/













































































































































































































































































































































































































Author: Тарг С.М.
Tags: теория машин и механизмов общие вопросы технической механики механика
Year: 1986




Text
С. М. Тарг
КРАТКИЙ КУРС
ТЕОРЕТИЧЕСКОЙ
МЕХАНИКИ
ИЗДАНИЕ 10-е, ПЕРЕРАБОТАННОЕ
И ДОПОЛНЕННОЕ
Допущено Министерством
высшего и среднего
специального образования СССР
в качестве учебника
для высших технических учебных
ваведений
МОСКВА «ВЫСШАЯ ШКОЛА» 1986
ББК 22.21
Т19
УДК 531.8
Рецензент: кафедра теоретической механики
Университета Дружбы народов им. П. Лумумбы
(зав. кафедрой д-р техн. наук, проф. А. С. Галиуллин)
Тарг С. М.
Т19 Краткий курс теоретической механики: Учеб. для вту-
втузов.— 10-е изд., перераб. и доп. — М.: Высш. шк., 1986.—
416 с, ил.
В книге изложены основы механики материальной точки, системы мате*
риальных точек а твердого тела в объеме, соответствующем программам техни-
технических вузов. Приведено много примеров и задач, решения которых сопровож-
сопровождаются соответствующими методическими указаниями. В 10-м издании (9-е —
1974 г.) значительно изменены и более компактно изложены вопросы статики;
в разделе «Динамика» дополнительно рассмотрены приложения общих теорем
к изучению движения жидкости, малые колебания системы и некоторые другие
вопросы.
Для студентов очных и заочных технических вузов.
1703020000—423 ББК 22.21
Т 001@1)—86 77~86 531
© Издательство «Наука», 1974
© Издательство «Высшая школа», 1986, о изменениями
ПРЕДИСЛОВИЕ К ДЕСЯТОМУ ИЗДАНИЮ
Десятое издание «Краткого курса теоретической меха-
механики» при сохранении общей его направленности отличается
от предыдущих изданий целым рядом изменений и дополне-
дополнений, внесенных во все разделы курса.
В статике существенно изменены последовательность, а
вместе с тем и само изложение ряда вопросов; особенно это
коснулось содержания глав III, IV и частично V, VII. В кине-
кинематике изменены лишь некоторые доказательства (§ 43, 66).
Рассмотрение графических методов исключено и в статике,
и в кинематике.
Выделение динамики точки в самостоятельный раздел сох-
сохранено ввиду важности этого раздела, а также потому, что
совместное изложение общих теорем динамики для точки и
системы экономии во времени по существу не дает, но создает
у изучающих курс дополнительные трудности, связанные с
необходимостью усваивать одновременно большое число важ-
важнейших понятий механики.
В изложение динамики также внесено много изменений и
дополнений. В частности, дополнительно рассмотрены неко-
некоторые приложения общих теорем к движению жидкости или
газа (§ 113, 119), элементы теории устойчивости равновесия
и малые колебания системы (гл. XXX), а также вопросы, из
ложенные в § 76, 105, 120, 125, 137 и др.
Как и в предыдущих изданиях, большое место в курсе от
ведено примерам и методам решения задач; этот материал
занимает около трети всей книги. Число рассмотренных задач
увеличено до 189, а их решения сопровождаются рядом указа-
ний, которые должны помочь студентам при их самостоятель
ной работе. В этой части книга будет полезна студентам всех
специальностей и особенно студентам заочных вузов.
Материал книги изложен так, что ею можно пользоваться
при изучении курса и по кратким, и по более полным програм-
программам. Та часть материала, которую можно опустить без ущерба
3
для понимания остального текста, выделена в главы или па-
параграфы (пункты), помеченные звездочкой или набранные
петитом. Хотя в книге, чтобы примерно сохранить ее объем,
помимо дополнений сделан и ряд сокращений, в ней сохранено
изложение некоторых вопросов, отнесенных в программах к
дополнительным (движение в поле земного тяготения и дви-
движение тела переменной массы — ракеты). Эти вопросы в наши
дни столь актуальны, что ознакомиться с ними должны иметь
возможность студенты всех специальностей.
В книге используется общепринятое векторное изложение
материала и предполагается, что читатель знаком с основами
векторной алгебры; однако в примечаниях даются и некоторые
необходимые справки. Нумерация формул в каждом из разде-
разделов книги сплошная и при ссылках на формулы данного раз-
раздела обычно указывается-только их номер; в ссылках на фор-
формулы из других разделов указывается еще и номер параграфа.
Автор выражает глубокую благодарность профессорам
А. С. Галиуллину и Г. Ю. Степанову за целый ряд полезных
замечаний и предложений, позволивших улучшить содержа-
содержание курса. Автор благодарит также всех читателей, выска-
высказавших замечания и пожелания, которые по возможности
были учтены при подготовке данного издания,
С. Тара
ВВЕДЕНИЕ
Современная техника ставит перед инженерами множество задач,
решение которых связано с исследованием так называемого механи-
механического движения и механического взаимодействия материальных
тел.
Механическим движением называют происходя-
происходящее с течением времени изменение взаимного положения материаль-
материальных тел в пространстве. Под механическим взаимодей-
взаимодействием понимают те действия материальных тел друг на друга,
в результате которых происходит изменение движения этих тел или
изменение их формы (деформация). За основную меру этих действий
принимают величину, называемую силой. Примерами механического
движения в природе являются движение небесных тел, колебания
земной коры, воздушные и морские течения, тепловое движение мо-
молекул и т. п., а в технике — движение различных наземных или
водных транспортных средств и летательных аппаратов, движение
частей всевозможных машин, механизмов и двигателей, деформация
элементов тех или иных конструкций и сооружений, течение жидко-
жидкости и газов и многое другое. Примерами же механических взаимодей-
взаимодействий являются взаимные притяжения материальных тел по закону
всемирного тяготения, взаимные давления соприкасающихся (или
соударяющихся) тел, воздействия частиц жидкости и газа друг на
друга и на движущиеся или покоящиеся в них тела и т. д.
Наука о механическом движении и взаимодействии материаль-
материальных тел и называется механикой. Круг проблем, рассматриваемых
в механике, очень велик и с развитием этой науки в ней появился це-
целый ряд самостоятельных областей, связанных с изучением меха-
механики твердых деформируемых тел, жидкостей и газов. К этим обла-
областям относятся теория упругости, теория пластичности, гидромеха-
гидромеханика, аэромеханика, газовая динамика и ряд разделов так называе-
называемой прикладной механики, в частности: сопротивление материалов,
статика сооружений, теория механизмов и машин, гидравлика, а так-
также многие специальные инженерные дисциплины. Однако во всех
этих областях наряду со специфическими для каждой из них зако-
закономерностями и методами исследования опираются на ряд основных
законов или принципов и используют многие понятия и методы, об-
общие для всех областей механики. Рассмотрение этих общих понятий,
законов и методов и составляет предмет так называемой теоретиче-
теоретической (или общей) механики.
В основе механики лежат законы, называемые законами класси-
классической механики (или законами Ньютона), которые установлены пу-
5
тем обобщения результатов многочисленных опытов и наблюдений я
нашли подтверждение в процессе всей общественно-производствен^
ной практики человечества. Это позволяет рассматривать знания,
основанные на законах механики, как достоверные знания, на кото-
которые инженер может смело опираться в своей практической деятель-
деятельности *.
Общий метод научных исследований состоит в том, что при рас-
рассмотрении того или иного явления в нем выделяют главное, опреде-
определяющее, а от всего остального, сопутствующего данному явлению,
абстрагируются. В результате вместо реального явления или объек-
объекта рассматривают некоторую его модель и вводят ряд абстрактных
понятий, отражающих соответствующие свойства этого явления
(объекта). Такие научные абстракции, как указывал В. И. Ленин,
«отражают природу глубже, вернее, полнее» и играют при построе-
построении науки исключительно важную роль.
В классической механике научными абстракциями или моделями
являются по существу все вводимые исходные положения и понятия.
Они учитывают то основное, определяющее, что существенно для
рассматриваемого механического движения и позволяет его строго
охарактеризовать и изучить. Так, например, вместо реальных ма-
материальных тел в механике рассматривают такие их абстрактные
модели, как материальная точка, абсолютно твердое тело или сплош-
сплошная изменяемая среда, абстрагируясь от учета в первом случае фор-
формы и размеров тела, во втором — его деформаций, в третьем —
молекулярной структуры среды. Но только построив механику та-
такого рода моделей, можно разработать методы, позволяющие изу-
изучать с пригодной для практики точностью равновесие и движение
реальных объектов, проверяя в свою очередь эту пригодность опы-
опытом, практикой.
Роль и значение теоретической механики в инженерном образова-
образовании определяется тем, что она является научной базой очень многих
областей современной техники. Одновременно законы и методы ме-
механики как естественной науки, т. е. науки о^-нрироде, позволяют
изучить и объяснить целый ряд важных явлений в окружающем
нас мире и способствуют дальнейшему росту и развитию естествозна-
естествознания в целом, а также выработке правильного материального мировоз-
мировоззрения.
По характеру рассматриваемых задач механику принято разде-
разделять на статику, кинематику и динамик у. В ста-
статике излагается учение о силах и об условиях равновесия материаль-
материальных тел под действием сил. В кинематике рассматриваются общие
* Последующее развитие науки показало, что при скоростях, близких к
скорости света, движение тел подчиняется законам механики теории относитель-
относительности, а движение микрочастиц (электроны, позитроны и др.) описывается зако-
законами квантовой механики. Однако эти открытия только уточнили область прило-
приложений классической механики и подтвердили достоверность ее законов для движе-
движений всех тел, отличных от микрочастиц, при скоростях, не близких к скорости
света, т. е. для тех движений, которые имели и имеют огромное практическое зна-
значение в технике, небесной механике и ряде других областей естествознания.
геометрические свойства движения тел..Наконец, в динамике изу-
изучается движение материальных тел под действием сил.
Возникновение и развитие механики * как науки неразрывно
связано с историей развития производительных сил общества, с
уровнем производства и техники на каждом этапе этого развития.
В древние времена, когда запросы производства сводились глав-
главным образом к удовлетворению нужд строительной техники, начи-
начинает развиваться учение о так называемых простейших машинах
(блок, ворот, рычаг, наклонная плоскость) и общее учение о равно-
равновесии тел (статика). Обоснование начал статики содержится уже
в сочинениях одного из великих ученых древности Архимеда B87—
212 г. до н. э.).
Развитие динамики начинается значительно позже. В XV—XVI
столетиях возникновение и рост в странах Западной и Центральной
Европы буржуазных отношений послужили толчком к значитель-
значительному подъему ремесел, торговли, мореплавания и военного дела (по-
(появление огнестрельного оружия), а также к важным астрономиче-
астрономическим открытиям. Все это способствовало накоплению большого
опытного материала, систематизация и обобщение которого привели
в XVII столетии к. открытию законов динамики. Главные заслуги
в создании основ динамики принадлежат гениальным исследовате-
исследователям Галилео Галилею A564—1642) и Исааку Ньютону A643—1727).
В сочинении Ньютона «Математические начала натуральной фило-
философии», изданном в 1687 г., и были изложены в систематическом виде
основные законы классической механики (законы Ньютона).
В XVIII в. начинается интенсивное развитие в механике анали-
аналитических методов, т. е. методов, основанных на применении диффе-
дифференциального и интегрального исчислений. Методы решения задач
динамики точки и твердого тела путем составления и интегрирова-
интегрирования соответствующих дифференциальных уравнений были разрабо-
разработаны великим математиком и механиком Л. Эйлером A707—1783).
Из других исследований в этой области наибольшее значение для
развития механики имели труды выдающихся французских ученых
Ж. Даламбера A717—1783), предложившего свой известный прин-
принцип решения задач динамики, и Ж. Лагранжа A736—1813), раз-
разработавшего общий аналитический метод решения задач динамики
на основе принципа Даламбера и принципа возможных перемещений.
В настоящее время аналитические методы решения задач являются
в динамике основными.
Кинематика, как отдельный раздел механики, выделилась лишь
в XIX в. под влиянием запросов развивающегося машиностроения.
В настоящее время кинематика имеет и большое самостоятельное
значение для изучения движения механизмов и машин.
В России на развитие первых исследований по механике боль-
большое влияние оказали труды гениального ученого и мыслителя
* Термин «механика» впервые появляется в сочинениях одного из выдающих-
выдающихся философов древности Аристотеля C84—322 г. до н. э.) и происходит от греческо-
греческого mechane, означающего по современным понятиям «сооружение», «машина».
7
М. В. Ломоносова A711—1765), а также творчество Л. Эйлера, дол-
долгое время жившего в России и работавшего в Петербургской акаде-
академии наук. Из многочисленных отечественных ученых, внесших зна-
значительный вклад в развитие различных областей механики, прежде
всего должны быть названы: М. В. Остроградский A801—1861), ко-
которому принадлежит ряд важных исследований по аналитическим
методам решения задач механики; П. Л. Чебышев A821—1894), соз-
создавший новое направление в исследовании движения механизмов;
С. В. Ковалевская A850—1891), решившая одну из труднейших за-
задач динамики твердого тела; А. М. Ляпунов A857—1918), который
дал строгую постановку одной из фундаментальных задач механики
и всего естествознания — задачи об устойчивости равновесия и дви-
движения и разработал наиболее общие методы ее решения; И. В. Ме-
Мещерский A859—1935), внесший большой вклад в решение задач ме-
механики тел переменной массы; К. Э. Циолковский A857—1935), ав-
автор ряда фундаментальных исследований по теории реактивного
движения; А. Н. Крылов A863—1945), разработавший теорию ко-
корабля и много внесший в развитие теории гироскопа и гироскопи-
гироскопических приборов.
Выдающееся значение для дальнейшего развития механики име-
имели труды «отца русской авиации» Н. Е. Жуковского A847—1921) и
его ближайшего ученика основоположника газовой динамики
С. А. Чаплыгина A869—1942). Характерной чертой творчества
Н. Е. Жуковского было приложение методов механики к решению
актуальных технических задач, примером чему служат многие его
труды по динамике самолета, разработанная им теория гидравличе-
гидравлического удара в трубах и др. Большое влияние идеи Н. Е. Жуков-
Жуковского оказали и на преподавание механики в высших технических
учебных заведениях нашей страны.
В наши дни перед отечественной наукой и техникой стоят важ-
важные задачи по ускорению научно-технического прогресса и дальней-
дальнейшему развитию и совершенствованию социалистического производ-
производства. В числе этих задач такие актуальные проблемы, как автомати-
автоматизация производственных процессов и их оптимизация, создание и
внедрение промышленных роботов, эффективное использование всех
конструкционных материалов и многие другие. Для решения этих
задач важное значение имеет дальнейшее повышение качества под-
подготовки инженерных кадров, расширение теоретической базы их
знаний, в том числе и знаний в области одной из фундаментальных
общенаучных дисциплин — теоретической механики.
раздел первый
СТАТИКА ТВЕРДОГО ТЕЛА
Глава I
ОСНОВНЫЕ ПОНЯТИЯ И ИСХОДНЫЕ ПОЛОЖЕНИЯ
СТАТИКИ
§ I. АБСОЛЮТНО ТВЕРДОЕ ТЕЛО; СИЛА. ЗАДАЧИ СТАТИКИ
Статикой называется раздел механики, в котором излагается
общее учение о силах и изучаются условия равновесия материальных
тел, находящихся под действием сил.
Под равновесием будем понимать состояние покоя тела по отно-
отношению к другим телам, например по отношению к Земле. Условия
равновесия тела существенно зависят от того, является ли это тело
твердым, жидким или газообразным. Равновесие жидких и газооб-
газообразных тел изучается в курсам гидростатики или аэростатики. В об-
общем курсе механики рассматриваются обычно только задачи о рав-
равновесии твердых тел.
Все встречающиеся в природе твердые тела под влиянием внеш-
внешних воздействий в той или иной мере изменяют свою форму (дефор-
(деформируются). Величины этих деформаций зависят от материала тел,
их геометрической формы и размеров и от действующих нагрузок.
Для обеспечения прочности различных инженерных сооружений и
конструкций материал и размеры их частей подбирают так, чтобы
деформации при действующих нагрузках были достаточно малы *.
Вследствие этого при изучении условий равновесия вполне допусти-
допустимо пренебрегать малыми деформациями соответствующих твердых
тел и рассматривать их как недеформируемые или абсолютно твер-
твердые. Абсолютно твердым телом называют такое тело, расстояние
между каждыми двумя точками которого всегда остается постоян-
постоянным. В дальнейшем при решении задач статики все тела рассматри-
рассматриваются как абсолютно твердые, хотя часто для краткости их назы-
называют просто твердыми телами.
* Например, материал и размеры стержней, входящих в те или иные конст-
конструкции, выбирают такими, что при действующих нагрузках стержни удлиняются
(или укорачиваются) менее чем на одну тысячную долю их первоначальной длины.
Таков же порядок допускаемых деформаций при изгибе, кручении и т. п.
Состояние равновесия или движения данного тела зависит от ха-
характера его механических взаимодействий с другими телами, т. е.
от тех давлений, притяжений или отталкиваний, которые тело испы-
испытывает в результате этих взаимодействий. Величина, являющаяся
основной мерой механического взаимодействия материальных тел,
называется в механике силой.
Рассматриваемые в механике величины можно разделить на ска-
скалярные, т. е. такие, которые полностью характеризуются их число-
числовым значением, и векторные, т. е. такие, которые помимо числового
значения характеризуются еще и направлением в пространстве.
Сила — величина векторная. Ее действие на тело определяется:
1) числовым значением или модулем силы, 2) направлением силы,
3) точкой приложения силы.
Модуль силы находят путем ее сравнения с силой, принятой за
единицу. Основной единицей измерения силы в Международной сис-
системе единиц (СИ), которой мы будем пользоваться (подробнее см.
§ 75), является 1 ньютон A Н); применяется и более крупная еди-
единица 1 килоньютон A кН = 1000 Н). Для статического измерения
силы служат известные из физики приборы, называемые динамомет-
динамометрами.
Силу, как и все другие векторные величины, будем обозначать
буквой с чертой над нею (например, F), а модуль силы — символом
\F\ или той же буквой, но без черты над нею (F). Графически сила,
как и другие векторы, изображается направленным отрезком
(рис. 1). Длина этого отрезка выражает в выбранном масштабе мо-
модуль силы, направление отрезка соответствует направлению силы,
точка А на рис. 1 является точкой приложения силы (силу можно
изобразить и так, что точкой приложения будет конец силы, как
?¦ на рис. 4, в). Прямая DE, вдоль ко-
которой направлена сила, называется ли-
нией действия силы. Условимся еще о
следующих определениях.
1. Системой сил будем называть сово-
совокупность сил, действующих на рассмат-
рассматриваемое тело (или тела). Если линии дей-
Рис. 1 ствия всех сил лежат в одной плоскости,
система сил называется плоской, а если
эти линии действия не лежат в одной плоскости,— пространствен-
пространственной. Кроме того, силы, линии действия которых пересекаются в од-
одной точке, называются сходящимися, а силы, линии действия кото-
которых параллельны друг другу,— параллельными.
2. Тело, которому из данного положения можно сообщить любое
перемещение в пространстве, называется свободным.
3. Если одну систему сил, действующих на свободное твердое
тело, можно заменить другой системой, не изменяя при этом состоя-
состояния покоя или движения, в котором находится тело, то такие две
системы сил называются эквивалентными.
4. Система сил, под действием которой свободное твердое тело
10
может находиться в покое, называется уравновешенной или экви~
валентной нулю.
5. Если данная система сил эквивалентна одной силе, то эта сила
называется равнодействующей данной системы сил.
Сила, равная равнодействующей по модулю, прямо противопо-
противоположная ей по направлению и действующая вдоль той же прямой, на-
называется уравновешивающей силой.
6. Силы, действующие на данное тело (или систему тел), можно
разделить на внешние и внутренние. Внешними называются силы,
которые действуют на это тело (или на тела системы) со стороны дру-
других тел, а внутренними — силы, с которыми части данного тела
(или тела данной системы) действуют друг на друга.
7. Сила, приложенная к телу в какой-нибудь одной его точке,
называется сосредоточенной. Силы, действующие на все точки дан-
данного объема или данной части поверхности тела, называются распре-
распределенными.
Понятие о сосредоточенной силе является условным, так как
практически приложить силу к телу в одной точке нельзя. Силы, ко-
которые в механике рассматривают как сосредоточенные, представля-
представляют собой по существу равнодействующие некоторых систем распре-
распределенных сил.
В частности, рассматриваемая в механике сила тяжести, дейст-
действующая на данное твердое тело, представляет собой равнодейст-
равнодействующую сил тяжести, действующих на его частицы. Линия действия
этой равнодействующей проходит через точку, называемую центром
тяжести тела*.
Задачами статики являются: 1) преобразование систем сил, дей-
действующих на твердое тело, в системы им эквивалентные, в частно-
частности приведение данной системы сил к простейшему виду; 2) опреде-
определение условий равновесия систем сил, действующих на твердое
тело.
Решать задачи статики можно или путем соответствующих гео-
геометрических построений (геометрический и графический методы),
или с помощью численных расчетов (аналитический метод). В курсе
будет главным образом применяться аналитический метод, однако
следует иметь в виду, что наглядные геометрические построения иг-
играют при решении задач механики чрезвычайно важную роль.
§2. ИСХОДНЫЕ ПОЛОЖЕНИЯ СТАТИКИ
При изложении статики можно идти двумя путями: 1) исходить
из уравнений, которые получаются в динамике как следствия основ-
основных законов механики (см. § 120); 2) излагать статику независимо от
динамики исходя из некоторых общих законов механики и положе-
* Вопрос об определении центров тяжести тел будет рассмотрен в гл. VIII.
Предварительно заметим, что если однородное тело имеет центр симметрии (пря-
(прямоугольный брус, цилиндр, шар и т. п.), то центр тяжести такого тела находится в
его центре симметрии.
а
ний, называемых аксиомами или принципами статики, хотя посу-
ществу они являются не независимыми аксиомами, а следствиями
тех же основных законов механики (см. § 120). В учебных курсах,
как и в данном, обычно идут вторым путем, так как по ряду причин
оказывается необходимым начинать изучение механики со статики,
т. е. до того, как будет изложена динамика. Положения (или аксио-
аксиомы), из которых при этом исходят, можно сформулировать следую-
следующим образом.
1. Если на свободное абсолютно твердое тело действуют две силы,
то тело может находиться в равновесии тогда и только тогда, когда
эти силы равны по модулю (F1=Fi) и направлены вдоль одной прямой
в противоположные стороны (рис. 2).
2. Действие данной системы сил на абсолютно твердое тело не
изменяется, если к ней прибавить или от нее отнять уравновешен-
уравновешенную систему сил.
Рис. 2 Рис. 3
Иными словами это означает, что две системы сил, отличающие-
отличающиеся на уравновешенную систему, эквивалентны друг другу.
Следствие: действие силы на абсолютно твердое тело не из-
изменится, если перенести точку приложения силы вдоль ее линии дей-
действия в любую другую точку тела.
В самом деле, пусть на твердое тело действует приложенная в точ-
точке А сила F (рис. 3). Возьмем на линии действия этой силы произ-
произвольную точку В и приложим в ней две уравновешенные силы Ft и
F2, такие, что FX=F и F\=—F. От этого действие силы F на тело не
изменится. Но силы F и F2 также образуют уравновешенную систе-
систему, которая может быть отброшена *. В результате на тело бу-
будет действовать только одна сила Flt равная F, но приложенная в
точке В. _
Таким образом, вектор, изображающий силу F, можно считать
приложенным в любой точке на линии действия силы (такой век-
вектор называется скользящим).
Полученный результат справедлив только для сил, действующих
на абсолютно твердое тело. При инженерных расчетах им можно
пользоваться лишь тогда, когда определяются условия равновесия
той или иной конструкции и не рассматриваются возникшие в ее
частях внутренние усилия.
* Отброшенные или перенесенные силы будем на рисунках перечеркивать.
12
Например, изображенный на рис. 4, а стержень АВ будет нахо-
находиться в равновесии, если F1=F2. При переносе точек приложения
обеих сил в какую-нибудь точку С стержня (рис. 4, б) или при пере-
переносе точки приложения силы /\ в точку В, а силы F2 в точку А
(рис. 4, в) равновесие не нарушается. Однако внутренние усилия
будут в каждом из рассматри-
рассматриваемых случаев разными. В пер-
первом случае стержень под дей-
действием приложенных сил рас-
растягивается, во втором случае он
не напряжен, а в третьем стер-
стержень будет сжиматься.
Следовательно, при определе-
определении внутренних усилий перено-
переносить точку приложения силы
вдоль линии действия нельзя.
Еще два исходных положения относятся к общим законам меха-
механики.
Закон параллелограмма сил: две силы, приложен-
приложенные к телу в одной точке, имеют равнодействующую, приложенную
в той же точке и изображаемую диагональю параллелограмма, по-
построенного на этих силах, как на сторонах.
¦?
А
ft
Рис. 4
<с
Рис. 5
Рис. 6
Вектор R, равный диагонали параллелограмма, построенного
на векторах Fx и ~F\ (рис. 5), называется геометрической суммой век-
векторов Fx и F2: _
Следовательно, закон параллелограмма сил можно еще сформу-
сформулировать так: две силы, приложенные к телу в одной точке, имеют
равнодействующую, равную геометрической (векторной) сумме этих
сил и приложенную в той же точке.
В дальнейшем следует различать понятия суммы сил и их равно-
равнодействующей. Поясним это примером. Рассмотрим две силы F[nF~t
(рис. 6), приложенные к телу в точках А и В. доказанная на рис. 6
сила Q равна геометрической сумме сил Fx и F2 (Q=F1+F2), как
диагональ соответствующего параллелограмма. Но сила Q не явля-
является равнодействующей этих сил, так как нетрудно понять, что одна
13
сила Q не может заменить действие сил Ft и F2 на данное тело, где
бы она ни была приложена. В дальнейшем будет еще строго доказа-
доказано (§ 29, задача 38), что эти две силы не имеют равнодействующей.
Закон равенства действия и противодей-
противодействия: при всяком действии одного материального тела на другое
имеет место такое же численно, но противоположное по направле-
направлению противодействие.
Этот закон является одним из основных законов механики. Из
него следует, что если тело А действует на тело В с некоторой силой
F, то одновременно тело В действует на тело А с такой же по модулю
и направлешюй_вдоль той же прямой, но в противоположную сторо-
сторону силой F'=—F (рис. 7). Заметим, что силы F и F', как приложен-
приложенные к разным телам, не образуют уравновешенную систему сил.
Рис. 7
Свойство внутренних сил. Согласно данному за-
закону при взаимодействии две любые части тела (или конструкции)
действуют друг на друга с равными по модулю и противоположно
направленными силами. Так как при изучении условий равновесия
тело рассматривается как абсолютно твердое, то все внутренние силы
образуют при этом уравновешенную систему сил, которую можно
отбросить. Следовательно, при изучении условий равновесия тела
(конструкции) необходимо учитывать только внешние силы, дей-
действующие на это тело (конструкцию). В дальнейшем, говоря о дей-
действующих силах, мы будем подразумевать, если не сделано специ-
специальной оговорки, что речь идет только о внешних силах.
Еще одним исходным положением является принцип от-
отвердевания: равновесие изменяемого (деформируемого) тела,
находящегося под действием данной системы сил, не нарушится,
если тело считать отвердевшим (абсолютно твердым).
Высказанное утверждение очевидно. Например, ясно, что рав-
равновесие цепи не нарушится, если ее звенья считать сваренными друг
с другом. Так как на покоящееся тело до и после отвердевания дей-
действует одна и та же система сил, то данный принцип можно еще вы-
высказать в такой форме: при равновесии силы, действующие на любое
изменяемое (деформируемое) тело или изменяемую конструкцию,
удовлетворяют тем же условиям, что и для тела абсолютно твер-
твердого; однако для изменяемого тела эти условия, будучи необходимы-
необходимыми, могут не быть достаточными (см. § 120).
Например, для равновесия гибкой нити под действием двух сил,
приложенных к ее концам, необходимы те же условия, что и для
14
жесткого стержня (силы должны быть равны по модулю и направле-
направлены вдоль нити в разные стороны). Но эти условия не будут достаточ-
достаточными. Для равновесия нити требуется еще, чтобы приложенные силы
были растягивающими, т. е. направленными так, как на рис. 4, а.
Принцип отвердевания широко используется в инженерных рас-
расчетах. Он позволяет при составлении условий равновесия рассмат-
рассматривать любое изменяемое тело (ремень, трос, цепь и т. п.) или лю-
любую изменяемую конструкцию как абсолютно жесткие и применять
к ним методы статики твердого тела. Если полученных таким путем
уравнений для решения задачи оказывается недостаточно, то до-
дополнительно составляют уравнения, учитывающие или условия рав-
равновесия отдельных частей конструкции, или их деформации (зада-
(задачи, требующие учета деформаций, решаются в курсе сопротивления
материалов).
§ 3. СВЯЗИ И ИХ РЕАКЦИИ
По определению, тело, которое может совершать из данного по-
положения любые перемещения в пространство, называется свободным,
(например, воздушный шар в воздухе). Тело, перемещениям кото-
которого в пространстве препятствуют какие-нибудь другие, скреплен-
скрепленные или соприкасающиеся с ним, тела, называется несвободным.
Все то, что ограничивает перемещения данного тела в пространстве,
называют связью. В дальнейшем будем рассматривать связи, реали-
реализуемые какими-нибудь телами, и называть связями сами эти тела.
Примерами несвободных тел являются груз, лежащий на столе,
дверь, подвешенная на петлях, и т. п. Связями в этих случаях будут:
для груза — плоскость стола, не дающая грузу перемещаться по
вертикали вниз; для двери — петли, не дающие двери отойти от
косяка.
Тело, стремясь под действием приложенных сил осуществить
перемещение, которому препятствует связь, будет действовать на нее
с некоторой силой, называемой силой давления на связь. Одновремен-
Одновременно по закону о равенстве действия и противодействия связь будет
действовать на тело с такой же по модулю, но противоположно на-
направленной силой. Сила, с которой данная связь действует на тело,
препятствуя тем или иным его перемещениям, называется силой ре-
реакции {противодействия) связи или просто реакцией связи.
Значение реакции связи зависит от других действующих сил и
наперед неизвестно (если никакие другие силы на тело не действуют,
реакции равны нулю); для ее определения надо решить соответству-
соответствующую задачу механики. Направлена реакция связи в сторону, про-
противоположную той, куда связь не дает перемещаться телу. Когда
связь может препятствовать перемещениям тела по нескольким на-
направлениям, направление реакции такой связи тоже наперед неиз-
-вестно и должно определяться в результате решения рассматривае-
рассматриваемой задачи.
Правильное определение направлений реакций связей играет
при решении задач механики очень важную роль. Рассмотрим по-
15
этому подробнее, как направлены реакции некоторых основных
видов связей (дополнительные примеры приведены в § 17).
1. Гладкая плоскость (поверхность) или
опора. Гладкой будем называть поверхность, трением о которую
данного тела можно в первом приближении пренебречь. Такая
г
Рис. 8
Рис. 9
в
поверхность не дает телу перемещаться только по направлению
общего перпендикуляра (нормали) к поверхностям соприкасающих-
соприкасающихся тел в точке их касания (рис. 8, а) *. Поэтому реакция N гладкой
поверхности или опоры направлена по общей нормали к поверхно-
поверхностям соприкасающихся тел в точке их касания и приложена в этой
точке. Когда одна из соприкасающихся поверхностей является точ-
точкой (рис. 8, б), то реакция направлена по нормали к другой поверх-
поверхности.
2. Нить. Связь, осуществленная в виде гибкой нерастяжимой
нити (рис. 9), не дает телу М удаляться от точки подвеса нити по
направлению AM. Поэтому реакция Т натя-
натянутой нити направлена вдоль нити к точке
ее подвеса.
3. Цилиндрический шарнир
(подшипник). Цилиндрический шар-
шарнир (или просто шарнир) осуществляет такое
соединение двух тел, при котором одно те-
тело может вращаться по отношению к другому
вокруг общей оси, называемой осью шарнира
(например, как две половины ножниц). Если тело АВ прикреплено
с помощью такого шарнира к неподвижной опоре D (рис. 10), то
точка А тела не может при этом переместиться ни по какому на-
направлению, перпендикулярному оси шарнира. Следовательно, ре-
реакция R цилиндрического шарнира может иметь любое направление
в плоскости, перпендикулярной оси шарнира, т. е. в плоскости Аху.
Для силы R в этом случае наперед неизвестны ни ее модуль R, ни
направление (угол а).
4. Сферический шарнир и подпятник. Тела,
соединенные сферическим шарниром, могут как угодно поворачи-
Рис. 10
На рис. 8—12 действующие на тела заданные силы не показаны.
Рис. 11
\
ваться одно относительно другого вокруг центра шарнира. Приме-
Примером служит прикрепление фотоаппарата к штативу с помощью
шаровой пяты. Если тело прикреплено с помощью такого шарнира
к неподвижной опоре (рис. 11, а), то точка А тела, совпадающая
с центром шарнира, не может при этом совершить никакого пере-
перемещения в пространстве. Следовательно, реакция R сферического
шарнира может иметь любое направление в пространстве. Для нее
наперед неизвестны ни ее
модуль R, ни углы с осями
Axyz.
Произвольное направ-
направление в пространстве мо-
может иметь и реакция R
подпятника (под-
(подшипника с упором), изо-
изображенного на рис. 11,6.
5. Невесомый
стержень. Невесо-
Невесомым называют стержень,
весом которого по сравнению с воспринимаемой им нагрузкой
можно пренебречь. Пусть для какого-нибудь находящегося в равно-
равновесии тела (конструкции) такой стержень, прикрепленный в точках
Л и В шарнирами, является связью (рис. 12, а). Тогда на стержень
будут действовать только две силы, приложенные в точках А и В;
при равновесии эти силы должны быть направлены вдоль одной
прямой, т. е. вдоль АВ (см. рис. 4, а, в). Но тогда согласно закону
о действии и противодействии стержень будет действовать на тело
с силой, тоже направленной вдоль АВ. Следовательно, реакция N
невесомого шарнирно прикрепленного прямолинейного стержня на-
направлена вдоль оси стержня.
Если связью является криволинейный невесомый стержень
(рис. 12,6), то аналогичные рассуждения приведут к выводу, что
его реакция тоже направлена вдоль прямой АВ, соединяющей
. -, шарниры А я В (на
' -^лГ ' ЩЩШШШ!ШШ(Щ рис. 12, а направление
реакции соответствует
случаю, когда стержень
сжат, а на рис. 12, б —
когда растянут).
При решении задач
реакции связей обычно
являются подлежащими
определению неизвестными. Нахождение реакций имеет то прак-
практическое значение, что определив их, а тем самым определив по
закону о действии и противодействии и силы давления на связи,
получают исходные данные, необходимые для расчета прочности
соответствующих частей конструкции.
Рис.
12
17
Глава II
СЛОЖЕНИЕ СИЛ. СИСТЕМА СХОДЯЩИХСЯ
§4. ГЕОМЕТРИЧЕСКИЙ СПОСОБ СЛОЖЕНИЯ СИЛ.
РАВНОДЕЙСТВУЮЩАЯ СХОДЯЩИХСЯ СИЛ;
РАЗЛОЖЕНИЕ СИЛ
Решение многих задач механики связано с известной из вектор-
векторной алгебры операцией сложения векторов и, в частности, сил. Ве-
Величину, равную геометрической сумме сил какой-нибудь системы,
будем в дальнейшем называть главным вектором этой системы сил.
Как отмечалось в § 3 (см. рис. 6), понятие о геометрической сумме
сил не следует смешивать с понятием о равнодействующей; для мно-
многих систем сил, как мы увидим в дальнейшем, равнодействующей
вообще не существует, геометрическую же сумму (главный вектор)
можно вычислить для любой системы сил.
1. Сложение двух сил. Геометрическая сумма R
двух сил Fi и F2 находится по правилу параллелограмма (рис. 13, а)
или построением силового треугольника (рис. 13, б), изображаю-
изображающего одну из половин этого
параллелограмма. Если угол
между силами равен а, то мо-
модуль R и углы р, у, которые
сила R образует со слагаемы-
слагаемыми силами, определяются по
формулам:
R = VF\ + F\ + 2F.F, cosa, A)
. B)
Рис.
2. Сложение трех сил, не лежащих в одной
плоскости. Геометрическая сумма R трех сил Flt F2, F3, не
лежащих в одной плоскости, изображается диагональю параллеле-
параллелепипеда, построенного на этих силах (правило параллелепипеда).
В справедливости этого убеждаемся, применяя последовательно
правило параллелограмма (рис. 14).
3. Сложение системы сил. Геометрическая сумма
(главный вектор) любой системы сил определяется или последова-
последовательным сложением сил системы по правилу параллелограмма, или
построением силового многоугольника. Второй способ является
более простым и удобным. Для нахождения этим способом суммы
сил Flt F2, F3, . . . , Fn (рис. 15, а) откладываем от произвольной
точки О (рис. 15, б) вектор Оа, изображающий в выбранном масшта-
масштабе силу Fi, от точки а — вектор ab, изображающий силу Рг, от
точки Ь — вектор be, изображающий силу F3, и_т. д.; от конца т
предпоследнего вектора откладываем вектор тп, изображающий
13
силу Fn. Соединяя начало первого вектора с концом последнего,
получаем вектор On~R, изображающий геометрическую сумму
или главный вектор слагаемых сил:
или /? =
C)
4. Равнодействующая сходящихся сил. Рас-
Рассмотрим систему сходящихся сил, т. е. сил, линии действия которых
пересекаются в одной точке (рис. 15, а). Так как сила, действующая
Рис.
Рис.
на абсолютно твердое тело, является вектором скользящим, то
система сходящихся сил эквивалентна системе сил, приложенных
в одной точке (на рис. 15, а в точке А).
Последовательно применяя закон параллелограмма сил, придем
к выводу, что система сходящихся сил имеет равнодействующую, рав-
равную геометрической сумме (главному вектору) этих сил и прило-
приложенную в точке пересечения их линий действия. Следовательно
система сил Fu F2, . . . , Fn, изображенных на рис. 15, а, имеет
равнодействующую, равную их главному вектору R и приложенную
в точке А (или в любой другой точке, лежащей на линии действия
силы R, проведенной через точку А).
5. Разложение сил. Разложить данную силу на не-
несколько составляющих — значит найти такую систему нескольких
сил, для которой данная сила является равнодействующей. Эта
задача является неопределенной и имеет однозначное решение лишь •
при задании дополнительных условий. Рассмотрим два частных
случая:
а) разложение силы по двум заданным на-
направлениям. Задача сводится к построению такого парал-
параллелограмма, у которого разлагаемая сила является диагональю,
а стороны параллельны заданным направлениям. Например, на
рис. 13 показано, как сила R разлагается по направлениям АВ и
AD на силы /ч и F2— составляющие силы R (сила R и прямые АВ,
AD лежат, конечно, в одной плоскости);
б) разложение силы по трем заданным на-
направлениям. Если заданные направления не лежат в одной
плоскости, то задача'является определенной и сводится к построе-
построению такого параллелепипеда, у которого диагональ изображает
19
заданную силу R, а ребра параллельны заданным направлениям
(см. рис. 14).
Способом разложения можно в простейших случаях пользовать-
пользоваться для определения сил давления на связи. Для этого действующую
на тело (конструкцию) заданную силу надо разложить по направле-
направлениям реакции связей, так как согласно закону о действии и противо-
противодействии сила давления на связь и реакция связи направлены вдоль
одной и той же прямой.
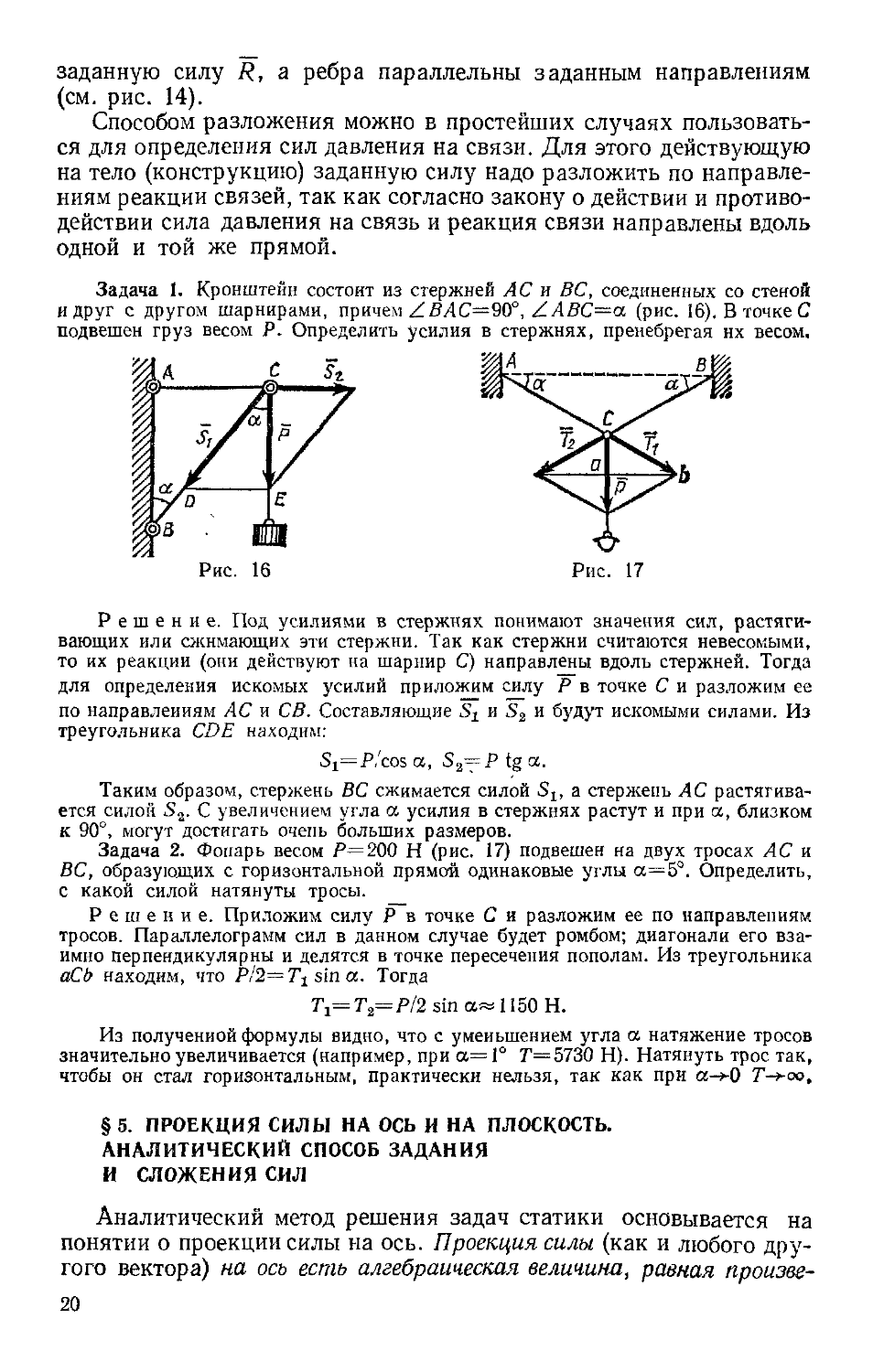
Задача 1. Кронштейн состоит из стержней АС и ВС, соединенных со стеной
и друг с другом шарнирами, причем ZBAC=90°, ZABC=a (рис. 16). В точке С
подвешен груз весом Р. Определить усилия в стержнях, пренебрегая их весом.
Рис. 16
Решение. Под усилиями в стержнях понимают значения сил, растяги-
растягивающих или сжимающих эти стержни. Так как стержни считаются невесомыми,
то их реакции (они действуют на шарнир С) направлены вдоль стержней. Тогда
для определения искомых усилий приложим силу Р в точке С и разложим ее
по направлениям АС и СВ. Составляющие Sx и 52 и будут искомыми силами. Из
треугольника CDE находим:
S1=P!cosa, S2=P tga.
Таким образом, стержень ВС сжимается силой Slt а стержень АС растягива-
растягивается силой S2. С увеличением угла а усилия в стержнях растут и при а, близком
к 90°, могут достигать очень больших размеров.
Задача 2. Фонарь весом Р=200 Н (рис. 17) подвешен на двух тросах АС и
ВС, образующих с горизонтальной прямой одинаковые углы а=5°. Определить,
с какой силой натянуты тросы.
Решение. Приложим силу Р в точке С и разложим ее по направлениям
тросов. Параллелограмм сил в данном случае будет ромбом; диагонали его вза-
взаимно перпендикулярны и делятся в точке пересечения пополам. Из треугольника
аСЬ находим, что Р/2=Т1 sin а. Тогда
711=r2=P/2sina»1150H.
Из полученной формулы видно, что с уменьшением угла а натяжение тросов
значительно увеличивается (например, при а= 1° Г=5730 Н). Натянуть трос так,
чтобы он стал горизонтальным, практически нельзя, так как при се-*-0 Т-*-оо,
§ 5. ПРОЕКЦИЯ СИЛЫ НА ОСЬ И НА ПЛОСКОСТЬ.
АНАЛИТИЧЕСКИЙ СПОСОБ ЗАДАНИЯ
И СЛОЖЕНИЯ СИЛ
Аналитический метод решения задач статики основывается на
понятии о проекции силы на ось. Проекция силы (как и любого дру-
другого вектора) на ось есть алгебраическая величина, равная произве-
20
дению модуля силы на косинус угла между силой и положительным
направлением оси. Если этот угол острый,— проекция положитель-
положительна, если тупой,— отрицательна, а если сила перпендикулярна оси,—
ее проекция на ось равна нулю. Так, для сил, изображенных на рис.
18,
FX=F cos a=ab, QX=Q cos at=—Q cos <p=—de, Px=0. D)
Проекцией силы F на плоскость Оху называется вектор FX1J=
—OBi, заключенный между проекциями начала и конца силы F на
эту плоскость (рис. 19). Таким образом, в отличие от проекции силы
на ось, проекция силы на плоскость есть величина векторная, так
как она характеризуется не только своими числовыми значениями,
но и направлением в
плоскости Оху. По мо-
модулю Fxy=F cos 6, где
6 — у(гол между направ-
направлением силы F и ее про-
проекции Fxy.
В некоторых случа-
случаях для нахождения
проекции силы на ось
удобнее найти сначала ее проекцию на плоскость, в которой эта
ось лежит, а затем найденную проекцию на плоскость спроектиро-
спроектировать на данную ось. Например, в случае, изображенном на рис. 19,
найдем таким способом, что
Fx=Fxy cos (jp=F cos Э cos ср, Fy—Fxy sin (p=F cos 0 sin <p. E)
Аналитический способ задания сил. Для
аналитического задания силы необходимо выбрать систему коорди-
координатных осей Oxyz, по отношению к которой будет определяться на-
!
о а
Рис. 18
г
у
У
А
Л
Уг
А
у/
г,
а
Рис. 19
Рис. 20
правление силы в пространстве. В механике мы будем пользоваться
правой системой координат, т. е. такой системой, в которой крат-
кратчайшее совмещение оси Ох с осью Оу происходит, если смотреть с
положительного конца оси Oz, против хода часовой стрелки (рис. 20).
21
Вектор, изображающий силу F, можно построить, если извест-
известны модуль F этой силы и углы a, fi, у, которые сила образует с ко-
координатными осями. Таким образом, величины F, а, р\ у и задают
силу F. Точка А приложения силы должна быть задана отдельно
ее координатами х, у, г.
Для решения задач механики удобнее задавать силу ее проекци-
проекциями Fx, Fy, Fz на координатные оси. Зная эти проекции, можно опре-
определить модуль силы и углы, которые она образует с координатными
осями, по формулам:
cos a = FX/F, cos fi = Fy/F, cos у
\
= FjF. J
Если все рассматриваемые силы расположены в одной плоскости,
то каждую из сил можно задать ее проекциями на две оси Ох и Оу.
Тогда формулы, определяющие силу по ее проекциям, примут вид:
F = V Fl + Fl; cos a = Fx/F, cos p = Fy/F. G)
Аналитический способ сложения сил. Пе-
Переход от зависимостей между векторами к зависимостям между их
проекциями осуществляется с помощью следующей теоремы гео-
геометрии: проекция вектора суммы на какую-нибудь ось равна алгебраи-
алгебраической сумме проекций слагаемых векторов на ту же ось. Согласно
этой теореме, если R есть сумма сил Flt F2, . . ., Fn, т. е. R=lLFk, то
R —2F.. R —HFt. R =?F (Я\
Зная Rx, Ry и Rz, по формулам F) находим:
cos a = RX/R, cos $ = Ry/R, cosy = RJR. j ^
Формулы (8), (9) и позволяют решить задачу о сложении сил
аналитически.
Для сил, расположенных в одной плоскости, соответствующие
формулы принимают вид:
^ '
Если силы заданы их модулями и углами с осями, то для приме-
применения аналитического метода сложения надо предварительно вычис-
вычислить проекции этих сил на координатные оси.
Задача 3. Найти сумму трех лежащих в одной плоскости сил (рис. 21, а),
если дано:
F= 17,32 Н, Г=10Н, Р=24Н, Ф=30°, ф=60°.
Решение. Вычисляем проекции заданных сил на координатные оси}
FX=F cos ф= 15 Н, Гх=-Гсо5ф=-5Н, Рх=0;
Fv=—F sin ф=-8,66 Н, Ту= Т sin 1И8.66Н, Ру=-Р=—24 Н,
22
Тогда по формулам A0)
Д*= 15—5= 10 Н, #j,=—8,66+8,66—24=—24 Н.
Следовательно,
(— 24J = 26H; cosa = 5/13, cos P = —12/13.
Окончательно #=26 Н, а=67°20', р=157°20'.
Для решения той же задачи геометрическим методом надо, выбрав соответ-
соответствующий масштаб (например, в 1 см — ЮН), построить из сил Р, F и Т сило-
у
Рис. 21
вой многоугольник (рис. 21, б). Его замыкающая ad и определяет в данном ма-
масштабе модуль и направление R. Если, например, при измерении получим ad~
»2,5 см, то, следовательно, #»25 Н с ошибкой по отношению к точному решению
около 4%.
§ 6. РАВНОВЕСИЕ СИСТЕМЫ СХОДЯЩИХСЯ СИЛ
Для равновесия системы сходящихся сил, приложенных к твер-
твердому телу, необходимо и достаточно, чтобы равнодействующая, а
следовательно, и главный вектор этих сил (см. § 4) были равны нулю.
Условия, которым при этом должны удовлетворять сами силы, мож-
можно выразить в геометрической или в аналитической форме.
1. Геометрическое условие равновесия.
Так как главный вектор R системы сил определяется как замыкаю-
замыкающая сторона силового многоугольника, построенного из этих сил
(см. рис. 15), то R может обратиться в нуль только тогда, когда ко-
конец последней силы в многоугольнике совпадает с началом первой
силы, т. е. когда многоугольник замкнется.
Следовательно, для равновесия системы сходящихся сил необхо-
необходимо и достаточно, чтобы силовой многоугольник, построенный из
этих сил, был замкнутым.
2. Аналитические условия равновесия. Аналити-
Аналитически модуль главного вектора системы сил определяется формулой
Так как под корнем стоит сумма положительных слагаемых, то R
обратится в нуль только тогда, когда одновременно Rx=0, Ry=0,
Rz=0, т. е., как это следует из формул (8), когда действующие на
тело силы будут удовлетворять равенствам:
ZFkx = Q, 2/^ = 0,2/^ = 0. A1)
23
Равенства (И) выражают условия равновесия в аналитической
форме: для равновесия пространственной системы сходящихся сил
необходимо и достаточно, чтобы суммы проекций этих сил на каж-
каждую из трех координатных осей были равны нулю.
Если все действующие на тело сходящиеся силы лежат в одной
плоскости, то они образуют плоскую систему сходящихся сил. В слу-
случае плоской системы сходящихся сил получим, очевидно, только два
условия равновесия:
2/^ = 0. 2Fft{/ = 0. A2)
3. Теорема о трех силах. При решении задач статики
иногда удобно пользоваться следующей теоремой: если твердое те-
тело находится в равновесии под действием трех непараллельных сил,
лежащих в одной плоскости, то линии действия этих сил пересека-
пересекаются в одной точке.
Для доказательства теоремы рассмотрим сначала какие-нибудь
две из действующих на тело сил, например Fx и F2. Так как по усло-
условиям теоремы эти силы лежат в одной плоскости и не параллельны,
то их линии действия пересекаются в некоторой точке А (рис.22).
Приложим силы Fx и F2 в этой точке и заменим их равнодействующей
R. Тогда на тело будут действовать две силы: сила R и сила F3,
приложенная в какой-то точке В тела. Если тело при этом находит-
находится в равновесии, то силы R и Fs должны быть направлены по одной
прямой, т. е. вдоль АВ. Следовательно, линия действия силы F3
тоже проходит через точку А, что и требовалось доказать.
Обратная теорема места не имеет, т. е. если линии действия трех
сил пересекаются в одной точке, то тело под действием этих сил
может и не находиться в равновесии; следовательно, теорема выра-
выражает только необходимое условие равновесия тела под действием
трек сил.
Рис. 22
Рис. 23
Пример. Рассмотрим брус АВ, закрепленный в точке А шарниром и опираю-
опирающийся на выступ D (рис. 23). На этот брус действуют три силы- сила тяжести Р~,
реакция iVp выступа и реакция R^ шарнира. Так как брус находится в равновесии,
то линии действия этих сил должны пересекаться в одной точке. Линии действия
сил Р и Np известны и они пересекаются в точке К- Следовательно, линия дей-
действия приложенной в точке А реакции R^ тоже должна пройти через точку К,
т. е. должна быть направлена вдоль прямой А К. Теорема о трех силах позволила
в этом случае определить заранее неизвестное направление реакции шарнира А.
24
§7. РЕШЕНИЕ ЗАДАЧ СТАТИКИ
Решаемые методами статики задачи могут быть одного из сле-
следующих двух типов: 1) задачи, в которых известны (полностью или
частично) действующие на тело силы и требуется найти, в каком
положении или при каких соотношениях между действующими сила-
силами тело будет находиться в равновесии (задачи 4, 5); 2) задачи, в
которых известно, что тело заведомо находится в равновесии и тре-
требуется найти, чему равны при этом все или некоторые из действую-
действующих на тело сил (задачи 6, 7, 8 и др.). Реакции связей являются
величинами, наперед неизвестными во всех задачах статики.
Приступая к решению любой задачи, следует прежде всего ус-
установить, равновесие какого тела (или каких тел) надо рассмотреть,
чтобы найти искомые величины. Процесс решения сводится к сле-
следующим операциям.
1. Выбор тела (или тел), равновесие кото-
которого должно быть рассмотрено. Для решения
задачи надо рассмотреть равновесие тела, к которому приложены
заданные и искомые силы или силы, равные искомым (например,
если надо найти давление на опору, то можно рассмотреть равнове-
равновесие тела, к которому приложена численно равная этой силе реакция
опоры и т. п.).
Когда заданные силы действуют на одно тело, а искомые на дру-
другое или когда те и другие силы действуют одновременно на несколь-
несколько тел, может оказаться необходимым рассмотреть равновесие систе-
системы этих тел или последовательно равновесие каждого тела в от-
отдельности.
2.'И зображение действующих сил. Установив,
равновесие какого тела или тел рассматривается (и только после
этого), следует на чертеже изобразить все действующие на это тело
{или тела) внешние силы, включая как заданные, так и искомые си-
силы, в том числе реакции всех связей. При изображении реакций
учесть все сказанное о них в § 3.
3. Составление условий равновесия. Усло-
Условия равновесия составляют для сил, действующих на тело (или
тела), равновесие которых рассматривается. Об особенностях со-
составления условий равновесия для различных систем сил будет
сказано в соответствующих местах курса.
4. Определение искомых величин, провер-
проверка правильности решения и исследование
полученных результатов. Важное значение в про-
цессе-решения имеет аккуратный чертеж (он помогает быстрее найти
правильный путь решения и избежать ошибок при составлении ус-
условий равновесия) и последовательное проведение всех выкладок.
Все расчеты при решении задач рекомендуется, как правило,
производить в общем виде (алгебраически). Тогда для искомых ве-
величин будут получаться формулы, дающие возможность проанали-
проанализировать найденные результаты. Кроме того, решение в общем виде
"позволяет иногда обнаружить сделанные ошибки путем проверки
25
размерностей (размерности каждого из слагаемых в обеих частях
равенства должны быть одинаковыми). Числа, если решение произ-
производится в общем виде, подставляются только в окончательные ре-
результаты.
В этом параграфе рассмотрим задачи на равновесие тела под дей-
действием сходящихся сил. Для их решения можно пользоваться гео-
геометрическим или аналитическим методом.
Геометрический метод. Им удобно пользоваться, когда общее
число действующих на тело сил (и заданных, и искомых) равно
трем. При равновесии треугольник, построенный из этих сил, дол-
должен быть замкнутым (построение следует начинать с заданной си-
силы). Решая этот треугольник, найдем искомые величины.
Аналитический метод. Им можно пользоваться при любом
числе приложенных сил. Для составления условий равновесия, кото-
которых в случае плоской,системы сходящихся сил будет два [формулы
A2)], а в случае пространственной системы три [формулы(П)}, надо
сначала выбрать координатные оси. Этот выбор можно производить
произвольно, но полученные уравнения будут решаться проще, если
одну из осей направить перпендикулярно какой-либо неизвест-
неизвестной силе.
Для составления условий равновесия полезно на первых порах
предварительно вычислить проекции всех сил на выбранные оси,
внося их в отдельную таблицу (см. задачу 4).
Ряд дополнительных указаний дается в ходе решения рассмат-
рассматриваемых ниже задач.
Задача 4. Груз весом Р лежит на гладкой наклонной плоскости с углом на-
наклона а, (рис. 24, а). Определить значение горизонтальной силы F, которую надо
приложить к грузу, чтобы удержать его в равновесии, и найти, чему при этом рав-
равна сила давления Q груза на плоскость.
Решение. Искомые силы действуют на разные тела: сила F на груз, сила
Q — на плоскость. Для решения задачи вместо силы Q будем искать равную
ей по модулю, но противоположно направ-
направленную реакцию плоскости N. Тогда задан-
заданная сила Р и искомые силы F H~N будут
действовать на груз, т. е. на одной то же те-
тело. Рассмотрим равновесие груза и изобра-
изобрази-^ действующие на этот груз силы Р
и F и реакцию связи N. Для определения
искомых сил можно воспользоваться или
геометрическим, или аналитическим усло-
условиями равновесия. Рассмотрим оба способа
решения.
Геометрический способ. При равновесии
треугольник, построенный из сил Р, F hW,
должен быть замкнутым. Построение треугольника начинаем с заданной
силы. От произвольной точки а в выбранном масштабе откладываем силу Р
(рис. 24, б). Через начало и конец этой силы проводим прямые, параллельные на-
направлениям сил F и Ж Точка пересечения этих прямых дает третью вершину с
замкнутого силового треугольника abc, в котором стороны Ьс и са равны в выбран-
выбранном масштабе искомым силам. Направление сил определяется правилом стрелок:
так как здесь равнодействующая равна нулю, то при обходе треугольника острия
стрелок нигде не должны встречаться в одной точке.
26
Рис.
Модули искомых сил можно из треугольника аЪс найти и путем численного
расчета (в этом случае соблюдать масштаб при изображении сил не надо). Заме-
Замечая, что Zbac=90 , a Zabc=a, получим:
F=Ptga, jV=P/cosoc.
Аналитический способ. Так как система действующих сходящихся сил является
плоской, дли нее надо составить два условия равновесия A2). Сначала проводим
координатные оси; при этом для получения более простых уравнений ось х на-
направляем перпендикулярно неизвестной силе N. Далее вычисляем проекции сил Р.
F~, N на оси х и у, внося их в таблицу *:
Fk
Fkx
?ky
Р
Р sin a
—Р cos ос
F
— F cos а
—F sin а
N
0
Теперь составляем уравнения "S.F^K=Q, EFky—О. Получим:
Р sin а—Fcosa=0; — P cos a—F sin a-{-N— 0,
Решая эти уравнения, найдем:
F—P tg a, N=P cos a+P sin2 a/cos a—p/cos a.
Геометрическое решение в подобных простых задачах (когда действующих
Сил три) оказывается более компактным, чем аналитическое. Как видно, при
и<45ь F<P, а при a>45° F>P; N>P при любом а>0.
Искомая сила давления груза на плоскость численно равна N, но направлена
В противоположную сторону (Q=—N).
Задача 5. Стержень АВ прикреплен к неподвижной опоре шарниром А
(рис. 25, а). К концу В стержня подвешен груз весом Р и прикреплена нить. Нить
перекинута через блок С и к ней подвешен груз весом Q. Оси блока С и шарнира А
расположены на одной вертикали, причем АС=АВ. Найти, при каком угле a
система будет в равновесии и чему при этом равно усилие в стержне А В; весом стер-
стержня и размером блока пренебречь.
Решение. Рассмотрим равновесие стержня АВ, к которому приложены
все данные и искомые силы. Изобразим для наглядности стержень отдельно
(рис, 25, б) и покажем действующие на него силы: силу Р, численно равную весу
Груза, натяжение Т нити и реакцию Ra> направленную вдоль стержня, так как
стержень считается невесомым. Если трением в оси блока пренебречь, то натяже-
. ние нити, перекинутой через блок, при равновесии всюду одинаково, следователь-
следовательно, T=Q.
Применяя геометрический способ решения, строим из сил Р, Т и /?д замкнутый
силовой треугольник cab (рис. 25, в), начиная с силы Р. Из подобия треугольников
abc и ЛВС находим, что ca=ab и Zcab=a. Следовательно,
RA=P, sin(a/2)=Q/2P,
«¦ак как T=Q=2P sin (a/2).
Из полученных результатов следует, что при а<180° равновесие возможно
только, если Q<2P. Стержень при этом будет сжат с силой, равной Р, независи-
независимо от значений груза Q и угла а.
* Таблицу целесообразно заполнять^ по столбцам, т. е. сначала вычислить
проекции на обе оси силы Р, затем силы F и т. д. Предварительное составление та-
таких таблиц уменьшает вероятность ошибок в уравнениях и особенно полезно на
.первых порах, пока не будет приобретен достаточный навык в проектировании сил,
я затем и в вычислении их моментов. Примеры таких таблиц для других систем
сил даются далее в задачах 10, 19 (§ 17) и 40 (§ 30).
27
Случай, когда а= 180°, должен быть рассмотрен отдельно. Легко видеть, что
в этом случае равновесие возможно при любых значениях Р и Q При этом, если
P>Q, то стержень растягивается с силой, равной Р—Q, если же Q>P, то стер-
стержень сжимается с силой, равной Q—Р
Обращаем внимание на то, что сила тяжести Q непосредственно в условие
равновесия (в силовой треугольник) не вошла, так как эта сила приложена к гру-
грузу, а не к стержню АВ, равновесие которого рассматривалось.
Задача 6. Кран, закрепленный подшипником А и подпятником В, несет ва-
грузку Р (рис. 26) Определить реакции RA и Rb опор, вызванные действием дан-
данной нагрузки, если вылет крана равен / и ЛВ=/г.
Рис. 25
Рис. 26
Решение Рассмотрим равновесие крана, к которому приложены задан-
заданная и искомые силы Изображаем действующие на кран силу Р и реакцию подшип-
подшипника Яд, направленную перпендикулярно оси АВ Реакция подпятника Rb мо-
может иметь любое направление в плоскости чертежа. Но кран находится в равно-
Еесии под действием трех сил, следовательно, их линии действия должны пересе-
пересекаться в одной точке. Такой точкой является точка Е, где пересекаются линии
действия сил Р и RA Таким образом, реакция Rb будет направлена вдоль BE.
Применяя геометрический способ решения, строим из сил Р, RA и Rb замкну-
замкнутый треугольник abc, начиная с заданной силы Р. Из подобия треугольников abc
я ABE находим.
R А/Р = //h, RBIP = Vh* -r P/h,
откуда
RA = Pl,h, RB
Из треугольника abc видно, что направления реакций RA и Rb показаны ла
чертеже правильно Силы давления на подшипник А и подпятник В численно
равны RA и Rb, но направлены противоположно реакциям Значения этих давле-
давлений будут тем больше, чем больше отношение l/h
Рассмотренная задача дает пример использования теоремы о трех силах.
Задача 7. К шарниру А коленчатого пресса приложена горизонтальная сила
Р"(рис. 27, а) Пренебрегая весом стержней и поршня, определить силу давления
поршня на тело М при данных углах аир.
Решение. Рассмотрим сначала равновесие шарнира Аг, к которому при-
приложена единственная заданная сила Р На ось шарнира кроме силы Р действуют
реакции стержней Rt и R2, направленные вдоль стержней Строим силовой тре-
треугольник (рис 27, б) Углы в нем равны ср=90°—а, г|з=9О°—р1, у—а.-\-$. Поль-
Пользуясь теоремой синусов, получим
R1km<p=Pfsmy и Ry=P cos a/sin (а+Р).
Теперь рассмотрим равновесие поршня На поршень действуют тоже три силы:
сила давления Ri=—R1 стержня АВ, реакция N стенки и реакция Q прессуемого
тела. Так как сил три, то они при равновесии должны быть сходящимися.
28
Строя из этих сил силовой треугольник (рис. 27, в), находим из него
Подставляя вместо R[ равную ей Rlt получаем окончательно
Р cos a cos E Р
Q=-
tga + tgp *
Сила давления поршня на тело М равна по модулю Q и направлена в противопо-
противоположную сторону Из последней формулы видно, что при одной и той же силе Р
сила Q возрастает с уменьшением углов а и Р
Если длины стержней ОА и АВ одинаковы, то а=р и Q—0,5 Р ctg a.
Задача 8. На цилиндр весом Р, лежащий на гладкой горизонтальной пло-
плоскости, действует горизонтальная сила Q, прижимающая его к выступу В (рис. 28).
Определить реакции в точках А я В, если BD=h=R/2 (R — радиус цилиндра).
Решение Рассмотрим равновесие цилиндра, на который действуют за-
заданные силы Р, Q и реакции связей N л и Ng (реакция Ng направлена по нормали
к новерхности цилиндра, т е вдоль радиуса ВС). Все силы лежат в одной пло-
плоскости и сходятся в точке С Так как сил четыре, то удобнее воспользоваться ана-
аналитическими условия\'й равновесия ?Fftx=0, 2Fj;j,=O. Проведя координатные
оси так, как показано на рис 28, получим
Q—Arjscosa = 0> NA—
При ft=0,5 R полечим sin a—(R—Л)/Я=0,5 и a=30°. Тогда из первого урав-
уравнения находим
Мй= Q/cos a = 2QV/3.
Подставляя это значение Ng во второе уравнение, получим
При Q=Py~3 реакция Ид обращается в нуль, а если <2>РУ~] то цилиндр
рторвется от плоскости и под действием силы Q начнет поворачиваться вокруг
Выступа В.
Задача 9. На кронштейне, состоящем из стержней АВ и ВС, скрепленных друг
с другом и со стеной шарнирами, укреплен в точке В блок (рис 29, а). Через блок
перекинута нить, один конец которой привязан к стене, а на другом подвешен груз
весом Q. Определить реакции стержней, пренебрегая их весом и размерами бло-
блока. Углы аир заданы,
29
Решение. Рассмотрим равновесие блока с прилегающим к нему отрезком
DE нити *. Для наглядности изобразим блок отдельно (рис. 29, б). На блок с от-
отрезком нити действуют четыре внешние силы натяжение правой ветви нити, рав-
равное Q, натяжение левой ветви нити Т, по числовой величине тоже равное Q(T=Q)i
и реакции стержней Rt и?2, направленные вдоль стержней. Силы, пренебрегая
размерами блока, считаем сходящимися. Так как число их больше трех, восполь-
воспользуемся условиями равновесия
у у р
2Ffcv=0. Проведя координатные оси
так, как показано на рис. 29, б, полу-
получим:
—Т cos p+#! sin а—#2=0,
—Q+T sin p+#! cos а=0.
учитывая, что
Из второго уравнения,
T=Q, находим
R1=Q(l—sin P)/cos a.
Подставляя это значение йх в пер-
первое уравнение, после преобразования
получаем
Г? —О sina~cos (ст — Р)
2 cos a
Из выражения для Rt следует, что при любых острых углах а и р Rx>0. Это
означает, что реакция направлена всегда так, как показано на чертеже. Сила же
давления блока на стержень направлена в противоположную сторону (стержень'
ВС сжат). Для R2 получаем другой результат. Бу-
Будем считать углы аир всегда острыми. Так как
sin а— cos (а—P)=sin а—sin (90°—а+Р),
то эта разность положительна, если а>(90°—а+Р)
или когда 2а>(90°+р). Отсюда следует, что при
а>D5°+р/2) значение R2>0, т. е. реакция R2 име-
имеет направление, изображенное на чертеже; если же
а<D5°+р/2), то R2<0, т. е. реакция R2 имеет
противоположное направление (от А к В). При этом
стержень АВ в первом случае растянут, а во втором
сжат. Когда а=45°+р/2, получаем ^2=0.
Обращаем внимание на следующие выводы 1)
если в систему входят блоки с перекинутыми через
них нитями, то при составлении условий равнове-
равновесия блок целесообразно рассматривать вместе с
прилегающим к нему отрезком нити как одно те-
тело. При этом, если трением нити о блок или тре-
трением в оси блока пренебречь, то натяжения на
обоих концах нити будут по модулю равны и на-
направлены от блока (иначе нить скользила бы в сто-
сторону большего натяжения или блок вращался бы);
2) если при изображении реакций связей какая-нибудь из них будет направлена
не в ту сторону, куда она фактически действует, то при геометрическом решении
это непосредственно обнаружится из силового многоугольника (правило стрелок),
а при аналитическом решении числовая величина соответствующей реакции полу-
получится отрицательной.
Однако во всех случаях, когда это можно наперед сделать, следует реакции
связей сразу направлять верно. Например, в задаче 6 направление реакции под-
Рис. 30
* В подобных случаях целесообразно рассматривать блок вместе с прилегаю-
прилегающим к нему отрезком нити как одно тело. Тогда заранее неизвестные силы взаим-
взаимного давления нити и блока друг на друга будут силами внутренними и в условия
равновесия не войдут.
30
шипннка А устанавливается следующими рассуждениями: если убрать подшип-
подшипник, то кран под действием силы Р начнет падать вправо; следовательно, сила /?д,
чтобы удержать кран в равновесии, должна быть направлена влево.
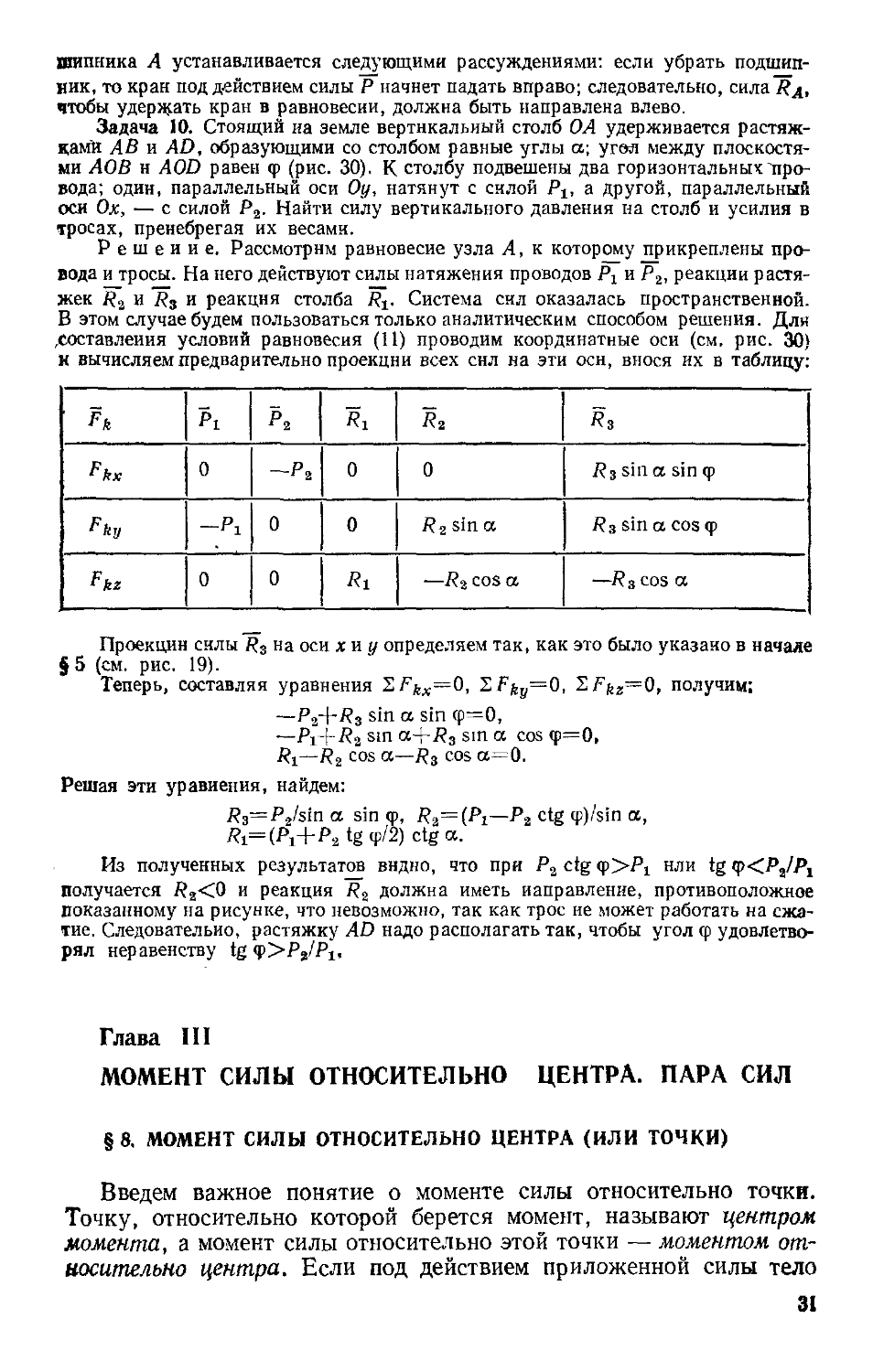
Задача 10. Стоящий на земле вертикальный столб ОА удерживается растяж-
растяжкам)! АВ и AD, образующими со столбом равные углы а; угол между плоскостя-
плоскостями АОВ и AOD равен q> (рис. 30). К столбу подвешены два горизонтальных про-
провода; один, параллельный оси Оу, натянут с силой Рх, а другой, параллельный
оси Ох, — с силой Р2. Найти силу вертикального давления на столб и усилия в
тросах, пренебрегая их весами.
Решение. Рассмотрим равновесие узла А, к которому прикреплены про-
провода и тросы. На него действуют силы натяжения проводов Рг и Р2, реакции растя-
растяжек R2 и Rs и реакция столба Ri. Система сил оказалась пространственной.
В этом случае будем пользоваться только аналитическим способом решения. Для
,составления условий равновесия A1) проводим координатные оси (см. рис. 30)
К вычисляем предварительно проекции всех сил на эти оси, внося их в таблицу:
Pk
Pkx
Pity
Fkz
Pi
0
-Pi
0
P*
~Рг
0
0
Ri
0
0
Ri
R^
0
/?2 sin a
—Ri cos a
R3
R3 sin a sinqp
Re sin a coscp
—Язсоб a
Проекции силы R3 на оси х и у определяем так, как это было указано в начале
§5 (см. рис. 19).
Теперь, составляя уравнения 2/^=0, 2Ffcs=0, 2FftZ=Q, получим:
—P2-\-R3 sin a sin ф=0,
—Pi+R2 sin a+R3 sin a cos <p=0,
Rt—R2 cos a—R3 cos a=0.
Решая эти уравнения, найдем:
/?3=.P2/sin a sin <p, R2=(Pi—Я2 ctg <p)/sin a,
Из полученных результатов видно, что при Р2 ctg Ф>РХ или tg q><P2//>1
получается jR2<0 и реакция R% должна иметь направление, противоположное
показанному на рисунке, что невозможно, так как трос не может работать на сжа-
сжатие. Следовательно, растяжку AD надо располагать так, чтобы угол ф удовлетво-
удовлетворял неравенству tg >Р/Р
Глава III
МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ЦЕНТРА. ПАРА СИЛ
§8. МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ЦЕНТРА (ИЛИ ТОЧКИ)
Введем важное понятие о моменте силы относительно точки.
Точку, относительно которой берется момент, называют центром
момента, а момент силы относительно этой точки — моментом от-
относительно центра. Если под действием приложенной силы тело
31
может совершать вращение вокруг некоторой точки, то момент силы
относительно этой точки будет характеризовать вращательный эф-
эффект силы.
Рассмотрим силу F, приложенную к телу в точке А (рис. 31).
Из некоторого центра О опустим перпендикуляр на линию действия
силы F\ длину h этого перпендикуляра на-
называют плечом силы F относительно центра
О. Момент силы относительно центра О опреде-
определяется: 1) модулем момента, равным произве-
произведению Fh; 2) положением в пространстве
плоскости ОАВ («плоскости поворота»), про-
проходящей через центр О и силу F\ 3) направ-
направлением поворота в этой плоскости.
Из геометрии известно, что положение плос-
Рис- ^ кости в пространстве определяется направле-
направлением нормали (перпендикуляра) к этой плос-
плоскости. Таким образом, момент силы относительно центра характери-
характеризуется не только его числовым значением, но и направлением в про-
пространстве, т. е. является величиной векторной.
Введем следующее определение: моментом силы F относительно
центра О называется приложенный в центре О вектор mo(F), мо-
модуль которого равен произведению модуля F силы на ее плечо h и ко-
который направлен перпендикулярно плоскости, проходящей через
центр О и силу, в ту сторону, откуда сила видна стремящейся
повернуть тело вокруг центра О против хода часовой стрелки (рис,
31). Согласно этому определению
\ = Fh=:2пл. А ОАВ. A3)
Последний результат следует из того, что пл. &ОАВ=АВ -Ы2 —
s=Fh/2. Измеряется момент силы в ньютон-метрах (Н -м).
Найдем формулу, выражающую вектор mo(F). Для этого рас-
рассмотрим векторное произведение OAXF векторов О А и F. По оп-
определению *,
|0Лх?| = 2пл. /\ОАВ = \то(Р)\.
Направлен вектор OAxF перпендикулярно плоскости ОАВ
в ту сторону, откуда кратчайшее совмещение ОА с F (если их отло-
отложить от одной точки) видно происходящим против хода часовой
стрелки, т. е. так же, как вектор mo(F). Следовательно, векторы
~ОА XF и mo(F) совпадают и по модулю, и по направлению, и, как
* Векторным произведением аХЬ векторов а и Ь называется вектор с, равный
по модулю площади параллелограмма, построенного на векторах а и 6, и направ-
направленный перпендикулярно плоскости этих векторов в ту сторону, откуда кратчайшее
совмещение "а с Ь видно происходящим против хода часовой стрелки. Модуль о
определяется еще равенством c=ab sin о^где а — угол между векторами о и ft.
Если векторы о и Ь параллельны, то оХ 6=0.
32
легко видеть, по размерности, т. е. выражают одну и ту же величи-
величину. Отсюда
т0(F) = ОАхF или mo(F) = 7xF, A4)
где г=ОА — радиус-вектор точки А, проведенный из центра О.
Таким образом, момент силы. F относительно центра О равен
векторному произведению радиуса-вектора г=ОА, проведенного из
центра О в точку А, где приложена сила, на саму силу. Этот резуль-
результат может служить другим определением понятия о моменте силы
относительно центра.
Отметим следующие свойства момента силы: 1) момент силы от-
относительно центра не изменяется при переносе точки приложения
силы вдоль ее линии действия; 2) момент силы относительно центра
О равен нулю или когда сила равна нулю, или когда линия действия
силы проходит через центр О (плечо равно нулю).
§ 9. ПАРА СИЛ. МОМЕНТ ПАРЫ
Парой сил * называется система двух равных по модулю, па-
параллельных и направленных в противоположные стороны сил, дей-
действующих на абсолютно твердое тело (рис. 32, а). Система сил F,
Fr, образующих пару, очевидно, не находится в равновесии (эти
силы не направлены вдоль одной прямой). В то же время пара сил
не имеет равнодействующей, поскольку, как будет доказано, рав-
равнодействующая любой системы сил равна ее главному вектору /?,
т. е. сумме этих сил, а для пары R=FJs-F' =0. Поэтому свойства
пары -сил, как особой меры механического взаимодействия тел,
должны быть рассмотрены отдельно.
Плоскость, проходящая через линии действия пары сил, назы-
называется плоскостью действия пары. Расстояние d между линиями дей-
действия сил пары называется плечом пары. Действие пары сил на
твердое тело сводится к некоторому вращательному эффекту, кото-
который характеризуется величиной, называемой моментом пары. Этот
момент определяется: 1) его модулем, равным произведению Fd;
2) положением в пространстве плоскости действия пары; 3) направ-
направлением поворота пары в этой плоскости. Таким образом, как и
момент силы относительно центра, это величина векторная.
Введем следующее определение: моментом пары сил называется
вектор т (или М), модуль которого равен произведению модуля одной
из сил пары на ее плечо и который направлен перпендикулярно плос-
плоскости действия пары в ту сторону, откуда пара видна стремящейся
повернуть тело против хода часовой стрелки (рис. 32, б).
Заметим еще, что так как плечо силы F относительно точки Л
равно d, а плоскость, проходящая через точку А и силу F, совпадает
* Теорию пар разработал известный французский ученый — механик и гео-
геометр Л. Пуансо A777—1859).
2 № 2173 33
с плоскостью1 действия пары, то одновременно m—mA{F)=ABxF.
Но в отличие от момента силы вектор т, как будет показано ниже,
может быть приложен в любой точке (такой вектор называется сво-
свободным). Измеряется момент пары, как и момент силы, в ньютон-
метрах.
Покажем, что моменту пары можно дать другое выражение:
момент пары равен сумме моментов относительно любого центра О
сил, образующих пару, т. е.
m = mo{F) + mo(F/). A5)
Для доказательства проведем из произвольной точки О (рис. 33)
радиусы-векторы гА=ОА и гв=ОВ. Тогда согласно формуле A4),
Рис. 32
Рис. 33
учтя_еще1 что F'=—F, получим mo{F)=rBxF, mo(F')=rAxF' =
——Fa^F и, следовательно,
то (F) + то (Л = GВ-7Л) х F = AS x ?.
Так как ABxF=m, то справедливость равенства A5) доказана.
Отсюда, в частности, следует уже отмеченный выше результат:
m =~АВ x~F = тД (F) или т = тв (?'), A5')
т. е. что момент пары равен моменту одной из ее сил относительно
точки приложения другой силы. Отметим еще, что модуль момента
пары
m=Fd. A5")
Если принять, что действие пары сил на твердое тело (ее вра-
вращательный эффект) полностью определяется значением суммы мо-
моментов сил пары относительно любого центра О, то из формулы
A5) следует, что две пары сил, имеющие одинаковые моменты, экви-
эквивалентны, т. е. оказывают на тело одинаковое механическое дейст-
действие. Иначе это означает, что две пары сил, независимо от того, где
каждая из них расположена в данной плоскости (или в параллель-
параллельных плоскостях) и чему равны в отдельности модули их сил и их
плечи, если их моменты имеют одно и то же значение т, будут экви-
эквивалентны. Так как выбор центра О произволен, то вектор т можно
считать приложенным в любой точке, т. е. это вектор свободный.
34
В дальнейшем будем обычно на чертеже вместо пары изображать
полностью ее характеризующий вектор т. При этом модуль т
определяет модуль момента пары [формула A5")], а направление т
определяет плоскость действия пары и направление поворота в
этой плоскости.
Из формулы A5) следует еще, что если на тело действует нес-
несколько пар с моментами тх, /п2, . . ., /п„, то сумма моментов всех
сил, образующих эти пары, относительно любого центра будет рав-
равна mi+m2+. . .-\-mn, а следовательно, вся совокупность этих пар
эквивалентна одной паре с моментом M=^mh. Этот результат вы-
выражает теорему о сложении пар.
§ 10*. ТЕОРЕМЫ ОБ ЭКВИВАЛЕНТНОСТИ
И О СЛОЖЕНИИ ПАР
Справедливость выводов, сделанных в конце § 9, можно дока-
доказать непосредственно. _
Рассмотрим действующую на твердое тело пару сил F, F'. Про-
Проведем в ллоскости действия этой пары через произвольные точки D
я Е две параллельные прямые до пересечения их с линиями действия
сил F, F' в точках А и В (рис. 34)
и приложим силы F, F' в этих
точках (первоначально F и F' мог-
могли быть приложены в любых дру-
других точках на их линиях дейст-
действия). Разложим теперь силу F по
направлениям АВ и ЕВ на силы
фи Р, а силу'Р — по направлени-
направлениям В А и AD на силы Q' и Р'. Оче-
Очевидно при этом, что Р'—¦—Р, а
Q'=—Q. Силы Q и Q', как уравно-
уравновешенные, можно отбросить. В ре-
результате пара сил F, F' будет заме-
заменена парой Р, Р' с другим плечом
и другими силами, которые можно, очевидно, приложить в точках
D, Е на их линиях действия. При этом в силу произвольности в
выборе точек D, Е и направлений прямых AD и BE пара Р, Р может
оказаться расположенной в плоскости ее действия где угодно
ifi положение, при котором силы Р и Р' параллельный, пару можно
привести, проделав указанное преобразование дважды).
Покажем в заключение, что пары F, F' и Р, Р' имеют одинаковые
моменты. Обозначим эти моменты соответственно через nil и т2, где
согласно формуле_A5_2_т1=ЛВ_Х/^ a m^~=ABxF. Так как 7=
—P+Q, то ABxF=ABxP+ABxQ, но AS"xQ=0 (см. подстроч-
подстрочное примечание на с. 32) и, следовательно, 7пг=тг.
2* 35
Р'
Рис 34
Из доказанного вытекают следующие свойства пары сил:
1) пару, не изменяя оказываемого ею на твердое тело действия,
•можно переносить куда угодно в плоскости действия пары;
2) у данной пары, не изменяя оказываемого ею на твердое тело
действия, можно произвольно менять модули сил или длину плеча,
сохраняя неизменным ее момент.
Можно доказать, что пара сил обладает еще одним достаточно
очевидным свойством (доказательство опускаем):
3) пару, не изменяя оказываемого ею на твердое тело действия,
можно перенести из данной плоскости в любую другую плоскость,
параллельную данной.
Отсюда следует, что две пары сил, имеющие одинаковые моменты,
эквивалентны друг другу (теорема об эквивалентности пар). Это сле-
следует из того, что указанными операциями, т. е. путем изменения
плеча и перемещения
пары в плоскости дей-
действия или переноса в
параллельную плос-
плоскость, пары с одинако-
одинаковыми моментами могут
быть преобразованы од-
одна в другую.
Теперь докажем те-
теорему о сложении пар:
рис. 35 система пар, действую-
действующих на абсолютно твер-
твердое тело, эквивалентна одной паре с моментом, равным геометри-
геометрической сумме моментов слагаемых пар.
Рассмотрим сначала две пары с моментами тг и т2, лежащие в
плоскостях / и // (рис. 35). Возьмем на линии пересечения плос-
плоскостей отрезок AB=d и изобразим пару с моментом тх силами
Fu F'u а пару с моментом т2 — силами F2, F'2, (при этом, конечно,
/rid=/Hi, F2d=m2).
Сложив силы, приложенные в точках А и В, убеждаемся, что
пары Fu F{ и F2, F'2 действительно эквивалентны одной паре R, R';
найдем_момент М этой пары. Так как R—Ft+Fr., то ABXR=A~BX
XFi+ABxFt или согласно формуле A5') M=ith+niz.
Для двух пар теорема доказана; при этом очевидно, что доказа-
доказательство сохранится и в случае, когда плоскости I a II сливаются
(слагаемые пары лежат в одной плоскости).
Если на тело действует система п пар с моментами mlt m2, . . .
..., тп, то последовательно применяя результат, полученный для
двух пар, найдем, что данная система пар будет действительно
эквивалентна одной паре с моментом
M = ln1 + ms+ ... +mn = 2'V A6)
Из полученного результата легко найти условие равновесия
системы пар, действующих на твердое тело: при равновесии должно
36
быть УИ=О или
2т* = 0. A7)
Задача 11. На твердое тело_дейст-
вуют две пары сил Fit Fx и F2, F2, ле-
лежащие во взаимно перпендикулярных
плоскостях (рис. 36). Модуль мо-
момента каждой из пар равен 30 Н-м.
Найти результирующую пару.
Решение. Изобразим векторы
/г^ и Jn2 моментов слагаемых пар,
приложив их в некоторой точке А,
тогда момент результирующей пары
изобразится вектором т. Следователь-
Следовательно, результирующая пара располо-
расположена в плоскости ABCD, перпенди-
перпендикулярной вектору т, а модуль ее мо-
момента равен 30^2 Н-м.
Рис. 36
Глава IV
ПРИВЕДЕНИЕ СИСТЕМЫ СИЛ К ЦЕНТРУ.
УСЛОВИЯ РАВНОВЕСИЯ
§ 11. ТЕОРЕМА О ПАРАЛЛЕЛЬНОМ ПЕРЕНОСЕ СИЛЫ
Равнодействующая системы сходящихся сил непосредственно
находится с пбмощью закона параллелограмма сил. Очевидно, что
аналогичную задачу можно будет решить и для произвольной систе-
системы сил, если найти для них метод, позволяющий перенести все силы
в одну точку. Такой метод дает следующая теорема: силу, прило-
приложенную к абсолютно твердому телу, можно, не изменяя оказываемого
ею действия, переносить
из данной точки в любую
другую точку тела, при-
прибавляя при этом пару с
моментом, равным момен-
моменту переносимой силы от-
относительно точки, Куда
сила переносится.
Пусть на твердое тело действует сила F, приложенная в точке А
(рис. 37, а). Действие этой силы не изменяется, если в любой точке
5 тела _приложить две уравновешенные силы ?' и 7", такие, что
/r'=FI_F"=—F. Полученная система трех сил и представляет собой
силу F', равную F, но приложенную в точке В, и пару F, F*
с моментом
Рис. 37
= mB(F).
(IS)
37
Пооледнее равенство следует из формулы A5'). Таким образом,
теорема доказана. Результат, даваемый теоремой, можно еще изо-
изобразить так, как это показано на рис. 37, б (силу F на этом рисунке
надо считать отброшенной). Рассмотрим примеры, иллюстрирующие
теорему.
Пример 1. Чтобы удержать в равновесии однородный брус АВ длиной 2а и
весом Р, надо приложить в его середине С направленную вверх силу Q, по модулю
равную Р (рис. 38, а). Согласно доказанной теореме силу Q можно заменить силой
Q', приложенной к концу А бруса, и парой с моментом, модуль которого m—Qa.
"Г
h
'f
f
С
2
Рис. 38
Рис. 39
Если плечо этой пары уменьшить до величины h (рис. 38, б), то образующие ее
силы F~, F', надо увеличить так, чтобы было Fh=Qa. Следовательно, чтобы удер-
удержать брус за его конец А, надо кроме силы Q' приложить еще пару F, F'. Этот
результат, вытекающий из доказанной теоремы, непосредственно «ощущает»
рука человека, удерживающая брус за его середину (рис. 38, а) или за конец
(рис. 38, б).
Пример 2. На барабан / радиуса г намотаны в противоположных направле-
направлениях две нити, к концам которых прикладывают силы F и F'——F (рис. 39);
на барабан 2 того же радиуса намотана одна нить, к которой прикладывают силу,
равную 2F. Рассмотрим, чем будут отличаться действия этих сил.
На барабан 1 действует только пара сил F, F' с моментом, численно равным
2Fr, вращающая барабан. Силу, действующую на барабан 2, можно заменить
силой 2F'=2F, приложенной к оси барабана, и парой 2F, 2F". В результате на-
находим, что на этот барабан действуют: 1) пара с численно таким же, как и в пер-
первом случае, моментом 2Fr, вращающая барабан, и 2) сила 2F', оказывающая дав-
давление на ось барабана.
Итак, оба барабана будут вращаться одинаково. Но при этом ось второго ба-
барабана испытывает давление, равное 2F, а ось первого барабана никакого дав-
давления не испытывает.
§ 12. ПРИВЕДЕНИЕ СИСТЕМЫ СИЛ К ДАННОМУ ЦЕНТРУ
Решим теперь задачу о приведении произвольней системы сил к
данному центру, т. е. о замене данной системы сил другой, ей экви-
эквивалентной, но значительно более простой, а именно состоящей, как
мы увидим, только из одной силы и пары.
Пусть на твердое тело действует произвольная система сил ~Flt
F*, ¦ • •, Рп (рис. 40, а). Выберем какую-нибудь точку О за центр
приведения и, пользуясь теоремой, доказанной в § 11, перенесем
все силы в центр О, присоединяя при этом соответствующие пары
(см. рис. 37, б). Тогда на тело будет действовать система сил
*1-—' \л *2 — *2> " • •> 'п — *я1
A9)
приложенных в центре О, и система пар, моменты которых согласи©
формуле A8) равны:
n = mQ(Fn).
B0)
Рис. 40
Сходящиеся силы, приложенные в точке О, заменяются одной
силой R, приложенной в точке О. При этом R^IiFk или, соглаен©
равенствам A9),
д=2^*- Ш)
Чтобы сложить все полученные пары, надо сложить векторы
моментов этих пар. В результате система пар заменится одной па-
парой, момент которой M0=%mh или, согласно равенствам B0),
Мо = 2«о(^а)- B2)
Как известно, величина R, равная геометрической сумме всех
сил, называется главным вектором системы сил; величина Мо,
равная геометрической сумме моментов* всех сил относительно цент-
центра О, называется главным моментом системы сил относительно
этого центра.
Таким образом, мы доказали следующую теорему о при-
приведении системы сил: любая система сил, действующих
на абсолютно твердое тело, при приведении к произвольно выбран-
выбранному центру О заменяется одной силой R, равной главному вектору
системы сил и приложенной в центре приведения О, и одной парой
с моментом Мо, равным главному моменту системы сил относи-
относительно центра О (рис. 40, б).
Заметим, что сила R не является здесь равнодействующей дан-
данной системы сил, так как заменяет систему сил не одна, а вместе
с парой.
Из доказанной теоремы следует, что две системы сил, имеющие
одинаковые главные векторы и главные моменты относительно одного
и того же центра, эквивалентны (условия эквивалентности систем
сил). _
Отметим еще, что значение R от выбора центра О, очевидно, не
зависит. Значение же Мо при изменении положения центра О может
в общем случае изменяться вследствие изменения значений момен-
моментов отдельных сил. Поэтому всегда необходимо указывать, относи-
относительно какого центра определяется главный момент.
Рассмотрим в заключение два частных случая: 1) если для дан-
данной системы сил R—0, а Моф0, то она приводится к одной паре сил
с моментом Мо. В этом случае значение Мо не зависит от выбора
центра О, так как иначе получилось бы, что одна и та же система сил
заменяется разными, не эквивалентными друг другу_парами, что
невозможно; 2) если для данной системы сил R=?0, а Мо=0,то_она
приводится к одной силе, т. е. к равнодействующей, равной R и
приложенной в центре О.
§ 13. УСЛОВИЯ РАВНОВЕСИЯ СИСТЕМЫ СИЛ.
ТЕОРЕМА О МОМЕНТЕ РАВНОДЕЙСТВУЮЩЕЙ
Покажем, что для равновесия любой системы сил необходимо и
достаточно, чтобы главный вектор этой системы сил и ее главный
момент относительно любого центра были равны нулю, т. е. чтобы
выполнялись условия
Я = 0, Мо = 0, B3)
где О — любой центр, так как в конце § 12 показано, что при R=0
значение Мо от выбора центра О не зависит.
Условия B3) являются необходимыми, так как если какое-ни-
какое-нибудь из них не выполняется, то система действующих на тело сил
приводится или к равнодействующей (когда R^O), или к паре сил
(когда М0Ф$) и, следовательно, не является уравновешенной. Од-
Одновременно условия B3) являются и достаточными, потому что при
/?=0 система сил может приводиться только к паре с моментом Мо,
а так как Мо—0, то имеет место равновесие.
Пользуясь полученным результатом, докажем следующую тео-
теорему Вариньона * о моменте равнодействую-
равнодействующей: если данная система сил имеет равнодействующую, то момент
равнодействующей относительно любого центра О равен сумме
моментов сил системы относительно того оке центра.
* П. Вариньон A654—1722) — выдающийся французский ученый, матема-
математик и механик. Изложил основы статики в книге «Проект новой механики» A687).
40
Пусть система сил Flt F2> . ¦ ¦, Рп приводится к равнодействую-
равнодействующей R, линия действия которой проходит jiepe3 некоторую точку
С (рис. 41). Приложим в этой точке силу R' =—R. Тогда система
сил Fu К, ¦ ¦ ¦, Fn, R' будет находиться
в равновесии и для нее должно выпол-
выполняться условие Мо=0, т. е. согласно фор-
формуле B2) для данных сил (включая силу
R') должно быть 2т0 JjFk)+mo (R')=0. Но _f
так как Я'=—R и обе силы направлены R~
вдоль одной и той же прямой, то mo(R') =
——mo{R). Подставляя это значение
mo(R') в предыдущее равенство, найдем
из него, что _ _ _
2 B4)
Тем самым теорема доказана. Ею часто бывает удобно пользо-
пользоваться при вычислении моментов сил.
Глава V
ПЛОСКАЯ СИСТЕМА СИЛ
§ 14. АЛГЕБРАИЧЕСКИЕ МОМЕНТЫ СИЛЫ И ПАРЫ
Переходя к рассмотрению плоской системы сил (системы сил,
как угодно расположенных в одной плоскости), начнем с введения
некоторых понятий.
1. Алгебраический момент силы относи-
относительно центра. Когда все силы системы лежат в одной плос-
плоскости, их моменты относительно любого центра О, находящегося
в той же плоскости, перпендикулярны этой плоскости, т. е. направ-
направлены вдоль одной и той же прямой. Тогда, не прибегая к векторной
символике, можно направления этих моментов отличить одно от
другого знаком и рассматривать момент силы F относительно центра
О как алгебраическую величину. Условимся для краткости такой
момент называть алгебраическим и обозначать символом mo(F).
Алгебраический момент силы F относительно центра О равен взя-
взятому с соответствующим знаком произведению модуля силы на ее
плечо, т. е.*
B5)
При этом в правой системе координат, принятой в механике,
момент считается положительным, когда сила стремится повернуть
* В подобных равенствах символ «?» будет означать, что данная величина
имеет или знак плюс, или знак минус.
41
тело вокруг центра О против хода часовой стрелки, и отрицатель-
отрицательным— когда по ходу часовой стрелки. Так, для сил, изображенных
на рис. 42: mo(P)=Phlt mo{Q)=—Qh2.
Заметим, что полученные выше формулы B2) и B4), содержащие
суммы моментов-векторов, сохранят свой вид и для алгебраических
моментов, но суммы при этом будут не векторные, а алгебраические.
Рис. 42
Рис. 43
Пример. Найти моменты сил F и Q относительно точки А (рис. 43), если АВ=а,
AD=b и углы a, (J известны.
Решение. Опустив из точки А перпендикуляр на линию действия силы
F, найдем плечо /i=asin а; тогда с учетом знака m^(F)=Fasina.
Для силы Q проще не находить плечо, а разложить Q на составляющие Qx и
Q2i Для которых плечи будут соответственно равны ЛВ=а и AD=b, a затем вос-
воспользоваться формулой B4), т. е. теоремой Вариньона. Тогда с учетом знаков:
wJ4(Q)=mJ4(Q1)+m^(Q2)=—Qi<H Q^b. Но Q1=QcosP, Q2=Q sin P и оконча-
окончательно
тА (Q) = Q F sin P—a cos P).
Выражение в скобках и является плечом силы Q, что не сразу видно.
Заметим, что тд(Р) можно тоже найти, разложив силу F на составляющие
Ft и F2. Тогда тд (F)—mA (Ft)=(F sin a)a, так как m/j(/r2)=0.
2. Алгебраический момент пары. Поскольку
момент пары сил равен моменту одной из ее сил относительно точки
приложения другой силы [формула A5')], то для пар, лежащих в
одной плоскости, момент пары мож-
можно тоже рассматривать как алгеб-
алгебраическую величину, называть
алгебраическим и условиться обоз-
обозначать символом т (или М). При
этом алгебраический момент пары
равен взятому с соответствующим
uz ^_^- знаком произведению модуля одной
из сил пары на плечо пары:
m=±Fd. B6)
Правило знаков здесь такое же, как для момента силы. Так,
для изображенной на рис. 44, а пары F, F' момент ml=Fd1, а для
парыР, Р' момент тг=—Pd2- Поскольку пара сил характеризуется
только ее моментом, то на рисунках пару изображают часто просто
42
Рис. 44
дуговой стрелкой, показывающей направление поворота пары (как
на рис. 44, б).
Полученные выше формулы A6) и A7), содержащие суммы мо-
моментов-векторов, тоже сохранят вид для алгебраических моментов,
причем суммы будут алгебраическими.
Задача 12. Криволинейный рычаг ABCD (рис. 45) находится в равновесии
под действием двух параллельных сил Р и Р', образующих пару. Определить силы
давления на опоры, если АВ—а= 15 см, ВС=&=30 см, CD—c= 20 см, Р=Р'=
=300 Н.
Ь
Рис. 45
Решение. Заменим пару Р, Р' эквивалентной ей парой Q, Q', силы кото-
которой направлены по направлениям реакций опор. При этом моменты пар должны
быть одинаковы, т. е. Р(с—a)=Qb.
Следовательно, силы давления на опоры численно равны
Q = Q' = P (с—аIЬ = 50 Н
к направлены так, как показано на чертеже.
Задача 13. На шестерню / радиуса тх действует пара сил с моментом ntf
(рис. 46, а). Определить момент т2 пары, которую надо приложить к шестерне 2
радиуса гг, чтобы сохранить равновесие.
Решение. Рассмотрим сначала условия равновесия шестерни /. На н?е
действует пара с моментом т1? которая может быть_уравновешена только действием
другой пары, в данном случае пары Qu Rt. Здесь Qt— перпендикулярная радиусу
составляющая силы давления на зуб со стороны шестерни 2, a Rx— тоже пер-
перпендикулярная радиусу составляющая реакции оси А (сила давления на зуб
И реакция оси А имеют еще составляющие вдоль радиуса, которые взаимно урав-
уравновешиваются и в условие равновесия не войдут). При этом, согласно условию рав-
равновесия A7), «!+(—<Эл)=0 и Q1=m1/r1.
Теперь рассмотрим условия равновесия шестерни 2 (рис. 46, б). По закону
равенства действия и противодействия на нее со стороны шестерни t будет дей-
действовать сила Q2=—Qi, которая с перпендикулярной радиусу составляющей
реакции оси В образует пару Q2, R2 с моментом, равным — Q2r2. Эта пара и
должна уравновеситься приложенной к шестерне 2 парой с моментом т2; следова-
следовательно, по условию равновесия A7), /п2+ (—Q2r2)=0. Отсюда, так как Q2=Qi'
находим m2=mirjrl.
Естественно, что пары с моментами mt и тг не удовлетворяют условию равно-
равновесия A7), так как они приложены к разным телам.
Полученная в процессе решения задачи величина 0.^ (или Q2) называется
окружным усилием, действующим на шестерню. Как видим, окружное усилие
равно моменту вращающей пары, деленному на радиус шестерни: Q1=m1/r1—
/
43
§ 15. ПРИВЕДЕНИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ
К ПРОСТЕЙШЕМУ ВИДУ
Результат, полученный в § 12, справедлив, конечно, и в частном
случае плоской системы сил. Следовательно, плоская система сил
тоже приводится к силе, равной R и приложенной в произвольно
выбранном центре О, и паре с моментом Мо, но сила и пара лежат
в данном случае в одной плоскости — в плоскости действия сил
(рис. 47, а, где пара изображена дуговой стрелкой). Значения глав-
главного вектора R и главного момента Мо даются формулами B1) и
B2); при этом вектор R можно определить или геометрически по-
построением силового много-
многому' ^—-ч я" 5) у—^ ?• угольника (§4), или анали-
аналитически по формулам A0) из
Rlr L-""T" \ § ^' Таким образом, для плос-
'-*""^ * <?t кой системы сил
рис 47 где все моменты в последнем
равенстве алгебраические и
сумма тоже алгебраическая.
Найдем, к какому простейшему виду может приводиться данная
плоская система сил, не находящаяся в равновесии. Результат зави-
зависит от значений R и Мо.
1. Если для данной системы сил R=0, а Моф0, то она приво-
приводится к одной паре с моментом Мо. Как показано в конце § 12,
значение Мо в этом случае не зависит от выбора центра О.
2. Если для данной системы сил R=^=0, то она приводится к одной
силе, т. е. к равнодействующей. При этом возможны два случая:
а) R=f^O, УИо=0. В этом случае система, что сразу видно, приво-
приводится к равнодействующей R, проходящей через центр О;
б) jRv^O, Mo?=0. В этом случае пару с моментом Мо можно изо-
изобразить двумя силами R' и R", беря R'=R, a R"=—R (рис. 47, б).
При этом, если d=OC — плечо пары, то должно быть
Rd-\Mol
B8)
Отбросив теперь силы R и R", как уравновешенные, найдем,
что вся система сил заменяется равнодействующей R'=R, проходя-
проходящей через точку С. Положение точки С определяется двумя условия-
условиями: 1) расстояние OC=cf (OC±_R) должно удовлетворять равенству
B8); 2) знак момента относительно центра О силы R', приложенной
в точке С, т. е. знак mo(R'), должен совпадать со знаком Мо.
Пример подобного расчета дан в задаче 17.
44
Таким образом, плоская система сил, не находящаяся в равнове-
равновесии, может быть окончательно приведена или к одной силе, т. е. к
равнодействующей (когда ИфО), или к паре сил (когда /?=0).
Задача 14. Привести к центру О систему сил Р, Ft, F2< F3, изображенных на
рис. 48, если Р=30 Н, F1=Fi=^F3=20 Н, а=0,3 м, 6=0,5 м, а=60°.
Рис. 48
Решение. Задача сводится к нахождению главного вектора R заданной
системы сил, который будем определять по его проекциям Rx, /?й, и главного мо-
момента Мо этих сил относительно центра О. Проводя оси Оху так, как показано на
рисунке, и пользуясь формулами B7), получим (см. пример вычисления моментов
сил в § 14):
Ry = 2Fky = —P—Fx sin a+F2 sin a,
Mo = 2m0 (Fk) = — bP + aFi cos a -f 2bF2 sin a H- aF3.
Подставляя сюда числовые значения сил, найдем, что Rx=:—40 Н, Ry=
=—ЗОН, Мо~П,3 Н-м. Таким образом, заданная система сил приводится к
приложеннойв центре приведения О силе/? с проекциями Rx 40 H,Ry=—30 Н
(^=50 Н) и паре сил с моментом УИо=11,3 Н-м.
Рис. 50
Задача 15. Привести к простейшему виду систему сил Pt, P2, Ps, действую-
действующих на балку АВ (рис. 49), и найти силы давления на опоры А и В, если Р,=
~Р2=Р3=Р.
Р е ш е Hji е. Многоугольник, построенный из сил Р1г Р2, Ps, замкнут; сле-
следовательно, /?=0. Сумма моментов всех сил относительно любой точки (напри-
(например, точки С) равна —Ра. Следовательно, данная система сил приводится к паре
С моментом т=—Ра. Располагая эту пару так, как показано на чертеже пункти-
пунктиром, заключаем, что силы Pi,~P2'~P~a оказывают на опоры давления Q^nQl, чис-
численно равные Ра/Ь,
45
Задача 16. Привести к простейшему виду систему сил Flt F2, fs, действую-
действующих ]ia ферму АВ (рис. 50), и найти силы давления на опоры Л и В, если Ft=
=F2=F3=F. _
Решение. Замечая, что силы F2 и Fs образуют пару, перемещаем ее в
положение, показанное на чертеже пунктиром. Тогда силы Flt F3 взаимно уравно-
уравновешиваются и вся система сил приводится к равнодействующей ~R=F2 (численно
R=F)-
Отсюда заключаем, что действие сил f,, F2, F3 сводится к вертикальному дав-
давлению на опору А; опора В при этом не нагружена.
Задача 17. Привести к простейшему виду систему сил, рассмотренную в зада-
задаче 14 (см. рис. 48).
Решение. Из результатов, полученных в задаче 14^ следует, что данная
система сил приводится к приложенной в точке О силе R, направленной так,
как показано на рис. 51, и паре с моментом Мо=П.З Н-м. При этом_численно
Я=50_Н и cos p= \Ry\/_R=0,6 (Р«53°)._Представим пару силами "#'="# и ~R"=
=—R, приложив силу R" в точке О, a R' в точке С, причем, согласно формуле
B8),d=OC=Mo/R~0,23 м. Отбрасывая силы R и R", найдем, что рассматривае-
рассматриваемая система сил приводится к равнодействующей, равной R, линия действия ко-
которой проходит на расстоянии 0,23 м от точки О (через точку С с координатами
х=—d cos p«— 0,14 м, y=dsin.p^0,18 м).
§ 16. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ.
СЛУЧАЙ ПАРАЛЛЕЛЬНЫХ СИЛ
Необходимые и достаточные условия равновесия любой системы
сил даются равенствами R=0 и УИо=0, выражаемыми формулами
B3). Найдем вытекающие отсюда аналитические условия равнове-
равновесия плоской системы сил. Их можно получить в трех различных
формах.
1. Основная форма условий равновесия.
Так как вектор R равен нулю, когда равны нулю его проекции Rx
и Rv, то для равновесия должны выполняться равенства Rx=0,
Ry=0 и Мо—0, где в данном случае Мо — алгебраический момент,
а О — любая точка в плоскости действия сил. Но из формул B7)
следует, что предыдущие равенства будут выполнены, когда дейст-
действующие силы удовлетворяют условиям:
2Fftjc=,0, 2/^ = 0, 2/по(?л) = 0. B9)
Формулы B9) выражают следующие аналитические условия рав-
равновесия: для равновесия произвольной плоской системы сил необхо-
необходимо и достаточно, чтобы суммы проекций всех сил на каждую из
двух координатных осей и сумма их моментов относительно любого
центра, лежащего в плоскости действия сил, были равны нулю. Одно-
Одновременно равенства B9) выражают условия равновесия твердого
тела, находящегося под действием плоской системы сил.
2*. Вторая форма условий равновесия: для
равновесия произвольной плоской системы сил необходимо и достаточ-
достаточно, чтобы суммы моментов всех этих сил относительно каких-ни-
каких-нибудь двух центров А и В и сумма их проекций на ось Ох, не перпен-
перпендикулярную прямой АВ, были равны нулю:
ЪпА (Fh) = 0, SmB (Fk) = 0, Щх = 0. C0)
46
Необходимость этих условий очевидна, так как если любое из
них не выполняется, то или R=?0, или МАф0 (Мвф0) и равновесия
не будет. Докажем их достаточность. Если для данной системы сил
выполняются только первые два из условий C0), то для нее МА=0
и Мв=0. Такая система сил, согласно результатам, полученным в
§ 15, может не находиться в равновесии, а иметь равнодействующую
R, одновременно проходящую через точки А и В * (рис. 52). Но
по третьему условию должно быть Rx='LFhx=0. Так как ось Ох
проведена не перпендикулярно к АВ, то последнее условие может
быть выполнено, только когда R=0, т. е. когда имеет место равно-
равновесие.
3*. Третья форма условий равновесия
(уравнения трех моментов): для равновесия произвольной плоской
системы сил необходимо и достаточно, что-
чтобы суммы моментов всех этих сил относи-
относительно любых трех центров А, В и С, не
лежащих на одной прямой, были равны нулю:
2mA(Ffc)=0, Ътв (Fk) = 0, Smc (Fk) = 0. C1)
Необходимость этих условий, как и в пре-
предыдущем случае, очевидна. Достаточность Рис. 52
условий C1) следует из того, что если при
одновременном выполнении этих условий данная система сил не
находилась бы в равновесии, то она должна была бы приводиться к
равнодействующей, одновременно проходящей через точки А, В и
С, что невозможно, так как эти точки не лежат на одной прямой.
Следовательно, при выполнении условий C1) имеет место равно-
равновесие.
Во всех рассмотренных случаях для плоской системы сил полу-
получаются три условия равновесия. Условия B9) считаются основными,
так как при пользовании ими никаких ограничений на выбор коор-
координатных осей и центра моментов не налагается.
Если на тело наряду с плоской системой сил Flt F2, , . ., Fn действует система
лежащих в той же плоскости пар с моментами т1( т2, . . ., тП, то при составлении
условий равновесия в уравнения проекций пары не войдут, так как сумма проек-
проекций сил пары на любую ось равна нулю. В уравнениях же моментов к моментам
сил алгебраически прибавятся моменты пар, так как сумма моментов сил пары
относительно любого центра равна моменту пары [§9, формула A5)]. Таким об-
образом, например, условия равновесия B9) при действии на тело системы сил и пар
примут вид:
= Q. C2)
Аналогично преобразуются в этом случае условия C0) и C1),
Равновесие плоской системы параллель-
параллельных сил. В случае, когда все действующие на тело силы парал-
параллельны друг другу, можно направить ось Ох перпендикулярно си-
* При Mjf=Q система сил может иметь равнодействующую, проходящую че-
через точку А, а при Мд=@ — проходящую через точку В.
47
лам, а ось Оу параллельно им (рис. 53). Тогда проекция каждой из
сил на ось Ох будет равна нулю и первое из равенств B9) обратится
в тождество вида 0=0. В результате для параллельных сил останет-
останется два условия равновесия:
где ось Оу параллельна силам.
Другая форма условий равновесия для параллельных сил, полу-
получающаяся из равенств C0), имеет вид:
^tnA(Fk) = 0, 1imR(Fk) = Q. C4)
При этом точки А и В не должны лежать на прямой, параллель-
параллельной силам.
Si
Рис. 53
§ 17. РЕШЕНИЕ ЗАДАЧ
Рис. 54
При решении задач этого раздела следует иметь в виду все те
общие указания, которые были сделаны в § 7.
Для получения более простых уравнений следует (если это толь-
только не усложняет ход расчета): а) составляя уравнения проекций,
проводить координатную ось перпендикулярно какой-нибудь неиз-
неизвестной силе; б) составляя уравнения моментов, брать центр момен-
nioe в точке, где пересекается больше неизвестных сил.
При вычислении моментов иногда бывает удобно разлагать дан-
данную силу на две составляющие и, пользуясь теоремой Вариньона,
находить момент силы как сумму моментов этих составляющих (см.
пример вычисления моментов сил в § 14).
Решение многих задач статики сводится к определению реакций
опор, с помощью которых закрепляются балки, мостовые фермы и
т. й. В технике обычно встречаются следующие три типа опорных
закреплений (кроме рассмотренных в § 3):
1. Подвижная шарнирная опора (рис. 54, опора А).
Реакция NA такой опоры направлена по нормали к поверхности,
на которую опираются катки подвижной опоры.
2. Неподвижная шарнирная опора (рис.54,опора5),
Реакция RB такой опоры проходит через ось шарнира и может
иметь любое направление в плоскости чертежа. При решении задач
будем реакцию RB изображать ее составляющими Хв и YB по
48
\
Рис. 55
направлениям координатных осей. Если мы, решив задачу,
найдем Хв и YB, то тем самым будет определена и реакция 7?в; по
модулю RB=VX%+Y%.
Способ закрепления, показанный на рис. 54, употребляется для
того, чтобы в балке АВ не возникало дополнительных напряжений
при изменении ее длины от изменения температу-
температуры или от изгиба.
3. Жесткая заделка (или непод-
неподвижная защемляющая опора; рис.
55, а). Рассматривая заделанный конец балки и
стену как одно целое, жесткую заделку изобража-
изображают так, как показано на рис. 55, б. В этом случае
на балку в ее поперечном сечении действует со сто-
стороны заделанного конца система распределенных
сил (реакций). Считая эти силы приведенными к
центру А сечения, можно их заменить одной напе-
наперед неизвестной силой RA, приложенной в этом
центре, и парой с наперед неизвестным моментом
тА (рис. 55, а). Силу RA можно в свою очередь изо-
изобразить ее составляющими ХА и УА (рис. 55, б). Таким образом,
для нахождения реакции жесткой заделки надо определить три не-
неизвестные наперед величины ХА, YA, mA.
Реакции других видов связей были рассмотрены в § 3.
Задача 18. Определить силы, с которыми давят на рельсы колеса А и В кра-
крана, схематически изображенного на рис. 56. Вес крана Р=40 кН, центр тяжести
его лежит на линии DE Вес поднимаемого груза Q= 10 кН, вылет крана 6=3,5 м,
расстояние ЛВ=2а=2,5 м.
Решение Рассмотрим равновесие всего
крана На кран действуют заданные силы Р и
Q и реакции связей NA и Лд Для этой системы
параллельных сил составляем условия равнозе-
сия C3), принимая за центр моментов точку А
и проектируя силы на вертикальную ось. Полу-
Получим.
—Pa+NB.2a-Q(a+b)=0,
NA-hNB-P-Q-Q.
Решая эти уравнения найдем:
Л^=0,5Р—0,5Q(b'a—1)=11 кН,
NB=0,5 Р+0,5 Q(b'a+1)=39 кН.
Для проверки составим уравнение моментов от-
относительно центра В
—NA-2a-\-Pa—Q(b—a)=0.
Рис. 56
Подставляя сюда найденное значение NА, убеждаемся, что уравнение удовлетво-
удовлетворяется Искомые силы давления колес на рельсы равны численно NА и Ng, но
направлены вниз.
Из найденного решения видно, что при Q=aPI(b—a)=22,2 кН реакция NA
обращается в нуль и левое колесо перестает давить на рельс. При дальнейшем
увеличении нагрузки Q кран начинает опрокидываться Наибольшая нагрузка Q,
при теторой сохраняется равновесие крана, определяется из условия 2 тд(Р^)=0>
где Fji— действующие на кран заданные силы (в данной задаче — силы тяжести).
49-
Задача 19. Однородный брус АВ весом Р
опирается концом А на гладкую горизон-
горизонтальную плоскость и выступ D, а концом
В — на наклонную плоскость, образующую
с горизонтальной плоскостью угол а (рис 57).
I' Сам брус наклонен под углом р. Определить
силы давления бруса на обе плоскости и вы-
выступ ?>.
Решение. Рассмотрим равновесие бру-
бруса АВ. На брус действуют: заданная сила Р,
приложенная в середине бруса, и реакции
связей R, Nlt N2, направленные перпендику-
перпендикулярно соответствующим плоскостям. Прово-
Проводим координатные оси (рис. 57) и составляем
условия равновесия B9), беря моменты отно-
относительно центра А, где пересекаются две неизвестные силы. Предварительно
вычисляем проекции каждой из сил на координатные оси и ее момент относи-
относительно центра А, занося эти величины в таблицу, при этом вводим обозначения:
ЛВ=2а, Z.KAB—у (АК — плечо силы R относительно центра А).
¦X
Рис.
Fkx
т A (Fk)
0
N,
0
N,
ft
0
0
p
0
—p
—Pa cos p
R
—R sin a
#cosa
.R2acos v
Теперь составляем условия равновесия.
N2—R sin a=0, Nj^—P+R cos a=0,
—P a cos p+2 Ra cos y=0.
Из последнего уравнения находим
R=(P cosP)/2 cosy.
Так как прямая АК параллельна наклонной плоскости, то Z. КАх=а; отсюда у=
=а—р. Окончательно
/?=(Р cos P)/2 cos (a—p).
Решая первые два уравнения, получим:
cos a cos P 1 ы D sin a cos
Г cos a cos pi
L 2cos(a-p)J'
2 cos (a—p) '
Силы давления на плоскости равны по модулю соответствующим реакциям и на-
направлены противоположно этим реакциям.
Для проверки правильности вычисления величин Л/j и N2 можно составить
уравнения моментов относительно точек, где пересекаются линии действия сил R
и N2 и сил R и Л/х.
Задача 20. Симметричная арка (рис. 58) загружена системой сил, приводя-
приводящейся к силе Q=40 кН, приложенной в точке D, и паре с моментом тц~ 120 кН -м,
50
Вес арки Р=80 кН. Дано:
АВ=а=Ю м, 6=2 м, Л=3м, а=60°.
Определить реакции неподвижной шарнирной опоры В и подвижной опоры А.
Решение. Рассмотрим равновесие всей арки. На нее действуют заданные
силы Я и Q, пара с моментом /ид и реакции опор N д, Хд, У в (реакцию неподвиж-
неподвижной шарнирной опоры В изображаем двумя ее составляющими, как на рис. 54).
В этой задаче удобнее воспользоваться условиями равновесия C0), беря моменты
относительно точек А и В я проекции на ось Ах. Тогда в каждое уравнение войдет
по одной неизвестной силе. Для определения моментов силы Q разложим ее на
составляющие Qt и Q2, модули которых Qi=Q cos a, Q2=Qs'na> и воспользу-
воспользуемся теоремой Вариньона. Тогда получим:
2Fkx = Хв + Q cos a = 0,
( —Pa/2—hQ cosa—bQ
—NАа—hQ cosa + (a—b) Q sina-l-mo =
Решая эти уравнения, найдем:
Хв=— Qcosa=— 20 кН,
YB=P/2+Q(b sin a+ft cos a)/a—mD/a« 40,9 кН,
^P/2)Q[(a—6) sin a—A cos a]/a+/nD/a~73,7 кН.
(а)
(б)
(в)
Величина Хд оказалась отрицательной. Следовательно, составляющая Хв
имеет направление, противоположное показанному на чертеже, что можно было
предвидеть заранее. Полная реакция
опоры В найдется как геометричес-
кая сумма сил Хв и YB. По моду-
модулю,
Rb = Vx%Tv% к 45,5 кН.
Для проверки можно составить
уравнение проекций на ось Ау.
Рис.
(г)
Подставляя сюда найденные величи-
величины N а и Yв, убеждаемся, что они
этому уравнению удовлетворяют
(подстановку следует делать и в об-
общем виде, чтобы проверить форму-
формулы, и в числах, чтобы проверить численные расчеты).
Следует иметь в виду, что прн такой проверке можно не обнаружить ошибок,
связанных с неправильным определением проекций или моментов сил, перпенди-
перпендикулярных оси Ау. Поэтому надо или дополнительно проверить эту часть расчетов,
или составить для проверки еще одно уравнение, например уравнение моментов
относительно центра D.
Отметим еще следующее Как известно, при составлении условий C0) ось про-
проекций надо направлять не перпендикулярно линии АВ, т. е в нашем случае не
вдоль Ау. Если, тем не менее, мы составили бы третье уравнение в проекциях на
ось Ау, то получили бы систему уравнений (б), (в), (г), содержащую только два
неизвестных Ид и Ув (в этой системе одно уравнение было бы следствием двух
других). В результате мы не могли бы определить реакцию Xg.
Задача 21. Однородный брус АВ жестко заделан в стену, образуя с ней угол
а=60° (рис. 59, а). Выступающая из стены часть бруса имеет длину Ь=0,8 м
и вес Р=100 Н. Внутри угла DAB лежит цилиндр весом Q=180 H, касающийся
бруса в точке Е, причем Л?'=а=0,3 м. Определить реакцию заделки, _
Решение. Рассмотрим равновесие бруса На брус действуют: сила Р,
приложенная в середине бруса, сила давления F цилиндра, приложенная в точке
Е перпендикулярно брусу (но ни в коем случае не сила Q, которая приложена к
51
цилиндру, а не к брусу!) и реакция заделки, которую представим составляю-
составляющими Ж а,У а и парой с моментом т_А (см рис. 55, б)._
Для определения силы давления F разложим силу Q, приложенную в центре
цилиндра, на составляющие F и JV, перпендикулярные брусу и стене (рис 59, б).
Из полученного параллелограмма находим, что F=Q/s,ma
Теперь, составив условия равновесия B9), или точнее C2), получим:
)sa = 0, 2Fky = YA—Fsma—P = 0,
После замены силы F ее значением эти уравнения примут вид:
XA+Q ctg ct=O, YA-Q~P=0,
mA—Qa/s'm <я—Р(Ы2) sin a=0.
Из составленных уравнений окончательно находим:
XA=—Q ctg a=—103,8 Н, YA=P+Q=280 H,
mA=Qalsin а-\-Р (Ы2) sin а=96,9 Н -м.
Реакция заделки слагается из сил ХА, YА и пары с моментом тА.
В заключение еще раз подчеркиваем вытекающий из хода решения задач ос-
основной вывод в условия равновесия входят только силы непосредственно прило-
женнь(е к телу, равновесие которого рассматривается.
л:
Рис
Рис.
Задача 22. К столбу с перекладиной (рис 60) прикреплены два блока С и D,
через которые перекинута веревка, удерживающая груз весом Q=240H. Нижний
конец веревки закреплен в точке В Столб удерживается в равновесии растяжкой
EEY Пренебрегая весом столба с перекладиной и трением в блоках, определить
натяжение растяжки и реакцию заделки А, рассматривая ее как шарнирную (т. е.
как нежесткую, позволяющую столбу поворачиваться вокруг точки А). Все раз-
размеры указаны на чертеже (в метрах) Размерами блоков пренебрегаем.
Решение. Рассмотрим равновесие всей конструкции, т. е столба с пере-
перекладиной, блоками и частью веревки KDCKi, охватывающей блоки (см. задачу 9).
На Конструкцию действуют следующие внешние силы приложенная в точке /Ci
сила Q, приложенная в точке К сила натяжения F веревки и реакции связей Т,
Жд> YА- Внутренние силы, как не входящие в уравнения равновесия, не изобра-
изображаем. Так как при отсутствии трения в блоках натяжение веревки всюду одинако-
одинаково, то F—Q. Составляем для действующих сил следующие условия равновесия
B9).
'ees F cos a — Т cos p + ХА = 0,
/= —Q— Fsina — Г sin p + К4 = 0,
5= — Q-1,0 —
52
Из прямоугольных треугольников АЕЕ1 и ADB находим, что ЕЕ1=2,0 м,
?)В=1,5 м. Отсюда sin a=sin P=0,8, cos a=cos p=0,6. Следовательно, в данном
случае <х=р. Подставляя в составленные уравнения найденные значения триго-
тригонометрических функций и полагая одновременно F—Q, получим
0,6 Q—0,6 Т+ХА=0, —Q—0,8 Q—0,8T+Ya=0,
— 1,0 Q — 0,72 Q+0,96 T = 0.
Решая эти уравнения, найдем окончательно Г=430 Н, .Х,4=114Н, У^=776 Н.
§ 18. РАВНОВЕСИЕ СИСТЕМ ТЕЛ
Статический расчет инженерных сооружений во многих случаях
сводится к рассмотрению условий равновесия конструкции из систе-
системы тел, соединенных какими-нибудь связями. Связи, соединяющие
части данной конструкции, будем называть внутренними в отличие
от внешних связей, скрепляющих кон-
конструкцию с телами, в нее не входя-
входящими (например, с опорами).
Если после отбрасывания внешних
связей (опор) конструкция остается
жесткой, то для нее задачи статики
решаются как для абсолютно твердо-
твердого тела. Подобные примеры были рас- р -.
смотрены в задачах 20 и 22 (см. рис.
58 и 60).
Однако могут встречаться такие инженерные конструкции, ко-
которые после отбрасывания внешних связей не остаются жесткими.
Примером такой конструкции является трехшарнирная арка (рис,
61). Если отбросить опоры А и В, то арка не будет жесткой: ее части
могут поворачиваться вокруг шарнира С.
На основании принципа отвердевания система сил, действующих
на такую конструкцию, должна при равновесии удовлетворять ус-
условиям равновесия твердого тела. Но эти условия, как указывалось,
будучи необходимыми, не будут являться достаточными; поэтому
из них нельзя определить все неизвестные величины. Для решения
задачи необходимо дополнительно рассмотреть равновесие какой-
нибудь одной или нескольких частей конструкции.
Например, составляя условия равновесия для сил, действующих
на трехшарнирную арку (рис. 61), мы получим три уравнения с
четырьмя неизвестными ХА, YA, XB, YB. Рассмотрев дополнительно
условия равновесия левой (или правой) ее половины, получим еще
три уравнения, содержащие два новых неизвестных Хс, Yc, на
рис. 61 не показанных. Решая полученную систему шести уравне-
уравнений, найдем все шесть неизвестных (см. задачу 23).
Другой способ решения подобных задач состоит в том, что кон-
конструкцию сразу расчленяют на отдельные тела и составляют условия
равновесия каждого из тел в отдельности (см. задачу 24). При этом
реакции внутренних связей будут попарно равны по модулю и про-
противоположны по направлению. Для конструкции из п тел, на каж-
каждое из которых действует произвольная плоская система сил, полу-
53
чится таким путем Зп уравнений, позволяющих найти Зп неизвест-
неизвестных (при других системах сил число уравнений соответственно из-
изменится). Если для данной конструкции число всех реакций свя-
связей будет больше числа уравнений, в которые эти реакции входят,
то конструкция будет статически неопределимой (см. § 19).
Задача 23. Кронштейн состоит
весом Р1=150 Н, прикрепленного к
= 120 Н, который с брусом AD и со
из горизонтального бруса AD (рис. 62, а)
стене шарниром, и подкоса СВ весом Р2=
стеной также соединен шарнирами (все раз-
размеры показаны на чертеже). К концу D
бруса подвешен груз весом Q=300 H.
Определить реакции шарниров А а С, счи-
считая брус и подкос однородными.
Решение. Рассмотрим сначала
равновесие всего кронштейна. На него
действуют следующие внешние силы: за-
заданные силы Ръ P2,~Q и реакции связей
ХА, Уд, Хс, Ус- Кронштейн, освобож-
освобожденный от внешних связей, не образует
жесткой конструкции (брусья могут по-
поворачиваться вокруг шарнира В), но по
принципу отвердевания действующие на
него силы при равновесии должны удов-
удовлетворять условиям равновесия статики.
Составляя эти условия, найдем:
—PL-2a—Pta—
—Q-4a=0.
= ХсЛа~
Рис.
Полученные три уравнения содержат,
как видим, четыре неизвестных ХА,
Ya, Xc, Yc. Для решения задачи рассмотрим дополнительно_равндаесие бруса
АО (рис. 62, &), На него действуют силы P"x, Q, реакции ХА, КдИ реакции Хя,
Yg* которые для бруса AD (когда рассматривается его равновесие) будут силами
внешними. Недостающее четвертое уравнение составим, беря моменты действую-
действующих на брус AD сил относительно центра В (тогда в уравнение не войдут новые
неизвестные Хв, Гд):
Решая теперь систему четырех составленных уравнений (начиная с последнего),
найдем:
YA=(P1—Q)/3=— 50 Н, Fc=2P1/3+P2+4Q/3=620 H,
Хс.=2Р1/3+Ра/2+4 Q/3=560 Н, ХА=— Хс=— 560 Н.
Из полученных результатов видно, что силы ХА и Уд имеют направления, про-
противоположные показанным на чертеже. Реакции шарнира В, если их надо опреде-
определить, найдутся из уравнений проекций на оси х и у сил, действующих на брус AD,
и будут равны: Хв=— ХА, YB=Pi+Q—YA=500 H.
Как видим, при решении задач статики не всегда надо составлять все условия
равновесия для рассматриваемого тела. Если в задаче не требуется определять
реакции некоторых связей, то надо пытаться сразу составить такие уравнения,
в которые эти неизвестные реакции не будут входить. Так мы и поступили в данной
задаче при рассмотрении равновесия бруса AD, составляя только одно уравнение
моментов относительно центра В.
Задача 24. Горизонтальная балка А В весом Q=200 H прикреплена к стене
шарниром А и опирается иа оперу С (рис. 63, а). К ее концу В дюрнирно прикреп-
54
лен брус ВК весом Р=400 Н, опирающийся на выступ В. При этом СВ=АВ/3,
DK~BKl3, угол а=45°. Определить реакции опор, считая балку и брус однород-
однородными.
Решение. Расчленяя систему на две части, рассматриваем равновесие
бруса ВК и балки АВ в отдельности. На брус ВК, (рис. 63, б) действуют сила Р
и_реакции связей Nq, Хв,
YB- Вводя обозначение
ВК=а и составляя для этих
сил условия равновесия B9),
получим:
I,Fkxe=XB — NDsina=--0,
X cosa =
— P{a/2)cosa = 0.
Решая эти уравнения, най-
найдем:
ND = (ЗР/4) cos a = 212 Н,
Хв = (ЗР/8) sin 2а = 150 Н,
YB=P~CP/4)cos2a = 250 H.
Рис
На балку АВ, если ее рас-
сматривать отдельно, дейст-
действуют сила Q, реакции внешних связей Nc, ~ХА, Yд и силы давления Хв и Ув
бруса ВК, передаваемые через шарнир В (рис. 63, в). При этом по закону о дей-
действии и противодействии силы Х'в и Yb должны быть направлены противопо-
противоположно Хв и Kg; по модулю же Хв=Хв, Y'b=Yb.
Вводя обозначение АВ=Ь и составляя для сил, действующих на балку, ус-
условия равновесия C0), получим:
2Fks^ХА-Х'в = 0, 2тА (Fk)^-YBb + Nc-2b/3-Q.ft/2 = 0,
Полагая в этих уравнениях Хв~Хв и Yb=Yb и решая их, найдем:
Хл=Хв=150Н, YA=Q!i—YB'2=— 75 Н, JVC=3 Q''4+3Fs/2=525 H.
Из полученных результатов видно, что все реакции, кроме YA, имеют направле-
направления, показанные на рис. 63, реакция же YА фактически направлена вниз.
При решении задач этим путем важно иметь в виду, что если давление какого-
нибудь одного тела на другое изображено силой R или составляющими X и Y, то
на основании закона о действии и противодействии давление второго тела на первое
должно изображаться силой R', направленной противоположно R (причем по мо-
модулю R'=R) или составляющими X', Y', направленными противоположно X uY
(причем по модулю Х'—Х, Y'—Y).
Задача 25. На трехшарнирную арку (рис. 64, а) действует горизонтальная
сила F. Показать, что при определении реакций опор Aw В нельзя переносить точ-
точку приложения силы F вдоль ее линии действия в точку Е.
Решение. Освобождая арку от внешних связей (опоры А и В), мы полу-
получаем изменяемую конструкцию, которую нельзя считать абсолютно твердым телом.
Поэтому при определении реакций опор А и В переносить точку приложения силы
'F в точку Е, принадлежащую другой части конструкции, нельзя.
Убедимся в этом путем непосредственного решения задачи, пренебрегая весом
арки. Рассмотрим сначала правую половину арки. На нее действуют только две
силы: реакции Rb и Rc шарниров В и С (сила Re на чертеже не показана). При
55
равновесии эти силы должны быть направлены вдоль одной прямой, т. е. по ли-
линии ВС. Следовательно, реакция Rb направлена вдоль ВС.
Рассматривая теперь равновесие всей арки в целом, найдем, что на нее дей-
действуют три силы: заданная сила F и реакции опор Rg (направление которой мы
нашли) ийд, По теореме о
трех силах; (§ 6) линии дей-
действия этих сил должны при
равновесии пересекаться в
одной точке; отсюда нахо-
находим направление реакции
/?д. Модули реакций R^ и
Rb можно определить из со-
соответствующего силового тре-
треугольника.
Если же приложить силу F в точке Е и, рассуждая аналогичным образом,
проделать необходимые построения (рис. 64, б), то убедимся, что в этом случае
реакции опор R& и RB окажутся другими и по модулю, и по направлению.
§ 19*. СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ И СТАТИЧЕСКИ
НЕОПРЕДЕЛИМЫЕ СИСТЕМЫ ТЕЛ (КОНСТРУКЦИИ)
При решении задач статики реакции связей всегда являются
величинами заранее неизвестными; число их зависит от числа и
вида наложенных связей. Условия равновесия, в которые входят
реакции связей и которые служат для их определения, называют
обычно уравнениями равновесия. Чтобы соответствующая задача
статики была разрешимой, надо, очевидно, чтобы число уравнений
равновесия равнялось числу неизвестных реакций, входящих в эти
уравнения.
Задачи, в которых число неизвестных реакций связей равно
числу уравнений равновесия, содержащих эти реакции, называются
статически определенными, а системы тел (конструкции), для кото-
которых это имеет место — статически определимыми.
Задачи же, в которых число неизвестных реакций связей больше
числа уравнений равновесия, содержащих эти реакции, называются
статически неопределенными, а системы тел (конструкции) для ко-
которых это имеет место ¦— статически неопределимыми.
У//////////////////////////Л У////////////////////////Л
Например, подвеска, состоящая из
двух тросов (рис. 65, а), будет стати-
статически определимой, так как здесь две
неизвестные реакции 7\ и Тг войдут в
два уравнения равновесия A2) плос-
плоской системы сходящихся сил. Подвес-
Подвеска же, состоящая из трех лежащих в
одной плоскости тросов (рис. 65, б),
будет статически неопределимой, так
как в ней число неизвестных реакций
равно трем (Tlt T2, Т3), а уравнений
равновесия по-прежнему только два.
Аналогично, горизонтальная балка, лежащая на двух опорах (рис. 66, а),
будет статически определимой, так как и здесь две неизвестные реакции Nt и Ns
входят в два уравнения равновесия C3) плоской системы параллельных сил. Та-
Такая же балка на трех опорах (рис. 66, б) будет статически неопределимой.
56
Рис. 65
Рассмотрим еще арку, изображенную на рис. 67, а, где связями являются не-
неподвижная шарнирная опора в точке А и шарнирная опора на катках в точке В.
Такая арка будет статически определимой, поскольку здесь три неизвестные ре-
реакции Хд, Уд, Ng войдут в три уравнения равновесия B9) произвольной плоской
системы сил. Если же в точке В будет тоже неподвижная шарнирная опора
(рис. 67, б), то неизвестных реакций окажется четыре (Хд, YA< Xg, YB), a
уравнений равновесия останется три и арка станет статически неопределимой.
Однако трехшарнирная арка, изображенная на рис. 61, будет статически оп-
определимой, так как, расчленив ее в шарнире С на две части, мы введем еще две
реакции Хс, Ус шарнира и неизвестных реакций станет шесть, но и уравнений рав-
равновесия тоже шесть (по три для каждой части). С аркой, изображенной на рис. 67,6,
"ёж
так поступить нельзя, поскольку разделив ее на две части, например, сечением,
проведенным через точку С, мы получим в этом сечении систему распределенных
сил, которую можно привести к двум неизвестным силам Хс, Ус и паРе с неизвест-
неизвестным моментом тс (см. § 20, задачу 26). Следовательно, неизвестных реакций ста^
нет семь (Хд, Уд, Хд, Уд, Х^, Ус> тс) и их из шести уравнений равновесия
определить нельзя.
Статическая неопределимость объясняется наложением лишних связей. На-
Например, для обеспечения равновесия балки, изображенной на рис. 66, достаточно
двух опор и третья опора не нужна (балка считается абсолютно жесткой и не про-
прогибающейся). Статически неопределимые конструкции можно рассчитывать, если
учесть их деформации; это делается в курсе сопротивления материалов.
§ 20*. ОПРЕДЕЛЕНИЕ ВНУТРЕННИХ УСИЛИЙ
Внутренними усилиями в каком-нибудь сечении тела или кон-
конструкции (балки, арки и др.) называют силы, с которыми части тела,
разделенные этим сечением, действуют друг на друга. Метод опре-
определения внутренних усилий аналогичен методу, применяемому при
изучении равновесия систем тел. Сначала рассматривают равновесие
всего тела (конструкции) в целом и определяют реакции внешних
связей. Затем сечением, в котором требуется найти внутренние уси-
усилия, разделяют тело на две части и рассматривают равновесие одной
из них. При этом, если система действующих на тело внешних сил
плоская, то действие отброшенной части заменится в общем случае'
плоской системой распределенных по сечению сил; эти силы, как
и в случае жесткой заделки (см. рис. 55), представляют одной прц:
Ложенной в центре сечения силой с двумя наперед неизвестными,
57.
составляющими X, Y и парой с наперед неизвестным моментом т.
Пример расчета дан в задаче 26.
Задача 26. Считая длину балки А В равной 1 м (задача 24, рис. 63), найти
усилия в поперечном сечении балки, отстоящем от конца А на расстоянии АЕ=
=0,6 м (точка Е левее опоры С на рис. 63).
Решение. Внешними связями для балки являются опора С и шарниры А
и В. Реакции этих связей найдены в ходе решения задачи 24. Рассечем балку се-
чекием аЬ и рассмотрим равновесие ее левой части (рис. 68). Действие отброшенной
части, согласно сказанному выше, заменяем двумя силами ХЕ, YE, приложенными
в центре Е сечения, и парой с моментом тЕ. Со-
Составляя для действующих на рассматриваемую
часть балки сил Хд, Уд, Q, XE, YЕн пары смо-
" ментом тЕ условия равновесия C2), получим:
-¦>
&
По данным задачи 24 Q=200H, X^=150H,
Уд=—75 Н. Пользуясь этими значениями, най-
Рис. 68 Дем из составленных уравнений:
Х?=—150 Н, FH=275H, mE=— 65H-M.
Таким образом, на левую часть балки в сечении аЬ действуют: 1) продольная сила
~ХЕ, вызывающая в данном случае сжатие балки; 2) поперечная сила YЕ, стремя-
стремящаяся сдвинуть примыкающую к сечению часть балки вдоль линии ab, 3) пара
с моментом тЕ, называемым изгибающим моментом, которая в данном случае вы-
вызывает растяжение верхних волокон балки и сжатие нижних.
§ 21*. РАСПРЕДЕЛЕННЫЕ СИЛЫ
В инженерных расчетах часто приходится встречаться с нагруз-
нагрузками, распределенными вдоль данной поверхности по тому или ино-
иному закону. Рассмотрим некоторые простейшие примеры распреде-
распределенных сил, лежащих в одной плоскости.
Плоская система распределенных сил характеризуется ее ин-
интенсивностью q, т. е. значением силы, приходящейся на единицу
длины нагруженного отрезка. Измеряется интенсивность в ньюто-
ньютонах, деленных на метры (Н/м).
1
•HI
А
, L
lit
а
А
¦
\ 1 ^
а
Т
Рис. 69
1) Силы, равномерно распределенные
вдоль отрезка прямой (рис. 69, а). Для такой системы
сил интенсивность q имеет постоянное значение. При статических
расчетах эту систему сил можно заменить равнодействующей Q".
58
По модулю,
Q=aq.
C5)
Приложена сила Q в середине отрезка АВ.
2) Силы, распределенные вдоль отрезка
прямой по линейному закону (рис. 69, б). Приме-
Примером такой нагрузки могут служить силы давления воды на плоти-
плотину, имеющие наибольшее значение у дна и падающие до нуля у по-
поверхности воды. Для этих сил интенсивность q является величиной
переменной, растущей от нуля до максимального значения qm.
Равнодействующая Q таких сил определяется аналогично равно-
равнодействующей сил тяжести, действующих на однородную треуголь-
треугольную пластину ABC. Так как вес однородной пластины пропорциона-
пропорционален ее площади, то, по модулю,
Q=0,5^m. C6)
Приложена сила Q на расстоянии а/3 от стороны ВС треугольника
ABC (см. § 35, п. 2).
3) Силы, распределенные вдоль отрезка
прямой по произвольному закону (рис. 69, в).
Равнодействующая Q таких сил, по аналогии с силой тяжести, по
модулю равна площади фигуры ABDE, измеренной в соответствую-
соответствующем масштабе, и проходит через центр тяжести этой площади (во-
(вопрос об определении центров тяжести площадей будет рассмотрен
в § 33).
4) Силы, равномерно распре-
распределенные по дуге окружности
(рис. 70). Примером таких сил могут служить
силы гидростатического давления на боковые
стенки цилиндрического сосуда.
Пусть радиус дуги равен R, a /L.B0D —
?=/-A0D=a, где OD—ось симметрии, вдоль
которой направим ось Ох. Действующая на
дугу система сходящихся сил имеет равнодей-
равнодействующую Q, направленную в силу симметрии
вдоль оси Ох; при этом численно Q=QX-
Для определения величины Q выделим на
дуге элемент, положение которого определяет-
определяется углом ф, а длина ds=Rd(p. Действующая
на этот элемент сила численно равна dQ=
=gds=qRA<p, а проекция этой силы на ось
—UQ -cos q>=qR cos ф -ckp. Тогда
Ох будет dQ№=
Но из рис. 70 видно, что R sin a=AB/2. Следовательно, так как
QX=Q, те
Q=qh, C7)
59
9*
s
где h=AB — длина хорды, стяги-
стягивающей дугу АВ\ q — интенсив-
интенсивность.
Задача 27. На консольную балку А В,
размеры которой указаны на чертеже
(рис. 71), действует равномерно распреде-
распределенная нагрузка интенсивностью q0 Н/м
Пренебрегая весом балки и считая, что
силы давления на заделанный конец рг-
спределены по линейному закону, опреде-
определить значения наибольших интенсивно-
стей qm и q'm этих сил, если Ь=па.
Решение. Заменяем распределенные
силы их равнодействующими Q, R и 7?',
где согласно формулам C5) и C6)
Q = qob, R = 0,5qma, R'=0,5q'ma,
и составляем условия равновесия C3) для действующих на балку параллельны*
сил-
s
Чт
A
a
3
I
1
a
Ш
oC
!
-ft
i
n
1
H
>
ь
HI
I
Рис. 71
Подставляя сюда вместо Q, R и R' их значения и решая полученные уравнения,
найдем окончательно
Например, при п=2 получим ?m=16^0, q'm—2Oq0, а при п=4 qm=56qt, »
6
Задача 28. Цилиндрический баллон, высота которого равна Н, а внутренний
диаметр d, наполнен газом под давлением рН/м2. Толщина цилиндрических ие-
ьок баллона а. Определить испытываемые этими стенками растягивающие напря-
напряжения в направлениях: 1) продоль-
продольном и 2) поперечном (напряжение О.
равно отношению растягивающей
силы к площади поперечного сече-
сечения), считая aid малым.
Решение. 1) Рассечем ци-
цилиндр плоскостью, перпендикуляр-
перпендикулярной его оси, на две части и рассмот-
рассмотрим равновесие одной из них (рис.
72, а). На нее в направлении оси
цилиндра действуют1 сила давления
на дно F= (яй2/4) р и распределен-
распределенные по площади сечения силы (дей-
(действие отброшенной половины), рай-
недействующую которых обозначим "ис- '*
Q." При равновесии Q=F=jid2p/4.
Считая приближенно площадь поперечного сечения равной nda, получим для рас-
растягивающего напряжения о1 значение
2) Рассечем теперь цилиндрическую поверхность плоскостью, проходящей
через ось цилиндра, на Две другие половины и рассмотрим равновесие одной из
них, считая, что все силы приложены к ней в плоскости среднего сечени4
(рис. 72, б). На эту половину цилиндра действуют: а) равномерно распределенные
60
по дуге полуокружности силы давления с интенсивностью q=pH; согласно форму-
формуле C7) равнодействующая этих сил R=qd=pHd; б) распределенные по сечениям
цилиндра силы_(действие отброшенной половины), равнодействующие которых
обозначим Sx и S2, причем ввиду симметрии S^S^S.
Из условий равновесия S1+S2=i?, откуда S=pHd/2. Так как площадь сече-
сечения, по которому распределена сила S, равна аН (площадью сечения дна цилинд-
цилиндра пренебрегаем), то отсюда для растягивающего напряжения а2 находим
G2=S/aH=(d/2a) р.
Как видим, растягивающее напряжение в поперечном направлении вдвое больше,
чем в продольном.
§ 22*. РАСЧЕТ ПЛОСКИХ ФЕРМ
Пример решения задач на равновесие системы тел (см. § 18) дает
расчет ферм. Фермой называется жесткая конструкция из прямо-
прямолинейных стержней, соединенных на концах шарнирами. Если все
стержни фермы лежат в одной плоскости, ферму называют плоской.
Места соединения стержней фермы называют узлами. Все внешние
нагрузки к ферме прикладываются только в узлах. При расчете
фермы трением в узлах и весом стержней (по сравнению с внешними
нагрузками) пренебрегают или распределяют веса стержней по уз-
узлам. Тогда на каждый из стержней фермы будут действовать две
силы, приложенные к его концам, которые при равновесии могут
быть направлены только вдоль стержня. Следовательно, можно"
считать, что стержни фермы работают только на растяжение или
на сжатие. Ограничимся рассмотрением жестких плоских ферм
без лишних стержней, образованных из треугольников. В таких
фермах число стержней k и число узлов п связаны соотношением
/г=2п—3. C8)
В самом деле, в жестком треугольнике, образованном из трех стерж-
стержней, будет три узла (см., например, ниже на рис. 74 треугольник
ABD, образованный стержнями /, 2, 3). Присоединение каждого
следующего узла требует два стержня (например, на рис. 74 узел
С присоединен стержнями 4, 5, узел Е — стержнями 6, 7, и т. д.);
следовательно, для всех остальных (п—3) узлов потребуется 2 (п—3)
стержней. В результате число стержней в ферме й=3+2(гс—3) =
—2/г—3. При меньшем числе стержней ферма не будет жесткой, а
при большем числе она будет статически неопределимой.
Расчет фермы сводится к определению опорных реакций и уси-
усилий в ее стержнях.
Опорные реакции можно найти обычными методами статики
(см. § 17), рассматривая ферму в целом как твердое тело. Перей-
Перейдем к определению усилий в стержнях.
Метод вырезания узлов. Этим методом удобно поль-
пользоваться, когда надо найти усилия во всех стержнях фермы. Он
сводится к последовательному рассмотрению условий равновесия
61
сил, сходящихся в каждом из узлов. Ход расчетов поясним на кон-
конкретном примере.
Рассмотрим изображенную на рис. 73, а ферму, образованную из одинаковы»
равнобедренных прямоугольных треугольников, действующие на ферму силы па-
параллельны оси х и численно равны:
F1=F2^F3=F=20 кН.
В этой ферме число узлов п=б,
а число стержней k=9. Следователь-
Следовательно, соотношение C8) выполняется и
ферма является жесткой без лиш-
лишних стержней.
Составляя уравнения равнове-
равновесия B9) для фермы в целом, най-
найдем, что реакции опор направлены,
как показано на рисунке, и числен-
численно равны.
Хи=3^=60кН,
Ya=N=3F/2=3OkH.
Переходим к определению усилий
в стержнях. Пронумеруем узлы фер-
фермы римскими цифрами, а стержни —
арабскими. Искомые усилия обоз-
обозначим St (в стержне /), S2 (в стерж-
стержне 2) и т. д. Отрежем мысленно все
узлы вместе со сходящимися в них
стержнями от остальной фермы. Действие отброшенных стержней заменим силами,
которые будут направлены вдоль соответствующих стержней и численно равны
искомым усилиям Si, 52, . . . Изображаем сразу все эти силы на рисунке, на-
направляя их от узлов, т. е. считая все стержни растянутыми (рис. 73, а; изобра-
изображенную картину надо представить себе для каждого узла так, как это показано
isa рис 73, б для узла ///). Если в результате расчета значение усилия в каком-
нибудь стержне получится отрицательным, это будет означать, что данный стер-
стержень не растянут, а сжат *. Буквенных обозначений для сил, действующих вдоль
(тержней, на рис. 73 не вводим, поскольку ясно, что силы, действующие вдоль
стержня /, равны численно S1( вдоль стержня 2 — равны 52 и т. д.
Теперь для сил, сходящихся в каждом узле, составляем последовательно
уравнения равновесия A2):
4
п
П
п
У
4
1*
у
1
i
2
Ж
в
5
А
Г
7
^\
f
Рис. 73
Начинаем с узла /, где сходятся два стержня, так как из двух уравнений равно-
равновесия можно определить только два неизвестных усилия.
Составляя уравнения равновесия для узла /, получим:
ft+S2 cos 45°=0, N+Sii-S2 sin 45°=0,
Отсюда находим:
S2 = — FV1 = — 28,2кН, Si = —N — S2Vl/2 = —F/2 = — 10kH.
Теперь, зная Sj, переходим к узлу //. Для него уравнения равновесия дают
S3+F2=Q, S4—S1=0, откуда
S3=— F=— 20 кН, S4=S!=—10 кН.
Определив 54, составляем аналогичным путем уравнения равновесия сначала
для узла ///, а затем для узла IV. Из этих уравнений находим:
S5 = —541/=14,1кН, S6 = 58 = —ЗОкН, S7 = 0.
* По этой причине принято, независимо от применяемого метода расчета,
приписывать растягивающим усилиям знак «+», а сжимающим — знак «—».
62
Наконец, для вычисления 59 составляем уравнение равновесия сил, сходящихся
в узле V, проектируя их на ось By. Получим K^+S9cos 45°=0, откуда S9=
=_30/У=— 42,3 кН.
Второе уравнение равновесия для узла V и два уравнения для узла VI можно
составить как проверочные. Для нахождения усилий в стержнях эти уравнения
не понадобились, так как вместо них были использованы три уравнения равнове-
равновесия всей фермы в целом при определении N, ХА и YА (см § 181.
Окончательные результаты расчета можно свести в таблицу
№ стержня
Усилие, кН
1
—10
2
—28,2
3
—20
4
—10
5
+ 14,1
6
—30
7
0
8
—30
9
—42,3
Как показывают знаки усилий, стержень 5 растянут, остальные стержни
сжаты; стержень 7 не нагружен (нулевой стержень).
Наличие в ферме нулевых стержней, подобных стержню 7, обнаруживается
сразу, так как если в узле, не нагруженном внешними силами., сходятся три стерж-
стержня, из которых два направлены вдоль одной прямой, то усилие в третьем стержне
равно нулю. Этот результат получается из уравнения равновесия в проекции на ось,
перпендикулярную упомянутым двум стержням. Например, в ферме, изображен-
изображенной на рис 74, при отсутствии силы Р4 нулевым будет стержень 15, а следова-
следовательно, и /3. При наличии же силы Р4 ни один из этих стержней нулевым не
является.
Если в ходе расчета встретится узел, для которого число неиз-
неизвестных больше двух, то можно воспользоваться методом сечений.
Метод сечений (метод Риттера). Этим методом удобно
пользоваться для определения усилий в отдельных стержнях фер-
фермы, в частности для проверочных расчетов. Идея метода состоит в
том, что ферму разделяют на две части сечением, проходящим через
три стержня, в которых (или в одном из которых) требуется опре-
определить усилия, и рассматривают равновесие одной из этих частей.
Действие отброшенной части заменяют соответствующими силами,
направляя их вдоль разрезанных стержней от узлов, т. е. считая
стержни растянутыми (как и в методе вырезания узлов). Затем со-
составляют уравнения равновесия в форме C1) или C0), беря центры
моментов (или ось проекций) так, чтобы в каждое уравнение вошло
только одно неизвестное усилие.
Пример. Пусть требуется определить усилие в стержне 6 фермы, изображен-
изображенной на рис 74. Действующие вертикальные силы P1=P2=P3=Pi=20 кН, ре-
реакции опор ЛД1=Л'2=40 кН. Проводим сечение ab через стержни 4, 5, 6 и рассма-
рассматриваем равновесие левой части фермы, заменяя действие на нее правой части
силами, направленными вдоль стержней 4, 5, 6. Чтобы найти S6, составляем урав-
уравнение моментов относительно точки С, где пересекаются стержни 4 и 5. Полу-
Получим, считая AD=DC=a и BCJ^BE,
—Nt ¦2a+P1a+Se-CB=0.
Отсюда находим Se. Плечо СВ вычисляем по данным, определяющим направле-
направления и размеры стержней фермы.
В данном примере ZABC=9Q>° и CB=aY^2. Следовательно, Se=30l/^=
=42,3 кН, стержень растянут,
63
Усилия в стержнях 4 и 5 можно найти, составив уравнения моментов отно-
относительно центров В (точка пересечения стержней 5,6) к А (точка пересечения стер-
стержней 4, 6),
Рис. 74
Чтобы определить усилие в стержне 9 той же фермы, проводим сечение dc
через стержни 8, 9, 10 и, рассматривая равновесие правой части, составляем урав-
уравнение проекций на ось, перпендикулярную стержням 8 и 10. Получим
S9 cos а—Р3—P4+W2=0,
откуда находим S9. Усилия в стержнях 8 к 10 можно в этом случае найти, составив
уравнения моментов относительно центров К и С,
Глава VI
ТРЕНИЕ
§ 23, ЗАКОНЫ ТРЕНИЯ СКОЛЬЖЕНИЯ
Опыт показывает, что при стремлении двигать одно тело по по-
поверхности другого в плоскости соприкосновения тел возникает сила
сопротивления их относительному скольжению, называемая силой
трения скольжения.
Возникновение трения обусловлено прежде всего шероховато-
шероховатостью поверхностей, создающей сопротивление перемещению, и на-
наличием сцепления у прижатых друг к другу тел. Изучение всех
особенностей явления трения представляет собой довольно слож-
сложную физико-механическую проблему, рассмотрение которой выхо-
выходит за рамки курса теоретической механики.
В инженерных расчетах обычно исходят из ряда установленных
опытным путем закономерностей, которые с достаточной для прак-
практики точностью отражают основные особенности явления трения.
Эти закономерности, называемые законами трения скольжения при
покое, можно сформулировать следующим образом.
1. При стремлении сдвинуть одно тело по поверхности другого
в плоскости соприкосновения тел возникает сила трения (или сила
сцепления), которая может принимать любые значения от нуля до
Значения Fnv, называемого предельной силой трения.
64
Приложенная к телу сила трения направлена в сторону, про-
противоположную той, куда действующие на тело силы стремятся его
сдвинуть.
2. Предельная сила трения численно равна произведению стати-
статического коэффициента трения на нормальное давление или нормаль-
нормальную реакцию:
FBV4oN. C9)
Статический коэффициент трения /0 — величина безразмерная; он
определяется опытным путем и зависит от материала соприкасаю-
соприкасающихся тел и состояния поверхностей (характер обработки, темпера-
температура, влажность и т. п.).
3. Значение предельной силы трения в довольно широких пре-
пределах не зависит от размеров соприкасающихся при трении по-
поверхностей.
Из первых двух законов следует, что при равновесии F^Fnv или
. D0)
Следует подчеркнуть, что значение силы трения при покое опре-
определяется неравенством D0) и что, следовательно, это значение мо-
может быть любым, но не большим, чем Fnv. Чему конкретно равна
сила трения, можно установить, только решив соответствующую
задачу (см. § 25). Величине Fnv сила трения будет равна лишь тогда,
когда действующая на тело сдвигающая сила достигает такого зна-
значения, что при малейшем ее'увеличении тело начинает двигаться
(скользить). Равновесие, имеющее место, когда сила трения равна
Fnp, будем называть предельным равновесием.
В заключение приведем значения коэффициента трения fa
для некоторых материалов: дерево по дереву 0,4—0,7; металл по
металлу 0,15—0,25; сталь по льду 0,027.
Более подробные сведения даются в соответствующих справочни-
справочниках.
Все изложенное выше относилось к трению скольжения при
покое. При движении сила трения направлена в сторону, противо-
противоположную движению, и равна произведению динамического коэф-
коэффициента трения на нормальное давление *:
F=fN.
Динамический коэффициент трения скольжения / также являет-
является величиной безразмерной и определяется опытным путем. Значе-
Значение коэффициента / зависит не только от материала и состояния
поверхностей, но и в некоторой степени от скорости движущихся
тел. В большинстве случаев с увеличением скорости коэффициент /
сначала несколько убывает, а затем сохраняет почти постоянное
значение.
* Это справедливо, как и формулы C9), D0), для сухого трения. Случай, ког-
когда между телами имеется слой жидкой смазки, требует специального изучения и
рассматривается в гидродинамической теории смазки.
3 № 2173 65
§ 24. РЕАКЦИИ ШЕРОХОВАТЫХ СВЯЗЕЙ. УГОЛ ТРЕНИЯ
Реакция реальной (шероховатой) связи слагается из двух состав-
составляющих: из нормальной реакции N и перпендикулярной ей силы
трения F. Следовательно, полная реакция R будет отклонена от
л
'Лр
el
PSir 0?
Рис. 75
Рис. 76
нормали к поверхности на некоторый угол. При изменении силы
трения от нуля до Fnv сила R изменяется от iV до Rnv, а ее угол с
нормалью растет от нуля до некоторого предельного значения ф0
(рис. 75). Наибольший угол ф0, который полная реакция шерохова-
шероховатой связи образует с нормалью к поверхности, называется углом
трения. Из чертежа видно, что
Так как Fnv—faN, то отсюда находим следующую связь между
углом трения и коэффициентом трения:
tg <Pa=ft,. D1)
При равновесии полная реакция R в зависимости от сдвигающих
сил может проходить где угодно внутри угла трения. Когда равно-
равновесие становится предельным, реакция будет отклонена от нормали
на угол ф9.
Если к телу, лежащему на шероховатой поверхности, приложить
силу Р, образующую угол а с нормалью (рис. 76), то тело сдвинется
только тогда, когда сдвигающее усилие Psin а будет больше Fnx> =
=f0P cos а (мы считаем N=P cos а, пренебрегая весом тела). Но
неравенство Р sin a>f0P cos а, в котором /o=tg9o, выполняется
только при tg a>tg ф0, т. е. при а>ф0. Следовательно, никакой
силой, образующей с нормалью угол а, меньший угла трения ф0,
тело вдоль данной поверхности сдвинуть нельзя. Этим объясняются
известные явления заклинивания или самоторможения тел.
§ 25. РАВНОВЕСИЕ ПРИ НАЛИЧИИ ТРЕНИЯ
Изучение равновесия тел с учетом трения скольжения можно
свести к рассмотрению предельного равновесия, которое имеет мес-
место, когда сила трения равна Fnp.
При аналитическом решении реакцию шероховатой связи изобра-
изображают двумя ее составляющими N и ^„р. Затем составляют обычные
66
уравнения равновесия и присоединяют к ним равенство Fnv=f0N.
Из полученной таким путем системы уравнений и определяют иско-
искомые величины.
Если в задаче требуется определить условия равновесия при
всех значениях, которые может иметь сила трения, т. е. при F^Fnv,
то ее тоже можно решить, рассмотрев предельное равновесие и
уменьшая затем в полученном результате коэффициент трения /„
до нуля *.
Отметим еще, что если в задаче надо определить значение силы
трения F, когда равновесие не является предельным и F=?FVV, то,
как уже отмечалось в § 23, эту силу F следует считать неизвестной
величиной и находить из соответствующих уравнений (см. вторую
часть задачи 29, а также задачи 151, 152, § 130).
При геометрическом решении реакцию шероховатой связи удоб-
удобнее изображать одной силой R, которая в предельном положении
равновесия отклонена от нормали к поверхности на угол ср0.
Задача 29. Груз весом Р= 10 Н лежит на горизонтальной плоскости (рис. 77).
Определить, какую силу Q, направленную под углом а=30° к этой плоскости,
надо приложить к грузу, чтобы сдвинуть его с места, если статический коэффи-
коэффициент трения груза о плоскость /о=О,6.
Решение. Рассмотрим предельное равновесие груза. Тогда на него дей-
действуют силы P,Q, N и Fnv. Составляя условия равновесия в проекциях на оси
хну, получим:
i Q cos а.—F-np^-Q, N-\-Q sin a—Р=0.
7?
Из последнего уравнения N=P—Q sin a. Тогда
Подставляя это значение Fnp в первое уравнение и
решая его, найдем окончательно
шшш.
* >
Q = ri « 5,2 Н.
cosa + fosina , -р
Если к грузу приложить меньшую силу, напри-
мер силу Q'=4 Н, то тогда сдвигающее усилие будет ™ис- ''
равно Q' cos 30°=2]АЗ= 3,46 Н; максимальная же си-
сила трения, которая может в этом случае развиться, будет Fnp=fa(P—Q' sin 30°)=
=4,8 Н. Следовательно, груз останется в покое. При этом удерживающая его в
равновесии сила трения F определится из уравнения равновесия в проекции на
ось Ох и будет равна сдвигающей силе (f=Q' cos 30°=3,46 Н), а не силе Fnp.
Обращаем внимание на то, что при всех расчетах следует определять Fnv, по
формуле Fnp=f0N, находя N из условий равновесия. Ошибка, которую часто до-
допускают в задачах, аналогичных решенной, состоит в том, что при подсчетах счи-
считают /гПр=/о-Р> в то время как сила давления на плоскость здесь не равна весу
Груза Р.
Задача 30. Определить, при каких значениях угла наклона а груз, лежащий
на наклонной плоскости, остается в равновесии, если его коэффициент трения о
плоскость равен /0<
* В самом деле, когда равновесие является предельным, сила трения F=Fпр=
~foN. В остальных положениях равновесия F<foN. Следовательно, в каждом
из этих положений можно считать F=kN, где ?</0. При k—О (или /0=0) получим
положение равновесия, соответствующее случаю, когда связь является гладкой
(идеальной).
3* 67
Решение. Найдем сначала предельное положение равновесия, при кото-
котором угол а равен оспр. В этом положении (рис. 78) на груз действуют сила тяже-
тяжести Р~, нормальная реакция N и предельная сила трения Fav. Строя из перечислен-
перечисленных сил замкнутый треугольник, находим из него, что Fn9=NtgaDV. Но с другой
стороны, Fnv=}0N. Следовательно,
tg «пр=/о- (а)
Если в полученном равенстве уменьшать /„, то значение апр будет тоже
уменьшаться. Отсюда заключаем, что равновесие возможно и при а<апр. Окон-
Окончательно все значения угла а, при которых груз будет в равновесии, определятся
неравенством
tg ««/„. (б)
Полученный в задаче результат, выражаемый равенством (а), можно исполь-
использовать для экспериментального определения коэффициента трения, находя угол
<хпр из опыта.
Заметим еще, что так как /:0=tg ср», где ф„— угол трения, то, следовательно,
апр~Фо. т- е- наибольший угол а, при котором груз, лежащий на наклонной пло-
плоскости, остается в равновесии, равен углу трения.
а1 3
Рис. 78
Задача 31. Изогнутый под прямым углом брус опирается своей вертикальной
частью о выступы А и В, расстояние между которыми (по вертикали) h (рис. 79, а).
Пренебрегая весом бруса, найти, при какой ширине d брус с лежащим на его гори-
горизонтальной части грузом будет находиться в равновесии при любом положении
груза. Коэффициент трения бруса о направляющие равен /0.
Решение. Обозначим вес груза через Р, а его расстояние от вертикаль-
вертикальной части бруса через I. Рассмотрим предельное равновесие бруса, при котором его
ширина d=dnp. Тогда на брус действуют силы Р, AT, ~F, Л/7", F, где ~Fv. F'— пре-
предельные силы трения. Составляя условия равновесия B9) и беря моменты отно-
относительно центра А, получаем:
N—N'=0, F+F'—P=0, Nh—Fdap—Pl=0,
где F=f0N, F'—f0N'. Из двух первых уравнений находим:
N=N', P=2f0N.
Подставляя эти значения в третье уравнение и сокращая на N, получим
Л-/о^пР-2/о/=0,
откуда
<*пР=Л to—2L
Если в этом равенстве уменьшать f0 до нуля, то его правая часть будет расти
до бесконечности. Следовательно, равновесие возможно при любом значении
d>dnp. В свою очередь dnp имеет наибольшее значение, когда 1=0. Значит брус
будет в равновесии при любом положении груза (при />0), если будет выполнять-
выполняться неравенство d^ft//0. Чем меньше трение, тем d должно быть больше. При от-
отсутствии трения (/о=О) равновесие невозможно, так как в этом случае получается
d=oo.
Приведем еще геометрическое решение задачи. При таком решении вместо
68
Рис. 80
нормальных реакций и сил трения изображаем в точках А и В полные реакции
Ra и Rb> которые в предельном положении отклонены от нормалей на угол тре-
трения ф0 (рис. 79, б). Тогда на брус будут действовать три силы RA, RB, P. При рав-
равновесии линии действия этих сил должны пересекаться в
одной точке, т. е. в точке К, где пересекаются силы RA и
Яд. Отсюда получаем очевидное (см. рис. 79, б) равенство
h=(l-\-dnv) tg фо+; tgфo или h=Bl+dnv) /„, так как
tg Фо=Д)- В результате находим для dnp то же значение,
что и при аналитическом решении.
Задача дает пример самотормозящегося устройства,
нередко применяемого на практике.
Задача 32. Пренебрегая весом лестницы АВ (рис. 80),
найти, при каких значениях угла а человек может под-
подняться по лестнице до ее конца В, если угол трения ле-
лестницы о пол и о стену равен ф0.
Решение. Рассмотрим предельное положение
равновесия лестницы и применим для решения гео-
геометрический метод. В предельном положении на лест-
лестницу действуют реакции RA и RB пола и стены, отклоненные от нормалей к этим
плоскостям на угол трения ф0. Линии действия реакций пересекаются в точке К-
Следовательно, при равновесии третья действующая на лестницу сила Р (числеь-
но равная весу человека) также должна пройти через точку К- Поэтому в поло-
положении, показанном на чертеже, выше точки D человек подняться не может. Что-
Чтобы человек мог подняться до точки В, линии действия сил RA и R$ должны пере-
пересечься где-нибудь на прямой ВО, что возможно лишь тогда, когда сила RA будет
направлена вдоль АВ, т. е. когда угол а<ф0.
Следовательно, человек может подняться по лестнице до ее конца тогда, koj да
она образует со стеной угол, не превышающий угла трения лестницы о пол.
Трение о стену при этом роли не играет, т. е. стена может быть гладкой.
§ 26*. ТРЕНИЕ НИТИ О ЦИЛИНДРИЧЕСКУЮ ПОВЕРХНОСТЬ
К нити, накинутой на круглый цилиндрический вал (рис. 81), приложена си-
сила Р. Найдем, какую наименьшую силу Q надо приложить к другому концу
нити, чтобы сохранить равновесие при данном угле АОВ, равном а, если коэф-
коэффициент трения нити о вал /0.
Для решения задачи рассмотрим равновесие элемента нити DE длины d/—
=i? d9, где R — радиус вала. Разность натяжений нити в точках D и Е, равная
AT, уравновешивается силой трения AF—/ediV
(AN — нормальная реакция), так как при
наименьшей силе Q равновесие является пре-
предельным. Следовательно,
Рис. 81
Значение d.V определим из уравнения
равновесия в проекции на ось у. Полагая
синус малого угла равным самому углу и
пренебрегая малыми высшего порядка, най-
найдем, что
dA/=rsin(d9/2)+(r+dr) sin (d0/2)=
=2Td0/2=rdO.
Подставляя это значение AN в предыдущее равенство, получим
dr=/oTd0.
Разделим обе части равенства на Т и возьмем интегралы справа в пределах от 0
до а, а слева от Q до Р (так как натяжение нити в точке, где 0=0, равно Q, а в
69
точке, где 9=а, равно Р). Получим:
р а.
С AT Г Р
J T=/o J d9 и In ¦?¦=/.«.
Отсюда следует, что PlQ=^"a' или
D2)
Как видим, потребная сила Q зависит только от коэффициента трения /о и угла а;
от радиуса вала сила Q не зависит. При отсутствии трения (/0=0) получаем, как
и следовало ожидать, Q=P. Практически очень важен тот факт, что, увеличивая
угол а (навивая нить), можно значительно уменьшить силу Q, необходимую для
уравновешивания силы Р, что видно из табл. 1. Например (см. табл. 1), натя-
натяжение в 1000 Н можно уравновесить силой всего в 2 Н, дважды обернув пенько-
пеньковый канат вокруг деревянного столба.
Таблица 1. Значения Q/P при fo = 0,5 (пеньковый канат по дереву)
Обороты
i?/P=e
-g~ оборота
1 оборот . .
1-у оборота
2 оборота .
Я
2я
Зя
0,208
0,043
0,009
0,002
Формула D2) определяет также отношение натяжений Р (ведущей) и Q (ве-
(ведомой) частей ремня, равномерно вращающего шкив, если проскальзывание рем-
ремня по шкиву отсутствует. Считая, например, при этом сс=я и принимая для кожа-
кожаного ремня и чугунного шкива /0=0,3, получим,
что отношение натяжений Q/P=e~0'3arss0,4.
Задача 33. К рычагу DE ленточного тормо-
тормоза (рис. 82) приложена сила F. Определить тор-
тормозящий момент Мт, действующий на шкив ра-
радиуса R, если CD=2CE и коэффициент трения
ленты о шкив /,,=0,5.
Решение На шкив вместе с прилегаю-
прилегающей к нему лентой А В действуют приложенная
в точке А сила Р, причем P=2F, и приложенная
в точке В сила Q, определяемая формулой D2).
В нашем случае /в=0,5 и а=5я/4=3,93 рад.
Следовательно,
Рис.
Искомый момент
0.28F.
Mx=(P-Q)R=l,72FR.
Момент будет тем больше, чем меньше Q, т, е, чем больше коэффициент трения
и угол а,
70
§ 27*. ТРЕНИЕ КАЧЕНИЯ
Трением качения называется сопротивление, возникающее при
качении одного тела по поверхности другого.
Рассмотрим круглый цилиндрический каток радиуса R и веса Р,
лежащий на горизонтальной шероховатой плоскости. Приложим
к оси катка силу Q (рис. 83, а), меньшую Fnp. Тогда в точке А воз-
возникает сила трения F, численно равная Q, которая будет препятст-
препятствовать скольжению цилиндра по плоскости. Если считать нормаль-
нормальную реакцию А/ тоже приложен- \
ной в точке А, то она уравновесит
силу Р, а силы Q и F образуют па-
пару, вызывающую качение цилинд-
цилиндра. При такой схеме качение долж-
должно начаться, как видим, под дей-
действием любой, сколь угодно малой
силы Q.
Истинная же картина, как по-
показывает опыт, выглядит иначе.
Объясняется это тем, что фактически вследствие деформаций тел
касание их происходит вдоль некоторой площадки АВ (рис. 83, б).
При действии силы Q интенсивность давления у края А убывает,
а у края В возрастает. В результате реакция N оказывается сме-
щенной в сторону действия силы Q. С увеличением Q это смещение
растет до некоторой предельной величины к. Таким образом^ в
предельном положении на каток будут действовать пара Qnp, F с
моментом QnvR и уравновешивающая ее пара N, Р с моментом Nk.
Из равенства моментов находим QnpR=Nk или
Рис. 83
Qnv=(k/R)N.
D3)
Пока Q«?np, каток находится в покое; при Q>Qnv начинается
качение.
Входящая в формулу D3) линейная величина k называется
коэффициентом трения качения. Измеряют величину k обычно в
сантиметрах. Значение коэффициента k зависит от материала тел
и определяется опытным путем. Приведем приближенные значения
этого коэффициента (в см) для некоторых материалов-.
Дерево по дереву 0,05-^-0,08
Сталь мягкая по стали (колесо по рельсу) 0,005
Сталь закаленная по стали (шариковый
подшипник) 0,001
Отношение klR для большинства материалов значительно мень-
меньше статического коэффициента трения /0. Этим объясняется то, что
в технике, когда это возможно, стремятся заменить скольжение
качением (колеса, катки, шариковые подшипники и т. п.).
71
Задача 34 Определить, при каких значениях угла а (рис 84) цилиндр ра-
радиуса R, лежащий на наклонной плоскости, остается в покое, если коэффициент
Tpei ля качения равен k
Решение Рассмотрим предельное положение равновесия, когда a—at
Разлагая силу Р на составляющие Р1 и Р2 (рис 84), находим, что в этом случае
сила Qnp™-Pi=^> sin at, а нормапьная ре-
реР Т ф D3)
сдвигающая
акция
N=P2— Р cos
Р
i t, р
Тогда по формуле D3)
Р cosax или iga1=k'R
При уменьшении k до нуля угол at также убывает до
нуля Отсюда заключаем, что равновесие сохранится при
любом угле a<aj Полученным результатом можно вос-
воспользоваться для экспериментального определения коэф-
коэффициента k, находя угол а,г из опыта
Примечание Цилиндр при a=a, 6} дет в покое, если
одновременно коэффициент трения скольжения /0 цилинд-
цилиндра о плоскость будет таков, что/0>tg аг (см задачу 30 в
I) 25), т е если /0>klR, что обычно имеет место Но если
окажется, что fo-CkR, то при а.=а1 цилиндр не будет в покое и начнет
скользить вдоль плоскости,
Рис
Глава VII
ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
§ 28. МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ОСИ.
ВЫЧИСЛЕНИЕ ГЛАВНОГО ВЕКТОРА
И ГЛАВНОГО МОМЕНТА СИСТЕМЫ СИЛ
В § 8 было введено понятие о моменте силы относительно
центра О Это вектор mo(F), направленный перпендикулярно тос-
кости ОАВ (рис. 85), модуль которого согласно формуле A3) имеет
значение
\то(Р)\ = 2ил А ОАВ.
Как это было и для силы, в
дальнейшем окажется необходимым
рассматривать проекции вектора
mo(F) на разные оси. Проекция
вектора mo(F), m е. момента си-
силы F относительно центра О, на
какую-нибудь ось г, проходящую
через этот центр, называется мо-
моментом силы F относительно оси
г, т. е. _
или mz{F)
Рис
|mo(F)|cosY,
D4)
где mz(F) — момент силы F относительно оси z; у — угол между век-
вектором tno(F) и осью 2. Из определения следует, что mz(F), как про-
72
екция вектора на ось, является величиной алгебраической (знак mz (F)
определяется так_же, как знак проекции любого вектора, например,
на рис. 85 mz(F)>0)
Найдем другое выражение для mz(F), позволяющее непосредст-
непосредственно вычислять эту величину. Для этого проведем через произ-
произвольную точку Ог оси z (рис. 85) плоскость ху, перпендикулярную
это й_оси, и спроектируем ДОЛ В на эту плоскость. Так как вектор
т0 (F) перпендикулярен плоскости ОАВ, а ось z перпендикулярна
плоскости ОхАхВи то угол у, как угол между нормалями к назван-
названным плоскостям, является углом между этими плоскостями. Следо-
Следовательно, если одновременно учесть равенство D4), то
2пл. Д01Л1В1 = 2пл. /\ОАВ cosy = \т0(Р)\со?,у = тг(Р).
Но, как видно из рис. 85, в треугольнике ОхАхВу сторона А±Вх
представляет собой одновременно проекцию Fxy силы F на плоскость
ху (см.§5). Тогда 2пл. A01A1B1=FX!/h=\mOi(Fx,j)\, где mOi(Fxy)~
алгебраический момент силы FX4 относительно центра 0х. Из этого
и предыдущего равенств следует (с учетом знаков), что
* Щ (F) = tnOi (Fxy) или т2 (?) = ± Fxyh. D5)
Таким образом, момент силы F относительно оси z равен алгеб-
алгебраическому моменту проекции этой силы на плоскость, перпенди-
перпендикулярную оси z, взятому относительно точки Ох пересечения оси с
этой плоскостью Этот результат может служить другим определе-
определением понятия момента силы относительно оси.
Замечая как направлен поворот, который стремится совершить
сила Fxy, когда mz(F)>Q (см. рис. 85; случай, когда mz(F)<0
получится, если изменить направление силы F на прямо противо-
противоположное), приходим к следующему выводу, момент силы относи-
относительно оси будет иметь знак плюс, когда с положительного конца
оси поворот, который стремится совершить сила Fxy, виден проис-
происходящим против хода часовой стрелки, и знак минус — когда по
ходу часовой стрелки.
Из рис. 85 видно еще, что если менять положение точки О на
оси z, то и модуль и направление вектора mo(F) будут при этом из-
изменяться, но АОхАхВх, а с ним и значение mz(F) изменяться не
будут. _
Механический смысл величины mz(F) состоит в том, что она ха-
характеризует вращательный эффект силы F, когда эта сила стремится
повернуть тело вокруг оси z. В самом деле, если разложить силу F
на составляющие Fxy и Р~г, где Fz\\Oz (рис. 86), то поворот вокруг
оси z будет совершать только составляющая Fxy и вращательный
эффект всей силы F будет, согласно формуле D5), определяться ве-
величиной mz(F). Составляющая же Fz повернуть тело вокруг оси z
не может (она лишь может сдвинуть тело вдоль оси г).
73
В заключение рассмотрим подробнее, как вычисляется момент
силы относительно оси z по формуле D5). Для этого надо (рис. 87):
1) провести плоскость ху^ перпендикулярную оси z (в любом месте);
2) спроектировать силу F на эту плоскость и найти величину Fxy;
1 г
Рис. 86
Рис. 87
3) опустить из точки пересечения оси с плоскостью (на рис. 87 это
точка О) перпендикуляр на линию действия Fxy и найти его длину h;
4) вычислить произведение Fxyh; 5) определить знак момента.
При вычислении моментов надо иметь в виду следующие частные
случаи:
1) если сила параллельна оси, то ее момент относительно оси ра-
равен нулю (так как Fxy=0);
2) если линия действия силы пересекает ось, то ее момент отно-
относительно оси также равен нулю (так как Л=0).
Объединяя оба случая вместе, заключаем, что момент силы отно-
относительно оси равен нулю, если сила и ось лежат в одной плоскости;
3) если сила перпендикулярна оси (лежит в плоскости, перпен-
перпендикулярной этой оси), то ее момент относительно оси равен взятому
с соответствующим знаком произ-
произведению модуля силы на расстоя-
расстояние между линией действия силы и
осью, т. е. вычисляется по форму-
формуле D5), в которую вместо Fxy вой-
войдет модуль силы F.
Задача 35. Найти моменты относи-
относительно осей х, у и г сил Р и Q, которые
действуют на горизонтальную плиту, изо-
изображенную на рис. 88.
Решение. 1. Сила Р параллельна
оси г; она перпендикулярна осям х и у и
проходит от них на расстояниях ft/2 и а/2.
Следовательно, с учетом знаков:
тх (Р) = _ Р6/2, ту (Р) = Ра/2, тг (Р) = 0.
2. Для вычисления mx{Q) проектируем силу Q на плоскость уг; получаем QyZ=
= Qsincc. _
Плечо силы Qyz относительно точки О равно Ь, а поворот ее с конца оси х
виден происходящим против хода часовой стрелки; следовательно,
mx{Q) = bQ sin a.
74
Теперь вычисляем my(Q). Сила Q лежит в плоскости ABD, перпендикулярной
оси у и пересекающейся с нею в точке В. Следовательно, QXZ=Q. Опуская из точки
В перпендикуляр на линию действия силы Q (см. вспомогательный чертеж спра-
справа), находим, что его длина h=a sin а, Окончательно, учитывая направление по-
поворота, получаем
ту (Q) =— Qa sin a.
Наконец, для вычисления тг (Q) проектируем силу Q на плоскость ху и нахо-
находим, что QXV=Q cos a, a плечо этой проекции относительно точки О равно ft."
Поэтому с учетом знака
mz (Q) =
cos a.
Теорема Вариньона для моментов силы
относительно оси. Если обе части векторного равенства
B4) из § 13 спроектировать на какую-нибудь ось г, проходящую через
центр О, то согласно формулам D4) получим
Следовательно, теорема Вариньона о моменте равнодействующей
справедлива и для моментов относительно любой оси. Теоремой осо-
особенно удобно пользоваться для нахождения моментов силы относи-
относительно координатных осей, разлагая силу на составляющие, парал-
параллельные осям или их пересекающие.
Задача 36. Найти моменты относительно осей х, у, г силы Q, приложенной
к плите в точке D (рис. 89), если ОА=а, ОВ=Ь и толщина плиты Л; угол а задан.
Решение. Разлагая силу Q на составляющие Q1 и Q2, параллельные соот-
соответственно осям х и г, где по модулю Q±=Q cos a, Q2=Q bin а, и применяя теоре-
теорему Вариньона, получим:
ту {Q) = my (Qi)+my (Q2) = Qih—Q2a=Q (h соь a,—a sin a),
mz (Q) = mz (QO +mz (Q2) = QJ = Qb cos a,
так как тхШ=0 Ш\Ох) и mz(Ql)=0 (СУОг).
Как видим, с помощью теоремы Вариньона моменты силы вычисляются до-
довольно просто (с ее помощью легко найти моменты силы Q и в задаче 35). Поэтому
рекомендуется во всех подобных случаях пользоваться данной теоремой. При реко-
тором навыке все подсчеты легко проделать, опуская промежуточные выкладки;
например, сразу видно, что mx(Q)=(Q sin a ) Ь и т. д.
Аналитические фор-
формулы для моментов си-
силы относительно коор-
координатных осей. Разложим
силу F, приложенную в точке А с
координатами х, у, г, на составля-
ющие Fx, Fy, Fz, параллельные
координатным осям (рис. 90, а).
Тогда по теореме Вариньона
/
ay
«2,
h
тх
= тх (Fx) + тх (Fy) + mx (F2).
Рис. 89
75
Но_так как составляющая Fx параллельна оси х, а составляющие Fg
и ^г_ей перпендикулярны, то с учетом знаков будет^ mx(Fx) — Q,
tnx(Fv)=—zFy, mx(Fz)=yFz и в результате mx(F)=yFz—zFy.
Аналогично находятся моменты относительно осей у и г. Оконча-
Окончательно получим:
my(F) = zFx—xFz, > D7)
тг (F) = xF — yFx. )
< т Формулы D7) дают аналшпи-
z u ческие выражения для моментов
силы относительно координат-
координатных осей. Сих помощью моменты
можно вычислять, зная проек-
н ции силы и координаты точки
Рис. 90 ее приложения. Заметим, что
каждая следующая формула в
равенствах D7) получается из предыдущей так называемой круго-
круговой перестановки букв и индексов, т. е. последовательной заме-
заменой х на у, у на z и z на х (рис. 90, б).
Отметим еще один результат: поскольку левые части равенств
D7) являются одновременно проекциями вектора mo(F) на коорди-
координатные оси (где О — начало координат), то с помощью этих равенств
можно найти модуль момента mo(F) по формуле
0
/
. А/
>
г
/х
F
/
7'
Я
I т
[my
+ [mz {F)]\
D8)
Задача 37. Вычислить по аналитическим формулам моменты силы Q, изобра-
изображенной на рис 89, относительно осей х, у, г и центра О
Решение Сила Q приложена в точке D с координатами х=а, y=b,z=~h.
Ее проекции на координатные оси
Qx = — Qcosa, Qy = 0, Qz = Qsma.
Подставляя эти значения в формулы D7), получим тот же результат, что и в зада-
задаче 36 Для \mo(Q)l по формуле D8) найдем
I m0 (Q) | = Q Vb2^-(hcoi,a — a sin aJ.
Вычисление главного вектора и главного
момента системы сил. Согласно формулам B1) и B2),
полученным в § 12, значения главного вектора R и главного момента
Мо системы сил определяются равенствами: R =2Fft, Мо=2то (Fh).
Покажем, как значения R и Мо вычисляются аналитически,
т. е. по их проекциям на координатные оси, что нам в дальнейшем
понадобится.
7G
Выражения для Rx, Ry, Rz уже известны (§5). Проекции век-
вектора Мо на координатные оси будем обозначать Мх, Му, Mz. По
теореме о проекциях суммы векторов на ось Мх—Ъ\т0(?ъ)\х или,
согласно равенству D4), Mx—2mx(Fk). Аналогично находятся Му
и Mz-
Окончательно для определения проекций главного вектора R
и главного момента Мо получим формулы:
D9)
E0)
В § 12 было отмечено, что две системы сил, у которых величины
R и Мо совпадают, эквивалентны. Отсюда следует, что для задания
(или определения) любой системы сил, действующих на твердое тело,
достаточно задать (определить) ее главный вектор и главный момент
относительно некоторого центра, т. е. шесть величин, входящих в
левые части равенств D9) и E0) [в случае рассмотренной в § 15 плос-
плоской системы сил — три величины, входящие в равенства B7)]. Этим
нередко пользуются на практике, например, при задании (опреде-
(определении) аэродинамических сил, действующих на самолет, ракету,
автомобиль, или при определении внутренних усилий в частях
конструкции (см. задачу 26 в §20).
§ 29*. ПРИВЕДЕНИЕ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ
К ПРОСТЕЙШЕМУ ВИДУ *
Как показано в § 12, любая система сил приводится в общем слу-
случае к силе, равной главному вектору R и приложенной в произволь-
произвольном центре О, и к паре с моментом, равным главному моменту Мо
(см. рис. 40, б). Найдем, к какому простейшему виду может приво-
приводиться пространственная система сил, не находящаяся в равнове-
равновесии. Результат зависит от значений, которые у этой системы имеют
величины R и Мо. _
1. Если для данной системы сил R=0, а МоФ0, то она приво-
приводится к паре сил, момент которой равен Мо и может быть вычислен
по формулам E0). В этом случае, как было показано в § 12, значение
Мо от выбора центра О не зависит.
2. Если для данной системы сил R^=0, а Мо=0, то она приводит-
приводится к равнодействующей, равной R, линия действия которой прохо-
проходит через центр О. Значение R можно найти по формулам D9).
3. Если для данной системы сил R^0, МоФ0, но Mo±.R, то
эта система также приводится к равнодействующей, равной R, но
не проходящей через центр О.
Действительно, при M0_LR пара, изображаемая вектором Мо,
и сила R лежат в одной плоскости (рис. 91). Тогда, выбрав силы пары
77
R' и ft" равными по модулю R и располагая их так, как показано
на рис. 91, получим, что силы R и R" взаимно уравновесятся, и
система заменится одной равнодействующей iR'=R~, линия действия
которой проходит через точку О' (см, § 15, п. 2, б). Расстояние 00'
@0' jCR) определяется при этом по формуле B8), где d=00'.
Рис. 91
Рис. 92
Рис. 93
Легко убедиться, что рассмотренный случай будет, в частности,
всегда иметь место для любой системы параллельных сил или сил,
лежащих в одной плоскости, если главный вектор этой системы R=?0.
_ 4. Если для данной системы сил /?=^=0, Моф0 и при этом вектор
Мо параллелен R (рис. 92, а), то это означает, что система сил при-
приводится к совокупности силы R и пары Р, Р'у
лежащей в плоскости, перпендикулярной силе
(рис. 92, б). Такая совокупность силы и па-
пары называется динамическим винтом, а пря-
прямая, вдоль которой направлен вектор R, осью
винта. Дальнейшее упрощение этой системы
сил невозможно. В самом деле, если за центр
приведения принять любую другую точку С
(рис. 92, а), то вектор Мо можно перенести в
точку С как свободный, а при переносе силы R в точку С (см. § 11)
добавится еще одна пара с моментом Mc=tnc(R), перпендикуляр-
перпендикулярным вектору R^_a следовательно, и Мо- В итоге момент результи-
результирующей пары Мс—Мо+М'с численно будет больше Мо; таким об-
образом, момент результирующей пары имеет в данном случае при при-
приведении к центру О наименьшее значение. К одной силе (равнодейст-
(равнодействующей) или к одной паре данную систему сил привести нельзя.
Если одну из сил пары, например Р', сложить с силой ~R, то
рассматриваемую систему сил можно еще заменить двумя скрещи-
скрещивающимися, т. е. не лежащими в одной плоскости силами Q и ~Р
(рис. 93). Так как полученная система сил эквивалентна динамиче-
динамическому винту, то она также не имеет равнодействующей.
5. Если для данной системы сил R=?0, Мо?=0 и при этом векторы
Мо и R~ не перпендикулярны друг другу и не параллельны, то та-
78
кая система сил тоже приводится к динамическому винту, но ось
винта не будет проходить через центр О.
Чтобы доказать это, разложим вектор Mq на составляющие: Mlt направлен-
направленную вдоль R, и М2, перпендикулярную R (рис._94). При_ этом Mt= Mo cos ос, M2=
— Mo sin а, где а — угол_между векторами Mq и R. Пару, изображаемую век-
вектором M2(M^XR), и силу/? можно, как в случае, показанном на рис. 91, заменить
одной силой R', приложенной в_точке О', Тогда данная система сил заменится си-
силой R'=R и парой с моментом Mlt параллельным R', причем вектор М±, как сво-
свободный, можно тоже приложить в точке О'. В результате действительно получится
динамический винт, но с осью, проходящей через точку О',
Рис. 94
Рис. 95
Задача 38. Найти, к чему приводится система сил i^ и F2, изображенных на
рис. 6 (см. §2), считая F1=F2=FlAB=2a.
Решение. Приведем силы F1 и F2 к центру О, лежащему на середине от-
отрезка АВ (рис. 95). Главный вектор системы R=F1-\-F2 и направлен по биссектри-
биссектрисе угла y'Oz'; численно он равен R—Fy~2. Главный момент системы Mo— tfio(^i)+
+"го(^г)- Вектор mo(fi) направлен вдоль оси у', а вектор mo(F^j—вдоль оси г';
численно оба Вектора равны Fa. Следовательно, по модулю M0=FaY^2, а направ-
направлен вектор Мд тоже по биссектрисе угла y'Oz'. Таким образом, система сил F[,
F% приводится к динамическому винту и, как было указано в § 2, равнодействую-
равнодействующей не имеет.
§30. РАВНОВЕСИЕ ПРОИЗВОЛЬНОЙ
ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ.
СЛУЧАЙ ПАРАЛЛЕЛЬНЫХ СИЛ
Необходимые и достаточные условия равновесия любой системы
сил выражаются равенствами R=0, Mo=0 (см. § 13). Но векторы
R и Мо равны нулю только тогда, когда Rx=Ry=Rz=Q и Мх=
=My=Mz=0, т. е. когда действующие силы, согласно формулам
D9) и E0), будут удовлетворять условиям:
E1)
Таким образом, для равновесия произвольной пространственной
системы сил необходимо и достаточно, чтобы суммы проекций всех
79
сил на каждую из трех координатных осей и суммы их моментов от-
относительно этих осей были равны нулю *.
Равенства E1) выражают одновременно условия равновесия твер-
твердого тела, находящегося под действием любой пространственной
системы сил.
Если на тело кроме сил действует еще пара, заданная ее момен-
моментом т, то при этом вид первых трех из условий E1) не изменится
(сумма проекций сил пары на любую ось равна нулю), а последние
три условия примут вид:
2 tnx (Fk) + тх = О,
+ Щ = 0,
(Fk
E2)
Рис- 96
Случай параллельных сил. В случае, когда все
действующие на тело силы параллельны друг другу, можно выбрать
координатные оси так, что ось z будет параллельна силам (рис. 96).
Тогда проекции каждой из сил на оси хиг/иих моменты относитель-
относительно оси z будут равны нулю и система E1)
даст три условия равновесия:
2 h* = О- 2 т* (?ъ) = 0. 2 ту (?*) = °- <53)
Остальные равенства обратятся при
этом в тождества вида (ЬнО.
Следовательно, для равновесия простран-
пространственной системы параллельных сил необ-
необходимо и достаточно, чтобы сумма проек-
проекций всех сил на ось, параллельную силам, и
суммы их моментов относительно двух дру-
других координатных осей были равны нулю.
Решение задач. Порядок решения задач здесь остается
тем же, что и в случае плоской систсмы-сил. Установив, равновесие
какого тела (объекта) рассматривается, надо изобразить все дейст-
действующие на него внешние силы (и заданные, и реакции связей) и со-
составить условия равновесия этих сил. Из полученных уравнений и
определяются искомые величины.
Для получения более простых систем уравнений рекомендуется
оси проводить так, чтобы они пересекали больше неизвестных сил
или были им перпендикулярны (если это только излишне не услож-
усложняет вычисления проекций и моментов других сил).
Новым элементом в составлении уравнений является вычисле-
вычисление моментов сил относительно координатных осей.
В случаях, когда из общего чертежа трудно усмотреть, чему ра-
равен момент данной силы относительно какой-нибудь оси, рекомен-
рекомендуется изобразить на вспомогательном чертеже проекцию рассмат-
рассматриваемого тела (вместе с силой) на плоскость, перпендикулярную
этой оси.
* При составлении условий E1) можно, если это целесообразно, брать для
вычисления проекций одну систему координатных осей, а для вычисления момен-
моментов — другую.
80
В тех случаях, когда при вычислении момента возникают за-
затруднения в определении проекции силы на соответствующую плос-
плоскость или плеча этой проекции, рекомендуется разложить силу на
две взаимно перпендикулярные составляющие (из которых одна
параллельна какой-нибудь координатной оси), а затем воспользо-
воспользоваться теоремой Вариньона (см. задачу 36). Кроме того, можно вы-
вычислять моменты аналитически по формулам D7), как, например, в
задаче 37.
Задача 39. На прямоугольной плите со сторонами а и Ь лежит груз. Центр
тяжести плиты вместе с грузом находится в точке D с координатами Хд, i/д
(рис, 97). Один из рабочих удерживает плиту за угол А. В каких точках В и Е
должны поддерживать плиту двое других рабочих, чтобы силы, прикладываемые
каждым из удерживающих плиту, были одинаковы.
Решение. Рассматриваем равновесие плиты, которая является свободным
телом, находящимся в равновесии под действием четырех параллельных сил Q-,,
Q-2> Рз> Р> гДе Р ¦— сила тяжести. Составляем для этих сил условия равновесия
E3), считая плиту горизонтальной и проводя оси так, как показано на рис. 97.
Получим:
Qib+Q2y—PyD=O, —Q2a-Qsx+PxD=0,
По условиям задачи должно быть Qi=Q2=Q<,= Q. Тогда из последнего урав-
уравнения P=3Q. Подставляя это значение Р в первые два уравнения, найдем оконча-
окончательно x=3xq—a, y=3yD—Ь.
Решение возможно, когда а/3«хд<2а/3, Ь/3<г/д<26'3. При xD=a/3, у^—Ь/З
получимx—y=Q, a при xD—2a/3, у д—26/3 будетх— а, у=Ь. Когда точка D в центре
плиты, х=а/2, у=Ь/2.
Рис. 98
Задача 40. На горизонтальный вал, лежащий в подшипниках Л и В (рис. 98)
насажены перпендикулярно оси вала шкив радиусом гг—20 см и барабан радиусом
JY= 15 см. Вал приводится во вращение ремнем, накинутым на шкив; при этом рав-
равномерно поднимается груз весом Р=540 Н, привязанный к веревке, которая на-
наматывается на барабан. Пренебрегая весом вала, барабана и шкива, определить
реакции подшипников А и В и натяжение 7\ ведущей ветви ремня, если известно,
что оно вдвое больше натяжения Г2 ведомой ветви. Дано: а=40 см, 6=60 см,
а^ЗО0.
Решение. В рассматриваемой задаче при равномерном вращении вала
действующие на него силы удовлетворяют условиям равновесия E1) (это будет
доказано в § 136). Проведем координатные оси (рис. 98) и изобразим действующие
на вал силы: натяжение F веревки, по модулю равное Р, натяжения ремня 7\,
Т2 и составляющие Yл, Z&, YBZs реакций подшипников.
81
Для составления условий равновесия E1) вычисляем предварительно и вно-
вносим в таблицу значения проекций всех сил на координатные оси и их моментов
относительно этих осей *,
Fkx
Fky
Fkz
"ix {Fk)
my (Fa)
mz (Fk)
F
0
fcos a
—F sin a
-Fr,
F sin ab
F cosa-b
Ti
0
Ti
0
Tin
0
-Tja
T2
0
Tx
0
-Ttft
0
—T2a
Ra
0
YA
Za
0
0
0
Rb
0
Yh
Zb
0
-ZB (a + b)
YB(a+b)
Теперь составляем условия равновесия E1); так как F=P, получим:
Р cos а+Т1+Г2+УА+Ув=0, (I)
-Я sin a.+ZA+ZB=0, (II)
-/¦зР+гЛ-^Г^О, (III)
ЬР sin a—(a+b)Z8=O, (IV)
bP cos а—аТ1—аТ2+ (a-{-b)Y3=0. (V)
Из уравнений (III) и (IV) находим сразу, учитывая, что 7'1=27'2?
Г2=г2р/Г1=405Н, Zs=(bP sin a)/(a+6)= 162 Н.
Далее, из уравнения (V) получаем:
Гд=(ЗаГ2—6Р cos а)/(а+6)~205 Н.
Подставляя найденные значения в остальные уравнения, найдем:
YA=— P cos a—ЗГ2—Гв«—1890 Н, ZA=P sin a—Zs=108 H,
И окончательно
74=810 Н, Кд~—1890 Н, ZA=108 H, Fs«205 H, Za=162 H.
Задача 41. Прямоугольная крышка весом Р=120Н, образующая с верти-
вертикалью угол а=60°, закреплена на горизонтальной оси АВ в точке В цилиндриче-
цилиндрическим подшипником, а в точке А — подшипником с упором (рис. 99). Крышка удер-
удерживается в равновесии веревкой DE и оттягивается перекинутой через блок О
нитью с грузом весом Q=200 Н на конце (линия КО параллельна АВ). Дано:
BD=BE, АК=а=0,4 м, АВ=Ь=1 м. Определить натяжение веревки DE и
реакции подшипников А и В.
Решение. Рассмотрим равновесие крышки. Проведем координатные оси,
беря начало в точке В (при этом сила Т пересечет оси у ж г, что упростит вид урав-
* Предварительное составление таблиц при решении задач этого раздела осо-
особенно полезно. Таблица заполняется по столбцам, т. е. сначала вычисляются все
проекции и моменты силы F, а затем силы Ti и т. д. Таким образом, сначала все
внимание сосредоточивается на первой силе, затем — на второй и т. д. Если же
сразу составлять уравнения E1), то к рассмотрению каждой силы придется воз-
возвращаться шесть раз; при этом вероятнее появление ошибок, а особенно пропус-
пропусков отдельных сил в том или ином уравнении.
82
нений моментов). Затем изобразим все действующие на крышку заданные силы
и реакции связей: силу тяжести Р, приложенную в центре тяжести С крышки,
силу Q', равную по модулю Q, реакцию Г веревки и реакции_Хл> YA, ZA и Kg, Zb
подшипников Ayl В (рис. 99; показанный пунктиром вектор М к данной задаче не
относится). Для составления ус-
условий равновесия введем угол р
и обозначим BD=BE=d. Под-
Подсчет моментов некоторых сил
пояснен на вспомогательных
рис. 100, а, б.
На рис. 100, а показан вид
в проекции на плоскость Вуг с
положительного конца оси х.
Этот чертеж помогает вычислять
моменты сил Р и Т относитель-
относительно оси х. Из него видно, что про-
проекции этих сил на плоскость yz
(плоскость, перпендикулярную
оен х) равны самим силам, а
плечо силы Р относительно точ-
точки В равно ВСх -sin a=(dl2) sina;
плечо же силы Т относительно
этой точки равно BD-sin f>=
==rf sin p.
На рис. 100, б показан вид Я/
в проекции на плоскость Bxz с
положительного конца оси у.
Этот чертеж (вместе с рис. 100, а)
помогает вычислять моменты сил d\
Р~я Q' относительно оси у. Из
него видно, что проекции этих
сил на плоскость хг равны са-
самим силам, а плечо силы Р от-
относительно точки В равно АВ/2=
=6/2; плечо же силы Q' относи-
относительно этой точки равно АК\,
т. е. AK-cosa или a cos a, что
видно из рис. 100, а.
Рис.
Составляя с учетом сделанных пояснений условия равновесия E1) и полагая
одновременно Q'=Q, получим:
(I)
= 0, (II)
созР + гл+2д = 0, (III)
2mx(Fk)=—(Pd/2) sin a + Tdsin$ = 0, (IV)
I,my(Fk)——Pb/2+Qa cos a + ZAb = 0, (V)
2mz (Fk) = Qa sin a —YAb = 0. (VI)
Учитывая, что {$=а/2=30°, найдем из уравнений (I), (IV), (V), (VI):
X4 = Q=200H, 7= (P sin a)/2 sin p« 104 H,
ZA = Pj2—(Qa cos a)/6 = 20 H, Кл= (Qa sin a)/6 я 69 H.
Подставляя эти значения в уравнения (II) и (III), получим:
YB = T sin$—YA = —l7 H, ZB = P — T cos $—ZA= 10H.
Окончательно,
TwlO4H, Хл = 200Н, Ул«69Н, Z4=20H, Ув =—17Н, ZB = 10H.
83
Задача 42. Решить задачу 41 для случая, когда на крышку дополнительно
действует расположенная в ее плоскости пара с моментом М=120 Н-м; поворот
пары направлен (если смотреть на крышку сверху) против хода часовой стрелки.
Решение. В дополнение к действующим на крышку силам (см. рис. 99)
изображаем момент М пары в виде вектора, перпендикулярного к крышке и при-
приложенного в любой точке, например в точке А. Его проекции на координатные оси:
Мх=0, Му=М cos а, Мг—М sin а. Тогда, составляя условия равновесия E2),
найдем, что уравнения (I) — (IV) останутся такими же, как в предыдущей задаче,
а последние два уравнения имеют вид:
~Pb!2+ZAb+Qa cos a+M cos a=0, (V)
—YBb+Qa sin a+M sin а=0. (VI')
Заметим, что этот же результат можно получить, не составляя уравнения в
виде E2), а изобразив пару двумя силами, направленными, например, вдоль линий
АВ и КО (при этом модули сил будут равны М/а), и пользуясь затем обычными ус-
условиями равновесия.
Решая уравнения (I) — (IV), (V'), (VI'), найдем результаты, аналогичные
полученным в задаче 41, с той лишь разницей, что во все формулы вместо величины
Qa войдет Qa-\-M. Окончательно получим:
ГиНИН, Хд = 200Н, Кл«173Н, ZA = — 40Н, Кя = —121 Н, ZB = 70H.
Задача 43. Горизонтальный стержень АВ прикреплен к стене сферическим
шарниром А и удерживается в положении, перпендикулярном стене, растяж-
растяжками КЕ и CD, показанными на рис. 101, а. К концу В стержня подвешен груз
весом Р—36 Н. Определить реакцию шарнира А и натяжения растяжек, если АВ=
=я=0,8 м, AC=AD1=b—0,6 м, АК=а>2, а=30°, C=60°. Весом стержня прене-
пренебречь.
С У
Рис. J01
Решение. Рассмотрим равновесие стержня. На него действуют сила Р
и реакции Тд-, Tq, ХА, YА, Z\. Проведем координатные оси и составим условия
равновесия E1). Для нахождения проекций и моментов силы Тс разло-
разложим ее на составляющие Тг и Т% (Т1= Tccos a, 7= Tc sin а). Тогда по теореме
Вариньона * mx(Tc)=mx(T1), так как mx(T2)=0, a mz(f^)=mz{1\), так как
* Заметим, что угол между силой Тс и плоскостью Ayz не равен 45°, как
иногда в аналогичных случаях ошибочно полагают. Поэтому, например, при на-
нахождении тх(Тс) по формуле D5) надо сначала определить этот угол или найти
другим путем проекцию Тс на плоскость Ауг, что усложнит расчет (составляющая
7i проекцией силы Тс на плоскость Ауг не является). С помощью же теоремы Ва-
Вариньона значение tnx(Tc) легко находится.
84
()—Q. Вычисление моментов сил относительно оси г пояснено вспомога-
вспомогательным чертежом (рис. 101, б), на котором дпн вид в проекции на плоскость Аху.
Теперь составляем уравнения E1). Предварительно заметим, что так как все
силы пересекают ось у, то их моменты относительно этой оси равны нулю; по-
поэтому уравнений равновесия останется только пять:
2Fkx = Тк cos Р — Тг sin 45° + ХА = 0,
b sin 45°-
~mz (Fk) = _G>/2)
или, заменяя Тг и Т2 их значениями:
TKcos$—Tcslnasin45°
— TKsin$ — 7С sin a cos 45° |-Гл = 0,
—P + 2"c cos а + Z^ = 0, — Pa - j- Tcft cos a = 0,
— (TKa/2) cos ft -j- 7CS sin a sin 45° - 0.
Решая эту систему уравнений, найдем окончательно Гс~55,4 Н, Гд-^58,8 Н,
Хд~—9,8 Н, YA~70,5 H, ZA'= —12 Н. Составляющие ХА и ZA имеют, таким
образом, направления, противоположные покачанным на чертеже.
Задача 44. Горизонтальная плита ABC, имеющая форму равностороннего
треугольника со стороной а, закреплена с помощью шести стержней так, как
показано на рис. 102; при этом каждый из на-
клончых стержней образует с горизонтальной
плоскостью угол а—30°. В плоскости плиты дей-
действует пара с моментом М. Пренебрегая весом
плиты, определить усилия в стержнях.
Решение. Рассматривая равновесие пли-
плиты, изображаем вектор М момента действующей
на нее пары сил и реакции Л1,, Л/2
Л'6 стер-
жней; реакции направляем так, как если бы все
стержни были растянуты (считаем, что плита
отрывается от стержней). При равновесии сумма
моментов всех действующих на тело сил и пар
[см. равенства E2)] относительно любой оси долж-
должна быть равна нулю.
Направляя ось г вдоль стержня 1 и составляя
уравнение моментов относительно этой оси, по-
получим при MZ=M
(Ar6cosa) h-\-M=0,
где )г=аУ'6,'2 — высота треугольника. Отсюда
иаходим _
Рис.
Составляя уравнения моментов относительно осей, которые направляем
рдоль стержней 2 и 3, получим такие же результаты для сил А/4 и Nb.
Теперь составим уравнение моментов относительно оси х, направленной вдоль
стороны АВ треугольника. Получим, учитывая, что Мх=0,
N.Jx+ (Л'4 sin a) /i=0.
Отсюда, так как iV4=A'e, находим
N3 = ~N4 sin a = BM/aV~l) tg a.
Такие же значения получим для величин N1 и N2, составляя уравнения моментов
относительно осей АС и СВ.
85
Окончательно при а=30° будет:
N1=N2-=N3=2M/3a, A^=iV5=iV0=— Ш/За.
Полученные результаты показывают, что действием заданной пары верти-
вертикальные стержни растягиваются, а наклонные сжимаются.
Из рассмотренного примера видно, что при решении задач не
всегда обязательно пользоваться условиями равновесия E1). Для
пространственной системы сил, как и для плоской, существует не-
несколько форм условий равновесия, из которых форма E1) является
основной.
В частности, можно доказать, что для равновесия пространствен-
пространственной системы сил необходимо и достаточно, чтобы были равны нулю
суммы моментов всех сил относительно шести осей, направленных
или по ребрам какой-нибудь треугольной пирамиды, или по боковым
ребрам и ребрам основания треугольной призмы.
Последние условия и были использованы при решении задачи 44.
Глава VIII
ЦЕНТР ТЯЖЕСТИ
§ 31. ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ
Понятие о центре параллельных сил используется при решении
некоторых задач механики, в частности при определении положений
центров тяжести тел.
Рассмотрим сначала две параллельные силы Ft и F2, приложен-
приложенные к телу в точках Лх и А2 (рис. 103). Очевидно, что эта плоская
система сил имеет равнодействующую R=Fl+F2, линия действия
которой параллельна слагаемым силам и проходит через некоторую
точку С, лежащую на .прямой АХА2. Положение точки С найдем с
помощью теоремы Вариньона. Согласно этой теореме mc(R) =
=mc(F1)+mc(F2) или 0=F1h1—FJi^Fx-A^C-cos a—F%'A2C-cos a,
откуда
Fi-A1C=F2-A%C. E4)
В равенство E4) входят модули F± и F2 рассматриваемых сил.
Поэтому, если силы Fi и F2 повернуть около точек А1иА2в одну и
ту же сторону на один и тот же угол, то образуются две новые па-
параллельные силы F[ и F'2, имеющие те же модули F1( F2; следова-
следовательно, для сил F'ly F'2 равенство E4) сохранится и линия действия
их равнодействующей R' тоже пройдет через точку С. Такая точка
называется центром параллельных сил Ft и F2.
Теперь рассмотрим систему параллельных и одинаково направ-
направленных сил Flt Ft, . . ., Fn, приложенных к твердому телу в точках
86
v4i, A2, . . ., An (рис. 104). Эта система сил имеет равнодействую-
равнодействующую R—'ZFb, модуль которой
t\~bth. [ЬЬ)
Если каждую из сил системы поворачивать около точки ее при-
приложения в одну и ту же сторону на один и тот же угол, то будут
получаться новые системы одинаково направленных параллельных
сил с теми же модулями и точ-
точками приложения (см. напри-
например, показанные пунктиром
силы на рис. 104). Равнодей-
Равнодействующая каждой из таких
систем сил будет иметь тот же
модуль R, но всякий раз дру-
hi
\
С
/
'
\
¦
я'
Рис. 103
Рис. 104
roe направление. Покажем, что при всех таких поворотах линия
действия равнодействующей проходит через одну и ту же точку С.
В самом деле, сложив сначала силы/7! и F2, найдем по формуле E4),
что их равнодействующая R± (на рис. 104 не показана) будет всегда
проходить через точку си положение которой определяется равенст-
равенством F1-AiC1=F2-A2c1. Сложив затем силы Rx и F3, найдем, что их
равнодействующая, являющаяся одновременно равнодействующей
сил Ти Ft, Fs, всегда проходит через аналогично определяемую точ-
точку с2, лежащую на прямой сгА 3, и т. д. Доведя этот процесс последо-
последовательного сложения сил до конца, убедимся, что равнодействую-
равнодействующая R всех сил действительно проходит всегда через одну и ту же
точку С, положение которой по отношению к точкам Аг, А2, . . ., Ап,
т. е. к телу, будет неизменным.
Точка С, через которую проходит линия действия равнодействую-
равнодействующей системы параллельных сил при любых поворотах этих сил около
их точек приложения в одну и ту же сторону и на один и тот же
угол, называется центром параллельных сил.
Найдем координаты центра параллельных сил. Положение точки
С по отношению к телу является неизменным и от выбора системы
координат зависеть не будет. Возьмем поэтому произвольные коорди-
координатные оси Охуг и обозначим в этих осях координаты точек: Ах(хи
уи Zi), A2(x2, У г, 22), • • ., С(хс, Ус, гс)- Пользуясь тем, что от на-
направления сил положение" точки С не зависит, повернем сначала
87
силы около их точек приложения так, чтобы они стали параллель-
ны оси Oz, и применим к повернутым силам F'lt F\, . . ., F'n теорему
Вариньона. Так как R' является равнодействующей этих сил, то по
формуле D6), беря моменты относительно оси Оу, найдем, что
т (R ) = 2jny(rk). (эо)
Но из чертежа [или из равенств D7)] видно, что my{R')=Rxc,
так как R'=R; аналогично my(F'1)=F1xl, так как F'X=FU и т. д.
Подставляя все эти величины в равенство E6), получим
рг F г 4-F г Л- 4- F г — Vfv
1ЧЛС — 1Л1 i 2Л2 ~~Г • • • ~ ' плп ' Z»J клк'
Отсюда определим хс.
Для координаты ус аналогичную формулу найдем, беря моменты
относительно оси Ох. Чтобы определить zc, повернем опять все силы,
сделав их параллельными оси Оу, и применим к этим силам (изобра-
(изображенным пунктиром с точками) теорему Вариньона, беря моменты
относительно оси Ох. Это даст:
— Rzc = — Flz1 + (— Jv2) +...+(— Fnzn),
откуда определим zc.
Окончательно получим следующие формулы для координат цент-
центра параллельных сил:
zc 'Vfz E7)
где R определяется равенством E5).
Заметим, что формулы E5) и E7) будут справедливы и для па-
параллельных сил, направленных в разные стороны, если считать Fk
величинами алгебраическими (для одного направления со знаком
плюс, а для другого — минус) и если при этом R=?0.
§ 32. СИЛОВОЕ ПОЛЕ.
ЦЕНТР ТЯЖЕСТИ ТВЕРДОГО ТЕЛА
Область, в каждой точке которой на помещенную туда материаль-
материальную частицу действует сила, зависящая от положения (координат)
этой точки, называется силовым полем *. Примером силового поля
является поле тяготения (поле сил притяжения к Земле или к лю-
боту другому небесному телу).
На каждую частицу тела, находящегося вблизи земной поверх-
поверхности, действует направленная вертикально вниз сила, которую
называют силой тяжести (вопрос о том, что собой представляет сила
* Такое силовое поле называют стационарным. Если же значения сил могут
еще изменяться с течением времени, поле называется нестационарным. Понятие
о поле может быть введено и для других векторов, которые такое векторное поле
образуют, например для скоростей или ускорений точек тела (см. § 48, 51).
88
тяжести, будет рассмотрен в § 92). Эти силы образуют поле сил тяже-
тяжести.
Для тел, размеры которых очень малы по сравнению с земным ра-
радиусом, силы тяжести, действующие на частицы тела, можно счи-
считать параллельными друг другу и сохраняющими для каждой час-
частицы постоянное значение при любых поворотах тела. Поле тя-
тяжести, в котором выполняются, эти два
условия, называют однородным полем тя-
тяжести.
Равнодействующую сил тяжести ри
р2, ¦ • ., рп, действующих на частицы дан-
данного тела, обозначим Р (рис. 105). Модуль
этой силы называется весом тела и опреде-
определяется равенством
P=2/v E8)
При любом повороте тела силы рк остают-
остаются приложенными в одних и тех же точках
тела и параллельными друг другу, изменяет-
изменяется только их направление по отношению к телу. Следовательно, по
доказанному в § 31, равнодействующая Р сил pk будет при любых
положениях тела проходить через одну и ту же неизменно связан-
связанную с телом точку С, являющуюся центром параллельных сил тя-
тяжести ph. Эта точка и называется центром тяжести тела. Таким
образом, центром тяжести твердого тела называется неизменно
связанная с этим телом точка, через которую проходит линия дейст-
действия равнодействующей сил тяжести, действующих на частицы дан-
данного тела, при любом положении тела в пространстве. Что такая
точка существует, следует из доказанного в §31.
Координаты центра тяжести, как центра параллельных сил, оп-
определяются формулами E7), следовательно,
1 ^ 1 *-._.. _ iv._. E9)
где xj,, Уку ?h — координаты точек приложения сил тяжести pk,
действующих на частицы тела.
Отметим в заключение, что согласно определению центр тя-
тяжести — это точка геометрическая; она может лежать и вне пределов
данного тела (например, для кольца).
§ 33. КООРДИНАТЫ ЦЕНТРОВ ТЯЖЕСТИ
ОДНОРОДНЫХ ТЕЛ
Для однородного тела вес pk любой его части пропорционален
объему vk этой части: ph=yvh, а веЬ Р всего тела пропорционален
объему V этого тела, т. е. P=yV, где у — вес единицы объема.
Подставив эти значения Р и pk в формулы E9), заметим, что во
всех суммах у как общий множитель выносится за скобки и сокраща-
89
ется с у в знаменателе. В результате из формул E9) получим:
f гн. F0)
Как видно, положение центра тяжести однородного тела зависит
только от его геометрической формы, а от величины у не зависит.
По этой причине точку С, координаты которой определяются форму-
формулами F0), называют центром тяжести объема V.
Путем аналогичных рассуждений легко найти, что если тело пред-
представляет собой однородную плоскую и тонкую пластину, то для нее
где 5 — площадь всей пластины; sh — площади ее частей.
Точку, координаты которой определяются формулами F1), на-
называют центром тяжести площади S.
Точно так же получаются формулы для координат центра тя-
тяжести линии:
Ц1У * ?(Л. F2)
где L — длина всей линии; lk — длины ее частей.
По формулам F2) можно находить центры тяжести изделий из
тонкой проволоки постоянного сечения.
Таким образом, центр тяжести однородного тела определяется,
как центр тяжести соответствующего объема, площади или линии.
§ 34. СПОСОБЫ ОПРЕДЕЛЕНИЯ КООРДИНАТ
ЦЕНТРОВ ТЯЖЕСТИ ТЕЛ
Исходя из полученных выше общих формул, можно указать конк-
конкретные способы определения координат центров тяжести тел.
1.Симметрия. Если однородное тело имеет плоскость, ось
или центр симметрии, то его центр тяжести лежит соответственно
или в плоскости симметрии, или на оси симметрии, или в центре
симметрии.
Допустим, например, что однородное тело имеет плоскость сим-
симметрии. Тогда этой плоскостью оно разбивается на две такие части,
веса которых р± и р2 равны друг другу, а центры тяжести находят-
находятся на одинаковых расстояниях от плоскости симметрии. Следова-
Следовательно, центр тяжести тела как точка, через которую проходит
равнодействующая двух равных и параллельных сил pi и р2, будет
действительно лежать в плоскости симметрии. Аналогичный ре-
результат получается и в случаях, когда тело имеет ось или центр
симметрии.
Из свойств симметрии следует, что центр тяжести однородного
круглого кольца, круглой или прямоугольной пластины, прямо-
прямоугольного параллелепипеда, шара и других однородных тел, имею-
90
щих центр симметрии, лежит в геометрическом центре (центре сим-
симметрии) этих тел.
2. Разбиение. Если тело можно разбить на конечное число
таких частей, для каждой из которых положение центра тяжести
известно, то координаты центра тяжести всего тела можно непосред-
непосредственно вычислить по формулам E9) — F2). При этом число сла-
слагаемых в каждой из сумм будет равно числу частей, на которые
разбито тело.
Задача 45. Определить координаты центра тяжести однородной пластины,
изображенной на рис. 106. Все размеры даны в сантиметрах.
Решение. Проводим оси х, у и разбиваем пластину на три прямоугольни-
прямоугольника (линии разреза показаны на рис. 106). Вычисляем координаты центров тяжести
каждого из прямоугольников и их площади (см. таблицу).
№
«ft
Ук
«ft
I
j
1
4
2
1
5
20
3
5
9
12
Рис. 106
Площадь всей пластины S=s1+s2+s3= 36 см2.
Подставляя вычисленные величины в формулы F1), получаем:
—4 + 20 + 60 „1
Ус_
36
4+100+108
36
Ц8
=5-9-см.
Найденное положение центра тяжести С показано на чертеже; точка С ока-
оказалась вне пластины.
3. Дополнение. Этот способ является частным случаем
способа разбиения. Он применяется к телам, имеющим вырезы,
если центры тяжести тела без выреза и выре-
занной части известные
Задача 46. Определить положение центра тяжести
круглой пластины радиуса R с вырезом радиуса г (рис.
107). Расстояние CiC.^a.
Решение. Центр тяжести пластины лежит на
линии Ct C2, так как эта линия является осью сим-
симметрии. Проводим координатные оси. Для нахождения
координаты Xq дополняем площадь пластины до пол-
полного круга (часть 1), а затем вычитаем из полученной
площади площадь вырезанного круга (часть 2). При
этом площадь части 2, как вычитаемая, должна браться
со знаком минус. Тогда st=nR2, s2=—яг2, jc1=O, х%=а, S=S!+s2=.u(i?3—а2),
91
Рис.
Подставляя найденные значения в формулы F1), получаем:
Найденный центр тяжести С, как видим, лежит левее точки Сг.
4. Интегрирование. Если тело нельзя разбить на не-
несколько конечных частей, положения центров тяжести которых
известны, то тело разбивают сначала на произвольные малые объемы
Дуъ для которых формулы F0) принимают вид
Д.,
F3)
где xh, yh, zh — координаты некоторой точки, лежащей внутри объе-
объема Avk. Затем в равенствах F3) переходят к пределу, устремляя
все Avk к нулю, т. е. стягивая эти объемы в точки. Тогда стоящие в
равенствах суммы обращаются в интегралы, распространенные на
весь объем тела, и формулы F3) дают в пределе:
F4)
(V)
(V)
: = 7] zdv-
(V)
Аналогично для координат центров тяжести площадей и линий
получаем в пределе из формул F1) и F2):
ds F5)
(S) (S)
± f zdl.
Id
F6)
Пример применения этих формул к определению координат
центра тяжести рассмотрен в следующем параграфе.
5. Экспериментальный способ. Центры тяжести
неоднородных тел сложной конфигурации (самолет, паровоз и т. п.)
можно определять экспериментально.
Один из возможных эксперименталь-
экспериментальных методов (метод подвешивания)
состоит в том, что тело подвешивают
на нити или тросе за различные его
точки. Направление нити, на которой
подвешено тело, будет каждый раз
давать направление силы тяжести.
Точка пересечения этих направлений
определяет центр тяжести тела.
Другим возможным способом экспериментального определения
центра тяжести является метод взвешивания. Идея этого метода
ясна из рассмотренного ниже примера.
Пример. Покажем, как можно экспериментально определить одну из коорли-
нат центра тяжести самолета (расстояние а), если расстояние АВ~ I (рис. 108)
92
известно. Поставив колесо В на платформу весов, найдем взвешиванием силу дав-
давления колеса на платформу; тем самым будет найдена численно равная этой силе
реакция Л^. Точно так же взвешиванием находим реакцию Л/2. Приравнивая за-
затем нулю сумму моментов всех сил относительно центра тяжести С самолета, полу-
получаем N.la—N1(l—а)—0, откуда находим a—lN1l(N1-\-N^.
Очевидно, Nl-\-Ni:=P, где Р — вес самолета. Если значение величины Р
наперед известно, то для определения а можно обойтись только однократным взве-
взвешиванием.
§ 35. ЦЕНТРЫ ТЯЖЕСТИ НЕКОТОРЫХ ОДНОРОДНЫХ ТЕЛ
1. Центр тяжести дуги окружности. Рас-
Рассмотрим дугу АВ радиуса R с центральным углом АОВ =2а. В силу
симметрии центр тяжести этой дуги лежит на оси Ох (рис. 109).
Найдем координату хс по формулам F6). Для этого выделим на дуге
АВ элемент ММ' длиной dl=R dcp, положение которого определя-
определяется углом ф. Координата х элемента ММ' будет x=R cos ф. Под-
Подставляя эти значения х и d/ в первую из формул F6) и имея в виду,
что интеграл должен быть распространен на всю длину дуги, полу-
получим:
В а
I
) = z-7-sin а,
где L —¦ длина дуги АВ, равная R -2а. Отсюда окончательно нахо-
находим, что центр тяжести дуги окружности лежит на ее оси симмет-
симметрии на расстоянии от центра О, равном
xc={R sin a)la, F7)
где угол а измеряется в радианах.
2. Центр тяжести площади треугольника.
Разобьем площадь треугольника ABD (рис. ПО) прямыми, парал-
< х >
у У
\У* jc
(л/
лельными стороне AD, на п узких полосок; центры тяжести этих
полосок будут лежать на медиане BE треугольника. Следовательно,
и центр тяжести всего треугольника лежит на этой медиане. Анало-
Аналогичный результат получается для двух других медиан. Отсюда за-
93
ключаем, что центр тяжести площади треугольника леокит в точ-
точке пересечения его медиан. При этом, как известно,
СЕ=ВЕ/3. F8)
3. Центр тяжести площади кругового сек-
сектора. Рассмотрим круговой сектор ОАВ радиуса R с централь-
центральным углом 2а (рис. 111). Разобьем мысленно площадь сектора ОАВ
радиусами, проведенными из центра О, на п секторов. В пределе,
Рис. 111
Рис. ИЗ
при неограниченном увеличении числа п, эти секторы можно рас-
рассматривать как плоские треугольники, центры тяжести которых
лежат на дуге DE радиуса 2.R/3. Следовательно, центр тяжести сек-
сектора ОАВ совпадает с центром тяжести дуги DE, положение кото-
которого найдется по формуле F7). Окончательно получим, что центр
тяжести площади кругового сектора лежит на его оси симметрии
на расстоянии от центра О, равном
Xf п
2 Я sin a
F9)
Приведем без доказательств еще два результата.
4. Центр тяжести объема пирамиды (или
конуса). Этот центр С лежит на прямой Ct? (рис. 112), где Е —
вершина, а Сг — центр тяжести площади основания пирамиды; при
этом
Результат справедлив для любой многоугольной пирамиды и для
конуса.
5. Центр тяжести объема полушара. Этот
центр С лежит на оси Ох (оси симметрии, рис. 113), а его координата
G1)
xc=OC=3R/8,
где R — радиус полушара.
Формулы, определяющие координаты центров тяжести других
однородных тел, можно найти в различных технических справочни-
справочниках.
Раздел второй
КИНЕМАТИКА ТОЧКИ И ТВЕРДОГО ТЕЛА
Глава IX
КИНЕМАТИКА ТОЧКИ
§ 36. ВВЕДЕНИЕ В КИНЕМАТИКУ
Кинематикой называется раздел механики, в котором изуча-
изучаются геометрические свойства движения тел без учета их инертно-
инертности (массы) и действующих на них сил.
Кинематика представляет собой, с одной стороны, введение в
динамику, так как установление основных кинематических понятий
и зависимостей необходимо для изучения движения тел с учетом
действия сил. С другой стороны, методы кинематики имеют и са-
самостоятельное практическое значение, например, при изучении пе-
передач движения в механизмах.
Под движением мы понимаем в механике изменение с течением
времени положения данного тела в пространстве по отношению к
другим телам.
Для определения положения движущегося тела {или точки) в
разные моменты времени с телом, по отношению к которому изучает-
изучается движение, жестко связывают какую-нибудь систему координат,
образующую вместе с этим телом систему отсчета. В дальнейшем
будем говорить о движении тела (или точки) по отношению к данной
системе отсчета, подразумевая под этим движение по отношению к
тому телу, с которым эта система отсчета связана. Изображать сис-
систему отсчета будем в виде трех координатных осей (не показывая
тело, с которым они связаны). Выбор системы отсчета в кинематике
произволен (определяется целью исследования), и в отличие от ди-
динамики (см. § 74) все кинематические зависимости, полученные при
изучении движения в какой-нибудь одной системе отсчета, будут
справедливы и в любой другой системе отсчета.
Движение тел совершается в пространстве с течением времени.
Пространство в механике мы рассматриваем как трехмерное евкли-
евклидово пространство. Все измерения в нем производятся на основании
методов евклидовой геометрии. За единицу длины при измерении
расстояний принимается 1 м. Время в механике считается универ-
универсальным, т. е. протекающим одинаково во всех рассматриваемых
95
системах отсчета. За единицу времени принимается 1 с. Размерность
длины обозначается символом L, а времени — символом Т.
Евклидово пространство и универсальное время отражают реаль-
реальные свойства пространства и времени лишь приближенно. Однако,
как показывает опыт, для движений, которые изучаются в механике
(движения со скоростями, далекими от скорости света), это прибли-
приближение дает вполне достаточную для практики точность.
Время является скалярной, непрерывно изменяющейся величи-
величиной. В задачах кинематики время t принимают за независимое пере-
переменное (аргумент). Все другие переменные величины (расстояния,
скорости и т. д.) рассматриваются как изменяющиеся стечением вре-
времени, т. е. как функции времени t. Отсчет времени ведется от не-
некоторого начального момента (^=0), о выборе которого в каждом
случае условливаются. Всякий данный момент времени t определя-
определяется числом секунд, прошедших от начального момента до данного;
разность между какими-нибудь двумя последовательными момен-
моментами времени называется промежутком времени.
Почерпнутые из опыта и подтвержденные практикой основы,
. на которых строится кинематика, дают аксиомы геометрии. Никаких
дополнительных законов или аксиом для кинематического изучения
движения не требуется.
Для решения задач кинематики надо, чтобы изучаемое движение
было как-то задано (описано).
Кинематически задать движение или закон движения тела (точ-
(точки) — значит задать положение этого тела (точки) относительно
данной системы отсчетав любой момент времени. Установление ма-
математических способов задания движения точек или тел является
одной из важных задач кинематики. Поэтому изучение движения
любого объекта будем начинать с установления способов задания
этого движения.
Основная задача кинематики точки и твердого тела состоит в
том, чтобы, зная закон движения точки (тела), установить методы
определения всех кинематических величин, характеризующих дан-
данное движение.
Изучение кинематики начнем с изучения движения простейшего
объекта — точки (кинематика точки), а затем перейдем к изучению
кинематики твердого тела.
Непрерывная линия, которую описывает движущаяся точка от-
относительно данной системы отсчета, называется траекторией точки.
Если траекторией является прямая линия, движение точки называ-
называется прямолинейным, а если кривая — криволинейным.
§ 37. СПОСОБЫ ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ
Для задания движения точки можно применять один из следую-
следующих трех способов: 1) векторный, 2) координатный, 3) естественный.
1. Векторный способ задания движения
точки. Пусть точка М движется по отношению к некоторой си-
системе отсчета Oxyz. Положение этой точки в любой момент времени-
96
можно определить, задав ее радиус-вектор г, проведенный из на-
начала координат О в точку М (рис. 114).
При движении точки М вектор г будет с течением времени изме-
изменяться и по модулю, и по направлению. Следовательно, г является
переменным вектором (вектором-функцией), зависящим от аргу-
аргумента i:
7=7 {ty (l)
Равенство A) и определяет закон движения точки в векторной
форме, так как оно позволяет в любой момент времени построить
соответствующий вектор г и найти положение движущейся точки.
Геометрическое место концов вектора /-, т. е. годограф этого век-
вектора, определяет траекторию движущейся точки.
Аналитически, как известно, вектор задается его проекциями на
координатные оси. В прямоугольных декартовых координатах для
вектора г будет: rx=x, ry=yKrz—z (см. рис. 114), где х, у, z — де-
декартовы координаты точки. Тогда, если
ввести единичные векторы (орты) i, j, k
координатных осей, получим для г выра-
выражение _ _ _
7=xT+yT'+zk. B)
Следовательно, зависимость A) г от t
будет известна, если будут заданы коор-
координаты х, у, zточки как функции време-
времени. Такой способ задания движения точки Рис. 114
(координатный) рассмотрим ниже. Век-
Вектор г может быть задан, как известно, и иными способами, например
его модулем и углами с осями или проекциями на оси других систем
координат. Для получения общих формул, не зависящих от того, как
конкретно задан век гор г, будем исходить из векторного закона дви-
движения, представленного равенством A).
2. Координатный способ задания движе-
движения точки. Положение точки можно непосредственно опре-
определять ее декартовыми координатами х, у, г, которые при движении
точки будут с течением времени изменяться. Чтобы знать закон дви-
движения точки, т. е. ее положение в пространстве в любой момент вре-
времени, надо знать значения координат точки для каждого момента
времени, т. е. знать зависимости
*=М0. у=Ш, z=/,'@. C)
Уравнения C) представляют собой уравнения движения точки
в прямоугольных декартовых координатах. Они определяют закон
движения точки при координатном способе задания движения *.
* Задать движение точки можно, пользуясь и другими системами координат,
например полярными (см. § 47), сферическими и т. д.
4 М> 2173 97
Если движение точки происходит все время в одной и той же
плоскости, то, приняв эту плоскость за плоскость Оху, получим в
этом случае два уравнения движения:
*=Ы'), У=Ш. D)
Наконец, при прямолинейном движении точки, если вдоль ее
траектории направить координатную ось Ох, движение будет опре-
определяться одним уравнением (законом прямолинейного движения
точки)
№ E)
Уравнения C) и D) представляют собой одновременно уравне-
уравнения траектории точки в параметрической форме, где роль параметра
играет время /. Исключив из уравнений движения время /, можно
найти уравнение траектории в обычной форме, т. е. в виде, дающем
зависимость между координатами точки.
Пример. Пусть движение точки в плоскости Оху дано уравнениями:
x=2t, у=121\ (а)
где х, у выражены в сантиметрах; / — в секундах.
По этим уравнениям можно найти, что в момент времени /=0 точка находится
в положении Мо (О, 0), т. е. в начале координат, в момент t^= lc — в положении
Mj B,12; и т д. Таким образом, уравнения (а) действительно определяют положе-
положение точки в любой момент времени. Давая t разные значения и изображая соот-
соответствующие положения точки на рисунке, можем построить ее траекторию.
Другим путем траекторию можно найти, исключив t из уравнении (а). Из
первого уравнения находим t~xf2 и, подставляя зю значение t во второе уравне-
уравнение, получаем (/=3ла Следовательно, траекторией точки является парабола с
вершиной в начале координат и осью, параллельной оси Оу. Другие примеры
определения траектории точки см. в §41.
3. Естественный способ задания движе-
движения точки. Естественным (или траекторным) способом задания
а , движения удобно пользоваться в тех слу-
®+ чаях, когда траектория движущейся точки
известна заранее. Пусть кривая АВ явля-
является траекторией точки М при ее движении
относительно системы отсчета Oxyz (рис.
115). Выберем на этой траектории какую-
нибудь неподвижную точку О', которую
примем за начало отсчета, и установим на
траектории положительное и отрицатель-
Рис. 115 ное направления отсчета (как на координат-
координатной оси). Тогда положение точки М на тра-
траектории будет однозначно определяться криволинейной коорди-
координатой s, которая равна расстоянию от точки О' до точки М, изме-
измеренному вдоль дуги траектории и взятому с соответствующим зна-
знаком. При движении точка М перемещается в положения Mlt Мг,. . .,
следовательно, расстояние s будет с течением времени изменяться.
Чтобы знать положение точки М на траектории в любой момент вре-
времени, надо зцать зависимость
/ F)
Уравнение F) и выражает закон движения точки М вдоль тра-
траектории.
Таким образом, чтобы задать движение точки естественным спо-
способом, надо задать: 1) траекторию точки; 2) начало отсчета на траек-
траектории с указанием положительного и отрицательного направлений
отсчета; 3) закон движения точки вдоль траектории в виде s=f(t).
Заметим, что величина s в уравнении F) определяет положение
движущейся точки, а не пройденный ею путь. Например, если точ-
точка, двигаясь из начала О', доходит до положения Мх (рис. 115),
а затем, перемещаясь в обратном направлении, приходит в положе-
положение М, то в этот момент ее координата s=O'M, а пройденный за
время движения путь б\дет равен O'AU+M^W, т. е. не равен s.
§38. ВЕКТОР СКОРОСТИ ТОЧКИ
Одной из основных кинематических характеристик движе-
движения точки является векторная величина, называемая скоростью
точки. Введем сначала понятие о средней скорости точки за какой-
нибудь промежуток времени. Пусть движущаяся точка находится
в момент времени t в положении М, определяемом радиусом-векто-
радиусом-вектором г, а в момент U приходит в положение Mlt определяемое векто-
вектором ti (рис. 116). Тогда перемещение точки за промежуток времени
Д/=^—t определяется вектором ММи который будем называть
вектором перемещения точки. Этот вектор направлен по хорде, если
точка движется криволинейно (оис. 116, а), и вдоль самой траек-
траектории АВ, когда движение является прямолинейным (рис. 116, б).
Из треугольника ОМ \'U видно, что r-\-MM1=ri\ следовательно,
ММ1 = г1—г = А/-.
Отношение вектора перемещения точки к соответствующему
промежутку времени дает векторную величину, называемую сред-
средней по модулю и направлению скоростью точки за промежуток вре-
времени At:
г7ср = MMjAt = Д7/Д/ G)
4* S9
Направлен вектор i>cp так же, как и вектор MMlt т. е. при криво-
криволинейном движении вдоль хорды ММи в сторону движения точки,
а при прямолинейном движении— вдоль самой траектории (от де-
деления на At направление вектора не изменяется).
Очевидно, что чем меньше будет промежуток времени А/, для
которого вычислена средняя скорость, тем величиаа vcv будет точ-
точнее характеризовать движение точки. Чтобы получить точную
характеристику движения, вводят понятие о скорости тонкие
данный момент времени.
Скоростью точки в данный момент времени t называется вектор-
векторная величина v, к которой стремится средняя скорость уср при стрем-
стремлении промежутка времени At к нулю:
v = lim (? ) = lim ? .
i
Предел отношения A/VAf при At -»- 0 представляет собой первую
производную от вектора г по аргументу t и обозначается, как и про-
производная от скалярной функции, символом drldt. Окончательно по-
получаем
Итак, вектор скорости точки в данный момент времени равен
первой производной от радиуса-вектора точки по времени.
Так как предельным направлением секущей ММг является ка-
касательная, то вектор скорости тонки в данный момент времени на-
направлен по касательной к траектории точки в сторону движения.
Формула (8) показывает также, что вектор скорости v равен от-
отношению элементарного перемещения точки йг, направленного по
касательной к траектории, к соответствующему промежутку вре-
времени dt. __
При прямолинейном движении вектор скорости v все время на-
направлен вдоль прямой, по которой движется точка, и может изме-
изменяться лишь численно; при криволинейном движении кроме чис-
числового значения все время изменяется и направление вектора ско-
скорости точки. Размерность скорости LIT, т. е. длина/время; в ка-
качестве единиц измерения применяют обычно м/с или км/ч. Вопрос
об определении модуля скорости будет рассмотрен в § 40 и 42.
§ 39. ВЕКТОР УСКОРЕНИЯ ТОЧКИ
Ускорением точки называется векторная величина, характери-
характеризующая изменение с течением времени модуля и направления ско-
скорости точки.
Пусть в некоторый момент времени ^движущаяся точка нахо-
находится в положении М и имеет скорость у, а в момент tt приходит в
100
положение М± и имеет скорость v± (рис. 117). Тогда за промежуток
времени At=tx—t скорость точки получает приращение Аи—иг—v.
Для построения вектора Аи отложим от точки М вектор, равный иь
и построим параллелограмм, в котором диагональю будет vu a
одной из сторон v. Тогда, очевидно, вторая сторона и будет изобра-
изображать вектор Av. Заметим, что вектор
Av всегда направлен в сторону вог-
вогнутости траектории.
Отношение приращения вектора
скорости Aw к соответствующему про-
промежутку времени А^ определяет век-
вектор среднего ускорения точки за этот
промежуток времени:
- ,-Л, /пч Рис.
acv — AvlAt. (9)
Вектор среднего ускорения имеет то же направление, что и век-
вектор Av, т. е. направлен в сторону вогнутости траектории.
Ускорением точки в данный момент времени t называется век-
векторная величина а, к которой стремится среднее ускорение аср при
стремлении промежутка времени At к нулю:
— ,. Ли dt»
а= urn -тт = ;гг
или, с учетом равенства (8),
Следовательно, вектор ускорения точки в данный момент време-
времени равен первой производной от вектора скорости или второй произ-
производной от радиуса-вектора точки по времени.
Размерность ускорения L/T2, т. е. длина/(времяJ; в качестве
единицы измерения применяется обычно м/с2.
Из формулы A0) следует также, что вектор ускорения точки а
равен отношению элементарного приращения вектора скорости dv
к соответствующему промежутку времени dt.
Найдем, как располагается вектор а по отношению к траекто-
траектории точки. При прямолинейном движении вектор а направлен вдоль
прямой, по которой движется точка. Если траекторией точки явля-
является плоская кривая, то вектор ускорения а, так же как и вектор аср,
лежит в плоскости этой кривой и направлен в сторону ее вогнутости.
Если траектория не является плоской кривой, то вектор аср на-
направлен в сторону вогнутости траектории и лежит в плоскости, про-
проходящей через касательную к траектории в точке М и прямую, па-
параллельную касательной в соседней точкеМг (рис. 117). В пределе,
101
когда точка Мг стремится к М, эта плоскость занимает положение
так называемой соприкасающейся плоскости, т. е. плоскости, в кото-
которой происходит бесконечно малый поворот касательной к траектории
при элементарном перемещении движущейся точки *. Следователь-
Следовательно, в общем случае вектор ускорения а лежит в соприкасающейся
плоскости и направлен в сторону вогнутости кривой. Вопрос об
определении модуля ускорения будет рассмотрен в § 40 и 43.
§ 40. ОПРЕДЕЛЕНИЕ СКОРОСТИ И УСКОРЕНИЯ ТОЧКИ
ПРИ КООРДИНАТНОМ СПОСОБЕ ЗАДАНИЯ ДВИЖЕНИЯ
Найдем, как вычисляются скорость и ускорение точки, если ез
движение задано уравнениями C) или D). Вопрос об определении
траектории в этом случае был уже рассмотрен в §37.
Формулы (8) и A0), определяющие значения v и а, содержат
производные по времени от векторов г и о. В равенствах, содержа-
содержащих производные от векторов, переход к зависимостям между их
проекциями осуществляется с помощью следующей теоремы: про-
проекция производной от вектора на ось, неподвижную в данной систе-
системе отсчета, равна производной от проекции дифференцируемого
вектора на ту же ось, т. е.
- dp dpx dp,, $„
если 9=~u> т0 ?*=?¦ Ь = -п'1* = 1&'
1. Определение скорости точки. Вектор ско-
скорости точки v=dr/tlt. Отсюда на основании формул A1), учитывая,
что rx=x, ry=y, rz=z, найдем:
dx dt/ йг ,.„.
°- = dF- vy = dt'v^dt <12)
нти
vx = x, vy = y, vz=--z, A2')
где точка над буквой есть символ дифференцирования по времени.
Таким образом, проекции скорости точки на координатные оси равны
первым производным от соответствующих координат точки по вре-
времени.
Зная проекции скорости, найдем ее модуль и направление (т. е.
углы а, р\ у, которые вектор у" образует с координатными осями) по
формулам
= yJ./D, cos P — vylv, cosy = vjv ) * '
* Для пространственной кривой (например, для винтовой линии) в каждой
точке кривой будет своя соприкасающаяся плоскость. Для плоской кривой со-
соприкасающаяся плоскость совпадает с плоскостью этой кривой и является общей
для всех ее точек.
102
2. Определение ускорения точки. Вектор ус-
ускорения точки a=dv/dt. Отсюда на основании формул A1) получаем:
_d^_d^ __^_d^ _4^_d=2 /,4ч
а* — dt ~ d!2 ' у ~ dt di* ' *~ ut ~~dl* y '
ax = vx = x, aJ/ = vg = y, az = v2 = z, A4')
т. е. проекции ускорения точки на координатные оси равны первым
производным от проекций скорости или вторым производным от
соответствующих координат точки по времени. Модуль и направле-
направление ускорения найдутся из формул
-= ay/a, cosу1 = сг/а J * '
где аь рь 7i — углы, образуемые вектором ускорения с коорди
ЬсГГНЬШИ ОСЯМИ.
Итак, если движение точки задано в декартовых прямоугольных
координатах уравнениями C) или D), то скорость точки определя-
определяется по формулам A2) и A3), а ускорение— по формулам A4) и
A5). При этом в случае движения, происходящего в одной плоско-
плоскости, во всех формулах должна быть отброшена проекция на ось z.
В случае же прямолинейного движения, которое задается одним
уравнением x=f{t), будет
dx dvx
Равенства A6) и определяют значения скорости и ускорения
точки в этом случае.
§ 41. РЕШЕНИЕ ЗАДАЧ КИНЕМАТИКИ ТОЧКИ
Задачи, решаемые методами кинематики точки, могут состоять в
определении траектории, скорости или ускорения точки, в отыска-
отыскании времени, в течение которого точка проходит тот или иной путь,
или пути, проходимого за тот или иной промежуток времени, и т. п.
Прежде чем решать любую из такого рода задач, надо устано-
установить, по какому закону движется точка. Этот закон может быть не-
непосредственно задан в условиях задачи (задачи 47, 48) или же из
условий задачи определен (задачи 49, 50).
Задача 47. Движение точки задано уравнениями (х, у — в метрах, t — в се-
секундах).
x=St—4P, y=&—3f:
Определить траекторию, скорость и ускорение точки.
Р е ш е ь и е. Для определения траектории исключаем из уравнений дви-
движения время /. Умножая обе части первого уравнения па 3, а обе части второ-
ю — на 4 и почленно вычитая из первого равенства второе, получим: Зх—4у=0
или у=3х,'4.
103
Следовательно, траектория — прямая линия, наклоненная к оси Ох под уг-
углом а, где tga=3/4 (рис. 118).
Определяем скорость точки. По формулам A2) и A3) получаем:
Теперь находим ускорение точки. Формулы A4) и A5) дают:
ах = 'х'=— 8, ау=у = —6, а— 10 м/с3.
Направлены векторы и и а вдоль траектории, т. е. вдоль прямой АВ. Проекции
ускорения на координатные оси все время отрицательны, следовательно, ускоре-
ускорение имеет постоянное направление от В к А. Проекции скорости при 0<*<1 по-
положительны, следовательно, в течение этого промежутка времени скорость точки
направлена от О к Б. При этом в момент времени ^=0и=10м/с; в момент t—\ си—0.
В последующие моменты времени (<>1 с) обе проекции скорости отрицательны и,
следовательно, скорость направлена от В к А, т. е. так же, как и ускорение.
Заметим, наконец, чго при i=0 x=0 и у=0; при <=1с %=4, у=3 (точка В);
при /=2с х=0, у=0; при if>2c значения х и у растут по модулю, оставаясь отри-
отрицательными.
Итак, заданные в условиях задачи уравнения движения рассказывают нам
всю историю движения точки. Движение начинается из точки О с начальной ско-
скоростью ко= 10 м/с и происходит вдоль прямой АВ, наклоненной к оси Ох под углом
а, для которого tga=3/4. На участке OS точка движется замедленно (модуль ее
скорости убывает) и через одну секунду приходит в положение В D, 3), где ско-
скорость ее обращается в нуль. Отсюда начинается ускоренное движение в обратную
сторону. В момент ^=2с точка вновь оказывается в начале координат и дальше
продолжает свое движение вдоль ОА, Ускорение точки все время равно 10 м/с2.
\СС
/0 12 3
Рис. 118
Рис. 119
Задача 48. Движение точки задано уравнениями:
x=R sin at, y=R cosarf, z=ut,
где Я,йио — постоянные величины. Определить траекторию, скорость и уско-
ускорение точки.
Решение. Возводя первые два уравнения почленно в квадрат и складывая,
получаем
Следовательно, траектория лежит на круглом цилиндре радиуса R, ось ко-
которого направлена вдоль оси Ог (рис. 119). Определяя из последнего уравнения t
и подставляя в первое, находим
x=R sin (<вг/и).
104
Таким образом, траекторией точки будет линия пересечения синусоидальной
поверхности, образующие которой параллельны оси Оу (синусоидальный гофр)
с цилиндрической поверхностью радиуса R. Эта кривая называется винтовой
линией. Из уравнений движения видно, что один виток винтовой линий точка про-
проходит за время tlt определяемое из равенства ш?1=2я. При этом вдоль оси г точ-
точка за это время перемещается на величину h=ut1=2nu/a>, называемую шагом
винтовой линии.
Найдем скорость и ускорение точки. Дифференцируя уравнения движения по
времени, получаем:
ах = vx = — /?со2 sin mt,
ay = Vy = —i?j)a cos (att
откуда
о= V Ягш3 (cos2 bit + sin2 at) + и2 =
Стоящие под знаком радикала величины постоянны. Следовательно, движение
происходит с постоянной по модулю скоростью, направленной по касательной
к траектории, Теперь по формулам A4) вычисляем проекции ускорения;
откуда
Итак, двлжение происходит с постоянным по модулю ускорением, Для опре-
определения направления ускорения имеем формулы:
tcos а.1=ах/а=—sin a>t=—xlR,
cos P1=aj//a=—cos mt=—ylR, cosy1=a2/a=0.
Но, очевидно,
x/R=zoba, ylR — cos f>,
где аир —углы, образуемые с осями Ох и Оу радиусом R, проведенным от оси
цилиндра к движущейся точке. Так как косинусы углов о, и р\ отличаются от ко-
косинусов а и р только знаками, то отсюда заключаем, что ускорение точки все вре-
время направлено по радиусу цилиндра к его оси.
Заметим, что хотя в данном случае движение и происходит со скоростью, по-
постоянной по модулю, ускорение точки не равно нулю, так как направление ско-
скорости изменяется.
Задача 49. Человек ростом h удаляется от фонаря, висящего на высоте //,
двигаясь прямолинейно со скоростью и. С какой скоростью движется конец тени
человека?
Решение. Для решения задачи найдем сначала закон, по которому дви-
движется конец тени. Выбираем начало отсчета в точке О, находящейся на одной вер-
вертикали с фонарем, и направляем вдоль прямой, по которой движется конец тени,
координатную ось Ох (рис. 120). Изображаем человека в произвольном положении
на расстоянии хг от точки О. Тогда конец его тени будет находиться от начала О
на расстоянии х2.
Из подобия треугольников ОАМ и DAB находим:
Я
Это уравнение выражает закон движения конца тени М, если закон движения
человека, т« е, Xi=}(t), известен,
105
Взяв производную по времени от обеих частей равенства и замечая, что по
формуле A6) х1=их=и> x^vx=v, где v — искомая скорость, получим
Я
Если человек движется с постоянной скоростью (ы= const), то скорость конца
тени М будет тоже постоянна, ко в Hi(H—h) раз больше, чем скорость человека.
Обращаем внимание на то, что при составлении уравнений движения надо
изображать движущееся тело или механизм (см. задачу 50) в произвольном поло-
у сети. Только тогда мы поучим уравнения, определяющие положение движу-
движущейся точки (или Te.iaj з любой момент времени.
Рис. 120
Рис. 121
Задача 50. Определить траекторию, скорость п ускорение середины М шату-
шатуна кривошипно-ползунйого мечанизма (рис. 121), если ОЛ=Лб=26, а угол <р
при вращении кривошипа растет пропорционально времени: q=<nt.
Решение. Начинаем с определения уравнений движения точки М. Про-
Проводя оси и обозначая координаты точки М в произвольном положении через х и у
находим
x=2b cos Ф+Ь cos ф, y=b sin ср.
Заменяя <р его значением, получаем уравнения движения точки М:
x=3b cos (ut, y—b sin wt.
Для определения траектории точки М представим уравнения движения в виде
~=cosu>*, -f- = sinco*.
6у Ь
Возводя эти равенства почленпо в квадрат и складывая, получим
Итак, траектория точки М — эллипс с полуосями 36 и Ь.
Теперь по формулам A2) и ^ 13) находим скорость точки М:
vx = x=—Зга sin cot, vy ~y= ba> cos at;
Скорость оказывается величиной переменной,' меняющейся с течением времени в
пределах от vm-m—ba до ?'1Гах=36<и.
Далее по формулам A4; определяем проекции ускорения точки М;
ах~—ЗЬа>2 cos со?——<а2*, ау=—ЬчР1 sin at——со?у;
106
отсюда
а = V ш1 {х%+уг) =¦ и2/-,
где г — длина радиуса-вектора, проведанного из центра О до точки М. Следо-
Следовательно, модуль ускорения точки меняется пропорционально ее расстояние
от центра эллипса.
Для определения направления а имеем по формулам A5):
cosa1=axta——x/r, cos $1=ag/a=—ylr.
Отсюда, так же как и в'задаче 48, находим, что ускорение точки М все вреь-ч
направлено вдоль МО к центру эллипса.
§ 42. ОСИ ЕСТЕСТВЕННОГО ТРЕХГРАННИКА.
ЧИСЛОВОЕ ЗНАЧЕНИЕ СКОРОСТИ
Рассмотрим, как вычисляются скорость и ускорение точки при
естественном способе задания движения (см. § 37), т. е. когда заданы
траектория точки и закон движения точки вдоль этой траектории в
виде s=f(t).
В этом случае значения векторов о и а определяют по их проек-
проекциям не на оси системы отсчета Oxyz (как в § 40), а на подвижные
оси Mxnb, имеющие начало в точке М и движущиеся вместе с нею
(рис. 122). Эти оси, называемые осями естественного трехгранника
(или скоростными осями), направлены следующим образом: ось
Мх — по касательной к траектории в сторону положительного
отсчета расстояния s; ось Мп — по нормали к траектории, лежащей
в соприкасающейся плоскости и направленной в сторону вогнутости
траектории; ось Mb — перпендикулярно к
первым двум так, чтобы она образовала с
ними правую систему осей. Нормаль Мп, ле-
лежащая в соприкасающейся плоскости (в
плоскости самой кривой, если кривая -о'+
плоская), называется главной нормалью, а
перпендикулярная ей нормаль Mb — би-
бинормалью.
Скорость точки, направленная по каса-
тельной к траектории (рис. 122), определяет- Рис- 122
ся в осях Mxnb только одной проекцией i\
на ось Мх. При этом vx=v или vx =—v. Следовательно, vx или сов-
совпадает с модулем скорости v, или отличается от v только знаком.
Условимся поэтому в дальнейшем обозначать vx тоже символом v,
опуская индекс х, и называть v числовым (или алгебраическим) зна-
значением скорости. Модуль скорости во всех случаях, когда это не
может вызвать недоразумений, будем тоже обозначать символом и,
а когда надо подчеркнуть, что речь идет о модуле скорости,— при-
применять символ \v\.
Найдем значение v. Если за промежуток времени Д? точка
совершит вдоль дуги траектории перемещение MMt=^s (см.
рис. 115), где одновременно As — приращение координаты s, то
численно средней скоростью точки за этот промежуток времени
107
будет ucp==-As/Ai и в пределе найдем, что
Таким образом, числовое значение скорости точки в данный мо-
момент времени равно первой производной от расстояния (криволиней-
(криволинейной координаты) s этой точки по времени.
Значение v можно также находить как отношение элементарного
перемещения ds точки к соответствующему промежутку времени dt.
Так как всегда dt>Q, то знак v совпадает со знаком ds. Следователь-
Следовательно, когда Ю>0, скорость направлена в сторону положительного
отсчета расстояния s, а когда v<cO, — в противоположную сторону.
Таким образом, величина v одновременно определяет и модуль ско-
скорости, и сторону, куда она направлена.
§43. КАСАТЕЛЬНОЕ И НОРМАЛЬНОЕ УСКОРЕНИЯ ТОЧКИ
В § 39 было установлено, что ускорение а точки лежит в соприка-
соприкасающейся плоскости, т. е. в плоскости Mm. Следовательно, проек-
проекция вектора а на бинормаль Mb равна нулю (аь—0). Найдем проек-
проекции а на две другие оси. Проектируя_обе части равенства A0) на оси
Мх и Мп и обозначая символами (dv)x и (dv)n проекции вектора do
на эти оси, получим:
ax=-(dv)x/dt, aa = {dv)j6i. A8)
Вектор do представляет собой разность между скоростями в двух
соседних точках М и М' (рис. 123, а), т. е. dv—v'—v. Отложим
векторы v=MA и v'=MB от общего начала (рис. 123, б); тогда du-
duff "
С *
Рис.
—АВ, а фигуру ACBD при бесконечно малом угле скр можно рас-
рассматривать как прямоугольник. Отсюда (dv)x=AC=DB=MB—
—MA~v'—v=dv, где dv — элементарное приращение числового
значения скорости. Далее, поскольку предел отношения дуги к
хорде равен единице, можно AD рассматривать как элементарную
дугу радиуса МА, размер которой определяется произведением
радиуса на центральный угол. Тогда (dv)n—AD=MA 'dq>=ydcp.
Подставляя найденные значения (dv)x и (dv)n в равенства A8),
получим:
ax — dv/dt, aa — vd(f/dt A9)
108
Угол между касательными к кривой в двух ее точках называется
углом смежности; тогда dcp — элементарный угол смежности. На-
Напомним, что отношение d<p к ds = ММ', определяет кривизну
кривой в точке М, а кривизна k является величиной, обратной
радиусу кривизны р в этой точке, т. е.
dq>/ds=A=l/p. B0)
Введем эту величину во второе из равенств A9) и преобразуем
его, учтя еще равенство A7), к виду
dq> ds
= v-r--r =
us dt
V — — .
р р
В результате окончательно получим:
du d2s о2
a а
B1)
Таким образом, ыы доказали, что проекция ускорения точки на
касательную равна первой производной от числового значения ско-
скорости или второй производной от расстояния (криволинейной коор-
координаты) s по времени, а проекция ускорения на главную нормаль
равна квадрату скорости, деленному на радиус кривизны траектории
в данной точке кривой; проекция ускорения на бинормаль равна
нулю. Это одна из важных теорем кинематики. Величины ах и
ап называют касательным и нормальным ускорениями точки.
При движении точки М в одной плоскости касательная Мх поворачивается
вокруг бинормали Mb с угловой скоростью ti>=dq>/dt. Тогда второе из равенств
A9) дает еще одну, часто используемую в инженерной практике формулу для
вычисления ап:
an=vm. B1')
Из нее следует, что нормальное ускорение равно произведению скорости точки на
угловую скорость поворота касательной к траектории.
Отложим вдоль касательной Мх и главной нормали Мп векторы
ах и ап, т. е. касательную и нормальную составляющие ускорения
(рис. 124). При этом со-
составляющая ап будет всег-
всегда направлена в сторону
вогнутости кривой, так как
всегда ап>0, а составляю-
составляющая а% может быть направ-
направлена или в положительном,
или в отрицательном на-
направлении оси Мх в зави-
зависимости от знака проекции
ах (см. рис. 124, а, б).
Вектор ускорения точки а изображается диагональю парал-
параллелограмма, построенного на составляющих ах и ап. Так как эти
составляющие взаимно перпендикулярны, то модуль вектора а
109
Рис. 124
§ 44. НЕКОТОРЫЕ ЧАСТНЫЕ СЛУЧАИ ДВИЖЕНИЯ ТОЧКИ
Пользуясь полученными результатами, рассмотрим некоторые
частные случаи движения точки.
1. Прямолинейное движение. Если траекторией
точки является прямая линия, то р=оо. Тогда ап=о2/р=0 и все
ускорение точки равно одному только касательному ускорению:
a=^az = dv/dt. B3)
Так как в данном случае скорость изменяется только численно,
то отсюда заключаем, что касательное ускорение характеризует
изменение числового значения скорости.
2. Равномерное криволинейное движение.
Равномерным называется такое криволинейное движение точки, в
котором числовое значение скорости все время остается постоян-
постоянным: t»=const. Тогда aT=dc,'d^=0 и все ускорение точки равно
одному только нормальному ускорению:
a=an=v-ip. B4)
Вектор ускорения а направлен при этом все время по нормали к
траектории точки.
Так как в данном случае ускорение появляется только за счет
изменения направления скорости, то отсюда заключаем, что нор-
нормальное ускорение характеризует изменение скорости по направле-
направлению.
Найдем закон равномерного криволинейного движения. Из фор-
формулы A7) имеем &s~v&t. Пусть в начальный момент времени (t—0)
точка находится от начала отсчета на расстоянии s0. Тогда, беря от
левой и правой частей равенства определенные интегралы в соот-
соответствующих пределах, получим
1Ю
так как u=const. Окончательно находим закон равномерного кри-
криволинейного движения точки в виде
s=so+vt. B5)
Если в равенстве B5) положить so=O, то s даст путь, пройденный
точкой за время t. Следовательно, при равномерном движении
путь, пройденный точкой, растет пропорционально времени, а
скорость точки равна отношению пути ко времени:
s=vt, v=s't. B5')
3. Равномерное прямолинейное движение.
В этом случае ап—ах—0, а значит, и а=0. Заметим, что единствен-
единственным движением, в котором ускорение тонки все время равно нулю,
является равномерное прямолинейное движение.
4. Равнопеременное криволинейное д в и-
ж е и и е. Равнопеременным называется такое криволинейное дви-
движение точки, при котором касательное ускорение остается все
время постоянным: aT=const. Найдем закон этого движения, считая,
что при /=0 s=s0, а v=v0, где иЛ — начальная скорость точки. Со-
Согласно первой из формул B1) dv=axdt. Так как aT=const, то, беря
от обеих частей последнего равенства интегралы в соответствующих
пределах, получим
B6)
Формулу B6) представим в виде
ds'dt=vo+axt или ds=vodtJ-axMf.
Вторично интегрируя, найдем закон равнопеременного криволи-
криволинейного движения точки
s=so-f-ty-fal/=/2. B7)
При этом скорость точки определяется формулой B6).
Если при криволинейном движении точки модуль скорости воз-
возрастает, то движение называется ускоренным, а если убывает,—
замедленным. Так как изменение модуля скорости характеризуется
м,
А
J
И
А
Уз
X
Риг. 123 Pec. 126
касательным ускорением, то движение будет ускоренным, если Ее-
лнчины v и ах имеют одинаковые знаки (угол между векторами и
и а острый, рис. 125, а), и замедленным, если разные (угол между
о и а тупой, рис. 125, б).
В частности, при равнопеременном движении, если в равенстве
Ш
B6) v и ах имеют одинаковые знаки, движение будет равноускорен-
равноускоренным, а если разные знаки,— равнозамедленным.
Формулы B5) — B7) определяют также законы равномерного
или равнопеременного прямолинейного движения точки, если
считать s=x. При этом в равенствах B6) и B7) ах=а, где а — чис-
числовое значение ускорения данной точки [см. формулу B3)].
5. Гармонические колебания. Рассмотрим пря-
прямолинейное движение точки, при котором ее расстояние х от начала
координат О изменяется со временем по закону
х=А cos kt, B8)
где А и k — постоянные величины.
Точка М (рис. 126) совершает при этом движении колебания
между положениямиМо(-\-А) пЛ41(—А). Колебания, происходящие
по закону B8), играют большую роль в технике. Они называются
простыми гармоническими колебаниями. Величина А, равная наи-
наибольшему отклонению точки от центра колебаний О, называется
амплитудой колебаний.
Легко видеть, что, начиная движение в момент ^=0 из положения
Ма, точка вновь придет в это положение в момент времени tu для
которого coskt1=\, т.е. Ых=2л.
Промежуток времени Г=/1=2:гт/&, в течение которого точка
совершает одно полное колебание, называется периодом колебаний.
Беря производные от х по t, найдем значения скорости и уско-
ускорения точки:
v~vx=—Aks'mkt, a=ax=—Ak2coskt. B9)
Следовательно, в этом движении и скорость, и ускорение точки
изменяются с течением времени по гармоническому закону. По
знакам о и а легко проверить, что когда точка движется к центру
колебаний, ее движение является ускоренным, а когда от центра
колебаний,— замедленным.
Аналогичные колебания происходят и при законе x=Asinkt,
только движение в этом случае начинается из центра О.
Гармонические колебания по закону s=Acoskt (или s=A sinkt)
точка может совершать, двигаясь вдоль любой кривой (см., напри-
например, в § 46 задачу 51). Все сказанное о характере движения при
этом сохранится с той лишь разницей, что последняя из формул
B9) будет определять касательное ускорение точки; кроме него точка
будет еще иметь нормальное ускорение an=v2/p,
§45. ГРАФИКИ ДВИЖЕНИЯ, СКОРОСТИ
И УСКОРЕНИЯ ТОЧКИ
Если в соответствующих масштабах откладывать вдоль оси абс-
абсцисс время i, а вдоль оси ординат — расстояние s, то построенная в
этих осях кривая s=f(f) будет изображать график расстояний,
или график движения точки. По этому графику наглядно видно, как
изменяется положение точки (ее координата s) с течением времени.
112
Аналогично, в соответствующих масштабах могут быть построе-
построены кривые, дающие зависимость v(t) — график скорости и ax(t),
an(t), a{i) — графики касательного, нормального и полного ускоре-
ускорений.
На рис. 127, а, б, в сверху показаны графики движений, опре-
определяемых соответственно уравнениями B5), B7) и B8). Ниже на
тех же рисунках изображены для этих движений графики-скоростей
и графики касательных ускорений.
График равномерного движения изображается, как мы видим,
прямой линией, направленной под углом к оси абсцисс, график ско-
скорости в этом случае —¦ прямой, параллельной оси абсцисс (u=const),
а график касательного ускорения — прямой, совпадающей с осью
абсцисс (ат=0). Для равнопеременного движения (в изображенном
на рис. 127, б случае — ускоренного) график движения изобра-
изображается ветвью параболы, график скорости — прямой, направлен-
направленной под углом к оси абсцисс, а график касательного ускорения —
прямой, параллельной оси абсциис (ах=const). Наконец, для гар-
гармонических колебаний (рис. 127, в) соответствующие графики изоб-
изображаются косинусоидами или синусоидами.
График движения не следует смешивать с траекторией, которая
во всех рассмотренных случаях должна быть задана дополнительно.
Графики нормального и полного ускорений на рис. 127 не пока-
показаны, так как ап и а кроме закона движения зависят еще от р, т. е.
от вида траектории, и при одном и том же законе s=f(t) будут для
разных траекторий разными.
ИЗ
§48. РЕШЕНИЕ ЗАДАЧ
Как уже указывалось, для решения задач кинематики надо знатв
закон движения точки. Если движение задано естественным спосо-
способом (дана траектория и закон движения вдоль траектории), то все
характеристики движения (скорость, касательное, нормальное п
полное ускорение) определяются по формулам, полученный в
§ 42—44. Этими формулами можно, конечно, пользоваться и когда
движение задано другим способом.
Покажем, как можно найти касательное и нормальное ускорения точки, когда
движение задано координатным способом, например, уравнениями D). Для этого
по формулам A2) — A5) находим и и а. Беря производную по времени от найден-
найденной скорости v, можно определить aT=doldt. Но обычно это проще делать иначе.
Возьмем равенство v3=v%-\-Vy и продифференцируем обе его части по t; получим
2w—2vxvx-\-2vyVy. Отсюда, учитывая равенства A4') и то, что v=a%, находим
окончательно
_(V,tVJ C0)
Т и
Теперь, зная лият, определяем а„ из равенства a2=al-\-aJ!. Одновременно мож-
можно найти радиус кривизны траектории р из формулы а„=у2/р. Пример таких рас-
расчетов дан в задаче 53.
Задача 51. При небольших углах отклонения груз маятника (рис. 128) дви-
движется по окружности радиуса / по закону s=A sin kt (начало отсчета в точке О,
А и k — постоянные величины). Найти скорость,
касательное и нормальное ускорения груза и те
положения, в которых эти величины обращаются
в нуль.
Решение. Пользуясь соответствующими
формулами, находим:
v=s= Akcos kt; cT = t> = —Акг sin kt;
an = vs/1 = (A-k?[t) cos2 kt.
, „ _ь Из закона движения следует, что груз со-
~0+ М вершает вдоль траектории гармонические коле-
р 12я бапия с дуговой амплитудой А. В крайних по-
ложениях (в точках Вг и В2) sin kt= ± 1, а слр-
довательно, cos kt=O. Поэтому в точках Вг и В,
скорость и нормальное ускорение обращаются в нуль; касательное же ускорение
имеет здесь наибольшее по модулю значение а_ _„=ЛА2.
Когда груз приходит в начало отсчета О, то s=0 и, следовательно, sin A/=0,
a cosAtf=l. В этом положении ат=0, a v и an имеют максимальные значения:
vm3*=Ak, а„ тах=АЧУ1.
Из данного примера видно, что при криволинейном неравномерном движении
в отдельных точках траектории ат или an могут обращаться в нули. При этом а =0
в тех точках, Tnedv/dt=O, т. е. там, например, где v имеет максимум или минимум,
а а,г=0 в тех точках, где v=0 (как в нашем случае) или где р=оо (точка перегиба
траектории).
Задача 52. Переход от координатного способа зада-
задания движения к естественному. Движение точки М задано в де-
декартовых координатах уравнениями:
*=?cos(efV2), y=R sin (et*/2), (a)
где R и e — постоянные положительные величины, имеющие размерности: R —
длины, е — углового ускорения (см. § 49),
114
Перейти к естественному способу задания движения, т. е. определить тра-
траекторию и закон движения точки вдоль траектории в виде s=f(t). Наити также
сксрость и ускорение точки.
Решение. Возведя каждое из уравнений (а) почленно в квадрат и затем
сложив их, получим х2 \-tf=R2. Следовательно, траекторией точки является ок-
окружность радиуса R с центром в начале координат. Из уравнений (а) видно,
что при t—Q x=R,y=0, т. е. точка М находится на оси Ох. Примем это положение
Мо за начало отсчета О' расстояния s; тогда при *=0 s=0. Когда *>0 у начинает
возрастать, а х — убывать, т. е. точка начинает двигаться по направлению к оси
Оу; примем это направление за положительное направление отсчета расстояния s.
Для определения зависимости s=f(t) найдем выражение ds. Как иззестно,
ds2~dx2-rdy2, a dx=x'dt, dy^y'dt. Тогда ds=Vx2-]-y2 dt, и поскольку при
Л=0 8 = 0,
t
о
Из уравнений (а) находим x——R?i sin (e№i, t/=Ret cos (ер'2) и x2+i/2=
=/?V-f2. Поптпвлря это выражение в равенство (б) и вынося постоянный множи-
множитель за знак интеграла, получим
t
s= Re [tdt или s = Ret2j2. (в)
о
Таким образом, точка движется по окружности радиуса R по закону s=Rst'1i2.
Скорость точки
v=s = Ret (r)
и растет пропорционально времени. Далее находим
Так как а = const и знаки v и ат совпадают (ч>0 и ах>0), то движение точки
является равноускоренным (см. § 44, п. 4).
Наконец, по формулам B2) находим
Как видим, при t=0 a=az= R? (ап=0) и ,и=я/2. Затем со временем величина а
растет, а угол [г между вектором а и радиусом окружности убывает, стремясь
к пулю.
Задача 53. Точка, получив направленную горизонтально скорость, движет-
движется по закону, определяемому уравнениями:
где и0 я g — некоторые постоянные.
Найти траекторию, скорость и ускорение точки, а также ее касательное и нор-
малъгюе ускорения и радиус кривизны траектории в любом положении, выразив
их через скорость в этом положении.
Решение. Определяя из первого уравнения t и подставляя во второе,
получим
и —Л г2
У— о,2
Траектория точки — парабола (рис. 129).
Дифференцируя уравнения движения: по времени, найдема
vx='x = v0, vy = y = gt, {a)
откуда /.____
v = Vv2a+g4*. (б)
115
Таким образом, в начальный момент времени (^=0) скорость точки v—с0, а затем
с течением времени скорость непрерывно возрастает.
Найдем ускорение точки. По соответствующим формулам имеем:
Следовательно, ускорение точки
a=g. (г)
В данном случае точка движется с постоянным по модулю и направлению ус-
ускорением, параллельным оси Оу (это ускорение силы тяжести). Обращаем внима-
внимание на то, что хотя здесь a=const, движение точки не является равнопеременным,
так как условием равнопеременного движения является не a=const, а aT=const.
В этом же движении, как мы сейчас увидим, а не посто-
постоянно.
Для определения а% воспользуемся формулой C0). Под.
ставляя в нее значения соответствующих величин из ра-
равенств (а) и (в), получим
, Но из равенства (б) zjz—v2-^-g4s и, следовательно^
Подставляя это значение t, выразим а через скорость о!
Рис. 129 _, -х
ax=gV \-vilv\ (д)
Отсюда следует, что в начальный момент времени, когда v~v0, aT=0. Затем,
с увеличением v значение а% растет и при у->-оо ax-+g; следовательно, в пределе
величина касательного ускорения стремится к полному ускорению g.
Для нахождения ап обратимся к зависимости a2=a^+an- Отсюда
о-п = vog/v. (e)
Таким образом, в начальный момент времени (v=v0) an—g, а затем с увеличе-
увеличением v значение ап убывает, стремясь в пределе к нулю.
Для нахождения радиуса кривизны траектории воспользуемся формулой
fln=ii2/p, откуда
В начальный момент времени радиус кривизны имеет наименьшее значение рщ-щ3
==i'o/g. а затем с увеличением v радиус кривизны растет и, следовательно, кривизна
траектории уменьшается. При и->-оо р-^-оо, а кривизна стремится к нулю,
§47*. СКОРОСТЬ И УСКОРЕНИЕ ТОЧКИ
В ПОЛЯРНЫХ КООРДИНАТАХ
Когда точка движется все время в одной и той же плоскости, ее
положение можно определять полярными координатами г и ср
(рис. 130). При движении точки эти координаты с течением времени
изменяются. Следовательно, закон движения точки в полярных
координатах будет задаваться уравнениями:
C1)
ив
Скорость точки численно равна ds/dt, т. е. отношению элемен-
элементарного перемещения ds к промежутку времени d^. В данном случае
перемещение ds геометрически слагается из радиального перемеще-
перемещения, численно равного dr, и поперечного перемещения, перпендику-
перпендикулярного радиусу ОМ и численно равного
r-dcp. Следовательно, сама скорость v будет
геометрически слагаться из радиальной
скорости vr и поперечной скорости vv,
численно равных
„,=4; = >, Ч, = г? = ,ф. C2)
Так как vr и иф взаимно перпендику-
перпендикулярны, то по модулю
Рис. 130
+ r2(p3- C3)
Формулы C2) и C3) определяют скорость точки в полярных ко-
координатах при плоском движении.
Равенство C3) можно еще получить, выразив через гиф декартовы координа-
координаты точки в виде (рис. 130):
х=г cos ф, y=r sin ф.
Тогда х=т cos ф—лр sin ф, y=r sin ф+гф cos ф и по формуле A3)
Таким же путем, вычислив х и у, можно по формуле A5) найти выражение для
ускорения точки в полярных координатах
а = V(r- гф2J -+- (гц? + 2л фJ. C4)
При этом величина, стоящая под знаком радикала в первых скобках, равна аг,
а во вторых скобках равна а_.
Глава X
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЯ
ТВЕРДОГО ТЕЛА
§ 48. ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ
В кинематике, как и в статике, будем рассматривать все твердые
тела как 'абсолютно твердые. Задачи кинематики твердого тела рас-
распадаются на две части:
1) задание движения и определение кинематических характе-
характеристик движения тела в целом; 2) определение кинематических
характеристик движения отдельных точек тела.
Начнем с рассмотрения поступательного движения твердого тела.
Поступательным называется такое движение твердого тела,
117
при котором любая прямая, проведенная в этом теле, перемещается,
оставаясь параллельной своему начальному направлению.
Поступательное движение не следует смешивать с прямолиней-
прямолинейным. При поступательном движении тела траектории его точек мо-
могут быть любыми кривыми линиями. Приведем примеры.
1. Кузов автомобиля на прямом горизонтальном участке дороги
движется поступательно. При этом траектории его точек будут пря-
прямыми линиями.
2. Спарник АВ (рис. 131) при вращении кривошипов ОХА и 02В
@iA=02B) также движется поступательно (любая проведенная в
нем прямая остается параллельной ее начальному направлению).
Точки спарника движутся при этом по окружностям.
г
Рис. 132
Свойства поступательного движения определяются следующей
теоремой: при поступательном движении все точки тела описывают
одинаковые (при наложении совпадающие) траектории и имеют в
каждый момент времени одинаковые по модулю и направлению ско-
скорости и ускорения.
Для доказательства рассмотрим твердое тело, совершающее по-
поступательное движение относительно системы отсчета Oxyz. Возьмем
в теле две произвольные точки А и В, положения которых в момент
времени t определяются радиусами-векторами гА и гв (рис. 132);
проведем вектор АВ, соединяющий эти точки. Тогда
7В = 7А + АВ. C5)
При этом длина АВ постоянна, как расстояние между точками
твердого тела, а направление А В остается неизменным, так как
тело движется поступательно. Таким образом, вектор АВ во все
время движения тела остается постоянным (АВ=const). Вследствие
этого, как видно из равенства C5) (и непосредственно из чертежа),
траектория точки В получается из траектории точки А параллель-
параллельным смещением всех ее точек на постоянный вектор АВ. Следова-
Следовательно, траектории точек А и В будут действительно одинаковыми
(при наложении совпадающими) кривыми.
Для нахождения скоростей точек А и В продифференцируем обе
части равенства C5) по времени. Получим
d7B/dt = drA/dt + d (AB)ldt.
118
Но производная от постоянного вектора АВ равна нулю. Про-
Производные же от векторов гд и гв по времени дают скорости точек
А и В. В результате находим, что
т. е. что скорости точек А и В тела в любой момент времени оди-
одинаковы и по модулю, и по направлению. Беря от обеих частей полу-
полученного равенства производные по времени, найдем:
dvA/dt = dvBldt или аА = ав.
Следовательно, ускорения точек А и В тела в любой момент
времени тоже одинаковы по модулю и направлению.
Так как точки А и В были выбраны произвольно, то из найден-
найденных результатов следует, что у всех точек тела их траектории, а
также скорости и ускоре-
ускорения в любой момент време-
ни будут одинаковы. Таким
образом, теорема доказана.
Скорости и ускорения
точек движущегося тела
образуют векторные поля—
поле скоростей и поле Рис 133
ускорений точек тела.
Из доказанного следует, что поля скоростей и ускорений точек
тела, движущегося поступательно, будут однородными (рис. 133),
но вообще не стационарными, т. е. изменяющимися во времени (см.
§32).
Из теоремы следует также, что поступательное движение твер-
твердого тела вполне определяется движением какой-нибудь одной его
точки. Следовательно, изучение поступательного движения тела
сводится к задаче кинематики точки, нами уже рассмотренной.
При поступательном движении общую для всех точек тела ско-
скорость v называют скоростью поступательного движения тела, а
ускорение а — ускорением поступательного движения тела. Век-
Векторы v и а можно изображать приложенными к любой точке тела.
Заметим, что понятия о скорости и ускорении тела имеют смысл
только при поступательном движении. Во всех остальных случаях
точки тела, как мы увидим, движутся с разными скоростями и
ускорениями, и термины «скорость тела» или «ускорение тела» для
этих движений теряют смысл.
§49. ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ ОСИ.
УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ
Вращательным движением твердого тела вокруг неподвижной оси
называется такое его движение, при котором какие-нибудь две точки,
принадлежащие телу (или неизменно с ним связанные), остаются во
119
Рис. 134
все время движения неподвижными (рис. 134). Проходящая через
неподвижные точки А я В прямая А В называется осью вращения.
Так как расстояния между точками твердого тела должны оста-
оставаться неизменными, то очевидно, что при вращательном движении
все точки, принадлежащие оси вращения,
будут неподвижны, а все остальные точки
тела будут описывать окружности, плоско-
плоскости которых перпендикулярны оси враще-
вращения, а центры лежат на этой оси.
Для определения положения вращаю-
вращающегося тела проведем через ось вращения,
вдоль которой направим ось Аг, полуплос-
полуплоскость / — неподвижную и полуплоскость
//, врезанную в само тело и вращающую-
вращающуюся вместе с ним (см. рис. 134). Тогда поло-
положение тела в любой момент времени одно-
однозначно определится взятым с соответствую-
соответствующим знаком углом ф между этими полуплоскостями, который назо-
назовем углом поворота тела. Будем считать угол ф положительным,
если он отложен от неподвижной плоскости в направлении против
хода часовой стрелки (для наблюдателя, смотрящего с положитель-
положительного конца оси Az), и отрицательным, если по ходу часовой стрелки.
Измерять угол ф будем всегда в радианах. Чтобы знать положение
тела в любой момент времени, надо знать зависимость угла ф от
времени t, т. е.
Ф=/@. C6)
Уравнение C6) выражает закон вращательного движения твер-
твердого тела вокруг неподвижной оси.
Основными кинематическими характеристиками вращательного
движения твердого тела являются его угловая скорость со и угловое
ускорение г*.
Если за промежуток времени At=U—t тело совершает поворот
на угол Аф=ф!—ф, то численно средней угловой скоростью тела за
этот промежуток времени будет соср=Дф/Д?. В пределе при
найдем, что
dq>
ft>~~dT
ИЛИ 0) = ф.
C7)
Таким образом, числовое значение угловой скорости тела в
данный момент времени равно первой производной от угла поворота
по времени. Равенство C7) показывает также, что величина со равна
отношению элементарного угла поворота с1ф к соответствующему
промежутку времени d/. Знак со определяет направление вращения
* Подобно тому, как в § 42 мы условились обозначать символом v числовое
значение скорости и одновременно ее модуль, здесь со и е будут обознэчать число-
числовые (алгебраические) значения угловой скорости и углового ускорения и одно-
одновременно их модули, когда это не может вызвать недоразумений.
120
тела. Легко видеть, что когда вращение происходит против хода
часовой стрелки, со>0, а когда по ходу часовой стрелки, то со<0.
Размерность угловой скорости 1/Т (т. е. 1/время); в качестве
единицы измерения обычно применяют рад/с или, чготоже, 1/с(с~1),
так как радиан — величина безразмер-
безразмерная.
Угловую скорость тела можно изоб-
изобразить в виде вектора со, модуль которо-
которого равен ]со| и который направлен вдоль
оси вращения тела в ту сторону, откуда
вращение видно происходящим против
хода часовой стрелки (рис. 135). Такой
вектор определяет сразу и модуль угло- „
вой скорости, и ось вращения, и направ-
направление вращения вокруг этой оси.
Угловое ускорение характеризует изменение с те-
течением времени угловой скорости тела. Если за промежуток вре-
времени ht=U—t угловая скорость тела изменяется на величину Дсо =
=coi—со, то числовое значение среднего углового ускорения тела
за этот промежуток времени будет еср=Дсо/Д/. В пределе при ДНЮ
найдем, учтя одновременно равенство C7), что
°=Ж = Ж или в = ш = ф. C8)
Таким образом, числовое значение углового ускорения тела в данный
момент времени равно первой производной от угловой скорости или
второй производной от угла поворота тела по времени.
Размерность углового ускорения 1/Га A/время2); в качестве
единицы измерения обычно применяется рад/с2 или, что то же, 1/с3
(с).
Если модуль угловой скорости со временем возрастает, вращение
тела называется ускоренным, а если убывает,— замедленным. Легко
видеть, что вращение будет ускоренным, когда величины со и е
имеют одинаковые знаки, и замедленным,— когда разные.
Угловое ускорение тела (по аналогии с угловой скоростью)
можно также изобразить в виде вектора е, направленного вдоль
оси вращения. При этом
Ё"= da/dt. C8')
Направление е совпадает с направлением со, когда тело вращается
ускоренно (рис. 135, а), и противоположно со при замедленном
вращении (рис. 135, б).
§ 50. РАВНОМЕРНОЕ И РАВНОПЕРЕМЕННОЕ ВРАЩЕНИЯ
Если угловая скорость тела остается во все время движения по-
постоянной (co=-const), то вращение тела называется равномерным.
Найдем закон равномерного вращения. Из формулы C7) имеем
121
d<p=(fld/. Отсюда, считая, что в начальный момент времени ?=0
угол ф=ф0, и беря интегралы слева от ср0 до ср, а справа от 0 до t,
получим окончательно
+W C9)
Из равенства C9) следует, что при равномерном вращении, когда
фо=О,
Ф=со? и ю=ф//. D0)
В технике скорость равномерного вращения часто определяют
числом оборотов в минуту, обозначая эту величину через «об/мин*.
Найдем зависимость между п об/мин и со 1/с. При одном обороте
тело повернется на угол 2я, а при п оборотах на 2лл; этот поворот
делается за время /=1 мин = 60 с. Из равенства D0) следует тогда,
что
<о=лл/30« 0,1л. D1)
Если угловое ускорение тела во все время движения остается
постоянным (е=const), то вращение называется равнопеременным.
Найдем закон равнопеременного вращения, считая, что в началь-
начальный момент времени ?=0 угол ф=фв) а угловая скорость ю=«„
(соо —¦ начальная угловая скорость).
Из формулы C8) имеем dco=ed/. Интегрируя левую часть в пре-
пределах от о)о до со, а правую — в пределах от 0 до t, найдем
D2)
Представим выражение D2) в виде
i или dq>=
Вторично интегрируя, найдем отсюда закон равнопеременного вра-
вращения
Ф=ф0+о>0/+е/2/2. D3)
Угловая скорость со этого вращения определяется формулой
D2). Если величины со и 8 имеют одинаковые знаки, вращение
будет равноускоренным, а если разные — равнозамедлепным.
§ 51. СКОРОСТИ И УСКОРЕНИЯ ТОЧЕК
ВРАЩАЮЩЕГОСЯ ТЕЛА
Установив в предыдущих параграфах характеристики движения
всего тела в целом, перейдем к изучению движения отдельных его
точек.
1. Скорости точек тела. Рассмотрим какую-нибудь
точку М твердого тела, находящуюся на расстоянии h от оси вра-
вращения (см. рис. 134). При вращении тела точка М будет описывать
скорость
122
* Следует особо подчеркнуть, что п по размерности не угол, а угловая
юсть.
окружность радиуса h, плоскость которой перпендикулярна оси
вращения, а центр С лежит на самой оси. Если за время dt проис-
происходит элементарный поворот тела на угол dtp, то точка М при этом
совершает вдоль своей траектории элементарное перемещение ds=
=ftd(p. Тогда числовое значение скорости точки будет равно отно-
отношению ds к dt, т. е.
__ d? _ , dm
~5t~ "At
ИЛИ
= ha>.
D4)
Скорость v в отличие от угловой скорости тела называют иногда
еще линейной или окруоюной скоростью точки М.
Таким образом, числовое значение скорости точки вращающегося
твердого тела равно произведению угловой скорости тела на расстоя-
расстояние от этой точки до оси вращения.
Направлена скорость по касательной к описываемой точкой
окружности или перпендикулярно плоскости, проходящей через ось
вращения и точку М.
Так как для всех точек тела со имеет в данный момент времени
одно и то же значение, то из формулы D4) следует, что скорости
точек вращающегося тела пропорциональны их расстояниям от оси
вращения. Поле скоростей точек вращающегося твердого тела имеет
вид, показанный на рис. 136.
Ркс. 13G
Риг. 137
2. Ускорения точек тела. Для нахождения ускоре-
ускорения точки М воспользуемся формулами aT=dv'dt, an=v~lp.
В нашем случае p=h. Подставляя значение v из равенства D4)
в выражения ах и ап, получим:
dco h-a*
Ж' n~~h~
ar — i
или окончательно:
D5)
Касательная составляющая ускорения ах направлена по каса-
касательной к траектории (в сторону движения при ускоренном вра-
вращении тела и в обратную сторону при замедленном); нормальная
составляющая ап всегда направлена по радиусу МС к оси вращения
(рис. 137).
123
Полное ускорение точки М будет а=
или
D6)
Отклонение вектора полного ускорения от радиуса описываемой
точкой окружности определяется углом \i, который вычисляется по
формуле tgfx=aT/a:n [вторая из формул B2)]. Подставляя сюда зна-
значения ат и ап из равенств D5), получаем
tg [x=e/co3. D7)
Так как со и е имеют в данный момент времени для всех точек
тела одно и то же значение, то из формул D6) и D7) следует, что
ускорения всех точек вращающегося твердого тела пропорциональ-
пропорциональны их расстояниям от оси вращения и образуют в данный момент
времени один и тот же угол \а с радиусами описываемых ими окруж-
окружностей. Поле ускорений точек вращающегося твердого тела имеет
вид, показанный на рис. 138.
Рис. 138
Рис. 139
Формулы D4) — D7) позволяют определить скорость и ускорение
любой точки тела, если известен закон вращения тела и расстояние
данной точки от оси вращения. По этим же формулам можно, зная
движение одной точки тела, найти движение любой другой его точки,
а также характеристики движения всего тела в целом.
3. Векторы скорости и ускорения точек
тела. Чтобы найти выражения непосредственно для векторов v и
а, проведем из произвольной точки О оси АВ радиус-вектор г точки
М (рис. 139). Тогда h=r sin a и по формуле D4)
\v \~ | со|Л = |
г sin a или
| = |сохг[
Таким образом, - модуль векторного произведения иХг равен
модулю скорости точки М. Направления векторов аХг и v тоже
совпадают (оба они перпендикулярны плоскости ОМВ) и размерно-
размерности их одинаковы. Следовательно,
D8)
124
т. е. вектор скорости любой точки вращающегося тела равен вектор-
векторному произведению угловой скорости тела на радиус-вектор этой
точки. Формулу D8) называют формулой Эйлера.
Беря от обеих частей равенства D8) производные по времени,
получим
Аи [ <й>
или
а = (ех7) + (юху). D9)
Формула D9) определяет вектор ускорения любой точки вращаю-
вращающегося тела.
Вектор еХг направлен, как и вектор иХг, т. е. по касательной
к траектории точки М, а \еХг\=гг sin а=гп. Вектор же сохо на-
направлен вдоль МС, т. е. по нормали к траектории точки М, а |сох
Xu|=«ysin 90°=(о%, так как y=coft. Учитывая все эти результаты,
а также формулы D5), заключаем, что гХг=а% и aXv=an.
Задача 54. Вал, делающий л=90 об/мин, после выключения двигателя на-
начинает вращаться равнозамедленно и останавливается через ^=40 с. Определить,
сколько оборотов сделал вал за это время.
Решение. Так как вал вращается равнозамедленно, то для него, считая
<ро=О, будет
«р=сО(,*+е*2/2, ш=<йо+е<. (а)
Начальной угловой скоростью при замедленном вращении является та, ко-
которую вал имел до выключения двигателя. Следовательно,
соо=ял/30.
В момент остановки при t=t1 угловая скорость вала. %=0. Подставляя эти
вначения во второе из уравнений (а), получаем:
0=5X71/30+6^ И Е=—ЯП/ЗО^.
Если обозначить число сделанных валом за время tt оборотов через N (не
смешивать ел; п — угловая скорость), то угол поворота за то же время будет ра-
равен ф1=2яЛг. Подставляя найденные значения е и цг в первое из уравнений (а),
получим
/
откуда
W=n*j/120=30 об.
Задача 55. Маховик радиусом R=0fi м вращается равномерно, делая п=
=90 об/мин. Определить скорость и ускорение точки, лежащей на ободе маховика.
Решение. Скорость точки обода v—Ra>, где угловая скорость со должна
быть выражена в радианах в секунду. Тогда ш=яп/30—Зя и ц=^-3я~5,7 м/с.
Далее, так как o)=const, то 8=0, и, следовательно,
а=яга=#со2=Я-9я2«53,3 м/с2.
Ускорение точки направлено в данном случае к оси вращения.
Задача 56. Полагая, что при разгоне маховик вращается по закону
, (а)
определить значения постоянных коэффициентов с0, съ с2 и k из условий, что при
*=0 должно быть Фо=О и со0=0 и что предельная угловая скорость, до которой
125
* Значение ю может изменяться по закону (д), когда на маховик действуют
постоянный вращающий момент и момент сил сопротивления, пропорциональный
со (задача 150 в § 128).
126
Глава XI
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
§ 52. УРАВНЕНИЯ ПЛОСКОПАРАЛЛЕЛЬНОГО ДВИЖЕНИЯ
(ДВИЖЕНИЯ ПЛОСКОЙ ФИГУРЫ).
РАЗЛОЖЕНИЕ ДВИЖЕНИЯ НА ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ
Плоскопараллельным (или плоским) называется такое движение
твердого тела, при котором все его точки перемещаются параллельно
некоторой фиксированной плоскости П (рис. 141). Плоское движение
совершают многие части механизмов и машин, например катящееся
колесо на прямолинейном участке пути, шатун в кривошипно-
ползунном механизме и др. Частным случаем плоскопараллельного
движения является вращательное движение твердого тела вокруг
неподвижной оси.
Рис. 141
Рис. 142
Рассмотрим сечение S тела какой-нибудь плоскостью Оху, парал-
параллельной плоскости П (рис. 141). При плоскопараллельном движе-
движении все точки тела, лежащие на прямой ММ', перпендикулярной
сечению S, т. е. плоскости П, движутся тождественно.
Отсюда заключаем, что для изучения движения всего тела дос-
достаточно изучить, как движется в плоскости Оху сечение S этого
тела или некоторая плоская фигура S. Поэтому в дальнейшем вместо
плоского движения тела будем рассматривать движение плоской
фигуры 5 в ее плоскости, т. е. в плоскости Оху. При этом все ре-
результаты, которые будут получены в § 53—59 для точек плоской
фигуры, справедливы, конечно, и для точек сечения S твердого тела,
движущегося плоскопараллельно.
Положение фигуры S в плоскости Оху определяется положением
какого-нибудь проведенного на этой фигуре отрезка АВ (рис. 142).
В свою очередь положение отрезка АВ можно определить, зная коор-
координаты хА, уА точки А и угол ф, который отрезок АВ образует с
осью х. Точку Л, выбранную для определения положения фигуры 5,
будем в дальнейшем называть полюсом.
При движении фигуры величины хА, уА и ср будут изменяться.
Чтобы знать закон движения, т. е. положение фигуры в плоскости
127
Оху в любой момент времени, надо знать зависимости
Хл=Ш, Уа=Ш, <Р=Ш- E0)
Уравнения E0), определяющие закон происходящего движения,
называются уравнениями движения плоской фигуры в ее плоскости.
Они же являются уравнениями плоскопараллельного движения твер-
твердого тела.
Первые два из уравнений E0) определяют то движение, которое
фигура совершала бы при q>=const; это, очевидно, будет поступа-
поступательное движение, при котором все точ-
точки фигуры движутся так же, как полюс
Л. Третье уравнение определяет движе-
движение, которое фигура совершала бы при
xA=const Hz/A=const, т. е. когда полюс
А неподвижен; это будет вращение фи-
фигуры вокруг полюса А. Отсюда можно
заключить, что в общем случае движение
плоской фигуры в ее плоскости может
рассматриваться как слагающееся из по-
v ступательного движения, при котором
л все точки фигуры движутся так же, как
Рис- 143 полюс А, и из вращательного движения
вокруг этого полюса *.
Основными кинематическими характеристиками рассматривае-
рассматриваемого движения являются скорость и ускорение поступательного
движения, равные скорости и ускорению полюса (vn0CT=vA, опост=
=аА), а также угловая скорость а и угловое ускорение е враща-
вращательного движения вокруг полюса. Значения этих характеристик в
любой момент времени t можно найти, воспользовавшись уравне-
уравнениями E0).
При изучении движения можно в качестве полюса выбирать лю-
любую точку фигуры. Рассмотрим, что получится, если вместо А вы-
выбрать в качестве полюса какую-нибудь другую точку С и опреде-
определять положение фигуры отрезком CD, образующим с осью Ох угол
Фх (рис. 143). Характеристики поступательной части движения при
этом изменятся, так как в общем случае vc^vA и ас-фаА (иначе дви-
движение фигуры было бы поступательным). Характеристики же
вращательной части движения, т. е. со и е, остаются неизменными.
В самом деле, проведя из С прямую СБЬ параллельную АВ, мы
видим, что в любой момент времени угол cpi=<p—а, где a=const.
Отсюда epi=cp, ф!=ф или m1 = co, E1=e.
Следовательно, вращательная часть движения от выбора полюса
не зависит.
* Соответственно плоскопараллельное движение твердого тела можно рас-
рассматривать как слагающееся из поступательного движения вместе с полюсом А
и вращательного вокруг оси, перпендикулярной плоскости П (см. рис. 141) и прохо-
проходящей через полюс А.
128
§53*. ОПРЕДЕЛЕНИЕ ТРАЕКТОРИЙ ТОЧЕК ПЛОСКОЙ ФИГУРЫ
Перейдем теперь к изучению движения отдельных точек плоской
фигуры, т. е. к отысканию траекторий, скоростей и ускорений этих
точек. Начнем с определения траекторий.
Рассмотрим точку М плоской фигуры, положение которой
определяется расстоянием b—АМ от полюса А и углом ВАМ=а
(рис. 144). Если движение задано уравнениями E0), то координаты
х и у точки М в осях Оху будут:
где хА, уА, ф — известные по уравнениям E0) функции времени t.
Равенства E1), определяющие закон движения точки М в плос-
плоскости Оху, дают одновременно уравнение траектории этой точки в
параметрическом виде. Обычное уравнение траектории получим,
исключив из системы E1) время t.
Если рассматривается движение звена какого-нибудь механизма,
то для определения траектории любой точки этого звена достаточно
выразить ее координаты через какой-нибудь параметр, определяю-
определяющий положение механизма, а затем исключить этот параметр.
Уравнения движения E0) при этом знать не обязательно.
Рис. 145
Задача 58. Ползуны Л и В, к которым прикрепляется линейка эллипсографа,
перемещаются по взаимно перпендикулярным направляющим (рис. 145). Расстоя-
Расстояние АВ=1. Определить траекторию точки М линейки.
Решение. Взяв за полюс точку А, будем определять положение точки М
на линейке отрезком АМ~Ь. Положение самой линейки задается углом ф. Тогда
для координат х и у точки М получим: х~(Ь—I) cos ц>, y=b sin <p. Исключая пара-
параметр ф, находим, что траекторией точки (независимо от закона движения линейки)
будет эллипс
с полуосями а= \Ь—/[ ибис центром в точке О.
Меняя с помощью соответствующих винтов расстояния /и 6, можно вычертить
карандашом М эллипс с любыми заданными полуосями, не превосходящими раз-
размеров линейки. Отсюда и название механизма — эллипсограф.
5 № 2173 129
§ 54. ОПРЕДЕЛЕНИЕ СКОРОСТЕЙ ТОЧЕК ПЛОСКОЙ ФИГУРЫ
В § 52 было отмечено, что движение плоской фигуры можно
рассматривать как слагающееся из поступательного движения, при
котором все точки фигуры движутся со скоростью vA полюса Л, и из
вращательного движения вокруг этого полюса. Покажем, что ско-
скорость любой точки М фигуры складывается геометрически из
скоростей, которые точка получает в каждом из этих движений.
В самом деле, положение любой точки М фигуры определяется
по отношению к осям Оху радиусом-вектором г=гА+г' (рис. 146),
где гА — радиус-вектор полюса Л, г'—AM. — вектор, определяю-
определяющий положение точки М относительно осей Ах'у', перемещающих-
перемещающихся вместе с полюсом Л поступательно (движение фигуры по отноше-
отношению к этим осям представляет собой вращение вокруг полюса Л).
Тогда
— dr drj , dr'
If'
d/
dt
В полученном равенстве величина drA/dt=vA есть скорость
полюса Л; величина же dr'/dt равна скорости vMA, которую точка М
получает при rA=const, т. е. относительно осей Ах'у", или, иначе
говоря, при вращении фигуры вокруг полюса А. Таким образом, из
предыдущего равенства действительно следует, что
Vm = Va + Vma- E2)
При этом скорость vMA, которую точка М получает при вращении
фигуры вокруг полюса Л, будет (ел:. §51):
(vMA±MA),
E3)
где со — угловая скорость фигуры.
Таким образом, скорость любой точки М плоской фигуры гео-
геометрически складывается из скорости какой-нибудь другой точки А,
Рис. 146
Рис. 147
Рис. 148
принятой за полюс, и скорости, которую точка М получает при
вращении_фигуры вокруг этого полюса. Модуль и направление
скорости vM находятся построением, соответствующего параллело-
параллелограмма (рис. 147).
130
Задача 59. Найти скорость точки М обода колеса, катящегося по прямо-
прямолинейному рельсу без скольжения (рис. 148), если скорость центра С колеса
равна z>c а угол DKM = a.
Р е ш_е н и е. Приняв точку С, скорость которой известна, за полюс, найдем,
что Ум=ус~1~иЛ1с> где v/ucJ_CM и по модулю vmc=<u-MC—(?>R (R — радиус ко-
колеса). Значение угловой скорости со найдем из условия того, что точка К колеса
не скользит по рельсу и, следовательно, в данный момент времени %=0. С дру-
другой стороны, так же как и для точки М, Vk==1'cjtvKc< где vKC~ia-KC=<i>R. Так
как для точки К скорости v%c и i'c направлены вдоль одной прямой, то при у^=0
vkc~vC> откуда ш=гс R. В результате находим, что vmc=<i>R—vc.
Параллелограмм, построенный на векторах vj^q mvq, будет при этом ромбом.
Угол между vc и удог равен ?5, так как стороны, образующие этот угол и угол р,
взаимно перепендикулярны. В свою очередь угол р=2а, как центральный угол,
опирающийся на ту же дугу, что и вписанный угол а. Тогда по свойствам ромба
>глы между vc и иЛ; и между v/-c и vn тоже равны а. Окончательно, так как
диагонали ромба взаимно перепендикулярны, получим
ад = 2сс cos а и
Расчет, как видим, оказывается достаточно громоздким. В дальнейшем мы
познакомимся с методами, позволяющими решать аналогичные задачи гораздо
проще (см. задачу 61 в § 57).
§ 55. ТЕОРЕМА О ПРОЕКЦИЯХ СКОРОСТЕЙ
ДВУХ ТОЧЕК ТЕЛА
Определение скоростей точек плоской фигуры (или тела, дви-
движущегося плоскопараллелыю) с помощью формулы E2) связано
обычно с довольно сложными расчетами (см. задачу 59). Однако
исходя из этого основного пезультата,
можно получить ряд других, практи-
практически более удобных и простых мето-
методов определения скоростей точек фи-
фигуры (или тела).
Один из таких методов дает тео-
теорема: проекции скоростей двух тпчас
твердого тела на ось, проходящую че- Рис. 149
рез эти точки, равны друг другу.
Рассмотрим какие-нибудь две точки А и В плоской фигуры (или
тела). Принимая точку А за полюс (рис. 149), получаем по формуле
E2), что vb=va-\-vba- Отсюда, проектируя обе части равенства на
ось, направленную по /123, и учитывая, что вектор vBA перпендику-
перпендикулярен АВ, находим
ивсозр=1'лсоза, E4)
и теорема доказана. Заметим, что этот результат ясен и из чисто
физических соображений: если равенство E4) не будет выполняться,
то при движении расстояние между точками А и В должно изме-
изменяться, что невозможно, так как тело считается абсолютно твердым.
Поэтому равенство E4) выполп^ася не только при плоскопарал-
плоскопараллельном, но и при любом движении твердого тела.
5~ 131
Доказанная теорема позволяет легко находить скорость данной
точки тела, если известны направление скорости этой точки и ско-
скорость какой-нибудь другой точки того же тела.
Задача 60. Найти зависимость между скоростями точек А а В линейки эл-
эллипсографа (см. рис. 145) при данном угле ф.
Решение. Направления скоростей точек А ж В известны. Тогда, проекти-
проектируя векторы Юд и vg на ось, направленную по АВ, получим согласно доказанной
теореме
ил cos f—vjjcos (90°—ф),
откуда vA=vBtg<p.
§ 56. ОПРЕДЕЛЕНИЕ СКОРОСТЕЙ ТОЧЕК ПЛОСКОЙ ФИГУРЫ
С ПОМОЩЬЮ МГНОВЕННОГО ЦЕНТРА СКОРОСТЕЙ.
ПОНЯТИЕ О ЦЕНТРОИДАХ
Другой простой и наглядный метод определения скоростей точек
плоской фигуры (или тела при плоском движении) основан на поня-
понятии о мгновенном центре скоростей.
Мгновенным центром скоростей называется точка плоской фигу-
фигуры, скорость которой в данный момент времени равна нулю.
Легко убедиться, что если фигура движется непоступательно, то
такая точка в каждый момент Еремени t существует и притом един-
единственная. Пусть в момент времени t точки А
и В плоской фигуры имеют скорости vA и
vB, не параллельные друг другу (рис. 150).
Тогда точка Р, лежащая на пересечении пер-
перпендикуляров Аа к вектору vA и ВЬ к векто-
вектору vB, и будет мгновенным центром скоростей,
так как vP=Q*. В самом деле, если допустить,
что Vp^O, то по теореме о проекциях скоро-
скоростей вектор vp должен быть одновременно
перпендикулярен и АР, (так как vA±AP) и ВР (так как vB L.BP),
что невозможно. Из той же теоремы видно, что никакая другая точ-
точка фигуры в этот момент времени не может иметь скорость, равную
нулю (например, для точки а проекция vB на линию Ва не равна
нулю и, следовательно, va=^0 и т. д.).
Если теперь в момент времени t взять точку Р за полюс, то по
формуле E2) скорость точки А будет
= VP -Г VPA = V
PA,
так как vP=Q. Аналогичный результат получается для любой дру-
другой точки фигуры. Следовательно, скорости точек плоской фигуры
определяются в данный момент времени так, как если бы движение
фигуры было вращением вокруг мгновенного центра скоростей. При
* Размеры фигуры всегда можно представить себе такими, что точка Р будет
принадлежать этой фигуре (см. ниже лример и рис. 151).
132
этом согласно соотношениям E3):
vA = u-PA_ {vA_\_PA);
vB = a-PB (vs±PB) и т. д.
Из равенств E5) следует еще, что
2а.
РА
ЕП.
РВ '
E5)
E6)
т.е. что скорости точек плоской фигуры пропорциональны их расстоя-
расстояниям от мгновенного центра скоростей.
Полученные результаты приводят к следующим выводам.
1. Для определения мгновенного центра скоростей надо знать то-
только направления скоростей vA и vB каких-нибудь двух точек А и В
плоской фигуры (или траектории этих точек); мгновенный центр
скоростей находится в точке пересечения перпендикуляров, вос-
восставленных из точек А и В к скоростям этих точек (или к каса-
касательным к траекториям).
2. Для определения скорости любой точки плоской фигуры надо
знать модуль и направление скорости какой-нибудь одной точки
А фигуры и направление скорости другой ее точки В. Тогда, вос-
восставив из точек А и В перпендикуляры к vA и vB, построим мгно-
мгновенный центр скоростей Р и по направлению vA определим направ-
направление поворота фигуры. После этого, зная vA, найдем по формуле
E6) скорость vM любой точки М плоской фигуры. Направлен век-
вектор vM перпендикулярно РМ в сторону поворота фигуры.
3. Угловая скорость со плоской фигуры, равна в каждый данный
момент времени отношению скорости какой-нибудь точки фигуры к
ее раШпоянию от мгновенного центра ско-
скоростей Р: gt
со = Ц, E7)
что видно из формул E5).
Найдем еще другое выражение для со.
Из равенств E2) и E3) следует, что
vba = \vb—va\ и vBA=a-AB, откуда
М-
E8)
Когда vA=0 (точка А—мгновенный
центр скоростей), формула E8) перехо- Рис 151
дит в E7).
Равенства E7) и E8) определяют одну и ту же величину, так как
по доказанному (см. § 52) поворот плоской фигуры вокруг точки А
или точки Р происходит с одной и той же угловой скоростью со.
Пример. Для линейки AD эллипсографа (рис. 151) направления скоростей
точек А и В известны. Восставляя к ним перпендикуляры, найдем мгновенный
центр скоростей Р линейки (эллипсограф можно представить себе в виде листа фа-
133
неры Л, прикрепленного шарнирно к ползунам, А и В, а линейку AD — нарисо-
нарисованной на этом листе; точка Р, принадлежащая листу, имеет скорость vp=0).
Зная Р, из пропорции vAIPA~vRIPB получим vA=vB(PAIPB)=vBtg cp,
т. е. тот же результат, что и в задаче 60. Для точки М аналогично найдем, что
Ид1=ч'я (РМ/РВ). Длину РМ можно вычислить, зная АВ\ AM и угол ор. Направ-
Направление вектора vm показано на чертеже (v^^PM).
Для угловой скорости линейки по формулам E7) или E8) находим
со =
Va
или a=
-р|- или a=J
Легко проверить, что обе формулы дают один и тот же результат.
Рассмотрим некоторые частные случаи определения мгновенного
центра скоростей.
а) Если плоскопараллельное движение осуществляется путем
качения без скольжения одного цилиндрического тела по поверх-
поверхности другого неподвижного, то точка Р катящегося тела, каеаю-
щаяся неподвижной поверхности (рис. 152), имеет в данный момент
времени вследствие отсутствия скольжения скорость, равную нулю
(vp—0), и, следовательно, является мгновенным центром'скоростей.
Примером служит качение колеса по рельсу.
Рис. 152
Рис. 153
б) Если скорости точек А и В плоской фигуры параллельны
друг другу, причем линия АВ не перпендикулярна оА (рис. 153, а),
то мгновенный центр скоростей лежит в бесконечности и скорости
всех точек параллельны vA. При этом из теоремы о проекциях
скоростей следует, что wAcosa==yBeosC, т. е, vB=vA; аналогичный
результат получается для всех других точек. Следовательно, в рас-
рассматриваемом случае скорости всех точек фигуры в данный момент
времени равны друг другу и по модулю, и по направлению, т. е.
фигура имеет мгновенное поступательное распределение скоростей
(такое состояние движения тела называют еще мгновенно поступа-
поступательным). Угловая скорость со тела в этот момент времени, как
видно из формулы E8), равна нулю.
в) Если скорости точек А и В плоской фигуры параллельны
друг другу и при этом линия АВ перпендикулярна vA, то мгновен-
мгновенный центр скоростей Р определяется построением, показанным
на рис. 153, б. Справедливость построений следует из пропорции
E6). В этом случае, в отличие от предыдущих, для нахождения цент-
134
pa P надо кроме направлений знать еще и модули скоростей vA
и vB.
г) Если известны вектор скорости vB какой-нибудь точки В
фигуры и ее угловая скорость со, то положение мгновенного центра
скоростей Р, лежащего на перпендикуляре к vB (см. рнс. 150), можно
найти из равенства E7), которое дает BP=vB/(o.
Мгновенный центр вращения и центроиды. Выше было
показано, что скорости точек плоской фигуры распределены в каждый момент
времени так, как если бы движение этой фигуры представляло собой вращение
вокруг центра Р. По этой причине точку неподвижной плоскости, совпадающую с
мгновенным центром скоростей, которую мы также будем обозначать буквой Р,
называют мгновенным центром вращения, а ось Pz, перпендикулярную сечению S
тела (см. рис. 141) и проходящую через точку Р,— мгновенной осью вращения
тела, совершающего гоюскопаралделыюе движение. От неподвижной оси (или
центра) вращения мгновенная ось'(или центр) отличаются тем, что они все время
меняют свое положение. В § 52 было установлено, что плоскопараллельное дви-
движение можно рассматривать как слагающееся из поступательного движения вме-
вместе с каким-то фиксированным полюсом и вращательного движения вокруг этого
лолюса. Полученный результат позволяет дать другую геометрическую картину
плоского движения, а именно: плоскогщраллельное движение слагается из серии
последовательных элементарных поворотов вокруг непреривно меняющих свое по-
положение мгновенных осей (или центров) вращения.
Например, качение -колеса, изображенного ниже на рис. 156, можно пред-
представить себе или как совокупность поступательного движения вместе с полюсом С
и вращения вокруг этого полюса, или лее как серию элементарных поворотов вок-
вокруг непрерывно изменяющей свое положение
точки касания Р обода с рельсом.
При движении плоской фигуры мгно-
мгновенный центр Р непрерывно изменяет сеое
положение как на неподвижрой плоскости
Оху, так и на плескссти, связанной с дьи-
Рис. 154
Рис. 155
жущейся фигурой. Геометрическое место мгновенных центров вращения, т. е.
положений точки Р на пеподьй/хпоп плоскости, называют неподвижной центрои-
Оой, а геометрическое место шновепных центров скоростей, т. е. положений точки
Р в плоскости, связанной с фшурон и движущейся смеете с ней,— подвижной
vfiitmpoudou (рис. 154). В данный момент времени обе центроиды касаются др\г
друга в точке Р, являющейся для эюю гсыента мгновенным центром ьращеа ия
(или скоростей); пересекаться центронди нз л;огут, так как тогда в дангып момент
времени существовало бы бслыпе одного шновенного u.ehij а, что невозможно.
В следующий момент времени будут соприкасаться ю'-ки i\ подвижной и Рх
неподвижной центрсид, и эта то"ка будет для следующего момеьта ггршенным
центром вращения и т. д. Осюда, поскольку положи не vn ове.тою иентра Р
изменяется непрерывно и в кеждый дампы; -,:омент времени vp- 0, можно заклю-
заключить, что при плескопараллелькем дгии'спил происходит качи-.ие без скольжения
подвижкой цептроидц по [.сподгпжной. Наоборот, если мме^цальчо сс\шсствить
сбе центроиды, то геометрическую картш у f-ockoi о движения 1Е.;доготе.тта мож-
го получить, скрепив тело с 11од2и;кпой целтроидои и катя эту центроиду без
скольжения по неподвижной.
135
Легко видеть, что для колеса, изображенного на рис. 156, ось Ох является
неподвижной центроидой, а окружность PEDK — подвижной. Качением без
скольжения подвижной центроиды по неподвижной и осуществляется движение
колеса.
Пример. Для линейки АВ эллипсографа (рис. 155) мгновенный центр вряще-
ния находится в точке Р (см. рис. 151). Так как расстояние РО=АВ=1 в любой
момент времени, то геометрическим местом точек Р в плоскости Оку, т. е. непод-
неподвижной цеитроидой, будет окружность радиуса I с центром в О. Но одновременно,
если линейку АВ представить нарисованной на листе фанеры Л, то расстояние
РС=//2 центра Р от точки С линейки будет тоже все время постоянным. Следова-
Следовательно, геометрическим местом точек Р на листе фанеры Л, т. е. подвижной цен-
центроидой, будет окружность радиуса 1/2 с центром в точке С. При движении эллип-
эллипсографа окружность 2 катится без скольжения по окружности / и точка их ка-
касания в каждый момент времени будет мгновенным центром вращения. Наоборот,
если окружности / и 2 осуществить материально (в виде шестерен) и катить одну
по другой (неподвижной) без скольжения, то при этом диаметр АВ окружности 2
воспроизведет движение линейки эллипсографа.
§ 57. РЕШЕНИЕ ЗАДАЧ
Для определения искомых кинематических характеристик (угло-
(угловой скорости тела или скоростей его точек) надо знать модуль и
направление скорости какой-нибудь одной точки и направление
скорости другой точки сечения этого тела (кроме случаев а) и в),
рассмотренных в конце § 56). С определения этих характеристик по
данным задачи и следует начинать решение.
Механизм, движение которого исследуется, надо изображать на
чертеже в том положении, для которого требуется определить соот-
соответствующие характеристики. При расчете следует помнить, что
понятие о мгновенном центре скоростей имеет место для данного
твердого тела. В механизме, состоящем из нескольких тел, каждое
непоступательно движущееся тело имеет в данный момент времена
свой мгновенный центр скоростей и свою угловую скорость.
Задача 61. Определить скорость точки М обода катящегося колеса (см.
задачу 59) с помощью мгновенного центра скоростей.
Чг
Рис. 156
Рис. 157
Решение. Точка касания колеса Р (рис. 156) является мгновенным цен-
центром скоростей, поскольку уя=0. Следовательно, vj^J_PM. Так как прямой угол
PMD опирается на диаметр, то направление вектора скорости vm любой течки
136
обода проходит через точку D. Составляя пропорцию v^lPM=vciPC и замечая,
что PC=R, a PM=2R cos а, находим vm=2vc cos a.
Чем точка М дальше от Р, тем ее скорость больше; наибольшую скорость
Vq=2vc имеет верхний конец D вертикального диаметра. Угловая скорость колеса
согласно формуле E7) имеет значение
a=vc/PC=vc'R.
Аналогичная картина распределения скоростей имеет место при качении
колеса или шестерни по любой цилиндрической поверхности (см. рис. 152).
Задача 62. Определить скорость центра С подвижного блока радиуса г и его
угловую скорость ш (рис. 157), если груз А поднимается со скоростью Уд, а груз В
опускается со скоростью vg. Нить при своем движении по подвижному блоку не
проскальзывает, а ее ветви вертикальны.
Решение. Так как нить по подвижному блоку не проскальзывает, то
скорости точек а и b блока равны по модулю скоростям грузов, т. е. иа=ид и
гь=%. Зная скорости точек а и b и полагая для определенности, что Уд>ул,
находим положение мгновенного центра скоростей Р подвижного блока таким же
приемом, как и в случае, показанном на рис. 153, б. Скорость центра С блока изо-
изображается вектором vc. Для определения модуля vc и угловой скорости (?> под-
подвижного блока составляем, пользуясь формулой E8), равенства:
ab '
Отсюда, так как ab=2r, ЬС=г, находим:
ЬС
При Vb>va центр С блока поднимается; если vb<va, он будет опускаться. При
Уд=уд получим 1>с=0.
Для случая, когда оба груза А я В опускаются, значения ш и Vq найдем, за-
заменив в полученных формулах vA на —ид.
Задача 63. В кривошипно-ползунном механизме (рис. 158) кривошип ОА
длиной г вращается с угловой скоростью соол. Длина шатуна АВ=1, При данном
угле ф определить: 1) скорость ползуна В;
2) положение точки М шатуна АВ, име-
имеющей наименьшую скорость; 3) угловую
скорость со^д шатуна. Рассмотреть допол-
дополнительно положения механизма при ф=0
и ф=90°.
Решение. Из данных задач следу-
следует, что точка А имеет скорость, численно
равную Ул=шолг и направленную пер-
перпендикулярно ОА, а скорость точки В
направлена вдоль ВО. Этих данных до-
статочно для определения всех кинемати-
кинематических характеристик шатуна АВ.
1. По теореме о проекциях скоростей уд cos a~vg cos p. Но поскольку угол
OAD, как внешний угол треугольника ОАВ, равен <р+р\ то а=90°—(ф+Р) и,
следовательно.
=aOAr (sin ф + cos q> tg P).
Исключим из этого равенства угол р. Из треугольника ОАВ sin {$//¦ = sin ц>/1;
кроме того,
sinz В
В результате находим
г cos
ф \
„-
ЬШ2ф /
ЬШ2ф /
137
2. Восставляя из точек А и В перпендикуляры к скоростям этих точек, опре-
определяем мгновенный центр скоростей Р для шатуна АВ (линия АР является про-
продолжением О А). Наименьшую скорость имеет точка М, ближе всего расположенная
к центру Р, т. е. лежащая на перпендикуляре РМ к АВ. Скорость этой точки
vм = va cos а = a0Ar sin (<р + р).
3. Угловая скорость шатуна АВ согласно формуле E7)
или a>AB = vBjPB.
Длина РВ (или РА) вычисляется по данным задачи.
4. При угле <р=0 (рис. 159, а) перпендикуляр А В к скорости {Г, и перпенди-
перпендикуляр ВЪ к направлению vB пересекаются в точке В. Следовательно, точка В яв-
является в этом положении мгновенным центром скоростей и yg=0 («мертвое»
положение механизма). Для этого положения
Распределение скоростей точек шатуна АВ показано на чертеже.
5. При угле ф=90° (рис. 159, б) скорости vA и vB направлены параллельно и
перпендикуляры к ним пересекаются в бесконечности. Следовательно, в этот мо-
момент времени все точки шатуна имеют одинаковые скорости, равные vA; 0
о)
¦А
ШЬ
Ш7,
б) , п, Л
Рес. 159
Рис. 160
Задача 64. Кривошип О А (рис. 160), врзщчгащийся вокруг осп О с угловой
скоростью и>оА> несет на себе ось подвижной шестерни 1, катящейся по неподвиж-
неподвижной шестерне 2, Радиусы шестерен одинаковы и равны г. Y^ шестерне / шарнир-
но прикреплен шатун BD длиной /, соединенный с коромыслом DC. Определить
угловую скорость (л>во шатуна в vo^eirr, когда он перпендикулярен кривошипу
ОА, если в этот момент ZBDC—io".
Решение. Для определения »до кадо з"ачь скорость какой-нибудь точки
шатуна BD и положение его мгровск-ою аечтра скоростей. Найдем скорость точки
В, пользуясь тем, что ола одновреме^'о прин.илелшт шестерне /. Для шестерни 1
известны скорость vA=e>o,\-2r (vA\_OA) и 'иновенный центр скоростей Рх.
Следовательно, уд ]_РгВ и по теореме о проекциях скоростей vB cos 45°=u_4>
откуда 1>д=1.'лУг2"=2/Ысы>л? _
Теперь для maiyna BD известги скорость vB и направление скорости ьд
(vj}_]_DQ. Восставляя перпендикуляры к vB и vD, найдем мгновенний центр ско-
скоростей Р2 шатуна. При этом, как легко ьндзть, отрезок ВР3=/]/,2. Тогда
/BP47/)
Db2()ои
Заметим, что еклыя пытаться искать пркол-пибудь мглсвеннь-й центр ско-
скоростей, восставляя перпегдпкулярл i; lcl'iC lJ. •: t/j л ^ц. Точки А ^ D щи .1адле..>&1
разным телам, и пересечение указанных перпендикуляров никакого центра ско-
скоростей не дает (сравн. с задачей 65).
Задача 65. На ось О (рис. 161) независимо друг от друга насажены шестерня /
и кривошип ОА, вращающийся с угловой скоростью co0^. Кривошип несет ось А
шестерни 2, наглухо скрепленной с шатуном АВ, проходящим через качающуюся
муфту С. Радиусы шестерен 1 и 2 одинаковы (г^г-г—г)- Определить угловую
скорость о), шестерни / в тот момент времени, когда ОА\ОС, если при этом
Z А СО= 30*.
Решение. Для определения угловой скорости щ шестерни / надо найти
скорость ее точки Е. Эту скорость найдем, пользуясь тем, что такую же скорость
имеет точка Е шестерни 2. Для шестерни 2 известны направление и модуль ско-
скорости точки А:
"vA±OA, vA—toOA-2r.
Кроме того, мы знаем направление скорости v^, но в данном случае этого не-
недостаточно, так как и^Цод. По теореме проекций значение иЕ также не найдется,
так как vA и vE перпендикулярны АЕ. Поэтому для дальнейшего решения вос-
воспользуемся тем, что шестерня 2 и шатун АВ образуют одно тело (они склепаны).
Для этого тела знаем направление скорости точки С: вектор Vq направлен вдоль
С А, так как в точке С шатун может только
проскальзывать вдоль муфты. Восставляя
перпендикуляры к оди р^, находим мгновен-
мгновенный центр скоростей Р тела ВАЕ.
По данным задачи Z АС0= 30°, откуда и
ZCPA=30°. Поэтому
AC=2-AO=4r, РА=2-АС=8г, РЕ=7г.
Тогда из пропорции Vg/PE=vA/PA находим,
что vp—G/8) ид=G/4) /чоод. Отсюда &>]=
=t»?/O?=G/4) ш0А.
Рис. 161
Рис.
Задача 66. В механизме, изображенном на рис. 162, кривошипы 1 и 2 дли-
длиной /j и 12 соответственно могут вращаться независимо друг от друга вокруг их
осей Ох и О2*. При данных углах а и Р (О2В\\АС) найти: 1) чему должны равняться
угловые скорости «j и ш2 кривошипов, чтобы шарнир С механизма имел в данный
момент времени заданную скорость vc, направленную под углом у к звену АС;
2) чему будет равна скорость vc, если кривошипы имеют заданные угловые ско-
скорости % и «2.
* Механизм имеет две степени свободы: его положение определяется двумя уг-
углами а и Р, не зависящими друг от друга (угол а можно изменять, не изменяя угол
Р, и наоборот). Механизмы, рассматривавшиеся в предыдущих задачах, имеют одну
степень свободы и положение каждого определяется одним углом, например у
механизма, изображенного на рис. 158, углом <р. Подробнее вопрос о степенях сво-
свободы рассматривается в § 138.
139
Решение. Так как точка С принадлежит одновременно звеньям АС и
ВС, то по теореме о проекциях скоростей должно быть
vA sin a = i c cos у, vB sin E = t'C cos ф — у). (а)
1. Из равенств (а), поскольку vA=a1l1, vb=v>212, найдем, что vc яу будут
иметь заданные значения, когда
Ю1 —сс L0S Y/'ism а> и>2 = г'с cos (Р — т)'^2 sm р.
Как видим, рассматриваемый механизм действительно позволяет сообщить
точке С перемещение в плоскости механизма по любому наперед заданному направ-
направлению с заданной скоростью. Подобные свойства механизмов используются в раз-
различных манипуляторах
2 Если заданы <цх и к>2, то одновременно будут известны од и чд. Тогда из
уравнении (а) можно определить искомые значения vc и у, но расчет при этом будет
обычно достаточно громоздким.
Однако задача легко и изящно решается графически. Для этого следует от-
отложить вдоль продолжения АС отрезок Сс^=Аа, а вдоль СВ — отрезок Сс2=В&
и восставить из точки сх перпендикуляр к Cclt а из точки с2— перпендикуляр к
Сс2 Точка пересечения этих перпендикуляров и определяет конец искомого век-
вектора vc, так как Ссх является проекцией ис на АС, а Ссг— проекцией vq на СВ,
§58*. ОПРЕДЕЛЕНИЕ УСКОРЕНИЙ ТОЧЕК ПЛОСКОЙ ФИГУРЫ
Покажем, что ускорение любой точки М плоской фигуры (так
же, как и скорость) складывается из ускорений, которые точка
получает при поступательном и вращательном движениях этой фи-
фигуры. Положение точки М по отношению к осям Оху (см. рис. 146)
определяется радиусом-вектором r—rA-\-r', где г'=АМ. Тогда
d»7
_ _
м cU2 ~ d/2 ^ № '
В правой части этого равенства первое слагаемое есть ускорение
аА полюса А, а второе слагаемое определяет ускорение амд, кото-
которое точка М получает при вращении фигуры вокруг полюса А
(см. § 54). Следовательно,
ам = пА-атА. E9)
Значение амд, как ускорения точки вращающегося твердого
тела, определяется по формулам D6) и D7) из §51:
амд =. МА VVj-оЛ tg ц = е/ю», F0)
где со и е — угловая скорость и угловое ускорение фигуры*, а
(j. — угол между вектором аМА и отрезком /ИЛ (рис. 163).
Таким образом, ускорение любой точки М плоской фигуры гео-
геометрически складывается из ускорения какой-нибудь другой точки А,
принятой за полюс, и ускорения, которое точка М получает при
вращении фигуры вокруг этого полюса. Модуль и направление ускоре-
* На чертеже сплошная дуговая стрелка показывает направление ш (направ-
(направление вращения), а пунктирная — направление (знак) е. При ускоренном враще-
вращении обе стрелки будут направлены в одну сторону, а при замедленном — в разные.
140
ния ам находятся построением соответствующего параллелограмма
(рис. 163).
Однако вычисление ам с помощью параллелограмма, изображен-
изображенного на рис. 163, усложняет расчет, так как предварительно надо бу-
будет находить значение угла ц, а затем — угла между векторами
аАХА и аА. Поэтому при решении задач удобнее вектор аМА заменять
его касательной (аАМ) и нормальной (апМА) составляющими и пред-
представить равенство E9) в виде
ам = аА + ахМА-\-амА. F1)
При этом вектор ахМА направлен перпендикулярно АМ в сторону
вращения, если оно ускоренное, и против вращения, если оно
замедленное; вектор апМА всегда направлен от точки М к полюсу А
(рис. 164). Численно же
w\ F2)
Если полюс А движется не прямолинейно, то его ускорение мо-
можно тоже представить как сумму касательной аА и нормальной аА
составляющих, тогда
ам =~а\ + аА + ахм А + апМА. F3)
Наконец, когда точка М движется криволинейно и ее траекто-
траектория известна, то ам в левых частях равенств F1) и F3) можно
заменить суммой ахм+апм. Формулами F1) — F3) и пользуются
обычно при решении задач.
Рис. 163
Рис. 164
Решение задач. Ускорение любой точки плоской фигуры
в данный момент времени можно найти, если известны: 1) векторы
скорости vA и ускорения аА какой-нибудь точки А этой фигуры в
данный момент, 2) траектория какой-нибудь другой точки В фи-
фигуры. В ряде случаев вместо траектории второй точки фигуры до-
достаточно знать положение мгновенного центра скоростей.
Тело (или механизм) при решении задач надо изображать в том
положении, для которого требуется определить ускорение соответ-
соответствующей точки. Расчет начинается с определения по данным задачи
скорости и ускорения точки, принимаемой за полюс. Дальнейшие
особенности расчета подробно рассматриваются в решенных ниже
задачах. Там же даются необходимые дополнительные указания.
141
Задача 67. Центр О колеса, катящегося по прямолинейному рельсу (рис. 165),
имеет в данный момент времени скоромь ^'о=1 и с и ускорение ад—2 м,с2. Радиус
колеса R=0,2 м. Определить ускорение точки В — конца перпендикулярного
ОР диаметра АВ и ускорение точки Р, совпадающей с мгновенным центром ско-
скоростей. _ _
Решение. 1) Так как ио и oq известны, принимаем точку О за полюс.
2) Определение со Точка касания Р язллется мгновенным центром ско-
скоростей; следовательно, угловая скорость колеса
(u^io'PO^vofR. (a)
Направление со определяется направлением ид и показано на чертеже сплош-
сплошной стрелкой.
3) О п р е д е л е н и е е. Так как в равенстве (а) величина PO=R остается
постоянной при любом положении колеса, то, дифференцируя это равенство по
временя, получим
dm ! cbо с0
ir=-R^r ил" 8-тг (б)
Знаки мне совпадают, следовательно, вращение колеса ускоренное.
Ba.iiHo помнить, что величина е определяется ¦равенством (б) только в том слу~
чае, когда расстояние РО в формуле (а) постоянно.
Ряс. 165
Рис. !6б
142
откуда
Аналогичным путем легко найти и ускорение точки Р:яр=а"о=5 м/с* и
направлено вдоль РО. Таким образом, ускорение точки Р, скорость которой в
данный момент времени равна нулю, пулю не равно.
Задача 68. По неподвижной шестерне / радиуса ^=0,3 м обкатывается ше-
шестерня 2 радиуса г2=0,2 м, насаженная-на кривошип ОА (рис. 166, а). Кривошип,
вращающийся вокруг оси О, имеет в данный момент времени узловую скорость
к>= 1 с и угловое ускорение е=—4 с~2. Определить в этот момент времени уско-
ускорение точки!), лежащей на ободе подвижной шестерни (радиус AD перпендику-
перпендикулярен кривошипу).
Р е ш е н и- е. 1) Для решения задачи надо рассмотреть движение шестерни 2,
Поданным задачи легко найти скорость уд и ускорение ад точки А этой шестерни,
которую и выбираем за полюс. _
2) Определение »д и ад. Зная ш и е кризошипа, находим:
уд=ОЛ-ш —0,5 м/с; ахд = ОА-е~~2м /с2;
ад =0Л-ша= 0,5 м/с2. (а)
Так как знаки у ад и ад разные, то движение точки из данного положения
является, замедленным. Векторы ад и а-л имеют направления, показанные на
чертеже.
3) Определение сог. Точка касания Р является мгновенным центром
скоростей для шестерни 2; следовательно, угловая скорость <о2 шестерни 2
Направление <в2 (направление вращения шестерни) определяется направле-
направлением уд и показано сплошной стрелкой.
4) О п р е д е л с и и е е2. Как и в предыдущей задаче, величина АР=г% во
все время движения постоянна. Поэтому
dw2 I Ava ал ,„ _,
Так как знаки ш2 и е2 разные, то вращение шестерни 2 явтяется замедленным,
5) Определение ад 4 й °Ъа- Ускорение точки D найдем по формуле
F3):
В нашем случае DA=r2 и
a%DA = DA-<i2 = —2 м/с*; сг«д = БЛ-со|= 1,25 м/с3.
Изображаем на чертеже (рис. 166, б) векторы, из которых слагается ускоре-
ускорение д, именно: ад, ад (переносим из точки Л); орд (против вращения, так
как оно замедленное); а'Ьл (от D к полюсу А).
6) Вычисление ад. Проводя оси Dx и Dy, находим, что
COj, = I ahд | — апА = 1,5 м/с2,
откуда
V Ъ Ъ 3,58 м/с2.
Задача 69. К кривошипу ОА, равномерно вращающемуся вокруг оси О
с угдовок скоростью «>од=4с~1 (рис. 167), прикреплен шатун АВ, соединенный
с коромыслом ВС. Даны размеры: ОЛ=л=0,5 м, Л5=2г, ВС=г|/. В положе-
положении, изображенном на чертеже, Z(X4B=90°, а ^ЛВС=45°. Определить для этого
положения ускорение точки В шатуна, а также угловую скорость и угловое уско-
ускорение коромысла ВС и шатуна АВ,
ИЗ
Решение. 1) Рассмотрим движение шатуна АВ; выберем в качестве по-
полюса точку А. Для нее, так как coo^=const:
= аА = г®оА = 8 м/с3
(а)
Изображаем векторы уд и ад на чертеже.
2) Определение в>дд. Нам известна траектория точки В шатуна (ок-
(окружность радиуса ВС). Зная поэтому направление Уд (ид_|_ВС), строим мгновен-
мгновенный центр скоростей Р шатуна АВ. Легко видеть, что ЛР=ЛВ=2/\ Тогда
юдд = ь'д/ЛР или Шдв = к>ол/2 = 2 с-1. (б)
Направление поворота показано на чертеже.
В этом случае расстояние АР при движении механизма не остается посто-
постоянным и для определения s,Ag нельзя воспользоваться приемом, примененным в
двух предыдущих задачах. Рассмотрим
поэтому другой метод решения.
3) Анализ векторного
уравнения F1). Учитывая, что «3=
= ав-\~ав, представим уравнение F1) в
виде
Изобразим все векторы на рис. 167 (ахв и
авд направляем так, как если бы соот-
соответствующие вращения были ускоренны-
ускоренными). Рассмотрим, какие из входящих в
уравнение (в) величин известны численно
или могут быть по данным задачи вы-
численны. Мы знаем ускорение аА полю-
полюса А. Кроме того, зная содд, можно най-
[ а'пд, а зная vA, можно определить vB и вычислить a% — v%lBC. Таким обра-
векторном уравнении (в) неизвестны только числовые значения двух
Рис.
ти авд,
зом, в
подчеркнутых величин: ав и овд- Но в проекциях на оси равенство (в) дает два
скалярных уравнения, из которых эти неизвестные и определяются.
Произведем предварительно подсчет авд и ав-
4) Определение авд. Зная co^g, по формуле F2) находим
= 4 м/с2.
(г)
5) Определение ав- Зная траекторию точки В, можно определить
нормальное ускорение ав этой точки. Для этого найдем сначала по теореме проек-
проекций (или с помощью мгновенного центра Р) скорость ид. Получим v^ cos 45°=чд,-
откуда vB=vAY~2. Тогда
aB = vh/BC = 2vA/rVl = 8V м/с2. (д)
6) О п р е д е л е и и е йв и ag, Для определения ав спроектируем обе ча-
части равенства (в) на ось В А, перпендикулярную другому неизвестному вектору
а\А. Получим
ав cos 45° + ав cos 45° = апВА-
Подставляя сюда вычисленные значения ав и авд, найдем
ав = апВд V — а"в = — 4 VI м/с2. (е)
Знак минус показывает, что вектор а%в имеет направление, противоположное ~vb
(вращение коромысла СВ из данного положения замедленное).
Теперь определяем ад:
ав =/DL (авJ = 4 /10= 12,65 м/с3.
144
7) Определение cogc и вдС. Зная Vb~vaY2 и ав, находим
wbc = <WSC = 4 с, eflc = ab/SC = —8 с~2.
8) Определение гАв. Чтобы найти еАд, надо вычислить аЬд- Для
этого спроектируем обе части равенства (в) на ось ВР, перпендикулярную а\.
Получим
ав = —fly, cos 45° — авл c°s 45°+ свЛ cos45°.
Отсюда
аЪА = — апв У - аА + а?л = -20 м/с2
и по первой из формул F2)
= —20 с.
Знак минус в обоих случаях указывает, что вращение шатуна АВ из рассматривае-
рассматриваемого положения является замедленным.
§59*-. МГНОВЕННЫЙ ЦЕНТР УСКОРЕНИЙ
При непоступательном движении плоской фигуры у нее в каждый момент
времени имеется точка Q, ускорение которой равно нулю. Эта точка называется
мгновенным центром ускорений. Определяется положение центра Q, если известны
ускорение"^ какой-нибудь точки А фигуры и величины со и в, следующим путем:
1) находим значение угла щ из формулы tg ji=e/co2;
2) от точки А под углом ц к вектору аА проводим прямую АЕ (рис. 168);
при этом прямая АЕ должна быть отклонена от а~А в сторону вращения фигуры, если
вращение является ускоренным, и против вращения, если
оно является замедленным, т. е. в сторону направления
углового ускорения е;
3) откладываем вдоль линии АЕ отрезок AQ,
равный
AQ = ал/|/"е2 + со4. F4)
Построенная таким путем точка Q и будет мгно-
мгновенным центром ускорений. В самом деле, по форму-
формулам E9) и F0) _
Рис.
где численно адА=А(}У~е2-\-(?>*. Подставляя сюда значение AQ из равенства
F4), находим, что ОдА=аА. Кроме того, вектор uqA должен образовывать с ли-
линией AQ угол ji, следовательно, вектор aqA параллелен аА, но направлен в про-
противоположную сторону. Поэтому a,QA——аА и qq=0.
Если точку Q выбрать за полюс, то так как ад=0, ускорение любой точки М
тела, согласно формуле E9) будет
aM = aQ + aMQ = aMQ- F5)
При этом из равенств F0) следует, что численно
aAj = MQV/"e2 + cu*. F6)
Следовательно, ускорения точек плоской фигуры определяются в данный мо-
момент времени так, как если бы движение фигуры было вращением вокруг мгновенного
центра ускорений Q. При этом, как следует из F6),
aM/MQ = aA/AQ = ...=/" Р+^Д F7)
т. е. ускорения точек плоской фигуры пропорциональны их расстояниям от мгно-
мгновенного центра ускорений. Картина распределения ускорений (т. е. поле ускоре-
ускорений точек плоской фигуры в данный момент времени) показана на рис, 169.
145
Следует иметь в виду, что положения мгновенного центра скоростей Р и мгно-
мгновенного центра ускорений Q в данный момент времени не совпадают. Например,
если колесо катится по прямолинейному рельсу (см. рис. 170), причем скорость его
центра С постоянна (i'c= const), то мгновенный центр скоростей находится в точ-
точке Р (vP=0), но при этом, как было показано в задаче 67, арфО; следовательно^
точка Р не является одновременно мгновенным центром ускорений. Мгновенный
Рис. 169
центр ускорений в этом случае находится, очевидно, в точке С, так как она дви-
движется равномерно и прямолинейно и ас=0. Центры скоростей и ускорений сов-
совпадают тогда, когда фигура (тело) вращается вокруг неподвижной оси.
Понятием о мгновенном центре ускорений удобно пользоваться при решении
некоторых задач.
Задача 70. Колесо катится по прямолинейному рельсу так, что скорость vq
его центра С постоянна. Определить ускорение точки М обода колеса (рис. 170).
Решение. Так как по условиям задачи i?=const, то ас—0 и точка С
является мгновенным центром ускорений. Мгновенный центр скоростей находится
в точке Р. Следовательно, для колеса
w=rc/PC=rc'/?=const, e=dco/d/=0, tg ц.=е/<о2=0, p=0.
В результате по формуле F6) находим
но
А
Рис. 171
Таким образом, ускорение любой точки М обода (в том числе и точки Р) рав-
равc^R и направлено к центру С колеса, так как угол ц,=0. Заметим, что это ус-
ускорение для точки М не будет нормаль-
нормальным ускорением. В самом деле, скорость
точки М направлена перпендикулярно РМ
(см. задачу 61). Следовательно, касатель-
касательная Мх к траектории точки М направ-
направлена вдоль линии MD, а главная нормаль
Мп — вдоль МР. Поэтому а'м=ам cos a,
aji—ам §in а.
Задача 71. Кривошип О А вращает-
вращается С ПОСТОЯННОЙ УГЛОВОЙ СКОРОСТЬЮ СО0Д
(рис. 171). Найти ускорение ползуна В и угловое ускорение шатуна АВ в тот мо-
момент времени, когда Z.BOA=90°, если ОА=г, АВ=1.
Решение. В рассматриваемый момент времени скорости всех точек ша-
шатуна АВ равны "уд (см. задачу 63, рис. 159, б), мгновенный центр скоростей на-
находится в бесконечности и <о^в=0. Тогда tg ц=едвДолв=о° и (г=90° (глцфЧ,
так как в противном случае по формулам F0) и E9) аВА=0 и aR=~aA% что невоз-
невозможно, поскольку эти два вектора взаимно перпендикулярны).
Ускорение точки Л аА=а'Х=г(х>ОА и направлено вдоль АО. Ускорение точки В,
так как она движется1 прямолинейно, направлено вдоль ОБ. Из рис, 169 видно,
146
что ускорение любой точки М тела направлено под углом (г к линии MQ. В данном
случае_ц=90°; следовательно, линии AQ и BQ должны быть перпендикулярны
ад и us- Восставляя эти перпендикуляры, [находим, положение точки Q. Со-
Составляя теперь пропорцию F7) aglBQ=a:>LlAQ, где BQ=r, AQ=V~P — г2, по-
получаем
Од = —7— , <?>ОА-
Ускорение а^ любой другой точки М шатуна А В будет перпендикулярно
MQ (и=90°); модуль адо находится из пропорции F7).
Угловое ускорение е^д шатуна найдем из равенства ciB=BQ'eABi которое
дает формула F6) при ш^а=0. Следовательно,
ав т
елЯ==
Глава XII*
ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ
НЕПОДВИЖНОЙ ТОЧКИ
И ДВИЖЕНИЕ СВОБОДНОГО ТВЕРДОГО ТЕЛА
§60. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА, ИМЕЮЩЕГО ОДНУ
НЕПОДВИЖНУЮ ТОЧКУ
Рассмотрим движение по отношению к системе отсчета Oxxyxzx
твердого тела, закрепленного так, что одна его точка О остается во
все время движения неподвижной. Такое движение совершает,
например, волчок, у которого неподвижна точка его опоры о пло-
плоскость, или любое другое тело, закрепленное в точке О шаровым
шарниром.
1. Уравнения движения. Найдем, какими параметра-
параметрами определяется положение тела, имеющего неподвижную точку.
Для этого свяжем жестко с телом трехгранник Oxyz, по положению
которого можно судить о положении тела (рис. 172). Линия ОК,
вдоль которой пересекаются плоскости Оху и 0x^1, называется ли-
иией узлов. Тогда положение по отношению к осям Ох^у^^ трехгран-
трехгранника Oxyz, а с ним и самого тела можно определить углами:
<p=/LKOx, ty=Z-x1OK, ®=Zzi°z-
Эти углы, называемые углами Эйлера, имеют следующие, взятые
из небесной механики наименования: ф — угол собственного вра-
вращения, i|> — угол прецессии, 0 — угол нутации. Положительные
направления отсчета углов показаны на рис. 172 стрелками.
Чтобы знать движение тела, надо знать его положение по отно-
отношению к осям Oxjt/iZy в любой момент времени, т. е. знать зависи-
зависимости:
ф=/х(ОпЫ3@, е=ыо. FS)
147
Уравнения F8), определяющие закон происходящего движения,
называются уравнениями движения твердого тела вокруг неподвиж-
неподвижной точки.
2. Угловая скорость тела. При изменении угла <р
тело совершает вращение вокруг оси Oz (собственное вращение) с
угловой скоростью cOi=<p, при изменении угла т|; — вращение во-
вокруг оси 0гг (прецессия) с угловой скоростью coa=i|) и при изменении
'ft
Рис. 172
Рис. 173
угла 6 — вращение вокруг линии узлов- ОК (нутация) с угловой
скоростью со3=0. Векторы coi, co2, ю3 этих угловых скоростей на-
направлены соответственно по осям Oz, 0z1 и ОК (рис. 173). Поскольку
при движении тела изменяются вообще все три угла, движение
тела представляет собой вращение с угловой скоростью со, равной
геометрической сумме названных угловых скоростей (справедли-
(справедливость этого вывода будет подтверждена в § 71). Таким образом,
_
Поскольку значения соъ со2, со3 со временем изменяются, вектор
со будет при движении тела тоже изменяться и численно, и по на-
направлению. По этой причине со называют еще мгновенной угловой
скоростью тела.
3. Геометрическая картина движения те-
л а. Если тело имеет в данный момент времени угловую скорость
со, то его элементарное перемещение за промежуток времени dt
представляет собой элементарный поворот на угол de=<od^ вокруг
оси ОР, вдоль которой направлен вектор со (см. рис. 173). Эта ось
ОР называется мгновенной осью вращения. Иначе, мгновенная ось
вращения — это ось, элементарным поворотом вокруг которой тело
перемещается из данного положения в положение бесконечно близ-
близкое к данному. От неподвижной оси мгновенная ось вращения
отличается тем, что ее направления и в пространстве, и в самом теле
непрерывно меняются.
Переместившись элементарным поворотом вокруг оси ОР в со-
соседнее положение, тело из этого положения в последующее перемеща-
перемещается поворотом вокруг новой мгновенной оси вращения ОРх и т. д.
Таким образом, движение твердого тела вокруг неподвижной точки
148
слагается из серии последовательных элементарных поворотов
вокруг мгновенных осей вращения, проходящих через эту неподвиж-
неподвижную точку (рис. 174).
4. Угловое ускорение тела. Векторная величина
8 = dco/d/, F9)
характеризующая изменение с течением времени угловой скорости и
по модулю, и по направлению, называется угловым ускорением тела
в данный момент времени или мгновенным угловым ускорением.
При изменении вектора со его конец А будет описывать в про-
пространстве некоторую кривую AD, являющуюся годографом вектора
ю (см. рис. 174). Тогда, сравнивая_вы-
ражение F9) с равенством v=dr,'dt,
приходим к выводу, что угловое уско-
ускорение е можно вычислять как скорость,
с которой конец вектора со перемещает-
перемещается вдоль кривой AD. В частности, на-
направление е совпадает с направлением
касательной к кривой AD в соответству-
соответствующей точке. Следовательно, в данном
случае, в отличие от случая вращения
вокруг неподвижной оси, направление
вектора е не совпадает с направлением Рис. 174
вектора со.
Векторы со и е являются основными кинематическими характе-
характеристиками движения тела, имеющего неподвижную точку. Их
можно определить аналитически, зная уравнения движения F8),
как это показано в § 61. Значение со можно найти и геометрически
(см. § 62).
§61. КИНЕМАТИЧЕСКИЕ УРАВНЕНИЯ ЭЙЛЕРА
Для определения вектора со найдем его проекции на подвижные оси Охуг
(рис. 175). Как было отмечено в §60, этот вектор можно представить в виде
со = о»! 4- со2 + Шз> G0)
где численно
Проектируя обе части равенства G0) на оси х, у, г, получим:
Проекции векторов а>1 и со3 находим сразу [см. рис. 175 и обозначения G1)]:
(t>ix =0I^ = 0, со1г = ф; созл-"= 0 cos ф, w3y =—8з1Пф, со3г = О.
Для определения проекций вектора к>2 проведем через оси Огг и Ог плоскость,
которая пересечется с плоскостью Оху вдоль линии OL. Так как линия ОК пер-
перпендикулярна плоскости гОг1; то она перпендикулярна и линии OL (ZKOL=9Q°,
a ?LOy=q). Тогда, проектируя вектор со2 на линию 0L, а эту проекцию в свою
149
Рис.
Эти проекции и определяют вектор е. Таким образом, зная уравнения движе-
движения F8), можно по полученным формулам найти ш и е,
§ 62. СКОРОСТИ И УСКОРЕНИЯ ТОЧЕК ТЕЛА
Так как тело, движущееся вокруг неподвижной точки, имеет в
каждый момент времени мгновенную ось вращения ОР, вокруг кото-
которой происходит элементарный поворот с угловой скоростью со
(рис. 176), то вектор скорости какой-нибудь точки М тела будет
определяться в этот момент равенством D8) из §51, т. е.
и = ©хг, G6)
где г — радиус-вектор, проведенный в точку М из неподвижной
точки О. Направлен вектор v перпендикулярно плоскости МОР,
проходящей через точку М и ось ОР, в сторону поворота тела.
Численно же
v=mh, G6')
где h—MC — расстояние точки М от мгновенной оси.
Геометрически скорость любой точки М тела в дан-
данный момент времени можно найти, зная в этот момент скорость vA
_* Заметим, что, дифференцируя равенства G3), нельзя найти проекции векто-
вектора е на оси х, у, г, так как соотношения A1) из § 40 справедливы только для про-
проекций на неподвижные оси.
150
какой-нибудь точки А тела и направление скорости vB другой точ-
точки В этого тела (сравн. с § 56). Пусть vA и направление vB известны.
Проведем тогда через точку А плоскость 1, перпендикулярную
вектору vA (рис. 177). Как показано выше (см. рис. 176), мгновенно
ось ОР должна лежать в этой плоскости. Но одновременно ось
\Р
2п IP
Рис. 176
ОР должна лежать и в плоскости 2, проведенной через точку В
перпендикулярно вектору vB. Следовательно, прямая, по которой
пересекутся эти плоскости, и будет мгновенной осью вращения ОР.
Теперь, определив расстояние !г точки А от оси 0Ру по формуле
G6') найдем угловую скорость со тела в данный момент времени:
©=Уд//1. После этого значение скорости vM любой точки М тела
находится по формуле G6'), а вектор vM будет направлен перпенди-
перпендикулярно плоскости ОМ Р.
В частном случае, когда известно, что скорость какой-то точки
тела равна в данный момент времени нулю, прямая, проходящая
через эту точку и неподвижную точку О тела, будет мгновенной
осью вращения и расчет существенно упростится (см. задачу 72).
Аналитически скорость у определяют по ее проекциям на какие-ни-
какие-нибудь координатные оси. Найдем проекции вектора v па оси Охуг, жестко связанные
с телом и движущиеся с ним (см. г*!с 176); эти оси имеют то преимущество, что
в mix координаты х, у, г точки М будут величинами постоянными, Так как гя=х,
iy—y , rz=z, то по известной формуле векторной алгебры
i / k
v = о) х r = (В/о ,j(oz
х у г
Отсгодя, разлагая опретелитель по элементам гервой строки и учитывая, что
у=|.'_/—. 7/>+.'-/ и что, следовательно, коэффициенты при ;, /, k в этом разложении
до.х.ши равняться vx, v,j, vz соответегьенко, получим
vv—<sszx—ь\г,
G7)
151
Эти формулы, как и формулу G6), называют формулами Эйлера. Каждую
из них можно тоже получить из предыдущей круговой перестановкой букв х, у, г
(см. формулы D7) и рис. 90, б в § 28).
В частном случае формулы G7), конечно, справедливы и при вра-
вращении тела вокруг неподвижной оси z. Так как при этом (дх=<оу=0
и (ог=ш, то для такого случая
vx=—щ, Vy—ax, vz=0. G7')
Определим теперь ускорение точки М. Из равенства G6), диф-
дифференцируя его по времени, найдем
а = v = (со х г) + (со х г).
Так как со—е, a r=v, то окончательно
a = (exr) + (u)xwj. G8)
_ Ускорение аг=гхг называют еще вращательным, а ускорение
a2=(oXU'—осестремительным ускорением точки М. Вектор аг
направлен перпендикулярно плоскости, проходящей через точку М
и вектор е (рис. 178), а по модулю а3 =ersinf5=e/ib где /гг — расстоя-
расстояние от точки М до вектора е. Вектор же а2, перпендикулярный одно-
одновременно и и со, будет направлен вдоль МС (см. рис. 176), причем по
модулю a2=coasin90°=co2/i, так как v=a)h.
Заметим, что в отличие от результатов, полученных в § 51, здесь
ах=гХг не будет вообще вектором касательного ускорения точки М
(по касательной направлен вектор y=ojXr, а направление вектора
еХг будет вообще другим); следовательно, и вектор a>Xv не будет
вектором нормального ускорения точки М.
Рис. 178
Рис. 179
Задача72. Найти скорости точек В и С конического катка (бегуна), если ско-
скорость Vji центра А катка, движущегося по окружности радиуса ОА, известна
(рис. 179). Каток при движении катится без скольжения по неподвижной кониче-
конической поверхности К-
Решение. Каток движется вокруг неподвижной точки О. Так как его
качение по поверхности К происходит без скольжения, то скорости точек катка,
лежащие в данный момент времени на линии ОВ, равны нулю и, следовательно,
ОВ является мгновенной осью вращения. Тогда (>A=ah1, где со — угловая ско-
152
рость катка при его повороте вокруг оси OS, а /гх— расстояние точки А от этой
оси. Отсюда (o=vj[lh1.
Скорость vc точки С будет равна ой2, где/г2— расстояние точки С от оси ОВ.
Так как в данном случае h2=2hlt то vc=2v^. Для точки В, лежащей на мгновен-
мгновенной оси вращения, Уд=0
§ 63. ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ СВОБОДНОГО
ТВЕРДОГО ТЕЛА
Рассмотрим наиболее общий случай движения твердого тела,
когда оно является свободным и может перемещаться как угодно по
отношению к системе отсчета Ох^у^ (рис. 180). Установим вид
уравнений, определяющих закон рассматриваемого движения.
Выберем произвольную точку А тела в качестве полюса и проведем
через нее оси Ах^у'^, которые при движении тела будут переме-
перемещаться вместе с полюсом поступательно. Тогда положение тела в
системе отсчета Ox^y^z^ будет известно, если будем знать положение
полюса А, т. е. его координаты xiA У\л, ^la. и положение тела по
отношению к осям Ax'x\j'xz{, определяемое, как и в случае, рассмот-
рассмотренном в§ 60, углами Эйлера <р, г|>, 9 (си. рис. 172; на рис. 180 углы
Эйлера не показаны,чтобы не затемнять чертеж). Следовательно,
уравнения движения свободного твердого тела, позволяющие найти
его положение по отношению к системе отсчета Ох^гх в любой мо-
момент времени, имеют вид
( У)
Установим теперь геометрическую картину рассматриваемого
движения. Нетрудно видеть, что первые три из уравнений G9) опре-
определяют то движение, которое тело совершало бы при постоянных
Рис. 180
Рис. 181
углах ф, ф, 6, т. е. при поступательном движении тела вместе с
полюсом А. Последние же три уравнения определяют движение,
которое происходило бы при постоянных значениях координат
*iA» {/ia. zia. т- е- когда точка А неподвижна. Но движение тела
вокруг неподвижной точки, как установлено в § 60, слагается из
элементарных поворотов вокруг мгновенных осей вращения. От-
153
сюда заключаем, что в общем случае движение свободного твердого
тела можно рассматривать как слагающееся из поступательного
движения, при котором все точки тела движутся как произвольно
выбранный полюс А со скоростью vA, и из серии элементарных пово-
поворотов с угловой скоростью ю вокруг мгновенных осей вращения,
проходящих через полюс А (рис. 181). Такой будет, например, кар-
картина движения любого непоступательного перемещающегося в воз-
воздухе тела: брошенного камня, самолета, проделывающего фигуры
высшего пилотажа, артиллерийского снаряда и т. д. Наконец, анало-
аналогичной может быть картина движения и несвободного твердого тела
при наличии соответствующих связей (см., например, в § 72 рис .207;
в том же параграфе показано, как можно еще иначе представить
геометрическую картину движения свободного твердого тела).
Основными кинематическими характеристиками движения яв-
являются скорость vA и ускорение аА полюса, определяющие скорость
и ускорение поступательной части движения, а также угловая
скорость со и угловое ускорение е вращения вокруг полюса. Зна-
Значения этих величин в любой момент времени можно найти по ура-
уравнениям G9). Заметим, что если за полюс принять другую точку
тела, например точку В (см. рис. 180), то значения vB и ав окажутся
отличными от vA и аЛ (предполагается, что тело движется не посту-
поступательно). Но если связанные с телом оси, проведенные из точки В
(на рис. 180 не показаны), направить так же, как и в точке А, что
можно сделать, то значения углов <р, яр, 9. а следовательно, и
последние из уравнений G9) не изменятся. Поэтому и здесь, как ив
случае плоского движения, вращательная часть движения тела, в
частности значения (о и е, от выбора полюса не зависят.
Движение свободного твердого тела может быть в частном случае
плоскопараллельным; при этом векторы со и е будут все время
перпендикулярны плоскости, параллельно которой движется тело.
Скорости и ускорения точек тела. Скорость
vM любой точки М тела в рассматриваемом движении слагается,
как и в случае плоскопараллельного движения (см. § 54 и рис. 147),
из скорости vA полюса А и скорости vMA, которую точка М нолучает
при движении вместе с телом вокруг полюса А. При этом, так как
движение тела вокруг полюса А происходит как движение вокруг
неподвижной точки, то значение vMA определяется формулой G6),
где г=ЛЛ1, т. е.
Е^л =сохЛЛТ. (80)
Таким образом,
vM — оА -\- vMA нтп vn — vA -J- (to x A At). (81)
Справедливость зтого результата доказывается так лее, как в § 54.
Аналогично для ускорения любой тот:ки М тела найдел (см.
§ 5j)
<"¦!-". ~\:\> (82)
155
где величина амл, т. е. ускорение, которое точка М получает при
движении вместе с телом вокруг полюса А, определяется равен-
ством G8), в котором только надо считать r=AM, a v=vMA=u>xAM-
Глава XIII
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
§ 64. ОТНОСИТЕЛЬНОЕ, ПЕРЕНОСНОЕ
И АБСОЛЮТНОЕ ДВИЖЕНИЯ
До сих пор мы изучали движение точки или тела по отношению к
одной заданной системе отсчета. Однако в ряде случаев при реше-
решении задач механики оказывается целесообразным (а иногда и не-
необходимым) рассматривать движе-
движение точки (или тела) одновременно
по отношению к двум системам от-
отсчета, из которых одна считается
основной или условно неподвиж-
неподвижной, а другая определенным образом
движется по отношению к первой.
Движение, совершаемое при этом
точкой (или телом), называют со-
составным или сложным. Например,
шар, катящийся по палубе движу-
движущегося парохода, можно считать
совершающим по отношению к бе-
берегу сложное движение, состоящее
из качения по отношению к палубе (подвижная система отсчета),
и движение вместе с палубой парохода по отношению к берегу (не-
(неподвижная система отсчета). Таким путем сложное движение шара
разлагается на два более простых и более легко исследуемых.
Возможность разложить путем введения дополнительной (подвиж-
(подвижной) системы отсчета более сложное движение точки или тела на
более простые широко используется при кинематических расчетах
и определяет практическую ценность теории сложного движения,
рассматриваемой в этой и следующей главах. Кроме того, результа-
результаты этой теории используются в динамике для изучения относитель-
относительного равновесия и относительного движения тел под действием сил.
Рассмотрим точку М, движущуюся по отношению к подвижной
системе отсчета Oxyz, которая в свою очередь как-то движется отно-
относительно другой системы отсчета О^а, которую называем основ-
основной или условно неподвижной (рис. 182). Каждая из этих систем
отсчета св"язана, конечно, с определенным телом, на чертеже не по-
показанным. Введем следующие определения.
1. Движение, совершаемое точкой М по отношению к подвиж-
подвижной системе отсчета (к осям Oxyz), называется относительным
движением (такое движение будет видеть наблюдатель, связанный
155
Рис. 182
с этими осями и перемещающийся вместе с ними). Траектория АВ,
описываемая точкой в относительном движении, называется относи-
относительной траекторией. Скорость точки М по отношению к осям
Oxyz называется относительной скоростью (обозначается уот), а
ускорение — относительным ускорением, _(обозначается аот). Из
определения следует, что при вычислении иог и аот можно движение
осей Oxyz во внимание не принимать (рассматривать их как непод-
неподвижные).
2. Движение, совершаемое подвижной системой отсчета Oxyz (и
всеми неизменно связанными с нею точками пространства) по отно-
отношению к неподвижной системе OiXtyiZi, является для точки М пере-
переносным движением.
Скорость той неизменно связанной с подвижными осями Oxyz
точки т, с которой в данный момент времени совпадает движущаяся
точка М, называется переносной скоростью точки М в этот момент
(обозначается ипер), а ускорение этой точки т — переносным уско-
ускорением точки М (обозначается апер). Таким образом,
ЙпеР = о"я. «пер = ««- (83)
Если представить себе, что относительное движение точки про-
происходит по поверхности (или внутри) твердого тела, с которым
жестко связаны подвижные оси Oxyz, то переносной скоростью
(или ускорением) точки М в данный момент времени будет скорость
(или ускорение) той точки т тела, с которой в этот момент совпадает
точка М.
3. Движение, совершаемое точкой по отношению к неподвижной
системе отсчета ОхХ\У\гг, называется абсолютным или сложным.
Траектория CD этого движения называется абсолютной траекто-
траекторией, скорость —¦ абсолютной скоростью (обозначается yag) и уско-
ускорение — абсолютным ускорением (обозначается ааб).
В приведенном выше примере движение шара относительно палу-
палубы парохода будет относительным, а скорость — относительной ско-
скоростью шара; движение парохода по отношению к берегу будет для
шара переносным движением, а скорость той точки палубы, которой в
данный момент времени касается шар, будет в этот момент его пере-
переносной скоростью; наконец, движение шара по отношению к берегу
будет его абсолютным движением, а_ скорость — абсолютной ско-
скоростью шара.
Для решения соответствующих задач кинематики необходимо
установить зависимости между относительными, переносными и
абсолютными скоростями и ускорениями точки, к чему мы и перей-
перейдем.
§ 65. ТЕОРЕМА О СЛОЖЕНИИ СКОРОСТЕЙ
Рассмотрим сложное движение точки М. Пусть эта точка совер-
совершает за промежуток времени At=tx—t вдоль траектории АВ отно-
относительное перемещение, определяемое вектором ММ' (рис. 183, а).
156
Сама кривая АВ, двигаясь вместе с подвижными осями Oxyz (на
рисунке не показаны), перейдет за тот же промежуток времени в
какое-то новое положение Л^. Одновременно та точка т кривой
АВ, с которой в момент времени t совпадает точка М, совершит пере-
переносное перемещение mm1=Mtn1. В результате точка М придет в
положение Mi и совершит за время Ы абсолютное перемещениеММ!.
Из векторного треугольника Мт±Мх имеем
ММ1 = Мт1 + т1М1.
Деля обе части этого равенства на At и переходя к пределу,
получим
lim (MMjAt) = lim (Mrnjto) + lim (mJVTjAt).
\t-
At-
Но, по определению,
(Mm1/At)=vl
пер"
Рис. 183
Что касается последнего слагаемого, то, так как при А/ ->- О
кривая AtBi стремится к совпадению с кривой АВ, в пределе
lim
At -*0
= lim
At-* 0
В результате находим, что
(84)
Направлены векторы va6, v0T, vnep по касательным к соответствую-
соответствующим траекториям (рис. 183, б).
Таким образом, мы доказали следующую теорему о сложении
скоростей: при сложном движении абсолютная скорость точки равна
геометрической сумме относительной и переносной скоростей. По-
Построенная на рис. 183, б фигура называется параллелограммом ско-
скоростей.
157
Если угол между векторами рот и упер равен «, то по модулю
г-'аб = Кг?г + ^лер -г 2уотупер cos а. (84')
Рассмотрим примеры решения задач.
Задача 73. Точка М движется вдоль прямой ОА со скоростью и (рис. 184)*
а са\;а прямая вращается в плоскости Ол^//, вокр\т центра О с угловой скоростью со.
Определить скорость точки М относительно осей Ox^jx в зависимости от расстоя-
расстояния ОМ—г.
Решение. Рассмотрим движение точки Л1 как сложное, состоящее из
относительного движения вдоль прямой ОА и движения вместе с этол прямой.
Тогда скорость и, направленная вдоль ОА, будет относительной скоростью точки.
Вращательное движение прямой ОА вокруг центра О является для точки М пере-
и
Рис. 184
Рис. 135
носным движением, а скорость той точки т прямой ОА, с которой в данный момент
времени созпадает точка М, будет ее переносной скоростью п^,ер. Так как эта точ-
точка прямой движется по окружности радиуса От— г, то по модулю скоросты»пер=
= (?>г и направлена перпендикулярно От. Строя на векторах и и ипер параллело-
параллелограмм, найдем абсолютную скорость nag точки М по отношению к осям
Так как и и упер взаимно перпендикулярны, то по модулю
Задача 74. Рычажок ОМ самопишущего прибора образует в данной момент
времени угол а с горизонтальной плоскостью, а перо М имеет скорость v, направ-
направленную перпендикулярно ОМ (рис. 185). Барабан с бумагой вращается вокруг
вертикальной оси с угловой скоростью со. Определить скорость и перемещения
пера по бумаге, если радиус барабана R.
Решение. Нам известна абсолютная скорость пера t>ag=tr. Скорость о
можно рассматривать как геометрическую сумму скорости пера относительно
бумаги (это искомая скорость и) и перепссноД скорости z>nep, распой скорости
той точки бумат, которой в данный момсьт вре::ени касается перо; m модулю
?'г,ер=<й^- _ _ _ _ _ _
На основании теоремы о сложении скоростей j=*t+i'nep, откуда гг—..+(—:'пер1.
Строя на векторах v и (—i'nep) параллелограмм, найдем искомую скорость и.
Так как угол ме;кду у и (—-спер) равен 90° —а, то по модулю
и— \ri'1-\-<ji:LR2'-\ ^.иЛ
153
Угол, который скорость и образует с направлением опер, можно теперь найти
по теореме синусов.
Задача 75. В кривошипно-ползунном механизме (рис. 186) кривошип ОА
длиной г вращается с угловой скоростью ю. Длина шатуна АВ равна I. При дан-
данном угле ф определить скорость ползуна относительно кривошипа ОА. Найти так-
также абсолютную скорость ползуна.
Решение. Ползун движется поступательно и его скорость равпа скорости
точки В, принадлежащей одновременно шатуну АВ. Следовательно, решение зада-
задачи сводится к определению скорости точки В шатуна.
Относительное движение шатуна А В по отношению к кривошипу ОА представ-
представляет собой вращение вокруг шарнира А. Точка В при этом вращении описывает
окружность радиуса АВ; следовательно, относительная скорость v0T точки В
по отношению к кривошипу направлена перпендикулярно АВ. Заметим еще, что
абсолютная скорость yag точки В направлена вдоль ВО.
Переносным для точки В является движение кривошипа ОА. Представим себе,
что с кривошипом жестко связан треугольник ОАВ, вращающийся вместе с кри-
кривошипом вокруг оси О с угловой скоростью со (как на рис. 151 со стержнем AD
был связан лист фанеры Л). Тогда скорость точки В треугольника ОАВ, совпадаю-
совпадающая в данный момент времени с точкой В шатуна АВ, будет переносной скоростью
t-nep точки В шатуна. Эта точка треугольника движется по окружности радиуса
ОВ. Следовательно, скорость упер направлена перпендикулярно ОВ и численно
равна vnep=(S>-AB. Так_как AB=l cos |H-r cos <p, то vnep~a(l cos p+r cos ф).
Строим из векторов г/от, апер и va& соответствующий параллелограмм. Из не-
него видно, что
i'oT = »nep/cosP пли i'0T = <»# + /" cos ф/cos Р).
Исключим отсюда угол р. Из треугольника ОАВ находим, что / sin p —r sin ф.
Тогда cos p= У" L—(г2//2) sin2 <p и окончательно значение искомой относительной
скорости
t ? COS ф \
)
vox =
(а)
Для определения абсолютной скорости раб точки В обратимся опять к парал-
параллелограмму скоростей. Из него fa5=t'0Tsin p. Учитывая, что sin P=(r sin ф)/7,
получим из равенства (а) для yag то же значение, которое другим путем было най-
найдено в задаче 63 (см. § 57) и обозначено там vg.
В частном случае, когда г—1, получается уот=2со/, уаб=2со / sin ф.
лш\ ш
Рис. 186
Рис. 187
Задача 76. Конец В горизонтального стержня АВ шарнирно соединен с
ползуном, скользящим вдоль прорези кулисы ОС и заставляющим последнюю
вращаться вокруг оси О (рис. 187). Расстояние оси О от стержня АВ равно h.
Определить угловую скорость кулисы в зависимости от скорости v стержня и
угла ф. • _
Решение. Нам известна абсолютная скорость ползуна, равная скорости а
стержня. Эту скорость ползуна можно рассматривать как слагающуюся из отно-
159
сительной скорости уот скольжения^ ползуна вдоль прорези кулисы и переносной
скорости ипер, равной скорости той точки кулисы, с которой в данный момент
времени совпадает ползун. Направления этих скоростей известны- скорость v0T
направлена вдоль ОВ, скорость ипер— перпендикулярно ОВ. Тогда, разлагая за-
заданную скорость v по направлениям еот и упср, найдем эти скорости. Из парал-
параллелограмма ВИДНО, ЧТО ПО МОДУЛЮ Упер' cos ф-
Но, с другой стороны, переносная скорость unep=:w*OB=(oh/cos <р, где со —
угловая скорость кулисы. Сравнивая эти два значения Упер, найдем угловую ско-
скорость кулисы @= (v/k) cos2 ф.
§66. ТЕОРЕМА О СЛОЖЕНИИ УСКОРЕНИЙ
(ТЕОРЕМА КОРИОЛИСА)
Найдем зависимость между относительным, переносным и абсо-
абсолютным ускорениями точки. Из равенства (84) получим
Производные здесь определяют изменение каждого из векторов
при абсолютном движении. Эти изменения слагаются в общем случае
из изменений при относительном и при переносном движениях, что
ниже будет непосредственно показано. Следовательно, если усло-
условиться изменения, которые векторы уот и упер получают при отно-
относительном движении, отмечать индексом «1», а при переносном дви-
движении — индексом «2», то равенство (85) примет вид
- (ДГртЬ (dF0TK , (d~ncp)l (<?„ер)»
Но по определению (см. § 64, п. 1) относительное ускорение
характеризует изменение относительной скорости только при
относительном движении; движение осей Oxyz, т. е. переносное
движение при этом во внимание не принимается. Поэтому
«оТ = %^. (87)
В свою очередь, переносное ускорение характеризует изменение
переносной скорости только при переносном движении, гак как аПер=
=ат (см. § 64, п. 2), где т — точка, неизменно связанная с осями
Oxyz и, следовательно, получающая ускорение только при движе-
движении вместе с этими осями, т. е. при переносном движении. Поэтому
a
"пер—
<d~nepJ
В результате из равенства (86) получим
„ер)* /плч
(89)
160
Введем обозначение
ctt
(90)
Величина акор, характеризующая изменение относительной ско-
скорости точки при переносном движении и переносной скорости точки
при ее относительном движении, называется поворотным, или корио-
лисовым, ускорением точки. В результате равенство (89) примет вид
¦г. Уi
Рис. 188
Формула (91) выражает следу-
следующую теорему Кориоли-
са о сложении ускоре-
н и й*: при сложном движении
ускорение точки равно геометри-
геометрической сумме трех ускорений: от-
относительного, переносного и пово-
поворотного, или кориолисова.
Найдем для вычисления акор
формулу, вытекающую из равенства
(90). При этом, рассматривая общийх\
случай, будем считать переносное
движение, т. е. движение подвиж-
подвижных осей Oxyz, а с ними и кри-
кривой АВ (см. рис. 182), слагающимся из поступательного движения
вместе с некоторым полюсом и вращения вокруг этого полюса с
угловой скоростью со, называемой переносной угловой скоростью.
Величина со, как показано в § 63, от выбора полюса не зависит и на
изображенных рис. 188, где полюс точка т, и рис. 189, где
полюс О, имеет одно и то же значение.
Начнем с определения (duOTJ/d^. При рассматриваемом перенос-
переносном движении вектор vm, направленный по касательной к кривой
АВ, переместится вместе с этой кривой поступательно (придет в
положение тф, рис. 188) и одновременно повернется вокруг точки
тх до положения тА. В результате вектор v0T получит в перенос-
переносном движении приращение (dvOTJ=bb1=vb-dt, где vb—скорость,
с которой перемещается точка b при повороте вектора m1b=vr)T
вокруг точки mi. Так как этот поворот происходит с угловой ско-
скоростью со, то по формуле G6) vb=o>Xm1b=(aXvo.I. В результате
получаем (dvot)i=vb-dt=a>XvOTdt и
(92)
* Гюстав Кориолис A792—1843) — французский ученый, известный своими
трудами по теоретической и прикладной механике. Кориолисово ускорение
называют еще поворотным, так как оно появляется при наличии у подвижных
осей вращения (поворота).
6 № 2173 161
Теперь определим (dynep)i/d/. Скорость ипер равна скорости той
неизменно связанной с подвижными осями точки т кривой АВ,
с которой в данный момент времени совпадает точка_М (рис. 189).
Если точку О принять за полюс и обозначить через г вектор От=*
—ОМ, то по формуле (81)
; -¦¦/ —-^* 0пер = v0 -f ы X г.
Совершив за промежуток вре-
времени dt относительное перемеще-
*3
ние MM'=vOT'dt, точка придет
в положение М', для которого
?=г+ЖМ' и
г' =
Рис- 189 Следовательно, вследствие то-
того, что точка совершает относи-
относительное перемещение MM'=v0Tit, вектор ипер получает прира-
приращение
3fnep)l = ипер —Упер = ю X ММ-' = « X U01 df,
откуда
(donep)i -ч-
dt
(93)
Подставляя величины (92) и (93) в равенство (90), получим
(94)
Таким образом, кориолисово ускорение равно удвоенному вектор-
векторному произведению переносной угловой скорости (угловой скорости
подвижной системы отсчета) на относительную скорость
точки.
Случай поступательного переносного дви-
движения. В этом случае <а=0 и, следовательно4 а^оз=0. В резуль-
результате равенство (91) дает*
= ао
(95)
* Этот результат виден и из рис. 188, 189 Когда кривая АВ перемещается
поступательно, то вектор v0T придет в положение тф, показанное на рис. 188 пунк-
пунктиром, т. е. не изменится, и будет (<foorJ=0. Одновременно при этом все точки кри-
кривой АВ имеют одинаковые скорости и в точке М' (рис. 189) упер будет таким же,
как в точке М, т. е. показанным пунктиром, вследствие чего ((bnep)i—О-
162
т. е. при поступательном переносном движении абсолютное уско-
ускорение точки равно геометрической сумме относительного и перенос-
переносного ускорений. Результат здесь аналогичен тому, который дает
теорема о сложении скоростей.
Вычисление относительно го, переносно-
переносного и кориолисова ускорений. Относительное уско-
ускорение, поскольку при
его нахождении движе-
движение подвижных осей во
внимание не принима-
принимается, вычисляется обыч-
обычными методами кинема-
кинематики точки (§ 40,43). Пе-
Переносное ускорение вы-
вычисляется как ускорение
точки,неизменносвязан-
Рис. 190
НОИ С ПОДВИЖНЫМИ ОСЯМИ,
т. е. как ускорение точки некоторого твердого тела, по формулам,
полученным для ускорений точек твердого тела в § 51, 58, 62, 63.
Кориолисово ускорение вычисляется по формуле (94). Модуль
кориолисова ускорения, если угол между векторами со и иот обоз-
обозначить через а, будет равен
aKOp = 2|co|.|yOT|sina. (96)
Направлен вектор акор так же, как и вектор caXtv, т^е. пер-
перпендикулярно плоскости, проходящей через векторы со и иот, в ту
сторону, откуда кратчайшее совмещение со с иот видно происходя-
происходящим против хода часовой стрелки (рис. 190, а). __
Из рис. 190, а видно также, что направление вектора акор можно
определить, спроектировав вектор v0T на плоскость П, перпендику-
перпендикулярную со, и повернув эту проекцию у$ на 90° в сторону переносного
вращения.
Если относительная траектория — плоская кривая и перемеща-
перемещается все время в своей плоскости, то угол а=90° (рис. 190, б) и в
этом случае по модулю
акор-2|со|.|уот|. (96')
Кроме того, как видно из рис. 190, б, направление акор можно в
этом случае найти, повернув вектор относительной скорости v0T
на 90° в сторону переносного вращения (т. е. по ходу или против
часовой стрелки, в зависимости от направления вращения).
На рис. 191 для иллюстрации приведенных правил показано
направление кориолисова ускорения шарика М, движущегося вдоль
трубки АВ в случаях, когда трубка вращается в плоскости чертежа
(рис. 191, а) и когда она при вращении описывает конус (рис. 191, б).
Из формулы (96) видно, что кориолисово ускорение может обра-
обращаться в нуль в следующих случаях;
б* 163
1) когда @=0, т. е. когда переносное движение является посту-
поступательным [формула (95)] или если переносная угловая скорость
в данный момент времени обращается в нуль;
В
Н—
Рис. 191
2) когда уотн=0, т. е. когда относительная скорость в данный
момент времени обращается в нуль;
3) когда а=0, или а=180°, т. е. когда относительное движение
происходит по направлению, параллельному оси переносного
вращения, или если в данный момент времени вектор v0T паралле-
параллелен этой оси.
§ 67. РЕШЕНИЕ ЗАДАЧ
А. Переносное движение поступательное. В случае,
когда переносное движение является поступательным, характер зйдач и методы
их решения аналогичны задачам на сложение скоростей (см. § 65).
Задача 77. Клип, движущийся прямолинейно по горизонтальной плоскости
с ускорением alt перемещает вдоль вертикальных направляющих стержень DE
(рис. 192). Определить ускорение стержня, если угол клина равен а.
Решение. Абсолютное ускорение ад точки D стержня направлено по вер-
вертикали вверх. Его можно рассматривать как слагающееся из относительного ус-
ускорения аот, направленного вдоль щеки клина, и переносного ускорения апер,
равного ускорению клина аг (так как переносное движение, т. е. движение клина,
является поступательным). Строя на основании равенства (95) соответствующий
параллелограмм и учитывая, что апер=а1, найдем
aD=ai tg a-
Величина ад и определяет ускорение стержня.
Б. Переносное движение вращательное. Покажем, как
вычисляется ааб, когда переносное движение является вращением вокруг непод-
неподвижной оси.
Рассмотрим точку М, движущуюся по поверхности некоторого тела (напри-
(например, шара) вдоль заданной кривой АМВ по закону s=/1(Q, гдев=ЛМ (рис. 193).
При этом само тело вращается вокруг оси В А по закону <р=/а (t), где <р — угол по-
поворота тела. Первое из названных движений считаем относительным, а второе —
переносным для точки М. Пусть требуется найти значение aag в некоторый мо-
момент времени 1=^. Расчет сводится к следующему.
164
1. Определение положения точки. Полагая в уравнении s—f1{f) время t=tlt
определяем положение точки М на кривой А В при t= t± и изображаем точку на
чертеже в этом положении.
2. Определение v0T и аот. По формулам кинематики точки (см. § 42, 43) нахо-
находим:
• Т • п 2 ;
где рот — радиус кривизны кривой АВ в точке М. Определяем числовые значения
этих величин при t=t1 и изображаем затем векторы vor, aJT и a2T на чертеже (с уче-
учетом знаков ?>от и aJT; на рис. 193 векторы v0T и aJT показаны для случая, когда
иот>0 и alr>0). _
3. Определение апер. Сначала находим а>=ср и г=ш и вычисляем их значения
Oj и 8j при t = tt. Затем определяем h — расстояние точки М от оси ВА в момент
времени tv После этого находим aJiep и а^ер как ускорения той точки тела, с ко-
которой в данный момент времени совпадает точка М, т. е. по формулам (см. § 51)
°пср = "е1> апер = >1 •
Изображаем векторы о„ер и а^ер на чертеже (с учетом знака af,ep; на рис. 193
вектор "aJep показан для случая, когда ех<0 и, следовательно, Опер<0).
4. Определение ~акор. Модуль и направление акор определяются так, как это
показано в конце § 66. Вектор aKOV также изображаем на чертеже.
5. Определение а^. По теореме Кориолиса находим
йаб = аот + аот "Т анер ~г" "пер "Г «кор-
Если сумму стоящих справа векторов трудно найти геометрически, то, проводя
какие-нибудь координатные оси Мхуг (рис. 193), вычисляем проекции всех сла1ае-
мых векторов на эти оси. Тогда по тео-
теореме о проекции суммы векторов на ось
После этого находим
Рис. 192
Рис. 193
Конкретный пример такого расчета см. в задаче 81.
Задача 78. Кулиса ОА вращается с постоянной угловой скоростью а вокруг
оси О (рис. 194). По прорези кулисы скользит ползун В с постоянной относитель-
относительной скоростью и. Определить абсолютное ускорение ползуна в зависимости от
его расстояния х до оси О.
Решение. По условиям задачи относительное движение ползуна по про-
прорези кулисы является равномерным и прямолинейным; следовательно, аот=0.
Движение кулисы ОА будет для ползуна В переносным. Следовательно, пере-
переносное ускорение апср ползуна равно ускорению той точки кулисы, с которой в
данный момент времени совпадает ползун. Так как эта точка кулисы движется
165
по окружности радиуса ОВ=х и со—const, то вектор апер=апер и направлен вдоль
ВО, а по модулю anep=anep==fi>2*-
Крриолисово ускорение акор=2со«, так как движение плоское. Повернув
вектор относительной скорости и вокруг точки В на 90° в сторону переносного вра-
вращения (т. е. по ходу часовой стрелки), находим направление акор. По теореме
Корполиса
В данном случае ао?=0, а акор перпендикулярно аПер- Следовательно,
V «пер + alop = СО V C
Задача 79. Эксцентрик, представляющий собой круглый диск радиуса R,
вращается с постоянной угловой скоростью со вокруг оси О, проходящей через
край диска (рис, 195). По ободу диска с постоянной относительной скоростью и
Рис. 195
скользит штифт М, начиная свое движение из точки А. Определить абсолютное
ускорение штифта в произвольный момент времени t. Направления движений по-
показаны на чертеже.
Решение. В момент времени t штифт находится от точки А на расстоянии
s—AM.= ut. Следовательно, в этот момент времени /.А0М=а., где
(а)
так как угол а равен половине центрального угла АСМ.
Считаем движение штифта М по ободу диска относительным движением.
Оно происходит по окружности радиуса R. Так как t/OT=«=conbt, то
Направлен вектор аот=а"т по радиусу МС.
Движение диска будет для штифта М переносным движением. Следовательно,
переносное ускорение апер штифта равно ускорению той точки диска, с которой
в данный момент совпадает штифт. Эта точка диска движется по окружности ра-
радиуса 0M=2R cos а. Так как для диска co=const, то е=0 и
«дер
= ОМ • е = 0, айер = ОМ ¦ со2 —
cos a.
(в)
Направлен вектор а„ер=Яот вдоль линии МО.
Поскольку движение происходит в одной плоскости, и в данном случае
акор = 2со«. (г)
Направление акор получаем, повернув вектор vOT=u вокруг точки М на 90°
В сторону переносного движения (т. е. против хода часовой стрелки).
Абсолютное ускорение штифта М определяется равенством
Япер
-f «
КОр*
(Д)
166
Для определения модуля ааб проведем оси Мху (см. рис. 195) и спроектируем
обе части равенства (д) на эти оси. Получим:
Тогда
aKOp,
i=V
cos a —аКорJ
sin2 а,
и>
Рис. 196
где значения а, аот, апер, акор определены равенствами (а), (б), (в), (г).
Задача 80. Тело движется в северном полушарии вдоль меридиана с севера
на юг поступательно (рис. 196) со скоростью уот=и. Найти модуль и направление
кориолисова ускорения тела, когда оно находится на широте X.
Решение. Пренебрегая размерами тела,
рассматриваем его как точку. Относительная
скорость и тела образует с земной осью угол Я,
Следовательно,
Окор = 2ш и sin Я,
где оз — угловая скорость Земли.
Таким образом, наибольшее кориолисово
ускорение тело имеет на полюсе при А,=90°. По
мере приближения к экватору значение акор убы-
убывает и на экваторе при Х=0 обращается в нуль
(на экваторе вектор vOT=u параллелен оси вра-
вращения Земли).
Направление акор находим как направление
векторного произведения. Так как акор=2шХи>
получаем, что вектор акор направлен перпенди-
перпендикулярно плоскости, проходящей через векто-
векторы и, о), т. е. перпендикулярно плоскости меридионального сечения, на восток,
откуда кратчайшее совмещение вектора шс вектором и видно против хода часовой
стрелки.
Вопрос о том, как изменяется движение тел по земной поверхности вследствие
наличия кориолисова ускорения, рассматривается в динамике. Однако из получен-
полученной формулы видно, что величина акор обычно мала, так как мала угловая ско-
скорость Земли.
Задача 81. Прямоугольный треугольник ABC, гипотенуза которого АВ—
=26=20 см, а ZCBA=a=60°, вращается вокруг оси Czt (рис. 197) по закону
<р= lOt—2t2. Вдоль гипотенузы АВ около ее середины О колеблется точка М по
закону l=b cos (ntlZ) (ось О| направлена вдоль ОА). Найти абсолютное ускоре-
ускорение точки М в момент времени ty=2 с.
Решение. 1. Считая движение точки М вдоль гипотенузы АВ относитель-
относительным, определяем положение этой точки на гипотенузе в момент времени tx. Из
уравнения движения находим
E1=6cosBn/3)=—6/2.
Следовательно, точка М находится в момент времени tx на середине отрезка
ОВ. Изображаем это положение на чертеже.
2. Определение v0T. Так как относительное движение является пря-
прямолинейным, то
VoT = | = _ (лЬ/3) sin (jtf/3).
В момент времени /х=2с
иот1 = — nb У /6, 11>от11 = 5я У/3 см/с.
Знак минус указывает, что вектор v0T направлен в момент времени tx от М
к точке В.
3, Определение <оие. Беря производные, находим;
ш = ф=Ю — At, в1 = 2г1,
167
где а1—значение со в момент времени ^=2с;
е = ш= —4 с~2.
Знаки указывают, что с момента t1 вра-
вращение направлено против хода часовой стрел-
стрелки (если смотреть с конца оси Сгх) и являет-
является замедленным.
4. Определение аот. Так как от-
относительное движение является прямолиней-
прямолинейным, то
аот = v'oi = — (л2/9) Ь соз (я*/3).
В момент времени t1=2z
5л2/9 см/с2.
Рис. 197
5. Определение аиер. Движение треугольника будет для точки М
переносным движением. Следовательно, переносное ускорение апер точки М рав-
равно ускорению той точки треугольника, с которой в данный момент времен:: совпа-
совпадает точка М. Эта точка треугольника движется по окружности радиуса MD=h,
причем в момент времени ^=2с
h = (й/2) sin а = 5
см.
Таким образом, в этот момент времени
aJep = eft = — 10 |/ см/с2, апср = cof/г = 10 V~~3 см/с2.
Вектор crjep направлен перпендикулярно плоскости ABC в сторону, противо-
противоположную направлению вращения треугольника. Вектор апер направлен вдоль
линии MD к оси вращения Сгг.
6. Определение акор. По модулю в момент времени ^=2с
якор = 2 | со J • [ v0T | sin a = Юл см/с2,
так как угол между иот и осью Czx равен в данном случае а.
Проектируя вектор иот на плоскость, перпендикулярную оси Czl (проекция
направлена вдоль линии MD), и повернув эту проекцию на 90° в сторону перенос-
переносного вращения, т. е. против хода часовой стрелки, найдем направление акор (оно
в данном случае совпадает с направлением апер).
7. Определение aag. Абсолютное ускорение точки М в момент вре-
времени tx в данном случае будет
«аб = аот + Япер + «пер + «кор-
Для нахождения модуля aag проводим оси Мхуг (рис. 197) и вычисляем про-
проекции всех векторов на эти оси. Получаем:
Яаб * = Якор +1 Опер |= Юя + Ю ^ я 48,7 см/с2,
fla6j, = a0Tsina — о"ер = 5я2 ^/18—10 V~3 и —12,6 см/са,
Яаб х = — «or cos a = —5л2/18 «2,7 см/с2.
168
У а1бх + а1бд + а1бг « 50,4 см/с2.
После этого находим
Вектор йаб можно построить по его составляющим вдоль осей Охуг,
Глава XIV*
СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
§68. СЛОЖЕНИЕ ПОСТУПАТЕЛЬНЫХ ДВИЖЕНИЙ
Если тело движется относительно подвижных осей Охуг (см.
рис. 182), а эти оси совершают одновременно переносное движение
по отношению к неподвижным осям О&у&и то результирующее
(абсолютное) движение тела называют сложным (см. §64).
Задачей кинематики в этом случае является нахождение зависи-
зависимостей между характеристиками относительного, переносного и
абсолютного движений. Основными кинематическими характеристи-
характеристиками движения тела, как мы знаем, являются его поступательные и
угловые скорости и ускорения. Мы ограничимся в дальнейшем опре-
определением зависимостей только между поступательными и угловыми
скоростями тела (кроме одного случая, рассмотренного в §71).
Рассмотрим сначала случай, когда относительное движение тела
является поступательным со скоростью vlt а переносное движение —
тоже поступательное со скоростью vt. Тогда все точки тела в отно-
относительном движении будут иметь скорость vu а в переносном —
скорость у2. Следовательно, по теореме сложения скоростей все
точки тела в абсолютном движении имеют одну и ту же скорость
v=v1+v2, т. е. абсолютное движение тела будет тоже поступатель-
поступательным.
Итак, при сложении двух поступательных движений со скоростя-
скоростями I»! и у2 результирующее движение тела также будет поступатель-
поступательным со скоростью v=v1-\~v2.
Задача сложения скоростей в этом случае сводится к задаче
кинематики точки (см. § 65).
§ 69. СЛОЖЕНИЕ ВРАЩЕНИЙ ВОКРУГ ДВУХ
ПАРАЛЛЕЛЬНЫХ ОСЕЙ
Рассмотрим случай, когда относительное движение тела явля-
является вращением с угловой скоростью сох вокруг осиоа', укрепленной
на кривошипе Ьа (рис. 198, а), а переносное— вращением криво-
кривошипа Ьа вокруг оси ЬЪ', параллельной аа', с угловой скоростью
ш2. Тогда движение тела будет плоскопараллельным по отношению
к плоскости, перпендикулярной осям. Здесь возможны три частных
случая.
169
1. Вращения направлены в одну сторону.
Изобразим сечение 5 тела плоскостью, перпендикулярной осям
(рис. 198, б). Следы осей в сечении S обозначим буквами А и В.
Легко видеть, что точка А, как лежащая на оси Аа', получает ско-
скорость только от вращения вокруг оси ВЬ', следовательно, ид=ш2 -АВ.
Точно так же vB=a1 -AB. При этом векторы vA и vB параллель-
Piic. 198
ны друг другу (оба перпендикулярны А В) и направлены в разные
стороны. Тогда точка С (см. § 56, рис. 153, б) является мгновенным
центром скоростей (ус=0), а следовательно, ось Сс', параллельная
осям Аа' и ВЬ', является мгновенной осью вращения тела.
Для определения угловой скорости со абсолютного вращения
тела вокруг оси Сс' и положения самой оси, т. е. точки С, восполь-
воспользуемся равенством [см. § 56, формула E7)]
(a=vBlBC=vAIAC, откуда со= (vA+vB)/AB.
Последний результат получается из свойств пропорции.
Подставляя в эти равенства vA=&z-AB, vB—a>i-AB, найдем окон-
окончательно:
(o=coj.+co2, (97)
(98)
Итак, если тело участвует одновременно в двух направленных
в одну сторону вращениях вокруг параллельных осей, то его резуль-
результирующее движение будет мгновенным вращением с абсолютной
угловой скоростью co^Wi+coa вокруг мгновенной оси, параллель-
параллельной данным; положение этой оси определяется пропорциями (98).
С течением времени мгновенная ось вращения Сс' меняет свое
положение, описывая цилиндрическую поверхность.
2. Вращения направлены в разные стороны.
Изобразим опять сечение S тела (рис. 199) и допустим для опре-
определенности, что со^соа. Тогда, рассуждая, как в предыдущем слу-
случае, найдем, что скорости точек A yl В будут численно равны: vA=*
=(ог-АВ, vB=(al-AB; при этом vA и vB параллельны друг другу и
направлены в одну сторону. Тогда мгновенная ось вращения про-
170
ходит через точку С (рис. 199), причем
<u=vb/BC=va/AC и a=(uB—vA)!AB.
Последний результат тоже получается из свойств пропорции.
Подставляя в эти равенства значения vA и vB, найдем окончательно:
о)=оI—со 2, (99)
A00)
Итак, в этом случае результатирующее движение также явля-
является мгновенным вращением с абсолютной угловой скоростью он —
=(«!—со2 вокруг оси Сс', положение которой определяется пропор-
пропорциями A00).
3. Пара вращений. Рассмотрим частный случай, когда
вращения вокруг параллельных осей направлены в разные стороны
Рис. 199
Рис. 200
(рис. 200), но по модулю со1=и2. Такая совокупность вращений
называется парой враищний, а векторы о»! и со2 образуют пару угло-
угловых скоростей. В этом случае получаем, чтоу4=а>2#Л/? и vB=(AB
т. е. vA—vB. Тогда (см. § 56, рис. 153, а)
мгновенный центр скоростей находится в
бесконечности и все точки тела в данный
момент времени имеют одинаковые скорости
»=«>! -АВ.
Следовательно, результатирующее движе-
движение тела будет поступательным (или мгновен-
мгновенно поступательным) движением со скоростью,
численно равной cox -АВ и направленной
перпендикулярно плоскости, проходящей че-
через векторы о)! и «2; направление вектора v
определяется так же, как в статике определялось направление момен-
момента т пары сил (см. § 9). Иначе говоря, пара вращений эквивалентна
поступательному (или мгновенно поступательному) движению со
скоростью v, равной моменту пары угловых скоростей этих враще-
вращений.
Примером такого движения является поступательное движение
велосипедной педали DE относительно рамы велосипеда (рис. 201),
171
Рис. 201
являющееся результатом относительного вращения педали вокруг
оси А, укрепленной на кривошипе В А, и переносного вращения
кривошипа В А вокруг оси В. Угловые скорости «i и со2 этих вра-
вращений направлены в разные стороны, а по модулю равны друг дру-
другу, так как в любой момент времени угол поворота ф, педали отно-
относительно кривошипа ВА равен углу поворота ф2 кривошипа. Ско-
Скорость поступательного движения педали v=a2-BA.
Из того, что пара вращений эквивалентна поступательному дви-
движению, следует и обратный вывод: поступательное движение твер-
твердого тела эквивалентно паре вращений, у которой момент угловых
скоростей этих вращений равен поступательной скорости тела.
§ 70. ЦИЛИНДРИЧЕСКИЕ ЗУБЧАТЫЕ ПЕРЕДАЧИ
Полученные в предыдущем параграфе результаты могут быть использованы
для кинематического расчета зубчатых передач, образованных цилиндрическими
зубчатыми колесами (шестернями). Рассмотрим основные виды этих передач.
Рядовой назовем передачу, в которой все оси колес, находящихся в по-
последовательном зацеплении, неподвижны. При этом одно из колес (например, ко-
колесо / на рис. 202) является ведущим, а остальные ведомыми. В случае внешнего
Рис. 202
(рис. 202, а) или внутреннего (рнс. 202, б) зацепления двух колес имеем |оI1-л1=
= |(О2| -г2, так как скорость точки сцепления А у обоих колес одинакова. Учитывая,
что число г зубцов сцепленных колес пропорционально их радиусам, а вращения
колес происходят при внутреннем зацепление в одну сторону, а при внешнем
в разные, получаем *
При внешнем зацеплении трех колес (рис. 202, в) найдем, что
щ/щ=—r2/rlt (о2/со3=—r3ir2 и со1/из=г3/г1=г3/г1.
Следовательно, отношение угловых скоростей крайних шестерен в этой пере-
передаче обратно пропорционально их радиусам (числу зубцов) и не зависит от радиу-
радиусов промежуточных (паразитных) шестерен.
Из полученных результатов следует, что при рядовом сцеплении шестерен
®i/«>»=(-l)* г„/Г1=(-1)* zjzy, A01)
где k — число внешних зацеплений (в случае, изображенном на рис. 202,а, имеется
одно внешнее зацепление; на рис. 202, в — два внешних зацепления, на рис. 202, б
внешних зацеплений нет).
Передаточным числом данной зубчатой передачи называется величина i\n,
дающая отношение угловой скорости ведущего колеса к угловой скорости ведо-
* Во всех формулах надо учитывать знак со (к>>0 при вращении против хода
и <о<0 при вращении по ходу часовой стрелки).
172
мого:
11„=и1/ш„. A02)
Для рядовой передачи значение iXn дает правая часть формулы A01).
Планетарной называется передача (рис. 203), в которой шестерня /
неподвижна, а оси остальных шестерен, находящихся в последовательном зацеп-
зацеплении, укреплены на кривошипе АВ, вращающемся вокруг оси неподвижной
шестерни.
Дифференциальной называется передача, изображенная на рис. 203,
если в пей шестерня / не является неподвижной и может вращаться вокруг своей
оси А независимо от кривошипа АВ.
Расчет планетарных и дифференциальных передач можно производить, со-
сообщив мысленно всей неподвижной плоскости Axiy1 вращение с угловой скоростью
—(<>АВ> равной по модулю и противополож-
противоположной по направлению угловой скорости
кривошипа АВ (метод остановки или ме-
метод Виллиса).
Тогда, на основании результатов §69, ^^-л л / *
кривошип в этом сложном движении бу- {g jjIsC^Sic— /S^ ' „„}
дет неподвижен, а любая шестерня радиу-
радиуса /¦? будет иметь угловую скорость
где @^— абсолютная угловая скорость
этой шестерни по отношению к осям Ах1у1
(рнс. 203). При этом оси всех шестерен будут неподвижны и зависимость между
coj, можно будет определить или приравнивая скорости точек сцепления, или не-
непосредственно по формуле A01).
Расчет планетарных и дифференциальных передач можно также производить
с помощью мгновенных центров скоростей (см. § 56).
Задача 82. В планетарном механизме (рис. 203) шестерня 1 радиуса rt не-
неподвижна, а кривошип АВ вращается с угловой скоростью ш^я- Найти угловую
скорость шестерни 3 радиуса гя.
Решение. Абсолютные угловые скорости шестерен по отношению к осям
Ах1у1 обозначим через % (шх=0), ш2 и <о3. Сообщив всей плоскости Ах^их враще-
вращение с угловой скоростью —(?>ав> получим в этом движении:
Й1=0 —СОЛд, С02 = (»а—Ш/.д,
В получившейся передаче оси колес неподвижны, а число внешних зацеплений
k=2. Тогда по формуле A01)
Отсюда находим абсолютную угловую скорость шестерни 3
Ю3=A—/i/r3) 0)ЛВ-
Если г3>г%, то направление вращения шестерни 3 совпадает с направлением
вращения кривошипа, при rs<r1—не совпадает. В случае, когда r3=rj, получаем
со3=О. Шестерня 3 в этом случае движется поступательно.
Относительную (по отношению к кривошипу АВ) угловую скорость шестер-
шестерни 3 найдем по формуле (97). Так как абсолютная скорость <о3=Шзот+шЛВ (уг-
(угловая скорость кривошипа является для шестерни 3 переносной), то
изот=йK—а>АВ= — (
При г3=г1 получаем (о3от=—ЫАВ- Относительная в3от и переносная дд
угловые скорости образуют при этом пару, и мы другим путем приходим к выводу,
что результирующее движение шестерни 3 является в этом случае поступатель-
поступательным со скоростью и=(ддв-АВ.
Задача 83. Редуктор скоростей (рис. 204) состоит из' а) неподвижной шестер-
шестерни /; б) двух спаренных шестерен 2 и 3, насаженных па кривошип, скрепленный с
173
ведущим валом АС (зацепление шестерен 2 я 1 внутреннее); в) шестерни 4, сидя-
сидящей на ведомом валу DB. Числа зубцов шестерен: z1=120, z2=40, г3=30, z4=50.
Ведущий вал делает яд=1500 об/мин. Найти число оборотов в минуту ведомого
вала В.
Решение. Обозначим абсолютные угловые скорости: вала АС вместе с
кривошипом через (Од, шестерни 4 вместе с валом DB через cog, шестерен 2 и 3
через о>2з (эти шестерни вращаются как одно тело). Шестерня / имеет угловую
скорость ш1=0. Сообщив плоскости Х]УЛ, параллельно которой движется механизм,
вращение с угловой скоростью — а>А, получим, что кривошип в этом движении
будет неподвижен (а>А=0), а шестерни будут иметь
скорости:
Составляя теперь для шестерен / и 2 и шесте»
рен 3 и 4 зависимости A01), получим:
Перемножая эти равенства, найдем, что
u>i/co4=— z2z4/zi?3 или (ua!((ds—wA)
Отсюда, учитывая, что величина п об/мин, про-
пропорциональна «в, находим
Рнс- 204 nB=(l+z1 гг1гг г4) ял=4200 об/мин.
Задача 84. Решить предыдущую задачу при условии, что шестерня 1 враща-
вращается в ту же сторону, что и ведущий вал АС, делая /г1=1Ю0 об/мин (редуктор
с дифференциальной передачей).
Решение. Ход решения остается таким же, как и в задаче 83, с той лишь
разницей, что теперь щфО (причем по условиям задачи знаки ooj и со,} совпадают);
следовательно, со1=со1—ыА. В результате полученная в задаче 83 пропорция
u>i/w4=—z&Jzfo Дает
(щ—а>А)!(а>в—«л)=— Wziz3«
Отсюда, переходя к оборотам в минуту, находим
nn^tiA+iZiZs/ZzZi) (nA—«i)==2220 об/мин.
Если шестерня / вращается в противоположном направлении, то в полученном
результате надо изменить знак при пх,
§ 71. СЛОЖЕНИЕ ВРАЩЕНИЙ ВОКРУГ ПЕРЕСЕКАЮЩИХСЯ ОСЕЙ
1. Сложение угловых скоростей. Пусть отно-
относительное движение тела представляет собой вращение с угловой
скоростью о>? вокруг оси ага, укрепленной на кривошипе 2
(рис. 205, а), а переносным является вращение кривошипа с угло-
угловой скоростью со 2 вокруг оси ЬгЬ, которая с осью а^а пересекается в
точке О. Схематически такой случай сложения вращений вокруг
пересекающихся осей показан на рис. 205, б.
Очевидно, что в этом случае скорость точки О, как лежащей
одновременно на обеих осях, будет равна нулю и результирующее
движение тела является движением вокруг неподвижной точки О.
Тогда тело имеет в данный момент времени угловую скорость оэ,
направленную по мгновенной оси вращения, проходящей через
точку О (см. § 60).
174
Чтобы определить значение со, найдем скорость какой-нибудь
точки М тела, радиус-вектор которой г=ОМ. В относительном
движении (вращение вокруг оси Оа) точка М, согласно формуле
G6), получит скорость уот=оIХг; в переносном же движении
(вращение вокруг оси Ob)
точка получит скорость
^пер—<*>2Xг. Тогда абсолют-
ная скорость точки М
пер
Но так как результи-
результирующее движение тела яв-
является мгновенным враще-
вращением с некоторой угловой
скоростью со, то должно
быть
Поскольку точка М — любая точка тела, полученные равенства
должны выполняться при любом г, что возможно лишь тогда, когда
5=^ + 5,. A03)
Следовательно, при сложении вращений вокруг двух осей,
пересекающихся в точке О, результирующее движение тела будет
мгновенным вращением вокруг оси Ос, проходящей через точку О,
и угловая скорость этого вращения будет равна геометрической
сумме относительной и переносной угловых скоростей. Мгновенная
ось Ос направлена вдоль вектора со, т. е. по диагонали параллело-
параллелограмма, построенного на векторах о^ и со3.
С течением времени ось Ос меняет свое положение, описывая
коническую поверхность, вершина которой находится в точке О.
Если тело участвует в мгновенных вращениях вокруг нескольких
осей, пересекающихся в точке О, то, последовательно применяя
формулу A03), найдем, что результирующее движение будет мгно-
мгновенным вращение^ вокруг оси, проходящей через точку О, с угло-
угловой скоростью
ш=2Я- О04)
Задача 8S. Определить абсолютную угловую скорость w конического катка
(см. задачу 72 в § 62), если радиус АС катка R, расстояние ОА—1 и скорость ад
точки А известны (рис. 206).
Решение. Абсолютное движение катка является результатом его относи-
относительного вращения вокруг оси ОА с угловой скоростью % и переносного вращения
кривошипа ОА вокруг оси ОВ с угловой скоростью ш2; при этом численно щ=
175
Мгновенная ось вращения, а следовательно, и вектор абсолютной угловой ско-
скорости^» направлены по линии ОС, так как скорость точки С равна нулю (см. задачу
72). Строя соответствующий параллелограмм, находим, что «=co2/sina
Так как sin a=R/V'P+R2, то окончательно a=(oA/R)V1+R4P.
Другим путем этот результат можно получить (учитывая, что ОС — мгновен-
мгновенная ось вращения) из равенства ид=ой, где h=lsma.
Движение катка представляет собой серию элементарных поворотов с угло-
угловой скоростью ш вокруг оси ОС, которая непрерывьо меняет свое положение,
описывает круглый конус с вершиной в
точке О
2 Сложение угловых ус-
ускорений Рассмотрим случай, когда
вращение тела вокруг двух пересекаю-
пересекающихся осей происходит с угловыми ус-
ускорениями вг— относительным и г2—
переносным. Найдем, каким будет тогда
абсолютное угловое ускорение 8 тела. Из
равенства A03) получим
Рис. 206
перенос-
где &>!— относительная, а со2 •
ная угловые скорости.
Рассуждая так же, как в § 66, и сохраняя ту же символику, представим пре-
предыдущий результат в виде
(d<o2J/df.
A05)
Здесь (dWjJj'd^Sj, а (dco2J/d/=c2. Значение (d<u1J^d^ определяется так же, как
значение (duOTJ/d/ в § 66 и дается формулой (92) с заменой в ней v0T на o)j, а со
на (о2 Следовательно, (du)]J/d^=ai2X<Bi Наконец, так как со2 при относительном
движении (на рис. 205 при вращении тела вокруг оси а^а) не изменяется, то
(dcoa)I/d^= 0. В результате равенство A05) дает окончательно
е=
A06)
Формула A06) и определяет в случае сложения вращений вокруг пересека-
пересекающихся осей абсолютное угловое ускорение тела.
§72. СЛОЖЕНИЕ ПОСТУПАТЕЛЬНОГО
И ВРАЩАТЕЛЬНОГО ДВИЖЕНИЙ.
ВИНТОВОЕ ДВИЖЕНИЕ
Рассмотрим сложное движение твердого тела, слагающееся из
поступательного и вращательного движений. Соответствующий
пример показан на рис. 207. Здесь относительным движением тела
1 является вращение с угловой скоростью со вокруг оси Аа, укреп-
укрепленной на платформе 2, а переносным — поступательное движение
платформы со скоростью v. Одновременно в двух таких движениях
участвует и колесо 3, для которого относительным движением яв-
является вращение вокруг его оси, а переносным — движение той же
платформы. В зависимости от значения угла а между векторами со
и v (для колеса этот угол равен 90°) здесь возможны три случая.
176
1. Скорость поступательного движения
перпендикулярна оси вращения (у_]_со). Пусть
сложное движение тела слагается из вращательного движения во-
вокруг оси Аа с угловой скоростью со и поступательного движения со
скоростью v, перпендикулярной со (рис. 208). Легко видеть, что это
to
Рис. 207
движение представляет собой (по отношению к плоскости П, пер-
перпендикулярной оси Аа) плоскопараллельное движение, подробно
изученное в гл. XI. Если считать точку А полюсом, то рассматри-
рассматриваемое движение, как и всякое плоскопараллельное, будет дейст-
действительно слагаться из поступательного со скоростью vA=v, т. е. со
скоростью полюса, и из вращательного вокруг оси Аа, проходя-
проходящей через полюс.
Вектор v можно заменить парой угловых скоростей со', со"
(см. § 69), беря со'=со, а со"=—со- При этом расстояние АР опре-
определится из равенства и=со' -АР, откуда (учитывая, что со'=со)
AP=v/a. A07)
Векторы со и со" дают при сложении нуль, и мы получаем, что
движение тела в этом случае можно рассматривать как мгновенное
вращение вокруг оси Рр с угловой скоростью со'=со. Этот результат
был раньше получен другим путем (см. § 56). Сравнивая равенства
E5) и A07), видим, что точка Р для сечения 5 тела является мгно-
мгновенным центром скоростей (vp=Q). Здесь еще раз убеждаемся, что
поворот тела вокруг осей Аа и Рр происходит с одной и той же угло-
угловой скоростью со, т. е. что вращательная часть движения не зависит
от выбора полюса (см. § 52). _ _
2. Винтовое движение (со|]и). Если сложное движение
тела слагается из вращательного вокруг оси Аа с угловой скоро-
скоростью со и поступательного со скоростью и, направленной параллель-
параллельно оси Аа (рис. 209), то такое движение тела называется винтовым.
Ось Аа называют осью винта. Когда векторы у и со направлены в
177
одну сторону, то при принятом нами правиле изображения со винт
будет правым; если в разные стороны,— левым.
Расстояние, проходимое за время одного оборота любой точкой
тела, лежащей на оси винта, называется шагом h винта. Если величи-
величины и и со постоянны, то шаг винта также будет постоянным. Обо-
Обозначая время одного оборота через Т, получаем в этом случае vT=h
и (оГ=2л, откуда й=2яу/со.
С
Га
_ I
С
5?
со
/
Рис. 210
При постоянном шаге любая точка М тела, не лежащая на оси
винта, описывает винтовую линию. Скорость точки М, находящей-
находящейся от оси винта на расстоянии г, слагается из поступательной ско-
скорости v и перпендикулярной ей скорости, получаемой во враща-
вращательном движении, которая численно равна cor. Следовательно,
Направлена скорость vM по касательной к винтовой линии.
Если цилиндрическую поверхность, по которой движется точка
М, разрезать вдоль образующей и развернуть, то винтовые линии
обратятся в прямые, наклоненные к основанию цилиндра под углом
a (tga=A/2nr).
3. Скорость поступательного движения
образует произвольный угол с осью враще-
вращения. Сложное движение, совершаемое телом в этом случае
(рис. 210, а), представляет собой движение, рассмотренное в § 63
(общий случай движения свободного твердого тела).
Разложим вектор v (рис. 210, б) на составляющие: v', направ-
направленную вдоль со (o'=wcosa), и у", перпендикулярную со (y"=usina).
Скорость v" можно заменить парой угловых скоростей со'=со и со"=
=—со (как на рис. 208), после чего векторы со и to" можно отбросить.
Расстояние АС найдем по формуле A07):
=у"/<а= (usina)/co.
178
Тогда у тела остается вращение с угловой скоростью со' и посту-
поступательное движение со скоростью v''. Следовательно, распределение
скоростей точек тела в данный момент времени будет таким же, как
ПрИ ВИНТОВОМ ДВИЖеНИИ ВОКруГ ОСИ Сс С УГЛОВОЙ СКОрОСТЬЮ 0>' = (й
и поступательной скоростью v'=v cos a.
Проделанными операциями (рис. 210, б) мы перешли от полюса А
к полюсу С. Результат подтверждает (см. § 63), что в общем случае
движения твердого тела угловая скорость при перемене полюса не
изменяется (ю'=со), а меняется только поступательная скорость
Так как при движении свободного твердого тела величины
v, со, а будут вообще все время изменяться, то будет непрерывно
меняться и положение оси Сс, которую поэтому называют мгновенной
винтовой осью. Таким образом, движение свободного твердого
тела можно еще рассматривать как слагающееся из серии мгновенных
винтовых движений вокруг непрерывно изменяющихся винтовых
осей.
Раздел третий
ДИНАМИКА ТОЧКИ
Глава XV
ВВЕДЕНИЕ В ДИНАМИКУ. ЗАКОНЫ ДИНАМИКИ
§ 73. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Динамикой называется раздел механики, в котором изучается
движение материальных тел под действием сил.
Движение тел с чисто геометрической точки зрения рассматри-
рассматривалось в кинематике. В динамике, в отличие от кинематики, прн
изучении движения тел принимают во внимание как действующие
на них силы, так и инертность самих материальных тел.
Понятие о силе, как об основной мере механического действия,
оказываемого на материальное тело, было введено в статике. Но в
статике мы не касались вопроса о возможных изменениях действую-
действующих сил с течением времени, а при решении задач считали все силы
постоянными. Между тем на движущееся тело наряду с постоянными
силами действуют обычно силы переменные, модули и направления
которых при движении тела изменяются. При этом переменными
могут быть и заданные (активные) силы*, и реакции связей.
Как показывает опыт, переменные силы могут определенным об-
образом зависеть от времени, положения тела и его скорости. В ча-
частности, от времени зависит сила тяги электровоза при постепенном
выключении или включении реостата или сила, вызывающая колеба-
колебания фундамента при работе мотора с плохо центрированным ва-
валом; от положения тела зависит ньютонова сила тяготения или
сила упругости пружины; от скорости зависят силы сопротивления
среды (подробнее см. § 76). В заключение отметим, что все введен-
введенные в статике понятия и полученные там результаты относятся в
равной мере и к переменным силам, так как условие постоянства
сил нигде в статике не использовалось.
Инертность тела проявляется в том, что оно сохраняет свое
движение при отсутствии действующих сил, а когда на него начи-
начинает действовать сила, то скорости точек тела изменяются не мгно-
* Активной обычно называют силу, которая, начав действовать на покоящее-
покоящееся тело, может привести его в движение.
180
венно, а постепенно и тем медленнее, чем больше инертность этого
тела. Количественной мерой инертности материального тела явля-
является физическая величина, называемая массой тела *, В класси-
классической механике масса т рассматривается как величина скалярная,
положительная и постоянная для каждого данного тела.
Кроме суммарной массы движение тела зависит еще в общем слу-
случае от формы тела, точнее от взаимного расположения образующих
его частиц, т. е. от распределения масс в теле.
Чтобы при первоначальном изучении динамики отвлечься от
учета формы тела (распределения масс), вводят абстрактное поня-
понятие о материальной точке, как о точке, обладающей массой, и
начинают изучение динамики с динамики материальной точки.
Из кинематики известно, что движение тела слагается в общем
случае из поступательного и вращательного. При решении кон-
конкретных задач материальное тело можно рассматривать как мате-
материальную точку в тех случаях, когда по условиям задачи допустимо
не принимать во внимание вращательную часть движения тела.
Например, материальной точкой можно считать планету при изу-
изучении ее движения вокруг Солнца или артиллерийский снаряд при
определении дальности его полета и т. п. Соответственно поступа-
поступательно движущееся тело можно всегда рассматривать как мате-
материальную точку с массой, равной массе всего тела. Справедливость
этих утверждений будет обоснована в § 107.
Изучать динамику мы начнем с динамики материальной точки,
так как естественно, что изучение движения одной точки должно
предшествовать изучению движения системы точек и, в частности,
твердого тела.
§ 74. ЗАКОНЫ ДИНАМИКИ. ЗАДАЧИ ДИНАМИКИ
МАТЕРИАЛЬНОЙ ТОЧКИ
В основе динамики лежат законы, установленные путем обобще-
обобщения результатов целого ряда опытов и наблюдений, посвященных
изучению движения тел, и проверенные обширной общественно-
производственной практикой человечества. Систематически законы
динамики были впервые изложены И. Ньютоном в его классическом
сочинении «Математические начала натуральной философии», издан-
изданном в 1687 г.**. Сформулировать эти законы можно следующим
образом.
Первый закон (закон инерции): изолированная от внеш-
внешних воздействий материальная точка сохраняет свое состояние
покоя или равномерного прямолинейного движения до тех пор, пока
приложенные силы не заставят ее изменить это состояние. Движе-
Движение, совершаемое точкой при отсутствии сил, называется движением
по инерции.
* Масса является еще мерой гравитационных свойств тела (см. § 76).
** Есть прекрасный русский перевод, сделанный А. Н. Крыловым. См.. Соб-
Собрание трудов акад. А. Н. Крылова, т. VII. М.— Л., 1936.
131
Закон инерции отражает одно из основных свойств материи —•
пребывать неизменно в движении. Важно отметить, что развитие
динамики как науки стало возможным лишь после того, как Гали-
Галилеем был открыт этот закон A638 г.) и тем самым опровергнута
господствовавшая со времен Аристотеля точка зрения о том, что
движение тела может происходить только под действием силы.
Существенным является вопрос о том, по отношению к какой сис-
системе отсчета справедлив закон инерции. Ньютон предполагал, что
существует некое неподвижное (абсолютное) пространство, по от-
отношению к которому этот закон выполняется. Но по современным
воззрениям пространство — это форма существования материи, и
какого-то абсолютного пространства, свойства которого не зависят
от движущейся в нем материи, не существует. Между тем, поскольку
закон имеет опытное происхождение (еще Галилей указал, что к
этому закону можно прийти, рассматривая движение шарика по
наклонной плоскости со все убывающим углом наклона), должны
существовать системы отсчета, в которых с той или иной степенью
приближения данный закон будет выполняться. В связи с этим в
механике, переходя, как обычно, к научной абстракции, вводят
понятие о системе отсчета, в которой справедлив закон инерции,
постулируют ее существование и называют инерциальнои системой
отсчета.
Можно ли данную реальную систему отсчета при решении тех или
иных задач механики рассматривать как инерциальную, устанав-
устанавливается путем проверки того, в какой мере результаты, полученные
в предположении, что эта система является инерциальнои, подтверж-
подтверждаются опытом. Поданным опыта для нашейСолнечной системы инер-
инерциальнои с высокой степенью точности можно считать систему
отсчета, начало которой находится в центре Солнца, а оси направ-
направлены на так называемые неподвижные звезды. При решении боль-
большинства технических задач инерциальнои, с достаточной для прак-
практики точностью, можно считать систему отсчета, жестко связанную с
Землей. Справедливость этого утверждения будет обоснована в § 92.
Второй закон (основной закон динамики) устанавливает,
как изменяется скорость точки при действии на нее какой-нибудь
силы, а именно: произведение массы материальной точки на ускоре-
ускорение, которое она получает под действием данной силы, равно по мо-
модулю этой силе, а направление ускорения совпадает с направлением
силы.
Математически этот закон выражается векторным равенством
та =7. A)
При этом между модулями ускорения и силы имеет место зависи-
зависимость
ma=F. (Г)
Второй закон динамики, как и первый, имеет место только по
отношению к инерциальнои системе отсчета. Из этого закона непо-
непосредственно видно, что мерой инертности материальной точки явля-
182
ется ее масса, поскольку при действии данной силы точка, масса
которой больше, т. е. более инертная, получит меньшее ускорение и
наоборот.
Если на точку действует одновременно несколько сил, то они,
как это следует из закона параллелограмма сил, будут эквивалентны
одной силе, т. е. равнодействующей.^, равной геометрической сум-
сумме данных сил. Уравнение, выражающее основной закон динамики,
принимает в этом случае вид
ma = R или ma — '?iFk. B)
Этот же результат можно получить, используя вместо закона
параллелограмма закон независимости действия сил, согласно кото-
которому при одновременном действии на точку нескольких сил каждая
из них сообщает точке такое же ускорение, какое она сообщила бы,
действуя одна.
Третий закон (закон равенства действия и противодейст-
противодействия) устанавливает характер механического взаимодействия между
материальными телами. Для двух материальных точек он гласит:
две материальные точки действуют друг на друга с силами, равными
по модулю и направленными вдоль прямой, соединяющей эти точки, в
противоположные стороны.
Этим законом мы уже пользовались в статике. Он играет большую
роль в динамике системы материальных точек, как устанавливаю-
устанавливающий зависимость между действующими на эти точки внутренними
силами.
При взаимодействии двух свободных материальных точек, они,
согласно третьему и второму законам динамики, будут двигаться с
ускорениями, обратно пропорциональными их массам.
Задачи динамики. Для свободной материальной точки
задачами динамики являются следующие: 1) зная закон движения
точки, определить действующую на нее силу (первая задача дина-
динамики); 2) зная действующие на точку силы, определить закон дви-
движения точки (вторая, или основная, задача динамики).
Для несвободной материальной точки, т. е. точки, на которую
наложена связь, вынуждающая ее двигаться по заданной поверх-
поверхности или кривой, первая задача динамики обычно состоит в том,
чтобы, зная движение точки и действующие на нее активные силы,
определить реакцию связи. Вторая (основная) задача динамики при
несвободном движении распадается на две и состоит в том, чтобы,
зная действующие на точку активные силы, определить: а) закон
движения точки, б) реакцию наложенной связи.
§ 75. СИСТЕМЫ ЕДИНИЦ
Для измерения всех механических величин оказывается доста-
достаточным ввести независимые друг от друга единицы измерения
каких-нибудь трех величин. Двумя из них принято считать едини-
единицы длины и времени. В качестве третьей оказывается наиболее
удобным выбрать единицу измерения или массы, или силы. Так как
183
эти величины связаны равенством A), то произвольно единицу изме-
измерения каждой нз них выбрать нельзя. Отсюда вытекает возмож-
возможность введения в механике двух принципиально отличных друг or
друга систем единиц.
Первый тип систем единиц. В этих системах за
основные принимаются единицы длины, времени и массы, а сила
измеряется производной единицей.
К таким системам относится Международная система единиц
измерения физических величин (СИ), в которой основными едини-
единицами измерения механических величин являются метр (м),килограмм
массы (кг) и секунда (с). Единицей же измерения силы является
производная единица — 1 ньютон (Н); 1 Н — это сила, сообщаю-
сообщающая массе в 1 кг ускорение 1 м/с2 (Ш = 1 кг-м/с2). О том, что собой
представляют 1 м, 1 кг и 1 с, известно из курса физики. Между-
Международная система единиц (СИ) введена в СССР как предпочтитель-
предпочтительная с 1961 г. и в данном курсе мы пользуемся ею.
Второй тип систем единиц. В этих системах за
основные принимаются единицы длины, времени и силы, а масса
измеряется производной единицей.
К таким системам относится имевшая большое распространение в
технике система МКГСС, в которой основными единицами являются
метр (м), килограмм силы (кГ) и секунда (с). Единицей измерения
массы в этой системе будет 1 кГ -cVm, т. е. масса, которой сила в 1 кГ
сообщает ускорение 1 м/с2.
Соотношение между единицами силы в системах СИ и МКГСС
таково: 1 кГ=9,81 Н или 1 Н=0,102 кГ.
В заключение отметим, что необходимо различать понятия раз-
размерность величины и единица ее измерения. Размерность определя-
определяется только видом уравнения, выражающего значение данной вели-
величины, а единица измерения зависит еще от выбора основных единиц.
Например, если, как это принято, обозначать размерность длины,
времени и массы соответственно символами L, Т и М, то размер-
размерность скорости LIT, а единицей измерения может быть 1 м/с, 1 км/ч
и т. д.
§76. ОСНОВНЫЕ ВИДЫ СИЛ
При решении задач динамики мы будем в основном рассматри-
рассматривать следующие постоянные или переменные силы (законы измене-
изменения переменных сил, как правило, устанавливаются опытным пу-
путем). _
Сила тяжести. Это постоянная сила Р, действующая на
любое тело, находящееся вблизи земной поверхности (подробнее
см. § 92). Модуль силы тяжести равен весу тела.
Опытом установлено, что под действием силы Р любое тело при
свободном падении на Землю (с небольшой высоты и в безвоздушном
пространстве) имеет одно и то же ускорение g, называемое ускоре-
184
*
наем свободного падения, а иногда ускорением силы тяжести
Тогда из уравнения (Г) следует, что
P=mg или m=Plg. C)
Эти равенства позволяют, зная массу тела, определить его вес
(модуль действующей на него силы тяжести) или, зная вес тела, опре-
определить его массу. Вес тела или сила тяжести, как и величина g,
изменяются с изменением широты и высоты над уровнем моря; масса
же является для данного тела величиной неизменной.
Сила трения. Так будем кратко называть силу трения
скольжения, действующую (при отсутствии жидкой смазки) на
движущееся тело. Ее модуль определяется равенством (см. § 23)
F=fN. D)
где / —коэффициент трения, который будем считать постоянным;
N — нормальная реакция.
Сила тяготения. Это сила, с которой два материальных
тела притягиваются друг к другу по закону всемирного тяготения,
открытому Ньютоном. Сила тяготения зависит от расстояния и для
двух материальных точек с массами тг и т2, находящихся на
расстоянии г друг от друга, выражается равенством
F=fm1mjr'1, E)
где / — гравитационная постоянная (в СИ/=6,673-101 м3/кг«сг).
Сила упругости. Эта сила тоже зависит от расстояния.
Ее значение можно определить исходя из закона Гука, согласно
которому напряжение (сила, отнесенная к единице площади)
пропорционально деформации. В частности, для силы упругости
пружины получается значение
F=cX, F)
где % — удлинение (или сжатие) пружины; с — так называемый
коэффициент жесткости пружины (в СИ измеряется в Н/м).
Сила вязкого трения. Такая сила, зависящая от
скорости, действует на тело при его медленном движении в очень
вязкой среде (или при наличии жидкой смазки) и может быть вы-
выражена равенством
R=liv, G)
где v — скорость тела; ц. — коэффициент сопротивления. Зависи-
Зависимость вида G) можно получить исходя из закона вязкого трения, отк-
открытого Ньютоном.
Сила аэродинамического (гидродинами-
(гидродинамического) сопротивления. Эта сила тоже зависит от
* Закон свободного падения тел был открыт Галилеем. Значение g в разных
местах земной поверхности различно; оно зависит от географической широты мес-
места и высоты его над уровнем моря. На широте Москвы (на уровне моря) g=
=9,8156 м/с2.
185
скорости и действует на тело, движущееся в такой, например, среде,
как воздух или вода. Обычно ее величину выражают равенством
R=0,5cxpSv\ (8)
где р — плотность среды; 5 — площадь проекции тела на плоскость,
перпендикулярную направлению движения (площадь миделя);
сх — безразмерный коэффициент сопротивления, определяемый
обычно экспериментально и зависящий от формы тела и от того, как
оно ориентировано при движении.
Инертная игравитационная массы. Для экспе-
экспериментального определения массы данного тела можно исходить из
закона A), куда масса входит как мера инертности и называется
поэтому инертной массой. Но можно исходить и из закона E), куда
масса входит как мера гравитационных свойств тела и называется
соответственно гравитационной (или тяжелой) массой. В принципе
ни откуда не следует, что инертная и гравитационная массы пред-
представляют собой одну и ту же величину. Однако целым рядом экспе-
экспериментов установлено, что значения обеих масс совпадают с очень
высокой степенью точности (по опытам, проделанным советскими
физиками A971 г.),— с точностью до 10~12). Этот экспериментально
установленный факт называют принципом эквивалентности. Эйнш-
Эйнштейн * положил его в основу своей общей теории относительности
(теории тяготения).
Исходя из изложенного, в механике пользуются единым терми-
термином «масса», определяя массу как меру инертности тела и его гра-
гравитационных свойств.
Глава XVI
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ,
РЕШЕНИЕ ЗАДАЧ ДИНАМИКИ ТОЧКИ
§77. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
МАТЕРИАЛЬНОЙ ТОЧКИ
Для решения задач динамики точки будем пользоваться одной
из следующих двух систем уравнений.
Уравнения в декартовых координатах. Из
кинематики известно, что движение точки в прямоугольных декар-
декартовых координатах задается уравнениями (см. § 37):
*=М0. У=Ш, г=Ш. (9)
Задачи динамики точки состоят в том, чтобы, зная движение
точки, т. е. уравнения (9), определить действующую на точку силу
* Альберт Эйнштейн A879—1955) — выдающийся ученый-физик, создатель
специальной теории относительности (релятивистская механика) и общей теории
относительности.
186
или, наоборот, зная действующие на точку силы, определить закон
ее движения, т. е. уравнения (9). Следовательно, для решения задач
динамики точки надо иметь уравнения, связывающие координаты
х, у, z этой точки и действующую на нее силу (или силы). Эти урав-
уравнения и дает второй закон динамики.
Рассмотрим материальную точку, движущуюся под действием сил
Fi, F2i. . ., Fn по отношению к инерциальной системе отсчета Охуг.
Проектируя обе части равенства B), т. е. равенства ma=HFh, на
оси х, у, z и учитывая, что ax=62xldt2 и т. д., получим:
или, обозначая вторые производные по времени двумя точками,
mx = ^Fkx, my = ZFky, mz^XFkz. A0')
Это и будут искомые уравнения, т. е. дифференциальные уравнения
движения точки в прямоугольных декартовых координатах. Так как
действующие силы могут зависеть от времени t, от положения
точки, т. е. от ее координат х, у, г, и от скорости, т. е. от vx=x,
vv=y, uz=2, то в общем случае правая часть каждого из уравнений
A0) может быть функцией всех этих переменных, т. е. t, x, у, г, х,
у, z одновременно.
Уравнения в проекциях на оси естествен-
естественного трехгранника. Для получения этих уравнений
спроектируем обе части равенства ma=SFft на оси МхпЬ, т. е. на ка-
касательную Мх к траектории точки, главную нормаль Мп, направ-
направленную в сторону вогнутости траектории, и бинормаль Mb (см. в
§ 42 рис. 122; на нем Охуг — оси, по отношению к которым дви-
движется точка). Тогда, учитывая, что (см. §43) ax=dv/dt, an=v2/p,
ab=0, получим
m-? = 2ffcT, m? = 2Fftn, 0 = 2Fftb. A1)
Уравнения A1), где v=ds/dt, представляют собой дифференциа-
дифференциальные уравнения движения точки в проекциях на оси естественного
трехгранника.
§ 78. РЕШЕНИЕ ПЕРВОЙ ЗАДАЧИ ДИНАМИКИ
(ОПРЕДЕЛЕНИЕ СИЛ ПО ЗАДАННОМУ ДВИЖЕНИЮ)
Если ускорение движущейся точки задано, то действующая сила
или реакция связи сразу находится по уравнениям A) или B). При
этом для вычисления реакции надо дополнительно знать активные
силы. Когда ускорение непосредственно не задано, но известен закон
движения точки, то для определения силы можно воспользоваться
уравнениями A0) или A1).
187
, Задача 86. Воздушный шар весом Р опускается с ускорением а. Какой груз Q
(балласт) надо сбросить, чтобы шар стал подниматься с таким же ускорением.
Решение. На падающий шар действуют сила тяжести Р и подъемная сила
F (рис. 211, а). Составляя уравнение B) в проекции на вертикаль, найдем, что
{Pig) a^P-F.
Когда будет сброшен балласт (рис. 211, б), вес шара станет равен Р—Q, а
подъемная сила останется той же. Тогда, учитывая что шар при этом движется
вверх, получим
(P-Q)a/g=F-(P-Q\
Исключая из этих уравнений неизвестную силу F, найдем
Q=2P/(l+g/a).
Задача 87. Лифт весом Р (рис. 212) начинает подниматься с ускорением а.
Определить натяжение троса.
В)
Рис. 211
Решение. На лифт действуют сила тяжести Р и реакция троса Т. Сос-
Составляя уравнение B) в проекции на вертикаль, получим (P/g)a—T—Р, откуда
T=P(l+alg).
Если лифт опускается с таким же ускорением, то натяжение троса будет рав-
равно T1=P(l—a/g).
Задача 88. Радиус закругления в точке А моста равен R (рис. 213). Найти,
какое давление на мост в точке А окажет автомобиль массы т, движущийся со
скоростью v,
У////////////////////,
А{
(
п
л ,w»n
Ж
t
.,
V
У
1
Й
1
1
1
ш
А
X
п
Рис. 213
Рис. 214
Решение. В точке А автомобиль имеет нормальное ускорение an—vi/R.
При этом на него действуют сила тяжести P—mg и реакция N. Тогда по уравне-
уравнению B), составленному в проекции на нормаль, или непосредственно по второму
188
из уравнений A1) будет
m^/R=mg—N, откуда N=m(g~vVR).
Сила давления на мост равна по модулю N, но направлена вниз.
Задача 89. Кривошип ОА длины /, вращаясь равномерно с угловой скоро-
скоростью со, перемещает кулису /•(, движущуюся поступательно вдоль направляющих
1, 1 (рис. 214). Найти, пренебрегая трением, чему при этом равна сила давления Q
ползуна А на кулису, если вес кулисы Р.
Решение. Проведем координатную ось Ох. Тогда положение кулисы опре-
определится координатной х=1со&ц> и, поскольку ф=со?, закон движения кулисы бу-
будет x=/cos (at. Зная этот закон, воспользуемся первым из уравнений A0'). Вы-
Вычисляя производную от х, получим
х = — ш2i cos at = — и>гх.
Кроме того, Qx=—Q. В результате находим
—(Pig)aP'x=—Q и Q=(P/g)(uix.
Следовательно, сила давления ползуна на кулису изменяется пропорционально
расстоянию х кулисы от оси О.
§79. РЕШЕНИЕ ОСНОВНОЙ ЗАДАЧИ ДИНАМИКИ
ПРИ ПРЯМОЛИНЕЙНОМ ДВИЖЕНИИ ТОЧКИ
Движение материальной точки будет прямолинейным, когда
действующая на нее сила (или равнодействующая приложенных
сил) имеет постоянное направление, а скорость точки в начальный
момент времени равна нулю или направлена вдоль силы.
Если при прямолинейном движении направить вдоль траектории
координатную ось Ох, то движение точки будет определяться пер-
первым из уравнений A0), т. е. уравнением
ml? = %Fkx нли mx = ^Fkx. A2)
Уравнение A2) называют дифференциальным уравнением прямоли-
прямолинейного движения точки. Иногда его удобнее заменить двумя урав-
уравнениями, содержащими первые производные:
^ 2^ v
В случаях, когда при решении задачи надо искать зависимость
скорости от координаты х, а не от времени t (или когда сами силы
зависят от х), уравнение A3) преобразуют к переменному х. Так
как d.vxldt—uvx/ux-ux/dt=dvx/dx-vx, то вместо A3) получим:
mt^ = 2^, -g=tv A4)
Решение основной задачи динамики сводится к тому, чтобы из
данных уравнений, зная силы, найти закон движения точки, т. е.
x=f{t). Для этого надо проинтегрировать соответствующее диффе-
дифференциальное уравнение. Чтобы яснее было, к чему сводится эта
математическая задача, напомним, что входящие в правую часть
уравнения A2) силы могут зависеть от времени t, от положения
189
точки, т. е. от х, и от ее скорости, т. е. от vx—x. Следовательно, в
общем случае уравнение A2) с математической точки зрения пред-
представляет собой дифференциальное уравнение 2-го порядка, имеющее
вид mx—F(t, х, х).
Если для данной конкретной задачи дифференциальное уравнение
A2) будет проинтегрировано, то в полученное решение войдут две
постоянные интегрирования Сг и С2 и общее решение уравнения
A2) будет иметь вид
x=f(t, Си С2). A5)
Чтобы довести решение каждой конкретной задачи до конца,
надо определить значения постоянных Сг и С2. Для этого использу-
используются обычно так называемые начальные условия.
Изучение всякого движения будем начинать с некоторого опреде-
ленного момента времени, называемого начальным моментом. От
этого момента будем отсчитывать время движения, считая, что в
начальный момент /=0. Обычно за начальный принимают момент
начала движения под действием заданных сил. Положение, которое
точка занимает в начальный момент, называется начальным положе-
положением, а ее скорость в этот момент — начальной скоростью (началь-
(начальную скорость точка может иметь или потому, что до момента /=0
она двигалась по инерции, или в результате действия на нее до
момента t=0 каких-то других сил).Чтобы решить основную задачу
динамики, надо кроме действующих сил знать еще начальные усло-
условия, т. е. положение и скорость точки в начальный момент времени *.
В случае прямолинейного движения начальные условия зада-
задаются в виде
при t=Q x—Xv, vx=vu. A6)
По начальным условиям можно определить конкретные значения
постоянных Ci и С2 и найти частное решение уравнения A2), даю-
дающее закон движения точки, в виде
x = f(t, х0, и0). A7)
Поясним все сказанное на примере следующей простейшей за-
задачи.
Задача 90. Материальная точка с массой т движется под действием постоян-
постоянной по модулю и направлению силы Q (рис. 215). Найти закон движения точки
при начальных условиях A6).
Решение. Составляя дифференциальное уравнение движения в виде A3)
и учитывая, что QX=Q, получим
at u
* Могут встречаться задачи, в которых для определения постоянных ин-
интегрирования вместо начальных задаются так называемые краевые условия, напри-
например могут быть заданы условия на «краях» интервала времени [t0, t\\ в виде, при
t=t0 x=xa, а при t=tx x=xx. Пример, показывающий, какие особенности мог^т
иметь решения таких задач, называемых краевыми, задачами, будет рассмотрен в
§94.
190
Так как Q=const, то умножив обе части уравнения на dt и беря от них инте-
интегралы, найдем, что
vx=(Qlm)t+Clt (a)
Замена в этом равенстве vx на dx/dt дает
~=(Q/m)t+Ct.
Умножая обе части полученного уравнения на dt и снова интегрируя, найдем
x=(Q/2/n)/4-C!f+C2. (б)
Этот результат и представляет собой для данной задачи общее решение урав-
уравнения A2) в виде, соответствующем равенству A5).
Теперь определим постоянные интегрирования Ct и С2 по заданным началь-
начальным условиям A6). Решения (а) и (б) должны быть справедливы в любой момент
времени, в том числе и в момент t=0. Поэтому, подставляя в (а) и (б) вместо t
нуль, мы вместо vx и х должны получить у0 и х0, т. е. должно быть
Полученными равенствами определяются значения постоянных С^ и С2,
удовлетворяющие начальным условиям задачи. Подставляя эти значения в урав-
уравнение (б), найдем окончательно закон происходящего _
движения в виде, соответствующем равенству A7): 0 ~ М Q*
x=xu+vat+(Ql2m) ^. (в) |< J ,[ •* X
Как видно из уравнения (в), точка под действием р ^\к
постоянной силы совершает равнопеременное движение,
что можно было предсказать заранее, так как если
Q= const, то и a=Q/m= const. В частности, таким является движение точки под
действием силы тяжести. При этом в уравнении (в) будет Qlm=g, а ось Ох должна
быть направлена по вертикали вниз.
§ 80. ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
Решение задач динамики точки путем интегрирования соответ-
соответствующих дифференциальных уравнений движения сводится к
следующим операциям.
1. Составление дифференциального урав-
уравнения движения. Для его составления в случае прямоли-
прямолинейного движения надо:
а) выбрать начало отсчета (как правило, совмещая его с началь-
начальным положением точки) и провести координатную ось, направляя
ее вдоль траектории и, как правило, в сторону движения; если под
действием' приложенных сил точка может находиться в каком-
нибудь положении в равновесии, то начало отсчета удобно помещать
в положении статического равновесия;
б) изобразить двужущуюся точку в произвольном положении
(но так, чтобы было х>0 и ух>0; последнее существенно, когда
среди сил есть силы, зависящие от скорости) и показать все дейст-
действующие на точку силы;
в) подсчитать сумму проекций всех сил на координатную ось
и подставить эту сумму в правую часть дифференциального уравне-
уравнения движения; при этом надо обязательно все переменные силы вы-
выразить через те величины (t, х или v), от которых эти силы зависят.
2. Интегрирование дифференциального
уравнения движения. Интегрирование производится
191
методами, известными из курса высшей математики и зависящими от
вида полученного уравнения, т. е. от вида его правой части. В тех
случаях, когда на точку кроме постоянных сил действует одна пере-
переменная сила, зависящая только от времени t или только от расстоя-
расстояния х, или же только от скорости v, уравнение прямолинейного
движения можно проинтегрировать методом разделения переменных
(см. задачи 91—93). Если при этом в задаче требуется определить
только скорость, то часто можно при решении ограничиться интег-
интегрированием одного из уравнений A3) или A4).
3. Определение постоянных интегриро-
интегрирования. Для определения постоянных интегрирования надо по
данным задачи установить начальные условия в виде A6). Значения
постоянных по начальным условиям находятся так, как это было
показано в задаче 90. При этом постоянные можно определять
непосредственно после каждого интегрирования.
Если дифференциальное уравнение движения является уравне-
уравнением с разделяющимися переменными, то вместо введения постоян-
постоянных интегрирования можно брать сразу от обеих частей равенства
определенные интегралы в соответствующих пределах; пример
такого расчета дан в задаче 93.
4. Нахождение искомых в задаче величин и
исследование полученных результатов. Что-
Чтобы иметь возможность исследовать решение, а также произвести
косвенную проверку результата подсчетом размерностей, надо все
решение проводить до конца в общем виде (в буквах), подставляя
числовые данные только в окончательные результаты.
Сделанные здесь указания относятся и к случаю криволинейного
движения.
Рассмотрим три конкретные задачи, в которых сила зависит от
времени, от расстояния и от скорости точки.
1. Сила зависит от времени
Задача 91. Груз весом Р начинает двигаться из состояния покоя вдоль глад-
гладкой горизонтальной плоскости под действием силы F, значение которой растет
пропорционально времени по закону F=kt. Найти закон движения груза.
Решение. Выберем начало отсчета О в начальном положении груза и на-
направим ось Ох в сторону движения (рис. 216). Тогда начальные условия будут:
— при ^=0 jc=O, vx=0. Изображаем в произвольном по-
_ ложении груз и действующие на него силы F, Р (сила
~| ? тяжести) и N (реакция плоскости). Проекции этих сил
на ось Ох имеют значения Fx=F=kt, Px=§, Nx=0 и
/А»>»м? ' на ось ®х имеют значения
ШЖЛх уравнение A3) примет вид
р
Рис. 216 1-^*-=ы.
g &
Умножив обе части этого равенства на dt, мы сразу разделим переменные и,
интегрируя, получим
(g)xr1
Подставляя сюда начальные данные, найдем, что Сг=0. Тогда, заменяя в по-
полученном результате vx на йх/dt, представим его в виде
192
Умножая обе части этого равенства на dt, опять разделим переменные и, ин-
интегрируя, найдем
x=(kgl2P)f>/3+C2.
Подстановка начальных данных дает С2=0, и окончательно получаем закон
движения груза в виде
Таким образом, проходимый грузом путь будет расти пропорционально кубу
времени.
2. Сила зависит от расстояния
Задача 92. Пренебрегая трением и сопротивлением воздуха, определить, в
течение какого промежутка времени тело пройдет по прорытому сквозь Землю
вдоль хорды АВ каналу от его начала А до кон-
конца В (рис. 217). При подсчете считать радиус
Земли ?=6370 км.
Указани е. В теории притяжения дока-
доказывается, что тело, находящееся внутри Земли,
притягивается к ее центру с силой F, прямо про-
пропорциональной расстоянию г до этого центра.
Принимая во внимание, что при r=R (т. е. на
поверхности Земли) сила F равна силе тяже-
тяжести (F=mg), получим, что внутри Земли
F=(mglR)r, Рис. 217
где г—МС — расстояние от точки М до центра Земли.
Решение. Поместим начало отсчета О в середине хорды АВ (в этой
точке тело, находящееся в канале, было бы в равновесии) и направим ось Ох
вдоль линии ОА. Если обозначить длину хорды АВ через 2а, то начальные
условия задачи будут: при t—0 x=a, vx=0.
В произвольном положении на тело действуют силы F и N. Следовательно,
Sf kx = — F cos a = — (mg/R) r cos a = — (mg/R) x,
так как из чертежа видно, что г cos а=х, Nx—0.
Действующая сила оказалась зависящей от координаты х точки М. Чтобы
в этом случае в дифференциальном уравнении движения разделились переменные,
составим его в виде A4). Тогда сокращая на т и вводя обозначение
g!R=k\
получим
Умножая обе части этого равенства на их, сразу разделяем переменные и,
интегрируя, находим
По начальным условиям при х=а ул=0. Следовательно, С1=^2а2У2. Подстав-
Подставляя это значение С1г получаем
vx=± kY~a2 — x2.
Считая, что в рассматриваемом положении скорость направлена от М к О,
т. е. что uv<0, берем перед корнем знак минус (легко, однако, проверить, что тот
же окончательный результат получится и при знаке плюс). Тогда, заменяя vx
на dx/dt, найдем, что
4
at
Разделяя переменные, приведем это уравнение к виду
, , _ Ах
7 № 2173 193
и, интегрируя, получим
W (xfa)-\-C2.
Подставляя сюда начальные данные (при t=Q x=a), находим, что С2=0. Окон-
Окончательно закон движения тела в канале будет иметь вид
х= a cos kt.
Следовательно, тело будет совершать в канале АВ гармонические колебания
с амплитудой а.
Найдем теперь время t± движения тела до конца В канала. В точке В коорди-
координата х=—а. Подставляя это значение в уравнение движения, получим cos Ых=—1,
откуда Ых=п и tx=nlk. Но по введенному обозначению k=Y~g/R. Отсюда, произ-
произведя подсчет, находим, что время движения по каналу АВ при условиях задачи
не зависит от его длины и всегда равно
t1=nV~Rig « 42 мин 11 с.
Этот очень интересный результат породил ряд (пока еще фантастических)
проектов прорытия такого канала.
Найдем дополнительно, чему будет равна при движении максимальная
скорость тела. Из выражения для vx видно, что v=vm3Vi при х=0, т. е, в точке О.
Следовательно,
Если, например, 2а=0,1./?=637 км (приблизительно расстояние от Москвы
до Ленинграда), то t'max~395 м'с=1422 км/ч.
Колебания, совершаемые материальной точкой под действием
силы, пропорциональной расстоянию, будут подробнее изучены в
гл. XIX. Там будет рассмотрен другой метод интегрирования
получающихся в этом случае дифференциальных уравнений дви-
движения.
З.Сила зависит от сксграсти
Задача 93. Лодку, масса которой /и=4О- кг, толкагат, сообщая ей начальную
скорость ?>0=0,5 м/с. Считая, силу соиротишлания воды* при малых скоростях из-
изменяющейся по закону G), т.. а. считая #=[№, где коэффициент |i=9,l кг/с,
определить, через сколько времени скарость лодки уменьшится вдвое и какой
она за это время пройдет путь. Найти также,
какой путь пройдет лодка до полной останоа-
ки.
Решение. Совместим начало .отсчета
О с начальным положением лодки и направим
ось Ох в сторону движения (рис. 218). Тогда на-
начальные условия будут: при<=Ол;=0, vx=v&
Изображаем в произвольном положении
Рис. 218 лодку и действующие на нее силы Р, W и W.
Примечание. Никакие другие
силы на лодку не действуют. Сила, сооб-
сообщившая лодке толчок, действовала на лодку до момента t=6. Результат этого
действия учитывается заданием начальной скорости v0, которую сила за время
толчка сообщила лодке (см. § 79.) Чтобы правильно определить, какие силы дей-
действительно действуют на тело при его движении, надо помнить, что сила есть ре-
результат _взаимодействия данного тела с другими телами. В данном случае сила
тяжести Р является результатом действия на лодку Земли, а силы N и R — ре-
результат действия на лодку воды Никакие другие материальные тела с лодкой при
ее движении не взаимодействуют, значит, никаких других действующих сил нет.
Обращаем внимание на этот вопрос, так как он часто является источником, оши-
ошибок при решении задач.
Вычисляя проекции действующих сил, находим, что
194
Для определения времени движения составляем дифференциальное уравнение
A3), Замечая, что в данном случае vx—v, получим
&v
т
Проинтегрируем это уравнение, беря от обеих его частей после разделения
переменных соответствующие определенные интегралы. При этом нижним преде-
пределом каждого из интегралов будет значение переменного интегрирования в началь-
начальный момент, а верхним — значение того же переменного в произвольный момент
времени.
По условиям данной задачи при i=0 v=va и, следовательно,
о t
\—=—— \ dt или Inn — \nv0 = — t.
J v m J m
I'd 0
Отсюда окончательно
t=(m/\i) In (vo/v), (a)
Искомое время tx определим, полагая а=0,5 v0. Это время, как видим, не за-
зависит в данном случае от величины v0. Так как In 2=0,69, то
In 2—3 с,
Для определения пройденного пути целесообразно вновь составить дифферен-
дифференциальное уравнение движения в виде A4), так как это уравнение позволяет сразу
установить зависимость между хин*, Тогда получим
dv
dx r
Отсюда, сокращая на v, разделяя переменные и учитывая, что при х=0 v=vai
получим
V X
\ dv=—— \ dx или V — vo=—— х.
J m J m
ч„ о
Следовательно,
х=(т/ц) (vQ—v). (б)
Полагая f=0,5 v0, найдем искомый путь: л1=/лу0''2|лл:1,1 м.
Чтобы найти путь, пройденный лодкой до остановки, следует в равенстве (б)
положить v=0. Тогда получим, что л;2=ти0/|х=2,2 м.
Определяя время движения до остановки, мы из равенства (а) найдем, что
при и=0 время t2=<x>. Это означает, что при принятом законе сопротивления
(R=[iv) лодка будет к своему конечному положению (определяемому координатой
х2) приближаться асимптотически. Фактически же время движения лодки до оста-
остановки будет конечным, так как с уменьшением скорости закон сопротивления ста-
становится другим и соответственно изменяется вид зависимости v от t (см,, например,
задачу 105 в §90).
Другой интересный пример движения под действием силы, зави-
зависящей от скорости, рассмотрен в следующем параграфе.
* Пройденный путь можно еще найти, определяя из равенства (а) зависимость
v ют t в виде 1>=иое~^т'*, а затем заменяя v на йх/dt и интегрируя полученное
уравнение, но такой путь решения будет несколько длиннее.
7* 495
§ 81*. ПАДЕНИЕ ТЕЛА В СОПРОТИВЛЯЮЩЕЙСЯ СРЕДЕ (В ВОЗДУХЕ)
Рассмотрим задачу о падении тела в воздухе с малой п? сравнению с радиусом
Земли высоты. Тогда действующую на тело силу тяжести Р и плотность воздуха р
можно считать величинами постоянными. Полагая одновременно, что при падении
тело движется поступательно, будем его рассматривать как материальную точку.
Действующую на тело силу сопротивления воздуха определяем по формуле (8)
из § 76; ее модуль
R=0,5cxpSv\ A8)
где полагаем сх=const * (величины р и S тоже постоянны).
Направив координатную ось Ох вертикально вниз (рис. 219), найдем, как бу-
будет изменяться скорость падения в зависимости от пройденного пути х, считая, что
движение начинается из точки О и vo=O.
На падающее тело действуют силы Р и R; тогда
HFkx = P—R =P — O,5cxpSv2.
Чтобы сразу получить зависимость v от х, составим дифференциальное урав-
уравнение движения в виде A4). Учитывая, что vx=v, получим
о. E_v*E=p L
g ° dx~ 2
Если ввести обозначение
2P/cxpS=a?, A9)
то предыдущее уравнение примет вид
йи
или после разделения переменных
vdv ?_ х
G3 — I»2 ft2
Беря от обеих частей равенства интегралы, находим
In (а2—ч2)=—2 (g/a2)x+ d.
По начальным данным при х=0 скорость и—0, следовательно, Ci=ln a2.
Подставляя это значение Сг, получим
in?i^?!=_24* или W .
а2 а2 а
Отсюда окончательно находим
v = aV 1-е~2Ша2)х- B0)
Формула B0) дает закон изменения скорости падающего в воздухе тела в за-
зависимости от пройденного пути.
С возрастанием х величина е~ 2 (g//a2) * убывает, стремясь при *->-оо к нулю. От-
Отсюда следует, что скорость падения v с возрастанием х возрастает, стремясь в пре-
пределе к постоянной величине а. Эта величина называется предельной скоростью па-
падения опр. Из равенства A9) находим, так как г.'пр=а,
onp = /2P/cxPS. B1)
Следовательно, при vo=O падающее в воздухе тело не может получить скоро-
скорости, большей, чем vnf. Предельная скорость падения возрастает с увеличением
веса тела и с уменьшением величин сх, р и S.
* В рассматриваемой задаче это допустимо, если скорость падения не превы-
превышает примерно 300 м/с.
196
Найдем, как быстро скорость падающего тела приближается к предельной.
Для этого обратимся к табл. 2, в которой дана зависимость величины vlvnp от
(g/vnp)x,-вычисленная по формуле B0). Из таблицы следует, что
Таблица 2
8 т
"пр
0
0,5
1,0
V
°пр
0
0,80
0,93
й ,.
У2 "
гф
1,2
1,5
2,0
V
"пр
0,95
0,97
0,99
при (g/i>nP)*=l,2
у = 0,95
при (g/i,'np)* = 2,0
099
B2)
Следовательно, скорость падения приближается к предельной довольно быстро,
если только величины сх и S не очень малы (см. задачу 94).
Наличие предельной скорости падения можно установить следующими про-
простыми рассуждениями. При падении тела его скорость v растет; следовательно,
растет и сила сопротивления R. Если считать очевидным, что сила R не может
стать больше, чем сила тяжести Р (рис. 219), то ^пр=Р. Подставляя сюда значе-
значение Rnp из формулы A8), получаем Q,ScxpSv^p^=P, откуда и находим даваемое
формулой B1) значение ипр. Однако приведенные рассуждения не позволяют оп-
определить, как быстро скорость падения v стремится к опр. Этот практически важ-
важный результат можно получить только с помощью формулы B0).
Задача 94. Определить предельную скорость падения парашютиста, вес ко-
которого вместе с парашютом Р=800 Н: а) при затяжном прыжке, считая в этом слу-
случае S=0,4 м2, сх=1,0; б) при прыжке с открытым парашютом, принимая в этом
случае S=36 и2, сЛ=1,4.
Найти в обоих случаях расстояние #lt пролетев которое, парашютист приобре-
приобретает скорость Dj—0,95 гпр (т. е. отличающуюся от предельной на 5%), и рас-
расстояние Нг, при котором скорость падения г>2=0,99иПр.
Решение. Предельную скорость падения определяем по формуле B1), счи-
считая для воздуха р= 1,29 кг/м3. Расстояния Нх и Я2 находим из равенств B2). Так
как у=0,95упр при (glvnV)x=\,2, то искомое расстояние Н1= l,2t^p/g. Аналогично
находим, что H2=2v2np/g.
В результате подсчетов получаем:
а) при затяжном прыжке Упр=56 м/с; #^380 м, Я2~630 м;
б) при прыжке с открытым парашютом ипр«5 м/с; Я^З м, Я2«5 м.
Как видим, при больших сопротивлениях предельная скорость достигается
очень быстро.
§ 82. РЕШЕНИЕ ОСНОВНОЙ ЗАДАЧИ ДИНАМИКИ
ПРИ КРИВОЛИНЕЙНОМ ДВИЖЕНИИ ТОЧКИ
В случае криволинейного движения точки основная задача
динамики решается с помощью дифференциальных уравнений дви-
движения, полученных в § 77. Если задача решается в прямоугольных
декартовых координатах, т. е. с помощью уравнений A0), то началь-
начальные условия, определяющие положение и скорость точки в началь-
начальный момент времени t=0, задаются в виде:
при t=0 х=х0, у=Уа, z=z0;
vx=v
x0, vy
vy=vy0, vz=v
vy0
197
Проинтегрировав уравнения A0), находят координаты х, у, г дви-
движущейся точки, как функции времени t, т. е. определяют закон дви-
движения точки. При этом полученные решения будут содержать
шесть постоянных интегрирования Си С2>. . ., Св, значения кото-
которых должны определяться по начальным условиям B3).
Конкретный ход решения показан в рассматриваемой ниже за-
задаче.
Движение точки, брошенной под углом к
горизонтальной плоскости в однородном
поле тяжести. Изучим движе-
движение тела, брошенного с начальной
скоростью v0, направленной под уг-
углом а к горизонтальной плоскости,
рассматривая его как материальную
точку с массой т. При этом сопро-
сопротивлением воздуха пренебрегаем, а
поле тяжести будем считать однород-
однородным (i'=const), полагая, что даль-
дальность полета и высота траектории ма-
малы по сравнению с радиусом Земли.
Поместим начало координат О в начальном гшкшешга точки.
Направим ось Оу вертикально вверх; горизонтальную ось Ох р-ас-
положим в плоскости, преходящей через Оу а вектор iv а ось Ог
проведем перпендиулярно первым двум ocmt (рис. 220). Тогда угол
между вектором уа и осью Ох будет а.
Изобразим движущуюся точку М в произвольном педюжении.
На нее действует только одиа сила тяжести Р (см. примечание к
задаче 93 в § 80), проекции которой на координатные оси равны:
Подставляя эти величин-ы в уравнения A0) и замечая, что
/Н=йих/<И и т. д., после сокращения на т подучим:
dw,
g> dt 0<
Умножая обе части этих уравнений на сМ и интегрируя, находим
vx=Cu vy=—gt+C2, vz=Ca.
Начальные условия B3) в нашей задаче имеют вид;
при t=0 jc=O, г/=0, z=Q;
Удовлетворяя начальным условиям, получим
Ci=u»cosa, C2=OoSina, Сз—О.
196
Подставляя эти значения Си Са и С8 в найденные выше решения и
заменяя vx на dx/dt и т. д., придем к уравнениям:
Ах Аи , Аг г.
¦^- = ycosa ^ = ysina—gt, -^ = 0.
Интегрируя эти уравнения, получим:
x=vot cosa+C4, y=votsina—g
Подстановка начальных данных даетС4=С8=С„=0, и окончательно
находим уравнения движения точки М в виде:
gMH, г=0. B4)
Из последнего уравнения следует, что движение происходит в
плоскости Оху.
Имея уравнения движения точки, можно методами кинематики
определить все характеристики данного движения.
1. Траектория точки. Исключая из первых двух урав-
уравнений B4) время t, получим уравнение траектории точки:
у = х tg a ^ х2. B5)
Это уравнение параболы с осью, параллельной оси Оу. Таким
образом, брошенная под углом к горизонтальной плоскости тяжелая
точка движется в безвоздушном пространстве по параболе (Галилей).
2. Горизонтальная дальность. Определим гори-
горизонтальную дальность, т. е. измеренное вдоль оси Ох расстояние
ОС=Х. Полагая в равенстве B5) т/=О, найдем точки пересечения
траектории с осью Ох. Из уравнения х [tga—gx/Bi'ocos2a)]=0 по-
получаем
O
Первое решение дает точку О, второе — точку С. Следовательно,
X=Xz и окончательно
X=(i»S/g)sin2a. B6)
Из формулы B6) видно, что такая же горизонтальная дальность
X будет получена при угле р\ для которого 2C = 180°—2а, т. е. если
угол Р=90°—а. Следовательно, при данной начальной скорости
v0 в одну и ту же точку С можно попасть двумя траекториями:
настильной (а<45°) и навесной (а>45°).
При заданной начальной скорости и0 наибольшая горизонтальная
дальность в безвоздушном пространстве получается, когда sin2a=l,
т. е. при угле а=45°.
3. Высота траектории. Если положить в уравнении
B5) x=X/2=(vl/g) sin a cos a, то определится высота траектории Н:
H=(vl/2g)sin*a. B6')
4. Время полета. Из первого уравнения системы B4)
следует, что полное время полета Т определяется равенством Х =
199
~vaTcosa. Заменяя здесь X его значением, получим
T=Byo/g) since. B6")
При угле наибольшей дальности а* =45° все найденные величины
имеют значения:
B7)
Полученные результаты могут находить некоторые приложения,
например, во внешней баллистике для оценки того, как изменяется
дальность полета при изменении угла а или скорости v0 на очень
малую величину, или же для ориентировочных оценок в случаях,
аналогичных рассмотренному в приводимом примере.
Пример. Известно *, что немецкий снаряд ФАУ-2 после вертикального запус-
запуска имел на высоте 20 км скорость ио« 1700 м/с и угол а— 45° (поворот снаряда про-
производился с помощью специальных приборов и рулей). Дальнейший полет снаряда
практически происходил как полет брошенного тела в_безвоздушном пространстве
и на высотах, для которых можно еще грубо считать Р= const Тогда по формулам
B7) должно быть:
X *~300 км, Я *~75 км, Т *«245 с.
Эти результаты очень близки к тем, которые имели место для данных снарядов
фактически.
Первая космическая скорость. Рассмотрим
еще одну задачу о движении брошенного тела. Найдем, какую на-
начальную скорость надо сообщить телу, находящемуся на расстоянии
R от центра Земли, чтобы оно двигалось
вокруг Земли по круговой орбите радиуса
R (рис. 221); сопротивление воздуха счита-
считаем отсутствующим, а тело рассматриваем
как материальную точку.
Прежде всего замечаем, что так как
скорость точки в любой момент времени
должна быть направлена по касательной к
траектории, то скорость v0 следует напра-
;—~^~. вить перпендикулярно радиусу СМ0, где
Мо — начальное положение точки.
Для дальнейшего решения воспользуемся уравнениями A1).
Рассматривая точку в произвольном положении М, проводим оси
УИт и Мп и изображаем действующую на точку силу тяготения
F; численно F=mg0, где m — масса точки, ?0 — ускорение силы
тяготения в пункте М. Так как Fx=0, a Fn=F, уравнения A1) при-
примут вид:
-| = 0, ^ = F или ^-3 = mg0.
Из первого уравнения находим, что и= const и, следовательно,
v=v0. После этого второе уравнение дает (еслисчитать, что R=R0 =
* См.: Коой И.,Ютенбогарт И. Динамика ракет. Оборонгиз, 1950.
200
=6378 км — радиус земного экватора, a go=9,82 м/с2)
v0 = Kgo/?o = 7914 м/с « 7,9 км/с. B8)
Эта наименьшая скорость, которую нужно сообщить брошенному
телу, чтобы оно не упало обратно на Землю, называется круговой
или первой космической скоростью (см. §97, 98).
Глава XVII
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ ТОЧКИ
Для решения многих задач динамики, особенно в динамике сис-
системы, вместо непосредственного интегрирования дифференциаль-
дифференциальных уравнений движения оказывается более эффективным пользо-
пользоваться так называемыми общими теоремами, являющимися следст-
следствиями основного закона динамики.
Значение общих теорем состоит в том, что они устанавливают
наглядные зависимости между соответствующими динамическими
характеристиками движения материальных тел и открывают тем
самым новые возможности исследования движения механических
систем, широко применяемые в инженерной практике. Кроме того,
применение общих теорем избавляет от необходимости проделывать
для каждой задачи те операции интегрирования, которые раз и на-
навсегда производятся при выводе этих теорем; тем самым упрощается
процесс решения.
Перейдем к рассмотрению общих теорем динамики точки.
§83. КОЛИЧЕСТВО ДВИЖЕНИЯ ТОЧКИ. ИМПУЛЬС СИЛЫ
Одной из основных динамических характеристик движения точки
является количество движения *.
Количеством движения материальной точки называется вектор-
векторная величина то, равная произведению массы точки на ее скорость.
Направлен вектор то так же, как и скорость точки, т. е. по ка-
касательной к ее траектории.
Единицей измерения количества движения является в СИ —
1 кг-м/с=1 Н'С, а в системе МКГСС—1 кГ-с.
Импульс силы. Для характеристики действия, оказывае-
оказываемого на тело силой за некоторый промежуток времени, вводится
понятие об импульсе силы. Сначала введем понятие об элементарном
импульсе, т. е. об импульсе за элементарный промежуток времени
At. Элементарным импульсом силы называется векторная величина
dS, равная произведению силы F на элементарный промеоюуток вре-
* Другая основная динамическая характеристика — кинетическая энер-
энергия — будет рассмотрена в § 89.
201
мени dt:
dS = Fdt. B9)
Направлен элементарный импульс вдоль линии действия силы.
Импульс S любой силы F за конечный промежуток времени tx
вычисляется как предел интегральной суммы соответствующих
элементраных импульсов, т. е.
и
\ C0)
Следовательно, импульс силы за некоторый промежуток времени
tx равен определенному интегралу от элементарного импульсаг
взятому в пределах от нуля до U.
В частном случае, если сила F постоянна и по модулю, и по на-
направлению (/?=const), то 5=/^!. Причем в этом случае и модуль
S^Ftj,. В общем случае модуль импульса может быть вычислен по
его проекциям на координатные оси:
J,df. C1)
Единицей измерения импульса силы, как и количества движения,
является в СИ — 1 кг -м/с, а в системе МКГСС — 1 кГ «с.
§ 84. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ ТОЧКИ
Так как масса точки постоянна, а ее ускорение a=dv/dt, то
уравнение B), выражающее основной закон динамики, можно
представить в виде
~Tt—2- «¦ C2)
Уравнение C2) выражает одновременно теорему об изменении
количества движения точки в дифференциальной форме: производная
по времени от количества движения точки равна сумме действующих
на точку сил *.
Пусть движущаяся точка имеет в момент времени ?=0 скорость
v0, а в момент U — скорость иг. Умножим тогда обе части равенства
C2) на d^ и возьмем от них определенные интегралы. При этом спра-
справа, где интегрирование идет по времени, пределами интеграла будут
0 и tu а слева, где интегрируется скорость, пределами интеграла
будут соответствующие значения скорости v0 и у1# Так как интеграл
* По существу это другая формулировка 2-го закона динамики, близкая к
той, которую дал сам Ньютон.
202
от d(mv) равен то, то в результате получим
_ ''_
mv1— mv0 = 2 J ^ft dt.
о
Стоящие справа интегралы, как следует из формулы C0), пред-
представляют собой импульсы действующих сил. Поэтому окончатель-
окончательно будет
mv1—тщ = Ъ8к. C3)
Уравнение C3) выражает теорему об изменении
количества движения точки в конечном виде:
изменение количества движения точки за некоторый промежуток вре-
времени равно сумме импульсов всех действующих на точку сил за тот же
промежуток времени.
При решении задач вместо векторного уравнения C3) часто поль-
пользуются уравнениями в проекциях. Проектируя обе части равенства
C3) на координатные' оси, получим
C4)
mvlz—mvOz =
В случае прямолинейного движения, происходящего вдоль оси
Ох, теорема выражается первым из этих уравнений.
Решение задач. Уравнения C3) или C4) позволяют,
зная как при движении точки изменяется ее скорость, определить
импульс действующих сил (первая задача динамики) или, зная им-
импульсы действующих сил, определить, как изменяется при движении
скорость точки (вторая задача динамики). При решении второй за-
задачи, когда заданы силы, надо вычислить их импульсы, Как видно
из равенств C0) или C1), это можно сделать лишь тогда, когда силы
постоянны или зависят только от времени.
Таким образом, уравнения C3), C4) можно непосредственно
использовать для решения второй задачи динамики, когда в задаче
в число данных и искомых величин входят: действующие силы, время
движения точки и ее начальная и конечная скорости (т. е. величины
F, t, v0, vt), причем силы должны быть постоянными или зависящи-
зависящими только от времени.
Задача 95. Точка, масса которой т= 2 кг, движется по окружности с численно
постоянной скоростью и—4 м'с. Определить импульс действующей на точку силы
за время, в течение которого точка проходит четверть окружности _ _
Решение. По теореме об изменении количества движения S=mu1—/ni>0.
Строя геометрически разность этих количеств движения (рис, 222), находим из
полученного прямоугольного треугольника
Но по условиям задачи ии=у1=у, следовательно,
S=mvV=ll,3 кг-м/с.
293
Для аналитического подсчета можно, используя первые два из уравнений C4),
найти
Sx = mv0, Sy= —mi'i, откуда S = mV iia-\-v\.
Задача 96. Грузу, имеющему массу га и лежащему на горизонтальной плоско-
плоскости, сообщают (толчком) начальную скорость о0 Последующее движение груза тор-
тормозится постоянной силой F. Определить, через сколько времени груз остановится,
;т///ж
Рис. 223
Решение. По данным задачи видно, что для определения времени движения
можко воспользоваться доказанной теоремой. Изображаем груз в произвольном
положении (рис. 223). На него действуют1 сила тяжести Р, реакция плоскости N
и тормозящая сила F. Направляя ось Ох в сторону движения, составляем первое
из уравнений C4)
mvOx = I.Skx. (a)
В данном случае vlx—0 (v± — скорость в момент остановки), a vM=vB. Из сил
проекцию на ось Ох дает только сила F. Так как она постоянна, то Sx=Fxti=
=—Ft-i, где t1 — время торможения. Подставляя все эти данные в уравнение (а),
получаем —mvu=—Ftlt откуда искомое время
(б)
Таким образом, время торможения растет пропорционально начальной скоро-
скорости.
Решим эту же задачу, считая, что тормозящая сила равна Q и не постоянна, а с
момента начала торможения растет пропорционально времени, т. е. Q=kt, где
k — некоторый постоянный коэффициент, и становится равной F в момент оста-
остановки груза. Так как сила зависит от времени, то опять можно воспользоваться
уравнением (а), определяя Sx по первой из формул C1). Учтя, что <ЭЛ=—Q=
=—kt, получим
U
S.v = — [ ktut=—ktl/2.
Тогда уравнение (а) дает mi'0~hti'2. Значение k найдем из условия, что при
t=t1 Q—F, т. е. ktx=F, откуда k—Fit-^ и окончательно будет
t^ZmvjF. (в)
Следовательно, в этом случае время торможения удваивается,
§ 85. ТЕОРЕМА ОБ ИЗМЕНЕНИИ МОМЕНТА
КОЛИЧЕСТВА ДВИЖЕНИЯ ТОЧКИ (ТЕОРЕМА МОМЕНТОВ)
В некоторых задачах в качестве динамической характеристики
движения точки вместо самого вектора количества движения то
рассматривают его момент относительно некоторого центра или оси.
204
Эти моменты определяются так же, как и моменты силы (см. § 8, 14
и 28).
Таким образом, моментом количества движения точки относи-
относительно некоторого центра О называется векторная величина то (mv),
определяемая равенством
т0 (mv) = г х mv, C5)
где г — радиус-вектор движущейся точки, проведенный из центра О.
При этом вектор т0 (mv) направлен перпендикулярно плоскости,
проходящей через mv и центр О, a \mo(mv)\=mv-h (рис. 224; для
сравнения на нем показан и вектор mo(/7)=rXF).
Момент количества движения точки относительно какой-нибудь
оси Oz, проходящей через центр О, будет равен проекции вектора
mo(mv) на эту ось:
tnz (mv) = [т0 (mv)]z = | т0 (mv) | cos у, C6)
где у — угол между вектором т0 (mv) и осью Oz.
Теорема моментов устанавливает, как изменяется со временем
вектор mo(mv). Чтобы доказать ее, продифференцируем по времени
выражение C5). Получим
-п- Gх mv) =( -=f х то) + ( гх т ^~ )= (ox mv) + (г х та).
Ho vXmv=0 как векторное произведение двух параллельных
векторов, a ma=F, где при действии нескольких сил F='ZFk.
Следовательно,
¦jj(rxmv) = rxF или -^ [mo(mv)\ = m0 (F). C7)
В результате мы доказали следующую теорему момен-
моментов относительно центра: производная по времени от
момента количества движения точки, взятого относительно какого-
нибудь неподвижного центра, равна моменту действующей на точку
силы относительно того же центра.
Сравнивая уравнения C7) и C2), видим, что моменты векторов mv
и F связаны такой же зависимостью, какой связаны сами векторы mv
и F.
Если спроектировать обе части равенства C7) на какую-нибудь
ось Oz, проходящую через центр О, то, учтя соотношение C6), полу-
получим
±[тгШ]=-тЛР). C8)
Это равенство выражает теорему моментов относительно оси.
Из уравнения C7) следует, что если mo(F)=0, то mo(mo)=const,
205
т.е. если момент действующей силы относительно некоторого цент-
центра равен нулю, то момент количества движения точки относительно
этого центра есть величина постоянная. Такой результат имеет
место в практически важном случае движения под действием цент-
центральной силы (см. § 86).
ifia(mv) _.
Рис. 224
Рис. 225
Задача 97. Шарик М привязан к нити МВА, часть ВА которой продета сквозь
вертикальную трубку (рис. 225). В момент, когда шарик находится на расстоянии
h0 от оси г трубки, ему сообщают начальную скорость!^, перепендикулярную плос-
плоскости МВА. Одновременно нить начинают медленно втягивать в трубку. Найти,
какую скорость ах будет иметь шарик, когда его расстояние от оси г станет равно
h. _ _
Р е ш е н и е. На шарик действуют сила тяжести Р и реакция нити Т. Моменты
этих сил относительно оси г равны нулю, так как сила Р параллельна оси г, а сила
Т эту ось пересекает. Тогда по уравнению C8)
откуда mz{mv)=mvh= const. Так как масса m постоянна, то отсюда следует, что
при движении шарика и0/г0=и1/!1.
Следовательно,
v1=h0v0jh1.
По мере приближения шарика к оси его скорость растет.
§ 86*. ДВИЖЕНИЕ ПОД ДЕЙСТВИЕМ ЦЕНТРАЛЬНОЙ СИЛЫ.
ЗАКОН ПЛОЩАДЕЙ
Центральной называется сила, линия действия которой прохо-
проходит все время через данный центр О. Примером такой силы является
сила притяжения планеты к Солнцу или спутника к Земле.
Рассмотрим, пользуясь уравнением C7), как будет двигаться
точка М (рис. 226) под действием центральной силы F. Так как в
данном случае mo(F)==0, то mo(mu)=rXmu=const или, поскольку
масса т постоянна, m0(v)=rXv=const, т. е. вектор mo(v) постоя-
постоянен и по модулю, и по направлению. Напомним, что вектор то{ь)=*
206
=rXv направлен перпендикулярно плоскости, проходящей через
векторы г и и. Следовательно, если вектор rXv имеет все время по-
постоянное направление, то радиус-вектор г=ОМ точки М и вектор
ее скорости v должны все время лежать в одной и той же плоскости.
Отсюда заключаем, что траектория точки М будет плоской кривой.
Кроме того, одновременно \mo{v)\—vh =
=const.
Таким образом, при движении под
действием центральной силы точка дви-
двигается по плоской кривой, а ее скорость
v изменяется так, что момент вектора
v относительно центра О остается по-
постоянным (u/i=const).
Последний результат имеет нагляд-
наглядное геометрическое истолкование. Так
как vh=h-ds/dt, a /i-ds=2dcr, где da —
площадь элементарною треугольника
ОММ', то, следовательно, vh=2da/dt.
Величина dis/dt определяет скорость, с которой растет площадь,
ометаемая радиусом-вектором ОМ при движении точки М, и назы-
называется секторной скоростью точки. В рассматриваемом случае эта
скорость постоянна:
Рис. 226
-тг = у 1 «Ь (mo) | = const.
C9)
Таким образом, при движении под действием центральной силы
точка движется по плоской кривой с постоянной секторной ско-
скоростью, т. е. так, что радиус-вектор тонки в любые разные проме-
промежутки времени ометает равные пло-
v щади (закон площадей). Этот закон
имеет место при движении планет или
спутников и выражает собой один из
законов Кеплера.
П
Пример. Орбитой планеты, движущей-
движущейся под действием силы притяжения Солн-
Солнца, является эллипс, причем Солнце на-
находится в одном из фокусов С эллипса
(рис. 227). Так как сила притяжения явля-
Рис. 227 ется центральной, то при движении име-
имеет место закон площадей. Поэтому в бли-
ближайшей к Солнцу точке орбиты Л (пери-
(перигелий) скорость планеты ед будет наибольшей, а в наиболее удаленной от Солнца
точке А (афелий) скорость у л будет наименьшей. Этот результат следует из урав-
уравнения C9), которое для точек А и П дает v^-AC=vn-nC. К такому же выводу мож-
можно прийти, если учесть, что площади пунктирно заштрихованных на рис. 227 сек-
секторов, ометаемых за одинаковые промежутки времени, должны быть равны, сле-
следовательно, за одно и то же время [планета вблизи точки П должна пройти больший
путь, чем вблизи А.
Аналогичный результат имеет место при движении спутника,
207
§ 87. РАБОТА СИЛЫ. МОЩНОСТЬ
Для характеристики действия, оказываемого силой на тело при
некотором его перемещении, вводится понятие о работе силы, широ-
широко используемое не только в механике. Сначала введем понятие об
элементарной работе.
Элементарной работой силы F, приложенной в точке М
(рис. 228), называется скалярная величина *
cL4=FTds, D0)
где FT — проекция силы F на касательную Мх к траектории точки
М, направленную в сторону перемещения этой точки (или про-
проекция F на направление скорости v точки М); ds — модуль элемен-
элементарного перемещения точки М.
Такое определение соответствует представлению о работе как
о мере того действия силы, которое приводит к изменению модуля
скорости точки. Если разложить силу F на составляющие Fz и Fn,
то изменять модуль скорости будет FT, так как Fx—max=m -dv/dt
(составляющая Fn изменяет или направление вектора v, или при
несвободном движении — силу давления на связь).
Замечая, что FX~F cos а, где а — угол между F и Мх, полу-
получим из D0) другое выражение для dA:
dA=Fds cos a. D1)
Если угол а острый, то работа положительна. В частности, при
а=0 элементарная работа dA=Fds.
Если угол а тупой, то работа отрицательна. В частности, при
<х=180° элементарная работа cL4=—Fds.
Если угол а=90°, т. е. если сила направлена перпендикулярно пе-
перемещению, то элементарная работа силы равна нулю.
Знак работы имеет следующий смысл: работа положительна,
когда составляющая Fx направлена в сторону движения (сила
ускоряет движение); работа отрицательна, когда составляющая
Fx направлена противоположно направлению движения (сила
замедляет движение).
Если учесть, что ds=|dr!, где dr — вектор элементарного переме-
перемещения точки, и воспользоваться известным из векторной алгебры
понятием о скалярном произведении двух векторов, то равенство
D1) можно представить в виде * *
dA=T-d7. D2)
* Здесь dA (как и"с!5 в § 83) — символ элементарной величины, но не диффе-
дифференциала. Дифференциалом какой-нибудь функции величина dA вообще может
не быть (см. § 126). _ _
** Скалярьым произведением двух векторов аи Ь называется скалярная вели-
величина, определяемая равенством a- b=ab cos а, где а — угол между векторами "а
и Ъ Выражение скалярного произведения через проекции векторов а и Ь на коорди-
координатные оси имеет вид а- Ь=ахЪх-\-ауЬу-\-агЬ2.
208
Следовательно, элементарная работа силы равна скалярному
произведению силы на вектор элементарного перемещения точки ее
приложения.
Если в формуле D2) выразить скалярное произведение через
проекции векторов F и г на координатные оси и учесть, что гх=х,
ry=y, rz=z, то получим аналитическое выражение элементарной
работы
dA=Fxdx+Fydy+Fzdz, D3)
в котором х, у, z — координаты точки приложения силы F.
\
ма м
м,
Рис. 228
Рис. 229
Работа силы на любом конечном перемещении M0M-i (рис. 228)
вычисляется как предел интегральной суммы соответствующих
элементарных работ
(Mi)
A{M,Mt)= 5 Fxds, D4)
(Мо)
или
(Л/,)
А{мом>)~ ) (Fxdx + Fydy-\-Fz<lz). D4')
(Л* о)
Следовательно, работа силы на любом перемещении МОМХ равна
взятому вдоль этого перемещения интегралу от элементарной
работы. Пределы интеграла соответствуют значениям переменных
интегрирования в точках Мо и Мг (точнее говоря, интеграл берется
вдоль кривой MoMi, т. е. является криволинейным).
Если величина Fx постоянна (Fx=const), то из D4), обозначая
перемещение M0Mi через su получим
A{MtMl) = F^1. D5)
В частности, такой случай может иметь место, когда действую-
действующая сила постоянна по модулю и направлению (/7=const), а точка,
к которой приложена сила, движется прямолинейно (рис. 229).
В этом случае Fx=Fcos a=const и
¦4(Vf0w,) = fs1cosa. D5')
Единицей измерения работы является в СИ — 1 джоуль A Дж=
= 1Н-м=1 кг-м2/с2), а в системе МКГСС — 1 кГ-м.
209
Графический способ вычисления работы. Если сила
зависит от расстояния s и известен график зависимости Fx от s (рис. 230), то ра-
работу силы можно вычислить графически. Пусть в положении Мо точка находится
от начала отсчета на расстоянии s0, а в положении М1 — на расстоянии sv Тогда
по формуле D4), учитывая геометрический смысл
интеграла, получим
где а — величина заштрихованной на рис. 230 пло-
площади, умноженной на масштабный коэффициент.
Мощность. Мощностью называется
величина, определяющая работу, совершае-
совершаемую силой в единицу времени. Если работа
совершается равномерно, то мощность N=A/tlt где tx — время, в
течение которого произведена работа А. В общем случае
Рис. 230
N = dA/dt = Fx ds/dt = Fxv.
D6)
Следовательно, мощность равна произведению касательной сос-
составляющей силы на скорость.
Единицей измерения мощности в СИ является ватт A Вт=
= 1Дж/с), а в системе МК.ГСС— 1 кГ-м/с. В технике за единицу
мощности часто принимается I л. с, равная 736 Вт (или 75 кГ-м/с).
Работу, произведенную машиной, можно измерять произведением
ее мощности на время работы. Отсюда возникла употребительная в
технике единица измерения работы киловатт-час A кВт-ч=3,6х
х10в Дж«367100 кГ-м).
Из'равенства N=Fxv видно, что у двигателя, имеющего данную
мощность N, сила тяги Fx будет тем больше, чем меньше скорость v.
Поэтому, например, на подъеме или на плохом участке дороги у ав-
автомобиля включают низшие передачи, позволяющие при полной
мощности двигаться с меньшей скоростью и развивать большую
силу тяги.
§ 88. ПРИМЕРЫ ВЫЧИСЛЕНИЯ РАБОТЫ
Рассмотренные ниже примеры дают результаты, которыми можно
непосредственно пользоваться при решении задач.
1. Работа силы тяжести. Пусть точка М, на которую
действует сила тяжести Р, перемещается из. положения М0(х0,
уа, z0) в положение Мг(х1у уи zj. Выберем координатные оси так,
чтобы ось Oz была направлена вертикально вверх (рис. 231). Тогда
Рх=0, Ру=0, Pz=—Р. Подставляя эти значения в формулу D4'),
получим, учитывая, что переменным интегрирования является г:
210
Если точка Мо выше Ми то г0—zx=h, где h — вертикальное
перемещение точки; если же точка Ма ниже точки Mi, то z0—zx=^
= —(z1—z0)=—h.
Окончательно получаем
Следовательно, работа силы тяжести равна взятому со знаком
плюс или минус произведению модуля силы на вертикальное переме-
перемещение точки ее приложения. Работа положительна, если начальная
точка выше конечной, и отрицательна, если начальная точка ниже
конечной.
Из полученного результата следует, что работа силы тяжести не
зависит от вида той траектории, по которой перемещается точка ее
приложения. Силы, обладающие таким свойством, называются
потенциальными (см. § 126).
z м.1
м,
ДУУ\АЛГУЛ
Рис. 231
Рис. 232
2. Работа силы .упругости. Рассмотрим груз М,
лежащий на горизонтальной плоскости и прикрепленный к свобод-
свободному концу некоторой пружины (рис. 232, а). На плоскости отме-
тим точкой О положение, занимаемое концом пружины, когда она не
напряжена (АО=10 — длина ненапряженной пружины), и примем
эту точку за начало координат. Если теперь оттянуть груз от
равновесного положения О, растянув пружину до величины /,
то пружина получит удлинение Я=/—10 и на груз будет действовать
сила упругости F, направленная к точке О. Так как в нашем случае
%=х, то по формуле F) из § 76
F=ck=c\x\ и Fx=—ex.
Последнее равенство справедливо и при x<0 (груз левее точки О);
тогда сила F направлена вправо и получится, как и должно быть,
^0
Найдем работу, совершаемую силой упругости при перемеще-
перемещении груза из положения М0(х0) в положение Mife). Так как в дан-
данном случае Fx=—ex, Fy=Fz=0, то, подставляя эти значения в
211
формулу D4'), найдем
о = J {—сх)йх = -| D—
(Этот же результат можно получить по графику зависимости F
от х (рис. 232, б), вычисляя площадь а заштрихованной на чертеже
трапеции и учитывая знак работы.) В полученной формуле х0 пред-
представляет собой начальное удлинение пружины %„, а Хх — конечное
удлинение пружины Ях. Следовательно,
D8)
т. е. работа силы упругости равна половине произведения коэффици-
коэффициента жесткости на разность квадратов начального и конечного удли-
удлинений (или сжатий) пружины.
Работа будет положительной, когда %0>К< т. е. когда конец
пружины перемещается к равновесному положению, и отрицатель-
отрицательной, когда ко<^!, т. е. когда конец пружины удаляется от равновес-
равновесного положения.
Можно доказать, что формула D8) остается справедливой и в
случае, когда перемещение точки М не является прямолинейным.
Таким образом, оказывается, что работа силы F зависит только
от значений Яо и J\,j и пе зависит от вида траектории точки М. Сле-
Следовательно, сила упругости также является потенциальной.
м'
Рис 233
Риг. 234
3. Работа силы трения. Рассмотрим точку, движу-
движущуюся по какой-нибудь шероховатой поверхности (рис. 233) или
кривой. Действующая на точку сила трения равна по модулю fN,
где / — коэффициент трения, а N — нормальная реакция поверхно-
поверхности. Направлена сила трения противоположно перемещению точки.
Следовательно, FTPT=—FIP=—/Я и по формуле D4)
(М,)
(МО
(Af0)
(Л1„)
212
Если численно сила трения постоянна, то AiMaMi)=—FTVs,
где s — длина дуги кривой MqMx, по которой перемещается точка.
Таким образом, работа силы трения при скольжении всегда отри-
отрицательна. Так как эта работа зависит от длины дуги M0Mi, то,
следовательно, сила трения является силой непотенциальной.
4. Работа силы тяготения Если Землю (планету) рассматривать
как однородный шар (или шар, состоящий из однородных концентрических сло-
слоев), то на точку М с массой т, находящуюся вне шара на расстоянии г от его цент-
центра О (или находящуюся на поверхности шара), будет действовать сила тяготения
F, направленная к центру О (рис. 234), значение которой определяется формулой
E) из § 76. Представим эту формулу в виде
F=km/r*
и определим коэффициент k из того условия, что, когда точка находится на поверх-
поверхности Земли (r=R, где R — радиус Земли), сила притяжения равна mg, где g —
ускорение силы тяжести (точнее силы тяютения) на земной поверхности. Тогда
должно быть
mg=kmiR2 и k=gR2.
Подсчитаем сначала элементарную работу силы F. Как видно из рисунка, эле-
элементарное перемещение ММ' точки М можно разложить на перемещение Ма, чис-
численно равное приращению йг расстояния ОМ=г и направленное вдоль ОМ, и на
перемещение Mb, перпендикулярное ОМ, а следовательно, и силе F, Поскольку на
этом втором перемещении работа силы F равна нулю, а перемещение Ма направле-
направлено противоположно силе, то
cL4=— Fdr=— km^-=— mgR*-^. D9)
Допустим теперь, что точка перемещается из положения Мй, где г=гй, в по-
положение Mi, где г=г1. Тогда
(М,) г, г,
ijj J" (
СМ „) ra r0
или окончательно
(?) E0)
Работа будет положительной, если ru>ri, т. е когда конечное положение точки
ближе к земной поверхности, чем начальное, и отрицательной, если гй<гх. От вида
траектории точки М работа силы тяготения, как видно из формулы E0), не зави-
зависит. Следовательно, сила тяготения является потенциальной.
% 89. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ
ЭНЕРГИИ ТОЧКИ
Введем понятие еще об одной основной динамической характе-
характеристике движения — о кинетической энергии. Кинетической энер-
энергией материальной точки называется скалярная величина mv2/2,
равная половине произведения массы точки на квадрат ее скорости.
Единица измерения кинетической энергии та же, что и работы
(в СИ — 1 Дж). Найдем зависимость, которой связаны эти две вели-
величины.
213
Рассмотрим материальную точку с массой т, перемещающуюся
из положения Мо, где она имеет скорость v0, в положение Mi, где ее
СКОрОСТЬ Vi.
Для получения искомой зависимости обратимся к выражающему
основной закон динамики уравнению ma=HTh. Проектируя обе его
части на касательную Мх к траектории точки М, направленную
в сторону движения, получим
Входящее сюда касательное ускорение точки представим в виде
dv
** = ¦& =
В результате найдем, что
dv dv ds dv
~dT —'"Is ~dt = V "ds "
Умножим обе части этого равенства на ds и внесем т под знак
дифференциала. Тогда, замечая, что Fkxds=dAk, где dAk — эле-
элементарная работа силы Fk, получим выражение теоремы об
изменении кинетической энергии точки в
дифференциальной форме:
S^. E1)
Проинтегрировав теперь обе части этого равенства в пределах,
соответствующих значениям переменных в точках Мо и Mlt найдем
окончательно
-t 2^ = S'4(m.m1). E2)
Уравнение E2) выражает теорему об изменении
кинетической энергии точки в конечном виде:
изменение кинетической энергии точки при некотором ее перемеще-
перемещении равно алгебраической сумме работ всех действующих на точку
сил на том же перемещении.
Случай несвободного движения. При несво-
несвободном движении точки в правую часть равенства E2) войдет работа
заданных (активных) сил F\ и работа реакции связи. Ограничимся
рассмотрением движения точки по неподвижной гладкой (лишенной
трения) поверхности или кривой. В этом случае реакция iV (см.
рис. 233) будет направлена по нормали к траектории точки и NT=0.
Тогда, согласно формуле D4), работа реакции неподвижной гладкой
поверхности {или кривой) при любом перемещении точки будет
равна нулю, и из уравнения E2) получим
mv\
214
Следовательно, при перемещении по неподвижной гладкой по-
поверхности (или кривой) изменение кинетической энергии точки
равно сумме работ на этом перемещении приложенных к точке
активных сил.
Если поверхность (кривая) не является гладкой, то к работе
активных сил прибавится работа силы трения (см. § 88). Если же по-
поверхность (кривая) движется, то абсолютное перемещение точки М
может не быть перпендикулярно N и тогда работа реакции ]V
не будет равна нулю (например, работа реакции платформы лифта).
Решение задач. Теорема об изменении кинетической
энергии [формула E2)] позволяет, зная как при движении точки
изменяется ее скорость, определить работу действующих сил (пер-
(первая задача динамики) или, зная работу действующих сил, опреде-
определить, как изменяется при движении скорость точки (вторая задача
динамики). При решении второй задачи, когда заданы силы, надо
вычислить их работу. Как видно из формул D4), D4'), это можно
сделать лишь тогда, когда силы постоянны или зависят только от
положения (координат) движущейся точки, как, например, силы
упругости или тяготения (см. § 88).
Таким образом, формулу E2) можно непосредственно использо-
использовать для решения второй задачи динамики, когда в задаче в число
данных и искомых величин входят: действующие силы, перемещение
точки и ее начальная и конечная скорости (т. е. величины F, s,
Vo, щ), причем силы должны быть постоянными или зависящими
только от положения (координат) точки.
Теорему в дифференциальной форме [формула E1)] можно, ко-
конечно, применять при любых действующих силах.
Задача 98. Груз массой яг=2 кг, брошенный со скоростью уо=2О м/с из пунк-
пункта А, находящегося на высоте й=5м (рис. 235), имеет в точке падения С скорость
^=16 м/с. Определить, чему равна работа дей-
действующей на груз при его движении силы сопро-
сопротивления воздуха R. ща
Решение. На груз при его движении дей-
действуют сила тяжести Р и сила сопротивления воз-
воздуха ~R. По теореме об изменении кинетической
энергии, считая груз материальной точкой, имеем
mvf/2—mvl/2 = А (Р) + A (R).
Из этого равенства, так как согласно форму-
ле D7) A(P)—Ph, находим рис. 235
A (R) = mvl/2 — mvl/2 — mgh = — 242 Дж.
Задача 99. При условиях задачи 96 (см.[§84) определить, какой путь пройдет
груз до остановки (см. рис, 223, где Мо — начальное положение груза, а Мх —
конечное). _
Решение. На груз, как и в задаче 96, действуют силы Р, N, F. Для опре-
определения тормозного пути sl=M0Af1, учитывая, что в условия данной задачи вхо-
входят slt оа, v1 и постоянная сила F, воспользуемся теоремой об изменении кинети-
кинетической энергии
tm>l/2-mvl/2 = XAMQMiy.
215
В рассматриваемом случае i>j=0 (vt — скорость груза в момент остановки).
Кроме того, А (Р)=0 и A (N)=0, так как силы ~Р я N перпендикулярны перемеще-
перемещению, A(F)~—Fs!, поскольку F=const В итоге получаем —mvt/2=—Fslt откуда
находим
По результатам задачи 96 время торможения растет пропорционалыго началь-
начальной скорости, а тормозной путь, как мы нашли,— пропорционально квадрату на-
начальной скорости. Применительно к наземному транспорту это показывает, как
возрастает опасность с увеличением скорости движения.
Задача 100. Груз весом Р подвешен на нити длиной / Нить вместе с грузом
отклоняют от вертикали на угол ф0 (рис. 236, а) и отпускают без начальной ско-
скорости. При движении на груз действует сила сопротивления R, которую прибли-
приближенно заменяем ее средним значением R * (R *=const) Найти скорость груза в тот
момент времени, когда нить образует с вертикалью угол ф.
Решение. Учитывая условия задачи, воспользуемся опять теоремой E2):
mv*!2-mvl!2= 2А(лит. (а)
На груз действуют сила тяжести Р, реакция нити N и" сила сопротивления,
представленная ее средним значением R*. Для силы Р по формуле D7) A (P)=Ph,
для силы N, так как N%=0, получим A(N)=0, наконец, для силы R *, так как
R *=const и R*x=—R *, по формуле D5) будет A (R *)=— R *s=—-Я */(ф0—ф)
(длина s дуги М0М равна произведению радиуса / на центральный угол ф0—ф).
Кроме того, по условиям задачи уо~О, a m=P'g В результате равенство (а) дает:
2gl (Фо-Ф) RVP-
При отсутствии сопротивления получаем отсюда известную формулу Галилея
v=Y~2gh, справедливую, очевидно, и для скорости свободно падающего груза
( 236 б
Yg
(рис, 23
В рассматриваемой задаче ft= /cosqp—кощ:0. Тогда, введя еще обозначение
R *lP=k * (k * — средняя сила сопротивления, приходящаяся на единицу веса
груза), получаем окончательно
ф0 — ф)]-
Задача Т01. Пружина клапана имеет в недеформированном состоянии длину
/0=6 см При полностью открытом клапане ее длина /=4 см, а высота подъема
клапана s=0,6 см (рис. 237). Жесткость пружины с= 150 Н/м, масса клапана т=
=0,4 кг. Пренебрегая действием силы тяжести и сил сопротивления, определить
скорость клапана в момент его закрытия.
Решение, Воспользуемся уравнением
(а)
216
По условиям задачи работу совершает только сила упругости пружины. Тог-
Тогда по формуле D8) будет
V.m.) = c(^-*?)/2-
В данном случае
^о=го—1=2 см, Х1=10—I—s=I,4 см.
Кроме того, flo=0. Подставляя все эти значения в уравнение (а), получим
окончательно
) =0,28 м/с.
(б)
Задача 102. Груз, лежащий на середине упругой балки (рис. 238), прогибает
ее на величину Хст (статистический прогиб балки) Пренебрегая весом балки, опре-
определить, чему будет равен ее максимальный прогиб Хт, если груз упадет на балку
с высоты Н.
Решение. Как и в предыдущей задаче, воспользуемся для решения урав-
уравнением E2). В данном случае начальная скорость груза v0 и конечная его скорость
Dj (в момент максимального прогиба балки) равны нулю и уравнение E2) прини-
принимает вид
=0. (а)
Но при равновесии груза на балке сила тяжести уравновешивается силой упру-
упругости, следовательно, Р=сХСТ и предыдущее равенство можно представить в виде
Работу здесь совершают сила тяжести Р на перемещении М0М1 и сила упру-
упругости балки F на перемещении M'Mj. При этом А (Р)=Р(Н-\-Хт), Л(Г) =
=—0,5сЯщ, так как для балки Я0=0, к1^Хт Подставляя эти величины в ра-
равенство (а), получим
Решая это квадратное уравнение и учитывая, что по условиям задачи долж-
должно быть кт>0, находим
Интересно отметить, что при Н~0 получается Хт=2Хст. Следовательно, если
груз положить на середину горизонтальной балки, то ее максимальный прогиб
при опускании груза будет равен удвоенному статическому. В дальнейшем груз
качнет вместе с балкой совершать колебания около равновесного положения.
Под влиянием сопротивлений эти колебания затухнут и система уравновесится
в положении, при котором прогиб балки равен Хсг.
Рис. 238
Рис 23Э
Задача 103. Определить, как^ю наименьшую направленную вертикально
БЕерх начальную скорость v0 надо сообщить телу, чтобы оно поднялось с поверх-
поверхности Земли на заданную высоту Н (рис 239) Силу притяжения считать изменяю-
изменяющейся обратно пропорционально квадрату расстояния от центра Земли. Сопротив-
Сопротивлением воздуха пренебречь.
217
Решение. Рассматривая тело как материальную точку с массой т, вос-
воспользуемся уравнением
Работу здесь совершает сила тяготения F. Тогда по формуле E0), учитывая,
что в данном случае ro=R, ^—R-'t-H, где R — радиус Земли, получим
Так как в наивысшей точке %=(), то при найденном значении работы уравне-
уравнение (а) дает
Рассмотрим частные случай:
а) пусть Н очень мало] по сравнению с R. Тогда H/R — величина, близкая
к нулю. Деля числитель и знаменатель на R, получим
Таким образом, при малых Н приходим к формуле Галилея;
б) найдем, при какой начальной скорости брошенное тело уйдет в бесконеч-
бесконечность. Деля числитель и знаменатель на Л, получим
2gR
+ RIH'
При #=о°, считая средний радиус Зели R=6370 км, находим
tl 1,2 км/с.
(б)
Следовательно, тело, брошенное с поверхности Земли со скоростью 11,2 км/с,
навсегда покинет поле земного тяготения. Скорость, определяемая равенством
(б), называется второй космической скоростью.
Можно доказать (см. гл. XX), что при начальных скоростях, лежащих при-
приблизительно в пределах 8 км/с<:уо<: 11 км/с, тело, брошенное по направлению ка-
касательной к земной поверхности, не упадет обратно на Землю, а превратится в
земного спутника. При начальных скоростях,
меньших 8 км/с, или при негоризонтальном
бросании тело, описав эллиптическую тра-
траекторию, упадет обратно на Землю. Все эти
результаты относятся к движению в безвоз-
безвоздушном пространстве.
Задача 104. Определить, пренебрегая тре-
трением, какую постоянную силу Q надо при-
приложить к поршню 1 (площадь поршня S,
начальная скорость vo=0), чтобы сжать газ,
находящийся в цилиндре 2, до давления plt
если начальное давление равно р0 (рис. 240).
Считать, что при сжатии давление газа р
растет обратно пропорционально его объему
V (сжатие происходит медленно, процесс изо-
изотермический).
Решение. На поршень действуют сила Q и сила давления газа Р. Так как
у поршня ио=0 и У1=О, то по теореме об изменении кинетической энергии
Направим ось Ох в сторону движения поршня, считая, что при х—0 давление
р=Ро- Обозначим через 10 начальное расстояние поршня от дна цилиндра, а через
хх — перемещение поршня до положения, при котором vt=Q и давление р=р1. Так
218
Рис. 240
как численно P=pS и Px=—P=—pS, то по формуле D4')
(б)
Зависимость р от х найдем из условия, что давление обратно пропорциональ-
пропорционально объему, т. е. p/po=Fo/V, где начальный объем Vo~Slo, а объем в произвольном
положении V=S (/„—я). Тогда для р, а талсже для координаты хх, при которой р=
=Pi, получим выражения:
_ Р<Л „ „ _ / {| Ра
Учтя эти зависимости, найдем из равенства (б)
'о Л 'о *i ко
о
Далее, так как Q=const, получим с учетом соотношений (в)
При найденных значениях работ равеиствв (а>) дает сжончательно
5 5„
Pl — Ро Ро
Если pi>Po. TOv полагая приближенно рх—po~Pi, получим
Q=p0Sln(p1/p0).
Сила Q с увеличением p.j растет па логарифмическому закону, т е. довольно
медленно. Например, при рь=20р0 Q«*3p0S, а при р1=50)оф Qw3,9po5.
Глава XVIИ
НЕСВОБОДНОЕ И ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЯ ТОЧКИ
§ 90. НЕСВОБОДНОЕ ДВИЖЕНИЕ ТОЧКИ
Движение матер-иалвнай теичют будет теевебодвым, кшгда в еилу
наложенных связей она вынуждена двигаться ио» зеда-ннеш» щшерх-
ности или кривой. Огранитшет р-аеемотрением второго» случая.
Движение тачки но заданной неподвижной
кривой. Рассмотрим материальную, точжу, движущуюся ао
заданной гладкой неподвижной. к.р,ивой. аод действием активных сил
F|, F|, . . ., F% и реакции связи N (рис. 241). Выберем на кр>шой
начало отсчета О' и будем ©првделять положение точки М криво-
криволинейной координатойs=O'M (см. § 37). Проведем из точки М оси
Mxnb (см. §-42), т. е. касательную Мт> (*в еторену иол©жител.ьного
отсчета координаты 5), главную нормаль Мп (в сторону вогнутости
кривой) и бинормаль Mb и воспользуемся уравнениями A1) из § 77.
Так как кривая гладкая, то реакция iV перпендикулярна кривой,
2-19
т. е. лежит в плоскости МЪп, потому jVt=O. В результате получим
следующие дифференциальные уравнения движения точки по
заданной кривой:
я* "Ж = 2 Пг или т -g - 2 ^V, E3)
ь. E4)
Уравнение E3) не содержит неизвестной реакции N и позволяет
непосредственно определить закон движения точки вдоль кривой,
т. е. зависимость s~f(t). Этим уравнением можно пользоваться и
в случае, когда кривая не является гладкой, присоединив к силам
F% силу трения Frv. Но так как FTV=fN, то в этом случае в уравне-
уравнение E3) через силу трения войдет еще и реакция N.
Уравнения E4) служат для определения реакции связи N. Из
уравнений видно, что при криволинейном движении динамическая
реакция в отличие от статической кроме действующих активных
сил и вида связи зависит еще от скорости. Эту скорость (если она
не задана) можно найти или проинтегрировав уравнение E3), или
же, что обычно проще, с помощью теоремы об изменении кинетиче-
кинетической энергии точки; в уравнение E2'), выражающее эту теоре-
теорему для случая связей без трения, реакция N тоже не входит.
Рис. 241
Задача 105. Тяжелому кольцу М, нанизанному на горизонтально расположен-
расположенную гладкую проволочную окружность, сообщают начальную скорость v0, направ-
направленную по касательной к окружности. При движении на кольцо действует сила со-
сопротивления F=kmy~v, где т — масса кольца; v — его скорость; k — постоян-
постоянный коэффициент. Найти, через сколько секунд кольцо остановится.
Решение, Помещаем начало отсчета О' в начальном положении кольца
(рис. 242). Изображаем кольцо в произвольном положении и проводим оси Мт,
Мп и Mb. На кольцо действуют сила тяжести Р, реакция N и сила сопротивления
F. Составим уравнение E3), учитывая, что PX=./VT=O, а Fi=—F=—km У о; урав-
уравнение примет вид
т-тг=—ктУ v.
Отсюда, разделяя переменные и учитывая, что при /=0 v=v0, получим
v t
\v7^-kUt или
220
В момент t=tlt когда груз останавливается, t>=0. Следовательно, полагая
в полученном уравнении о=0, найдем
Время движения до остановки при данном законе сопротивления является
конечным (см. задачу 93 в §80).
Задача 106. В предыдущей задаче найти, какой путь st пройдет кольцо вдоль
окружности до остановки, считая, что на него действует не сила сопротивления,
зависящая от скорости, а сила трения F=fN. Дано: радиус кольца /?=0,3 м, на-
начальная скорость i>0=2 м/с, коэффициент трения кольца об окружность /=0,3.
Решение. Выбираем начало отсчета О' и проводим оси Мх, Мп и Mb так
же, как_и в_предыдущей задаче (рис. 242). Действующими на кольцо силами бу-
будут: Р, N и F, где F — теперь сила трения. Составляя уравнения E3) и E4), полу-
получим:
du _ ти2 ,. ,, _ п
md7=— F< -r- = N>" Л'ь —Я = 0.
По модулю F — fN = f V N\ -f- N\ (было бы ошибкой вычислить силу трения
как арифметическую сумму сил fNf, и fNn). Замечая, что Nt,—P=mg, находим
F = fm Yg2 + vi!Ri.
Как видим, сила трения зависит через реакцию N от скорости кольца. Чтобы
сразу найти зависимость s от и, заметим, что dv/dt=dv/ds-ds/dt=v-du/ds. Тогда,
после сокращения на т, уравнение движения кольца примет вид
Разделяя переменные и беря от обеих частей равенства соответствующие
определенные интегралы, получим
V S
d(f2)
r> d (t>;
0 0
откуда
—2fs/R = In (ч2 + VifW+v1) - In U +
и окончательно
В момент остановки У=0. Поэтому искомый путь, если считать приближенно
O м/с2, будет
i^ 0,5 In 3» 0,55 м.
Задача 107. Груз весом Р, подвешенный на нити длиной I, отклоняют от вер-
вертикали на угол а в положение Мд и отпускают без начальной скорости. Опреде-
Определить натяжение нити в момент, когда груз дойдет до наинизшего положения Мг.
Решение. Изображаем груз в том положении, для которого надо найти
натяжение нити, т. е. в положении Мх (рис. 243). На груз действуют сила тяжести
~Р и реакция нити Т. Проводим нормаль Мхп в сторону вогнутости траектории
и составляем уравнение E4), учитывая, что в нашем случае р=/. Получим
mv\H = T—P или Т = Р + то\Ц,
где vt — скорость груза в положении Мг. Для определения vx воспользуемся урав-
уравнением E2')
mv\l2—mvll2= A\MaMi). (a)
221
Работу на участке М0М± совершает только сила Я Поэтому Ла=РА
ф )
Так как vo=0, то, подставляя найденное значение работы в равенство (а), по-
получим mv\=2Pl(\—cosa) и окончательно найдем
Т=Р C—2 cos a).
В частном случае, если угол начального отклонения а=90°, натяжение нити
при прохождении через вертикаль будет равно ЗР, т. е. утроенному весу груза.
Полученное решение показывает, что динамические реакции действительно
могут значительно отличаться от статических,
п
Рис. 244
Задача 108. Желоб состоит из двух дуг АВ и BD окружностей радиуса R, рас-
расположенных в вертикальной плоскости так, что касательная BE в точке сопряже-
сопряжения горизонтальна (рис. 244). Пренебрегая трением, определить, на какой высо-
высоте h над линией BE надо положить в желоб тяжелый шарик, чтобы он соскочил
с желоба в точке М±, лежащей на таком же расстоянии h ниже линии BE.
Решение. Шарик оторвется от желоба в той точке Mf, где его давление на
желоб (или реакция N желоба) обратится в нуль. Следовательно, задача сво-
сводится к определению N, Изображаем шарик в точке М±. На него действуют сила
тяжести Р и реакция желоба ~N. Составляя уравнение E4) в проекции на внутрен-
внутреннюю нормаль МгС, найдем, что
Так как в точке отрыва N=0, то, учитывая,что R cos(f=KC=R—h, получим
для определения h уравнение
mvl=P(R—h), (а)
Величину mi>i найдем из теоремы об изменении кинетической энергии. Так
как Уо==О, то уравнение E2') дает
Работу здесь совершает только сила Р, причем A(P)=2Ph. Следовательно,
mui=4P/i, Подставляя это значение ти\ в уравнение (а), получим ih=R—Л, откуда
h=0,2R.
Задача 109. Груз_М подвешен на нити длиной I (рис. 245). Какую наименьшую
начальную скорость v0, перпендикулярную нити, надо сообщить грузу, чтобы он
описал полную окружность?
Решение. Груз опишет полную окружность, если на всем пути натяже-
натяжение нити нигде (кроме, может быть, точки М') не обратится в нуль, т. е. нить ни-
нигде не будет смята. Если же в какой-нибудь точке Mlt где v^O, натяжение нити
обратится в нуль, то нить перестанет удерживать груз и он будет продолжать дви-
движение как свободная точка (по параболе),
222
Для решения задачи найдем натяжение Т нити в произвольном положении Mj
определяемом углом <р, а затем потребуем, чтобы при любом угле ф=?И80° было
7>0.
В положении М на груз действуют сила Р и натяжение нити Т, Составив уравг
нение E4) в проекции на внутреннюю нормаль Мп, получим
mv2/l=T— Pcoscp, (a)
где v — скорость груза в положении М. Для определения v применяем теорему об
изменении кинетической энергии:
mv*/2-mvV2=Aa.
В данном случае Аа=—Ph=—Pl(\—cosqp) и, следователь-
следовательно,
t>2P/(lcoscp) П
Подставив это значение mxr в уравнение (а) и вычислив Т,
получим
T=P(fo/g/—2+3costp).
Наименьшее значение Т будет иметь при ф= 180°:
Чтобы Т нигде (кроме, может быть, точки М') не обрати-
лось в нуль, необходимо, чтобы было Гт;п>0. Отсюда
лГ-Е—, Рис- 245
Следовательно, наименьшая начальная скорость, при которой груз будет опи-
описывать полную окружность, определяется равенством
Допустим, что вместо нити груз будет подвешен на жестком легком (невесомом)
стержне длины /. В этом случай (так кан. отиржеиь.в^ ошлидне от нити может рабо-
работать и на растяжение, и, на сжатие), пр^опишет полну,ю»о1фу,жность, если при дви-
движении его скорость нигде (кроме, может быть, точки. М!) не' обратится в нуль.
Применяя уравнение* E2') для перемещения МйМ' и считая в точке М! скорость
о=0, получим — OTt?ft/2?=—mg-2'l, Ожсюда следует,;' что- в данном случае
§ 91. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ ТОЧКИ
Второй закон динамики и полученные ив него выше уравнения
и теоремы верны только для так называемого абсолютного движения
точки,- т. е. движения по отношению к инердиальной («неподвиж-
(«неподвижной») системе отсчета.
Обратимся теперь к изучению относительного движения точки,
т. е. движения по отношению к неинерциальным, произвольно дви-
движущимся по отношению к инерциальной системам отсчета.
Рассмотрим материальную точку М, движущуюся под действи-
действием приложенных к ней сил Flt T2, ..., Р„,, являющихся результатом
взаимодействия тачки с другими материальными тедами. Будем
научать д&ижеаие этой, тючки ш> ©чжошеиша к осям; Oxyg ($з>ж. 246),
ко-торые в свсш> очередь,, катш/ь-w давеетишф warn ©браэшм движутся
ояеноедаельш* инердиаяьнои системы отсчета (шетодеижгаых екей)
223
Найдем зависимость между относительным ускорением точки
аот и действующими на нее силами. Для абсолютного движения
основной закон динамики имеет вид
maa6 = 2Fft. E5)
Но из кинематики известно (см. § 66), что аа6=аот-^-аП(.р+ако^,
где а01, апср, акор — относительное, переносное и кориолисово ус-
ускорения точки. Подставляя это значение aag в равенство E5) и счи-
считая в дальнейшем аот=а, так как эта величина представляет собой
ускорение изучаемого нами относительного движения, получим
(— maMV)
Введем обозначения:
Величины F"ep и F"op имеют размерность силы. Назовем их соот-
соответственно переносной и кориолисовой силами инерции. Тогда пре-
предыдущее уравнение примет вид
та — 2 ^* + ^«ер + ^кор • E6)
Уравнение E6) выражает основной закон динамики для относи-
относительного движения точки. Сравнивая равенства E5) и E6), прихо-
приходим к выводу: все уравнения и теоремы механики для относительного
движения точки составляются так же, как уравнения абсолютного
движения, если при этом к действующим на точку силам взаимо-
взаимодействия с другими телами прибавить переносную и кориолисову
силы инерции. Прибавление сил F"ep и F%op учитывает влияние на
относительное движение точки перемещения подвижных осей.
««г
'2, 'X
Рис. 246
Ряс. 247
Чтобы уяснить характер этого влияния, рассмотрим, HanpHMeps точку В,
неподвижную в инерциальной системе отсчета Огхгухгл (рис. 247), и допустим, что
подвижные_оси Охуг перемещаются относительно осей Оххху^ поступательно с ус-
ускорением а0. Тогда по отношению к осям Охуг точка В будет иметь ускорение ад=
= —а0 и причина появления этого ускорения будет кинематическая — движение
подвижной системы отсчета,
224
Таким образом, если в инерциальной системе отсчета материальная точка,
как это видно из_уравнения E5), может получить ускорение только за счет дей-
действия на нее сил Fj., то в неинерииальной системе отсчета точка получает ускоре-
ускорение еще и в результате ускоренного движения самой системы отсчета.
В общем случае, если из равенства E5; определить aa(,— ?,F\i'm и учесть зави-
зависимость ааб=аот+а'пер+«'кср> то, полагая, как это сделано выше, аот=а, получим
5"=^- + (-Пер) + (-Йко1,)- E6')
Это другое выражение закона относительного движения точки, которым мож-
можно непосредственно пользоваться при решении задач. В его правой части первое
слагаемое выражает ускорение, которое точке сообщают действующие силы Fи,
а два других слагаемых являются ускорениями, которые точка получает вследствие
движения подвижной системы отсчета.
Из уравнения E6') видно также, что данные силы Гь сообщают точке ускоре-
ускорение, равное S/^/m в любой системе отсчета, но в инерциальной системе отсчета
это будет все ускорение точки, а в неинерциальной — только его часть.
Математически уравнения E6') и E6) эквиваленты. Но для приложений урав-
уравнение E6) более удобно, так как по виду совпадает с уравнением E5), что позволяет
использовать при изучении относительного движения все результаты, полученные
ранее для движения в инерциальной системе отсчета (например, общие теоремы).
Рассмотрим некоторые частные случаи.'
1. Если подвижные оси движутся поступательно, то /^=0,
так как в этом случае со=0 (со — угловая скорость вращения под-
подвижных осей Oxyz), и закон относительного движения принимает
вид
2. Если подвижные оси перемещаются поступательно, равномер-
равномерно и прямолинейно, то F"ep=F"op=0 и закон относительного движе-
движения будет иметь такой же вид, как и закон движения по отношению
к неподвижным осям. Следовательно, такая система отсчета также
будет инерциальной.
Из полученного результата вытекает, что никаким механиче-
механическим экспериментом нельзя обнаружить, находится ли данная си-
система отсчета в покое или совершает поступательное, равномерное
и прямолинейное движения. В этом состоит открытый еще Галилеем
принцип относительности классической механики.
3. Если точка по отношению к подвижным осям находится в по-
покое, то для нее а=0 и иот=у=0, a следовательно, и F"op==Q, так как
кориолисово ускорение акор=2(шХиот). Тогда равенство E6) при-
принимает вид
2^Н-^ер = 0. E7)
Уравнение E7) представляет собой уравнение относительного
равновесия (покоя) точки. Из него следует, что уравнения относи-
относительного равновесия составляются так же, как уравнения равнове-
равновесия в неподвижных осях, если при этом к действующим на точку
силам взаимодействия с другими телами добавить переносную силу
инерции.
8 № 2173 225
4. При составлении уравнений относительного движения в слу-
случаях, когда Р%орф0, надо иметь в виду, что
F "op = — maK0V = — 2т (со х йог).
Следовательно, сила FK0V перпендикулярна vo^—v, а значит, и каса-
касательной к относительной траектории точки. Поэтому:
а) проекция кориолисовой силы инерции на касательную Мх
к относительной траектории точки всегда равна нулю(Р"орт=0), и
первое из уравнений A1) в относительном движении будет иметь вид
m-^j = 2FfeT + /™epT; E8)
б) работа кориолисовой силы инерции на любом относительном
перемещении равна нулю [см. § 87, формула D4)], и теорема об из-
изменении кинетической энергии точки в относительном движении
будет иметь вид (vt и v0 — значения относительных скоростей,
А — работа на относительном перемещении)
moi/2—mvl/2 =
E9)
Последние слагаемые в правых частях равенств E8) и E9) учи-
учитывают влияние движения подвижных осей на изменение величины v.
Во все остальные уравнения относительного движения будут в
общем случае входить и переносная, и кориолисова силы инерции.
Задача 110. Пренебрегая массой всех вращающихся частей центробежного ре-
регулятора (рис. 248) по сравнению с массой шаров В и D, найти угол а, определяю-
определяющий положение относительного равновесия стержня АВ, если регулятор вращает-
вращается с постоянной угловой скоростью о, а длина АВ=1.
Рис. 248
Рис. 249
Решение. Для определения положения относительного равновесия (по
отношению к вращающимся вместе с регулятором осям) прибавляем, согласно ра-
равенству E7), к действующим на шар В силе тяжести Р и реакции N переносную
силу инерции /^ср. Так как w=const, то anep=anep=BC-GJ=to2sina. Тогда
/"пер= mfc>2 sin a. Направлена сила F"ep противоположно ускорению Опер, т е.
от оси вращения (вдоль линии СВ); эту силу называют еще центробежной силой
инерции. Составляя уравнение равновесия в проекции на ось Вх, перпендикуляр-
перпендикулярную А В, найдем, что
— Psina + fSep cosa = 0.
226
Отсюда, заменяя силу Fnep ее значением и сокращая на sin а (решение а=0
не рассматриваем), получим —g+to2 cosa=0. Тогда
cos a=gi lot2.
Так как cosa<:l,TO равновесие при <хфО возможно только, когда aJ>g//.
Задача 111. Полуокружность BCD радиуса R (рис. 249) вращается вокруг
вертикальной оси с постоянной угловой скоростью ш. По ней из точки В, чуть сме-
смещенной от оси вращения, начинает скользить без трения кольцо М. Найти отно-
относительную скорость кольца vt в точке С, если его начальная скорость f0=0-
Решение. Для определения скорости иг воспользуемся теоремой об изме-
изменении кинетической энергии. Чтобы составить уравнение E9), выражающее эту
теорему, вычислим работу сил Р и F"ep. где Fnep='ww2x (работа реакции N равна
нулю). Считая приближенно жв=0, находим
_ (О R
ABc(F пер) = § fnePdx = :m(u2$xdx = mGl2#2/2.
(S) О
Кроме того, A(fiC)(P)=PR=mgR. Подставляя эти значения в уравнение
E9) и учитывая, что lo=0, получим
mvll2=mR(g+(i>2R/2),
Отсюда находим
Задачу можно также решить, используя уравнение E8).
Пример интегрирования уравнений относительного движения
дан в § 93.
§ 92. ВЛИЯНИЕ ВРАЩЕНИЯ ЗЕМЛИ НА РАВНОВЕСИЕ
И ДВИЖЕНИЕ ТЕЛ
При решении большинства технических задач систему отсчета,
связанную с Землей, считают инерциальной (неподвижной). Тем
самым не учитывается суточное вращение Земли по отношению к
звездам (о влиянии движения Земли по
ее орбите вокруг Солнца см. § 99). Это
вращение (один оборот в сутки) проис-
ходит с угловой скоростью
со = 2л/B4-60 60) «0,000073 с-1.
Рассмотрим, как сказывается такое
довольно медленное вращение на равно-
равновесии и движении тел вблизи земной
поверхности.
1. Сила тяжести. С суточным вра-
вращением Земли связано понятие о силе тя-
тяжести, являющейся частью силы тяго- Рис- 250
тения (притяжения к Земле). На мате-
материальную точку, находящуюся вблизи
земной поверхности, действует сила тяготения Fr, разлагающаяся
на силы Fn и Р (рис. 250). Сила Fn, направленная к земной оси,
сообщает точке то нормальное ускорение ап> которое точка должна
8* 227
иметь, участвуя вместе с Землей в ее суточном вращении; если мас-
масса точки т, а ее расстояние от земной оси г, то Fn=man и численно
Fn~ni(tJr.
Другая составляющая силы тяготения — сила Р и является ве-
величиной, называемой силой тяжести. Таким образом,
т. е. сила тяжести равна разности между всей силой тяготения и
той ее составляющей, которая обеспечивает участие точки (тела)
в суточном вращении Земли.
Направление силы Р определяет направление вертикали в дан-
данном пункте земной поверхности (таким будет направление нити, на
которой подвешен какой-нибудь груз; натяжение нити при этом рав-
равно Р), а плоскость, перпендикулярная силе Р~, является горизон-
горизонтальной плоскостью. Так как Fn=ma2r, где со2 очень мало, то сила
Р и численно, и по направлению мало отличается от силы тяготе-
тяготения Fr*. Модуль силы Р называют весом тела.
2. Относительный покой и относительное
движение вблизи земной поверхности. Если
в числе действующих сил выделить силу тяготения FT, то уравнени-
уравнением относительного равновесия (покоя) точки на вращающейся Зем-
Земле согласно E7) будет
Но в данном случае апер=а„ и /?Sep=—maniiV=—man=—Fn. Тогда
^т+^пер=^т—Рп=Р и уравнение примет вид I,Fk+P=0, г. е. та-
такой же, какой уравнение равновесия имеет, когда система отсчета,
связанная с Землей, считается неподвижной.
Следовательно, при составлении уравнений равновесия тел по
отношению к Земле дополнительных поправок на вращение Земли
вводить не надо (это вращение учитывается наличием в уравнениях
силы Р).
Теперь обратимся к уравнению относительного движения E6),
в котором тоже выделим силу тяготения. Тогда получим
Но, как и в предыдущем случае, FT+F^ep=?T—Fn—P и уравнение
примет вид
* Сила Fn имеет наибольшее значение на экваторе, где r=R, и составляет
там около 0,34% от силы тяготения. Наибольшая разность показанных на рис. 250
углов Я (геоцентрическая широта) и <р (астрономическая широта) имеет место при
Х=45° и равна приблизительно 0,1°.
228
Отсюда следует, что когда, при составлении у равнений двююения,
оси, связанные с Землей, считают неподвижными, то пренебрегают
учетом только кориолисовой силы инерции, численно равной
^"ор = 2mG>»sina,
где a — угол между относительной скоростью v точки и земной
осью.
Так как угловая скорость Земли о> очень мала, то если скорость
v не очень велика, величиной F"op по сравнению с силой тяжести
можно пренебречь. Например, при и=700 м'с (скорость обычного
артиллерийского снаряда) и а=90° значение F"Op составляет только
около 1% от силы Р. Поэтому в большинстве инженерных расчетов
при изучении движения тел систему отсчета, связанную с Землей,
можно действительно считать инер-
циальной (неподвижной).
Учет вращения Земли приобре-
приобретает практическое значение или
при очень больших скоростях (ско-
(скорости полета баллистических ра-
ракет), или для движений, длящихся
очень долго (течение рек, воздуш-
воздушные и морские течения).
3*. Примеры. Рассмотрим,
в чем качественно сказывается вли-
влияние вращения Земли на движе-
движение тел.
Движение по земной поверхно-
поверхности. При движении точки по ме-
меридиану в северном полушарии с севера на юг кориолисово ускоре-
ускорение акор направлено на восток (см. § 67, задача 80), а F^ov — на за-
запад. При движении с юга на север F"op будет направлена на восток.
В обоих случаях, как видим, точка вследствие вращения Земли
отклоняется вправо от направления ее движения.
Если точка движется по параллели на восток, то ускорение акор
будет направлено вдоль радиуса МС параллели (рис. 251), а сила
^"ор — в противоположную сторону. Вертикальная составляющая
этой силы, направленная вдоль ОМ, вызовет незначительное измене-
изменение веса тела, а горизонтальная составляющая, направленная к
югу, вызовет отклонение точки тоже вправо от направления ее дви-
движения. Аналогичный результат получится при движении по парал-
параллели на запад.
Отсюда заключаем, что в северном полушарии тело, движущееся
вдоль земной поверхности по любому направлению, будет вследствие
вращения Земли отклоняться вправо от направления движения.
В южном полушарии отклонение будет происходить влево.
Этим обстоятельством объясняется то, что реки, текущие в се-
северном полушарии, подмывают правый берег (закон Бэра). В этом
же причина отклонений ветров постоянного направления (пассаты)
229
Рис. 251
и морских течений, а также воздушных масс в циклоне и антицикло-
антициклоне, где вместо движения к центру циклона (область пониженного
давления) или of центра антициклона (область повышенного давле-
давления) возникает циркуляционное движение воздуха вокруг центра
циклона (антициклона).
Вертикальное падение. Чтобы определить направление корио-
лисовой силы инерции FJJop в случае свободно падающей точки, надо
знать направление относительной скорости v точки. Так как сила
F?op очень мала по сравнению с силой тяжести, то в первом прибли-
приближении можно считать вектор v, направленным по вертикали, т. е.
вдоль линии МО (рис. 251). Тогда вектор акор будет, как легко ви-
видеть, направлен на запад, а сила F"ор — на восток (т. е. так, как на
рис. 251 направлен вектор v). Следовательно, в первом приближении
свободно падающая точка (тело) отклоняется вследствие вращения
Земли от вертикали к востоку. Тело, брошенное вертикально вверх,
будет, очевидно, при подъеме отклоняться к западу. Величины этих
отклонений очень малы и заметны только при достаточно большой
высоте падения или подъема, что видно из расчетов, приведенных
в § 93.
§ 93*. ОТКЛОНЕНИЕ ПАДАЮЩЕЙ ТОЧКИ ОТ ВЕРТИКАЛИ
ВСЛЕДСТВИЕ ВРАЩЕНИЯ ЗЕМЛИ
Рассмотрим материальную точку, падающую с не очень большой (по сравнению
с радиусом Земли) высоты Н на поверхность Земли. Силу тяжести Р при падении
будем считать постоянной; сопротивлением воздуха пренебрегаем. Направим ось
Оу вертикально вверх, а ось Ох — на восток (рис. 252, а)*. Чтобы учесть вращение
Земли, к точке кроме силы Р надо приложить силу .Ркор. направленную, как было
установлено в первом приближе-
приближении, на восток. Тогда дифферен-
дифференциальные уравнения относитель-
относительного движения точки примут
вид:
rnx — Flop, ту = — Р = — mg,
F0)
а начальные условия будут: при
Интегрируя второе из урав-
уравнений F0) и определяя постоян-
постоянные интегрирования по началь-
начальным условиям, найдем:
Рис. 252 •
При вычислении модуля ^"ор пренебрежем, как мы уже делали, определяя
направление F^op, составляющей скорости vx по сравнению с vy (так как сила F"Op
много меньше Р) и, отыскивая приближенное решение, будем считать v=\Vy\=gt.
При этом скорость v будет направлена по вертикали вниз (по линии МО на рис.
251) и образует с осью вращения Земли угол а=90°—Я,, где к — широта. Следова-
* Масштаб изображения в направлении оси Ох на рис. 252 сильно увеличен.
230
тельно, Fkop= 2m to g/cos Я и первое из уравнений F0) примет вид
X=2((x>g COS Я) t.
Так как величина, стоящая в скобках, постоянная, то, интегрируя это урав-
уравнение, получим:
Подстановка начальных данных дает С1=С2~0. Таким образом, уравнения,
приближенно определяющие закон относительного движения точки, будут:
х= (cog cos К) fi/3, у= H—gt2/2.
Движение оказывается непрямолинейным и падающая точка действительно
отклоняется к востоку. Исключив из предыдущих равенств время t, получим в пер-
первом приближении уравнение траектории точки (полукубическая парабола):
Полагая здесь г/=0, найдем восточное отклонение е, которое точка будет иметь
в момент падения на Землю*:
F1)
Как видим, отклонение е пропорционально угловой скорости Земли со и явля-
является ¦величиной малой. Например, на широте Москвы (Я=55°47', g=9,816 м/с2)
при падении с высоты Н— 100 м величина е= 1,2 см.
Ряд опытов, проведенных во многих пунктах Земли разными исследователя-
исследователями, подтверждает правильность результата, который дает формула F1).
Рассмотрим движение точки, брошенной из пункта О вертикально вверх с на-
начальной скоростью v0. Сила ^кор при подъеме будет в первом приближении направ-
направлена на запад. Тогда, если направить ось Ох также на запад (рис. 252, б), то диффе-
дифференциальные уравнения движения сохраняют вид F0), а начальные условия будут:
при t=Q х=0, (/=0, vx=0, vy=v0.
При этих условиях второе из уравнений F0) дает:
vu=va-gt, y=v0t-gt2/2. F2)
Тогда, считая, как и в предыдущей задаче, приближенно у=уу, получим Fkop=
=2m(!>(vQ—gt)cosk, и первое из уравнений F0) примет вид
i"=2(wcos)v) (vo-gt).
Это уравнение будет описывать движение точки и при ее падении вниз, так как
происходящее при этом изменение направления вектора F"Op учтется изменением
знака множителя (v0—gt)=vy.
Интегрируя полученное уравнение при начальных условиях задачи, найдем
окончательно
х= со cos л (v0t2—gi3l3). F3)
Полагая в равенстве F2) г/=0, найдем время движения точки до момента ее па-
падения на Землю: t1=2vjg. Учитывая одновременно, что vo='tyr2gH1, гдеЯх — вы-
высота подъема, определим из уравнения F3) западное отклонение точки в момент
* При определении модуля и направления силы F"op мы в первом прибли-
приближении пренебрегали составляющей скорости vx, направленной на восток. Вслед-
Вследствие наличия этой скорости сила F"op будет иметь дополнительную составляю-
составляющую, вызывающую отклонение точки к югу. Так как х== (cog cos k)ts/3, то скорость
vx=x пропорциональна со и отклонение к югу пропорционально со2, т. е. является
малой величиной второго порядка.
231
падения:
OB = ех = со cos Я ¦— или ex = —cacosXl/ * F4)
Из формул F1) и F4) видно, что при Н!=Н отклонение е1=4е.
Если движение точки может продолжаться дальше (точка бросания О не на
поверхности Земли), то траектория точки, начиная от пункта В, будет все время
отклоняться на восток.
Все эти расчеты относятся, как было указано, к движению в безвоздушном про-
пространстве и учитывают влияние вращения Земли только в первом приближении,
Глава XIX
ПРЯМОЛИНЕЙНЫЕ КОЛЕБАНИЯ ТОЧКИ
§ 94. СВОБОДНЫЕ КОЛЕБАНИЯ БЕЗ УЧЕТА СИЛ
СОПРОТИВЛЕНИЯ
Учение о колебаниях составляет основу ряда областей физики
й техники. Хотя колебания, рассматриваемые в различных обла-
областях, например в механике, радиотехнике, акустике и др., отлича-
.. ются друг от друга по своей физической при-
-.— ? < г ? роде, основные законы этих колебаний во всех
j ах | * случаях остаются одними и теми же. Поэ-
Поэтому изучение механических колебаний явля-
Рис. 253 ется важньш не только по той причине, что
такие колебания очень часто имеют место
в технике, но и вследствие того, что результаты, полученные при
изучении механических колебаний, могут быть использованы для
изучения и уяснения колебательных явлений в других областях.
Начнем с изучения свободных колебаний точки без учета сил
сопротивления. Рассмотрим точку М, движущуюся прямолинейно
под действием одной только восстанавливающей силы F, направлен-
направленной к неподвижному центру О и пропорциональной расстоянию от
этого центра. Проекция силы F на ось Ох (рис. 253) будет
Fs=-cx. F5)
Сила F, как видим, стремится вернуть точку в равновесное по-
положение О, где F=0; отсюда и наименование «восстанавливающая»
сила. Примером такой силы является сила упругости (см. § 88,
рис. 232) или сила притяжения, рассмотренная в задаче 92 (см. § 80).
Найдем закон движения точки М. Составляя дифференциальное
уравнение движения в проекции на ось х (уравнение 12 из § 79), по-
получим:
mx = Fx или тх = — сх.
Деля обе части равенства на т и вводя обозначение
с1т=№, F6)
232
приведем уравнение к виду
х + ^х=^О. F7)
Уравнение F7) представляет собой дифференциальное уравнение
свободных колебаний при отсутствии сопротивления. Решение это-
этого линейного однородного дифференциального уравнения второго
порядка ищут в виде x=ent. Полагая в уравнении F7) х=е"*, полу-
получим для определения п характеристическое уравнение п2+&2=0.
Поскольку корни этого уравнения являются чисто мнимыми (fti,2=
= ±ik), то, как известно из теории дифференциальных уравнений,
общее решение уравнения F7) имеет вид
x=d sin kt+C2 cos kt, F8)
где Сх и С2 — постоянные интегрирования. Если вместо постоянных
Ct и С2 ввести постоянные Л и а, такие, что С^Лсоэа, С3=Л5та,
то получим х—А (sin kt cos a+coskt sin а) или
x=As\n{kt+a). F9)
Это другой вид решения уравнения F7), в котором постоянными
интегрирования являются Л и а. Им удобнее пользоваться для об-
общих исследований.
Скорость точки в рассматриваемом движении
vx=x=Akcos(kt+a). G0)
Колебания, совершаемые точкой по закону F9), называются
гармоническими колебаниями. График их при а=я/2 показан на
рис. 127, в (см. §45).
Всем характеристикам этого движения можно дать наглядную
кинематическую интерпретацию. Рассмотрим точку В, движущуюся
равномерно по окружности радиуса Л из
положения Во, определяемого углом DOB0=
=а (рис. 254). Пусть постоянная угловая
скорость вращения радиуса ОВ равна k.
Тогда в произвольный момент времени t
угол q>=^DOB=a+kt и легко видеть, что
проекция М точки В на диаметр, перпен-
перпендикулярный DE, движется по закону х=
—Asm(kt-{-a), где х=0М, т. е. совершает
гармонические колебания.
Величина Л, равная наибольшему откло-
отклонению точки М от центра колебаний О, на-
называется амплитудой колебаний. Величина
у
p—kt+a называется фазой колебаний. Фаза ц> в отличие от коорди-
координаты х определяет не только положение точки в данный момент вре-
времени, но и направление ее последующего движения; например, из
положения М при фазе, равной ср, точка движется вправо, а при
фазе, равной (я—<р),— влево. Фазы, отличающиеся на 2л, считают-
считаются одинаковыми (на рис. 127, б светлыми точками отмечены две оди-
233
паковые фазы). Величина а определяет фазу начала колебаний (на-
(начальная фаза). Например, при а=0 колебания происходят по за-
закону синуса (начинаются от центра О со скоростью, направленной
вправо), при ф=я/2 — по закону косинуса (начинаются из поло-
положения х=А со скоростью о0=0). Величина k, совпадающая с угло-
угловой скоростью вращения радиуса ОВ, показанного на рис. 254, на-
называется круговой частотой колебаний.
Промежуток времени Т (или г), в течение которого точка совер-
совершает одно полное колебание, называется периодом колебаний. По
истечении периода фаза изменяется на 2л. Следовательно, должно
быть kT=2n, откуда период
Т=2л//г. G1)
Величина v, обратная периоду и определяющая число колеба-
колебаний, совершаемых за 1 с, называется частотой колебаний:
v=l/T=k/2n. G2)
Отсюда видно, что величина k отличается от v только постоян-
постоянным множителем 2л. В дальнейшем мы обычно для краткости часто-
частотой колебаний будем называть и величину k.
Найдем теперь значения постоянных интегрирования Л и а.
Определение Л иа по начальным условиям.
Считая, как всегда, при t—О х=х0 и vx=v0, получим из F9) и G0)
хо—А sin a, valk=A cos а. Отсюда, складывая сначала почленно квад-
квадраты этих равенств, а затем деля их почленно одно на другое, най-
найдем:
A = VxZ + v$/k3, tga = foo/i;o. G3)
Определение А к а по краевым условиям (см. § 79). Пусть
вместо начальных заданы краевые условия вида: при t=0 х=0, а при t=t± x=l.
Тогда из F9) получим0=sina,/=/lsin(W1-T-a), откуда a=0,J4=//sinW1, и реше-
решением уравнения F7) будет х— (//sin Ыг) sin kt, если только tx^n/k= Т/2. Если же
ti=n/k (или 2nfk и т. д.), то для определения А получится уравнение l=Asm я,
которому при 1фЧ удовлетворить нельзя, и задача решения не имеет. Лесли 1=6
и t-i=nlk, то для определения А получится уравнение 0=Аsin л, которое удовлет-
удовлетворяется при любом А, и, следовательно, уравнение F7) имеет неоднозначное ре-
решение x=Asin kt, где А — любое число.
Таким образом, в отличие от задач с начальными условиями, краевые задачи
могут иметь неоднозначные решения или вовсе не иметь решения. В рассмотренных
случаях это объясняется тем, что если по условиям при /=0х=0, то и через пол-
полпериода, т. е. при tj^n/k, должно быть тоже х=0. Поэтому здесь удовлетворить
условию при t-i=nlk х=1ф0 нельзя, а условие при ^х=л//г л;=/—0 удовлетво-
удовлетворяется всегда, т. е. при колебаниях с любой амплитудой А.
Свойства свободных колебаний. В заключе-
заключение отметим следующие важные свойства свободных колебаний:
1) амплитуда и начальная фаза колебаний зависят от начальных
(или краевых) условий; 2) частота k, а следовательно, и период Т
колебаний от начальных (или краевых) условий не зависят [опре-
[определяются равенствами F6) и G1I и являются неизменными харак-
характеристиками данной колеблющейся системы.
234
Отсюда, в частности, следует, что если в задаче требуется опре-
определить только период (или частоту) колебаний, то надо составить
дифференциальное уравнение движения и привести его к виду F7).
После этого Т найдется сразу по формуле G1) без интегрирования.
Рассмотренные колебания, как и те, что будут рассмотрены: в
§ 95, 96, называют линейными, так как они описываются линейны-
линейными дифференциальными уравнениями. То, что период этих колеба-
колебаний не зависит от начальных (или краевых) условий, а следователь-
следовательно, и от амплитуды, является одним из основных свойств линейных
колебаний. Колебания, которые
описываются нелинейными диф-
дифференциальными уравнениями, на-
называют нелинейными; они упомя- 0
м
нутыми свойствами не обладают i \cr
(см. задачу 115). г^——
Влияние постоянной Рис. 255
силы на свободные ко-
колебания точки. Пусть на точку М кроме восстанавливаю-
восстанавливающей силы F, направленной к центру О (численно F—c-OM), дейст-
действует еще постоянная по модулю и направлению сила Р (рис. 255).
В этом случае положением равновесия точки М, где сила Р уравно-
уравновешивается силой F, будет точка Ох, отстоящая от О на расстоянии
ОО!=>-СТ, которое определяется равенством сКст=Р или
Хст^Р/с. G4)
Величину >Чт назовем статическим отклонением.
Примем Ог за начало координат и направим ось Огх в сторону
действия силы Р. Тогда Fx=—с(х+^ст) и Рх—Р. В результате,
составляя уравнение A2) и учитывая, что согласно равенству G4)
сХСТ=Р, получим тх=—сх или x-\-k2x—0.
Это уравнение, где /г определяется равенством (G6), совпадает
с уравнением F7). Отсюда заключаем, что постоянная сила Р, не
изменяя характера колебаний, смещает центр колебаний в сторону
действия силы на величину статического отклонения Хст.
Выразим период колебаний через Я,ст. Из G4) и F6) находим,
что й2=Я/тА,ст. Тогда равенство G1) дает
Г = 2л VmkCT/P. G5)
Таким образом, период колебаний пропорционален корню квад-
квадратному из статического отклонения Хсс.
В частности, если силой Р является сила тяжести (как, напри-
например, в задаче 112), то P=mg и формула G5) принимает вид
T = 2nV~KJg. G5')
Задача 112. Груз подвешивают к концу В вертикальной пружины АВ и от-
отпускают без начальной скорости. Определить закон колебаний груза, если в рав-
равновесном положении он растягивает пружину на величину ХСТ (статическое удли-
удлинение пружины).
235
Решение. Поместим начало коорди»ат О в положение статического рав-
равновесия груза и направим ось Ох по вертикали вниз (рис. 256). Сила упругости
F=ck В нашем случае л=Асг-|-л:. Следовательно, Fx=—с(А.ст-глг).
Составляя дифференциальное уравнение движения, получим
Но по условиям задачи сила тяжести P=mg=c\Ll (в равновесном положении
сила Р уравновешивается силой упругости еАст)чВ результате, введя обозначение
c/m=g/ACT=A:2) приведем уравнение к виду
Отсюда сразу находим период колебаний груза в виде G5')
Решением полученного дифференциального уравнения будет
х = С1 sin Ы + С2 cos kt.
По начальным условиям при t—0 х=—Асг, vx=0. Так как
vx = x^=kC1 coskt—k
то, подставляя начальные данные, получим С2=—Аст, ^=0. Следовательно, ко-
колебания происходят с амплитудой Хст по закону
х = — Яст cos kt.
Отсюда видно, что наибольшее удлинение пружины при колебаниях груза рав-
равно 2кСТ. Этот результат был получен другим пугем в задаче 102, где роль пружины
играла балка.
i '/////////л
Рис. 257
Задача 113. Определить период колебаний груза весом Р, подвешенного па
двух пружинах с коэффициентами жесткости с± и са, так, как показано на рис.
257, а.
Решение. Каждая из пружин в статическом положении растягииаегся
с силой Р. Следовательно, статические удлинения пружин будут: 'k\zT—Picl,
Х2сг=Р/с2. Тогда общее удлинение пружин
1 J
Аст = А
1ст
Полагая Р=сЭквлст> наиДем. чт0
ЭК Ci+Сг'
где сэкв — коэффициент жесткости" эквивалентной пружины, заменяющей две
данные пружины. В частности, при с1=с2=с получим сэкв=о2.
236
Период колебаний по формуле G5') будет
Задача 114. Решить предыдущую задачу, считая, что груз подвешен на пружи-
пружинах так, как показано на рис. 257, б.
Решение. В этом случае очевидно, что статические удлинения (сжатия)
обеих пружин одинаковы. При этом сила Р уравновешивается силами упругости
сЛт и с2Яст пружин, т. е. Р= (сх+с2)%ст. Отсюда сэкп=С1+с2, а период коле-
колебаний
Г = 2я
Задача 115. Определить период колебаний материальной точки с массой т,
если действующая на нее восстанавливающая сила F пропорциональна кубу от-
отклонения точки от центра О (см. рис. 253) и Fx——^х3, где сх — заданный постоян-
постоянный коэффициент. В начальный момент времени ^—О координата я=л:0, а ио=О.
Решение. Дифференциальное уравнение движения точки составим в виде
A4) (см. § 79,1; получим следующее нелинейное уравнение:
dvx , d (ч|/2) „ , ( 2 сг
mvx~: = —CiX3 или ———- = —nV \ n'=—
х dx Ах \ т
Умножим обе части этого уравнения на dx и возьмем (в соответствии с началь-
начальными условиями) интегралы слева от 0 до vx, а справа от хй до х; получим
(а)
Так как в момент времени t=0 ул=0, то под действием силы F (см. рис. 253)
точка начнет двигаться влево и ах<0. При х=—ха, как видно из равенства (а),
vx=0 и дальше под действием силы F (при я<0 и с1л;:'<0, а следовательно, /?х>0)
точка будет двигаться вправо до положения х=х0, где опять vx=0, и т. д. Таким
образом, точка совершает колебания с амплитудой х0.
Для дальнейшего решения находим из (a) dx/dt=vx; учитывая, чтоих<0, по-
получим:
и dt=-
Из предыдущих рассуждений следует, что время движения от положения х=
—х0 до х~=0 (до точки О) равно четверти периода. Следовательно,
V2C dx
L.—-.YJ. Г
4 ~~ п )
Полагая здесь л;=л;ог, где г— новое переменное, и учтя, что при л;=0 и z=0,
а при х=х0 будет z=l, получим
1^2" С йг
Т = -
— г*
Значение стоящего справа определенного интеграла (это частный вид так назы-
называемого эллиптического интеграла) можно найти из соответствующих таблиц; приб-
приближенно он равен 1,31 и тогда окончательно
Мы видим, что при этих нелинейных колебаниях (в отличие от колебаний ли-
линейных) период зависит от х0 и с увеличением х0 в данном случае убывает.
237
§ 95. СВОБОДНЫЕ КОЛЕБАНИЯ ПРИ ВЯЗКОМ СОПРОТИВЛЕНИИ
(ЗАТУХАЮЩИЕ КОЛЕБАНИЯ)
Рассмотрим, как влияет на свободные колебания сопротивление,
создаваемое силой вязкого трения [см. § 76, формула G)], т. е. си-
силой, пропорциональной первой степени скорости: R =—ци (знак
минус указывает, что сила R направлена противоположно v). Пусть
на точку при ее движении действуют восстанавливающая сила F
и сила сопротивления R (рис. 258). Тогда Fx=—ex, Rx=—[*.vx=
=—\хх, и дифференциальное уравнение движения будет
тх = — сх—[ах.
Деля обе части уравнения на т, получим
= 0, G6)
где обозначено
clm = k\ \i/m=2b. G7)
Легко проверить, что величины k и Ъ имеют одинаковые размер-
размерности A/время); это позволяет сравнивать их с друг с другом.
Уравнение G6) представляет собой дифференциальное уравнение
свободных колебаний при. сопротивлении, пропорциональном скорос-
скорости. Его решение, как и решение уравнения
_ - V F7), ищут в виде х=е™*. Подставляя это зна-
.—i—« <—"^-—^ чение х в уравнение G6), получим характери-
0 стическое уравнение n2+2bn+k2=0, корни
Рис. 258 которого будут
n1,2^ — b±V?^F. G8)
1. Рассмотрим случай, когда fc>b, т. е. когда сопротивление по
сравнению с восстанавливающей силой мало. Введя обозначение
ft1==J/#_ b\ G9)
получим из G8), что n1^i=—b±ik, т. е. что корни характеристиче-
характеристического уравнения являются комплексными. Тогда общее решение
уравнения G6) будет, очевидно, отличаться от решения уравнения
F7) только множителем e~bt, т. е.
x = e-w(C1sin/s1z' + C2cos?1z') (80)
или, по аналогии с равенством F9),
x = Ae-btsm(k1t + a). (81)
Входящие в (81) величины Л и а являются постоянными интегри-
интегрирования и определяются по начальным условиям.
Колебания, происходящие по закону (81), называются затухаю-
затухающими, так как благодаря наличию множителя е~ы величина х=0М
238
(рис. 258) с течением времени убывает, стремясь к нулю. График
этих колебаний показан на рис. 259 (график заключен между пунк-
пунктирными кривыми х=Ae~bt rx=—Ae~bt, так как sin (feiH-cc) по мо-
модулю не может стать больше единицы).
Промежуток времени Тъ равный периоду sin(fe^+a), т. е. ве-
величину
?fe?' (82)
принято называть периодом затухающих колебаний. За период точ-
точка совершает одно полное колебание, т. е., например, начав дви-
двигаться из положения х=0 вправо (см. рис. 258), приходит в то же
положение, двигаясь также вира- х
во. Формулу (82), если учесть ра-
равенство G1), можно еще предста-
представить в виде
Т 2л Т
1 — , ,/-г-
Из полученных формул видно, Рис- 25Э
что Т{>Т, т. е. что при наличии
сопротивления период колебаний несколько увеличивается. Одна-
Однако когда сопротивление мало (b<^.k), то величиной b2lk2 по сравне-
сравнению с единицей можно пренебречь и считать 7\«7\ Следовательно,
малое сопротивление на период колебаний практически не влияет.
Промежуток времени между двумя последовательными макси-
максимальными отклонениями колеблющейся точки вправо (или влево)
также оказывается равным Т\ *. Следовательно, если первое макси-
максимальное отклонение вправо хх происходит в момент /ь то второе
отклонение х2 наступит в момент ?2=^+7\ и т. д. Тогда по формуле
(81), учитывая, что k1T1=2n, получим:
хх = Ле-Р'' sin
х2 = Ле-*«'« + г«> sin (ft
Аналогично для любого отклонения xn+i будет хп+1=хпе~ьт'.
Таким образом, оказывается, что размахи колебаний будут убывать
по закону геометрической прогрессии. Знаменатель этой прогрессии
е~т называется декрементом рассматриваемых колебаний, а мо-
модуль его логарифма, т. е. величина ЬТи— логарифмическим декре-
декрементом.
Из всех полученных результатов следует, что малое сопротив-
сопротивление почти не влияет на период колебаний, но вызывает постепен-
* Моменты, когда х имеет максимум или минимум, находятся из уравнения
dx/dt=Ae-b* [&tcos(k^t+a.)—b sin(A1^+a)]=0. Если квадратная сксбка обращает-
обращается в нуль при некотором t=ti, то она, очевидно, обратится в нуль и в моменты вре-
времени ti~{-Ti, ty\-2Tx и т. д., поскольку &1711=2я.
ное их затухание вследствие убывания размахов колебаний по за-
закону геометрической прогрессии.
2. Рассмотрим теперь случай, когда b>k, т. е. когда сопротивле-
сопротивление по сравнению с восстанавливающей силой велико. Вводя обозна-
обозначение b2—k2=r2, найдем, что в этом случае корни характеристиче-
характеристического уравнения G8) равны п1<2=—b+r, т. е. оба действительны и
отрицательны (так как r<b). Следовательно, решение уравнения
G6), описывающее закон движения точки, имеет при b~>k вид
Так как функция e~at, где а>0, со временем монотонно убывает,
стремясь к нулю, то движение точки в этом случае не будет колеба-
колебательным и она под действием восстанавливающей силы будет посте-
постепенно (асимптотически) приближаться к равновесному положению
х=0. График такого движения, если при ^=0 л;=л;0>0 и vx=vxO,
имеет в зависимости от значения vx0 вид одной из кривых, показан-
показанных на рис. 260 A — при »ж0>0; 2— при vx0<.0, когда \vx0\ неве-
невелик; 3 — при иж0<0, когда \vxB\ велик; все эти результаты качествен-
качественно ясны из физических соображений). При хо<0 вид графиков не
изменится (они будут лишь зеркально отображенными относитель-
относительно оси 01); наконец, при л:0>0 и vx0=0 график (кривая /) имеет мак-
максимум В в начальный момент времени t=0.
3. В заключение рассмотрим случай, когда b=k. Корни харак-
характеристического уравнения G8) будут при этом тоже действительны-
действительными, но кратными (nli2=±/?) и общее решение уравнения G6) примет
вид (что можно проверить подстановкой х в уравнение)
Движение точки в данном случае тоже не будет колебательным
и она со временем стремится асимптотически к равновесному поло-
положению х=0 [по правилу Лопиталя lim(//ebf)=lini(l/beb*=0]. гра-
фик движения в зависимости от начальных условий имеет тоже вид
кривых, показанных на рис. 260.
Решение. В равновесном положении (рис. 261, а) на цилиндр действуют
сила тяжести Р и архимедова сила JV0, равная численно весу вытесненной жидко-
жидкости, т. е. N0=ySh(h — высота погруженной части цилиндра при равновесии).
Проведем из начального положения точки С вертикально вниз ось Сх и изоб-
изобразим цилиндр в произвольном положении, при котором точка С смещена вниз на
величину х (рис. 261, 6). На цилиндр в этом положении действуют: сила тяжести Р,
архимедова сила N и сила сопротивления R (при движении цилиндра вниз, т. е.
когда »Л>0, она направлена вверх); изобразим силы Р и R приложенными в точ-
точке С. Поскольку дополнительное погружение цилиндра равно х, то N=yS (h-\-x)=
=N0-\-ySx (мы видим, что N здесь является восстанавливающей силой, пропорцио-
пропорциональной смещению х). Составляя дифференциальное уравнение поступательного
движения цилиндра в проекции на ось Сх, получим:
mx = Px-\-Nx-\-Rx или mx = P — (
Учтя, что при равновесии P=N0 и введя обозначения
ySlm=k2, ц/т=2Ь, (а)
приведем составленное уравнение к виду
"x+2bx-\-k3x = 0,
такому же, как у уравнения G6). Тогда по формуле (82), учтя обозначения (а),
найдем для искомого периода колебаний значение
Г1 =
VyS/m— |х2/4/л2
§ 96. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ. РЕЗОНАНС
Рассмотрим важный случай колебаний, возникающих когда на
точку кроме восстанавливающей силы F действует еще периодически
изменяющаяся со временем сила Q, проекция которой на ось Ох
равна
Qx=Qosinpt. (83)
Эта сила называется возмущающей силой, а колебания, происхо-
происходящие при действии такой силы, называются вынужденными. Вели-
Величина р в равенстве (83) является частотой возмущающей силы.
Возмущающей силой может быть сила, изменяющаяся со вре-
временем и по другому закону. Мы ограничимся рассмотрением слу-
случая, когда Qx определяется равенством (83). Такая возмущающая
сила называется гармонической. Конкретный пример ее дан ниже в
задаче 117.
1. Вынужденные колебания при отсутст-
отсутствии сопротивления*. Рассмотрим движение точки, на
которую кроме восстанавливающей силы F (см. рис. 253) действует
только возмущающая сила Q. Дифференциальное уравнение движе-
движения в этом случае будет
тх——cx-\-Q0 sin pt.
* Получаемые в этом пункте результаты могут быть найдены как частный слу-
случай из п. 2.
Разделим обе части этого уравнения на т и положим
cim=k\ Q0/m=Plh (84)
где Ро имеет размерность ускорения. Тогда дифференциальное урав-
уравнение движения примет вид
x+k2x=P0smpt. (85)
Уравнение (85) является дифференциальным уравнением вынуж-
вынужденных колебаний точки при отсутствии сопротивления. Его ре-
решением, как известно из теории дифференциальных уравнений, бу-
будет х=х1-\-х2, где xt — общее решение уравнения без правой части,
т. е. решение уравнения F7), даваемое равенством F9), а х2 — ка-
какое-нибудь частное решение полного уравнения (85).
Полагая, что рфк, будем искать решение х2 в виде
х2=В sin pt,
где В — постоянная величина, которую надо подобрать так,чтобы
равенство (85) обратилось в тождество. Подставляя значение хг и
его второй производной в уравнение (85), получим
—ргВ sin pt+k*B sin pt=P0 sin pt.
Это равенство будет выполняться при любом t, если В (k2—р2) = Ро
или
В=Рв/(#-р*).
Таким образом, искомое частное решение будет
Х2 = fe2_°p2 Sln^- (86)
Так как х—хг+хъ, а значение хх дается равенством F9), то об-
общее решение уравнения (85) имеет окончательно вид
х = A sin (kt + a) + fe3^° z sin pt, (87)
где А и а — постоянные интегрирования, определяемые по началь-
начальным данным. Решение (87) показывает, что колебания точки слага-
слагаются в этом случае из: 1) колебаний с амплитудой А (зависящей от
начальных условий) и частотой k, называемых собственными коле-
колебаниями; 2) колебаний с амплитудой В (не зависящей от начальных
условий) и частотой р, которые называются вынужденными колеба-
колебаниями.
Практически, благодаря неизбежному наличию тех или иных со-
сопротивлений, собственные колебания будут довольно быстро зату-
затухать. Поэтому основное значение в рассматриваемом движении име-
имеют вынужденные колебания, закон которых дается уравнением (86).
Частота р вынужденных колебаний, как видно, равна частоте
возмущающей силы. Амплитуду этих колебаний, если разделить
числитель и знаменатель на №, можно представить в виде
В= | fea—ра | = | 1— Д
242
где согласно равенствам (84) lk0=PJki=Q0/c, т. е. Я„ есть величина
статического отклонения точки под действием силы Qo. Как ви-
видим, В зависит от отношения частоты р возмущающей силы к часто-
частоте k собственных колебаний. Введем обозначения
z=pfk, ц=В/К. (88')
Безразмерный коэффициент ц называют коэффициентом динамично-
динамичности. Он показывает, во сколько раз амплитуда вынужденных коле-
колебаний В (т. е. максимальное отклонение точки от центра колебаний)
больше статического отклонения Яо, и зависит от отношения час-
частот г. График этой зависимости, определяемой равенством (88), по-
показан ниже на рис. 264 кривой, помеченной знаком /i=0 (другие
кривые на рис. 264 дают зависимость т) от z при наличии сопротивле-
сопротивления).
Из графика [или из формулы (88)] видно, что, подбирая различ-
различные соотношения между р и k, можно получить вынужденные коле-
колебания с разными амплитудами. При р=0 (или p<<ck) амплитуда
равна Яо (или близка к этой величине). Если величина р близка к
k, амплитуда В становится очень большой. Наконец, когда p^>k,
амплитуда В становится очень малой (практически близка к нулю).
Отметим еще, что при р<к, как видно из сравнения формул (83)
и (86), фазы вынужденных колебаний и возмущающей силы все вре-
время совпадают (обе равны pi). Еслижер]>&, то, внося минус под знак
синуса, можно представить уравнение (86) в виде
Sltl \Pt
Следовательно, при p>k сдвиг между фазами вынужденных коле-
колебаний и возмущающей силы равен я (когда сила Q имеет максималь-
максимальное значение и направлена вправо, колеблющаяся точка максималь-
максимально смещена влево и т. д.).
Резонанс. В случае, когда p=k, т. е. когда частота возму-
возмущающей силы равна частоте собственных колебаний, имеет место
так называемое явление резонанса. Формулами (86), (88) этот слу-
случай не описывается, но можно доказать,
что размахи вынужденных колебаний при
резонансе будут со временем неограничен-
неограниченно возрастать так, как это показано на
рис. 262. Подробнее общие свойства вынуж-
вынужденных колебаний (и, в частности, резонан-
резонанса) рассмотрены в конце этого параграфа
(п. 3).
При p=k уравнение (85) частного решения хг=
= Bsinpt не имеет, и это решение будем искать в виде р „go
х2= Ct cos pt.
Тогда х2=—2Cpsinpt—p2Ctcospt, и подстановка в уравнение (85), если учесть, что
p=k, дает —2Cpsmpt=Posiapt, откуда С=—Ра/2р. В результате находим закон
вынужденных колебаний при резонансе в случае отсутствия сопротивления:
*2= — (P0/2p)fcospf или ха= (Р0/2р) tsin (pi—л/2), (89)
243
Как видим, размахи вынужденных колебаний при резонансе действительно воз-
возрастают пропорционально времени, и закон этих колебаний имеет вид, показан-
показанный на рис. 262. Сдвиг фаз при резонансе равен я/2.
2. *. Вынужденные колебания при вязком
сопротивлении. Рассмотрим движение точки, на которую
действуют восстанавливающая сила F, сила сопротивления R, про-
пропорциональная скорости (см. § 95), и возмущающая сила Q, опреде-
определяемая формулой (83). Дифференциальное уравнение этого движе-
движения имеет вид
тх = — сх—\ix + Qos'mpt. (90)
Деля обе части уравнения на т и учитывая обозначения G7) и (84),
получим
x + 2b'x + k*x = Posmpt. (91)
Уравнение (91) является дифференциальным уравнением вынуж-
вынужденных колебаний точки при наличии вязкого сопротивления. Его
общее решение, как известно, имеет вид х=хг+х2, где хх — общее
решение уравнения без правой части, т. е. уравнения G6) [при
k~>b это решение дается равенством (81)], а х2 — какое-нибудь част-
частное решение полного уравнения (91). Будем искать решение х% в
виде
x2 — Bsm(pt—Р),
где Вир — постоянные, которые надо подобрать так, чтобы равен-
равенство (91) обратилось в тождество. Вычисляя производные, получим:
x=--Bpcos(pt — р), x = —Bp2sin(pt—$).
Подставляя эти значения производных и величины х2 в левую
часть уравнения (91) и обозначая для краткости pt— Р=г|э (или
t{ P) найдем, что
В(—p2+?2)sin ty+2bpB cos^=P0 (cos p sini|H-sin p cosij>).
Чтобы это равенство выполнялось при любом i]\ т. е. в любой
момент времени, коэффициенты при sin-ф и cosip в левой и правой
частях должны быть порознь равны друг другу; следовательно,
В (k2—p2) =P0cosP, 2bpB=PosinP.
Из полученных уравнений (ими также пользуются для однозначно-
однозначного определения величины р) находим, возводя их сначала почленно
в квадрат и складывая, а затем деля почленно друг на друга:
Я — р° ts В = 2bp
Так как a;=x1+x2, а значение хх (при k~>b) дается равенством
(81), то окончательно найдем решение уравнения (91) в виде
х = Ae-bt sin {kj + а) + В sin (pt—Р), (93)
244
где Ana — постоянные интегрирования, определяемые по началь-
начальным условиям, а значения В и р даются формулами (92) и от началь-
начальных условий не зависят. При 5=0 найденные решения дают форму-
формулы (86) и (87), полученные выше для случая отсутствия сопротивле-
сопротивления.
Рассматриваемые колебания являются сложными и слагаются из
собственных (первое слагаемое в равенстве (93), рис. 263,а) и вы-
вынужденных (второе слагаемое в равенстве (93), рис. 263,6). Собст-
Собственные колебания точки для рассматриваемого случая были изуче-
изучены в § 95. Как было установлено,
эти колебания довольно быстро за-
затухают и по истечении некоторого
промежутка времени ty, называемо-
называемого временем установления, ими
практически можно пренебречь.
Если, например, считать, что собст-
собственными колебаниями можно пренебречь,
начиная с момента, когда их размахи бу-
будут меньше 0,01 В, то величина ty будет
определяться из равенства Ле~ь'=0,01 В,
откуда
1 1 ]00А
/у=Т1п-в- <94>
Как видим, чем меньше сопротивление
(т. е. чем меньше Ь), тем время установле-
установления больше.
Одна из возможных картин
установления колебаний, происхо-
происходящих по закону (93) и начинаю-
начинающихся из состояния покоя, показана
на рис. 263,6. При других начальных условиях и соотношениях меж-
между частотами р и kx характер колебаний в интервале времени
0<.t<ty может оказаться совершенно другим. Однако во всех слу-
случаях по истечении времени установления собственные колебания
практически затухают и точка будет совершать колебания по за-
закону
x=Bsin(pt—P). (95)
Эти колебания и называются вынужденными. Они представляют
собой незатухающие гармонические колебания с амплитудой В, оп-
определяемой равенством (92), и частотой р, равной частоте возмущаю-
возмущающей силы. Величина Р характеризует сдвиг фазы вынужденных ко-
колебаний по отношению к фазе возмущающей силы.
Исследуем полученные результаты. Введем обозначения:
в)
d\tWf\f\
\
If
1
1
V
Рис. 263
z=plk, h=blk, X0=
(96)
где z — отношение частот; h — величина, характеризующая сопро-
сопротивление; Ко — величина статического отклонения точки под дейст-
245
вием силы Qo (например, при колебаниях груза на пружине ка рав-
равно статическому удлинению пружины, вызываемому силой Qo).
Тогда, деля числитель и знаменатель равенств (92) на /г2, полу-
получим:
1 —г2J+4/г2га
(97)
Из формул (97) видно, что В и Р зависят от двух безразмерных
параметров z и h. Для большей наглядности вид этой зависимости
при некоторых значени-
значениях h показан на графи-
графиках. На первом графи-
графике (рис. 264) даны за-
зависимости коэффициен-
коэффициента динамичности ti =
=В/к0 (показывающего,
во сколько раз ампли-
амплитуда В больше Я„) от
отношения частот г, а
на втором (рис. 265) —
зависимости сдвига фаз
Р тоже от г. В каждой
конкретной задаче по ее
данным можно вычис-
вычислить величины %0, z,h и
найти значения Вир,
пользуясь соответствую-
соответствующими графиками или
формулами (97). Из этих
графиков (или формул)
видно также, что, меняя соотношение между р и k, можно полу-
получать вынужденные колебания с разными амплитудами.
Когда сопротивление очень
мало, а величина z не близка
к единице, в формулах (97)
можно приближенно считать
Тогда будем иметь резуль-
результаты, полученные в п. 1, а
именно:
Рис.
В =
а 0 (при z < 1),
180° (при 2> 1).
>(98)
7.5
Рис. 265
Рассмотрим еще следующие частные случаи.
1. Если отношение частот г очень мало (p^k), то, полагая приб-
приближенно z«0, получим из формулы (97) ВжХ0. Колебания в этом
246
случае происходят с амплитудой, равной статическому отклонению
Хо, и сдвигом фаз р«0.
2. Если отношение частот z очень велико (p"^k), величина В
становится малой. Этот случай представляет особый интерес для
проблем виброзащиты различных сооружений, приборов и др. При
этом, считая сопротивление малым и пренебрегая в (97) 2hz и еди-
единицей по сравнению с г'2, можно получить для подсчета В прибли-
приближенную формулу
B=%0/z2=Pjp2. (99)
3. Во всех практически интересных случаях величина h много
меньше единицы. Тогда, как видно из (97), если величина z близка
к единице, амплитуда вынужденных колебаний достигает максиму-
максимума. Явление, которое при этом имеет место, называется резонансом.
Из формулы (97) видно, что В=Вр=Втах, когда стоящая в знаменателе вели-
величина f(|)= (I—|J+4/i2| (где ?=г2) имеет минимум. Решая уравнение /' (?)=
= —2A—|—2й2)=0, найдем, что В имеет максимум при ?—1—2Л2, т.е. при
zp = ]/" I —2/i2. Следовательно, резонанс имеет место, когда г немного меньше еди-
единицы. Но практически, пренебрегая величиной h? по сравнению с единицей, мож-
можно считать, что гр=1. При немалых h резонанс выражен слабо (амплитуда /?р не-
невелика, см. рис. 264), а при /г>)^2/2~0,7 резонанс, как видно из выражения для
гр и из рис. 264, вообще не возникает.
При резонансе амплитуду вынужденных колебаний и сдвиг фаз
можно практически вычислять по приближенным формулам, кото-
которые получаются из равенств (97), если в них положить г=1:
?p=V2fc, Рр=я/2. A00)
Отсюда видно, что при малых h величина Bvможет достигать доволь-
довольно больших значений.
Колебания с амплитудой Bv, как и вообще вынужденные колеба-
колебания, устанавливаются при резонансе не сразу. Процесс установле-
установления колебаний будет аналогичен показанному на рис. 263,е. Чем
меньше сопротивление, т. е. чем меньше Ь или h, тем больше вели-
величина Bv; но одновременно будет больше и время ^ установления этих
колебаний [см. формулу (94)].
Когда сопротивление отсутствует, т. е. Ь=/г=О, то, как было
установлено, закон вынужденных колебаний при резонансе дается
уравнением (89), а график колебаний имеет вид, показанный на
рис. 262. Таким образом, в случае отсутствия сопротивления процесс
«раскачки» системы при резонансе длится неограниченно долго, а
размахи колебаний со временем непрерывно возрастают. Аналогич-
Аналогичной будет картина резонансных колебаний при очень малых сопро-
сопротивлениях.
3. Общие свойства вынужденных колеба-
колебаний. Из полученных выше результатов вытекает, что вынужденные
колебания обладают следующими важными свойствами, отличаю-
отличающими их от собственных колебаний точки: 1) амплитуда вынужден-
вынужденных колебаний от начальных условий не зависит; 2) вынужденные
колебания при наличии сопротивления не затухают; 3) частота вы-
247
нужденных колебаний равна частоте возмущающей силы и от ха-
характеристик колеблющейся системы не зависит (возмущающая сила
«навязывает» системе свою частоту колебаний); 4) даже при малой
возмущающей силе (Qo мало) можно получить интенсивные вынуж-
вынужденные колебания, если сопротивление мало, а частота р близка
к k (резонанс); 5) даже при больших значениях возмущающей силы
вынужденные колебания можно сделать сколь угодно малыми, если
частота р будет много больше k.
Вынужденные колебания и, в частности, резонанс играют боль-
большую роль во многих областях физики и техники. Например, при ра-
работе машин и двигателей обычно возникают периодические силы, ко-
которые могут вызвать вынужденные колебания частей машины или
фундамента.
Процесс изменения амплитуды этих колебаний можно просле-
проследить, заставляя работать на разных оборотах двигатель, для кото-
которого р = со, где со — угловая скорость (см. задачу 117). С увеличе-
увеличением со амплитуда В колебаний вибрирующей части (или фундамен-
фундамента) будет возрастать. Когда со=&, наступает резонанс и размахи
вынужденных колебаний достигают максимума. При дальнейшем
увеличении и амплитуда В убывает, а когда станет co^>&, значе-
значение В будет практически равно нулю. Во многих инженерных соо-
сооружениях явление резонанса крайне нежелательно и его следует из-
избегать, подбирая соотношение между частотами р и k так, чтобы
амплитуды вынужденных колебаний были практически равны нулю
(>k)
>)
Противоположный пример мы имеем в радиотехнике, где резо-
резонанс оказывается очень полезным и используется для отделения
сигналов одной радиостанции от сигналов всех остальных (настрой-
(настройка приемника).
Па теории вынужденных колебаний основывается также кон-
конструирование ряда приборов, например вибрографов — приборов
для измерения смещений колеблющихся тел (фундаментов, частей
машин и др.) и, в частности, сейсмографов, записывающих колеба-
колебания земной коры, и т. п.
Задача 117. Балка, на которой установлен мотор, прогибается от его веса на
Хст= 1 см. При каком числе оборотов вала мотора в минуту наступит резонанас?
Решение. Из формулы G5') следует, что период собственных колебаний
балки
Если центр тяжести С вала мотора смещен от оси О, то на мотор будет дей-
действовать передаваемая через подшипники вала сила Q, направленная вдоль ОС
(рис. 266; такие силы рассматриваются в § 136). Проекция силы Q на ось Ох, рав-
равная Qx~Qsin tot (со — угловая скорость вала), и будет возмущающей силой, дей-
действующей на мотор; частота этой силы р=а>. Следовательно, период вынужденных
колебаний Гд=2п/ш.
Резонанс наступит, когда 71s=7, т. е. при
248
Отсюда критическое число оборотов
/гКр = 30шкр/я « 300 об/мин.
Рабочее число оборотов вала мотора должно быть значительно больше пнр.
Задача 118. Исследовать вынужденные колебания груза 1 массы т., подвешен-
подвешенного на пружине с коэффициентом жесткости с, если верхний конец D пружины
совершает вертикальные колебания по закону |=aosinp^.
Решение. Поместим начало координат О в положение статического рав-
равновесия груза и направим ось Ох по вертикали вниз (рис. 267). Если обозначить
длину иедеформированной пружины через 10, то ее длина в произвольный момент
времени будет 1=10—|+Хст+л;, а удлинение %=1—10=кСТ-{-х—|. Тогда действую-
действующая на груз сила упругости F=cX~c(%CT-{-x—?), и составляя дифференциальное
уравнение движения груза, будем иметь (так как c^CT=mg):
=— еде-f-eg.
mx =—c(XCT-f-jc—|)+mg или
Отсюда, вводя обозначение с//я=?2, получим
Следовательно, груз будет совершать вынужденные колебания, так как полу-
полученное уравнение совпадает с уравнением (85) или уравнением (91), если в нем счи-
считать 6=0 и Р0=62а0. Из равенств (96) видно, что в
данном случае %й-=аа и h=0. Амплитуда вынужден-
вынужденных колебаний и сдвиг фаз определяются форму-
формулами (98).
Если р<? (верхний конец пружины колеблется
очень медленно), то г~0 и В~а0, а сдвиг фаз {5=0.
Груз будет при этом колебаться так, как если бы
Рис. 266
пружина была жестким стержнем, что физически и соответствует условию ;
При р=к наступает резонанс, и размахи колебаний начнут сильно возрастать.
Если частота р станет больше fe(z>l). то груз будет колебаться так, что когда
конец D пружины идет вверх, груз будет опускаться вниз и наоборот (сдвиг фаз
P=180J); амплитуда же колебаний будет тем меньше, чем больше р. Наконец,
кетда р будет много больше k (г>1), амплитуда ВкО. Груз при этом будет оста-
оставаться в положении статического равновесия (в точке О), хотя верхний конец
пружины и совершает колебания с амплитудой а0 (частота этих колебаний столь
велика, что груз как бы не успевает за ними следовать).
4.* Электродинамические аналогии. Схожесть законов ряда колебательных
процессов, рассматриваемых в разных областях физики, отмеченная в начале § 94,
объясняется тем, что колебания в этих случаях описываются одинаковыми диф-
дифференциальными уравнениями. Рассмотрим в качестве примера электрический кон-
контур, состоящий из последовательно соединенных катушки с индуктивностью L,
омического сопротивления R, конденсатора с емкостью С и источника переменной
электродвижущей силы (э. д. с.) Е (t) (рис. 268).
249
Тогда, исходя из второго закона Кирхгофа, можно установить, что заряд
q конденсатора удовлетворяет дифференциальному уравнению
Lq+Rq + (l/Qq = E(t). A01)
Сравним это уравнение с уравнением (90), в котором для общности будем счи-
считать, что вместо ~Qosinpt стоит Q(t); видны, что тогда оба уравнения совпадают с
точностью до обозначений. Следовательно, закон рассмот-
рассмотренных выше механических колебаний и закон изменения
заряда конденсатора аналогичны. При этом, сравнивая
уравнения (90) и A01), найдем, что аналогами являются:
1) для смещения (координаты) х — заряд q; 2) для массы
т — индуктивность L; 3) для коэффициента вязкого сопро-
сопротивления [г — омическое сопротивление R; 4) для коэф-
коэффициента жесткости с — величина \1С, обратная емко-
сти; 5) для возмущающей силы Q — э. д. с. Е.
Рис 268 ®та аналогия> естественно, относится не только к
вынужденным, но и к свободным (затухающим и не-
незатухающим) колебаниям. Например, для периода соб-
собственных затухающих электрических колебаний в рассматриваемой цепи по фор-
формулам G7) и (82) из § 95 получим:
Когда омическое сопротивление отсутствует, Т=2
Электродинамические аналогии используются для моделирования соответ-
соответствующих механических колебаний, в частности и в электронных аналоговых ма-
машинах.
Глава XX*
ДВИЖЕНИЕ ТЕЛА В ПОЛЕ ЗЕМНОГО ТЯГОТЕНИЯ
§ 97. ДВИЖЕНИЕ БРОШЕННОГО ТЕЛА
В ПОЛЕ ТЯГОТЕНИЯ ЗЕМЛИ
Задача о движении тела в поле земного тяготения возникает при
изучении движения баллистических ракет и искусственных спут-
спутников Земли, а также при рассмотрении проблем космических по-
полетов.
Будем рассматривать движущееся тело как материальную точ-
точку массы т, а Землю считать неподвижной. Пусть в начальный мо-
момент времени эта точка находится у поверхности Земли в положении
Мо (рис. 269) и имеет начальную скорость v0, направленную под
углом а к горизонтальной плоскости. Если пренебречь сопротив-
сопротивлением воздуха (что для рассматриваемых высот полета в первом
приближении допустимо), то на точку при ее движении будет дейст-
действовать только сила тяготения F, направленная к центру Земли.
Как показано в §88, п. 4, модуль этой силы можно представить в
виде
F=mgR2!r\ A02)
250
где г=ОМ — расстояние точки от центра Земли; R=OM0 — зна-
значение г для точки вылета Мо; g — ускорение силы земного тяготе-
тяготения в точке Мо *.
Так как сила F — центральная (см. § 86), то траектория точки
будет плоской кривой. Поэтому для изучения движения можно вос-
воспользоваться полярными координатами
г=ОМ и ф, поместив их начало (полюс)
О в центре Земли и направляя поляр-
полярную ось Ох вдоль линии ОМ0. Составим
дифференциальные уравнения движения
точки М.
По закону площадей (см. § 86) при
движении под действием центральной си-
силы момент вектора скорости v относи-
относительно центра О (или удвоенная сектор-
секторная скорость точки) будет величиной по-
постоянной. Следовательно, /no(v)—c. Но
из чертежа видно, что если разложить
вектор v на радиальную vr и попереч-
поперечную уф составляющие (см. § 47), то
т0(и) = т0(оф) = /Фф, где vv=r-uq>/dt.
Рис. 269
Отсюда получаем первое уравнение
A03)
Значение постоянной с найдем из условий в точке вылета Мо,
где, как легко видеть, mo(v0)=Rv0cosa. Следовательно,
c=Rv0 cos a. A04)
Второе уравнение получим из теоремы об изменении кинетиче-
кинетической энергии в дифференциальной форме [см. § 89, формула E1)]
Но по формуле D9) из § 88
<L4 =—Fdr=—mgR
В результате найдем второе уравнение в виде
dT=**'«Чт-
dT=**'«Чтdtp
A05)
* В формуле A02) R может иметь любое значение, большее земного радиуса.
Когда точка Мо берется на поверхности Земли, будем обычно считать R равным
радиусу земного экватора R0=f>37& км и g=9,82 м/с2 (g всюду — ускорение силы
земного тяготения, а не силы тяжести, см. § 92). Но, конечно, все получаемые да-
далее формулы справедливы для движения в поле тяготения любого другого небес-
небесного тела.
251
где (см. § 47)
Интегрируя дифференциальные уравнения A03) и A05), можно
определить г и ф как функции времени t, т. е. найти закон движе-
движения точки. Вместо этого найдем сразу ее траекторию. Чтобы упро-
упростить расчет, введем новое переменное и, полагая
1 йи 1 dr
Тогда с учетом равенств A07) и A03) получим
йг _ Ar _dq>_ 2 _dr^ _? du . dip __ с __
ЧГ"~ dcp d< "~ dq> z-2 ~ C dcp ' Л di г
Подставляя эти значения в формулу A06), находим
Найденное выражение и2 подставим в левую часть уравнения A05).
Получим
2 Г du . du A2u "I n2 du
Заменяя здесь с его значением из A04) и сокращая на du/dq>,
найдем окончательно дифференциальное уравнение траектории:
-г4- + Ц = , или -т-т + ы= —, (Ю8)
где обозначено
Решение этого уравнения слагается из общего решения уравне-
уравнения без правой части, которое совпадает с решением уравнения F7)
при k=l и частного решения уравнения с правой частью. Следова-
Следовательно, и=и1+и2, где их имеет вид F8) или F9) при fe=l, а иг=\!р,
в чем можно убедиться непосредственной подстановкой. В резуль-
результате решением уравнения A08) будет
у или w =
где с, и с2 — постоянные интегрирования. Полагая здесь с3р=—е,
са=л/2—р, где е и Р — новые постоянные, и переходя от и к г, най-
найдем окончательно уравнение траектории в виде
Г==
Из аналитической геометрии известно, что (ПО) представляет
собой уравнение конического сечения (эллипса, параболы или ги-
252
перболы) с фокальным параметром р и эксцентриситетом е, выражен-
выраженное в полярных координатах, для которых полюс О находится в од-
одном из фокусов. При этом геометрический смысл постоянной р ви-
виден из того, что при ф=р знаменатель в равенстве (ПО) имеет ми-
минимум, а следовательно, величина г=ОМ — максимум. Таким об-
образом, угол Р определяет положение оси симметрии траектории
(ось АР на рис. 269) по отношению к линии ОМВ или к точке выле-
вылета Мо.
Чтобы определить значения постоянных интегрирования е и р,
надо для начального положения ф=0, т. е. в точке Мо, знать кроме
г (или и) еще и производную от г (или от и) по ф. Формулы C2),
полученные в § 47, и последнее из равенств A07) дают:
-^- = -— или —1-^ = -^_.
?>Ф т dq> г Vqi dq> '
Но в точке Мо, как видно из рис. 269, r=R и vrhv=tga. Следо-
Следовательно, начальные условия для и имеют вид:
при Ф = 0 h = -L -*L = —jLtga.
Из уравнения (ПО), переходя опять от г к и, найдем
И [1С0(рР)], ^ ^8Ш(фр)
Подставляя сюда начальные значения и и dul&y, получим
p!R = \— ecosp, — (p/R)tga=—esinP
или, заменяя р его значением A09),
о , vo cos2 a . о fo sin 2a
ecosp=l i7r-, esinp=
Из этих равенств, деля их сначала почленно друг на друга, а за-
затем возводя в квадрат и складывая, найдем окончательно:
(ИЗ)
Равенство A12) определяет угол Р, т. е. положение оси симмет-
симметрии траектории по отношению к точке вылета Мо- Формула же
A13) дает значение эксцентриситета траектории. Из нее видно, что
траекторией точки будет:
а) эллипс (е < 1), если v0 <
б) парабола (е = 1), если vQ-=V2gR;
в) гипербола (е > 1), если v0 > V2gR.
253
Скорость v2=V2gR называется параболической или второй кос-
космической скоростью. Если считать R=R0=6378 км и g=go=9,82 м/с2,
то получим v2f&l 1,2 км/с. Таким образом, при начальной скорости
уо^11,2 км/с тело, брошенное с поверхности Земли под любым уг-
углом а к горизонтальной плоскости, будет двигаться по параболе или
гиперболе (при а=90° — по прямой), неограниченно удаляясь от
Земли. Достижение скоростей такого порядка необходимо для меж-
межпланетных сообщений *. При скорости, меньшей второй космиче-
космической, тело или упадет обратно на Землю, или станет искусственным
спутником Земли.
Закон движения точки вдоль траектории, т. е. ее положение на
траектории в любой момент времени, можно найти, заменяя в ра-
равенстве A03) г его значением из A10), а затем, интегрируя получен-
полученное уравнение.
§ 98. ИСКУССТВЕННЫЕ СПУТНИКИ ЗЕМЛИ.
ЭЛЛИПТИЧЕСКИЕ ТРАЕКТОРИИ
При vo<\^2gR и афп12 траектория тела, брошенного с земной
поверхности, есть эллипс, у которого ось РА, образующая с Ох
угол р, является осью симметрии (см. рис. 269). Если начальные
условия в пункте Мо будут таковы, что угол $фп, то траектория
пересечет поверхность Земли в симметричной относительно оси
РА точке Ми т. е. тело упадет на Землю. Следовательно, брошен-
брошенное тело может стать спутником Земли лишь при тех начальных ус-
условиях, которые дают Р=я. Но, как показывают равенства A11),
Р =jt только при а=0 (или а=л) и vl^gR, так как при (J=jt и
vl<.gR первое из равенств A11) дает е<0, что невозможно, посколь-
поскольку е — величина положительная. Следовательно, чтобы тело, бро-
брошенное с земной поверхности, превратилось в спутника Земли,
необходимо выполнение двух условий:
а = 0, V2gQR0 > v0 > ИГ?Д. A14)
Эксцентрисистет орбиты спутника при а=0 и $=п, как видно
из равенств A11) или A13), будет
e=vllgR—\. A15)
Скорость v±^=VgR, при которой е=0 и спутник движется по
круговой орбите радиуса R, называется круговой или первой кос-
космической скоростью [см. § 82, формула B8)]. При бросании с поверх-
поверхности Земли, если считать R=R0=6378 км и g=go=9,82 м/с2, пер-
первая космическая скорость i>x»7,9 км/с. При v?>vt орбитой спутни-
спутника будет эллипс, эксцентриситет которого тем больше, чем больше
у0 (рис. 270).
* Скорость, необходимая для освобождения межпланетного корабля от сов-
совместных притяжений Земли и Солнца, будет больше 1^2gaR0 и при определенном
направлении v0 равна около 16,7 км/с; эту скорость называют третьей космиче-
космической скоростью.
254
Когда угол бросания а=^0, то ни при какой начальной скорости
г0 тело, бросаемое с земной поверхности (если даже не учитывать
сопротивление воздуха), спутником Земли стать не может. Поэтому,
например, создать искусственный спутник Земли выстрелом из
орудия практически невозможно; для этой цели пригодна управляе-
управляемая ракета, которая с помощью со-
соответствующих приборов может под-
поднять спутник на заданную высоту и
сообщить ему в пункте Мо (рис. 270)
нужную скорость у„ под углом а «0
к горизонтальной плоскости. Таким
путем и был осуществлен запуск пер-
первых в мире советских искусственных
спутников Земли и космических ко-
кораблей с человеком на борту. мв
Отметим в заключение, что с Рис. 270
увеличением высоты Я пункта Мо
над поверхностью Земли сопротивление воздуха будет убывать и
спутник будет долговечнее. Одновременно станет, очевидно, воз-
возможным получение спутникового движения и при а=^0. Однако
нетрудно подсчитать, что при увеличении Я (хотяух, например, при
этом уменьшается) полная энергия, затрачиваемая на запуск спут-
спутника данной массы, возрастает.
Эллиптические траектории. При а>0 и у0 < V 2go/?Q
тело, брошенное с земной поверхности, описав дугу эллипса, упа-
упадет обратно на Землю. Такие эллиптические траектории описывают
баллистические ракеты, в частности межконтинентальные. Найдем
основные характеристики этих траекторий.
Так как ось РА является осью симметрии траектории, то точкой
падения будет Мг и дальность 5 будет равна длине дуги MaMi (см.
рис. 269); следовательно,
S=2/?op, A16)
где р определяется формулой A12). При этом, как обычно принято,
в равенстве A16) Ro— средний радиус Земли.
Наибольшая высота Я траектории равна (/¦)ф=р —Ro или,
согласно равенствам A09) и (ПО),
,, г>о cos2 a
где е определяется формулой A13).
- Время полета Т найдем из уравнения A03), которое вместе
с A04) дает
dt= (r-Id) dcp= (r2/Rovo cos a) d<p.
Заменяя здесь т его значением, получаемым из равенств A09) и A10),
и интегрируя, найдем, что
а С
J A-
Rogl J A-е cos^)a
255
где ^:=ф—р. Вычисляя интеграл, найдем окончательно после ряда
преобразований
2^(П8)
где обозначено
±f tg|). A19)
По полученным формулам, зная v0 и угол бросания а, можно
определить дальность полета S, наибольшую высоту траектории //
и время полета Т.
С практической точки зрения важно найти минимальную ско-
скорость и™'п и наивыгоднейший угол бросания ан, при которых может
быть получена заданная дальность S=2??0P-
Для этого определим из равенства A12) величину у„. Получим
При данной дальности (при данном угле р) потребная скорость
va зависит от угла а. Так как угол а входит в равенстве A20) только
в знаменатель, то v0 имеет минимум, когда этот знаменатель дости-
достигает максимума. Приравнивая производную от знаменателя по a
нулю, найдем
cos 2a—sin 2a tg p =0,
откуда ctg2aH=tgP и наивыгоднейший угол бросания
aH=45°—p/2. A21)
Что данная величина аи дает и™'11, легко проверяется по знаку
второй производной. Подставляя значение ан в равенство A20) и
учитывая, что 2 cos2a = 1+cos2a, получим
). A22)
Формулы A22) и A21) определяют наименьшую начальную ско-
скорость и наивыгоднейший угол бросания, обеспечивающие заданную
дальность. Высота траектории и время полета при этом подсчиты-
ваются по формулам A17) и A18), в которых v0 и а заменяются их
значениями из A22) и A21). Для наглядности элементы нескольких
наивыгоднейших эллиптических траекторий, подсчитанные по этим
формулам при /?0=^ср=:6370км, приведены в табл. 3 (все величины
даны в таблице с точностью до 5 единиц последнего знака).
Напоминаем, что все эти расчеты относятся к движению в без-
безвоздушном пространстве и не учитывают влияние вращения Земли.
В заключение отметим, что при малых дальностях (угол р мал) дуга
эллипса, описываемого брошенным телом, близка к дуге параболы.
Если при этом считать sinP»P и 2R0$=X, а величиной f> в других
равенствах по сравнению с единицей пренебречь, то в пределе все
256
Таблиц
Угол р.
град
10
20
30
40
70
90
а 3
Дальность
S, км
2 220
4 450
6670
8 900
15 570
20 020
Необходимая
начальная
скорость
ч?"п, м/с
4300
5650
6460
7000
7780
7910
Наивыгодней-
Наивыгоднейший угол бро-
бросания ан,
град
40
35
30
25
19
0
Высота тра-
траектории Н,
км
500
900
1170
1300
900
0
Время полета Т
12 мин 30 с
19 » 10 »
24 » 50 »
30 » 00 »
40 » 16 »
42 » 10 »
полученные формулы перейдут в соответствующие формулы для
параболических траекторий (см. § 82). В частности, из A21) и A22)
получаем сразу
ав=а*=45°
§ 99. ПОНЯТИЕ О НЕВЕСОМОСТИ.
МЕСТНЫЕ СИСТЕМЫ ОТСЧЕТА
При движении тел в поле тяготения может иметь место интерес-
интересное явление, называемое невесомостью. Начнем с частного примера.
Рассмотрим груз массой т, покоящийся в лифте, который дви-
движется по отношению к неподвижным осям Оху вертикально вниз с
ускорением а (рис. 271,а). На груз о
действуют сила тяжести P=mg и
реакция N. Так как груз, двига-
двигаясь вместе с лифтом, тоже имеет
ускорение а, то, составляя урав-
уравнение его движения в проекции на
ось х, получим
ma=mg—JV и N=m(g-
Рис
Отсюда находим, что когда a=g,
т. е. когда лифт свободно падает,
N=0 и груз никакого давления на пол А В кабины не оказывает
(пол не служит ему опорой). Поэтому груз по отношению к лифту
будет оставаться в покое («висеть») в любом месте кабины, если его
туда поместить. На чашу весов, находящихся в кабине, груз тоже
не окажет давления и они покажут, что «вес» груза равен нулю.
Аналогичное состояние будет и у груза, помещенного в кабину по-
поступательно движущегося космического летательного аппарата.
Такое состояние груза (тела) и называют невесомостью.
Объясняется полученный результат просто: под действием силы
тяжести и лифт, и находящийся в нем груз движутся по отношению
к осям Оху с одним и тем же ускорением g (рис. 271, б); поэтому от-
9 № 2173
257
носительно кабины лифта груз не перемещается (находится в любом
месте в покое) и не будет давить на дно кабины. Но одновременно
ясно, что состояние падающего груза никак не зависит от наличия
лифта и останется таким же, когда груз падает один. Следователь-
Следовательно, в состоянии невесомости находится любое тело, свободно дви-
движущееся (падающее) в поле сил тяжести (тяготения).
Однако из изложенного не видно, чем же физически состояние
тела при невесомости отличается от состояния, которое будет у тела,
когда оно просто покоится на поверхности Земли или движется под
действием каких-нибудь других сил, например силы тяги. Между
тем, что в этих состояниях есть существенное различие, показывает
эксперимент. Например, если в кабину падающего лифта (или косми-
космического летательного аппарата) поместить сосуд с водой, то при не-
невесомости вода не заполнит сосуд, а примет в нем форму шара и со-
сохранит ее, если этот шар вытолкнуть из сосуда. Объясняется это,
очевидно, "тем, что при невесомости изменяется характер внутренних
усилий в теле (в данном случае в жидкости). Следовательно, чтобы
выяснить, в чем состоит отличительная особенность состояния не-
невесомости, надо обратиться к рассмотрению возникающих в теле
внутренних усилий.
Будем различать две категории внутренних усилий в теле: уси-
усилия, не связанные с внешними воздействиями на тело (например, мо-
молекулярные силы, температурные напряжения или усилия в двух
стянутых болтами и образующих одно тело полосах железа) и уси-
усилия, вызванные внешними воздействиями на тело, т. е. действием
на тело внешних сил.
Остановимся на рассмотрении второй категории внутренних
усилий (см. § 20). При этом будем различать так называемые мас-
массовые (или объемные) и поверхностные силы. Массовыми называют
силы, действующие на каждую из частиц данного тела и численно
пропорциональные массам этих частиц; примером массовых сил
являются силы тяготения. Поверхностными называют силы, прило-
приложенные к точкам поверхности данного тела; примером таких сил
являются реакции всевозможных опор, сила тяги, силы сопротив-
сопротивления среды и т. п. При определении закона движения (или усло-
условий равновесия) физическая природа приложенных к телу сил роли
не играет. Важно лишь, чему равны модуль и направление каждой
из сил. Однако на значениях возникающих в теле внутренних уси-
усилий это различие, как мы увидим, сказывается весьма существенно.
Объясняется такой результат тем, что массовые силы действуют на
каждую из частиц тела непосредственно; действие же поверхност-
поверхностных сил передается частицам тела за счет давления на них соседних
частиц.
Рассмотрим тело массой т, движущееся в поле тяготения Земли
поступательно, но не обязательно прямолинейно. Размеры тела по
сравнению с земным радиусом будем считать настолько малыми,
что различием в расстояниях частиц тела от центра Земли можно
пренебречь и считать, что силы тяготения сообщают всем частицам
258
тела одно и то же ускорение g. Тогда равнодействующая приложен-
приложенных к телу сил тяготения будет
TT = mg. A23)
Допустим, что кроме сил тяготения на тело действуют еще по-
поверхностные силы, приложенные вдоль какой-то площадки АВ и
имеющие равнодействующую Q (рис. 272, а). Сила Q может быть
реакцией дна кабины лифта (или кабины самолета, космического
летательного аппарата), в которой покоится тело, или же силой
тяги, силой сопротивления среды и т. п.
Согласно сказанному в § 73, тело, движущееся поступательно,
можно рассматривать как материальную точку. Составим уравне-
уравнение движения этого тела в век- а) ~ б)
торной форме, получим J Fr
A24)
Отсюда, учитывая равенство
A23), найдем ускорение тела
Ь-
^g + Q/m.
A25)
Рис. 272
Определим теперь внутренние
усилия, возникающие под дейст-
действием сил FT и Q в каком-нибудь сечении ЬЬг тела, перпендикулярном
направлению вектора Q, т. е. те силы, с которыми частицы тела,
разделенные этим сечением, действуют друг на друга. Для этого
рассмотрим движение одной из частей тела, например верхней, мас-
массу которой обозначим тг. На эту часть тела действуют силы тяго-
тяготения, равнодействующая которых согласно формуле A23) будет
Fji^niig, и силы давления отброшенной части тела, равнодейст-
равнодействующую которых назовем St (рис. 272, б). Поскольку тело движется
поступательно, то и рассматриваемая его часть тоже движется по-
поступательно с тем же ускорением а и для нее miCt—Fjx+Si или
m^a—rrixg+Su откуда S1=m1(a—g). Заменяя здесь а его значением
из формулы A25), найдем окончательно, что
^^(mJmjQ. A26)
Таким образом, значения возникающих в теле внутренних уси-
усилий зависят только от действующих на него поверхностных сил.
При этом, поскольку в формулу A26) ускорение не входит, она бу-
будет справедлива и для покоящегося тела.
Рассмотрим тело, покоящееся на поверхности Земли. Действую-
Действующей на него поверхностной силой будет реакция земной поверхнос-
поверхности, численно равная весу Р тела. Следовательно, при Q=P формула
A26) определяет внутренние усилия в теле, покоящемся на поверх-
поверхности Земли. Состояние^ в котором находится тело при наличии в
9* 259
нем таких внутренних усилий, называют состоянием весомости.
Испытываемое человеком, находящимся на поверхности Земли,
ощущение «весомости» и является следствием наличия в его теле
таких внутренних усилий (давлений частей тела друг на друга).
Если на покоящееся или движущееся тело действует поверхност-
поверхностная сила Q<.P, то внутренние усилия в любом сечении тела будут
меньше, чем при его покое на земной поверхности (явление недо-
недогрузки); если же действующая поверхностная сила Q>P (например,
Q — сила тяги вертикально стартующей ракеты), то внутренние
усилия в любом сечении тела будут больше, чем при его покое на
земной поверхности (явление перегрузки). Наконец, когда Q—0
и тело движется свободно под действием только массовых сил (сил
тяготения), т. е. находится в состоянии невесомости, то под дейст-
действием этих сил никаких внутренних усилий в теле не возникает.
В итоге приходим к следующим результатам: 1) любое тело,
размеры которого малы по сравнению с его расстоянием от центра
Земли и которое движется в поле тяготения Земли свободно (т. е. под
действием только сил тяготения) и поступательно, находится в со-
состоянии невесомости; 2) состояние невесомости характеризуется
тем, что при невесомости в теле не возникает внутренних усилий,
вызываемых внешними воздействиями на это тело.
Аналогичный результат имеет место при движении в поле тя-
тяготения любого другого небесного тела.
Таким образом, если сопротивление воздуха пренебрежимо мало,
то любое падающее на Землю или брошенное с ее поверхности тело,
движущееся поступательно, будет находиться в состоянии невесо-
невесомости. В частности, в состоянии невесомости находятся движущиеся
вне земной атмосферы искусственные спутники Земли или косми-
космические летательные аппараты и все находящиеся в них тела.
Учет невесомости приобретает важное значение при космиче-
космических полетах, поскольку невесомость изменяет условия работы мно-
многих устройств и приборов, а те из них, в которых, например, ис-
используются физические маятники или свободная подача жидкости и
т. п., вообще оказываются непригодными. Важную роль в услови-
условиях невесомости начинают играть не зависящие от внешних воздейст-
воздействий и сохраняющиеся при невесомости молекулярные силы (в зем-
земных условиях малые по сравнению с взаимными давлениями, обус-
обусловленными весомостью), что меняет характер ряда явлений. На-
Например, в условиях невесомости смачивающая жидкость, заполняю-
заполняющая замкнутый сосуд, под действием молекулярных сил распреде-
распределится равномерно по его стенкам. Жидкость же, не смачивающая
стенок, примет форму шара, на что уже указывалось *.
* Невесомость влияет и на работу ряда органов человеческого тела (напри-
(например, на вестибулярный аппарат, обеспечивающий чувство равновесия); поэтому,
чтобы приспособиться к условиям невесомости, требуется соответствующая тре-
тренировка. Чтобы в некоторой мере имитировать при полете в космосе состояние «ве-
«весомости», на космонавтов надевают специальные костюмы, придающие телу соот-
соответствующие («вертикальные») нагрузки.
260
Местные системы отсчета. Рассмотрим тело А,
движущееся в поле тяготения Земли (или другого небесного тела)
свободно и поступательно с ускорением g (ускорение поля тяготе-
тяготения), т. е. находящееся в состоянии
невесомости. Свяжем с телом А систему
отсчета Охуг, движущуюся вместе с ним
тоже поступательно (рис. 273), и рас-
рассмотрим движение материальной точки
М массой т по отношению к этой систе-
системе отсчета. При этом область, где проис-
происходит движение, будем считать по срав- у
нению с расстояниями от тела А и точ- '
ки М до центра Земли (небесного тела)
настолько малой, что в этой области Рис. 273
можно считать g=const. На точку М, по-
поскольку она, как и тело А, движется в поле тяготения Земли, будет
действовать сила тяготения FT=mg, а также могут действовать дру-
другие силы Fu F2, ...,Fn.
Составим уравнение относительного движения точки по отно-
отношению к осям Охуг, т. е. уравнение E6) из § 91. Так как оси Охуг
движутся поступательно, то FJjop=0 и уравнение примет вид
"^=2^+^+^пер. A27)
где 2^л — сумма других действующих сил, кроме FT.
Но так как оси Охуг перемещаются вместе с телом А поступа-
поступательно с ускорением g, то для движущейся точки апеР=§' и F?ep=
=—mg. Учтя еще, что FT=mg, получим из уравнения A27)
/nJ=S^- A28)
Таким образом, хотя система отсчета Охуг не является инерци-
альной (см. § 91), так как движется с ускорением g, уравнение дви-
движения точки по отношению к этой системе отсчета составляется
так, как если бы она была инерциальной; но при этом в число дейст-
действующих на точку сил не должна включаться сила тяготения FT, т. е.
сила притяжения к Земле (небесному телу), в поле тяготения ко-
которого движутся тело А и связанная с ним система отсчета. Такую
систему назовем местной системой отсчета. Ее практически можно
считать инерциальной с тем большей степенью точности, чем мень-
меньше область, в которой происходит движение.
Например, если местную систему отсчета связать с движущимся
поступательно вокруг Земли космическим летательным аппаратом,
то уравнение движения по отношению к летательному аппарату лю-
любого находящегося в нем тела будет составляться в виде A28), т. е.
как в инерциальной системе отсчета, но при этом в число действую-
261
щих на тело сил не должна включаться сила притяжения к Земле.
Иначе говоря, все механические явления в летательном аппарате
будут происходить так, как если бы он находился вне поля тяготе-
тяготения.
Другим примером местной системы является система отсчета,
связанная с Землей, но имеющая оси, направленные на звезды, т. е.
не участвующие в суточном вращении Земли и движущиеся вместе
с Землей поступательно вокруг Солнца. Такая система отсчета для
движений в области, малой по сравнению с расстоянием от Земли
до Солнца, т. е. для движений в окрестностях Земли, будет практи-
практически инерциальной. Но при этом в число сил, действующих на те-
тело, движение которого изучается, не должна включаться сила при-
притяжения к Солнцу (к небесному телу, в поле тяготения которого
движется эта местная система отсчета). Поэтому, когда систему
отсчета, жестко связанную с Землей, рассматривают как инерциаль-
ную, то не учитывают только суточное вращение Земли, на что и
было указано в § 92. Силой притяжения к Солнцу при этом, как иног-
иногда ошибочно полагают, не пренебрегают ввиду ее малости, а ее про-
просто, согласно показанному выше, не следует учитывать.
Раздел четвертый
ДИНАМИКА СИСТЕМЫ И ТВЕРДОГО ТЕЛА
Глава XXI
ВВЕДЕНИЕ В ДИНАМИКУ СИСТЕМЫ. МОМЕНТЫ ИНЕРЦИИ
§ 100. МЕХАНИЧЕСКАЯ СИСТЕМА.
СИЛЫ ВНЕШНИЕ И ВНУТРЕННИЕ
Систему материальных точек или тел, движение (или равнове-
равновесие) которой рассматривается, будем называть механической систе-
системой. Если между точками (телами) механической системы действу-
действуют силы взаимодействия, то она обладает тем
свойством, что в ней положение или движе-
движение каждой точки (тела) зависит от положения
и движения всех остальных. Классическим
примером такой системы является солнечная
система, в которой все тела связаны силами
взаимного притяжения.
Действующие на механическую систему ак-
активные силы FI и реакции связей Nk разделя- Рис- 274
ют на внешние F% и внутренние F\ (индексы
е и i от латинских exterior — внешний и interior — внутренний).
Внешними называют силы, действующие на точки системы со сторо-
стороны точек или тел, не входящих в состав данной системы. Внутрен-
Внутренними называют силы, с которыми точки или тела данной системы
действуют друг на друга. Это разделение является условным и за-
зависит от того, какая механическая система рассматривается. На-
Например, если рассматривается движение всей Солнечной системы,
то сила притяжения Земли к Солнцу будет внутренней; если же рас-
рассматривается движение системы Земля — Луна, то для этой системы
та же сила будет внешней.
Внутренние силы обладают следующими свойствами:
1. Геометрическая сумма (главный вектор) всех внутренних сил
системы равняется нулю. В самом деле, по третьему закону динами-
динамики любые две точки системы (рис. 274) действуют друг на друга с
равными по модулю и противоположно направленными силами
Fи и Fh, сумма которых равна нулю. Так как аналогичный резуль-
263
тат имеет место для любой пары точек системы, то
2. Сумма моментов (главный момент) всех внутренних сил си-
стемы относительно любого центра или оси равняется нулю. Дей-
Действительно, если взять произвольный центр О, то из рис. 274 видно,
что mo(Fi2)-\-mo(Fi1)=0. Аналогичный результат получится при
вычислении моментов относительно оси. Следовательно, и для всей
системы будет:
2mo(F?) = 0 и 2Х(^) = 0.
Из доказанных свойств не следует, однако, что внутренние силы
взаимно уравновешиваются и не влияют на движение системы, таи
как эти силы приложены к разным материальным точкам или телам
и могут вызвать взаимные перемещения этих точек или тел. Урав-
Уравновешенной вся совокупность внутренних сил будет у системы, пред-
представляющей собой абсолютно твердое тело.
§ 101. МАССА СИСТЕМЫ. ЦЕНТР МАСС
Движение системы кроме действующих сил зависит также от ее
суммарной массы и распределения масс. Масса системы (обознача-
(обозначаем М или т) равна арифметической сумме масс всех точек или тел,
образующих систему:
Распределение масс в системе определяется значениями масс
mk ее точек и их взаимными положениями, т. е. их координатами
Xh, Ук, 2ft. Однако оказывается, что при решении тех задач динами-
динамики, которые мы будем рассматривать, в частности динамики твердого
тела, для учета распределения масс достаточно знать не все ве-
величины т&, xk, Уи, 2й, а некоторые, выражаемые через них суммар-
суммарные характеристики. Ими являются: координаты центра масс
(выражаются через суммы произведений масс точек системы на их
координаты), осевые моменты инерции (выражаются через суммы
произведений масс точек системы на квадраты их координат) и
центробежные моменты инерции (выражаются через суммы произ-
произведений масс точек системы и двух из их координат). Эти характери-
характеристики мы в данной главе и рассмотрим.
Центр масс. В однородном поле тяжести, для которого
g=const, вес любой частицы тела пропорционален ее массе. Поэто-
Поэтому о распределении масс в теле можно судить по положению его
центра тяжести. Преобразуем формулы E9) из § 32, определяющие
координаты центра тяжести тела, к виду, явно содержащему массу.
Для этого положим в названных формулах Ph=tnkg и P—Mg, после
чего, сократив на g, найдем:
z Sm2 0)
264
В полученные равенства входят теперь массы тк материальных
точек (частиц), образующих тело, и координаты xk, yk, zk этих то-
точек. Следовательно, положение точки С(хс,ус, zc) действительно
характеризует распределение масс в теле или в любой механиче-
механической системе, если под mh, xk, у к, zh понимать соответственно массы
и координаты точек системы.
Геометрическая точка С, координаты которой определяются
формулами A), называется центром масс или центром инерции
механической системы.
Если положение центра масс определять его радиусом-вектором
гс, то из равенств A) для гс получается формула
где rk — радиусы-векторы точек, образующих систему.
Из полученных результатов следует, что для твердого тела, на-
находящегося в однородном поле тяжести, положения центра масс
и центра тяжести совпадают. Но в отличие от центра тяжести поня-
понятие о центре масс сохраняет свой смысл для тела, находящегося в
любом силовом поле (например, в центральном поле тяготения),
и, кроме того, как характеристика распределения масс, имеет смысл
не только для твердого тела, но и для любой механической системы.
§ 102. МОМЕНТ ИНЕРЦИИ ТЕЛА ОТНОСИТЕЛЬНО ОСИ.
РАДИУС ИНЕРЦИИ
Моментом инерции тела (системы) относительно данной оси
Oz (или осевым моментом инерции) называется скалярная величина,
равная сумме произведений масс всех точек тела (системы) на квад-
квадраты их расстояний от этой оси:
г _ "у mjii (9\
j г — j^ mbnk. {?)
Из определения следует, что момент инерции тела (или системы)
относительно любой оси является величиной положительной и не
равной нулю.
В дальнейшем будет показано, что осевой момент инерции играет
при вращательном движении тела такую же роль, какую масса при
поступательном, т. е. что осевой момент инерции является мерой
инертности тела при вращательном движении.
Согласно формуле B) момент инерции тела равен сумме моментов
инерции всех его частей относительно той же оси. Для одной мате-
материальной точки, находящейся на расстоянии h от оси, Jz=m№.
Единицей измерения момента инерции в СИ будет 1 кг -м2 (в системе
МКГСС— 1 кгм-с2).
Для вычисления осевых моментов инерции можно расстояния
точек от осей выражать через координаты xh, yh, zk этих точек (на-
(например, квадрат расстояния от оси Ох будет y\-\-z\ и т. д.). Тогда
моменты инерции относительно осей Oxyz будут определяться фор-
265
мулами:
). C)
Часто в ходе расчетов пользуются понятием радиуса инерции.
Радиусом инерции тела относительно оси Ог называется линейная
величина рг, определяемая равенством
/, = Afp», D)
где М — масса тела. Из определения следует, что радиус инерции
геометрически равен расстоянию от оси Oz той точки, в которой надо
сосредоточить массу всего тела, чтобы момент инерции одной этой
точки был равен моменту инерции всего тела.
Зная радиус инерции, можно по формуле D) найти момент
инерции тела и наоборот.
Формулы B) и C) справедливы как для твердого тела, так и для
любой системы материальных точек. В случае сплошного тела, раз-
разбивая его на элементарные части, найдем, что в пределе сумма, стоя-
стоящая в равенстве B), обратится в интеграл. В результате, учитывая,
что dm=pdV, где р—плотность, а V—объем, получим
Jz = $ /г2 dm или Jz = $ p/i2 dV. E)
Интеграл здесь распространяется на весь объем V тела, а плотность
р и расстояние к зависят от координат точек тела. Аналогично фор-
формулы C) для сплошных тел примут вид
т. д. E')
Формулами E) и E') удобно пользоваться при вычислении мо-
моментов инерции однородных тел правильной формы. При этом плот-
плотность р будет постоянной и выйдет из-под знака интеграла.
Найдем моменты инерции некоторых одно-
однородных тел.
1. Тонкий однородный стержень длиной / и
массой М. Вычислим его момент инерции относительно оси Az, пер-
перпендикулярной стержню и проходящей через его конец А (рис. 275).
Направим вдоль АВ координатную ось Ах. Тогда для любого эле-
элементарного отрезка длины dx величина h—x, а масса dm=pxdx,
где р!=М/1 — масса единицы длины стержня. В результате форму-
формула E) дает *
г i
JA = J х2 dm = Pi J x2 dx = p^/3.
* Здесь и везде далее Jд обозначает момент инерции относительно оси, про-
проходящей через точтсу А и натравленной перпендикулярно плоскости изображен-
изображенного на чертеже сечения тела.
266
Заменяя здесь рх его значением, найдем окончательно
JA=MM3. F)
2. Тонкое круглое однородное кольцо ра-
радиусом R и массой М. Найдем его момент инерции относительно
Б
х
Рис. 275
Рис. 276
Рис. 277
оси Cz, перпендикулярной плоскости кольца и проходящей через
его центр С (рис. 276). Так как все точки кольца находятся от оси
Cz на расстоянии hh=R, то формула B) дает
=2
=B
Следовательно, для кольца *
G)
Очевидно, такой же результат получится для момента инерции
тонкой цилиндрической оболочки массой М и радиусом R относи-
относительно ее оси.
3. Круглая однородная пластина или ц и-
л и н д р радиусом R и массой М. Вычислим момент инерции круг-
круглой пластины относительно оси Cz, перпендикулярной пластине и
проходящей через ее центр (см. рис. 276). Для этого выделим эле-
элементарное кольцо радиусом г и шириной dr (рис. 277, а). Площадь
этого кольца 2ro--dr, а масса dm=p22nr-dr, где р2=М/лг2 — масса
единицы площади пластины. Тогда по формуле G) для выделенного
элементарного кольца будет d/c=r!dm=2jtp2r)dr, а для всей
пластины.
R
Jc = 2лр2 J г3 dr = яр2#4/2.
о
Заменяя здесь р2 его значением, найдем окончательно
Jq iVll\ Iti. (О)
* Сравнивая формулы D) и G) можно еще заключить, что радиус инерции
тела равен радиусу тонкого кольца с таким же осевым моментом инерции,
как и у тела.
267
Такая же формула получится, очевидно, и для момента инер-
инерции J' г однородного круглого цилиндра массой М и радиусом R
относительно его оси (рис. 277, б).
4. Прямоугольная пластина, конус, шар.
Опуская выкладки, приведем формулы, определяющие моменты
инерции следующих тел (читатель может получить их самостоятель-
самостоятельно, а также найти эти и другие формулы в различных справочни-
справочниках):
а) сплошная прямоугольная пластина массой М со сторонами
АВ=а и BD—b (ось х направлена вдоль стороны АВ, ось у — вдоль
BD):
Jx=Mb*/3, Jy=Ma43;
б) прямой сплошной круглый конус массой М с радиусом осно-
основания R (ось г направлена вдоль оси конуса):
в) сплошной шар массой М и радиусом R (ось z направлена вдоль
диаметра):
O
Моменты инерции неоднородных тел и тел сложной конфигура-
конфигурации можно определять экспериментально с помощью соответствую-
соответствующих приборов. Один из таких методов рассмотрен в § 129.
§ 103. МОМЕНТЫ ИНЕРЦИИ ТЕЛА ОТНОСИТЕЛЬНО
ПАРАЛЛЕЛЬНЫХ ОСЕЙ. ТЕОРЕМА ГЮЙГЕНСА
Моменты инерции данного тела относительно разных осей бу-
будут, вообще говоря, разными. Покажем, как, зная момент инерции
относительно какой-нибудь одной оси, проведенной в теле, найти
момент инерции относительно любой дру-
другой оси, ей параллельной.
Проведем через центр масс С тела про-
произвольные оси Cx'y'z', а через любую точ-
точку О на оси Сх' — оси Oxyz, такие, что
OyWCy', Oz\\Cz' (рис. 278). Расстояние меж-
между осями Cz' и Oz обозначим через d.
Тогда по формулам C) будет:
Joz=Hmk (*1 + У I), Jcz> = 2 mk (х'ь + </*")•
Но, как видно из рисунка, для любсй
точки тела х^=х'к—d и xl=x'k2-\-d2—2х$,
а Уи=Ук- Подставляя эти значения х%, у& в выражение для JOz и
вынося общие множители d2 и 2d за скобки, получим
jO2=s щ {х':+y'ki+(s щ) *-B>*;Jd-
В правой части равенства первая сумма равна УСг,, а вторая —
массе тела М. Найдем значение третьей суммы. На основании фор-
268
мул A) для координат центра масс Ит^х'^Мхс. Так как в нашем
случае точка С является началом координат, то х'с=0 и, следова-
следовательно, 2mfcJtft=0. Окончательно получаем
(9)
Формула (9) выражает следующую теорему Гюйген-
Гюйгенса*: момент инерции тела относительно данной оси равен момен-
моменту инерции относительно оси, ей параллельной, проходящей через
центр масс тела, сложенному с произведением массы всего тела на
квадрат расстояния между осями.
Из формулы (9) видно, что Joz>J'сг- Следовательно, из всех
осей данного направления наименьший момент инерции будет отно-
относительно той оси, которая проходит через центр масс.
Теорема Гюйгенса позволяет найти момент инерции тела отно-
относительно данной оси Ozi и в том случае, когда известен его момент
инерции относительно любой оси Az2, параллельной Огг. При этом
надо знать расстояния й± и d2 каждой из этих осей от центра (масс
тела. Тогда, зная JAZi и йг, мы по формуле (9) определяем Jсг,,
а затем по той же формуле находим искомый момент инерции J0Zi.
Задача 119. Определить момент инерции тонкого стержня относительно оси
Сг, перпендикулярной стержню и проходящей через его центр масс.
Решение. Проведем через конец А стержня ось Аг (см. рис. 275; ось Сг
на нем не показана). Тогда по формуле (9)
В данном случае d=t/2, где / — длина стержня, а величина J л определяется
формулой F). Следовательно,
Задача 120. Определить момент инерции цилиндра относительно оси Azlt про-
проходящей через его образующую (см. рис. 277,6).
Решение. По теореме Гюйгенса JАг^^СгЛ'Мй^. В данном случае
d~R, а по формуле (8) JCz=MR2/2. Подставляя эти значения, получим
jMi = MRV2 + MR2 = C/2) MR*.
§ 104*. ЦЕНТРОБЕЖНЫЕ МОМЕНТЫ ИНЕРЦИИ.
ПОНЯТИЯ О ГЛАВНЫХ ОСЯХ ИНЕРЦИИ ТЕЛА
Если через точку О провести координатные оси Oxyz, то по отно-
отношению к этим осям центробежными моментами инерции (или про-
произведениями инерции) называют величины Jxy, Jyz, Jzx, определяемые
равенствами:
где mk — массы точек; xh, yh, zh — их координаты; при этом оче-
очевидно, что Jxy=Jyx и т. д.
* Христиан Гюйгенс A629—1695) — выдающийся голландский ученый, меха-
механик, физик и астроном. Изобрел первые маятниковые часы. В связи с этим изучал
колебания физического маятника (см. § 129) и ввел понятие о моменте инерции тела
(сам термин предложил позже Эйлер).
269
Для сплошных тел формулы A0) по аналогии с E') принимают
вид
J*ii = S PxydV и т. д.
A0')
В отличие от осевых центробежные моменты инерции могут быть
как положительными, так и отрицательными величинами и, в част-
частности, при определенным образом выбранных осях Oxyz могут обра-
обращаться в нули.
Главные оси инерции. Рассмотрим однородное тело,
имеющее ось симметрии. Проведем координатные оси Oxyz так, что-
чтобы ось Oz была направлена вдоль оси симметрии (рис. 279). Тогда
в силу симметрии каждой точке тела с массой mh и координатами
*kt У к, Zk будет соответствовать точка с другим индексом, но с такой
же массой и с координатами, равными —xk, —yk, zh. В результате
получим, что 2тAхй=0 и 2/nft?/ftzfe=0, так как в этих суммах все
слагаемые попарно одинаковы по модулю и противоположны по
знаку; отсюда, учитывая равенства A0), находим:
J*z=0, Jvz=0. (И)
Таким образом, симметрия в распределении масс относительно
оси z характеризуется обращением в нуль двух центробежных мо-
моментов инерции Jхг и Jyz. Ось Oz, для ко-
которой центробежные моменты инерции
JXz> Jyz, содержащие в своих индексах
наименование этой оси, равны нулю, на-
называется главной осью инерции тела для
точки О.
Из изложенного следует, что если
тело имеет ось симметрии, то эта ось
является главной осью инерции тела для
любой своей точки.
Главная ось инерции не обязательно
является осью симметрии. Рассмотрим
однородное тело, имеющее плоскость
симметрии (на рис. 279 плоскостью сим-
симметрии тела является плоскость abed).
Проведем в этой плоскости какие-нибудь оси Ox, Oz и перпендику-
перпендикулярную им ось Оу. Тогда в силу симметрии каждой точке с массой
mh и координатами xh, yh, zk будет соответствовать точка с такой же
массой и координатами, равными xh, —yh, zk. В результате, как и
в предыдущем случае, найдем, что I>mhxhyk=0 и ~2mhyhzh=0 или
Jxy=0, Jyz=0, откуда следует, что ось Оу является главной осью
инерции для точки О. Таким образом, если тело имеет плоскость
симметрии, то любая ось, перпендикулярная этой плоскости, будет
главной осью инерции тела для точки О, в которой ось пересекает
плоскость.
Равенства A1) выражают условия того, что ось Oz является глав-
главной осью инерции тела для точки О (начала координат). Аналогич-
270
Рис. 279
но, если Jxy—U, Jyz=0, то ось Оу будет для точки О главной осью
инерции. Следовательно, если все центробежные моменты инерции
равны нулю, т. е.
то каждая из координатных осей Oxyz является главной осью
инерции тела для точки О (начала координат).
Например, на рис. 279 все три оси Oxyz являются для точки О
главными осями инерции (ось Ог как ось симметрии, а оси Ох и Оу
как перпендикулярные плоскостям симметрии).
Моменты инерции тела относительно главных осей инерции
называются главными моментами инерции тела.
Главные оси инерции, построенные для центра масс тела, на-
называют главными центральными осями инерции тела. Из доказан-
доказанного выше следует, что если тело имеет ось симметрии, то эта ось
является одной из главных центральных осей инерции тела, так как
центр масс лежит на этой оси. Если же тело имеет плоскость сим-
симметрии, то ось, перпендикулярная этой плоскости и проходящая
через центр масс тела, будет также одной из главных центральных
осей инерции тела.
В приведенных примерах рассматривались симметричные тела,
чего для решения задач, с которыми мы будем сталкиваться, доста-
достаточно. Однако можно доказать, что через любую точку какого угод-
угодно тела можно провести, по крайней мере, три такие взаимно пер-
перпендикулярные оси, для которых будут выполняться равенства
A1'), т. е. которые будут главными осями инерции тела для этой
точки.
Понятие о главных осях инерции играет важную роль в динами-
динамике твердого тела. Если по ним направить координатные оси Oxyz,
то все центробежные моменты инерции обращаются в нули и соот-
соответствующие уравнения или формулы существенно упрощаются
(см. § 105, 132). С этим понятием связано также решение задач о
динамическом уравнении вращающихся тел (см. § 136), о центре
удара (см. § 157) и др.
§ 105*. МОМЕНТ ИНЕРЦИИ ТЕЛА ОТНОСИТЕЛЬНО
ПРОИЗВОЛЬНОЙ ОСИ
Проведем ось 01, образующую с осями Oxyz углы а, р и у соответственно
(рис. 280). По определению, Jl='Zm^h%, где, как_ видно из треугольника 0Вфк,
hk=rk—(ODfcK. Но ODk, как проекция вектора О^л^+г/^+гдА: на ось 01, рав-
равна сумме проекций составляющих этого вектора на ту же ось, причем (jc^i)j =
=*ftcos а и т. д.; кроме того, г1=4+<Д+4. Тогда
h = %Щ [4 + у1 + г\ — fa cos a + </ft cos Р + zft cos vJ] •
Если сначала учестьJ что 1—cos2a=cos2 p+cos2v и т. д., а затем вынести
квадраты и произведения косинусов,'как общие множители, за скобки и принять
во внимание формулы C) и A0), то окончательно получим
y os2 Р + ^г cos2 у—2/^ cos a cos (i—
cos P cos 7—2J2X cos у cos a. A2)
271
Если же в качестве осей Охуг выбрать главные оси инерции тела для течки О
то формула упрощается.
s* a + Jy cos2 p" + Jz cos2 y. A2')
, = Jx cos*
Формулы A2) или A2') позволяют, зная входящие в их правые части моменты
инерции относительно заданных осей Охуг, определить момент инерции относи-
относительно любой оси, проходящей через точку О*. Если же известно и положение
центра масс тела, то, используя формулу (9), можно найти момент инерции относи-
относительно оси, проходящей через любую другую точку.
s
ъ
A
С
a
X
Рис 280
Рис. 281
Задача 121. Найти момент инерции однородной прямоугольной пластины
с массой т и сторонами а и Ь относительно ее диагонали (рис 281).
Решение. Проведем через центр С пластины оси Сху (ось Сг на рисунке
не показана), которые, как оси симметрии, будут для точки С главными осями
инерции. Тогда по формуле A2'), учитывая, что 7=90°, получим
По аналогии с результатом, полученным в задаче 119, для пластины будет
Jx—mbVl2, Jy=mail\2, кроме того, cosa= а/с, cos$=b/c, где с=Д.8. В результате
окончательно найдем
Jt = ma262/6c2 = таЧуб (a2 + b2).
В заключение рассмотрим, в чем проявляется влияние введен-
введенных характеристик распределения масс на частном примере враще-
вращения вокруг оси Oz стержня с нани-
нанизанными на него одинаковыми ша-
шарами А и В (рис. 282).
Если Ь,ъФЬ.х, то центр масс си-
системы не лежит на оси Oz и при
вращении появятся давления на
подшипники; если h2=hu центр
масс лежит на оси и этих давлений
не будет.
Если при /i2=^i расстояния шаров от оси увеличить, то положе-
положение центра масс не изменится, но увеличится момент инерции Jz
и при прочих равных условиях вращение будет происходить мед-
медленнее.
Если стержень DE повернуть в плоскости Оуг так, чтобы /JDCz
не был прямым, а расстояния hi и A2=Ai сохранить, сместив шары
* Шесть величин Jx, Jy, Jz, —Jxy, —JyZ, —Jzx определяют так называемый
тензор инерции и являются его компонентами.
272
Рис. 282
к концам стержня, то ни положение центра масс, ни момент инерции
Jz не изменятся, но станет не равным нулю центробежный момент
инерции J,JZ и ось Oz не будет главной; в результате при вращении
возникнут дополнительные боковые давления на подшипники (ось
будет «бить»).
Глава XXII
ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС СИСТЕМЫ
§ 106. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ
Рассмотрим систему, состоящую из п материальных точек. Вы-
Выделим какую-нибудь точку системы с массой тк. Обозначим равно-
равнодействующую всех приложенных к точке внешних сил (и активных,
и реакций связей) через F%, а равнодействующую всех внутренних
сил — через Flk. Если точка имеет при этом ускорение ah, то по
основному закону динамики mkah—F%+Fj;.
Аналогичный результат получим для любой точки. Следователь-
Следовательно, для всей системы будет
Уравнения A3) представляют собой дифференциальные уравне-
уравнения движения системы в векторной форме (в них ah=vk—rk)- Входя-
Входящие в правые части уравнений силы могут в общем случае зависеть
от времени, координат точек системы и их скоростей.
Проектируя равенства A3) на какие-нибудь координатные оси,
получим дифференциальные уравнения движения системы в проек-
проекциях на эти оси.
Полное решение основной задачи динамики для системы будет
состоять в том, чтобы, зная заданные силы и наложенные связи,
проинтегрировать соответствующие дифференциальные уравнения
и определить в результате закон движения каждой из точек системы
и реакции связей. Сделать это аналитически удается лишь в отдель-
отдельных случаях, когда число точек системы невелико, или же интегри-
интегрируя уравнения численно с помощью ЭВМ.
Однако при решении многих конкретных задач необходимость
находить закон движения каждой из точек системы не возникает,
а бывает достаточно найти какие-то характеристики, определяющие
движение всей системы в целом. Например, чтобы установить, как
движется под действием приложенных сил кривошипно-ползунный
механизм (см. рис. 158 в § 57), достаточно определить закон враще-
273
ния кривошипа, т. е. найти зависимость угла его поворота <р от
времени t. Обычно для отыскания подобных решений уравнения
A3) непосредственно не применяют, а применяют другие, разрабо-
разработанные в динамике методы. К их числу относятся методы, которые
дают широко используемые в инженерной практике общие теоремы
динамики системы, получаемые как следствия уравнений A3);
эти теоремы и будут рассмотрены в данной и в трех последующих
главах.
Но предварительно решим одну задачу, показывающую, что
искомый результат можно иногда эффективно находить и непосред-
непосредственно, используя дифференциальные уравнения движения си-
системы.
Задача 122. Динамический гаситель колебаний. Укреп-
Укрепленный на пружине груз 1 совершает вынужденные колебания под действием воз-
возмущающей силы Q, проекция которой Ox=Q0 sin pt
(см. § 96).
Определить, при каких условиях можно погасить
эти колебания, прикрепив к грузу 1 на пружине с ко-
коэффициентом жесткости с2 груз 2 массой т2 (рис. 283)^
Решение. Будем определять положения гру-
грузов координатами х1 и х2, отсчитываемыми от поло-
положений статического равновесия грузов, направив ось
х по вертикали вверх. Тогда силы тяжести уравновесят-
уравновесятся СИЛаМИ упруГОСТИ FlcT=c:lAlCT и F2СТ=С2^2ст и из
уравнений движения исключатся (см. в § 94 зада-
задачу 112), а учитываемые при движении силы упруго-
упругости будут пропорциональны удлинениям, которые полу-
получают пружины при смещениях грузов от положений ста-
статического равновесия. Эти удлинения будут соответ-
соответственно равны %1=Xi и %2=х2—*i и на груз 2 бу-
будет действовать_сила упругости F2 (F2x= —с2^2)' а на
груз 1 — силы F'2=— F2, Fi (Flx=—CxXj) и Q, В ре-
результате получим следующие дифференциальные уравнения движения грузов:
ff*iA = — с\Х\ + с2 (*2—*i) + Q о si n pt, т2х2 = — с2 (xz — х±).
Чтобы колебания груза 1 гасились, должно быть ^=0. Тогда
O и
Рис.
Из первого уравнения яа=—(Qjc^ sin pt и х%= рг (Q0/c2) sin pt. В результате под-
подстановка во второе уравнение после сокращений дает
Это и будет искомым условием гашения, в котором одной из величин т2 или
с2 можно задаваться произвольно. Конечно, желательно, чтобы масса тг была мень-
меньше, но при малой /и2 и заданном р будет мало и с2, а это приведет к нежелательному
увеличению амплитуды Q0lc2 колебаний груза 2.
§ 107. ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС
В ряде случаев для определения характера движения системы
(особенно твердого тела) требуется знать закон движения ее центра
масс. Чтобы найти этот закон, обратимся к уравнениям движения
системы A3) и сложим почленно их левые и правые части. Тогда
получим
2Г4
Преобразуем левую часть равенства. Из формулы (Г) для радиуса-
вектора центра масс имеем
Беря от обеих частей этого равенства вторую производную по вре-
времени и замечая, что производная от суммы равна сумме производ-
производных, найдем
ИЛИ
Ъткак = Мас, A5)
где ас — ускорение центра масс системы. Так как по свойству внут-
внутренних сил системы 2/^=0, получим окончательно из равенства
A4), учтя A5),
Уравнение A6) и выражает теорему о движении цен-
центра масс системы: произведение массы системы на ускоре-
ускорение ее центра масс равно геометрической сумме всех действующих
на систему внешних сил. Сравнивая уравнение A6) с уравнением
движения материальной точки [§ 74, формула B)], придем к дру-
другому выражению теоремы: центр масс системы движется как ма-
материальная точка, масса которой равна массе всей системы и к кото-
которой приложены все внешние силы, действующие на систему.
Проектируя обе части равенства A6) на координатные оси, по-
получим:
= 2F%z. A6')
Эти уравнения представляют собой дифференциальные уравнения
движения центра масс в проекциях на оси декартовой системы коор-
координат.
Значение доказанной теоремы состоит в следующем.
1. Теорема дает обоснование методам динамики точки. Из урав-
уравнений A6') видно, что решения, которые мы получаем, рассматривая
данное тело как материальную точку, определяют закон движения
центра масс этого тела, т. е. имеют вполне конкретный смысл.
В частности, если тело движется поступательно, то его движение
полностью определяется движением центра масс. Таким образом,
поступательно движущееся тело можно всегда рассматривать как
материальную точку с массой, равной массе тела. В остальных слу-
случаях тело можно рассматривать как материальную точку лишь
тогда, когда практически для определения положения тела доста-
достаточно знать положение его центра масс и допустимо по условиям
решаемой задачи не принимать во внимание вращательную часть
движения тела.
275
2. Теорема позволяет при определении закона движения центра
масс любой системы исключать из рассмотрения все наперед неиз-
неизвестные внутренние силы. В этом состоит ее практическая ценность.
§ 108. ЗАКОН СОХРАНЕНИЯ ДВИЖЕНИЯ ЦЕНТРА МАСС
Из теоремы о движении центра масс можно получить следующие
важные следствия.
1. Пусть сумма внешних сил, действующих на систему, равна
нулю:
Тогда из уравнения A6) следует, что ас—0 или t»c=const.
Следовательно, если сумма всех внешних сил, действующих на
систему, равна нулю, то центр масс этой системы движется с по-
постоянной по модулю и направлению скоростью, т. е. равномерно и
прямолинейно. В частности, если вначале центр масс был в покое,
то он и останется в покое. Действие внутренних сил, как мы видим,
движение центра масс системы изменить не может.
2. Пусть сумма внешних сил, действующих на систему, не равна
нулю, но эти силы таковы, что сумма их проекций на какую-нибудь
ось (например, ось х) равна нулю:
Тогда первое из уравнений A6') дает
хс = 0 или xc = vCx = const.
Следовательно, если сумма проекций всех действующих внешних
сил на какую-нибудь ось равна нулю, то проекция скорости центра
масс системы на эту ось есть величина постоянная. В частности,
если в начальный момент vCx=0, то и в любой последующий момент
времени vCx=Q, т. е. центр масс системы в этом случае вдоль оси х
перемещаться не будет (хс=const).
Все эти результаты выражают собой закон сохранения движения
центра масс системы. Рассмотрим некоторые примеры, иллюстри-
иллюстрирующие его приложения.
Движение центра масс Солнечной системы. Так
как притяжением звезд можно практически пренебречь, то можно считать, что
на Солнечную систему никакие внешние силы не действуют. Следовательно,
в первом приближении ее центр масс движется по отношению к звездам равно-
равномерно и прямолинейно.
Действие пары сил на тело (см., например, рис. 32). Если
на свободное твердое тело начнет действовать пара сил F, F', то геометрическая
сумма этих внешних сил будет равна нулю (F-\-F'—0). Следовательно, центр масс
С тела, если он вначале был неподвижен, должен остаться неподвижным и при
действии пары. Таким образом, где бы к свободному твердому телу ни была при-
приложена пара сил, тело начнет вращаться вокруг своего центра масс (но мгно-
мгновенная ось вращения в общем случае не будет направлена перпендикулярно
плоскости действия пары, как можно предположить).
276
Движение по горизонтальной плоскости. При
отсутствии трения человек с помощью своих мускульных усилий (силы внутрен-
внутренние) не мог бы двигаться вдоль горизонтальной плоскости, так как в этом случае
сумма проекций на любую горизонтальную ось Ох всех приложенных к человеку
внешних сил (сила тяжести и реакция плоскости) будет равна нулю и центр
масс человека вдоль плоскости перемещаться не будет (Хс= const).
Если, например, человек вынесет правую ногу вперед, то левая его нога
скользнет назад, а центр масс останется на месте. При наличии же трения сколь-
скольжению левой ноги назад будет препятствовать сила трения, которая в этом случае
будет направлена вперед. Эта сила и будет той внешней силой, которая позволяет
человеку перемещаться в сторону ее действия (в данном случае вперед).
Аналогично происходит движение тепловоза или автомобиля. Сила давления
газа в двигателе является силой внутренней и сама по себе не может переместить
центр масс системы. Движение происходит потому, что двигатель передает соот-
соответствующим колесам, называемым ведущими, вращающий момент. При этом
точка касания В ведущего колеса (рис. 284) стремится скользить влево. Тогда
на колесо будет действовать сила трения, направленная вправо. Эта внешняя
сила и позволит центру тяжести тепловоза или автомобиля двигаться вправо.
Когда этой силы нет или когда она недостаточна для преодоления сопротивления,
испытываемого ведомыми колесами *, движения вправо не будет; ведущие колеса
будут при этом вращаться на месте (буксовать).
Торможение. Для торможения к барабану, жестко связанному
с катящимся колесом, прижимают тормозную колодку. Возникающая при этом
сила трения колодки о барабан будет силой внутренней и сама по себе не изменит
движение центра масс, т. е. не затормозит поезд или автомобиль. Однако трение
колодки о барабан будет замедлять вращение
колеса вокруг его оси и увеличит силу трения
колеса о рельс (или грунт), направленную про-
противоположно движению. Эта внешняя сила и
будет замедлять движение центра масс поезда
или автомобиля, т. е. создавать торможение
(см. задачу 154 в § 130).
В заключение отметим, что движениеобъек-
та в предыдущих примерах происходит, конечно,
за счет работы внутренних сил (двигателя авто- Рис. 284
мобиля или мускулов ног человека). Но привес-
привести в движение центр масс объекта внутренние
силы могут лишь тогда, когда они вызывают такое взаимодействие объекта с внеш-
внешней, средой, при котором на объект начинают действовать внешние силы (в при-
примерах это силы трения). Другой возможностью является реактивный эффект
(см. § 112, 114). Никакое устройство, не обеспечивающее появление таких внеш-
внешних сил или не создающее реактивного эффекта, привести в движение центр масс
объекта за счет действия одних только внутренних сил не может. В таких пред-
предлагавшихся устройствах, как «машина Дина» или «инерцоид», движение объекта
тоже происходит за счет его взаимодействия с внешней средой, но менее явно вы-
выраженного, что давало повод необоснованно отрицать наличие такого взаимо-
взаимодействия.
§ 109. РЕШЕНИЕ ЗАДАЧ
Пользуясь теоремой о движении центра масс, можно, зная внеш-
внешние силы, найти закон движения центра масс, и, наоборот, зная
движение центра масс, определить главный вектор действующих
* На ведомое колесо действует не вращающий момент, а сила Q, приложенная
к оси (рис. 284). Под ее действием все колесо, а с ним и точка касания А колеса о
грунт стремятся сдвинуться вперед. При этом на колесо будет действовать сила
трения, направленная назад. Эта внешняя сила и тормозит движение.
277
на систему внешних сил. Первой задачей мы занимались в динамике
точки. Примеры решения второй задачи рассмотрим ниже.
Теорема позволяет исключить из рассмотрения все внутренние
силы. Поэтому рассматриваемую систему надо стараться выбирать
так, чтобы ряд наперед неизвестных сил сделать внутренними.
В случаях, когда имеет место закон сохранения движения цент-
центра масс, теорема позволяет по перемещению одной части системы
найти перемещение другой ее части.
Мы доказали, что когда 2/^=0 и в начальный момент времени vCx=0,
то при движении системы хс=const. Пусть для определенности система состоит
из трех тел с массами titi, m2, tng и начальными координатами их центров масс
х-у, х2, х3. Если под действием внутренних (или внешних) сил тела совершат аб-
абсолютные перемещения, проекции которых на ось Ох будут \ъ ?2, ?3, то соответст-
соответствующие координаты станут равны JCi-f?i» *а+13, #з+?з- Тогда по формулам A)
координата центра масс Xq всей системы в начальном и конечном положениях
определяется равенствами:
МхСо = m^i + ш2лг2+т3х3;
MxCi = тг fa + |i) + т2 (х2 + Iss) + ms (x3 +?3) •
Так как *с= const, то дгС1=л-Со и, следовательно,
т111+т2В,2+т313=0 A7)
или
рЛг\-рЛ*+гъЪ=о- A7')
Таким образом, когда имеет место закон сохранения движения центра масс
вдоль оси Оде, то алгебраическая сумма произведений масс (или весов) тел системы
на проекции абсолютных перемещений их центров масс должна быть равна нулю,
если только в начальный момент времени vCx=0. При вычислении Ъ,г, i2, ...
следует всегда учитывать их знаки.
Задача 123. На носу и корме лодки весом р сидят на расстоянии I друг
от друга два человека весом ра и рв каждый (рис. 285). Пренебрегая сопротив-
сопротивлением воды, определить, куда и
насколько переместится лодка, если
люди поменяются местами.
Решение. Чтобы исклю-
исключить из рассмотрения неизвестные
нам силы трения подошв о дно
лодки и мускульные усилия людей,
будем рассматривать лодку и лю-
людей как одну систему (при этом наз-
названные силы станут внутренними).
Внешними силами, действующими
на систему, будут вертикальные си-
силы р, рд, pff, N. Тогда Sf|jt=O, и
так как в начальный момент време-
времени fcx=0, Т0 хс=const. Следова-
Следовательно, абсолютные перемещения
всех тел связаны зависимостью A7).
Изображая лодку и людей в на-
наРис. 285
чальном и конечном положениях,
мы видим, что перемещение лодки
?л=х *. Далее, для первого чело-
* Во избежание ошибок в знаках рекомендуется, независимо от того, куда
фактически происходит смещение, изображать лодку (систему) в смещенном поло-
положении так, чтобы координата х была положительной (рис. 285). Если после под-
подсчетов значение х получится отрицательным, то это будет означать, что при усло-
условиях задачи смещение происходит в другую сторону!
278
века абсолютное перемещение 1.д=лН-?; абсолютное перемещение второго чело-
человека равно ВВХ, а проекция этого перемещения на ось Ох будет 5в=—{I—х).
Тогда по уравнению A7')
Отсюда находим, что перемещение лодки
х = (Рв—РаI/Р> где Р = Р+Ра+Рв-
Если рв>рл> то х>0, т. е. лодка смещается вправо; при рв<РА смещение
лодки произойдет влево. Когда рв~РА> лодка остается на месте
Подчеркиваем еще раз: систему, движение которой надо рассмотреть при
решении подобных задач, следует выбирать так, чтобы наперед неизвестные
силы сделать внутренними.
Задача 124. Центр масс вала мотора смещен от оси вращения на величину
АВ=Ъ. Масса вала т\, а масса всех остальных частей мотора т2 Определить,
по какому закону будет двигаться мотор, поставленный на гладкую горизон-
горизонтальную плоскость, когда вал вращается с постоянной угловой скоростью со.
Найти дополнительно, какое максимальное усилие будет испытывать болт D,
если с его помощью неподвижно закрепить мотор.
у
Ъ
ЖШЖ
рг1
Рис. 287
Решение. Чтобы исключить силы, вращающие вал, сделав их внутрен-
внутренними, рассмотрим весь мотор с валом как одну систему.
_ 1. При незакрепленном моторе все действующие на него силы {p1=m1g]
Pi~mi& и реакция плоскости) будут вертикальными, и здесь, как и в предыдущей
задаче, будет иметь место закон сохранения движения центра масс вдоль оси Сх
Изображаем мотор в произвольном положении (рис. 286), считая начальным
то положение, когда точки В к А лежат на одной вертикали (на оси Оу). Тогда
в произвольном положении 1л=Л:> 5д—x-\-b sin ср. Отсюда, учитывая, что <р=со?,
найдем по формуле A7)
откуда
х— n-sinc0*» гДе M=m1-\-mi.
М
Следовательно, мотор будет совершать гармонические колебания с круговой
частотой со.
2. Когда мотор закреплен, то по первому из уравнений A6') горизонталь-
горизонтальная реакция Rx болта будет
1
Rx=Mxc, где дгс=— (гп1Хв-\-т2Хд).
В этом случае точка А неподвижна и хд=1 (i=const), а Хд=1-\-Ь sin <nt. В ре-
результате, дифференцируя выражение >с и )множая его на М {М здесь всюду —
масса всей системы), находим
Rx = Мхе = ЩХв = —
sin a>t.
279
Сила давления на болт равна по модулю \RX\ и направлена в противопо-
противоположную сторону; ее максимальное значение будет mj&QJ. Во избежание ударов
мотора по болтам при его работе, затяжка болтов Q должна быть такой, чтобы
суммарная сила трения мотора о плоскость, на которой он установлен, т. е.
fQ, была не меньше т-^Ьа2.
Задача 125. Кривошип АВ длиной г и массой m-i, вращающийся с постоян-
постоянной угловой скоростью о, приводит в движение кулису и связанный с нею пор-
поршень D, общая масса которых равна т2 (рис. 287). На поршень при его движе-
движении действует постоянная сила Q. Пренебрегая трением о направляющие, найти
наибольшее горизонтальное давление на ось А кривошипа.
Решение. Чтобы исключить силы, вращающие кривошип, и давление
на него со стороны кулисы, рассмотрим движение всей системы. Тогда по пер-
первому из уравнений A6'), если обозначить горизонтальную реакцию оси А через
Rx> бУДет
Mxc=Rx-Q,
где согласно формулам A) Мхс=т1х1-\-т2х2.
В пашем случае x1=0,5rcos a>t, x2=b+r cos at, так как (р=Ш. В резуль-
результате находим
Rx — Q + Мхс = Q — @,5/Лх + /na) ra2 cos Ш.
Сила давления на ось равна по модулю \RX\ и направлена в противополож-
противоположную сторону. Давление будет максимальным, когда ф=180°, и будет равно Q+
+@,5тг+ J
Глава XXIII
ТЕОРЕМА ОБ ИЗМЕНЕНИИ
СИСТЕМЫ
КОЛИЧЕСТВА ДВИЖЕНИЯ
§ ПО. КОЛИЧЕСТВО ДВИЖЕНИЯ СИСТЕМЫ
Количеством движения системы будем называть векторную вели-
величину Q, равную геометрической сумме (главному вектору) количеств
__ движения всех точек системы
(рис. 288):
3 = 2>Я A8)
Пользуясь этим определе-
определением, найдем формулу, с по-
/mnvn мощью которой значительно
легче вычислять величину Q,
а также уяснить ее смысл.
Рис. 288 Из равенства (Г) следует, что
iff = м ЧГ шн
Беря от обеих частей производную по времени, получим
Отсюда находим, что
A9)
280
т. е. количество движения системы равно произведению массы всей
системы на скорость ее центра масс. Этим результатом особенно
удобно пользоваться при вычислении количеств движения твердых
тел.
Из формулы A9) видно, что если тело (или система) движется
так, что центр масс остается неподвижным, то количество движения
тела равно нулю. Например, количество движения тела, вращаю-
вращающегося вокруг неподвижной оси, проходящей через его центр масс,
будет равно нулю.
Если же движение тела является сложным, то величина Q не
будет зависеть от его вращательного движения вокруг центра масс.
Например, для катящегося колеса Q=Mvc, независимо от того, как
вращается колесо вокруг его центра масс С.
Таким образом, количество движения можно рассматривать как
характеристику поступательного движения системы (тела), а при
сложном движении — как характеристику поступательной части
движения вместе с центром масс.
§ Ш. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
Рассмотрим систему, состоящую из п материальных точек. Со-
Составим для этой системы дифференциальные уравнения движения
A3) и сложим их почленно. Тогда получим
Последняя сумма по свойству внутренних сил равна нулю. Кроме
того,
S— d v, - do
Окончательно находим
^ B0)
Уравнение B0) выражает теорему об изменении
количества движения системы в дифферен-
дифференциальной форме: производная по времени от количества
двиоюения системы равна геометрической сумме всех действующих на
систему внешних сил. В проекциях на координатные оси будет:
Найдем другое выражение теоремы. Пусть в момент времени
?=0 количество движения системы равно Qo, а в момент tx становится
равным Qi. Тогда, умножая обе части равенства B0) на dt и интег-
интегрируя, получим
281
или
Qi-Q. = 2$. B1)
так как интегралы, стоящие справа, дают импульсы внешних сил.
Уравнение B1) выражает теорему об изменении
количества движения системы в интеграль-
интегральной форме: изменение количества движения системы за некото-
некоторый промежуток времени равно сумме импульсов, действующих на
систему внешних сил за тот же промежуток времени.
В проекциях на координатные оси будет:
Qi*-Q,*=7jSb, Qiy-Qo« = 2^, ?1г-<?ог = 2512. B1')
Укажем на связь между доказанной теоремой и теоремой о дви-
движении центра масс. Так как Q=Mvc, то, подставляя это значение
в равенство B0) и учитывая, что dvc/dt~ac, получим Mac=HF%,
т. е. уравнение A6).
Следовательно, теорема о движении центра масс и теорема об
изменении количества движения системы представляют собой, по
существу, две разные формы одной и той же теоремы. В тех случа-
случаях, когда изучается движение твердого тела (или системы тел),
можно в равной мере пользоваться любой из этих форм, причем
уравнением A6) обычно пользоваться удобнее. Для непрерывной
же среды (жидкость, газ) при решении задач обычно пользуются
теоремой об изменении количества движения системы. Важные при-
приложения эта теорема имеет также в теории удара (см. гл. XXXI) и
при изучении реактивного движения (см. § 114).
Практическая ценность теоремы состоит в том, что она позволяет
исключить из рассмотрения наперед неизвестные внутренние силы
(например, силы давления друг на друга частиц жидкости),
§ 112. ЗАКОН СОХРАНЕНИЯ КОЛИЧЕСТВА ДВИЖЕНИЯ
Из теоремы об изменении количества движения системы можно
получить следующие важные следствия.
1. Пусть сумма всех внешних сил, действующих на систему, рав-
равна нулю:
Тогда из уравнения B0) следует, что при этом Q=const. Таким
образом, если сумма всех внешних сил, действующих на систему,
равна нулю, то вектор количества движения системы будет постоя-
постоянен по модулю и направлению.
2. Пусть внешние силы, действующие на систему, таковы, что
сумма их проекций на какую-нибудь ось (например, Ох) равна нулю:
Тогда из уравнений B0) следует, что при этом QT=const. Таким
образом, если сумма проекций всех действующих внешних сил на
282
какую-нибудь ось равна нулю, то проекция количества движения си-
системы на эту ось есть величина постоянная.
Эти результаты и выражают за/сон сохранения количествадви-
оюения системы. Из них следует, что внутренние силы изменить ко-
количество движения системы не могут. Рассмотрим некоторые при-
примеры.
Явление отдачи или отката. Если рассматривать винтовку
и пулю как одну систему, то давление пороховых газов при выстреле будет силой
внутренней. Эта сила не может изменить количество движения системы, равное
до выстрела нулю. Но так как пороховые газы, действуя ка пулю, сообщают
ей некоторое количество движения, направленное вперед, то они одновременно
должны сообщить винтовке такое же количество движения в обратном направле-
направлении. Это вызовет движение винтовки назад, т. е. так называемую отдачу. Анало-
Аналогичное явление получается при стрельбе из орудия (откат).
Работа гребного винта (пропеллера). Винт сообщает
некоторой массе воздуха (или воды) движение вдоль оси винта, отбрасывая эту
массу назад. Если рассматривать отбрасываемую массу и самолет (или судно)
как одну систему, то силы взаимодействия винта и среды, как внутренние, не
могут изменить суммарное количество движения этой системы. Поэтому при от-
отбрасывании массы воздуха (воды) назад самолет (или судно) получает соответст-
соответствующую скорость движения вперед, такую, что общее количество движения рас-
рассматриваемой системы остается равным нулю, так как оно было нулем до начала
движения.
Аналогичный эффект достигается действием весел или гребных колес
Реактивное движение. В реактивном снаряде (ракете) газооб-
газообразные продукты горения топлива с большой скоростью выбрасываются из от-
отверстия в хвостовой части ракеты (из сопла ракетного двигателя). Действующие
при этом силы давления будут силами внутренними и не могут изменить коли-
количество движения системы ракета — продукты горения топлива. Но так как вы-
вырывающиеся газы имеют известное количество движения, направленное назад,
то ракета получает при этом соответствующую скорость, направленную вперед.
Величина этой скорости будет определена в § 114.
Обращаем внимание на то, что винтовой двигатель (предыдущий пример)
сообщает объекту, например самолету, движение за счет отбрасывания назад
частиц той среды, в которой он движется. В безвоздушном пространстве такое
движение невозможно. Реактивный же двигатель сообщает движение за счет от-
отброса назад масс, вырабатываемых в самом двигателе (продукты горения). Дви-
Движение это в равной мере возможно и в воздухе, и в безвоздушном пространстве.
При решении задач применение теоремы позволяет исключить
из рассмотрения все внутренние силы. Поэтому рассматриваемую
систему надо стараться выбирать так, чтобы все (или часть) заранее
неизвестных сил сделать внутренними.
Закон сохранения количества движения удобно применять в
тех случаях, когда по изменению поступательной скорости одной
части системы надо определить скорость другой части. В частности,
этот закон широко используется в теории удара.
Задача 126. Пуля массой т, летящая горизонтально со скоростью и, по-
попадает в установленный на тележке ящик с песком (рис 289). С какой скоростью
начнет двигаться тележка после удара, если масса тележки вместе с ящиком
равна Л1?
Решение. Будем рассматривать пулю и тележку как одну систему
Это позволит при решении задачи исключить силы, которые возникают при ударе
пули о ящик. Сумма проекций приложенных к системе внешних сил на горизон-
горизонтальную ось Ох равна нулю. Следовательно, Qx=const или Qix=Qox, где Qo —
283
количество движения системы до удара; Qx — после удара. Так как до удара
тележка неподвижна, то Qox=mu.
После удара тележка и пуля движутся с общей скоростью, которую обозначим
через v. Тогда Qlx=(m-\-M)v.
Приравнивая правые части выражений Qix и Qox, найдем
v=
ти
Задача 127. Определить скорость свободного отката орудия, если вес отка-
откатывающихся частей равен Р, вес снаряда р, а скорость снаряда по отношению
к каналу ствола равна в момент вылета и.
7LJT
Рис. 289
Рис. 290
Решение. Для исключения неизвестных сил давления пороховых газов
рассмотрим снаряд и откатывающиеся части как одну систему.
Пренебрегая за время движения снаряда в канале ствола сопротивлением
откату и силами Р, р и N, которые очень малы по сравнению с силами давления
пороховых газов, вызывающих откат, найдем, что сумма приложенных к системе
внешних сил равна нулю (рис. 290; откатывающиеся вместе со стволом части на
нем не показаны). Тогда Q=const и Qx=const, а так как до выстрела система
неподвижна (Qo=O), то и в любой момент времени Qx=0. _
Обозначим скорость откатывающихся частей в конечный_момент через v.
Тогда абсолютная скорость снаряда в этот момент равна ы+и. Следовательно,
Qx = Pvx/g+p(ux + vx)/g = O. (a)
Отсюда находим
рих
V*~ (Р + р) •
Если бы была известна абсолютная скорость вылета снаряда uag, то в равен-
равенство (а) вместо ux-\-vx вошла бы сразу величина «абх. откуда
Знак минус в обоих случаях указывает, что направление v противоположно и.
Подчеркиваем, что при вычислении полного количества движения системы
надо учитывать абсолютные скорости движения ее частей,
§ ИЗ*. ПРИЛОЖЕНИЕ ТЕОРЕМЫ К ДВИЖЕНИЮ ЖИДКОСТИ (ГАЗА)
Рассмотрим установившееся течение жидкости. Установившимся
называется течение, при котором в каждой точке области, занятой
жидкостью, скорости v ее частиц, давление р и плотность р не изме-
изменяются со временем. При таком течении траектории жидких час-
частиц являются одновременно линиями тока, т. е. кривыми, в каждой
точке которых касательные направлены так же, как скорости жид-
жидких частиц, находящихся в данный момент времени в этих точках.
284
Выделим в движущейся жидкости область, ограниченную линия-
линиями тока, называемую трубкой тока (рис. 291, о; в случае движения
в трубе это область, ограниченная стенками трубы). При устано-
установившемся течении через любое поперечное сечение трубки с плО-
щадью 5 за 1 с будет проте-
протекать одно и то же количество
массы жидкости
Gc = pSv,
B2)
где v— средняя скорость жид-
жидкости в данном сечении. Бе-
личину Gc называют секунд-
секундным массовым расходом жид-
жидкости.
Выделим в трубке в мо-
момент времени t объем жид-
жидкости / — 2, ограниченный
сечениями 1 и 2 (рис. 291)
и обозначим его количество
движения Q12. В момент времени i-\-&t этот объем перейдет в поло-
положение 3—4, а его количество движения будет
так как в объем 1—3 за время dt войдет масса жидкости Gcdt
со скоростью х)и а в объем 2—4 — та же масса со скоростью v2.
Тогда
dQ = Q34-Q]2 = Gc(v2—v~)dt и
= Gc{v2—v1).
Подставляя это значение производной в уравнение B0), получим
Gc(w,-0i) = 2n. B3)
Равенство B3) выражает теорему об изменении количества дви-
движения для установившегося движения жидкости (или газа) в трубке
тока (или в трубе). Величину Gcv называют секундным количеством
движения жидкости. Тогда теорему можно сформулировать так:
разность секундных количеств движения жидкости, протекающей
через два поперечных сечения трубки тока (трубы), равна сумме
внешних сил, действующих на объем жидкости, ограниченный этими
сечениями и поверхностью трубки тока (стенками трубы). Теорема
позволяет при решении задач исключить из рассмотрения все внут-
внутренние силы (силы взаимных давлений частиц жидкости в объеме
1-2).
В случае движения в трубе разделим действующие внешние си-
силы на главный вектор массовых сил (сил тяжести) F", действующих
на все частицы жидкости, и главные векторы поверхностных сил:
R" — сил давления на жидкость со стороны стенок трубы (реакций
285
трубы), Р? и Р% — сил давления в сечениях / и 2 со стороны жид-
жидкости, находящейся вне объема 1—2 (рис. 291, б); численно Р" =
—piSi, P%=pzS2. Тогда уравнение B3) можно представить в виде
Gcfa-vJ=T*+R» + P? + P2. B3')
Равенство B3') выражает теорему, называемую теоремой Эйлера.
Задача 128. Давление струи. Струя воды вытекает из брандспойта
со скоростью с= 10 м/с и ударяет под прямым углом о твердую стенку (рис. 292).
Диаметр вытекающей струи <2=4 см. Определить силу динамического давления
на стенку.
Решение. Рассмотрим часть струи, заключенную между сечениями
1 и 2, и применим к ней теорему, выражаемую равенством B3), проектируя обе его
части на ось Ох. Учтя, что внешней силой, дающей проекцию на ось Ох, является
реакция R стенки и что Rx=—R, получим
Gc(ViX-vlx)= — R. (a)
Отсюда, так как vlx=v, v2x=0, а по формуле B2) Gc=pond2/4, где плотность
воды р=1000кг/м3, находим окончательно
R=p(nd?!4)v2= 125,6 Н.
Сила давления струи на стенку равна этой же величине,
Рис. 292
Рис. 293
§ 114.* ТЕЛО ПЕРЕМЕННОЙ МАССЫ. ДВИЖЕНИЕ РАКЕТЫ
В классической механике масса каждой точки или частицы систе-
системы считается при движении величиной постоянной. Однако в не-
некоторых случаях состав частиц, образующих данную систему или
тело, может с течением времени изменяться (отдельные частицы мо-
могут отделяться от тела или присоединяться к нему извне); вследствие
этого будет изменяться и суммарная масса рассматриваемого тела.
Задачи, в которых имеет место подобное присоединение или отде-
отделение единичных масс, нам уже встречались (см. выше задачи 126,
127 или задачу 86 в § 78). В этом параграфе будет рассмотрен другой
практически важный случай, когда процесс отделения от тела или
присоединения к нему частиц происходит непрерывно. Тело, масса
М которого непрерывно изменяется с течением времени вследствие
присоединения к нему или отделения от него материальных частиц,
будем называть телом переменной массы. Для тела переменной
массы
где F (t) — непрерывная функция времени.
Когда такое тело движется поступательно (или когда вращатель-
вращательная часть его движения не учитывается), это тело можно рассмат-
рассматривать как точку переменной
массы.
Движение раке-
т ы. Найдем уравнение дви-
движения тела, масса которо-
которого со временем непрерывно
убывает, на практически
важном примере движения ракеты, считая ее точкой переменной
массы. Обозначим относительную (по отношению к корпусу ра-
ракеты) скорость истечения' продуктов горения из ракеты через и.
Чтобы исключить силы давления, выталкивающие продукты горе-
горения, сделав эти силы внутренними, рассмотрим в некоторый момент
времени t систему, состоящую из самой ракеты и частицы, отделяю-
отделяющейся от нее в течение промежутка времени dt (рис. 294). Масса \х
этой частицы численно равна величине dM, на которую за время
dt изменяется масса ракеты. Так как М — величина убывающая,
то dM<0, и, следовательно, [i=\dM\ =—dM.
Уравнение B0) для рассматриваемой системы можно предста-
представить в виде
dQ = F*dt, B4)
где F" — геометрическая сумма приложенных к ракете внешних
сил.
Если скорость v ракеты за время dt изменяется на величину do,
то количество движения рассматриваемой системы получает при
этом приращение Mdv. У частицы в момент t количество движения
равно \xv (она еще является частью тела), а в момент t-\-dt оно будет
287
]i(u+u), так как частица получает дополнительную скорость и.
Следовательно, за время d^ количество движения частицы изменится
на величину и\л=—UdM (поскольку ц=—dM), а для всей системы
получится dQ=Mdy—udM. Подставляя это значение dQ в равенство
B4) и деля обе его части на dt, найдем окончательно
M-TT = Fe4-u-rr. B5)
dt ' it v '
Уравнение B5) представляет собой в векторной форме дифферен-
дифференциальное уравнение движения точки переменной массы, называемое
уравнением Мещерского.
Учитывая, что последнее слагаемое в правой части B5) по раз-
размерности также является силой, и обозначая его через Ф, мы можем
уравнение B5) представить еще в виде
М-^- = Те + Ф. B6)
Таким образом, реактивный эффект сводится к тому, что на ра-
ракету при ее движении дополнительно действует сила Ф, называемая
реактивной силой.
Величина dMIdt численно равна массе топлива, расходуемого за
единицу времени, т. е. секундному расходу массы топлива G&
Таким образом, если учесть знак, то
¦dT = ~Gc<
Отсюда следует, что
Ф = —UGC, B7)
т. е. реактивная сила равна произведению секундного расхода массы
топлива на относительную скорость истечения продуктов его сго-
сгорания и направлена противоположно этой скорости.
Некоторые другие случаи движения тела пере-
переменной массы. Если рассмотреть движение тела, масса М которого с те-
течением времени вследствие непрерывного присоединения к нему частиц возрас-
возрастает (dAf/d<>0), считая это тело тоже точкой переменной массы, а относительную
скорость присоединяющихся частиц обозначить по-прежнему «, то нетрудно про-
проверить, что для такого тела уравнение движения сохранит вид B5) или B6), только
в уравнении B6), поскольку теперь dMldt>Q, будет
Наконец, для тела, у которого одновременно происходит непрерывное от-
отделение и присоединение частиц, в уравнении B6) получится
Ф = — ¦
где «х и "а — относительные скорости отделяющихся и присоединяющихся час-
частиц соответственно; <Jlc — отделяющаяся, a G2C — присоединяющаяся за се-
секунду масса,
288
Такой случай имеет, например, место для самолета, на котором установлен
воздушно-реактивный двигатель, засасывающий воздух из атмосферы и выбра-
выбрасывающий его вместе с продуктами горения топлива. Так как доля этих про-
продуктов в отбрасываемом воздухе очень мала (не превышает 2—3%), то здесь
практически можно считать Glc=G2c=Gc- Кроме того, очевидно, что относитель-
относительная скорость присоединяемой массы воздуха и2——v> где v — скорость само-
самолета. Тогда, полагая и1=и, получим соответственно для вектора Ф и его мо-
модуля Ф значения:
ф~=_ Gc(u+v), Ф = Сс(м —v).
При определении модуля реактивной силы принято, что скорости v (самолета)
и и (отбрасываемого воздуха) направлены в прямо противоположные стороны.
Формула справедлива и для гидрореактивного двигателя, создающего тягу
за счет засасывания и выброса воды.
Формула Циолковского. Найдем, как происходит
движение ракеты под действием только одной реактивной силы,
считая Fe—0, а относительную скорость истечения и постоянной.
Направим координатную ось х в сторону движения (см. рис. 294).
Тогда vx=v, ux——и и уравнение B5) в проекции на ось х, если в
нем положить Fe=0, примет вид
лл dy AM , AM
М-гг = —U-гг ИЛИ СШ = — U-гг.
At at M
Интегрируя это уравнение и считая, что в начальный момент
масса М=М0, а скорость v=v0 и направлена вдоль оси Ох, получим
v^vo+u In (Mo/M). B8)
Обозначим массу корпуса ракеты со всем оборудованием через
Мк, а всю массу топлива через Мт. Тогда, очевидно, МО=МК+МТ,
а масса ракеты, когда все топливо будет израсходовано, будет равна
Мк. Подставляя эти значения в равенство B8), получим формулу
Циолковского, определяющую скорость ракеты, когда все ее топливо
будет израсходовано (скорость в конце так называемого активного
участка):
v=vo+uln(l+MT!MK). B9)
Строго этот результат справедлив в безвоздушном пространстве
и вне поля сил. Из формулы B9) видно, что предельная скорость
ракеты зависит: 1) от ее начальной скорости о„; 2) от относительной
скорости истечения (вылета) продуктов горения и; 3) от относитель-
относительного запаса топлива МТ/МК (число Циолковского). Очень интересен
тот факт, что от режима работы ракетного двигателя, т. е. от того,
насколько быстро или медленно сжигается все топливо, скорость
ракеты в конце периода горения не зависит.
Важное практическое значение формулы Циолковского состоит
в том, что она указывает возможные пути получения больших ско-
скоростей, необходимых для космических полетов. Этими путями явля-
являются увеличение Мт/Мк, и и v0, причем путь увеличения и и у0
более эффективен. Увеличение и и МТШК связано с видом топлива
и конструкцией ракеты. Применяемые жидкие топлива позволяют
10 № 2173 289
получить «=3000-И500 м/с. Но значения Мт/Мк у одноступенча-
одноступенчатых ракет таковы, что они не дают скоростей, необходимых для кос-
космических полетов (см. § 98). Получить необходимую скорость можно
путем использования составной (многоступенчатой) ракеты, части
(ступени) которой по мере израсходования содержащегося в них
топлива автоматически отделяются от последней ступени, получаю-
получающей в результате дополнительную (начальную) скорость.
Подобная многоступенчатая ракета была применена для запуска
первых в мире советских искусственных спутников Земли D октяб-
октября и 3 ноября 1957 г.), а также при многочисленных пусках других
космических объектов, в том числе кораблей, на которых совершают
свои полеты космонавты.
Глава XXIV
ТЕОРЕМА ОБ ИЗМЕНЕНИИ МОМЕНТА
КОЛИЧЕСТВ ДВИЖЕНИЯ СИСТЕМЫ
§ 115. ГЛАВНЫЙ МОМЕНТ КОЛИЧЕСТВ ДВИЖЕНИЯ СИСТЕМЫ
Понятие о моменте количества движения для одной материальной
точки было введено в § 85. Главным моментом количеств движения
(или кинетическим моментом) системы относительно данного цент-
центра О называется величина Ко, равная геометрической сумме моментов
количеств движения всех точек системы относительно этого
центра *:
C0)
Аналогично определяются моменты количеств движения систе-
системы относительно координатных осей:
Kx-=^mx{mkvk), Ку^Ъту{т$!к), К, = 1,тг{ткщ). C1)
При этом Кх, Ку, Kz представляют собой одновременно проекции
вектора Ко на координатные оси.
В § 110 было отмечено, что количество движения системы можно
рассматривать как характеристику ее поступательного движения.
Из последующего будет видно, что главный момент количеств дви-
движения (кинетический момент) системы может рассматриваться
как характеристика ее вращательного движения.
Кинетический момент вращающегося тела.
В качестве важного конкретного примера найдем значения
Kz, Кц и Кх для тела, вращающегося вокруг неподвижной оси г
(рис. 295).
* Чаще для краткости величину Ко называют кинетическим моментом или
просто моментом количеств движения системы.
290
1. Определение Kz. У любой точки тела, отстоящей от оси вра-
вращения на расстоянии hk, скорость vh=<ahh (со — угловая скорость
тела). Следовательно, для этой точки mz(mhvk)=mkvkhh=mkhla).
Тогда для всего тела, вынося общий множитель
со за скобки, получим
Кж =
со.
Величина, стоящая в скобках, представляет
собой момент инерции тела относительно оси г
(см. § 102). Окончательно находим
Яг = /гсо. C2)
Таким образом, кинетический момент враща-
вращающегося тела относительно оси вращения равен
произведению момента -инерции тела относи-
относительно этой оси на угловую скорость тела.
Если система состоит из нескольких тел, вра-
вращающихся вокруг одной и той же оси, то
Кг = Jlzo
Рис. 295
^п- C2')
Заметим еще, что формула C2) сохранит свой вид и в случае
поворота тела вокруг мгновенной оси вращения 01 с угловой ско-
скоростью со, так как при этом поле скоростей точек тела будет в дан-
данный момент времени таким же, как при вращении вокруг неподвиж-
неподвижной оси. Таким образом,
Kt = J>. C3)
2*. Определение Кх н Ку Для определения Кх вычислим величину mx(vii)
так же, как вычисляется момент силы, при этом используем формулы D7) из
§ 28, заменив в них F на и. Тогда
Но согласно формулам G7') из § 62
из рис 295), следовательно, mx{v^)=—
житель со за скобки, найдем
^, v^z~Q (последнее сразу видно
результате, вынося общий мно-
мноКх =
= — Bmkxkz!t) ы = — Jxz<?>,
так как сумма, стоящая в скобках, представляет собой центробежный момент
инерции JxZ (см. § 104). Аналогичное выражение получится для Ки> где всюду
вместо хк войдет ук. Окончательно
Кх = —'хг<о, Ky = ~Jvia. C4)
Таким образом, кинетический момент вращающегося тела относительно
центра О, лежащего на оси вращения Ог, представляет собой вектор А^о, проекции
которого на оси Oxyz определяются формулами C2) и C4) В общем случае, как
видим, вектор К о не направлен по оси вращения Ог Но если ось Ог будет для точ-
точки О главной осью инерции тела (в частности, осью симметрии), то Jxz=Jyz—Q-
При этом Кх=Ку=-0 и Ko~Kz Следовательно, если тело вращается вокруг оси,
являющейся для точки О главной осью инерции тела (или вокруг оси симметрии
тела), то вектор Ко направлен вдоль оси вращения и численно равен К2,
т. е. J2(j).
10* 291
§116. ТЕОРЕМА ОБ ИЗМЕНЕНИИ ГЛАВНОГО МОМЕНТА
КОЛИЧЕСТВ ДВИЖЕНИЯ СИСТЕМЫ (ТЕОРЕМА МОМЕНТОВ)
Теорема моментов, доказанная для одной материальной точки
(см. § 85), будет справедлива для каждой из точек системы. Следо-
Следовательно, если рассмотреть точку системы с массой mk, имеющую
скорость vk, то для нее будет
-gf [in0 (mkvk)] = т0 (Р%) + тп (Р1к),
где F% и Fk — равнодействующие всех внешних и внутренних сил,
действующих на данную точку.
Составляя такие уравнения для всех точек системы и склады-
ьая их почленно, получим
-A- [2m0 (ткпк)] = Sm0 {?%) + 2m0 (FJL).
Но последняя сумма по свойству внутренних сил системы равна
нулю. Тогда, учитывая равенство C0), найдем окончательно
C5)
Полученное уравнение выражает следующую теорему мо-
моментов для системы: производная по времени от главного момента
количеств движения системы относительно некоторого неподвижного
центра равна сумме моментов всех внешних сил системы относитель-
относительно того же центра
Проектируя обе части равенства C5) на неподвижные оси Oxyz,
получим:
i* ?§ ^(П)- C6)
Уравнения C6) выражают теорему моментов относительно любой
неподвижной оси.
Доказанной теоремой широко пользуются при изучении враща-
вращательного движения тела, а также в теории гироскопа и в теории
удара. Но значение теоремы этим не ограничивается. В кинематике
было показано, что движение твердого тела в общем случае слага-
слагается из поступательного движения вместе с некоторым полюсом
и вращательного движения вокруг этого полюса. Если за полюс
выбрать центр масс, то поступательная часть движения тела может
быть изучена с помощью теоремы о движении центра масс, а вра-
вращательная —• с помощью теоремы моментов. Это показывает важ-
важность теоремы для изучения движения свободного тела (летящий
самолет, снаряд, ракета; см. § 132) и, в частности, для изучения
плоскопараллельного движения (см. § 130).
Практическая ценность теоремы моментов состоит еще в том, что
она, аналогично теореме об изменении количества движения, позво-
292
ляет при изучении вращательного движения системы исключать
из рассмотрения все наперед неизвестные внутренние силы.
Теорема моментов относительно центра
масс*. Чтобы применять теорему моментов к изучению плоско-
плоскопараллельного движения или движения
свободного твердого тела, надо найти вы-
ражение этой теоремы для движения систе-
системы относительно центра масс. Пусть Oxyz—
неподвижные оси, по отношению к которым
движется рассматриваемая механическая
система, a Cx'y'z' — оси перемещающиеся
поступательно вместе с центром масс С
этой системы (рис. 296), при этом оси
Cx'y'z' имеют ускорение ас, равное ускоре- Рис. 296
нию центра масс. В §91 было показано, что
все уравнения динамики можно составлять в осях Cx'y'z' так же,
как в неподвижных, если к действующим на каждую из точек си-
системы силам F% и F\ прибавить переносную силу инерции F" пер (ко-
риолисовы силы инерции в данном случае равны нулю, так как оси
Cx'y'z' движутся поступательно). Следовательно, уравнение C5)
в осях Cx'y'z' примет вид
с(Пт?), C7)
поскольку сумма моментов внутренних сил относительно любого
центра равна нулю. При этом величина Кс вычисляется по формуле
Xc = 2mc(m^). C7')
где v'k — скорости точек системы по отношению к осям Cx'y'z'.
Найдем значение последней суммы в равенстве C7). По опре-
определению, Ffinep=—mfea/enep. Так как оси Cx'y'z' движутся поступа-
поступательно, то для любой из точек Bk системы ak т:р=ас', следовательно,
Fk пеР=—tnhac и mc(ffcncp)=OtX(—mftac)=—-tfV-ftXac. Тогда, вы-
вынося общий множитель ас за скобки и учитывая, что по формуле
(Г) Hmhr'k—Mr'c, получим
2mc (F?nep) = — Bт,Л) х ас = — М7'с х ас = О,
так как точка С является в системе осей Cx'y'z' началом координат
и гё=О. В результате равенство C7) дает
§ (Fg). C8)
Сравнивая этот результат с уравнением C5), приходим к выводу,
что для осей, движущихся поступательно вместе с центром масс
системы, теорема моментов относительно центра масс сохраняет
тот же вид, что и относительно неподвижного центра. Точно так
293
же для моментов относительно осей Cx'y'z' из C8) получаются урав-
уравнения, аналогичные уравнениям C6).
Заметим, что в любой другой подвижной системе отсчета будет
или Гс^О, или не будут равны нулю кориолисовы силы инерции и
уравнение моментов не будет иметь вид, совпадающий с C5).
§ 117. ЗАКОН СОХРАНЕНИЯ ГЛАВНОГО МОМЕНТА
КОЛИЧЕСТВ ДВИЖЕНИЯ
Из теоремы моментов можно получить такие следствия.
1. Пусть сумма моментов относительно центра О всех внешних
сил, действующих на систему, равна нулю
Тогда из уравнения C5) следует, что при этом /Co=const. Таким
образом, если сумма моментов относительно данного центра всех
приложенных к системе внешних сил равна нулю, то главный момент
количеств движения системы относительно этого центра будет
численно и по направлению постоянен. Приложение этого результа-
результата к случаю движения планеты было рассмотрено в § 86.
2. Пусть внешние силы, действующие на систему, таковы, что
сумма их моментов относительно некоторой неподвижной оси Oz
равна нулю
Тогда из уравнений C6) следует, что при этом ^Cz=const. Таким
образом, если сумма моментов всех действующих на систему внешних
сил относительно какой-нибудь оси равна нулю, то главный момент
количеств движения системы относительно этой оси будет величи-
величиной постоянной.
Эти результаты выражают собой закон сохранения главного мо-
момента количеств движения системы. Из них следует, что внутренние
силы изменить главный момент количеств движения системы не
могут.
Случай вращающейся системы. Рассмотрим
систему, вращающуюся вокруг неподвижной (или проходящей через
центр масс) оси г. Тогда по формуле C2) /С2=/гсо. Если в этом слу-
случае 2mz(F|)=0, то
/2со=const.
Отсюда приходим к следующим выводам:
а) если система неизменяема (абсолютно твердое те,ло), то /г=
=const и, следовательно, co=const, т. е. твердое тело, закрепленное
на оси, вращается в этом случае с постоянной угловой скоростью;
б) если система изменяема, то под действием внутренних (или
внешних) сил отдельные ее точки могут удаляться от оси, что вы-
вызывает увеличение J z, или приближаться к оси, что приведет к
уменьшению Jz. Но поскольку /2w=const, то при увеличении мо-
294
мента инерции угловая скорость системы будет уменьшаться, а
при уменьшении момента инерции — увеличиваться. Таким обра-
образом, действием внутренних сил можно изменить угловую скорость
системы, так как постоянство Кг не означает вообще постоянства со.
Рассмотрим некоторые примеры.
а) Опыты с платформой Жуковского. Для демонстрации
закона сохранения момента количеств движения удобно пользоваться простым
прибором, называемым «платформой Жуковского». Это круглая горизонтальная
платформа на шариковых опорных подшипниках, которая может с малым тре-
трением вращаться вокруг вертикальной оси г. Для человека, стоящего на такой
платформе, Sm0(F|)=O и, следовательно, J^ed^const. Если человек, разведя
руки в стороны, сообщит себе толчком вращение вокруг вертикальной оси, а за-
затем опустит руки, то величина Jz уменьшается и, следовательно, угловая ско-
скорость вращения возрастет. Таким способом увеличения угловой скорости широко
пользуются в балете, при прыжках в воздухе (сальто) и т. п.
Далее, человек, стоящий на платформе неподвижно (/Сг=0), может повер-
повернуться в любую сторону, вращая вытянутую горизонтально руку в противопо-
противоположном направлении. Угловая скорость человека при этом будет такой, чтобы
в сумме величина Кг системы осталась равной нулю.
б) Раскачивание качелей. Давлением ног (сила внутренняя)
человек, стоящий на качелях, раскачать их не может. Сделать это можно следую-
следующим образом. Когда качели находятся в левом верхнем положении А№, человек
приседает. При прохождении через вертикаль он быстро выпрямляется. Тогда
массы приближаются к оси вращения г, величина J'г уменьшается и угловая ско-
скорость со скачком возрастает. Это увеличение ш приводит в конечном счете к тому,
что качели поднимутся выше начального уровня Ао. В правом верхнем поло-
положении, когда w=0, человек опять приседает и Jz увеличивается, но ы остается
равной нулю; при прохождении через вертикаль он снова выпрямляется и т. д.
В результате размахи качелей будут возрастать.
Происходящие при этом вынужденные колебания качелей называются пара-
параметрическими, так как они совершаются не под действием периодически меняю-
меняющейся силы (см. § 96), а вследствие периодического изменения параметров систе-
системы: ее момента инерции и положения центра тяжести.
в) Реактивный момент винта. Если рассматривать корпус вер-
вертолета (вместе с двигателем), его винт и отбрасываемую массу воздуха как одну
систему, то силы взаимодействия между двигателем и винтом и между винтом
и воздушной средой будут для этой системы внутренними и не могут изменить
ее суммарный момент количеств движения, равный до пуска двигателя нулю.
Поэтому корпус вертолета должен начать вращаться в сторону, противополож-
противоположную направлению вращения винта и воздушной среды. Действующий при этом
на вертолет вращающий момент называют реактивным моментом. Чтобы предот-
предотвратить реактивное вращение корпуса одновинтового вертолета, на его хвостовой
части устанавливают соответствующий рулевой винт. У многовинтового вертолета
винты делают вращающимися в разные стороны.
Появление реактивного момента можно использовать для эксперименталь-
экспериментального определения вращающего момента авиационного двигателя, так как эти
моменты равны друг другу по модулю, а реактивный момент можно измерить,
установив двигатель с вращающимся винтом на соответствующих весах.
§ 118. РЕШЕНИЕ ЗАДАЧ
Теоремой моментов пользуются для изучения вращательного
движения тел (см. §128, 131, 132).
Закон сохранения момента количеств движения позволяет по
величине или по скорости перемещения одной части системы опре-
определить изменение угловой скорости (или угол поворота) другой ее
части. При этом из рассмотрения исключаются все наперед неизвест-
295
ные внутренние силы, а также внешние силы, пересекающие ось
вращения или ей параллельные.
Задача 130. Два диска насажены на общий вал (рис. 297). В некоторый
момент времени вал слегка закручивают и предоставляют самому себе. Пренебре-
Пренебрегая массой вала, определить зависимость между угловыми скоростями и углами
поворотов дисков при их крутильных колебаниях,
если моменты инерции дисков Jx и J2 относительно
оси х известны.
Решение. Чтобы исключить неизвестные си-
силы упругости, вызывающие колебания дисков, рассмот-
рассмотрим оба диска и вал как одну систему. Действующие
Рис. 297 на ЭТУ систему внешние силы (реакции подшипников и
сила тяжести) пересекают ось х, поэтому 2mx(F|)=0
и /ex=const. Но так как в начальный момент времени
##=0, то и во все время колебаний должно быть .Kx=>'ito1+'/2(B2:==0 (кинети-
(кинетический момент системы относительно оси х равен сумме кинетических моментов
каждого из дисков относительно той же оси). Отсюда
где ф! и ф2 — углы закручивания дисков, отсчитываемые от начального положе-
положения (последний результат получается интегрированием первого равенства).
Таким образом, колебания будут происходить в противоположные стороны,
а угловые амплитуды колебаний будут обратно пропорциональны моментам
инерции дисков. Неподвижное сечение будет ближе к диску, момент инерции ко-
которого больше.
Задача 131. У вертолета с двумя соосными винтами, вращающимися в раз-
разные стороны, один винт в полете внезапно останавливается, а другой продол-
продолжает вращаться вокруг вертикальной оси z с угловой скоростью щ. Момент инер-
инерции относительно оси z вращающегося винта равен Jlt а вертолета вместе с оста-
остановившимся винтом — /2. Пренебрегая сопротивлением воздуха, определить,
с какой угловой скоростью со2 станет вращаться вертолет.
Решение. Силы взаимодействия между двигателем и валом винта не-
неизвестны, но они станут внутренними, если рассмотреть в качестве механической
системы вертолет вместе с винтами. Остановку винта вызвали тоже внутренние
силы, которые не могут изменить кинетический момент Kz системы, равный до
этого (когда оба винта вращались в разные стороны) нулю. Следовательно, и после
остановки винта должно быть /Сг=/1(й)]+(о2)+У2й)а=0, где ¦/i(toiH-<a2) — ки-
кинетический момент вращающегося винта (винт, вращаясь еще и вместе с верто-
вертолетом, будет иметь абсолютную угловую скорость соа(-)=со1-1-йJ), а У2ш2— ки-
кинетический момент вертолета вместе с остановившимся винтом. В результате
находим
ш2=—/
Знак указывает, что направление со2 противоположно щ.
При решении задач необходимо обращать внимание на то, что в исходные
выражения величины Kz (или Ко) входят абсолютные скорости точек и тел сис-
системы.
Задача 132. В регуляторе АВ, имеющем вертикальную ось вращения Ог
(величина Jz регулятора известна), помещены два симметрично расположенных
груза массой т каждый, прикрепленных к пружинам (рис. 298). Когда грузы на-
находятся в точках С, отстоящих от оси Ог па расстояниях /, регулятор вращается
с заданной угловой скоростью ш0. В некоторый момент времени угловая скорость
изменяется и грузы начинают совершать около центров С одинаковые затухающие
колебания. Пренебрегая трением в оси, найти, как будет изменяться угловая ско-
скорость со регулятора в зависимости от положений грузов, считая их материаль-
материальными точками.
Решение. Чтобы исключить неизвестные нам силы упругости пружин
и силы трения грузов о направляющие, рассмотрим регулятор и грузы как одну
систему. Тогда, поскольку силы тяжести параллельны оси Oz, а реакции подшип-
подшипников пересекают эту ось, 2wj(fj)=0 и должно быть Кг:=Кгег+2К?= const.
296
Найдем сначала К^. Скорость груза v=v0SJrvnep и K^—m^mv^)-}-
+mz(mvnev). Но_вектор vot направлен по оси Сх, пересекающей ось Ог, следо-
следовательно, ms(mvOT)—0. Скорость vnep перпендикулярна плоскости х,г, а ее
модуль цпер=со(Н-х). Тогда Krzp=mvnep A+х)=пиоA+хJ. Учтя еще, что Kler~
= Угсо, получим
При л:=0 со=ш0 и
чательно дает
Когда х~>0, то со<ш0, а когда %<0, то со>Шо. При затухании колебаний гру-
грузов х стремится к нулю, а со — к ш0.
1
. Так как Kz~const, то Кг=Кго, что окон-
оконРис. 299
Задача 133. Однородный диск 1, имеющий массу т± и радиус R, насажен на
перпендикулярную ему вертикальную ось Сг (рис. 299, где показан вид сверху).
На диске^сделан паз, в середине О которого находится ползун 2 массой т2(ОС=
=h) В момент времени ^,= 0 имеющийся на диске толкатель (на рис. 299 не по-
показан) сообщает ползуну скорость и, с которой ползун продолжает двигаться.
Определить зависимость угловой скорости, с которой начнет вращаться диск,
от положения ползуна.
Решение. Рассмотрим диск и ползун как одну систему. Моменты дейст-
действующих на нее внешних сил относительно оси Сг равны нулю (см. рис. 298);
следовательно, /fz=const. Поскольку до момента времени /0=0 система была
в покое, а ее движение начинается под действием внутренних сил, которые ана-
чечие К.х изменить не могут, то и в момент ^,=0 /Сг=0 Отсюда в любой момент
времени тоже Кг~К.<г'-\-К<г)=Ъ, так как K^const.
При движении системы АГ21)=^гш и Kz">=ffJz(m3iiOT)+mz(m2yI,ep)_L где чОт=
= м, Vj,ep=a-CD (ползун в точке D и ипср_1_СД). Тогда mz(mjJ0T)=mzuh,
/?гг(т2упер)==т2упер-СО=т2о)-(СОJ. В итоге, так как (CDJ=/i2+s2, где s=
— OD — перемещение ползуна, то получим
i-\-s2). (a)
Полагая теперь /Сг=0 и считая для диска Jz=0,5m1Ri [см. § 102, формула (8)],
найдем окончательно
Вращение происходит в направлении, противоположном показанному на
рис. 299.
297
Примечание. В данной задаче (и ей аналогичных) было бы ошибочно
считать, что так как в момент /0=0 ползун получил скорость и, то у системы
KZ0=m2uh (а не /Сго= 0). В действительности же внутренние силы изменить зна-
значение Кг не могут; поэтому, сообщив ползуну при /о=0 скорость и, они одно-
одновременно сообщат диску угловую скорость <оо, такую, что у системы сохранится
/Сго=О. Из решения (б) видно, что при to=O, когда и s=0, диск получает сооб-
сообщенную внутренними силами угловую скорость шо=—mJiu/^^mxR^mJi2),
что и дает /Сг0=0. Затем, при возрастании s, модуль со убывает.
Если же принять KZ0=m2uh, то, полагая KZ=KZO, где Kz дается равенством
получим со=0. Такой результат действительно имеет место, когда скорость и
ползуну сообщают внешние силы и его трение о паз
отсутствует.
Задача 134. На барабан весом Р и радиусом г (рис. 300)
намотана нить с грузом А весом Q на конце. Пренебрегая
весом нити, определить угловое ускорение барабана при
вертикальном движении груза, если радиус инерции ба-
барабана относительно его оси равен р и на барабан дей-
действует постоянный момент сил трения Л1Тр.
Решение. Рассмотрим систему барабан — груз;
тогда неизвестные силы натяжения нити будут внутрен-
внутренними. Воспользуемся теоремой моментов относительно
оси О:
Рис-300 ^Г=^о(Я). (а)
Для данной системы К'о=КсР+Ко'р. Груз движется поступательно и его
скорость и=сог. Барабан вращается вокруг неподвижной оси О и для него J q=
= (P/g)p2 [см. § 102, формула D)]. Тогда
Для моментов сил получим 11m0(F%)—Qr—AfTp.
Подставляя все эти величины в равенство (а), найдем
dt~~4 TP'
— MTp)g
g dt
отсюда
е=-
§ 119*. ПРИЛОЖЕНИЕ ТЕОРЕМЫ МОМЕНТОВ
К ДВИЖЕНИЮ ЖИДКОСТИ (ГАЗА)
Рассмотрим опять (см. § 113) установившееся течение жидкости
(газа) в трубке тока (или в трубе). Выделим в трубке объем жидкости
)—2, ограниченный сечениями 1 к2, который за промежуток време-
времени cU переходит в положение 3—4 (рис. 301). Найдем, как за время
сМ изменится момент количеств движения Ко этого объема жидкости
относительно некоторого центра О. Рассуждая так же, как в § 113,
придем к выводу, что это изменение определится равенством, ана-
аналогичным полученному при выводе формулы B3), т. е. что
где К13 и K2i — моменты количеств движения жидкости в объемах
/—3 и 2—4 соответственно.
298
Для определения Ki3 разобьем площадь Si сечения / на эле-
элементы Ash. За промежуток времени dt через площадку Asfe в объем
/—3 войдет масса жидкости Amk=(GJS1)Ask-dt (Gc— секундный
расход массы). Момент количества движения этой массы будет
&Kia=rhX&mh-v1=rhXVi(GJSi)&sh-dt, где rh— радиус-вектор эле-
элемента Ask; vx — средняя скорость жидкости в сечении /. Тогда,
вынося общие множители за скобки, получим
где rCi — радиус-вектор центра тяжести площади Sx сечения /.
Аналогично найдем, что K2i~Gc(>'c^v2) dt, где обозначения
очевидны. Тогда
d*0 = *!.-*„ = GC[GC, X^)-GCl xv,)] dt.
Подставляя это значение dKo B уравнение C5), получим
Gc [<7с2 хщ)-Gс, хдг)] = Ът0 (F%).
Равенство C9) можно еще представить в виде
C9)
0с[т0(у2)-т0Ы] = 2т0(П)- C9')
При этом векторы vt и v2 должны быть приложены в центрах тяжес-
тяжести площадей соответствующих сечений трубки тока (трубы).
Если величину Gcmo(t>) назвать секундным моментом количеств
движения жидкости относительно центра О, то теорему, выражен-
выраженную равенством C9), можно сформулиро-
сформулировать так (сравн. с § 113): разность секунд-
секундных моментов количеств движения отно-
относительно центра О жидкости, протекаю-
протекающей через два поперечных сечения трубки
тока (трубы), равна сумме моментов от-
относительно того же центра всех внешних
(массовых и поверхностных) сил, действую-
действующих на объем жидкости, ограниченный
этими сечениями и поверхностью трубки
тока (стенками трубы). При решении за-
задач теорема позволяет исключить из рас-
рассмотрения все внутренние силы, т. е. силы
взаимных давлений частиц жидкости в объ-
объеме 1—2.
Рис. 301
Задача 135. В радиальной гидротурбине, у которой внешний радиус рабо-
рабочего колеса ги а внутренний л2, вода имеет на входе абсолютную скорость vlt а на
выходе — абсолютную скорость v2; при этом векторы v1 и у~2 образуют с касатель-
касательными к ободам колеса углы ах и а2, соответственно (рис. 302, где показан один
канал между двумя лопатками турбины). Полный секундный расход массы воды
через турбину Gc. Определить действующий на турбину момент относительно ее
оси Ог сил давления воды (ось Oz направлена перпендикулярно плоскости чер-
чертежа).
299
Решение. Воспользуемся уравнением C9') в проекции на ось Ог, считач
движение воды плоским Так как в силу симметрии центр тяжести воды, запол-
заполняющей все каналы, лежит на оси Ог, то момент массовых сил (сил тяжести)
относительно этой оси равен нулю. Поверхностные внешние силы давления во
входном и выходном сечениях направлены вдоль радиусов и их моменты отно-
относительно оси Ог тоже равны нулю. Таким образом, в правой части уравнения C9')
сохранится только момент поверхностных сил дав-
давления на жидкость лопагок турбины. Поскольку
искомый момент Мг сил давления воды на лопагки
турбины имеет противоположное направление, то
из C9') в проекции ось Ог получим
MZ=GC [щг (pi)—mz (tT2)].
Здесь Gc полный расход воды через все каналы и
поэтому Мг будет искомым полным моментом. Из
рис. 302 видно, что mz(v1)=mo{v1)=i'yv1cxisa1, ана-
логично mz[ji)=r2v2cos a2 Таким образом,
Mz~=Oc(r1v1cos a,—r2u2cosa2). (а)
Примечание. По формуле D6) из § 87
мощность N=Fxv. Если сила F действует на тело,
вращающееся вокруг оси Ог, то а=о)г и N—FTrv)—
= Mzb) (см. § 122). Тогда, умножив обе части равен-
равенства (а) на (о и учтя, что г1ш=и1, г2ш=м2, где их —
окружная скорость па внешнем, а и2 на внутреннем ободе колеса турбины, получим
yV=Gc(a1f1cos ax—u2ti2cosa2).
Это уравнение, устанавливающее зависимость между основными динами-
динамическими характеристиками турбины, называют турбинным, уравнением Эйлера.
§ 120. УСЛОВИЯ РАВНОВЕСИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ
Представим уравнения A6) из § 107 и C5) или C8) в виде:
m^- = R* я *?>- = МЬ или ^?- = М'с. D0)
Покажем, что из этих уравнений, являющихся следствиями
законов, изложенных в § 74, получаются все исходные результаты
статики.
1. Если механическая система находится в покое, то скорости
всех ее точек равны нулю и, следовательно, vc=0 и Ко~®, где О —
любая точка. Тогда уравнения D0) дают:
Re=0, Meo = 0. D0')
Таким образом, условия D0') являются необходимыми условиями
равновесия любой механической системы. Этот результат содержит
в себе, в частности, сформулированный в § 2 принцип отвердевания.
Но для любой системы условия D0'), очевидно, достаточными
условиями равновесия не являются. Например, если изображенные
на рис. 274 точки Аг и Л2 являются свободными, то под действием
сил F12 и F21 они могут двигаться навстречу друг другу, хотя усло-
условия D0') для этих сил будут выполняться. Необходимые и достаточ-
300
ные условия равновесия механической системы будут изложены в
§ 139 и 144.
2. Докажем, что условия D0') являются не только необходимы-
необходимыми, но и достаточными условиями равновесия для сил, действую-
действующих на абсолютно твердое тело. Пусть на свободное твердое тело,
находящееся в покое, начинает действовать система сил, удовлет-
удовлетворяющая условиям D0'Jj где О любая точка, т. е., в частности, и
точка С. Тогда уравнения D0) дают wc=const и /Cc=?onst, а так
как тело вначале было в покое, то vc=0 и К"с=0. При ис=0 точка
С неподвижна и тело может иметь только вращение с угловой ско-
скоростью со вокруг некоторой мгновенной оси С/ (см. § 60). Тогда по
формуле C3) у тела будет Kt=J №¦ Но К{ есть проекция вектора
Кс на ось С/, а так как /Сс=0, то и /(г=0, откуда следует, что и
со=0, т. е. что при выполнении условий D0') тело остается в покое.
3. Из предыдущих результатов вытекают, в частности, исходные
положения 1 и 2, сформулированные в § 2, так как очевидно, что
две силы, изображенные на рис. 2, удовлетворяют условиям D0')
и являются уравновешенными и что если к действующим на тело
силам прибавить (или от них отнять) уравновешенную систему сил,
т. е. удовлетворяющую условиям D0'), то ни эти условия, ни урав-
уравнения D0), определяющие движение тела, не изменятся.
Глава XXV
ТЕОРЕМА ОБ ИЗМЕНЕНИИ
КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ
§ 121. КИНЕТИЧЕСКАЯ ЭНЕРГИЯ СИСТЕМЫ
Кинетической энергией системы называется скалярная величина
Т, равная сумме кинетических энергий всех точек системы:
Кинетическая энергия является характеристикой и поступатель-
поступательного, и вращательного движений системы. Главное огличие величи-
величины Т от введенных ранее характеристик Q и Ко состоит в том, что
кинетическая энергия является величиной скалярной и притом су-
существенно положительной. Поэтому она не зависит от направлений
движения частей системы и не характеризует изменений этих на-
направлений.
Отметим еще следующее важное обстоятельство. Внутренние
силы действуют на части системы по взаимно противоположным на-
направлениям. По этой причине они, как мы видели, не изменяют век-
векторных характеристик Q и Ко- Но если под действием внутренних
сил будут изменяться модули скоростей точек системы, то при этом
будет изменяться и величина Т. Следовательно, кинетическая энер-
301
гия системы отличается от величин Q и Ко еш-е и тем> чт0 на ее изме-
изменение влияет действие и внешних, и внутренних сил.
Если система состоит из нескольких тел, то ее кинетическая
энергия равна сумме кинетических энергий этих тел.
Найдем формулы для вычисления кинетической энергии тела
в разных случаях движения.
1. Поступательное движение. В этом случае все
точки тела движутся с одинаковыми скоростями, равными скорости
центра масс. Следовательно, для любой точки vk=vc и формула
D1) дает
T
или
Tmn = Mvb/2. D2)
Таким образом, кинетическая энергия тела при поступательном
движении равна половине произведения массы тела на квадрат ско-
скорости центра масс.
2. Вращательное движение. Если тело вращается
вокруг какой-нибудь оси Oz (см. рис. 295), то скорость любой его
точки vh—(uhh, где hh — расстояние точки от оси вращения, а а> —
угловая скорость тела. Подставляя это значение в формулу D1) и
вынося общие множители за скобки, получим
ТЕр = 2тЛ<о*А|/2 = Bmfcftl) tf/2.
Величина, стоящая в скобках, представляет собой момент инер-
инерции тела относительно оси z. Таким образом, окончательно найдем
Tw = Jj&/2, D3)
т. е. кинетическая энергия тела при вращательном движении равна
половине произведения момента инерции тела относительно оси
вращения на квадрат его угловой скорости.
3. Плоскопараллельное движение*. При этом
движении скорости всех точек тела в каждый момент времени рас-
распределены так, как если бы тело вращалось вокруг оси, перпенди-
перпендикулярной плоскости движения и проходящей через мгновенный
центр скоростей Р (рис. 303). Следовательно, по формуле D3)
Tn30eK = JPv>*/2, D3')
где JP — момент инерции тела относительно названной выше оси;
<о — угловая скорость тела.
Величина JР в формуле D3') будет переменной, так как положе-
положение центра Р при движении тела все время меняется. Введем вместо
Jp постоянный момент инерции Jc относительно оси, проходящей
через центр масс С тела. По теореме Гюйгенса (см. § 103) JP=JC+
Md где d—PC. Подставим это выражение для Jp в D3'). Учиты-
* Этот случай может быть получен как частный из рассмотренного в следую-
следующем пункте общею случая движения твердого тела.
302
вая, что точка Р — мгновенный центр скоростей и, следовательно,
a>d=ft) -PC=vc, где vc — скорость центра масс С, окончательно
найдем
т
D4)
Следовательно, при плоскопараллельном движении кинетическая
энергия тела равна энергии поступательного движения со скоростью
центра масс, сложенной с кинетической энергией вращательного дви-
движения вокруг центра масс.
Рис. 303
Рис. 304
4*. Общий случай движения. Если выбрать
центр масс С тела в качестве полюса (рис. 304), то движение тела в
общем случае будет слагаться из поступательного со скоростью
vc полюса и вращательного вокруг мгновенной оси СР, проходящей
через этот полюс (см. § 63). При этом, как показано в § 63, скорость
vh любой точки тела Bk слагается из скорости vc полюса и скорости,
которую точка получает при вращении тела вокруг полюса (вокруг
оси СР) и которую мы обозначим v'k, т. е. %=ус+ил- При этом по
модулю v'k=ahk, где hh — расстояние точки Bk от оси СР, а ю —
угловая скорость тела, которая (см. § 63) не зависит от выбора по-
полюса. Тогда *
»1 = = (Ре + v'kY = v-c + v'k2 + 2пс -l}'k.
Подставляя это значение v\ в равенство D1) и учитывая, что v'k—
—<йпк, найдем
Т =
vh/2
co2/2+F
где общие множители сразу вынесены за скобки.
В полученном равенстве первая скобка дает массу М тела, а
вторая равна моменту инерции Jср тела относительно мгновенной
_ * Из определения скалярного произведения двух векторов следует, что
ti2=o- o=twcosO°=ir, т. е. скалярный квадрат вектора равен квадрату его модуля.
Этот результат здесь использован; мы будем пользоваться им без оговорок и в
дальнейшем.
303
оси СР. Величина же 2/?вд^=0, так как она представляет собой
количество движения, получаемое телом при его вращении вокруг
оси СР, проходящей через центр масс тела (см. § ПО).
В результате окончательно получим
T = Mvc/2+Jcpa>42. D5)
Таким образом, кинетическая энергия тела в общем случае дви-
движения (в частности, и при плоскопараллельном движении) равна
кинетической энергии поступательного движения со скоростью цент-
центра масс, сложенной с кинетической энергией вращательного движе-
движения вокруг оси, проходящей через центр масс.
Если за полюс взять не центр масс С, а какую-нибудь другую
точку А тела и мгновенная ось АР при этом не будет все время про-
проходить через центр масс, то для этой оси 2/nftt^?=0 и формулы вида
D5) мы не получим.
Рассмотрим примеры.
Задача 136. Вычислить кинетическую энергию катящегося без скольжения
сплошного цилиндрического колеса массой М, если скорость его центра равна
vc (см. рис. 308, а).
Решение Колесо совершает плоскопараллелыюе движение. По фор-
формуле D4) или D5)
T=Mv2c/2-\-Jc(x>*!2.
Считаем колесо сплошным однородным цилиндром; тогда (см. § 102) Jc—
— MR2l2, где R — радиус колеса. С другой стороны, так как точка В является
для колеса мгновенным центром скоростей, то Vc=<i>-BC=oiR, откуда a>=i>c/R.
Подставляя все эти значения, найдем
Задача 137. В детали А, движущейся поступательно со скоростью и, име-
имеются направляющие, по которым со скоростью v перемещается тело В массой т.
Зная угол а, (рис. 305), определить кинетическую энергию тела В.
В,
Y777777777///////////////////77.
Рис. 305
Рис. 306
Решение. Абсолютное движение тела В будет поступательным со ско-
скоростью yag=y+w (см. § 68). Тогда
Т = ото|б/2 = m (и2 + и2+2vu cos a)/2.
Заметим, что если тело совершает сложное движение, то его полная кинетиче-
кинетическая энергия не равна в общем случае сумме кинетических энергий относительного
а переносного движений. Так, в данном примере
Tot + Tnev = mvy2 + mu*/2 ф Т.
304
Задача J38. Часть механизма состоит из движущейся поступательно со
скоростью и детали (рис. 306) и прикрепленного к ней на оси А стержня АВ
длиной / и массой М. Стержень вращается вокруг оси А (в направлении, указан-
указанном дуговой стрелкой) с угловой скоростью оз. Определить кинетическую энергию
стержня пр-и данном угле а.
Решение. Стержень совершает сложное (плоскопараллельное) движе-
движение. По формуле D4) или D5) Т= ЛЬ?/2 +^с»2/2-
Скорость точки С слагается из скорости va=u и скорости vca (или dot), мо-
модуль которой Гсл=<в^'2- Следовательно (рис. 306), ис~и2+исл+2и1'сдсо8 ее.
Угловая скорость вращения стержня вокруг центра С такая же, как и вокруг
конца А, так как со не зависит от выбора полюса. Кроме того, в задаче 119 (см.
§ 103) было показано, что Jc=MP/l2.
Подставляя все эти данные, получим
Т=М (и2+а?Р/4+иш1 cos a)/2+MPw2,24=Mu2/2+M'2o>2/6+(M/cou cos a)/2.
Заметим, что в данном случае нельзя считать
Результат этот неверен, так как по доказанной теореме формула Т=ТП0СТ+ТВр
справедлива только тогда, когда ось вращения проходит через центр масс тела,
а ось А через центр масс не проходит.
§ 122. НЕКОТОРЫЕ СЛУЧАИ ВЫЧИСЛЕНИЯ РАБОТЫ
Работа сил вычисляется по формулам, полученным в § 87 и
88. Рассмотрим дополнительно следующие случаи.
1. Работа сил тяжести, действующих на
систему. Работа силы тяжести, действующей на частицу весом
pk, будет равна ph (zM—zhl), где гм и zhl — координаты, определяю-
определяющие начальное и конечное положения частицы (см. § 88). Тогда,
учтя, что Spfi2ft=-Pzc (см. § 32), найдем для суммы работ всех сил
тяжести, действующих на систему, значение
А = Zpkzk0—Zphzkl = Р BСо —zCl).
Этот результат можно еще представить в виде
A = ±Phc,
где Р — вес системы, hc — вертикальное перемещение центра масс
(или центра тяжести). Следовательно, работа сил тяжести, дейст-
действующих на систему, вычисляется как работа их главного вектора
(в случае твердого тела — равнодействующей) Р на перемещении
центра масс системы (или центра тяжести тела).
2. Работа сил, приложенных к вращающе-
вращающемуся телу. Элементарная работа приложенной к телу силы
F (рис. 307) будет равна (см. § 87)
АА --= Fx ds = F%h dtp,
так как ds=/idq>, где dep — элементарный угол поворота тела.
Но, как легко видеть*, Fxh=mz(F). Будем называть величину
* Если разложить F по направлениям Вт, ВС и Вг' (см. рис. 307), то mz (F)=
=tnz(Fx), так как моменты двух других составляющих равны нулю.
305
Af2=m,(/r) вращающим моментом. Тогда получим
cL4=Mzd(p.
D6)
Следовательно, в рассматриваемом случае элементарная работа
равна произведению вращающего момента на элементарный угол
поворота. Формула D6) справедлива и при действии нескольких
сил, если считать Mt=I,mz(Fh).
При повороте на конечный угол (pf работа
A=[Med<p, D7)
а в случае постоянного момента
A=Mz<pl, D7')
Если на тело действует пара сил, лежащая в плоскости, перпен-
перпендикулярной оси Oz, то Mz в формулах D6)—D7') будет, очевидно,
означать момент этой пары.
Укажем еще, как в данном случае определяется мощность (см.
§ 87). Пользуясь равенством D6), находим
N=dAldt=Mz •dy/dt=Mz(o.
Следовательно, при действии сил на вращающееся тело мощность
равна произведению вращающего момента на угловую скорость
тела. При той же самой мощности вращающий момент будет тем
больше, чем меньше угловая скорость.
г
г'
Рис. 307
Рис. 308
3. Работа сил трения, действующих на ка-
катящееся тело. На колесо радиусом R (рис. 308), катящееся
по некоторой плоскости (поверхности) без скольжения, действует
приложенная в точке В сила трения FTp, препятствующая скольже-
скольжению точки вдоль плоскости. Элементарная работа этой силы сЫ =
=F%HsB. Но точка В в данном случае совпадает с мгновенным цент*
306
ром скоростей (см. § 56) и ув=0. Так как dsB=vBdt, то ds?=O и
для каждого элементарного перемещения dA=0.
Следовательно, при качении без скольжения работа силы трения,
препятствующей скольжению, на любом перемещении тела равна
нулю. По той же причине в этом случае равна нулю и работа нор-
нормальной реакции N, если считать тела недеформируемыми в силу
N приложенной в точке В (как на рис. 308, а).
Сопротивление качению создает возникающая вследствие де-
деформации поверхностей (рис. 308, б) пара сил N, Р, момент которой M=kN,
где k — коэффициент трения качения (см. § 27). Тогда по формуле D6), учитывая,
что при качении угол поворота колеса d<p= dsc/R, получим
k
dAKa4 = — kNd^ = ~-^-Ndsc, D8)
где dsc — элементарное перемещение центра С колеса.
Если JV=const, то полная работа сил сопротивления качению
Лкач =_ ?Мр1== _ — Nsc. D8')
Так как величина klR мала, то при наличии других сопротивлений сопро-
сопротивлением качению можно в первом приближении пренебрегать.
§ 123. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ
ЭНЕРГИИ СИСТЕМЫ
Доказанная в § 89 теорема справедлива для любой из точек си-
системы. Следовательно, если рассмотреть какую-нибудь точку си-
системы с массой mk, имеющую скорость vh, то для этой точки будет
где dA% и dAlk — элементарные работы действующих на точку внеш-
внешних и внутренних сил. Составляя такие уравнения для каждой из
точек системы и складывая их почленно, найдем, что
или
dT = 2<L4| + 2cL4?. D9)
Равенство D9) выражает теорему об изменении
кинетической энергии системы в дифферен-
дифференциальной форме. Проинтегрировав обе части этого равен-
равенства в пределах, соответствующих перемещению системы из неко-
некоторого начального положения, где кинетическая энергия равна
То, в положение, где значение кинетической энергии становится
равным Ти получим
T.-T^-EAl + ^Ai. E0)
Это уравнение выражает теорему об изменении кинетической
энергии в другой (интегральной) форме: изменение кинетической
энергии системы при некотором ее перемещении равно сумме работ
307
на этом перемещении всех приложенных к системе внешних и внут-
внутренних сил.
В отличие от предыдущих теорем внутренние силы в уравнениях
D9) или E0) не исключаются. В самом деле, если F[2 и Fl21 — силы
взаимодействия между точками Вх
и В 2 системы (рис. 309), то F\2-r
+/7ri=0. Но при этом точка Вг
может перемещаться по направле-
направлению к В2, а точка В2 — по нап-
направлению к Вх. Работа каждой из
Рис. 309 сил будет тогда положительной и
сумма работ нулем не будет. На-
Например, при выстреле (см. задачу 127 в § 112) силы давления поро-
пороховых газов, являющиеся для системы снаряд — откатывающиеся
части внутренними, совершают работу и сообщают скорости телам
системы.
Рассмотрим два важных частных случая.
1. Неизменяемая система. Неизменяемой будем на-
называть механическую систему, в которой расстояние между каж-
каждыми двумя взаимодействующими точками остается во все время
движения постоянным.
Рассмотрим две точки Вг и В2 неизменяемой системы (В1В2=
=const), действующие друг на друга с силами F[2 и F\x=—F{2
(см. рис. 309). Тогда, поскольку при движении отрезка В±В2 долж-
должно быть i>i cos ce!=y2 cos а2 (см. § 55), то и usx cos «i=ds2 cos a2,
так как ds1=u1d^, ds2=v,dt (vu v2 и dsx, ds2—соответственно скоро-
скорости и элементарные перемещения точек Вх и В2). Кроме того, F[2=
=Fl21. В результате для суммы элементарных работ этих сил получим
dA 1 + dЛ j = F^ds-L cos аЛ — F^ds^ cos аг = 0.
То же получится и для всех других взаимодействующих точек
системы. В итоге приходим к выводу, что в случае неизменяемой си-
системы сумма работ всех внутренних сил равна нулю и уравнения
D9) или E0) принимают вид
<1Г = 2<1Л| и Гх-Г0 = 2:Л|. E1)
2. Система с идеальными связями. Рассмотрим
систему, на которую наложены связи, не изменяющиеся со време-
временем. Разделим все действующие на точки системы внешние и внут-
внутренние силы на активные и реакции связей. Тогда уравнение D9)
можно представить в виде
где АА1 — элементарная работа действующих на k-ю точку системы
внешних и внутренних активных сил, a dArk — элементарная работа
реакций, наложенных на ту же точку внешних и внутренних свя-
связей.
308
Как видим, изменение кинетической энергии системы зависит от
работы и активных сил и реакций связей. Однако можно ввести
понятие о таких «идеальных» механических системах, у которых
наличие связей не влияет на изменение кинетической энергии систе-
системы при ее движении. Для таких связей должно, очевидно, выпол-
выполняться условие
ZdATk = 0. E2)
Если для связей, не изменяющихся со временем, сумма работ всех
реакций при элементарном перемещении системы равна нулю, то
такие связи являются идеальными *. Укажем ряд известных нам
видов идеальных связей.
В § 89 было установлено, что если связью является неподвижная
поверхность (или кривая), трением о которую можно пренебречь,
то при скольжении тел вдоль такой поверхности (кривой) работа
реакции JV равна нулю. Затем в§ 122 показано, что если пренебречь
деформациями, то при качении без скольжения тела по шероховатой
поверхности работа нормальной реакции N и силы трения Frp (т. е.
касательной составляющей реакции) равна нулю. Далее, работа
реакции R шарнира (см. рис. 10 и 11), если пренебречь трением, бу-
будет также равна нулю, поскольку точка приложения силы R при
любом перемещении системы остается неподвижной. Наконец, если
на рис. 309 материальные точки Вг и В2 рассматривать как связан-
связанные жестким (нерастяжимым) стержнем ВХВЪ то силы F[2 и Fl21 будут
реакциями стержня; работа каждой из этих реакций при перемеще-
перемещении системы не равна нулю, но сумма этих работ по доказанному
дает нуль. Таким образом, все перечисленные связи можно с уче-
учетом сделанных оговорок считать идеальными.
Для механической системы, на которую наложены только не
изменяющиеся со временем идеальные связи, будет
dT = 2cL4f и Т1—Г0 = 2Д?. E3)
Таким образом, изменение кинетической энергии системы с иде-
идеальными, не изменяющимися со временем связями при любом ее
перемещении равно сумме работ на этом перемещении приложенных
к системе внешних и внутренних активных сил.
Все предыдущие теоремы позволяли исключить из уравнений
движения внутренние силы, но все внешние силы, в том числе и
наперед неизвестные реакции внешних связей, в уравнениях сохра-
сохранялись. Практическая ценность теоремы об изменении кинети-
кинетической энергии состоит в том, что при не изменяющихся со време-
временем идеальных связях она позволяет исключить из уравнений дви-
движения все наперед неизвестные реакции связей.
* Общее понятие об идеальных связях определено в § 139.
309
§ 124. РЕШЕНИЕ ЗАДАЧ
Теорема об изменении кинетической энергии в случаях, когда
движущаяся система является неизменяемой, позволяет исключить
из рассмотрения все неизвестные внутренние силы, а при идеаль-
идеальных, не изменяющихся со временем связях — и наперед неизвест-
неизвестные реакции внешних связей.
В случае изменяемой системы теорема дает решение задачи толь-
только тогда, когда внутренние силы наперед известны. Если же эти
силы не известны (задачи 123, 127 и им подобные), то получить ре-
решение с помощью одной только этой теоремы нельзя.
Уравнение E0) позволяет легко решать те задачи, в которых в
число данных и искомых величин входят: 1) действующие силы;
2) перемещение системы; 3) скорости тел (линейные или угловые)
в начале и в конце перемещения. При этом действующие силы долж-
должны быть постоянными или зависеть только от перемещений (расстоя-
(расстояний).
Важно также иметь в виду, что с помощью теоремы об изменении
кинетической энергии можно (когда положение системы определя-
определяется одним параметром) составлять дифференциальные уравнения
движения системы и, в частности, находить ускорения движущихся
тел; при этом на систему могут вообще действовать и любые перемен-
переменные силы (см. задачи 141—143 и задачу 154 в § 130).
Задача 139. Стержень АВ длиной 1 подвешен на шарнире в точке А (рис. 310),
Пренебрегая трением в шарнире, найти, какую наименьшую угловую скорость щ
надо сообщить стержню, чтобы он отклонился до горизонтального положения.
Рис. 310
Рис. 311
Решение. В число данных и искомых в задаче величин входят щ, о>1=О
и перемещение системы, определяемое углом BOABV Следовательно, для решения
задачи удобнее всего воспользоваться теоремой об изменении кинетической энер-
энергии. Учитывая, что система не изменяема, составим уравнение E1)
Обозначая массу стержня через М, вычислим все входящие в это уравнение
величины. По формуле D3) и формуле F) из § 102 находим
Так как в конечном положении скорость стержня равна нулю, то Тг—0. Нало-
Наложенная связь является идеальной (шарнир А); следовательно, работу совершает
только активная сила P=Mg и Ae=—Phc=—Mgll2. Подставляя все эти зна-
310
чения в уравнение (а), найдем
— Ml*mlQ = — Mgt/2, откуда б>0 =
Задача 140. Шкивы А и В, соединенные ремнем (рис. 311), вращаются
после выключения двигателя так, что шкив А имеет угловую скорость <о0. Общий
вес шкивов Р, а вес ремня р. Чтобы затормозить вращение, к шкиву А радиусом R
прижимают с силой Q тормозную колодку; коэффициент трения колодки о шкив /.
Пренебрегая трением в осях и считая шкивы сплошными дисками, найти, сколько
оборотов сделает шкив .4 до остановки.
Решение. Для определения искомого числа оборотов jVog воспользу-
воспользуемся уравнением E1)
При вычислении кинетической энергии надо всегда иметь в виду, что кинети-
кинетическая энергия системы равна сумме кинетических энергий всех входящих в нее тел.
По условиям задачи 7^=0, а Т0=Тл+Тд+Гр. Учитывая, что начальные скорости
всех точек ремня ур0= Woi?= Wo'", где щ и г — начальная угловая скорость и радиус
шкива В, найдем по формулам D3) и (8):
1 = (PB/4g) г*од2 = (PB/4g) ?
Последнее равенство следует из того, что все точки ремня движутся с одной в той
же по модулю скоростью. Окончательно, так как Рд+Р.в=-Р> получаем
Вычисляем работы сил. В данном случае работа сил тяжести равна нулю,
так как центры тяжести колес и ремня при движении системы не перемещаются.
Сила трения FIV=fQ. Ее работу найдем по формуле D7')
Подставляя все найденные значения в уравнение (а), получим окончательно
Задача 141. Тележку тянут вверх по наклонной плоскости с углом на-
наклона а=30°, приложив к ней постоянную силу Q= 160 Н (рис. 312). Вес плат-
платформы тележки Р= 180 Н, вес каждого из четырех ее сплошных колес р=20 Н.
Определить: 1) какую поступательную скорость ох будет иметь тележка, пройдя
путь 1=4 м; если уо=О; 2) с каким ускорением движется тележка. Качение колес
происходит без скольжения; сопротивлением качению пренебречь.
Решение. 1. Для определения % воспользуемся уравнением E1)
Г!-Г0 = 2Л1. (а)
В данном случае Т0=0, а Т1=Т'пл+4Гк0Л. Тележка движется поступа-
поступательно, а кинетическая энергия сплошного катящегося колеса была вычислена
в задаче 136 (см. § 121); следовательно,
Tt = Pvl/2g+4 Cpvl/4g) = (Р + 6p)vt/2g.
Работу совершают сила Q и сила тяжести Р1г равная Р-Мр Работа силы трения,
препятствующей скольжению, и нормальных реакций плоскости равна нулю
(см. § 122). Вычисляя, находим:
Подставляя все эти данные в уравнение (а), получаем
(P-r-6p)^/2g=LQ-(P+4p)sin a] /, (б)
311
откуда
1
= 2,8 м/с.
2. Для определения ускорения а, поскольку нами уже получено равенст-
равенство (б), поступим следующим образом: будем считать в равенстве (б) величины
v±=v и / (параметр, определяющий положение всей системы) переменными. Тогда,
продифференцировав по времени обе части равенства, найдем
[(Р~\ 6P)/g]y-J = [Q-(P + 4p)sina]-^-.
Но dlfdt=v, а dv/dt=a. Окончательно, сокращая на v, получим
Q — (P + 4p)sina n „о ,9
я=-—pZ-Щр § = 0,98 м/с2.
Обращаем внимание на использованный в этой задаче прием определения
ускорения с помощью теоремы об изменении кинетической энергии.
А
}р=мд
Рис. 313
Задача 142. На цилиндрический каток радиусом R и массой М намотана
нить, перекинутая через блок О (рис. 313) и несущая на конце груз D массой т.
Определить, какую скорость vc будет иметь центр С катка, пройдя путь s, если
»С„=0. Найти, чему равно ускорение ас этого центра. Коэффициент трения каче-
качения катка равен k, радиус инерции катка относительно его оси равен рс. Массой
нити и блока О пренебречь,
Решение. 1. Для определения скорости vq воспользуемся уравнением
Г —Г0=2Л|. (а)
В данном случае Г0=0, а Т=ТкаТ-\-То, причем по формулам D2), D4) и D)
TD=:mvb/2, Гкат =
сш2/2.
Так как точка В является мгновенным центром скоростей, то <a=vclR и Уд=
vjl=2vc. Следовательно,
Работу совершают сила Q=mg и пара Af, P (P~Mg). Поскольку V?>=2vc,
то перемещением груза D будет h=2s, где s — перемещение центра С катка, и
A(Q)~mg-2s. Работу сил сопротивления качению вычисляем по формуле D8'),
так как N=P=Mg= const. Тогда
-(k/R)Mgs.
Подставляя найденные значения в уравнение (а), получим
[4т -\-М (l-Ьрс/Л2)] vc/2 = Bm—kM/R)gs,
откуда
312
(б)
kM)Rs
2. Для определения ас, как и в предыдущей задаче, дифференцируем обе
части равенства (б) по t. Окончательно, учитывая, что ds/dt=i'c, найдем
_ BmR~kM)Rg
Задача 143. Шестерня 1 радиусом г и массой т1, насаженная на кривошип 2
длиной ОС=1 и массой т2 и связанная с ним спиральной пружиной, может ка-
кататься по неподвижной шестерне 3 радиусом R=
= 1—г (рис. 314). Момент, действующий со сторо-
стороны пружины, МПр=са, где а — угол поворота
шестерни 1 относительно кривошипа. Пренебре-
Пренебрегая трением в осях, найти период колебаний, ко-
которые будет совершать кривошип, если его вы-
вывести из положения равновесия. Механизм рас-
расположен в горизонтальной плоскости.
Решение. Будем определять положение
кривошипа углом <р, отсчитываемым от положе-
положения равновесия. Чтобы исключить неизвестную
реакцию оси С, рассмотрим шестерню 1 и кри-
кривошип как одну систему и составим дифферен-
дифференциальное уравнение ее движения с помощью
уравнения D9).
Сначала вычисляем кинетическую энергию
Т системы, выражая ее через угловую скорость
сокр кривошипа (так как мы ищем закон движе-
движения кривошипа). Получаем
Т = Гкр-1- Тш = /Окр«У 2+
Считая кривошип однородным стержнем, а шестерню — диском и учитывая,
что точка касания является для шестерни 1 мгновенным центром скоростей,
найдем, что
Рис. 314
(a)
Подчеркиваем, что в формулу D4), по которой вычисляется Тш, входит абсо-
абсолютная угловая скорость шестерни, а не ее относительная скорость поворота
по отношению к кривошипу. Подставляя все найденные значения в равенство (а),
получим окончательно
Г=(9т1 + 2т2)/2й)кр/12. (б)
Теперь вычисляем элементарную работу. Внешние силы в данном случае
работу не производят; следовательно, йА^=0. Элементарная работа силы упру-
упругости пружины (внутренняя сила), когда шест»рня повернута вокруг кривошипа
на угол а, равна dA'=—Alnpd«=—cada (знак минус потому, что момент направ-
направлен в сторону, противоположную углу поворота шестерни). Поскольку мы ищем
закон движения кривошипа, то выразим угол а. через ф. Так как аф—аф, то
Яф=га или (/—r)(f=rat откуда
a=[(l—r)/r] ф и <L4'=—с [A—гJ/г*] <р йф.
Составляя теперь уравнение 6!Т=аЛ', получим
[(9mx + 2m2) /2/6] сокр dcoKp = — с[A~гJ/гЦ ф dq>.
Но так как
A d(P Л,
'^Ж к
At
I*
то окончательно, после сокращения на dt, найдем следующее дифференциальное
уравнение движения системы:
ё3ф 6с (/—гJ
-д^+Л-Ф = О, где A.li
313
Полученное уравнение является дифференциальным уравнением гармони-
гармонических колебаний (см. § 94), Следовательно, кривошип, выведенный из положения
равновесия, будет совершать гармонические колебания, период которых
k /—т V
6с
Решенная задача показывает, как может использоваться теорема об изме-
изменении кинетической энергии для составления дифференциального уравнения
движения системы, положение которой определяется одной координатой (здесь
углом ф).
Задача 144. Трос, имеющий длину / и массу т1, намотанный на барабан
массой т2, несет на конце груз массой т3 (см. рис. 300). Считая массу барабана
равномерно распределенной по ободу и пренебрегая толщиной троса и трением
в оси (уИтр=О), определить зависимость скорости v груза от длины х свешиваю-
свешивающейся части троса. В начальный момент времени v=0 и приближенно х=0.
Решение. Для определения, искомой зависимости воспользуемся урав-
уравнением
Поскольку груз, все частицы троса и все точки обода барабана движутся
с одной и той же скоростью и, то Г=Л1у2/2, где M=m1Jrm2-\-m3. Кроме того, так
как вес свешивающейся части троса равен (т^11)х, то 2йА% = (т^х/1-\-щ^)йх
и уравнение (а) примет вид
М& (Л'2)=(mixil+m^gdx.
Отсюда, интегрируя и учитывая что при х=0 и=0, получим
v = V(miS/Ml) х* + 2 (m3gjM) x.
§ 125*. СМЕШАННЫЕ ЗАДАЧИ
В ряде случаев получить решение задачи с помощью одной из
общих теорем не удается, но решение легко находится, если исполь-
использовать одновременно, например, две общие теоремы. Несколько та-
таких задач и рассматривается ниже.
Задача 145. Горизонтальная трубка АВ, масса которой т1 и радиус инер-
инерции рг относительно вертикальной оси Az известны, вращается вокруг этой оси
с угловой скоростью ы0 (рис. 315). В не-
некоторый момент времени находящийся в
трубке шарик массой т2, чуть смещенный
от точки А, начинает двигаться без на-
чальной скорости вдоль трубки. Прене-
брегая сопротивлениями, най-ш скорость
v шарика относительно трубки как функ-
цию его расстояния х от оси Аг.
Решение. Рассмотрим систему
трубка — шарик. Так как сопротивления-
сопротивлениями (в том числе силами трения) здесь пре-
пренебрегают, то при движении системы рабо-
работа действующих на нее сил тяжести и ре-
Рис. 315 акций связей равна нулю. Следовательно,
из уравнения E0) получим Т=Т0.
В момент /=0 шарик находится в точке А и его абсолютная скорость равна
нулю. В произвольный момент времени угловая скорость трубки равна ш, а ско-
скорость шарика слагается из относительной, численно равной v, и ей перпендику-
перпендикулярной переносной, численно равной сох. Поэтому
Та = тхр*й«72, Т = /Л1ргШг/2 + тг (f2 +
314
Подстановка этих величин в равенство Т=Т0 дает
t>2 = n2o)o—(rt2-L^)co3, где п2 = т191/тг. (а)
Для определения неизвестной величины <ю воспользуемся теоремой моментов
относительно оси Аг. Так как здесь Zmz(F%)=0, то /C2=const=/<'Zo ИЛИ
откуда
Подставляя это значение ш в равенство (а), найдем окончательно
V х* +
V
(б)
(в)
Интересно отметить, что с увеличением х скорость стремится к предельному
значению t'np= пщ— Y т\!тг Ргао-
Задача 146. Однородный сплошной круговой цилиндр массой т. и радиусом г,
находящийся в наивысшей точке цилиндрической поверхности радиусом R и чуть
смещенный из этого положения, начинает катиться вниз без начальной скорости
(рис. 316). Найти, при каком значении угла 6 цилиндр оторвется от поверхности;
обе поверхности абсолютно шероховаты (имеют насечку).
¦J-
Рис. 317
Решение. Отрыв произойдет в точке, где реакция N поверхности обра-
обратится в нуль. Чтобы найти значение А1', воспользуемся теоремой о движении центра
масс, составив уравнение A6) в проекции на главную нормаль Сп к траектории
центра масс С. Получим, учтя, что центр С движется по окружности радиуса
R+r,
или mvc/(R + г) = mg cos 9—N.
(а)
Для определения vc воспользуемся теоремой об изменении кинетической
энергии. Так как Г0=0, а значение Т для катящегося цилиндра было найдено
в задаче 136 (см. § 121) и равно Зтас/4, то
3mvc/i=mg(RJrr)(l~ cos 9). (б)
Подставляя отсюда значение nvJc в уравнение (а), найдем
A'=mgGcos9— 4)/3.
Следовательно, отрыв произойдет в точке, определяемой равенством
cos 6=4/7 F^55°).
Положение точки отрыва, как и величина N, от значений R и г не зависят.
Задача 147. К ползуну 1 массой гп^, который может перемещаться по гладким
горизонтальным направляющим, шарннрно прикреплен стержень 2 длиной I
и массой т2 (рис. 317). В начальный момент времени стержень отклоняют до
315
горизонтального положения и отпускают без начальной скорости. Пренебрегая
трением в оси шарнира, определить, какую скорость vx будет иметь ползун в мо-
момент прохождения стержня через вертикаль.
Решение. Рассматривая систему ползун — стержень, применим к пей
теорему об изменении кинетической энергии на перемещении, при котором стер-
стержень приходит из положения АВа в положение АВг. Получим, учтя, что Т0=0
T1=m2gt/2. (a)
Здесь T1=TiI0JI+TiT, где tiOJl=m1vl/2 и, согласно формулам D4) или D5),
7т1Т=т2ис/2+Ус(о2/2. В последнем равенстве ш — угловая скорость стержня,
vc — скорость его центра масс, причем и^—^—^сл=у1—(о//2; кроме того, как
было найдено в задаче 119, ./с=т2/2/12.
В результате уравнение (а), если поделить обе его части на mj2, примет вид
(mi/m2) ?>!+(?>!—<ol/2J-\-PaJ/l2=gL (б)
Для определения а воспользуемся теоремой об изменении количества движе-
движения систем. Так как в данном случае SF|X=O, а в начальный момент система
находилась в покое, получим Q^=0, т. е.
(Vx—al/2) = 0, откуда] la = 2 (l-\-mx/m2) vt.
Подставив это значение Ы в равенство (б), найдем окончательно
V3gl ~
Задача 148. По наклонной грани призмы 1 массой mlt стоящей на гладкой
горизонтальной плоскости, начинает скользить (без трения) груз 2 массой т.2
(рис. 318). Угол наклона грани равен а.
Найти, с каким ускорением будет при этом
двигаться призма.
Решение. Рассмотрим систему
груз — призма и применим к ней теорему
о движении центра масс. В проекции на
горизонтальную ось Ох будет Sf|^=0 и,
следовательно, Мхс=0-
Обозначая координату призмы через
х и определяя положение груза на призме
координатой s, получим Л4лс=т1(л;-1-&)+
). Так как Mxq=0, то отсюда
= 0. (а)
Рис. 318
Значение s можно было бы опять определить с помощью теоремы об изменении
кинетической энергии, но в данном случае проще составить дифференциальное
уравнение относительного движения груза [уравнение E6) из §91) в проекции
на ось As. Так как подвижная система отсчета вместе с призмой перемещается
поступательно, то ^кОр=0, а Fnep=—Щ^, где аг—ускорение призмы (а.1=\х\).
Тогда /'neps=—тгх cos a, и в проекции на ось As получим
Подставив это значение m2s в равенство (а), найдем искомое ускорение призмы
in 2a,
2 (mj-f m^sin2 a)'
316
§ 126. ПОТЕНЦИАЛЬНОЕ СИЛОВОЕ ПОЛЕ
И СИЛОВАЯ ФУНКЦИЯ
Задачи, рассмотренные в предыдущих параграфах (и в § 89),
удалось решить с помощью теоремы об изменении кинетической энер-
энергии по той причине, что во всех случаях работу действующих сил
можно было подсчитать, не зная заранее закона происходящего
движения. Важно установить, каков вообще класс сил, обладающих
этим свойством.
Работа на перемещении Mj_M2 силы F, приложенной к телу вточ-
ке М, вычисляется по формуле D4') из § 87:
(М2) (Л12)
¦<W,>= J ал = J (Fxdx + Fydy + Fzdz). E4)
(М,| (Mi)
Как уже было отмечено в § 89, вычислить стоящий справа ин-
интеграл, не зная закона происходящего движения (т. е. зависимостей
х, у, г от времени t), можно лишь в случаях, когда сила постоянна
или зависит только от положения точки, т. е. от ее координат х,~ у,
z. Такие силы образуют силовое поле (см. § 32). Так как сила опре-
определяется ее проекциями на координатные оси, то силовое поле зада-
задается уравнениями:
Рх=Ф1(х, у, г), Fy=O2(x, у, г), Рг^=Ф3(х, у, г). E5)
Но в общем случае и для вычисления работы таких сил надо в фор-
формуле E4) перейти под знаком интеграла к одному переменному, т. е.
например, знать зависимости г/=Д (х) и z=f2(x). Эти равенства, как
известно, определяют в пространстве уравнение кривой, являю-
являющейся траекторией точки М. Следовательно, в общем случае, ра-
работа сил, образующих силовое поле, зависит от вида траектории
точки приложения силы.
Однако если окажется, что выражение, стоящее в формуле E4)
под знаком интеграла и представляющее собой элементарную рабо-
работу силы F, будет полным дифференциалом некоторой функции
U(x, у, г), т. е".
dA = dU(x, у, г) или Fx dx+Fy dy+Fz dz=dU(x, y, z), E6)
то работу A(MiM^ можно вычислить, не зная заранее траекторию
точки М.
Функция U от координат х, у, z, дифференциал которой равен
элементарной работе, называется силовой функцией. Силовое поле,
для которого существует силовая функция, называется потенци-
потенциальным силовым полем, а силы, действующие в этом поле,— потен-
потенциальными силами. В дальнейшем силовую функцию считаем одно-
однозначной функцией координат.
Если в формулу E4) подставить выражение dA из равенства
E6), то получим
(Mi)
AwiMj = J dU(x, у, z) = Ui — Ui, E7)
317
где U1=U(xl, yu Zi) и ?/2=?/(х2, y2, z2) — значения силовой функ-
функции в точках Mi и М2 поля соответственно. Следовательно, работа
потенциальной силы равна разности значений силовой функции в
конечной и начальной точках пути и от вида траектории движу-
движущейся точки не зависит. При перемещении по замкнутой траекто-
траектории Uz=Ui и работа потенциальной силы равна нулю.
Основным свойством потенциального силового поля и является
то, что работа сил поля при движении в нем материальной точки за-
зависит только от начального и конечного положений этой точки и
ни от вида ее траектории, ни от закона движения не зависит.
Силы, работа которых зависит от вида траектории или от закона
движения точки приложения силы, называются непотенциальными.
К. таким силам относятся силы трения и сопротивления среды.
Если установлено, что соотношение E6) имеет место, то силовая
функция находится из равенства
U = J АА + С или U = J (Fx dx + Fy dy + Fz dz) + C. E8)
Постоянная С здесь может иметь любое значение (как видно из
формулы E7), работа от С не зависит). Однако обычно условливают-
условливаются считать в некоторой точке О, называемой «нулевой точкой», ве-
величину Uо=0 и определяют С исходя из этого условия.
Известными нам примерами потенциальных сил являются силы
тяжести, упругости и тяготения (см. § 88). Покажем, что для полей
этих сил действительно существуют силовые функции, и найдем их
выражения. Поскольку под знаком интегралов, из которых в § 88
были получены формулы D7), D8) и E0), стоят элементарные ра-
работы соответствующих сил, то придем к следующим результатам,
используя равенство E8):
1) для поля силы тяжести, если ось г направлена вер-
вертикально вверх, cL4=—Р dz, откуда, считая ?/=0 при 2=0 (нуле-
(нулевая точка в начале координат), находим
U=—Pz; E9)
2) для поля силы упругости, действующей вдоль оси
Ох *, dA =—ex dx, откуда, считая ?/=0 при х=0, находим
U=—cx*/2; E9')
3) для поля силы тяготения 6А =mgR*dA/г), откуда,
считая ?/=0 при г=оо (нулевая точка в бесконечности), находим
U=mgRVr, E9")
где |/2 + 2 + 2
е г = |/х + г/ + 2.
Пользуясь найденными значениями функций ?/, можно по фор-
формуле E7) получить те же выражения для работ соответствующих
сил, которые даются равенствами D7), D8) и E0) в § 88.
* Такое поле можно назвать линейным; в нем областью, в которой задано си-
силовое поле, является прямая линия.
318
Покажем, что, зная силовую функцию, можно определить силу, действую-
действующую в любой точке поля. Из равенства E6), вычисляя дифференциал от функция
11 (х, у, г), получим
Отсюда, приравнивая коэффициенты при dx, dy, dz в обеих частях равенства, при-
придем к такому результату:
F -ди F -ди р -В. т
tx—b4' F»~^i' F*~~W F0)
Следовательно, в потенциальном силовом поле проекции силы на координатные
оси равны частным производным от силовой функции по соответствующим коор-
координатам. Вектор F, проекции которого определяются равенствами вида F0),
называют градиентом скалярной функции U(x, у, г). Таким образом, JF=grad U,
Из равенств F0) находим
dF^_d4J_ dFy дги
ду ***
Отсюда следует, что если для данного поля существует силовая функция, то
проекции силы удовлетворяют соотношениям:
dF^_dFy dF]L_dFJL dF^_dF^
ду ~~ дх ' дг ~~ ду ' дх ~~ дг ' * }
Можно доказать справедливость и обратного вывода, т. е. что если равенства F1)
имеют место, то для поля существует силовая функция U. Следовательно, усло-
условия F1) являются необходимыми и достаточными условиями того, что силовое
поле является потенциальным.
Таким образом, если силовое поле задано уравнениями E5), то по усло-
условиям F1) можно установить, является оно потенциальным или нет. Если поле
потенциально, то уравнение E8)
определяет его силовую функцию, О]
а формула E7) — работу сил поля.
Наоборот, если силовая функция
известна, то по формулам F0) мож-
можно найти, какое силовое поле этой
функцией определяется.
Полагая U (х, у, z)=C, где
С — некоторая постоянная, полу-
получим в пространстве уравнение по-
поверхности, во всех точках которой
функция 0 имеет одно и то же значе- р gig
ние С. Такие поверхности называют
поверхностями уровня или поверх-
поверхностями равного потенциала. Если, как мы считаем, силовая функция является
однозначной функцией координат, то поверхности уровня не могут пересекаться
и через каждую точку поля проходит только одна поверхность уровня. При лю-
любом перемещении AfiM2 вдоль поверхности уровня U1= U2=C, и работа сил поля,
как следует из уравнения E7), будет равна нулю. Поскольку сила при этом не
равна нулю, то отсюда заключаем, что в любой точке потенциального силового
поля сила направлена по нормали к поверхности уровня, проходящей через эту
точку.
На рис. 319, а показаны две поверхности уровня U(x, у, z)—Clt U(x, у, z)=
= С2, а на рис. 319,6 — их сечение плоскостью, проходящей через нормаль Вп
Если сила направлена в сторону, показанную на рисунке, то ее работа на пере-
перемещении ВВ' будет положительна. Но по формуле E7) эта работа равна С2—Ct.
Следовательно, C2>Ci, т. е. сила в потенциальном поле направлена в сторону
возрастания силовой функции. Далее, работы силы F1 на перемещении ВВ' и си-
силы F2 на перемещении DD' одинаковы, так как равны С2—Сх. Но поскольку
319
DD'<BB', то должно быть F2>Fl. Следовательно, численно сила в потенциальном
пом больше там, где поверхности уровня проходят гуще. Отмеченные свойства
позволяют наглядно представить картину распределения сил в потенциальном
силовом поле с помощью поверхностей уровня. Кроме того, как видно из равен-
равенства E7), работа" потенциальной силы зависит в конечном счете только от того,
с какой поверхности уровня и на какую происходит перемещение точки.
Поясним сказанное примерами.
1. Для однородного поля сил тяжести (см. рис. 231), как видно из формулы
E9), ?/= const, когда 2= const. Следовательно, поверхностями уровня являются
горизонтальные плоскости. Сила тяжести Р направлена по нормали к этим пло-
плоскостям в сторону возрастания U и во всех точках поля постоянна.
2. Для поля сил тяготения, согласно формуле E9"), ?/=ccnbt, когда r=const.
Следовательно, поверхностями уровня являются концентрические сферы, центр
которых совпадает с притягивающим центром. Сила в каждой точке поля на-
направлена по нормали к соответствующей сфере в сторону возрастания V (убыва-
(убывания г), т. е. к центру сферы.
Если в потенциальном силовом поле находится система
материальных точек, то силовой функцией будет та-
такая функция координат точек системы U(хи уи zu . . ., хп, уп, zn),
для которой
dU = HdAk, F2)
т. е. дифференциал которой равен сумме элементарных работ всех
действующих на систему сил поля.
§ 127. ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ.
ЗАКОН СОХРАНЕНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ
Для потенциального силового поля можно ввести понятие о
потенциальной энергии как о величине, характеризующей «запас
работы», которым обладает материальная точка в данном пункте
силового поля. Чтобы сравнивать между собой эти «запасы работы»,
нужно условиться о выборе нулевой точки О, в которой будем услов-
условно считать «запас работы» равным нулю (выбор нулевой точки, как и
всякого начала отсчета, производится произвольно). Потенциаль-
Потенциальной энергией материальной точки в данном положении М называ-
называется скалярная величина П, равная той работе, которую произве-
произведут силы поля при перемещении точки из положения М в нулевое
П =
Из определения следует, что потенциальная энергия П зависит
от координат х, у, z точки М, т. е. что П=П (х, у, z).
Будем в дальнейшем считать нулевые точки для функций П (х,
у, г) и U (х, у, z) совпадающими. Тогда Uo—0 и по формуле E7)
AM0—U0—U=—U, где U — значение силовой функции в точке М
поля. Таким образом,
п(х, у, z)=—U(x, у, z),
т. е. потенциальная энергия в любой точке силового поля равна зна-
значению силовой функции в этой точке, взятому с обратным знаком.
320
Отсюда видно, что при рассмотрении всех свойств потенциального
силового поля вместо силовой функции можно пользоваться поня-
понятием потенциальной энергии. В частности, работу потенциальной
силы вместо равенства E7) можно вычислять по формуле
Л(м1м2) = П1-П2. F3)
Следовательно, работа потенциальной силы равна разности зна-
значений потенциальной энергии движущейся точки в начальном и ко-
конечном ее положениях.
Выражения потенциальной энергии для известных нам потен-
потенциальных силовых полей можно найти из равенств E9) — E9"),
учитывая, что П=—U. Таким образом, будет:
1) для поля силы тяжести (ось z вертикально вверх)
П=Рг; F4)
2) для поля силы упругости (линейного)
П^схЧ2; F4')
3) для поля силы тяготения
П=—mgR*lr. F4")
Потенциальная энергия системы определяется так же, как и
для одной точки, а именно: потенциальная энергия П механической
системы в данном ее положении равна работе, которую произведут
силы поля при перемещении системы из данного положения в нулевое,
т. е.
При наличии нескольких полей (например, полей сил тяжести
и сил упругости) для каждого поля можно брать свое нулевое по-
положение.
Зависимость между потенциальной энергией и силовой функ-
функцией будет такой же, как и для точки, т. е.
nfo, уи zlt . . ., хп, уп, zn)=—U(xu ylt z± ,. . ., хп, уп, zn).
Закон сохранения механической энергии.
Допустим, что все действующие на систему внешние и внутренние
силы потенциальны. Тогда
Подставляя это выражение работы в уравнение E0), получим для
любого положения системы: Г—Г0=П„—П или
F5)
Следовательно, при движении под действием потенциальных
сил сумма кинетической и потенциальной энергий системы в каждом
ее положении остается величиной постоянной. В этом и состоит
закон сохранения механической энергии, являющийся частным слу-
случаем общего физического закона сохранения энергии. Величина
11 № 2173 321
Рис. 320
74-П называется полной механической энергией системы, а сама меха-
механическая система, для которой выполняется закон F5),— консер-
консервативной системой.
Пример. Рассмотрим маятник (рис. 320), отклоненный от вертикали на угол <ра
и отпущенный без начальной скорости. Тогда в начальном его положении По=
= Рг0 и То=0, где Р — вес маятника; z — коор-
координата его центра тяжести. Следовательно, если
пренебречь всеми сопротивлениями, то в любом
другом положении будет П+Г=П0 или Рг+
+JAti>V2=Pz0.
Таким образом, выше положения г„ центр
тяжести маятника подняться не может. При
опускании маятника его потенциальная энергия
убывает, а кинетическая растет, при подъеме,
наоборот, потенциальная энергия растет, а ки-
кинетическая убывает.
Из составленного уравнения следует, что
<i?=2P(zQ-z)lJA.
Таким образом, угловая скорость маятника
в любой момент времени зависит только от поло-
положения, занимаемого его центром тяжести, и в
данном положении всегда принимает одно и то
^ же значение. Такого рода зависимости имеют
место только при движении под действием потенциальных сил.
Диссипативные системы. Рассмотрим механиче-
механическую систему, на которую кроме потенциальных сил действуют не-
неизбежные в земных условиях силы сопротивления (сопротивление
среды, внешнее и внутреннее трение). Тогда из уравнения E0) полу-
получим: Т— Г„=П0—П+Лд или
Т-^-П=Т -f-П ~ЬЛД F5)
где Лд— работа сил сопротивления. Так как силы сопротивления
направлены против движения, то Лд величина всегда отрицательная
(Лд<0). Следовательно, при движении рассматриваемой механи-
механической системы происходит убывание или, как говорят, диссипация
(рассеивание) механической энергии. Силы, вызывающие эту дисси-
диссипацию, называют диссипативными силами, а механическую систему,
в которой происходит диссипация энергии,— диссипативной си-
системой.
Например, у рассмотренного выше маятника (рис. 320) благодаря
трению в оси и сопротивлению воздуха механическая энергия будет)
со временем убывать, а его колебания будут затухать; это диссипа-
тивная система.
Полученные результаты не противоречат общему закону сохра-
сохранения энергии, так как теряемая диссипативной системой механи-
механическая энергия переходит в другие формы энергии, например в
теплоту.
Однако и при наличии сил сопротивления механическая система
может не быть диссипативной, если теряемая энергия компенсирует-
компенсируется притоком энергии извне. Например, отдельно взятый маятник,
как мы видели, будет диссипативной системой. Но у маятника часов
потеря энергии компенсируется периодическим притоком энергии
822
извне за счет опускающихся гирь или заводной пружины, и маятник
будет совершать незатухающие колебания, называемые автоколеба-
автоколебаниями. От вынужденных колебаний (см. § 96) автоколебания отли-
отличаются тем, что они происходят не под действием зависящей от вре-
времени возмущающей силы и что их амплитуда, частота и период опре-
определяются свойствами самой системы (у вынужденных колебаний
амплитуда, частота и период зависят от возмущающей силы).
Глава XXVI
ПРИЛОЖЕНИЕ ОБЩИХ ТЕОРЕМ К ДИНАМИКЕ
ТВЕРДОГО ТЕЛА
§ 128. ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
ВОКРУГ НЕПОДВИЖНОЙ ОСИ
Рассмотрим приложения общих теорем динамики к задачам о
движении абсолютно твердого тела. Так как изучение поступатель-
поступательного движения твердого тела сводится к задачам динамики точки,
то начнем с рассмотрения вращательного движения вокруг непод-
неподвижной оси.
Пусть на твердое тело, имеющее неподвижную ось вращения г
(рис. 321), действует система заданных сил F\, F%, . . ., F%. Одно-
Одновременно на тело действуют реакции подшипников RA и RB. Чтобы
исключить из уравнения движения эти наперед не известные силы,
воспользуемся теоремой моментов относительно оси z (см. § 116).
Так как моменты сил RA и RB относительно z (
оси z равны нулю, то получим _
йК - П^
~~ = М,, где yVL = 2m, (Fi).
Будем в дальнейшем величину Mz назы-
называть вращающим моментом.
Подставляя в предыдущее равенство зна-
значение /Сг=У;?со, найдем
J2 — = MZ ИЛИ J2-~ = MZ. F6) рис_ 321
Уравнение F6) представляет собой дифференциальное уравнение
вращательного движения твердого тела. Из него следует, что произ-
произведение момента инерции тела относительно оси вращения на уг-
угловое ускорение равно вращающемуся моменту:
Jze=Mz. F6')
Равенство F6') показывает, что при данном Мг чем больше мо-
момент инерции тела, тем меньше угловое ускорение, и наоборот. Сле-
11* 323
довательно, момент инерции тела действительно играет при враща-
вращательном движении такую же роль, как масса при поступательном,
т. е. является мерой инертности тела при вращательном движении
(см. § 102).
Уравнение F6) позволяет: 1) зная закон вращения тела, т. е.
ф=д^), найти вращающий момент Mz; 2) зная вращающий момент
Мг, найти ф=/@> т. е. закон вращения тела, или найти его угло-
угловую скорость со. При решении второй задачи следует иметь в виду,
что в общем случае величина Мг может быть переменной и зависеть
от t, ц> и со=ф.
Вместо уравнения F6) для изучения вращательного движения
можно также пользоваться теоремой об изменении кинетической
энергии: Т—Т0=Ае, где Т и Ае определяются по формулам D3) и
D7).
Отметим следующие частные случаи:
1) если 7kfz=0, то ©—const, т. е. тело вращается равномерно;
2) если M2=const то и e=const, т. е. тело вращается равнопе-
равнопеременно.
Уравнение F6) по своему виду аналогично дифференциальному
уравнению прямолинейного движения точки (см. § 77). Поэтому
имеется аналогия и между самими названными движениями, и все
результаты, получаемые для прямолинейного движения точки, бу-
будут справедливы и для вращательного движения твердого тела, если
в них заменить соответственно силу F, массу пг, координату х, ско-
скорость v и ускорение а точки на вращающий момент Mz, момент инер-
инерции Jz, угол поворота ф, угловую скорость со и угловое ускорение б
вращающегося тела.
При решении задач уравнением F6) целесообразно пользовать-
пользоваться тогда, когда система состоит только из одного вращающегося
тела. Если в системе кроме одного вращающегося тела есть еще дру-
другие движущиеся тела (см., например, задачи 134, 140 и т. д.), то
уравнение движения лучше составлять с помощью общих теорем или
методов, изложенных в § 141 и 145.
В задачах, аналогичных задаче 134, следует иметь в виду, что
на барабан действует не сила Q, а натяжение веревки F, не равное Q,
и уравнение F6) для барабана имеет вид J0&=Fr—Мтр. Для его
решения надо дополнительно определить силу F, составив уравне-
уравнение движения груза А, что удлиняет расчет.
Задача 149. Колесо массой m вращается вокруг оси О с угловой скоростью
щ (рис. 322). В некоторый момент времени к колесу прижимается тормозная
колодка с силой Q. Коэффициент трения йолодки о колесо f, радиус колеса г.
Пренебрегая трением в оси и массой спиц, определить, через сколько секунд
колесо остановится.
Решение. Составляя уравнение F6) и считая момент положительным,
когда он направлен в сторону вращения колеса, получаем
Jo^-fQr, (a)
так как сила трения F=fQ. Отсюда, интегрируя, находим
324
По начальным данным, при ^=0 «=<й0, следовательно, С1=7осоо и оконча-
окончательно
a=ag—[Qrt/J0. (б)
В момент остановки, когда t=tu <в=0. Подставляя значение со=0 в уравне-
уравнение (б) и учитывая, что для обода (кольца) Jo—mr2, получим
_J0co0_
Если понадобится найти число оборотов, сделанных колесом до остановки,
то это проще сделать, пе интегрируя еще раз уравнение (б), а применив теорему
об изменении кинетической энергии.
Рис. 322
Задача 150. Вертикальный цилиндрический ротор, момент инерции которого
относительно оси Ог равен Jz (рис. 323), приводится во вращение приложенным
к нему моментом Мвр. Найти, как изменяется при движении угловая скорость
ротора о), если <»о=О, а момент сил сопротивления воздуха пропорционален ш,
т. е. МС0Пр=|Ш-
Решение. Дифференциальное уравнение F6) для вращающегося ротора
имеет вид (считаем положительными моменты, направленные в сторону вра-
вращения)
т dw ,,
Jz-?f=MBV—цсо.
Разделяя переменные и полагая \ilJz=n, возьмем от обеих частей равенства
соответствующие определенные интегралы, получим
a t
J МВр —цш J
Отсюда
ln-
M,
-= — nt или
М
-=e-nt.
вр
Окончательно найдем, что
(а)
Угловая скорость ротора со временем возрастает, стремясь к предельному
значению:
(б)
Согласно отмеченной выше аналогии эти результаты дают одновременно
решение задачи о прямолинейном движении точки с массой m под действием
325
силы f=const и силы сопротивления R=—jj,y. При этом для скорости v точки
по аналогии с равенствами (а) и (б) получится
" = (f/|x)(l —е-"'), где n = \i/m, и ипр = /7ц.
§ 129. ФИЗИЧЕСКИЙ МАЯТНИК. ЭКСПЕРИМЕНТАЛЬНОЕ
ОПРЕДЕЛЕНИЕ МОМЕНТОВ ИНЕРЦИИ
Физическим маятником называется твердое тело, которое может
совершать колебания вокруг неподвижной горизонтальной оси под
действием силы тяжести.
Изобразим сечение маятника плоскостью, перпендикулярной
оси подвеса и проходящей через центр масс маятника С (рис. 324, а).
Введем обозначения: Р — вес маятника, а — расстояние ОС
от центра масс до оси подвеса, J0 — момент инерции маятника от-
относительно оси подвеса. Положение маятника будем определять уг-
углом ср отклонения линии ОС от
вертикали.
Для определения закона коле-
колебаний маятника воспользуемся диф-
дифференциальным уравнением вра-
вращательного движения F6). В дан-
данном случае Mz—M0——Pa sin q>
(знак минус взят потому, что при
Ф>0 момент отрицателен, а при
Ф<0 — положителен) и уравнение
F6) принимает вид
Joq> = — Pa sin ф.
Деля обе части равенства на J0 и вводя обозначение
Pa'J0=k\ F7)
найдем дифференциальное уравнение колебаний маятника в виде
Ф+&2 sin ф=0.
Полученное дифференциальное уравнение в обычных функциях
не интегрируется. Ограничимся рассмотрением малых колебаний
маятника, считая угол ф малым и полагая приближенно sin <p»<p.
Тогда предыдущее уравнение примет вид
Ф+&2Ф=0.
Это дифференциальное уравнение совпадает по виду с дифферен-
дифференциальным уравнением свободных прямолинейных колебаний точки
и его общим решением по аналогии с равенством F8) из § 94 будет
<{)=(?! sin kt-\-C coskt.
Полагая, что в начальный момент i==0 маятник отклонен на малый
угол, ф=ф0 и отпущен без начальной скорости (йH=0), найдем для
постоянных интегрирования значения Ci=0 и С2—фо. Тогда закон
326
малых колебаний маятника при данных начальных условиях будет
cp=cp0cos kt.
Следовательно, малые колебания физического маятника явля-
являются гармоническими. Период колебаний физического маятника,
если заменить к его значением F7), определяется формулой
Гф = 2я/? = 2nV J0/Pa. F8)
Как видим, для малых колебаний период от угла начального от-
отклонения ф0 не зависит. Этот результат является приближенным.
Если проинтегрировать составленное вначале дифференциальное
уравнение колебаний маятника, не считая в нем угол ср малым
(т. е. не полагая sin ф^ф), то можно убедиться, что Т$ зависит от
Фо. Приближенно эта зависимость имеет вид
Отсюда, например, следует, что при фо=0,4 рад (около 23°) фор-
формула F8) определяет период с точностью до 1 %.
Полученные результаты охватывают и случай так называемого
математического маятника, т. е. груза малых размеров (который
будем рассматривать как материальную точку), подвешенного на
нерастяжимой нити длиной /, массой которой по сравнению с мас-
массой груза можно пренебречь (рис. 324, б). Для математического
маятника, так как он представляет собой систему, состоящую из
одной материальной точки, очевидно, будет
a=OC=l.
Подставляя эти величины в равенство F8), найдем, что период
малых колебаний математического маятника определяется форму-
формулой
TH = 2nVVg- F8')
Из сравнения формул F8) и F8'), видно, что при длине
lx=JoglPa=JolMa F9)
период колебаний математического маятника совпадает с периодом
колебаний соответствующего физического маятника.
Длина h такого математического маятника, период колебаний
которого равен периоду колебаний данного физического маятника,
называется приведенной длиной физического маятника. Точка К,
отстоящая от оси подвеса на расстоянии OK=li, называется цент-
центром качаний физического маятника (см. р.ис. 324).
Замечая, что по теореме Гюйгенса J0=Jс-\-Ма2, мы можем при-
привести формулу F9) к виду
h=a+JclMa. F9')
Отсюда следует, что расстояние ОК всегда больше, чем ОС—а
т. е. что центр качаний маятника веегда расположен ниже его цент-
центра масс.
327
Из формулы F9') видно, что KC=Jc/Ma. Поэтому, если поместить ось под-
подвеса в точке К, то приведенная длина 12 полученного маятника согласно F9 )
Следовательно, точки К и О являются взаимными, т. е. если ось подвеса будет
проходить через точку К, то центром качаний будет точка О (так как /2='i) и пе-
период колебаний маятника не изменится. Это свойство используется в так называе-
называемом оборотном маятнике, который служит для определения ускорения силы
тяжести.
Экспериментальное определение момен-
моментов инерции. Один из экспериментальных методов определе-
определения моментов инерции тел (метод маятниковых колебаний) основан
на использовании формулы F8) периода малых колебаний маятника.
А
0
с
—о-
f—I
Рис. 325
Рис. 326
Пусть требуется определить момент инерции относительно оси
Oz изображенного на рис. 325 тела (шатуна), вес которого Р изве-
известен. Подвесив тело так, чтобы ось Oz была горизонтальна, найдем
с помощью секундомера период его малых колебаний Т. Затем ме-
методом взвешивания (см. § 34, рис. 108) определим расстояние ОС=а.
Подставляя все эти значения в формулу F8), получим
J Oz=
Если требуется определить момент инерции тела относительно
оси Ох, проходящей через его центр тяжести, то тело можно подве-
подвесить на двух жестко прикрепленных к телу штангах (стержнях)
так, чтобы ось Ох была горизонтальна (рис. 326), и найти экспери-
экспериментально момент инерции JAB относительно оси АВ (величина a
в этом случае наперед известна). После этого искомый момент инер-
инерции вычисляется по теореме Гюйгенса: Jox=Jab—(P/g)a\
§ 130. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Положение тела, совершающего плоскопараллельное движе-
движение, определяется в любой момент времени положением полюса и
углом поворота вокруг полюса (см. § 52). Задачи динамики будут
решаться проще всего, если за полюс принять центр масс С тела
(рис. 327) и определять положение тела координатами хс, ус и
углом ф.
328
На рис. 327 изображено сечение тела плоскостью, параллельной
плоскости движения и проходящей через центр масс С, Пусть на
тело действуют внешние силы F[, F%, . . ., Fen, лежащие в плоскости
этого сечения. Тогда уравнения движения точки С найдем по теоре-
теореме о движении центра масс
Mac = 2F?, G0)
а вращательное движение вокруг центра С будет определяться урав-
уравнением F6), так как теорема, из которой получено это уравнение,
справедлива и для движения системы вокруг центра масс. В резуль-
результате, проектируя обе части равенства G0) на координатные оси,
получим:
Mac, = 2Fk, МаСу = ЪР1У, /c.8 = 2me(F?). G1)
или
П). G1')
Уравнения G1) представляют собой дифференциальные уравне-
уравнения плоскопараллельного движения твердого тела. С их помощью
можно по заданным силам определить закон движения тела или,
зная закон движения тела, найти главный вектор и главный момент
действующих сил.
При несвободном движении, когда траектория центра масс из-
известна, уравнения движения точки С удобнее составлять в проек-
проекциях на касательную т и главную нормаль п к этой траектории.
Тогда вместо системы G1) получим: _g
f, i У'
G2)
где рс — радиус кривизны траектории
центра масс.
Заметим, что если движение является
несвободным, то в правые части уравне-
уравнений G1) или G2) войдут еще неизве-
неизвестные реакции связей. Для их определе- Рис- 327
ния надо будет составить дополнительные
уравнения, отражающие те условия, которые налагаются на движе-
движение тела связями (см. задачу 151 и др.). Часто уравнения несвобод-
несвободного движения будут составляться проще с помощью теоремы об
изменении кинетической энергии, которой можно воспользоваться
вместо одного из уравнений G1) или G2).
Задача 151. Сплошной однородный круговой цилиндр скатывается по на-
наклонной плоскости с углом наклона а (рис. 328). Определить ускорение центра
цилиндра и наименьший коэффициент трения / цилиндра о плоскость, при кото-
котором возможно качение без скольжения, в двух случаях: 1) пренебрегая сопротив-
сопротивлением качению; 2*) учитывая сопротивление качению (коэффициент трения ка-
качения k и радиус цилиндра R известны).
Решение. 1. Изображаем действующие на цилиндр силы: силу тяжести
P—mg, наименьшую силу трения F, при которой возможно качение без сколь-
329
жения, реакцию iV плоскости, приложенную, когда сопротивление качению не
учитывается, в точке касания. Направим ось Ох вдоль наклонной плоскости, а
ось Оу—перпендикулярно ей.
Так как вдоль оси Оу центр масс цилиндра не перемещается, то аСу=0, и пер-
первое из уравнений G1) дает
N—P cos a=0, откуда N=P cos a.
Составляя другие два уравнения системы G1), учтем, что аСх=ас и будем
считать момент положительным, когда он направлен в сторону вращения цилин-
цилиндра. Получим:
тпа^=Р sin а—F, Jc-t=FR. (a)
Уравнения (а) содержат три неизвестные величины ас, е и F (здесь нельзя
считать F=/JV, так как это равенство имеет место, когда точка касания скользит
вдоль плоскости, а при отсутствии скольжения может быть /•«?/.?; см. § 23).
Дополнительную зависимость между нризвестными величинами найдем, учиты-
учитывая, что при "истом качении vc=aR, откуда, диф-
дифференцируя, получим ac=&R. Тогда второе из ра-
равенств (а), если учесть, что для сплошного ци-
цилиндра Jc=tnR2i'2, примет вид
macl2=F. (б)
Подставляя это значение F в первое из равенств
(а), получим
cc=B/3)gsina. (в)
Теперь находим из выражения (б)
ИС- /¦=(P/3)sma. (г)
Такая сила трения должна действовать на катящийся цилиндр, чтобы он ка-
катился без скольжения. Выше было указано, что F^fN. Следовательно, чистое
качение будет происходить, когда
(Р/3) sin a</P cos a или /S=(tg a)/3.
Если коэффициент трения будет меньше этой величины, то сила F не может
принять значения, определяемого равенством (г), и цилиндр будет катиться с про-
проскальзыванием. В этом случае Vq и со не связаны зависимостью vc=v>R (точка
касания не является мгновенным центром скоростей), но зато величина F имеет
предельное значение, т. е. F=fN—fP cos a, и уравнения (а) принимают вид:
(P/g)ac=P (sin a—/ cos a), PRh/2g=fPR cos a,
откуда
ac=g (sin a—/cos a); e—Bgf/R) cos a. (д)
Центр цилиндра в этом случае движется с ускорением ас, а сам цилиндр
вращается с угловым ускорением е, значения которых определяются равенства-
равенствами (д). _
2*. При учете сопротивления качению реакция jV будет смещена в сторону
движения на величину k (расположена так, как на рис. 308, б) и ее момент отно-
относительно центра С будет равен —kN. Тогда второе из уравнений (а) примет вид
Jc-e=FR—kN или mR4l2=FR—kN. (e)
Остальные уравнения сохраняют свой вид, т. е. будет по-прежнему
N=P cos a, mac=P sin a—F. (ж)
Из уравнений (е) и (ж), учитывая, что и в данном случае ctc—sR, найдем
окончательно:
— -^-cosa 1, ^=-3" (sma + 2-p- cos«
После этого из неравенства Fs^fN получим, что / должно иметь для обеспечения
качения без скольжения значение /s=[(tga)/3+2?/3i?].
330
Задача 152. По шероховатой цилиндрической поверхности радиуса R
(рис. 329) из положения, определяемого углом ф0, начинает катиться без сколь-
скольжения сплошной однородный цилиндр радиусом г. Пренебрегая сопротивлением
качению, определить закон движения
центра цилиндра, когда угол ф0 мал. Най- ( »>У д_ /"
ти также, при каких значениях ф0 воз- 'fy
можно качение без скольжения, если ко-
коэффициент трения цилиндра о поверх-
поверхность /.
Решение. Рассмотрим цилиндр
при его качении вниз (движение проис-
происходит в вертикальной плоскости). В по-
положении, определяемом углом ф, на ци-
цилиндр действуют сила тяжести P=mg,
сила трения скольжения F и реакция N. рис 329
Проведя касательную Сх к траектории цент-
центра С (в сторону движения этого цеьтра)
и учтя, что для цилиндра Jc=mr2/2, составим первое и третье из уравнений G2>
в виде:
_ mr2 do> „ ,„.
где со — угловая скорость цилиндра.
Выразим все скорости через ф. Одновременно учтем, что в точке К находится
мгновенный центр скоростей. Тогда, поскольку при качении цилиндра вниз ф
убывает и ф<0, будет:
% = — (Я — I) Ф. © = ?>?•//¦ = — (Я— г) ф/г.
При этих значениях vq и со уравнения (а) примут вид:
m{R — г) ф = — mgsinф + F, m(R — r)tp = — 2F. (б)
Исключая из равенств (б) силу F, найдем окончательно следующее дифференци-
дифференциальное уравнение, определяющее движение центра С:
ф=0, где k2=2g/3(R—r).
Поскольку очевидно, что при движении цилиндра ф<:ф0, то, когда угол фв
мал, можно приближенно принять втф^ф. Тогда получим известное дифферен-
дифференциальное уравнение гармонических колебаний
ф+^Ф=0. (в)
В данной задаче при t=0 Ф=Фо, а ф=0. Интегрируя уравнения (в) при этих:
начальных условиях, найдем следующий закон малых колебаний цилиндра:
ф=ф0 COS kt. (Г)
Период этих колебаний
T = 2nlk = 2xV 3(R~-r)j2g.
В заключение найдем условие качения без скольжения, учитывая, что F^fN
(см. § 23). Значение F дает второе из равенств (б):
'F=—m(R—r)<p/2.
Но согласно уравнению (в) ф=—й2ф и так как k2=2g/3(R—г), то окончательно
Теперь заметим, что при малом ф часть цилиндрической поверхности, по ко-
которой катается цилиндр, можно рассматривать как часть горизонтальной пло-
плоскости и считать приближенно N=P=mg. Тогда неравенство F<fN дает ф<3/\
Так как наибольшее значение ф равно ф0, то при рассматриваемых малых коле-
колебаниях качение цилиндра будет происходить без скольжения, когда Ф0<3/.
331
Задача 153. Тело весом Р опирается в точке В на пьезоэлектрический датчик
прибора, измеряющего силу давления, а в точке А поддерживается нитью AD
(рис. 330). При равновесии линия АС горизонтальна, а давление в точке В равно
Qo- Вычислить, чему равен момент инерции Jc тела относительно оси, проходя-
проходящей через его центр масс С, если в момент, когда нить пережигают, давление
в точке В становится равным Qt. Расстояние I известно.
Решение. 1. В положении равновесия Qol=P(l—Ь). Отсюда находим
b=(P-Q0)t/P.
2. Когда нить пережигают, тело начинает двигаться плоскопараллельно.
Для начального элементарного промежутка времени изменением положения
тела можно пренебречь. Тогда уравнения G1), справедливые только для этого
промежутка времени, будут иметь вид:
MaCx = P-Qlt aCy = 0, Jc.e=Qj.b. (a)
Так как аСу—0, то точка С начинает перемещаться по вертикали вниз, а точ-
точка В скользит горизонтально (трение в опоре считаем малым). Восставляя перпен-
перпендикуляры к направлениям этих перемещений, находим, что мгновенный центр-
скоростей будет в точке К- Следовательно, ир=6со. Дифференцируя это равен-
равенство и считая в течение рассматриваемого элементарного промежутка времени
b= const, получим ас=Ье. Тогда первое из уравнений (а) дает
Определяя отсюда е, найдем окончательно
Полученный результат можно использовать для экспериментального опре-
определения моментов инерции.
J
A
H
X
t
с
¦ P
b
4
Q
к
Ш
Рис. 330
Рис. 331
Задача 154. Вес автомобиля с колесами равен Р (рис. 331); вес каждого из
четырех его колес равен р, радиус г, радиус инерции относительно оси С—р^.
К задним (ведущим) колесам приложен вращающийся момент Мвр. Авто-
Автомобиль, начиная движение из состояния покоя, испытывает сопротивление воз-
воздуха, пропорциональное квадрату его поступательной скорости: ^=(j.a2. Момент
трения в оси каждого колеса AfTp=const. Пренебрегая сопротивлением качению,
определить: 1) предельную скорость автомобиля; 2) силу трения скольжения,
действующую на ведущие и ведомые колеса при движении.
Решение. 1. Для определения предельной скорости составим диффе-
дифференциальное уравнение движения автомобиля, пользуясь равенством D9)
AT = 2 dAl + 2 dAi. (a)
Кинетическая энергия автомобиля равна энергии кузова и колес. Учитывая,
что Р — вес всего автомобиля, a v=<ar (так как скорость vc центра С колеса равна
скорости v кузова), получим
где полагалось, что <в— угловая скорость колеса.
Из внешних сил работу совершает только сила сопротивления воздуха, так
как сопротивлением качению мы пренебрегаем, а работа сил трения Fx и F2 колес
332
о грунт равна в этом случае нулю (см. § 122). Следовательно,
2 cL4fc = — R ds = — fw2 us,
где ds — элементарное перемещение кузова.
Работа внутренних сил (вращающего момента и сил трения в осях), если
учесть, что dsc=ds=rd<p, где ф — угол поворота колеса, будет
(MBp-4MTp) dep = (MBp-4AfTp) ds//-.
Подставим все эти значения в равенство (а) и одновременно разделим обе его
части на dt. Тогда, учтя еще, что ds'd^=w, a dvidt=a, получим
r*) va/g = (MBV/r - 4MTp/r - yufl) v.
Отсюда, сокращая на v, находим
(Р + АррУ*) a=(MEp-47HTp-firu2) g/r. (б)
Когда скорость автомобиля стремиться к ее предельному значению, eFO
ускорение а стремится к нулю. Следовательно, inp найдется из уравнения
Л*вр-4Мтр-цто2 = 0,
откуда
*'пр = V (мп$— 4Мтр)/цг.
Этот результат можно получить сразу, приравняв нулю сумму работ всех
сил. Цель предыдущих выкладок — показать, как составляется уравнение дви-
движения (б).
2. Для определения сил трения, действующих на каждое колесо, составим
уравнения вращательного движения колес относительно их осей. Для двух веду-
ведущих колес, учитывая, что действующая на каждое из них сила трения F1 направ-
направлена вперед (см. § 108, рис. 284), получим
Так как при качении ег=ас~а, то окончательно найдем
2 (в)
Действующая на каждое из ведомых колес сила трения F% направлена назад.
Следовательно, для ведомого колеса будет
откуда
* (г)
Из равенства (б) видно, что с увеличением скорости ускорение а убывает,
стремясь к нулю, когда v стремится к сПр- Таким образом, сила трения, действую-
действующая на ведущие колеса, при разгоне несколько возрастает и достигает наиболь-
наибольшего значения, когда движение установится (а=0). Если подставить значение а
из равенства (б), то легко видеть, что последнее слагаемое в формуле (в) будет
много меньше первого, так как Р>р. Поэтому практически величина Ft изме-
изменяется незначительно.
На ведомых колесах сила трения имеет наибольшее значение в момент начала
движения, а затем убывает и при равномерном движении (в=0) равна наимень-
наименьшему значению УИтр//\
Если коэффициент трения колес о грунт не будет достаточен для того, чтобы
сила трения могла принять значение Fx или F2, то соответствующие колеса будут
буксовать. Так как Л1вр много больше Мтр, то в первую очередь буксование
угрожает ведущим колесам.
При выключенном двигателе все колеса являются ведомыми и на них вна-
вначале будет действовать сила трения F=Mlplr. Действие тормозных колодок экви-
эквивалентно увеличению момента Мтр в осях, а следовательно, и силы трения, дейст-
действующей на каждое из колес, чем и ускоряется торможение автомобиля (см. § 108).
333
§ 131*. ЭЛЕМЕНТАРНАЯ ТЕОРИЯ ГИРОСКОПА
Рассмотрим однородное твердое тело с неподвижной точкой О,
имеющее ось симметрии Oz и вращающееся вокруг этой оси с угло-
угловой скоростью Q, на много превышающей ту угловую скорость а,
которую может иметь сама ось Oz при ее поворотах вместе с телом
Рис. 332
вокруг точки О; такое тело называют гироскопом. Ось Oz гироскопа,
как ось симметрии, является одновременно его главной центральной
осью инерции (см. § 104).
Простейшим примером гироскопа является детский волчок
(см. ниже рис. 335). В гироскопических приборах ротор гироскопа
обычно закрепляют в так называемом кардановом (кольцевом) под-
подвесе, позволяющем ротору совершить любой поворот вокруг непод-
неподвижного центра подвеса О, совпадающего с центром тяжести ротора
(рис. 332). Такой гироскоп, как и волчок, имеет три степени свобо-
свободы *.
У гироскопов, применяемых в технике, Q больше со в десятки
и сотни тысяч раз (Q^>co), что позволяет построить весьма эффектив-
эффективную приближенную теорию гироскопа, называемую элементарной,
или прецессионной. Исходят при этом из следующего.
В каждый момент времени абсолютная угловая скорость гиро-
гироскопа ©аб=й+о), а его движение, как движение тела, имеющего
неподвижную точку О (см. § 60), слагается из серии элементарных
поворотов с этой угловой скоростью юа6 вокруг мгновенных осей
вращения ОР (рис. 333). Но когда Й^>©, угол р между векторами
юаб и Q очень мал и практически можно принять, что wa6=Q, а
ось ОР в любой момент времени совпадает с осью Oz гироскопа. Тогда
кинетический момент Ко гироскопа относительно точки О> можно
* Гироскоп на рис. 332 может совершать независимые друг от друга поворо-
повороты вокруг оси Ог, оси Ох (вместе с кольцом 2) и оси Ог4 (вместе с кольцом J).
Подробнее вопрос о степенях свободы рассматривается в § 138.
334
тоже считать в любой момент времени направленным вдоль оси Oz
и численно равным Kz, т. с. JZQ (см. конец § 115). В этом и состоит
основное допущение элементарной теории гироскопа.
Таким образом, в дальнейшем будем считать
K0^J2U, Go)
где Jz — момент инерции гироскопа относительно его оси Ог, а
саму ось Oz и вектор Ко полагать все время направленными вдоль
одной и той же прямой. Последнее позволяет находить, как изме-
изменяется со временем направление оси Oz гироскопа, определяя, как
изменяется направление вектора Ко- Установим, исходя из элемен-
элементарной теории, каковы основные свойства гироскопа.
1. Свободный трехстепенной гироскоп.
Рассмотрим гироскоп с тремя степенями свободы, закрепленный
так, что его центр тяжести неподвижен, а ось может совершать
любой поворот вокруг этого центра (см. рис. 332); такой гироскоп
называют свободным. Для него, если пренебречь трением в осях под-
подвеса, будет 2m0 (F%) =0 и /C0=const, т. е. модуль и направление ки-
кинетического момента гироскопа постоянны (см. § 117). Но так как
направления вектора Ко и оси Oz гироскопа все время совпадают,
то, следовательно, и ось свободного гироскопа сохраняет неизменнее
направление в пространстве по отношению к инерциальной (звездной)
системе отсчета. Это одно из важных
свойств гироскопа, используемое при
конструировании гироскопических при-
приборов.
Сохраняя неизменное направление в
звездной системе отсчета, ось свободного
гироскопа по отношению к Земле будет
совершать вращение в сторону, про-
противоположную направлению вращения
Земли. Таким образом, свободный гиро-
гироскоп можно использовать для экспери-
экспериментального обнаружения факта враще-
вращения Земли * .
2. Действие силы (пары сил) на ось трех-
трехстепенного гироскопа. Устойчивость оси
гироскопа. Пусть на ось гироскопа (рис. 334) начинает дейст-
действовать сила F, момент которой относительно центра О равен Мо
(или пара сил F, F' с моментом, равным Мо). Тогда по теореме мо-
моментов (см. § 116)
= Мп или
IF*
* Чтобы проделать подобный опыт, французский ученый Ж. Фуко A819—
1868) сконструировал в 1852 г. прибор, сходный с изображенным на рис. 332, ко-
который он и назвал «гироскоп» (от греческих gyreuo — вращаюсь и skopeo — смот-
смотрю, наблюдаю).
335
где В — точка оси, совпадающая с концом вектора Ко- Отсюда,
учитывая, что производная от вектора ОБ по времени равна скоро-
скорости vB точки В, получаем
G4)
Равенство G4) выражает следующую теорему Резаля *: ско-
скорость конца вектора кинетического момента тела относительно
центра О равняется по модулю и по направлению главному моменту
внешних сил относительно того же центра. Следовательно, точка
В, ас нею и ось гироскопа, будет перемещаться по направлению век-
вектора Мо- В! чезультате находим, что если на ось быстро вращающе-
вращающегося гироскопа подействует сила, то ось начнет отклоняться не в
сторону действия силы, а по направлению, которое имеет вектор Мо
момента этой силы относительно неподвижной точки О гироскопа,
т. е. перпендикулярно силе. Аналогичный результат имеет место и
при действии на ось гироскопа пары сил.
Из равенства G4) следует, что когда действие силы прекра-
прекращается, то Мо=0, а следовательно, и vB обращается в нуль и ось
гироскопа останавливается. Таким образом, гироскоп не сохраняет
движения, сообщенного ему силой. Если действие силы является
кратковременным (толчок), то ось гироскопа практически почти не
изменяет своего направления**. В этом проявляется свойство ус-
устойчивости оси быстро вращающегося гироскопа, имеющего три
степени свободы.
3. Прецессия трехстепенного гироскопа.
Допустим, что сила F (или пара сил F, F', см. рис. 334) действует
на гироскоп во все рассматриваемое время его движения, оставаясь
в плоскости zOZi (такой силой может, например, быть сила тяжести).
Так как по установленному выше ось Oz в сторону действия силы не
отклоняется, то угол §=/j,xOz остается все время постоянным, а
скорость vB — перпендикулярной плоскости zx0z. Следовательно,
ось Oz гироскопа будет вращаться (прецессировать) вокруг оси 0zx
с некоторой угловой скоростью со, называемой угловой скоростью
прецессии. Найдем уравнение, определяющее <в. Так как ось Oz
вращается вокруг оси 0гг с угловой скоростью со (см. рис. 334), то
по формуле D8), из §51 ив=соХОБ=соХ/С0 и равенство G4) дает
пхК0 = М0. G5)
* Анри Резаль A828—1896) известный французский ученый, автор первого
учебника по кинематике A862), где кинематика излагается как самостоятельный
раздел механики.
«Скорость» vr в формуле G4) имеет, конечно, размерность не длина / время,
а кинетический момент/время.
** Точнее ось начнет совершать вблизи начального положения высокочастот-
высокочастотные колебания малой амплитуды, которые при наличии сопротивлений затухнут,
и ось придет в положение, близкое к начальному (тем ближе, чем больше JZQ).
336
Это уравнение является исходным приближенным уравнением
элементарной (прецессионной) теории гироскопа. Из него следует,
что (oKosin Q=M0, откуда
со =
Мр _ Мо
G6)
Чем больше JZQ, тем меньше со и тем большую точность дает эле-
элементарная теория * .
В качестве примера найдем угловую скорость прецессии волчка
под действием силы тяжести Р (рис. 335). Введя обозначение ОС=а,
получим, что Мр—Ра sin 0 и равенство G6) дает
Pa Pa i*tci\
До JZQ
Аналогичную прецессию совершает земная ось, так как вслед-
вследствие отклонения формы Земли от правильной шарообразной и нак-
наклона ее оси равнодействующие сил притяжения Солнца и Луны не
проходят через центр масс Земли и создают относительно этого цент-
центра некоторые моменты. Период прецессии земной оси (время од-
одного оборота) приблизительно 26 000 лет.
Рис. 336
4. Гироскоп с двумя степенями свободы.
Гироскопический эффект. Рассмотрим гироскоп с
ротором 3, закрепленным только в одном кольце 2, которое может
вращаться по отношению к основанию / вокруг оси Ох (рис. 336).
Такой гироскоп имеет по отношению к основанию две степени сво-
свободы (поворот вокруг оси Oz и вместе с кольцом 2 — вокруг оси Ох)
и его свойства существенно отличаются от свойств гироскопа с тре-
тремя степенями свободы. Например, если толкнуть кольцо 2, то оно
* Процессия сопровождается еще так называемой нутацией — происходя-
происходящими с очень большой частотой малыми колебаниями оси Ог около ее среднего по-
положения. В элементарной теории нутация не учитывается.
337
начнет свободно вращаться вместе с ротором вокруг оси Ох, в то
время как трехстепенной гироскоп на такие толчки практически не
реагирует (см. п. 2). Не реагирует трехстепенной гироскоп и на вра-
вращение основания, сохраняя неизменным направление своей оси Oz
(см. п. 1). Рассмотрим, что в таком случае будет с двухстепенным
гироскопом.
Допустим, что в некоторый момент времени основание / начи-
начинает вращаться вокруг оси 0zk (или любой другой ей параллель-
параллельной) с угловой скоростью со (со<<с?2). Тогда, вращаясь вместе с осно-
основанием, гироскоп начнет совершать вынужденную прецессию во-
вокруг оси 0гг. При этом, согласно уравнению G5), на ротор 3 должен
действовать момент Мо = (аХКо, который, очевидно, могут создать
только силы F, F' давления подшипников Л, Л' на ось ротора, по-
показанные на рис. 336 пунктиром (сравни с рис. 334). Так как центр
масс О ротора 3 неподвижен, то по теореме о движении центра масс
должно быть F-\-F' =0, и, следовательно, силы F, F' образуют пару.
Но когда подшипники действуют на ось ротора с силами F, F',
то по третьему закону динамики и ось будет одновременно действо-
действовать на подшипники Л, А' с такими же по модулю и противополож-
противоположными по направлению силами N, N'. Пара сил N, N' называется
гироскопической парой, а ее момент MTVIV — моментом гироскопиче-
гироскопической пары или гироскопическим моментом * . Поскольку момент
МТвр противоположен Мо, то
G7)
Отсюда получаем следующее правило Н. Е.Жуков-
с к о г о: если быстро вращающемуся гироскопу сообщить вынужден-
вынужденное прецессионное движение, то на подшипники, в которых закреп-
закреплена ось ротора гироскопа, начнет действовать гироскопическая пара
с моментом МГир, стремящаяся кратчайшим путем установить
ось ротора параллельно оси прецессии так, чтобы направления век-
векторов Q и со совпали.
Под действием гироскопической пары кольцо 2 начнет вращаться
вместе с ротором вокруг оси Ох; при этом угол 0, а с ним момент
•Мгир будут убывать, и когда станет 0=0, вращение кольца прекра-
прекратится .
Если кольцо 2 скрепить с основанием / жестко, т. е. так, чтобы
оно не могло вращаться вокруг оси Ох, то у гироскопа останется од-
одна степень свободы (поворот вокруг оси Oz). Но и в этом случае, если
вращать основание вокруг оси Ог1г будет иметь место гироскопиче-
гироскопический эффект и ось начнет давить на подшипники с силами N, N',
значения которых, зная расстояние АА', можно определить по фор-
формуле G7), если все величины, входящие в ее правую часть, будут
тоже известны.
* Некоторые авторы применяют этот термин в другом смысле, называя ги-
гироскопическим моментом момент сил инерция частиц гироскопа.
338
5. Некоторые технические приложения гироскопа.
Гироскопы используются как основной элемент в очень большом числе гироскопи-
гироскопических приборов и устройств, имеющих самое разнообразное применение.
Трехстепенные гироскопы используют в целом ряде навигационных приборов
(гирокомпас, гирогоризонт, курсовой гироскоп и др ), а также в устройствах
для автоматического управления движением (стабилизации) таких объектов, как
самолет (автопилоты), ракеты, морские суда и др.
Рассмотрим в качестве примера простейшее устройство, где трехстепенной
гироскоп используется как стабилизатор (прибор Обри, стабилизирующий дви-
движение мины в горизонтальной плоскости). Прибор содержит свободный гироскоп
(см. рис. 332), ось которого в момент выстрела совпадает с осью торпеды, на-
направленной на цель. Если торпеда в некоторый момент времени отклонится
от заданного направления на угол а (рис. 337), то ось гироскопа, сохраняя свое
Рис. 337
Рис. 338
направление на цель неизменным (по свойству свободного гироскопа), окажется
повернутой по отношению к корпусу торпеды на такой же угол. Этот поворот
с помощью специального устройства приводит в действие рулевую машину.
В результате происходит поворот руля в соответствующую сторону, и торпеда
выравнивается.
Прибор дает пример широко используемой индикаторной системы стабили-
стабилизации (стабилизатор непрямого действия), где гироскоп играет роль чувстви-
чувствительного элемента, регистрирующего отклонение объекта от заданного положе-
положения и передающего соответствующий сигнал двигателю, который и осуществляет
стабилизацию, возвращая объект в исходное положение (например, с помощью
рулей).
Рассмотрим примеры использования двухстепенного гироскопа. Допустим,
что ротор этого гироскопа (рис. 338) помещен в кожух 2, связанный с основа-
основанием 1 жесткой пружиной, удерживающей ротор в положении, для которого
угол р=я/2—8=0, и сохраняющей в дальнейшем этот угол малым. При вра-
вращении основания начнется под действием гироскопической пары поворот ротора,
что вызовет увеличение угла |3 и деформацию пружины. В результате начнет
действовать момент йE силы упругости пружины. При некотором р этот момент
и момент гироскопической пары уравновесятся, т. е. будет /ф=Уг?2(о или w=
=?|5/,/г?2. Таким образом, прибор служит гиротахометром, т. е. позволяет ио
значению угла р определить угловую скорость объекта, на котором прибор уста-
установлен. Конкретным примером подобного прибора является авиационный ука-
указатель поворотов.
Примером использования двухстепенного гироскопа в качестве стабилизатора
служит успокоитель качки. Он представляет собой вращающийся с угловой ско-
скоростью Q ротор 1 (рис. 339). Ось АА^ ротора закреплена в раме 2, которая имеет
свою ось вращения DDlt скрепленную с корпусом судна. Когда на судно при вол-
волнении подействует момент М, он сообщит судну какую-то угловую скорость щ
(вектор a>i направлен перпендикулярно плоскости чертежа). Тогда, согласно
правилу Жуковского, рама вместе с роторем начнет вращаться вокруг оси DD
339
с некоторой угловой скоростью со2, вследствие чего на подшипники D vDx станет
действовать гироскопическая пара N, N' с моментом Mraf=JZQ(O2, способст-
способствующая уменьшению крена. Для повышения эффективности стабилизатора ис-
используют снабженный специальным регулятором двигатель, увеличивающий
угловую скорость <в2, а с него и стабилизирующий момент УИгир, и возвращающий
раму в исходное положение, когда крен прекратится.
а
Рис. 339
Рис. 340
Успокоитель качки дает пример силовой гироскопической стабилизации
(стабилизатор прямого действия), где массивный гироскоп и регистрирует от-
отклонение объекта от заданного положения, и осуществляет стабилизацию, а дви-
двигатель играет лишь вспомогательную роль.
Рассмотрим в заключение пример определения гироскопических давлений
на подшипники. Если судно, у которого ротор турбины вращается с угловой ско-
скоростью Й (рис. 340), совершает поворот с угловой скоростью <в, то на подшипники
А к В будут действовать силы N1, N2, направленные как показано па рисунке *,
Если при этом АВ=1, а момент инерции ротора J z, то по формуле G7)
Величины этих сил могут достигать десятков килоньютонов и должны учиты-
учитываться при расчете подшипников. Через подшипники гироскопические давления
передаются корпусу судна и у очень легкого судна могли бы вызвать при по-
повороте опускание киля или носа. Подобный эффект может наблюдаться и у вин-
винтовых самолетов при виражах (поворотах в горизонтальной плоскости).
§ 132*. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
И ДВИЖЕНИЕ СВОБОДНОГО ТВЕРДОГО ТЕЛА
Для составления дифференциальных уравнений движения тела, имеющего
неподвижную точку, необходимо найти выражение главного; момента количеств
движения Ко (кинетического момента) и кинетической энергии Т тела в этом
случае движения.
1. Кинетический момент тела, движущегося во-
вокруг неподвижной точки. Вектор Ко можно определить, найдя его
проекции на какие-нибудь три координатные оси Oxyz. Чтобы получить соответст-
соответствующие формулы в наиболее простом виде, возьмем в качестве осей Oxyz (см.
ниже рис. 341) жестко связанные с телом главные оси инерции этого тела для точ-
точки О (см. § 104).
Начнем с вычисления Кх- По аналогии с формулами D7) из §28
mx (mm) = Щ (yhvkz — г
Но по формулам Эйлера [§ 62, формулы G7)]
* Гироскопические давления на подшипники возникают и вследствие качки
судна. Направления этих давлений будут, конечно, другими.
340
где ах, Шу, «г — проекции на оси Охуг мгновенной угловой скорости тела; Хь,
Уь, tf, — координаты точек тела.
Подставим эти значения v^.y и Vftz в предыдущее равенство; при этом заметим,
что члены с произведениями координат можно не подсчитывать, так как оси
Охуг являются главными осями инерции и для них все центробежные моменты
инерции равны нулю, т. е. ^т^ХкУк—^Щ^кЧ—^- В результате, вынося общий
множитель ь>х за скобки, найдем
Кх = lmx (mkvn) =- [lmk (yl ¦+ г|)] ых,
где величина в квадратных скобках представляет собой, согласно формулам C)
из § 102, главный момент инерции тела относительно оси Ох. Аналогичные вы-
выражения получим для Ку, Kz и окончательно будет4
Kx=Jxax, Ky=/yCoy, Kz = Jzo>z. G8)
Формулы G8) дают выражения проекций вектора Ко на главные оси инерции
тела для точки О.
Если оси Охуг не будут глазными, то, как нетрудно подсчитать, формулы G8)
примут следующий более сложный вид:
Кх = Jxax — JxlJ<»v — Jxz(oz, \
Zoiz, \ G8')
)
2. Кинетическая энергия тела, движущегося во-
вокруг неподвижной точки. Так как любое элементарное переме-
перемещение твердого тела, имеющего неподвижную точку О, представляет собой эле-
элементарный поворот с угловой скоростью со вокруг мгновенной оси вращения 01,
проходящей через эту точку (см. § 60), то кинетическую энергию тела можно оп-
определить по формуле
Подставим сюда значение J[ из формулы A2) (см. § 105, рис. 280) и одновре-
одновременно учтем, что u)cosa=o)x, wcosp=o^, со cos у= ыг, так как вектор со на-
направлен по оси 01. Тогда получим
IT = J^l + JyD + J2(ol - 2Jxyaxay -21^@,. - 2JZxazax. G9)
Если в качестве координатных осей взять главные оси инерции тела для точ-
точки О, то все центробежные моменты инерции обратятся в нули и тогда
ЧТ = 1хы2х + jyy + Jzu>l G9')
3. Динамические уравнения Эйлера. Пусть на твердое
тело, имеющее неподвижную точку О, действуют заданные силы F\, F\, ..., F%
(рис. 341). Одновременно на тело будет действовать реакция Rq связи (на ри-
рисунке не показана). Чтобы исключить из уравнений движения эту неизвестную
реакцию, воспользуемся теоремой моментов относительно центра О (§ 116), пред-
представив ее в виде G4), т. е. в виде теоремы Резаля. Тогда поскольку то(/?о)=0,
уравнение G4) даст
"пв=-М0, (80)
где Л1о=2дао(^1). а VB — скорость по отношению к инициальной системе отсчета
Ojtjf/jZi точки В, совпадающей с концом вектора Ко-
Движение тела изучается тоже по отношению к инерциальной системе отсчета
Ох1У1г1- Но чтобы получить уравнения этого движения в наиболее простой форме,
спроектируем обе части предыдущего равенства на жестко связанные с телом и дви-
движущиеся вместе с ним оси Охуг, являющиеся главными осями инерции тела для
точки О. Тогда выражения проекций вектора Ко будут иметь простой вид, давае-
даваемый формулами G8), а входящие в них моменты инерции Jx, Jy, Jz будут вели-
величинами постоянными.
341
Для вычисления проекций абсолютной скорости чд на подвижные оси пред-
предкак сумму относительной (по отношению к осям Oxyz) скорости чот и
ставим
переносной скорости v p. Тогда из уравнения (80)
= М0 и
+ v?p = Mx. (81)
Обозначим координаты точки 5 через х, у, z. При этом, так как радиусом-
вектором точки В является вектор Ко (ри?- 341), то х=Кх, У=Ку, z=Kz.
Как указано в § 64, при определении иот движение осей Oxyz во внимание
не принимается, следовательно, vxT=:<ix/dt=dKx/dt, а при определении ипер
точку В можно рассматривать как принадлежащую телу, связанному с осями
Oxyz. Но это тело движется вокруг неподвижной точки О; следовательно, по
первой из формул Эйлера [формулы G7) в §62] и"ср=шг/г—шгу=а>уКг—<?>2Ку,
где <в — угловая скорость тела. Заменяя в найденных выражениях v°T
величины Кх, Ку, Kz их значениями G8) и подставляя эти значения
во второе из равенств (81), получим
„пер
At
--{-Jz(uz(Oy-
Аналогичные выражения получаются для проекций первого из равенств (81)
на оси у и г (их можно найти круговой перестановкой индексов). Так как для
связанных с телом осей Oxyz величины Jx, Jy, Jz постоянны, то окончательно
найдем следующие дифференциальные уравнения движе-
движения твердого тела вокруг неподвижной точки в про-
проекциях на главные оси инерции тела для этой точки:
У At
(82)
Уравнения (82) называются динамическими уравнениями Эйлера. Если положение
тела определять углами Эйлера <р, \р, 9 (см. § 60), то основная задача динамики
¦у,
Рис. 341
Рис. 342
будет состоять в том, чтобы, зная Мх, Му, Мг, найти закон движения тела.
т.е. найти Ф,1|з, G как функции времени. Для решения этой задачи надо к урав-
уравнениям (82) присоединить кинематические уравнения Эйлера (см. § 61), уста-
устанавливающие связь между а>х, (Оу, сог и углами ф, г|), 8. Динамические и кинема-
342
тические уравнения Эйлера образуют систему шести нелинейных дифференциаль-
дифференциальных уравнений 1-го порядка; интегрирование этой системы представляет собой
сложную математическую задачу. В § 131 была изложена приближенная теория
гироскопических явлений. Точно движение гироскопа описывается уравнени-
уравнениями (82). Для интегрирования этих уравнений при решении соответствующих
конкретных задач обычно используют те или иные приближенные математиче-
математические методы.
В случаях, когда это целесообразно, одно из уравнений (82) можно заменять
теоремой об изменении кинетической энергии. Формула G9') используется также
при составлении уравнений методом, изложенным в § 145 (задача 181 в § 146).
4. Пример. В качестве простейшего примера приложения получетных
уравнений рассмотрим движение свободного гироскопа, закрепленного в центре
тяжести, на который никакие силы, кроме силы тяжести, не действуют (см, § 131,
п. 1). В этом случае Mq=Q и теорема моментов (см. § 116) дает:
d/Co/d^ = 0 или Ко = const. (a)
Таким образом, вектор Ко имеет постоянное направление в инерциалыюй
системе отсчета. Пользуясь этим, направим для упрощения дальнейших рас-
расчетов неподвижную ось Огг вдоль вектора Ко (рис. 342); две другие оси, на чер-
чертеже не показанные, можно провести произвольно. Подвижные оси, связанные
с гироскопом, проведем так, чтобы ось Ог была направлена вдоль оси симметрии
гироскопа. Тогда Jx=Jy и последнее из уравнений (82), поскольку в нашей
случае Mz=0, дает d(oz/d^=O, откуда
«г=const. (б)
По этой причине из формул G8) следует, что /<=7z@z=const. Но одновре-
одновременно, как видно из рис. 342, Kz=Ko?°s 9, где Q=/.zt0z — угол нутации (см.
рис. 172 в § 60). Так как согласно равенству (a) /Co=const, то отсюда заклю-
заключаем, что и cos 9= const или
9=const=60, (в)
где 90 — начальное значение угла нутации.
Умножим теперь обе части первого из уравнений (82) на шх, второго — на с»,
и сложим эти равенства почленно, учитывая, что в нашем случае Мх=Му—й,
a Jx=Jy. Тогда получим
/ rfm.. da,,
Отсюда, интегрируя и деля обе части на постоянный множитель, найдем
в>х-\-<йу = const.
Заменим здесь а>х и со7/ их значениями из кинематических уравнений Эйлера
(см. § 61). Учитывая, что 6=const и 9=0, получим:
9 sin ф, <йу = я]з sin 9 cos q>,
откуда
Но по доказанному левая часть этого равенства и sin 9 постоянны. Следова-
Следовательно, и
ф = const = фо- (i)
Наконец, последнее из кинематических уравнений Эйлера дает {Ог=ф-Н|> cos в.
Здесь, как мы нашли, wz, i|) и cos в постоянны. Следовательно, и
ф= Const = фо- (J0
Итак, при любых начальных условияк"рассматриваемый гироскоп вращается
вокруг своей оси симметрии с постоянной угловой скоростью «рв, а сама эта ось
343
вращается, в свою очередь, вокруг неподвижной оси Oz1 с постоянной угловой
скоростью ij>o, описывая коническую поверхность с постоянным углом при вер-
вершине 26О (см. рис. 342). Такое движение гироскопа называется регулярной пре-
прецессией.
5. Движение свободного твердого тела. Как известно,
движение свободного твердого тела слагается из поступательного движения
вместе с полюсом, в качестве которого при решении задач динамики выбирают
обычно центр масс С тела, и из движения вокруг центра масс, как вокруг не-
неподвижной точки (см. § 63). Если на тело действуют внешние силы F\, F%, ..,,?%
то движение полюса С описывается теоремой о движении центра масс mac'=
где т — масса тела. В проекциях на неподвижные оси Оххху^гх это равенство дает:
mkc = *F{Xi, тук^Щ^ mzlc = 2F{Zi (83)
где xic, t/ic. zic — координаты центра масс тела.
Для движения же вокруг центра масс теорема моментов, выражаемая равен-
равенством C8), дает в проекциях на главные центральные оси инерции тела три урав-
уравнения, совпадающие по виду с уравнениями (82). Таким образом, система диффе-
дифференциальных уравнений (83), (82) описывает движение свободного твердого тела
(снаряда, самолета, ракеты и т. д.),
Глава XXVII
ПРИНЦИП ДАЛАМБЕРА
§ 133. ПРИНЦИП ДАЛАМБЕРА ДЛЯ ТОЧКИ
И МЕХАНИЧЕСКОЙ СИСТЕМЫ
Методы решения задач механики, которые до сих пор рассматри-
рассматривались, основываются на уравнениях, вытекающих или непосредст-
непосредственно из законов Ньютона, или же из общих теорем, являющихся
следствием этих законов. Однако этот путь не является единствен-
единственным. Оказывается, что уравнения движения.или условия равнове-
равновесия механической системы можно получить, положив в основу вместо
законов Ньютона другие общие положения, называемые принципа-
принципами механики. В ряде случаев применение этих принципов позволяет,
как мы увидим, найти более эффективные методы решения соответст-
соответствующих задач. В этой главе будет рассмотрен один из общих прин-
принципов механики, называемый принципом Даламбера.
Найдем сначала выражение принципа для одной материальной
точки. Пусть на материальную точку с массой т действует система
активных сил, равнодействующую которых обозначим Fa, и реак-
реакция связи N (если точка является несвободной). Под действием всех
этих сил точка будет двигаться по отношению к инерциальной систе-
системе отсчета с некоторым ускорением а.
Введем в рассмотрение величину
Fa = —ma, (84)
имеющую размерность силы. Векторную величину, равную по мо-
модулю произведению массы точки на ее ускорение и направленную
противоположно этому ускорению, называют силой инерции точки.
344
Тогда оказывается, что движение точки обладает следующим
свойством: если в любой момент времени к действующим на точку
активным силам и реакции связи присоединить силу инерции, то
полученная система сил будет уравновешенной, т. е.
Fd + ]V + FH = 0. (85)
Это положение выражает принцип Даламбера для
материальной точки. Нетрудно убедиться, что оно экви-
эквивалентно второму закону Ньютона и наоборот. В самом деле, вто-
второй закон Ньютона для рассматриваемой точки дает ma=Fa-\~N.
Перенося здесь величину та в правую часть равенства и учитывая
обозначение (84), придем к соотношению (85). Наоборот, перенося в
уравнении (85) величину F" в другую часть равенства и учитывая
обозначение (84), получим выражение второго закона Ньютона.
Рассмотрим теперь механическую систему, состоящую из п
материальных точек. Выделим какую-нибудь из точек системы с
массой mk. Под действием приложенных к ней внешних и внутрен-
внутренних сил ?% и F\ (в которые входят и активные силы, и реакции свя-
связей) точка будет двигаться по отношению к инерциальной системе
отсчета с некоторым ускорением ak. Введя для этой точки силу инер-
инерции Fg=—mkah, получим согласно равенству (85), что
П+П + П = 0, (85')
т. е. что F|, Flk и F? образуют уравновешенную систему сил. Пов-
Повторяя такие рассуждения для каждой из точек системы, придем к
следующему результату, выражающему принцип Далам-
Даламбера для системы: если в любой момент времени к каждой
из точек системы кроме действующих на нее внешних и внутренних
сил присоединить соответствующие силы инерции, то полученная
система сил будет уравновешенной и к ней можно применять все
уравнения статики.
Математически принцип Даламбера для системы выражается п
векторными равенствами вида (85'), которые, очевидно, эквивалент-
эквивалентны дифференциальным уравнениям движения системы A3), полу-
полученным в § 106. Следовательно, из принципа Даламбера, как и из
уравнений A3), можно получить все общие теоремы динамики.
Значение принципа Даламбера состоит в том, что при непосред-
непосредственном его применении к задачам динамики уравнения движения
системы составляются в форме хорошо известных уравнений равно-
равновесия; это делает единообразным подход к решению задач и часто
упрощает соответствующие расчеты. Кроме того, в соединении с
принципом возможных перемещений, который будет рассмотрен в
следующей главе, принцип Даламбера позволяет получить новый
общий метод решения задач динамики (см. § 141).
Из статики известно, что геометрическая сумма сил, находя-
находящихся в равновесии, и сумма их моментов относительно любого
центра О равны нулю, причем, как показано в §120, это справедли-
345
во для сил, действующих не только на твердое тело но и на любую
изменяемую механическую систему. Тогда на основании принципа
Даламбера должно быть:
2 К (П) + т0 (П) + т0 (П)] = 0. (86)
Введем обозначения:
h (87)
Величины R", М^ представляют собою главный вектор и главный
момент относительно центра О системы сил инерции. В результате,
учитывая, что геометрическая сумма внутренних сил и сумма их
моментов равны нулю, получим из равенств (86):
2П + & = 0, %то(П) + Мо = 0. (88)
Применение уравнений (88), вытекающих из принципа Даламбе-
Даламбера, упрощает процесс решения задач, так как эти уравнения не со-
содержат внутренних сил. По существу уравнения (88) эквивалентны
уравнениям, выражающим теоремы об изменении количества дви-
движения и главного момента количеств движения системы, и отлича-
отличаются от них только по форме.
Уравнениями (88) особенно удобно пользоваться при изучении
движения твердого тела или системы твердых тел. Для полного изу-
изучения движения любой изменяемой системы этих уравнений будет
недостаточно, так же как недостаточно уравнений статики для изу-
изучения равновесия любой механической системы (см. § 120).
В проекциях на координатные оси равенства (88) дают уравне-
уравнения, аналогичные соответствующим уравнениям статики (см. § 16,
30). Чтобы пользоваться этими уравнениями при решении задач,
надо знать выражения главного вектора и главного момента сил
инерции.
В заключение следует подчеркнуть, что при изучении движения
по отношению к инерциальной системе отсчета, которое здесь и
рассматривается, силы инерции вводятся только тогда, когда для
решения задач применяется принцип Даламбера * .
§ 134. ГЛАВНЫЙ ВЕКТОР И ГЛАВНЫЙ МОМЕНТ СИЛ ИНЕРЦИИ
Сравнивая первое из равенств (88) с уравнением
выражающим доказанную в § 107 теорему о движении центра масс
* В § 91 мы рассматривали силы инерции (переносную и кориолисову), кото-
которые вводятся для того, чтобы получить возможность составлять уравнения движе-
движения в неинерциальной системе отсчета в том виде, который они имеют в системе
отсчета инерциальной. Здесь силы инерции вводятся для того, чтобы в инерциаль-
инерциальной системе отсчета получить возможность составлять уравнения движения в
виде уравнений равновесия. Все эти силы инерции к категории <$|изических сил,
примеры которых были рассмотрены в § 76, не принадлежат.
346
(в этой главе массу системы обозначаем буквой т), найдем, что
R"=—rriac, (89)
т. е. главный вектор сил инерции механической системы (в частности,
твердого тела) равен произведению массы системы (тела) на ускоре-
ускорение центра масс и направлен противоположно этому ускорению.
Если ускорение ас разложить на касательное и нормальное,
то вектор Ra разложится на составляющие *
r« = _ таСх> RI = _ таСп. (89')
Сравнив теперь второе из равенств (88) с уравнением &K.ol&t—
=Smo(f|), выражающим теорему моментов (см. §116), и учтя,
что аналогичным будет соотношение для моментов относительно
оси, получим:
Щ = -Щ* и М»=-й?, (90)
т. е. главный момент сил инерции механической системы (твердого
тела) относительно некоторого центра О или оси г равен взятой со
знаком минус производной по времени от кинетического момента си-
системы (тела) относительно того же центра или той же оси.
Приведение сил инерции твердого тела.
Согласно результатам § 12, справедливым для любых сил, систему
сил инерции твердого тела можно заменить одной силой, равной Ra
и приложенной в произвольно выбранном центре О, и парой с мо-
моментом, равным МЪ- Рассмотрим несколько частных случаев.
1. Поступательное движение. В этом случае ус-
ускорения всех точек тела одинаковы и равны ускорению ас центра
масс С тела (ah=ac). Тогда все силы инерции F%=—tnkac образуют
систему параллельных сил, аналогичных силам тяжести pk =mhg,
и поэтому, как и силы тяжести, имеют равнодействующую, прохо-
проходящую через точку С.
Следовательно, при поступательном движении силы инерции
твердого тела приводятся к равнодействующей, равной R". и прохо-
проходящей через центр масс тела.
2. Вращательное движение. Пусть твердое тело
имеет плоскость материальной симметрии Оху и вращается вокруг
осиОг, перпендикулярной этой плоскости ** (рис. 343, где показано
сечение тела плоскостью Оху). Если привести силы инерции к центру
О, то вследствие симметрии результирующая сила и пара будут ле-
лежать в плоскости Оху и момент пары будет равен МЪг- Тогда, так как
* Нормальную составляющую силы инерции называют еще центробежной
составляющей или центробежной силой инерции.
** Для тела произвольной формы, вращающегося вокруг неподвижной оси,
Пример приведения сил инерции дается в § 136.
347
K,z~Joz®, то по второй из формул (90)
Мог=— -V«=— /0*'в, (91)
где е — угловое ускорение тела.
Следовательно, система сил инерции такого вращающегося тела
приводится к силе R", определяемой формулой (89) и приложенной
в точке О (рис. 343), и к паре с моментом М$г, определяемым фор-
формулой (91), лежащей в плоскости симметрии
тела.
3. Вращение вокруг оси, про-
проходящей через центр масс тела.
Если тело, рассмотренное в п. 2, вращается
вокруг оси Cz, проходящей через центр масс С
тела, то /?"=0, так как ас—0. Следовательно, в
этом случае система сил инерции тела приводится
к одной только паре с моментом Мог, лежащей
в плоскости симметрии тела.
р „,„ 4. Плоскопараллельное дви-
ис" ж е н и е. Если тело имеет плоскость симмет-
симметрии и движется параллельно этой плоскости,
то, очевидно, система сил инерции тела приведется к лежащим в
плоскости симметрии силе, равной Ru и приложенной в центре масс
С тела, и паре с моментом Мсг=—Jсг ¦?•
При решении задач по формулам вида (91) вычисляется модуль
момента М", а его направление, противоположное е, указывается
на чертеже.
§ 135. РЕШЕНИЕ ЗАДАЧ
Принцип Даламбера дает единый метод составления уравнений
движения любой несвободной механической системы. Им особенно
удобно пользоваться для нахождения реакций связей, когда дви-
движение системы известно или может быть определено с помощью
уравнений, не содержащих реакций, например с помощью теоремы
об изменении кинетической энергии или уравнений, которые будут
получены в § 141, 145. При этом из рассмотрения исключаются все
наперед неизвестные внутренние силы. В случаях, когда надо оп-
определить реакции внутренних связей, систему следует расчленить
на такие части, по отношению к которым искомые силы будут внеш-
внешними.
Для одной несвободной материальной точки применение принци-
принципа Даламбера приводит к уравнениям, аналогичным тем, которые
рассматривались в § 90 (см. задачу 155).
Задача 155. Решить задачу 107 (см. § 90) с помощью принципа Даламбера.
Решение. Изображаем груз в том положении, для которого надо найти
натяжение нити (рис. 344). На груз действуют сила тяжести Р"и реакция нити Г.
Присоединяем к этим силам нормальную и касательную силы инерции Fn и /•"?•
Полученная система сил, согласно принципу Даламбера, будет находиться в рав-
равновесии. Приравнивая нулю сумму проекций всех этих сил на нормаль М^О,
348
получим
T—P — Fl = 0.
Так как Fn=man~mvl/l, где vt — скорость груза в положении М1г то
Таким образом, мы получили для Т то же выражение, что и в задаче 107.
Определяя теперь, как и в задаче 107, величину v1 с помощью теоремы об измене-
изменении кинетической энергии, найдем искомый результат.
Уравнение в проекции на касательную дает F"=0. Этот результат получается
потому, что в точке Мх производная dy/ck=O, так как в этой точке модуль ско-
скорости имеет максимальное значение,
Рис. 345
Задача 156. Два груза весом Рх и Р2 каждый, связанные нитью, движутся
по горизонтальной плоскости под действием силы Q, приложенной к первому
трузу (рис. 345, а). Коэффициент трения грузов о плоскость /. Определить уско-
ускорение грузов и натяжение нити.
Решение. Изображаем все действующие на систему внешние силы.
Прибавляем к этим силам силы инерции грузов. Так как оба груза движутся
поступательно с одним и тем же ускорением, то по модулю
Направления сил показаны на чертеже. Силы трения равны:
Fi=fPi. F2=fP2.
Согласно принципу Даламбера полученная система сил должна находиться
в равновесии. Составляя уравнение равновесия в проекции на горизонтальную
ось, найдем
Q/
Отсюда
Очевидно, грузы будут двигаться, если f<Q!(P1-\-P2)-
Искомое натяжение нити является в рассматриваемой системе силой вну-
внутренней. Для ее определения расчленяем систему и применяем принцип Да-
Даламбера к одному из грузов, например ко второму (рис. 345, б). На этот груз
действуют сила Рг, нормальная реакция N2, сила трения F$ и натяжение нити Т.
Присоединяя к ним силу инерции F\ и составляя уравнение равновесия в про-
проекции на горизонтальную ось, находим
Подставляя сюда найденное ранее значение а, получим окончательно
Интересно, что натяжение нити в этом случае не зависит от силы трения
и при одном и том же суммарном весе системы будет тем меньше, чем меньше
349
вес второго (заднего) груза. Поэтому, например, в железнодорожном составе вы-
выгоднее в голове помещать более тяжелые вагоны, а в хвосте — более легкие.
Рассмотрим численный пример. Пусть Q=200 H, Pj=400 H, Р2=100Н.
Тогда движение возможно, если /<0,4. Натяжение нити при этом равно 40 Н,
Если грузы поменять местами, то натяжение нити станет равным 160 Н.
Задача 157. Решить задачу 134 (см. § 118) с помощью принципа Даламбера
и найти дополнительно натяжение нити.
Решение. 1. Рассмотрим барабан и груз как одну систему; присоеди-
присоединяем к телам системы силы инерции (рис. 346). Груз А движется поступательно,
и для него Ra=Qa g=Qre/g Силы инерции барабана приводятся к паре с мо-
моментом М*о, равным по модулю /o-e=Ppao/g и направленным противоположно
вращению (см § 134). Составляя для всех сил условие равновесия в виде 2 mo(Fk)—
=0, получим
или
Отсюда находим
2. Рассматривая теперь груз_Л отдельно и присоединяя к действующим на
него силам Q и Т силу инерции Ra, получим из условий равновесия, что натяже-
натяжение нити
V 8 J
Задача 158. Определить силу, стремящуюся разорвать равномерно вра-
вращающийся маховик массой т, считая его массу распределенной по ободу. Радиус
маховика г, а угловая скорость о>,
Рис. 347
Решение. Искомая сила является внутренней. Для ее определения раз-
разрезаем обод на две части и применяем принцип Даламбера к одной из половин
(рис. 347). Действие отброшенной части заменяем одинаковыми силами F', чис-
численно равными искомой силе F. Для каждого элемента обода сила инерции (цен-
(центробежная сила инерции) направлена вдоль радиуса. Эти сходящиеся в точке_О
силы имеют равнодействующую, равную главному вектору сил инерции R"
и направленную вследствие симметрии вдоль оси Ох. По формуле (89) Rs=
=0,5/гшс=0,5яи'с<»2, где хс — координата центра масс дуги полуокружности,
равная 2г/л (см. § 35). Следовательно,
Условия равновесия дают 2F—R" и окончательно
350
С помощью этой формулы можно найти предельную угловую скорость, при пре-
превышении которой маховику из данного материала грозит разрыв.
Задача 159. Однородный стержень АВ весом Р, закрепленный в точке А
шарниром, отклоняют до горизонтального положения и отпускают без начальной
скорости (рис. 348). Определить реакцию шарнира А как функцию угла ф.
Решение. Рассматривая стержень в произвольном положении, проводим
оси Аху (перпендикулярно стержню и вдоль стержня) и изображаем действующие
на стержень силу тяжести Р и реакции Хд, YА. Пользуясь принципом Даламбера,
присоединяем к этим силам силы инерции стержня, приведя их к центру А (см.
§ 134, п. 2). Тогда силы инерции будут представлены двумя составляющими
Ят и Wn главного вектора R" и парой с моментом МА. При этом по формулам
(89') и (91) модули этих составляющих и момента пары имеют значения:
„ Р Р I ц Р __ Р I 2 и Р12
Rx==~g~acx=V2e' n~~~gacn~~~gm' л~ л'е~~~з?г' (а)
где I — длина стержня; ш и е — его угловая скорость и угловое ускорение.
Составляя для этой плоской системы сил уравнения равновесия 2/^=0,
2Ffty=0, 2mA(Fh)=0, получим:
Из последнего уравнения, заменив МА его значением, найдем е:
e=Cg/2/) cos ф. (в)
Для определения величины ы, входящей в выражение Rn, можно или проин-
проинтегрировать уравнение (в), или воспользоваться теоремой об изменении кинети-
кинетической энергии. Избирая второй путь и учтя, что Т0=0, получим: JA(o2/2~
=(P//2)sinq> или (P/2/3g)to2=P/sin ф, откуда
<u3=Cg//) sin ф.
При найденных значениях е и со2 равенства (а) дают:
#? = (ЗР/4) созф, Я" = (ЗР/2) sin <p.
Подставив эти величины в первые два из уравнений (б), найдем искомые реакции:
ХА = 0,25Р cos ф, У,4 = 2,5Р sin ф.
В начальный момент времени (ср=О) Хд=О,25Р, Кд=0. В момент, когда стержень
проходит через вертикаль (ф=90°), Хд=0, YA=2,5P,
У]
Рис. 348
Рис. 349
Задача 160. Однородный стержень АВ длиной I и весом Р прикреплен шар-
шарниром А к вертикальному валу, вращающемуся с угловой скоростью (o=const
(рис. 349). Найти натяжение Т горизонтальной нити, удерживающей стержень
под углом а к валу,
351
Решение. Пользуясь принципом_Даламбера, присоединяем к действую-
действующим на стержень внешним силам Р, Т, Хд, У а силы инерции. Для каждого эле-
элемента стержня с массой Am центробежная сила инерции равна ДтоАс, где х —
расстояние элемента от оси вращения Оу. Равнодействующая этих распреде-
распределенных по линейному закону параллельных сил (см. §21) проходит через центр
тяжести треугольника ABE, т. е. на расстоянии /i=B//3) cos а от оси Ах. Так
как эта равнодействующая равна главному вектору сил инерции *, то по фор-
формуле (89)
R« = mac = ma2xc = (P/g) со2 (//2) sin a
(здесь Хс — координата центра тяжести стержня).
Составляя теперь уравнение статики 2/n^(F^)=0, получим
Tl cos a—Rah—P(ll2) sin a=0.
Подставляя сюда значения R* и h, найдем окончательно
Другое решение. Задачу можно решить, не пользуясь результатами
§21, а вычисляя сумму моментов сил инерции относительно центра А непосред-
непосредственно путем интегрирования. Проведем вдоль стержня АВ ось А\. Для каж-
каждого элемента А\ стержня с координатой \ сила инерции будет v?x&tn. Ее момент
относительно центра А равен —yafixum. Тогда уравнение моментов даст
(В)
ЪтА (F/,) &з Tl cos и—Р A/2) sin а— [ (xPxydm—Q. (а)
d)
Выражая все величины, стоящие под знаком интеграла, через ?, получим:
x=?sina, y=|cosa, dm=(m/Qdi.
В результате будет
(fl) '
f а>2ху dm = (m/0 юг sin a cos a[ |2 d? = (P/3g) /%>2 sin a cos a.
W - о
Подставляя это значение в равенство (а), находим для Т то же выражение, что
и при предыдущем решении.
§ 136*. ДИНАМИЧЕСКИЕ РЕАКЦИИ, ДЕЙСТВУЮЩИЕ
НА ОСЬ ВРАЩАЮЩЕГОСЯ ТЕЛА.
УРАВНОВЕШИВАНИЕ ВРАЩАЮЩИХСЯ ТЕЛ
Рассмотрим твердое тело, вращающееся равномерно с угловой
скоростью со вокруг оси, закрепленной в подшипниках А к В
(рис. 350). Свяжем с телом вращающиеся вместе с ним оси Axyz;
преимущество таких осей в том, что по отношению к ним координаты
центра масс и моменты инерции тела будут величинами постоянными.
Пусть на тело действуют заданные силы F{, F%, . . ., Fen. Обозначим
проекции главного вектора всех этих сил на оси Axyz через Rex,
Rey, Rez (Rx=I>Fekx и т. д.), а их главные моменты относительно тех
* Из статики известно, что для любой системы сил равнодействующая (если
она существует) равна главному вектору этих сил. Следовательно, равнодейст-
равнодействующая сил инерции, когда она существует, равна R", но при непоступательном
движении эта равнодействующая вообще не проходит через центр масс тела, что и
имеет место в данном случае.
352
же осей —через Мех, М% М% \Mex=2inx(Fek) и т. д.]; при этом, так
как co=const, то Mez=0.
Для определения динамических реакций ХА, YA, ZA, Хв, YB
подшипников, т.е. реакций, возникающих при вращении тела, при-
присоединим ко всем действующим на тело заданным силам и реакциям
связей силы инерции Ff всех частиц тела, приведя их к центру А
(см. § 134). Тогда силы инерции будут представлены одной силой,
равной R" и приложенной в точке А, и парой сил с моментом, рав-
равным MA='ZmA(Fl). Проекции этого момента на оси к и у будут:
M'x=^mx(Ff}, jW"=Sms(Ffc); здесь опять М"=0, так как <o=const.
Теперь, составляя согласно принципу Даламбера уравнения (88)
в проекциях на оси Axyz (или соответствующие им уравнения равно-
равновесия из § 30) и полагая АВ=Ь, получим
(92)
Последнее уравнение Мег+М"~0 удовлетворяется тождественно,
так как Mez=0 и М^—О.
Главный вектор сил инерции R"=—тас, где т — масса тела
[см. формулу (89)]. При co=const центр масс С имеет только нормаль-
нормальное ускорение аСп=а>%с, гдеЛс — расстоя-
расстояние точки С, от оси вращения. Следователь-
-но, направление вектора R* совпадает с на-
направлением ОС. Вычисляя проекции R11 на
координатные оси и учитывая, что
ftccos a=xc, hcsm a=yc, где хс и ус — ко-
координаты центра масс, найдем:
R% = mco2/ic cos a = тсо2хс;
jRj} = moi2hc sin a = яко!ус; i?J = 0.
Чтобы определить М" и My, рассмот-
рассмотрим какую-нибудь частицу тела с массой
Ши, отстоящую от оси на расстоянии hk.
Для нее при co=const сила инерции тоже
имеет только центробежную составляющую
Ff=mk(o2hh, проекции которой, как и у
вектора Ra, равны:
Fkx = Щ^Ч, Fly = mfco>2 yk,
Тогда [см. §28 формулы D7)]:
Рис. 350
= 0.
тц (fj) = Ffxzk =
12 J4 2173
Э53
Составляя такие выражения для всех точек системы, складывая
их и вынося общий множитель за скобки, придем к равенствам:
Ml = B ЩУьЧ) ^ = - J>*; Щ = B тЛгк) со* = J^o», (93)
где /хг и JHZ — соответствующие центробежные моменты инер-
инерции *. Подставляя все найденные значения в равенства (92), полу-
получим
Уравнения (94) и определяют динамические реакции, действую-
действующие на ось равномерно вращающегося твердого тела, если осью
вращения является ось г.
Назовем статическими реакциями те значения реакций, которые
дают уравнения (94), если в них положить со=0. Как видно из урав-
уравнений (94), динамические реакции могут вообще быть значительно
больше статических, причем это зависит не только от значения о,
но и от величин хс, Ус, Jxz, Jyz, характеризующих распределение
масс тела по отношению к оси вращения Oz.
Однако из уравнений (94) видно, что наличие вращения не будет
влиять на значения реакций подшипников А и В, если
хс=0, ус=0; (95)
•f«=0, /у«=0. (96)
Равенства (95) и (96) выражают условия того, что динамические
реакции, действующие на ось вращающегося тела, равны статичес-
ким реакциям или, как говорят, условия динамической уравновешен-
уравновешенности вращающегося тела при его вращении вокруг оси z.
Условия (95) означают, что центр масс тела должен лежать на
оси вращения, а условия (96) — что ось вращения должна быть
главной осью инерции тела для начала координат А. При одновре-
одновременном же выполнении условий (95) и (96) ось Аг будет главной
центральной осью инерции тела (см. § 104). Таким образом, динами-
динамические реакции, действующие на ось вращающегося тела, будут равны
статическим, если ось вращения является одной из главных централь-
центральных осей инерции тела. Этот вывод остается справедливым и в слу-
случае, когда тело вращается неравномерно.
Рассмотренная задача позволяет одновременно уяснить механи-
механический смысл величин Jxx и Jyz, а именно: центробежные моменты
инерции Jxz и J yz характеризуют степень динамической неуравно-
неуравновешенности тела при его вращении вокруг оси г.
Динамическое уравновешивание вращающихся тел представляет
собой важную техническую задачу, которая, как мы видим, сводит-
сводится к определению главных центральных осей инерции тела. В § 104
* См. § 104, формулы A0). В равенствах (93) величины Jxz, Jyz входят в вы-
выражения моментов центробежных сил инерции; этим можно объяснить появление
термина «центробежный момент инерции».
354
было указано, что любое тело имеет, по крайней мере, три взаимно
перпендикулярные главные центральные оси инерции.
Докажем другое, практически не менее важное положение:
любую ось, проведенную в теле, можно сделать главной центральной
осью инерции прибавлением к телу двух точечных масс. Пусть для
тела массой т величины хс, Ус> Jxz, Зуг известны и не равны нулю.
Прибавим к телу две массы т± и пг2 в точках с координатами (хи
у1} гй) и (хц, у2, г2). Тогда из формул A) и A0) следует, что если удов-
удовлетворить равенствам
=0, myc+miy1+m2y2—0,
=0, Jyz+mdiZ1+m2y2z2=0, (97)
то для полученного тела будет x'S=ycl=zJ'xz=J'y2=0, т. е. ось z
станет главной центральной осью инерции. Подбирая массы mlt
тг и их положения так, чтобы удовлетворялись уравнения (97),
мы и решим поставленную задачу. Частью величин при этом следует,
конечно, задаться наперед. Например, можно задать значения ти
т\ и zx, z2 (но так, чтобы было ггфг^), а х1г уи х2, У г найти из уравне-
уравнений (97) и т. п.
Такой метод уравновешивания вращающихся тел широко исполь-
используется в технике для уравновешивания коленчатых валов, криво-
кривошипов, спарников и т. п. При этом окончательная балансировка
производится на специальных стендах.
Для определения сил давления на ось в отдельных конкретных
задачах обычно не пользуются готовыми уравнениями (94), а каж-
каждый раз непосредственно применяют принцип Даламбера.
Задача 161. Ось вращения диска, перпендикулярная его плоскости (рис. 351),
смещена от центра масс на расстояние ОС—b. Вес диска Р, угловая скорость по-
постоянна и равна <в. Определить динамические реакции подшипников А и В, если
OA=OB=h.
;В
Рис. 351
Рис. 352
Решение. Проведем вращающиеся вместе с диском оси Охуг так, чтобы
ось Оу прошла через центр масс С диска (см. рис. 351). Ось Ог будет главной
осью инерции диска для точки О, поскольку плоскость Оху является плоскостью
симметрии диска. Тогда }хг=Зуг=Ъ и из формул (93) и условия w= const видно,
что Л?о=0. Следовательно, силы инерции нриводятся к одной равнодействующей,
проходящей через точку О и направленной вдоль линии ОС (вдоль оси Оу ). По мо-
12*
355
дулю Rn=maCn=(P/g)ba>2. Так как силы Р н R* лежат в плоскости Оуг, то_реак-
ции подшипников лежат в этой же плоскости, т. е. имеют составляющие YА, %а
в точке А и YB в точке В. Тогда, составляя на основании принципа Даламбера
для всех действующих сил и сил инерции уравнения равновесия в проекциях на
оси у я г к уравнение моментов относительно центра А, получим:
R»-YA-YB = 0, ZA-P=0,
Решая эти уравнения, найдем:
YB = Pb(a>42g+\/2h), YA = Pb^/2g
Реакции YA и Yg все время располагаются в плоскости Оуг, вращающейся вместе
с телом.
Задача 162. Под прямым углом к вертикальному валу АВ длиной Ь прива-
приварены два одинаковых стержня, расположенных в одной плоскости на расстоянии
h друг от друга (рис. 352); длина каждого из стержней 21, а масса т. Пренебрегая
действием сил тяжести, найти динамические давления на вал, если он вращается
с постоянной угловой скоростью со.
Решение. По принципу Даламбера реакции подшипников и силы инер-
инерции образуют уравновешенную систему. В данном случае силы инерции каж-
каждого из стержней равны по модулю
Рис. 353
и образуют пару, которая уравновешивается парой сил Хд, Хв. Моменты этих
пар по модулю равны друг другу. Следовательно, XAb=Fiji, откуда
ХА = Хв = F%h/b = mlhaPlb.
Пара все время расположена в плоскости Аху, вращающейся вместе с валома
Задача 163. Коленчатый вал одноцилиндрового двигателя несет на себе дв-
одинаковых маховика А и В радиусом л=0,5 м. Рассматривая щеки и шейку ко
лена вала как груз массой т=21 кг, на
ходящийся на расстоянии /t=0,2 м от оси,
определить массы тА и тв грузов, кото-
которые надо расположить на ободах махови-
маховиков, чтобы сбалансировать систему, если
6=0,6 м, /=1,4 м (рис. 353).
Решение. Проведем координат-
координатные оси, вращающиеся вместе с телом,
так, чтобы колено вала лежало в плоскос-
плоскости Охг (см. чертеж). Тогда эта плоскость-
будет плоскостью симметрии. Следователь-
Следовательно, ус=0, и так как при этом ось Оу бу-
будет для точки О главной осью инерции, то
и Jyz=O. Кроме того, если обозначить массу всей системы через М, то для нее
xc — mhlM, JxZ~mhb.
Последний результат следует из того, что центробежный момент инерции системы
равен сумме центробежных моментов инерции ее частей, а для маховиков и при-
примыкающих к ним частей вала центробежные моменты J хг равны нулю (ось Ог —
ось симметрии).
Тогда, как видно из уравнений (97), для присоединяемых грузов, координаты
которых уА=ув=О, массы тА и тв должны удовлетворять равенствам.
Мхс + тАхА + твхв = 0, Jxz + mAxAzA-{- mBxBzB = 0.
Так как грузы располагаются на ободах маховиков, то гА=0, гв= I и xA=xg=—г
(при знаке плюс уравнения не имеют решений, следовательно, грузы должны
быть снизу). Решая уравнения, найдем:
тА = {1—6) ftm/(r/) = 4,8 кг, mB = 6ftm/(r/) = 3,6 кг.
Присоединение этих грузов делает систему уравновешенной, а ось Ог —
главной центральной осью инерции (но не осью симметрии) тела.
355
Глава XXVIII
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
И ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
§ 137. КЛАССИФИКАЦИЯ СВЯЗЕЙ
Введенное в § 3 понятие о связях охватывает не все их виды. По-
Поскольку рассматриваемые ниже методы решения задач механики
применимы вообще к системам не с любыми связями, рассмотрим
вопрос о связях и об их классификации несколько подробнее.
Связями называются любого вида ограничения, которые нала-
налагаются на положения и скорости точек механической системы и вы-
выполняются независимо от того, какие на систему действуют задан-
заданные силы. Рассмотрим, как классифицируются эти связи.
Связи, не изменяющиеся со временем, называются стационар-
стационарными, а изменяющиеся со с временем — нестационарными.
Связи, налагающие ограничения на положения (координаты)
точек системы, называются геометрическими, а налагающие ограни-
ограничения еще и на скорости (первые производные от координат по вре-
времени) точек системы — кинематическими или дифференциальны-
дифференциальными *.
Если дифференциальную связь можно представить как геомет-
геометрическую, т. е. устанавливаем} ю этой связью зависимость между
скоростями свести к зависимости между координатами, то такая
связь называется интегрируемой, а в противном случае — неин-
тегрируемой.
Геометрические и интегрируемые дифференциальные связи на-
называют связями голсномными, а неинтегрируемые дифференциаль-
дифференциальные связи — неголономными.
По виду связей механические системы тоже разделяют на
голономные (с голономными связями) и неголономные (содержащие
неголономные связи).
Наконец, различают связи удерживаюище (налагаемые ими огра-
ограничения сохраняются при любом положении системы) и неудержи-
воющие, которые этим свойством не обладают (от таких связей, как
говорят, система может «освобождаться»). Рассмотрим примеры.
1. Все связи, рассмотренные в § 3, являются геометрическими (голономными)
и притом стационарными. Движущийся лифт, изображенный на рис. 273, а,
будет для лежащего в нем груза, когда положение груза рассматривается по от-
отношению к осям Оху, нестационарной геометрической связью (пол кабины, реали-
реализующий связь, изменяет со временем свое положение в пространстве).
2 Положение катящегося без скольжения колеса (см. рис 328) определяется
координатой Хс центра С колеса и углом поворота <р. При качении выполняется
условие Vc=Rсо или л'с=Яф. Это дифференциальная связь, но полученное уравне-
* По существу геометрические связи являются одновременно и кинематиче-
кинематическими, так как продифференцировав уравнения, которым при геометрических
связях должны удовлетворять координаты системы, найдем, что скорости при этом
тоже связаны определенными зависимостями (см. ниже в примерах п. 2).
357
ние интегрируется и дает лгс=?!ф, т- е- сводится к зависимости между координа-
координатами. Следовательно, наложенная связь голономная.
Заметим, что эту связь можно сразу считать геометрической, подчиняющей
координаты зависимости xc=R<f. Но тогда отсюда найдем, что одновременно
и xc=R<C т. е. что связь является и кинематической.
3. В отличие от колеса для шара, катящегося без скольжения по шерохова-
шероховатой плоскости, условие того, что скорость точки шара, касающаяся плоскости,
равна нулю, не может быть сведено (когда центр шара движется не прямолинейно)
к каким-нибудь зависимостям между координатами, определяющими положение
шара. Это пример негалономной связи. Другой пример дают связи,, налагаемые
на управляемое движение. Например, если на движение точки (ракеты) нала-
налагается условие (связь), что ее скорость в любой момент времени должна быть на-
направлена в другую движущуюся точку (самолет), то это условие к какой-нибудь
зависимости между координатами тоже не сводится и связь является неголо-
номной.
4. В § 3 связи, показанные на рис. Ш—12, являются, удерживающими,
а на рис. 8 и 9 — неудерживающими (на рис. 8, а шарик может покинуть поверх-
поверхность, а на рис. 9 — перемещаться в сторону точки А, сминая нить). С учетом
особенностей неудерживающих связей мы сталкивались в задачах 108, 109 (§90)
и в задаче 146 (§¦ 125).
§ 138. ВОЗМОЖНЫЕ ПЕРЕМЕЩЕНИЯ СИСТЕМЫ.
ЧИСЛО СТЕПЕНЕЙ СВОБОДЫ
Эффект механических связей можно учитывать, не только вводя
их реакции, как это до сих пор делалось, но и рассматривая те пере-
перемещения, которые точки механической системы могут иметь при на-
наложенных на нее связях. Такой путь позволяет сразу получать урав-
уравнения равновесия или движения системы, не содержащие наперед
неизвестных реакций связей, что существенно облегчает решение
многих задач механики.
Перемещения, о которых сказано выше, называют возможными
(или виртуальными} перемещениями. Они должны удовлетворять
двум условиям: 1) быть элементарными, так как при конечном пере-
перемещении система может прийти в положение, где эффект наложен-
наложенных связей будет другим; 2) быть такими, чтобы все наложенные в
данный момент времени на систему связи сохранялись, иначе может
измениться вид рассматриваемой механической системы.
Например, в кривашипно-ползунном механизме, изображенном ниже на
рис. 356 (см. § 140), перемещение из показанного положения в положение, при
котором <р=01, нельзя рассматривать как возможное, так как при tp=O эффект
наложенных связей будет другим, что, в частности, изменит условие равновесия
механизма под действием силы Р и пары с моментом М. Точно так же нельзя
считать возможным даже элементарное перемещение точки В шатуна вдоль ли-
линии А В; оно было бы возможным, если в точке В вместо ползуна была бы качай-
щаяся муфта (рис. 161 в § 57, м^фта С), т. е_ когда механизм был бы другим.
Таким образом, возможным перемещением механической системы
будем называть любую совокупность элементарных перемещений то-
точек этой системы из занимаемого в данный момент времени положен
ния, которые допускаются всеми наложенными на систему связями.
При этом под допускаемыми в случае неудерживающих связей будем
понимать те возможные перемещения, при которых связи сохраня-
сохраняются (точки системы от связей не «освобождаются»):.
35а
В дальнейшем следует различать действительное перемещение
йг движущейся точки, которое она совершает за элементарный про-
промежуток времени At, и возможное перемещение, которого точка не
совершает, а только могла бы совершить, не нарушая наложенных
на нее в данный момент времени связей.
Чтобы учесть это различие, будем возможное перемещение точки
обозначать символом бг * и изображать соответствующим элемен-
элементарным вектором. При этом 6s будет обозначать модуль бг (8s=\8г\),
а Ьх, by, &z — проекции бг на координатные оси; эти проекции рав-
равны элементарным приращениям координат точки при ее возможном
перемещении и формально вычисляются так же, как дифферен-
дифференциалы.
Отметим, что при стационарных связях действительное переме-
перемещение йг любой точки системы, которое тоже должно допускаться
наложенными связями, совпадает с одним из возможных перемеще-
перемещений бг. При нестационарных связях йг ни с одним из возможных
перемещений не совпадает.
Поясним это на приведенном в § 137_примере нестационарной связи (груз
в лифте, см. рис. 271, а). Здесь для груза бг направлено вдоль АВ, a Аг слагается
из перемещения вдоль А В и перемещения вместе с лифтом, равного vdtjv — ско-
скорость лифта) и направленного перпендикулярно АВ; следовательно, йг образует
с АВ какой-то угол и ни с одним из 6> совпасть не может.
В общем случае механическая система может иметь множество
различных возможных перемещений. Однако для любой из систем,
которые нами будут рассматриваться, можно указать некоторое
число таких независимых между собой перемещений, что всякое
другое возможное перемещение может быть через них выражено.
Например, для точки, находящейся на какой-нибудь плоскости
(поверхности), любое возможное перемещение бг вдоль этой плоско-
плоскости можно выразить через два взаимно перпендикулярных перемеще-
перемещения 8гх и бг2 в виде 8r=a8r1+b8ri, где а и b — любые положитель-
положительные или отрицательные числа.
Число независимых между собой возможных перемещений механи-
механической системы называются числом степеней свободы этой системы.
Следовательно, точка, находящаяся на плоскости, имеет две сте-
степени свободы; одновременно ее положение на плоскости определя-
определяется двумя независимыми координатами (координатами, каждая из
которых может изменяться независимо от другой), например коор-
координатами х и у. Свободная материальная точка имеет три степени
свободы (независимыми будут три возможных перемещения вдоль
трех взаимно перпендикулярных осей); одновременно положение
точки определяется тремя независимыми координатами х, у, z и т. д.
Этот результат оказывается общим, т. е. у механической систе-
системы с геометрическими связями число независимых координат, опре-
* В математике символом «d» обозначается, как известно, дифференциал,
а символом «6» обозначают так называемую вариацию функции.
359
деяяющих положение системы, совпадает с числом, ее степеней сво-
свободы. Поэтому у такой системы число степеней свободы можно опре-
определять как по числу независимых возможных перемещений, так и
по числу независимых координат. Так, у кривошипно-ползунного
механизма (см. ниже рис. 356) одна степень свободы (у него одно не-
независимое возможное перемещение, например поворот кривошипа
ОА, и одна независимая координата, например уголф). У свобод-
свободного твердого тела шесть степеней свободы (независимых перемеще-
перемещений — три поступательных вдоль координатных осей и три поворо-
поворота вокруг этих осей, а независимых координат — три координаты
полюса и три угла Эйлера).
§ 139. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Перейдем к рассмотрению еще одного принципа механики, кото-
который устанавливает общее условие равновесия механической систе-
системы. Под равновесием (см. § 1) мы понимаем то состояние системы, при
котором все ее точки под действием приложенных сил находятся в
покое по отношению к инерциальной системе отсчета (рассматри-
(рассматриваем так называемое «абсолютное» равновесие). Одновременно бу-
будем считать все наложенные на систему связи стационарными и
специально это в дальнейшем каждый раз оговаривать не будем.
Введем понятие о возможной работе, как об элементарной работе,
которую действующая на материальную точку сила могла бы совер-
совершить на перемещении, совпадающем с возможным перемещением
этой точки. Будем возможную работу активной силы F3 обозначать
символом бЛа (бЛа—Fa-br), а возможную работу реакции N связи —
символом 6Лг(бЛг=Л' •§/•).
Дадим теперь общее определение понятия об идеальных связях,
которым мы уже пользовались (см. § 123): идеальными называются
связи, для которых сумма элементарных работ их реакций на любом
возможном перемещении системы равна нулю, т. е.
26Л? = 0. (98)
Приведенное в § 123 и выраженное равенством E2) условие иде-
идеальности связей, когда они одновременно являются стационарны-
стационарными, соответствует определению (98), так как при стационарных
связях каждое действительное перемещение совпадает с одним из
возможных. Поэтому примерами идеальных связей будут все при-
примеры, приведенные в § 123.
Для определения необходимого условия равновесия докажем,
что если механическая система с идеальными связями находится
поа, действием приложенных сил в равновесии, то при любом воз-
возможном перемещении системы должно выполняться равенство
26Л| = 0 (99)
или
2F|.57ft = 2F|asftcosafe = 0, (99>
где ah — угол между силой и возможным перемещением.
360
Обозначим равнодействующие всех (и внешних, и внутренних)
активных сил и реакций связей, действующих на какую-нибудь точ-
точку системы Bh, соответственно через F% и Nk. Тогда, поскольку
каждая из точек системы находится в равновесии, Fh-\-Nk-=0, а сле-
следовательно, и сумма работ этих сил при любом перемещении точки
Bh будет тоже равна нулю, т. е. 8Л1+6Л?=0. Составив такие ра-
равенства для всех точек системы и сложив их почленно, получим
Но так как связи идеальные, а дги представляют собой возможные
перемещения точек системы, то вторая сумма по условию (98) будет
равна нулю. Тогда равна нулю и первая сумма, т. е. выполняется
равенство (99). Таким образом, доказано, что равенство (99) выра-
выражает необходимое условие равновесия системы.
Покажем, что это условие является и достаточным, т. е. что если
к точкам механической системы, находящейся в покое, приложить
активные силы F%, удовлетворяющие равенству (99), то система
останется в покое. Предположим обратное, т. е. что система при этом
Придет в движение и некоторые ее точки совершат действительные
перемещения drk. Тогда силы F% совершат на этих перемещениях
работу и по теореме об изменении кинетической энергии будет:
где, очевидно, аТ>0, так как вначале система была в покое; сле-
следовательно, и 2cL4|>0. Но при стационарных связях действитель-
действительные перемещения Агк совпадают с какими-то из возможных переме-
перемещений drh и на этих перемещениях тоже должно быть 2бЛ|>0,
что противоречит условию (99). Таким образом, когда приложенные
силы удовлетворяют условию (99), система из состояния покоя
выйти не может и это условие является достаточным условием
равновесия.
Из доказанного вытекает следующий принцип возмож-
возможных перемещений*: для равновесия механической системы
с идеальными связями необходимо и достаточно, чтобы сумма эле-
элементарных работ всех действующих на нее активных сил при любом
возможном перемещении системы была равна нулю. Математически
сформулированное условие равновесия выражается равенством
(99), которое называют также уравнением возможных работ. Это
равенство можно еще представить в аналитической форме (см. § 87):
К + F%y Ч + Пг Szft) = 0. (ЮО)
* В форме, близкой к современной, но без доказательства этот принцип вы-
высказал знаменитый математик и механик (швейцарец по происхождению) Иоганн
Бернулли A667—1748). В общем виде принцип впервые сформулировал и доказал-
Ж- Лагранж A788 г.) Обобщение принципа на случай неудерживающих связей
было дано М.В. Остроградским в работах 1838—1842 гг.
361
Принцип возможных перемещений устанавливает общее условие
равновесия механической системы, не требующее рассмотрения рав-
равновесия отдельных частей (тел) этой системы и позволяющее при
идеальных связях исключить из рассмотрения все наперед неиз-
неизвестные реакции связей.
§ 140. РЕШЕНИЕ ЗАДАЧ
Приступая к решению задачи, следут вначале определить число
степеней свободы рассматриваемой системы (в частности, механиз-
механизма), по числу независимых возможных перемещений или координат
системы.
В плоских механизмах число степеней свободы можно практически опреде-
определять так. Представим себе, что механизм движется. Если, остановив поступатель-
поступательное или вращательное движение какого-нибудь одного звена, мы одновременно
останавливаем весь механизм, то он имеет одну степень свободы. Если после этого
часть механизма может продолжать движение, но, когда затем будет остановлено
перемещение какого-нибудь другого звена, механизм остановится, то он имеет
две степени свободы и т. д. Аналогично, если определить положение механизма
какой-нибудь координатой и когда она постоянна, механизм не может двигать-
двигаться — у него одна степень свободы. Если же после этого часть механизма может
двигаться, то выбирается вторая координата и т. д.
Для решения задачи геометрическим методом, когда система
имеет одну степень свободы, надо: 1) изобразить все действующие
на систему активные силы; 2) сообщить системе возможное переме-
перемещение и показать на чертеже элементарные перемещения 6sh точек
приложения сил или углы 6 фь элементарных поворотов тел, на кото-
которые действуют силы (у элементарных перемещений будем на черте-
чертеже указывать их модули 6sft, которые непосредственно входят в
условия равновесия); 3) подсчитать элементарные работы всех
активных сил на данном перемещении по формулам:
6Aak = FakT8sk = F%8sls cos aft или 8Л ? = m0 (F|) 6cpft A01)
и составить условие (99); 4) установить зависимость между вели-
величинами 8sk и бфй, вошедшими в равенство (99), и выразить эти ве-
величины через какую-нибудь одну, что для системы с одной степенью
свободы всегда можно сделать.
После замены в равенстве (99) всех величн 8sh, 6cpft через одну
получим уравнение, из которого и найдется искомая в задаче ве-
величина или зависимость.
Зависимости между 8sk и 8фь можно находить: а) из соответ-
соответствующих геометрических соотношений (задачи 164, 169); б) из
кинематических соотношений, считая, что система движется, и
определяя при данном положении системы зависимости между
линейными vh или угловыми ®h скоростями соответствующих точек
или тел системы, а затем полагая 6sk=vhdt, 6^h=(okdt, что справед-
справедливо, так как получаемые точками или телами за время &t действи-
действительные перемещения будут при стационарных связях одними
из возможных (иначе, здесь можно сразу считать зависимости меж-
362
ду возможными перемещениями такими же, как между соответствую-
соответствующими скоростями, см. задачи 165, 166 и др.).
Для системы с несколькими степенями свободы задачу можно
решать, составляя условие (99) для каждого из независимых возмож-
возможных перемещений системы и преобразуя его тем же путем. В ре-
результате для системы получится столько условий равновесия,
сколько она имеет степеней свободы. Другой метод решения, при-
приводящий к тем же результатам, изложен в § 144.
При аналитическом методе расчета условие равновесия состав-
составляют в виде A00). Для этого выбирают координатные оси, связанные
с телом, которое при возможных перемещениях системы остается
неподвижным. Затем вычисляют проекции всех активных сил на
выбранные оси и координаты xh, yk, zh точек приложения этих сил,
выражая все координаты через какой-нибудь параметр (например,
угол). После этого величины 5xh, 8yh, 8zk находятся дифференциро-
дифференцированием координат xh, yk, zh по этому параметру.
Если все координаты xh, yh, zk выразить через один параметр
сразу не удается, то надо ввести несколько параметров, а затем
установить зависимость между ними.
Отметим в заключение, что условиями (99) или A00) можно
пользоваться для решения задач и при наличии трения, включая
силу трения в число активных сил. Этим же путем можно находить
реакции связей, если, отбросив связь, заменить ее соответствующей
реакцией, включить последнюю в число активных сил и учесть, что
после отбрасывания связи у системы появляется новая степень
свободы.
Задача 164. В механизме, изображенном на рис, 354, найти зависимость
между силами Р и Q при равновесии.
Решение, У системы одна степень свободы. Если сообщить системе
возможное перемещение, то все диагонали параллелограммов, образованных
стержнями, удлинятся на одну и ту же величину 6s. Тогда 6зд=
=6s, 6s,g=36s. Составляя уравнение (99), получим:
P6sB—Q6sA=Q или (ЗР—QNs=0, од.
откуда Q=3P. Результат получается очень просто.
Задача 165. Вес бревна Q, вес каждого из двух цилиндри-
цилиндрических катков, на которые оно положено, Р. Определить, ка-
какую силу F надо приложить к бревну, чтобы удержать его в
равновесии на наклонной плоскости при данном угле наклона а
(рис. 355). Трение катков о плоскость и бревно обеспечивает отсут-
отсутствие скольжения.
Решение. Если пренебречь сопротивлением качению, то
плоскость для катков будет идеальной связью. При качении без
скольжения у системы одна степень свободы. Сообщая системе
возможное перемещение, получаем по условию (99)
F bsB — Q sina-8sj} — IP sina-6sc = 0,
где 8s д — возможное перемещение бревна, совпадающее с перемеще- Рис- 354
нием точки В.
Точка касания К является мгновенным центром скоростей катка. Следова-
Следовательно, vs=2vc и 6ss=26sc, если считать 6ss=i>Bdf, 8sc=vcdtt Подставляя
это значение 8sq в предыдущее уравнение, найдем окончательно
F=(Q+P) sin a,
363
Задача 166. Найти зависимость между моментом М пары, действующей н_а
кривошип кривошипно-ползунного механизма (рис. 356), и силой давления Р
на поршень при равновесии, если ОА=г, AB=l, ZAOB=(pt
Рис. 355
Рис. 356
Решение. У механизма одна степень свободы. Из условия равнове-
равновесия (99), если положить 6sg=vsdt, Ыр—ыодШ, получим:
— МЬ<р = 0 ИЛИ
Решение сводится к нахождению зависимости между ид и <i>oA- Эта кине-
кинематическая задача была решена ранее (см. § 57, задача 63). Пользуясь получен-
полученным там результатом, находим
г™\ M1пф,
у I2— r2s№2(p / v
Задача 167. Для редуктора, рассмотренного в задаче 83 (см. § 70), найти за-
зависимость между вращающим моментом МА, приложенным к ведущему валу А,
и моментом сопротивлений Л1д, приложенным к ведомому валу В, когда оба
вала вращаются равномерно.
Решение. При равномерном вращении соотношение между МА и Мд
будет таким же, как при равновесии. Следовательно, по условию (99), если по-
положить 6<pA=aAdt, 8(рд=@дсМ, будет:
= 0 или МАи>А =
Отсюда, пользуясь результатом, полученным в задаче 83, находим
Задача 168. Найти зависимость между силами Р и Q в подъемном механизме;
детали которого скрыты в коробке К (рис. 357), если известно, что при каждом
повороте рукоятки АВ (АВ=1) вичт D выдвигается на величину h,
Решение. Составляя условие равновесия (99), получаем
Предполагается, что при равномерном вращении рукоятки винт вывинчи-
вывинчивается также равномерно, тогда
= -r-6sn.
Подставляя это значение 6<fAB в предыдущее равенство, находим
Q=2nlP/h.
Заметим, что методами геометрической статики эту несложную задачу вообще
нельзя было бы решить, так как детали механизма не известны.
Решенная задача показывает, каковы (принципиально) возможности при-
примененного метода. Но при конкретном инженерном расчете подобного механизма
необходимо будет, конечно, учесть трение между его деталями, для чего понадо-
понадобится знать, каков механизм,
364
Задача 169. Балка, состоящая из двух брусьев, соединенных шарниром С,
несет нагрузку Р (рис. 358, а). Размеры балки и расположение опор показаны
на чертеже. Определить силу давления на опору В, вызываемую заданной на-
нагрузкой.
Рис. 357
Рис. 358
Решение. Отбрасываем опору В и заменяем ее реакцией Ng, численно
равной искомой силе давления (рис. 358, б). Сообщив системе возможное пере-
перемещение (у нее теперь появилась одна степень свободы), составляем условие (99)
Связь менаду 8sg и bsg находим из пропорций:
6sn dsr bsp bsr $ Wi s
¦7Г=-Г> ТГ=-Г> откуда 6sE=-ffbsB.
Следовательно,
NB=(bA/bih)P-
При применении метода геометрической статики решение оказалось бы более
длииньш (пришлось бы рассмотреть равновесие частей балки и ввести дополни-
дополнительно реакции других связей, а затем исключить эти реакции из полученной
системы уравнений равновесия).
Задача 170. Горизонтальный брус / весом Pt, закрепленный в точке А
шарниром (рис. 359), соединен шарниром В с брусом 2 весом Р21 концом С брус
опирается на горизонтальный пол, образуя с ним угол а. Определить, при каком
значении силы трения бруса о пол система будет в равновесии.
Sip
%
1
1
Л
Рис. 359
Рис. 360
Решение. Изображаем действующие на систему силы Рь Р2 и силу тре-
трения F, включая ее в число активных сил; при этом силу Р2 разлагаем на две
составляющие, равные Р2/2 каждая и приложенные в точках В к С (обращаем
365
внимание на этот прием, существенно облегчающий вычисление возможной
работы).
Составляя условие равновесия (99) и учитывая формулы A01), получим^
обозначив АВ= I,
—(P1l/2+Pit/2)&p+FSsc=0.
Но, по аналогии с теоремой о проекциях скоростей двух точек тела, fisccos a=
ea,, где 6%=/6ф. Тогда 6sc=l tga-бф и окончательно
F=0,5(P1+P2)ctga.
Заметим, что методами геометрической статики в этой задаче составить только
одно уравнение, из которого сразу найдется F, нельзя.
Задача 171. В планетарном механизме с дифференциальной передачей
(см. § 70) на ось А независимо друг от друга насажены шестерня I радиусом г$
и кривошип АВ, несущий на себе ось В шестерни 2 радиусом г2 (рис. 360). На
кривошип действует вращающий момент М, а на шестерни 1 и 2 — моменты со-
сопротивлений Мх и М2. Найти значения Мг и М2 при равновесии механизма.
Решение. Механизм имеет две степени свободы, так как в нем возможны
два независимых перемещения: а) поворот кривошипа АВ при неподвижной
шестерне / и 6) поворот шестерни 1 при неподвижном кривошипе АВ. Сообщим
смачала системе возможное перемещение, при котором шестерня 1 остается не-
неподвижной (рис, 360, а), Для этого перемещения уравнение (99) дает
Мбф^ в—М 2бф2=0.
Но когда шестерня 1 неподвижна, точка касания шестерен будет мгновенным
центром скоростей для шестерни 2. Следовательно, og=ov4. В то же время уд=
= и>дв(г\-\-г2)- Отсюда <о2г2= <0,дя(/'1+/2) или /'26ф2=(л1-(-/'2Nф_4д и мы получаем
М2=/-2М/(г1+г2).
Теперь сообщим системе другое, независимое от первого возможное пере-
перемещение, при котором кривошип АВ неподвижен (рис. 360, б). Для этого пере-
перемещения по условию (99) будет Мф^—
—тИ26ф2=0, Но при неподвижном кри-
кривошипе
бф2/бф1=0J/йI=/'1//-2 И М-±—
Окончательно находим:
1*
Задача 172. В прессе, изображенном
на рис. 361, найти зависимость между
„„ „ __ силами Qj, Q2 и Р3 при равновесии (Qx=
~Ш///////////////Ш/ШШ Л1 =Qz=Q, P3=P). Углы аир известны,
р «л.. Весом стержней пренебречь,
^ис. 301 Решение. Чтобы дать рример
аналитического расчета, воспользуемся
условием равновесия A00). Беря начало в неподвижной точке А и проводя оси
хну, получим
0, (a)
так как остальные проекции сил обращаются в нули.
Для нахождения бк1, 8х2, 6t/3 определим значения координат хг, х2, у3 точен
приложения сил, выразив их через углы а и fJ. Получим, обозначая длины стерж-
стержней через а и Ь:
хх=а cos а, х2=а cosa+2b cosP, уг~Ъ sinp+a sin a,
Дифференцируя эти выражения, найдем:
Ьх]=—asina-Sa, Sx2=—(asma-6a-S-26 sin p -бр), &y3=b cos {5- брЧ- a cos a -бос.
Подстановка полученных величин в равенство (а) дает (с учетом того, что
2Qb sin р Щ—Р (Ь cos p .бр-fa cos a .6a)-0. (б)
366
Для .нахождения зависимости между 5а и 8$ воспользуемся тем, что в данном
случае расстояние <4fi=const. Следовательно, 2(acosa+b cos P)=const, Диффе-
Дифференцируя это равенство, получим:
a sin a
Подставляя это значение ба в равенство (б) найдем
2Q sin Р—Р ( cos [5 — ctg a sin P)=0,
откуда
P=2Q/(ctgp —ctg a).
При угле Р, близком к a, сила давления Р получается очень большой,
§ 141. ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
Принцип возможных перемещений дает общий метод решения
задач статики. С другой стороны, принцип Даламбера позволяет
использовать методы статики для решения задач динамики. Сле-
Следовательно, применяя эти два принципа одновременно, мы можем
получить общий метод решения задач динамики.
Рассмотрим систему материальных точек, на которую наложены
идеальные связи. Если ко всем точкам системы кроме действующих
на них активных сил Ff и реакций связей Nk прибавить соответст-
соответствующие силы инерции Fl=—mkah, то согласно принципу Даламбе-
Даламбера полученная система сил будет находиться в равновесии. Тогда,
применяя к этим силам принцип возможных перемещений, получим
2 ЬА% + 2 ЬАI + 2 ЬАI = 0.
Но последняя сумма по условию (98) равна нулю и окончательно
будет:
2 6АЦ-Е6Л? = 0. A02)
Из полученного результата вытекает следующий принцип
Даламбера — Лагранжа: при движении механической
системы с идеальными связями в каждый момент времени сумма
элементарных работ всех приложенных активных сил и всех сил инер-
инерции на любом возможном перемещении системы будет равна нулю.
Уравнение A02), выражающее этот принцип, называют общим
уравнением динамики. В аналитической форме уравне-
уравнение A02) имеет вид
2 [(FL + т 8хк + (F%a + F»ky) Ьук + {F%2 + F%z) bzk] = 0. A03)
Уравнения A02) или A03) позволяют составить дифференциаль-
дифференциальные уравнения движения механической системы.
Если при этом система представляет собой совокупность каких-
нибудь твердых тел, то для составления уравнений нужно к дейст-
действующим на каждое тело активным еилам прибавить приложенную
в любом центре силу, равную главному вектору сил инерции, и пару
с моментом, равным главному моменту сил инерции относительно
этого центра (или одну из этих величин, см. § 134), а затем приме-
применить принцип возможных перемещений.
367
Задача 173. В центробежном регуляторе, равномерно вращающемся вокруг
вертикальной оси с угловой скоростью со (рис. 362), вес каждого из шаров Ог и
D, равен р, а вес муфты СгСг равен Q. Пренебрегая весом стержней, определить
угол а, если ODX= OD2= I, OB1= O52= SjC^B2C2==b._ _
Решение. Присоединяем к активным силам pL, р2 и Q3 центробежные силы
инерции F\ и Ь\ (сила инерции муфты, очевидно, будет равна нулю) и составляем
общее уравнение динамики в виде A03). Тогда, вычисляя проекции всех сил на
координатные оси, получим
Q3ax3=0. (a)
При этом Q3—Q, Pi=Pi=p, F"=F2= (p'g)aD= (plg)u>4 sin a.
Координаты точек приложения сил равны:
Х\=х%= I cos a, y2=—уг= I sin a, xs=26 cos a.
Дифференцируя эти выражения, находим:
6*1=6х2=—/sina-ба, б(/2=—Ьуг=1 cosa-6a, Ьх3=— 26sina-6a.
Подставляя все найденные значения в уравнение (а), получаем
[—2р/ sin a+2 (p/g)/2co2 sin a cos a—2Q6 sin a]Sa=0.
Отсюда окончательно
(pl+Qb)g
cosct=ки ,7 „ .
Так как cosa<l, то шары будут отклоняться, когда w2^ (p/+ Qfyg/p
С увеличением со угол а растет, стремясь к 90° при со-^оо,
Рис. 363
Задача 174. В подъемнике, изображенном на рис. 363, к шестерне /, имею-
имеющей вес Pi и радиус инерции относительно ее оси рь приложен вращающий
мемент М. Определить ускорение поднимаелюго груза 3 весом Q, пренебрегая
весом веревки и трением в осях. Барабан, на который наматывается веревка,
жестко скреплен с другой шестерней; их общий вес равен Р2( а радиус инерции
относительно оси вращения р2. Радиусы шестерен равны соответственно гг и г2,
а радиус барабана г.
Решение. Изображаем действующую на систему активную силу Q и вра-
вращающий моментам (силы Рх и Р2 работы не совершают); присоединяем к ним силу
инерции груза Fg и пары с моментами М\ и Л/1], к которым приводятся силы инер-
368
Глава XXIX
УСЛОВИЯ РАВНОВЕСИЯ
И УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ
В ОБОБЩЕННЫХ КООРДИНАТАХ
§ 142. ОБОБЩЕННЫЕ КООРДИНАТЫ И ОБОБЩЕННЫЕ СКОРОСТИ
Число координат (параметров), определяющих положение меха-
механической системы, зависит от количества точек (или тел), входящих
в систему, и от числа и характера наложенных связей. Будем в
дальнейшем рассматривать только системы с геометрическими
связями (точнее только голономные системы). Как установлено в
§ 138, у такой системы число независимых координат, определяю-
определяющих положение системы, совпадает с числом ее степеней свободы.
В качестве этих координат можно выбирать параметры, имеющие
любую размерность и любой геометрический (или физический)
смысл, в частности отрезки прямых или дуг, углы, площади и т. п.
Независимые между собой параметры любой размерности, число
которых равно числу степеней свободы системы и которые одно-
однозначно определяют ее положение, называют обобщенными координа-
координатами системы. Будем обозначать обобщенные координаты буквой q.
Тогда положение системы, имеющей s степеней свободы, будет опре-
369
деляться s обобщенными координатами
Чи <7i. • • -. Яг (Ю4)
Поскольку обобщенные координаты между собой независимы, то
элементарные приращения этих координат
8qlt 6<72, . . ., 8qs A05)
также между собой независимы. При этом каждая из величин A05)
определяет соответствующее, независимое от других возможное
перемещение системы.
Как при всяком переходе от одной системы координат к другой,
декартовы координаты xh, yh, zh любой точки рассматриваемой ме-
механической системы можно выразить через обобщенные координаты
зависимостями вида: xk=xk(qu q2, . . ., qs) и т. д. Следовательно,
и для радиуса-вектор a rfe этой точки, поскольку rk—xhi-\-ykj-\-zkk,
тоже будет*
Пример 1. Плоский математический маятник (рис. 364) имеет одну степень сво-
свободы (s=l), следовательно, его положение определяется одной обобщенной коор-
координатой q В качестве этой координаты здесь можно выбрать или угол <р, или дли-
длину S дуги AM, или (так как движение происходит в одной плоскости) площадь
а сектора ОАМ, указав во всех случаях положительное и отрицательное направле-
направления отсчета каждой из этих координат. Выбор в качестве обобщенной координаты
абсциссы х точки М будет неудачным, так как эта координата не определяет поло-
положение точки М однозначно (при данном значении х маятник может быть отклонен-
отклоненным от вертикали вправо или влево).
Если в качестве обобщенной координаты выбрать угол ф, то возможное пере-
перемещение маятиика получки-, сообщив углу приращение бф. Декартовы коорди-
координаты хну точки М можно выразить через ф в виде x=l cos ф, </=/ sin ф, г.де 1=
— ОМ. Тогда, в соответствии с равенством A06), и г=г(ф).
о
м
Рис 364
Рис. 365
Пример 2. Двойной плоский маятник (рис. 365) имеет две степени свободы и в
качестве обобщенных координат можно выбрать углы ф и'ф(^1=ф, <72=;Ф)- Эти углы
между собой независимы, так как можно изменять угол ф, сохраняя неизменным
г|з, и наоборот. Величины 6ф и 6i|) определяют независимые между собой возможные
перемещения системы. Выражения декартовых координат точек А и В через обоб-
* Считаем для сокращения записей наложенные связи стационарными (иначе
rj. зависели бы еще от аргумента f). Вид окончательных уравнений (см. ^ 145) ет
эюго допущения не зависит и они будут справедливы и для нестационарных свя-
связей.
370
щенные даются равенствами вида: хл=1± cos <p, хд—l-^ cos «р-Нг cos (<p+i|>) и т. д.,
тяе^11=0А, 1%=АВ. Следовательно, в соответствии с равенством A06) ~гд=
(O7
При движении системы ее обобщенные координаты будут с тече-
течением времени непрерывно изменяться, и закон этого движения оп-
определится уравнениями:
Уравнения A07) представляют собой кинематические уравнения
двиэюения системы в обобщенных координатах.
Производные от обобщенных координат по времени называются
обобщенными скоростями системы. Обозначим обобщенные скорости
символами
где q1=dq1!dt и т. д. Размерность обобщенной скорости зависит от
размерности соответствующей обобщенной координаты. Если q —
линейная величина, то q — линейная скорость; если q — угол, то
q — угловая скорость; если q — площадь, то q — секторная ско-
скорость и т. д. Как видим, понятием об обобщенной скорости охваты-
охватываются все встречавшиеся нам ранее в кинематике понятия о ско-
скоростях.
§ 143. ОБОБЩЕННЫЕ СИЛЫ
Рассмотрим механическую систему, состоящую из п материаль-
материальных точек, на которые действуют силы Fu F2, .. ., Fn. Пусть систе-
система имеет s степеней свободы и ее положение определятся обобщен-
обобщенными координатами A04). Сообщим системе такое независимое
возможное перемещение, при котором координата qx получает при-
приращение 8<7ь а остальные координаты не изменяются. Тогда каждый
из радиусов-векторов rh точек системы получит элементарное при-
приращение Frh)!*. Поскольку, согласно равенству A06), rk=rk(qlt
g2, ..., qs), а при рассматриваемом перемещении изменяется только
координата q± (остальные сохраняют постоянные значения), то
Frft)i вычисляется как частный дифференциал и, следовательно,
Используя это равенство и формулу D2) из § 87, вычислим
сумму элементарных работ всех действующих сил на рассматривае-
рассматриваемом перемещении, которую обозначим ЬА±. Получим
ел 1 = f^ (б?1I -+- 7, .F7^ +...+?„• F7п)^
* Символ (бг^ означает, что берется то элементарное приращение, которое
радиус-вектор г^ получает при изменении только координаты <?i на величину Ьдг.
371
Вынося общий множитель 6<7i за скобки, найдем окончательно
bA^Q^qu A08)
где обозначено
Q1 = 2Fft.g. A09)
По аналогии с равенством 6,4 = FT6s, определяющим элементар-
элементарную работу силы F, величину Qx называют обобщенной силой,
соответствующей координате qlm
Сообщая системе другое независимое возможное перемещение,
при котором изменяется только координата q2, получим для эле-
элементарной работы всех действующих сил на этом перемещении
выражение
6,42=Q26<72, (ПО)
где
Величина Q2 представляет собой обобщенную силу, соответствую'
щую координате q2, и т. д.
Очевидно, что если системе сообщить такое возможное пере-
перемещение, при котором одновременно изменяются все ее обобщенные
координаты, то сумма элементарных работ приложенных сил на этом
перемещении определится равенством
28Ak = Qlbql + Q26qi+ ... + Qs8qs. A12)
Формула A12) дает выражение полной элементарной работы
всех действующих на систему сил в обобщенных координатах. Из
этого равенства видно, что обобщенные силы —• это величины, рав-
равные коэффициентам при приращениях обобщенных координат в
выражении полной элементарной работы действующих на систему
сил.
Если все наложенные на систему связи являются- идеальными, то
работу при возможных перемещениях совершают только активные
силы и величины Qlt Q2, . . ., Qs будут представлять собой обоб-
обобщенные активные силы системы.
Размерность обобщенной силы зависит от размерности соответ-
соответствующей обобщенной координаты. Так как произведение Q6q,
а следовательно, и Qq имеет размерность работы, то
[<2] = $. (ИЗ)
т. е. размерность обобщенной силы равна размерности работы,
деленной на размерность соответствующей обобщенной координаты.
Отсюда видно, что если q — линейная величина, то Q имеет раз-
размерность обычной силы (в СИ измеряется в ньютонах), если q —
угол (величина безмерная), то Q будет измеряться в Н-м и имеет
размерность момента; если q — объем (например, положение поршня
372
в цилиндре можно определять объемом запоршневого пространства),
то' Q будет измеряться в Н/м2 и имеет размерность давления, и т. д.
Как видим, по аналогии с обобщенной скоростью, понятием об
обобщенной силе охватываются все величины, встречавшиеся ранее
как меры механического взаимодействия материальных тел (сила,
момент силы, давление).
Вычисление обобщенных сил будем производить
по формулам вида A08), (ПО) *, что сводится к вычислению возмож-
возможной элементарной работы (см. § 140). Сначала следует установить,
каково число степеней свободы системы, выбрать обобщенные коор-
координаты и изобразить на чертеже все приложенные к системе актив-
активные силы и силы трения (если они совершают работу). Затем для
определения Qx надо сообщить системе такое возможное перемещение,
при котором изменяется только координата qu получая положитель-
положительное приращение 8qlt вычислить на этом перемещении сумму эле-
элементарных работ всех действующих сил по формулам A01) и пред-
представить полученное выражение в виде A08). Тогда коэффициент
при 6ft и дает искомую величину Qx. Аналогично вычисляются Q2,
Q>, ¦ ¦ ¦
Пример 1. Подсчитаем обобщенную силу для системы, изображенной на рис.
366, где груз А весом Рг перечещрется по гладкой наклонной плоскости, а груз
В весом Р2 — до шероховатой горизонтальной плоскости, коэффициент трения о
7,
Рис. 366
которую равен /. Грузы связаны нитью, перекинутой через блок О Массой нити
и блока пренебрегаем. Система имеет одну степень свободы и.ее положение опре-
определяется координатой <?!=.« (положительное направление отсчета х показано стрел-
стрелкой). Для определения Ql сообщаем системе возможное перемещение Ьх, при кото-
котором бх>0, и вычисляем на этом перемещении элементарные работы сил Рг и FTi>;
остальные силы работы не совершают. Так как F^—fN—fP^, то
бЛ= (Р± sina—fP2)bx.
* Значения Q/ можно еще определить непосредственно по формулам вида
A09), A11), учтя, что FU • ^.^Fte^H+Fng^+Fb, ^- и т. д., и выразив
координаты Xji, уь, 2> точек приложения сил через qu qz, . . ., qs, Можно также,
вычислив сразу элементарную работу всех сил и приведя ее к виду A12), нахо-
находить Q/ как коэффициенты при Ьд/. Но обычно расчет этими методами не дает
преимуществ, а может оказаться и более сложным.
373
Следовательно,
Q1=
Пример 2. Пренебрегая трением, найдем обобщенные силы для системы, изоб-
изображенной на рис. 367. Однородный стержень АВ имеет длину / и вес Р и может вра-
вращаться вокруг оси А в вертикальной плоскости. Нанизанный на него шарик М
имеет вес р. Длина пружины AM равна в ненапряженном состоянии Ьа, а жест-
жесткость — с.
Система имеет две степени свободы (независимыми являются перемещение ша-
шарика вдоль стержня и поворот стержня вокруг оси А). В качестве обобщенных ко-
координат выберем угол <р и расстояние х шарика от конца ненапряженной пружины
(<71=Ф> Яг=х)\ положительные направления отсчета координат показаны стрел-
стрелками.
Сообщаем сначала системе возможное перемещение, при котором угол <р полу-
получает приращение б<р(бф>0), а ;c=const. На этом перемещении работу совершают
силы Р и р. По второй из формулA01) находим (знак минус здесь потому, что на-
направление момента противоположно направлению бср)
&i4i=[—(Pl/2) sin ф—p(bQ-i-x) sin ф!6ф.
Следовательно,
Qi=-[Pf/2+p(VM] sin ф.
Теперь сообщаем системе возможное перемещение, при котором изменяется
только координата х, получая приращение 6хХ), а угол 9=const. На этом пере-
перемещении работу совершают сила тяжести р и сила упругости, модуль которой F=
—ex. Тогда
6Л2= (р cos ф—сх)Ьх
и
Q2=p соэф—сх.
Обобщенная сила Q+ имеет в этом случае размерность момента, так как c/i=<Pi
а сила <?2 — размерность обычной силы.
Случай потенциальных сил. Если все действую-
действующие на систему силы являются потенциальными, то для системы,
как известно, существует такая силовая функция U, зависящая от
координат xh, yk, zk точек системы, что сумма элементарных работ
действующих сил равна полному дифференциалу этой функции, т. е.
il8Ak=8U [см. § 126, формула F2)]. Но при переходе к обобщенным
координатам qu цг, .. ., qs все хк, yh, zh могут быть выражены через
эти координаты и тогда U—U(qi, q2, . . ., qs). Следовательно, вы-
вычисляя 8U как полный дифференциал от функции U(qt, qt, . . .
...,qs), найдем, что
=8U = ^5ql + 5q2+...+8qs,
Сравнивая это выражение с равенством A12), заключаем, что
в данном случае
а -ди п -ди п ди
или, так как потенциальная энергия П=—U, то
Следовательно, если все действующие на систему силы потенци-
потенциальны, то обобщенные силы равны частным производным от силовой
374
функции (или взятым со знаком минус частным производным от по-
потенциальной энергии) по соответствующим обобщенным координа-
координатам.
Пример 3. Все силы, действующие на систему, изображенную на рис. 367,
потенциальны. Если при этом направить координатную ось Аг вертикально вверХ|
то по формулам F4), F4') из § 127 найдем для всей системы
П=— (Pt/2) cos <p—p(bo+x) cos ф+сл2/2,
где обобщенные координаты <7i=<p> q%=x. Тогда
Qi = — -g— = — [W/2 + p(&o4-*)]sincp, Q2 = ——=pcosq> —с*,
что совпадает с результатами, полученными в примере 2.
§ 144. УСЛОВИЯ РАВНОВЕСИЯ СИСТЕМЫ
В ОБОБЩЕННЫХ КООРДИНАТАХ
Согласно принципу возможных перемещений необходимым и
достаточным условием равновесия механической системы является
равенство нулю суммы элементарных работ всех активных сил
(и сил трения если они совершают работу) на любом возможном
перемещении системы, т. е. условие 284fe=0. В обобщенных коорди-
координатах это условие, согласно равенству A12), дает
QM+QSq^. . .+Qs8qs=Q. A16)
Так как все величины 8qu 6q2, . . ., bqs между собой независимы,
то равенство A16) может выполняться тогда и только тогда, когда
каждый из коэффициентов при 6qu 6qit , , ., 8qsn отдельности ра-
равен нулю, т. е.
Qi=0, Q2=0, ..., Q,=0. A17)
В самом деле, если допустить, что одна из этих величин, например
Qlt не равна нулю, то всегда можно сообщить системе такое возмож-
возможное перемещение, при котором6^i#0, abq2=bqsz=. . .=6qs=0, и мы
придем к противоречию с условием A16).
Таким образом, для равновесия механической системы необхо-
необходимо и достаточно, чтобы все обобщенные сильц соответствующие
выбранным для системы обобщенным координатам, были равны нулю.
Число условий равновесия A17) равно, как видим, числу обобщенных
координат, т. е. числу степеней свободы системы.
Из сравнения метода вычисления обобщенных сил (см. § 143) и
способа решения задач, которым пользовались в § 140, видно, что
по существу при решении задач с помощью принципа возможных пе-
перемещений мы вычисляли соответствующие обобщенные силы, а за-
затем приравнивали их нулю.
Рассмотрим еще два примера.
1. Условием равновесия системы, изображенной на рис. 366, будет Qi=0 или
Pj=/P2/ sin а. Поскольку при вычислении Qj было принято, что Fip=fN=Fnv,
то условие Q]=0 дает наибольшее значение Р1г при котором груз А не опускается;
т. е. определяет предельное положение равновесия (см, § 25), Система будет в рав-
равновесии и при Pi<fP2l sin a,
375
2. Для системы, изображенной на рис. 367, из условий равновесия Qi==0
и Q2=0 получаем очевидный результат, при равновесии ф=0, х=р/с=^ст.
Случайпотенциальных сил. В этом случае услозия
равновесия A17), если учесть равенства A14) и A15), дают:
ИЛИ
д2 = 0, ^ = 0, ..., g^ = 0. A18')
Отсюда следует, что при равновесии полный дифференциал
функций U или П равен нулю, т. е.
dU(qlt <7а,. • •, </Л=0 или dll^, qr2). . ., qs)=0. A19)
Равенства A18) или A19) выражают необходимые условия
экстремума функции нескольких переменных. Следовательно, сис-
система, на которую действуют потенциальные силы, в тех положениях,
для которых силовая функция или потенциальная энергия системы
имеет экстремум (в частности, минимум или максимум), находится в
равновесии. Вопрос об устойчивости этих положений равновесия
будет рассмотрен в § 147.
§ 145. УРАВНЕНИЯ ЛАГРАНЖА
Чтобы найти уравнения движения механической системы в
обобщенных координатах, обратимся к общему уравнению динамики
A02), которое дает
28/к + 26Д" = 0. A20)
ft i к \ f
Для общности не будем предполагать, что все наложенные на
систему связи являются идеальными. Поэтому в первую сумму мо-
могут входить как работы активных сил, так и, например, работы
сил трения.
Пусть система имеет s степеней свободы и ее положение опреде-
определяется обобщенными координатами A04). Тогда по формуле A12)
2бЛй = Qi6<7i + Q2 ^2+ • • • +Ф$б<7л. A21)
Очевидно, что совершенно так же, как это было сделано в § 143
для сил Fk, можно преобразовать к обобщенным координатам
элементарную работу сил инерции F\. При этом получим
2»8q2+ ...+Q*6qs, A21')
где Q", Q*t .... Q" — обобщенные силы инерции, которые согласно
формулам A09, A11) будут:
376
Подставляя величины A21) и A21') в уравнение A20), найдем
(Qi+0!) «ft + (& + <Й) «<7. + ¦ • • + (Q, + QS) ty, = 0.
Так как все 6<7i, б</2, . . ., &Ь между собой независимы, то полу-
полученное равенство может выполняться тогда и только тогда, когда
каждый из коэффициентов при 6</ь 8q2, ¦ ¦., $qs в отдельности равен
нулю, в чем убеждаемся, рассуждая так же, как при выводе урав-
уравнений A17). Следовательно, должно быть
Qi + Q? = 0, Q2+Q? = 0, .... Q, + Q? = O. A23)
Полученными уравнениями можно непосредственно пользовать-
пользоваться для решения задач динамики. Однако процесс составления этих
уравнений значительно упростится, если выразить все входящие
сюда обобщенные силы инерции через кинетическую энергию систе-
системы. Преобразуем сначала соответствующим образом величину
Q". Поскольку сила инерции любой из точек системы Fl=—mkak —
——mkdvk/dt, то первая из формул A22) дает
Чтобы выразить Q\' через кинетическую энергию системы, надо пре-
преобразовать правую часть равенства A24) так, чтобы она содержала
только скорости уточек системы. С этой целью заметим прежде
всего, что _
В справедливости равенства A25) легко убедиться, продифферен-
продифференцировав произведение, стоящее справа в скобках. Дальнейшее
преобразование осуществляется с помощью следующих двух ра-
равенств:
д7к _d7fe d/d7k\_dJlt
Докажем сначала справедливость первого из них. Так как сог-
согласно A06) rh=rh(qu q2, ¦ ¦ -,qs), то
Справедливость второго из равенств A26) следует из того, что
операции полного дифференцирования по t и частного по </х пере-
местительны, т. е.
Подставив теперь величины A26) в равенство A25), получим
d^ ' dqi dt V* ' dqj к ' dqt d/ \ 2 dqj 2 dqt'
377
и формула A24), есть учесть, что сумма производных равна производ-
производной от суммы, а "у|=у|, примет вид
где 7=2mfty|/2 — кинетическая энергия системы.
Аналогичные выражения получатся для всех остальных обоб-
обобщенных сил инерции. В результате равенства A23) дадут оконча-
окончательно
d /дТ \ дТ_
дТ _
A27)
Уравнения A27) и представляют собой дифференциальные урав-
уравнения движения системы в обобщенных координатах или уравнениях
Лагранжа *. Число этих уравнений, как видим, равно числу сте-
степеней свободы системы.
Уравнения Лагранжа дают единый и притом достаточно простой
метод решения задач динамики. Важное преимущество этих уравне-
уравнений состоит в том, что их вид и число не зависят ни от количества
тел (или точек), входящих в рассматриваемую систему, ни от того,
как эти тела движутся; определяется число уравнений Лагранжа
только числом степеней свободы системы. Кроме того, при идеаль-
идеальных связях в правые части уравнений A27) входят обобщенные ак-
активные силы, и, следовательно, эти уравнения позволяют заранее
исключить из рассмотрения все наперед неизвестные реакции свя-
связей.
Основная задача динамики в обобщенных координатах состоит
в том, чтобы, зная обобщенные силы Qlt Q2, . . ., Qs и начальные
условия, найти закон движения системы в виде A07), т. е. определить
обобщенные координаты qu q2, . . ., qs как функции времени. Так
как кинетическая энергия Т зависит от обобщенных скоростей q{,
то при дифференцировании первых членов уравнений A27) по t
в левых частях этих уравнений появятся вторые производные по
времени qt от искомых координат. Следовательно, уравнения Лаг-
Лагранжа представляют собой обыкновенные дифференциальные урав-
уравнения второго порядка относительно обобщенных координат qu
q%, ¦ ¦ -, qs-
Случай потенциальных сил. Если действующие на
систему силы потенциальные, то, используя формулы A15), можно
* Уравнения Лагранжа могут применяться для изучения движения любых
механических систем с геометрическими (точнее с голономными) связями. Для изу-
изучения движения неголономных систем (см. § 137) используются другие уравнения,
которые в данном курсе не рассматриваются.
378
первое из уравнений A27) представить в виде
d /дТ \ дТ . дИ л' d Гд(Т—П)"? д(Т—П) п
-77 ( Г" I д р ¦ = U ИЛИ -Г7 1 : — [ ^ = U.
Последнее равенство справедливо потому, что потенциальная
энергия П зависит только от координат qit q3,, , ., qst а от обобщен-
обобщенных скоростей не зависит и dTi/dq1=Q.
Аналогично преобразуются все остальные уравнения системы
A27). Введем функцию
L=T—П. A28)
Функция L от обобщенных координат и обобщенных скоростей,
равная разности между кинетической и потенциальной энергиями
системы, называется функцией Лагранжа или кинетическим потен-
потенциалом. Тогда в случае потенциальных сил уравнения Лагранжа
примут вид
d / dL\ dL n
A29)
dL\dL
J
d / dL
Из полученного результата следует, что состояние механической
системы, на которую действуют потенциальные силы, определяется
заданием одной только функции Лагранжа, так как, зная эту функ-
функцию, можно составить дифференциальные уравнения движения
системы.
При соответствующем обобщении понятий, функции, аналогич-
аналогичные функции Лагранжа, описывают состояние других физических
систем (непрерывной среды, гравитационного или электромагнит-
электромагнитного поля и др.) Поэтому уравнения Лагранжа вида A29) играют
важную роль в ряде областей физики.
§ 146. РЕШЕНИЕ ЗАДАЧ
Уравнениями Лагранжа, как уже указывалось, можно пользо-
пользоваться для изучения движения любой механической системы с
геометрическими или сводящимися к геометрическим (голономными)
связями, независимо от того, сколько тел (или точек) входит в
систему, как движутся эти тела и какое движение (абсолютное или
относительное) рассматривается.
Чтобы для данной механической системы составить уравнения
Лагранжа, надо: 1) установить число степеней свободы системы
и выбрать обобщенные координаты (см. § 142); 2) изобразить систе-
систему в произвольном положении и показать на рисунке все действую-
действующие силы (для систем с идеальными связями только активные);
379
3) вычислить обобщенные силы Q, путем, указанным в § 143; при этом
во избежание ошибок в знаках каждое сообщаемое системе возмож-
возможное перемещение должно быть направлено так, чтобы приращение
соответствующей координаты было положительным; 4) определить
кинетическую энергию Т системы в ее абсолютном движении и вы-
выразить эту энергию через обобщенные координаты q( и обобщенные
скорости q{; 5) подсчитать соответствующие частные производные
от Т по <7; и <7,- и подставить все значения в уравнения A27).
Указанным путем уравнения Лагранжа составляются независи-
независимо от того, рассматривается ли абсолютное (по отношению к инер-
циальной системе отсчета) или относительное движение механиче-
механической системы. Но в последнем случае возможен и другой путь, а
именно кинетическую энергию системы определять в ее относитель-
относительном движении, но зато при нахождении обобщенных сил присоеди-
присоединить к силам, действующим на систему, переносные силы инерции
(чего при использовании первого пути делать не надо).
Из полученных уравнений, если заданы действующие силы и
начальные условия, можно, интегрируя эти уравнения, найти закон
движения системы в виде A07). Если же задан закон движения,
то составленные уравнения позволяют определить действующие
силы.
Когда все приложенные к системе силы являются потенциаль-
потенциальными, уравнения Лагранжа можно составлять в виде A29). При
этом вместо вычисления обобщенных сил надо определить потенци-
потенциальную энергию системы, выразив ее через обобщенные координаты,
и затем, определив еще и кинетическую энергию, составить функцию
Лагранжа A28).
Начнем с задачи, позволяющей легко уяснить порядок составле-
составления уравнений Лагранжа.
Задача 175. Составить, пользуясь методом Лагранжа, дифференциальное урав-
уравнение колебаний физического маятника (см. § 129).
Решение. Маятник имеет одну степень свободы и его положение определя-
определяется углом ф (см. рис. 324). Следовательно, ?i=cp. Сообщая углу ф положительное
приращение бф, найдем, что на этом перемещении работу совершает только сила
тяжести Р и 8А1= (—Pa sin ф)бф, где а= ОС. Поэтому Qx=—Pa sin ф. Кинетиче-
Кинетическая энергия маятника 7"=</ott>2'2 или T=Jo4>2i2 (напоминаем, что величина Т
должна быть выражена через обобщенную скорость, а ш=ф). Уравнение Лаг-
Лагранжа, так как q1=<f, имеет вид
d / дт \ дТ
аКаф;-*-*1- (а>
В данном случае, поскольку Т от угла <р не зависит,
дф бф Ы \ йф /
Подставляя найденные величины в уравнение (а), получим
/Оф = — Pa sin ф,
т. е. тот же результат, что и в § 129.
зео
Поскольку сила тяжести Р потенциальная, то уравнение Лагранжа можно сос-
составить в виде A29). Направляя ось Ог вертикально вниз, имеем в данном случае
П=—Рг=^Ра cos ф. Тогда по формуле A28).
и —г = .Аоф. — = — Pas'mq>.
дф dtp
В результате уравнение A29) также дает Уоф+Рй sin ф=0.
Задача 176. Решить с помощью уравнений Лагранжа задачу 143 (см. § 124).
Решение. Механизм имеет одну степень свободы (см рис. 314) и его по-
положение определяется координатой ф (<?1=ф). Сообщая углу ф приращение 6ф,
найдем, что на этом перемещении элементарная работа ЬА1 будет иметь выраже-
выражение, совпадающее с выражением АА{ в задаче 143, если только заменить в нем с!ф на
бф. Следовательно,
»/*
Величина Т для механизма также была найдена (формула (б) в задаче 143),
Учитывая, что шкр=ф, получим
Т= /
откуда
Подстановка в уравнение Лагранжа дает окончателыю
^-с^, или
т. е. тот же результат, что и в задаче 143.
Обращаем внимание на то, что для системы с одной степенью свободы составле-
составление дифференциального уразнения движения методом Лагранжа сводится по су-
существу к тем же расчетам, что и при использовании теоремы об изменении кинети-
кинетической энергии.
Задача 177. Найти закон движения шчрика В массой m вдоль трубки О А, вра-
вращающейся равномерно в горизонтальной плоскости с угловой скоростью ю
(рис. 368). В начальный момент шарик находится от оси О на расстоянии ха и его
скорость вдоль трубки равна нулю. Найти также, какой при этом денствует на
трубку вращающий момент ЛГвр.
Решение. Система ичеет две степени свободы. В качестве обобщенных
координат выберем координату х, определяющую относительное движение шарика,
и угол поворота ф трубки Тогда уравнения Лагранжа будут иметь вид.
d /дТ\ дТ _ d /дТ\ дТ
Найдем сначала Qx и Q2. На перемещении, при котором координата х получа-
получает приращение бх, действующие силы работу не совершают (трубка вращается в
горизонтальной плоскости), следовательно, 6\Лх=0. На перемещении, при котором
угол ф получает приращение 6ф, 6Л2=Л1Врбф. Таким образом:
Qi=0, Qt=MBV. (б)
Кинетическая энергия системы слагается из энергии 7\ шарика и энергии Т2 труб-
трубки. Энергию Tt определяем для абсолютного движения шарика. Тогда T1=mv%l2,
где Vg —¦ абсолютная скорость шарика, причем векторно Уд=уО1+г.1пер. В данном
случае численно vOT=x, unep= OS-о)=А:ф и так как Уот_[_гп(,р, то
Учтя еще, что T.l=Jo<itil2=Jq^I2, где Jq — момент инерции трубки, получим
окончательно
381
x=xo(em' + e-uH/2 или x = xochwt. (г}
Второе из равенств (в) определяет искомый момент (нетрудно видеть, что он
равен моменту кориолисовой силы инерции). Если с помощью уравнения (г) вы-
выразить х через х, то найдем следующую зависимость MBV от координаты х ша«
рика:
MBp = 2m(u*xVx2—xl (д)
Заметим, что для шарика здесь решалась основная задача динамики (опреде-
(определение закона движения по заданным силам), причем изучалось его относительное
движение, но так как значение Т находилось для абсолютного движения системы^
то вводить силы инерции не понадобилось; для трубки же, наоборот, по заданному
движению определялся момент действующей силы (или пары сил).
Рис. 368 Рис. 369
Задача 178. Масса тележки 1 равна тг, а масса находящегося на ней сплош-
сплошного цилиндрического катка 2 равна т2. Определить, с каким ускорением будет
двигаться тележка вдоль горизонтальной плоскости под действием приложенной
к ней силы F (рис. 369), если каток при этом катится по тележке без скольжения,
Массой колес тележки пренебречь.
Решение. Система имеет две степени свободы (независимы перемещение
катка относительно тележки и перемещение самой тележки). В качестве обобщен-
обобщенных координат выберем координату х тележки и координату s центра масс С катка
относительно тележки. Тогда уравнения Лагранжа для системы будут;
Тогда
-j-=m1x+m2(x—s),
дх
ds
дТ дТ
(в)
Для определения обобщенных сил дадим сначала системе возможное переме-
перемещение, при котором координата х получает приращение 6х>0. На этом перемеще-
перемещении 6A1—Fdx На перемещении же, при котором s получает приращение 6s, оче-
очевидно, 6А2=0. Следовательно,
Qi=F, (?2=0.
Подставляя эти значения Qlt Q2 и значения производных, определяемые фор-
формулами (в), в равенства (а), найдем следующие дифференциальные уравнения дви-
движения системы:
s — 2x=0.
(г)
Из последнего уравнения s=2x/3, и тогда первое уравнение дает окончательно
для ускорения аг тележки значение
Если каток был бы на тележке закреплен неподвижно, то ее ускорение, оче-
очевидно, равнялось бы /•7(m1+m2).
Отметим еще одни результат. Допустим, что трения катка о тележку нет. Тогда
он по тележке будет скользить, двигаясь поступательно, и Т%= m2vcl2= щ(х—if 12,
В результате для системы
Т=Ш1Х*/2+тг (х—sJ/2.
Легко видеть, что первое из уравнений (г) при этом не изменится, а второе, так
как теперь dTlds= щ (s—х), примет вид s—x—Q и дает s=x. В результате из первого
уравнения системы (г^ находим для ускорения тележки значение a1=F/mi.
Объясняется такой результат тем, что при отсутствии трения тележка не увле-
увлекает с собой катка и движется так, как если бы катка на ней вообще не было
Задача 179. На барабан 1, имеющий радиус R и массу т1( распределенную по
его ободу, намотан тросик, к которому посредством пружины с коэффициентом
жесткости с прикреплен груз 2 массой щ (рис. 370; включе-
включением такой пружины можно моделировать упругость тросика).
К барабану приложена пара сил с моментом Мвр. Составить
для системы уравнения Лагранжа и определить частоту коле-
колебаний, сопровождающих движение тел системы.
Решение. У системы две степени свободы. Выберем
в качестве обобщенных координат угол <р поворота барабана
и удлинение х пружины (<7j.=q>, Яг~х)- Тогда уравнения
Лагранжа будут.
А /дТ\ дТ
Рис.
(а)
Изобразив действующие силы (F и F' — силы упругости пру-
пружины, численно F=F'=cx), найдем сначала Qt и Q2. Сообщая
системе возможное перемещение, при котором ёф>0, а х—
=const, и учтя, что на этом перемещении сумма работ сил F
и F' равна нулю, получим 6ЛХ= (Мвр—m2gRN<p. Для друго-
другого независимого возможного перемещения Fjc>0, ф—const)
будет 8/42=(m2g—сх)Ьх. Следовательно,
Ql=MBp—m2gR, Qi—m^g—ex. (б)
Кинетическая энергия системы Т=7\-т-Г2, где Г1=/1ф2/2, Т=т2у1/2. В дан-
данном случае Jj—miR2, а У2=уот+упер и а2=х—Rq>. Тогда
383
384
Подставляя эти величины в равенства (а), получим после очевидных сокращений
следующие дифференциальные уравнения движения системы:
d / • 2 • \
c ф + -=- /ф
d / •
-г- л: cos ф + -=- /ф -j
at \ 6 J
Перейдем теперь к отысканию закона малых колебаний системы. При этом счи-
считаем угол ф и смещение х малыми величинами одного и того же порядка жалости,
т. е. полагаем, что Ф=е/1(/), x=kf2(t), где е — малая величина, a/j^). ЫО — Iic"
которые функции от времени (ограниченные вместе с их производными), опреде-
определяющие закон колебаний. Очевидно, что при этом и скорости <$=c[[(t), x—Ef'i(t)
будут также малыми величинами порядка е.
Чтобы составить дифференциальные уравнения малых колебаний системы,
надо в уравнениях (б) сохранить только члены порядка е, а малые более высокого
порядка отбросить. Для этого в слагаемом р1ц> cos ф, которое входит в первое из
уравнений, надо положить cos(p=l, а во втором уравнении принять sin ф—ф,
cos ф~ 1 и член хф sin ф отбросить целиком как имеющий порядок е3. В результате
уравнения (б) примут вид-
Отсюда, вычисляя производные, найдем окончательно следующие дифференциаль-
дифференциальные уравнения малых колебаний рассматриваемой системы:
(ЗР + 2р) х + р/ф =0, * + B1/3) ф + g-ф = 0. (в)
Определив из первого уравнения х и подставив его значение во второе уравне-
уравнение, получим
ф4-А2ф = 0, (г)
где
6Р + р I ' W
Интегрируя уравнение (г) и определяя постоянные интегрирования по начальным
условиям задачи (при t~0 ф=фо, ф=0), найдем окончательно
Ф=ф0со8&?. (е)
Интегрируя теперь первое из уравнений (в) и учитывая, что при /=0 л~0, х=0,
ф=ф0, ф^О, получим
Замена здесь ф его зггачением из равенства (е) дает
Р /фоA— COS «)• (Ж)
Уравнения (е), (ж) и определяют закон малых колебаний системы. Частота k этих
колебаний дается равенством (д).
Такой сравнительно простой результат получился в данной задаче потому, что
здесь Qi=0. Вообще же, колебания системы с двумя степенями свободы оказыва-
оказываются значительно более сложными и слагаются из колебаний с двумя разными ча-
частотами kx и k2 (см. § 150).
Задача 181. Составить уравнения движения симметричного гироскопа в форме
Лагранжа. Рассмотреть случай медленной прецессии.
Решение. Гироскоп имеет три степени свободы. В качестве обобщенных
координат выберем углы Эйлера ф,1)э, ti (см. рис. 172 в § 60). Тогда уравнения Лат-
13 № 2173 385
ранжа будут:
d IL-^L—n A^L_^L—n AiUL—fL—n
еИЛр дф~"Уф> dt д;р dy-Q*' dt dQ дд-Цо- (a)
Кинетическая энергия гироскопа определяется формулой G9') из § 132. Считаем,
как всегда, ось Ог направленной по оси симметрии гироскопа. Тогда JX=JV и
Г=4[/,(«? + а>2)+/гШ!]. (б)
Чтобы выразить Т в обобщенных координатах, воспользуемся кинематиче-
кинематическими уравнениями Эйлера (см. § 61):
(йх = ф sin 6 sin ф -f- 6 cos ф,
cov=ij)sin 9 cos ф — 8 sinip, шг = ф-f ^> cos 0.
Из этих уравнений
Подставляя обе эти величины в равенство (б), найдем
Т = -j [Jx № sin2 8 + 82) + Jz (ф + 4 cos в)»].
Тогда учитывая, что ./г(ф-|-*|5 cos 9)=/гсог, получим:
—г-= /Я0, —= /Л4'2 sin 6 cos в — /г шг^ sin 9.
Для подсчета обобщенных сил обратимся к рис. 172. Если координате ф сооб-
сообщить приращение 6ф>0, то гироскоп совершит элементарный поворот вокруг оси
Ог. Элементарная работа при таком повороте бЛ1=Л1гбф, где Mz — главный мо-
момент всех действующих сил относительно оси Ог. Следовательно, <2<р=Мг. Анало-
Аналогичным путем, учитывая, что при изменении угла я|з гироскоп совершает поворот
вокруг оси Ог1г а при изменении угла 6 — вокруг линии узлов ОК, найдем, что
<г Л! Q M
Подставляя все вычисленные величины в равенства (а), получим окончатель-
окончательно следующие дифференциальные уравнения движения гироскопа в форме Лагран-
жа:
Z4i— г>
(
JX8— Jxi>2 sin 9 cos 8+ /2<вгг|) sin 9 = M 0A,
где
Ф cosO.
В отличие от уравнений Эйлера (см. § 132, п. 3) эти уравнения определяют
движение только симметричного тела, для которого Jx=Jy, но зато они проще,
чем совокупность динамических и кинематических уравнений Эйлера.
В частном случае, когда на гироскоп действует только сила тяжести Р, при-
приложенная в какой-то точке С на оси Ог (см. рис. 172; точка С на нем не показана),
и расстояние ОС=а, а ось Огх вертикальна, будет Мг=0, MZi=0, Мок=Ра sin 9.
Случай медленной прецессии. Рассмотрим случай, когда
Ф—fl= const, aj3=ct>= const, 9= const и Q>co, Тогда первые два из уравнений (в)
386
дают Mz—0 и /MZl=O, а из третьего уравнения, пренебрегая малой величиной, со-
содержащей iji2, находим
=JzQm sin6.
Результат совпадает с тем, который дает элементарная теория гироскопа [см.
§ 131, формула G6)].
Глава XXX *
МАЛЫЕ КОЛЕБАНИЯ СИСТЕМЫ ОКОЛО ПОЛОЖЕНИЯ
УСТОЙЧИВОГО РАВНОВЕСИЯ
§ 147. ПОНЯТИЕ ОБ УСТОЙЧИВОСТИ РАВНОВЕСИЯ
При определении условий равновесия механической системы воз-
возникает весьма важный вопрос о том, будет ли это равновесие практи-
практически реализуемым, т. е. устойчивым, или нет. Равновесие системы
в данном положении называется устойчивым, если ее можно выве-
вывести из этого положения настолько малым возмущением (смещением,
толчком), что во все последующее время отклонения системы от
равновесного положения будут меньше любого сколь угодно мало-
малого заданного отклонения. В противном случае равновесие называют
неустойчивым. Такое определение соответствует понятию об устой-
устойчивости равновесия и движения по А. М. Ляпунову. Исходя из
него, можно, например, сразу установить, что равновесие маятника,
изображенного на рис. 324, при ф=0 будет устойчивым, а при
Ф=180° — неустойчивым.
Один общий критерий, устанавливающий достаточное условие
устойчивости равновесия консервативной (см. § 127) системы, дает
следующая теорема Лагранжа — Дирихле: если потен-
потенциальная энергия консервативной системы имеет в положении рав-
равновесия строгий минимум, то равновесие системы в этом положении
является устойчивым.
В качестве доказательства ограничимся следующими рассуждениями. Для
консервативной системы имеет место закон сохранения механической энергии,
т. е. Г+П= const, где Т — кинетическая, а П — потенциальная энергия системы.
Поэтому, если в положении равновесия II=nmjn, то когда система после малого
возмущения придет в движение и будет удаляться от положения равновесия, зна-
значение П должно возрастать и, следовательно, Т будет убывать. Однако при воз-
возрастании П не может стать больше некоторой величины П1=Пт1П+ДП, которая
получится, когда Т обратится в нуль. Учтя это, можно начальные возмущений,
а с ними и значение АП сделать столь малыми, что когда у системы II=IImjn+AII
ее отклонение от равновесного положения будет меньше любого сколь угодно
малого заданного. Отсюда и следует, что равновесное положение является устой-
устойчивым.
Даваемое теоремой условие устойчивости равновесия является
лишь достаточным и не позволяет судить о том, что будет, если в
положении равновесия потенциальная энергия не имеет минимума.
Рассмотрим отдельно случай равновесия консервативной
системы, имеющей одну степень свободы. Пусть положение системы
13* 387
определяется обобщенной координатой q, выбранной так, что при
равновесии q=0. Согласно формулам A18') из § 144 в положении рав-
равновесия (dUldqH=0. Кроме того, если II (q) имеет при q—0 минимум,
то (<52H/<5(f H>0. Таким образом, при выполнении следующих усло-
условий (достаточных, но не необходимых):
™) =0, (??
A30)
равновесие системы в данном положении (q—0) будет устойчивым.
При решении задач, считая q малым, достаточно определять
П(д) с точностью до q2, так как члены с q* и выше в условия A30)
не войдут (при q—О обратятся в нули).
Задача 182. Определить, при каких условиях стержень AD (маятник), имею-
имеющий ось вращения в точке А, находится в устойчивом равновесии, когда он верти-
вертикален, если масса стержня равна т, а
длина ( (рис. 372, а) У прикреплен-
прикрепленных к стержню в точке В (АВ h) гори-
горизонтальных пружин 1 а 2 коэффициен-
коэффициенты жесткости равны сх и с2, а начальные
поджатия — Х1о и Я.2О соответственно
Решение Выберем в качестве
обобщенной координаты угол ф откло-
отклонения сгержня от вертикали, считая ф
малым (рис 372, б), и найдем значение
П (ф) с точностью до ф2. Согласно фор-
формулам F4) и F4') из § 127 будет:
Hi— P?c~= (mgl/2) cos ф, П,—
Рис. 372
При определении П2 учтено, что в
виду малости ф перемещение точки В
можно считать горизонтальным и рав-
равным /гф и что при этом сжатие пружигы / увеличится, а пружины 2 уменьшится
на величину Лф Далее, используя разложение cos ф в ряд и принимая cos ф=
= 1—Ф2/2, а также раскрывая скобки в выражении Ш, получим
ia—с2Х20)/ир f 0,5 (сх
где в По=П@) включены все постоянные величины
П„). Отсюда находим
Щ=~ (mgl/
оез выяснения, чему равно
+ cs) /г2Ф.
Чтобы при ф=0 стержень был в равновесии, эта производная при ф=0 должна
равняться нулю Следовательно, должно быть
сЛо~ cZ^2l)> (а)
что, конечно, можно было предвидеть заранее. Далее получим
(в)
дф-
Тогда по условиям A30) равновесие будет устойчивым, если
mgl
Совокупность условий (а) и (в) и дает решение задачи.
Другой пример исследования устойчивости равновесия сы. в задаче 184.
388
§ 148. МАЛЫЕ СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ
С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Допустим, что консервативная механическая система, состоящая
из п материальных точек и имеющая одну степень свободы, нахо-
находится в некотором положении в устойчивом равновесии. Исследуем,
какое движение будет совершать эта система, если ее вывести из
равновесия малым возмущением. Условимся опять определять поло-
положение системы обобщенной координатой q, выбранной так, что при
равновесии q=Q. Так как равновесие устойчиво, а возмущения малы,
то координата q и обобщенная скорость q будут во все время движе-
движения тоже оставаться величинами малыми. Для составления диффе-
дифференциального уравнения движения системы воспользуемся уравне-
уравнением Лагранжа, которое, если выразить обобщенную силу Q через
потенциальную энергию системы П [(см. § 143, формулы A15)],
примет вид
iL^ZUJV" о. A31)
Вообще это уравнение будет нелинейным, но его можно линеаризи-
линеаризировать и тем самым существенно упростить, сохранив в уравнении
малые величины q и q только в первой степени (первого порядка
малости; см. задачу 180 в § 146). Для этого значения T(q, q) и
П (q) достаточно определить тоже приближенно. При этом, так как
в уравнение A31) входят первые производные от II и Т по q и q,
то, чтобы сохранить в нем q и q в первой степени, надо Т и П опре-
определить с точностью до малых величин второго порядка малости,
т. е. с точностью до q2 или q2.
Найдем сначала приближенное выражение T(q, q). Для любой
точки системы при станционарных связях
rk = rh(q) и vk=-rf = -J[q.
Тогда, вынося общий множитель q2 за скобки, получим
или T = ±
так как производные drh/dq, как и сами гк, являются функциями
только q. Разложив F (q) в ряд Тейлора, получим
F(q)=F@)+F'@)q+...
Так как Т надо определить с точностью до q'2, то в этом разложении
следует сохранить только первое постоянное слагаемое F@). Тогда
для Т получим выражение
T = ±aq\ где a = F@). A32)
389
Поскольку Т величина существенно положительная, то постоянный
коэффициент а>0; его называют инерционным коэффициентом.
Размерность а зависит от размерности q; в частности, а может
иметь размерность массы или момента инерции.
Далее, разлагая П(д) в ряд Тейлора и учитывая, что в положении
равновесия (dlVdq)lt=O, найдем (с точностью до q2)
-1^, где с=E?)о- A33)
При этом по условиям A30) с>0. В частном случае, если q — удли-
удлинение пружины, равенство A33) выражает потенциальную энергию
поля сил упругости; поэтому коэффициент с называют квазиупругим
коэффициентом (или обобщенным коэффициентом жесткости).
Из равенств A32) и A33) находим:
дТ ¦ дт п дП
—^ = aq, з- = 0, з— = cq.
dq ' dq dq ч
Подставляя эти величины в уравнение A31), получим следующее
дифференциальное уравнение малых свободных колебаний системы
с одной степенью свободы:
q-\ /г2<7 = 0, где № = с/а. A34)
Это уравнение совпадает с известным уравнением свободных
прямолинейных колебаний материальной точки (см. § 94) и его общее
решение имеет вид
q=Asin(kt+a), A35)
где Л и а — постоянные интегрирования, определяемые по на-
начальным условиям. Частота и период этих колебаний согласно
A34) определяются равенствами:
k = Vc~]a, х = 2n/k = 2л Vajc- A36)
Установим, как при этом движутся точки системы. Разлагая ра-
радиус-вектор rh(q) одной из точек системы в ряд Тейлора, получим
rfc(i7)=rft(O)+rfc(O)G+- • • Заменяя здесь q его значением A35),,
найдем, что с точностью до величин первого порядка малости
|7t(<7)-r*(O)| = |ri(O)Hsin(*f + a) (*=1, 2, .... п). A37)
Таким образом, точки системы тоже совершают малые колебания с
частотой k и амплитудами \r'k{Q)\A. Из найденных результатов
вытекают следующие свойства малых колебаний
системы:
1) свободные (собственные) колебания системы являются коле-
колебаниями гармоническими; частота и период этих колебаний не за-
зависят от начальных условий и определяются равенствами A36);
2) так как постоянные Л и а зависят от начальных условий, то
амплитуды колебаний точек системы, равные Л 1^@I, и начальная
фаза а тоже зависят от начальных условий;
390
3) отношения амплитуд колебаний разных точек системы от
начальных условий не зависят, так как определяются только зна-
значениями r'k@), т.е. конфигурацией системы;
4) все точки системы в каждый момент времени, как видно из
равенств A37), находятся в одной и той же фазе (kt+a.) и, следова-
следовательно, одновременно проходят через положения равновесия и
одновременно достигают максимальных отклонений от этого поло-
положения.
При решении задач наибольший интерес представляет опреде-
определение частоты k и периода т собственных колебаний системы, что
существенно, например, для установления условий наличия или
отсутствия резонанса (см. § 149). При этом достаточно определить из
равенств A32) и A33) коэффициенты а я с и воспользоваться
формулами A36).
Задача 1S3. Определить частоту и период малых колебаний механической сис-
системы, рассмотренной в задаче 182 (см. ^ 147).
Решение. В задгче 182 кинетическая энергия системы (стержня A.D,
см. рис. 372) будет Т—0,5 J^q2. Следовательно, в этой задачеF (q)=F (<$) —J д—
— const и
a=JA-=ml2 3. (а)
Далее, согласно формуле A33) и соотношениям (б) и (в), полученным в задаче
182,
/ Д2П
с = ( -^ J= (Г! + cz) k*-mglj2 (с > 0).
(С)
Следовательно, по формулам A36)
-V-
G (с! -1 c2)/;a-3,v,
2m/2
_2я
k '
Задача 184. Механическая система состоит из весомых стержней !, 2 \\ диска 3,
имеющих оси вращеьия в точках О]. О.,, О3 соответственно и связанных др}ч с дру-
другом невесомыми стержнями АВ и DE (в точках А, В, D, Е ш 1рниры). В положении,
показанном на рис. 373, система
находится в равновесии; при этом
стержень / вертикален (прикреп-
(прикрепленная к его концу А горизонталь-
горизонтальная пружина имеет удлинениеА.ст),
а стержень 2 — горизонтален (при-
(прикрепленная к его концу D верти-
вертикальная пружина не деформирова-
деформирована). Длины стержней равны /х и /2,
массы — тг и т2, масса диска —
—т3, коэффициенты жесткости пру-
пружин — сх и с2.
Определить: 1) значение ХСТ;
2) условие устойчивости равнове-
равновесия системы; 3) частоту и период ее
собственных колебаний.
Решение. Выберем в качестве обобщенной координаты системы малый
угол ф! отклонения стержня 1 от равновесного положения. При таком отклонении,
очевидно, As^=Asg=As?—As?). Следовательно, ^Ф2=^1Ф1 и rs<f3=l1if1, тле rs —
й ЛЛ| A
д, ^g??) ^Ф21Ф1 sf31f1,
радиус диска. Кроме того, удлинение горизонтальной пружины ЛХ=ЛСТ—| ^
=XCT+'i<Pi. а удлинение вертикальной пружины Х3= Aso=/.^2=/l(pl. Тогда для
потенциальной энергии системы, принимая во внимание формулы F4) и F4')
391
из §
или,
127, получим
ll = mtff
полагая cos ф
значение
II
СОЗф^
1—Фх/2
2 i ^i /<i
Г mt8 ~п~ sln Ф2 + ~2~ '^с
, sin Ф2=ф2 и учитывая,
т + -
что
?1ф0Ч-
/2ф,-/
¦f
,2 2
*2фа
(все постоянные величины включены в ГГ0). Отсюда находим
l-f c2) tx- mjg] -|-Ф1-
Щ% )
В положении равновесия, т. е. при 9i=0, эта производная должна равняться
нулю. Следовательно, должно быть m2g+2c1XCT=0 или
Vr = —m2g/Bci). (a)
Таким образом, в положении равновесия пружина сжата на эту величину. Далее
получим
Тогда, согласно условиям A30), заключаем, что равновесие будет устойчивым,
если
2(c1+c2)l1>mlg. (б)
Кроме того, из равенства A33) следует, что квазиупругий коэффициент
C=[2(c1+c11)/1-mJg]/1/2. (в)
Для кинетической энергии системы получим значение
где mjfi/S, т2/|/3, т3гз/2 — моменты инерции тел 1,2,3 относительно их осей вра-
вращения; фг, ф2, ф3 — угловые скорости этих тел. Но из найденных выше зависимо-
зависимостей между ф2, фх и ф3, фх следует, что /аФг-'1ф1 и гзФз='1Ф1- Тогда, учтя еще ра-
равенство A32), получим:
При найденных значениях с и а формулы A36) дают:
/
/б^ + с^^-З/И!^ 2я_
К (г + г+З)/1 fe
§ 149. МАЛЫЕ ЗАТУХАЮЩИЕ И ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Как и в § 148, будем считать, что рассматриваемая механическая
система при <7=0 находится в положении устойчивого равновесия.
Исследуем ее малые колебания около положения равновесия еще в
двух случаях.
1. Затухающие колебания. Пусть на точки системы,
когда она выведена из равновесного положения, кроме потенциаль-
потенциальных сил начинают действовать еще силы вязкого сопротивления
392
(диссипативные силы) Fk=—\ikvk=— ^k(drkldq)q*. Тогда обобщен-
обобщенную диссипативную силу Qfl можно найти по формуле A09) из § 143
и преобразовать окончательно [подобно тому, как это сделано в
§ 148 при получении равенства A32)] к виду
Qft=—W (и = const). A38)
Теперь, составляя уравнение Лагранжа
и заменяя в нем Г, П и Q;l их значениями A32), A33), A38), полу-
получим окончательно следующее дифференциальное уравнение зату-
затухающих колебаний системы:
*q = 0, A40)
где обозначено
\i/a = 2b, c/a--=k*. A40')
Уравнение A40) совпадает с уравнением G6) из §95. Следова-
Следовательно, для малых колебаний системы с одной степенью свободы
имеют место все результаты, полученные в § 95 для точки. Таким
образом:
а) при k > Ъ система совершает затухающие колебания с ча-
частотой
k^ = V k2—b2 и периодом t =
б) при k^b система совершает неколебательное движение.
Закон движения системы дают во всех случаях уравнения,
полученные в § 95, если в них заменить х на q. Общие свойства
этих движений аналогичны отмеченным в § 148.
2. Вынужденные колебания. Пусть на точки меха-
механической системы, рассмотренной в п. 1, действуют еще возмущаю-
возмущающие силы, изменяющиеся со временем по закону Fh=Fhosinpt.
Тогда, по аналогии с тем путем, который указан в п. 1 для опреде-
определения Qa, можно найти обобщенную возмущающую силу
QB = Qa sin pt. A41)
В итоге в правой части уравнения Лагранжа A39) добавится еще
сила QB и из него окончательно получится следующее дифференци-
дифференциальное уравнение вынужденных колебаний системы:
q + 2bq + k*q = P()smpt, где P0 = Qja; A42)
остальные обозначения указаны в равенствах A40').
Уравнение A42) совпадает с уравнением (91) из § 96. Следова-
Следовательно, все результаты, полученные в § 96 для точки, имеют место
* На условия устойчивости равновесия A30) эти силы не влияют, так как
при равновесии 1^=0, а следовательно, и F^Q.
393
и для малых колебаний системы с одной степенью свободы, а с )от-
ветствующие уравнения будут определять закон движения системы,
если в них заменить х на ц. Это относится и к результатам, полу-
полученным в § 96 для случая отсутствия сопротивления (Ь=0), и ко
всем рассмотренным в § 96 свойствам вынужденных колебаний.
В частности, резонанс при малом сопротивлении будет тоже иметь
место, когда pf&k.
§ 150. МАЛЫЕ СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ С ДВУМЯ
СТЕПЕНЯМИ СВОБОДЫ
Колебания системы с несколькими степенями свободы, имеющие важные прак-
практические приложения, отличаются от колебаний системы с одной степенью свобо-
свободы рядом существенных особенностей. Чтобы дать представление об этих особен-
особенностях, рассмотрим случай свободных колебаний системы с двумя степенями сво-
свободы.
Пусть положение системы определяется обобщенными координатами qlt цг
и при 9i=(h=0 система находится в устойчивом равновесии. Тогда кинетическую
и потенциальную энергии системы с точностью до квадратов малых величин мож-
можно найти так же, как были найдены равенства A32), A33), и представить в виде:
Т=~ (аи^ + а^^ + СгаЙ); (Г43)
П = П0Ч y(cu<7? + 2c12<M2-f-c227i). A44)
где инерционные коэффициенты ап, а12, а22 и квазиупругие коэффициенты сг1,
г1г, с22 — величины постоянные. Если воспользоваться двумя уравнениями Ла-
граижа вида A31) и подставить в них эти значения Т и П, то получим следующие
дифференциальные уравнения малых колебаний системы с двумя степенями сво-
свободы
<Wl-r-rtl2'72 + Ol<7l + <?12'?2^, 1
0. \
Будем искать решение уравнений A45) в виде:
qv=A sin (kt+a), q^B sin (kt-\-a), A46)
где A, B, k, a — постоянные величины. Подставив эти значения qlt <?2 в уравнения
A45) и сократив на sin (kt-\-a), получим
(с12—а12аВ=0, \ A47)
(/2)В0 /
Чтобы уравнения A47) давали для А и В решения, отличные от нуля, определи-
определитель этой системы должен быть равен нулю или, иначе, коэффициенты при А к В в
уравнениях должны быть пропорциональны, т. е.
^12 — «12* c22~a22k" А
Отсюда для определения k2 получаем следующее уравнение, называемое уравнением
частот:
^30. A49)
Корни kl и k\ этого уравнения вещественны и положительны; это доказывается ма-
математически, но может быть обосновано и тем, что иначе йг= У k\ и k^= У k^ не бу-
будут вещественны и'уравнения A45) не будут иметь решений вида A46), чего для
системы, находящейся в устойчивом равновесии, быть не может (после возмущений
она должна двигаться вблизи положения qx=Qz~ 0)-
394
Определив из A49) kt и k.z, найде\т две совокупности частных решений вида
A46). Если учесть, что согласно A48) В=пА, эти решения будут:
:>=А1 sin (V+ai)> q'i^n^ sin (k^t-1
a2),
A50)
A51)
где пх и n2 — значения, которые п получает из A48) при k=klt и k=k2 соответ-
соответственно.
Колебания, определяемые уравнениями A50) и A51), называются главными ко-
колебаниями, а их частоты kx и k2 — собственными частотами системы. При этом,
колебание с частотой й-, (всегда меньшей) называют первым главным колебанием,
а с частотой k.2 — вторым главным колебанием. Числа пг и п.,, определяющие от-
отношения амплитуд (или самих координат, т. е. q2lqi) в каждом из этих колебаний,
называют коэффициентами формы.
Так как уравнения A45) являются линейными, то суммы частных решений
A50) и A51) тоже будут решениями этих уравнений:
q1~=A1 sin (fejH-аг)+А2 sin (ЫЧ а2), 1
Я,= п,АЛ sin (k,t-\-a.)+n,A9sin (Ы+аЛ.) (lbiJ
(р — частота возмущающей силы). На-
Of
Равенства A52), содержащие четыре произвольных' постоянных Лъ Л2, о^,
а2, определяемых по начальным условиям, дают общее решение уравнений A45)
и определяют закон малых колебаний системы. Эти колебания слагаются из двух
главных колебаний с частотами &х и k2 и не являются гармоническими. В частных
случаях, при соответствующих начальных условиях, система может совершать одно
из главных колебаний (например, первое, если А2=0) и колебание будет гармони-
гармоническим.
Собственные частоты kx, k2 и коэффициенты формы пг, пг не зависят от началь-
начальных условий и являются основными характеристиками малых колебаний системы;
решение конкретных задач обычно сводится к определению этих характеристик.
Сопоставляя результаты этого и предыдущего параграфов, можно получить
представление о том, к чему сведется исследование затухающих и вынужденных
колебаний системы с двумя степенями свободы. Мы этого рассматривать не будем,
отметим лишь, что при вынужденных колебаниях резонанс у такой системы может
возникать дважды: при pjsfcj и при '
конец, отметим, что колебания си-
системы с s степенями свободы будут
слагаться из s колебаний с частота-
частотами kx, k2,...,ks, которые должны
определяться из уравнения степени
s относительно fe3. Это связано со
значительными математическими
трудностями, преодолеть которые
можно с помощью электронных вы-
вычислительных (или аналоговых) ма-
машин.
Задача 185. Определить собст-
собственные частоты и коэффициенты
формы малых колебаний двойного
физического маятника, образован-
образованного стержнями / и 2 одинаковой
массы т и длины / (рис. 374, а).
Решение. Выберем в каче-
качестве обобщенных координат малые
углы фг иф2. Тогда Г=0,5(У1Оф1+тчс+/2сф1), где У1р=т/2/3, УгС=т/2/12 и,
при требуемой точности подсчетов, г^— ^|л""!~1'сл='ф1~Ь^Фг''2. В итоге
Т = 0,5т/2 Dф1/3 + ф!ф2 + фЛ/3). (а)
Далее П=— 0,5mg/cos фх—mgl( cos ф!+0,5 cos ф2) или, полагая cos9=l—фг/2.
= Н0
(б)
395
Из равенств (а) и (б) видно, каковы здесь значения аи, а1г, а22, с^ и с22 (ci2=0).
При этих значениях коэффициентов уравнение частот A49) примет вид
Его корнями будут: kt, г-3A ±2/У 1)gH, откуда
fe, = 0,86 VjjTl h = 2,30 Vj;i. (в)
Подставляя теперь в любое из отношений, стоящих в левой части равенства A48),
сначала klt а затем k2, получим
п1=1,43, п2=—2,10. (г)
Таким образом, при первом главном колебании оба стержня будут в каждый
момент времени отклонены от вертикали в одну и-ту же сторону (рис. 374, а) и
Ф,'Ф1=1,43, а при втором главном колебании — в разные стороны (рис. 374, б)
")У|210
Глава XXXI
ЭЛЕМЕНТАРНАЯ ТЕОРИЯ УДАРА
§ 151. ОСНОВНОЕ УРАВНЕНИЕ ТЕОРИИ УДАРА
При движении тела под действием обычных сил, рассматривав-
рассматривавшихся до сих пор, скорости точек тела изменяются непрерывно, т. е.
каждому бесконечно малому промежутку времени соответствует
бесконечно малое приращение скорости. Действительно, если им-
импульс любой силы Fh за промежуток времени т представить в виде
Flpx, где Ff ¦— среднее значение этой силы за время т, то теорема об
изменении количества движения точки, на которую действуют
силы Fh, дает
Отсюда видно, что когда время т бесконечно мало (стремится к
нулю), то при обычных силах и приращение скорости Av=vt—v~Q
будет тоже величиной бесконечно малой (стремящейся к нулю).
Однако если в числе действующих сил будут очень большие
силы (порядка 1/т), то приращение скорости за малый промежуток
времени т окажется величиной конечной.
Явление, при котором скорости точек тела за очень малый
(близкий к нулю) промежуток времени т изменяются на конечную
величину, называется ударом. Силы, при действии которых проис-
происходит удар, будем называть ударными силами Fya. Промежуток
времени т, в течение которого происходит удар, назовем временем
удара.
Так как ударные силы очень велики и за время удара изменяются
в значительных пределах, то в теории удара в качестве меры вза-
взаимодействия тел рассматривают не сами ударные силы, а их импуль-
396
сы. Ударный импульс
является величиной конечной. Импульсы неударных сил за время
т будут величинами очень малыми и ими практически можно
пренебречь.
Будем в дальнейшем обозначать скорость точки в начале удара v,
а скорость в конце удара и. Тогда теорема об изменении количества
движения точки при ударе примет вид *
m{u~—v) = ZSk, A53)
т. е. изменение количества движения материальной точки за время
удара равно сумме действующих на точку ударных импульсов. Урав-
Уравнение A53) является основным уравнением теории удара и играет в
теории удара такую же роль, как основной закон динамики ma—F
при изучении движений под действием неударных сил.
В заключение отметим, что перемещение точки за время удара
будет равно vcpx, т. е. величине очень малой, которой практически
можно пренебречь.
Итак, из всех полученных результатов вытекает следующее:
1) действием неударных сил (таких, например, как сила тяже-
тяжести) за время удара можно пренебречь;
2) перемещениями точек тела за время удара можно пренебречь
и считать тело во время удара неподвижным;
3) изменения скоростей точек тела за время удара определяются
основным уравнением теории удара A53).
§ 152. ОБЩИЕ ТЕОРЕМЫ ТЕОРИИ УДАРА
Рассмотрим, какой вид принимают общие теоремы динамики для
системы материальных точек при ударе.
1. Теорема об изменении количества дви-
движения системы п р и у д а р е. Уравнение B1), полученное
в § 111, сохраняет свой вид и для случая удара. Но так как импуль-
импульсами обычных сил при ударе пренебрегают, то в правой части оста-
останутся только ударные импульсы. Следовательно, при ударе
U-Q^SSS, A54)
т. е. изменение количества движения системы за время удара равно
сумме всех внешних ударных импульсов, действующих на систему.
В проекциях на любую координатную ось х уравнение A54)
дает
Qi*-C., = 2S|,. A54')
* В дальнейшем будем ударный импульс обозначать просто символом S,
так как импульсы неударных сил в теории удара не рассматриваются.
397
Если геометрическая сумма всех внешних ударных импульсов
равна нулю, то, как видно из уравнения A54), количество дви-
движения системы за время удара не изменяется. Следовательно, внут-
внутренние ударные импульсы не могут изменить количества движения
всей системы.
2. Теорема об изменении главного момен-
момента количеств движения системы (теорема
моментов) при ударе. Теорема моментов принимает для
случая удара вид, несколько отличный от полученного в § 116;
объясняется это тем, что точки системы за время удара не переме-
перемещаются. Рассмотрим систему, состоящую из п материальных точек.
Обозначим равнодействующую внешних ударных импульсов, дей-
действующих на точку с массой ть, через 5|, а равнодействующую
действующих на ту же точку внутренних ударных импульсов — че-
через S[. Тогда по уравнению A53) будет mk(uk—Dft)=S|+5j^ или
Входящие в это равенство векторы приложены к точке, которая,
как было указано, за время удара остается неподвижной. Тогда,
беря моменты этих векторов относительно какого-нибудь центра О,
по теореме Вариньона, справедливой для любых векторных вели-
величин, найдем, что
«го (тА) = то (тЛ) — ^о (Si) + т0 E1к).
Составляя такие равенства для всех точек системы и складывая
их почленно, получим
Ъп0 (П1кик)—1то (тк7-к) = Ъп0 (Sek) + Ът0 (S|).
Суммы, стоящие слева, представляют собой главные моменты
количеств движения системы относительно центра О в конце и в
начале удара, которые обозначим К\ и /Со. Стоящая справа сумма
моментов внутренних ударных импульсов по свойству внутренних
сил равна нулю. Окончательно находим
Ki-Ku = 2,mo(S%), A55)
т. е. изменение за время удара главного момента количеств движения
системы относительно какого-нибудь центра равно сумме моментов
относительно того же центра всех действующих на систему внеш-
внешних ударных импульсов.
В проекциях на любую ось х равенство A55) дает
К1х-КОх = ЪтхфЪ). A55')
Из полученных уравнений следует, что если сумма моментов
внешних ударных импульсов относительно какого-нибудь центра
(или оси) равна нулю, то главный момент количеств движения
системы относительно этого центра (или оси) за время удара не
398
изменяется. Следовательно, внутренние ударные импульсы не могут
изменить главный момент количеств движения системы.
Вопрос о том, как изменяется за время удара кинетическая
энергия соударяющихся тел, будет рассмотрен в § 156.
§ 153. КОЭФФИЦИЕНТ ВОССТАНОВЛЕНИЯ ПРИ УДАРЕ
Значение ударного импульса, появляющегося при соударении
двух тел, зависит не только от их масс и скоростей до удара, но и
от упругих свойств соударяющихся тел; эти свойства при ударе ха-
характеризуют величиной, называемой коэффициентом восстановления.
Ряс. 376
Рассмотрим шар, падающий вертикально на неподвижную гори-
горизонтальную жесткую плиту (рис. 375). Для прямого удара, который
при этом произойдет, можно различать две стадии. В течение первой
стадии скорости частиц шара, равные в момент начала удара v
(движение шара считаем поступательным), убывают до нуля. Шар
при этом деформируется и вся его начальная кинетическая энергия
яго2/2 переходит во внутреннюю потенциальную энергию деформи-
деформированного тела. Во второй стадии удара шар под действием внутрен-
внутренних сил (сил упругости) начинает восстанавливать свою форму; при
этом его внутренняя потенциальная энергия переходит в кинетиче-
кинетическую энергию движения частиц шара. В конце удара скорости
частиц будут равны и, а кинетическая энергия шара ти2/2. Однако
полностью механическая энергия шара при этом не восстанавлива-
восстанавливается, так как часть ее уходит на сообщение шару остаточных дефор-
деформаций и его нагревание. Поэтому скорость и будет меньше v.
Величина k, равная при прямом ударе тела о неподвижную пре-
преграду отношению модуля скорости тела в конце удара к модулю
скорости в начале удара, называется коэффициентом восстановления
при ударе:
k = u/v. A56)
Значение коэффициента восстановления для разных тел опреде-
определяется опытным путем. По данным опыта при изменении скорости v
не в очень больших пределах величину k можно считать зависящей
только от материала соударяющихся тел.
399
В качестве предельных случаев рассматривают случай абсолют-
абсолютно упругого удара (k=\), при котором кинетическая энергия тела
после удара полностью восстанавливается, и случай абсолютно
неупругого удара (k=0), когда удар заканчивается в первой стадии
и вся кинетическая энергия тела теряется на его деформацию и нагре-
нагревание.
Экспериментально величину k можно найти, если рассмотреть
шар, свободно падающий на плиту с предварительно измеренной
высоты Я, и определить с помощью стоящей рядом вертикальной
рейки (рис. 376) высоту его подъема h после удара. Тогда по фор-
формуле Галилея
V u=--V2gh
Значение коэффициента восстановления для тел из различных
материалов дается в соответствующих справочниках. В частности,
можно считать при скоростях соударения порядка 3 м/с для удара
дерева о дерево &«0,5, стали о сталь &»0,56, стекла о стекло /г«г
жО,94.
§ 154. УДАР ТЕЛА О НЕПОДВИЖНУЮ ПРЕГРАДУ
Рассмотрим тело (шар) массой М, ударяющееся о неподвижную
плиту. Действующей на тело ударной силой будет при этом реакция
плиты; импульс этой силы за время удара назовем S. Пусть нормаль
к поверхности тела в точке его касания с плитой проходит через
центр масс тела (для шара это будет всегда). Такой удар тела назы-
называется центральным. Если скорость v центра масс тела в начале
удара направлена по нормали п к плите, то удар будет прямым,
в противном случае —• косым.
1. Случай прямого удара. Составляя в этом случае
уравнение A54) в проекции на нормаль п (см. рис. 375) и учитывая,
что Qn=Mv, a Q1=Mu, получим
М(ип— vn)=Sn.
Но при прямом ударе ип=и, vn=—v, Sn=S. Следовательно,
M(u+v)=S.
Второе уравнение, необходимое для решения задачи, дает ра-
равенство A56)
u=ku.
Из полученных уравнений, зная М, v, k, найдем неизвестные
величины и и S. При этом
S=M(\+k)v.
Как видим, ударный импульс будет тем больше, чем больше
коэффициент восстановления к. На эту зависимость S от k и было
указано в § 153.
400
Чтобы определить среднюю величину ударной силы (реакции),
надо дополнительно знать время удара т, которое можно найти эк-
экспериментально.
Пример. При падении стального шара массой т= 1 кг с высоты Я—3 м на
стальную плиту (?-=0,56) получим v=V~2gH^7,7 м'с и к=й-4,3ч'с. Ударный
импульс S=/tw(H *)« 12 Н-с
Если время удара т=0,0005 с, то средняя величина ударной реакции Л/у^=
=-St-24 000 H.
2. Случай косого удара Пусть в этом случае скорость^ центра
масс тела в начале удара образует с нормалью к плите угол а, а скорость и в конце
удара — угол р1 (рис. 377). Тогда уравнение A54) в про-
проекциях па касательную т и нормаль п даст
М(их—vx)=0, M(un-v,,) = S.
Коэффициент восстановления в данном случае
равен отношению модулей \и„\ и \vn\, так как удар
происходит только но направлению нормали к поверх-
поверхности (влиянием трения пренебрегаем) Тогда с учетом
знаков проекций получим ип——kvn. В результате окон-
окончательно находим.
ux = vx, un = ~kvn, S-=M]vn\(\ + k). Рис 377
Из полученных уравнений можно найти модуль и направление скорости в кон-
конце удара и ударный импульс, если величины М, v, а и k известны. В частности, из
первого равенства, замечая, что v% — \vn\ tg а и tix — \un\ tg p, получаем
откуда
* = l««l/KI
Следовательно, при косом ударе отношение тангенса угла падения к тангенсу
угла отражения равно коэффициенту восстановления. Так как й<1, тоа<р\ т. е.
угол падения всегда меньше угла отражения.
§ 155. ПРЯМОЙ ЦЕНТРАЛЬНЫЙ УДАР ДВУХ ТЕЛ (УДАР ШАРОВ)
При соударении двух тел удар называется прямым и централь-
центральным, когда общая нормаль к поверхностям тел в точке касания про-
проходит через их центры масс и когда скорости центров масс в на-
начале удара направлены по этой общей нормали. Таким, в частности,
будет удар двух однородных шаров, центры которых до удара дви-
движутся вдоль одной и той же прямой.
Пусть массы соударяющихся тел равны Mt и М2, скорости их
центров масс в начале удара vr и v2, а в конце удара щ и ы2. Прове-
Проведем через центры масс d, С2 координатную ось CjX, направленную
всегда от Сг к С2 (рис. 378). Тогда, чтобы произошел удар, должно
быть vlx>v2x (иначе первое тело не догонит второе); кроме того,
и1х^и2х, так как ударившее тело не может опередить ударяемое.
Считая Mi, M2, vlx, v2x и k известными, найдем и1х и и2х- Для
этого применим теорему об изменении количества движения к
соударяющимся телам, рассматривая их как одну систему. Тогда
ударные силы, действующие между телами, будут внутренними и
401
ZS|=O. В результате уравнение A54') дает Qix=Qox или
M1ulx+M2u2x=M1vlx+M2v2x.
A57)
Второе уравнение найдем из выражения для коэффициента
восстановления. При соударении двух тел интенсивность удара
(ударный импульс) зависит не от абсолютного значения скорости
каждого из тел, а от того, насколько
скорость ударяющего тела превышает
скорость ударяемого, т. е. от разности
Vix—v2x- Поэтому при ударе двух тел,
если учесть, что всегда vlx>v-lx, и
, получим:
k =
Ulx-'
vlx v?
с — uZx
A58)
или
x=—k(vlx—vtx). A58')
Рис. 378 Система уравнений A57), A58) и по-
позволяет решить поставленную задачу.
Ударный импульс, действующий на соударяющиеся тела, найдем,
составив уравнение A54') для какого-нибудь одного из тел, на-
например для первого. Тогда
Slx=M1(ulx~vlx), S2x=—Srx. A59)
Рассмотрим два предельных случая.
1. Абсолютно неупругий удар (k—О). В этом слу-
случае из уравнений A58) и A57) находим
Оба тела после удара движутся с одной и той же скоростью.
Действующий на тела ударный импульс при этом равен
2. Абсолютно упругий удар (&= 1). В этом случае
из уравнений A57) и A58) получаем
A61)
Действующий на тела ударный импульс при этом равен
Как видим, при абсолютно упругом ударе ударный импульс
вдвое больше, чем при абсолютно неупругом.
402
В частном случае, когда МЛ=М2, получаем из уравнений A61)
ж=^2ж, U2x=vlx\ таким образом, два тела одинаковой массы при
абсолютно упругом ударе обмениваются скоростями.
Задача 186. Два шара массой М1 и М2 подвешены так, как показано на
рис. 379. Первый шар отклоняют на угол а и отпускают без начальной скорости.
После удара второй шар отклоняется на угол р.
Найти коэффициент восстановления для шаров при
ударе.
Решение. По данным задачи можно опре-
определить скорость U[ центра первого шара в начале
удара и скорость и2 центра второго шара в конце
удара. Из теоремы об изменении кинетической энер-
энергии на перемещении В0В1 находим для первого
шара
M1vl-=2P1h=2M1gl(\—cos a),
где I — расстояние центра шара от точки подвеса.
Отсюда 1^ = 2]^gl sin (а/2). Аналогично находим,
Рис. 379
Так как в нашем случае у2=0, уравнения A57) и A58) дают:
Исключая из этих уравнений и1х и замечая, что vlx=v1, a vix=ui, получим
M1v1(l+k)=(M1+M2)u.i.
Отсюда окончательно находим:
¦1 = 5
ыи (a/2)
' —1.
§ 156. ПОТЕРЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
ПРИ НЕУПРУГОМ УДАРЕ ДВУХ ТЕЛ. ТЕОРЕМА КАРНО
Из рассуждений, приведенных в § 153, следует, что при неупру-
неупругом ударе происходит потеря кинетической энергии соударяю-
соударяющихся тел. Наибольшей эта потеря будет при абсолютно неупругом
ударе. Подсчитаем, какую кинетическую энергию теряет система
при абсолютно неупругом ударе двух тел.
Считая, что соударяющиеся тела движутся поступательно, и
обозначая их общую скорость после абсолютно неупругого удара
через и, получим для кинетической энергии системы в начале и в
конце удара значения:
ix, 2T1 = (Ml + Mt)ul A62)
Потерянная при ударе кинетическая энергия равна Гс—7\.
Представим эту разность в виде
Т0—Т1=Т^-2Т1+Т1. A63)
Так как из формулы A60) следует, что
то отсюда
A64)
403
Подставляя в правую часть равенства A63) вместо То и 7\ их
значения из формул A62), а вместо 27\— правую часть выражения
A64), получим:
^о - 7\ = у (^ ivlc + Mtvl - 2Л4 ,vlxux -
или
A65)
Разности (t»u—их) и (и2ж—ur) показывают, насколько уменьши-
уменьшилась при ударе скорость каждого из соударяющихся тел. Их можно
назвать потерянными при ударе скоростями. Тогда из формулы A65)
вытекает следующая теорема Кар но *: кинетическая энергия, поте-
потерянная системой тел при абсолютно неупругом ударе, равна той
кинетической энергии, которую имела бы система, если бы ее тела
двигались с потерянными скоростями.
Если удар не является абсолютно неупругим (кфО), то аналогич-
аналогичными преобразованиями можно найти, что кинетическая энергия,
потерянная при ударе двух тел, определяется равенством
A65')
Рассмотрим частный случай абсолютно неупругого удара по первоначально не-
подзижногау телу. В этом случае У2=О и
0 ~ 2
Тогда
или
л/2-,2
М,
Т Ч12 т
х~ Mi \ Ah'0'
A66)
Формула A66) показывает, какая энер1ия остается у системы после удара.
Отметим два интересных предельных случая.
\Г...
Рис. 380
I.Масса ударяющего тела много больше массы уда-
ударяемого (Л11>Л12) В этом случае можно считать М±-\-Мг~Mlt и формула
* Лазар Карно A753—1823) — выдающийся французский ученый (матема-
(математик и механик) и видный деятель эпохи французской революции,
404
A66) дает TjR! To. Следовательно, хотя удар и является абсолютно нспругим, поте-
потеря кинетической энергии при ударе почти не происходит, и система после удара
начнет двигаться почти с той же кинетической энергией, которая у нее была в на-
начале удара.
На практике такой результат нужно, очевидно, получать при забивании гвоз-
гвоздей, свай и т п. Следовательно, в этом случае нужно, чтобы масса молотка была
намного больше массы гвоздя (рис. 380, а).
2. Масса ударяемого тела много больше массы уда-
ударяющего (M2p-Mj) В этом случае можно считать М1/(Л41+А12)«0, и фор-
формула A66) дает Г,я»0. Таким образом, здесь при ударе почти вся кинетическая
энергия расходуется на деформацию соударяющихся тел, по окончании удара тела
можно считать неподвижными.
Практически такой результат нужно, очевидно, получать при ковке, клепке
и т. п. Следовательно, в этих случаях нужно, чтобы масса поковки вместе с нако-
наковальней (или масса заклепки вместе с поддержкой) была много больше массы мо-
молота (рис. 380, б).
§ 157*. УДАР ПО ВРАЩАЮЩЕМУСЯ ТЕЛУ. ЦЕНТР УДАРА
Рассмотрим тело, имеющее ось вращения z (рис. 381). Пусть в
некоторый момент времени к телу будет приложен ударный импульс
S. Тогда по уравнению A55')
так как моменты относительно оси z импульсивных реакций SA
и SBl возникающих в подшипниках, будут равны нулю.
Условимся обозначать угловую скорость тела в начале удара
через со, а в конце удара — через Q. Тогда /(ог==/гш, K1Z=JZQ,
и окончательно получим:
mz(S)
Jz (Q—со) =
или fi =
A67)
Формула A67) определяет изменение угловой скорости тела
при ударе. Из нее следует, что угловая скорость тела за время удара
изменяется на величину, равную отношению момента ударного
импульса к моменту инерции тела относительно оси вращения.
Задача 187. Колесо 1, вращающееся с угловой скоростью со-,, ударяет высту-
выступом D± о выступ ?>2 первоначально неподвижного колеса 2 (рис. 382). Радиусы ко-
колес и их моменты инерции относительно осей Ах и А2 соответственно равны rlt
405
тг, ju J2- Определить угловую скорость Q2 колеса 2 в конце удара, если коэффи-
коэффициент восстановления при ударе равен k.
Решение. При ударе на колеса действуют численно равные ударные им-
импульсы Sj и 52 (Sl—S,=S). Тогда, составив jpani'eiirie A67) для каждого из колес
и учтя, что ма=0, получим:
Л(Й1—»i)=— Srlt J2Q^=Sri.
Исключив из этих уравнений S, придем к равенству
/1r2(Q1-a>1)+./2rla2=0. (а)
Так как скорости точек Z), и D2 в начале и в конце удара равгы соответственно
vl—a>ir1, Ui=Й,г,, i>2=0, u2=Q2/-2, то формула A56'), определяющая коэффициент
восстановления при прямом ударе, даст
ft^—O2r2=— kwtrv (б)
Исключив из уравнений (а) и (б) Qlt найдем окончательно
Импульсивные реакции. Найдем, чему равны при ударе импульсив-
импульсивные реакции подпятника А и подшипника В. Проведем оси Ахуг так, чтобы центр
масс С тела лежал в плоскости Ауг (рис. 383, а). Изобразим искомые импульсивные
реакции их составляющими вдоль этих осей. П>сть АВ=~Ъ, а расстояние точки С
от оси Az равно а. Составим уравнения A54') в проекциях на все три оси, а уравне-
уравнения A55') в проекциях на оси Ах и Ау (уравнение в проекции на ось Az уже ис-
использовано при получении равенства 167). Поскольку тело за время удара не пере-
перемещается, векторы г>с и ис будут параллельны оси Ах; следовательно, Qnx=
. 2 =—Mvc=—Маш, Qix=—MaQ, Qy=
I i J ¦ 4 z =Qz—0. Используя одновременно при
^ J .-™~ составлении уравнений A55') формулы
C4) из § 115, получим
ч
#^
1
—(»)= Sj3Xb -r-mv{S).
Рис.
Уравнения A68) и служат для опреде-
определения неизвестных импульсивных реак-
реакций SAx, SAy, SAz, Srx, SBy. Входя-
Входящая сюда разность Si—со находится
из равенства A67).
Центр удара. Появление при
ударе импульсивных реакций нежела-
нежелательно, так как может привести к ускорению износа или даже к разрушению ча-
частей конструкции (подшипников, вала и т. п.). Найдем, можно ли произвести удар
по телу, закрепленному на оси, так, чтобы импульсивные реакции в подшипниках
А и В вообще не возникли. Для этого найдем, при каких условиях можно удовлет-
удовлетворить уравнениям A68), положив в них S^=Ss=0. Если SA=Sg=0, то 2-е и
3-е из уравнений A68) примут вид: Sy—0, S2=0. Чтобы удовлетворить этим урав-
уравнениям, надо направить импульс S перпендикулярно плоскости Ауг, т. е. (по при-
принятому условию) плоскости, проходящей через ось вращения и центр масс тела.
Допустим, что импульс S имеет такое направление (рис. 383, б). Поскольку при
Sa=Sr=-0 вид системы A68) не зависит от выбора на оси Az начала координат,
проведем для упрощения дальнейших расчетов плоскость Оху так, чтобы импульс
S лежал в этой плоскости. Тогда тх (S)=- my (S)=0 и последние два уравнения сис-
системы A68) при Sa=0 дадут JXz=Jyz=O- Это означает (см. § 104), что плоскость
406
Оху, п которой лежит импульс S, должна проходить через такую точку О, для ко-
которой ось г является главной осью инерции тела; в частности, как показано в § 104,
условия Jxz=Jy!—Q будут выполняться, если плоскость Оху является для тела
плоскостью симметрии. _ _
Обратимся, наконец, к 1-му из уравнении A68). Поскольку S,i=S/}=0 и
Sx=—S (см. рис 383, б), оно принимает_вид Ma(Q—a)=S. Одновременно урав-
уравнение A67), так как в нашем случае mz(S)=Sh, дает Jz(Q—<o)=Sh. Исключая из
двух полученных равенств разность Q—ш, находим
h = Jzl(Ma). A69)
Формула A69) определяет, па каком расстоянии h от оси г должен быть при-
приложен ударгый импульс.
Итак, для того чтобы при ударе по телу, закрепленному на оси г, в точках
закрепления этой оси не возникло импульсивных реакций, ьадо:
1) чтебы ударный импульс был расположен в плоскости Оху, перпендикулярной
сси г и проходящей через такую точку О тела, для которой ось г является главной
осью инерции (в частности, плоскость Огу может быть плоскостью симметрии чела);
2) чтобы удар был направлен перпендикулярно плоскости, проходящей через
ось вращения г и центр месс С тела;
3) чтобы ударный импульс был приложен на расстоянии h—Jz'Ma от оси (поту
стороьу от сси, где находится ци тр масс).
Течка К, через которую при этом будет проходить ударный импульс, не вызы-
вызывающий ударных реакций в точках закрепления геи, называется центром удара.
3avcTiw, что согласно формуле A69) центр удара совпадает с центром качаний
физического маг.ткика. Следсватьлью, к?к было показано в § 129, /г>а, т. е. рас-
расстояние ст сси до центра удара больше, чем до центра масс. Если есь вргщшгя
проходит через цеыр масс тела, то а—0. и \;ы получаем h=oo С этом случае цо.т-
ра удара на конечном расстоянии не существует, и любой удар по телу будет пере-
передаваться ьа ссь.
Приложения полученных результатов иллюстрируются следующими приме-
примерами.
1. При конструировании вращающегося курка (см задачу 189) или маятнико-
маятникового копра (прибор в виде маятника для испытания материалов на удар) и т. п. надо
ось вращения располагать так, чтобы точка тела, производящая }дар, была по от-
отношению к этой сси центром }дара.
Рис. 384
Рис. 385
2. При работе ручным молотом его надо брать за рукоятку в таком месте, чтобы
точка, которой производится удар, была относительно руки центром удара. В про-
противном случае руку будет «обжигать».
3. При ударе палкой, чтобы не «обжечь» руку (рис. 384), надо ударять тем ме-
местом, которое по отношению к руке будет центром удара. Если палку считать од-
407
нородным стержнем длиной /, а ось вращения совпадающей с его концом, то тогда
а=//2, Jz=MPl3 и h=Jz/Ma=2ll3.
Следовательно, (рис. 384) удар надо производить тем местом стержня, кото-
которое находится на расстоянии 2//3 от руки или /''3 от другого конца стержня.
Задача 188. Мишень представляет собой тонкую однородную пластину, кото-
которая может вращаться вокруг оси Аг (рис. 385). Форма мишени — прямоугольный
треугольник ABD с катетами AB=llt AD=l2. Определить, где у мишени находит-
находится центр удара, если известно, что для пластины ABD осевой момент инерции
Js=Mll!6, а центробежный — Jyz-=K4lLlJ\2 (M —масса пластины, оси Ауг в
плоскости пластины).
Решение. Так как у треугольной пластины ABD центр тяжести С на-
находится на расстоянии а — /j/Зотоси Аг, то по формуле A69) расстояние центра уда-
удара К от той же оси будет h = Jzl(Ma) = 3Jz'(Mli) = l1l2.
Остается определить, на каком расстоянии Ь находится центр удара от оси
Ау. Для этого надо найти на оси Аг точку О, для которой эта ось будет главной.
Если через точку О провести оси Ох'у'г', параллельные осям Ахуг, то точка О
будет главной, когда Jx-zt=%tnkxk 2/г=0 н У^»г.=2/Пй^ г^=0.
Первое условие, очевидно, всегда выполняется, так как для пластины все
Л?=0. Чтобы найти, когда выполняется второе условие, воспользуемся тем, что
нам известно значение Jyz—^mkykZft и
Sb)BрЬ JM
что ук=уь, а гУ^г^—Ь. Тогда JyZ'=
b где yc=a—lli'&. Следовательно,
yzkyk
k—b)=JyZ—Bтд,</рЬ= Jy
/i/'2'=0, если b = Jyzl(Ma) = l2l<l.
Итак, центр удара находится в точке К с координатами у—ft=f1/2, z=6=/3/'4.
Задача 189. Вращающийся курок AD в момент начала удара по ударнику В
(рис. 386) имеет угловую скорость <в. Определить скорость ударника в конце удара
и импульсивное давление на ось А. Массы М и т
курка и ударника, момент инерции J A курка отно-
относительно оси А, коэффициент восстановления k и
расстояния а и b известны (точка С — центр масс
курка).
Решение. Обозначим ударные импульсы,
действующие на курок и ударник при ударе через
Sx и S2. Тогда для курка [по уравнению A67)] и для
ударника [по уравнению A54')], учитывая, что S]=
=S.2=S, a f#=0, получим:
JA{Q~a,)=~Sb, muB = S. (a)
У момента Sb взят знак минус, так как момент на-
направлен противоположно направлению вращения
курка. Кроме того, поскольку для точки D курка
vD=u>b, a Mo=Qb (уд—скорость в начале удара,
U0 — в конце), то формула A58'), определяющая
коэффициент восстановления при прямом ударе двух тел, дает:
UD~-UB=—k(vD — vB) или Qb—uB = ~hiib.
Подставляя сюда Q и S т уравнений (а), найдем скорость ударника в конце удара;
Для определения Бд — импульсивной реакции, действующей со стороны оси
на курок, составляем для курка уравнение A54) в проекциях на оси Ах и Ау. Учи-
Учитывая, что QOx = MvCx = M<?>a, Qlx — MuCx = MQa, найдем:
Ma(Q-a) = ~S + SAxt SAy = 0. (б)
Но из уравнений) (a)S = muB, Q—<»= — mbuB/JA. Подставляя эти величины
в равенство (б) и заменяя из его значением, получим окончательно
При 6= Jjj (Ма) точка D является центром удара и S^=0.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
409
410
Теоремы динамики общие 201. 274
Течение жидкости установившееся 284
Точка материальная 6, 181
— переменной массы 287
ОГЛАВЛЕНИЕ
Предисловие к" десятому изданию 3
Введение 5
РАЗДЕЛ ПЕРВЫЙ
СТАТИКА ТВЕРДОГО ТЕЛА
Глава I. Основные понятия и исходные положения статики 9
§ 1. Абсолютно твердое тело; сила. Задачи статики 9
§ 2. Исходные положения статики 11
§3. Связи и их реакции 15
Глава'Н. Сложение сил. Система сходящихся сил 18
§4. Геометрический способ сложения сил. Равнодействующая сходя-
сходящихся сил; разложение сил 18
§ 5. Проекция силы на ось и на плоскость. Аналитический способ за-
задания и сложения сил 20
§ 6. Равновесие системы сходящихся сил 23
§ 7. Решение задач статики , 25
Глава III. Момент силы относительно центра. Пара сил 31
§ 8. Момент силы относительно центра (или точки) 31
§ 9. Пара сил. Момент пары 33
§ 10*. Теоремы об эквивалентности и о сложении пар 35
Глава IV. Приведение системы сил к центру. Условия равновесия ... 37
§11. Теорема о параллельном переносе силы 37
§ 12. Приведение системы сил к данному центру 38
§ 13. Условия равновесия системы сил. Теорема о моменте равнодейст-
равнодействующей 40
Глава V. Плоская система сил 41
§ 14. Алгебраические моменты силы и пары 41
§ 15. Приведение плоской системы сил к простейшему виду .... 44
§ 16. Равновесие плоской системы сил. Случай параллельных сил . 46
§ 17. Решение задач 48
§ 18. Равновесие систем тел 53
§ 19*. Сгатически определимые и статически неопределимые системы
тел (конструкции) 56
§20*. Определение внутренних усилий 57
§21*. Распределенные силы 58
§22*. Расчет плоских ферм 61
Глава VI. Трение 64
§ 23. Законы трения скольжения 64
§24. Реакции шероховатых связей. Угол трения 66
§ 25. Равновесие при наличии трения 66
§26*. Трение нити о цилиндрическую поверхность 69
§27*. Трение качения 71
412
Глава VII. Пространственная система сил У2
§28. Момент силы относительно оси. Вычисление главного вектота
и главного момента системы сил ' 72
§ 29*. Приведение пространственной системы сил к простейшему виду 77
§30. Равновесие произвольной нро-мрапстзеппой системы сил. Сли-
Сличай параллельных сил 79
Глава VIII. Центр тяжести . gg
§3!. Центр параллельных сил 86
§32. Силовое поле. Центр тяжести твердого тела si
§33. Координаты центров тяжссш однородных тел 89
§34. Способы определения коорльпат центров тяжести тел 90
§ 35. Центры тяжести некоторых однородных тел 93
РАЗДЕЛ ВТОРОЙ
КИНЕМАТИКА ТОЧКИ И ТВЕРДОГО ТЕЛА
Глава IX. Кинематика точки 95
§ 3G. Введение в кинематику 95
§ 37. Способы задания движения точки 96
§38. Вектор скорости точки 99
§ ?9. Вектор ускорения точки 100
§ 40. Определение скорости и ускорения точки при координатном
способе задания движения 102
§ 41. Решение задач кинематики точки 103
§42. Оси естестзенного трехгранника. Числовое 3!.ачыше скорости 107
§43. Касательное и нормальное ускорения точки 103
§44. Некоторые частные случаи движения точки 110
§45. Графики движения, скорости и ускорения точки 112
§ 43. Решение задач 114
§47". Скорость и ускорение точки в полярных координатах .... 116
Глава X. Поступательное и вращательное движения твердого тела . . 117
§43. Поступательное движение 117
§ 49. Вращательное дзижение твердого тела вокруг оси. Угловая ско-
скорость и угловое ускорение 119
§50. Равномерное и равнопеременное вращения 121
§51. Скорости и ускорения точек вращающегося тела 122
Глава XI. Плоскопараллельное движение твердого тела 127
§52. Уравнения плоскопараллелыюго движения (движения плос-
плоской фигурь1). Разложение движения на поступательное н вра-
вращательное 127
§53"'. Определение траекторий точек плоской фигуры 129
§54. Определение скоростей точек плоской фигуры 130
§55. Теорема о'проекциях скоростей двух точек тела 131
§ 56. ¦ Определение скоростей точек плоской фигуры с помощью мгно-
мгновенного центра скоростей. Понятие о центроидах 132
§57. Решение задач 136
§58*. Определение ускорений точек плоской фигуры 140
§59*. Мгновенный центр ускорений 145
Глава XII*. Движение твердого тела вокруг неподвижной точки и дви-
движение свободного твердого тела 147
§60. Движение твердого тела, имеющего одну неподвижную точку . 147
§61. Кинематические уравнения Эйлера 149
§ 62. Скорости и ускорения точек тела 150
§ 63. Общий случай движения свободного твердого тела 153
Глава XIII. Сложное движение точки 155
§64. Относительное, переносное и абсолютное движения 155
§ 65. Теорема о сложении скоростей 156
413
§ 66. Теорема о сложении ускорений (теорема Кориолиса) 160
§67. Решение задач 164
Глава XIV*. Сложное движение твердого тела 169
§68. Сложение поступательных движений 169
§69. Сложение вращении вокруг двух параллельных oceii 169
§70. Цилиндрические зубчатые передачи 172
§71. Сложение вращений вокруг пересекающихся осей 174
§ 72, Сложение поступательною и вращательного движений. Винто-
Винтовое движение . , 176
РАЗДЕЛ ТРЕТИЙ
ДИНАМИКА. ТОЧКИ
Глава XV. Введение в динамику. Законы динамики 180
§ 73. Основные понятия и определения 180
§74. Законы динамики. Задачи динамики материальной точки . . . 181
§ 75. Системы единиц 183
§ 76. Основные виды сил 184
Глава XVI. Дифференциальные уравнения двиления тонки. Решение
задач динамики точки 186
§77. Дифференциальные уравнения движения материальной точки 186
§ 78. Решение первой задачи динамики (определение сил по заданно-
заданному движению) 187
§ 79. Решение основной задачи динамики при прямолинейном движе-
движении точки 189
§80. Примеры решения задач 191
§81*. Падение тела в сопротивляющейся среде (в воздухе) 196
§ 82. Решение основной задачи динамики при криволинейном движе-
движении точки 197
Глава XVII. Общие теоремы динамики точки 201
§83. Количество движения точки. Импульс силы 201
§ 84. Теорема об изменении количества движения точки 202
§ 85. Теорема об изменении момента количества движения точки (тео-
(теорема моментов) 204
§86*. Движение под действием центральной силы. Закон площадей . 206
§ 87. Работа силы. Мощность 208
§88. Примеры вычисления работы 210
§ 89. Теорема об изменении кинетической энергии точки 213
Глава Х\'Ш. Несвободное и относительное движения точки 219
§90. Несвободное движение точки 219
§91. Относительное движение точки 223
§ 92. Влияние вращения Земли на равновесие и движение тел . . . 227
§ 93*. Отклонение падающей точки от вертикали вследствие вращения
Земли 230
Глава XIX. Прямолинейные колебания точки 232
§ 94. Свободные колебания без учета сил сопротивления ...... 232
§ 95. Свободные колебания при вязком сопротивлении (затухающие
колебания) 238
§96. Вынужденные колебания. Резонанс , 241
Глава XX*, Движение тела в поле земного тяготения 250
§97. Движение брошенного тела в поле тяготения Земли 250
§ 98. Искусственные спутники Земли. Эллиптические траектории . 254
§99. Понятие о невесомости. Местные системы отсчета 257
414
РАЗДЕЛ ЧЕТВЕРТЫЙ
ДИНАМИКА СИСТЕМЫ И ТВЕРДОГО ТЕЛА
Глава XXI. Введение в динамику системы. Л1оменты инерции .... 263
§ 100. Механическая система. Силы внешние и внутренние .... 263
§ 101. Масса системы. Центр масс 264
§102. Момент инерции тела относительно оси. Радиус :-.чсрщч1 . . 265
§ 103. Моменты инерции тела относительно параллельных осек. Тео-
Теорема Гюйгенса 268
§104*. Центробежные моменты инерции. Понятия о глазных осях
инерции тела 269
§ 105*. Момент инерции тела относительно произвольной оси .... 271
Глава XXII. Теорема о движеггии центра масс системы 273
§ 106. Дифференциальные уравнения движения системы 273
§ 107. Теорема о движении центра масс 274
§ 108. Закон сохранения движения центра масс 276
§ 109. Решение задач 277
Глава XXIII. Теорема об изменении количества движения системы . . 280
§110. Количество движения системы 280
§ 111. Теорема об изменении количества движения 281
§ 112. Закон сохранения количества движения 282
§ 113*. Приложение теоремы к движению жидкости (газа) 284
§114*. Тело переменной массы. Движение ракеты 287
Глава XXIV. Теорема об изменении момента количеств движения сис-
системы 290
§ 115. Главный момент количеств движения системы 290
§ 116. Теорема об изменении главного момента количеств движения
системы (теорема моментов) 292
§ 117. Закон сохранения главного момента количеств движения . . 294
§ 118. Решение задач 295
§ 119*. Приложение теоремы моментов к движению жидкости (газа) 298
§ 120. Условия равновесия механической системы 300
Глава XXV. Теорема об изменении кинетической энергии системы . . ЗЭ1
§ 121. Кинетическая энергия системы 301
§122. Некоторые случаи вычисления работы 305
§ 123. Теорема об изменении кинетической энергии системы .... 307
§ 124. Решение задач 310
§125*. Смешанные задачи 314
§ 126. Потенциальное силовое поле и силовая функция 317
§ 127, Потенциальная энергия. Закон сохранения механической
энергии 320
Глава XXVI. Приложение общих теорем к динамике твердого тела . . 323
§ 128. Вращательное движение твердого тела вокруг неподвижной
оси 323
§ 129. Физический маятник. Экспериментальное определение момен-
моментов инерции 326
§130. Плоскопараллельное движение твердого тела 323
§ 131*. Элементарная теория гироскопа 334
§ 132*. Движение твердого тела вокруг неподвижной точки и движе-
движение свободного твердого тела 340
Глава XXVII. Принцип Даламбера 344
§ 133. Принцип Даламбера для точки и механической системы . . 344
§ 134. Главный вектор и главный момент сил инерции 346
§ 135. Решение задач 348
§ 136*. Динамические реакции, действующие на ось вращающегося
тела. Уравновешивание вращающихся тел ......... 352
415
Глава XXVIII. Принцип возможных перемещений и общее уравнение
динамики " 357
§ 137. Классификация связей 357
§138. Возможные перемещения системы. Число степеней свобод!: . . 358
§ 139. Принцип возможных перемещений 360
§ 140. Решение задач 362
§ 141. Общее уравнение динамики 367
Глава XXIX. Условия равновесия и уравнения движения системы в
обобщенных координатах 369
§ 142. Обобщенные координаты и обобщенные скорости 369
§ 143. Обобщенные силы 371
§ 144. Условия равновесия системы в обобщенных координата* . . 375
§ 145. Уравнения Лагранжа 376
§ 146. Решение задач 379
Глава XXX*. Малые колебания системы около положения устойчивого
равновесия 387
§ 147. Понятие об устойчивости равновесия 387
§ 148. 7^алые свободные колебания системы с одной степенью свободы 389
§ 149. Малые затухающие и вынужденные колебания системы с одной
степенью свободы 392
§ 150. Малые свободные колебания системы с двумя степенями свободы 394
Глава XXXI. Элементарная теория удара .............. 396
§ 151. Основное уравнение теории удара 396
§ 152. Общие теоремы теории удара 397
§ 153. Коэффициент восстановления при ударе 399
§ 154. Удар тела о неподвижную преграду 400
§ 155. Прямой центральный удар двух тел (удар шаров) 401
§ 156. Потеря кинетической энергии при неупругом ударе двух тел.
Теорема Карно 403
§ 157*. Удар по вращающемуся телу. Центр удара 405
Предметный указатель 409
Учебное издание
Семен Михайлович Тарг
КРАТКИЙ КУРС
ТЕОРЕТИЧЕСКОЙ
МЕХАНИКИ
Зав. редакцией К. И. Аношина. Редактор М. Т. Самсонова. Младший редактор
Н. М. Иванова. Художник В. Г. Пасичник. Художественный редактор Т. А. Ду-
расова. Технический редактор А. К- Нестерова. Корректор Р. К- Косинова
ИБ № 5855
Изд. № ОТ-585. Сдано в набор 27.01.86. Подп. в печать 22.07.86.
Формат 60Х901/],,. Бум. кн.-журн. К 2. Гарнитура литературная.
Печать высокая. Объем 26 усл. печ. л. 26 усл. кр.-отт. 27,60 уч.-изд. л.
Тираж 140 000 экз. Заказ № 2173. Цена 1 р. 10 к.
Издательство «Высшая школа», 101430, Москва, ГСП-4, Неглияная ул., д. С9 14.
Ордена Октябрьской Революции и ордена Трудового Красного Знамени
МПО «Первая Образцовая типография» имени А. А. Жданова
Союзполиграфпрома при Государственном комитете СССР по делам издательств,
полиграфии и книжной торговли. 113054, Москва, Валовая, 28