/

















































































































































































































































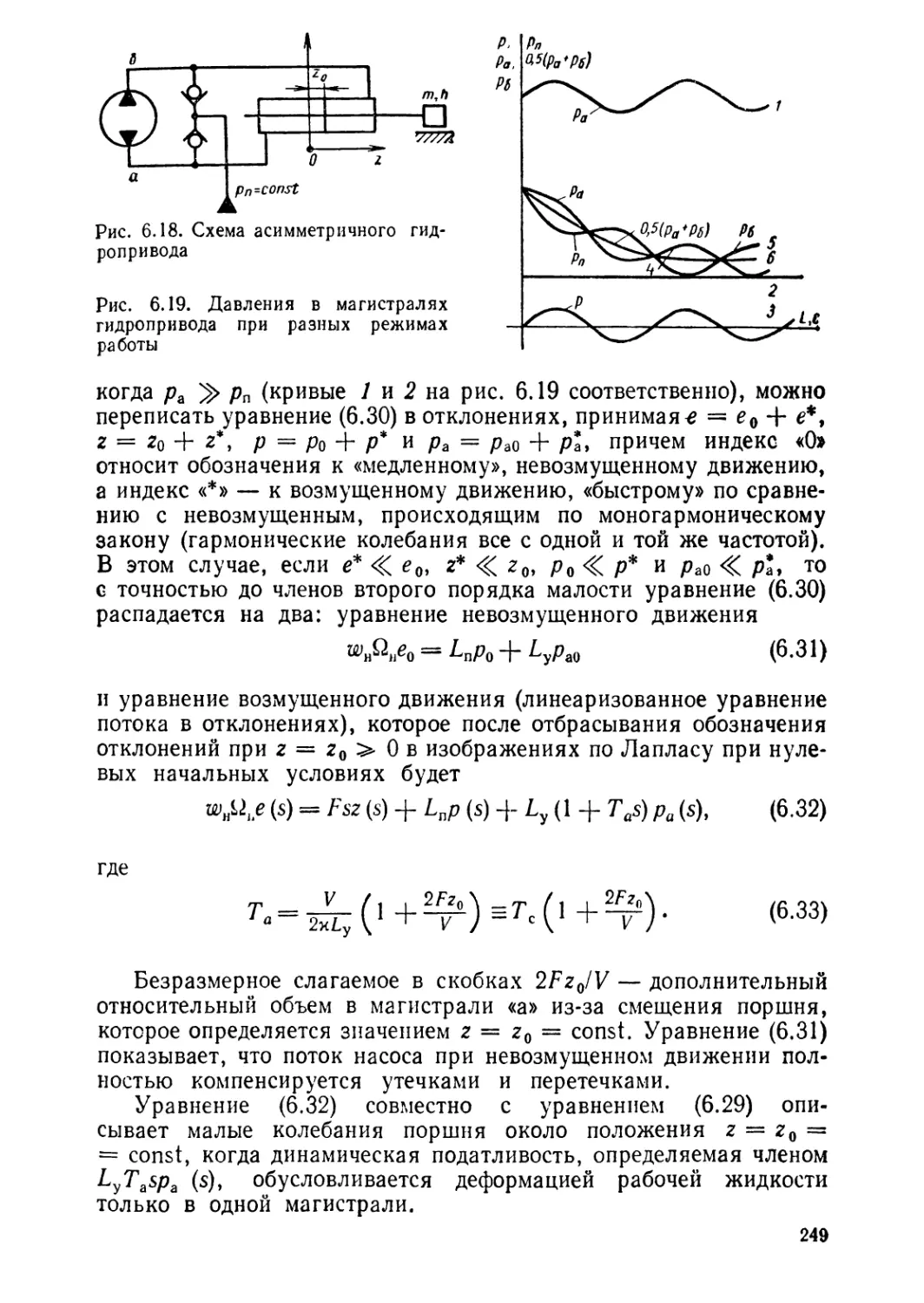
















































































































































































































































Author: Прокофьев В.Н.
Tags: общее машиностроение технология машиностроения машиностроение гидропривод
Year: 1978




Text
МАШИНОС
МАШИНО-
СТРОИТЕЛЬНЫЙ
ГИДРОПРИВОД
Под ред. засл. деят. науки
и техники РСФСР
д-ра техн, наук
проф. В. Н. Прокофьева
МОСКВА
«МАШИНОСТРОЕНИЕ»
1978
6П2.3
М38
УДК 621—82
Авторы: Л. А. Кондаков, Г. А. Никитин,
В. Н. Прокофьев, В. Я. Скрицкий, В. Л. Сосонкин
Рецензент д-р техн, наук проф. А. С. Гордеев
Машиностроительный гидропривод./ Л. А. Кондаков,
М38 Г А. Никитин, В. Н. Прокофьев и др. Под ред. В. Н. Про-
кофьева. М., Машиностроение, 1978 — 495 с., ил.
Авт. указ, на обороте тит. л,
В пер. 2 р.
Книга посвящена современному машиностроительному гидроприводу меж-
отраслевого применения. Рассмотрены конструкции, рабочий процесс, характе-
ристики, тенденции развития и вопросы расчета, возникающие в процессе проек-
тирования машин, оснащенных гидроприводом. Даны рекомендации по управ-
ляемости гидроприводов. В отдельных главах изложен материал по уплотнениям
и свойствам рабочих жидкостей.
Книга предназначена для инженерно-технических работников, занимаю-
щихся созданием и эксплуатацией гидрофицированных машин. Может быть
полезна студентам и аспирантам вузов.
30314-034
М 038(01 )-78
034-78
6П2.3
© Издательство «Машиностроение», 1978 г
от редактора
В отечественной промышленности преимущественное развитие имеет отраслевой
гидропривод, получивший наибольшее распространение в станкостроении,
строительно-дорожном, а также тракторном и сельскохозяйственном машино-
строении. Обеспечение смежных отраслей предприятиями, изготовляющими
гидравлическое оборудование, вызвало необходимость в гидроприводах межотра-
слевого применения, в большей или меньшей степени универсальных. Такими
гидроприводами стали приводы, работающие по объемному принципу, и поэтому
предлагаемая работа посвящена устройству, анализу рабочего процесса и рас-
четам, связанным с применением гидроприводов именно этого типа.
Рабочие жидкости и уплотнения, свойства которых взаимосвязаны не только
друг с другом, но и с особенностями конструкций и условиями эксплуатации
гидроприводов, относятся к наиболее ответственным элементам гидрофициро-
ванных систем, обусловливая их надежность, ресурс и экономическую эффектив-
ность. Это в особой степени имеет отношение к гидроприводу, работающему на
высоком давлении, тенденция к переходу на которое имеется во многих отраслях
машиностроения. Этой проблеме в настоящей работе уделено существенное вни-
мание. Помимо вопросов расчета, возникающих при проектировании, частично
рассмотрены и некоторые вопросы эксплуатации, в частности, загрязнения рабо-
чих жидкостей.
Ввиду существенного расширения (например, в сельскохозяйственном
и строительно-дорожном машиностроении) применения гидропривода, работа-
ющего в переходных процессах и управляемого как автоматически, так и вруч-
ную (полуавтоматические гидроприводы), более подробно рассмотрены в отдель-
ных главах механизмы управления и управляемость машин.
В автономных системах, к которым чаще всего относятся мобильные машины,
обычно с ограниченной мощностью источника энергии, несколько гидроприводов
могут обслуживаться от одного источника питания. В этом случае через него
возникает нежелательное взаимовлияние гидроприводов. Автоматизация про-
изводственных процессов расширяет область применения гидроприводов с дис-
кретным регулированием скорости. Этим сравнительно недавно решенным зада-
чам также посвящены отдельные главы, причем изложение проблем взаимо-
влияния приводов через источник питания, а также динамика гидроприводов
высокого давления основываются на приемах, разработанных в Калужском
филиале МВТУ им. Н. Э. Баумана школой д-ра техн, паук Ю. Е. Захарова
при участии редактора.
Еще недостаточное внимание уделяется вопросам влияния переменности
приведенной инерционной нагрузки в машинах с рычажной связью между гидро-
цилиндром и объектом управления, особенно распространенной в строительно-
дорожных, сельскохозяйственных и металлургических машинах. Поскольку
в переходных процессах указанное влияние наиболее существенно, его анализу
посвящена глава 9.
Глава 3 написана канд. техн, наук Л. А. Кондаковым, глава 4 — д-ром
техн, наук проф. Г. А. Никитиным, раздел 5.2 главы 5 — канд. техн, наук
В.^Я. Скрицким, глава 9 — д-ром техн, наук проф. В. Л. Сосонкиным, осталь-
ной материал — редактором.
В. Н. Прокофьев
ВВЕДЕНИЕ
Приводом называют устройство, обеспечивающее реализацию
и регулирование, в том числе дистанционное, автоматическое
и полуавтоматическое (т. е. с человеком-оператором), движений,
положений или усилий на исполнительных органах машин.
Если в качестве рабочего тела используется жидкость, то при-
вод называется гидравлическим. В большинстве случаев исполь-
зуется внешний источник энергии (следящие или регулируемые
системы). Основой гидропривода являются гидравлические меха-
низмы, т. е. механизмы, в которых в качестве хотя бы одного из
звеньев используется рабочая жидкость.
Здесь рассматриваются гидроприводы, работающие по объем-
ному принципу, т. е. приводы, в исполнительном устройстве
которых (гидромоторе, гидроцилиндре или поворотнике) рабочая
жидкость обеспечивает геометрические связи за счет своего объ-
ема. Поэтому рабочая жидкость должна рассматриваться в каче-
стве одного из основных элементов гидропривода объемного типа,
динамическая и статическая податливости которого обусловли-
вают его динамические свойства, зависящие также и от свойств
уплотняющих устройств, особенно при работе на высоких давле-
ниях. Гидродинамические передачи (турбопередачи), имеющие
главным образом отраслевые формы исполнения, здесь не рас-
сматриваются, поскольку основным объектом изложения взяты
гидроприводы межотраслевого применения или могущие быть
использованными в качестве межотраслевых.
Отраслевое построение отечественной промышленности при
росте объективной потребности, расширяющей функциональные
возможности и повышающей техническое совершенство машин,
привело к развитию прежде всего технических средств отрасле-
вого применения и только затем — к созданию в явно недостаточ-
ных объеме и номенклатуре гидрооборудования межотраслевого
применения.
В процессе развития отечественного гидрооборудования сфор-
мировались такие крупные традиционные его потребители-изго-
товители, как сельскохозяйственное и строительно-дорожное
машиностроение, а также станкостроение со своими сложившимися
конструктивными формами гидрооборудования. В несколько мень-
ших масштабах, но с большими потенциальными возможностями
развивается гидрооборудование горного машиностроения, осо-
бенно угольной промышленности.
Потенциально самым крупным потребителем гидросистем яв-
ляется сельскохозяйственное машинострое-
н и е, где наибольший выпуск при небольшой номенклатуре
изделий позволяет обслуживать гидрооборудованием смежные
отрасли машиностроения, претендуя на межотраслевое приме-
нение. Гидросистемы малой мощности (до 16 кВт) здесь пред-
назначены в основном для обслуживания навесного оборудова-
4
ния тракторов и гидросистемы средней мощности (50—60% мощ-
ности приводного двигателя) с гидромоторами — для обслужива-
ния активных рабочих органов уборочных машин, почвенных
фрез и т п.
Гидропривод в наибольшей мере удовлетворяет реализации
общих тенденций развития сельскохозяйственных машин: увели-
чению числа рабочих органов, взаимодействующих (независимо,
последовательно или одновременно в регулируемых режимах)
с разными потребителями мощности при значительном удалении
их от двигателя и разнообразной пространственной ориентации;
обеспечению перемещения рабочих органов относительно машины
и перемещения самой машины относительно трактора, с которым
она агрегатируется; автоматизации технологических процессов
с целью повышения производительности и улучшения условий
труда.
Предусматривается гидрофикация режущих аппаратов коси-
лок, жаток, комбайнов и других машин, использование гидропри-
вода к дискам разбрасывателей минеральных удобрений, к рабо-
чим органам погрузчиков, транспортерам и транспортирующим
устройствам, грохотам картофелеуборочных комбайнов и машин
для вибрационной уборки садовых культур.
Применение мотор-колес позволяет отказаться от традицион-
ных компоновок и структур мобильных сельскохозяйственных
машин, а также использовать безмоторные сельскохозяйственные
шасси с активными осями, образуя фронтальные сцепы нескольких
гидрофицированных шасси. Полная конструктивная независи-
мость машины и гидравлической трансмиссии создает неограни-
ченные возможности компоновок, допуская получение принци-
пиально новых свойств машин, существенно снижая их массу
и стоимость при увеличении производительности и эффективности.
В станкостроении гидропривод упрощает механизмы
станков за счет использования безредукторных приводов подач
и шпинделей, особенно при высоких требованиях к скоростям,
ускорениям и точности при больших нагрузках. Получают рас-
пространение различного типа гидростатические опоры; широко
гидрофицируются станки с числовым программным управлением
для контурной и контурно-позиционной обработки. Имеются
тенденции к форсированию давления с 2—6 до 7—16 МПа для
получения больших моментов при высоком быстродействии;
создания^смешанных систем дискретного управления, содержащих
в средней части электрические и пневматические элементы; по-
вышения надежности и точности за счет использования релейного
и широтно-импульсного управления.
Тенденция перехода на повышенное давление не относится
к гидросистемам шлифовальных станков, которые не допускают
вибраций и перебегов, работают на давлениях 2—3 МПа при
достаточно высоком КПД, обеспечивая при этом стабильность
температуры и, следовательно, характеристики.
5
Гидравлический привод — наиболее распространенный тип
привода промышленного робота. Следящий гидропривод широко
применяется и в системе подач многооперационных станков
повышенных точности и мощности; в новых моделях этих же
станков средства гидроавтоматики используются для обеспече-
ния смены инструмента, фиксации направляющих, разгрузки
несбалансированных масс (т. е. в качестве противовеса), авто-
матизированной смены заготовок, изделий, шпиндельных узлов,
для переключения скоростей и осуществления вспомогательных
операций. Вместе с тем приходится констатировать сокращение
применения гидравлических приводов подачи в станках с число-
вым программным управлением в пользу электрогидропривода.
Широкая номенклатура строительно-дорожных
машин делает особенно значимыми не только глубокую уни-
фикацию и агрегатирование средств гидроавтоматики, но и раз-
работку типовых гидравлических схем, имеющих важное зна-
чение, например, для экскаваторов, погрузчиков, скреперов,
бульдозеров, автогрейдеров, самоходных стреловых кранов, снего-
очистителей, мусоровозов, автолестниц, поливо-моечных и дру-
гих машин. Особенность гидравлических схем строительно-
дорожных машин заключается в существенной зависимости объема
гидросистемы от положения рабочих органов. Поэтому гидравли-
ческие схемы таких машин чаще всего открытого типа с насосами,
работающими на самовсасывании с относительно меньшей быстро-
ходностью и большей возможностью загрязнения рабочей жидко-
сти. Именно этим обстоятельством следует объяснить многочи-
сленные разработки по форсированию быстроходности гидравли-
ческих машин в этой отрасли и трудности, возникающие при
внедрении типовых гидравлических схем при разработке новых
образцов.
На относительно мощных мобильных строительно-дорожных
машинах и на автомобилях используются гидравлические руле-
вые механизмы (насос постоянной подачи и гидроусилитель дрос-
сельного управления либо система с дозирующим насосом);
эти механизмы оказываются в ряде случаев конструктивно слож-
ными из-за необходимости дистанционного размещения исполни-
тельного устройства, чем затрудняется реализация обратной
связи. Ее замена дозирующими гидромашинами привела к созда-
нию принципиально новых гидравлических рулевых механизмов.
При разработке новых унифицированных гидроусилителей
рулевых систем стремятся увеличить чувствительность и четкость
передачи реакции на управляемые колеса (реализация ощущения
водителем усилия на рулевом колесе — так называемый «эффект
присутствия»), модернизируют насос с целью существенного по-
вышения давления и увеличения подачи на единицу веса, а также
разрабатывают новые типы стабилизаторов давления питания,
обеспечивающих стабилизацию подачи также и в динамических
режимах при существенно нестабильных давлениях.
6
Использование гидропривода и гидроавтоматики в отечествен-
ных угледобывающих машинах позволило увели-
чить мощность этих машин в несколько раз без существенного
изменения их размеров и значительно повысить их надежность.
Благодаря применению эмульсии вместо минерального масла
гидропривод угледобывающих машин взрывобезопасен, однако
требует использования специально сконструированных основ-
ных элементов, которые перестают быть устройствами межотра-
слевого применения.
Благодаря широкому диапазону регулирования скорости в ме-
ханизмах перемещения угледобывающих машин гидропривод
повышает производительность, обладает большой приемистостью
из-за меньших на полтора—два порядка по сравнению с электро-
приводом моментов инерции вращающихся частей гидродвига-
телей.
Применяемый в горных машинах отечественный
гидропривод имеет меньшие диаметральные размеры по сравне-
нию с зарубежным (что особенно важно при работе в шахтах
и горных выработках), используется с приводными двигателями
мощностью более 100 кВт (мощные скребковые конвейеры, стру-
говые установки автоматизированных агрегатов, буровые станки,
дизелевозы, проходческие комбайны и щиты для проходки тун-
нелей) при непрерывной работе и подвержен действию значитель-
ных динамических нагрузок. Гидроцилиндры применяются для
подъема и опускания рабочих органов горных машин, их подачи
в забой, коррекции положения и т. п. Разработаны типовые
схемы гидросистем различных горных машин и проведена унифи-
кация основных элементов. Создаются гидросистемы на более
высокие давления для увеличения мощности машины при преж-
них размерах и ресурсе не менее 4000—6000 ч.
В угольной промышленности гидравлический привод исполь-
зуется в механизмах подачи угольных комбайнов, механизмах
хода проходческих машин, для управления исполнительными
органами добычных машин и приводе другого горношахтного
оборудования, а также в гидравлических крепях. Такие крепи
относятся к основному базовому оборудованию для комплексной
механизации процессов угледобычи. Механизированная крепь,
работающая на эмульсии, включает 400—1000 гидроцилиндров,
150—200 распределителей с плоскими золотниками, 150—500 пре-
дохранительных и столько же разгрузочных клапанов, 3000—
5000 м рукавов высокого давления, две-три насосные станции
с подачей 1,33 дм3/с на давление 20 МПа.
Прецизионное производство гидрооборудования горной про-
мышленности должно удовлетворять высоким требованиям по
надежности и нуждается в специализированном производстве,
обеспечивающем высокую точность изготовления с пооперацион-
ным контролем деталей, с повышенными требованиями к термо-
обработке и антикоррозионным покрытиям.
7
В гидроприводах и гидроавтоматике межотраслевого
применения наибольшее распространение получили восемь
групп технических средств гидроавтоматики, отдельные элементы
которых входят одновременно в несколько групп.
1. Источники питания, часто автономные, содержащие в себе
емкость, насос, приводной двигатель, контрольно-регулирующую
и распределительную аппаратуру, теплообменники, а также ряд
элементов последующих ipynn (фильтры, уплотнения и т. п.).
2. Усилительная или регулирующая часть гидропривода
или электрогидропривода в виде регулируемого насоса (чаще
аксиально-поршневого) или электрогидравлического усилителя,
который используется также и в качестве механизма управления
регулируемого насоса. Электрогидравлический усилитель обычно
имеет механизм управления, обеспечивающий положение или
заданный закон движения управляющего золотника, который
устанавливает выбранную зависимость между смещением золот-
ника, регулируемым расходом и перепадом давления. Такой
усилитель в гидроприводе дроссельного управления служит
распределителем мощности.
3. Исполнительная часть — гидромоторы, чаще всего постоян-
ного расхода, в том числе и низкооборотные, позволяющие непо-
средственно соединять исполнительную часть с объектом упра-
вления; гидроцилиндры очень обширной и еще недостаточно упо-
рядоченной номенклатуры; поворотники различных конструкций.
4. Контрольно-регулирующая, распределительная аппаратура
и различные элементы гидроавтоматики, в том числе используе-
мые при реализации обратной связи и составлении автоматиче-
ских систем с желаемыми динамическими свойствами.
5. Рабочие жидкости и фильтрующие устройства.
6. Трубопроводы и рукава.
7. Уплотнения.
8. Гидродинамические передачи (турбопередачи).
Общим для гидроприводов большинства отраслей машино-
строения, хотя и в меньшей степени для станкостроения, должен
рассматриваться переход на более высокие давления, что позво-
ляет уменьшить массу и габариты гидропривода, повысить его
быстродействие и другие динамические свойства, а также снизить
влияние газовоздушной составляющей рабочей жидкости. Однако
перевод гидросистем на более высокие давления вызывает увели-
чение температур рабочей жидкости, требует создания новых рабо-
чих жидкостей и уплотнений, внесения различных изменений
в конструктивные формы гидрооборудования. В гидроприводе
высокого давления возрастает роль динамических (в том числе
и акустических) эффектов, способы расчета которых нельзя больше
основывать на предположении об отсутствии влияния давления
на физические свойства рабочих жидкостей.
Естественная тенденция к повышению давления привела
к появлению нового поколения элементов гидросистем с более
8
широким использованием новой технологии и различных комплек-
тующих изделий повышенного качества. Создание элементов
гидрооборудоваиия, отвечающего современным требованиям, свя-
зано с разработкой новых методов расчета, учитывающих дина-
мические процессы и вызываемые ими деформации рабочей жидко-
сти, изменение ее вязкости и многие иные особенности других
элементов гидроавтоматики.
В процессе создания нового поколения элементов гидрообору-
дования продолжается их деление на образцы отраслевого и меж-
отраслевого применения. Так, насосные станции, реализуемые
в форме отдельных гидравлических агрегатов, не стали изделиями
межотраслевого применения. Зато во многих отраслях выбор
подходящих аксиально-поршневых гидромашин высокого давле-
ния завершился признанием бесшатунных конструкций с наклон-
ным диском, плоским торцовым распределением и гидростатиче-
скими опорами на головках плунжеров. На насосных станциях
вместо насосов постоянной подачи используются регулируемые
насосы того же типа, снабженные автоматами мощности (регули-
рование подачи по давлению), что уменьшает потери энергии и,
главное, понижает эксплуатационную температуру рабочей жидко-
сти, стабилизируя характеристики систем. Гидромоторы, в целях
унификации гидрооборудования, применяются тех же типов, что
и насосы.
Необходимость использования регулируемых насосов в на-
сосных станциях привела к появлению новых конструкций ши-
берных, теперь уже регулируемых насосов на номинальное
давление 14 МПа, допускающих перегрузку до 17,5 МПа.
В последние годы уменьшилось число типов выпускаемых
электрогидравлических усилителей, и сей-
час межотраслевое применение имеют в основном четыре типа
усилителей. Электромеханическим преобразователем в них слу-
жит электромагнит, управляющий системой сопло—заслонка или
струйной трубкой. В качестве второго каскада гидравлической
системы усиления используется управляющий золотник. По-
этому выходные характеристики электрогидравлических усили-
телей определяются характеристическими свойствами управля-
ющего золотника и давлением источника питания.
В гидроусилителях первого типа функции первого каскада
усиления выполняет система сопло—заслонка, а управляющий
золотник снабжен центрирующими пружинами. В конструкциях
второго типа вместо пружин используется упругая обратная
связь с управляющего золотника на якорь электромеханического
преобразователя. В усилителях третьего типа в качестве первого
каскада усиления используется струйная трубка (поворотная
или с дефлектором). Гидроусилитель четвертого типа отличается
от первого типа отсутствием центрирующих пружин на упра-
вляющем золотнике и используется в системах с широтно-импульс-
ной модуляцией с целью уменьшения влияния нелинейностей.
9
В рассматриваемых усилителях электрогидравлический пре-
образователь вместе с первым каскадом гидравлического усиле-
ния образуют механизм управления управляющим золотником,
давление питания которого может отличаться от давления пита-
ния механизма управления при установке ограничителя расхода
(дросселя) на соответствующей линии питания (при использова-
нии общего источника питания).
Механизмы управления реализуются в линейной части их
характеристики и аппроксимируются колебательным звеном,
параметры которого могут быть сделаны стабильными в широком
диапазоне изменения эксплуатационных условий.
Постоянные времени механизмов управления первого типа
при невысоких давлениях питания весьма малы, а коэффициенты
демпфирования существенно велики (могут достигать 10—12).
В этом случае динамические характеристики механизмов упра-
вления аппроксимируются апериодическими звеньями.
Механизмы управления второго типа могут быть выполнены
с меньшими значениями коэффициентов демпфирования при точ-
ной реализации (имеется в виду соответствие расчета исполнению)
упругой обратной связи с управляющего золотника на якорь
электромеханического преобразователя. Однако дефекты изго-
товления такого механизма могут привести к тому, что его ха-
рактеристика окажется такой же, как и у конструкций первого
типа, а дополнительные зазоры в.месте размещения стыкующихся
устройств упругой обратной связи с управляющим золотником
могут привести к тому, что в диапазоне малых управляющих
сигналов (в пределах размера зазора на сторону) характеристика
механизма управления окажется такой же, как и у конструкций
четвертого типа.
Создаются унифицированные электрогидравлические усили-
тели на рабочее давление до 20 МПа с условным проходом 25 мм.
Имеются уникальные образцы электрогидравлических усилите-
лей отраслевого применения (в кузнечно-прессовом оборудова-
нии) на расходы 46,7 дм3/с и давление 32 МПа.
При работе нескольких электрогидравлических усилителей
от общего источника питания (например, в роботах и манипуля-
торах) динамические расчеты ведутся с учетом взаимовлияния
гидроприводов через источник питания, и в настоящее время
совершенствуются алгоритмы таких расчетов. С целью устране-
ния указанного взаимовлияния гидроприводов на насосных стан-
циях устанавливают регуляторы-стабилизаторы давления, однако
они еще недостаточно эффективны. Дополнительная установка
аккумуляторов также не может компенсировать влияния рабо-
тающего гидропривода на давление источника питания, поскольку
аккумуляторы выполняют свои функции на сравнительно низких
частотах, не превышающих 9—11 Гц.
Ошибки гидропривода вследствие изменения давления источ-
ника питания могут быть значительными, и при симметричном
ю
гармоническом сигнале на управляющем золотнике давление
питания меняется с удвоенной частотой. Генерация таких колеба-
ний и отклики на нее на сопряженных (работающих от общего
источника питания) гидроприводах, особенно без главной обрат-
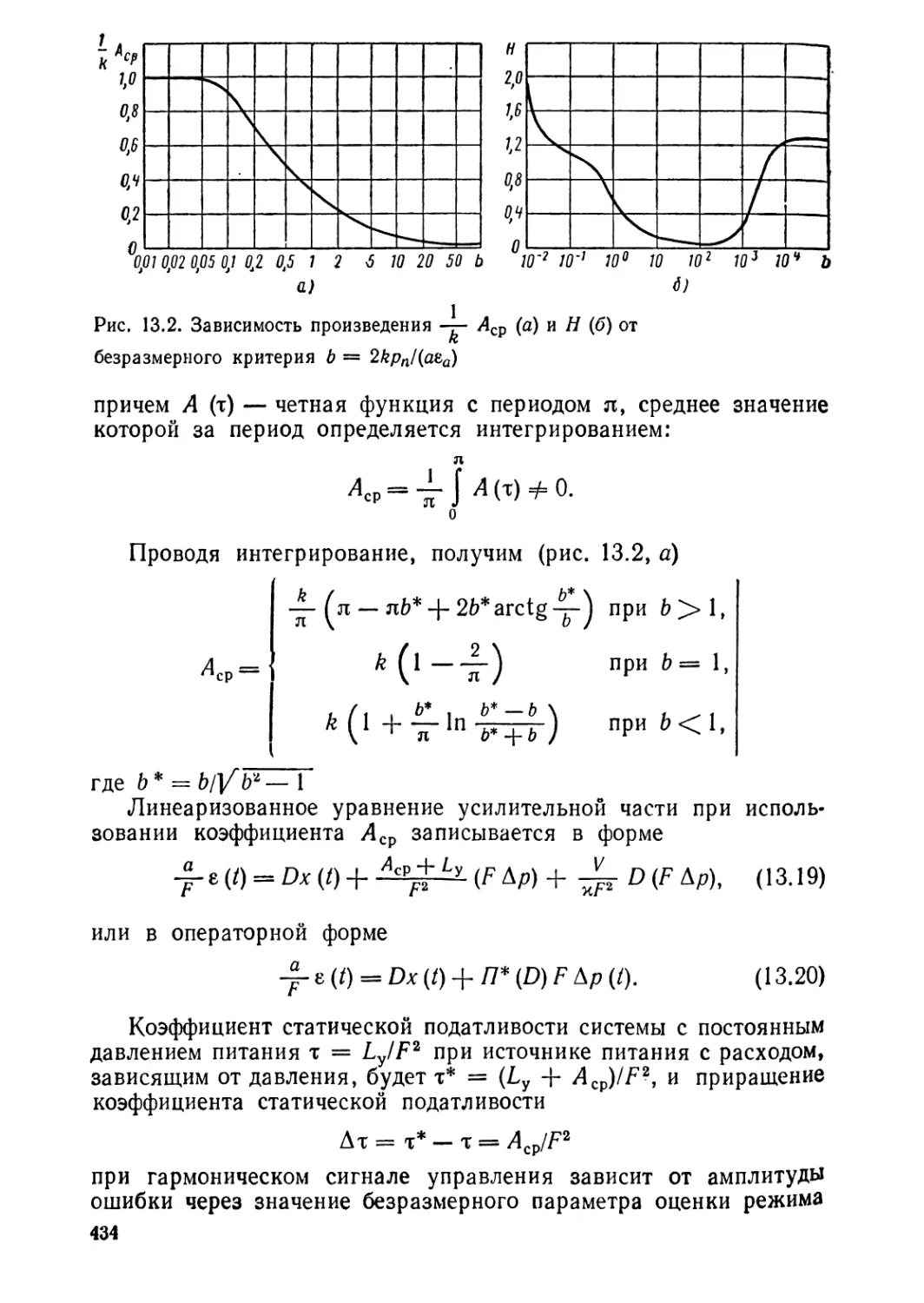
ной связи, оказываются весьма существенными.
Задача снижения влияния изменения давления источника
питания на работу гидропривода особенно актуальна в связи
с применением нескольких гидроприводов на роботах и манипу-
ляторах. Такое взаимовлияние в момент включения одного из
гидроприводов может привести к потере управления на осталь-
ных приводах, например, удерживающих груз. Поэтому задачи
анализа и синтеза систем с несколькими гидроприводами, выбор
параметров которых обеспечивает наименьшее взаимовлияние
через источник питания, привлекают большое внимание.
Исполнительные гидравлические двига-
тели различных типов, особенно гидроцилиндры, составляют
основную часть выпуска гидрооборудования (от 30 до 40% в раз-
ных странах). Гидроцилиндры чаще всего соединены с объектом
управления при помощи рычагов, что делает приведенную к ги-
дроцилиндру инерционную нагрузку переменной, зависящей от
положения поршня и меняющейся иногда более чем на порядок,
чем существенно затрудняются точные расчеты переходных про-
цессов. Алгоритмы таких расчетов разработаны еще недостаточно.
Например, задача о перемещении рычажной системы при помощи
второго аналогичного гидропривода пока еще не решалась, и
применительно к конкретизированной системе приходится обра-
щаться к ЦВМ. В частности задачи, связанные с расчетами пере-
ходных процессов гидроприводов экскаваторов, требуют соста-
вления алгоритмов подобного рода расчетов.
Конструкции поворотников существуют только в вариантах
отраслевого применения, а по многим параметрам лишь в виде
опытных образцов.
Образцы контрольно-регулирующей аппа-
ратуры еще не носят характера изделий межотраслевого
применения, так же как и конструкции распределителей на высо-
кое давление (до 40 МПа) блочного типа. Однако в станксстроении
имеются многочисленные конструкции распределителей и кон-
трольно-регулирующей аппаратуры на давление до 20 МПа.
В ряде отраслей применяются распределители секционного типа
й осуществляется перевод всей распределительной и контрольно-
регулирующей аппаратуры на международные присоединитель-
ные размеры.
uОдновременно с расширением номенклатуры распределитель-
ной и контрольно-регулирующей аппаратуры с условными про-
ходами до 80 мм создаются малогабаритные элементы с услов-
ными проходами 6 мм.
Применяемые в качестве рабочих жидкостей ми-
неральные масла при работе гидропривода быстро стареют,
а омываемые ими детали корродируют. При использовании масел
в гидроприводах высокого давления ресурс последних понижен
из-за недостаточных противозадирных свойств. В настоящее
время создается новый ассортимент рабочих жидкостей, и притом
взаимозаменяемых между отраслями. Их физические свойства
подробно изучаются, поскольку от них зависит характер мате-
матических моделей гидроприводов, особенно работающих па
высоких давлениях.
Практически еще не начаты исследования динамических
процессов гидроприводов, работающих в северных условиях.
Не найдено удовлетворительных форм гидроприводов для южных
районов страны, работающих в условиях, когда температура
рабочей жидкости намного выше допустимой. Конструктивные
формы гидроприводов межотраслевого применения, могущих
работать и в этих экстремальных условиях, также еще не созданы.
Наличие безупречно работающих фильтрующих устройств —
необходимое условие надежной работы нового поколения эле-
ментов гидроприводов и гидроавтохматики. Ведутся большие
работы по созданию фильтров с тонкостью фильтрации 5—25 мкм
и пропускной способностью до 200 дм3/мин, приемных и сливных
с сигнализацией о засорении, на давления 0,63 МПа с тонкостью
фильтрации 10—160 мкм, пропускной способностью до 250дм3/мин,
сетчатых с автоматической очисткой от загрязнения на давле-
ния до 6,3 МПа с тонкостью фильтрации 40—80 мкм. Создаются
мощные фильтрующие агрегаты для очистки рабочей жидкости
пропускной способностью 100—1000 дм3/мин.
Рабочие жидкости, уплотнения, температурные условия ра-
боты и динамические нагрузки в гидроприводах взаимосвязаны,
и неправильный учет свойств материалов уплотнений и рабочих
жидкостей может привести или к разбуханию уплотняющих
устройств, или к их растворению. Говоря о деформации рабочей
жидкости, необходимо учитывать деформации уплотняющих уст-
ройств и рукавов.
Непрерывно увеличивающиеся масштабы производства тех-
нических средств гидроприводов делают особенно актуальной
разработку новых проблем технологических про-
цессов. Технический уровень, а порою и возможность созда-
ния элементов с желаемыми характеристиками (например, гидро-
машин на высокие давления) в значительной мере определяются
способами изготовления, применяемыми материалами и каче-
ством комплектующих изделий. В числе актуальных технологи-
ческих задач можно назвать освоение высококачественных отли-
вок из серого и высококачественного чугуна с точно выполняе-
мыми каналами малых сечений, производство биметаллизирован-
ных деталей (особенно блоков цилиндров аксиально-плунжерных
гидромашин), прецизионных труб для гидроцилиндров, металло-
керамических деталей, высококачественных электромагнитов,
фильтрующих материалов и т. п. По мере роста выпуска техниче-
12
ских средств гидроприводов и гидроавтоматики будет совершен-
ствоваться учение о технологической чувствительности (влиянии
технологических отклонений на характеристические свойства
изделия).
Уже при существующих масштабах производства техниче-
ских средств становятся актуальными проблемы унификации,
агрегатирования, функциональной взаимозаменяемости и стандар-
тизации элементов. Решение этих проблем послужит прочной
базой создания нового поколения гидрооборудования межотра-
слевого применения. Разработка проблем квалиметрии техниче-
ских средств гидроавтоматики, должный уровень развития ква-
лиметрии позволит повышать качество изделий и управлять их
качеством.
Дальнейшее сокращение времени цикла исследова-
ния и разработки нового поколения технических средств
вызывает необходимость создания методов проведения ускорен-
ных испытаний, позволяющих оценивать надежность и ресурс
гидрооборудования, и притом не только с позиций прочности.
Без создания таких методов при малом времени цикла существо-
вания новых элементов оценка надежности и ресурса может
оказаться нереальной.
Основой роботов и манипуляторов, элементы
гидроприводов которых также следует относить к изделиям
межотраслевого применения, являются электрогидравлические
приводы дроссельного управления, реализуемые на миниатюри-
зованных элементах с широким использованием обратной связи
по давлению и применением импульсных датчиков. Создание се-
рийных электрогидравлических приводов такого типа на систем-
ных принципах, особенно имея в виду взаимосвязь нескольких
каналов управления от общего источника питания, должно осно-
вываться на использовании небольшого числа унифицированных
блоков. Такие работы пока еще находятся в состоянии первона-
чальных поисков.
Непосредственно к проблемам совершенствования роботов
и манипуляторов примыкает большая группа новых проблем,
относящихся к изучению полуавтоматических гидроприводов,
т. е. приводов, работающих совместно с человеком-оператором
и изучаемых в виде единой биотехнической системы. Массовое
применение полуавтоматических приводов, например в сельском
хозяйстве, строительно-дорожных машинах, безрельсовом транс-
порте, на промышленных предприятиях и т. п., делает обязатель-
ным совместное изучение в их взаимосвязи не только машины-
двигателя, машины-орудия и трансмиссии, но также и человека-
оператора, управляющего таким машинным устройством и со-
ставляющего вместе с ним единую биотехническую систему.
Оказывается, что динамические свойства, например числовые
значения доминирующих постоянных времени автоматических
и полуавтоматических приводов, должны быть разными. Также
13
должны отличаться доминирующие постоянные времени техни-
ческой части полуавтоматической системы при автономном раз-
мещении оператора и при его размещении непосредственно на
управляемом объекте. А от выбора доминирующих постоянных
времени технической части зачастую зависят производительность
машины, утомляемость оператора, качество выполняемых опера-
ций, а в отдельных случаях даже условия комфорта
В свете содержания этих многочисленных новых проблем
необходима дальнейшая дифференциация складывающейся их
совокупности и, по мере их изучения и развития, нахождение
наиболее подходящих форм изложения учения о гидроприводе
в виде самостоятельных инженерных дисциплин, непрерывно
развивающихся вместе с современным машиностроением.
Глава 1
УСТРОЙСТВО И ДЕЙСТВИЕ
ГИДРОПРИВОДА
Гидропривод составляется из источника энергии (источника
питания), усилительной, исполнительной и управляющей частей.
Здесь рассматриваются два типа гидроприводов в зависимости
от способа действия усилительной части: 1) машинного или объ-
емного регулирования, если насос переменной подачи, и 2) дрос-
сельного регулирования при использовании распределителя мощ-
ности (управляющий золотник, сопло-заслонка, струйная
трубка и т. п.).
Исполнительная часть гидропривода преобразует поток рабо-
чей жидкости в движение регулируемого органа, а управляющая
часть при полуавтоматическом (ручном) или автоматическом
(дистанционном электрическом) управлении обеспечивает задан-
ный закон движения управляющего органа исполнительного
устройства. Таким образом, гидропривод механизма управления
по существу должен рассматриваться в качестве предшествующего
каскада усиления, а исполнительное устройство — как оконча-
тельный каскад усиления следящей системы.
Поскольку в электрогидравлическом следящем приводе объ-
емного регулирования в качестве управляющей части обычно
используется гидропривод дроссельного управления, то рас-
смотрение его позволяет выяснить устройство и действие гидро-
приводов обоих типов.
Оба типа гидравлических устройств относятся к системам
непрерывного управления, если частота вращения гидромашин
достаточно велика, а наблюдаемый интервал времени соизмерим
с интервалом времени поворота гидромотора на угол, соответ-
ствующий одному циклу рабочего процесса этого гидромотора.
При использовании в качестве исполнительных двигателей
или поворотников возможна цикловая система движения, реа-
лизуемая при помощи концевых переключателей. Такие системы
используются, например, в сельскохозяйственном машинострое-
нии в качестве привода рабочих органов уборочных машин.
Гидроприводы дискретного регулирования рассмотрены в гл. 9.
1.1. ГИДРАВЛИЧЕСКИЕ СХЕМЫ ИСПОЛНИТЕЛЬНЫХ
УСТРОЙСТВ ОБЪЕМНОГО РЕГУЛИРОВАНИЯ
Гидравлическая схема исполнительного устройства объемного
регулирования (рис. 1.1) в качестве усилительной части вклю-
чает регулируемый насос 2, приводной двигатель (обычно асин-
хронный) и в качестве исполнительной части нерегулируемый
гидромотор 6, приводящий в движение объект управления 7
13
Рис. 1.1. Гидравлическая схема гидропривода объемного (гидрома-
шинного) регулирования
(обычно через один или несколько последовательно соединенных
редукторов).
Приводной двигатель 1 одновременно обслуживает при помощи
вспомогательного нерегулируемого насоса 14 систему компенса-
ции утечек, поддерживающую примерно постоянное давление
подпитки рп при помощи переливного клапана 15. Этот клапан
совместно с насосом 14 и баком 13 составляет миниатюрную на-
сосную станцию, характеристика которой5 рассмотрена в гл. 13.
Та же насосная станция обслуживает и механизм управления.
Система компенсации утечек при помощи обратных клапанов 3
соединена с обеими рабочими магистралями гидравлического
исполнительного устройства и не допускает в них падения давле-
ния ниже давления подпитки рп. Каждая рабочая магистраль
снабжена предохранительным клапаном 4, ограничивающим дав-
ление. Поскольку момент, развиваемый исполнительным двига-
телем, пропорционален давлению рабочей жидкости, указанные
клапаны называют ограничителями момента.
Приводной двигатель 1 обеспечивает определенную зависимость
между частотой вращения и развиваемым моментом, что связано
с ограниченной мощностью этого двигателя. Диапазон изменения
момента велик, поскольку определяется сопротивлением враще-
нию главного насоса 2, а гидромотор 6 допускает большую пере-
грузку (в таких системах установочная, т. е. номинальная, мощ-
ность основных гидромашин обычно оказывается много больше
мощности приводного двигателя), и поэтому регулируемый
насос снабжается ограничителем мощности в виде двух гидро-
цилиндров 9, нагруженных снизу пружинами и сверху — наи-
большим давлением, которое имеет место в одной из двух рабо-
чих магистралей. Это давление благодаря обратным клапанам 5
16
через магистраль 8 подводится к силовым гидроцилиндрам огра-
ничителя мощности, опускает их поршни и ограничивает поворот
регулировочного рычага 11 (подача насоса, пропорциональная
углу поворота рычага).
При пуске после любых остановок подача насоса 2 должна
быть нулевой. Для обеспечения этого служит нуль-установитель
в виде двух гидроцилиндров 10, пружины которых устанавливают
регулирующий рычаг на нулевую подачу, а давление подпитки рп,
подводимое через магистраль 12, сжимая эти пружины, полностью
освобождает регулирующий рычаг 11,
Отечественной промышленностью выпускаются несколько се-
рий гидромашин, из которых составляют исполнительные меха-
низмы с объемным управлением.
Гидравлическая схема отечественных реверсивных регули-
руемых насосов типа IIД с рабочим объемом > 102 см3/об
(образцы № 5—50) показана на рис. 1.2. Изменение подачи
таких насосов осуществляется при помощи электрогидравличе-
ских механизмов управления, работающих от электрического
управляющего сигнала. Кроме того, предусмотрено переключе-
ние на ручное управление при помощи управляющего валика.
Гидромотор 14 соединен по закрытой гидравлической схеме
с регулируемым насосом 1 при помощи главных магистралей 16
и 17 Давление подпитки создается вспомогательным шестерен-
ным насосом 13, приводимым от общего вала с основным насосом.
Такая насосная станция обслуживает систему компенсации уте-
чек и электрогидравлический механизм управления.
1?
Рис. 1.2. Гидравлическая схема исполнительных механизмов, составляемых из
регулируемых насосов ИД № 5—50
17
1
2
3
Система компенсации утечек представляет собой насосную
станцию (насос /3, переливной клапан 9, фильтр /0), соединен-
ную через обратные клапаны 15 с рабочими магистралями 16
и /7 и предохранительным клапаном 12 (открывается при повы-
шении давления до 20 МПа). Переливной клапан включается
в действие при повышении давления до 0,8—0,9 МПа. Предохра-
нительные клапаны главных магистралей (ограничители момента)
в насосах № 5—50 расположены в корпусе гидромотора 14.
При включении ручного управления кран 8 запирается,
а при открытом кране управление осуществляется при помощи
управляющего золотника 4 (гидроусилитель выходного каскада
механизма управления), к которому поступает рабочая жидкость
от вспомогательного насоса 13 через клапанную коробку, пере-
мещая поршни силовых гидроцилиндров 3, которые изменяют
угол наклона у люльки 2 с блоком цилиндров основного насоса,
меняя тем самым его подачу. При аварии из-за падения давления
в системе компенсации утечек клапан 5 перебрасывает золотник 7
в крайнее правое положение и силовые гидроцилиндры 11 под
воздействием пружин 6 ставят люльку насоса 18 в нейтральное
положение (нулевая подача основного насоса /), а следовательно,
разгружают приводной двигатель.
В таких же насосах № 0,5—2,5 предохранительные клапаны 1
располагают не в корпусе гидромотора 2, а в корпусе основного
насоса (рис. 1.3). Вспомогательный насос 9 постоянной подачи
выполняется не шестеренным, а шиберным. Система управления
18
основных насосов тех же номеров упрощена, поскольку в них не
предусмотрен нуль-установитель, и составляется из двух толка-
ющих силовых гидроцилиндров 4, поворачивающих люльку 3
с блоком цилиндров.
Насосная станция состоит из насоса 9, предохранительного
клапана S, фильтра 6 и переливного клапана 5. Присоединяется
она к главным магистралям 11 и 12 гидравлического исполни-
тельного устройства при помощи обратных клапанов 7. Гидро-
моторы 10 малых номеров имеют уменьшенные размеры, поскольку
в них нет встроенных предохранительных клапанов.
В насосах ручного управления серии ПР № 5—50 система
управления упрощена. Насосная станция системы компенсации
утечек состоит из шестеренного насоса, предохранительного кла-
пана, фильтра и переливного клапана, а предохранительные
клапаны установлены в корпусе гидромотора, как и у регулируе-
мых насосов серии ПД № 5—50. Обратные клапаны системы
компенсации утечек обеспечивают подпор 0,2 МПа, переливной
клапан настроен на давление подпитки рп = 1,1 МПа, а предохра-
нительный клапан включается при повышении давления до 2 МПа.
1.2. ГИДРОМАШИННЫЙ УСИЛИТЕЛЬ
Кинематическая схема регулируемого насоса ПД гидравличе-
ского исполнительного устройства объемного регулирования (ги-
дромашинного усилителя) приведена на рис. 1.4. Такие насосы
дистанционного управления обслуживаются специальными меха-
низмами управления.
Приводной вал 7 основного насоса серии ПД, соединяемый
с приводным двигателем через карданный механизм, вращает
блок цилиндров 16, На валу насоса закреплена шестерня 9,
которая через зубчатое колесо /, сидящее на выступающем конце
валика вспомогательного шестеренного насоса 2, приводит по-
следний в движение. На том же валике закреплена коническая
шестерня 19, которая совместно с шестерней 21 приводит в дей-
ствие эксцентриковый валик 23 вибратора, обеспечивающего
вибрационную линеаризацию управляющего золотника 4. Созда-
ваемые вибратором осциллирующие перемещения втулки 5 отно-
сительно золотника, регулируемые по амплитуде, при достаточ-
ной частоте повышают его чувствительность. Такой способ повы-
шения чувствительности управляющего золотника позволяет
применять золотники с положительным перекрытием, которые
повышают устойчивость движения, предохраняя систему от
возбуждения автоколебаний.
Осциллирующие движения создаются эксцентриковым вали-
ком 23, эксцентриситет которого можно менять при помощи
эксцентрикового механизма 22. Приводной валик вибратора имеет
на своем конце шейку с резьбой, ось которой эксцентрична отно-
сительно оси валика. На шейку навернута и закреплена глухая
гайка вибратора, имеющая цилиндрический палец. Ось пальца,
в свою очередь, эксцентрична относительно оси гайки, при этом
эксцентриситеты гайки и вибратора одинаковы. Поэтому при по-
вороте гайки относительно валика вибратора их эксцентриситеты
алгебраически складываются, изменяясь в сумме от нуля до
максимального значения и позволяя изменять амплитуду вибра-
ции, передаваемой на втулку 4 управляющего золотника гидро-
усилителя механизма управления при помощи тяги 3, насаженной
на палец гайки вибратора.
Управление углом наклона у «люльки 15 основного насоса
с целью изменения его подачи осуществляется поворотом валика
управления 8, который через рычаг 10 соединен одним концом
через тягу 6 с управляющим золотником 4 гидроусилителя,
обеспечивая тем самым рычажную обратную связь, а другим
концом через тягу 11 — с люлькой 15 основного регулируемого
насоса. Указанная система образует ’механический рычажный
дифференциал. Поэтому перемещение управляющего золотника
гидроусилителя всегда будет равно алгебраической сумме пере-
мещений (углов поворота) валика управления и люльки. А так как
расстояние точки крепления тяги 11 на люльке от ее оси поворота
равно расстоянию между осями крепления на рычаге 10 тяг 6
и 11 и при среднем положении рычага 10 ось валика управления
совпадает с осью крепления тяги 6 на рычаге, то угол поворота
люльки (при неподвижном управляющем золотнике 4) точно
соответствует углу поворота валика управления 8.
Таким образом, при повороте валика управления перемещается
управляющий золотник гидроусилителя, открывая доступ рабо-
чей жидкости от насосной станции в один из управляющих гидро-
цилиндров 20 (исполнительная часть механизма управления дрос-
сельного регулирования), связанных с неподвижным стальным
корпусом 18 и через шарнирно закрепленные штоки с люль-
20
кой 15. Люлька, поворачиваясь, через рычажный дифференциал
перемещает золотник по направлению к начальному положению
до тех пор, пока угол ее наклона у не будет равен углу поворота
валика управления. Этот процесс слежения люльки за валиком
управления благодаря малой постоянной времени гидравличе-
ского исполнительного устройства происходит непрерывно, с очень
малой ошибкой, величина которой рассчитывается применительно
к любым следящим системам.
На рис. 1.4 гидроцилиндры нуль-установителя 17 показаны
внизу.
При ручном управлении изменение наклона люльки осуще-
ствляется при помощи силового валика 12 с укрепленной на
нем шестерней 13, находящейся в зацеплении с зубчатым секто-
ром 14, который закреплен на люльке основного насоса. Пере-
даточное отношение зубчатой передачи 1 4 (при повороте управ-
ляющего валика на 120° — наибольший возможный угол пово-
рота в одном направлении — люлька изменяет свое положение
на 30°).
Все перечисленные элементы управления выполнены в общем
корпусе коробчатой формы, внутренняя полость которого служит
резервуаром для рабочей жидкости (баком насосной станции).
Места стыка корпуса с литыми крышками уплотняются при
помощи колец из маслостойкой резины, а места выходов силового
вала и вала силового (ручного) управления, а также валика
дистанционного управления уплотняются манжетами.
Кинематическая схема управления насосов серии ПР № 5—50
(образцы ручного управления) отличается отсутствием валика
управления, вибратора с его приводом и рычажного дифферен-
циала.
Кинематическая схема управления насосов серии ПД № 0,5—
2,5 наиболее проста. Изменение угла наклона люльки у (до 30°)
осуществляется поворотом валика ручного управления, ограни-
чиваемым регулируемыми упорами. При использовании дистан-
ционного (автоматического) управления изменение угла у обес-
печивается гидравлическим исполнительным устройством, испол-
нительная часть которого реализуется при помощи силовых ги-
дроцилиндров.
1.3. МЕХАНИЗМ УПРАВЛЕНИЯ
Принципиальная схема механизма управления с электромехани-
ческим преобразователем 1 (преобразующим электрический упра-
вляющий сигнал в поворот якоря) и двухкаскадным гидравличе-
ским исполнительным устройством дроссельного регулирования
приведена на рис. 1.5. Усилительная часть первого каскада
реализована при помощи гидроусилителя типа сопло—заслонка,
питаемого от насосной станции с давлением pQ. Смещение заслонки
будет изменять открытие сопл 2, меняя перепад давления на
21
7 ? <2 ?
Рис. 1.5. Принципиальная схема механиз-
управляющем золотнике 5 —
исполнительной части пер-
вого каскада. Использование
дросселей 3 обеспечивает при
нейтральном положении за-
слонки достаточно высокое
давление в рабочих камерах
управляющего золотника рп,
которое, однако, существенно
меньше давления питания.
Применение позиционирую-
щих пружин 4 позволяет по-
лучать однозначную связь
между смещениями заслонки I
и управляющего золотника А3.
Смещение последнего откры-
вает доступ рабочей жидкос-
ти от насосной станции к
одному из силовых гидро-
цилиндров <?, изменяющих
угол наклона люльки 6 основ-
ного насоса, обратная связь
по положению которой реа-
ма управления с электромагнитным преоб- лизуется при ПОМОЩИ ПОТен-
разователем и двухкаскадным гидравли- циометоа 7
ческим исполнительным устройством дрос- r-г
селыюго регулирования Позиционные поворотные
электромагниты, преобразую-
щие управляющий сигнал в
угол поворота ротора вместе с заслонкой, выполняются с
возбуждением от постоянного магнита или от независимого источ-
ника постоянного тока. Позиционирование реализуется специаль-
ным немагнитным зазором в статоре или подпружиниванием
якоря при помощи торсиона. Такой электромеханический пре-
образователь при тех небольших скоростях и ускорениях, ко-
торые имеют место в механизмах управления, устанавливает
линейную связь между управляющим сигналом по току /у (/)
и углом поворота заслонки при наличии сопротивления ее пе-
ремещению, пропорционального перепаду давления р (/), созда-
ваемого гидроусилителем типа сопло—заслонка (силовая обрат-
ная связь) [1].
Гидроусилитель типа сопло—заслонка устанавливает нелиней-
ную связь между управляющим сигналом I (смещение заслонки),
выходными сигналами в виде перепада давления на управляю-
щем золотнике р (/) (исполнительное устройство первого каскада
усиления и усилительное устройство второго каскада усиления)
и расходом Q (/), пропорциональным скорости смещения упра-
вляющего золотника. При этом расход Q (/) пропорционален
корню квадратному из величины давления питания р0 (0- Следо-
22
вательно, При изменении давления питания pQ (/) соответственно
меняется зависимость между I (/), Q (/) и р (/).
Связь между этими тремя величинами становится определен-
ной при использовании уравнения движения управляющего
золотника, устанавливающего зависимость между активным (т. е.
индикаторным) усилием Fp (/), возмущающим воздействием Рв (/),
позиционирующими силами пружин и потока рабочей жидкости,
а также смещением управляющего золотника h3 (/) (выходная
переменная).
Таким образом, гидроусилитель типа сопло—заслонка вместе
с управляющим золотником составляет гидравлическое испол-
нительное устройство с дроссельным регулированием, в котором
переменными входа будут I (t) и Р3 (/), а выходными (фазовыми
координатами) h3 (/) и перепад давления на управляющем золот-
нике р (/), нагружающий источник питания — насосную станцию.
Одновременно тот же управляющий золотник вместе с сило-
выми цилиндрами составляют гидравлическое исполнительное
устройство с дроссельным регулированием второго каскада уси-
ления, причем первый исполняет обязанности усилительной
части, а вторые — исполнительной. Входными переменными вто-
рого каскада будут смещение управляющего золотника h3 (/),
момент Мв (/), препятствующий повороту люльки, и давление
источника питания р0 (/), а фазовыми координатами — угол
наклона люльки у (/) и перепад давлений на силовых гидроци-
линдрах (/).
1.4. ГИДРОПРИВОД
В качестве примера на рис. 1.6 показана принципиальная схема
электрогидравлического автоматического привода, управляемого
дистанционно при помощи электрического сигнала. Гидропри-
вод представляет собой электрогидравлическую следящую си-
стему или сервомеханизм.
Исполнительное гидравлическое устройство такого гидропри-
вода составляется из приводного двигателя 1 (источника энергии,
23
поскольку система его питания не рассматривается), регулируе-
мого насоса 2 (усилительная часть) и гидромотора 10, враща-
ющего через редуктор 11 вал тормоза 12 (исполнительная часть).
Управляющий сигнал формируется в задающем устройстве 5,
соединенном зубчатой передачей с сельсином-датчиком 6 и дающим
тахогенератором 7, сигнал которого используется в качестве
компенсирующего сигнала по производной от задающего сигнала.
Сельсин-приемник 8 через зубчатые колеса связан с валом гидро-
мотора 10, фиксирует положение вала и вместе с сельсином-
датчиком, работая в индикаторном режиме, вырабатывает сигнал
ошибки, передаваемый в усилитель 4. Последний, получая ком-
пенсирующий сигнал от дающего 7 и принимающего 9 тахо-
генераторов (обратная связь по скорости объекта управления),
формирует управляющий сигнал, подаваемый на механизм упра-
вления 3, который представляет собой электрогидравлическую
следящую систему дистанционного управления.
Таким образом, гидропривод дистанционного управления являет-
ся силовой электрогидравлической следящей системой, управляю-
щая часть которой состоит из ряда электрогидравлических следящих
систем,охваченных компенсирующими и обратными связями, обес-
печивающими необходимые динамические свойства гидропривода.
1.5. ГИДРОПРИВОД С КОНЦЕВЫМИ
ПЕРЕКЛЮЧАТЕЛЯМИ
На рис. 1.7 показана схема гидравлического привода с конце-
выми переключателями [11]. Поршень 1 гидроцилиндра совер-
Рис. 1.7. Гидропривод
с концевыми переклю-
чателями
24
uiaeT возвратно-поступательное движение, размах которого обу-
словлен размерами гидроцилиндра в корпусе 2, где также раз-
мещен золотник 3, используемый в качестве концевых пере-
ключателей.
При смещении поршня вправо в конце его движения прои-
зойдет перекрытие сливного канала и выжимаемая из правой
полости цилиндра рабочая жидкость сместит золотник 3 влево
(возрастанию значений х соответствует снижение значений h
из-за смещения управляющего золотника). В новом положении
золотника напорный канал окажется соединенным с правой
полостью гидроцилиндра и поршень будет перемещаться влево,
повторяя первую часть цикла движения, но с обратными знаками
смещений и скоростей.
Частота циклов движения определяется подачей питающего
насоса, а при питании от насосной станции с аккумулятором —
от соотношения активного усилия, статической нагрузки, инер-
ционной нагрузки 4, упругого 5 и активного 6 (пропорциональ-
ного скорости) сопротивлений.
График изменения скорости на рис. 1,7 соответствует исполь-
зованию в качестве источника питания насоса с постоянной
подачей, а изменение скорости в начале и конце каждого полу-
цикла движения обусловливается результатом действия упра-
вляющего золотника и упругими свойствами системы. Колеба-
ния скорости при достижении ее установившегося значения
сопровождаются значительными колебаниями давления.
Глава 2
РАБОЧИЕ ЖИДКОСТИ
Рабочая жидкость выполняет в -гидроприводе важные и много-
сторонние функции. Прежде всего это — рабочее тело гидравли-
ческого исполнительного механизма, вспомогательных, измеря-
ющих и управляющих устройств. Выполнение этой функции
определяется упругими свойствами самой жидкости и находя-
щейся в ней нерастворенной газовоздушной составляющей
(фазы Г), а также упругими свойствами трубопровода или рукава
с такой двухфазной жидкостью. Эти упругие свойства рассматри-
ваются в качестве элемента гидропривода [41 ].
Передача движения и давления (сигналов), а также энергии
обусловливается возможностью герметизации всех трактов гидро-
привода. Поэтому нельзя рассматривать свойства рабочей жидко-
сти безотносительно к средствам уплотнения и, во всяком случае,
без рассмотрения материалов уплотнительных устройств и взаимо-
действия рабочей жидкости с этими материалами. Очевидно, что
рабочая жидкость не должна отрицательно воздействовать на
уплотнения и уплотняющие материалы.
Рабочая жидкость должна обеспечивать работоспособность
и надежность всех правильно спроектированных и выполненных
узлов гидропривода. Она выполняет функции смазывающего и
охлаждающего агента, защищает детали от коррозии, позволяет
эвакуировать из системы продукты износа. Распространение
гидропривода в значительной мере обязано наличию ассорти-
мента рабочих жидкостей, в определенной степени удовлетворя-
ющих поставленным задачам. Рабочая жидкость должна быть
дешевой, доступной (обеспеченной сырьевыми ресурсами) и при-
емлемой для хранения и эксплуатации (нетоксичной, невзрыво-
опасной, теплостойкой и т. п.).
Наиболее широкое распространение в качестве рабочих жидко-
стей получили минеральные масла нефтяного происхождения,
состоящие из углеводородных полимеров, а также синтетические
жидкости на основе сложных эфиров и фтороуглеродных поли-
меров. В кузнечно-прессовых гидроприводах широко применяют
различные эмульсии. Свойства таких рабочих жидкостей оцени-
ваются их вязкостью и способностью образовывать на поверх-
ностях деталей адсорбированные пленки. Вязкость жидкостей,
и особенно минеральных масел, существенно меняется при изме-
нении температуры и давления. Поэтому при проектировании
необходимо прогнозировать поведение гидропривода с возможно
точной оценкой режимов его работы, а также связанных с ними
значений температуры и давлений, тем более, что повышение
температуры не только уменьшает вязкость, но и существенно
увеличивает скорость старения полимеров. Как правило, гидро-
привод, работающий на более высоком давлении, при прочих рав-
26
вых условиях имеет меньшие размеры и более высокую темпера-
туру рабочей жидкости.
Условия эксплуатации гидравлического исполнительного уст-
ройства оцениваются прежде всего диапазоном температур окру-
жающей среды и соответствующими рабочими температурами,
режимами нагрузки, запыленностью окружающей среды (осо-
бенно при эксплуатации в южных районах страны), характером
частиц запыления, а также требуемым сроком работоспособности.
Свойства рабочей жидкости и ее температура обусловливают
процессы износа сопрягаемых деталей и старение различных
конструктивов (собственно рабочей жидкости, материалов уплот-
нений, электроизоляции, термоизоляции, различного рода по-
крытий и т. п.), обеспечивающих, а иногда и лимитирующих
необходимую надежность гидропривода.
Проектирование современного гидропривода должно прово-
диться с учетом происходящих в нем тепловых процессов, в том
числе и в собственно рабочей жидкости, а ее выбор, являясь
одним из основных исходных пунктов проектирования, требует
тщательного анализа режимов работы гидропривода, ограниче-
ния рабочих температур и расчетов стабильности свойств при-
меняемых материалов.
2.1. ЭКСПЛУАТАЦИОННЫЕ ГРУППЫ
ГИДРОПРИВОДОВ
В зависимости от условий эксплуатации гидроприводы разделяют
на промышленные, полевые, периодического применения и спе-
циальные.
Промышленные гидроприводы работают в за-
крытых отапливаемых помещениях, обычно на промышленных
предприятиях и кораблях. Такие приводы должны работать от
5000 до 15 000 ч без ремонта со сменой рабочей жидкости не ранее
чем через 2000—5000 ч работы.
Обычно температура окружающей среды при эксплуатации
промышленных гидроприводов находится в пределах 0—35° С,
позволяя применять минеральное масло вязкостью 25 v50
40 сСт с повышенными теплостойкостью, стабильностью и сма-
зывающими свойствами. Как правило, такой гидропривод рабо-
тает от насосной станции, в которой применяется водяное охла-
ждение и гарантируется верхний предел рабочей температуры
(чаще всего 50—60° С). При воздушном охлаждении указанный
предел повышается (до 70—80° С), уменьшая сроки смены рабо-
чей жидкости и ресурс гидропривода. В этом случае элементы
гидропривода снабжают металлическими или высокотемператур-
ными уплотнениями (материал обычных уплотнений в таких усло-
виях быстро стареет), а рабочие жидкости выбирают из числа
тяжелых минеральных или синтетических масел, сокращая срок
их смены.
27
Полевые гидроприводы используются в самых
различных условиях эксплуатации, более всего — в мобильных
машинах (различных транспортных, дорожно-строительных, гру-
зоподъемных, подвижных полевых объектах различного назна-
чения), палубных корабельных установках, стационарных поле-
вых сооружениях и т. д. Гидроприводы могут иметь четыре ис-
полнения. Традиционное исполнение предполагает применение
в умеренной климатической зоне с морозами до —35° С и лет-
ними температурами до +35° С, длительными осенними и весен-
ними периодами с температурой от +15 до —15° С при влаж-
ности до 100%.
Северное исполнение (для Крайнего Севера и Северовостока)
предполагает эксплуатацию при морозе до —55° С (при более
низких температурах полевые машины обычно не используются).
Тропическое исполнение для сухого климата (например,
для среднеазиатских районов) с изменением температуры от
—10 до +55° С при малой влажности предусматривает возмож-
ность большого запыления. Температура рабочей жидкости, на-
пример в гидроприводах экскаваторов, в таких условиях (экска-
ваторы Э-153, Э-1514, ЭО-2621) при температуре окружающей
среды +45° С достигает +110° С. Тропическое исполнение для
влажного климата с изменением температуры от +3 до +45° С
при 100%-ной влажности обычно предусматривает возможность
воздействия в различной форме морской воды (например, в виде
брызг).
Выбор рабочей жидкости и проектирование гидропривода,
работающего без ее смены при эксплуатации во всех четырех
климатических зонах, представляет большие трудности, по-
скольку вязкость такой всесезонной рабочей жидкости должна
находиться в регламентированных пределах, а диапазоны изме-
нения ее температуры могут достигать 150—160° С.
Затруднения вызывает также процесс запуска при очень
низкой температуре, когда вязкость рабочей жидкости достигает
5000 сСт (нормальная работа* гидропривода возможна при вяз-
кости жидкости не более 1500 сСт). С другой стороны, вязкость
рабочей жидкости не должна быть меньше 3—4 сСт, чем опреде-
ляется допустимый интервал ее изменения при заданном темпе-
ратурном диапазоне.
На мобильных машинах реализуется только воздушное охла-
ждение с расчетом на перегрев (относительно температуры окру-
жающей среды) до 40° С при длительном режиме работы и до 60° G
при кратковременных форсированных режимах. Поэтому верх-
ний предел рабочих температур может достигать 110° С и быть
превзойденным при эксплуатации мобильных машин летом в юж-
ных районах страны (особенно на юго-востоке). Для специальных
гидроприводов верхний температурный предел существенно больше.
Гидроприводы периодического приме-
нения (механизмы аварийного обслуживания, подвижные
28
и стационарные полевые объекты и т. п.) должны характеризо-
ваться постоянной готовностью к действию, кратковременными
периодами работы, часто на форсированных режимах, и длитель-
ными стоянками без использования. Такие приводы обычно
проектируют для работы с быстрым подъемом температуры до
наибольшей допустимой по условиям взрывоопасности или вы-
хода из строя различных деталей, в первую очередь уплотнений.
Эти гидроприводы не предназначены для длительной работы.
Минеральные масла допускают нагрев до 150° С, а синтетиче-
ские рабочие жидкости — до 200 и даже до 300° С. Гидросистемы,
работающие при высоких температурах (например, в горячих
цехах) и имеющие металлические или специальные уплотнения,
работают на эмульсиях, тяжелых минеральных маслах или
синтетических рабочих жидкостях.
Условия эксплуатации специальных гидропри-
водов (например, авиационных) могут существенно отличаться
от рассматриваемых, и здесь материалы по этим гидроприводам
не приводятся.
Минимальный ассортимент рабочих жидкостей по их вяз-
костно-температурным характеристикам, пожаробезопасности и
стоимости должен включать, по крайней мере, шесть групп:
1) легкое маловязкое минеральное масло на нефтяной основе
с особопологой характеристикой вязкости (v50 = 5 сСт и v_50 =
= 500 сСт) для использования в системах гидроавтоматики, тре-
бующих быстродействия, в том числе при работе на морозе;
2) минеральное масло на нефтяной основе для силовых гидро-
приводов с достаточно большим ресурсом (v50 = 10 сСт и v_50 =
= 1500 сСт);
3) минеральное масло на нефтяной основе для силовых гидро-
систем, эксплуатирующихся на морозе, но не в условиях крайнего
севера (v.o = 15 сСт и v_35 = 4000 сСт);
4) минеральное масло на нефтяной основе для тяжелонагру-
женных силовых гидросистем с ограниченными утечками и боль-
шим ресурсом (v50 = 25 сСт);
5) негорючие синтетические жидкости с параметрами одной
из первых трех групп (обычно дорогие и с малообеспеченным
сырьевым ресурсом);
6) негорючие эмульсии (весьма дешевые, однако не могущие
обеспечить большие ресурсы тяжелонагруженных гидромашин).
Каждая из этих групп не обязательно должна обеспечиваться
только одним сортом рабочей жидкости или одним типом уплот-
нений, выполняемых из одной марки герметика.
Многообразие конструктивных форм гидропривода, условий
его работы и диапазонов температур различных узлов гидро-
системы может потребовать согласованного, а иногда и компро-
миссного выбора рабочей жидкости, типа уплотнений и марки
герметика. Еще недостаточно исследованы деформационные свой-
ства рабочих жидкостей, особенно в процессе деформации (дина-
29
мические свойства), которые также должны учитываться при ее
выборе. При переходе на силовые гидроприводы высоких давле-
ний более точная оценка деформационных свойств рабочих жидко-
стей, в том числе с газовоздушной составляющей и при различ-
ных стадиях загрязнения, насущно необходима.
2.2. ФИЗИЧЕСКИЕ СВОЙСТВА РАБОЧИХ
ЖИДКОСТЕЙ
Относительный вес (по отношению к весу воды при температуре
4° С) керосина при 15° С лежит в пределах 0,79 < у15 0,83;
минеральных масел 0,82^ у15 < 0,90; синтетических жидкостей —
до 1,05; эмульсий аИ; для воды с антикоррозионными присад-
ками определяется их свойствами и может быть больше 1,05.
Зависимость объемного веса жидкости у от температуры и
давления определяется выражением
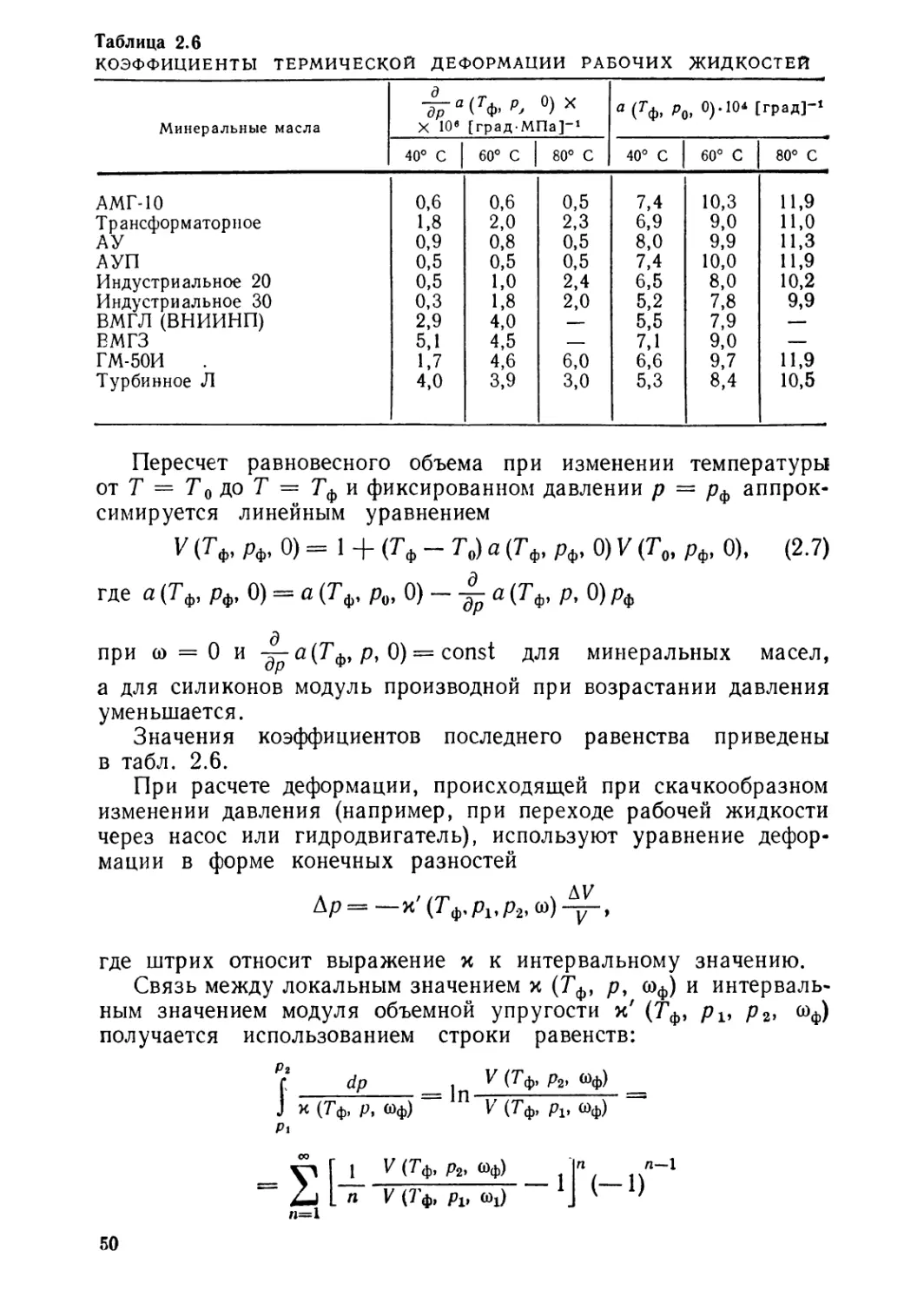
^ = Х=1-а(ГС-15)--^-, (2.1)
715 715 Ки
где р и pQ — соответственно абсолютное и атмосферное давления;
хи — изотермический (равновесный) модуль объемной упругости.
Для минеральных масел а (у0) аппроксимируется кусочно-
непрерывной функцией из трех отрезков: в интервале 0,71
у о 0,82 от 8,97 до 7,39, в интервале 0,82 у0 0,86 —
до 6,94 и в интервале 0,86 т0 0,90 — до 6,32. При ориенти-
ровочных оценках для минеральных масел принимают 5-Ю"4 <
<а<8,4-10~4 и 0,51 • 10"3 < — < 0,63-10~3 (МПа)-1, а для
силиконов в состоянии поставки 7,8-10~4 <а <10,0-10 4 и
1,0-10"3< — < 1,3- 10-3(МПа)-1, причем нижний предел соот-
Хи
ветствует 40° С, а верхний 80° С.
То же выражение (2.1) используется для определения плот-
ности рабочей жидкости р = р (/° С, р), поскольку р = ylg,
где g — ускорение силы тяжести.
Вязкость или внутреннее трение — важнейшее свойство жидко-
сти, проявляющееся при относительном движении ее частиц.
Различают объемную и тангенциальную вязкости. Объемная
вязкость проявляется при сжатии и растяжении жидкости, вызы-
вая сдвиг по фазе между объемной деформацией и давлением и
рассеяние энергии при упругих колебаниях. Объемная вязкость
рабочих жидкостей гидросистем изучена недостаточно и обычно
не учитывается при проведении технических расчетов.
Тангенциальной (сдвиговой) вязкостью называют способность
жидкости сопротивляться сдвигу одного слоя относительно СО-
30
седнего. По Ньютону сила такого сопротивления определяется
выражением (в Н)
где р. — коэффициент пропорциональности, называемый дина-
мическим коэффициентом вязкости, Н>с/см; F— площадь, по
которой происходит сдвиг, см2; dv/dn — градиент скорости по
нормали к поверхности слоя, 1/с.
В системе СГС используется единица вязкости—пуаз (П); 1 П
соответствует силе трения Pu = 1 дин при F = 1 см; dv/dn =
== 1/с. Соотношение р: 10,2 Н-с/см = 1 кгс-с/см = 105 П. Вода
при температуре 20° С имеет вязкость 0,01 П, или 1 сантипуаз (сП).
При расчетах потоков в разрешающие уравнения обычно
входит отношение р/р, которое называют кинематическим коэф-
фициентом вязкости:
V = ц/р = pg/y.
Единица v (1 см2/с) называется стокс (Ст); обычно используют
величину в одну сотую Ст — сантистокс (сСт). При определении
вязкости вискозиметром Пинкевича указывают температуру, при
которой проводился замер (например, v£0 — при 50° С). При
замере вязкости с помощью вискозиметра Энглера используют
относительные единицы вязкости. Время истечения 200 см3 ис-
пытуемой жидкости из вискозиметра Энглера называют вязкостью
в секундах Энглера. Отношение этого времени к времени истече-
ния дистиллированной воды при температуре 4° С в том же ви-
скозиметре называют вязкостью в градусах Энглера (Е°),
причем
v = О.О732Е0 - -5^ мг/с.
Влияние температуры на вязкость определяется при помощи
уравнения
vz = v50 (50//)", (2.2)
где п — показатель степени, зависящий от вязкости рабочей
жидкости при температуре 50° С (табл. 2.1).
Это уравнение справедливо для легких минеральных масел
при п as 2,77 в температурном интервале 30 Г С 150, а
для тяжелых минеральных масел — при п > 2,77 в температур-
ном интервале 40 гс ГС НО. Уточнение уравнения (2.2)
при существенном расширении интервала температур приведено
в работе [62].
Независимость влияний давления и температуры на вязкость,
а также экспоненциальная зависимость вязкости от избыточного
31
Таблица 2.1
ТЕМПЕРАТУРНЫЕ ХАРАКТЕРИСТИКИ ВЯЗКОСТИ
Г'И Вязкость при 50° С п Вязкость при 50° С Вязкость при 50° С’ п
°Е СЕ 10*v60 СЕ 104v60 10*v50
1,2 0,0365 11э 4 0,280 2,13 9 0,658 2,52 30 2,192 3,06
1,5 0,0<^ 1Г59 5 0,355 2,24 10 0,731 2,56 35 2,560 3,10
1,8 0,1016 1,72 6 0,430 2,32 15 1,097 2,75 50 3,655 3,17
2,0 0,121 1,79 7 0,505 2,42 20 1,462 2,86 65 4,760 3,32
3,0 0,203 1,99 8 0,585 2.49 25 1,828 2,96 80 5,847 3,42
давления и температуры делают удобным при аналитических
исследованиях использование аппроксимирующего уравнения
Р-Ро / —40°С\
Рц /
(2.3)
где р0 — динамический коэффициент вязкости при атмосферном
давлении и температуре t = 40° С; значения и в интервалах
давления 5 р 100 МПа и температур 40 t 80° С по
материалам МВТУ [99] приведены в табл. 2.2.
Наличие в жидкости твердых частиц (например, в результате
запыленности и т. п.) или фазы Г увеличивает силы сопротивле-
ния сдвигу (кажущаяся вязкость), что оценивается произведением
динамического коэффициента вязкости «чистой» жидкости р,
на корректирующий множитель (1 — 1,35V)-2’5, где V — объемная
концентрация инородных включений [99].
Разделение твердых и газообразных включений при оценке
кажущейся вязкости нецелесообразно, поскольку твердые вклю-
чения чаще всего служат местами выделения растворенной газо-
воздушной составляющей (фазы Р) в нерастворенную (фазу Г)
(см. раздел 2.7).
Температурный предел работоспособности минеральных масел
для закрытых систем (систем, в которых рабочая жидкость не
Таблица 2.2
ВЯЗКОСТНЫЕ ХАРАКТЕРИСТИКИ РАБОЧИХ ЖИДКОСТЕЙ
Минеральное масло Ц0’ t °с Ц’ р , МПа при температуре
40° С 60° с 80° С
ЛУ 0,171 65,4 41,5 57,5 80,7 108,7
АУП 0,160 70,5 35,8 52,7 79,4 122,0
Индустриальное 30 0,35" 28,6 43,6 50,0 61,8 79,4
32
. Прокофьев и др.
Таблица 2.3
ТЕРМИЧЕСКИЕ СВОЙСТВА РАЗЛИЧНЫХ МАТЕРИАЛОВ И ЖИДКОСТЕЙ
Материал Параметры Значения с и Л при температуре, °C
_ 55-и—50 0 | 20 I 50—60 80—100 120 150
Вода С X — — 1,0 1,47 0,998 1,54 1,002 1,60 — —
Керосин Т-5, легкие минераль- ные масла типа AM Г-10 С X 0,394 0,384 0,466 0,53 0,27 0,55 0,25 0,574 0,61
Минеральные масла: индустриальное 12 и АУ с X — 0,375 0,44 0,365 0,36 0,50 0,348 0,340 —
Минеральное масло трансфор- маторное с X — 0,355 0,46 0,35 0,34 0,485 0,324 0,506 0,315 —
Синтетический диэфир (типа M1L-L78080) с X 0,32 (при —40° С) 0,37 (при —40° С) — — — 0,50 0,36 — 0,51 (при 180°С) 0,32
Синтетическая диметилсилок- сановая жидкость с — — 0,35 — — — —
Синтетическая смесь кремни й- органического эфира и диэфира (типа оронайт 8515) с X 0,38 0,395 — — — — — 0,56 0,27
Синтетический фосфорный эфир (типа скайдтрол 500) с X 0,33 0,39 (при 38° С) 0,32 0,44 (при 105° С) 0,32
Алюминий с X 0,175 0,210 500 — — 0,224 500 — 0,235
Железо с X 0,085 0,105 120 — — 0,116 120 — 0,125
Резина | с - 1 — 0,33 — —
имеет свободной поверхности уровня, т. е. ее соприкасается
с воздухом) ограничивается значением 120° С. Предел работоспо-
собности синтетических рабочих жидкостей, помимо их меньшей
огнеопасности, поднимается до 200—250° С. Имеются рабочие
жидкости и с более высокими значениями предельных температур.
Теплоемкость с минеральных масел (количество тепла в ккал/кг,
необходимое для повышения температуры на 1°С) лежит в диа-
пазоне 0,4 < с < 0,6 ккал/(кг*°С) и зависит от температуры.
Ориентировочно теплоемкость оценивается выражением
с = (0,345 + 0,000886/° С) (2,1 - у15),
где у15 — удельный вес при температуре 15° С.
Коэффициент теплопроводности минеральных масел % — коли-
чество тепла в калориях, проходящее в 1 с через площадь в 1 см1?
слоя толщиной 1 см. Для рабочих жидкостей среднее значение
X 0,3 ккал/(см-с*°C). При повышении температуры от 0 до
120° С значение X уменьшается примерно линейно. С точностью
до — 10% зависимость X (/°C) аппроксимируется равенством [481
x==0J01(1 _0 00054/) ккал/(м-ч-°C).
715
Значения си X по материалам [48, 53] приведены в табл. 2.3.
Минеральные масла имеют высокую теплотворную способность,
близкую к 11 000 ккал/кг, относясь к числу опасных горючих.
2.3. МИНЕРАЛЬНЫЕ МАСЛА
Минеральные масла получают в результате переработки нефти,
первым этапом которой служит разгонка на фракции. Наиболее
легкие фракции нефти (у20 = 0,84, v20 4 сСт, температура
выкипания 200—315° С и температура застывания ниже —60° С)
имеют весьма пологую закономерность изменения вязкости в за-
висимости от температуры (условная оценка температурной зави-
симости вязкости — индекс вязкости НО). Эти фракции исполь-
зуются в качестве основы для получения загущенных минераль-
ных масел на нефтяной основе путем растворения в ней полимер-
ной вязкостной присадки. Подобного рода рабочие жидкости
используются в гидроприводах, эксплуатирующихся в диапазоне
температур от —60 до +120° С.
Большую однородность свойств минерального масла обеспе-
чивают «узкие» фракции, т. е. такие, у которых температурный
диапазон выкипания меньше.
Ориентировочная оценка взаимовлияния минеральных масел
и резинотехнических изделий (уплотнения, рукава и т. п.) реа-
лизуется по критической температуре растворения смеси угле-
водородов в анилине, которая называется анилиновой точкой
и определяется соотношением между классами углеводородов
в минеральном масле.
34
Различают три основных класса углеводородов: алкановые
или парафиновые, нафтеновые или циклановые и ароматические.
Последние вызывают набухание резины из-за проникновения в ее
толщу, а алкановые и нафтеновые углеводороды растворяют
резинотехнические изделия. Комбинируя весовой состав компо-
нентов минерального масла (т. е. углеводородов различных клас-
сов), можно уравновесить процессы растворения и проникновения
и достигнуть минимума воздействия рабочей жидкости на резино-
технические изделия.
Поскольку при изменении соотношения компонентов масла
меняется анилиновая точка, то ее оценка становится существен-
ной при прогнозировании взаимовлияния рабочей жидкости и
омываемых ею поверхностей резинотехнических изделий. Значе-
ния анилиновой точки для рабочих жидкостей на нефтяной ocnoie
изменяются в пределах от 70 до 90° С. Очевидно, что резина
при работе с минеральными маслами, анилиновые точки которых
близки к 80° С, будет набухать, если значение анилиновой точки
окажется значительно ниже этой температуры, и растворяться,
если анилиновая точка превышает это значение.
Допускается изменение веса резинотехнических изделий при
работе в минеральном масле с температурой 70° С в пределах
от +5 до —2% за одни сутки, и в соответствии с этим диапазоном
изменения веса подбирается углеводородный состав масла.
Резинотехнические изделия, изготовленные на основе синте-
тического дивинилнитрильного (нитрильного) каучука (напри-
мер, СКН-18, СКН-26 и СКН-40), хорошо работают с минераль-
ными маслами, причем как для изделий, так и для масел темпера-
турные пределы работоспособности совпадают. Изделия на основе
каучука СКН-18 работоспособны в диапазоне температур от —55
до +80° С и кратковременно при температуре до 120° С. Они
работоспособны в минеральных маслах с анилиновой точкой от
80 до 90° С и считаются морозостойкими. Те же изделия на основе
каучука СКН-26 работоспособны в диапазоне температур от —40
до +90° С, а при кратковременной работе — при температуре
до +120° С в минеральных маслах с анилиновой точкой от 75
до 80° С.
Чистые минеральные масла, обладая высокой химической
стабильностью, хорошо защищают смоченную ими поверхность
металлов. При правильном выборе масел и смачиваемых ими
поверхностей обеспечивается длительная работоспособность ги-
дропривода.
В процессе эксплуатации гидропривода, главным образом
из-за растворения в минеральном масле 7—10% воздуха, обога-
щенного кислородом по сравнению с атмосферным воздухом,
происходит окисление. Рабочие качества масла оцениваются его
стабильностью, т. е. стойкостью против окисления кислородом
воздуха. Стабильность определяется величиной осадка, кислот-
ным числом (КОН) и содержанием водорастворимых кислот после
2* 35
искусственного старения масла при пропускании через него
воздуха фиксированной температуры в течение определенного
времени. КОН — количество милиграммов едкого кали, нейтра-
лизующего 1 г минерального масла. Процесс окисления масла
определяется не значением КОН, а его увеличением по времени
до 0,5—0,6. У свежего минерального масла без присадок кислот-
ное число имеет значение 0,1—0,2 и удвоенное значение при
использовании присадок. Значение 1,5 мг КОН считается пре-
дельным
Окисление минерального масла изменяет вязкость, повышает
кислотность, меняет цвет, приводит к выпадению осадков и со-
провождается коррозией смачиваемых поверхностей.
В процессе эксплуатации вязкость минерального масла умень-
шается, однако кажущаяся вязкость, в том числе вызванная
загрязнениями, а также наличием газовоздушной составляющей,
может увеличиться.
Рассматриваемый процесс старения масла разделяется на ин-
дукционный (скрытый) период, в течение которого заметных при-
знаков старения весьма мало, и период интенсивного окисления,
ео время которого эксплуатация гидропривода недопустима и
необходима смена рабочей жидкости.
В течение индукционного периода среди продуктов износа
накапливаются медь и свинец, оказывающие каталитическое
действие на процесс старения масла, происходит разрушение
цепочек молекул масла из-за его многократного прохождения
под высоким перепадом давлений через регулирующие щели.
Старение происходит также из-за совместного длительного
действия повышенных температур (усиливается отложение смол),
соприкосновения с атмосферным воздухом, проникновения в масло
пыли, воды и промышленных газов. Особенно опасны электро-
гальванические процессы при остановленном гидроприводе, про-
текающие из-за различия электрических зарядов на примыкаю-
щих поверхностях деталей.
Стабильность минерального масла повышается при использо-
вании периодически возобновляемых антиокислительных при-
садок (альфанафтола, дифениламина, ионола, фенотиазина и т. п.),
образующих на поверхностях смоченных деталей прочные адсор-
бированные предохранительные пленки. Эти же присадки улуч-
шают смазывающие свойства масла и увеличивают его работо-
способность в 2—3 раза.
Применение поверхностно-активных присадок повышает склон-
ность рабочей жидкости к загрязнению и снижает степень ее
очистки при помощи обычно применяемых фильтров. Чем меньше
загрязнений в рабочей жидкости, тем надежнее система и тем
больше срок ее службы. Содержание в материалах деталей, омы-
ваемых минеральным маслом, сплавов меди и свинца усиливает
коррозионные процессы, а наличие в масле 0,5% воды удваивает
скорость корродирования металлов. В минеральном масле не
36
должен содержаться бензин, приводящий к «охрупливанию»
поверхностей деталей; при работе на высоких давлениях рабочая
жидкость должна быть чистой, а нагруженные трущиеся поверх-
ности следует шабрить, обеспечивая их большую смачиваемость.
2.4. ЗАГУЩЕННЫЕ МИНЕРАЛЬНЫЕ МАСЛА
В качестве рабочей жидкости гидропривода чаще всего исполь-
зуют загущенное минеральное масло, представляющее собой
раствор полимерной вязкостной присадки в маловязкой масляной
основе. Присадка увеличивает вязкость при повышенных темпе-
ратурах, примерно сохраняя или улучшая значение температур-
ного градиента вязкости. Обычно в качестве загущающей при-
садки применяются винипол (полимер винил Н-бутилового эфира),
полиметакрилаты или полиизобутилены (высокомолекулярные
соединения цепного строения с молекулярным весом от 3000
до 30 000 и выше). Увеличение молекулярного веса присадки
обеспечивает более пологую зависимость вязкости от температуры.
Прохождение рабочей жидкости под большими перепадами
давлений через дросселирующие щели приводит, особенно в пер-
вые 50—100 ч эксплуатации, к энергичному разрушению высоко-
молекулярных составляющих загущающих присадок. Поэтому
понижение в течение указанного временного интервала вязкости
на 29—30% при температуре 50° С считается допустимым.
Характер зависимости вязкости v загущенного минерального
масла от градиента скорости сдвига жидкости dvldn = \/Тп
(в с"1) приведен на рис. 2.1, причем гистерезисные свойства
обусловлены тем, что ориентация цепочек молекул загущающей
присадки вдоль линий тока при увеличении скорости движения
наступает существенно позднее, чем нарушение этой ориентации
при уменьшении скорости движения. В зазорах с относительным
перемещением поверхностей в гидроприводе значение градиента
скорости сдвига может быть весьма большим. Так, на торцовом
распределителе с диаметром 100 мм аксиально-поршневого насоса
при зазоре 0,01 мм и частоте вращения 3000 об/мин градиент ско-
рости сдвига будет 1,6-106 1/с.
Аналогичные явления имеют место и в отношении зависимости
напряжения сдвига т (в кгс/с-см) от градиента скорости сдвига,
как это показано на рис. 2.2 кривыми 3 для загущенного масла,
2 — для основы, 1 — для вязкостной (загущающей) присадки
и 4 — для консистентной смазки. Такая смазка характеризуется
размещением минерального масла в своеобразном «каркасе»
из загустителя, который обусловливает реологические свойства
среды, более всего отличающиеся от свойств ньютоновых жидко-
стей при малых значениях градиента скорости сдвига.
Если гидропривод эксплуатируется при низких температурах
окружающего воздуха, то для остановленных гидромашин утечки
при высокой вязкости рабочей жидкости весьма малы. При запу-
37
щенного масла (/) и его основы (2) от
градиента скорости сдвига жидкости
Рис. 2.2. Напряжение сдвигат
как функция градиента ско-
рости ТгГ1
ске из-за трения резко снижается вязкость жидкости, а, значит,
и силы трения, чем облегчается запуск, который происходит прак-
тически при неизменной температуре. Зато работающий гидропри-
вод при нормальной и повышенной температурах оказывается
под воздействием вязкости рабочей жидкости, практически рав-
ной вязкости основы минерального масла, которая в 2—3 раза
меньше вязкости жидкости при пуске.
В качестве рабочих жидкостей гидроприводов, работающих
в помещениях, чаще всего используют минеральные масла на
нефтяной основе: индустриальное 20 (у20 = 0,884-0,90) и транс-
форматорное (у20 = 0,89). Температура застывания первого
—20° С, а температура вспышки в закрытом приборе 170° С.
Для трансформаторного масла значения указанных свойств
будут —45° С и 135° С соответственно.
В гидроприводах транспортных установок во всех климатиче-
ских зонах используют загущенные минеральные масла на нефтя-
ной основе с присадками АМГ-10 и АГМ с у20 = 0,85. Для масла
АМГ-10 температура застывания —70° С, температура вспышки
в открытом приборе 92° С и анилиновая точка 80—85° С, а для
масла АГМ значения указанных свойств —60° С, 110° С и 78—
85° С соответственно. В зонах умеренного климата на судах
в гидроприводах используется минеральное масло АУ с присад-
ками АУП, температура застывания которого —45° С, температура
вспышки в закрытом приборе 165° С и анилиновая точка 78—
85° С.
Минеральное масло ЖРМ на силиконовой основе с присадкой
АМГ-10 (у20 = 0,91) используется в авиационных гидроприводах
во всех климатических зонах. Температура вспышки в открытом
приборе 108° С. В турбореактивных двигателях во всех клима-
тических зонах может использоваться минеральное масло на
нефтяной основе МК-8 (у20 = 0,88), температура его застывания
—55° С, температура вспышки в закрытом приборе 145—165° С
и анилиновая точка 80—85° С.
38
Температурные характе-
ристики вязкости (в сСт) пе-
речисленных рабочих жидкос-
тей приведены в виде кривых
1—7 на рис. 2.3.
Пары минеральных масел
вместе с воздухом образуют
взрывопожароопасные смеси.
Однако в гидросистемах, из
которых удален воздух, ми-
неральные масла углублен-
ной переработки оказываются
более стойкими (по образо-
ванию осадков и устойчивос-
ти к разложению) и при по-
вышенной температуре (даже
выше 300° С) по сравнению с
синтетическими жидкостями.
Взрыво-пожаробезопасные
жидкости выполняются на
кремнийорганической основе
и допускают работу при тем-
пературах 200—230° С, одна-
ко они весьма чувствительны
к воде и поэтому должны
работать только в закрытых
гидросистемах. Негорючие
Рис. 2.3. Температурные характеристики
вязкости минеральных масел:
1 — индустриальное 20; 2 — трансформатор-
ное; 3 — АМГ-10; 4 — АГМ; 5 — АУ; 6 —
ЖРМ; 7 — МК-8
жидкости на фосфорорганической
основе работают в ограниченном температурном диапазоне из-за
недостаточной стабильности (предельная температура примерно
100—107° С).
2.5. СИНТЕТИЧЕСКИЕ РАБОЧИЕ ЖИДКОСТИ
Для гидроприводов создан широкий ассортимент синтетических
негорючих жидкостей, которые работоспособны при высоких
температурах, не допускающих использования минеральных ма-
сел. Синтетические рабочие жидкости не универсальны, имеют
высокую стоимость, ограниченные сырьевые ресурсы и требуют
при их использовании специальных уплотнений.
Довольно распространенной группой рабочих жидкостей,
применяемых для гидроприводов, являются д и э ф и р ы (на-
пример, ди-2-этилгексилсебацинат), обладающие смазочными свой-
ствами, работоспособностью в диапазоне температур от +205
до —40° С и удовлетворительной пологостью вязкостно-темпера-
турной характеристики. Поскольку диэфиры—кислородные соеди-
нения, они недостаточно устойчивы к окислению и требуют анти-
окислительных присадок, влекущих ограничение термостойкости.
При использовании рабочих жидкостей на основе диэфиров
необходимо применение уплотнений из фтороорганических каучу-
39
ков (СКФ), поскольку нитрильные резины под воздействием диэфи-
ров набухают. Кроме того, из-за плохой совместимости таких жид-
костей с медью, цинком, кадмием и свинцом все металлические пары
гидропривода должны проверяться на коррозионную стойкость.
В качестве негорючих рабочих жидкостей применяют поли-
силоксаны (силиконы) — негорючие полимеры, в ос-
нове которых лежит силоксановая группировка с присоединен-
ными органическими радикалами, образующими полиметил-,
полиэтил- и полифенилсилоксаны. Силиконы имеют низкую
температуру застывания и наиболее пологую вязкостно-темпера-
турную характеристику; разлагаются они при температурах
свыше 200° С. Нитрильные резины в уплотнениях при работе
с силиконами не используются, поскольку ресурс таких уплот-
нений существенно уменьшается из-за растворения.
Силиконы часто применяют в качестве антипенных присадок
к минеральным маслам, а также с целью улучшения вязкостно-
температурных характеристик (до 20—30%). Добавление мине-
рального масла к силикону улучшает его смазывающие свой-
ства. По сравнению с минеральными маслами силиконы имеют
на 30% меньшие силы поверхностного натяжения и существенно
большую сжимаемость.
Наиболее широко в качестве синтетических рабочих жидко-
стей гидроприводов применяют кремнийорганические жидкости
на основе эфиров кремниевой кислоты. Они могут работать при
температурах до 260° С, однако при соприкосновении с водой
распадаются с образованием геля, а при высоких температурах
выделяют твердые продукты двуокиси кремния. Такие жидкости
нуждаются в антиокислительных и противоизносных присадках
и требуют специальных уплотнений. Обычно в качестве последних
применяют резины на основе фторорганических каучуков (СКФ),
хотя они могут работать только при температурах не ниже —25° С,
или резины на основе фторсилоксановых каучуков, обладающих
недостаточной прочностью. Нитрильные резины не могут хра-
ниться при воздействии рабочих жидкостей на основе кремниевой
кислоты и неработоспособны при повышенных температурах.
Смешение различных синтетических жидкостей позволяет
получать рабочие жидкости повышенного качества. Так, оро-
найт 8515 (технические условия США MIL-H-8446) составляется
из дисилоксана, полисилоксана и 15% диэфира с присадками.
Рабочий температурный диапазон от +232 до —54° С, вязкости
v_50 = 2360 сСт, v38 = 24 сСт, v176 = 3,4 сСт, v204 = 2,6 сСт,
относительный вес у20 = 0,93, температура вспышки 202° С, темпе-
ратура воспламенения 402° С.
2.6. ЭМУЛЬСИИ
В гидроприводах кузнечно-прессовых и горных машин исполь-
зуют негорючие рабочие жидкости — эмульсии, представляющие
собой чаще всего 2—3%-ную дисперсную водную смесь (большие
40
значения соответствуют эмульсии для заполнения, так как при
этом часть эмульсола затрачивается на адсорбцию металлических
поверхностей, а меньшие значения — обычным условиям экс-
плуатации) эмульсола Э-1 или А, Э-2 или Б, Э-3 или В (5%-ная
эмульсия). Эмульсол составляется из 83,5—87,0% минерального
масла, 12—14% олеиновой кислоты и 2,5% едкого натра 40%-ной
концентрации.
Считается, что эмульсии ВН-117 на основе присадки
ВНИИНП-117 имеют более высокие по сравнению с самой присад-
кой, водой и минеральным маслом индустриальное 20 аптиизнос-
ные и антизадирные свойства. Уплотнения из фторопласта, поли-
хлорвинила и резины УА-1 имеют одинаковые показатели по набу-
ханию как в эмульсии ВН-117, так и в минеральном масле инду-
стриальное 20. Присадка ВНИИНП-117 составляется из 77,4%
легкого экстракта очистки трансформаторного масла, 0,5% кап-
стакса, 0,1% стереорита хрома, 15% нафтаната калия, 6% суль-
фаната натрия и 1% двухатомного спирта. Дисперсная среда на
базе этой присадки, составляющая от 1 до 1,5% (по весу), и яв-
ляется эмульсией ВН-117.
Стоимость эмульсий невелика, они обладают высокой тепло-
проводностью и теплоемкостью и повышенными антиизносными
и антизадирными свойствами, а по деформационным свойствам
близки к воде, которая входит в состав эмульсий в качестве
доминирующей компоненты.
Свойства эмульсий зависят от общей жесткости воды. Опти-
мальные свойства эмульсий на основе эмульсолов достигаются
при общей жесткости менее 11° Н (общая жесткость питьевой
воды должна быть не более 20° Н), а для эмульсий ВН-117
повышение эффективности действия присадки и срока ее службы
достигается применением воды с общей жесткостью не выше
6° Н.
Изменение общей жесткости воды достигается добавкой кон-
денсата или дистиллированной воды, объем которых (в дм3)
определяется из соотношения
v = vai-h/hr),
где — суммарный объем смеси; И — желаемая общая жест-
кость смеси, °Н; Нв — общая жесткость исходной воды, °Н.
Линеаризованная закономерность изменения плотности
эмульсии с давлением р (в мН/м) при фиксированной темпера-
туре Тф описывается равенством
Р (Р. Тф) = р (р0, Тф) + 0,45р г/см3.
Повышение содержания присадки в эмульсии ВН-117 увели-
чивает ее вязкость. Так, при содержании 1,5% присадки v20 =
1,06 и v80 = 0,60 сСт, при 2,5% v20 =1,11 и v8o = 0,62 сСт,
при 5% v20 == 1,22 и v80 = 0,66, при 7,5% v20 = 1,35 и v80 = 0,73.
41
Гидравлические системы, потребляющие большие объемы
эмульсии, снабжаются установками для приготовления эмульсии.
Обычно это бак для эмульсии и бак-смеситель большего объема
для приготовления и смешения эмульсии. В смеситель подается
фиксированный объем эмульсии, а затем малыми порциями по-
догретая до 45—60° С вода, в которой растворена кальциниро-
ванная сода или тринатрийфосфат (например, 3—6 г СаО на
0,1 м3 воды; такой раствор обеспечивает стабильность эмульсии
и предупреждает пенообразование). Смешение реализуется при
помощи воздуха или пара, пропускаемого в течение 2 ч через
барботер (трубу с отверстиями). Полученная сметанообрлзная
масса разбавляется водой.
Для получения однородной высокодисперсной эмульсии все
чаще используют ультразвуковые установки (рис. 2.4) [10].
Насос 7 забирает из нижней части бака 5 составные компоненты
эмульсии и непрерывно перекачивает их через гидродинамический
вибратор 6. В нем набегающая струя из сопла 1 рассекается вибри-
рующей пластиной 2, закрепленной на опорах 3 и 4. При совпаде-
нии частот колебаний струи и пластины 2 (примерно 22 000 Гц) воз-
никают интенсивные ультразвуковые колебания, эмульгирующие
составные компоненты смеси, которые подаются через сопло.
Готовая эмульсия тем же насосом 7 подается в сборный бак 8
или непосредственно в питательные баки (например, баки насосно-
аккумуляторной станции). В последнем случае объем бака для
хранения эмульсола принимается равным четырехкратной су-
точной потребности.
2.7 РАСТВОРЕННАЯ И НЕРАСТВОРЕННАЯ
ГАЗОВОЗДУШНЫЕ СОСТАВЛЯЮЩИЕ
РАБОЧИХ ЖИДКОСТЕЙ
Вследствие растворимости в рабочей жидкости окружающей
среды (обычно воздуха) и трудности ее удаления при заполнении
рабочего пространства гидропривода, возникновения кавита-
42
ционных явлений на вибрирующих смоченных поверхностях,
а также вследствие местных гидродинамических понижений дав-
ления рабочая жидкость почти всегда неоднофазна.
Газовоздушная составляющая жидкости (в том числе и пары,
включаемые в дальнейшем в понятие «газы») может быть как
в растворенном состоянии (фаза Р), так и в нерастворенном в виде
пузырьков (фаза Г). Количественное содержание пузырьков
определяется их свойствами (в первую очередь силами поверх-
ностного натяжения), конкретными условиями эмульсирования
(образования пузырьков), давлением, местными скоростями дви-
жения, параметрами периодических процессов и периодом цирку-
ляции жидкости. Конкретные условия эмульсирования включают
состояние омываемых жидкостью поверхностей (в том числе на-
личие в них микротрещин) и различные загрязнения; те и другие
могут быть очагами при выделении фазы Г.
В рабочей жидкости гидропривода при его работе всегда
имеются фазы Г и Р, непрерывно переходящие одна в другую,
а в неподвижной жидкости может происходить подъем и местная
концентрация достаточно крупных пузырьков фазы Г, их всплы-
тие и переход в фазу Р в соответствии с законом Генри [15].
Поэтому при работающем гидроприводе содержание в жидкости
фаз Р и Г нестабильно, оценивается отношениями а = V?/Vc
и т = Уг/Ус соответственно, отнесенными к начальным условиям
по давлению (760 мм рт. ст.) и температуре (273 К), причем Гс —
объем смеси, Гг — объем фазы Г и Гр — объем растворенной га-
зовоздушной составляющей.
Значение а обычно составляет 7—11% и может быть суще-
ственно понижено вакуумированием [40]. Определяется оно,
например, при помощи струйно-вакуумного дегазатора [151.
Содержание в жидкости фазы Г находят по экспериментально
определяемой зависимости изотермического (равновесного) мо-
дуля объемной упругости от давления хи (р) при фиксированной
температуре, предполагая, что при нулевом содержании фазы Г
такая зависимость должна быть линейной.
Экспериментально установлена примерно линейная зависи-
мость равновесного содержания фазы Р [40] от плотности рабочей
жидкости р (г/см3):
а = — 55р + 56,3 %
и от сил поверхностного натяжения а (дин/см):
а = — 0,673о + 28,1%.
Значения сил о для различных рабочих жидкостей при атмо-
сферном давлении и температуре 20° С были получены [40]:
Для минеральных масел АУ о = 29,8 дин/см; для АУп — 29,4;
Для индустриального 30 — 31,6; для ВГМЗ — 27,6; для турбин-
ного Л —31,2; для ГМ-50И —29,2; для АМГ-10 — 26,7; для
жидкости ОКБ-122-4 — 24,9; для смазки «Автол 10» — 32,2.
43
a,% Частоты собственных ко-
Рис. 2.5. Зависимость содержания фазы Г где R — начальный радиуо
от вязкости рабочей жидкости пузырька; сг — скорость рас-
пространения упругих коле-
баний в фазе Г; индекс «г» относит величины к фазе Г, а «О» —
к начальным условиям.
Из-за действия сил поверхностного натяжения рг > р (где р —
давление в жидкости)
рг = Р + 2о//?.
Чем меньше R, тем больше ошибка при определении со0 без
учета влияния а (доходит до 25% при R = 1 мкм). В эксперимен-
тальной установке, созданной для визуального наблюдения за
фазой Г, были замерены R 27-н37 мкм (при р = 0 и t = 20° С).
Зависимость содержания фазы Г от вязкости рабочей жидко-
сти при v 5$ 40 м2/с нелинейна, причем -^-<0 (рис. 2.5). При
v^4-10’5 м2/с можно пользоваться зависимостью
а = — 11 800v 4-8,47%.
Фаза Г содержится как в самой жидкости во взвешенном со-
стоянии (пузырьки размером менее 10 мкм не всплывают)-, так
и на стенках, особенно в микротрещинах. При прохождении ра-
бочей жидкости через гидромашину, существенно меняющую дав-
ление, происходит деформация пузырьков фазы Г с соответствую-
щим изменением температуры. Так, если повышение температуры
происходит за такой промежуток времени, что отвод тепла будет
исчезающе мал, то температура после завершения процесса сжа-
тия
п — 1
^2 = (P2/P1) П
где индексы 1 относят обозначения к начальному состоянию,
индексы 2 — к конечному, ап — степенной показатель адиаба-
тического процесс; который зависит от физических свойств
фазы Г, существенно увеличивается с ростом давления и не-
сколько уменьшается с повышением температуры (табл. 2.4).
Местное (локальное) повышение температуры в пузырьке фа-
зы Г может достигать весьма больших значений, приводящих
44
Таблица 2.4
СТЕПЕННОЙ ПОКАЗАТЕЛЬ п АДИАБАТИЧЕСКОГО ПРОЦЕССА
Избыточ- ное давле- ние, МПа п при 17° С п при 77е С Избыточ- ное давле- ние, МПа п при 17° С п при 77° С Избыточ - ное давле- ние, МПа и при 17° С п при 77° С
0,1 1,0 1,397 1,400 10 1,527 1,506 30 1,770 1,674
1,419 1,415 15 1,667 1,561 35 1,772 1,691
2,5 5 1,449 1,480 1,431 1,453 20 25 1,730 1,762 1,601 1,640 40 1,775 1,709
к быстро протекающим химическим реакциям (так называемый
«дизель-эффект») внутри пузырьков. О величинах возможных по-
вышений температур можно судить по результатам расчетов,
приведенных на рис. 2.6 при начальной температуре Tlt равной
323 и 353К.
Повышение температуры с ростом давления существенно за-
висит от степенного показателя п адиабатического процесса.
Цифровые обозначения на рис. 2.6 /, 2, 3 и 4 соответственно от-
носят результаты расчета к значениям п = 1,4; 1,5; 1,6 и 1,7.
Рис. 2.6. Локальная температура Т2 в пузырьке при заверше-
нии быстрого повышения давления и начальной температуре
323 К (а) и 353 К (б)
45
Цифры с одним и двумя штрихами относят результаты расчетов
к начальным давлениям 0,2 и 1,0 МПа соответственно, а кривые
с цифрами без штрихов — к начальному давлению 0,1 МПа.
Таким образом, в гидроприводах с открытой схемой циркуля-
ции, где начальное давление менее 0,1 МПа, могут иметь место
весьма существенные локальные температуры в пузырьках фа-
зы Г, что потребует значительного времени для установления
термодинамического равновесия, и, следовательно, могут возник-
нуть релаксационные процессы с высокими значениями постоян-
ных времени.
Повышение температуры в пузырьках фазы Г почти до 1000° С
и сопровождающий это повышение «дизель-эффект» были зафикси-
рованы экспериментально. Этими локальными температурами
объясняют возникновение каверн на поверхностях уплотнений и
рукавов, особенно в местах, близких к креплениям соединений.
Накопление таких каверн приводит к катастрофическим разруше-
ниям (отказам).
Увеличение размеров пузырьков усиливает пузырьковую ре-
лаксацию рабочих жидкостей, а их уменьшение ускоряет про-
цессы теплообмена, сокращая время наступления термодинами-
ческого равновесия.
Пусть объем фазы Г в жидкости будет л/?3 и распределяется
между х одинаковыми пузырьками, радиусы которых г. Тогда
из равенства объемов
R = x'/*r
Обозначая площадь поверхности сферы с радиусом R через Г,
а площадь поверхности пузырька через /, можно записать f/F =
= xrNR2. Заменяя R2 через х2/3г2, получим зависимость отноше-
ния площадей от х:
flF = ^x.
Следовательно, увеличение х приводит к возрастанию суммар-
ной поверхности пузырьков фазы Г, увеличивая интенсивность
теплообмена.
Понижение давления в рабочей жидкости приводит к пере-
ходу фазы Р в фазу Г, а повышение давления — к обратному
процессу [18, 43]. В порядке первого приближения эти процессы
можно принять экспоненциальными, а отношение их постоян-
ных времени примерно равным 10. Так, для минерального масла
МГЕ-10А постоянная времени перехода фазы Г в фазу Р при
давлении выдержки 5 МПа равна около 2580 с, а при обратном
процессе (переход фазы Р в фазу Г при сбросе давления до атмо-
сферного) — примерно 25 200 с. Однако при турбулентных про-
цессах движения жидкости значения постоянных времени
уменьшаются на два, а иногда и на три порядка и еще больше,
если рабочая жидкость находится под воздействием вибрации,
особенно если это ультразвуковые колебания.
46
2.8. ДЕФОРМАЦИЯ ЖИДКОСТИ
Из-за эффекта пузырьковой релаксации связь между изменениями
давления и объема запаздывающая. Так, при мгновенных (скачко-
образных) изменениях объема V (/) (abcefh, на рис. 2.7, а) выход-
ная переменная р (/) меняется частично мгновенно, а частично
с запаздыванием (a' b'c'd'e'f'g'h'). Аналогичный процесс имеет
место и при скачкообразном изменении давления р (/) в качестве
входной переменной (abcefh на рис. 2.7, б). В этом случае про-
цесс изменения объема V (t) также продолжается после установ-
ления постоянного значения давления р (/) (a' b'c'd'e'f'g'h').
Если все пузырьки фазы Г одинакового размера, то говорят,
что имеет место один механизм релаксации, и тогда кривые c'd'1
и f'g' — экспоненты, и время стабилизации процесса в 3 раза
больше постоянной времени релаксации.
Коэффициент пропорциональности в уравнении связи между
давлением и относительной деформацией при их гармонических
изменениях зависит не только от температуры Т и давления р,
но и от частоты (быстроты деформации):
dp=— х(Т, р, со) 4г- (2.4)
При со —* 0 модуль объемной упругости называется равновес-
ным или изотермическим и обозначается через хи, а при со —> оо
изоэнтропийным или адиабатическим и обозначается через соа.
Очевидно, что ха > хи, при со —> 1/Тр существенно увеличивается
сдвиг по фазе между гармоническими колебаниями Др (со) и
Д£ = ДУ (со)/У, как это показано на рис. 2.8, а и б; при со —> оо
зависимость между Др (со) и Д£ (со) изображается прямой 1
(рис. 2.8, в), при со —> 0 — прямой 2, а при со —> 1/Тр — эллип-
сом 3.
деформация— входная переменная; б — давление ₽* входная переменная
41
Рис. 2.8. Характеристики деформации жидкости:
а — амплитудно-частотная; б — фазочастотная; в — фазовые пор-
треты; 1 — изоэнтропийный процесс; 2 — равновесный процесс;
3 — релаксационная частота
Деформационный расход рабочей жидкости в изображениях
по Лапласу при одном (все пузырьки фазы Г имеют одина-
ковые размеры) механизме релаксации определяется выраже-
нием
у 1 +
Qa (S) = Vsi (s) = -------sp (s).
n
ки
Если процесс деформации жидкости обладает п механизмами
релаксации (и групп пузырьков фазы Г одинакового размера в каж-
дой группе, что можно установить по числу ступеней зависи-
мости х от частоты со), каждый из которых определяется своим
значением постоянной времени релаксации Тр/, отличающимся
Таблица 2.5
УПРУГИЕ И ВЕСОВЫЕ ХАРАКТЕРИСТИКИ РАБОЧИХ ЖИДКОСТЕЙ
по крайней мере на порядок от других, то деформационный
расход в изображениях по Лапласу описывается произведе-
нием
причем i = 1, 2, и; х(- < х,+1.
Аналогичные явления имеют место и в гибких рукавах. По-
скольку некоторые значения релаксационных постоянных вре-
мени Т ,• могут оказаться в полосе частот пропускания гидро-
привода, необходима экспериментальная проверка рабочей жид-
кости, и, при необходимости, наполненных ею рукавов по зави-
симости х (Тф, рф, со = var) при фиксированных значениях тем-
пературы Тф и давления рф.
Для рабочих жидкостей гидроприводов зависимость модуля
объемной упругости от давления линейна:
^v=^vP~\-Bv\ и\ (2.5)
значения Av и Bv для различных рабочих жидкостей приведены
в табл. 2.5.
Уравнение состояния рабочей жидкости при Т = и со =
== соф:
р, (Оф)Г0(р) = У(7’ф, р0, ®ф)/7в(р0); и, (2.6)
А__________
где для краткости записи обозначено Fv(p) = у Avp 4- Bv,
v — а при со —► оо и v = и при со —> 0.
ю-з Ва Ди. МПа '°-
20 С 40" С С 80° С 20° С 40° С 60° с 80° С 20" С 40° С 60° с 80° С
1,89 1,795 1,605 1,36 12,0 11,0 10,12 8,50 1,215 1,17 1,08 0,96
1,68 i ’495 1,333 1,185 9,98 10,25 9,25 7,60 1,497 1,497 1,31 1,19
1,88 1,26 1,74 1,88 1,95 1,95 1.740 1,835 1,54 1,7 4 1,81 1,81 1,53 1,5э 1,34 1,Ы 1,66 1,64 ,255 1.5 ) 1,50 1,39 12,75 10,70 13,25 10,70 9,07 11,50 9,25 7,42 10,0 7,75 1,59 1.75 1,46 Orts | 1 10^01 I I 1,38 1,156 1,08 1,19
9,91 0,785 0,6СЗ 3,545 8,13 7,77 7,63 7,38 0,805 0,71 0,605 0,52
49
Таблица 2.6
КОЭФФИЦИЕНТЫ ТЕРМИЧЕСКОЙ ДЕФОРМАЦИИ РАБОЧИХ ЖИДКОСТЕЙ
Минеральные масла д др ° X 10е (гф. р, °) х [град • МПа]-1 а (гф, Ро> °)‘104 [гРаД]-1
40° С 60° С | 80° С 40° С | 60° с 80° С
АМГ-10 0,6 0,6 0,5 7,4 10,3 11,9
Трансформ атор н ое 1,8 2,0 2,3 6,9 9,0 11,0
АУ 0,9 0,8 0,5 8,0 9,9 11,3
АУП 0,5 0,5 0,5 7,4 10,0 11,9
Индустриальное 20 0,5 1,0 2,4 6,5 8,0 10,2
Индустриальное 30 0,3 1,8 2,0 5,2 7,8 9,9
ВМГЛ (ВНИИНП) 2,9 4,0 — 5,5 7,9 —
ВМГЗ 5,1 4,5 — 7,1 9,0 —
ГМ-50И 1,7 4,6 6,0 6,6 9,7 11,9
Турбинное Л 4,0 3,9 3,0 5,3 8,4 10,5
Пересчет равновесного объема при изменении температуры
от Т = То до Т = Тф и фиксированном давлении р = рф аппрок-
симируется линейным уравнением
V (Тф, рф, 0) = 1 + (Тф - То) а (Тф, рф, 0) V (То, рф, 0), (2.7)
где а (Тф, рф, 0) = а (Тф, р9, 0) - а (Тф, р, 0) рф
при со = 0 и а (Тф, р, 0) = const для минеральных масел,
а для силиконов модуль производной при возрастании давления
уменьшается.
Значения коэффициентов последнего равенства приведены
в табл. 2.6.
При расчете деформации, происходящей при скачкообразном
изменении давления (например, при переходе рабочей жидкости
через насос или гидродвигатель), используют уравнение дефор-
мации в форме конечных разностей
\р = — х' (Тф, р2, со) ,
где штрих относит выражение х к интервальному значению.
Связь между локальным значением х (Тф, р, соф) и интерваль-
ным значением модуля объемной упругости х' (Тф, pit р2, шф)
получается использованием строки равенств:
г dp । (Tt» Р2> w<|>) _
J х (Тф, р, соф) — П V (Тф, pv <оф) ~~
Pi
ЕГ 1 v (Т’ф- Pit шф) . р "-1
Ln V (Тф, Pl, (ОХ) ‘Р
П=1
50
(n — индекс члена ряда), поскольку
V (Тф, р2, (Оф)
V (Тф, Р1, <0ф) ->U-
Для п = 2
«' (Тф, pv р2, ®ф) =
Рг Р1
dp
X ф» Р» (Оф)
Г dp ,, « (^ф, Рг» <°ф) „ 0
причем 1, так как -----------г-<2.
r J X (Тф, р, (Оф) хх V (Тф, pv (Оф)
pt
Но тогда с достаточной для практических целей точностью
можно пользоваться только первым членом ряда разложения,
и поэтому [ 1 ]
«' (Тф, Р1< Р2> ®ф) - Рг~Р<---,
f df>
J х (Тф, р, (Оф)
Р1
причем х' (Тф, plt р2, (Оф) = х (Тф, р, (оф) при р2 -* рг -> О
и Pi-^ Р, Pi = р2 = Р-
В рабочей жидкости гидропривода при его работе происходит
непрерывный переход фазы Г в фазу Р и обратно, причем со-
держание фазы Г меняется при изменении режима работы гидро-
привода и может превосходить 20% по объему в пересчете на нор-
мальные температуру и давление. При наличии длинных трубо-
проводов содержание фазы Г уменьшается иногда в несколько раз
по длине трубопровода из-за ее растворения.
Уравнением состояния фазы Г является уравнение Клапей-
рона
Vr(Т, р, 0) = -(р°+оу^- Vr (То, р0, 0), (2.8)
а пересчет объемов для произвольного процесса осуществляется
при помощи уравнения политропы
(Р + о, 1) Кг (Т, р, (Оф) = (р0 + 0,1) Vkr (То, р0, (0ф), (2.9)
где индекс 0 имеют давление и температура исходного равновес-
ного состояния, показатель политропы k = 1 при То, р0 и (оф —♦
—► 0, а для адиабатического процесса ((оф —» <х>) зависит от значе-
ний р и Т (см. табл. 2.4).
Дифференцируя выражение (2.9), получим
(ip = —6(р + 0,1)
dVr (Т, р, (Оф)
Vr (Т, р, (Оф) ’
откуда модуль объемной упругости фазы Г
хг(Л Р,<оф) = *(р + 0,1). (2.10)
Содержание фазы Г в жидкости оценивается относительным
объемом
17/'Г ч Уг(Тф,р,ш) Г V (7ф, р, to) 1-1
У(Тф,р, (0) гс(Тф, р, to) [ + У(Тф, р, to)] <211>
где Vr (Тф, р, со) — объем фазы Г; V (Тф, р, со) — объем жидко-
сти; Vc (Тф, р, со) — объем смеси.
При частотах деформации, существенно отличающихся от
частоты собственных колебаний сог пузырьков фазы Г, а также
при скачкообразных изменениях координат считается справед-
ливым принцип суперпозиции деформаций жидкости и фазы Г,
если предположить, что внешнее давление, воздействующее на
каждую фазу, одинаково, а р pr (X —» 1). В этом случае, диф-
ференцируя равенство Ус (Тф, р, (о) = Уг (Тф, р, ю) 4~
+ V (Гф, Р, to) и деля почленно на —dp, в соответствии с урав-
нением (2.4) получим выражение модуля объемной упругости
смеси
хГ^Тф, р, (о) = х"”1(Тф, р, to) {1 — Й(ТФ, р, со) [1 — х(Тф, р, со)]),
(2.12)
- и (7ф, р, со) Avp + Bv
гдех(Гф, р, <о)=Хг(Гф>р (о) ^-^ + 0>1); vа, и,
как это следует из равенств (2.5) и (2.10).
Выражения V (Тф, р, 0) определяются по значению исход-
ного относительно содержания фазы Г V (Тф, р, 0) при помощи
соотношений
IZ/'T \ 1®/ ™
V (Тф, р, а>) |/ + fio v (Тф, Рф, 0)
и
К (Тф, р, <о) = Vr (Тф, РФ, 0),
полученных из уравнений (2.5) и (2.6). Подстановка этих выраже-
ний с учетом равенства (2.11) в условие (2.12) дает разрешающее
уравнение для модуля упругости смеси
. 1 + R (7ф- РФ- 0) % (Тф, р, to)
Хс J ф- Р, ®) = К (Тл» р, <о)-----------------------=----------,
Ф ' ф J + R (Тф Рф) 0) х (Гф) Р| ш) х (Тф) р> ш)
(2.13)
62
где функция объема R (Тф, рф, 0) = [V (Тф, рф, 0) ’ — 1] 1 и функ-
ция термодинамического процесса
/'Г X _ I / "рф + оТ Avp-VBv
%(Тф,р,&) у р + 0,1 У AvP^ + Bv'
Таким образом, хс (Тф, р, со) определяют через исходное
относительное содержание фазы Г V (Тф, рф, 0), которое вы-
числяют через начальное относительное содержание фазы Г
V (Т'о, Ро, 0)- По значению последнего проводят сравнение со-
держания фазы Г в жидкости разных систем, а также на различ-
ных участках одной системы и при различных режимах работы.
Обычно принимают То = 288 К и р0 = 0,1 МПа. Использование
обозначения Тф в уравнении состояния фазы Г связано с возмож-
ностью существования неравновесного процесса фазы Г, что
должно быть учтено рассмотрением соответствующего механизма
релаксации. Так, в двухфазной смеси соотношение Тф=/= Тф
отвечает случаю, когда значению Тф жидкости может соответ-
ствовать иное значение температуры Тф фазы Г, и время установ-
ления термического равновесия рассматривается в качестве вре-
мени процесса релаксации.
Относительное содержание фазы Г в исходном состоянии
V (Тф, рф, 0) определяют через V (Тф, р0, 0) в следующей по-
следовательности. Изменение объема жидкости вследствие изме-
нения давления и температуры в соответствии с уравнениями (2.6)
и (2.7) описывается выражением
v (Тф, Рф, 0) = [ 1 + (Тф - То) а (Т„, Рф, 0)] ^^В. V (Г°’ р" 0)-
Используя это выражение совместно с уравнением состояния
фазы Г (2.8) в равенстве (2.11), получим
y-i /т п 01 = 1 + 0> 1) То АнРр 4-
V Нф, Рф, 0) (ро + О,1)Тф V ЛиРф+в„ х
X [ 1 - (Тф - то) а (Тф, Рф, 0)1 [ 1 - Г* (То, р0, 0)].
Данное выражение позволяет определить последний неизвест-
ный множитель R (Тф, рф, 0) из разрешающего уравнения (2.13).
В зависимости от значения со и постоянных времени механиз-
мов релаксации жидкости и фазы Г различают четыре процесса,
для каждого из которых расчетное уравнение (2.13) принимает
свою форму
1. Изоэнтропийный процесс, при котором деформации жидко-
сти и фазы Г будут изоэнтропийными. В этом случае -^=-4----С
I plmln
«“ и -(7р'г)п11п' где (7’р)тш и (7’pr)min — соответственно
53
наименьшие постоянные времени релаксации жидкости и фазы Р.
При таком процессе
Ч^ф» Р> ®)
Мр+о,1) ’
. / рф+°»1 АаР+&а
%(^ф. Р, ®) — у р + ол у ЛоРф + Во«
2. Равновесный (или изотермический) процесс, при котором
деформации жидкости и фазы Г
место при
будут равновесными, что имеет
® (Т ) ’
U р/тах
xz 1
(Т \ ’
v рг/тах
и тогда % (Тф, р, со) = ЛрР++0^-';
Х(7ф, р, со) =
РФ~ЮЛ Ау АирВц
р+0,1 г Аирф + Ви
3. Квазиизоэнтропийный процесс, при котором деформация
жидкости изоэнтропийная, а фазы Г — равновесная. Такой
процесс может иметь место при условии выполнения неравенств
1
(Т p)min
« ® « тН—
С с рГ;шах
В этом случае
Р- ®) =
РФ + 0.1 АдО + Вд
р + 0» 1 г Аарф +
4. Квазиравновесный процесс, при котором деформация
жидкости равновесная, а фазы Г — изоэнтропийная. Это имеет
место при
(Трг)тах (^р)тах
и тогда %(Тф, Р; со) = ;
* [ РФ + о, 1 АЦ АирВи
% (Тф, р, со) = у р + 01 у лиРф + Ви •
Поскольку значение наибольшей постоянной времени ре-
лаксации фазы Г (TprJmax обычно весьма велико, то в рабочем
интервале частот гидропривода деформация жидкости в маги-
54
стралях описывается квазиравновесным процессом и только при
передаче низкочастотных сигналов может считаться равновесным.
Кроме того, расчеты деформации жидкости, связанные с опреде-
лением статических состояний [например, относительного со-
держания фазы Г V (Тф, Рф, 0) или V (То, р0, 0) L проводятся
р предположении, что процесс деформации равновесный.
При расчетах быстропротекающих процессов (например
эффектах, связанных с действием гидравлического удара) с лю-
бым скачкообразным изменением координат процесс деформации
жидкости предполагается изоэнтропийным.
Квазиизоэнтропийный процесс возникает лишь тогда, когда
постоянные времени релаксации связаны неравенством (Tp)mln >
> (Трг)тах> что может иметь место при значительном возраста-
нии доминирующих значений Тр, например, из-за больших ре-
лаксационных эффектов соединительных рукавов.
Кроме жидкости и фазы Г деформируются и стенки магистра-
лей, что может быть учтено соответственно сниженным значением
приведенного к бесконечно жестким стенкам модуля объемной
упругости хп, при определении которого принцип суперпозиции
деформации распространяют и на радиальные деформации стенок
магистралей. Соответствующее расчетное уравнение будет
Хп 1 = Хс 1 +
2 п2 + 1 Г . / со у-]-1
Е и2-1 L1 \<*r) J
где Е — модуль линейной деформации материала стенок трубы,
МПа; п = Ra!Rb\ Ra и Кь — соответственно наружный и вну-
тренний радиусы трубы; (Од — частота собственных радиальных
колебаний стенок трубы;
E(Ra + Rb)
где рг — плотность материала стенок трубы.
При использовании гибких рукавов соответствующую раз-
ность —иё"1» как и существование механизмов релаксации
в полосе пропускания частот, следует определять эксперимен-
тально. В порядке первого приближения для рукавов, напол-
ненных минеральным маслом, следует считать значение приве-
денного модуля объемной упругости равным одной трети модуля
объемной упругости рабочей жидкости.
Глава 3
УПЛОТНЕНИЯ
Работоспособность уплотнительных устройств обусловливает
возможность нормальной работы гидропривода и обеспечивается
рациональным выбором системы герметизации, рабочей жидкости
и самих уплотнений при учете взаимовлияния указанных эле-
ментов. Проблему их оптимального выбора можно решить только
комплексно, анализируя рабочие параметры гидропривода (дав-
ление, скорость, температуру) и совместимость материалов с ра-
бочей жидкостью.
Признаком, которым в наибольшей степени характеризуются
свойства и эксплуатационные возможности уплотнительного
устройства, называемого для краткости уплотнением, является
его структурная схема и класс материала основного уплотняю-
щего элемента [30].
3.1. ТИПЫ И КЛАССИФИКАЦИЯ УПЛОТНЕНИЙ
Уплотнение, принципиальная схема которого приведена на
рис. 3.1, а, имеет следующие элементы: основной уплотняющий /,
силовой 2, вспомогательные уплотняющие 3, первую уплотняе-
мую поверхность (обычно подвижную) 4, вторую уплотняемую
поверхность (обычно неподвижную) 5. Показанная на рис. 3.1, б
резиновая армированная манжета является конструктивной реа-
лизацией общей структурной схемы уплотнения. Торцовое уплот-
нение вала с металлическим кольцом 1 (рис. 3.1, г) имеет аналогич-
ную структурную схему. Разница между рассмотренными
уплотнениями определяется различием свойств материалов основ-
ного уплотняющего элемента. Поэтому свойства последнего по-
ложены в основу классификации уплотнений (рис. 3.2).
В механических уплотнениях основной уплот-
няющий элемент — твердое тело в форме кольца из металличе-
ского, углеграфитового, керамического или другого материала.
Такие уплотнения применяют для наиболее тяжелых условий
эксплуатации: температурный диапазон от —210° С до +650° С,
давление в уплотнениях валов до 20 МПа, ресурс в десятки ты-
сяч часов, работа в высокоагрессивной среде. На рис. 3.1, в по-
казан представитель бесконтактного механического уплотнения
(пояски золотника с малым зазором между уплотняемыми поверх-
ностями), на рис. 3.1, г — контактное торцовое уплотнение вала.
В эластичных уплотнениях основной уплот-
няющий элемент выполнен из эластичного полимерного материала,
чаще всего из резины (эластомера), контактным давлением рн
он плотно прижимается к уплотняемым поверхностям 4 и 5,
устраняя зазоры и обеспечивая герметичность. Наиболее рас-
пространены уплотнения с помощью прокладок (рис. 3.1, д),
56
Рис. 3.1. Основные типы уплотнений:
о — структурная схема; б — манжета; в — бесконтактное уплотнение золотника;
е — торцовое уплотнение вала; д — эластичное уплотнение прокладкой; е —.
эластичное уплотнение кольцом; ж — набивочное уплотнение; з — диафрагмо-
вое уплотнение
колец (рис. 3.1, е) и манжет (рис. 3.1,6). Свойства эластомера
определяют положительные эксплуатационные качества уплот-
нения: хорошую герметичность, удовлетворительное трение,
простоту конструкции, компактность, низкую стоимость, совме-
стимость со многими жидкостями. Однако вследствие старения
срок работы и хранения таких уплотнений ограничен. Эластич-
ные уплотнения наиболее широко распространены в гидромашино-
строении.
В набивочных уплотнениях (рис. 3.1, ж) уплот-
няющим элементом 1 является специальная вязкоупругая на-
бивка, включающая основу, антифрикционные материалы и
жидкую пропитку. Набивка должна прижиматься к уплотняемым
поверхностям 4 и 5 с определенным контактным давлением рк
за счет силового элемента 2. Набивочные уплотнения применяют
Для герметизации тех сред, в которых быстро разрушаются эла-
стичные уплотнения (например, в горячей воде, растворах).
57
Уплотнения
Рис. 3.2. Классификация уплотнений
Рис. 3.3. Жидкостные уплотнения:
а — гидрозамок; б — центробежного типа
В диафрагмовых уплотнениях (рис. 3.1, з)
основной уплотняющий элемент выполнен из эластичного ма-
териала или металла, имеет сильно развитую поверхность и форму,
обеспечивающую большую деформацию под действием перепада
давления герметизируемых сред. Эти уплотнения сочетают в себе
отличную герметичность контактных уплотнений неподвижных
соединений с возможностью обеспечивать передачу движения.
Диафрагмовые уплотнения валов, применяемые в криогенной
технике и при герметизации токсичных сред, представляют собой
специальные конструкции муфт, обеспечивающие практически
полную герметичность.
В жидкостных уплотнениях (рис. 3.3) уплот-
няющим элементом 1 является жидкость, заполняющая зазор
между поверхностями 4 и 5 и разделяющая две среды. Для вы-
полнения своих функций эта жидкость не должна смешиваться
со средами. В жидкости должны развиваться внутренние силы,
препятствующие действию внешних сил давления.
Жидкостные уплотнения подразделяются на группы соответ-
ственно действующим в них внутренним силам. В гидрозамках
используется гравитационная сила или капиллярный эффект,
в гидродинамических уплотнениях перепад давления между сре-
дами уравновешивается градиентом давления в кольце вращаю-
щейся жидкости. Эти уплотнения по существу являются простей-
шими насосами винтового, центробежного или вихревого типа.
Их герметизирующая способность велика, но проявляется только
при вращении вала и сопровождается значительной потерей мощ-
ности и нагревом.
Области применения уплотнений различных типов указаны
в табл. 3.1.
Анализ совместимости материалов уплотнений с рабочей
жидкостью включает исследование физических и химических
процессов, возникающих при длительном контактировании ука-
занных элементов. Исследуются набухание, прочность, морозо-
59
Таблица 3.1
ОБЛАСТИ ПРИМЕНЕНИЯ УПЛОТНЕНИЙ
Класс, группа, Область применения Примеры применения
Механические бескон- тактные, лабиринтные Насосы и аппараты всех отраслей маши- ностроения Уплотнения первого каскада парогазовых сред
Механические контакт- ные, торцовые Нефтепродукты, вода, газы, кислоты, щелочи: Пример 1. Уплотнение для легких нефтепродуктов: D 90 мм; /* = —80-ь 4-4-200° С; р 2,5 МПа. Пример 2. Уплотнение для перегретой воды: /* = = 177° С, р = 1 МПа
Механические, гидроста- тические Турбины ГЭС Пример. Уплотнение масляной системы: D = = ООО4-1500 мм; /* = 55° С; р = 1 МПа; ресурс 30 000 ч
Эластичные — резиновые кольца, манжеты Все отрасли машино- строения Рабочие жидкости гидроси- стем: /* = —604-4-120° С; р 50 МПа; ресурс 2000— 15 000 ч за 7—3 года. Вода: /* = —4-ь4-80°С; р = = 10 МПа
Набивочные — сальни- ковые, асбестографито- вые Химическое и энер- гетическое машино- строение Нефтепродукты: /* до 300° С; р до 25 МПа
Примечание. D — диаметр уплотнения, t* — температура среды; р —•
давление.
стойкость, трение и старение материала в среде и на этой основе
прогнозируются сроки эксплуатации.
Для работы в среде нефтепродуктов практически наиболее
пригодны эластомеры на основе нитрильных каучуков СКН.
Каучуки СКН-18, СКН-26, СКН-40 (цифры указывают процент-
ное содержание в каучуке нитрила акриловой кислоты) набухают
в нефтепродуктах тем меньше, чем больше в молекулах каучука
групп нитрила. Например, если набухание каучука СКН-18
в данной жидкости равно 100%, то набухание каучука СКН-26
30%, а каучука СКН-40 до 17%. Введение в резиновую смесь
наполнителей (преимущественно сажи) еще более снижает набу-
хание. При набухании проявляются в основном два диффузион-
60
Рис. 3.4. Графики набухания эластомеров в рабочих жидкостях на нефтяной
основе:
с — от времени; б — от содержания каучука; в — от температуры; г — от анилиновой
точки
ных процесса: проникновение жидкости в массу эластомера и
растворение некоторых компонентов эластомера в жидкости
(преимущественно пластификаторов). Эти процессы иллюстри-
руют по времени графики на рис. 3.4, а.
Поскольку объем детали из эластомера ограничен, ее набуха-
ние происходит до достижения некоторого равновесного состоя-
ния. Если начальная масса образца Go, в процессе испытания G,
а при равновесном состоянии (наступающем через 70—200 ч ра-
боты при температуре +70° С) становится равной Gp, то относи-
тельное набухание
<7 = -ЦА 100 = <7Р (1 - е-'/П 100%,
— 60
где qp = —-------; т — постоянная времени, ч; t — время, ч.
Соответственно объемное набухание qv при плотности эласто-
мера ур 1,3 и плотности жидкости уж 0,85 будет
<7и ~ <7РТР/7ж = 1,5<7р.
61
Допустимыми пределами набухания материалов уплотнений
считают q? от минус 3 до плюс 8—12%, однако при рационально
подобранных эластомере и рабочей жидкости величина q? не долж-
на выходить за пределы —2-.—|-4%. Теплостойкие эластомеры
на основе фторкаучуков СКФ мало набухают даже в синтетических
рабочих жидкостях, а в жидкостях на нефтяной основе набухают
не более ±1%. Зависимость набухания эластомеров на основе
каучуков СКН от содержания х каучука в смеси и температуры' /*
показана на рис. 3.4, бив. Вследствие диффузионного харак-
тера процесса эта зависимость описывается уравнением
q = = [а (х - с) + d] (3.1)
где а — коэффициент, определяемый типом каучука (например,
для СКН-18 а = 0,35, для СКН-26 а = 0,10, для СКН-40 а =
= 0,03); с и d— коэффициенты (обычно с = 9,5%; d = 0,5%);
Ъ — коэффициент, зависящий от типа нефтепродукта.
С учетом количества qn вымываемых из эластомера компонен-
тов окончательное равновесное значение набухания его в жидко-
сти равно
?р = Q Qu*
Графики процесса набухания по времени могут в зависимости
от соотношения q и qu иметь одну из трех форм (см. рис. 3.4, а):
1 — q > qu\ 3 — q < qn\ 2 — q > qn при различной скорости
набухания и вымывания. Более сложные зависимости будут для
эластомеров на основе двух каучуков СКН (например, СКН-18
и СКН-26). В этом случае зависимость коэффициента А в уравне-
нии (3.1) от содержания каучука будет нелинейной и определяется
по содержанию групп нитрила акриловой кислоты в обоих кау-
чуках.
Набухание эластомера в рабочих жидкостях на нефтяной основе
определяется соотношением в них углеводородов парафиново-
нафтенового и ароматического классов. Это соотношение в из-
вестной степени оценивается анилиновой точкой (АТ) в °C (чем
больше в жидкости ароматических углеводородов, тем ниже АТ).
При подборе эластомера для данной рабочей жидкости исполь-
зуют графики зависимости qp от АТ, подобные показанным на
рис. 3.4, г, из которых следует, что эластомер 1 будет хорошо
совместим с рабочей жидкостью, имеющей А Т = 724-76° С,
а эластомер 2 пригоден для рабочей жидкости с АТ = 654-70° С.
Однако сравнительная оценка степени воздействия рабочей
жидкости на эластомер по АТ дает надежные результаты только
для жидкостей, близких по химическому составу. Это объясняется
разным воздействием на эластомер ароматических углеводородов
по мере возрастания их молекулярного веса, а также активным
действием некоторых присадок.
Влияние набухания на механические свойства эластомеров
проявляется в некотором снижении прочности вследствие умень-
62
тения межмолекулярных взаимодействий. Стандартные методы
определения прочности применительно к материалам уплотнений
еще не дают достоверной информации, поэтому применяют натур-
ные испытания в сравнении с поведением известных уплотнений.
Прочностные характеристики и трение необходимо оценивать на
установках, имитирующих работу уплотнений пар возвратно-
поступательного движения при давлениях среды до 20—40 МПа
с наработкой 25-103 циклов и пути трения не менее 2,5 км. Должны
сравниваться моменты трения и температура нагрева кромки
эталонных манжетных уплотнений валов в диапазоне скоростей
скольжения от предельно малых до 10 м/с, проверяться герметич-
ность в интервале температур от —50° С до 100° С и наработка
(не менее 250 ч). После испытания на уплотнениях не должно
быть следов износа и повреждений, микротвердость поверхностей
трения не должна измениться более чем на 2—3 единицы по СИ.
Последним этапом оценки совместимости эластомера с рабочей
жидкостью является прогнозирование сроков эксплуатации.
3.2. ТЕОРИЯ ГЕРМЕТИЧНОСТИ
Наиболее важной характеристикой уплотнений является их гер-
метизирующая способность. Требования к герметичности опреде-
ляют выбор типа уплотнения и влияют на конструкцию агрегата.
Теория герметичности основывается на следующих положениях.
1. Минимум проникновения сред определяется диффузией
через материал. Этот вид негерметичности в той или иной степени
свойствен всем уплотнениям.
2. Утечки по контактным уплотнениям неподвижных соедине-
ний определяются микрогеометрией уплотняемых поверхностей,
контактным давлением и дефектами поверхностей соединений.
3. Утечки по уплотнениям подвижных соединений связаны
с образованием пленки смазки между контактирующими поверх-
ностями в процессе их взаимного перемещения. Образование
этой пленки и герметичность тесно связаны с режимом трения.
4. Факторы, обеспечивающие герметичность в процессе
эксплуатации, подвержены значительному изменению вследствие
старения материала, изменения его механических свойств в за-
висимости от температуры, усталостного и износного разрушения
контактирующих поверхностей, влияния вибраций и микроде-
формаций.
5. На герметичность и трение существенно влияют многочис-
ленные случайные факторы, в частности загрязнения жидкости,
выделение продуктов износа в месте контакта. Поэтому при
исследовании уплотнений необходим статистический подход
к установлению основных зависимостей.
Эмпирические и теоретические формулы для расчета утечек
позволяют выявить общие для разных уплотнений зависимости,
на основе которых можно установить классы негерметичности
63
a)
Рис. 3.5. Схема микроканалов утечки по контактной по-
верхности (а) и расчетные схемы сети микроканалов (б
и в)
для сравнения уплотнений различных типов и размеров, функций
распределения их по степени герметичности.
Расход диффузионного проникновения фд рассчитывают
исходя из закона Фика. В случае эластичного уплотнения можно
пренебречь проницаемостью через металлические поверхности
(кроме отливок из легких сплавов) и учитывать только фд через
площадь поверхности ВН резиновых уплотнений. Если уплот-
нение имеет периметр В см, ширину I см и высоту канавки Н см
(рис. 3.5, а), то при перепаде парциального давления Apt МПа
<?д = ^0 — СМ /С.
где kQ—коэффициент проницаемости, у. \ ориентиро-
вочно
при = 20° С k.^ равен 0,4-10's для воздуха, 10"6—10-5 для
фреона, 10'8—10'9 для нефтяных масел; величина kQ зависит
от типа резины, температуры и давления.
Изучение утечек основывается на положениях гидромеха-
ники вязкой жидкости, поэтому рассмотрим сначала случай
течения вязкой жидкости (динамический коэффициент вязкости р,
МПа-с) через щель с зазором 6 (мкм) под действием перепада
давления Др (МПа) в бесконтактном уплотнении золотника (см.
64
рис. 3.1, в). При малых зазорах обычно имеет место ламинарный
режим течения, и расход Q см3/с утечки будет
Q = (3.2)
где коэффициент т] учитывает особенность геометрической формы;
например, для золотника диаметром £>, находящегося во втулке
со смещением а, В == n= -nr l + -?r hr •
12 L 2 \ О / J
В неподвижных контактных уплотнениях утечки могут про-
исходить по неплотностям соединения поверхностей, так как по-
следние имеют шероховатость от обработки, волнистость и раз-
личные дефекты. При соприкосновении двух твердых поверх-
ностей образуется система впадин, капилляров произвольной
формы и отдельных пятен касания, которые можно представить
схемой, приведенной на рис. 3.5, б. При действии перепада дав-
ления по отдельным капиллярам происходит утечка Qz, суммар-
ный внешний расход которой Q можно оценить по упрощенной
схеме на рис. 3.5, в, где выделены только сквозные микрокапалы.
Капилляры близки по форме к узким прямоугольным щелям
с условной длиной lit шириной Bt и высотой 6Z.
Используем уравнение (3.2) для определения Qt и выразим
размеры Zz, Bz, 6Z соответственно в долях /z, В(, 6Z от периметра
уплотнения В, ширины уплотняющей поверхности / и максималь-
ной высоты микронеровностей Rz:
B^Bfr Sz = 6z/?2.
Так как общая утечка Q равна сумме Qz, уравнение системы
после выделения безразмерных членов становится подобным
уравнению (3.2):
1 г*
k _
где ф = 10-3 у1, — безразмерная функция состояния
поверхности, характеризующая проводимость микроканалов.
Следует обратить внимание на вероятностный характер функ-
ции ф. В ее составе можно выделить две категории членов. Пер-
вые— фр—отражают наличие большого количества микрокана-
лов между довольно регулярными неровностями поверхности от
следов обработки и характеризуются б, 1. Вторые—фд—от-
ражают наличие ограниченного количества дефектов — рисок,
царапин, раковин, пор, частиц загрязнений и характеризуются
б; > 1. Таким образом,
ф = фр + фд.
3 В. Н. Прокофьев и др. 65
При создании механических уплотнений реализуют возможно
малые величины Rz (например, назначая обработку Rz = 0,4 мкм).
Величина пятен касания двух поверхностей определяется
модулями упругости материалов Е1У Е2 и контактным давле-
нием рк. Резины имеют модуль Е1 = Ем = 4ч-15 МПа и поэтому
сильно деформируются при действии малых нагрузок. При дей-
ствии сжимающей силы эластичное уплотнение заполняет микро-
неровности контртела, что приводит к постепенному исчезнове-
нию регулярных микроканалов. Процесс уменьшения зазоров от
начального 6Z0 до б£- в зависимости от контактного давления опи-
сывается уравнением [28]
6, = 6ioe-pn/M, (3.3)
где М — фактор с размерностью давления, характеризующий
свойства материала уплотнения: модуль упругости, соотношение
упругой и пластической деформаций, коэффициент Пуассона.
Если в уравнении (3.2') учесть зависимость величины зазоров
и формы микроканалов от рК) то получим
е=^4^^е"3₽к/Л1 <3-4>
Из этого уравнения следует, что повышение рк от нуля до М
при фх = ф = const уменьшает утечки примерно на два порядка,
так как е-3 = 5-Ю’2. Это выявляет шкалу зависимости утечки
от контактного давления, которое при эксплуатации изделия су-
щественно меняется вследствие старения материала уплотнения,
температурных влияний и деформаций сопряжения. При уста-
новке резинового кольца или прокладки в изделие оно должно
быть сжато так, чтобы контактное давление обеспечивало герме-
тичность при всех условиях эксплуатации. При этом составляю-
щая фр равна нулю. Для резине модулем Е^ = 7ч-12 МПа
в конце эксплуатации необходимо рк = 0,25 МПа, поэтому но-
вое уплотнение в нормальных условиях должно иметь ==
= 1,5ч-3,0 МПа. Для металлических прокладок необходимы зна-
чительно большие рк: свинца 50—60, алюминия 100—140, нержа-
веющей стали 500—650 МПа.
Рассмотрим теперь влияние дефектов поверхности на герме-
тичность. Расположение дефектов совершенно случайно и может
быть оценено лишь вероятностными соотношениями. Частота
появления дефектов при прочих равных условиях пропорцио-
нальна периметру уплотнения В, а их влияние обратно пропор-
ционально ширине I уплотнения, поэтому роль дефектов оказа-
лось возможным учесть в уравнении (3.4). По размерам дефекты
значительно превосходят регулярные микронеровности от обра-
ботки, поэтому увеличение контактного давления может не устра-
нить микроканалы утечки (функция фд 4= 0).
Дефекты являются основной причиной негерметичности уплот-
нений неподвижных соединений. Они выявляются и устраняются
66
Рис. 3.6. Распределение контактного давления по поверх-
ности эластичного уплотнения при отсутствии (а) и при на-
личии (б) давления среды
при приемо-сдаточных испытаниях. Вероятность появления де-
фектов существенно зависит от того, насколько тщательно выпол-
нены изделия. Чем грубее назначена обработка поверхности, тем
менее тщательно она контролируется и больше содержит дефек-
тов. Например, на поверхности, обработанной с Rz = 10 мкм,
можно обнаружить до 10% площади с обработкой Rz = 20 мкм,
а в отливках зональные раковины и пористость обычно на один—•
два балла выше допущенных чертежом для всей детали.
Влияние давления среды, свойство самоуплотнения. В эла-
стичных уплотнениях главным параметром, определяющим гер-
метичность, является контактное давление рк. Для повышения
герметичности с ростом давления среды р необходимо обеспе-
чить автоматическое повышение0контактного давления, ввести
в конструкцию обратную связь по давлению. Реализуется это
следующим образом. Рассмотрим кольцо круглого сечения, уста-
новленное в закрытую канавку с обеспеченным радиальным под-
жатием со стороны низкого давления (рис. 3.6). При установке
кольца диаметром d в канавку высотой Н на уплотняемых поверх-
ностях шириной Zo возникает давление рк = рк0, определяемое
относительной деформацией сжатия е, модулем Еоо эластичности
материала на стандартном образце и формой кольца. Среднее
значение рко равно
Рко = кфЕ.» [— In (1 — е)]
или для е < 0,25
Рко ==
где k$ = [1 + (Z/2/7)2 ] учитывает влияние формы сечения
кольца на модуль детали и распределение рко по уплотняющей
поверхности; для кольца круглого сечения /гф = 1,25, для кольца
прямоугольного сечения практически k$ = 1,1; е = .
з* 67
Распределение рк0 по уплотняющей поверхности с координа-
той х зависит от формы сечения кольца. Для кольца круглого
сечения зависимость рко *— х описывается параболой, поэтому
максимальное давление pi = ?12рк0. Когда возникает давление р,
достаточное для деформации кольца, его материал ведет себя
подобно очень вязкой жидкости и передает давление р на стенки.
При этом на уплотняемых поверхностях шириной I возникает
давление рк, близкое к сумме рк0 + р:
Рк = Рко-НР. (3-5)
где s — коэффициент передачи давления в условиях всесторон-
него сжатия, определяемый в основном коэффициентом Пуассона
р* [для резин р* = 0,48-г0,496, поэтому s = р*/(1 — р*) =
= 0,94-0,98].
Результаты экспериментальной проверки аддитивной зако-
номерности (3.5) передачи давления на уплотняемые поверхности
показаны на рис. 3.7. Эпюры контактного давления рк — х,
определенные на специальном приборе [28] для колец круглого,
прямоугольного, Х-образного и U-образного сечений, подтверж-
дают уравнение (3.5). Положение максимума рк — х смещается
в сторону низкого давления вследствие деформации сечения кольца
под действием р. Таким образом, при правильной установке ко-
лец в закрытую канавку контактное давление рк автоматически
растет с давлением среды р, причем рк > р. Обратившись к урав-
нению (3.4), установим, что герметичность при этом, несмотря на
рост р, возрастает за счет уменьшения члена е~3(рк/Л1). Уплотне-
ния прокладками не обладают способностью к самоуплотнению.
Рис. 3.7. Распределение контактного давления р& по ширине контактной поверх-
ности для колец различного профиля [29]
68
F
f Q,CHJ/4
Рис. 3.8. Формирование зазора и
утечки в механических торцовых
уплотнениях:
а ~ схема действующих сил; б — схема
образования зазора в начале вращения;
в—зависимость зазора б между дисками от скорости скольжения v и контакт-
ного давления рк; г — утечки Q и трение f в функции давления среды р (при
v = 5 м/с; уплотнение — сталь по углеграфиту в масле); д — утечки Q в
функции коэффициента
При действии давления среды р здесь может уменьшаться р1О и
при некотором критическом давлении р = ркр наступает раз-
уплотнение (величина ркр зависит от жесткости фланцев и пред-
варительной затяжки болтов).
Уплотнения подвижных соединений. Движение контртела
(вала, штока, цилиндра) меняет состояние контакта и вызывает
новые физические процессы, в результате которых между уплот-
няемыми поверхностями может возникать пленка смазки, а в об-
разовавшийся зазор проникает уплотняемая жидкость.
В торцовых и радиальных уплотнениях соединений враща-
тельного движения поток утечки Q, создаваемый перепадом дав-
ления между средами, перпендикулярен потоку жидкости в на-
правлении скольжения. Утечка зависит от величины зазора
б == F (у, р, рк ...), геометрии поверхностей и других факторов,
учет которых возможен только при более детальном анализе.
В механических торцовых уплотнениях за счет гидравличе-
ской разгрузки контактной поверхности добиваются снижения
трения при обеспечении самоуплотнения. Действующие на уплот-
няющий элемент (подвижное кольцо) силы показаны на рис. 3.8, а:
Рк = Рко 4- S.P k frp, (3.6)
69
где sT = kF — kp— коэффициент обратной связи (sT = 0,1-т-0,2);
kp = FJF — коэффициент нагруженности (kF = 0,64-0,7);
kv = pjp — коэффициент распределения давления в радиальном
направлении контактной поверхности (kp = 0,454-0,55); рк0 ==
= рп — контактное давление, создаваемое пружиной; k — коэф-
фициент эмпирической формулы.
Влияние kp на герметичность уплотнения иллюстрируется
графиками на рис. 3.8, д, из которых следует, что при kp < kF mln
(например, при п = 3000 об/мин kFmin = 0,57) наступает раскры-
тие стыка и потеря герметичности. Соответственно определяется
Р« mm = Рпр 0,25 МПа. С другой стороны, увеличение рк по-
вышает силу трения, нагрев и износ, поэтому верхний предел рл
также ограничен. Проектируя уплотнение, следует обеспечить
условие /?кш|п < рк < рк шах при изменении давления среды от
НУЛЯ ДО ртах-
Формирование зазора первоначально вызвано взаимным со-
ударением выступов поверхностей торцов (рис. 3.8, б) в отдельных
точках. В результате этого даже при малых скоростях скольже-
ния между торцами возникает зазор 60 порядка долей микрона.
Графики на рис. 3.8, в показывают, что б0 Ra- Дальнейшее
увеличение скорости скольжения вызывает развитие гидродинами-
ческих подъемных сил в пленке и увеличение зазора до 2—3 мкм.
Толщина пленки зависит от нагрузки на диск и уменьшается
с ростом нагрузки. Пленка обладает свойствами самовыравниваю-
щейся системы, в которой с ростом нагрузки Р от нуля до pKmxlF
автоматически уменьшается толщина пленки и возрастает ее
подъемная сила. При сформировавшемся жидкостном режиме
(обычно при рк < Зрко) толщина пленки 6 определяется суммой
6о + 6Г kf, в которой бг 60 (рис. 3.8, в). Подставляя
эмпирические зависимости kf, — в уравнение расхода
утечки, получим с учетом уравнения (3.6)
Л . nD / р \‘Л
где фт5 — коэффициент фт для жидкостного режима.
Дальнейшее увеличение нагрузки приводит к смешанному
гранично-жидкостному режиму, при котором в области выступов
контактируют граничные пленки и средний зазор близок к 6
Rz. Для этого режима Майер [102] рекомендует эмпириче-
скую формулу
Рк
При больших нагрузках возникает граничное трение, расчет
утечек при котором [102] ведется по формуле
П — .1. nD
Рк
70
Экспериментальная зависимость Q от р показана на рис. 3.8, г
[102]. Уплотнение герметично до перепада давления
Др < ро = 2о/6,
где о — коэффициент поверхностного натяжения (для воды
75-Ю"5, для минеральных масел 30-1СГ5, для силиконовых
жидкостей и спиртов 20-Ю"5 Н/см). Вибрации нарушают устой-
чивость мениска и действие капиллярного давления.
Формирование зазора в эластичных уплотнениях связано
с релаксационной природой резины. Под воздействием танген-
циальных сил трения и нормальных сил от выступающих микро-
неровностей точки поверхности эластичного уплотнения находятся
в состоянии непрерывного движения. Благодаря внутренним
упругим силам они стремятся следовать за микронеровностями
контртела, но вследствие релаксации обратное их движение
отстает от соответствующих точек контртела. Процесс образова-
ния зазора усиливает граничная пленка адсорбированных на
поверхности контртела поверхностно-активных веществ и загряз-
нений. В результате совместного воздействия этих факторов при
движении контртела между поверхностями частично возникает
пленка жидкости, частично появляется граничная пленка, раз-
деляющая поверхности уплотнения и контртела.
На формирование жидкостной пленки оказывает большое
влияние величина микроперемещений и свойственная резине ско-
рость восстановления формы vQ. Можно показать [23], что
в эластичных уплотнениях образуется пленка смазки толщиной,
пропорциональной !р" (п = 0,54-1,0); пленка в большой
степени зависит от величины и геометрии контртела. При
увеличении давления среды автоматически возрастает контактное
давление рк и ширина контактной поверхности I, улучшая
герметичность уплотнения.
Уплотнения соединений возвратно-поступательного движе-
ния (УПС). В зависимости от сочетания р, v, р, конструкции
и материала уплотнения они имеют несколько режимов работы
с различными механизмами трения и утечки (рис. 3.9, а). В об-
ласти очень малых ри или высоких р наблюдается смешанное
гранично-сухое трение при практическом отсутствии пленки
жидкой смазки, наличии граничной пленки и очагов схватыва-
ния (режимы I—II). Режим сухого трения сопровождается раз-
витием высоких поверхностных температур и быстрым износом
уплотнения. При возрастании ри граничная пленка распростра-
няется на большую часть поверхности (режим III). Далее ме-
стами возникает пленка смазки в условиях смешанного гранично-
жидкостного трения (режим IV), что проявляется в снижении
трения и появлении утечек. При достаточно больших ри и умерен-
ных р имеется почти сплошная пленка смазки, определяющая
Жидкостное трение и природу утечек.
71
V,mkm f
/ j Д [ Ш I 27
-4
VtMHM
0,35 7
0,30 - 6
0,25 p 5
0,20
0,15 -3
0,10 - 2
0,05 - 1
4 8 12 16 20 24 28 32р,МПа
6>
0)
Рис. 3.9. Утечки и трение в уплотнениях соединений возвратно-поступа-
тельного движения:
а »— зависимость утечки У_и коэффициента трения f от безразмерного критерия 6;
б — зависимость утечки V от давления среды р [29 J; в — зависимость V от ско-
рости скольжения о. Кольцо круглого сечения; резина на основе СКН по стали
R = 0,2 мкм; масло АУ
Для режима жидкостного трения удается сравнительно просто
получить зависимость утечек Q от рабочих (ц, v, р) и конструк-
тивных (рко, е, Еж) параметров. Оказалось также возможным
распространить полученное уравнение Q = F (ц, v, р ...) на
другие режимы работы, введя функцию режима ф, пределы ко-
торой указаны на рис. 3.9, а.
При этих исследованиях выявилось существенное влияние
соотношения толщины смазочной пленки б и высоты неровностей
поверхности Rz. Поэтому при переходе к безразмерным крите-
риям режима можно использовать не только общепринятый кри-
терий G = ри/(рк<2')> но и критерий h = ДЛ/Rz, выражающий
отношение толщины пленки ДЛ, эквивалентной утечке, к высоте
микронеровностей Rz. Теория основана на совместном решении
уравнений гидромеханики и уравнения упругости. Утечка обра-
зуется в результате того, что толщина пленки б, при выходе контр-
тела из полости со скоростью t/j отличается от толщины пленки б2
72
при обратном ходе со скоростью ц2 (обычно > 62). За каждый
двойной ход L см контртела диаметром D см утечка в см3 равна
]/=^(Ф161-фД) = ^Д/1, (3.7)
где Фг и 'Ра — функции, учитывающие возможность различных
режимов при прямом и обратном ходах (например, при прямом
ходе может быть режим V, при котором фх = 1, при обратном
ходе— режим 11 и фа = 0, а также другие их сочетания); ДЛ—
эквивалентная толщина пленки, см. Толщина пленки опреде-
ляется по уравнениям [28]
Sj = —ЦН—; 6а = ]/ k2 , W , (3.8)
1 Г 1 (Лрн/dx)! 2 V 2 {dPn/dx)2 ’ ' ’
где выражения (dpjdx)i = рм и (dpKldx)2 = р^— градиенты
давления в точках перегиба кривой рк в зависимости от х. Прибли-
женно pwl и pw2 определяются из треугольников и
А2В2С2 (см. рис. 3.13):
При более точном значении этих градиентов для колец круг-
лого сечения формулы для толщины пленки соответственно на
входе и выходе из уплотнения имеют вид
= = (3.9)
г Рко У Рко СР
В уравнениях (3.8) и (3.9) р! и р2—вязкость жидкости соот-
ветственно при внутреннем и при наружном давлениях.
Скорости прямого и обратного ходов и v2 могут быть раз-
ными, тогда при v2 > fj утечки могут отсутствовать за счет
б2 бх. Если контртело совершает ю двойных ходов в секунду
при Uj = v2 = v, то расход утечки будет Q — V© см3/с.
Удобно относить утечку V к площади штока riDL м2, тогда вели-
чина V = 2V/(nDL) = ДЛ численно равна толщине пленки Д/гмкм,
и логично вводится в рассмотрение критерий h = &hlR2.
Влияние параметров режима р, v, ц на утечки УПС из уравнений
(3.7), (3.8) и (3.9) можно для vt = v2 = v выразить в более на-
глядной форме
Q = tyynDvd ]/l*v/(pd) = фу • nDvd ]/G см3/с, (3.10)
в которой все сложные функциональные зависимости от конструк-
тивных параметров и характера физических процессов объеди-
нены функцией фу; G — критерий режима.
На рис. 3.9, бив показаны экспериментальные зависимости V
от р и V от v для уплотнения кольцом круглого сечения. В гид-
73
Рис. 3.10. Утечки в манжетных уплотнениях валов:
а — профиль сечения и распределение контактного давления; б — вынос плен-
ки смазки на передней половине вала; в — то же на задней половине вала;
г — зависимость утечки от частоты вращения вала; д — совместное влияние
частоты биений и эксцентриситета вала на герметичность
равлических машинах эластичные УПС применяют для гермети-
зации соединений при давлении среды до 100 МПа и скорости
скольжения до 0,5 м/с, чаще для р до 40 МПа; при этом уровень
негерметичности оценивается величинами Д/i порядка 0,01—
0,5 мкм.
Радиальные манжетные уплотнения с нажимной пружиной
(см. рис. 3.1, б) при перепадах давления до 0,05—0,15 МПа яв-
ляются самым распространенным типом уплотнений валов вслед-
ствие простоты, малых габаритов, хорошей герметичности. С ва-
лом контактирует узкая кромка уплотнения, давление которой рк
создается в основном браслетной пружиной. При оптимальном
Рк = Pi = 1,5ч-3,0 МПа или удельном усилии контакта Р =
= 1рк = 2 4-4 Н/см (рис. 3.10, а) в месте контакта обеспечивается
тонкая пленка смазки толщиной в доли микрона, смешанный ре-
жим трения и хорошая герметичность. Утечки при отсутствии
дефектов при этом весьма малы и определяются прежде всего не-
которой неперпендикулярностью кромки к оси вала. Механизм
таких утечек аналогичен рассмотренному выше для УПС.
Из рассмотрения рис. 3.10, бив следует, что поверхность
вала на его передней половине движется относительно переко-
шенной кромки таким образом, что пленка жидкости увлекается
валом из зазора наружу. На задней половине вала происходит
74
обратное явление и пленка засасывается валом под кромку ман-
жеты. Разность толщин пленок 6Х и б2 образует утечку. Таким
образом, для расчета утечки манжетного уплотнения может
быть применено уравнение (3.7), в котором путь L = лО -п/60,
В = D tg у (где у — угол наклона кромки, п —- частота враще-
ния вала, об/мин):
Q = TtZ?2 (п/60) tg у-ДЛ/2. (3.11)
Вычисление Д/i производится по уравнению (3.8), но производные
(dpjdx) lt2 берутся в направлении движения поверхности вала;
они определяются профилем сечения кромки манжеты (углами
и (52> показанными на рис. 3.10, а). При определении ДЛ следует
иметь в виду большое влияние на рк перепада давления Др.
Обратная связь по давлению в манжетных уплотнениях очень
сильно выражена, так как Др действует на всю поверхность губки
манжеты шириной Ь, а рк — только на кромку шириной I =
= 0,24-0,3 мм. Из работы [28] следует, что рк = рко + Др х
X Ь/l + р, рк Рко + ЮДр. Поэтому манжетные уплотнения
при Др >0,15 МПа работают при недостаточной смазке и быстро
изнашиваются. Подставляя в уравнение (3.11) значение Д/i =
= F (|i, v, р ...), объединяя все параметры, кроме р, vt р в функ-
ции фв, и вводя характерный размер d't получим уравнение
Q = yBTiDvd' ]/ py/(pKd'),
устанавливающее принципиальную зависимость утечек за счет
перекоса кромки манжеты от параметров режима.
Следующей важной причиной утечек манжетных уплотнений
является наличие статического и динамического эксцентриси-
тетов вала. Первый вызывает неравномерность распределения рк
по окружности кромки, чем способствует негерметичности. Дина-
мический эксцентриситет вызывает радиальные перемещения
точек уплотняющей кромки при вращении вала. При эксцентри-
ситете ед поверхность вала совершает радиальные перемещения
(биения):
Дг = ед sin со/, где со = 2шг/60, /г — в об/мин.
Чтобы кромка уплотнения не отставала от вала, ее поверхность
Должна восстанавливать свою форму со скоростью vB > ид —
= едсо. Фактически при температуре выше переходной к стекло-
ванию начинается влияние релаксации резины уже при >
> 0,1 м/с. При температуре, приближающейся к стеклованию ре-
зины (—35ч—40° С), релаксационные процессы резко возрастают
и скорость восстанавливаемости значительно уменьшается. Кроме
того, биение вала вызывает развитие инерционных сил в кромке,
пропорциональных ускорению j = ед<о2, и соответствующее сни-
жение контактного давления. В результате совместного влия-
ния релаксационных и инерционных воздействий на кромку
75
при некотором сочетании величин ед и п наступает разуплотне-
ние вала.
На рис. 3.10,г показано влияние на герметичность частоты
вращения п, а на рис. 3.10, д—совместное влияние ед и п.
Из изложенного следует критерий для назначения допусти-
мого динамического эксцентриситета: 8дм < kva [где
величина порядка (0,Зч-0,4) vB м/с].
Классы негерметичности. Из сопоставления уравнений, опи-
сывающих утечки через уплотнения различных типов, вытекают
следующие выводы.
1. Утечки пропорциональны размерам соединения, поэтому
целесообразно сравнивать уплотнения по величине погонной
—* см3 1
утечки за килосекунду Q = QIВ отнесенной к пе-
риметру уплотнения В дм, либо по утечке V = VIF, отнесенной
к единице площади F (штока, диффузионного проникновения)
см3/м2.
2. В рассмотренных уравнениях выявлена явная зависимость
величины утечек от рабочих параметров режима р, v, р или их
совокупности в форме безразмерных критериев режима. Осо-
бенно важна идентичность критериев режима с безразмерной тол-
щиной пленки, эквивалентной утечкам, и их связь с характери-
стиками трения. Безразмерные критерии позволяют распростра-
нять результаты частных экспериментальных исследований на
другие типоразмеры уплотнений.
3. Для оценки многочисленных конструктивных факторов
и погрешностей в уравнения утечек введены функции ф, характер-
ные для каждого типа уплотнений. Эти функции позволяют оце-
нить также влияние старения, износа и закономерность распреде-
ления большого количества однотипных уплотнений по степени
герметичности [плотность распределения вероятности р (Q)].
Утечки в большой партии уплотнений имеют наиболее харак-
терную среднюю величину Qcp, а отклонения от нее отдельных ре-
зультатов находятся в определенных пределах (рис. 3.11, а),
что позволяет при статистической обработке материалов уста-
новить соответственно их математическое ожидание QM и диспер-
сию ам. Погонные утечки Q и V позволяют сравнить степень
герметичности уплотнений различных типов (рис. 3.11, б) и уста-
новить для их оценки классы и группы герметичности. При этом
рассматривают утечки в характерном для каждого типа уплот-
нений диапазоне скоростей и давлений. Величина утечки для
уплотнений разных типов находится в очень широких пределах
(рис. 3.11, в, табл. 3.3), поэтому шкала разбивки на классы и
группы выбрана нелинейной с возрастанием QM по геометрической
прогрессии.
Распределение р (Q) бесконтактных уплотнений изображается
симметричными кривыми (5 и 6 на рис. 3.11, в) и описывается
двухпараметрическим (Q„,au) нормальным законом. Для осталь-
76
Ри 3.11. Распределение больших партий уплотнений по степени герметичности:
1 — уплотнения неподвижных соединений; 2 — УПС; 3 — манжетные уплотнен и
4 — торцовые механические уплотнения; 5 и 6 — бесконтактные уплотнения
вых типов уплотнений характерны несимметричные кривые р (Q)
с максимумом, смещенным к нижнему пределу; кривые описы-
ваются трехпараметрическим логарифмически нормальным зако-
ном распределения. Такая закономерность объясняется стремле-
нием добиться при изготовлении продукции минимума утечек
после монтажа и отладки уплотнений. Изделия с утечками свыше
допущенных при приемо-сдаточных испытаниях (величины Q
правее точек Л1Э Л2, Л8 и Л4 на кривых /, 2, 3 и 4) бракуют и
направляют на доработку.
В процессе эксплуатации за счет старения материала, износа
сопряженных деталей и роста воздействия таких неблагоприятных
факторов, как деформация посадочных мест, вибрация, корро-
зия, происходит постепенное увеличение утечек. Когда они прев-
зойдут допустимые нормы, уплотнение необходимо заменять.
Обычно при эксплуатации допускаются утечки по нормам сле-
дующего класса (группы) герметичности. Количественная оценка
утечек при эксплуатации изделий, как правило, затруднена или
невозможна, поэтому в табл. 3.3 указаны также критерии визуаль-
ной оценки.
Изучение утечек через уплотнения в течение длительного
периода эксплуатации (рис. 3.12) показывает их нестабильность
но времени и наличие случайных кратковременных пиков. Наибо-
лее вероятной причиной этого явления следует считать раскли-
нивающий эффект от попадания в зазор твердых частиц загрязне-
ний, содержащихся в рабочих жидкостях или выделяемых в месте
77
Таблица 3.2
КЛАССЫ НЕГЕРМЕТИЧНОСТИ УПЛОТНЕНИЙ И УДЕЛЬНАЯ УТЕЧКА
Q см3/дм-кс, Qp сма/дм2-кс, V см9/м2
Класс Удельная утечка Качественная (визуальная) оценка Характерные типы уплотнений
0—0 0—1 До 10-1» МО*5 Абсолютная герме- тичность Металлические сильфоны
1—1 От 1-10*4 до 5-10"4 Визуально невиди- мое отпотевание Мембраны — диффузия через резину
1—2 От 5-10"4 до 2,5-10"? То же Уплотнения неподвиж- ных соединений (УН) эластомерные
2—1 2—2 От 2,5-10"3 до 10-Ю"3 От 10-Ю"3 до 5-10"2 Подтекание без кап- леобразования и па- дения УН в тяжелых режимах, эластичные У ПС штоков, УВ валов манжетные
3-1 От 5.10-2 до 25•10"2 Подтекание с капле- образованием У ПС в тяжелых режи- мах, УВ манжетные, тор- цовые
3—2 От 25-10"2 до 1 Капельные утечки УВ торцовые, манжет- ные
4—1 От 1 ДО 5 Капельные утечки УВ торцовые, УПС на- бивочные, УВ набивоч- ные
4—2 От 5 до 25 Часты 2 капли Бесконтактные УВ, УПС
Б От 25 до 100 Непрерывные утечки Бесконтактные
6 Свыше 1 • 102 То же То же
контакта при износе. Постепенно эти частицы загрязнений уда-
ляются из зазора, а поврежденные участки прирабатываются и
утечки уменьшаются до нормальных пределов. Как правило,
в пределах установленного для уплотнения класса герметичности
первая группа оценивает герметичность при нормальной работе,
а вторая — выбросы утечек. В заключение еще раз обратим вни-
78
123456789 Ютысч
Рис. 3.12. Утечки торцового уплотнения при длительной работе (мас-
ло АУ, температура 40—60° С, давление 0,05 МПа)
мание на то, что погонная утечка Q, V находится в определенной
связи с толщиной пленки смазки и режимом трения в месте кон-
такта.
Примеры расчета утечек. Пример 1. Определить диффузионные потери
через диафрагмовое уплотнение компенсатора температурных деформаций ра-
бочей жидкости гидропривода (см. рис. 3.1, з). Сферическая диафрагма из масло-
стойкой резины площадью F = 100 см2 и толщиной I = 2 мм отделяет рабочую
жидкость от атмосферы. Давление жидкости — атмосферное. Температурный
режим: = 20р С в течение пяти лет, I* = 60° С в течение /2 = 1000 ч, ==
= 90° С в течение 13 = 100 ч.
Расчет расхода диффузионного проникновения Qi ведется по уравнению
р
Ql = kai — bpi смг1с,
в котором коэффициент проницаемости kGi в соответствии с уравнением
1,05 (<;_ 20)
ь . — Ь е 20
равен: kal = Ы0“9, ko2 = 12-10"9, kG3 = 40 • 10“9 см2/с-МПа.
Перепад парциальных давлений жидкости и насыщенного пара Др/ « =»
= 0,1 МПа, так как в интервале температур от 20 до 90° Срг-2 = 0,14-0,5 мм рт. ст.
Объем просочившейся жидкости Ui = Qiti см3.
Подставляя значения членов уравнения (в см, с и МПа), получаем
Qi = ЫО’МОМ, 1/0,2 = 5‘10“8 см3/с; t± = 5-12-30,5-24-3600 = 15,8-107 с;
= 5- 10’8-15,8-107 = 7,8 см3}
Q2 = 12.10"9-102• 0,1 /0,2 = 0,6.10"6 см3/с; t2 = 3,6.10f с;
t/2 = 0,6- 10”б-3,6.106 = 2,2 см3;
Q3 = 40- IO"9-102- 0,1/0,2 = 2,0.10“6 см3/с; t3 = 3,6-103 с; U3 = 0,7 см3.
Общие потери жидкости за пять лет эксплуатации U = + U2 + U3 =»
== 7,8 + 2,2 + 0,7 = 10,7 см3.
Класс негерметичности уплотнения в соответствии с табл. 3.2 оценивается
Удельными потерями за килосекунду:
Температура, °C ..........
^дельные потери, см3/дм кс
Класс негерметичности . .
20 60 90
5-10-4 6.10'4 2- IO-3
0-1 1-2 1-2
79
Пример 2. Определить утечки по уплотняющим пояскам золотника
(см. рис. 3.1, в) при температуре = 204-504-80° С, если периметр В = nD =
== 10 мм, зазор 6 = 10 мкм, длина пояска I == 10 мм, перепад давления Др =
= 1 МПа, вязкость жидкости типа АМГ-10 р20 = 22, ц50 = 8, Щоо ==
= 3 мПа - с.
Расчет ведется по уравнению (3.2), в которое подставляются члены с раз-
мерностью: 6 в мкм, Др в МПа, р в мПа-с:
Утечка будет меняться с температурой следующим образом:
Температура, °G
Утечка, см3/с
Класс негерметичности
20 50 100
3,8.10*3 1 10’2 2,8-10"а
4—1 4—2 5—1
Пример 3. Определить утечки по уплотнению штока резиновым коль-
цом с протектором (см. рис. 3.22, а), если периметр В = nD = 100 мм, рабо-
чая жидкость типа АМГ-10, ход штока L = 100 мм, диаметр сечения кольца
d=3 мм, скорость скольжения ц= 0,054-0,5 м/с, давление р=10 МПа и
температура ^*= 204-40° С, t* = — 20° С. Шероховатость поверхности штока
Кг = 1,6 мкм.
Расчег ведем по уравнениям (3.7), (3.8) и (3.9). Для расчета утечек в нор-
мальных условиях (р = 10 МПа, v= 0,05 м/с, /* = 20° С) используем стати-
стические данные, обобщенные в критериях классов негерметичности (табл. 3.2
и рис. 3.9), из которых устанавливаем, что удельная утечка V = 0,05 см3/м2
и уплотнение соответствует 3—1-му классам. Следовательно, утечка за один
двойной ход штока V' = -у- V = 0,1-0,1 -0,05/2 = 2,5• 10‘4 смд.
За 104 = п двойных ходов утечка составит = V' >п = 2,5 см3.
Оценим утечки при =» —20° С, v2 = 0,5 м/с. В уравнениях (3.7) и (3.8)
при этом меняются только члены с К1М/, поэтому можно записать
Ki = К f
Для = —20е С р, = 130 мПа -с, для t* = 20° С щ = 22 мПа -с, по-
этому зависимость утечек от температуры и скорости будет следующей:
Температура, °C 20 20 —20 —20
Скорость, м/с 0,05 0,5 0,05 0,5
Утечка за 104 ходов, см3 2,5 8,0 10,0 24,8
3.3. ТРЕНИЕ В УПЛОТНЕНИЯХ
Методика инженерного расчета. Расчет силы трения Pf по кон-
структивным параметрам в соответствии с обозначениями на
рис. 3.13 производят с помощью условного коэффициента тре-
ния f по формуле
Pf = nDlfpK, (3.12)
где рк — среднее контактное давление по кольцу шириной I;
i
р& — 2- J рк dl ры sp [s берется по уравнению (3.5)1; I —
1 о
80
ширина контакта, зависящая
от давления и деформации е
при установке кольца в ка-
навку (рис. 3.14)
Для сложных профилей
сечения колец при определе-
нии рл следует использовать
графики на рис. 3.7. Так как
в зоне контакта наблюдается
существенная неоднород-
ность р.л и толщины пленки h,
должна быть и неоднород-
ность сил трения P'f в отдель-
ных ее элементах. Это вынуж-
дает рассматривать некоторые
средние величины рк, рко и
f, определяемые из зависи-
мостей:
Рис. 3.13. Конструктивные параметры эла
стичного уплотнения в зоне контакта
i
сила трения (находится экспериментально) = л£>| т dl\
о
i
нормальная сила давления по контакту Р= noj P^dl",
о
коэффициент трения f — PfIP.
После подстановки Pf, Р, интегрирования и упрощений полу-
чаем с достаточной точностью
f — ~ГГй • Т.-,' ИЛИ [ =-------------.
nD (Z0pKo + IP) nDl (pK0 4- sp)
Уравнение используется для расчета f по экспериментальным
данным. На рис. 3.15 показаны характерные зависимости f от р
и f от V. Непременным условием использования таких графиков
для расчета Pf является подобие профилей сечения модели и
уплотнения, так как они должны иметь одинаковые величины
производных dpjdx, определяющих толщину пленки. Режимы
трения также должны быть однотипны. При экспериментальном
определении f удобнее оперировать удельными силами трения
Pf — PflnD и давления Р — PlaD, Величина Р определяется
суммой Ро + S^P< поэтому
Pf _ _ Pf
Р P, + slp‘
Момент трения Mf для уплотнения диаметром D см, исходя
из уравнения (3.12), рассчитывают по формуле
Mt ш -J- fPD2 = + sip) D*. (3113)
81
б) г)
Рис. 3.14. Конструктивные параметры уплотнений:
а и б—ширина контакта; в — контактное давление; г — удельное
контактное усилие
Рис. 3.15. Зависимость коэффициента трения резиновых уплотнений:
а - от скорости скольжения v; б — от давления р. Резина на основе СКН-26
по стали, обработанной Яг = 1,6 мкм; /, 2, 3 и 4 кольца круглого сечения,
р=1; 2,5; 17 и 26 МПа; 5 — манжета на вал диаметром 50 мм, р = 0,8 МПа; 6 «=*
манжета на вал диаметром 35 мм
82
Рис. 3.16. Коэффициент трения эластомерных уплотне-
нений и схема состояния поверхности контакта при раз-
личных режимах трения
Зависимость PQ от деформации сжатия е для уплотнений различ-
ных типов показана на рис. 3.14, г и может использоваться для
расчета уплотнений с размером профиля сечения d от 2 до 6 мм.
Трудность расчета заключается в отсутствии формул для опре-
деления f в различных режимах работы, а также справочных дан-
ных по f в широком диапазоне скоростей, давлений, температур,
видов смазки, состояний поверхности трения.
Физические процессы и модели трения в уплотнениях. Меха-
низм трения определяется физическими процессами в области
контакта, связан с образованием или отсутствием пленки смазки
между контактирующими поверхностями, внешним проявлением
которой является утечка. Следовательно, изучение трения должно
обязательно сопровождаться одновременным определением утечек.
В зависимости от наличия и сплошности пленки смазки мо-
жет быть следующее трение (рис. 3.16, а): I — сухое; II — гра-
нично-сухое, III — граничное, IV — гранично-жидкостное и
V — жидкостное. На рис. 3.16, а и б показана схематически за-
висимость коэффициента трения и состояния контактной поверх-
ности от режима трения и ориентировочной величины смазочной
пленки 7г = 6//?2. Эту связь f и h наиболее наглядно выявляют
при жидкостном режиме трения исходя из закона Ньютона:
/ж = т/Рк = рт/(р А (3.14)
где 6 — толщина пленки жидкой смазки.
83
Поскольку в соответствии с уравнениями (3.7), (3.10) и (3.11)
толщина пленки определяет также величину утечки, введение
безразмерного критерия h = б//?2 — относительной толщины
пленки дает принципиальную возможность установления связи
трения и утечки через уплотнения. В других режимах трения
эта связь имеет очень сложный характер, слабо исследована и
нуждается в дополнительном рассмотрении.
Контактные поверхности не являются идеальными, поэтому
область контакта неоднородна, а сила трения в уплотнении опре-
деляется совокупностью сил трения Pf в отдельных элементах.
Хотя в этих элементах могут быть разные режимы трения и соот-
ветственно силы P/ь Р'[з и Р'[5, всегда какой-то один (/) режим
является преобладающим. Поэтому мы переходим от многочлен-
ной суммы
Ni
Pl- Iph+'LP'l.+ zpfb
к одночленной формуле, учитывающей главные параметры ре-
жима:
Ni
Р^Ф^Р’.^ФР^),
в которой функция Ф учитывает все остальные факторы. Как уже
отмечалось в разделе 3.2, при анализе утечек основная зависимость
выражается в функции критерия режима: G = pv/(pKd') или
Тг = &h/R2i h = f>/R2.
Эластичные уплотнения отличаются малым модулем упру-
гости, вследствие чего: 1) площадь фактического контакта близка
к номинальной даже при действии только рко; 2) величина ри
в отдельных микроэлементах поверхности близка к рк. Трение
эластомеров имеет преимущественно молекулярно-активационный
механизм, на основе представлений о котором создана молеку-
лярно-кинетическая теория трения Г М. Бартенева [51. Эта
теория наиболее точно описывает явления при сухом трении по
гладким поверхностям, имеющим место при страгивании после
длительной остановки, когда еще не сформирована пленка смазки
или граничная пленка. Режим характеризуется малыми значе-
ниями критериев G и Ъ (G < 10"9, h < 0,05 для УПС). В местах
контакта эластомера с твердым телом возникают адгезионные
связи, которые в сумме создают сопротивление трения.
Величина силы трения Pf и формирование площади факти-
ческого контакта Рф с молекулярной точки зрения определяется
энергией активации процесса и числОхМ молекул, находящихся
в контакте. Эти предпосылки позволили теоретически определить
удельную силу трения в элементе пары Р^ = F (v, pt Т ...),
84
относительную площадь фактического контакта F =* F (pt v ...),
коэффициент трения f:
pn^At(l -BT/lnu); (3.15)
F = F*/F = 1 - e"p^£; (3.16)
Z1 = = Л (i __SZ_) (i _ е-^), (3.17)
где члены Дг и В объединяют ряд физико-химических парамет-
ров; р — коэффициент, зависящий от шероховатости поверх-
ности (для резин на основе СКН р = 1,24).
Уравнение (3.17) позволяет предсказать зависимость трения
от давления р, скорости скольжения и температуры Т К, а также
от материала контртела, полярности резины и густоты простран-
ственной сетки, влияющих на члены At и В. Оно хорошо корре-
лирует с результатами экспериментов при трении образцов по
гладким поверхностям при малых v, когда отмечается линейное
снижение f при повышении температуры, рост f при повышении
скорости.
Объясняя многие экспериментальные результаты, молеку-
лярно-кинетическая теория не является общей теорией трения.
Она не может описать, например, существование максимума на
кривой зависимости f от v и явления в области больших скоростей
скольжения. Поэтому уравнение (3.17) описывает только участок /
на указанной кривой (рис. 3.16). Дальнейшим обобщением и
развитием рассмотренной теории является релаксационная тео-
рия В. В. Лаврентьева [51, однако ее формулы для инженерных
расчетов использовать затруднительно.
Граничное трение. Этот режим наиболее часто встречается
при эксплуатации уплотнений. При проектировании уплотнений
стремятся назначить конструктивные параметры, которые обеспе-
чивают режим гранично-жидкостного трения, отличающийся со-
четанием минимального трения с малыми утечками (участок IV
кривой на рис. 3.16). За счет роста нагрузок и снижения скорости
часто бывает переход в область граничного трения. Теории, ма-
тематически описывающей силу граничного трения, нет. Меха-
низм граничного трения, рассмотренный в работах А. С. Ахма-
това 14] и других исследователей, объясняется следующими яв-
лениями. На поверхности контактирующих тел образуется пленка
растворенных в рабочей жидкости поверхностно-активных ве-
ществ, из которых наиболее распространены углеводородные со-
единения, содержащие карбоксильные группы СООН. Мономоле-
кулярный слой граничной пленки на поверхности твердого тела
очень прочен и имеет модуль Юнга Е (3^5) 105 МПа. Этот
слой оказывается далее покрыт многими слоями ориентирован-
ных полярных молекул толщиной до 0,1—0,2 мкм. С увеличением
85
толщины пленки модули Е и G уменьшаются на несколько по-
рядков.
Граничная пленка предотвращает непосредственный контакт
элементов пары и, в частности, резко ослабляет силы адгезион-
ного взаимодействия эластомеров с металлическими поверхностя-
ми. При движении контртела скольжение осуществляется по по-
верхностям наименьшего сцепления, например, между концевыми
метильными группами СН3 ориентированных слоев. Силы связи
молекул и напряжение сдвига убывают по мере удаления h от
твердой поверхности в зависимости т' = l/h\ Эта зависимость
установлена теоретически (теория флуктуаций электромагнит-
ного поля) и экспериментально подтверждена Д. М. Толстым [92].
Наличие определенной связи коэффициента трения и экви-
валентной толщины пленки смазки позволяет использовать за-
висимость т' == 1/Л4 для оценки силы трения при граничном ре-
жиме. Рассмотрим контакт в зоне одного из микровыступов (см.
рис. 3.16, в), полагая, что эластомер копирует форму поверх-
ности, но толщина пленки минимальна на выступах и максимальна
во впадинах, где могут быть и скопления жидкости. Обозначив
толщину пленки h, минимальную толщину Лм и угол подъема
профиля а, получим в окрестностях выступа h = hM 4-аг. Если
напряжение трения в пятне касания т' = Е7Л4, то сила трения
в окрестностях микровыступа
Pf = ( 2лгт dr = f I ^rd(4 •
r J J (^M + «r)4
о о
После интегрирования оценим порядок членов, учитывая, что
параметры микронеровностей имеют следующий порядок вели-
чин: а 10'2 рад, г' 102 мкм, hM 10"2 мкм. Основной со-
ставляющей силы трения на микровыступе оказывается член
P'f = ^/(а‘2/1м), а удельная сила трения равна
где Еф — площадь фактического контакта на элементе действия
граничных сил.
Формирование площади фактического контакта в элементе
определяется числом молекул пленки на поверхности скольже-
ния, вступающих в контакт с мономолекулярным нижележащим
слоем пленки. Можно показать аналогично методам релаксацион-
ной теории, что относительная площадь контакта Еф уменьшается
с ростом скорости скольжения
где и0 — константа с размерностью скорости.
66
При о« г, 1 и мало меняется, при v = и0 F — 0,37.
Практический диапазон изменения Рф в зависимости от v нахо-
дится в пределах 1—0,4. Известно, что толщина пленки умень-
шается с ростом нагрузки [4], поэтому в уравнение (3.18) можно
ввести Лм = р-'1* и, объединив все параметры в А’з, записать
Pt =
Коэффициент трения в граничном режиме (отнеся 1 ф- рко/р
в Л3)
fr = ^- = Ap-*/.e-^o. (3.19)
Рк"
Исключая область очень малых скоростей, где F 1, можно
заменить F = е-^ степенной функцией F = сЛ4. Эксперимен-
тальные исследования f (у, р, р ...) подтверждают достовер-
ность уравнения (3.19) и выявляют, кроме того, слабую зависи-
мость коэффициента трения от вязкости: f = р~1/6. Последнее
можно объяснить уменьшением площади фактического контакта
за счет гидродинамических эффектов в начальном участке уплот-
няющей поверхности.
Для инженерных расчетов преобразуехМ выражение (3.19):
/г== Лгр-2/з^-оли->/в> (3.20)
где Аг — функция материала контртела и состава поверхностно-
активных компонентов рабочей жидкости, шероховатости поверх-
ности, материала резины.
Ввиду большого количества факторов, определяющих Дг,
величина /г для каждой пары находится экспериментально. На
рис. 3.15 показаны примерные пределы изменения /г в зависи-
мости от р и от V.
Жидкостное трение. При увеличении критерия G = p>v/(pKd')
в начальных участках зоны контакта развиваются гидродина-
мические процессы, приводящие к частичному раскрытию стыка
и проникновению смазки в зону контакта (см. рис. 3.16, б), Насту-
пает смешанный гранично-жидкостный режим трения. Дальней-
шее повышение G приводит к распространению зоны раскрытия
стыка на всю уплотняемую поверхность. В элементах зоны кон-
такта (/) площадью F' с жидкостной пленкой при скольжении
контртела со скоростью v развиваются силы трения, определяе-
мые по закону Ньютона
Р/ = iwF /8С.
На остальных участках при смешанном трении развиваются
силы граничного трения. Общая сила трения в уплотнении будет
при этом определяться соотношением площадей с жидкостной
пленкой и с граничной пленкой. В режиме жидкостного трения
87
Рис. 3.17. Зависимость коэффициента трения от критерия режима при
жидкостном трении (по экспериментальным данным):
а — торцовые механические уплотнения; б — манжетные уплотнения вала, в -*
вависимость фактора Ф от волнистости поверхности
доля участков с граничным трением становится малой, поэтому
можно оперировать средними величинами толщины пленки 6
и контактным давлением рк. Коэффициент /ж жидкостного тре-
ния по уравнению (3.14) будет
/ж = Н^/(Рк6)-
Толщина пленки 6 при жидкостном режиме определяется кри-
терием режима G. Приближенно:
для УПС 6 = Kyd' /G = Kyd' /pu/(pKd');
для торцовых уплотнений 6 = [iv/(pKl) v^G;
для манжетных уплотнений валов § G.
Подставляя значение б в уравнение (3.14), получим выраже-
ние для расчета зависимости / от G:
/ж = Ф0ш,
где функция Ф отражает характерные особенности конструкции
1 2
Функция Ф зависит от геометрии поверхности (рис. 3.17, в)г
эффективности обратной связи по давлению и других конструк-
88
Рис. 3.18. Коэффициент трения рези-
ны по стали без смазки при высоком
давлении
тивных особенностей уплотне-
ния. На рис. 3.17, а и б пока-
заны в логарифмической сетке
экспериментальные зависимос-
ти от G для торцовых и ман-
жетных уплотнений. При этом
выявилось, что в координатах
lg f—IgG данные зависимости
изображаются рядом параллель-
ных линий. Это значит, что
для однотипных уплотнений
показатель степени т постоя-
нен при изменении условий
работы. Величина коэффициен-
та трения оказалась определенно связанной с наличием утечек.
Влияние высокого давления. Эластичные уплотнения при
давлении свыше 30—40 МПа работают в режиме полусухого или
сухого трения. При таких давлениях уравнения (3.15) и (3.17),
выведенные без учета влияния давления на удельную силу тре-
ния P'f, дают заниженные результаты. На рис. 3.18 показаны
кривые зависимости f от р для трения резины по стали без смазки—
рассчитанная по уравнению (3.17) кривая 1 и определенная экспе-
риментально кривая 2. В области р < 40 МПа кривые совпадают,
чго объясняется превалирующим влиянием р только на площадь
фактического контакта Рф — РФЕ.
При более высоких давлениях необходимо учитывать значи-
тельное увеличение силы и коэффициента трения по сравнению
с расчетом по уравнению (3.17). Это возможно сделать на основе
релаксационной теории [5], которая рассматривает энергию
активации процесса трения как функцию фактического давления
в местах контакта. В первом приближении
личение энергии активации при уменьшении
за счет сжатия под давлением, что приводит
двучленному выражению закона трения [3]:
учитывается уве-
объема полимера
к более точному
P'l = CiF + с2
к (Р, 7) ’
(3.21)
где ci =Р/ по уравнению (3.15); с2— константа; х (р, Т) — мо-
дуль полимера при всестороннем сжатии [х (р, Т) 4-Ю3 МПа
для резины и х (р, Т) = 6-Ю3 МПа для фторопласта-4]; —>
объем полимера при р = 0.
Так как модуль х (р, Т) является функцией давления и тем-
пературы, второй член уравнения (3.21) равен х q
(где b 10 а) и растет с увеличением р за счет тепловыде-
89
Рис. 3.19. Начальное трение эластичных уплотнений:
а — экспериментальная зависимость от пути сдвига коитртела; б — схема зависимости
Pf (L); в — рост коэффициента начального трения во время остановки
ления р = ДТ, Расчетная форма зависимости f от р имеет вид
f = (1 - BT/ln V) 4- А2рт, (3.22)
где для сухого трения А 2 0,002 и т = для смешанного
О
трения Л2:=#0,001 и т = ~.
О
Трение эластичных уплотнений при страгивании. Распро-
странено мнение о существовании трения покоя, значительно
превосходящего по величине трение движения и растущего
во время предварительного неподвижного контакта. С другой
стороны, согласно молекулярно-кинетической теории трение по-
коя должно быть равно нулю, что подтверждается эксперимен-
тами, пример которых показан на рис. 3.19, а [5]. Это противо-
речие устраняется при более детальном рассмотрении процесса
страгивания, который включает несколько стадий с разным ме-
ханизмом процесса сопротивления сдвигу. Сила сопротивления Ро
зависит от пути движения L контртела (рис. 3.19, б).
На первой стадии происходит высокоэластическая деформа-
ция уплотнения, взаимное скольжение контактирующих поверх-
ностей отсутствует и сила Рс линейно растет с перемещением AL,
Удельная сила Рс = Pcln,D при этом
Р = G
г с и и,
где Н — высота уплотнения; I — ширина уплотнения (AL, //,
I—в см); G—модуль сдвига (в 3-^-5^ , МПа.
На второй стадии происходит отрыв контактной поверхности
уплотнения от контртела. Силу Pfo в момент отрыва можно на-
звать начальной силой трения. Она определяется упругим де-
90
формированием поверхностного слоя в момент отрыва и разры-
вом химических связей, возникших между полимером и контр-
телом. Следует заметить, что потери на упругое деформирование
поверхностного слоя при движении контртела определяются
разностью работ, затраченных на микроперемещения с двух сто-
рон микронеровностей, и незначительны в общем балансе потерь
трения. В момент отрыва необходимо преодолевать полную силу
сопротивления деформации, действующую на площади фактиче-
ского контакта, близкой к номинальной. Поэтому составляющая
сила Pf0 на деформирование поверхностного слоя при страгива-
нии имеет значительную величину.
На формирование силы трения оказывает большое влияние
процесс диффузии из зоны контакта жидкой пленки смазки и
граничной пленки в материал эластомера. Этот процесс допол-
няется частичным испарением или растворением пленок с наруж-
ной стороны уплотнения. Постепенное исчезновение смазочной
пленки по времени неподвижного контакта, описываемое экспо-
ненциальным законом, объясняет возрастание трения на третьей
стадии процесса, когда наступает взаимное перемещение поверх-
ностей. Чем больше время неподвижного контакта, тем больше
формируются условия сухого трения при страгивании. На этой
стадии наблюдается рост силы трения до величины PfM (см.
рис. 3.19, б) и последующее ее снижение до установившейся
Обычно при экспериментах фиксируют именно величину Р/м1
по которой рассчитывают коэффициент fQ трения покоя.
Силы PfQ и PfM зависят от скорости страгивания, температуры,
состава полимера, материала контртела и состояния его поверх-
ности, состава рабочей жидкости. Поэтому отмечается большая
разница в результатах экспериментов. Этот вопрос нуждается
в дополнительных исследованиях для получения точных расчет-
ных зависимостей.
Процесс образования химических связей (хемосорбция) ре-
зины с материалом контртела связан с наличием в ее составе
матричных структур наполнителя (сажи), не полностью израс-
ходованного при вулканизации вулканизирующего агента (сера
и ее соединения), загрязнений в виде различных солей и других
веществ. Так как количество этих веществ в поверхностном слое
ограничено, процесс хемосорбции характеризуется постепенным
насыщением и может быть описан экспоненциальным законом.
Учитывая изложенное, рост величины силы начального трения
по времени неподвижного контакта описывают уравнением
Pfo = Ры (1 - + Рх (1 -
где Tj — постоянная времени процесса диффузии смазки (вели-
чина порядка нескольких часов); PfM—максимальная сила тре-
ния; т2 — постоянная времени процесса хемосорбции (величина
порядка нескольких месяцев, т2 Tj); Рх — дополнительное
увеличение сдвигового усилия за счет хемосорбции.
91
Рис. 3.20. Зависимость силы трения от температуры
В работе [80] показано, что трение возрастает за 168 ч при
неподвижном контакте при температуре t* = +90° С в 5 раз
и более, а аналогичный процесс при /* = +20° С происходит
за 300 суток. Таким образом, рост начального трения при дли-
тельном хранении уплотнений в неподвижном состоянии можно
имитировать выдержкой при повышенной температуре испытания.
Для ориентировочного расчета начального трения по уравне-
ниям (3.12) и (3.13) коэффициент трения fto определяется по фор-
муле
ft* = fol (1 - е-(^) + /02 (1 - e-G/4
где f01 — 0,Зн-0,5; f02 — 0,4-нГ, тх= 14-3 ч; т2= 10*4-10* ч (рис.
3.19, в).
Влияние температуры. При сухом и смешанном режимах
сила трения Pf эластомеров с уменьшением температуры линейно
растет до максимальной величины при t* = t* + (104-20)° С,
что соответствует изменению члена 1 — ВТНпи в уравнениях
(3.15) и (3.22). Зависимость Pf от t* показана на рис. 3.20. Тем-
пература влияет также и на член 1 — е-Ррк/£ уравнений (3.16)
и (3.17) вследствие изменения модуля Е в зависимости от темпе-
ратуры. Граничное трение в широком температурном диапазоне
исследовано недостаточно, однако рост Pf при уменьшении t*
здесь также имеет место. При понижении температуры ниже
переходной к стеклованию области (от + 20° С до /*) сила
трения резко снижается, что объясняется уменьшением площади
фактического контакта за счет роста модуля при уменьшении
температуры. При дальнейшем понижении температуры сила
трения почти не меняется.
При жидкостном трении влияние температуры проявляется
в изменении вязкости рабочей жидкости и собственного контакт-
ного давления уплотнения рко вследствие изменения модуля
Е. Так как динамический коэффициент вязкости с понижением
температуры возрастает очень сильно, коэффициент трения (ж =
= /Сцр.‘/г растет при снижении температуры.
Зависимость силы трения от температуры при смешанном
гранично-жидкостном трении показана на рис. 3.21. Экспери-
ментальные кривые имеют минимум в области от 0 до —20’ С.
92
от температуры при смешанном гранично-жидкостном режиме:
J — УПС; р = 10 МПа, v в 0,04 м/с, масло АМГ-10, D = 30 мм; 2 •-* УПС5
р = 22 МПа, масло АМГ-10, резина 9088, D = 170 мм
Коэффициент смешанного трения в соответствии с уравнениями
(3.14) и (3.20) определяется двумя членами (/г и /ж), первый из
которых уменьшается, а второй увеличивается с ростом вязкости:
f = А + Ак - (3.23)
Па рис. 3.21, а показано изменение f в соответствии с урав-
нением (3.23); оно подтверждается экспериментальными данными
в основном режиме работы уплотнений.
Трение уплотнения с защитной шайбой и уплотнений из фторо-
пласта-4. Уплотнения высокого давления для предотвращения
их разрушения от выдавливания в зазор делают с защитной шай-
бой (рис. 3.22, а), которую обычно выполняют из фторопласта-4
Рис. 3.22. Протекторные уплотнения с защитной шай-
бой из фторо пласта-4 (а) и уплотнения из фторопласта-4
(б):
J — резиновое кольцо; 2 — защитная шайба; 3 — нажимное
резиновое кольцо; 4 кольцо из фторопласта-4
93
(политетрасрто рэтилена).
Этот материал является
линейным термопластич-
ным полимером, обладаю-
щим холодной текучестью
и ведущим себя в условиях
всестороннего сжатия по-
добно очень вязкой жидкос-
ти. Его модуль при сжатии
равен 310 МПа, твердость
по Бринеллю НВ 3—
4 кгс/см2. Коэффициент
трения находится в преде-
лах 0,12—0,01, уменьша-
ясь с ростом давления
(рис. 3.23). Важно, что
зависимость коэффициента
трения от скорости в пре-
делах v < 0,3 м/с весьма
полога (градиент dPt/dv
Рис. 3.23. Коэффициент трения фторопласта-4
по стали (Rz = 1,6 мкм), рассчитанный по эк-
спериментальным данным:
/ — из работы [5]; 2 — из работы [1 ]; 3 — из ра-
боты В. Б. Овандера (v = 0,1 -?0,2 м/с); 4 — тре-
ние при страгивании
мал), а коэффициент начального трения почти не растет со вре-
менем. Таким образом, физико-механические свойства фторо-
пласта-4 резко отличаются от свойств эластомеров.
Характер трения фторопласта-4 подчиняется закономерно-
стям трения полимеров в застеклованном или закристаллизо-
ванном состоянии (ветвь кривой зависимости Pf от i* на рис. 3.20
левее температуры стеклования /*). Закон трения определяется
формированием площади фактического контакта согласно урав-
нению (3.16), поэтому коэффициент трения уменьшается с дав-
лением. Учтя также слабое падение /ф с ростом скорости, полу-
чим расчетное уравнение
^ = 4(1-е-М£) „-•/., (3.24)
где коэффициент Аф = f0 определяется по графикам на рис 3.23.
Расчет комбинированных уплотнений, состоящих из рези-
нового кольца и защитной шайбы, ведется по формуле
Pf = nDlJj* 4- nDlJ^p или Pf = + Уфр,
где Zx и /2—ширина контактной поверхности соответственно
кольца и шайбы; и /ф— коэффициенты трения соответственно
резины и фторопласта. Контактное давление рк определяется
по уравнению (3.5); на поверхности защитной шайбы рк р,
так как она устанавливается в канавку без деформации сжатия
при монтаже.
Представляет интерес случай работы уплотнения при высоком
давлении внешней среды р2. При этом для совершения полезной
работы агрегата давление в полости нагнетания рх должно быть
94
больше р2 на величину Др. Расчетная формула для определения
силы трения Pf в этом случае будет
Pf = /1/1 (Р2 4- Др + Рко) 4- /2/ф (р2 4- Др), (3.25)
где коэффициенты трения /]_и /ф рассчитываются соответственно
для давлений р2 + Др + рко и р2 + Др.
Влияние высокого давления внешней среды р2 проявляется
прежде всего в уменьшении толщины смазочной пленки вследст-
вие снижения критерия режима G, в переходе к граничному
или гранично-сухому трению. Более точные расчеты требуют
построения эпюр рк (/) и определения производных dpjdx по
уравнению (3.9). Если наружная среда обладает существенно
отличными физическими свойствами (например, вода), то коэф-
фициенты f х и /ф могут существенно отличаться от рассмотренных
выше за счет влияния сил поверхностного натяжения. Эти во-
просы в настоящее время исследованы недостаточно.
На рис. 3.24 показаны экспериментальные зависимости удель-
ной силы трения уплотнения (рис. 3.24, а) от давления внешней
среды р2 (масла). Из рассмотрения этих кривых следует, что
влияние давления р2 проявляется прежде всего в росте началь-
ной силы трения Pf0, которая, в свою очередь, растет в соответст-
вии с уравнениями (3.22), (3.24) и (3.25) (рис. 3.24, б). Зависимость
Pf от Pi показана на рис. 3.24, в.
Рис. 3.24. Изменение силы трения уплотнения при высоком
давлении внешней среды
3.4. РАСЧЕТ ТЕМПЕРАТУРЫ
Проблему оптимального выбора рабочей жидкости, системы
герметизации и типа уплотнений можно решить только комплексно.
При этом необходимо проанализировать рабочие параметры
основных элементов (давление, скорость, температуру), матери-
алы и их совместимость, выделение продуктов износа и другие
источники загрязнения, содержание воздуха и возможности
обводнения гидросистемы. Далее должна быть произведена оценка
надежностных показателей уплотнений и разбивка их по степени
ответственности, выбор типов уплотнений. Анализ завершается
прогнозированием сроков смены рабочей жидкости и сроков
эксплуатации уплотнений. Эти сроки следует устанавливать
по опыту эксплуатации аналогичных систем.
Для выбора и проектирования уплотнения необходимо знать
количество рабочих циклов, давление р и скорость v перемеще-
ния во время цикла, температурный режим, частоту и ампли-
туду колебаний давления.
На рис. 3.25 для примера показаны типичные графики зави-
симости р (Q и v (Q за одно рабочее движение машины, v (0,
р (0 и t* (0 за период работы до остановки привода и графики
температуры за все время эксплуатации. Расчет средней темпера-
туры гидропривода t* °C при температуре окружающей среды to
производится по мощности потерь Nf по формулам
где N — отдаваемая гидроприводом мощность, Вт; т] — его КПД;
Qf — тепловыделение, Вт; F — площадь наружных поверхно-
стей, м2; Kf—коэффициент теплоотдачи, Вт/(м2-К), который
при воздушном охлаждении в зависимости от интенсивности об-
дува находится в пределах 12—20.
После включения гидпропривода температура экспоненци-
ально возрастает (рис. 3.25, а), так как часть выделяемого тепла
идет на нагрев масс гидропривода, а остальное тепло рассеива-
ется с поверхности F. Поэтому перегрев Л/* °C при Q = const
определяется уравнением
АГ = -Ди1(3.26)
Л 4
I
где т = 2 cfii/iKpF) — постоянная времени нагрева, ч; t —
время, ч; cz — теплоемкость материала привода, Дж/(кг- К); Gz —•
масса гидропривода, кг.
Расчет результирующего температурного графика гидропри-
вода (рис. 3.25, е) производят для различных климатических
зон. По этим графикам устанавливают сроки эксплуатации ра-
бочей жидкости и уплотнений, поскольку температура явля-
96
Рис. 3.25. Графики режима работы гидропривода и уплотне-
ний:
а — изменение температуры за один период работы; б — изменение
давления и скорости за один цикл работы; виг — изменение давле-
ния и скорости за один период работы; д и е — эквивалентные мощ-
ность и температура за весь период эксплуатации гидропривода
ется главным фактором, определяющим старение материалов.
Температура в подвижных уплотнениях ty превышает среднюю
температуру гидропривода за счет потерь на трение на величину
М*.
Расчет нагрева подвижных уплотнений. Наиболее важно опре-
делить температуру уплотнений вала. Мощность трения Nf Вт,
определяемая с помощью уравнения (3.13), вследствие малой
величины утечек через уплотнение практически равна тепловы-
делению Qf в зоне контакта:
Nf = Qf = Mf(A = (п/2) fPD2<a, (3.27)
где Mf — момент трения, Н-м; со — угловая скорость вала,
рад/с.
Наиболее теплонапряженным уплотнением гидропривода яв-
ляется манжетное уплотнение вала (рис. 3.26, а). При расчете
температуры на поверхности контакта манжеты и вала исходят
4 В. Н. Прокофьев и др. 07
в области манжетного уплотнения
из предположения, что распре-
деление тепловых потоков из
зоны контакта в вал QB и ман-
жету QM определяется уравне-
ниями
Qf = Qb + Ом Qb*»
й-тэт4' <зм>
гдеХв—коэффициент теплопро-
водности материала вала (для
стали 40 = 50 Вт/м-град);
Хр — то же для резины (Хр =
— 0,13 -т- 0,17 Вт/м-град).
Из выражения (3.28) сле-
дует, что в манжетном уплот-
нении вала основной теплоотвод
происходит через вал. В стационарном состоянии, когда темпера-
тура в каждой точке по времени не меняется, температура в се-
чении вала под кромкой манжеты будет ty. От поверхности вала
тепло отводится с одной стороны (длиной £в1) в рабочую жидкость,
температура которой равна /*, с другой (длиной Лв2)— в воздух
с температурой /о.. Температура зоны контакта ty зависит от длины
вала. На расстоянии от зоны контакта температура вала пра-
ктически равна t* Эта минимальная длина теплоотдающей части
определяется тепловой характеристикой вала т — ]/'4а/(Л.Б£>) [см.
уравнения (3.29)] (2,5//Их), Л2 > (2,5/т2). Ближе к зоне
контакта температура растет (рис. 3.26, б) до ty в соответствии
с уравнениями
д t* —________________________• Д t* —________—________
яЬП.дъ th (mJ, Z.J ’ ‘У л£>2Лвт2 th (m2, L2) ’
(3.29)
где Qx и Q2—теплоотвод от вала соответственно в рабочую
жидкость и в воздух, Вт; т1 и т2—тепловая характеристика
сторон вала, 1/м;
т1 = l/’4a1/(XBD); т2 = /4а2/(Хв£>2); (3.30)
здесь ах и а2— коэффициенты теплоотдачи от вала в среду,
Вт/м-град; D2 и D — диаметры сторон вала, м.
Коэффициент теплоотдачи от вала в окружающую среду опре-
деляется экспериментально с последующим обобщением резуль-
татов при помощи безразмерных критериев. Конвективный тепло-
обмен между поверхностью и средой оценивается критерием
Био (Bi), поэтому а находится по формуле
а = В1Лж/Р, (3.31)
где для масел типа АМГ-10 равна 0,1, для воздуха
0,026 Вт/м-град; D — диаметр вала, м.
68
Рис. 3.27. Графики для расчета температуры в манжетном
уплотнении:
а — критерий Bi = F (Re); б — зависимость th (х) от mL
Критерий Bi является функцией критериев Рейнольдса Re,
Прандтля Рг, теплоемкости окружающей среды ср и плотности
ее р. Для нашего случая эту сложную зависимость Bi = F (Re,
Рг, ср, р) можно представить графически на рис. 3.27, а, что
существенно упрощает расчеты. Определив по уравнению (3.31)
величины <хх и а2, оценим теплоотводы в наружную и внутрен-
нюю стороны вала по уравнениям (3.29) и уравнению Qf = Qi +
+ Q,:
ft" , , Л W • (М2)
mj th
В гидроприводах обычно фактическая длина вала L1B и L2b
больше минимальной теплоотдающей части Llt L2, поэтому ве-
личины (рис. 3.27, б) th (ffixLi) «=« th (m2L2) & 1 могут не учи-
тываться в расчете. Кроме того, т1^>т2, и можно ограничиться
определением теплоотвода во внутреннюю полость, заполненную
жидкостью. Из уравнений (3.30) и (3.32) следует поэтому
1 + К «2/а1 ’
(3.33)
4*
99
Подставляя в уравнение (3.29) значения т1У по уравне-
нию (3.31), С?! по уравнению (3.33) и Qf = Nf по уравнениям
(3.27) и (3.13), получим весьма простую формулу для ориенти-
ровочного подсчета температуры в ° С в зоне контакта манжеты
с валом
дг = р> р_
у ИМж KBi ’
где Pf = [Р — удельная сила трения, Н/см; v — окружная
скорость, см/с; величина Bi определяется по графику на рис.
3.27, а; величина для валов из конструкционной стали
и масел типа АМГ-10 равна 2,2 Вт/м-град, для валов из нержавею-
щей стали типа 3X13 1,6 Вт/м-град.
Удельная сила трения для манжет разных диаметров нахо-
дится в сравнительно узких пределах. Например, для манжет
из резины на основе каучука СКН-26 при давлении в корпусе
от 0 до 0,1 МПа было получено [281:
Диаметр вала, мм. 20 35 45 62
Pf, Н/см . . 4—5 5—6 10—11 7—9
Нестационарный температурный режим характерен экспо-
ненциальным повышением температуры места контакта от на-
чальной t* до ty в соответствии с уравнением (3.26). Постоянная
времени нагрева т для манжетного уплотнения с учетом выве-
денных в данном разделе уравнений будет
_ __ СрРр_______________________Li 4~ бг___
4 Вц£|Лж Bi2Л2Х0 *
где св—теплоемкость материала вала, Дж/кг-град; р — его
плотность, кг/м8; Ло — коэффициент теплопроводности воздуха.
Для часто встречающихся соотношений между диаметром
вала D и длинами его сторон £в1, £в2 (£в1 = 3D; LBi = 3D)
можно получить простую формулу, оценивающую в минутах
время t нагрева вала до установившейся температуры. Так как
t 4т, то подставляя численные значения теплоемкости кон-
струкционных сталей св =
= 460 Дж/кг • град, теплопровод-
ности масла A^=0,l Вт/м-град
и плотности стали р =
= 8-10?кг/м8, получим
Пример расчета. Манжета на вал
диаметром D = 76 мм; удельная сила
трения fy== 1,1-ь 1,0 Н/см, частота вра-
щения вала 1000—3000—4000 об/мин;
масло вязкостью vioo = 10 сСт =
=0,1 см2/с; = 0,1 Вт/м-град; среда
100
Рис. 3.28. График температуры в зоне
контакта манжетного уплотнения
снаружи корпуса — воздух (?io = 0,026 Вт/м-град); = 40° С; /♦ = 100° С.
Определить температуру в зоне контакта манжеты t* и время нагрева ty до уста-
новившегося состояния.
Расчет выполняется в табл. 3.3, где даны расчетные формулы и размерности
их членов. График температуры в зоне контакта построен на рис. 3.28, на ко-
тором нанесены также экспериментально установленные точки (из работы [1031)
для манжеты D = 76,2 мм, масла SAE = 30 (vxoo = 10-ь 13 сСт), Р = 1,73 Н/см.
Таблица 3.3
ПРИМЕР РАСЧЕТА ТЕМПЕРАТУРЫ МАНЖЕТЫ
Формула Размерность членов Частота вращения, об/мин Примечание
1000 3000 4000
nDn 0=s 60 м/с D lcm] 400 1200 1600 —
n vD Re = V D [cmI; v [cm/c] ЗЛО4 9-Ю4 1,2.10s
Bi, J/'bT — 100; 10 225; 15 275; 16,5 Рис. 3.27
д/‘ = pf. - y ГЧАв Г Bi Pf [H/cm]; v [cm/c] 20 40 45 Pf = 1 Н/см
/;=г+д/; °C 120 140 145 —
. 100 П2 ty = D2 мин D [cm] 58 26 21 са = 460 Дж/кг« гра,.
3.5. ПРОГНОЗИРОВАНИЕ СРОКОВ ЭКСПЛУАТАЦИИ
Сроки возможного хранения и работы эластомерных уплотнений
прогнозируют на основе ускоренных испытаний при повышенных
температурах. Полученные результаты экстраполируют на ра-
бочие условия, используя уравнения теории химических реак-
ций и диффузии. Наблюдения за процессом старения различных
полимерных материалов показали, что под воздействием среды
происходят, во-первых, диффузионный обмен, приводящий к из-
менению объема и состава компонентов материала уплотнений,
и, во-вторых, химические реакции (преимущественно окисли-
тельные), приводящие к частичному изменению природы полн-
им
мерных цепей и структурным изменениям. Основным параметром,
определяющим герметичность уплотнений, является контактное
давление, которое после установки уплотнений сначала быстро
уменьшается до величины р'ко за счет обратимого физического
процесса релаксации напряжения в резине (при нормальной
температуре — за несколько десятков часов). Затем происходит
медленный процесс уменьшения рк вследствие старения мате-
риала, продолжающийся при нормальной температуре несколько
лет. В качестве примера на рис. 3.29, а показано изменение рл
во времени t для резины на основе каучука СКН-26 в масле.
Уменьшение рк в процессе старения описывается уравнением
Рк — Рков (3.34)
где К — константа скорости старения, зависящая от темпера-
туры;
К = (3.35)
где А — постоянная, зависящая от природы материала; Т —
абсолютная температура; /? — газовая постоянная; U — энер-
гия активации (избыточная энергия, которой должна обладать
молекула, чтобы находиться в активном состоянии и иметь воз-
можность вступать в реакцию).
102
Из уравнений (3.34) и (3.35) вытекает соотношение между
изменением контактного давления F (р'к0/рк), временем t и
температурой Т:
ln/ = F(p'0/pK) + -^4-’ (3-36)
которое используется для построения линейных номограмм в ко-
ординатах Int и 1/Т для р'ио/рк = const (рис. 3.29, б). Экспери-
ментальное определение рк сопряжено со значительными труд-
ностями, поэтому вместо pKJpv. используют величину накоп-
ления остаточной деформации АЛ = д°_/[2- (где h0 — размер
до деформации, Лх—размер при деформации под нагрузкой и
Л2—размер после разгрузки и выдержки в течение 3 мин).
Исследования падения напряжения и накопления остаточной
деформации при старении показали, что кривые этих процессов
являются зеркальным отображением друг друга [79]. Поэтому
на номограмме рис. 3.29, б прямые , соответствующие F^pio/рк) —
— const, заменены прямыми, соответствующими АЛ — const.
Для построения номограмм необходимо по экспериментальным
данным определить величины U и АЛ в зависимости от t из кине-
тических кривых изменения остаточной деформации АЛ (рис.
3.30, а). Величину АЛ находят для каждой из трех температур:
50, 70, 90 или 70, 90, 110° С и для каждого интервала подсчиты-
вают энергию активации U кал/моль по уравнению, которое по-
лучают из выражений (3.34) и (3.35). Отношение времен дости-
жения определенной величины р'ко1рк или АЛ при температурах
Tt и Тм равно
Следовательно,
энергия активации в этом интервале
[/. = 4 6 TiTi" 1g—.
' ’ Ti - Ti+1 lg /(+1
Для большего удобства расчет времени старения производят
по номограмме (рис. 3.30, б), на которой по оси абсцисс отло-
жены масштабы времени для различных интервалов температур,
а по оси ординат — величина относительной остаточной дефор-
мации. Совмещенная кривая зависимости АЛ от t строится для
каждой марки резины. Предельным значением АЛ, при
котором допускается эксплуатация уплотнений, является АЛ =
== 0,8. При установлении срока эксплуатации или хранения не-
обходимо учесть снижение рк при низких температурах и влияние
механических воздействий на ускорение процесса старения.
ЮЗ
Рис. 3.30. Кинетические кривые накопления относительной остаточной дефор-
мации при температурах 50; 70 и 90° С (а) и совмещенная кривая (б):
7 — сутки при температуре Т = 90° С; // — сутки при Т <= 70° С; 7/7 — месяцы при
Т = 50° С; IV — годы при Т = 25° С
С понижением температуры время релаксационных перегруп-
пировок цепных молекул резины становится настолько большим,
что при разгрузке деталь не восстанавливает за ограниченное
время полностью свою форму. Уплотнение с начальным размером
/i0, установленное в посадочное место с размером ht, после раз-
грузки некоторое время имеет размер Л2, а не Ло. Величину kB —
= называют коэффициентом восстановления на морозе.
На рис. 3.31, а показано изменение kB образцов морозостойкой
резины на основе каучука СКН-18 (/* = —52° С) после снятия
нагрузки. Обычно величину kB определяют после выдержки
в течение 3 мин. На рис. 3.31, б показано изменение kB в зави-
симости от температуры для резин на основе каучуков СКМС-10
(кривая 1), СКН-18 (кривая 2), СКН-26 (кривая 3) и СКН-40
(кривая 4). kB для каждой резины значительно отклоняется
от средней величины, поэтому для оценки температурной зави-
симости kB от t* можно использовать приближенную формулу
(<с+2)-<*
kB = 1 - е ° ,
где а = —12° для резин на основе каучуков СКН-18 и СКН-26,
а ——15° для резин на основе каучука СКН-40. На рис. 3.31, в
показано падение контактного давления образцов из резины
на основе каучука СКН-26 в масле в исходном состоянии и после
1; 2—5 и 17 суток термостарения при температуре от 4- 60
до —60° С [28].
Из сравнения кривых зависимостей kB от t* и рк от t* следует,
что коэффициент kB не является достаточным критерием оценки
поведения уплотнения при низких температурах. Для учета
ухудшения герметичности при низких температурах срок эксплу-
атации уплотнений, рассчитанный по кинетическим кривым
на рис. 3.30, б, необходимо уменьшить в k (/♦) раз.
104
о
5
В первом
Ю 15 t,сутки
6)
приближении
Рк 1 — Ай
Р ко
1 — Дйе
1 - Ай,
а контактное давление при низкой температуре pKt — kBpK.
Следовательно, при расчете минимально допустимого рк =
= ркм необходимо внести первую поправку р'км — рНм1Ьъ. Ве-
личина ркм на морозе из условия обеспечения герметичности
равна —0,1 МПа.
Второй поправкой к расчету
сроков возможной эксплуатации
уплотнений неподвижных сое-
динений является учет динами-
ческих воздействий, под влия-
нием которых процесс старения
резины интенсифицируется. На
рис. 3.32 показаны кривые ре-
лаксации напряжения при ста-
тическом (кривая /) и динами-
ческом (кривая 2) нагружении,
при котором на образец дей-
ствовали высокочастотные ви-
Рис. 3.32. Влияние динамических на-
грузок на релаксацию напряжения ]2]
для образцов резины на основе СНК-40
105
брации. Кроме того, при ударных нагрузках может происхо-
дить значительная деформация посадочных мест уплотнения. Для
учета характера нагрузки вводится коэффициент ka, равный: при
статических нагрузках 1,0, при умеренных вибрациях 0,9, при
сильных вибрациях 0,8 и при ударных нагрузках в сочетании
с вибрациями 0,6.
Разброс параметров уплотнения оценивается коэффициентом
запаса ks = 1,25 ч-1,5.
В итоге расчетная величина контактного давления к концу
срока эксплуатации должна быть не менее
(3.37)
а расчетная величина накопления относительной остаточной
деформации
ЛЛ =1 (рк min/Рко)* (3.38)
По величине Д/г из совмещенной кинетической кривой на рис.
3.30, б определяется гарантированное время хранения и работы
уплотнения.
Зависимости (3.35) и (3.36) установлены для условий при по-
стоянной температуре. В реальных условиях температура хра-
нения и работы уплотнений колеблется в широких пределах
за счет суточных и сезонных изменений, а также периодических
включений привода в работу. Учет этих факторов рассмотрен
в работе [28]. При переменной температуре эксплуатации рас-
считывается эквивалентная температура /*к, Тэк [28], под которой
понимается такая температура, при которой старение в течение
года приводит к такому же изменению свойств материала, как
и в реальных условиях:
Тэк = 273 +/*к =
Ucv/R
lg Pi (0 t~UllRT‘
где (7ср и Ui •— энергия активации соответственно средняя и
в интервале температуры Tt, кал/моль; р, (/)— частота (веро-
ятность) появления температуры 7\ в течение года.
Пример расчета. Установить время эксплуатации и хранения уплотнения
неподвижного соединения торцового разъема из резины на основе каучуков
СКН-26 и СКН-18, если оно должно эксплуатироваться при температуре от
—45 до +100° С, эквивалентная температура /эк = 35° С; нагрузка при работе —
динамические вибрации; требования к надежности по лямбда-характеристике
X = 10"6. Резина имеет при температуре —45° С kB = 0,25.
Выбираем коэффициенты уравнения (3.37) равными: kQ = 0,25, k9 = 0,85,
ks = 1,3, минимальное контактное давление при температуре —45° С рКм =
= 0,1 МПа. Расчетное контактное давление к концу эксплуатации по уравнению
(3.37) в этом случае равно:
п — _ flfil МПа
₽кт1“ kBk„ 0,25-0,85 0,61 М ’
10в
Исходное контактное давление рко назначаем рко = 2,5-ь4,0 МПа, а ве-
личину р'ко с учетом релаксации резины после установки уплотнения прини-
маем p'KQ = 0,75-2,5 = 1,87 МПа. Расчетная величина накопления остаточной
деформации ДА по уравнению (3.38)
АЛ = 1 — = 1 — = °-67-
Рко 1,87
По совмещенной кинетической кривой для выбранной резины (аналогичной
кривой на рис. 3.30, б) устанавливаем для температуры /*к = 35Q С расчетное
время гарантии tr = 8 лет.
После оценочных расчетов при эскизном проектировании
производится их уточнение на этапе технического проектирования
с подтверждением принятых решений результатами конструк-
торских отработочных испытаний. Программа испытаний должна
включать ускоренно термостарение изделия с уплотнениями
и наработку ресурса.
Глава 4
ЗАГРЯЗНЕНИЯ
В РАБОЧИХ ЖИДКОСТЯХ
Анализ отказов и нарушений работы агрегатов гидросистем по-
казал, что их надежность и срок службы в большой степени за-
висят от наличия в рабочих жидкостях загрязнений. 1 Экономи-
ческий ущерб от применения некондиционных по загрязненности
жидкостей гидравлических систем очень значителен. По зарубеж-
ным данным из 100 аварийных ситуаций в гидросистемах 90
происходит вследствие загрязненности жидкости.
Особенно чувствительны к загрязнениям агрегаты, работа-
ющие при высоких рабочих давлениях. Для защиты аппаратуры,
чувствительной к загрязнениям, жидкость перед заправкой
в гидросистему и в самой системе подвергают очистке. Однако
используемые в настоящее время методы очистки и конструкции
фильтров не могут полностью решить этой задачи. По мере умень-
шения размера частиц загрязнений в жидкости заметно возра-
стает их число, а вместе с тем увеличивается стоимость их уда-
ления.
4.1. ИСТОЧНИКИ ЗАГРЯЗНЕНИЙ
При эксплуатации, хранении, перевозках загрязнение рабочей
жидкости идет непрерывно. Загрязняющие вещества выделяются
из жидкости в виде частиц красителя, различных присадок и до-
бавок, улучшающих те или иные свойства жидкости. При дли-
тельном хранении в условиях положительных температур в мас-
лах могут развиваться колонии микроорганизмов, водорослей
и грибков. В основном их наблюдают на границе масло — вода,
в отстойной зоне. Загрязнения биологического характера пред-
ставляют собой желеобразную массу, которая может прочно удер-
живаться на поверхности трубопроводов, фильтров, агрегатов.
Одноклеточные организмы при благоприятных условиях раз-
множаются. Размер отдельных бактерий, грибков, спор обыч-
но составляет 1—2 мкм, однако их длина может достигать
10 мкм.
Непрерывно идет процесс окисления масла, используемого
в качестве рабочей жидкости; активность этого процесса повы-
шается с увеличением температуры и при наличии в масле эмуль-
гированного воздуха. Катализатором окисления являются ча-
1 Под загрязнениями обычно понимают совокупность веществ, которые
могут быть выделены из жидкости (твердые частицы,смолы, вода, нерастворенный
газ, колонии бактерий и продукты их жизнедеятельности) и оказывают нежела-
тельное воздействие на целевые функции жидкости.
108
стицы износа стальных и медных деталей. При окислении в масле
образуются растворимые и нерастворимые продукты, которые
способствуют его сгущению и могут в конечном счете выпадать
в виде «лака» на детали. Мельчайшие нерастворимые продукты
окисления коагулируют и укрупняются. Они могут образоваться
также в результате термического разложения и гидролиза жид-
кости.
Замечены случаи «самопроизвольного» увеличения размера
частиц загрязнений в герметически закрытых сосудах (в баках
с запаянными заливными горловинами, внутри гидроагрегатов,
где в качестве консерванта применяется рабочая жидкость).
В жидкости, не имеющей при заполнении агрегатов и сосудов
частиц загрязнений размером более 10 мкм, со временем обнару-
живаются частицы размером 25—200 мкм в виде рыхлых образо-
ваний. Быстрый рост размера частиц происходит в жидкости,
подвергающейся вибрационному воздействию — при транспорти-
ровке. Такому явлению дано следующее объяснение. Жидкости
на нефтяной основе являются хорошими диэлектриками, по-
этому заряды на мельчайших частицах, возможно, сохраняются
такими же, как и в воздухе. При соприкосновении частицы с про-
тивоположными зарядами слипаются и образовывают частицы
большего размера. Рост частиц не наблюдается в жидкостях,
содержащих антикоррозионные присадки, при которых мелкие
частицы удерживаются на расстоянии друг от друга и, возможно,
освобождаются от своих статических зарядов.
Жидкость может загрязняться частицами пыли из воздуха.
Пыль поступает в баки через систему наддува и дренажа, через
заливные горловины при «открытой» заправке баков; в гидроси-
стему пыль попадает при сборке и изготовлении, через уплот-
нения штоков гидроцилиндров при их работе. В атмосфере всегда
в том или ином количестве есть пыль, в 1 л воздуха число пылинок
может изменяться от 10 до 200 000. Предельная крупность ча-
стиц пыли в воздухе 50 мкм, основную массу пыли составляют
частицы размером менее 10 мкм. В составе пылинок до 80% —
кварц с твердостью по десятичной шкале (Мооса) 7 единиц, до
17% — окись алюминия с твердостью 9 единиц, полевой шпат
с твердостью 6—6,5 единиц и другие компоненты. Для сравнения
можно указать, что твердость алмаза по десятичной шкале 10,
железа 4,4, меди 3,0, алюминия 2,9. Таким образом, большая
доля частиц пыли соизмерима с зазорами в подвижных узлах
гидроагрегатов, а твердость некоторых компонентов загрязне-
ний значительно превосходит твердость материалов сопрягаемых
деталей.
Непрерывно в жидкость генерируются продукты износа тру-
щихся деталей, особенно у насосов и гидромоторов. Наши изме-
рения деталей цилиндрово-поршневой группы десяти аксиально-
поршневых насосов НП-25, отработавших межремонтный ресурс
(около 2000 ч), показали, что за это время вследствие иэнбса
109
зазоры между поршнями и цилиндрами увеличились в среднем
на 10—15 мкм. При микроанализе проб жидкости было установ-
лено, что размер металлических продуктов износа, генерируемых
в рабочую жидкость, составляет от 1 до 10 мкм. Если для грубой
оценки положить, что все частицы имеют форму сферы диаметром
5 мкм, а зазор между плунжером и цилиндром увеличился всего
на 10 мкм, то за время эксплуатации только цилиндры и плун-
жеры каждого насоса вносят в систему более 800 млн. частиц
загрязнений. Кроме плунжерной пары, .у насосов интенсивно из-
нашиваются трущиеся поверхности распределительного золот-
ника и блока цилиндров, шаровой опоры толкателей поршней,
подшипников и т. п.
Много частиц загрязнений остается в гидросистеме и ее эле-
ментах после изготовления и ремонта; это песок, попадающий
при литье; пыль, осевшая на стенках; окалина от сварки, ковки
или термической обработки; остатки механической обработки
деталей; заусенцы от трубопроводов; волокна ветоши, остающиеся
после протирки. Притирочные пасты, применяемые при доводке
гидроагрегатов, образуют смешанные с парафином, стеарином,
воском и т. п. абразивные зерна (карбид бора и кремния, белый
электрокорунд, алмазная пыль), твердость которых превышает
твердость большинства конструкционных материалов. Паста при
обработке деталей обычно накапливается в глухих ответвлениях
системы и при ее работе постепенно вымывается, начиная цирку-
лировать вместе с жидкостью.
Совместное воздействие влаги, кислорода воздуха и рабочей
жидкости может вызвать на поверхности деталей, трубопрово-
дов, баков образование ржавчины и шелушение покрытий. Ча-
стицы ржавчины выпадают в виде осадков частиц микронных
размеров. Этому способствует вибрация конструкции и пуль-
сация давления.
Кроме того, загрязнения в жидкость попадают при обслужи-
вании системы, при небрежном монтаже агрегатов, рукавов
и трубопроводов, через незаглушенные соединительные узлы,
из-за загрязненности инструментов, заправочных средств, одежды
обслуживающего персонала.
Источником загрязнения топлив и масел в некоторых случаях
могут служить также сами фильтры, предназначенные для очистки
жидкости. В процессе работы фильтрующие элементы частично
разрушаются и их компоненты вымываются потоком жидкости.
Такого типа загрязнения наблюдаются у всех фильтров с волок-
нистыми наполнителями, изготовленными, например, из бумаги,
шерсти, войлока, целлюлозы, стекловолокна и т. п. Кроме того,
при использовании волокнистых наполнителей, которые могут
изменить пористость при увеличении перепада давления, при гид-
роударах и пульсации давления, задержанные фильтром частицы
загрязнений медленно проходят через фильтроэлемент и вновь
попадают в рабочую жидкость.
110
4.2. НОРМЫ ДОПУСТИМОЙ ЗАГРЯЗНЕННОСТИ
жидкости
Чистота жидкости регламентируется специальными стандартами,
например, ГОСТ 6370—59, 10227—62, 10577—63 и др. В гидрав-
лических системах общепромышленного назначения жидкость
считается чистой, если содержание загрязнений при анализе
пробы по ГОСТ 6370—59 по массе не превышает 0,005%, что
составляет 50 мг/л.
Очевидно, что массовая концентрация загрязненности жид-
костей лишь косвенно может характеризовать опасность загряз-
нений. При одной и той же массовой концентрации в жидкости
может быть малое количество крупных частиц и большое коли-
чество мелких. В то же время на надежность работы гидроагре-
гатов, как показали исследования, в первую очередь влияют
частицы определенных размеров. В основе ГОСТ 17216—71 на чи-
стоту рабочей жидкости заложен другой принцип. Стандарт уста-
навливает 19 классов чистоты жидкости, каждому из которых
соответствует определенное число частиц различного размера,
содержащихся в 100 см3 жидкости (табл. 4.1).
Могут быть и другие критерии по определению допустимой
загрязненности жидкости, например, максимально допустимое
число частиц определенного размера, или общее максимальное
количество частиц свыше установленного размера. Так, Между-
народная ассоциация транспортной авиации рекомендует обес-
печивать такую фильтрацию рабочей жидкости гидравлических
систем, чтобы в ней не было частиц размером более 5 мкм и имелось
ограниченное число частиц меньших размеров. По проекту Между-
народной организации по стандартизации ИСО/ТК 131 классы
чистоты жидкости устанавливают по числу частиц размерами
более 15 мкм. Последнее требование относится к обычным про-
мышленным гидравлическим системам, где сравнительно неве-
лики рабочие давления, а зазоры сопряженных деталей гидро-
агрегатов равны 15—40 мкм. Класс чистоты по ИСО/ТК 131,
например 15 000, означает, что в 100 см3 рабочей жидкости со-
держится 15 000 частиц с размерами более 15 мкм.
Каждой системе в зависимости от ее назначения и важности
выполняемых функций, планируемой надежности и срока службы
аппаратуры должен быть определен класс чистоты жидкости.
При этом следует учитывать, что работоспособность системы
кроме размера частиц загрязнений зависит еще и от концентра-
ции, природы и твердости частиц, величины зазоров в сопряга-
емых деталях гидроагрегатов, скорости взаимного перемещения
деталей, твердости и шероховатости их поверхностей, величины
рабочего давления и температуры жидкости. Это свидетельст-
вует о том, что нормирование чистоты жидкости для каждой
системы или класса систем является сложной задачей. Вместе
с тем требования не должны быть чрезмерно жесткими, так как
in
Таблица 4.1
КЛАССЫ ЧИСТОТЫ ЖИДКОСТИ ПО ГОСТ 17216—71
Класс чисто- ты жидкости Число частиц загрязнений в объеме жидкости 100±0,5 см9, не более, при размере частиц, мкм Масса загряз- нений, %, не более
0,5—1 1—2 2-5 5—10 10-25 25—50 50—100 100—200 Волок- на
00 800 •400: 32 8 4 1 От- сут- ствие АО АО
0 1609 800 63 16 8 2
1 1600 125 32 16 3 От- сут- ствие
2 250 63 32 4 1 От- сут- ствие Не нор- мируется
3 125 63 8 2
4 250 125 12 3
5 500 250 25 4 1
5 " 1 000 500 50 $ 2 1 0,0002
7 2 000 1000 100 12 4 2 0,0003
§ Не норми- руется 4 000 2 000 200 23 6 3 0,0004
S 8 000 4 000 400 50 12 4 0,0006
10 16 000 8 000 800 100 25 5 0,0008
11 J31 500 16 00 1 600 200 50 10 0,0016
12 63 000 31 500 3 150 400 100 20 0,0032
13 63 000 6 300 800 200 40 0,003
14 125 000 12 500 1 600 400 80 0,008
15 25 000 3 150 800 160 0,016
16 50 000 6 300 1600 315 0,032
17 12 500 3150 630 0,063
Примечания; 1. «Отсутствие» означает, что при взятии одной пробы жидко-
сти частицы заданного размера не обнаружены или при взятии нескольких проб общее
число обнаруженных частиц меньше числа взятых проб.
2. АО —" абсолютное отсутствие частиц загрязнений.
3. Масса загрязнений для классов G—12 не является обязательным контрольным
параметром. Контроль может вводиться по усмотрению разработчика системы, для ко-
торой предназначена жидкость.
112
Таблица 4.2
ДОПУСТИМАЯ ЗАГРЯЗНЕННОСТЬ РАБОЧЕЙ ЖИДКОСТИ
ПРИ ИСПЫТАНИИ ГИДРОСИСТЕМ САМОЛЕТОВ НА РАБОТОСПОСОБНОСТЬ
Меато и время определения загрязненности Число частиц загрязнении в объеме 100 см8 при размере частиц, мкм Масса загряз- нений, мг/л, не более
5—10 11—25 26-50 51-100 Свыше 100
На выходе из заправоч- ных средств 15. 25 10 2 1 0,0131
После испытаний на ра- ботоспособность системы 1000 300 75 25 1 0,296
повышение чистоты жидкости приводит к увеличению затрат
на фильтрацию. Считают [31], что затраты на фильтрацию жид-
кости примерно удваиваются при переходе к каждому последую-
щему классу чистоты.
Для окончательного контроля гидросистем в самолетострое-
нии до настоящего времени были установлены следующие нормы
чистоты жидкости [83]: жидкость на выходе из заправочных
средств и после испытаний на работоспособность гидросистемы
считается чистой и пригодной, если в 100 см3 пробы жидкости
содержание механических частиц не больше числа, указанного
в табл. 4.2, и совершенно нет свободной воды, что эквивалентно
соответственно 3 и 6-му классам чистоты по ГОСТ 71216—71.
В табл. 4.3 приводятся рекомендации [31] для ориентировочного
выбора классов чистоты по проекту ИСО/ТК 131 для различных
гидравлических систем.
Если количество частиц загрязнений в каждом размерном
интервале стандарта не совпадает с табличным, то для определения
Таблица 4.3
СВЕДЕНИЯ ДЛЯ ОРИЕНТИРОВОЧНОГО ВЫБОРА
КЛАССА ЧИСТОТЫ ЖИДКОСТИ ДЛЯ ГИДРОСИСТЕМЫ
ПО ПРОЕКТУ ИСО/ТК 131
Класс чистоты Вид гидропривода
400, 800 Небольшой мощности, высокой точности и системы
1300 2030, 3303 15 000, 21 000 управления Следящие, с чувствительной гидроаппаратурой Нераздельного исполнения мощностью до 50 кВт Стационарных машин большой мощности (свыше 50 кВт)
100 000, 600 000 Мобильных машин и стационарных машин, рабо- тающих в условиях большой загрязненности ок- ружающей среды
113
класса чистоты жидкости ВНИИГидропривод [31] рекомендует
использовать так называемый индекс загрязненности:
z = То5б *10 + П10-25 *25 + ft25-50 * ^0 + ^50-100 ‘ 100
+ Люо-2оо • 200 + пвол • 400),
где п5_10, Лю-25 ••• число подсчитанных частиц в пробе жид-
кости объемом 100 см3 в размерных группах 5—10 мкм, 10—
25 мкм и др., указанных в ГОСТ 17216—71; пвол — число под-
считанных волокон; 1/1000 — масштабный коэффициент.
Полученные значения z сравниваются со значениями z*,
подсчитанными по данным, приведенным в размерных рядах
ГОСТ 17216—71 для каждого из десяти классов чистоты от 5 до 14.
Класс чистоты
(ГОСТ 17216—71) 5 6 7 8 9 10 11 12 13 14
Индекс загрязненности 13 27 53 105 210 415 830 1645 3275 6520
При несовпадении расчетных данных z с табличными г* класс
чистоты определяется по приведенному к ближайшему табличному
значению (в сторону увеличения). Так как стандрат в 13 и 14-м
классах чистоты не нормирует количества частиц размером 5—
10 мкм, при расчете z* использовались значения, полученные
экстраполированием распределения частиц данной размерной
группы в предыдущих классах.
4.3. МЕТОДЫ КОНТРОЛЯ ЧИСТОТЫ ЖИДКОСТИ
Для оценки загрязненности жидкости используются показатели:
1) масса частиц загрязнений в единице объема жидкости, мг/л
или %; 2) объем механических включений в единице объема
жидкости; показатель с загрязненности выражают в процентах:
__объем частиц загрязнений
объем пробы жидкости
X 100%;
3) количество частиц различных размеров загрязнений в единице
объема жидкости.
Для удобства подсчета и определения гранулометрической
характеристики загрязненности частицы разделяют на группы
(см. табл. 4.1) по наибольшему значению размера.
Одним из наиболее простых и широко распространенных
методов контроля чистоты жидкости является визуальный кон-
троль. В этом случае через чистый фильтрующий материал тон-
кой очистки пропускают определенный объем контролируемой
жидкости и затем тщательно осматривают поверхность фильтро-
элемента. По обнаруженным загрязнениям на фильтре судят
о чистоте жидкости. Без оптических средств на фильтре можно
обнаружить частицы размером более 25 мкм. Чистоту бака,
например, проверяют, проводя по его поверхности чистым там-
114
поном из марли; если тампон загрязняется, то бак следует про-
мыть. Визуальный контроль проводят также с помощью так
называемого «оптического фильтра», в корпусе которого разме-
щается фильрующий элемент, подсвечиваемый лампой. Над
фильтром устанавливают линзу с 4- или 10-кратным увеличением.
Через фильтр пропускают некоторый объем жидкости. Мини-
мальный размер частиц, которые можно обнаружить таким филь-
тром, 10—15 мкм.
Массу механических примесей в единице объема жидкости
определяют по ГОСТ 6370—59. Измерения показали, что масса
1 см3 загрязнений составляет 2,3—3,5 г.
Гранулометрическая и объемная оценка загрязнений про-
водится при помощи микроскопов, обычно при 200-кратном уве-
личении. Исследуемую пробу жидкости заливают в чистый ста-
кан с плоским и прозрачным дном и закрывают притертой крыш-
кой. Высота столбика жидкости в зависимости от степени за-
грязненности принимается равной 20—60 мм. Затем стаканы
с пробой ставят на отстой. Время отстоя зависит от вязкости
жидкости: например, для жидкости АМГ-10 оно составляет —10 ч.
Естественно, на дно стакана осаждаются только частицы с боль-
шим удельным весом, чем у исследуемой жидкости. Смолистые
выделения, ворсинки ветоши практически не осаждаются. Вслед-
ствие броуновского движения не осаждаются также частицы
малых размеров (менее 1 мкм). В проходящем свете после фо-
кусировки на предметном столе микроскопа осажденные частицы
хорошо видны (рис. 4.1) и могут быть сфотографированы. Под-
счет частиц различного размера производят либо сразу на
микроскопе, либо с фотографии.
При существующем микрофотографическом методе контроля
чистоты жидкости субъективная погрешность оператора может
Рис. 4.1. Микрофотографии отстоя жидкости АМГ-10 в емкости, зали-
той до высоты 42 мм (размер ячейки 50X50 мкм)
115
достигать 100%, а время, затрачиваемое на анализ пробы, —не-
скольких часов. Измерения показали, что каждая конкретная
проба представляет собой такую совокупность значений коли-
чества частиц загрязнений п каждого размера D, которую не-
возможно соединить плавной кривой. Закономерность п — f (D)
может быть получена лишь на основании обработки большого числа
отдельных проб жидкости. Для нахождения «наилучшей» функ-
циональной зависимости между случайными величинами п и D
используется метод регрессионного анализа. К. В. Рыбаков [82]
установил необходимое число полей зрения микроскопа (фото-
графий) в зависимости от числа частиц каждого интервала раз-
мера (например, 5—10, 10—25 мкм и т. д.) и получения относи-
тельной ошибки измерения 30, 20, 15 и 10% при доверительной
вероятности а = 0,9:
Среднее число частиц за- грязнений в поле зрения 50 и более 30 20 10 5 1 0,5 0,1
Необходимое число полей зрения Относительная ошибка оп- 4 6 8 13 25 50 50 70
ределения, % 10 10 10 10 10 15 20 30
Для повышения точности и ускорения процесса контроля
чистоты жидкости разрабатываются автоматические счетчики,
в которых используется фотоэлектронный принцип определения
размера и подсчета частиц путем развертки исследованной по-
верхности пробы на широкую дорожку. Существуют разработки
приборов контроля чистоты жидкости, использующих иные прин-
ципы, например, ультразвук, силу трения подвижного плунжера
и др. Однако прибора, который бы позволял быстро, с высокой
точностью измерить загрязненность жидкости, еще нет.
Для качественной оценки загрязненности используется эмис-
сионный спектральный анализ, который позволяет определить
как химические элементы, входящие в состав загрязненности,
так и процентное их содержание. Для фазового анализа исполь-
зуется рентгеноскопический метод, который дает возможность
определить такие элементы, как кремний, окислы металлов и
т. п., входящие в состав механических частиц загрязнений. По
известной концентрации химических элементов, определенной
спектральным анализом, и составу веществ, исследованных
рентгеноскопическим методом, определяется концентрация от-
дельных веществ в загрязнении.
Во всех случаях перед проведением контроля чистоты иссле-
дуемая жидкость должна быть тщательно перемешана. Поэтому
отбор проб жидкости следует производить при работающей гидро-
системе или не позже 1 мин после прокачки системы с переклад-
кой подвижных частей агрегатов. Предполагается, что в это
время частицы загрязнений находятся во взвешенном состоянии
и взятая проба отражает действительную характеристику загряз-
116
ненности. Все приспособления и оснастка, которые применяют
при отборе проб, должны надежно предохранять пробу от загряз-
нений как во время ее взятия, так и при транспортировании и
проведении анализа. Обычно для отбора проб используют стеклян-
ные флаконы емкостью 500—1000 см3 с притертыми пробками,
хорошо промытые и сухие. Флаконы не рекомендуется заполнять
полностью, чтобы перед анализом пробу жидкости можно было
хорошо перемешать взбалтыванием. Помещение, где проводится
анализ жидкости, должно быть чистым. В нем должно поддер-
живаться избыточное давление 0,005—0,007 МПа; из окружаю-
щего воздуха не должно выпадать более 35 частиц пыли на 1 см2
поверхности в час. Контролируемыми являются частицы разме-
ром свыше 5 мкм.
4.4. ИЗМЕНЕНИЕ ЗАГРЯЗНЕННОСТИ ЖИДКОСТИ
ПРИ РАБОТЕ ГИДРОСИСТЕМ
Загрязненность жидкости, поступающей к потребителю, зависит
от того, каким образом она транспортировалась и хранилась.
Так, жидкость АМГ-10 поставляется в 20-литровых банках, за-
ливные горловины которых запаяны и запломбированы. Имеются
следующие данные о загрязненности такой жидкости:
Размер частиц,
мкм 3±=2
Число частиц в
1 см3 2000—8000
Масса частиц в 1 л,
мг/л 0,1—2
5±1
800—4500
0,2—1
Ю±2 15±2 25±2°
400—1500 200—600 200—600
0,7—2,4 1,4—4,1 5,1—20,4
Из этих данных следует, что масса загрязнений в жидкости
АМГ-10 в состоянии поставки составляет 7,5—29,2 мг/л, т. е.
менее допустимой по ГОСТ 6370—59 (не более 50 мг/л), однако
в ней содержится большое количество частиц, соизмеримых
с размерами зазоров в гидроагрегатах.
Масла, предназначенные для гидросистем общего машино-
строения, строительных и дорожных машин, станков и пр., транс-
портируются железнодорожными цистернами, хранятся на скла-
дах в резервуарах или бочках. Загрязненность жидкостей дости-
гает 0,01—0,062% и на целый порядок может превышать допу-
стимую норму. В жидкости гидравлических систем автомобилей,
самосвалов масса загрязнений изменяется от 0,03 до 0,225%,
что составляет 300—2250 мг/л.
Анализ проб, взятых ГосНИТИ из резервуаров на базах
Главнефтеснаба, совхозов, колхозов и из топливных баков трак-
торов и, комбайнов, показал, что содержание механических при-
месей достигает (мг/л) в бензине — 97, керосине — 187, дизель-
ном топливе — 630, дизельном масле— 1422, автоле — 2127,
нигроле 6000, солидоле — 2505. В рабочей жидкости гидрав-
117
Размер частиц
Рис. 4.2. Гранулометрическая характерис-
тика загрязненности жидкостей
лических систем экскаваторов
загрязненность колеблется от
178 до 1180 мг/л. В жидкос-
ти обнаружено много частиц
загрязнений большого разме-
ра, до 500 мкм. В гидросисте-
ме тракторов величина загряз-
ненности может быть равной
1800 мг/л, в гидравлических
системах станков она иногда
достигает 2500 мг/л [311.
Значительно выше частота
жидкости в гидросистемах
самолетов, где этому вопросу
зре-
уделяется особое внимание и условия эксплуатации с точки
ния поступлений загрязнений в систему благоприятнее, чем у
наземных машин.
Обобщенные результаты измерений и подсчета количества
частиц приведены на рис. 4.2.
Математическая обработка наблюдений позволила установить
взаимосвязь осредненного числа частиц загрязнений п каждого
размера D мкм в 1 см3 жидкости:
п = 3,94.105£>-2’35.
(4.1)
Из-за трудностей подсчета количество частиц размером ме-
нее 2 мкм не определялось. Поэтому величина D = 2 мкм явля-
ется границей применимости формулы (4.1). Оценка параметров
в формуле выполнена по методу средних на основании данных
k = 68 наблюдений по каждому фиксированному значению ар-
гумента D. Доверительный интервал для значений п при каждом
значении D задается верхним и нижним доверительными пре-
делами:
vs ।
П---------------------7^,
где ТГ = ]/? (п‘~п)2-
Величину у находят по таблицам /-распределения Стьюдента
по значениям т = k — 1 и а — заданной доверительной веро-
ятности. Если принять а = 0,8, то с 80 %-ной уверенностью
можно утверждать, что количество частиц загрязнений в 1 см3
жидкости заключено между верхним и нижним доверительными
пределами.
Максимальный размер частиц загрязнений определяется тон-
костью фильтрации, однако при всех измерениях было обнару-
жено, что в жидкости имеются частицы больших размеров, чем
118
те, которые должны быть задержаны фильтрами. Так, в гидравли-
ческих системах, оборудованных фильтрами с сетчатым филь-
трующим элементом грубой очистки и бумажным элементом
тонкой очистки, обеспечивающим, согласно техническим данным,
тонкость фильтрации 8—12 мкм, были обнаружены частицы раз-
мерами 25 мкм, а в гидросистемах, оборудованных фильтрами
с тонкостью фильтрации 30—50 мкм, выявлены частицы размером
до 75 мкм.
Штучная концентрация загрязнений в жидкости неравно-
мерна: число частиц малого размера значительно выше числа
частиц, имеющих размеры больше, чем поры фильтроэлементов.
При анализе изменения загрязненности жидкости в зависимости
от времени наработки системы с фильтром [49] установлено,
что число частиц загрязнений и их концентрация стремятся к не-
которому пределу и описываются уравнением
О / О \
= (4.2)
где пс, п0 и пп — число частиц загрязнений определенного раз-
мера соответственно: в баке и перед фильтром; в начале эксплуа-
тации (начальная загрязненность); поступающих в систему вслед-
ствие износа, проникновения пыли и другими путями; ф ==
= — коэффициент отфильтровывания; пг и п2 — число
ni
частиц рассматриваемого размера в пробе жидкости соответственно
перед и за фильтром; Q — расход жидкости через фильтр, см3/с;
V — объем жидкости в гидросистеме, см3; т — время фильтрации.
При выводе уравнения были приняты допущения: темп по-
ступления частиц загрязнений в жидкость постоянный, не за-
висящий от времени наработки системы; объем жидкости в гид-
росистеме в течение отрезка времени, определяемого сроком ра-
боты фильтра, постоянный, так же как и постоянен коэффициент
отфильтровывания ф.
Серия кривых, описанная
уравнением (4.2), представ-
лена на рис. 4.3. Нетрудно
видеть, что изменение загряз-
ненности гидросистемы про-
исходит по экспоненте и для
случая т —> оо асимптотически
приближается к предельному
значению
пс = Пд/ф. (4.3)
Рис. 4.3. Закономерности изменения за-
грязненности жидкости в зависимости от
количества частиц, поступающих в гидрав-
лическую систему
Из данного выражения сле-
дует, что уровень стабилиза-
ции загрязненности в системе
119
повышается с увеличением числа частиц лп, поступающих в си-
стему, уменьшается с ростом коэффициента отфильтровывания ф
и не зависит от первоначальной загрязненности жидкости п0.
Если количество частиц, генерируемых в систему и задержи-
ваемых фильтром, одинаково, то загрязненность системы не будет
изменяться со временем и будет равна начальной загрязненности:
пс = п0 (кривая 2). Решением уравнения (4.3) можно определить,
что в систему в этом случае поступает /гп = поф частиц каждого
размера. Отсюда следует, что при значениях пп > поф уровень
загрязненности в системе будет повышаться (кривая /), а при
значениях п„ < иоф — понижаться (кривая 3).
Для частиц, размер которых превышает размер пор фильтро-
элемента, коэффициент отфильтровывания ф = 1, и тогда урав-
нение (4.2) принимает вид
«с = «о« v + «nV — е v ),
из которого следует, что количество частиц загрязнений с уве-
личением времени эксплуатации уменьшается, приближаясь при
т —» со к значению пс = п'п (кривая 4), где п„ — число частиц
рассматриваемого размера, генерируемых в систему за время
одного полного прохода жидкости через фильтр.
4.5. ВЛИЯНИЕ ЗАГРЯЗНЕННОСТИ ЖИДКОСТИ
НА НАДЕЖНОСТЬ И СРОК СЛУЖБЫ
АГРЕГАТОВ ГИДРАВЛИЧЕСКИХ СИСТЕМ
Доказано [31, 44, 49, 82, 83], что повышение тонкости фильтра-
ции жидкости в гидравлической системе с 20—25 до 5 мкм увели-
чивает срок службы насосов более чем в 10 раз, а гидроаппара-
туры в 5—7 раз. При фильтрации тонкостью 10 мкм износ гидро-
оборудования дорожно-строительных машин, вызываемый загряз-
ненностью рабочей жидкости, практически прекращается. Уста-
новка фильтра с тонкостью фильтрации топлива 13 мкм вместо
30 мкм увеличивает срок службы плунжерных пар топливного
насоса в 3,5 раза. Наблюдения за эксплуатацией пластинчатых
насосов показали, что при наличии загрязнений в рабочей жид-
кости до 0,088% с размером частиц 10—40 мкм срок службы
насосов в 4—5 раз ниже предусмотренного техническими усло-
виями.
В электрогидравлических следящих системах наблюдаются
следующие нарушения работы и повреждения, вызванные за-
грязнениями: затрудненность движения или полная остановка
следящего привода; ошибка по положению привода и колебания
его положения; неодинаковая скорость перемещения привода
в ту и другую сторону; скачкообразность движения привода
при плавном изменении сигнала управления; уменьшение жест-
120
кости системы из-за увеличения со временем утечки в гидроагре-
гатах; порча поверхности штока исполнительного механизма;
порча поверхности седел клапанов; повреждение насосов и преж-
девременный выход из строя его деталей.
При наличии загрязнений особенно интенсивный износ на-
блюдается ,в; распределительных устройствах плунжерных на-
сосов, в результате чего резко снижается их подача и объемный
КПД. На рис. 4.4 приведена зависимость изменения относитель-
ного объемного КПД аксиально-поршневого насоса при работе
на очищенной и загрязненной жидкостях. Из графика следует,
что при наличии в жидкости частиц загрязнений размером 20—
30 мкм КПД за 5 ч работы уменьшается на 40%, а при работе
на очищенной жидкости заметного изменения КПД не произошло.
Усилия, потребные, например, для перемещения плунжеров
золотниковых распределителей жидкости, измеряемые десятыми
долями ньютона, могут при наличии загрязнений возрасти в сотни
раз, вызвав нарушение нормальной работы системы и даже вы-
ход из строя отдельных участков. Это особенно вероятно в си-
стемах с дистанционным управлением распределительными и ре-
гулирующими устройствами с помощью электромагнитов и элект-
ромеханизмов малой мощности. Чтобы гарантировать надежную
работу, в этом случае для преодоления сил трения плунжеров,
применяют электромагниты с большим тяговым усилием, дости-
гающим 150 Н. Такие устройства имеют большие размеры и массу
и малый срок службы, так как большие инерционные силы, раз-
виваемые якорем при его втягивании, быстро разбивают электро-
магнит. В то же время большие пусковые токи требуют мощных
контактных устройств в системах электропитания.
Жидкость со взвешенными твердыми частицами при течении
с большой скоростью, достигающей в некоторых участках систем
300 м/с, притупляет, подобно абразивной эмульсии, кромки рас-
пределительных отверстий. От этого с течением времени увели-
чиваются зазоры, уменьшаются перекрытия, изменяются коэф-
фициенты расхода и сопротивления сопл и калиброванных от-
верстий.
На графике рис. 4.5 приведены изменения относительного
расхода Q через дроссельное устройство в зависимости от вре-
мени работы под действием перепада давления Др = 10 МПа.
Под относительным расходом Q понимается отношение расхода
через дроссель в фиксируемый момент времени фф к расходу QH
через новый дроссель;
Q = Q*/Qtt-
Увеличение Q свидетельствует о повышении расхода, что вы-
звано износом отверстия в шайбе. При работе на загрязненной
жидкости через 20 ч проливки расход через дроссель увеличился
на 11%.
121
Рис. 4.4. Изменение относительного
объемного КПД »]о насоса НП-25 от
времени наработки /н:
1 — работа с очищенной жидкостью; 2 и
3 — работа с жидкостью, загрязненной ча-
стицами 7 — 13 и 20—30 мкм
Рис. 4.5. Влияние загрязненно-
сти жидкости на изменение отно-
сительного расхода через дрос-
сель:
/ — жидкость с загрязненностью
40 мг/л; 2 — отфильтрованная
жидкость с загрязненностью менее
5 мг/л
Увеличение утечки жидкости из-за износа в агрегатах умень-
шает жесткость гидравлической системы и скорость движения
исполнительных механизмов. Величина утечки влияет также на
степень рассогласования ведомого и ведущего движения в сле-
дящих приводах, так как движение ведомого звена может
начаться только тогда, когда при располагаемом перепаде давле-
ния подача насоса превысит утечку жидкости. Повышение утечки
в гидросистемах с регуляторами давления вызывает частые вклю-
чения насосов на зарядку гидроаккумуляторов. В момент вклю-
чения и выключения насосов наблюдаются кратковременные и
значительные колебания давления вследствие гидравлического
удара. Такое периодическое дополнительное нагружение трубо-
проводов и агрегатов не раз было причиной их разрушения
Наличие загрязнений в жидкости крайне нежелательно в си-
стемах, требующих точной регулировки очень малых потоков.
Практика отмечает, что при малых открытиях распределитель-
ных устройств расход жидкости после некоторого времени на-
чинает уменьшаться вследствие закупорки щели и за несколько
минут может полностью прекратиться. Это происходит потому,
что распределительное устройство само задерживает загрязнения,
что подтверждается результатами экспериментов (рис. 4.6). При
экспериментах через щель прямоугольного сечения шириной
6 мм и высотой h = 34, 24, 22, 15 и 10 мкм с перепадом давления
Др = 5 МПа проливалось масло АМГ-10, которое очищалось
фильтром, установленным перед щелью, о фильтроэлементом
из бумаги АФБ-1К и тонкостью фильтрации 8—12 мкм. При
122
анализе загрязненности жидкос-
ти в пробах, взятых после
фильтра, не были обнаружены
частицы загрязнений размером
более 20 мкм. Из графика же
(рис. 4.6) следует, что при те-
чении через щель размером бо-
лее 22 мкм расход со временем
не изменялся, но при течении
через щели размером 15 и 10 мкм
расход уменьшался всегда.
Влияние частиц загрязнений
Рис. 4.6. Изменение относительного рас-
хода Q = при течении жидко-
сти АМГ-10 через плоские щели с раз-
личной высотой h зазора
жидкости на силу трения в под-
вижных элементах гидроагре-
гатов можно определить путем
простых рассуждений. Рас-
смотрим элемент золотникового распределителя (рис. 4.7, а), об-
разованный плунжером и корпусом, с зазором между ними \ рав-
ным Л. Через зазор при наличии перепада давления Др =*
Pi—Pi происходит перетекание жидкости; вместе с ней в зазо-
ры попадают частицы загрязнений. Допустим, что сила трения
между частицей, попавшей в зазор, и плунжером равна силе тре-
ния между частицей и корпусом. Тогда сила dF, необходимая
для перемещения плунжера, определится из условия (в примере
не рассматриваются силы жидкостного трения и инерции)
dF =dPt =-^-dpds,
где dPi — сила, удерживающая частицу в зазоре; dp — пере-
пад давления на частице — разность между давлениями перед
частицей и за частицей; ds — площадь сечения частицы верти-
кальной плоскостью.
Представляет интерес определение максимального значения
силы F, потребной для перемещения плунжера. Эта сила воз-
никает при полной закупорке кольцевого зазора Л и прекращении
течения через зазор:
Др s
F = -д-1 fdp ds = ~ bps = -i- Дрл d/г,
”оо
где s = ndh — площадь кольцевого зазора.
1 Радиальный зазор h у гидроагрегатов в зависимости от диаметра плун-
жера и величины перепада давления устанавливается равным 3—100 мкм, т. е.
соизмерим с размерами частиц загрязнений в жидкости.
123
a)
Рис. 4.7. Засорение щели:
Q
Плунжер
Увеличенное изображение
выступа „а*
б)
а — ©кема к определению влияния загрязнения хсидкости на силу трения плунжерных
пар> б — профилограмма поверхности пояска плунжера распределителя 4Г-73 (верти-
кальное увеличение 20 000, горизонтальное увеличение 200)
Если плунжер имеет п поясков, разделяющих иолости с раз-
личным давлением, то величина усилия для перемещения плун-
жера увеличивается в п раз, т. е.
F = Дрл dhn. (4.4)
Эксперименты показали, что подсчитанная по этой формуле
сила трения обычно меньше действительной в 8—10 раз, поскольку
рассматривалась идеально ровная поверхность плунжера и кор-
пуса, тогда как в действительности поверхность твердого тела
всегда волниста и шероховата. По данным Крагельского И. В.
149], даже самые гладкие металлические поверхности имеют не-
ровности высотой 0,05—0,10 мкм, а наиболее грубые, встречаю-
щиеся в машиностроении, имеют выступы до 100—200 мкм, ко-
торые обычно располагаются на волнистой поверхности. Шаг
этой волны меняется в пределах 1—10 мм, а ее высота — от не-
скольких микрон до 20—40 мкм. Трущиеся поверхности плун-
жера и гильзы обычно имеют шероховатость, для которой высота
неровностей достигает значений соответственно 3,2—0,8 мкм.
Кроме того, практически всегда на концах поясков плунжеров
и гильз имеются завалы.
Типичная профилограмма поверхности плунжера распредели-
теля 4Г-73, полученная при помощи профилографа-профилометра
(модель 201), приведена на рис. 4.7, б. Профилограмма свиде-
тельствует о том, что поверхность плунжера имеет волнообраз-
ный характер. Поэтому при относительном перемещении деталей
плунжерной пары происходит изменение конфигурации зазора
и его высоты h. Это приводит к тому, что частицы загрязнений
в точках контакта могут развивать высокие удельные давления
на поверхности, образующие зазор, и внедряться в них, имея
более высокую твердость, или деформироваться, если их твер-
дость мала. При дальнейшем перемещении деталей в зависимости
124
от глубины внедрения частиц одни из них наподобие микрорез-
цов будут снимать стружку или скалывать материал, другие —
упруго его деформировать, а третьи — пластически деформиро-
вать поверхности плунжера и гильзы. Это и приводит к возраста-
нию силы трения по сравнению с расчетной по формуле (4.4).
Следует заметить, что поверхностная твердость деталей плун-
жерных пар практически не зависит от конструктивного выпол-
нения и размеров последних и равна HRC 58^-62. Примерно
одинакова также чистота поверхностей деталей после их оконча-
тельной доводки — притирки. Учитывая эту специфику при
ориентировочных расчетах, максимальное значение силы трения
в плунжерных парах можно подсчитать по формуле
F = (4-н5) Дрл dhn. (4.5)
Естественно, что уменьшение шероховатости поверхностей спо-
собствует снижению силы трения при работе с загрязненным
маслом.
Сила трения в большой степени зависит от поверхностной
твердости деталей. Так, у стальных незакаленных плунжеров
она значительно выше, чем у плунжерной пары с высокой поверх-
ностной твердостью. Поэтому материал для изготовления плун-
жеров и гильз должен быть скорее хрупким, чем пластичным.
Тогда твердые частицы загрязнений, попавшие в зазор, будут
откалывать от трущихся поверхностей мелкую стружку, которая
затем вымывается потоком рабочей жидкости. Сами же частицы
при работе в таких условиях быстро разрушаются и также вы-
мываются жидкостью. Наоборот, если выбранные материалы
пластичны, то твердые частицы загрязнений, внедряясь в одну
из сопрягаемых деталей, могут царапать поверхность другой
детали, образуя на ней борозды и выступы. Следует также иметь
в виду, что при большой твердости металла уменьшается возмож-
ность его схватывания.
Из формулы (4.5) следует, что сила трения увеличивается
с ростом перепада давления Др, диаметра плунжера распредели-
теля d и зазора h между плунжером и корпусом. Но если величина
h превышает максимальный размер твердых частиц, нераствори-
мых в жидкости, то эти частицы не будут задерживаться в зазоре,
вымываются потоком жидкости, а усилие страгивания плунжера
не будет повышаться.
Справедливость приведенных рассуждений была подтверждена
данными проведенных нами экспериментов, которые позволили
установить следующие зависимости.
Влияние размеров частиц загрязнителя.
Сила трения плунжеров гидромашин зависит от размеров частиц
загрязнителя жидкости и имеет максимальное значение, если
размер частиц близок к величине щелевого зазора. Это иллюстри-
руется диаграммой зависимости силы тока /, подводимого к элек-
125
тромагнитам для перемещения плунжера распределителя, от раз-
мера d4 абразивных частиц (рис. 4.8, а). Увеличение силы тока
свидетельствует о росте силы трения F. Максимальная ее вели-
чина, как это видно из диаграммы, имеет место при наличии в жид-
кости загрязнений размером d4 = 7-н13 мкм, близким к вели-
чине зазора между плунжером и гильзой. В этом случае при
изменении концентрации загрязнителя от 0,5 до 40 мг/л плун-
жер обычно заклинивало после 5—10 переключений. При работе
на жидкости, загрязненной частицами с d4 = 1ч-3 мкм, закли-
нений плунжера не наблюдалось. Когда жидкость была загряз-
нена частицами с d4 = 20^-30 мкм, наблюдалась неустойчивая
работа распределителя (плунжер часто перемещался с запазды-
ванием), а через 500—600 переключений плунжер, как правило,
заклинивало. Вероятной причиной этого могло быть постепенное
увеличение концентрации опасных по своим размерам частиц
в результате дробления более крупных частиц.
Влияние тонкости фильтрации жидкости
иллюстрируется графиком на рис. 4.8, б, из которого следует,
что чем выше тонкость фильтрации, тем меньше сила трения.
Измерение последней производилось каждый раз после нахожде-
ния плунжера под давлением р в течение 5 мин. Кольцевой зазор
между плунжером и гильзой был равен 10 мкм. Масло к распре-
делителю подавалось либо неочищенное, в состоянии поставки
(кривая /), либо очищенное одним из следующих фильтроэле-
ментов: пластинчатым, обеспечивающим тонкость фильтрации
120 мкм (кривая 2), сетчатым с тонкостью фильтрации до 40 мкм
(кривая 3), фетровым с тонкостью фильтрации до 30 мкм (кривая 4)
и бумажным (бумага АФБ-1К), обеспечивающим тонкость филь-
трации 8—13 мкм (кривая 5).
Влияние величины кольцевого зазора
между плунжером и гильзой. При неизменном
диаметре корпуса распределителя проводилось измерение силы
трения плунжера, диаметр которого постепенно уменьшался
притиркой. Чтобы не учитывать побочного влияния на силу тре-
ния гидродинамических защемляющих сил, возникающих вслед-
ствие нарушения геометрии плунжера при притирке, обработка
результатов проводилась путем сравнения силы трения F3 при
работе на загрязненной жидкости (в состоянии поставки) с силой
For, измеренной при подводе к распределителю тщательно очи-
щенной жидкости (последовательная фильтрация бумажным
и металлокерамическим фильтрами).
Результаты, представленные на рис. 4.8, в, дают основание
утверждать, что с увеличением диаметрального зазора 6 сила
трения увеличивается. Это справедливо до тех пор, пока в жид-
кости будут частицы загрязнений с размером, превышающим
зазор (эксперименты проводились с плунжером d = 25 мм при
перепаде давления Др = 7,5 МПа; усилие измерялось через
5 мин после подвода давления).
126
(j) e) ж) з)
Рис. 4.8. Влияние загрязнений в жидкости на силы трения плунжерных пар
Влияние времени нахождения под дав-
лением. Чем больше времени t плунжерная пара находится
в покое под действием давления, тем больше в зазоре задержится
частиц загрязнений и тем больше сила, потребная для переме-
щения плунжера. Когда щель будет полностью забита, значение
указанной силы становится постоянным. На рис. 4.8, г величины
для верхней кривой получены для жидкости с концентрацией
абразивных частиц 40 мг/л, нижняя кривая иллюстрирует рост
силы трения плунжера при работе на тщательно очищенной
жидкости. Перепад давления на золотнике 6,0 МПа.
Влияние осциллирующих движений
плунжера. Значительного уменьшения силы трения можно
достигнуть, если плунжеру или гильзе сообщить круговое вра-
щение или осциллирующие движения небольшой амплитуды и
высокой частоты. Экспериментально установлено, что изменение
амплитуды колебаний в диапазоне от 0,1 до 2,4 мм практически
не оказывает никакого влияния на защемляющую силу. При
увеличении частоты Ф колебаний плунжера до 5 Гц наблюдается
интенсивное уменьшение силы трения F, величина которой в даль-
нейшем стабилизируется и сохраняется почти неизменной до Ф =
= 30 Гц (рис. 4.8, д). На рисунке верхняя кривая построена для
давления 7,5 МПа, а нижняя — для давления 5,0 МПа.
Влияние концентрации загрязнений.
Повышение концентрации загрязнений в жидкости, не изменяя
закономерности увеличения силы трения подвижных деталей
от времени нахождения под действием давления, лишь значительно
ускоряет процесс нарастания этой силы. Чем больше концентра-
ция С загрязнителя, тем быстрее забивается зазор и сила трения
достигнет своего максимального значения. В опытах, по данным
которых построен график на рис. 4.8, е, усилие трения измеря-
лось после того, как неподвижный плунжер в течение 15 с на-
ходился под давлением 6 МПа.
Влияние перепада давлен и я. При увеличении
перепада давления сила трения возрастает быстрее. Вместе с тем
чем больше перепад давления Др, тем больше сила трения. На
рис. 4.8, ж приведены опытные данные зависимости величины
усилий, необходимых для перемещения управляющего элемента
распределителя, от Др. Верхняя кривая построена для неподвиж-
ного плунжера, нижняя — для плунжера, осциллирующего с ча-
стотой 20 Гц.
Защемления плунжеров после сброса
подводимого давления. После сброса высокого дав-
ления усилия, необходимые для перемещения плунжера, могут
значительно превышать усилия, имевшие место при действии
давления. Для сравнения можно указать, что для перемещения
опытного плунжера диаметром 12 мм, когда он не находится
под давлением, требовалось усилие 0,4 Н, после 45 мин нахожде-
ния под давлением 50 МПа требовалось усилие примерно в 40 раз
128
больше начального, а после той же выдержки под давлением
50 МПа, но через 1 мин после его сброса до куля, уже потребова-
лось усилие 2533 Н, т. е. приблизительно в 630 раз больше
первоначального. Жидкость была очищена бумажным фильтро-
элементом (бумага АФБ-1К).
Установлено, что величина силы трения, наблюдаемая после
сброса давления, зависит от подводимого давления и времени
пребывания плунжерной пары под этим давлением в покое
(рис. 4.8, з). Если при работе с малыми давлениями после сброса
рабочего давления защемление плунжера практически устраня-
лось, то при работе с высокими давлениями сила трения стано-
вилась недопустимо большой. Она уменьшается при осцилли-
ровании плунжера. Причиной возникновения защемляющих уси-
лий после сброса рабочего давления является забивание зазоров
твердыми частицами загрязнений.
На величину защемляющих усилий оказывают также влия-
ние упругие силы, возникающие вследствие деформации стенок
плунжера и гильзы под действием давления. После сброса давле-
ния упругие силы .возвращают плунжеру и гильзе исходную
форму и размеры, и механические частицы, попавшие в зазор,
будут обжаты стенками каналов.
Влияние конструктивной схемы гидро-
агрегата на силы трения. Эксперименты показали,
что наиболее чувствительны к наличию в жидкости загрязнений
агрегаты с цилиндрической золотниковой парой. Менее всего
влияет загрязненность на стабильность работы устройств кла-
панного типа. Распределители со струйной трубкой нечувст-
вительны к загрязнениям жидкости, чего нельзя сказать о рас-
пределителях типа сопло-заслонка. Здесь наблюдались случаи
полного и частичного забивания частицами загрязнений сопла.
Это приводит к замедленному срабатыванию гидропривода и
нарушает баланс сил, действующий на управляемый сервозолот-
ник, в результате чего появляется ошибка по положению в си-
стеме управления или же неодинаковость скоростей перемещения
в противоположных направлениях.
Заклинивания золотников можно избежать путем приложения
к плунжеру большой осевой силы, используя для этой цели уст-
ройства с усилением командного сигнала. Вспомогательный
командный золотник в этом случае следует выполнять клапанного
или шарикового типа, но не цилиндрического.
4.6. ЗАЩИТА ГИДРАВЛИЧЕСКИХ СИСТЕМ
ОТ ЗАГРЯЗНЕНИЙ
Установлено, что наиболее опасным для гидравлических систем
является содержание в рабочей жидкости частиц большой твер-
дости, соизмеримых с зазорами в гидроагрегатах. Поэтому,
подбирая фильтры для гидравлической системы, это обстоятель-
5 В. Н. Прокофьев и др. 129
Таблица 4.4
НОМИНАЛЬНАЯ тонкость ФИЛЬТРАЦИИ и стоимость
ФИЛЬТРОВАЛЬНЫХ МАТЕРИАЛОВ
Фильтровальный материал Номинальная тонкость фильтрации, мкм Стоимость 1 м2, руб. Возможность многократного использования
Фильтровальная бумага АФБК (ТУ 379—59) 10—15 5—8 Отсутствует
Сетка саржевого плетения 80/120 (ТУ 1-62) 12-16 60—70 Существует
Пористая нержавеющая сталь ФНС-5 (МРТУ 14-2-89—66) 5—8 1200
ство необходимо учитывать в первую очередь. Так, в рабочей
жидкости систем с высоким давлением желательно не иметь час-
тиц размером свыше 5 мкм. В то же время чем выше требования
к чистоте системы, тем она будет дороже как в части фильтроваль-
ного оборудования, так и в части профилактических эксплуа-
тационных мер.
В табл. 4.4 приведены сведения по тонкости фильтрации и
стоимости 1 м2 некоторых фильтровальных материалов [61.
В отфильтрованной жидкости всегда имеется много частиц, раз-
мер которых превышает значения, указанные в графе «Номиналь-
ная тонкость фильтрации». Предельное количество таких частиц
(в % от поступающих к фильтру загрязнений) строго не регла-
ментировано, оно обычно устанавливается изготовителями филь-
тров и может достигать 10%. Это связано с невозможностью по-
лучить в фильтровальных материалах поры одинакового размера.
Желательно обеспечивать изоляцию рабочей жидкости от
окружающей среды. Емкости, агрегаты и трубопроводы должны
изготовляться из антикоррозионных материалов. Целесообразно
применять агрегаты, нечувствительные или малочувствительные
к загрязнениям. Для обеспечения чистоты трубопроводов и агре-
гатов при их изготовлении и ремонте на заводах выделяют спе-
циальные сборочные участки, в которых не должно быть опера-
ций, приводящих к загрязнениям, — сверления, клепки, ок-
раски. Вводятся нормы допустимой загрязненности воздуха этих
участков, например, на одном из заводов в сборочных участках
гидравлического цеха и цеха топливной аппаратуры введены тре-
бования: в 100 мл воздуха не должно быть больше 600 частиц
загрязнений. К работе с гидросистемами или их компонентами
должны допускаться только аттестованные сборщики.
Перед началом любой работы необходимо проверить пломбы
на деталях и их упаковку. Детали и трубопроводы с поврежден-
ной герметизацией отсылают на повторную очистку. Разгермети-
зацию соединительных штуцеров производят поочередно, в со-
130
ответствии о последовательностью сборочных операций, отвер-
стия должны оставаться открытыми только очень короткое время.
Особо тщательно производят сборку уплотнений и соединений
трубопроводов, поскольку сборка под напряжением может выз-
вать отделение металлических или пластмассовых частиц. Ис-
пользование для очистки сжатого воздуха категорически запре-
щается, следует для этого применять пылесосы или специальную
противопыльную или неворсистую ветошь.
Системы собирают из предварительно очищенных и промытых
агрегатов и непосредственно перед использованием тщательно
промывают очищенной рабочей жидкостью. Промывку целесо-
образно проводить в два этапа: сначала промывают трубопроводы
при закольцованных агрегатах, а затем систему с подключен-
ными агрегатами. При промывке фильтры системы заменяют
технологическими фильтрами тонкой очистки. Каждый агрегат
за время промывки должен сработать не менее 20 раз.
Для устранения возможности попадания в гидросистему
загрязнений при заполнении ее жидкостью заправку целесооб-
разно производить закрытым способом, с помощью специальных
стендов. Заправляться система должна безусловно чистой жид-
костью. Заправочные стенды и емкости для хранения жидкостей
должны периодически очищаться от загрязнений, горловины баков
маслозаправщиков должны пломбироваться, рукава и наконеч-
ники средств заправки должны иметь чехлы.
При эксплуатации рабочие жидкости необходимо периодически
проверять на засорение механическими примесями. Критерий
или уровень допустимой загрязненности рабочей жидкости си-
стемы по ГОСТ 17216—71 следует устанавливать в зависимости
от ее назначения и важности выполняемых функций, а также
чувствительности агрегатов к загрязнениям.
Все способы очистки жидкости от нерастворимых частиц
загрязнений делятся на две группы: 1) отделение загрязнений
при прокачке жидкости через пористый фильтровальный материал
(фильтрация) и 2) очистка жидкости в силовых полях — гравита-
ционных, центробежных, магнитных, электрических и др. Выбор
способа очистки жидкости, конструкции и места установки очи-
стителя в гидросистеме должен производиться с учетом необхо-
димой степени очистки и ее стоимости.
При выборе очистителя, помимо таких характеристик, как
размер удерживаемых частиц, прочность, пропускная способность,
гидравлическое сопротивление, следует учитывать также срок
службы фильтра и удобство обслуживания. Фильтровальный
материал не должен влиять на жидкость, так же как и жидкость
не должна влиять на фильтр. Некоторые типы фильтровальных
материалов постепенно растворяются или распадаются в опре-
деленных жидкостях, другие виды фильтров задерживают анти-
коррозионные вещества, вязкостные присадки или другие полезные
примеси в жидкости. При выборе фильтров обязателен учет
5* 131
температуры жидкости, так как при высоких температурах не-
которые фильтроэлементы повреждаются. Все эти факторы вза-
имосвязаны и не могут рассматриваться изолированно.
4.7. ФИЛЬТРЫ
Конструкцию фильтра обычно образуют корпус со штуцерами
подвода и отвода жидкости, фильтрующий элемент и, иногда,
устройство для контроля уровня загрязненности.
По способу задержания частиц загрязнений фильтроэлементы
делятся на поверхностные, объемные и комбинированные; пос-
ледние сочетают в себе признаки двух первых групп. Примером
поверхностного фильтроэлемента является плетеная металли-
ческая сетка. Частицы загрязнений, размер которых больше раз-
мера отверстий сетки, при прокачке жидкости задерживаются.
Сетки имеют сравнительно малое гидравлическое сопротивление,
хорошо противостоят пульсациям давления, вибрациям, пере-
грузкам и изменениям температуры; они удобны в эксплуатации,
так как не требуют замены и легко промываются. Вместе с тем
поверхностные фильтроэлементы имеют малую грязеемкость,
не способны задерживать частицы величиной меньше размеров
пор фильтрующего материала, на большой площади которого
трудно получить стабильные по размерам поры.
Объемные фильтроэлементы выполняются из проницаемого
материала значительной толщины: бумаги, картона, целлюлозы,
стекловолокна, войлока, замши, сукна, минеральной ваты, по-
ристой керамики и металлокерамики и пр. Жидкость очищается,
проходя по узким, длинным и извилистым поровым каналам
фильтровального материала. Особенно хорошо задерживаются
в таких элементах волосообразные частицы. Объемные фильтро-
элементы удерживают частицы самых различных размеров, так как
размеры и проходные сечения поровых каналов у них менее
однородны, чем у поверхностных фильтроэлементов. Примером
объемного фильтроэлемента являются пористые материалы, ко-
торые получены спеканием в атмосфере инертного газа или ва-
куума металлических шариков. Если для изготовления подобного
фильтроэлемента применяют шарики диаметром D, то диаметр
поровых каналов практически будет равен O,1D. Таким образом,
можно изготовлять фильтры с заданной тонкостью фильтрации.
По сравнению с поверхностными объемные фильтроэлементы
имеют более высокое гидравлическое сопротивление и часто не
могут быть восстановлены, но обеспечивают более качественную
фильтрацию и обладают большей грязеемкостью.
В комбинированных фильтроэлементах вначале по ходу тече-
ния жидкости устанавливают объемный фильтроэлемент, обес-
печивающий высокую грязеемкость, а затем поверхностный,
который служит для полного ограничения максимального размера
пропускаемых частиц.
132
Основными характеристиками
фильтров и фильтровальных ма-
териалов являются тонкость очист-
ки (фильтрации), пропускная спо-
собность, гидравлическое сопро-
тивление и срок службы.
Тонкость очистки
определяется минимальным раз-
мером частиц загрязнений, удер-
живаемых фильтроэлементом,и за-
висит от размера пор фильтрующе-
го материала. Так как определить
размер последних у большинства
фильтрующих элементов невозмож-
но, тем более, что этот размер часто
неоднороден, тонкость очистки
Рис. 4.9. Зависимость коэффициента
отфильтровывания некоторых филь-
тровальных материалов от размера
частиц загрязнений:
1 — металлокерамика с размером пор
6 мкм; 2 — сплющенная проволочная
сетка с размерами ячейки 12X20 mkmj
3 — металлокерамика с размером пор
20 мкм; 4 — бумага АФБ-2; 5 — фетр
определяют микроскопическим ана-
лизом проб жидкости, взятых перед и за фильтром.
Оценку тонкости фильтрации различных фильтровальных
материалов проводят по коэффициенту отфильтровывания
4’ = (П1 — п2)/пь
где пх и /?2 — число частиц загрязнений данного размера соот-
ветственно в пробах нефильтрованной и профильтрованной
жидкостей.
Значение коэффициента ф изменяется от нуля до 1; чем оно
выше, тем больше частиц загрязнения данного размера задержи-
вает фильтр. Так, если ф = 1 для частиц размером 15 мкм, то
это означает, что фильтровальный материал задерживает 100%
частиц указанного размера. Зависимость коэффициента ф от диа-
метра частиц d4 называется кривой отфильтровывания. Для
каждого фильтровального материала эта кривая определяется
экспериментально. На рис. 4.9 приведены такие кривые для
некоторых материалов. По мере забивания пор фильтроэлементов
частицами загрязнений коэффициент ф постепенно увеличивается.
Для оценки тонкости фильтрации иногда пользуются поня-
тиями номинальной и абсолютной маркировки. Из самого опре-
деления номинальной маркировки следует, что фильтр с номи-
нальной тонкостью 5; 10; 20 мкм и т. д. может пропускать в си-
стему частицы размером, большим указанной величины (обычно
на 2—3%). Этот недостаток устраняется введением абсолютной
маркировки, которая определяется диаметром наибольшего сте-
клянного шарика, могущего пройти через фильтр.
Количество жидкости (прокачка) Q л/мин, кото-
рое может пропустить фильтр с перепадом давления Др, может
быть подсчитано по формуле
Q= lOAi^-s,
ц
133
где k — удельная пропускная способность единицы площади
фильтровального материала при перепаде давления 0,1 МПа
и вязкости жидкости 1П (пуаз), л/мин-см2; Др — перепад давле-
ния на фильтре, МПа; р — динамический коэффициент вязкости
жидкости, П; s— площадь поверхности фильтра, через которую
проходит поток жидкости, см2.
Эксперименты показали, что в широком диапазоне перепадов
давления удельная пропускная способность k сохраняет постоян-
ное значение, что позволяет применять его в качестве величины,
характеризующей фильтровальный материал. Чем выше значе-
ние k, тем меньше гидравлическое сопротивление фильтра; чем
меньше диаметр поровых каналов фильтроэлемента, тем меньше k.
Величина k цля некоторых фильтровальных материалов имеет
следующие значения:
Сетка проволочная с ква- Бумага АФБ-2 0,036
дратными отверстиями по ГОСТ 6613—53: » АФБ-1 0,015
№ 01 . 11,24 Ткань капроновая 0,013
№ 009 9,91 Капрон фильтровальный 0,012
№ 0071 6,83 Металлокерамика с диаме-
№ 006 6,06 тром гранул, мм:
№ 0045 2,27 0,6 0,0182
Сетка проволочная плюще- 0,4 0,0172
ная с размером ячейки 0,2 0,0132
15X20 мкм 0,022 0,1 0,0116
Фильтр проволочный с раз- 0,05 . 0,003
мером щели 0,08 мм 0,105 Бумага лабораторная бы-
Фетр авиационный 0,037 строфильтрующая 0,00065
Зависимость расхода жидкости, проходящей через единицу
поверхности фильтровального материала, от перепада давления
при постоянной вязкости жидкости называется г и др а в ли-
Рис. 4.10. Гидравлические ха-
рактеристики фильтроваль*
них материалов:
1 — картон; 2 — плющеная сет-
ка; 3 — бумага крепированная;
4 — фетр
ческой характеристикой.
Обычно она строится по результатам
экспериментов. На рис. 4.10 приведены
гидравлические характеристики неко-
торых фильтровальных материалов для
жидкости вязкостью 0,157П.
Срок службы фильтра.
При фильтрации поры фильтроэлементов
постепенно забиваются частицами за-
грязнений, что вызывает, при сохране-
нии постоянного расхода через фильтр,
увеличение перепада давления на филь-
троэлементе. Поэтому при расчетах ра-
бочую площадь фильтра обычно берут
больше. Например, площадь проволоч-
ных плетеных сеток берут в 4 раза
больше расчетной. Таким образом,
даже при забивании 75% площади
134
фильтрующих пор перепад давления останется в расчетных пре-
делах.
Чтобы предупредить разрушение фильтроэлемента, во многих
фильтрах предусмотрен встроенный перепускной клапан. Такой
клапан открывается при определенном перепаде давления, вели-
чина которого устанавливается конструктором в зависимости
от прочности фильтроэлемента. Например, в фильтрах с фильтро-
элементом из бумаги АФБ-1 перепускной клапан открывается
при повышении перепада давления до 0,7±0,1 МПа. При открытии
перепускного клапана жидкость проходит через фильтр, минуя
фильтроэлемент; при этом механические примеси, скопившиеся
в корпусе фильтра, могут попасть в систему. Поэтому в гидра-
влических системах, очень чувствительных к загрязнениям,
перепускной клапан не устанавливается.
В том случае, когда перепускного клапана в фильтре нет,
очень важно иметь фильтроэлементы, которые могли бы выдер-
жать большой перепад давления. Отрезок времени между началом
работы фильтра и моментом, когда возросший перепад давления
может привести к разрушению фильтроэлемента, называется
сроком службы (ресурсом) фильтра. Для фильтров, снабженных
перепускными клапанами, ресурс — это время между началом
работы фильтра и моментом открытия клапана. Срок службы
зависит от материала и площади фильтроэлементов, от харак-
тера загрязнений жидкости, количества и размера загрязняющих
частиц. Так как характер загрязнений обычно не поддается
строгому расчету, то время работы фильтра между очистками или
заменой фильтроэлемента устанавливается на основе данных
эксплуатационных испытаний.
Для избежания преждевременной замены фильтроэлемента
при неполном использовании его «грязеемкости» на фильтрах
рекомендуется устанавливать сигнализаторы загрязненности, ко-
торые работают на принципе перепада давления. Сигнализатор
может быть выполнен в виде индикаторного стержня, который
выдвигается по мере увеличения перепада давления на фильтре.
Иногда индикатор выполняется электрическим. Наличие сигна-
лизатора загрязненности избавляет от необходимости вскрывать
фильтр для замены или промывки фильтроэлемента до того мо-
мента, когда это действительно нужно, кроме того, чем реже
вскрывается гидросистема, тем чище ее жидкость.
При определении срока службы фильтра нужно учитывать
особенность изменения перепада давления в зависимости от
степени засорения пор фильтроэлемента. Фильтр с засорением
50% может иметь перепад давлений лишь на несколько сотых
долей МПа больше, чем у чистого фильтра, и только к концу
срока службы фильтроэлемента перепад давлений начнет нарастать
очень быстро. Поэтому высокий перепад давлений означает, что
фильтр загрязнен. В то же время низкий перепад давлений еще
не означает, что фильтр чистый. На рис. 4.11 показана типичная
135
Др/Лр*
Рис. 4.11. Типичная картина измене-
ния перепада давления в зависимо-
сти от удельного объема профиль-
трованной жидкости:
Др — фиксируемый перепад давления;
Ддн — перепад давления в начале пролив-
ки, когда фильтр не загрязнен
картина изменения относительного перепада давления в зависи-
мости от удельного объема V жидкости, профильтрованной через
металлокерамический фильтр.
Материал фильтроэлемента может быть использован только
1 раз, если его фильтрующая способность не может быть восста-
новлена. Имеются фильтроэлементы многоразового применения
проволочные, сетчатые, пластинчатые, металлокерамические. Филь-
троэлементы, изготовленные из бумаги, войлока, хлопка, годны
лишь для разового применения. Повторное их использование
может повлечь загрязнение гидросистемы.
В целях экономии целесообразно восстанавливать характе-
ристику некоторых фильтров после их загрязнения. Так, у филь-
тров с щелевыми фильтроэлементами для этого пользуются щет-
кой, имеющейся в корпусе и приводимой в действие наружной
рукояткой. Грязь, накапливающаяся в нижней части корпуса
фильтра, удаляется обычно через сливной кран. Металлические
сетки и мембраны промываются при помощи мягкой щетки. Для
регенерации глубинных фильтров применяют продувку фильтро-
элементов сжатым воздухом, промывку очищенной рабочей жид-
костью или специальной моющей жидкостью. Направление потока
при этом устанавливается обратным обычному при работе фильтра.
Для повышения эффективности очистки с успехом применяют
высокочастотную механическую вибрацию фильтра вместе с пото-
ком жидкости, обжиг фильтроэлементов, промывку в ультразву-
ковой ванне. В качестве источника колебаний при этом может
быть использован, например, ультразвуковой генератор типа
УЗГ-5. Для вымывания загрязнений, задержанных в глубине
фильтроэлемента, используются силы, возникающие в момент
захлопывания кавитационных пузырьков при воздействии на
моющую жидкость ультразвуковых колебаний. При этом в кави-
тационных пузырьках происходит местное резкое повышение
давления (до нескольких десятков МПа) и температуры (до 300—
400° С). Эксперименты показывают, что ультразвуковая очистка
может восстановить пропускную способность металлокерамиче-
ского фильтроэлемента на 90%.
Для уменьшения потери жидкости при периодической замене
фильтроэлементов фильтры целесообразно снабжать автоматиче-
скими устройствами для запирания жидкости в системе.
136
Несмотря на многообразие конструкций фильтров и фильтро-
вальных материалов, задачу тонкой очистки жидкостей гидравли-
ческих систем нельзя считать решенной. Это объясняется следу-
ющими основными недостатками, присущими фильтроматерпалам:
трудность получения в материале большого количества стабиль-
ных по размерам капиллярных каналов малого диаметра; неболь-
шая грязеемкость и малый ресурс (особенно у материалов, обес-
печивающих высокую тонкость очистки); малая пропускная спо-
собность и большое гидравлическое сопротивление; недостаточная
прочность и пластичность; плохое восстановление свойств многих
пористых сред при промывке засорившихся фильтроэлементов;
миграция загрязнений и самого материала в очищаемую жидкость;
высокая стоимость материалов.
4.8. ОЧИСТКА ЖИДКОСТИ В СИЛОВЫХ ПОЛЯХ
Силовые очистители рабочей жидкости по сравнению с механиче-
скими фильтрами имеют незначительное гидравлическое сопро-
тивление и могут выполняться в термостойком варианте, но,
как правило, имеют большую массу и требуют специальный
источник энергии.
Очистка в гравитационном поле (от-
стое м). Это наиболее простой способ частичной очистки, не
требующий каких-либо дополнительных устройств и затраты
энергии. Жидкость в емкости должна находиться достаточное
время в покое для осаждения частиц загрязнений. Осаждение
происходит за счет разницы сил тяжести и архимедовой подъем-
ной силы, которая для частиц сферической формы равна
F =фЛг3^(Тч--Тж)-
Движению частицы оказывают сопротивление силы вязкого
трения. При малых значениях числа Рейнольдса Re < 0,5 сила
сопротивления равномерному движению шара в жидкости опре-
деляется выражением
Fc = 6лргуч,
которое носит название формулы Стокса. При условии устано-
вившегося движения частицы загрязнений F = Fc определяется
ее скорость (в см/с)
ё (Уч — Уж) 2
ч“ 9 Г’
где уч и уж — соответственно плотности осаждаемой частицы
и жидкости; v — кинетический коэффициент вязкости; г — ра-
диус частицы.
Время отстоя при высоте Н уровня жидкости в отстойном
баке
т =
137
Частицы загрязнений обычно оседают очень медленно. Из фор-
мулы следует, что чем меньше вязкость жидкости, тем больше
скорость осаждения. Для ускорения отстоя масло подогревают до
температуры 80—90° С, однако при нагреве масла, а также вслед-
ствие суточных колебаний температур в емкости возникают кон-
вективные токи, которые ухудшают отстой. По данным работы [44]
в летний период при хранении горюче-смазочных материалов
в наземных емкостях не осаждаются частицы размером менее
15 мкм из топлива ТС-1, менее 20 мкм из дизельного топлива
и менее 25 мкм из масла веретенного АУ. При отстое механиче-
ские примеси в масле по высоте емкости распределяются нерав-
номерно. В нижних слоях содержание механических частиц наи-
большее, в верхних — наименьшее. Полностью очистить жидкость
от механических частиц загрязнений методом отстоя не удается.
Очистка в центробежном силовом поле.
При вращении жидкости, помимо силы тяжести и архимедовой
силы, на каждую частицу загрязнений действует еще и центро-
бежная сила. Если удельный вес частиц больше удельного веса
жидкости, то под действием центробежной силы частицы движутся
к периферии и осаждаются на внутренней поверхности ротора.
Величина центробежной силы может быть определена из вы-
ражения
Ацб = /псо2/-,
где т — масса частицы; <о = лп/60 — угловая скорость (здесь
п — частота вращения частицы); г — расстояние рассматривае-
мой частицы от оси вращения.
При достаточно высокой частоте вращения жидкости вели-
чина центробежной силы может быть на два-три порядка больше
веса и архимедовой силы частицы, поэтому последними силами
при расчете центрифуг обычно пренебрегают.
Движению частицы в жидкости препятствует сила гидравличе-
ского сопротивления, которая может быть определена по формуле
Стокса:
Fc = 3np.y4d,
где d — диаметр частицы.
Если полагать, что твердая частица под действием центробеж-
ной силы Ецб и силы гидравлического сопротивления Fc движется
без ускорения, то из условия равенства Ёцб = Fc можно опреде-
лить минимальный диаметр частицы, осаждающейся на стенки
ротора при заданной частоте вращения [1]:
d = 50 1/ 'LtQ
mln П Г учГу1рПГр*
где п — частота вращения ротора; Q — расход жидкости через
ротор; р — динамический коэффициент вязкости; уч — плотность
вещества осаждаемой частицы; гТ — радиус трубки входа жидко-
сти в ротор; /р и гр — соответственно длина и радиус ротора.
138
При выводе формулы было учтено, что частота вращения
жидкости будет несколько меньше, чем ротора, а также и то, что
жидкость, поступая в ротор очистителя, приобретает угловую
скорость ротора не мгновенно, а в течение некоторого времени.
Критическая скорость потока через очиститель, при превы-
шении которой из последнего будут выноситься частицы загряз-
нений, устанавливается равной цкр 5 м/с. Отсюда критиче-
ский расход, соответствующий началу уноса частиц,
Окр = V,
где s — площадь рабочего сечения ротора.
Большое распространение получили центрифуги с гидрореак-
тивным приводом ротора (по принципу сегнерова колеса), разви-
вающим частоту вращения до 6000 об/мин. Имеются также кон-
струкции с электрическим приводом, у которых частота враще-
ния может достигать 15 000—20 000 об/мин.
Центробежные очистители конструктивно сложнее фильтров,
больше их по габаритам и массе, имеют более высокую трудоем-
кость при изготовлении, наконец, они требуют затраты энергии
на вращение, которая увеличивается по мере повышения тон-
кости фильтрации и вязкости жидкости. Значительные трудности
возникают также с обеспечением балансировки вращающегося
ротора и созданием надежных уплотнений.
Очистка в магнитном поле. Ферромагнитные
частицы загрязнений в жидкости, представляющие собой в основ-
ном продукты износа гидроагрегатов, могут составлять до 65%
общего количества загрязняющих частиц. Для удержания этих
частиц используют магнитные поля. В магнитных фильтрах вся
фильтруемая жидкость пропускается через область сильного
магнитного потока. Применяются также магнитные уловители
(пробки), устанавливаемые в различных местах гидросистемы,
чаще всего в резервуарах на пути потока жидкости.
Анализ загрязнений, улавливаемых магнитным фильтром,
показал, что на фильтре удерживаются не только ферромагнит-
ные включения, но и значительная доля сцепленных с ними нема-
гнитных частиц. Наиболее хорошо магнитные очистители задер-
живают частицы размером 0,4—4 мкм. Обычно в таких очисти-
телях используется поле постоянного магнита, но имеются кон-
струкции с электромагнитами.
Целесообразно применять магнитные очистители в комбина-
ции с механическими фильтрами, которые будут задерживать
немагнитные частицы, а также частицы, отрывающиеся от магни-
тов в условиях сильной вибрации и ударов. Срок службы магнит-
ных очистителей не ограничен, необходимо лишь периодически
очищать магниты от удерживаемых на них загрязнений.
При помощи магнитных полей можно значительно повысить
тонкость очистки механических фильтров, не увеличивая их
гидравлического сопротивления. Для этого, например, прово-
139
лочную сетку устанавливают в магнитном поле. Тогда нити
сетки, параллельные оси магнитов, в результате индукции нама-
гничиваются, а нити, перпендикулярные к оси магнита, не будут
намагниченными и предотвратят короткое замыкание магнитной
цепи. В литературе описано влияние магнитного поля на тонкость
очистки металлокерамического фильтроэлемента: без магнитного
поля фильтроэлемент задерживал лишь частицы размером более
10 мкм, в магнитном поле тонкость очистки возросла, и фильтр
стал задерживать 95% частиц размером 3 мкм.
Электростатические очистители. Большие
возможности для очистки рабочих жидкостей от частиц загряз-
нений заложены в применении сильных электрических полей,
поскольку жидкости гидравлических систем являются типичными
диэлектриками, а частицы загрязнений в них обычно несут заряд.
Поэтому, если жидкость подвергнуть воздействию электрического
поля, то частицы загрязнений, следуя законагл электростатики,
будут совершать движение, которым можно управлять: осаждать
на поверхность электродов, отделять от основного потока жидко-
сти, вызывать укрупнение, седиментацию. Находясь в электри-
ческом поле, частицы поляризуются, а величина заряда на них,
как правило, повышается, что интенсифицирует процесс.
У частиц загрязнений, не несущих в обычных условиях опре-
деленного заряда, под действием электрического поля происхо-
дит электризация, в результате чего частицы становятся ориен-
тированными с образованием диполей. Величина такого индуци-
рованного диполя будет тем больше, чем сильнее поле и чем легче
происходит переориентация зарядов. Эта физическая закономер-
ность — движение заряженных частиц под силовым воздействием
электрического поля — легла в основу разработок конструкций
электроочистителей. Они имеют высокую тонкость очистки (до
1—3 мкм) при малом гидравлическом сопротивлении, большую
грязеемкость и малую стоимость изготовления и эксплуатации;
имеется возможность производить регенерацию (т. е. полное
восстановление рабочих характеристик) таких фильтров без их
демонтажа и разработки с извлечением накопленных загрязнений.
Простейшая схема электроочистителя представляет собой две
металлические пластины, помещенные в жидкий диэлектрик.
К пластинам подается электрический потенциал: положительный
заряд на одну пластину к отрицательный — на другую. Частицы
загрязнений в жидкости в зависимости от знака их заряда будут
притягиваться к одной из пластин. Чтобы удержать частицы на
поверхности пластины, последние покрывают слоехМ электроизо-
ляции, в противном случае, соприкоснувшись с пластиной, ча-
стицы будут перезаряжаться, отталкиваться от нее и двигаться
к противоположно заряженной пластине. Такое движение от
пластины к пластине частицы будут совершать до тех пор, пока
вместе с потоком жидкости не выйдут из-под действия электриче-
ского поля.
140
Процесс очистки можно интенсифицировать увеличением за-
ряда частиц, напряженности поля, градиента напряженности,
времени нахождения частиц в электроочистителе и снижением
вязкости жидкости. Лучше удерживаются в электроочистителях
крупные частицы с большим значением диэлектрической прони-
цаемости.
Испытания показали, что электрические очистители рабочих
жидкостей рационально применять наряду с фильтрами и взамен
их перед заправкой жидкости в систему, в технологическом
оборудовании заводов, в стендах для промывки внутренних
полостей гидроагрегатов и гидросистем. Эффективным является
использование их при регенерации рабочих жидкостей, в уста-
новках для промывки и восстановления фильтрующей способ-
ности загрязненных фильтроэлементов.
Глава 5
ГИДРОМАШИНЫ
Гидромашина — основной элемент гидропривода, предназначен-
ный для преобразования механического движения в поток рабочей
жидкости (насос, энергатор) и потока рабочей жидкости в дви-
жение исполнительного органа (гидродвигатель, например, гидро-
мотор, гидроцилиндр, поворотник, вибратор и т. п.). Чаще всего
в гидроприводах используются обратимые гидромашины, меха-
низмы которых одинаково пригодны для работы в качестве насо-
сов и гидромоторов (т. е. обратимы). Однако способы выполнения
отдельных узлов, особенно системы распределения рабочей жидко-
сти, могут быть разными. Поэтому имеется в виду только прин-
ципиальная обратимость.
Уравнения связи кинематические (расход—частота вращения)
и нагрузочные (момент—перепад давления) при отсутствии потерь
однотипные, с одним и тем же коэффициентом пропорциональ-
ности, а при учете потерь отличаются знаками показателей сте-
пени выражений КПД [59], поэтому раздельное рассмотрение
насосов и гидромоторов нецелесообразно, и классификация ги-
дромашин чаще всего проводится по кинематическим схе-
мам.
Разработанная теория роторных гидромашин [1, 54, 81 ], кото-
рые чаще всего входят в гидропередачи, не учитывает эффекта
деформации рабочей жидкости, в первом приближении справед-
лива для квазилинейных режимов работы и охватывает также
гидромашины, которые не применяют в гидропередачах. По-
этому основы теории роторных гидромашин приведены лишь
вкратце.
Учет динамических эффектов при невозможности абсолютно
точного повторения изготовляемых гидромашин с весьма разви-
тыми поверхностями трения при существенно малых зазорах
допускает корректное описание рабочего процесса только на
основе учета случайных процессов, способы использования и
изложения которых применительно к гидромашинам объемного
типа еще не получили окончательного оформления. Поэтому
количественные зависимости между входными и выходными
переменными приводятся на основе детерминированных соот-
ношений, предполагая процессы непрерывными. На самом деле
эти процессы могут быть дискретными, обусловливаясь помимо
прочего числом рабочих клеток гидромашины, переносящих
рабочую жидкость из приемной полости в отдающую.
Дискретность подачи рабочей жидкости, вызывающая пара-
метрические колебания, проявляется в существенной форме только
при работе гидромоторов на нижнем пределе регулирования
и поэтому рассматривается отдельно.
Поскольку число типов и вариантов гидромашин, исполь-
142
зуемых в гидроприводах, весьма велико и непрерывно меняется,
рассматриваются лишь наиболее распространенные конструкции.
Однако везде, где это возможно, проводится анализ конструкций
и различных сторон рабочего процесса при помощи обобщенных
приемов, допускающих распространение получаемых результатов
на гидромашины различных типов.
Наиболее широкое применение в сколько-нибудь мощных
и точных гидроприводах вращательного движения получили
аксиально-поршневые и аксиально-плунжерные гидромашины,
которые имеют наименьшие габаритные размеры, работают при
высоких давлениях, допускают форсирование по давлению,
быстроходны и могут работать на режимах с высоким КПД.
Эти качества гидромашин обеспечивают возможность получения
в них наибольших ускорений инерционной нагрузки, наименьших
моментов инерции вращающихся частей и работы на самой высо-
кой частоте вращения при заданной мощности. Поэтому при
рассмотрении различных типов гидромашин предпочтение полу-
чают аксиально-поршневые и аксиально-плунжерные машины,
обусловливающие технический уровень современного гидро-
привода.
5.1. АКСИАЛЬНО-ПОРШНЕВЫЕ ГИДРОМАШИНЫ
С ДВОЙНЫМ НЕСИЛОВЫМ КАРДАНОМ
Конструкция отечественного насоса IIД № 5—50 (цифра II
в обозначении типоразмера насоса означает вторую гамму гидро-
машин) показана на рис. 5.1 [1]. Насос имеет литой стальной
корпус S, внутренняя полость которого использована в качестве
емкости для рабочей жидкости; корпус с двух сторон закрыт
крышками 10 и 20 из алюминиевого сплава.
Приводной вал 13 установлен на шарико- или роликоподшип-
никах 7 и 11 (12 — уплотняющий узел) и шарнирно связан с семью
(или девятью) шатунами поршней 21, На цапфах 5 подвижно
закреплена люлька 2 насоса, поворот которой на угол у = =±=30q
меняет подачу от Qmax до —Qmax. Сопряженные поверхности
люльки и цапф герметизированы фторопласто-резиновыми уплот-
нениями 4. Рабочая жидкость через каналы в крышке 19 люльки,
в собственно люльке 2 и через отверстия в цапфах 5 подводится
к неподвижным фланцам 1 корпуса, соединяемым с основными
магистралями. Блок цилиндров 14 на шарикоподшипнике 15
установлен на центрирующей оси 17 так, что может самоцентри-
роваться, обеспечивая надежное прилегание к торцу распреде-
лителя 18. Блок цилиндров приводится во вращение через кар-
дан 6 и гильзу 3. Левая головка кардана опирается на гнездо 16,
а правая — на гнездо, которое выполняется подвижным и под-
пирается пружиной. Трущиеся поверхности кардана обеспечи-
ваются смазкой, поступающей через различные сверления (напри-
мер 9),
143
Рис. 5.1. Аксиально-поршневой насос ПД № 5—50
При повороте вала на полный оборот поршни гидромашины
совершают двойной ход; при отсутствии утечек и у = утах вытес-
няется объем, который называется рабочим [1, 52]:
Vo = fDz sin 1>шах см7об,
где f — площадь поперечного сечения поршня, см2; D — диаметр
разнесения осей крепления головок шатунов в упорном диске
вала, см; z — число поршней; ушах — наибольший угол наклона
люльки.
Рассмотренная конструкция называется насосом с двойным
несиловым карданом, поскольку нагрузка на кардан определяется
моментом потерь при установившемся режиме работы. При пере-
ходных процессах кардан оказывается под действием инерцион-
ных нагрузок.
Конструкции с силовым карданом рассмотрены в рабо-
тах [1, 52].
Основные технические характеристики аксиально-поршневых
насосов и гидромоторов постоянной и переменной производи-
тельности второй гаммы гидроприводов (гаммы II), которые
применяют в гидроприводах и при комплектовании следящих
систем, приведены в табл. 5.1. Выпускаются насосы и гидро-
144
Таблица 5.1
ПАРАМЕТРЫ ГИДРОМАШИН ВТОРОЙ ГАММЫ ГИДРОПРИВОДОВ
Параметры Номера гидромашин
0,5 1.5 2.5 | 2.5А 5 10 20 | 30 | 50
Рабочий объем, см3/об 3 9 16 32 71 142 251 501 790
Наибольшая частота вращения вала, об/мин: насоса . . 2950 2950 2950 1440 1440 1440 980 980
гидромотора ±2950 ±2950 ±2950 ±1440 ±1440 ±1440 ± 1440 ±980 ±980
Наибольший поток при отсут- ствии утечек, дм3/мин 9 26,5 47 46 102 204 361 491 774
Момент на валу гидромотора при перепаде давления 10 МПа, Н-м 4 12 21 42 105 210 370 740 1170
Номинальный момент привода, Н-м 3,3 10 17,5 — 95 190 340 —
Момент инерции вращающихся частей, кгс-см-с2: насоса и входного вала гидро- привода ... Ы0"3 4-10“3 НО’2 6-ю-2 0,193 0,47 1,6 4,26
гидромотора и выходного вала гидропривода 0,9.10-? 4.10"3 0,9-10" 2 2-10'2 5,5-10-2 0,175 0,415 1,5 3,74
Наименьшее время изменения по- дачи насоса от нуля до наиболь- шей, с 0,1 0,12 0,15 0,2 0,3 0,35 0,4 0,5
Момент трогания валика управле- ния, Н-м Наибольшие допустимые моменты, Н-м: на валике управления 1,5 2,0 2,5 0,035 0,07 0,09 0,12 0,15
10 30 40 1 1 1 1 1
на валу силового управления 0,1 0,3 0,4 — 0,5 1 2 2,5 5
Масса без рабочей жидкости, кг: насоса ПД 10 17,5 29 95 160 238 410 580
» ПР 10 17,5 29 — 75 140 198 330 535
гидропривода ПД-Н 13,5 25,7 43 — 177 282 429 — —
~ » ПР-Н 13 25,1 42,5 — 152 — — — —
& гидромотора ИМ 1,2 4,64 7,0 14,7 29 52,4 79 121 200
моторы девяти типоразмеров № 0,5; 1,5; 2,5; 2,5А; 5; 10; 20;
30 и 50, пяти серий [1, 52].
Отечественная гамма II аксиально-поршневых гидромашин
(всего 35 типоразмеров) включает восемь типоразмеров насосов
дистанционного управления ПД, восемь типоразмеров насосов
ручного управления ПР, шесть типоразмеров нераздельных
(насос и гидромотор в общем корпусе) гидроприводов дистанцион-
ного управления ПД-Н, четыре типоразмера нераздельных ги-
дроприводов ручного управления IIР-Н и девять гидромоторов
типа ИМ, которые могут работать в качестве насосов постоян-
ной подачи. Гидромашины работают со стабильными характери-
стиками при изменении температуры окружающей среды от —50
до 4-50° С. Возможна долговременная работа при давлении
10 МПа и допускается кратковременная перегрузка до давле-
ния 16 МПа.
В качестве рабочей жидкости используется маловязкое веретен-
ное масло АУ с допустимой температурой в работающем гидро-
приводе —10 t +90° С, АГМ при —40° С t 4-90° С
и минеральное масло ГМ-50 при —50° С t 4-90° С. Иногда
используют специальные сорта индустриального и трансформа-
торного масел.
5.2. АКСИАЛЬНО-ПЛУНЖЕРНЫЕ НАСОСЫ
БЕСКАРДАННОГО ТИПА КОНСТРУКЦИИ
ВНИИГИДРОПРИВОД
Регулируемые аксиально-плунжерные насосы типа НА... кон-
струкции ВНИИгидропривода представляют собой агрегаты,
состоящие из следующих основных узлов: аксиально-плунжерного
насоса высокого давления, механизма управления и вспомога-
тельного насоса низкого давления для насосов НАС и НАМ
(реверсивных).
В зависимости от способа управления подачей рабочей жидкости
различаются следующие типы насосов: НАР — с ручным изме-
нением подачи, нереверсивные по подаче; НАС — реверсивные
по подаче со следящим механизмом управления; НАМ — ревер-
сивные по подаче с электрогидравлическим механизмом управле-
ния; НАД — с регулятором мощности.
Аксиально-плунжерный насос (рис. 5.2) имеет корпус 4 и
две крышки: переднюю 1 и заднюю 7 В корпусе установлен роли-
ковый подшипник 3, который служит опорой блока цилиндров 5
и воспринимает радиальные нагрузки, возникающие в месте кон-
такта плунжеров //с упорным диском 2.
При вращении блока цилиндров находящиеся в нем плунжеры
совершают возвратно-поступательное движение, осуществляя та-
ким образом всасывание и нагнетание рабочей жидкости. Контакт
между плунжерами и упорным диском выполнен при помощи
146
Рис. 5.2. Аксиально-плунжерный насос тина НА ВНИИгидропривода
завальцованных на сферических головках плунжеров бронзовых
подпятников 13, разгрузка которых осуществляется подводом
рабочей жидкости под давлением к их опорной поверхности.
Пружина 17 через сферическую опору 15 и прижимной диск 12
осуществляет постоянный поджим плунжеров с подпятниками
к упорному диску 2. С другой стороны она вместе с пружиной 10
прижимает ротор к распределительному диску 6.
Рабочая жидкость подводится к торцу блока цилиндров и
отводится от него через распределительный диск 6 и заднюю
крышку 7, на которой устанавливаются фланцы для соединения
насоса с гидросистемой.
В передней крышке насоса на двух шарикоподшипниках 19
установлен приводной вал 16. Подшипники позволяют осуще-
ствить безлюфтовую посадку вала и исключить влияние на блок
цилиндров нагрузок со стороны привода. Сопряжение приводного
вала с ротором осуществляется при помощи эвольвентного шли-
цевого соединения, позволяющего обеспечить в процессе работы
некоторое смещение и поворот ротора, компенсируя тем самым
неперпендикулярность зеркала распределительного диска и торца
блока цилиндров к оси его вращения.
Изменение подачи осуществляется поворотом наклонной
шайбы 14 в цилиндрической направляющей передней крышки /.
Наклонная шайба связана со скалками и траверсой 18, которая
сочленяется с механизмами регулирования подачи. В передней
крышке также установлен указатель подачи насоса.
В задней крышке 7 насоса установлены два клапана 9,которые
обеспечивают всасывание и нагнетание рабочей жидкости в соот-
ветствующих полостях. Наличие подпорного клапана в сочетании
с всасывающим позволяет вести работу насоса по закрытому
циклу.
147
К задней крышке насоса крепится шиберный насос S, привод
которого осуществляется через муфту. Утечки из корпуса насоса
отводятся через отверстия в задней крышке.
Механизм ручного изменения подачи предназначен для ее
регулирования вручную от нулевой до максимальной на любой
из полостей при работе насоса без нагрузки (давление, развивае-
мое насосом, не более 0,5 МПа). Механизм монтируется на перед-
ней крышке насоса и имеет следующее устройство (рис. 5.3).
В корпусе 1 установлен винт 2, который соединен с гайкой-тра-
версой 3 насоса. При вращении маховика 4 траверса перемещается
по винту и соединенные с ней скалки поворачивают наклонный
диск на заданный угол. Таким образом устанавливается необхо-
димая подача насоса. Крайнее положение наклонного диска фик-
сируется гайкой 5.
В насосах с ручным регулированием подачи задняя крышка
выполнена без реверсивной коробки, всасывающего и подпорного
клапанов.
Следящий механизм управления подачи предназначен для
регулирования подачи насоса от нуля до номинального значения
на любой из полостей при работе насоса под давлением или без
него. Механизм устанавливается на передней крышке насоса
(рис. 5.4). Основным его элементом является гидроусилитель со
следящим золотником, состоящий из поршня 1 с запрессованной
в него втулкой 2, следящего золотника 3 и штока 4. Поршень со-
единяется с траверсой при помощи штифта. Рабочая жидкость
через корпус подводится постоянно под поршень в полость Л.
При перемещении штока 4 вверх полость над поршнем сообщается
со сливом и поршень под действием давления перемещается вверх,
поворачивая наклонную шайбу на заданный угол и устанавливая
необходимую подачу насоса. При перемещении штока вниз
Рис. 5.3. Механизм ручного ре-
гулирования подачи насоса
Рис. 5.4. Следящий механизм
регулирования подачи насоса
148
Иасос с реверсивной короткой
механизм
Рис. 5.5. Гидравлическая схема насоса типа НАС
рабочая жидкость подводится в надпоршневое пространство в по-
лость Б, и за счет разности верхней и нижней площадей поршень
перемещается вниз. Вертикальное перемещение поршня обуслов-
ливает изменение положения наклонной шайбы и, следовательно,
подачи насоса. Крайние верхнее и нижнее положения штока 4
соответствуют номинальной подаче насоса, среднее положение
штока соответствует нулевой подаче.
В корпусе следящего механизма установлены три обратных
клапана и предохранительный клапан шиберного насоса. Два
обратных клапана обеспечивают подвод рабочей жидкости к ги-
дроусилителю от полостей насоса высокого давления, третий —
от шиберного насоса для перевода наклонней шайбы через нуле-
вое положение. Слив рабочей жидкости из механизма осуще-
ствляется непосредственно в корпусе насоса.
Гидравлическая схема насоса приведена на рис. 5.5. На схеме
указаны следующие узлы: 1 — аксиально-плунжерный насос;
2 — вспомогательный (шиберный) насос; 3 — подпорный клапан;
4 — реверсивная коробка; 5 и 6 — соответственно обратный и
предохранительный клапаны вспомогательного насоса; 7 — об-
ратные клапаны полостей насоса высокого давления; 8 — всасы-
вающий клапан; 9 — следящий золотник гидроусилителя; 10 —
гидроусилитель.
Электрогидравлический механизм управления предназначен
для дистанционного ступенчатого регулирования подачи насоса
от электрического сигнала и состоит из исполнительного меха-
низма, включающего в себя все элементы следящего механизма
регулирования, и задающего механизма, устанавливающего
следящий золотник в заданное положение (рис. 5.6). Зада-
ющий и исполнительный механизмы смонтированы в одном
корпусе.
Механизм управления допускает предварительную настройку
двух различных расходов на каждой полости при нулевом поло-
жении. Возможны и другие варианты: четыре подачи на одной
149
полости при нулевом положении, три подачи на одной полости
и одна на другой при нулевом положении.
Задающий механизм работает от вспомогательного насоса и
устроен следующим образом. В корпус 1 запрессованы четыре
гильзы 9, имеющие по наружному диаметру кольцевые проточки.
Последние сообщаются с внутренними полостями гильз, в кото-
рых электромагнитами через толкатель 10 с уплотнением 12
перемещаются золотники 13. Возврат золотников осуществляется
пружинами 14, закрытыми крышкой 15. В корпусе имеется также
пять глухих отверстий, в которых установлены плунжеры 8.
Жидкость под каждый из плунжеров подводится при переме-
щении соответствующего золотника, получающего команду от
электромагнита. Плунжеры давят своими торцами на прижим 2
с фиксатором 19, жестко связанный со штоком 3. Ход плунжеров
ограничивается гайками-упорами 5, положение которых регу-
лируется винтами 6. Шток 3 представляет собой цилиндр, в кото-
рый постоянно подается рабочая жидкость от вспомогательного
насоса; плунжер 4 в стакане 17 с базой 18 упирается в крышку 20,
площадь его меньше площади плунжера 8. Под действием давле-
ния шток 3 и связанный с ним прижим 2 стремятся занять крайнее
нижнее положение. Нижняя часть штока 3 соединена со следя-
щим золотником 16 гидроусилителя. Слив утечек из механизма
осуществляется непосредственно в корпусе насоса.
Работа электрогидравлического механизма управления осу-
ществляется следующим образом. При невключенных магнитах
жидкость от лопастного насоса подается под плунжер 4 и под
Рис. 5.6. Механизм управления подачей насоса
150
один из плунжеров 8, обеспечивающих нулевой расход, а также
под нуль-установитель. Благодаря разности диаметров плун-
жеров 4 и 8 последний, поднимаясь до упора 5, перемещает при-
жим и шток 3. Положение штока, соответствующее нулевой
подаче, регулируется винтом 6. Полости под четырьмя другими
плунжерами соединены в этот момент со сливом. При вклю-
чении одного из электромагнитов 11 золотник 13 перекрывает
подвод жидкости под плунжер нулевой подачи и нуль-уста-
новитель, одновременно соединяя с давлением полость соот-
ветствующего плунжера 8. Этот плунжер выводит следящий
золотник в положение, соответствующее настройке регулировоч-
ного винта.
Настройка подачи производится следующим образом. На
крышке 20 возле каждого из винтов 6 выбиты порядковые номера
(О, 1, 2, 3 и 4), которые соответствуют порядковым номерам элек-
тромагнитов и золотников. Номера золотников нанесены на кор-
пусе механизма. Винты 6 фиксируются в заданном положении
контргайкой 7. Для установки соответствующей подачи необ-
ходимо отдать контргайку и, проворачивая винт 6, установить
упор 5 в заданное положение. После установки необходимой
подачи контргайку затягивают.
Гидравлическая схема насоса приведена на рис. 5.7. На схеме
указаны следующие узлы: 1 — аксиально-плунжерный насос;
2 — шиберный насос; 3 — подпорный клапан; 4 — реверсивная
коробка; 5 — всасывающий клапан; 6 и 7 — соответственно
предохранительный и обратный клапаны шиберного насоса;
8 — нуль-установитель; 9 — обратные клапаны полостей насоса
высокого давления; 10 — электромагнит; И — прижим; 12 (Пи
П2, /73, /74, /70) — плунжеры установки подачи; 13 — следящий
151
Рис. 5.8. Регулятор мощности
Рис. 5.9. Гидравлическая схема на-
соса типа НАД
золотник гидроусилителя; Зь 32, З3, 34 — золотники уста-
новки подачи (на рис. 5.6 — поз. /3); Пь — плунжер пружины
(па рис. 5.6 — поз. 4).
Регулятор мощности — механизм, предназначенный для авто-
матического изменения подачи насоса в режиме постоянной
выходной мощности pQ = const и допускающий настройку для
поддержания постоянной мощности в диапазоне от 30 до 80%
номинальной на одной полости насоса. Механизм (рис. 5.8) выпол-
нен в самостоятельном корпусе 1 и устанавливается на передней
крышке насоса.
Работа механизма осуществляется следующим образом. Жид-
кость из полости нагнетания поступает в полость А гидроусили-
теля и полость Б регулятора. Шток 3 в полости регулятора имеет
диаметр больший, чем в полости следящего золотника 2, поэтому
на шток всегда действует усилие, зависящее от давления нагне-
тания. До начала регулирования это усилие уравновешивается
силой пружин 4 и 5. При увеличении давления шток 3 начинает
перемещаться вверх, сжимая пружины. Характеристики пружин
выбраны такими, что перемещение штока, а следовательно, и
следящего золотника обеспечивает изменение подачи насоса по
закону pQ = const.
Настроечный винт 6 и гайка 7 позволяют изменять характе-
ристику пружин и вместе с ней поддерживаемую выходную мощ-
152
Таблица 5.2
ТЕХНИЧЕСКАЯ XАРАКТЕРИСТИКА НАСОСОВ ТИПА НА... 0.04/20А
Тип насоса
Параметры нлс-ш- НАМ над4£
Габочий объем, см3/об .... Давление нагнетания, МПа: 40 40 40 40
номинальное 20 20 20 10—20
максимальное . . . Давление на всасывании, МПа: 25 25 25 —
максимальное • . 1,5 1,5 1,5 1,5
минимальное (абсолютное) Частота вращения, об/мин: 0,085 0,085 0,085 0,085
номинальная 1500 1500 1500 1500
минимальная Номинальная затрачиваемая 600 600 600 600
мощность, кВт КПД, %: 19 20 20 10
объемный 92 90 90 —
полный Параметры регулирования: диапазон регулирования (отношение подачи мини- 87 85 85 83
м аль ной к номинальной) усилие на регулирующих 1/13 1/13 1/13 1/2
элементах, кгс ход4 регулирующего элемен- 8 5 — —
та, мм . ... — 24 24 —
давление управления, МПа Момент инерции вращающихся — 2,5 2,5 —
масс, кгс«м«с2 Параметры реверсирования: 0,00144 0,00144 0,00144 0,00144
время реверса потока, с допускаемая частота ревер- — 0,5 0,5 —
са, мин Шумовая характеристика: средний уровень звукового давления в октавных поло- 20 20
сах, дБ средний уровень звука, ПС-85 ПС-85 ПС-85 ПС-85
ДВА .... Характеристика рабочей жидко- сти: диапазон кинематической 92 92 92 92
вязкости, сСт температура максимальная, 20—500 20-500 20-500 20—500
°C . температура минимальная, +60 +60 +60 +60
°C . номинальная тонкость филь- + 10 +ю + 10 + 10
трации, мкм . ... Масса (без рабочей жидкости), 25 25 25 25
кг 80 90 120 100
153
ность насоса. В табличке, прикрепленной к насосу, указаны дан-
ные Ах и Bi для настройки механизма на требуемую мощ-
ность.
Гидравлическая схема насоса приведена на рис. 5.9. На схеме
указаны следующие узлы: 1 — аксиально-плунжерный насос;
2 — гидроусилитель; 3 — следящий золотник гидроусилителя;
4 — шток следящего золотника; 5 — пружина; 6 — регулировоч-
ный винт.
Аксиально-плунжерные насосы описанной конструкции выпу-
скаются с рабочими объемами 16, 40, 63, 125 и 400 см3/об. Тех-
ническая характеристика насосов типа НА... 0.04/20А приве-
дена в табл. 5.2.
5.3. АКСИАЛЬНО-ПОРШНЕВЫЕ ГИДРОМАШИНЫ
БЕСКАРДАННОГО ТИПА
Аксиально-поршневые гидромашины бескарданного типа отно-
сятся к классу роторных гидромашин с пространственной кине-
матикой и ломаной осью; они изготовляются в различных моди-
фикациях на мощности от самых малых до 3000 кВт и наибольшее
распространение находят на строительно-дорожных машинах
[1, 16, 52].
Конструкция насоса с рабочим объемом Ко = 54,8 см3/об,
работающего с частотой вращения п = 1500-ь 1800 об/мин на ре-
жиме самовсасывания и п = 3000 об/мин в закрытых схемах
(работа с подпором), приведена на рис. 5.10. Вал 1 фиксирован
при помощи трех подшипников в корпусе 2, а в торцовой части
имеет шарнирное крепление центрирующего валика и головок
шатунов 7. В том же корпусе при помощи двух цапф и подшип-
ников установлена люлька 3, которая может поворачиваться около
вертикальной оси при неподвижных фланцах, соединяющих
приемную и отдающую магистрали насоса с присоединительными
трубопроводами. Люлька закрыта крышкой с клапанами 6 ком-
пенсации утечек, на которую опирается сферический распредели-
тель 5, сопряженный с блоком цилиндров 4. Поворот люльки
реализуется при помощи механизма управления (на рисунке не
показан), смещающего штырь, заделанный в люльке. Шатуны
завальцованы в поршни 8 и имеют сверления, через кото-
рые подается смазка для опорных поверхностей их го-
ловок.
Один и тот же качающий узел (рис. 5.11, а) используется
в гидромоторах или насосах постоянной подачи (рис. 5.11, б)
и переменной подачи (рис. 5.11, в), в которых при работе на само-
всасывании соответствующий фланец заменяется заглушкой, а
крышка люльки снабжается всегда открытым всасывающим
сходящимся каналом. В этом случае насос перестает быть ревер-
сивным. Реверсивность насоса может быть сохранена при исполь-
154
Рис. 5.10. Аксиально-поршневой насос бескарданного типа
зовании обратных клапанов, аналогичных клапанам 6 на рис. 5.10,
размещенным на крышке люльки, однако такие клапаны должны
быть достаточно большими.
При использовании роликовых (рис. 5.12) или гидростатиче-
ских опор размеры качающего узла существенно уменьшаются.
Такой вариант исполнения получил большое распростра-
нение.
Гидромоторы не допускают уменьшения угла у наклона оси
блока цилиндров относительно оси вала за предел, обусловлен-
ный силами трения. Поэтому регулируемые гидромоторы типа
«Тримот», у которых угол у можно изменять от 25 до 7Q, снаб-
жаются ограничителями углов наклона (рис. 5.13).
Блоки цилиндров выполняются бронзовыми или стальными
бронзированными. В первом случае гидромашина работает с давле-
нием 16 МПа и наибольшим давлением 25 МПа, допуская пиковые
нагрузки 32 МПа. Во втором случае эти давления повышаются
до значений 20, 32 и 40 МПа соответственно.
Гидро^ашины работают с рабочей жидкостью вязкостью
155
10 v 1000 сСт (кратковременно 5 v 1200 сСт) в темпе-
ратурном диапазоне —25 t +80° С при тонкости фильтра-
ции 25—40 мкм (при заправке — 20 мкм). Рекомендуемая вяз-
кость рабочей жидкости 16—200 сСт. Допускается кратковремен-
ная работа при высоких температурах и вязкости жидкости
5 сСт. Запуск насосов при отрицательных температурах допустим,
если вязкость рабочей жидкости находится в пределах 750—
1000 сСт.
3;
Рис. 5.11. Унифицированный качающий узел «Гидроматик»
156
Технические характеристики насосов и гидромоторов приве-
дены в табл. 5.3, где рабочий объем указан при наибольшем угле
наклона люльки у = 25°, а в скобках — при у = 20е, применяе-
мом при работе на более высоких давлениях.
Конструктивное совершенство и быстроходность гидромашин
оцениваются допустимым значением коэффициента скорости
где w — ~^^o—характерный объем гидромашины, см3/рад;
Qmax — наибольшая частота вращения, рад/с.
При у = 20° и работе с подпором (в закрытых схемах) значе-
ния коэффициента скорости 538—643, относительная масса нере-
гулируемых гидромашин G/Vo = 0,483 -т-0,585 кг-об/см3, а для
регулируемых — примерно вдвое больше.
Рис. 5.13. Гидромотор типа «Тримот»
157
Таблица 5.3
ТЕХНИЧЕСКАЯ ХАРАКТЕРИСТИКА АКСИАЛЬНО-ПОРШНЕВЫХ
ГИДРОМАШИН «ГИДРОМАТИК»
Рабочий объем, см3/об
Показатель 4,93 11,6 (9,4) 28,1 (22,7) 54,8 (44,3) 80
Частота вращения, об/мин: в закрытой схеме 6003 5600 4750 3750 3350
в открытой схеме .... 4500 4000 3000 2500 2240
при работе с электродви- гателем 1450 1450 1450 1450 1450
При работе с электродви- гателем: подача (расход), дм3/мин 7,15 16,8 40,7 79,5 116
мощность кВт: при р = 20 МПа 2,38 5,6 13,6 26,5 38,7
» р = 32 МПа 3,81 9,0 21,7 42,4 61,9
» р = 40 МПа . . . 4,76 11,2 27,2 53 77,3
Маховой момент GD2, кгс/м2 — 0,017 0,0068 0,021 —
Масса гидромашин, кг: регулируемых — 15 29 45 —
постоянной подачи (расхода) — 5,5 12,5 23 —
Рабочий объем, см3/об
Показатель 107 (86,5) 160 225 (182) 468 915 1830
Частота вращения, об/мин: в закрытой схеме 3000 2650 2360 1900 1500 1200
в открытой схеме . . 2000 1750 1500 1200 1000 750
при работе с электродви- гателем 1450 1450 1450 970 970 970
При работе с электродвига- телем: подача (расход), дм3/мин 155 232 326 454 888 1775
мощность, кВт: при р = 20 МПа 51,7 77,3 108,6 151 296 592
» р = 32 МПа 82,7 123,7 174 242 473 947
» р = 40 МПа . . 103,4 154,6 217,5 302 592 1183
Маховой момент GD2, кгс/м2 0,67 — 0,213 1,29 3,64 4,48
Масса гидромашкн, кг: регулируемых 85 165 —
постоянной подачи (расхода) 44 — 88 195 328 486
Возможность обеспечивать ускорение инерционной нагрузки
определяется приемистостью (см. раздел 5.12) [52], величина
которой пропорциональна значению динамического качества ги-
др омотора:
п* = /КЛ«дО£2).
158
Рис. 5.14. Регулируемый насос «Гидростабиль»
где Ид — частота вра-
щения гидродвигателя.
Для гидромоторов «Гид-
роматик» П* лежит в
пределах 0,718—1,037.
Близкую к рассмат-
риваемым гидромаши-
нам кинематическую
схему при несколько
ином конструктивном
выполнении имеют гид-
ромашины фирмы Линде
(ФРГ) «Г идростабил ь»
(рис. 5.14), широко ис-
пользуемые на мобиль-
ных машинах различно-
го назначения (обычно
на дорожно-строитель-
ных и сельскохозяй-
ственных). В этих кон-
струкциях торцовый
распределитель 3 — плоский, с гидростатическим прижимом
давлением, подводимым из магистралей в камеры 2, и предва-
рительным поджатием пружиной 4. Блок цилиндров фиксирован
при помощи комбинированного радиально-упорного подшипника 1.
Технические характеристики гидромашины «Гидростабиль»
несущественно отличаются от характеристик машин «Гидроматик».
Насосы «Гидростабиль» работают на номинальном давлении
16 МПа, допуская 10%-ную по времени перегрузку до давления
32 МПа (табл. 5.4).
Таблица 5.4
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ НАСОСОВ «ГИДРОСТАБИЛЬ»
Рабочий объем, см3/об
Показатель 35 50 75 105 140 186
Частота вращения, об/мин: в закрытой схеме 3200 3000 2800 2500 2350 2203
в открытой схеме . . 2400 2200 2000 1800 1600 1450
Мощность в закрытой схеме при р = 16 МПа, кВт 29,5 39 55 69 87 108
Масса насосов, кг: постоянной подачи 17 22 31 47 77 96
регулируемых 40 46 63 98 134 188
сдвоенных 96 142 182 196 320 368
159
Кинематическая схема аксиально-поршневой гидромашины
бескарданного типа (с наклонным блоком цилиндров) приведена
на рис. 5.15, а. На фиксированном в пространстве валике (его
ось ОХ) может вращаться блок 2 цилиндров, в которых совершают
возвратно-поступательное движение поршни 4. В каждом поршне
шарнирно закреплена одна из головок шатуна 3, а вторая, также
шарнирно, — в торцовом диске вала /. При повороте вала на
некоторый угол <р ось шатуна отклоняется на угол к, меняющийся
относительно поршня. Когда угол х, увеличиваясь, станет рав-
ным углу а наклона внутренней конической поверхности поршня
(рис. 5.15, б), шатун, прижимаясь к поршню, заставит вращаться
блок цилиндров, преодолевая механические потери трения на
распределителе, центрирующем валике и в зазорах между порш-
нями и цилиндрами.
Связь между углами поворота вала ср, блока цилиндров 9
и смещением поршней при различных значениях длин шатуна I,
радиуса R заделки головок шатунов в торцовой шайбе вала и
радиуса г разноски цилиндров в блоке [69] рассмотрена в раз-
деле 5.8 для использования при анализе любых аксиально-порш-
невых гидромашин.
5.4. АКСИАЛЬНО-ПЛУНЖЕРНЫЕ ГИДРОМАШИНЫ
БЕСКАРДАННОГО ТИПА
В последние годы особенно широкое распространение получают
аксиально-плунжерные гидромашины бескарданного типа (с пря-
мой осью, или, как их еще называют, гидромашины с наклонным
диском). Причинами их распространения послужили конструк-
тивная простота и технологичность, обеспечивающие возмож-
ность автоматизированного производства, работоспособность на
160
211, 2
Рис. 5.16. Нерегулируемая аксиально-плунжерная гидромашина бескарданного
типа Зауэр с рабочим объемом 89 см3/об
высоких давлениях, высокие динамические качества, малая
металлоемкость, сравнительно невысокая стоимость и небольшие
производственные площади, потребные при массовом изготовле-
нии гидромашин.
Наибольшее распространение получили гидромашины Санд-
стренд и Зауэр (ФРГ), идентичные по конструктивному испол-
нению, однако первые форсированы по быстроходности, что
улучшает их энергетические показатели при примерно одинаковых
ресурсах 8000—12 000 ч.
Конструкция гидромашины Зауэр с рабочим объемом Уо =
= 89 см3/об при угле наклона диска у = 18° и девяти плунжерах
приведена на рис. 5.16. Ее масса 40 кг, наибольшая частота вра-
щения 2590 об/мин, номинальное давление 25 МПа при наиболь-
шем допустимом 40 МПа (мощность 150 кВт).
Характер зависимости ре- р
сурса Тр аксиально-плунжер-
ных гидромашин в широком
интервале изменения давле-
ний р показан на рис. 5.17,
свидетельствуя о «неограни-
ченности» времени эксплуа-
тации на давлении pmln.
Коэффициенты скорости
гидромашин Зауэр велики и
стабильны ДЛЯ разных раз- Рис. 5.17. Ресурс гидромашин Сандстренд
6 В. Н. Прокофьев и др.
161
меров 33,3 Vo sg 333,7 см3/об, изменяясь в пределах 652
cq ss 656.
Металлоемкость G/Vo гидромашин постоянной производитель-
ности находится в пределах 0,81 —1,29, увеличиваясь с уменьше-
нием рабочего объема.
Наименьший угол наклона диска в гидромоторах у = 7°.
Гидромашины предназначены для работы в закрытых схемах.
Система компенсации утечек обслуживается вспомогательным
насосом, развивающим давление от 1 до 1,5 МПа. Предохрани-
тельный клапан системы настроен на давление 1,33—1,47 МПа,
а подпорный клапан — на давление 1,12—1,26 МПа. Давление
в корпусе насоса, создаваемое внешними утечками, не должно
превышать 0,25 МПа. Наибольшая температура в баке 80° С,
а рекомендуемая тонкость фильтрации 10 мкм.
Возможность работы гидромашин на высоких давлениях
обусловливается применением бронзированного блока цилиндров,
выполняемого фирмой Кюглер (Швейцария), обслуживающей
фирмы-изготовители аксиально-поршневых и аксиально-плунжер-
ных гидромашин. Материалы по другим надежным приемам брон-
зирования блоков цилиндров отсутствуют.
Некоторое представление о технологичности конструкций
аксиально-плунжерных гидромашин дают статистические мате-
риалы о необходимых производственных помещениях, площади
которых при масштабах производства свыше /V == 100 000 шт.
в год определяются выражением
F = (0,25+0,40) N м2,
а число обслуживающего персонала
Мр= (0,010-0,022) N.
Наиболее крупный потребитель таких гидромашин, как и
любых аксиально-плунжерных и аксиально-поршневых, — сель-
скохозяйственное машиностроение, где такие гидромашины при-
меняются, в частности, на комбайнах и тракторах.
Другим примером аксиально-плунжерной гидромашины с на-
клонным диском является конструкция Рексрот, имеющая уни-
фицированный качающий узел (рис. 5.18, а) с внешним присоеди-
нением справа или слева (по требованию заказчика). Гидро-
машина постоянной производительности показана на рис 5.18, б,
а регулируемая и управляемая электрогидравлическим механиз-
мом— на рис. 5.18, в. Образец гидромашины NG-125 с ручным
управлением приведен на рис. 5.19 (Го = 125 см3/об, п —
= 2100 об/мин, у = 15q, р = 2,5ч-40 МПа, N = 172 кВт, G «
= 104 кг).
Гидромашины выпускаются с рабочими объемами от 32 до
250 см3/об, с коэффициентами скорости cq от 540 до 645 (увели-
чивается с увеличением размера). Металлоемкость GIVO гидро-
машин постоянной производительности колеблется от 0,5 до
162
0,625 кГ’Об/см3, а регулируемых гидромашин — от 0,816 до
0,968 кг'Об/см3 динамическое качество гидро-
моторов 0,55 П* sg 0,845 и уменьшается с увеличением раз-
мера.
Отличительная особенность гидромашин Рексрот — сравни-
тельно небольшое изменение значения КПД в широком диапа-
зоне значений М и й для гидромоторов, а также Q и р для насо-
сов (показано в форме универсальных или топографических
характеристик на рис. 5.20). Это позволяет лучше использовать
гидромашины при компоновке гидропривода с гидромотором
6* 163
Рис. 5.19. Аксиально-плунжерный насос бескарданного
типа Рексрот
постоянного расхода и регулируемым насосом при использова-
нии приводного двигателя ограниченной мощности, что очень
важно для мобильных машин [1, 52].
На рис. 5.20, а (для гидромотора) сплошными линиями показан
полный КПД, штриховыми линиями — геометрические места
точек, соответствующих постоянной мощности на выходе, и
штрихпунктирными линиями — изобары. На рис. 5.20, б (для
насоса) сплошными линиями показан полный КПД, штриховыми
линиями — геометрические места точек, соответствующих посто-
янной мощности на входном валу, и штрихпунктирными линиями—
геометрические места точек, соответствующих постоянным углам
наклона диска. В обоих случаях при малых значениях перемен-
ных, изображаемых по оси абсцисс, существенно падающие зна-
чения КПД не приводятся (нижний предел диапазона регули-
рования).
Электрогидравлические механизмы управления регулируемых
насосов Рексрот унифицированы и обслуживаются источником
питания с давлением 7 МПа. Насосы работают при температуре
рабочей жидкости от —20 до +75° С, ее вязкости от 12 до 75 сСт;
допускается запуск при отрицательных температурах и вязкости
рабочей жидкости до 380 сСт с обязательным последующим ее
снижением до 75 сСт в течение не более 10 мин. Тонкость непре-
рывной очистки полного потока рабочей жидкости 25 мкм и
ответвленного потока (примерно 10—20% основного) 10 мкм.
Относительный момент на рычаге сервомеханизма управления
M/Vo имеет следующие значения при различном рабочем объеме Ко:
Уо, см3/об . . 32 63 125 250
ТИ/Vo, Н-об/см2 50 31,8 20 11,5
Время увеличения подачи от нулевой до наибольшей для
первых двух образцов 0,1 с и для вторых — 0,15 с.
164
Q.°/o
S Рис, 5.20. Универсальные (топографические) характеристики гидромотора (а) и насоса (6) Рексрот
Рис. 5.21. Аксиально-плунжерный насос бескарданного типа
Виккерс «Ин-лайн» с регулируемой подачей
Номинальное давление гидромашин Рексрот 25 МПа. Допу-
скается в течение 25% времени работы перегрузка до давления
31,5 МПа. Создаваемое воздушное шумовое давление находится
в пределах 78—82 дБ.
Фирма Виккерс (США) помимо аксиально-поршневых гидро-
машин с двойным несиловым карданом, рассмотренных в раз-
деле 5.1, выпускает аксиально-плунжерные гидромашины бес-
карданного типа «Ин-лайн» (рис. 5.21 и 5.22) с рабочими объемами
Уо от 10,5 до 198 см3/об на номинальное давление от 10 до 15 МПа
и углом наклона диска у = 17,5°. Значения коэффициента ско-
/ dcQ \
рости cq от 448 до 600 металлоемкость гидромашин
постоянной производительности 0,31—0,476 кг-об/см3, а пере-
менной производительности — 0,53—0,714 кг-об/см? у- <о).
Рис. 5.22. Аксиально-плунжерный гид-
ромотор бескарданного типа Виккерс
«Ин-лайн» в нерегулируемом исполнении
Благодаря работе на сравнительно невысоких давлениях необ-
ходимая тонкость фильтрации рабочей жидкости составляет
25 мкм на сливных магистралях и 150 мкм на приемной линии.
Рабочая жидкость должна иметь вязкость в пределах от 20 до
51 сСт и может повышаться до 220 сСт на пусковых режимах.
Температура рабочей жидкости не должна превышать 57° С.
Ресурс на номинальных режимах работы доходит до 10 000 ч
при использовании металлокерамического блока цилиндров и
выполнении задней крышки распределителя насоса из высоко-
качественного чугуна. Снижение уровня воздушного шума дости-
гается использованием асимметричного распределителя с разгру-
жающими «усиками» [1]. Поэтому насосы нереверсивны по отно-
шению к приводному двигателю и выпускаются в двух испол-
нениях в соответствии с пожеланиями заказчика.
5.5. ШЕСТЕРЕННЫЕ И ШИБЕРНЫЕ ГИДРОМАШИНЫ
Шестеренные насосы с внешним зацеплением выпу-
скаются в наибольших количествах по сравнению с насосами
других типов, они просты в изготовлении, имеют невысокую
металлоемкость (0,148—0,292 кг-об/см3), наиболее дешевы и на
крупных специализированных заводах изготовляются до 2000 шт.
в сутки.
Насос НШ (рис. 5.23) состоит из корпуса 2, крышки 1 и кача-
ющего узла, в который входят вал 6 с ведущей 3 и ведомой 4
шестернями и четыре втулки 5. Крышка крепится к корпусу бол-
тами 10, под головки которых подкладываются пружинные
шайбы 11. Уплотняющий узел вала составляется из манжеты 8,
опорного кольца 7 и стопорного кольца 9. Второй уплотняющий
узел составляется из манжеты 12, двух колец 13, специального
уплотнения 15 и вкладыша 14. Втулки 5 служат опорами для
цапф и уплотнениями торцовых поверхностей шестерен, осуще-
ствляя их автоматический прижим (автоматическое регулирова-
Рис. 5.23. Шестеренный насос с внешним зацеплением типа НШ
167
Таблица 5.5
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ШЕСТЕРЕННЫХ НАСОСОВ НШ
Насосы
Показатель 10Е 32У 32-2 .46 У 50-2 67-2 100-2 250-2
Рабочий объем, см3/об Наибольшее давле- 10 32 32 46 50 67 100 250
ние, МПа Номинальная частота 14 14 16 14 16 16 16 16
вращения, об/мин Металлоемкость, 1500 1500 1920 1500 1920 1920 1920 1920
кг«об/см3 0,292 0,203 0,234 0,153 0,148 0,233 0,216 0,152
Масса, кг ... Ресурс, тыс. моточа- 2,92 6,5 7,5 7,0 7,4 15,6 21,6 37,9
сов .... 6 5 6 5 6 6 6 2,5
Цена в 1975 г., руб. 8,14 17,5 26 19,5 28 65 65 162
ние зазоров) при поступлении рабочей жидкости под давлением
нагнетания в камеру А. Отжимающее усилие (несколько меньшее
прижимающего) обеспечивается гидростатическим давлением со
стороны межзубовых камер шестерен.
Объем бака для рабочей жидкости выбирается так, чтобы
при температуре окружающей среды +20° С температура рабо-
чей жидкости в баке находилась в диапазоне от +45 до +55° С.
Наибольшая допустимая температура рабочей жидкости +80° С.
Разрежение на входе в насос при указанном температурном
диапазоне не должно быть больше 200 мм рт. ст. Тонкость филь-
трации на сливной линии не более 80 мкм.
Допускается работа с давлением до 14—16 МПа при установке
на сельскохозяйственных машинах и на 2 МПа ниже при уста-
новке на строительно-дорожных машинах.
Параметры шестеренных насосов НШ с внешним зацеплением
(ГОСТ 8753—71) приведены в табл. 5.5; они выгодно отличаются
по металлоемкости от шестеренных гидромоторов фирм США
Би-Жи и Вебстер (табл. 5.6), несколько уступая им по быстро-
ходности и ресурсу. Более высокая металлоемкость гидромоторов
обусловлена в первую очередь отказом от применения легких
сплавов и необходимостью более равномерной подачи рабочей
жидкости, вследствие чего шестерни таких гидромашин при боль-
шем числе зубьев и меньшем модуле при прочих равных условиях
имеют бдльшие размеры. Более современны английские шесте-
ренные насосы (табл. 5.6), которые при существенно меньших
рабочих объемах допускают работу на значительно больших
давлениях.
Шестеренные насосы широко применяют в качестве вспомога-
тельных, в том числе мелкосерийного и даже индивидуального
исполнения, с установкой в таких узлах машин, в которых при-
168
Таблица 5.6
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ШЕСТЕРЕННЫХ ГИДРОМОТОРОВ
С ВНЕШНИМ ЗАЦЕПЛЕНИЕМ
Показатель Фирма-изготовитель
Би-Жи (США) Вебстер (США) Плессей (Англия) Доути (Англия)
Рабочий объем, см3/об 28—123 5—215 9—27 8-32
Наибольшее давление, МПа 12,5 14 17 21
Частота вращения, об/мин: наибольшая 3000—2400 2600—2000 2500 3000
наименьшая — 400 250 400
Металлоемкость, кг*об/см3 0,465—0,308 0,600—0,209 0,330-0,185 0,250—0,188
Масса, кг . 13-40 3—45 3-5 2-6
Удельный момент, Н*м/кг 4—6 3,3-11 8,3-16 13-18
ходится использовать шестерни не только самых различных
размеров, но и разных по числу зубьев в сопряжениях кача-
ющих пар. Расчет таких пар рассмотрен, например, в работах
[52, 81 ].
Выражение рабочего объема шестеренной гидромашины, снаб-
женной системой разгрузки от запертого объема (система, обра-
щающая гидравлическую продолжительность зацепления в еди-
ницу), определяется точным для одинаковых шестерен и при-
ближенным для неодинаковых по числу зубьев шестерен выра-
жением
уо==ль + + ± А)
12
см3/об,
где b — ширина шестерни, см; Rr и R2— радиусы полоидных
окружностей шестерен, см; /ц и h2 — высоты головок зубьев,
считая от полоидных окружностей, см; /ш — длина линки заце-
пления, соответствующая одному шагу, см; верхний знак перед
дробью RJR2 используется для гидромашин с внешним заце-
плением, а нижний — для гидромашин с внутренним зацепле-
нием.
Если применены одинаковые шестерни, образующие кача-
ющую пару, можно использовать для расчета приближенное выра-
жение
Уо^4,4лШ1. (5.1)
Положение окружности ножек зубьев шестерни (т. е. ее ра-
диус) непосредственно на величину подачи не влияет, однако
уменьшение этого радиуса увеличивает так называемый «мерт-
вый» объем, существенно ухудшающий работу насоса при высо-
ких давлениях.
169
Изменение объема, запер-
того между двумя соседними
сопряженными парами зубь-
ев, определяется выражением
АУ3 =
Рис. 5.24. График геометрической подачи (5.2)
шестеренной гидромашины
где — число зубьев веду-
щей шестерни; 8 — геометрическая продолжительность зацепления.
График геометрической (т. е. без учета утечек) подачи шесте-
ренной гидромашины Qr, умноженной на 2/lbQJ (где — угло-
вая скорость ведущей шестерни), приведен на рис. 5.24. Отрезки
парабол изображают подачу при нахождении в зацеплении соот-
ветствующей пары сопряженных зубьев. По оси абсцисс отклады-
вается угол поворота шестерни <р = Ш, причем <p2w соответствует
смещению точки зацепления на полную длину линии зацепления,
а <Р/ш — смещению точки зацепления на один шаг.
При нахождении в зацеплении лишь одной пары зубьев подача
будет изображаться отрезком параболы 1—2. Точке 5 соответствует
вступление в зацепление новой пары зубьев, определяющей
подачу гидромашины отрезком параболы 5—3—6—7—8. Подача
третьей пары зубьев будет изображаться отрезком параболы 9—10.
При отсутствии разгрузки от запертого объема большая
подача (изображается отрезком параболы 2—3—4) первой пары
сопряженных зубьев по сравнению с подачей второй пары зубьев
приведет к уменьшению запертого объема, величина изменения
которого определяется площадью криволинейного треуголь-
ника 2—5—3 или выражением (5.2).
Точка 3 соответствует наименьшему значению запертого
объема, и при дальнейшем вращении шестерни этот объем будет
симметрично увеличиваться. Такие изменения запертого объема
приводят к деформации рабочей жидкости, существенным утеч-
кам и, как следствие, к возникновению соответствующих дина-
мических нагрузок, причем давление в запертом объеме в опре-
деленные моменты времени окажется большим, чем давление
в магистралях гидромашины.
В гидромашинах с внешним и внутренним зацеплениями
при одинаковых значениях Vo величины ДУ3, как и коэффициенты
неравномерности подачи
Отах — Qmln Отах — 0mln
Отах Оср
относятся как
R2 + Ri
170
Способы разгрузки от запертых объемов рассмотрены в рабо-
тах [52, 81 L
При индивидуальном и мелкосерийном производстве шесте-
ренных гидромашин корпус их выполняется из серого чугуна
СЧ 21-40, а боковые щеки и втулки—из бронзы Бр.Аж 9-4.
При изготовлении боковых щек из серого чугуна СЧ 21-40 изно-
соустойчивость насоса уменьшается. Крышки выполняются из
стали 35 с закалкой до твердости HRC 24—30 или из сплава
Д16Т.
Шестерни выполняются из стали 20Х с цементацией на глу-
бину 0,5—0,9 мм и закалкой до твердости HRC 56—62 или из
стали 15Х с цементацией на глубину 0,4—0,8 мм и закалкой
до той же твердости. Применяются также стали 18ХГ и ЗОХГС.
а для сильно нагруженных шестерен — стали 12ХНЗА, 18ХНВА
и 40ХНМА. Шестерни из сталей 18ХГТ, 12ХНЗА и 18ХНВА пред-
варительно цементируются на глубину 0,5—0,9 мм и для всех
перечисленных материалов закаляются до твердости HRC 56—62.
Валик и ось выполняются из стали 40Х с закалкой до твер-
дости HRC 24—30 или из стали 50 с закалкой до твердости
HRC 40—45. Применяются также стали 20Х и 18ХГТ с последу-
ющей цементацией на глубину 0,4—0,8 мм и закалкой до твер-
дости HRC 56—62.
Поверхности деталей гидромашин обрабатываются со следу-
ющей шероховатостью (по параметру Ra ГОСТ 2789—73):
7?а, мкм
Торцы шестерен ............................................. 0,32—0,08
Поверхности шестерен по наружному диаметру 2,5—0,63
Расточки в корпусе под шестерни . 1,25—0,63
Торцы корпуса ,.......................... 0,63—0,32
Поверхности прокладки, сопрягаемые с корпусом 0,63—0,32
То же, сопрягаемые с крышкой 1,25—0,63
Поверхности крышки и основания 1,25—0,63
Шейки валика под подшипник качения , ♦ . 1,25—0,63
Поверхность валика, сопрягаемая с шестерней 1,25—0,32
При изготовлении насоса межцентровые расстояния между
осями расточек в корпусе под шестерни и между осями расточек
под подшипники в крышке и основании должны быть выполнены
с точностью ±0,02—0,05 мм. Соосность отверстий шестерен с на-
ружной окружностью их (эксцентричность) должна находиться
в пределах примерно 0,01 мм. Непараллельность торцовых пло-
скостей шестерен, т. е. разность по ширине последних, не должна
превышать 0,01 мм, а неперпендикулярность этих плоскостей
к их осям — не превышать 0,01 мм на радиусе 50 мм. Непарал-
лельность торцовых плоскостей корпуса не должна быть более
0,01 мм, а неперпендикулярность осеЛ расточек в корпусе под
шестерни и расточек в крышке и основании под подшипники
к их торцовым поверхностям — не более 0,02 мм на радиусе 50 мм.
Целесообразно на торцовой поверхности шестерни выпол-
нять расточку глубиной 0,5—1,0 мм диаметром, меньшим диа-
171
метра окружности ножек на 3—6 мм. Такая расточка предупре-
ждает возможность неравномерного прижима и возникновение
полусухого трения вместо жидкостного.
Расчет шестеренного насоса с внешним зацеплением и одина-
ковыми шестернями проводится по заданным частотам вращения,
необходимой подаче QH, рабочему (номинальному) давлению рабочей
жидкости в напорной камере рп и наибольшему давлению (рн)тах-
Принимая объемный КПД равным 0,7—0,9, определяют гео-
метрическую подачу Qr = Qu/t)oh, а по ней — необходимое зна-
чение рабочего объема Vo = 60QrM, по которому, обращаясь
к приближенному равенству (5.1), можно получить приемлемое
значение модуля. Так, если принять диаметр начальной окруж-
ности равным диаметру полоидной окружности 2R = mz, высоту
зубьев h = \,5т и ширину шестерни в виде доли диаметра b =
= btnz (где b = 0,65-7-1,00 при давлениях до 1 МПа, Ь = 0,54-0,7
при давлениях до 2,5 АШа и b = 0,254-0,40 при давлениях до
7 МПа), то получим расчетное уравнение для т в см:
Полученное значение модуля округляют до ближайшего по
ГОСТу, задаваясь числом зубьев в пределах от 10 до 15 с после-
дующим уточнением значения b так, чтобы полученный рабочий
объем Vo соответствовал заданию.
Имея в виду, что диаметр окружности головок зубьев 2гх =
= т (z + 3) = 2 (/?i + ht), находим диаметр окружности впа-
дин = т (г— 1,4), межцентровое расстояние L = т (г + 1),
угол зацепления шестерен в сборе а = arccos cos а =
= arccos —-^-7- cos а0 и диаметр основной окружности d0 =
2 Т 1
= mz cos а0,
Величина коэффициента перекрытия (продолжительность заце-
пления) уточняется по известному соотношению
__К (г + З)1 2 — г2 cos2 а0 — L sin а
л cos а0
Расчет оси проводится по неуравновешенной гидростатической
силе (75% от перепада давления) и среднему значению нормально-
го усилия, возникающего из-за передачи момента через зацепление.
Среднее значение нормального усилия Ри = Л4п1ах/(гот)нм)
представляет собой вектор, действующий по линии зацепления,
причем т]нм = 0,804-0,85— механический КПД; г0— радиус ос-
новной окружности ведомой шестерни; /Итах — наибольший мо-
мент нагрузки от гидростатических сил на ведомой шестерне;
1 / /2 \
A4max = “g- ( ^2 — $2 И- S1I1 ОС-\ Ь (Рн)тах*
172
Направления действия рассматриваемых усилий рассмотрены
в работе [52]. Расчет на прочность ведется по валику ведомой
шестерни, поскольку усилие на ведущей шестерне меньше. Обя-
зателен учет напряжения кручения от момента, подводимого к на-
сосу от приводного двигателя.
При выполнении валика и оси из стали 50 по третьей теории
прочности при III режиме нагрузки допускаемые напряжения
1,35 Н/м2. При использовании сегментной шпонки ее рассчиты-
вают на смятие, а при ее изготовлении из стали 50 допускаемое
напряжение может быть принято равным 15 кН/см2.
Опоры качения выбирают в соответствии с рекомендациями
каталога по условной нагрузке, равной RkokK, где R — суммар-
ная реакция в наиболее нагруженной опоре; ko = 2 и kK = L
При выборе опор качения применительно к бронзе ОЦС 6-6-3
давление не должно превосходить 300—400 Н/см2, если удельная
работа трения не превышает 550—750 Н-м-с/см2 (произведение
давления на скорость скольжения в м/с).
Для сильно нагруженных шестерен проводят обычную про-
верку зубьев по контактным и изгибным напряжениям.
Диаметры всасывающей и напорной магистралей в мм выби-
раются из условия
d=-
где QH — расход, дм3/мин; v — скорость рабочей жидкости,
не превышающая 1,5—2,0 м/с во всасывающей и 3,5—5,0 м/с
в напорной магистралях, если ее вязкость не превосходит 2—3° Е
(12—20 сСт). При большей вязкости жидкости значение v и окруж-
ной скорости шестерни насоса уменьшают, так как иначе рабочая
жидкость не будет успевать заполнять межзубовые пространства,
что приведет к интенсивному увеличению фазы Г в рабочей жидко-
сти. Допустимые значения окружных скоростей головок зубьев
цп1ах самовсасывающих шестеренных насосов в зависимости от
вязкости рабочей жидкости имеют следующую величину:
Вязкость, сСт 11,8 25,8 52,8 78,0 105 131 158 304 532 760
Wmax, м/с 5,1 4,5 3,8 3,5 3,25 3,2 2,85 2,2 1,6 1,26
Близки по принципу действия к шестеренным гидромашинам
с внутренним зацеплением, но существенно более сложны по
кинематике, героторные гидро машины, предста-
вляющие интерес благодаря уникально малым значениям металло-
емкости (табл. 5.7). Они используются на мобильных сельско-
хозяйственных машинах и особенно в гидравлических рулевых
системах.
На рис. 5.25 показаны профили рабочих органов героторных
гидромашин. Статор 6 имеет выпуклых зубьев 2 на один больше,
чем ротор 5. Герметичное разделение приемной и отдающей камер
обеспечивается не только точками зацепления, но и шиберами 1,
размещенными в головках зубьев ротора.
173
Таблица 5.7
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГЕРОТОРНЫХ ГИДРОМОТОРОВ OMR ДАНФОС
Показатель Рабочий объем, смя/об
80 100 160 200 315 335
Наибольшее давление, МПа: на входе 12,5 12,5 12,5 12,5 12,5 12,5
» выходе 7 7 7 7 7 7
Наибольший крутящий момент, Н-м 160 200 320 400 620 930
Наибольшая частота вращения, об/мин 750 600 400 300 200 450
Масса, кг . . . 7,0 7,2 7,5 8,0 8,5 28
Удельный момент, Н • м/кг 23 28 42,5 50 73 33
Металлоемкость, кг«об/см3 0,0875 0,072 0,0468 0,04 0,027 0,0835
Таблица 5.8
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ШИБЕРНЫХ НАСОСОВ БГ12 (р = 12,5 МПа)
Насосы
Показатель 42 22А 22 23А 23 24А 24 25А 25 26А
Рабочий объем, см3/об 8 12,5 11,5 15,5 23,4 31 43 56 86,2 115 156
Номинальная частота враще- ния, об/мин Масса, кг 1500 1500 1450 1450 1450 1450 1450 1450 1450 1450 1450
3,7 3,7 9,2 9,2 24,4 24,4 24,4 24,4 75 75 75
Ресурс, тыс. ч 3 3 5 5 3 3 3 3 1,5 1,5 1,5
Цена в 1975 г., руб. 15 15 54 54 85 85 85 85 — — —
Рис. 5.25. Профили рабочих органов героторных гидромашин
При одновременном вращении около двух разных центров
(привод осуществляется через кардан) приводного валика 7
объемы отдающей камеры 4 и приемной (для насоса) камеры 3
меняются, обеспечивая при этом процесс подачи рабочей жидкости.
Несмотря на некоторую сложность кинематической схемы и
конструкции, героторные гидромашины получили распростране-
ние благодаря возможности работы на сравнительно больших
давлениях при весьма малой металлоемкости.
В гидроприводах, работающих на малых и средних давлениях,
распространены шиберные гидромашины (табл. 5.8),
которые несколько дороже шестеренных гидромашин, более
металлоемки и менее быстроходны. Рабочий процесс и некоторые
конструкции шиберных гидромашин рассмотрены в работах
5.6. СРАВНЕНИЕ ГИДРОМАШИН
ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
Результаты сравнения гидромашин чаще всего носят субъектив-
ный характер вследствие многочисленности их параметров, мно-
гие из которых не представляют интереса для потребителей,
а часть параметров известна не для всех сравниваемых гидро-
машин. Имеет значение также неодинаковость местных условий
и задач испытаний гидромашин, проводимых независимо друг
от друга.
Стремление упростить и удешевить гидроприводы, к которым
не предъявляются жесткие требования по массе, габаритам и точ-
ности исполнения управляющего сигнала, часто приводит к ис-
пользованию самых простых гидромашин — шестеренных и ши-
берных. Однако ресурс первых определяют в моточасах, предпо-
лагая их установку на мобильной машине с приводом от двигателя
внутреннего сгорания (см. табл. 5.5), а вторык — по числу часов
175
работы в стационарных условиях, обычно с электродвигателем
(см. табл. 5.8). Способов количественного сравнения ресурса
с моторесурсом пока нет. Можно заметить, что ГОСТ 14060—68
«Моторы шестеренные гидравлические» предусматривает ряд ча-
стот вращения, начиная от 120 об/мин, а ГОСТ 14061—68 «Моторы
шиберные гидравлические» — от 0,6 об/мин, хотя наименьшая
частота вращения обусловливается свойствами не только гидро-
мотора, но и системы в целом.
Однако, если судить по главным «потребительским» пара-
метрам насосов и гидромоторов Vo и р, а также Л4 и Q, то области
значений этих параметров для выпускаемых шестеренных и
шиберных гидромашин в большей своей части «перекрываются».
Так, на Лондонском симпозиуме по гидроприводу в 1972 г. было
показано (рис. 5.26), что шиберные гидромашины 28 фирм обла-
дают несколько большими значениями Уо и М, а образцы меньших
размеров, чем шестеренные, могут работать при больших значе-
ниях р и Q. В то же время шестеренные гидромашины, обеспечи-
вая меньший диапазон изменения номинальных значений р для
насосов и Q для гидромоторов, проще по конструкции, менее
металлоемки и значительно дешевле, что привело к расширению
областей их применения.
Сравнение отечественных шестеренных насосов НШ (см.
табл. 5.5) с шиберными насосами БГ12 (табл. 5.8) по металлоем-
кости (рис. 5.27, а) и относительной стоимости (рис. 5.27, б)
свидетельствует о том, что шестеренные насосы имеют значительно
более высокую подачу, а их металлоемкость примерно вчетверо
ниже металлоемкости шиберных насосов главным образом вслед-
Рис. 5.26. Области параметров насосов (а) и гидромото-
ров (б):
1 — шиберные гидромашины; 2 — шестеренные гидромашины
176
Рис. 5.27. Металлоемкость G/Q (а) и относительная стоимость S/Q (б) ши-
берных (5Г12) и шестеренных (НШ) насосов;
1 — шиберные насосы; 2 — шестеренные насосы
ствие применения легких сплавов. По удельной стоимости шесте-
ренные насосы НШ (преимущественно ввиду больших масштабов
их производства) более чем в 5 раз дешевле шиберных насосов БГ 12.
На рис. 5.28 дано сравнение по металлоемкости различных
гидромашин, работающих по принципу зубчатого зацепления.
Наиболее металлоемкими являются
гидромоторы шестеренного типа с
внутренним зацеплением фирм Би-
Жи и Вебстер (США). Значения их
металлоемкости примерно те же,
что и у шестеренных насосов с внеш-
ним зацеплениегл НШ (штриховая
линия 2 на рис. 5.28). Сущест-
венно меньшую металлоемкость,
чем у гидромашин других типов,
работающих на высоких давле-
ниях, имеют героторные гидрома-
шины фирмы Данфос; это особенно
важно для мобильных машин. Сле-
дует, однако, заметить, что у гидро-
машин с рабочим объемом Уо >
> 250 см3/об металлоемкость
несколько повышается, прибли-
жаясь по своим значениям к ме-
таллоемкости гидромашин с мень-
шим Vo.
Сложнее обстоит с оценкой
аксиально-поршневых гидрома-
Рис. 5.28. Сравнение металлоемко-
сти гидромашин:
1 — героторные гидромоторы Данфос;
2 — шестеренные насосы НШ; 3 — 6 —
шестеренные гидромоторы; Би-Жи
(5), Вебстер (4), Плессей (5) и Доути (6)
177
Рис. 5.29. Металлоемкости аксиально-поршиевых и аксиально-
плунжерных гидромашин (по материалам каталогов):
1 — «Гидроматик»; 2 — Виккерс «Ин-лайн»; 3 — Рексрот; 4 — Зауэр;
цифры со штрихом — сведения по гидромашинам постоянной произ-
водительности; цифры со звездочкой — сведения по гидромашинам
с уменьшенным углом наклона блока цилиндров V
шин, существенно более дорогих и определяющих технический
уровень не только гидропривода, но зачастую и машины, на
которой они устанавливаются. Сравнение аксиально-поршневых
гидромашин прежде всего может проводиться по техническим
характеристикам. Хотя такое сравнение имеет большое значение,
однако не может считаться исчерпывающим, поскольку публи-
куются не все технические характеристики и получают их в раз-
ных условиях, например, номинальное давление выбирается при
разных ресурсах, получаемых при неодинаковых способах про-
ведения испытаний. И все же такое сравнение дает ориентиры,
по которым возможна первоначальная отбраковка сравниваемых
образцов при выборе оптимальных.
На рис. 5.29 приведены металлоемкости аксиально-поршне-
вых гидромашин в зависимости от номинального рабочего объ-
ема Уон, который будет отличаться от действительного при ис-
пользовании меньших углов у наклона блока цилиндров, напри-
мер, с целью увеличения ресурса или давления, как это делается
в конструкциях «Гидроматик».
Наименьшую металлоемкость имеют гидромашины постоянной
производительности Виккерс «Ин-лайн» и «Гидроматик» при
у = 25° (кривые 2' и /'), а из числа регулируемых аксиально-
поршневых гидромашин — Виккерс «Ин-лайн» и Рексрот (соот-
178
ветственно кривые 2 и 3). Наибольшую металлоемкость имеют
гидромашины Зауэр (кривая 4) и «Гидроматик» (кривая 1).
Наибольшее значение коэффициента скорости cq =*
= 2max У q/2n имеют конструкции «Гидроматик» (кривая 1
на рис. 5.30), примерно на том же уровне, что и конструкции
Зауэр (кривая 4). Наименьшее значение коэффициента скорости
имеют конструкции Виккерс «Ин-лайн» (кривая 2). ___________
Коэффициент динамического качества П* = У V0/(nmaxGD2)
для гидромоторов «Гидроматик» и Зауэр примерно одинаков
(рис. 5.31) и несколько выше у конструкций «Гидроматик» с наи-
большим углом у = 25°
При сравнении гидромашин фирм Сандстренд, Зауэр и Линде
(соответственно кривые /, 2 и 3 на рис. 5.32) по массе, приходя-
щейся на единицу мощности (относительная масса),
G = G/N кг/кВт,
при давлениях и частоте вращения, обеспечивающих одинаковые
ресурсы, преимущества оказываются у гидромашин Сандстренд.
Такое сравнение, проводимое для идентичных условий, одновре-
менно охватывает во взаимосвязи параметры G, Vo, Аир, поэтому
имеет особенное значение в тех случаях, когда увеличение массы
гидрооборудования нежелательно, например при выборе гидропри-
вода для сельскохозяйственных и транспортных машин, поскольку
мобильные машины всегда имеют двигатели ограниченной мощности.
Не меньшее значение при больших масштабах производства
гидрофицированных машин имеют и стоимостные критерии.
Если стоимость изготовления гидромашины Сандстренд постоян-
ной производительности с Уо = 89 см3/об принять за единицу, то
относительная стоимость регулируемой гидромашины того же
типа с регулируемой производительностью будет 1,25, а при
Уо = 166 см3/об соответственно 2 и 2,46. Что же касается гидро-
машин Рексрот, то соответствующие значения относительной
стоимости в этом случае при Го = 125см3/об будут 2,94 и 7,52, а
при Уо = 250 см3/об — 9,8 и 15,3. Существенное превышение
стоимости регулируемой гидромашины над стоимостью нерегу-
лируемой в двух последних случаях обусловливается большей
сложностью конструкций гидромашин Рексрот.
Аксиально-плунжерные гидромашины бескарданного типа
с прямой осью или, что то же самое, с наклонным диском кон-
структивно проще и компактнее аксиально-поршневых гидро-
машин с наклонным блоком цилиндров. Вследствие этого первые
гидромашины более технологичны, имеют меньшее число деталей,
менее трудоемки в изготовлении и более приспособлены к крупно-
серийному и массовому производству, имеющему высокий уровень
автоматизации. Однако такие машины требуют большей чистоты
рабочей жидкости, а КПД их в некоторых случаях может быть
несколько ниже КПД аксиально-поршневых гидромашин»
179
Рис. 5.30. Коэффициент скорос-
ти аксиально-поршневых и ак-
сиально-плунжерных гидрома-
шин:
1 — «Гидроматик» с углом V = 25°;
Г' — «Гидроматик» с углом у =
= 20е; 2 — Виккерс «Ин-лайн;
3 — Рексрот; 4 — Зауэр
Рис. 5.31. Коэффициенты дина-
мического качества гидромото-
ров «Гидроматик» и Зауэр:
/ —«Гидроматик» при угле у=25с;
/*_«Гидроматик» при угле ?=20с;
2 — Зауэр
Рис. 5.32. Металлоемкость с аксиально-плунжерных и аксиаль-
но-поршневых гидромашин бескарданного типа, сравниваемая
при одинаковых ресурсах
180
При эксплуатации гидромашин с двигателем ограниченной
мощности, а также в гидроприводах с регулируемыми насосами
весьма важна геометрическая конфигурация линий равных КПД
(изотроп) на универсальных характеристиках гидромашин (см.
рис. 5.20). Точка характеристики с самыми большими значе-
ниями М и Q для гидромотора, а также Q и р для насоса опреде-
ляет наибольшую возможную мощность гидромашины 2Vy, назы-
ваемую установочной мощностью. Как правило,
приводной двигатель имеет мощность < jVy, причем в гидра-
влических приводах отношение Ny/Np> = k называют по аналогии
с механическими трансмиссиями силовым диапазо-
ном [1,52]. В гидравлических трансмиссиях мобильных ма-
шин силовой диапазон всегда должен быть больше единицы, и
для тяжелых машин его значение может доходить до 10 и даже 12.
На универсальных характеристиках гидромашин Рексрот
(см. рис. 5.20) нанесены линии постоянных мощностей, которые
Рис. 5.33. Зависимости КПД насоса (а) и гидромотора (5)
Рексрот от относительной частоты вращения при различных
значениях силового диапазона
181
Рис. 5.34. Оценка воздействия вибра-
ций самоходных машин, средств тран-
спорта и оборудования на человека
можно принять в качестве ли-
ний Л/д = const, а значит, и
линий k = const. Используя
графики на рис. 5.20, можно
построить для гидромотора за-
висимость т] =т] (fe, п) (рис. 5.33,а)
и для насоса т)н = rjH (й, п)
(рис. 5.33, б), где п=п/птахв %.
В отличие от гидромашин с
двойным несиловым карданом,
машин с силовым карданом [52]
(их называют УРС) и радиаль-
но-поршневых гидромашин [14,
52] значения КПД гидромашин
Рексрот в большом диапазоне
изменения п и k оказываются
высокими. Однако провести
сравнение по таким зависимос-
тям перечисленных гидромашин
не представляется возможным, поскольку по гидромашинам Зауэр,
«Гидростабиль», «Гидроматик» и Виккерс «Ин-лайн» опубликован-
ных материалов недостаточно, а по гидромашинам Сандстренд
универсальные характеристики приводятся в форме, затрудняю-
щей процесс пересчета.
Практически все гидромашины сколько-нибудь значительной
мощности в процессе работы превращаются в генераторы колеба-
ний. Однако установившихся приемов прогнозирования интен-
сивности таких вибраций нет, поэтому пользуются эксперимен-
тальными материалами, носящими сугубо локальный характер.
О допустимости этих вибраций судят, сравнивая их с оценками
воздействия вибраций самоходных машин, средств транспорта
и оборудования на человека, которые содержатся в международ-
ном стандарте. Рекомендуемые этим стандартом пределы средне-
квадратичных виброускорений а, м/с2, в вертикальном напра-
влении (от ног к голове), определяющие границу снижения про-
изводительности труда от усталости в зависимости от среднегео-
метрической частоты активной полосы в Гц для разных по вре-
мени периодов воздействия, приведены на рис. 5.34.
Увеличение ускорений в 2 раза (на 6 дБ) по сравнению с при-
водимыми на рисунке должно рассматриваться как предел воз-
действия, переход через который может угрожать безопасности
и здоровью человека. Для получения пределов виброускорений,
обеспечивающих комфорт (порог снижения комфорта), нужно
приведенные на рисунке значения уменьшить в 3,15 раза (на
10 дБ).
В качестве основных элементов гидравлических трансмиссий
с наименьшими весовыми цо^аз^телями используются гидрома-
182
шины Сандстренд, Рексрот и Виккерс «Ин-лайн». Известны
трансмиссии HS-400 на базе последних машин с рабочим объемом
уо = Ю6 см3/об, наибольшей частотой вращения п = 3800 об/мин
и давлением р = 42 МПа при мощности 277 кВт и массе 71 кг.
Меньшая трансмиссия ТА-35 — на базе тех же гидромашин
с Vo = 38 см3/об, п = 3000 об/мин и р = 42 МПа, работающая
при температуре рабочей жидкости от — 20 до+Ю5° С.
СРАВНИТЕЛЬНЫЕ ПАРАМЕТРЫ ГИДРОМАШИН САНДСТРЕНД И РЕКСРОТ
Сандстренд Рексрот
Число типоразмеров в ряде насосов Диапазон рабочих объемов, см3/об Наибольший угол наклона упорного град Диапазон частот вращения, об/мин Наибольшее давление, МПа . 11 15—562 диска, 18 1800—4200 450 5 32—250 15 1800—3000 400
Тонкость фильтрации рабочей жидкости, мкм 10 Металлоемкость, кг/кВт . . 0,292—0,340 Диапазон изменения вязкости рабочей жидко- сти, сСт 6—1300 Диапазон масс, кг 14,5—270 10 0,394—0,565 12—380 25—170
Коэффициент скорости cq в гидромашинах Рексрот меньше
на 10—12%, относительный вес гидромашин постоянной произ-
водительности больше на 50%, габаритные размеры больше на
10%, а частота вращения при работе на самовсасывании 1800 об/мин
против 3000 об/мин у насосов Сандстренд.
Абсолютные значения и соотношение стоимостей регулируе-
мых насосов и гидромашин постоянной производительности Санд-
стренд свидетельствуют о высокой технологичности и совершен-
стве конструкций, а большая энергоемкость и малая металло-
емкость объясняют причины широкого распространения этих
машин, о чем также свидетельствуют большие масштабы их
производства.
5.7. ГИДРОЦИЛИНДРЫ И ГИДРОМАШИНЫ
С КОНЦЕВЫМИ ПЕРЕКЛЮЧАТЕЛЯМИ
Существует множество конструкций гидроцилиндров, выпускае-
мых в больших количествах, поэтому мероприятия по их унифи-
кации и стандартизации даже в пределах одной отрасли могут
дать большой экономический эффект.
Примеры конструкций гидроцилиндров приведены на рис. 5.35.
Так, гидроцилиндры Рексрот с проушиной на резьбе (рис. 5.35, а)
на номинальные давления 20—35 МПа выпускаются с диаметрами
от 63 до 250 мм, диаметрами штоков от 42 до 180 мм и ходами
поршней от 100 до 3000 мм. Крепление крышек фланцевое на
резьбе, а уплотнения шевронные резинотканевые. Демпфирова-
ние осуществляется при помощи плавающей втулки с регули-
ровкой игольчатым дросселем.
Конструкции «Гидравлик» (ФРГ) без демпфера и с демпфером
приведены соответственно на рис. 5.35, бив. Узел демпфирова-
ла
Рис. 5.35. Конструкции гидроцилиндров:
а — Рексрот; б — «Гидравлик» (без демпфера); в — «Гидравлик» (с демпфером); г
Перриер (проушина приварена)
ния с цилиндрическим демпфером включает обратный клапан
и дроссель игольчатого типа, размещенные вне цилиндра.
Большой ход поршня (до 6000 мм) имеет гидроцилиндр фирмы
Перриер (Франция) (рис. 5.35, г), предназначенный для работы
с давлением до 40 МПа. Такие гидроцилиндры выпускаются
в разнообразных исполнениях. Задние крышки привариваются,
184
а передние крепятся на резьбе. Гильзы гидроцилиндров имеют
утолщенные стенки.
Гидроцилиндр составляется из пяти основных деталей: кор-
пуса (гильзы), двух крышек корпуса с крепящим устройством,
поршня с уплотняющими устройствами и штока. Корпус имеет
внутренний диаметр от 20 до 700 мм, длину до 8000 мм (в кон-
струкциях индивидуального изготовления до 15 000 мм) и тол-
щину стенок не менее 2,5 мм. Толщина стенок определяется или
из условий прочности, или из условий деформации, поскольку
деформирование стенок нарушает герметичность системы.
На высокие давления корпус изготовляется из прецизионной
стальной бесшовной трубы прокаткой, горячим прессованием
или протяжкой. Зеркало (внутренняя поверхность) корпуса
хонингуется (обычно материал — углеродистая сталь 55) до
шероховатости поверхности 1 мкм, допуски при изготовлений —.
от 1 до 3 мкм. Крышки корпуса в стационарных машинострои-
тельных конструкциях выполняются из серого чугуна или из
чугуна с шаровидным графитом и реже — из углеродистой
стали 35.
Шток выполняется из углеродистой стали 35 или 45, реже —.
из хромоникелевой, после точения шлифуется, хонингуется и
полируется с доведением шероховатости поверхности до 3 мкм
и хромируется слоем толщиной 25—30 мкм. Поршень изгото-
вляется из серого чугуна.
Уплотнения цилиндра при работе на минеральных маслах
эластомерные (пербутан, буна и др.); при работе на трудновос-
пламеняемых жидкостях, например в кузнечно-прессовом обо-
рудовании, используются уплотнения из витона и тефлона.
В гидроцилиндрах широко используются пластмассовые по-
крытия (фторуглеродистые полимеры, например тефлон), обеспе-
чивающие защиту поверхностей (поршня, штока, цилиндра)
от коррозии, снижающие трение и износ сопрягаемых деталей.
Пластмассовые покрытия работоспособны при высоком давлении,
нечувствительны к загрязнениям и обладают свойством самовос-
становления поверхности при образовании рисок и при других
аналогичных повреждениях.
Тефлон наносится на поверхности разбрызгиванием слоем тол-
щиной от 76 до 127 мкм и последующей сушкой в течение 6 ч
при температуре 315° С (она должна быть ниже температуры
спекания). Возможно двукратное нанесение покрытия с двукрат-
ной сушкой.
Зеркало цилиндра может быть без покрытия или с покрытием
из эпоксидных и фенолформальдегидных смол, нейлона и других
полимеров высокой твердости, прочности и теплостойкости.
Из тех же полимеров выполняются и уплотнения поршня. Обли-
цовка зеркала производится прессованием с последующей поли-
меризацией (облицовочный материал — из гранул, предварительно
размещаемых в цилиндре). После охлаждения цилиндра пуансон
185
Рис. 5.36. Сельскохозяйственный вибратор
извлекается и облицовка заканчивается. При такой технологии
дальнейшая обработка поверхности не требуется.
Гидроцилиндры с концевыми переключателями обеспечивают
циклическое (периодическое) движение поршня. При значитель-
ной частоте и малой амплитуде такие устройства называются виб-
раторами, а при меньших частотах и увеличенных амплитудах —
автоматическими гидроприводами возвратно-поступательного дви-
жения. Они широко применяются в сельскохозяйственных ма-
шинах.
Гидровибратор ГА 40000 (рис. 5.36) используют в качестве
привода вибрационной площадки зерновых бункеров зерноубо-
рочных комбайнов СК-5 («Нива») и СК-6 («Колос»), предупреждая
зависание зерна. Вибратор имеет две движущиеся детали —
поршень 4 со штоком и золотник 3, размещенные в корпусе 8.
Для начала хода поршня вверх золотник занимает крайнее
правое положение (рис. 5.36, а). Тогда напорный канал /, соеди-
няясь с нижней камерой 6 гидроцилиндра, обеспечивает движение
поршня вверх, верхняя камера 5 гидроцилиндра соединена с ли-
нией слива 2, а золотник находится в фиксированном правом
положении, потому что к правой камере 7 золотника подведено
давление слива, а центральная камера золотника находится под
воздействием давления питания. При достижении поршнем край-
него верхнего положения правая камера 7 золотника соединяется
с каналом нагнетания, золотник перебрасывается в крайнее левое
положение до упора (рис. 5.36, б), нижняя камера 6 гидроцилин-
дра соединяется с линией слива 2, а верхняя камера 5 — с линией
питания 1. Поршень начинает двигаться вниз. При достижении
им крайнего нижнего положения пониженное давление в ка-
1В6
мере 7 вновь перебрасывает золотник в крайнее правое поло-
жение, и цикл движения повторяется.
Гидровибратор ГА 40000 работает при давлении питания
6,3 МПа, обеспечивает рабочий ход 2,5—3,0 мм, имеет массу
6,5 кг и за цикл потребляет 19 см3 рабочей жидкости. Частоты
гидровибратора ГА 40000 определяются подачей рабочей жидко-
сти и могут достигать 1500 циклов в минуту.
5.8. КИНЕМАТИКА АКСИАЛЬНО-ПОРШНЕВЫХ
И АКСИАЛЬНО-ПЛУНЖЕРНЫХ ГИДРОМАШИН
Переходные процессы при заполнении и опорожнении гидроци-
линдра и, в частности, при расшифровке экспериментально полу-
ченных индикаторных диаграмм или при их аналитическом
построении требуют точного описания относительного движения
поршня (или плунжера) в гидроцилиндре. Этот процесс в зави-
симости от кинематики гидромашины описывается уравнениями
[14, 52], которые имеют весьма громоздкую форму применительно
к аксиально-поршневым гидромашинам бескарданного типа [69].
Любые расчеты, связанные с получением или оценкой индикатор-
ных диаграмм, требуют весьма точных описаний кинематических
свойств механизмов гидромашин.
Использование результатов анализа кинематики механизмов
указанных гидромашин позволяет получить общие приемы рас-
чета относительного смещения поршня в любых аксиально-порш-
невых гидромашинах и смещения плунжера в любых аксиально-
плунжерных гидромашинах [1].
На рис. 5.37 показана обобщенная кинематическая схема
аксиально-поршневой гидромашины с одним поршнем. Вал 1
вместе с упорным диском 3 вращается в опоре 2 с угловой ско-
ростью Q = daldt. Вокруг оси ОХ вращается блок цилиндров 6
с угловой скоростью Q* = dp/d/, а оси вала и блока цилиндров
образуют угол у. Смещение поршня 5 в блоке цилиндров обес-
печивается благодаря связи упорного диска 3 с поршнем при по-
мощи штока. Изменение производительности обеспечивается изме-
нением угла у. Схема обладает дополнительной степенью свободы,
которая устраняется нало-
жением связи между уг-
лом а поворота вала 1 и
углом р = р (а) поворота
блока цилиндров, напри-
мер, использованием ка-
кого-либо карданного
устройства, место размеще-
ния которого показано на
рис. 5.37 контуром К-
В аксиально-поршне-
вых гидромашинах с сило-
5.37. Положение поршня аксиально-пор-
Рис. { . ____г
шневой гидромашины бескарданного типа
в начальный момент нагнетания
187
вым карданом (УРС) устанавливается синхронный или асинхронный
кардан, а в аксиально-поршневых гидромашинах с двойнььм несило-
вым карданом — двойной синхронный кардан, В аксиально-
поршневых гидромашинах бескарданного типа шатуны 4 (см.
рис. 5.37) попеременно становятся ведущими и, опираясь на
юбку поршня 5, принудительно устанавливают определенную
связь между углами а и |3. Наконец, в аксиально-плунжерных
гидромашинах бескарданного типа головки плунжеров, опираясь
на упорный диск, также устанавливают определенную связь
Р = Р (а).
В работе [69] на основе векторной алгебры было показано,
что смещение поршня в цилиндре в зависимости от угла у будет
х =----^-Dsin у cos а /cosq>, (5.3)
причем
cos <р = ]/1 — р2 (kD — I)2 sin2 а — р2 (1 — kD cos у)2 cos2 а — <2p2kDA,
(5.4)
где А = (cos2 а ♦ cos у + sin2 а) (1 —cos гР) + -у (1 — cos у) sin 2а • sin ф;
р = D/(2lkD) — безразмерный параметр; D —диаметр окружности
размещения головок шатунов поршней в упорном диске;
I — длина шатуна, считая от центров заделок;^ = DID' —
дезаксиал механизма; D' — диаметр цилиндрической поверхности
размещения осей цилиндров в блоке цилиндров; ф — угол между
осями поршня и шатуна; ф = а — [3 — угловая асинхронность,
т. е. угол отставания блока цилиндров от поршневой группы.
В начальный момент нагнетания при а = 0 поршень в цилин-
дре находится в наиболее близком положении к плоскости 00
(см. рис. 5.37), и тогда начальное значение смещения будет
Хо = — "2~ sin у + / COS ф0,
а относительное смещение поршня в цилиндре при повороте порш-
невой группы на угол а
h = х — xQ = sin у (1 — cos а) + Z (cos ф — cos ф0).
Можно привести четыре примера.
1. Для конструкций с двойным несиловым карданом и с син-
хронным силовым карданом считают, что блок цилиндров и порш-
невая группа вращаются синхронно (ф = а — £ == 0). Тогда
h = sin (1 — cos а) +
188
где h*/l = ]/1 — р2 (/jd — I)2 sin2 a — p2(l —kDcosy)2 cos2a —
— ]/l — p2 (1 — kD cos y)2 =
= ]/1—p2 (1 —/eDcosy)2—pa[(/zD—I)2 —• (1 — /eD cosy )2 ] (1 — cos2a) —
-]/l — p2(l — £Dcosy)2.
Если считать, что подрадикальные выражения h * близки
к единице (что равносильно предположению о малости угла <р),
то, раскладывая радикалы в ряд и пользуясь лишь двумя первыми
членами, можно получить более простое приближенное выраже-
ние смещения поршня
h = -у-1 sin у (1 — cos a)
+ К1 - kD cos у)2 — (kD - I)2] (1 - cos2 у)1.
о/йд j
Следовательно, смещение поршня в блоке цилиндров можно
рассматривать в виде суммы двух движений (ft = h' + h *),
одно из которых называется основным (первый член разложения
в ряд Фурье)
h' = sin у (1 — cos а),
обусловленным только наклоном оси блока цилиндров относи-
тельно упорного диска, и второе — дополнительным
h = 77^71(1 ~ ^c°sy)2 ~ - I)2] (1 - cos 2a),
1 O/v
обусловленным отклонением оси шатуна от оси цилиндра. Это
выражение должно рассматриваться в качестве приближенного,
поскольку оно не учитывает асинхронность углового перемещения
блока цилиндров относительно упорного диска.
Можно заметить, что при дезаксиале kD, удовлетворяющем
условию
kD = 2/(1 4- cos у0),
дополнительное движение обращается в нуль.
2. Для аксиально-поршневых гидромашин бескарданного типа
при определении h следует использовать выражение (5.3) с уче-
том (5.4), где угловую асинхронность ip находят из выражения
угла наклона шатуна <р = и — const, определяемого углом на-
клона внутренней поверхности поршня (юбки поршня).
Выражение ip имеет форму [52, 69]
ф = 2 arctg
где Д1 = kD (1 — cos у) sin 2a; Bi = (1 — cos y)2 k2D sin2 2a;
Cx = (1 4- kDy sin2 a + (1 + kD cos y)2 cos2 a - ;
Di S'p'2'" — (1 &£>)2sin2a — (1 — kD cosy)2cos2a;
E± = (1 + &o)2 sin2a+ (1 + kD cos y)2 cos2 a —si^2 x .
3. Для конструкций с силовым асинхронным карданом (УРС)
также обращаются к уравнениям (5.3) с учетом (5.4), в котором
выражение угловой асинхронности ф = a — р позволяет исклю-
чить угол р при помощи уравнения связи, устанавливаемого кар-
даном, р = Р (а), и тогда получают ср = гр (а).
4. Для аксиально-плунжерных гидромашин бескарданного
типа выражение h принимает форму
/i=-§-tgY(l — cosa),
т. е. движение будет гармоническим, обусловленным величиной
диаметра D' цилиндрической поверхности, по которой размещены
оси цилиндров в блоке.
5.9. ИНДИКАТОРНАЯ ДИАГРАММА
ОБЪЕМНОЙ ГИДРОМАШИНЫ
Процесс подачи в гидромашине, работающей по объемному прин-
ципу, заключается в том, что из отдающей в приемную камеру
перемещается или в ней образуется рабочая клетка, которая пере-
носит рабочую жидкость в отдающую камеру. В процессе переме-
щения рабочей клетки из-за изменения ее объема и упругих
свойств жидкости давление в ней меняется. Графическое изобра-
жение зависимости этого давления рц от угла поворота вала ги-
дромашины называется индикаторной диаграммой.
Применительно к поршневой или плунжерной гидромашине
закономерность изменения давления в зависимости от положения
поршня х (определяет объем цилиндра, занятый рабочей жидко-
стью) для насоса показана на рис. 5.38, а и б и для гидромотора —
на рис. 5.38, в. Поскольку положение поршня в цилиндре опреде-
ляет однозначно объем V последнего, то зависимость рц (х) может
быть пересчитана в зависимость рц (V), а пользуясь материалами
раздела 5.8, можно пересчитать экспериментально полученную
индикаторную диаграмму в зависимость рц от времени.
Изменение давления рц (0 в цилиндре насоса с золотниковым
распределением (или с принудительной посадкой клапанов) при пе-
реходе цилиндра из приемной области с давлением рй в отдающую
190
a — насоса в форме рц (0; б •* насоса в форме рц (х)1 в = гидромотора
в форме рц (х)
с давлением рн составляется из трех, обычно переходных (по-
скольку они не успевают завершиться) процессов: изменение
давления в запертом цилиндре после его отсечки распредели-
телем (/—2—3 на рис. 5.38, а), выравнивание давления в цилин-
дре и отдающей камере (3—4—6), генерация цилиндровых коле-
баний из-за вступления в действие последующих цилиндров (6—7
и 7—8). Аналогичные процессы происходят при переходе цилин-
дра из отдающей области в приемную (8—9—10, 10—11—13,
13—14 и 14—1 соответственно).
При работе рассматриваемой гидромашицы генерируются ко-
лебания четырех разных частот: роторные с периодом Тр =*
191
= 2л/Q (Q — угловая скорость ротора); коммутационные с пе-
риодом Тк = Tp/z (z — число цилиндров) и высокочастотные
цилиндровые с периодами Гцн и Гцв, определяемые переход-
ными процессами выравнивания давлений при открытии ци-
линдров.
Если даже не считать изменений давления из-за колебаний
нагрузки и различных упругих процессов в системе, а также
различного рода вибрационных процессов и воздействий (как
правило носящих случайный характер), то в рассматриваемых
переходных процессах возможны флюктуации, поэтому значения
рц и dpjdt в начале каждого нового переходного процесса не
должны рассматриваться в качестве детерминированных. Обычно
используются аналитические описания переходных процессов
с нулевыми начальными условиями. В этом случае необходимо
корректирование результатов расчета при помощи эксперимен-
тально получаемых коэффициентов, позволяющих судить о воз-
можных, вероятных или наибольших отклонениях от рассчиты-
ваемых некоторых средних детерминированных периодических
значений рц, рассматриваемых в качестве осредненных.
Изменение давления в запертом объеме описывается уравне-
нием [56]
Хд
V*
<1Рч
di
dV*
di
(Рц — рк) sign (рц — рк)
, (5.5)
где иа — изоэнтропийный (ввиду краткости рассчитываемого
процесса) модуль объемной упругости рабочей жидкости; V * —•
объем цилиндра в момент отсечки; рк — давление в камере,
в которую выдавливается рабочая жидкость (при двух и более
камерах, включая внутреннюю полость гидромашины, исполь-
зуется эквивалентное значение); f—суммарная площадь ще-
лей; е — коэффициент утечек (для специально выполненных
щелей на распределителе е 0,65-^0,85); р — плотность рабочей
жидкости.
Для аксиально-плунжерных и аксиально-поршневых гидро-
машин с торцовым распределением зазор между блоком цилин-
дров и поверхностью распределителя меняется от 5—6 до 20 мкм.
То же уравнение (5.5) используется при выборе дросселиру-
ющих канавок на распределителе, обеспечивающих локализацию
скачков давления при открытии цилиндров, что приводит к по-
нижению уровня воздушного шума и вибрационных эффектов
гидромашин [1].
Процессы выравнивания давлений под воздействием пере-
падов Дрв = Рц — Ри и дРн = Рн — Рз (где р3 и pii — давления
в моменты открытия цилиндров, соответствующие точкам 3 и 11
на рис. 5.38, а) определяются интегрированием уравнения [58]
• • 9 •
Др (0 +-р Др (0 + А Др (0 = о, (5.6)
192
где А ^пр> ^пр
k = 16,7 —
я/lXcp
= ТрЁ3"’
корректирующий коэффи-
циент; h — ширина окна;
хср=среднее значение иа =
= на (р). Изменение зна-
чения k позволяет, напри-
мер, повышать точность
определения tn при сни-
жении точности опреде-
ления частоты и на-
Рис. 5.39. Характеристики переходного про-
цесса и цилиндровых колебаний в цилиндрах
аксиально-поршневых и аксиально-плунжер-
пых гидромашин
оборот.
Поскольку решения
уравнения (5.6) в форме
рядов сходятся медленно,
то пользуются ЦВМ.
Переходный процесс Др (0 выравнивания давления в цилин-
дре и в соответствующей камере (3—4—6 и 10—11—13 на рис.
5.38, а) состоит из начального участка продолжительностью /п,
определяющего, в частности, усилие на регулирующем органе,
и цилиндровых колебаний с частотой /ц и коэффициентом затуха-
ния 6Z = при коэффициенте демпфирования £ = 0,24-0,3
(v — декремент затухания; i в индексе может быть н и в). Экспери-
ментально проверенные на аксиально-поршневой гидромашине
с двойным несиловым карданом значения /п, /ц, и 6 приведены
на рис. 5.39 [58].
Форма закономерности Др (г) при t < tn обусловливает ве-
личину усилия на регулирующем органе (fn — наименьшее время,
за которое перепад давлений Др обращается в нуль), поскольку
Рис. 5.40. Характеристики начального участка переходного процесса вы-
равнивания давлений:
а — эпюра Ар (/); б — функции kQ (Дпр) и t9 (Дпр)
7 В. Н. Прокофьев и др.
193
с координатами Др0 и tQ.
Значение относительной ко-
ординаты tQ = tQ/tn и коэф-
фициент /?а, учитывающий
превышение площади под кри-
вой Др (/) над площадью пря-
моугольного треугольника
со сторонами Др (0) и <п>
будет
k° ~ Ьр (0) tn f дР(0^.
о
Рис. 5.41. Эпюра давлений по осевой ок- Значения и t в ча-
ружности рабочего участка плоского тор- «а и ‘'О D
нового распределителя ВИСИМОСТИ ОТ ЛПр приведены
на рис. 5.40, б.
Рассмотрим аксиально-поршневую гидромашину (для опре-
деленности — насос) с плоским торцовым распределением, оси
цилиндров которой перемещаются по цилиндрической поверх-
ности диаметром £)ц (рис. 5.41). Выше оси АС находится прием-
ная полость с давлением рабочей жидкости рв, а ниже — отдаю-
щая полость с давлением рн.
Пусть блок цилиндров вращается относительно распредели-
теля с угловой скоростью Q и при повороте оси цилиндра относи-
тельно начала отсчета на угол л — а2 (где а2 происходит
отсечка цилиндра. Из-за продолжающегося движения поршня
в цилиндре давление р (а) < ръ при л < а < л — а2, а затем
возрастает и после открытия цилиндра в отдающую полость на
некотором угле а3 < давление в цилиндре станет таким же,
как и в отдающей полости. На рис. 5.41 понижение значения р (а)
относительно рв при а < л и относительно ри при а > л за-
штриховано, и соответствующие площади обозначены через
о2 и о4.
Аналогичный процесс происходит при переходе цилиндра из
отдающей полости в приемную, только в этом случае при 2л >
> а > 2л — а4 (где а4 — угол отсечки цилиндра) происходит
повышение давления в цилиндре р (а) по сравнению с давлением
рн, а при 0 < а с ах по сравнению с давлением рв, где а4 ~
и ах «-=- (ах— угол, соответствующий моменту выравнивания
давления в цилиндре и приемной полости). И в этом случае эпюра
р (а) отклоняется от ри при а с 2л и от ръ при а < ах вправо,
как показано заштрихованными площадями о4 и ог соответст-
венно.
194
Среднее значение момента на регулирующем органе от давле-
ния в цилиндре р (а) определяется строкой очевидных равенств
Т 2л 2л
<Р = у- J M(a)dt = j M(a)da = -^j M(a)da,
ООО
причем момент относительно оси СА, нагружающий цапфы, около
которых поворачивается люлька, будет
/Рц f"
Л1^ = _4г] P(a)slnada>
о
а момент относительно оси BD, нагружающий механизм управле-
ния (усилие на регулирующем органе),
.. fDa 2,"
MBD = -yr] р (a) cos a da,
О
где f — площадь поперечного сечения поршня; Т — время одного
оборота (период).
Легко видеть, что при 04 —> О, о2* 0, о3 —* 0 и о4 —* 0 сред-
нее значение момента на регулирующем органе обращается в нуль,
поскольку
(л 2л \
ръ j cos a da + рн j cos a da I = 0.
0 л /
Среднее значение момента относительно оси СА
fD ( « f \ fD
МСл = Рв] sinada + pH j sinada =-уу(рн-рв),
\ 0 л /
а от всех z поршней
/Рцг
(^ср)сД = ^СА = 2л
Из-за эффекта сжимаемости рабочей жидкости, т. е. вслед-
ствие конечного значения модуля объемной упругости жидкости х,
значения площадей эпюр 04 4= 0, о2 =£ 0, о3 4= 0 и о4 =£ 0, центр
тяжести эпюр смещается вправо и среднее значение момента,
потребного для изменения наклона регулирующего органа, ста-
новится отличным от нуля. Таким образом, усилие на регулиру-
ющем органе регулируемой гидромашины зависит от эффекта
сжимаемости рабочей жидкости, поскольку площади 04, о2, о3 и
о4 определяются также и значением х.
Поскольку (А4щ))ср = 0 при 04 = 0, о2 = 0, о3 = 0 и о4 = 0,
то отличие этого момента от нуля, т. е. его среднее значение на
7* 195
регулирующем органе при ох 0, о2=/= 0, а3 =/= 0 и о4 =/» О, будет
определяться очевидным соотношением
fD„ 'П 2л > I [р («) — Рв] cos a da + J [p (a) — p„] cos a dal, ,0 л J
(5.7)
которое следует определять по шести диапазонам изменения угла а.
Так, имея в виду малость углов аь а2, а3 и а4, получим:
при 0 < а < аь р (а) > рв, cos а 1
J [р (а) — рв] cos а da о\; (5.8)
с
при ах < а < л — а2, р (а) = рв
j [р (а) — рв] cos а da = 0; (5.9)
при л — а2 < а < л, р (а) < рв, cos а —1
л
j \р (а) — рв] cos а da а2; (5.10)
л—а2
при л < а < л + а3, р (а) < рн, cos а —1
л+аа
J [р (а) — рн] cos a da о3; (5.11)
л
при л + аэ « а < 2л — а4, р (а) = ра
2л—а4
j Ip (а) — р„] cos а da = 0; (5.12)
я+а,
при 2л — а4 « а с 2л, р (а) > рн, cos а «=< 1
2л
j [р(а) — pjcosada«*a4. (5.13)
2л—а4
Подставляя выражения (5.8)—(5.13) в исходное равенство
(5.7), окончательно получим
/£>ц
(^во)ср 2 ~4л” (Q1 Н“ °2 + °3 +
т. е. усилие на регулирующем органе определяется площадью
асимметричной относительно оси BD части эпюры давлений р (а).
Закономерность изменения давления р (а), а значит и р (/),
называемая индикаторной диаграммой, определяет величину со-
196
противления изменению наклона регулирующего органа в про-
цессе регулирования.
Перестройка индикаторной диаграммы из формы Др (0 (см.
рис. 5.38, а) в форму Др (х) или форму Др (У) (см. рис. 5.38, б)
позволяет при помощи материалов раздела 5.8 выявить эффект
пузырьковой релаксации рабочей жидкости и установить влияние
релаксационных процессов на подачу гидромашины, поскольку
время ta мало и не позволяет завершиться релаксационному про-
цессу, а за время -^-Тр обычно устанавливается термическое
равновесие рабочей жидкости. Поэтому, строя штриховые кри-
вые /—5 и 8—12 на рис. 5.38, б, изображающие процесс деформа-
ции рабочей жидкости в цилиндре, можно определить потери
объемов при передаче жидкости в отдающую камеру (ДУН) и при
получении ее из приемной камеры (ДУВ), определяемые соответ-
ственно положениями точек 5 и 12. Объем рабочей жидкости в ци-
линдре Vi при изменении давления от = рв до рц = рн умень-
шается до значения V5 < Vlt а объем V8 увеличивается до зна-
чения V12 > V8 из-за уменьшения давления от рц = рн до рц = ра.
Таким образом, из-за деформации рабочей жидкости в началь-
ный момент открытия цилиндра происходит движение потока
в обратном направлении, которое уменьшает величину подавае-
мого объема.
В гидромоторах происходят аналогичные процессы (см.
рис. 5.38, в).
Все линейные модели гидромашин объемного типа — статиче-
ские [1 ], т. е. основаны на предположении о несжимаемости рабо-
чей жидкости, не учитывают деформационные потери объемов Д VH
и Д1/в, относя их к утечкам, чем и объясняется существенное
различие статических характеристик, получаемых при разных
условиях проведения эксперимента [104]. Происходит это вслед-
ствие того, что при исследовании гидромашины свойства рабочей
жидкости обычно не проверяют и получают существенно завышен-
ные утечки, вдобавок не разделенные на внешние утечки и пере-
течки.
Изменение давлений р.:1 и рв и, особенно, содержания фазы Г
существенно меняет значения интервальных модулей объемной
деформации, по-разному уменьшая подачу гидромашины.
Для регулируемой гидромашины рабочий объем Vo может
меняться, и это изменение оценивается безразмерным параме-
тром управления е < 1 (для реверсивных насосов—1 < е < +1).
В дальнейшем окажется удобным, как это уже делалось в разделе
5.3, использовать характерный объем гидромашины иун
т’е’ °^ъем» подаваемый гидромашиной при повороте
ротора на 1 рад, отсутствии утечек и деформации рабочей жидко-
сти. Тогда подача насоса для несжимаемой жидкости при отсут-
ствии утечек будет
197
Деформация жидкости зависит от значения интервального
равновесного модуля ее объемной деформации х' (рв, рн, со = 0)
и от объема жидкости, участвующей в деформации; в этом при-
нимает участие также и мертвый объем каждого цилиндра или
характерный мертвый объем шм= Ум, где — число
двойных ходов поршня за один оборот вала. Значение kx может
отличаться от единицы, например, в конструкциях многоходовых
низкооборотных гидромоторов.
Выражение деформируемого характерного объема, если иметь
в виду зависимость мертвого объема от значения безразмерного
параметра управления е, будет
4 (2^м + 1 + где = шм/шн.
Обозначая расход перетечек через &пк Др, а внешних утечек —•
через £унРн» можно записать выражение подачи насоса
QH = (2шм 1 в) ^пн ^унРп*
Описание процесса подачи упрощается при линеаризации
последнего выражения в форме
Qh = ^пн &Р ^унРн»
где коэффициент перетечек Лпн учитывает деформационные по-
тери, весьма существенно меняющие этот коэффициент, который
перестает быть постоянным. Именно таким постоянством и следует
объяснять неповторяемость результатов при испытаниях насоса,
проводимых разными экспериментаторами в различных лабора-
ториях [104]. В частности, обычное предположение о независи-
мости knn от QH перестает быть справедливым применительно
к аппроксимирующему коэффициенту £пк, который обязательно
зависит от QfI, во всяком случае при работе на небольших давле-
ниях, из-за того, что включает в себя деформационные потери
подачи.
5.10. ОСНОВНЫЕ РАСЧЕТНЫЕ УРАВНЕНИЯ
В области рабочих характеристик гидропривода при работе на
давлениях более 3—5 МПа с достаточной для практических целей
точностью можно считать процесс прохождения рабочей жидкости
непрерывным, могущим быть описанным в порядке первого при-
ближения линейными уравнениями.
В основу расчета кладется характерный объем гидромашин
w = 4”^° и Разделение всех потерь на объемные (кинематические)
и механические (нагрузочные).
198
При установившемся режиме работы, а также для оценки
совершенства гидромашины пользуются представлениями в фор-
ме КПД.
Если математическая модель гидромашины не предусматри-
вает потери энергии, то ее мощность называют индикаторной:
= MQ = Qrp, (5.14)
где р = рн — рв — перепад давлений, под которым находится
гидромашина; Qr — геометрический (без учета объемных потерь)
поток. Поскольку рассматриваются гидромашины, работающие
при рп рв, то принимают р = ри и рв —♦ 0.
ЛАощность кинематических потерь определяется произведе-
нием Ny = pQy, а механических AfM = QAfM, поэтому КПД
насоса записывается в форме
Ni — Ny _ 1 — Wy
+ 1 + л/м ’
где Л/у и Л/м ,
а для гидромотора
Nt-N„ _ I — NM
1д + - 1 + дГу •
(5.15)
(5.16)
Выражения относительных мощностей потерь могут быть
записаны в форме
N = — = — = О и N = — = — = ~М
У - Ni ~ Qr ~ м~ Ni “ М -
Если Ум —> 0 при Ny конечной, то потери будут только кине-
матические и соответствующий КПД называется объемным:
Пон = 1 - Qy И Под= 1/(1 + Qy), (5.17)
а если Л/у —> 0 при NM конечной, то потери будут только механи-
ческие и соответствующие составляющие КПД называются меха-
ническими:
Пмн ” 1+Д, и ^мд = 1 - Мм. (5.18)
Следовательно, объемный КПД т]о учитывает потери объемной
подачи, а механический КПД г]м — потери момента, и поэтому
любые потери, не являющиеся объемными, называются механи-
ческими. Всегда
По = П/Пм.
(5.19)
где и — полный КПД.
199
В гидроприводе в подавляющем большинстве случаев исполь-
зуются гидромашины, принадлежащие к классу роторных [14,
52, 81 ]. Они принципиально обратимы, и расчетные уравнения
для них записываются в одинаковой форме, с тем лишь различием,
что при обращении насоса в гидромотор или обратно знак при
показателе степени КПД меняется на обратный [591, так же как
и знаки слагаемых, соответствующих кинематическим или на-
грузочным потерям.
Расчетные уравнения (5.14)—(5.19), а также и последующие
записываются в одинаковой форме для гидромашин как враща-
тельного, так и возвратно-поступательного движения, однако
в последнем случае характерный объем w заменяется активной
площадью поршня, вместо момента М применяется усилие Р,
развиваемое на поршне гидроцилиндра, и вместо окружной
скорости Q — линейная скорость v перемещения поршня. В за-
дачах динамики момент инерции при исследовании вращательного
движения заменяется инерционной нагрузкой при рассмотрении
прямолинейного движения.
Поток насоса
Qh = еи’АПон. (5.20)
где безразмерный параметр управления для реверсивных насосов
лежит в диапазоне —1 < е < +1, а для нереверсивных — в диа-
пазоне 0 < е < +1. Для гидромоторов безразмерный параметр
управления иногда обозначается по аналогии с электроприводом
буквой и\ он не может быть малым из-за возникающего в регулируе-
мых гидромоторах эффекта самоторможения. В этом случае приме-
нительно к статическим условиям работы umln < и с +1 и
Q = uwnQn-^-. (5.21)
Под
Связи между нагрузочными параметрами будут
А = (5.22)
Чмн
Л1д = ииУдРдПад. (5.23)
При т]о = Нм = 1 (в математических моделях) подачу (расход)
насоса и гидромотора Q называют геометрическим или индика-
торным, так же как момент М и мощность
Применительно к индикаторным показателям режима при е =*
= и = 1
dQ дМ 1
^Г==-^==ш==
что соответствует формулировке об электромеханической взаимно-
сти в электроакустике [52]. Это соответствие кинематических и
нагрузочных свойств следует из того, что насос и гидромотор
200
являются преобразователями энергии и рассматриваются приме-
нительно к случаю, когда нет ее потерь.
Следует иметь в виду, что значение характерного объема w
может определяться из геометрических соображений только для
однофазных несжимаемых жидкостей (при отсутствии фазы Г).
Экспериментально установлено, что экстраполяция замеров по-
тока насоса при давлении, равном 7 МПа и выше, на более низкие
давления приводит к значениям ш, меньшим, чем геометрические
размеры рабочих органов гидромашин. При давлениях 7—8 МПа
и выше определять w в расчетных уравнениях следует из выраже-
ния
да==(1 + 0,8Уг)-^Уо,
где Vr — относительное содержание фазы Г при давлении, соот-
ветствующем давлению в приемной линии; верхний знак приме-
няется для насосов, нижний— для гидромоторов.
Зависимость развиваемого гидродвигателем момента от без-
размерного параметра управления дает возможность регулировать
этот момент при постоянном давлении источника питания.
При расчетах, оценивающих типоразмерные ряды гидромашин,
в которых обеспечивается геометрическое подобие рабочих орга-
нов (точнее, смоченных потоком рабочей жидкости поверхностей
качающего узла), пользуются характерным размером
0=|/&усм, (5.24)
по значению которого устанавливают место рассматриваемой
гидромашины в типоразмерном ряду.
При работе гидромашин, принадлежащих к общему типораз-
мерному ряду, соответствующие линейные скорости (окружные,
относительные на поверхностях трения, в каналах и т. п.) будут
пропорциональны произведению Q )/w, которое называют коэф-
фициентом скорости:
= Q Yw (cQ)np, (5.25)
имеющим для каждого типоразмерного ряда предельное значение
(сй)пр, различающееся для различных конструкций. Числовое.
значение (сд)пр обусловлено наиболее слабым звеном (узлом,
деталью) конструкции и определяет степень ее совершенства.
По значению (Сй)пр оценивают быстроходность гидромашлн,
составляющих общий типоразмерный ряд. Форсирование гидро-
машины по быстроходности включает выявление наиболее сла-
бого узла конструкции и его усовершенствование для повышения
значения (сд)пр.
При выборе размера и режима работы гидромашины из задан-
ного типоразмерного ряда необходимо, чтобы cq = Q Y&
201
= const С (ся)пр. В частности, чем больше размер гидромашины,
тем меньше наибольшая допустимая скорость:
Й<^пр=(^)пр/3/^
Эксплуатационное значение Q для гидромашины может быть
и меньше Qnp, например из-за свойств приводного двигателя или
чрезмерной вязкости рабочей жидкости. В этом случае оценка
гидромашины должна проводиться по значению Qnp применительно
к нормальным (номинальным) условиям работы (температура,
геометрическая высота и давление всасывания, особенности си-
стемы компенсации утечек и т. п.).
Корректное сравнение гидромашин разных размеров Dr и
D2 =/= Di должно проводиться не__по значениям и Q2 = QX,
а по значениям (cq)x = yGy2 — (cah- Гидро-
машина, имеющая более высокий коэффициент скорости, должна
считаться более быстроходной. Обычно гидромашины, составля-
ющие общий типоразмерный ряд, имеют примерно одинаковые
значения коэффициентов быстроходности.
Возможности гидромашин каждого типоразмерного ряда ха-
рактеризуются в том числе коэффициентом мощности
CN = ^pVw < (cAf)np,
значение которого обусловливается ресурсом гидромашины, стой-
костью трущихся поверхностей, деформациями, иногда комплекту-
ющими деталями (обычно опорами качения), реже— прочностью.
При использовании коэффициента мощности следует иметь
в виду некоторую ограниченность его применения. Он состав-
ляется из двух сомножителей: с& и р, причем нельзя увеличивать
значение с& = (сдг)пр/р за счет уменьшения р и лишь весьма редко
можно увеличить р = (сдг)пр/со за счет сравнительно небольших
уменьшений с&. Исключением могут быть гидромашины, наиболее
слабым узлом которых являются поверхности трения. Поэтому
чаще всего при расчетах пользуются раздельно значениями cq и р.
Типоразмерные ряды гидромашин, работающих на повышен-
ных давлениях (например, форсированные по давлению), позво-
ляют существенно уменьшить их размеры, что и служит одной
из причин перевода гидрофицированных машин на гидроприводы
высокого давления. При заданной мощности можно выбирать
гидромашину меньшего размера, которую, однако, можно форси-
ровать по частоте вращения, сохраняя при этом значение cq.
Рассмотрим гидромашину с параметрами до0, Qo и р0, подле-
жащую форсированию по давлению до значения ра при тех же
значениях Qo и N = оуо^оРо = ^а^оРа» что позволит умень-
шить размер гидромашины, относительное значение которого
можно оценить безразмерной величиной
~ = _ &оРо - 1
а Wq QqP& ра
202
Поскольку при ра > 1 значение wa < 1, то можно увеличить
Q, сохранив значение cq. В этом случае N = WqQqPq = w6Q6p6,
и тогда N = cqpqDc, или D6 = ]/N/(cqp), поэтому
или шб = -^
ш,= y = £(WL
' X сйРб / Рб Крб
1
Рб1^рб
При рб >_1 (t.j. при форсировании гидромашины по давле-
нию) всегда w6 < wa, и это возможное уменьшение характерного
объема при различных значениях ра > 1 и рб > 1 показано на
рис. 5.42. Поскольку (dPwfjdpe) < 0, то наиболее целесообразно
форсирование по давлению в ограниченных пределах увеличения
ра и р6. Это одна из причин современной тенденции форсирования
гидромашин по давлению.
Для типоразмерных рядов гидромоторов обязательна оценка
инерционных свойств движущихся частей, приводимых к выход-
ному валу Уд. Эта оценка осуществляется при помощи коэффи-
циента </: _
Последнее выражение аппроксимирующее, и поэтому J раз-
мерно. В этом случае удается получить более стабильные значе-
ния J по сравнению с его значением в выражении <7Д = «7*О6.
Переменность коэффициента в нем обусловлена отсутствием
подобия в комплектующих изделиях гидромашин общего типо-
размерного ряда. Так, для аксиально-поршневых гидромашин
с двойным несиловым карданом Виккерс при 1,56 с Vo <з
< 60,2 см3/об значение J 103 меняется от 1 до 2,31, причем для
средних значений (dJldw) > 0. Для аксиально-плунжерных ги-
дромашин бескарданного типа
(8 < Vo < 140) значение J ме-
няется от 0,0291 до 0,0399, а
7* — от 0,0267 до 0,0142, при-
чем (dJJdw) < 0.
Для одного из наиболее ши-
рокого типоразмерного ряда
аксиально-поршневых гидрома-
шин с силовым карданом Вик-
керс-Ватербери (УРС) (88,9 <
Vo < 2189) значение J 103
меняется в пределах от 14,71
до 100,2 существенно увеличи-
ваясь при Vo > 5346 см3/об,
Рис. 5.42. Зависимость относительным
размеров характерных объемов гидро-
машин от значений относительных дав-
лений
203
зато довольно стабильно значение J*•103, меняясь от 3,83 до
6,68, за исключением размера с = 88,9 см3/об, для которого
= 11,12.
Для аксиально-поршневых гидромашин с двойным несиловым
карданом гаммы II для номеров 0,5—5 значение J-103 меняется
в пределах от 2,208 до 2,42 и увеличивается у гидромашин но-
меров 10—50 до значений 2,735—5,91 при (dJIdw) > 0 (соответ-
ственно для насосов от 2,37 до 2,685 и 3,02—6,78). Для гидро-
машин номеров 0,5—2Д> А значение /#-103 меняется в пределах
от 1,322 до 3,03 при (dJjdw) < 0 и уменьшается для гидромашин
номеров 5—50 до значений 0,8775—1,18 (соответственно для на-
сосов от 2,1 до 3,37 и 1,003—1,082).
5.11. ОСНОВЫ ТЕОРИИ РОТОРНЫХ ГИДРОМАШИН
Роторные гидромашины — гидромашины, удовлетворяющие при-
знакам, перечисленным в работах [14, 81], и работающие по
объемному принципу. Они характеризуются весьма развитыми
поверхностями трения и используются преимущественно на
высоких давлениях, при которых объемные и механические
потери в области развитых поверхностей трения оказываются
доминирующими. Теория роторных гидромашин в первую оче-
редь рассматривает вопросы подобия гидромашин,__линейные
размеры которых характеризуются значением D = y^w.
Потери как механические, так и объемные аппроксимируются
аналогичными потерями в некоторых эквивалентных щелях
с одинаковыми зазорами б, величину которых выбирают в пре-
делах диапазонов изменений зазоров рассматриваемых конструк-
ций. Эквивалентный зазор для каждого типоразмерного ряда
может быть связан с характерным размером гидромашины сте-
пенной зависимостью
6 = A < D. (5.26)
Поскольку показатель корня <р в этом выражении не обязательно
равен единице, приходится различать номинальное подобие гидро-
машин по линейному размеру D от абсолютного подобия, могу-
щего быть реализованным лишь тогда, когда ср = 1.
Режим работы роторной гидромашины определяется тремя
переменными: угловой скоростью ротора Q, перепадом давлений р,
который должен быть существенно больше давления в приемной
линии, и динамическим коэффициентом вязкости рабочей жидко-
сти р. Рабочая жидкость предполагается несжимаемой, а ее пара-
метры такими, при которых процессы потерь энергии в эквива-
лентных щелях будут линейными. Поэтому теория роторных
гидромашин рассматривает линейную модель гидромашины, ра-
ботающей при достаточно высоких давлениях, которые, однако,
существенно меньше давления рм (см. раздел 2.2).
204
Следует иметь в виду, что значение р для эквивалентной щели
(т. е. с потерями, как и в гидромашине) не равно его значению
для рабочей жидкости в магистралях, поскольку температура
жидкости в малых и притом существенно развитых зазорах, опре-
деляющих потери энергии в гидромашинах, обычно значительно
выше температуры жидкости в магистралях.
Потери в роторной гидромашине аппроксимируются потерями
в пяти эквивалентных щелях, которые подчиняются принципу
суперпозиций.
Плоская щель первого типа имеет фиксированный зазор 6,
величина которого не зависит от режима работы гидромашины;
щель находится под воздействием перепада давления, вызыва-
ющего утечки, а поверхности, образующие щель, совершают
относительное перемещение, скорость которого пропорциональна
размеру гидромашины и ее угловой скорости.
Плоская щель второго типа отличается от первой тем, что
скорости относительного перемещения поверхностей, образу-
ющих щель, пропорциональны не только размеру гидромашины
и ее угловой скорости, но и значению безразмерного параметра
управления.
В плоской щели третьего типа относительные скорости поверх-
ностей, образующих щель, пропорциональны размеру гидро-
машины и ее угловой скорости; поверхности прижимаются друг
к другу гидростатическими усилиями, пропорциональными пере-
паду давления при отсутствии утечек через щель. Плоская щель
четвертого типа отличается от третьей тем, что скорости относи-
тельного перемещения поверхностей, образующих щель, про-
порциональны не только размеру гидромашины и ее угловой
скорости, но и значению безразмерного параметра управления.
Плоская щель пятого типа аналогична плоской щели первого
типа с тем лишь отличием, что ее зазор меняется по законам ги-
дродинамической смазки в соответствии с изменением параметров
режима работы Q, р и р.
При исследовании гидромашин постоянной производительно-
сти потери в щелях второго и четвертого типа должны прини-
маться равными нулю.
Для типоразмерного ряда площади поверхностей щелей
третьего типа пропорциональны D2, нормальные составляющие
сил гидростатического прижима пропорциональны pD2, а ско-
рости относительного смещения поверхностей пропорциональны
Ш). Поэтому мощность механических потерь в таких щелях про-
порциональна QpD* с коэффициентом пропорциональности с,
включающим коэффициент кулонова трения. С учетом равенства
(5.14), дающего выражение индикаторной мощности Nt = eQpD3f
величину относительной мощности механических потерь в щели
третьего типа можно записать в форме
205
Для щелей четвертого типа из-за пропорциональности относи-
тельной скорости величине безразмерного параметра управления
и = с**
Экспериментально установлено для применяемых конструк-
ций гидромашин, что с ** с *.
В соответствии с законом Ньютона о вязком трении сопротив-
ление относительному сдвигу поверхностей, образующих щель
первого типа, пропорционально ц, площади поверхности (т. е. D2)
и градиенту скорости, в свою очередь пропорциональному -у DQ,
а мощности механических потерь при относительной скорости
сдвига ~ QD:
Nui = -у- Q2 = С:р£»3й2, (5.27)
где Св = Лв*-у (Св‘ » 1, А- « 1).
Переходя к относительным величинам, получим
/VM1 — Ni - е сво,
где
o=pQ/p. (5.28)
Безразмерный множитель о называют критерием изо-
го нальност и, поскольку при его одинаковых значениях
в геометрически подобных гидромашинах ламинарные потоки
в зазорах обладают подобием, включая фрикционный расход и
расход просачивания.
В той же щели расход просачивания без разделения на утечки
и перетечки в соответствии с законами ламинарного потока опре-
деляется выражением, пропорциональным р 63/|л, а теряемая
из-за утечек мощность
где
Су = йу(ВД(Су« 1, (6/D)3« 1).
Переходя к относительным величинам, получим
V Nyf 1 Су
ЛУ1— Ni е а *
В щели второго типа имеют место механические потери, выра-
жающиеся зависимостями, аналогичными (5.26), в которой скорости
206
будут пропорциональны безразмерному параметру управления;
поэтому _
Хм2 = еСГо.
Предполагается, что утечки в щелях второго типа, имеющие
характер фрикционных расходов, компенсируются в процессах
всасывания и нагнетания.
В щели пятого типа имеют место и механические потери и
утечки, причем [60]
Ммъ — — Св, l/o» Уу5 = — С[ 4- — Су1о.
Экспериментально установлено, что Св* С Св, и поэтому
сумму членов Св + еl 2Св* заменяют одним Св; тогда, используя
полученные выражения относительных мощностей применительно
к КПД насоса и гидромотора, получим при е=1ис* + с**=с
_ 1 — ci — (Су/a) — Cy]g .
1+с + Сва + Св1/а ’
1 — с Сва Св1 К" (у
Пд = 1+с1 + (Су/а)+Су1а *
Упрощение полученных выражений КПД для режимов работы
гидромашин, близких к оптимальным по КПД, заключается
в отбрасывании нелинейных членов Су1о и СВ1 ]/а с соответ-
ствующей корректировкой значений коэффициентов Су и Св.
Тогда анализ может проводиться при помощи более простых
выражений
1—с, —(Су/о). _ 1—с —Свст
Пн 1+с + Сва ’ l + q+CCy/a)’
(5.29)
Для регулируемых гидромашин индикаторную мощность сле-
дует записывать в форме N( = eQpDz, и тогда выражения для
КПД меняются при е < 1:
I _ Н ]_ Су
е е о
Пн______________7* 7Д \ »
1+Д_ + с** + (±С*+еС«^а
^-<**-(4- c:+ccB**)q
1 + SL + ± JSl
е е о
и поскольку с ** « с * и Св* «С Св, можно воспользоваться
более простыми выражениями
।_____£l_________Су
е е g 9
1 + — + —
Лд =
1----~1-Св<1
е е
l + -£L + ±-£y_
1 е е a
Следовательно, при уменьшении значения безразмерного па-
раметра управления существенно возрастает влияние всех коэф-
фициентов потерь (с, Св и Су) на величину КПД. В этом случае
требуется повышенная точность определения значений коэффи-
циентов потерь, и сколько-нибудь существенное уменьшение е
приводит к возрастанию ошибок при использовании теории по-
добия роторных гидромашин.
Целесообразно по возможности использование второй формы
записи уравнений (5.29) (при е = 1):
1 _ Cj— ex.-?-
ц Q
1 + с+ИСв у
1 — с — иСц —
Р
Лд =
Су Р
В этом случае при проведении анализа не следует отделять
коэффициенты Су и Св от р и пользоваться выражениями Су/р и
рСв, поскольку в расчетах, как было оговорено выше, исполь-
зуется аппроксимирующее значение р, а при получении разреша-
ющих уравнений может оказаться, что эти коэффициенты войдут
в них в форме произведения СуСв с сокращением множителя р.
Качество гидромашин оценивается, в частности, произведением
СуСв, от которого зависит величина КПД. Значения коэффициен-
тов Су и Св для различных конструкций меняются в широких
пределах в отличие от произведения СУСВ. Так, в гидромашинах
с гидростатической разгрузкой значения Св понижены, а Су
повышены (имеются дополнительные утечки) по сравнению с их
значениями у гидромашин без гидростатической разгрузки.
Проводя анализ выражения (5.29) на экстремум применительно
к гидромотору, можно убедиться, что наибольшее значение КПД
будет при
Поскольку для гидромашин с высоким значением КПД всегда
свсу
то экстремальное значение критерия изогональности может быть
упрощено:
“/-гт^-гг s (4У /Угттгг <5'30)
а оптимальный КПД гидромотора будет
»__ 1 — с 1 — X*
110 “ 1 + С! 1 4- К* ’
где х* = 1/ СуСв = — 1/
Д V (i-Od+c) “ D V (1-с)(1 +d)’
208
Аналогично получается выражение q*. Чем ближе значение х *
к единице, тем выше максимальный КПД.
При эксплуатации гидромашины на режиме с экстремальным
значением критерия изогональности а* с учетом равенств (5.27) и
(5.29) можно записать
О* = (—У 1/ 1 ~с *У~
Ц* \ Dj V 1 + q kQ ’
где связь между 6 и D устанавливается условием (5.26). Тогда,
выражая в последнем равенстве б через D, получим
П* = А- Л2#2 ]/_Lz£A • (5.31)
|Л F 1 -ф- С[ Kq
Следовательно, для того чтобы все гидромашины одного типо-
размерного ряда имели наибольшее значение КПД при одинако-
вой угловой скорости Q *, необходимо выбирать ф = 1, т. е.
обеспечивать полное геометрическое подобие гидромашин ряда.
Но в этом случае гидромашины малых размеров будут выпол-
няться с большим запасом по коэффициенту скорости, поскольку
у них значения коэффициента скорости будут пониженными.
Поэтому естественно требовать, чтобы все гидромашины, образу-
ющие единый типоразмерный ряд, имели наибольшее значение
КПД при одном и том же значении коэффициента скорости, на-
пример, при наибольшей скорости. Такая задача решается умно-
жением обеих частей равенства (5.31) на £>; получим
cQ АЧ)2 (1/Ф-П+1 1/А-.
и* Г 1-+-CI ka
Отсюда можно убедиться, что желаемое условие удовлетворяется
при <р = 2, т. е. при независимости коэффициента скорости cq
от характерного размера D, что и дает рекомендацию о законе
изменения зазоров в гидромашине в зависимости от ее размера.
В существующих аксиально-поршневых и аксиально-плунжер-
ных гидромашинах <р находится в пределах 1,215—1,490, свиде-
тельствуя о том, что режимы наибольших значений КПД разных
гидромашин имеют место при неодинаковых коэффициентах ско-
рости cq, и поэтому универсальные (топографические) характери-
стики гидромашин существенно зависят от их размеров. Геоме-
трическая конфигурация универсальной характеристики меняется
с изменением размера гидромашины.
Способы экспериментального определения коэффициентов Су,
Со и с приведены, например, в работах [1, 52].
5.12. ПРИЕМИСТОСТЬ ГИДРОДВИГАТЕЛЯ
При разгоне двигателем инерционной нагрузки, присоединенной
к нему при помощи редуктора с передаточным отношением i =
= йи/йд (где индексы «н» и «д» относят обозначения к нагрузке
209
и двигателю соответственно), можно рассматривать систему в ка-
честве двухмассной, в которой моменты инерции вращающихся
масс распределены между нагрузкой (JH) и двигателем (</д).
При выборе двигателя к системе, в которой заданы нагрузка Ju
и редуктор передаточным отношением Z, следует считать наиболее
подходящим двигателем такой, у которого будет наибольший
развиваемый момент Л1Д и наименьший момент инерции /д, т. е.
наибольшее значение коэффициента
k± = MjJJp.
При проектировании, когда еще не выбран редуктор по зна-
чению /, следует считать с точки зрения разгона инерционной
нагрузки наилучшим двигателем такой, у которого будет наи-
больший коэффициент
*2=Л1Д//Л. (5.32)
При сравнении типоразмерных рядов гидродвигателей поль-
зуются приемистостью
п = /Л1д/(йдпд).
Целесообразность использования коэффициента очевидна.
Если обозначить угол поворота вала двигателя через 0д,
а вала нагрузки через 0Н, то, пренебрегая потерями, можно за-
писать
("«-!>>«) 4 =
где 0Н = 10д; б„ = 10д и 0Н = Юд,
поэтому
и приведенный к любому соединяемому при помощи редуктора
валу момент инерции двигателя будет
Aip = А- (5.34)
Последнее выражение, в частности, свидетельствует о том, что
в процессе изменения передаточного отношения (например, при
использовании бесступенчатого вариатора) кинетическая энергия
системы не меняется, что позволяет создавать конструкции ва-
риаторов, не требующие больших усилий или работ на процесс
изменения передаточного отношения.
Проводя анализ выражения (5.33) на экстремум, можно убе-
диться, что наибольшее значение ускорения инерционной нагрузки
02 = Л1я/(2/7Л) (5.35)
210
будет при передаточном отношении
»* = /ЛМГ. (5.36)
Выражение (5.35) показывает, что наибольшее возможное
ускорение инерционной нагрузки пропорционально коэффициенту
k2 из равенства (5.32), чем и обосновывается его применение.
Однако для сравнения разных типоразмерных рядов использова-
ние k2 непригодно, поскольку чем больше размер двигателя, тем
большее может быть достигнуто ускорение одной и той же инер-
ционной нагрузки. Поэтому сравнение должно проводиться
при одинаковой мощности. С этой целью выражение (5.35) пере-
писывается в форме
Q* = КМд^Д j-j
н 2 кт; 2 кл<
™ (5-з7>
может служить критерием, оценивающим динамическую доброт-
ность двигателя. Следовательно, приемистость П — величина,
пропорциональная наибольшему возможному ускорению инер-
ционной нагрузки, причем коэффициент пропорциональности
будет 4" Гидродвигатели имеют значение П почти на
порядок больше, чем электродвигатели.
Можно показать, что значение коэффициента k2 не зависит
от передаточного отношения, и если редуктор, соединяющий дви-
гатель с нагрузкой, имеет несколько ступеней, то применительно
к любой ступени при любой величине i значение k2 будет одним
и тем же. Так как выражение приведенного к любой ступени мо-
мента будет Л4пр = Л4Д, то с учетом выражения (5.34) можно
записать
М npJi$p = ~'~2хМл.1д.
Правая часть полученного выражения не будет зависеть от
значения i при х = —1/2, поскольку в этом случае оно обращается
в выражение (5.32), не зависящее от i.
Заменяя в выражении (5.37) Мд на £>3рт)мд, а 7Д на JD1, можно
получить
П = V рПмд/W),
откуда следует, что гидродвигатели, форсированные по давлению,
способны обеспечивать разгон инерционной нагрузки с большим
ускорением. Это еще одна причина стремления к переводу гидро-
приводов на более высокие давления.
Если же для рассматриваемого типоразмерного ряда непо-
стоянно также и значение коэффициента J, но более стабильно
211
значение (см. раздел 5.10), то пользуются другим выражением
приемистости __________
/7* = Vp^jJcjD .
Полученное выражение свидетельствует об уменьшении наи-
большего ускорения инерционной нагрузки с увеличением раз-
мера гндродвигателя. В этом случае для повышения быстродей-
ствия целесообразно использовать многодвигательный привод с
гидродвигателями меньшего размера, но с большей приемистостью.
Можно представить случай, когда заданное ускорение инер-
ционной нагрузки нельзя реализовать при помощи двигателей
данного типоразмерного ряда. Чем больше мощность применяе-
мого двигателя, тем больше момент инерции его вращающихся
частей, на разгон которых и затрачивается увеличение мощности.
Поэтому оценка возможностей двигателей по их приемистости
имеет большое значение.
Часто оказывается невозможным реализовать наивыгоднейшее
передаточное отношение i* = йн/йд из-за различных ограничи-
тельных условий, накладываемых на выбор значений QH и £2Д.
Тогда оценка полученного ускорения 0Н, отличающегося от 0J,
осуществляется при помощи относительных величин
i = i/r и ён = ё„/ё*.
Так, деля почленно равенства (5.33) и (5.35) с учетом выраже-
ния (5.36), получим
ё = 27/(1 +72).
Аналогичные выражения встречаются в дальнейшем, поэтому
введем понятие функция режима
О у ty
(5.38)
график изменения которой приведен на рис. 5.43. Пользуясь
значением 1, в соответствии с имеющимися возможностями
можно оценить уменьшение ускорения инерционной нагрузки
по сравнению с возможным оптимальным.
Рис. 5.43. График функции режима А (%)
212
Для таких закономерностей небольшие отклонения х от еди-
ницы приводят к незначительным уменьшениям функции режима
Л (л), которая для рассматриваемого случая записывается в форме
’ё(7)= *0*Л (f).
Легко видеть, что величины \(i) при фиксированных значениях
7ф и 1Дф будут одинаковыми.
5.13. ГИДРОСТАТИЧЕСКИЕ ОПОРЫ
В аксиально-плунжерных и аксиально-поршневых гидромаши-
нах, особенно работающих на высоких давлениях и нуждающихся
в снижении уровня воздушного и структурного шумов, а также
во многих узлах аналогичных гидромашин используют гидроста-
тические опоры. В подавляющем большинстве аксиально-плун-
жерных гидромашин контакты головок плунжеров с рабочей
поверхностью опорной шайбы реализуются при помощи гидро-
статических башмаков (3 на рис. 5.44).
Плунжер 2, перемещаясь в блоке цилиндров 1 под действием
давления рабочей жидкости ри через башмак прижимается
к рабочей поверхности опорной шайбы 4. Размер башмака выбран
так, что площадь сечения его рабочей камеры -^-(£Е>)2 несколько
больше площади сечения плунжера d2. Поэтому под действием
гидростатического давления башмак будет отходить от рабочей
поверхности наклонного диска при отсутствии утечек через уплот-
няющую щель. Последняя будет расширяться, установится зазор S
в соответствии с давлением р0 в рабочей камере и башмак сможет
перемещаться по поверхности опорной шайбы в «плавающем»
состоянии. Размер зазора обусловлен утечками, в результате
которых и происходит падение давления в сверловке головки плун-
жера (длина сверловки /, сечение дросселирующего канала /).
Гидростатическая разгрузка представляет собой систему,
включающую разгружающую рабочую камеру башмака, дроссе-
лирующие щели между башмаком и опорной шайбой, а также
дросселирующую сверловку в плунжере, выполняющую роль
регулятора системы. Геометрические формы деталей устройства,
свойства рабочей жидкости (и и р), жесткость пружины и давле-
ние pj определяют зависимость зазора 6 = 6 (pj, а также дина-
мические особенности системы.
Для построения математической модели гидростатического
уравновешивания применительно к гидромашинам выберем обоб-
щенную плавающую гидростатическую опору (рис. 5.45), которая
при небольших ограничениях обращается или в самоустанавли-
вающуюся гидростатическую опору, обычно применяемую на
головках плунжеров аксиально-плунжерных гидромашин, или
в подвижной стакан, применяемый, например, в торцовых распре-
213
Рис. 5.44. Гидростатическая опо-
ра на головке плунжера
Рис. 5.45. Конструктивная
схема плавающей гидроста-
тической опоры
делителях низкооборотных гидромоторов и в традиционных кон-
струкциях радиально-плунжерных гидромашин [1, 52]. В такой
модели статическая (обычно весовая) нагрузка заменена силовым
воздействием поджимающей пружины с жесткостью сп, а эпюра
изменения давления, показанная штриховыми линиями в нижней
части рис. 5.45, учитывает термические эффекты (рассматривае-
мые, например, в гл. 12). Сплошными линиями показаны эпюры
давления без учета таких эффектов.
Меняя размеры подводящего канала в головке плунжера или
заменяя этот канал иным дросселирующим устройством, а также
заменяя поджимающую пружину весовой или любой иной на-
грузкой, можно получить различные варианты применяемых
плавающих гидростатических опор.
Динамические эффекты рассматриваемой обобщенной гидро-
статической опоры описываются уравнением потерь в подводящем
канале-регуляторе, уравнением потерь в торцовой щели, балансом
расходов и уравнением движения обобщенной плавающей гидро-
статической опоры.
Первое уравнение, если иметь в виду ламинарный поток в под-
водящем канале-регуляторе, будет
= + (5.39)
где v и v — скорость и ускорение рабочей жидкости.
Принимая каждую переменную состоящей из статического
значения и отклонения (отмечаемых индексом в виде звездочки
и знаком Л соответственно), можно записать применительно к ста-
214
тическим условиям работы, когда все отклонения обращаются
в нуль (уравнение невозмущенного состояния),
Pi* - Ро* = v*- (5.40)
Соответствующие уравнения потерь в торцовой щели имеют
форму
р0 =—^-1п£ш —р-^-1п£ш; (5.41)
Ри*=—(5-42)
где w — скорость рабочей жидкости на выходе из торцовой щели.
Баланс расходов через цилиндрический подводящий канал
и торцовую щель и деформационный расход в рабочей камере
гидростатической опоры записываются для переходного процесса
и установившегося режима соответственно в форме
vf — TiDbw — F6 — ФгРо = 0; (5.43)
v*f = (5.44)
где Ог = V/x — коэффициент сжатия; V — объем рабочей жидко-
сти в центральной камере гидростатической опоры.
Уравнение движения обобщенной плавающей гидростатической
опоры будет
М8 4- р/76 + сп (6 — 6„) 4- р! (F\ —f) — Po (фГ — f) = 0 (5.45)
и для установившегося режима
сп (б* - 60) + Pi* (Л - f) = Ро* - f). (5.46)
где М — масса (включая и соответствующую долю массы пружины)
плавающей части гидростатической опоры; И — отношение пло-
щади боковой трущейся поверхности к среднему значению ра-
диального зазора; сп и 60 — жесткость пружины и ее предвари-
тельный натяг; Fr — активная (находящаяся под воздействием
гидростатического давления) площадь плавающей части гидро-
статической опоры со стороны подвода рабочей жидкости от
источника питания.
Член р0* (ф/7 — f) в формулах является значением гидроста-
тического отжимающего усилия, причем величина коэффициента ф
будет зависеть от закона изменения давления в торцовой щели
по радиусу. Эта закономерность, рассмотренная, например,
в гл. 12, в случае не слишком малого зазора (адиабатический ла-
минарный поток) зависит, помимо прочего, от вязкости, теплоемко-
сти и упругости рабочей жидкости, теплообмена, формы и разме-
ров торцовой щели.
Возможны случаи, когда сравнительно небольшое изменение
значения ф может существенно изменить динамические свойства
215
и «жесткость» рассматриваемой системы, поскольку некоторые
параметры разрешающего линеаризованного дифференциального
уравнения зависят в том числе от разности Fx — фА Чем ближе
отношение F^F к единице, тем точнее должен вычисляться
исправляющий коэффициент ф, разумеется, при условии значи-
мости влияния членов разрешающего дифференциального уравне-
ния, зависящих от значения ф/7.
Уравнение (5.39) описывает баланс напоров при протекании
рабочей жидкости через цилиндрический подводящий канал в пере-
ходном режиме (ускорении, отличном от нуля) и каких-либо
обоснований не требует, как и уравнение (5.43). Уравнения же
(5.41) и (5.45) корректны лишь применительно к малым колеба-
ниям, поскольку при значительных амплитудах колебаний поле
давлений в щелях претерпевает существенные отклонения от
квазистатического режима, что в наибольшей степени относится
к уравнению (5.45).
Уравнение (5.41) представляет собой результат интегрирования
уравнения энергий одномерного потока в торцовой щели для
нестационарного движения (имеются в виду малые гармонические
колебания на входе в нелинейную систему):
\ дг 2r r J лс3
где Q — расход.
Справедливость записанного равенства для установившегося
потока (w = 0) очевидна. Для случая, когда w =/= 0, доказывается,
что дополнительное усилие, возникающее из-за разгона жидкости
в канале небольших размеров (по сравнению с длиной волны)
произвольной формы, определяется произведением плотности
на координату, среднее значение площади поперечного сечения
и ускорение в центре тяжести. Поэтому потеря давления, отне-
сенная к координате, будет определяться произведением плотно-
сти на ускорение.
Поскольку произведение скорости на радиус для торцовой
щели постоянно, скорость на любом радиусе определяется выра-
жением Dw/2r, а значит, ускорение будет Dwl^r. Именно эта
величина и вычитается из dpldr в последнем равенстве.
Следует иметь в виду, что в процессе колебаний амплитуды
ограничены значением статического зазора
A6+16J,
где Д6 — отклонение и [6J — наименьший допустимый зазор,
диапазон изменения которого определяется выступами шерохо-
ватостей поверхностей тел, составляющих зазор, и размерами
возможных инородных включений в рабочую жидкость.
Исключая из уравнений (5.40), (5.42) и (5.44) скорости и* и
получим известное соотношение между и р не зависящее
от вязкости рабочей жидкости, а значит, инвариантное по отно-
216
шению к температуре, обеспечивающее стабильность характери-
стики гидростатической опоры:
Л? 4
гдеф = -/ЛПТ
Р1» = (1
Поэтому, обращаясь к уравнению (5.46), получим зависимость
между зазором 6* и постоянным значением давления питания ри
6=6 + (чд-/)-(1-Ф)(^-/)
°* Оо+ (1-Ф)Сп Р1*’
а также выражение расхода
Q = v/=(Pi*-Po»)-8^-,
по которым проводится выбор параметров гидростатической опоры.
Проводя линеаризацию уравнений (5.39), (5.41), (5.43) и (5.45)
в отклонениях П 1, получим систему линейных дифференциаль-
ных уравнений, описывающих малые колебания пяты обобщен-
ной гидростатической опоры в вариациях:
А/?! — Др0 = — HL Ду _J_ pl Ду;
Apv = — In 5 Аю — р In I Да» + l2£D- In Sa»* A6;
/ Ai) — л£>6* Да» — nDw* A6 — F A6 — Or Ap0 = 0;
МД6 + |1ЯДб + спА6 + (Г1-/)ЛР1"-(ф/7-/)ЛРо= 0-
Исключая промежуточные переменные До, Да) и Ар0, можно
получить передаточную функцию обобщенной гидростатической
опоры
тот /_\ && (s) .г_s3 + B2s2 + flts + До_
Д₽! (S) Л «6 + Л454 + Лэ53 + Л253 + Л1«+Л0’
выражения коэффициентов которой через параметры опоры при-
ведены в работе [ 1 ].
Принимая в последнем выражении s = 0, получим коэффи-
циент связи между 6* и р*, определяющий жесткость обобщенной
гидростатической опоры
Аналогично записываются уравнения гидростатического под-
пятника, нагруженного внешним усилием Р (рис. 5.46):
Pi- +
Ро = - / v 1п * “ Р /т1п <5'47>
vf — 2 Y— F6 — Фгр0 =0; Р + А16 =® x|/Fp0,
217
Рис. 5.46. Конструктивная
схема гидростатического под-
пятника
62___ j
где t|r = 0 -7^ g- , причем 0 < 1 учи-
тывает отклонение эпюры давления от
расчетной без учета термических про-
цессов (на рис. 5.46 показано штрихо-
вой линией).
Выбор параметров гидростатиче-
ского подпятника ведется при помощи
уравнений, описывающих статический
режим работы, при котором
8 л ц/ ~
Pi* Ро* р Q»
12|ы1п g i/* F 6|ы In g ~
Ро* — Si w* у
v*f - 2 УлЁ = 0;
Р* = ’(’'Гро*.
Исключая промежуточные переменные, получим связь между
давлениями р0* и а значит, и несущую способность гидро-
статического подпятника
_______Pi*____ _ Р* .
Ро*— 4л2/
статическую жесткость, зависящую от значения зазора,
Л n2l |'ГЯ2
4л2/ \2 Р1* < О’
» dP.
* d^
расход
л<52
р / 4Л2/ S3 Д, Л
6р ( 3f2 In £ 6* 9
и выражение расчетного зазора
s$== im(1
* Г 4л2/ \ Р*
Линеаризация уравнений (5.47) в отклонениях позволяет
получить описание динамических процессов рассматриваемой
опоры применительно к малым колебаниям:
— Др0 = Ди + р/Ди;
дРо = — ’У g XДш + "24<8*П • VДб “ р 1пIT
Оф F U* F JI F
f Ди — 2 УлР 6* Дю — 2 jAiP ю* Д6 — f Д6 — Др0 = 0;
ДР + М Д6 = i|/F Др0.
218
Глава в
ГИДРАВЛИЧЕСКИЙ ПРИВОД
МАШИННОГО (ОБЪЕМНОГО)
РЕГУЛИРОВАНИЯ
Исполнительные устройства с объемным управлением гидравличе-
ского привода состоят из насоса и гидродвигателя, причем одна
из гидромашин или обе регулируемые, т. е. обеспечивают изме-
нение объема жидкости, проходящего через гидромашину за один
оборот ее ротора. В этом случае регулируемая гидромашина
выполняет обязанности усилительной части исполнительного
устройства. Такие системы гидромашинного регу-
лирования имеют незначительные потери энергии, особенно
по сравнению с системами дроссельного регулирования с распре-
делителями мощности.
Устройства с объемным управлением чаще всего используются
с разделением усилительной и исполнительной частей, т. е. с ре-
гулируемым насосом (регулятором мощности) и нерегулируемым
I идродвигателем, особенно если нет необходимости ограничивать
мощность приводного двигателя. При этом обеспечивается ли-
нейная зависимость угловой скорости выходного вала (или мо-
мента на валу) от управляющего сигнала, если приводной дви-
гатель имеет достаточную мощность. При увеличении компонент
вектора входа следует учитывать возможность «просадки» при-
водного двигателя и влияние ограничителя момента — предохра-
нительного клапана.
Если приводной двигатель имеет ограниченную мощность,
необходимо либо использовать специальные корректирующие
устройства, локализующие влияние «просадки» приводного дви-
гателя, либо совмещать усилительную и исполнительную части
в виде гидромотора переменного расхода, допускающего регули-
рование развиваемого момента, что имеет особое значение, напри-
мер, на мобильных машинах. Однако при этом зависимость угло-
вой скорости выходного вала от управляющего сигнала, даже при
использовании приводных двигателей неограниченной мощности,
будет определяться, помимо прочего, произведением пере-
менных.
При работе на малых сигналах управления, соответствующих
нижнему пределу диапазона регулирования, существенное влия-
ние на динамику привода оказывают такие нелинейности, как
контактное давление, падающая характеристика сухого трения,
система компенсации утечек и нестационарность процессов де-
формации жидкости, дискретность подачи в гидромашинах и т. п.
Динамические характеристики и в этом случае перестают быть
линейными, причем расчет влияния подобного рода нелинейностей
находится в процессе своего становления.
219
Для гидравлического привода машинного регулирования
нужны механизмы управления, чаще всего электрогидравлические,
обычно на основе гидропривода дроссельного'регулирования, т. е.
систем с распределителями мощности, а значит, с большими
потерями энергии.
В последнее время большое распространение получила система
с насосом, подача которого регулируется по давлению. Такая
система может рассматриваться в качестве источника питания
(гидравлический «приводной двигатель») машинного регулирова-
ния. По сравнению с источниками питания постоянной подачи и
дроссельного регулирования давления здесь существенно умень-
шаются потери энергии и, как следствие, в значительной степени
стабилизируются статические и динамические характеристики
гидр а вл и чес ко го пр и вода.
6.1. СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Принципиальная схема наиболее распространенного варианта
совокупности силовых агрегатов, составляющих исполнительное
устройство гидропривода (заключительный каскад комплекса
следящих устройств), показана на рис. 6.1, а. Усилительная
часть составляется из приводного двигателя 1 и регулируемого
насоса 2, который при помощи магистралей 3 и 7 обслуживает
исполнительную часть, включающую гидромотор 4 постоянной
производительности и нагрузку (инерционную 5 и активное
сопротивление 6), которые могут быть соединены через редуктор.
Такой тип гидравлического исполнительного устройства получил
особенно большое распространение в стационарных системах
с нерегулируемыми приводными двигателями достаточно большой
мощности, чтобы не требовалось изменения редукции в широком
диапазоне изменения скорости.
Этот тип исполнительного устройства рассматривается чаще
всего для случая, когда скорость приводного двигателя постоянна
Рис. 6.1. Принципиальные схемы гидравлических исполнитель-
ных устройств машинного регулирования:
а — с регулируемым насосом; б — с регулируемым исполнительным дви-
гателем; в — с регулируемым приводным двигателем; г — с двумя регу-
лируемыми гидромашинами
220
(автономное исполнительное устройство), что соответствует при-
водному двигателю неограниченной мощности. В этом случае
рабочий процесс описывается линейными уравнениями.
Совмещение усилительной части с исполнительной (рис. 6.1, б)
допускает регулирование усилия на управляемом органе, полу-
чение высоких скоростей исполнительного устройства, а также
использование приводного двигателя ограниченной мощности,
что так важно для мобильных машин.
При рассмотрении статических характеристик можно исследо-
вать обобщенную систему (рис. 6.1, г), в которой регулируются
и насос и гидромотор. Такие исполнительные устройства могут
применяться в трансмиссиях, где гидромотор регулируется по
нагрузке, например, одновременно с двигателем внутреннего
сгорания, а подачу насоса меняет оператор, устанавливающий
желаемую скорость движения. Таким образом, первый управля-
ющий сигнал реализуется своеобразным регулятором, второй же —
сигнал независимый.
Четвертый тип исполнительного устройства — гидравлический
вал (рис. 6.1, в), представляющий собой нерегулируемый гидрав-
лический исполнительный механизм, обеспечивающий постоянное
передаточное отношение и изменение скорости управляющего
устройства, реализуется только за счет регулирования приводного
двигателя.
Гидравлические исполнительные устройства всех четырех
типов — механизмы с астатизмом первого порядка, т. е. меха-
низмы управления скоростью (с неголономными связями), в ко-
торых значение управляющего сигнала обусловливает не положе-
ние объекта управления, а его скорость. Для получения испол-
нительного устройства управления положением объекта регули-
рования необходимо использовать обратную связь по положению.
Обычно рассматриваются предельные статические характери-
стики, т. е. зависимости моментов насоса Мн (или Мн1 — инди-
каторного момента) и гидромотора Мд (или МД1) от его угловой
скорости Q при постоянном наибольшем перепаде давления и
постоянной частоте вращения насоса. Таким образом, статические
характеристики описывают автономное исполнительное устрой-
ство, определяя его свойства безотносительно к свойствам источ-
ника питания.
Применительно к обобщенному исполнительному устройству
(см. рис. 6.1) следует раздельно рассматривать области регулиро-
вания насоса (А и А' на рис. 6.2), осуществляемого при безраз-
мерном параметре управления гидродвигателя u = 1, и области
регулирования гидродвигателя при безразмерном параметре
управления насосом е = 4-1 или —1 (В и В' соответственно на
рис. 6.2). Поскольку в первом случае и = 1, то в соответствии
с уравнением (5.23) индикаторный момент, развиваемый гидро-
мотором, будет постоянным и притом наибольшим, что и тре-
буется, в зонах малых значений Q.
221
Рис. 6.2. Механическая харак-
теристика гидропривода с двумя
регулируемыми гидромашинами
при отсутствии потерь:
а — характеристики моментов; б —
закон регулирования насоса; в —
закон регулирования гидромотора
Приравнивая потоки насоса и гид-
ромотора при и = 1 и е = var, по-
лучим
Й = е (wjw) йн,
а значит (рис. 6.2, б),
Мш. = данр=(а’/Йн)рЙ.
При Й = (wjw) йн будет до-
стигнуто наибольшее значение МнО
а дальнейшее увеличение й дости-
гается уже изменением расхода гид-
ромотора. Приравнивая при отсут-
ствии утечек потоки насоса и
гидромотора при е = 1 и и = var
(зоны В и В' на рис. 6.2), получим
W и
а значит, = uwp = —р.
Поскольку йн = const, то ли-
ния Мд(- одновременно соответствует
мощности на входе и выходе гидрав-
лического исполнительного устройства, так как рассматри-
вается система без потерь.
Полученные статические характеристики в зонах А и Д'
справедливы для исполнительного устройства с регулируемым
насосом и гидромотором постоянного расхода (см. рис. 6.1, а),
а в зонах В и В' справедливы для исполнительного устройства
с регулируемым гидромотором и насосом постоянной подачи (см.
рис. 6.1, б), с помощью которого регулируется развиваемый мо-
мент при одновременном изменении частоты вращения гидромотора.
При учете механических потерь момент на валу гидромотора
Мд уменьшается по сравнению с Мл,- (а'с'Ь' вместо acb на рис. 6.3),
а для насоса увеличивается (O'g'h' вместо Ogh). Утечки соответ-
ственно со значением перепада давления р и давления подпитки
уменьшают значение Й на величину Йу, определяемую из соот-
ношения Qy = дойу. Этот пересчет упрощается построением за-
висимости Qy = Qy (р) в форме кривой Odr на рис. 6.3 с масштаб-
ными коэффициентами осей, равными w и ил]дм соответственно,
поскольку связь между р и Мд/ определяется равенством Мд/ =;
= йур]дм. Масштабы осей Йу и й должны быть при этом построении
одинаковыми.
Учет влияния утечек на статическую характеристику рассма-
триваемого исполнительного устройства при разных значениях р
осуществляется переносом кривой Od' в положение fc"t которым
и определяется граница областей А и В.
222
Рис. 6.3. Характеристики моментов гидропривода с дву-
мя регулируемыми гидромашинами и оценкой влияния
потерь
Смещая кривую c'b' влево на величину отрезка с'с", получим
результирующую статическую характеристику Л4Д = Л4Д (Й)
в виде кривой а'с"Ь" и предельно возможное значение Й точкой Ь",
определяющей наименьшее значение параметра управления ги-
дромотора wmIn, поскольку при и с wmln гидравлическое испол-
нительное устройство становится самотормозящим.
При использовании приводного двигателя ограниченной мощ-
ности, например в мобильных машинах, на разных скоростях
реализуются разные по величинам моменты. Вместо 7ИД, = const
(CDE на рис. 6.4, а) используется линия CDF, где участок DF —
гипербола, соответствующая постоянной мощности двигателя Мд.
В этом случае степень нагруженности гидромашин в диапазоне
скоростей от Й = ОК до Й = ОН будет неизменной, а момент,
Рис. 6.4. Статические характеристики одноступенчатого (а) и двух-
ступенчатого (б) гидроприводов с насосом переменной подачи при ог-
раниченной мощности приводного двигателя
223
нагружающий насос, Л4н/ изображается линией OAG (заштри-
ховано на рис. 6.4, а).
Регулирование мощности осуществляется только в зоне А
(см. рис. 6.3) при изменении подачи насоса, работающего в ка-
честве усилительной части. В зоне В, для которой характерно
совмещение исполнительной и усилительной частей, регулируется
развиваемый момент при неизменной потребляемой мощности.
Таким образом, в системе, в которой изменяется подача насоса,
усилительная часть меняет не только регулируемую переменную
Й, но и мощность, а при изменении подачи гидромотора, т. е. при
совмещении усилительной и исполнительной частей, одновременно
и притом взаимозависимо регулируются Й и развиваемый момент
Л4Д при неизменной мощности, поскольку рассматриваются пре-
дельные статические характеристики.
Номинальная (установочная) мощность гидромашины 2Vy опре-
деляется положением точки £, а реализуемая — мощностью AL,
причем отношение Л/у/Л7д называется силовым динапазоном (Q,
т. е. Л4дтах/Л1д mln = dK = Л/у/Л/д [57].
В гидравлических исполнительных устройствах, работающих
только в зоне А (см. рис. 6.1, а) или только в зоне В (см. рис. 6.1, б
и г), насосы и гидромоторы должны быть неодинаковыми (их
универсальные характеристики должны иметь разное расположе-
ние областей наибольших значений КПД). В первом случае* наи-
большее значение КПД должно лежать в зоне, соответствующей
УУд = const, а во втором случае — в зоне Afy. Таким образом,
основные гидравлические машины, из которых составляются
гидроприводы, не должны быть универсальными, а возможно и
однотипными.
При высоких значениях силового диапазона dK приходится
использовать гидромашины большой мощности, а значит, более
тяжелые и притОхМ значительных размеров, поскольку при этом
Wy > Лгд. Уменьшения размеров и массы гидравлического испол-
нительного устройства можно достигнуть, используя многосту-
пенчатую гидравлическую трансмиссию, в которой применяют
многодвигательную исполнительную часть с переключением ги-
дромоторов при помощи распределителя с последовательного
соединения на параллельное в различных комбинациях [57].
При работе двух гидромоторов с уменьшенным вдвое характер-
ным объемом можно вдвое уменьшить отношение Ny/N^ (см.
рис. 6.4, б). Так, соединяя гидромоторы параллельно, получим
сложение их моментов в форме горизонтали С'Е' при наибольшей
скорости Й = О'Р', а соединяя те же гидромоторы последова-
тельно, можно увеличить скорость вдвое (Й = O'R') при умень-
шенном в 2 раза моменте, изображаемом горизонталью LTM’Nf
В этом случае установочная мощность Ny определяется положе-
нием точек Е' и АГ Используя большее число гидромоторов,
включаемых в различных комбинациях и работающих на общую
нагрузку, можно обеспечить лучшее приближение значения Afy/Л/д
224
к единице, соответственно умень-
шая габаритные размеры и массу
гидропривода [1].
Статическая характеристика
гидравлического вала (см.
рис. 6.1, в) определяется гидрав-
лической редукцией /г и состав-
ляющими КПД т]0 и 1]м, причем
ir = wu/w\ Т)о = ЛонЛодЛот’»
Рис. 6.5. Три области потерь энергии
на принципиальной схеме гидравли-
ческого исполнительного устройства
Лм ЛмнЛмдЛмт»
где механический КПД трубопроводов т]мт определяется гидрав-
лическими сопротивлениями, а объемный т]от — утечками или
отбором рабочей жидкости на вспомогательные нужды (устрой-
ства управления и обслуживания). Выражения этих КПД запи-
сываются в форме
ЛмТ Р/Рн» Лот Q/Qh» (6* О
где перепад давления в насосе рн > р, так же как и подача насоса
QH > Q.
Потери давления в трубопроводах рг = рн — р определяют
известными гидравлическими расчетами и уточняют эксперимен-
тально, имея в виду эффект индукции местных сопротивлений
[911. КПД т)эд и г]мд оценивают потери в области 5Д обобщенного
исполнительного устройства (рис. 6.5), т)эн и т)мн — в области SH
и Лот и Лмт — в области ST. В системах с короткими соединитель-
ными магистралями потери в них ради упрощения расчетных выра-
жений относят обычно к потерям насоса.
При проектировании гидравлического исполнительного уст-
ройства по заданному передаточному отношению i = Q/QH обра-
щаются к уравнениям подач для насоса и гидромотора (5.20) и
(5.21), деля которые почленно с учетом выражения (6.1), получим
wjw = iu/(y[oe), (6.2)
где 1% = тЬнЛодЛот — полный объемный КПД исполнительного
устройства; и и е — безразмерные параметры управления гидро-
мотора и насоса соответственно. Расчет ведется применительно
к фиксированным значениям и и е, обычно равным единице.
Если должно быть обеспечено заданное значение коэффициента
трансформации k = M^IM^ то обращаются к уравнениям мо-
ментов насоса и гидромотора (5.22) и (5.23), деля которыепочленно-
получим
= Лм"/^), (6.3)
где Лм = ЛмнЛмдЛмт — полный механический КПД исполнитель-
ного устройства.
Последние два равенства, позволяющие определить соотно-
шение характерных объемов насоса и гидромотора, взаимозази-
8 В. Н. Прокофьев и др.
симые, поскольку для любого пассивного передающего механизма
с переменными входа QH и Мн и переменными выхода Q и Мд
справедливо равенство
П = ПоПм = ki-,
поэтому i/r]0 = r\Jk и обращение при расчете к условию (6.2)
или (6.3) зависит от задания на проектирование.
При выборе абсолютных размеров гидромашин записывают
выражения мощности приводного двигателя
^пд = ~ ^нРн^н •
Имея в виду [в соответствии с уравнениями (5.24) и (5.25)],
что = DI и DHQH = (^q)h, можно получить [14]
1f МпдЛмн
" (сй)н
(^н)пр>
(6.4)
где используется наибольшее допустимое (например, ограничи-
телем мощности) значение е или ерн.
Пользуясь полученным значением Он, при помощи равенства
(6.2) или (6.3) находим характерный объем гидромотора. Если
=$= w, то допустимость полученного значения w проверяется
при помощи неравенства
МпдЛ __
^(^)д
(6.5)
Поскольку обычно и > е, то (£>н)пр > £>пр.
При использовании гидромашин типоразмерных рядов, рабо-
тоспособных при более высоких перепадах давления, допустимо
применение меньших по размеру образцов, удовлетворяющих
неравенствам (6.4) и (6.5), чем также определяется стремление
создавать гидромашины, форсированные по давлению.
6.2. ДИНАМИЧЕСКАЯ ХАРАКТЕРИСТИКА
МАТЕМАТИЧЕСКОЙ МОДЕЛИ РЕГУЛЯРНОГО
ИСПОЛНИТЕЛЬНОГО УСТРОЙСТВА
Из множества возможных математических моделей гидравличе-
ских исполнительных устройств рассмотрим наиболее распростра-
ненную, в которой связи между переменными входа и выхода
описываются линейными уравнениями; нелинейности, если они
имеются, отнесены к нагрузке, магистрали имеют такую протяжен-
ность, при которой параметры могут считаться сосредоточенными,
влияние обеих магистралей одинаково, потери подачи из-за де-
формации рабочей жидкости вместе с внешними утечками отнесены
или к перетечкам, или совместно с перетечками к утечкам, а про-
цессы обусловливаются перепадом давлений на гидромоторе
226
и не зависят от давления системы компенсации утечек. Инер-
ционная нагрузка при проведении анализа считается неизменной,
а ее зависимость от смещения исполнительного гидродвигателя
при его соединении с объектом управления при помощи рычажной
связи (переменное передаточное отношение) будет рассмотрена
отдельно в гл. И.
Пусть давление перед гидромотором будет ра, а после него
причем р = ра — рб. Тогда уравнения потоков для обеих маги-
стралей соответственно будут
еаунЙн = uwQ + Lnp + Ьурл + ^-ра;
ей» А = + Ьпр - Lyp6 - рб,
где Ln и — коэффициенты перетечек и утечек соответственно;
V — полный объем рабочей жидкости, находящейся в обеих
(одинаковых) соединительных магистралях; х — среднее значе-
ние модуля объемной деформации рабочей жидкости.
Складывая почленно оба уравнения для симметричного испол-
нительного устройства, получим уравнение потоков
= uwQ + Lp + р
или е й = uQ + xwp + ®wp, (6.6)
где коэффициент статической податливости
__ _Ln ~h ^у/2 .
коэффициент динамической податливости
О = И/(4до2х)
и wp = МД1 — индикаторный момент гидромотора, рассматривае-
мый в качестве одной из выходных переменных, которая нагру-
жает приводной двигатель.
В операторной форме уравнение потоков (уравнение кине-
матического тракта, или уравнение тракта передачи управляющих
сигналов) будет
»гЙне(0=ы(0£2(0 + Л(Р)Л1д^(0,
где оператор потерь, определяющий воздействие нагрузочных
переменных на кинематические,
л(Р) = т(1+ад, (6.7)
причем D = d/dt (символ производной), а постоянная времени
оператора потерь будет
Тп = О/т
8*
227
и для рассматриваемой матема-
тической модели
т =_______К______
п 4x(Ln + Ly/2) ’
Материалы для подсчетов
параметров т, ft, h и J содер-
жатся в гл. II и V.
Структурное представление
уравнения потоков приведено
на рис. 6.6, а (четыре перемен-
ных входа и одна выхода) и в
более простой форме на рис. 6.6, б
для случая гидромотора по-
стоянного расхода при постоян-
ной угловой скорости привод-
ного двигателя:
irQ^(0 = Q(/) + /7(D)44A/(/);
(6.8)
но и в этом случае использо-
вание уравнения потоков не-
реализуемо без уравнения на-
грузки, поскольку имеется
лишняя степень свободы (в
уравнении три переменных).
Уравнение нагрузки записыва-
ется в форме
= uwp = 4- Ш 4- Мс,
е)
Рис. 6.6. Структурные представления
гидравлического исполнительного
устройства
где J — инерционная (реактивная) нагрузка, предполагаемая
постоянной; h — коэффициент активного сопротивления (про-
порционального скорости гидромотора); Мс — статическая (не
зависящая от времени) нагрузка. В более общих задачах эта
нагрузка может зависеть от времени, например, если исполнитель-
ный двигатель служит приводным двигателем для последующего
каскада привода.
В операторной форме уравнение нагрузки будет
ц(/)Мд/(/) = Я(О)Й(0 + Л1с, (6.10)
где оператор нагрузки, определяющий воздействие кинематиче-
ских переменных на нагрузочные, будет
/7(D) = /i(14-THD), (6.11)
а постоянная времени оператора нагрузки
Tn = J!h.
228
Структурное представление уравнения нагрузки регулируемого
гидромотора приведено на рис. 6.6, в и для случая гидродвигателя
постоянного расхода — на рис. 6.6, г.
Структурное представление исполнительного устройства с на-
сосом переменной подачи и нерегулируемым гидромотором (е =
= var, и = 1) при постоянной скорости приводного двигателя
йн = const (рис. 6.6, д и е) получается объединением структур,
приведенных на рис. 6.6, б и г. Полученный четырехполюсник
имеет две переменных входа е (f) и Мс, две переменных выхода
й (0 и МД1- (/), где последняя переменная обусловливает нагруже-
ние приводного двигателя. Возможен нередко встречающийся
в практике случай, когда Мс = Мс (t). Одноканальное представ-
ление с трактом от управляющего сигнала е (/) до управляемой
фазовой координаты й (/) (см. рис. 6.6, д) содержит местную
обратную связь и описывается двумя уравнениями потоков и
нагрузки
1гйне (0 = й(/) + /7(й) МД1(/);
мс(0 = мд,.(/)-Я(й)й(0.
Структурное представление с разделением кинематического
тракта и тракта нагрузок показано на рис. 6.6, е, где существова-
ние местной обратной связи обусловлено замкнутым контуром,
составленным операторами потерь П (D) и нагрузки Н (£>)."
Структурное представление исполнительного устройства с на-
сосом постоянной подачи и регулируемым гидромотором (е = 1
и и = var) при постоянной скорости приводного двигателя йн =
= const (рис. 6.7) может быть получено при помощи структур, по-
казанных на рис. 6.6, а и в, и описывается уравнениями потоков
и нагрузки (6.8) и (6.10):
ZrQH = Q(0 + /7(D)MAJ/);
u(t) =
В таких системах с управлением величиной развиваемого
гидромотором момента удается получить весьма жесткую харак-
теристику, поскольку в тракт связи между управляющим сигна-
лом и (0 и управляемой переменной Q (/) оператор потерь не
входит, и поэтому прямого влияния на Q (/) со стороны статиче-
ской и динамической податливости нет.
Использование меняющейся управляющей переменной е (t)
или и (/) сопровождается в структурах появлением двух операто-
ров перемножения переменных от каждой управляющей пере-
менной, делая систему нелинейной и существенно затрудняя
исследование ее динамических свойств. Отсутствие таких опера-
торов в структурных представлениях, приведенных на рис. 6.6, д
или 6.6, е, — следствие практически невыполнимого и приме-
няемого в порядке первого приближения условия QH *= const,
229
устраняющего возможность влияния источника питания на ра-
боту гидропривода.
Структурное представление исполнительного устройства при
е = var, и = var и йн = var получается объединением структур,
приведенных на рис. 6.6, а и в, со структурой условия нагруже-
ния приводного двигателя (рис. 6.8) и описывается этим уравне-
нием совместно с уравнениями потоков и нагрузки:
мн(о = м(ОЛ1д/ (О + АЛО;
АЯ (0 е (0 = и (0 Q (0 + П (D) MRi (ty
u(t) MRt(f) — Н (D)Q(t) + Mc(t).
В этой системе уравнений и структурном представлении,
приведенном на рис. 6.8, возмущающее воздействие /н (0 учиты-
вает механические потери в насосе, а /д (t) — механические по-
тери в гидромоторе.
При общем рассмотрении гидравлического исполнительного
устройства, которое обслуживается приводным двигателем и
кроме регулируемых переменных выхода Q (t) и Мд1 (/), в свою
очередь, несет обязанности приводного двигателя по отношению
к последующему каскаду исполнительного устройства, необхо-
димо рассматривать четыре группы переменных (см. рис. 6.8).
Управляющие сигналы е (I) и и (/), управляемые переменные
взаимодействия с источником энергии, обеспечивающим угловую
скорость насоса йн (/) и нагружаемым моментом от него МИ (t) —
вторая группа; переменные взаимодействия с обслуживаемым
исполнительным устройством, которое нагружает рассматривае-
мое моментом Мс (t) — (/) вследствие вращения гидромашинного
усилителя с угловой скоростью Q (/) — третья группа. Четвертую
группу составляют ранее упомянутые переменные Q (t) и Мд1 (/).
Рис. 6.7. Структурное представ-
ление гидравлического исполни-
тельного устройства, в котором
совмещены усилительная и ис-
полнительная части
Рис. 6.8. Обобщенное регулярное
исполнительное устройство
230
Рассматриваемое структурное представление позволяет при
помощи рекуррентных уравнений описать непрерывную цепь
взаимосвязанных, так называемых регулярных преобра-
зователей энергии, составляющих машиностроительную автомати-
ческую систему управления, к которым относятся в том числе и
гидравлические исполнительные устройства [64, 94] (рис. 6.9):
knen (/) Vn_. (/) = ип (/) Vn (/) + Пп (D) гп (/);
ип (0 rn(t) = Rn(t) + /„(0 +
+ <Jn-len-l (0 rn-l (0 + (D) V„(Z).
(6.12)
Цепь обобщенных преобразователей энергии включает N каска-
дов. Любому каскаду с индексом п — 2, 3, ..., N — 1 соответ-
ствуют уравнения связи (6.12) координат входа en (Z), ип (/),
Rn (/) (безразмерные сигналы управления и возмущающее воздей-
ствие) с управляемой фазовой координатой Vn (/) и фазовой коор-
динатой состояния системы rn (t). Коэффициенты kn и qn обеспе-
чивают соответствие размерностей, а переход к обобщенным пере-
менным позволяет использовать полученные уравнения не только
для гидроприводов, но и для других преобразователей энергии,
в том числе электрических. Для гидравлических исполнительных
устройств kn — qn, а для электрических возможны случаи,
когда kn qn.
В цепи каскадов для каждого начального звена (n = 1) в урав-
нениях связи принимается Vn_i (t) = Ко, а для замыкающего
звена (n = N) qn+irn+i (Z) ип+1 (/) = 0. Рассматриваемая цепь
представляет собой нелинейную систему с 2V линейными частями,
взаимодействующими через перекрестные связи с 2 (N — 1) эле-
ментами перемножения сигналов. Любые два сопряженных (име-
ющих индексы, отличающиеся на единицу) каскада (рис. 6.10)
образуют цепь предельного вида, в которой каскад п = 2 замы-
кающий, а каскад п — 1=1 — исходное звено цепи; каскад
п = 2 — регулярный исполнительный механизм, а каскад п — 1 =
= 1 — источник энергии (например, приводной двигатель). Иссле-
дование динамических свойств цепи предельного вида проведено
в работах [64, 65, 94].
Рекуррентные уравнения обобщенных цепей регулярных пре-
образователей энергии основываются на уравнениях связи кине-
матических и нагрузочных показателей режима
(/) - и (/) V (/) = (т + &D) г (t) = n (D) г (ty, (6.13)
и (t) r(t) — R (0 = (h + JD) V(t) = H (D) V (t),
носящих достаточно общий характер (регулярный преобразова-
тель энергии или линейный сервомеханизм). В этой форме записи
уравнение связи между кинематическими показателями режима
фиксирует отличие задаваемого значения кинематического пока1
зателя режима от его реализуемого значения V (/). Эта разность
231
Рис. 6.9. Структурное пред-
ставление цепи регулярных пре-
образователей энергии
Рис. 6.10. Структурное пред-
ставление цепи предельного ви-
да регулярных преобразователей
энергии
затрачивается на статическую тг (Z) и динамическую ODr (/)
податливости (эффект «просадки»), где Vx — значение кинемати-
ческого показателя режима при г (/) = 0 и и = е — \ (режим
холостого хода). Уравнение связи между нагрузочными показа-
телями режима оценивает отличие развиваемого нагрузочного
показателя режима от преодолеваемых механизмом активного
и реактивного сопротивлений, возникающих вследствие отличия
значения кинематического показателя режима от нуля.
Форма записи (6.13) применима для многих устройств, включая
не только гидропривод объемного управления с гидромотором,
гидроцилиндром и двумя толкающими гидроцилиндрами, но
232
Таблица 6.1
ОБОЗНАЧЕНИЯ ВЕЛИЧИН, ВХОДЯЩИХ В ОБОБЩЕННУЮ МОДЕЛЬ
РЕГУЛЯРНОГО ИСПОЛНИТЕЛЬНОГО УСТРОЙСТВА
Обозначения Г идропрнвод
с гидромотором с гидроцилинд- ром с двумя толкаю- щими гидроци- линдрами Исполнительный двигатель nocio- явного тока с независимым возбуждением
V Q V Q
wp = Mi Fp = Pi flp = Ml kMI = Ml
Vx ф ю X -у- fl н
R мс Ре мс мс
J J т J J
h h h h h
т L 4 L (fl)2 ря
fl УпР HW2 Vnp xF2 Упр X (//)a ^я
также исполнительный двигатель постоянного тока с независимым
возбуждением [96] при соответствующем использовании коэф-
фициентов, приведенных в табл. 6.1, где V (t) и г (/) — управляе-
мая и неуправляемая компоненты вектора выхода, a R (/) — обоб-
щенное возмущающее воздействие.
Аналогичными уравнениями, но с иными выражениями опе-
ратора потерь П (£>), описывается широкий класс сервомеханиз-
мов, включая источники энергии, в том числе и тепловые, как,
например, двигатели внутреннего сгорания и газотурбинные
двигатели.
В табл. 6.1 Q и v соответственно обозначают регулируемые
угловую и линейную скорости; и — соответственно эффек-
тивные (индикаторные) момент и усилие; w и F — соответственно
233
характерный объем и активную площадь гидроцилиндра (до ==
= fl — характерный объем двух толкающих гидроцилиндров;
f — активная площадь каждого из них; I — плечо); / — ток
в якорной обмотке; kM — конструктивный коэффициент; Мс и Ро —
соответственно полные возмущающий момент и усилие; J и т —
соответственно приведенные к гидродвигателю момент инерции
и масса нагрузки; h и L — соответственно коэффициенты актив-
ного сопротивления и утечек; /?я и Ья — соответственно активное
и индуктивное сопротивления якорной обмотки электродвига-
теля; Лсу и Kq — соответственно коэффициенты усиления схемы
управления и противо-ЭДС двигателя; Упр их — соответственно
приведенные объем жидкости в магистралях, участвующий в де-
формации, и значения модуля объемной деформации жидкости.
Уравнения (6.13) будут линейными при и (t) = 1 и Vx = const
(например, неограниченная мощность приводного двигателя),
и тогда выражения фазовых координат через переменные входа
будут
где собственный оператор системы
<p(D)=l + /7(D)/7(D),
порождающий характеристическое уравнение
Ф (X) = П (X) Н (X) 4-1 = 0.
Поскольку имеются две компоненты вектора входа, две фазо-
вые координаты системы V (/) и г (t) и два уравнения связи,
то передаточные функции фазовых координат системы могут рас-
сматриваться при постоянном значении одной из компонент
вектора входа. Так, при R (0 = const
Ц7 м = = Vx •
W e(s) q>(D)’
(6.14)
r(s)_ VXH(D)
r{’~e(s)~ <p(D) »
а при e (t) — const
"w>—>—<615>
Все четыре передаточные функции позволяют выявить отклик
системы на заданные сигналы е (0 или R (s) при R (0 = 0 или
е (0 = 0 соответственно, либо приведенные (отклоняющиеся на
постоянную величину) значения при R (0 = const + 0 и е (0 =
== const 0.
234
Выражение передаточной функции гидропривода (6.14) с уче-
том равенств (6.7) и (6.11) показывает, что регулярное исполни-
тельное устройство будет колебательным звеном
IF(s)=±^- =________*_____
{ > e(s) 1 + 2£Ts-\- T2s2>
причем коэффициент усиления
К = М1 + ^)1
постоянная времени
Т = /#//( 14-т/г); (6.16)
коэффициент демпфирования
с=4 VrS (?+4)=4-т +’’Л
коэффициент затухания, определяющий наибольшее возможное
значение коэффициента усиления при замыкании рассматривае-
мого исполнительного устройства главной (единичной) отрица-
тельной обратной связью,
и выражение
V = ттг (т + 4) = т‘
При синтезе следящих систем, в которых исполнительными
устройствами будут гидроприводы с передаточными функциями
(6.15), их удобно разделять на три группы: низкочастотные (с Т >
> 0,05 с), среднечастотные (0,0125 Т 0,05 с) и высокочастот-
ные (Т < 0,0125 с), поскольку коррекция каждой группы осуще-
ствляется по-разному. Обычно частоты среза электрогидравли-
ческих приводов лежат в диапазоне 20 со 80 1/с.
Колебательность и демпфирующие свойства регулярного испол-
нительного устройства определяются не только собственно демп-
фирующими свойствами, обусловливаемыми значениями т и h,
но и соотношением постоянных времени операторов потерь и на-
грузки Тп и Тн. Самая большая колебательность (самое малое
значение имеет место при одинаковых значениях Тп и Тн.
Так, выражению (6.16) можно придать форму
235
Безразмерное число
/Г = / Тн/Тп = V
определяет отклонение колебательности рассматриваемой системы
от наибольшей возможной. Так, выражение £ может быть пере-
писано в форме
С = ^Л-1(/7). (6.17)
где наименьшее возможное значение коэффициента демпфиро-
вания
а множитель, сопровождающий £т, представляет собой величину,
обратную ранее использовавшейся функции режима (5.38):
a-(/7)=’+Xs,i.
2р Т
Чем больше будут отличаться друг от друга значения Тп
и Тн, тем меньше будет колебательность регулярного исполни-
тельного устройства из-за увеличения £. Однако при этом может
изменяться и значение постоянной времени
T = ^nVrTJn,
6.3. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ
СОЕДИНИТЕЛЬНЫХ ТРАКТОВ
При определении приведенного к гидромотору момента инерции
движущихся частей учет инерционных свойств рабочей жидкости
в соединительных магистралях обязателен. При достаточной
длине трубопроводов эффект может быть существен.
При расчете динамических характеристик гидравлического
вала (см. рис. 6.1, в) обязателен учет частотных характеристик
соединительных трактов, устанавливающих связь между расхо-
дом Q и перепадом давления /?. Особенность таких задач заклю-
чается в том, что рассматриваемый элемент ненаправленный
и каждая из двух переменных может быть управляющим сигналом
(переменной входа).
Реактивное сопротивление трубопровода, когда его параметры
могут считаться сосредоточенными, определяется выражением
__ р dQ __ fdv _ 4pZ dQ
pi ~ / dt dt~ nd* dt 9
где p — плотность рабочей жидкости; I — длина трубопровода;
v — скорость; d — диаметр трубопровода.
236
Гидравлическое сопротивление (активное сопротивление) при
ламинарном движении
128/ц _ 32 .
Рг ‘ Q л^4 Q — J2
где р — динамический коэффициент вязкости.
Связь между р и Q (или v) определяется при помощи выражений
Р = Рг + Pj = CQ + С/
или в изображениях по Лапласу при нулевых начальных условиях
для задач, в которых Q ($)— переменная выхода (рис. 6.11, а)9
где коэффициент усиления К = 1/С, а постоянная времени Т =*
₽= С./С.
Применительно к задачам, в которых переменной выхода будет
р ($), передаточная функция записывается в форме (рис. 6.11, б)
г₽^=Ш==л*(1+?5)’
где коэффициент усиления К* = С.
То обстоятельство, что порядок числителя выше порядка
знаменателя (объект ненаправленный, пассивный), свидетель-
ствует о том, что система, например, обладает предельным значе-
нием частоты со = сопр, при которой
р (jd>) [или | Wp (jd>) |] достигает
предельного значения, обуслов-
ленного настройкой предохрани-
тельного клапана или мощностью
приводного двигателя.
Ограничения в диапазоне про-
пускания частот также могут обу-
словливаться вырождением описы-
вающего уравнения, например,
вследствие изменения на опреде-
ленных интервалах движения ха-
рактера потока, который перестает
быть ламинарным, или вследствие
прекращения действия модели с
сосредоточенными параметрами
из-за возникновения и развития
волновых процессов и т. п.
Хотя методы частотного анали-
за применительно к передаточным
функциям рассматриваемой формы
существенно ограничены, все же
Рис. 6.11. Асимптоты ЛАХ частот-
ных передаточных функций соеди
нительных трубопроводов
237
нет оснований для отказа от их применения, а тем более от по-
лучения, пусть в какой-то степени ограниченных, решений задач,
описываемых такими передаточными функциями.
Обращаясь к графическим изображениям частотных характе-
ристик рассматриваемого соединительного тракта, можно заме-
тить, что низкочастотная асимптота (АВ на рис. 6.11) определяется
значением коэффициента усиления, т. е. коэффициентом актив-
ного сопротивления, поскольку
I(/®) Uo = К = 1/C; I Wp (/«) 1^0 = Л* = с,
а вторая асимптота (ЕВС на рис. 6.11) имеет первый уклон, и ее
положение определяется значением коэффициента реактивного
сопротивления С;- (ордината точки Е при <о = 1 на рис. 6.11),
поскольку
I WQ (/(О) = А в _1_; | Гр (/(0) = С/(0.
Так как возрастание перепада давления в реальных системах
ограничено, то на рис. 6.11, б вторая асимптота с уклоном — 1
также соответственно ограничена, например, точкой F, положение
которой обусловливается значением предельной частоты <опр.
Таким образом, положение второй асимптоты определяется только
значением коэффициента реактивного сопротивления как и ча-
стота среза (otp = 1/Ср а собственная частота со = 1/7 = C/Cf.
Для турбулентного потока выражение Cf не меняется, а актив-
ное сопротивление подчиняется иной закономерности:
p_CtQ- + C,§.
Линеаризируя в отклонениях, отмечаемых индексом *, полу-
чим применительно к возмущенному движению
P* = 2CTQOQ* + CZQ*,
где Qo — расход невозмущенного движения. В дальнейшем ин-
декс * будет опускаться.
Поскольку по уравнению Вейсбаха для турбулентного потока
перепад давлений
откуда
CT=8PM/(jAf),
получим
9С О = С____16pXZ п _„
ZCTyc — ь — уо— щр Ц).
Следовательно, для турбулентного потока коэффициент ли-
неаризированного активного сопротивления дополнительно за-
238
Таблица 6.2
ПАРАМЕТРЫ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ТРУБОПРОВОДОВ
Характер потока с = к* С/ К 1 T(0 = СуСй = C y(l)
Ламинар- ный, число труб п = 1 128/ц л^4 4pZ Jtd2 nd4 128/ц d2 32v nd2 4pZw 4pZw nd2
Ламинар- ный, п > 1 128/цге2 Л^ Apln nd?3 nd3 128/цп2 d2 32vn лб/3 4p/nw 4pltu& Лб/3
Турбулент- ный, п = 1 (линеариза- ция в от- клонениях) 4рХ/ nd3 и° 4pZ Jtd2 nd3 4pX/y0 d nd3 4pZ(0 4pZw nd2
Турбулент- ный, п > 1 (линеариза- ция в от- клонениях) 4pXZn Кп 3 V° ndj 4pln л(/3 jtdl 4phln VnvQ л^3 4pZ/rco 4pZnw л^3
висит от скорости невозмущенного движения и в его выражение
диаметр трубопровода входит в третьей степени (несколько смяг-
чено влияние величины d на С по сравнению с ламинарным дви-
жением).
Соединительный тракт может составляться из нескольких
параллельно соединенных труб. При сравнении тракта с одной
трубой, диаметр которой d3, с трактом из п параллельно соеди-
ненных труб, но с той же площадью проходного сечения (диаметры
этих труб обозначены через d), следует пользоваться соотношением
d3 = dtf п.
Проведя подстановку последнего равенства в ранее получен-
ные выражения для С и (табл. 6.2), получим возможность ана-
лизировать влияние изменения /, d, р и и0 на положение асимптот
частотных характеристик.
Для ламинарного потока асимптоты частотной характеристики
| WQ (/со) I (АВС на рис. 6.12, а) определяются ординатой точки А
(в соответствии со значением С) и точкой Е (в соответствии со
значением С-). При увеличении значения / уменьшается коэф-
фициент усиления К при неизменном значении собственной ча-
стоты со = 1/Т (FGH на рис. 6.12).
При увеличении диаметра трубопровода d увеличивается
коэффициент усиления Д, и хотя собственная частота умень-
шается (KPR на рис. 6.12), значение частоты среза увеличивается,
233
Рис. 6.12. Асимптоты ЛАХ частотных функций соединительных трубопроводов
при турбулентных потоках и изменении параметров коэффициентов сопротивлений:
1 — исходные; 2—5 — при увеличении I (2), d (<?), ц (4) и (5)
поскольку ордината точки N, определяющая положение второй
асимптоты ЛАХ, увеличивается.
При возрастании вязкости рабочей жидкости уменьшается
только коэффициент усиления (NOC на рис. 6.12). Этот случай
может быть подтверждением того, что увеличение собственной
частоты не обязательно увеличивает полосу пропускания частот,
о которой следует судить по частоте среза. Первая определяется
отношением С; к С, а вторая, так же как и положение второй
асимптоты, только значением Су, не зависящим от вязкости рабо-
чей жидкости. Следовательно, например, тракт соединения насосной
станции с гидроприводом должен иметь возможно больший диаметр
(или гидравлический радиус), а значения р и I следует уменьшать.
Применительно к частотной передаточной функции lFp (/со)
влияние тех же параметров анализируется исходя из того, что
Рис. 6.13. Асимптоты ЛАХ частотных
функций соединительных трубопрово-
дов:
1 — при одном трубопроводе; 2 — при не-
скольких трубопроводах и ламинарных ре-
жимах; 3 — при тех же нескольких трубо-
проводах и турбулентных режимав
асимптоты ЛАХ этой функции
будут зеркальным отображением
только что рассмотренной. По-
этому, когда, например, нужно
понизить потери давления в
насосе, устройство которого не
обеспечивает равномерную по-
дачу, следует изменить пара-
метры d, р и I так же, как и в
предыдущем случае.
Аналогичные эффекты имеют
место и при турбулентном по-
токе (рис. 6.12, б), однако в этом
случае увеличение коэффициен-
та усиления К при возрастании
диаметра d будет несколько
меньше, поскольку в выражение
240
для С эта величина входит с показателем степени —3, а
не —4.
При использовании нескольких соединительных труб вместо
одной значения собственных частот увеличиваются (рис. 6.13
и табл. 6.2), однако только за счет уменьшения коэффициента
усиления и частоты среза, т. е. полоса пропускания частот также
уменьшается. Так, асимптоты ЛАХ частотной передаточной
функции однотрубного тракта (п = 1) показаны на рис. 6.13
кривой АВС в соответствии с положением опорной точки Е.
При п > 1 опорная точка М опускается по отношению к точке Е.
Для ламинарного потока и п > 1 асимптоты ЛАХ изображаются
кривой FGH, а для турбулентного потока — кривой КРН. Поэтому
многотрубные соединительные тракты должны применяться только
вынужденно, и в этих случаях следует по возможности переходить
на турбулентные потоки.
6.4. МЕСТНАЯ ОБРАТНАЯ СВЯЗЬ В РЕГУЛЯРНОМ
ИСПОЛНИТЕЛЬНОМ УСТРОЙСТВЕ
Обобщенные уравнения (6.13) для регулярного исполнительного
устройства (и = 1) имеют форму [11
Ухе(/)~Г(/) = /7(О)г(/); (6.18)
r(/)-P(/) = tf(D)V(Z)
и содержат главную обратную связь, если в качестве управля-
ющего сигнала рассматривать произведение VKe (/) = g (/) (так
называемое «масштабное» управление скоростью), как показано
на рис. 6.14, а. В этом случае передаточная функция разомкнутой
системы по управляющему воздействию g (t) будет передаточной
функцией статической системы (астатизм нулевого порядка)
Г = П (s) Н (s) = (1 + Л) (1 + THs)1 <6'19)
замкнутой системы (рис. 6.14, б)
ф V^(s) = 1 + /7 (s) /У (s) = 1 + IT (s)-l ’ (6.20)
ошибки
ф (s) . 6 =________!_______= 1 /6 211
617 V\e(s) 1 + in (s) H (S)J-1 l + «Z(s)’
где 8 ($) = Vxe (s) — V (s),
а передаточная функция замкнутой системы по силовому воз-
действию записывается в форме
ф М V(s) 77 (*)
р ' ' Р (s) 14-/7 (s) Н (s) •
241
a)
n(D)
1*n(I))H(D)
1
e—v(t)
в)
Рис. 6.14. Структурные представления линей-
ной модели исполнительного механизма в ка-
честве замкнутой системы управления ско-
ростью:
а — структура в одноканальном представлении;
б — выявление передаточной функции разомкну-
той системы; в — выявление операторов влияния
обоих входов на управляемую переменную; г —
приведение действия силового воздействия к уп-
равляемому входу
ключения силовой переменной выхода
Сравнивая выражения
(6.19)—(6.21), можно убе-
диться, что
Фе($) = Ф («):№(«) =
1 + W (s)-A : (S) -
1 + BZ (s) ’ (6-22)
поэтому имеющую формаль-
ный характер передаточную
функцию разомкнутой це-
пи W (s) (формальный, по-
скольку в действительности
объектом рассмотрения
будет все же система замк-
нутая) можно записать в
форме
F(s) = V(s)/e(s),
так как из равенства (6.22)
следует
№($)==Ф($):Фе($)==
V ($) . 8 (S) _ У ($)
Ухе ($) ’ Ухе (s) е (s) ’
Поскольку из исходных
уравнений (6.18) после ис-
г (О
m
П + П (D) Н (£))] V (() = Уле (/) - П (D) Р (/),
то приведение действия Р (/) на V (/) к управляющему сигналу
g (/) = Vле (I) определяется соотношением
gnp (0 = К^пр (0 = - П (р) Р (0, (6.23)
структурные представления которого показаны на рис. 6.14, виг.
Передаточная функция составляющей ошибки от силового
воздействия в результате использования выражения (6.21) с уче-
том последнего равенства записывается в форме
феР (*) = - ^ = - ГТ^) = ~ П фе СО- (6-24)
При гармоническом силовом воздействии Р (/) = Ра sin со/
его амплитудное значение не должно быть больше того, которому
соответствует амплитудное значение управляющего сигнала еа =;
242
в= 1. Так, переписывая уравнение (6.23) применительно к ампли-
тудным значениям сигналов с подстановкой D = /со, получим
где соп = 1/Тп = т/Ф — собственная частота оператора потерь.
При больших частотах исполнительное устройство прекра-
щает движение исполнительного органа, поскольку возмущения
полностью компенсируются утечками и деформацией рабочей
жидкости.
Приближенное выражение предельной частоты (иногда назы-
ваемой частотой захвата) из равенства (6.25) будет
(О < ®пр = Vx/($Pa).
Передаточная функция разомкнутой системы определяет вы-
ражения передаточных функций Ф (s) и Ф6 (s):
= 1 + 2t,Ts + T2sa ’ (6.26)
где К = 1/(тЛ); 2£Т = Тп + Тн; Т2 = ТПТН-, 2ЦТ = 1 +
Ф “ 1 + 2JrTrs + ту ’ (6.27)
здесь
= 1 + т/i; 2^г = 1 _|_тЛ (Т’п + т’н);
712__ ^пГн . 1 । гр— 1.
1 г ™ 1 + тЛ ’ Тг “ 1 п + 1 н ’
Ф (s) -------- rt(l+ г.8>(1 + T„s) -------------
ь \ / Г тп rh 1
[1+T+Th <г"+s+
В соответствии с равенством (6.19) передаточной функции
разомкнутой системы всегда соответствует двойное апериодиче-
ское звено.
В зависимости от величины коэффициента усиления К = 1/(тй)
будет различное значение частоты среза сос. Так, при =
= сон < соо < соп = Т’п* точка, определяющая частоту среза,
лежит на второй низкочастотной асимптоте ЛАХ частотной
функции W (ja), а при ®0 > <оп > сон — на первой среднеча-
стотной асимптоте (рис. 6.15).
Пользуясь асимптотами ЛАХ частотной функции W (/<л)
и выражением (6.20), можно построить асимптоты частотной функ-
ции замкнутой системы
Ф = I + •
Рис. 6.15. Построение асимптот |Ф (/со) | и
|Фе(/(о)| для апериодической и колеба-
тельной систем управления скоростью
При со < сос всегда | W (/со) |>1
(abed на рис. 6.15, а), поэтому
|ф (/со) | = 1/(1 +Тй),
как это следует из выражения
(6.27), а при со > сос обяза-
тельно | W (/со) | < 1, тогда
IФ (/ю) | I W (jay) |, как
показано на том же рисунке
штриховой линией efed. Та-
ким образом, передаточной
функции замкнутой системы
соответствует также двойное
апериодическое звено, одна
из собственных частот которо-
го соп, а вторая — больше (ои.
По мере увеличения коэф-
фициента усиления К = 1/(тй)
и фиксированных значений
Тн и Тп происходит умень-
шение коэффициента демпфи-
рования системы £г, выраже-
ние которого из равенства
(6.27) будет
* __ 1 1/^ л ~F Т н _
2 V 1+т/1 “
__ 1 J f 1 Т п 71 н
- 2 г 1+Х ита
(6.28)
Величина £ становится равной единице при критическом
значении коэффициента усиления К = Лк, где
к = (Тп - = 1
4ТПТН т/i ’
и при Л > Лк, поскольку £г < 1; передаточной функции замкну-
той системы уже будет соответствовать колебательное звено
(e'f'd' на рис. 6.15, б). В этом случае точка, определяющая частоту
среза сос > соп > сон, лежит на первой среднечастотной асимптоте,
уклон которой —2.
Обычно формулируемое требование о том, чтобы точка, соот-
ветствующая частоте среза, лежала на асимптоте с уклоном —1
[9, 85 ], относится к астатическим системам, в то время как разом-
кнутая линейная модель исполнительного механизма — система
статическая (a'b'c'd' на рис. 6.15, б).
Увеличение статического демпфирования системы Th умень-
шает коэффициент усиления Л, и значение частоты среза сос
становится неопределенным при К = 1/(тЛ) = 1. Такая система,
хотя и нежелательна, но возможна. Поскольку в этом случае
коэффициенты усиления передаточных функций замкнутой си-
244
стемыКг = 1/(1 + т/г) и ошибки /<е = т/г/(1 4- т/г) численно оди-
наковы, то на частотах, которые равны или меньше наименьшей соб-
ственной (сон или (оп), модуль ошибки | Фе (/<о) | равен модулю управ-
ляемой величины | Ф (/со) |. Принципиальная возможность даль-
нейшего уменьшения коэффициента усиления за счет увеличения
статического демпфирования Th > 1, при котором частота среза от-
сутствует, не используется из-за больших значений ошибок (/С8 >Kf).
Если вести оценку демпфирующих свойств системы по коэф-
фициенту демпфирования £г, то необходимо считаться с зависи-
мостью этого коэффициента не только от статического демпфиро-
вания т/г, но и от собственных частот сон и соп, что и должно быть
исследовано. При оценке демпфирующих свойств по коэффициенту
затухания 6 = £Г/ТГ = сон + соп вообще не приходится стал-
киваться со статическими демпфирующими свойствами. Зави-
симость 6 от сон и (оп естественна, поскольку апериодическое
звено не может быть консервативным. Таким образом, демпфиру-
ющие свойства рассматриваемой системы обусловлены составлением
ее из двух апериодических частей: усилительной и исполнительной.
Поскольку при применении частотных методов используется
оценка при помощи £г, необходим детальный анализ зависимости
£г от статического демпфирования т/г и постоянных времени со-
ставляющих элементов Тн = 1/сои и Тц = 1/со(1, как это следует
из равенства (6.28). В этом выражении зависимость £г от Тп и Тн
приводится к зависимости от одного безразмерного критерия,
описываемой уравнением (6.17).
Чем больше отличается значение Тн от Тп, тем больше воз-
растает £г за счет увеличения множителя [ A(VТ)]"1 (штриховая
кривая на рис. 6.16). Следовательно, демпфирующие свойства,
если под ними понимать величину £г, определяются не только зна-
чениями т и ft, но также и отношением постоянных времени Тн
и Тп. Если же оценка осуществляется при помощи коэффициента
затухания 6 = £Г/Тт = 7Т1 + 7V\ то значение степени демпфи-
рования тИ в это выражение вообще не входит. В этом случае 6 —
характеристика динамическая, а £г должно рассматриваться
совместно с Кг и Тг.
Пользуясь минимально возможным значением коэффициента
демпфирования можно получить выражения коэффициентов
усиления передаточных функций W (s), Ф (s) и Фе (s):
Условия превращения замкнутой системы из апериодической
в колебательную можно получить из характеристического урав-
нения, вытекающего из выражения (6.26):
^+(о>н + «п)^ + -^ = 0,
Ст
где сон = 1/Тн и о)п = 1/Тп (для краткости написания).
245
Рис. 6.16. Использование функции режима Л]Л Т при
анализе динамических свойств линейной модели испол-
нительного механизма
Решение записывается в форме
М.2=-----2"(®н + ®п)± у ---------j
и система будет апериодической, если подрадикальное выражение
не меньше нуля, т. е.
г 2 /<оне>п _ 2 Ксон/ofr _ д
<0н + <оп “ 1 + (<oH/Wn) ~ 1 ’’
что также непосредственно следует из выражения (6.17), поскольку
последнее равенство равносильно условию £r > 1.
Оставляя в последнем выражении только знак равенства,
можно получить критические значения безразмерного критерия
Г по точкам пересечения горизонтали А'В', соответствующей
заданному значению £от, с линией ОА'СВ', изображающей функ-
цию режима Л (КТ) на рис. 6.16. Точки А и В определяют корни
уравнения Т — -p-VТ 4-1 = 0:
При Тг <Т <Тг — процесс колебательный, в противном
случае (т. е. при нарушении этих неравенств) — апериодический.
При возрастании значения область значений безразмерного
критерия VТ, при которых система будет колебательной, умень-
246
шается, и при = 1, когда Аг=0,
/( = О и Kg = 1, система перестает
передавать сигнал, поскольку в
этом случае xh —♦ оо.
Условие существования часто-
ты среза будет
Х = или U<7^.
Qm V
L дВ
При Ст = 1/^2 значение ча-
стоты среза становится неопреде-
ленным, когда К = 1, Аг = V2
и Ле = 1//2. При Ст > у=-
частота среза отсутствует.
Асимптоты ЛАХ передаточной
функции ошибки |Ф8 (/со) | на
рис. 6.15 показаны линиями ghlm
и g'h'Tm’ и строятся вычитанием
асимптот ЛАХ | W (/’со) | из |Ф (/со) |,
как это следует из условия (6.22).
Используя ЛАХ систем, про-
стыми приемами можно получить
с учетом равенства (6.24) графи-
ческое изображение частотной ха-
Рис. 6.17. Построение асимптот
ЛАХ составляющей ошибки от си-
лового воздействия | ФеР (/со) | для
апериодической (а) и колебательной
(б) систем
рактеристики составляющей ошиб-
ки от силового воздействия |ФеР (/со) |. Так, на рис. 6.17, а ли-
нией ghftn показаны асимптоты |Фе (/со) | и abed— \П (/’со) | для
случая, когда со„ < сос < соп (апериодическая система). Проведя
сложение, получим асимптоты | ФеР (/со) | в виде линии ekbed, при-
чем частота сок, значение которой определяется положением точ-
ки d, ограничивает область возможной работы системы. Условием
такого ограничения будут неравенства |Фе(/со)|^0 дБ и
|ФеР (/’со) | < 0 дБ, при нарушении которых движения испол-
нительного органа прекращаются (статическая и динамическая
податливости полностью «поглощают» действие усилительной
части).
Аналогичные результаты с существенным увеличением зна-
чения интегральной оценки J | ФеР (/со) | dco из-за возрастания
о
К = 1/тЛ имеют место для колебательной системы (линии
g'h'rf'tn', a'f'd' и e'k'b'c'd’m' на рис. 6.17, 6).
В обоих рассмотренных случаях значения сок оказались для
ЛАХ |Ф8 (/со) | и |ФеР (/со) | совпадающими. Однако при даль-
нейшем увеличении К = 1/тй асимптоты ЛАХ |ФеР (/<») | пересе-
кут ось абсцисс при меньшем значении частоты, которая и будет
лимитировать работу системы.
247
Можно заметить, что для статической системы при достаточно
больших значениях т/i (при малых коэффициентах усиления Л)
получаются «два значения» частоты среза: значение <ос, опреде-
ляемое изменением знака | W (ja) | ее второй низкочастотной
асимптоты, оказывается меньше значения <0с (см. рис. 6.15, а
и 6.17, а), соответствующего переходу |Фе (/<о) | от второй низко-
частотной асимптоты к первой среднечастотной.
6.5. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ИРРЕГУЛЯРНЫХ
ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ
Рассмотрим гидравлическое исполнительное устройство объемного
регулирования, составленное из регулируемого насоса и гидро-
цилиндра в предположении неограниченной мощности источника
энергии (постоянство частоты вращения приводного двигателя)
и стабильности параметров насоса, что возможно при достаточно
большой частоте вращения приводного двигателя Q(l Полученные
результаты легко распространяются и на случай использования
в качестве исполнительного двигателя гидромотора.
Уравнение исполнительной части гидропривода (уравнение
нагрузки)
Fp = mz hz -j- P, (6.29)
где F — активная площадь гидроцилиндра; р = pa — рб — пере-
пад давлений на поршне гидроцилиндра; ра и рб — давления
в рабочих полостях гидроцилиндра (рис. 6.18); т — приведенная
к поршню масса движущихся частей, включая рабочую жидкость
в магистралях; h — коэффициент активного сопротивления; Р —
возмущающее воздействие; z — смещение поршня.
Математическая модель определяется для случая большой
статической нагрузки Р = const, когда Р > mz + hz и ра >
> рб = Рп (следствие первого условия), где р;, — постоянное
давление системы компенсации утечек.
Имея в виду существование в системе утечек, поток которых
Lypa, и перетечек L.p, к которым относят и потерю подачи (ста-
тическую податливость) из-за деформации рабочей жидкости при
ее прохождении через насос, можно записать уравнение усили-
тельной части (уравнение потоков) в форме
= Fz + Lnp + Lypa + ра + ра, (6.30)
где V — полный объем рабочей жидкости в системе; х — среднее
значение модуля объемной деформации рабочей жидкости; е —
безразмерный сигнал управления.
При достаточно больших утечках (соответствующее количе-
ственное условие будет оговорено в дальнейшем) и таком гармони-
ческом законе изменения управляющего сигнала е еа sin со/,
248
Pn=const
Рис. 6.18. Схема асимметричного гид-
ропривода
Рис. 6.19. Давления в магистралях
гидропривода при разных режимах
работы
когда ра > рп (кривые 1 и 2 на рис. 6.19 соответственно), можно
переписать уравнение (6.30) в отклонениях, принимая € = е0 + е*,
z = 20 + z*, р = Ро + р* и ра = ра0 + р*, причем индекс «0»
относит обозначения к «медленному», невозмущенному движению,
а индекс «*» — к возмущенному движению, «быстрому» по сравне-
нию с невозмущенным, происходящим по моногармоническому
закону (гармонические колебания все с одной и той же частотой).
В этом случае, если е* < е0, ** С z0, Ро Р* и ра0 < р*, то
с точностью до членов второго порядка малости уравнение (6.30)
распадается на два: уравнение невозмущенного движения
= ^пРо 4“ ^уРаО (6.31)
и уравнение возмущенного движения (линеаризованное уравнение
потока в отклонениях), которое после отбрасывания обозначения
отклонений при z = z0 > 0 в изображениях по Лапласу при нуле-
вых начальных условиях будет
е (s) = P^z (s) + Lnp (s) 4- Ly (1 + Tas) pa (s), (6.32)
где
(1 + 4^) (’ + • (6133)
Z/lLy r / \ r /
Безразмерное слагаемое в скобках 2Fz0/V — дополнительный
относительный объем в магистрали «а» из-за смещения поршня,
которое определяется значением z = z0 = const. Уравнение (6.31)
показывает, что поток насоса при невозмущенном движении пол-
ностью компенсируется утечками и перетечками.
Уравнение (6.32) совместно с уравнением (6.29) опи-
сывает малые колебания поршня около положения z = z0 =
= const, когда динамическая податливость, определяемая членом
^уЛ5Ра ($), обусловливается деформацией рабочей жидкости
только в одной магистрали.
249
При симметричном расположении поршня (z0 = 0), когда
Р > mz и h = 0, из уравнений (6.29) и (6.32) в результате исклю-
чения р = mz/F получим передаточную функцию
Ц7, м =Z±L =________*______ (6.34)
e(s) 1+2C17’1s+T'fs2 ’ v
где коэффициент усиления А = QH; постоянная времени
коэффициент демпфирования определяется из
равенства
2£17\=(£п + £у)>, (6.35)
откуда коэффициент затухания
бх = A = 2L(jLn + Ly). (б.зб)
свидетельствуя о равноправности влияния утечек и перетечек
на и б1# Индекс «1» означает, что в динамических процессах
принимает участие рабочая жидкость только одной магистрали «а»,
поскольку рб = рп = const.
Скачкообразное изменение статической нагрузки, например
при Р—*0 (поломка рабочего органа строительно-дорожной ма-
шины, обрыв трала на морской лебедке и т. п.), приведет к воз-
растанию давления в магистрали «б», и тогда для случая
рб>рп уравнение потоков для магистрали «б» в изображениях
по Лапласу применительно к отклонениям будет
te>HQHe (s) = Fsz (s) + Lnp (s) - Ly (1 -f- T6s) p6, (6.37)
r«-ST7(1-?T!)s7'.(1-2v!). <M8>
поскольку во временной области нелинейное уравнение потоков
будет
• I/ • р? •
w&t = Fz-\-Lap — Lyp6 --^Рб + ^Рб (б-39)
(поступает в магистраль рабочая жидкость с потоками Fz + L„p,
а отводится с потоками wHQHe 4- Lyp6 -ф- рб — рб) . В этом
случае динамические процессы описываются не двумя уравне-
ниями (6.29) и (6.30), а тремя — (6.29), (6.30) и (6.39), в кото-
рых переменные ра и р6 превращаются в промежуточные пере-
менные и подлежат исключению с учетом условия р = ра — р6.
Асимметрия математической модели возникает из-за отличий
постоянных времени Та и Тб. При использовании в качестве
исполнительного двигателя гидромотора возможно применение
250
магистралей разной длины или разного объема из-за неодинако-
вых диаметральных размеров, возможно также отличие в значе-
ниях модуля объемной деформации рабочей жидкости из-за раз-
ного содержания газовоздушной составляющей, например, выде-
ляемой работающим гидромотором. Наконец, разной может ока-
заться герметичность магистралей. В этих случаях при г0 = О
у_____i Уб 'Г
1 • — 2zaLya 2z6Ly6 б-
При использовании гидроцилиндра в качестве гидродвигателя
и среднем положении поршня, когда z0 = 0, Та = Т6 = Тс,
можно, вычитая из равенства (6.32) уравнение (6.37) и переходя
в пространство временных переменных, получить выражение
Ра + Рб+Л^-(^ + Рб) = °- (6-40)
из которого
4-(Ра + Рб) = 4_(/’а + /’б)нехр(— (6.41)
где(ра + рб) — начальное значение среднего давления в ма-
гистралях при скачкообразном сбросе статической нагрузки;
Тс — время, в течение которого из-за утечек значение среднего
давления по сравнению с начальным уменьшается в е раз.
При малом значении Ly и большом значении частоты со по-
стоянная времени Тс соответственно возрастает, как и число
периодов колебаний давления, за которое давление в магистралях
снизится до значения, равного давлению системы компенсации
утечек р„. В этом случае соТ,. 1 («герметичный» гидропривод,
отрабатывающий высокочастотный сигнал), величина -g-(pa + рб)
(кривая 6 на рис. 6.19) может считаться медленно меняющейся
по сравнению с изменением р, ра и рб (кривые 3, 4 и 5 на рис. 6.19),
и при гармоническом перепаде давления р = ра — рб = A sin со/
в соответствии с решением (6.41) получим
ра = 4(ра + рб)ехр(-^)+4-Л31псо/; (6.42)
рв=4" +рб) ехр (—4) - 4-А sin
В момент, когда ра или рб станут равными рп, зависимости
Ра (0 и рб (/) перестают быть гармоническими при гармоническом
изменении е (/) и р (/), происходит компенсация утечек через
открывающийся обратный клапан, соответственно повышается
значение 4"(Ра + Рб) Д° значения, при котором закономерности
Ра (0 и рб (/) опять могут считаться гармоническими.
251
Рис. 6.20. Давления в магистралях гидропривода при двух одно-
временно (а) и попеременно (б) работающих магистралях
Установившийся периодический процесс (рис. 6.20, а) при
гармоническом изменении е (/) и р (/) подчиняется следующей
закономерности: -|-(ра + Рб) уменьшается от значения А
по уравнению (6.41) до тех пор, пока ра или рб не станет равным рп
(участки ab, cd, е[, на рис. 6.20); после включения в действие
системы компенсации утечек происходит подъем значения
-^-(ра + Рб) Д° 4“ в соответствии с характеристикой обратного
клапана и мощностью системы компенсации утечек (участки Ьс,
de, fg, на рис. 6.20). На первой серии участков давления ра
и рб определяются уравнениями (6.42), а на второй серии участков
одно из значений давления ра или рб постоянно и равно рп, при
этом другое будет изменяться в соответствии с изменением р =
= ра — рб = A sin (о/. Увеличение постоянной времени Тс со-
провождается возрастанием отношения ed cd.
Чем больше значение <оТс 1, тем точнее приближенное для
случая z0 + 0 равенство (6.40), из которого в результате подста-
новки рб = ра — р и ра = р — рб получим
_ (1 + T6s) _ -U + Tas)
2(1 + Tcs) — 2(1 + Tcs)
поскольку Та + Тб = 2ТС.
При г0 + 0, когда Та =/= Тб, сдвиг по фазе ра (со/) и рб (со/)
будет отличаться от л в отличие от режима с Та = Тб» когда
эти давления колеблются в противофазе.
252
Подставляя выражение ра через р в равенство (6.32), получим
уравнение усилительной части гидропривода с двумя работающими
магистралями
Ке = 2 + La -j- Ly
(1 + Tas) (1 + Т&)
2(1 + Tcs)
из которого следует, что в этом случае утечки и перетечки по-раз-
ному влияют на динамические процессы как непосредственно,
так и через постоянную времени Тс, зависящую от £у.
При Р = h = 0 в соответствии с уравнением движения (6.29)
р =-у2, и тогда выражение передаточной функции будет
П/ _ sz (s) _ к [. , Г , , , (1 + Tas) (1 + Tqs) 1 m 1-1
— t (s) ~ ' L y 2(1 + Tcs) J f2 J
(6.43)
Случай, когда Л + О, здесь не рассматривается, поскольку
тогда разрешающие выражения становятся неоправданно громозд-
кими, не выявляя при этом каких-либо принципиально новых
особенностей. Поэтому анализ систем с h + 0 проводится только
тогда, когда он выявляет их новые свойства.
При среднем положении поршня, когда z0 —>0и P = /i = O,
гидропривод становится симметричным и в соответствии с выраже-
ниями (6.33) и (6.38) Та = Тб = Тс. Тогда передаточная функ-
ция (6.43), которую вместе с ее параметрами будем отличать
индексом «О», принимает форму
= = 1 + 2Q0T0s + Tgs2 ’ <6'44)
где П = %0Tv = (L„+Q,5Ly) причем 60 = ф- =
О v
= (Ln + 0,5Ly)^-
Сравнивая режимы работы гидропривода с одной работающей
магистралью и с двумя работающими магистралями при централь-
ном положении поршня в гидроцилиндре, можно убедиться в том,
что
П = 4- Т\ и 60 = 2-^тЬ?’51у 6Х.
Z Ьп “Г Ьу
Следовательно, собственная частота гидропривода при двух
одновременно работающих магистралях будет в У 2 раз больше,
но большим будет и коэффициент затухания 60 > $1» по-
скольку [17]
Ьп + Ьу
253
В крайнем положении поршня, когда г0 —> zmax и Р = h — О,
постоянные времени магистралей Та —> 2ТС и Т6 —> 0; тогда
из уравнения (6.43)
U7 СсЧ — _ К 0 + rcS)
e(s) 1+2U7'ms + T21s2’
где (1 +p)= 2 (1 +r) T°> ^Tm = Tt + 2^T0,
я 6o У
причем 6m- 2 (i + tn/Ly) -t- 2m(Ln + ty) •
Поскольку в гидромашинах высокого давления велики потери
подачи из-за сжимаемости рабочей жидкости, Ly < Ln, причем
это неравенство может быть сильным, и тогда происходит суще-
ственное возрастание Тт по сравнению с Тт. е. в крайних поло-
жениях поршня полоса пропускания частот существенно умень-
шается вместе с частотой собственных колебаний. Так же суще-
ственно возрастают демпфирующие свойства гидропривода. Для
оценки этих свойств весьма важно с возможно большей точностью
оценить соотношение значений Ln и Ly.
Существенное отличие постоянных времени Тт и 7\ возни-
кает вследствие того, что во втором случае рб = рп = const
и динамическая деформация рабочей жидкости происходит только
в одной магистрали, а в первом случае рб + const и динамическая
деформация имеет место в обеих магистралях.
Выражение передаточной функции в промежуточных положе-
ниях поршня 0 < z0 < zraax получается из выражения (6.43)
в форме
а l ; 1 + ^mTms + T^s2 + Ta Ц (1 - 4F2?0/V2) S3 >
поскольку Ta + T6 = 2TC и ТаТб = Т1 (1 — 4F2z0/P).
Условие устойчивости асимметричного гидропривода опреде-
ляется по Гурвицу соотношением произведений коэффициентов
характеристического уравнения передаточной функции (6.45)
2иП > Т.П (1 - 4F2z0/V2). (6.46)
Легко видеть, что Тт > То и Тт > Тс. Кроме того, увеличе-
ние z0 только усиливает неравенство (6.46), и поэтому асимметрич-
ный привод всегда устойчив.
Превращение 1Га (s) в Wo ($) при z0 —» 0 обусловлено тем, что
2^тТ т = 2£о7о 4* То И Тт = Тд + 2£oTqTc. ПОЭТОМУ При
z0-> 0
(1 + 2£mTms + T2ms2 + Т0Ж) = (1 + Tcs) (1 + 2£0T0s + Ж).
Пятая модель гидропривода имеет место при малых значе-
ниях со, особенно когда частоты нарастают медленно и соТс < 1.
В этих случаях из-за недостаточной герметичности магистралей
254
они начинают работать попеременно [17, 56] (рис. 6.20, б). Тогда
в первом полупериоде р6 = рп, ра = рп + р, и уравнение рас-
ходов будет определяться равенством (6.30), а во втором полу-
периоде ра = рп, рб = рП — Р, и уравнение потоков запишется
в форме
= Fz+ Lnp — Аурб - Рб + 4 гРв- (6-47)
Можно заметить, что, переписывая последнее равенство в изо-
бражениях по Лапласу, после линеаризации в отклонениях
получим уравнение (6.37).
Применяя подстановки в уравнение (6.30) ра = рп + р,
где р > 0, и в уравнение (6.47) рб — р„ — р, где р < 0, получим
Ke^i + ‘^+hp+±!P-!fPn-±Pp.
Эти два равенства, имея в виду знаки последних двух членов
каждого уравнения и соответствующие знаки перепада давле-
ний р, записывают в форме одного равенства
Ке = г + —р + 2^р + рп + 4- ZP) si§nР- (6.48)
При исследовании режимов работы, для которых р > рп,
когда обычно Ln > Ly (герметичный гидропривод), членом рп
пренебрегают, и усилительная часть математической модели
пятого режима работы гидропривода описывается более простым
нелинейным уравнением
Ke = z + ^+_£у р JL р _L Zp sj gn р,
приближенное решение которого получают в результате подста-
новки
Р sign р = । Р1 = 2рР’
и тогда
№= *4- ^у^Р + г^Р + 4 VP- (6.49)
6.6. ПЕРЕДАЧА ГАРМОНИЧЕСКОГО СИГНАЛА
ЧЕРЕЗ ГИДРОПРИВОД С ПОПЕРЕМЕННО
РАБОТАЮЩИМИ МАГИСТРАЛЯМИ
Анализ вынужденных колебаний, описываемых системой равенств
(6.29) и (6.48) при й =£ 0, реализуется при помощи ЦВМ и сви-
детельствует о существовании скачкообразного резонанса [17, 56].
255
Проведение анализа с помощью уравнения, получаемого исклю-
чением р из равенств (6.29) и (6.49), затруднительно из-за чрез-
вычайной громоздкости разрешающего уравнения, в котором
прогрессивно увеличивается число нелинейных членов. Так, при
Р = 0 и h + 0 дифференциальное уравнение системы будет
2^ г j" (in +Ly) т [ 1 -f- (Ln -|- I ) 1 z _|_
+ 2 22+^\22 + 2/2 + ^р 2 22=/<г- (6-50)
В системах с параметрами, при которых hz < Fp и uh < (Ln +
+ Ly) m, что соответствует автоматическим приводам большин-
ства стабилизирующих устройств и подавляющему большинству
машиностроительных следящих систем, можно принять h = 0;
тогда нелинейное уравнение (6.49) упрощается:
^г + г + z + ^'z'zz=Ke. (6.51)
Пусть входной сигнал будет гармоническим:
Ke (t) = В cos (at. (6.52)
Проверка такой системы на аналоговой установке свидетель-
ствует о существовании в этом случае доминирующей гармоники
в переменной выхода z (/), поэтому можно принять
z = х sin (at + у cos (at, (6.53)
считая, что последующие гармоники отфильтровываются. Тогда,
проводя подстановку выражений (6.52) и (6.53) в равенство (6.50)
и отбрасывая за малостью члены, содержащие sin Зсо/ и cos За>/,
получим выражение нелинейного члена
z zz= у x/?2cos (at — уР2 sin (at, (6.54)
где R2 = х2 + у2.
Используя выражение (6.54) в уравнении (6.51), получим
для (at — 0
- (4- C-LR2) х - Dty = В
и для (а = п'2
(Ai — C1R2)x — Dly = Q,
где Л = (о (Т2со2 — 1); Ci = 4&; £>i = (^n +
+ ^у)>.
но тогда
CIR5 - 2А£^ + (Д| + D?) R2 = В2 (6.55)
256
и устойчивость полученного решения исследуется при помощи
записи исходных равенств в форме [95]
= (А - АК2) х + Diy + В = Фх (х, у)-,
| = (41-С1К2)с/-Р1х = ФДх,^),
позволяющей получить параметры установившегося режима
Г>2 _ v2 | ,.2. dx — dy _ n
Ко — Хо + Уо, =at= °-
Характеристическое уравнение в отклонениях от устано-
вившегося режима будет
дФх (х, у) , дФх (х, у)
дх дх
дФу (х, у) дФу (х, у) ~~ ’
ду ду
откуда условия устойчивости будут
mV<o2 — 4xF2__to2 — (о2 у.
2m2(o* 2m(o4 *
(6.56)
r>2 2 V Г i 2 2\ . 1 1/ ( 2 2\2 3 L„rn 2 21
((0 — С0г) ± — у (<O — COr)------4--7Г j •
Следовательно, перетечки влияют на условия устойчивости,
которые не зависят от внешних утечек.
Наличие двух и более устойчивых состояний означает
существование «скачкообразного» резонанса, который может
возникнуть тогда, когда подрадикальное выражение в
условии (6.42) не будет отрицательным, т. е.
3 £пт22
4 F2 '
Условие (6.56) равносильно неравен-
ству (dB2/dK2)>0, в чем можно убедить-
ся, обращаясь к равенству (6.55), описы-
вающему зависимость г (В, со) примени-
тельно к рассматриваемой системе.
На рис. 6.21 приведена амплитудная
характеристика К2 (В2, со = const) при
фиксированном значении частоты, где
штриховой линией показан участок, соот-
ветствующий неустойчивым решениям,
подробно анализируемым в работе [95].
9 В. Н. Прокофьев и др.
Рис. 6.21. Амплитудная ха-
рактеристика нелинейного
гидропривода
257
6.7. АСИММЕТРИЧНЫЙ ГИДРОПРИВОД,
ЗАМКНУТЫЙ ГЛАВНОЙ ОБРАТНОЙ СВЯЗЬЮ
Структурное представление гидропривода, замкнутого главной
обратной связью, показано на рис. 6.22. Поскольку замыкание
осуществляется по положению, то такая система будет иметь уже
астатизм нулевого порядка (система статическая).
С целью увеличения коэффициента усиления и уменьшения
динамической ошибки возможно введение дополнительного
звена с коэффициентом усиления Ку и с управлением основного
тракта системы по ошибке е (s) = g(s) — z(s). Поскольку z(s) =5
— ~Wi (s)e(s); 1=1,0, tn, а, то передаточная функция замкну-
той системы будет
= <6-57>
так как в соответствии со структурной схемой
8 (S) ($) = [g (s) - Z (S)] Г(s) = z (s).
Применительно к математической модели с одной работа-
ющей магистралью, когда Wt ($) = IT, (s), с учетом выражения
(6.34) можно получить
W «\ = г —____________________________________
311 ; g(s) . , 1 , 2^?! , . П з
1 + ЛКу1 5 + ККу1 S + ККу1 s'
и условие устойчивости по Гурвицу с учетом равенств (6.35)
и (6.36)
<< = 2Si = 2х (Ln + Ly) F
У1<г К7\ К QhK'hV
При большой статической нагрузке, что обязательно для
одной работающей магистрали, наибольшее допустимое значе-
ние KyiK., обусловливающее динамическую точность системы,
определяется демпфированием последней. Значение х в этом слу-
чае не может быть малым из-за действия статической нагрузки.
При двух работающих магистралях и центральном положении
поршня, подставляя выражение (6.44) в уравнение (6.57), получим
^30 W-g(s)- _j_ ад _n_ ’
+ ККуо + ККу» + ККу0
Рис. 6.22. Структурное пред-
ставление гидропривода, замк-
нутого главной обратной связью
258
и условие устойчивости по Гурвицу будет
к 2t0 260 _2x(Ln + 0,5ty)/:'
лу0-\ КТл к ^WuV
(6.58)
Несмотря на малое различие наибольших возможных зна-
чений (Яу1)шах и (tfy0)max, все же
(^уо)тах <(М max,
свидетельствуя о больших динамических ошибках режима о двумя
работающими магистралями при выборе наибольших возможных
значений усилительного звена Ку.
При крайнем положении поршня, когда z0 —> zmax, Р = h = О
и Wt (s) = Wm (s),
W (s) = -г(^ =
3m[) g(s)
1 V | tmTm 2 , Tm 3
XXym ) KKym KKynt
В этом случае условие устойчивости по Гурвицу
К с' 1
к i/28m-Tc ♦
Поскольку > 60, то соотношения между (/Су0)тах и (Kym)max
устанавливаются после конкретизации параметров гидропривода.
Выражение предельного значения (/(ym)max через конструк-
тивные параметры гидропривода будет
(f( ) __ ~Ь 0>5£у) I_________
tAym/шах 0^ Г
или КутК < 26О + .
Известно, что при малых сигналах управления, когда перепад
давления на исполнительном двигателе мал, использование вы-
ражения (6.58) перестает быть корректным, поскольку оно по-
лучено в предположении, что h = 0. Непосредственно из выра-
жения (6.58) следует, что Ку0 < const и, а (ди/др) <0 и х —> 1
при р —♦ 0, но замкнутый гидропривод при этом устойчивости
не теряет. При малых значениях управляющего сигнала и малых р
(первые — сравнительно с единицей, а вторые—сравнительно
с номинальным давлением исполнительного двигателя) проверка
устойчивости системы должна проводиться с учетом значения h,
влияние которого становится решающим при х —> 1.
Однако, если даже допустить, что h — 0, то значение (/Cym)max
из выражения (6.59) не будет малым из-за второго члена в правой
части, не зависящего от значения х.
Соответственно усложняется условие устойчивости в слу-
чаях промежуточного положения поршня, поскольку при подста-
новке значения lFa (s) из равенства (6.45) в выражение (6.57)
порядок характеристического уравнения увеличивается до четвер-
того. В этом случае целесообразно пользоваться частотными спо-
собами оценки устойчивости замкнутой системы.
9* 259
Глава 7
ГИДРАВЛИЧЕСКИЕ
ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА
С ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ
Гидравлические исполнительные устройства с дроссельным упра-
влением находят большое распространение в силовых систе-
мах автоматического управления малой и средней мощности.
При большой мощности системы из-за сравнительно низкого
значения КПД и трудностей отвода тепла такие устройства не
используются. Они обладают высоким быстродействием, имеют
относительно малую массу на единицу выходной мощности,
небольшие размеры, высокую надежность и широкую полосу
пропускания частот. Однако системы дроссельного управления
могут обладать нестабильными характеристиками при изменении
температур рабочей жидкости или окружающей среды, нуждаются
в тщательной очистке рабочей жидкости, требуют высокой точ-
ности при изготовлении рабочих органов и надежную гермети-
зацию подвижных и неподвижных соединений, нуждаются в спе-
циальных источниках питания, а работа системы сопровождается
большой потерей энергии, поскольку управляющее устройство
не является регулятором, а представляет собой распределитель
мощности.
Гидравлическое исполнительное устройство с дроссельным
управлением состоит из источника питания — насосной станции
(чаще — «постоянного» давления, реже — постоянной подачи или,
что получило большое распространение в последние годы, насоса,
подача которого регулируется по давлению, что позволяет умень-
шить потери и в большей мере стабилизировать температуру),
распределителя мощности (чаще всего золотникового типа в форме
распределительного золотника или сопла-заслонки) и нерегули-
руемого исполнительного двигателя. Обычно распределитель
мощности типа «струйная трубка» рассматривается вместе с рас-
пределителями дроссельного типа, а также вместе с исполнитель-
ными устройствами, обслуживаемыми гидроусилителями типа
сопло-заслонка, поскольку такие устройства также относятся
к числу распределителей мощности в отличие от регуляторов
мощности, используемых в системах объемного регулирования.
Использование нескольких гидроприводов дроссельного ре-
гулирования от одного источника питания с регулируемым на-
сосом упрощает систему приводов по сравнению с гидроприводами
объемного регулирования, поскольку гидроусилители проще ре-
гулируемых насосов. Однако эксплуатация таких систем при-
водов выявила существенное и малоисследованное взаимовлияние
гидроприводов.
Силовые исполнительные устройства гидроприводов относятся
к числу сервоустройств, усилительная часть которых описывается
260
нелинейным уравнением связи между управляющим сигналом,
управляемым расходом, всегда зависимым от давления источника
питания, и нагрузочной переменной привода (эффективный момент
или усилие исполнительного двигателя), а исполнительная —
уравнением связи между управляемым расходом, нагрузочной
переменной привода и возмущающим воздействием. Поэтому
исполнительные устройства всегда замкнутые (с обязательной
местной обратной связью), а при ограниченной мощности источ-
ника энергии — по крайней мере двухкаскадные.
Работа исполнительного устройства с дроссельным регули-
рованием, когда исполнительный двигатель оказывается в насос-
ном режиме, практически не исследована, и система ведет себя
по-разному при соединении источника питания непосредственно
или через обратный клапан, при источнике питания с регулируе-
мым насосом или с переливным клапаном, при работе источника
питания на один гидропривод или на несколько.
При работе источника питания с одним гидроприводом дрос-
сельного регулирования динамические характеристики считаются
стабильными при асимметричных с не чрезмерно большими ампли-
тудами знакопостоянных гармонических сигналах. При увеличе-
нии амплитуды таких сигналов динамические характеристики из-за
влияния нелинейности становятся нестабильными и в этом случае
определяются при помощи аналоговых вычислительных машин
или ЦВМ.
При симметричных гармонических управляющих сигналах
с небольшой амплитудой обязателен учет зоны нечувствитель-
ности, а также сжимаемости жидкости.
7.1. СТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА
ГИДРОУСИЛИТЕЛЯ ТИПА СОПЛ О-ЗАСЛ ОН КА
Поскольку гидроусилитель относится к системам с аппаратным
способом реализации усилительной части исполнительного устрой-
ства (сервоустройства), то его статическая характеристика должна
описываться уравнением расхода, выражение которого примени-
тельно к гидроусилителю типа сопло-заслонка должно представ-
лять собой функцию смещения / заслонки, перепада давления
(нагрузки) р и давления питания pQ:
G(Q, I, р, Ро) = О. (7.1)
В искомой зависимости в качестве переменных входа следует
принимать управляющий сигнал I (t) и при рассмотрении системы
источник питания—исполнительное устройство давление источ-
ника питания р0 (t). Переменными выхода будут расход Q и пере-
пад давления р.
Однозначно определенные решения получаются только при
совместном рассмотрении уравнения (7.1) с уравнением движе-
ния, устанавливающим недостающую зависимость между Q,
261
Рис. 7.1. Схема гидроусилителя типа сопло-
заслонка
а значит, скоростью v сме-
щения исполнительного
органа исполнительного
устройства и перепадом да-
вления р. Таким образом,
гидроусилитель типа соп-
ло-заслонка, как и всякий
гидроусилитель, —система
. с двумя степенями свободы.
Схема гидроусилителя
показана на рис. 7.1, где
заслонка 1 при своем сме-
щении на угол фэ вправо
открывает левое сопло 2
на величину Zx = /0 + h
а правое прикрывает на
величину 12 = 1о — I, по-
этому в магистрали 5 и
правой камере 7 исполни-
тельного устройства давление р± больше давления р2 в левой
камере 10, так как в систему непрерывно подается через канал 4
жидкость под давлением питания р0.
Поскольку смещение золотника должно повышать значе-
ние plt приближая его к р0, и понижать значение р2, то давление
в системе при нейтральном положении заслонки р = рн (при I ==
= 0) должно быть меньше р0> что реализуется при помощи сим-
метричной установки двух дросселей 5. Чем больше потеря давле-
ния в дросселе, тем больше понижается значение рн по сравнению
с давлением питания р0. Можно показать, что при равенстве по-
терь давления в дросселе и в сопле при нейтральном положении
заслонки рн = р0/2.
Под воздействием перепада р = рх—р2 исполнительное уст-
ройство 8 смещается влево, преодолевая усилие двух пози-
ционирующих пружин 6 и 9. Исполнительное устройство чаще
всего бывает управляющим золотником гидроусилителя второго
каскада, рабочий процесс которого рассмотрен в дальнейшем.
Если исполнительное устройство должно работать под большим
давлением питания по сравнению с усилителем типа сопло-за-
слонка, то между ними и источником питания устанавливают
дополнительный дроссель.
Расходы через сопла определяются выражениями
Qci = nd. (Zo - Z) Нс/27р~/рГ = OcGo-D/pT; (72)
Qc2 == я^с (Zg “j- Z) цс ]/2/р j/"р2 — ас (Zo -J- Z) р2 ,
где ас = ndcpc ]/"2/р; dc — диаметр сопла; р0— коэффициент
расхода сопла; р — плотность рабочей жидкости.
262
Выражения расходов через дроссели будут
<?Д1 = Нд/2/р V р0 —Pi = аду Po — Pii
___ ________ ____________ (7-3)
<2д2 = Ид / 2/р / р0 - р2 = ад/ ро-р2,
где Ид — коэффициент расхода через дроссель; р0 = рОи—рс —
эффективное давление питания; рОи — абсолютное давление источ-
ника питания.
Имея в виду сравнительно большие расходы через сопла
и дроссели (система проточная) и достаточно высокую герметич-
ность исполнительного устройства, утечками пренебрегают, а ма-
лые размеры магистралей гидроусилителя по сравнению с объемом,
освобождаемым при смещении того же исполнительного устрой-
ства, позволяют игнорировать эффект сжимаемости рабочей
жидкости. Поэтому расходы потока, поступающего в рабочую
камеру исполнительного устройства Q3 и выходящего из другой
рабочей камеры —Q3, можно записать в форме
±F^-=±Q3, (7.4)
где F — площадь поперечного сечения исполнительного устрой-
ства; h3 — смещение исполнительного устройства.
Балансы расходов определяются очевидными равенствами
Q.3 = Qfll Qcl’ — Qa = Сд2 — Qc2>
которые с учетом выражений (7.2)—(7.4) позволяют записать
нелинейные уравнения статической характеристики гидроусили-
теля типа сопло-заслонка
= -ас(/0_/)/^; (7.5)
f “ «д/+ ас (zo + О /РГ; (7-6)
Р = Pi - р2, (7.7)
где р — перепад давлений на исполнительном органе.
В безразмерной форме те же уравнения будут
Q = a/l-px -(1-/)/^; (7.8)
Q = -aV'l-p2 +(1 + /)/^; (7.9)
P = Pi-P2, (7.Ю)
263
причем
Q3
Q = , »
ado V Po
a = ~л7Г const;
Io 4dc p,c
(7.Н)
„ _ _p_. n _ _£i_. n —Ps_- 1 — _L
p ~~ * "i — « ’ p* — ’ 1 — 1
Po ^0 Po Lq
В равенствах (7.8)—(7.10) в рабочих камерах исполнительного
устройства давления рх и р2 — промежуточные переменные,
исключение которых позволяет найти искомую статическую ха-
рактеристику в форме (7.1) или в безразмерной форме
G=(Q, I, р)=0. (7.12)
Структурные представления гидроусилителя типа сопло-за-
слонка (рис. 7.2) выявляют четыре входных переменных (управ-
ляющий сигнал I, эффективное давление источника питания рОи,
давление слива рс и расход, измеряющий скорости смещения испол-
О ГЧ \
нительного устройства Р , одну переменную выхода — пере-
пад давления р и две промежуточные переменные рг и р2 — давле-
ния в рабочих камерах исполнительного устройства. Величина /0
фиксируется положением сопл относительно заслонки и поэтому
в рассматриваемом процессе работы гидроусилителя не меняется.
Связи усилительной части исполнительного устройства с его
исполнительной частью устанавливаются при помощи перемен-
г-, dh-з
ных р и Р которые в этом случае могут рассматриваться в ка-
честве промежуточных переменных. Поэтому исполнительное
устройство — всегда замкнутая система, в которой переменная
--------обратная связь.
Рис. 7.2. Структурные представления гидроусилителя типа сопло-
заслонка
264
Рис. 7.3. Структурные представления линейной модели исполнительной части
исполнительного устройства с гидроусилителем в усилительной части:
а — астатизм нулевого порядка; б — астатизм первого порядка
Динамика исполнительного устройства описывается уравне-
нием движения, которое в линейном плане (например, при по-
стоянстве инерционной нагрузки и коэффициента активного
сопротивления) при наличии позиционирующих пружин (поз. 6 и 9
на рис. 7.1), т. е. при астатизме нулевого порядка, записывается
в форме
Fp = h3 (/) + h 4- h3 (/) + ch3 (0 + PB (/), (7.13)
или в операторной форме
Гр(/) = Я(О)/г3(/) + Рв(/),
причем оператор нагрузки
Н (D) = mD2 + hD + с,
где D = d/dt — алгебраизированный оператор дифференцирова-
ния; т — инерционная нагрузка; h — коэффициент активного
сопротивления; с — жесткость нагрузки (позиционирующая, т. е.
обусловливающая астатизм нулевого порядка); Рв — возмуща-
ющее воздействие.
Структурное представление такой исполнительной части при-
ведено на рис. 7.3, а.
При отсутствии позиционирующей нагрузки оператор нагрузки
упрощается (рис. 7.3, б):
Н (D) = mD2 + hD,
а порядок астатизма системы становится первым.
При неподвижном исполнительном устройстве и нейтральном
положении заслонки (Dh3 —> 0 и Z —> 0) давления в рабочих каме-
рах будут одинаковы: рх —> рн и р2 —* рн, и тогда связь между р„
и давлением питания р0 может быть получена из уравнения (7.6):
йд/ Ро~ Pi ~ aJoVlh о;
«л/ Рй — Pi — 0,
откуда
2Ц_ = а=1/__Рн_
Octo ’ Ро -- Рн
или, с учетом равенства (7.11),
Рн _ а2 _
Ро а2 + 1 “
16HcZ0dc
= с2. (7.14)
Рис. 7.4. Зависимость рн/ро от соотноше- Зависимость Рн = Рн (а)
ния потерь давления в дросселе и сопле Ро р0 ' 7
приведена на рис. 7.4, где
точка / соответствует конструкции, в которой сопротивления сопл
и дросселей одинаковы. Точка II соответствует конструкции, при-
меняемой в механизмах управления гаммы гидроприводов объемно-
го регулирования [1 ], для которых ^2=yL = 0,367 при а = 0,76.
При нейтральном положении заслонки и неподвижном испол-
нительном органе
Pi + Рг = 2рн.
(7.15)
Аналитическое выражение статической характеристики (7.1)
или (7.12) может быть получено исключением промежуточных
переменных рг и р2 из уравнений (7.6) или (7.8)—(7.10), однако
оно получается громоздким и по этой причине не используется.
Только в работе [39] это выражение приводится к параметриче-
ской форме. Графическое изображение зависимостей Q (р) при
постоянных значениях I (рис. 7.5) имеет ту же геометрическую
конфигурацию, что и характеристика четырехщелевого золот-
ника с достаточно большим отрицательным перекрытием. Линей-
ность статической характеристики в большом диапазоне измене-
ния р и I позволяет использовать линеаризованные уравнения
гидроусилителя типа сопло-заслонка применительно ко всему
линейному диапазону изменения переменных.
Построение графических изображений решения нелинейного
уравнения проще всего реализуется при помощи ЦВМ или «по
точкам». Так, задаваясь рядом (арифметическая прогрессия
в диапазоне от —1 до +1) значений Q, при фиксированных ве-
личинах I находят и р2 при помощи равенств (7.8) и (7.9).
Затем, обращаясь к тождеству (7.10), определяют значение р.
Проведя такие подсчеты для ряда (также арифметическая про-
грессия в диапазоне от—1 до +1) значений Z, строят статическую
характеристику Q (Z) при фиксированных значениях безразмерной
нагрузки р (рис. 7.6).
266
Рис. 7.5. Статическая характери-
стика гидроусилителя типа соп-
ло-заслонка в безразмерных пе-
ременных Q (р) при фиксирован-
ных значениях безразмерного
управляющего сигнала
Рис. 7.6. Статическая характери-
стика гидроусилителя типа соп-
ло-заслонка в безразмерных пере-
менных Q (Г) при фиксированных
значениях безразмерной нагруз-
ки
Первая форма графического изображения статической харак-
теристики (см. рис. 7.5) удобна при определении коэффициента
усиления по нагрузке (дополнительной статической податливости),
а вторая (см. рис. 7.6) — при определении коэффициента усиле-
ния по управляющему сигналу.
Имея в виду практическую нестабильность значений коэффи-
циентов расхода рд и особенно р0 (существенная зависимость
от значений чисел Рейнольдса при их малых значениях), а также
отклонения размеров dc и da в пределах допусков на изготовле-
ние, целесообразно статическую характеристику усилительной
части получать экспериментально, используя расчетные построе-
ния в качестве ориентировочных.
_ Можно заметить, что для режимов, соответствующих I —* О,
р —♦ 0 и Q —> 0, статическая характеристика усилительной части
гидроусилителя типа сопло-заслонка становится линейной даже
при значительных отклонениях значений /, р и Q от нулевых
(см. рис. 7.5 и 7.6). В пределах таких отклонений справедливо
использование уравнения
AQ =А/+Др0 — Ар, (7.16)
которое представляет собой результат линеаризации уравнений
(7.5)—(7.7).
Выражая коэффициенты Kh KQ и Кр через параметры (вклю-
чая и конструктивные) гидроусилителя типа сопло-заслонка,
получаем еще на стадии проектирования возможность реализации
желаемой характеристики из числа возможных.
Графическое изображение статической характеристики в форме
уравнения (7.12) приведено в работе [39], однако использование
точных соотношений в аналитических расчетах затруднено из-за
267
громоздкости выражений, получаемых при исключении промежу-
точных переменных рг и р2 из уравнений (7.8)—(7.10). С доста-
точной для практических целей точностью можно получить раз-
решающие выражения, основываясь на том, что равенство (7.15)
остается справедливым в пределах линейности характеристики
гидроусилителя (во всяком случае при |/| с О,4/о). Решая это
равенство совместно с уравнением (7.7), получим
Р1 = Рн + ^Р'. Р2 = ри--^Р- (7.17)
Этими же зависимостями пользуются при линеаризации урав-
нений (7.5)—(7.7).
Когда делается оговорка о линейности характеристики, то
предполагается, в частности, что
^- = -^1 = const,
др др
как это следует из рис. 7.7, а, на котором значения pt и р2 при-
ведены относительно давления слива рс. Абсолютные значения
давлений получаются при переносе оси абсцисс в положение,
показанное на рис. 7.7, а штриховой линией.
Очевидно, что линейная характеристика предполагает линей-
ную зависимость между перепадом давлений р и управляющим
сигналом I.
Обычно при рн = -L- р0 нелинейные свойства проявляются
при р —»р0 и несколько больше ограничивается линейная зона
характеристики при рн р0 (на рис. 7.7, б линейная зона
характеристики ограничена волнистыми линиями а и б). Поло-
жение вычисляемых границ области линейности характеристики
зависит от точности оценки линейных свойств.
Подставляя выражение (7.17) в равенство (7.5), получим
уравнение статической характеристики в форме
Q3 = Г~ЗГ1г^ = адУГ Ро-Р«—-^Р -«oGo-0 ]/ра + -^-Р >
268
раскладывая которое в ряд Тейлора и ограничиваясь линейными
членами при р —► О, получим уравнение статической характери-
стики линейной модели гидроусилителя типа сопло-заслонка
в форме (7.15). В этом случае
Ki = -^- = acV^ = асс^; (7.18)
Т7 — VQs __ / 11 | ' I \ — acl<> /„2 | 1 <*\.
Кр = ~ +1 ~l
(7.19)
(7.20)
дРо 2^рХ V
или в размерной форме
/Со = °СД_ /* = (7.21)
2|/р0* /2рГр0*
причем индекс * относит величины к невозмущенному движению,
отклонения которого описываются уравнением (7.17).
Таким образом, увеличение давления питания ро невозму-
щенного движения увеличивает и уменьшает /<0 и /<р. Если
нелинейности системы (в некоторых случаях увеличение значе-
ния ро приводит к появлению автоколебаний, из-за чего осуще-
ствляют дросселирование линии питания системы сопло-заслонка)
допускают ее работу с увеличением давления питания, то это,
при прочих равных условиях, уменьшает статическую податли-
вость системы, повышает стабильность ее работы относительно
давления питания и увеличивает коэффициент усиления по управ-
ляющему воздействию.
Член —#рДр в уравнении (7.16) свидетельствует о появлении
дополнительной статической податливости, свойственной гидро-
усилителям аппаратного (альтернативное понятие по отношению
к гидроусилителям гидромашинного типа — регулируемым на-
сосам) типа.
На основе модели гидроусилителя типа сопло-заслонка может
быть составлена модель исполнительного устройства, в линейной
части которой, с целью достижения общности структурных пред-
ставлений гидравлических исполнительных устройств с аппарат-
ным регулированием, следует в линеаризованном уравнении уси-
лительной части (7.16) предусмотреть выражение утечек и объем-
ной деформации рабочей жидкости:
Kt Д/ + Ко Др0 - Кр Др = д<2 + Ly Др + 4 D Др, (7.22)
которое совместно с уравнением движения (7.13) описывает
динамику исполнительного устройства.
269
Рис. 7.8. Структурные схемы исполнитель-
ного устройства:
а — выявление дополнительной статической подат-
ливости; б — одноканальный тракт управления
смещением; в — выявление кинематического и на-
грузочного трактов управления
Перепишем уравнение
(7.22) в операторной
форме:
Ад/(/) +Адро(0 =
=n^D)Fbp(t)+DMi3(t),
(7.23)
где оператор потерь
/7* (D) = -^-4-77(D) =
= I ^-у I _К_ Г)-
- рг Т рг Т крг
£) Д/^ (/) = ^2 = А Д/ц (/);
Ly — коэффициент утечек;
V—объем жидкости, участ-
вующей в деформации;
х —модуль объемной упру-
гости жидкости.
Получаем структурную
схему, приведенную на
рис. 7.8, а. В этой струк-
туре характерна дополни-
тельная статическая подат-
ливость Др (/), существенно увеличивающая коэффициент
демпфирования исполнительного устройства.
Включая коэффициент дополнительной статической податли-
вости в обобщенный оператор потерь П * (D), получим
обобщенную структурную схему в одноканальном представлении
(рис. 7.8, б), или в двухканальном (рис. 7.8, в), когда необходим
анализ тракта нагрузки.
7.2. ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО
ТИПА СОПЛО-ЗАСЛОНКА
Существует много модификаций исполнительных устройств типа
сопло-заслонка, которые в разных отраслях машиностроения
отличаются не только техническими параметрами и назначением,
но также конструктивными формами и способами исполнения.
Гидроусилитель исполнительного устройства типа сопло-за-
слонка используется в качестве первого каскада усиления, напри-
мер, в механизмах управления регулируемых аксиально-поршне-
вых насосов гаммы гидроприводов [1 ] с управлением от позицион-
270
Рис. 7.9. Характерные размеры
дросселя и сопла в гидроусилителе
типа сопло-заслонка
кого электромагнита, с исполни-
тельным устройством в виде управ-
ляющего золотника гидроусилите-
ля второго каскада. В таких си-
стемах используется невысокое
давление питания р0 = 1,1 МПа.
В этом случае обеспечивается
устойчивость работы исполнитель-
ного устройства, стабильность и
линейность его характеристики в
большом диапазоне изменения на-
грузок, скоростей и смещений.
Однако при этом постоянная вре-
мени, а также демпфирующие свойства увеличиваются.
Стабильность и линейность характеристики обеспечиваются
не только значением давления питания, но и соответствующими
геометрическими формами рабочих органов гидроусилителя.
В частности необходима реализация следующих требований
(рис. 7.9) [1 ]: 1) диаметр сопла dc должен на 60% превышать
диаметр дросселя: dc/da = 1,6; 2) первоначальное открытие
сопла (при нейтральном положении заслонки) /0 должно состав-
лять 12,5% от диаметра сопла: l0/dc = 0,125; 3) толщина стенки
дросселя sd должна составлять от 80 до 100% диаметра дросселя:
sd/da = 0,8-? 1,0; 4) ширина рабочей кромки сопла As и длина
его цилиндрической части $с должны находиться в диапазонах
0,05 As 0,10 мм и 0,5 sg sc sg 0,8 мм; 5) углы конусности
наружной а2 и внутренней ах поверхностей сопла должны быть
равны 30°.
Для исключения влияния потерь в соединительных каналах
их диаметр не должен быть меньше dc, а длина — возможно
малой. Обычно принимают = 4dc, поскольку при возраста-
нии d,( не только увеличиваются габариты гидроусителя, но и
могут появиться динамические эффекты, связанные с деформа-
ционными свойствами и инерцией рабочей жидкости, находящейся
в соединительных каналах.
Сопла изготовляют из стали 40Х, закаленной до твердости
HRC 32—38, крепят на резьбе, уплотняют резиновыми коль-
цами и фиксируют контргайками после проверки зазора по зна-
чению относительного давления рп1р0 при нейтральном положе-
нии заслонки. Дроссели изготовляют из той же стали 40Х, за-
каленной до твердости HRC 32—38, и уплотняют резиновыми
кольцами. Дросселирующие отверстия выполняют по 2-му классу
точности Ra — 1,25-? 0,63 мкм. Заслонку изготовляют из стали
ЗОХГСА, закаленной ТВЧ до твердости HRC 40—45, Ra = 0,63-?
-?0,32 мкм, устанавливают строго перпендикулярно оси сопл
и крепят на оси якоря электромагнита.
Результаты проверки достаточно стабильных значений коэф-
фициентов расхода дросселя [лд 0,68 и сопла ра я» 0,70 на
271
Рис. 7.10. Электромеханический преобразо-
ватель (позиционный электромагнит)
минеральном масле А У при
температуре 35—40° С и
масле АК-10 при разных
температурах приведены в
работе [1]. Вязкости этих,
а также других специаль-
но подобранных жидкостей
менялись в 350 раз (от 0,04
до 14 см2/с), что соответст-
вует изменению температу-
ры в пределах от —50 до
+90° С.
Использование значе-
ний р.с и рд совместно о
рекомендуемыми геометри-
ческими соотношениями
гидроусилителя в уравне-
нии (7.14) дает значения
с- = рн/ро = 0,367 при
а = 0,72, что соответствует
точке II на рис. 7.4.
Небольшие отклонения в экспериментально получаемом зна-
чении с2 = 0,35 применительно к реализуемым конструкциям
механизмов управления гидроприводов объемного регулирования
[1 ] обусловлены колебаниями величин рд и рс ив большей мере
округлением значения l0 0,125dc в процессе юстировки гидро-
усилителя.
Следует специально отметить, что помимо получения стабиль-
ной характеристики гидроусилителя при рн < О,5ро удается
уменьшить усилие трения при трогании с места исполнительного
органа, что имеет значение при использовании гидромоторов или
поворотников с торцовым распределением, особенно в замкнутых
системах, где исполнительное устройство чаще всего работает
в режимах с прохождением ошибки через нуль (например, симме-
тричные гармонические колебания, при которых может отсут-
ствовать «захват» при недостаточном значении амплитуды).
Гидроусилитель управляется посредством электромеханиче-
ского преобразователя—позиционного электромагнита (рис. 7.10).
Управляющий сигнал g (t) при помощи дифференциатора 1 подает
сигнал ошибки 8 (t) = g (t) — h3 (t) на усилитель 2, где h3 (/) —
смещение объекта управления. Чаще всего дифференциатор и уси-
литель выполняются в одном блоке.
В соответствии с сигналом ошибки возникает рассогласование
токов мх (0 и и2 (0 на позиционном электромагните 3, питаемом
током и0 const; это рассогласование обеспечивает поворот
якоря 4 и соответствующее смещение заслонки 5 (l < /0) »
изменяющее соотношение открытия сопл 6 и 7.
272
Входной сигнал па позиционном электромагните iy (f) от
электронного усилителя позволяет получить активный момент
на якоре (/), где Сх — коэффициент, значение которого
определяется конструкцией электромагнита. Для рассматривав*
мой системы Сх = 0,343 Н> см/мА (0,035 кгс> см/мА).
Уравнение движения якоря электромагнита записывается
в традиционной форме
С11у(0 = ^э(^)%(0 + А1в, (7.24)
где фэ — угол поворота якоря электромагнита; Л4В — момент
возмущающего воздействия, обычно ограничивающийся реакцией
струй на заслонку; H3(D) — оператор нагрузки якоря электро-
магнита. Этот оператор имеет форму
Сэм + Сн + (71эм + йн) D 4* (Лм + 4» D2,
где индексы «эм» и «н» относят обозначения к якорю электрома-
гнита и нагрузке соответственно.
Получение Сэм =£ 0, т. е. позиционирование электромагнит-
ного преобразователя, реализуется введением специального не-
магнитного зазора в статоре или использованием торсиона, под-
пружинивающего ротор.
При Л4В = 0 (этот случай рассматривается для выяснения
свойств собственно электромагнита) передаточная функция элек-
тромагнита
Г9М (s) = . /эм а , (7.25)
9MV 1+Um73mS+ Tins2 '
где
К ___ Ь1______. j* __ I / * эм “Г * н е
Лэм Сэм+Сн ’ эм“ Г Сэм + Сн ’
Я- __ _______^эм ___________
2 К (Сэм + Сн) (Ам + Л<)
или для ненагруженного электромагнита
Jf* _ Cj , /р* __ ”| / *?ЭМ , ___ ^эм
Л эм ~г > ‘ ЭМ У ~г- > Ьэм . —==~ >
Сэм ' Сэм 2ГСэм/эм
где для реализованных конструкций в механизмах управления
Т’эм = 0,002-т-0,005 с и при работе в минеральном масле Йм 0,5.
Поскольку в реализованных конструкциях значение жестко-
сти магнитной пружины СэМ = 115 Н-см/рад (11,7 кгс«см/рад),
то, воспользовавшись значениями Т** и £*м, можно получить
/1эм =2ШэмСэм = 0,23 ч-0,57 Н-см (0,0234 — 0,0585 кгс-см);
•7эм = Сэм (Т'эм)2 =
= (460 ч-3060) Ю^Н-см/с2 [(45,8 ч-312,5) 10 кгс-см/с2],
273
Ср
1,6
0 2 4 6 8 10 12 1,смг1с
Рис. 7.11. Зависимость коэффициента реактивного уси-
лия на заслонке от вязкости рабочей жидкости
что позволяет в практических расчетах пренебрегать значениями
h„ и JH, а также /гн < /гзм и J„ < J3M применительно к ничтожно
малым размерам заслонки. Собственно заслонка не обладает
позиционирующим действием, и поэтому считают Сн = 0.
В гидроусилителе типа сопло-заслонка имеется обратная
связь от нагрузки на заслонку в форме реактивного воздействия
струй. Экспериментальная количественная оценка этого воздей-
ствия [1] позволила оценить величину реактивного усилия R
при помощи гидродинамического коэффициента силы Ср:
где величина Ср — Ср (dc, As, v) приведена на рис. 7.11 в интер-
вале изменения кинематического коэффициента вязкости v от
долей единицы до 14 см2/с.
Самое большое значение Ср было получено при наименьшем
диаметре сопла dc = 0,14 см и наименьшей ширине рабочей
кромки сопла As = 0,02 см (кривая /), а самые малые значения —
при dc = 0,22 см и As = 0,05 см (кривая 4).
Влияние увеличения As по сравнению с влиянием увеличе-
ния dc оказывается более существенным (зависимость 2 на рис. 7.11
получена при dc = 0,22 см и As = 0,05 см, а зависимость 3 —
при dc — 0,14 см и As = 0,05 см), поэтому сопла следует выпол-
нять с «затуплением» выходной кромки (с увеличенным значе-
нием As), однако увеличение dc нецелесообразно из-за потерь
энергии с выходящей струей.
Из-за ограниченности мощности источника питания элек-
тромагнита ток возбуждения iB 4= const, что приводит к изме-
нениям значений и Сэм, от которых зависит величина уравно-
вешивающего реактивного момента струй на заслонке Л4В.
При различных значениях плеча заслонки h3n и при одном и
том же усилии R в равенстве (7.25) величина момента Л4В будет
разная. Плечо h3n выбирают таким, чтобы отношение РИУ при
наибольшем и наименьшем токах возбуждения iB было одинако-
вым. В рассматриваемой конструкции /гзп = 1,2-г-1,4 см [1].
274
Воспользовавшись перечисленными рекомендациями, можно
переписать уравнение (7.24) в форме
C.iy (0 = СэмЧ> (П + Ср h3np (/),
где
ф(0
IV)
Лзп *
откуда
C,iy (О = /(0 + Ср (0, (7.26)
и величину смещения заслонки I (t) можно представить структу-
рой, приведенной на рис. 7.12, где Сх = 0,344 Н» см/мА, Сэм “
nd3
е= 115 Н.см/рад, h3n = 1,2 см и Ср —— h3Ii = 0,017 см3.
Эти зависимости справедливы при достаточном токе возбужде-
ния, когда Ci и СэМ могут считаться постоянными [1].
Управляющий сигнал формируется в электронном усилителе,
передаточная функция выходного каскада которого
U7 (с\ — *у fc) _______
wyW— ~iT(s)~ ~ 1 + TyS ’
где и — напряжение на входе выходного каскада усилителя;
Ку — коэффициент усиления выходного каскада усилителя по
току; Ту = Ly/(R3 + /?у) — постоянная времени выходного
каскада усилителя; Ly — индуктивность обмотки управления
электромеханического преобразователя (здесь — позиционного
электромагнита); 7?э — активное сопротивление обмотки управ-
ления электромеханического преобразователя; 7?у — активное
сопротивление выходного каскада усилителя.
Динамика исполнительного устройства с гидроусилителем
типа сопло-заслонка в нелинейной форме описывается линейным
уравнением движения (7.13) (см. рис. 7.3) и нелинейным уравне-
нием, составляемым совокупностью нелинейных форм (7.5)—(7.7)
(см. рис. 7.2) с выражениями утечек и эффекта деформации жидко-
сти, как это сделано в уравнении (7.22). Такая совокупность ра-
венств описывает усилительную часть исполнительного устройства.
275
В линейном приближении система описывается теми же ли-
нейными уравнениями (7.13) (исполнительная часть) и линеари-
зованным уравнением (7.16), которое при учете утечек и эффекта
деформации рабочей жидкости описывается уравнением (7.23)
(см. рис. 7.3).
Поскольку исполнительное устройство типа сопло-заслонка
обычно применяется в качестве первого каскада силовой следя-
щей системы, у которой вторым каскадом служит исполнительное
устройство с управляющим золотником, то конкретизацию урав-
нения (7.19) целесообразно провести при рассмотрении рабочего
процесса управляющего золотника.
7.3. СТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА
ЧЕТЫРЕХЩЕЛЕВОГО УПРАВЛЯЮЩЕГО
ЗОЛОТНИКА
Чаще всего управляющий золотник смещается при помощи ги-
дравлического исполнительного устройства, например, с гидро-
усилителем, также реализованным на базе управляющего золот-
ника, или с гидроусилителем типа сопло-заслонка, как, напри-
мер, показано на рис. 7.13. Поэтому управляющий золотник
можно рассматривать в качестве гидроусилителя второго каскада
и исполнительного органа первого каскада, состоящего из управ-
ляющей заслонки /, сопл 2, дросселей 3 и канала 5 с подводом
рабочей жидкости через канал 4 от источника питания и кор-
пуса 6, в котором смещается управляющий золотник 8 за счет
создаваемого перепада давлений в рабочих камерах 7 и 11, а
Рис. 7.13. Гидравлическое исполни-
тельное устройство с гидроусилителем
типа сопло-заслонка и управляющим
золотником в качестве исполнитель-
ного двигателя
также действия позиционирую-
щих пружин.
Пусть управляющий золот-
ник 8 обладает отрицательным
перекрытием Лз0 (осевой размер
щели при нейтральном положе-
нии золотника) и работает при
смещении | h31 < /i30. Тогда ра-
бочая жидкость от источника
питания под давлением р0з (ис-
точники питания для двух кас-
кадов управляющего устройства
могут быть, вообще говоря, раз-
ными) через канал 13 и обра-
зующиеся между втулкой и цен-
тральным поршнем золотника
щели попадает в золотниковые
камеры, а затем через каналы 9
и 10—в исполнительный орган
второго каскада усиления (не
276
показанный на рисунке). Из тех же золотниковых камер рабо-
чая жидкость под давлением идет на слив через каналы 12.
При смещении управляющего золотника влево более высокое
давление создается в правой золотниковой камере, расход через
выходной канал 9 которой определяется балансом потоков
Q = pb /2/р [ </i30 + h3) VрОз — рт — (/i3U — /г3) /р1п — рс],
а для левой золотниковой камеры
- Q = рЬ /2/р [(Язо - й3) /р03 - р2п - (йз0 4- h3) /р2п -рс],
где b (h30 + h3) и b (/t30 — h3) — площади живых сечений
щелей; b — размер щели, перпендикулярный к направлению
смещения золотника; р. — коэффициент расхода; р — плотность
жидкости. Подрадикальные выражения представляют собой по-
терю давления в каждой из четырех щелей. Закономерности
изменения этих потерь давления изображаются графиком, ана-
логичным приведенному на рис. 7.7.
Обозначая через рОз = рОз — ра эффективное давление источ-
ника питания и отсчитывая давления на выходе из управляющего
золотника р1п и р2п от давления слива, можно записать выражение
перепада давлений, создаваемого гидроусилителем типа «управ-
ляющий золотник»:
Pin Pin ~ Рп И Pin Pin = Роэ>
откуда
Рт 2 \Роз г Рп) > Ргп 2 (Роэ Рп)
Подставляя полученные выражения в любое из уравнений
расхода, получим уравнение усилительной части (гидроусили-
теля типа управляющий золотник) четырехщелевого управля-
ющего золотника с отрицательным перекрытием:
Qi = «4 [(^30 + Л3) VРоз — рп — (h3o — М V Роз + Рп ]. (7.27)
где
а4 — цЬ V 1/2р,
а индекс 4 относит величины к четырехщелевому золотнику.
В безразмерной форме уравнение рассматриваемой усилитель-
ной части будет
С4=(14Л)/Т^-(1-й)/Т+^, (7.28)
где
h ^з/^ЗО’ Р ------- PnlPw*
277
Очевидно, при h3 Лз0 две из четырех дросселирующих
щелей перекрываются и управляющий золотник становится
двухщелевым. Так, при смещении золотника 8 на рис. 7.13 влево
сливная линия 12 от межзолотниковой напорной камеры будет
отсечена и в уравнениях (7.27) и (7.28) останутся только первые
члены.
Рассматривая каждую из четырех переменных в уравнении
(7.27) в виде суммы: = QX + Дфь h3 = Л* + ДЛ3, Роэ ==
= роэ + ДрОэ и рп = рп + Дрп, где индексы * относят величины
к невозмущенному движению, а Д — к отклонениям, изменения
которых считаются «быстрыми» по отношению к переменным
невозмущенного движения, можно переписать уравнение (7.27)
в отклонениях:
Д(?4 = /Сд4 Д/13 4“ ^04 Дроэ ^р4 ДДр
ЛГ/14 = = ^4 (VРоэ — Рп 4” VРоэ + Рп) =
= а4/^(/1 - р* +И+р*); (7.30)
К = ^4 ______ 04 (ЛзО + ^з) _ Q4 (йзО — Лэ)
°4" дроэ ~ ~
__ д4^зо / 1 Л*__________1 — h* \ . (7 31)
2 j/роэ \ V1 — р* У' 1 4" Р* /
К — д^4 ________^4 / ЬзО + hl_______h3o — hl \ __
др™ 2 I 1/ * *" л/, * )
\ V Р0э — Рп V рОэ 4- рп /
— fl4^3o / 1 + ^* . 1 —h* \ zy 22)
2 УрОэ \ 1 — Р* У1 + Р* )
Дополняя выражение Дф4 объемными потерями £уДрп и
деформационным расходом V/н = d Apn/dt, как это делалось,
например, в равенстве (7.22), можно получить уравнение усили-
тельной части исполнительного устройства с гидроусилителем
в форме управляющего золотника
Дйэ (0 + ДрОэ (/) = /7* (D) F Ьрп (/) + D Д.г (/),
где оператор потерь
/7* (D) = + П (D) = + -h- + D;
F — активная площадь гидроцилиндра — исполнительного уст-
ройства, работающего от рассматриваемого гидроусилителя; х —
смещение поршня гидроцилиндра.
278
Структурные представления исполнительного устройства с ги-
дроусилителем типа сопло-заслонка (см. рис. 7.8) остаются спра-
ведливыми в этом случае, если в них соответственно изменить
обозначения А/, Др0, Д/г3, Az, Ко и на Д/г3, ДрОэ, Дх, Khi,
К од и ^р4> как и Для любого гидроусилителя, работающего по
принципу дроссельного регулирования. Однако при использова-
нии таких структурных представлений необходимо иметь в виду,
что они действительно «развязывают» входные переменные ДЛ3
и Дроэ только применительно к малым колебаниям (составлены
для возмущенного движения).
Экспериментально установлено (при гармонических сигналах
управления в закономерностях изменения выходных переменных
фигурирует доминирующая гармоника), что при амплитудных
значениях h «s 0,4 линеаризованными уравнениями можно поль-
зоваться с достаточной для практических целей точностью.
При значительных амплитудах колебаний, а также для очень
малых симметричных колебаний h3(t) и при больших амплитудах
второй переменной входа рОз (/) использование линеаризирован-
ных уравнений перестает быть корректным, так как коэффициенты
усиления Khi и К04 взаимозависимые, поскольку определяются
одними и теми же параметрами невозмущенного движения. При
уменьшении амплитуды колебаний h3 (f) даже большие ампли-
туды колебаний рО9(0 приведут к малым колебаниям управляемой
переменной х (/). Однако при уменьшении амплитуды колеба-
ний рОэ(/) большие амплитуды колебаний h3(t) приведут к боль-
шим колебаниям управляемой переменной х (t).
Различие в действиях больших колебаний h3(f) и рОз(/)
обусловлено свойствами характеристического уравнения гидро-
усилителя (7.1)
G (Q, h3, ра, рОз) = 0.
Область справедливости линейных свойств изменения пере-
менных h3, рп и Q целесообразно оценивать при помощи графиче-
ских представлений уравнения
G (Q, h, р) = 0, (7.33)
в котором рОэ вместе с Q содержатся в общей безразмерной пере-
менной Q, как это следует из уравнения (7.29).
Графическое изображение уравнения (7.33) для четырехщеле-
вого управляющего золотника приведено на рис. 7.14, где штри-
ховой линией показано нахождение Q по значениям hup. Абсо-
лютные значения^ переменных определяются из равенств h3 =
= h3l)h, рп = роэр и Q4 = с4Лз0 ]^рОэ Q. Пользуясь такой же
безразмерной характеристикой, можно для фиксированных зна-
чений перепада р* = рп/роэ определять значения коэффициен-
тов усиления по управляющему сигналу Кй4 = dQ/dh3, которые
В большом диапазоне изменения р* меняются в сравнительно
279
Рис. 7.14. Зависимость Q (h) при фик-
сированных значениях безразмерной
нагрузки
77 2flp4 УрГэ (
Р4 а4^30 \
узком интервале (например, по
сравнению с аналогичными ко-
эффициентами усиления двух-
щелевого управляющего золот-
ника).
В дальнейшем может ока-
заться удобным, особенно при
сравнении гидроусилителей раз-
ных типов, использовать отно-
сительные коэффициенты уси-
ления, например [50]
tfft4=-^=- = /i-p* +
аА V рсэ
+ + (7.34)
77 _ 2/<04 р"э _ 1 +Й* ___
04 aih-3o |/" 1 р*
(7.35)
V 1 +р*
Графическое изображение Q (h) при фиксированных значе-
ниях р позволяет оценить область существования линейных зна-
чений Kht = dQJdh (см. рис. 7.14). При выяснении области ли-
нейных значений Kvi = dQJdp следует обращаться к графиче-
скому изображению Q (р) при фиксированных значениях безраз-
мерного управляющего сигнала h (рис. 7.15). Сравнивая послед-
нее графическое изображение с рис. 7.5, убеждаемся, что управ-
ляющий золотник с отрицательным перекрытием может обеспе-
чить более крутую характеристику, чем гидроусилитель типа
сопло-заслонка.
Коэффициент усиления по перепаду давления, определяющий
дополнительную часть статической податливости гидропривода
дроссельного регулирования по сравнению с гидроприводом объем-
ного управления КР4 = КР4 (Лэ, роэ, рп), зависит от трех фиксиро-
ванных значений переменных и поэтому по-разному определяется
в зависимости от нагрузки, как это следует из уравнения (7.36).
Значение коэффициента усиления по давлению питания может
определяться либо непосредственно по уравнению (7.35), либо
через Кр4, поскольку К4 и Кр4 взаимозависимы (рис. 7.16):
k = *04 = Км = (!-ft*),
Кр4 Л₽4
280
Поскольку при некотором значении h * знак k меняется,
то происходит увеличение диапазона регулирования скорости
исполнительного устройства х при падении давления питания рОэ
в насосном режиме движения. В этом случае уменьшение давле-
ния питания уменьшает сопротивление движению. Следует иметь
в виду, что малоизученный насосный режим движения исполни-
тельного устройства полностью изменяется, если гидроусилитель
соединяется с источником питания через обратный клапан, ко-
торый на таком режиме работы прекращает питание усилителя.
При разгруженном исполнительном ^устройстве, т. е. при
р* = 0, значение не зависит от h* (Кр4 = 2 на рис. 7.17).
При |р|< 1 расчет вынужденных движений основывают на
строке приближенных равенств
^Л4 ^р4 ^04
Чем больше нагружается гидропривод, тем больше изменяются
коэффициенты усиления: Л^4 уменьшается при увеличении |р*|;
Кр4 увеличивается при одновременном возрастании р* и Л* и
наоборот; | /<04 /Гр4| увеличивается при одновременном возра-
стании р* и /г* и наоборот.
Крутизна характеристик, приведенных на рис. 7.14 и 7.15,
справедлива лишь при ~h 1. При h > 1, когда две из четырех
Рис. 7.15. Зависимость Q (р)
при фиксированных значени-
ях безразмерного управляю-
щего сигнала
Рис. 7.16. Зависимость отношения k =»
= ^4/Кр4 от безразмерного управляющего
сигнала при фиксированных значениях без-
размерной нагрузки
281
Рис. 7.17. Зависимость мо-
дуля коэффициента усиле-
ния по нагрузке от безраз-
мерного управляющего си-
гнала при фиксированных
значениях безразмерной
нагрузки
Рис. 7.18. Зависимость Q (h) при фиксиро-
ванных значениях безразмерной нагрузки
р в широком диапазоне изменения безраз-
мерного управляющего сигнала
щелей управляющего золотника закрываются (см. рис. 7.13),
в уравнении (7.29) остается только первый член и крути-
зна характеристик существенно меняется, как показано на
рис. 7.18.
Сравнение характеристик наиболее распространенных гидро-
усилителей с управляющими золотниками, четырехщелевым и
двухщелевым, будет рассмотрено ниже.
При смещении управляющего золотника, обычно осуществляе-
мом при помощи гидроусилителя типа сопло-заслонка, в уравне-
нии движения (7.13) принимают для механизмов управления
гидроприводов объемного регулирования [1] h = 0,98ld3 Н-с/см,
где d3 — диаметр управляющего золотника, см. Для других
конструкций значение h. можно пересчитывать, имея в виду, что
h ~ р/б, где р — динамический коэффициент вязкости, а б —
зазор пары «втулка—золотник».
Протекание рабочей жидкости через управляющий золотник
приводит к возникновению гидродинамического позиционирова-
ния с жесткостью, равной сг. Так, для механизма управления
насоса № 2,5 ПД с d3 = 0,7 см сг = 17,1 Н/см. Поскольку
значение сг пропорционально количеству движения, то пересчет
на иные значения параметров проводится с учетом соотноше-
ния
сР ~ pd3v,
282
где р — плотность рабочей жидкости; d3 — диаметр управля-
ющего золотника; v — скорость рабочей жидкости в золотнико-
вой камере; наибольшее значение v = 4 м/с.
Рассмотренные золотники, работающие о рОэ гд 2,5 МПа,
выполняются по менее жестким техническим условиям [1], чем
для гидроусилителей, работающих на больших перепадах давле-
ния. Так, управляющие золотники и подвижные золотниковые
втулки изготовляются из цементуемых сталей 20Х или 12ХНЗА
с закалкой до твердости HRC 56—62, а неподвижные золотнико-
вые втулки — из стали 40Х с твердостью HRC 40—45. Шерохова-
тость цилиндрической поверхности — не менее Ra = 0,08-4-
-?-0,04 мкм, а сопряженной поверхности контртела — не менее
Ra = 0,16н-0,08 мкм; чистота обрабатываемых торцовых поверх-
ностей поясков золотника и расточек во втулке — не менее Ra =
= 1,25-4-0,63 мкм. Радиальный зазор между управляющим зо-
лотником и втулкой 8—16 мкм на диаметр при овальности и конус-
ности цилиндрических поверхностей, не превышающей 3—5 мк.
Осевые размеры поясков золотника выполняются по фактическим
значениям размеров проточек или пазов во втулке с допуском
0,02—0,05 мм.
Конструкция управляющего золотника должна быть достаточно
жесткой, и поэтому диаметр штока золотника выбирают dm =»
= 0,7d3, длина золотника (5-4-6) d3, а конструкция втулки должна
иметь осевое уравновешивание.
7.4. ДВУХЩЕЛЕВОЙ УПРАВЛЯЮЩИЙ ЗОЛОТНИК
Если в управляющем золотнике перекрытие нулевое (h30 = 0
на рис. 7.13), то он превращается для каждой магистрали в двух»
щелевой золотник. Поскольку знак перепада давлений на испол-
нительном устройстве при его работе в двигательном режиме
определяется знаком смещения управляющего золотника, то
Q2 = [tbh31/ = a2h3 /рОэ — ра si gn h3, (7.37)
* р
где аг = ub —const, за исключением малых значений h3,
и р
когда величина ц резко падает. Индекс 2 относит расход к двух-
щелевому управляющему золотнику, остальные обозначения ана-
логичны обозначениям в уравнении (7.27).
Уравнение (7.37) в безразмерной форме будет
где
Q2 = h V1 — р signh ,
Q2 =-------
а2^з max V Роэ 1
h — hjh3 max, p — Рп/Роэ^ •
283
При значениях переменных, которые допускают существова-
ние частных производных выражений коэффициентов усилений,
они записываются в форме
К/.2 = = =а>/ро*э /1-р* ;
C/аз F
/Г = — ° 2^ __ ct2h3 щах_____h* .
02 - дРоз ~ ~ 2/^7 ’
д- dQ2 ___________________________ ___ д2^з max____________
P dpa 2]/" роз — рп 2]/роз 1^1— p*
(7.38)
где индекс * относит обозначения к невозмущенному движению,
а р* = рп/роз.
Легко видеть, что Kh2 > О, К02 >0, /<р2 < 0 и К.02Кр2 = —1.
Аналогично четырехщелевому управляющему золотнику
можно пользоваться и относительными коэффициентами усиления
«м--^=--УТ=?;
02 V РОэ
j7 _ 2Дог1^роз _ ;
02 в2Лз max 1 — р*
- ft*
Р2 a2h3 щах уЛ [ р*
Статическая характеристика двухщелевого золотника в форме
Q (р) при фиксированных значениях управляющего сигнала h
приведена на рис. 7.19; сравнивая ее с рис. 7.5 и 7.16, можно
убедиться в существенном отличии значений коэффициентов уси.
ления от их значений у ранее рассмотренных гидроусилителей.
При сравнении Ah2 и Khi (рис. 7.20) можно заметить, что
второй коэффициент усиления меняется незначительно по сравне-
нию с изменением Kh2 в достаточно большом диапазоне значений
относительной нагрузки р*. Применительно к возмущенному дви-
жению с малыми нагрузками (| р* | 1) гидроусилитель с четырех-
щелевым управляющим золотником обладает практически стацио-
нарной характеристикой (Kh4 «=< const) в отличие от гидроусили-
теля с двухщелевым золотником, для которого переменная часть
Км------Р*
Поскольку при | р* I < 1
Км /2 Г 1 +? \ .
_^_== —р + |/
то гидроусилитель с четырехщелевым золотником при прочих
равных условиях обеспечивает примерно на 40% большее усиление
284
Рис. 7.19. Зависимость Q (р) при фиксиро-
ванных значениях безразмерного управля-
ющего сигнала Ъ для управляющего зо-
лотника с нулевым перекрытием
Рис. 7.20. Сравнение значений
коэффициентов усиления проточ-
ного и герметичного золотников
управляющего сигнала при более стабильной характеристике,
однако при увеличенной нагрузке источника питания.
Коэффициент усиления по перепаду давления, определяющий
дополнительную часть статической податливости гидропривода
дроссельного регулирования, по сравнению с тем же коэффициен-
том гидропривода объемного управления Кр = dQ/dpn описы-
вается функцией трех переменных невозмущенного движения /г*,
Роэ и рп и поэтому по-разному определяется в зависимости от
нагрузки.
При малых нагрузках (|р*| 1) диапазон изменения Kpi (Л)
существенно меньше аналогичного диапазона Кр2 (h), как это
показано на рис. 7.17 и 7.21. _
При р* —> 0 значение Лр4 — const > Лр2V2, поэтому двух-
кромочный золотник при прочих равных условиях обеспечивает
меньшую статическую податливость, которая, однако, энергично
меняется при изменении h*. Кроме того, Kpi знакопостоянен,
а знак Кр2 всегда меняется при изменении знака h*.
Различные способы линеаризации симметричных колебаний
гидропривода с двухкромочным золотником представляют собой
приближенное описание такого движения только при помощи
первой гармоники. Применительно к такому золотнику анализ
влияния изменения р^э на Q2 затруднен той же нелинейностью,
поскольку Лр2 = —К02.
285
Структурные представления исполнительного устройства с ги-
дроусилителем, управляющий золотник которого двухщелевой
(рис. 7.22), содержат ряд нелинейных звеньев. В части же, начи-
нающейся от расхода Q, оно не отличается от гидравлических
исполнительных устройств иных типов.
При линеаризации системы проявляется дополнительная ста-
тическая податливость (рис. 7.23, а) и дополнительный вход
ДрОэ (/), коэффициент усиления по которому взаимозависим
с коэффициентом усиления по основному управляющему сигналу
Kh- Очевидно, что при Д/г —> О обязательно 7<0 —> 0 и влияние
давления источника питания становится исчезающе малым. Дру-
гие способы изображения линеаризованной структурной схемы,
общие для всех гидроусилителей (рис. 7.23, б и в), не отличаются
от изображенных на рис. 7.8 и поэтому соответствующие коэффи-
циенты усиления приведены без индексов, указывающих число
работающих щелей.
Точная реализация нулевого перекрытия нереальна, и в ряде
случаев [1 ] управляющий золотник выполняют с небольшим
положительным перекрытием (0,1—0,5 мм) и осциллирующим
движением втулки с целью существенного снижения сил сухого
трения (эффект вибрационной линеаризации). При небольших
массах управляющего золотника осциллирующее движение соб-
ственно золотника осуществляется подачей на вход в управля-
ющий электромагнит одновременно с управляющим сигналом
Рис. 7.21. Зависимость коэффициента
усиления по нагрузке от безразмерного
управляющего сигнала при фиксиро-
ванных значениях безразмерной на-
грузки
Рис. 7.22. Структурные представле-
ния исполнительного устройства
с гидроусилителем дроссельного регу-
лирования
286
Рис. 7.23. Структурные представления линеаризованной
модели исполнительного устройства с гидроусилителем
дроссельного регулирования:
а — структурная схема с кинематическим и нагрузочным трак-
тами; б — структурная схема в одноканальном представлении}
в — сокращенная структурная схема с выявлением оператора
потерь
переменного тока частотой 50—100 Гц, который не только возбу-
ждает осциллирующее движение золотника с амплитудой 0,3—
0,5 мм, но и сужает петлю гистерезиса электромагнита. В этом случав
удается реализовать даже симметричные колебания исполнитель-
ного устройства с малой амплитудой без неравновесных остановок.
При осциллирующем движении управляющего золотника коэф-
фициент расхода уменьшается примерно от 0,65 до более стабиль-
ного значения 0,62. Падение давления питания при больших
открытиях управляющего золотника может доходить до 20—30%
от номинального, а гидравлические сопротивления в каналах
управляющего золотника находятся в диапазоне 0,1—0,2 МПа.
Подача источника питания выбирается по активной площади
исполнительного устройства и его наибольшей скорости движения.
Например, управляемая таким устройством люлька регулируе-
мого насоса должна перебрасываться в течение Ai = 0,2-4-0,4 о.
Тогда Qmax = Fs А/, где s — ход исполнительного устройства
(гидроцилиндра).
287
7.5. ОБЩИЕ ЗАКОНОМЕРНОСТИ ИСПОЛНИТЕЛЬНЫХ
УСТРОЙСТВ С ДРОССЕЛЬНЫМ РЕГУЛИРОВАНИЕМ
Существует множество разных гидроусилителей, каждый из
которых устанавливает свою форму зависимости переменных
усилительной части в форме уравнения (7.1). Для гидроусилителя
типа сопло-заслонка такая форма конкретизировалась уравне-
ниями (7.5)—(7.7) с промежуточными переменными и р2» Для
гидроусилителя с четырехщелевым управляющим золотником —
уравнением (7.27) и для гидроусилителя с двухщелевым управля-
ющим золотником — уравнением (7.37). В дальнейшем будут
рассмотрены и иные типы гидроусилителей с дроссельным регу-
лированием, общие формы математических моделей которых выяв-
ляются из рассмотрения обобщенного исполнительного устрой-
ства, работающего от источника питания с линейной характери-
стикой.
Рассматриваемая система состоит из источника питания, уси-
лительной части дроссельного регулирования (гидроусилитель)
и исполнительной части (нагруженный гидродвигатель). Перемен-
ными обобщенной системы будут: QH О — расход, получаемый
от источника питания; ри — давление источника питания; Q —
расход в усилительной части, имеющий знак управляющего сиг-
нала g (| Q| = QH); р = Pi — р2 — перепад давления в испол-
нительной части, нагружающей усилительную часть; рг и р2 —
давления в выходных магистралях усилительной части; х —
смещение исполнительной части; Рв — возмущающее воздействие
в исполнительной части; I — управляющий сигнал.
Характеристика источника
Рис. 7.24. Структурные представления
гидропривода дроссельного регулиро-
вания с насосной станцией
питания QH = Qo — kpu иска-
жается свойствами соединитель-
ной линии, поэтому эффективное
давление питания, которое обу-
словливает работу усилитель-
ной части, будет рэ = ри —
-Wk(D)Q„, где ¥*(£>)-
оператор.
Структурное представление
источника питания показано
выше волнистой линии а на
рис. 7.24. Усилительная часть
(на рис. 7.24 — ниже волнистой
линии а и слева от волнистой
линии б) представляет собой
гидроусилитель, устанавливаю-
щий связь между обобщенными
переменными;
G(Qp”, I, p) = G, (7.39)
288
где переменные Q и рэ входят в виде произведения Qp%, причем
значение п обычно аппроксимируется дробью — -% . Поэтому
линеаризация уравнения (7.39) в форме
М + Кй\р3-К^р
справедлива только применительно к малым колебаниям, причем
падение значения I* для невозмущенного движения, уменьша-
ющее AQ, обязательно уменьшает как значение коэффициента
усиления так и значение Ко.
Поскольку Q и р3 в уравнении (7.39) входят в виде произве-
дения Qp", переход к безразмерным переменным оставляет только
две переменные входа I и р и лишь одну переменную выхода Q,
оценивающую указанное произведение, как это было записано,
например, в уравнении (7.12). Определяя по I и р значение Q,
можно находить действительный расход для фиксированного зна-
чения эффективного давления питания р3, как это делалось, на-
пример, на рис. 7.14.
Можно заметить, что при конечном значении коэффициента к
крутизны характеристики линейного источника питания и отличии
от единицы оператора Wk (D) (т. е. при заметном влиянии соеди-
нительной линии) утверждать, что гидроусилитель работает с по-
стоянным давлением источника питания, нельзя. Корректнее
определять такой тип гидроусилителя, основываясь на том, что
эффективное давление питания меняется в диапазоне, ограничен-
ном характеристикой источника питания. Связь между QH и р3
будет
QAt)[i + kWK(D)] = Q0-kp3(t).
Линеаризация уравнения источника питания и усилительной
части дает дополнительное уменьшение регулируемого расхода Q,
т. е. дополнительную статическую податливость.
В исполнительной части имеются «потери» расхода (Lv +
+ — D] р, определяющие статическую и динамическую податли-
вости, и в соответствии со значениями возмущающего воздействия
Рв (/) и оператора нагрузки Н (D) регулируемое смещение х (или
его скорость Dx) определяется аналогично обычным уравнениям
движения
Fp(t) = Н (D) x(f)
Ряд гидроусилителей описывается не одним уравнением (7.39),
а тремя:
G, (Qpl I, р>) = 0; G2(Qp?, I, р2) = 0;
Р = Pi - Pt-
10 В. Н. Прокофьев и др. 289
Исключение из этих уравнений промежуточных переменных
и р2 иногда приводит к чрезмерно громоздким выражениям.
Тогда для получения уравнения (7.39) используют либо ЦВМ,
либо прием, заключающийся в том, что поскольку при I О
статическая характеристика усилительной части, как правило,
оказывается линейной, находят значения р± = р2 = рп (регули-
руемые давления при нулевом управляющем сигнале). Тогда
для линейной части характеристики
Р1 + р2 = 2р„,
и из определения перепада давления получим
Pi - Р2 = Ру
поэтому
f 1 1
Pl = Рп +• Р2 = Рп “ "2"Р.
В этих выражениях предполагается, что давление слива р0 =»
— 0; в противном случае значение давлений (всех) измеряется от
рс (начало отсчета).
Следовательно, характерной особенностью исполнительных
двигателей гидроприводов с дроссельным регулированием будет
работа при высоких средних значениях давлений, примерно
равных рп, что иногда исключает возможность использования
отдельных типов аксиально-поршневых гидромоторов с торцовым
распределением из-за чрезмерно больших сил трения, обусловлен-
ных высокими значениями прижима блока цилиндров к распреде-
лителю.
Оценка ряда динамических свойств, например устойчивости,
осуществляется чаще всего при помощи линеаризованных урав-
нений, собственный оператор которых имеет третий или второй
(при отсутствии позиционирующей нагрузки для симметричного
привода) порядок, причем коэффициент усиления и постоянная
времени системы второго порядка не зависят от величины управ-
ляющего сигнала. Зато его величина существенно влияет на дем-
пфирующие свойства, поскольку коэффициенты усиления в линеа-
ризованном уравнении усилительной части (7.16) зависят от фик-
сированного значения /*, около которого рассматриваются откло-
нения (исследуемые возмущенные движения). Так, значения
коэффициента демпфирования £ для системы второго порядка
при возрастании I* вначале падают, а затем возрастают.
Однако необходимо отметить, что такое свойство присуще
лишь аппроксимирующей линейной модели. Применительно к соб-
ственно нелинейной системе затухание собственных колебаний,
как показали исследования на аналоговых установках, происходит
несколько медленнее, показывая некоторые отличия нелиней-
ной модели от описывающей ее свойства линейной аппрок-
симации.
290
7.6. ПРИМЕРЫ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ
С ДРОССЕЛЬНЫМ РЕГУЛИРОВАНИЕМ
Известно более 40 различных вариантов исполнительных уст-
ройств с дроссельным регулированием [13, 23, 93, 101 ], отлича-
ющихся гидравлической схемой, конструктивным выполнением
и характеристическими свойствами. Исполнительное устройство
(рис. 7.25) кроме рассмотренного в разделе 7.3 гидроусилителя 1
включает гидроцилиндр 4. Если втулка гидроусилителя жестко
соединена с движущейся частью исполнительного двигателя (на
рис. 7.25 показано штриховой линией соединение со штокОхМ
поршня), то исполнительное устройство замыкается единичной
отрицательной обратной связью и х (/) (смещение штока поршня)
следит за смещением золотника 2 или за пропорциональным ему
смещением рычага 3, острие А которого меняет свое положение
благодаря копиру 5. Это смещение 8 — управляющий сигнал,
причем h = is, где i — передаточное отношение.
При рассмотрении исполнительного устройства, включая испол-
нительную часть, можно при использовании статической характе-
ристики гидроусилителя в форме уравнений (7.1) или (7.12) вместо
управляющего сигнала h применять рассогласование 8, вместо
расхода Q — скорость поршня v и вместо перепада давления р —
индикаторное усилие Р, как это сделано в работе [13]. В этом
случае, переходя к безразмерным переменным, можно эффективное
давление рэ принять равным давлению питания (т. е. принять
рс = 0), поскольку переход к случаю рс + 0, рассмотренному
ранее, не представляет затруднений. При использовании безраз-
мерных переменных получим
Р
Ро
где Ло — наибольшее смещение
управляющего золотника (поэтому
Цпах = Kv (М), emax = hQ/1 И
Pmvi=Fpo)', Kv = mod (dv/d&) при
p = 0 — фиксированное значение
модуля коэффициента усиления
по скорости Kv = dv/d&.
Безразмерная статическая ха-
рактеристика четырехщелевого ис-
полнительного устройства, пока-
занного на рис. 7.25 в форме
G(e, v, Р) = 0, (7.40)
приведена в первой строке
табл. 7.1, причем давление питания
содержится в выражении v, и обыч-
но говорят, что такое исполнитель-
ное устройство работает при р0=:
Р>
Рис. 7.25. Гидравлическое исполни-
тельное устройство с четырехщеле-
вым управляющим золотником
(Сх-1, 2 и 10)
10*
291
Таблица 7.1
ХАРАКТЕРИСТИКА СХЕМ ДРОССЕЛЬНОГО УПРАВЛЕНИЯ
№ рис. Г Ро т G (е, Vi Р) = 0
Сх-1 7.25 Вход Выход 1 (1 +ё)]/1 _р_ — (1 — T)V 1 +Р — 2у = 0
Сх-2 7.25 Выход Вход 1 / | v \2 / 1 -4- v — 2—L - 2Р = о \ 1 — Е / \ 1 /
Сх-3 7.26 Выход Вход 1 О II 1СЦ 1 сч 1 Г_> | 00 + + I сч 2 2
Сх-4 7.27 Вход Выход 0,5 (1 + ё)/1 -2Р- — (1 — ё)]/1 +2Р —2у = 0
Сх-5 7.27 Выход Вход 0,5 (ь^у_(2+2)2_4Р = о \ 1 —8 / \ 1 +8 /
Сх-6 7.28 Вход Выход 0,5 ' 1— т ' т — v = 0
Сх-7 7.29 Выход Вход 0,5 1 — v/-E — 0 \ т / 1 — 8 -1/(1 + ё)2+ р = 0 r т (1 — т)
Сх-8 7.30 Выход Вход 0,5 1 1 оз । с; । SI 7 - s । 11 1 °
Сх-9 7.28 Выход Вход 0,5 1 8 2 7^ о । и ia.||g ' =
Сх-10 7.25 Вход Выход 1 (1 + | е 1) V1 — Р sign 8 sign 8 — — 2v = 0
292
s= const (po — переменная входа). На самом деле значение р0
меняется в соответствии с характеристикой источника питания
(насосной станции), чтобудет рассмотрено в разделе 13.2.
В той же таблице т обозначает дифференциал поршня, т. е.
отношение активных площадей поршня с одной и другой стороны.
В соответствии с материалами раздела 7.3 выражение К* будет
=-т- О
где b — ширина щели управляющего золотника, наибольшее
значение которой nd.
При сопоставлении характеристик гидроусилителей поль-
зуются сравнением значений коэффициентов усиления по скоро-
сти К*, сравнением крутизны характеристики рассогласования
(ошибки) по нагрузке
К*р = mod (dP/dn) при v = 0 (7.41)
[фиксированное значение КР = mod (dP/de) при v — 01 и сравне-
нием той же крутизны характеристики при е = 0, когда приме-
няется обозначение Кр*
В безразмерных переменных
<7'42>
Выражения перечисленных параметров приведены в табл. 7.2,
где для сокращения написания использованы коэффициенты А =
= KI для рассматриваемого гидроусилителя и В = 2рйРИНй.
При питании рассматриваемого гидроусилителя от насоса,
подающего постоянный поток Q (схема Сх-2), давление при входе
в управляющий золотник при ро = 0 и и = 0 определяется выра-
жением (Q — переменная входа)
* ( Qo \
p»=f,Ud'
где — площадь проходного сечения щели управляющего зо-
лотника, находящегося в нейтральнОхМ положении. В этом случае
меняются статическая характеристика исполнительного устрой-
ства (табл. 7.1) и ее параметры (табл. 7.2).
Двухщелевой управляющий золотник (дросселирующие щели дt
и д2) при питании от двух насосов с одинаковыми расходами пи-
тания Qo (рис. 7.26) имеет в 2 раза меньшее значение коэффициента
усиления по скорости (Сх-3), причем значение давления питания ро
при v = 0 и Р = 0 будет
* _ Р f Qo V
Ро~ 2 {buhj
В станкостроении широко используются гидравлические меха-
низмы с дифференциальными гидроцилиндрами (разные активные
293
Таблица 7.2
ХАРАКТЕРИСТИКИ СХЕМ ДРОССЕЛЬНОГО УПРАВЛЕНИЯ
Схема № рис. Ро Qo т к2*/в * а. 1* *р/В
Сх-1 7.25 Вход Выход 1 1 1-ё2 (1 +е'2)2 2(1—ё2) (1+ё2)2 1
Сх-2 7.25 Выход Вход 1 V Ро 1+Зе2 (i-а1 X У Ро 2(1 +3ё2) (1-ё2)3 I
Сх-3 7.26 Выход Вход 1 2 V Ро 2(1+3ё2) О-?)1 xl/-^ У Ро 4(1 Ч-Зё2) (1-ё2)3 2
Сх-4 7.27 Вход Выход 0,5 1 1-ё2 2(1-Не2)2 1-ё2 (1+ё2)2 1 2
Сх-5 ,7.27 Выход Вход 0,5 /г У Ро +зё2 2(1 х1Л^- У Ро 1 + Зё2 (1-ё2)3 1 2
Сх-6 7.28 Вход Выход 0,5 1 2 1 — 8 2(1-ё) 1 4
(2 —2ё + ё2)2 (2 —2ё + ё)2
Сх-7 7.29 Выход Вход 0,5 X 1 ° |?*| X 1 X 8 (1-е2) х]М- У Ро 1 4(1-ё)2 1 8
Сх-8 7.30 Выход Вход 0,5 /4 1 — =пг X 4 (1-е)3 x/3Z У Ро 1 2(1—ё)3 1 4
294
площади, отношение которых
обозначается т и называ-
ется дифференциалом гидроци-
линдра), пример которого при-
веден на рис. 7.27. Совокупность
такого гидроцилиндра с т=0,5
и двухщелевого управляющего
золотника при постоянном рас-
ходе питания Qo образует Сх-4,
для которой при v = 0 и Р = О
_ Р / Qo V
Р° 2(1 — т)\Р(о/
При постоянном значении
давления питания (Сх-5) стати-
ческая характеристика двух-
Рис. 7.26. Гидравлическое исполни»
тельное устройство с двухщелевым
управляющим золотником и двумя
насосами питания (Сх-3)
щелевого управляющего золот-
ника меняется (табл. 7.1 и 7.2) о существенным при прочих
равных условиях уменьшением развиваемого усилия.
Применение однощелевого управляющего золотника (рис. 7.28)
требует использования поршня с дросселирующим отверстием
(Сх-6). При работе с постоянным давлением питания и усилием,
действующим на большую активную площадь поршня, значение
коэффициента усиления по скорости по сравнению с его значением
в иных схемах будет наименьшим (табл. 7.1 и 7.2). Если действу-
ющее усилие воспринимается меньшей активной площадью (Сх-9),
то статическая характеристика меняется (табл. 7.1 и 7.2).
Другой вариант исполнительного устройства с однощелевым
управляющим золотником приведен на рис. 7.29. Здесь в случае
восприятия усилия меньшей активной площадью поршня (Сх-7)
Рис. 7.27. Гидравлическое исполнитель-
ное устройство с двухщелевым управ-
ляющим золотником и дифференциаль-
ным гидроцилиндром (Сх-4 и 5)
Рис. 7.28. Гидравлическое исполнитель-
ное устройство с однощелевым управ-
ляющим золотником и дифференциаль-
ным гидроцилиндром (Сх-6 и 9)
295
Рис. 7.29. Гидравлическое исполните-
льное устройство с однощелевым уп-
равляющим золотником, дифференциа-
льным гидроцилиндром и нерегулиру-
емым насосом питания (Сх-7)
Рис. 7.30. Гидравлическое исполни-
тельное устройство с однощелевым уп-
равляющим золотником и подпорным
клапаном, работающее от нерегулируе-
мого насоса (Сх-8)
при постоянном расходе питания удается получить самое большое
значение коэффициента усиления по скорости (табл. 7.1 и 7.2).
Применение подпорного клапана в однощелевом управляющем
золотнике позволяет избавиться от дросселирующего отверстия
в поршне (рис. 7.30). В этом случае форма уравнения статической
характеристики существенно меняется (Сх-8 и табл. 7.1 и 7.2).
Уравнение статической характеристики ранее рассмотренного
исполнительного устройства (см. рис. 7.28) меняется при измене-
нии направления движения и знака усилия Р. Этот случай в
табл. 7.1 назван Сх-9.
При mod е 1 исполнительное устройство, выполненное на
Сх-1, вырождается, поскольку две из четырех щелей управля-
ющего золотника закрываются. Получаемая при этом схема
исполнительного устройства названа Сх-10, уравнение статиче-
ской характеристики приведено в табл. 7.1, а соображения о рабо-
чем процессе такого устройства —- в разделе 7.3.
7.7. СРАВНЕНИЕ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК
ГИДРОУСИЛИТЕЛЕЙ
Статическая характеристика гидроусилителя описывает связь
между тремя переменными: смещением управляющего золотника
(управляющий сигнал), перепадом давлений (нагрузка, преодоле-
ваемое исполнительным двигателем усилие и т. п.) и расходом
рабочей жидкости (скорость исполнительного двигателя). Разли-
чают три вида статических характеристик, представляющих связь
между двумя переменными при фиксированном значении третьей:
1) скоростная характеристика предусматривает фиксированное
значение нагрузки G (I, Q, рф) = 0; 2) силовая характеристика
296
предполагает фиксированное
значение расхода, чаще всего
равное нулю (заторможенный
исполнительный двигатель),
рассматривая тем самым цент-
ральную часть линейной облас-
ти характеристики G (Z, Q$,p) =
= 0; 3) внешняя характеристика
рассматривает зависимость меж-
ду расходом и перепадом при
фиксированном значении управ-
ляющего сигнала G (/ф, Q, р) = 0,
позволяя при этом выяснить
влияние р на Q, т. е. степень
влияния возмущающего воздей-
ствия. Такая характеристика
Рис. 7.31. Силовая характеристика за
торможенного гидравлического испол«
нительного устройства
дает важную оценку, например, систем стабилизации.
Силовая характеристика заторможенного исполнительного
двигателя (рис. 7.31) может иметь разные формы. Так, идеальный
(без утечек) четырехщелевой управляющий золотник с нулевым
перекрытием имеет силовую характеристику, изображаемую ли-
нией 1. Значение перепада давлений меняется от +р0 до —р0 при
прохождении управляющего золотника через нейтральное поло-
жение. Из-за утечек силовая характеристика меняется (кривая 2),
а при утечках в исполнительном двигателе (например, при замене
гидроцилиндра гидромотором, в котором утечки всегда больше)
крутизна силовой характеристики уменьшается (кривая 3). Кри-
вой 4 показана силовая характеристика при положительном, а
кривой 2 — при отрицательном перекрытии и существенных утеч-
ках в золотниковой паре четырехщелевого золотника. Для сравне-
ния линией 6 показана силовая характеристика при использова-
нии в качестве гидроусилителя регулируемого насоса. В этом
случае р0 — давление настройки предохранительного клапана
(ограничителя момента). Пользуясь линейным участком кривой
3 или 4, можно менять р (/), управляя величиной усилия, разви-
ваемого исполнительным двигателем.
Различные характеристики сравниваются либо при помощи
значений соответствующих коэффициентов усиления, получаемых
дифференцированием уравнений (7.39) и (7.40) (см. например,
материалы табл. 7.1), т. е. сравнением свойств линеаризованных
моделей, или экспериментально. Обращение к эксперименталь-
но получаемым характеристикам обусловлено, в частности,
существенными колебаниями зазоров при изготовлении сопря-
женных деталей, образующих пути просачивания рабочей жид-
кости.
Зона нечувствительности 80 определяется суммой рассогласо-
ваний и 82, которые находят при v = 0 по величинам перепадов
давлений, необходимых для трогания с места при р = р„ > 0
287
и р = рт < 0 соответственно. В хорошо выполненных гидро-
двигателях |рт| = 0,3-4-0,5 МПа [55], в станкостроительных
гидроприводах принимают |рт | «=< 0,1р0 [13], а в авиационных
[12], поскольку в этом случае значение р0 велико, |рт| <=« (0,01-5-
-4-0,03) р0. В аксиально-поршневых гидромоторах с торцовым
распределением, рассчитанным на давление подпитки не более
1 МПа, значение рг может существенно превышать 2 МПа, делая
невозможным использование подобного гидромотора в системах
с дроссельным регулированием.
Зона нечувствительности существенно уменьшается при ис-
пользовании вибрационной линеаризации [581. Влияние зоны
нечувствительности обязательно должно учитываться при работе
системы со знакопеременными сигналами.
Сравнение различных схем исполнительных устройств с дрос-
сельным регулированием можно проводить по относительной
жесткости характеристики. Ее оценка реализуется при помощи
величины Кр, выражение которой определяется уравнениями
(7.41) и (7.42) и приводится в табл. 7.2. Значения Кр для схем,
которые работают с постоянным давлением источника питания
(р0 = const), приведены на рис. 7.32, а. Для Сх-1 и Сх-4 справед-
ливо неравенство (дК,р!д | Р |) < 0, а для Сх-6 и Сх-9 оно справед-
ливо только за исключением интервалов 0 Р sg 0,85 и 0^
Р — 0,25 соответственно.
Для исполнительных устройств с Qo = const (рис. 7.32, б)
обратные неравенства (дКр/д\Р\) >0 (справедливо кроме не-
большого интервала малых значений Р для Сх-7 и Сх-8) — силь-
ные неравенства. Поэтому обращения к исполнительным устрой-
ствам, работающим с Qo = const, позволяют работать с высокой
относительной нагрузкой Р и получать весьма большие значения
ния Кр.
Наибольшая жесткость характеристики исполнительного уст-
ройства с р0 = const у схемы Сх-1, чем и объясняется ее широкое
распространение. Однако эта система проточная, и при нулевом
управляющем сигнале имеет место потеря энергии.
Наибольшей жесткостью характеристики при | Р | sg 1 среди
систем с Qo = const обладает схема Сх-3. Если нужна большая
жесткость характеристики при Р > 1 и знакопостоянной нагрузке,
то следует обращаться к схеме Сх-8. Однако в этом случае не
удается обеспечить высокую чувствительность, поскольку рт <
< О,О5ро ИЗ]. Обычно для станкостроительных систем рт
0,2р0, и в этом случае е0 = 0,2 для схемы Сх-2, е0 = 0,1 для
схемы Сх-3 и е0 = 0,2 для схемы Сх-5.
Системы с Qo = const, несмотря на жесткость характеристики,
большого распространения не получили, поскольку энергетиче-
ский выигрыш в них достигается при малых значениях т. е.
298
Рис. 7.32. Зависимости К* (Р) для исполнительных уст-
ройств с гидроусилителями дроссельного регулирования:
а .=- g р0 = const; б-с Qo = const
тогда, когда влияние относительной зоны нечувствительности е0
велико (велико влияние сил сухого трения). Кроме того,
при уменьшении значения ро существенно возрастает по-
стоянная времени механизма управления. Такие исполнитель-
ные устройства целесообразны только при знакопостоянной
нагрузке.
Если требуется высокая чувствительность системы, то об-
ращаются к гидроусилителям с р0 = const и в первую
очередь к исполнительным устройствам, выполненным по схеме
Сх-1.
299
7.8. КПД ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ
С ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ
В системах дроссельного регулирования управляющий золотник
работает в качестве распределителя энергии, сбрасывая на слив
избыток расхода, во всяком случае для систем с Qo = const, и
поэтому КПД таких систем при работе на установившемся ре-
жиме невелик. Сложнее обстоит дело с системами, у которых
Ро = const. Поскольку источник питания здесь фактически не
обеспечивает соблюдения условия р0 = const, то в случае регу-
лирования давления переливным клапаном избыток расхода также
сбрасывается на слив. Если же насос источника питания регули-
руется по давлению (автомат мощности), то потери энергии будут
меньше. Но тогда следует говорить о КПД исполнительного уст-
ройства, а не системы, а сама модель исполнительного устройства
из-за некорректности основного предположения о том, что ра =
= const, становится чрезмерно грубой.
Выражение КПД рассмотренных моделей исполнительных
устройств
П = (Pi = Ро, Ро), (7.43)
поэтому при v —»0 или р —> 0 и конечных значениях р, = р, (о)
И Qo — Qo (р) неизбежно падение КПД, так как при р —> 1 обя-
зательно v —> 0, а при возрастании v обязательно р —♦ 0.
Конкретизация уравнения (7.43) для различных схем дает
разные формы. Так, для исполнительных устройств, выполненных
по схемам Сх-1 и Сх-2, конкретизация разрешающего уравнения
приводит к равенству
_ ёр|/(1 — р)-2
Pi + Р2Р + ё К(1 + б)/2’
где ___ _______________
р____h. т/ Р'Р. р _ 1/ р^р .
L? и L„ — коэффициенты утечек и перетечек соответственно;
(р0 для систем с ро — const;
Р‘~\ро для систем с Qo = const;
f 1 для систем с р0 = const;
~[0 для систем с Qo = const.
КПД системы с источником питания, в котором насос регули-
руется по давлению, определяется выражением
п =------=—LTi—й’
1 + /?2 — + ^1 [ pv ь )
зоа
T L 1 1/ Р
где к = к —т—- I/ -х---*
М/max V %Ро
относительная жесткость
характеристики источника
питания; k = dQJdp —
жесткость характеристики
источника питания.
Зависимости т] = т] (р)
для рассматриваемой си-
стемы при = 0,06 и
R 2=0,03 и трех значениях
k (0,5; 1,0; 1,5) приведены
на рис. 7.33.
Использование регули-
руемого по давлению на-
соса в качестве источника
Рис. 7.33. КПД г] (р) исполнительных уст-
ройств с гидроусилителями дроссельного ре-
гулирования
питания позволяет более чем вдвое уменьшить потери на опти-
мальных по нагрузке стационарных режимах работы.
7.9. ДИНАМИКА ИСПОЛНИТЕЛЬНОГО УСТРОЙСТВА
С ЧЕТЫРЕХЩЕЛЕВЫМ УПРАВЛЯЮЩИМ
ЗОЛОТНИКОМ, ИМЕЮЩИМ НУЛЕВОЕ
ПЕРЕКРЫТИЕ
Использование статической характеристики гидроусилителя с че-
тырехщелевым управляющим золотником, имеющим нулевое
перекрытие (см. рис. 7.19), позволяет записать уравнение динамики
исполнительного устройства. Так, используя уравнение расхода
(7.37) и уравнение движения
тх + hx + сх + Р» + | Ррт | sign х = pF,
получим для исполнительного устройства выражение
х = kx 1/1 - — -L- (nix + hx + сх + Рв) sign h3h3 , (7.44)
1 Pv
анализ которого целесообразно проводить при помощи ЦВМ или
аналоговой установки, причем
К = yblV ppqF,
ах — смещение поршня исполнительного устройства.
При использовании отрицательной обратной связи (система
замкнутая по положению) динамическая характеристика описы-
вается последним уравнением совместно с условием
h3 = g — kQx, (ТАЪ)
где g — управляющий сигнал; k0 — коэффициент обратной связи.
301
В этом случае смещение управляющего золотника h3 стано-
вится промежуточной переменной, исключение которой из урав-
нений (7.44) и (7.45) дает
х + kxk0Ex = kxEg, (7.46)
где
£=1/1 —-1-^- —-^(mx + /ix + cx + PB)sign/i3.
' ног ног
Для случая, когда Ртр = FpT тх + hx + сх + Рв> из
равенства (7.45) уравнение собственных движений будет
->+ Vo/1 --^-Х=О или T-g- + x=0,
где Т =-----, 1 —•—постоянная времени следящей систе-
мы (сервомеханизма).
Поскольку собственные движения описываются линейным
дифференциальным уравнением первого порядка, то движение
всегда устойчиво, а переходный процесс монотонный.
Если постоянная нагрузка Рв совместно с силой трения будут
доминирующими, то уравнение собственных движений, записан-
ное в безразмерной форме, принимает вид
о + У"1 — |рт| —PBsign их = О,
где
V - X ^тр
у=-------; х —-------; рг =—
l'max xmax P»F
р Рв .
в PoF '
хтп — смещение поршня, определяющее наибольшую скорость
холостого хода гидроцилиндра; хтах = gm!J k0.
Фазовый портрет рассматриваемой системы [100], приведен-
ный на рис. 7.34, а, свидетельствует о ее устойчивости, и дей-
ствие внешних сил проявляется в изменении угла наклона ско-
ростной характеристики (меняется коэффициент усиления). Коэф-
фициент усиления уменьшается при преодолении внешней на-
грузки и увеличивается, когда направление действия нагрузки
совпадает с перемещением поршня. На рисунке зона, соответству-
ющая условию р <— 1, заштрихована. При р <0 и v > 0, а
также при р > 0 и v < 0 давление в гидроцилиндре отрицатель-
ное. При работе гидроцилиндра в насосном режиме зона А соот-
ветствует выдавливанию рабочей жидкости в сливную магистраль,
302
a)
Рис. 7.34. Фазовые портреты замкнутого исполнительного устройства с доми-
пирующей постоянной (а) и позиционирующей (б) нагрузками
а зона Б — выдавливанию в напорную магистраль. Фазовый
портрет справедлив в том случае, когда источник питания не
отделен от гидроусилителя обратным клапаном.
Переходный процесс при единичном воздействии описывается
экспонентой, постоянная времени которой определяется величиной
и направлением постоянной внешней силы, величиной силы су-
хого трения и коэффициентом обратной связи. Если доминирует
позиционирующая нагрузка Р = сх, то уравнение (7.46) записы-
вается в форме ________________ _____________
Т + sign = k. У1 - g,
где сп — переменное (нелинейное) значение жесткости позициони-
рующей нагрузки.
В безразмерных переменных уравнение собственных движений
записывается в форме ________
v + У~ 1 — ex sign vx = О,
Где С = £n/CrtmaX.
Фазовый портрет системы, приведенный на рис. 7.34, б, сви-
детельствует об устойчивости движения при любом значении жест-
кости позиционирующей нагрузки, действие которой проявляется
в изменении коэффициента усиления. Расчет переходного про-
цесса для этого случая приведен в работе [1001.
Если доминирует инерционная нагрузка, то уравнение (7.46)
записывается в форме
У + ^У^-Уг^пУ-^
= Р-47>
303
Рис. 7.35. Фазовый портрет замкнутого
исполнительного устройства с доминирую-
щей инерционной нагрузкой
При g=0 в безразмерных
переменных (уравнение соб-
ственных движений) [100]
V
— do-
и sign их = 0,
(7-48)
d2x dv
поскольку = V и
= р р ^л^оЦпах (^тах “
наибольшая скорость при от-
сутствии нагрузки). Обозна-
dv л
чая т = С, можно убе-
dx
диться, что С—угол наклона
интегральной кривой. Поль-
зуясь в равенстве (7.47) фик-
сированными значениями С,
можно его рассматривать как
уравнение изоклины. Полу-
чив семейство изоклин, с их
помощью строят фазовые тра-
ектории (на рис.
показаны для т
т — 1,0).
При начальных условиях v — 0, х = —1 и т = 1
уравнения (7.48) будет v = 0,64 при х = —0,64.
Форма фазовых траекторий свидетельствует о монотонности
переходных процессов при любых инерционных нагрузках, а
также об устойчивости движений. Однако величина инерционной
нагрузки должна удовлетворять условию
(Ро — Pnp)F
(d^x/dt^ ’
поскольку давление в рабочей жидкости не должно опускаться
ниже значения рпр (предельно допустимое давление).
7.35 они
= 0,5 и
решение
Глава 8
ЭЛЕКТРОГИДРАВЛИЧЕСКИЕ
УСИЛИТЕЛИ
Электрогидравлический усилитель применяется для управления
потоком рабочей жидкости Q (/) при помощи электрического
сигнала iy (/). Значение Q (/) зависит от перепада противодавле-
ния р (/) [97]. Усилитель управляет движением исполнительного
гидродвигателя и может устанавливаться или на напорной ли-
нии насосной станции, или на сливной линии гидродвигателя,
работающего от любого источника питания. Используется в ка-
честве усилительной части следящего электрогидропривода с испол-
нительными двигателями: гидроцилиндрами, толкающими гидро-
цилиндрами, поворотниками и реже с гидромоторами, если у них
при повышенных давлениях в обеих магистралях зона нечувстви-
тельности невелика [38]. Усилитель обеспечивает управление
электрическим сигналом потоков рабочей жидкости с существенно
большим усилением можности (существенно активная система).
Электрогидравлические усилители изготовляются в значитель-
ных количествах во многих странах для различных отраслей
промышленности и имеют множество модификаций, частично
рассмотренных, например, в работах В. А. Хохлова [100]. Наи-
большее распространение получили четыре типа электрогидравли-
ческих усилителей, описанных ниже и широко используемых
в машиностроении на расходы более 3 дм3/с с давлением источника
питания до 28 МПа, потерей расхода рабочей жидкости 0,013—
0,040 дм3/с, нелинейностью характеристики 6—9% и зонами
нечувствительности 2—3%. Такие усилители допускают работу
с полосой пропускания частот до 15—20 Гц [85] с отставанием
по фазе на этих частотах до —30-;—45°. Чистота рабочей жидко-
сти, на которой работает электрогидравлический усилитель,
должна быть не меньше 6-го класса по ГОСТ 17216—71.
8.1. ОСНОВНЫЕ ТИПЫ ЭЛЕКТРОГИДРАВЛИЧЕСКИХ
УСИЛИТЕЛЕЙ МЕЖОТРАСЛЕВОГО ПРИМЕНЕНИЯ
Наибольшее распространение находят гидроусилители первого
типа (рис. 8.1) — трехкаскадные. Первый каскад включает элек-
тромеханический преобразователь, в котором управляющим дви-
гателем служит заслонка; во втором каскаде имеется гидроуси-
литель типа сопло-заслонка, а управляющий золотник служит
управляющим двигателем, при помощи которого второй каскад
управляет третьим; в третьем каскаде усиление мощности обес-
печивается управляющим золотником. Источник питания первого
каскада — электрический, а остальных двух каскадов — гидрав-
лический, чаще — общий, но может быть и раздельным для
каждого каскада с целью ослабления взаимовлияния приводов
305
Рис. 8.1. Электрогидравлический уси-
литель первого типа
Рис. 8.2. Электрогидравлический уси-
литель второго типа
через источник питания и обеспечения устойчивой работы каскада,
имеющего недостаточный запас устойчивости. При общем источ-
нике питания давления питания второго и третьего каскадов могут
быть разными, что достигается установкой на подводящих маги-
стралях дросселей. Такие дроссели, в частности, ограничивают
расходы питания.
Электрогидравлические усилители первого типа при запуске
обслуживаются рабочей жидкостью с температурой не ниже
—60° С, имеют наименьшие размеры отверстий (до 0,03 мм),
работают в пределах линейных зон характеристик первых двух
каскадов усиления с перепадом давления на управляющем золот-
нике не выше 0,25 эффективного давления питания. Размер ча-
стиц загрязнений (уровень фильтрации) рабочей жидкости в пер-
вом каскаде усиления не должен превосходить 2/3 наименьшего
размера отверстий (сопл и дросселей). При правильном выполне-
нии системы уровень шума на выходе оказывается небольшим.
Гидроусилитель первого типа фирмы Нормалайр Гаррет
(Англия) на давление 28 МПа работает в диапазоне изменения
температур рабочей жидкости —50-4-204° С при температуре
окружающей среды от —54 до -f-427° С, требует мощность вход-
ного сигнала 60—120 мВт, обладает порогом чувствительности
1% и допускает смещение нуля характеристики на 4—7%. Ресурс
такого гидроусилителя достигает 60 млн. циклов, а гистерезис
управляющей части — 2—4%.
Поскольку управляющая часть (первые два каскада усиления)
гидроусилителя первого типа работает в пределах линейной части
характеристики, то до частот 15—20 Гц она может быть аппрокси-
мирована «колебательным» звеном с достаточно стабильными
параметрами, причем значение коэффициента усиления велико,
300
коэффициент демпфирования С = 8-н12 и более, а постоянная
времени обычно бывает малой (0,005 с и менее). Поэтому допу-
скается аппроксимация управляющей части апериодическим зве-
ном.
При необходимости существенного уменьшения коэффициента
демпфирования в механизме управления используют электро-
гидравлический усилитель второго типа (рис. 8.2), у которого
центрирующие пружины заменены на упругую обратную связь
управляющего золотника с якорем электромеханического пре-
образователя.
Считается, что гидроусилители второго типа обладают более
стабильными характеристиками, что может свидетельствовать
о недостаточном совершенстве механизма управления. Точное
изготовление и сборка деталей упругой обратной связи и сопря-
женных с ними деталей требует более высокой технологии (осо-
бенно процессов финишной обработки) по сравнению с требу-
ющимся при выполнении конструкций первого типа.
Требования к чистоте рабочей жидкости, допустимым диапа-
зонам температур, наименьшим размерам отверстий и зазорам
для обоих типов усилителей практически одинаковы, как одина-
ковы и относительные диапазоны изменения гидростатического
усилия на управляющем золотнике. Запас устойчивости усили-
телей второго типа выше, чем у первого типа.
Большей надежностью обладают электрогидравлические уси-
лители третьего типа (со струйной трубкой во втором каскаде),
которые обычно выполняются с той же упругой обратной связью,
что и конструкции второго типа. Выпускаются они в двух моди-
фикациях: со струйной трубкой (рис. 8.3, а) и с дефлекторным
струйным усилителем (рис. 8.3, б). Примером первой модификации
может служить конструкция АВЕХ (США), а второй — кон-
Рис. 8.3. Электрогидравлические усилители третьего типа:
а •=- со струйной трубкой; б с дефлектором
307
струкция ЛАТ (ФРГ), допускающие понижение температуры
рабочей жидкости при запуске до —55 и —50° С соответственно
и более высокий уровень шума на выходе при меньшем запасе
устойчивости в конструкциях без дефлектора. Диаметр проход-
ного отверстия магистралей в таких конструкциях не ниже 0,3 мм,
а диапазон изменения относительного гидростатического усилия
на управляющем золотнике составляет 0,9—0,95 для первой
модификации и 0,70—0,75 для второй, свидетельствуя о работе
второго каскада со значительными отклонениями от линейной
части характеристики.
Существенным преимуществом гидроусилителей третьего типа
является возможность снижения требований к фильтрации рабо-
чей жидкости из-за больших проходных сечений экстремальных
участков магистралей (0,15 мм).
Расчет гидроусилителя со струйной трубкой приводится
в работах [32, 33].
В электрогидравлических приводах дискретного типа с ши-
ротно-импульсным управлением на режимах ШИМ-I (режим
управления скоростью с разнополярными импульсами, при ко-
тором дискретный режим работы охватывает также и управляющий
золотник, когда обслуживаемый исполнительный двигатель несет
обязанности интегратора) и ШИМ-II (при увеличении несущей
частоты сигнала ошибка пропорциональна скорости управля-
ющего золотника, смещение которого становится меньше расстоя-
ния между упорами) используется электрогидравлический уси-
литель четвертого типа, отличающийся от конструкции первого
типа отсутствием центрирующих пружин.
Следует иметь в виду, что в тех же электрогидравлических
приводах дискретного типа на режиме ШИМ-III (системы с ши-
ротно-импульсным управлением по ускорению) необходимо охва-
тывать управляющий золотник какой-либо обратной связью
(например, при помощи синхронизирующих пружин), снимая
астатизм. В этом случае в следящем контуре не требуются допол-
нительные стабилизирующие устройства [86].
8.2. СИЛОВЫЕ ВОЗДЕЙСТВИЯ УПРУГОЙ
ОБРАТНОЙ СВЯЗИ В ЭЛЕКТРОГИДРАВЛИЧЕСКОМ
УСИЛИТЕЛЕ ВТОРОГО ТИПА
Упругая обратная связь с управляющего золотника 3 (рис. 8.4)
на якорь электромеханического преобразователя с заслонкой 1
реализуется при помощи упругой струны 2, которая должна
работать без люфтов и остаточных деформаций. Обычно диаметр
струны в заделке больше, чем диаметр крепления в шарике,
достигающий величины меньше 1 мм.
При повороте якоря на угол <р происходит смещение I заслонки,
отсчитываемое по осевой линии сопл (/ = АА' = где h3n —
308
Рис. 8.4. Дефорхмация
пружины обратной
связи
расстояние осевой линии сопл от оси пово-
рота якоря О, как это следует из рис. 7.10),
управляющий золотник смещается влево на
величину ВВ" = h3, деформируя упругую
струну на величину h3 + I — В'В" Та-
кая деформация струны создает на золот-
нике усилие R3, стремящееся поставить его
в нейтральное положение и нагружающее
якорь электромеханического преобразователя
дополнительным моментом Mr, который воз-
вращает якорь в первоначальное положение,
причем
R.= (h3 + ^l\cCK\
Mr (/) = haR3 (t) = [ h3 (t) + A.1 (0 ] hncoc,
где c0C — жесткость пружинной обратной
связи; hn — плечо управляющего золотника
относительно оси якоря.
Таким образом, уравнение электромеханического преобразо-
вателя (7.26) дополняется моментом MR. Однако в электроги-
дравлических усилителях, работающих на высоких частотах,
например при очень малых инерционных нагрузках исполни-
тельного двигателя, обслуживаемого этим усилителем, уже нельзя
пренебрегать инерцией якоря и его моментом активного сопро-
тивления. Тогда уравнение (7.26) дополняется еще двумя чле-
нами с соответствующим изменениехм его порядка:
CVy (0 = Ср/ (ЛэпР (0 + (0 +
+ *т— [Сэп + /гяО + (Л + Л) В2] l(t) Н • см/мА,
'1ЭП
где /гя — коэффициент активного сопротивления нагрузки, при-
веденный к оси якоря; /я и Ju — моменты инерции ротора и
нагрузки соответственно, приведенные к оси якоря; /с — площадь
сечения сопла.
Имея в виду малость членов, содержащих множители /гэп
и */я + 7Н, по сравнению с остальными членами, на частотах
до 20 Гц можно аппроксимировать уравнение движения якоря
электромеханического преобразователя в электрогидравлических
усилителях второго типа в отклонениях уравнением
CxAiy(0 = C( Д/(0 + СРМэпДр(0 + СЛД/13(0 Н-см, (8.1)
где С\ — коэффициент активного момента на якоре, Н-см/мА;
С
Q = + сос -т---коэффициент момента смещения заслонки.
Пэп lL3U *
309
Н; Срм = Ср/сЛэп — коэффициент гидродинамического момента,
Н-см/МПа; Ch = сосЛп — коэффициент момента от смещения зо-
лотника, Н; Сэм — жесткость магнитной пружины.
8.3. АНАЛИТИЧЕСКИЕ И СТРУКТУРНЫЕ
ПРЕДСТАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО
УСИЛИТЕЛЯ
Функциональная схема электрогидравлического усилителя вто-
рого типа вместе с нагрузкой — исполнительным двигателем
включает пять функциональных блоков.
Первый блок — электромеханический преобразователь (ЭМП
на рис. 8.5) с тремя переменными входа: управляющим сигналом
iy (0, перепадом давления на управляющем золотнике р (0, дей-
ствующим на заслонку через реакцию струй, и смещением управ-
ляющего золотника h3 (0, воздействующим на якорь ЭМП через
упругую обратную связь. Выходная переменная ЭМП одна —
смещение заслонки I (0.
Структурное представление первого функционального блока
приведено на рис. 8.6 слева от волнистой линии а, причем кор-
ректирующие связи, показанные на этой схеме штриховыми ли-
ниями, относятся лишь к электрогидравлическому усилителю
второго типа. Для конструкции первого типа такие связи пре-
кращают свое действие, поскольку в этом случае с0С = 0 (отсут-
ствует упругая обратная связь).
В первом гидравлическом каскаде усиления сопло-заслонка
(СЗ на рис. 8.5, на рис. 8.6 — между волнистыми линиями а и б)
также три переменных входа: смещение заслонки I (t), перепад
давления на управляющем золотнике р (0 и эффективное давле-
ние питания рассматриваемого каскада усиления pQ (0. Выход-
ная управляемая переменная только одна — смещение управляю-
щего золотника h3 (0. В отклонениях связь между этими пере-
менными описывается уравнением (7.16) с учетом выражений
(7.18)—(7.21):
К/ Д/ (0 4- Ко Др0 (0 - Кр Др (0 = ДQ3 (0 = FD ДЛ3 (0 см3/с. (8.2)
Исполнительным органом гидроусилителя первого каскада
будет управляющий золотник, материальное тело которого слу-
жит управляющим двигателем гидроусилителя второго каскада
Рис. 8.5. Функциональная схема электрогидравлического усилителя
310
Рис. 8.6. Структурные представления электрогидравлического усилителя вместе с исполнительным двигателем
(УДУЗ на рис. 8.5, в отклонениях — на рис. 8.6 между волни-
стыми линиями би в, в нелинейном структурном представлении —
на рис. 7.2). Пренебрегая в этом функциональном блоке утечками
и эффектом деформации рабочей жидкости, можно рассматривать
две переменные входа: смещение золотника Л3 (/) и смещение
заслонки / (/), воздействующие на золотник из-за упругой обрат-
ной связи. Переменной выхода будет перепад давлений на управ-
ляющем золотнике, причем уравнение связи между этими пере-
менными в отклонениях в соответствии с равенством (7.13)
имеет вид
Ар(0 = (тП2 + ЛО + Сг + Ск)Д/1з(/) + СосА-Д/(/) Н, (8.3)
л ЭЛ
где для механизмов управления гидроприводов гаммы II [1)
Н-с/см; F — площадь поперечного сечения исполни-
тельного устройства, см2; сг — гидродинамическая жесткость,
обусловленная реакцией рабочей жидкости, протекающей через
управляющий золотник (применительно к тем же механизмам
управления сг 17,5 Н/см); ск = с0С для электрогидроусилите-
лей второго типа и ск = 2с для первого типа, причем с — жест-
кость центрирующей пружины.
Второй каскад гидравлического усиления — управляющий зо-
лотник, уравнение расхода (7.37) которого, например для нуле-
вого, наиболее распространенного перекрытия, записывается
в форме
AQ (Z) = ^2Д/1э(/) + /<озЛроэ(/)-/<рпДрп(0 см3/с, (8.4)
где выражения коэффициентов усиления определяются уравне-
ниями (7.38), для четырехкромочного золотника — уравнениями
(7.30)—(7.32); Дроэ — отклонение эффективного давления пита-
ния, которое может отличаться от эффективного давления пита-
ния гидроусилителя сопло-заслонка, в том числе за счет отличия
Рис. 8.7. Исполнительный
двигатель с двумя толкаю-
щими цилиндрами
давления слива.
В нелинейном представлении вместо уравнения (8.4) исполь-
зуют выражение (7.37) или (7.27) в со-
ответствии с типом управляющего зо-
лотника.
На функциональной схеме (рис. 8.5)
рассматриваемый четвертый блок обо-
значен буквами УМ (усилитель мощ-
ности), а на структурной схеме (рис. 8.6)
показан между волнистыми линиями в и а.
В рассматриваемом электрогидрав-
лическом усилителе три главных пере-
менных (реакции отброшенных связей):
управляющий сигнал Д/у (/) и перепад
давлений на исполнительном двигателе
312
bpn (i) (на рис. 8.5 — блок ИД, на рис. 8.6 — справа от вол-
нистой линии г) являются входными переменными, расход рабо-
чей жидкости AQ (/) — управляемая переменная.
Электрогидравлический усилитель обслуживает исполнитель-
ный двигатель 2 вместе с объектом управления, который в случае
применения двух толкающих гидроцилиндров 1 оценивается экви-
валентным характерным объемом (рис. 8.7), а его динамиче-
ские свойства — операторами потерь П (D) и нагрузки Н (D).
8.4. ДИНАМИЧЕСКИЕ СВОЙСТВА МЕХАНИЗМОВ
УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИХ
УСИЛИТЕЛЕЙ
Первые три функциональных блока ЭМП, СЗ и УДУЗ на функ-
циональной схеме (см. рис. 8.5) или, что то же самое, участок
структуры до волнистой линии в на рис. 8.6 соответствуют меха-
низму управления электрогидравлического усилителя с компо-
нентами вектора входа Д1у (/), Др0 (/) и переменной выхода
Дй3 (0 (смещение управляющего золотника). Механизм управле-
ния по числу компонент вектора входа описывается двумя пере-
даточными функциями (рис. 8.8, «): при стабильном источнике
питания [Др0 ($) = 0]
^му (s) = д/13 (s)/A »у ($),
и при нестабильном источнике питания и отсутствии сигнала
управления [Дгу (s) = 0]
(S) = \h3 (з)/Др0 (s).
В структуре механизма управления две промежуточные пере-
менные: смещение заслонки AZ (/) в гидроусилителе сопло-заслонка
и перепад давления на управляющем золотнике Др (/). Поэтому
при стабильном источнике питания структура, показанная на
рис. 8.8, а, может быть заменена
структурой, приведенной на
рис. 8.8, б, с промежуточной пере-
менной Др (/) и передаточными
функциями [611:
r2(s) = Др(з)/Д1у(з) и
F3(s) = Д/13(з)/Др(з),
причем U7My (s) = W2 (s) Г3 (з).
Используя передаточную функ-
цию W3 (з) и заменяя перепад
давлений на управляющем золот-
нике Др ($), можно проводить оцен-
ки его смещения Д/т3 (з), экспе-
риментальное определение которо-
Рис. 8.8. Структурные схемы меха-
низма управления электрогидравли-
ческого усилителя:
а — с двумя переменными входа; б_
при стабильном источнике питания с
выявлением промежуточной перемен-
ной Др (О
313
Рис. 8.9. Упрощенная функциональная схема электрогидрав-
лического усилителя
го часто оказывается затруднительным. Такие оценки могут быть
достаточно точными на низких частотах (обычно в полосе пропус-
кания частот гидропривода объемного регулирования).
Механизм управления можно рассматривать в качестве четы-
рехполюсника с двумя переменными входа и двумя переменными
выхода, а усилитель мощности — в качестве четырехполюсника
с тремя переменными входа и одной переменной выхода (рис. 8.9).
Электрогидравлический усилитель в целом — шестиполюсник
с четырьмя переменными входа и двумя переменными выхода,
поскольку составляется из механизма управления и усилителя
мощности — управляющего золотника.
Механизм управления электрогидравлического усилителя при
стабильном источнике питания, т. е. при Др0 (t) = 0, аппрокси-
мируется колебательным звеном с передаточной функцией
W (s) = AZ*3 (s) =______-_____ (8 5)
МУW Му (/) 1 + 2tfTs + TV> °’
параметры которой получаются исключением промежуточных пе-
ременных Д/ (0 и Ар (0 из уравнений (8.1)—(8.3).
Обозначая в равенствах (8.1) и (8.3) coch = Ch. сос =Б
"ЭП
и ms2 4* hs 4* сг + ск = НУА (s), получим
aiCi [№ му ($)]-1 = а2Н уд ($) 4- a3F s 4-
где = K[F — БКР; а2 = CtKp 4- ^Срм; а3 = CZF 4- 5Срм;
ск — Сос Для электрогидравлических усилителей второго типа,
ск = 2с — для первого типа и ск = О — для четвертого типа.
Использование при получении выражения №му ($) равенства
% КГ* - + 1
нежелательно, поскольку для электрогидравлических усилите-
лей первого типа Ch = 0, а для конструкций второго типа Ch 4= 0.
и поэтому разрешающие выражения не будут общими (выро-
ждаются при переходе от второго типа к первому и четвертому
в результате деления членов равенства на нуль).
314
Учитывая, что
ai ____________ ______— cGchn__________,
°2 “ (c9m + coX)ap + *W/ ’
ая _ сосАп + (Сэм + соЛп) F
°* ~ йэп/сСр/</ + (Сэм+Сос^)Лр ’
можно получить зависимость параметров передаточной функции
механизмов управления электрогидравлическими усилителями
от конструктивных коэффициентов
с с
Ch + %- (Сг + Ск) с0СЛп + (сг + ск) (Сэм + C°ch'n) КР +
"1 осп-ГКг-Гк/ ЛэпГК/-С0сйп
tn
^2 __ ___
Ch~~ 4“ сг4“ ск
U2
2^ = -
~~ Ch 4“ сг 4- ск
«2
______________Ci___________________
„ । . ________hy^FKi — cochn_____
°С П (Сэм + сос^)кр + луссрк,
^оЛ + (Сэм + с0Л2п) F г
^сСЛ + (Сэм+сос/»2)Кр
оспп
— ^осЛп
(Сэм + сосЛп)Кр+йиСр*/
(8.6)
“ 0>с>
Применяя в последних трех выражениях подстановку ск
получим параметры передаточной функции механизма управле-
ния электрогидравлического усилителя второго типа.
Для конструкций первого типа сос = 0 и ск = 2с,
, и тогда
параметры передаточной функции механизма управления будут
д* ___ _________________h3nCxFKi__________* (У*)2__ т .
(с₽ + 2с) (Сэмяр + h2n/cCpKz) ’ ~ сг + 2с ’
£1
^2
2^*Т* =
________F2_________
Хр + й2п/с^/Ср/Сэм
сг4- 2с
а для конструкции четвертого типа
Д** ==. ______h-anC^F_____т .
Рг(СЭм/<р/Л/ + ^п/сСр)’
п^**^** __ I____________F2_________
Cr ^^P + ^lCp/Csu)*
Из-за малости значений постоянных времени и больших зна*
чений коэффициентов демпфирования механизм управления элек-
315
трогидравлических усилителей первого типа можно аппрокси-
мировать апериодическим звеном
JjZ ($) = _М$) . __
МУ' ' A(y(s) 14-T4S ’
(8.7)
Где Т* = ~2'(сг+~20 [° + m (СГ + 2с)];
ЯСЭМ
где
q ;= h -I--------------,
что в большинстве случаев оказывается допустимым для конструк-
ций второго типа при частотах менее 10 Гц.
Передаточная функция 1Г3 (s) получается в результате исклю-
чения промежуточной переменной Д/ из уравнений (8.2) и (8.3)
V/7 — _^3_(£)_ _ _____Дз_______
з[> bp(s) 1 + 2£3T3s + ту* ’
к — 1 (f с hn ;
3 Сг+Ск V С°с Лэп Д( )
Т1 —___—___• 2?\7\ = 1 1 - ft" F \ •
* 3 I г » ^ъЗ< 3
Сг+Ск V 0С /1эп Д/ Г
ск = 2с для конструкций первого типа, ск — с0С — для второго
типа и ск= 0 — для четвертого типа.
Передаточная функция ($) получается из очевидного ра-
венства (см. рис. 8.8, б)
w /<Л _ Ар (s) _ r«y (S) _ Д 1 + ^Ts + TW
2 W Му (s) Г3 (S) Д3 1 + 2£3T3s + Т$$г *
Поскольку характеристическое уравнение механизма управле-
ния электрогидравлического усилителя однозначно, а входные
переменные Дгу (/) и Др0 (0 на структурной схеме (см. рис. 8.6)
разделяются лишь алгебраическими операторами, то передаточ-
ная функция (s) от передаточной функции механизма управле-
ния 1Гму (s) может отличаться лишь значением коэффициента
усиления. Имея в виду равенство (8.5), можно искомую переда-
точную функцию записать в форме
Н7 /<л _ А/1з ($)______________
1 v ' &pa (s) 1 + 2LTs 4- TW ’
Выражение коэффициента усиления для входного сигнала
от источника питания Ki можно получить из уравнений (8.1)—(8.3)
в форме отношения ДЛ3/Др0 в результате исключения промежу-
точных переменных Д/ и Др, принимая Д/у (s) = 0, Fs \h3 (s) =
~ 0, НуД (s) = ст + ск и $ = 0. Тогда
c hn 4- F Cl
COC к Ч Г /П
“ЭМ ЬрМ
Q \ / h„ /<р \ ‘
Срм ' ' 0 ^ЭП Ло ' £₽M
К — %9
Л2“ Д/
ДР
До
316
8.5. ДИНАМИЧЕСКИЕ СВОЙСТВА
ЭЛЕКТРОГИДРАВЛИЧЕСКОГО УСИЛИТЕЛЯ,
РАБОТАЮЩЕГО С ИСПОЛНИТЕЛЬНЫМ
ДВИГАТЕЛЕМ
Усилитель мощности (на структурной схеме рис. 8.6 показан
между волнистыми линиями в и г) и исполнительный двигатель
(справа от волнистой линии г) составляют исполнительное устрой-
ство дроссельного регулирования. Рассматривая исполнительный
двигатель безотносительно к его типу, можно воспользоваться
эквивалентным характерным объемом шэ, который применительно
к гидромотору, непосредственно соединяемому с объектом управ-
ления, будет характерным объемом гидромотора w\ применительно
к гидромотору, соединяемому с объектом управления через ре-
дуктор, передаточное отношение i определяется равенством =
= wi, где i = Q/QH (Q и QH — угловые скорости гидромотора
и объекта управления соответственно); применительно к двум
толкающим гидроцилиндрам (см. рис. 8.7) w3 = fL, где f — актив-
ная площадь плунжера и L — плечо плунжера относительно оси
поворота исполнительного органа; применительно к гидроци-
линдру w3 — активная площадь гидроцилиндра, а частота вра-
щения в этом случае заменяется линейной скоростью.
Проведя элементарные структурные преобразования, можно
обратную связь по перепаду давления Лрп Дрп (s), присущую
всем гидроприводам дроссельного регулирования, привести к утеч-
кам в исполнительном двигателе, и тогда уравнения усилитель-
ной и исполнительной частей исполнительного устройства будут
Кл Дйэ (S) + Коэ Ароэ (s) = п* (s) w3 \рп (S) + АЙ (s); |
w9 &pn(s) = H (s) AQ (s)-|- AA4b(s), / ' ‘ '
где /7* (s) = Xpn t Ly + H (s) = h + J*s’
w3 2xu>;
где J3 — эквивалентное значение инерционной нагрузки, учиты-
вающее влияние всех движущихся частей.
Тогда механизм управления смещением управляющего золот-
ника h3 (/) посредством электрического сигнала управления 1у (/)
вместе с исполнительным двигателем составит систему с четырьмя
переменными входа и двумя переменными выхода, одна из кото-
рых й (/) — управляемая переменная, а другая рп (/) определяет
нагружение источника питания и может быть использована в це-
лях коррекции.
Имея в виду, что характеристические уравнения передаточных
функций WMV(s) = и ($) = д^3 одинаковы, а сами
у Aly (S) ISpQ (S)
передаточные функции отличаются только значениями коэффи-
циентов усиления К и можно привести «сигнал» от источника
317
питания к управляемому входу с множителем а коэффи-
циент усиления Kh управляющего золотника отнести к меха*
низму управления.
Принимая в уравнениях (8.8) возмущающее воздействие
Мв (s) = 0 и исключая нагрузочный показатель режима шэ Лрп ($),
получим передаточную функцию исполнительного двигателя
в форме
= 1 + Л* (s) Н (S)'
Принимая ДЛ3 (s) = 0 и Дроэ (з) = 0 1т. е. AQ (з) = 0], а за-
тем исключая из уравнений (8.8) w3 \ра (s), получим передаточ-
ную функцию влияния возмущающего воздействия ДЛ1В (s) на
управляемую переменную ДО (з):
П7 /г\_ (s) _ _ П* (S)
м ' ' ЛМВ (s) 1 + П* (s) Н (s) •
Для выявления нагрузочной переменной выхода Дрп (з) можно
воспользоваться вторым уравнением системы (8.8).
Таким образом, при рассмотрении лишь одного основного
управляющего сигнала iy (t) при р0 (/) = 0, р09 (/) = 0 и Мв (t) =
= 0 передаточная функция гидропривода будет
z„\ _ (з)______________Кгп______________ ZO П\
"'mW- Д«у($) -(1+2^+72з2)(1 + 2СгпТгпз+Т2г/)’
г пр fC _ KKfr . т _______ ,
де ЛГп— а»,(1 + т*Л) ’ га“ 1 + т*Л ’
9Г Т — Т*’& + ^э. т*_ Ly + ^pn . а _ V
^гп/гп- 1+т*Л > - w2 • 2хда2 «
Имея в виду условие (8.7), при частотах управляющего сиг-
нала не более 10 Гц можно пользоваться приближенным ра-
венством
W (s\ ____________—______________
rnU (1 + ^)(1+2?гпТгпз + Г2гпз2) ’
где Т4 = определяется для электрогидравлических усилите-
лей при помощи выражения (8.6).
8.6. ОБРАТНАЯ СВЯЗЬ ПО ПЕРЕПАДУ ДАВЛЕНИЙ
В ГИДРОПРИВОДЕ, РЕАЛИЗОВАННОМ НА БАЗЕ
ЭЛЕКТРОГИДРАВЛИЧЕСКОГО УСИЛИТЕЛЯ
В некоторых конструкциях, например в большинстве роботов
с гидроприводами, реализация обратной связи по скорости за-
труднена из-за консольного размещения исполнительных орга-
нов, значительных масс и габаритов тахомашин или устройств,
319
Рис. 8.10. Структурные схемы гидроприводов на базе
электрогидравлических усилителей:
а — с обратной связью по перепаду давлений на исполнитель-
ном двигателе; б — с главной обратной связью по положению
их заменяющих. В этом случае естественно обращение к обратной
связи по перепаду давлений на исполнительном двигателе. Струк-
тура такой системы при Др0 (s) = 0, Дроэ (s) = 0 и Мв ($) = 0
приведена на рис. 8.10, а, где R (s) — корректирующий оператор.
Для получающейся замкнутой местной обратной связи по
Дрп ($) (управляемой по ошибке) системы передаточная функция
будет
w3 (s) = -^4- =-----------1---------»
(S) r-’(s) +-^~R(S)H(S)
где Ггп (s) определяется выражением (8.9) или
П7 (o') =___________fSJSh___________=>
rn w w3 (1 + 2£Ts + TV) [I + П* (s) H (s)]
_____________________KKh_____________________
(1 + (1 + 2'QTs + T2s2) (1 + 2£rn7’rns + Г2/) ’
в котором коэффициент усиления, обычно бывает весьма велик.
Таким образом,
- (1 + + T2s2) (1 + 2£rnTrns + Г2/) +
+ -J- 7?(s)(l + THs)
и при 7? (s) = У? (0) = У? что легко реали-
зуется; имея в виду большие значения коэффициентов усиления
319
электрогидгавлических усилителей, можно пользоваться прибли- 1
женным выражением
где Ти = JJh и К3 = w3/(hR).
Ввиду большого значения коэффициента усиления тракта
управления по ошибке, проверка полученного контура на устой*
чивость обязательна. В этом случае пользуются характеристичен
ским уравнением
W3(lK^h) (1 + TiS) (1 + 2^rnTrns + 7’2r[,s2)+ (1 + = °>
определяя Tit Т1„ и 2£Гп7'гп в соответствии с уравнениями (8.7)
и (8.9).
При замыкании системы обратной связью по положению
(рис. 8.10, б), например, когда используют импульсный датчик,
передаточная функция замкнутой системы будет
Д) /<А = _Axjs)_ _ (1/S) Дй (S) _________1_________ _
W Ag(s) Д(у (s) 4-Дх (s) l + (l/K3)(l + TBs)s
1
где7’ф = -?Г=<7’н = ^; 2^ф = 4- = /?-^, причем
коэффициент затухания определяется только постоянной вре-
мени Та:
6 = &1>/Тф=1/(2Тв).
Глава 9
СИЛОВЫЕ ГИДРОПРИВОДЫ
С ДИСКРЕТНЫМ РгГУЛИРОВАНИЕМ
СКОРОСТИ
Понятие «дискретное регулирование» рассмотрено в дальнейшем
применительно к способу формирования управляющего воздей-
ствия на исполнительный гидродвигатель. Дискретный способ
регулирования скорости в системах гидроавтоматики вполне само-
стоятелен и в ряде случаев может конкурировать с другими извест-
ными способами регулирования скорости — дроссельным, объем-
ным, струйным. Однако дискретный способ предполагает исполь-
зование специализированных технических средств с высоким
быстродействием. Обозрение подобных средств позволяет устано-
вить наиболее актуальные теоретические проблемы дискретной
гидроавтоматики, анализу которых и посвящено последующее
изложение.
Одна из таких проблем состоит в определении регулировоч-
ных характеристик (т. е. параметров движения в связи с управ-
ляющим сигналом) исполнительного гидродвигателя при дискрет-
ном регулировании его скорости. Другие проблемы относятся
к частным задачам исследования рабочих режимов дискретных
систем отдельных классов (шаговых, релейных, импульсных,
цифровых). При теоретическом исследовании гидроприводов с ди-
скретным регулированием скорости наибольший интерес пред-
ставляют методы, пригодные для инженерной практики. Именно
такие методы отобраны при решении ряда конкретных задач,
которые далее проиллюстрированы примерами.
9.1. ДИСКРЕТНЫЙ СПОСОБ ФОРМИРОВАНИЯ
УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ
В АВТОМАТИЗИРОВАННЫХ ГИДРОПРИВОДАХ
Преобразование информации в контуре силовой гидравлической
системы -автоматического регулирования (стабилизации, следящей,
системы программного регулирования) носит характер восприя-
тия, измерения, передачи, переработки и представления различ-
ного рода сигналов, а также формирования управляющих воз-
действий на исполнительный двигатель. По способу передачи,
переработки, представления сигналов в автоматике различают
системы непрерывные и дискретные, а по способу формирования
управляющих воздействий на двигатель в гидроавтоматике при-
нято делить системы на дроссельные, объемные и струйные.
Использование термина «дискретная» применительно к гидравли-
ческой системе автоматического регулирования предполагает
обычно, что в несиловых промежуточных цепях этой системы
И В. Н. Прокофьев и др. 321
имеется, по крайней мере, одно звено с дискретной характеристи-
кой связи входа и выхода независимо от того, сказывается ли эта
характеристика на параметрах движения выходного звена си-
стемы или нет.
Между тем нетрудно представить себе автоматическую систему
с дискретным способом формирования управляющего воздействие
на исполнительный двигатель, когда параметры выходной коор!
динаты дискретного звена и выходной координаты системы свя-
заны между собой лишь через статические и динамические харак-
теристики собственно двигателя [86]. Особенность такой гидрав-
лической системы состоит не в дискретном способе передачи сиг-
нала по каналам связи, а в дискретном способе управления испол-
нительным двигателем. Термин «дискретная» здесь может иметь
тот же смысл, какой для систем других классов имеют понятия
«дроссельная», «объемная», «струйная», однако, разумеется, лишь
в том случае, если дискретный способ формирования управляющих
воздействий по своей физической природе представляет нечто
новое по сравнению с дроссельным, объемным, струйным.
Дроссельный способ с энергетической точки зрения заклю-
чается в вариации сопротивления на пути энергетического потока
в исполнительный двигатель, т. е. в диссипации энергии. Объем-
ный способ состоит в изменении основного конструктивного пара-
метра одной из рабочих машин объемной гидропередачи, а сле-
довательно, в регулировании величины самого энергетического
потока, либо его плотности. Существо струйного способа — в ре-
гулировании величины потока кинетической энергии, поступаю-
щего в исполнительный двигатель. При дискретном же способе
формирования управляющих воздействий (называемом далее д и •
скретным способом регулирования) постоян-
ный энергетический поток попеременно подключается к исполни-
тельному двигателю и отводящей магистрали, в силу чего течение
процесса регулирования определяется параметрами работы ключа.
Последнее определение показывает физическое различие дискрет-
ного и других способов регулирования исполнительных двига-
телей и предполагает существование обширного класса систем,
требующих самостоятельного изучения.
В роли ключа в системах дискретного регулирования скоро-
сти исполнительных двигателей выступает обычно электрогидрав-
лический (в других случаях пневмогидравлический) усилитель,
назначение которого состоит в перераспределении постоянного
потока энергии без существенного влияния на его величину.
Поэтому наиболее благоприятным режимом включенного электро-
гидравлического (или другого) дискретного усилителя является
режим, близкий к насыщению по расходу с минимальными дрос-
сельными потерями.
Существует много различных способов манипулирования клю-
чом, однако, отбирая лишь режимы, позволяющие регулировать
подвод к исполнительному двигателю энергии без ее диссипации
322
в дискретном усилителе, рассмотрим следующие разновидности
дискретного способа регулирования:
широтно-импульсный способ, когда регулирование двигателя
осуществляется путем подачи в режиме насыщения прямоуголь-
ных импульсов расхода, модулированных управляющим сигна-
лом по ширине в пределах периода постоянной несущей частоты;
частотно-импульсный способ, при котором в исполнительный
двигатель поступает частотно-модулированная управляющим сиг-
налом последовательность прямоугольных импульсов расхода по-
стоянной длительности и неизменной амплитуды, сформирован-
ной в режиме насыщения;
релейный способ, состоящий в попеременном автоколебатель-
ном замыкании—размыкании гидравлического реле и формирова-
нии в режиме насыщения прямоугольных импульсов расхода,
частота и ширина которых обусловлены как динамическими ха-
рактеристиками звеньев, слагающих замкнутый контур, так и
уровнями входного сигнала и возмущения, приложенных к зам-
кнутой гидравлической автоматической системе;
цифровой способ, заключающийся в подаче в исполнительный
двигатель в промежутках между тактами постоянной несущей
частоты доз рабочей жидкости, смена величин которых возможна
лишь с одним из тактов этой несущей частоты, а сама величина
выбирается в соответствии с уровнем управляющего сигнала
из некоторого, ограниченного разрядами кода набора фиксиро-
ванных значений;
релейно-импульсный способ, заключающийся в том, что при
каждом замыкании гидравлического реле, работающего в автоко-
лебательном режиме, в исполнительный двигатель поступает на
постоянной несущей частоте серия неизменных по своему объему
доз рабочей жидкости, формируемых импульсным источником
расхода.
Если квалифицировать сигнал управления исполнительным
двигателем как программу изменения скорости последнего или
расхода поступающей в него рабочей жидкости, то импульсный
способ регулирования будет состоять в квантовании (дискретиза-
ции) поступающего от насосной станции расхода по времени
(т. е. путем временных отсечек). В то же время релейный способ
регулирования исполнительного двигателя будет заключаться
в квантовании поступающего от насосной станции расхода по
уровням, один из которых — нулевой (при разомкнутом ключе),
а другой — некоторый постоянный, положительный или отри-
цательный (при замкнутом ключе). Цифровой способ можно опре-
делить как способ регулирования исполнительного двигателя
с одновременным квантованием поступающего от насосной стан-
ции расхода по времени и многим уровням.
Различные варианты гидравлического импульсного регулиро-
вания показаны на рис. 9.1. Управляющий сигнал, аналог про-
граммы изменения скорости v гидродвигателя (рис. 9.1, а), мо-
И* 323
Q
6)
ci
I I I I I I I ' I I I I I I I ' I
fl* I I I I I I 1 I I I I I I I 1 I I
। ндп । iiimii |Н| ?
IllHillllimgl
I III '
Рис. 9.1. Гидравлическое дискретное
импульсное регулирование гндродвига-
телей:
а — программа изменения скорости гидро-
двигатсля; б и в — широтно-импульсное ре-
гулирование с модуляцией по заднему и пе-
реднему фронтам; г — широтно-импульсное
регулирование при помощи знакоперемен-
ных импульсов; д — частотно-импульсное
регулирование; е — частотно-широтное ре-
гулирование
а
Q
дулирует по заднему фронту
(рис. 9.1, б) или по переднему
фронту (рис. 9.1, в) последова-
тельность импульсов расхода Q,
поступающих от насоса в напор-
ную магистраль двигателя,—
по ширине (широтно-импульс-
ное регулирование первого ро-
да). Широтное регулирование
может быть реализовано и при
подаче в двигатель импульсов
со знакопеременной последова-
тельностью (рис. 9.1, г) за счет
изменения соотношения времени
подключения магистралей дви-
гателя к насосной станции в
пределах каждого периода Т
постоянной несущей частоты
(широтно-импульсное регулиро-
вание второго рода).
Частотно-импульсное регу-
лирование представлено в двух
модификациях. В одной из них
частота постоянных по длитель-
ности и амплитуде импульсов
расхода пропорциональна теку-
щему значению управляющего
сигнала (рис. 9.1, о). В другой
(рис. 9.1, е) использован частот-
но-широтный алгоритм регули-
рования исполнительного двиг
гателя: чем выше уровень
управляющего сигнала, тем ниже частота постоянных по дли-
тельности пауз между постоянными по амплитуде импульсами
расхода, длительность которых пропорциональна текущему зна-
чению управляющего сигнала.
Релейное регулирование осуществляется при помощи гидрав-
лического усилителя с релейной характеристикой (рис. 9.2, а).
имеющей зону нечувствительности 2Д, гистерезис с показате-
лем т, а нередко и весьма существенное запаздывание т в сраба-
тывании. Из графиков на рис. 9.2 следует, что картина переклю-
чений реле однозначно связана с расположением точек /, 2, 3, ...
пересечения управляющего сигнала (программы изменения ско-
рости v исполнительного двигателя — рис. 9.2, б) с границами
зоны нечувствительности (как видим, принудительно задаваемой
частоты следования импульсов здесь нет). Релейное (рис. 9.2, в),
либо релейно-импульсное регулирование (рис. 9.2, г) реализуется
в зависимости от того, какой источник расхода — постоянный
324
Рис. 9.2. Гидравлическое дискретное релейное регулирование гидро-
двигателей:
а — релейная характеристика дискретного гидроусилителя; б — программа из-
менения скорости гидродвигателя; в — релейное регулирование; г релейно-
импульсное регулирование
или импульсный — подключен к гидравлическому дискретному
двигателю.
Цифровой способ регулирования проиллюстрирован на рис. 9.3.
Из располагаемого набора доз, построенного в соответствии
с каким-либо кодом, с очередным тактом несущей частоты форми-
руется комбинированная доза на предстоящий период, величина
которой находится в соответствии с управляющим сигналом
(программой изменения скорости и гидродвигателя). Формиро-
ванне гидродвигателей:
а — цифровое регулирование с объемным формированием дозы;
б — цифровое регулирование с амплитудным формированием
дозы
325
вание дозы может быть объемным (объемное дозирование рабочей
жидкости, геометрическое ограничение перемещения выходного
вала двигателя — рис. 9.3, а) или амплитудным (выбор уровня
расхода на время между границами периода несущей частоты —
см. рис. 9.3, б).
9.2. ТЕХНИЧЕСКИЕ СРЕДСТВА
БЫСТРОДЕЙСТВУЮЩИХ СИСТЕМ ДИСКРЕТНОЙ
ГИДРОАВТОМАТИКИ
Технические средства, описанные здесь, являются оригинальными
решениями и охватывают все гидравлические дискретные системы
автоматического регулирования. Рассмотрим варианты структур
электрогидравлических дискретных приводов подачи, работаю-
щих по программе от некоторых устройств ввода программы.
В наиболее общем виде привод состоит из электронной схемы
управления ЭСУ и регулируемого привода РП (рис. 9.4, а).
К электронной схеме управления отнесем (рис. 9.4, б) блок сравне-
ния сигналов программы и обратной связи по положению БСП,
блок формирования управляющего алгоритма БФУА. К регули-
руемому приводу отнесем источник расхода ИР, электрогидрав-
лический дискретный усилитель ЭГДУ и гидродвигатель. Стан-
дартными элементами в этой структуре являются блок сравне-
ния БСП, датчик ДОСП, источник ИР, гидродвигатель ГД,
Специфичными являются блок формирования БФУА (для каждой
разновидности дискретной следящей системы) и гидроусилитель
ЭГДУ со своей электронной схемой управления. Для электро-
гидравлических цифровых следящих систем необходим специали-
а — укрупненная структура; б — раз- 2)
вернутая структура гидравлического
дискретного следящего привода; в — структура двухконтурного гидравличекого дис«
кретного следящего привода; г — структура электрогидравлического разомкнутого
дискретного привода подачи
326
зированный цифровой источник ИР либо специализированный
цифровой гидродвигатель ГД.
Для построения электрогидравлического двухконтурного ди-
скретного привода подачи требуются дополнительное последова-
тельное корректирующее устройство ПКУ и блок сравнения сиг-
налов задания и отработки по скорости БСС (рис. 9.4, в). Осталь-
ные блоки оригинальны либо стандартны, как на рис. 9.4, б.
Наконец, на рис. 9.4, г показана развернутая структура элек-
трогидравлического разомкнутого дискретного привода подачи.
Стандартными устройствами при их наличии могут быть источ-
ник ИР либо гидродвигатель ГД. Электронный коммутатор ЭК
и гидроусилитель ЭГДУ с электронной схемой управления во всех
случаях требуют специальной разработки применительно к при-
воду.
Электрогидравлический дискретный усилитель ЭГДУ (т. е.
ключ) является необходимым элементом любой электрогидравли-
ческой дискретной системы. При разработке его схемы и кон-
струкции обеспечивалось выполнение следующих требований:
время переключения — не более 0,001 с, включение должно
протекать в режиме насыщения по расходу; при выключении
ЭГДУ магистрали гидродвигателя ГД должны быть перекрыты;
«запуск» импульса расхода должен осуществляться маломощным
«включающим» электрическим импульсом длительностью не-
сколько микросекунд — на одном входе блока управления, а мо-
мент окончания импульса расхода должен определяться «выклю-
чающим» электрическим импульсом на другом входе блока управ-
ления.
Электрогидравлическая схема разомкнутого привода РП с ги-
дроусилителем ЭГДУ показана на рис. 9.5, а. Привод может
быть использован либо самостоятельно — в электрогидравличе-
ских разомкнутых приводах подачи, либо входить составной
частью в контур следящей системы [89]. Запуск положительного
импульса расхода, которому предшествует форсированное пере-
ключение электромагнита ЭМ1, осуществляется по входу а элек-
тронного блока управления; момент окончания положительного
импульса расхода, которому предшествует форсированное пере-
ключение электромагнита ЭМ2, наступает с приходом управляю-
щего импульса на вход б блока управления. Аналогично форми-
руются отрицательные импульсы расхода подачей управляющих
импульсов на входы а и б другого блока управления парой со-
пряженных электромагнитов ЭМЗ—ЭМ4. В паузе между управ-
ляющими импульсами через катушки соответствующих электро-
магнитов протекает небольшой ток поддержки.
Вариант регулируемого привода с более сложной конструк-
цией гидроусилителя ЭГДУ представлен на рис. 9.5, б. Дополни-
тельные щели и магистраль III мъгуг быть использованы для
разгрузки насоса в паузах между импульсами расхода, для за-
рядки аккумулятора, для управления другим гидродвигателем
327
Рис. 9.5. Электрогидравлические дискретные усилители (ЭГДУ) в схемах разомк-
нутого привода:
а — гидравлическая схема ЭГДУ и электронная схема блока форсированного переклю-
чения смежных электромагнитов ЭМ1 и ЭМ 2; б — ЭГДУ с дополнительным гидравличе-
ским потоком II/; в — привод с импульсным источником расхода — электрогидравличе-
ской дозирующей ячейкой (ЭГДЯ)
и др. Во всех этих случаях мы приближаемся к полному исполь-
зованию энергии источника ИР независимо от уровня управляю-
щего сигнала.
Комплекс «гидроусилитель ЭГДУ — объемный дозатор»
(рис. 9.5, в) образует электрогидравлическую дозирующую ячейку
ЭГДД, которая может быть установлена в сливной, напорной,
либо в обеих магистралях гидродвигателя одновременно, образуя
электрогидравлический силовой шаговый регулируемый привод,
работающий на частотах в сотни герц. Переключение электро-
магнитов ячейки ЭГДД осуществляется специальным электрон-
ным коммутатором. Подобный привод может быть использован
самостоятельно либо в контуре релейно-импульсной следящей
системы.
328
Другой вариант силового высокочастотного электрогидравли-
ческого шагового двигателя показан на рис. 9.6. Пара конических
колес с малым углом между осями и малой разницей в числе
зубьев работает таким образом, что входное колесо обкатывается
без вращения по выходному, а цикл обкатки осуществляется
гидравлически управляемыми от гидроусилителей ЭГДУ толка-
телями. Группа гидроусилителей переключается электронным
коммутатором ЭК через блок форсированного переключения
электромагнитов БФП. Программа задается блоком про-
граммы БП. Цена шага определяется разницей в числе зубьев,
количеством толкателей и режимом работы коммутатора.
Регулируемый привод с гидроусилителем ЭГДУ, охваченный
обратной связью по положению, составляет следящую систему,
которая в зависимости от структуры блока формирования управ-
ляющего алгоритма БФУА может быть релейной, широтно-им-
пульсной и частотно-импульсной. На рис. 9.7, а в качестве при-
мера показана блок-схема электрогидравлической следящей си-
стемы, в которой функции блока формирования БФУА выпол-
няет блок квантования по уровню БКУ, функции блока сравнения
БСП—реверсивный счетчик РС, функции датчика ДОСП—импульс-
ный датчик. Импульсы программы и обратной связи синхронизиру-
ются в блоках С при помощи генератора тактовых импульсов ГТ И.
Общая структура электрогидравлических следящих систем
других классов может быть аналогичной с единственным отли-
Рис. 9.6. Схема высокочастотного электрогидравлического шагового
двигателя:
а — структурная н кинематическая схема; б — гидравлическая схема
329
Рис. 9.7. Структурные схемы электрогидравлических дискретных следя-
щих систем:
а релейная система; б — цифровая система
чием, касающимся блока, следующего за реверсивным счетчиком.
Таким блоком будет широтно-импульсный модулятор либо блок
частотно-импульсной модуляции в зависимости от алгоритма
управления исполнительным гидродвигателем [86].
зз»
Блок-схема электрогидравлической цифровой следящей си-
стемы выглядит несколько сложнее (см., например, рис. 9.7, б,
где использован регулируемый привод с цифровым источником
расхода). В качестве цифрового источника ИР можно применить
группу ячеек ЭГДД с объемами дозаторов, различающимися
в двоичном коде [87]. В зависимости от рассогласования ревер-
сивного счетчика отбирается та или иная комбинация разрядных
делителей 1 4, каждый из которых управляет переключением
электромагнитов своей ячейки ЭГДД. В результате текущая
скорость гидродвигателя будет пропорциональна рассогласова-
нию в следящем приводе.
<*)
Рис. 9.8. Цифровое регулирование скорости исполнительного гидро-
двигателя:
а — при помощи цифрового источника расхода в виде цифрового делителя
потока (ЦДП); б при помощи цифрового исполнительного двигателя
331
В электрогидравлических цифровых следящих системах можно
использовать и другие варианты цифровых источников ИР.
Таким источником является, например, цифровой делитель по-
тока ЦДП, представляющий собой четырехсекционный гидромо-
тор со связанными выходными валами и объемами секций, раз-
личающимися в двоичном коде (см. рис. 9.8, а). Изменение ско-
рости гидродвигателя ГД достигается подключением различной
комбинации секций делителя ЦДП.
Электрогидравлические цифровые следящие системы могут
использовать и цифровые гидродвигатели ГД, как, например,
в схеме на рис. 9.8, б. Изменение комбинаций секций гидроци-
линдра, подключаемых к насосу постоянной подачи, позволяет
изменить скорость выходного звена. Различные конструктивные
варианты цифровых гидродвигателей могут быть построены и на
базе гидромашин ротационного типа [90].
Высокое быстродействие элементов цифровых следящих систем
позволяет назначить несущую частоту порядка 100 Гц и выше.
9.3. РАСЧЕТ ПАРАМЕТРОВ ДВИЖЕНИЯ
ИСПОЛНИТЕЛЬНОГО ГИДРОДВИГАТЕЛЯ
ПОД ДЕЙСТВИЕМ НЕПРЕРЫВНОЙ
И УСТАНОВИВШЕЙСЯ ПОСЛЕДОВАТЕЛЬНОСТИ
ИМПУЛЬСОВ РАСХОДА
Как в замкнутых, так и в разомкнутых системах процесс дискрет-
ного регулирования силового гидродвигателя состоит в возбу-
ждении его движения последовательностью прямоугольных им-
пульсов расхода. Отсюда первая задача анализа особенностей
дискретного регулирования состоит в нахождении характери-
стик, определяющих связь параметров установившейся последо-
вательности импульсов расхода и параметров движения выход-_
ного вала. Являясь по своей сути статическими, подобные харак-
теристики при дискретном регулировании могут быть установлены
только через дифференциальные уравнения движения гидравли-
ческого дискретного регулируемого привода.
Определим уравнение фазовой траектории установившегося
движения гидродвигателя под действием произвольной последо-
вательности прямоугольных импульсов расхода, следующих G пе-
риодом Т.
Рассмотрим передаточную функцию W (s) гидродвигателя
с учетом дополнительного фиктивного запаздывания т, которое
позволит нам в дальнейшем при использовании математического
аппарата дискретного преобразования Лапласа знать закон дви-
жения выходного вала в промежутке 0 < т < 7\ а не только
в тактовые моменты начала и конца периода Т*.
= ‘91>
332
Передаточная функция гидродвигателя записана в обычной
форме: k — коэффициент усиления; 7\р — постоянная времени;
t — коэффициент демпфирования; v и цзад — выходная и зада-
ваемая гидродвигателю скорости (узад = v0 А//Т); ц0 — ско-
рость, соответствующая абсолютному заполнению управляющим
сигналом (расхода) периода несущей частоты; А/ — длительность
импульса расхода; s—оператор Лапласа.
Перейдем в выражении (9.1) к приведенному оператору Лап-
ласа q = sT, воспользуемся также некоторыми дополнительными
обозначениями:
= (9.2)
гдет = -^-; а = ₽ =
7 ^врИ 1 — I2 7 ВР 7 вр
Та же передаточная функция, но в смысле дискретного преоб-
разования Лапласа (или ^-преобразования, где z— оператор
преобразования), имеет различное выражение для т < Т (или
т < 1) и для т > Т (или т > 1):
W(z) = если т<Т (9.3)
'' 1 г2 — 2ze~“ cos Р + е—'
Wh\ — k е-“ (2-?) г SM (2 - i) + е~а sinP(T-l)
1 z (г* - 2ze-“ cos 0 + e~2“) ’
если т > T. (9.4)
Реакция (в смысле z-преобразования) объекта на последова-
тельность входных импульсов, задающих узад = 1, длитель-
ностью Д7 = ЬИТ описывается выражениями
Н (г, т) = kyAi (z)e~“ (1-т) sin 0(1 —т) ф- kLA2 (z) е~а (1~г) sin 0т —
— (z)e-a sin 0(1 — Д7— т) —
— ^Л2(г)е-а (1-д7-т) sin0(x4-Д7) при тф-Д7<1; (9.5)
Н (г, т) = klA1 (г) е~а <1-т) sin 0 (1 —т) ф- klA2(z)e~a <1-г )sin 0т —
— kLA3 (г) е_“ (2-Д/-т) 5щ р (2 — Д/ — г) —
— (г) е_“ sin 0 (т + — 1) ПРИ т4~Д7>1. (9.6)
Поскольку вывод этих выражений здесь опущен, сделаем не-
которые пояснения. Исходным для получения выражений яв-
ляются передаточные функции (9.3) и (9.4). Оба выражения опи-
сывают реакцию объекта, но на различных подынтервалах (0 <
< т < 1 — Д/) и (1 — Д7 < т < 1). Далее выражения (9.5)
ззз
w (9.6) записаны таким образом, что содержат коэффициенты, за*
висящие либо только от оператора г (это_относится ко всем коэф-
фициентам Д), либо только от параметра т (это относится к осталь-
ным коэффициентам).
Обозначения в формулах (9.5) и (9.6) имеют следующий смысл:
2^2
& в (г — 1) (г2 —az-j-t) ’ = (г — 1) (г2 — аг + д) ’
г е*“а
= (z — 1) (г2 —аг 4-6) ’ ^4 (^ = (г — 1) (г2 — аг + &) ’ '7)
причем а = 2е~а cos 0; b = е~2а.
Поскольку коэффициенты А зависят только от г, они с тече-
нием времени стремятся к некоторым постоянным значениям по
мере того, как затухает переходный процесс, связанный с перво-
начальным «набросом» последовательности управляющих вход-
ных импульсов. По смыслу поставленной задачи нас интересуют
именно установившиеся значения коэффициентов А. Ниже пред-
ложен способ определения этих значений.
Осуществив в выражении для Дх деление числителя на зна-
менатель по правилу деления многочленов, получим
А,, = тог0 4- (т0 -j- mL) г-1 ф-
П=зГ
ф- (т0 ф- 4- тг) г'г 4----F z~r L (/лп) 4---. (9.8)
п.=о
где коэффициенты при z~r, в соответствии с правилами перехода
от изображений в смысле дискретного преобразования Лапласа
к оригиналам, дают значение коэффициента Дъ г в пределах пе-
риода номера г.
Было установлено, что слагаемые т могут быть найдены с по-
мощью вспомогательной матрицы
ги0 = 1 0 0 0 0 0
mi = a 0 0 0 0 0
a2 —b 0 0 0 0
m3 = a3 —2a b 0 0 0 0
m4 = a4 —3a2b 4-t8 0 0 0
m6 = a5 —4a3b +3ab2 0 0 0
/п6 = a6 —5a4b +§a2b2 —b3 0 0
пг~ = a7- —6a5 Z? + 10a3Z?2 —4ab3 0 0
334
Читать эту матрицу следует построчно по горизонтали, а за-
полняется она по диагонали — слева направо вниз. В каждой
диагонали, как это видно из структуры матрицы, расположены
различные степени двучлена (ab). Имея в виду указанную законо-
мерность, нетрудно продолжить матрицу и определить слагае-
мые т любого номера. Начиная с некоторого номера г, эти слагае-
мые становятся практически равными нулю. Это означает, что
в периодах данного и последующих номеров движение будет
носить установившийся характер. Значение коэффициента А± ==
== Л1>г в этом периоде следует зафиксировать и подставить в ка-
честве постоянного сомножителя в формулы (9.5) и (9.6). Осталь-
ные коэффициенты Л2, г—Л 4if связаны с Л1|Г простыми соотно-
шениями, следующими из выражений (9.7):
^2, г= Alt r+it~a't A3t r = Alt A4t r = Alt r+2e a. (9.10)
Таким образом, переменное установившееся значение V; ско-
рости гидродвигателя в пределах некоторого периода номера г
подчиняется зависимости
Vi (т) = k4Ab re-a (1“т) sin р (1 — т) + k4A2t re~a (l~T) sin |3т —
— ^1ЛК fe~a (!-д7-т) р (1 — Д/ — т) —
— &1Л2| ге~а<1“д?“т) sin р (т + Д?) при ?+ Д/< 1; (9.11)
Vi (т) = k4Alt sin р (1 — т) -{- kLA2t ге""а^""т) sin р? —
— Z^3i re~a (2-д'-'О sin р (2 — т — Д/) —
— й1Л41Ге-а (2—д7—т) sin р (т + Д/ — 1) при т+Д7>1. (9-12)
Нетрудно показать, что эти выражения можно рассматривать
как решения одного и того же дифференциального уравнения для
различных начальных условий. Это искусственное дифферен-
циальное уравнение (поскольку отражает движение дискретного
привода лишь в установившемся колебательном режиме) имеет вид
_ 2a + (аз + 02) Sign tel = 0.
ат2 dx L
Уравнение может быть переписано в виде, удобном при по-
строении фазовых портретов:
e1^--2a8(. + (a2 + 02)sign8z = O> (9.13)
где 8i = dvjdx.
335
(9.15)
Решение (9.11) получается из уравнения (9.13) при начальных
условиях
[uj-^ = krAlt ,е~а sin Р — ге~а (1-д?> sin р (1 — Д7) —
— kiA^ ге~а <‘-д^ sin Р Д7;
[е,]- п = ге-а (а sin Р — Р cos Р) +
- (9.14)
+ Mve-a₽-M1.,e-“('-A'> х
X [asinP(l — Д/) — Р cos Р (1 — Д7)] —
— re-a (a sin Р Д / + Р cos р • Д7).
Решение (9.12) получается из уравнения (9.13) при начальных
условиях
[v/]t=i-a7 = Mi, ге~а^ sln Р ДМ
-|- kjA2 ге~адг sin р (1 — Д7) — kiA3' re~a sin Р;
[е;И=1-д7 = г(ае-“д/ sinР Д7 —
— ре-а Д( cos р Д7) kiA2, г [ае-а д' х
х sin р (1 — Д7) + Ре-“ д* cos р (1 — Д7)] —
— ^гЛ31 r [ае-“ sin р — f3e~a cos Р] — kjA^ ЛРе~а д<.
Итак, получено уравнение (9.13) фазовой характеристики
установившегося движения объекта под действием непрерывной
последовательности входных управляющих прямоугольных им-
пульсов. Эта фазовая характеристика состоит из двух ветвей,
каждая из которых строится для своих начальных условий (9.14)
и (9.15).
Полученные результаты можно использовать для расчета ре-
гулировочных характеристик дискретного регулирования или
оценки степени колебательности скорости (т. е. «шума» дискрет-
ного регулирования [88]).
Пример расчета фазовой траектории установившегося движения дискретного
гидропривода. Построим фазовую траекторию гидродвигателя при импульсном
(со скважностью «два» — для примера) регулировании его скорости. Пусть чис-
ленные выражения для передаточных функций гидродвигателя имеют вид
e“TS 4е~х<?
W (S) = 25-10'6s2 + 6-10"3s + 1 ; 117 (</) = (<? + 1,2)2+ 2,56 5
здесь Твр = 5• 10'3с; £ = 0,6; k = vQ=\', Т=10"2 с [см. формулы (9.1)
и (9.2)].
На первом этапе расчетов определим слагаемые вспомогательной матрицы
(9.9). Значения слагаемых для последовательно возрастающих номеров i таковы:
1; —0,0175; —0,0904; 0,0031; 0,0081; 0,0003 ...» причем, начиная с i = 5, &
~ 0. Это говорит о том, что переходный процесс, связанный с первоначальным
«набросом» последовательности управляющих входных импульсов, практически
336
затухает в пятом периоде. Для этого периода
рассчитаем по формулам (9.8) и (9.10) коэф-
фициенты г=5 -ь Л4,
r=5= A3t r=5 = 0,904;
^2, г=5 = ^4, г=5 — 0,272.
Теперь по формулам (9.14) и (9.15) могут
быть найдены начальные условия для отрезков
фазовых траекторий колебательного режима, в
котором работает двигатель:
[М'т=0 = - 0.477; [ег]-т=0 = 0,754;
Pdi=0,5 = 0.890; [e<J-t=0>5 = - 1,024.
Уравнение фазовой траектории (9.13) с уче-
том численных значений коэффициентов выгля-
дит так:
е‘ ЧиГ ~ 2,4е' + 3 Sign е‘ = °’
Практически построение фазовой
траектории (рис. 9.9) удобно произвести
методом Льенара по участкам, которые
начинаются в точках М , и М2. с коор-
динатами начальных условий.
Рис. 9.9. Фазовая траектория
установившегося движения
при импульсном (со скваж-
ностью 2) регулировании ско«
рости гидродвигателя
(Г = 5.10-» с; & = 0,6; k =-
= v0 = 1; Т = 10-8 с)
9.4. РАСЧЕТ ПРИЕМИСТОСТИ ШАГОВОГО
ГИДРОДВИГАТЕЛЯ
Применительно к шаговым гидродвигателям наибольший интерес
с теоретической точки зрения представляет определение расчет-
ных соотношений, которые позволили бы найти наибольший пе-
риод смены кодов управления без потери шага, т. е. приемистость
привода при различных его конструктивных модификациях и
внешних условиях работы. Рассмотрим эту проблему на примере
шагового гидродвигателя, показанного на рис. 9.6.
Если числа зубьев входного и выходного конических колес
двигателя равны соответственно zBX и ?вых, а число гидравличе-
ских толкателей м, то цена шага двигателя
дгг° __360 (zBbIX zBX) . ° 360° (zBbIX zBX)
A(P" ~-------------- ИЛИ Дф2" --------&--------’
где Дер* — цена шага при n-тактной схеме коммутации (когда
в каждом рабочем тактовом цикле включено постоянное число
толкателей, например: три из восьми); Дф2п — цена шага при
2п-тактной схеме коммутации (когда в соседних тактовых циклах
включено различное число толкателей, например: три—четыре—
три—четыре из восьми).
Максимальная частота шагового перемещения может быть
ограничена конечным временем срабатывания гидроусилителей
337
ЭГДУ, управляющих фазами двигателя, а также и определенным
собственным быстродействием двигателя, под которым будем под-
разумевать общее время перемещения на один шаг.
Методика определения максимальной частоты fmax может
заключаться в следующем. Полагая гидроусилители ЭГДУ безы-
нерционными, определим собственное быстродействие и соответ-
ствующую ему условную максимальную частоту /усл работы шаго-
вого двигателя. Сопоставим эту частоту с допустимой (по сообра-
жениям длительной надежной эксплуатации) суммарной часто-
той всех гидроусилителей ЭГДУ двигателя (для быстродей-
ствующих гидроусилителей, разработанных нами, = 200п Гц
или = 200-2п Гц в зависимости от числа тактов в схеме ком-
мутации). Теперь, если /усл < то fmm = / ; если / сл >
то /тах =
Таким образом, задача определения приемистости сводится
к нахождению собственного быстродействия шагового двигателя.
С каждым новым управляющим тактом напорная магистраль
подключается к очередному по ходу движения «рабочему» толка-
телю, относительно которого будем далее записывать уравнения
движения. Такое уравнение имеет вид
Fраб = ^прив 4“ ^сопр 4“ Гнагр, (9.16)
где Fpa6 — приведенное тяговое усилие, обусловленное совмест-
ным действием самого рабочего и других толкателей, находящихся
в текущем рабочем тактовом цикле под давлением; Мприв — масса
подвижных частей, приведенная к рабочему толкателю; х — коор-
дината рабочего толкателя, отсчитываемая от условного исходного
положения, в котором он находится, когда плоскости ведущей и
ведомой шестерен параллельны; Гсопр — приведенная к рабочему
толкателю сила сопротивления, являющаяся функцией скорости
толкателя и обусловленная тем, что при смене фаз (переключении
комбинаций толкателей) из ряда рабочих полостей рабочая
жидкость выжимается; Гнагр — усилие внешней нагрузки, при-
веденное к рабочему толкателю.
Приведенная к рабочему толкателю масса может быть опре-
делена по формуле приведения:
^прнв = ^толк 4“ ^вщ 4- ("v”) = ^ТОЛК 4“ ^вщ 4 ^2 ’
где тТОЛк — масса всех толкателей; 7ИВЩ — масса ведущего ко-
леса; J — приведенный к выходному валу момент инерции вра-
щающихся частей со стороны ведомого колеса и выходного вала;
со — угловая скорость вращения выходного вала; v — скорость
поступательного перемещения рабочего толкателя; q — переда-
точное число шагового двигателя.
Обозначим Н — максимальное перемещение рабочего толка-
теля из исходного положения (когда плоскости ведущей и ведо-
с38
мой шестерен параллельны); п — число толкателей и, кроме того,
индекс, характеризующий n-тактную схему коммутации; 2/г — ин-
декс, характеризующий 2/г-тактную схему коммутации; h — ход
рабочего толкателя в очередном рабочем тактовом цикле. Тогда
, . 2//zBX
п ' — л (z ____г } '
" 31 кгВЫХ -
Величина приведенного тягового усилия Fpa6 зависит от схемы
коммутации, точнее, от числа k толкателей, одновременно нахо-
дящихся в текущем такте под давлением. Кинематическая схема
взаимодействия толкателей ведущего и ведомого колес представ-
лена на рис. 9.10 для различных значений k = 2; 3; 4. Толкатели
условно показаны стрелками; линия I—I обозначает плоскость
ведомого колеса; линия II—О—II является следом развертки
на плоскости делительной окружности ведущего колеса перед
очередным управляющим тактом; линия III—Ог—III является
следом развертки на плоскости делительной окружности веду-
щего колеса после перемещения на очередной шаг.
Стрелки типа 1 характеризуют толкатели, рабочие полости
которых перед следующим управляющим тактом и после переме-
щения на очередной шаг не изменяют своего коммутационного
состояния и соединены со сливной магистралью. Стрелки типа 2
показывают положение толкателей, полости которых меняют
свое коммутационное состояние при подаче следующего управ-
ляющего такта, соединяясь со сливной магистралью. Стрелки
типа 3 являются обозначением толкателей, полости которых перед
следующим управляющим тактом и после перемещения на оче-
редной шаг остаются в неизменном коммутационном состоянии,
когда они соединены с напорной магистралью. Стрелки типа 4
условно обозначают рабочие толкатели, полости которых изме-
няют свое коммутационное состояние после подачи очередного
управляющего такта, причем соединяются с напорной маги-
стралью. Для этих последних толкателей и рассматривается при-
веденное тяговое усилие Граб.
Анализ кинематической схемы на рис. 9.10 показывает, что
из-за непостоянства плеч сил в процессе перемещения на очеред-
ной шаг приведенное тяговое усилие является функцией угла
поворота, амплитудное же значение этого усилия зависит, кроме
того, и от варианта коммутации:
/?раб(0 = ад(п--^-)> (9.17)
где Fo — номинальное тяговое усилие, обусловленное подведен-
ным давлением и рабочей площадью толкателя; <р (/) — текущий
угол поворота выходного вала; — коэффициент коммутации,
339
равлического шагового двигателя приведенного тягового усилия на рабо-
чем толкателе
значения которого, полученные для k = 2; 3; 4, равны соответ-
ственно 1,33; 1,5; 1,6; п — номер текущего управляющего такта.
На границе приемистости моменты подачи управляющих так-
тов совпадают с моментами завершения перемещения на очеред-
ной шаг. В этой ситуации уравнение (9.17) идентично выражению
^раб (0 = >
в котором параметр Т — период следования управляющих тактов.
Графическое представление этого уравнения показано в верх-
ней части рис. 9.11. Пилообразная кривая может быть представ-
лена в виде совокупности ступенчатой и падающей линейной
функций, как это показано в нижней части рис. 9.11.
Соответственно этому приведенное тяговое усилие Граб можно
рассматривать как разность ступенчато возрастающей с каждым
управляющим тактом функции, характеризующей движущее уси-
лие Гдз (с высотой ступеньки, равной приведенному тяговому
усилию рабочего толкателя), и пружинной (по углу поворота ша-
гового двигателя) нагрузки Гпруж.
Перейдем к определению следующего параметра основного
уравнения (9.16) — приведенной к рабочему толкателю силы
сопротивления Fconp.
Скорости всех плунжеров за один ход в среднем одинаковые.
Рабочая жидкость выжимается из и/2 полостей плунжеров (если
п — общее их число). При этом противодавление р, создаваемое
в каждой полости,
п_ V / /пл \2 ( dx у
\ fuj \ dt J '
где V — удельный вес рабочей жидкости; g — ускорение силы
тяжести; р — коэффициент расхода через щель электрогидравли-
ческого дискретного усилителя; /пл — рабочая площадь плунжера;
/ — площадь проходного сечения щели электрогидравлического
дискретного усилителя; dx/dt — скорость перемещения рабочего
плунжера.
Анализируя кинематическую схему на рис. 9.10, можно пока-
зать, что суммарная сила сопротивления, образованная совокуп-
ностью сил противодавления всех плунжеров, после приведения
к рабочему плунжеру получит выражение
с ____ yfnn ( /пл \2 ( dx \2 у г
Гсопр- 2^2 V /щ / \ dt ) £ Г>
в котором все промежуточные значения 1 > г > (л/2) есть только
целые числа, а г = п/2 может быть дробью, если п — нечетное.
С учетом проведенного анализа уравнение движения (9.16)
примет вид
F = aJX-|- b Г -I- <р,
dt* \ dt } * т
причем
Р
F дв q “ ф 7 t
кл ; 4’° МГ; , = Т:
(мтолк + МВщ +<7 Дф
а = ----------------------•
ft \ 2 r='t/2
Дф2уМ2(-^-) 2 *
, \ /щ / Г=1
RkF^
(9.18)
(9.19)
где Мн — момент внешней нагрузки на валу; F — постоянное
приведенное движущее усилие, развиваемое рабочим толкателем
в текущем тактовом цикле (от такта к такту ступенчато возра-
стает); ф — безразмерный угол поворота выходного вала; t —
безразмерное время; а и b — безразмерные коэффициенты; в ка-
честве значения Т в формулы следует подставлять период, соот-
ветствующий предполагаемой частоте приемистости (пока эта
частота не уточнена окончательно).
Дополнительные обозначения позволяют перейти к безразмер-
ному фазовому уравнению движения двигателя:
dQ Ф —Q2_§
dQ ~ ’
где Й = 0 = —<р; t = Ф = —F.
dx а Ка «
341
Рис. 9.12. Фазовая траектория разгона (выхода на режим управления с посто-
янной частотой) гидравлического шагового двигателя
Удобство этого фазового уравнения в том, что оно не содержит
коэффициентов и единой своей формой описывает любую кон-
структивную модификацию гидравлического шагового двигателя.
Пример расчета переходного процесса разгона при ступенчатом «набросе»
импульсов управляющей частоты. Пусть п = 6; k = 3 (вид коммутации — ше-
ститактная, по типу «три из шести»); zBX = 60; zBbIX =61; Н = 0,5 см; /?к =
= 1,5; Fq = 1000 Н; Т = 0,01 с (т. е. частота управления равна 100 Гц)’>
Мприв = 2 кг; Мн = 0 (т. е. разгон вхолостую); /пл = 2,25 см2; = 0,157 сма.
В качестве первого шага определим коэффициенты уравнения (9.18) по фор-
мулам (9.19), после чего это уравнение приобретет вид
F = 4,5-^_ +эо5 +ф.
dt* \dtJ
Параметр F при разгоне вхолостую численно равен номеру N периода по-
следовательности импульсов управляющей частоты (см. нижнюю часть
рис. 9.11).
Запишем полученное в численном виде выражение в форме уравнения фазо-
вой траектории, для которого dy/dt= со:
dq ___ 4,5(0
dm N — 9,05со2 — ср
Эта траектория построена графически методом изоклин на рис. 9.12 после-
довательно для пяти первых шагов. На траектории нанесены метки безразмерного
времени F, которое позволяет определить расположение соответствующих точек
фазовой траектории внутри последовательно сменяющихся периодов Т частоты
100 Гц. Из сопоставления значений меток и текущей величины шага определяют
запаздывание шагового двигателя по отношению к сигналу управления. К на-
чалу шестого шага нарастание запаздывания прекращается и движение шагового
342
двигателя устанавливается. Имея в виду то обстоятельство, что для шеститактной
схемы управления наибольшее запаздывание по шагу не должно превышать
шести целых шагов, можно полагать частоту управления 100 Гц в рассмотренном
примере критической, т. е. частотой приемистости.
9.5. ОПРЕДЕЛЕНИЕ УСЛОВИЙ ОТСУТСТВИЯ
ПЕРИОДИЧЕСКИХ ДВИЖЕНИЙ
В ЭЛЕКТРОГИДРАВЛИЧЕСКОЙ РЕЛЕЙНОЙ
СЛЕДЯЩЕЙ СИСТЕМЕ
В работе [86] для определения граничных условий периодиче-
ских режимов одноконтурных релейных следящих систем полу-
чены вспомогательные выражения, по форме совпадающие с из-
вестным уравнением Вышнеградского, а условия устойчивости
поставлены в зависимость от расположения точки с координатами
параметров Вышнеградского в области комплексных корней на
плоскости Вышнеградского. При этом рассмотрены два режима
работы релейных следящих систем:
режим ПД с постоянным подведенным давлением и настройкой
скорости холостого хода с помощью дросселирования в последо-
вательно расположенных дросселе и гидроусилителе ЭГДУ;
режим ПР с постоянным подведенным расходом, настройкой
скорости холостого хода объемным способом и настройкой предо-
хранительного клапана лишь для защиты от аварийных пере-
грузок.
Дополнительные экспериментальные и теоретические исследо-
вания показали, что можно пользоваться единой методикой рас-
чета систем классов ПД и ПР по следующей схеме.
1. Для безынерционного гидроусилителя ЭГДУ определяем
значения параметров Вышнеградского х (Д) и £ (Д) в функции
величины Д — половины зоны нечувствительности электрогидрав-
лического реле:
_±|i+J^. + 0,75
х= тУ7-0,125;
г \ С С3 л с2 /
Л1О-7С , 2^2 2Z?4 , 4а264 , 264 2ab* 8aW , 4а268
«.__ 1 с лас с2 лг2 с3 с4 с6
/(-0.125-^ + ^-^)' ’
V \ с с3 яс2 /
где а, b и с — безразмерные параметры;
а = fPq i) — я АА’« . с = л д .
с’о КMkM' 4/? ’ 4у0 Ум
v0 — настраиваемая (по-разному в режиме ПД и ПР) скорость
холостого хода (максимальная скорость релейной следящей си-
стемы); р0 — настройка давления предохранительного (в ре-
343
жиме ПД) или перегрузочного (в режиме ПР) клапана; F — пло-
щадь поршня; М — масса, приведенная к поршню; k1K — коэффи-
циент жесткости масляного столба [861; R — сила сухого трения.
2. На плоскости Вышнеградского строим траекторию переме-
щения точки N (х, £) с координатами параметров Вышнеградского
при изменении величины половины зоны нечувствительности Д.
Пересечение этой траектории с границей области комплексных
корней дает граничное (из условий устойчивости) значение Д.
3. Повторив подобную процедуру для других настроек ско-
рости холостого хода, получим численный материал, позволяю-
щий построить границу устойчивости релейной следящей системы
на плоскости (ц0, Д).
4. Для гидроусилителя ЭГДУ со временем срабатывания Д/
определяем значения параметров Вышнеградского х (Д) и £ (Д)
в функции величины Д по другим формулам:
У = :— — — -- •
У / 2с 2а b2 2аЬ2 2ас \2
V d ~cd cd2" + "d2’)
4а2 4Ь2 4с2 8а 8с 12ас 2b2 4аЬ2
d2~ + ~d2' + ~1 d d^~ ' ' ~~cd2' ‘
Я 2с 2а b2 2аЬ2 2ас \4
1 d 7d
где все обозначения прежние, a d = Д/V kjY М.
5. Границы устойчивости на плоскости (и0, Д) релейной следящей
системы с инерционным гидроусилителем предстают в виде семейства
кривых, каждая из которых построена для своего значения Д/.
На рис. 9.13, а показаны рассчитанные на ЭВМ границы устойчивости
Рис. 9.13. Границы устойчивости электрогидравлической релей-
ной следящей системы, работающей в режимах ПД (а) и ПР (6):
кривые / — 6 соответственно для запаздываний Д/гидравлического реле^
0; 0,0005; 0,001; 0,005; 0,010; 0,015 о
344
ПД, для следующих значений параметров: ро = 4МПа; F = 70 см2; М = 200 кг;
= 670 кН/см; R — 1500 Н; Д/ = 04-0,015 с. На рис. 9.13, б показана граница
устойчивости электрогидравлической следящей системы, работающей в режиме
ПР, для значений параметров: ро = 8 МПа; F = 70 см2; М = 200 кг; kM =
= 670 кН/см; R =1500 Н; Д/= 0.
9.6. ОПРЕДЕЛЕНИЕ УСЛОВИЙ ОТСУТСТВИЯ
ПЕРИОДИЧЕСКИХ ДВИЖЕНИЙ И СИНТЕЗ
ЭЛЕКТРОГИДРАВЛИЧЕСКИХ ИМПУЛЬСНЫХ
И ЦИФРОВЫХ СЛЕДЯЩИХ ПРИВОДОВ
В дискретных системах входные воздействия на гидродвигатели
носят характер ступенчатых сигналов, и по этой причине микро-
траектории выходных звеньев двигателей достаточно однотипны
(под микротраекторией понимается конфигурация перемещения
во времени между сменой фронтов ступенчатых воздействий).
Однотипность траекторий позволяет составить динамическую
структуру гидродвигателя и жестко связанного с ним исполни-
тельного устройства в виде последовательно соединенных инте-
грирующего и колебательного звеньев даже в тех случаях, когда
существенны различного рода нелинейности (например, сухое
трение в уплотнениях двигателя и направляющих исполнитель-
ного органа). Нелинейные особенности удается в этих случаях
отразить в эквивалентных значениях постоянной времени и коэф-
фициента демпфирования, причем эти эквивалентные значения
могут быть найдены либо экспериментально в процессе идентифи-
кации объекта, либо расчетным путем [86].
Отмеченные обстоятельства дают основание представить пере-
даточную функцию непрерывной части дискретной (импульсной
или цифровой) следящей системы в виде выражения
W = ~ТТ2——--------------г ’
<? <?2 + +1)
где W (q) — приведенная передаточная функция относительно
приведенного оператора Лапласа q = sT\ Т — период следова-
ния управляющих импульсов; kx — коэффициент усиления дви-
гателя и исполнительного органа; k2 — коэффициент усиления
звена формирования импульсов расхода (или доз рабочей жидко-
сти в цифровых следящих системах с дозирующими ячейками).
Передаточная функция W* (г) в смысле дискретного преобра-
зования Лапласа для разомкнутого контура, состоящего из фор-
мирующего элемента и непрерывной части, может быть запи-
сана [19]:
Г* (2) = k^z {1^— W (<?)], (9.20)
345
где z = е? — оператор дискретного преобразования Лапласа;
г\} — символ операции дискретного преобразования Лапласа;
у — относительная в периоде Т длительность импульсов расхода
на выходе формирующего звена.
При помощи билинейного преобразования z =—!пе-
1 — 0,5ш
рейдем в выражении (9.20) в область ау-изображений. Тогда при-
веденная передаточная функция разомкнутого контура системы
примет вид
W (w) = w (k±k2z [ 1~e~gV. w (<7)11 = k ('-2’5ц,Н1+г>1а, + г,^2) ,
I )) 0/(1-}- + b4w2)
(9.21)
где W (w) — приведенная передаточная функция в смысле ^-пре-
образования; w = wT — приведенный оператор ^-преобразова-
ния; — символ операции приведенного ^-преобразования;
— коэффициенты; k = kj^y.
Громоздкий вывод формулы (9.21) здесь опущен. Коэффи-
циенты Ьг—bi имеют следующие значения:
. __ sh а__________В (у)________1___________
1 ch а — cos 6 у а (1 — 2d cos 6 d2)
Л (у) — В (у) 2а
у 1 —2dcos 6 +d2’
b == a nc ch а + cos 6 __ Р(у)_________1_________
2 * ch а— cos 6 у а (1 — 2d cos 6 + d2)
С(у)-В(у) а
у 1 — 2d cos 6 + d2 ’
h — sha h — n ос cha + cosd .
3 ch a — cos 6 ’ 4 ’ ch a — cos 6 *
Л (y) = d2 — d cos 6 + d1-? cos (1 — y) 5 — d2~v cos уб;
В (y) = -y- [d sin 6 — d'—v sin (1 —- у) 6 — d2~v sin уб];
C (?) = — d cos 6 + d1-? cos (1 — у) б Ц- d2~Y cos уб — d2;
D (y) = -y [d sin 6 — d1-^ sin (1 — у) 6 4~ d2~v sin уб];
d = e-«; a = 5(3; ₽ = 77TBp; 6 = (3/Г=ПГ2. (9.22)
Передаточная функция, записанная в форме (9.21), позволяет
воспользоваться частотными методами синтеза с помощью частот-
ных логарифмических характеристик в области приведенной
псевдочастоты со*, если положить w = j&* = — 1). Зна-
346
Таблица 9.1
ВЫРАЖЕНИЯ КОЭФФИЦИЕНТОВ УСИЛЕНИЯ k
Следящая сис1ема k для гидро- цилиндра k для гидро- мотора V Примечание
Ши ротноим- пульсная <?ОГ &hnF Qo* 0—1 Рассмотреть семей- ство ЛАЧХ для раз- личных у
С цифровым ИСТО 1 ни ком расхода \QT \hF &QtnT bhg Соответ- ствует длитель- ности импульса источника Конкретное значение у должно быть уч- тено при расчете ко- эффициентов ь
С цифровым ис- полнительным гидродвигате- лем QpT Q9iut 1,0 Рассмотреть семей- ство ЛАЧХ для раз- личных Т'вр = (7ч); 5 = 5 (/•’<); Твр — Tgp (g>); 5=1 (gi)
max g max
чения коэффициента усиления k, необходимые при построении ча-
стотных характеристик, должны быть определены по формулам
табл. 9.1.
В таблице использованы следующие обозначения: Qo — подача
насоса; Д/г — цена одной дискреты дискретного датчика обратной
связи по положению выходного звена исполнительного органа;
п — число ступенчато-переключаемых скоростей при дискретном
регулировании скорости; F, и Fmax — соответственно площадь
цилиндра, ее текущее и максимальное значения для цифрового
гидроцилиндра; tB — шаг винта, связывающего гидромотор и
исполнительный орган; g, и ginax — соответственно рабочий
объем гидромотора (на один оборот), его текущее и максимальное
значения для цифрового гидромотора; AQ — минимальная фикси-
рованная подача цифрового источника расхода.
Из таблицы следует, что синтез широтно-импульсной следящей
системы и следящей системы с цифровым исполнительньъм гидро-
двигателем может быть выполнен путем анализа семейства лога-
рифмических частотных характеристик, в результате которого
в качестве расчетной выбирается худшая характеристика (с наи-
меньшим запасом по фазе).
Синтез электрогидравлических дискретных следящих систем
возможен двумя методами. Первый заключается в построении
ЛАЧХ_разомкнутого контура в области приведенной псевдоча-
стоты со* и выборе такого последовательного корректирующего
347
ко Г Структура корректирующего зйена Передаточная функция
1 Lg— 1 + \5w 1 + 0,5*
2 dp 77]—* (1 * 0,5 *) 1
3 "П—। л] * 1И-2,5И) 00,03»’MS*1)
11 ^-0,5»)3
Ч 4т Л]—* (1^0,ЗЗЛЦ25»^11<-2,5») (1^0,5*)4 * (lH0t5w)
5 ^>НЯ>-*-х'' 3— 1 -н2* + 1,73 w2 О0,5»)г
5 Нн]—1 > Т|— (^0,002аН^^»<-2,5»г) <1^0,5»)3
7 Г (Р) 3— О2,5»+2;!5»г)(1-0,05») (1^0,5 »)3
8 ' 1 Цщ 1 (1+0,1Э»+0,030»г) 00,5»)" • (1+3,1 Л + 3,15 »г)
9 (1-0/03»)-(1+3,53»+5,58»г)
L-[771—i— (1 + 0,5w)3 >(1-0,00w + 0,13»2)
Рис. 9.14. Структуры (алгоритмы) и приведенные передаточные функ-
ции в смысле w преобразования для универсальных корректирую-
щих звеньев:
Т — задержка на период несущей частоты; цифры в треугольниках — коэф-
фициент усиления
звена из числа рекомендованных на рис. 9.14, которое бы приво-
дило к окончательной ЛАЧХ желаемой формы. Структуры уни-
версальных корректирующих звеньев, показанные на рисунке,
составлены по типу блоков прогноза таким образом, чтобы они
покрывали достаточно широкий частотный диапазон вероятной
коррекции. С другой стороны, структуры отбирались таким обра-
348
som, чтобы операции деления в выходных двоичных регистрах
корректирующих звеньев сводились к простым сдвигам.
На рис. 9.14 помимо структур представлены и приведенные пере-
даточные функции корректирующих звеньев в смысле да-преобра-
зования, что позволяет построить логарифмические частотные
характеристики этих звеньев в области приведенной псевдо-
частоты.
Второй подход состоит в построении асимптотической ЛАЧХ
разомкнутого контура системы в области приведенной псевдо-
частоты со*, построении желаемой асимптотической ЛАЧХ, опре-
делении разностной асимптотической ЛАЧХ последовательного
корректирующего звена, синтезе структуры корректирующего
звена. При этом следует иметь в виду, что далеко не все струк-
туры корректирующих звеньев просто реализуемы. Потому при-
ходится широко пользоваться неоднозначным характером связи
асимптотической ЛАЧХ корректирующего звена и его переда-
точной функции и перебирать ряд вариантов.
Проиллюстрируем на примере второй подход (для следящей
системы с цифровым источником расхода), поскольку первый
дополнительных пояснений не требует.
Пусть значения параметров системы таковы: | = 0,6; Твр =
= 0,0025 с; Т = 0,01 с; у = 1,0, приведенная передаточная
функция системы в смысле w-преобразования при единичном
коэффициенте усиления получит тогда вид [пользуемся форму-
лами (9.22) ]
. _(1 — 0,5ш) (1 + 0,53а/4- 0,05а/2)
' ш(1 +0,83ш + 0,17ш2) ’
Передаточная функция №кор (да) корректирующего звена, най-
денная указанным выше способом, может быть, в частности,
такова:
W (да) = - »+,^+0,175ш2_
кор (1 Н-0,5ш) (1+0,2а>)
В уравнении для передаточной функции корректирующего
звена перейдем в область z-изображений, пользуясь формулой
W х<г) _ 3,7г2 + 0,6г —0,3 12г2 + 2г-1
K°pW Д(г) 2,8г2-|-1,2г ~2 16г2 + 7г ’
где Ц7кор (2) — передаточная функция последовательного коррек-
тирующего звена в смысле дискретного преобразования Лапласа;
А (г) — изображение дискретного сигнала на входе корректирую-
щего звена; х (г) — изображение дискретного сигнала на выходе
корректирующего звена.
34»
Рис. 9.15. Структура синтезированного кор-
ректирующего звена
Рис. 9.16. Логарифмические частотные харак-
теристики для исходной (/) и скорректирован-
ной (2) систем:
------— амплитудные характеристики;
** фазовые характеристики
Аппроксимация передаточной функции необходима для того,
чтобы избавиться от дробных коэффициентов в числителе и зна-
менателе и получить такой коэффициент при старшей степени г
в знаменателе, который представлял бы целую степень числа 2.
Это позволяет упростить реализацию структуры корректирую-
щего звена.
Перейдем от дискретной передаточной функции корректирую-
щего звена в область оригиналов:
„ __ 24ДП — 2Д„_2 —
— 16 >
причем п — текущий управляющий такт.
Структурная реализация этого алгоритма дана на рис. 9.15,
на рис. 9.16 представлены логарифмические частотные характе-
ристики исходной и скорректированной систем для единичного
коэффициента усиления.
Несложные подсчеты показывают, что в скорректированной
системе с запасом по фазе 25° допустимый коэффициент усиления
k = 1,41; при четырехразрядном реверсивном счетчике, цене
импульса Дй = 0,02 мм и значениях других параметров, указан-
ных выше, это позволяет получить максимальную скорость сле-
жения 2500 мм/мин и частоту среза 30 Гц.
Глава 10
МЕХАНИЗМЫ УПРАВЛЕНИЯ
Механизмы управления предназначены для изменения производи-
тельности регулируемых гидромашин, входящих в состав испол-
нительных устройств гидроприводов, и разделяются на механизмы
ручного и автоматического управления. Первые при помощи эле-
ментарных кинематических связей (рычажных, зубчатых и т. п.)
осуществляют возвратно-поступательное движение регулирую-
щего органа в радиально-поршневых гидромашинах или воз-
вратно-поворотное движение в аксиально-поршневых гидромаши-
нах полуавтоматических гидроприводов. В этом случае обязан-
ности главной обратной связи выполняет человек-оператор, бы-
стродействие которого существенно ограничено.
В электрогидравлических (автоматических) силовых следящих
приводах механизм управления представляет собой автоматиче-
ский следящий привод, иногда многокаскадный, управляющий
заключительным информационно-энергетическим каскадом — ис-
полнительным устройством. Применение в этом случае различных
обратных связей, обеспечивающих точность, устойчивость и по-
мехозащищенность гидропривода, а также получение желаемой
динамической характеристики заставляет рассматривать испол-
нительное устройство вместе с механизмом управления, усилите-
лями и корректирующими устройствами как единую силовую
следящую систему. Однако динамический расчет такой системы
требует выявления динамической характеристики собственно ме-
ханизма управления.
Иногда при рассмотрении автоматического привода исполни-
тельное устройство называют неизменяемой частью [20] и кор-
рекции подвергается усилительно-управляющая часть, включаю-
щая механизм управления. В этом случае проектирование элек-
трогидравлического привода с новым исполнительным устрой-
ством требует создания новой усилительно-управляющей части.
Возможна коррекция исполнительного устройства с желаемым
изменением его операторов потерь П (D) и нагрузки Н (D) [94].
В этом случае можно использовать одну и ту же усилительную
часть при замене исполнительного устройства. Поэтому коррек-
ция исполнительных устройств рассматривается вместе с дина-
мическими характеристиками механизмов управления.
10.1. МЕХАНИЗМЫ РУЧНОГО УПРАВЛЕНИЯ
В аксиально-поршневых регулируемых насосах с силовым кар-
даном (УРС), поскольку ручное управление бывает не только
дискретным, но и непрерывным, используется самотормозящий
червячный механизм (рис. 10.1) для поворота чашки У, в которой
размещен наклонный диск. Ее поворот на углы 2=20° реализуется
351
Рис. 10.1. Механизм руч-
ного управления аксиаль-
но-поршневого насоса с
силовым карданом (УРС)
Рис. 10.2. Узел вала уп-
равления аксиально-пор-
шневого насоса с силовым
карданом
при вращении валика 4, по резьбе которого будет перемещаться
гайка 6 с поворачивающимися сухарями 2. Сухарь, воздействуя
на направляющие вилки 3, поворачивает чашку, которая опи-
рается на корпус при помощи опор 5.
Расчет на прочность проводится по нормальным составляющим
усилия Т и Q на оси сухаря 2 с плечом b относительно оси чер-
вяка. При определении напряжения смятия рабочей поверхности
сухаря пользуются нормальной составляющей усилия Q" c уче-
том уменьшения длины f на величину k в крайнем положении
чашки 1 (плечо aj. Расчет оси сухаря проводится по составляю-
щей Q' и плечу blf а проверка на прочность губ вилки — по сече-
нию с размерами с и h и плечом а.
Пример конструкции узла с силовым валиком 1 и перемещаю-
щейся гайкой 2 приведен на рис. 10.2.
В аксиально-поршневых насосах с двойным несиловым кар-
даном ручное управление реализуется при помощи цилиндриче-
ских зубчатых колес. Силовой вал 3 (рис. 10.3), закрепленный при
помощи подшипников в стакане 4, несет на себе ведущую цилин-
дрическую шестерню 2, поворачивающую при помощи зубчатого
сектора 1 люльку насоса. Стакан 4 консольно закреплен при
помощи промежуточной детали 6 на корпусе насоса, а герметиза-
ция силового валика в крышке 5 обеспечивается вставным вкла-
дышем.
352
Рис. 10.3. Механизм ручного управления
аксиально-поршневого насоса с двойным
несиловым карданом
Рис. 10.4. Узел вала управле-
ния в автономном стакане на
аксиально-поршневом насо-
се с двойным нссиловым
карданом
Другой вариант выполнения вала 3 ручного управления ак-
сиально-поршневого насоса с двойным несиловым карданом
в форме вставного стакана 2 показан на рис. 10.4. Этот вал смон-
тирован в стакане на двух радиально-упорных подшипниках,
несет на себе цилиндрическое зубчатое колесо 4 и уплотнен при
помощи манжеты, установленной в крышке /. Стакан 2 устанавли-
вается в верхней стенке насоса так, что ведущее зубчатое колесо
входит в зацепление с зубчатым сектором люльки насоса. На валу 3
насажен и закреплен штифтом рычаг ограничителя поворота 5,
допускающий повороты вала только на углы до =±248°, поскольку
в крайних положениях упирается в выступы крышки.
Все механизмы ручного управления обеспечивают пропорцио-
нальную зависимость между углами поворота управляющего
вала а и регулирующего органа у с передаточным отношением
i == у а от 0,1 до 0,25.
Ю.2. ОСНОВЫ СТРУКТУР ГИДРОПРИВОДОВ
С МЕХАНИЗМАМИ УПРАВЛЕНИЯ В ТРАКТЕ
УПРАВЛЕНИЯ ПО ОШИБКЕ
В гидроприводе с механизмом управления тракт управления
по ошибке составляется, если не считать корректирующих связей,
из трех основных элементов: 1) исполнительного устройства,
включающего интегрирующее звено, с передаточной функцией
W = х =__________-______•
Т («) (1+2$Т$+ТМ)$’
12 В. Н. Прокофьев и др.
353
Рис. 10.5. Основы структур гидроприводов с механизмами уп-
равления в тракте управления по ошибке
2) механизма управления, включающего интегрирующее звено,
с передаточной функцией
№му (s) = у (s)/i (s),
которая для однокаскадных механизмов управления имеет ту же
структуру, что и W ($), и 3) усилительной части, обычно состоя-
щей из электронного усилителя с передаточной функцией
Wy (s) = i (s)/u (s)
и сельсинной пары с коэффициентом усиления Ке (рис. 10.5).
Поскольку исполнительное устройство W ($) и механизм
управления 1Гму ($) включают интегрирующие звенья, то тракт
управления по ошибке при отсутствии местных обратных связей
обладает астатизмом второго порядка (рис. 10.5, а). В таких си-
стемах, требующих специфичных способов коррекции, расчет
которых рассмотрен в работах [20, 85, 100], величина рассогла-
сования в пропорциональна х. Применяются такие системы для
управления объектами, работающими с маломеняющимися ско-
ростями х при небольших значениях х.
С помощью местных обратных связей (рис. 10.5, б—д) можно
довести порядок астатизма тракта управления по ошибке до пер-
вого, и тогда величина рассогласования е будет пропорцио-
нальна х. Такие системы применяются для управления объектами,
работающими с большими скоростями х и ускорениями х (т. е.
с существенно меняющимися высокими скоростями).
354
Широко распространен способ уменьшения астатизма разом-
кнутой системы реализацией электрической обратной связи от
органа регулирования насоса на усилитель (рис. 10.5, б). Способ
используется с магнитными электромеханическими преобразова-
телями "и требует линейности характеристик датчиков обратной
связи, высокой надежности и долговечности системы.
Понижение порядка астатизма при помощи обратной связи
с вала исполнительного двигателя на регулирующий орган насоса
(рис. 10.5, в) применяется только в нераздельных исполнитель-
ных устройствах, обычно в виде зубчатого дифференциального
механизма, алгебраически суммирующего углы поворота валов
управляющего электродвигателя и исполнительного гидродви-
гателя.
В тех же целях применяется комбинированная обратная связь
(рис. 10.5, г)у которая вместо главной обратной связи использует,
кроме только что рассмотренной (рис. 10.5, в), местную обратную
связь от исполнительного двигателя механизма управления на
усилитель. В этом случае система представляет собой две после-
довательно соединенные следящие системы, ошибки которых
суммируются.
Четвертый способ понижения порядка астатизма (рис. 10.5, б)
заключается в использовании местной обратной связи в механизме
управления (в его позиционировании). Такая позиционирующая
обратная связь позволяет не пользоваться электрическим датчи-
ком углового положения регулирующего органа гидромашины,
и некоторое усложнение механизма управления окупается про-
стотой электронного усилителя, а также повышением надежности
и долговечности механизма управления.
10.3. МЕХАНИЗМЫ УПРАВЛЕНИЯ
С ЭЛЕКТРИЧЕСКИМИ УПРАВЛЯЮЩИМИ
ДВИГАТЕЛЯМИ
Однокаскадные механизмы управления должны обладать испол-
нительным двигателем, развивающим достаточно большой мо-
мент, чтобы, непосредственно воздействуя на орган управления
гидромашины, можно было осуществлять регулирование гидро-
привода. Такой исполнительный двигатель 2 (рис. 10.6) одновре-
менно служит электромеханическим преобразователем, а сам
механизм управления будет электрическим. Этот электродвига-
тель в соответствии с сигналом управления iy (/) через редуктор 4
осуществляет поворот люльки регулируемого насоса 6. Реализа-
ция электрического сигнала обратной связи по скорости иос (/) =
= (s) осуществляется дающим тахогенератором /, а по
положению К'осу (s) — при помощи сельсина 3. Структурное
представление такого механизма управления приведено на
рис. 10.7, бу а без сигнала обратной связи по положению (без
сельсина) — на рис. 10.7, а.
12* 355
Рис. 10.6. Однокаскадные
механизмы управления:
а — без позиционирующей
обратной связи; fi — с по-
зиционирующей обратной
связью
Рис. 10.7. Структурные
представления однокас-
кадных механизмов уп-
равления:
а — без обратной связи по
положению; б — о электри-
ческой обратной связью по
положению на усилитель
Рис. 10.8. Структурные представления однокаскадных ме-
ханизмов управления с комбинированной обратной связью:
а — без обратной связи по положению; б — с электрической
обратной связью по положению на усилитель
856.
2Чеханическая обратная связь по положению исполнительного
двигателя гидропривода реализуется при помощи зубчатого
дифференциального механизма (5 и 7 на рис. 10.6, б), а структур-
ные представления меняются, как показано на рис. 10.8, где
кинематические связи между углами поворота вала электродви-
гателя <рэ ($), люльки у ($) и исполнительного двигателя гидро-
привода 6 ($) описываются уравнением [59]
СФэ (s) — (S) = ЧУ (S),
в котором имеется два взаимонезависимых параметра и
tj/r'i при использовании дифференциального механизма с постоян-
ной внешней опорой момента и один параметр i9lit (тогда ii/i1 =
= 1 — <з^1)> если этот механизм не обладает постоянной внешней
опорой момента [59].
Структурные представления такого механизма управления
приведены на рис. 10.8. В них усилитель аппроксимируется
апериодическим звеном [94 ]
U7 = <у ® ___
У 1 ; и (s) 1 + Tys •
а передаточная функция электродвигателя (интегрирующее звено)
\Y7 (с) = = Кз
fy($) (l + 7\s)s-
Однокаскадные механизмы управления требуют применения
достаточно мощных управляющих электродвигателей, момент
инерции роторов которых оказывается весьма значительным, и
поэтому доминирующая постоянная времени такого механизма
управления оказывается больше или существенно больше доми-
нирующей постоянной времени исполнительного устройства си-
лового следящего электрогидропривода. Поэтому рассматривае-
мые механизмы управления используются лишь в системах,
от которых не требуется высокого быстродействия.
Двухкаскадные механизмы управления, у которых электро-
двигатели служат электромеханическим преобразователем, содер-
жат в качестве второго каскада усиления управляющий золотник
(рис. 10.9) и поэтому относятся к электрогидравлическим меха-
низмам управления. Каждый каскад такого механизма имеет
интегрирующее звено, и поэтому для получения системы с аста-
тизмом первого порядка обязательна местная обратная связь.
Электромеханический преобразователь — электродвигатель 2
(рис. 10.9, а) через зубчатый редуктор 4 и рычажный дифферен-
циальный механизм 8 связан с управляющим золотником 6 и
органом регулирования гидромашины — люлькой 9, поворот
которой реализуется при помощи двух толкающих гидроцилин-
Дров 10. Такая обратная связь обеспечивает позиционирование
управляющего золотника. Обратная связь по скорости обеспечи-
вается тахогенератором /.
357
Структурное представление рассматриваемого механизма упра-
вления (рис. 10.10, а) включает последовательно соединенные
усилитель, электродвигатель, редуктор с передаточным отно-
шением i и управляющий золотник с передаточной функцией
Ц7 т =___________________
у3 h3(s) 14-2$3Т3«+ T2s2 *
Обратная связь по скорости органа управления с сигналом
«ос ($) — RocSy ($) реализуется при помощи тахогенератора, а для
получения обратной связи по положению органа управления
с сигналом К'осУ (s) (рис. 10.10, б) используют сельсин (напри-
Рис. 10.10. Структур-
ные представления
двухкаскадных меха-
низмов управления с
электродвигателями:
а — с электрической об-
ратной связью по скорос-
ти; б — с электрической
обратной связью по ско-
рости и положению
358
Рис. 10.11. Структурные представления двухкаскадных ме-
ханизмов управления с электродвигателями и дополнитель-
ным кинематическим входом:
а — с электрической обратной связью по скорости; б — с элек-
трической обратной связью по скорости и положению
мер 3 на рис. 10.9, б). Применяются механизмы управления с ком-
бинированной обратной связью в гидроприводах нераздельного
исполнения, где реализация обратной связи по углу поворота
вала исполнительного двигателя 0 ($) (7 на рис. 10.9, б) не пред-
ставляет затруднений. Принципиальная структура электроги-
дравлической следящей системы с таким механизмом управления
приведена на рис. 10.5, в.
Структурные представления механизма управления с комби-
нированной обратной связью показаны на рис. 10.11, где алгебраи-
ческие операторы ilt i2 и i3 описывают действие зубчатого (5 на
рис. 10.9, б) и рычажного дифференциалов.
Подробный расчет и частотные характеристики двухкаскад-
ного механизма управления с электродвигателем в качестве элек-
тромеханического преобразователя без обратной связи по поло-
жению (см. рис. 10, 9, а) приведены в работе [85], в которой
такой механизм назван механизмом управления первого типа.
10.4. ДВУХ КАСКАДНЫЕ ЭЛЕКТРОГИДРАВЛИЧЕСКИЕ
МЕХАНИЗМЫ УПРАВЛЕНИЯ С МАГНИТНЫМИ
ЭЛЕКТРОМЕХАНИЧЕСКИМИ
ПРЕОБРАЗОВАТЕЛЯМИ
Применение маломощных управляющих сигналов в электроги-
дравлических следящих приводах заставляет использовать меха-
низмы управления с магнитными электромеханическими преобра-
зователями в первом каскаде усиления и по крайней мере один
гидравлический каскад усиления в виде управляющего золот-
ника (рис. 10.12). Электромеханический преобразователь с упра-
вляющим магнитом 1 [17], имеющий позиционирующий зазор, об-
мотку возбуждения 2, питаемую током и0, и обмотку управления 3,
359
Рис. 10.12. Двухкаскадные механизмы
управления с электромагнитами:
а — без обратной связи по положению; б с электрической обратной связью на усилитель; а » с местной обратной связью на управляю,
щий золотник
Рис. 10.13. Структурные представления двухкаскадных механизмов управления
с электромагнитами:
а — без обратной связи по положению; б — с электрической обратной связью на усили*
тель; е — с местной обратной связью на управляющий золотник
питаемую токами управления иг (/) и и2 (/), обеспечивают
поворот якоря в соответствии с рассогласованием этих сигналов.
Якорь преобразователя имеет рычажную связь с управляющим
золотником 4, который при своем перемещении при помощи тол-
кающих гидроцилиндров 9 поворачивает люльку 8 регулируемой
гидромашины. Электрическая обратная связь по положению
люльки, реализуется при помощи потенциометра 5, а обратная
связь от люльки на управляющий золотник — при помощи ры-
чажной обратной связи 7 и пружины 6 (упругая обратная связь).
Механизмы управления, приведенные на рис. 10.12, а, исполь-
зуются в системах с астатизмом первого порядка, а приведенные
на рис. 12, б и в обладают астатизмом первого порядка. Структур-
ные представления таких механизмов приведены на рис. 10.13,
где передаточная функция электромеханического преобразова-
теля
пр М = =________—_______
8 ' ' «(s) 1 + 2£3T3s + T2s2 ’
алгебраический оператор h3 оценивает плечо управляющего
золотника относительно центра поворота якоря электромагнита,
управляющий золотник аппроксимируется передаточной функ-
цией [1 ]
Н7 М = У — Кр
Р W Аэ (s) (1 + TpS) s ’
коэффициент потенциометрической обратной связи Кос, а при
использовании местной упругой обратной связи (см. рис. 10.12, в)
ее алгебраический оператор КоссЛ3, где Кос — коэффициент мест-
ной обратной связи и с — жесткость пружины [1]. В этом слу-
301
чае коэффициент усиления передаточной функции электромагнита
по моменту
TV7 ____ Фэ (5) _ _____Кэм_____
Э>Л> М (s) 1 + 2^э5+ Т2/ ’
где = 1/(Сэ + Сн); Сэ — коэффициент момента электро-
магнита; Сн — жесткость торсионной составляющей нагрузки,
приведенной к оси электромеханического преобразователя.
Структурные представления рассматриваемого механизма
управления без обратной связи по положению в виде последова-
тельного соединения трех элементов приведены на рис. 10.13, а.
Электрическая обратная связь по положению показана на
рис. 10.13, б, а структурное представление рассматриваемого
механизма управления с местной упругой обратной связью —
на рис. 10.13, в.
Имея в виду фильтрующие свойства исполнительного устрой-
ства гидропривода, передаточную функцию механизма управле-
ния с местной упругой обратной связью с достаточной для прак-
тических целей точностью можно аппроксимировать передаточной
функцией
W (s) = т ® =______________-__________
“У w и (s) (1 + 7» (1 + 2£Ts + T2s2) ’
гпа 9ГТ__ Сн+Сэ, гр^_____ (Гр + 2£э7\) (Си + Сэ)
где - СнКр/(в , - СЛрКв
поскольку влиянием произведений T9TP, Tj и Т-/Гр ввиду их
малости можно пренебречь.
10.5. ТРЕХ КАСКАДНЫЕ ЭЛЕКТРОГИДРАВЛИЧЕСКИЕ
МЕХАНИЗМЫ УПРАВЛЕНИЯ С МАГНИТНЫМИ
ЭЛЕКТРОМЕХАНИЧЕСКИМИ
ПРЕОБРАЗОВАТЕЛЯМИ
Наибольшее распространение в автоматических электрогидравли-
ческих приводах объемного регулирования получили трехкаскад-
ные электрогидравлические механизмы управления с магнитными
электромеханическими преобразователями, гидроусилителем
сопло-заслонка в первом гидравлическом каскаде и управляющим
золотником во втором гидравлическом каскаде усиления (рис. 10.14).
Хотя в таких механизмах происходит непрерывная потеря рабо-
чей жидкости даже при постоянном значении сигнала управления,
однако это окупается существенным уменьшением зоны нечув-
ствительности гидроусилителя сопло-заслонка, возможностью
большого усиления сигнала управления при более высокой точ-
ности реализации управляемого движения и применением элек-
тромагнитов меньшей мощности,
362
Магнитный электромеханический преобразователь (позицион-
ный электромагнит, как и в ранее рассмотренных механизмах
управления) 1 (рис. 10.14) смещает заслонку, рассогласовывая
открытие сопл 2, что благодаря дросселям 3 обеспечивает практи-
чески линейный закон изменения положения управляющего
золотника 5 с позиционирующими пружинами 4. Смещение управ-
ляющего золотника приводит к изменению давлений под толка-
ющими гидроцилиндрами <9, которые поворачивают люльку 6.
На рис. 1.5 (с. 22) показан аналогичный механизм управления
с потенциометрической обратной связью 7 на усилитель. В работе
[85] такой механизм назван механизмом управления третьего
типа; там же приведен его подробный динамический расчет вместе
с частотными характеристиками.
Структура трехкаскадного электрогидравлического механизма
управления без обратной связи (см. рис. 10.14) в полосе пропу-
скания частот электрогидравлического привода объемного управ-
ления представляет собой два последовательно соединенных апе-
риодических звена с апериодическим звеном, обладающим аста-
тизмом первого порядка (рис. 10.15, а). Применительно к случаю
использования потенциометрической обратной связи на усили-
тель (см. рис. 1.5) структурное представление (рис. 10.15, б)
изменится аналогично предыдущим случаям.
Трехкаскадные электрогидравлические механизмы управле-
ния с местными обратными связями приведены на рис. 10.16.
При помощи позиционного электромагнита 1 обеспечивается рас-
согласование открытий сопл 2, за счет действия дросселей 3
создается перепад давлений на торцах перемещающегося управ-
ляющего золотника 6. Под действием момента, создаваемого тол-
кающими гидроцилиндрами 11, происходит перемещение люльки 10
Рис. 10.14. Трехкаскадный механизм уп-
равления без обратной связи по положе-
нию
Рис. 10.15. Структурное представление
трехкаскадног’о механизма управления:
а — без обратной связи; б — с электрической
обратной связью по положению
363
Рис. 10.16. Трехкаскадные механизмы управления с местными меха-
ническими обратными связями:
а — с упругой обраткой связью; б —* с жесткой обратной связью
и связанных с ней рычажной передачей 7 толкателей 5. Деформи-
руемые пружины обратной связи 4 (рис. 10.16, б) возвращают
золотник в нейтральное положение при достижении люлькой 10
заданного управляющим сигналом положения, и ее движение
прекращается.
В трехкаскадном механизме управления с жесткой местной
обратной связью (рис. 10.16, а) разность давлений в междроссель-
пых полостях гидроусилителя сопло-заслонка вызывает пере-
мещение силовых гидроцилиндров 8 и связанногос ними валика 9
до тех пор, пока разность усилий деформируемых пружин, уста-
новленных в этих гидроцилиндрах, не уравновесит разность сил
давления. При достижении люлькой заданного угла поворота
рычажная передача возвратит золотник в нейтральное положение
и движение люльки прекратится.
В работе [851 трехкаскадный электрогидравлический механизм
управления, изображенный на рис. 10.16, б, назван механизмом
управления второго типа, и там же приведен его подробный
динамический расчет вместе с частотными характеристиками и
полной структурой электрогидравлического следящего привода.
Структурное представление трехкаскадного электрогидравли-
ческого механизма управления с жесткой обратной связью
(рис. 10.17, q) с достаточной для практических целей точностью
в полосе пропускания частот электрогидравлического следящего
привода с исполнительным устройством объемного регулирования
аппроксимируется последовательным соединением четырех опера-
364
?(S)
а)
Рис. 10.17. Структурные представления трехкаскадных механизмов
управления:
а — с жесткой обратной связью; б — с упругой обратной связью
торов (рис. 10.17, а), где алгебраический оператор hr]h2 оценивает
влияние плеч рычажной обратной связи, а передаточная функция
сигналов от управляющего золотника до люльки регулируемой
гидромашины аппроксимируется колебательным звеном.
Развернутая структурная схема трехкаскадного электрогидрав-
лического механизма управления с упругой обратной связью
(см. рис. 10.16, а) приведена на рис. 10.17, б, где оператор обрат-
ной связи Л4 оценивает моментную реакцию струи на заслонку,
оператор — силовую обратную связь угла поворота люльки
по усилию воздействия на управляющий золотник, операторы /С7
и К8 — обратные связи скорости смещения управляющего золот-
ника й3 и угла поворота люльки у на перепад давления; назначение
операторов и очевидно из обозначения промежуточных
переменных на структурной схеме.
Расчеты и результаты экспериментальной проверки такого
механизма управления приведены в работе [1].
10.6. ТРЕБОВАНИЯ К МЕХАНИЗМАМ УПРАВЛЕНИЯ
Помимо заданных надежности, долговечности и точности управ-
ления, к механизмам управления электрогидравлических следя-
щих гидроприводов с устройствами управления, обслуживаю-
щими регулируемые насосы, предъявляют следующие весьма
важные требования, которые должны быть обеспечены в процес-е
конструирования и освоения: 1) линейность статической харак-
теристики (зависимости угла поворота или скорости перемещения
люльки насоса от управляющего сигнала) во всем рабочем диапа-
зоне работы системы; 2) минимальность ширины петли гистерезиса
статической характеристики и зоны нечувствительности; 3) ми-
нимальность изменения крутизны статической характеристики
и дрейфа нуля во всем диапазоне эксплуатационных температур;
4) монотонность переходного процесса и возможно меньшая
365
доминирующая постоянная времени; 5) стабильность статических
и динамических характеристик в течение всего периода эксплуа-
тации; 6) простота и надежность конструкции, наименьшие га-
бариты и масса.
В работе [1] перечислены рекомендации по проектированию
электрогидравлических механизмов управления. Так, линейность
статических характеристик достигается применением составля-
ющих элементов с линейными статическими характеристиками
(электромеханический преобразователь и датчики углового поло-
жения), применением жесткой обратной связи в гидроусилителях,
а при ее отсутствии — использованием гидроусилителей диффе-
ренциального типа [100].
С целью уменьшения петли гистерезиса и зоны нечувствитель-
ности на вход электромеханического преобразователя подается
дополнительный осциллирующий сигнал переменного тока, чем
уменьшается магнитный гистерезис, снижается сухое трение и
выбираются люфты в гидроусилителях и рычажных системах
(эффект вибрационной линеаризации). Если из-за фильтрующих
свойств осциллирующее воздействие не передается на управля-
ющий золотник, то в конструкцию вводят специальный механиче-
ский вибратор, сообщающий осциллирующее движение золот-
нику или золотниковой втулке.
С целью стабилизации характеристик по отношению к темпе-
ратурным воздействиям, меняющим сопротивление обмоток и
вязкость рабочей жидкости, применяют стабилизаторы тока в об-
мотках возбуждения электромеханических преобразователей, элек-
тромеханические преобразователи с постоянными магнитами,
а также дифференциальные схемы управляющих золотников.
Такие конструкции золотников обеспечивают большую стабиль-
ность нуля статических характеристик. Кроме того, все гидрав-
лические тракты конструируют так, чтобы их сопротивление было
возможно меньшим.
Быстродействие механизмов управления достигается приме-
нением составляющих элементов с возможно меньшими значе-
ниями доминирующих постоянных времени. Постоянная времени
маломощных электродвигателей невелика, что и обусловило
широкое распространение управляющих электродвигателей в ме-
ханизмах управления. Высоким быстродействием обладают мало-
мощные электромагниты, которые и применяются для управления
гидромашинами малых размеров через управляющие золотники;
для гидромашин средних и больших размеров применяют те же
электромагниты с двумя гидравлическими каскадами усиления.
Для обеспечения стабильности характеристик необходим подбор
пар трения с высокой износостойкостью, выбор материалов, стойких
к воздействиям струй рабочей жидкости при больших скоростях
омывания, а также выборка люфтов всеми доступными средствами.
Выполнение механизмов управления в форме отдельного блока
позволяет подбирать конструкцию независимо от имеющегося
366
регулируемого насоса. Механизмы, встроенные в конструкцию
регулируемой гидромашины, имеют меньшие массу и габариты,
что уменьшает также конструкцию гидромашины.
10.7. ВОЗМОЖНЫЕ СТРУКТУРЫ
ЭЛЕКТРОГИДРАВЛИЧЕСКИХ СЛЕДЯЩИХ
ПРИВОДОВ
Примеры структур электрогидравлических следящих силовых
приводов приведены на рис. 10.18, где штрихпунктирным конту-
ром охвачена область так называемой неизменяемой части, вклю-
чающей механизм управления с передаточной функцией lFMy (s),
исполнительное устройство с передаточной функцией W (s) и
коэффициентом усиления К, а также редуктор с передаточным
отношением i.
Тракт управления по ошибке е (s) силовой следящей системы,
охваченной главной обратной связью, включает коэффициент
сравнивающего устройства Ке (например, сельсинной пары) и
усилитель сигнала и (s) с передаточной функцией Ц7у (s). С целью
уменьшения влияния нагрузки на ошибку [оператор К'1 П (s) X
X W (s) ] используются корректирующие устройства с передаточ-
ными функциями (s) и IFKM (s).
Для того чтобы обеспечить заданные точность исполнения
сигнала, помехозащищенность, запас устойчивости и данное ка-
Рис. 10.18. Примеры структур электрогидравлических силовых следя-
щих приводов
367
Рис. 10.19. Простейшая
структура замкнутой кор.
ректированной системы
чество переходного процесса, которыми должна обладать проекта-
руемая система с желаемыми динамическими свойствами WK (s),
применяют корректирующие устройства, обычно находящиеся
вне неизменяемой части, например, местную обратную связь
1FKX (s), последовательное и параллельное корректирующие ус-
тройства WK (s) и IFK' (s), как применительно к разомкнутой
системе с астатизмом первого порядка показано на рис. 10.18, а.
Той же цели в силовых следящих электрогидравлических приво-
дах служит коррекция по нагрузке FKM (s). Удобно расчет веста
по сигналу У, (s) после включения местных обратных связей.
Существенно удается повысить точность автоматического при-
вода, используя компенсацию по входному сигналу (передаточ-
ная функция 1Гд (s) на рис. 10. 18, б). Одновременное использова-
ние компенсации по входному сигналу W„ (s) g (s) и обратной
связи по управляемому сигналу 1Гкх (s) х (s), как показано на
рис. 10.18, б, характерно для систем с астатизмом второго порядка.
Коррекция обеспечивается введением корректирующих эле-
ментов в виде местной обратной связи X ($) (параллельный кор-
ректирующий элемент) и элемента, последовательно включенного
в канал сигнала ошибки Y ($) (рис. 10.19). Место включения кор-
ректирующих элементов определяется только техническими воз-
можностями получения корректирующих сигналов.
Пусть передаточная функция информационного канала (канал
управления по ошибке) при отсутствии коррекции будет 1ГП (s) =
= W0K (s) V (s), где W'ox (s) — передаточная функция той части
канала сигнала ошибки, которая охвачена обратной связью
X ($) (рис. 10.19). Тогда частотная характеристика разомкнутой
скорректированной следящей системы будет
wr /л___ Т (/to) Гох (/со) V (/со)
" ’ ~ 1 + W01l (/со) X (jv)
и должна мало отличаться от желаемой частотной характери-
стики (/со), что и обеспечивается соответствующим выбором
X ($) и Y (s).
Поскольку Lm | Y (/со) Fox (/со) V (j<£> )| с ростом частоты умень-
шается, a Lm \ Wo* (/co) X (/co) | на низких частотах увеличивается,
уменьшаясь на высоких частотах, то X (s) и Y (s) выбирают
так, чтобы на низких и высоких частотах
1»|^ох(/«)Х(/С0)|,
и тогда
(/©) Y (/со) ГОх (/со) V (Ju),
ЗМ
а на средних частотах
1«|^ох(/®)Х(/0))|,
и в этом случае
WK(ju)
Y (/«) V (in) W0K (/и)
X (Ю Wox (/to)
(Ю.1)
Не обусловливая величину коэффициента усиления канала
сигнала ошибки, строят логарифмическую амплитудно-частотную
характеристику (ЛАЧХ) Lm\ U7OX (/со) V (/to)|, проходящую
через точку а (acefh, например, с уклонами /, 3, 5 и 6 на рис. 10.20),
т. е. для коэффициента усиления, равного единице. Затем строят
ЛАЧХ желаемой характеристики Lm\WK(j(d)\
с уклонами 3, 1, 2 и 4 на рис. 10.20 и arg (/со) 1.
Уклон и положение второй низкочастотной асимптоты Bbv
выбирают так, чтобы обеспечить на рабочей частоте сор должное
значение коэффициента усиления. Точка В может размещаться
как на первой низкочастотной асимптоте a3bs, так и на второй
Уклон первой среднечастотной асимптоты выбирают
первым, поскольку иначе трудно обеспечить достаточный запав
Lm,96
369
устойчивости (10—14 дБ по амплитуде, определяемый при сдвиге
по фазе —180°, и запас по фазовому углу 40—45° при частоте
среза —точки С и А соответственно на рис. 10.20), так как в про-
цессе эксплуатации параметры системы не остаются стабильными.
Положения точек и определяет колебательность системы,
а также ее фильтрующие свойства по отношению к помехам с по-
стоянной спектральной плотностью.
Разработанные алгоритмы расчета желаемых ЛАЧХ, в том
числе с различными уклонами первых низкочастотных асимптот,
подробно изложены в работе [8, 9].
Для минимизации среднего значения квадрата ошибки, вы-
званной такими помехами, необходимо обеспечить наименьшее
значение интеграла
оо
/=4-!|ф^1Мсо’
где Ф (/со) — частотная характеристика замкнутой системы.
Кроме того, необходимо в наибольшей возможной степени мини-
мизировать значение интеграла
оо
J = J- J | ф (/со) со212 dco,
пропорциональное величинам «забросов» давления в гидроси-
стеме, вызванных теми же помехами. Поскольку «забросы» давле-
ния лимитируют] возможность использования гидромашин, целе-
сообразно допустить некоторое увеличение значения J ради суще-
ственного уменьшения J, Такая задача применительно к электро-
машинным системам рассмотрена в работах [20, 85].
При выборе второй среднечастотной и высокочастотных асимп-
тот необходимо обеспечить фильтрующие свойства системы по
отношению к высокочастотным колебаниям, генерируемым в ги-
дромашинах в процессе открытия цилиндров [1, 52].
Передаточная функция последовательного корректирующего
контура (корректирующий контур в цепи сигнала ошибки Y ($)
представляет собой дифференцирующее или интегрирующее звено.
Асимптоты ЛАХ передаточных функций обычно применяемых
параллельных корректирующих контуров показаны на
рис. 10.21, а, В большинстве случаев этот корректирующий кон-
тур содержит в себе дифференцирующее (разделительное) звено
(кривая /). При отсутствии этого звена асимптоты ЛАХ имеют
формы линий 2, 3 или 4, в которых имеются нулевые и первые
уклоны
T’ks . 1 , 1 + TKs ь i • 1 JLi_^Zjs£ ь 1
l + TKs’ l + TKs’ l+^TKs’ k \ + TKs>
Асимптоты ЛАХ корректирующего контура в цепи сигнала
ошибки показаны линиями 5 и 6 на рис. 10.21, б. В первом слу-
370
дБ
Рис. 10.21. Асимптоты ЛАХ корректирующих контуров:
а — параллельные контуры; б — контуры в цепи сигнала ошибок
чае этот контур будет дифференцирующим звеном (кривая 5),
а во втором — интегрирующим с передаточными функциями
1 1 + kTKs, 1 TkS < 1
k 1 + TKs ’ 14-sTKs ’
Передаточная функция параллельного корректирующего кон-
тура X (s) в зависимости от ее вида оказывает существенное влия-
ние на величины установившихся скоростной и моментной со-
ставляющих ошибки. Если X (s) содержит дифференцирующее
звено, то при Q = const и отсутствии возмущающего воздействия
скоростная составляющая ошибки определяется отношением ско-
рости к коэффициенту усиления в цепи сигнала ошибки К. Как
известно, при отсутствии дифференцирующего звена в канале
М (s) упомянутая скоростная ошибка увеличивается в соответ-
ствии со значением коэффициента усиления обратной связи по
скорости [20].
Подробнее задача коррекции автоматических линейных систем
рассмотрена в работах [9, 85].
Выбирая Y (/со), строим ЛАЧХ Lm\Y (a2b2d2h2 на
рис. 10.20), которая суммируется с Lm | №ох (/®) V (/со) |, что
позволяет получить Lm \ Wm (/со) V (/со) Y (jti>)\(abc'd'e'f'h'), ко-
торую смещают вверх так, чтобы она совпала с точкой В
(asb3c3d^3f3h3). Тогда разность ординат между полученной ли-
нией и Lm | (/со) | в соответствии с равенством (10.1) дает
Lm| Wox (/со) X (/со)|, которая на рис. 10.20 показана штриховой
линией; пользуясь ее ординатами и зная IFOX (/со), можно опре-
делить X (/со) и начать синтезировать второй недостающий кор-
ректирующий элемент.
Поскольку в реальных системах всегда есть нелинейности,
необходимо при синтезе электрогидравлических следящих сило-
вых приводов следить за тем, чтобы контур местной обратной
связи был устойчив. Контур находится на границе устойчивости,
если Гох (/со) X (ja>) = —1 или arg X (/соа) — arg Wox (/соа) =
=* —л. Контур устойчив, если значение фазы будет положительно.
371
Изменение запасов устойчивости достигается изменением наклона
асимптоты желаемой характеристики справа или слева от точки С
ла рис. 10.20. Затем производится уточнение ЛАЧХ, особенно
в области частот ®р и <оа, связанное с отбрасыванием единицы
в знаменателе выражения W и уточняются запасы устой-
чивости.
Расчет корректирующих элементов линеаризованных следя-
щих систем дроссельного регулирования, частично рассматривае-
мый в работах [85, 94, 100], существенно сложнее, поскольку
содержит большое число разнообразных ограничений, нарушение
многих из которых может привести к не всегда прогнозируемым
нелинейным эффектам. В отличие от исполнительных устройств
с объемным регулированием корректирующие устройства систем
с дроссельным регулированием должны выбираться чаще всего
или однозначно, или с возможным весьма малым допуском на
неизбежные изменения параметров корректирующих устройств.
10.8. КОРРЕКЦИЯ ЛИНЕЙНЫХ ИСПОЛНИТЕЛЬНЫХ
УСТРОЙСТВ СИЛОВЫХ СЛЕДЯЩИХ ПРИВОДОВ
Уравнения связи (6.13) применительно к обобщенному линейному
исполнительному устройству силового следящего привода с пере-
менными входа g (Z) и R (/) (управляющий электрический сигнал
и внешняя нагрузка соответственно) и переменными выхода
V (t) и г (/) (кинематическая управляемая переменная и силовая
фазовая координата) записываются в форме
Ф (D) V (/) = A (D) g (/) + А2 (D) R (/);
Ф (D) г (0 = А, (О) g (0 + А4 (D) R (I), (10.2)
где собственный оператор системы
Ф(Р) = /7(Р)Д(О)+1;
операторы, определяющие передаточные функции V (s)/g (s) и
г (s)/g (s) при R (/) = 0, соответственно будут
A (D) = К* (D) и Аг (О) = -П (D),
а операторы, определяющие передаточные функции V (s)IR (s)
и г (s)IR (s) при g (/) = 0, соответственно запишутся
А3 (D) = И (D) К* (D) и A (D) = 1.
Использование электрического управляющего сигнала g (/)
допускает простые способы реализации коррекции. Оператор
К* (D) — VxRy (О), где Vx — кинематическая фазовая коорди-
ната на режиме холостого хода, а /<у (D) — оператор преобразо-
вания электрического сигнала g (/) в безразмерный управляющий
сигнал е (I) собственно линейного исполнительного устройства.
Физические свойства величин, определяющих безразмерный упра-
372
Рис. 10.22. Способы линейной коррекции исполнительных устройств
автоматических приводов:
а — коррекция по управляющему сигналу; б — по внешней нагрузке; в — по
управляемой переменной; г — по силовой фазовой координате
вляющий сигнал е (/)> который в рассматриваемом случае стано-
вится промежуточной переменной, обусловливаются принципом
действия и способом реализации исполнительного устройства.
При необходимости изменения динамических свойств испол-
нительного устройства, например при изменении соотношений
постоянных времени операторов потерь и нагрузки, ослаблении
влияния R (/) на V (/) и т. п., можно применять коррекцию, кото-
рая при использовании электрических сигналов может быть реали-
зована по любой из четырех переменных: g (t), R (/), V (0 и г (/).
Структурные представления примеров таких способов коррекции
показаны штриховыми линиями на рис. 10.22, где Rg (D), R% (D),
Rv (D) и Rr (D) — соответственно корректирующие операторы
четырех перечисленных сигналов.
Коррекция приводит к соответствующим изменениям выраже-
ний операторов связи At (£)), А2 (D), А3 (D) и Д4 (£)) в уравне-
ниях (10.2); выражения этих операторов приведены в табл. 10, 1,
причем вариант I соответствует исходному (т. е. без коррекции)
исполнительному устройству, вариант II — использованию ком-
пенсации по входному сигналу g (t), вариант III — положитель-
ной обратной связи по внешней нагрузке R ((), вариант IV —
отрицательной обратной связи по управляемой переменной V (/)
и вариант V — отрицательной обратной связи по силовой фазовой
координате г (/).
Очевидно, при использовании Л* (0) < 0, т. е. при изменении
знака выражения /(* (О), характер обратной связи меняется:
из положительной она превращается в отрицательную и наоборот.
Коррекция по переменным входа не меняет собственный опе-
ратор системы ф (D) и может применяться с целью уменьшения
влияния R (0 на V (/). Однако компенсация по входному сиг-
налу g (/) эквивалентна увеличению влияния оператора канала
373
Таблица 10.1
ПАРАМЕТРЫ КОРРЕКТИРОВАННЫХ ЛИНЕЙНЫХ ИСПОЛНИТЕЛЬНЫХ
УСТРОЙСТВ
1 Вариант 1 Коррек- тирующий оператор Ф (D) Ax (D) A2 (D) Л, (D) (D)
I Нет П (D) Н (D) + 1 A* (D) — 77(D) H(D)A* (D)
II *g(D) П (D) Н (D) + 1 к* <o) + + «g (D) -Z7(D) H(D)(K*(D)+ + Rg (D)J
III RRW П (О) Н (D) + 1 К» (D) K*(D)R^(D)- -П (D) H (D) A* (D) H (D) K* (D) X X RR (D)+ 1
IV Ry (£0 К* (D) Ry (D) + + n(D)H(D) + l A* (D) -П (D) H (D) A* (£>) K* (D) Ry (D)+ 1
V «r(D) W(D)[K*(D)X XRr(D) + + /7(D)]+1 К» (D) -K*(D) X XK,(D)- -77(D) H (D) K* (£>) 1
ввода К* (D) на оператор компенсации Rg (£>) и вместо исполь-
зования такого способа коррекции достаточно соответственно
изменить оператор К* (D).
Коррекция по внешней нагрузке R (0 (см. рис. 10.22, б),
не меняя собственного оператора системы <р (D), позволяет суще-
ственно уменьшить влияние R (D) на управляемую переменную
V (D), поскольку в этом случае А2 (D) = К* (D) Rr (D) — /7 (Ь).
Так, при выборе Rr (D) = П (D)IK.* (D) оператор связи А2 (D)
обращается в нуль и V (t) становится независимым от R (0.
Такая компенсация корректирующим каналом Rr (D) влияния
R (0 легко просматривается при перестройке двухканальной
структуры (см. рис. 10.22, б) в одноканальную структуру g (j.)—
V (0, приведенную на рис. 10.23.
Значительно больше возможностей содержится в системах
коррекции по фазовым координатам выхода V (0 и г (0 (см.
рис. 10.22, в и г). Так, проводя элементарные структурные
преобразования в одноканальном представлении (рис. 10.24),
Рис. 10.23. Одноканальная структура исполнительного
механизма с коррекцией по внешней нагрузке
374
д)
Рис. 10.24. Структурные представления корректирован-
ных исполнительных устройств:
а — при коррекции по силовой фазовой координате; б — то
же после структурного преобразования; в — при коррекции
по управляемой переменной
можно убедиться, что коррекция в форме отрицательной обратной
связи по силовой координате г (t) равносильна замене оператора
потерь П (D) на оператор К* (Р) Rr (£>) + П (D), а коррекция
по управляемой переменной V (0 равносильна замене единичной
отрицательной обратной связи на отрицательную обратную связь
с оператором К* (D) Rv (D) + 1.
В обоих случаях (рис. 10.24, айв) дополнительная обратная
связь слабая (0) •< 11, как показывает анализ, должна быть
положительной и поэтому имеет свое предельное значение, обус-
ловленное необходимым запасом устойчивости. Параметры соб-
ственного оператора <р (D) меняются (см. табл. 10.1), и поэтому
при необходимости изменения нулей и полюсов механизма управ-
ления привода следует обращаться к коррекции при помощи
обратных связей по выходным переменным.
Результаты сравнения обоих вариантов коррекции при К* (D) =
= К* (0) = К* и форме корректирующих операторов Rr (D)
ro + 'iD, Rv (D) vQ 4- Vx (D) -p v2 D2 с коэффициентами
»o> и v2, a также r0 и rlt имеющими одинаковые знаки, сведены
в общую табл. 10.2. Такие операторы могут быть реализованы
лишь в ограниченной полосе пропускания частот, обязательно
совпадающей с полосой пропускания частот проектируемого авто-
матического привода.
375
Таблица 10.2
СРАВНЕНИЕ РЕЗУЛЬТАТОВ КОРРЕКЦИИ ПО КИНЕМАТИЧЕСКОЙ
И НАГРУЗОЧНОЙ ФАЗОВЫМ КООРДИНАТАМ
Характе- ристика Коррекция по V (1) Коррекция no r (t)
Rl(D) v« + ViD + v2D2; VoVi 0; u0v2 0 r0 4“ r0'i 0
Характер обратной связи Отрицательная при и0 > 0, положительная при t>0 < 0 Отрицательная при r0 > 0, положительная при r0 < 0
q>(D) 1 + Th + K*VO + (Tj + + h^ + K*v1)D + + + /СЧ)£>а 1 + Th + K*roh + (tJ + + hfl + K*rtJ) D + + (W + K*r2J)
A2(D) —т — &D -vt+ K*r0)_(^+ K*ri)D
А2 (D) = 0 Нет г0 = — -^г При Г1 = 0 _ т _ ^0 II Гд — д.*
+ K*v2 tf + KSrJJ
1 4" т/i + Х*^о 1 + Th + К*г<Л
tJ + hfl 4- K*vi 1 + uh + K*Vq (^ + К%)Л + (т + К%) J 1 + Т/l + K*rQh
К K* К*
1 + Th + K*Vo 1 4-Th4-K*roh
Условия устойчи- вости 1 4-t/i Vo> K* -iJ +ho V1> K* ^2> X» т 1 Г° > К* A ‘h т П К* K‘J rt>
376
Для того чтобы постоянная времени механизма управления приво-
да могла быть изменена, порядок корректирующего оператора RV(D)
должен быть больше, чем порядок корректирующего оператора Rr(D).
Уменьшение постоянной времени Т, члена характеристиче-
ского уравнения, обусловливающего демпфирующие свойства 2£Т,
и увеличение (практически обычно небольшое) коэффициента
усиления К достигаются использованием положительной коррек-
тирующей обратной связи, т. е. Rv (0) < 0 и Rr (0) < 0.
Существуют пределы глубины корректирующей обратной связи,
обусловленные имеющимся запасом устойчивости (все коэффициенты
собственного оператора потерь должны быть положительными).
Применительно к коррекции по V (/)
_ 1 4- тЛ
уо> к*(0)’
а для системы коррекции по г (/)
г - 1 + Tft
° hK* (0) •
Поскольку h 1, то при vQ < 0 и г0 < 0 можно во втором
случае использовать значительно большие значения |г0| по
сравнению с | v01.
Также отличаются возможные предельные значения vx и />:
. tJ + И _ J& 7T-i । т-ц.
U1 к* (0) - «По)v п "* н h
О xJ -\-hft _ О (т~1 । т-Ц
К* (0) JK* (0) “ К* (0) '' п ' 7 "
причем первое ограничение гг обусловлено знаком Т2, а второе —
знаком 2£Т. При Тй' + ^й'> 1 предельное значение определяется
первым ограничением, и наоборот.
Коррекция по V (/) не может изменить выражения оператора
связи Л 2 (D) = —т — &D, зато методы линейной коррекции по-
зволяют выполнить систему инвариантной по отношению к внешней
статической нагрузке или возмущающему воздействию, если принять
г0 — — х/К* (0). Однако при этом обращается в нуль постоянная
времени, система перестает быть грубой по отношению к меняю-
щейся в широких пределах динамической податливости (например,
из-за изменения значения модуля объемной упругости жидкости) и
появляется возможность возникновения расходящихся движений.
Коррекция по силовой фазовой координате г (t) сравнительно
с коррекцией по управляемой фазовой координате V (/) имеет
преимущества, как это следует из материалов табл. 10.2. Возмо-
жен случай, когда коррекция по фазовой координате V (i) трудно
реализуема (например, в роботах и манипуляторах) из-за малых
значений V (/) и необходимости минимизации привода по массе.
Тогда коррекция по силовой фазовой координате имеет дополни-
тельные преимущества.
Глава 11
ДИНАМИКА ГИДРОПРИВОДА
С РЫЧАЖНОЙ связью
МЕЖДУ ГИДРОЦИЛИНДРОМ
И ОБЪЕКТОМ УПРАВЛЕНИЯ
Сравнительная ограниченность перемещений штока гидроцилин-
дра, а также необходимость дистанционного размещения гидро-
двигателя по отношению к объекту управления заставляют соеди-
нять их при помощи рычагов. В этом случае передаточные отно-
шения между объектом управления, отдельными звеньями меха-
низма и гидродвигателем перестают быть постоянными. Перемен-
ность передаточного отношения приводит к изменению приведенной
к поршню гидроцилиндра инерционной нагрузки в зависимости
от его положения. В случае рычажных подъемных устройств
изменяется и приведенная весовая нагрузка, что соответственно
влияет на динамические свойства привода.
Необходимость осуществления определенных заранее заданных
и притом больших перемещений привела к использованию не-
скольких гидроцилиндров (например, у экскаваторов, погрузчи-
ков, роботов и манипуляторов и т. п.), причем некоторые из этих
цилиндров перемещаются другими цилиндрами. В этом случае
динамические процессы еще более усложняются, поскольку при-
веденные к поршню цилиндра инерционная и весовая нагрузки
будут разные в зависимости от того, неподвижен этот цилиндр
или принимает участие в движении как абсолютном, так и отно-
сительном.
При одновременной работе двух гидроцилиндров, один из
которых смещает другой, возникает их взаимовлияние через
приведенные к поршням цилиндров инерционные и весовые на-
грузки. Хотя обобщенные приемы расчета такого взаимовлияния
еще не разработаны, однако сам расчет при конкретизации системы
не имеет принципиальных затруднений.
Возможен и подробно рассматривается, например в работах
[21, 78, 94], случай непосредственного изменения инерционной
нагрузки. Решение таких задач основывается на использовании
уравнения кинетического момента вместо уравнения живых сил,
что приводит к изменению в 2 раза соответствующих членов раз-
решающих уравнений.
11.1. СОЕДИНИТЕЛЬНЫЙ РЫЧАЖНЫЙ МЕХАНИЗМ
Объектом исследования выбран рычажный механизм подъема
стрелы (стреловой кран, экскаватор, погрузчик и т. п.), схема
которого показана на рис. 11.1 Этот кулисный механизм [31
378
с ведущим поршнем на
шатуне составляется из
трех звеньев: гидроцилинд-
ра /, ведущего поршня 2 со
штоком и стрелы подъема 3
с грузом 4. Массы этих
звеньев—mlt т2и т3 соот-
ветственно, центры масс
размещены на радиусах rlt
г2 и г3 от центра кача-
ния О, а радиусы инер-
ции — klt k2 и k3. Пред-
полагается, что центры
масс звеньев расположены
на линиях ОгО2 и О2О3.
Геометрия механизма
определяется базой а =
= const, углом ее наклона к горизонту у = const, плечом b = const.
При смещении поршня, определяемом значением х = var, меняется
р (р — х = const, х = р), а также углы а = var и р = var.
Любая из трех переменных может быть выбрана в качестве обоб-
щенной координаты (маханизм имеет одну степень
а связь между переменными может определяться,
равенствами
Рис. 11.1. Схема механизма подъема стрелы
свободы),
например,
2аЬ
р2 I а2 _ £2 а2 + ь2 — р2
cos а = -Е-Хг--------; cosp = —-----------—
2др г
При исследовании динамики гидропривода в качестве обоб-
щенной координаты целесообразно выбирать координату положе-
ния поршня х (или р), непосредственно связанную с исполнитель-
ным двигателем, а при исследовании движений звеньев — угол р,
поскольку каждому значению р соответствуют два значения р,
а последняя переменная однозначно определяет положение соеди-
нительного механизма. В машинах возможные положения такого
механизма обычно ограничиваются конструкцией, и поэтому
Двузначность угла Р в аналитических решениях для анализируе-
мых механизмов обычно несущественна.
11.2. ГЕОМЕТРИЧЕСКИЕ И КИНЕМАТИЧЕСКИЕ
СООТНОШЕНИЯ В СОЕДИНИТЕЛЬНОМ
МЕХАНИЗМЕ
Геометрические соотношения в соединительном рычажном меха-
низме определяются зависимостями
а = а(р), ₽ = ₽(р) (11.2)
379
или
а = аф), р = р(0).
(11.3)
При выборе размеров базы а в качестве единицы измерения
целесообразно использовать безразмерные величины а = 1; b =
— Ыа, р = p/а, г j — гх/а и т. д. Тогда зависимости (11.2) с уче-
том (11.1) зап ишутся
а = arccos ' ; (11 • 4)
2р
Р = arccos 1 ~ р , (И.5)
а равенства (11.3) с учетом (11.1) будут
р = У1 +Я- 26 cos 0; (11.6)
b sin В /11 7\
а = arcsin U1 • и
1 COS |3
Из зависимости (11.4) следует, что при b < 1 звено совершает
возвратно-поступательное движение и 0 < а < 90°, а при b > 1
возможно вращательное движение. Из равенства (11.6) следует,
что при b < 1 максимальный ход поршня хтах = ртах — рт1п =
= 2Ь, а при b > 1 хтах = 2. Величина р определяется как в зави-
симости от положения соединительного механизма (угол 0),
так и размеров (Ь), причем pmln = | b — 11 (при р = 0 и р ==
= 360°), a р“ ах = £ + b _(при (3 = 180°£.
Зависимости р (х), а (х) и (3 (х) (где х = х /хтах — относитель-
ный ход поршня) приведены на рис. 11,2 для различных значе-
ний Ь. причем
х = х = Р — Pmln
*max ршах — Pmln
Кинематические параметры механизма определяются скоро-
стями изменения величин р, а и (3. Возможно использование пере-
даточных отношений
; = = w <1L8>
или их обратных величин, которые могут рассматриваться как
функции независимых переменных р или 0.
380
При выборе в качестве обобщенной координаты величины р
зависимости (11.8) получаются из (11.4) и (11.5) дифференциро-
ванием по р:
а _ </а 1 — Ь2 — р2 1 — Ь2 — р2
Р “ а'р Р /р - (1 - b)2l [(1 -Й)* - р2] 4sp
Р _ Ф. = 2р = Р .
р dt> /(>-(1-6)2] [(1 +*)2-P2J й ’
а ___ da __ 1 — b2 — р2
"У ~ 2(? ’
где $ — ?-^°-^.2°2 — безразмерная площадь треугольника ОйгОз;
4s = У[р2 - (1 - F)2] [(1 4- Ь)г - р2] = 2&sin р.
Закономерности изменения ф/dp и da/ф в качестве функций х
Для фиксированных значений b приведены на рис. П.З.
381’
Рис. 11.3. Зависимость кинематических параметров рычажно-
го механизма от х при фиксированных значениях b
Наименьшее значение dp/dp при b > 1 равно единице, а при
b <1 и р = '|/|^-1| равно 1/6; в первом случае при х =
— Ь2 — 1 — (b — 1)], а во втором при х = -4- ty" 1 — Ь2 —
- (1 - Ь)].
Производная da/ф при b > 1 всегда отрицательна и только
при ~b < 1 и х < ~ [У 1 — b2 — (1 — &)] будет положи-
тельной. При малых значениях относительного хода, когда р
< У-^-|б2 — 11» абсолютное значение а больше р.
382
Н.з. РЫЧАЖНЫЕ МЕХАНИЗМЫ ГИДРОПРИВОДОВ
ГРУЗОПОДЪЕМНЫХ И СТРОИТЕЛЬНО-ДОРОЖНЫХ
МАШИН
Наибольшее распространение в грузоподъемных и строительно-
дорожных машинах имеют соединительные рычажные механизмы
с относительным размером плеча b = (b/а) > 1. Так, размеры
сторон рычажного треугольника подвески телескопической стрелы
стреловых гидрофицированных автомобильных кранов (рис. 11.4),
в которых точка опоры штока поршня может размещаться как
на оси стрелы, так и консольно (точка В на рис. 11.4), приведены
в табл. 11.1, причем угол 02 в отличие от угла 0 отсчитывается
от горизонтали.
Значения хтах и хт1п (табл. 11.1) с учетом рис. 11.2 и 11.3
свидетельствуют о работе механизма в области больших значений
углов а (от —65 до —155°), а также об изменении приведенной
инерционной нагрузки более чем на порядок в начале хода поршня
вследствие резкого изменения передаточного отношения dfJ/dp.
Имеются машины, в которых относительный размер плеча b
и больше и меньше единицы, например механизмы подъема стрелы
одноковшовых гусеничных погрузчиков (табл. 11.2 и рис. 11.4).
Применяются различные варианты двухприводных рычажных
механизмов. Например, у одного из экскаваторов рычажный
механизм подъема стрелы образуется стрелой 1 и гидроцилин-
дром 2 с b = (b/а) > 1 (рис. 11.5), а рычажный механизм поворота
рукояти составляется гидроцилиндром 3 и рукоятью 4 с b =
= (b/а) < 1.
Центр массы рукояти и центр приложения силы размещаются
на продолжении рукояти по другую сторону от точки опоры
штока поршня по сравнению с предшествующими схемами рычаж-
ных механизмов.
Механизм подъема стрелы с b = 2,0-5-2,5 работает в области
значений 0 > 90°, когда da/dp и dfi/dp меняются сравнительно
Рис. 11.4. Рычажный треугольник Рис. 11.5. Схема гидропривода с двухпри-
подвески телескопической стрелы водным рычажным механизмом
383
Таблица 11.1
РЫЧАЖНЫЕ МЕХАНИЗМЫ СТРЕЛОВЫХ КРАНОВ
Индекс крана Грузо- подъем- ность, тс Ь', мг d, мм С, мм е, мм град X b
min max min max
КС-1571 4 2950 1020 530 274 —8 + 73 0,024 0,635 2,58
КС-2571 6,3 3030 1020 530 336 -9 + 73 0,018 0,623 2,65
КС-3571 10 3080 1180 400 0 —8 + 69 0,014 0,578 2,47
КС-4571 16 3185 1300 680 390 —2 +70 0,047 0,614 2,19
Таблица 11.2
РЫЧАЖНЫЕ МЕХАНИЗМЫ ПОГРУЗЧИКОВ
Тип Модель погруз- чика а, мм ь, мм V» град Р b X
mi max min max
Гусеничные Д-574 582 1118 84 1000 1630 1,921 0,399 0,940
Д-653 1550 685 65 1300 2150 0,442 0,317 0,940
Д-543 810 1760 106 1385 2358 2,173 0,268 0,870
Пневмоколес- Д-660 640 1550 96 1275 2075 2,422 0,285 0,910
ные ТО-18 533 1150 97 856 1566 2,158 0,224 0,890
ТО-19 492 1315 130,5 930 1560 2,673 0,109 0,749
мало. Рабочий ход механизма поворота рукояти вследствие значи-
тельной величины базы работает при малых углах наклона гидро-
цилиндра (3; в этом случае производные dfi/dp и da/dp могут
в пределах рабочего хода меняться на порядок [67, 74].
Можно заметить (см. рис. 11.3), что при Ыа = b < 1 значе-
ния da/dp и dfi/dp меняются существенно даже с изменением знака,
и поэтому применение таких механизмов нежелательно.
Применение прямой или обратной лопаты экскаватора (см.
рис. 11.5) приводит к тому, что рабочий ход реализуется или при
увеличении переменной стороны р рычажного треугольника, или
при ее уменьшении.
11.4. УРАВНЕНИЯ ДВИЖЕНИЯ РЫЧАЖНОГО
МЕХАНИЗМА
Рассмотрим плоский рычажный механизм с абсолютно твердыми
звеньями, обладающими постоянной массой. Уравнения движения
384
звеньев такого механизма, размещенного в плоскости XOY,
будут
где т — масса звена; хс и ус — координаты центра масс звена;
<р, Jc и — соответственно угол поворота, момент инерции
и сумма моментов всех сил относительно оси, проходящей через
центр масс перпендикулярно плоскости XOY\ ^Fx и ^Fy—
сумма проекций всех действующих на звено сил (включая реак-
ции отброшенных связей и силы трения, зависящей от величин
реакций и относительных скоростей) на оси X и Y [27].
Поскольку в исследуемом механизме три звена, то совокуп-
ность 17 уравнений динамики включает 9 уравнений движений
и 8 уравнений связи, которые будут голономными и склероном-
ными (стационарными). При помощи этой системы уравнений
устанавливается зависимость между приложенными к системе
силами и движением всего механизма. Такими силами будут
сила Р (/), действующая на поршень гидроцилиндра, и силы тя-
жести звеньев, а положение механизма определяется обобщенной
координатой р или р.
Исключая промежуточные переменные, можно уменьшить
число переменных и свести систему уравнений к одному дифферен-
циальному нелинейному разрешающему уравнению второго по-
рядка относительно обобщенной координаты. Возможность полу-
чения такого уравнения зависит от математической модели сил
трения. Если действие сил трения существенно и с достаточной
для практических целей точностью они описываются так назы-
ваемой моделью сил жидкостного трения (пропорциональность
сил трения относительным скоростям), то разрешающее уравнение
будет
«1 (Р) Р + «2 (Р) Р2 + «з (Р) Р = + 6 (Р)>
где G (р) — нагрузка от сил тяжести, приведенная к поршню.
Если действие сил трения существенно и для обеспечения
необходимой точности обращаются к математической модели,
учитывающей сухое трение, величина которого зависит и от ста-
тических и от динамических составляющих нагрузки (обуслов-
ленных как скоростями, так и ускорениями звеньев механизма),
то исключение в явной форме всех промежуточных переменных
оказывается невозможным (система существенно нелинейна).
Однако, если можно ограничиться математической моделью, в ко-
торой силы сухого трения обусловливаются лишь статическими
составляющими, то разрешающее уравнение принимает форму
th (р) р + а2 (р) р2 = Р (/) + G (р) - S (р) sign р,
13 В. . Прокофьев и др. 385
где S (р) — дополнительная нагрузка на поршень, определяемая
действием сил трения в механизме.
Поскольку в первом случае приведенная к поршню нагрузка
была G (р) — а3 (р) р, а во втором G (р) — S (р) sign р, то при
условии, что G (р) а3 (р) и G (р) S (р) sign р, силы трения
можно не учитывать и разрешающее уравнение упрощается:
(р) Р + а2 (р) р2 = Р (I) + G (р).
В случае, когда можно принять а3 (р) = 0 и S (р) sign р = О
(отсутствует необходимость определять реакции в кинетических
парах механизмов), выражения коэффициентов аг (р) и а2 (р)
проще всего определять из уравнения Лагранжа 2-го рода
= « (4.9)
или из уравнения живых сил
dT = S dA,
где q — обобщенная координата; Т — кинетическая энергия си-
стемы; Q — обобщенная сила; А — работа сил на некотором
перемещении.
11.5. ПРИВЕДЕННЫЕ МАССА И ВЕСОВАЯ
НАГРУЗКА В РЫЧАЖНОМ МЕХАНИЗМЕ
При вычислении кинетической энергии механизма и работы при-
ложенных к нему сил бывает удобно воспользоваться применяе-
мыми в теории механизмов понятиями приведенной массы и при-
веденной силы.
Кинетическая энергия механизма складывается из кинетиче-
ской энергии отдельных его звеньев, которая в общем случае
определяется по теореме Кенига
гр _ mivci , /n£/ezQ?
1 i “ ~ । 2 ’
где — масса Z-ro звена; — радиус инерции; vcl — абсо-
лютная скорость движения центра масс; Q, — угловая скорость
вращения звена.
Для рычажного механизма (см. рис. 11.1) кинетическая энер-
гия первого звена — гидроцилиндра
Л = wi + 4" =^-^Jice2,
где J\ = гп\ (r\ 4- k\) — момент инерции первого звена отно-
сительно оси Ог;
386
кинетическая энергия второго звена — поршня со штоком
Т2 ~ ~2~ т2 [р + (Р — гг)2 а2] + “2“ tn2k22a = lm2p2 Л (р) а2],
где J2 (р) = /л2 Кр — г?)2 + — момент инерции второго звена
относительно центра качания О19 который зависит от величины р;
кинетическая энергия третьего звена — стрелы
Тз = ~2~тз Кз?)2 “у тз^зР2 = “2“ JзР2,
где Л = (d + &з) — момент инерции третьего звена отно-
сительно оси О3.
Поэтому полная кинетическая энергия всех звеньев механизма
S = — [Л + Л(Р)1а2 + "2“т2Р2“Ь "2”3^2’
поскольку все скорости в рассматриваемом механизме однозначно
связаны между собой кинематическими соотношениями. Следо-
вательно, кинетическую энергию механизма можно определять
по любой из скоростей.
Приведенную к поршню гидроцилиндра массу можно вычис-
лить из очевидного равенства
тпР (р) = " = т2 + (Л “г Л (р)] ("^") *^з (“у") 9
причем приведенная масса — функция координаты р и форма
функции обусловлены соотношением величин m2, Jlt J2 (р)
и J3t а также а/р = da/dp и fVp = dfi/dp.
Поскольку силы тяжести есть силы стационарного потенциаль-
ного силового поля, то элементарная работа этих сил опреде-
ляется изменением потенциальной энергии, взятой с обратным
знаком:
dAG= —dn.
Выбирая за начало отсчета горизонтальную плоскость, про-
ходящую через центр О1? можно записать потенциальную энергию
в форме
л = (G3r3 + G2fc) sin (Р - у) + (Gfr -
— 62r2) sin (a + у) + (G3 + G2) a sin y.
Поэтому приведенной силой тяжести можно назвать производную
от потенциальной энергии по перемещению с обратным знаком
Gnp = - + W cos (Р - Y) -f -
- (G^ - G2r2) cos (a + у)
13*
387
причем перемена знака означает, что направление действия —
в сторону уменьшения координаты р, а величина силы зависит
от той же координаты.
_ 1 t/mnp (р) • 2
”2 ф Р *
11.6. ЧАСТНЫЕ ФОРМЫ УРАВНЕНИЯ ДВИЖЕНИЯ
РЫЧАЖНОГО МЕХАНИЗМА
При отсутствии сил трения уравнение Лагранжа 2-го рода (11.9)
при использовании выражения приведенной массы принимает
форму
= <MP)P + -i2j7a-P!: (11-Ю)
поскольку Т = -^-/ипр(р)р2,
дТ . . • дТ
-^=/ипр(р)р;
Следовательно, инерционная нагрузка включает составля-
ющую, вызванную изменением скорости обобщенной координаты
по времени, и составляющую, связанную с изменением приведен-
ной массы в зависимости от положения механизма (следствие
переменности передаточных отношений). Соотношение влияния
этих составляющих определяется выражением
z ч d2p 2 dw 2 d in w ’
где w = p.
Значение k зависит как от переменности приведенной массы
/ппр, так и переменности скорости. Поэтому небольшое измене-
ние тпр еще не свидетельствует о малости ее влияния. При k 1
допустимо игнорирование влияния члена -^-р2-^-[mnp(P)L а
при k 1 — члена /ппр (р) р.
При авариях гидросистемы (например, обрыве рукавов и
т. п.) может оказаться, что Р (/) = 0, и тогда произойдет «скла-
дывание механизма» под воздействием сил тяжести, например,
падение стрелы рычажного механизма. В этом случае условие
Р (/) = 0 позволяет получить решение уравнения (11.10) при
помощи первого интеграла уравнения Лагранжа 2-го рода для
консервативных сил (закон сохранения механической энергии)
Т + Л = Ео = const, (Н.П)
388
где Ео — начальное значение энергии (запас энергии). Если
в начальный момент скорости движения равны нулю, то значе-
ние Ео определяется только положением механизма. Тогда Ео =
= П (ро), где ро — начальное значение обобщенной координаты.
С учетом решения (11.11) Ео = П (р) ф- тпр (р) р2 и
at Г "‘пр VP/
а время протекания процесса
При опускании стрелы под воздействием сил тяжести и дрос-
селировании рабочей жидкости, выпускаемой из гидроцилиндра,
усилие на поршне определяется при квазистационарном движении
уравнением
/оР
(11.12)
где F и fо — площади поршня и дросселирующей щели соответ-
ственно; рж и ц — плотность жидкости и коэффициент расхода
соответственно.
Обращаясь к уравнению (11.10) с учетом (11.12), в
обозначим F-^~ = т,
получим
котором
(Р)Р + i i>! [ ъ п = 0.
Уравнение будет неоднородным линейным, в чем можно убедиться
подстановкой р2= z:
dz_ i z Г rffftnp (p)__т 1 . 2 dn _ q
dp 1" L «пр (p) dp mnp (p) J I” mnp (p) dp ’
интеграл которого
Жр) L Я(р) f П(р) dp
тпр (P) 0 Ф (P) J «пр (P) Ф (P)
Po
p
Г«М(Р) = «Р •
Po J
и окончательно переходный процесс опускания опишется урав-
нением
__________dp_______________________
₽
F 77 <Р) т ( П dP
° t(P) J mnp(P) l’(P)
Ро
11.7. СТРУКТУРНЫЕ ПРЕДСТАВЛЕНИЯ
ГИДРОПРИВОДА С ИСПОЛНИТЕЛЬНЫМ
УСТРОЙСТВОМ РЫЧАЖНОГО ТИПА
Применительно к управляемому гидроприводу усилие Р (/)
превращается в промежуточную переменную, управляющей пере-
менной будет е (/) и переходный процесс описывается двумя
уравнениями [1]
vxe(t) = p-^%Fp-}-'&Fp-,
mop (р) р + 4-Р2 + Лр + I (О + = FP> (11-13)
структурные представления которых приведены на рис. 11.6;
f (t) — приведенное к поршню внешнее возмущение.
Особенность этих структурных представлений заключается
в наличии нового члена р [тпр (р)] и зависимости весовой
нагрузки G (р) =—от смещения поршня гидроцилиндра.
Соответствующие операторы на рис. 11.6 обведены штриховой
линией, причем приведенные на структуре звенья тпр и Спр обо-
значают некоторые функциональные преобразователи алгебраи-
ческого типа.
Когда работа рассматриваемого механизма сопровождается
одновременной работой и второго дополнительного рычажного
механизма (рис. 11.7), инерционная и весовая нагрузки окажутся
Рис. 11.6. Структурное представление гидро-
привода с переменной приведенной массой
Рис. 11.7. Схема двухприводного рычажного
механизма
390
Рис. 11.8. Структурное представление гидропривода
с двухприводным рычажным механизмом
зависимыми не только от рь но и от р2 или т. е. т„р1 = т (ри
Vi) и Gj = Gj (рь у!). Влияние гидропривода 2 (соответствующие
обозначения отмечены на рисунке индексом 2) на гидропривод 1
(обозначения отмечены индексом /), смещаемый вместе с объектом
управления при помощи гидропривода 2, выявляется с помощью
структурного представления, показанного на рис. 11.8. В верхней
части рисунка приведено структурное представление гидропри-
вода 1, а в нижней части — гидропривода 2 с показом нелинейных
членов, соответствующих переменным приведенным инерционным
нагрузкам и переменным весовым нагрузкам, зависящим от сме-
щений поршней гидроцилиндров.
Поскольку гидропривод 2 смещает базу гидропривода 1, то
возникающие дополнительные скорости каждого из звеньев
гидропривода / меняют приведенную инерционную нагрузку
т1Ф1Рг) — т (Pi) + (р2), а изменение положения звеньев
учитывается выражением G1(p1p2) = Gt (pj) 4-Д^1(р2). Такое
структурное представление приемлемо при источниках питания
неограниченной мощности. Случай работы нескольких гидропри-
водов от одного источника питания ограниченной мощности при-
водит к громоздким решениям, которые следует рассматривать
дополнительно.
11.8. ЧАСТНЫЕ РЕШЕНИЯ УРАВНЕНИЙ ДВИЖЕНИЯ
РЫЧАЖНОГО МЕХАНИЗМА
При f (/) = 0 система уравнений (11.13) переписывается в виде
системы дифференциальных уравнений первого порядка
dp т 1 . vx
dt 0 Р &F +
4- = ®: (1М4)
dw _ р I бпр (р)___________h _ ш2 dmnp (р)
dt /Ппр (р) " "I /Ппр (Р) /Ппр (р) 2 mnp (р) dp ’
391
а исследование устойчивости решения может быть сведено к иссле-
дованию на устойчивость тривиального решения, которому соот-
ветствует точка покоя, расположенная в начале координат.
Поскольку система (11.14) нелинейна, то по устойчивости частного
решения нельзя судить об устойчивости системы в целом, т. е.
при иных решениях условия устойчивости могут быть другими.
Из системы (11.14) следует, что при частном решении w =5
s= u’o = 0 (соответствует положению равновесия)
р = р0 = const; р = р0=-----G (р0) = const;
е (0 = е0 (/) = — Ро = const.
Введением новых переменных х = р — р0, у = р — рй и
и = w — wQ сведем исследование решения w = 0, р = р0, р =
= р0 к исследованию тривиального решения х — 0, у — О,
и — 0. В новых переменных система (11.14) принимает форму
— = F (о 4-1/14- -G (ро + х)
dt т (р0 4- х) У> т (р0 х)
иг dm (р0 4- х)______h
2 m(po4-x)dx zn(p04-x) и'
Для исследования полученной системы на устойчивость по
Ляпунову по первому приближению используем разложение
- G(n 1 4- Г dG ...Wp)! *2_j_ .
G (Р) - G (р0) + [—J₽=poх + [ ]р=р.— 4- .,.,
/ \ , ч , Г dm (р)
/И(р) = /И(ро) 4-
х । Г d2m (Р) I хг
р=Ро "Г" L dp2 Jp=p0 2
причем
dm (р) [dm (р) ] Г d2m (р) 1 ,
dp L dp Jp=p0 L dp2 ]р=р<|
Отбрасывая в третьем уравнении системы (11.15) член R (X,
у, и), имеющий порядок малости выше первого относительно
Ухг у1 и2, получим линейную систему уравнений первого
приближения
dy т 1
=------------
dt v J vr
dx
~di U’
du __ F
It ~ m(p0)
I uv 1 ri,
V L dp Jp=p<, m(p0)X ~~ m (po) U‘
(11.16)
392
OF
1
—ГТ- х
т (Ро)
Характеристическое уравнение полученной системы будет
0
о -х.
F 1 Г dG (р) 1
'«(Ро) ™(Ро) L dp Jp=p0
(П.17)
откуда
Г rfG(p)-] 1 L т Г dG (р) 1 =0
I dp Jp=p0 m(Po)J <Wpo) L dp Jp=p0
Для того чтобы решение системы (11.16) было асимптотически
устойчивым, необходимо, чтобы действительные части корней
характеристического уравнения (11.17) были отрицательны, т. е.
по Гурвицу [36]
т । h Г dG (р)~| т
О т (Ро) ’ L dp ]р=р0 О/п(Ро) ’
(11.
Г dG (р) 1 1 , т Г т(ро) , тт (Ро) , .1
L dp J р=р0 О- О I. АО $ т J •
Поскольку т, О', Ли m (р0) положительны, то из трех неравенств
выполняется лишь последнее.
При т = 0 и h = 0 система консервативная, обладает одной
степенью свободы и может быть исследована на фазовой плоскости.
Поскольку из первых двух уравнений системы (11.15) р =>
= Ро—— (р —ро) или же у =— х, то система (11.15)
в этом случае заменяется двумя уравнениями
dx
~тг =
dt
т(р)|=-4+[С(р)-С(р0)]-4^> <1И9>
а уравнение фазовых траекторий будет иметь вид
1 , , - z- / «2 dm (р)
du == — ^Х+1°(Р) G (Ро)] 2 ф
dx ит (р) ’
допуская решение
X
Ш (Р) 4 + [ {4 * - lG (р) - G (Ро)]} dx = Ео. (Н .20)
График приведенной весовой нагрузки
поршне p = Fp=--------у, причем
Gnn (р) и усилие на
1^1
< -и- соответ-
1Р=Ро V
393
ствует устойчивому решению
системы (11.19) или послед-
нему неравенству системы
(11.18).
Уменьшение давления в
гидроцилиндре ограничено
— переходом рабочей жидкости
9 в фазу Г с существенным
уменьшением модуля объем-
ной деформации и соответ-
ствующим изменением зави-
симости усилия на поршне от
его смещения х. Такой пере-
ход на рис. 11.9,а показан в
~р форме излома в точке п.
График изменения потен-
циальной энергии системы
/?£ (х) показан на рис. 11.9, б:
X
= J {-^х“ 1С(Р)~
- о »
р .
— 6 (Ро)1 dx
Г dG (р)1 . 1
и при —у <
1 L Ф Jp=po О
О
имеет минимум, когда х =
(условие устойчивого равно-
весия системы).
Возможный график изме-
нения тпр (р) показан на
рис. 11.9,в, анарис. 11.9, г—
Рис. 11.9. Фазовые портреты консерватив-
ного гидропривода
фазовые траектории системы
при двух значениях Е'о (ни-
же точки п на рис. 11.9, а) и Е'о (выше точки п).
Величины экстремальных отклонений системы от положения
равновесия Xmin и х^ах определяются только видом функции
/72 (х) и начальным запасом энергии Е'о (точки пересечения
1—1 на рис. 11.9,6) и не зависят от характера изменения
/«пр (р)-
Период обращения изображающей точки на фазовой траекто-
рии определяется из выражения (11.20):
*niax
р __ 2 С _____________
*min
Из того же выражения (11.20) находят ординаты фазовой
траектории (скорости изменения обобщенной координаты р = и)
и = Д f Е<) ~
/2 V т(Р)
Если при mnp = const наибольшие скорости будут при х — 0,
то при тпр = var имеет место, вообще говоря, максимальное
смещение.
При достаточно больших значениях Е’о (правее вертикали п—п
на рис. 11.9, г) соответственно меняется характер фазовой траек-
тории из-за перехода рабочей жидкости в фазу Г. Если же
[~~^рР~']р > ЧГ (штриховая линия на рис. 11.9, а), то функция
/7е (х) в точке х = 0 имеет максимум (штриховая линия на рис.
11.9,6), что соответствует неустойчивому равновесию системы.
Фазовая траектория для начального запаса энергии Eq показана
штриховой линией на рис. 11.9, г. При [“^^]р__р < точке
равновесия соответствует особая точка типа центр (устойчивое
равновесие), а при ~]р_р >"у типа сеАЛ0 (неустойчивое
равновесие).
Наличие потерь (т > 0, h > 0) не меняет выводов об устой-
чивости движений системы, находящейся под действием сил,
имеющих потенциал [36]. Добавление диссипативных сил с пол-
ной диссипацией делает устойчивое равновесие асимптотически
устойчивым, и особая точка типа центр превращается в особую
точку типа фокус.
Возможен и подробно рассмотрен (например, в работах [21, 78,
94]) случай динамики гидропривода с непосредственным измене-
нием инерционной нагрузки. Решение таких задач основывается
на использовании уравнения кинетического момента вместо
уравнения живых сил, что приводит к изменению в 2 раза соот-
ветствующих членов разрешающих уравнений.
Глава 12
АНАЛИЗ МАТЕМАТИЧЕСКИХ
МОДЕЛЕЙ ГИДРОПРИВОДА,
ФОРСИРОВАННОГО ПО ДАВЛЕНИЮ
Стремление повысить ускорение инерционной нагрузки, быстро-
действие гидропривода, уменьшить его габариты при фиксиро-
ванной мощности и проходные сечения его элементов, получить
многие другие преимущества гидропривода заставляет создавать
системы с высоким давлением рабочей жидкости. Поскольку
эта тенденция имеет место во многих отраслях машиностроения
и реализуется использованием весьма немногочисленных типов
аксиально-поршневых гидромашин (в станкостроении, строительно-
дорожном, тракторном и сельскохозяйственном машиностроении,
авиа- и судостроении и т. п.), то имеются основания к созда-
нию аксиально-поршневого гидропривода межотраслевого приме-
нения.
Например, аксиально-поршневые гидромашины Сандстренд
или Зауэр Гетрибе (ФРГ) работают на давлениях до 40 МПа, а при
уменьшении их ресурса — и на более высоких давлениях. Из-
вестны системы с давлением до 45 МПа; разрабатываются кон-
струкции и более высоких давлений.
Создание аксиально-поршневых гидромашин, форсированных
по давлению, связано с решением многих весьма сложных задач,
особенно технологических, и встречает поэтому определенные
трудности. Рабочее давление во вновь создаваемых образцах,
как правило, повышено, и рабочий процесс таких гидромашин
усложнен, поскольку форсирование давления заставляет учиты-
вать нелинейности, которыми обычно пренебрегают в системах
с более низким давлением.
Из-за отсутствия опыта длительной эксплуатации аксиально-
поршневых гидроприводов высокого давления серийного изго-
товления каких-либо материалов по результатам эксплуатацион-
ных испытаний гидросистем нет. Имеющиеся немногочисленные
гидросистемы кузнечно-прессовых машин при давлениях выше
40 МПа чаще всего работают по цикловой программе с невысокой
динамической точностью в течение ограниченного времени, когда
расходящееся движение не успевает получить большого развития.
Сравнительно большая часть времени цикла этих гидроприводов
содержит главным образом нулевые скорости движения, что
также не дает достоверных материалов для прогнозирования
динамических процессов следящего гидропривода. Поэтому при-
ходится обращаться к прогнозированию поведения динамических
процессов гидроприводов, форсированных по давлению, при
помощи построения и анализа подходящих математических мо-
делей.
396
12.1. ЭКВИВАЛЕНТНАЯ ЩЕЛЬ
Линейный закон изменения утечек через плоскую щель, который
обычно рассматривается в общих курсах гидравлики, справедлив
только при целом ряде ограничений. Так, поток должен быть
изотермичен, рабочая жидкость несжимаема, подчиняясь закону
Ньютона о вязком трении, а ее вязкость должна быть независима
от давления. На самом деле даже при установившемся потоке
рабочей жидкости, подчиняющейся закону Ньютона о силах
вязкого трения, при проходе через плоскую щель потери напора
сопровождаются выделением тепла, что приводит к повышению
температуры и соответствующему уменьшению сил вязкого тре-
ния. Рабочая жидкость сжимаема. Вязкость рабочей жидкости
зависит от давления.
Влияние термического эффекта на просачивание 'рабочей
жидкости через плоскую щель рассмотрено в работах [66, 105}f
влияние одновременного действия термического эффекта и упру-
гой деформации рабочей жидкости — в работах [52, 66]. Влияние
температуры, давления и упругой деформации на вязкость и
плотность рабочей жидкости аппроксимируется уравнениями (2.3)
и (2.1), соответственно составляющими систему применительно
к решаемой задаче
р = р0[1 — а(/_ Q — P(p0_p)], (12.1)
где индекс «ноль» относит величины к начальным условиям;
и — вязкостное давление и вязкостная температура соответ-
ственно; а и Р — коэффициенты влияния температуры и давле-
ния на плотность жидкости соответственно (сведения о них при-
ведены в разделе 2.2 и работах [66, 99]).
При ламинарном движении рабочей жидкости через узкую
щель с большими скоростями можно предположить, что количе-
ство тепла, передаваемого стенкам, относительно невелико, и
энергия, затрачиваемая на продавливание жидкости через щель,
практически полностью тратится на ее нагревание. Работа за
время
W=Q dt.yc (t - /0) J = (p0 - p) Q dti • 10е,
где Q — расход; — время; у — объемный вес; с — удельная
теплоемкость (с = 0,045ч-0,050 ккал/Н °C); t—10 — перепад тем-
ператур; J — тепловой эквивалент работы (J = 4270 Н-м/ккал);
Ро—Р — перепад давлений.
Следовательно, перепад температур в рабочей жидкости,
возникающий при ее просачивании через щель под воздействием
перепада давлений р0—р, пропорционален этому перепаду:
' ~ = 7^ (Ро - Р) = * (Ро - р). (12.2)
397
Исключая из системы (12.1) перепад температур, при помощи
равенства (12.2) получим
р = exp [(а + kb) (р - р0)] = р0 ехр
P = Poll ~(ka-\-b)(pu-р)] = (1 -P^P)pot
X гр /
(12.3)
где pt = (а + kb)~x и рр = (ka -|- b)'1 — термическое давление
и давление деформаций соответственно. По материалам работ
[66, 101 ] можно принять для минеральных масел pt 26 МПа
и рр 990 МПа, а для силиконовых рабочих жидкостей pt «=«
30 МПа и рр 640 МПа.
Соотношение поправок на термическое давление и давление
деформации соответственно определяются величинами
k — = ъ 0,64 + 0,74 и k 0,47 ч- 0,93,
a Jyca ’ ’ (3 Jycp ’ ’ ’
свидетельствуя об одинаковом порядке поправок и примерно
одинаковой степени важности учета каждой из них. Поэтому
учет влияния эффекта деформации рабочей жидкости при ее про-
сачивании через узкую щель обязателен, если важен учет влияния
термического эффекта (термического клина).
Просачивание рабочей жидкости через плоскую щель описы-
вается уравнением Навье-Стокса
др __ d2vx
где х — координата, направленная по линии тока; z— коорди-
ната, нормальная к х и стенкам щели.
Имея в виду, что vx = 0 при г = 0 и z = h (где h — расстоя-
ние между стенками щели), получим после интегрирования выра-
жение скорости
vx = -J— z (z — h) .
х 2ц v ' дх
Умножая обе части равенства на р (из уравнения неразрыв-
ности pvx — const), с учетом системы (12.3) получим дифферен-
циальное уравнение решаемой задачи применительно к каждой
линии тока
-2^4- dx= (1 exp dp. (12.4)
рог (z — h) \ рр ) * \ Р/ /
Решение уравнения при начальных условиях р = р0 при
х = 0 будет
х = Т, [+р ~ Л) ехр (^тг1) ] ’
398
и при х = I (где I — длина плоской щели), когда р = 0, при-
нимает форму
(Р^х) / _ PL Г п п — /п ±п — n ^PYnJkl
poz (z — h) Pp ’ Pp P Pt J *
Деля почленно полученные равенства, найдем закон измене-
ния давления по длине плоской щели в форме трансцендентного
равенства, свидетельствующего о нелинейной зависимости р =*
= р (I, pt, рр):
X
7
—) ехр ( —-------------- ) — 1
Р/ + Рр / \ Pt /
Ро
Pt + Рр
(12.5)
1
Частное решение этой задачи для случая рр — оо получено
Ж. Тома [105]:
' ЧУ)-
I ехр (р0/р/) — 1
(12.6)
Решения (12.5) и (12.6) отличаются от традиционного линей-
ного решения, приводимого в курсе гидравлики применительно
к пьезометрической линии:
2 = i______Р__
I Ро •
Характер изменения давления р/р0 по длине плоской щели
хН при трех значениях начального давления р0 = 26; 52 и 78 МПа
при pt = 26 МПа и рр = 990 МПа приведен на рис. 12.1, свиде-
тельствуя о более энергичном падении давления в начальном
участке щели (считая по
жидкости). Поэтому значе-
ние отжимающего усилия,
создаваемого гидростати-
ческим давлением в ще-
ли, отличается от тради-
ционной линейной фор-
мы:
Р = -±-Ыр0,
где I — ширина плоской
Щели.
Величина отжимаю-
щего усилия Pt при
Рр = оо определяется вы-
направлению просачивания рабочей
Рис. 12.1. Влияние эффектов «термического
клина» и упругой деформации рабочей жидко-
сти на пьезометрическую линию плоской щели
399
Рис. 12.2. Характеристика плоской щели при р0 -> оо
и pt конечном:
а безразмерное отжимающее усилие Рр б пьезометри-
ческая линия—= 0,1
Ро Ро \ I ’ /
Z
ражением b J pdx, которое с учетом равенства (12.6) дает ре-
о
шение
Р, = Ь J [[р0 —Р, Ы {1 4-JL[exp(-g-)- 1]}]]^-
в е*Р (Po/Pz) — (1 + Ро/Р<) h!n
ехР(Ро/Р/)-1 OiPt>
или в безразмерной форме
р _ - о ехр (р0/Р<) — (1 +р0/р/) pt л0 71
z Р exp (p0/pt) — 1 Ро ’ ( • /
Величина Pt существенно падает о ростом начального значе-
ния давления pOl как показано на рис. 12.2, а для Pt = 26 и
400
30 МПа, а эпюры давлений (пьезометрические линии) тем более
отличаются от прямых, чем больше отношение pjpt — pot = 1;
"2 и 3 (рис. 12.2, б).
Противоположный эффект, хотя и с меньшими количествен-
ными оценками, имеет место при учете деформации рабочей жидко-
сти (рр конечно) и отсутствии влияния термического клина (pt —»оо).
В этом случае интеграл от выражения (12.4) будет
X = [ (1 - dp + С.
рог (z — h) j \1 Рр J
Поскольку при х = 0 давление р =» р0, то уравнение пьезо-
метрической линии будет
Использование положительных значений р в последнем урав-
нении позволяет получить безразмерное выражение отжимаю-
щего усилия
Рр = J "j/"Рр + (Ро — 2роРр) +
dx — -^-
О
+ Ро — Рр
3 —А.
___Рр_г
2 —
Рр
(12.8)
Значение Рр монотонно возрастает о ростом начального зна-
чения До, как показано на рис. 12.3, а для рр = 640 и 990 МПа,
а кривизна пьезометрической линии по сравнению со случаем
рр —> оо и конечным значением pt меняет знак, увеличиваясь
с ростом рад = pjpp (на рис. 12.3, б показаны случаи рОр =
« 0,1 и 0,2). _
Величина Рр не намного отличается от единицы. Так, при
Ро = 45 МПа значение Рр = 1,012, если рр » 640 МПа, а для
аксиально-поршневых гидромашин Брюнингхауз (ФРГ) серий
D и Е [52] с ро = 60 МПа значение Рр становится равным 1,016
и превышение этой величины над единицей имеет тот же порядок,
как и превышение прижимающего усилия над отжимающим в тор-
цовом распределении гидромашин этого типа, обычно рассчиты-
ваемых без учета сжимаемости рабочей жидкости и эффекта тер-
мического клина.
Распространенное мнение о том, что эффект сжимаемости рабо-
чей жидкости следует учитывать лишь при высоких значениях
401
Рис. 12.3. Характеристика плоской щели при р/ -> оо
и рр конечном:
а — безразмерное отжимающее усилие Р ; б — пьезометри-
р Р / х - \
ческая линия — =— (-рЛ I
Ро Р0 ' / ’ ОР7
Ро> неточно. Несмотря на то, что Рр — 1 <1 — Pti отношение
этих величин меняется незначительно, причем
lim Рр~- = —%— 0,045,
1 — Pt рР +Pt
увеличиваясь до 0,050 при р0 = 80 МПа.
Таким образом, упругая деформация рабочей жидкости имеет
место при любых давлениях и составляет примерно одну и ту же
долю от поправки на термический эффект, в определенной мере
компенсируя ее. Поэтому, когда учитывается эффект термического
клина, необходимо брать поправку на упругую деформацию ра-
бочей жидкости, которая составляет от 4,5 до 5,0% от первой,
отличаясь знаком.
При расчете гидростатического усилия по уравнению (12.7)
или графику, показанному на рие. 12.2, а, определяется поправка
402
на термический эффект 6, по которой выбирают исправляющий
множитель k гидростатического усилия внесением исправления k
на сжимаемость рабочей жидкости, причем
k = k6t
где в порядке первого приближения k равно 0,945 для силиконовой
рабочей жидкости и 0,965 для минерального масла. Если для
используемой рабочей жидкости значения pt и рр будут иными,
последующие приближения определяют соответствующими рас-
четами при помощи уравнений (12.7) и (12.8).
12.2. МАТЕМАТИЧЕСКИЕ МОДЕЛИ
ПЛОСКИХ ЩЕЛЕЙ, ЗАПОЛНЕННЫХ РАБОЧЕЙ
ЖИДКОСТЬЮ, ВЯЗКОСТЬ КОТОРОЙ
ОБУСЛОВЛИВАЕТСЯ ДАВЛЕНИЕМ
Математическая модель эквивалентной щели не относится к числу
грубых, и закономерности изменения расхода просачивания и
вязкостного трения существенно отличаются в гидромашинах
различных конструкций.
Влияние упругой деформации рабочей жидкости, как было
выяснено, сравнительно невелико. Существенно больше влияние
эффекта термического клина, однако при условии, если отвод
тепла невелик. На самом деле детали гидромашин, примыкающие
к щелям, в которых реализуется сколько-нибудь существенное
жидкостное трение, всегда нагреты и отбор тепла оказывается
значительным. Поэтому поток рабочей жидкости в таких щелях
по своим свойствам приближается к изотермическому.
В гидромашинах, форсированных по давлению, наиболее су-
щественным оказывается влияние изменения вязкости, завися-
щей от давления, особенно при использовании рабочих жидко-
стей с небольшими значениями вязкостного давления.
Пусть плоская щель шириной &щ, высотой и длиной
находится под перепадом давлений р0, причем избыточное давле-
ние на выходе равно нулю. Одна из стенок смещается относительно
другой со скоростью v, нормальной к скорости просачивания жид-
кости через эту щель. Тогда, считая поток изотермическим и ра-
бочую жидкость вследствие малости влияния деформации недефор-
мируемой, а = const при изменении вязкости по закону |х =
р
= иоехр —, можно получить выражение расхода просачивания
Рц
интегрированием уравнения
(12.9)
403
с граничными условиями р = р0 при х = 0 и р s= 0 при х =
Это выражение расхода будет
Л 1 — ехр (— Рп/p..)
С = Т5^>П -ехр(-Л/А,)| Q,--------------(12.10)
b h3
где Qo = -[^-Po-Расход при рм —> оо.
Из того же уравнения (12.9) закон изменения давления по
длине щели
Р = — Рц In {ехр (— р0/рм) 4- -у [1 - ехр (— ро/рц)]}, (12.11)
а сила вязкостного трения при смещении одной из стенок отно-
сительно другой
(12.12)
где ^o = ~^-Mi0/w, т. е. Т-+То при рд -> оо.
Соотношение между Т и То имеет тот же коэффициент пропор-
циональности, что и соотношение между Л1 и Мо — соответствую-
щими моментами жидкостного трения для гидромотора:
Ро/Рц
М =
т--------1-----r-Г ^<1,
1 — ехр (— Ро/Рц) 0
(12.13)
где при рц —> оо
причем Q — частота вращения ротора гидромотора, a R — неко-
торый линейный размер гидромашины (р и»).
Таблица 12.1
Q=Q/Q0 при давлении pQ (МПа)
'Ц> МПа 1 10 20 30 40 50 60 70 80 90 100
200 1 0,975 0,952 0,929 0,906 0,885 0,864 0,844 0,824 0,805 0,787
142,86 1 0,966 0,933 0,932 0,872 0,844 0,816 0,790 0,766 0,742 0,719
100 1 0,952 0,906 0,864 0,824 0,787 0,752 0,719 0,688 0,659 0,632
66,67 1 0,929 0,864 0,805 0,752 0,704 0,659 0,619 0,582 0,549 0,518
50 1 0,906 0,824 0,752 0,688 0,632 0,582 0,538 0,499 0,464 0,432
43,48 1 0,893 0,802 0,722 0,654 0,594 0,542 0,497 0,457 0,422 0,391
40 1 0,885 0,787 0,703 0,632 0,571 0,518 0,472 0,432 0,398 0,367
33,33 1 0,864 0,752 0,659 0,582 0,518 0,464 0,418 0,379 0,345 0,317
28,57 1 0,844 0,719 0,619 0,538 0,472 0,418 0,373 0,335 0,304 0,277
25 1 0,824 0,688 0,582 0,499 0,432 0,379 0,335 0,300 0,270 0,245
404
Таблица 12.2
PlH Ml I а Р = Р/Р$ при давлении ;?0 (МПа)
1 80 90 100
200 1 0,992 0,983 0,975 0,967 0,958 0,950 9,942 0,933 0,925 0,917
1 42,80 1 0,982 0,977 0,965 0,953 0,942 0,930 0,919 0,907 0,896 0,884
100 1 0,983 0,967 0,959 0,933 0,917 0,900 0,884 0,868 0,852 0,836
66,67 1 0,975 0,950 0,925 0,900 0,876 0,852 0,828 0,805 0,782 0,759
50 1 0,967 0,933 0,900 0,868 0,836 0,805 0,774 0,744 0,715 0,687
43,48 1 0,962 0,924 0,886 0,849 0,812 0,777 0,742 0,709 0,677 0,647
40 1 0,958 0,917 0,876 0,836 0,797 0,759 0,722 0,687 0,653 0,621
33,33 1 0,950 0,900 0,852 0,805 0,759 0,715 0,673 0,634 0,597 0,562
28,57 1 0,942 0,884 0,828 0,774 0,722 0,673 0,627 0,585 0,545 0,509
25 i 0.933 0,868 0,805 0,744 0,687 0,634 0,585 0,540 0,499 0,463
Сравнивая выражения (12.10) и (12.12), можно убедиться,
что при всех изменениях начального значения давления р0 про-
изведение М на Q постоянно:
MQ = const = M0Q0. (12.14)
Пользуясь равенством (12.11), можно получить выражение
отжимающего усилия
L Ро 1 — ехр (— р0/рц) J ”
где Pq == 2 Р •
Таким образом, и в рассматриваемом случае зависимость р.
от р приводит к более энергичному падению пьезометрической
линии в начальном участке (\dp/dx\ монотонно уменьшается по
длине щели).
Зависимости Q/Qo и Р1Р0 при различных значениях и р9
приведены в табл. 12.1 и 12.2; эти отношения существенно
уменьшаются при росте р0 и снижении
Если эквивалентная щель находится под воздействием напор-
ного давления рабочей жидкости (вторая исследуемая модель),
то выражение момента жидкостного трения (12.13) меняется:
М2 = ехр (— р/рц) Мо, (12.15)
и тогда, руководствуясь экспериментально подтверждаемым со-
отношением (12.14), можно принять при составлении математиче-
ской модели гидропривода выражение расхода просачивания
в форме
ехр (— р/рд) '
12.3., МАТЕМАТИЧЕСКИЕ МОДЕЛИ ГИДРОПРИВОДА,
ФОРСИРОВАННОГО ПО ДАВЛЕНИЮ
При форсировании давления общепринятая линеаризованная
математическая модель гидропривода, описываемая уравнениями
усилительной (6.6) и исполнительной (6.9) частей соответственно
wp=J-^-+h® + MB, /i = /h + /i0;
+ + т=т1 + т0,
может измениться за счет составляющих коэффициентов активного
сопротивления h0 и статической податливости т0, зависящих от
вязкостного трения, утечек и перетечек в гидродвигателе.
Экспериментально установлено, что при форсировании гидро-
двигателя по давлению с достаточной для практических целей
точностью можно принять аналогично выражению (12.14)
^[(/1-М(т-т1)] = 0, (12.16)
что позволяет в случаях, когда непосредственное проведение
эксперимента, выявляющего влияние изменения давления на
h— h1 и на т — тг, затруднено, обращаться к проверке такого
влияния лишь на одну из двух названных величин, наиболее до-
стоверно получаемых экспериментально, выясняя значения дру-
гой при помощи уравнения (12.16).
Поскольку экспериментальные исследования подтверждают
справедливость выражений (12.13) и (12.15) для исполнительных
гидродвигателей, форсированных по давлению, то эти выражения
совместно с равенством (12.16) и положены в основу составления
сравниваемых математических моделей гидроприводов.
Если обратиться к обычному приему оценки потерь в роторной
гидромашине в форме эквивалентной щели, то применительно
к гидромотору, форсированному по давлению, в щелях которого
направление скорости потока просачивания нормально к относи-
тельной скорости смещения одной поверхности по отношению к дру-
гой (например, торцовое распределение), момент (или сила) вяз-
костного трения с учетом влияния давления на вязкость в соот-
ветствии с условием (12.1) будет зависеть от относительного давле-
ния р = р!Рух. Что же касается составляющих скорости, совпа-
дающих по направлению действия со скоростью просачивания, <
то в роторных гидромашинах такие составляющие обязательно М
компенсируются [52]. ж
При высоких давлениях рассматриваемый момент трения мо- W
жет оказаться доминирующим, и тогда можно принять коэффи-
циент активного сопротивления гидропривода h ~ Л4тр и записать
406
выражение составляющей коэффициента активного сопротивления
в форме
h — h-. = -------------г-,
1 ° 1 — exp (— р/рц)
причем p = hQ при p = 0 и h —> сю при p —> oo, поскольку в по-
следнем случае h — hx — р/рц, hx — составляющая коэффициента
активного сопротивления, возникающая из-за сопротивления
движению всех остальных движущихся частей, кроме исполни-
тельного гидродвигателя.
Пользуясь условием (12.16), можно записать выражение ко-
эффициента статической податливости в уравнении усилительной
части
т = Tj + т0
1—ехр (—Р/Рц)
Р/Рц
(т = Tj + т0 при р — 0 и т —♦ Tj при р —> оо), и тогда математи-
ческая модель гидропривода, форсированного по давлению,
будет описываться уравнениями
wp = J ГhL + h0 -----P/P* , . 1 Q + Me;
r dt L 1 1 u 1 — exp(—р/Рц) J 1
r 1 / , ' n (Ш7)
Q „ dp , Г . 1 - exp (-р/рц) 1 v
— — w -±- 4- r, -4- t0--------------\wp4-Q.
w dt ' L 1 1 ° p/p^ J K ‘
В дальнейшем модель, описываемую этими двумя уравнениями,
будем называть первой моделью.
Можно представить и другую математическую модель, осно-
ванную на эквивалентной щели, где давление во всех участках
щели одинаково и с достаточной для практических целей точ-
ностью равно перепаду давлений р. Тогда в соответствии с урав-
нением момента жидкостного трения в исполнительном гидродви-
гателе (12.15)
h = /ii -|- h0 exp (p/pg),
в соответствии с условием (12.16)
т = Tj + т0 ехр (— р/рц),
а вторая математическая модель гидропривода, форсированного
по давлению, будет описываться уравнениями
wP = J^r + + exp-^-)Q + MB;
= [Ti + TOexp (—•^)]^р + ^. (12.18)
В системы уравнений (12.17) и (12.18) непосредственно не
входит безразмерный управляющий сигнал е (/), связь которого
407
с геометрической подачей Q определяется из очевидного соотно-
шения j
Q = 1
причем использование Q вместо е более корректно в случаях, когда.;.;
не конкретизируется влияние ограниченной мощности источника?
питания.
Большую информацию о динамических процессах математи-:
ческой модели гидропривода можно получить, если анализ будет*
проводиться при исключении кинематической переменной Q,
что позволит исследовать процессы, происходящие в том числе
и при остановленном исполнительном двигателе. Это имеет зна-
чение, например, при изучении рабочего процесса гидропривода
кузнечно-прессовых машин, работающих при Q = 0 (процесс
«выдержки), когда уравнение движения вырождается, обращаясь
в тождество.
Исследование проводится для случая = 0. Кроме того,
целесообразно обращение к безразмерным переменным, выбирая
их так, чтобы наибольшее число коэффициентов обратилось в еди-
ницы [72, 73]. В качестве единицы времени используется постоян-
ная времени
T = VJ$/(i + ^hu),
поэтому безразмерное время будет
т* = t/T.
В качестве единицы давления используется или весьма боль-
шое значение такого давления р0, при котором вся геометрическая
подача расходуется на процесс деформации рабочей жидкости:
р0 = (12.19)
или произведение
02.20)
В первом случае, в дальнейшем используемом применительно
к первой математической модели, безразмерное давление будет
определяться из выражения
р = р!рй,
а во втором (вторая математическая модель)
р2=(Р/Ю>Р.
где
б = + тЛ)«
(12.21)
408
Безразмерное выражение возмущающего воздействия приме-
нительно к первой математической модели (12.17)
° (1 +
также отличается от безразмерного выражения возмущающего
воздействия применительно ко второй математической модели
(12.18):
wMB М„ _ 1 + Т(Д) тй
® h0Q TiM’Po tj/io 0 6
В дальнейшем окажется полезным использование промежуточ-
ных переменных: для первой математической модели
z = bp = pip^ Ь-р^/р^ (12.23)
и для второй математической модели
z=fe2p = p/pg; й2 = 6р0/рц, (12.24)
а также трех безразмерных коэффициентов
е = To/Tj; I = M/(TiJ); (12.25)
2п =_____bZ----.
(1+т0Л0)Г-
Исключая из уравнений первой математической модели гидро-
привода, форсированного по давлению, кинематический показа-
тель режима Q и переходя к безразмерным переменным, получим
p' + 2n [ 1 + еехр(-г) + { +
+ ?°8-1('хй-г)+^ (12.26)
причем установившееся значение безразмерного давления, соот-
ветствующее движению привода с постоянной скоростью или,
в частности, остановленному приводу, будет
Р.= «Т^ДГ + ™.. (12.27)
или при т0 =/= 1, поскольку р9 =/= 1, можно записать
Для второй математической модели
р2 + 2пА2 (г) р'2 ф- (1 4-6expz)p2 = mB + ехр z, (12.29)
409
где Л2 (г) = 1 + e (1 — z) ехр (— г) + £ ехр (г);
d - - cP -
Р* = РЪ = -^Р*
а для установившегося процесса
(1 + 6 ехр г02) ро2 = тв + ехр г02.
(12.30)
12.4. УСТАНОВИВШИЙСЯ ПРОЦЕСС В ПЕРВОЙ
МАТЕМАТИЧЕСКОЙ МОДЕЛИ ГИДРОПРИВОДА,
ФОРСИРОВАННОГО ПО ДАВЛЕНИЮ
Анализ установившегося процесса удобно вести, переписав урав-
нение (12.28) в форме
А (р0) = = 6 т ехв°(—z) = (12-31)
1 — р0 1 — ехР 1— го)
При т0 = 1 это уравнение имеет единственное решение р0 = I,
в чем можно убедиться, переписав уравнение в форме
где выражение в квадратных скобках никогда не равно нулю,
поскольку 1 — ехр (—г0) > 0.
При то =^= 1 обязательно р0 1 и (ро) — гипербола, положение ветвей
которой зависит от значения то. Если то < 1, то асимптоты с бесконечными пре-
делами будут ро = 1, fi (ро) — —1. В этом случае ft (0) == —то > —если
ро = 0 и f± (т0) = 0, при ро = то\ h (ро) > 0, если то < ро < 1 и (ро) < 1
при ро > 1 (рис. 12.4, а). _ _
Если то > 1, то асимптоты будут те же: fx (ро) = —то <j—1 ПРИ Ро “ 0»
Zi (™о) = 0 при ро —_m^t f± (ро) < —1 при__0 < р0 < 1, h (ро) 0 при 1 <
< ро то, 0 > (ро) >—1 при то < ро (рис. 12.4, б).
Рис. 12.4. Графическое изображение функции (ро) первой матема-
тической модели гидропривода, форсированного по давлению
410
Экстремальные значения f2 (г) из вы-
ражения (12.31)
f . __________&________
/2 и) — j _ ехр
й ее производной
(?) __ g 1 — (1 +z)exp (— ?)
dz [1 — ехр (— г)]2
будут f2 (0) = 6; /2 (ро) -> &z при р -> сю
/г (Ро) = 0 ПРИ Р — сю; =j= 0 при
г^О, поскольку тогда 1 — (14-г) ехр (—z)=4-0.
Так, умножая все члены неравенства на
ехр (z), получим ехр (z) — 1 = г, а ехр z =
Z Z2
=1 + Tr + 1F + '”-
Следовательно, >0 при г > 0,
растает при z > 0 (рис. 12.5) и
ражение функции /2 (ро) пер-
вой математической модели
гидропривода, форсированного
по давлению
причем — f2 (z) монотонно воз-
lim-^-f2(z) = 61im
ы z-»0
1 — (1 4-z) ехр (— г)
[1 — ехр (—г)]2
6
2
Таким образом, уравнение (12.31) имеет всегда одно решение
р90 при т0- < 1, лежащее в диапазоне т0 < р00 <1 (рис. 12.6, а),
и при т9 > 1 — в диапазоне 1 < р00 < т9 (рис. 12.6, б). Един-
ственность решения обусловливается взаимным пересечением кри-
вых /1 (р0) и f2 (р0) в противоположных направлениях.
Для получения доказательства единственности решения урав-
нения (12.30) перепишем его в форме
Ф1 (А>) = 1 - ехр (— г) = бг-(1~Ро) н ср2 (р0).
Ро —/По
Рис. 12.6. Графическое изображение решения уравнения устано-
вившегося движения первой математической модели гидропри-
вода, форсированного по давлению
411
Рис. 12.7. Второе графическое изображе-
ние решения уравнения установившегося
движения первой математической модели
гидропривода, форсированного по давле-
нию
Функция ф, (ро) монотон-
но возрастает, стремясь к 1
при р0_—> 00> поэтому 0
< 91 (Ро)< 1 при 0 < р0 < 1
(рис. 12.7), а функция ф2 (р0)
при тй sg р0 sg 1 убывает от
оо до 0, оставаясь положи-
тельной.
Знак производной от
функции
<*ф2 (Ро) _ —р^ + ^т^—т^
dpo (ро — m0)2
(12.32)
определяется знаком выра-
жения —ро + 2т0р0 — т0,
корни которого будут p0I 2 = ± j/mj- — т0.
Поскольку т0 < 1, то числитель производной (12.32) не имеет
действительных корней, а производная -4- ф (р0) не меняет знак
____________________ М
в интервале т0 гд р00 sg 1, оставаясь отрицательной.- Таким об-
разом, -Графические изображения ф, (р0) и ф2 (р0) в интервале
«5 poo < 1 пересекаются в противоположных направлениях
и при т0 < 1, т. е. уравнение (12.31) и в этом случае имеет также
единственное решение.
Итак, рассматриваемая первая математическая модель гидро-
привода, форсированного по давлению, имеет единственные по-
ложения уравновешенных процессов, причем
если т0 > 1, то 1 > р00 > ш0;
если пг0 = 1, то р00 = 1;
если т9 < 1, то т0 < р00 < 1
и возможно установившееся движение исполнительного устрой-
ства гидропривода.
При /н0 > 1 движение исполнительного устройства гидропри-
вода прекращается и уравнение (12.31) описывает условие равно-
весия такого устройства.
12.5. УСЛОВИЯ УСТОЙЧИВОСТИ ДИНАМИЧЕСКИХ
ПРОЦЕССОВ ПЕРВОЙ МАТЕМАТИЧЕСКОЙ
МОДЕЛИ ГИДРОПРИВОДА, ФОРСИРОВАННОГО
ПО ДАВЛЕНИЮ [72, 73]
Исследование устойчивости таких процессов сводится к исследо-
ванию устойчивости решений уравнения (J2.26). Подставляя
в него выражение отклонения и = р — p^Po « const, которое
412
представляет собой координату возмущенного процесса, а также
пользуясь первыми членами разложения до величин первого по-
рядка малости включительно
ехр (— г) = ехр (— г0) (1 - z0 4-),
Р = Ро________________I 1 ~ ехР (— — Ро ехР (— 2 |
1— ехр (— г) 1— ехр (— z0) [1 — ехр (—г0)]а
получим уравнение возмущенного процесса в форме
и" 4- 2пАх (и) и' (и) и 4- Сг (и) 4* Ф1 (и, и') = О,
где А, (z0) = 1 4- е ехр (г0) 4- £ -г=е--грп(—о)-;
О , 1 _ 1 I______________&>(! — р0) [1 — ехр(—г0) —г, ехр (—гр)],
1'0' т i—ехр(—z0) [1 —ехр (— г0)]2 ’
(12.33)
С, (г0) = р№4- 6 /о^о-П _ тй-
ф, (и, и')=№ +
В соответствии с теоремой Пуанкаре, отбрасывая члены выс-
шего порядка малости и учитывая уравнение (12.28), по которому
С\ (г0) = 0, получим в отклонениях линейное уравнение второго
порядка с постоянными коэффициентами
и" 4- 2/1^! (z0) и' 4- (z0) и = 0.
Легко видеть, что первое условие устойчивости, по которому
функция демпфирования At (г0) >0, удовлетворяется всегда,
поскольку все трансцендентные функции, определяющие выраже-
ние At (z0) при р0 > 0, положительны. Так, Ах (р0 = 0) — 14*
4- е 4- ь и Ai (р0 —» оо) —> оо, как выражение 1 4- ?z0.
Второе условие устойчивости, по которому функция инер-
ционных свойств Вг (г0) > 0, удовлетворяется при т0 > 1,
когда ро > 1 (случай отсутствия движения). В этом случае все
слагаемые выражения (12.20) положительны и Вх(р0—»оо),
как выражение 1 4* 2бг0.
При ро = 0 выражение В1(р0)=14-6---------и может
быть отрицательным, если удовлетворяется неравенство
4<46-'- (12.34)
413
Исследования условия устойчивости проводятся примени-
тельно к записи функции инерционных свойств
bl (го) = 1 + u _еХрг>(_ го>р {(2р0 - 1) [1 - ехр (- z0)] +
+ Ро(1 — Ро)^ехр (— г©)}, (12.35)
которая удовлетворяется при р0^> — . При Po<Z—> особенно
при малых значениях р0, условие (12.35) может и не удовлетво-
ряться, что приведет к апериодической неустойчивости, поскольку
особая точка — типа седло.
Условие (12.34) в размерных параметрах
2к<2 (1 + тЛ) (1 + тЛ0)
имеет место при уменьшении значения (например при пониже-
нии температуры рабочей жидкости) или при чрезмерном увели-
чении скорости движения Q = Q/w.
Приближенное решение уравнения (12.27) реализуется после
замены выражения р на z/b:
[1 — ехр (— z)] (z — bm0) = 8z (b — г). (12.36)
Корень этого уравнения z0 = bp0.
СлучайЬ^!. Решение представляет интерес при ро < 1, и тогда
г — bpQ < 1. Для случая г 0,8 можно с точностью до величин второго по-
рядка малости включительно принять 1 —ехр (—г) г-z2. В этом случае
погрешность знакопеременного ряда не превышает значения первого отброшен-
ного члена г3/3! (менее 9%), а уравнение (12.36) приводится к виду
г2 — 2 (1 + 6 + Ьт<^ г + 26 (6 + m0) = 0,
корни которого действительны:
г0=(1+6+4-/,то)-р<(1 + 6 + -у &/п0)2-26(6 +/п0), (12.37)
поскольку при b 1 подрадикальное выражение положительно. Перед ради-
калом реализуется только знак «минус», так как z < 1.
Случай b > 1. Тогда z > 1, и при z > 2,5 с погрешностью не более
9% можно принять ехр (—z) 0, поскольку ехр (—2,5) =0,081; уравнение
(12.35) в этом случае приводится к выражению
6z2 + (1 — 6b) z — bm0 = 0,
корень которого будет
г° = (1 - 66)2 + 466,п0 - (1 - 66)], (12.38)
поскольку z > 0. Этим решением пользуются при b > 1 и г > 2,5.
414
Случай 0,8 z^ 2,5 и b > 1. По способу наименьших квадратов
возможно использование аппроксимирующего равенства
1 — ехр (— z) 0,695z — 0,129г2;
подстановка его в уравнение (12.36) дает выражение
0,129z2 — (0,695 4-6 + 0» 129Z?m0) z + b (6 + O,695/no) = 0,
корень которого при 0,8 z 2,5
(0,695 + 6 + 0,129bm0) —
— V(0,695 + 6 + 0,1296mn)2 - 0,5166 (6 + O,695mo) ...
г« ---------------------0^58--------------------* °2-38 >
Условие (zo) >0 в форме (12.35) при замене ро через у го приводится
к выражению
(1 — ехр (— z0)]2 + 6 [zH- (2 — 6) г0 —6] [1 — ехр (—г0)] +
+ 6г0 (6 — г0) > 0, (12.39)
и его справедливость зависит от значения zo.
При го 0,8 неравенство (12.35) после подстановки в него 1 —
— ехр (—z0) ~ z0--zg принимает форму
_L (1 _26)Z2-(1—L-бб)Zo+(i + 6_ Абб) >0.
Поскольку zo < 1 при 1 — 26 > 0, движение устойчиво при
(1-^_бб)-]/(1-Абб)2-(1-26) (1+6----------------------|-6б)
20>--------------------------i------------------------------- .
— (1—26)
При 0,8 < Zo <2,5 неравенство (12.39) после подстановки в него 1
— ехр (—z) O,695zo — 0,129z§ запишется в форме
г0 (0,695 — O,129zo)2 +
+ 6 [z2 + (2 — b) г0 — Ь] (0,695 — 0,129z0) > 6 (z0 — b),
а при zo 2,5 примет вид
и при использовании размерных параметров будет
> "уРо — Руст» (12.40)
zo 2 J
где руст — давление установившегося режима работы
Полученные решения сведены в табл. 12.3.
Таким образом, в рассматриваемой математической модели
условие устойчивости движения существенно зависит от свойств
рабочей жидкости, выраженных через р^. При уменьшении зна-
415
416
Таблица 12.3
АППРОКСИМИРУЮЩИЕ УРАВНЕНИЯ МАТЕМАТИЧЕСКОЙ МОДЕЛИ
Диапазон изменения z0 1 — ехр (—г0) Выражение z0 Условие устойчивости (z0) > 0
го^О,8 1 ?_г2 1 2 и (i+fi+4_ Ьто}— -]/(1 + 6 +-1_6/п0)2-2& (S + «o) j "Г 1 5т + „ X- | ю г§ - « -h 1 8 2 1 °" i - Н А о м
0,8 < zQ < 2,5 0,695Zg — — 0,129z§ (0,695 + б + О,1296лго) — _ 1 / (0,695 + 6 + О,1296то)2— V — 0,5166 (б+ О,695то) 0,258 г0 (0,695 — 0,129гЭ2 + б [г2 + (2 - 6) 206] X X (0,695 — 0,129го) > б (zu — 6)
z0^2,5 Arf 1 (К(1 — бб)2 + 466m0 — (1 - 66)] -и 100 1 «CJ А fc?
чения например из-за снижения температуры, а также при
увеличении статических потерь (возрастание 6) условие (12.40)
может нарушиться и привод потеряет устойчивость. Легко видеть,
что условие (12.40) непосредственно не зависит от величины статиче-
ской нагрузки. Однако ее влияние проявляется через z0, т. е. через
руст, которое при возрастании статической нагрузки увеличивается.
Во всех случаях, когда обеспечивается неравенство
6>2(1 + -П), (12.41)
необходима проверка устойчивости динамических процессов, по-
скольку в этом случае возможно несоблюдение условия устой-
чивости (12.33).
В размерных параметрах последнее условие (12.41) перепи-
сывается в форме
ft>2(, + 2±it)Piu
свидетельствуя о нежелательности выбора рабочей жидкости
с малым значением и об ограничении допустимого значения
отношения pjp^
пример расчета. Гидропривод с регулируемым насосом ПНР № 5 и гидро-
мотором постоянного расхода НМ №5с характерным объемом w = 11,3 см3,
Qx = 152 1/с, w2 = 0,04 см/Н-с, 0 = 0,66-10"4 1/Н-см, 7 = 54 Н-см-с2,
ho = 0,2 Н-см-с преодолевает статическую нагрузку Мв = 100 кН-см и рабо-
тает на рабочей жидкости с рц = 43,5 МПа.
Значения т=3,12-10"4 1/Н-см-с и = 0,5т = 0,156-10"3 1/Н-см-с.
Характерное давление по уравнению (12.19) ро = Qx/(тх^) = 860 МПа,
мера интенсивности перепада давления b =
ческих потерь 6 = , — = 3,12-10"6,
1 + Мо
грузка т0 = -тт—---------= 0,103.
0 (1+т0/10)оур0
Имея в виду, что b > 1, допустим, что
(12.38) zo = 54, а ро = zo/b = 2,37, свидетельствуя о неприемлемости в этом
ро/рц = 19,8, коэффициент стати-
безразмерная статическая на-
Zo > 2,5, и тогда из выражения
случае выражения (12.37), поскольку ро должно быть меньше единицы.
Также можно убедиться в неприемлемости для рассматриваемого случая
выражения (12.67), из которого zo= 1,33, а это равенство справедливо при z0<0,8.
Тогда, обращаясь к равенству (12.38), справедливому при 0,8 < Zo <2,5,
получим Zo = 2,5 или р0 = 0,0143, откуда установившееся давление процесса
Руст = РоРо = 0,0143-860 = 12,3 МПа.
12.6. УСЛОВИЯ УСТОЙЧИВОСТИ ДИНАМИЧЕСКИХ
ПРОЦЕССОВ ВТОРОЙ МАТЕМАТИЧЕСКОЙ
МОДЕЛИ ГИДРОПРИВОДА, ФОРСИРОВАННОГО
ПО ДАВЛЕНИЮ 172, 73]
Устойчивость таких процессов выясняют в результате анализа
нелинейного уравнения (12.29), в которое подставляют выражение
отклонения и2 = р2 — РУ2« РУ2 const. Физический смысл
14 В. Н. Прокофьев и др. 417
отклонения u2 — координата возмущенного процесса. При под.,
становке, пользуясь первыми членами разложения до величин
первого порядка малости включительно, получим
^2 4~ 2/2Л2 (г0) ^2 4“ Bi (^о) ^2 4“ С*2 (^о) 4“ ®2 (^2, ^2) = 0» (12.42)
где А2 (ги) = 1 + е (1 — z0) ехр (— г0) + С ехр z0;
^2 (г0) = 1 + [6 (1 + г0) — Ь] ехр г0;
С2 (г0) = ро (1 + 6 ехр z0) — (тв + ехр z0);
Фг («2. «2) = bb2u2 ехр г0 — 2/г {[е£>2 (2 — г0) ехр (— г0) —
— ехр Zo] и — e,blul ехр (— z0)} и2
Нелинейная часть уравнения (12.42) Ф2 (и2, и2) содержит
только члены высших порядков малости (начиная со второго и
выше). При и2 = и2 — и2 = 0 нелинейная функция Фг (и2, и2)
обращается в нуль и равенство (12.42) вырождается в С2 (z0) — О,
позволяя найти параметр невозмущенного процесса р0, а линей-
ное приближение уравнения будет
и2 -]- 2пА2 (zq) и2 В2 (zo) и2 = 0, (12.43)
порождая характеристическое уравнение X2 + 2пА 2 (z0) X +
+ Вг (Zo) = 0.
Поскольку п > 0, условия устойчивости есть условия суще-
ствования устойчивых фокуса или узла, когда Д2(г0) >0 и
В2 (z0) >0. При Д2(го) = О и В2(г0) >0 линеаризованная
система становится консервативной, позволяя определить либо
особую точку типа центр, либо устойчивый фокус в результате
дополнительного исследования (проблема «центр-фокус»). По-
скольку при Д2(го) = О исследуемая система перестает быть
грубой, такое исследование, как не имеющее практического ин-
тереса, не проводится. Условия Д2(г0) >0 и В2(г0) = 0, опре-
деляющие особую точку высшего порядка, соответствуют не гру-
бой системе и поэтому не рассматриваются.
Переписывая, с учетом равенства (12.24), уравнение невозму-
щенного процесса (12.30) в форме трансцендентного уравнения
<|2'44>
проведем его анализ при помощи приближенных выражений с оцен-
кой степени приближения. Эти выражения должны выяснять об-
щие закономерности в форме соответствующих неравенств.
Точные решения целесообразны при числовой конкретизации
параметров гидропривода, когда эти решения можно получать
418
с любой наперед заданной точностью. С
точностью до А включительно решение
уравнения (12.44) записывается в форме
г0^ь2‘;'Гвех/ (7 (12.45)
h 14—/??D I
причем Д = (12.46)
-y + exp-f-
Движение реализуется при mn6 < 1,
а при mB6 = 1 и mB6 > 1 гидромотор за-
торможен. Все три случая подлежат ана-
лизу.
Реализация движения исполнительно-
го двигателя при mB6 < 1 следует из за-
писи этого неравенства в размерных пара-
метрах
Q TjAlB _______q
w 1 + То^о “ м’
Рис. 12.8. Определение
значения основной пере-
менной невозмущенного
процесса Zq =* b2po при
незаторможенном гидро-
моторе (тв6 < 1)
где QM — скорость «просадки» исполнительного двигателя под
действием статической нагрузки А4„. Поэтому условия > 1
соответствуют остановленному исполнительному двигателю, и
только при mab < 1 скорость этого двигателя отлична от. нуля.
При /пв6 < 1, как это следует из графического изображения
обеих частей равенства (12.44) на рис. 12.8,
mBb2 < Zj < z0 < &2/6,
где Zi = b2— корень уравнения f (z) = 1.
Решение отыскивается в форме z0 = — А, причем 0 <
< А < -у , поскольку z0 > 0.
Подставляя выражение z0 в уравнение (12.44) и принимая
expz0 = exp (-^—А) (1 — А + • • •) ехр-у, получим равен-
ство (12.46), а значит, и приближенное равенство (12.45).
При mB6 > 1, когда -у < z0 < z2 < b2m2, где z2 — корень
уравнения f (z2) = 1, причем
_ b2 1+^exp^-^-J
22 “ 6 . . 1 / b, \ ’
* + —еХр(-1)
положим z0 = -у- + А, где А > 0. Обращаясь к тем же приемам,
получим выражения (12.45) и (12.46).
14*
419
Рис. 12.9. Граничная поверхность, разделяющая области,
соответствующие устойчивым (снизу) и неустойчивым (свер-
ху) процессам
Подстановка в равенство (12.45) условия твб дает г0 = 62/б.
Условие устойчивости по функции инерционных свойств
B2(z0) >0 переписывается в форме
1 + 6z0 ехр (z0) > (b — 6) ехр (z0)
или b — б<ехр(— z0) + 6z0 = фх(г0).
Функция фх (z0) имеет экстремум-минимум при Zo = —In 6.
При фх (г?) > b— 6 условие В2 (z0) >0 выполняется всегда,
поэтому условие устойчивости по инерционным свойствам системы
может быть записано в форме б — 6 In 6 > b — б или b < б (2 —
— In б).
Поскольку 0 < б 1, то In б < 0 и В2 (z0) > 0 при 26 > Ь
или, переходя к размерным параметрам, условие устойчивости
по инерционным свойствам записываем в форме
т >_2_
W‘pu '
Результаты расчета на ЦВМ условия В2 (z0) > 0 в форме
ехР 2° < ft - 6 (1 4- г0)
показаны при помощи граничной поверхности на рис. 12.9, раз-
деляющей область устойчивости (под этой поверхностью) от обла-
сти неустойчивых процессов (над поверхностью).
Условие устойчивых процессов по функции демпфирования
А2 (*о) > 0 можно записать в форме
<Р2 (?о) = 4- + -j- ехр z0 > (z0 — 1) ехр (— z0) = <рх (z0),
С с
где z0 > 0.
420
Функция Фх (г0) имеет экстремум-максимум фх (2) =
= ехр (—2) 0,135, поскольку ф{ (z0) = 0 при г0 = 2, ф[ (z0) >
> 0 при Zo < 2 и ф! (zo) < 0 при г0 > 2; кроме того, ф1 (0) =
= —1, Ф1 (1) = 0 и фг (сю) = 0+.
Функция ф2 (г0) — экспонента, поэтому при z0 1 условие
Д2(г0) >0 удовлетворяется (область Sy на рис. 12.10) так же,
1 I г
как при - у - > ехр (— 2). При
ехр (—2)^0,135 (12.47)
условие устойчивости Л2 (г0) может не удовлетворяться (область
S„ на рис. 12.10).
Полученное в форме неравенства (12.47) условие возможности
возникновения неустойчивости в явной форме не зависит от зна-
чений безразмерных коэффициентов Ь2, 6 и тв и поэтому недоста-
точно для установления влияния статической нагрузки тв на
устойчивость динамических процессов гидропривода.
Воспользуемся тем, что по условию Д2 (z0) > 0 значение фа-
зовой координаты z0 sg 1 обеспечивает устойчивость динамиче-
ских процессов гидропривода, а при нарушении последнего не-
равенства те же процессы могут оказаться неустойчивыми. С этой
целью проведем по такому условию анализ устойчивости динами-
ческих процессов гидропривода для всех трех возможных случаев:
mB6 < 1, = 1 и mfi > 1, принимая в качестве критерия
устойчивости выполнение требования z0 1.
При /пв6 < 1 динамические процессы устойчивы, если
b2 1 + тв ехр (— 62/6) .
го ~ j 1
1 + Т ехр
421
Рис. 12.11. Определение границ областей Sy устойчивых процессов:
а — при работающем гидромоторе (znBd < 1); б — при заторможенном гидромоторе
(mBd > 1)
-f н х < i + m,«p(-» s °-«•
Легко видеть, что при х > 0 всегда 0, (х) > 0, причем
О, (х)= 'j~1/6 > 1, 0,(00)-» 1 и -lejxXO.
[функция 0, (х) с увеличением х монотонно уменьшается, как по*
казано на рис. 12.11, а]. Поэтому
где х, — корень уравнения х = 0, (х).
При х < х, гидропривод устойчив, он может быть неустойчи*
вым только при х > х,. В рассматриваемом случае условие устой-
чивости (Ь2/б) х, > 1.
При /л6 = 1 всегда z0 = 6/6 и условие устойчивости гидропри-
вода 62/6 sg 1. При mb6 > 1 аналогично первому случаю
1+ 4-ехр(— х)
Последнее выражение свидетельствует, что при х >0 всегда
6а (х) > 0, причем
02(О) = ТТТГ<1- McoW и
1 IIIQ UX
[функция 0j (х) е увеличением х монотонно возрастает, как пока-
зано на рис. 12.11,61. Поэтому
14-1/6, ,.
, Т - < х» <3 1,
1 4- «в
где х2 — корень уравнения х = 02 (х).
422
(12.48)
При х < х2 гидропривод устойчив, он может быть неустойчи-
вым только при х > х2. В рассматриваемом случае условия устой-
чивости 0 < (b2/f>) < х2.
Таким образом, нахождение условия устойчивости сводится
к нахождению корня уравнения
1 + 4~ехр
Х 1 + тв ехр (— х) ’
например, методом итерации.
Если в качестве нулевого приближения принять х10 = х20 «
= 1, то производные от соответствующих функций удовлетворяют
условиям применимости метода итерации: в интервале между
корнем уравнения и нулевым приближением
1" |4в°Н<’-
Первые приближения хХ1 и х2Х получают в результате подста-
новок нулевых приближений в уравнение (12.48):
1 + -^-ехр(— О 1+-уехр(—1)
Хи ~ 1 4- тв ехр (— 1) ’ %21 — 1 -|-mBexp (— 1) ’
Эти приближения находятся в интервалах разложений корней
решаемых уравнений. Так, хХ1 > 1, поскольку при этом твб <
< 1. Кроме того,
1 + ~6~ ехр ') l + 1/d
1 4~/пвехр (—1) 1 + /пв ’
что также приводится к неравенству /ив6 < 1.
Аналогично проверяется и последующее приближение.
Следовательно, гидропривод может быть неустойчив при соблю-
дении неравенства
Ь2 . 14-1/6 ехр (— 1)
6 1 4~ тв ехр (— 1)
Таким образом, динамические процессы рассматриваемого
гидропривода будут неустойчивыми при одновременном удовлет-
ворении неравенств (12.47) и (12.49). Переписывая неравенство
(12.49) с учетом обозначений (12.21), (12.22) и (12.24), можно полу-
чить условие возможности возникновения неустойчивых процессов
в размерных параметрах
Мв > ehQ (^wpn — + (1 + тД)юрц,
свидетельствующее о том, что потеря устойчивости возникает
тогда, когда статическая нагрузка Мв оказывается близкой
к Л4Ц = или больше (такое значение индикаторного момента,
при котором вязкость рабочей жидкости в гидроприводе при
423
(12.49)
(1+т0/.0)Л1и-Л1в
+ *1^,
eh0
(12.50)
отсутствии механических потерь увеличивается в е раз), а упра-
вляющий сигнал Q/w оказывается больше критического значения
W К W /кр
где член обычно мал.
Очевидно, при возрастании статической нагрузки до значе-
ния (1 4- t0/i0) Мц опасность потери устойчивости становится
реальной и рабочая жидкость должна выбираться с достаточно
большим значением рм. Неравенство
А1В<(1 + тЛ) ми
должно быть достаточно сильным.
Переписывая неравенство (12.47) с учетом обозначений (12.25),
получим второе условие возможности возникновения неустойчи-
вых процессов в размерных параметрах:
гр _ 7 п 1___Tj
~ Та ~ е2 т0 ’
где постоянные времени линейных частей уравнений расхода и
движения будут соответственно
Т = ___ _____-__ и Т — —
п т0 хЛ, и h0 ’
где V — объем жидкости, участвующий в деформации; х — модуль
объемной упругости рабочей жидкости.
Условие (12.50) показывает, что опасность возникновения
неустойчивых процессов возрастает, когда постоянная времени
Т„ окажется существенно больше Тп; однако это означает при
прочих равных условиях существование большого демпфирования
в системе. Кроме того, поскольку Т > 0, значение тх должно быть
существенно меньше т0, т. е. неравенство
-Ч<-£~0,135то
должно быть достаточно сильным. Но тогда в гидроприводе, фор-
сированном по давлению, не следует применять рабочую жид-
кость с низкими значениями х. Кроме того, малые «мертвые»
объемы рабочих цилиндров поршневых и плунжерных гидромашин
позволяют получать меньшие значения тх и увеличивают склон-
ность гидропривода к потере устойчивости. Поэтому фазовое
распределение, при котором велико влияние «мертвого» объема
в гидромашинах, допустимо применительно к гидроприводу, ра-
бочий процесс которого аппроксимируется рассматриваемой ма-
тематической моделью.
Предупреждение возникновения автоколебаний выбором боль-
шого значения характерного объема w приводит к соответствую-
щему возрастанию А4Й и уменьшению давления в магистралях
гидропривода при возросших габаритах и массе.
424
12.7. РЕШЕНИЯ ЗАДАЧИ ОБ УСТОЙЧИВОСТИ
ДИНАМИЧЕСКИХ ПРОЦЕССОВ ВТОРОЙ
МАТЕМАТИЧЕСКОЙ МОДЕЛИ ГИДРОПРИВОДА,
ФОРСИРОВАННОГО ПО ДАВЛЕНИЮ
Решения такой задачи целесообразно получать при помощи вычисли-
тельных машин, поскольку решения рассмотренных трансцендент-
ных уравнений с заданной точностью, например, методом последова-
тельных приближений, приводят к весьма громоздким выражениям.
Условия устойчивости решений уравнений (12.42) и (12.43)
определяются положительным значением функции демпфирова-
ния А (z0), т. е. неравенством
A (z0) = 1 + е (1 — z0) ехр (— z0) + £ ехр z0 > 0.
Для положительных значений е, z0 и £ при помощи ЦВМ вы-
числялась поверхность (рис. 12.12, а), соответствующая равен-
ft
Рис. 12.12. Безразмерные характеристики второй нелинейной
математической модели гидропривода, форсированного по
давлению:
а — граница областей устойчивых и неустойчивых процессов гидро-
привода, определяемая условием At (z0) = О ПРИ различных значе-
ниях £ и е; б—графическое изображение функции Zq=z9 (btt б, т&)
425
Рис. 12.13. Осциллограммы и фазовые портреты переходного процесса второй
математической модели гидропривода, форсированного по давлению, со значе-
ниями параметров, обеспечивающих устойчивые переходные процессы (а) и не-
устойчивые (б) движения (обозначения л относят изображающие кривые к ли-
нейной, a w — к нелинейной модели)
ству A (z0) = 0 и разделяющая пространства, соответствующие
устойчивым и неустойчивым процессам.
На рис. 12.12, б приведены значения безразмерного параметра
г0 невозмущенного процесса в зависимости от значений Ь2, т„ и б.
Эти значения z0 (Ьг, mR, б) получены на ЦВМ в результате решения
трансцендентного уравнения (12.44).
Изменение статической нагрузки оказывает существенно боль-
шее влияние на устойчивость динамических процессов гидропри-
вода, форсированного по давлению, по сравнению с изменением
его скорости, определяемой отношением Q/да. Происходит это
потому, что влияние Ь2 = ~~~~ нейтрализуется измене-
нием параметра niB ~ wjQ. Поэтому при математическом модели-
ровании на аналоговой установке превращение устойчивой си-
стемы в неустойчивую реализовалось существенным изменением
статической нагрузки.
Математическое моделирование проводилось применительно к гидромотору
№0,5 с tt>=0,48 см3/рад, J= 100 Н-см-с2, = 0,125 Нем- с, 0 =0,02 1/Н-см,
т = тоН~т1=0,0435 1/Н-см-с, 8=40,тг=0,00106 1/Н-см-с, то=0,0424 1/Н см-с,
£ = 0,236, б = 0,00013.
Сравнивались два варианта такой системы: 1) кинематическая перемен-
ная входа Q = 300 см8/с и нагрузочная переменная входа Мв = 1000Н-см
(рис. 12.13, а)} 2) кинематическая переменная входа (?=300 см3/с и нагрузочная
426
переменная входа ЛГв=3000 Н -см
(рис. 12.13, б).
В первом случае «выход»
на заданное значение скорости
применительно к линейной мо-
дели имел очень небольшое пе-
ререгулирование, а колебатель-
ность нелинейной модели ока-
зывалась существенно больше,
чем у линейной модели
(рис. 12.13, а). Фазовый пор-
трет такой системы приведен на
рис. 12.13, а. Во втором случае
при сравнительно небольшом
изменении скорости возникают
незатухающие колебания (авто-
колебания с явно выраженным
предельным циклом, как пока-
зано на рис. 12.14, б).
Насколько велика колеба-
тельность нелинейной системы
в широком диапазоне изменения
скорости при постоянном зна-
чении статической нагрузки,
показывают осциллограммы,
приведенные на рис. 12.14, а
для (?=80 см3/с и на рис. 12.14, б
для Q ~ 430 см3/с. В то же вре-
мя линеаризованные (отбрасы-
ванием нелинейных членов) мо-
дели таких систем практически
устойчивы с быстрым затуха-
нием переходного процесса.
Общим при оценке дина-
мических процессов двух
сравниваемых математи-
ческих моделей гидро-
приводов, форсированных
по давлению, оказывается
возможность возникнове-
ния расходящихся процес-
сов, особенно при возрас-
Рис. 12.14. Осциллограммы переходных
процессов второй математической модели
гидропривода, форсированного по давле-
нию при малых запасах устойчивости:
а — при малой скорости движения; б — при
большой скорости движения (обозначения л
относят изображающие кривые к линейной,
а н —- к нелинейной модели)
тании ро по сравнению с /?ц, а также при увеличении скорости
установившегося процесса.
Отличия сравниваемых моделей заключаются в том, что устой-
чивые решения второй математической модели имеют место при
малых значениях статической нагрузки, а для первой математи-
ческой модели влияние значения статической нагрузки существенно
меньше и притом иное. Поэтому гидропривод, форсируемый по
давлению, относится к системам не грубым. Условия устойчиво-
сти динамических процессов могут быть разными, особенно для
отличающихся друг от друга конструкций, динамические свой-
ства которых должны выясняться экспериментально.
Глава 13
АНАЛИЗ РАБОТЫ НЕСКОЛЬКИХ
ГИДРАВЛИЧЕСКИХ СИСТЕМ
УПРАВЛЕНИЯ ОТ ОБЩЕГО ИСТОЧНИКА
ПИТАНИЯ ОГРАНИЧЕННОЙ МОЩНОСТИ
Экспериментально установлено, что при работе гидравлического
исполнительного устройства с источником питания, обладающим
линейной зависимостью отдаваемого расхода от давления Q (p)t
давление меняется. Также установлено, что при реализации ис-
полнительным устройством моногармонического сигнала g (t) =?
= ga sin со/ (где со — частота и t — время) давление источника
питания колеблется с удвоенной частотой, причем амплитуда
этих колебаний может быть значительной. Этот факт подтвер-
ждается также работами [46, 47]. Источник питания ограничен-
ной мощности вместе с гидравлическим исполнительным устрой-
ством образуют в этом случае систему, и автономное рассмотрение
исполнительного устройства без источника питания, вообще го-
воря, не дает корректного решения задач, описывающих динамику
гидравлической системы управления.
Поскольку существует взаимовлияние источника питания и
исполнительного устройства, им обслуживаемого, то при обслу-
живании общим источником питания двух и более исполнитель-
ных устройств все они, включая и источник питания, образуют
систему и в той или иной степени влияют друг на друга.
Оценка взаимовлияния нескольких гидравлических систем
управления через общий источник питания особенно важна при-
менительно к роботам и манипуляторам, поскольку в этом случае
используется общий, и притом чаще всего существенно ограни-
ченной мощности, источник питания, а сами гидравлические си-
стемы управления по различным причинам (в том числе из-за
ограниченности способов реализации обратной связи по скорости)
не снабжены такими корректирующими связями, которые делали бы
каждую гидравлическую систему управления инвариантной (авто-
номной) по отношению к состоянию источника питания даже
в сравнительно узком диапазоне изменения давления питания.
Анализ взаимовлияния нескольких гидравлических систем
управления через общий источник питания позволяет установить
оптимальные соотношения параметров рассматриваемой системы,
при которых взаимовлияние становится минимальным, а также
позволяет в допустимых при проектировании системы пределах
выбрать ее параметры так, чтобы это взаимовлияние оказалось
наименьшим из возможных.
Экспериментальная проверка работы источника питания с ли-
нейной зависимостью Q (/?), обслуживающего два гидропривода
дроссельного управления, один из которых замкнут по скорости,
428
а второй — без главной обратной связи (управляемая перемен-
ная — частота вращения гидромотора), показала, что при реали-
зации гармонического сигнала в переменных выхода доминирует
первая гармоника, свидетельствуя о допустимости аппроксимации
системы линейной моделью.
13.1. ЛИНЕЙНЫЕ МОДЕЛИ ГИДРАВЛИЧЕСКИХ
СИСТЕМ УПРАВЛЕНИЯ И ИСТОЧНИКА
ПИТАНИЯ [68]
Рассмотрим гидропривод дроссельного регулирования с упра-
влением по ошибке е (/), управляющий золотник которого имеет
нулевое перекрытие (рис. 13.1). В этом гидроприводе сигналом
управления будет смещение управляющего золотника g (/), втулка
которого соединена со штоком поршня неподвижно закрепленного
исполнительного гидроцилиндра, обеспечивая тем самым единич-
ную отрицательную обратную связь со смещением поршня х (/):
e(t) = g(t)-x(t). (13.1)
Рассматривая работу N гидроприводов, будем использовать
индексы i и j (i = 1, 2, ..., N и j = 1, 2, .... N), причем первый
индекс будет использоваться при раздельном изучении каждого
гидропривода, а оба индекса — в тех случаях, когда исследуется
взаимовлияние гидроприводов i и / =£ i.
Каждый гидропривод может «отрабатывать» свой моногармо-
нический сигнал gt (/) = gai sin ©г/. Давление питания такого
гидропривода будет меняться под воздействием «отрабатываемого»
сигнала gt (/), а также сигналов g, (Z) других гидроприводов (по-
этому / + i) из числа N, работающих от общего источника пита-
Рис. 13.1. Конструктивная схема гидропривода дроссель-
ного регулирования с управлением по ошибке
ния — насосной станции. В рабочей зоне давлений питания
Рп Р Рт характеристика насосной станции линейна:
Д' /П
£ Q™ = Qo — kp, (!3.2)
где р рп — давление, развиваемое насосной станцией; QH[ —
расход рабочей жидкости, потребляемый f-м гидроприводом;
k др
коэффициент крутизны характеристики; Qo—-
наибольшая подача насоса при отсутствии зоны насыщения, т. е.
при р = 0.
Из-за ограниченности подачи насоса (т. е. при 0 р рп)
существует зона насыщения, уравнение которой
N
Qm = Qo — kHpt
i=i
причем kH < k и Qo < Qo.
Расход рабочей жидкости Qr для осуществления движения ис-
полнительного двигателя с учетом знака его смещения (/) (т. е.
направления движения объекта управления) будет [100]
Qi = aQie.( Ур — рс — &Pi sign ez, (13.3)
где aQi — коэффициент, зависящий от геометрии управляющего
золотника и свойств рабочей жидкости; рс — давление слива;
Др, — перепад давлений на поршне гидроцилиндра.
При описании работы системы, т. е. гидропривода вместе с на-
сосной станцией, традиционное выражение (13.3) расхода Q,
отличается от выражения расхода QH/ на питание этого гидропри-
вода от насосной станции в связи с тем, что Qm не зависит от знака
скорости гидродвигателя Xi (/) = Qi/F и всегда QHi = |QJ, по-
этому
Qni = Oq; 16/1/р — Pc - Assignez. (13.4)
Будем рассматривать давление, развиваемое насосной стан-
цией, состоящим из двух частей: pQ — постоянной составляющей
давления при ненагруженных гидроприводах, т. е. когда Др, = 0,
и переменной составляющей давления р* < р0, обусловленной су-
ществованием нагрузки на гидроприводах при Др, =f= 0:
Р = Ро + Р*. (13.5)
Составляющую р0 рассмотрим как характеристику невозмущен-
ного движения, ар* — как характеристику возмущенного дви-
жения аппроксимирующей линейной системы, считая, что возму-
щение вызывается нагрузкой.
430
Линеаризация выражений (13.3) и (13.4) достигается разложе-
нием в ряды Тейлора с удержанием линейных членов разложения
и учетом равенства (13.5):
(13.6)
(13.7)
поскольку | е,- | sign ez = ef; е,-sign е,- = | е, |, причем рп =
= р0 — рс — располагаемый перепад невозмущенного движения;
ai = aQiVpn —параметр гидропривода, представляющий собой
отношение расхода к управляющему сигналу при невозмущенном
движении (при Ар,- = 0 и р* = 0).
В дальнейшем будут исследоваться только те режимы работы,
при которых исполнительные двигатели работают только в дви-
гательном режиме, т. е. когда соблюдается условие
| р* — Др,- sign е,-1 j
Отказ от рассмотрения работы исполнительного двигателя
в насосном режиме обусловлен не только недостаточностью ис-
следования такого режима, но и тем, что в реальных конструкциях
соединение насосной станции с гидроприводом обычно реализуется
через обратный клапан, препятствующий обратному поступлению
рабочей жидкости в насосную станцию.
13.2. ЗАВИСИМОСТЬ СОСТАВЛЯЮЩЕЙ р*
ВОЗМУЩЕННОГО ДВИЖЕНИЯ ОТ ПЕРЕПАДА
ДАВЛЕНИЯ Ар ПРИ РАБОТЕ ОДНОГО
ГИДРОПРИВОДА [68]
При работе только одного гидропривода от насосной станции
использование при анализе индекса i нецелесообразно, поскольку
он имеет только одно значение. Подставляя выражение (13.6)
в равенство (13.2) и опуская индексы i, получим уравнение расхода
(a|e|)cp + ^lp*--^-Ap=Q0-^p0-^p*, (13.8)
в первом члене которого проводим осреднение за период. Это
осреднение целесообразно проводить применительно к разгру-
женному гидроприводу, когда Ар = 0 и поэтому р* = 0. Но тогда
равенство (13.8) принимает форму
(я 16 l)cp = Qo (13.9)
Принимая
|е| = ea|sin (<в/ + <ре)|
и осредняя за период, получим
| с |)ср — а 8а,
откуда
Следовательно, р0 = р0 (еа) и должно меняться с изменением
амплитудного значения ошибки.
Вычитая почленно из равенства (13.8) равенство (13.9), полу»
чим искомую зависимость между перепадом давления на приводе
Др и возбуждаемым им отклонением давления р*1
а 161 * Q8 * 1 *
или, окончательно,
р*=^Дтй-д^
Применительно к моногармоническому процессу можно ввести
безразмерный параметр оценки режима работы системы
b = 2kpn/(asa),
где еа — амплитудное значение ошибки.
Тогда уравнение связи (13.10) принимает форму
Следовательно, коэффициент крутизны характеристики на»
сосной станции k оказывает влияние на зависимость р* = р* (Др)
не непосредственно, а совместно со значениями рп и ае.а. Кроме
того, структура зависимости р* = р* (Др) такова, что она не за-
висит непосредственно от амплитудного значения управляющего
сигнала еа.
13.3. ЛИНЕАРИЗОВАННЫЕ УРАВНЕНИЯ
ГИДРОПРИВОДА 168]
Используя выражения (13.7) расхода Q, гидропривода и имея
в виду, что он балансируется утечками (статическая податливость),
эффектом сжатия (динамическая податливость) и реализацией
движения исполнительного двигателя, можно записать уравнение
усилительной части гидропривода в форме
ае + -f" />* - 44 Др = Ьу Др + V D Др+FDx> (13 •12)
*Ptl £Рп *
где Ly — коэффициент утечек; V — деформируемый объем рабо-
чей жидкости; х — приведенное к бесконечно жестким стенкам
432
значение модуля объемной упругости рабочей жидкости; х — сме-
щение поршня исполнительного гидродвигателя — гидроцилиндра;
F— активная площадь гидроцилиндра; D = d>dt— алгебраизи-
рованный оператор дифференцирования.
Исключая из равенств (13.10) и (13.12) промежуточную пере-
менную р* и имея в виду, что е? = |е|2, получим
ае - k -ihD-a^ Др = Ly Ар + X D Др + fDx, (13.13)
^Рп ~Г а I ь I J л
где нелинейный член в левой части равенства представляет собой
дополнительную статическую податливость гидропривода.
Линеаризацию полученного нелинейного уравнения осуще-
ствляют методом последовательных приближений [22], применяя
в качестве порождающего условия уравнение ненагруженного
гидропривода (Др = 0 и, как следствие, р* = 0). Тогда нулевое
приближение будет
ae0(l) — FDx0(t), (13.14)
где
8o(/) = g(0-Xo(0; (13.15)
g (t) — управляющий сигнал (переменная входа).
Найденный в зависимости от вида входного сигнала g (/) сиг-
нал ошибки в нулевом приближении е0 (0 из равенств (13.14)
и (13.15) подставляется в выражение коэффициента при Др урав-
нения (13.13), которое в этом случае становится линейным с пере-
менными по времени коэффициентами:
“• W -к + V D < 13-16>
оно решается совместно с уравнениями движения
ГДр(0 = (mD2 + /iD4-c)x(0 + PB(0 (13.17)
и обратной связи (13.1)
e(0 = g(0-x(0,
где т — инерционная нагрузка; h — коэффициент активного со-
противления; с — жесткость нагрузки (позиционирующая на-
грузка); Рв (t) — возмущающее воздействие (внешняя нагрузка).
Система уравнений (13.1), (13.16) и (13.17) в первом прибли-
жении описывает динамические свойства исследуемой системы
с учетом изменения давления источника питания.
При гармоническом входном сигнале g ()) = ga sin со( в ли-
нейной части характеристики
е0 (/) = га sin (со/ <ре) = еа sin т, (13.18)
и тогда переменный по времени коэффициент в уравнении (13.16)
будет
433
Рис, 13.2. Зависимость произведения — Лср (а) и Н (б) от
безразмерного критерия b = 2/грп/(аеа)
причем А (т) — четная функция с периодом л, среднее значение
которой за период определяется интегрированием:
л
Дср — ~ J Л (т) =£ 0.
о
Проводя интегрирование, получим (рис. 13.2, а)
(л — л£>*4~ 2b*arctg-^-) при Ь>1,
при Ь= 1,
/г(1 приЬ<1,
где b * = b/У Ь2 — 1
Линеаризованное уравнение усилительной части при исполь-
зовании коэффициента Лср записывается в форме
у-е (0 = Dx (/) + Ар+Лу (F (F Лр), (13.19)
или в операторной форме
-y-e(/) = Dx(/) + n*(D)F Ьр(1). (13.20)
Коэффициент статической податливости системы с постоянным
давлением питания т = Ly/F2 при источнике питания с расходом,
зависящим от давления, будет т* = (Ly 4- Acp)/F?, и приращение
коэффициента статической податливости
Дт = т* — т = ЛсР//72
при гармоническом сигнале управления зависит от амплитуды
ошибки через значение безразмерного параметра оценки режима
434
работы системы b = 2kpn1(az^ и от крутизны характеристики
насосной станции.
Безразмерный параметр работы системы b меняется в очень
широких пределах, однако при его использовании следует- иметь
в виду, что наименьшее амплитудное значение га ограничено су-
ществованием зоны нечувствительности исполнительного двига-
теля. Для конкретной системы диапазон изменения b определяется
значениями k, рп и диапазоном возможного изменения значения
управляющего сигнала на исполнительном устройстве Так,
а (еа)шах = Qxx — рЗСХОД ХОЛОСТОГО ХОДЗ, ПОЭТОМУ
^mln = 2^Prt/Qxx«
Наибольшее значение b определяется выражениями
h — 2kpn __________ %kpn (ea)max _ t. (ga)max = 1
max a (6a)mln a (ea)mln (ea)max mln (^a)mln ’
где e — безразмерная форма записи сигнала управления на ис-
полнительном устройстве.
Поскольку по определению е = е/етах, то (ea)max = 1, а наи-
меньшее возможное значение безразмерного сигнала управления,
полученное в работе [75],
^mln = Т ^/Qxx>
где т* — коэффициент полной (т. е. с учетом влияния источника
питания) статической податливости исполнительного устройства;
Рт — индикаторное усиление гидроцилиндра, необходимое для
трогания ненагруженного поршня с места.
Таким образом, наибольший возможный диапазон изменения
безразмерного параметра работы системы определяется наимень-
шим возможным значением безразмерного сигнала управления
minimax = (^a)mln = т ^t^/Qxx*
Дополнительная статическая податливость, пропорциональ-
ная Лср, определяется превышением т* над т, зависит от & и в том
числе от коэффициента k крутизны характеристики источника
питания. Поскольку Лср — k и & ~ то статическая податли-
вость существенно меняется при изменении статической характе-
ристики насосной станции.
Зависимость линейного приближения переменной составляю-
щей давления р* от перепада давления Др можно получить из
выражения (13.11), используя ранее применявшуюся подстановку
(13.18):
р* = В(т)Др, (13.21)
причем
и для линейного приближения Др = Дра sin (со£ 4- фр).
435
Переменный коэффициент В (т) — нечетная симметричная
функция с периодом 2л, поэтому ее осредненное значение за период
будет
2л
Яср = j в ю = °-
о
Однако разложив В (т) в ряд Фурье и ограничиваясь для ли-
нейного приближения лишь первой гармоникой
В (т) = Н sin т 4* • • •»
Л
г, 2 f sin2T ,
где Н = ----- -7—:---:— dr,
л J b + sm т
о
можно вычислить значение Н = Н (Ь) (рис. 13.2, б):
т~2ь+тьь*(т~атс^-т) ПРИ fc>1;
н = 8~2я при 6=1; (13.22) 4 о. %>ь*. ь* — ь , 2Ь In . „ , . при о<1. л л b* + b г
Подставляя в равенство (13.21) выражения Др = Дра X
X sin (со/ + <Рр) и В (т) = Н sin (<о/ + <ре), получим после преоб-
разований
р* = н Ьра cos (фе - фр) - -L я Дра cos (2(0/ 4- фе + фр);
это свидетельствует о том, что переменная составляющая давления
питания меняется с удвоенной частотой входного моногармониче-
ского сигнала.
Таким образом, экспериментально полученный в работах [46,
47] факт «наведения» колебаний с удвоенной частотой получает
аналитическое обоснование.
13.4. СТРУКТУРНЫЕ ПРЕДСТАВЛЕНИЯ ЛИНЕЙНОЙ
МОДЕЛИ ГИДРОПРИВОДА ДРОССЕЛЬНОГО
РЕГУЛИРОВАНИЯ ПРИ СОВМЕСТНОЙ РАБОТЕ
С ИСТОЧНИКОМ ПИТАНИЯ
Структурные представления системы, описываемой уравнением
усилительной части (13.19) и уравнением движения (13.17), по-
казаны справа от волнистой линии на рис. 13.3. В этой части
структуры имеется только одно отличие от структур линейных
моделей гидроприводов, работающих от источника энергии не-
ограниченной мощности (Л—> оо и р = ро = const), — дополни-
тельная статическая податливость Acp/F?, имеющая принципиаль-
436
Рис. 13.3. Структурные представления линеаризован-
ной модели гидропривода с управляющим золотником,
имеющим нулевое перекрытие, при работе от источника
питания ограниченной мощности
ное значение, поскольку при игнорировании утечек в гидропри-
воде дроссельного регулирования при управляющем золотнике
с нулевым перекрытием т —> О, если рассматриваются симметрич-
ные гармонические сигналы на входе. Очевидно, что отличие
Дср/Я от нуля свидетельствует о конечном значении k и перемен-
ности давления питания.
Левая часть структурной схемы показывает формирование
переменной части давления питания р* при 0 < k =/= оо, которая
может рассматриваться в качестве дополнительного входа через
источник питания или обратной связи через источник питания.
Из структурной схемы следует, что р* (t) определяется свойствами
системы и основным входом е (/), поэтому переменную р* (/)
можно назвать функционального применительно к гидроприводу
или обратной связью применительно к системе в целом.
Поскольку структурная схема на рис. 13.4 графически изо-
бражает уравнения (13.91) и (13.20), описывающие собственно
гидропривод, то вход от насосной станции здесь не показан,
а ее влияние отражается в появлении дополнительной статиче-
ской податливости -—^-Др, где Др уже содержит влияние пере-
менной составляющей р* (/).
Если линеаризовать исходное уравнение усилительной части,
то структура системы в целом, включая вход от насосной станции,
изменится (см. рис. 13.4). В этом случае дополнительная статиче-
ская податливость уже функционировать не должна (на рисунке
показано штрихпунктирными линиями) и ее действие заменяется
действием р* (/) с коэффициентом усиления Др//7, причем значение
Др определяется разложением в ряд Тэйлора нелинейного урав-
нения усилительной части гидропривода.
В соответствии со строкой равенств
р* = В (т) Др = Н sin т \р = Н Др,
437
Рис. 13.4. Структурные представления дополнитель-
ного переменного входа от источника питания ограни-
ченной мощности
записываемых по уравнениям (13.21), (13.22) и (13.18), структур-
ная схема содержит произведение е (/) Др (/). Такой дополни-
тельный вход включает помимо постоянной части (что соответ-
ственно меняет постоянную составляющую давления питания р0)
еще и периодическую составляющую, период которой вдвое меньше
периода управляющего гармонического сигнала.
Влияние нестабильности источника питания становится мало
заметным при безразмерном параметре работы системы b 100.
Это значение b или близкое к нему следует принимать в качестве
среднего значения Ьср, поскольку b = b (еа).
Принимая f>max + 6mln = 2bcp, a &mln/f>„,ax = iPF/(e*Qxx),
где e* 0,2 — наибольшее допустимое значение безразмерного
управляющего сигнала, допускающее сохранение линейных
свойств системы, можно получить выражение наибольшего Ьшах
и наименьшего bmln значений, обеспечивающих наименьшее влия-
ние источника питания на работу гидропривода:
26ср . 2&ср %Рп
= ~ iP'F ’ &mln ~ “ iP,F ~ e*Q™ ’
+ + e*Qxx
откуда рекомендация по выбору оптимальных значений k и рп
будет
, ^ср
кРп— 1,1
e*Qxx + T.P1F
13ж5. РАБОТА ДВУХ ГИДРАВЛИЧЕСКИХ СИСТЕМ
УПРАВЛЕНИЯ ОТ ОДНОГО ИСТОЧНИКА
ПИТАНИЯ ОГРАНИЧЕННОЙ МОЩНОСТИ
При одновременной работе двух гидроприводов от одного источ-
ника питания ограниченной мощности баланс расходов, соста-
вленный по тем же принципам и в тех же обозначениях, что и
уравнение (13.8), записывается в форме
2
У 1 | )ср (1 + ~ У )=Qo~kPo~ kP*> i-b 2,
(13.23)
где (Oi|81|)cp = a1-^-8ol; (a2 1e2|)cp = a2 —ea2.
Для ненагруженных гидроприводов, т. е. при Дрх = Др2 = О,
когда р* — О,
2
Stol<M)cp=Q0-£p0, (13.24)
2
или р0 = -p(Qo~"r2fl‘e«-
»=i
Вычитая из уравнения (13.25) равенство (13.24), можно уста-
новить связь между нагрузками на гидроприводы и переменной
составляющей давления источника питания:
р* = Вх ДрхВ2 Др2, (13.25)
где В, = a-fijr, В2 = а2е2/г; г = 2kpn + аг | ех | + а2 |в2|.
Уравнения усилительных частей гидроприводов аналогично
уравнению (13.12) записываются в форме
afil + W - \Pl = Lyl bPl + Др,- + РрХь 1,2,
а с учетом выражения (13.25)
«1е1 + Аг А/’s — A Лр! = Lyl Д рх + D Ьр2 + Fx Dxx;
а2е2 4- А2Х Ьрг - Аг &р2 = Ву2 Д р2 + D\p2 + F2 Dx2,
(13.26)
причем выражения коэффициентов дополнительной статической
податливости Ах, А2 и взаимовлияния гидроприводов через источ-
ник питания А12 и Д21 будут
д __а1 I е1 I ( 1 °1 181 1\ .
А1~ 2рп г )•
д ____ аг I ®2 I
**2 П------
2 ^Рп
А12 — А21 —
Для линеаризации нелинейных членов ЛхДрх» Л2Др2, Л12Др,
и Л21Дрх уравнений усилительных частей гидроприводов (13.26)
примем
ею (0 = ею sin (aj 4- <pa) = е1а sin
е20 (0 = е2а sin (<о2/ + <р£2) = е2а sin т2.
Тогда At (0, А 2 (0 и Л12 (/) = Л21 (/) будут четными функциями
времени, приведенными в первых двух строках табл. 13.1.
Таблица 13.1
ПАРАМЕТРЫ УРАВНЕНИЙ ВЗАИМОСВЯЗИ
1. Л, (/) = — 1 sin T11(&1 + ё1 5in T2 ; A2 (0 = k ё (di +1 sin x2|) ,
^i R R *
„ . . . _ k ё sin Tj sin x2 _ Ле cos (т2 — xj — cos (x2 + Xj) .
Л ^12 W ~ R ~ 2bt R ’
Дф
Л , C sinaTi
3. = I -----------=--------------=-----------
J 61 + (1 — £ cos Д<р) sin Tt + £ sin Acp cos Ti
о
Л I C sin2Ti
4. J2 = I ------------=-----------1-----=---------------aTi;
J + (1 + £ cos Д(р) sin tx — e sin Д<р cos
Дф
5. 5,(0 = -^-; B2(/)=A£p_;
П
2 f Sin2!!^
л J + I Sin Ti I + £ I sin (XT! — X<p€1 + <p£2) I ’
n
7 yy = 2 f_______________________sin2T2 dT2________________.
2 я J 62 + | sin t2 | + e | sin (x"1^ — х->Фе1 + cp£2)| ’
о
a^ai | sin Ту I /
a^aj | sin T;-1
N
^kpn+ ^a,eaZ| sin xz|
i=l
440
Продолжение табл. 13.1
N
a^aj sin Tj UiZal (1 — б/y) Sin Т/
9- (0 = 2p^ N J
2*Pn + 2 a‘e<’' I sin T' ।
. N
io. B( (0 ------------------------------------; fl;2 = 2 e< cos (2®/ + ф.);
2kpn + 2 aieai I sin т,-1
1=1
2kp
Обозначения: R = bx 4- | sin тх | + e I sin t2 |j Z?x =—— ] b2=*
d^ai
2k pn ж ^2 > j i j 1
= -~~i e = '7V1l x=m ; 1/ = ®/< + ФеЛ T/ = ®;Z + <pe/
При «! = <о2 = to ?! = (!)/ + <Ре1 И Та = (о/ + фе2 яТ —
— Дф, где Дф = фе1 — фе2 > 0. Поскольку функция Лг(0 —
четная с периодом л, выражение ее среднего значения будет
д______L
Л1С₽— лЬ,
Дф
Jsinтх [\ — е sin (Tj — А у)]
b + sin тх — e sin (tx — A (p)
0
dti-h
Л
I SinT! + £
jin (T! — А Ф)]
J bt + sin tx + e sin (14 — A <p) 2
Дф j
-4-(2-7‘-'Л
причем выражения и J2 приведены в третьей и четвертой строках
табл. 13.1.
Интегралы Jx и J2, у которых подынтегральные функции ра-
циональные относительно sin тх и cos тх, интегрируются в эле-
ментарных функциях, например, универсальной тригонометри-
ческой подстановкой z = tg-y, приводя, однако, к весьма гро-
моздким выражениям.
441
Применительно к конкретной системе с заданным режимом
работы вычисления упрощаются. Однако проще всего значение
А1ср определяется графически, тем более, что особенно высокая
точность здесь не требуется, поскольку система грубая.
Аналогично определяются осредненные значения А2ср и
А12ср, ПРИ использовании которых уравнения (13.26) становятся
линейными дифференциальными уравнениями с постоянными
коэффициентами, причем значения коэффициентов А1ср, Ааср и
А12ср зависят от частоты и амплитуд входных сигналов
81 (/) = Dx, (0 4- п\ (D) (0;
„ . А О3-27)
е2 (0 = Dx2 (0 + П2 (D) F^Pi - F^Pl (t),
где
77;(D) = ^i+^£> + ^B =771(О) + ^;
772’(D)= + D+=/72(D)
r2 xrj r2 r2
Следовательно, при работе двух гидроприводов от общего
источника питания помимо ранее рассмотренной дополнительной
статической податливости, зависящей от свойств обоих приводов,
включая и передаваемые ими сигналы, появляется еще один до-
полнительный вход также через источник питания от силовой пе-
ременной выхода Ft&fJi (0.
Аналогичными способами линеаризуются коэффициенты (0
и В2 (0 уравнения (13.25), описываемые нечетными функциями
времени (пятая и шестая строки в табл. 13.1), и поэтому, ограни-
чиваясь лишь первыми гармониками, можно записать
Вх(0 =/f1sin©1/+ (13.28)
В2 (0 = #2 sin со2/+ •• (13.29)
где выражения и Н2 приведены в шестой и седьмой строках
табл. 13.1, позволяя для конкретной системы найти их значения
численным способом.
Структурное представление линеаризованной модели двух
гидроприводов, работающих от общего источника питания огра-
ниченной мощности, показано на рис. 13.5. Как и в случае ис-
пользования одного привода, ограниченность мощности источ-
ника питания проявляется лишь в усилительных частях гидро-
приводов.
Взаимозаменяемости систем управления осуществляются пере-
крестными связями с одним и тем же осредненным коэффициентом
442
Рис. 13.5. Структурные представления линеаризованной
модели двух гидроприводов с управляющими золотниками,
имеющими нулевое перекрытие, при работе от общего ис-
точника питания ограниченной мощности
Л14ср (J7,/7,)-1, и поэтому наибольший дополнительный сигнал
взаимовлияния будет воздействовать на ту систему, которая
меньше «нагружает» источник питания, т. е. имеет меньшее зна-
чение Fi&Pi.
13.6. РАБОТА ДВУХ ГИДРАВЛИЧЕСКИХ СИСТЕМ
УПРАВЛЕНИЯ ОТ ОДНОГО ИСТОЧНИКА
ПИТАНИЯ ОГРАНИЧЕННОЙ МОЩНОСТИ
ПРИ РАЗНЫХ ЧАСТОТАХ ВХОДНЫХ СИГНАЛОВ
Взаимовлияние двух гидроприводов через общий источник пита-
ния ограниченной мощности при разных частотах входных сиг-
налов приводит к двухчастотным колебаниям перепадов давлений
на исполнительных двигателях, как это следует из уравнения
(13.27):
А Р1 = крап Sin + Фр11) 4- Д ра12 sin (со2/ + фр12);
Др2 = Дра21 sin + фр21) + Дра22 sin (со2/ + фр22).
Подстановка из этих выражений Apt и Др2 в равенство (13.25)
в учетом разложения (13.28) и (13.29) показывает, что переменная
443
составляющая давления в источнике питания, а значит, и на входе
в гидродвигатели будет содержать боковые частоты
р* — а0 + al cos (2a>j/ -|- фх) -|- а2 cos (2ю2/ -[-
+ 4’г) а*2 COS (——— t + гр!2 +
4- Й21 cos (-^1
t + 4’21) >
где а0 — постоянная составляющая давления; а*, а2, а*2 и а*1 —
соответствующие амплитуды гармоник; 4*12 и Ч’гх — их
фазовые сдвиги.
13.7. РАБОТА N ГИДРАВЛИЧЕСКИХ СИСТЕМ
УПРАВЛЕНИЯ ОТ ОБЩЕГО ИСТОЧНИКА
ПИТАНИЯ ОГРАНИЧЕННОЙ МОЩНОСТИ [68]
Полученные в разделах 13.5 и 13.6 аналитические выражения легко
распространяются на случай параллельного включения N гидро-
приводов рассматриваемого типа к одному общему источнику пи-
тания. Так, обобщением выражения (13.25) будет
N
. V а‘Ъ‘ А
р = £j—— &f<-
i=i 2kpn + 2 а,-1 е,-1
z=i
а уравнение усилительного звена получается в результате обоб-
щения выражений (13.26):
<¥/ +
N
aie-i V — 6г/)
ipT Zj £
i=l 2kpn + £ at I st I
(=1
Apz-
o/|e/l
N
2kpn + 2 all el I
i=l
Ap, =
Vi
= Ly/ Лр^-^D \pt + FtDxb (13.30)
( 1 при i = j,
ГДе ~ I 0 при i + j.
444
При моногармонических входных сигналах уравнение (13.30)
линеаризуется подстановкой
0/8/ + ЕЛ/ (О ДА “ А1 (0 ^Pi =
V,
= Lyi ^Pj + — D &Pi + Fi Dxr
где выражения A (/) и AH (t) приведены в 8 и 9-й строках
табл. 13.1.
Поскольку Лу (/) и Аи (/) — четные функции времени, они
могут быть осреднены, например, графически:
Aj (0 ~ ^/ср И Aji (О = ^/7ср«
При использовании этих средних значений система описы-
вается линейными дифференциальными уравнениями, причем
член с коэффициентом Луср описывает дополнительную статиче-
скую податливость, включая влияние остальных гидроприводов
на рассматриваемый гидропривод/, а член с коэффициентом взаимо-
влияния Aji ср — влияние нагружения остальных гидроприводов
на рассматриваемый через источник питания.
Каждый гидропривод охвачен перекрестными обратными свя-
зями по давлению с остальными приводами, и поэтому работа
любого гидропривода оказывает влияние на работу всех осталь-
ных, причем степень этого влияния определяется прежде всего
значениями коэффициентов взаимовлияния ср и нагрузками
на гидроприводы Дру.
Так же обобщается уравнение (13.25):
р* = £ В/ (0 Др/,
<=1
где выражение В, (/) приведено в 10-й строке табл. 13.1.
Поскольку В,- (/) — нечетная функция времени, то применяется
приближенное решение, получаемое использованием первого члена
разложения в ряд Фурье:
В/ (/) = Hi sin со,/ + ...,
где Hi — соответствующий коэффициент разложения в ряд
Фурье при синусе первой гармоники.
Как и в первом случае работы двух гидроприводов, перемен-
ная составляющая подводимого давления от источника питания
содержит удвоенные и боковые частоты:
Р’ — аО + а17 + а2Х + язх,
как это следует из выражений членов, приведенных в 10 и 11-й
строках табл. 13.1.
Глава 14
ПОЛУАВТОМАТИЧЕСКИЙ
ГИДРОПРИВОД
Полуавтоматической системой управления называют автоматиче-
скую систему, управляемую человеком. Гидропривод и управляю-
щий им человек-оператор составляют единую биотехническую
систему, в которой осуществляется чаще всего фиксированный
процесс управления, и такая система не должна рассматриваться
раздельно ввиду наличия взаимовлияния обеих ее частей. Поэтому
свойства и возможности человека-оператора, кроме предельных
и существующих у него привычных динамических стереотипов
движений, обусловлены также динамическими свойствами упра-
вляемой им технической части.
Необходимость изучения полуавтоматических систем обусло-
вливается их большим распространением и тем обстоятельством,
что в любой автоматической системе должна быть предусмотрена
возможность работы в качестве полуавтоматической, например,
в случае, когда задающая часть не обеспечивает требуемого за-
кона управления вследствие каких-либо отказов, или из-за огра-
ниченности технических возможностей системы.
Существует взаимная связь между зависимостями, аппрокси-
мирующими динамические свойства системы, возможностями опе-
ратора и процессом управления совместно с обусловливающим
этот процесс формированием управляющих сигналов (т. е. про-
цессов, описываемых зависимостью физической величины, напри-
мер, перемещения органа управления — от времени). Поэтому
существенное значение приобретает количественная оценка ди-
намических свойств такой биотехнической системы. Это взаимо-
влияние и его количественная оценка называется управляемостью
машины (системы) или эргономической управляе-
мостью в отличие от механической управляемости, когда
отклик на управляющий сигнал перестает быть прогнозируемым,
например, из-за потери устойчивости движения.
Возможны две альтернативные оценки управляемости техни-
ческой системы: «...машина трудно управляема...» и «...машиной
не научились управлять... Вместе с тем существуют машины,
которые единодушно признаются легко управляемыми и обслу-
живающий персонал которых быстрее проходит период обучения
и освоения. Рассмотрение эргатических трудовых систем требует
разработки качественных и количественных оценок особенностей
человека-оператора с целью рационального выбора оптимального
варианта технических средств.
Изменение динамических свойств машины отражается на воз-
можностях оператора, в связи с чем определяет не только произ-
водительность машины, но и утомляемость человека при упра-
446
влении. Это обусловливает необходимость изучать управляемость
машины, имея в виду потенциальную возможность ее улучшения
еще на стадии проектирования.
14.1. ИЗОЛИРОВАННЫЙ КАНАЛ ПЕРЕДАЧИ
УПРАВЛЯЮЩЕГО СИГНАЛА (ИКПУС)
Обеспечение управляемости проектируемой машины делает жела-
тельным разделение управляющей части на отдельные изолирован-
ные каналы передачи управляющих сигналов (ИКПУС) с целью
их изучения. Входным устройством такого канала должен быть
орган управления, а выходным — являющаяся объектом управле-
ния собственно машина вместе с исполнительным устройством.
Необходимость исследования именно ИКПУС основывается
на том, что в настоящее время установился взгляд на оператора,
как на «одноканальную систему». Изучение психической деятель-
ности оператора отвергает возможность одновременного осуще-
ствления двух и более деятельностей. При этом утверждается,
что «одновременность» ряда деятельностей оператора есть не что
иное, как быстрая и четкая последовательность этих деятельно-
стей [26]. Применение хорошо разработанной теории автоматиче-
ского регулирования при изучении и расчете ИКПУС делает
желательным использование математических моделей, по возмож-
ности линеаризованных, человека-оператора и технической части
ИКПУС.
Оценка управляемости машины возникла в авиации, где больше,
чем в других отраслях техники, от функциональной работоспособ-
ности биотехнической системы зависит жизнь людей. Вначале
использовался способ, основанный на применении передаточной
функции оператора, но в дальнейшем, поскольку была установлена
существенная зависимость реакции оператора от динамических
свойств управляемой системы и от процесса управления, а также
влияние субъективных ощущений оператора на эффективность
(время и точность) выполнения заданной или задуманной опера-
ции и в отдельных случаях даже на возможность управления
машиной, получил распространение также экспериментальный
метод субъективных оценок управляемости машины.
Однако при оценке экстремальных возможностей человека-
оператора, особенно применительно к управлению конкретных
объектов, и притом к фиксированным процессам управления, или же
при оценке результатов процесса обучения человека-оператора
допустимо использование передаточной функции, числовые зна-
чения параметров которой позволяют в определенной степени
оценить возможности человека-оператора и изменение этих воз-
можностей. Кроме того, при решении задач об оптимизации взаи-
модействия технической части полуавтоматической системы и пси-
хофизиологической, а также при сравнении и количественной
оценке управляемости различных систем использование передаточ-
447
ной функции при описании математической модели человека-опе-
ратора оказывается полезным.
Использование субъективных оценок полуавтоматической си-
стемы хотя и позволяет перейти к некоторым объективным оценкам
при сравнении осциллограмм задающего и исполняющего движе-
ний, как это будет показано ниже, все же пока еще не допускает
аналитической проверки и решения аналитических задач по опти-
мизации свойств исследуемой биотехнической системы.
14.2. ПРОЦЕССЫ И СПОСОБЫ УПРАВЛЕНИЯ
В машиностроении получили большое распространение три про-
цесса управления: транспортный (Т), процесс компенсированного
слежения (К) и процесс слежения с преследованием цели (П).
Наиболее распространен процесс Т, заключающийся в пере-
мещении рабочего органа управляемой машины в заданное поло-
жение. Примерами такого процесса могут быть различные пере-
мещения рабочих органов машин (ковша экскаватора, захватов
ковочного манипулятора или погрузчика, ротора любого враща-
ющегося или поворотного устройства в процессе разгона или
торможения и т. п.) или движения какой-либо транспортной
машины при разгоне и остановке.
Водитель, управляя движением транспортной машины в ко-
лонне, или рулевой, удерживая судно на курсе, осуществляют
процесс К. В подобных случаях оператор следит за индиктором
и осуществляет управление по ошибке, обычно носящей случайный
характер. При возникновении отклонения (оно чаще всего оказы-
вается небольшим) его практически невозможно разделить на
части, соответственно обусловленные сообственными действиями
оператора и изменением возмущающего воздействия на объект
управления.
Водитель, «пристраивающий» грузовой автомобиль к работа-
ющему комбайну или снегоуборочной машине, а также рулевой
судна, начинающего преследование кита, осуществляют про-
цесс П, который часто завершается переходом в процесс К. В этом
случае оператор имеет визуальную и сенсорную информацию
о собственных действиях и только визуальную информацию
о движении цели и возникающих рассогласованиях.
Формируя сигнал управления в процессе П, оператор может
ввести в управляющий сигнал и производную (например, опере-
жение по фазе) и интеграл от рассогласования, компенсируя
в этом случае свое инерционное запаздывание.
Даже эти три процесса управления из числа множества других
возможных имеют многочисленные варианты. Так, возможно
автономное положение оператора относительно управляемого
устройства, а возможно и его непосредственное размещение на
управляемом устройстве. В последнем случае обозначения про-
448
цессов управления соответственно меняются на ТО, КО ПО,
например, для случая управления самолетом.
Использование рулевых устройств относится к промежуточ-
ному случаю, поскольку движение, обусловленное действием
руля, представляет собой всего лишь дополнительную составля-
ющую, например, от транспортного движения, управляемого,
во-первых, нажатием педали акселератора, и, во-вторых, возму-
щающим воздействием сопротивления дороги.
В машиностроении получили распространение три способа
управления: управление положением, управление скоростью и
командное управление.
Управление положением (предполагается не-
прерывное и притом копирующее управление) предусматривает
существование главной отрицательной обратной связи, охваты-
вающей исполнительное устройство, которое является интегри-
рующим звеном (исполнительное устройство такого типа обла-
дает астатизмом первого порядка). В этом случае постоянному
значению управляющего сигнала соответствует фиксированное
положение исполнительного устройства. Примерами копирующих
управлений могут служить системы управления манипуляторов,
устройства управления столами тяжелых станков, различные
копирующие устройства станков, системы управления корабель-
ными рулями, гидравлические рулевые системы с обратной связью
мобильных машин различного назначения, системы управления
лопастями гидравлических турбин, насосов и гребных винтов,
бустеры систем управления самолетами и т. п.
Управление скоростью х предполагает исполь-
зование в качестве исполнительного устройства разомкнутого
интегрирующего звена и применяется в бесступенчатых транс-
миссиях транспортных машин, гидравлических рулевых системах
без главной обратной связи мобильных машин, системах управ-
ления двигателями внутреннего сгорания, газотурбинными дви-
гателями, различного типа электрическими приводными дви-
гателями и т. п.
Командное управление (чаще всего трехпози-
ционное релейного типа), если не считать быстрозатухающий пере-
ходный процесс, представляет собой систему дискретного управ-
ления скоростью (например, х = V = const, х = —V = const, х
0), широко используется в электроприводах грузоподъемных
устройств, гидроприводах строительных и дорожных машин, ме-
таллорежущих станков, сельскохозяйственных машин и т. п.
Выбор способа управления обусловлен многими обстоятель-
ствами — наличием технических средств, стоимостью, габаритами,
массой, требуемой точностью и иными характеристиками привода
и его элементов. Кроме того, на выбор системы управления влияют
традиции, основанные на коллективном опыте и, следовательно,
на экспериментально обнаруженных свойствах системы, непо-
средственно относящихся к управляемости машины.
15 В. Н. Прокофьев и др. 449
14.3. ВОЗМОЖНОСТИ ЧЕЛОВЕКА-ОПЕРАТОРА
Человек-оператор в качестве звена системы управления машиной
(полуавтоматическая система) имеет собственные иерархические
характеристики входа (детектирование сигнала), канала преоб-
разования информации и формирования командного сигнала
(идентификация сигнала) и выхода (интерпретация сигнала).
Считается, что частота восприятия визуальных сигналов огра-
ничена сверху величиной 10 сигн./с. Однако каналы ввода инфор-
мации («сенсорный» вход), на основе которых формируется управ-
ляющий сигнал, не ограничиваются только визуальными сигна-
лами, хотя они оцениваются как наиболее чувствительные. Эти
каналы разделяются на прямые (система индикации, использова-
ние информационного поля и т. п.) и косвенные (например, шумы,
вибрации, температурные воздействия и т. п.).
Пропускная способность канала информации при формирова-
нии управляющего сигнала существенно зависит от числа ИКПУС,
процессов и способов управления, степени задействования запо-
минающего устройства («памяти») и навыков оператора. Так,
работа в режимах Т и К чаще всего не предусматривает активное
включение канала памяти (исключением являются переходные
процессы, связанные с существованием динамической зоны не-
чувствительности), повышая вследствие этого пропускную спо-
собность канала информации.
Полоса пропускания частот следования информационного
сигнала ограничена сверху значением 1 Гц. Частоты, бдльшие
1 Гц (частота механических воздействий на бегущего человека),
воспринимаются организмом человека-оператора, особенно его
вестибулярным аппаратом, болезненно и, за редким исключением,
не допускаются в тех случаях, когда оператор размещается на
управляемом устройстве. Поэтому доминирующие постоянные
времени технической части полуавтоматических систем должны
быть больше со = 1/2л.
Всякое усложнение программы управления, а также необхо-
димость управления двумя и более ИКПУС снижает пропускную
способность оператора, поскольку дополнительно загружает его
центральную нервную систему
Движение управляющей конечности оператора происходит
с задержкой в зависимости от процесса управления и будет наи-
меньшей в процессе П, даже при преследовании равномерно дви-
жущейся цели. Движение управляющей конечности имеет две
составляющие: разгоняющую и корректирующую. Последняя
обычно прерывистая, с частотой импульсов около 2,5 Гц, если
оператор автономен относительно объекта управления.
Управляющие органы машины требуют приложения усилий,
меняющихся в очень широком диапазоне. Так, релейное управле-
ние механическими трансмиссиями тяжелых гусеничных машин
старых образцов требовало приложения усилий до 240 Н. В боль-
450
шинстве машиностроительных систем управления их выполняют
или стремятся выполнять на управляющие усилия от 5 до 30 Н;
в этом диапазоне затраты мощности оператором на процесс управ-
ления меняются мало и зависят от скорости перемещения управ-
ляющей конечности.’^ Так, с уменьшением управляющего усилия
угловая скорость перемещения управляющей конечности (пред-
локтевой сустав) прогрессивно увеличивается, что обусловливается
перераспределением нагрузки между отдельными группами мышц.
Энергетические затраты оператора уменьшаются при уменьшении
управляющего усилия с прогрессивным возрастанием скорости
перемещения управляющей конечности.
Визуальная обратная связь, осуществляемая оператором и
определяющая формирование управляющего сигнала, часто до-
полняется не только косвенной информацией, но и дополнитель-
ной кинетостатической обратной связью (отражение действу-
ющего на исполнительном органе усилия, создающее для опера-
тора «эффект присутствия»). Такая форма обратной связи позво-
ляет оператору количественно ощущать смещение управляющего
устройства.
Время реакции оператора определяется, во-первых, времен-
ным интервалом от появления стимула до начала управляющего
движения («латентный» период), диапазон которого от 0,15 до
0,30 с в зависимости от тренированности оператора, и, во-вторых,
временем переходного процесса «моторного» выхода 0,3—0,6 с.
«Латентный» период включает время прохождения сигнала (сти-
мула) к центральной нервной системе и время переработки инфор-
мации («задержка» мышления) о сигнале и формирование команд-
ного биоимпульса. Кроме того, при управлении ИКПУС для
перехода с движения, вызванного предыдущим стимулом, на
движение, обусловленное новым последующим стимулом, затра-
чивается не менее 0,1 с.
Возникновение нового неожиданного стимула для оператора,
осуществляющего управление несколькими ИКПУС, требует 0,1 с
на обнаружение сигнала, 0,4 с на распознавание образа, 4—5 с
на принятие решения и 0,5 с на двигательную реакцию.
14.4. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ТЕХНИЧЕСКОЙ
ЧАСТИ ПОЛУАВТОМАТИЧЕСКОЙ СИСТЕМЫ
Математическая модель технической части полуавтоматической
системы должна иметь по крайней мере две переменные входа
и две переменные выхода. Оператор по выбранному им закону
меняет управляющий сигнал, обозначаемый в безразмерной
форме е (t), а возмущающее воздействие, также зависящее от
времени R (£), обусловливает дополнительные движения испол-
нительного органа, мера которых обозначается через V (/) и
в зависимости от структуры технической части может быть сме-
щением X (/) или скоростью X (/).
15* 451
Вторая нагрузочная переменная выхода г (0, воздействующая
на источник энергии (питания), может рассматриваться в каче-
стве промежуточной переменной.
Многочисленные возможные нелинейности технической части
существенно затрудняют процесс управления. Так, возникающий
чаще всего неожиданно для оператора скачкообразный резонанс,
автоколебания, потеря устойчивости движения и т. п. приводят
к физиологическим отказам в процессе управления. Поэтому тех-
ническая часть проектируется и проходит отладку так, чтобы ее
динамическая характеристика была линейной в эксплуатационной
области изменения переменных, в которой влияние нелинейностей
было бы пренебрежимо мало.
Тогда аппроксимирующее уравнение связи между перемен-
ными входа е (t) и R (0 и переменной выхода V (0 будет линей-
ным:
V(0 = A(O)e(0 + A(Z))7?(/), (14.1)
где Al(D) — оператор, оценивающий влияние управляющего
сигнала е (0 на V (0; А2 (D) — оператор, оценивающий влияние
возмущающего воздействия R (0 на V (0; D = d/dt — алгебраи-
зированный оператор дифференцирования.
Поскольку линейная система сколь угодно высокого порядка
ведет себя в переходном процессе так же, как некоторая система
второго или третьего порядка [8], а переходный процесс опре-
деляет управляемость машины, то возможно нахождение аппрок-
симирующей передаточной функции (s) А± (s) при R =
= const, способ получения которой и оценка точности аппрокси-
мации рассмотрены, например, в работе [26].
В качестве аппроксимирующего выражения принято
u(s) (l + 2C373s4-Hs0(1+?eS) ’
где Кэ — коэффициент усиления; Тэ и Те — постоянные времени;
£э — коэффициент демпфирования; т — время чистого (не зави-
сящего от динамических свойств системы) запаздывания; и ($) —
размерный управляющий сигнал.
Экспериментальная проверка проводится применительно к ма-
тематической модели технической части с эквивалентной пере-
даточной функцией
= u(s) 1 + 2f37’3s + T^s2 ’ (14• 2)
поскольку первая гипотеза о фильтрующих свойствах оператора
позволяет рассматриваемыми в дальнейшем приемами вносить
в результаты экспериментов коррективы, учитывающие влияние
множителя e~TS. Вторая гипотеза о фильтрующих свойствах
оператора позволяет оценивать управляемость технической части
452
по доминирующей постоянной времени из числа Тэ и Те. Если
Тъ Те, то влияние множителя 1 + Tes можно игнорировать
с последующей проверкой правомерности такого вывода. Если
Те Л, т0 игнорируется влияние множителя 1 + 2£37\s + Tls2,
и экспериментальной проверке должна будет подлежать мате-
матическая модель с передаточной функцией
= 043)
Поскольку экспериментальной проверке подвергается матема-
тическая модель с широким диапазоном изменения параметров £3
и Тэ, то всегда можно использовать выражение (14.2) с таким
значением £э > 1, при котором
1 2?эТэз + ТЬ2^(1+7»(1 T'es),
где Тэ > Т'е. Тогда, применяя ту же вторую гипотезу о фильтру-
ющих свойствах оператора, можно будет использовать выраже-
ние (14.2) вместо (14.3).
Правомерность подобного рода приемов проистекает из того,
что системы, в которых значения постоянных времени Тэ, Те и Те
близки друг к другу, не относятся к числу оптимальных по управ-
ляемости (обладают чрезмерно большой колебательностью) и их
следует избегать.
Поскольку в линейных системах только характеристическое
управление не зависит от того, какая исследуется переменная
входа, то аппроксимация оператора А± (D) и оператора A2(D)
в выражении (14.1) приведет к использованию тех же параме-
тров Тэ и £э.
Встречаются также системы с технической частью, аппрокси-
мируемой передаточной функцией, содержащей дифференциру-
ющее звено:
п/ /о\ _KJ2LL — _____Кэ (1 -}-ТЭд$) __
Ms) ~ (l+2C9T3s + Tls2)(l + Tes> *
К их числу относится, например, объемный гидропривод с ре-
гулируемым аксиально-поршневым насосом, у которого центр
поворота блока цилиндров относительно наклонного диска не
совпадает с осью вала. Процесс управления такими системами
предъявляет к оператору больше требований, и поэтому эти
системы практически не используются. Однако, если возникнет
необходимость установить управляемость полуавтоматических
систем, в технической части которых Тэд =/= 0, то придется обра-
щаться к пока еще не исследованной в этом смысле эквивалентной
передаточной функции
П7 М = V _ Кэ(1 +T3As)
и (s) 1 -h 2t3T3s 4-
453
14.5. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ
ЧЕЛОВЕКА-ОПЕРАТОРА
Получение математической модели человека-оператора привле-
кает внимание исследователей и конструкторов полуавтоматиче-
ских систем, особенно в связи с успехами теории автоматического
регулирования, позволяющей применительно к конкретным мо-
делям с достаточной для практических целей точностью выяснить
и корректировать в желаемом направлении их динамические
свойства.
Однако решения задач о «черном ящике», которые проводи-
лись разными исследователями, не оказались совпадающими.
Позднее отдельные исследователи, отыскивая математическую
модель оператора, столкнулись с тем, что разные технические
части полуавтоматических систем давали существенно разные
математические модели человека-оператора.
Применительно к неадаптированному оператору, особенно не
имеющему навыков управления, не получены математические
модели, и приходится обращаться к субъективным оценкам про-
цесса управления. Однако применительно к адаптированному
оператору может быть получена математическая модель, если
конкретизированы объект управления, способ управления и усло-
вия, в которых работает оператор. В этом случае, используя
математическое описание оператора фиксированной квалификации
применительно к перечисленным фиксированным условиям, можно,
например, решать задачу об оптимизации динамических свойств
объекта управления, учитывая при этом возможные изменения
математической модели оператора.
Возможны разные способы определения математической модели
оператора. Записывая математическую модель технической части
и определяя экспериментально математическую модель системы
в целом, можно вычислить искомую модель оператора. Определяя
дифференциатором ошибку в откликах исследуемой полуавтома-
тической системы и ее технической части с подбираемой математи-
ческой моделью человека-оператора, добиваются получения наи-
меньших динамических ошибок.
Во всех этих случаях учитываются возможные изменения,
например, вследствие утомляемости, из-за которой снижается
чувствительность, резко понижается пропускная способность,
способность к преобразованию информации, снижается спектр
частот входа, меняются временные характеристики и структура
выходного сигнала.
Чаще всего аппроксимация технической части и математической
модели осуществляется при помощи линейных представлений,
тогда как оператор всегда звено нелинейное. Поэтому в процессе
аппроксимации могут появиться в искомой передаточной функции
члены высоких порядков (до пятого в характеристическом урав-
нении и до третьего в интегрирующем звене).
454
Одна из первых форм математической модели человека-опера-
тора представляла собой «стационарную» квазилинейную модель,
например, в форме передаточной функции [34, 98]
ц/ ($) =_____0 + ТУР.! J?______ (14 4)
(l+2S2T2s + T|s2)(1 + r3S) >
где 7\ 1 с и T3 10 с (видимо, значительно преувеличенное
значение) — нестационарные из-за процесса адаптации постоян-
ные времени; Т2 > 0,1 с и £2 = 0,7ч-0,9 определяются свойствами
нервно-мускульной системы и стабильны для адаптированного
оператора. Такая математическая модель применима при частотах
f < 1,5 Гц при автономном от объекта управления размещении
оператора и f 1 Гц при размещении оператора на объекте
управления. При использовании выражения (14.4) к выходному
сигналу следует добавлять генерируемый оператором «шум».
В ряде работ предлагается применять нестационарную ква-
зилинейную модель с самонастраивающимся аналогом человека-
оператора, в которую вводятся переменные коэффициенты, значе-
ния которых обусловливаются процессом обучения и адаптации.
Известно использование импульсной модели оператора, основы-
вающейся на дискретности реакции на информацию. Частота сле-
дования информационных импульсов не должна быть больше
2—3 Гц, а при частоте —0,75 Гц спектр выходного сигнала при-
ближается к спектру выхода квазилинейной модели.
Математическая модель адаптированного оператора в форме
(14.4) с различными, а в определенных условиях меняющимися
коэффициентами К, Тъ т, Т2, £2 и Тз применима и, кроме того,
с достаточной степенью точности описывает соответствующее звено
полуавтоматической системы управления и в порядке первого
приближения допускает решение задачи об оптимизации динами-
ческих свойств технической части. В результате получения такого
решения после соответствующей экспериментальной проверки
форма (14.4) может измениться дополнением одного, реже — двух
дифференцирующих звеньев и иногда дополнением еще одного
интегрирующего звена. Последнее легче всего объяснять след-
ствием процесса аппроксимации нелинейного звена линейным
выражением.
В различных работах высказывались идеи, близкие к содер-
жанию гипотезы о передаточной функции адаптированного опе-
ратора. Адаптированный оператор в процессе активного выполне-
ния обязанностей стремится всеми доступными для него спо-
собами так реализовать управление технической частью, чтобы
динамическая ошибка процесса управления была наименьшей.
Динамическая ошибка обращается в нуль, когда произведение
передаточных функций технической части и оператора при соот-
ветствующем выборе начала отсчета является действительным
числом, не зависящим от частоты, т. е. передаточная функция
определяется значением приведенного масштабного коэффициента.
455
В передаточной функции обязательно чистое запаздывание,
обусловленное «латентным» периодом и временем переходного
процесса «моторного» выхода. В числителе передаточной функции
адаптированного оператора обязательно присутствие дифферен-
цирующего звена, постоянную времени которого Т± оператор
стремится довести до значения, соответствующего значению до-
минирующей постоянной времени технической части, чем дости-
гается уменьшение динамической ошибки. Значение этой постоян-
ной времени меняется в зависимости от интенсивности стремления
оператора форсировать процесс управления, увеличиваясь по
мере совершенствования навыков управления.
Недоминирующие постоянные времени технической части,
если и отражаются на передаточной функции оператора, то только
на значении чистого запаздывания в силу фильтрующих свойств
оператора, которые рассматриваются в разделе 14.9.
Поскольку свойства оператора нелинейны и специфика нервно-
мускульной системы заключается в стремлении генерировать
колебательные движения в процессе управления, знаменатель
передаточной функции должен содержать колебательное звено
с параметрами Т2 и £2. Влияние этого звена особенно заметно
в системах управления, в которых оператор размещается на
объекте управления.
Техническая часть полуавтоматической системы редко содер-
жит дифференцирующее звено, поскольку его существование может
затруднить процесс управления. Поэтому в дальнейшем иссле-
дуются только полуавтоматические системы, техническая часть
которых не содержит дифференцирующего звена. Если бы в тех-
нической части было дифференцирующее звено, то в передаточной
функции адаптированного оператора появилось бы интегриру-
ющее звено с постоянной времени Т3 из-за стремления оператора
уменьшить динамическую ошибку.
Поскольку при использовании передаточной функции опера-
тора подразумевается, что оператор адаптирован применительно
к данной технической части и конкретным условиям работы, то
применение такой передаточной функции с целью выяснения
условий устойчивости системы теряет смысл. Затруднено исполь-
зование передаточной функции оператора и в процессе проекти-
рования, поскольку в этом случае требуется для реализации
процесса адаптации оператора не только создание достаточно
большого числа высококачественных макетов технической части,
но и строгой имитации его условий работы на натурных образцах.
Полноправно используется передаточная функция для констатации
достаточности адаптации оператора в процессе обучения.
Распространена точка зрения о возможности оценки управ-
ляемости полуавтоматической системы без обращения к переда-
точной функции оператора. Применение ее в последнем примере
оказывается полезным, а в предпоследнем — только возможным
наряду с использованием различных субъективных оценок.
456
14.6. НАБЛЮДАЕМЫЙ МАСШТАБНЫЙ
КОЭФФИЦИЕНТ Кхи
Управление положением исполнительного устройства желательно
осуществлять в пределах нормальной рабочей зоны оператора.
Естественный диапазон изменения управляющего сигнала, осу-
ществляемого перемещением локтевого сустава руки оператора,
должен быть в пределах 2 Au 50 см, иначе управление ста-
новится затруднительным.
Наблюдаемым масштабным коэффициентом Кхи называют отно-
шение видимого оператором на расстоянии до 2—2,5 м смещения
исполнительного устройства L = Ах к линейному смещению
управляющего сигнала Au. Экспериментальные исследования
систем управления положением показали желательность исполь-
зования коэффициента /Схи в диапазоне значений
0.1 < кхи = L . Ах < 15.
хи Ди
При Кх11 > 15 точное управление должно осуществляться очень
малыми смещениями органа управления, а при Кхи< 0,1 оператору
приходится в процессе управления перемещать руку на большие
расстояния, в результате чего наступает быстрая утомляемость.
При удалении исполнительного устройства на расстояние I >2,5м
подсчет Кхи можно вести по соответствующим угловым размерам,
т. е. приведенный наблюдаемый масштабный коэффициент будет
^гпр _ 2,5Дх 2,о
Ахи “ Т\й~ ~г~ Лхи-
Нижняя граница Ах определяется разрешающей способностью
глаз человека, равной примерно Г Наиболее удобный диапазон
изменения значений /<хи опреде-
ляется неравенством 0,6^Кхи^1.
Результат выбора способа
управления (положением, ско-
ростью или командное управление)
должен зависеть от приведенного
значения Кхи. Так, если это значе-
ние попадает в заштрихованную
зону рис. 14.1, то возможно ис-
пользование управления положе-
нием, т. е. техническая часть бу-
дет следящей системой, астатизм
которой имеет нулевой порядок.
Существенно больший диапазон
значений /Схи имеют системы
управления скоростью и положе-
нием. Однако и при таких способах
управления возможный диапазон
Рис. 14.1. Области способов управ-
ления в зависимости от приведенно-
го значения наблюдаемого масштаб-
ного коэффициента /<х£ и величи-
ны наблюдаемого смещения объекта
управления
457
то это выражение будет иметь вид
Ц7* (s) == 1 v (s) = v* (s)
э V 7 Кэ u(s) ~ и (s)
и тогда передаточная функция будет
смещений органа управления рукой оператора чаще всего не
превышает 2,5 Ди (/) 10 см.
Если в выражении эквивалентной передаточной функции
(14.3) в качестве выходной'переменной принять V' (t) = —J— V (/),
Лэ
_ ________1_______
~ 1 + 2£3r3s + Трг ’
определяться только двумя
параметрами 7\ и £э, а коэффициент усиления Кэ применительно
к системе управления положением, когда V (/) = х (/), приобре-
тает смысл приведенного наблюдаемого масштабного коэффи-
циента.
14.7. СУБЪЕКТИВНЫЕ ОЦЕНКИ СИСТЕМ
УПРАВЛЕНИЯ
Применительно к процессу Т при автономном размещении опе-
ратора относительно объекта управления были проведены испы-
тания биотехнической системы [37], состоящей из не имеющего
навыков управления оператора и макета задающего органа упра-
вления, измерявшего перемещение локтевого сустава оператора.
Управляемая машина моделировалась при помощи аналоговой
установки МН-7, которая обеспечивала заданные значения Тэ
и £э и их изменение от одного движения к другому в неизвестном
для оператора порядке. Оператор при помощи органа управления
через моделирующую установку МН-7 перемещал в заданное
положение (процесс управления Т) световое пятно на экране
осциллографа, находящегося на расстоянии 1 м от оператора
(наибольшее перемещение пятна составляло 16 см).
Объективная оценка режимов управления осуществлялась
сравнением осциллограмм управляющего сигнала и (/) и движе-
ния исполнительного устройства х (0, а реакция оператора на
изменение значений Тэ и £э позволяла фиксировать его субъектив-
ное мнение об управляемости машины.
Экспериментальная проверка динамических моделей машин
при всех трех способах управления и участии многих операторов
показала целесообразность использования трех субъективных
оценок в соответствии с субъективными ощущениями операторов:
1) отсутствие влияния динамических свойств управляемой модели
машины на работу оператора; 2) ощущение колебательности
переходных процессов и 3) ощущение запаздывания переходных
процессов. Соответствующие этому области на полученных гра-
фиках (рис. 14.2) обозначены So, SK и S3.
Геометрические формы областей для всех трех способов управ-
ления (положением, скоростью и командное управление) имеют
одинаковый характер. Заштрихованные участки обозначают «раз-
458
б) ления (в)
мытые» границы областей, поскольку разные операторы в за-
висимости от индивидуальных особенностей нервной системы,
от имеющихся у них динамических стереотипов движений, а также
один и тот же оператор в зависимости от своего состояния (вклю-
чая усталость) могут давать различные субъективные оценки
одним и тем же динамическим моделям машин. Незаштрихован-
ные участки областей оказались общими для всех операторов
и поэтому гарантируют получение конкретной субъективной
оценки.
Эквивалентная передаточная функция динамической модели
машины с управлением скоростью, а также с командным управ-
лением имеет тот же вид, что и для случая управления поло-
жением. Только в первом случае V (s) = х (s) — координата
управляемого устройства, а в других двух случаях V (s) = sx (s).
Геометрические конфигурации областей So (слева от ли-
нии АВС К), а также их положение относительно оси абсцисс
для^всех трех способов управления оказались одинаковыми при
автономном по отношению к объекту управления размещении
оператора (положение оператора независимо от управляемых
движений объектов регулирования). Однако наиболее ограничена
эта область значением постоянной времени Тэ ^'0,04 с при управ-
лении положением (рис. 14.2, а). В случае управления скоростью
при 0,35 < £э < 0,75 область So простирается до существенно
459
больших значений Тэ (рис. 14.2, б); хотя в этом случае уменьшение
коэффициента усиления /Сэ с 10 до 3,3 см/с-рад увеличивает до-
пустимое значение Тэ, однако затрудняет процесс управления
из-за непрерывного «дрейфа нуля», требуя непрерывного воздей-
ствия на управляемый объект, особенно при уменьшении Кхи-
Таким образом, чем меньше быстродействие машины, тем больше
оснований для использования системы управления скоростью.
Аналогичные замечания могут быть сделаны и в отношении
командного управления (14.2, в). Уменьшение включаемой ско-
рости vx движения управляемого пятна на экране осциллографа
с 2 до 1 см/с увеличивает примерно на 35% наибольшие допусти-
мые значения Тэ.
Оказалось, что существует «наиболее удобная» с точки зрения
оператора область значений £э и, следовательно, показателя коле-
бательности
которым соответствуют наибольшие допустимые значения Т9.
Для всех способов управления 1 М 1,52, что существенным
образом определяет среднечастотную часть желаемых частотных
характеристик при решении задач синтеза систем управления
машинами [8].
14.8. ОБЪЕКТИВНЫЕ ОЦЕНКИ СИСТЕМ
УПРАВЛЕНИЯ
Сравнивая осциллограммы движений органа управления и управ-
ляемого объекта, а также оценивая время и точность процесса
управления в режиме Т, можно убедиться в существовании соот-
ветствия между субъективными оценками процесса управления
и объективными оценками по двухбалльной системе — следящий
режим (или режим слежения) и режим форсированного управ-
ления.
В режиме слежения управляющие движения органа управ-
ления и (t) при монотонных изменениях управляемого исполни-
тельного устройства х (0 совершаются также непрерывно и мо-
нотонно на протяжении всего рабочего цикла при качественном
сходстве изображающих движение кривых (/ и 2 на рис. 14.3).
Сигнал, формируемый оператором, применительно к следя-
щему режиму управления при малых усилиях на органе управле-
ния для начального участка аппроксимируется выражением
Au (0 = Aw* [1 -(W+6/4- 1) ехр ( — 6/)],
где А^* — полное смещение управляющего органа, задаваемое
либо самим оператором, либо обстановкой в рабочей зоне [24].
460
Рис. 14.3. Переходные процессы при транспортном про-
цессе управления
При увеличении преодолеваемых усилий на органе управле-
ния значение наибольшей скорости уменьшается, и она должна
рассматриваться в качестве нелинейности типа насыщения. Любое
дальнейшее увеличение скорости неизбежно сопровождается вы-
нужденными остановками (физиологические отказы), при которых
оператор проверяет реакцию машины на управляющие воздей-
ствия. Во всех случаях оператор будет фильтром низких частот
с верхней границей, не превышающей 1,5 Гц.
Всегда, когда операторы не ощущали при реализации пере-
ходных процессов динамических свойств машины, наблюдался
режим слежения. Даже при небольших демпфированиях и значи-
тельных доминирующих постоянных времени также наблюдался
режим слежения (область на рис. 14.2, а, ограниченная сверху
кривой A BCD). Считается, что оператор, осуществляя режим
слежения, пользуется свойственными ему динамическими стерео-
типами движений; в этом случае имеет место естественная опти-
мальность во времени переходных процессов управления, а утом-
ляемость оператора наименьшая. Поэтому при проектировании
следует так выбирать динамические характеристики машины,
чтобы гарантировать осуществление режима слежения, т. е.
обеспечить оптимальную управляемость машины.
Альтернативой режима слежения будет режим форсированного
управления, наблюдаемый, например, при растянутых во времени
процессах управления, когда характер изменения управляющего
сигнала, формируемого оператором, по геометрической конфи-
гурации существенно отличается от характера изменения смещения
исполнительного устройства (кривые 3 и 4 на рис. 14.3). В этом
случае операторы, ощущая (при помощи субъективных оценок
процесса управления) ухудшение динамических свойств, связанных
с очень большими значениями Тэ при слишком больших или не-
достаточных значениях £э, пытаются компенсировать эти значе-
461
ния резким увеличением скоростей и ускорений руки, осуществ-
ляющей управляющее движение и (/). В таком режиме управле-
ния в ряде случаев наблюдается иногда повторяющееся прекра-
щение движений (физиологические отказы), особенно когда опе-
раторы теряют способность прогнозировать движение исполни-
тельного органа из-за недостаточного быстродействия технической
части.
Переход к форсированному режиму управления обусловлен
особенностями центральной нервной системы оператора. Так,
в начальном’ периоде движения, равном латентному периоду
(отрезок времени от появления стимула до начала управляющего
движения, равный в зависимости от тренированности оператора
0,15—0,30 с) зрительных рецепторов, зрительный контроль за
ходом перемещения управляемого устройства не может прово-
диться. Считается, что величина зрительного восприятия движе-
ния ограничивается наименьшей скоростью 1—2 угловых минуты
в секунду при оценке скорости движения относительно покоя-
щегося предмета, а при меньших скоростях движущийся объект
представляется неподвижным.
Только по истечении латентного периода центральная нервная
система оператора получит сигнал о начале движения. Поэтому
управляемая машина должна обладать скоростью, превышающей
зрительный порог восприятия движения (соответствующие малые
скорости оператор не может фиксировать), а запаздывание реак-
ции управляемой машины на сигнал управления не должно пре-
вышать латентного периода зрительных рецепторов. Поэтому
значение чистого запаздывания в полуавтоматических системах
должно определяться с достаточной точностью и обязательно
с прогнозированием возможных изменений динамических свойств
машины в процессе эксплуатации.
Режим форсированного управления наблюдается во всей обла-
сти ощущений запаздывания переходных процессов (см. рис.14.2)
в управляемой машине и, частично, при значительных доминиру-
ющих постоянных времени,
особенно в задемпфированных
машинах, управляемых по
положению исполнительного
устройства. Так, на рис. 14.2,а
(управление положением с
необученным оператором) об-
ласть форсированного управ-
ления размещается выше кри-
вой ABCD, на рис. 14.2, б
(управления скоростью) —
справа от кривой АВК и на
рис. 14.2, в (командное управ-
ление) — справа от кривой
АВК.
Рис. 14.4. Зависимость динамической оши-
бки ед от и Тэ для систем управления
462
После приобретения операторами (например, в процессе обу-
чения и тренировок) навыков управления область форсированного
управления существенно сдвигается в направлении увеличения
постоянных времени 7\, особенно в диапазоне значений 0,4
< £э < 0,8. Рост доминирующей постоянной времени означает
падение быстродействия, т. е. увеличение участка разгона машины.
При переходе к режиму форсированного управления суще-
ственно возрастает величина динамической ошибки
ед (/со) = [Г ДО) — Fs (/со)] и (/со),
как это показано для систем управления положением на рив. 14.4
137].
14.9. ГИПОТЕЗЫ О ФИЛЬТРУЮЩИХ СВОЙСТВАХ
ОПЕРАТОРА
Результаты экспериментов по субъективным оценкам управляе-
мости машин, приведенные на рис. 14.2, в основном были полу-
чены для систем с технической частью, динамические свойства
которых описывались выражениями (14.2) или (14.3), т. е. упро-
щенными аппроксимирующими выражениями, как правило, систем
высокого порядка. Поэтому при проведении экспериментов всегда,
когда это допускалось условиями, подвергалась проверке право-
мерность такой упрощенной аппроксимации.
Проведение таких проверок позволило сформулировать две
гипотезы о регулировании сервоустройств оператором [61 ].
По первой гипотезе о регулировании сервоустройства опера-
тором (гипотеза о влиянии чистого запаздывания сервоустройства,
регулируемого оператором), если динамические свойства двух
сервоустройств аппроксимируются передаточными функциями
Wj (s) = W и W2 (s) = We~xs (где т — время чистого запазды-
вания), а границы рабочих областей, соответствующих режимам
слежения этих сервоустройств, описываются уравнениями Р± (Тэ,
£э) = 0 и Р2 (Тэ, £э) = 0, то их графические изображения на
плоскостях Тэ и £э, а также Т3 — соответственно окажутся
совпадающими.
Таким образом, при использовании графиков, приведенных
на рис. 14.2, применительно к системам с чистым запаздыванием т
следует сместить начало отсчета постоянных времени Тэ вправо
на величину т. При этом соответственно уменьшается рабочая
область полуавтоматической системы, и при достаточно большом
значении т может оказаться возможным лишь режим форсиро-
ванного управления. Но и здесь следует выбирать такое значе-
ние £э, при котором границы рабочей области обладают наиболь-
шими значениями Тэ. В этом случае имеется большая вероятность
при соответствующей натренированности (адаптации) оператора
добиться следящего режима управления.
463
Было замечено, что влияние «обучения» оператора изменяет
графики, изображенные на рис. 14.2 сдвигом начала отсчета
постоянных времени влево, причем необходимое абсолютное
«отрицательное» значение чистого запаздывания т < 0 увеличи-
вается с приобретением опыта управления оператором.
По второй гипотезе о регулировании сервомеханизма опера-
тором (гипотеза о фильтрующих свойствах оператора) серво-
устройство, регулируемое оператором, обеспечивает режим сле-
жения, если при отображении плоскости корней его передаточной
функции на плоскость Тэ и £э все точки, соответствующие полю-
сам, размещаются внутри области, относящейся к режимам
слежения.
Пользуясь гипотезой о фильтрующих свойствах оператора,
всегда можно выяснить, не выходят ли точки, соответствующие
полюсам передаточной функции технической части, из области,
относящейся к режиму слежения. При проектировании конструк-
тор должен всеми доступными средствами смещать точку, соответ-
ствующую доминирующей постоянной времени, влево и проверять
положение остальных точек, изображающих полюса передаточной
функции, описывающей динамические свойства управляемой ма-
шины. Возможно, что одной из причин экспериментального под-
тверждения справедливости гипотезы о фильтрующих свойствах
оператора служит то обстоятельство, что при проектировании
управляемых машин стремятся обеспечить существенное отличие
значений постоянных времени машин друг от друга и если значе-
ния любых двух постоянных времени окажутся близкими, то
динамические характеристики таких устройств оказываются не-
приемлемыми из-за чрезмерно большой колебательности. В этом
случае конструктор вынужден изменять динамические свойства
создаваемой системы, и тогда гипотеза оказывается заведомо
справедливой.
Графики, представленные на рис. 14.2, соответствуют этой
гипотезе, и ветви EF для £э > 1 получались экспериментально,
а ветви RF вычислялись с последующей экспериментальной про-
веркой.
При £э > 1 передаточная функция (14.2)* может быть перепи-
сана в форме
W (s) = - =________—________
=________Ь________, (14.5)
(l+7es)(l + 7';s)
где те= Л(£э+ /3^) >Л и г;=тэ(с9-/й^Т) <Т3.
Поскольку Те > Тэ > Т'ь, то постоянная времени Те будет
доминирующей, определяя положение ветви RF, оказывающейся
экстраполяционным продолжением кривой FG.
464
Ветвь EF соответствует значениям
постоянной времени Тэ < Те и опре-
деляется применительно к передаточной
функции в форме (14.2), а постоянная вре-
мени Те не может быть доминирующей.
Увеличение £э сверх единицы при
водит к энергичному возрастанию Т
по сравнению с Т'е, и легко убедить-
ся, что
Рис. 14.5. Зависимость отно-
шений Те/Тэ и T'JT3 от £э
=- Сэ+1/gi-i _ .
= / Те
Поэтому зависимость £э от Те/Те описывается обратным зна-
чением правой ветви функции режима
г л-11/т zT' = ——i_L
1/ е/ е - 2/7^ ’
справедливой при Те > Т'е или, что то же самое, при £, > 1.
Когда значение Те на порядок отличается от Те, следует от
передаточной функции в форме (14.2) или (14.5) переходить к функ-
ции в форме (14.3), которую применяют при £э > 1,731, не учиты-
вая влияния постоянной времени Те.
Графические изображения Те/Тэ и Т'е/Тэ в зависимости от
значения £э приведены на рис. 14.5, где штриховой линией ука-
зана граница £* = 0,551/ 10, слева от которой следует исполь-
зовать передаточную функцию в форме (14.5).
Таким образом, результаты экспериментов с системами, опи-
сываемыми передаточными функциями в формах (14.2) и (14.3),
распространяются на линейные системы любых порядков.
14.10. ЭФФЕКТИВНОСТЬ ПРОЦЕССА УПРАВЛЕНИЯ
Поскольку режим слежения обеспечивается при помощи динами-
ческих стереотипов движений оператора, выработанных в процессе
повседневной деятельности, то при этом режиме затрата вре-
мени /0 на процесс управления будет наименьшей [37].
При переходе на режим форсированного управления "реали-
зуемое время t? на тот же процесс управления возрастает, снижая
тем самым производительность машины. Поэтому при проекти-
ровании полуавтоматической системы, включая ее систему управ-
ления, необходимо проверять и максимизировать произведение,
называемое эффективностью [54]:
Еф = с (W-
16 В. II. кофьев и др.
465
где с — коэффициент, характеризующий удобство работы опера-
тора в биотехнической системе.
Экспериментально установлено, что объективные оценки опе-
раторами свойств управляемой машины хорошо коррелируются
со стабильностью управляющих движений руки при многократном
их выполнении [54]. Стабильность движения оценивается раз-
бросом длительности Д элементарных движений; минимальная
величина разброса Дт, т. е. наибольшая стабильность движений,
имеет место при значениях Ц = 0,6-н0,9, которые субъективно
оценивались оператором как наиболее удобные. Коэффициент с
определяется отношением Affl к А.
Применительно к системе управления положением для транс-
портного режима управления, заключающегося в перемещении
на величину I пятна на экране осциллографа, выражения Еф при
использовании результатов экспериментов, приведенных в работе
[54], будут
£ф = с при Тэ с 0,02 с;
Еф = с [ 1 + а1-~о1’7^ (1g 50Тэ)2 ]"'
при Тэ>0,02с и £э<0,7;
(14-6)
Еф = с [ 1 + (1g 50Тэ)2] 1 при
7\> 0,02с и £э^0,7,
где значения alt а2 и /0 в зависимости от I приведены на рис. 14.6.
Подсчет значений Еф применительно к следящему режиму
управления показал, что при 0,525 < < 0,93 имеется зави-
симость Еф от Т3, определяемая условиями (14.6) и расположе-
нием области So на рис. 14,2, б, что показано заштрихованным
участком на рис. 14.7, верхняя граница которого соответствует
Рис. 14.6. Зависимости коэффици-
ентов, определяющих значение эф-
фективности системы управления
положением, от перемещения пятна
на экране осциллографа
Рис. 14.7. Зависимости эффективности Еф
системы управления положением от коэф-
фициента демпфирования
466
постоянной времени эквивалентной передаточной функции Тэ
0,02 с, а нижняя — Тэ= 0,05 с. Меньшие значения Еф имеют
место при переходе на режим форсированного управления [63].
Применительно к каждому способу управления ИКПУС су-
ществуют свои области значений £э и Тэ, обеспечивающие наиболь-
шие £ф. Эти желаемые области следует экспериментально опре-
делять, в крайнем случае, на динамической модели машины и
реализовать еще в процессе проектирования или доводки машины.
Графики Еф (£э) следует получать в процессе проектирования на
макетах установок с проверкой влияния особенностей, присущих
условиям эксплуатации проектируемой машины. Если значения
Тэ и £э не обеспечивают следящего режима управления, то желае-
мые изменения этих параметров могут быть достигнуты исполь-
зованием коррекции посредством обратной связи по кинематиче-
ской или нагрузочной переменной выхода, т. е. по фазовым коорди-
натам регулируемой машины.
Разумеется, процесс исследования управления любой машиной
не может ограничиваться лишь единичным ИКПУС и обычно
включает сбор и переработку многочисленной быстро меняющейся
информации и завершается в качестве реализации принятых ре-
шений использованием какой-либо ИКПУС или последователь-
ными действиями с несколькими ИКПУС, каждый из которых
должен по возможности создаваться в качестве оптималь-
ного.
Полная и объективная оценка управляемости машины возможна
лишь при проведении натурных испытаний, включающих рассмо-
трение воздействий машины на оператора, а также условий работы
на посту управления.
14.11. СУБЪЕКТИВНЫЕ ОЦЕНКИ УПРАВЛЯЕМОСТИ
ПОЛУАВТОМАТИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ
ПОЛОЖЕНИЕМ ПРИ РАЗМЕЩЕНИИ ОПЕРАТОРА
НА ОБЪЕКТЕ УПРАВЛЕНИЯ
Полученные в результате экспериментов субъективные оценки
трех способов управления, приведенные на рис. 14.2, перестают
быть справедливыми при размещении оператора на управляемом
устройстве, например, на летящем самолете.
При систематизации и обработке результатов экспериментов,
относящихся к управлению самолетом (опубликованных, напри-
мер, в работе 142]), был получен в осях координат Т9 и £э иной
(рис. 14.8) график областей различных субъективных оценок
системы управления положением для случая, когда оператор
(пилот самолета) размещается на объекте управления. В таких
системах при малых постоянных времени Тэ < 2л— ^0,159
(соответствует частоте 1 Гц) в процессе управления создаются
16* 467
Рис. 14.8. Области субъективных оце-
нок системы управления положением
при размещении оператора на объекте
управления
ные для него малозатухающие
вибрации, болезненно действую-
щие на вестибулярный аппарат
оператора. Такая граничная ча-
стота соответствует частоте
внешних импульсов, ощущае-
мых человеком при беге. По-
этому в осях координат Т3 и
£э область левее вертикали АВС
неприемлема при выборе пара-
метра динамических характери-
стик технической части полуавто-
матической системы управления.
Область под кривой ABD
неприемлема из-за того, что при
управлении системами с пара-
метрами, свойственными этой
области, оператор ощущает
весьма неудобные и утомитель-
колебания. В области CBDHC
(рис. 14.8) хотя и возникают в процессе управления нежелатель-
ные для оператора колебания, их частота оказывается достаточ-
ной для того чтобы воздействием на орган управления демпфиро-
вать эти колебания, практически не ощущая переходные процессы
(аналогично области So на рис. 14.2, а).
В области с клеточной штриховкой (рис. 14.8) оператор ощу-
щает переходные процессы, и эта область аналогична области S3
на рис. 14.2, а, но при достаточной адаптации следящее управ-
ление возможно. В заштрихованной области на рис. 14.8 трени-
рованный оператор может в какой-то мере осуществлять форси-
рованное управление ценой увеличения утомляемости.
Таким образом, отличие областей на рис. 14.2, а и 14.8 заклю-
чается не только в том, что первый график соответствует системе,
где оператор размещен автономно (изолированно) от объекта
управления, но также и в том, что этот график соответствует
субъективным оценкам «необученного» оператора, который ис-
пользует для осуществления процесса управления имеющиеся
у него динамические стереотипы движений. Области субъективных
оценок, показанные на рис. 14.8, соответствуют тренированным
операторам-профессионалам (опытные пилоты самолетов), обес-
печивая возможность использования существенно больших зна-
чений Тэ управляемых машин. Кроме того, в таких машинах
допускаются большие значения чистого запаздывания т.
Следовательно, размещение оператора на управляемом объекте
всегда требует обученных операторов, зона допустимых значе-
ний Тэ всегда оказывается неширокой, а значения £э, лежащие
в диапазоне 0,35—0,70, не только оказываются «удобными», но одно-
временно допускают некоторое увеличение постоянной вре-
мени Т3.
Г л а в a 15
ГИДРОПРИВОДЫ
ПРОМЫШЛЕННЫХ РОБОТОВ
Роботом называют программируемую с определенной степенью
универсальности машину, предназначенную для манипулирования
различными предметами и выполнения комплекса различных
движений (загрузка, разгрузка, передача изделий и материалов,
а также производство различного рода сборочных работ и техно-
логических операций). Роботы-манипуляторы или копирующие
роботы отличаются использованием полуавтоматических при-
водов.
Основная цель создания робота — замена человека главным
образом при производстве работ в неприемлемых для него усло-
виях (экстремальные роботы). Применение робота расширяет по
сравнению с человеческими возможности по усилиям, точности
и скорости смещений объектов управления, продолжительности
и надежности непрерывной работы, а также стабильности рабочих
циклов в течение рабочей смены.
Роботы, работающие по цикловому или программному управ-
лению, обеспечивающему выполнение заданной хореографической
программы, называются роботами первого поколения. Хореогра-
фическая программа обусловливает траектории движения испол-
нительных органов и несущих их звеньев промышленных роботов.
Роботы второго поколения снабжаются исполнительными орга-
нами, обеспечивающими «ощущение» объектов («осязание» и
«зрение») при помощи разного рода датчиков. Роботы третьего
поколения снабжаются устройствами, обеспечивающими искус-
ственный интеллект, например, самообучение, оптимизация за-
данных процессов управления и движения, адаптирование соб-
ственных технических характеристик к различным условиям
работы и т. п.
Представители роботов всех трех поколений могут использо-
ваться одновременно, имея свою область применения, причем
роботы первого поколения хотя и работают всего лишь по задан-
ному цикловому или программному управлению, однако, если не
считать устройств сбора и переработки информации, а также
блоков формирования управляющих сигналов, содержат в себе
материальную основу робота любого поколения — автоматиче-
ские приводы каждой из степеней подвижности с исполнительными
органами и источниками питания.
Промышленные роботы относятся к первому поколению; без
их реализации невозможно создание и даже проверка основных
оригинальных узлов роботов последующих поколений. Совер-
шенствование промышленных роботов и переход к роботам после-
дующих поколений осуществляется за счет создания устройств
формирования целенаправленного управления, основанного на
469
получении и переработке (в том числе при помощи ЦВМ) инфор-
мации, получаемой от разного рода датчиков.
Робот первого поколения, равно как и промышленный робот,
составляется из устройств получения и переработки задающих
сигналов, устройств формирования управляющих сигналов и из
так называемой основы робота. Последняя состоит из
основания с источником питания (для электрогидравлических
систем — насосная станция, бак с рабочей жидкостью, фильтру-
ющие устройства и система охлаждения) и блоков автоматических
приводов, обеспечивающих движение исполнительных органов
каждой из степеней подвижности. Основы роботов — принци-
пиально общие для роботов всех поколений и в первую очередь
подлежат исследованию в качестве специфичной формы автома-
тических приводов.
15.1. ПРОМЫШЛЕННЫЕ РОБОТЫ
Промышленный робот — средство автоматизации, не заменяющее
других средств. Этот подкласс автоматических устройств имеет
широкую область применения, в том числе благодаря медленному
устареванию конструкции, непосредственно не связанной с видом
продукции, характером операции и, чаще всего, не связанной со
спецификой обслуживаемой отрасли. Поэтому промышленный
робот — машина межотраслевого применения.
Промышленные роботы морально не устаревают при появле-
нии новых образцов, допускают быструю наладку и освоение,
легко встраиваются в линии и на участки на новых и переналажи-
ваемых производствах. Использование роботов устраняет длинные
транспортеры и многие промежуточные складирования, а разме-
щение оборудования, обслуживаемого роботами, обладает своими
особенностями, обусловленными техническими возможностями
этих машин.
Установка роботов допускает большую детализацию при пла-
нировании производственных процессов, что позволяет получать
новые технические решения и выявить дополнительные резервы
производства.
Среди множества систем классификации промышленных робо-
тов следует упомянуть Шведскую четырехгрупповую классифи-
кацию по стоимости. В этой системе оценок перевод робота в группу
более высокого номера обусловлен уменьшением его приспособ-
ляемости (универсальности). Несмотря на то, что такая классифи-
кация имеет только экономические основы, она позволяет легко
оценить технико-экономическую целесообразность применения
различных моделей промышленных роботов при решении конкрет-
ных технических задач. Этим объясняется широкое использова-
ние основных принципов такой системы классификации.
Наибольшее распространение получили промышленные роботы
с электрогидроприводами фирм Юнимейт (США), Кавасаки (Япо-
470
ния), Версатран (США, Англия), Хайбот, серин РБ, РЦ и РА
Мицубиси Хэви Индастриз (Япония) и роботы с пневмоприво-
дами — Аутоханд (Япония), МНИ (ФРГ), Электролюкс (Швеция),
Минитран (Англия) и др.
Наиболее перспективным приводом промышленных роботов
с грузоподъемностью свыше 10—15 кг считается электрогидро-
привод из-за его высокой энергоемкости, быстродействия, точ-
ности, жесткости механических характеристик (практической
независимости скоростей и смещений исполнительных органов
от нагрузки), широких полос пропускания частот, стабильности
характеристических свойств и широкого диапазона скоростей
движения исполнительных устройств. Помехозащищенность и
стабильность работы на нижнем пределе диапазона регулирования
при использовании соответствующих средств коррекции сов-
местно с остальными указанными характеристическими достоин-
ствами делают в ряде случаев использование электрогидравличе-
ского привода наиболее предпочтительным, тем более, что его
весовые характеристики оказываются весьма благоприятными.
Однако для успешной реализации всех этих преимуществ
привода необходим правильный выбор элементов, структурных
схем и средств коррекции системы автоматического привода,
обслуживающего каждую степень подвижности робота при обес-
печении должной «автономности» за счет уменьшения взаимовлия-
ния автоматических приводов через общий источник питания и
приведенную инерционную нагрузку.
15.2. ОСНОВА РОБОТА
Состав основы робота отчетливо проявился после создания и
реализации агрегатного (модульно-блочного) принципа построе-
ния промышленных роботов из универсальных блоков.
Базовой частью робота является основание, фиксированное или
движущееся по полу (напольный вариант) или по настенной балке
(подвесной вариант). Основание обычно включает шесть агрегатов:
бак с рабочей жидкостью, насосную станцию, систему охлаждения
рабочей жидкости, блок перемещения (если основание нефикси-
рованное), пульт управления (если он не вынесен на место, удоб-
ное для дистанционного управления), панель управления (если
усилительные части автоматических приводов других блоков не
размещаются непосредственно в этих блоках).
Основание упрощается при использовании пневматических
приводов. В этом случае отсутствуют баки рабочей жидкости,
системы охлаждения, нет насосной станции, но обязателен блок
подготовки воздуха, что повышает уровень шума.
Обычно число блоков, размещаемых на основании, опреде-
ляется числом степеней подвижности руки (или рук, поскольку
робот может иметь несколько рук). Среди этих блоков обязательны:
блок горизонтального поворота руки, блок подъема или верти-
471
калыюго поворота руки, блок выдвижения руки и блок кисти
с захватом. Блок кисти с захватом, также могущий быть состав-
ным, включает цилиндр (обычно пневматический) смыкания
захвата, блок смещения или наклона кисти и блок ротации за-
хвата. Возможно использование совмещенных блоков.
К особенностям автоматических приводов основы робота отно-
сятся: 1) использование в некоторых случаях рычажной связи
исполнительного органа с исполнительным устройством; 2) много-
каскадность реализации движений объекта управления, при
которой автоматические приводы последующих степеней подвиж-
ности перемещаются приводами предыдущих степеней подвиж-
ности (считая по очередности компоновки блоков на основании);
3) трудность реализации обратной связи по скорости из-за сравни-
тельно небольших скоростей исполнительных органов и значи-
тельности масс тахогенераторов; 4) существенность и широкий
диапазон изменений внешних возмущений (нагрузок) на все
автоматические приводы робота; 5) работа автоматических при-
водов от общего источника питания ограниченной мощности.
Первые две особенности требуют обязательного учета пере-
менности приведенной инерционной нагрузки, вызванной как
особенностями рычажной связи, так и влиянием последующих
работающих приводов на предыдущие. Тщательно должны иссле-
доваться случаи, когда производная от приведенной инерционной
нагрузки по смещению исполнительного органа отрицательна.
Трудности реализации обратной связи заставляют отказы-
ваться от использования тахогенераторов. Обычно применяется
потенциометрическая обратная связь или же импульсная, т. е.
по положению. Коррекция, обеспечивающая улучшение динами-
ческих свойств автоматического привода, реализуется при помощи
обратной связи по давлению [55, 70].
Существенность влияния внешних возмущений заставляет
вести расчет силовых элементов автоматического привода с учетом
тракта нагрузочных показателей режима, а в отдельных случаях
обращаться к использованию положительной обратной связи по
давлению [70]. Большие затруднения вызывает ограниченность
мощности источника питания, что заставляет вести расчет динами-
ческих характеристик при помощи ЦВМ, которые могут быть
использованы и при реализации процессов управления.
15.3. ТЕНДЕНЦИИ РАЗВИТИЯ ПРОМЫШЛЕННЫХ
РОБОТОВ
Серийное производство промышленных роботов было начато
в 1961—1963 гг. и в настоящее время превращается в самостоя-
тельную отрасль машиностроения. Базовые конструкции наиболее
распространенных промышленных роботов имеют примерно пят-
надцатилетнюю давность, свидетельствуя об определенности и
472
стабильности требований к таким изделиям, а также о достоин-
ствах этих конструкций, апробированных временем.
Чем шире универсальность промышленного робота, тем он
дороже. Его универсальность далеко не всегда полностью исполь-
зуется, и поэтому такие машины не в каждом случае окупаются,
чем и ограничивается их распространение. Наиболее широко
они используются в США. В европейских странах распростра-
нены более простые и дешевые специализированные роботы, а уни-
версальные, существенно более сложные по конструктивному
выполнению, изготовляются только по лицензиям.
В Японии производятся промышленные роботы обоих типов,
а также созданы агрегатные (модульно-блочные) роботы, состав-
ляемые из ограниченного числа универсальных блоков, обеспе-
чивающих в определенных комплектах заданные потребителем
функции (заданную приспособляемость). В таких конструкциях
блок представляет собой унифицированный конструктив с соответ-
ствующим автоматическим приводом и штеккерным подводом
управляющего сигнала и энергии. Агрегатные промышленные
роботы весьма перспективны из-за высокого уровня унификации,
легкости удовлетворения многообразных требований потребителя
и сравнительно невысокой стоимости.
Применительно к роботам всех трех поколений модульнО'
блочный принцип их составления принципиально одинаков, как
и сами унифицированные блоки. Отличия заключаются лишь
в создании и использовании разных датчиков и создании систем
управления, которые на основе получаемой от датчиков информа-
ции формируют должные целенаправленные управляющие сиг-
налы.
Во всех случаях универсальные блоки представляют собой
конструктивы с электрическими сигналами входа, связями с источ-
ником питания и разного типа механическими исполнительными
устройствами, т. е. каждый такой блок является комплектным
автоматическим приводом.
На основе модульно-блочного принципа японская фирма
Мицубиси Хэви Индастриз выпускает промышленные роботы
серии РЦ.
Обследование 133 различных моделей промышленных роботов
фирмой Ретаб (Швеция) установило, что 40% их имеют электро-
гидравлические приводы, 47% — пневматические и 13% —элек-
трические.
Использование электрогидравлических приводов в промыш-
ленных роботах нормальной и большой грузоподъемности, пнев-
матических и комбинированных в конструкциях меньшей грузо-
подъемности весьма стабильно во вновь появляющихся моделях
и обусловливается техническими характеристиками этих автома-
тических приводов.
С целью снижения стоимости промышленного робота с огра-
ниченной универсальностью применяют гидравлические приводы
473
с цикловыми системами управления. В таких системах остановка
исполнительных устройств в заданных положениях осуществ-
ляется при помощи жестких регулируемых и нерегулируемых
упоров. Регулирование скорости движения исполнительных ус-
тройств, а также их торможение при подходе к упору реализуются
при помощи дросселей и путевых тормозных устройств.
К числу основных недостатков рассматриваемых систем сле-
дует отнести сложность настройки на заданный режим работы,
необходимость точного профилирования кулачков или шаблонов
каждой новой программы управления, что делает эффективным
применение таких промышленных роботов только в массовом
и крупносерийном производствах.
Цикловая система управления используется в промышленных
роботах с электрогидроприводом при грузоподъемности свыше
10—15 кг, а при меньшей грузоподъемности — преимущественна
в роботах с пневмоприводом [71 ] и является в этом случае един-
ственно применимой системой, так как пневматические приводы
должны управляться на основе релейного принципа действия;
ввиду недостаточной жесткости их механических характеристик
и чрезмерной величины постоянной времени усилительной части.
Применение пневмоприводов в роботах обусловливается про-
стотой конструкции, надежностью и долговечностью, высоким;
быстродействием и возможностью работы в тяжелых условиях
(в средах с высокой взрывоопасностью, запыленностью и влаж-
ностью, при действии сильных магнитных полей и т. п.). Эти
достоинства часто компенсируют основной недостаток привода —
его низкий КПД по сравнению с КПД электрогидравлического
привода. Кроме того, стоимость промышленного робота с пневмо-
приводом при не слишком высокой грузоподъемности в 2—3 раза
ниже стоимости аналогичного образца, оборудованного электро-
гидравлическим приводом.
В ряде промышленных роботов, например «Химейт» и «SMT-700»
(Япония), пневматика используется не только в силовой части
(в качестве исполнительного устройства), но и в устройствах
управления, выполняемых на основе блоков, реализуемых из
пневмоэлементов высокого давления и струйной техники.
Пневмоника в промышленных роботах получила меньшее
распространение главным образом из-за недостаточной номенкла-
туры периферийных элементов, что связано с ограниченностью
производства промышленных роботов соответствующих грузо-
подъемностей (недостаточностью платежеспособного спроса).
Частое использование промежуточных передач, соединяющих
исполнительный двигатель с объектом управления, не должно
рассматриваться в качестве тенденции при создании новых типов
автоматических приводов промышленных роботов. Скорее это
свидетельствует о недостаточности элементной базы, вследствие
чего используют дополнительные кинематические цепи, преоб-
разующие прямолинейное движение поршня исполнительного
474
двигателя во вращательное движение объекта управления, а также
пневмо- и гидромоторы для получения поступательного или пово-
ротного перемещений. Такие исполнения усложняют конструкцию
робота, повышают его стоимость, снижают надежность и точность
позиционирования, в том числе из-за неизбежных люфтов, увели-
чивающихся в процессе эксплуатации.
По мере расширения элементной базы ее образцы, минимизи-
рованные по массе и соответствующие конструктивному выпол-
нению модели робота с размещением контрольно-регулирующей
аппаратуры, управляющих и усилительных частей электрогидро-
приводов непосредственно в составляющих блоках, получают все
большее распространение. Поэтому удельный вес конструкций
с существенным уменьшением применения гибких рукавов за-
метно увеличивается.
Число моделей, оборудованных насосными станциями с исполь-
зованием аксиально-поршневых насосов, регулируемых по давле-
нию, растет за счет меньшего использования нерегулируемых
насосов с переливными клапанами и различными регуляторами,
поддерживающими постоянство давления питания. Эта тенденция
развития промышленных роботов обусловлена необходимостью
стабилизации температуры и содер?кания в рабочей жидкости
газовоздушной составляющей, в том числе за счет более надежной
фильтрации. Чистота рабочей жидкости, содержание в ней газо-
воздушной составляющей и принципиальные особенности гидрав-
лической схемы, в частности количество перепускаемой через
переливные клапаны под давлением рабочей жидкости, взаимо-
связаны. Значительно расширяется применение систем охлажде-
ния рабочей жидкости.
Поскольку существует, и притом значительное, взаимовлия-
ние электрогидравлических приводов и других (например, усили-
тельных) блоков через насосную станцию, использование пневма-
тических аккумуляторов становится общепринятым [76]. Уста-
новка аккумуляторов в какой-то мере стабилизирует развиваемое
насосной станцией давление, несколько расширяет возможности
станции на режимах работы с кратковременными «пиками» рас-
хода и в ограниченной полосе частот пропускания уменьшает
взаимовлияние электрогидравлических приводов через насосную
станцию.
При реализации электрогидравлическим приводом гармони-
ческого сигнала давление насосной станции колеблется с удвоен-
ной частотой и, зачастую, со значительной амплитудой [76],
которая уменьшается при установке аккумуляторов (см. гл. 13).
Поскольку в каждом аккумуляторе существует активное (гидрав-
лическое) и реактивное (инерционное) сопротивление, динамиче-
ская характеристика аккумулятора зависит от геометрической
формы соединительного тракта и частоты передаваемого сигнала.
При частотах, превышающих собственные, стабилизирующий
эффект аккумулятора прекращает свое действие.
475
Аналогичными свойствами обладают частотные эффекты ус-
тройств, соединяющих насосную станцию с электрогидравличе-
ским приводом, особенно, если соединительный тракт имеет зна-
чительную длину. Собственные частоты аккумуляторов и соедини-
тельных трактов редко превышают 10 Гц, что примерно соответ-
ствует собственным частотам большинства электрогидравлических
приводов промышленных роботов.
Возможность использования промышленного робота в первую
очередь определяется его стоимостью. Поэтому используемые
усилительные устройства электрогидравлических приводов дрос-
сельного регулирования чаш,е всего упрощенного типа, однокаскад-
ные с непосредственным соединением управляющего золотника
с электромеханическим преобразователем, реализуемым на основе
позиционных электромагнитных устройств 117 ].
15.4. ПАРАМЕТРЫ АВТОМАТИЧЕСКИХ ПРИВОДОВ
ПРОМЫШЛЕННЫХ РОБОТОВ
Промышленные роботы классифицируют прежде всего по грузо-
подъемности, числу степеней подвижности и виду движений как
исполнительного органа робота, так и его основания (напольные
стационарный и перемещающийся, подвесной и движущийся по
настенной балке) [51, 77]. Наибольшие скорости перемещения
основания роботов не превышают 0,5 м/с.
Кроме серийно изготовляемых роботов, предназначенных для
обслуживания сборочных работ и процессов механической обра-
ботки, выпускаются роботы в шести специальных исполнениях.
Для литейных, термических и кузнечно-прессовых цехов выпу-
скаются модели в температуростойком варианте, а для первого
и третьего видов цехов, кроме того, в пылезащитном исполнении.
Применительно к производству сварочных работ выполняют
конструкции с защитой от сварочных брызг; для моделей, уста-
навливаемых на участках гальванопокрытий, предусматривается
защита от агрессивного действия паров рабочих жидкостей, при-
меняемых в процессе производства; конструкции роботов, пред-
назначенные для работы на участках лакокрасочных покрытий,
защищаются от брызг составов покрытий и от специфических для
этого вида производств пылеповреждений.
Наименее высокие требования к точности выполнения опера-
ций (А ±10 мм) предъявляют к роботам, обслуживающим
литейные цехи и участки лакокрасочных и гальванических покры-
тий. Точность А = ±3 мм требуется от роботов, обслуживающих
кузнечно-прессовые и термические цехи, и несколько большая
точность, доходящая до А ±1 мм, должна обеспечиваться робо-
тами, используемыми при сварочных работах и процессах меха-
нической обработки.
Наибольшую точность движений должны иметь роботы, об-
служивающие сборочные работы. Серийные образцы таких робо-
476
тов обеспечивают точность реализации запрограммированных
движений А ±0,5 мм. Выпускаются модели шведской фирмы
Кауфельд (промышленные роботы АЗ, А4 и А5), обеспечивающие
значение' А = ±0,15 мм при'пониженных на 15—20% скоростях
подъема руки и пониженных на 20—25% скоростях выдвижения
руки.
В кузнечно-прессовых цехах и на участках гальванических
покрытий используют промышленные роботы только первого
поколения, роботы второго и третьего поколений применяют при
сборочных работах, во всех других ранее перечисленных случаях
используют роботы первого и второго поколений.
В серийных промышленных роботах цехов механической
обработки и сборочных цехов, а также в роботах, используемых
при производстве сварочных работ, применяют приводы всех
трех типов (электрический, гидравлический и пневматический)
в соответствии с грузоподъемностью. В роботах специального
исполнения чаще всего используют электрические и пневматиче-
ские приводы главным образом благодаря их пожаро- и взрыво-
безопасности. Использование в этом случае гидропривода требует
применения специальных средств защиты или специальных рабо-
чих жидкостей.
На всех промышленных роботах, кроме устанавливаемых
в цехах механической обработки и сборочных цехах, применяется
автономный пульт управления, в остальных случаях, кроме
отдельных исключений для моделей, используемых в термических
цехах, пульт управления находится непосредственно на роботе.
ЭВМ при работе от пульта управления применяются в роботах,
устанавливаемых в сборочных и термических цехах, а также в це-
хах механической обработки и на участках гальванических по-
крытий.
В кузнечно-прессовых цехах устанавливают роботы в наполь-
ном неподвижном исполнении, в участках гальванических покры-
тий применяют только подвижные роботы, чаще всего подвесные;
во всех остальных случаях промышленные роботы выполняют как
неподвижными, так и подвижными, в том числе и подвесными, за
исключением роботов литейных цехов.
По грузоподъемности промышленные роботы разделяются на
семь групп: сверхлегкие, легкие, малой грузоподъемности, нор-
мальной грузоподъемности, повышенной грузоподъемности, тя-
желые и сверхтяжелые (табл. 15.1), модели которых выполняются в
порядке опытно-конструкторских разработок по отдельным заказам.
Наибольшее распространение получили роботы нормальной
грузоподъемности, позволяющие существенно расширить производ-
ственные возможности по сравнению с теми, которые обеспечи-
ваются непосредственной работой человека. Эти роботы выпол-
няются также и универсальными.
Роботы повышенной грузоподъемности, а также тяжелые
роботы чаще всего выполняются узкоспециализированными.
477
Таблица 15.1
ГРУППЫ ПРОМЫШЛЕННЫХ РОБОТОВ ПО ГРУЗОПОДЪЕМНОСТИ
№ группы Обозначение Наименование Г рузоподъ- емносгь, кг, не более № группы Обозначение Наименование Грузоподъ- емность, кг, не более
1 СЛ Сверхлегкая 1 5 ПГ Повышенной гру- 100
2 3 Л мг Легкая Малой грузо- 5 10 6 Т зоподъемности Тяжелая 200
4 иг подъемности Нормальной гру- зоподъемности 50 7 СТ Сверхтяжелая 2000
Имеются отдельные блоки (в США) грузоподъемностью до 500 кг.
Установки с еще большей грузоподъемностью относятся уже
к специализированным машинам, например, кузнечным манипу-
ляторам, корабельным рулевым устройствам, различным системам
регулирования крупных машин и т. п.
Роботы малой и нормальной грузоподъемностей эксплуати-
руются иногда совместно со сверхлегкими (миниатюрными), кото-
рые используются также и самостоятельно, например для сборки
мелких деталей, с датчиками по усилию, срабатывающими при
неточных положениях объекта или исполнительного органа. Блоки
промышленных роботов малой грузоподъемности и приводы сверх-
легких роботов обычно электрические и, реже, пневматические.
Приводы роботов нормальной и повышенной грузоподъем-
ностей, а также тяжелых роботов чаще всего электрогидравличе-
ские. Пневматический привод выполняется только дискретного
действия и притом совместно с электрогидравлическим.
Захват в подавляющем большинстве случаев реализуется на
основе пневматического цилиндра.
В серийных конструкциях промышленных роботов значения
основных эксплуатационных параметров смещений, давлений и
подачи насосных станций увеличиваются с ростом грузоподъем-
ности, а наибольшие скорости движений уменьшаются (табл. 15.2).
Подача насосной станции промышленного робота грузоподъем-
ностью Р 200 кг не должна быть меньше Qb где
п _ 225- 69,2?
1 — 97?
дм3/с,
а наибольшее значение подачи Q2 аппроксимируется выражением
п _ 0,012?+ 0,367
0,0033?+1
дм3/с.
Пневматические приводы работают на давлении 0,5—0,7 МПа
от общей магистрали. Имеются отдельные образцы с автономными
источниками питания, работающие на давлении 1,2—1,6 МПа.
478
В роботах грузоподъемностью Р 200 кг скорость выдвиже-
ния руки vt не превышает 1,5 м/с и уменьшается с повышением
грузоподъемности. Эта скорость аппроксимируется выражением
__ 0,0242/* 4- 1,73
0,03157*4-1
м/с;
скорость подъема руки vh не должна превышать 1 м/с и умень-
шается с повышением грузоподъемности:
__ 0,0763?+1,247
Vh~ 0,101?+1
м/с;
угловая скорость поворота руки Qp не должна превышать 1807с,
уменьшаясь с увеличением грузоподъемности:
п 1,13?+ 208,4
0,02214?+1 гРад/с’
Электрогидравлический следящий привод в сочетании с элек-
тронной системой числового программного управления позволяет
получить в роботах с позиционными системами управления от
нескольких сотен до нескольких тысяч программируемых точек
позиционирования манипулируемыми объектами, а с контурными
системами управления практически неограниченное число точек.
Таблица 15.2
ПАРАМЕТРЫ ПРОМЫШЛЕННЫХ РОБОТОВ ПО ГРУППАМ
ГРУЗОПОДЪЕМНОСТИ
Группа роботов
Параметр СЛ л мг нг пг т ст
Раскрытие захвата,
мм До 50 40—100 50—150 175— 300— 400 400
325 400
Подъем руки, м 0,5— 0,65— 0,8— 1,3— 1,5- 2,0 2,0
0,8 1,1 1,2 1,6 2,0
Наибольшая ско-
рость подъема руки, м/с 1,2 1,0 1,0 0,8 0,8 0,7 ОД
Выдвижение руки, м ОД- ОД- ОД- 0,85- 1,2— 1,5 1,5
ОД ОД ОД 1,25 1,5
Наибольшая ско- рость выдвижения руки, м/с 2,5 1,0 0,9
1,5 1,5 1,2 1,0
Наибольшая ско- рость поворота руки, град/с Насосная станция: 200 180 100 80
180 120 90
давление питания, МПа 5,0— 6,3— 7—10 1 ОД- 12,5— 12,5—
6,3 8,0 12,5 16,0 16,0
подача, дм3/ 0.25— 0,42— 0,67— 0,83— 0,95— 1,25—
0,42 0,58 0,83 1,25 1,4 1,67
479
Современные промышленные роботы с числовыми системами
программного управления имеют до шести степеней подвижности
и управляются автоматическими следящими приводами, электри-
ческие системы управления которых обусловливают особенности
движений исполнительных устройств, непосредственно соединяе-
мых с исполнительными двигателями приводов.
Техническая характеристика модульно-блочного напольного
промышленного робота серии РЦ фирмы Мицубиси Хэви Индастриз
(Япония) свидетельствует, что основа (конструктив), которая
по требованию заказчика может быть или фиксированной, или
перемещающейся прямолинейно, содержит насосную станцию
с баком рабочей жидкости. На конструктиве размещаются блок
горизонтального поворота руки, затем блок подъема или верти-
кального поворота руки, блок телескопической части (блок
выдвижения) руки, на конце которой крепится блок кисти, обес-
печивающий вращательное, прямолинейно-вертикальное или пря-
молинейно-горизонтальное движение. На кисти размещен пнев-
матический захват. Из тех же блоков составляется промышленный
робот, перемещающийся по настенной балке.
Диапазон изменения длины руки 1,35 м с наибольшей ско-
ростью vt = 1 м/с при четырех остановках, смещение по верти-
кали 0,5 м с наибольшей скоростью 0,5 м/с также при четырех
остановках, диапазон вертикального поворота 30° с наибольшей
угловой скоростью 607с при двух остановках, диапазон гори-
зонтального поворота 250° с наибольшей угловой скоростью
1007с при четырех остановках. Диапазоны всех трех поворотов
кисти 180° с наибольшей скоростью 607с и тремя остановками.
Диапазон перемещения основания в напольном варианте 0,5 м
и наибольшие скорости смещения, как и для варианта с движе-
нием по настенной балке, 0,5 м/с.
Приводы всех прямолинейных перемещений (измеряемых в де-
картовых или цилиндрических координатах) обеспечиваются элек-
трогидравлическими устройствами дискретного действия с давле-
нием питания 0,5—0,7 МПа и могут гарантировать предельную
точность установки А = ±0,1 мм при преодолении нагрузки
30 кгсна номинальных скоростях движения в блоках перемещения
руки и нагрузки 40 кгс в устройствах перемещения основания.
Приводы поворота — следящие (измеряются в сферических
координатах) при фиксированном основании, обеспечиваются
электрогидравлическими следящими системами дроссельного упра-
вления и могут гарантировать точность устапова до ±2,0 мм при
преодолении нагрузки 45 кгс на номинальной скорости движения.
15.5. ОСОБЕННОСТИ ЭЛЕМЕНТОВ АВТОМАТИЧЕСКИХ
ПРИВОДОВ ПРОМЫШЛЕННЫХ РОБОТОВ
Гидроприводы промышленных роботов малой, нормальной и повы-
шенной грузоподъемностей (от 5 до 100 кг) при обслуживании
480
Рис. 15.1 Комбинированный
пневмогидропривод:
1 — пневматический поворот-
ник; 2 — гидравлический пово-
ротник; 3 — тормозные клапаны
их общей паиелыо управления могут
быть реализованы на основе существую-
щих элементов станкостроительных ги-
дроприводов.
При использовании общего пульта
управления и размещения контрольно-
регулирующей аппаратуры на состав-
ляющих блоках промышленного робота
минимизация массы каждого элемента
становится важной, и тогда либо ис-
пользуют элементы авиационных гид-
росистем, либо создают новые элементы.
Снижение массы достигается также ра-
циональным выбором элементов; так,
выбор гидроусилителя системы дрос-
сельного регулирования должен про-
водиться с обязательной минимизацией
расходной характеристики «расход—
давление».
Для сведения к минимуму числа
гибких рукавов широко используются
поворотные оси в качестве многослой-
ных магистралей, конструкции и уплотнения которых существен-
но усложняются, а габариты несколько увеличиваются. Устране-
ние такими способами гибких рукавов с переходом на штеккерные
электрические связи повышает эксплуатационную надежность
робота, хотя и увеличивает стоимость конструкции при ее неболь-
шом выпуске.
На тех же минимизированных по массе элементах реализуются
миниатюрные и весьма часто малой грузоподъемности промыш-
ленные роботы.
При создании новых элементов преимущество имеют симме-
тричные и притом уравновешенные конструкции. Управляющие
устройства удобно размещать внутри оси силовых элементов
(вдоль нее), которые обслуживаются этими устройствами.
Применяют комбинированные пневмогидравлические приводы
(рис. 15.1), в которых перемещение исполнительного устройства
осуществляется пневмоприводом (например, пневматическим по-
воротником /), а регулирование рабочего движения — при по-
мощи гидропривода (например, гидравлическим поворотником 2
с регулированием его скорости при помощи тормозных клапа-
нов 3). В такой системе совмещаются грубый и точный установи
171].
В промышленных роботах с цикловым управлением и для
реализации непрограммируемых перемещений устройств с число-
выми системами управления используется комбинированная кон-
струкция с двумя гидроцилиндрами (рис. 15.2, а). Шток гидро-
цилиндра 2 снабжен упором 3, взаимодействующим с регулируе-
481
Рис. 15.2. Типовые схемы силовых элементов гидро- и пневмо-
приводов промышленных роботов:
а — исполнительные устройства реализации линейных перемещений;
б — исполнительные устройства реализации линейных перемеще-
ний с дискретным управлением; в — исполнительные устройства
электрогидравлического следящего привода системы числового про-
граммного управления
мыми упорами, которые выдвигаются при помощи гидроцилин-
дров 4.
Скорость перемещения исполнительного органа реализуется
при помощи дросселей с обратными клапанами 5, а режим тормо-
жения регламентируется профилем кулачка 7, непосредственно
воздействующего на тормозящий золотник 6. Реверс реализуется
при помощи золотника 1
В системах с числовым, а также числовым программным
управлением используются гидроцилиндры дискретных смещений
(рис. 15,2, б). Такие гидроцилиндры с составными поршнями 8—11,
работающими от включателя 5, построены по принципу двоич-
ного кода и при использовании в различных комбинациях п
входных сигналов обеспечивают получение 2п—1 разных поло-
жений штока с постоянным интервалом дискретности, опреде-
ляемым конструкцией составного поршня [71 ]. Регулирование
скорости гидроприводов, работающих по этому принципу, рас-
смотрено в гл. 9.
Использование исполнительного устройства дискретного упра-
вления позволяет применять системы управления без главной
обратной связи.
Существенно расширяются возможности схемных решений,
если соединять штоковую полость рассматриваемого позиционера
как с магистралью слива, так и с магистралью давления питания
при помощи крайнего правого распределителя. В выполненных
системах чаще всего используют вариант соединения штоковой
полости с магистралью давления питания.
В следящих электрогидравлических приводах систем про-
граммного управления направление и закон изменения модуля
скорости смещения штока гидроцилиндра 2 (рис. 15, 2, в) опре-
деляются электрогидравлическим усилителем 12 в соответствии
с управляющим сигналом. Остановка штока реализуется сигналом
от сравнивающего устройства, который подается при равенстве
сигналов заданной величины смещения поршня и отрабатываемого
датчиком обратной связи.
Сравнительно большие скорости реализуемых движений (1,5 м/с
и, в перспективе, 2 м/с) при значительных смещениях требуют
применительно к промышленным роботам создания специализи-
рованных гидро- и пневмоцилиндров малого диаметра с большим
ходом.
В блоках промышленных роботов в качестве исполнительных
гидродвигателей используются гидроцилиндры, поворотники и
гидромоторы, обычно аксиально-поршневые (требуются наимень-
шие радиальные размеры) самых малых размеров. Эти конструк-
ции должны иметь специальное исполнение, поскольку должны
быть минимизированы по массе, а размещение центров масс не
должно создавать излишних неуравновешенностей.
Минимизация по массе, а также симметричность и уравнове-
шенность гидравлических и пневматических поворотников, рабо-
483
тоспособных при угловых скоростях поворота, доходящих до
180%, обязательны, поскольку конструкции приходится раз-
мещать на движущихся неуравновешенных консольного типа
устройствах, перемещаемых и поворачиваемых гидравлическими
и пневматическими исполнительными устройствами, в том числе
и через многокаскадные системы, участвующие в автономных
движениях.
В качестве главной обратной связи применяют потенциометры
или импульсные датчики. Корректирующие обратные связи реали-
зуются чаще всего по давлению, поскольку весовые нагрузки
должны быть минимальными, а скорости применительно к суще-
ствующим тахогенераторам невелики.
Расчет исполнительных устройств при учете существенной
ограниченности мощности источника питания и широкого диапа-
зона изменения внешних нагрузок ведется одновременным рас-
смотрением кинематического канала и нагрузочного, что относится
к специфическим особенностям электрогидравлических приводов
промышленных роботов и манипуляторов.
С целью удешевления конструкции гидроусилители роботов
применяются однокаскадные, а управляющие золотники имеют
нулевое (или очень малое) перекрытие. Для повышения энерго-
емкости гидроусилителя производится минимизация расходной
характеристики «расход—давление». Двухкаскадпые гидроуси-
лители (обычно в первом каскаде система «сопло-заслонка»),
обладающие лучшими динамическими свойствами, но имеющие
существенно большие массы и габариты, используются в тех
конструкциях, где усилительную часть можно разместить на
общей для робота панели управления.
В качестве электромеханического преобразователя приме-
няется позиционный электромагнит [17], непосредственно воз-
действующий на управляющий золотник.
Для промышленных роботов необходимы малогабаритные на-
сосные станции с надежной системой стабилизации температуры,
фильтрами тонкой (до 3—5 мкм) очистки рабочей жидкости, а также
пневматическими аккумуляторами с эластичным разделителем
сред.
Насосные станции с фильтрами тонкой очистки и, весьма
часто, с аккумуляторами па малые мощности выполняются из
нерегулируемых насосов с переливными клапанами и на любые
мощности — с аксиально-поршневыми насосами, регулируемыми
по давлению (с автоматами мощности). В последнем случае КПД
системы и ресурс основных элементов увеличиваются, умень-
шаются нагрев рабочей жидкости и размеры бака.
Аккумуляторы не только стабилизируют давление источника
питания и существенно уменьшают взаимовлияние приводов при-
менительно к сигналам с нечрезмерно большими частотами, но
и позволяют кратковременно осуществлять движения, не обеспе-
ченные подачей основного насоса.
484
Возможность серийного выпуска наиболее дешевых агрегат-
ного типа промышленных роботов зависит от создания достаточ-
ной номенклатуры контрольно-регулирующей аппаратуры с путе-
вым и дистанционным управлением в модульном исполнении.
Основное затруднение при создании унифицированных блоков
промышленных роботов заключается в ограниченности элементной
базы, а обязательная минимизация по массе требует широких
унифицированных рядов исполнительных двигателей и гидро-
усилителей, поворотников и аксиалыю-поршневых гидромоторов
малых размеров, гидроцилиндров и соответствующих специали-
зированных гидроусилителей.
15.6. ПРИНЦИПИАЛЬНАЯ КОМПОНОВКА
АВТОМАТИЧЕСКИХ ПРИВОДОВ
ПРОМЫШЛЕННЫХ РОБОТОВ
Промышленный робот с числовым программным управлением
чаще всего имеет шесть степеней подвижности, пять из которых
обслуживаются следящими электрогидравлическими приводами
и одна — пневматическим приводом релейного действия [71 ] —
цилиндром захвата 5 (рис. 15.3, а). Две степени подвижности
обеспечиваются двумя гидравлическими поворотниками (ротации
захвата 2 и наклона захвата 4), разворот руки (электрогидравли-
ческий следящий привод 7) гидромотором или гидроцилиндром,
а выдвижение и подъем руки вместе с захватом — гидроцилиндрами
(электрогидравлическими следящими приводами 3 и 6 соответ-
ственно).
Все исполнительные гидродвигатели через соответствующие
усилительные части питаются от общей насосной станции 8, а кон-
трольно-регулирующая аппаратура 9, включающая усилительные
части автоматических электрогидравлических приводов, управ-
ляется с общего пульта управления 1,
Принципиальная компоновка промышленного робота с пятью
степенями подвижности и автоматическими электрогидравличе-
скими приводами с цикловой системой управления приведена
Рис. 15.3. Принципиальная компоновка гидравлических приводов промышленных
роботов с числовой (а) и цикловой (б) системами программного управления
485
Рис. 15.4. Принципиальная компо-
новка пневматических приводов
промышленных роботов с цикловой
системой управления
на рис. 15.3, б. Две степени под-
вижности обеспечиваются гидро-
моторами (// выдвижение руки
и 7 — поворот руки), одна — гид-
равлическим поворотником (2 —
ротация захвата), одна—гидро-
цилиндром (6 — подъем руки) и
одна — пневмоцилиндром (5 — смы-
кание захвата).
Электрогидравлические приво-
ды обслуживаются общей насосной
станцией S, автоматизация рабо-
чего процесса обеспечивается
клапанами 10, а контрольно-регулирующая аппаратура 9 разме-
щается на общей панели управления.
Принципиальная компоновка промышленного робота с пятью
степенями подвижности, цикловой системой управления и пнев-
матическими приводами приведена на рис. 15.4. Три пневмо-
цилиндра обеспечивают смыкание захвата, выдвижение руки и
подъем руки (7, 6 и 5 соответственно).
Ротация захвата и поворот руки реализуются при помощи
пневмодвигателей (4 и 2 соответственно) с управлением от общей
штеккерного типа панели управления 3. Логические блоки управ-
ления 1, а также пневмодроссели и направляющие пневмоаппа-
раты 8 составляют устройства управления.
Все пневматические приводы робота обслуживаются общим
блоком 9 подготовки воздуха.
СПИСОК ЛИТЕРАТУРЫ
1. Аксиально-поршневой регулируемый гидропривод. Под ред. В. Н. Про-
кофьева, М., «Машиностроение», 1969. 496 с. Авт.: В. Н. Прокофьев, Ю. А. Да-
нилов, Л. Н. Кондаков и др.
2. Андропова В. Н. Влияние наложения динамических нагрузок на ре-
лаксацию напряжений в сжатых резиновых образцах. В кн.: Исследования
в области физики и химии резины. Л., «Химия», 1972. с. 88—91.
3. Артоболевский И. И. Теория механизмов и машин. М. «Наука», 1975.
638 с.
4. Ахматов А. С. Молекулярная физика граничного трения. М., Физмат-
гиз, 1963. 472 с.
5. Бартенев Г. М., Лаврентьев В. В. Трение и износ полимеров. Л., «Химия»,
1972. 344 с.
6. Белянин П. Н. Центробежная очистка рабочих жидкостей авиационных
гидросистем. М., «Машиностроение», 1976. 328 с.
7. Белянин П. Н. Промышленные роботы. М., «Машиностроение», 1975.400с.
8. Бесекерский В. А. Динамический синтез систем автоматического регу-
лирования. М., «Наука», 1970. 576 с.
9. Бесекерский В. А., Попов Е. П. Теория систем автоматического регу-
лирования. М., «Наука», 1966. 992 с.
10. Бочаров Ю. А., Прокофьев В. Н. Гидропривод кузнечно-прессовых ма-
шин. М., «Высшая школа», 1969. 248 с.
11. Ведерников В. В. Аналитическое исследование гидродвигателей воз-
вратно-поступательного движения с гидравлическим переключением золот-
ника. — В кн.: Гидравлические приводы активных рабочих органов сельскохо-
зяйственных машин. Труды ВИСХОМ, № 80. М., 1974, с. 103—123.
12. Гамынин Н. С. Гидравлический привод систем управления. М., «Машино-
строение», 1972. 376 с.
13. Гидравлический следящий привод. Под ред. В. А. Лещенко. М., «Машино-
строение», 1968. 564 с. Авт.: Н. С. Гамынин, Я. А. Каменир, Б. Л. Коробочкин
и др.
14. Гидропередачи. — В кн.: Машиностроение. Энциклопедический спра-
вочник. Т. 12. М., Машгиз, 1948, с. 420—478.
15. Гиршфельдер Д., Кертис У., Бердт Р. Молекулярная теория газов и
жидкостей. Пер. с англ. М., ИЛ, 1961. 929 с.
16. Гречин Н. К., Васильченко В. А. Гидравлическое оборудование строи-
тельных и дорожных машин за рубежом. М., ЦНИИТЭстроймаш, 1974. 88 с.
17. Динамика гидропривода. Под ред. В. Н. Прокофьева. М., «Машинострое-
ние», 1972. 288 с. Авт.: Б. Д. Садовский, В. Н. Прокофьев, В. К. Кутузов и др.
18. Динамика заторможенного гидропривода. — В кн.: Гидросистемы и
приводы машин для хлопководства. Труды ТИИМСХ, № 71. Ташкент, 1976,
с. 79—98. Авт.: В. Н. Прокофьев, И. А. Лузанова, И. В. Прокофьева и др.
19. Динамика цифровых следящих систем. М., «Энергия», 1970, 496 с. Авт.:
Ю. А. Николаев, В. П. Петухов, Г. И. Феклисов, Б. К. Чемоданов.
20. Динамика электромашинных следящих систем. Под ред. Н. М. Якименко,
М., «Энергия», 1967. 408 с. Авт.: Е. С. Блейз, Ю. Н. Семенов, Б. К. Чемоданов,
Н. М. Якименко.
21. Динамика гидропривода с переменной инерционной нагрузкой. — «Из-
вестия вузов. Машиностроение», 1971, № 11, с. 74—80. Авт.: В. Н. Прокофьев,
Ю. Е. Захаров, А. А. Лескин, Е. А. Мусатов.
22. Захаров Ю. Е., Разоренов Л. А. К расчету электрогидравлических виб-
раторов. — «Известия вузов. Машиностроение», 1972, № 2, с. 65—71. *
23. Захаров Ю. Е., Прокофьев В. Н. Устойчивость гидропередач. — «Вест-
ник машиностроения», 1969, № 7, с. 7—13.
24. Исследование некоторых особенностей человека-оператора как элемента
биотехнической системы «оператор—манипулятор». — В кн.: Теория и устройство
манипуляторов. М., «Наука», 1973, с. 9—14. Авт.: В. Л. Афонин, Н. А. Лакота,
В. И. Лобачев и др.
487
25. Кардашев А. А. Анализ качества систем авторегулирования методом
понижения порядка дифференциального уравнения. — «Автоматика и теле-
механика», т. XXIV, 1963, № 8, с. 1073—1083.
26. Качарэвский И. Б. Распределение и переключение внимания при по-
летах по приборам. М., Воениздат, 1972. 104 с.
27. Кожевников С. Н. Теория механизмов и машин. М., «Машиностроение»,
1969. 584 с.
28. Кондаков Л. А. Уплотнения гидравлических систем. М., «Машинострое-
ние», 1972, 240 с.
29. Кондаков Л. А., Овандер В. Б. Герметичность и трение эластичных уплот-
нений пар возвратно-поступательного движения. — «Вестник машиностроения»,
1971, № 11, с. 33—37.
30. Кондаков Л. А., Сухов Н. К- О классификации уплотнительных уст-
ройств. — «Стандарты и качество», 1974, № 9, с. 29—32.
31. Коновалов В. М., Скрицкий В. Я., Рокшевский В. А. Очистка рабочих
жидкостей в гидроприводах станков. М., «Машиностроение», 1976. 288 с.
32. Крамской Э. И. Гидравлические следящие приводы со струпными усили-
телями. Л., «Машиностроение», 1972. 104 с.
33. Красов И. М. Гидравлические элементы в системах управления. М.,
«Машиностроение», 1967. 256 с.
34. Кремень М. А. К вопросу о построении самонастраивающейся модели
человека-оператора. — В кн.: Проблемы инженерной психологии. Вып. I,
ч. 1 и 2. Изд. ЛГУ, 1968, с. 73—81.
35. Кулешов В. С., Лакота Н. А. Динамика систем управления манипуля-
торами. М., «Энергия», 1971. 304 с.
36. Курош А. Г. Курс высшей алгебры. М., «Наука», 1962. 408 с.
37. Лакота Н. А., Лобачев В. И., Моисеенков В. А. Экспериментальные
исследования динамических свойств биотехнической системы «оператор-манипу-
лятор».— «Известия вузов. Машиностроение», 1971, №9, с. 51—55.
38. Лещенко В. А. Гидравлические следящие приводы станков с програм-
мным управлением. М., «Машиностроение», 1975. 288 с.
39. Литвин-Седой М. 3. Гидравлический привод в системах автоматики.
М., Машгиз, 1956. 312 с.
40. Лузанова И. А., Нейман В. Г., Прокофьев В. Н. Влияние переменности
упругих свойств гидропривода на динамику гидродвигатсля. — «Автоматика
и телемеханика», 1969, № 3, с. 120—135.
41. Льюис Э., Стерн X. Гидравлические системы управления. Пер. с англ.
М., «Мир», 1966. 408 с.
42. Методы инженерно-психологических исследований в авиации. Под
ред. Ю, П. Доброленского. М., «Машиностроение», 1975. 280 с.
43. Модуль объемной упругости резиновых шлангов с металлическими оп-
летками. — «Механика машин», 1975, № 49, с. 47—55. Авт.: В. Н. Прокофьев,
И. А. Лузанова, В. Г. Выборнов, Д. А. Пискунов.
44. Моторные и реактивные масла и жидкости. Под ред. К. К- Паппок,
Е. Г. Семенидо. М., «Химия», 1963. 768 с.
45. Мушловин Б. Л., Гавриленко Ю. А., Валоцкий В. М. Аксиально-порш-
невые насосы за рубежом. М., НИИМаш, 1973. 108 с.
46. Нейман В. Г. Гидроприводы авиационных систем управления. М., «Ма-
шиностроение», 1973. 200 с.
47. Некоторые особенности динамики гидропривода. — «Вестник машино-
строения», 1973, № 3, с. 30—32. Авт.: В. Н. Прокофьев, В. Ф. Казмиренко,
Г. Е. Подпоркип, Л. А. Синько.
48. Нефтепродукты. Справочник. Под ред. Б. В. Лосикова. М. «Химия»,
1966. 776 с.
49. Никитин Г. А., Чирков С. В. Влияние загрязненности жидкости на на-
дежность работы гидросистем летательных аппаратов. М., «Транспорт», 1969.
183 с.
50. О динамической податливости гидропривода. — «Известия вузов. Ма,
шиностроение», 1975, № 9, с. 65—69. Авт.: В. Н. Прокофьев, И. А. Лузанова-
И. В. Прокофьева.
488
51. Опыт эксплуатации промышленных роботов (по материалам Второго
Международного симпозиума по промышленным роботам). М. НИИМаш, 1974
96 с.
52. Основы теории и конструирования объемных гидропередач. Под ред.
В. Н. Прокофьева. М., «Высшая школа», 1968. 400 с. Авт.: А. В. Кулагин,
Ю. М. Демидов, В. Н. Прокофьев, Л. А. Кондаков.
53. Паппок К- К-, Рагозин Н. А. Технический словарь-справочник по топ-
ливам и маслам. М., Гостоптехиздат, 1963. 768 с.
54. Попов Е. П., Лобачев В. И. Биотехнические системы управления рабо-
тами. — В кн.: Бионика, 1973. Т. 1. Тезисы докладов 14-й Всесоюзной конферен-
ции по бионике. М., «Наука», 1973. с. 52—57.
55. Прокофьев В. Н. Сервомеханизмы полуавтоматических систем регу-
лирования. — В кн.: Техническая кибернетика. Кн. 3. Под ред. В. В. Солодов-
никова. М., «Машиностроение», 1976, с. 409—413.
56. Прокофьев В. Н. Влияние деформации жидкости на динамическую ха-
рактеристику гидропривода.—«Вестник машиностроения», 1973, № 6, с. 21—28.
57. Прокофьев В. Н. Выбор оптимальной схемы объемной гидротрансмиссии
универсального сельскохозяйственного трактора. — «Механизация и электри-
фикация социалистического сельского хозяйства», 1965, № 1, с. 11—14.
58. Прокофьев В. Н. Упругость гидропривода. — В кн.: Национальна кон-
ференция по хидравлика и пневматика. София, «Научно-технически съюз по
машиностроене», 1972, с. 128—161.
59. Прокофьев В. Н. Основы теории гидромеханических передач. М., Маш-
гиз, 1957. 424 с.
60. Прокофьев В. Н. Математическая модель гидропривода. — В кн.: Гидро-
приводы в сельскохозяйственной технике. Труды ВИСХОМ, 1971, № 62, с. 14—
45.
61. Прокофьев В. Н. Гидравлические и пневматические исполнительные
устройства и сервомеханизмы. — В кн.: Устройства и элементы систем автома-
тического регулирования и управления. Под ред. В. В. Солодовникова. Кн. 3.
Исполнительные устройства и сервомеханизмы. М., «Машиностроение», 1976,
с. 406—409.
62. Прокофьев В. Н. О вязкости смазочных масел и жидкостей, применяе-
мых в машинах и гидросистемах. — «Вестник машиностроения», 1944, № 3—4,
с. 16—24.
63. Прокофьев В. Н., Лобачев В. И. Управляемость машин. — «Вестник
машиностроения», 1974, № 3, с. 7—14.
64. Прокофьев В. Н., Казмиренко В. Ф. О влиянии формы управляющего
воздействия на оценки взаимовлияния каскадов в цепях преобразователей энер-
гии. — «Машиноведение», 1974, № 3, с. 17—24.
65. Прокофьев В. Н., Казмиренко В. Ф. Синтез цепей преобразователей энер-
гии с желаемой мерой взаимовлияния каскадов. — «Машиноведение», 1976,
№ 4 с. 18—24.
66. Прокофьев В. Н., Борисов Б. П. Некоторые вопросы ламинарного дви-
жения жидкости в щелях объемных гидромашин. «Механика машин», 1967,
№ 9—10, с. 120—128.
67. Прокофьев В. Н., Борисов Б. П. Динамика гидропривода при рычажной
связи гидродвигателя с объектом управления. — «Известия вузов. Машино-
строение», 1977, № 5, с. 63—68.
68. Прокофьев В. Н., Захаров Ю. Е. Взаимовлияние гидроприводов через
источник питания. — «Известия вузов. Машиностроение», 1976, № 7, с. 66—73.
69. Прокофьев В. Н., Синев А. В. Кинематические связи в бескарданных
аксиально-поршневых гидромашинах. — «Вестник машиностроения», 1964, № 11,
с. 14—18.
70. Прокофьев В. Н., Кондратенко Л. А. Гидропривод машинного регули-
рования с положительной обратной связью по перепаду давления. — «Известия
вузов. Машиностроение», 1974, №11, с. 96—101.
71. Прокофьев В. Н., Скрицкий В. Я-, Водопьян П. О. Гидравлика и пнев-
матика в промышленных роботах. — «Вестник машиностроения», 1976, № 5,
с. 19-23.
489
72. Прокофьев В. Н., Захаров Ю. Е., Мусатов Е. А. Гидропривод высокого
давления. — «Известия вузов. Машиностроение», 1976, № 7, с. 71—76.
73. Прокофьев В. Н., Захаров Ю. Е., Мусатов Е. А. Об устойчивости дви-
жения гидропривода высокого давления. — «Вестник машиностроения», 1976,
№ 12, с. 37—41.
74. Прокофьев В. Н., Борисов Б. П., Лазариди А. П. Пути совершенствова-
ния гидропривода дорожно-строительных машин. Ашхабад, Республиканский
институт научно-технической информации пропаганды Госплана Туркменской
ССР, 1975. 22 с.
75. Прокофьев В. Н., Захаров Ю. Е., Мусатов Е. А. Влияние сухого трения
на отклик регулярного преобразователя энергии в механическую, отрабатываю-
щего симметричный гармонический сигнал. — «Известия вузов. Машинострое-
ние», 1974, № 2, с. 60—68.
76. Прокофьева И. В., Хурашвили К* И. Взаимовлияние дроссельных гидро-
приводов.— «Известия вузов. Машиностроение», 1976, № 11, с. 71—74.
77. Промышленные роботы зарубежных фирм и их применение. НИАТ,
1973. 134 с. Авт.: Белянин П. Н., Розин Б. Ш., Данилевский В. Н. и др.
78. Расчет электромеханического привода с переменным моментом инер-
ции. — «Известия вузов. Машиностроение», 1972, №4, с.73—77. Авт.: В. Н. Про-
кофьев, А. Е. Бор-Раменский, Ю. Е. Захаров и др.
79. Расчеты и конструирование резиновых технических изделий и форм.
Под ред. В. А. Лепетова. Л., «Химия», 1972. 303 с.
80. Резина — конструкционный материал современного машиностроения.
Под ред. П. Ф. Баденкова, В. Ф. Евстратова, М. М. Резниковского. М., «Химия»,
1967. 318 с.
81. Роторные насосы. — В кн.: Машиностроение. Энциклопедический спра-
вочник. Т. 12. М., Машгиз, 1948, с. 396—419.
82. Рыбаков К. В. Фильтрация авиационных топлив. М.» «Транспорт»,
1973. 164 с.
83. Сапожников В. М. Монтаж и испытание гидравлических и пневматиче-
ских систем на летательных аппаратах. М., «Машиностроение», 1972. 271 с.
84. Скудчик Е. Основы акустики. Т. 2. Пер. с нем. М., ИЛ, 1959. 568 с.
85. Следящие приводы. Под. ред. Б. К. Чемоданова. М., «Энергия», 1976.
Кн. 1, 480 с., кн. 2, 384 с.
86. Сосонкин В. Л. Дискретная гидроавтоматика (следящие и шаговые си-
стемы станков). М., «Машиностроение», 1972. 164 с.
87. Сосонкин В. Л. Расчет параметров электрогидравлического цифрового
следящего привода. — «Вестник машиностроения», 1973, № 5, с. 28—31.
88. Сосонкин В. Л. О «шуме» дискретного регулирования исполнительных
двигателей. — «Электричество», 1974, № 4, с. 84—87.
89. Сосонкин В. Л., Крючков Е. С. Электрогидравлический силовой привод
подачи с дискретным регулированием скорости. — «Станки и инструмент»,
1973, № 12, с. 11—13.
90. Сосонкин В. Л., Константинопольский В. И. Регулируемые приводы
машин с гидравлическими цифровыми исполнительными двигателями. — «Вест-
ник машиностроения», 1974, № 1, с. 16—19.
91. Техническая механика жидкостей и газов. — В кн.: Машиностроение.
Энциклопедический справочник. Т. 1, кн. 2. М., Машгиз, 1947, с. 381—431.
92. Толстой Д. М. Зависимость равнодействующей молекулярных сил
при трении ползуна. Доклады АН СССР. Т. 153, № 4. М., 1963, с. 119.
93. Тумаркин М. Б. Синтез методов и характеристики систем управления
гидравлическими исполнительными механизмами. — «Механизация и автомати-
зация производства», 1962, № 2, с. 27—31.
94. Устройства и элементы систем автоматического регулирования и управ-
ления. Кн. 3. Исполнительные устройства и сервомеханизмы. Под ред. В. В. Со-
лодовникова. М., «Машиностроение», 1976. 736 с.
95. Хаяси Т. Нелинейные колебания в физических системах. Пер. с англ.
М., «Мир», 1968. 432 с.
96. Чиликин М. Г., Корытин А. М., Прокофьев В. Н. Силовой электрогидро-
привод. М., Энергоиздат, 1955. 216 с.
490
97. Чупраков Ю. И. Электрогидравлические усилители. М. МАДИ, 1974.
124 с.
98. Шеридан Т. Б. Экспериментальное исследование изменений передаточ-
ной функции человека-оператора во времени. — В кн.: Первый конгресс ИФАК*
М., изд. АН СССР, 1960. 16 с.
99. Экспериментальное исследование вязкости рабочих жидкостей гидро-
системы.— «Известия вузов. Машиностроение», 1971, № 10, с. 71—76. Авт.:
В. Н. Прокофьев, Б. П. Борисов, А. С. Луганский и др.
100. Электрогидравлические следящие системы. Под род. В. А. Хохлова.
М., «Машиностроение», 1971. 432 с. Авт.: В. А. Хохлов, В. Н. Прокофьев, Н. А. Бо-
рисова и др.
101. Blackburn I. F., Reethof G., Shearer I. L. Fluid Power Control. N. J.,
1960, 702 v.
102. Mayer E. Axiale Gleitringdichtungen. VDI Verlag GmbH, Dusseldorf,
1974.
103. Proceedings 6th International Conference on Fluid Sealing, BHRA,
Cranfild, 1973, c. 1/1—10.
104. Schlosser W., Muller W. Was Sind die Aussagen unserer Priifstands-
messungen wert? «Olhydraulik und Pneumatik», N. 2, 1969, c. 49—52.
105. Thoma J. Sealing Gaps. Hydrauloc, Pneumatic, Power & Controls, N 9,
1963, c. 26—33.
ОГЛАВЛЕНИЕ
От редактора 3
Введение 4
Глава 1 Устройство и действие гидропривода
1.1. Гидравлические схемы исполнительных устройств объемного ре-
гулирования 15
1.2. Гидромашинный усилитель 19
1.3. Механизм управления 21
1.4. Гидропривод 23
1.5. Гидропривод с концевыми переключателями 24
Глава 2. Рабочие жидкости 26
2.1. Эксплуатационные группы гидроприводов 27
2.2. Физические свойства рабочих жидкостей 30
2.3. Минеральные масла 34
2.4. Загущенные минеральные масла 37
2.5. Синтетические рабочие жидкости 39
2.6. Эмульсии 40
2.7. Растворенная и нерастворенная газовоздушные составляющие
рабочих жидкостей 42
2.8. Деформация жидкости 47
Глава 3. Уплотнения 56
3.1. Типы и классификация уплотнений 56
3.2. Теория герметичности 63
3.3. Трение в уплотнениях 80
3.4. Расчет температуры 96
3.5. Прогнозирование сроков эксплуатации 101
Глава 4. Загрязнения в рабочих жидкостях 108
4.1. Источники загрязнений 108
4.2. Нормы допустимой загрязненности жидкости 111
4.3. Методы контроля чистоты жидкости . 114
4.4. Изменение загрязненности жидкости при работе гидросистем 117
4.5. Влияние загрязненности жидкости на надежность и срок службы
агрегатов гидравлических систем . 120
4.6. Защита гидравлических систем от загрязнений 129
4.7. Фильтры 132
4.8. Очистка жидкости в силовых полях 137
Глава 5. Гидромашины 142
5.1. Аксиально-поршневые гидромашины с двойным несиловым кар-
даном . 143
5.2. Аксиально-плунжерные насосы бескарданного типа конструкции
ВНИИгидропривод 146
5.3. Аксиально-поршневые гидромашины бескарданного типа 154
5.4. Аксиально-плунжерные гидромашины бескарданного типа 160
5.5. Шестеренные и шиберные гидромашины 167
5.6. Сравнение гидромашин вращательного движения 175
5.7. Гидроцилиндры и гидромашины с концевыми переключателями 183
5.8. Кинематика аксиально-поршневых и аксиально-плунжерных
гидромашин 187
5.9. Индикаторная диаграмма объемной гидромашины 190
5.10. Основные расчетные уравнения 198
5.11. Основые теории роторных гидромашип 204
5.12. Приемистость гидродвигателя 209
5.13. Гидростатические опоры................................... 213
492
Глава 6. Гидравлический привод машинного (объемного) регулирования 219
6.1. Статические характеристики . 220
6.2. Динамическая характеристика математической модели регу-
лярного исполнительного устройства 226
6.3. Частотные характеристики соединительных трактов 236
6.4. Местная обратная связь в регулярном исполнительном устрой-
стве 241
6.5. Математические модели иррегулярных исполнительных устройств 248
6.6. Передача гармонического сигнала через гидропривод с попере-
менно работающими магистралями . . 255
6.7 Асимметричный гидропривод, замкнутый главной обратной
связью 258
Глава 7 Гидравлические исполнительные устройства с дроссельным
управлением 260
7.1. Статическая характеристика гидроусилителя типа сопло-за-
слонка 261
7.2. Исполнительное устройство типа сопло-заслонка 270
7.3. Статическая характеристика четырехщелевого управляющего
золотника 276
7.4. Двухщелевой управляющий золотник . 283
7.5. Общие закономерности исполнительных устройств с дроссель-
ным регулированием . 288
7.6. Примеры исполнительных устройств с дроссельным регулирова-
нием . 291
7.7. Сравнение статических характеристик гидроусилителей 296
7.8. КПД исполнительных устройств с дроссельным управлением 300
7.9. Динамика исполнительного устройства с четырехщелевым управ-
ляющим золотником, имеющим нулевое перекрытие 301
Глава 8. Электрогидравлические усилители 305
8.1. Основные типы электрогидравлических усилителей межотрасле-
вого применения . . 305
8.2. Силовые воздействия упругой обратной связи в электрогидравли-
ческом усилителе второго типа 308
8.3. Аналитические и структурные представления электрогидравли-
ческого усилителя 310
8.4. Динамические свойства механизмов управления электрогидрав-
лических усилителей 313
8.5. Динамические свойства электрогидравлического усилителя,
работающего с исполнительным двигателем 317
8.6. Обратная связь по перепаду давлений в гидроприводе, реали-
зованном на базе электрогидравлического усилителя 318
Глава 9. Силовые гидроприводы с дискретным регулированием скорости 321
9.1. Дискретный способ формирования управляющих воздействий
в автоматизированных гидроприводах . 321
9.2. Технические средства быстродействующих систем дискретной
гидроавтоматики 326
9.3. Расчет параметров движения исполнительного гидродвигателя
под действием непрерывной и установившейся последовательности
импульсов расхода 332
9.4. Расчет приемистости шагового гидродвигателя 337
9.5. Определение условий отсутствия периодических движений в
электрогидравлической релейной следящей системе . 343
9.6. Определение условий отсутствия периодических движений и син-
тез электрогидравлических импульсных и цифровых следящих
приводов ........................................................ 345
493
Глава 10. Механизмы управления 351
10.1. Механизмы ручного управления 351
10.2. Основы структур гидроприводов с механизмами управления
в тракте управления по ошибке 353
10.3. Механизмы управления с электрическими управляющими дви-
гателями 355
10.4. Двухкаскадные электрогидравлические механизмы управле-
ния с магнитными электромеханическими преобразователями 359
10.5. Трехкаскадные электрогидравлические механизмы управления
с магнитными электромеханическими преобразователями 362
10.6. Требования к механизмам управления 365
10.7. Возможные структуры электрогидравлических следящих при-
водов . . 367
10.8. Коррекция линейных исполнительных устройств силовых сле-
дящих приводов 372
Глава 11 Динамика гидропривода с рычажной связью между гидроци-
линдром и объектом управления 378
11.1. Соединительный рычажный механизм 378
11.2. Геометрические и кинематические соотношения в соединитель-
ном механизме 379
11.3. Рычажные механизмы гидроприводов грузоподъемных и стро-
ительно-дорожных машин 383
11.4. Уравнения движения рычажного механизма 384
11.5. Приведенные масса и весовая нагрузка в рычажном механизме 386
11.6. Частные формы уравнения движения рычажного механизма 388
11.7. Структурные представления гидропривода с исполнительным
устройством рычажного типа 390
11.8. Частные решения уравнений движения рычажного механизма 391
Глава 12. Анализ математических моделей гидропривода, форсированного
по давлению 396
12.1. Эквивалентная щель . . 397
12.2. Математические модели плоских щелей, заполненных рабочей
жидкостью, вязкость которой обусловливается давлением 403
12.3. Математические модели гидропривода, форсированного по дав-
лению . 406
12.4. Установившийся процесс в первой математической модели
гидропривода, форсированного по давлению . 410
12.5. Условия устойчивости динамических процессов первой матема-
тической модели гидропривода, форсированного по давлению
[72, 73] . . 412
12.6. Условия устойчивости динамических процессов второй матема-
тической модели гидропривода, форсированного по давлению
[72, 73] . . 417
12.7. Решения задачи об устойчивости динамических процессов вто-
рой математической модели гидропривода, форсированного по
давлению 425
Глава 13. Анализ работы нескольких гидравлических систем управления
ит общего источника питания ограниченной мощности 428
13.1. Линейные модели гидравлических систем управления и источ-
ника питания [68] . . 429
13.2. Зависимость составляющей р* возмущенного движения от пере-
пада давления Др при работе одного гидропривода [68] 431
13.3. Линеаризованные уравнения гидропривода [68] 432
13.4. Структурные представления линейной модели гидропривода
дроссельного регулирования при совместной работе с источни-
ком питания .................................................... 436
494
13.5. Работа двух гидравлических систем управления от одного ис-
точника питания ограниченной мощности 439
13.6. Работа двух гидравлических систем управления от одного источ-
ника питания ограниченной мощности при разных частотах вход-
ных сигналов . 443
13.7. Работа N гидравлических систем управления от общего источ-
ника питания ограниченной мощности [68] 444
Глава 14. Полуавтоматический гидропривод 446
14.1. Изолированный канал передачи управляющего сигнала
(ИКПУС) 447
14.2. Процессы и способы управления 448
14.3. Возможности человека-оператора . 450
14.4. Математическая модель технической части полуавтоматической
системы 451
14.5. Математическая модель человека-оператора 454
14.6. Наблюдаемый масштабный коэффициент Лхи 457
14.7. Субъективные оценки систем управления 458
14.8. Объективные оценки систем управления 460
14.9. Гипотезы о фильтрующих свойствах оператора 463
14.10. Эффективность процесса управления . 465
14.11. Субъективные оценки управляемости полуавтоматической си-
стемы управления положением при размещении оператора на
объекте управления 467
Глава 15. Гидроприводы промышленных роботов 469
15.1. Промышленные роботы 470
15.2. Основа робота . 471
15.3. Тенденции развития промышленных роботов . 472
15.4. Параметры автоматических приводов промышленных роботов 476
15.5. Особенности элементов автоматических приводов промышленных
роботов 480
15.6. Принципиальная компоновка автоматических приводов промыш-
ленных роботов 485
Список литературы................................................. 487
ИВ № 743
Владимир Николаевич Прокофьев,
Лев Анатольевич Кондаков,
Геннадий Андреевич Никитин и др.
МАШИНОСТРОИТЕЛЬНЫЙ
ГИДРОПРИВОД
Редактор издательства С. И. Булатов
Технический редактор Л А. Макарова
Корректоры: Ж. Л. Суходолова,
А. М. Усачева
Переплет художника Л. С. Вендрова
Сдано в набор 25.11.77
Подписано в печать 31.03.78. Т-03255.
Формат бОХЭО1/^- Бумага типографская № 1.
Литературная гарнитура. Печать высокая.
Усл. печ. л. 31,0. Уч.-изд. л. 33,15.
Тираж 20 000 экз. Зак. 647. Цена 2р. Юк.
Издательство «Машиностроение», 107885,
Москва, Б-78, 1-й Басманный пер. 3
Ленинградская типография № 6
Союзполиграфпрома
при Государственном комитете
Совета Министров СССР
по делам издательств, полиграфии
и книжной торговли
193144, Ленинград, С-144, ул. Моисеенко, 10