, в среднем, 0,65° С
на каждые 100 м поднятия. Эта средняя величина счи-
тается «стандартной» в расчётах, связанных с полётом
самолёта. «Стандартной» же температурой на уровне
моря принимается -|-15оС.
Градиент считается неизменным до высоты 11 км
(условная граница тропосферы). В стратосфере темпера-
тура воздуха считается неизменной и равной —56,5° С.
Конечно, в действительности температура воздуха и
её изменение с высотой могут уклоняться от указан-
ных средних значений, которыми пользуются при расчё-
тах. Так, например, зимой часто наблюдается темпера-
турная инверсия: на некоторой высоте температура
выше, чем у земли. Отклонения от «стандартных» дан-
ных учитываются при расчётах в виде поправок.
too
Атмосфера
[гл. 4
§ 34. Плотность воздуха.
На первый взгляд часто преуменьшают вес того или
иного объёма воздуха. Заметим, что, например, вес воз-
духа в маленькой комнате равен 30—40 кг. В сутки чело-
век пропускает через свои лёгкие около 20 кг воздуха.
Весомость воздуха характеризуется его еесоеой плот-
ностью. Весовой плотностью называется вес одного ку-
бического метра данного вещества. Будем обозначать
весовую плотность буквой у; единица её — кг)м3. При
«стандартных» условиях на уровне моря (давление 760 мм
рт. ст., температура 4-15° С) весовая плотность воздуха
равна:
уе= 1,225 кг)м3,
т. е. вес одного кубического метра воздуха равен 1,225 кг.
При уменьшении давления (например, при поднятии
на высоту) весовая плотность воздуха уменьшается. При
повышении температуры (при неизменном давлении) воз-
дух расширяется и, следовательно, плотность его также
падает. Так, например, при одинаковой! давлении весо-
вая плотность воздуха летом меньше, чем зимой.
В теории полёта удобно пользоваться величиной массо-
вой плотности воздуха. Массовой плотностью (обозна-
чается буквой р) называется масса одного кубического
метра данного вещества. Соотношение между массовой
и весовой плотностью то же, что и между массой и
весом какого-нибудь тела:
где £ = 9,8 м сек3 — ускорение силы тяжести. Из этой
формулы получается единица для р:
7 кг!м3 у кг-сек*
g м/сек^ g Mi ‘
В «стандартных» условиях на уровне моря массовая
плотность воздуха равна:
р —0,125 кг-сек'^м*.
§ 35J
Международная стандартная атмосфера
101
Эту величину легко запомнить в виде простой дроби:
Р = -1 кг-сек? м4.
1 о
Массовая плотность воздуха, так же как и весовая
плотность, убывает с поднятием на высоту. Уменьшение
плотности сказывается и на человеке и на моторе. В раз-
режённом воздухе с каждым вдохом человек получает
недостаточное количество кислорода. Поэтому с высоты
около 4000 м приходится пользоваться кислородными при-
борами, примешивающими чистый кислород к вдыхае-
мому воздуху. На высотах больше 10—12 км даже
вдыхание чистого кислорода недостаточно: лётчик дол-
жен помещаться в герметически закрытой кабине, где
поддерживается достаточное давление воздуха.
Аналогичная картина получается и с мотором: коли-
чество горючей смеси — «весовой заряд», поступающий в
цилиндры мотора, уменьшается по мере разрежения воз-
духа; мощность мотора падает с поднятием на высоту.
Для поддержания мощности приходится применять на-
гнетатели, сжимающие воздух до его поступления в ци-
линдры мотора.
§ 35. Международная стандартная атмосфера.
На лётные свойства самолёта большое влияние ока-
зывает состояние воздуха, особенно его плотность. Так,
например, один и тот же самолёт, испытанный два раза
при различных атмосферных условиях, покажет и раз-
личные лётные данные.
Зависимость лётных свойств от состояния атмосферы
хорошо изучена. Зная, например, скорость полёта при
Данной плотности воздуха, можно расчётом предсказать,
какова будет скорость самолёта при другой плотности
воздуха. Поэтому оказалось удобным ввести раз на-
всегда стандартные данные для основных величин, харак-
теризующих атмосферу; данные лётных испытаний,
проводимых при каких-то конкретных условиях, пере-
считываются на эти стандартные условия.
Стандартные условия изображают нам «стандартную
атмосферу», в которой давление, температура, плотность
102
Атмосфера
[гл. 4
воздуха изменяются при поднятии на высоту по опреде-
лённому закону. Если бы в действительной атмосфере
распределение этих величин было стандартным, то са-
молёт при полёте в такой атмосфере показал бы те дан-
ные, которые получены пересчётом из реальных условий
испытаний.
Международная стандартная атмосфера (MCA), введён-
ная первоначально во Франции, а с 1S20 г. и у нас, за-
даётся в виде таблицы, в которой данные приведены
каждые 50, 100, 500 или 1000 м.
Таблица 1
Международная стандартная атмосфера (MCA).
Высота над уровнем моря Нм Темпера- тура tH°c Давление рнмм рт. ст. Весовая плотность Гн кг!м* Массовая плотность Р/7 кг-сек2/м*
0 -Ь 15,0 760 1,225 0,125
1000 + 8,5 674 1,112 0,113
2000 + 2,0 596 1,007 0,103
3000 — 4,5 526 0,909 0,093
4000 — 11,0 462 0,819 0,084
5000 - 17,5 405 0,736 0,075
6000 — 24,0 354 0,660 0,067
7000 — 30,5 308 0,590 0,060
8000 — 37,0 267 0,525 0,054
9000 -43,5 230 0,466 0,048
10 000 -50,0 198 0.413 0,042
11 000 — 56,5 169 0,364 0,037
12000 — 56,5 144 0,310 0,032
13 000 — 56,5 124 0,265 0,027
14 000 — 56,5 106 0,227 0,023
15000 -56,5 90 0,194 0,020
В дальнейшем будем считать условия полёта всегда
приведёнными к условиям международной стандартной
атмосферы. Так, например, полётом на уровне моря (мы
обычно буде^м говорить короче: «у земли») будем считать
полёт на той высоте, на которой в данном случае плот-
ность равна 0,125 кг-сек21м*.
Градуировка высотомера производится именно по
данным MCA. Поэтому, если, например, в районе полёта
§ 35] Международная стандартная атмосфера юз
барометр стоит низко, то высотомер покажет большую
высоту, чем фактическая высота полёта. Наоборот, при вы-
соком показании барометра высотомер даёт заниженные
показания. Поэтому шкала высотомера делается подвиж-
ной, и перед полётом лётчик устанавливает нуль шкалы
против стрелки.
ГЛАВА 5.
ДВИЖЕНИЕ ВОЗДУХА И ЛОБОВОЕ
СОПРОТИВЛЕНИЕ.
§ 36. Обтекание тел потоком воздуха.
Если какое-нибудь тело движется вместе с потоком
воздуха, то оно не нарушает движения воздуха; давле-
ние на поверхность тела такое же, как и давление ок-
ружающего воздуха, и на тело действуют такие же
аэростатические силы, как и в неподвижном воздухе.
Например, воздушный шар, уносимый потоком воздуха,
движется с той же скоростью, что и воздух, и поверх-
ность шара спереди, сзади и с боков испытывает одина-
ковое давление; ветер чувствоваться не будет.
Объяснение этого в том, что тело, движущееся вме-
сте с потоком воздуха, неподвижно относительно воз-
духа. То, что и шар, и воздух движутся (одинаково)
относительно земли, не влияет на действие воздуха на
шар. Картина взаимодействия воздуха и шара та же,
как если бы ветра не было и шар висел бы в воздухе
неподвижно.
Другая картина наблюдается, когда тело движется
относительно воздуха (или воздух — относительно тела).
В этом случае движение воздуха вблизи тела меняется:
воздух обтекает тело. Меняются и силы, действующие
на тело со стороны воздуха: появляется новая сила —
сила трения воздуха о поверхность тела; кроме того,
изменяется распределение давления по поверхности тела:
со стороны набегающего потока давление растёт, с об-
ратной стороны — понижается. В отличие от аэростатиче-
ских сил давления покоящегося воздуха силы, действую-
щие на тело со стороны набегающего потока, распределены
по поверхности тела неравномерно. Мы будем называть
их аэродинамическими силами.
§ 37] Линии ТОКА И СПЕКТРЫ УСТАНОВИВШЕГОСЯ ДВИЖЕНИЯ 105
Аэродинамические силы зависят только от относи-
тельного движения тела и воздуха. Аэродинамические
силы будут одни и те же для тела, движущегося в непо-
движном (относительно земли) воздухе, и для неподвиж-
ного (относительно земли) тела, обтекаемого потоком воз-
духа. Движение относительно земли здесь вообще роли не
играет. Ощущение ветра будет одно и то же при насто-
ящем ветре, дующем со скоростью 60 KMj4ac, и при езде в
открытой автомашине со скоростью бО/см/час—при штиле.
Таким образом, когда нас интересуют аэродинами-
ческие силы, мы можем рассматривать безразлично:
тело, движущееся в неподвижном воздухе, или непо-
движное тело, обтекаемое встречным потоком воздуха
(здесь слово «неподвижное» значит — неподвижное от-
носительно земли).
В большинстве случаев мы будем пользоваться именно
второй «точкой зрения»; её преимущество в следующем:
движение воздуха, рассматриваемое относительно тела,
представляется более простым; тело, являясь препят-
ствием на пути обтекающего его равномерно движуще-
гося потока, конечно, изменяет вблизи себя движение
воздуха. Но движение воздуха относительно тела не
будет меняться с течением времени. Вблизи каждой
данной точки тела движение воздуха будет оставаться
неизменным; в разных же точках скорость потока, ко-
нечно, может быть различна. Такое движение будем
называть установившимся. При полёте самолёта движе-
ние воздуха относительно земли — неустановившееся, а
относительно самолёта — установившееся.
Мы всегда будем предполагать, как это и имеет
место в действительности, что скорость воздуха плавно
меняется от точки к точке, не делая скачков.
§ 37. Линии тока и спектры установившегося
движения.
Для установившегося течения жидкости или воздуха
можно дать наглядную картину потока, изображая
траектории отдельных частиц жидкости. Все частицы,
лежащие в данный момент на траектории, которую про-
бежала какая-нибудь одна частица, пробегут с течением
106
Движение воздуха и лобовое сопротивление [гл. 5
времени эту же самую траекторию: частицы движутся,
как бы оставаясь «нанизанными» на проведённые нами
линии — траектории.
В аэродинамике изучают, кроме траекторий отдель-
ных частиц, ещё и линии тока; это—линии, касательные
к которым в любой точке совпадают с направлением ско-
рости жидкости в этой точке. Вообще линии тока и
траектории частиц жидкости в потоке — разные линии.
Например, для неустановившегося движения линии
Рис. 39. Спектры обтекания разных тел: а — круглый цилиндр;
б — стойка эллиптического сечения.
тока меняют свою форму с течением времени. Но для
установившегося движения линии тока неизменны и
совпадают с траекториями; поэтому в дальнейшем будем
говорить только о линиях тока. Если мысленно прове-
сти целый ряд линий тока, то они разобьют поток на
отдельные струйки — трубки тока. Внутри каждой
трубки тока поток течёт, не выходя за её пределы так,
как если бы стенки трубки были границами потока.
Через каждое сечение трубки за одинаковое время про-
ходят одинаковые объёмы жидкости *).
Линии или трубки тока можно сделать видимыми,
например, впуская в поток воздуха струйки дыма или
в поток воды — струйки чернил или туши. Если дымные
струйки впустить в поток впереди тела, то, очерчивая
линии тока, они дадут наглядную картину обтекания
тела. Такие картины обтекания называются аэродинами-
ческими спектрами обтекания (рис. 39).
') Здесь и в дальнейшем пренебрегаем сжимаемостью жидкости
или воздуха.
§ 37] Линии тока и спектры установившегося движения Ю7
По спектру потока можно судить о скорости жидко-
сти в разных точках. Например, если линии тока парал-
лельны друг другу, т. е. ширина трубок тока не ме-
няется, то и скорость потока вдоль трубки не меняется:
через равные сечения проходят за одно и то же время
одинаковые объёмы жидкости. Если линии тока сбли-
жаются (трубки тока сужаются), — значит, скорость вдоль
Рис. 40. Обтекаемые автомобиль и локомотив.
трубки растёт (через меньшее сечение должен пройти
за то же время тот же объём жидкости). Наоборот,
в местах расширения трубок скорость потока понижена.
Обратим внимание на различие в спектрах обтекания
разных тел. Плавное, струйное обтекание получается
только для удлинённых тел с заострённой хвостовой
частью. В других случаях, а особенно для широких тел
с тупой хвостовой частью, за телом образуются вихри —
вращательные движения жидкости; позади тела в этом
случае образуется длинный «хвост» нарушенного, вих-
Реобразного движения жидкости. За плавно обтекае-
мыми телами, наоборот, жидкость скоро приобретает
108
Движение воздуха и лобовое сопротивление
[гл. 5
своё прежнее равномерное течение; это «удобообтекае-
мые» тела. При движении в воздухе они испытывают
малое сопротивление, в то время как большое вихре-
образование является причиной большого сопротивления.
Поэтому скоростным поездам, автомобилям и, конечно,
в первую очередь самолётам придаётся удобообте-
каемая форма, уменьшающая сопротивление, встречаемое
ими при движении (рис. 40). Особо важную роль в удо-
бообтекаемости играет хвостовая часть тела. Объяснение
этому будет дано в следующих параграфах.
§ 38. Лобовое сопротивление и подъёмная сила.
Познакомимся сперва в общих чертах с аэродинами-
ческими силами, действующими па тело, помещённое
в поток воздуха.
Рис. 41. При симметричном обтекании полная аэроди-
намическая сила направлена по потоку; при несимме-
тричном обтекании сила R имеет обе составляющие:
подъёмную силу и лобовое сопротивление.
Силы трения и силы давления, действующие со сто-
роны потока на поверхность тела, дают некоторую рав-
нодействующую, которую будем называть полной аэро-
динамической силой и обозначать буквой R. На рис. 41
показаны полные аэродинамические силы, возникающие
при обтекании различных тел.
При обтекании симметричных тел, направленных
своей осью симметрии по потоку, сила R также направ-
лена по потоку. В этом случае R называется лобовым
сопротивлением тела.
§ 38] Лобовое сопротивление и подъёмная сила
109
При обтекании же несимметричных тел или тел, по-
ставленных под углом к потоку, сила R наклоненак потоку.
В этом случае разложим силу R по направлению потока
и по перпендикуляру к нему. Составляющую в направ-
лении потока попрежнему назовём лобовым сопротивле-
нием; будем обозначать лобовое сопротивление буквой X;
составляющую, перпендикулярную к потоку, будем назы-
вать подъёмной силой и обозначать буквой Y.
и}
У* V . е)
Рис. 42. Направление подъёмной силы при разных
эволюциях самолёта: а — горизонтальный полёт, б — на-
бор высоты, в— планирование, г— вираж, д— верхняя
точка петли, е— перевёрнутый полёт.
Как мы увидим дальше, подъёмную силу можно
представлять себе как результирующую сил давления
под телом и над телом; лобовое же сопротивление —
как результирующую сил давлений впереди и позади
тела, сложенную с силой трения воздуха о поверх-
ность тела.
В полёте на крыло самолёта действуют и лобовое со-
противление (уравновешиваемое тягой винта), и подъёмная
сила, уравновешивающая вес самолёта. При горизонталь-
ном полёте подъёмная сила вертикальна, но не следует
думать, что подъёмная сила всегда направлена верти-
кально вверх. Так, например, при планировании она
ПО Движение воздуха и лобовое сопротивление [гл. 5
отклонена от вертикали вперёд, при подъёме—назад,
при вираже — в сторону. На рис. 42 показано направ-
ление подъёмной силы при разных эволюциях самолёта.
Ввиду важности этого ещё раз подчёркиваем, что на-
правление подъёмной силы определяется направлением
полёта, к которому перпендикулярна сила V.
Изучение лобового сопротивления и подъёмной силы —
одна из главных задач аэродинамики и теории полёта.
Сначала мы исследуем возникновение лобового сопротив-
ления, встречающегося при обтекании любого тела;
в дальнейшем рассмотрим и более специальный вопрос
о возникновении подъёмной силы.
§ 39. Две составляющие лобового сопротивления.
Лобовое сопротивление возникает вследствие двух
обстоятельств: первое из них есть трение воздуха о по-
верхность тела, второе — разность давлений впереди и
позади тела ’).
Трение о поверхность тела вызвано вязкостью («вну-
тренним трением») воздуха.
Все жидкости и газы обладают вязкостью; сущность
этого свойства заключается в следующем. Когда поток
обтекает тело, то, как показывает опыт, слой жидкости,
прилегающий к телу, прилипает к его поверхности, ос-
таётся неподвижным. Более отдалённые слои уже обладают
некоторой скоростью; чем дальше от поверхности тела,
тем эта скорость больше, пока она не сравнивается
с общей скоростью потока.
Таким образом, следующие друг за другом слои, на
которые мы можем мысленно разбить поток, скользят
один по другому (рис. 43). Между этими слоями и дей-
ствуют силы внутреннего трения. Более быстрые слои
действуют на более медленные с силой трения, направ-
ленной по линии их движения. Сила трения действует
и на слой, прилипший к поверхности тела, а потому
и самое тело также испытывает силу трения, направлен-
ную по потоку.
*) Мы увидим ниже, что разность давлений сама возникает
вследствие трения.
Две составляющие лобового сопротивления
111
Чем ббльшую скорость имеют слои, близкие к по-
верхности тела, тем больше сила трения. Иначе говоря:
чем быстрее возрастает скорость потока при удалении
от поверхности тела, тем больше сила трения.
Согласно закону действия и противодействия, тело
действует на протекающую жидкость с силой, направ-
ленной противоположно течению: тело тормозит тече-
ние жидкости.
Рис. 43. По мере удаления от тела ско-
рость слоёв потока возрастает, пока не срав-
няется со скоростью потока вдали от тела.
Сила трения зависит и от физических свойств самой
жидкости, образующей поток. Эти свойства характери-
зуются коэффициентом вязкости р.. Как показывают опыты,
силу трения, приходящуюся на единицу площади тела,
можно вычислить по формуле
F = (28)
Здесь F кг/м2 есть сила трения, рассчитанная на 1 м-
поверхности тела; и м/сек — скорость потока на расстоя-
нии d м от тела (считая по перпендикуляру к поверхно-
сти). Принимается, что по мере удаления от тела ско-
рость заторможенной жидкости меняется равномерно,
т. е. скорость пропорциональна удалению от тела. Прак-
тически так всегда можно считать, если брать вели-
чину d достаточно малой. Величина есть изменение
скорости, рассчитанное на единицу длины — так назы-
ваемый градиент скорости. Согласно формуле (28), сила
трения пропорциональна градиенту скорости. Из фор-
112
Движение воздуха и лобовое сопротивление [гл. 5
мулы (28) можно найти выражение для единицы коэф-
фициента вязкости:
FkzIm2-(1 м__Fd
и-м/сек и
кг сек/м*.
Для воды коэффициент вязкости равен 0,0001 кг-сек/м-,
для воздуха — 0,000002 кг-сек/м2; в обоих случаях этот
коэффициент очень мал. Изменение скорости на 100 км/час
на протяжении одного сантиметра создаёт силу трения
всего около 6 граммов на квадратный метр. Но надо
помнить, что градиенты скорости могут быть очень ве-
лики: так, например, вблизи крыла самолёта скорость
возрастает на десятки метров в секунду уже на рас-
стоянии миллиметра открыла. Такие большие градиенты
обусловливают значительные силы трения. Зато уже на
расстоянии нескольких сантиметров от крыла градиент
скорости почти равен нулю: скорость почти не меняется
при дальнейшем удалении от крыла. Практически, на
некотором расстоянии от обтекаемого тела — обычно на
небольшом расстоянии — скорость почти сравнивается
с общей скоростью потока, градиенты скорости так малы,
что силы трения почти неощутимы, и вязкостью можно
пренебрегать. Но Даже самая малая вязкость даёт боль-
шие силы и играет значительную роль в непосредствен-
ной близости к поверхности тела.
Та часть лобового сопротивления, которая непосред-
ственно обусловливается трением и величина которой
определяется формулой (28), называется сопротивлением
трения. Вторая часть, обусловленная разницей давлений
впереди и позади тела, называется сопротивлением дав-
ления. Вообще давление на переднюю часть тела больше,
чем на хвостовую, и эта разность давлений и создаёт
силу, направленную по потоку. Разность давлений вы-
звана, кратко говоря, тем, что тело, являясь препят-
ствием в потоке, изменяет движение жидкости. Наша
задача теперь и будет заключаться в том, чтобы подробно
проследить, как возникает эта разность давлений. Для
этого нам потребуется несколько параграфов.
Раньше всего выясним, при каких условиях вообще
в разных местах потока возникает разное давление.
Злкон Бернулли
ИЗ
§ 40]
При движении данной массы воздуха на неё действуют
следующие силы: силы давления (как со стороны твёрдых
тел, погружённых в поток, так и со стороны окружаю-
щих масс воздуха), силы веса и силы трения. Но в
интересующих нас вопросах полёта самолёта сила
веса для воздуха настолько незначительна, сравни-
тельно с возникающими силами давления и трения, что
ею можно пренебречь. Далее, в целом ряде вопросов
можно не учитывать и силу трения; так, мы видели,
что уже на сравнительно небольшом расстоянии от
обтекаемого т-ела силы трения очень малы. Подобными
случаями движения мы сейчас и займёмся, считая, что
единственными силами, действующими на данную массу
воздуха, являются силы давления.
Таким образом приходим к рассмотрению движения
жидкости, не обладающей вязкостью.
Жидкость или газ, вязкость которых равна нулю,
называют идеальной жидкостью. Таких жидкостей или
газов в природе нет; но есть целый ряд важных прак-
тических вопросов, которые можно решить с достаточной
точностью, пользуясь представлением об идеальной
жидкости, т. е. пренебрегая вязкостью. Теоретическое
же изучение движения идеальной жидкости значительно
проще, чем изучение тех же вопросов для вязкой жидкости.
§ 40. Закон Бернулли.
Рис. 44 Скорость в широких частях
трубки тока меньше, чем в узких.
Итак, будем рассматривать установившееся движение
идеальной жидкости. Выделим мысленно какую-нибудь
трубку тока и просле-
дим за движением жид-
кости по ней (рис. 44).
Трубка тока на сво-
ём протяжении может
иметь разную ширину:
она может сужаться
в одном месте, расши-
ряться в другом. Объём
же жидкости, проте-
кающей через любое сечение за данный промежуток
времени, одинаков для всех сечений. Следовательно, в
® М. а. Исакович
114 Движение воздуха и лобовое сопротивление [гл. 5
местах сужения трубки скорость жидкости должна быть
повышена, а в местах расширения — понижена.
Разберём сначала случай сужения трубки. Переходя
из широкой части трубки в узкую, частицы жидкости
увеличивают свою скорость, т. е. получают ускорение
в направлении движения. По закону Ньютона это значит,
что результирующая сил, действующих на частицу, также
направлена в сторону движения. Но, как мы предполо-
жили, на частицу действуют только силы давления со
стороны окружающих частиц; и если равнодействующая
этих сил направлена вперёд, значит, сзади на частицу
действует большая сила, большее давление, чем спереди.
Следовательно, в случае сужения трубки частица дви-
жется от мест с большим давлением к местам с мень-
шим давлением. Иначе говоря, при сужении струи дав-
ление вдоль неё уменьшается.
Теперь разберём случай расширения трубки. Здесь
картина обратная: скорость потока при переходе в рас-
ширенную часть уменьшается, частицы жидкости тормо-
зятся; их ускорение, а значит, и равнодействующая сил
давления направлены против течения; следовательно,
впереди частицы встречают большее давление, чем сзади;
жидкость течёт от мест с меньшим давлением к местам
с большим давлением; иначе говоря, при расширении
струи давление вдоль неё растёт.
В этом и заключается сущность закона Бернулли,
устанавливающего связь между скоростью потока и
давлением. Ему можно дать такую краткую форму-
лировку:
В тех местах струи установившегося потока, где
скорость больше, — давление меньше; и обратно, — в тех
местах, где скорость меньше, — давление больше.
При изучении спектров удобнее пользоваться другой
формулировкой закона Бернулли:
В местах сужения струи давление понижено, а в ме-
стах расширения — повышено.
С помощью закона Бернулли можно разъяснить прин-
цип действия целого ряда приборов и устройств. На
рис. 45 изображена трубка Вентури, устанавливаемая
снаружи самолёта на борту фюзеляжа. Ось трубки на-
правлена по движению самолёта, так что струя воздуха
§ 40]
Закон Бернулли
П5
свободно проходит через трубку. У открытых концов
трубки давление равно наружному атмосферному дав-
лению. В суженной же части трубки, где скорость по-
тока увеличена, давление
понижается и делается Мень-
ше атмосферного. Такая
трубка Вентури на самолете
играет роль воздушного на-
соса, создающего разреже-
ние. К узкой части трубки
Вентури ' присоединяется
трубка, ведущая к корпусу
турбинки. Трубка Ве1ПурИ
Рис. 45. Трубка Вентури.
непрерывно «высасывает» воздух из корпуса, а наруж-
Рис. 46. Схема карбюратора.
диффузора образуется, как и
женное давление; жикЬео и
ный воздух, входя в Корпус через специальное сопло,
попадает на лопатки турбинки, приводя её в быстрое
вращение. Вращение тур-
бинки используется в ги-
роскопических приборах
(например, указатель по-
ворота).
Другим примером яв-
ляется устройство диффу-
зора карбюратора (рису-
нок 46). При прохождении
воздуха в суженной части
в трубке Вентури, пони-
ообщающаяся с наружным
воздухом поплавковая камера карбюратора представляют
собой сообщающиеся Сосуды; но давление над свободной
поверхностью бензина в поплавковой камере больше,
чем над уровнем бензина в жиклере, отверстие кото-
рого находится в суженной части диффузора. Поэтому
бензин вытесняется разностью давлений в диффузор, где
он распыляется и испаряется в потоке воздуха; образо-
вавшаяся горючая смесь и поступает затем в цилиндры
мотора.
Одним из самых Важных приборов на самолёте яв-
ляется указатель скорости. Его действие также пояс-
няется с помощью закона Бернулли. Прибор состоит
в основном из двух трубок А и В (рис. 47), присоеди-
8*
116
Движение воздуха и лобовое сопротивление [гл. 5
ценных к запаянной коробке К, разделённой мем-
браной М. Трубка А открыта спереди; трубка В
имеет только боковые отверстия. Обе трубки устанав-
ливаются на крыле самолёта прямо в направлении дви-
жения, так что встречный поток воздуха набегает парал-
лельно осям трубок. В полёте встречный поток воздуха
обтекает обе трубки. Но, подходя к отверстию трубки А,
струйка воздуха останавливается, и, согласно закону
Бернулли, давление в ней повышается. Поток же, обте-
кающий трубку В, проходит мимо её отверстий, не те-
ряя скорости; поэтому давление его, передающееся через
отверстия в трубку В, остаётся неизменным, равным
(ГТ' -
с s
В
Рис. 47. Схема указателя скорости. Пунктиром
показан прогиб мембраны при обтекании прибора
потоком воздуха.
давлению окружающего воздуха. Давления из трубок А и
В передаются по отводным трубкам в коробку, где по
обе стороны мембраны создаётся разное давление: с од-
ной стороны — давление окружающего воздуха, с дру-
гой— давление, повысившееся вследствие остановки
струи. Мембрана, прогибающаяся под действием разности
давлений, передаёт с помощью рычагов свой прогиб
стрелке, перемещающейся по циферблату. По величине
отклонения стрелки (соответствующей величине прогиба
мембраны) можно судить о скорости набегающего потока,
т. е. о скорости движения самолёта относительно воздуха.
Каково же увеличение давления в струе при её оста-
новке? И, вообще, как именно меняется давление вдоль
струи, когда скорость в разных местах её различна?
Чтобы ответить на эти вопросы, дадим теперь закону
Бернулли математическое выражение. Для этого приме-
ним закон Ньютона (сила равна массе, умноженной на
117 I
площадь сечения участка трубки
и.
Рис. д8 Участок трубки тока.
и а 0 точке В —через v2 и
выдоил!* из потока часть жид-
§ 40] Закон Ь>ерну,1ли
ускорение) к жидкости, текущей по трубке тока. Выре-
жем мысленно двумя попере1)НЫЛ|И сечениями настолько
малый участок трубки тока, ЧТО()Ы его можно было без
заметной ошибки считать пря^^нейным (рис. 48). Кроме
того, предположим, что пло(цадь сечения участка трубки
мало меняется на
всём его протяжении.
Среднюю площадь се-
чения обозначим F,
длину участка — Г,
скорость и давление
в точке А обозначим
соответственно через
р2. Таким образом, мы
кости объёмом FI; масса её равн!1 pF/, где р — массовая
плотность жидкости. Ускоре1ше ;»той массы—изменение
скорости в единицу временц____д(ожно подсчитать следу-
ющим образом: изменение ci«jp0CTP на пути I равно f2—пр
это изменение произошло За время t = —, где иср —
средняя скорость жидкости 11а участке трубки:
I
^ср —* f
2
/=—
Разделив изменение скоростй на время, в течение кото-
рого это изменение произощ/1О райдём ускорение а:
V - V ’
а ~ — z~2/
Силы, действующие на выделеннуЮ массу жидкости, пред-
ставляют собой силы давле([ия окружающей жидкости.
Сила, действующая на сечецие 1, равна Fpp она дей-
ствует в направлении движ^Ния- сила, действующая на
сечение В, равна Fp2 и н^ рлена противоположно.
Равнодействующая этих сил „авра Fpi — Fp2.
Теперь, зная массу и ус^ррерие выделенного объёма
жидкости и силу, действующую} на него, можем примем
а потому
118
Движение воздуха и лобовое сопротивление [гл 5
нить формулу закона Ньютона:
FPi — ?Рг = —21
Производя сокращения, найдём:
Р1 Рг — 9 2
ИЛИ
+ =Рг+^?^2.
Итак, сумма давления и половины произведения массо-
вой плотности на квадрат скорости не меняется при
переходе от одной точки трубки тока к другой, т. е.
эта величина не меняется вдоль всей трубки тока,
одинакова во всех её точках, что можно записать ещё
и так:
р -ф- y ри2 = const, (постоянная).
Это и есть математическое выражение закона Бернулли.
Величина ~ ро2 называется скоростным давлением; будем
обозначать её буквой q. Тогда последнюю формулу можно
переписать в таком виде:
p-\-q — const.,
а закон Бернулли получает такую формулировку: сумма
давления и скоростного давления постоянна вдоль
струи.
Физический смысл величины q можно представить
себе следующим образом. Пусть в каком-нибудь месте
струи давление равно р, а скоростное давление равно q,
и пусть в каком-то другом месте струи скорость равна
нулю (или, практически, очень мала); тогда закон Бер-
нулли можно написать в виде
Р' = Р + <7,
где р'— давление в том месте струи, где скорость равна
нулю (и потому q'~0); следовательно, в месте оста-
Влияние трения на поток
119
§ 411
новки струи давление повышается на величину скорост-
ного давления.
Вообще говоря, сумма p-\-q может быть различна
для разных струек; но если рассматривать обтекание
тела потоком, то впереди тела, там, где его присутствие
ещё не сказывается на движении жидкости, давление и
скоростное давление одинаковы для всех струек. Соглас-
но закону Бернулли, делаем отсюда вывод, что
p-^q = const.,
и эта постоянная — одна и та же в любой точке потока,
т. е. для всех струек потока на всём их протяжении.
При обтекании тела на его носовой части всегда
есть точка разветвления потока, где струи разделяются.
В этой точке скорость жидкости равна нулю, а потому
давление в этой точке повышено, сравнительно с общим
давлением в потоке, на величину скоростного давления.
Вернёмся теперь к указателю скорости. Вблизи от-
верстия открытой трубки поток останавливается, по-
этому повышение давления здесь равно скоростному да-
влению в потоке. Следовательно, измеритель скорости
измеряет, собственно говоря, скоростное давление
циферблат же прибора размечается непосредственно по
скоростям, исходя из «нормальной» плотности на уровне
моря р = 0,125 кг-сек21м\
В теоретической гидродинамике доказывается, что
закон Бернулли можно рассматривать как закон живых
сил для идеальной жидкости. Если жидкость обла-
дает вязкостью, tq часть энергии тратится на работу
против сил трения и величина p-\-q убывает вдоль
струи.
§ 41. Влияние трения на поток.
Рассмотрим теперь, какие изменения вносит наличие
вязкости в движение реальной жидкости или газа срав-
нительно с движением идеальной жидкости.
Для жидкости, обладающей вязкостью, возможны
Два характерных типа движения: один — при малых ско-
ростях потока, другой — при больших. Сперва мы рас-
120 Движение воздуха и лобовое соп^
Явление [гл. 5
Рис. 49- Распределение
скоростей по сечению
трубы для течения иде-
альной жидкости.
смотрим для примера оба типа двид(е
вившегося потока жидкости, текущей ь.Ия для устано-
трубе. Так как все сечения одинакп^цилиндРичеСкоИ
вдоль струй потока не меняется. Если бь °1» т0 скорость
то скорость жидкости была бы одиц?яз,<ости не было,
точках одного са*(ова и во всех
Согласно закону рНИЯ (Рис- 49)-
ние в любой точ?еРнУлли’ давле'
одно и то же е потока было бы
Иначе течёт нп
обладающая Лубе жидкость,
прилегающие костью. Слои,
прилипают к не(.стенкам трубы,
течения невель. ’ если скорость
щие слои двинЛ3, т0 следую-
но оси трубы; £ся параллель-
ке слои заторможены сильнее; чем блил^^ зкие к стен-
меньше торможение и тем больше скор0 к оси тРубы, тем
самой оси скорость течения наибольш^;}тв жидкости; на
скоростей по сечению неравномерное (рис Распределение
ние жидкости называется ламинарным Такое движе-
нием. Отдельные струйки (трубки тшДСтРУИНЬ1М) тече'
по другой; изменение скорости от CTpyJ скользят одна
ное, непрерывное, в этом смысле щк к струе—плав-
— - - ”--------. ‘Ок представляет
собой одно целое. Непрерыв-
но меняются и'силы трения,
действующие между слоями.
Со стороны стенок тру-
бы на поток действуют силы
трения, направленные про-
тив течения и тормозящие
поток. Поэтому, для того
чтобы было возможно уста-
новившееся движение, не-
обходимо, чтобы с одного'
Рис. 50. F>
тей по се%СпРеДеление скорос-
мик,?,ию трубы при ла-
чРном течении.
конца трубы давление было больше, чец
ние должно убывать вдоль трубы в наьС ДРУГОГ°> давле-
ния. Тогда разность сил давления вдвух ^авлении движе-
чениях будет уравновешивать силы тр ^аких-нибудь се-
стенки на участке трубы между этими сс’1ия жидкости о
же точках одного и того же сечения давл,ениями' всеХ
‘ение одинаково.
§ 41]
Влияние трения на поток
121
Мы рассмотрели один из типов движения — ламинар-
ное течение. Будем теперь увеличивать скорость течения
жидкости по трубе. Опыт показывает, что струйное,
ламинарное течение становится, начиная с некоторой
скорости, неустойчивым. Это видно из того, что нару-
шается установившийся характер течения; начинается
перемешивание струек, распространяющееся по всей
длине трубы. Движение частиц жидкости приобретает,
на первый взгляд, совершенно беспорядочный, зигзаго-
образный характер. Установившееся ламинарное дви-
жение сохраняется только в тонком слое, прилегающем
к стенкам трубы, — так называемом пограничном слое.
Такое беспорядочное „
движение жидкости на- =* " —-
зывается турбулент- *а
ным течением.
Процесс перехода
ламинарного течения в
турбулентное удобно
наблюдать, подкраши-
Рис. 51. Течение воды в трубе: а —
ламинарное течение; б — турбулент-
ная струйкой туши по- ч°е течение.
ток воды, протекающий
по стеклянной трубке. Пока скорость потока меньше
определённой величины (течение ламинарное), струйка
туши вытягивается в прямую линию вдоль одной из
линий тока (рис. 51,а); при увеличении скорости начи-
нается колебание окрашенной струйки и её размывание;
при дальнейшем увеличении скорости наступает турбу-
лентное движение, и тушь, расплываясь в перемешш
Бающемся потоке, окрашивает всю текущую жидкость
(рис. 51, б).
Причиной неустойчивости потока при больших ско-
ростях является опять-таки вязкость жидкости; но при
этом чем больше вязкость, тем дольше сохраняется
ламинарное течение и тем при большей скорости насту-
пает неустойчивость; кроме того, неустойчивость насту-
пает тем раньше, чем больше диаметр трубы.
Рассмотрим более подробно распределение скоростей
по сечению трубы при турбулентном течении. Будем
обращать внимание только на скорость частиц вдоль
оси трубы, не учитывая поперечных составляющих ско-
122 Движение воздуха и лобовое сопротивление [гл. 5
ростей (они вообще невелики). Скорость в данной точке
сечения трубы не остаётся постоянной: всё время про-
исходят колебания, «пульсации» скорости. Поэтому будем
брать в каждой точке сечения среднюю скорость проте-
кающей жидкости; средняя скорость не меняется с те-
чением времени. Опыт показывает, что средняя ско-
рость почти постоянна по всему сечению (за исключе-
нием пограничного слоя; о движении в пограничном
слое речь будет итти в дальнейшем), т. е. распределе-
. ние скоростей почти та-
Рис. 52. Распределение скоростей по
сечению трубы при турбулентном те-
чении.
ково, как в идеальной
жидкости (рис. 52).
Итак, пока движе-
ние оставалось лами-
нарным (малые ско-
рости), движение резко
отличалось от течения
при отсутствии вяз-
кости. Когда же при
больших скоростях воз-
никла турбулентность,
поток разбился на две
части: тонкий пограничный слой со струйным течением и
главная масса жидкости, которая движется (если не учи-
тывать пульсаций скорости) приблизительно так, как
если бы вязкости не было. Это и есть второй тип дви-
жения: течение с пограничным слоем; поток в целом
снова стал похож на поток идеальной жидкости (за
исключением пограничного слоя).
Но при турбулентном течении, в отличие от течения
идеальной жидкости, давление вдоль трубы падает
вследствие трения в пограничном слое о стенки. Силы
вязкости проявляются заметно только в пограничном
слое; зато они там больше, чем в случае ламинарного
движения, так как градиент скорости у стенки при
турбулентном движении больше, чем при ламинарном.
Поэтому и давление вдоль трубы падает быстрее при
турбулентном течении, чем при ламинарном.
Резюмируем различия между двумя типами течения.
При малых скоростях, при удалении от стенки трубы,
скорость возрастает, а силы трения убывают плавно,
§ 42] Обтекание тел потоком идеальной жидкости 123
без резкого перехода. При больших же скоростях рост
сКорости и действие сил трения происходят практически
только в тонком пограничном слое, прилегающем к стенке
трубы; остальная жидкость движется, примерно, так,
как если бы трения не было.
Аналогичная картина наблюдается и в других слу-
чаях течения жидкости, в частности, в наиболее интере-
сующем нас случае обтекания тела потоком. И здесь
возможны два типа движения: одно —при малых ско-
ростях и другое — течение с пограничным слоем при
больших скоростях. С другой стороны, при обтекании
тел потоком идеальной жидкости можно расчётным спо-
собом найти форму потока вокруг тела. И вот, оказы-
вается, что при малых скоростях, когда пограничный
слой не образуется, картина обтекания резко отличается
от движения идеальной жидкости. При движении же
с пограничным слоем поток в целом движется приб-
лизительно так, как идеальная жидкость, а силы
трения проявляются, практически, лишь в погранич-
ном слое.
Поэтому, хотя идеальных жидкостей в природе и
нет, всё же важно изучить (с помощью математического
расчёта, так как на опыте этого, конечно, сделать нельзя)
обтекание тел идеальной жидкостью. С математической
стороны это сравнительно простая задача, а общая кар-
тина обтекания в случае течения с пограничным слоем
близка к картине обтекания тела идеальной жидкостью.
Практически же в интересующих нас вопросах полёта
самолёта всегда имеет место обтекание с пограничным
слоем.
§ 42. Обтекание тел потоком идеальной жидкости.
Математическая теория обтекания тел потоком идеаль-
ной жидкости хорошо разработана. Рассмотрим, напри-
мер, случай обтекания шара, предположив поток симмет-
ричным относительно диаметра, лежащего вдоль потока.
Теоретически можно найти форму струй, обтекающих шар
(рис. 53), и вычислить скорость в любом месте потока.
Спектр получается совершенно симметричным впереди
и позади тела: струи расширяются, подходя к шару,
сужаются, обходя его, и снова расширяются, сходя с
124 Движение воздуха и лобовое сопротивление [гл. 5
шара. По картине обтекания нельзя решить, с какой
стороны набегает поток, слева или справа: в обоих слу.
чаях получаются совершенно одинаковые линии тока
Каковы же будут силы давления потока на по-
верхность шара? По закону Бернулли давление по-
вышено в местах расширения струй и понижено в
местах их сужения. Значит, давление в передней
части тела повышено, с боков — понижено и позади
тела —снова повышено, причём давления в передней и
задней части тела распределены совершенно симмет-
Рис. 53. Спектр обтека-
ния шара потоком иде-
альной жидкости.
рично. Поэтому равнодействую-
щая сил давления равна нулю,
т. е. лобовое сопротивление от-
сутствует.
В теоретической гидромеха-
нике доказывается, что и для
любого тела в потоке идеальной
жидкости (если только оно не
имеет острых углов) распределе-
ние давлений имеет тот же ха-
рактер: давление оказывается
повышенным не только впереди, но и позади тела,
и подсчёт показывает, что равнодействующая сил давле-
ний равна нулю: сопротивление отсутствует.
Это положение называется парадоксом Даламбера.
Парадокс Даламбера резко противоречит повседневному
опыту: в действительности на любое тело в потоке реальной
жидкости или газа действует сила лобового сопротив-
ления. «Противоречие» получилось, конечно, потому, что
мы совершенно пренебрегли вязкостью; наличие же вну-
треннего трения, хотя бы такого малого, как у воды
или воздуха, изменяет, -как мы увидим дальше, всю
картину распределения давлений, хотя самые силы тре-
ния будут заметны лишь на очень малом расстоянии
от тела, в тонком пограничном слое.
Для лучшего понимания парадокса Даламбера рас-
смотрим механическую «модель» обтекания тела, где
роль частиц потока будут играть катящиеся стальные
шарики. «Обтекаемое потоком» тело выбрано специаль-
ной формы, чтобы шарики, изображающие поток, вка-
тывались со стола на тело и скатывались с него без
§ 42] Обтекание тел потоком идеальной жидкости 125
удара (рис. 54). Будем считать, что шарики катятся без
трения. Передняя и задняя часть тела, для простоты
рассуждений, взяты симметричными.
р Каждый шарик, поднимаясь к верхней точке тела и
скатываясь с неё, проходит две симметричные половины
Рис. 54. Модель «обтекания» тела «потоком» шариков.
пути. Например, в точках А и В скорости шариков оди-
наковы; силы же, с которыми они действуют на тело,
равны и симметрично направлены. Следовательно, и в
этом «потоке» шариков результирующая сил, действу-
ющих со стороны шариков на тело в направлении по-
тока, равна нулю: «лобовое сопротивление» отсутствует.
Этот пример представляет аналогию с парадоксом Да-
ламбера, хотя, конечно, лишь грубую аналогию.
Рис. 55. «Срыв струи» шариков.
Но нетрудно видеть, что, начиная с некоторой ско-
рости шариков, характер «обтекания» изменится, и
«сопротивление» появится. В самом деле, если значи-
тельно увеличить скорость «потока», то «струя» шари-
ков начнёт срываться с поверхности- тела и будет падать
на стол уже за телом (рис. 55). Симметрия «обтекания»
Нарушится: впереди тела будет «повышенное давление»
(Давление шариков), а позади тела — «пониженное дав-
ление» (давления шариков нет). «Разность давлений»
126 Движение воздуха и лобовое сопротивление [гл 5
даст результирующую силу в направлении «потока» —
«лобовое сопротивление».
Вернёмся теперь от модели к обтеканию тела пото-
ком. В потоке идеальной жидкости струи всё время
прилегают к поверхности тела, «срыв струй» не проис-
ходит, течение симметрично, распределение давлений
также симметрично и сопротивление отсутствует. Но в
реальной жидкости благодаря вязкости происходит яв-
ление, напоминающее «срыв струи» шариков, который
может служить моделью этого явления. Правда, сход-
ство будет здесь только внешнее. Это явление — отрыв
пограничного слоя от поверхности обтекаемого тела — и
нарушает симметричность распределения давлений впе-
реди и позади тела.
Для его уяснения нужно теперь подробнее рассмот-
реть пограничный слой при обтекании тела потоком
реальной жидкости.
§ 43. Пограничный слой.
Итак, теперь будем снова учитывать вязкость и рас-
смотрим такое обтекание тела потоком, при котором
образуется пограничный слой. Мы уже знаем, что об-
текание всегда имеет такой характер при полёте само-
лёта.
Весь поток воздуха, обтекающий тело, разбивается
на две части: прилегающий к телу пограничный слой
и весь остальной поток. Во всём потоке, кроме погра-
ничного слоя, движение таково, как если бы вязкость
отсутствовала: при удалении от тела градиенты скорости
настолько малы, что силы внутреннего трения ничтож-
ны и ими можно пренебречь. Напротив того, в погра-
ничном слое и происходит, в основном, изменение ско-
рости от нуля (на поверхности тела) до полной ве-
личины скорости потока. Распределение скоростей потока
вблизи поверхности тела, внутри пограничного слоя,
показано на рис. 56.
Толщина пограничного слоя невелика; она зависит
от размеров тела и скорости потока; например, на ло-
пастях вращающегося винта пограничный слой имеет
толщину в несколько миллиметров; на крыльях и
§ 43]
Пограничный слой
127
фюзеляже самолёта — не больше нескольких сантимет-
ров. Градиент скорости в пограничном слое велик; си-
лы трения имеют здесь большую величину и играют ре-
шающую роль; в пограничном слое изменение скорости
частиц жидкости, в частности, их торможение, происхо-
дит под действием сил вязкости и поэтому не связано
с изменением давления. Иначе говоря, в пограничном
слое кинетическая энергия частиц жидкости расходу-
ется на преодоление сил вязкости. Поэтому к погранич-
Рис. 5G. Изменение скорости происходит в тон-
ком пограничном слое.
ному слою нельзя применять закон Бернулли. Как
показывает опыт, давление в пограничном слое опреде-
ляется почти исключительно давлением окружающего
потока. Пограничный слой передаёт это давление на
поверхность тела почти без изменений. Давление же в
окружающем потоке, где трением можно пренебречь,
подчиняется закону Бернулли. Поэтому, зная спектр
основного потока, обтекающего тело, будем знать и
распределение давлений в потоке, передающееся через
пограничный слой на поверхность тела, а потому смо-
жем в конечном счёте найти и лобовое сопротивление.
Но форма основного потока зависит от пограничного
слоя. Отрываясь от поверхности тела, пограничный
слой изменяет спектр основного потока, а это, в свою
очередь, изменяет распределение давлений в потоке.
Таким образом, хотя основной поток и можно считать
не имеющим вязкости, но спектр его зависит от поведе-
ния пограничного слоя, в котором силы трения велики,
и этот спектр получается в конечном счёте совсем другим,
чем для идеальной жидкости.
128
Движение воздуха и лобовое сопротивление (гл. 5
Действие пограничного слоя на поток в целом про-
является в вызываемом им срыве струй — нарушении
плавности обтекания. Рассмотрим, например, срыв струй
при обтекании шара. Для этого вернёмся к спектру
обтекания шара идеальной жидкостью и выясним, какие
изменения внесёт в спектр наличие вязкости.
Обратим внимание на струйку потока, прилегающую
к поверхности шара (рис. 53). Для идеальной жидкости
трения между струйкой и поверхностью тела нет:
жидкость скользит по поверхности, и давление в струе под-
чиняется закону Бернулли. Частицы жидкости, проте-
кающие в струе, изменяют свою скорость соответственно
изменению давления вдоль струи. Подходя к телу, ча-
стица жидкости встречает повышенное давление, и ско-
рость её уменьшается; следуя дальше по струе, частица
увеличивает свою скорость, так как давление здесь по-
нижается; дальше, на пути к задней части тела, измене-
ние скорости происходит в обратном порядке: частица
движется в направлении растущего давления, и скорость
её падает. Наконец, при удалении от тела скорость ча-
стицы и давление возвращаются к тем же значениям,
что и далеко впереди тела. На первой половине пути
частица приобретала кинетическую энергию за счёт па-
дения давления; на второй половине пути, наоборот,
кинетическая энергия затрачивалась на переход в область
повышенного давления.
Так происходило бы обтекание при отсутствии вяз-
кости. Но для реальной жидкости необходимо, кроме
сил давления, учесть ещё и силы трения, тормозящие
частицу на всём её пути. Струйка, прилегающая к телу,
является теперь пограничным слоем, в котором и будет
сильно сказываться вязкость жидкости. В то время как
для идеальной жидкости скорости частиц в симметрич-
ных точках впереди и позади тела были равны, тормо-
жение частиц приведёт к тому, что скорость вблизи
задней поверхности тела будет меньше, чем вблизи пе-
редней его части. Симметрия движения нарушится, и
движение на задней стороне тела будет происходить с
меньшими скоростями, чем на передней. Частица, за-
тратившая свою кинетическую энергию на преодоление
сил трения, может, двигаясь против растущего давления.
Пограничный слой
129
§ 431
полностью истратить свою кинетическую энергию и оста-
новиться, не дойдя до хвостовой части. Кинетической
। энергии, которой хватало на преодоление давления, не-
хватит на преодоление и давления,.и трения.
И действительно, при обтекании шара в погранич-
ном слое наблюдается именно такая картина: в некото-
рой точке пограничного слоя на задней поверхности
шара происходит остановка течения. Но вдоль задней
поверхности давление растёт, и поэтому остановивша-
яся жидкость начинает двигаться в обратном направле-
нии (от большего давления к меньшему). Происходит
накопление замедленной, остановленной и возвраща-
ющейся жидкости; толщина пограничного слоя здесь
растёт, отодвигая основной поток от тела. Встречное
течение вызывает вращение частиц жидкости в погра-
ничном слое; далее образуются целые объёмы жидкости,
* охваченные общим вращательным движением — «выде-
ленные вихри». Направление вращения вихрей таково,
как если бы поток вращал вихрь подобно колесу, на-
саженному на ось. Образовавшиеся вихри увеличива-
ются в размерах, захватывая всё новые массы жидкости
и всё дальше отодвигая поток от задней поверхности
тела, — и, наконец, отрывайэтся набегающим потоком и
уносятся от тела; на месте отрыва начинается образо-
вание новых вихрей, и вся картина повторяется сна-
чала.
Таким образом, струи основного потока оказываются
оторванными от задней поверхности тела, а их место
занимают вихри. Аналогичная картина получается и для
тел другой формы. Например, на рис. 57 изображено
течение вокруг цилиндра, погружённого в воду, в раз-
ные моменты от начала движения до полного развития
вихрей. Вначале спектр имеет такой же вид, как и для
идеальной жидкости (а), но с течением времени картина
резко меняется (/): в задней части тела поток имеет
совершенно другой характер, чем впереди тела, благо-
даря вихрям, образовавшимся из пограничного слоя и
проникшим в общий поток. Изменилась именно зад-
няя часть потока, где в случае идеальной жидкости
струи должны были бы сходиться, создавая повышенное
Давление за счёт своей кинетической энергии. Здесь же
® М. А. Исакович
130
Движение воздуха и лобовое сопротивление [гл. 5
струи затратили свою кинетическую энергию на работу
против сил трения; образовавшимися вихрями струи
оторваны от тела, и давление в задней части тела не
Рис. 57. Развитие пограничного слоя и срыв обтекания с обра-
зованием вихрей вокруг цилиндра, начинающего двигаться
в жидкости.
повышается. Более того, опыты показывают, что за те-
лом. в пространстве, заполненном вихрями, давление
остаётся даже меньшим, чем давление окружающего по
§ 43]
Пограничный слой
131
тока вдали от тела. Характер же движения в передней
части тела остаётся почти без изменения: здесь струи
движутся в направлении падения давления, и работа,
затраченная на преодоление сил трения, компенсируется
работой сил давления; остановки течения в пограничном
слое не происходит,
и поток продолжает
прилегать к телу,
как и в случае иде-
альной жидкости.
Итак, трение в
пограничном слое
вызвало образование
вихрей и срыв струй
с задней поверхности
тела; в завихренной
области позади тела
передней части тела
альной жидкости, т.
Рис. 58. Обтекание <-удобообтекаемого»
тела. Вихри почти отсутствуют.
давление понижено. Течение же в
почти то же, что и в случае иде-
c. здесь давление повышено. Раз-
ность давлений впереди и позади тела и создаёт лобо-
вое сопротивление, точнее — ту часть его, которую мы
раньше назвали сопротивлением давления.
Теперь понятно, как влияет форма хвостовой части
тела на обтекание и лобовое сопротивление. Если хво-
стовая часть тела вытянута и заострена (тело «удобооб-
текаемой» формы), то расширение струй в хвостовой
части происходит постепенно, и повышение давления к
хвосту — медленное. В этом случае жидкость в погра-
ничном слое не останавливается, срыв струй не проис-
ходит, и обтекание остаётся плавным. Спектр потока
почти таков, каким он был бы в идеальной жидкости
(рис. 58); давление в хвостовой части повышается, и
разность давлений впереди и позади тела мала. Для
удобообтекаемых тел почти всё лобовое сопротивление
есть сопротивление трения.
Наоборот, при резком закруглении хвостовой части
срыв струй всегда наблюдается, и сопротивление дав-
ления настолько превосходит сопротивление трения, что
последним часто можно пренебречь. Особенно большое
сопротивление представляют тела, при обтекании кото-
рых образуется внезапное расширение потока,— напри-
9*
132
Движение воздуха и лобовое сопротивление [гл. 5
мер, тела со срезанной хвостовой частью (рис. 59); в
месте расширения потока давление, как мы знаем, должно
было бы повышаться; но расширение потока вызывает
срыв струй и вихреобразование,
Рис. 59. Обтекание тела со срезанной
хвостовой частью. Большая вихревая
область позади тела.
которые приводят к
падению давления
позади тела: так,
например, при дви-
жении полушара вы-
пуклостью вперёд
сопротивление ока-
зывается значитель-
но большим, чем при
движении его срезом
вперёд. Велико со-
противление у вся-
ких пластинок, по-
ставленных поперёк потока: срыв струй образуется
как раз на кромке пластинки, и вся задняя её сто-
рона оказывается в области пониженного давления.
Рис. 60. Открытая кабина с козырьком обтекается хуже, чем
кабина, закрытая обтекаемым колпаком.
Большим сопротивлением обладают козырьки само-
лётов, также представляющие собой пластинки, по
ставленные под углом к потоку. Поэтому на современных
скоростных самолётах кабина лётчика от
козырька до конца закрывается колпаком
обтекаемой формы (рис. 60). При полёте с
открытым колпаком сопротивление воздуха
сильно возрастает, и скорость самолёта
уменьшается. Большое сопротивление вы-
зывают на самолёте выступающие детали,
V9S
Рис. 61.
Обтекатель
стойки и ко-
углы, резкие переходы одних поверхностей леса шасси,
в другие, — всё это является источником
вихреобразования, а мы видели, что там, где образуются
вихри, давление понижается, а потому сопротивле-
ние растёт. Поэтому на современных самолётах высту-
Величина лобового сопротивления
133
§ 44]
па1ощие детали закрываются обтекателями, углы и стыки
конструкции закругляются, «зализываются». Всё, что
возможно, прячется внутрь фюзеляжа или в крыло.
Так, например, шасси в полёте убирается в специаль-
ные углубления в крыле, где оно не выступает наружу.
Если шасси неубирающееся, то стойки и колёса снаб-
жаются обтекателями (рис. 61). Вооружение и бомбы
размещаются в крыльях и в фюзеляже.
§ 44. Величина лобового сопротивления.
Число Рейнольдса.
В предыдущих параграфах мы видели, что лобовое
сопротивление слагается из сопротивления трения и
сопротивления давления. И та и другая части сопротив-
ления вполне определяются формой потока, обтекающего
тело. Оцнако влияние вязкости настолько усложняет
форму потока, особенно в хвостовой части тела, что
теоретически рассчитать форму потока, а вместе с ней
и лобовое сопротивление на самом деле невозможно.
Поэтому лобовое сопротивление различных тел находят,
непосредственно измеряя силу, действующую на тело в
потоке.
Результаты измерений можно обобщить в виде про-
стой формулы, которая даёт хорошее совпадение с дан-
ными опыта. Эта формула имеет следующий вид:
X = cxSq. (29)
Здесь X кг — лобовое сопротивление тела; S м2 — «ха-
рактерная» площадь тела; часто выбирается площадь
миделя тела [миделем называется то из сечений тела
плоскостью, перпендикулярной направлению набега-
ющего потока, которое имеет наибольшую площадь
(рис. 62)]1); q^—скоростное давление набегающего по-
х) Конечно, вместо площади миделя можно было бы взять
любую другую «характерную» площадь, например, общую площадь
всей поверхности тела, площадь тела в плане (так берётся обычно
«характерная» площадь для крыла) или вообще любую величину,
пропорциональную квадрату линейных размеров тела. Важно здесь
лишь то, чтобы величины S у подобных тел относились как сход-
ственные площади, конкретный же выбор этой величины влияет,
как увидим, только на величину коэффициента с*.
134
Движение воздуха и лобовое сопротивление [гл. 5
тока: (?=-^ ру2; с( — коэффициент лобового сопротивле-
ния— безразмерный коэффициент, зависящий, в осно-
вном, от формы тела: на него оказывают влияние и
шероховатость повер-
хности тела, и поло-
жение тела в пото-
ке. В дальнейшем мы
не будем упоминать
I о шероховатости и по-
Рис. 62. Миделево сечение фюзеляжа, ложении в потоке, счи-
тая эти факторы оди-
наковыми в тех случаях, когда тела имеют одинако-
вую форму.
Формулу (29) можно переписать ещё и в таком виде:
(30)
Здесь вместо q подставлено его значение.
Согласно формулам (29) и (30), лобовое сопроти-
вление прямо пропорционально площади миделя и
скоростному давлению, или, иначе, площади ми-
деля, массовой плотности жидкости и квадрату скоро-
сти потока.
Огромное практическое значение написанных формул
заключается в том, что коэффициент сх зависит, как
показал опыт (требуемые оговорки сделаем в дальней-
шем), только от формы тела. Это значит, что для всех
тел данной формы — подобных тел — сх имеет одно и то
же значение. Например, коэффициент ск для шара лю-
бого радиуса — один и тот же.
Таким образом, если изготовить точную уменьшенную
модель самолёта (конечно, соответственно уменьшив и
шероховатость поверхности), то для неё коэффициент сх
будет тот же, что и для настоящего самолёта; достаточно
из опыта найти сопротивление маленькой модели, чтобы
иметь возможность рассчитать сопротивление самолёта
в натуральную величину. Нужно будет лишь заменить
в формуле величины миделя и скорости потока для мо-
дели величинами миделя и скорости полёта настоящего
§ 44]
Величина лобового сопротивления
135
самолёта. Подобно этому, зная сопротивление воздуха для
данного тела у земли, можно вычислить сопротивление
на любой высоте, заменяя лишь плотность воздуха у
земли её значением на заданной высоте.
Но возможно ли, что, изменяя в широких пределах
Рис. 63. Потоки идеальной
жидкости, обтекающие по-
добные тела, подобны между
собой.
показывает, что при
и даже при одинако-
скорость потока, размеры тела, плотность воздуха, мы
всё же можем пользоваться одним и тем же значе-
нием коэффициента сх, который, как мы увидим в § 45,
определяется из опыта при каких-то одних определённых
значениях и для размера тела,
и для скорости потока, и для
плотности воздуха?
Оказывается, что это не
вполне возможно: более по-
дробные исследования показы-
вают, что при той же форме
тела, но других его размерах,
или при изменённой скорости
или плотности воздуха, коэф-
фициент сх также не остаётся
в точности постоянным. Опыт
геометрически подобных телах
вых телах, но при изменённых v и р, спектры обте-
кания могут и не быть подобны; потоки, обтекающие
тело, могут быть различны по форме. А если раз-
личны потоки, то различны и коэффициенты лобового
сопротивления. И лишь в том случае, когда подобны
не только тела, но и обтекающие их потоки, коэффи-
циенты сх для обоих случаев обтекания равны между
собой. Нарушение же подобия спектров ведёт к нару-
шению равенства коэффициентов.
Каково же условие подобия потоков при обтекании
подобных тел? Для идеальной жидкости, где действуют
только силы давления, потоки, обтекающие подобные
тела, всегда должны быть подобны друг другу (рис. 63).
Для вязкой же жидкости можно доказать, что условием
подобия является одинаковое отношение между силами
давления и силами трения в соответственных точках
потока.
Так как речь идёт об отношении сил, то достаточно
наитц какие-нибудь величины, им пропорциональные,
136
Движение воздуха и лобовое сопротивление [гл. 5
Кроме того, для сил давления нужно учитывать не общее
давление потока вдали от тела, так как оно всюду
одинаково, а лишь изменение этого давления. Можно
доказать, что в подобных потоках изменения давления
пропорциональны скоростному давлению. Поэтому в ка-
честве величины, пропорциональной силам давления,
возьмём скоростное давление ~ рп2, умноженное на пло-
щадь, на которую давление действует. Но для подобных
тел площади пропорциональны квадрату линейных раз-
меров тела. Обозначим какой-нибудь линейный размер
тела через а (например, для шара это может быть его
радиус или диаметр). Вообще безразлично, какой именно
размер тела взять за характерный размер а, так как
для подобных тел все соответственные размеры пропор-
циональны. Таким образом, площадь пропорциональна а2,
а сила давления пропорциональна ри2а2 (множитель — из
выражения для скоростного давления опускаем, так как
пропорциональность величин не зависит от неизменных
множителей).
С другой стороны, сила трения пропорциональна
коэффициенту трения д, градиенту скорости и площади.
Градиент скорости пропорционален о:а, а площадь —
величине а2; значит, сила трения пропорциональна
Р-~ • a2 = ]iva.
Теперь найдём отношение силы давления к силе
трения:
ру2а2: циа = ~ .
Следовательно, для того чтобы потоки, обтекающие подоб-
ные тела, и сами были подобны, величины — для одного
и для другого потока должны быть равны. Безразмерная
величина называется числом Рейнольдса и обозна-
чается R. Условием подобия потоков, обтекающих по-
добные тела, является, как это подтверждает и опыт,
равенство чисел Рейнольдса для потоков.
§ 44] Величина лобового сопротивления 137
Образование первого или второго типа течения, из
пазобранных в § 41, также определяется числом Рей-
нольдса. При достаточно малых значениях R устанавли-
вается первый тип течения: ламинарное, струйное течение
в трубах, или обтекание тел без пограничного слоя.
При больших же значениях R течение в трубах турбу-
лентное, а при обтекании тел образуется пограничный
слой.
Из выражения для числа Рейнольдса видно, что,
например, чем меньше вязкость, тем больше R и, значит,
тем скорее наступает второй тип течения. С другой
стороны, уменьшение вязкости обозначает приближе-
ние свойств жидкости, обладающей вязкостью, к свой-
ствам идеальной жидкости. Увеличение чисел Рей-
нольдса обозначает уменьшение отличия данной жид-
кости от идеальной. Ведь чем больше значение
R, тем меньше, в среднем, силы трения сравнительно
с силами давления. И действительно, как мы знаем,
при втором типе течения поток в целом движется
подобно идеальной жидкости. Но, как бы мала
ни была вязкость, спектр потока, обтекающего тело,
резко отличается от спектра обтекания идеальной жидко-
стью. Причина этого, как мы уже знаем, есть пове-
дение пограничного слоя, т. е. той области жидкости,
где, при сколь угодно малой вязкости, силы трения всё
же велики. И, напомним ещё раз, образование вихрей
и срыв струй, вызываемые движением в пограничном
слое, совершенно изменяют спектр потока, который, за
исключением этого, ведёт себя подобно потоку идеаль-
ной жидкости.
Так же как и форма потока, коэффициент лобового
сопротивления сх при обтекании тела данной формы
зависит от числа Рейнольдса, следовательно, не является
постоянным, как мы это предположили вначале.
Однако практически форма потока и величина сх
сильно зависят от числа Рейнольдса лишь при небольших
его значениях (особенно при переходе от движения без
пограничного слоя к движению с пограничным слоем).
При больших же значениях R, с которыми приходится
встречаться при полёте самолёта, поток мало меняет
свою форму, и сх почти постоянно, кроме некоторых
138
Движение воздуха и лобовое сопротивление [гл. 5
исключительных случаев; в этих случаях приходится,
конечно, брать и изменённое значение для сх.
В дальнейшем мы всюду будем считать, что для тела
данной формы, при данном его положении в потоке,
сх есть постоянная величина, как бы ни менялось
число Рейнольдса, оставляя, таким образом, в стороне
исключительные случаи, которые вообще требуют спе-
циального изучения.
§ 45. Аэродинамические испытания.
Итак, основной формулой сопротивления (30) мы
будем теперь пользоваться, считая, что сх для данного
тела зависит только от его формы. Покажем теперь, как
Рис. 64. Схема аэродинамической трубы и подвески тела при опре-
делении лобового сопротивления модели. Л4 — модель; а — а — про-
волоки подвески модели; К — упорный стержень, передающий силу
лобового сопротивления на аэродинамические весы т; О —обтека-
тель рычага весов.
практически определяется величина сх для тел разной
формы. Эта задача решается аэродинамическими испы-
таниями, «продувкой» моделей тел в аэродинамической
трубе.
Схема аэродинамической трубы показана на рис. 64.
С помощью вентилятора Р в трубе создаётся равномерный
поток воздуха. В рабочей части А трубы подвешивается
на тонких проволоках модель М исследуемого тела.
При работе вентилятора модель обтекается потоком
воздуха, и возникающее лобовое сопротивление пере-
даётся через подвеску модели на аэродинамические весы.
Аэродинамические испытания
139
§ 45]
которыми оно непосредственно и измеряется. Измерив
лобовое сопротивление X, находим сх, пользуясь фор-
мулой (30):
(31)
Здесь S — площадь миделя модели, v — скорость потока
в трубе, р — плотность воздуха в аэродинамической
трубе.
Определив сх для модели из одной такой продувки,
мы можем теперь пользоваться найденным значением сх
для вычисления лобового сопротивления тела в нату-
ральную величину при любой скорости и плотности
воздуха.
ГЛАВА 6.
АЭРОДИНАМИЧЕСКИЕ СИЛЫ КРЫЛА.
§ 46. Подъёмная сила.
В § 38 мы видели, что полную аэродинамическую
силу можно рассматривать как равнодействующую двух
составляющих: лобового сопротивления и подъёмной силы,
В следующих параграфах мы будем изучать подъёмную
силу для крыльев, т. е. для сравнительно тонких пла-
стинок специальной формы, стоящих под небольшим
углом к потоку. Для крыльев полная аэродинамическая
сила почти перпендикулярна к потоку, т. е. подъёмная
сила велика сравнительно с лобовым сопротивлением.
Подъёмная сила, возникающая при других случаях обте-
кания тел, например, при обтекании фюзеляжа, сравни-
тельно невелика и не имеет такого значения в вопросах
полёта самолёта. Будем считать, что при обтекании
крыла скольжение отсутствует, т. е. что поток набегает
перпендикулярно к размаху крыла.
Происхождение лобового сопротивления нами уже
выяснено: оно возникает благодаря наличию вязкости
(хотя бы и очень малой); в идеальной жидкости лобового
сопротивления нет. Иначе обстоит дело с подъёмной си-
лой; как мы увидим, подъёмная сила может действовать
и в потоке идеальной жидкости при определённой
форме течения; и в идеальной жидкости величина подъ-
ёмной силы будет та же, что и в потоке маловяз-
кой жидкости при такой же форме течения. Роль
вязкости здесь лишь в создании и поддержании опре-
делённой формы течения. Поэтому, пока не встанет во-
прос о создании этой формы потока, будем считать, что
она уже имеет место при обтекании крыла, и будем
Считать жидкость идеальной.
§46]
Подъёмная сила
141
установим теперь, как возникает подъемная сила при
бТекании крыла, причём сначала будем рассматривать
° лько самые внешние, общие черты явления, а после
их выяснения перейдём к более ____
детальному изучению. /
А Возьмём простейший случай: /
плоская пластинка поставлена
под углом в потоке воздуха;
каковы аэродинамические си-
лы, действующие на пластинку?
Начнём с грубой модели
явления: поток воздуха заме-
ним «потоком» гладких упру-
гих шариков, ударяющихся о
пластинку (рис. 65). При ударе
О
Рис. 65. Модель возникно-
вения аэродинамической си-
лы при обтекании наклон-
ной пластинки. Поток воз-
духа изображается «струёй»
шариков.
направление «струи» шариков
изменяется: они отражаются,
отклоняясь вниз; при ударе
пластинка действует на ша-
рики с силой, перпендикуляр-
ной пластинке (так как трение отсутствует), сообщая
им дополнительную скорость Им. Скорость •и' после отра-
жения есть векторная сумма скоростей набегающего
потока v и дополнительной скорости Д®:
•и' =у-\- (сложение по правилу треугольника).
Так как шарики гладкие и упругие и пластинку
тоже считаем упругой, то при ударе нет потери кине-
тической энергии и v' — v (по величине, но не по на-
правлению!).
По закону действия и противодействия шарики дей-
ствуют на пластинку с силой, равной и противоположной
действию пласа инки на шарики (сила 7? на рис. 65).
Сила R для «потока» шариков есть то же, что полная
аэродинамическая сила для потока воздуха. Разлагая
силу R цо направлению потока и перпендикулярно к
нему, получим «лобовое сопротивление» X и «подъёмную
силу» у. Мы получили модель обтекания наклонной пла-
стинки. Основные черты явления переданы правильно:
при обтекании пластинки набегающий поток воздуха
действительно отклоняется вниз; следовательно, плас-
тинка действует на него с некоторой силой, а потому
142
Аэродинамические силы крыла
[гл. 6
поток действует на пластинку с силой, противоположно
направленной — полной аэродинамической силой (рис. 66).
Если определить приращение скорости потока (по вели-
чине и направлению), то можно было бы найти и полную
аэродинамическую силу (также по величине и напра-
влению) и, разложив её на две составляющие, найти
силы X и У.
На первый взгляд кажется, что сходство модели с
самим явлением идёт и дальше: сила R для пластинки
в потоке воздуха есть равнодействующая сил давления
на нижнюю и на верхнюю поверхность пластинки. И
действительно, на нижней
--------------------uU"~'стороне пластинки давле-
--------------------ние повышено, как если
•----------_бы частицы воздуха уда-
----рялись о пластинку, по-
— ' Добно упругим шарикам.
Но как раз здесь модель
перестаёт следовать суще-
ственным чертам явления:
поток шариков действует
Рис 66. Отклонение потока воз- только на нижнюю по-
духа, обтекающего наклонную верхкость пластинки, а
пластинку. при обтекании потоком
воздуха, кроме того, что
растёт давление на нижней поверхности, ещё и по-
нижается давление на верхней поверхности пластинки.
Измерения показывают даже, что понижение давления
над пластинкой больше, чем повышение давления под
пластинкой. Таким образом, здесь сходство обрывается,
и воспользоваться моделью из шариков для определе-
ния, например, величины силы R, зависящей от разности
давлений по обе стороны пластинки, нельзя. Правильный
результат можно получить, только рассматривая весь
поток в целом, а для этого представление о потоке как
о собрании отдельных, независимых друг от друга час-
тиц неприменимо, так как форма потока в целом опре-
деляется как раз взаимодействием между отдельными
частями потока.
Заметим, что исторически первые попытки вычислить
аэродинамические силы основывались именно на карти
Подъёмная сила
143
§ 461
не удара отдельных, независимых друг от друга частиц
воздуха о переднюю поверхность тела. Так, Ньютон
впервые вычислил лобовое сопротивление пластинки,
поставленной перпендикулярно потоку, а также и пол-
ную аэродинамическую силу для наклонной пластинки.
Он получил для аэродинамических сил формулу
F = cSfT,
которой мы пользуемся ещё и теперь. Но величина ко-
эффициента с, вычисленная по теории Ньютона, не за-
висела от формы тела и поэтому расходилась с опытными
данными. Мы знаем теперь, что это расхождение объяс-
няется неучётом формы всего потока в целом, а особен-
но— его хвостовой части.
Итак, теперь будем рассматривать поток в целом.
Подходя к пластинке, поток разделяется на две части:
Рис. 68. Обтекание
крыла.
Рис. 67. Обтека-
ние пластинки по-
током воздуха.
одна обтекает верхнюю поверхность пластинки, другая —
нижнюю. Как уже было сказано,- опыт показывает, что
в потоке, обтекающем верхнюю сторону пластинки, дав-
ление вблизи поверхности понижено; напротив того, под
пластинкой давление повышено. Значит, по закону Бер-
нулли скорость над пластинкой должна быть повышена,
а под пластинкой — понижена, сравнительно со скоростью
набегающего потока. Спектр обтекания пластинки под-
тверждает это (рис. 67). Над пластинкой струи сужены,
значит, скорость здесь действительно повышена; под
пластинкой струи расширены, значит, скорость пони-
жена.
Подобную же картину даёт и спектр обтекания кры-
ла (рис. 68). И здесь скорость над крылом повышена,
а под крылом понижена.
144 Аэродинамические силы крыла [гл. g
Дадим теперь упрощённый расчёт подъёмной силы,
действующей на пластинку, считая её равной результи-
рующей сил давления на нижнюю и на верхнюю по-
верхность пластинки.
Опыт показывает, что увеличение скорости над пла-
стинкой примерно равно уменьшению скорости под
пластинкой; обозначим эту величину изменения скорости
через и; скорость же набегающего потока там, где поток
ещё не изменён присутствием пластинки, обозначим че-
рез и. (Если воздух неподвижен, а пластинка движется,
то v — скорость движения пластинки.) Значит, скорость
над пластинкой равна v-j-u, а под пластинкой v — и.
Подсчитаем теперь разность давлений снизу и сверху
пластинки, пользуясь для этого законом Бернулли. Сумма
давления и скоростного давления должна быть одинако-
ва для потока под пластинкой и над пластинкой:
Рп + у ~ У)2=Рв + 4 Р (р + «)2-
Здесь ря—давление на нижнюю поверхность, а рв— дав-
ление на верхнюю поверхность пластинки. Из написан-
ного равенства находим разность давлений:
Ра — Рв = Р {(" + «)2— — и)2 } = 2рни.
Результирующую сил давления, т. е. подъёмную си-
лу Y, найдём, умножая разность давлений на площадь S
пластинки:
Y = 2pvuS. (32)
Предположим теперь, что пластинка — прямоугольной
формы с размахом I (размахом называется размер крыла
в направлении, перпендикулярном к потоку) и хордой t
(хорда — размер крыла по потоку). Тогда S — U, и
подъёмная сила равна:
Y — 2pvult.
Величина 21 есть периметр сечения пластинки плоскостью,
перпендикулярной размаху. Произведение дополнитель-
ной скорости и на периметр называется циркуляцией
§ 47]
Циркуляция скорости
145
скорости и обозначается буквой Г:
Г=^2н/.
Подставляя это выражение в формулу для подъёмной
силы, получим окончательно:
(33)
Эта основная формула аэродинамики крыла получила
название формулы Жуковского, по имени знаменитого
учёного, одного из пионеров теории полёта, Н. Е. Жу-
ковского.
Наш вывод основан на целом ряде упрощений, ко-
торые мы даже не оговаривали; но более точное ма-
тематическое рассмотрение приводит к той же формуле.
Формула (33) выведена для плоской пластинки; но
и для изогнутых пластинок и для крыльев, имеющих
обычно применяемый в самолётостроении профиль, фор-
мула (33) остаётся справедливой.
§ 47. Циркуляция скорости.
Рассмотрим подробнее поток, обтекающий наклонную
пластинку. Мы знаем уже, что над пластинкой скорость
жидкости повышена, а под пластинкой понижена. Ха-
рактер такого течения
можно сделать особенно
наглядным, если пред-
ставить его в виде сум-
мы двух течений, нала-
гающихся одно на дру-
гое так, что скорость
жидкости в каждой
точке равна векторной
сумме скоростей, обу-
словленных каждым из
Рис. 69. Два течения, дающие при
наложении друг на друга течение,
изображённое на рис. 67.
течений в отдельности в этой
же точке. Слагающие течения выберем так, чтобы одно из
них давало одинаковое распределение скоростей на ниж-
ней и на верхней поверхности пластинки, а второе —
Давало бы дополнительные скорости. Течения такого
вида представлены на рис. 69. Спектры их вычерчены
по теоретическому расчёту. Первое из течении даёт
^0 м. а. Исакович
146
Аэродинамические силы крыла
[гл. ь
одинаковые скорости по верхней и по нижней стороне пла-
стинки. Такое течение образовала бы идеальная жидкость,
начавшая обтекать пластинку. Второе течение — замкну-
тое течение жидкости вокруг пластинки; оно называется
циркуляционным. Уточним теперь понятие циркуляции
скорости. Циркуляцией скорости вдоль замкнутой линии
(или, как часто говорят, вдоль контура) называется
произведение периметра линии на составляющую скоро-
сти вдоль линии. Если
Рис. 70. Вычисление циркуляции по
контуру ABCL).
составляющая скорости
различна в разных мес-
тах контура, то вся ли-
ния разбивается на
участки, в пределах
каждого из которых со-
ставляющая скорости
практически постоянна.
Для каждого из участ-
ков составляется про-
изведение из длины его
на составляющую скорости, и сумма этих произведе-
ний представляет циркуляцию вдоль всего контура.
Если при обходе контура в определённом направле-
нии составляющая скорости направлена против обхода,
то соответствующее произведение считается отрица-
тельным.
Для примера вычислим циркуляцию вдоль контура
прямоугольника в однородном (прямолинейном и равно-
мерном) потоке жидкости (рис. 70). Выражение для
циркуляции составляем из четырёх слагаемых, отдельно
для каждой стороны прямоугольника. Направление об-
хода прямоугольника показано изогнутой стрелкой. Для
стороны АВ скорость совпадает с направлением обхода, а
для стороны CD — направлена противоположно; поэтому
произведения скорости на длину участка берём с разными
знаками: -\-иа для стороны АВ и—va для стороны CZ).
Для сторон же ВС и DA соответствующие произведения
равны нулю, так как составляющая скорости вдоль них
равна нулю. Складывая полученные произведения, полу-
чаем нуль: циркуляция вдоль контура прямоугольника
оказалась равна нулю. Можно доказать, что в однородном
Циркуляция скорости
147
§ 47]
потоке циркуляция по любому замкнутому контуру равна
нулю; течение, как говорят, бесциркуляционное. Также
бесциркуляционным является течение, изображённое
на рис. №’а> и многие другие.
Напротив, в течении, показанном на рис. 69, Ь, цир-
куляция скорости по замкнутому контуру, окружающему
пластинку, не равна нулю. Для линии тока, идущей
вдоль пластинки, периметр равен двойной длине хорды 2/,
а дополнительная скорость и направлена всё время вдоль
линии тока. Значит, циркуляция вдоль этой линии тока
раВВа; • Г=Ж
как мы и писали в предыдущем параграфе.
Теоретические соображения, подтверждённые опытом,
показывают, что для дополнительного течения, образую-
щегося вокруг пластинки, циркуляция скорости вдоль
любого контура, окружающего пластинку, одна и та же-,
отсюда следует, между прочим, что величина дополни-
тельной скорости убывает по мере удаления от пластинки.
Циркуляция же по контуру, не охватывающему пластин-
ку, равна нулю, как и для бесциркуляционного течения.
Итак, мы видели, что подъёмная сила возникает
тогда, когда на бесциркуляционное движение потока
накладывается циркуляционное течение. Подъёмная сила
возникает не только для пластинки, но и для крыла
любого профиля и даже для тел, не имеющих крылооб-
разной формы, если только вокруг тела циркуляция не
равна нулю. Циркуляция увеличивает скорость потока
с одной стороны тела (там, где скорость циркуляцион-
ного движения направлена так же, как скорость натека-
ния) и уменьшает— с другой. Согласно закону Бернулли,
в местах увеличения скорости давление понижено, а
в местах её уменьшения — повышено; образуется разность
Давлений, которая и создаёт подъёмную силу.
Рассмотрим ещё возникновение подъёмной силы при
обтекании вращающегося цилиндра потоком воздуха.
Этот случай был исследован в связи с изучением полёта
вращающихся снарядов Магнусом и получил название
эффекта Магнуса. При обтекании неподвижного цилин-
дра потоком воздуха спектр имеет вид, показанный на
Ю*
148
Аэродинамические силы крыла
[гл
рис. 71 (срыв обтекания пока не учитываем; это ра
посильно тому, что рассматриваем обтекание идеальной
жидкостью). Это — бесцирк
Рис. 71. Линии
тока при обтекании
цилиндра идеаль-
ной жидкостью.
Рис. 72. Линии тока про-
ведепы так, что через сече-
ние каждой кольцевой труб-
ки тока проходит за секун-
ду одинаковое количество
жидкости.
Рис. 73. Обтека-
ние цилиндра по-
током при наличии
циркуляции.
ляционное течение. Линии тога
циркуляционного течения, при
котором скорость вдали от ци-
линдра равна нулю, имеют вид
окружностей (рис. 72). Нало-
жим теперь оба течения одни
на другое. Получим результи-
рующее течение, спектр кото-
рого, вычерченный но расчёт;,
изображён на рис. 73. Это и
есть спектр обтекания враща-
ющегося цилиндра потоком
воздуха Причину возникнове
ния такого течения мы рас-
смотрим после, а пока только
предположим что такое течение
уже образовалось. Тогда над
цилиндром скорость циркуля-
ционного течения складывается
со скоростью потока и даёт уве-
личение скорости, на что указы-
Рис. 74. Спектр обтекания
вращающегося цилиндра.
вает сужение струй над цилиндром; под цилиндром скорости
направлены навстречу друг другу, значит, результирх
ющая скорость уменьшена, и струи расширены. Рис. 74
Возникновение циркуляции
149
§ 48]
оедставляет фотографию вращающегося цилиндра в по-
оке жидкости: расчётный спектр, как мы видим, совпа-
пает с фактическим. Вследствие различия скоростей,
давление над цилиндром меньше давления под цилинд-
ром, и разность давлений образует подъёмную силу,
перпендикулярную к потоку. При полёте снаряда эта
подъёмная сила отклоняет траекторию в сторону. Эффек-
том Магнуса объясняется, между прочим, и «неправиль-
ный» полёт теннисного или футбольного мяча, получив-
шего быстрое вращение при ударе
§ 48. Возникновение циркуляции.
Итак, чтобы объяснить возникновение подъёмной силы
при обтекании пластинки, крыла пли вращающегося ци-
линдра, нам теперь нужно только объяснить, каким образом
образуется циркуляционное течение вокруг обтекаемого
тела и почему это круговое движение в потоке не ос-
лабляется и не затухает под действием сил трения о по-
верхность тела. Как мы увидим сейчас, здесь, как и при
возникновении лобового сопротивления, играет решаю-
щую роль пограничный слой и образующиеся из него
вихри. Если циркуляция вокруг тела уже имеется, то
для объяснения наличия подъёмной силы достаточно
представления об идеальной жидкости. Но вопрос о
возникновении и поддержании циркуляции требует
учёта вязкости. Поэтому мы снова возвращаемся к рас-
смотрению вязкой жидкости и, по тем же причинам, что
и раньше, будем учитывать вязкость лишь в погра-
ничном слое, считая общий поток лишённым внутрен-
него трения.
Предварительно остановимся немного на понятии
вихревого движения в жидкости и на связи между вих-
рями и циркуляцией. Попутно приведём (без доказа-
тельств) несколько сведений из теоретической гидроди-
намики.
Вихревым движением называется вообще всякое дви-
жение жидкости, при котором отдельные частицы её
обладают вращением. Подчеркнём, что речь идёт не о
круговом движении, при котором отдельные частицы
могут двигаться и чисто поступательно (таково, например,
150
Аэродинамические силы крыла
[гл. 6
движение частиц в чисто циркуляционном движении во-
круг цичиндраили крыла), а именно о вращении отдельных
частиц. Можно различить два основных типа вихревою
движения. Первый тип возникает при скольжении одною
слоя жидкости по другому: частицы жидкости образуют
вихревой слои, закручиваясь между скользящими слоями,
подобно тому как перекатывается, например, палочка”
зажатая между столом
и движущейся дощеч-
кой; подобное же дви-
жение получают шари-
ки в шарикоподшипни-
ке между втулкой и
обоймой или кусочки
хлебного мякиша при
скатывании из них ша-
риков. Пограничный
слой при обтекании те-
ла даёт пример вихре-
вого слоя в жидкости.
Вихревые слои часто
неустойчивы и, распа-
Рис. 75. Распределение скоростей,
обусловленное одиночным прямоли-
нейным вихрем.
даясь на части, «свёртываются» в отдельные крупные
вихревые области, подобно тому как скручиваются в
один большой комок мелкие хлебные шарики, пере-
катываемые между ладонями. Это — второй тип вихре-
вого движения — «выделенные» вихри или, в обыденной
речи, просто вихри; с ними мы уже встречались в § 43
и далее.
Несколько упрощая картину, можно себе представить,
что выделенный вихрь представляет собой ограниченный
объём жидкости, вращающийся как одно целое, подобно
твёрдому телу; при этом пренебрегаем взаимным пере-
мещением частиц, составляющих вихрь, друг относитель-
но друга.
Представим себе теперь, что в жидкости находится
только один «выделенный» вихрь. Тогда окружающая
жидкость не может покоиться, но будет совершать во-
круг него циркуляционное движение в направлении вра-
щения вихря (в противном случае, на границе вихря,
скорость жидкости менялась бы скачком). Такое течение
Возникновение циркуляции
151
§ 48]
показано на рис. 75. На рисунке сечение вихря заштри-
ховано, а круговые линии вокруг вихря — замкнутые
линии тока — образуют спектр циркуляционного течения,
обусловленного вихрем.
Подчеркнём ещё раз, что вне вихря частицы жидко-
сти движутся, не вращаясь, хотя и по круговым тра-
екториям: всюду, кроме области, занятой самим вихрем,
движение безвихревое. Скорость течения убывает по мере
удаления от вихря, что показано увеличением расстоя-
ний между последующими линиями тока.
Можно доказать, что в рассматриваемом случае цир-
куляция по любому замкнутому контуру, охватываю-
щему вихрь (например, по линиям 1 и 2, рис. 75), —
одна и та же, в то время как циркуляция по контуру,
не охватывающему вихря (например, по линии 3),
равна нулю. Циркуляция по контуру, охватывающему
вихрь, есть величина, характерная для самого вихря;
мы будем называть её напряжённостью вихря. Таким
образом, напряжённость вихря есть величина циркуля-
ции по контуру, охватывающему вихрь.
Теперь допустим, что в жидкости имеется несколько
вихрей. Каждый из них в отдельности создавал бы в ок-
ружающей жидкости циркуляционное течение, соответ-
ственно своей напряжённости. При совместном же их на-
личии в жидкости создаётся некоторое результирующее
течение, причём циркуляция по какому-либо замкнутому
контуру, проведённому в жидкости, определяется вих-
рями, оказавшимися внутри контура. Именно, можно до-
казать, что циркуляция равна сумме напряжённостей
всех вихрей, охватываемых контуром, т. е. равна сумме
циркуляций, обусловливаемых каждым из этих вихрей
в отдельности. При этом напряжённостям вихрей, вра-
щающихся в разные стороны, нужно приписывать про-
тивоположные знаки (соответственно знаку циркуляции,
вычисляемой для каждого вихря в отдельности при об-
ходе контура в одну и ту же сторону).
Если внутри контура вихрей нет, то циркуляция равна
нулю. Также равна нулю и циркуляция по любому кон-
туру, охватывающему два одинаковых вихря, вращаю-
щихся в разные стороны (так как напряжённости таких
вихрей равны по величине и противоположны по знаку).
152
Аэродинамические силы крыла
[гл. 6
Из сказанного ясна тесная зависимость между нали-
чием вихрей в жидкости и наличием циркуляции.
И действительно, можно доказать, например, что если
вихрей в жидкости нет, т. е. частицы жидкости не вра-
щаются, то циркуляция по любому контуру равна нулю
за исключением того случая, когда в жидкости имеются
твёрдые тела. В этом последнем случае наличие цирк' -
ляции по контурам, охватывающим твёрдое тело, во:
можно (хотя, конечно, не обязательно) даже при отсут-
ствии вихрей в жидкости. Зато в этом случае тело
ведёт себя подобно вихрю: если по какому-либо кон-
туру, охватывающему твёрдое тело, циркуляция не рав-
на нулю, то циркуляция будет иметь то же значение
и для любого контура, внутри которого находится
данное тело. Если в этом контуре окажутся ещё и
вихри, то циркуляция будет равна сумме напряжён-
ностей этих вихрей, сложенной с циркуляцией, обус-
ловленной телом в отдельности. Таким образом, наличие
циркуляции вокруг тела полностью аналогично присут-
ствию вместо тела некоторого вихря соответственной на-
пряжённости. Создание циркуляции вокруг тела равно-
сильно созданию вихря в жидкости и требует приложения
таких же сил. Это лучше уясняется, если представить
себе, что как образование вихря, так и создание цирку-
ляции вокруг тела связано с приданием кругового дви-
жения окружающей массе жидкости; отсюда и сходство
в спектрах циркуляционных течений вокруг вихря и
вокруг твёрдого тела.
Теперь перейдём к самому вопросу о возникновении
циркуляции. В теоретической гидродинамике доказы-
вается, что в идеальной жидкости, т. е. при действии
только сил давления, вихри образоваться не могут: для
их возникновения необходимы силы трения, «закручива-
ющие» вихрь. Следовательно, место их возникновения,
как мы это уже видели в предыдущих параграфах, есть
пограничный слой у поверхности обтекаемого твёрдого
тела. Но как только силы вязкости со стороны окружа-
ющей жидкости начнут образовывать вихрь, он, в свою
очередь (по закону действия и противодействия), начнёт
действовать на окружающую жидкость с равными и про-
тивоположными силами, которые должны или образовать
Возникновение циркуляции
153
§ 481
в окружающей жидкости вихрь равной интенсивности,
но противоположного направления вращения, или — цир-
куляцию соответственной величины и направления во-
круг твёрдого тела. И действительно, оба случая встре-
чаются в реальных условиях. Во-первых, возможно
образование парных вихрей противоположного вращения
(см. например рис. 57, d). Они часто наблюдаются позади
симметричных тел, обтекаемых потоком. Во-вторых, —
и этот случай имеет для нас решающее значение — воз-
можно образование только одного вихря, но сопровожда-
ющееся возникновением циркуляции противоположного
направления вокруг самого обтекаемого твёрдого тела.
Такой одиночный вихрь и возникает при несимметричном
обтекании тела, в частности —при обтекании крыла. По
мере роста такого вихря растёт в той же мере и про-
тивоположная циркуляция вокруг тела, так что цир-
куляция по контуру, охватывающему и вихрь и
твёрдое тело, всё время остаётся равной нулю. Если
же теперь образовавшийся вихрь будет унесён пото-
ком жидкости, то вокруг тела останется циркуляционное
течение.
Как это происходит на практике, проследим сперва
для эффекта Магнуса.
Если цилиндр в потоке не вращается, то по обе
стороны цилиндра условия для возникновения вихрей
одинаковы и, действительно, за цилиндром возникают
два симметричных вихря (см. рис. 57 на стр. 130).
Если же цилиндр вращается, то условия с верхней
и с нижней стороны различны. С той стороны, где вра-
щение направлено в сторону течения потока, трение
о поверхность цилиндра ускоряет движение погранич-
ного слоя, сообщает ему дополнительную кинетическую
энергию. Остановка течения в пограничном слое на этой
стороне цилиндра не происходит, и вихрь не образуется.
Наоборот, с той стороны, где вращение противоположно
Движению потока, пограничный слой будет тормозиться,
и остановка течения в нём произойдёт раньше, чем
при отсутствии вращения; возвратное течение приведёт
к образованию вихря именно на этой стороне, в
то время как другая сторона будет обтекаться плавно
(рис. 76).
154
Аэродинамические силы крыла
[гл. 6
Образование вихря вызовет, как мы уже знаем, цир.
куляцию вокруг цилиндра; но циркуляция скорости по
линии, охватывающей и цилиндр, и вихрь, будет равна
нулю (циркуляция по линии
Рис. 76. Стадии образования
«начального» вихря.
L на рис. 76).
Следующим этапом дви-
жения будет отрыв вихря
от поверхности цилиндра
набегающим потоком. Те-
перь циркуляции раздели-
лись. Уносимый потоком
вихрь создаёт вокруг себя
циркуляцию; например,
циркуляция по линии. L'
(рис. 76) не равна нулю
и направлена против вра-
щения цилиндра. С дру-
гой стороны, имеется и
циркуляция вокруг ци-
линдра (например, по ли-
нии L"). Эта циркуляция
равна и противоположна
циркуляции, уносимой
«начальным» вихрем.
Теперь легко просле-
дить и возникновение
циркуляции вокруг на-
клонной пластинки или
крыла. В первый момент
обтекания спектр обтека-
ния крыла таков, каким
он был бы и для идеаль-
ной жидкости (рис. 77).
Как мы видим, струи рас-
ширяются, — а значит,
давление повышается —
быстрее всего на верхней
поверхности крыла, вбли-
зи задней кромки, где
соединяются потоки, об-
текающие верхнюю и нижнюю поверхности крыла. Это
и есть место остановки .пограничного слоя, возвратного
§ 48]
Возникновение циркуляции
155
течения и возникновения «начального» вихря (рис. 78).
Вместе с его возникновением возникает и циркуляция
вокруг крыла, а когда «начальный» вихрь уносится
потоком (рис. 79), вокруг крыла остаётся дополнитель-
течепие, которое, налагаясь на
даёт результирующий спектр,
ное циркуляционное
первоначальное течение,
показанный на рис. 68.
Интересна здесь роль
Она определяет величину
круг крыла. Если обра-
зовавшаяся- циркуля-
ция мала, так что сое-
динение потоков, обте-
кающих верхнюю и
нижнюю поверхности
острой кромки профиля крыла.
циркуляции’ образующейся во-
Рис. 78. Образование вихря у зад-
ней кромки крыла и начало возник-
новения циркуляции (в передней ча-
сти крыла). Показано только «допол-
нительное» течение, как если бы об-
щий поток отсутствовал.
Рис. 77. Начальный мо-
мент обтекания крыла
(бесциркуляционное те-
чение).
крыла, происходит на верхней поверхности крыла
(рис. 80), то налицо условия для образования ещё
одного начального вихря, который увеличит циркуляцию
вокруг крыла. Образование вихрей может прекратиться
только тогда, когда жидкость не обтекает острую кромку,
но оба потока соединяются как раз на ней. Для этого
величина циркуляции должна иметь вполне определён-
ное значение, какое и устанавливается практически
при обтекании крыла. Если теперь, с течением времени,
циркуляция будет ослабевать, например, вследствие тре-
ния о поверхность крыла, то снова образуется вихрь,
восстанавливающий первоначальную циркуляцию. Если
156 АЭРОДИНАМИЧЕСКИЕ СИЛЫ КРЫЛА [гл. 6
поставить крыло под большим углом к потоку воздуха
(«угол атаки»), то точка соединения потоков в первый
момент обтекания окажется сдвинутой по верхней по-
верхности крыла вперёд (как на рис. 80). Поэтому для
смещения точки раздела на острую кромку потребуется
большая циркуляция: напряжённость «начального» вихря
будет больше, а вместе с тем увеличится и подъёмная
Рис. 79. «Начальный» вихрь оторвался потоком
от крыла. Показано только «дополнительное»
течение.
сила крыла, пропорциональная, как мы видели, вели-
чине циркуляции. Обратно, при уменьшении угла атаки
крыла, от него отходит вихрь противоположного на-
правления, уменьшающий
циркуляцию.
Подобно этому влияет и
искривление профиля: во-
круг профиля большой кри-
визны образуется большая
Рис. 80. Недостаточная цнр-
куляция вокруг крыла.
циркуляция, чем вокруг
плоского профиля. Соответ-
ственно этому профили большей кривизны дают и боль-
шую подъёмную силу (а также и большее лобовое со-
противление).
Перейдём теперь к изучению величины подъёмной
силы и лобовою сопротивления для крыла.
Величина подъемной силы
157
§ 491
§ 49. Величина подъёмной силы и лобового
сопротивления для крыла.
В § 44 мы видели, что лобовое сопротивление тела про-
порционально площади его миделя. Но для крыльев —
тел, имеющих вид пластинок, — площадь миделя мало
характерна; поэтому при составлении формул для подъ-
ёмной силы и лобового сопротивления крыла будем
пользоваться в качестве «характерной площади»
площадью крыла в плане. Конечно, для подобных
по форме крыльев площади в плане находятся в том
же отношении, что и площади миделей, поэтому пропор-
циональность нарушена не будет.
Вернёмся к формуле (32)
Y = 2ymS.
При обтекании подобных крыльев, потоки, обтекающие
их, также подобны (напомним, что мы не учитываем влия-
ния изменения числа Рейнольдса), а это значит, что до-
полнительные скорости и пропорциональны скорости
набегающего потока v, а потому и может быть заменено
скоростью v, умноженной на некоторый коэффициент, ко-
торый обозначим через • су (множитель ~ берётся для
получения более удобного вида формулы),
Коэффициент су называется коэффициентом подъёмной
силы. Выражение для подъёмной силы приобретает те-
перь следующий вид:
(34>
Поскольку мы не учитываем влияния R, су зависит только
от формы крыла и его положения в потоке.
Формула для лобового сопротивления у нас уже есть
(формула (30)), правда, в неё входит площадь миделя.
Заменим в этой формуле площадь миделя пропорциональ-
ной ей площадью крыла; при этом придётся изменить
соответственно и коэффициент лобового сопротивления.
158 Аэродинамические силы крыла
[гл 6
Тогда формулу можно переписать в следующем виде:
X = CxS?^, (35)
считая, что сх имеет уже изменённое значение.
Формулы для Y и X можно написать ещё и так,
чтобы в них входило скоростное давление. Для этого
вспомним, что скоростное давление (? —^ро2. Тогда:
Y = cySq, |
X=cxSq. |
(36)
Заметим, что иногда пользуются формулами, имеющими
вид:
Y=--CyS^, )
X = CvSpu2. j
(37)
Очевидно, коэффициенты С и Сх («старые коэффици-
енты»), входящие в эти формулы, равны соответственно
половинам коэффициентов су и сх («новые коэффи-
циенты»): Су=-^ и Сх = ^
Итак, подъёмная сила и лобовое сопротивление про-
порциональны площади крыла и скоростному давлению.
Формулы для Y и X отличаются только коэффициентами.
Следовательно, при изменении S, р или v величины Y и X
изменяются в одинаковом отношении.
§ 50. Угол атаки крыла и распределение давлений
по поверхности крыла.
Углом атаки называется угол между хордой крыла и на-
правлением полёта (рис. 81) Будем обозначать его бук-
вой я. За хорду профиля крыла принимают линию его
нижней поверхности, а в случае неплоской нижней по-
верхности проводят условную линию в зависимости о г
формы профиля (рис. 82).
Если хорда направлена по линии полёта, то угол
атаки равен нулю (рис. 83). Поворачивая крыло так,
§ 50] Угол атаки крыла и распределение давлений
159
чтобы верхняя поверхность профиля оказалась снаружи
угла между хордой и линией полёта, получим положи-
тельный угол атаки (рис. 81). Поворачивая крыло в другую
сторону, получим отрица-
тельный угол атаки (рис. 84).
Крыло часто устанавли-
вается так, что хорда обра-
Рпс. 81. Угол атаки крыла.
Рис. 82. Линии хорды для
профилей разной формы.
зует некоторый угол с осью самолёта (угол установки).
Если в горизонтальном полёте ось самолёта горизонталь-
на, то угол атаки не равен нулю, а равен
новки, угол же наклона
фюзеляжа к линии полёта
вообще не равен углу атаки.
Угол атаки характери-
углу уста-
полета
Рис. 83. Угол атаки равен
нулю.
зует положение крыла отно-
сительно набегающего пото-
ка. От угла атаки зависит
характер обтекания крыла.
При малых а обтекание крыла плавное; при увеличении
угла атаки начинается срыв обтекания на верхней по-
верхности крыла, вблизи ребра обтекания (задняя острая
кромка профиля).
_ Направление полети Чем больше угол
атаки, тем ближе к
ребру атаки (перед-
няя кромка профиля)
Рис 84. Отрицательный угол атаки. подвшается начало
срыва и, наконец,
струйное течение совсем отделяется от верхней поверх-
ности крыла вихревой областью (рис. 85).
С изменением обтекания изменяется и распределение
Давления по поверхности крыла. Вообще давление рас-
160
Аэродинамические силы крыла
[гл. 6
пределяется таким образом: в точке раздела струй про-
исходит остановка течения; здесь давление воздуха воз-
растает на величину скоростного давления =
В точке соединения струй у ребра обтекания давле-
ния обеих частей потока снова одинаковы; практически
это давление обычно несколько больше давления в по-
Рпс. 85. Срыв обтекания на
большом угле атаки.
ления принято давление
токе вдали от тела; лишь
при больших углах атаки
давление здесь делается
меньше давления в потоке
вследствие большого вихре-
образованпя. На рис. 86
показано распределение дав-
ления по верхней и по ниж-
ней поверхности крыла при
разных углах атаки. На
этих рисунках за нуль дав-
в потоке вдали от тела. Оно
одинаково во всех точках поверхности крыла, и
обусловленные им силы взаимно уравновешиваются;
поэтому мы это давление не учитываем, и графики
показывают только изменение этого давления. Вверх
от осп абсцисс отложено повышение давления, а
вниз — его понижение. Чтобы получить разность дав-
лений, нужно сложить эти изменения в соответствен-
ных точках верхней и нижней поверхности крыла. На
рис. 87 показано распределение этой разности давле-
ний вдоль хорды крыла. Можно представить себе, что
эта разность давлений создаётся, во-первых, избыточ-
ным давлением на нижней поверхности крыла, а во-вто-
рых, — «подсасывающим действием» верхней поверхно-
сти крыла. Почти для всех углов атаки «подсасыва-
ющее действие» верхней поверхности составляет боль-
шую часть разности давлений, т. е. даёт большую часть
подъёмной силы.
Заметим, что наибольшие разности давлений образ\-
ются в передней части крыла, ближе к ребру атаки-
Соответственно этому большая часть подъёмной силы об-
разуется в области крыла, ближайшей к набегающему
потоку. Это положение оказывается верным и в друг»4
161
Угол АТАКИ КРЕПЯ И РАСПРЕДЕЛЕНИЕ ДАВЛЕНИЙ
Рис. 86. Распределение давления по поверхности крыла.
емная сила для левого и правого крыла различна: со
ст°роны, ближайшей к набегающему потоку (со стороны
скольжения), подъёмная сила больше, а с противополож-
М. А. Исакович
162
Аэродинамические силы крыла
[гл. 6
ной стороны меньше (см. рис. 32, на котором изображено
левое скольжение: соответственно подъёмная сила больше
для левого крыла).
§ 51. Зависимость су и сх от угла атаки.
Как видно из рис. 86, при отрицательных углах
атаки подсасывающее действие испытывает частично
Рис. 87. Примерное рас-
пределение разности да-
влений вдоль хорды.
Рис. 88. Полёт вверх
колёсами.
и нижняя поверхность крыла. При некотором отрицатель-
ном угле атаки средняя разность давлений сверху и снизу
Рис. 89. Зависимость
су от угла атаки.
крыла равна нулю—подъёмная сила
отсутствует. Это происходит при
том угле атаки, при котором цир-
куляция вокруг крыла не возни-
кает. Этот угол атаки называется
углом нулевой подъёмной силы или
первым лётным углом; мы будем
обозначать его а,. При угле атаки,
равном ctp су=0. Если ещё умень-
шить угол атаки, то верхняя и
нижняя поверхности крыла меня-
ются ролями: циркуляция меняет
своё направление, подсасывающее
действие испытывает нижняя поверх-
ность крыла, а повышенное давле-
ние— верхняя поверхность. При
этом подъёмная сила меняет своё направление на про-
тивоположное: от верхней поверхности к нижней, и
коэффициенту су нужно приписать знак минус. На таких
163
§ 51]
Зависимость с„ и <с„ от угла атаки
У х
называть крити-
Рис. 90. Зависимость
сх от угла атаки.
отрицательных углах атаки (меньших си) летит самолёт
в перевёрнутом полёте вверх колёсами (рис. 88).
С увеличением угла атаки от угла нулевой подъёмной
силы су растёт приблизительно пропорционально углу
атаки. Зависимость су от а показана на рис. 89.
При начале срыва обтекания с верхней поверхности
крыла рост су замедляется, затем при некотором угле
атаки су достигает наибольшего значения и при даль-
нейшем росте а начинает падать. Угол атаки, при ко-
тором су достигает максимума, будем
ческим и обозначать через акр. Для
разных профилей углы а, и акр
имеют разные значения: обычно акр
близко к 15°, а максимальное зна-
чение Су равно примерно 1,4-ь-1,5,
изменяясь в зависимости от формы
профиля. Заметим, что при а = 0, cv
уже достигает довольно большой
величины, так что для ряда само-
лётов возможен горизонтальный по-
лёт с нулевым и даже отрицатель-
ным углом атаки. Для симметрич-
ных же профилей и подъём-
ная сила при нулевом угле атаки
отсутствует, так как обтекание при этом будет симмет-
ричным.
Аналогичный график зависимости от угла атаки мож-
но построить и для коэффициента сх (рис. 90). Наи-
меньшее значение сх достигается обычно при угле атаки,
несколько большем С увеличением а коэффициент
сопротивления растёт — особенно быстро при приближении
к секр. Ни при каком угле атаки ни для какого профиля
сх не обращается в нуль: лобовое сопротивление никогда
не исчезает.
Приведённые нами графики строятся по данным
аэродинамических испытаний модели крыла в аэродина-
мической трубе. Эти испытания аналогичны продувкам
для определения cv (см. § 45), но продувка производится
Для целого ряда углов атаки, а подвеска крыла к аэро-
динамическим весам позволяет замерять одновременно Y
и X для модели. Найдя при данном угле атаки вели-
11*
164
Аэродинамические силы крыла
[1Л. 6
чины X и V для модели крыла, определяем cv и су по
формулам:
2Х 2Y .„о>
Сх~~ Sf(-2 ’ СУ Stlfl ’
где S — площадь модели крыла, av— скорость потока
воздуха в аэродинамической трубе при продувке.
§ 52. Индуктивное сопротивление.
Вернёмся к вопросу о возникновении подъёмной силы
и лобового сопротивления.
В § 39 мы рассмотрели две составные части лобового
сопротивления: сопротивление трения и сопротивление дав-
ления. Эти две части входят и в сопротивление крыла. Но
для крыла можно выделить часть сопротивления давле-
ния, сильно зависящую от угла атаки, — индуктивное сопро-
тивление,—возникновение которой непосредственно связа-
но с возникновением подъёмной силы крыла, а не с трением
потока о поверхность тела или с нарушением потока
позади тела,— обстоятельствами, обуславливающими пол-
ное лобовое сопротивление для симметричных тел. Так,
если бы при обтекании крыла исчезла вязкость воздуха,
то, как мы знаем, подъёмная сила сохранилась бы;
вместе с тем сохранилось бы и индуктивное сопротив-
ление. Но при таком обтекании, при котором подъёмная
сила отсутствует (при угле атаки а,), будет отсутствовать
и индуктивное сопротивление. Лобовое сопротивление, по-
лученное нами в начале § 46 при рассмотрении «потока»
шариков, является именно индуктивным лобовым сопро-
тивлением.
Итак, рассмотрим возникновение индуктивного со-
противления. Для этого проследим образование подъём-
ной силы с точки зрения закона действия и противодей-
ствия. Крыло, обтекаемое воздухом, отклоняет набегающий
поток вниз. Аэродинамические силы, действующие на
крыло, представляют собою силы реакции отклоняемого
потока. Рассмотрим подробнее это отклонение потока.
Различные части потока отклоняются по-разному: силь-
нее всего отклоняются части потока, проходящие в не
посредственной близости к крылу; более далёкие струп
§ 52]
Индуктивное сопротивление
165
отклоняются в меньшей степени. Заметно отклоняется
только часть потока, окружающая крыло подобно трубе
(рис. 91). При подсчёте реакции отклоняемого потока
будем учитывать лишь массы воздуха, протекающие по
этой мысленно вы-
деленной трубе тока.
Для подобных пото-
ков такие трубы так
же подобны; а реак-
ция учитываемой мас-
сы воздуха, пред-
ставляющей опреде-
лённую часть всего
потока, пропорцио-
нальна полной ре-
акции всего откло-
няемого потока. По-
Рпс. 91. Выделенные части потока,
обтекающие подобные крылья,
подобны между собой.
этому, рассматривая реакцию этой выделенной массы,
получим величины, пропорциональные аэродинамическим
силам, действующим на крыло. Площадь поперечного
сечения трубы пропорциональна квадрату размаха крыла
/2 (площади подобных фигур пропорциональны квадратам
их линейных размеров). За одну секунду через сечение
такой трубы тока проходит объём воздуха, пропорцио-
нальный l2v, где v— скорость потока. Следовательно, мас-
са воздуха, отклоняемая за секунду, пропорциональна
р/2п. Скорость v при отклонении потока не изменяет своей
величины, а только изменяет направление (потерей кине-
тической энергии, вызванной вязкостью, мы здесь пре-
небрегаем). Действительно, при изменении величины
скорости изменилась бы кинетическая энергия потока, а
для этого необходимо совершение работы. Единственные
же, помимо вязкости, силы, приложенные к потоку,
суть силы давления, действующие со стороны крыла, а
они работы не совершают, так как они перпендикулярны
скоростям частиц жидкости, протекающих вдоль поверх-
ности крыла.
Таким образом, реакция отклоняемого потока обуслов-
лена лишь изменением направления скорости.
На рис. 92 показан вектор Д» изменения скорости по-
тока. Секундное изменение количества движения потока
166
Аэродинамические силы крыла
[гл. 6
пропорционально р/2пДи. Следовательно, и реакция по-
тока, т. е. полная аэродинамическая сила R также про-
порциональна pl2v&v. Направление же силы R прямо
противоположно изменению скорости До, следовательно, R
отклонено от перпенди-
куляра к потоку и,
значит, помимо подъём-
ной силы возникает и
лобовое сопротивление.
Обозначим угол ско-
са потока (угол между
скоростью набегающего
потока и скоростью
Рис. 92. Реакция отклоняемого
потока.
отклонённого потока)
через Да. При обтекании крыла угол скоса потока во-
обще мал. Поэтому в треугольнике скоростей (рис. 92)
можем считать приближённо Ап = пДа. Следовательно, R
пропорционально /2ро2Да или 1-qXa (q — скоростное дав-
ление). Разложим теперь силу R па подъёмную силу
и лобовое сопротивление. Сила R составляет угол -%
с вертикалью. Поэтому, ввиду малости угла Да, можно
приближённо принять Y = R и X — R1^-. Иначе говоря,
подъёмная сила пропорциональна l2qXa, а лобовое сопро-
тивление пропорционально PqXa?.
Но, с другой стороны, Y=cySq и X — c^Sq1). Срав-
нивая с выражениями, пропорциональными Y и X,
находим, что cyS пропорционально /2Да, a cXiS пропор-
ционально /2Да2. Чтобы исключить из написанных выра-
жений угол скоса, составим выражение ; оно пропор-
ционально отношению
12Д-Ж _ //2Да\ 2_ S
S : УТ') “ «2 •
Для прямоугольного крыла S = lt (t — хорда крыла)
!) Коэффициент сопротивления обозначаем через cXi (индуктив-
ное) в отличие от полного коэффициента лобового сопротивления сх-
§ 52]
Индуктивное сопротивление
167
Величина к=-| — отношение размаха крыла
к хорде —называется удлинением крыла1).
Следовательно,^- пропорционально у или cXi про-
су
cv
порционально . Пропорциональность можно записать
в виде равенства:
е
где А — коэффициент пропорциональности. Мы нашли,
таким образом, зависимость между коэффициентом индук-
тивного сопротивления и коэффициентом подъёмной силы.
Эта зависимость для разных 1
показана на рис. 93.
Мы видим, таким образом, что
индуктивное сопротивление крыла
обратно пропорционально удли-
нению. Поэтому крыло с боль-
шим удлинением выгоднее аэро-
динамически, чем крыло с малым
удлинением; иначе говоря, чем
больше размах крыла (при данной
хорде), тем меньше его коэффи-
циент сопротивления. Далее, коэф-
Рис. 93. Зависимость сг.
от cv (масштаб по оси
сХ{ растянут в 5 раз) для
удлинений 1=4 и 1 = 8.
фициент индуктивного сопротив-
ления пропорционален квадрату
коэффициента подъёмной силы;
следовательно, он быстро растёт
при увеличении угла атаки, когда
с? возрастает. Наоборот, при малых углах атаки cXi не-
значительно. Коэффициент пропорциональности А за-
висит только от формы крыла в плане.
Сопротивление крыла складывается из индуктивного
сопротивления, обусловленного отклонением потока, и со-
противления, обусловленного торможением потока, вызы-
р 1
1) Для непрямоугольного крыла удлинением называется -== т— ,
*ср
где tcp — средняя хорда крыла, т. е. хорда прямоугольного крыла,
имеющего ту же площадь и тот же размах, что и данное крыло* *
168 Аэродинамические силы крыла [гл. 6
ваемым крылом; последнее называется обычно профильным
сопротивлением крыла. Профильное сопротивление мало
зависит от угла атаки. Лишь для значений а, превосхо-
дящих акр, когда наступает срыв обтекания, профильное
сопротивление также начинает расти. В докритической
же области рост лобового сопротивления с увеличением
угла атаки обусловлен почти исключительно ростом ин-
дуктивного сопротивления крыла.
Полный коэффициент лобового сопротивления мож-
но представить в виде суммы коэффициента индуктивного
сопротивления cXi и коэффициента профильного сопротив-
ления
с, ' — Сх- —I- с ,
X Ai 1 хпр
Зная сх и cXj для данного крыла с удлинением )., легко
подсчитать коэффициент лобового сопротивления с'х для
крыла того же профиля с другим удлинением А'. В самом
деле,
СХ1 =
а профильное сопротивление от удлинения не зависит,
следовательно,
' * ।
Сх —CXiy “г 6л: пр-
§ 53. Кривая Лилиенталя.
Оба графика для су и сх можно свести в один, строя
кривую с абсциссами, равными сх, и ординатами, рав-
ными су (рис. 94). Каждая точка графика соответствует
определённому углу атаки; некоторые из них отмечаются
на самой кривой.
При построении масштаб по оси абсцисс берётся
обычно в 5 раз большим, чем по оси ординат, так как
сх в несколько раз меньше су и при одинаковых масшта-
бах график получался бы неудобным для пользования.
График такого типа был предложен известным теоре-
тиком и экспериментатором в области аэродинамики
Отто Лилиенталем. Он построил в конце прошлого века
ряд планёров и был первым, систематически осуществив-
шим настоящие планирующие полёты. По его имени этот
график называется кривой или полярой Лилиенталя.
§ 53]
Кривая Лилиенталя
169
Итак, абсциссы и ординаты точек поляры дают вели-
чины сх и с,, для соответственных углов атаки. Угол ну-
левой подъёмной силы соответствует точке пересечения
Рис. 94. Кривая Лилиенталя: а — в
одинаковых масштабах; б — масштаб
по оси сх растянут в 5 раз.
Рис. 95. Углы атаки:
критический (Су max) и
первый лётный (су = 0).
поляры с осью абсцисс, так как в этой точке су = 0;
верхняя точка поляры соответствует акр, так как здесь су
Рис. 96. Поляры двух разных профилей.
I — скоростной профиль; II — профиль
с большой подъёмной силой.
имеет наибольшее значение; эту точку находим, проводя
к поляре касательную, параллельную оси сх (рис. 95).
Продолжение поляры ниже оси абсцисс соответствует
отрицательным углам атаки, меньшим а„—углам атаки.
170
Аэродинамические силы крыла
[гл. 6
используемым при перевёрнутом полёте. Не следует ду-
мать, что такие углы атаки крыло имеет всегда при
положении самолёта вверх колёсами: например, в верх-
ней точке петли угол атаки крыла положителен, а подъ-
ёмная сила, хотя и направлена вниз, но положи-
тельна, т. е. направлена от нижней поверхности крыла
к верхней.
Форма поляры зависит от формы профиля. На рис. 96
показаны для примера два разных профиля и их поляры.
Рис. 97. Составля-
ющие коэффициен-
та сх: индуктивное
н профильное со-
противление.
Рис. 98. Перестроение по-
ляры на другое удлинение
крыла.
Рядом с полярой, на тех же осях можно нанести
также график зависимости сХ1 от су: это будет парабола
с вершиной в точке О (рис. 97). Горизонтальные от-
резки между параболой индуктивного сопротивления
и нолярой дают величину коэффициента спр профильного
сопротивления. Зная поляру и параболу индуктивного
сопротивления для какого-то определённого удлинения
крыла ).р легко построить поляру крыла того же про-
филя с другим удлинением ),2. Для этого, построив па-
раболу для нового удлинения, добавляем к абсциссам
её точек соответственные величины коэффициента про-
фильного сопротивления (рис. 98).
Лобовое сопротивление самолёта в целом
171
§ 54. Лобовое сопротивление самолёта в целом.
Лобовое сопротивление всего самолёта в целом, ко-
нечно, больше, чем сопротивление крыла в отдельности.
На первый взгляд кажется, что сопротивление самолёта
можно подсчитать, складывая сопротивление отдельных
частей самолёта: крыла, фюзеляжа, шасси и т. д.
Однако сумма сопротивлений отдельных частей не
равна сопротивлению всего самолёта. Дело в том,
что поток, обтекающий ту или иную деталь само-
лёта, имеет другой вид, чем если бы эта же деталь
обтекалась отдельно. Например, на обтекание хвосто-
вого оперения влияет то, что на него попадает поток, уже
обтекший крыло и фюзеляж. Кроме того, поток видоиз-
меняется в местах соединения отдельных частей самолёта.
Вообще говоря, обтекание одних частей самолёта влияет
на обтекание других. Это влияние называют интерфе-
ренцией потоков, обтекающих отдельные части самолёта.
Интерференцию и вызываемое ею изменение сопротив-
ления нельзя определить теоретически, расчётным пу-
тём, даже если знать сопротивление всех частей само-
лёта в отдельности: слишком сложно это взаимное
влияние потоков. Поэтому для определения сопротивле-
ния самолёта в целом приходится прибегать к продувке
модели целого самолёта со всеми его деталями. Про-
дувку производят при разных углах атаки и по найден-
ным значениям X находят соответственные величины сх
по формуле:
_ 22£
'Spi^ •
Пользуясь найденным значением сх, можно вычислить
X и для самолёта в натуральную величину.
Лобовое сопротивление самолёта в целом обычно
разбивают на два слагаемых: сопротивление крыла ХкР
(которое можно определить отдельной продувкой крыла)
и остаток — так называемое «вредное сопротивление» Лвр.
Данные продувок показывают, что ХЕр почти не зависит
от угла атаки; будем считать его постоянным для дан-
ного самолёта. Сопротивление же крыла сильно зависит,
как мы видели в § 51, от угла атаки
172
Аэродинамические силы крыла
[гл. 6
Соответственно разбивается на два слагаемых и коэф-
фициент лобового сопротивления самолёта в целом: на
практически постоянное слагаемое сх,,р и коэффициент
лобового сопротивления отдельного крыла cv , который
в свою очередь складывается из коэффициентов про-
фильного сопротивления и индуктивного сопротивления.
§ 55. Кривая Лилиенталя для самолёта в целом.
Все части самолёта, кроме крыльев, являются нене-
сущими, т. е. на них не действует подъёмная сила, а
только лобовое сопротивление. Это не вполне точно, так
как, например, на больших углах атаки фюзеляж об-
ладает некоторой подъёмной силой; на стабилизатор и
руль глубины также может действовать положительная
или отрицательная подъёмная сила (в зависимости от
Рис. 99. Кривая Лилиенталя для
крыла и для самолета в целом.
угла установки стабилиза-
тора и отклонения руля).
Но, сравнительно с подъ-
ёмной силой крыла, этл
силы невелики, и мы
пренебрежём ими без боль-
шой погрешности, считая,
что подъёмная сила само-
лёта равна подъёмной силе
крыла в отдельности.
Тогда нетрудно пост-
роить поляру самолёта в
целом, зная поляру для
крыла и коэффициент вредного сопротивления с\вр.
Для этого достаточно сдвинуть на графике всю поляру
Лилиенталя вправо, на расстояние cVBp по масштабу.
Тогда для каждого угла атаки с останется прежним,
а сх станет равным сх сх вр, т. е. будет равно коэф-
фициенту лобового сопротивления для самолёта в ц
лом (рис. 99). Вместо этого можно, не перечерчивая
поляру, сдвинуть ось cv на то же расстояние cvcp влево
и отсчитывать абсциссы точек поляры от нового положе
ния OvCy оси су (рис. 100).
Очевидно, как углы атаки ai и акр, так и макси-
мальное значение су остаются без изменения при пере-
§ 56]
Аэродинамическое качество
173
ходе от крыла ко всему самолёту. В действитель-
ности, это верно только приблизительно. В дальнейшем
нам придётся в большинстве случаев иметь дело именно
с полярой самолёта, а не
Рис. 100. Перенос оси с,
динаты точек этой кривой
Рис. 101. Вектор полной аэроди-
намической силы описывает по-
ляру.
с полярой самолёта,
отдельного крыла.
Поляре Лилиенталя мож-
но придать простой механи-
ческий смысл. Представим
себе, что мы изменяем угол
атаки крыла, вращая само-
лёт вокруг точки О (рис. 101),
и будем откладывать от этой
точки вектор полной аэро-
динамической силы для каждого угла атаки. Поток
воздуха будем считать горизонтальным.
Конец вектора R опишет некоторую кривую. Коор-
будут равны соответственно
X и Y. Но величины X
и Y отличаются от cv и с,
только общим множителем
. Поэтому кривая,
описываемая концом век-
тора R, представляет со-
бой поляру Лилиенталя
в одинаковых масштабах
по осям. И обратно, рас-
сматривая поляру, вычер-
ченную в одинаковых мас-
штабах, можно представ-
лять себе координаты её
X и Y, выраженные в
точек, как значения величин
некотором масштабе. Тогда отрезок, соединяющий точку
О с точкой поляры, изобразит в этом же масштабе век-
тор силы R для соответственного угла атаки.
§ 56. Аэродинамическое качество.
Сделаем небольшое отступление в механику: разбе-
рём закон трения для твёрдых тел.
Для того чтобы двигать тело, лежащее на твёрдой
поверхности, к нему необходимо прикладывать силу
174
Аэродинамические силы крыла
гл. 6
щихся тел, шероховатости
Рве. 102. Сила трения между
двумя твёрдыми телами.
тяги Т, преодолевающую силу трения. При равномер-
ном движении сила тяги равна силе трения. Величина
силы трения зависит, во-первых, от материала тру-
соприкасающихся поверхно-
стей и, во-вторых, от силы,
прижимающей тела друг к
другу, т. е. от силы, перпен-
дикулярной поверхности со-
прикосновения.
При движении по гори-
зонтальной плоскости эта
сила — реакция плоскости—
и равная ей сила, действу-
ющая со стороны телй на
плоскость, равны весу тела.
Опытами установлено, что
сила трения X пропорциэ-
нальна этой «силе нормального давления» Y (рис. 102).
Так, если положить на тело добавочный груз, то силы X
и Y возрастут в одинаковом отношении. Коэффициент
пропорциональности между X и Y называется коэффи-
циентом трения; обозначим его через е:
X=tY.
Следовательно,
т. е. коэффициент трения равен отношению силы трения к
силе нормального давления.
Построим равнодействующую R сил X и Y, действу-
ющих со стороны поверхности на тело. Сила R откло-
нена от Y на некоторый угол 0, называемый обычно
углом трения или углом скольжения. Тело начинает
соскальзывать под действием своего веса с наклонной
плоскости при угле наклона, как раз равном 6.
Между коэффициентом трения и углом трения есть
простая зависимость: в прямоугольном треугольнике
сил катеты равны X и Y, а острый угол, прилежащий
к катету Y, равен 0. Поэтому
§ 56]
Аэродинамическое качество
175
откуда следует:
или
tg 0 = е
CtgO = y.
(рис. 103). Схема силзресъ
Рис. 103. Угол качества
самолёта.
Чем больше коэффициент трения, тем больше и угол
трения, и обратно: между этими величинами существует
прямая зависимость.
Перейдём теперь к самолёту, летящему горизонтально.
Вес самолёта ^уравновешивается подъёмной силой, а ло-
бовое сопротивление — тягой ‘— ,по' п......~
та же, что для тела, сколь-
зящего по горизонтальной
плоскости. Реакция поверх-
ности здесь заменена подъ-
ёмной силой, а трение —ло-
бовым сопротивлением. Силе
R соответствует полная аэро-
динамическая сила.
Здесь также можно ввес-
ти «коэффициент трения»:
это будет отношение лобового
сопротивления к подъёмной
силе у . Этот «коэффициент
образом от формы крыла и
деляется соотношение между zV и
вредного сопротивления увеличивается «коэффициент тре-
ния». Выгодно, конечно, иметь возможно меньший «коэф-
фициент трения», т. е. возможно меньшее сопротивление
сравнительно с подъёмной силой.
В аэродинамике принято пользоваться вместо «коэф-
у
фициента трения» обратной величиной у, называемой
аэродинамическим качеством К:
зависит главным
атаки: этим опре-
Y. С возрастанием
трения»
от угла
(39)
Качество есть отношение подъёмной силы к лобовому
сопротивлению; оно показывает, во сколько раз гобовэе
сопротивление меньше подъёмной силы.
176
Аэродинамические силы крыла
[гл. 6
Коэффициенту трения соответствует величина, обрат-
ная качеству:
е = Т
Заменяя в формуле (39) величины Y и X их выра-
жениями из формулы (36), найдём:
<4°)
-X. 1
т. е. качество равно отношению коэффициента подъёмной
силы к коэффициенту лобового сопротивления.
Углу трения соответствует для самолёта угол между
подъёмной силой и полной аэродинамической силой.
Этот угол получил название угла ка-
/ чгства.
с //*Х Так же как 11 для Угла тРения>
a f \ получается соотношение между углом
/ \ качества и качеством:
/а"« /< = ctgO. (41)
6т.л 1 Зависимость между качеством и уг-
лом качества — обратная: с увеличе-
у нием качества угол качества умень-
шу шается и наоборот. Качество отдель-
^1а ного крыла при хорошей форме про-
филя и обычных лётных углах атаки
может превосходить 20; качество само-
лёта в целом меньше, чем качество
крыла: при той же подъёмной силе ло-
бовое сопротивление увеличено. Наи-
большее качество современных самолё-
тов составляет, в зависимости от их
типа, от 8 до 14.
Угол качества для данного угла атаки я можно найти
по поляре Лилиенталя, вычерченной в одинаковых мас-
штабах. В самом деле, направление оси cv соответствует
направлению подъёмной силы, а секущая, проведённая
из начала координат к данной точке на поляре — на-
правлению силы /?. Следовательно, угол между секущей
и осью су и есть угол качества (рис. 104). Для разных
О l~fal-------*
Рис. 104. Нахо-
ждение угла каче-
ства 0 и наивы-
годнейшего угла
атаки (при 6min).
§ 56]
Аэродинамическое качество
177
углов атаки угол качества, а потому и самое качество
”[ угол качества получим, проведя
различны. Наименьший
из точки О касательную
к поляре. Точка каса-
ния Даст угол атаки,
при котором качество
максимальное. Этот
угол атаки называется
наивыгоднешиим и обо-
значается анв. Он лежит,
как ясно из чертежа,
между и ак'р. Указы-
вая качество самолёта,
приводят величину
именно наибольшего ка-
чества, достигаемого
при угле атаки анв.
Рис. 105 показывает,
Рис. 105. Сравнение углов качества
для крыла и для самолета.
что угол качества для
вается при сдвигании
I 2 4 6 8 1012 W
Рис. 106. Зависимость ка-
чества самолёта от угла
атаки.
м. А. Исакович
к
данного угла атаки а увеличи-
пэляры вправо. Это, как мы,
впрочем, видели и раньше, ука-
зывает на то, что качество
самолёта в целом ниже каче-
ства крыла. Из этого же чер-
тежа видно, что при сдвигании
поляры вправо точка касания
прямой, проведённой из начала
координат, смещается вверх по
поляре. Следовательно, наивы-
годнейший угол атаки самолёта
больше наивыгоднейшего угла
атаки отдельного крыла. Наи-
большее же качество самолёта
меньше наибольшего качества
крыла.
При угле атаки ctj угол ка-
чества равен 90э, а качество
равно нулю. С увеличением
угла атаки качество сперва растёт (до угла атаки анв),
а затем —снова уменьшается. Примерный график зави-
симости качества от угла атаки показан на рис. 106.
178
Аэродинамические силы крыла
[гл. 6
Если из начала координат провести секущую к по-
ляре, то она пересечёт поляру в двух точках, одна из
Рис. 107. При угле
атаки В качество то
же, что и при угле
атаки А.
которых соответствует углу атаки,
меньшему наивыгоднейшего, а дру-
гая—большему (рис. 107). Угол
качества для обоих этих углов
атаки один и тот же; поэтому и
качество для обоих углов атаки
одинаковое.
Соотношение между весом к со-
противлением для самолёта значи-
тельно менее выгодно, чем для на-
земных средств передвижения. Так,
например, «качество» для поезда
(отношение веса к сопротивлению)
доходит до 200, т. е. в 15—20 раз
больше, чем для самолёта. Отсюда видна экономическая
невыгода авиатранспорта сравнительно с наземным транс-
портом.
§ 57. Боковая сила.
Подъёмная сила и лобовое сопротивление представ-
ляют собой главные аэродинамические силы, действую-
щие на самолёт в полёте.
Если, как мы до сих пор и предполагали, скорость
самолёта лежит в плоскости симметрии,
то подъёмная сила и лобовое сопротивле-
ние также лежат в этой плоскости, и
никакие другие силы не возникают. Одна-
ко встречаются случаи, когда движение
самолёта направлено под углом к его
плоскости симметрии: самолёт летит со
скольжением (рис. 108). В этом случае,
кроме сил X и Y, на самолёт действует
ещё сила, перпендикулярная к ним —
боковая сила Z. Чем больше угол сколь-
жения (угол между скоростью и плос-
костью симметрии), тем больше и боко-
вая сила.
Боковая сила возникает вследствие
несимметричного обтекания фюзеляжа и
Рис. 108. Боке'
вая сила.
вертикального
§ 67]
Боковая сила
179
едения. Её можно назвать «боковой подъёмной силой»
°Пмолёта; угол скольжения является «боковым углом ата-
ки>> Линия действия боковой силы обычно проходит
позади центра тяжести; поэтому она даёт заворачиваю-
щий момент в сторону скольжения.
При скольжении, вследствие несимметричного об-
текания, значительно возрастает лобовое сопротивление
самолёта, и поэтому уменьшается его качество.
Боковая сила может достигать большой величины
для самолётов, имеющих большую боковую поверхность,
например, для пассажирских самолётов с высокими фю-
зеляжами.
Как увидим в дальнейшем, скольжением и возника-
ющей при нём боковой силой пользуются в некоторых
случаях пилотирования самолёта.
12*
ГЛАВА 7.
ВИНТОМОТОРНАЯ ГРУППА.
§ 58. Мотор и винт.
Тягу, необходимую для продвижения самолёта, соз-
даёт винтомоторная группа (сокращённо вмг). Она
состоит, в основном, из двигателя — бензинового мотора
или дизеля, и вращаемого им движителя — воздушного
винта. Тягу создаёт непосредственно винт.
Коротко говоря, принцип действия винтомоторной
группы заключается в следующем: винт, вращаемый
мотором, отбрасывает назад всё новые и новые массы
воздуха, следовательно, действует на них с некоторой си-
лой, направленной назад. По закону действия и проти-
водействия отбрасываемая струя воздуха действует на
винт с равной силой, направленной вперёд, — «реакцией
отбрасываемой струи». Эта реакция и есть тяга винта.
Этот принцип действия движущего устройства харак-
терен не только для самолета: все виды средств передви-
жения на воде (кроме парусников) пользуются тем же
принципом отбрасывания назад среды, в которой нахо-
дится движитель, причём реакция отбрасываемой струи
и является тягой. Полная аналогия имеется между ра-
ботой воздушного винта и работой водяного винта ко-
раблей. Но и колёса речных судов, и вёсла гребных
лодок работают, по существу, так же, отбрасывая назад
с каждым ударом по воде всё новые и новые массы
воды. С этой точки зрения принцип действия винтов,
гребных колёс, вёсел — один и тот же. Однако, изучая
работу винта, мы обратим внимание на другую сторону
вопроса: к изучению возникновения сил, действующих на
лопасти воздушного винта, мы применим «аэродинамиче-
ский подход», рассматривая обтекание вращающихся
Мотор и винт
181
§ 58]
лопастей подобно тому, как мы рассматривали обтека-
ние движущегося в воздухе крыла. Между обтеканием
лопасти и обтеканием крыла есть много общего; матема-
тические теории работы крыла и работы винта сходны
меЖДУ собой. В самом деле, каждую лопасть можно
рассматривать как крыло специальной формы, но дви-
жущееся не прямолинейно, а по окружности. Грубо го-
воря, лопасть винта, как и крыло, есть пластинка, дви-
жущаяся наклонно в окружающем воздухе. И на крыле,
и на лопасти винта возникают аэродинамические силы,
направленные под углом к движению. Составляющая
полной аэродинамической силы в направлении оси винта
и есть тяга винта. Вторая составляющая (она перпен-
дикулярна оси и лежит в плоскости вращения винта)
создаёт момент вокруг оси, тормозящий вращение
винта. Он уравновешивается вращающим моментом
мотора.
Устройство мотора мы считаем известным читателю.
Здесь мы рассмотрим подробнее только влияние различных
факторов на мощность мотора, сообщаемую им винту.
Далее мы будем рассматривать совместную работу мо-
тора и винта со следующей точки зрения: мотор есть
«производитель» мощности, а винт — её «потребитель».
Мощность, получаемая от мотора, поглощается винтом
(который снова отдаёт эту мощность на продвижение
самолёта). При разных условиях — различном числе
оборотов, разной высоте и скорости полёта — винт тре-
бует для своего вращения ту или другую мощность.
С другой стороны, при этих условиях мотор может дать
лишь какую-то определённую мощность. Мощность, да-
ваемая мотором винту, есть «располагаемая мощность
мотора» (будем обозначать её N3); мощность, требуемая
винтом, есть «потребная мощность винта» (будем обоз-
начать её ZVM). Для того чтобы при данных условиях
мотор действительно мог вращать винт с указанным чис-
лом оборотов, необходимо, чтобы «располагаемая мощ-
ность мотора» была, по крайней мере, равна «потребной
мощности винта», или же превосходила её, т. е. необ-
ходимо, чтобы выполнялось условие
182 Винтомоторная группа [гл. 7
Подобное разделение рассматриваемых мощностей на
«располагаемую» и «потребную» можно провести и в других
случаях. Например, рассматривая полётсамолёта, мы будем
называть мощность, соответствующую работе тяги винта,
располагаемой мощностью винта, а мощность, затрачивае-
мую на преодоление лобового сопротивления самолёта,—
потребной мощностью (для самолёта). Именно к этому слу-
чаю и применяют в авиации термины располагаемая и
потребная мощности; в других случаях эти названия
будем ставить в кавычки. Но во всех подобных случаях
«располагаемая» мощность есть мощность, получаемая
от источника мощности, а «потребная» — мощность, по-
глощаемая потребителем мощности. И во всех таких слу-
чаях возможность работы потребителя мощности при
заданных условиях определяется тем, чтобы при этих
условиях «располагаемая» мощность была равна или
больше «потребной».
Мы начнём с рассмотрения «располагаемой» мощности
мотора при различных условиях его работы.
§ 59. Характеристики моторов.
В авиации применяются большей частью четырёхтакт-
ные бензиновые моторы. Мы будем считать известным
как принцип их действия, так и основы их конструкции.
В этом параграфе мы разберём только характеристики
моторов и особенности авиационных моторов.
«Располагаемая» мощность здесь есть так называемая
эффективная мощность или мощность на валу Ns. Эф-
фективная мощность для данного мотора зависит от числа
оборотов в минуту, от высоты полёта и от степени дрос-
селирования мотора.
При составлении разных графиков число оборотов
всегда берётся для мотора. Число оборотов винта или
равно этому числу, если винт насажен непосредственно
на носок коленчатого вала, или меньше его в опреде-
лённое число раз, если винт вращается мотором через
редуктор.
С увеличением числа оборотов мощность растёт, так
как при этом увеличивается число «рабочих ходов» пор-
шней за единицу времени. Высота полёта влияет на эф-
§ 59]
Характеристики моторов
183
N3n.c.
гго-
200-
180-
КО-
НО-
ко-
ио-
। -I — 1---1 I1 |- ।—т?
1200 1300 №01500 1800 КОО 18001800 об/мин
Рис. 109. Внешняя характеристика
мотора.
фективную мощность вследствие уменьшения плотности
воздуха на высоте; вследствие этого уменьшается коли-
чество горючей смеси, поступающей в цилиндры мотора,
и мощность его па-
дает. Наконец, дрос-
селирование заключа-
ется в создании пре-
пятствия в трубопро-
воде, подающем горю-
чую смесь, что также
уменьшает - мощность
мотора.
Изменение эффек-
тивной мощности, вы-
званное перечисленны-
ми обстоятельствами,
изображается графика-
ми, называемыми ха-
рактеристиками мотора,
характеристик.
График зависимости эффективной мощности от числа
оборотов при полном открытии дросселя («на полном
Разберём некоторые из этих
Рис. 110. Мулинетка.
газе») называется внешней характеристикой мотора
(рис. 109). Различные обороты при одном и том же от-
крытии дросселя получаются при разной нагрузке мо-
тора, т. е. при разном моменте внешних сил, уравнове-
шиваемом вращающим моментом мотора. Практически,
при испытаниях мотора, на вал насаживаются различ-
184
Винтомоторная группа
[гл. 7
ные «мулинетки», лопасти которых испытывают со-
противление воздуха при вращении (рис. НО). Силы
сопротивления лопастей мулинеток при вращении
дают момент сопротивления (его называют также реак-
тивным моментом) относительно оси вала мотора. Если
число оборотов мотора постоянно, то вращающий момент
Рис. 111. Схема измерения реактивного момента
на балансирном станке.
мотора равен реактивному моменту. Чем больше реак-
тивный момент, тем меньше число оборотов при полно-
стью открытом дросселе.
Реактивный момент опрокидывает мотор в сторону,
обратную вращению мулинетки. На испытаниях мотор
устанавливается в «люльке» балансирного станка, по-
зволяющего измерять реактивный момент Мр (рис. 111).
Измерив, кроме того, и число оборотов мотора в ми-
Характеристики моторов
185
дросселирования мотора, то
§ 59]
нуту и, вычислим мощность мотора по формуле (18):
М —71б^2Л-с- (42)
Ставя на мотор разные мулинетки и замеряя соот-
ветственные величины Л4р и п, получим данные для по-
строения внешней характеристики мотора.
Если теперь, надев на вал какую-нибудь одну му-
линетку, изменять степень
при этом будет меняться
и число оборотов и мощ-
ность мотора. При откры-
вании дросселя будет рас-
ти и п и Na. График изме-
нения Ns в зависимости
от п при одной определён-
ной мулинетке называется
дроссельной характерис-
тикой мотора (рис. 112).
Дроссельная мощность
связана с числом оборо-
тов простым математиче-
ским соотношением. В
самом деле, силы сопро-
тивления, действующие
на лопасти мулинетки,
пропорциональны квадрату
рату числа оборотов; следовательно, и реактивный мо-
мент пропорционален квадрату числа оборотов. Но тогда
из формулы (42) заключаем, что эффективная мощность
пропорциональна кубу оборотов. Это значит, что, при
определённой мулинетке и разной степени дросселиро-
вания мотора, мощности относятся как кубы оборотов:
дроссельная характеристика есть кубическая парабола.
Вместо мулинетки при всех испытаниях можно было
бы брать обычный воздушный винт. Данные испытаний
показывали бы, какую мощность получает винт от мотора
при том или другом открытии дросселя. Однако, это ус-
ложнило бы испытания благодаря возникновению силы
тяги винта, которую пришлось бы специально уравно-
вешивать, в то время как прямо поставленные лопа-
га?-
200-
180-
160-
wo-
120-
100-
1200 1300 то 1500/6001700№00 №00 П
Рис. 112. Дроссельная характе-
ристика мотора.
скорости и, значит, — квад-
186
Винтомоторная группа
[гл. 7
сти мулинетки не дают тяги, а только момент сил со-
противления.
Внешняя и дроссельная характеристики обычно сво-
дятся на один график (рис. 113). Дроссельная характе-
ристика строится для такого винта (или для такой му-
Рнс. 113. Внешняя характе-
ристика мотора с дроссельными
характеристиками, соответст-
вующими нормальному числу
оборотов, более лёгкому (а) и
более тяжёлому (Ь) винту.
линетки), при котором пол-
ное открытие дросселя даёт
максимально допустимое
(«расчётное») число оборотов
мотора. Более «лёгкий» винт
(имеющий меньший Afp цри
том же числе оборотов) даёт,
при том же открытии дрос-
селя, большее число оборо-
тов: его дроссельная ха-
рактеристика смещается
вправо. При полном откры-
тии дросселя число оборо-
тов мотора с «легким» винтом
будет больше расчётного; так
как это может привести к
поломке и, во всяком слу-
чае, вызывает быстрый из-
нос мотора, то работа на
полном газе с «лёгким» винтом недопустима. Наоборот,
мотор с «тяжёлым» винтом даже при полном открытии
дросселя будет «недодавать» обороты (рис. 113).
Влияние высоты полёта на мощность мотора вызвано
тем, что с поднятием на высоту изменяются температура
и давление воздуха, от которых зависит его плотность.
Данные опыта и теоретические соображения показывают,
что мощность TVh на высоте и мощность No на уровне
моря (при том же числе оборотов) связаны формулой:
NH = AN0,
(43)
где А — коэффициент падения мощности, вычисляемый
по формуле:
A = l,ll^|/p.-0,ll; (44)
Ро г ]Н
рн и Тн обозначают здесь давление и абсолютную тем-
§ 59]
Характеристики моторов
187
пературу воздуха1) данной высоте, а р0 и То—те же
величины на уровне гцоря. Для «нормальных условий»
(ро = 76О мм рт. ст. ц 7'0—15Ц-273 = 288J)
На рис. 114 изобца?кена
при условиях MCA. Здметим,
шается при поднятии на вы-
соту быстрее, чем плоть!ость
воздуха. ч
Из формулы (43) следует,
что для перестроения внеш-
ней характеристики н9 опре-
делённую высоту поднятия
достаточно сжать по вь1соте
график мощности в отно-
шении Г. А. Этим сцособом
^-0,11. (45)
1 н
зависимость А от высоты
что мощность мотора умень-
можно построить ряд внеш-
них характеристик мотора
для разных высот (рис. 115).
Наглядную картину за-
висимости мощности Люгера от
Рис 115. Внешние характеристики
мотора для разных bj>icot.
Рис. 114. Зависимость коэффи-
циента падения мощности А от
высоты.
высоты при данном числе
оборотов даёт высотная
характеристика мотор а
(рис. 116). Координаты
точек графика здесь —
высота Н и мощность мо-
тора 1\1н=А А^.Так как
при построении графи-
ка No принято за по-
стоянную, то высотная
характеристика изобра-
жает, в некотором мас-
штабе, также и зави-
симость А от Н. Если
высотные характери-
стики заданы для раз-
рисунке 116, то по ним
Э Абсолютная темперагура 71 выражается через температуру
по Цельсию t формулой:
ных чисел оборотов, j/ак на
188
Винтомоторная группа
[гл. 7
можно построить внешние характеристики для разных
высот. Обратно, по внешним характеристикам можно
построить высотные характеристики мотора для разных
Рис. 116. Высотные характеристики
мотора для разных чисел оборотов.
чисел оборотов. Обе
серии кривых дают за-
висимость между тремя
величинами: высотой
полёта, числом оборо-
тов и мощностью мото-
ра — при полном от-
крытии дросселя.
Всё, что сказано* в
этом параграфе о вли-
янии высоты на мощ-
ность мотора, относится
к невысотным моторам.
Такие моторы разви-
вают полную мощность
только на уровне моря,
и с поднятием на вы-
на высоте около 5000 м
соту их мощность падает. Уже
мощность невысотного мотора падает вдвое. Требования
высотной авиации поставили задачу поддержания мощ-
ности мотора и на большой высоте, и эта задача была
разрешена созданием высотных моторов. В современной
авиации применяются почти исключительно высотные
моторы.
§ 60. Высотные моторы.
Мощность невысотного мотора падает вследствие
уменьшения плотности воздуха при поднятии на высоту.
Чтобы сохранить величину мощности, необходимо под-
держивать плотность воздуха, поступающего в цилиндры,
на неизменном уровне. Для Этого применяют наддув,
устанавливая на моторе нагнетатель, сжимающий воздух
до определённого давления перед поступлением его в
цилиндры. На авиационные моторы устанавливают цен-
тробежные нагнетатели, приводимые во вращение самим
мотором (рис. 117). Хотя часть мощности мотора и рас-
ходуется на работу сжатия поступающего воздуха, но
§ 60]
Высотные моторы
189
этот расход значительно меньше того падения мощ-
ности, которое имел бы мотор при работе без нагнета-
теля-
Давление, создаваемое нагнетателем, зависит от дав-
ления окружающего воздуха и от числа оборотов крыль-
чатки нагнетателя (передача от вала мотора к валу
крыльчатки имеет передаточное число 10: 1 и выше; во
столько раз число оборотов крыльчатки выше числа
оборотов мотора; крыльчатки делают до 30000 об[мин).
Рис. 117. Нагнетатель высотного мотора (схема).
Нагнетатель конструируется с таким расчётом, чтобы на
некоторой определённой высоте («расчётная высота» или
«граница высотности» Нр) он давал при полном откры-
тии дросселя определённое давление («расчётное давле-
ние» рк) воздуха, поступающего в цилиндры. Ниже рас-
чётной высоты нагнетатель может создать давление,
значительно превышающее расчётное. При таком давле-
нии мотор развил бы мощность, значительно большую
расчётной; это недопустимо, так как прочность мотора
рассчитана только на определённую мощность. Поэтому
на высотах ниже Н необходимо искусственно снижать
давление поступающего от нагнетателя воздуха. Это до-
стигается специальной заслонкой на пути нагнетаемого
воздуха или же просто дроссельной заслонкой. Во вся-
ком случае, давление на высотах ниже расчётной не
должно превышать давления р/г, создав; емого нагнета-
телем на расчётной высоте. Часто на моторе устанавли-
190
Винтомоторная группа [гл. 7
вается автоматический регулятор давления, не допуска-
ющий увеличения давления выше pk. Таким образом,
от уровня земли до расчётной высоты мотор работает
при неизменном давлении pk поступающего в цилиндры
воздуха. Хотя это давление и остаётся постоянным до
расчётной высоты, но мощность мотора растёт от земли
до расчётной высоты по следующим причинам. Плотность
сжатого нагнетателем
воздуха растёт вслед-
ствие понижения тем-
пературы при подня-
тии на высоту; это по-
зволяет увеличить коли-
чество бензина в смеси,
заполняющей цилинд-
ры. Далее, уменьшается
«противодавление» ат-
мосферы выхлопным га-
зам, выбрасываемым в
атмосферу, где давле-
ние понижается; одно-
временно улучшается
очистка цилиндров от
Рис. 118. Высотная характеристика
мотора с наддувом; граница высот-
ности 2000 м.
продуктов сгорания во
время такта выхлопа. Эта же причина приводит к благо-
приятному увеличению разности давлений над поршнем
и под поршнем во время рабочего такта. Все эти причины и
вызывают рост эффективной мощности при поднятии на
высоту. Этот рост продолжается до расчётной высоты; за
расчётной высотой давление воздуха, сжатого нагнетате-
лем, уже не сохраняется, а начинает падать. Соответствен-
но этому падает и мощность мотора; это падение происхо-
дит по тому же закону, что и для невысотного мотора, с
той только разницей, что падение мощности начинается
не от уровня моря, а от расчётной высоты. На рис. 118
показана высотная характеристика мотора с наддувом.
Пунктиром показана высотная характеристика такого
невысотного мотора, который имел бы выше Нр ту же
мощность, что и Данный высотный мотор. Мощность та-
кого мотора на уровне моря должна была бы быть зна-
чительно больше мощности высотного мотора. Соответ-
Воздушные винты
191
§ 61]
ственно пришлось бы утяжелить мотор и увеличить его
размеры. Уже отсюда ясно преимущество установки над-
дува на авиационный мотор.
Современные моторы имеют наддув порядка pk —
= 1000—1200 лш рт. ст. и выше. Поэтому мотор уже
на земле работает при повышенном давлении: это один
из способов повышения мощности мотора без увеличе-
ния его размеров. Но основное преимущество наддува
заключается в сохранении мощности мотора до значи-
тельной высоты. Граница высотности современных мото-
ров доходит до б—7 км. Достижение стратосферных вы-
сот полёта оказалось возможным только благодаря при-
менению высотных моторов.
§ 61. Воздушные винты.
Винт простейшего типа показан на рис. 119. Такие
винты, склеенные из деревянных пластин, применяются
на учебных самолётах и самолётах устаревших типов
Рис. 119. Деревянный винт учебного самолёта.
ещё и теперь. Винты современных самолётов металли-
ческие или из специально обработанного дерева, трёх-, че-
тырёх-или даже пятилопастные (рис. 120). Лойасти их
изготовлены отдельно от втулки и закрепляются таким
образом, что могут поворачиваться в полёте на тот или
иной угол по отношению к плоскости вращения. Пово-
рот лопастей выполняется или лётчиком, с помощью
специального привода, или с помощью автоматического
устройства, регулируемого лётчиком.
На рис. 121 изображено сечение лопасти перпенди-
кулярно её длине. Профиль сечения, напоминающий
профиль крыла, обычно плоско выпуклый, за исключением
части, прилегающей к ступице, где профиль утолщается
192
Винтомоторная группа
[гл. 7
из соображений прочности. Угол ср между хордой про-
филя и плоскостью вращения винта называется углом
наклона. Угол наклона неодинаков для сечений, про-
ведённых на разном расстоянии от оси винта: он убы-
вает от ступицы к концу лопасти.
Рис. 120. Металлический винт с поворотными логистями.
Основными геометрическими характеристиками винта
являются его диаметр и шаг. Шагом И называется рас-
стояние, на которое продвинулся бы винт вперёд за
один оборот, если бы он «ввинчивался» в воздух, т. е.
продвигался бы так, чтобы данное сечение лопасти пере-
мещалось всё время в направлении своей хорды. При
таком движении сечение лопасти прорезало бы канавки
Воздушные винты
193
§ 61]
в мысленно построенной цилиндрической поверхности
соответственного радиуса (рис. 122). Эта канавка — вин-
товая линия, а шаг этой винтовой линии (расстояние
между витками) и есть шаг винта. Если шаг одинаков
для каждого сечения лопасти, то винт называется винтом
постоянного шага. Если шаг меняется вдоль лопасти, то
винт называется винтом переменного шага.
Если представить себе, что цилиндрическая поверх-
ность развёрнута на плоскость, то часть сё, ограниченная
Рис. 121 Сечение лопа-
сти винта, перпендику-
лярной к длине лопасти.
Рис. 122. Геометрический шаг
винта.
прорезанной канавкой, развернётся в прямоугольный
треугольник (рис. 123). Накладывая одна на другую
такие «развёртки» для разных сечений лопасти винта,
получим развёртки вида, изображённого на рис. 124
(винт постоянного шага) и рис. 125 (винт переменного
шага). По развёрткам легко установить зависимость
между шагом Н и углом наклона ср сечения, проведён-
ного на расстоянии г от оси винта. Действительно, в
прямоугольном треугольнике развёртки (рис. 123) ка-
теты равны шагу Н и длине 2пг окружности радиуса г.
Острый угол, лежащий против катета Н, есть <р. По-
этому
Н = 2тгг tg ср. (46)
Отсюда следует, что если величина г tg ср не меняется вдоль
® М. А. Исакович
194
Винтомоторная группа
[гл. 7
лопасти, то винт—постоянного шага, а если меняется,—
то переменного. В этом последнем случае шагом винта
в целом считается условно шаг какого-то определённого
среднего сечения; оно берётся обычно на расстоянии 2/3
или 3/4 радиуса винта от оси.
Рис. 123. Развёртка
винтовой линии, опи-
санной сечением ло-
пасти.
Рис. 124. Развёрт-
ка для винта по-
стоянного шага.
Рис. 125. Развёрт-
ка для винта пере-
менного шага.
При фактическом движении винта — комбинации вра-
щения вокруг оси и поступательного движения парал-
лельно оси1) —каждое сечение лопасти также движется
по винтовым линиям, но вообще шаг этих винтовых ли-
ний (конечно, одинаковый для всех сечений лопасти)
отличается от шага винта Н. Шаг этих винтовых линий
равен расстоянию, фактически пройденному самолётом
за время одного оборота винта. Это расстояние назы-
вается поступью винта; будем обозначать её буквой Hs.
Поступь винта зависит только от скорости полёта и от чис-
ла оборотов винта. Пусть число оборотов винта в ми-
нуту равно п, а скорость самолёта равна v м/сек; за
минуту самолёт пройдёт расстояние 60 им, а винт сделает
1) В действительности ось винта может быть наклонена к линии
полёта, т. е. к направлению поступательного перемещения винта;
но мы будем пренебрегать этим углом, так как он мал в обычных
условиях полёта.
Воздушные винты
195
§ 61]
при этом п оборотов. Поэтому поступь — расстояние,
пройденное за один оборот нинта — равна:
Н=^м. ' (47)
А п
Если скорость дана в км/час, то формула примет вид:
ц ___ 60 и
ns~~3,6n
= 16,7- м.
п
С увеличением скорости полёта поступь растёт, при
увеличении числа оборотов — уменьшается; при изме-
нении числа оборотов и скорости в одинаковое число
Рис. 126. Линии шага и поступи
для сечения лопасти.
Рис. 127. Развёртки
линий шага и линий
поступи.
раз поступь остаётся без изменения. При стоянке само-
лёта на месте с работающим мотором поступь равна
нулю.
На рис. 126 показаны вместе винтовая линия, соот-
ветствующая шагу, и винтовая линия, фактически опи-
сываемая сечением лопасти в полёте. Рис. 127 изображает
соответственные развёртки для ряда сечений. Линии
поступи всегда сходятся в одной точке, так как поступь
одинакова для всех сечений лопасти. Линии же шага
сходятся в одной точке только для винтов постоянного
шага.
13*
196
Винтомоторная группа
[гл. 7
Разность S между шагом и поступью называется
скольжением винта. Обычно скольжение выражают в про-
центах от шага:
$ = ^^1ОО°/о. (48)
В горизонтальном полёте скольжение винта равно
в среднем 10—2О'7о. При уменьшении поступательной
скорости или при увеличении числа оборотов (например,
при наборе высоты) скольжение увеличивается. При уве-
личении же скорости, например, при спуске с работающим
мотором, скольжение уменьшается. Так, при пикиро-
вании скольжение может обратиться в нуль и - даже
стать отрицательным.
§ 62. Движение элемента лопасти винта
и аэродинамические силы, действующие на него.
Представим себе мысленно всю лопасть разделённой
поперечными сечениями на короткие отрезки — элементы
лопасти. Каждый элемент в отдельности будем рассма-
Рис. 128. Угол накло-
на и угол атаки эле-
мента лопасти.
тривать как короткое крыло, дви-
жущееся по соответственной линии
поступи. На развертке для данного
кэлемента линия шага совпадает с
направлением его хорды, а линия
поступи соответствует направлению
его скорости. Следовательно, угол
между этими линиями есть угол
атаки а данного элемента лопасти
(рис. 128).
Прямоугольный треугольник раз-
вёртки изображает в некотором мас-
штабе треугольник скоростей для
данного элемента лопасти. В самом
деле, если увеличить рисунок раз-
п ,
вертки в ns= эд раз (ns есть число оборотов винта в се-
кунду), то катеты будут равны соответственно 2пгп5 и
Hsns, т. е. будут равны окружной скорости и и посту-
пательной скорости v данного элемента. Гипотенуза
Движение элемента лопасти винта
197
§62]
iv прямоугольного треугольника с катетами и и
Жеесть векторная сумма этих скоростей, т. е. резуль-
v уюшая скорость элемента лопасти. В зависимости
Т соотношения между окружной и поступательной ско-
остями меняется наклон результирующей скорости, а сле-
довательно, и угол атаки элемента. Тангенс угла наклона ф
^езультирующей скорости к плоскости вращения равен
отношению катетов в треугольнике скоростей (рис. 128):
Ш = (49)
Угол же наклона ф элемента лопасти к плоскости вра-
щения равен, как видно из того же чертежа,
<₽ = Ф + «-
(50)
Чем ближе к концу лопасти, тем больше окружная ско-
V
рость, а значит, тем меньше отношение — , а вместе с тем
и угол ф.
За величину, характеризующую режим работы винта,
т. е. углы атаки его элементов, принимают обычно без-
размерную величину, «относительную поступь» винта X
= <51>
где D —диаметр винта.
Так как окружная скорость конца лопасти равна тгпДХ,
то отношение — для конца лопасти отличается от X
только множителем тг. Если винт работает при разных
оборотах и разной поступательной скорости, но при од-
ном и том же X, то углы атаки элементов лопасти одинако-
вы в обоих случаях. Следовательно, X определяет углы атаки
элементов лопастей винта; поэтому X и называют также ха-
рактеристикой режима работы винта. С увеличением X уг-
лы атаки элементов лопасти убывают, а с уменьшением X —
растут. ПриХ —0 (поступательная скорость равна нулю,
самолёт стоит на месте) угол атаки имеет наибольшее
значение, равное углу наклона:
а = ^>.
198
Винтомоторная группа
[гл. 7
Рис. 129. Аэродинамические силы, дей-
ствующие на элемент лопасти винта.
Ось винта
Переходя к изучению аэродинамических сил, дей-
ствующих на элемент лопасти, предположим для простоты,
что каждый элемент обтекается воздухом так, как если
бы он один находился в потоке воздуха; влияние сосед-
них элементов учитывать не будем; конечно, их присут-
ствие изменяет обте-
кание данного эле-
мента, но основная
картина остаётся та
же.
Обтекание отдель-
ного элемента анало-
гично обтеканию кры-
ла. Скорость движе-
ния есть результиру-
ющая скорость дан-
ного элемента. При
обтекании возникает
полная аэродинами-
ческая сила R (рис.
129), отклонённая на-
зад по движению от
перпендикуляра ОРк
скорости. Разложим
силу R на две составляющие: параллельно оси винта
(сила Тэя) и параллельно плоскости вращения (сила Qa„).
Сила Тэл есть сила тяги элемента лопасти, сила Q3JI—
сопротивление вращению. Отметим, что это разложение
отличается от того, которое мы выполняли для сил,
действующих на крыло (разложение R на подъёмную
силу и лобовое сопротивление; для сравения такое раз-
ложение показано на рисунке пунктиром). Очевидно,
выгодно иметь наибольшую тягу при наименьшем сопро-
тивлении вращения; для этого R должно быть возможно
меньше отклонено от перпендикуляра к скорости. Но
угол отклонения есть угол качества для данного профиля;
он имеет наименьшее значение при угле атаки, равном
наивыгоднейшему для данного профиля. Поэтому угол
наклона элемента должен быть, для наилучшего действия
данного элемента, равен:
199
Коэффициент полезного действия винта
§
как угол ф уменьшается к концу лопасти, а анп для
ппоФилей разных элементов, примерно, одно и то же, то
"гол наклона должен, для лучшей работы винта, убы-
У оТ ступицы к концу лопасти. Исходя из указанных
Воображений, и подбирают закон изменения ip вдоль
С°пасти. Конечно, угол атаки элементов лопасти будет
тогда наивыгоднейшим только при одной определённой
характеристике режима I, иначе говоря, при одном
определённом соотношении между числом оборотов и ско-
ростью полёта. При изменении числа оборотов или ско-
рости полёта угол атаки элементов изменится, и соотно-
шение между тягой и сопротивлением вращению будет
менее выгодным. Если винт — изменяемого в полёте шага,
то, поворачивая лопасти, можно снова добиться более вы-
годного наклона элементов лопасти. Для винтов же
фиксированного шага (с неповоротными лопастями) есть
только один наивыгоднейший режим работы винта, и винт
конструируется так, чтобы этот режим соответствовал
наиболее часто встречающимся условиям эксплоатации
самолёта.
§ 63. Коэффициент полезного действия винта.
Найдём коэффициент полезного действия элемента
лопасти. Результат получится до известной степени ус-
ловный, так как не учитывается влияние соседних эле-
ментов. Как известно, коэффициент полезного действия
есть отношение полезной работы (в данном случае это
работа силы тяги) к затраченной работе (в данном слу-
чае это работа против сил сопротивления вращения).
Полезная работа за секунду — полезная мощность —
равна Тэл v (см. § 19); затраченная мощность равна Q3Jlu;
поэтому коэффициент полезного действия элемента т1эл
выражается формулой:
__Тзл v
(52)
Выразим силы Тэл и Q34 через силу /?. Угол между
силой и перпендикуляром ОР к направлению движения
элемента есть угол качества для данного профиля
(рис. 129). Угол качества 0 связан с качеством К соот-
200
Винтомоторная группа
[гл. 7
ношением
К — ctgO.
Угол между ОР и силой тяги равен углу ф (углы со
взаимно перпендикулярными сторонами). Поэтому угол
между Тэл и R равен ф + 0, а угол между Q3JI и R равен
90 — (ф-ф-О). Величины сил Т9Л и Q3n равны проекциям
силы R на соответственные направления:
Тэл =/? COS (фб), Сэл = R sin (ф 4- 6).
Подставим эти выражения в формулу (52):
_T3Av _V cos(ф4-В) ,эл Qa.i11 11 sin (ф ~Р 6) = * с t ЧФ 4- о) = - УМ-^8--1. ц э'.т 1 / u dg ф _|—ctg 0 '
но ctg6 = /(, с1еф= " ,
поэтому -К— 1 К-- У_ _ _ 1 " /с-р Е. к4- L 1 V 1 v
Обозначим для краткости отношение поступательной
и окружной скорости через к:
Тогда
v i ,
-=(йф=з/(.
К —к
(53)
Таким образом, коэффициент полезного действия данного
элемента зависит только от качества профиля элемента
и от отношения поступательной и окружной скорости.
Теперь исследуем полученный результат: выясним,
при каких значениях Кик величина т;эл— наибольшая.
Во-первых, из формулы (53) видно, что при увеличении К
§ 63]
Коэффициент полезного действия ви нта
201
коэффициент полезного действия растёт: в самом деле,
т --правильная дробь, при увеличении же числителя
^’знаменателя правильной дроби на одно и то же число
дробь увеличивается. Отсюда делаем первый вывод,
подсказанный уже предыдущими рассуждениями: коэф-
фициент полезного действия элемента наибольший при
наивыгоднейшем угле атаки профиля элемента.
Рис. 130. Определение коэффициента полезного дей-
ствия элемента лопасти при разных k графическим
путём.
Далее, выясним зависимость т/эл от отношения скоро-
стей к. Для этого применим следующее построение (рис.
130). Выбрав оси координат х, у, возьмём точку А с обеими
координатами, равными К- Проведём через точку А две
новые оси координат, параллельные взятым, и в этой
новой системе координат построим точки с координатами
к и y при разных значениях к. Полученные точки рас-
положатся на гиперболе, так как произведение их коор-
динат постоянно (равно единице). Вершина гиперболы
соответствует значению к — 1. Теперь рассмотрим ко-
ординаты какой-нибудь из этих точек относительно
старых осей. Из чертежа видно, что координаты точки
В равны х = , у = К — к. Соединим точки О и В,
проведя секущую ОВ гиперболы, и опустим из точки В
перпендикуляр ВС на ось х. В прямоугольном треу-
202
Винтомоторная группа
(гл. 7
гольнике ОВС катетами служат х и у, а острый угол 8
есть угол между секущей и осью х. Очевидно:
tgS
К —к
(54)
1
х
и, следовательно, согласно формуле (53),
= (55)
Угол 8 всегда меньше 45°, поэтому ^.,<4, как и
должно быть. Чем больше угол 8, тем больше »]эл- Наи-
больший угол 8, а вместе с тем и наибольшее значение
т/эл получим, проводя из точки О касательную к гипер-
боле (рис. 130). Точка М касания и определяет то
значение к (обозначим его через к'), при котором г(эл
имеет наибольшее значение. Точка М лежит правее
вершины гиперболы, следовательно, к' <С 1, т. е. посту-
пательная скорость меньше окружной. Переходя к
другим значениям к (перемещаясь по гиперболе от
точки М), видим, что 8, а вместе с тем и г1эл убывают.
Если переходить к меньшим значениям к («горизонталь-
ная ветвь» гиперболы), то г1э1 уменьшается медленнее,
чем при переходе к большим к («вертикальная ветвь»).
Отсюда делаем второй вывод — при конструировании
винтов следует избегать к 1, в то время как умень-
шение к (увеличение окружной скорости сравнительно
с поступательной) лишь незначительно ухудшит коэф-
фициент полезного действия. Точнее говоря, уменьше-
ние к на определённую величину выгоднее, чем умень-
1
шение -т- на ту же величину.
Зная наиболее выгодную величину к', найдём соот-
ветственную величину ф' из формулы
tg$' = Д'.
Отсюда можно получить уже конструктивную величину —
угол наклона, который нужно придать элементу лопасти
для получения наибольшего г)эл:
?' = Ф' + анв-
Нужно иметь в виду, что этот угол наклона даст наи-
§ 63] Коэффициент полезного действия винта 203
больший коэффициент полезного действия лишь при
условии:
В противном случае ф будет иметь другое значение,
угол атаки элемента лопасти изменится, качество
уменьшится, и т]эл не достигнет наибольшего значения.
Для вычисления наибольшего значения ij3JI воспользу-
емся теперь следующим известным свойством гиперболы:
касательная отсекает на сторонах координатного угла от-
резки, вдвое большие координат точки касания. Следова-
тельно, на рис. 130 отрезок AD = 2k' и отрезок АЕ = 2& .
Прямоугольные треугольники ADE и ODF подобны, по-
этому
AD _DF \
AE~OF ’
но DF — K — 2к' и OF —К; следовательно,
2fc' _К — 2к'
21 ~ к
к'
или
,,2 К — 2к'
к =—к~
и окончательно:
Кк'2 -\-2к> — К = 0.
Отсюда находим, решая квадратное уравнение и вы-
бирая положительное решение:
Следовательно, к', а вместе с тем и т;эл зависят лишь
от качества профиля элемента.
Если К достаточно велико, то легко получить очень
простую приближённую формулу для Г|эл. В этом случае
предположим, что величиной ~ можно пренебречь сравни-
204
Винтомоторная группа
[гл. 7
тельно с единицей. Тогда, согласно формуле (56), имеем
приближённо
(57)
и, с той же степенью точности:
или
^эл — Кф- 1
1 2
ГЬл к •
(58а)
(586)
Например, при /<=15 т1эл^= 0,875.
Формула (57) показывает, что к’ близко к единице,
а это равносильно тому, что ф' близко к 45° (но всё же
меньше 45°). Угол анв для всех профилей вообще равен
нескольким градусам. Поэтому угол наклона </ = ф'ф-ап
тоже близок к 45°. Итак, наиболее выгоден угол уста-
новки элемента около 45°.
До сих пор мы рассматривали работу только одного
элемента лопасти. Для одного элемента всегда Можно
подобрать такие условия, при которых ц9Л имеет наиболь-
шее значение. Но лопасть состоит из ряда элементов, и,
конечно, выбирать независимо условия работы для эле-
ментов нельзя. Поэтому приходится итти на компромисс.
Так, например, величина к может иметь наивыгоднейшее
значение при данном 1 лишь для одного элемента лопасти.
К концу лопасти значение к будет меньше наивыгодней-
шего, а к ступице — больше. Но мы видели, что значе-
ния к, меньшие наивыгоднейшего, выгоднее, чем большие.
Поэтому наивыгоднейший (теоретически) угол наклона
выбирается в средней части лопасти ближе к ступице;
тогда получается наибольший коэффициент полезного дей-
ствия винта в целом.
Так как величина к каждого элемента лопасти зави-
сит для данного винта только от X, то, очевидно, коэф-
фициент полезного действия данного винта в целом
тоже зависит только от X. При некотором значении X
коэффициент полезного действия винта имеет наибольшее
значение. При увеличении или уменьшении X коэффициент
полезного действия уменьшается, причём при уменьше-
§ 64]
Аэродинамические силы
205
*1
1.0-
0.8-
0.6-
0.0
о.г
о
нии коэффициент полезного действия убывает медленнее,
чем при увеличении. Примерный график зависимости
г. от X показан на рис. 131.
Коэффициент полезного действия винта в целом яв-
ляется какой-то средней величиной от коэффициента по-
лезного действия отдельных
элементов. Но вычислить тео-
ретически э), зная г)эл для от-
дельных элементов, нельзя, так
как при этом не будет учтено
взаимное влияние отдельных
элементов, т. е. изменение по-
тока, обтекающего данный эле-
мент, которое вызвано сосед-
ством других элементов. Кроме
того, останется неучтённым вли-
яние ступицы винта и взаим-
ное влияние лопастей. Поэтому
на практике коэффициент по-
лезного действия винта в целом определяют опытным
путём в аэродинамической трубе, замеряя тягу и реак-
тивный момент модели винта при её работе в потоке
0.2 00 00 0.8 w 1.2 J
Рис. 131. Зависимость коэф-
фициента полезного дейст-
вия от относительной по-
ступи к.
воздуха.
§ 64. Аэродинамические силы, действующие
на винт в целом.
В этом параграфе мы ограничимся рассмотрением вин-
тов фиксированного шага, причём для простоты рассмо-
трим двухлопастный винт.
Аэродинамические силы, действующие на весь винт
в целом, складываются из сил, действующих на отдельные
элементы лопастей (уже с учётом взаимного влияния
элементов), т. е. из сил Тэл и сил фэл. Складывая Тэл,
найдём их равнодействующую — силу тяги Т для всего
винта. В силу симметрии винта она будет приложена
по его оси (рис. 132). Силы фэл для двух симметричных
элементов на двух лопастях дают пару сил. Складывая
все такие пары, найдём результирующую пару сил со-
противления вращения (Q, Q') (рис. 133). Момент Л1р
этой пары и есть реактивный момент для винта в целом.
206
Винтомоторная группа
[гл. 7
Он преодолевается вращающим моментом Мы мотора
При постоянном числе оборотов эти моменты должны
взаимно уравновешиваться:
Мр=Мм.
Полезная работа винта есть работа силы тяги Т. По-
лезная мощность винта NB выразится, согласно (17),
формулой
.. T-v
Nb = '75‘/i- с- (59)
«Потребная» же или затраченная для вращения винта
мощность NM выразится, согласно (18), формулой
Jlfn-П
— 716^ л- с- (60)
По форме (60) и (42) совпадают, но Мр в последнем
выражении есть момент, потребный для вращения данного
винта, а в формуле (42) мр обозначает «располагаемый
момент мотора» при данных условиях его работы. Если
эти моменты равны, то число оборотов винта постоян-
но и
NM = NS.
g4j Аэродинамические силы 207
Итак, зная, при данной скорости v и данном числе
оборотов п, тягу и реактивным момент винта, можно
найти по формулам (59) и (60) полезную и затраченную
мощности NB и NM, а по этим мощностям определится
и коэффициент полезного действия винта в целом:
>)=£ (61)
Тяга и реактивный момент (или непосредственно мощ-
ность мотора на валу) должны быть найдены из опыта
по испытаниям винта. Но провести полное испытание
винта на разных скоростях и с разными числами обо-
ротов— слишком сложно. Поэтому (сравним с аэродина-
мическими испытаниями крыла) испытывают уменьшенную
модель винта, а результаты испытаний пересчитывают
на действительный винт. Методы аэродинамических испы-
таний и пересчёта для винтов и для крыльев аналогичны.
Исследуемые модели винтов приводятся во вращение
в аэродинамической трубе; изменяя число оборотов модели
и скорость набегающего потока, получаем работу модели
при различных X и для этих значений X определяем тягу,
развиваемую моделью, и потребную для её вращения
мощность. Полученные данные нужно пересчитать на
винт нормальных размеров. Ход рассуждений, приво-
дящий к формулам пересчёта, здесь таков: будем сравни-
вать аэродинамические силы, возникающие для модели
и для настоящего винта. Если X для модели и для винта
одинаково, то потоки, обтекающие модель и винт, подоб-
ны друг другу. В самом деле, обтекаемые тела подобны,
а при одинаковых X одинаково и отношение окружной и
поступательной скоростей; поэтому каждый элемент ло-
пасти модели работает на том же угле атаки, что и
соответствующий элемент винта. При этих условиях
аэродинамические силы для модели и для оригинала
должны находиться в определённом отношенииг). Как
мы знаем (§ 49), аэродинамические силы пропорциональны
плотности воздуха, площади тела и квадрату скорости.
В качестве характерной площади можно взять квадрат
’) Здесь, как и раньше, мы пренебрегаем различием числа Рей-
нольдса для модели н для настоящего винта.
208
Винтомоторная группа
[гл. 7
какого-нибудь характерного линейного размера тела, так
как сходственные площади подобных тел относятся как
квадраты их линейных размеров. В качестве характерной
скорости можно взять какую-нибудь величину, пропор-
циональную скорости. Обычно вместо площади берут
квадрат диаметра винта О2, а вместо скорости — вели-
чину nsD (отличающуюся только постоянным множителем
от окружной скорости конца лопасти). Итак, аэродина-
мические силы, действующие на винт, пропорциональны
величинам р, D2 и (nsD)2. Следовательно, тяга винта
выразится формулой
Т = щ п\ Di кг, (62)
где а — безразмерный коэффициент пропорциональности;
он называется обычно коэффициентом тяги. Для всех
подобных друг другу винтов а одинаково при равных
для данного винта а зависит только от 1. Поэтому,
измерив при определённом X тягу Т' для модели, найдём:
(63)
Здесь штрих указывает, что соответствующие величины
относятся к испытанию модели. Но это же значение а
относится и к настоящему винту при том же значении X.
и тягу настоящего винта при этом X можно вычислить
из формулы (62), взявши а по (63), т. е. по результатам
испытаний, а остальные величины — применительно к
настоящему винту.
Аналогичный расчёт применим и для нахождения
мощности, потребной для вращения винта. Мощность
есть сила, умноженная на скорость, следовательно, Л/м
пропорционально р, D2 и (nsD)2, и мощность выразится
формулой
NM=ipn3/)5 л. с. (64)
Здесь безразмерный коэффициент мощности р (зависящий
для данного винта, как и а, только от X) определяется
из испытаний модели по формуле
75N'M
p'n'3Dr5
(05)
§ 641
Аэродинамические силы
209
Постоянный множитель 75 введён в формулу для удоб-
ства дальнейших расчётов (выражение [ipиздаёт, мощ-
ность, выраженную в кг-м/сек).
Примерные графики зависимости а и р от X показаны
на рис. 134.
Если для данного X известны а и р, то коэффициент
полезного действия винта при этом значении X легко
определить. В самом деле, выражая мощность в кг-м/сек,
нзидём» 9
NB = Tv = a?nlDiv,
Следовательно,
NB apn'Dbj av
но
поэтому
V ____ ,
n//D ~~К>
(66)
Для подобных винтов, работающих при одинаковом X,
величины а и р имеют соответственно одинаковые значе-
ния. Следовательно, оди-
наковы и коэффициенты
полезного действия вин-
тов. Далее, из формулы
(66) следует, что коэффи-
циент полезного действия
данного винта зависит
только от X. Примерная
зависимость J] от X пока-
зана на рис. 131.
Интересно проследить,
Рис. 134. Зависимость коэффи-
циентов тяги и мощности от
относительной поступи X.
как меняются величины а,
Р и Г) (или Т, NM и т() при
изменении X. Заметим пред-
варительно, что графики а по X и р по X представляют в
некотором масштабе графики зависимости Т и NM от v при
неизменном п. В самом деле, из формул (62) и (64) видно,
что при п постоянном Т и NM пропорциональны соответ-
ственно аир, поступательная же скорость v пропорцио-
И М. А. Исакович
210
Винтомоторная группа
[гл. 7
нальна X. Поэтому графики рис. 134 и 131 будем рас
сматривать сейчас именно как графики Т, Nu и т;
в зависимости от v при п — const, считая, что масштабы
по осям координат соответственно изменены.
График для Т (линия а на рис. 134) показывает, что
наибольшая тяга для данного винта получается при
стоянке самолёта на месте; с ростом скорости тяга убы-
вает и при некоторой скорости обращается в нуль. Даль-
нейшее увеличение скорости даст уже отрицательную
тягу, т. е. вращающийся винт будет представлять сопро-
тивление. Такой ход графика для Т становится понят-
ным, если рассмотреть изменение угла атаки элементов
лопасти с увеличением v. При v — 0 угол наклона каждого
элемента равен его углу наклона к плоскости вращейия.
Это — наибольший возможный угол атаки элементов, и
при нём аэродинамические силы (тяга в том числе) также
достигают наибольшего значения. При этом и NM также
имеет максимум, так как и силы Q максимальны. При
увеличении скорости угол атаки уменьшается; при этом
уменьшаются и аэродинамические силы; значения Т и
уменьшаются, но не в одинаковой пропорции, так как
полная аэродинамическая сила R при уменьшении угла
атаки не только изменяет свою величину, но и повора-
чивается. При дальнейшем увеличении скорости угол
атаки обращается в нуль и затем делается отрицатель-
ным; при таких углах атаки, близких к первому лётному
углу, угол качества велик, и при некоторой скорости
сила R делается параллельной плоскости вращения винта.
Это и есть та скорость, при которой тяга обращается
в нуль (точка пересечения кривой а с осью абсцисс). Но
при этой скорости мощность, требуемая для вращения
винта, ещё не равна нулю. Если ещё увеличить скорость,
то сила R будет продолжать поворачиваться, тяга сде-
лается отрицательной и, наконец, при некотором угле
атаки сила R окажется параллельной оси винта, не
создавая более момента сопротивления вращению (точка
пересечения линии р с осью абсцисс на рис. 134); при
этом NM —0. При дальнейшем увеличении скорости
сила Q создаёт момент, направленный по вращению винта,
винт работает как «ветряк». В былые времена при малых
мощностях моторов случайно остановившийся в полёте
§ 65] Совместная работа винта и мотора 211
_оТор запускался в воздухе пикированием: вращающий
МоМент, создаваемый встречным потоком на лопастях
M,HTa, проворачивал мотор и запускал его. В современ-
» мощных моторах создаваемый пикированием вра-
иающий момент недостаточен для запуска мотора. Но
пои пикировании современных самолётов нужно счи-
таться с сильным падением NM при росте скорости. Даже
при дросселировании мотора, т. е. при уменьшении Ns,
возможен быстрый рост числа оборотов — «раскрутка» мо-
тора, против которой приходится принимать специаль-
ные меры.
Из того, что NM падает при росте скорости, следует,
что для поддержания неизменного числа оборотов нужно
«уменьшать газ» (прикрывать дроссельную заслонку) при
увеличении скорости (например, при снижении). Если не
уменьшать подачу горючего в мотор, то при увеличении
скорости число оборотов будет расти. Наоборот, при
работе на месте винт «недодаёт» обороты сравнительно
с горизонтальным полётом. По той же причине, если
перейти из горизонтального полёта к набору высоты, не
меняя положения дросселя, число оборотов упадёт.
Ход изменения tj в зависимости от скорости даётся
снова графиком рис. 131, так как при данном числе обо-
ротов л пропорционально скорости. При стоянке на
месте коэффициент полезного действия равен нулю, так
как полезная мощность винта при этом отсутствует. С
ростом скорости растёт и коэффициент полезного действия.
Винты конструируются так, чтобы наибольший коэф-
фициент полезного действия достигался при скорости,
на которую в основном рассчитана эксплоатация само-
лёта. При большей скорости т( снова начинает падать и
снова обращается в нуль при той же скорости, при
которой равна нулю и тяга.
§ 65. Совместная работа винта и мотора.
Характеристики винтомоторной группы.
В предыдущих параграфах мы рассматривали мощность,
требуемую для вращения винта («потребная» мощ-
ность NM), и мощность, развиваемую мотором («распола-
гаемая» мощность Ns). Поставим теперь такой практи-
14*
212
Винтомоторная группа
ческий вопрос: какую наибольшую тягу и наибольшую
полезную мощность разовьёт данный винт, вращаемый
данным мотором при заданной скорости и данной высоте
полёта? Мы ответим на этот вопрос, построив графики
зависимости полезной мощности винтомоторной группы
от скорости полёта для разных высот (при полном от-
крытии дросселя). Для этого будем пользоваться графи,
ком внешней характеристики мотора и графиками зави-
симости £ и от 1. Метод расчёта станет ясным из
примера. Зададимся определённым значением 1, напри-
мер, 1 = 0,7. При данном к мощность Л'м, потребная для
вращения винта, пропорциональна кубу числа оборотов
(формула (64)). Если полёт происходит у земли, то
р=0,125 —; допустим еще, что диаметр винта ра-
вен D = 2,4ai. По графику рис. 134 находим для 1 = 0,7
£=0,05. Следовательно,
0,05-0,125 'Л-2,43 „
NM = --------- - = 0,008бп*.
(67)
75
Нанесём теперь на график внешней характеристики
(рис. 109) полученную зависимость N от п%. Эта кривая
(рис. 135) даст дрос-
сельную характеристи-
ку мотора. Для каж-
дого значения 1 полу-
чается своя дроссель-
ная характеристика;
чем больше 1, тем «лег-
че» винт. Точка пере-
сечения внешней и
дроссельной характе-
ристик даст то число
оборотов, при котором
«располагаемая» мощ-
ность мотора (изобра-
жаемая внешней харак-
Рис. 135. Совместная работа винта и
мотора.
теристикой) равна «по-
требной» мощности винта (изображаемой дроссельной ха-
рактеристикой). В нашем примере получим п = I860
об:мин; соответственная мощность равна Л/м=&205 л. с.
Совместная работа винта и мотора
213
§65]
пее по графику рис. 131, при Х = 0,7 находим, что
Пжфициент полезного действия винта равен 0,84; зна-
читполезная мощность винта NB равна:
=7]TVM = 0,84-205 171 л. с.
. V
С ДРУг°й стороны, по данному к= , зная ns —
18б° —31 об,сек и £) = 2,4, найдём скорость и:
=== 60
v = \nsD = 0,7-31 -2,4= 52 м.сек — 187 км:час.
nt Tv -г 75N„
Далее, так как 7VB = ~ , то Т = , или, после
подстановки числовых значений,
75 171 _.с
-52- = 246 кг.
Т
(68)
В итоге получаем величины Т и NB при некоторой
скорости полёта при полном открытии дросселя. Подоб-
ный же расчёт можно про-
вести и для других значе-
ний 1, что даст величины
Т и NB для разных скоро-
стей полёта. По этим дан-
ным и строятся характе-
ристики винтомоторной
группы для тяги и для
мощности.
Для того чтобы соста-
вить характеристику вин-
томоторной группы для
другой высоты полёта,
нужно только в расчёте
взять соответственную ве-
личину для р (по между-
народной стандартной ат-
мосфере для данной высо-
ты) и воспользоваться со-
ответственной внешней
Рис. 136. Характеристика винто-
моторной группы для тяги.
характеристикой мотора.
При расчёте мы получаем попутно числа оборотов и,
что позволяет построить график зависимости числа обо-
214
Винтомоторная группа
[r-i. 7
ротов от поступательной скорости полёта при полном
открытии дросселя. Как уже отмечалось, обороты будут
расти при увеличении поступательной скорости.
При дросселировании мотора величины Т и NK д ,я
данной скорости полёта падают. Примерные графики
зависимости Т и Д'
от скорости при пол-
ном числе оборотов
(сплошная линия) и
уменьшенных оборо-
тах (пунктир) даны
на рис. 136, 137.
Мощность и тягу,
входящие в характе-
ристики винтомотор-
ной группы, назы-
вают, при йзучении
полёта самолёта, рас-
располагаемой тягой,
тяга, которые лётчик
Рис. 137. Характеристика винтомотор-
ной группы для мощности.
полагаемой мощностью винта и
Это — та мощность винта и та
может при той или иной скорости получить от дан-
ной винтомоторной группы. Поэтому графики рис. 136,
137 называются иначе графиком располагаемой мощности
винта и графиком располагаемой тяги.
§ 66. Потери при работе винта.
Мотор сообщает винту мощность N„, винт же отдаёт
самолёту, в виде полезной работы, мощность NB = rlNi1,
причём Ns меньше, чем NM. При преобразовании энергии,
получаемой винтом, в полезную работу силы тяги проис-
ходят потери энергии: теряется мощность NM — NB. Коэф-
фициенты полезного действия современных винтов
доходят до 85—88°/0, мощности моторов доходят до
1500—2000 л. с. и выше. Следовательно, потери мощ-
ности при работе винта могут достигать сотен л. с. На
что же тратится потерянная мощность? Главную часть
потерь составляет кинетическая энергия струи воздуха,
отбрасываемой и закручиваемой винтом. Чем с большей
скоростью происходит отбрасывание струи, тем болмяе
потери и тем меньше коэффициент полезного действия
ggj Потери при работе винта 215
инта. Поэтому всегда стремятся выбрать винт возможно
большего диаметра, отбрасывающий большую массу воз-
духа, но с меньшей скоростью: кинетическая энергия
такой струи будет меньше. Другие источники потерь
„преобразование на лопастях и ступице, возбуждение
звуковых колебаний в окружающем воздухе. Резкий
пост потерь, а следовательно, и резкое уменьшение коэф-
фициента полезного действия винта начинаются при
скорости концов лопастей, превышающей, примерно,
300 м сек. Эта скорость кладёт предел увеличению числа
оборотов винта данного диаметра или увеличению диа-
метра винта для мотора с данным числом оборотов. Так,
например, если винт диаметром 3,5 м работает при
числе оборотов 1600 об/мин, при скорости полёта 80 м/сек,
то увеличение числа оборотов или замена винта другим,
большего диаметра, может уже привести к падению
коэффициента полезного действия.
Скорость 300 Л1( сек называется критической скоростью
для работы винта. Причина изменения основных харак-
теристик винта при переходе за эту скорость в том, что
при скорости, большей критической, начинает играть
роль сжимаемость воздуха, и обтекание лопастей изме-
няется; при обтекании всё большая часть энергии уно-
сится в виде колебаний воздуха.
Здесь мы встречаемся с одним из примеров многих
противоречивых требований при проектировании самолё-
тов. Винт для сохранения высокого коэффициента по-
лезного действия не должен иметь чрезмерное число
оборотов; авиационный же мотор выгодно строить высо-
кооборотный: это позволяет уменьшить его вес и габа-
риты. Поэтому современные самолёты обычно снабжаются
высокооборотными моторами, винт же приводится во
вращение не непосредственно коленчатым валом мотора,
но через редуктор, понижающий число оборотов настолько,
чтобы скорость концов лопастей не переходила за кри-
тическую.
При стоянке самолёта на месте вся мощность мотора
идёт на потери, и коэффициент полезного действия винта
и полезная мощность равны нулю. И здесь мощность
поглощает в основном отбрасываемая струя воздуха,
особенно сильная на стоянке
216
Винтомоторная группа [гл. 7
§ 67. Винты изменяемого шага.
Обратимся теперь к винтам изменяемого в полёте
шага. Поворот лопасти в сторону увеличения угла на-
клона (в сторону увеличения шага) называется «затяжеле-
нием» винта; затяжеление винта увеличивает нагрузку
на мотор; обратный поворот называется «облегчением),
винта.
Практически применяются винты изменяемого шага
двух типов: двухшаговые винты и винты-автоматы (или
винты постоянных оборотов). Двухшаговые винты по-
зволяют ставить лопасти в два положения: на большой
угол наклона (большой шаг) и на малый угол (малый
шаг). Пользование таким винтом поясним на следующем
примере: допустим, что самолёт летит горизонтально на
полном газе на расчётной высоте; скорость полёта макси
мальна, и мощность мотора имеет максимальное Значе-
ние, соответствующее наибольшему допустимому числу
оборотов. Переведём самолёт в режим набора высоты;
скорость полёта уменьшится, значит, уменьшится и X, а сле-
довательно, нагрузка мотора увеличится: винт при этом
новом режиме будет «тяжёл» для мотора, который сба-
вит обороты и не будет уже развивать полную мощность
Подобно этому, на высоте, превышающей расчётную,
мощность мотора, как мы знаем, падает быстрее, чем
плотность воздуха, а значит, и скорее, чем мощность,
потребная для вращения винта: и в этом случае винт
будет для мотора тяжёл, и полную мощность мотора
(развиваемую только при полных оборотах) получить не
удастся.
Итак, меняя скорость или высоту полёта, получаем
несоответствие винта фиксированного шага и мотора. В
разобранных случаях винт становится слишком тяжёлым.
Но если на моторе установлен винт изменяемого шага,
то в этих случаях его можно перевести на малый шаг.
Нагрузка на мотор уменьшится, мотор вернётся к наи-
большим оборотам, и мы снова сможем «снять с мотора*
полную мощность. Случаи, когда выгоден переход с
большого шага на малый и обратно, хорошо уясняются
при построении характеристики винтомоторной группы
для мощности (рис. 138). На рисунке нанесены характе
§67]
Винты ИЗМЕНЯЕМОГО ШАГА
217
Малый шаг Бплымй шо?.
О
Рис. 138. Характеристика винтомо-
торной группы для двухшагового
винта.
стики для обоих положений лопастей, соответствую-
большому и малому шагу. Из рисунка видно, что
111 и малых скоростях полезная мощность больше при
ПРпом шаге, чем при большом, а при большой скорос-
ма_ наоборот. Точка пересечения характеристик разде-
т« область скоростей, при которых пользование малым
шагом Даёт большую
полезную мощность, от
скоростей, где выгоден
большой шаг винта.
При двухшаговых
винтах малым шагом
пользуются при взлёте,
крутом наборе высоты,
при полёте на большой
высоте. Режим же го-
ризонтального полёта
на расчётной высоте
требует перевода винта
на большой шаг; если в
этом режиме оставить винт на
малом шаге, то возможна его «раскрутка», так как на
больших скоростях он будет лёгок для мотора. Чтобы
удержать обороты в допустимых пределах, пришлось
бы дросселировать мотор, т. е. оставить неиспользован-
ной часть его мощности.
Ещё большими преимуществами перед винтами фи-
ксированного шага обладают «винты-автоматы». Их ло-
пасти могут занимать любое промежуточное положе-
ние между двумя крайними положениями максималь-
ного и минимального шага. Такие винты имеют целый
Диапазон непрерывного изменения угла наклона
лопастей. Лопасти поворачиваются с помощью специаль-
ного механизма, реагирующего на изменение числа обо-
ротов винта. Этот механизм регулируется в полёте лёт-
чиком: лётчик устанавливает его на желаемое число
оборотов; после этого число оборотов автоматически
сохраняется, как бы ни менять (в известных пределах)
Режим работы мотора или условия полёта. Регулятор
постоянства оборотов действует следующим образом:
если, например, лётчик уменьшает газ, дросселируя мо-
Т0Р> то число оборотов начинает уменьшаться, что при-
218
Винтомоторная группа
[гл. 7
водит в действие регулятор постоянства оборотов. Тогда
этот регулятор «облегчает» винт (поворачивает его лопасти
на меньший угол), т. е. уменьшает нагрузку на мотор
Наоборот, при увеличении открытия дросселя регулятор
«затяжеляет» винт, увеличивая наклон лопастей. Регуля-
тор поворачивает лопасть до тех пор, пока мощность
потребная для вращения винта при заданных оборотах'
не сравняется с мощностью, развиваемой мотором при
этих оборотах и при данном открытии дросселя. Таким
образом, работа дросселем не изменяет (за исключением
времени, в течение которого поворачиваются лопасти}
числа оборотов, но лишь меняет шаг винта, соответ-
ственно изменяющейся мощности мотора; тяга же и по-
лезная мощность, конечно, изменяются, возрастая при
данном числе оборотов вместе с шагом винта. Подобно
этому работает регулятор постоянства оборотов и при
изменении условий полёта. Например, при переходе ла
высоту полёта, ббльшую расчётной, этот регулятор об-
легчает винт настолько, чтобы уменьшившаяся мощность
мотора была достаточна для вращения винта при прежнем
числе оборотов. То же происходит автоматически и при
уменьшении скорости полёта при неизменном положении
дросселя, — например, при переходе в режим набора.
Наоборот, при планировании или пикировании с рабо-
тающим мотором, когда мощность, требуемая для враще-
ния винта, убывает, регулятор ставит лопасти на боль-
шой шаг, затяжеляя винт, что предохраняет мотор от
раскрутки. Некоторые типы винтов допускают поворот
лопастей во «флюгерное» положение (вдоль набегающею
потока воздуха); лопасти занимают это положение в
случае остановки мотора, представляя наименьшее сопро-
тивление набегающему потоку воздуха. Это важно для
возможности продолжения полёта на многомоторном
самолёте в случае остановки одного мотора.
Пользуясь регулятором постоянства оборотов, можно
подбирать для любых условий полёта наивыгоднейшшь
в смысле экономичности, режим работы винтомоторной
группы. Покажем, например, как нужно действовать pej
гулятором, для того чтобы выполнять полёт на данной
высоте и при данной скорости с наименьшим расходом
горючего на 1 км пройденного пути. Закончив наоор
Винты ИЗМЕНЯЕМОГО ШАГА
219
§ 67]
д0 заданной высоты (эта часть полёта производится
на полном газе), переведём самолёт в режим горизон-
тального полёта и, дросселируя мотор, добьёмся задан-
ной скорости. Попробуем теперь, не трогая дроссель,
изменять число оборотов регулятором, т. е. затяжелять
или облегчать винт. Если только число оборотов, при
котором производился набор высоты, не является случай-
но наивыгоднейшим режимом и для заданного горизон-
тального полёта, то изменение числа оборотов в одну
или в другую сторону даст увеличение скорости полёта
(обычно набор высоты производится на большом числе
оборотов, 'так что практически придётся затяжелять
винт, уменьшая число оборотов). Следовательно, при
этом изменённом числе оборотов можно несколько сба-
вить газ, чтобы вернуться к заданной скорости. Пов-
торив, в случае надобности, ту же операцию, находим
то число оборотов, изменение которого (при неизменном
дросселе) в ту или другую сторону уже не даст увеличения
скорости. Это и значит, что подобранное число оборотов
соответствует наивыгоднейшему режиму работы винто-
моторной группы при полёте на данной высоте при за-
данной скорости.
ЧАСТЬ 111
ПОЛЁТ САМОЛЁТА.
ГЛАВА 8.
ГОРИЗОНТАЛЬНЫЙ ПОЛЁТ.
§ 68. Изучение режимов полёта.
Во второй части книги мы изучили силы, действую-
щие на самолёт в полёте. В зависимости от величины
и направления этих сил (а также и их моментов) са-
молёт летит на том или ином режиме. Уточним это
понятие. Данный режим полёта—это значит данный
характер установившегося движения самолёта. Он опре-
деляется скоростью полёта, формой траектории, работой
винтомоторной группы, пбложением самолёта относи-
тельно траектории и вертикали и т. п. При полёте на
определённом режиме все данные, характеризующие по-
лёт самолёта, остаются неизменными; так, например,
сохраняются скорость самолёта, кривизна и наклон
траектории, положение самолёта относительно траекто-
рии и относительно вертикали и т. д. Следовательно,
при полёте на определённом режиме силы, действующие
на самолёт, сохраняют свою величину и направление
относительно самолёта.
Примерами режимов являются.' прямолинейный по-
лёт с постоянной скоростью по горизонтальной или на-
клонной (набор высоты и планирование) траектории,
вираж постоянного радиуса и т. д. Примерами неуста-
новившегося движения могут служить: взлёт и посадка
самолёта, фигурный полёт, изменение скорости в прямо-
линейном полёте и вообще переход от одного режима
к другому. В этой книге мы разбираем главным образом
установившиеся движения, т. е. режимы полёта. При
этом будем придерживаться такого порядка: будем счи-
тать, что вес самолёта, площадь крыльев и аэродинами-
ческие характеристики самолёта известны и характер
§ 69] Условия РАВНОВЕСИЯ СИЛ ПРИ ГОРИЗОНТАЛЬНОМ ПОЛЁТЕ 221
движения самолёта задан, например, — прямолинейный
горизонтальный полёт на данной высоте с определённым
углом атаки или вираж с определённым углом крена
и т. п. Для такого заданного движения будем искать, како-
ва должна быть скорость полёта, тяга винта, мощность
винта. Эти величины мы будем называть потребными
величинами при данном режиме. Затем, зная характе-
ристики винтомоторной группы, определим, какую ма-
ксимальную тягу и мощность может развить винт при
данных условиях полёта. Эти величины мы назвали распо-
лагаемыми 'величинами.
Располагаемые величины характеризуют винтомотор-
ную группу; данный мотор с данным винтом разовьёт
при определённой скорости полёта ту же тягу и ту же
мощность, на каком бы самолёте он ни был установлен.
Напротив того, потребные величины зависят только от
веса и аэродинамических свойств данного самолёта и от
плотности воздуха. Они остаются без изменения, чем бы
ни создавалась сила тяги: работой ли винта, натяже-
нием ли буксировочного троса. Они характеризуют пла-
нер данного самолёта.
Наконец, сравнивая потребные и располагаемые вели-
чины, определим совместную работу планера и его вин-
томоторной группы: выясним, возможно ли данное движе-
ние, требуется ли для его осуществления работа мотора
при полностью открытом дросселе или остаётся запас
мощности и т. д.
Изучение режимов начнём с простейшего случая:
с прямолинейного равномерного горизонтального полёта
без скольжения — режима горизонтального полёта.
§ 69. Условия равновесия сил
при горизонтальном полёте.
При режиме горизонтального полёта скорость само-
лёта не меняется ни по величине, ни по направлению:
Ускорение самолёта равно нулю. Следовательно, и рав-
нодействующая всех сил, приложенных к самолёту, равна
нулю: все силы взаимно уравновешиваются. Заметим, что
сумма всех сил, действующих на самолёт, равна нулю
и в других случаях прямолинейного равномерного
222
Горизонтальный полёт
[гл. 8
движения. Равенство нулю равнодействующей ещё не
обеспечивает того, чтобы все моменты также взаимно
уравновешивались. Это надо поставить отдельным требо-
ванием, чтобы не могло возникнуть вращение самолёта.
Поэтому условиями, которым должны удовлетворять
силы, будут: 1. Сумма всех сил равна нулю. 2. Сумма
всех моментов равна нулю.
Сначала мы будем рассматривать только первое усло-
вие, а вопрос о моментах, действующих на самолёт при
том или ином режиме, рассмотрим в дальнейшем в от-
дельности. В вопросе о равнодействующей мы можем
учитывать только величину и направление отдельных сил,
точки же приложения этих сил могут быть выбраны как-
угодно. Для удобства будем условно считать все силы
приложенными в центре тяжести самолёта. Когда же
будем изучать равнове-
сие моментов, то, ко-
нечно, точки приложе-
ния сил будем брать
там, где они действи-
тельно находятся.
Далее, при изучении
равновесия сил будем
учитывать только силы:
вес самолёта, подъём-
ную силу, лобовое со-
Рис. 139. Схема сил в горизонталь-
ном полёте.
противление и тягу
винта. Другие, меньшие по величине силы, например,
подъёмная сила стабилизатора, играют, как увидим,
важную роль в равновесии моментов, но в вопросе о
равнодействующей силе ими можно пренебречь без за-
метной погрешности.
Наконец, в большинстве случаев ось винта составляет
настолько малый угол с линией полёта, что можно
практически считать силу тяги направленной по этой
линии.
На рис. 139 изображены силы, действующие на са-
молёт в горизонтальном полёте; они приложены условно
в центре тяжести; очевидно, для равновесия эти силы
должны быть попарно равны: подъёмная сила —весу
самолёта и тяга — лобовому сопротивлению. Условия
§ 70]
Потребная скорость
ра
вновесия записываются так:
Y=G,
Х = Т. J
223
(69)
Первое условие есть условие равновесия нормальных
следовательно, оно представляет собой условие
прямолинейности полёта. Второе условие — условие по-
стоянства скорости (равенство касательных сил).
При изучении других режимов мы также будем от-
дельно составлять условия равновесия нормальных и
касательных' сил, т. е. отдельно условие прямолиней-
ности и условие равномерности полёта.
§ 70. Потребная скорость.
Условия (69) дают возможность найти потребные ве-
личины скорости, тяги и мощности винта для каждого
угла атаки. Начнём с потребной скорости. Её можно
определить как такую скорость, при которой подъёмная
сила равна весу самолёта:
Y = G.
Заменим здесь подъёмную силу её выражением из фор-
мулы (34):
c^Sp|-=G.
Решая это уравнение относительно V, находим выраже-
ние для потребной скорости:
20
V — I ’
(70)
Иногда эту формулу переписывают в другом виде,
вводя «удельную нагрузку» q крыла — вес, приходя-
щийся в среднем на 1 ,w2 площади крыла:
q = у кг 1м2.
Тогда получим
v =
2?
(71)
224
Горизонтальный полёт
[™. 8
Отсюда видно, что при данной нагрузке па квадрат.
ный метр и данной плотности воздуха (т. е. при данной
высоте полёта) потребная скорость зависит только от
величины су, значит, в конечном счёте, от угла атаки
крыла. При больших углах атаки су велико, следова-
тельно, скорость должна быть мала; при малых а - ца.
чение су мало, а потребная скорость велика. Итак
каждому углу атаки соответствует своя потребная скп-
рость. Очевидно, далее, что при критическом угле атаки
при котором су максимально, по-
требная скорость имеет мини-
мальное значение р1п1п. Напротив
того, максимальной потребной
скорости вообще нет: при умень-
шении угла атаки и при прибли-
жении его к первому лётному
углу атаки значение су, умень-
шаясь, стремится к нулю, а по-
тому потребная скорость неогра-
ниченно растёт. Разумеется, эго
не .значит, что самолёт может
развить сколь угодно большую
скорость, если только придать
ему достаточно малый угол атаки.
Это только значит, что предел
Рис. 140. Зависимость
потребной скорости от
для увеличения скорости полёта
угла атаки. ставит винтомоторная группа, так
как при росте потребной ско-
рости растёт и мощность, потребная для поддержания
этой скорости. Предел же для уменьшения скорости по-
лёта ставит планер: при скорости, меньшей, чем мини-
мальная скорость, горизонтальный полёт невозможен ни
при каком угле атаки, так как подъёмная сила будет
меньше веса самолёта.
На рис. 140 показан примерный график зависимости
потребной скорости от угла атаки. Наименьшая ско-
рость — нижняя точка кривой — соответствует критиче-
скому углу атаки. Чем меньше угол атаки, тем больше
потребная скорость; при углах атаки, больших а,.Р>
потребная скорость снова растёт (так как су умень-
шается); но практически полёт на этих углах атаки не
§ 70]
Потребная скорость
225
производится: самолёт неустойчив и, сваливаясь на крыло,
переходит в штопор. Горизонтальный полёт на скорости,
меньшей глмп, невозможен ни теоретически, ни практически.
Минимальная скорость очень важна при посадке:
соприкосновение с землёй должно, для безопасности,
происходить при возможно меньшей скорости. Поэтому
посадочный угол атаки при «трёхточечном» положении са-
молёта в момент приземления должен быть близок к
критическому углу атаки. Например, при акр=15°
посадочный угол равен, примерно, 13?1). На современ-
ных скоростных самолётах потребная скорость, даже
при критическом угле атаки, слишком высока для воз-
можности безопасной посадки. Поэтому на таких само-
лётах применяют посадочные щитки, или закрылки, уве-
личивающие су крыла и, следовательно, уменьшающие
потребную скорость.
Простейший тип щитка показан на рис. 141. При
Открывании щитка — это производится при заходе на
посадку — изменяется обтекание крыла (рис. 142).
Рис. 141. Посадочный
щиток.
Рис. 142. Обтекание крыла с от-
крытым щитком.
Точка схода струй переходит с ребра обтекания крыла на
ребро обтекания щитка; циркуляция вокруг крыла увели-
чивается, и подъёмная сила крыла растёт. С другой сторо-
ны, за щитком образуется вихревая область: это увеличи-
вает лобовое сопротивление крыла. Лобовое сопротивление
увеличивается в большей степени, чем подъёмная сила;
поэтому при открывании щитка качество уменьшается.
На рис. 143 показаны поляры Лилиенталя для крыла
с закрытым и открытым щитком. Максимальное зна-
чение су, при котором практически и производится при-
Посадочный угол всё же выбирается несколько меньшим, чем
рнтический, так как при а'кр самолёт неустойчив и может свалить-
ся «а крыло.
М. А. Исакович
226
Горизонтальный полёт
[гл. 8
земление, увеличивается при открывании щитка, при
мерно, в 1,5 раза; это соответствует уменьшению
посадочной скорости более, чем на 20%. Уменьшенн
качества также благоприятно для посадки: угол качесп
при открывании щитков увеличивается, следовательно,
увеличивается и угол планирования при заходе на по-
садку (см. § 86). Крутое планирование позволяет произ-
Рис. 143. Поляра Лилиенталя при закрытом
и открытом щитке.
водить посадку на посадочные площадки с препятствиями
на подходах (рис. 144), используя «мёртвое простран-
ство» за препятствиями.
Формула (71) показывает, далее, что с увеличением
удельной нагрузки потребная скорость растёт. Это ска-
зывается и на величине минимальной скорости. Совре-
менные скоростные самолёты, имея большую удельную
нагрузку (порядка 200 кг/м2), имеют и большую мини-
мальную скорость.
Увеличение высоты полёта также увеличивает по-
требную скорость полёта, вследствие уменьшения плот-
ности воздуха. Так же сказывается и уменьшение плот-
ности воздуха вследствие повышения температуры: летом
потребная скорость больше, чем зимой (при том же угле
атаки).
§ 71]
Потребная тяга
227
Заметим, что понятие потребной скорости характерно
менно для самолёта. Все другие виды наземного, вод-
“Мг0 и воздушного транспорта имеют только «распола-
И°емые» скорости. Уравновешивание веса за счёт аэро-
Гинамических сил, зависящих от скорости, происходит
^олько для самолёта. Например, подъёмная сила, урав-
новешивающая вес дирижабля, возникает за счёт раз-
Рис. 144. Более крутое планирование при открытых щитках
позволяет производить посадку на аэродромах с плохими
подходами.
ницы в плотности лёгкого газа, наполняющего оболочку,
и воздуха. Поэтому у дирижабля и нет минимальной
скорости: он может неподвижно висеть в воздухе.
Некоторое сходство с понятием потребной скорости
встречаем только у глиссеров: там есть минимальная
скорость «выхода на редан».
§ 71. Потребная тяга.
Итак, при данном угле атаки самолёт летит горизон-
тально с определённой скоростью — потребной скоростью,
при которой Y— G. При этом лобовое сопротивление
также будет иметь вполне определённую величину. По-
требная тяга при данном угле атаки и будет равна этому
лобовому сопротивлению. Лобовое сопротивление, а зна-
Чит, и потребную тягу в горизонтальном полёте можно
выразить через вес самолёта и его качество К при дан-
15*
228
Горизонтальный полёт
[гл. 8
ном угле атаки. В самом деле, из формулы (39) следует-
л-=Л.
Но в горизонтальном полёте У — G, а потому
а'=4
и, следовательно, потребная тяга равна
Т=~.
(72)
7
-300
Рис. 145. Зависимость по-
требной тяги от угла атаки.
У^-НВ
« о ч 8 1г io а
Чем больше качество, тем меньше потребная тяга.
Так как при наивыгоднейшем угле атаки качество имеет
наибольшее значение, то по-
требная тяга при этом наи-
меньшая. Потребная скорость,
при которой потребная тяга
минимальна, называется наивы-
годнейшей скоростью; она со-
ответствует углу атаки анв.
Здесь снова самолёт как
средство передвижения пред-
ставляет исключение: для авто-
машины,'поезда, корабля и т. д.
потребная тяга тем меньше,
чем меньше скорость; с ростом
скорости растёт сопротивление
и, следовательно, потребная
для поддержания этой скоро-
сти тяга. Если же проследить изменение потребной тяги
при увеличении скорости (что соответствует уменьшению
угла атаки) для самолёта, то увидим, что, начиная с
минимальной скорости, потребная тяга убывает, при
наивыгоднейшей скорости достигает минимума, а затем
снова начинает расти. Примерная зависимость потребной
тяги от угла атаки показана на рис. 145. Нижняя точка
графика соответствует наивыгоднейшему углу ’атаки.
Сравним экономическую выгодность авиатранспорта
с выгодностью наземных средств передвижения. Работа
Потребная мощность
229
§721
СИЛЫ Т»™ "Р”
формУле ( -)>
перелёте на расстояние L равна, согласно
GL
К '
Величина -g соответствует коэффициенту трения для
заемного транспорта. Мы видели в§ 56, что коэффициент
трения Для наземного транспорта во много раз меньше
величины для самолёта. Следовательно, работа, тре-
буемая для передвижения по земле данного груза на
определённое расстояние, во столько же раз меньше ра-
боты, необходимой для перевозки груза на самолёте.
В этом смысле самолёт, примерно, эквивалентен повозке
на железных шинах, едущей по песку! Это указывает
на неэкономичность воздушной перевозки груза, оправ-
дывающейся только своей скоростью и независимостью
от путей сообщения.
§ 72. Потребная мощность.
Зная потребную скорость и потребную тягу в гори-
зонтальном полёте на данном угле атаки, можем под-
считать и соответственную потребную мощность винта Лв
по формуле (59):
с. (59)
или, так как Т — Х,
N = — .
в 75
Из последней формулы видим, что мощность винта
равна работе (за одну секунду) силы лобового сопротив-
ления. Таким образом, работа, совершаемая винтом, це-
ликом идёт на преодоление лобового сопротивления при
Движении самолёта.
, Заменим в формуле (59) величины 7'и и по формулам
(70) и (72). Тогда получим
Д’ 2 2 ,/2G G /2G _ (73)
8 75 К 1 cyS?~ 75 I S? К\ Гу ' 1 ’
230
Горизонтальный полёт
(гл. 8
От угла атаки в этом выражении зависит только
множитель ^Д--. Обратная ему величина 1<Ус^ обычно
называется коэффициентом мощности и обозначается бук-
вой s:
е = (74)
Чем больше коэффициент мощности, тем меньше потреб-
ная мощность, и обратно. Проследим, как меняется по-
требная мощность при увеличении угла атаки. Для этого
достаточно проследить за изменением е.
При первом лётном угле и К и су равны нулю, зна-
чит, равен нулю и коэффициент мощности; с увеличением
угла атаки К и су начинают расти, а вместе с ними
растёт и е; следовательно, потребная мощность убывает.
При наивыгоднейшем угле атаки качество достигает ма-
ксимума, су же продолжает увеличиваться. При этом рост
су за наивыгоднейшим углом атаки происходит всё ещё
быстрее, чем начинающееся убывание качества '). Поэтому
рост е и убывание потребной мощности продолжаются
и за наивыгоднейшим углом атаки. Но, с другой стороны,
за критическим углом атаки убывают и качество, и с;
поэтому максимальное значение е будет достигаться при
каком-то угле атаки, лежащем между наивыгоднейшлм и
критическим. Этот угол атаки называется экономическим и
обозначается аэк. Соответственная потребная скорость на-
зывается экономической скоростью. При экономическом
угле атаки потребная мощность имеет наименьшее значе-
ние и при дальнейшей! увеличении угла атаки снова начи-
нает расти. При скорости, меньшей, чем экономическая,
потребная мощность больше, чем при экономической скоро-
сти. И здесь, так же, как и в вопросе о тяге, самолёт пред-
ставляет исключение: например, потребная мощность
корабля тем меньше, чем меньше его скорость; потреб-
ная же мощность для самолёта растёт по обе стороны
от экономической скорости. На рис. 146 показана при;
мерная зависимость коэффициента мощности и потребной
мощности от угла атаки.
’) Вблизи максимума (или минимума) всякая величина меняется I
очень медленно.
231
Потребная мощность
§ 72]
Лоомулу (59) МОЖНО преобразовать так, чтобы на-
но показать зависимость потребной мощности от ско-
гЛ и полёта. Для этого подставим в формулу (59)
вместо Т выражение c^Sp — . Тогда получим
1
(75)
Япесь нужно обратить внимание на высокую степень, в
которой' в формулу входит скорость. В обычном гори-
зонтальной полёте углы атаки малы, и сх практически
Рис. 146. Зависимость по-
требной мощности и коэф-
фициента мощности от угла
атаки.
Рис. 147. Изменение потреб-
ной мощности при изменении
скорости.
почти постоянно; но потребные скорости меняются сильно.
В этом случае формула (75) показывает, что потребная
мощность пропорциональна кубу скорости и поэтому
растёт гораздо быстрее, чем скорость. Например, чтобы
Увеличить скорость на I °/0, необходимо увеличить мощ-
ность, примерно, на 3°/0; увеличение скорости на 10J/o
требует увеличения мощности на треть. На рис. 147
показана зависимость процентного изменения мощности
232
Горизонтальный полёт
Гг.т. 8
от процентного изменения скорости. Для небольших из-
менений можно принимать, что рост мощности в процен-
тах втрое больше роста скорости в процентах.
§ 73. Влияние полётного веса на потребные
величины.
При увеличении веса, например, при Дополнительной
загрузке самолёта, все потребные величины растут, но
не одинаково быстро. Чтобы найти зависимость потреб-
ных величин от веса, перепишем формулы (70), (72) и
(73) в таком виде:
з_
»=Гс/5. т=о1
Будем считать, что полёт производится на неизмен-
ной высоте и при неизменном угле атаки. Тогда все
множители, кроме первых, постоянны и, следовательно,
потребная скорость пропорциональна корню квадратному
из веса; потребная тяга пропорциональна весу в первой
степени; потребная мощность пропорциональна весу в
степени %. Быстрее всего растёт мощность, а медленнее
всего — скорость.
Для небольших изменений веса можно считать при-
ближённо, что изменению веса на 1% соответствует из-
менение скорости на О,5°/о, изменение тяги на 1°/0 и
изменение мощности на 1,5%. При изменении веса до 20%
ошибка в такой оценке скорости не превысит 0,5%, а
в оценке мощности — 1,5%.
Иногда удобно выразить изменение потребных вели-
чин при изменении веса самолёта другим способом, вводя
понятие перегрузки ’)• Какой-то определённый вес само-
лёта (обычно средний полётный вес) принимается за нор-
мальный вес G. Допустим, что при добавлении или снятии
груза вес самолёта стал равен G'. Отношение п новою
веса к нормальному весу называется перегрузкой:
!) Здесь понятие перегрузки отличается от того, которое было
принято в § 24 и с которым снова встретимся в § 104.
Влияние высоты полёта на потребные величины 233
§ 74'
вательно, G’ = nG. Теперь напишем выражения для
След0 х величин при новом весе самолёта, отмечая
п°тРс°лиЧины штрихами, в отличие от потребных вели-
чин для нормального веса:
✓ О'’ Г = °’-
Заменим в этих формулах С через nG:
3 , 3 |
\G* ты
Т’=П(С^),
2
Выражения, взятые в скобки, представляют собою по-
требные величины для нормального веса. Следовательно,
з
v' = Vnv, Г = пТ, W=n2N.
Напомним ещё раз, что при выводе этих формул
предполагается, что угол атаки остаётся тем же и при
новом весе.
§ 74. Влияние высоты полёта на потребные величины.
I Определим теперь, как изменяются потребные вели-
чины при изменении высоты полёта. Непосредственно
высота полёта, конечно, не влияет на потребные вели-
чины: значение имеет только изменение плотности воз-
духа при поднятии на высоту. По существу мы и будем
решать такой вопрос: как влияет изменение плотности
воздуха на потребные величины. Но так как плотность
воздуха зависит преимущественно именно от высоты по-
лёта, то этим самым будет дан ответ и на наш основной
вопрос.
Будем считать, что угол атаки остаётся неизменным,
и сравним горизонтальный полёт на высоте Н с полётом
На уровне моря. Плотность воздуха на уровне моря
°оозначим через р0, а на высоте Н — через pw. Остальные
величины также будем отмечать соответственными знач-
ками.
234 Горизонтальный полёт [Г1
Так как подъёмная сила при горизонтальном полёт
на любой высоте равна одному и тому же весу самолёТае
то должно выполняться равенство '
VH ^0
Су$Рц ~ = СУ$ Ро ~2
или после сокращения:
?hVh = Ро^о, (76)
т. е. при горизонтальном полёте на любой высоте и
при одном и том же угле атаки скоростные давления
равны. Поэтому при уменьшении плотности скорость
растёт, и обратно.
Из равенства (76) получим:
vH=v0^°-. (77)
Величина j/"называется высотным коэффициентом.
Он всегда больше единицы, так как с поднятием на вы-
соту плотность воздуха убывает. Следовательно, при
увеличении высоты потребная скорость горизонтальною
полёта растёт (при неизменном угле атаки). В частности,
растёт минимальная скорость, соответствующая крити-
ческому углу атаки. Например, на высокогорных аэро-
дромах посадочная скорость больше, чем на низменных.
Потребная скорость изменяется так же, как и при
поднятии на высоту, и в тех случаях, когда изменение
плотности вызвано другими причинами, например, из-
менением температуры воздуха. Так, зимой, при низких
температурах воздуха плотность повышена, поэтому
потребная скорость уменьшена. Наоборот, в жаркое время
года плотность уменьшается, а потребная скорость по-
вышается.
Чрезвычайно важно выяснить, как реагирует указа-
тель скорости на изменение плотности воздуха. Мы ви-
дели (§ 40), что указатель скорости измеряет, по суще-
ству, скоростное давление. Но скоростное давление при
полёте на неизменном угле атаки не меняется (измене-
ние плотности компенсируется изменением пот ребнои
скорости). Следовательно, при полёте па неизменном ) гле
74J Влияние высоты полёта на потребные величины 235
указатель скорости будет показывать всё ту же
атаКоСть, на какой бы высоте ни производился полёт
СК°аг бы ни менялась плотность воздуха вследствие
Изменения температуры.
1 Скорость, прочитанная на циферблате указателя ско-
ости. называется в авиации скоростью по прибору.
qTn—-та скорость, которую имел бы самолёт относительно
оздуха, если бы он летел при данном угле атаки на
voOBHe моря при «нормальных» атмосферных условиях,
действительная же воздушная скорость на высоте боль-
ше скорости по прибору. Очевидно, «истинная» воздуш-
ная скорость г1ГСТ связана со скоростью по прибору
Уприб соотношением.
^ист ^приб
Ро.
Ph
Это равенство необходимо, конечно, учитывать при
навигационных расчётах. Например, самолёт, держа ско-
рость по прибору 250 км/час на высоте 5000 м, пролетит
за один час расстояние не 250 км, но около 325 км.
Таким образом, для штурмана, подсчитывающего прой-
денное самолётом расстояние, это свойство прибора не-
удобно; оно требует специального пересчёта приборной
скорости на «истинную». На навигационной линейке штур-
мана под эти расчёты выделена специальная шкала.
Зато для лётчика это свойство удобно в высшей степени.
Держа определённую скорость по прибору, лётчик со-
здаёт определённые условия работы крыла, так как дан-
ной скорости по прибору соответствует вполне опреде-
лённый угол атаки, независимо от высоты полёта. Для
лётчика важна не «истинная» скорость, но аэродинами-
ческие силы; они же зависят от скоростного давления
точно так же, как и показания указателя скорости.
Так, например, посадка выполняется всегда на опреде-
лённой скорости по прибору, независимо от высоты аэро-
дрома над уровнем моря или от температуры воздуха.
«Истинная» скорость будет различна, но, доводя самолёт
До той же скорости по прибору, лётчик доводит машину
До того же посадочного угла атаки, т. е. до трёхточеч-
ного положения, что и требуется при посадке. Далее,
выполнение различных фигур требует известного разгона
236
Горизонтальный полёт
Ггл. 8
самолёта. На разной высоте самолёт должен разгонятьс
до различной скорости, чтобы получить при выполнециЯ
фигуры те же аэродинамические силы. Но по указател^
скорости, при выполнении какой-либо фигуры, лётчиц
должен всегда доводить самолёт до одной и той же ско*
роста, независимо от высоты полёта. Получающаяся
«истинная» скорость относительно воздуха автоматически
И км
/<'-
12-
Ю-
£-
6-
0-
г-
io i.z fjs is гл гл
Рис. 148. Зависимость высот-
ного коэффициента от высоты.
ооеспечит возникновение оди-
наковых аэродинамических
сил при любой высоте по-
лёта.
На рис. 148 показана за-
висимость высотного коэффи-
циента от высоты. График
вычерчен в предположении,
что плотность воздуха убы-
вает при поднятии на высо-
ту согласно международной
стандартной атмосфере.
Рассмотрим теперь влия-
ние высоты полёта на потреб-
ные тягу и мощность. Угол
атаки попрежнему будем
считать одинаковым при по-
лёте на высоте и на уровне моря. Поскольку подъём-
ная сила и качество остаются неизменными, лобовое
сопротивление также должно сохранять своё значение,
и, следовательно, потребная тяга на высоте равна по-
требной тяге на уровне моря (при том же угле атаки):
TW = TO.
Потребная же мощность растёт с увеличением высоты
полёта. В самом деле,
IV — THVH
75 •
Но
=
а потому
Nfi — N0
Ро
?н
-] влияние высоты полёта на потребные величины 237
§ 7
Таким образом, изменение потребной мощности про-
зонально изменению потребной скорости.
п°РПосмотрим теперь, как меняются потребные обороты
та при изменении высоты полёта при неизменном
в,1Н атаки. В этом случае, как мы видели, потребная
УгЛ не меняется. Но так как плотность воздуха с уве-
ТЯчением высоты уменьшается, то для получения той же
7111 необходимо увеличить число оборотов. Покажем,
тЯ пчя этого достаточно сохранить режим работы винта,
чТ0 . V „
т е. величину л =
что режим работы
уровне моря:
. В самом деле, предположим,
винта одинаков на высоте Н и на
— ),0,
т. е. он _ "о nSoD ’
откуда следует: n — He — SH so p0
или, согласно (77), (78a)
откуда
(786)
Напишем теперь формулу (62) для тяги на высоте Н
и на уровне моря:
ТH = aH?Hn2s
п
T^a^ri^D*.
Здесь ая = 20, так как коэффициент тяги зависит только
От режима работы винта. Поэтому, принимая во внима-
ние формулу (786), найдём: Тн — Тй.
Итак, каждому углу атаки соответствует, независимо
01 высоты полёта, не только определённая потребная
скорость по прибору, но и определённый режим работы
Ггл- 8
238
Горизонтальный полёт
винта. С другой стороны, из (78а) видно, что при увсли
чении высоты при неизменном угле атаки необходимо
увеличивать число оборотов в том же отношении, что
скорость («истинную» воздушную скорость, а не прибоп?
ную, которая остаётся без изменений).
В заключение рассмотрим мощность, потребную д;1я
полёта с данной воздушной скоростью на разных высо-
тах. При неизменной скорости для сохранения величины
подъёмной силы необходимо увеличивать угол атаки
чтобы увеличение су компенсировало уменьшение плот’
ности воздуха на высоте. Именно, произведение сур дол-
жно в данном случае оставаться неизменным при под-
нятии на высоту. Из формулы же (73) для потребной
мощности следует, что в этом случае потребная мощность
обратно пропорциональна качеству. Поэтому, если (как
практически всегда и бывает в горизонтальном полёте)
скорость больше, чем наивыгоднейшая (а значит, угол
атаки меньше анв), то для сохранения той же скорости
на большей высоте потребуется меньшая мощность: ка-
чество растёт с увеличением угла атаки при приближении
его к наивыгоднейшему углу. Следовательно, полёт с дан-
ной скоростью на высоте требует меньшей мощности и, в
конечном счёте, меньшей затраты горючего, чем полёт
у земли. Поэтому при полётах, особенно на большие
расстояния, расход горючего можно уменьшить, подобрав
определённую высоту полёта.
§ 75. Графики тяги и мощности.
В предыдущих параграфах мы научились вычислять
потребные величины при горизонтальном режиме. Напом-
ним ещё раз, что потребные величины — это ещё не
значит достижимые величины. Осуществляются ли они
для данного самолёта, зависит, как уже было сказано,
от работы винтомоторной группы, т. е. от располагаемых
величин. Поэтому для выяснения, например, вопроса
о скорости, фактически развиваемой самолётом, рассмо-
трим совместно потребные и располагаемые величины.
Очевидно, полёт при данной скорости возможен только
в том случае, когда потребные величины меньше распо-
лагаемых (или, в крайнем случае, равны им).
239
Г РАФИКИ ТЯГИ и мощности
§ 75]
Представим себе сперва горизонтальный полёт на
| 1 р моря при нормальном весе самолёта. Составим,
Ур°ьзуясь формулами (70), (72), (73) и полярою Лили-
п°лаЛЯя таблицу потребных величин для разных углов
ен* и включим в эту таблицу величины располагаемой
аТЯц и располагаемой мощности для соответственных по-
ТЯебных скоростей. Располагаемые величины возьмём из
графиков на рисунках 136, 137.
Таблица 2
1 2 3 4 5 б 7 8 9 10
СУ К ^нотр V км/час Т Л потр ^потр т 1 расп 1 урасп
— 2 0,09 0,032 2,8 89,5 322 430 513 90 108
2 0,43 0,040 10,7 41,0 117 112 61,5 275 150
6 0,76 0,064 11,8 30,8 105 102 42 300 123
10 1,08 0,120 9,0 5,5 25,9 93 131 46 307 106
14 1,22 0,220 24,3 87 220 72 310 101
Таблица составлена для самолёта со следующими данными:
вес G= 1200 кг, площадь крыла 26 №. Характеристики винтомотор-
ной группы взяты с рис. 136, 137. Плотность воздуха принята
равной ро = О,125.
Из таблицы видно, что до скорости 147 км/час (при
угле атаки 2J) потребные величины значительно меньше
располагаемых, при скорости же 322 км/час (при угле
атаки — 2°) потребные величины превосходят располагае-
мые. Отсюда заключаем, что максимальная скорость го-
ризонтального полёта лежит где-то между скоростями
147 км/час и 322 км/час и соответствует некоторому углу
атаки между —23 и 2Э. Чтобы уточнить пределы, в кото-
рых находится максимальная скорость, нужно было
бы сделать расчёт и для промежуточных значений угла
атаки. Однако, более удобно провести сравнение потреб-
ных и располагаемых величин, построив по таблице 2
гРафики тяги и мощности.
240
Горизонтальный полёт
[гл. 8
Графиком тяги называется график зависимости По
требной тяги от потребной скорости. Иначе говоря, Зт'
график зависимости лобового сопротивления от потреб°
ной скорости. Данные для построения графика возьмём
из столбцов 6 и 7 таблицы. На рис. 149 этот графИи
вычерчен, согласно составленной таблице, для углов
атаки, имеющих практическое значение. В соответствен
ных точках кривой отмечены углы атаки.
График потребной тяги характеризует планер дан.
ного самолёта. Для сравнения с данными винтомотор-.
Рис. 149. Кривые потребной п располагаемой тяги.
ной группы здесь же наносится кривая располагаемой
тяги. Такой общий график заменяет нам таблицу и
имеет перед ней преимущество большей наглядности.
Кроме того, по такому графику проще находить потреб-
ные и располагаемые величины и для тех промежуточных
углов атаки, для которых вычисления не произведены.
Отметим на графике некоторые наиболее важные
точки. Крайняя левая точка кривой потребной тяги (точка
касания с вертикальной касательной) даёт, очевидно,
минимальную скорость полёта. Соответственный угол
атаки равен акр. Нижняя точка кривой (точка касания
с горизонтальной касательной) соответствует минималь-
ной потребной тяге. Поэтому здесь должен быть отмечен
наивыгоднейший угол атаки анв, которому отвечает наи-
выгоднейшая скорость 1/нв.
Графики тяги и мощности
241
§ 75]
Если итти в сторону увеличения скорости, начиная
минимальной скорости, то располагаемая тяга будет
9оЛьше потребной вплоть до точки пересечения соответ-
ственных кривых. В этой области горизонтальный полёт
осуществим. При ещё большей скорости потребная тяга
ке превосходит располагаемую, и потому такая скорость
Недостижима в горизонтальном полёте. Следовательно,
точка пересечения кривых соответствует максимальной
скорости горизонтального полёта нгаах. Скорости, боль-
шей чем максимальная, самолёт может достигнуть толь-
ко разгоняясь при снижении, например, при пикиро-
вании.
Интервал между минимальной и максимальной ско-
ростями называется диапазоном скоростей. Иногда этим
термином называют отношение максимальной скоро-
сти к минимальной.
Конструктор самолёта
стремится увеличить
диапазон скоростей как
за счёт увеличения мак-
симальной скорости(она
является одним из глав-
ных тактических пока-
зателей военного само-
лёта), так и за счёт
возможного уменьше-
ния минимальной ско-
рости, что важно для
безопасности посадки.
Практически в полёте
используется лишь область скоростей, больших экономи-
ческой; экономическая скорость является практической
минимальной скоростью полёта, обеспечивающей кроме
того достаточную устойчивость и управляемость са-
молёта.
Итак, во всём диапазоне скоростей располагаемая
тяга превосходит потребную. Разность между ними на-
зывается избытком или запасом тяги. Мы будем обозна-
чать его через АТ. Наглядно избыток тяги представлен
на ^графике расстоянием по вертикали между кривыми.
Изоыток тяги зависит от скорости полёта. Наибольший
м. А. Исакович
Кривая
Рис. 150. Определение наибольшего
избытка тяги.
242
Горизонтальный полёт
[гл. 8
Рис. 151. Кривые тяг для разного
положения дросселя. Каждая кривая
соответствует определённому числу
оборотов.
избыток тяги получается при скорости, близкой к эко
комической. Эту скорость можно найти следующим об*
разом: сдвинем кривую располагаемой тяги параллельно
самой себе вниз, пока она не будет касаться кривой по-
требнойтяги в некоторой точке а (рис. 150). Расстоя-
ние, на которое сдвинута кривая, равно избытку
тяги для точки а; для любой другой точки это рассто-
яние больше соответственного избытка тяги. Следова-
тельно, наибольший избыток тяги получается именно
для точки а, соответствующей «.скорости наибольшего
избытка тяги».
Кривая располагаемой тяги соответствует полному от-
крытию дросселя; так как при этом получается тяга больше
потребной, то практи-
чески при горизонталь-
ном полёте мотор всег-
да дросселируется, и
число оборотов сбав-
ляется до такого, при
котором тяга, развива-
емая винтом при данной
скорости, оказывается
равной тяге, потреб-
ной при этой скорости.
Только полёт на мак-
симальной скорости
требует полного откры-
тия дросселя. Графичес-
ки дросселирование мотора показано на рис. 151. Каждая
кривая соответствует определённому положению дросселя
и определённому числу оборотовх); чем меньше число
оборотов, тем ниже проходит кривая. Для полёта на
какой-нибудь определённой скорости можно найти по-
требные обороты, выбирая ту кривую тяги винта, кото-
рая проходит через соответственную точку на кривой
потребной тяги. Таким образом, при полёте на скорости,
]) Это верно лишь приближённо: для того чтобы иметь неиз-
менные обороты мотора при разной скорости полёта, нужно, |<аК
мы знаем, уменьшать газ при увеличении скорости (например, при
переходе от набора высоты к горизонтальному полёту).
§ 75]
Графики тяги и мощности
243
еныпей максимальной, мы «снимаем с винта» тягу, мень-
шую располагаемой. Увеличивая открытие дросселя до пол-
1 ого газа, можно получить от винта избыток тяги и ис-
пользовать его, например, для разгона самолёта или для
набора высоты.
Перейдём теперь к графику мощностей, т. е. к гра-
фику зависимости между потребной " “
МОЩНОСТЬЮ и по-
Рис. 152. Кривые потребной и располагаемой
мощности.
требной скоростью. Он строится совершенно аналогично
графику для тяги по столбцам б и 8 таблицы 2. Так
Же, как и на кривой для тяги, на кривой потребной
мощности размечаются соответственные углы атаки; вы-
черчивается также и кривая располагаемой мощности
(рис. 152). Минимальная скорость, критический угол
атаки и максимальная скорость находятся по графику
точно так же, как и по графику тяги. Но горизонталь-
ная касательная к кривой потребной мощности даёт
здесь наименьшую потребную мощность и потому точка
касания соответствует экономическому углу атаки и
экономической скорости.
По графику можно найти и наивыгоднейший угол
атаки. Для этого заметим, что прямая, проведённая
из начала координат к какой-нибудь точке А кривой
потребной мощности, образует с осью абсцисс угол с,
16*
244
Горизонтальный полёт
Ггл. 8
тангенс которого
(рис. 153).
Но
равен отношению
- Для
точки 4
7У= —
2V 75 ’
следовательно,
, j. Tv Т
tg5 — 75 -V~ 75 '
Из всех прямых, проведённых из начала координат
к точкам кривой потребной мощности, наименьший угол
с осью абсцисс состав-
Рис. 153. Нахождение наивыгодней-
шего угла атаки по кривой потребной
мощности.
вается запасом или избытком
ляет касательная. Сле-
довательно, для точки
В касания tg с, а вместе
с тем и потребная тяга
имеют наименьшие зна-
чения. Поэтому точка
касания В соответствует
наивыгоднейшему углу
атаки.
Разность между рас-
полагаемой и потреб-
ной мощностью назы-
мощности ДА-Г. Избыток
мощности зависит от скорости полёта и достигает
Рис. 154. Определение наибольшего
избытка мощности.
наибольшей величины
при скорости, близкой
к наивыгоднейшей. По-
строение точки, в ко-
торой избыток мощ-
ности в точности мак-
симальный (рис. 154),
аналогично соответст-
венному построению для
избытка тяги.
Основные точки, на-
ходимые по графику
мощности, соответствуют, конечно, тем же скоростям,
что и найденные по графику для тяги.
§76]
Графики тяги и мощности
245
§ 76. Графики тяги и мощности при различном
полётном весе и различной высоте йолёта.
Зависимость потребных и располагаемых величин от
веса самолёта и от высоты полёта наглядно изображается
с помощью тех же графиков тяги и мощности. Рас-
смотрим сначала изменение полётного веса. При изме-
нении веса располагаемые величины остаются без изме-
нения. Потребная скорость при новом весе изменена в от-
ношении V п,- а потребная тяга в отношении п (п— пере-
грузка, см. § 71). Соответственно новым значениям потреб-
ных величин, можно
построить кривые по-
требной тяги для но-
вого веса.
На рис. 155 по-
строение выполнено
для нескольких зна-
чений перегрузки.
Пунктиром соедине-
ны одинаковые углы
Т иг
50 л---1---1--1---1---1---1---1---
80 ЮО 180 140 160 180 ООО /20 ъкм/час
Рис. 155. Кривые потребной тяги
для различного веса самолёта.
атаки, отмеченные
на кривых. Из чер-
тежа видно, что мак-
симальная скорость
убывает при увеличении перегрузки, угол же атаки,
при котором достигается максимальная скорость, рас-
тёт; минимальная скорость возрастает при увеличении
перегрузки; следовательно, диапазон скоростей умень-
шается. Избыток тяги также уменьшается для всего
диапазона скоростей. Для полёта на данной скоро-
сти необходимо увеличивать угол атаки; для полёта
на данном угле атаки необходимо увеличивать скорость
полёта.
Подобным же образом можно построить графики мощ-
ности, при перегрузке, учитывая, что потребная мощность
з_
изменяется в отношении п 2 .
Г рафики для различных высот полёта построим только
Для мощностей. Потребная скорость и потребная мощ-
246
ГОРПЗОНТАЛЬНЫЙ ПОЛЁТ
(гл. 8
ность при данном угле атаки изменяются, как мы
видели в § 72, в одном и том же отношении, равном вы-
сотному коэффициенту. Значит, кривая потребной мощ-
ности для какой-нибудь высоты подобна такой же кри-
вой для уровня моря. Отсюда вытекает и метод построения
(рис. 156). На прямых, проведённых из начала коорди-
нат к точкам основной кривой, лежат соответственные
Рис. 156. Потребные и располагаемые мощности для
разных высот полёта.
точки (для тех же углов атаки) кривых для других вы-
сот. Изменив длину всех отрезков прямых от начала ко-
ординат до точек основной кривой в отношении , по-
r f/f
лучим точки кривой потребных мощностей для высоты Я.
Критический, экономический и наивыгоднейший углы
атаки остаются без изменения, соответственные же скоро-
сти (и потребные мощности) вырастут в отношении .
' Рн
С другой стороны, изменение располагаемой мощности
с высотой зависит, как мы знаем, от типа мотора. Для
невысотных моторов мощность убывает с поднятием на
высоту (рис. 156). Для самолёта с таким мотором мак-
симальная скорость также убывает с поднятием на вы-
соту; уменьшается и диапазон скоростей, так как iw
§ 761
Графики тяги и мощности
247
бывает, а Птш растёт. Для высотного же мотора при
^однятии до расчётной высоты располагаемая мощность
Пастёт. Растёт и максимальная скорость полёта, и лишь
P,]Uje расчётной высоты начинает падать. Поэтому совре-
менные самолёты, снабжённые высотными моторами, до-
стигают наибольшей скорости полёта не на уровне моря,
а на расчётной высоте.
Изменение минимальной и максимальной скорости
при изменении высоты наглядно показано на примерном
графике рис. 157. До расчётной
высоты диапазон скоростей рас-
тёТ; выше же — уменьшается.
Для невысотного мотора умень-
шение диапазона начинается от
уровня моря. Чем больше высота
полёта, тем больше сближаются
минимальная и максимальная ско-
рости и, наконец, сходятся вместе.
На этой высоте полёт возможен
Рис. 157. Зависимость
максимальной и мини-
мальной скоростей от
высоты полёта. Пунк-
тирная линия — высот-
ный мотор.
только при одной единственной
скорости на одном единственном
угле атаки, близком к экономи-
ческому. Эта высота, называемая
теоретическим потолком, есть
предельная высота полёта само-
лёта. Выше этой высоты полёт невозможен, так как при
любом угле атаки потребная мощность больше, чем
располагаемая.
Предел для высоты полёта ставит уменьшение плот-
ности воздуха, вследствие чего падает мощность мотора.
Поэтому потолок может оказаться на разной высоте над
уровнем моря, в зависимости от фактической плотности
воздуха во время данного полёта. Если плотность воз-
духа выше нормальной, то потолок увеличен, и наоборот.
Но данные лётных испытаний пересчитываются, как мы
знаем, на стандартные условия международной стандарт-
ной атмосферы, и потолком считается именно та высота,
которой самолёт достиг бы, если бы атмосферные усло-
вия соответствовали международной стандартной атмо-
сфере. Эта рассчитанная высота -уже не зависит от атмо-
сферных условий.
248
Горизонтальный полёт
Н 8
§ 77. Изменение скорости в горизонтальном полёте.
Два режима горизонтального полёта.
Рис. 158. Переход к другой ско-
рости горизонтального полёта.
личилось и2), т. е. пеоейти
Представим себе, что требуется изменить скорость
горизонтального полёта, сохраняя прямолинейность дви-
жения. Пусть, например, самолёт летит со скоростью и
и требуется перейти к большей скорости v2.
Проведём на графике мощностей кривые мощности
винта соответственно скоростям vx и v2 (рис. 158.). По
графику видно, что для перехода к большей скорости
необходимо уменьшить
угол атаки и
увеличить обороты винта
(кривая 2 выше кривой
/). К этому же выводу
придём простым рассуж-
дением: чтобы увеличить
скорость, сохранив прямо-
линейность полёта, необ-
ходимо, чтобы подъёмная
сила осталась неизмен-
ной. Для этого нужно
уменьшить су (в том же
отношении, в каком уве-
к меньшим углам атаки.
Но, при удалении от экономического угла атаки, потреб-
ная мощность растёт (§ 70), следовательно, потребуется
и увеличение оборотов винта, т. е. большее открытие
дросселя. Следовательно, переход к большей скорости
следует выполнять так: давая вперёд рукоятку i аза
(увеличивая открытие дросселя), нужно одновременно
отдавать вперёд и ручку управления рулём высоты, что
приведёт к требуемому уменьшению угла атаки. Если
только увеличить обороты, оставляя угол атаки неиз-
менным, то по мере роста скорости будет возрастать
и подъёмная сила. Поскольку подъёмная сила будет те-
перь превышать вес самолёта, траектория полёта начнёт
искривляться вверх.
В обратном порядке происходит переход от большей
скорости к меньшей: необходимо, уменьшая обороты
винта, увеличить угол атаки. Рукоятку газа и ручку
Изменение скорости в горизонтальном полёте 240
§ 77]
„авления и в этом случае нужно сместить в одном
^том же направлении: на себя.
и рассмотрим ещё движение самолёта в том случае,
'огда, не трогая рукоятки газа, будем брать ручку управ-
кия' на се®я или отдавать её от себя. Собственно,
члесь движение получится неустановившимся; но по
кривой мощностей можно всё же выяснить характер из-
менения движения самолёта.
Пусть самолёт летит горизонтально при некоторой
скорости Потребная мощность равна мощности винта;
мотор работает не при полном числе оборотов. Возьмём
ручку на себя; подъёмная сила возрастёт, и траектория
начнёт искривляться вверх. Скорость полёта умень-
шится, подобно тому как уменьшается скорость автомо-
биля, въезжающего на подъём. Но при меньшей скорости,
как видно из рисунка, появляется избыток мощности.
За счёт этого избытка мощности самолёт сможет про-
должать набор высоты. Напротив, отдавая ручку от себя,
уменьшим угол атаки и искривим вниз траекторию са-
молёта; скорость возрастёт. При увеличенной скорости
потребная мощность больше располагаемой, и самолёт
сможет поддерживать увеличенную скорость только сни-
жаясь: недостающая мощность винта будет восполняться
работой силы тяжести.
До сих пор мы рассматривали, хотя и не оговари-
вали этого, только скорости, большие гэк. Полёт на
скорости, большей экономической (а значит, на угле
атаки, меньшем аэк), назовём полётом на 1-м режиме.
Полёт же при скорости, меньшей 1>эк (при угле атаки,
большем аэк), назовём полётом на 2-м режиме. Эконо-
мическая скорость и экономический угол атаки разде-
ляют |-й режим от 2-го.
Рассмотрим теперь полёт на 2-м режиме. Практически
такой полёт почти не встречается, но пилотирование само-
лёта во 2-м режиме представляет некоторые интересные
особенности.
Отметим раньше всего, что при данном положении
Дросселя возможен горизонтальный полёт на двух
Разных скоростях (соответственно двум точкам пере-
сечения кривой потребной мощности с кривой мощности
винта). Одна из них больше экономической (1-й режим),
250
Горизонтальный полёт
Егл. 8
а другая — меньше (2-й режим). Практически полёт про»
исходит всегда на 1-м режиме: при том же положений
дросселя, т. е. при той же затрате горючего, скорость
на 1-м режиме больше, чем на 2-м режиме, следовательно
полёт на 1 -м режиме выгоднее. Кроме того, полёт на 2-м ре’
жшие с его большими углами атаки и малой скоростью не-
удобен ещё и тем, что управляемость и устойчивость
самолёта хуже, чем на больших скоростях. Но есть и
ещё одна интересная особенность 2-го режима: это —
переход к новой скорости полёта. Рассматривая ход кри-
вой потребной мощности во втором режиме, видим, что
уменьшение скорости связано здесь с увеличением по-
требной мощности и обратно. Значит, желая уменьшить
скорость и беря ручку на себя (для увеличения уч ла
атаки), нужно передвинуть рукоятку газа от себя, уве-
личивая число оборотов. Наоборот, увеличение скорости
производится дачей ручки от себя и уменьшением числа
оборотов: и здесь ручка управления и рукоятка газа
передвигаются навстречу друг другу, в то время как
в 1-м режиме они двигались в одном направлении.
Если же работать ручкой, не трогая дросселя, то при
взятии ручки на себя уменьшим скорость; потребная
мощность станет больше мощности винта. Самолёт, летя
на увеличенном угле атаки, «с задранным носом», пе-
рейдёт к снижению, начнёт «проваливаться». При отда-
че же ручки от себя скорость самолёта возрастёт; по-
явится избыток мощности, и самолёт начнёт набирать
высоту.
Таким образом, действие руля высоты на траекторию
самолёта во втором режиме противоположно его дей-
ствию в первом режиме. Это явление называется обрат-
ным действием руля высоты на малых скоростях. Нужно,
однако, иметь в виду, что вышесказанное относится
только к медленным движениям ручкой, когда движение
самолёта почти установившееся: резко взяв ручку на
себя, можно и во втором режиме получить кратковре-
менное взмывание самолёта; но тем резче будет выра-
жено следующее за тем проваливание. Точно так же>
резко отдавая ручку от себя, получим «клевок носом»
с потерей высоты; но по мере приобретения большей
скорости самолёт всё же перейдёт к набору высоты.
Г Изменение скорости в горизонтальном полёте 251
указанные особенности второго режима затрудняют
дотирование самолёта, так как «обратное действие»
ПИ пей противоречит выработанным у лётчика рефлексам.
Поэтому полёт на втором режиме на малой высоте не-
безопасен.
Как мы УВИДИМ в дальнейшем, «два режима» полёта
характерны не только для горизонтального полёта, но
дЛЯ набора высоты и для планирования самолёта.
ГЛАВА 9.
НАБОР ВЫСОТЫ.
§ 78. Равновесие сил при наборе высоты.
Режимом набора высоты или, короче, режимом на-
бора называется подъём самолёта по 'прямолинейной
траектории с постоянной скоростью. Этот режим всегда
используется при длительных подъёмах; другие виды
подъёма — «горка», боевой разворот — дают более быстрый
набор высоты, но только на ограниченную высоту — они
представляют собой неустановившиеся движения с убы-
вающей скоростью.
Переход к режиму набора из режима горизонталь-
ного полёта выполняется следующим образом. Увеличив
открытие дросселя для получения избытка мощности,
лётчик «берёт ручку» управления рулём высоты «на себя»,
увеличивая угол атаки, а вместе с тем и подъёмную
силу. Равновесие сил нарушается: образовавшийся из-
быток подъёмной силы начинает искривлять траекторию
вверх. Когда траектория составит требуемый угол с го-
ризонтом, лётчик «отдаёт ручку от себя», уменьшая угол
атаки и подъёмную силу так, чтобы снова получить
равновесие сил. По достижении этого равновесия полёт
продолжается прямолинейно и равномерно, но уже по
наклонной траектории.
Рассмотрим условия равновесия сил при режиме
набора. Угол набора (угол между траекторией самолёта
и горизонтом) обозначим через 0. Силу тяги попреж-
нему будем считать направленной вдоль траектории, и
все силы будем откладывать от центра тяжести (рис. 159).
Разложим силу веса G по направлению траектории
(составляющая G2) и по перпендикуляру к траектории
(составляющая Gj). Тогда все силы, приложенные к са"
§ 781
рАВНОВГСИК СИЛ ПРИ НАБОРЕ высоты
253
-лёту, будут действовать по этим двум направлениям,
М приравнивая противоположные силы для обоих на-
правлений, получим два условия равновесия:
° Y = G '
(79)
Угол между силами G и GY равен углу набора 0 (углы
с0 взаимно перпендикулярными сторонами). Следова-
тельно,
G1 = Gcosfj, |
G2 = Gsin6, J
(80)
и условия равновесия можно переписать в таком виде:
Y =- G cos О,
T = X+GsinO.
Первое условие (79) есть условие прямолинейности по-
лёта, аналогичное первому условию (69) для горизон-
тального режима; второе условие — условие постоянства
скорости и аналогично второму условию (69). Из усло-
вий (81) видно, что при наборе высоты подъёмная сила
меньше веса самолёта, а тяга больше лобового сопро-
тивления. Чем больше угол набора 0, тем меньше должна
быть подъёмная сила и тем больше сила тяги. Если бы
тяга могла превзойти вес самолёта, был бы возможен
254
Набор высоты
[гл. э
вертикальный набор высоты. На современных самолёт
это ещё не достигнуто: при наборе на каждый кИд
грамм веса приходится обычно не более 0,1—0,2 кг сцл°'
тяги. Ч
поэтому
§ 79. Потребная скорость самолёта и лобовое
сопротивление при наборе высоты.
Потребную скорость при наборе высоты найдём, Как
и для режима горизонтального полёта, из условия пря.
молинейности полёта:
Y=Gr.
Различие с условием для горизонтального полёта только
в том, что подъёмная сила равна не весу G, а только
составляющей веса Gv в направлении, перпендикуляр,
ном траектории. Поэтому получаем и аналогичную фор.
мулу для потребной скорости
V = \/^-
на6 V cySp '
Заменим здесь Сг через Geos6:
Но первый множитель есть потребная скорость гори-
зонтального полёта о10Р (при том же угле атаки). Сле-
довательно,
"наб^гор^созО- (S3)
Подобным же образом можно выразить и лобовое сопро-
тивление при наборе Х,1а6 через лобовое сопротивление
в горизонтальном полёте АГ :
у- __Y Gl_____ G л / п
лНдб cos 0. (о4)
Но
G -
К---лгор>
(Ь5)
^a6 = ^ropCOSe-
§ уд] Потребная скорость самолёта при наборе высоты 255
Из формУл (83) и (85) найдём и мощность, расходуемую
интом на преодоление лобового сопротивления, и вы-
разим её через потребную мощность в горизонтальном
полёте:
-^наб^наб -^гор^гор. .4 , ,.4 ,о .
---- 75~ (cosO)2=Nrop(cosO)2. (86)
75
Заметим, что потребная тяга и потребная мощность
При наборе уже не равны, как это было для горизон-
тального режима, лобовому сопротивлению и секундной
работе лобового сопротивления; здесь эти величины со-
ставляют только часть потребных величин; кроме них,
потребная тяга долж-
на уравновесить ещё
составляющую G2 силы
веса, а потребная мощ-
ность произвести рабо-
ту против силы веса.
Формулы (83), (85)
и (86) показывают, что
потребная скорость, ло-
бовое сопротивление и
Рис. 160. Изменение величин v, X и
vX в зависимости от угла набора.
мощность, расходуемая
на преодоление лобово-
го сопротивления, мень-
ше, чем соответственные величины для горизонтального
полёта при том же угле атаки (косинус всегда меньше
единицы). Но для обычно встречающихся углов набора
эта разница невелика. На рис. 160 показано процент-
ное уменьшение величин v, X и Xv для набора сравни-
тельно с горизонтальным полётом в зависимости от угла
набора. Разница в скорости не превышает 5°/0 для углов
набора, не больших 25°; при этом разница в сопротив-
лениях не больше 1О°/о, а в мощностях —не больше 15°/0.
При углах же набора до 1СР даже разница в мощностях
не превышает 3°/0. Таким образом, за исключением
очень больших углов набора или случаев особо точных
расчётов, можно практически пренебрегать этой разни-
цей и считать потребную скорость, лобовое сопротивле-
ние и мощность, затрачиваемую на его преодоление при
Набор высоты
[гл. 9
256
наборе высоты, равными соответственным величинам
в горизонтальном полёте. В дальнейшей! мы и будем
пренебрегать этой разницей; это даст нам возможность
пользоваться графикал*и тяги и мощности, построенными
для режима горизонтального полёта и для решения
вопросов режима набора высоты.
§ 80. Потребная тяга и угол набора.
Обратимся теперь к условию постоянства скорости:
T=X + G sin 5.
Здесь Т — потребная тяга при наборе высоты с углом
набора 0. Потребная тяга при наборе больше лобового
сопротивления, т. е. больше потребной тяги в горизон-
тальном полёте при том же угле атаки. Поэтому набор
высоты возможен только при таких углах атаки (или
при таких скоростях), при которых в горизонталь-
ном полёте имеется избыток тяги. Так, например,
при максимальной скорости набор высоты невозмо-
жен, так как избыток тяги равен нулю. Для меньших
же скоростей избыток тяги имеется, и набор высоты
осуществим.
Предположим теперь, что мотору дан полный газ,
и найдём при этом условии угол набора при разных
скоростях полёта. Располагаемая тяга равна,, как видно
из графика тяги:
Т = Х-|_ДТ.
Сравнивая эту формулу с предыдущей, заключаем, что
при наборе высоты при полной мощности мотора:
G sin 0 = ДТ,
откуда находим:
sinO~. (87)
По этой формуле и определяется наибольший возможный
угол набора при данной скорости. Угол набора зависит
§ 80]
Потребная тяга и угол набора
257
от скорост»1’ так ка1< избыток тяги различен при разных
скоростях. Избыток тяги определяется по графику тяги
для горизонтального полёта. Наибольший угол набора
получается ПРИ той скорости, при которой избыток
тяги максимален. Таким режимом следует пользоваться
только в случаях необходимости получения предельного
угла набора- например, при взлёте с площадки, ограни-
ченной препятствием. Практически же этим режимом
избегают пользоваться, так как скорость' при нём мала
(близка к экономической), устойчивость самолёта ухуд-
шена, а б случае отказа мотора возможна «потеря ско-
рости».
При увеличении полётного веса угол набора умень-
шается: вО-первых, в формуле (87) увеличивается зна-
менатель, во-вторых,
уменылается числи-
тель вследствие рос-
та лобового сопро-
тивления.
Подъём с Данным
углом набора (за ис-
ключением предель-
ного) положен на
разных скоростях:
для каждого Угла на-
бора имейся опре-
Рис. 161. Перестроение графика потреб-
ной тяги на режим набора.
делённый диапазон
скоростей, Это легко проследить, перестраивая кривую
потребной тяги так, чтобы она давала потребную тягу при
наборе. ДЛЯ данного угла набора 0 потребная тяга увеличи-
вается на s*n сравнительно с потребной тягой в го-
ризонтальном полёте. Поэтому, сдвинув кривую потреб-
ной тяги ;1ля горизонтального полёта вверх на расстояние
G sin 6, поучим кривую потребной тяги для угла на-
бора 6 (pl’c. 161). Точки пересечения кривых потребной
тяги для различных углов набора с кривой располагаемой
тяги даюf режим набора при полной мощности мотора
на максимальных для этих углов скоростях. При меньших
скоростях ПРИ том же угле набора остаётся запас тяги.
При увеличении угла набора максимальная скорость и
Диапазон скоростей уменьшаются.
17 м. а. И;акович
[гл. 9
Набор высоты
§ 81. Потребная мощность и вертикальная скорость
при наборе.
При режиме набора мощность винта расходуется ца
работу против лобового сопротивления и на работу
против силы веса. Секундная работа против силы ло-
бового сопротивления равна;
Это — та же мощность, которая расходуется и при го-
ризонтальном полёте при той же скорости, т. е. потреб-
ная мощность горизонтального полёта.
Секундная работа против силы веса равна силе веса,
умноженной на вертикальную составляющую скорости
полёта (вертикальная скорость набора и м сек), или,
в лошадиных силах:
Это — мощность, «расходуемая на подъём». Следователь-
но, мощность, потребная для набора высоты, равна:
Если мотор работает при полном открытии дросселя,
то винт развивает располагаемую при данной скорости
мощность, которая должна равняться потребной мощ-
ности. Но располагаемая мощность равна, как мы
знаем,
Поэтому
(88)
Избыток мощности определяется для любой скорости
набора из графика мощности. Зная избыток мощности,
найдём вертикальную скорость по формуле:
(89)
§82]
УКАЗАТЕЛЬНИЦА ТРАЕКТОРИЙ ПОДЪЁМА
259
Наибольшая вертикальная скорость набора получается
при скорости, при которой избыток мощности макси-
мальный, т. е. при скорости, близкой к наивыгоднейшей.
Практически набор высоты и производится, примерно,
при этой скорости. Отметим, что наибольшая вертикаль-
ная скорость набора достигается не при наибольшем
угле набора, хотя разница в углах набора и невелика.
Как и угол набора, вертикальная скорость тоже
сильно зависит от полётного веса самолёта: с увеличе-
нием веса не только растёт работа против силы тяжести,
но и уменьшается избыток мощности.
Подчеркнём, что в то время как часть мощности,
расходуемая на преодоление сопротивления, тратится
безвозвратно, мощность, идущая на работу против силы
веса, увеличивает потенциальную энергию самолёта,
энергию его поднятия над землёй. Набирая высоту, са-
молёт приобретает запас работы, который в дальнейшем
можно ещё использовать, например, для разгона при
снижении. В воздушном бою преимущество — на стороне
лётчика, имеющего большую высоту: в распоряжении
лётчика имеется, помимо мощности мотора, ещё допол-
нительная энергия, которую он может использовать
в любой момент. Поэтому так важна, особенно для
истребителей, большая вертикальная скорость набора.
§ 82. Указательница траекторий подъёма.
Мы видим, что при разных углах атаки скорость
подъёма, угол набора и вертикальная скорость самолёта
V м/сек
Рис. 162. Указательница траекторий подъёма.
различны. Приведём наглядный график изменения всех
этих величин в зависимости от угла атаки.
На рис. 162 горизонтальная ось соответствует гори-
и зонтальной линии полёта; на ней отложен масштаб
17*
26С
Набор высоты
[гл. 9
скорости. Представим себе, что из точки О вылетает
самолёт, производящий набор высоты. Отложим в мас-
штабе от точки О вектор скорости этого самолёта
В конце вектора отметим угол атаки. Угол между век-
тором и горизонтальной осью есть угол набора 0. Длина
вектора равна величине скорости самолёта; на чертеже
её можно найти, перенося циркулем длину вектора на
горизонтальную ось. Вертикальная скорость равна ор-
динате конца вектора. Масштаб для вертикальной ско-
рости отложим на второй оси, проходящей через точку О.
Сделаем такое же построение для разных углов набора.'
Рис. 163. А — максимальная горизонтальная
скорость; В — угол атаки наибольшей скороподъ-
ёмности; С —угол атаки наибольшего угла
набора.
Концы построенных векторов расположатся по неко-
торой кривой, которая называется указателъницей тра-
екторий подъёма. Если бы из точки О одновременно вы-
летели самолёты, выполняющие набор высоты при раз-
ных углах атаки, то через единицу времени они достигли
бы соответственных точек на указательницз траекторий.
По указательнице легко проследить изменение основных
данных подъёма при изменении угла атаки. Начнём
с горизонтального полёта на максимальной скорости
(точка А на рис. 163). Теперь станем увеличивать угол
атаки, выбирая ручку на себя. Скорость полёта будет
уменьшаться, а угол набора и вертикальная скорость —
увеличиваться. В точке В (верхняя точка кривой,точка
касания её с горизонтальной касательной) вертикальная
скорость максимальна. При дальнейшем увеличении
угла атаки вертикальная скорость начинает уменьшаться,
но угол набора продолжает расти до точки С (точка
касания с касательной, проведённой из точки О). За
точкой С убывает и угол набора, хотя наклон фюзеляжа
§ 83]
Зависимость вертикальной скорости от высоты 261
, горизонту и продолжает увеличиваться. Точка С раз-
деляет первый режим набора высоты от второго. Прак-
тическое значение имеет только первый режим. Второй
режим характеризуется теми же особенностями, что и
для горизонтального полёта: устойчивость и управляе-
мость ухудшены, действие руля высоты — обратное:
в первом режиме взятие ручки на себя вызывает увели-
чение угла набора, во втором — его уменьшение. Встре-
чая перед собой препятствие, неопытный лётчик, в своём
стремлении «перетянуть» через него, склонен по возмож-
ности выше поднять нос самолёта; при этом можно по-
пасть во второй режим. Не говоря уже об опасности
срыва в штопор при уменьшившейся скорости, такое
«передирание» самолёта не достигает пели, так как угол
набора не увеличивается, а уменьшается.
§ 83. Зависимость вертикальной скорости подъёма
от высоты полёта.
При поднятии на высоту избыток мощности, кото-
рому пропорциональна вертикальная скорость подъёма,
изменяется благодаря двум обстоятельствам. Во-первых,
растёт мощность, затрачиваемая на преодоление лобо-
вого сопротивления. Во-вторых, меняется располагаемая
мощность винта вследствие уменьшения плотности воз-
духа. Для невысотных моторов располагаемая мощность
начинает уменьшаться уже при подъёме от уровня моря;
поэтому уменьшается и избыток мощности, и верти-
кальная скорость. Наибольшую вертикальную скорость
самолёт с невысотным мотором имеет у земли. Высот-
ный же мотор при подъёме до расчётной высоты увели-
чивает свою мощность: избыток мощности растёт, и верти-
кальная скорость увеличивается, примерно, до расчётной
высоты. При дальнейшем наборе высоты располагаемая
мощность начинает убывать, и вертикальная скорость
уменьшается так же, как если бы мотор был невысотным.
На рис. 164 изображены примерные графики зави-
симости вертикальной скорости набора от высоты по-
лёта. Вертикальная скорость для каждой высоты бе-
рётся наибольшая, т. е. соответствующая наибольшему
избытку мощности на данной высоте. Для этого скО’
262
Набор высоты
[гл. 9
рость самолёта по мере подъёма на высоту должн
расти: скорость, при которой избыток мощности наиболь
ший, увеличивается с поднятием на высоту. Меняется
и угол атаки, при котором имеется максимальный из
быток мощности. У земли — это угол, близкий к наивьь
годнейшему, а при подъёме на высоту сдвигается к эко-
Н км
Рис. 164. Зависимость вертикальной ско-
рости от высоты.
комическому, т. е. растёт. Поэтому по прибору скорость
наивыгоднейшего подъёма уменьшается, хотя воздушная
скорость и увеличивается. Заметим, что при увеличении
угла атаки мощность, потребная для преодоления лобового
сопротивления, уменьшается, что почти компенсирует
рост затрачиваемой мощности вследствие увеличения
скорости. Поэтому основным фактором, влияющим
на вертикальную скорость подъёма, является изме-
нение располагаемой мощности винта при подъёме на
высоту.
Графики рис. 164 почти прямолинейны. Точка встре-
чи графика с вертикальной осью соответствует теоре-
тическому потолку самолёта. Влияние высотности мотора
на потолок наглядно видно из сравнения графиков для
высотного и невысотного мотора. При той же мощности
на уровне моря, высотный мотор даёт увеличение по-
толка. Обратно, при том же потолке невысотный мотор
§ 831
Зависимость вертикальной скорости от высоты 263
должен был бы иметь очень большую мощность на
уровне моря.
3 Процесс набора высоты хорошо иллюстрируется так
называемой барограммой подъёма, т. е. графиком зави-
симости высоты набора от
времени, в течение которого "л
происходил набор высоты
(рис. 165). При составлении ----
графика принимается, что
самолёт летит, всё время на
скорости, соответствующей /
максимальной вертикальной /
скорости подъёма. Поэтому цУ. . ., , ,... ~,Линг
барограмма даёт наименьшее „ „
uapvi р м Рис. 165 Барограмма набора,
время, требуемое для подня-
тия ДО той или иной высоты.
Угол наклона кривой барограммы к горизонтальной
оси характеризует вертикальную скорость набора. Чем
высота ближе к потолку самолёта, тем положе идёт ба-
рограмма.
Барограмма вычерчивается на основании расчёта по
данным вертикальных скоростей на разных высотах.
При испытаниях самолётов и при рекордных полётах
на высоту барограмму «снимают» в полёте барографом —
самопишущим высотомером. Рычаг барографа заменяет
стрелку в приборе, устроенном по принципу высотомера:
смещение рычага соответствует изменению плотности
воздуха. Рычаг чертит линию на бумаге, обёрнутой во-
круг равномерно вращающегося барабана. Бумага раз-
графлена заранее таким образом, что линия, вычерчи-
ваемая на ней перемещающимся рычагом, даёт в каждый
момент высоту, на которой находится самолёт (рис. 166).
Сравнение такой, снятой в полёте, барограммы с теоре-
тически построенной барограммой позволяет проверить
расчёт вертикальной скорости на разных высотах.
Контроль за режимом набора высоты ведётся, во-пер-
вых, по скорости полёта: для каждой высоты полёта
Для данного самолёта известна наивыгоднейшая скорость
набора по прибору. Мы уже знаем, что эта скорость
убывает при подъёме на высоту. Другой способ опреде-
ления наивыгоднейшего режима набора — по варио-
264 Набор высоты £Гл g
метру — прибору, регистрирующему быстроту изменения
давления воздуха и показывающему непосредственно
вертикальную скорость самолёта. Наконец, режим на-
бора можно контролировать и по высотомеру, отсчи-
тывая его показания через определённые промежутки
времени.
ГЛАВА 10.
ПЛАНИРОВАНИЕ.
§ 84. Равновесие сил при планировании.
Спуск самолёта с высоты происходит обычно при уб--
ранном газе: мотор работает на малых оборотах, и винт,
хотя и не представляет дополнительного лобового сопро-
тивления, но и не даёт тяги. При снижении малые обо-
роты мотора, конечно, не подобраны точно так, чтобы
тяга была равна нулю, но практически ею можно пре-
небречь. Если же мотор выключен или испорчен и винт
остановился, то он создаёт дополнительное лобовое со-
противление.
Для перехода к планированию лётчик убирает газ;
лобовое сопротивление начинает тормозить движение
самолёта, подъёмная сила убывает, не уравновешивая
более вес самолёта, и траектория искривляется вниз.
Но при этом появляется составляющая веса вдоль тра-
ектории, равновесие сил снова восстанавливается, и
самолёт летит дальше прямолинейно и равномерно, но
по наклонной траектории.
Рассмотрим схему сил при планировании, причём
будем считать, что тяга равна нулю, дополнительного
сопротивления нет, и предположим, что снижение
происходит с постоянной скоростью по прямолинейной
траектории. Это — режим планирования, или, короче,
планирование самолёта. Траектория планирования часто
называется глиссадой. Угол между глиссадой и горизон-
том называется углом планирования.
При планировании самолёт движется прямолинейно
и равномерно; следовательно, силы, действующие на него,
взаимно уравновешиваются. Кроме силы веса, на само-
лёт действуют только подъёмная сила и лобовое сопро-
тивление. Их равнодействующая — полная аэродинами-
266
Планирование
[гл. Ю
ческая сила R — должна уравновешивать силу веса q
(рис. 167). Следовательно, сила R направлена вертИ.
кально вверх, а по величине
/? = G. (90)
Условие равновесия сил можно представить в дпу.
том виде, разлагая силы R и G по направлению граек-
тории и по направле-
нию, перпендикулярно-
му к траектории. Сила
R разложится снова
на подъёмную силу и
лобовое сопротивление,
сила же веса — на со-
ставляющие G, и G.,.
Из рис. 167 видно, что
угол планирования равен
углу качества 0 —углу
между подъёмной силой
и полной аэродинамической силой (углы со взаимно
перпендикулярными сторонами). Это — важный резуль-
тат, которым воспользуемся в дальнейшем.
Условия равновесия запишутся теперь в виде
y=G1, x=g2
(91)
или, так как угол между G и G( также равен углу ка-
чества,
У—Geos 6, X=GsinO.
(92)
Первое условие, условие прямолинейности полёта,
имеет тот же вид, что и условие для набора высоты.
Поэтому и выражение для потребной скорости при пла-
нировании нпя, выводимое из этого условия, будет иметь
тот же вид, что и для набора:
1'пл = ‘'гор-/сО80-
(93)
Здесь нгор обозначает горизонтальную скорость при том
же угле атаки, при котором происходит планирова-
ние. Для небольших углов планирования — а обычно
снижение самолёта происходит при С = 5° — 6Э, — Ра3"
§ 851
Спуск с работающим мотором
267
нцца между нпл и нгор мала, и можно приближённо
сЧитать:
Упл '’гор
фактически, как показывает формула (93), скорость пла-
нирования всегда меньше скорости горизонтального полёта
при том же угле атаки, но разница становится заметной
(например, достигает 2—3°/с) лишь при углах снижения
свыше 10°—15°. При крутых снижениях (например, пики-
рование) нужно пользоваться
точйой формулой (93).
§ 85. Спуск с работающим
мотором.
В некоторых случаях
спуск самолёта производится
при работающем моторе, на-
Рис. 168. Схема сил при
снижении с работающим мо-
тором.
пример, с целью догнать са-
молёт противника, летящий
на меньшей высоте. Отличие
в схеме сил от случая пла-
нирования с убранным газом
в том, что имеется ещё сила тяги, направленная по
Рис. 169. Перестроение графика потребной
тяги на режим снижения.
линии полёта вперёд (рис. 168). Условия равновесия
сил примут такой вид:
y = GcosO, X= G sin 6Т. (94)
268
Планирование
[гл. ю
второе условие можно переписать иначе:
Т = X — G sin 0.
Значит, потребная тяга меньше, чем лобовое сопротивление
на величину G sin 0. Для этого режима можно построить
кривые потребной тяги аналогично кривым рисунка 16]
для подъёма; но смещать кривые нужно теперь вниз
(рис. 169). Точки пересечения смещённых кривых с кривой
располагаемой тяги дают максимальную скорость при
данном угле снижения (при полном газе). Максимальная
нм/сен
Рис. 170. Продолжение указательницы траекторий
подъёма на режим снижения.
скорость быстро растёт при увеличении угла снижения.
Это лишний раз показывает важность преимущества в
высоте в воздушном бою: теряя высоту, можно получить
преимущество в скорости. Данными для скорости сниже-
ния при работающем моторе можно продолжить указа-
тельницу траекторий подъёма и на режимы снижения
при полном газе (рис. 170).
§ 86. Угол планирования.
Мы видели, что угол планирования равен углу ка-
чества. Поэтому при увеличении качества угол плани-
рования уменьшается. Наименьший угол планирования
получается при угле атаки, соответствующем наиболь-
шему качеству, т. е. при наивыгоднейшем угле атаки.
Практически наименьший угол планирования для разных
типов самолётов колеблется, примерно, от 4° до 7°, что
соответствует качеству от 14,5 до 8. Как мы уже говорили
раньше, всякая величина вблизи своего максимума из-
§ 871
Вертикальная скорость снижения
260
меняется медленно. Поэтому изменение угла атаки вблизи
от анв мал0 С1<азывается на угле планирования. Скорость
ке планирования меняется значительно. Таким образом,
планирование с углом, близким к наименьшему, возможно
в целом диапазоне скоростей, близких к ннв. Всякое
уменьшение качества самолёта увеличивает его угол
планирования. Так, например, при наружной подвеске
бомб (под крылья или под фюзеляж) крутизна глиссады
увеличивается. То же действие окажет выпускание шасси
в полёте, открывание посадочных щитков, открывание
колпака кабины лётчика и т. д.
Важно подчеркнуть, что угол планирования не зави-
сит ни от веса самолёта, ни от плотности воздуха, сле-
довательно, не зависит и от высоты полёта. Так, например,
самолёт с полным грузом бомб в бомбовом отсеке (внутри
фюзеляжа) и с полным запасом горючего имеет ту же
крутизну глиссады, что и после сбрасывания бомб и
израсходования топлива. Поскольку внешняя фор-
ма самолёта не меняется, его качество, а значит, и
угол планирования, зависят только от угла атаки.
Конечно, скорость планирования зависит и от по-
лётного веса и от высоты полёта, и здесь зависи-
мость та же, что и для потребной скорости горизонталь-
ного полёта.
Заметим, что угол планирования для данного угла
атаки можно найти по кривой Лилиенталя, вычерченной
в одинаковых масштабах. В самом деле, угол планиро-
вания равен углу качества, значит, он найдётся как угол
между соответственной секущей поляры и осью с (рис.
105).
§ 87. Вертикальная скорость снижения.
Высота, теряемая самолётом за одну секунду, есть
вертикальная скорость снижения. Обозначим её, как и
вертикальную скорость набора, буквой и м/сек. Из рис. 171
следует:
и=v sin 0.
При разных углах атаки вертикальная скорость сни-
жения различна. Иногда требуется, планируя с данной
высоты, продержаться в воздухе возможно большее время.
270
Планирование
[гл. ю
Для этого нужно планировать, имея наименьшую скорость
снижения. Угол атаки, при котором получается наимень-
шая скорость снижения, найдём из следующих сообра-
жений. При планировании работа, совершаемая против
лобового сопротивления, производится не за счёт мощ-
ности винта (так как тяга равна нулю), а за счёт работы
Рис. 171. Вертикальная скорость снижения.
силы веса. При снижении самолёта «мощность силы веса»
есть секундная работа силы веса, т. е. произведение Си;
эта мощность должна равняться секундной работе силы
сопротивления.
Но работа силы сопротивления равна потребной мощ-
ности при горизонтальном полёте; она имеет наименьшее
значение при экономическом угле атаки, Поэтому и вер-
тикальная скорость минимальна при экономическом угле
атаки и, чтобы дольше всего продержаться в воздухе
при планировании, нужно держать скорость нэк (но при-
бору).
§ 88. Дальность планирования.
Один из главных показателей режима планирования
есть дальность планирования с данной высоты (рис. 172).
При остановке мотора в воздухе важно иметь большую
дальность планирования, чтобы «дотянуть» до намеченной
посадочной площадки. Дальность планирования играет
роль и при «расчёте на посадку». Из рис. 172 видно,
что дальность планирования L зависит от высоты Н
самолёта над землёй и от угла 0 планирования. Чем
больше высота и чем меньше угол планирования, тем
больше дальность. Из прямоугольного треугольника АВС
следует:
L = tfctg0.
§ 881
Дальность планирования
271
цо 0 равно углу качества, а качество K = ctgO, значит:
L = H-K. (96)
Итак, Дальность планирования зависит только от вы-
соты и от качества. При снижении с данной высоты
дальность зависит только от качества, а поэтому наи-
большая дальность получится при наибольшем качестве,
т е. при наивыгоднейшем угле атаки (при наивыгоднейшей
скорости по прибору).
Рис. 172. Дальность планирования с данной
высоты.
Заметим, что наибольшая дальность планирования
достигается при большей скорости, чем наибольшая про-
должительность планирования (онв>оэк).
Дальность планирования с данной высоты не зависит
от веса самолёта: загрузка самолёта вызовет только
увеличение скорости планирования, наклон же глиссады
остаётся без изменения. Конечно, это верно лишь в том
случае, если дополнительный груз не изменяет качества
самолёта: например, при наружной подвеске бомб каче-
ство уменьшается, и угол планирования при том же угле
атаки возрастёт, т. е. дальность уменьшится. Выпуск
шасси и посадочных щитков тоже уменьшает качество
и дальность планирования. Поэтому, например, при оста-
новке мотора на большой высоте щитки и шасси не выпу-
скаются до тех пор, пока лётчик, снизившись по напра-
влению к выбранной посадочной площадке, не окажется
в Достаточной близости от неё.
Высота полёта не влияет на угол планирования, зна-
чит, расстояние, проходимое самолётом по горизонтали
при данной потере высоты, — одно и то же, с какой бы
'272
Планирование
[гл. ю
•высоты ни началось снижение. Например, на любой вы
соте снижение на 1 км соответствует продвижению салю'
лёта в горизонтальном направлении на расстояние /< КЛ1".
«дальность на каждый километр высоты равна качеству»’
Начиная планировать с высоты Н, самолёт может
пролететь расстояние НК в любом направлении и потому
может приземлиться в любой точке круга радиуса НК
Площадь этого круга очень велика даже при не очень
больших высотах полёта. Например, при качестве К — Ю
самолёт, планируя с высоты 1500 м, может пролететь
в любую сторону 15кжи выбрать посадочную площадку
на площади почти в 80000 гектаров. Практически эти
цифры необходимо несколько уменьшить, так как высота
теряется на разворот в нужную сторону и на выполне-
ние самой посадки.
Ветер изменяет дальность планирования, оставляя
время планирования / без изменения. Если ветер попут-
ный,—дальность увеличивается па wt, где iv —скорость
ветра. При встречном ветре дальность уменьшается на
ту же величину. При попутном ветре выгодно несколько
уменьшать скорость планирования сравнительно с наи-
выгоднейшей; при этом вертикальная скорость снижения
уменьшится, самолёт дольше пробудет в воздухе, и его
дальше отнесёт ветер. При встречном ветре, наоборот,
выгоднее увеличить скорость: самолёт скорее снизится,
.и относ его назад ветром будет меньше.
При данной воздушной скорости планирования угол
планирования относительно земли зависит от ветра. От-
носительно равномерно движущейся массы воздуха все
условия планирования те же, что и при штиле; но го-
ризонтальное перемещение самолёта относительно земли
изменяется при ветре: поэтому при попутном ветре кру-
тизна глиссады уменьшается, а при встречном — увели-
чивается. Это всегда нужно иметь в виду при заходе на
посадку.
При планировании с попутным или встречным ветром
вес самолёта оказывает влияние на дальность планирова-
ния: если, например, два одинаковых самолёта с одина-
ковым качеством, но разной загрузкой планируют с
одинаковой высоты, то более тяжёлый, имея большую
скорость, быстрее достигнет земли, и для него относ
§ 891
Указательница глиссад планирования
273
етром будет меньше. Поэтому при попутном ветре даль-
ность планирования для более тяжёлого самолёта будет
меньше, а при встречном — больше, чем дальность пла-
нирования более лёгкого самолёта. При штиле же даль-
ность планирования обоих одинакова.
§ 89. Указательница глиссад планирования.
Наподобие указательницы траекторий подъёма постро-
им указателъницу глиссад — кривую, наглядно представ-
ляющую зависимость скорости и угла планирования от
угла атаки.
Рис. 173. Планирование с разными углами атаки.
Представим себе, что из точки О (рис. 173) одновре-
менно начинают планировать самолёты при разных углах
атаки. Через одну секунду каждый из них проходит по
своей глиссаде отрезок, равный скорости планирования,
как это и изображено в масштабе на рисунке: все само-
лёты расположатся па точках некоторой кривой — ука-
зательницы глиссад. По горизонтальной и вертикальной
осям, проведённым через О, отложим принятый масштаб
скорости, а по кривой разметим соответственные углы
атаки. Теперь по указательнице можно определить основ-
Пд данные планирования при любом угле атаки (рис.
*'/• Отрезок, соединяющий начальную точку О с точкой
Указательницы, даст по величине и направлению скорость
М. а. Исакович
274
Планирование
[™. 10
планирования при соответственном угле атаки. Ордина
точек указательницы дают вертикальную скорость ощ1
жения. Проводя t
указательнице го-
ризонтальную каса
тельную, найдём наи-
меньшую вертикаль-
ную скорость сни-
жения, а значит, и
экономический угол
атаки. Касательная,
проведённая из точки
О, даст наименьший
угол планирования
и наивыгоднейший
угол атаки.
В случае попут-
ного или встречного
данных планирования
можно пользоваться той же глис-
UM/LOl
Рис. 174.
У
казательница глиссад пла-
нирования.
Рис.
175. При встречном ветре крутизна
планирования возрастает.
ветра для определения основных
(относительно земли)
садой, смещая лишь
начальную точку в
соответственную сто-
рону: при попутном
ветре — влево, при
встречном — вправо,
на величину, равную
скорости ветра по
масштабу. Такое сме-
щение равносильно
построению треу-
гольника скоростей,
как это пояснено на
рис. 175.
Аналогично, сме-
щая начальную точ-
ку вниз или вверх,
изобразим планирование самолёта в восходящих и нисхо-
дящих потоках воздуха. Если скорость восходящего потока
больше вертикальной скорости снижения, то результи-
рующая скорость относительно земли направлена вверх
§ 891
Указательница глиссад планирования
275
/рис. 176); самолёт, планируя, не теряет высоту, а на-
бирает её, переносясь вверх со всей массой воздуха.
Рис. 176. Планирование в восходящем по-
токе воздуха; траектория направлена вверх.
Этим пользуются при свободных полётах на планерах,
выбирая для набора высоты восходящие потоки воздуха
над холмами или в районе образования кучевых облаков.
18*
к
ГЛАВА 11.
РАВНОВЕСИЕ МОМЕНТОВ В ПОЛЁТЕ,
УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ.
§ 90. Главные оси самолёта и вращения
вокруг главных осей.
Для выполнения своего назначения самолёту, конеч-
но, недостаточна его способность летать на одном каком-
нибудь режиме; этим можно было бы удовлетвориться раз-
ве только для «летающей бомбы». Для полёта же на разных
режимах, для перехода из одного режима в другой и
для выполнения фигур лётчик должен иметь возмож-
ность изменять по своему желанию силы, действующие
на самолёт.
Величина силы сеса остаётся в полёте неизменной (по
крайней мере, пока рассматривается небольшой проме-
жуток времени, в течение которого расход горючего не-
велик). Но, изменяя наклон траектории к горизонту,
можно изменить направление силы веса относительно
траектории. Так, например, при снижении самолёта
составляющая силы веса, направленная по траектории,
«заменяет» силу тяги, производя работу против сил со-
противления и разгоняя самолёт. Наоборот, направляя
траекторию вверх, получим быстрое торможение самолёта,
так как составляющая силы веса вдоль траектории будет
направлена против движения.
Изменение силы тяги достигается лётчиком регули-
ровкой работы мотора и шага винта (в случае установки
на самолёте винта изменяемого шага), как мы это видели
в главе 7.
Наконец, величиной и направлением аэродинамических
сил лётчик управляет (помимо изменения скорости по-
лёта), изменяя положение самолёта относительно траек-
Главные оси самолёта и вращения вокруг осей 277
тории или относительно вертикали, поворачивая самолёт
пулями вокруг той или иной оси.
Мы будем различать вращение самолёта вокруг ка-
ждой из трёх взаимно перпендикулярных главных осей:
продольной, поперечной и нормальной. Главные оси вы-
бираются следующим образом: все они проводятся через
цзнтр тяжести самолёта; продольная и нормальная оси
располагаются в плоскости симметрии самолёта, а попе-
речная ось — перпендикулярно этой плоскости (парал-
лельно размаху крыла); продольная ось проводится вдоль
фюзеляжа, обычно параллельно оси винта. В горизон-
Рис. 177. В горизонтальном полёте наклон оси
самолёта к горизонту изменяется в зависимости
от угла атаки (от скорости полёта).
тальном режиме поперечная ось горизонтальна (полёт
без крена), а продольная может иметь небольшой угол с
горизонтом, в зависимости от угла атаки (рис. 177).
Вращение самолёта вокруг главных осей достигается
отклонением соответственных рулей.
Увеличение и уменьшение подъёмной силы крыла
получается (при данной скорости) при изменении угла
атаки; для этого требуется вращение самолёта вокруг
поперечной оси. Оно достигается с помощью руля высоты,
связанного с ручкой управления (рис. 178). При «взя-
тии ручки на себя» руль высоты отклоняется на своих
шарнирах вверх; самолёт поднимает нос («кабрирует»),
и угол атаки (а вместе с ним и подъёмная сила) растёт.
При «отдавании ручки от себя» руль высоты отклоняется
вниз, самолёт опускает нос, и угол атаки и подъёмная
сила уменьшаются.
Направлением подъёмной силы лётчик управляет (по-
мимо изменения наклона траектории к горизонту), на-
креняя самолёт, т. е. вращая его вокруг продольной оси.
Подъёмная сила наклоняется на тот же угол, на какой
накренён самолёт (рис. 179). Крен создаётся элеронами,
подвешенными на шарнирах к концам крыльев. Они
278
Равновесие моментов в полёте
[гл. 11
соединены с ручкой управления таким образом, что npi
боковом отклонении ручки тот элерон, в сторону кот0'
рого отклонена ручка, поднимается, а другой опускается'
Рис. 178. Передача от ручки управления к рулю
глубины н к элеронам.
При этом подъёмная сила крыла с опущенным элероном
растёт, а крыла с поднятым элероном уменьшается; са-
молёт получает вращение
вокруг продольной оси в ту
сторону, куда отклонена
ручка.
Лобовым сопротивлением
управлять почти не прихо-
дится. Уменьшить его в
полёте лётчик не может; уве-
личивать же его намеренно
Рис. 179. Наклон подъёмной приходится лишь при по-
силы на вираже. садке (выпуская посадочные
щитки) и при пикировании
(выпуская воздушные тормоза, если самолёт ими обо-
рудован).
§ 90] Главные оси самолёта и вращения вокруг осей 279
Боковой силой лётчик управляет, создавая скольже-
ние самолёта. Для этого он поворачивает самолёт вокруг
нормальной оси рулём поворотов, соединённым с педа-
лями (рис. 180). При «даче правой ноги» руль отклоняется
вправо, и самолёт поворачивается по часовой стрелке,
если смотреть сверху. Образуется левое скольжение, и
появляется боковая сила, направленная вправо. При
«даче левой ноги» возникают правое скольжение и боко-
вая сила, направленная влево. Скольжение можно полу-
чить и накреняя самолёт элеронами: скольжение начи-
нается в сторону опущенного крыла.
Рис. 180. Передача от педалей к рулю поворота.
Итак, действуя рулями, лётчик изменяет величину
и направление аэродинамических сил, действующих на
самолёт. Изменённые силы, в свою очередь, вызывают
желаемое изменение движения самолёта. Так достигается
управляемость самолёта. Различают продольную, попе-
речную и путевую управляемость. Продольная управляе-
мость соответствует вращению самолёта вокруг поперечной
оси; поперечная — вокруг продольной оси; путевая — во-
круг нормальной оси.
Аэродинамику рулей подробнее разберём после; пока
уточним только, в чём заключается их действие на само-
лёт. При отклонении рулей, аэродинамические силы,
действующие на них, изменяются: возникают дополни-
тельные аэродинамические силы. Эти силы невелики
сравнительно с другими силами, действующими на са-
молёт, например, в сравнении с подъёмной силой крыла
или с тягой винта. Но точки приложения этих сил
расположены далеко от главных осей: рули высоты и
поворота расположены в конце хвостовой части; эле-
роны— по концам крыльев; плечи этих сил велики,
а потому велики и их моменты относительно глав-
ных осей.
280
Равновесие моментов в полёте
[гл. ц
Эти моменты того же порядка, что и моменты «боль
ших» сил: подъёмной силы, тяги, боковой силы и
поэтому, действуя «малыми» силами рулей, всё-таки
можно получить желаемое вращение самолёта.
Отклоняя рули, лётчик изменяет по своему Желанию
моменты рулей; здесь проявляется двоякая роль рулей-
с одной стороны, подбирая соответственное отклонение
рулей, можно добиться равновесия моментов всех сил
действующих на самолёт, а вместе с тем и того или ино-
го режима полёта; это — статическая управляемость-
с другой стороны, рулями достигается и динамическая
управляемость самолёта, т. е. вращение его вокруг той
или иной оси.
Однако равновесием и управляемостью не исчерпы-
ваются требования, предъявляемые к самолёту. Очень
важным свойством самолёта является устойчивость его
в полётех).
Вопросы устойчивости мы будем рассматривать лишь
для прямолинейных режимов. Для таких режимов как
силы, так и все моменты, действующие на самолёт, взаи-
мно уравновешиваются. Однако случайные толчки, порывы
ветра и т. д. выводят самолёт из данного установивше-
гося движения, например, изменяют его угол атаки или
создают крен или скольжение. При этом будут изменяться
и силы и моменты, действующие на самолёт. Основную
роль здесь играет изменение моментов, так как силы
изменяются, как мы видели, именно при вращениях
самолёта, которые вызываются моментами. Каково будет
дальнейшее движение самолёта при нарушении режима
полёта? Здесь возможнытри случая: под действием изменив-
шихся моментов самолёт вернётся к исходному режиму; са-
молёт будет всё дальше отклоняться от исходного режима;
самолёт будет лететь в отклонённом положении при
каком-то новом режиме. В первом случае мы говорим,
что самолёт устойчив (точнее, что исходный режим устой-
чив); во втором случае — самолёт неустойчив; в третьем
случае мы говорим о безразличном равновесии при дан-
ном режиме.
!) В настоящей книге мы ограничимся разбором только так на-
зываемой статической устойчивости,
§ 90] Главные оси самолёта и вращения вокруг осей 281
Во всех этих случаях мы считаем, что лётчик не из-
меняет положения рулей. Нас интересует именно «само-
стоятельное» поведение самолёта при нарушениях режима.
Устойчивый самолёт возвращается к первоначальному
режиму без вмешательства лётчика; неустойчивый — всё
более и более отклоняется от этого режима и может,
например, сорваться в штопор, если лётчик во-время не
выправит самолёт рулями. Отсюда ясно, насколько важна
устойчивость для самолёта: она разгружает лётчика от
непрерывной работы рулями при частых, хотя и неболь-
ших, нарушениях режима, встречающихся в полёте. На
устойчивом самолёте лётчику достаточно лишь ускорять,
в случае надобности, возвращение самолёта к первона-
чальному режиму. Кроме того, как увидим в дальней-
шем, на неустойчивом самолёте усложняется и пило-
тирование.
Условием устойчивости является, как мы видели в § 17,
возникновение восстанавливающих моментов при наруше-
ниях режима, т. е. моментов, которые вращали бы само-
лёт в сторону, обратную создавшемуся отклонению.
Например, при возникновении правого крена должен
создаться момент, вращающий самолёт вокруг продоль-
ной оси влево — левокренящий момент. Наоборот, при
нарушении режима неустойчивым самолётом возникают
отклоняющие моменты. Наконец, при безразличном рав-
новесии не возникают ни восстанавливающие, ни откло-
няющие моменты: равновесие моментов сохраняется и
в полёте при отклонённом положении.
Устойчивость самолёта есть свойство, так сказать,
«обратное», до известной степени, управляемости. Коротко
говоря, устойчивость есть способность самолёта восста-
навливать первоначальный режим, в то время как упра-
вляемость— это способность самолёта изменять перво-
начальный режим. При управлении самолётом рули
создают моменты, отклоняющие самолёт от данного ре-
жима; устойчивость же создаёт при этом восстанавлива-
ющие моменты, направленные в противоположную сторону.
Таким образом, самолёт, обладающий большой устойчи-
востью (большими восстанавливающими моментами) менее
управляем, чем самолёт с меньшей устойчивостью, т. е.
требует больших отклонений рулей для изменения своего
282 Равновесие моментов в полёте ^гл ц
режима. И наоборот, сильное реагирование самолёта н
небольшие отклонения рулей указывает, вообще, на мень-
шую устойчивость: чем больше устойчивость, тем меньше
управляемость, и обратно. Поэтому самолёты, требующие
повышенной маневренности, например, истребители, обла-
дают обычно меньшей устойчивостью, чем пассажирские
самолёты, основное назначение которых есть полёт по
прямой и которые имеют большую устойчивость за счёт
уменьшенной управляемости.
Так же, как и для управляемости, различают про-
дольное, поперечное и путевое равновесие и продольную
поперечную и путевую устойчивость, соответственно ка-
ждой из трёх главных осей. Наибольшую важность пред-
ставляют продольные равновесие и устойчивость, так как
поперечное и путевое равновесия обеспечиваются сим-
метрией самолёта. Нарушение симметрии вызывается
лишь работой винта (реактивный момент), но эта несим-
метрия легко уравновешивается. Поэтому главное вни-
мание уделим моментам вокруг поперечной оси.
§ 91. Центровка самолёта.
Моменты сил вокруг поперечной оси сильно зависят
от положения самой поперечной оси, т. е. от положения
центра тяжести. Положение же центра тяжести зависит
от расположения различных грузов на самолёте, включая
сюда и вес самой конструкции. Вообще, особую важность
имеет расположение центра тяжести по длине самолёта;
расположение его по высоте меньше сказывается на лёт-
ных свойствах самолёта. Мы будем для простоты считать,
что центр тяжести расположен на самой хорде крыла,
но при практическом аэродинамическом расчёте расстоя-
ние по высоте центра тяжести от хорды тоже должно
быть учтено.
Самые большие силы, действующие на самолёт, — это
вес самолёта и подъёмная сила, создаваемая крылом.
Поэтому мы будем отмечать положение центра тяжести
именно относительно крыла. Положение центра тяжести
будем характеризовать центровкой. Центровкой самолёта
называется расстояние центра тяжести от ребра атаки
крыла, выраженное в процентах от длины хорды. Обо-
§ gij Центровка самолёта 283
„ачиМ центровку через £, расстояние центра тяжести от
ребра атаки через х и длину хорды через /; тогда
= =^-1ОО°/о. (97)
Центровка определяет, таким образом, взаимное положе-
нИе крыла и центра тяжести самолёта. Величина цен-
тровки сильно влияет на лётные свойства самолёта,
/особенности на его продольные управляемость и устой-
чивость.
Центровка самолёта при его стандартной загрузке
обычно известна. Мы покажем сейчас, как найти изме-
нённую центровку в случае изменения загрузки самолёта,
например, при добавлении на него или снятии некоторого
груза.
Предположим, что вес самолёта равен G, его «старая»
центровка равна а длина хорды равна t. Пусть на
самолёт добавлен груз Г на дх
расстоянии-1 от «старого» цен-
тра тяжести. Найдём новое по-
ложение центра тяжести или
смещение Дх центра тяжести
(рис. 181). Новое положение
центра тяжести есть точка при-
ложения равнодействующей сил
G и Г. Равнодействующая
должна давать вокруг старого
Рис. 181. Смещение центра
тяжести при добавлении
груза.
центра тяжести тот же момент,
что и две составляющие. Но
момент силы G равен нулю,
так как она проходит через точ-
ку, вокруг которой берётся момент. Поэтому момент
равнодействующей равен моменту силы Г. Равнодейству-
ющая равна <7 —1; её плечо есть Дх; плечо груза Г
равно I. Следовательно:
(G-|~Г)Дх = Г/,
откуда находим смещение центра тяжести:
284
Равновесие моментов в полёте
[гл. ц
Выражая это смещение в процентах от хорды няй
дём изменение центровки Д;: ’ ай'
Д= = Т-100 = ®ТП7|00’(«- (98)
Полученную величину нужно прибавить к старой
центровке, если груз кладётся позади центра тяжести **
вычесть — если груз кладётся впереди него (центр тяжесп
смещается в сторону добавленного груза). Таким обра*
зом, новая центровка равна р '
£' = £±Д;,
где Д; берётся по формуле (98).
Если груз Г снимается с самолёта, то Д; принимает вид:
Г/
д^=ё4т-1ОО°/о’
а в формуле (99) нужно брать знак плюс, если снимается
груз, расположенный впереди центра тяжести, и знак
минус, если он снимается позади центра тяжести.
Наконец, если данный груз только переносится на
расстояние I вдоль продольной оси самолёта, то
Д'=^-ЮОо/0,
и в формуле (99) знак плюс соответствует переносу
груза от носа к хвосту, а знак минус — противополож-
ному переносу.
Центровка современных самолётов (она колеблется от
20—35°/0 для разных типов самолётов) в полёте меняется
незначительно. Большое изменение центровки резко на-
рушило бы лётные свойства самолёта. Для того чтобы
в полёте центровка мало менялась, стремятся распола-
гать расходуемые в полёте грузы (горючее, боезапас,
бомбы) возможно ближе к центру тяжести самолёта.
Современные самолёты редко имеют прямолинейную
форму крыла; обычно крылья сужаются к концу; хорда
такого крыла изменяется вдоль размаха. Кроме того,
крылья часто имеют «стреловидность» в плане. Поэтому
при определении центровки самолётов с таким крылом,
положение центра тяжести относят к некоторой средней
хорде («средняя аэродинамическая хорда»). Для этого
§ 921
Продольные равновесие и устойчивость
285
иидсленно заменяют данное крыло
крылом, для которого момент
jioro крыла. Хорда такого прямоугольного крыла и на-
таким прямоугольным
аэродинамических сил
вокруг поперечной оси был бы таким же, как и для дан-
Едвается средней аэродинамической
хордой (рис. 182). В расчётах, от-
носящихся к равновесию моментов,
управляемости и устойчивости, цен-
тровка берётся обычно именно от-
носительно средней аэродинамиче-
ской хорды. Это позволяет сравни-
вать между собой центровку само-
лётов, даже имеющих различную
форму крыла.
Рис. 182. Средняя
аэродинамическая
хорда.
§ 92. Продольные равновесие
И уСТОЙЧИЕОСТЬ.
При изучении продольных равно-
весия и устойчивости мы будем
рассматривать моменты вокруг поперечной оси самолёта.
Моменты, вращающие самолёт в сторону увеличения
угла атаки, назовём кабрирующими моментами и будем
считать положительными. Противоположные моменты,
вращающие самолёт в сторону уменьшения угла атаки,
назовём пикирующими и будем считать отрицательными.
Наибольшими моментами вокруг поперечной оси
являются момент крыла и момент горизонтального опе-
рения. Начнём с рассмотрения момента крыла Мкр, т. е.
момента подъёмной силы крыла вокруг поперечной оси.
Момент крыла данного самолёта, летящего при данной
скорости, зависит от угла атаки и центровки самолёта.
При изменении угла атаки меняется как величина пол-
ной аэродинамической силы, так и её плечо относительно
Центра тяжести; при изменении центровки изменяется
только плечо силы.
Чтобы проследить изменение момента крыла, разберём
сперва случаи «очень передней» и «очень задней» цен-
тровки. Для наглядности воспользуемся упрощённой
моделью — схемой самолёта: стержнем, на котором укреп-
лено крыло и который может вращаться на шарнире
286
Равновесие моментов в полёте
[гл. Ц
(рис. 183). Положение шарнира на стержне, т. е.
жение оси вращения относительно крыла,
поло-
можно ме-
нять: шарнир соответ
ствует поперечной оси
самолёта, а его пере-
двигание — изменению
центровки.
Рис. 183. Модель крыла на стержне. НейГ центровке8 шаЕ
находится впереди кры-
ла (рис. 184). При первом лётном угле атаки ах на крыло
действует пикирующий момент Ми: аэродинамические
силы образуют пару. Момент сил, составляющих пару, не
зависит, как мы знаем,
от положения оси,
вокруг которой берётся
момент, следовательно,
момент Мо крыла при
угле атаки ах не зави-
сит от центровки.
Будем теперь уве-
личивать угол атаки
крыла. Вместо пары
теперь на крыло будет
действовать подъёмная
Рис. 184. Ось вращения впереди
крыла; передняя центровка; первый
лётный угол атаки.
сила, которая также будет давать пикирующий момент
(рис. 185). С увеличением угла атаки абсолютная всли-
Рис. 185. С увеличением угла атаки
пикирующий момент растёт.
чина момента будет ра-
сти (напомним, что пики-
рующий момент счита-
ем отрицательным). Аэ-
родинамические испы-
тания позволяют найти
этот момент для раз-
ных углов атаки и по
данным испытаний мож-
но построить график
зависимости момента
крыла от угла атаки. Оказывается, что почти до крити-
ческого угла атаки график изображается прямой
линией, идущей вниз (рис. 186).
§ 92]
Продольные равновесие и устойчивость
287
Аналогичный график получается и для «очень задней»
центровки (рис. 187). И здесь при угле атаки а, полу-
чается пикирующий момент крыла Мо (точка А на
рис. 188); но с увеличением угла атаки возникающая
Рис. 186. Зависимость момента крыла от
угла атаки при передней центровке.
подъёмная сила даёт возрастающий момент; график снова
изобразится прямой линией, но идущей с наклоном вверх
(рис. > 188).
При промежуточных значениях центровки также будем
получать прямолинейные графики, проходящие через
точку А; они будут раз-
личаться лишь своим на-
клоном. При увеличении
центровки от «очень пе-
редней» до «очень задней»
yjhw/mntm
Рис. 187. Задняя центровка:
ось вращения позади крыла.
Рис. 188. Зависимость момента
крыла от угла атаки при задней
центровке.
график момента крыла вращается вокруг точки А
против часовой стрелки. При некотором промежуточном
значении центровки график расположится параллельно
288
Равновесие моментов в полёте
[гл. П
оси абсцисс: при этом значении центровки момент крыла
одинаков при любом угле атаки. Как показывают аэро-
динамические испытания, момент, не зависящий от угла
атаки, получается при центровке, близкой к 25°/0. Точка,
лежащая на 25°/0 длины хорды от её ребра атаки, назы-
вается фокусом крыла. При меньшей центровке (центр
тяжести впереди фокуса) момент крыла убывает с уве-
личением угла атаки, и
график наклонён вниз;
при большей центровке
момент крыла растёт
вместе с углом атаки, и
график наклонён вверх.
Чем дальше центр тя-
жести отстоит от фо-
куса. тем больше наклон
графика (рис. 189).
Покажем теперь, что
рассмотренная упро-
щённая модель само-
лёта не может нахо-
диться в устойчивом
равновесии при лётных
Рис. 189. Зависимость момента кры-
ла от угла атаки при разных цен-
тровках.
углах атаки, т. е. при углах атаки, больших а,.
В самом деле, при малой центровке (опускающийся
график) равновесие (обращение момента крыла в нуль)
наступает только при угле атаки, меньшем щ (точка В
на рис. 186), при котором подъёмная сила уже отрица-
тельна. При большей же центровке (поднимающийся гра-
фик) равновесие хотя и возможно при лётном угле атаки
(точка С на рис. 188), но оно неустойчиво: увеличение
угла атаки вызывает появление кабрирующего момента,
а уменьшение угла атаки — пикирующего. В обоих слу-
чаях возникшие моменты будут увеличивать отклонение
от положения равновесия. Признаком неустойчивости
и здесь является наклон кверху графика возникающего
момента (сравни § 17). Таким образом, крыло в отдель-
ности неустойчиво на лётных углах атаки. Поэтому
для создания устойчивости уже в самых первых кон-
струкциях самолётов стали устанавливать горизонталь-
ное оперение — стабилизатор и руль высоты. Работу
§ 92]
Продольные равновесие и устойчивость
289
руля высоты разберём в дальнейшем, а теперь рассмотрим
момент МС1 стабилизатора — момент вокруг попереч-
ной оси подъёмной силы стабилизатора.
Стабилизатор — это небольшое крыло симметричного
профиля; он устанавливается позади крыла в конце хво-
стовой части самолёта и, следовательно, расположен
далеко позади центра
тяжести. Изменение цен-
тровки не оказывает за-
метного влияния на
момент стабилизатора,
так как перемещение
центра тяжести мало
сравнительно с рассто-
янием стабилизатора от
центра тяжести. Г рафик
зависимости момента
Рис. 190. Зависимость момента ста-
билизатора от угла атаки крыла.
стабилизатора от угла
атаки изображается, как и для крыла, прямой линией.
При отрицательном угле атаки момент стабилизатора
положителен (кабрирующий момент), а при положитель-
ном угле атаки — отрицателен (пикирующий момент). Та-
ким образом, момент
С ~ ~ стабилизатора убывает
... -г—с увеличением угла
атаки, и, значит, график
момента наклонён вниз
Рис. 191. Модель крыла со стабили-
затором на стержне.
(рис. 190). На этом
графике углы атаки от-
ложены для крыла.Фак-
тические углы атаки стабилизатора будут отличаться от
них, так как, во-первых, угол установки стабилизатора
обычно отличается от угла установки крыла, а, во-вторых,
поток воздуха отклонён за крылом вниз («скос потока»),
что уменьшает угол атаки стабилизатора.
Теперь учтём одновременное действие на самолёт обоих
моментов: момента крыла и момента стабилизатора.
Этому случаю соответствует упрощённая схема, изобра-
жённая на рис. 191. Шарнир попрежнему служит попе-
речной осью модели, следовательно, соответствует центру
тяжести. Равновесие осуществимо, если моменты крыла
19 М. А. Исакович
290 Равновг.сие моментов б полёте [гл. ц
и стабилизатора равны по величине и противоположны
по направлению. Чтобы найти угол атаки, при котором
это равновесие имеет место, построим совместно графики
моментов крыла и стабилизатора (рис. 192). Выберем та-
кую центровку, при которой крыло в отдельности не-
устойчиво. Сейчас мы увидим, что стабилизатор может
внести устойчивость.
Построим график результирующего момента М
действующего на самолёт. Для этого достаточно сложить
для каждого угла
атаки ординаты гра-
фиков для и для
Мст, учитывая при
этом знаки моментов.
«Результирующий
график» момента
Мкр + М„ также
изобразится прямой
линией, и точка пере-
сечения этой пря-
мой с осью абсцисс
даст угол атаки, при
котором наступает
Рис. 192. Суммарный момент крыла и
стабилизатора обозначен жирной ли-
нией.
равновесие моментов
(результирующий мо-
мент равен нулю).
Наклон результиру-
ющего графика определяет, устойчиво ли это равнове-
сие. При наклоне графика вниз — равновесие устой-
чиво, при наклоне вверх — неустойчиво. Очевидно, в
рассматриваемом случае условие устойчивости выпол-
няется, если угол наклона линии Мст к оси абсцисс
больше угла наклона линии Мкр, иными словами, рав-
новесие устойчиво, если момент стабилизатора изме-
няется быстрее момента крыла при изменении угла ата-
ки. Для того же чтобы МСТ изменялся быстрее, чем7Икр,
необходимо, чтобы стабилизатор имел достаточную пло-
щадь (величина силы) и был расположен достаточно
далеко от центра тяжести (плечо силы). При длинном
фюзеляже для устойчивости достаточна меньшая пло-
щадь стабилизатора, чем при коротком.
Продольная управляемость
291
§ 93]
Кроме моментов крыла и стабилизатора на самолёт
действуют и моменты силы тяги и лобового сопротивле-
ния. Но эти моменты мало изменяют характер зависи-
мости суммарного момента вокруг поперечной оси от угла
атаки. График зависимости от угла атаки результиру-
ющего момента всех сил, действующих на самолёт, имеет,
в целом, тот же вид, что и график'для момента 7Икр + Л4ст.
Поэтому будем рассматривать именно этот график, считая,
что моменты других сил уже учтены.
§ 93.-Продольная управляемость.
Теперь примем во внимание работу руля высоты. При
нейтральном положении руля, он составляет просто
продолжение стабилизатора. Мы будем считать, что гра-
фик рис. 192 составлен именно для этого случая. При
данном угле атаки крыла
можно изменить момент
оперения, поворачивая
руль высоты. При откло-
нении руля обтекание го-
ризонтального оперения
изменяется. Если угол
Рис. 193. Отклонение руля равно-
сильно изменению кривизны про-
филя.
атаки стабилизатора с рулём был положителен, то
отклонение руля вниз вызовет увеличение циркуляции
вокруг общего профиля стабилизатора и руля так же,
как если бы мы искривили профиль (рис. 193). Это уве-
личит подъёмную силу профиля, которая даст дополни-
тельный пикирующий момент. Конечно, вместо устрой-
ства поворотного руля за стабилизатором (изменение
формы профиля горизонтального оперения при отклоне-
нии руля) можно было бы просто поворачивать весь
стабилизатор в целом (изменение угла атаки при неиз-
менной форме профиля). Но, оказывается, уже поворот
части горизонтального оперения настолько изменяет
обтекание, что дополнительная подъёмная сила возникает
и на руле и на стабилизаторе, и изменение момента опе-
рения достаточно велико. С конструктивной же точки
зрения проще сделать подвижной только часть всей
площади оперения, чем двигать всё оперение. При от-
клонении руля вверх циркуляция вокруг оперения
10*
292
Равновесие моментов в полёте
[гл. н
уменьшается и может даже изменить направление. Со-
ответственно уменьшится или изменит направление его
подъёмная сила, и мы получим уменьшенный пикиру-
ющий или даже кабрирующий момент оперения.
На суммарном моменте отклонение руля скажется
следующим образом: отклонение вниз даст дополнитель-
ный пикирующий (отрицательный) момент; поэтому гра-
фик результирующего момента сдвинется вниз на вели-
чину дополнительно-
го момента. Откло-
нение руля вверх
равносильно добав-
лению кабрирующе-
го (положительного)
момента; значит, это-
му соответствует сме-
щение графика вверх.
Для разных откло-
нений руля глуби-
ны получим разные
смещения результи-
рующего графика.
На рис. 194 изобра-
жена серия графи-
Рис. 194. Гоафик суммарного момента
всех сил вокруг поперечной оси.
ков результирующих моментов для ряда различных от-
клонений руля. Угол отклонения руля й считается поло-
жительным при отклонении руля вниз (отдача ручки
управления от себя).
При различных отклонениях руля, соответственная
линия результирующего момента пересекает ось абсцисс
в разных точках, соответствующих разным углам атаки.
Поэтому при разных положениях руля равновесие мо-
ментов наступает при разных углах атаки: отклоняя
руль, можно уравновесить самолёт на разных режимах,
т. е. получить статическую управляемость. Статическая
управляемость считается достаточной, если при крайних
отклонениях руля вниз и вверх достигается равновесие
моментов на предельных углах атаки, встречающихся
в полёте. Это обычно углы а, и акр.
По графику рис. 194 видно, что чем больше угол
атаки, на котором совершают полёт, тем больше при-
§ 93]
Продольная управляемость
293
ходится «брать ручку на себя», и обратно — полёт на
уменьшенном угле атаки требует «отдачи ручки от себя».
Процесс перехода от одного угла атаки к другому
можно представить себе следующим образом: допустим,
например, что самолёт совершает установившийся гори-
зонтальный полёт на некотором угле атаки, соответ-
ствующем равновесию моментов при определенном откло-
нении руля высоты. Пусть А есть «изображающая точка»
такого режима на графике моментов (рис. 194). Пусть
требуется перейти к полёту на большем угле атаки. Возь
мём ручку на себя; в
первый момент угол
атаки крыла ещё преж-
ний, а угол отклоне-
ния руля уже изменён:
«изображающая точка»
перейдёт на другую ли-
нию моментов, соответ-
ствующую новому от-
клонению руля (точка
В). Но теперь равно-
весие моментов нару- рис 1Q5 на меньший
шено: точка В лежит г атаки.
над осью абсцисс, зна-
чит, на самолёт действует кабрирующий момент, кото-
рый и начнёт вращать самолёт вокруг поперечной оси,
увеличивая угол атаки. Рост угла атаки соответствует
перемещению «изображающей» точки вдоль по графику
вправо. Когда точка придёт в положение С на оси
абсцисс, самолёт примет новое положение, при котором
снова будет равновесие моментов, но уже при увеличен-
ном угле атаки. Путь «изображающей точки» показан
на рис. 194 стрелками.
Аналогично выполняется переход к меньшему углу
атаки при отдаче ручки от себя; путь «изображающей
точки» показан для этого случая на рис. 195.
Рассмотрим теперь особенности пилотирования не-
устойчивого самолёта. Для неустойчивого самолёта можно
построить такую же серию линий результирующего мо-
мента, но, в отличие от случая устойчивости, они будут
наклонены вверх (рис. 196). Допустим, что и здесь мы
294
Равновесие моментов в полёте
[гл. Ц
хотим перейти на больший угол атаки, например,
перейти из точки А в точку С по графику.
Раньше всего необходимо создать вращение самолёта
в сторону увеличения угла атаки, а для этого нужно взять
ручку на себя (переход в точку В). Возникший кабри-
рующий момент будет увеличивать угол атаки самолёта,
т. е. «изображающая точка» будет перемещаться вдоль
линии моментов вправо (к точке D). Но так как линия
моментов наклонена вверх, то при увеличении угла атаки
кабрирующий момент будет возрастать, и когда требу-
м
Рис. 196. Суммарные моменты для
продольно неустойчивого самолёта.
емый угол атаки будет
достигнут (точка D),
то равновесия моментов
не будет, а будет уве-
личенный кабрирующий
а момент. Чтобы полу-
чить равновесие момен-
тов при новом угле ата-
ки, т. е. перейти по
графику в точку С,
необходимо теперь от-
клонить ручку от себя
причём дальше, чем она
была в первоначальном
режиме. Таким обра-
зом, переход к большему углу атаки на неустойчи-
вом самолёте производится двойным движением ручки:
сперва на себя — чтобы создать вращение самолёта вокруг
поперечной оси; затем от себя, за первоначальное поло-
жение — чтобы притти к равновесию моментов на новом
угле атаки. Аналогичным двойным движением ручки вы-
полняется и переход на меньший угол атаки. Конечно,
такие двойные движения ручкой, необходимые при пи-
лотировании неустойчивого самолёта, затрудняют работу
лётчика.
§ 94. Влияние центровки на устойчивость
и управляемость самолёта.
Изменение центровки сказывается, как мы видели,
на наклоне графика момента крыла к оси абсцисс: при
увеличении центровки линия момента поворачивается
295
§ 94] Влияние центровки на устойчивость самолёта
против часовой стрелки. Соответственно этому, линия
результирующего момента также поворачивается в том
л<е направлении: по мере увеличения центровки, линия
момента, поворачиваясь против часовой стрелки, сначала
уменьшает свой наклон к оси абсцисс, затем становится
параллельно ей и, наконец, располагается с наклоном
вверх. Значит, при увеличении центровки переходим от
устойчивого равновесия к безразличному, а затем и к
неустойчивому.
Центровка, при которой наступает безразличное рав-
новесие (т. е. при которой момент не зависит от угла
атаки), называется критической центровкой. Обычно она
равна 35—40% хорды. Один и тот же самолёт устойчив
при центровках, меньших критической, и неустойчив
при центровках, больших критической. Уже отсюда ясно
важное значение центровки и необходимость её контроля
при загрузке самолёта.
По кривым моментов, вычерченным для разных цен-
тровок, можно проследить влияние центровки на степень
устойчивости и степень управляемости. Поясним пред-
варительно эти понятия.
При отклонении устойчивого самолёта от установив-
шегося режима (в рассматриваемом случае — при изме-
нении угла атаки) возникают восстанавливающие мо-
менты. Чем больше восстанавливающие моменты при
данном изменении угла атаки, тем большей будем счи-
тать степень устойчивости. Очевидно, чем круче опу-
скается линия момента, тем больше устойчивость
(рис. 197). Следовательно, с уменьшением центровки
устойчивость возрастает, а с увеличением центровки —
убывает. При критической же центровке устойчивость
равна нулю — при изменении угла атаки момент не по-
является. При центровке, превышающей критическую,
самолёт неустойчив, и степень неустойчивости тем больше,
чем больше центровка: здесь мерой неустойчивости яв-
ляется величина отклоняющего момента, возникающего
при данном изменении угла атаки.
Степень управляемости будем оценивать следующим
образом: если самолёт летит на некотором определённом
режиме, то для достижения равновесия при изменённом
угле атаки необходимо отклонить руль глубины на не-
296
Равновесие моментов в полёте
[гл. 11
который yi ол. Мы будем считать степень управляемости
тем большей, чем меньший угол отклонения руля тре-
буется для достижения равновесия при определённом
изменении угла атаки. Иначе говоря, управляемость тем
больше, чем больше изменение угла атаки, соответству-
ющее данному отклонению руля глубины. Для выяснения
влияния центровки на степень управляемости рассмотрим
Рис. 197. Восстанавливающий момент при
малой центровке больше восстанавливаю-
щего момента при большей центровке:
Л1 > М'\ при центровке больше критиче-
ской изменение угла атаки вызывает от-
клоняющий момент.
два графика моментов: при большей и при меньшей
центровке (рис. 198). Линии моментов на обоих графи-
ках проведены для одинаковых отклонений руля глубины,
например, через каждые 5° изменения угла й. Расстояние
по вертикали между соответственными линиями моментов
одинаково для обоих графиков — это расстояние есть
дополнительный момент отклонённого руля, не завися-
щий от центровки. Различные положения равновесия
определяются точками пересечения линий моментов с осью
абсцисс. Но чем положе идут линии моментов, тем боль-
ший участок оси абсцисс лежит между смежными точ-
ками пересечения, т. е. тем больше изменение угла
атаки при данном отклонении руля. Следовательно, при
полого опускающейся линии моментов управляемость
§ 95]
Давление на ручку
297
больше, чем при круто опускающейся, т. е. увеличение
центровки увеличивает управляемость, а уменьшение
центровки — уменьшает
Рис. 198. Сравнение управляемости при
малой и при большой центровке.
Мы встречаемся здесь снова с взаимной связью устой-
чивости и управляемости: изменение центровки изменяет
как устойчивость, так и управляемость, но увеличение
устойчивости связано с уменьшением управляемости, и
обратно.
§ 95. Давление на ручку.
Как ясно из схемы передачи к рулевому управле-
нию (рис. 178), для отклонения руля высоты и для
удержания его в отклонённом положении необходимо
прилагать к ручке определённую силу. Для отклонения
руля вверх ручку нужно тянуть на себя, для отклоне-
ния вниз — толкать от себя. Только при одном каком-то
промежуточном положении руля высоты можно «бросить
ручку», не прикладывая к ней никакого усилия: при
этом руль располагается вдоль потока таким образом,
что подъёмной силы на нём не создаётся, и ею момент
равен нулю1).
J) Обычно рули снабжаются противовесами (<< весовое уравно-
вешивание руля»), так что центр тяжести руля лежит на его оси.
Если центр тяжести не лежит на оси, а, например, смещён назад,
298
Равновесие моментов в полёте
[гл. Ц
Если приходится много маневрировать самолётом,
как, например, на истребителе в воздушном бою, или
на бомбардировщике во время выполнения противозе-
нитного манёвра, то работа ручкой делается утомитель-
ной. Так же утомительно пилотирование при «болтанке»,
когда всё время приходится прикладывать к ручке уси-
лия то в одну, то в другую сторону, отклоняя руль.
С другой стороны, при длительном полёте на неизменном
режиме, даже малое усилие, непрерывно прилагаемое
к ручке, очень утомляет лётчика. Поэтому на современ-
Рис. 199. Ком-
пенсация руля
поворота.
ных самолётах принимаются меры, умень-
шающие усилие, которое необходимо при-
ложить к ручке для отклонения руля, а
также устраиваются приспособления, по-
зволяющие лететь с брошенной ручкой
на любом режиме.
Уменьшить требуемое усилие на ручке
можно, уменьшая шарнирный, момент
руля, т. е. момент вокруг оси шарнира
аэродинамических сил, действующих на
руль. Этот момент и преодолевается мо-
ментом силы, передаваемой на «кабан-
чик» руля тягой, идущей от ручки управления. Меры,
уменьшающие шарнирный момент, называются аэроди-
намической компенсацией рулей. Простейший способ
компенсации — расположение оси шарниров так, чтобы
часть площади руля находилась впереди, а часть —
позади оси (рис. 199). Тогда подъёмная сила части
руля, расположенной впереди шарнира, уменьшает
шарнирный момент остальной части. Другой способ
это применение флеттнеров— небольших крылышек,
поворачивающихся на шарнирах в задней части руля
и соединённых тягой со стабилизатором (рис. 200). При
отклонении руля в одну сторону, флеттнер отклоняется
в противоположную. Подъёмная сила флеттнера проти-
воположна подъёмной силе руля. Но момент оперения во-
то при брошенной ручке он будет отклонён вниз и будет создавать
пикирующий момент. «Весовое уравновешивание» применяется и на
рулях поворота и на элеронах. Его главная роль — уменьшение
вибраций, возникающих при обтекании рулей потоком воздуха.
Давление на ручку
299
§ 95]
круг поперечной оси самолёта уменьшается незначитель-
но, так как сила, действующая на небольшой флеттнер,
мала сравнительно с силой, действующей на руль и
стабилизатор, Зато шарнирный момент уменьшается на
Рис. 200. Механизм флеттнера.
много, так как плечо относительно шарнира силы, дей-
ствующей на флеттнер, значительно больше плеча силы,
действующей на самый руль.
Для «снятия нагрузки» с ручки при разных режимах
полёта применяются триммеры (рис. 201). По конструк-
ции триммер близок к флеттнеру; но отклонение его
происходит не автоматически при отклонении руля, а
с помощью специальной передачи из кабины лётчика;
при движении же ручки трим-
мер не меняет своего поло-
жения относительно откло-
няющегося руля.
Триммер—это как бы
«руль руля». Если мы откло-
ним триммер, поставив его
под углом к потоку, то полу-
чим подъёмную силу триммера,
ный момент этой силы, который повернёт руль в сторону,
обратную отклонению триммера. Руль отклонится на
такой угол, при котором возникший шарнирный момент
руля уравновесит момент триммера. Для этого отклоне-
ния руля не нужно прилагать к ручке никаких сил.
Таким образом, отклоняя триммер, лётчик заменяет
300 Равновесие моментов в полёте [гл. 11
усилие на ручке аэродинамической силой на триммере.
Триммер управляет движением руля аналогично тому
как руль управляет движением самолёта.
Триммер не облегчает движений ручкой: чтобы устра-
нить усилие на ручке при другом угле отклонения руля,
необходимо переставить триммер. Таким образом, он
не может оказать помощи при быстром маневриро-
вании.
Но для каждого неизменного режима полёта можно
подобрать такое отклонение триммера, при котором нс
требуется прилагать к ручке никаких усилий.
Иногда применяется комбинированное устройство
триммер-флеттнер (рис. 202). Это — регулируемый в
полёте флеттнер. При отклонениях ручки он работает
как обычный флеттнер; изменяя же угол отклонения
триммера-флеттнера с помощью тяги, можно снять на-
а=======^ грузку с ручки при данном
,[-- режиме полёта так же, как
-----------J______JI и обычным триммером.
I_______—---------з<==- Компенсация, флеттнеры
I и триммеры применяются
Рис. 202. Триммер-флсттнер. не только на рулях высоты,
но и на рулях поворота
и на элеронах. И там назначение этих приспособлений
облегчение работы рулями: снятие боковой нагрузки
с ручки или нагрузки с педалей. Так, например, при
левом вращении винта реактивный момент вращает са-
молёт вокруг продольной оси, опуская правое крыло.
Уравновесить этот момент можно, отклоняя ручку влево,
но тогда непрерывно придётся прилагать к ручке боко-
вое усилие.
Если же элероны снабжены триммерами, то, откло-
няя вверх триммер правого элерона, вызовем опу-
скание правого элерона и поднятие связанного с ним
через передачу к ручке левого элерона. То же получится,
если триммером снабжён левый элерон и этот триммер
отклонить вниз.
Аэродинамическая сила, действующая на триммер,
отклонит элероны, заменяя давление, которое лётчик
должен был бы произвести на ручку; ручка же «сама»
отойдёт в сторону.
§ 96] Моменты вокруг продольной и нормальной осей 301
§ 96. Моменты вокруг продольной
и нормальной осей.
Продольная и нормальная оси самолёта лежат в пло-
скости симметрии самолёта. Поэтому при прямолинейном
полёте без скольжения моменты аэродинамических сил
вокруг этих осей симметричны и взаимно уравновеши-
ваются. В основном — это моменты подъёмных сил пра-
вого и левого крыла (вокруг продольной оси) и моменты
лобовых сопротивлений правого и левого крыла (вокруг
нормальной оси). Сила тяжести также обычно не даёт
момента вокруг этих осей, так как при симметричном
распределении нагрузки центр тяжести лежит в плоско-
сти симметрии. Неуравновешенным остаётся только ре-
активный момент винта вокруг продольной оси. Об
уравновешивании этого момента скажем в дальнейшем.
Равновесие вокруг продольной оси (поперечное рав-
новесие) является, как увидим, устойчивым, а равнове-
сие вокруг нормальной оси (путевое равновесие) — без-
различным.
Вращения вокруг продольной и нормальной осей об-
ладают следующей характерной особенностью: при по-
вороте вокруг одной из этих осей не только возникают
моменты вокруг этой оси, но движение самолёта изме-
няется таким образом, что возникают моменты и вокруг
второй оси. Так, например, при накренении самолёта
образуется скольжение на опущенное крыло, вследствие
чего появляются разворачивающие моменты, поворачива-
ющие самолёт вокруг нормальной оси в сторону сколь-
жения. Обратно, если самолёт по какой-либо причине
повернулся вокруг нормальной оси, то также возникает
скольжение, которое вызовет появление кренящего мо-
мента, накреняющего самолёт в сторону, противоположную
скольжению. Таким образом, появление разворачива-
ющих и кренящих моментов не вполне независимо друг
от друга и, по существу, устойчивость и управляемость
вокруг продольной и нормальной осей связаны между
собой. Однако мы будем для простоты рассматривать
устойчивость и управляемость для каждой оси в отдель-
ности, указывая только на особенности движения само-
лёта, обусловленные этой взаимной связью.
802
Равновесие моментов в полёте
(гл. 11
§ 97. Поперечная устойчивость.
Самолёт обладает поперечной устойчивостью, если
возникновение крена вызывает восстанавливающий момент
вокруг продольной оси, т. е. если при возникновении
левого крена образуется правокренящий момент, и обратно.
Рассмотрим подробнее сперва нарушение поперечного
равновесия — образование крена, а затем уже восста-
новление первоначального положения самолёта.
Рис. 203. Изменение углов атаки опускающегося и поднимающегося
крыла при вращении вокруг продольной оси.
В процессе возникновения крена самолёт вращается
вокруг продольной оси. Пусть образуется, например,
левый крен: левое крыло опускается, а правое подни-
мается. Это значит, что левое крыло, помимо общей
скорости полёта самолёта, получает дополнительную ско-
рость, направленную вниз; точно так же правое крыло
получает дополнительную скорость, направленную вверх.
Построив параллелограмм скоростей, получим резуль-
тирующие скорости для левого и правого крыла (рис. 203).
Из рисунка видно, что угол атаки опускающегося крыла
увеличивается, а поднимающегося крыла — уменьшается.
Но величина подъёмной силы зависит от угла атаки: с
увеличением угла атаки подъёмная сила растёт; вместе
с тем растёт и лобовое соцротивление. Значит, подъём-
ная сила опускающегося крыла возрастёт, а поднима-
кщлюся — уменьшится. Моменты подъёмных сил уже
§ 97]
Поперечная устойчивость
803
не будут уравновешиваться, и результирующий момент
будет замедлять вращение вокруг продольной оси. Та-
ким образом, при образовании крена создаётся тормо-
зящий момент, прекращающий накренение. Тормозящий
момент не обеспечивает ещё устойчивости: он не может
вернуть самолёт в ненакренённое положение, а может
только остановить вращение самолёта, прекратив нара-
Рис. 204. Равнодействующая
веса и подъёмной силы направ-
лена вбок.
Рис. 205. Траектория
искривляется под дей-
ствием равнодействую-
щей веса и подъёмной
силы.
стание крена. Отметим, что различие в лобовых сопро-
тивлениях правого и левого крыла создаст момент во-
круг нормальной оси, поворачивающий самолёт в сторону
опускающегося крыла. Особенно велик заворачивающий
момент будет при полёте на больших углах атаки, так
как в этой области лобовое сопротивление быстро растёт
при увеличении угла атаки. Уже здесь видна связь
между моментами вокруг продольной и нормальной
осей.
Итак, тормозящий момент останавливает накренение.
Каково будет дальнейшее движение самолёта? При на-
кренении подъёмная сила отклоняется от вертикали, как
показано на рис. 204. Равнодействующая веса и подъ-
304
Равновесие моментов в полёте
[гл. 1|
ёмной силы уже не будет равна нулю и будет направ-
лена перпендикулярно траектории в сторону крена.
Траектория самолёта начнёт искривляться в эту же сто-
рону (рис. 205). Но при искривлении траектории само-
лёт получит скольжение в сторону крена; снова наступит
изменение аэродинамических сил на левом и правом
крыле. Как указывалось в § 49, при скольжении рас-
пределение давлений по поверхности крыла таково, что
на крыле, со стороны которого набегает поток, подъём-
Рис. 206. Поперечное V крыла.
ная сила болыпё, чем на другом крыле. Следовательно,
при скольжении, вызванном креном, подъёмная сила
опущенного крыла больше, чем подъёмная сила подня-
того, и моменты подъёмных сил вокруг продольной оси
снова оказываются неуравновешенными. Здесь образуется
уже восстанавливающий момент, который и будет, умень-
шая крен, возвращать самолёт к первоначальному по-
ложению.
Восстанавливающий момент у плоского крыла неве-
лик; его можно значительно увеличить, располагая
крылья под углом («поперечное V», рис. 206). В этом слу-
чае крыло, в сторону которого происходит скольжение,
обтекается потоком под большим углом атаки, чем вто-
рое крыло. Особенно наглядно различие углов атаки
видно при обтекании крыла вдоль размаха (конечно,
практически такие случаи не встречаются). Тогда со
стороны набегающего потока крыло имеет положитель-
ный угол атаки, а с другой стороны — отрицательный.
В действительности, при скольжении скорость потока
имеет только составляющую вдоль размаха, которая
и увеличивает угол атаки со стороны скольжения и
уменьшает с другой стороны. Поэтому поперечное V
дополнительно увеличивает подъёмную силу крыла со
Потеря устойчивости. Штопор
305
§ 981
стороны скольжения и уменьшает подъёмную силу про-
тивоположного крыла; в результате восстанавливающий
момент возрастает.
И здесь возрастание подъёмной силы на одном крыле
сопровождается ростом лобового сопротивления на этом
крыле и разворотом самолёта в сторону скольжения,
т. е. в сторону опущенного крыла. Но, кроме этого,
при скольжении возникает боковая сила, направленная
в сторону, обратную скольжению. Точка приложения
этой силы лежит позади центра тяжести, так как зна-
чительная её часть создаётся вертикальным оперением,
которое лежит далеко позади центра тяжести. Поэтому
момент боковой силы увеличивает разворачивание само-
лёта в сторону скольжения
Итак, если самолёт получает вращение вокруг про-
дольной оси, вызывающее образование крена, то тормо-
зящие моменты остановят вращение, а восстанавлива-
ющие— вернут самолёт в ненакренённое положение
В то же время разворачивающие моменты повернут са-
молёт в сторону, в которую первоначально накренил-
ся самолёт. Вернувшись в прямое положение, само-
лёт будет лететь уже по изменённому направлению.
Таким образом, самолёт может выравнивать крены
(по крайней мере, не превышающие известной величины)
без вмешательства лётчика, т. е. обладает поперечной
устойчивостью, но при этом будет всё больше сбиваться
со своего курса.
§ 98. Потеря устойчивости. Штопор.
В предыдущем параграфе было показано, что тормо-
зящие, а также и восстанавливающие моменты возни-
кают вследствие того, что подъёмная сила крыла растёт
при увеличении угла атаки. Но при больших углах
атаки, приближающихся к критическому, рост подъём-
ной силы замедляется; вследствие этого и тормозящие
и восстанавливающие моменты уменьшаются, и попереч-
ная устойчивость ухудшается Если же угол атаки крыла
больше критического, то самолёт делается неустойчивым
относительно продольной оси. В самом деле, предполо-
жим, что угол атаки крыла превосходит д,р, и пусть
20 м. А. Исакович
306
Равновесие моментов в полёте
гл 11
самолёт начинает вращаться вокруг продольной оси
И здесь угол атаки опускающегося крыла увеличится,
а поднимающегося — уменьшится. Но в закритической
области, при увеличении угла атаки, подъёмная сила
। убывает: возникающий момент подъ
; \ ёмных сил' вокруг продольной оси
1 \ Зудет направлен в сторону начав
Jzyr шегося вращения и будет ускорять
। это вращение, что в свою очередь
еЩё увеличит различие углов атаки
] / опускающегося и поднимающегося
, / крыла. Одновременно различие ло-
। / бэвых сопротивлений (а в закрити-
। / ческой области лобовое сопротив-
/ ление быстро растёт при увеличении
угла атаки) создаст момент, вра-
*7 щающий самолёт вокруг нормальной
bs-. оси в ст°Р°ну опускающегося крыла.
Нарастание скорости вращения про-
дэлжится до тех пор, пока враща
У® и ющие моменты, возникающие на
/ 1 крыле, не уравновесятся противо-
/ положными тормозящими моментами
_ / । аэродинамических сил, действующих
® / i на фюзеляж и оперение самолёта.
/ । Подобная картина наблюдается
чЬл 1 при штопоре самолёта, наступаю-
щему щем при переходе крыла за крити
। ческий угол атаки. При штопоре
\ । траектория центра тяжести само-
\ i лёта — винтовая линия и, кроме то-
' 1 го, самолёт, описывая эту траекто
Рис. 207. Штопор рию, вращается вокруг вертикаль-
самолёта. ной оси, проходящей через центр
тяжести (рис. 207). Вращение во-
круг вертикальной оси может быть представлено
как комбинация вращений вокруг продольной и нор-
мальной осей, причём угловая скорость вращения
вокруг нормальной оси тем больше, чем мёныпий
угол составляет продольная ось самолёта с горизон-
том. В случае установиешезося штопора вращающие
Поперечная управляемость
307
§ ээ;
моменты крыла уравновешиваются тормозящими момен-
тами, образующимися при обтекании фюзеляжа и
оперения. ч
Штопорное движение самолёта возможно не только
вниз по винтовой линии с вертикальной осью, но и в
горизонтальном направлении, и по поднимающейся тра-
ектории (восходящий штопор). Такие фигуры, как пе-
реворот, «бочки», иммельман, представляют собой цели-
ком или частично штопорное движение самолёта с его
характерной особенностью: углом атаки, превышающим
критический.
§ 99. Поперечная управляемость.
Моменты вокруг продольной оси создаются элеронами.
При отклонении ручки в какую-нибудь сторону элерон,
расположенный на этой стороне, поднимается, а на дру-
гой— опускается. Опускание элерона равносильно уве-
личению кривизны профиля крыла. Согласно § 47, это свя-
зано с увеличением циркуляции вокруг крыла и, следова-
тельно, с увеличением подъёмной силы. Наоборот, подни-
мание элерона уменьшает циркуляцию и подъёмную силу.
Значит, при отклонении ручки, равновесие моментов
вокруг продольной оси нарушается, и образуется резуль-
тирующий момент, вращающий самолёт в сторону от-
клонения ручки. Таким образом, для создания крена
нужно отклонять ручку в ту сторону, куда желательно
накренить самолёт; обратно, чтобы выравнять крен, не-
обходимо «давать ручку» в сторону, противоположную
имеющемуся крену.
Рост подъёмной силы на крыле с опущенным элероном
сопровождается ростом лобового сопротивления. Поэтому
при отклонении ручки самолёт будет разворачиваться
вокруг нормальной оси в сторону, противоположную
отклонению. Например, при устранении левого крена
элеронами (отклонение ручки вправо) самолёт начнёт
разворачиваться влево. Для того чтобы сохранить на-
правление движения, необходимо будет «дать правую
ногу», т. е. отклонить руль поворота вправо, уравнове-
шивая этим левозаворачивающий момент элеронов. По-
этому работа ручкой всегда производится координирован-
но с работой ног (поворотом руля направления) так,
20*
308 Равновесие моментов в полёте [гл. 11
что при отклонении ручки влево «даётся левая нога», и
обратно.
С увеличением угла атаки поперечная управляемость
ухудшается: вблизи критического угла атаки отклонение
элерона лишь незначительно изменяет подъёмную силу
крыла. Напротив, заворачивающее действие элеронов
на больших углах атаки усиливается: опускание элерона
значительно увеличивает лобовое сопротивление крыла.
Поэтому при больших углах атаки (например, при по-
садке) возникающие крены не могут быть устранены
элеронами, и самолёт выравнивают, отклоняя руль по-
ворота в сторону, обратную крену. Такое отклонение
руля создаёт скольжение самолёта в сторону опущенного
крыла, что увеличивает подъёмную силу этого крыла и
выравнивает самолёт. Кроме того, при отклонении руля
поворота самолёт вращается вокруг нормальной оси, и
крыло, идущее вперёд, имеет относительно воздуха боль-
шую скорость, а значит, и большую подъёмную силу, чем
второе крыло; это также способствует выравниванию крена.
§ 100. Путевая устойчивость и управляемость.
При горизонтальном полёте положение самолёта, при
котором имеет место равновесие моментов, определено
только относительно поперечной и продольной осей: мы
видели, как при уклонении от положения равновесия
(при изменении угла атаки или при образовании крена)
возникают восстанавливающие моменты, возвращающие
самолёт к первоначальному режиму. Иначе обстоит дело
с равновесием моментов вокруг нормальной оси1). Здесь
нет определённого положения равновесия, т. е. того
специального направления полёта, при котором только
и уравновешиваются моменты: все направления полёта
равноправны в том смысле, что силы, действующие на
самолёт, не зависят от направления полёта так, как они
зависят, например, от угла атаки или крена. Самолёту
«безразлично», летит ли он на норд, на ост или на
зюйд-вест! Поэтому, если самолёт отклонился от за-
J) Ограничимся горизонтальным прямолинейным полётом, при
чём будем считать, что нормальная ось самолёта вертикальна;
при обычных лётных углах атаки это близко к действительности,
§ 100] Путевая устойчивость и управляемость
309
данного курса, то никакие восстанавливающие моменты
вокруг нормальной оси не возникают, и самолёт к пер-
воначальному курсу не возвращается.
В этом смысле путевая устойчивость отсутствует,
и путевое равновесие безразлично. Однако, при вращении
вокруг нормальной
оси, т. е. при самом
процессе нарушения
путевого равновесия,
восстанавли в а ю щ и е
моменты возникают
и сохраняются неко-
торое время и после
того как вращение
прекратилось. Эти
моменты могут умень-
шить возникающее
отклонение от курса,
а также не дают раз-
виться значительным
уклонениям при дей-
Рис. 208. Боко-
вая сила, воз-
никающая при
скольжении.
Рис. 209. Ис-
кривление тра-
ектории под
ствии тех или иных
действием боко-
заворачивающих мо-
вой силы.
ментов. Но эти мо-
менты неполностью возвращают самолёт к первоначаль-
ному направлению полёта: для «выдерживания» задан-
ного курса необходимо участие лётчика.
В самом деле, рассмотрим, что произойдёт, если в го-
ризонтальном полёте самолёт получит по той или иной
причине вращение вокруг нормальной оси. Пусть самолёт
вращается вправо. Тогда возникает левое скольже-
ние, а следовательно, и боковая сила (рис. 208). Под
действием боковой силы траектория будет искривляться
в сторону её действия (рис. 209), момент же боковой
силы будет вращать самолёт в обратную сторону, пре-
кращая скольжение. Скольжение прекратится, когда
плоскость симметрии самолёта совпадёт с направлением
скорости, и тогда момент вокруг нормальной оси исчез-
нет. Однако направление скорости уже изменилось
благодаря искривлению траектории, и направление полёта
будет уже не то, что вначале. Таким образом, путевая
21 М, А. Исакович
810 Равновесие моментов в полёте [гл. 11
•
устойчивость является только частичной. Путевая управ-
ляемость достигается отклонением руля поворота, соеди-
нённого с педалями (рис. 180). При отклонении руля
возникает подъёмная сила киля и руля, направленная
горизонтально — перпендикулярно направлению полёта.
Момент этой силы вращает самолёт вокруг нормальной
оси в сторону отклонения руля, создавая скольжение.
Взаимосвязь путевой и поперечной управляемости
наглядно проявляется при рассмотрении прямолинейного
полёта двухмоторного самолёта с одним остановленным
мотором. Мощность моторов современных самолётов до-
статочна для поддержания горизонтального полёта на
одном моторе. Но при этом возникают моменты, нуж-
дающиеся в уравновешивании для того, чтобы самолёт
мог лететь прямолинейно. В самом деле, если, например,
остановлен правый мотор, то сила тяги работающего мо-
тора создаёт момент, заворачивающий самолёт вправо.
Этот момент можно уравновесить отклонением влево руля
поворота; но тогда сила, действующая на руль перпенди-
кулярно к траектории, не может быть уравновешена при
прямолинейном полёте, происходящем в плоскости сим-
метрии: эта сила вызовет искривление траектории в
сторону остановленного мотора: самолёт пойдёт со сколь-
жением в эту сторону, в данном случае — вправо.
При этом сила, действующая на руль, уравновесится
возникающей боковой силой; но эта же боковая сила
даст дополнительный заворачивающий момент в сторону
остановленного мотора. Таким образом, получить одно-
временно равновесие сил и равновесие моментов с помощью
только руля поворотов — нельзя. Зато такое равновесие
можно получить совместным действием руля и элеронов.
Действительно, накренив самолёт в сторону работающего
мотора, наклоним подъёмную силу, горизонтальная со-
ставляющая которой уравновесит силу, действующую
на руль. С другой стороны, при накренении возникнет
скольжение в сторону работающего мотора, и боковая
сила, появляющаяся при таком скольжении, даст заво-
рачивающий момент того же направления, что и руль
поворота. При таком положении рулей можно лететь
прямолинейно, причём, увеличивая крен, можно даже
уменьшить отклонение руля поворота.
§ 101]
Реактивный момент
311
§ 101. Реактивный момент.
При вращении винта на него действует со стороны
воздуха реактивный момент, направленный против вра-
щения. Он является кренящим моментом, и для его
уравновешивания в полёте приходится применять спе-
циальные меры. На старых типах самолётов левое и
правое крыло ставились с разными углами установки:
например, при правом вращении винта (левокренящий
момент) левое крыло имело больший угол установки,
а следовательно, и больший угол атаки в полёте. Поэтому
и подъёмная сила этого крыла была увеличена, и раз-
личие в подъёмных силах левого и правого крыла соз-
давало уравновешивающий момент. Уравновешивания
можно, конечно, достигнуть и простым отклонением
ручки в сторону вращения винта, но при большой ве-
личине момента это связано с необходимостью боль-
шого давления на ручку, что вызывает утомление. На
современных самолётах реактивный момент уравновеши-
вают с помощью триммера элеронов, как это объяснено
в § 93.
Реактивный момент проявляется не только в полёте,
но и при разбеге самолёта по земле при взлёте. Его
действие в этом случае заключается в изменении давления
на колёса: например, при правом вращении винта левое
колесо нагружено сильнее, чем правое, а поэтому и тре-
ние левого колеса больше, чем правого, и при разбеге
самолёт разворачивается влево (вообще, в сторону, об-
ратную вращению винта), если не препятствовать этому
отклонением руля поворота. Тенденция к развороту
проявляется особенно сильно в начале разбега, когда
руль поворота ещё мало эффективен (скорость встречного
потока воздуха мала). Некоторые двухмоторные само-
лёты имеют винты противоположного вращения. Для
таких самолётов, при одинаковой работе моторов, сум-
марный реактивный момент равен нулю и ни накрене-
ния в полёте, ни разворачивания при разбеге нет.
ГЛАВА 12.
ВИРАЖ.
§ 102. Разворот без крена.
Самая важная и чаще всего встречающаяся эволюция
самолёта—это разворот, или вираж, служащий для
изменения направления полёта в горизонтальной пло-
скости.
Траектория самолёта при вираже —дуга окружности
большего или меньшего радиуса. Чем меньше радиус
виража, который может выполнить самолёт, тем лучше
его горизонтальная манёвренность — одно из важнейших
лётно-тактических свойств самолёта. В воздушном бою
самолёт, совершающий вираж меньшего радиуса, легче
сможет «зайти в хвост» своему противнику.
Будем считать, как это обычно и бывает, что во время
выполнения виража скорость самолёта постоянна по
величине. Однако ускорение при вираже (как и при
всяком криволинейном полёте) не равно нулю: при ви-
раже самолёт имеет центростремительное ускорение, на-
правленное к центру окружности виража. Величина
ускорения равна (§ б):
а=у м/сек2, (100)
где v м/сек есть скорость самолёта, а гм — радиус виража.
Следовательно, на самолёт должна действовать центро-
стремительная сила, равная массе самолёта т, умножен-
ной на ускорение:
т -кг.
Эта сила должна быть направлена к центру окружности
виража. Напомним, что масса т выражена в технических
50-2
§ 102]
Разворот вез крена
313
и связана с весом самолёта G соотно-
Следовательно, центростремительная
двумя путями:
берётся эта
траекторию
во-первых,
Рис. 210. Разворот без крена.
Внешнее скольжение.
единицах массы :
G
шением т = гТг .
У «о
сила равна у . Выясним теперь, откуда
центростремительная сила, искривляющая
полёта. Её можно получить
выполняя вираж без крена,
со скольжением; центростре-
мительной -силой здесь слу-
жит боковая сила. Во-вторых,
выполняя «правильный» ви-
раж с креном; здесь центро-
стремительной силой явля-
ется наклонённая подъёмная
сила, точнее — её горизон-
тальная составляющая.
Рассмотрим сначала ви-
раж без крена. Представим
себе,что самолёт летит прямо-
линейно и что лётчик «даёт но-
гу», т. е. отклоняет руль по-
воротов; для того чтобы не
дать образоваться крену,
придётся отклонить ручку в
сторону, обратную «данной
повернёт самолёт вокруг нормальной оси; плоскость сим-
метрии составит некоторый угол с направлением скорости
полёта (рис. 210) — возникнет скольжение (внешнее
скольжение). При скольжении появляется боковая сила;
она будет направлена перпендикулярно к траектории по-
лёта самолёта и будет искривлять её. Самолёт начнёт
выполнять вираж. Кроме того, при скольжении тяга
направлена под углом к траектории и имеет составляю-
щую 7\, направленную перпендикулярно к траектории
(рис. 210); эта составляющая также является центро-
стремительной силой; складываясь с боковой силой, она
будет уменьшать радиус виража.
Боковая сила, а также составляющая силы тяги при
скольжении обычно невелики: вместе они составляют
всего 0,1—0,2 веса самолёта. Поэтому радиус виражи
ноге». Отклонённый руль
314
Вираж
[гл. 12
получается большим, порядка километров, особенно для
современных скоростных самолётов, имеющих небольшую
боковую поверхность и летящих с убранными шасси.
Самолёты с высоким фюзеляжем с плоскими стенками
(например, пассажирские) или бипланы со стойками
(устаревшие типы) имеют большую боковую силу и спо-
собны на развороты без крена меньшего радиуса. Но
всё же, основным видом разворота для всех самолётов яв-
ляется вираж с креном. -
§ 103. Правильный вираж.
Предположим, что вираж с креном происходит без
скольжения; такой вираж называется правильным. На
правильном вираже подъёмная сила, лежащая в плос-
кости симметрии, отклонена от вертикали и имеет гори-
зонтальную составляющую, которая и является центро-
Рис. 211. Схема сил, действующих па самолёт при вираже.
При большем крене — большая подъёмная сила. Движение
рассматривается относительно земли.
стремительной силой. Так как скольжение отсутствует,
то направление скорости (касательная к окружности
виража) лежит в плоскости симметрии самолёта.
На рис. 211 изображена схема основных сил, прило-
женных к самолёту. С её помощью получим важные
соотношения между элементами виража: скоростью, ра-
диусом и углом крена.
Наклон подъёмной силы к вертикали равен углу
крена самолёта р (углу между поперечной осью и го-
ризонтом). Разложим подъёмную силу по вертикали и
§ 103] Правильный вираж 315
горизонтали на составляющие Yt и У2. Вертикальная
составляющая уравновешивает вес самолёта:
Yt = G. (101)
Уже отсюда видно, что полная подъёмная сила Y
больше веса самолёта.' Чем больше угол крена, тем
больше должна быть подъёмная сила, так как её вер-
тикальная составляющая должна оставаться равной весу
самолёта. Из прямоугольного
треугольника в разложении си-
лы Y находим:
у ——У1.
COS Р
или, так как Yr = G,
г=с-ггт-
С увеличением крена вели-
чина перегрузки растёт;
зависимость п от угла крена
показана на рис. 212. Особенно
быстрый рост п начинается при угле крена выше 45—50э.
Требуемое увеличение подъёмной силы достигается
или увеличением скорости полёта, или увеличением угла
атаки, или тем и другим вместе.
Рассмотрим теперь силу У2. Сила У2 является цен-
тростремительной силой; значит, она равна
О 102030405060708090 ?
Рис. 212. Зависимость пере-
грузки от угла крена.
• — ст!
3 9,8 г ‘
Но из того же прямоугольного треугольника следует:
или
Следовательно,
316
Вираж
[гл. 12
или
*ч2
‘8? = ад7- 0“)
Это равенство показывает, что при выполнении правиль-
ного виража без скольжения величины скорости полёта,
угла крена и радиуса виража связаны между собой:
их нельзя выбрать независимо друг от друга. Так, для
выполнения правильного виража данного радиуса, при
данной скорости, самолёту необходимо придать вполне
определённый угол крена согласно формуле (102). С этим
углом крена и будет лететь самолёт любого типа, если
только он выполняет вираж без скольжения при дан-
ных v и г. Например, при скорости полёта 250 км/час
(около 70 м/сек) вираж радиуса 200 м получится при
угле крена, который найдётся из равенства:
w=-7°2-
& 1 9,8-200
откуда ^ = 68э.
Равенство (102) можно переписать в таком виде:
7/2
(103)
2,5,
Г 9,8 tgГ
Радиус виража (при данном крене) прямо пропорциона-
лен квадрату скорости; это объясняет, почему скоростные
самолёты имеют большой радиус виража. Напротив того,
увеличение крена приводит к уменьшению радиуса.
Предел для увеличения крена (а значит, и для умень-
шения радиуса) ставится ростом требуемой для этого
подъёмной силы.
При полёте на высоте, для получения тех же аэро-
динамических сил при неизменном угле атаки,
рость должна быть увеличена в отношении ]/ —
г Рл
сотный коэффициент). Следовательно, радиус виража на
высоте при том же крене и том же угле атаки возрастёт
в отношении — :
Рн
ско-
гн=гЛ.
Рн
Скорость же по прибору останется неизменной.
§ 1041
Перегрузка на вираже
317
Рис. 213. Схема сил. дей-
ствующих на самолёт при
вираже. Движение рас-
сматривается относи-
тельно самого летящего
самолёта.
§ 104. Перегрузка на вираже.
При выполнении виража каждая точка самолёта имеет
центростремительное ускорение, равное — . Если ко всем
частям самолёта приложить силу инерции, равную массе
этой части, умноженной на ускорение, и направленную
от центра — центробежную силу —то все прочие силы
вместе с силами инерции будут находиться в равнове-
сии.
Строго говоря, ускорения различных частей самолёта
несколько различны: например, наружное крыло, нахо-
дясь на большем расстоянии от
центра виража, имеет и большее
ускорение, чем внутреннее кры-
ло. Кроме того, направление ус-
корения для разных частей само-
лёта (например, для носовой и
хвостовой части фюзеляжа) тоже
различно. Но размеры самолёта
малы по сравнению с радиусом ви-
ража; поэтому при рассмотрении
сил инерции движение самолёта
можно, без существенной ошибки,
считать поступательным, т. е.
считать, что ускорения одинаковы
для всех частей самолёта и по
величине, и по направлению. Тог-
да силы инерции будут действо-
вать вполне аналогично силе веса,
их равнодействующая будет при-
ложена к центру тяжести самолёта и, сложив вес са-
молёта и эту равнодействующую, получим перегру-
зочный вес самолёта G , приложенный к цгнтру тяжести
(рис. 213). Он отклонён от вертикали на угол [1 наружу.
Очевидно, центробежная сила I для всего самолёта в
целом равна:
а перегрузочный вес уравновешивается Полной подъёмной
силой
Gn=Y. (Ю4)
318
Вираж
[гл. 12
Перегрузка подсчитывается по формуле (20):
G V 1
П = <105)
График зависимости перегрузки от угла крена был
нами уже построен на рис. 212. Обратим внимание на
то, что перегрузка (при правильном вираже) зависит
только от угла крена.
Из равенства (105) найдём:
Y = G-n.
Напряжения и деформации частей самолёта таковы,
каковы они были бы в горизонтальном полёте, если бы
вес каждой части увеличился в п раз. Направление
с)
Рис. 214. Указатель
скольжения: а) гори-
зонтальный полёт; б)
левый вираж с внеш-
ним скольжением.
перегрузочного веса относительно
самолёта—то же, что и направление
«обычного» веса в горизонтальном
полёте. Перегрузочный вес откло-
нён от вертикали на тот же угол,
на который накренён и весь само-
лёт. Поэтому, например, ощущения
лётчика таковы, как будто его вес
увеличился; но зтот увеличенный
вес «прижимает» лётчика к сиденью
по тому же направлению, что и
«обычный» вес в горизонтальном по-
лёте: нет никакой тенденции «съез-
жать» с сиденья. Если бы в кабине
самолёта висел маятник, то он рас-
положился бы по направлению
перегрузочного веса, параллельно
плоскости симметрии самолёта. Та-
кой маятник действительно имеется
на самолёте: это — «указатель сколь-
жения», или «шарик». Устройство
прибора показано на рис. 214. Шарик может сво-
бодно перемещаться по изогнутой трубке, подобно грузу
маятника, который также способен двигаться по неко-
торой дуге окружности. Шарик находится в трубке
в положении равновесия, когда реакция стенки трубки
§ 105]
Потребные величины при вираже
319
(заменяющая натяжение нити в маятнике обычного типа)
уравновешивает его перегрузочный вес. Реакция направ-
лена по радиусу дуги, вдоль которой изогнута трубка,
так как трение шарика о стенки трубки очень мало.
Поэтому шарик занимает такое положение, при котором
радиус направлен параллельно перегрузочному весу.
При правильном вираже, когда перегрузочный вес всех
частей самолёта, в том числе и шарика, направлен па-
раллельно плоскости симметрии, шарик «стоит в центре».
В случае наружного скольжения (например, вираж без
крена) шарик отклонён наружу. При вираже с внутренним
скольжением (см. § 107) шарик отклонён во внутреннюю
сторону.
§ 105. Потребные величины при вираже.
При вираже, выполняемом с постоянной скоростью,
тяга уравновешивает лобовое сопротивление:
Т = Х. (106)
Вместе с' равенством (104) мы получаем такие же
условия равновесия сил, как и в случае горизонтального
полёта с изменённым весом. «Новым» весом здесь является
перегрузочный вес О„, и перегрузка п играет в схеме
сил ту же роль, что ив § 71. Поэтому потребные вели-
чины для правильного виража выражаются теми же
формулами, что и в § 71. Обозначим их через и , Твяр,
NB..p, а потребные величины для горизонтального полёта
с тем же углом атаки —через Prop, Trop, Nrop. Тогда
v = v п Т = Т -п N — N п1'*
</внгр ^гор V 11 f J вир 1 гор 2’вир 2 ’гор*1
Таким образом, при увеличении перегрузки (рост угла
крена) потребные величины растут. Из рис. 215 ясна
зависимость потребных величин от угла крена при
неизменном угле атаки. Отсюда получаем важное след-
ствие: скорость по прибору на вираже уже не со-
ответствует углу атаки так, как это было для горизон-
тального полёта. Лётчик, привыкший в горизонтальном по-
лёте держать скорость не ниже определённой величины для
сохранения достаточной управляемости и устойчивости,
320
Вираж
[гл. 12
должен при вираже увеличитьэту минимальную безопасную
скорость («эволютивную скорость»). Тому же углу атаки (а
именно, угол атаки определяет, как мы знаем, поведение са-
молёта в полёте) соответствует на виражеббльшая скорость.
Так как тяга и мощность, потребные на вираже, растут,
то при выполнении виража необходимо увеличить число
оборотов мотора. Соотношение между потребными и рас-
полагаемыми величи-
нами при вираже
наглядно показыва-
ется на графиках
тяги, аналогичных
графикам рис. 155 для
изменения полётного
веса (рис. 215). Пунк-
тиром соединены точ-
ки кривых потребной
тяги, соответствую-
щих одинаковым уг-
лам атаки. Каждая
кривая соответствует
определённой пере-
Рис. 215. Кривые потребной тяги для грузке, а значит, и
разных углов крена. определённому углу
крена. Для каждого
угла крена существует, как показывает график, опреде-
лённый диапазон скоростей, на которых возможно вы-
полнение правильного виража с этим креном. Чем боль-
ше угол крена, тем меньше этот диапаз эн. Предельный
угол крена, определяемый располагаемой тягой, дости-
гается при угле атаки, близком к экономическому. Но
скорость при таком вираже больше экономической, так
как имеется перегрузка.
Если провести на графике вертикальную прямую,
соответствующую определённой скорости, то точки её
пересечения с кривыми потребной тяги укажут углы
атаки, на которых должен лететь самолёт, выполняя ви-
раж с данной скоростью при разных углах крена. Точка
пересечения этой прямой с линией располагаемой тяги
соответствует предельному крену, достижимому на дан-
ной скорости.
§ 106]
Предельный вираж
321
§ 106. Предельный вираж.
Чем больше запас мощности в диапазоне скоростей
данного самолёта, тем более крутые виражи он может
выполнять на данной скорости, т. е. тем меньше радиус
предельного виража (правильного виража наименьшего
радиуса).
Напишем формулу для радиуса виража в другом виде,
более удобном для исследования. Для этого заменим
в формуле (103) скорость v на вираже её выражением
через Prop: *Уор'п
Но 9,8tg₽' 2 2д 1 Пго₽-?7р’ п —сМ’
следовательно, г= • (107)
Эта формула показывает, что радиус виража данного са-
молёта зависит от угла атаки (так как с зависит от а)
и угла крена. С увеличением угла атаки и с увеличением
крена радиус уменьшается. Увеличение угла атаки огра-
ничивается требованиями достаточной устойчивости
и управляемости самолёта; поэтому при совершении ви-
ража возможно меньшего радиуса доходят только до угла
атаки, примерно равного экономическому, хотя теорети-
чески наименьший радиус при данном крене соответст-
вует критическому углу атаки, при котором су макси-
мально. Зависимость радиуса от угла атаки понятна
и по формуле (103); в самом деле, увеличение угла атаки
соответствует уменьшению потребней скорости.
Предположим теперь, что наибольший допустимый
угол атаки уже достигнут; дальнейшее уменьшение ра-
диуса возможно лишь при увеличении угла крена. Од-
нако при большом крене дальнейшее его увеличение
уже лишь незначительно может уменьшить радиус. Дей-
ствительно, уже, например, sin 65 =0,9, и дальнейшее
увеличение крена, хотя бы и до 90 ’, могло бы увеличить
синус только до 1,0 и потому могло бы уменьшить ра-
322
Вираж
[гл. 12
диус ещё только на 10%. Но значительное увеличение
угла крена при правильном вираже вообще невозможно:
при этом быстро растёт требуемая подъёмная сила, а для
создания этой силы при данном угле атаки необходимо
увеличивать скорость. Предел же увеличению скорости
кладёт мощность мотора. Отсюда видно, что манёврен-
ность самолёта зависит, в конечном счёте, от избытка
мощности винтомоторной группы.
Правильный вираж при угле крена 90° невозможен
уже ни при какой мощности мотора: подъёмная сила
направлена горизонтально, и вес самолёта, оставаясь
неуравновешенным, вызовет сколь-
жение на опущенное крыло и сни-
жение самолёта.
Таким образом, предельный ви-
раж выполняется при наибольшем
крене, допускаемом мощностью мо-
тора, и при предельно допустимом
угле атаки.
§ 107. Вираж со скольжением.
Выясним теперь, какие отличия
внесёт скольжение в схему сил, дей-
ствующих на самолёт на вираже,
и в выполнение самого виража.
При выполнении виража разли-
чают внешнее и внутреннее сколь-
жение (частный случай виража с
внешним скольжением — при отсут-
ствии крена — мы уже разобрали в
начале главы). При внешнем сколь-
жении хвостовая часть самолёта
Рис. 216. Положение
самолёта относитель-
но траектории при
внутреннем и при
внешнем скольжении.
отклонена наружу («занос хвоста») от траектории срав-
нительно с её положением при правильном вираже,
а при внутреннем скольжении — внутрь (рис. 216).
В обоих случаях возникает боковая сила, направ-
ленная, как мы знаем, по перпендикуляру к траек-
тории. Её наклон к горизонту равен углу крена; при
внутреннем скольжении она направлена наружу траек-
тории, а при внешнем — внутрь (рис. 217). Найдём рав-
§107]
Вираж со скольжением
323
недействующую подъёмной силы и боковой силы. Для
современных самолётов, с их обтекаемыми фюзеляжами,
боковая сила невелика сравнительно с подъёмной силой.
Поэтому равнодействующая сил У и Z по величине мало
отличается от величины подъёмной силы, и влияние бо-
ковой силы практически сказывается только на направ-
лении равнодействующей. Для виража со скольжением
равнодействующая F сил У и / играет ту же роль, что
Рис. 217. Схемы сил при вираже со скольжением
сила У при правильном вираже. Но хотя по величине
эти силы почти равны, угол наклона силы F к вертикали
заметно отличается от угла наклона силы У при пра-
вильном вираже. В этом отношении появление скольжения
равносильно изменению крена: при внутреннем скольже-
нии схема сил приблизительно такова, какой она была бы
при правильном вираже с меньшим креном, а при внеш-
нем скольжении — как при большем крене. При вну-
треннем скольжении достаточно поэтому меньшей подъ-
ёмной силы, чем при правильном вираже с тем же углом
крена: боковая сила «поддерживает самолёт». Наоборот,
при внешнем скольжении требуется большая подъёмная
324
Вираж
[гл. 12
Рис. 218. Положение са-
молёта при развороте с
углом крена 00°.
этом продольная ось
сила. Если вираж с данным креном производится при
определённом угле атаки, то при внутреннем скольжении
потребуется меньшая, а при внешнем — большая скорость,
чем при правильном вираже.
Улучшить манёвренность самолёта, пользуясь сколь-
жением, обычно нельзя. Хотя схема сил при внешнем
скольжении и соответствует увеличенному крену, но рост
лобового сопротивления, обусловленный скольжением,
уменьшает избыток мощности, и фактически при внешнем
скольжении приходится уменьшать угол крена. Только
при очень большой боковой силе
и малом росте сопротивления воз-
можно уменьшить предельный ра-
диус виража, применяя внешнее
скольжение.
Зато увеличение предельного
крена при внутреннем скольже-
нии возможно; при достаточной
величине боковой силы можно
сделать разворот с углом крена,
доходящим до 90э (рис. 218). При
фюзеляжа уже не будет гори-
зонтальна: нос самолёта будет приподнят, и «подъ-
ёмная сила фюзеляжа» будет уравновешивать вес
самолёта.
Перегрузка при вираже со скольжением уже не соот-
ветствует крену. В самом деле, сравним схему сил на
вираже с данным кре-
ном при внутреннем и
внешнем скольжении и
при правильном вира-
же (рис. 217). Перегру-
зочный вес равен равно-
действующей подъёмной
и боковой сил и направ-
лен противоположно
равнодействующей. Так
как вертикальная со-
ставляющая подъёмной силы (или равнодействующей сил
У и Z) должна быть равна весу G, то, очевидно, при
внутреннем скольжении перегрузка уменьшена, а при
Рис. 219. Положение шарика указа-
теля скольжения при: а) правильном
вираже; б) вираже с внешним сколь-
жением; в) вираже с внутренним
скольжением.
§ 108] Равновесие моментов и работа рулей на вираже 325
внешнем — увеличена сравнительно с перегрузкой при
правильном вираже с тем же креном. Изменено и на-
правление перегрузочного веса: при внутреннем сколь-
жении он отклонён от плоскости симметрии внутрь
виража, а при внешнем скольжении — наружу. При
внутреннем скольжении лётчика «прижимает» к внут-
ренней стенке кабины, а при внешнем —к наружной.
Также не остаётся в центре и шарик указателя сколь-
жения. На рис. 219 показано положение шарика при
вираже со скольжением. Шарик своим положением ука-
зывает напра'вление перегрузочного веса, следовательно,
отклонён от средней точки в сторону скольжения.
§ 108. Равновесие моментов и работа рулей
на вираже.
При вираже центр тяжести самолёта движется кри-
волинейно, причём самолёт вращается вокруг вертикаль-
ной оси, совершая один оборот за время полного виража.
Сумма всех сил, действующих на самолёт, не равна нулю:
для криволинейного движения необходима центростреми-
тельная сила. Вращение же происходит равномерно, по-
этому сумма всех моментов, действующих на самолёт
ири вираже, должна быть равна нулю.
Рассмотрим в отдельности моменты, действующие во-
круг каждой из главных осей. Предварительно разберём
подробнее движение самолёта, считая приближённо, что
продольная ось его горизонтальна. Вращение самолёта
вокруг вертикальной оси, проходящей через центр тя-
жести, можно представить себе как комбинацию враще-
ний вокруг поперечной и нормальной осей. При разво-
роте без крена вращение происходит только вокруг
нормальной оси; при вираже с креном 90J — только
вокруг поперечной оси. При обычном вираже имеются
оба вращения. Угловую скорость каждого из вращений
можно найти, разлагая (по правилу параллелограмма)
угловую скорость суммарного вращения вокруг верти-
кальной оси по направлениям нормальной и поперечной
осей. Чем больше крен, тем больше угловая скорость
вращения вокруг поперечной оси сравнительно с угло-
вою скоростью вокруг нормальной оси,
326
Вираж
гл 12
Разложение вращения на два вращения вокруг двух
осей можно 'представить себе ещё и таким образом. Пред-
ставим себе, что, описывая окружность виража, самолёт
вращается только вокруг нормальной оси. Тогда, по мере
движения самолёта, его продольная .ось наклонялась бы
вниз, уменьшая угол атаки крыла. Для восстановления
прежнего положения самолёта относительно траектории
необходимо вращение самолёта вокруг поперечной оси
в сторону увеличения угла атаки. Если же представить
себе, что вращение происходит только вокруг поперечной
оси, то по мере движения ось самолёта будет откло-
няться от направления полёта; чтобы не возникло сколь-
жение, необходимо вращение самолёта вокруг нормаль-
ной оси в сторону выполнения виража.
Вращение самолёта вокруг продольной оси отсутст-
вует во время выполнения виража. Это вращение необ-
ходимо только в первый момент ввода в вираж для со-
здания крена (и при выводе из виража — для убирания
крена). Как только самолёт накренён на требуемый угол,
необходимо, остановив вращение, поставить элероны
нейтрально. Более того, при выполнении виража прихо-
дится давать ручку в сторону, обратную виражу. При-
чина этого в том, что наружное крыло, описывая ок-
ружность большего радиуса, чем внутреннее, движется
с большей скоростью. Поэтому подъёмная сила наруж-
ного крыла больше, чем подъемная сила внутреннего,
и кренящий момент, возникающий вследствие различия
подъёмных сил крыльев, приходится уравновешивать
отклонением элеронов. Точнее говоря, отклонение элеро-
нов уменьшает подъёмную силу наружного крыла и уве-
личивает подъёмную силу внутреннего так, чтобы подъ-
ёмные силы оказались равны друг другу и их моменты
вокруг продольной оси уравновешивались.
Рассмотрим теперь моменты вокруг поперечной оси
Вращение вокруг поперечной оси создаёт дополнительные
скорости точек, удалённых от этой оси. Поэтому оперение
будет иметь увеличенный угол атаки. Это вызовет уве-
личение пикирующего момента оперения, который нужно
уравновесить отклонением руля глубины вверх (откло-
нением ручки «на себя»). То же действие оказывает и
обтекание, хвостовой части фюзеляжа. Таким образом
§ 108] Равновесие моментов и работа рулей на вираже 327
при вираже руль высоты должен давать больший каб-
рирующий момент, чем при прямолинейном полёте при
том же угле атаки, а значит, и должен быть отклонён
вверх на больший угол. Чем больше крен, тем больше
составляющая вращения вокруг поперечной оси, и тем
сильнее должна быть взята ручка на себя, даже если
угол атаки и не увеличен. Только тогда сумма всех мо-
ментов вокруг поперечной оси будет равна нулю, и вра-
щение вокруг этой оси будет равномерным. Начальная
же скорость вращения вокруг поперечной оси также
создаётся рулём высоты, когда лётчик, вводя самолёт
в вираж, берёт ручку на себя.
Вращение вокруг нормальной оси вызывает (и при
правильном вираже) боковое обтекание хвостовой части
и вертикального оперения. Возникает боковая сила, да-
ющая вокруг нормальной оси момент, тормозящий вра-
щение. Чтобы уравновесить этот момент, необходимо
отклонить руль поворота в сторону виража. Чем больше
крен, тем меньше составляющая вращения вокруг нор-
мальной оси и тем меньшее отклонение руля требуется
во время виража. На глубоких виражах можно почти
не отклонять руль поворота. При вводе же в вираж
отклонение руля поворота должно производиться одно-
временно с накренением самолёта для придания началь-
ной скорости вращения. Если при вводе в вираж руль
поворота был отклонён недостаточно, и вращение, воз-
никшее вокруг нормальной оси, мало, то при движении
по искривлённой траектории самолёт будет изменять
своё положение относительно неё: поворот самолёта будет
меньше, чем угол, описанный самолётом по траектории,
возникнет внутреннее скольжение. Если, наоборот, от-
клонение руля поворота при вводе слишком велико, то
угол поворота самолёта превзойдёт угол, описанный
самолётом в своём движении по траектории, и возникнет
внешнее скольжение. Для получения правильного виража
отклонение рулей должно быть произведено, как гово-
рят, координированно. Нарушение координированности
в управлении приводит к возникновению скольжения.
Если выполняется вираж со скольжением, то момент
боковой силы требует изменения отклонения руля пово
рота. При внешнем скольжении требуется большее от-
Вираж
[гл. 12
328
клонение руля в сторону виража, чем при правильном
вираже. Напротив, при внутреннем скольжении
момент боковой силы ускоряет вращение вокруг нормаль-
ной оси, и чтобы уравновесить этот момент, руль пово-
ротов должен быть отклонён в сторону, обратную виражу.
Дополнительное (в сравнении с правильным виражом)
отклонение руля поворота должно быть произведено
в сторону, обратную желаемому скольжению.
Но, как сказано в § 76, скольжение вызывает и кре-
нящий момент. Поэтому при внутреннем скольжении
необходимо дополнительное отклонение ручки в сторону
виража, а при внешнем скольжении — в противоположи
ную сторону. Иначе говоря, дополнительное отклонение
ручки (сравнительно с её положением при правильном
вираже) производится в сторону скольжения.