/











































































































































































































































































































































































































































































































































































































































Author: Гусак А.А. Гусак Г.М. Бричикова Е.А.
Tags: математика аналитическая геометрия справочник высшая математика история террасистемс
ISBN: 985-6317-51-7
Year: 1999


Text
А.А. Гусак
Г.М. Гусак
Е.А. Бричикова
СПРАВОЧНИК
ПО ВЫСШЕЙ
МАТЕМАТИКЕ
МИНСК
ТетраСистемс
1999
УДК 51(035)
ББК 22.1 я2
Г 96
Авторы:
кандидат физико-математических наук, профессор А. А. Гусак;
кандидат физико-математических наук, доцент Г.М.Гусак;
старший преподаватель Е.А.Бричикова
Научный редактор:
доктор физико-математических наук, профессор П.И.Монастырный
Рецензенты:
доктор физико-математических наук, профессор МД. Мартыненко;
кандидат физико-математических наук, профессор А. А.Дэдаян
Гусак А.А. и др.
Г 96 Справочник по высшей математике / А.АТусак,
Г.М.Гусак, Е.А.Бричикова. - Мн.: ТетраСистемс.
1999. - 640 с.
ISBN 985-6317-51-7
Справочник содержит теоретические сведения по многим разделам
математики: аналитической геометрии, алгебре, математическому анали-
зу, дифференциальным уравнениям, численным методам, теории вероят-
ностей и ее приложениям, теории функций комплексной переменной, опе-
рационному исчислению. Включает примеры применения теории к реше-
нию задач, иллюстрации, соответствующие исторические сведения.
Рассчитан на студентов, аспирантов и преподавателей вузов, а так-
же на инженерно-технических и научных работников
УДК 51(035)
ББК 22.1 я 2
ISBN 985-6317-51-7
© НТООО "ТетраСистемс",
1999
ПРЕДИСЛОВИЕ
Справочник включает следующие разделы высшей математики:
аналитическая геометрия (на плоскости и в пространстве), алгебра (мат-
рицы и определители, линейные пространства, линейные операторы,
квадратичные формы, группы), дифференциальное исчисление и инте-
гральное исчисление (функций одной переменной и функций нескольких
переменных), ряды (числовые и функциональные, в том числе ряды Фу-
рье), дифференциальные уравнения (обыкновенные и с частными произ-
водными), численные методы (решения алгебраических, трансцендентных
и дифференциальных уравнений; .интегрирования и интерполирования
функций), элементы теории вероятностей и математической статистики (с
математической обработкой результатов измерений), элементы теории
функций комплексной переменной и операционного исчисления (с прило-
жением последнею к решению дифференциатьных уравнений и их сис-
тем), начала векторного и тензорного анализа.
Справочник содержит теоретический материал без доказательств:
определения соответствующих понятий, формулы, уравнения; формули-
ровки теорем, основных задач, признаков; изложение математических ме-
тодов; свойства математический понятий, их смысл и приложения.
Во многих случаях указано, кто и когда предложил соответствую-
щий термин, символ для его обозначения, отмечено происхождение мате-
матического термина.
В каждом параграфе имеются примеры применения теории к реше-
нию практических задач. Наличие многочисленных примеров с подроб-
ными решениями может оказать существенную помощь студентам, зани-
мающимся по заочной форме обучения, при самостоятельном выполнении
ими контрольных работ, а также студентам дневных отделений при вы-
полнении домашних заданий и подготовке к зачетам и экзаменам.
Справочник снабжен иллюстративным материалом; в нем имеются
рисунки, поясняющие математические понятия, идеи методов, формулы,
уравнения, условия задач и примеров, а также чертежи кривых и поверх-
ностей, графики функций, таблицы.
Справочник включает два приложения: некоторые оригиналы и их
изображения, некоторые математические знаки и даты их возникновение
Приложен также биографический словарь, содержащий краткие
сведения о жизни и деятельности математиков, имена которых встречают-
ся в справочнике.
Авторы
3
I
АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ
Глава 1
КООРДИНАТЫ НА ПРЯМОЙ,
НА ПЛОСКОСТИ, В ПРОСТРАНСТВЕ
1.1. Координаты на прямой
На прямой зафиксируем одно из двух определяемых сю направлений и назовем
его положительным, другое - отрицательным Прямую, на которой указано по-
ложительное направление, называют осью.
Отрезок, ограниченный точками А и В, называют направленным отрезком или
вектором, если указано, какая из данных точек является началом, какая - концом.
Направленный отрезок с началом в точке А и концом в точке В сЯспначыт АВ.
Величиной направленного отрезка АВ некоторой оси называют его длину, взя-
тую со знаком плюс, когда направление этого отрезка совпадает с положительным
направлением данной осн, и со знаком минус, когда оно совпадает с отрицатель-
ным направлением оси. Величину направленного отрезка АВ обозначают АВ.
Координатной осью называют прямую, на которой зафиксированы начало от-
счета, положительное направление и выбран масштаб для измерения длин.
Координатой точки М координатной оси (рис. I I) называют величину ОМ на-
правленного отрезка ОМ, где О - начало координат. Если обозначить ко-
ординату точки М через х, то по определению х = ОМ.
-« . >
О Е М х
Рис. 1.1
Запись М(х)означает, что точка М имеет координату х.
Если даны две точки A/,(x,) и Мг(хг\, ТО величина направленного отрезка
M,Mj вычисляется по формуле
Л/|Л/2=дг,-х„ * (1.1)
а расстояние между ними по формуле
р(Л/„Л/1) = |*/|М:| = ^-4 <IJ>
4
Простым отношением трех различных точек Л/,. Мг, М, лежащих на одной
прямой и взятых в указанном порядке, называют число
(1.3)
ммг
где М,М и ММ, - величины направленных отрезков М,М и ММ,.
Если точка М принадлежит отрезку М|М2, простое отношение положительно
(/ > 0), так как числитель и знаменатель в последней формуле одного знака В
этом случае говорят. что точка М делит о1рсзок М.М, внутренним образом Если
точка М лежит вне отрезка М|М2, то /<0 (числитель и знаменатель в формуле
имеют противоположные знаки); точка Л< делит отрезок М,М2 внешним образом.
Если точки Л/, и Л/совпадают, то /»0.
Пусть Л/|(Х|К Л/,(хгХ М(х) - точки координатной оси Ох, тогда
/- М1М _ л~*1 (14)
ММг хг—х’
откуда
**»***!. (1.5)
1 + /
'>та формула определяет координату точки М, делящей направленный отрезок
М ,М, в данном отношении I.
Если точка М совпадает с серединой отрезка М,М2, то / = 1, поэтому се ко-
ордината определяется формулой
x = i2i. Об)
Пример 1.1 Даны две точки ЛУ,(4). ЛК,(—3). Найти величину направленно-
го отрезка М,М, и расстояние между точками
В данном случае Х|=4, х2=-3; по формулам (1.1) и (1.2) находим
--3-4--7, р(М,, Л/2) = |-3-4|«7.
1.2. Координаты на плоскости
Прямоугольными декартовыми коорлишпами точки М называют числа, опре-
деляемые формулами
x«OM„y«OMr
где ОМ, - величина отрезка ОМ, оси Ох, ОМ, - величина надрав ленного
отрезка ОМ, оси Оу (рис. 1.2).
Полярная система координат на плоскости определяется точкой О
(полюс), исходящим из нес лучом ОР (полярная ось), масштабным огрезком
е и направлением отсчета углов (рис. 1.3).
5
Полярными координатами точки М. нс совпадающей с полюсом, называют
расстояние р = |ОЛ/1 (полярный радиус) от точки Мпо полюса О и величину угла
ф (полярный угол) между полярной осью ОР и лучом ОМ. Для полюса считают
р = 0 (ф нс определен). Полярный угол имеет бесконечное множество значений,
главным значением его называют значение, удовлетворяющее условию О S ф < 2к
При соответствующем выборе прямоугольной декартовой и полярной систем
координат (рис. 1.4) связь между декартовыми координатами х и у точки М и ее
полярными координатами риф выражается формулами
х = рсокф, у = р51Пф;
(17)
Пример 1.2. Найти прямоугольные декартовы координаты точек А (2. я/4).
В (4, я/4) в системе, для которой полюс совладает с началом координат, поляр-
ная ось - с положительной полуосью Ох.
Применяя формулы (1.7), находим координаты точки А:
* = 2cos--2^ = ^.y = 2sin4 = 2^ = V2, А(Л.Л).
4 2 4 2
Аналогично находим координаты точки В: х = 2^2, у = 2^2
6
1.3. Расстояние между двумя точками
на плоскости
В прямоугольной декартовой системе координат расстояние между двумя точ-
ками Л/|(Х|,уД Мг(хг, уг) определяется формулой
р( ч. +(у» -Л)1
В частном случае, когда одна из точек, например М,. совпадает с началом ко-
ординат, формула (1.9) принимает вид
Р(О, М2)=7*з
Пример 1.3. Вычислить расстояние между точками */,(6.-3), Л/2(9,-7)
и расстояние от точки Л/2 до начала координат.
По формулам (1.9) и (1.10) получаем
р(Л/„ = 7(9-6)’ +((-7)-(-3))* = 5. р(О. Л/2)= +(~7)2 »V130
Пример 1.4. Вычислить периметр треугольника с вершинами в точках
И(-1.-ЗХ в (2,-3). С(2.1).
По формуле (1.9) находим
а - Р (В С) - 7(2-2)’+(1-(-3))2 = 4.
b = р (А. С) - 7(2-("'»’+(1-(-3))’ = 5,
с - р(А. В)- 7(2-(-1))’ +(-3-(-3))2 -1
Следовательно, Р = о+ b+с-12.
1.4. Деление отрезка в данном отношении
Отношением, в котором точка М. лежащая на прямой, проходящей через точки
Мх и Мг, делит отрезок М,М2, называют число/, определяемое формулой (1.3).
Бели даны точки Л<|(х),у1), Мг(хг, у2), то координаты точки М(х.у\. де-
лящей отрезок М,М2 в отношении /, определяются формулами
Когда точка Л/ является серединой отрезка М,М2, то ее координаты вычис-
ляют по формулам
х=(х,+х2)/2, у = (Л+у2)/2. (1.12)
7
Пример 1.5. Даны две точки МД-!.-2), М2(3,4). Непрямой МхМг най-
ти точку М, которая в три Г®38 ближе к М(, чем к Мг. и находится вне отрезка
MjMj. Найти середину этого отрезка.
Искомая точка М делит отрезок М,М2 в отношении /»-1/3. По формулам
(1.11), считая в них х,=-1, у,=-2 х2=3, у2 = 4, находим
-> + (-1/3)3 _ , -2 + (-уЗ)4_
t+(—1/3) 7Л 1 + (-УЗ)
-5; М(-3,-5Х
С помощью формул (1.12) находим точку Л'=(1.1)- середину отрезка М,М2.
Пример 1.6. Найти координаты точки пересечения медиан треугольника с
вершинами в точках Л(х„ >у), в(х2, уг), С(х2.у2).
Пусть S (х, у) - точка пересечения медиан АК, BL, СМ треугольника АВС
(рис. 1.5, а). Так как точка L- середина отрезка АС, то она имеет координаты
х, «(я, + хэ)/2, yt =(>>| +у, )/2. Отрезок BL точкой S делится в отношении
I = 2/\ = 2 Считая точку В первой, точку L второй, по формулам (1.11) находим
,_ х2+2(х,+х2)/2 _ х, + х, ч-x, _ Уа+2(У|+У>)Д = К+Ъ+Уэ
1+2 3 1+2 3
Следовательно, координаты точки пересечения медиан треугольника по коор-
динатам его вершин определяются форму нами
х = (Х|+х2+х,)/3, У-(У)+у2 + у,)/3.
(ИЗ)
1.5. Центр тяжести системы масс
Дана система масс ,т„, помещенных соответственно в точках
Л/|(Х|, уд М2(х2, >гХ ". М,(хя,у„) некоторой плоскости. Формулы, выражаю-
щие координаты центра тяжести этой системы масс, имеют вид
x,M;+x2irii+ - +,уц, у,ж,
Ш| + Wfj + *** + /Ял ТПу + Plj -4-••• + fKf,
или
X**"4 У, у»"*
*= -----• у “ —
^"Ч * Х"*
1-1 1-1
(1 14)
где таком I обозначена сумма однотипных слагаемых.
Пример 1.7. В вершинах Л(х(, у,), В(х2,у2\ С (х„ у,) треугольника АВС
сосре.югочены ранные массы т. Найти це>гтр тяжести этой материя.тыюй системы
Формулы (1.14) при п “ 3 принимают вид
Х|Л^ -г x^mj + х}Ш) * _ y,m( + yj/rij -ь у}/П)
/п, + m2 + zn. wij + mj + nt;
Используя условие = т, = т}, получаем
* _ x|m-t-x2M-t-xlm _ m(x, + х2 +х}) _ х, +х2 + х2
m + m + m Зт 3
= У|« + у2от + уэт = ж (у, » у2 + у,) = у, + у2 + у,
т+т + т Зт 3
Замечание. Из последнего примера и формул (1.13) следует, что центр тя-
жести данной системы находится в точке пересечения медиан треугольника.
1.6. Площадь треугольника
Каковы бы ни были три точки Л(х(,У|), в(х2, уД С(хэ, у,Х площадь 5
треугольника А ВС вычисляется по формуле
±^ = ^К*т-*|)(Уз-У|)-(*з-*|)(Л-У|Я- О ,5>
Правая часть формулы равна +5 в . том случае, koi да кратчайший поворот от-
резка АВ к отрезку АС положителен (рис. 1.5, а), и -5, когда указанный поворот
отрицателен (рис 1.5, б).
В формуле (1.15) берут знак плюс когда выражение в квадратных скобках по-
ложительно, и минус, когда оно отрицательно.
9
Пример 1.8. Даны две точки А (3, 5), в (6, - 2). На оси Оу найти такую точ-
ку С. чтобы площадь треугольника ЛЯС равнялась 15 квадратным единицам.
Пусть С(0, у) - искомая точка (х = 0, так как точка лежит на оси Оу). В фор-
мулу (1.15) подставим значения 5'= 15, xt=3, у( = 5, х2=6, у2=—2, х,=0.
у2 = у и найдем у.
±15 = у|(6-3)(у-5)-(О-3)(-2—5)}=уР(у-5)-21|,
±15-|(Зу-36), ±ЭО-Зу-З6.у(-2.Л«22.
Итак, условию задач и удовлетворяют координаты точек С,(0,2), СДО, 22).
1.7. Уравнение линии в декартовых координатах
Уравнением линии относительно фиксированной системы координат называют
такое, уравнен не с двумя переменными, которому удовлетворяют координаты лю-
бой точки этой линии и нс удовлетворяют координаты ни одной точки, нс лежа-
щей на данной линии.
Уравнение линии в декартовых координатах в общем виде записывается так:
F(x.y)-0.
где F(x, у)- функция переменных х и у.
Пример 1.9. Составить уравнение множества точек, равноудаленных от двух
данных точек A/t(-4,3) и Л/2(2,5).
Пусть Л/(х, у) - произвольная точка данного геометрического места. По ус-
ловию | Л/, М | = | М2 М | По формуле (1.9) получаем
|М,М| = 7<х + 4)2+(у-3)’, |М2М| = V(*-2)’+(y-5)2.
Подставляя эти выражения в равенство | Мх М | = |Л/2Л< |, находим уравнение дан-
ного множества точек:
V(x+4)2+(y-3J* =V(x-2)’+(y-5)2.
Упростим это уравнение. Возведем в к вал par обе части уравнения и раскроем
скобки в подкоренных выражениях.
х2 + 8х +16 + у2 - бу + 9 = х2 - 4х + 4 + у2 - Юу + 25.
Произведя преобразования, получим Зх + у—I = 0. Эго уравнение прямой линии.
Пример 1.10. Составить уравнение окружности радиуса Л с центром в
точке С(а,Ь).
Пусть М (х, у) - произвольная точка данной окружности. По определению
окружности (как множества точек, равноудаленных от данной точки) для любой се
10
точки имеем |Л/С| = Я Выражая расстояние между точками М и С по формуле
|Л/С|«^(х-а)2 + (у-6)2 и подставляя его в левую часть данного равенства,
получим уравнение J(x-a)1 + (y-b)2 = Я, которое можно записать так:
(х-а?+(у-Ь)г =/?. (1.16)
Уравнение (1.16) является уравнением окружности радиуса Я с центром в
точке С(а,Ь).
Если точка С совпадает с началом координат, то уравнение (1.16) принимает вид
х2+у2-Я2. (1.17)
Замечание. Если точка Л' (х, у) лежит внутри круга радиуса Я с центром в
начале координат, то ее координаты удовлетворяют неравенству х2 + уг < R1;
если вне указанною круга, то неравенству к2 + у2 > Я2.
Пример 1.11. Точка Л/ движется так, что в любой момент времени се рас-
стояние до точки Л (4,0) вдвое больше расстояния до точки в (1,0). Найти урав-
нение траектории движения точки М.
Текущие координаты точки М в прямоугольной декартовой системе координат
обозначим через х, у. По условию | МА | = 2| МВ | Выразим длины отрезков МА и
МВ через координаты соответствующих точек с помощью формулы (19):
\Ш| = 7(ж-4)2 + у2, |Л/В| = у/(х —I)2+ у2.
Подставляя эти выражения в равенство |ЛМ|- 2|М0|. получаем уравнение траек-
тории движения точки М: J(x - 4)1 + у2 = 2^(х - I)2 + у1. Упростим это уравне-
ние, для чего возведем в квадрат обе части и приведем подобные члены
(х-4)2+у2 = 4((х-1)2+у2Х х2 —8х + 16+у2 = 4(х2-2х + 1 + у2Х
12 = 3х’+3у2. х2+у2=4.
Итак, траекторией движения точки М является окружность радиуса Я = 2 с
центром в начале координат
1.8. Пересечение линий
Координаты точек пересечения двух линий, заданных уравнениями
Я(х, у) = 0, Ф(х,у) = 0, нахоляг из системы этих уравнений
Г(х,у)=0, Ф(х,у) = а (ИМ)
Число действительных решений равно числу точек пересечения Если система
(1.18) нс имеет действительных решений, то данные линии не пересекаются.
Пример 1.12. Найти точки пересечения линий х2+у2=10, х + у-4 = 0.
Из последнего уравнения выражаем у = -х+4 и подставляем в первое урав-
11
нснис: х2+(-х + 4)2 = 10, 2х2-8х + 6 = 0, х2-4х+ 3 = 0, откуда Х| = 1, х2=3.
Подставим эти значения в уравнение у = -х + 4 и найдем у, = 3. y2 = L Следова-
тельно, получены две точки пересечения Af (1,3). Л'(II).
Пример 1.13. Найти точки пересечения двух окружностей, заданных урав-
нениями (х-5)2+(у-6)2 =25, (х+ 2)2+(у-6)2 = 32
Раскрывая скобки и приводя подобные члены, получаем систему уравнений
х,+у,-10х-12у + 36=й
х,+у, + 4х-12у + 8 = 0
Вычитая второе уравнение из первою, получаем -14х +28 = 0, откуда х = 2
Второе уравнение системы при х = 2 сводится к квадратному относительно у:
у2-12у+20 = 0. Решив его, найдем у, =2, у2»10. Следовательно, данные ок-
ружности пересекаются в точках Л/,(2.2Х М2(2Ю).
1.9. Уравнение линии в полярных координатах
Уравнение линии на плоскости в полярных координатах в общем виде
можно записать так:
^(Р.ф) = О.
где F(p, ф) - функция переменных р и ф (р, ф - полярные координаты). Если это
уравнение разрешимо относительно р, то его можно представить в виде р = р (<?).
Пример 1.14. Составить уравнение прямой, перпендикулярной полярной
оси и отсекающей от нее отрезок, длина которого равна а.
Обозначим буквой А точку пересечения данной прямой с полярной осью ОР
(рис. 1.6). Пусть М (jp, ф) - произвольная точка данной прямой. Из прямоуголь-
ного треугольника ОАМ находим, что рсокф = а. Полученное уравнение является
искомым; ему удовлетворяют координаты любой точки данной прямой и не удов-
летворяют координаты ни одной точки, не принадлежащей этой прямой.
Рис 16
Рис. 1.7
12
Пример 1.15. Составить уравнение окружности радиуса а, касающейся по-
лярной оси в полюсе, центр которой расположен выше полярной оси (рис. 1.7).
Пусть М (р. <р) - произвольная точка окружное™, ОА — диаметр окружности,
равный 2а. Так как в треугольнике ОАМ угол при вершине М прямой, угол при
вершине О равен л/2-ф, то 2аав(я/2-ф) = р, или p = 2asinp Эго искомое
уравнение данной окружности.
1.10. Параметрические уравнения линии
Уравнения вида
* = /('). У = 9 (О (I 19)
называются параметрическими уравнениями линии, если при изменении / в неко-
тором промежутке формулы (1.19) дают координаты любой точки данной линии и
только таких точек.
Если линия задана уравнением р = р (q>) в полярных координатах. то ее пара-
метрические уравнения можно записат ь так:
х = р(Ф)со5ф, у = р(ф)мпф (120)
В уравнениях (1.20) роль параметра играет полярный угол ф
Пример 116 ('оставить параметрические уравнения окружности радиуса Л
Пусть Л/ (х, у) - произвольная точка данной окружное™, t - величина утла,
образуемого отрезком ОМ и осью аба икс, Р и Q- основания перпендикуляров,
опущенных из точки М на координатные оси (рис. 1.8). Так как по определению
х = ОР, y = OQ и OP = Acosr, OQ= Rsint. то x = Rcost, у=Ляп/.
Следовательно, параметрические уравнения данной окружности имеют вид
х = Rcost, у = Я sin t, где 0 S t < 2п.
Исключив из этих уравнений параметр t (для чего возведем в квадрат оба равен-
ства и почленно сложим), получим уравнение xi+y1 = R7 (см уравнение (1 17)).
Пример 1.17. Составить параметрические у равнения циклоиды. 1 (иклоидой
называют линию, являющуюся траекторией фиксированной точки окружности
радиуса R, катящейся по прямой.
13
Указанную прямую примем за ось Ох декартовой прямоугольной системы ко-
ординат (рис. 1.9). Предположим, что фиксированная точка при начальном поло-
жении окружности находилась в начале координат, а после того как окружность
повернулась на угол г, заняла положение М.
Поскольку х = ОР = ОК-РК, у- MP = CK-CN и ОК = МК Rt,
РК = MN “ Л sin Г, СК = R, СК = Яак/, то х = Rt-Яяп/, у = Я-Яак/, или
х = Я(/-sm<X У ~ Я(1 -ак/). (1-21)
Уравнения (1.21) называются параметрическими уравнениями циклоиды.
1.11. Преобразования декартовых
прямоугольных координат на плоскости
Одна и та же точка имеет раз личные координаты в разных системах декартовых ко-
ординат. Существует связь между координатами точки в ратных системах координат
Параллельный перенос. Пусть даны две системы декартовых прямоугольных
координат с общим масштабным отрезком- Оху (старая) и (\XY (новая), соответ-
ствующие оси которых параллельны (рис. I.IO) Положительные полуоси имеют
одинаковые направления, начало новой системы находится в точке О,(<з, />), старые
координаты которой х = а, у = b (новые координаты се равны нулю). Относительно
таких систем говорят, что одна гкт.ту чека из другой путем параллельного переноса
Старые координаты х, у точки М через ее новые координаты X, Y и старые ко-
ординаты а, b нового начала О, выражаются формулами
х = А’+о.у=Г + Л, (122)
откуда
% = x-e, Y = y-b (123)
Поворот координатных осей. Новая система Ох'у' получена путем поворота
старой на угол а вокруг точки О (рис 1.11). Старые декартовы прямоугольные х, у
14
точки Mчерез ее новые координаты х', у' выражаются формулами
х = х' cos а - / sin а, у - х' sin а - у’ cos а.
(1.24)
Чтобы выразил. х', / через х, у. необходимо разрешить систему (1.24) относи-7
тсльпо х', у'. Можно сделать проще считать систему Ох'у' старой, т осла переход
к новой системе Оху совершается поворотом на угол (-а), поэтому в формулах
(1.24) достаточно поменян, местами.» и х', у и у', записать (-а) вместо а
В общем случае, когда даны две системы Оху и Ох'у' (рис 1.12), вводя про-
межуточную систему ОУ у" и применяя последовательно формулы (1.22) и
(1.24), получаем
х = х' cos а - у' sin а + а,
. . . х 0^)
у-х sina + y cosa + o. *
Замечание. Система координат
Оху, в которой кратчайший поворот
положительной полуоси Ох до совпа-
дения с положительной полуосью Оу
совершается против часовой стрелки,
называется правой; если указанный
сюворот совершается по часовой
стрелке, система называется левой.
Формулы (1.25) остаются прежними,
если обе системы координат являются
левыми. Если одна система правая,
другая левая, то в формулах (1.25) из-
менится знак перед у', так как в случае простейшего преобразования координат
разноименных систем формулы имею! вид х = х', у = -у'.
1.12. Прямоугольные декартовы координаты
в пространстве
Прямоугольная декартова система координат в пространстве определяется за-
данием масштаба (отрезка для измерения длин) и трех пересекающихся в одной
точке взаимно перпендикулярных осей, занумерованных в определенном порядке.
Точка пересечения осей называется началом координат, сами оси -
координатными осями, первая из них - осью абсцисс. вторая осью ординат,
третья - осью аппликат. Обозначим начало координат буквой О, координатные
оси будем обозначать соответственно через Ох. Оу. Oz (рис 1.13>
Пусть М~ произвольная точка пространства; проведем через нес гри плоско-
сти, перпендикулярные координатным осям, и точки пересечения с осями обозна-
чим соответственно через М,, М,, Мг. Прямоугольными декартовыми коор-
динатами точки М называются числа, определяемые формулами
х = ОМ,, у = ОМ,, х = ОМ,.
15
где ОМ,, ОМ,. ОМ, - величины
направленных отрезков ОМ,.
ОМ у, ОМ, соответствующих
координатных осей. Число х назы-
вается первой координатой или
абсциссой, число у - второй коор-
динатой или ординатой, число г -
третьей координатой или ап-
пликатой точки М.
Координатные плоскости Оху,
Oxz. Oyz делят вес точки пространст-
ва, нс принадлежащие гтим плоско-
стям, на восемь частей, называемых
октантами.
Таблица 1.1
Координата Октант
I II III IV V VI VII VII)
X + - - + ♦ • - ♦
У ♦ ♦ - - + + - -
г + + ♦ + - - - -
Начиная с I октанта, в котором вес координаты положительны, пронумеруем ок-
танты I, U, III, IV верхнего полупространства (г > 0) против часовой стрелки (для
наблюдателя со стороны положительной оси Oz). В нижнем полупространстве
(z < 0) проведем соответствующую нумерацию октантов V, VI, VII, VIII так, что-
бы V находился под I, VI - под II. VII - под III, VIII - под IV. Знаки координат
точек в различных октантах приведены в табл. 1.1.
Очевидно, знаки координат однозначно определяют октант пространства.
1.13. Расстояние между двумя точками
в пространстве
Если A/jtxj.yj.z,)-две любые точки пространства, то рас-
стояние между ними определяется формулой
В частном случае, когда точка М, совпадает с началом координат
(х( = у, = z, = 0), то формула (1.26) принимает вид
(|27>
16
Пример 1.18. Вычислить расстояние межлу точками Д/((|,-2,2) и
Л/2(3, -1, 4), а также расстояние от точки А/2 до начала координат
По формулам (1.26) и (1.27) соответственно получаем
Р(Ч. М,)-7(Э-1)1 +(-1-(-2))’ +(4-2)1 -3.
р(О, Мг)- ^З2+(-!)’+4* = т/26
Замечание. Формулы (1.26) и (1.27) упрощаются, когда точки М, и М2
лежат в плоскости, параллельной одной из координатных плоскостей, или в самой
этой плоскости. В этом случае получаем формулы (1.9) и (1.10).
1.14. Цилиндрические асферические
координаты
В плоскости П фиксируем точку О и исходящий из нее луч ОР (рис 1.14). Че-
рез точку О проведем прямую, перпендикулярную плоскости П, и укажем на ней
положительное направление, полученную ось обозначим Ог. Выберем масштаб
для измерения длин. Пусть М- произвольная точка пространства, N - ее проекция
на плоскость П, Mt - проекция на ось Ог. Обозначим через риф полярные коор-
динаты точки N в плоскости П относительно полюса О и полярной оси ОР. Ци-
линдрическими координатами точки М называются числа р, ф. г. где р, ф -
полярные координаты точки N (р £ 0,0S ф < 2я\ г = ОМ, - величина направ-
ленного отрезка ОМ, оси Ог Запись А/ (р.ф, z) обозначает, что точка А/ имеет
цилиндрические координаты р, ф, г. Наименование «цилиндрические координаты»
17
объясняется тем, что координатная поверхность р = const (т. с. множество точек,
имеющих одну и ту же первую координату р) является цилиндром (на рис. 1.14 он
изображен штрихами).
Если выбрать систему прямоугольных декартовых координат так, как показано
на рис. 1.14, то декартовы координаты к, у, z точки М будут связаны с ее цилинд-
рическими координатами р, ф, z формулами
я = pcostp. уpsinqt. i«г. (1.28)
Сферические координаты вводят следующим образом Выберем маепггаб для
измерения длин отрезков, фиксируем плоскость П с точкой О и полуосью Ох, ось
Oz, перпендикулярную плоскости П (рис. 1.15). Пусть М- произвольная точка
пространства (отличная от Оу, N- проекция ее на плоскость П, г- расстояние
точки М до начала координат, 0 -.угол, образуемый отрезком ОМ с осью Oz, ф-
угол, на который нужно повернуть ось Ох против часовой стрелки (если смотреть
со стороны положительного направления оси Oz). чтобы она совпала с лучом ON;
0 называется широтой, ф - долготой.
Сферическими координатами точки М называются три числа г. 0, ф. опреде-
ленные выше. Если точка М имеет сферические координаты г, 0, ф, то пишут
А/(г,0,ф).
Наименование «сферические координаты» связано с тем, что координатная по-
верхность г - const (т.е множество точек, имеющих одну и ту же координату' г)
является сферой (на рис. 1.15 одна из таких сфер изображена штрихами); фикси-
ровав другое значение г, получим другую сферу.
Для того чтобы соответствие между точками пространства и тройками сфери-
ческих координат г. 0, ф было взаимно однозначным, обычно считаютг. что г, 0. <р
изменяются в следующих границах: OSr<+~, 050'S я, 05ф<2к Если вы-
брать оси прямоугольной декартовой системы координат так. как указано на
рис. 1.15, то декартовы координаты х, у, z точки М связаны с ее сферическими
координатами г, 0, ф формулами
х = г51п0совф, у = гып05Шф, z = rcosO (1.29)
18
Глава 2
ЛИНИИ НА ПЛОСКОСТИ
Алгебраической линией (кривой) n-го порядка называют линию, определяемую
юпебраическим уравнением л-й степени относительно декартовых координат
Линии первого порядка определяются уравнением Ах + Ву + С-0 (Л2 + Я2 * 0),
а линии второго порядка - уравнением Ахг + Вху + Су* + +Dx + £у + А=О
(Л’ + в’+С^хО).
Линии первого порядка - прямые. К линиям второго порядка относятся ок-
ружность, эллипс, гипербола, парабола
2.1. Прямая на плоскости
Прямую линию на плоскости относительно системы декартовых прямоуголь-
ных координат можно задать различными способами. Прямая однозначно опреде-
ляется ут лом, образуемым ею с осью Ох, и величиной направленного отрезка, от-
секаемого на оси Оу, координатами двух точек и т. п.
Различные виды уравнения прямой иа плоскости. Прямая, параллельная
оси Оу прямоугольной декартовой системы координат (рис 2.I). перссекаххцая
ось Ох в точке А(а, 0), имеет уравнение
х = в. (2 1)
Угловым коэффициентом прямой называют тангенс ут ла а наклона ее к поло-
жительной полуоси Ох прямоугольной декартовой системы координат
ft = tga (О£а<я).
Угловой коэффициент прямой через координаты двух ее различных точек
У|)- М2(х2, у2) определяется формулой
19
к=у^. (2-2)
Х2-Х|
Уравнение прямой с угловым коэффициентом имеет вид
у = кх + Ь, (2.3)
где к - угловой коэффициент, Ь=О1) - величина направленного отрезка ОВ
отсекаемого на осн Оу (рис. 2.2).
Уравнение прямой, имеющей угловой коэффициогт к и проходящей через дан-
ную точку М0(х0, у0Х записывается так:
У~Уо “*(*“*•)• (24>
Уравнение прямой проходящей через две данные точки А/Дх^уД
АЛ(*а«ЛХ ,
—— (*1 * Л * У|) (2.5)
У2-У1 ’i-»i
Параметрические уравнения прямой проходящей через эти точки:
х = х,+(х2-Х|)/, У = У|+(Уз-У|)'. (2.6)
где / принимает все действительные значения.
Уравнением прямой в отрезках называют уравнение
xla*ylb=t (27)
где а = ОЛ, b-ОВ величины направленных отрезков, отсекаемых соответст-
венно на оси Ох и оси Оу.
Общим уравнением прямой называют уравнение
Лх + Яу + С-О. (2.8)
в котором А и В одновременно в нуль не обращаются, т.е. А1 + В2 * 0.
Пример 2.1. Составить параметрические уравнения сторон треугольни-
ка, вершины которого находятся в точках Л (2, ЗХ 6(4,7), С (6,9).
Составим сначала уравнения прямых, на которых лежат стороны АВ, ВС и АС
соответственно. Используя уравнение (2.5Х получаем
у-3 х-2 у-З т-2 у-3 х-2
7-3" 4-2’ 4 = 2 ’ 2 " 1 ’
ZzZ=*Z*. ZzI = AZ*.y_7-x-4;
9-7 6-4 2 2
у-Зх-2 у-3 х-2 у-3 х-2
9-3- 6-2’ 6 4 ’ 3 " 2
Обозначим буквой t равные отношения, получим параметрические урав-
нения этих прямых: х = 2+1, у = 3 + 2/(ЛЯ), х = 4+/, у = 7+ЦВС);
х = 2 + 2/, у=3 + 3/(ЛСХ
20
Введя ограничения на изменение параметра t, получим уравнения соответст-
вующих сторон треугольника АВ, ВС, АС: х-2+t, у = 3 + 2/ (Osrsl);
* = 4 + г, у«7+г (0£Г£1); х = 2 + 21, у = 3+3/ (ОSt S1).
Пример 2.2 Найти величины отрезков, отсекаемых на осях координат
прямой, заданной уравнением 1х - Зу - 21ж 0.
Разделив это уравнение почленно на 21, получим
х/3-y/l-i-O, или х/3 + у/(-7)=1.
Сравнивая полученное уравнение с у равнением (2.7), заключаем, что а = 3. b 7.
Угол между двумя прямыми. Условия параллельности и перпендикуляр-
ности двух прямых. Тангенс угла между двумя прямыми (рис 2 3)
у = *,х+(у.у = А2х + Ь. (2.9)
вычисляется по формуле .
“’olA в'0)
Необходимое и достаточное условие параллельности прямых, заданных уравне-
ниями вида (2.9). выражается равенством Л, =Л2. а условие их перпенлику
лярности - равенством
. I
*i=-T- (2.11)
Если прямые заданы общими уравнениями
Л,х + В,у + С, =0, (2.12)
Xjx + Bjy+C, =0, (2.13)
то тангенс утла между ними определяется формулой
(2 14)
Необходимое и достаточное условие параллельности прямых, заданных
уравнениями (2.12) и (2.13), выражается
равенством
AJA^BJB,. (2.15)
или
Л.Ж/Л,. Д =/«,. (2.16)
а условие их перпендикулярности -
равенством
-Ajfy = В2/Аг, илиЛ^ + ^Вг «0. (2.17)
Отмстим, что прямые Ах + By + С ж 0,
Вх-Ау + С-0 перпендикулярны в силу
условия (2.17).
21
Пример 23. Найти угол между прямыми, заданными уравнениями
5х + Зу + 15 = 0, х + 4у-7 = О.
Применяем формулу (2.14). Так как в данном случае 4=5, Д=3, Л2-1,
fij = 4, то
5 4-13
tgq> - —-—— I. ф = 45°.
51 + 34
Замечание. При другой нумерации прямых (4 = 1, Д = 4, 4=5,
Д=3) получаем tg<p' = -l. ф' = 135°. Очевидно, ф + ф' = 180°.
Пример 2.4. Составил, уравнение прямой, проходящей через точку
М (4, - 5) и параллельной прямой Зх + 4у +12 = 0.
Искомое уравнение имеет вид Зх + 4у + С = 0, где С пока не определено. Вид
уравнения следует из условия (2.1 в) при / = 1 (считаем соответствующие коэффи-
циенты равными). Чтобы найти значение С, необходимо подставить координаты
точки М в искомое уравнение (точка Л/ лежит на прямой, поэтому ее координаты
должны удовлетворять уравнению этой прямой) Подставляя координаты х = 4,
у = -5 в уравнение Зх + 4у + С = 0. получаем 3 4 + 4 (-5) + С = (1, откуда С=К
Таким образом, уравнение прямой имеет вид Зх + 4у + 8 = 0.
Пример 2.5 Составить уравнение прямой, проходящей через точку
М (-3,2) и перпендикулярной прямой 4х + 5у - 7 = 0.
Искомое уравнение имеет вид 5х-4у + С = 0 Действительно, для прямых вы-
полнено условие (2.17): 4-5 + 5'(-4) = 0. Точка М(-3,2) лежит на прямой
5х - 4у + С “ 0, поэтому ее координаты должны удовлетворять этому уравнению:
5(-3)~ 4 2 + С “ 0. Отсюда находим, что С = 21 Итак, уравнение прямой прини-
мает вид 5х - 4 у + 23 ” 0.
Пример 2.6. Вершины треугольника находятся в точках 4(3,4),
В (-2,1), С (-3,-5). Составить уравнение прямой, на которой лежит высота,
опущенная из вершины В на сторону АС.
Найдем сначала угловой коэффициент прямой, проходящей через точки А и С.
Считая точку А первой, точку С второй, т.е. полагая х, = 3, у, = 4, х, = -3,
У}“-5, по формуле (2.2) получаем к, = (-5-4)/(-3-3) = ^2. Прямая, на кото-
рой лежит высота, опущенная из точки В на сторону АС. будет перпендикулярна
прямой, проходящей через точки А и С. Угловой коэффициент этой прямой обо-
значим через А2. Используя условие перпендикулярности двух прямых, заданное
формулой (2.11). находим kj = 1/А(, кг = -ЦЗ.
Составим уравнение прямой, проходящей через точку в(-2,1) и имеющей
заданный угловой коэффициент А,. Подставляя значения х0 = -2, у0 = 1.
А = -2/3 в уравнение (2.4), получаем у-\ = (-2/3)(х-(-2)Х
3(у-1) + 2(х + 2)=0, 2x + 3y + l = ft
22
Расстояние от точки до прямой. Уравнения биссектрис углов между двумя
прямыми. Расстояние от точки Л/0(х0,у0) до прямой Ах + By+С = 0 вычис-
ляют по формуле
а=|д+^+с|
Vx’ + e2
(2.18)
Уравнения биссектрис углов между' прямыми Дх + + С, = О,
А1х + В2у + С2=:0 имеют вид
V + В(у > С, _ ± Ар + Bty + С2
7л2+а2 +
(2.19)
Пример 2.7. Найти расстояние от точки Мо(-7,4) до прямой, заданной
уравнением 4х-Зу-15=О. •
Воспользуемся формулой (2.18). Так как в данном случае х0=-7, у0 = 4,
Л = 4, В = -3, С=-15, то
Пример 2.8. Лан треугольник с вершинами Р(2,-1). @(6,-4),
Я (10,3). Найти длину высоты, опущенной из точки R.
Задача сводится к нычис.к:нию расстояния <п точки R до прямой PQ Запишем уран-
____. _ /->»» у+1 х-2
некие згой прямой. На основании уравнения (2 5) имеем —- = -——. или
Зх + 4у - 2 « 0. Расстояние точки R (10,3) до згой прямой вычислим по формуле (2.18)
|3 10+4 3-2|
а = <—т--——L=&
т/з2 + 42
Следовательно, длина высоты равна 8.
Замечание. Эту задачу можно решить н друшми способами. Например,
длину искомой высоты можно вычислить, зная ii Kiuiaji. треугольника PQR и длину
основания PQ. Эта же длина равна расстоянию между двумя точками R и М (М -
основание высоты, опушенной из точки R на PQ). В свою очередь координаты точки
М находятся в результате решения системы уравнений стороны PQ и высоты RM
Пример 2.9. Составить у равнения биссектрис углов, образованных пря-
мыми Зх-4у-7 = 0, 8х + 6у-1 = 0.
В соответствии с формулой (2.19) получаем
Зх-4у-7 _^8х+6у-1
/з’+М)2 /в2+6Г
23
Преобразуя эти уравнения, находим
2 (Зх - 4у - 7) = ± (8х + бу - IX
Отсюда получаем уравнения биссектрис 2х +14 у +13 = 0, 14х - 2у -15 = О
Задачи, относящиеся к прямым. Рассмотрим примеры решения задач, в ус-
ловиях которых даны уравнения прямых.
Примср2.10. Даны уравнения двух сторон параллелограмма
х + 2у + 2 = 0 и х+у-4=0 и уравнение одной из диагоналей х-2 = 0 Найти
координаты вернин параллелограмма.
Решая систему уравнений х + 2у + 2 = 0, х + у-4 = 0, находим точку
Л (10, - 6) - одну из вернин параллелограмма. Две другие вершины найдем как
точки пересечения данной диагонали со сторонами, т. е. определим их координаты
из систем уравнений х + 2у + 2 = 0, х—2 = 0; х + у —4 = 0, х-2 = 0. Эго будут
точки В (2,2) и О (2,-2). Середина диагонали BD находится в точке
S (2,0). Так как диагонали параллсло1рамма в точке пересечения делятся пополам,
то четвертая вершина С(х, у) может быть найдена как коней отрезка АС по извест-
ному концу А и середине S: (х + 10)/2 = 2, (у + (-6))/2 = 0. Отсюда получаем
х = -6, у = 6, т. с. точку С (-6,6) - четвертую вершину параллелограмма ABCD.
Пример 2.11. Составить уравнение линии, расстояние каждой точки кото-
рой до точки А (2,0) относится к ее расстоянию до прямой 5х + 8 = 0 как 5:4
Пусть М (х, у) - произвольная точка данной линии, N - основание перпен-
дикуляра, проведенного через точку М к прямой 5х + 8 = 0, или х = -8/5 Рас-
стояния точки М до точки Л и до прямой х = -8/5 определяются соответственно
форму вами | МА | = ^(х- 2)’+у2, |Л/Л'| = |х-(-8/5)| = |х + 8/5| (последнее ра-
венство следует также из формулы (2.18)). По условию задачи ^(х-2)2 + у*:
|х + 8/5| = 5:4, откуда 4^(х-2)’+у2 = 5|х + 8/5|. Преобразуем это уравнение:
16 (х2 - 4х + 4 + у1) = 25 (х2 ♦ (16/5)х + 64/25),
16х2 -64х + 64 + 16у2 = 25х2 + 80х + 64, 9х2 - 16у2 + 144х = 0.
Выделим полные квадраты в левой части полученного уравнения:
9(х2 + 16х + 64)-16у2-9 64 = 0, 9(х + 8)2-16у2 =9 64.
Последнее уравнение примет вид 9Д’2 -16 К2 « 9 64, или №/б4-У2/36 = 1, если
перейти к новым координатам X = х + 8, Y - у.
Полученное уравнение определяет гиперболу с полуосями а = 8, 6 = 6 (см.
уравнение (2.25)Х
24
2.2. Окружность
Ка>юническим уравнением окружности радиуса R с центром в точке С (а. Ь)
называют уравнение
(х-а?+(у-Ь? =R2 (220)
Когда центр окружности находится в начале координат, уравнение принимает
вцд х2+у2 = Л2.
Если уравнение второй степени, нс содержащее члена с произведением коор-
динат и имеющее равные коэффициенты при х2 и у1, т.е. уравнение
Ах2 -гАу2+Dx+Ey+F=0, определяет некоторую линию, то эта линия - окружность.
Пример 2.12. Найти координаты центра и радиус окружности, опреде-
ляемой уравнением 4х2 + 4у2 - 8х +12у - 3 = 0.
Разделив обе части уравнения на 4 и выделив полные квадраты, получим
(*2-2х + 1)+/ + 2 4у+|-)-|-2 = О.
Z 4 4 4
или (х-1)2 +(у + у2)2 « 4.
Сравнивая полученное уравнение с уравнением (2.20), заключаем,
что о = 1, Л»-У2. К = 1
Пример 2.13. Какое множество точек плоскости определяет уравнение
хг + уг -4х + 10у + 29=0?
Так как это уравнение сводится к уравнению (х - 2)2 + (у + 5)2 = 0, которому
удовлетворяют лишь координаты х = 2, у = -5, то оно определяет единственную
точку С(2,-5).
2.3. Эллипс
Эллипсом называют геометрическое место точек плоскости, для каждой из ко-
торых сумма расстояний до двух данных точек (фокусов) той же плоскости есть
постоянная величина.
Каноническое уравнение эллипса
х2/в2+у2/б2-1. (221)
где а = ОА - большая, Ь = ОВ — малая полуоси (рис. 2.4).
Координаты фокусов эллипса, определяемого уравнением (2.21): х,=-с,
У| «О, х2 ’с, уг = 0, т. е. /у(—с,ОХ F,(c.0\ где
c = Va2-*2. (222)
Эксцентриситегом эллипса Е называют отношение фокусного расстояния 2с к
длине большой оси 2а:
Z-c/a, е. = ф-(Ъ/а?. (2.23)
25
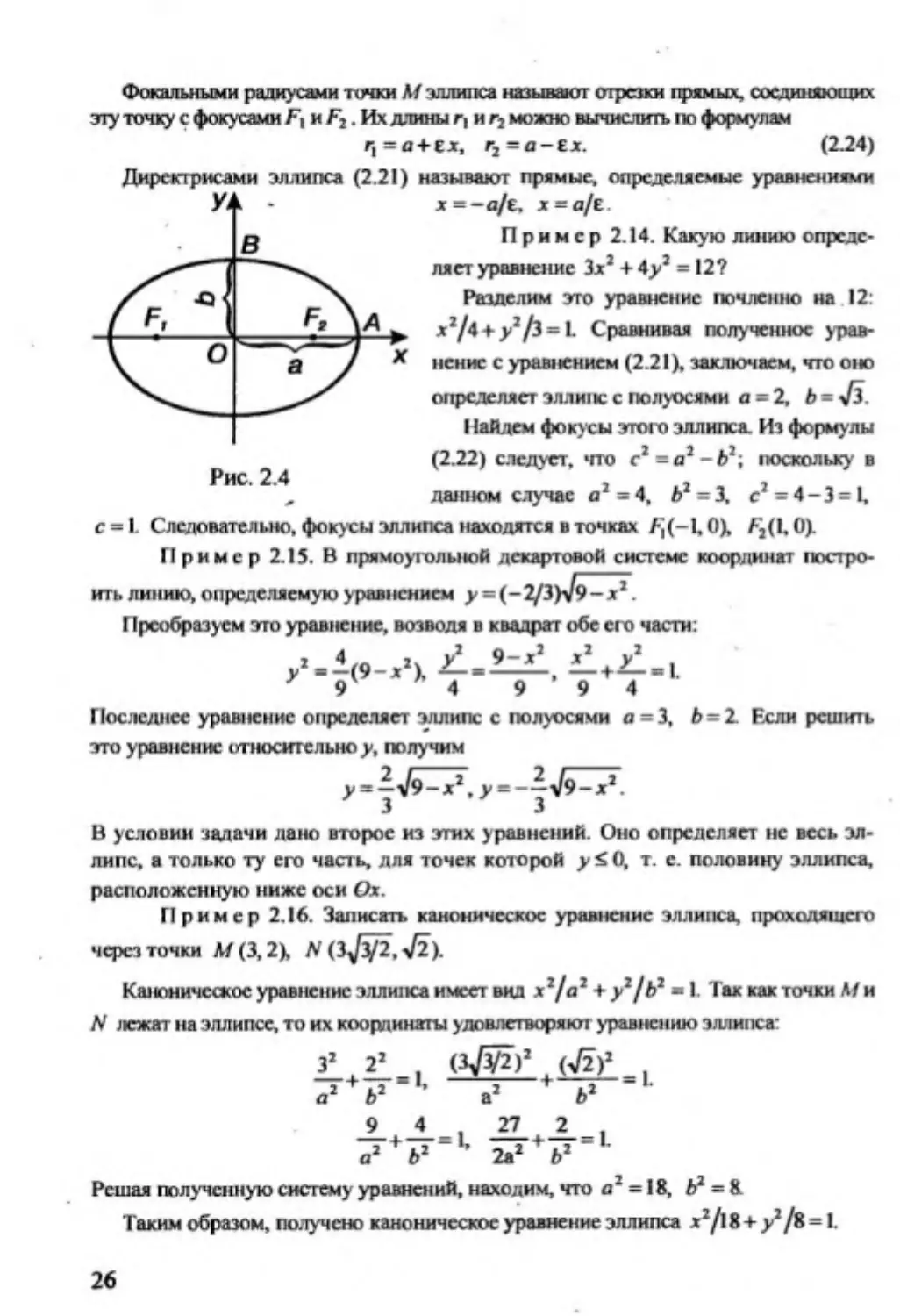
Фокальными радиусами точки Мэллипса называют отрезки прямых. соединяющих
эту точку с фокусами Ft и Ft. Их длины г( и г2 можно вычислить по формулам
г, =я+ех, г2=я-£х. (2.24)
называют прямые, определяемые уравнениями
х=-я/е. х = я/е
Пример 2.14. Какую линию опреде-
ляет уравнение Зх2 + 4у2 = 12?
Разделим это уравнение почленно на 12:
х2/4 + у2/3 = 1 Сравнивая полученное урав-
нение с уравнением (2.21). заключаем, что оно
определяет эллипс с полуосями а = 2, Ь = 4з.
Найдем фокусы этого эллипса. Из формулы
(2.22) следует, что с2=я2—/>2; поскольку в
данном случае а2 =4, А2 = 3, с2 =4-3=1,
с = 1. Следовательно, фокусы эллипса находятся в точках Г,(-1,0), Л'2(1,0).
Пример 2.15. В прямоугольной декартовой системе координат постро-
Прсобразусм это уравнение, возводя в квадрат обе его части:
У 9 К 4 9’94
Последнее уравнение определяет эллипс с полуосями о=3, 6 = 2 Если решить
это уравнение относительно у, получим
у = 1^9-х2, у = -|V9-x2.
В условии задачи дано второе из этих уравнений. Оно определяет нс весь эл-
липс. а только ту его часть, для точек которой у^ 0, т. е. половину эллипса,
расположенную ниже оси Ох.
Пример 2.16. Записать каноническое уравнение эллипса, проходящего
через точки М (3,2), N (3^3/2,41).
Каноническое уравнение эллипса имеет вид х2/я2 + у1/Ь2 = L Так как точки А/ и
N лежат на эллипсе, то их координаты удовлетворяют уравнению эллипса:
З2 2у , (3^2)2 (Л)2 ,
я2 62 ’ а2 Ьг
9 4 , 27 2 ,
ea+*2“U 2а2 +62
Решая полученную систему уравнений, находим, что я2 = 18, Ь2 - К
Таким образом, по.туч ено каноническое уравнение эллипса х2/18+у2 /8 = L
26
2.4. Гипербола
Гиперболой называется геометрическое место точек плоскости, для каждой из
которых модуль разности расстояний до двух данных точек (фокусов) той же
плоскости есть величина постоя иная.
Каноническое уравнение гиперболы
х1 /а1 - у1 /Ь1 =\, (2.25)
где а«ОЛ - действительная, b-ОВ - мнимая полуоси (рис. 2.5).
Координаты фокусов гиперболы (2.25):
х,“-с, х,=с, >1 = 0. т. с.
Ft(-c,0\, Fj(c.O), где
»
c^Ja' + b*. (2.26)
Эксцентриситетом гиперболы называется
отношение фокусного расстояния 2с к длине
действительной оси 2а:
fc/a. (2 27)
Асимптотами гиперболы называют пря-
мые, определяемые уравнениями
Рис. 2.5
Директрисами гиперболы называются прямые, определяемые уравнениями
X = -о/е, х = aft. (2.29)
Гипербола с равными полуосями (Ь= о) называется равносторонней, се кано-
ническое уравнение имеет вид
х’ (2.30)
Фокальные радиусы точки правой ветви гиперболы вычисляется по формулам
г( = ех + я, г, =Ех-а; (2.31)
фокальные радиусы точки левой ветви - по формулам
г, = -£х-а, г, =-ех + о; (2.32)
Пример 2.17. Какую линию определяет уравнение 9х: —4уг = 36?
Разделив обе части уравнения на 36, получим х2/4-у2/9 = 1. Сравнивая это
уравнение с уравнением (2.25), заключаем, что оно определяет гиперболу с дейст-
вительной полуосью а = 2 и мнимой полуосью 6 = 3.
Пример 2.18. Найти полуоси, координаты фокусов и эксцентриси-
тет гиперболы, заданной уравнением 5х2 - 4у2 = 2d Вычислить длины фо-
кальных радиусов точки М (-4,
27
Разделив обе части уравнения на 20, получим jt2/4-y2/5 = 1. Сравнивая по
уравнение с уравнением (2.25Х заключаем, что а2 = 4, Ь1 = 5, т. с. а = 2, b =
Из формулы (2.26) следует, что с2 = а1 + b\ с«3, ^(-3.0). /^(3,0> По форму-
ле (2.27) находим е = с/а = 3/2. Поскольку точка Л/ лежит на левой ветви гипер-
болы, то при вычислении г, и г2 необходимо пользоваться формулами (2.32)
Г| =(-3/2)(-4)-2« 4, гг »(~3/2)(-4)+2 = 8. Отмстим. что
гг-г, -8-4 = 4 = 2о
Пример 2.19. Записать уравнения асимптот и директрис гиперболы
4х2-9у2=36
Приводя уравнение гиперболы к каноническому виду (2.25), заключаем, что
а2 =9, 62=4, т.е. а = 3, Ь = 2. В соответствии с (2.28) записываем уравнения
асимптот у = (2/3)х, у - (2/3) х. По формуле (2.26) находим с = V9 + 4 = V13.
а по формуле (2.27) - эксцоприситег £ = Vb/з. Согласно (2.29), получаем
уравнения директрис х = -9/JI3, х-9/-Лз.
2.5. Парабола
Параболой называется геометрическое место точек плоскости. равноудаленных от
данной точки (фокуса) и данной пряхой (директрисы), лежащих в той же плоскости.
Уравнение параболы, симметричной относительно оси Ох и проходящей через
начало координат (рис. 2.6), имеет вид
/ = 2рх. (2.33)
уравнение ее директрисы
х—р/2. (2 34)
Парабола, определяемая уравнением (2.33), имеет фокус £(р/2,0), фокаль-
28
ный радиус ее точки М (х, у) вычисляется по формуле
г-х+р/2. _ (2-35)
11арабола. симметричная относительно оси Оу и проходящая через начало ко-
ординат (рис. 2.7), определяется уравнением
*’=2«у. (2.36)
Фокус пой параболы находится в точке F(0,^/2), уравнение директрисы имеет вид
y = -q/2 Фокальный радиус се точки М(х.у) выражается формулой г=у + <у2.
Замечание. Каждое из уравнений у1 = -2рх, х1 = -2qy определяет
параболу.
Пример 2.20. Найти координаты фокуса и уравнение директрисы пара-
болы у1 = 8х. Вычислить расстояние точки М (2,4) до фокуса
Сравнивая уравнение уг = 8х с уравнением (2.33), находим, что 2р - 8, отку-
да р « 4, р/2 = 2. В соответствие с формулой (2.34) получаем уравнение х = -2
директрисы параболы, фокус параболы находится в точке >(2,0). Точка
М (2,4) лежит на параболе, так как се координаты удовлетворяют уравнению
у2 = 8х По формуле (2.35) находим фокальный радиус точки М: г = 2 + 2 - 4
Пример 2.21. Найти координаты фокуса и уравнение директрисы пара-
болы х1 = 4у. Вычислить расстояние точки А/ (6,9) до фокуса
Сравнивая уравнение х2 = 4 у с уравнением (2.36), полу чаем 2q - 4, откуда
q-2, q/2-\. Следовательно, фокус параболы находится в точке >'(0,1). урав-
нение директрисы имеет вцд уж-1, а фокальный радиус точки А/; г-9+1«10
Пример 2.22. Составить уравнение параболы, симметричной относи-
тельно оси Ох и проходящей через точки А/ (5,4), Д' (15, - 6).
Так как парабола симметрична относительно оси Ох, то в ее уравнение у вхо-
дит только во второй степени. Уравнение этой параболы имеет вид
у1 -2рх +с,глср и с - некоторые постоянные. Найдем рис, использовав усло-
вия задачи. Поскольку точки А/ и N лежат на параболе, то их координаты должны
удовлетворять се уравнению 42 =2р5 +с, (-6)2 = 2р |5+с. Из уравнений
16=10р + с, 36 = 30р + с находим р = 1, с = 6.
Таким образом, данная парабола определяется уравнением у2 = 2х + 6
2.6. Полярное уравнение эллипса,
гиперболы, параболы
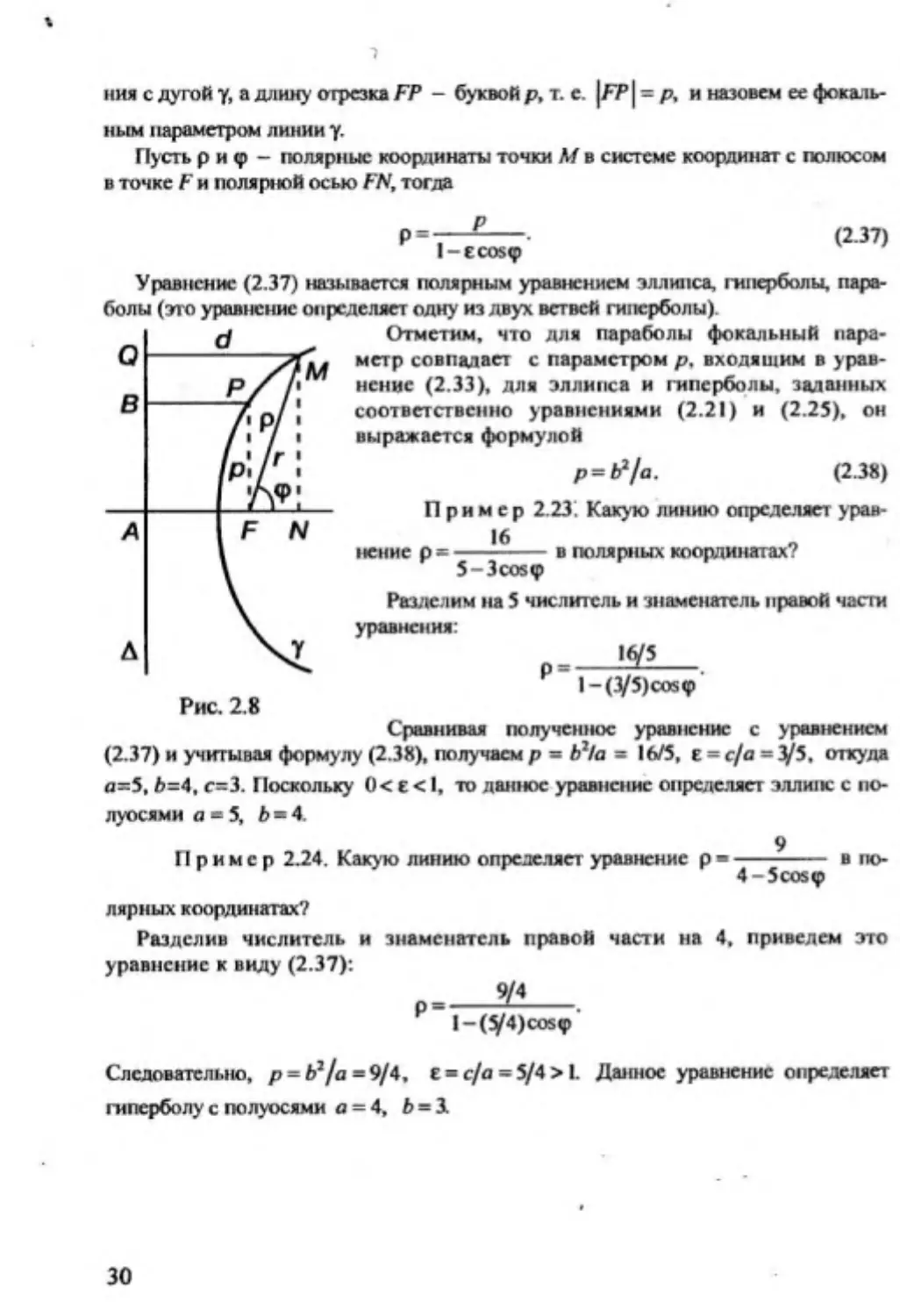
Пусть у - дуга эллипса, гиперболы или параболы (рис. 2.8). Проведем через
фокус F прямую, перпендикулярную директрисе Д, точку их пересечения обозна-
чим через А, проекцию точки М на эту прямую - буквой N. В точке F проведем
перпендикуляр к прямой AN (оси линии у), обозначим буквой Р точку ее пересече-
29
>
ния с дугой у, а длину отрезка FP - буквой р, т. е. |fiP | - р, и назовем ее фокаль-
ным параметром линии у.
Пусть р и <р - полярные координаты точки М в системе координат с полюсом
в точке F и полярной осью FN, тогда
р=-^-
!-ecos<₽
Уравнение (2.37) называется полярным уравнением эллипса, гиперболы, пара-
болы (это уравнение определяет одну из двух ветвей гиперболы)
(2-37)
Отметим, что для параболы фокальный пара-
метр совпадает с параметром р. входящим в урав-
нение (2.33), для эллипса и гиперболы, заданных
соответственно уравнениями (2.21) и (2.25), он
выражается формулой
р=Ь*/а. (2.38)
Пример 2.23. Какую линию определяет урав-
16 >
нение р =---------в полярных координатах9
5-3cos<p
Разделим на 5 числитель и знаменатель правой части
уравнения:
1-(3/5)акф
Сравнивая полученное уравнение с уравнением
(2.37) и учитывая формулу (2.38), получаем р - Ь21а = 16/5, Z = c/a = 3/5, откуда
в=5, Ь=4, е=3. Поскольку ()< Е < I, то данное уравнение определяет ЭЛЛИПС с по-
луосями а “5, />«4
9
Пример 2.24 Какую линию определяет уравнение р ----------------- в по-
4 5cos«p
лярных координатах?
Разделив числитель и знаменатель правой части на 4, приведем это
уравнение к виду (2.37):
р—
|-(3/4)со5ф
Следовательно, р = ьЧа=9/4, t^c/a=5/4>\. Данное уравнение определяет
гиперболу с полуосями о = 4, fc = 3.
30
2.7. Некоторые другие виды уравнений
линий второго порядка
Уравнение у = ах2 + Ьх + с приводится к виду X2 - 2qY и определяет парабо-
лу с осью, параллельной оси QK
Уравнение х = Ay2 + fiy + С приводится к виду Y2 = 2рХ и определяет пара-
болу с осью, параллельной оси OtX.
Равносторонняя гипербола имеет уравнение (2.30), в в системе координат, ося-
- ми которой являются се асимптоты, определяется уравнением
ХУ = С(С*0). (2.39)
Уравнение
ах + Ь , , .
у -------(ad - be # 0, с * 0)
сх + «/
приводится к виду (2.39) и определяет /иперболу.
Параметрические уравнения эллипса х2/а2 + у2/Ь2 = 1 имеют вид
х = асов/, y = *sin/.
Параметрические уравнения гиперболы х2/а2 - у2/b1 = 1 имеют вил
х =а(/ + (1/4/)), у = *(/-(1/4/)),
а также
х о ch/, у - bsht,
где ch/, sh/ - гиперболические функции аргумента / (см. п. 13.11).
11араметрнчсскис уравнения параболы X2 = 2qy можно записать так:
x*t, y~t2fy.
Уравнение
у2 = 2px+(t2-1)х2 (2.40)
определяет эллипс при 0<Е<1, гиперболу при €>1, параболу при Е = 1_ В слу-
чае 0 < Е < 1 это уравнение принимает вид
y^lpx-qx2,
где p = b2]a, q*b2/a2, а в случае Е>1 у2 -2рх + qx2, гдер и q имеют те же
выражения.
Уравнение (2.40) называют уравнением эллипса, гиперболы, параболы, отне-
сенных к вершине; начало декартовой прямоугольной системы координат нахо-
дится в вершине линии - точке пересечения с координатной осью (рис. 29)
Эллипс, гиперболу, параболу называют ка/юническими сечениями В сечении
конуса плоскостью, нс проходящей через его вершину (рис. 2.10), получаются эти
линии, а именно эллипс (сечение одной полости конуса плоскостью, нс перпенди-
31
кулярной его оси и нс параллельно образующей), парабола (сечение плоскостью,
параллельной его образующей), гипербола (течение плоскостью обеих полостей
Пример 2.25. Построить линию, определяемую уравнением Зу =
= х’-6х + 15.
Преобразуя это уравнение, получаем у = (|/3)((xJ-6x+9)+6), уш
= (1/3)(х-3)’+2, у-2-(УЗ)(л-3)*. .
Перейдем к новым координатам по формулам Х = х-3, У’ = у-2. В новых
координатах уравнение принимает вид )' = (^3)А'2, или X1 =ЗУ; оно определяет
параболу. Строим системы координат Оху и O)XY, последнею с началом в точке
О|(3,2\ и саму параболу - в новой системе координат по ее каноническому
уравнению (рис. 2.11).
Пример 2.26 Построить линию, определяемую уравнением
2х + 12
у=тгг-
Преобразуя данное уравнение:
>(х + 3)-2х-12 = 0, >(х + 3)-2х-6-6 = 0.
y(x + 3)-2(x+3)-6 = 0, (х + 3)(у-2)=б
Переходя к новым координатам по формулам >' =л + 3, Y = y-2, получаем
уравнение А У = 6, определяющее гиперболу. Строим линию в системе координат
O,XY (рис. 2.12), начало которой находится в точке Ц(-3,2).
32
Пример 2.27. Какую линию определяет уравнение ху+х-2у-14 = О?
Преобразуем это уравнение (ху+х)-(2у + 2)-12 = 0, л(у+1)-2Су+
+ 1)-12 = а (> + 1)(л-2)-12 = 0, (*-2)(у + 1)= 12.
Переходя к новым координатам по формулам Х = х~2. >'= > + !. получаем
уравнение ХУ = 12, которое определяет гиперболу.
2.8. Упрощение уравнения второй степени, не
содержащего члена с произведением
координат
Рассмотрим уравнение второй степени относительно прямоугольных декарто-
вых координат, нс содсржашсс члена с произведением координат ху.
Ax'+Cy' + Dx + Ey + F-O. (241)
Перейдем к новой системе координат ОхХУ. полученной кт исходной путем парал-
лельною переноса (см. рис. 1.10) начала в точку Ot(a.b). при котором старые координа-
ты (л>) точки М выражаются через ее новые координаты (X, У) формулами (122)
Уравнение (2.41) путем выделения полных квадратов может быть приведено к
одному из следующих канонических уравнений:
Л’/а’ + Г2/*1-!, (2«)
+ (2.43)
I (2 44)
в случае ЛС>0 (линии эллиптического типа);
Хг1аг-Уг1ьг = \. - Xi/a-¥Yl/b1 = \, (2.45)
Х’/д’-Г’/ь’жО (2.46)
в случае АС < 0 (линии гиперболического типа);
2 3ш I
33
Y2 = 2рХ, (2.47)
Y2 = b2, (2.48)
Р=0, ' • (2.49)
Y2--b2 (2.50)
в случае АС =0, А = 0 (линии параболического типа).
Если С=0, Л#0, то уравнение (2.41) приводится к виду X2 -2qY, если
Е * 0, и к одному из уравнений X2 - а2, X2 = -а2, X2 = 0, когда Е = 0.
Уравнение (2.42) определяет эллипс, уравнения (2.45) - гиперболы (с дейст-
вительной осью О)Х или Q) ), уравнение (2.47) - параболу (с осью О^ХУ,
уравнения (2.46) - пару пересекающихся прямых ЫС-о)' = 0, 6Л +а> =0,
уравнение (2.48) - пару параллельных прямых Y = b, Y = -6. уравнение (2.49) -
пару совпавших прямых 1=0, Y = 0, уравнению (2.43) удовлетворяют координа-
ты единственной точки X - 0, Y = 0, уравнениям (2.44) и (2.50) нс удовлетворя-
ют координаты ни одной точки
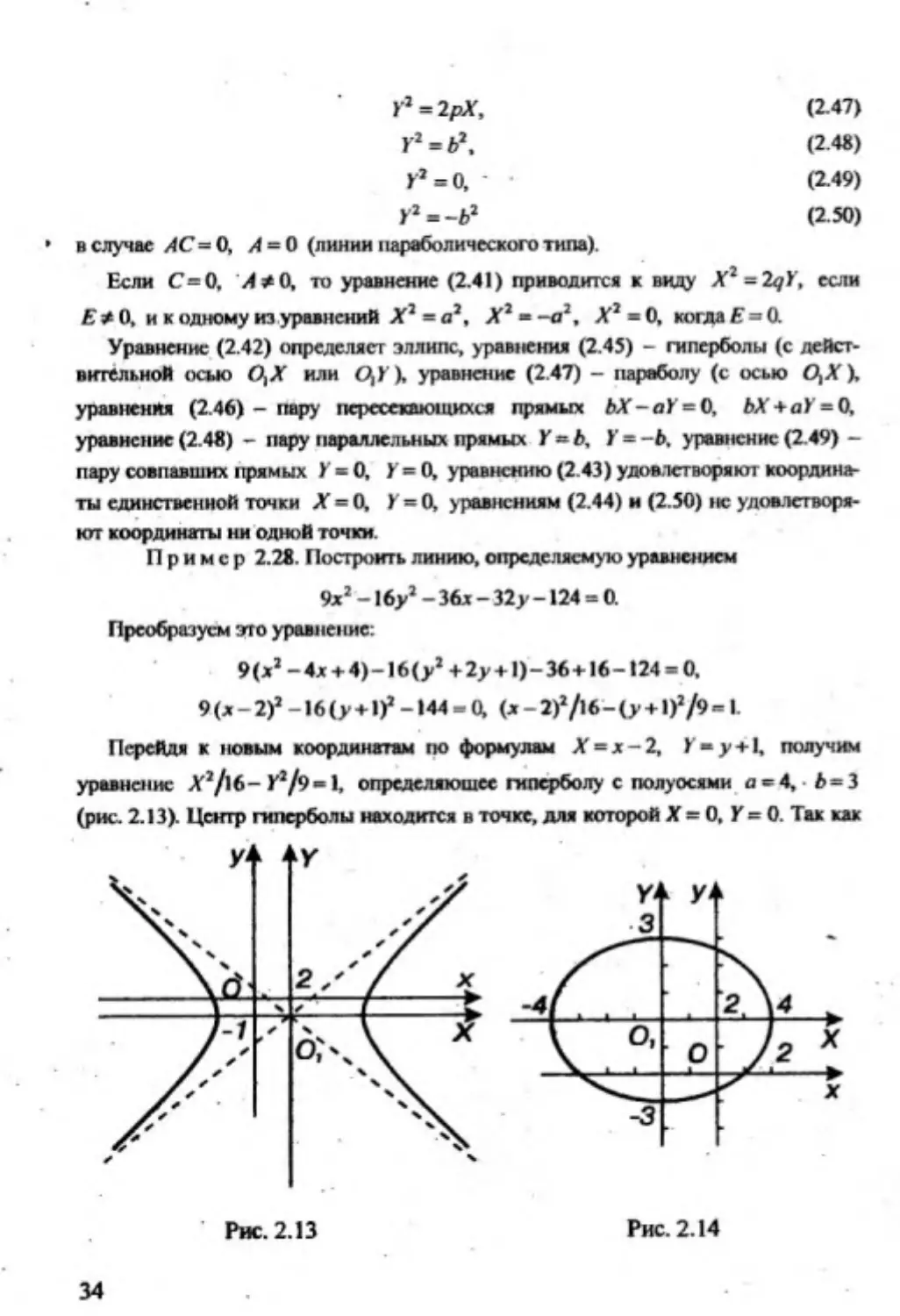
Пример 2.28. Построить линию, определяемую уравнением
9л2 - 16у2-36х-32у-124 = 0.
Преобразуем это уравнение:
9(л2-4л+ 4)-16(/+2у + 1)-36+16-124.0,
9(л-2)2-I6O- + I)2 -144 = а (л-2)2/16-(у + 1)2/9-1.
Перейдя к новым координатам по формулам Х = л-2, )=y-t-l, получим
уравнение №/16- У2/9-1, определяющее гиперболу с полуосями а = 4, 6 = 3
(рис. 2.13). Центр гиперболы находится в точке, для которой X = 0. Y = 0 Так как
34
Х = х-2, Г = у + 1, то х—2 = 0, у+1 = 0, откуда х = 2, у=-1. Получена точка
Ot(2, - IX в которой находится начало новой системы координат.
Пример 2.29. Построить линию, определяемую уравнением
9х2 + 16у2 + 36х -64у-44 = 0.
Выделяя полные квадраты в левой части уравнения, получаем
9(х2+4х + 4)+1б(у2-4у + 4)-36 - 64- 44 = 0,
' 9(х+2)2 + 1б(у-2)2-144, (x + 2)2/h6+(y-2)2/9 = l. -
' I I иг...... ... • > (
Переходя к новым координатам по формулам ,X - х + 2, Y у-2, последнему
уравнению придадим вид >'2/16 + 12/9 = 1 Это уравнение определяет типе с полу-
осями а « 4, Ъ= 3 (рис 214). Центр эллипса находится в точке, для которой X = 0,
3 =0, или х+2 = 0, у-2 = 0, откуда х=-2, у = 2, т е втонке Ц(-2,2).
2.9. Упрощение общего уравнения второй степени
Общее уравнение второй степени относительно прямоугольных декартовых
координатх и у
4х2+2&у + (У + Пх + Еу + £-0 ____с (2.51)
при повороте координатных осей на угол а, для которого
ctg2a = (X-Cy2B, (2.52)
преобразуется в уравнение А^х,г + С,/2 + D,x' + £,/ + F = 0, являющееся уравне-
нием вида (2.41).
Формулы преобразования ксюрдннат имеют вид
х = x'cosa-y'sina, у=х* sin a + у* сова, (2.53)
причем
sina - ±^(1-сов2а)/2, cosa =1^(1 +сов 2а)/2. (2.54)
cos 2а = c>g2ot , (2.55)
±yi + ctg22a
rae^ctg2к'оправляется форму>1^1Ц2.52)< ’> Г~ ’Л
Уравнение (£.51) определяет Juih пустое множество, или точку, или пару пря-
мы^ (пёре9а9бщю|ск пэд^лельных, совпавших), или одну из линий
(окружность, Тпаипс, гипербблу, параболу). Пару прямых называют распадающей-
ся линией второго порядка. .' ; »
Пример 2.30. Построить линию. Определяемую уравнением
5х2 - бху + 5у2 — 24 х + 8у + 24 = 0.
Это частный случай уравнения (2.5 IX для которого 4 = 5, 2В = -6, С =5,
35
D = -24, £ = 8, F = 24. По формуле (2.52) имеем etg2а = (5- 5)/( -6) = 0 Возь-
мем 2а = х/2, т. е. а-л/4, тогда sina = cosa = ^2/2. Формулы (2.53) прини-
мают вид
д-(Л/2)(дг'-/).> = (^/2)(ж' + /Х (I)
Подставляя эти выражения в исходное уравнение, получаем
(y2)(Z-yy-(^2)(x'-y)(** + y)+(V2)(*'+/)*-
-1V Л (X'-/) + 4з/2 (л'+уЭ + 24 = О,
(3/2) (хй -2л>'+/Ъ- 3 (лй - /Ъ+(У2) (лй + 2х'/ + ул )-
-1VV2 (л* - /)+ 4 Л( л' + /)+ 24 = О,
2л'1 + 8/’ - яЛх' + 1бЛу' + 24 = О,
л'2 + 4/’- 4Лл'+ 8я/2У +12 = 0.
Преобразуем левую часть последнего уравнения, выделив в ней полные квадраты:
(Xй - 4 Лх' + 8) + 4(у'7 + 2J2/ + 2)- 8- 8+12 = 0. (л'- 2Л)1 + 4(/ + Л)’ - 4
Переходя к новым координатам по формулам
Х = х'-2-Л, Г-/+Л, <и>
последнее уравнение записываем так:
X1 + 4 К1 = 4. или Хг/4 + Yi/1 -1. О»)
Каноническое уравнение (III) определяет эллипс с полуосями а = 2, b “ 1- По-
строим этот эллипс относительно
новой системы декартовых прямо-
угольных координат О, АТ Угол
наклона оси О1Х к оси Ох уже
известен a =45°, осталось опре-
делить старые координаты точки
OJ. В системе OIXY эта точка
(центр эллипса) имеет координаты
А" = 0, )«й По формулам (П)
имеем л'-гЛ-о, у+Л=а
откуда х' = 2J2, у’ - -2-J2. С
помощью формул (I) находим координаты точки Q в старой системе координат Оху:
л = (4/2/2) (2з/2 - (-Л))= 3, у » (Л/2) (2Л - Л) -1. Ц(3,1).
Строим новую систему координат и сам эллипс по его канониче-
скому уравнению (III) (рис. 2.15).
36
Пример 2.31. Построить линию, определяемую уравнением
Зх* + 4лу — 4зг - 8у “ 0.
В данном случае Л = 3, 2В=4,‘ С = 0. По формуле (2.52) находим
ctg2a = (3-0)/4 = у4. В формулы (2.53) входят sin а и cosol Найдем их значе-
ния с помощью формул (2.54) и (2.55), в которых знак можно выбрать по своему
усмотрению. Выбрав везде знак плюс, получим
Формулы (2.53) принимают вид
я «(^я/5)(2ж'-у'), у e(^Vs)(x' + 2y'). (IV)
Подставим эти выражения в исходное уравнение и преобразуем его:
| (2Г - у')’ + J (Ь' - у') (л' + 2у 9--J- (2х* - у') - ^(х< ♦ 2Н = 0.
| (4жЛ - 4х'у' + у'1) +1 (2т'1 + 4л'у' - х'у' - 2у'*) - -£х' - 0.
5 5 V5 Л
Перейдем к новым координатам по формулам
JT-x'-VVs, Г = у'+б/Л. (V)
Последнее уравнение в новых координатах примет вид
4Х1 - Y2 -4, или - Х2/1 + Г’/« L
Это каноническое уравнение определяет гиперболу с полуосями ажЦ Ь-2,
причем действительной осью будет ось О, У. Построим гиперболу в новой системе
координат OfXY. Найдем сначала старые координаты точки О„ в которой нахо-
дится центр гиперболы. Для этой точки X = 0, Y = 0. По формулам (V) получаем
x'-VVs. у'--<^5. С помощью формул (TV) находим
37
Q(2,-2). Через точку Q про-
водим ось О;Д', для которой tga = 1/2, и ось О, У, перпендикулярную оси С\Х.
В системе координат О,ХУ строим гиперболу по ее каноническому урав-
нению (рис. 2.16).
Пример 2.32. I [встроить линию, определяемую уравнением
х2 - 2ху+уг + 4л - 8у + 7 = 0.
Поскольку /4 = 1, 2в = -2, С = 1, то по формуле (2.52) ctg2a = (l-
-1)/(-2)=0, 2a = я/2. a = ’t/4. Формулы (2.53) принимают вид
л»(Л/2)(х'-УХу = (Л/2)(х'+УХ (VD
Подставим эти выражения в исходное уравнение и преобразуем его:
(1/2)(х'-У)2-(х'-У)(х' + /)+(1/2)(х' + У)2 + 2Л(х'-У)-
-4Л(х' + У)+7-0.
2у,г - 2 Лл' - бЛу' + 7 = 0, (у' - 3 Л/г)2 - Л (х* + (/Л) = 0.
Перейдем к новым координатам по формулам
Х = х' + 1/Л, Г"У-3ЛА- (V,I)
В новых координатах последнее уравнение принимав вид
У2-Ла = 0, или Г2 - Лх.
38
Это уравнение опрслсляс! параболу. Вершина параболы находится в точке, для
которой X = О, К = 0. Найдем старые координаты этой точки. По формулам (VII)
находим х' = -1/^2, у' = . С помощью формул (VI) получаем
Строим систему координат О,АЭ’ и параболу по сс каноническому уравнению (рис 2.17).
2.10. Некоторые алгебраические линии
высших порядков
Декартов лист - линия, определяемая в прямоугольной декартовой системе
координат алгебраическим уравнением
х1 + у’ - Зату * 0 (а = const # 0).
В полярных координатах уравнение принимает вид
р __ Зо cosy sin <р
cos’ у+sin’ у
Декартов лист можно задать и параметрическими уравнениями
х - Зо//(1 + Л у = 3*7(1+?).
Линия зга изображена на рис. 2.18.
Циссоида Рассмотрим окружность с диаметром ОА - 2а и касательную к ней
в точке А (рис. 2.19). Из точки О проведем луч ОВ, точку его пересечения с ок-
39
Проведя другой луч и выполнив аналогичное построение, получим точку А/,.
Таким способом можно построить сколько угодно точек. Множество точек
М, называют циссоидой. Построив достаточное число указанных точек и
соединив их плавной линией, получим циссоиду (см. рис. 2.19).
Уравнение циссоиды и декартовых прямоугольных координатах имеет вид
/=x7(2e-K),
в полярных координатах
р= 2asin2<p/cos<p
Параметрические уравнения циссоиды
2a 2a
х - —• У - —;--------•
r’ + l *o2+l)
или
х = 2zisin2<p, у = 2д sin’ф/cos ф,
где ф - полярный угол.
Строфоида Рассмотрим точку Я и прямую Л. нс проходящую через данную
точку (рис. 2.20). Обозначим буквой С точку пересечения перпендикуляра к пря-
мой Д, проведенной в точке А. а длину отрезка АС-а, т. с. | ЛС| = в. Вокруг
точки А вращается луч. на котором откладываются отрезки КМ, и ВМ2 от точки
в пересечения с данной прямой так, что | ВЛ/, | “ |ВЛ/21 * | Ж’| Каждому положе-
нию луча соответствует пара точек W|t М2, построенных указанным способом.
Множество пар точек А/(, М2 называют строфоидой Точки Л/, и М2 при этом
называют сопряженными Построив достаточное число точек и соединив их плав-
ной линией, получим строфоиду (см. рис. 2.20). Название «строфоида» происхо-
дит от греческого слова <про<рт| поворот.
Уравнение строфоиды в полярных координатах
р = а (1 ± sin ф)/соб<р,
н декартовых координатах
» (х-а)’х , . . I х
' -\rr-
Параметрические уравнения строфоиды
х « а (1 ±sinф\ у = a (I ±sinф) sinф/совф.
Версьера Рассмотрим окружность с диаметром |ОС| = о и отрезок ВЛ/, по-
строенный так. что |ОВ| :| BD| = | ОС| :| ВМ| (рис. 2.21). Множество точек Л/
называют версьерой
40
В прямоугольных декартовых координатах уравнение версьеры имеет вид
Параметрические уравнения версьеры
х-Г.у = а7(»2+я2).
। де роль параметра играет первая координата
Рассматриваемую линию называют так же «локоном Аньези» в честь первой н Ев-
ропе женщины, получившей известность благодаря заслугам на пентрите математики
Лемниската Бернулли - множество всех точек плоскости, для каждой из ко-
торых произведение расстояний до двух данных точек той же плоскости есть посго-
янная величина, равная квадрату половины расстояния между данными точками
В декартовых прямоугольных координатах лемниската Бернулли (рис. 2.22)
имеет уравнение
(х2 + у2)2=2я2(х2-у2Х
в полярных
р2 = 2л2 cos2<p.
При другом выборе системы координат (рис. 2.23) эта линия определяется соот-
ветственно уравнениями
(х2 +/)’ = 4о2ху, р2 = 2а1 ял2ф.
41
Название линии происходит от греческого слова Лтцтако^ - повязка, бант.
Линия названа по имени ученого, открывшего се. Уравнение лемнискаты впервые
встречается в статье Я. Бернулли, опубликованной в 1694 г. в журнале «Acta eru-
ditorum» («Труды ученных»).
Овал Кассини - множество всех точек плоскости, для каждой из которых
произведение расстояний до двух данных точек той же плоскости есть постоянная
величина.
Уравнение овала Кассини в декартовых координатах
(х* +/)-2в,(д1 -/) = 64 -в4,
в полярных
р “ а^со$2<р ± ^/сов2 2ф((64/а4) -1).
Вид овала Кассини зависит от соотношения между постоянными а и />. В слу-
чае Ь>а овал имеет форму замкнутой линии, симметричной относительно осей
координат (рис. 2.24). При b«о получаем лемнискату Бернулли. В случае Ь<а
овал состоит из двух замкнутых линий.
Овалы Кассини названы в честь французского ученного, впервые рассмотрев-
шего их. Жан Доминик Кассини (1625 — 1712) открыл эти линии при попытке
определить орбиту земли.
Конхоида. В плоскости фиксируем прямую 22, и точку О, отстоящую от этой
прямой на расстоянии |ОЕ|-а (рис. 2.25, о). Проведем луч ОК, пересекающий
прямую £2, в точке К. На луче от точки К, по обе стороны от нее, отложены два
отрезка КМ и КМ, таких, что | КМ| = | КМ, |» /, где/ - заданное число. Вращая
луч вокруг точки О (от 0 до 180° ) и проводя аналогичные построения (при одном
и том же значении /), получим линию, описываемую точками М и М,. которую
называют конхоидой. Точку О при этом называют полюсом конхоиды, а прямую
42
Z2, - ее базисом. Линия эта состоит из двух ветвей: одну ветви описывает точка
А/,Другую- точка Мх.
Рис. 2.25
Уравнение конхоиды в полярных координатах
p = (<ysin<p)±/,
знак плюс - для верхней ветви, минус - дгя нижней Форма конхоиды зависит
от соотношения между параметрами / и а. При / = а и 1>а линия имеет вид.
изображенный на рис. 2.25,6, в.
В прямоугольных декартовых координатах конхоида имеет уравнение
(х*Уу1)(у-а^-1гу1 =(1
Линию эту называют конхоидой Пикомеда, по имени древнегреческого гео-
метра. впервые открывшею ее.
Улитка Паскали. Рассмотрим окружность радиуса г с центром в точке С
(рис. 2.26). Выберем на данной окружности точку О. Представим себе, что вокруг
точки О вршцае1ся луч ОМ В каждом ею положении от точки N пересечения луча
и окружности откладываем отрезок | NM | - /, г де / - заданное положительное
число. При повороте луча от 0 до 180° получим множество точек М При даль-
нейшем повороте луча от 180 до 360°, откладывая отрезок длины / по направле-
нию луча, мы фактически будем откладывать его в сторону, противоположную
Рис. 2.26 Рис. 2.27 Рис. 2.28
43
прежней, т. е. | NM, | ж /,и получим точки Л/,. Множество точек М и Mt назы-
вают улиткой Паскаля.
Уравнения улитки Паскаля:
рж2лсов<р±/, (х1 + уг-2лх)2-/’(х2 + у2) = й
Форма улитки Паскаля зависит от соотношения между параметрами г и /:
/ < 2л (рис. 2.26). / “ 2г (рис. 2.27), I > 2л (рис. 2.2в).
Линия названа в честь 'Тгьена Паскаля - французского математика-любителя,
отца знаменитого Блеза Паскаля.
Караколя - линия, описываемая точкой М окружности радиуса г. катящейся
по окружности с таким же радиусом (рис 2.29). Параметрические уравнения кар-
ЛИОДМ
х = 2л cos/-л cos 2т. у = 2л sin Г-sin 2т,
в полярных координатах
р-2л(1 -совфХ
в декартовых координатах
(х2+у2 + 2лх)2 = 4л2(х2+у2)
Уравнение р ж 2л (1 + cos«p) также определяет кардиоду в полярной системе коор-
динат с полюсом в той же точке и противоположно направленной полярной осью.
Каппа - линия, представляющая собой множество точек касания касательных,
проведенных из данной точки к окружности заданного радиуса, центр которой пере-
мешается по фиксированной прямой, проходящей мера эту точку (ряс 2.30).
Линия эта ижквлиаст греческую букву к (каппа). откуда и происходит се название
11араметрмческме уравнения каппы
х =ocos2 <p/sin<p, y”<3Cos<p.
44
в полярных координатах
р = octgrp,
в декартовых координатах
Рота - линия, заданная полярным уравнением p = osini<p или уравнением
р = ocos*q>. где а и к - положительные числа Роза целиком расположена в круге
радиуса а (р S а), так как | sin fap | 51. Роза состоит из конгруэнтных лепестков,
симметричных относительно наибольших радиусов, каждый из которых равен а.
Количество этих лспсстков зависит от числа к. Если к - целое число, то роза со-
стоит из к лепестков при нечетном к и из 2к лепестков при четном к (рис. 2.31. а,
б). Если к - рациональное число, причем к = т/п (п > 1), то роза состоит из m
лепестков в случае, когда тип- нечетные числа, или из 2т лепестков, если одно
из чисел будет четным При этом в отличие от предыдущего случая каждый сле-
дующий лепесток будет частично покрывать предыдущий (рис 2.31, в- е).
Если число к является иррациональным, то роза состоит из бесконечного мно-
жества лепестков, частично накладывающихся друг на друга
Четырех лепестковой розой (см. рис. 2.31,6) называют линию, определяемую
полярным уравнением
р = a sin 2<р.
В декартовых координатах линия имеет уравнение
(х’+у1)1-4Л1у1*(1
К=3 К=2 К5/3
К=4/3 К=1/2 К=1/3
Рис. 2.31
45
Четырехлепестковая ром образуется множеством оснований перпендикуляров,
опушенных ю вершины О прямого утла на отрезок постоянной длины, концы которого
скользят по двум взаимно i крпенлику лярным прямым, пересекающимся в точке О.
Трехлепсстковой розой (см рис 231. а) называют линию, определяемую уравнением
р = а$й>3ф.
В декартовых координатах линия имеет уравнение
(*’+/?-в(3х1у-А
Астроида. Прямоугольник, две стороны которого лежат на двух взаимно перпен-
дикулярных прямых, деформируется так, что его Диагональ сохраняет постоянную
длину Д Множество точек - оснований перпендикуляров, опушенных из вершины
прямоугольника на его диагональ, называют астроидой (рис. 232, о).
" Астроида имеет параметрические уравнения ,,,
ж «асов1 г, у=вяпэ'г.
Исключив из этих уравнений параметр t, получим уравнение астроиды в пря-
моугольных координатах:
Освобождаясь от дробных показателей, находим
(ж1 + у1 - о’)’ + 27хгу*а2 = 0.
Астроиду можно рассматривать как траектории) точки окружности радиуса г
(рис. 232, б), катящейся по внутренней стороне другой окружности, радиус R ко-
торой в четыре раза больше г (R-4г).
46
Гипоциклоида - плоская линия, описанная фиксированной точкой окружно-
сти радиуса г, катящейся без скольжения по другой неподвижной окружности
радиуса Я внутри се (рис. 2.33, где М - вычерчивающая точка, А - се исходное
положение, г- угол поворота окружности, AM - дуга линии).
Параметрические уравнения гипоциклоиды
х = ( Я - mR) cos ml + mRcos (t - mt),
у = (R-mR)sin mi-mRsin (r-mr),
где m-r/R. Форма кривой зависит от зна-
чения т. Если т = p/q (р и q - взаимно
простые числа), тогда М после q полных
оборотов окруж!юсти возвращается в ис-
ходное положение и гипоциклоида -
замкнутая линия, состоящая из q ветвей с q
точками возврата при т<\]2 (рис. 2.34);
при т > 1/2 вмесго q точек возврата линия
имеет q других точек (рис. 2.35). При
т-\]2 линия вырождается в диаметр не-
подвижной окружности, при т = \Ц явля-
ется астроидой (см. рис. 2.32). При иррациональном m число ветвей бесконечно,
точка М в исходное положение не возвращается. Обобщением гипоциклоиды яв-
ляется гипотрохоида.
Гипотрохомда - плоская линия - траектория точки, жестко связанной с ок-
ружностью радиуса г, катящейся без скольжения по другой неподвижной окруж-
ности радиуса Я внутри ее, причем вычерчивающая точка М находится на рас-
стоянии h от центра окружности радиуса г. При h > г кривая называется удлинен-
ной гипоциклоидой (рис. 2.36, т = 1/4), при Лег - укороченной (рис. 2.37.
т “ \J4 ). Параметрические уравнения гипотрохоиды
47
х = (Я-тЯ)о»тт +Acos(r- ml),
я - (R- тЯ)япт/ - Asin (Г - ml),
где т = r/R. При R = 2г линия является эллипсом, при А = /?+г- ротой (см рис. 231).
Рис. 2.37
Эпициклоида плоская линия - траектория фиксированной точки окружно-
сти радиуса г. катящейся без скольжения по другой неподвижной окружности
радиуса R вне ее (рис. 238, те М - вычерчивающая точка А - ее исходное
положение, <- угол поворота окружности. AM -
дуга кривой).
Параметрические уравнения эпициклоиды
х = ( Я + mR) cos ml - mR cos (/ + ml),
у = (R + mR) sin ml - mRsin (l + ml),
где m= r/R Форма кривой зависит от значения т
(рис. 239, а, т=\/3, рис. 239, 6; т^2/3). Если
т p/я (Р и q ~ взаимно простые числа), точка Л/
после q полных оборотов окружности возвращаем-
ся в исходное положение и эпициклоида -
замкнутая линия, состоящая из q вегвей С q точка-
ми возврата При т ~ I кривая является кардиодой
(см. рис. 2.29). При иррациональном m число ветвей бесконечно, точка М в исходное
юложение нс возвращается. Обобщением эпициклоиды является эпитрохоида
Эпитрохоида - плоская кривая - траектория точки, жестко связанной с про-
изводящей окружностью радиуса г, катящейся без скольжения по другой непод-
вижной окружности радиуса R вне ее. причем вычерчивающая точка Л/ находится
на расстоянии h от центра производящей окружности. При А > г линия называет-
ся удлиненной эпициклоидой (рис 2.40, a; m = 1/4 ), ПРИ ^<г ~ укороченной
эпициклоидой (рис. 2.40, б; т = 1/4 ). Параметрические уравнения эпитрохоиды
48
x = (R+mR)ctKmt-hcos(t + mt),
y = (R+mR)sin m/-Asin (r + m/\
где m = r/R. При r = R линия является улиткой Паскаля (см. рис. 2.27,2 28), при
2.11. Некоторые трансцендентные линии
Трансцецденп1ой называется линия, уравнение которой в прямоугольных де-
картовых координатах не является алгебраическим Простейшими примерами
трансцендентных линий могут служить графики функций у = а*. у—Igx,
у = sin х и других тригонометрических функций
Спираль Архимеда - траектория точки Л/, равномерно движущейся по пря-
мой, которая равномерно вращается вокруг фиксированной точки О (рис. 2.41).
Уравнение спирали Архимеда в полярных координатах
р = о<р.
49
в декартовых координатах
Jx2+y2 = a arvtg (у/х }.
Циклоида — траектория фиксированной точки окружности, которая без
Рис. 2.4!
скольжения катится по прямой
(см. пример 1.17, уравнения (1.21)).
Рассмотрим траекторию точки, жестко
связанной с окружностью, катящейся по
прямой, но находящуюся не на самой окруж-
ности, а на расстоянии d от ее центра
При d<R вычерчивающая точка находится
внутри окружности, ее траекторию называют
укороченной циклоидой (рис. 2.42, а).
Если d>R, то вычерчивающая точка нахо-
дится вне окружности; ее траекторию
называют удлиненной циклоидой
(рис. 2.42, 6). Эти линии определяются пара-
метрическими уравнениями
х* Rt-dant, y-R-dcost.
Алгебраическая спираль линия, определяемая алгебраическим уравнением
/(р, <р) = 0 относительно полярных коордннкг К алгебраическим спиралям отно-
50
(гиперболическая спираль, рис. 2.43);
(конхоида гиперболической спирали, рис. 2.44);
(сгпфаль Галилея, рис 2.45);
(спираль Ферма, рис 2.46);
*Лг ». . 1 -
(параболическая спираль, рис. 2.47);
• с
(жйК'рис. 2.48);
сится спираль Архимеда, та* как ее уравнение р = а<р является алгебраическим
уравнением первой степени относительно риф Другими простейшими алгебраи-
ческими спиралями являются линии, определяемые уравнениями:
р = <^ф
р = (о/ф) + /, где/>0
Рз=Оф2
л,
р = а&+1, где/>0
• . ♦
р = а/7ф' ' 1
Логарифмической спираль (рис. 2.49) - линия, определяемая уравнением
р = а* (а > О, а * 1).
Логарифмическая спирать пересекает полярные радиусы всех своих точек пол
одним и тем же углом. На этом свойстве основано ее применение в технике. Так, в
различных режущих инструментах и машинах вращающиеся ножи имеют про-
филь, очерченный по дуге логарифмической спирали. В силу этого угол резания
остается постоянным Логарифмическая спираль применяется в теории механиз-
мов при проектировании зубчатых колес с переменным передаточным числом (т.е.
отношением их угловых скоростей). В природе некоторые раковины очерчены по
логарифмической спирали (рис. 2.50).
Логарифмическая спираль впервые упоминается в письме Декарта к Мсрсениу
от 12 сентября 1638 г. (опубликовано в 1657 г.). Независимо от Декарта логариф-
мическая спираль была открыта 1орричелли, который выполнил ее спрямление и
квадратуру. Название «логарифмическая спираль» для данной линии предложил
Лопиталь, автор первого печяпгого учебника по дифференциальному исчислению
Квадратриса Дан отрезок AD длины 2а, середина которого находится в точке
О (рис. 2.51, а). Отрезок ОА равномерно вращается вокруг точки О с угловой ско-
ростью <0 = я/2Г, а прямая КС. перпендикулярная AD, одновременно начинает
равномерно двигаться от точней А к точке D со скоростью v = а/Т, оставаясь па-
раллельной исходному направлению Точка М пересечения вращающегося отрезка
и движущейся прямой гйгисывает линию, которую называют квадратрисой
,, / ',г г
Уравнение квадхтгрисы в декартовых координатах
/I-.. _. , У хс<8 («*/2^). А
в полярных координатах
р = о(Я-2ф)/ясо5ф.
. Г4 *
51
52
Линия имеет бесконечное множество точек пересечения с осью ординат, так
etg (кх/2в) = О при х = ±а, x = ±3a, х = ±5в,... Квадратриса изображена на
рис. 2.51, б, а на рис. 2.51, а указана та часть линии, которая соответствует значе-
ниям аргумента г,-a S х S а. Название линии дал Лейбниц.
Рис. 2.51
Квадратрису впервые открыл Гиппнй из Эллцды (древнегреческий софист,
живший в V в. до н.э.) в поисках решения задачи о трисекции угла. К задаче о
квадратуре круга згу линию применил древнегреческий геометр Динострат IV к
до н.э. В связи с этим линию называют квадратрисой Динострята.
Трактриса - линия, у которой длина касательной является постоянной вели-
чиной. Под длиной касательной понимают длину отрезка МТ. касательной между
точкой касания М и точкой Т пересечения с осью Ох (рис. 2.52). Трактриса имеет
параметрические уравнения
х = alntg(r/2) + ucosz, y = asin/;
ее уравнение в прямоугольных декартовых координатах
* » ±(eln ((a+Ja*-у2)/у)+№-у*).
Трактриса применяется в одной из частей механизма карусельного токарною
станка (рис. 2.53). Линия вертикального профиля антифрикционной пяты этого
механизма обладает тем свойством, что длина ее касательной постоянна
53
Трактриса сыграла выдающуюся роль в истории математики в свази с откры-
тием Н.И. Лобачевским новой геометрии и последующим развитием учения о не-
евклидовых геометриях. Геометрия Лобачевского реализуется на псевдосфере,
полученной вращением трактрисы вокрут ее асимптоты.
Трактриса была открыта в XVII в Ес название происходит от латинского слова
tracto — тащу, влеку.
Цепная лииия - кривая, форму которой принимает под действием силы тя-
жести нить с закрепленными концами (рис 2.54). В прямоугольных декартовых
координатах цепная линия имеет уравнение
у = (о/2)(е‘/'+е-ж'“Х
Длина дуги цепной линии от ее вершины до заданной точки равна про-
екции ординаты этой точки на касательную, проведенную в этой точке
(рис. 2.55, s- MN). Проекция ординаты произвольной точки цепной линии
на нормаль в этой точке является величиной постоянной, равной параметру
а цепной линии (а = ML).
Свойства цепной линии применяются в строительстве и технике Они исполь-
зуются в расчетах, связанных с провисанием нитей-проводов, тросов и тд В
строительной технике применяется также линия свода, определяемая уравнением
у-с(е*+»
Вопрос о форме линии провисания впервые рассмотрел Галилей (1638).
Он полагал, что линия провисания является параболой. Против этого позже
возражал Гюйгенс. Окончательное теоретическое решения вопроса о форме
линии провисания дали Лейбниц, Гюйгенс, Я. Бернулли.
54
гл&аз
ВЕКТОРЫ
Понятие вектора возникло как математическая абстракция объектов, характе-
ризующихся величиной и направлением, например, таких как перемещение, ско-
рость и г. п. Термин «вектор» ввел У. Гамильтон (около 1845 г), обозначения
а - Ж Аргаи (1806), АВ - А. Мебиус, г - Коши (1853), а - О. Хевисайд (1891)
3.1. Основные понятия
Вектором называется направленный отрезок Если начало вектора находится в
точке А, конец - в точке В, то вектор обозначается символом АВ или АВ Нача-
ло вектора называют также точкой его приложения Вектор икн да обозначается
одной строчной буквой жирногошрифта я, Ьит, д., или такой же буквой светлого
шрифта с черточкой наверху а, Ь мт. я.
D
К
N
М
Рис. 3.1
Модулем вектора а называется его длина, он обозначается через | а | или про-
сто а. Модуль вектора - скалярная
неотрицательная величина. *
Пуль-вектором (или нулевым век-
тором) называется вектор, начало и
конец которого совпадают Нуль-
вектор обозначается символом 0. Его
модуль равен нулю, а направление нс
определено.
Единичным вектором называется вектор, длина которого равна единице.
Векторы, лежащие на параллельных прямых или на одной прямой, называются
коллинеарными (рис. 3.1, CD и MN. К1. и MN, CDhKL).
Коллинеарные векторы, имеющие одинаковые направления и равные длины,
называются равными (рис. 3.2, а, ВС = AD ). Гак как векторы АВ и CD имеют
противоположные направления, то АВ X CD. хотя | АВ |«| CD |.
Отметим, что
ОМ, х ОМ,. где М, и
М2 - две различные
точки окружности ра-
диуса R с центром в
точке О (рис. 3.2, б),
поскольку векторы
ОМ, и ОМ2 имеют
разные направления
55
Векторы, противоположно направленные и имеющие равные длины, называ-
ются противоположными (векторы АВ и CD на рис. 3.2, а). Вектор противопо-
ложный вектору а, обозначается через - а.
Векторы, лежащие в параллельных плоскостях (или в одной плоскости), назы-
ваются компланарными
Вектор, точка приложения которого может быть выбрана произвольно, назы-
вается свободным.
3.2. Линейные операции над векторами
Линейными операциями над векторами называют сложение, вычитание, умно-
жение вектора на чисто.
Суммой векторов а и b называют третий вектор с, начато которого совпадает с
началом вектора а, а конец - с концом вектора b при условии, что вектор Ь отло-
жен из конца вектора а Вектор с получается по правилу треу пшьмика (рис 3 3. о)
или параллелограмма (рис. 33, б).
Рис. 3.3
Аналогично определяется сумма трех и более векторов Суммой л векторов
at.а,...а„ называется вектор, начало которого совпадает с началом первого
вектора а,, конец - с концом последнего а, при условии, что каждый после-
дующий вектор а14, отложен из конца предыдущего а* (* = 1,2,..., л-1). Ука-
занный способ построения суммы называется правилом замыкающей
Рис. 3.4
Сумма векторов обладает свойством переместительности (коммута-
тивности, рис. 3.4):
а+Ь=Ь+а
и свойством сочетательности (ассоциативности)
(а + Ь) + с = а + (Ь + с).
56
Сумма трех нскомпланарных векторов а. Ь. с наряду с правилом замыкающей по-
лучается и по правил) параллелепипеда сумма а + b + с равна вектору OD. где
0D - диагональ параллелепипеда, построенного на векторах ОА=а, ОВ=Ь.
ОС = с. отложенных из одной точки (рис, 3.5).
Рис. 3.6
Из определения суммы следует, что
а + О*=а, а+(-а)~О.
Разностью а-b двух векторов а и Ь называется такой вектор d, который в
сумме с вектором Ь дает вектор а:
а - b = d, если b + d - а.
Чтобы получить разность а - Ь двух векторов а и Ь. необходимо or дожить их
из одной точки и соединить конец второго вектора с концом первого (рис. 3.6, а).
Разность а - b равна сумме двух векторов а и (- Ь). где (- Ь) - вектор, про-
тивоположный вектору Ь (рис. 3.6, б), т. е.
a-b^a+f-b).
Векторы - диагонали параллелограмма ОАСВ (рис. 3.6, •), построенного на векто-
рах ОА = а, ОВ=Ь, являются соответственно суммой и разностью зтих вскгорои
57
Произведением вектора а на число а называется вектор
b = <и,
удовлетворяющий условиям: 1) |b| = |а||а|; 2) b и а одинаково направлены при
a>ft 3) b и а имеют противоположные направления при а<0 (рис. 3.7). Оче-
видно, Ь = 0, если а = 0 или a = 0.
2,5а
-За
◄-------------------------------
Рис. 3.7
11роизвсдение вектора на число обладает следующими свойствами:
а(Ра)-(сф)а. a(a + b) = aa+ab, (а + Р)а =аа+0а;
а (а, +аа + —+ ая)=аа|+<и1 ♦ •••аа,;
(а, +а2 +••• ♦ а,) a = а,а + а2а+••• а,а.
Необходимое и достаточное условие коллинеарности векторов а и b выражает-
ся равенством
Ь = аа (3 1)
3.3. Проекция вектора на ось
В пространстве заданы вектор АВ и ось и (рис. 3.8). Пусть Л( - проекция
точки А на ось и. б, - проекция точки В. т. е. основания перпендикуляров, опу-
щенных из данных точек на эту ось.
Проекцией вектора на ось и
Рис. 3.8
называется величина направленного отрезка
(вектора) А1В1 оси и. Проекция вектора АВ
на ось и обозначается через пр, АВ, т. е.
А, В, “ лр, АВ, вычисляется по формуле
пр,АВ=| Ав|соаф, (3.2)
где<р - угол между вектором АВ и осью и.
Из равенства (3 .2) следует, что если а = Ь то
пр, в = пр,Ь, (3.3)
т. е. равные векторы имеют равные проекции (на одну и ту же ось).
58
Проекция вектора на ось обладает следующими свойствами:
пр,(а + Ь) = пр,Ь+пр,а. (3.4)
пр,(аа) = апр,а, (3.5)
npu(a, +a, +••• + a,) = upual +np„a2 + — + npua,. (3.6)
Если a^a,....a„ - произвольная конечная система векторов; a,,a2.--.an -
произвольная система действительных чисел, то вектор
а = а,а( + а2а2 + —+ апа„
называется линейной комбинацией векторов этой системы
Из равенств (3.4) - (3.6) следует, что
nP»(ai*i +“2*з + •" <*»•>.) = а|приа1+а2приа2+-а,пр,,а,. (3.7)
3.4. Декартовы прямоугольные координаты
вектора в пространстве. Длина вектора.
Направляющие косинусы вектора
Рассмотрим в пространстве декартову прямоугольную систему координат Ра-
диусом-вектором точки М называется вектор г = ОМ, точка приложения которого
совпадает с началом координат, а конец находится в точке М (рис 3.9).
Декартовыми прямоугольными координатами X. У. Z вектора г называются его
проекции на координатные оси
X •= пр,г, Y - пр, г, Z - пр,г.
(Зв)
Каждая из записей
г = (Х, У, Z), г(Д(, У, Z), г = {Х, У. Z) (3.9)
означает что вектор г имеет координаты л, г, Z
Если я, у, г - декартовы прямоугольные координаты точки М, то
X = x,Y=y,Z=z, ZA
т. е. координаты радиуса-вектора ОМ
равны координатам точки М.
Введем в рассмотрение единичные
векторы i, j, к координатных осей (их
называют ортами) и векторы ОА = Л1.
ОВ=У]. O€ = Zk, где А, В, С -
вершины прямоугольного параллелепи-
педа, для которого ОМ является диаго-
налью (А, В, С - проекции точки М на
координатные оси; О А = X, ОВ= Y,
ОС — Z- проекции вектора на коорди-
Рис. 3.9
59
натные оси). По определению суммы ОМ = ОА + ОВ+ОС, поэтому
r-Al+lj + Zk (3.10)
Формула (3.10) выражает разложение вектора г по базисным векторам i. j. k
Векторы стоящие в правой части формулы (3.10), называются составляющими или
компонентами вектора г.
Па основании теоремы о квадрате диагонали прямоугольного параллелепипеда по-
лучаем формулу, выражающую длину вектора (3.9) или (3.10) через его координаты:
|r|-Vx2♦r’+z2. 0-11)
Из равенства (3.3) следует, что равные векторы имеют равные координаты, по-
этому координаты вектора не зависят от точки его приложения Координатами
любого вектора называются его проекции на координатные оси.
Направляющими косинусами вектора называются косинусы углов а, Р. у, обра-
зуемых им с координатными осями.
Принимая во внимание формулу (3.2), для вектора (3.9) получаем
X-|r|cosa, K-|r|cosP, Z-|r|cosy. (3.12)
Из равенств (3.11) и (3.12) следуют формулы для направляющих косинусов
вектора г:
X Y Z
cosa = , - . cosP= j и । , cosy = । , (3 13)
Vx’ + k’+z’ Vz’+j^+z* Vx’+i^+z®
откуда t
cos2 a + cos’ p + cos’ у = L
Из формулы (3.12) следует, что координаты единичного вектора равны его на-
правляющим косинусам; т. е.
е = (cosa, cosP, cosy).
Пример 3.1. Дан вектор а-(2,-1,-2) Найти его длину и единичный
|ектор а0 направления вектора а.
По формуле (3.11) находим длину вектора |а | = ^22 +(-!)’ +(-2)’ >3, а по
2 1
формулам (3.13) - его направляющие косинусы cosa = у, cosp--—.
2
cosy =а0
2 _1
з'з’з
60
3.5. Переход от векторных соотношений
к координатным
Если даны векторы (т. с известны их координаты) и указаны определенные со-
отношения между ними, то они равносильны аналогичным числовым соотноше-
ниям между координатами.
Координаты ирон {веления вектора на число. Пусть дан вектор
а = (Х„ и число а#0. Координаты X2,Y2,Z2 вектора Ь = аа
Х2 = аХ„ Y2-аГр Z, «aZ,. (3.14)
Отмстим, что равенства (3.14) выражают необходимое и достаточное условие
коллинеарности двух векторов: а = (Х„ Г„ ZJ, b = (Х2, Y2, Z2). Если ни одно из
чисел не равно нулю, то эти равенства можно записать так:
XjX,-Yt/Yt~Z2/Z,.
Некторы коллинеарны тогда и только тогда, когда пропорциональны их одно-
именные координаты.
Координаты суммы (разности) двух векторов. Пусть даны два вектора
а-(Х„ Y„Zt), Ь = (Х2,Yj.Zf), тогда X, У, Z - координаты вектора суммы а + Ь:
Х-Х, + Х2. + Г2. Z-Z.+Zj;
Х'-Х,-Х2. Y'~Y,-Y2. Z'~Z,-Z2.
где X', y*,Z* - координаты разности а-Ь.
Координаты вектора, заданного двума точиачи. Начало Вектора М,М2 на-
ходится в точке Л/,(ж,, у,, г,), коней - в точке М2(х2,у2. г2). Выражение для
его координат X.* Y, Z через координаты точек Л/, и М2.
Х-х2-х,. Г=у2-У|. Z-Zj-x,. (3.15)
Координаты линейной комбинации векторов. Заданы л векторов
а, =(Х|, Y^Z,). а2 =(Х2, Zj),...,а, = (Х„, Y„, Z„) и их линейная комбинация
а оца, +а2а2 +— +аяая.
Координаты X, Y, Z вектора а определяются формулами
X а,Х| yo2X2 + — +аяХ„
Y = а, Ц + а2У2 + —+а.Уя,
Z-a^+ctjZ,*-•♦a„Z,.
Деление отрезка в данном отношении. Даны дне точки в пространстве
A/Xxi.yi.z,), М2(х2,у2, Координаты точки М, делящей отрезок М,М2 в
отношении fc
1 + 7 1 + 7 ’ 1 + 7
61
В частности, координаты середины отрезка определяются формулами
Рис. 3.10
теме, X, Y. Z - в новой, тогда
x=*L±i
2 ’У 2 ’ 2
Преобразование декартовых прямоуголь-
ных координат при параллельном переносе.
Рассмотрим две декартовы прямоугольные сис-
темы координат с одним и тем же масштабным
отрезком и одинаковыми направлениями одно-
именных координатных осей (рис. 3.10). Начало
новой системы координат находится в точке
С\(а, Ь, с) Пусть М — произвольная точка про-
странства, я, у, г ее координаты в старой сис-
или
X»x-e. Y = y-b. Z-z-c. (3.17)
Пример 3.2. Даны две точки А(3,-4,7), /?(5,-6,8). Найти координа-
ты вектора АВ и координаты точки Е — середины отрезка АВ.
По формулам (3.15) и (3.16) соответственно получаем
Х-5-3-2, Г=-6-(Ч) = -2, Z-8-7-1, АВ = (2,-2,1);
х = (5 + 3)/2 = 4. у = (-6 ♦ (-4))/2 = -5. * • (8 + 7)/2 - 7Д Е (4; - 5; 7 Л)
Пример 3.3. Даны четыре точки 4(5,6.-8). в(8,10.-3), CU.-2.4),
D (7,6.14). Коллинеарны ли векторы АВ и CD?
Так как АВ = (8-5,10-6,-3-(-8)) = (3.4.5), CD = (7-1,6-(-2),
14 — 4) = (6,8, Ю) и CD - 2АВ. т. е. выполнено равенство (3.1), то векторы АВ и
CD коллинеарны.
3.6. Скалярное произведение двух векторов
Скалярным произведением двух векторов а и b называется число, равное про-
изведению их длин на косинус утла межз^у ними. Бели обозначить скалярное про-
изведение через ab, то
' »f. rt j ,V» * •»» rri.
Так как |b|cos<p=npab и |a|cosp = np,a (рис. 3d 1), то равенство (3.18) можно
представить в двух видах: ‘ I : .- Ф-' *
ab = |a|np,b, ab = |b|np1)a
Понятие скалярного произведения возникло в механике. Если вектор а изо-
бражает силу, точка приложения которой переметается из начала в конец вектора
62
Ь, то работа н указанной силы определяется равенством и = | а 11 b | cos<p
Скалярным квадратом вектора а называется
скалярное произведение вектора а на себя:
а2 = = | ж 11 ж | cosO = | • J2,
т. е. скалярный квадрат вектора равен квадра-
ту его длины.
Векторы а и b перпендикулярны тогда и
только тогда, когда
ab = O. (3.19)
Скалярное произведение обладает свойствами:
1) переместительности (коммутативности)
ab= Ьа.
2) сочетательности (ассоциативности) относительно числового множителя
(aa)b*a(ab),
3) распределительности (дистрибутивности) относительно суммы векторов
a (b + e)-ab + ac
Скалярное произведение двух векторов
.-(x„y1,ztx ь=(Х2,к2.г,) (3.20)
выражается формулой
аЬ-ОД+.ЗД+ЗД. (3.21)
т е. скалярное произведение двух векторов равно сумме произведений одноимен-
ных координат.
Замечание. Если Ь»«, то формула (3.21) принимает вид аа = Х2 +
+ + Z2. Поскольку аа - а2 -1а|2, то |а|^Xl + l^+Z}.
Косинус угла между векторами (3.20) определяется формулой
X,X2 + r1E2+ZlZ2
I a L / а а (122)
Необходимое и достаточное условие перпендикулярности двух векторов (3.20)
выражается равенством
A'|A'j + i;r2+Z1Z2-0, (3.23)
оно следует из формул (3.19) и (3.21).
Если ось и образует с координатными осями углы а, р. у соответственно, то
проекция вектора я = (X, У, Z) на эту ось определяется равенством
np,» = Xcosa + Ecoep + Zcosy.
63
Пример 3.4. Даны два вектора в =(8,-7,-2), Ь = (7,-11,8). Найти
угол между ними.
По формуле (3.22) получаем
/в1 + (-7)2 +(-2)1 77* ♦(-> *)’ + в2 ,17'*2 2
П р и м е р 3.S. Доказать, что векторы а = (2, -4,6), Ь = (3,3,1) пер-
пендикулярны.
По формуле (3.21) находим: ab = 2-3+(-4)-3 + 6 1«0. Так как выполнено ус-
ловие (3.19), то векторы а и Ь перпендикулярны
3.7. Правые и левые тройки векторов.
Правые и левые системы координат
Три некомпланарных вектора ОД = а, ОВ = Ь, ОС = с, взятых в указанном
порядке (а - первый вектор, b - второй. с - третий) и приложенных в одной
точке (рис. 3.12, а, б). называют тройкой векторов а, Ь. с. Будем смотреть с конца
вектора с на плоскость, определяемую векторами а и Ь. Если кратчайший поворот
Рис 3.12
СП вектора а к вектору Ь совершается против часовой стрелки, то тройка векторов
а, Ь, с называется правой** (рис. 3.12, а), если указанный поворот совершается по
часовой стрелке, тройка а, Ь, с называется левой (рис 3.12, б).
Две тройки, обе правые или обе левые, называются тройками одной ориента-
ции; если одна тройка является правой, а другая левой, то они называются трой-
ками различной ориентации.
При круговой перестановке векторов (первый заменяется вторым, второй- третьим,
третий - первым, рис. 3.12, в) ориентация тройки не меняется (см. рис. 3.12, а, б).
*' В случае правой тройки а. Ь. с векторы а, Ь, с располагаются так, как большой. указатель-
ный н средний пальцы правой руки; если тройка а. Ь, с является левой, то векторы а. Ъ. с
располагаются так, как указанные пальцы левой руки
64
Если поменять местами два вектора. то ориетгтация тройки меняется, например
если а, Ь. с - правая тройка, то тройка Ь. а, с (тех же векторов, взятых в порядке
Ь, а. с) будет левой.
Прямоугольная декартова система координат называется правой, если тройка
базисных векторов i, J, к правая; если эта тройка левая, то система координат на-
зывается левой.
3.8. Векторное произведение двух векторов
Векторным произведением вектора а на вектор Ь называется третий вектор,
обозначаемый символом [a, bj и удовлетворяющий условиям:
1) | (*• •>] | = | а 11 i>| sin <р. гдеф - угол между векторами а и Ь;
2) вект ор [а. Ь| перпендикулярен каждому из векторов а и Ъ;
3) тройка векторов а, Ь, [а. Ь| имеет ту же ориентацию, что и 1. j, к
Для векторного произведения применяют и другие обозначения, например а х b
Замечание. Если пользоваться только правыми системами координат,
то условие 3) можно заменить другим - тройка а, Ь, [а. Ь] является правой
Понятие векторного произведения возникло в
механике. Если вектор b изображает силу, ггрило-
женную в тючке М, а = ОМ, то (а, Ь| выражает
момент силы Ь относительно точки О.
Из условия I) следует, что модуль векторного I к
произведения (а, Ь| ранен площади S параллело-
грамма, построенного на векторах а и b е
(рис. 3.13), т.е.
| (•. Ь] | - £ (3.24) 9 Ъ
поэтому а/
[а,Ы=Л, / /
глее - единичный вектор направления вектора|ajb].
Равенство [а, Ь| — 0 выражает необходимое и Рис. 3.13
достаточное условие коллинеарности двух векторов а и Ь; в частности, для любого
вектора a |»,i| = 0
Векторное произведение двух векторов обладает свойствами:
I) аигиперестановочности множителей
[а, Ь] = - [Ь. а);
2) сочетательности относительно скалярного множителя
((a>Xb| = a[a, bj, [a. (pb)) = р (a. bj;
3) распределительности относительно сложения
((• + bXc]=[a,cJ+[b,cJ, [a, (b + c)J = (a. b]+fa. ej
Векторное произведение [а, Ь] двух векторов
।
a=(X1,r„ZlXb-(X2,>i,^)
выражается формулой
(3.25)
l-.bj
Z,
(3 26)
к
Эту формулу можно представить
третьего порядка
через символический определитель
I
i
(«,ы
z,
У,
(3 27)
Замечание. Составим матрицу из координат векторов а и Ь
Г У| Z, 1
Координаты векторного произведения [а, Ь| равны минорам второго порядка
этой матрицы, полученным путем поочередного вычеркивания первого, второго и
третьего столбцов, причем второй минор нужно взять со знаком минус.
Площадь параллелограмма, построенного на векторах (3.25), вычисляет-
ся по формуле
Jlr, Z.I* IX. Z.P 1АГ, У, Р
Шз ZJ 1*з Z,| У,Г
которая следует из (3.11) и (3.24).
Площадь треугольника АВС определяется формулой
S-1||AB,AC]|.
(3 29)
Формула (3.29) следует ю (3.24), так как площадь треугольника АВС составля-
ет половину площади параллелограмма, построенного на векторах АВ и АС.
Пример 3.6. Даны два вектора а “ (5,3,-4). b » (6,7,-8). Найти ко-
ординаты векторного произведения [а, Ь|.
По формуле (3.27) получаем
(о,*)-
i J *
5 3-4
6 7-8
[а, Ь]. (4,16,17).
k =4i + 16j + 17k.
Пример 3.7. Вершины треугольника находятся в точках А(1.1,3),
В (3,-1.6), С(5,1,-ЗХ Вычислить его площадь.
66
С помощью формул (3.15) цаходим координаты векторов АВ и
АС: АВ-(2,-2,3), АС = (4,0, - 6). Так как
• • . Ч'*1 'г' ' ’r't : II *
,АВ-АС|-{1» -»г1« -4 b !
ТО , Г ...
I 1 / ‘ * » | • 1> ! 1.\ •
. i4 7“‘4
3.9. Смешанное произведение трех векторов
Пусть даны три вектора а, Ь, с. Вектор а умножим векторно на Ь, векторное
произведение (а. Ь| умножим схалярно на с. в результате получаем число, кото-
рое называют векторно-скалярным произведением или смешанным произведением
[а, b | с трех векторов а, Ь, с.
Смешанное произведение [а, Ь| с трех некомпланарных векторов равно объе-
му параллелепипеда, построенного на векюрах ОА-а, ОВ - Ь, ОС - с
(рис. 3.14), взятому со знаком плюс, если тройка (а, Ь, с) — правая, со знаком
минус, когда эта тройка - левая:
К - mod ([а, Ь] с). (3.30)
Векторы а, Ь, е компланарны тогда и только тогда, когда их смешанное произ-
ведение равно нулю, т. е.
[а, Ь] с = 0.
Смешанное произведение (а, Ь|е и
а[Ь,с] обозначают через abc:
abc = |а, Ь|с - а [Ъ, с|.
Если поменять местами два вектора, то
смешанное произведение изменит лишь
знак. Для трех векторов а, b, с:. ।
abc - bca = cab - ba с = cba - acb
(332)
м
Смешанное произведение трех век-
торов
а -(X„ JJ.Z.X b = (X„ li.Z,). с-(Х„ r„Z,)
определяется формулой
Z.
abc
(333)
Из формул (3.30) и (3.33) следует, что объем параллелепипеда, построенного
67
на векторах (3.32) вычисляется по формуле
И « mod
п
у,
2,
г»
2,
(3.34)
Объем треугольной пирамиды с вершинами в точках МДх,. у,,^)
Мг(.ж1,уг.хгу Му(Ху, уу, к,) М<(х<.у<.г<) определяется формулой
И = — mod
6
х,-х,
*4~*1
Л->|
л-л
У4-У1
*2~*1
Ъ-*1
(3.35)
Необходимое и достаточное условие компланарности трех векторов (3.32) вы-
ражаете! равенством
X, У,
Г,
Ху Г,
2,
Л
Л
-а
(3.36)
которое следует из равенств (331). (333)
Пример 3.8. Найти объем параллелепипеда, построенного на векторах
в = (1,3,1), Ь«(2ДЗ) с«(М,2)
По формуле (3.34) получаем
1
2
3
К «mod
mod
0
-5
-8
0
I
-I
«11
3
I
1
I
3
2
1
2
3
Пример 3.9. Доказать.
е«(5,-7,9) компланарны.
Так как
что
векторы а=(1,-2,3), Ь = (4,-5,6)
1 -2
4 -5
5 -7
I -2
0 3
0 3
3
-6
-6
= 0,
3
6
9
т.е. выполнено условие (3.36) то данные векторы компланарны.
Пример 3.10. Вычислить объем треугольной пирамиды, вершины кото-
рой находятся в точках Л/,(6.1,4) М3(1,-3,7), Л/э(7,1,3) М«(2,-2,-5)
В соответствии с формулой (335) находим
V = mod 7
6
1-6 -3-1
2-6 -2-1
7-6 1-1
7-4
-5-4
3-4
«mod-7
6
-5
-4
1
-4 3
-3 -9
0 -1
23
3
68
3.10. Линейная зависимость векторов.
Векторы а,.а2...а, называются линейно зависимыми, если существуют дей-
ствительные числа oq.Oj,...,а„ из которых по меньшей мере одно отлично от
нуля, закис что
а,а,+Oja2+ —+ а„а. =0. (3.37)
В противном случае (т. е. когда таких чисел не существует) векторы называют -
ся линейно независимыми; другими словами, векторы линейно независимы, если
равенство (3.37) выполняется лишь при
а, = а2 =...-а, = Q (3.38)
Если один из векторов, например а,, является нулевым, то система
•о а2....а„ окажется линейно зависимой, так как равенство (3.37) будет выпол-
нено при а,=1, а, *а, =... = а„ «0. Если часть векторов а,.а2.аа линейно
зависима, го и вся система а,.а2.а, линейно зависима, поскольку из равенст-
ва оца(+О4а2+ - +a4at »0 следует равенство (3.37), в котором
а*м-ам-....а,-й
Теорема 3.1. Векторы а,.а2.....а, (л>1) линейно зависимы тогда и
только тогда, когда по меныией мере один из них является линейной комбинаци-
ей остальных
Теорема 3.2. Два вектора а и Ь линейно зависимы тогда и только тогда
когда они коллинеарны
Теорема 3.3. Если я, и е2 - два неколлинеарных вектора некоторой
плоскости, то любой третий вектор а той лее плоскости молено единственным
образом разлолсить по ним. т е. представить в виде а = хе, + уе2
Теорема 3.4. Три вектора а, Ь, с линейно зависимы тогда и только тогда,
когда они компланарны
Теорема 3.5. Если векторы е,, а2, Я, некомпланарны, то любой вектор а
молено единственным образом разложить по ним. те
а = хе, + >«2 + rtj.
Теорема 3.6. Всякие четыре вектора линейно зависимы.
Любая упорядоченная система трех линейно независимых (т.е. некомпланар-
ных) век! оров а, Ь, с называется базисом. Согласно теореме 3.5. всякий вектор <1
можно разложить по базису, т.е представить в виде
d = xa + yb+«_ (3.39)
Числа х, у, i называют координатами вектора d в базисе а, Ь. с.
Пример 3.11. Образуют ли базис векторы а = (8,2,3), b =(4,6,10),
с=(3>-2,1)?
69
Так как
3 -1
10 = -26
I 0
8
26
о
т. е. смешанное произведение отлично от нуля, то векторы некомпланарны. Зна-
чит, они линейно независимы и образуют базис.
Пример 3.12. Даны векторы а=(1,1,-1Х b = (2,-1,3), с=(1,-2,1),
d = (12, -9,11). Доказать, что векторы а, Ь, с образуют базис и найти координаты
вектора d в этом базисе.
Поскольку
1 1
abc= 2 -1
I -2
-I 0 0
3=52
1 2 -1
то векторы а. Ь. с линейно независимы (некомнланарны) и образуют базис Вектор
d можно представить в виде d = ха + yb + zc (см формулу (3.39)). Это равенство
равносильно следующим равенствам:
12 = a + 2y + z. -9*х-у-2х, ll = -x + 3y + z,
так как равные векторы имеют ранные координаты и координаты линейной коорди-
нации векторов равны соответствующим линейным комбинациям одноименных ко-
ординат (см. п. 3.5). Решив полученную систему уравнений, найдем х=2. у«3, г=4.
Итак, d = 2а + ЗЪ + 4с, вектор d в данном базисе имеет координаты х-2, у-3. z=4.
3.11. Аффинные координаты
Фиксируем некоторую точку О заданной плоскости и выберем два неколлинсар-
ных вектора е,, е2, назовем згу точку началом координат, векторы е(, е2 -
базисными. От точки О отложим векторы ОЕ, = е, и ОЕ, " е2, проведем прямые,
которым принадлежат векторы ОЕ, и ОЕ;. фиксируем на них положительные
Рис. 3.15
направления, совпадающие с направлениями
ОЕ, и ОЕ; соответственно, получим две коор-
динатные оси Ох и Оу (рис. 3.15). Будем гово-
рить, что построена общая декартова или аф-
финная системы координат (О,е(,е2Х Пусть а
- любой вектор данной плоскости, отложим из
точки О вектор ОА = а, тогда по теореме 3.3
в = хе,+>*2. (3.40)
Числа х и у формулы (3.40) называются
общими декартовыми или аффинными координатами вектора а в системе
(О,е|,е2Х они также называются аффинными координатами точки А в той
же системе, т. е. а = (х, уХ А (к, уХ
70
Гак как ОА, = хе1, ОА2 - yt2, то х и у - величины направленных отрезков
ОА, и OAj координатных осей, |х| - длина отрезка ОА,, измеренная с помо-
щью масштабного отрезка ОЕ,, |у| - длина отрезкаОА2, измеренная с помо-
щью масштабного отрезка О£2. Другими словами, аффинными координатами
точки А (и вектора а • ОА ) называются числах ну, определяемые формулами
х = ОА1,у-ОА1, •
где ОА,. ОАг - величины направленных отрезков ОА, и ОА2 координатных
осей ( А, - проекция точки А на ось Ох, взятая параллельно оси Оу, А} - проек-
ция точки Л на ось Оу, взятая параллельно оси От; длины отрезков на каждой оси
измеряют ся с помощью своего масштабного отрезка).
Аналогично вводится аффинная система координат в пространстве. Фиксируем
начало координат - точку О, базис - три нскомпланарных вектора е„ е2, е2,
отложим из точки О векторы ОЕ, =е(, ОЕ2 = а2, ОЕ, = *,. координатные оси
Ох, Оу, Oz. Если а - любой вектор, то. отложив и 1 точки О вектор ОА = а. по
теореме 3.5 получим
a«=xe(+уе2+те,. (3.41)
Общими декартовыми или аффинными координатами вектора а (и точки Л) на-
зываются числах,у, i в разложении (3.41).
Пусть Л| - проекция точки А на ось Ох, взятая параллельно координатной
плоскости Oyz (определяемой векторами е2, е2), т.е. точка пересечения оси Ох и
плоскости, проходящей через точку А и параллельной плоскости Oyt. Аг -
проекция точки А на ось Оу, взятая параллельно плоскости Oxz. А, - проекция
точки А на ось Oz, взятая параллельно плоскости Оху, тот да ОА( -хе,.
ОА2“уе2, OAn=ze,.
Следовательно, х, у, z - проекции вектора О А на координатные оси, т.е. вели-
чины направленных отрезков ОА(, ОА2, ОА„ длины отрезков на каждой коор-
динатной оси измеряются с помощью своего масштабного отрезка (е, - на оси
Ох, е2 - на Оу. е, - на Oz).
В частном случае векторы е,. е2, е2 попарно перпендикулярны и имеют рав-
ные длины | е, | ж | е21 = | е, | = 1, их называют ортами и обозначают 1, J, к. система
координат называется прямоугольной.
Термин «орт» ввел О. Хевисайд (1892), обозначения е„ е2, е, - Г. Грассман
(1844). I, j. к - У. Гамильтон (1853).
71
Глава 4
ПОВЕРХНОСТИ И ЛИНИИ
В ПРОСТРАНСТВЕ
4.1. Уравнение поверхности.
Уравнения линии в пространстве
Уравнением поверхности в фиксированной системе координат называете! та-
кое уравнение с трема переменными. которому удовлетворяют координаты любой
точки данной поверхности и только они.
Из этого определения вытекает способ решения следующей простой задачи
выяснить лежит ли данная точка на поверхности, определяемой заданным урав-
нением Для решения задачи необходимо подставить ее координаты в данное
уравнение, если получается числовое равенство, то точка лежит на поверхности, в
противном случае точка поверхности нс принадлежит.
Всякое уравнение с тремя переменными х,у, z можно записать так:
Г(х.у,х)-О, (4.1)
где F(x,y,z) - функция переменных х, у. z.
Из опре.телення прямоугольных декартовых координат точки в пространстве
(см и >.12) следует, что координатные плоскости Oyz. Oxz, Оху определяются соот-
ветственно уравнениями: х-0. у = 0, г = О(х~О - уравнение плоскости Oyz и та).
Линию в пространстве можно рассматривать как пересечение двух поверхно-
стей. поэтому она определяется двумя уравнениями. Пусть / - линия, по которой
пересекаются поверхности, определяемые уравнениями F(x.y,z) = O и
♦(х, у, х) = 0, т.е. множество общих точек этих поверхностей, тогда координаты
любой точки линии I одновременно удовлетворяют обоим уравнениям:
F (х, у, г) = 0. Ф (х, у, z) = 0. (4.2)
Пример 4.1. Составить уравнение сферы радиуса К с центром в точке CfcU>,c).
Исходя из определения сферы как множества точек пространства, равноуда-
ленных от данной точки (центра), для произвольной ее точки М (х. у, г)
получаем р(С, М)= Я. Так как
р(С, М) = V(*-a)’ +(У-Ь)1 +(>-«)’. то V<*-e)’ +О’-*)1 ♦(»“«)* =
жлм
(х - а)а + (у - Ь)г +(t - с)2 « я2. (43)
72
Для точки N, нс лежащей на данной сфере, равенство р (С, N) * R не будет выпол-
нено, поэтому ее координаты не удовлетворяют уравнению (4.3). Следовательно,
уравнение (4,3) является уравнением сферы радиуса R с центром в точке С (а ,Ь, с ).
В частном случае, koi да центр сферы находится в начале координат
(a = t> = c=0), уравнение (4.3) принимает вид
х’+у’+я’-Я2. (4.4)
Уравнение (4.4) называется каноническим уравнением сферы.
Пример 4.2. Уравнения
x2+y2+z2 -25,2 = 0
определяю! окружность радиуса Я = 5, лежащую в плоскости Оху. Действитель-
но, первое уравнение определяет сферу радиуса Я = 5 с центром в начале коорди-
нат, второе уравнение - координатную плоскость Оху.
Пример 4.3. Ось Ох прямоугольной декартовой системы координат в
пространстве определяется уравнениями у = 0, 2-0.
Действительно, уравнение у-0 О1гредсдяет координатную плоскость Oxz. а
уравнение z=0 - координатную плоскость Оху. Ось Ох является линией пересе-
чения координатных плоскостей Oxz и Оху (см. рис. 1.13).
Отмстим, что ось Оу имеет уравнения х=0, г=0, а ось Ог - уравнения х~0, у=0.
Поверхность, определяемая алгебраическим уравнением n-й степени относи-
тельно декартовых координат, называется поверхностью л-го порядка Сфера -
поверхность второго порядка, так как се уравнение (см (4 3) и (4 4)) является
уравнением второй степени относительно декарт овых координат .
4.2. Параметрические уравнения линии
и поверхности
I Ьрамстрическими уравнениями линии в пространстве называются уравнения вила
*-Ч>|(0.У"=Ф1(0. г-фз(0. (4-5)
где ф|(/\ Ф2(<Х ф,(/) - функции некоторой переменной I (параметра), если
при каждом значении t из конечною или бесконечною промежутка они дают ко-
ординаты всех точек данной линии и только таких точек.
Параметрические уравнения часто применяются в механике для описания тра-
ектории движущейся точки, роль параметра / в таких случаях играет время.
Параметрическими уравнениями поверхности называются уравнения вида
>"/»(**"/з(*»*Х (4.6)
где /|(и, v),/2(«b v),/i(i4, v) - функции двух переменных и и v (параметров),
если при любых значениях и и v (меняющихся н некоторой области) они дают
координаты всех точек данной поверхности и только таких точек.
Правые части уравнений (4.6) содержат два параметра, а уравнения (4.5) —
только один параметр.
73
Пример 4.4. Составить параметрические уравнения винтовой линии.
Винтовой линией называется линия, описываемая точкой, равномерно движу-
щейся по образующей кругового цилиндра, который при этом вращается вокруг
своей оси с постоянной угловой скоростью
Выберем ось вращения цилиндра в качестве оси Oz декартовой прямоугольной
системы координат в пространстве (рис 4 1) Обозначим через v постоянную ско-
рость прямолинейного движения точки вдоль образующей, о> - скорость враща-
тельного движения, R - радиус цилиндра Пусть в начальный момент точка нахо-
дилась на осн Ох (совпадала с точкой .4), а в момент времени t - в положении М.
Обозначим буквой N проекцию точки М на плоскость Оху, буквой Р - проекцию
точки N на ось Ох, буквой Q - проекцию точки N на ось Оу. Обозначим через ф
угол между ОР и ON, получаем x = OP”Cos<p, у = OQ = Rsinp. x»NM-vi.
Поскольку <р = cur. то
х = RcosliX, у« Rsinow. г = W. (4.7)
Уравнения (4.7) являются параметрическими уравнениями винтовой линии
Пример 4.5. Составить параметрические уравнения сферы радиуса R.
Наедем в рассмотрение систему декартовых прямоугольных коорлинз! с нача-
лом н центре сферы и систему сферических координаз с начатом в той же точке
(рис. 4.2). Пусть М - произвольная точка сферы, N - ее проекция на плоскость
Оху. Обозначим угол, образуемый вектором ОМ с осью Oz, через в (широта),
угол, образуемый вектором ON с осью Ох, через v (долгота) Принимая во внима-
ние определение декартовых координат (или связь между декартовыми и сферичс-
74
скнми координатами, см 1.13, формулы (129)), получаем параметрические урав-
нения сферы
х = Л sin н cos V, у = flsinusinv, z= Rcosu, (4.8)
где О£м£я, 0Sv<2x.
Исключив ю этих уравнений параметры ни v (для чего нужно возвести в квадрат обе
части каждого уравнения и почленно сложить), получим уравнение сферы (4 4)
4.3. Различные виды уравнения плоскости
Плоскость в пространстве можно задать различны ми способами (точкой и век-
тором, перпендикулярном плоскости, тремя точками и т л.), в зависимости от
этого рассматривают различные виды ее уравнения.
Уравнение плоскости, проходящей через данную точку и перпендикуляр-
ной данному вектору. Ненулевой вектор п, перпендикулярный плоскости, назы-
вают ее нормальным вектором. Если дана точка М0(х0,у0,г0) и нормальный
вектор в = (А, В, О плоскости, то ее уравнение имеет вид
4(x-xo)+fl(y->-o) + C(z-zo) = 0.
(4.9)
В пом уравнении ко тффициситы А, В, С являются координатами нормального вектора
Равенство (4.9) выражает необходимое и достаточное условие перпендикуляр-
ности двух векторов; п = (Л.в,О, MoMw(x-x0,>->0,z-z0X где М(х,у,г)
- любая точка плоскости (рис. 4.3).
Общее уравнение плоскости. Уравнение первой степени относительно декар-
товых координат
Лх + ByyCz-yD-O,
где А, В, С одновременно в нуль не обращаются, т.е.
Л’+В’+С^О, (4.11)
определяет плоскость в пространстве Урав-
нение (4.10) называется общим уравнением
плоскости. Отмстим частные случаи этого
уравнения.
Если £) = 0, то уравнение (4.10) при-
нимает вид
Ах + Ву + Сг = 0
и определяет плоскость, проходящую че-
рез начало координат (рис. 4.4, а; коорди-
наты т = у = т»0 удовлетворяют данному
уравнению).
(4 10)
Рис 4.3
Если С” 0, то уравнение (4.10) принимает вид
Ах + By + D = 0
н определяет плоскость, параллельную оси Oz (рис 4 4. 6); нормальный вектор
п = ( А, В. 0) перпендикулярен оси Oz, ибо С= 0.
75
Если С = 0/ £> = 0, то уравнение (4.10) принимает вид
Ах + Ву = 0
и определяет плоскость, проходящую через ось Oz (рис. 4.4, г, плоскость парал-
лельна оси Oz и проходит через начало координат; в этом случае А2 + В2 * 0 в
силу условия (4.11)).
Если С=0, Я = 0. то уравнение (4.10) принимает вил
Лх + /)=0, илих = а (в = -О/Л)
и определяет плоскость, параллельную плоскости Oyz или перпендикулярную оси Ох
(рис 4.4, г; нормальный вектор п = (А, 0,0) перпендикулярен плоскости Oyz).
Если С «0, Я = 0, D = 0, то уравнение (4.10) принимает вид
Лх = 0, и.тнх-0 (так как Л #0)
и определяет координатную плоскость Oyz.
Замечание. Если в уравнении (4.10) свободный член равен нулю (D = 0),
то плоскость проходит через начало координат, если ко<ффициснт при одной из
текущих координат равен нулю, то плоскость параллельна соответствующей коор-
динатной оси (например, если Я=О. то плоскость параллель»» оси Оу); еелй в нуль
обращаются свободный член и один из коэффициентов при текущей координате, то
плоскость проходит через соответствующую ось (если 0=0 н С 0. то плоскость
проходит через ось Oz); если равны нулю два коэффициент а при текущих коорди-
натах. то плоскость параллельна соответствующей координатой плоскости (koiда
А = 0, В = 0. плоскость параллельна плоскости Оху); если обращаются в нуль сво-
бодный член и два коэффициента при текущих координатах, то плоскость совпа-
дает с соответствующей координатной плоскостью (ко< да D = 0, А = 0. С = 0,
плоскость совпадает с плоскостью Oxz).
Уравнение плоскости в отрезках, отсекаемых на осях координат. Если все
коэффициенты уравнения (4.10) и его свободный член отличны от нуля, то урав-
нение можно привести к виду
х/о + у/Ь + г/с^Х, (4.12)
где о =—О/А, Ь - О/В, с = - D/С. Числа а, Ь и с означают величины направ-
Рис. 4.4
76
ленных отрезков, отсекаемых на осах координат. Этим объясняется название дан-
ною вида уравнения плоскости.
Нормальное уравнение плоскости. Уравнение
xcosa + >coe₽ +-сову-р = 0, (4.13)
где а, р, у - углы, образованные нормальным вектором плоскости с координат-
ными осями Ох. Оу, Oz соответственно, р - длина перпендикуляра, опушенного
из начала координат на плоскость, называется нормальным (или нормированным)
уравнением плоскости. Чтобы привести общее уравнение плоскости к виду (4.13),
необходимо умножить его на нормирующий множитель
1
.
±^Аг + В*+С1
inc знак выбирается противоположным знаку D После умножения уравнения
(4.10) на число ц получаем нормированное уравнение плоскости
Лх + By + Cz + D „
— -a
iVx’+b1 «-с1
Уравнение плоскости, проходящей через три точки. Если даны три точки
МД*!. Ун MJ(xJ,y2,zJy, Л/Дхру,,^,), нс лежащие на одной прямой, то
уравнение плоскости, проходящей через зти точки, имеет вид
x-Xt y-yt z-z,
Л-Л =0.
(4 14)
*з-*| У»"У| «>-».
Равенство (4.14) выражает необходимое и достаточное условие
(см. (3.36)) компланарности трех векторов М(М =(х-х|,у-у|,х-гД
М,М2 “(х2-х,,у,-ypTj-Zt). MlM,-(xJ-x,.y,-y|.zJ-zlX где М(х,у.г)
- любая точка данной плоскости (рис. 4.3).
Уравнение плоскости, проходящей через две ючки и параллельной дан-
ному вектору. Если задан вектор а -(Ot.aj.a,) и две точки МДх,, y,,Z|),
Рис. 43
Рис. 4.6
77
A/j(x2, у2,г2). причем векторы а и М(М2 яекошншеарны (рис. 4.6), то уравне-
ние плоскости, проходящей через эту точку параллельно вектору а, имеет вид
x-x.i.. у-у, t-K| f
(415)
w
необходимое и достаточное условие компланарно-
г*ь‘У*к«-*А MiM/sfe-hMHjtt-yi. й-г»).
Равенство (4.15)
сти трех векторов ж _ _ ... _ . _ ___ __ _
а=(а|,д2,о,Х гае М(х, У,е) - любая точка данной плоскости
Уравнение плоскости, проходящей мере, данную точку и параллельной
двум неколлмнеарным векторам. Если даны два неколлинеарных вектора
(рис. 4 7) а-(а,,а2,аэ). b = (fc1, fcj, и точка М,(х„ yt, а,X +о уравнение плос-
кости, проходящей через данную точку параллельно векторам а и Ь. имеет вил
y-y.
a
(4.16)
ft.
ft.
Равенство (4.16) выражает необходимое и достаточное условие компланарности
трех векторов: а, Ь. М,М, где М - произвольная точка данной плоскости.
Параметрические уравнения плоскости. Если даны два неколлинсарных век-
тора а8(а|(О],аД Ь«(61,62,Ь)Х и точка Л/,(я,,У|.гД то параметрические
уравнения .июскости, проходящей через эту точку параллельно данным векторам,
имеют вид
х-Xi +и<Т| + vfej, у = У| + нд2 + vbj, к == Z| + м2♦ v6j. (4.17)
Уравнения (4.17) следуют из равенства М,М = 1<а + ьЪ. где Л/(я,у,г)-
любая точка плоскости (равенство
M'M^ia + vb означает, что любой вектор
М|М можно разложить по векторам а и Ь).
Пример 4.6. Записать уравнение
плоскости. проходящей через точку
Л/О(2,-3,4) и имеющей нормальный вектор
я-(5,6,-7). »;•
Так как в данном случае х0 = 2, у0 » -3,
z0-4, А = 5, В = 6, С=—7, то уравнение (4.9) принимает вид
5(я-2)+6(у+3)-7(я-4)«01 или 5х+6у-7т+ 36 = 0
Пример 4.7. Составить уравнение плоскости, проходящей через точку
Л/|(1, -3,2) параллельно векторам а (5, - 4.8), b = (6, -1,7).
Данные векторы неколлинеарны, так как их координаты не пропорциональны
78
В соответствии с уравнением (4.16) получаем
Разлагал определитель по элементам первой строки, находим
1-4 81 |5 8| |5 -41
М-1 >г4 ’г Мб -1Г0’
-20(х-1)+13(у+3)+19(х-2)=0, 20x-13y-19z-21 = Q
Пример 4.8 Найти величины отрезков, отсекаемых на осах координат
плоскостью Зх-4у + 5г-60 = 0.
Разделив обе чести уравнения на 60 и преобразовав его, получим
—----—+— = 1, или +—— + = 1.
20 15 12 20 -15 12
Сравнивая последнее уравнение с уравнением (4.12). заключаем, что а -20,
6 =-15. с» 12 Таковы величины отрезков, отсекаемых п.юскостъю соответст-
венно на осях Ох, Оу, Oz.
Пример 4.9. Составить уравнение плоскости, проходятся через три
точки */,(9.-1.1,5), Л/2(7,4,-2), МД-7,13,-3)
В соответствии с уравнением (4.14) получаем
х-9 у + 11 х-5 х-9 у + Н г-5
7-9 4+11 -2-5 = 0. -2 15 -7
-7-9 13 + 11 -3-5 -16 24 -8
х-9 у + 11 х-5 х-9 у+11 х-5 -
= 8 -2 15 -7 «0, -2 15 -7 -о.
-2 3 -1 -2 3 -1
6(х-9) + 12(у + 11)+24(х-5)=0, (х-9)+2(у + 11)+4(х-5)=0,
х + 2у + 4х-7 = 0.
79
4.4. Различные виды уравнений прямой
в пространстве
Прямую в пространстве можно задать различными способами (т очкой и векто-
ром, параллельной ей; двумя точками и т. пД в связи с чем рассматривают раз-
личные виды ее уравнений.
Векторно-параметрическо* уравнение прямой. Направляющим вектором
прямой называется любой ненулевой вектор, параллельный ей Если даны точка
Мо(*о> Уо» го) инаправляющий вектор а*(а,,а2.а,) прямой (рис 4.8), то
г = г0+а/, (4.18)
где г = ОМ - радиус-вектор точки Л/(х, у, г). г0 = OMt - радиус-вектор точки
AIM«о- У» Zo). t - переменная величина (параметр). Уравнение (4 18) называется век-
торно-параметрическим уравнением прямой, проходящей через точку Л/о и имею-
щей напраллякхций вектор а Равенство (4.18) следует из определения суммы векто-
ров и необходимого и достаточною условия коллинеарности двух векторов
Параметрические уравнения прямой. Переходя от векторною соотношения
(4.18) к координатным, получаем
x = xe+e,Z, У = У0+аг1, х = г0Уау1. (4.19)
Эти уравнения называются параметрическими уравнениями прямой, проходящей
через точку AfaCxo, уо, Zo) и имеющей направляющий вектор а =(а1,а2,а]).
Канонические уравнения прямой. Выражая параметр z из уравнений (4.19) и
приравнивая полученные выражения, находим, что
Уравнения (4 20) 1изынактл каноническими уравнениями прямой, проходящей че-
реггхяку Л/с/хо. уь. Zo) и имеющей направляющий вектор а = (а|,а2,а]).
Уравнение прямой, проходящей через две точки. Если даны две точки
Af|(X|, У|, х,\ Л/2(х2, у2,х2), то в качестве се направляющего вектора можно
/т ОУ- ► / у Рис 4.8 взять вектор М,М2 =(х2-Х|,у2-у*.х2-хД поэтому уравнения (4.20) примут вил «-*1 _ У->1 »-«L. (4.21) *i ~ *i У1~ У» гг ~ г1 Пример 4.10. Записать параметрические и канонические уравнения прямой, проходящей через точку А/о (7, -9, 8) параллельно вектору а-(4,3,-2). Так как в данном случае *о =7.Уо = -9.«Ь =8.о, =4,д2 *3,д2 = -2,
80
параметрические уравнения (4.19) принимают вид
*«7+4/, у«-9 + 3/, * = S-2/,.
а канонические уравнения (4.20) запишутся так:
х-7 у + 9 2-8
4 “ 3 ” -2 ‘
Пример 4.11. Составить уравнения прямой, проходящей через точки
М|(6, - 3.4), Л/2(8, -7,9). Привести эти уравнения к параметрическому виду
Поскольку Х|«6, у,=-5, Z|=4, х2=8, У2=-7, ?2=9, то уравнения (4.21) примут вид
*-6 у + 5 г-4 *—6 у + 5 z-4
---- —-----------, или------- —-ж-----.
8-6 -7+5 9-4 2 -2 5
Обозначая рамные отношения буквой t, получаем параметрические уравнения
данной прямой:
* «6+2/, у = -5-2/, z = 4 + 5/
4.5. Задачи, относящиеся к плоскостям
Взаимное расположение двух плоскостей. Даны две плоскости
• Л2х+В2у + С22 + р,=0.
(422)
(4.23)
Необходимое и достаточное условие параллельности этих плоскостей выража-
ется равенствами
А ’ A А*
а их сон падения - равенствами
(4.24)
(4.25)
A A А А
Другими словами, плоскости параллельны тогда и только тогда, когда 1гр<як5хи®наль-
ны их коэффициенты при текущих координатах, например, плоскости
x + 2y-3z-l = O, 3x + 6y-9z« 7 = 0 параллельны Плоскости совпадают тогда и
только тогда. когда пропорциональны коэффициенты при текущих координатах и свобод-
ные члены, например, плоскости 2х- Зу+г-4 = 0, 4х-бу + 2z - 8 = 0 совпадают.
Если условие (4.24) не выполняется, то плоскости (4.22) и (4.23) пересекаются.
Угол между двумя плоскостями. Косинус угла между плоскостями (4.2?) и
(4.23) определяется формулой
(426)
Необходимое и достаточное условие перпендикулярности плоскостей (4.22) и
(4.23) выражается равенством
^,xa + slB2+qc!=ft
(4.27)
81
Расстояние от точки до плоскости. Расстояние-от точки Л/0(хо, у0, z0) до
плоскости Ax + By + Cz + D^O вычисляется по формуле
| Ахд + Дуд + Czp+D]
/i’ + B’+C2
(4.28)
Пример 4.12. Составить уравнение плоскости, проходящей через точку
Мо(2,3,-5) и параллельной плоскости x-2y + 4z-l = tt
Эго уравнение будем искать в виде x-2y + 4z + D = 0, тле D - неизвестный
свободный член (в формуле (4.24) полагаем отношение равным единице).
Так как плоскость проходит через точку Ма, то ее координаты должны удов-
летворять последнему уравнению 2-2-3+4(-5)+£) = 0, 2-6-20+ + 0=0,
D=24 Следовательно, x-2y + 4z + 24 = 0 - искомоеурв ihchhc
Пример 4.13. Найти угол между двумя плоскостями 11х-8у-7х +
+ 6 = 0, 4х-10у + z-5 = 0.
Косинус угла найдем по формуле (4.26), подставив в нее значения Л, = 11,
А--«. С,=-7. = 4. /?. = -10, Са = 1:
= II 4 + (-8) (-10)+(-7) I = 44 + 80 -7 = Л = М
* /112 +(-8)2 +(-7)’ ^42 +(-10)’ +1’ /2З4/117 2 4
Пример 4.14. Вычислить расстояние от точки Мо(4, X б) до плоскости
2x-y-2z-8 = O
Подставив в формулу (4.28) значения х0 « 4. уе = 3, = 6, А = 2, В = -I,
С=-2, D = -8, получим
I2 Ч-3- + 6-»!
Пример 4.13. Найти расстояние между параллельными плоскостями
x+2y-2l-l = О, x + 2y-2z + 5=0.
Это расстояние равно расстоянию любой точки одной плоскости до дру-
гой. Выберем на первой плоскости произвольную точку. Приняв, например,
что у0 = 1. ?#!. из уравнения x + 2y-2z-l = 0 найдем хс=1. По формуле
(4.28) находим расстояние от точки A/odU) До плоскости
х + 2у-2т + 5 = 0:
11+2-2+51 _6_,
Ji’+22+(-2;r 3
82
4.6. Задачи, относящиеся к прямым
в пространстве. . ..... , .
Угол между двумя прямыми - угол между «вправляющими векторами этих
пряных Косинус угла между двумя прямыми '
х = х,+с|Г,у = у,+а3Г, z = z,+а,/, (4.29)
• -л ипи.-./'Н । а>лз*л .ишч' дпи.. л»’1 । •- ». «эв1 _____
определяется
.15 к.j •;M-j’
1. <
(431)
Ферулой
«Об«Р“г
Равенство в,6| +a^ + в,йу = 0 выражает необходимое и достаточное условие
перпендикулярности прямых (4.29), (4.30). Необходимое и достаточное условие
параллельности этих прямых выражается равенствами b,=aat, Ь2=<ха2,
b, »Mj, или
(4.32)
Взаимное расположение двух прямых в пространстве. Для исследования
взаимного расположения прямых (4.29) и (4 30) рассматривается смешанное про-
изведение трех векторов а = («,. 02. а5), b = (bt. Ь* Ьэ). М|М2=(х2-Х|, у,-у,,
Zj-Zi). Если аЬМ|М]*0, т.е.
«1 fl, «3
Л Ь, *0,
*>“*! л-л
(433)
то прямые являются скрещивающимися Неравенство (4.33) означает, «по векторы
а, Ь, М,М2 неком планарны. *
Прямые (4.29) и (430) лежат в одной
плоскости тот да и только тогда, когда
аЬМ|М, =0, т.е.
в, в, в, А* ь> Ь> -G (4 34)
Л->т Ъ“*|‘ г • „ ।. ♦ -
Эти прямые пересекаются, если первые две строки определителя не пропор-
циональны, т.е. не выполнена условие (4.32). Прямые параллельны. когда первые
две строки определителя пропорциональны Прямые совпадают, если пропорцио-
нальны все строки определителя (4.34).
Замечание. Чтобы найти точку пересечения прямых (4.29) и
(4.30), необходимо решить систему их уравнений; при этом целесообразно
параметры обозначить различными буквами (так как одна и та же
точка пересечения прямых получается, как правило, при различных значе-
ниях параметра в уравнениях данных прямых).
83
Расстояние от точки до прямой. Расстояние от точки Л/о (x0,y0.ze) л° ПРЯ"
мой (4.29) вычисляется по формуле
<.|10.->Д»1|. (4JJ)
где г0 и г, - радиусы-векторы точек Л/о и Му, - направляющий вектор пря-
мой (рис. 4.9).
Расстояние между двумя прямыми. Кратчайшее расстояние между двумя
прямыми (4.29) и (4.30) определяется формулой
где г(> г2 - радиусы-векторы точек M|t Л/2; а, Ь направляющие векторы
данных прямых (рис. 4.10).
Пример 4.16. Найти угол между двумя прямыми х = 3+2/. у» 4+7/.
z = -5+8r, х = 2 + 8/, у-6-11/, z = -8-7r.
Первая прямая имеет направляющий вектор > = (2,7,8). вторая -
Ь = (8,-11,-7). По формуле (4.31) находим
2 8+7 (~П)+8 (-7) -117 1
0059 ' /22 + 7,+82 ^в2+(-11)2+(-7)* ' ТП7^34 71
Следовательно. <р = 135°
Пример 4.17. Доказать, что прямые х = 7+ St, у = -5-7/, z = -2 -Зг и
х = I, у = /, z = -3 + 21 пересекаются. Найти точку их пересечения.
Рассмотрим векторы М,М2 = (О-7,О-(-5),-3-(-2)) = (-7.5.-1).
>=(5,-7,-3), Ь»(1,1,2) и их смешанное произведение
84
Поскольку смешанное произведение трех векторов равно нулю, го векторы ком-
планарны; значит, данные прямые лежат в одной плоскости. Так как направляю-
щие векторы а и b этих прямых нсколлинеарны (их координаты не пропорцио-
нальны), то прямые пересекаются.
Чтобы найти точку пересечения, приравняем выражения для координат, пред-
варительно обозначив параметр буквой з в уравнениях второй прямой:
7+5г = я, -5-7т = я, -2-Зт»-3+2х
Из первых двух уравнений следует, что 7+5т = -3-7т. откуда / = -1; следова-
тельно, я = 2. При этих значениях г и з третье уравнение обращается в тождество.
Подставляя значение Г = —I в уравнения первой прямой (или з = 2 в уравнения
второй прямой х = з, у = », Z“-3+2j), находим х = 2, у‘2, z = L Итак.
М (2, 2,1) - точка пересечения данных прямых
Пример 4.18. Найти расстояние от точки А/О(2,-3,3) до прямой:
х»5 + 2т, у = -4-/, я = 6-2/.
Найдем сначала векторное произведение, входящее в формулу (4.33):
г,-г0 = М0М, «(5-2,-4-(-3),6-5)-(3,-1.1), а »(2,-1,-2),
Цг,-г0),а)=(|_’ _’2|,- J Д • J .’J j“(X8,-1).
По формуле (4.33) получаем
J32 -К-1)2 /74
О = ,
V22+(-!)’+(-2/ 3
4.7. Задачи на прямую и плоскость
Прямая как линия пересечения двух плоскостей. Рассмотрим две плоско-
сти. заданные общими уравнениями (4.22) и (4.23). Если условие (4.24) нс выпол-
нено (т. е. коэффициапы А(. В,, Ct не пропорциональны коэффициентам Аг, В2.
СД то плоскости пересекаются по прямой, определяемой уравнениями
Лрг + Ду+С^я + Д =0, XjX + Bjy + CjZ+D, “й (4 37)
Эти уравнения приводятся к параметрическому виду
х = х0+ С‘ |б>вЛ~| С‘ Г,Х-Ж0+ L (4-38)
• в» GT 141 G ° A sj
85
Данная прямая имеет направляющий вектор
5 2Н1 Ж £ )•
где п, = (Л|, Д, Q). П2 = (Х2, Bj, С2) - нормальные векторы данных плоскостей.
Точка Л/0(х0,y0,z0) на прямой может быть выбрана произвольно, для этого не-
обходимо в системе (4.37) зафиксировать значение одной переменной (например,
z = z0 X из полученной системы уравнений найти значения двух друтмх псрсмсн-
ных(х>=х0, у-у0).
Пучок плоскостей - множество всех плоскостей, проходящих через одну и ту же
прямую Уравнение пучка плоскостей. проходящих через прямую (4 J7), имеет вид
а (А, ж ++ C,z + Ц )+0 (Хг ж + Bjy + CjZ + D,) = 0,
где ex и 0 - любые действительные числа, причем хотя бы одно из них отлично от
нуля. ’>го уравнение можно привести к виду
А,ж + В, у +Ctx + D| + X(X2x + Bj.y + C2z + £^) = 0, (4 40)
где X. = P/a, a # 0. Уравнение (4 40) определяет все плоскости пучка, за исклю-
чением той, которой соответствует а«0, т.е. за исключением плоскости
Х,х ♦ Bzy + CjZ + Dj =0.
Угол между прямой и плоскостью. Синус угла между прямой
x = xo+e,r,> = yo+ejl,x = Xo+e,r (4.41)
и плоскостью
Xx + By + Cx + D = 0 (442)
определяется формулой |Ха,+Во2+Соз| / * ~ i И 1» । > Г.
а!пф"- (443)
Vx* у В1 уС* 7°’ +вт +вз
Взаимное расположение прямой й плоскости. Прямая (4.4!) и ПЛОСКОСТЬ
(4.42) пересекаются, если Аа, + Ва2+Са,*0; (4.44)
перпендикулярны, когда х w в ш С. (4.45)
в, аг а,'
параллельны, если
Xfl| + Ba2 з hCoj = 0, Хх0 + Ву0 +Сх0 + D#0; (4.46)
совпадают, когда
Xfl| + Ba2 + Cflj = 0, Xxe + Ву0 + Сх0 + D = 0. (4 47)
Координаты точки пересечения прямой (4.41) и плоскости (4.42) нахо-
дятся из системы их уравнений.
86
Неравенство (4.44) означает, что нормальный вектор п=(Л. В. Q плоскости
(4.42) и направляющий вектор в = (a1,n2,aJ) прямой (4.41) не перпендикулярны,
т.е. прямая и плоскость не параллельны.
Равенства (4.45) означают, что векторы она коллинеарны, т.е. прямая (4.41) и
плоскость (4.42) перпендикулярны.
Соотношения (4.46) показывают, что векторы п и а перпендикулярны, т.е.
прямая и плоскость параллельны, но точка М0(хв, у0, z0) прямой (4 41) не при-
надлежит плоскости (4.42).
Равенства (4.47) означают, что векторы п и а перпендикулярны и точка
М0(х0, Уд, Zg) прямой принадлежит плоскостм (прямая лежит в плоскости)
Пример 4.19. Уравнения прямой x + 2y+4z-7 = 0, 2я >у-г-5 = О
привести к параметрическому виду
Поскольку в этих уравнениях коэффициенты при текущих координатах непро-
порциональны, то плоскости, определяемые данными уравнениями, пересекаются
Данные уравнения определяют прямую. Выберем на прямой точку. Полагая в этих
уравнениях, например, z0 = 2, получаем
я+2у«—1, 2х+у=7,
откуда д«=5. ytr=-3. На прямой зафиксирована точка Л/о(5, - 3,2). По формуле (4.39)
найдем направляющий вектор прямой. Так как п, =(1, 2,4), п2 = (2,1,-1), то
Параметрические уравнения (4.38) данной прямой принимают вид х«5-6*,
у = -3 + 9/, 2 = 2-3/.
Замечание. В качестве направляющего вектора можно взят».
|•-(-2,3,-1), тогда х-5-2/. у = -3+3/, z-2-f.
Пример 4.20. Найти угол между прямой х = —3~/, у «5-/,
гж-4 + 2/ и плоскостью 2х-4у + 2г-9 = 0.
Применяя формулу (4.43) для случая а,=-1, о}=-1, в,=2, А=2. В=-4, С-2, находим
sin/p = |2(-1)-4(-1)+2 2| в 6 = _1_
/г1 -к-4)1 + 2’ 7(-В2 +(-1)2 + 2* э/24 Л 2’
ф = 30°.
Пример 4.21. Найти проекцию точки А/(Ц-2,4) на плоскость
3x-3y + 6z + 35-a
Этой проекцией является точка пересечения перпендикуляра к плоско-
сти, проходящей через точку М. Для прямой, перпендикулярной плоскости,
направляющим вектором будет п«(5,-3,6) Параметрические уравнения
87
прямой, перпендикулярной плоскости и проходящей через точку М, примут
вид x = 1 + 5f, > = -2-3/, z = 4+6r.
Подставляя эти выражения в уравнение плоскости, находим;
5(1 + ST)-3(-2-30+6(4+ 60 + 35 = 0. 70Г + 70 = 0, Г=-1
При этом значении t из уравнений прямой получаем: я = 1 - 5 = - 4, у = -2 ♦ 3 -
1. г = 4- 6= -2. Следовательно, точка N(—4,1,-2) - искомая проекция.
Пример 4.22. Вершины пирамиды находятся в точках At(4,6,5), Aj(65>,4).
Л,(2,10,1 ОХ 44(7,5,9). Найти: I) длину ребра 4Л3; 2)угол между ребрами 44 и
441 3) площадь грани А>Аг4; 4) объем пирамиды 44441 5) уравнение плоскости
A,AjAy 6) уравнения прямой Л|4; 7)угол между ребром А,А4 и гранью А|АИзь
8) уравнения высоты, опушенной из вершины 4 на грань A|AjA3.
Найдем сначала координаты векторов А(А2, А,А,, А,А4 и координаты век-
торною произведения [AjAj.A^J. По формуле (3.15) получаем
А,А} =(6-4,9-6,4-5) = (2,3,-l), A,Aj =(2-4,10-6,10-5) = (-2,4,5Х
А, А4 = (7 - 4,5 - 6,9 - 5) = (3. -1,4Х
»
С помощью формулы (3.26) находим
1. Длина ребра Л(А2 равна расстоянию между точками А( и А3, которое вы-
числим по формуле (1.26):
Р(4. Аа) = 1/(6-4),+(9-6)’+(4-5)2 =714-3,74.
Тот же результат можно получить, найдя модуль вектора А, А: по формуле (3.11).
2. Угол между ребрами 44 и 44 равен углу ф между векторами А,А2=я,
A^j = Ь. В соответствии с формулой (3.22) получаем
= аЬ = 2(—2) + 3-4-1 5 • = 3 = I
1811b I V22 +32 +(-1? 7(-2)* +42 + 52 ТТО
cosp - 0,1195, Ф-8У31'.
3. Площадь грани 444 равна плошали треугольника 444- которую вы-
числим по формуле (3.29), использовав формулу (3.11) для модуля вектора и ко-
ординаты вектора [ A t А 2, А, А, J:
S = у | [А,А2, А, Аэ J | = у 7192 +(-8)2 +142 = S - 12,46.
88
4. Объем пирамиды А^АгАуА4 найдем по формуле (3.35):
1 6-4 9-6 4-5 2 3 -1
V = — mod 2-4 10-6 10-5 1 . = —mod -2 4 5 = 3*=2ol
6 6 6 6
7-4 5-6 9-5 3 -1 4
5. Уравнение плоскости А,А2А,
как плоскости, проходящей через три точки
(см. (4.14)), принимает вил
х-4
6-4
2-4
у—6
9-6
10-6
х-5
4-5
10-5
= 0,
х-4
2
-2
у-6
3
4
г-5
-I
5
= 0.
19(х-4)-8(у-6)+14(х-5) = 0, I9x-I8y + I4z-98 = O. (I)
6. Уравнения прямой А|А4 как прямой, проходящей через две точки
(см. (4.21)), запишутся так:
х-4 _ у-6 _ г-5 х-4 _ у-6 z-5
7-4 ~ 5-6 " 9-5’ 3 = -1 =-4~'
или
х = 4+Зг, у = 6—4, х = 5+4т. (II)
7. Угол между ребром А,А4 и гранью А,А2А2 равен углу ф между плоскостью
(I) и прямой (II). По формуле (4.43) находим
119 3-8 (-D + 14 4| |21
Sin Ф = J I дпт-Х—L— с (
7l92+(-8)’+14’ ^З1+(-!)*+42 V621V26
sin ф-0,9522, <р-72-13'.
8. Уравнения высоты, опушенной из вершины Д, на грань можно за-
писать как уравнения прямой, проходящей через точку А4 и перпендикулярной
плоскости (1), имеющей нормальный вектор п = (19, -8,14), который для згой
прямой будет направляющим вектором Уравнения (4.19) в данном случае прини-
мают вид х = 7 + 19г, у = 5-8/, z = 9 + 14/.
4. 8. Цилиндрические поверхности.
Поверхности вращения
Цилиндрической называется поверхность, описываемая прямой (образующей),
движущейся вдоль некоторой линии (направляющей) и остающейся параллельной
исходному направлению (рис. 4.11). Уравнение цилиндрической поверхности,
образующие которой параллельны оси Oz, имеет вид
F(x,y)=ft (4.48)
89
Особенность уравнения (4.48) состоит в том, что оно не содержит переменной г.
Если уравнение F (у, z) = 0 определяет некоторую поверхность, то ею является
цилиндрическая поверхность с образующей, параллельной оси Ох Бати уравнение
F (х, z) - 0 определяет некоторую поверхность, то ею является цилиндрическая
поверхность с образующей, параллельной оси Оу.
Поверхность, образованная вращением линии I
* = Я*Х >“»(*) (449)
вокруг оси Oz (рис. 4.12), определяется уравнением
х, + /-/2(х)+ф,(х). (4.30)
Поверхность, образованная вращением линии х = /i(yk z = /г(у) вокруг оси Оу,
имеет уравнение х2 + z2 =/(2(у ) + //(>).
Поверхность, образованная вращением линии у - ф((х), г = ф2(х) вокруг оси
Ох. определяется уравнением у2 +z2 = ф?(х) + ф|(х).
Поверхностью вращения второго порядка называется поверхность, полученная
вращением линии второго порядка вокруг ее оси.
Эллипсоидом вращения называется поверхность, полученная вращением
эллипса вокруг одной из его осей. Уравнение эллипсоида вращения, полу-
ченного вращением эллипса у2/!»2 + г2/с2 = 1, х = 0 вокруг оси Oz. имеет вид
xVfe2 ♦ у2Л2 + Z2/c2 = 1.
Z
Однополосным гиперболоидом вращения называется поверхность, полученная враще-
нием гиперболы вокруг ее мнимой осн. Однополосный гиперболоид вращения, получен-
ный вращением гиперболы y^/h1 -гг1сг = 1, х = 0 вокруг оси Ог. имеет уравнение
x762+y2/fr2-z2/c2 = L
Двуполостным гиперболоидом вращения называется поверхность, по-
лученная вращением гиперболы вокруг ее действительной оси. Двуполо-
стный гиперболоид, полученный вращением гиперболы г2/с2 - уг1Ьг = 1.
90
х = 0 вокруг оси Oz, определяется уравнением
Параболоидом вращения называется поверхность, полученная вращением па-
раболы вокруг се оси. Уравнение параболоида вращения, полученного вращением
параболы у1 = 2pz, х = 0 вокруг оси Oz, имеет вид
Р Р
Пример 4.23. ( оставить уравнение поверхности. полученной вращени-
ем линии хг/а2 - z2/c2 = 0, у = 0 вокруг оси Oz.
Данные уравнения определяют пару пересекающихся прямых в плоскости Oxz,
проходящих через начало координат (являющихся пересечением плоскостей х/а
z/c = О, х/о + z/c -Ос плоскостью Охг). Приведем эти уравнения к виду (4.49):
х = ±(a/c)z, у = 0.
В соответствии с уравнением (4.50) получаем
Последнее уравнение является уравнением конуса вращения, гюлу чающегося при
вращении указанных прямых вокруг оси Oz.
4.9 . Поверхности второго порядка
Поверхностью второго порядка называется поверхность, определяемая ал-
гебраическим уравнением второй степени относительно текущих координат х,у, z
Канонические уравнения поверхностей второго порядка:
(эллипсоид, рис 4.13); (4 51)
х^/а1 + у2/b1-х21сг = Х (однополосный гиперболоид, рис. 4.14); (4.52)
х^а^уЧ^-г^с^-Х (дву подостный гиперболоид, рис 4 15); (4.53)
х2/д2 + y2/b2 -z’/c2 =0 (конус, рис 4.I6X (4.54)
х2/д2 + у1/б2=.2г (эллиптический параболоид, рис. 4 17); (4.55)
x2/e2-//62 = 2z (гиперболический параболоид, рис 4.18), (4.56)
91
л1<?+/1ьг-\ (эллиптический цилиндр. рис. 4.19); (4.57)
21аг-уг1ь2^\ (гиперболический цилиЛдр, рис 4.20); (458)
2 = 2ру (параболический цилиндр, рис 4:21); (4.59)
Ча'-уЧь'-о (пара пересекающихся плоскостей). (4.60)
7*2-1 (пара параллельных плоскостей); (4.61)
:2 = 0 (пара совпадающих плоскостей) (4.62)
Рис. 4.13
Рис. 4.14 Рис. 4.15
92
Рис. 4.17
93
Замечание I. Уравнение(4.51) при a,~t>-с-R принимает вид
хг +/+/’«R2 «• •*«. . (4.63)
и определяет сферу радиуса ft с центром'» начале Координат
Общее уравнение второй степени относительно аг, у, z может быть приведено к
одному из уравнение (4.51) — (4.63) или к одному из следующих уравнений:
Л7«2 +УД2.+г7с2 = -1; (4.64)
ж’/в2 + у1/б2гМ,/^Ь- • .у, <4-65)
«! (4.66)
ж'Р+уУГ-Ь, , "14.67)
л7в2=~1- (4 68)
Уравнениям (4 64), (4.66) и (4.68) не удовлетворяют координаты нм одной точ-
ки пространства, уравнении' (4.65) удовлетворяют координаты единственной точ-
ки О (О, О, ОХ уравнению (4.67) удовлетворяют координаты точек, лежащих на
прямой к “О, у - О
Замечание 2. Если уравнение
Axi + 7</ + Hj2 + & + Q/+Dz + F = 0 (4.69)
(т.е. уравнение, у которого коэффициенты при квадратах координат равны между
собой, а коэффициенты при произведениях координат равны нулю) определяет
некоторую поверхность, то этой поверхностью является сфера Уравнение (4 69) в
этом случае может быть приведено к виду
(ж-в)*+(у-6)’+(х-с)2-Яа. (4.70)
Уравнение (4.70) является уравнением сферы радиуса ft с центром в точке С(а, Ь, с).
Прямые, целиком лежащие на некоторой поверхности, называются прямоли-
нейными образующими данной поверхности.
Однополосный гиперболоид (4.52) имеет два семейства прямолинейных
образующих:
Гиперболический параболоид (4.56) также имеет два семейства прямолиней-
ных образующих: • • •• !Й
94
Пример 4 24. Определить вид и параметры поверхности второго поряд-
ка, заданной уравнением
Зх* + 4/ ♦ 6? -6х + 1бу-36т +49 * а
Преобразуем это уравнение, выделив в левой части полные квадраты:
3(х2-2х + 1)+4(>2 + 4у + 4)+6(х2-6г + 9)-3-16-54 + 49= О,
3 (х -1)2 + 4 (у + 2)2 + 6 (х - 3)’ = 24.
Введем новые координаты по формулам (3.17):
Х-х-1, Y^y + 2,Z = x-3, (Г)
тогда уравнение примет вил
ЗЛ2 + 4Уа + 6Z2 = 24, или Х2/8+ Y'lb+Z'/i = L
11олученнос уравнение определяет эллипсоид (см. (4 51)). для которого а = 2-J1,
b = х/б, с = 2 Центр эллипсоида находится в точке 0,(1. - 2,3fc в новой системе
координат центром является точка с координатами X = О. Y = О, Z = О. Из этих ра-
венств и формул (1) находим х = i,y=-2,z = З.т.е координаты точки Ц.
Пример 4.25. Определить вид и параметры поверхности
2х2+3у2-6х2-8х + 6у + 12х-1 = 0.
Преобразуем это уравнение:
2(х2-4х + 4) + 3(у2 + 2у + 1)-6(х2-2г + 1)-в-3 + 6-1 = 0.
2(х-2)2 + 3(у+1)2-6(*-1)2-б
Переходя к новым координатам по формулам X «х-2. Y « у+ I. Z ж z -I. полу-
чаем
2Л1 + ЗУ2 - 6Z2 - 6, или Х2/3 + YJ/2- Z2/l - L
Зп> уравнение определяет одного лостный гиперболоид (см. (4.52)), для которого
а^-Л, Ь-Л, cat, с центром в точке Q (2,-1, Ц
Пример 4.26. Доказать, что уравнение г = ху определяет гиперболиче-
ский параболоид.
Введем новые координаты по формулам х “ X- Y. y=X + Y, z^Z, тогда
уравнение примет вид
?-(>•-K)(Jf+О. Z-X'-Y1.
Полученное уравнение является уравнением вида (4.56), для которого 2а2 = Ц
2Ьг = 1; оно определяет гиперболический параболоид.
Пример 4.27. Доказать что уравнение х2 = уг определяет конус.
Переходя к новым координатам по формулам х-Х, y*Z-Y, z = Z+Y, по-
лучаем хг-(z-n(z+n.хг = z2-r2, или jr2 + r2-z2-a
Полученное уравнение является уравнением вида (4.54), для которого
а ” b » с = 1. оно определяет конус.
95
4.1 0. Некоторые другие поверхности
В плоскости Oxz (у=0) задана линия /, своими параметрическими уравнениями
х = /(и), ж = ф(и), (4.71)
не пересекающая ось Oz. Рассмотрим поверхность, полученную вращением этой
линии вокруг оси Oz. .. . ...
Параметрические уравнения рассматриваемой поверхности вращения
имеют вид
х = /(«)cosv, у~ /(u) sin и, г = ф(и). (4.72)
Тор - поверхность, полученная вращением окружности вокруг оси, лежащей
в плоскости данной окружности и нс пересекающей се. Эта поверхность напоми-
нает спасательный круг, камеру автомобильной шины (рис. 4.22).
Рассмотрим тор, по лученный вращением вокруг оси Oz окружности, заданной
параметрическими уравнениями
х = а + Ьсази, у = 0, z = bsinu (6<в)
Эта окружность лежит в плоскости Oxz (у = 0) и определяется уравнениями вита
(4.71>гдс /(u)=e + bcosu, <р(u) = fcsinu.
В соответствии с(4.72) получаем параметрические уравнения тора
x=(ot/>cosu)cosv, y = (o + 6cosb)sinv, z-hsinu. (4.73)
Кятеноид - поверхность, полученная вращением цепной линии вокруг се оси
(рис 4.23). Рассмотрим катеноид, полученный вращением вокруг оси Oz цепной
линии, заданной параметрическими уравнениями
х = ech (и/а\ у-0, z = и.
Эта линия расположена в плоскости Oxz (у = 0). Она определена уравнения-
ми вида (4.71), где /(w) = ech (и/а\ <р (и)= и. В соответствии с (4.72) находят
Zi L
а ^\z \ /о Рис. 4.22 х 5— |/ / /РГ\ У / Д | 1 V J 1 Рис. 4.23
96
параметрические уравнения катеноида
xBoch(i^a)cosv, у = och(iya)sin v, z = u
Исключая из этих уравнений параметры и, v, получаем
Jx2+y2 - (а/2) (в* ♦ «’*). (4.74)
Катеноид является единственной минимальной поверхностью среди поверхно-
стей вращения Минимальные поверхности возникли при решении следующей
задачи: среди всех поверхностей, проходящих через данную замкнутую простран-
ственную линию, найти ту, которая имеет минимальную п юшадь поверхности.
О1раничснной данной линией. Отсюда происходит и название такой гюаерхяпстш
Бслынйсхнй физик Плато предложил простой экспериментальный способ получе-
ния минимальных поверхностей посредством мыльных пленок, натянутых на про-
волочный каркас,
Каз еноид обладает следующим свойством Рассмотрим две зжружаостм. волу -
ченныс пересечением катеноида (4.74) соответстаенно плоскостями г «-с, г = с.
Любая поверхность, края которой совпадают с этими окружностями, имеет пло-
щадь большую, чем часть катеноида, расположенная между у—*-— — окружно-
стями. Мыльная пленка, соединяющая данные окружности пол действием сил
внутреннего натяжения, принимает форму катеноида
Геликоид - поверхность, описанная прямой, которая вращается с постоянной
узловой скоростью вокруг неподвижной оси. пересекает ось под постоянным уг-
лом а и одновременно перемещается поступательно с постоянной скоростью
алолъ этой оси При а = 90° геликоид называют прямым (рис. 4.24, о), при
а х 90° геликоид называют косым (рис. 4.24, б).
Рассмотрим прямой геликоид, описанный прямой, перпендикулярной оси Oz
(см. рис. 4.24, в). Пусть М (я, у, г) - произвольная точка поверхности. Р- ее
проекция на плоскость Оху, Q, L - проекции точки Р соответственно на оси Ох.
Оу Обозначим через и расстояние точки М до оси Oz (| МЫ | =| ОР| = в), а через
v - угол, образуемый отрезком ОР с осью Ох.
Параметрические уравнения зеликонда имеют вид
х = ucos v, у - к sin к, z - <7V.
где а - некоторая постоянная.
Наглядное представление о положении отдельных прямых (лучей) при
v = consl дают ступени винтовой лестницы.
Представление о геликоиде можно составить, ззапримср. наблюдая движение
винта вертолет а при его вертикальном взлете. Отмстим, что перво начально верто-
леты называли геликоптерами, винтокрылыми Первый эскиз! с. тмина был нари-
сован еще Леонардо да Винчи.
Разнообразные геликоиды широко применяются на праязыке Узо объясняется
следующим: геликоид образован сложением двух самых (хкпрост раненных видов
«За* I
97
равномерною движения - прямолинейною и вращательного. Вследствие этого
геликоид можно применить там, где необходимо перейти от одного из указанных
видов движения к другому, что имеет место практически в любой машине
Псевдосфера - поверхность, полученная вращением трактрисы вокруг
ее асимптоты (рис. 4.25). Рассмотрим псевдосферу, полученную вра-
щением вокруг оси Oz трактрисы
Jt = asinu, у = 0, z = a(ln tg(n/2) + cosu).
Эта трактриса лежит в плоскости Oxz (у - 0), ось Oz служит ее асимптотой. Ли-
ния задана параметрическими уравнениями вида (4.71). где /(u) = esin и.
Рис. 4.24 Рис 4.25
<p(u) = a(ln tg(«/2) + cosu). В соответствии с (4 72) получены параметрические
уравнения псевдосферы
х в sine cosv, у = asinusinv, г = a (in tg (и/2) + cosh).
Важность псевдосферы состоит в том, что на ней частично реализуется
плоская неевклидова геометрия Лобачевского Этот удивительный факт
установил итальянский математик Эудженио Бельтрами в 1868 г„ уже
после смерти Н.И. Лобачевского.
98
II
АЛГЕБРА
Главе 5
МАТРИЦЫ И ОПРЕДЕЛИТЕЛИ
/ 51
5.1. Матрицы. Основные определения
Матрицей натыкаете» система т п чисел, расположенных а пр»моут ольноЯ
таблице из т строк и л столбцов Числа этой таблицы называются элементами
матрицы Обозначения матрицы
—.Чы составляют *-й столбец (к = 1,2,....л); а„ - элемент, принад-
лежащий t-й строке и 4-му столбцу матрицы, числа«, к называют индексами эле-
мента. Матрицу, имеющую т строк н л столбцов, называют матрицей размеров
тхл (читается т на л). Употребляются и более краткие обозначения матрицы
размеров т*п
Ln* (аи)ж»> К L
Матрицу обозначают также одной заглавной буквой, например
Если необходимо отметить, что матрица Д имеет т строк и л столбцов, т. е не-
обходимо указать ее размеры, то пишут АШКЯ или A„
Две матрицы Аш, = (дйназываются равными, если
p=m, q = n и оа = 4* (i = l,2,...,т; 4 = 1,2»...,лК другими словами, если
они одинаковых размеров и их соответствующие элементы равны
99
Матрица, состоящая из одной строки, называется строчной матрицей, или мат-
рицей-строкой. Строчная матрица и меет вид
Матрица
имеющая один столбец, называется столбцовой матрицей, или матрицей-
столбцом
Матрица, все элементы которой равны нулю, называется нулевой. Нулевую
матрицу обозначают буквой О:
О 0 ... О
О 0 ... О
О 0 ... О
Квадратной называется матрица, у «порой число строк равно числу столбцов
(т = л), т. е матрица вида
«и вп ... eto
о,, а„ ... аи
. 4.1 — °- .
Порядком квадратной матрицы называется число ее строк.
Будем говорить, что элементы квадратной матрицы образуют
ее главную диагональ, а элементы а,„. aln.t,.... о„, - вторую диагональ.
Квадратная матрица называется симметрической, если а„ ah, т. е. равны ее
элементы, симметричные относительно главной диагонали
Диагональной называется квадратная матрица, у которой все элементы, не
принадлежащие главной диагонали, равны нулю, т. е. матрица
diag(e||.Ojj. ....«„)
Скалярной называется диагональ
(с-const) при i«1,2,...,и.
о,, О ... О
О агз ... О
О 0 ... em
тая матрица, у которой а„=с
100
Единичной называется диагональная матрица, у которой все элементы главной
диагонали равны единице Единичную матрицу обозначают буквой Е:
1 0 ... О
О I ... о
О 0 ... I
Треугольной называется квадратная матрица, все элементы которой, располо-
женные по Одну сторону от главной диагонали, равны нулю. Различают соответст-
венно верхнюю и нижнюю треугольные матрицы:
аи ап °13 ••• в1л
О «м «и — «г»
О 0 ап ...
Он 0 0 ... О
я21 оп 0 ... О
вн ап вм ••• °
Матрица произвольных размеров вила
ап °U ‘’tl в|г ••• в|«
° °п °а ••• аъ ••• аг»
О 0 ам ... av ... а,.
(5.1)
О 0 0 ... а„ ... а„
О 0 0 ... О ... О
где в„#0 ((=1.2,..., г), называется квазитреугольной (ступенчатой или
трапециевидной).
Матрица Аг, полученная из данной матрицы А заменой каждой ее строки
столбцом с тем же номером, называется транспонированной относительно А. Если
А - матрица размером тхл, то Лт имеет размеры лхлс
101
Элементарными преобразованиями матрицы называют следующие преоб-
разования: 1) умножение строки (или столбца) матрицы на число, отличное от
нуля; 2) прибавление к элементам строки (столбца) соответственных элемен-
тов другой строки (столбца), умноженных на любое число; 3) перестановка
местами двух строк (столбцов).
Термин «матрица» был введен Д. Сильвестром в 1851 г.
5.2. Линейные действия над матрицами
Линейными действиями над матрицами называются сложение и вычитание
матриц, умножение матриц на число Сложение и вычитание определяются только
для матриц одинаковых размеров.
Суммой двух матриц A*(alt)K,. В„ =(ЬЛ)„ называется такая матрица
С *•(<*).. что
сл = <»<» (' = 1.2,...,ж; к - 1,2,...,л\ (5.2)
т. с матрица, элементы которой равны суммам соответствующих элементов мат-
риц слагаемых. Сумма двух матриц А и В обозначается А ♦ В.
Разностью двух матриц Л = (аж)„, #.»,=(/>)„, называется матрица
D = (da )^, для которой
•1л=ал-Ьл (1=1,2......ж; 4 = 1.2,..., л). (5.3)
Произведением матрицы А = (ort )„, на число а (или числа а на матрицу А) нюы-
нается матрица В « (/>„ )„, для которой
Ьл-ааа («» 1,2,.... т. к = 1.2,..., л), (5.4)
т. е. матрица, полученная из данной умножением всех се элементов на число а
Произведение матрицы А на число а обозначается Аа (или cU).
Матрицу (-1)Л называют матрицей, противоположной матрице А, и
обозначают -А.
Замечание. Разность А - В двух матриц можно определить так:
Л-й=И + (-вХ (5.5)
Линейные действия над матрицами обладают следующими свойствами:
1)Л + В = В + Л; 2) (Л+В) + С= Л + (В + СХ 3)А + О=А; 4) Л + (-Л) = О;
5) I Л = Л; 6) а(РЛ) = (а₽)Л; 7) а(Л + В) = аЛ + аВ; 8) (а + Р) Л = а4 ♦ Р4, где
А, В, С - матрицы одних и тех же размеров; О - нулевая матрица; (-А) -
матрица, противоположная матрице А; а, Р - любые действительные числа
102
В соответствии с формулами (5.2) и (5.3) получаем
1+8 3+2 9 5 1-8 3-2' -7 1
л+в= 2+6 5+3 8 8 . А-В = 2-6 5-3 = -4 2
6 + 1 4+5 7 9 6-1 4-5 5 -1
Пример 5.2. Даны две матрицы
Найти ЗА-2В.
В соответствии с формулами (5.4) и (5.5) получаем ЗА, -2В, и
ЗЛ-2В = ЗЛ+(-2В):
6 3
ЗЛ = 12 9 , -2В =
18 15
-6 2 4 4 -2 6 , ЗЯ-2В = 0 S 8 13 16 21
5.3. Произведение матриц. Многочлены от матриц
Произведение определяется для квадратных матриц одного и того же порядка,
а также для прямоугольных матриц, у которых число столбцов матрицы множимо-
го рдяно числу строк матрицы множителя.
Произведением матрицы = (о14 на матрицу В^ = (art )rf называется та-
кая матрица = (с,, для которой
Ав +flA +-+<ЬА* = ХвАм (5-6)
т. е. элемент сл матрицы равен сумме произведений элементов i-й строки
матрицы А на соответствующие элементы к-гд столбца матрицы В^ Матрица
Cw имеет т строк (как и матрица А) и I столбцов (как и матрица Bw ). Произве-
дение матрицы А на матрицу В обозначается АВ.
Замечание. Из того, что матрицу А можно умножить на В, не следует,
что матрицу В можно умножать на А. В общем случае АВ* ВА. Если АВ- ВА, то
матрицы А и В называются перестановочными или коммутативными
При умножении матриц единичная матрица £ играет роль единицы, а нулевая
матрица О — роль нуля, так как АЕ" ЕА>* А, АО-ОА = О.
Умножение матриц обладает следующими свойствами. Если имеют
смысл соответствующие действия, то выполняются равенства:
1) (АВ)С-А(ВС), 2) а(ЛВ) = (а4)В; 3) (А + В)С= АС+ВС;
4) С(А + В) = СА + СВ, где а - любое действительное число.
103
Отметим, что (Л£)' = В'Л', где штрихом обозначена матрица, транспо-
нированная данной.
Целой положительной степенью А* (к > 1) квадратной матрицы А называется
произведение к матриц, каждая из которых равна А, т.е. Ак = А х Лх...х А. Мат-
ряца А1 имеет тот же порядок, что и матрица А. Нулевой степенью квадратной
матрицы А (А # 0) называется единичная матрица того же порядка, что и А, т. с.
Л° = £ Первой степенью А' матрицы А называется сама матрица А. т. е. А' А.
Многочленом (или полиномом) степени к (к — целое неотрицательное число) от
квадратной матрицы А называется выражение вида
atA* +at_lA>'1 +... + а,А} +alA-f-acA°,
где a, (i = 0,1.2,.... A) — любые числа, причем at # 0. Обозначим многочлен от
матрицы Л через В (Л), тогда по определению
P[A)-atA* +...+а2Л1 + а,/< + а0А
ли
Р(Л) = о4Л* + в*_|Л*’' +...+в,Л’ + в(Л+в0£. (5.7)
Из определения следует, что многочлен от матрицы можно получить, если в
обычный многочлен Р(х) = о4х*+в4_,х*''+...+а,х + ос вместо х подставить
квадратную матрицу (и учесть, что Ав = £ ).
Пусть дан многочлен £(х). Если Р(А) является нулевой матрицей, Т. е.
Р(А)=О, то матрица Л называется корнем многочлена Р(х\ а многочлен Р(х)
— аннулирующим многочленом для матрицы А.
Пример 5.3. Найти произведение АВ и ВА матриц
Обе матрицы являются квадратными матрицами одного и того же порядка
(второго), поэтому можно получить произведения АВ и ВА Применяя формулу
(5.6) для случая т = л = 2, п=/ = 2, получаем
Г| 21 Г-5 71 Г 1(-5)+2(-6) 1-7 + 2 81 Г-17 231
ЛВ"[з 4 J [-6 8 J [ 3(-5) + 4(-6) 3 7 + 4 8 ]"[-39 53 J ’
[-5 71Г' (-5)2+7 4] Г16 18 1
[-6 8j [3 4 ] = [ (-6)1 + 8 3 (-6)2 + 8 4 ] [18 20 ]’
Отметим, что АВ # ВА, т. е результат умножения зависит от порядка множителей.
104
Пример 5.4. Даны две матрицы
Л= 6 5 7 -8 , В»
Найти произведение АВ Можно ли получить произведение ДА?
Число столбцов матрицы А равно числу строк матрицы В (ширина матрицы А
равна высоте матрицы В), поэтому произведение АВ определено Умножая строку
матрицы А на столбец матрицы В, по формуле (5.6) получаем
ЛВ =
’ 3-4 + 1 5 + 2 6 + (-4)8 3(-1) + 1(—2) + 2(-3) + (—4)(-7)
6 4 + 5 5 + 7 6+(-8)8 6(-1) + 5(-2)+7(-3)+(-8)(-7)
9 4 + 0 5 + 1 -6+(—2)8 9(-1) + 0(—2) + 1 (—3) + (—2)(—7)
12 + 5+12-32 -3-2-6 + 28 -3 17
24 +25+42-64 -6-10-21+56 27 19
36+0 + 6-16 -9+0-3 + 14 26 2
Произведение ВА нс определено, так как число столбцов матрицы В нс равно
числу строк матрицы А.
Пример 5.5. Пай™многочленД(А).еслиЛ’(хНт2-Зх +5и = 'j-
В соответствии с определением многочлена от матрицы (см. формулу (5.7)) по-
лучаем Р (А) = Л’ - ЗА + 5£ или
5.4. Определители и их свойства
Определителем квадратной матрицы второго порядка
°|2
называется число, равное -а^, и обозначаемое символом
вн
аТ1
ап I т с I а"
fla I I <41 °а
(3.8)
“ “пйи ~а12а11-
105
Числа в„, О|2. а2|. а22 называются элементами определителя матрицы второго
порядка Каждый элемент определителя обозначен буквой а с двумя индексами;
первый (1) обозначает номер строки, второй (2) - номер столбца на пересечен ни
которых находится соответствующий элемент (например, элемент а21 принадле-
жит второй строке и первому столбцу определителя)
Определитель матрицы называют также детерминантом Для определителя
матрицы употребляются следующие обозначения:
| А |. det A, det (art), A.
Определителем квадратной матрицы третьего порядка
ап вп °и
в23 взз
fl3i ауг ап
называют число
|в||вивм ♦alJa23e3. +<’1|аПа13 - .. о%
«21 а» аи •< (5 9)
1"а13а»ам-виа21ам-<Чзвма11-
вл вп ап
Заметим, что каждое слагаемое алгебраической суммы в правой части этой
формулы представляет собой произведение элементов определителя, взятых по
одному и только по одному из каждой строки и каждого столбца Этому произве-
дению приписывается соответствующий знак. Чтобы запомнить, какие произведе-
ния следует брать со знаком плюс какие со знаком минус, полезно правило, схе-
матически изображенное на рис. 5.1.
Рис. 5.1
Минором какого-либо элемента определителя называется определитель, полу-
ченный из данною вычеркиванием той строки и того столбца, которым принадле-
жит данный элемент. Минор элемента ал обозначим Мл.
Алгебраическим дополнением элемента ал определителя называется его ми-
нор, взятый со знаком (-1)'** Алгебраическое дополнение элемента ал будем
обозначать через A,t. В соответствии с определением Ал = (-!)'** Мл.
106
Определители матриц второго порядка и третьего порядка короче называют
определителями второго и третьего порядка
Свойства определителей:
1) определитель нс изменится при замене всех его строк соответствующими
столбцами;
2) при перестановке двух соседних строк (столбцов) определитель меняет лишь знак;
3) определитель с двумя одинаковыми строками (столбцами) равен нулю;
4) множигель, общий для элементов некоторой строки (столбца), можно вы-
нести за знак определителя;
5) определитель равен нулю, если вес элементы некоторой строки (столбца)
равны нулю;
6) определитель нс изменится, если к элементам некоторой строки (столбца)
прибавить соответствующие элементы другой строки (столбца), предварительно
умножив их на один и тот же множитель;
7) определитель равен сумме произведений элементов любой строки (столбца)
на их алгебраические дополнения.
Например, det Л = йиЛ|1+ан Л,, +я|,4,, т.е.
'Эта формула выражает разложение определителя третьего порядка по элементам
первой строки.
По аналогии с формулой (5.10) вводятся определители четвертого порядка:
вп вь — в1»
«и Ч. ... о,. = £(-))^виМи, (5.П)
............... м
ам1 •••
ИЛИ
deM = J\u4t,
М
где Л|4 - алгебраическое дополнение элемента ац, л = 4; определители пятого
порядка и т. д.
Теорема 5.1 (теорема замещения). Суммы произведений произвольных
чисел b^b,,.... b„ соответственно на алгебраические дополнения элементов
некоторого столбца (троки) матрицы порядка п равны определителю мат-
рицы, которая получается из данной заменой элементов этого столбца
(строки) числами
Теорема 5.2 (теорема аннулирования). Сумма произведений элементов
одного из столбцов (трок) матрицы на соответствующие алгебраические
дополнения элементов другого столбца (троки) равна нулю.
107
Теорема 5.3. Определитель произведения двух квадратных матриц А и В
одного порядка равен произведению определителей перемножаемых матриц:
det (АВ) = det A det В
Название «детерминант* предложил Гаусс. (©временное изложение теории
определителей дал Коши Обозначение определителя в виде квадратной таблицы
чисел с двумя вертикальными чертами ввел Кэли в 1841 г.
17 61
Пример 5.7. Вычислить определитель Д = I |.
В соответствии с формулой (5.8) получаем Д»78-61 = 50.
Пример 5.8. Вычислить определитель
4273 32731
4274 3274|
Умножая первую строку на -I и прибавляя ко второй, находим
4273 32731
4274 3274 Г j
4273 3273
I I
«4273-3273» 1000.
Пример 5.9. Вычислить определитель третьего порядка
2
6
5
I
Д- 2
3
-4
-1
-8
тремя способами: 1)по определению; 2) по формуле (5 10); 3) преобразованием
его с помощью свойств.
1) Д-1 6<-8)+2(-1)3 + 2 5(-4)-(-4)6 3-2 2(-8)-1 5(-1)»И
2)Д-'1< "Из 'й "41з !|=Ц-43)-2(-13)-4<-8)-15.
1 “ о I I * И | J J I
3) Умножая первую строку на (-2) и прибавляя ко второй, затем умножая
первую строку на (- 3) и прибавляя к третьей, получаем
I 2 -4
Д» 0 2 7
0-14
Разлазая этот определитель по элементам первого столбца, находим
12 71
, |ж8-(-7) = 15.
— I 4
108
Пример 5.10. Вычислил» определитель матрицы
I (римсняя формулу (3.11X получаем
del Л = 1 8 3 2 1 2 2 4 1 2 8 3 3 1 2 4 4 1 + 2 1 3 3 2 2 4 2 1 - 2 1 8 3 2 1 4 2 4 •
Вычислял определители третьего порядка, находим detA = 27 - 50 + (-5) - (-12)=-16.
Замечание, Этот определитель
топаний на основании свойств:
можно вычислить путем его прсобра-
1111
2 18 3
3 2 12
4 2 4 1
1 0 О
2-16
3 -1 -2
4-2 0
5.5. Обратная матрица
Матрицей, обратной квадратной матрице А, называется квадратная матрица
А'1, удовлетворяющая равенствам
ЛА*' - Л*'Л = £, (5.12)
где£- единичная матрица
Квадратная матрица называется невырожденной или неособенной, если ее оп-
ределитель отличен от нуля. Если определитель матрицы равен нулю, то матрица
называется вырожденной или особенной.
Всякая невырожденная квадратная матрица
ан ••• вы
(5В)
имеет единственную обратную матрицу
109
Ai Ai ••• Ai
Л-'=— 4j " 4з . (5.14)
det/}.....................
. Аи ••• А» .
где A,t - алгебраическое дополнение элемента а14 матрицы А Отметим, что
алгебраические дополнения элементов каждой строки матрицы А в формуле (5.14)
записаны в столбец с тем же номером.
В случаях л-2 и л=3 формулы (5.13) и (5.14) принимают соответственно вид
Теорема 5.4. Произвольную невырожденную матрицу А с помощью зле-
ментарных преобразований можно привести к единичной матрице Е
А-зЕ. (5.17)
Теорема 5.5. Если к единичной матрице порядка п применить те же зле-
ментарные преобразования только над строками и в там же порядке, с помо-
щью которых невырожденная квадратная матрица А порядка п приводится к
единичной, то полученная при зтом матрица будет обратной матрице А.
Эта теорема дает способ нахождения матрицы, обратной данной, с помощью эле-
ментарных преобразований 11ри этом удобно зштисыжлъ матрицы А и Е рядом, отде-
ляя их вер1икальной чертой (рассматривать расширенную матрицу (Л | Е) ), и одно-
временно производить гюменгарные прсобраювання нал строками матриц А и Е В
результате преобразования строк матрица (А | Е) преобразуется в матрицу (Е | Л1):
М|Е)-»(Е|Л-').
(5.18)
'Нот метод вычисления обратной матрицы называют методом Жордана
Замечание 1. Теорема 5.5. верна применительно к элементарным преобразова-
ниям над строками. Когда преобразования проктводятся над столбцами, то матрицу Е
_______________________ . ___AL ГЛ]
располагают под матрицей А. рассматривают расширенную матрицу —
, тогда
(5.19)
Замечание 2. Если в соотношении (5.18) на место единичной матрицы
справа от вертикальной черты поставить матрицу В. то в результате соответст-
вующих преобразований получим матрицу Я*'В.
MIBJ-KlEM-'B].
(5.20)
ПО
Замечание 3. Если в соотношении (5.19) на место единичной матрицы под
тори топтал ьной чертой поставить матрицу В, то в результате соответствующих
преобразований получим матрицу ВЛ'1:
Л1 Г Е 1
вПйЛ- J
(5.21)
Обратная матрица используется при решении матричных уравнений вида
АХ = В, ГА* В. (522)
где Л, В - невырожденные квадратные матрицы одною и того же порядка Оги
уравнения имеют соответственно решения
Х*А'В,Г=ВА' (5.23)
Матрицы А~'В и ВЛ’1 можно найти с помощью элементарных преобразова-
ний в соответствии с соотношениями (5.20) и (5.21).
Пример 5.11. Найти матрицу, обратную матрице Л = | |.
Так как det А = 2, т. е. det А # 0, то матрица Л имеет обратную. Поскольку
Лц=3, Д, =-2. Л2|=-5, Лй = 4, то по второй из формул (5.15) находим
л-‘=1[ 3 “51=[W -2Л1
2[-2 4] [-1 2 ]’
Пример 5.12 Найти матрицу, обратную матрице
Вычислим определитель данной матрицы
Так как det А # 0, то матрица Л имеет обратную матрицу. Найдем алгебраиче-
ские дополнения элементов матрицы А:
Ли - 3 6 101=0, 201 лп =- 10 20 1=10. л,, = 7 15 31 6Г -3.
Л2| - | 1 3| 6 20 | ~2, Ли 1 2 15 3| = -5, 20 | ли = 1 2 | 15 :i
4>| • 1 3 .«К ="| 2 7 31 10 1 = 1. Лз» СЧ €* 1 3 = -L
= 3.
111
По второй из формул (5.16) находим
0 -2
10 -5
-3 3
О
10
-3
-2
-5
3
1
1
-1
Пример 5.13. С помощью элементарных преобразований найти матрицу
обратную матрице
Составляем матрицу (4|£) и преобразуем ее; приводя матрицу А
ной. матрица Е будет приведена к Л"':
к единим -
I
2
2
О
-I
1
1
2
I
I
I
1
I
‘ 1
I
2
I
2
2
Г
2
1
в результате следующих элементарных
Вторая матрица получена из первой
преобразований: элементы первой строки умножены на (-1) и сложены с элемен-
тами второй строки, элементы первой строки умножены на (-2) и сложены с
элементами третьей строки.
Умножив последнюю строку второй матрицы на (-Г), получим третью матри-
цу (матрица А приведена к верхней треугольной форме)
Умножая третью строку на (-1) и прибавляя ее ко второй, а затем к первой
строке, получаем четвертую матрицу. Умножая ее вторую строку на (-1) и при-
бавляя к первой строке, получаем пятую матрицу: слева от черты - единичная
матрица, справа - матрица А'', обратная исходной матрице Л.
Замечание. Элементарные преобразования производятся в два
этапа: 1) матрица А преобразуется к верхней треугольной форме с единич-
ными диагональными элементами (путем преобразования строк «сверху
вниз»); 2) полученная матрица преобразуется к единичной (путем преобра-
зования строк «снизу вверх»).
112
Пример 5.14. Даны две матрицы
’ 3
2
1
1
1
2
1
2
3
6
6
8
Л =
2
I
-I
Г
1
4
АХ = В.
Найти матрицу X, удовлетворяющую уравнению
Эго уравнение разрешимо, так как det Л* 0, его решение Х~А~'В
(см. первую из формул (5.23)). Матрицу А"'В найдем с помощью элементарных
преобразований в соответствии с соотношением (5.20).
[А | В], преобразуем ее, приводя матрицу А к единичной
Составляем матрицу
3
2
I
I
1
2
1
2
3
6
6
8
I
I
4
‘ I
О
О
2
I
-1
2
-3
-5
3
-4
-8
2
1
-5
8
-10
-18
-1
3
S
3
2
-8
8
4
-18
4
-7
-13
-1
-1
5
I
2
3
' I
О
О
2
2
-5
8
6
6
3
4
-8
-1
I
2
8
8
-18
-1
-2
3
4
6
-13
-1
-I
о
4
3
-13
4‘
3 -»
1
2
1
О
о
о
I
-I
-I
О
-I
-I
о
1
О
О
1
О
о
2
1
О
3
2
I
8
1
2
I
I
3
2
I
I
О
о
3
2
2
8
4
2
4
I
1
4
3
2
I
о
о
2
I
О
5
2
I
I
1
I
о
1
о
о
о
1
1
О
о
1
2
1
1
•I
О
I
I
1
Отсюда следует, что
А'В=Х =
I
2
1
1
1
О
I
1
1
Называя шагом переход от одной матрицы к другой, диим пояснения к выпол-
ненным преобразованиям I шш - поменяли местами первую и третью строки
(чтобы а,, = I X 11 шаг - первую строку умножили на «*2 и прибавили ко второй,
первую строку умйожйли на’-З и прибавили к третьей. III шаг - третью строку
умножили на -1 и прибавили ко второй. IV шаг - вторую Строку умножили на
1/2. V шаг - вторую строку умножили на 5 и прибавили к ipertefl VI шаг -
третью строку умножили на 1/2. VII шаг - третью строку умножили на_-3 и при-
113
бавили к первой; третью строку умножили на - 2 и прибавили ко второй. VIII шаг -
вторую строку умножили на -2 и прибавили к первой.
5.6. Ранг матрицы
Рассмотрим матрицу размером т х л
. a-i °-2 ... °— .
Выберем в ней произвольно з различных строк и з различных столбцов, причем
I < s S min (»i. л), где min (m, л) - меньшее из чисел тип Элементы. стоящие на
пересечении выбранных строк и столбцов, образуют матрицу порядка з Определитель
згой матрицы называется минором порядка з матрицы А. Например, если дана матрица
7-3165
2-6380.
4-591 2
то, взяв первую и третью строку, третий и пятый столбец, получим матрицу вто-
рого порядка и ее определитель
ГНот определитель является минором второго порядка для исходной матрицы
Аналогично можно получить другие миноры второго порядка, а также миноры
третьего порядка Некоторые из миноров могут оказаться равными нулю.
Рангом матрицы называется наибольший из порядков се миноров отличных от
нуля. Ранг матрицы А обозначают одним из символов: r^.rangX, г. Если все
миноры матрицы равны нулю, то ранг се считается равным нулю
Из определения ранга матрицы получаем следующие утверждения
I. Ранг матрицы выражается целым числом, заключенным между 0 и мень-
шим из чисел т, п, т. е. OS г S min (m, л).
.... Ранг матрицы равен нулю тогда и только тогда, когда матрица нулевая.
3. Для квадратной матрицы л-го порядка г = л тогда и только тогда, когда
матрица невырожденная.
При пахождеггии ранга матрицы можно пользоваться свойствами миноров Если все
миноры порядка к данной матрицы равны нулю, то все миноры более высокого порядка
также равны нулю. Таким образом, если среди миноров порядка к данной матрицы есть
отличные от нуля, а все миноры порядка к +1 равны нулю юти нс сутцсствуюг, то г = к.
Отметим некоторые очевидные свойства ранга матрицы
1. Раш- матрицы, полученной из данной транспонированием, равен
рангу исходной матрицы.
114
2. Ранг матрицы нс изменится, если вычеркнет!, или приписать нулевую стро-
ку (т. е. строку, все элементы которой равны нулю) или нулевой столбец.
При элементарных преобразованиях ранг матрицы не меняется. С помощью
элементарных преобразований матрицу можно привести к квазитреугольной фор-
ме Ранг квазитреугольной матрицы (5.1) равен г, поскольку ее минор с главной
диагональю аи,аи,...,а„ равен произведению atian...a„ #0, а все миноры
более высокого порядка равны нулю (как содержащие нулевые строки).
Пример 5.15. Найти ранг матрицы
2 5 0
3 7 0
ООО
0
0
0
Среди миноров второго порядка этой матрицы имеется один, отличный от нуля:
Все миноры третьего порядка равны нулю. Следовательно. ранг данной матри-
цы ранен двум (г “2). .
Пример 5.16. Найти ранг матрицы
Г 1 1-1 -Г
12 3 4
8 7 6 5’
-I -1 1 1
Применяя элемс1гтарные преобразования, приводим данную магрит^у к квазиг-
реугольной форме:
’ 1. 1 -1 -Г ’ 1 1 -1 -Г 1 1 -1 -Г
1 2 3 4 0 1 4 5 0 1 4 5
8 7 6 5 0 -1 14 13 —4 0 0 18 18
-1 -1 1 1 0 0 0 0 0 0 0 0
(Вторая матрица получена из первой путем поочередного умножения первой
строки на (-1), (-8), 1 и прибавления ко второй, третьей и четвертой строкам,
третья матрица получена из второй путем прибавления второй строки к третьей )
Ранг последней матрицы равен трем, так как имеется отличный от нуля минор
третьего порядка этой матрицы ’ * .
1.1-1
О I 4
0' О 18
I I 18=18#0,..
а определитель самой матрицы (определитель четвертого порядка) равен нулю
(как содержащий нулевую строку) Следовательно, ранг исходной матрицы равен
трем (г = 3).
115
Гпава 6
СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
6.1. Линейные системы. Основные определения
Системой уравнений называют множество уравнений с л неизвестными
(л2 2\ для которых требуется найти значения неизвестных, удовлетворяющих
одновременно всем уравнениям системы.
Системой т линейных уравнений с л неизвестными х„ х2. или линейной
системой, называется система вида
а,|Х,+а„ха + —+atox, £>,.
в,1Х, +яих,+ —+ Oj.X. -fcj.
Яых1 +в«з*з
где аа,Ь( - числа Числа ал (i* 1,2, ...,m; к = 1,2,..., л) называются коэффи-
циентами. />,(/ = 1,2,..., т) - свободными членами Коэффициенты обозначены
буквой а с двумя индексами i и к: первый (г) указывает номер уравнения, второй
(к) - номер неизвестной, к которой относится данный коэффициент Число урав-
нений т может быть больше, равно или меньше числа неизвестных л.
Линейная система называется неоднородной, если среди свободных членов
имеются отличные от нуля. Если все свободные члены равны нулю, то линейная
система называется однородной Однородная линейная система имеет внл
aux, +о12х2 + — + в1жх, =0,
в2,х( + anx2 + — +в2ах. • а {6 2)
+а«з*з "й
Решением линейной системы (6.1) называется упорядоченная совокупность л чисел
q.tj,. ...с„ (6.3)
подстановка которых вместо х(,х2,...,ха соответственно (х(«С|, Xj^Cj,...
..., ха = с„) обращает в тождество каждое из уравнений этой системы.
Система, имеющая хотя бы од но решение, называется совместной, а система, не
имеющая ни одного решения. - несовместной Отметим, что однородная система всегда
совместна, так как она имеет нулевое решение: х, = О, х2 = 0,..., х„ = 0.
Совместная система, имеющая единственное решение, называется определенной
Совместная система называется неопределенной, если она имеет более одного решения
116
Две системы называются эквивалентными или равносильными, если любое ре-
шение одной из них является также решением другой и обратно, т. е. если они
имеют одно и то же множество решений. Любые две несовместные системы счи-
таются эквивалентными.
Элементарными преобразованиями линейной системы называются следующие
преобразования: 1) умножение уравнения системы на чисто, отличзюе от нуля;
2) прибавление к одному уравнению другого уравнения, умноженного на любое
число; 3) перестановка местами двух уравнений системы.
При элементарных преобразованиях линейной системы получают систему,
равносильную данной.
Выражение «решить линейную систему» означает выяснить, совместна она или
несовместна; в случае совместности - найти все ее решения.
6.2. Матричная запись линейной .системы
Линейную систему (6.1) можно записать в матричном виде Мазрица
(64)
составленная из коэффициентов линейных уравнений системы (6.1), называется
основной матрицей системы (или матрицей системы). Матризи
Л-
ви ап
°ji ап
(65)
Ь,
зюлученная из оезювной присоединением столбца свободных членов, называется
расширенной матрицей системы (6.1).
Рассмотрим столбцовые матрицы, составленные из неизвестных и свободных членов:
(6.6)
Поскольку матрица А согласована с мазриззей X (число столбцов матрицы А равно
числу строк матрицы X ), то можно найти произведение
АХ
117
Элементами этой столбцовой матрицы являются левые части уравнений системы
(6.1), поэтому на основании определения равенства матриц
АХ - В (6.7)
Таким образом, система линейных уравнений (6.1) записана в виде одного мат-
ричного уравнения (6.7), где А. X, В определяются формулами (6.4) и (6.6); эта
запись системы называется матричной.
Каждой линейной системе (6.1) соответствует единственная пара матриц А, В и
обратно: каждой парс матриц - единственная линейная система Система (6.1)
может быть записана и а таком виде
“н
L J
Если ) -
системы (6.1), то матрица
(68)
С =
q
(6.9)
с.
называется вскгор-рсшснисм этой системы. Матрица (6.9) удовлетворяет уравнению (67).
II р и м е р 6. I I 1рслсгавии. в матричной форме линейную систему уравнений
2х,+3х2=8.
5х, + х2 =7.
В данном случае формулы (6.4) и (6.6) запишутся так:
поэтому уравнение (6.7) принимает вил
2 31Г*> 1=Г81
.3 L7J
Г 1
Эта система имеет вектор-решение С = I .
Замечание. В соответствии с формулой (6.8) данная система
представима в виде
118
6.3. Невырожденные линейные системы
Определителем системы л линейных уравнений с л неизвестными х2.л„
an*i +о12х2 + —+амх4 ♦ •••+а1„х(, =Ь,.
в21х, +апх2 + •- + в24х4 + + а2яхи = 6,.
(О. IUJ
a.i*i + а.зхт ♦ •••♦в.4х4 + —+<U*« "Ь,
называется определитель матрицы из коэффициентов уравнений этой системы:
а11 ап ••• аи ••• а|»
А = а31 а32 ••• а1* — ®3» аы oKi ... аЛ ... а„ (6И)
Обозначим через At определитель. полученный заменой в «тределитсле А столбца
из коэффициентов при неизвестной х4 столбцом свободных членов системы (6 10):
аи аи ••• 6, ... в„
А»’ в2| Аи ... Ь, ... а1» (6.12)
аы а« — 6. ... а~
где к «1.2...., п
Линейная система (6.10) называется невырожденной. если ее определитель от-
личен от нуля (А # 0).
Теорема 6.1. Невырожденная линейная система (6.10) имеет единст-
венное решение
х.-Д./Д, х2=Д2/Д, .... х, «Д./Д. (6.13)
где Ди Д4 ( к = I, 2.л) определены соответственно формулами (6.11) и (6.12)
Эта теорема называется теоремой Крамера, а формулы (6.13) -
формулами Крамера.
Следствие из теоремы Крамера Если однородная линейная система
enX| + at2x2 + ••• +etox» =°-
а2,Х| + а22х2 +-- + а2жхя =0,
a.iJti+a«1*i+- + a-,J(. =0
имеет ненулевое решение, то ее определитель Е равен нулю.
Систему (6.10) л линейных уравнений с л неизвестными можно записать
в матричном виде
АХ^В. (6.14)
119
Х~А'В. (6.16)
еде А~1 - матрица, обратная матрице А, а В определяется третьей из формул (615)
Пример 6.2. Решить систему уравнений
х,+х2-4х, = 1.
х( + 2х, -Зх, =5,
Зх| - 2х, + 4х, 4.
Составим определитель системы Д и определители Д4(* = 1,2,3):
и < 1 1 -4 1 5 -3 3 4 4 . Аэ- 1 1 1 1 2 3 3-2 4 •
Определитель системы Д = 21 X 0. т. е. данная система является невырожден-
ной, поэтому применимы теорема 6.1 и формулы (6.13). Вычислим определители
Д|,Д},Д); пользуемся формулами (6.13), полагая в них и = 3 Так как
Д, = 42, Д, = 63, Д, - 21, то
х( ж Д|/Д =— = 2, х3 « Д]/Д= 3, х, = Дэ/Д =— = 1-
Пример 6.3. Решить систему уравнений
4х, - Зх2 + 2х, = 9,
2х( + 5х} - Зхэ = 4,
5Х| + 6х3 — 2хэ = 18.
Данную систему запишем в магричном виде (6.14). где
120
Вычисляем определитель матрицы А, находим матрицу Л'1:
-1
-13
6 -1
-18 16
-39 26
По формуле (6.16) получаем решение системы
т. е. х, = 2, хг 3, х, = 5.
6.4. Произвольные линейные системы
Рассмотрим линейную систему (6.1), ее основную матрицу А и расширенную
А, определяемую формулой (6.5).
Теорема 6.2. (Кронекерв — Калелли). Ди совместности системы (6.1) необхо-
димо и достаточно. чтобы ранг ее матрицы был равен рангу расширенной матрицы
Теорема 6.3. Если ранг матрицы совместной системы равен числу неиз-
вестных, то система имеет единственное решение
Теорема 6.4. Если ранг матрицы совместной системы меньше числа неиз-
вестных. то множество ее решений является бесконечным.
Базисным минором матрицы называется отличный от нуля ее минор, порядок
которого равен ражу этой матрицы Базисными неизвестными совместной систе-
мы, ранг матрицы которой равен г, назовем г неизвестных, коэффициенты при
которых образуют базисный минор. Остальные неизвестные назовем свободными
Из теорем 6.2 - 6.4 следует, что решение системы линейных уравнений можно
производить следующим образом.
I. Находят ранг г матрицы А системы и ранг г расширенной матрицы А.
(•ели г # г, то система несовместна
2. Если г = г, то выделяют базисный минор и базисные неизвестные. Исход-
ную систему уравнений замснякн эквивалентной ей системой, состоящей из тех г
уравнений, в которые вошли элементы базисною минора
Отмстим, что в случае, когда чисто базисных неизвестных равно числу неизвестных
системы, система имеет единственное решение, которое можно найти по формулам
Крамера. Если число базисных неизвестных меньше числа всех неизвестных, то из со-
ответствующей системы находят выражения базисных неизвестных через свободные,
используя, например, формулы Крамера Придавая свободным неизвестным произ-
вольные значения, получают бесконечное множество решений исходной системы
121
Пример 6.4. Решить систему уравнений
х, - Зх2 + 2х3 = 1.
2х, +х2 -4х3 = 5,
5Х| - 8х2 + 2хj ® 8
Поскольку
г = 2, г г,
то система совместна. В матрице А минор
отличен от нуля, ему соответ-
ствует система уравнений X,-Зх2 =1-2Х), 2х(+х2 = 5+4х3, в которой х(, х2
- базисные неизвестные, х, - свободная неизвестная. Решая эту систему но
формулам Крамера, находим
х, -(10х3 + 16)/7, х2 = (8х3 + 3)/7.
где х, может принимать любые действительные значения
6.5. Метод Гаусса
Пусть дана система (6.1) т линейных алгебраических уравнений с п не-
известными X|,Xj,...,X„.
Метод последовательного исключения неизвестных, или метод Гаусса, приме-
няемый для решения системы (6.1), состоит в следующем.
Предполагая, что оп*0 (это всегда можно сделать сменой нумерации
уравнений), умножая первое уравнение системы (6.1) на -а21/ац и прибав-
ляя ко второму, получаем уравнение, в котором коэффициент при х, обра-
щается в нуль. Умножая первое уравнение на -в3,/вц и прибавляя к треть-
ему, получаем уравнение, также не содержащее члена с х,. Аналогичным
путем преобразуем все остальные уравнения, в результате чего придем к
системе, эквивалентной исходной системе уравнений:
122
a,iXi+o,pr2+3 + aux, = 6j.
<4(Х2+3 +а^. = ^.
^Л+З +<Л,=^',
(6.17)
в«л*а+3 *-а'1ШГжк = Ь^,
гм а'л(1 = 2,3,2 ,т; к-2,3,2 , я) - некоторые новые коэффициенты.
Полагая х 0 и оставляя неизменными первые лаз уравнения системы
(6 17), преобразуем ее так, чтобы в каждом из остальных уравнений коэффициент
при х2 обратился в нуль. Продолжая этот процесс, систему (6.17) можно привес-
ти к одной из следующих систем:
<=•»*• + с|2х2 + с|2х, + 3 +сь,х. = d„
СИ*2+С2Л+3 + с2,л»=^2.
С,Л+3 + cwx.=d1.
(6 18)
~dK,
где с„ х О (1 *= 1,2,2 , я), си - некоторые коэффициента, d, - свободные члены;
Сц*|+сцХ2+3 +сих*+3 +с1ях, =</(,
c»x2+3 ♦с»х>+3 +с2яхя»</2.
(6 19)
(6.20)
сы**+3 +«ь.х, = dtt,
где к < п ;
с„х, +с|2х2 +3 ♦clwxB = d„
с22х2+3 **с2яхя = </2,
О *."4н
где kin.
Система (6.18) имеет единственное решение, значение х„ находится из по-
следнего урав1«:ния, х„, - из предпоследнего, х, - из первого.
Система (6.19) имеет бесконечное множество решений. Из посэеднего уравне-
ния можно выразить одно из неизвестных (например, х> ) через остальные п-к
неизвестных входящих в это уравнение Из предпоследнего
уравнения можно выразить х*., через эти неизвестные и т. д В полученных фор-
мулах, выражающих Х|,х2,2 .**_|,х* нсрез х^,хм,2 ,хя. последние неиз-
вестные могут принимать любые значения.
123
Система (6 20) несовместна, так как никакие значения неизвестных не могут
удовлетворять ее последнему уравнению.
Итак, метод последовательного исключения неизвестных применим к любой
системе линейных уравнений. Решая систему этим методом, преобразования со-
вершаются не над уравнениями, а над матрицами, составленными из коэффициен-
тов при неизвестных и свободных членах.
Пример 6.5. Решить систему уравнений
Х| -2х2-3хэ-х4 = 2,
*1 +х2 + 6х, + 1х« = -3, ..
2xt + Зх2 + 5х, + 2х, = I,
Xj+Xj+x, -3,
5xj + 7xj + 4x« = 5.
Составляем матрицу и преобразуем ее: ’ 1 -2 -3 -1 9 4 II 4 2 -5 -3 -♦
1 1 2 -2 1 3 -3 6 5 -1 3 2 2‘ -3 1
0 0 3 7
0 1 1 1 3 0 1 1 1 3
0 5 7 4 5 0 5 7 4 5
- 1 -2 -3 -1 2 1 - 2 -3 -1 2'
0 1 1 1 3 0 1 1 3
—> 0 3 9 4 -5 -» 0 0 € 1 -14 -»
ч 0 7 II 4 -3 0 0 4 -3 -24
0 5 7 4 5 0 0 2 -1 -10
1 -2 -3 -1 2‘ 1 -2 — 3 -1 2
0 1 1 1 3 0 1 1 1 3
—> 0 0 2 -1 -10 -» 0 0 2 -1 -10 —»
0 0 4 - -3 -24 0 0 0 -1 -4
• • 0 0 6 1 -14 0 0 0 4 16
’ 1 -2 -3 -1 2й
0 1 1 1 3
0 0 2 -1 -10 •
0 0 0 -1 4
0 0 0 0 0
124
Последней матрице соответствует совместная система четырех уравнений с че-
тырьмя неизвестными:
х,-2х2-3х,-х4 =2,
Xj-KX)+х4 =3,
2Xj-x«--10,
Решая эту систему, находим х4 = 4, 2х3 ~-10+х4 = -10+4 = -6, х,--3,
х2 =3-х2-х4 =3-(-3)-4 = 2, х,-2х, + 3х2 +х4 +2= = 2-2 + 3(-3) + 4 + 2- 1
Следовательно, исходная система имеет решение Х(-I, х2«2, х,= -3. х(«4
Пример 6.6. Решить систему уравнений
х, + х2 +х2+х4 =4,
2xt -х2+Зх,-2х4-2,
Ь, + 2х2 + 4xj—6х4 - 3,
4х( + Зх2 + 5х, - Sx4 “ 6.
Записывая соответствующую матрицу и совершая преобразования, получаем
111 I 4 1 I I I 4'
2-13-22
О -3 I
О -I I
4 3 5 -5 6] 0 -1 1 -9 -10
’ 1 1 1 1 4 1 1 1 1 4
0 -1 1 -9 -9 0 -1 1 -9 -9
0 -1 1 -9 -10 —> 0 0 0 0 -1
° -3 1 -4 -6 0 0 -2 23 21
Третья матрица получена из предыдущей переменой местами последних трех
строк. Последней матрице соответствует система уравнений
х( +х2 +х} +х4 = 4,
-х2 +х,-9х4 = -9.
0х4--1,
-2х, + 23х4«21.
Эта система несовместна, так как никакие значения неизвестных не могут
удовлетворить ее третьему уравнению.
Следовательно, исходная система также несовместна.
Пример 6.7. Решить систему уравнений
х,+х2-х, + х4 *2.
2Х| -х2 + Зх2 -4х4 = 0,
4х(+х2+х2-2х4 = 4,
5Х| + 2х2 - х4 = 6
125
Преобразуя матрицу, получаем
I
2
4
5
1
-I
I
2
-1 1
3 -4
1 -2
О -I
I -I I
1 -1
-3 5 -6
-3 5 -6
-3 5 -6
I 2‘
О
4
1
О
О
О
2
• О -3 5.-6
О О . О О,
0 0 0 0
Таким образом, данная система сводится к
тельно четырех неизвестных:
-4,
*.(h ’
о
системе двух уравнений относи-
•}, • . •
2,
общее решение которой определяется формулами
2 2 Ж 1x1 -7
*i _у-у *1 ’>“з + ]
t де х„ xt могут принимать любые действительные значения
Пример 6.8. Решить систему уравнений
х,-х, + 7х,-2х4 = 2,
2х| - Зх, +8xj-4x4 = 1,
Составляем матрицу и преобразуем ее:
‘ 1
2
4
6
1
О
О
О
-1
-3
2
-5
-1
-I
О
О
7
8
19
11
7
-6
-45
-37
-2
-4
1
-3
' -2
i О
i 9
I 9
2‘
I
8
-3
2
-3
-18
-18
I
О
О
О
-I
-I
6
1
I
о
о
о
7
-6
-9
-31
-1
-1
О
О
-2
О
9
9
7
-6
-45
i
2
-3
О
-15
-2
О
9
О
2 ’
-3
-18
О
Последняя матрица получена в результате сложения третьей, умноженной на
(-1), и четвертой строк. Этой матрице соответствует система уравнений
—45ij + 9х4 “ —18,
8х,=а
имеющая решение х, " 0. х,
126
fpsea 7
КОМПЛЕКСНЫЕ ЧИСЛА
7.1. Упорядоченные пары действительных
чисел и операции над ними
Пару (а. Ь) действительных чисел а и b называют упорядоченной, если указа-
но. какое из них считается первым, какое - вторым Примеры упорядоченных
пар: (О, I); (2,3); (3,2). Отметим, что последние две пары различны, хотя и об-
разованы одними и теми же числами.
Каждую упорядоченную пару чисел обозначим одной буквой, введем понятие
равенства двух пар, определим действия над ними Рассмотрим две упорядочен-
ные пары
a-(«.*). p»(c.rf). (7.1)
Эти пары называют равными, если a « с, 6= </, т. е. ((a,6)=(с,d))<=>(a-с,6»d). (7-2)
Суммой двух । >ар (7.1) называют упорядоченную пару a+р = (в, Ь) + (с, d) " (в + с, 6 + d\ (7-3)
а их произведением упорядоченную пару ар - (о, 6) (с, d) (ас - bd, bc+ad). (7.4)
Из соотношения (7.3) видно, что пара 0 = (0,0) (7-5)
обладает тем свойством, что сложение ее с любой другой упорядоченной парой не
меняет исходной пары: (а, 6)+(0,0)«(а,/>). Пара (7.5) играет роль нуля при
сложении упорядоченных пар; назовем ее ну ль-парой
Разностью а-p двух упорядоченных пар (7.I) называют такую упорядочен-
ную пару г = (х,у), что z + P = a.
Вычитание упорядоченных пар (7.1) определяется следующим обрезом:
в-₽ = (в,б)-(с,</)»(в-с,6-^Х (7.6)
Частным a/Р, где р*0, двух упорядоченных пар (7.1) называют такую упо-
рядоченную пару z - (х, у), что z(5 - a
Если Р#0, т. е. с* +d* *0, то частное a/Р Двух упорядоченных пар (7.1)
127
определяется формулой
a f a<-+bd be - ad \
рЧс’+d’’ с’ +dJJ
Из этой формулы следует, что если а = р, т. е. а = с, b=d, то
Значит, роль единицы при делении двух упорядоченных пар выполняет упорядо-
ченная .пара
1«(1,0). (7.8)
Рассмотрим упорядоченные пары
а = (а,О) b-(b,O) (79)
Арифметические действия над упорядоченными парами вида (7.9) производят-
ся так. как и над действительными числами Действительные числа отождествля-
ются с парами айда (7.9).
7.2. Понятие комплексного числа.
Алгебраическая форма комплексного числа
Комплексным числом называют упорядоченную пару (а, Л) дсйствиiсльных
чисел а и Ь. Рассмотрим упорядоченную пару
/ = (<М) (7.10)
Применяя формулу (7.4), получаем i1 «/ |«(0,1) (0,1) = (0-1,0-»-0)= «(-1,0).
Поскольку (-1,0) = -1 (см. формулу (7.9)), то
? «-1, («ул. (7.11)
Упорядоченную пару (7.10), удовлетворяющую соотношению (7 11), называют
мнимой единицей. С помощью мнимой единицы можно выразить любое ком-
плексное число а « (в, Ь), т. е. упорядоченную пару действительных чисел. В са-
мом деле, так как Ы « (Ь, 0)(0,1) = (0, Ь), то (о. Ъ) = (о, 0) + (0, Ь)« « fl + fer, т. е.
(в, Ь) = а + Ы. (7.12)
Поскольку (о, Ь) а + Ы, (а, Ь) = (0, Ь) + (а, 0) = Ы + а, то а + Ы = /и + в. Значит,
в правой части формулы (7.12) можно менять местами слагаемые Выражение
а + Ы называют ал: ебраической формой комплексного числа Число а называют
действительной частью, число Ь - мнимой частью комплексного числа а + Ьг
Обозначая комплексное число a+bi одной буквой а, записывают
a «Rea, 6= 1m а, где Re -начальные буквы латинского слова realis
(действительный), 1m - начальные буквы латинского с.юм imaginanus (мнимый)
128
Кроме этих обозначений, употребляют и другие, например. а = Я (a). b-I (а),
где а = а + Ы.
Отметим частные случаи формулы (7.12). Если Ь = 0. то (а, 0) = « -
действительное число; если а = 0. то
(0, Ь) = Ы (7.13)
Число Ы называют чисто мнимым или Просто мнимым.
Два комплексных числа а + bi, с + di называют равными, когда а=с, b^d:
(a+bi = c + di)<=>(a = c,b=d).
Комплексное число равно нулю, когда равны нулю его действительная и мни-
мая части:
(a + bi = 0)c=>(a = 0.6-0)
Если дано комплексное число а = а + Ы, то число а - Ы, отличающееся от а
только знаком при мнимой части, называют числом, сопряженным числу а, и обозна-
чают а Числом, сопряженным а, будет, очевидно, число а, поэтому товорят о паре
сопряженных чисел Действительные числа, и только они, сопряжены сами себе
Обозначение i для мнимой единицы ((= ^Ч) ввел Эйлер в 1777г.
7.3. Геометрическое изображение
комплексных чисел
На плоскости выберем систему прямоугольных декартовых координат
(рис 7.1). Комплексному числу (a,b)*a + bt сопоставим точку М(а. Ь) этой
Рис. 7.1
плоскости с координатами (a, fc) Если Ь = 0. то
получим действительное число (о,0) = о. которое
изображается точкой Л (а, 0) на оси Ох. Вследствие
этого ось Ох называют действительной осью
(точками оси абсцисс изображаются действительные
числа). Если а = 0, то получаем чисто мнимое чис-
ло Ы, которое изображается точкой В(0.Ь\ ле-
жащей на оси Оу. По этой причине ось ординат на-
зывают мнимой осью (точками этой оси изобража-
ются чисто мнимые числа). Отметим. что мнимая
единица i изображается точкой (0,1), расположенной на положительной полуоси
ординат и отстоящей от начала координат на расстояние, равное единице. Число
(-/) изображается на оси ординат точкой (0,-1), симметричной точке (в.1).
Любое комплексное число а = (а, 6), где а * 0, b к 0, изображается точкой, не
лежащей на осях координат Обратно, любой точке М (а, Ь) плоскости соответст-
вует комплексное число (a, b) = а + Ы. Таким образом, между множеством ком-
5 Зак. I
129
плехеных чисел и множеством точек плоскости установлено взаимно однозначное
соответствие Плоскость, точки которой отождествлены с комплексными числами,
называют комплексной плоскостью.
Рассматривают также комплексную переменную г = х + (у, где х, у -
действительные переменные, i— мнимая единица Значения згой переменной -
комплексные числа, изображаемые точками комплексной плоскости Вследствие этого
комплексную плоскость называют также плоскостью комплексной переменной.
7.4. Действия над комплексными числами
Из определения комплексного чис.га (как упорядоченной пары действительных
чисел) и определения арифметических действий над упорядоченными парами
(см. формулы (7.3), (7.4), (7.6), (7.7)) следует, что
(д + (ч')+(с + <й)“(в + с) + (Ь+</)*. (7.14)
(a+W)-(c+<fl)=(«-e)+(6-<f)l. (7.15)
(a + W) (c + di) = (ac - bd) + {be + ad) i. (716)
a+Ы ac+bd bc-ad (7.17)
c + di c2+d2 c1+d2 ' " “
Формула (7.14) определяет правило сложения двух комплексных чисел: чтобы
сложить два комплексных числа, необходимо сложить отдельно их дсйствигезьныс и
мнимые части. Формула (7.15) означает, что при вычитании одного комплексного
числа из другого необходимо вычесть отдельно их действительные и мнимые части.
Отмстим, что сумма и произведение двух комплексно-сопряженных чисел
а = в + Ы, а=а-Ы являются действительными числами: а + а = 2а.
аа = а’ +6*.
Арифметические действия над комплексными чис лами подчиняются тем же за-
конам, что и действия над действительными числами. Если а ~ а + bi, $ = c + di.
y = e + fi - любые комплексные числа, то верны следующие равенства:
1) а + р = р+а; 2) (а+Р)+у-а + (Р+у); 3)сф = Ра; 4) (сф)у = а(₽7);
5) (а + р)у = ау+₽у.
Полагая а = 1, Ъ = 0 в формуле (7.17), получаем
I с —d /
- Ч .4 . Ч -Ч ••
(7.18)
Формулой (7.18) определяется число 0'1. обратное комплексному числу 0 =
= с + di (Р # 0, т. е. с2 + d1 * 0).
Натуральные степени мнимой единицы i принимают лишь четыре значения:
-I, I, I, определяемые формулами
= 1./***’ = I, - -I, = -i.
(7.19)
где 4 = 0.1,2....
130
При возведении комплексного числа а = п + Ы в степень п (л- натуральное
число) пользуются формулой бинома Ньютона:
(в + ЫУ = а" + яд" я"*’(Ы)’ +
+ ""-"У" —о“~ЧЬГУ + ••• + (ЫУ. (7.20)
В правой части этого равенства заменяют степени мнимой единицы по фор-
мулам (7.19) и приводят подобные члены, в результате подучают некоторое
комплексное число c + di.
Квадратным корнем из комплексного числа называют комплексное число,
квадрат которого равен данному комплексному числу:
Ja + bi = u+tv, если (н+Zv)2 =а +6/. Р-21)
Числа м и v определяются из равенств
и’ =(в+7в*+6* )/2, v2 = (-в+/в2 + 62)Д, (7 22)
причем и и v будут действительными, так как при любых а и b выражения
о +Vo* + А2 и -a+Ve* + Л2 являются положительными Знаки кик выбирают
так, чтобы выполнялось равакство 2uv - b. И зн.зсчсние квадратного корня из
комплексного числа а + Ы всегда возможно и дает два значения ц + /v,, u, +/vJt
различающихся лишь знаком.
Пример 7.1. Даны два комплексных числа 5+/ и 2+3/. Найти их сум-
му, разность, произведение и частное.
В соответствии с формулами (7.14) - (7.17) получаем
(5 + 0+(2 + 3/)^(5 + 2)+(1 + 3)/»7 + 4/,
(5 + /)-(2 + 3/) = (5-2)+(1-3)/«3-2/.
(5 + /)(2 + 3/)= 10 + 15/ + 2/ + 3/2 = 7+17/,
S+i _ (5+0(2-30 IO-15/+2/-3/2 _ 13-13/
2+3/ (2+3/)(2-3/) 4-9/2 13 " '
Пример 7.2. Возвести в указанные степени данные комплексные числа
(3+40*. (1 + 2/)*, (2+0*.
Применяя формулы (7.19) и (7.20) при л = 2, л-3, л = 4, получаем
• (3 + 4/)2-З2 +2 12з+(4/)2-9+24/+16/3 = -7 + 24/,
(1 + 2/)’=1+6/ + 12?+8/’ = 1 + 6/-12-8/ = -11-2А
(2+0* = 2*+4 2*/+6 4?+4•2/*+/* = 16 + 32з-24 - 8/ + 1 = -7 + 24/.
131
Пример 7.3. Извлечь корень квадратный из числа а » 9+40*
Обозначим V9+40* =u+iv. Поскольку а данном случае а =9, 6®40, то
формулы (7.22) примут вид
и2 = (9+^92 +402)Д = (9+4IJ/2 - 25,
V2 »(-9+V^ ьДО2 )/? = (-9+41)/2-16.
Так как и2 = 25, v2=16, то ц = -5, з*2 = 5, v,=-4, v2 = 4. Получено два значения
корня: **, + v,/ = -5-4* и Hj+»«,/ 5+41
Пример 7.4 Найти значение выражения z’-2z2+5z при z » I - *.
Поскольку(1-О2 -I-2/+? «1-2/-1ж -2а, (1-02 «(l-iftl-i) =
= -2*(l-i') = -2* + 2*J = -2-2*, то z’-2z2+5z =-2-2*-2(-2*)+5(1-*) - 3-3*.
Пример 7.5. Показать, что комплексное число z = 1 - i является корнем
уравнения z’ + 2z2-6z+8 = 0.
Тах как z2- (I*)2 —21 z’ = (1-0*=-2-21 to zj+2z2-6z + 8-
—2-2i+2(-20-6(1-0 + 8 = O. т.е. (1-0 - корень уравнения.
7.5. Модуль и аргумент комплексного числа.
Тригонометрическая форма комплексного
числа
Комплексное число а = а + Ы, заданное в ал1ебраической форме, можно пред-
ставить и в другом виде. Изобразим число а точкой М (а, 6) комплексной плос-
кости. Рассмотрим радиус-вектор згой точки (рис 7.2). Модулем комплексного
числа а-а+Ы называют длину г радиуса-вектора ОМ точки М(а,Ь\ изобра-
жающей данное число. Модуль комплексного числа а обозначают символом | а |
Следовательно, по определению
г = |ОМ |, г-|сх|, |а|*а (7.23)
Так как | ОМ | Va2 + Ь1 (см. рис. 7.2), то
| а | ® Ja1 + Ь1, | а + Ы |= Vo2+b2, г = Vo2 + b2, (7.24)
т.е. модуль комплексного числа равен арифметическому значению корня квадратного
из суммы квадратов его действительной и мнимой частей. Если 6 = 0, т. е. число a
является действительным, причем а = о, то формула (724) принимает вид | а | = 4^
Аргументом комплексною числа а = а+Ы называют величину угла <р наклона
радиуса-вектора г = ОМ точки М (о, 6) к положительной полуоси Ох. Аргумент
комплексного числа а обозначают символом Arga Угол «р может принимать
132
любые действительные значения. Аргумент комплексного числа а имеет бесконеч-
ное множество значения отличающихся одно от другого на число, кратное 2л. Аргу-
мент не определен лишь для числа О, модуль которого равен нулю. Среди значений
аргумента комплексного числа а * 0 существует одно и только одно, заключенное
между - я и к, включая последнее значение Его называйи главным значением и обо-
значают arg а. Итак, аргумент комплексного числа удомстворяет соопкилсниям
Arga - arg а + 2кк (к «0.11.12,...). —ж arga Sic
С помощью модуля и аргумента комплексное число a ° а + Ы можно предста-
вить в другой форме. Поскольку
а»гсо5ф, h»rsin<p.
(7 25)
а+Ы = г (cosip+isin<p) (riO), (7.26)
где
г = Ve’ +61. созф = а/Va’ +6*', зшф = ь/Vfl2 + 61(7.27)
Выражение, стоящее в правой части формулы
(7.26), называют тригонометрической формой
комплексного чиста. Отметим особенности три-
гонометрической формы: I) первый множитель
- неотрицательное число, riO, 2) записаны
косинус и синус одного и того же ар<у мента;
3) мнимая единица умножена на sin ф.
Два комплексных числа, заданных в триго-
нометрической форме, раины тогда и только
тогда когда их модули равны, а аргументы
отличаются на величину, кратную 2л. Следовательно, если
г, («кф| +15Шф|) = г, (cosip, +isin9j).
(728)
то
=Г,. ф2 =4», ь2*я (*-0,11,12,...); (7.29)
и обратно, из равенств (7 29) следует формула (7.28).
Если комплексное число а = а + Ы задано в тригонометрической форме
a = г (соьф к /sin <р), то комплексно-сопряженное число а = а-Ы записывается
вформе а »г (со5(-ф) + 151п(-ф)); поэтому |a|»|a|, arga = -arga (рис. 7.3)
уПример 7.6. Комплексное число a = 2з/2/(1 - /) записать в алгебраиче-
ской и тригонометрической форме
Умножая числитель и знаменатель данной дроби на число, сопряженное
знаменателю, получаем
2^2 _ 2т/2(1 + 0 _ 2т/2(1 + <) ijz + fbji c.r:
1-/= (1-00 + 0 I-/3 ~ 2 “ ’
133
Это - алгебраическая форма данного числа
a = 4i+i42.
Применяя формулы (7.27), находим
г= 2, япф=//г = ЛД.
с<«<р = а/г = V2/2, откуда главное значение
<р = я/4- Следовательно, тригонометрическая фор-
ма данного числа имеет вил
а = 2(сов(к/4) + /sin (л/4)>.
7.6. Действия над комплексными числами,
заданными в тригонометрической форме
Произведение двух комплексных чисел
Z| = r(cos(p+/sinvX z2 = р(со$у+1ыпуХ (7.30)
где г = | Z| |, ф = Arg z,, p - |z21. у - Arg z2 находится по формуле
zlz1=rp(«e(<p + v)+'*n(**V))- C73*)
Из этой формулы следует, что
|»л| = |*'1Ы* * + V = Arg(zlZj),
т. е. модуль произведения равен произведению модулей множителей, а сумма ар-
гументов множителей является аргументом их произведения.
Если гг # 0, т. е. р # 0, то
—(cos (<»-*)+isin (ф*)), (7.32)
«1 Р
откуда
|*|/»а|-|ж» 1/1х>Ь <₽-V = Ar8('iAz)-
Эти формулы означают, что модуль частного равен модулю делимого, ле.юн-
ному на модуль делителя, а разность аргументов делимого и делителя является
аргументом частного двух комплексных чисел
Если z = r(cosip + isiny)Hr*0, то
дч«|/жвг''(а»(-ф)+1яп(-ф)), (7.33)
откуда
р_,|-|»Г'. arg z-' = —argz,
Т. е. модуль комплексного числа z"', обратного числу г. равен обратной ве-
личине модуля числа г. а его главное значение аргумента отличается от глав-
ного значения аргумента z лишь -знаком.
134
(734)
Если л- натуральное число и z =r (cos9 + isin<p), то
z" =(r (cosip+1 sin<р))” »г"(со$лф + 1 sinпф),
откуда |z" |- |zI", лф -Argz".
Формула (734) называется формулой Муавра. При г = 1 она принимает вид
(cos ф + i sin ф)" = cos лф + i sin лф.
Корнем л-Й степени из комплексного числа z называется такое комплексное
число а, что а" = г.
Извлечение корня л-й степени из комплексного числа » г (cos<p + isinф) все-
гда возможно и дает л различных значений:
.г( Ф + 2я . ф + 2к
х, -Vr I cos----+/stn —---
\я л
з-4я , , ф>4х'\
--+isin—------1 ....
л л J
л л
a0-
+ isin
(735)
Ф + 2*я . . ф + 2*х
COS-с-----+ ISU1 —-----
л л
(736)
где * = 0,1,2,...,л-1
Из формул видно, что все п значений корня л-й степени из комплексного числа
Z расположены на окружности радиуса ^[z| с цезпром в точке нуль и делят эту
окружность на л равных частей
Отметим, что корень л-й степени из действительного числа также имеет л раз-
личных значений. Средн этих значений действительных будет два. одно или ни
одного в зависимости от знака а и четности л. Корень л-fl степени из нуля имеет
только одно значение, равное нулю (Vo = 0).
Корни л-fl степени из единицы определяются формулой
n
n
(7.37)
где * = 0,1, 2,..., л-1
Пример 7.7. Найти значения квадратного корня из числа z = i.
Представим сначала это число в тригонометрической
i = cos(л/2)+/sin (ж/2). В соответстами с формулой (7.36) имеем
г I к '.. к я/2+2*х , . х/2+2*х . л,
•Ji = J cos —+ «sin — = cos—------rjsin-1------. * = 0,L
V 2 2 2 2
Следовательно,
- я . , к
a0 = cos—+isin—
4 4
форме
/2 . V2 5х . 5х
—+1—, a, =cos—-+/ып — = -а0
Z Z 4 4
135
Пример 7.8. Найти все значения корня 6-й степени из числа -64
Представим данное чис;ю в тригонометрической форме:
-64 = 64 (cos я + ism я). Формула (7.36) принимает вид
г— ( Я+2*Я , , Я+2*Я
'64 cos-------+/sm —-—
k 6 6
, *-0.1..5.
'-64
Замечая, что V64 = 2 и придавая к указанные значения, находим шесть ис-
комых значений:
л . . .
ас » 2 cos —+ jsm
\ 6
а. = 2 I cos — + i sin — | = 2 i,
V 2 г)
„( 5R .
а, = 2 I cos — + ,sm
7Я
а, = 2 cos — + rstn
I 6
3* Зя')
а, = 2 cos — -г isin — = -2з.
I 2 2 J
IK Ilxl r- ,
сц = 2 cos—-+isin —-| = v3-i.
\ 6 6 /
Эти значения изображаются вершинами правильного шестиугольника, вписан-
ного в окружность радиуса Н = 2 (рис. 7.4.).
Пример 7.9. Решить уравнение z1 - 2 Vz/(l - 0 = 0.
Так как 2Л/(1-О=2(«» (R/4) + ism (я/4)), то
z = ^2 (cos (я/4)-Hsin (я/4)).
Применяя формулу (7.36), получаем
Г7 ’О (я/4) + 2*Я (я/4) + 2*я)
11 2 cos —+ isin — = V2 cos —---------+isin —1-------- , к - 0,1,2.
1 \ 4 *' V 3 3 J
Полагая в этой формуле к и 0, к = 1, к - 2, находим
136
[давав
АЛГЕБРАИЧЕСКИЕ УРАВНЕНИЯ
8.1. Алгебраические многочлены
Алгебраическим многочленом степени п называется сумма целых неотрица-
тельных степеней переменной х, взятых с некоторыми числовыми коэффициента-
ми, т. е. выражение вила
вох'’+aix""1 + - +о„.|ХЧ-а„, ДоЖО.
Для сокращенной записи многочленов употребляют обозначения /(х),
*(*). к(х)ит. п
Два многочлена /(х) и g(x) считают равными и пишут /(x)=g(x) в том и
только в том случае, когда равны их коэффициенты при одинаковых степенях х.
Теорема 8.1, Для любых двух многочленов f{x) и <р (х) можно найти та-
кие многочлены q(x) и г(х). что
/(>)“ф(*)«(х)+г(жХ (81)
причем степень г(х) меньше степени ф(х) или же г(х)«О. Многочлены q(x)
и г(х) определяются однозначно.
Многочлен q(x) называется частным от деления f(x) на <р(х), а г(х) -
остатком от этого деления.
Замечание. Формулу (8.1) можно записать так.
777 = <?(х)+-Ц4 (»(*)*0)
♦ (*) Ф(*)
Если остаток от деления /(х) на <р(х) равен нулю, то многочлен <р(х) назы-
вается делителем многочлена /(х); в этом случае говорят, что /(х) делится на
<р(х) (или нацело делится на <р(х) ).
Многочлен ф(х) тогда и только тогда является делителем многочлена /(х),
когда существует многочлен (х), удовлетворяющий равенству
/(х) = ф(х)ф(х).
Многочлен й(х) называется общим делителем для многочленов /(х) и
g (х), если он является делителем каждого из этих многочленов.
Два многочлена называются взаимно простыми, если они нс имеют других об-
щих делителей, кроме многочленов нулевой степени (т. е. постоянных).
137
Наибольшим общим делителем отличных от нуля многочленов /(х) и g (х)
называется общий делит ель d (х), который делится на любой другой общий де-
литель этих многочленов. Наибольший общий делитель многочленов /(х) и
Х(х) обо значается так (/(х),£(х)).
Наибольший общий делитель многочленов /(х) и g (х) можно найти с по-
мощью алгоритма Евклида. Если
/U)=JfU)fliU)+nUX
(jr)93(x)+ri(xX
Г| (*)-») (х)«э(*)+М*Х
(82)
г, -»(*) = Г, _ I (-Ж ) Я, (*)+Г. UX
r.-i(-*)eriU)fl,.iUX
то г, (х) - (/(х ),#(*))
Замечание. Наибольший общий делитель многочленов определен с
точностью до постоянного множителя: если d (х) - наибольший общий дели-
тель многочленов /(х) и g(x), то cd(x), где с - любое число, отличное от
нуля, также является их наибольшим общим делителем
Пример 8.1. Найти частное q(x) и остаток г(х) при делении много-
члена /(х) = х*-х’-2 на многочлен ф(х) = х’-2х’+х-2. Выразить /(х)
через ф(х) и г(х).
Выполняя деление, находим
х4-х2-2
±2х’т4х’±2хТ4
2х’+2
Итак, 9(х)=х + 2, г(х)=2х1+2, х*-х’-2 = (х’-2х2 +х-2)х
х(х + 2) + 2х’+2.
Пример 8 2. Найти общий наибольший делитель двух многочленов
/(х)=х4+2xJ-3 и ф(х) = х’-х2+2х-2.
138
Произведя деление /(х) на ф(х), получим первое из равенств (8.2):
х* + 2х*-3=(х*-х2 + 2х-2)(х-1)+(х2-1), так как <у((х) = х-1 и r,ix)*J-l.
Разделив ф (х) на г( (х\ найдем второе из указанных равенств:
х’-х2+2х-2 = (х2-1)(х-1) + Зх-3, поскольку д2(х) = х-1 и г,(х)=3х-3.
Остаток г( (х) нацело делится на остаток г2 (х): х2-1 = (3х-3)х
О П . ч 1 ।
х — х+—I; л(х) = —х+—.
U 3) 3 3
Следовательно. г2(х)=3х-3«= 3(х-1) является общим наибольшим делите-
лем данных многочленов. В соответствии с замечанием общим наибольшим дели-
телем будет также d (х) = х -1
8.2. Корни многочлена. Теорема Безу
Значением многочлена
/(х)«аох"+а|х"4 + — +ая_,х + а, (8.3)
при х = с называется число
/(с) = о0с" +а|с*-1 +*- + ew_|C+aI>.
Число с называется корнем многочлена /(х) или корнем уравнения /(х)«0,
если /(с) = 0, т. е.
Оос" +а|с"‘' +”-+вя ,с + о„ =0.
Теорема 8.2. (Безу) Остаток г от деления многочлена f(x) на линейный
многочлен Х—С равен чначению /(с) многочлена f[x) при х = с, т. е.
г-Д.с\ (8.4)
Следствие Числ о с тогда и только тогда будет корнем многочлена
f(x\ когда f(x) делится на х • с.
Если многочлен /(х) задан формулой (8.3) и
/(х) = (х-с)^(х)+г.
тле
q (х) = box"-' + Ь)Х”~г + йух’’"’ + + Ь,,^ + b_„
то коэффициенты многочлена q (х) определяются формулами
А»"во. жс(^_|+а*, * = К2,...,л-1, (8.5)
а остаток г - по формуле г = cb^ + а„.
Коэффициенты частного и остаток вычисляются по следующей схеме:
Ч а,
Ь^ cbo+a^bf сЬ)+а2=Ь2 сЬ2ч-О)=Ь) ... cb^+a^-b^ cb^^a^r.
Эту схему, называемую схемой Горнера, используют также для вычисле-
ния значений многочлена, поскольку /(с) = г (см формулу (8.4)).
139
Если с - корень многочлена /(х), т.е; /(с) = 0, то многочлен /(х) делится
на X—с. Может оказаться, что /(х) делится и на более высокие степени х—с.
Пусть существует такое натуральное число к, что /(х) нацело летится на
(х-с/, но уже не делится на (х-с/*1. В этом случае /(х)= »(х-с/<р(х),
причем число с не является корнем многочлена р(х). Число к называется кратно-
стью корня с многочлена /(х), а число с - Л-кратным корнем этого многочлена
Если к = 1, то говорят, что число с - простой корень многочлена /(х)
Теорема 8.3 Всякий многочлен. степень которого не меньше единицы
имеет хотя бы один корень (действительный или комплексный)
Эту теорему раньше называли «основной теоремой высшей алгебры».
Следствие. I. Всякий многочлен п-й степени единственным образом. с
точностью до порядка сомножителей, разлагается в произведение п линейных
множителей: если а,, а,,..., а„ - корни многочлена (8.3). то
/(х)=с0(х-а1)(х-а,)...(х-а.) (8.6)
Следствие. 2. Всякий многочлен /(х) степени пi 1 имеет п корней,
считая равные и комплексные
Следствие. 3. Если многочлены /(х) и ф(х), степени которых не
превышают п. имеют равные значения более чем при п различных значениях пе-
ременной. то /\х) = <р (х).
Если многочлен
/(х) = х" +в|х-' + о,х"~2+-- • +в,_|Х+вж, (8.7)
для которого а0 = 1, имеет корни а,, а,, ....а,, то его коэффициенты выражают-
ся формулами Виета:
o1--(at+aJ+-+a,X
a, =a,a, +a,aJ + --+a|al( + a/i1 + "- + a„_|a„;
о, =- (a,a,a, та.а/х, + ••+ая.
(8.8)
= (-1)*",(а|а, + a,a, ...a,,_}a,, + - +a1aJ ...а,);
а„ Я(-1ЛЧ“1 •••“»•
Эти формулы Означают следующее: в правой части Л-го равенства
(k = 1,2,.... и) находится сумма всевозможных произведений по к корней, взятая
со знаком плюс или минус в зависимости от четности или нечетности к.
Последняя из формул (8 8) свидетельствует о том. что корни многочлена (8 7)
являются делителями его свободного члена
Формулы Виета дают возможность найти многочлен по корням.
Теорема 8.4. Если комплексное число а является корнем многочлена с дейст-
вительными коэффициентами то его корнем будет также и сопряженное число a
140
Следствие. 1. Многочлен f(x) в этом случае делится на квадратный
трехчлен <р (л) = (л - а) (х -а) = л2 + рх +q с действительными коэффициента-
ми /> = -(а+а). д*аа
Следствие. 2. Комплексные корни всякого многочлена с действитель-
ными коэффициентами попарно сопряжены.
Следствие. 3. Многочлен нечетной степени с действительными ко-
эффициентами имеет хотя бы один действительный корень. Если же действи-
тельных корней больше одного, то их будет нечетное число (так как комплекс-
ные корни попарно сопряжены).
Следствие. 4. Всякий многочлен с действительными коэффициентами
можно представить, причем единственным способом (с точностью до порядка
множителей), в виде произведения его старшего коэффициента и нескахьких
многочленов с действительными коэффициентами, линейных вида х-с, соот-
ветствующих его действительным корням. и квадратных вида X2 + рх + q. со-
ответствующих парам его сопряженных комплексных корней
Пример 8.3. Разделить многочлен /(л) = л*-2л’ + 2л2-Зл + 5 на л-1
Коэффициенты многочлена: а0=1. о, =0, о, =-2, fl,-2. fl4=-3, в, = 1
Коэффициенты частного q (л) = Ь^х* + ^л* уЬ^х1 + 6>л уЬ, и остаток г находим
по схеме Горнере, считая с = 1:
с I 0 -1 1 -J 1
I 1 11+0-1 11-2--1 1-(-1)+2 = 1 1 1-3 = -2 1-(-2)+5 = 3
Следовательно, частное q (л) - л4 + л* - л2 + л-2, а остаток г = 3.
Пример 8.4. Вычислить значение многочлена /(л)-2л*-4л* +
+5л* —26л2—17Д+9 при л-3.
По схеме Горнера находим
<1-4 1 -ЭЬ -17 4
3 2 32-4=2 3-2 + 5 = 11 3-11-26 = 7 3-7-17-4 34+9 = 21 '
Итак, г-21; поскольку /(с) = г, то/(3)-21.
Пример 8.5. Показать, что число л = 4 является корнем многочлена
/(л) = Зх* - 2л* - 47л2 + 30л - 8.
С помощью схемы I орнера находим, что г = /(4) = ft
<1-1 -47 № -
4 3 4-3 — 2 = 10 4 10 - 47--7 4(-7)+30 - 2 4-2 - 8 »0
Гак как г = 0. то /(4) = 0. л = 4 - корень многочлена.
Пример 8.6. Найти многочлен третьей степени, корни которого а, »I.
04=-2, а,=3.
141
Воспользуемся формулами Виета. При л • 3 многочлен (8.7) и формулы (8.8)
принимают соответственно вид
/(»)»i' +а,х2 +а2х+а3, а, = -(«, +04 +азХ
а2 = а,а2 +01,01, + а2а,, в, = -0,0404.
Подставляя в последние три формулы значения корней, получаем а, -
= —(1—2+3) = —2, а2 = 1(-2)+1-3+(-2)3 = -5. о, =-1(-2)3 = 6 Следова-
тельно, f(x) = xi-2x2-5х + 6.
Пример 8.7. Найти многочлен четвертой степени, имеющий корни
оц=-1, 04 = 2, а, = 4, а, =5.
При л = 4 многочлен (8.7) и формулы (8.8) запишутся так:
/(к) = х* + а,к’ + арг1 +в,х + а„
а, «-(а,+04+04+0,),
в2 ж«»<4 +ottai +а,а4 +040, +а2а, +а,а„
О, - - (0,0404 + 0,0/14 + 0,0,0, + 0/40, X
О, = 0,0,0,0,.
По эти формулам находим а, =-10, о, =27, в, =-2, а, =-40 Итак.
Дх) = х*-10х’+27х2-2х-4й
8.3. Квадратные уравнения
Алгебраическим уравнением л-й С1епени с одной переменной х называется
уравнение вида
вох‘’+О|Х""'+ —+в(г_,х + ая =0, (8.9)
где а0, о,.o»-,, а„ - заданные числа, называемые коэффициентами.
Корнем алгебраического уравнения (8 9) наминается такое значение перемен-
ной х = с, при котором оно обращается в тождество,
+ о/”-1 + • • а„-,с + а„ » 0.
Выражение «решить уравнение» означает найти все его корни.
Квадратным называется уравнение вида
ах2 + hx+e = O (а#0).
Корни уравнения (8.10) вычисляются по формуле
т.е. +
' (8 Ю)
(8.11)
Выражение
D = t>2-4<2c
называется дискриминантом квадратного уравнения (8.10).
142
Если а, Ь. с - действительные числа, то квадратное уравнение (8.10) при
D>0 имеет два различных действительных корня, при П = 0 - два равных дей-
ствительных корня, при £><0 - два комплексно-сопряженных корня
Отмстим, что ко >ффициенты квадрат ного уравнения (8 10) могут быть и ком-
плексными числами. Его корни также вычисляются по формулам (8 11) В этом
случае дискриминант будет комплексным числом
Уравнение (8.10) можно привести к виду
— х’ + дг+9 = 0. (8.12)
Корни этого уравнения вычисляются по формуле
которая является частным случаем формулы (8.11).
Пример 8.8. Решить уравнение хг - 4х +13 = 0.
По формуле (8.13) получаем х12 = 21^4-13 “ 2 ±J-9. Это уравнение имеет
корни я, = 2 + X ха = 2 - X где i = .
Пример 8.9. Решить уравнение х1-(4 + 6*) х-5 + 101 = 0 с комплекс-
ными коэффициентами
По формуле (8.13) находим xu = (2 + 3/)±7(2+3/)1-(-5 + 10*) =
= (2 + 30± V4 + 121+9/’ + 5-IW - (2 + 3*) ± я/г7 = (2 + 31) ± (1 + *): х, =3+4*.х2 =1+2*.
8.4. Кубические уравнения
Кубическим называется уравнение
х’ +ДХ1 + 6х + с = 0.
Это уравнение с помощью формулы х - г - о/З можно привести к виду
z’ +pz+g = 0.
Корни кубического уравнения (8.15) вычисляются по формуле z = ** + v.
или
(814)
(8.15)
где
(8 16)
(8.17)
(8.18)
Все три корня уравнения (8.15) определяются следующими формулами:
z, = ц + V*. za = це + ЦЕ2, z, - ЦЕ2 + v,e.
*де ц - любое из трех значений и, определяемых первой из формул (8.16), v, -
то из трех значений к, которое соответствует ц на основании равенства
143
(8.19)
3wv + p = 0,
- кубические корни из единицы.
Дискриминантом уравнения (8.15) называется выражение
(8-20)
( 1 3'
D=-4j>’ -27?2 —-108 +
Уравнение (8.15) при D<0 имеет один действительный и два комплексно-
сопряженных корня: при D = 0 - три действительных корня, причем два равных,
при D > 0 - три различных действительных корня.
Замечание. Третий случай (D>0) называется неприводимым. В этом
случае все корни уравнения (8.15) с действительными коэффициентами являются
действительными, однако для нахождения их по формуле (8.17) следует извлекать
кубические корни из комплексных чисел.
Формула (8.17) называется формулой Кардано Правило, соответствующее
этой формуле, впервые опубликовано в книге итальянского ученого Д Кар-
дано «Великое искусство или о правилах алгебры» (1545). Это правило реше-
ния кубического уравнения было получено ранее (1535) другим итальянским
математиком Н. Тартальей.
Пример 8.10. Решить уравнение г* - 6? + 9 « О Эго уравнение вида
(8.15), для которого р = - 6, д = 9 Составим выражение
. _ * (~6)3 _ 81 49
4 27 4 3’ 4 4
По формулам (8.16) находим «ни
Следовательно, ц=-1, к, =-2, равенство (8.19) выполняется. По формулам
(8.18) с учетом формул (8.20) находим
г, = ц+У|.-3,
х.-це+М1 Ч-1)(-|+*-у]+(-2)(-{_<4)" ?+V-
, 3 з/з .
г, = ц€ 2+v,E = y——I.
144
Замечание. Корни z2 и z, можно найти и другим способом. Тах как
Д|=-3 - корень уравнения, то многочлен z’-6z+9 делится на (z+З). Произ-
ведя это деление, получим z’ - 6z + 9 = (z + 3) (z2 - 3z + 3). Данное уравнение при-
мет вил (z + 3)(z2-3z + 3) = 0, откуда z + 3»0, z2—3z+3=0. Последнее урав-
нение имеет корни
3- Л, 3 Л,
'‘ГТ'
Пример 8.11. Решит уравнение х2-5х2+8х-6 = 0.
Разложим на множители многочлен в левой части уравнения:
х2 - 5х2 + 8х—6“х5 - Зх2 - 2х2+6х+2х - 6 “ х2(х—3)—2х (я—3)+2(х-3)«
= (х-3)(х2-2х+2). Данное уравнение примет вил (х-3)(х2-2х + 2) = 0 и
распадается на л на уравнения: х -3=0, х’-2х+2 = 0, которые имеют корни
Xi=3, х2 = 1+/, хэ«=1-£
8.5. Уравнения четвертой степени
Алгебраическое уравнение четвертой степени
х* +ex’ + ftx2 +cx + d «0 м
с помощью подст ановки х = г - о/4 можно привести к уравнению
z4+pz2+gz+ г = 0, (8.21)
в котором коэффициент при z’ равен нулю.
'Но уравнение можно записать так-
(z2 +р/2+а)2 -(2<к2 -gz+(<x2 +ра-г+р2/4)) = 0, (8.22)
где а - вспомогательный параметр. Значение параметра выберем так. чтобы вы-
читаемый многочлен был полным квадратом В этом случае многочлен имеет два
равных корня, так как его дискриминант равен нулю, т. с
д2-4 2а(а2+ра-г + р’/4) = 0: (8.23)
Уравнение (8.22) принимает вид
(с* / X»
z’+^+aJ -2a0 z--S- =0, (8.24)
2 ) 4a0)
где a0 - отличный от нуля корень уравнения (8.23).
Уравнение (8.24) распадается ita два квадратных уравнения:
145
(8.25)
Корни этих уравнений будут корнями уравнения (8.21).
Пример 8.12. Решить уравнение z*-5z2 + 4 = 0.
Это уравнение вида (8.21), для которого р=—5, q = 0, г = 4. Уравнение
(8.23) в данном случае сводится к квадратном} уравнению относительно парамет-
ра а:а2-5а-4 + 2^4 = 0, или a2-5a+9/4 = 0. которое имеет корни <^=9/2,
а2=1/2. При а0 = 1/2 уравнения (8.25) запишутся так: г1 -г- 2-0,
z2+z—2 = 0. Первое из них имеет корни z,«—1, z2 = 2, а второе - z(=l,
z2 = -2. Эти числе являются и корнями исходного уравнения
Пример 8.13. Решить уравнение х*+4х’ + 7х2-4х-8 = 0 Разложим на
множители многочлен в левой части уравнения:
х* + 4х’ + 7х2 - 4х - 8 = (х4 - х2)+(4х’ - 4х)+(8х2 - 8) = х2(х2 -1) + 4х (х2 -1)+
+ 8 (х2 -1) = (х2 -1) (х2 + 4х + 8).
Следовательно, уравнение примет вид (х2-1)(х2+4х+8) = 0, откуда
х2-1-0, х2+4х + 8 = 0; Х|=-1, xx«l, х2=—2 + 2/, х4=-2-2/.
8.6. Решение алгебраических уравнений
способом разложения многочлена
на множители
Если a(,a2......a„ - корни многочлена /(x)=e0x"+otx,*",+-“ +
+ Я„ |Х + а„, то уравнение (8.9) можно записать так:
ao(x-al)(x-a2)...(x-a.)=O.
Если а и а - сопряженные комплексные корни, то (х-а)(х-а) =
= x2+px + fl, гдерид — действительные числа (р = -(а + а), <?жаа).
Предположим, что левая часть уравнения (8.9) разложена на множители вида
х-с и х2 + рх+q Приравнивая нулю каждый множитель, получаем уравнения,
каждое из которых является линейным или квадратным. Корни этих уравнений
будут корнями уравнения (8.9).
Пример 8.14. Решить уравнение х’-2х-4 = 0.
Разлагаем на множители многочлен в левой части уравнения:
х’-2х-4 = х’-2х2 + 2х’-4х+2х-4 =
146
= х2(х - 2) + 2х (х - 2)+2 (х - 2) - (х - 2) (х2 + 2х + 2).
Данное уравнение принимает вид (х-2)(х1 +2х + 2) = 0 и распадается на два
уравнения. х—2«=0, х2 + 2х + 2 = О, первое из них имеет корень Х|=2, а второе
- два комплексно-сопряженных корня х2 = -1-1, х, =-1+1.
Пример 8.15. Решить уравнение х4-5х’ + 5х2 + 5х-6 = 0.
Тах кахх4- 5?+5?+5дс-6=х - 5х’+5?+5х-5 - I = (х4-|) + (-5х*+5?)+(5х-5)»
-Cx’-DU’+l) -5?(х -1НЯх -1)= U2-IXx2+l) -5 (х -1) I? -1>= (x’-lX ?♦! -5(х -|)>=
(х2 -IX? -5х+6). то (х2-1)(х2-5х + 6) = 0, откуда х2-1 = 0, х2-5х+6 = 0,
Х| = -1, х, = 1, Xj = 2, х, = 1
Пример 8.16. Решить уравнение х4+2х’-2х2-8х-8 = 0.
При разложении на множители используется результат примера 8.14.
Поскольку х4 + 2х’ -2х2-8х-8 = х4 + 2х’ -2х2 -4х -4х-8 = х’(х + 2)-
-2х(х+2)-4(х+2) = (х + 2)(х-2)(х2+2х + 2) = 0, откуда х+2 = О, х-2 = 0,
х2 + 2х + 2 = О, Х|=-2, х2 = 2, х, = -!-/, х4 = -1+ь
Пример 8.17. Решить уравнение x$-x4-8lx + 8l = tt Так как х’-
-х4-81х + 81 = х4(х-1)-81(х-1) = (х-1)(х4 - 81) = (х-1)(х2-9)(х2+9), то
(х-1)(х2-9)(х2+9) = 0, откуда х-1 = 0, х2-9«0, х2+9=Ц х,=1.
х2 = -3, х, = 3, х4 = — 31, х, = 31.
Замечание. Алгебраические уравнения л-й степени (л25) в общем
случае в ради калах нс решаются, т. е. нс существует формул, которые давали бы
возможность вычислить корни уравнения по его коэффициентам. Это впервые
доказал норвежский математик Н.Х Абель. Однако имеются частные виды урав-
нений любой сгепснн, разрешимые в радикалах (например, х" = а\ Вопрос о том,
каково необходимое и достаточное условие для того, чтобы алгебраическое урав-
нение решалось в радикалах, исследовал французский математик Э. Галуа
8.7. Разложение дробной рациональной
функции в сумму элементарных дробей
Целой рациональной функцией называют алгебраический многочлен. Дробной
рациональной функцией или рациональной дробью называется отношение двух
многочленов:
Q^(x) ^хй + ^х"_|+ —+ 6и_|х + 6и
Если т>п, то рациональная дробь называется правильной
Элементарными дробями называются рациональные дроби вида
(8.26)
А Вх+С
(х-сГ’ (x2+px+fl)"‘
147
где я, л» - натуральные числа; с, р, д, А. В, С - действительные числа;
(p2/4)-q<0 (корни трехчлена х2 +рх+д являются комплексными).
Всякую правильную рациональную дробь можно разложить в сумму элемен-
тарных дробей на основании следующей теоремы.
Теорема 8.3. Если дама правильная рациональная дробь (8.26) и
Q(x)=(x-clf' ...(*-СгЛ(х2+АХ+?,)’ -..(** *Л*+4У*.
где с, (1 = 1,2,...,г) — попарно различные действительные корни многочлена
Q(x) кратности п,; х2 +PtX+qt = (х-а*)(х-а*Х «>* <** “ (4 =
1,2,...,») • попарно различные при разных к корми многочлена Q (х) кратно-
сти mt, то существуют действительные числа
Л; (J=l,2..г. п =1,2,..., л^), ДГ- <Т(Л-1,1....« м=1,2,....<»0
такие, что
Q(x) х-с, (x-q)2 (*-С|Г
+ . +
х-с, (x-c,? (x-c,fr
, Bjx + C2 , t др»С? , ..
x2+Ax+g, (*2+A* + Vi)2 (х2+а*+9|Г
, &+С2, t , В?х+с?
x2+p,x+q, (x2+p^+q,)2 (x2+ppt+q,)"'
Отметим, что каждому действительному корню с кратности / соответствует
сумма / элементарных дробей вила А/(х - cf :
A t 4» । t
x-c (x-c)2
а каждой паре комплексно-сопряженных корней а и а (таких, что
(х-а)(х-а) = ж2 +px+q) кратности т- сумма дробей вида
(& + С/(ж2 +/Ж+9)':
в.ж+С. В,х+С2 /Ljt + C_
x2+px+q (x2+px+q)2 (х2 + рх+q)“
Пример 8.18. Разложить в сумму элементарных дробей рациональную
дробь (7х2-ж + 1)/(ж’+1).
148
Так как х’ +1 = (х +1) (л2 - х + IX то искомое разложение имеет вид
7х2-х + 1 7х2-х + 1 А Вх + С
х’ + 1 (х+1)(х2-х + 1) х + 1 х2-х + 1’
где коэффициенты А, В, С пока не определены. ,
Приводя к общему знаменателю правую часть и сравнивая коэффициенты при
одинаковых степенях х, получаем
7х2-х + 1 (А + В)хг +(В+С- А)х+А+С
х’ + 1 “ х’+1
7x1-x + l-(.A^B)xt+(B^C-A)x+(A + C\
А + В-7, В+С-А—1, А + С^1
Из этой системы уравнений находим Л = 3, й = 4, С=-2. Следовательно,
7х2-х + 1 3 4х-2
х’+1 х + 1 х’-х + Г
Пример 8.19. Разложить в сумму элементарных дробей рациональную
дробь (х2+х+1)/(х’-Зх + 2)
Разлагая знаменатель на множители, получаем х’—3х + 2=х'-х —
-2х-2-х(х2~1)-2(х-1) = (х-!)(х (х + 1)-2) (х-1)(х2-1)+(х-1)«
= (х-1)2(х+2).
Данную рациональную дробь представим в виде суммы элементарных дробей
х2+х+1 А В С
х2 —Зх+2 " х + 2 "х—I+(х-1)* * ()
откуда
х’+х + 1- Л (х-1)2 + в(х-1)(х+ 2)+С(х+ 2), (II)
или
х2+х + 1 = (Аз-й)х2+(й + С-2Л)х+(Л-2й + 2С).
Сравнивая коэффициенты при одинаковых степенях, получаем уравнения А + В - 1,
В + С-2А = \, А-2Й + 2С = 1, из которых находим А = 1/3, в=2/3, С=1
Следовательно, разложение (I) примет вил
х2+х+1 1 2 ___I
х’-Зх + 2 ” 3(х + 2) + 3(х-I) + (х-1)2
Замечание. Коэффициенты А. В, С разложения (I) можно получить и
другим способом Полагая в тождестве (II) х = 1, по/гучасм 3 = С 3. С = 1. Поло-
жив в этом тождестве *=-2, получим 3=Л(-3)2, откуда Л = (/3- Аналогично
при х = 0 находим 1 = А~ 2В+2С, В = 2^.
149
гngga р
ЛИНЕЙНЫЕ ПРОСТРАНСТВА
9.1. Линейное пространство. Подпространство
Линейным действительным пространством или векторным действительным
пространством называется множество V элементов ж, у, ж,.... для которых опреде-
лены операции сложения элементов и умножения элемезгга на действительное
число, удовлетворяющие следующим аксиомам: I. ж + у «= ж ♦ у,
II. (ж + у)+ж= ж+(у + ж), III. Существует нулевой элемент0 такой, что ж+О = ж,
IV. Для каждого я е V существует противоположный элемент -ж такой, что
ж+(-ж) = О, V. 1 ж«ж, VI. а(рж)«=(сф)ж, VII. а (ж + у) = = аж+ау,
VIII. (а+Р)ж = аж+Рж.
Эти аксиомы выполняются соответственно для всех ж, у, же К, а, р с К
Элементы действительного линейжя о пространства называются векторами
Замечание. Аналогично определяется комплексное линейное про
странсгво: вместо множес тва R действительных чисел рассматривается мжзжеез в<
С комплексных чисел.
Из определения линейного пространства вытекают следующие утверждения
1. В линейном пространстве имеется единственный нулевой элемент
2. Для любого элемента ж линейного пространства существует единственны
элемент -ж.
3. Для элемента -ж противоположным будет элемент ж.
4 Для любого элемента ж произведение 0ж=-0. где 0 - нуль, 0 - нулевой элемен
5. Для любого элемента ж (—1)ж «-ж, где (-ж) - элемент, противоположный я
6. Для любого числа а произведение аО = 0, где 0 - нулевой элемент
7. Если си = 0 и а * 0, то ж = О
8. Если аж = 0 и ж * О, то а =• 0.
Равенство ах = О выполняется тогда и только тогда, когда а = 0 или ж = 0
Замечание. Сумму ж+(-у) обозначают ж * у и называют разноси
элементов ж и у.
Примеры линейных пространств.
1. Множество Г3 всех свободных векторов afOpa^.o,), лдя которых огг
делены сложение и умножение вектора на число так, как в п. 3.2, является лин
ным пространством Отметим, что роль нулевого элемента здесь израет ну
вектор; для любого вектора а противоположным является -а. Аксиомы I - X
выполняются, о чем свидетельствуют формулы п. 3.2.
150
2. Множество всех матриц размером mxn, для которых определены сложе-
ние матриц и умножение матрицы на число соответственно формулами (5.2), (5.4).
Роль нулевого элемента здесь играет нулевая матрица; для матрицы (ал про-
тивоположной является матрица (-а*),*,. Аксиомы I - VIII выполняются
(см. а 5.2, свойства 1 - 8 линейных операций над матрицами).
3. Множество { Д(х)) всех алгебраических многочленов степени, не превы-
шающей натурального числа л, для которых операции сложения многочленов и
умножения многочлена на действительное число определены обычными правила-
ми Нулевой элемент - многочлен, все коэффициенты которого равны нулю; для
многочлена /^(х) = а^х” +<£»'’' + •• + ов_1х + а„ противоположным будет
~ Р„(х) = - Оох" - Цх""' “ ••• - <«»-,» - °. •
Замечание. Множество всех многочленов степени, точно равной нату-
ральному числу л, нс является линейным пространством, так как сумма двух таких
многочленов может оказаться многочленом степени ниже п (т. е. не принадлежать
рассматриваемому множеству).
4. Множество Л„ элементами которого являются упорядоченные совокупно-
сти л действительных чисел (х(>х2..хл). Каждый элемент этого множества
будем обозначать одним символом, например я, у,..., и писать
X“(*i.*a....хл), У = (>1.Ъ.--.У»).— Действительные числа х„х2......х„
называют координатами элемента я. Линейные операции над элементами Л* оп-
ределяются формулами я+у«((х|+у1Х(х2+>2Х...,(хл+ >,)), ах-
-(ах,,ах2...ахл). Отметим, что элемент 0 = (0,0.„.,0) является нулевым,
элемент -х-(-х(,-х2,...,-хя) - противоположным элементу х*
= (х„х2,....хл).
5. Множество С (а, 6] всех функций х~х(1\ определенных и непре-
рывных на отрезке (а, 6). Операции сложения этих функций и умножения
функции на число определяются обычными правилами Нулевым элементом
является функция х(|)яО для всех те [а, б). Элементом, противоположным
элементу х(Г), будет -х(Т).
Множество И' с Г называется подпространством линейного пространства V,
если выполняются следующие условия: I. В множестве W определены те же опе-
рации, что и в множестве V. 2. Если я. у е W. то я + у е W. 3. Если я е Ж, то
ах е И'. Очевидно, всякое подпространство Ж линейного пространства V является
линейным пространством, т.е. в Ж выполняются аксиомы I - VIII. Прежде всего, в
W имеется нулевой элемент 0: если я е И', то Ох = 0 е W. Для любого элемента
яей’ имеется противоположный элемент -я: если хе И', то (- 1)х = -яеИ.
Отмстим, что нулевой элемент 0 линейного пространства У образует подпро-
странство этого пространства, которое, называют нулевым подпространством.
151
Само линейное пространство V можно рассматривать как подпространство этого
пространства. Эти подпространства натывакттся тривиальными, а все другие, если
они имеются, — нетривиальными Приведем примеры нетривиальных подпро-
странств. 1. Множество И2 всех свободных векторов параллельных
некоторой плоскости, для которых обычным обратом определены операции сло-
жения векторов и умножения вектора на число, представляет подпространство
линейного пространства 2. Множество Ц всех свободных векторов «(о,),
параллельных некоторой прямой, также является подпространством линейного
пространства Г’,. 3 Множество {Р„_,(.х)} всех алгебраических многочленов сте-
пени, не превышающей натурального числа л-Ч, является подпространством
линейного пространства {
9.2. Линейная зависимость и линейная
независимость векторов линейного
пространства
Рассмотрим векторы (элементы) x|t х2..ж, линейного пространства Вектор
у = а,х, + а2к2 + — + а„х„, где а,,а,....а„ - некоторые числа, называется
линейной комбинацией векторов х^Хз,...,!,. а числа at,a2..........а„ —
коэффициентами этой линейной комбинации. Если все числа а, (4= 1,2,..., л)
равны нулю, то линейная комбинация называется тривиальной Если хотя бы одно
из чисел а, отлично от нуля, линейная комбинация называется нетривиальной.
Система векторов
жьж2.....ж. (91)
называется линейно зависимой, если существуют числа
a,, а,...а„ (9 2)
нс все равные нулю, такие, что
а,Х| +а2х2 + —+ авж„ =0. (9.3)
Если таких чисел не существует, т. с. равенство (9.3) выполняется только в
случае
O| =0Cj=-»a, = 0, (9.4)
то система векторов (9.1) называется линейно независимой.
Другими словами, векторы (9.1) называются линейно зависимыми, если существует
их нетривиальная линейная комбинация, равная нуль-вектору, н линейно недавней
мыми, если только их тривиальная линейная комбинация является ну ль-всктором.
Из определения линейной зависимости и линейной независимости векторов
вытекают следующие утверждения.
1. Всякая система векторов, содержащая нуль-вектор, является линейно зависимой.
2. Если к (к < п) векторов системы (9.1) линейно зависимы, то и вся система
линейно зависима
152
3. Если ю системы линейно независимых векторов х(, х2, х„ отбросить г(г<п)
векторов, то оставшиеся векторы образуют также линейно независимую систему.
4. Если среди векторов системы (9.1) имеются такие векторы х4 и х„, что
х4=Хх„, где Л - некоторое чис ло, то система (9.1) линей»ю зависима
Теорема 9.1. Векторы х(, х},..., х„ линейно зависимы тогда и только то-
гда. когда хотя бы один из них является линейной комбинацией всех остальных
Эта теорема выражает необходимое и достаточное условие линейной зависи-
мости л вспоров Х|,Х2,..,,ХЯ.
Два вскгора линейного пространства называются коллинеарными, если они
линейно зависимы, и нсколлинсарными. если они линейно независимы Гри век-
тора линейного пространства называются компланарными, если они линейно за-
висимы, и нсхомпланарными, если они линейно независимы Введенные понятия
коллинеарности и компланарности векторов линейного пространссва совпадаю! с
известными из аналитической геометрии понятиями коллинеарности и компла-
нарности обычных векторов.
9.3. Размерность и базис линейного пространства.
Изоморфизм линейных пространств
Число л называется размерностью линейного пространства V, если выполняют-
ся следующие условия: 1) в V существует л линейно независимых векторов,
2) любая система л +1 векторов из V линейно зависима Размерность линейного
пространства V обозначают diml' (от французского слова dimension —
размерность) Если пространство состоит из одного нулевого элемента, то его
размерность считают равной нулю. Размерност», линейного пространства это
наибольшее возможное количество линейно независимых элементов в нем. Поня-
тие размерности согласуется с наглядным представлением о ней; так, пространст-
во У, всех свободных векторов является трехмерным (dim 1, = 3), пространство
Уг - двумерным, пространство Р( - одномерным.
Базисом п-мерного линейною пространства Е, называется любая упорядочен-
ная система п линейно независимых векторов этого пространства Приведем при-
меры базисов некоторых линейных пространств Базис пространства Ц образует
любая тройка нскомпланарных векторов, так как эти векторы линейно независимы
(см. теорему 3.4), и любая четверка векторов линейно зависима (см. теорему 3.6).
Базис пространства 12 образует два любых неколлинеарных вектора, поскольку они
линейно независимы (см. теорему 3.2), и любой вектор плоскости, определяемой
двумя векторами, можно разложить по ним (см терему 33). Базисом линейного про-
странства I является любой ненулевой вектор, коллинеарный данной прямой
Линейное пространство, в котором имеется базис, состоящий из конечного
числа векторов, называется конечномерным. Примерами конечномерных про-
странств являются пространства Ц, V2, К,, Л„.
153
Линейное пространство А„ является л-мерным, а его базис образует система
векторов е, = (1.0,...,ОХ е2 «(0,1,0.....ОХ е, »(0,0,...,0,1).
Линейное пространство называется бесконечномерным, если при любом нату-
ральном числе т в нем найдется т линейно независимых векторов Примером бес-
конечномерного пространства может служить линейное пространство С [а, 6] всех
функций х = х (г). определенных и непрерывных на отрезке [а. />]
Два линейных пространства V и U называются изоморфными, когда между их
злеметп ами можно установить взаимно однозначное соответствие такое, что если
где Уз.УаеС/, то (ж, + ж2)*-»(у(+у2Х
ах1г-»ау|, где а действительное число.
Теорема 9.2. Два линейных пространства изоморфны тогда и только то-
гда, когда они имеют одинаковую размерность
В частности, пространство К, (всех свободных векторов) и пространство Л,
(всех упорядоченных троек действительных чисел) изоморфны Отмстим также,
что каждое конечномерное линейное пространство размерности л изоморфно ли-
нейному пространству А„.
9.4. Координаты вектора линейного пространства
Теорема 9.3. Если е,.*,,- базис линейного п-мерного пространст-
ва Е„, то любой вектор к зтого прост/юнства линейно выражается через ба-
зисные векторы е1,е2,...,ея, т е.
ж = а,е,+а2е2+ —-уа,*, (9.5)
Коэффициенты а,, а?....а„ этого разложения определяются однозначно
Выражение (9.5) называется разложением вектора ж по базису *t.e2.
Координатами векторе ж в базисе «|,в2,...,ея называют коэффициенты
«i.ctj...<хя в разложении этого вектора по данному базису, т. е. в формуле
(9.5). Если вектор ж в некотором базисе имеет координаты с^.о^.ая, то пи-
шут ж = (а|,а2................................................ая), или ж(а,,а2,...,а,).
Операции над векторами сводятся к операциям над их координатами на осно-
вании следующих свойств
I. Вектор является нулевым вектором линейного гтространства тогда и только
тогда, когда все его координат ы в любом базисе равны нулю.
2. Координаты суммы двух векторов в некотором базисе равны сумме соот-
ветствующих координат данных векторов в том же базисе
3. Координаты произведения вектора на число равны произведению соответ-
ствующих координат на это число (в одном и том же базисе)
4. Два вектора равны тогда и только тогда, когда равны их соответствующие
координаты в одном и том же базисе.
5. Вектор у является линейной комбинацией векторов ж,,ж2.....ж, тогда и
154
только тогда, когда каждая координата вектора у является такой же линей-
ной комбинацией соответствующих координат этих векторов в одном и том
же базисе.
Пример 9.1. Пусть 4, - четырехмерное линейное простраисгро с базисом
с|,в2,«),е4. Найти координаты векторов е, и х = Зе, - 5е, + 7е4 в этом базисе.
Представим каждый из векторов е, и х в виде (9.5) Тах как е, =
Ое, + 0е2 +lej + 0е4, то вектор е, имеет координаты (0,0,1,0). Поскольку
х = Зе, + 0е2 - 5е, + 7е4, то вектор х имеет координаты (3,0, -5,7).
Пример 9.2. В некотором базисе даны векторы х(|,2,-2.-1,3).
у(4,-3,-2,1,-1). Найти координаты вектора 5х-3у.
Так как 5х »(5,10.-10,-5,15), -Зу «(-12,9,6,-3,3), то вектор
5х - Зу = 5х +(-Зу) имеет координаты (-7.19, -4,-8,18).
9.5. Ранг системы векторов линейного
пространства
Рассмотрим систему т векторов
*i = (en«flji.°м)
...вч)
(9.6)
=(°и.. ••• °— )
линейного л-мерного пространства, координаты коз орых заданы в одном и том же
базисе. Системе векторов (9.6]
поставим в соответствие матрицу
а,, в12 ...
eii ви ••• °2«
(9.7)
в Л-м столбце которой записаны координаты вектора а4 (к = 1,2,..., т). Матрицу
(9.7) называют матрицей системы векторов (9.6) в данном базисе, а ранг этой мат-
рицы - рангом системы векторов а„а2.....а„. Обратно, если дана матрица
(9.7), то ей можно поставить в соответствие систему (9.6) т векторов линейного л-
мерного пространства Согласно свойству 5 п. 9.4, будем говорить, что столбцы
матрицы (9.7) линейно зависимы, если векторы (9.6) линейно зависимы и обратно.
Теорема 9.4. Для того чтобы т векторов п-мерного линейного про-
странства были линейно независимы, необходимо и достаточно, чтобы
ранг матрицы этой системы был равен т
Следствие 1. Система п векторов п-мерного линейного про-
странства линейно независима тогда и только тогда, когда матрица
этой системы векторов является невырожденной.
155
Следствие 2. Если ранг матрицы системы т векторов линейного
пространства равен г, то максимальное число линейно независимых век-
торов этой системы равно г.
Пример 93- Найти максимальное число линейно независимых векторов
всистемс а,(1,1,-1,-1),.'жа(1,2,3,4), а,(8.7,6,5), ж4(-1,-1,1, !)•
Матрица данной системы векторов имеет вил
‘ 1 I 8 -Г
ч X 12 7-1 •
-I 3 6 1
-14 5 I
Так как ранг этой матрицы равен 3 (см, пример 5.16), то максимальное число
линейно независимых векторов этой системы равно 3.
Т с о р е м а 9.5. Максимальное число линейно независимых строк всякой мат-
рицы равно максимальному числу ее линейно независимых столбцов, т. е равно
рангу этой матрицы.
9.6. Преобразование координат вектора
при изменении базиса
В линейном л-мерном пространстве фиксируем два базиса
•i.Bj...(9.8)
...< (99)
Матрицей перехода от базиса (9 8) к базису (9.9) называется матрица системы
векторов (9.9) в базисе (9 8). Каждый вектор системы (9 9) можно разложить по
базису (9.8). Пусть
•;=+ga ♦ •••+(910)
•1-'|я*1 + 'зЛ1
тогда матрица перехода от базиса (9.8) к базису (9.9) имеет вид
Al Aj ••• А»
Г- '» - ** . (9.11)
. »м 'м ••• % .
Матрица перехода от одного базиса к другому невырожденная (так как базис-
ные векторы линейно независимы). Всякую невырожденную матрицу л-го порядка
можно рассматривать как матрицу перехода от одного базиса л-мерного линейно-
го пространства к другому базису этого пространства. Очевидно, матрица Г'1,
обратная матрице (9.11), является матрицей перехода от базиса (9.9) к базису (9.8).
156
Теорема 9.6. Если —
координаты вектора х в базисе в|,а2,....е„;
х(*, Xj..х' - координаты того же вектора в
базисе С|. «2..^>по
Х~ТХ\ (9.12)
Рис. 9.1
Т - матрица, определяемая формулой (9.11).
Замечание. Теорема 9.6 выражает старые координаты х^х^.^.х.
вектора х через его новые координаты Чтобы получить формулы, выражающие
новые координаты через старые, умножим слева равенство (9.12) на матриц) Г"1,
обратную матрице Т, получим Г'Х= Г'ТХ', Т'Х-Х' или Х'-Т'Х.
Пример 9.4. В пространстве рассмотрим базис е, «I, е2 «j, где I,
j - орты, и базис е' = i*. е2 = f, где I', j' - орты, причем 1' образует с 1 угол <р
(рис.9.1). В данном случае i' = icosp +jsin<p, • J' = -isin<p +jeosp
Матрица перехода от базиса 1, j к базису 1', j' имеет вид
Г cos«p -sinp 1
[ sin «р cos<p J
Если вектор а имеет координаты х у в базисе 1, j; х', у’ - в базисе i', J'. то
х =x'cos<p-y'sinp, у - x'sinp + y'cosp.
9.7. Евклидово пространство
Определение евклидова пространства. В линейном действительном про-
странстве V, кроме операций сложения векторов и умножения вектора на действи-
тельное число, введем еще одну операцию, которую назовем скалярным умноже-
нном векторов. Каждой упорядоченной паре векторов х, у е V поставим в соот-
ветствие действительное число, которое назовем их скалярным произведением и
обозначим (х, у). Потребуем, чтобы для любых х, у. х е V и любого числа а е R
выполнялись следующие аксиомы: L (х,у) = (у,х), II. (х + у,х) = -(х, z)+(y, х),
III. (ах, у)= а (х, у), IV. (х,х)>0 для всех х#0. (х,х)»О для х = 0.
Очевидно, скалярное произведение равно нулю, если хотя бы один из векторов
нулевой. (О, у) - (Ох, у) « 0 ( х, у) = 0.
157
Скалярное произведение (х, х) вектора х на себя называется скалярным квад-
ратом этого вектора и обозначается х2, т. е.
(ж. ж)-Ж1. (9- М)
Евклидовым пространством называется линейное действительное пространст-
во, в котором задана операция скалярного умножения векторов, удовлетворяющая
аксиомам 1 - IV. Если л-мерное линейное пространство является евклидовым, то
будем называть его евклидовым п-мерным пространством, а базис этого линейно-
го пространства - базисом евклидова пространства.
Примеры евклидовых пространств. I. П линейном пространстве I д скаляр-
ное произведение двух векторов а и b определим так, как в п. 3.6; аксиомы I - IV
для него будут выполнены (см свойства скалярного произведения и определение
скалярного квадрата вектора).
Следоватслыю. линейное пространство И, всех свободных векторов с обыч-
ным определением скалярного произведения является евклидовым пространством.
2. Рассмотрим n-мерное линейное пространство А, упорядоченных совокупностей
л действительных чисел Скалярное ггрою»с.кттие двух его злемеитое X = (xi< Xj» - . *»).
у “ (»• Уг> •••. У„) ® аналогии с формулой (3.21) определим соотношением
(«.у)ж*1й+*1Л С913)
Легко видеть, что все аксиомы I - IV скалярного произведения при этом вы-
полняются Таким образом, рассматриваемое линейное пространство со скалярным
произведением (9.15) является евклидовым пространством, его обозначают Е,
3. В бесконечномерном линейном пространстве С (fl, 6] всех функций, не-
прерывных на отрезке (о, />|, скалярное произведение двух его функций х (г),
y(t) определим формулой
Ь
(х, у) «= J х (Т) у(т) Л. (9.16)
а
Непосредственной проверкой можно убедится в том, что аксиомы I - IV скаляр-
»
иото произведения будут выполнены, в частности (х, х) » J х2(Г)Л > О при
х(/)*0, (х,х) = О при х(г)"0.
Следовательно, линейное пространство С (а, 6] с указанным определением скаляр-
ного произведения любых двух его элементов является евклидовым пространством.
Норма вектор» евклидова пространства- Нормой вектора евклидова про-
странства называется арифметическое значение корня из скалярного квадрата
этого вектора Норму вектора х обозначим | х тогда по определению
|х| = 7(Гю-^. (9.17)
Норма вектора обладает следующими свойствами: 1) | х | = 0 тогда и только тогда.
158
когда х = 0; 2) |ах|| = |<х| |х|, где а-действительное число, 3) |(х.у)|$|х||у|;
оЬуНФМ
Неравенством Коши - Буняковского называют неравенство
|(х,у)|ф| |у|. (9.18)
а неравенством треугольника - неравенство
|*+у|^|*|+|у| (9.19)
Запишем норму и неравенства (9 18). (9.19) для векторов (элементов) каждого
из рассмотренных выше евклидовых пространств.
В евклидовом пространстве К, с обычным определением скалярного произведения
норма вектора совпадает с его длиной, т. е. | а || = | а |. это следует из формул
а3«|а| и (9.17). Неравенства (9.18) и (9.19) принимают соответственно вид
|(a,b)|^|a| |b|, |а + b|£|а| +1bj. Отмстим, что неравенство | (а, Ь)|з|а||Ь|
следует из формулы (3.18) Неравенство |a + b|€|a|+|b| следует из определений
суммы векторов и длины вектора, оно имеет простой геометрический смысл (в тре-
угольнике сумма длин двух сторон больше длины третьей стороны)
В евклидовом пространстве С (о, 6] норма элемента х(т) определяется формулой
ь со |«*(*)<*.
неравенства (9.18) и (9.19) принимают вид
* Г* F
Jx (О у (I) Л £ I jх’(1) Л 11/(0 Л.
П г* г*
J j(*(О+ >(«))’ л « J |х’(ОЛ + I jy2(t)dt
В евклидовом пространстве Е, со скалярным произведением (9.15) норма
элемента x = (xt,x2,определяется формулой
а неравенства (9.18) и (9.19) принимают вид
| *|Л++•••+*яуя |
V<*i+^)1+(xi+>2)2+" +(*.+>’,,)2
«7л?+*»+-+*-+7у? + И+-+>4-
1КО
Угол между двумя векторами евклидова пространства. Углом между двумя
векторами х и у евклидова пространства называется угол ф, для которого
Урт (0:5ф<2я).
(9.20)
cos<p =
Отметим, что в пространстве К, всех свободных векторов введенное понятие угла
совпадает с понятием утла, рассматриваемого в векторной алгебре
Два вектора евклидова пространства называются ортогональными. если их скаляр-
ное произведение равно нулю. Очевидно, ну тфвой вектор ортогонален любому другому
вектору. В пространстве У, ортогональность векторов означает их перпендикулярность.
Из определений следует, что ненулевые векторы к и у ортогональны тогда и
только тогда, когда созф = 0.
Равенство
|(*.У)|=НМ (921)
выполняется тогда и только тогда, когда к и у коллинеарны (у = ах ) Другими словами,
в формуле (9.18) равенство достиг везся лишь в случае коллинеарности векторов я и у.
Ортонормнроынный базис. Система векторов а,,а2, ...,а„ называется ор-
тогональной, если эти векторы ортогональны, т. е. (a,, at) = 0 при i * к
Теорема 9.7. Ортогональная система ненулевых векторов линейно независима
Вектор а называется нормированным или единичным, если | а || = 1. Если а -
ненулевой вектор, то каждый из векторов
<=на,’"ы (922)
будет нормированным Нахождение для данного вектора нормированного векторе
по формулам (9.22) называется нормированием данного вектора, а множитель
р = 1/± I а ] - нормирующим множителем.
Система векторов е,, е2,...,е„ называется ортонормировая ной, если она орто-
гональна и каждый вектор является нормированным, т. е.
[0. при i* к,
[1, при /=*.
(923)
где /,4 = 1,2,...,л.
Базис п-мерного евклидова пространства называется оргонормированным, если
базисные векторы образуют ортонормированнуто систему
Теорема 9.8. Во всяком евклидовой п-мерном пространстве (л 2 2) суще-
ствует ортонормированный базис.
Выражение скалярного произведения через координаты векторов в орто-
нормированием базисе. Пусть в п-мер»<ом евклидовом пространстве фиксирован
оргонормированный базис е(, е2,..., е„ и даны векторы этого пространства
ж = х,е, + х2е2 + •••+ х,е.. у = у& + УА + — + УЛ (9.24)
160
Скалярное произведение этих векторов выражается формулой
(x,y)=xly1 +*гЛ
Отсюда следует, что
(9.25)
9.8. Унитарное пространство
Комплексное линейное пространство U называется у янтарным пространством,
если каждой парс векторов я, у е U поставлено в соответствие комплексное чис-
ло. обозначаемое (ж. у) и называемое скалярным произведением векторов ж и у.
причем выполняются следующие аксиомы. 1. (ж, у) = (у,х),
II. (х + у,х) = (х,х) + (у,х), Ill. (ах, у) ж а (х, у), IV. (х,х)>0 если х#0. для
всех х, у, хе(7 и всех аеС (С - множества комплексных чисел).
Замечание. Черта означает комплексную сопряженность (у,х) -
комплексное число, сопряженное комплексному числу (у, х).
Из аксиом скалярного произведения в унитарном пространстве вытекают сле-
дующие свойства:
1) (х, у+х) = (х,у) + (х, х) для любых х,у,хе(/;
2) (х,ау)=<х(х, у) для любых х.уе(/ и любого а е С;
3) (О, х) = (х, 0) = 0 для любого х е U;
Примером унитарно!о пространства является множество С, упорядоченных
систем п комплексных чисел
« = («!.«2..««Л У = (₽!.₽2....ЭД..,
для которых скалярное произведение определено формулой
(х,у) = а,р,+аД + -+а.₽..
где Р, - комплексное число, сопряженное числу Р, (4 = 1,2,..., л).
Унитарным преобразованием комплексного линейного пространства называется
линейное преобразование, сохраняющее положительно опредезениую эрмитову форму
Х|Х| + х2х2 + — +хжх„ где jti.Xj,...,*,,- координаты вектора пространства В ор-
тонормированием базисе относительно эрмитова произведения, задаваемого этой фор-
мой, унитарное преобразование записывается унитарной матрицей .Унитарной матри-
цей называется квадратная невырожденная матрица А. удовлетворяющая условию
А1 = Аг, где А'1 — обратная матрица. А1 - транспонированная и комплекою-
сонряженная матрица. Определитель унитарной матрицы по модулю равен единице.
Все характеристические корни унитарной матрицы по модулю равны единицы. Всякая
(действительная) ортогональная матрица есть в то же время унитарная матрица
6 Зак I
161
Глава IQ
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ
(ЛИНЕЙНЫЕ ОПЕРАТОРЫ)
10.1. Линейное преобразование и его матрица
Если указано правило /, по которому каждому вектору ж линейною простран-
ства V ставится в соответствие единственный вектор у этого пространства, то бу-
дем говорить, что в нем задано преобразование (отображение, оператор) / или
задано преобразование пространства V в себя, и писать /: F —♦ V. Говорят также,
что преобразование/ переводит вектор к в вектор у, и пишут у = /(к). Вектор у
называют образом вектора к, а к - прообразом вектора у
Преобразование, при котором каждый вектор имеет единственный прообраз,
называется взаимно однозначным (или биективным).
Преобразование / линейного пространства V называется линейным преобразо-
ванием (линейным оператором), если для любых векторов этого пространства
ж,, х2, к и любого действительного числа К выполняются условия
1)/(х,+х2)=/(х,)+/(х2); 2)/(Xx)=VOO-
(Если рассматривается комплексное пространство. то X - любое комплексное число.)
Из этих ус.ювий следует, что
/(ах,+Рх2)«цС(Х|)+й<(х2Х (Ю.1)
где а, 0 - любые чиста (действительные или комплексные). Обратно, из равенст-
ва (10.1) следуют условия 1) и 2). Итак, линейное преобразование (линейный опе-
ратор) определяется равенством (10.1).
Отметим, что линейное преобразование переводи! нулевой вектор в нулевой,
так как, согласно условию 2), /(0) = /(0х) = 0/(х) = 0
Простейшим примером линейного преобразования является тождественное
преобразование или преобразование /(х)=х, т.е. преобразование. которое каж-
дому вектору линейного пространства ставит в соответствие тот же вектор Ли-
нейное преобразование будет вполне определено, если заданы образы базисных
векторов рассмафиваемого пространства
Пусть /-линейное преобразование «-мерного линейного пространства, пере-
водящее базисные векторы е,,е2.е„ в векторы ej,e2,...,e'. Каждый из по-
следних векторов разложим по базису•:
•2 = а12с( +ви*2 +'”+<,я2е),
•i = °ue! +<’1Л + —+
162
н которой к й столбец СОСТОИТ ИЗ координа!
вектора е, (4 = 1,2,..., л), называется мат-
рицей линейного преобразования / в базисе
е(,е2....ранг г матрицы А называется
рангом преобразования /, а число (л-г) -
дефектом этого преобразования Итак, каждому линейному преобразованию л-
мернгм о линейнот о пространства соответствует матрица порядка л в данном бази
се; и наоборот, каждой матрице порядка л соответствуег линейное преобразование
л-мерно!о пространства
Отмстим, что матрица тождественного преобразования в любом базисе будет
единичной; обратно, любой единичной матрице л-го порядка соответствуег тож-
дественное преобразование линейного л-мерного пространства
Пример 10.1. В пространстве Иг всех свободных векторов на плоскости
определим преобразование поворота всех векторов вокруг начата координа! на угол
<р. Каждому вектору ж (рис 10 1) этой плоскости ставим в соответствие вектор
у - /(ж), полученный вращением вектора ж на один и тот же угол ф. Эго цреобра
зованнс является линейным, поскольку условия 1) и 2), определяющие линейное
прсобраюванис. будут выполнены Найдем матрицу этого линейного преобразова
ния в базисе i. j (рис. 102, а. 6) Так как /(1)=ОА+ОВ= 1сокфт)$тф,
/(J) = OC + OD = -isin9 +|<хжф, то
163
10.2. Линейное преобразование в координатах
Рассмотрим линейное преобразование f п-мерного линейного пространства, за-
данное в некотором базисе е„е2,...,е„ матрицей
(10.2)
Координаты вектора ж и его образа у = /(ж) известны:
х >Х|С| + х2е2 + •• • + х.е,, /(ж) = >(е| + у2е2 + — *>,»«• (>03)
Зависимость между координатами векторов хну выражается формулами
>i "в||-«|+в|Л + "*+в|А.
у, =а21х,+в22х2+-+а2жх„ 04)
У„ +аюла + — + в«^«
Формулы (10.4) можно записать в матричном виде
Г- АХ, (10.5)
где А определяется формулой (10.2), а X и У - формулами
Если переменные у„ у2.....у„ связаны с переменными x^Xj. — .x, форму-
лами (10.4), то будем говорить, что задано линейное однородное преобразование
переменных с матрицей А, переводящее переменные Х|,х2,...,хв в переменные
Ут, у2,.... Ув. Оно обладает теми же свойствами, что и линейное преобразование
л-мерного линейного пространства. Линейное однородное преобразование пере-
менных (10.4) или (10.5) называется невырожденным, если det А # б
Замечание. При рассмотрении линейных преобразований (линейных
операторов) пользуются и другими обозначениями. Если у = /(х\ где /-
линейное преобразование (линейный оператор) с матрицей А в некотором базисе,
то пишут у = Ах. Условия 1) и 2), определяющие линейное преобразование, мож-
но записать в виде А (х,+х2)= Ах, + Лх2, А(кх) = ХАх.
164
10.3. Зависимость между матрицами одного
и того же преобразования в различных
базисах. Подобные матрицы
В n-мерном линейном пространстве фиксируем два базиса: «„«j,...,®, и
ej,е2,..., е'; первый из них назовем старым, второй - новым. Предположим, что
известно преобразование, переводящие старый базис в новый
Теорема 10.1. Если ®|,е2, ...»•„ и С|,е2>...,е' - два базиса линейного про-
странства, А - матрица линейного преобразования в старом базисе е,, е2..
то матрица В этого преобразования в новом базисе ef, е2,...,е^ имеет вид
В=7~*АТ. (10.6)
где Т - матрица перехода от старого базиса к новому
Следствие. Если линейное преобразование имеет невырожденную
матрицу в некотором базисе, то матрица этого преобразования будет невыро-
жденной в любом другом базисе
Матрица В называется подобной матрице А, если существует невырожденная
квадратная матрица С, удовлетворяющая равенству В =С~'А('
Две квадратные матрицы А и В порядка п тогда и только тогда являются мат-
рицами одного и того же линейного преобразования пространства Г, в соответст-
вующих базисах, когда матрица В подобна матрице А
Пример 10.2. В базисе е,, е2 преобразование / имеет матрицу
11айги матрицу преобразования f в базисе е[ = 2е, + е2, ej бе, + 4е2.
Так как
10.4. Характеристическое уравнение линейного
преобразования
Теорема 10.2 Если линейное преобразование f в базисе е(1 е2,..., е„ имеет
матрицу Айв базисе ej. е'2.е' — матрицу В. то
dct(A-k£)=det(fl-X£), (10.7)
где X — любое действительное число, Е — единичная матрица п-го порядка
165
Отмстим, что det (Л-ХЕ) является многочленом степени л относительно X и
называется характеристическим многочленом матрицы А или характеристическим
многочленом линейного преобразования /.
Замечание. Равенство (10.7) означает, что характеристический много-
член линейного преобразования остается неизменным при переходе к новому ба-
зису; матрица линейного преобразования меняется.
Характеристическим уравнением литейного преобразования называется уравнение
det (Л-ХЕ) =0. (10.8)
где А - матрица этого преобразования в некотором базисе. Очевидно, характери-
стическое уравнение не зависит от выбора базиса Уравнение (10 8) называют
также характеристическим уравнением матрицы А, а корни уравнения -
характеристическими числами линейного преобразования f или характеристиче-
скими числами матрицы А.
Если линейное преобразование / в некотором базисе е1,е2,...,еп имеет
квадратную матрицу л-го порядка А - (а*), то характеристическое уравнение
(10.8) запишется так:
°u ~Х
'и
'» ~ X
= 0.
(10.9)
~Х
Левая часть равенства (10.9) является характеристическим многочленом
матрицы А; обозначим его /^(Х), тогда характеристическое уравнение
(10.9) примет вил /^,(Х) = 0.
Пример 10.3. Найти характеристический многочлен и характеристи-
ческие числа матрицы
4 -1 -2*
2 1 -2
I -1 I
В соответствии с определением характеристического многочлена получаем
4-Х
2
1
-1 -2
1-Х -2
-1 1-Х
^(Х) = (4-X) (1-Х)2+4 + 2 + 2 (1-Х) + 2 (1-Х)-2 (4-X) = -Х’+ 6Х2 -11Х + 6.
Приравнивая этот многочлен нулю, находим характеристическое уравнение
-Хэ+6Х2-11Х+6 = 0 или ХЭ-6Х2+11Х-6 = 0 Разлагая левую часть этого
166
уравнения на множители X’- 6Х2 +1IX - 6 = X1 - X2 - 5Х2 + 5Х+ 6Х - 6 =
= Х1(Х-1)-5Х(к-'1) + 6(Х-1) = (Х-1)(Х2-5Х + 6), привадим данное уравне-
ние к виду (Х-1)(Х2-5Х + 6)= О, откуда X, - 1, Х2 = 2, X, =3. СИп корни -
характерно! ическис числа данной матрицы.
10.5. Собственные векторы линейного
преобразования
Ненулевой вектор к линейного пространства называется собственным век-
тором линейного преобразования f этого пространства, если существует
число к такое, что
/(ж)=*ж, (10.10)
причем к - действительное число для действительно!о линейного пространства и
комплексное число в случае комплексного пространства. Число к называется соб-
ственным значением вектора ж относительно преобразования f Равенство (10.10)
можно записать в матричном виде
АХ^кХ. (1011)
где Л - матрица преобразования / в некотором базисе, X - матрица-столбец из
координат собственно!о вектора ж в том же базисе Ненулевая матрица-столбец X,
удовлетворяющая уравнению (10.11), называется собственным вектором-столбцом
матрицы А с собственным значением к.
Собственные векторы и собственные значения обладают стаду тощими свойствами.
1. Собственный вектор линейного преобразования имеет единственное
собственное значение к.
2. Если ж - собственный вект ор линейного преобразования / с собственным
числом к и X - любое, отличное от нуля число, то Хх - также собственный век-
тор преобразования /с собственным значением к
3. Если х и у - линейно независимые собственные векторы линейного пре-
образования /с одним и тем же собственным значением X. то х + у - также соб-
ственный вектор этого преобразования с собственным значением к.
4. Если ж и у - собственные векторы линейного преобразования /с собствен-
ными числами кит, причем к # т, то ж и у линейно независимы.
Следствие. Если Х|,ж:,..., х„ линейно независимые собственные
векторы линейного преобразования f с одним и тем .ясе собственный значением к.
то любая нетривиальная линейная комбинация этих векторов является собст-
венным вектором этого преобразования с собственным значением к
Теорема 10.3. В комплексном линейном пространстве все корни
характеристического уравнения и только они являются собственными
значениями линейного преобразования
167
Координаты собственного вектора x=(x1,xJ.х„) находятся из систе-
мы уравнений
(ап - *)х, +а12х2 + •••+в1лх. = 0.
втЛ+(ви-*)хт+" + въЛ. =°>
а„|Х| +а„л + • + (аяв-*)х, = 0.
Эта система имеет ненулевое решение тогда и только тогда, когда ее определю ель
равен нулю (см. следствие из теоремы Крамера), т. е.
вц“* ви — °1«
ан Ojj-k ... а»
(10.13)
Эго означает, что число к является корнем характеристического уравнения
Замечания 1. Уравнение (1013) является алгебраическим уравнением л-
й степени относительно к Такое уравнение имеет ровно п корней, считая равные и
комплексные. Среди корней этого уравнения может нс окатагься действительных.
2. Собственными значениями линейного преобразования действительного
пространства являкпея только действительные корни харахтермстичсског о уравнения
Собственные значения линейного преобразования называются также собствен-
ными значениями матрицы этого преобразования. Собственное значение называется
m-кратным, если оно является m-кратным корнем характеристического уравнения
Теорема 10.4 Корни характеристического уравнения действительной
симметрической матрицы являются действительными числами
Следствие. Действительная симметрическая матрица имеет только
действительные собственные векторы
Система (10.12) для определения координат собственного векторе в этом случае
имеет только действительные решения, так как а^ и к- действительные числа
Теорема 10 5. Собственные векторы действительной симметрической
матрицы, соответствующие различным собственным значениям, ортогональны
Пример 10.4. Найти действительные собственные значения и собствен-
ные векторы линейного преобразования с матрицей
‘4-57’
А- 1-4 9
-4 0 5
Составляем характеристическое уравнение матрицы А
4-Х -5 7
I -4-Х 9
-4 0 5-Х
= 0 или Х’-5Х2+17Х-13 = а
168
Разложим на множители многочлен в левой части уравнения: 1’ -
-512+171-13= I2-!2-412 + 41 + 131-13= 12(1-1)-41(1-1)+13(1-1) =
= (1-1)(12 -41 + 13). Уравнение принимает вид (1-1) (К2-41+ 13) = 0, откуда
1, = 1, 12 = 2 - 31, I, = 2 + 31. Следовательно, линейное преобразование с данной
матрицей имеет только одно действительное собственное значение 1 = 1.
Для отыскания соответствующего собственного вектора используем систему
уравнений (10.12), которая принимает вид
(4 -1) х( - 5х2 + 7xj = 0, ЗХ| - Sxa + 7х, » 0.
х,-(4 + 1)Х] + 9х, =0, и X, -Sxj + 9х) «0,
-4х,+(5-1)хэ=0 -4x,+4xj=0
при 1=L Решая полученную систему, находим x,=Xj, Xj=2x,. Полагая х, = 1,
получаем собственный вектор к = (1,2,1).
Замечание. Собственный вектор линейного преобразования определяет-
ся с точностью до произвольного множителя (см свойство 2 собственно»о вектора).
10.6. Приведение матрицы линейного
преобразования к диагональному виду
Теорема 10.6. Л/атрица линей ногопреобраэоваиия имеет диагональный вид
Он 0 ... 0
0 0 ... ew
тогда и только тогда . когда каждый базисный вектор является собственным
вектором этого преобразования
Матрица Л называется приводимой к диагональному виду. если существует не-
вырожденная матрица Т такая, что матрица 1'АТ - Н является диагональной
Следовательно, если матрица А приводима к диагональному виду, то
1, 0 ... О'
0 1, ... 0
D 3 ,
О О ... 1,
где I,, 12...1, - характеристические числа матрицы А.
Теорема 10.7. Матрица А линейного преобразования/л-мерного линей-
ного пространства приводима к диагональному виду тогда и только тогда ,
когда существует базис этого пространства . состоящий из собственных
векторов данного преобразования.
Если все собственные числа матрицы А попарно различны, то матрица
приводится к диагональному виду.
169
10.7. Действия над линейными преобразованиями
Произведение преобразований. Рассмотрим преобразование/. переводящие
вектор х в вектор у, т е. у = /(х). К вектору у применим преобразование g,
переводящие вектор у в вектор х, т. с. x=g(y). Так как у = /(х\ то имеем
преобразование x=g(/(x)), переводящее вектор х в вектор х, причем х по-
лучен в результате последовательного применения преобразований fug Пре-
образование, заключающееся в последовательном применении преобразова-
ний f и g, называется произведением преобразования f на преобразование g
или композицией этих преобразований и обозначается go/ (или просто gf);
отмстим, что справа записывается первое преобразование. Таким образом,
g°/U)=g(/(*)) (10.I5)
Произведение линейных преобразований является линейным преобраюианнсм
Теорема 10.8. Если в некотором базисе линейные преобразования fug
имеют соответственно матрицы Лив. то их произведение gf в том же
базисе имеет матрицу В А.
Сумма преобразований. Суммой преобразований fug некоторого про-
странства называется преобразование h такое, что для любого вектора х
этого пространства
A(x)=/(x)+g(x). (I0.I6)
Сумму преобразований/и g будем обозначать / + g. Очевидно / + g = g + /.
Теорема 10.9. Если линейные преобразования f и g в некотором базисе
имеют соответственно матрицы А и В. то преобразование f + g в том же
базисе и меет матрицу А у В.
Пример 10.5. Даны два линейных преобразования
х(* = 7х( + 4х,, х"= Xj -6xJ,
Xj=4xa-9Xj, xj=3x|+7xj,
х£=ЗХ|+хг. xj’=x£+xj —Xj.
Средствами матричного исчисления найти преобразование, выражай инее
Xpxj.xj' через x^Xj.x,.
Первое преобразование задано матрицей А, второе - матрицей В, где
’7 0 4‘ 0 1 -6
л = 0 4 -9 . в = 3 0 7
3 1 0 1 1 -1
170
Искомое преобразование в соответствии с теоремой 10.8. имеет матриц)' ВЛ.
Умножив матриц}' В на матриц}' А, получим
0 I -61 г 7 0
3 0 7
1 I -I
-2
7
3
-9
12
-5
0 4
3 1
Следовательно, искомое преобразование определяется формулами
Х|"«-18т| —2х2 -9хэ, х2 “ 42х, + 7х2 + 12л,. х“* 4х, + 3х2 —5х,.
10.8. Невырожденные линейные преобразования.
Преобразование, обратное данному
Линейное преобразование называется невырожденным, если его матрица является не-
вырожденной, в противном случае линейное преобразование называется вырожденным
Теорема 10.10. Линейное преобразование является невырожденным тогда
и только тогда, когда оно взаимно однозначно.
Следствие. Линейное невырожденное преобразование ненулевой век-
тор переводит в ненулевой, обратно также верно если линейное преобразование
ненулевой вектор переводит в ненулевой. то оно будет невырожденным
Теорема 10.11. Произведение двух линейных невырожденных преобразова-
ний есть невырожденное линейное преобразование Преобразование ф называет
ся обратным преобразованию f если для любого вектора к
/ф(ж)^(ж)=ж, (10.17)
т. с проитвеление этих преобразований является тождественным преобразовани-
ем Из определения следует, что если ф - преобразование, образное преобразова-
нию /, то/- преобразование. обратззое ф. Преобразования / и ф. удовлетворяющие
условию (10.17), называются взаимно обратными.
Линейное преобразование имеет обрапзое преобразование тозда и только то-
зда, когда оно является невырожденным.
Для лзобого невырожденного линейного преобразования с матрицей А в неко-
тором базисе существует сдинст венное обрапзое преобразование с матрицей А-1
в том же базисе.
Пример 10.6. Найти линейное преобразование, обратное преобразова-
нию у, »2х,-ж,, у2 = -3х, + х2 + х„ у,=2х,-х2.
Это преобразование имеет матриц}1 А, определи!ель которой отличен от нуля,
поэтому для него существует обрагпзое преобразование с матрицей А '. Так как
а = 2 0 -Г -3 1 1 2-10 . х-‘ = ’ 1 1 Г 2 2 1 1 2 2
то образное преобразование выражается формулами х, = у\ + у2 + у}.
х2=2у, +2у2+уз, х2 = У) + 2у2 + 2yj.
171
10.9. Ортогональные матрицы
Матрица
вп а12 ••• °|»
(10.18)
. ая2 ... а„
1-1
называется ортогональной, если соответствующая ей система векторов
«Дви.Оц.................................0.2Х - •»(“!..Оы...“-) (10.19)
является ортонормнрованной.
Векторы (10.19) будут ортонормированиями (см. п. 9.7), если
I. / = /.
(10.20)
0, /#/
для любых i,j (/,/=1,2,..., и).
Примеры ортогональных матриц:
cosot -sina 1 Г 0,8 -0,61 10
sina сова J’ [-0,6 -0,8]’ 0 I
Отмстим, что единичная матрица любого порядка является ортогональной
Теорема 10.12. Необходимое в достаточное условие ортогональности
матрицы А выражается равенством
AJA = E, (10.21)
Ale АТ - матрица, полученная ил матрицы А транспонированием, Е -
единичная матрица того же порядка, что и А.
Следствие 1. Модуль определителя ортогональной матрицы
равен единице.
Следствие 2. Ортогональная матрица является невырожденной
матрицей
Следствие 3. Произведение двух ортогональных матриц есть ортого-
нальная матрица
Следствие 4. Равенство АТ * А~‘ выражает необходимое и доста-
точное условие ортогональности матрицы А
Следствие 5. Матрица полученная транспонированием ортогональ-
ной матрицы, является ортогональной
Следствие 6 Матрица, обратная ортогональной матрице, является
ортогонал ьной
172
Замечания.!. Из условия detA = ±l не следует, что А-
ортогональная матрица. Например, матрица А = j, для которой det А = L не
является ортогональной, так как А1А # Е.
2. Сумма ортогональных матриц нс является ортогональной матрицей.
3. Необходимое и достаточное условие ортогональности матрицы А мож-
но выразить равенством АА г = Е.
Теорема 10.13. Матрица перехода от одного ортонормированного базиса
к другому является ортогональной
10.10. Ортогональные преобразования
Линейное преобразование евклидова пространства называется ортогональным,
если в некотором ортонормировамном базисе его матрица ортогональна
Теорема Ю. 14. Линейное преобразование евклидова пространства являет-
ся ортогональным тогда и только тогда, когда оно ортонормированный базис
переводит в ортонормированный.
Теорема 10.15 Ортогональное преобразование не мензлет скалярного про-
изведения векторов
Следствие I. При ортогональном преобразовании / остается неиз-
менной норма вектора, т. е.
Следствие 2. При ортогональном преобразовании / остается неиз-
менным угол между векторами, т. е
(«.у) (/(«К/(у))
Ортогональные преобразования обладают следующими свойствами.
1. Ортогональное преобразование является невырожденным.
2. Для любого ортогонального преобразования существует обратное преобра-
зование, являющееся ортогональным.
3. Если ортогональное преобразование имеет матрицу А, то обратное ему
преобразование имеет матрицу Лт.
4. Произведение двух ортогональных преобразований является ортогональ-
ным преобразованием.
173
Гпт 11
КВАДРАТИЧНЫЕ ФОРМЫ
11 .1. Квадратичная форма и ее матрица
Квадратичной формой /(.Х\,хг..л„) п действительных переменных
*|. *1. • . х„ называется сумма вида
Л*1. .... *„)=О||«? ♦ +
+ О21ЖТ*|+вП*2 +“'+а1<г*Л +
+<Wi +алХ„хг + - + ажгх’,
ИЛИ
Я*!,*,, (,U)
Я /-1
где а* - некоторые числа, называемые коэффициентами. Нс ограничивая общ-
ности, можно считать, что = а
Квадратичная форма называется действительной или комплексной в зависимости
от того, являются ли ее коэффициенты соответственно действительными или ком-
плексными числами. Кулем рассматривать действительные квадратичные формы
Матрицей квадратичной формы называется матрица, составленная из ее
коэффициентов Квадратичной форме (11.1) соответствует единственная
симметрическая матрица
°п аи ••• °Тл
.4.1 ал —
И наоборот, всякой симметрической матрице (11.3) соответствует единственная
квадратичная форма с точностью до обозначения переменных.
Рангом квадратичной формы называют ранг ее матрицы Квадратичная форма
л переменных называется невырожденной, если се матрица невырожденная, т. е.
г = и, и вырожденной, если г < л.
Квадратичную форму (11.1) л переменных Xj.Xj, .... х„ можно записать в мат-
ричном виде. Действительно, если X- матрица-столбец из переменных
174
*i,x2...х„, X1 - матрица, полученная транспонированием матрицы X, т.е.
матрица-строка из тех же переменных, то
f(xl,xi,...,x,,)= Х'АХ, (11-4)
где А определяется формулой (11.3).
Пример 11.1. Записать матрицу квадратичной формы /(Xj.Xj.Jtj)®
= *’ - 6x,x2 - 8X|Xj + 7xJ + 4*2X3 - 5х, и найти се ранг.
В данном случае ап=1, Оц = а21=-3, Оц-вце-*, ап-7, а2, =
-0,2=2, ап= -5, поэтому
I -3 -4
А = -3 7 2
-4 2 -5
Вычислим определитель этой матрицы
I
det А =
2 --35 + 24 + 24- 112 + 45-4 «-58
Так как det А * 0, то ранг матрицы равен трем (г 3). Эта квадратичная форма
является невырожденной, поскольку г = п.
11.2. Преобразование квадратичной формы при
линейном однородном преобразовании
переменных
Рассмотрим квадратичную форму (11.1). Перейдем к новым переменным ••••>» по формулам
*1 = Ai>'i + АгЪ + — + Ьъ,У,' х2 *1>пУ\ +^22У-г + *" + АмУя» (U.S)
* ЖА1У| +Ь.аУ2 +•♦ АЬ„уя,
или в матричном виде
X = BY, (116)
где
*1 Ai Аг ••• A. >’i
Х = g= Al Аг — А« у_ Уг (117)
.х» Ai Аг — A. J у,.
В квадратичной форме (11.1) вместо Х|,х2,...,х, подставим их выражения
чсРвз М’Л. —определяемые формулами (11.5), получим квадратичную
175
форму ф(_>>!, у2, Уя) п переменных с некоторой матрицей С. В этом случае го-
ворят, что квадратичная форма /(х,,х2,...,хя) переводится в квадратичную форму
Ф (>!•>»...>я) линейным однородным преобразованием (11.5). Линейное одно-
родное преобразование (11.6) называется невырожденным, если de! В # 0.
Две квадратичные формы называются конгруэнтными, если существует невы-
рожденное линейное однородное преобразование, переводящее одну форму в дру-
гую. Если /(хьх2.....х„) и ф(у>х.уг,...,уя) конгруэнтны, то будем писать
/(*». *г *») ~ Ф (Л. Уг Уя) •
Свойства конгруэнтное! и квадратичных форм.
• Л*|. *1..*« ) ~ Л*з. *г.*•) •
2. Если Дх„х2.....*.)~Ф(Л.Л......>яХ Ф(Л.Л......................г-Х
то ДхрХ,.....*W)~V(Z|,*„...,X11X
Теорема 11.1. Квадратичная форма f\xx, х2,...,х„) с матрицей Л линей-
ным однородным преобразованием X = Bt переводится в квадратичную форму
Ф(у,.у2,...,у«) с матрицей С “ В1 АВ
Следствие I. Определители матриц конгруэнтных невырожденных
действительных квадратичных форм имеют одинаковые знаки.
Следствие 2. Конгрузнтиые квадратичные формы имеют одинаковые ранги
11.3 . Приведение действительной квадратичной
формы к нормальному виду
Квадратичная форма /{х,, х2,..., х.) называется канонической. если ома не
содержит произведений различных переменных, т. е.
— (т5л). (11.8)
Каноническая квадратная форма называется нормальной (или имеет нормаль-
ный вид), если | аж | = I (з 1,2,.... г), т. е. отличные от нуля коэффициенты при
квадратах переменных равны +1 или -L Например, квадратичная форма
/(x1,x2,xj,x4) = 6x’+4xJ-SxJ, для которой а,, «6, аи =0, ап = 4, а^=-3,
имеет канонический вид; квадратная форма /(х(,х2,х2,х4)=Х|- — xj+xj явля-
ется нормальной, так как <х1( = 1, а23 = 0, аи = -1, а*4 = 1.
Теорема 11.2 Любая квадратичная форма некоторым невырожденным
линейным преобразованием может быть приведена к каноническому виду
Ф(Л. Уз....Уя)= *>1Гз2 +Ьх2У} + •• + ^Ую
где У\,У2,-..^Уя ~ новые переменные
Некоторые из коэффициентов Ь„ могут оказаться ранными нулю, число отличных
от нуля коэффициентов в этой формуле равно рангу г матрицы квадратичной формы ф.
176
Теорема 11.3. Любую действительную квадратичную форму линейным не-
вырожденным преобразованием можно привести к нормальному виду1
V («I. zi.*•)“*? +*я + — + **-i ~ --
Число входящих сюда квадратов равно рангу формы.
11.4 . Закон инерции квадратичных форм
Закон инерции квадратичных форм выражает
Теорема 11.4. Число положительных и число отрицательных квадратов в
нормальном виде. к которому приводится данная действительная квадратичная
форма невырожденным действительным линейным преобразованием. не зависит
от выбора преобразования
Число положительных квадратов в нормальной форме, к которой приводится
данная действительная квадратичная форма, называют положительным индексом
инерции этой формы, число отрицательных квадратов - отрицательным индск-
сом инерции, разность между положительным и отрицательным индексами инер-
ции - сиптатурой формы/. Если известен ранг формы, то задание любою из трех
указанных выше чисел определяет два других
Теорема 11.5. Две действительные квадратичные формы от п пере-
менных тогда и только тогда конгруэнтны. когда они имеют одинаковые
ранги и одинаковые сигнатуры.
11.5 . Знакоопределенные квадратичные формы
Действительная квадратичная форма /(х(,х2,...,хя) называется положитель-
но-определенной, если она приводится к нормальному виду, состоящему из п по-
ложительных квадратов: /(*,.х2,...,хя)~ф(у1,уг,...,укУ, где
Ф(Л.Л......>.)=>? +Н + —+ (Н.9)
т. е. если ранг и положительный индекс инерции равны числу неизвестных.
Систему значений xb х2,....х„ назовем нулевой, если Х| = х2 =... = хя = О,
и ненулевой, если хотя бы одно из них отлично от нуля.
Теорема 11,6 Действительная квадратичная форма яв-
ляется положительно-определенной тогда и только тогда когда она принимает
положительные значения при любой ненулевой системе значений переменных
Х|,Х2,...,ХЯ.
Пусть дана квадратичная форма /<Х|,х2,...,хя) с матрицей А = (ач). Глав-
ными минорами квадратичной формы f называются миноры
177
т. е. миноры порядка 1,2,...,л матрицы Л, расположенные в левом верхнем углу,
последний из них совпадает с определителем матрицы.
Теорема 11.7. Квадратичная форма /(х|,х2,...,х.) с действительной
матрицей является положительно-определенной тогда и только тогда. когда
все ее главные миноры положительны
Действительная квадратичная форма называется отрицательно-определенной. ес-
ли она является невырожденной и приводится к нормальному виду, содержащему
только отрицательные квадраты всех переменных, эту форму можно привести к виду
ф(>|.у2....>.)->?-Я---------->.2 (п.Ю)
Теорема II.8. Квадратичная форма является отрицательно-определенной
тогда и только тогда, когда ее главные миноры четного порядка положительны,
а не четного — отрицательны.
Положительно-определенные и отрицательно-определенные квадратичные
формы называются знакоопределенными квадратичными формами.
Вырожденные квадратичные формы. нормальный вид которых состоит из
квадратов одного знака, называются полуопрслс.тсннымн
Псоп)>едслснными называются квадрагичныс формы, нормальный вид которых
содержит как положительные, так и отрицательные квадраты переменных.
Пример 112. Доказать, что квадратичная форма f(xt. х2,х,)=
= бх? + 5х2 ♦ 7х’ - 4х,х2 + 4x^3 положительно-определенная
Запишем матрице' А этой квадратичной формы и определитель матрицы А:
6-2 2 6 -2 2
А = -2 5 0 , det А = -2 5 0
2 0 7 2 0 7
6 -2
Гак как главные миноры матрицы аи = 6, -2 5 26 и det Л = 162, т е.
нее пожтжи1ельны, то данная кнгырлмчная форма является положитслынми1рсле.тен1К1й
11.6 . Приведение квадратичной формы
к каноническому виду ортогональным
преобразованием переменных
Теорема 11.9. Если существует ортогональное преобразование с матри-
цей С. приводящее действительную квадратичную форму /(ху,хг,...,х^) к ка-
ноническому виду
Ф(Х|.>2. = (П Н)
то Хь Х2,..., X. - характеристические числа матрицы А квадратичной формы f
Теорема 11.10. Для любой действительной квадратичной формы сущест-
вует ортогональное преобразование, приводящее ее к каноническому виду
Теорема 11.11. Для любой действительной симметрической матрицы А су-
ществует такая ортогональная матрица Т. что Г'АТ — диагональная матрица.
178
Следствие. Любая действительная симметрическая матрица может
быть приведена к диагональному виду.
Теорема 11.12 Если линейное преобразование действительного линейного
пространства имеет действительную симметрическую матрицу в некотором
ортонормированием базисе, то существует ортонормированный базис, состоя-
щий из собственных векторов этого преобразования
Из этих теорем следует правило нахождения ортогонально» о преобразования, при-
водящего квадратичную форму п переменных к каноническому виду. Это правило со-
стоит в следующем' I)записать матрицу данной квадратичной формы, найти ее собст-
венные значения и л попарно ортогональных собственных векторов, пронормировать
их, 2) составить матрицу из оргонормироиаяных собственных всктор-столбцов;
3) записать искомое ортогональное преобразование с помощью последней матрицы.
Пример 11.3. Найти ортогональное преобразование, приводящее к
каноническому виду квадрат ичную форму двух переменных х,,
/(•»!. *, )= 5х,' + 4х/бх1х, + 7х?. '—
Поскольку в данном стучас ап = 5, аи = в1( = 2 Уб. о„ = 7, то матрица А этой
квадратичной формы и ее характеристическое уравнение det (А - А/.) = О запишутся так
Г 5 2-/б1 15-Х 2^6 I
~[2я/б 7 J’ | 14б 7-А|~
Характеристическое уравнение (5—А)(7 —А)-24 = 0, или А’-12А + +11=0,
имеет корни А, = I, А, = 11. которые являются собственными значениями матрицы А.
Найдем собственные векторы, соответствующие полученным собственным
значениям. Координаты (я,/) этих векторов определяются из системы уравнений
(10.12), которая в данном случае имеет вид
(5-А)я+2,/б/ *0.0
2Тбя+(7-А)*«а
При А,=1, А, =11 имеем две системы
4я + 2я/бг = 0. -бя + 2я/б/=а
2я/бя + б/ = 0. 2я/бя-4т = 0.
Из этих систем находим собственные векторы и = (- (-Уб/2) t.t), v = ((7б/з) Г, Т\
где /#0. Положив Г|=-2, /, =3, получим и = (4б, -2), v = (j6,3). Нормиро-
вав эти векторы, запишем их координаты в столбцы, составим матрицу В
179
С помощью матрицы В записываем искомое ортогональное преобразование
Гз ГТ
15* iV” Х,Ж
или
£(-Лу,+ЛЛ).
Эго преобразование приводит данную квадратичную форму к каноническому виду
Ф(У|. Уз)” л2 +1 bt
11.7 . Упрощение уравнений фигур второго
порядка на плоскости
Фигурой второю 1кэрядка на плоскости называется множество точек этой плоско-
сти, декартовы координаты которых удовлетворяют уравнению второй степени
аих2 + + + =0, (11.12)
где вп.а^.а,} одновременно в нуль нс обращаются. Отмстим, что это множест-
во, в частности, может состоять из единственной точки или оказаться пустым
Первые три члена левой части уравнения (11.12) образуют квадратичную фор-
му двух переменных х, = х, х2 = у.
f(x, у) - в! ,х2 + 2atlxy + аг2у
с симметрической матрицей
(11.13)
(ИМ)
По теореме 11.10 эту квадратичную форму ортоюнальным преобразованием мож-
но привести к каноническому виду
+ Х2У
(II IS)
с матрицей
С =
(11.16)
(11.17)
где Хо Х3 — характеристические числа матрицы А, т. е. корни характеристиче-
ского уравнения матрицы А:
|°ц~Х О,} =
I Оц Ои-Х
При этом ортогональном преобразовании уравнение (11.12) примет вид
Xtxrt + Xay',+a^x'+«Jly'+<^J»O. (11.18)
Эго уравнение можно привести к каноническому виду путем выделения в левой
части полных квадратов.
Фигуру второго порядка, определяемую уравнением (11.12), называют
центральной, если det А* 0, и нецентральной, когда detA = tt
180
Отметим, что при ортогональном преобразовании переменных определитель
матрицы квадратичной формы не меняется, т. е. det С = det А. Так как
dctC = X,X2 (см. (11.16)), то
detA = k,k1. (11.19)
Пусть уравнение (11.18) определяет центральную фигуру, т. е. det Л # Ос Здесь
возможны два случая: I) Х,Х2 > 0 (числа Х( и X? одного знака), фигура называ-
ется фигурой эллиптического типа; 2) X,Xj < 0 (числа X, и Х2 имеют разные
знаки), фитура называется фигурой гиперболического типа
Если Х|Х2 # 0, то уравнение (11.18), выделив в его левой части полные квадра-
ты, можно привести к виду
М*' - Л/+)’и ч
или
Х,№ + Х2У2=д, (11.20)
тле
X-x’-V У = /-А, (11.21)
Формулы (11.21) выражают зависимость между координатами (к*, у') и (X, У)
при параллельном переносе координатных осей в точку
В случае Х,Х2 > 0 уравнение (1120) приводится к одному из канонических видов
Х'1аг + 1?1ь'-\, (11.22)
Х’/о’ + У’/б1--!, (П23)
Х’/я’ + Г’/б’жО (1124)
в зависимости от знаков X, и q: I) Х^ > 0, 2) Х,9 <0, 3) q = 0.
Уравнение (1122) определяет эллипс, уравнению (11.23) нс удовлетворяют ко-
ординаты ни одной точки плоскости, уравнению (II 24) удовлетворяют координа-
ты одной точки (X « 0, У = 0).
В случае Х,Х2 < 0 уравнение (1120) приводится к одному из канонических видов
Хг1а*-У'1&-К (11.25)
Х’/о2-У’/fc2 =-1, (11.26)
Х2/а2 - У2/б2 =0 (11.27)
в зависимости от знаков X, nq: 1) Х,$>0, 2) Х^сО. 3) 9 = 0.
Уравнение (1125) определяет гиперболу с действительной осью (\Х, уравне-
ние (11.26) - гиперболу с действительной осью О,У. уравнение (1127) - пару
пересекающихся прямых, так как оно распадается на два уравнения
А_1а0,А+Х.
а b а Ь
0. или У=-Х. Y = -~
а а
181
Обратимся к нецентральным фигурам, т.е. к случаю когда det ,4 = 0. В силу
(11.19) из равенства det Л = 0 следует, что Х,Х2 = 0. Последнее равенство означа-
ет, что одно из чисел Х,Х, равно нулю (оба числа X,, Х2 в нуль обратиться не
могут, так как это означало бы, что квадратичная форма (11.15) является вырож-
денной, чего быть не может, поскольку а,2 + в’2 + а22 # 0 ). Если а2j * 0, то урав-
нение (11.18) можно привести к виду ХДх'-Л^)2+aJjy' + ? = O и записать так:
Х,(*'-/Ь)2 = (1128)
Осуществим параллельный перенос репера (Q,e;,«2) на вектор
ОО| = + А2е2, получим новую систему координат QAY, причем X и Y опре-
деляются формулами (11.21). Уравнение (11.28) приведем к виду
X' = 2pY. (11.29)
Уравнение (11.29) определяет параболу с осью QK
Если в уравнении (11.18) а£, = 0 (и Х2 = 0). то, выделив полный квадрат, его
можно записать так:
Х,(х'-/ц)2+<7 = 0. (11.30)
Осуществив параллельный перенос репера (Q,e[, е2) на вектор ОО, =Ле,,
т.е. выполнив преобразование X Y = у", получим новую систему коор-
динат QXY, в которой уравнение (11.30) принимает один из видов:
Х2«а2, Х2=-в2, Х*-0 (11.31)
в зависимости от соотношения знаков чиСел Х| и q: X,g>0, Х(9<0, Пер-
вое из уравнений (11.31) определяет пару параллельных прямых А" = с, Х«-в,
второму уравнению не удовлетворяй» координаты ни одной точки плоскости,
третье уравнение определяет пару совпавших прямых X = 0, X = 0.
Операция перехода от уравнения (11.12) к уравнению (11.18) называется отне-
сением фигуры к главным осям. Новые оси координат параллельны осям симмет-
рии фигуры. Главными направлениями фигуры, заданной уравнением (11.12), на-
зывают направления ортогональных собственных нсюорон матрицы квадратичной
формы, соответствующей этому уравнению
Из теорем п. 11.6 следует, что существует декартова прямоугольная система
координат, в которой уравнение (11.12) принимает канонический вид. Чтобы вы-
брать эту систему координат, необходимо сделать следующее.
1. Найти ортогональное преобразование, приводящее к каноническому виду
квадратичную форму, соответствующую данному уравнению
2. С помощью этого преобразования определить главные направления фи.'у-
ры, т. е. векторы е{, е2 - ортонормированные собственные векторы матрицы
указанной квадратичной формы.
3. Найти уравнение фигуры в репере (Q, е{, е2 ).
4. Выделить полные квадраты в полученном уравнении.
5. Совершить параллельный перенос системы (Q.eJ, е^) на соответствующий
вектор ОО| и составить каноническое уравнение фигуры в репере е[, е2).
182
Пример 11.4. Какую линию на плоскости определяет уравнение
5х2 + 4-/бху + 7у2 = 22?
С помощью теории квадратичных форм приведем это уравнение к канониче-
скому виду. Левая часть уравнения - квадратичная форма /(х,у)=
Зх1 + 4Лху + 7у’, которая с точность до обозначений переменных (xt=x,
*1 = У. У| =*'. у2 = у’) (см. п. 11.6, пример 11.3) приведена к каноническому
виду ф(х*,у')= зг*’ +Н/2 посредством ортогонального преобразования х =
я-^(43х'+-Лу‘\ y = -j=(-Jix’+ 4зу').
Это преобразование данное уравнение переводит в уравнение
5 [ j (Лх' + Лу')’) + ^ (Лх' + Лу') (- Лх' + Лу') ♦
+ у(-Лх' +Лу')1 = 22, или Zl+lly'’-22
Полученное уравнение определяет эллипс с полуосями а - Л2, b = Л
11.8. Упрощение уравнений фигур второго
порядка в пространстве
Фигурой второго порядка в пространстве напивается множество точек про-
странства, декартовы координа 1ы которых удовлетворяют уравнению
«ня’ + огу’ +Oj/ + 2а,,3^ + 2д„хг + 2a2iyz ♦
+ а|4х+а24у+амг+а44 = 0, (11.32)
где а+ а’2 + а2, + a’, + o’, + а2] * 0.
Сумма первых шести членов левой части уравнения (11.32) представляет собой
квадратичную форму трех переменных, л, у, г:
/(*.У.х) = в|гХ2 +ацу’ +о,,г’ + 2о„ху + 2о,,« + 2одХ (II 33)
с симметрической матрицей
eti eu ап
Л = ‘’ll а11 вгз (11.34)
. ви °зз ,
Физура второго порядка называется центральной, если det>4#0, и нецен-
тральной, если det А = Q
С помощью ортогонального преобразования квадратичную форму (11.33)
можно привести к каноническому виду ф(х',у',г') = Хрг'2 ч-к^у'’+Х^'’, гас
183
Х|,Х2,Х2 - корни характеристического у равнения det(4-X£) = O. Матрица
квадратичной формы <р=чр(х', у', г') принимает вид
Х( 0 0 '
С-= О Х2 О
(11.35)
О О X,
У казанное ортоз опальное преобразование приводит уравнение (11 32) к виду
Х,х'2 + ‘кгу’г + Х2г'2 + а'^х’ + а'г4у' + e^z' + = 0. (II .36)
Центральные фигуры. Если deMaO, то det С= Х,ХгХ, * 0. так как
det А - det С. Выделяя полные квадраты в левой части уравнения (11.36), можно
привести в о к виду
X,JT,+X1r4X,Z2-g, (П37)
где X = x’-hf, Y = y,— h1, Z = z'-h1.
Поскольку Х|Х,Х, х 0, то ни одно из чисел не равно нулю, все эти числа могут
иметь один знак (X,ХаХ, > 0) или только два из них одного знака
I. Если все числа Х|,Х2.Х2 одного знака, то уравнение (11.37) можно при-
вести к одному из следующих канонических видов:
x'lf+Y'ib'+fie-i, (11.38)
№/a2 э-Г2/^2 + Z2/c2 - -1, (•139)
Х'/а1 +Z4<? =0 (11.40)
в зависимости от Xt и р: Х.р > 0, ХаЦ <0, g = 0.
Уравнение (11.38) определяет эллипсоид, уравнению (11.39) нс удовлетворяют
координаты ни одной точки пространства, уравнению (11.40) удовлетворяют ко-
ординаты единственной точки (X - 0, Y = 0, Z = 0).
2. Пусть знак одного из этих чисел протиэозюложен знаку двух других: предполо-
жим, что ХД2 >0. Уравнение (11.37) можно привести к одному из канонических видов
x2/fl2 + r762-z2/c2 = u (1141)
X^a^Y^^-Z^c^-i, (Н42)
X^a2 + Г2/б2 - Z2/c2 = 0 (1143)
в зависимости от Х( и ц: Х(ц > 0, Х(ц <0, ц = 0.
Уравнения (11.41) - (11.43) определяют соответственно однополосный гипер-
болоид, лвуполостный гиперболоид и конус второго порядка.
184
Нецентральные фигуры. Если det А = О, или XjXjX, ж О, то одно или два из
этих чисел равны нулю.
I. Пусть Х3 = О, * 0, тогда уравнение (11.36) приводился к виду
X,X'2+X1r2+MZ = Q (1144)
Если Х,Х2 > 0 и Х,ц < 0. то имеем
Х2/а2 + Y2/b2 = 2Z; (11-45)
в случае Х,Х2 < 0, Х,ц < 0 получаем
Л'7в,-Г7*2 = 27. (11.46)
Уравнения (11.45) и (11.46) определяют соответственно эллиптический болический параболоиды. 2. Пусть X, = 0, = 0, тогда имеем уравнение и гипср-
Х,Л(,+Х2И+у-(Х (1147)
которое приводится к одному из следующих канонических видов:
Л’/а’ + Г2/*2»!. (11.48)
(П49)
хЧ^-уЧь2^, (11 50)
Х2/а2-Y2/Ь2 =-\, (П51)
X2/a2-Y2lb2 «0. (1152)
Уравнение (11.48) определяет эллиптический цилиндр, каждое из уравне-
ний (11.51), (11.50) - гиперболический цилиндр, уравнение (11.52) - пару
пересекающихся плоскостей; уравнению (11.49) не удовлетворяют коорди-
наты ни одной точки.
3. Если Х2=Х2жО и а24*0, то уравнение (11.36) приводится к виду
XiX2 = 0 или
Х2 = 2рГ (11.53)
и определяет параболический цилиндр.
4. Если Х2 = X, = 0 и а24 = 0, то имеем уравнение \tX2 + v = 0, которое
приводится к одному из канонических видов
Х2=а2, Х2»-с2, %2=Q (1134)
Первое из уравнений (11.54) определяет пару параллельных плоскостей
(Х=а, Л' = —о), третье уравнение - пару совпавших плоскостей; второму
уравнению не удовлетворяют координаты ни одной точки пространства.
185
Пример 115. Какую поверхность определяет уравнение 6_г2+5у2 +
+ 7z2—4xy+4xz = 18?
Эго уравнение вида (11.32), для которою а|( = 6, оа = 5, ап = 7, а12 = -2,
«п = 2, 0^=0, аи = = ом = 0, «^ =-18. Левая часть данного уравнения
является квадратичной формой /(х, у, z) = 6x2+5у2+7z2-4ху + +4« трех
переменных х,у,г (х = х,,у = х2.г = х,). Составим матрицу А этой квадратич-
ной формы и характеристическое уравнение матрицы А:
л= 6 -2 2 -2 2‘ 5 0 0 7. * 6-Х -2 2 -2 5-Х 0 = 0.
2 0 7-Х
Характеристическое ) равнение (6-Х)(5- Х)(7-Х)-4(5-Х)-
-4(7-Х)=0, или Х’-18Х2+99Х-162 = 0 имеет корни к,=3. X, =6, Хэ«9,
(так как X’ - 18Ха + 99X-I62 = X’-ЗХ2-I5X2 + 45Х + 54Х-162 = X1 х
х (X-3)-15Х(Х-3)+54 (Х-3) = (Х-3) (X2 — I5X+54)).
Следовательно, квадратичную форму /(х,у, г) можно привести к виду
<р(Л", Y, Z)“3A'2 +6К2 + 9Z2. В новых координатах X. Y, Z данное уравнение
имеет вид ЗХ2 +6F2 +9Z2 = 18, или
X2/6+r2/3 + Z2/2«l.
оно определяет эллипсоид с полуосями а = Уб, b = Уз. с = У?.
186
Глауа 12
ГРУППЫ
12.1. Понятие группы. Основные определения
Группой называется множество G элементов а, Ь, с,..., для которых опреде-
лена операция (сложения или умножения), которая каждой упорядоченной паре
(в, />) элементов G ставит в соответствие единственный элемент с = а ® b данного
множества, причем операция обладает следующими свойствами:
I) операция ассоциативна, т.е. для любых в, Л, с € G
ао(Аос)«(во А)®с; (12.1)
2) в С существует нейтральный элемент е такой, что для любого элеметтта а € G
аое^еоа-а; 1122)
3) для каждого элематта а € G существует обратный ему элемент а 1 такой, что
а»в'' = е, (123)
Если, кроме того, для любых a, b € G выполняется условие
a<>b=*b»a, (12.4)
то группа называется коммутативной или абелевой группой.
В любой группе нейтральный элемент определен однозначно, для каждого
элемента существует единственный обратный элемент.
Груши состоящая из конечного числа элементов, называется конечной. Число
элементов группы называют ее порядком. Группа, не являющаяся конечной, назы-
вается бесконечной.
Группа называется аддитивной или группой по сложению, когда групповая
операция, ставящая в соответствие паре элсмеггтов (о, Ь) элемент с = а о Ь. явля-
ется сложением. В этом случае символ операции ° заменяется знаком +;
с = в + А, нейтральный элемент называют нулем и обозначают символом О;
а + 0 = 0 + и = в. Элемент, обрат ный к элементу а, натыкайи противопо.южиым и
обозначают -а :а +(-e) = (-в)+в =0.
Группа назывался мультипликативной или группой по умножению, когда группо-
вая операция, ставящая в соответствие упорядоченной парс (а, Ь) элемент с = а « Ь,
является умножением В данном случае произведение а»Ь обозначается а b или ab,
нейтральный глемент называется единицей и обозначается символом I: а 1 = 1 а = а
Произведение п элементов, равных о, называют л-й степенью э.гемента а и обо-
значают в". Отрицательные степени элемента а можно определить или как эле-
187
менты труппы G, обратные положительным степеням, или как произведения соот-
ветствующего числа множителей, равных элементу в'1. Эти определения совпа-
дают, так как верно ранено во
(а")-'=(в-'Г (н>0).
В любой группе G для степеней каждого элемента а при любых показателях т
и л (положительных, отрицательных или нулевых) выполняются равенства
» а”а* = а"а" “ в**". (о’У = в"".
Если операция в труппе называется сложением, то вместо степеней элемента а
говорят о кратных этого элемента и пишут па
В каждой мультипликативной труппе однозначно разрешимы уравнения
ах = Ь, ya^h, первое из них имеет решение хчГ'Ь, второе - у -Ьа~'.
Если группа является коммутативной, то эти уравнения не различаются, они
имеют одинаковые решения x-y=a~'h.
12.2. Примеры групп
1. Множество всех целых чисел с операцией сложения образует аддитивную
группу. Действительно, сумма а +/> двух целых чисел а и Л также является целым
числом В этом случае т оворят, что множество целых чисел замкнуто отноентельтю
операции сложения. Сложение целых чисел коммутативно: (о +/>)+ С« с+(Ь + с).
В данном множестве имеется нейтральный элемент, т.е. число 0 такое, что а + 0 = а
при любом целом числе а. Дтя каждого элемента целого числа а существует обрат-
ный элемент (противоположное число), т.с. такое число -в, что в + ( о) = 0. Рас-
сматриваемая труппа является коммутативной, так как а + h = h + а
Замечание 1. Множество всех целых чисел не образуют группу по ум-
ножению, так как обратные для целых чисел (отличных от -1 и 1) нс являются
целыми числами. Например, для числа 2 обратное число 2"1 не принадлежит
множеству целых чисел.
2. Множество всех действительных чисел, отличных от нуля, с операцией ум-
ножения образует мультипликативную группу. Эта группа является коммутатив-
ной. так как ah = ha.
Замечание 2. Множество всех действительных чисел не образует
группу по умножению, поскольку для числа 0 нез обратного.
3. Множество всех векторов трехмерного пространства образует труппу по
сложению. Эта группа является коммутативной (а + h = h + а).
4. Множество матриц размером mxn образует коммутативную группу по
сложению (Л + В = В + А). Для матрицы А обратным элементом является матрица
(- А); нейтральный элемент - нулевая матрица О.
5. Множество всех невырожденных квадратных матриц порядка п образует
мультипликативную труппу. Эта труппа, которую называют полной линейной
группой, не является коммутативной ( в общем случае АВ х ВА).
188
Замечание 3. Множество всех квадратных матриц порядка п нс обра-
зует труппу по умножению, так как для некоторых его элементов нет обратных
(вырожденная матрица нс имеет обратной)
6. Множество всех невырожденных линейных преобразований линейного
пространства образует мультшыикатинную группу.
7. Множество, состоящее из двух чисел +1,-1, образует группу по умноже-
нию. Действительно, каждой из произведений (+1) (-!) = -!, (+1) (+ I) - + I,
(-!)(-!) = + 1 принадлежит данному множеству. Умножение ассоциативно. Су-
ществует единица - число +1, которое удовлетворяет условию (-!)(+1) = -1.
(+ I) (+1) ° + L Дтя каждого элемента существует обратный каждое из этих двух
чисел совпадает со своим обратным.
Замечание 4. Множество, состоящее из двух чисел +1.-1, не образу-
ет группу по сложению, так как сумма (+!) + (-!) = О, а число 0 нс принадлежит
данному множеству. (В таком случае говорят, что данное множество не является
замкнутым относительно операции сложения)
8 Множество, состоящее из одною элемента 0, образует аддитивную группу.
Действительно. 0 + 0 = 0, сумма принадлежит данному множеству. С войства опе-
рации сложения очевидны.
9. Множество, состоящее из одного элемента I, образует мультиплика-
тивную группу.
Группа, образованная одним элементом, называется единичной.
12.3. Подгруппа
Подгруппой группу G называется подмножество Н ее элементов, образующее
группу относительно операции, определенной в G Чтобы убедится в том, что
множество Н группы С является ее подгруппой, необходимо проверить, что:
1) произведение (сумма) любых двух элементов а.ЬеН принадлежит Н; 2)для
любого элемента at II обратный элемент принадлежит Н. Этою будет достаточ-
но. так как ассоциативный -закон выполняется для любых трех элементов G, в том
числе и для элементов Н, а нейтральный элемент е (1 или 0) будет принадлежать Н
(как произведение аа’1 или сумма а + (-«)).
Примеры подгрупп некоторых трупп.
I. Множество всех действительных чисел является аддитивной группой.
Подгруппами аддитивной группы всех действительных чисел являются в част-
ности, следующие: 1) аддитивная группа рациональных чисел; 2) аддитивная
группа целых чисел; 3) аддитивная группа всех целых чисел, кратных числу к,
например аддитивная группа четных чисел.
Группа целых чисел является подгруппой группы рациональных чисел
Замечание 1. Множество нечетных чисел не образует труппу по сло-
жению, так как сумма двух нечетных чисел является четным числом (и нс принад-
лежит данному множеству).
II. Мультипликативная группа всех действительных чисел, отличных от нуля, име-
ет, в частности, следующие подгруппы: I) мультипликативную группу положительных
189
действительных чисел; 2) мультипликативную группу рацио» ильных чисел, отличных
от нуля; 3) множество, состоящее из двух чисел +1, -1 с операцией умножения
Замечание 2. Мультипликативная группа положительных действи-
тельных чисел не является подгруппой аддитивной группы всех действительных
чисел, гак как групповые операции в рассматриваемых множествах - рагные
(соответственно умножение, сложение).
TTI. Мулы индикативная группа невырожденных матриц порядка п имеет, в ча-
стности, подгруппы: I) группу ортогональных матриц; 2) группу диагональных
матриц; 3) группу матриц с положительным определителем; 4) группу матриц с
определителем, равным единицы (ттрутвга называется утгимодулярной).
Пересечение двух подгрупп группы G является подгруппой в G. Например, в
аддитивной группе целых чисел пересечение подгруппы четных чисел и подгруп-
пы чисел, крат ных трем, будет подгруппой чисел, кратных шести
Каждая группа является своей подгруппой. Далее, каждая ipynna имеет еди-
ничную подгруппу, состоящую из одного нейтрального элемента (единицы или
нуля). Эти две подгруппы называются несобственными (или тривиальными) под-
группами. Остальные подгруппы называются собственными (или истинными)
подгруппами. В любой группе все подгруппы каждой группы являются в тоже время
подгруппами исходной группы. Например, аддитивная группа петых чисел является
подгруппой аддитивной группы рациональных чисел, которая в свою очередь есть
подгругпш аддитивной группы всех действительных чисел; аддитивная груши целых
чисел - подгруппа аддит ивной г руины всех действительных чисел
12.4. Группы преобразований.
Симметрическая группа л-й степени
Преобразованием множества X называется взаимно однозначное отобра-
жение этого множества на себя Преобразование множества X обозначим бук-
вой Р Определение преобразования Р множества X означает следующее: лю-
бому элементу х € X ставится в соответствие единственный элемент х' - Рх
того же множества; х' называется образом элемента х. а х прообразом х'.
Каждый элемент х' € X имеет единственный прообраз х е X.
Умножением преобразований напивается пос.тсдокателрюс их выполнение.
Проигвсдснис двух преобразований Р, Q обогначается PQ (справа записано то
преобразование, которое выполняется первым; по определению (QP)x = £?(Лг)).
Очевидно, произведение двух преобразований данного множества является преоб-
разованием данного множество. Отмстим, что в общем случае умножение не явля-
ется коммутативным, т.е QP * PQ. Можно показать, что произведение преобра-
зований подчиняется ассоциативному закону. Роль единицы при умножении пре-
образований выполняет тождественное преобразование Е, ставящее в соответст-
вие каждому элементу множества его самого. Для каждого преобразования Р суще-
ствует обратное преобразование которое каждому элементу х' е X ставит в
соответствие его единственный прообраз х е X, причем РР~* = Р 'Р=Е Следова-
тельно, множество преобразований Жданного множества X образует группу.
190
Если множество X конечно и состоит из л элементов, то всевозможные взаимно
однозначные отображения этого множества на себя называются подстановками
Подстановку из л элементов можно обозначить так:
I 2 3 ... л
а, а, а, ... а„
|де а,, (Xj,..., а„ - те же числа 1,2,3,.... л, обозначающие данные элементы и
записанные в другом порядке.
Примеры подстановок при л = 5:
1 2 3 4 5 ) < I 2 3 4 5 А
3 1 324/ [12345 /
1234 1 4 5 3 А
3 4 5 2 1 4 3 2 '1 5 )’
Первая подстановка означает такое взаимно однозначное отображение множества
(1.2, 3,4, 5) на себя, при котором I переходит в 3, 2 - в 1 и т. д. Вторая подста-
новка называется тождественной, каждый элемент соответствует сам себе Равен-
ство двух друпзх подстановок показывает, что расположение столбцов в записи
подстановки нс и, рвет роли. Подстановки, отпинающиеся только порядком следо-
вания столбцов, не считаются различными
Умножением подстановок называют последовательное их выполнение (сначала
правого сомножителя, затем левого). Умножение подстановок ассоциативно, но не
коммутативно. Например, если
( I 2 3 4 \ f I 2 3 4 А
^2413/ ^234 1J
то
М: ” ;)• Hi:: :)• ™
Единицей при умножении подстановок из л элементов служит тождественная
подстановка
(I 2 3 ... д’)
(1 2 3 ... л)’
Каждая подстановка из п элементов имеет обратную:
Чтобы получить подстановку, обратную данной, необходимо поменять местами строки.
191
Множество подстановок из п элементов относительно введенной операции ум-
ножения образует i руппу. Группа подстановок из л элементов называется симмет-
рической группой л-й степени и обозначается Число подстановок из л элемен-
тов равно л!, поэтому группа S„ имеет порядок л!.
Рассмотрим группу подстановок из трех элемстгтов а, Ь, с. Поскольку из трех элемен-
тов можно составил, шесть различных перестановок abt, acb. Ьас. Ьса, сЫ>, cba. то
и число различных подстановок для них равно шести (п » 3.3! = I 2 3 = 6).
Обозначим эти подстановки следующим образом:
6с] ( а b
Ь е
ас) I о с
С 1 ( а b с
I • Л = I
b I I с b а
b
Отметим, что I] - тождественная подстановка; для каждой подстановки су-
ществует обратная
Л-'« Л. - Л. р»' = V* - с». = Ру
Группа 5, (симметрическая iруппа подстановок из 3 элементов) некоммута-
тивна, поскольку, например, PJ\ = Рг, l\Pt Г,. т. е. РЛР5 # Р$Р4.
Таблица 12.1
р, Ру Рг Ру Ра Ру Ра
Ру Ру Рг Ру Ра Ру Ра
Ру Pi Ру Ру Рь Ру Ра
Ру А Рь Ру Ру Ра Рг
С, С, Pi Ра Ру Рг Ру
А р. Ра Рг Ру Ра Ру
С, р» Ру Ра Рг Р, Ру
Группу S3 можно представить следующей таблицей умножения, в которой
слева стоят левые множители Р„ сверху - правые Pt, а на пересечении соот-
ветствующей строки и столбца - их произведение Таблицы такого рода на-
зывают таблицами Кэли (табл. 12.1).
192
12.5. Группа вращений правильного
многоугольника. Циклические группы.
Группа симметрий правильного
треугольника
Пусть дан правильный n-угольник ... Д, с центром в точке О (рис. 12.1,
л = 6). Рассмотрим всевозможные повороты плоскости вокруг точки О. при
которых этот правильный n-угольник совмещается сам с собой. Таких поворо-
тов будет л:ос - поворот на угол фо=О
(тождественное преобразование); а, -
поворот на угол <р, = 2п/п, аг - поворот на
угол ф,= =(2к/л)2,...,оя_| - поворот на
угол фв_, ~(2л/л)(л-1). Под умножением
поворотов будем понимать последовательное
их выполнение: at*ai -<>ш, причем
au„=at при любом к (А = 0.1.2,...,л). в
частности <г„=а0. Умножение поворотов
является ассоциативным (и коммутативным).
Множество указанных поворотов правильно-
го многоугольника образует группу по умножению, роль единицы играет тож-
дественное преобразование - поворот ай. Для каждого элемента а, существу-
ет обратный элемент oj1 = a„_t (А = 0,1,2..... л-1), так как at = а, = ав.
т.е. at °a„_t =а0, где а0 — единичный элемент.
Положим at = a, тогда о, ~а\аг = а1,...,оя_| = = сГ В этом случае
говорят, что группа образовала степенями одного из своих элементов (или что она
порождается одним из своих элементов); таким элементом является элемент
а ж я,. Группы, образованные степенями одного из своих элементов, называются
циклическими. Таким образом, группа вращения правильного
л-угольника является циклической группой порядка л, эта группа обозначается
С„. Отметим, что аддитивная группа целых чисел также будет циклической, опа
порождается одним из своих элементов - числом 1: 2=1 + 1, 3=(1 + 1)+1 ит. д.
Эта группа является бесконечной циклической группой, се обозначают С_.
Пусть дан правильный треугольник АВС с центром в точке О (рис. 122). Рас-
смотрим все симметрии данной фигуры, т.е. те преобразования плоскости, при
которых этот треуг ольник ггереходит в себя (или самосовмсщается). К ним отно-
сятся: три поворота ф0. ф,. ф; плоскости вокруг точки О соответственно на ут лы
0,2к/3,4к/3 (частный случай рассмотренных выше вращений правильного п-
7 Зак. I
193
угольника при л = 3); три осевых симметрии <р3,<р4,<р,, определяемых соот-
ветственно осями симметрии I, т, и, прохо-
дящими через вершину правильного тре-
угольника и середину его противоположной
стороны (см. рис. 12.2).
Будем характеризовать каждое самосовмеще-
нис ф подстановкой на множестве вершин
А, В, С правильного треугольника
С А В С 'I
I «I “г «эЛ
где а(,а2,а2 - те же буквы А Я, С. взятые в
некотором порядке. Принятое нами соответст-
вие между самосовмещениями треугольника и подстановками множества его
вершин даст
Множество самосовмещений ф0,ф|,ф2,ф1,ф4.ф3 образует группу относитель-
ного умножения (последовательного выполнения двух самосовмещений) Роль еди-
ницы играет тождественное преобразование. каждый элемент данного преобразова-
ния имеет обратный. ')та группа называется группой симметрий треугольника.
12.6. Изоморфизм групп
Группы G| и G2 называются изоморфными, если между их элементами можно
установить взаимно однозначное соответствие, сохраняющее групповую опера-
цию, т.е. такое, что если х,. >,«&,, x2,y2€G2 и х, «-эх,, Z *->Уг. то
Х|°У1 *~*хг°У1-
Симметрическая группа S, трех элементов а, Ь, с и группа симметрий правиль-
ного треугольника с вершинами А, В, С изоморфны. Эти группы отличаются только
обозначениями элементов и названиями соответствующих преобразований. Цикли-
ческая группа порядка л изоморфна группе крашений правильного л-угольника; бес-
конечная циклическая Iруппа изоморфна аддитивной ipynne целых чисел
Если/- изоморфное отображение группы G, на G2, то /(et) = e2, где
е,. е2 - единичные элементы групп G| и G2 соответственно, и для любого
194
12.7. Разложение группы по подгруппе
Пусть дана группа G и некоторая ее* подгруппа И. Фиксировав любой эле-
мент х € G, рассмотрим множество элементов х о Л, h — любой элемент Н. Эго
множество х°Н называется левым смежным классом группы G по полгруппе
И, порожденным элементом х. Два любых смежных класса группы G по под-
группе Н иди совпадают, или не имеют ни одного общего элемента.
Вся группа G распадается на непересекающиеся левые смежные классы по
подгруппе Н. Это разложение называется левосторонним разложением труппы
G по подгруппе И. Очевидно, одним из левых смежных классов этого разложе-
ния будет сама подгруппа Н, этот смежный класс порождается элементом е (или
любым элементом Ле Н, поскольку h°H= И ),
Аналогично вводится понятие правого смежного класса группы G по под-
группе Н, порожденного элементом х; это множество Н»х, т. е. множество всех
элементов вида h»x. где х - фиксированный элемент G. h- любой элемент из
Н. Аналогичным образом получается правостороннее разложение группы G по
подгруппе Н Гели труппа G абелева, то оба ее разложения по любой подгруппе
(левостороннее и правостороннее) совпадают В этом случае говорят просто о
разложении группы по подгруппе. Приведем пример такого разложения.
Пусть G — аддитивная группа целых чисел и Н - ее подтруппа, состоящая
из всех чисел, кратных к. Разобьем труппу G на классы, относя к одному классу
все те числа, которые при делении на к дают одинаковые остатки Разложение
данной группы G по указанной подгруппе Н состоит из к различных смежных
классов, порождаемых соответственно чис.тами 0,1,2,.к - L В классе, по-
рождаемом чис.том I, тле 0 < / ^ Л -1, собраны все те числа, которые при делении
на число к аыт остаток /.
Полученное разложение труппы целых чисел по подгруппе чисел, кратных к,
при к = 3 можно представить следующим образом:
Н...-9-6-3 0 3 6 9...
1 + W...-8-S-2 1 4 7 10...
2+Н...-7-4-1 2 5 8 II...
Замечание. В некоммутативной труппе левостороннее и правосторон-
нее разложения могут оказаться различными. Обратимся к симметрической группе
S, (см. п. 12.4). Из таблицы Кэли для этой группы видно, что множество элемен-
тов 1], Р2 образует подгруппу, обозначим ее В = {/{, Р2}. Левостороннее разложе-
ние группы Sj по подгруппе В состоит из классов В, Р3В- Р4В = {Р„Р3},
Р3В = Є «{Д, Pt}, а правостороннее - из классов В, BPt = BPt = {Р4, Pt},
BPf = В1\- (Р3, Р5), т. е. эти разложения различны. Отмстим, что левостороннее и
1О<
правостороннее разложение этой группы по ее подгруппе третьего порядка
А = {Г,, Pt} совпадают; каждое из них состоит из двух классов:
лр1»р2л={Р2./’„р4).
Теорема 12.1 (Лагранжа). Порядок подгруппы конечной группы является
делителем порядка группы.
Следствие 1. Порядок любого элемента конечной группы является де-
лителем порядка группы
Следствие 2. Всякая конечная группа, порядок которой есть простое
число, является циклической
12.8. Нормальный делитель
Подгруппа Н группы G называется нормальным делителем этой группы (или
инвариантной подгруппой), если левостороннее и правостороннее разложения
этой группы по указанной подгруппе совпадают.
Из определения следует, что любая подгруппа коммутативной группы является
в ней нормальным делителем. Далее, в любой группе G сама группа и ее единич-
ная подзруппа будут нормальными делителями: разложение группы G по самой
этой группе состоит из одного элемента С, разложения группы G по единичной
подгруппе совпадают с разложением группы на отдельные элементы. Приведем
примеры нормальных делителей в некоммутативных группах.
I. В симметричной группе Sj (см. п. 12.4) подгруппа Н = {Pt, Р5, Р6) явля-
ется нормальным делителем, та* как левостороннее и правостороннее разложения
совпадаю!, они состоят из двух классов: Н =* {Pt, Pit Pt}, HP^*
= РгН~{Рг,Р>,Р<}.
2. В мультипликативной группе невырожденных квадратных матриц порядка
л подгруппа матриц с определителем, равным единице, будет нормальным делите-
лем. Действительно, левый и правый смежные классы по этой подгруппе, порож-
даемые матрицей М, совпадают с классом всех матриц, определитель которых
равен определителю матрицы М (как известно, определитель произведения двух
матриц равен произведению определителей этих матриц).
Можно дать и другие определения нормального делителя, равносильные ис-
ходному. Приведем одно из них.
Подгруппа Н группы G называется нормальным делителем этой группы, ес-
ли *»// = Нол для любого x€G, т. е. для любого з«С и элемента heHcy-
ществуюттакие, что хоЛжЛ)®*. Лох = хоЛ2.
12.9. Классы сопряженных элементов
Элементы а и b группы G называют сопряженными, если в G существует
хотя бы один такой элемент х, что
Ь^х-'ах. (115)
В этом случае говорят, что э.темеггт b получается из элемеггга а трансформирова-
196
нисм с помощью элементах Из равенства (12.5) находим
а “ xbx~' - (ж_,)~,Лх~|,
т.е. элемент а при этом получается из элемента Ь трансформированием
элементом х“*..
Теорема 12.2. Подгруппа Н группы G тогда и только тогда будет нор-
мальным делителем в С, если вместе с любым свопы элементом h она содержит
все элементы, сопряженные с ним в G.
Замечание. Нормальный делитель называют также инвариантной
подгруппой. Из теоремы 12.2 следует происхождение этого названия Если
Н - нормальный делитель группы G, то трансформирование любого эле-
мента подгруппы Н с помощью элемента группы G дает снова элемент под-
группы Н (подгруппа Н остается неизменяемой по отношению к операции
трансформирования элементов Н ).
Теорема 12.3. Пересечение двух нормальных делителей группы является
нормальным делителем этой группы
12.10. Фактор-группа
Фактор-i рун пой |руппы С по нормальному делителю Н натыкается группа
всех смежных классов этой группы G по подгруппе Н.
lax им образом, с группой G можно связать некоторый набор новых групп -
ее фактор-групп по различным нормальным делителям.
Отметим, что фактор-группа абелевой группы является абелевой, фактор-
группа циклической группы - циклической группой.
Примеры фактор-групп.
I. Пусть G - аддитивная группа целых чисел, Н — подгруппа чисел,
делящихся на 3. Найдем фактор группу G/Н. Групповой операцией в дан-
ном случае является сложение. Число смежных классов равно трем
(см. пример в п. 12.7): множество чисел, делящихся на 3, два множества
чисел, дающих при делении на 3 соответственно остатки 1 и 2. Обозначим
эти смежные классы (0], [I], [2]. В этом множестве введем операцию
сложения следующим образом: сложив соответствующие числа в
квадратных скобках, определим, какой остаток при делении на 3 дает их
сумма, и будем считать суммой смежных классов тот, которому
принадлежит полученный остаток. Таблица умножения для фактор-гру ппы
имеет вид (0)+{0) = (П+Р) - (2]+(П = Ю]. (0J+(l| = ИМО) = [2J-H21 - (IJ.
(0)+[2) = [2J+(0] = (1]+П ]= [2]. Отсюда видно, что фактор-группа абелева
Кроме того, все смежные классы порождаются классом [I], они совпадают
со степенями этого класса: [1], (1]+[1|=(2), [1J+ (1] + (1] = (0|. Поскольку фак-
тор-группа порождена одним элементом, то она циклическая.
197
2. Пусть G — аддитивная группа целых чисел, Н - подгруппа целых чи-
сел, кратных натуральному числу к. Фактор-группой G/Н является конечная
группа порядка к, состоящая из классов [0], (IJ.P1 Эта фактор-
группа циклическая, как и сама группа G.
3. Пусть G - мультипликативная группа всех невырожденных матриц
порядка п, И - подгруппа матриц с определителем, равным единице. Фак-
тор-группа G/Н изоморфна мультипликативной группе отличных от
нуля действительных чисел.
12.11. Гомоморфизм групп
Если G и G’ - группы и /: С -ьС - такое отображение, при котором для
любых элементов ж, у группы G
Л*У)-Л*)Лу). (12.6)
то / называется гомоморфным отображением или гомоморфизмом группы G
в группу G'. Отметим, что в определении гомоморфизма имеется в виду, что
каждый элемент группы G поставлен в соответствие хотя бы одному элемен-
ту группы G', но разным элементам из G может соответствовать один и тот
же элемеггт из G'. Другими словами, отображение группы G в группу G' не
предполагается взаимно однозначным, как в случае изоморфизма.
Очевидно, каждая группа гомоморфна себе самой, так как можно поло-
жить /(х) = х для всех зеС. Далее, каждая группа гомоморфна единичной
группе ( состоящей из одного нейтрального элемента е). Примером гомо-
морфного отображения групп может служить циклическая групп* С, шестого
порядка с элементами е, а, о1, в’, а*, в5, которая гомоморфна циклической
группе Cj второго порядка с элементами £, А:
Ле) = Л»2) = /(в“)= Е. Ла) = /(п1)-/(в*)- Я-
Равенство (12.6) означает, что обраг произведения двух элементов
равен произведению образов этих элементов (которые, впрочем, могут
называться по-разному в группах G и G'), поэтому говорят, что гомомор-
физм «сохраняет групповую операцию». Гомоморфизм групп сохраняет не
только групповую операцию, но также нейгральный и обратный элементы:
если/— гомоморфное отображение группы G в группу G', то /(е) = е', где
е,е' - нейтральные элементы групп G и С соответственно
Теорема 12.4. Каждая группа гомоморфна любой своей фактор-группе.
Обратно, если группа G гомоморфна группе G", то G' изоморфна фактор-
группе G по некоторому нормальному делителю И.
198
12.12. Представления групп
С точки зрения алгебры изоморфные группы не считаются различными. О
группе, изоморфной некоторой подгруппе группы подстановок, говорят, что она
представлена подстановками.
Теорема 12.5. (Кэли). Каждая конечная группа изоморфна некоторой
группе подстановок (т. е. всякую конечную группу можно представить
подстановками)
Следовательно, при описании любой конечной группы можно воспользоваться
преимуществами группы подстановок.
Для теории и приложений наиболее интересны линейные представления
конечных групп. Говоря о линейном представлении конечной группы G,
предполагают, что дано векторное пространство V„, в котором действуют
линейные невырожденные преобразования. Оги преобразования образуют
группу G', которой гомоморфна исходная группа G; при этом говорят, что
группа G' представляет группу G.
Гомоморфное отображение Г группы G в группу G' невырожденных линей-
ных преобразований л-мерного векторною пространства Г, называется линей-
ным представлением группы G.
Следовательно, если Г - линейное представление группы G группой G', то
каждому элементу aeG поставлено в соответствие невырожденное линейное
преобразование Г(о)€в' пространства К, так, что для любых a,beG спра-
ведливо соотношение Г(аЬ) = Г(а)Г(Ь). Как известно, при этом Г(е) = £, где
е. Е - нейтральные элементы групп G, G' соответственно, и
Г (а*')»(Г(о))'1 для любого oeG.
Пространство Ря, в котором действуют преобразования из группы G", назы-
вается пространством представления труппы G. Размерность пространства К,
называют размерностью (или степенью) рассматриваемого представления.
Вместо линейных преобразований часто рассматривают соответствующие
им матри11Ы.
199
Ill
МАТЕМАТИЧЕСКИЙ АНАЛИЗ
Гпава 13
ФУНКЦИИ И ПРЕДЕЛЫ
13.1. Понятие функции. Основные определения
Рассмотрим множество X элементов х и множество У элементов у. Если каж-
дому элементу хе X по определенному правилу / поставлен в соответствие
единственный элемент у е У, то говорят. что на множестве X задана функция
у- f(x) со значениями в множестве У. Элементы хе X называются значения-
ми аргумента, а элементы у е У - значениями функции. Множество X называют
областью определения функции, множество всех значений функции - областью
значений этой функции.
Замечание. Функцию, заданную на множестве X со значениями в мно-
жестве У, называют также отображением множества X в множество У. Если
множество У является множеством значений функции, то рассматриваемую
функцию называют отображением множества X на множество У.
Функцию, заданную на множестве X, называют также оператором, "заданным на
множестве X, и обозначают символом /.
В случае, когда X и У - числовые множества, соответствующие функции на-
зываются числовыми функциями. Если рассматриваются действительные числа, то
функции называют действительными (вещественными) функциями одной дейст-
вительной (вещественной) переменной.
Употребляются следующие обозначения функции: у = /(х), у=Е(х),
у = Ф(х), у = <р(х), > = >>(*) и т. п. Значение, которое функция у = /(х) при-
нимает при х = а, обозначается через /(в).
Функция и аргумент могут обозначатся также другими буквами, например
« = /(0. «-/(vX r«r(t), «м(1)«т.д
К простейшим областям определения функции относятся отрезок, ин-
тервал, полуинтервалы или совокупность указанных промежутков. Напри-
мер, для функции областью определения является отрезок
[-3,3], а областью ее значений - отрезок [-3,0]; для функции у = х* об-
ласть определения и область значений совпадают с интервалом (-«», + •»).
200
Графиком функции у = f(x) называется множество точек плоскости, коорди-
наты которых удовлетворяют данной функциональной зависимости, Т. е. точек
М (к, /(к)). Например, графиком функции у = -\16-х2 является полуокруж-
ность радиуса R = 4 с центром в начале координат, расположенная ниже оси Ох.
К традиционным основным способам задания функции относятся: аналитиче-
ский (с помощью одной или нескольких формул), графический (с помощью гра-
фика); табличный (с помощью таблицы значений)
Функция заданная формулой
у=/(хХ (13 1)
правая часть которой не содержит у, называется явной функцией.
Функция у=у(х), определяемая уравнением
F(x,y)-O, (132)
называется функцией, заданной неявно, или неявной функцией.
Отметим, что одно уравнение вила (13.2) может определять несколько функ-
ций. Например, уравнение х2+у1-/?2»0 определяет две функции
>1 = /|(х) = -4^ - х*. Уз А(х) - V/?2 -х*.
Обратимся к функции (13.1). Каждому я«Х по определенному закону ста-
вится в соответст вис единственное значение у € У. С другой стороны, каждому
у € У соответствует одно или несколько значений хе X.
В случае, когда каждому у € У по некоторому закону <р соответствует только
одно значение хе X, получаем функцию
х*ф(уХ (133)
заданную на множестве У со значениями в множестве X. Функцию (13.3) назы-
вают обратной функцией по отношению к функции (13.1). Функции (13.1) и (13.3)
в этом случае называются взаимно обратными. Для взаимно обратных функций
выполняются тождества:
ф(/(х))"х, хеХ, /(ф(у))«у. уеУ.
Примеры взаимно обратных функций: у = У, я = log, У, у = 2х-3, я = (у + ЗУ2.
Если придерживаться стандартных обозначений (у - функция, х-
аргумент), то обратную функцию (13.3) следует писать в виде у = <р(х). Напри-
мер, можно говорить, что функции у = 3', y = 1og,x взаимно обратные.
Функцию, обратную к функции у =Дх). удобно обозначать символом х-f '(у).
Если у = /(«X и = ф (х) - функции своих аргументов, причем область опре-
деления функции f содержит область значений ф. то каждому х из области опре-
деления функции ф соответствует у такое, что у- f(u), где и-=ф(х). Эта функ-
ция, определяемая слответствием
У»/(ф(х)Х
201
называется функцией от функции или сложной функцией. (Применяются также и
другие названия: композиция функций ф и /, суперпозиция функций ф и /.)
Например, сспи у = и’, u = cosx, то у - (cosx)’ = cos’ я.
Рассматривают также функции, являхяциеся композициями более чем двух
функций. Так, функция w = sinlg(l+x2) представляет собой композицию сле-
дующих функций: w = sini3, «=lgv, v=l+e, я—я2.
Функция У~ f(x) называется четной, если для любых х и -я из области ее
определения выполняется равенство /(-я) =/(я). Функция у - ф(я) называется
нечетной, если дтя любых я и -я из области сс определения выполняется равен-
ство <р(-х)я - ф(я). Например, у = я2, у = сояя- четные функции. у = х1,
у-sin я - нечетные функции.
Функция у = /(я) называется периодической, если существует число Т х О
такое, что при всех я и я + Г из области ее определения выполняется равенство
/(я + Т)= /(я)- Число Т в этом случае называется периодом функции Всякая
периодическая функция имеет бесконечное множество периодов. Говоря о перио-
де функции у* f(x) (/(я) X const), обычно имеют в виду наименьший положи-
тельный период: так, периодом функции у-sin я является число 2к, периодом
функции у - tgx - число я.
Функция у - /(х) называется ограниченной на множестве X, если существует
такое число С> 0, что для всех я € X выполняется неравенство | /(я) | S С.
Тригонометрические и обратные тригонометрические функции, функции
у = х* (а = const), у = а‘ (а > 0, а х 1), у = log„ я (а > 0, а х!) называются
основными элементарными функциями.
Элементарными функциями называются все функции, которые можно полу-
чить из основных элеме|ггарных функций с помощью алгебраических действий и
образования сложных функций. Например, функции у = lgcosx, у = я* + sin я,
у = и т д. являются элементарными.
Термин «функция» впервые появился в 1673 г. в одной из работ Лейбница Пол
функциями Лейбниц понимал некоторые отрезки прямых. И. Бернулли дал опре-
деление функции как аналитического выражения, состоящего из переменной и
постоянных величин (1718), он же применил обозначение фх (без скобок). Обо-
значение /(я) впервые предложил Эйлер в 1734 г.
13.2. Предел последовательности
Числовой послсдоватсльностьк> (или последовательностью) называется функция
я„«=ф(л), л-1,2,3....,
определенная на множестве натуральных чисел. Каждое значение х„
(л = !,2,3,...) называется элементом последовательности, а число п - его номером.
202
Числовую последовательность с элементом х„ обозначают либо хя,
л = 1,2,Х..., либо (x|,xJ(...,xB,...), либо (х„).
Примеры числовых последовательностей: 1) (с) = (с,с,C....X
2) pzlTlLG- । ’ - ’ 1 3) (со5Кл)^(-!Л-1,1....).
л ) \ 4 9 16 )
Числовая последовательность всегда содержит бесконечное множество эле-
ментов; среди них могут быть равные (см. примеры 1) и 3)).
Число а называется пределом последовательности (х„), если для любого чис-
ла е > О найдется такое натуральное число N. что при всех л > N выполняется
неравенство |х„-в|<е.
Предел последовательности (х„) обозначают limx,=e; х„-»а при
л -> о» (читается: х„ стремится к а, когда л стремится к бесконечности).
Последовательность, имеющая предел, называется сходящейся Последова-
тельность, у которой нет предела, называется расходящейся.
Интервал (о-е,а + е) называется ечжреспгостыо точки а и обозначается О(л,е).
Определение предела имеет следующий геометрический смысл: число а явля-
ется пределом последовательности (х,), если в любой e>v £-окрестностн содер-
жатся почти вес члены (х„), или вне этой окрестности находится лишь конечное
число членов данной последовательности.
Из определения предела последовательности следует, что предел постоянной
равен этой постоянной lim с = с (с = const), поскольку в данном случае х„ = с,
а = с, |*„-о| = 0<е для любого £>0. Из определения следует также, что по-
следовательность может иметь только один предел.
Последовательность (х„) называется ограниченной сверху (снизу), если суще-
ствует такое число Л, что хя£ А (соответственно хя 2г А) для всех номеров п.
Последовательность (х„), ограниченная сверху и снизу, называется просто
ограниченной.
Очевидно, последовательность (хя) ограничена тогда и только тогда, когда
существует такое число С > 0, что | хя | S С для всех номеров л.
Например, последовательности (Ул), (У"2). (cos(x^'2)) ограничены, после-
довательность (л2) ограничена снизу, но нс ограничена сверху, последователь-
ность (и cos гм) не является ограниченной ни сверху, ни снизу.
Теорема 13.1. Если последовательность имеет предел, то она ограничена
Число а называется верхней гранью последовательности (х„), если: 1) х„ 5 а
при всех л; 2) для любого е > 0 существует такой номер N, что xN > а - £. Верх-
няя грань последовательности (хж) обозначается sup (х„) или supx,.
203
Аналогично определяется нижняя грань последовательности (х„) и обознача-
ется inf(x„) или infxw.
j ''I ( н А
В качестве примеров отметим, что sup I---I = I, inf I---1 = 0, inf (л2 ) -1,
V n J k л )
sup(w2) = -.
Последовательность 0») называется монотонно возрастающей (монотонно убываю-
щей). если х„ S хм| (соответственно х„ 2 х„+,) при всех п. Монотонно возрастающие
или монотонно убывающие последовательности называются просто монотонными
Теорема 13.2 Всякая ограниченная сверху (снизу) монотонно возрастаю-
щая (монотонно убывающая) последовательность (х„) имеет предел, причем
lim х„ = sup (х„) (соответственно lim х„ = inf (хя)).
Если последовательности (ая) и ((>„) имеют пределы, то пределы их суммы,
разности, произведения, частного существуют и находятся по формулам
lim (в, +(\,)- lim e„+ lim Л„, (13-4)
lim («„-<>,,) lim а„ - lim b„. (13.5)
lim (оя6я)= lim a„ lim b„. (13.6)
( x lim o, lim | |= *7*" ; (lim b, # 0). (13.7)
lim bK "-»•
Пример 13.1. Послаювигелыюсп.(8+1/л) сходится и имеет предел о=8.
Действительно, каково бы ни было число е > 0, найдется такое натураль-
ное число N, что |х„-а|(8 +(/л)-81 = Ул<е, 1/п<£ для n>N; неравен-
ство (1/л)<£ будет выполнено при всех n>N, если N >\Jt, т. е. в качестве
N можно взять большее из двух последовательных натуральных чисел, между
которыми заключено число Vе- Например, если е, = 0.1. то Nt 10; если
е, = 0,01, то А2 = 100 и т. д.
Замечание. Одновременно показано, что последовательность (I,и)
имеет пределом нуль. т. е.
lim — = 0.
»-•- и
(13.8)
Пример 13.2. Последовательность (cosnn) является расходящейся.
В самом деле каково бы ни было число а, вне его е-окрестности, например при
0 < Е < 1, заведомо лежит бесконечное множество элементов данной последова-
тельности (хотя среди них и много равных между собой); это означает, что а нс
является ее пределом.
204
Пример 13.3. Найти lim —5---.
6л’+4л-9
Разделив числитель и знаменатель дроби на л2 и применив формулы
(13.4) —(13.8Х получим
. 2л2-Зл + 5 2-Ул + Ул2 Ь^(2-ул + ^и2) ,
"-•-бя +4л-9 6 + 4/л-9/л2 lim (6+4/и-9/л2) 3
13.3. Предел функции
Постоянная b называется пределом функции у = /(х) при х~*а (или в точ-
ке оХ если для любого числа е > 0 существует такое число 6 > 0, что при всех х,
удовлетворяющих условию
0<|х-в|<5,
выполняется неравенство
|/(х)-б|<е.
Предел функции /(х) при х, стремящемся к а, обозначают.
Itm/(x)»h, f(x)~*b при х-»о.
ж-9в
Рассматриваю! также односторонние пределы функций: предел слева
)tm^/(x)«6| (х стремится к а, оставаясь меньше а; х<в) и предел справа
Mm.ZU)-At (л стремится к а, оставаясь больше о; х>о). Если односторонние пре-
делы равны: lim /(х) = lim /(х) = Ь, то предел функции f(x) в точке а существу-
>—949—0 Ж-9 0*0
ег и равен b: lim /(х) = b Если односторонние пределы различны или хотя бы один ю
Ж-9 49
них не существует, то не существует и предел функции в соответствующей точке
Если с - постоянная величина, то lim с = с.
Если функции f(x) и ф (х) имеют пределы при х -» а, то
*'пт (/(х)± ф (х)) = lim /(х)± Inn ф (х\ (13.9)
•нп (/(х)ф(х)) = Inn /(х) Ьп ф (хХ (13.10)
lim ^ = i*=_^ (1ппф(х)*0). (13.1!)
>-•«(? (х) 1ипф(х) > —
Из (13.10) следует, «по
lim(c/(x))=clim/(x) (с = const), (13.12)
205
lim (/(xf)’ = (lim /(x)f, (13.13)
x-м
lim x“ ~ a", (13.14)
где m - натуральное число.
Если Jlim /(x) существует, то
lim ^//(xj = ^f lim/(х). (13.15)
Число Л называется пределом функции у = /(х) при х, стремящемся к -•»
или + ~, если для любого числа е > 0 можно указать положительное число N,
такое, что при всех значениях х, удовлетворяющих условию | х | > Л/, выполнялось
неравенство |/(х)-Л|<€.
Пример 13.4. Найти lim (2х2-5x4-4).
Применяя формулы (13.9), (13.12), (13.14), получаем
lim (2х2 - 5х 4- 4) = lim (2х2) - lim (5х) + lim 4 - 2 • З1 - 5 3 + 4 = 7.
ж-*» ж-»> <-•>
6х2 -9x4-7
Пример 13.5. Найти lim—;--
—»Зх’-8х + 5
С помощью формулы (13.11) и формул, указанных в примере 13.4, находим
.. 6х2-9x4-4 6-2*-9-24-4
lim --=---------------=-----®----г--------« 5.
«-♦> Зх’-8х+6 lim (Зх2-8х+6) 3 22-8 2 + 6
ж-«2
Пример 13.6. lim
—1 х‘-2х5+2х2-1
При х = I числитель и знаменатель дроби равны нулю, имеем неопределен-
ность вида 5 Чтобы раскрыть ее, предварительно преобразуем данную дробь.
разложив многочлены на множители:
х*-х>4-х2-1 _ х2(х — 1)4-(х — 1) (х 4-1)
х* - 2х’ 4- 2х2 -1 (х4- 1)(х2+1)-2х2(х-1) '
______(х-1)(хЭ 4-Х 4-1) ______Х^ 4- Х 4-1
~ (Х-1)((Х4-1)(Х2 4-1)-2х2) х*-Х,4-Х4-Г
Переходя к пределу, получаем
1
= Нт
>»|
х’+х + 1 _ 3
х’-х14-х4-1 2
206
т2
Пример 13.7. Найти lim .
*-« V5+7-3
При х = 4 числитель н знаменатель дроби обращаются в нуль, имеем неопре-
лелснность вида Чтобы раскрыть эту неопределенность, предварительно пре-
образуем дробь:
16-х* (1б-х*)ь/зТ7+з) (1б-х*)(УГ>7-ьЗ)
Vs+x-3 (V5+x-3)(-V5 + x+3) 5 + Х-9
в +3) = -(х ,4)(^ + 3).
х— 4
Переходя к пределу с использованием формулы (13.15), находим
16— I’2 J
lim - — = -lim (х + 4)(-/5 + х + 3) = -8 6»-48.
з/5+х-З
13.4. Бесконечно малые функции и их свойства
Функция а « а (х) называется бесконечно малой при х —» а (или при х —> •»),
если ее предел равен нулю:
lima(x) = O (ltma(x) = O).
Например, функция а (х) = (х-5)1 есть бесконечно малая при х —К 5, так как
lirna(x)» lirn (х-5)1 =.0; функция а(х)=(/х является бесконечно малой при
х —♦ поскольку
hma(j)« lim — = 0.
»-•- »-»- х
Принимая во внимание определение предела функции, определение бесконеч-
но малой функции можно сформулировать следующим образом.
Функция а = а (х) называется бесконечно малой при х -♦ а, если, задав лю-
бое число е > 0, можно указать такое число 6 > 0, что для всех х, удовлетворяю-
щих условию 0<|х-а|<8, выполняется неравенство [а(х)|<е.
Свойства бесконечно малых выражаются следующими теоремами
Теорема 13.3. Если функция у = у(х) имеет предел b при х-»а. то
у(х)=Ь + а(х\ у = 6 + а, (1316)
где а = а (х) - бесконечно малая при х —♦ а. Обратное также верно: если вы-
полнено равенство (13.16), то limy(x)=fc.
x-»a
Теорема 13.4. Алгебраическая сумма конечного числа бесконечно малых
функций при х —» а есть бесконечно малая функция при я-л а.
207
Теорема 13.5. Произведение бесконечно малой функции на ограниченную
функцию есть бесконечно малая функция.
Следствие 1. Произведение двух бесконечно малых функций есть бес-
конечно малая функция.
Следствие 2. Произведение бесконечно малой функции на постоянную
есть бесконечно малая функция
13.5. Сравнение бесконечно малых функций
Бесконечно малые а (х) и Р (х) при х -»а называются величинами одного
порядка, если их отношение имеет конечный предел, отличный от нуля, т е.
lim - с, или lim = - (с # 0).
«-••Р(х) »-»«а(х) с
В этом случае пишут: а(х) = О(Р(х)) при х-»а (читается: а(х) есть О
большое от Р(х) при х—»а).
Например, a(x)-sinx и р(х) = 3х при х-*0 являются бесконечно малыми
одного порядка, так как lijn а(х)/Р(х) = 1/3, япх = О(Зх) прнх-»0.
Если предел отношения а(х)/р(х) при х-»о равен нулю (с =01 то величина
а (х) называется бесконечно малой высшего порядка по сравнению с р (х) (величина
Р (х) - бесконечно малая низшего порядка по сравнению с а (х) > В данном случае
применяется обозначение а(х)=о(Р(х)) при х-»а (читается: а(х) есть о малое
от р (х) при х —> а ). Например, х1 = о(япх) при х -» 0, поскольку
,» X
lim----= lim х lim----= 01 = 0.
»-»osinx »-»<• <-»osinx
Функция Р (х) называется бесконечно малой *-го порядка относительно функ-
ции а(х), если Р(х) и (а(х))* - бесконечно малые одного порядка т. е.
lim = с (с и 0).
«-». (а(х)/
Например, если а(х) = х, Р(х) = х4, то при х-»0 Р(х) - бесконечно ма-
лая четвертого порядка относительно бесконечно малой а(х) (но бесконечно
малая второго порядка по сравнению с у (х) = х1).
Две бесконечно малые функции а(х) и Р(х) называются эквивалентными
(или равносильными) бесконечно малыми при х —» а, если предел их отношения
равен единице, т. е.
lim a(— = 1, или lim = |.
»-»«P(x) *-»«a(x)
208
Эквивалентность бесконечно малых а(х) и Р(х) обозначаетсясимволом-
а(х)~Р(х) при х-»а.
Из формул (13.17) и (13.22) (см. п. 13.8) следует, что при х -* 0
х-sinx-Igx, 1п(1+х)-х
Теорема 13.6. Бесконечно малые функции а (я) и Р(х) эквивалентны то-
гда и только тогда, когда их разность есть бесконечно малая высшего порядка
по сравнению с каждой из них
Теорема 13.7. Если а(х)-О|(хХ Р(х)~р|(х) при х-»о и существует
ai(x) «(*)
hm , то существует hm—причем
—*Р|(х) '-•"₽(*)
а(х) .. а. (х)
hm = lim -1 —.
<-»«р(х) »-• р| (х)
Следствие. Если at(x)~P(x), а2(х)-Р(х) при х-»а, то
а( (х) -а, (х) при х -» а.
При нахождении предела отношения двух бесконечно малых функций каждую
из них (или только одну) можно заменить другой бесконечно малой, ей жвива-
лентной:если a(x)~a,(x), Р(х)~Р, (х), то
а(х) а.(х) .. а(х) ,, а. (х)
hm ——- «= hm J - = hm „ «= hm
—“P(x) P(x) >-»«p|(x) «—P,(x)
Замечание. Если отношение a(x)/P(x) двух бесконечно малых
функций при х-ко не имеет предела и не стремится к бесконечности, то беско-
нечно малые функции ct(x) и Р(х) несравнимы между собой. Например, несрав-
нимы при х—>0 бесконечно малые функции a(x)-xsin(Vx). Р(х) = х, так как
Р(х) х X
и sin (1/х) не имеет предела при х 0.
Пример 13.8. Доказать, что функции a(x)-6xJ/(l-x) и Р(х)» «х2
при х -к 0 являются бесконечно мшыми одного порядка.
Найдем предел отношения двух данных функций;
6 hm----= 6.
lim
Поскольку полученный предел отличен от нуля, то данные функции являются
бесконечно малыми одного порядка
Пример 13.9. Доказать, что порядок функции а(х)=х*/(2+х2) выше,
чем порядок функции р (я) = х* при х -♦ 0.
209
Гак как
.. x5
hm —--------z- = hm
= 0,
то функция а(х) = х’/(2 + х2) есть бесконечно малая высшего порядка, чем
функция Р(х)=х*.
Пример 13.!0. Найти lim s‘n
При х-эЗ функции х-3, sin (х-3) являются жвивалсшиими бесконечно
малыми. Поскольку при замене бесконечно малой функции sin(х-3) эквива-
лентной ей функцией х-3 предел отношения нс изменится, то
sin(x-3)_hm sin(x-3) _
lim .“ = hm-------------
*-»’х2-5х+6 ->(х-3)(х-2)
= lim----— -----«= lim —-— = I.
»-J(x-3)(x-2) »-»’x-2
Пример 13.11.Найти lim s*11*.
Так как (sinx+x*-х*)~х, (2х-х')-2х при х-»0, то
sinx + x’-x* .. sinx 1 .. sinx 1
hm----------;--« lim * hm------------= —
»-*o 2jc —jr ж-»о 2x 2 x 2
13.6. Бесконечно большие функции
Функция у = J(x) называется бесконечно большой при х -♦ а, если для любого
положительного числа Лг можно найти такое число 8 > 0, что при всех значениях х,
удовлетворяющих условию 0 < | х - а | < 6, выполняется неравенство | /(х) | > N.
Бесконечно большая функция не имеет предела при х —♦ а. но иногда условно
говорят, что се предел равен бесконечности, и пишут: lim /(х) = “>, или
г-»в
/(х)—»“>, при х-»а.
Если /(х) стремится к бесконечности при х -♦ а, принимая только положи-
тельные или только отрицательные значения, то соответственно пишут,
lim /(х)= + «®, lim /(х )= — •«.
Если функция /(х) стремится к бесконечности при х—»®»,
то пишут Ит/(х)=<>о.
Примером бесконечно большой функции является функция /(х)=1/х при
х -♦ 0. В самом деле, при любом V > 0 неравенство | \Jx | > N будет выполнено,
210
если |x|=jx-0|<l/A' = 8. Эта функция принимает положительные значения при
х>0 ( lim /(х)= + ~) и отрицательные - при х<0 ( lim /(х) = -“>).
т-«+0 ж-*»-О
Функция /(х)» (/(х-2)2 - бесконечно большая при х —»2 Действительно,
при любом N > 0 неравенство ]/(х -2)г >N будет выполнено, если
(х - 2)2 < 1/N или | х- 2| < 1/4Й = 6. Данная функция принимает только положи-
тельные значения.
Если функция а = а (х) стремится к нулю при х —> а (или х -» «) и не обра-
щается в нуль, то функция у (х) = 1/а (х) стремится к бесконечности.
13.7. Основные теоремы о пределах функций
Теорема 13.8. Функция у = у(х) не может иметь более одного
предела при х-*а.
Теорема 13.9. Пусть функция у* f(x) определена в некотором проме-
жутке, содержащем точку а Если при х—з а функция у = /(х) имеет поло-
жительный (отрицательный) предел, то найдется Ь-окрестность точки а та-
кая, что для всех хеО(а.Ь) функция положительна (отрицательна).
Эта теорема называется теоремой о сохранении знака функции, имеющей предел.
Теорема 13.10. Если функции и(х\ v(x) определены в некоторой 8-
окрестности точки а, для всех хбО(а, 6), х#о выполняется неравенство
и (х) < v (х) и функции имеют пределы при х -» а, то lim к (х) S lim v (х).
ж-»в
Замечание. Теорему 13.10 кратко можно сформулировать
так: в неравенстве, обе части которого имеют пределы, можно перейти к
пределу, присоединив знак равенства. Например, 7 + х2>7-х2, х*О,
lim (7+х2)= lim (7-х2)-7.
ж-40 ж-» О
Теорема 13.11. Пусть три функции к = |4(х), у = у(х\ v = v(x) опреде-
лены в некотором промежутке, содержащем точку а
Если для любого х из этого промежутка выполняются неравенства
и(х)£у(х)£ v(x) и функции I4=i4(x\ v=v(x) имеют одинаковые пределы
при х —» а, то у — у(х) имеет тот же предел при х -за.
13.8. Некоторые важные пределы
Если угол а выражен в радианах, то
lim^^-=l, lim-^- = L (13.17)
а-»0 (X а-*0 <1
711
Числом е называется предел
lim|1 + —| земли lim (1 + а)'*’= е. (13.18)
х) и-»о
При нахождении многих пределов применяются следующие пределы.
lim h*e(Ux) = log,, е, (13.19)
>-•0 X
lim ^-11 = too, (13.20)
я-»0 *
lim ^^"'за. (13.21)
x
Частными случаями формул (13.19) и (13.20) являются соответственно формулы:
lim (13.22)
Ж-.0 X
(13.23)
«-•о X
При нахождении пределов вида lim (ф(х))*<ж> = С необходимо иметь
в виду следующее:
1) если существуют конечные пределы lim ф(х) = И, lim у (х) - В, то С= Ай;
2) если 1йпф(х)зЛх1 и limy(i) = ~, то С находится с помощью формул
[0, если 0<Л<1.
hm А
-»♦- 1 + “, если Л>1,
। « 1+“- ехли
lim А = <
10, если
0< А<1,
А>1;
3) если Нтф(х)=1, Птф(х) = »=, то, положив ф(х)=1+а(х), где
»-*в
<х(х)-»0 при х->а, получим
С= ton {(l + a(x)fo,,)}o(*’*<*) = e~' =е*’*
к-еО
Пример 13.12. Найти lim ^1-—J .
При х—выражение (1-(А/х))—»1, получаем неопределенность
вида 1“. Чтобы раскрыть ее, введем новую переменную по формуле
(-/ух) = а, откуда х = -6/а; а-»0, когда х -»«>. Переходя к пределу
с использованием формул (13.13) и (13.18), находим
212
(ху
1-—I = Hm (1 + а)**“ lim [ (I +a)v°]'A =
«[lim = **; lim fl-—)
a-.# x)
В частности, при 6 =-2 получаем limfl + -| = e’, при 6=3 lim fl--) = r“’
«-•“I x) »-»“V x)
Пример 13.13. Найти lim I—1 .
Разделив числитель и знаменатель на Зх и воспользовавшись результагом при-
мера 13.12, получим
= lim
музу*)'
1 + (4/3)/х )
« lin, fI _ У1)*. Hfn f, + 4?¥ „ .-Ю. .VI = .-а
* ) "-•"К х )
Пример 13.14. Найти lim
»-»о х
Преобразуя эту дробь и применял первую из формул (13.17), находим
Нт - lim 2"^ - 7 Нт « 7 I = 7.
х-»о х х-»а 7х х-хо 7х
Пример 13.15. Найти Нт —1.
>-»о у
Преобразуя данную функцию, вводя новую переменную х = 2у и применяя
формулу (13.21 X находим
>-•» у /-»« 2у
= 2 lim + = 2 - = I
х-о х 2
Пример 13.16. Найти lim -*2-34 V).
У-.0 у
Преобразуя згу функцию, вводя новую переменную х = 5у и применяя
формулу (13.22), получаем
lim 4J + V)=iim5JM!±j>0_
>-»о у >-»о 5у
ж5Нт1П1*±^ = 5 1 = 1
!-.« х
213
Пример 13.17. Найти lim
После соответствующих преобразований по формуле (13.23) находим
lim----= lim-
к-»о у к-»® Зу/З
1 .. е"-1 1 , 1
3х 3 3
13.9. Непрерывность функции
Функция >’• /(хХ определенная на интервале (о, by, называется непрерыв-
ной в точке х0 е (а, by, если
lim /(х) = /(х0)
(1324)
(т. е. предел функции равен ее значению при предельном значении аргумента).
Согласно определению предела функции, условие (13.24) равносильно сле-
дующему: для любого числа е>0 существует
такое число 6 > 0, что при всех х, удовлетво-
ряющих условию 0<|х-а|<8, выполняется
неравенство | f(x) - /(х0 ) | < е.
Если хое(а,/>) и хе (о, by. то разность
Дх = х — х0 называется приращением араумента в
точке х0, а разность Ду = /(х)- /(x®). или
Ду ш/(хв + Дх)-/(хД - приращением функ-
ции в той же точке (рис. 13.IX Ду -функция Дх
Необходимое и достаточное условие непре-
рывности функции у = /(х) в точке хв выра-
жается равенством
lim Ду = О,
(1325)
или
lim (/(х0 + Дх)-/(хс) )= 0.
У-вО
Итак, функция непрерывна в точке, если бесконечно малому приращению ар-
гумента в этой точке соответствует бесконечно малое приращение функции.
Замечание. Поскольку хс » lim х, то формулу (1324) можно перепи-
сать так: lim /(х) = /( lim х\ Т. с для непрерывной функции символы предела и
функции перестановочны.
Теорема 13.12. Если функции f(x) и <р(х) непрерывны в точке х0, то
также непрерывны в этой точке их сумма /(х) + ф(хХ разность /(х)-ф(х),
произведение /(х)ф(хХ а также частное /(х)/ф(х) при условии, что ф(х)#0.
214
Следствие I. Целая рациональная функция Р„(х) = а$ + орг +
+орг2+••+о,рг* непрерывна при всех х.
Следствие 2. Дробная рациональная функция
R (ж) . АЙ1 ж <Ч+<У+<У*+ ~
G.(x) £fe+fclx + Aix1+ —+ V"
непрерывна при всех х. для которых знаиенатель не обращается в нуль
Теорема 13.13. Если функция <р(х) непрерывна в точке хе, а функция
/(.у) непрерывна в точке >0 = ф(*вХ то сложная функция Л'(х) = = /[<р(х)]
непрерывна в точке х9.
Функция называется непрерывной на интервале, если она непрерывна
в каждой точке этого интервала
Если функция определена при х - а и при этом lim f(x) = f(a), то говорят,
г-йа>0
что /(х) в точке о непрерывна справа. Аналогично. если lim /(х) = f(b\ то
говорят, что в точке b эта функция непрерывна слева
Функция называется непрерывной на отрезке (о, 6], если она непрерывна в
каждой его точке (в точке а - непрерывна справа, в точке b - непрерывна слева).
Отмстим, что основные злсме1ггарныс функции непрерывны в соответствую-
щей области определения.
Функции, непрерывные на отрезке, обладают рядом важных свойств, которые
выражаются следующими теоремами.
Теорема 13.14 Функция, непрерывная
на отрезке |п,/>], достигает в нем своего
наименьшего значения т и наибольшего значе-
ния М, т е существуют такие точки Х|, хг
этого отреука, что /(х,) = т, /(х2)= А/.
'ha теорема имеет простой геометрический
смысл (рис 13.2).
Замечание. Функция, непрерывная
на интервале, этим свойством не обладает.
Например, функция уу*6х2 на интервале
(0,1) не достигает значений т = 0 и М = 6,
так как зги значения функция принимает в
Рис. 13 2
точках х = 0 и х = 1, а последние данному интервалу нс принадлежат
Теорема 13.15. Если функция y=f(x) непрерывна на отрезке [a,h]
и на его концах принимает неравные значения /(a)* A, f(b)= В,
Ав- В, то каково бы ни было число С. заключенное между А и В.
найдется точка се [о,/*] такая, что f(c) = C.
215
Геометрический смысл теоремы иллюстрируется на рис. 133, а, б. Всякая пря-
мая у-С, где А<С<В (или А>С>В), пересекает график функции у = /(х).
Следствие. Если функция непрерывна на отрезке и на его концах при-
нимает значения разных знаков, то на этом отрезке найдется хотя бы одна
точка, в которой функция обращается в нуль
Это частный случай теоремы: АВ<0, С = 0, геометрический смысл: график
непрерывной функции y = f(x\ соединяющий точки P(a,f(a)), Q(b,f(b)\
для которых /(а)/(6)< 0, пересекает ось Ох (рис. 13.4, о, б).
Отметим, что сумма конечного числа функций, непрерывных на некотором ст-
релке, непрерывна на этом отрезке.
13.10. Точки разрыва функции
Рассмотрим функцию у = f (х), определенную на интервале (а, />), кроме,
быть может, точки хс € (о, Ь). Значение аргумента х0 называется точкой раз-
рыва данной функции, если при х = х0 функция определена, но не является
непрерывной или ис определена при этом значении х.
2I6
Если х0 - точка разрыва /(х) и существуют конечные пределы
/(хО“0)ж №п /UX /(*о+0) = Ьт /(х\ f(x^ - 0) * f(xe + ОХ то она на-
ж-»Дф-0 ж-
зывается точкой разрыва первого рода Величина /(х0 + 0)-/(хо -0) называется
скачком функции f (х) в точке х^.
Если х0 - точка разрыва и /(хо-0) = /(х0+ОХ то хе называется точкой
устранимого разрыва
Если хотя бы один из односторонних пределов /(хо-ОХ /(хо+О) не существует
или является бесконечным, то хс называется точкой разрыва второго рода
Пример 13.18. Функция
/(х) = -х/|х| в точке хс=0 имеет
разрыв первого рода.
Действительно, /(х) I при х < 0
и /(х) = -1 при х>0, в точке х0 - 0
функция не определена; lim^/(x) = X
lim /(x) = -L Скачок функции в точ-
«-.♦0
кс хо = 0 равен -2 (рис. 13.5).
Пример 13.19. Для функции /(x) = (sinx)/x значение аргумента Хр » 0
является точкой устранимого разрыва
В самом деле, при х0 = 0 данная функция нс определена, ио имеет равные од-
носторонние пределы:
lim (sinx)/x = 1, lim (sinxVx L
«-♦-о «-»♦<>
Пример 13.20. Функция /(x)=l/x в точке Хр = 0 имеет разрыв
второго рода, так как
lim 1/х = -°“, lim 1/х = + “>.
*-♦-0 х-»*0
217
Пример 1321. Для функции
/(х) = 3^* значение хе = О является
точкой разрыва второго рода, так как
lim /(*) = + «». Второй односторонний
Г-»+4>
предел конечен , lim /(х) = 0 (рис. 13.7).
13.11. Показательная функция. Гиперболические
функции
Показательной (экспоненциальной) называется функция у = а1 (а > 0. а х 1).
Пусть а = е (см. формулу 13.18), в этом случае показательная (экспоненциальная)
функция обозначается у = е‘ = схр х.
Показательную функцию с другим основанием можно привести к показатель-
ной функции с основанием е. Действительно, по определению лозарифма
в = е*"®, поэтому а' - еЬ, где k = lna.
Гипсрболичсскнм синусом называется функция, определяемая формулой
shx. (1326)
2
гиперболическим косинусом - функция
chx-****'*•. (1327)
2
Гиперболический тангенс и 1ипсрболический копии сис определяются соответ-
ственно формулами
thx = —= (1328)
chx е‘ + е
cthx = jg—"****. (1329)
shx е -г
Функции, определяемые формулами (1326) - (1329), называются
зтз перболичсс кими.
Гиперболическис функции имеют вполне определенные значения при всех зна-
чениях х, кроме функции у = cth х, которая в точке х = 0 обращается в бесконеч-
ность. Отметим, что sh 0 = 0, ch 0 = 1, как и для обычных синуса и косинуса
Гиперболическне функции нс обладают важнейшим свойством тригонометри-
ческих функций - свойством периодичности. Кроме того, множество значений
218
каждой iмпсрболической функции существенно отличается от множества значе-
ний соответствующей тригонометрической функции Функция y = shx принима-
ет все действительные значения, т. с. множество се значений сонщщаст с беско-
нечным интервалом y = chx - значения, нс меньше единицы
(1S ch х < + «»); значения функции у = th х по модулю не превышают единицы
(-Icthxcl); значения у= cthx по модулю больше единицы (cthx>l при
х>0, cthx<-l при х<0).
Графики гиперболических функций представлены на рис. 13.8 и 13.9, а, 6.
Прямые у = +1, у«-1 являются асимптотами |рафиков функций y = thx,
у = cthX. Кроме того, ось Оу служит асимптотой графика фу нкции у = clh х
Рис. 13.9
219
Глава 14
ПРОИЗВОДНЫЕ И ДИФФЕРЕНЦИАЛЫ
14.1. Понятие производной, ее геометрический
и физический смысл
Касательной к линии / в точке Мо называется прямая М0Т — предельное
положение (рис. 14.1) секущей М0М, когда точка А/стремится к Ме вдоль дан-
ной линии (т. е. угол устремится к нулю) произвольным образом.
Производной функции у- f(x) в точке хс называется предел отношения при-
ращения этой функции к прнрашенюо apt у мента, ко< да последнее стремится к нулю
Производную функции y’/fx) в точке х0 обозначают символом /'(х0)
(читается: «эф штрих от Хо») или у'(х0). Следовательно, по определению
/*(*•) lim или /(х0)- (in (14.1)
Д|-»0 Дт Ад-вО Дд
Употребляются и другие обозначе
dy ,, Ay . .. Ах
ния: —= hm ~ . х = inn —.
Al-. О Ат А/-.о Az
если х = /(т).
Термин «производная» (а также
«вторая производная») ввел Ж. Лагранж
(1797), он же предложил обозначения
У’. Г(*Х /"(*) (177а 1779) Обозна-
чение dy/dx впервые встречается у
Лейбница (1675).
Геометрический смысл произвол
мой. Производная функции у* f(x)
при х = х0 равна угловому коэффициенту касательной к (рафику данной функции
в точке А/0(х0, /(х0)), т. е.
Г(хь)-«ва.
(14.2)
где а - угол наклона касательной к оси Ох прямоугольной декартовой системы
координат (рис. 14.2).
Уравнение касательной к линии у = /(х) в точке А/С(хо, у0) принимает вил
У~ УохГ(*о) (*-*<>) (,4J)
220
Нормалью к кривой в некоторой ее точке называется перпендикуляр к каса-
тельной в той же точке. Если /(хв) * 0, то уравнение нормали к линии у = /(х) в
точке A/ofxo, у0) запишется так:
УУо
(14.4)
Физический смысл производной. Если х = /(/) - закон прямолинейного
движения точки, то х'» /'(/) - скорость этого движения в момент времени I.
Быстрота протекания физических, химических
и других процессов выражается с помощью про-
изводной.
Если отношение Ьу/Ьх при х-»х0 имеет
предел справа (или слева), то он называется про-
изводной справа (соответственно производной
слева). Такие пределы называются односторонни-
ми производными.
Односторонние производные функции /(х)
в точке х0 обозначается соответственно
символами /_'(хс), Д'('о):
/-'(*о)ж ,*т £(Лс+д-1) . производная слева,
Лх-»-0 Лт
/+(<«)ж ,’m - производная отрава
Дг-»+О Дх
Очевидно, функция /(х), определенная в некоторой окрестности точки х0, имеет
производную /'(х0) тогда и только тогда, когда односторонние производные /_'(х0),
/Дх0) существуют и равны между собой, причем /_'(хс) = /4'(х0) = /'(Хо).
Если для некоторого значения х выполняется одно из условий
lim ^ = + ~, lim — = -«•,
Дх Аг-йО Д.Х
то говорят, что в точке х существует бесконечная производная, равная
соответственно + «», -«”
Геометрическое истолкование производной как углового коэффициента каса-
тельной к зрафику распространяется и на этот случай: касательная в данном слу-
чае параллельна оси Оу (рис. 14.3, а - />).
Функция, имеющая производную в данной точке, называется дифференцируе-
мой в этой точке Функция, имеющая производную в каждой точке данного про-
межутка, называется дифференцируемой в этом промежутке. Если промежуток
является замкнутым, то на концах его имеются односторонние производные.
Операция нахождения производной называется дифференцированием
221
Зависимость между непрерывностью и дифференцируемостью функции выра-
жается следующей теоремой.
Теорема 14.1. Если функция y-f(x) дифференцируема в данной точке,
то она и непрерывна в ней.
Замечание. Обратное утверждение нс всегда верно. Например,
функция у = |х—1 непрерывна в точке х = 1, ио не является дифферен-
цируемой в ней.
Пример 14.1. Записать уравнение касательной к линии /(!)?-
- 4х + 7 в точке х = 1
Так как /*(х) = 2х-4, х0=3, /'(х,)-/'(3)-2. у0 =/(х0) = /(3) = 4, то я
соответствии с уравнением (14.3) получаем у-4=2(х-3), или 2х-у-2 = 0.
Пример 14.2. В какой точке касательная к линии /(х)«х1 -11х-5 па-
раллельна прямой 2х-2у + 3 = 0.
Z
Данная ттрямая имеет угловой коэффициент t-l. Поскольку /'(*)“
= Зх2-11, то в силу равенства (142) имеем Зх1—11 = 1, или Зх* = 12, откуда
х,=-2, х, = 2. Находим у, =/(х,) = /(-2) = 9, у2 =/(х2) =/(2) =+19. Сле-
довательно, получили две точки. Л/,(-2,9), М2(2, -19).
Пример 14.3. Записать уравнение нормали к линии /(х) = х’+ 5х-7
в точке х = -4.
Так как /'(х)=2х + 3, хо=-4, /'(х0)=/'(-4)»-3, у0ж/(*о) =
= /(-4) = -11, то уравнение (14.4) принимает вид у +11 = (-1/-3)/(х + 4), или
х-3у-29=й
222
14.2. Основные правила дифференцирования
Производная алгебраической суммы функций выражается следующей теоремой
Теорема I4.2. Производная суммы (разности) двух дифференцируемых
функций равна сумме (разности) производных этих функций
(w±v)' = u'±v'. (М.5)
С л едет нис. Производная конечной алгебраической суммы дифферен
цируемых функций равна такой же алгебраической сумме производных слагае-
мых, Например, (и - v + w)' = и' - v* + w'.
Производную произведения функций определяет
Теорема I4.3. Производная произведения двух дифзфзеренцируемых функций
равна гцзоизведенизо первой функции на производную второй плюс произведение
второй функции на производную первой, т. е
(иг)" = и'у + «у*. (14.6)
Следствие 1. Постоянный множитель можно выносить за знак про-
изводной (cvY = cv' (с = const).
Следствие 2. Производная произведения нескольких дифференцируе-
мых функций равна сумме произведений производной каждой из них на все ос-
тальные. Например, (uvw'f = и’vw + uv‘w + uvw".
Производная частного двух функций выражается следующей теоремой.
Теорема 14.4. Производная частного двух дифзфзеренцируемых функций оп-
ределяется фюрмулой
»
(-1 , и*у-w* (v#0). (14.7)
\v/ у
Производную сложной функции выражает
Теорема 14.5. Если у-/(и) и ц = ф(х) - дифзфзерезецируемые функции
своих аргументов, то производная сложной функции у к /(<р( х)) существует и
равна произведению производной этой функции по промежуточному аргументу
на производную промежуточного аргумента по независимой переменной, т е.
у, шуЖ-
dy dy du
dx du dx
(14.8)
Производная обратной функции. Если у = f(x) и х-ф(у) - взаимно об-
ратные дифференцируемые функции и у' # О, то
(14.9)
223
14.3. Основные формулы дифференцирования
Производные степеииых и тригонометрических функций выражаются сле-
дующими формулами:
ах“ х; = 1. (Vx)' = —U, [-
2-Vx \х
(sinx)' = cosx, (cosx)' = - sin
(tgx)'= *-, (etgx)'»---3
1
Если 14 = 14 (х) - дифференцируемая функция, то
(|4ВУ = 0U4°''u'.
(sin «У = cos m V. (cos«У = -sin 14•и',
(ctgu)'- - —.
sin и
Пример 14.4. Найти производную функции у = •j\~ хг.
Считал 1-х2 = 14 и применяя формулу (14.1 ОХ получаем
(14.10)
(МП)
(14.12)
2
2л/1-х2
Пример 14.5. Найти производную функции у = sin —+cos —.
3 о
Применяя формулы (14.1IX находим
3U>
1 х
-у cos.
-яп б^б] =
1 . X
1 —- sin —.
3 6 6
Пример 14.6. Найти производную функции у - etg2 Зх.
Так как у = v1, где v = etgu, и» Зх, то формулу (14.8) применяем дважды. На
основании формулы (14.10) и второй из формул (14.12) получаем
• > 1 „ v 6ctg3x
/ --2ctg3x -т-у— (Зх)' = - - .7 -
sin Зх sin Зх
Пример 14.7. Найти производную функции y = l/tg22x.
Так как > = 1/**, ’* = з'2, v = tgu, м = 2х, то у' у'„ w' v' м' Применяя
формулу (14.10) и первую из формул (14.12Х находим
, 1^,1, 4 1
tg 2х cos
4cos2x
2 = —
224
Производные показательных н логарифмических функций выражаются
формулами
(ожУ = в*1па, (е*)'»е',
_ v I , I
(•«в. - log. е «-г—.
х xlno
(1пхГ-1 (х>0), (1п|х|у = 1 (х#0).
Если ц-и(х) - дифференцируемая функция, то
(в*)' = в*1па V, (е*У = e*i/. (14.13)
(log.«<r--^-. (1п«Г’-. (14 14)
х In а и
Пример 14.8. Найти производную функции у = е"1
Применяя вторую из формул (14.13), находим
у' = e“",a(sin3x)' - с“’' сояЗх (Зл/ = соаЗх.
Пример 14.9. Найти производную функции у = 1п(1+х2). На основа-
нии второй из формул (14.14) получаем
2»
i+j? i+x1
Пример 14.10. Найти производную функции у = In Vx1+4х + 5. Так
как у »*dn (х2 + 4х + 5), то
(х2+4х+5/ х + 2
У 2(х2 + 4х + 5) х’+4х + 5
Прон (водные обратны! тригонометрических функций находят по формулам
(arcsinх)' *— , (arccosx/ = —. *
Vl-x’ у/1-Х2
(aretgx)'*—Ц-, (arcetgx)'»-
1+х2 1 + х2
Если и = u (x) - дифференцируемая функция отх, то
, |2* 1/
(arcsinи/д(arccosw) д- , (14.15)
у/1-и2 Vl-V
(aretgu)'-—--, (arccig ь)' = -- —г. (14.16)
1+У 1+1Г
Пример 14.11. Найти производную функции у = агсяп ^-Зх +
+ arccos Jl-2x.
«Зак. I
225
Применяя формулы (14.15), находим
(ТПху _ -з 1
у ^-О-Ь) ф-(1-2х) 2^1-Зх 757
-2 1 3 !
гТГъТь- 2^3*-9х2 -hx-4x2
Пример 14.12. Найти производную функции у - arclg--.
С помощью первой из формул (14.16) и формулы (14.7) получаем
_______________________________________________X
l + Rl-X^l + x))2 ll + xj (l + xf. + fl-xj*
x (-1(1 + х)-1(1-хЙ _ -2______1_
t (1 + x)2 J 2 + 2x2 l+x*‘
Производные гиперболических функций находят по формулам
(shx)' = chx, (chxf-shx,
(thx)f. * , (ah,/ —-L.
ch х sh'x
Если u = и (х) - дифференцируемая функция, то
(sh и)' = ch и i/, (ch к)' = sh и 1/,
(14.17)
(14.18)
(th«)'._* <aha)' =
ch х
u'
sh2x
Пример 14.13. Найти производную функции у = sh2х + chЗх.
Применяя формулы (14.17), находим y' = ch2x(2x)' + sh3x(3x)' =
= 2ch2x + 3sh3x.
Пример 14.14. Найти производную функции у = th * + cth у.
В соответствии с формулами (14.18) получаем
О/У (W _ I J
ch’(x/5) sh2(x/7) 5ch^x/5) 7sh2(x/7)
Производные неявных функций и функций, заданных параметрически.
Производная функции у=и. Если дифференцируемая функция у-у(х} зада-
на уравнением Г(х,у) = О, то производная у'-)>"(*) этой неявной функции
может быть найдена из уравнения = Ц где F*F(x,y) рассматривается как
сложная функция переменной х.
226
Если функция у = у (х) задана параметрически.
* = *(0. y*y(t) (а</<РХ (14.19)
где х(/Ху(О ~ дифференцируемые функции и х'(Т)#О, то ее производная у'
определяется формулой
X =>;/*,'• (14 20)
Производная степенно-показательной функции и’, где к, v -
дифференцируемые функции от х, находится с помощью предварительного лога-
рифмирования, которое приводит к формуле
(и’’)’ = м*| v'lnu+—I. (14.21)
к “ )
Пример 14.15. Найти производную функции, заданной уравнением
ysinx = cos(x-y).
Это уравнение определяет у = у (х) - функцию от х. Подставляя функцию
у-у(х) в данное уравнение, получаем тождество y(x)sinxacos(x-y(x)).
Дифференцируем «то тождество и из полученного уравнения находим у’ = у‘ (х):
y'sinx+ycosx = -sin(x-y)(l-y'X y'sinx+ ycosx = -sin (x - у) + /sin (x - y),
. . . . . • . , . , ycosx + sin(x-y)
ycosx + sin(x-y) = y (sm(x-y)-sinx), у' = ^—------- - ".
sin(x-y)-snx
Пример 14.16. Найти производную функции, заданной уравнениями
x»/-sin/, у = 1-cost
Эта функция задана параметрически (см. (14.19)). Так как x,' = i- -cost,
у,' = sin/, то по формуле (14.20) получаем у' = — = -ап^ .
х’, 1-C0ST
Пример 14.17. Найти производную функции у “ х“”.
Логарифмируя это равенство по основанию е, получаем Iny- sinxlnx. Диф-
ференцируя, находим y'/y-cosxlnx + sinx (|/х), откуда у' =
= у (cosxlnx + sin х (1/х)), у' = х““* (coex inx+sin х/х).
Пример 14.18. Найти производную функции х'.
Это также функция у=и*. где u = x, v=x. По формуле (14.21) тюлучаем
у' = хж(1пх+1).
Производные высших порядков. Производной второго порядка, или второй
производной, функции у = /(х) называется производная от ее производной
у' = /'(*) (которую называют первой производной).
Обозначения второй производной:
Г = (/)'. Г(*)-(/'«Г,
ах ах
227
Механический смысл второй производной. Если х = f (!)
- закон прямолинейного движения точки, то х” = /”(/) - ускорение этого дви-
жения в момент времени I.
Аналогично определяются и обозначаются производные третьего, четвертого и
более высоких порядков:
у"=(у'У=СГ(*)Г. у" = (у~Г.....у1"' - (?’'’)'•
Производная л-го порядка обозначается и так:
А"
Если функция задана параметрически: х = х(Г), у = у(Г), то ее вторая произ-
водная определяется формулой
<МЛ2>
Пример 14.19. Найти вторую производную функции y = x’lnx.
Так как у' = (х’У 1пх + х’(1пхУ = 3х2 lnx + x’(Vx)=3x,lnx + x’. то
y*' = 6xlnx + 3x2(Vx)+2x, у" = 6х1пх + 5х.
Пример 14.20. Найти вторую производную функции, заданной парамет-
рически: х-Z-sin/, y = l-cosr.
Поскольку х'-1 cost, y' = sinr, x"-sinr, у" = cosr, то по формуле (14.22)
d2y (I-cosr) cosr-sin г sin г cosr-l 1
зюлучасм —$- “ —-----------;------=--------г =---------
dx (\-tmff (1-cos) (l-coeff
Пример 14.21. Найти /'“(l) для функции /(x)-x*-5x’ + 6x2 - 7x + 9.
Tax как /'(x)=4x’-15x2+12x-7, /*(x) = 12x2 -Klx + 12, to
/'"(x)= 24x-30. Следовательно, /”(!) =-б
14.4. Дифференциал функции
Нонн i не дифференциала. Применение дифференциала в приближенных
вычислениях. Рассмотрим функцию у = f(x\ определенную в некотором про-
межутке (в. б), и ее приращение Ду ж/(х +Дх)-/(х) в точке х0, где х0,
(Хд+Дх)€(о, 6).
Если приращение функции представимо в виде
Ду = ЛЛх-го(Лх), (14.23)
где А - постоянная, о(Дх) - бесконечно ма_ьая высшего порядка по сравнению с
Дх, то слагаемое ЛДх называют дифференциалом функции /(х) в точке хс и
228
обозначают dy или df(x9):dy- ЛДх; функцию у = /(х) в этом случае называют
дифференцируемой в точке Хо-
Бели приращение функции у = f(x) представимо формулой (14.23), то
А = /'(х): следовательно, dy * /'(х^)Лх. Так как
А = Дх, (14-24)
т. е. дифференциал независимой перемалюй равен приращению пой переменной, то
dy = /'(Хо) dx, dy ж y’.dx, (1425)
откуда f’(x0) = dy/dx, т. е. производная равна отношению дифференциала функ-
ции к дифференциалу независимой переменной
Формулу (14.23) можно записать так:
Лу = dy + о(Лх\ (14 26)
Дифференциал функции наывамп также главной линейной частью се приращения
Теорема 14 6 бесконечно малое приращение функции эквивалентно ее
дифференциалу при всех /начениях негависимой переменной. для которых произ-
водная функции конечна и отлична от нуля
Из равенства (14.26) при достаточно малых Лх получаем
Лу-dy. или /(х«+Лх)-/(х)-/'(х0)Лг, (14.27)
откуда
/(х^ + Дх)«/(х0) + /'(х0) Дх. (14.28)
Формулы (14.27) и (14.28) применяю! ся в приближенных вычислениях.
Пример 14.22. Вычислить значение дифференциала функции
/(х) = х* - 5х’ + 7, коя да аргумент х меняется от х = 2 до х 2,1.
Найдем сначала выражение для дифференциала данной функции по формуле
(14.25): г/у» (Хо - 5х^+7)*<Д =(4хд+ 10ло)<(х. Так как <Ь=Лх =
= х,-х0-2,1-2 = 0,1. хс-2, то dy = (4 2’-10 2)0,1 = 12.
Пример 14.23. Вычислить приближенно значение функции /(х) =
= 1/1 + 7х2 при х = 1,1
Значение api-умснта х = х0 + Дх представим в виде Х« 1+0,1, где х0 = I,
Лх = 0,1. При х0 = I netxo вычисляются значения функции и се производной
/'(*) = :/(,)=-21 Г(|> = -г-1--;» ж7•
ЗУ(1 + 7х1)2 3V(l + 7 I1)1 6
Эти значения входят в формулу 1/1+ 7(1,1)’ « Vl + 7 )’ +-- , 14 1 -0.1, полу-
3 (j(l+7 1’У
ченную из формулы (14.28). Следовательно, /(Б 1) = 2 + 7/60 • 2,117.
229
Геометрический смысл дифференциала. Дифференциал
функции ранен приращению ординаты касательной к графику функции в соответ-
ствующей точке, когда аргумент получает приращение Лх (рис. 14.4).
Отметим, что dy<tty (рис 14.4, а) или dy>txy (рис. 14.4,6); если функция
равна постоянной, то dy = Ду = 0.
Физический смысл дифференциала. Рассмотрим прямолиней-
ное движение тючки по закону s = /(/), где s — длина пути, / - время, /(») —
дифференцируемая функция; тогда <й = /'(/)Л = v(T)df, где v(/) - скорость
движения. Следовательно, дифференциал пути ранен приращении» пути, получен-
ною в предположении, что, начиная с данного момента /, точка движется равно-
мерно, сохраняя приобретенную скорость.
Свойства дифференциала. Дифференциал функции обладает свойствами,
аналогичными свойствам производной.
I. Дифференциал постоянной равен нулю:
de = 0, с- const (14 29)
2. Дифференциал суммы дифференцируемых функций ранен сумме диффе-
ренциалов слагаемых:
d(u+v)= du + dv. (14.30)
Следствие. Если две дифференцируемые функции отличаются посто-
янным слагаемым, то их дифференциалы равны
d(u+c) = du (с= const) (14.31)
3. Дифференциал произведения двух дифференцируемых функций равен про-
изведению первой функции на дифференциал второй плюс нроитаедснис второй
на дифференциал первой:
d (uv) = udv + vdu. (14.32)
Следствие. Постоянный множитель можно выносить за знак
дифференциала
d(cu)=cdu (с = const). (14.33)
230
4. Дифференциал частного u/v (v*0) двух дифференцируемых функций
и = и (х) и v = v (х) определяется формулой
vdu-udv
d I - I =--=—. (14.34)
\.v/ v
5. Свойство независимости вида дифференциала от выбора независимой пе-
ременной (инвариантность формы дифференциала): дифференциал функции равен
произведению производной на дифференциал аргумента независимоюот того,
является ли этот аргумент независимой переменной или функцией другой незави-
симой переменной.
Основные дифференциалы:
1. dxa -axa'dx. II. d(a') = a‘Inadx.
III. </(1п|я|)=у. IV. d(snx)=cosxdx.
V. d (COSX) = - япх<&. VI. d (tgx) = <fc/coe2 я.
VII. d (etg я) = - dx/sin 2 я, VIII. </(arcsinx)« dx/Jl-x2
IX. </(агссо5я) = -л/з/|-я2, X. </(arctgx)= rfx/(l + x2).
XI. d (arcctgx) - dx/(l + я2 X XII. </(shx)= chxdr.
XIII. <Z(chx)* sh«fr. XIV. c/(thx)= <#/ch2x.
XV. d (cth я) - Дт/sh2 x, XVI. df(u) = f'(u)du
Дифференциалы высших порядков. Если х - независимая переменная и
у =/(я) - дифференцируемая функция, то dx ~ f'(x) dx, т. с дифференциал
функции есть функция, зависящая от двух аргументов х и dx. Этт дифференциал
будем называть также дифференциалом первою порядка (или первым дифферен-
циалом). Считая dx постоянной, получаем, что df(x) - функция одной пере-
менной. Предположим, что функция у = /(я) имеет нс только первую производ-
ную, но и л последовательных производных у" = /"(я),
У* /"’(я).
Дифференциал от дифференциала функции у = f(x) называется вторым диф-
ференциалом или дифференциалом второю порядка этой функции и обозначается
d2у. d2у d (dy\ причем
d2y -f"l*)dx2. (14.35)
Дифференциалом л-го порядка называется дифференциал от дифференциала
(л-I)-го порядка: d"y = d (d”~'y):
d" у = f*"\x) dx*. (14.36)
Замечание. Формулы (14.35) и(14.36) при л>1 справедливы, когда я
является независимой переменной
231
14.5. Основные теоремы дифференциального
исчисления
Теорема 14.7. (Лшранжа). Если функция f(x) непрерывна на отрезке [о, 5] и
дифференцируема в интервазе (а, б), то существует такая тонка ce(a.b), wn0
ЛЬ)-/{а)-Лс)(Ь-а) (a<c<b).
Следствие I. Если производная функции равна нулю в каждой точ-
ке некоторого промежутка, то функция есть тождественная постоянная в
этом промежутке.
Следствие 2. Если две функции имеют равные производные в не-
котором промежутке, то они отзичаются в этом промежутке лишь
постоянным слагаемым.
Корнем (или нулем) функции /(ж) называется такое значение х = хс
ее аргумента, при котором эта функция обращается в нуль 1 еомстрически
корень функции означает абсциссу точки, в которой (рафик функции пере-
секает ось Ох или касается ее.
Теорема 14.8. (Ролля). Между двумя
различными корнями дифференцируемой
функции содержится по меньшей мере один
корень ее производной.
Замечание I. Теорема имеет про-
стую геометрическую интерпретацию: меж-
ду значениями а и b имеется по меньшей
мере одно значение с такое, что в точке
С (с,/(c)) графика функции касательная к
графику параллельна оси Ох (рис. 14.5).
Замечание 2. Теорему можно сформулировать в более общем виде.
Если у = f(x) - функция, дифференцируемая на отрезке (а, б] и /(о) = /(/>), то
между а и b найдется точка с, в которой производная равна нулю, т. с. /'(с) = 0.
Теорема 14.9. (Кошм). Если у "/(ж) и у = ф(т) - две функции, непре-
рывные на отрезке |<з, 6] и дифференцируемые в интервале (в, б). причем
<р'(л)#0 для любого хе(а,Ь), то между а и b найдется такая точка с, что
f(b)-f(a) т Г(с)
<р(Ь)-<р(о) <р'(с)‘
232
14.6. Формула Тейлора
Формула
/(*) - /(«)+ (х - а)+^^ (х - а)1 + — + ^->(°) (х - о)" +
1! 2! л!
называется формулой Тейлора с остаточным членом в форме Лагранжа.
(14.38)
(л +1)!
Если л = 0, то формула принимает вид
1! 2! л! (л + 1)!
(14.39)
где 0< 0 < 1, и называется формулой Мак.юрена
Формулу (14.37) можно записать в виде
/(*)=/(о)+-^(*-в)+ • + -J°\x-of+ о((х-в)"Х (14 40)
л!
где о((х-о)") — бесконечно малая порядка выше л-го по сравнению с х-а; эта
форма остаточного члена была указана Пеано
Замечание. Если в формулах(14.37) и(14.40) перенести в левые части
/(о) и обозначить (х -о) = Дх, тогда
V(o) = f\a) Лх + Дх1 + - + Дх" + д»-'
2! л! (л + 1)!
V(e) = f'(a) Дх ♦ /'(о) Дх2 + — + — /"’(о) Дх" + о(Дх").
2! л!
Если в этих формулах Дх заменить на dx и принять но внимание формулы
(14.35), (14.36), то получим соответственно
V(n)= 4Г(о)+^ </7(О)+ .+1 </-/(0)+^—
2! л! (л-1-1)!
V(a) - df(a)+— rf2/(o)+ — + J- d"f(a )+о ( Дх" ).
2! л!
233
Следовательно, если предположить, что Дх -> 0. то по этим формулам из бес-
конечно малого приращения функции можно выделить не только его глав-
ный член - первый дифференциал, но и члены более высоких порядков малости,
совпадающие (с точностью до факториалов в знаменателях) с последовательными
дифференциалами d'f(a\.... d"f(a\
14.7. Формула Тейлора для некоторых функций
Формула (14.39) для функции /(х) = е* принимает вид
еж=1+-+- + ••• + —+ ^—е“’ (0<0<1). (I4.4I)
I! 2! л! (п + 1)!
Отметим, что при любом х остаточный член формулы (14.41) стремится к
нулю при неограниченном возрастании л, т. е.
lim Я„(х) = lim------— е* = 0.
Разложение функции /(x)=sinx по формуле (14.39):
х3 х’ х1 . Xя . ля
япх-х------+-------+ ••• + - sin — +
3! 5! 7! и! 2
х**1 . .(л + 1) д')
+.......sin | Ох + I.
(14 42)
(л+1)!
Остаточный член
«„(х)-—----sin di+£--^
' (л+1)! I 2 J
формулы (14 42) также стремится к нулю при л -» ®».
Формула (14.39) для функции /(x)=cosx имеет вид
.1 -* -* «"
” ” пл
cos---+
2
cosx = l----+---------
2! 4! 6!
(1443)
+-------COS0X +
(л + 1)! I
Каково бы ни было х, остаточный член формулы (14.43) стремится
к нулю при л —» о».
Для функции /(х) = (о+х)", где о - действительное число, л- натуральное
число, получаем
(а + х)‘
2!
+ +... + "("-В 2 «-
3! (л-1)!
Это равенство называется формулой бинома Ньютона
(14.44)
234
14.8. Приближенные формулы
Если в формуле (14.39) отбросил, остаточный член, то получится прибли-
женная формула
(14.45)
заменяющая данную функцию многочленом л-й степени. Качество этой фор-
мулы оценивается двояко: указываются границы погрешности /^,(х) с помо-
щью выражения (14.38) для остаточного члена либо порядок малости этой
погрешности при х-» О ^,(х) = о(х").
В случае функции /(ж) = е’ получаем приближенную формулу
г-и£+*1+^+...+Л
11 2! 3! л!
(1446)
Поскольку /^,(х) = r*x”'l(n +1)!,
то например, при х>0 погрешность
оценивается неравенствами
0<Л,(х)<—— **♦'.
(л + 1)!
(14.47)
В частности, при л=) получаем е* - I + — + — +•••+—, 0<Л,(х)< —-—.
1! 2! л! (" + !)!
Если взять п = 8 и произвести вычисления с пятью десятичными знаками, то
получим « = 2,71827. Здесь верны первые четыре знака, так как ошибка
нс превосходит у9! или 0,00001.
Взяв /(x)=sinx и положив в равенстве (14.42) л = 2т, получим прибли-
женную формулу
sinx
31 51 (2зт>1)’ '
(14.48)
остаточный членжоторой
= ifa(ex+(2m+1)«/2) =
(2т + 1)!
(2m+ 1)!
оценивается соотношением
(2т+1)Г
235
Для функции /(x)=cosx аналогично получаем
хг х* _ х2"
COSX.1- — + -------+(-!)" ——• (14.49)
2! 4! (2м)!
Погрешность приближенной формулы (14.49) выражается остаточным членом
н оценивается неравенством
। il-*J
Например, для формулы cosx - I - — + — погрешность
Пример 14.24. Вычислить е0,75 с точностью до 0,001.
Применяем формулу (14.46), по лапт в ней х = 0,75 = 3/4. Поскольку х<1 и
е < 3, то из формулы (14.47) следует, что
I КС*) I < *"*' <, 3 •
1 л (л + 1)! (л+1)!
Требование | КС*)| <0.001 будет выполнено, если (“+])!* КЙО*
или (л + 1)!>ЗООй
Эго неравенство выполняется при л = 6 (тогда («+!)!= 71= 5040).
Значит, для вычисления е°” с заданной точностью в формуле (14.46) нужно
дт» .. з . I З2 . 1 3* , I З4 , 1 3*
взять шесть слагаемых е - 1+—+ ——г + —г+-——«"• +
4 2 4’ 6 4’ 24 4* 120 4*
+0.7500 + 0.2813 + 0,0703 + 0,0132 + 0,0019 - 2,1167, е°” -2,117.
236
ГЛЭ9?15
ПРИЛОЖЕНИЯ ПРОИЗВОДНОЙ
15.1. Правило Лопиталя - Бернулли
При исследовании функций может появиться необходимость нахождения пре-
дела дроби f(x)/q (х), числитель и знаменатель которой при х —» а стремятся к
нулю или к бесконечности. Нахождение таких пределов называют раскрытием
неопределенностей соответствующего вида Основой его является правите Лопи-
таля - Бернулли, выражаемое следующей теоремой
Теорема 15.1. Если функции f(x) и ф(х) дифференцируемы в окрестно-
сти точки х = а, обращаются в нуль в этой точке и существует предел отно-
шения f\x)/q' (х) при х -»а, тогда существует предел отношения самих
функций, равный пределу отношения производных
(15.1)
когда
»-..ф(х) »-»«ф'(х)
Замечание 1. Теорема верна и в том случае, когда функции /(х) и
ф(х) нс определены в точке х = о, но lim /(х)*=0, lim <р(х) = О.
Замечание 2. Теорема верна и в случае
lim/(x) = 0, 1|тф(х) = 0.
Замечание 3. Если /*(о) = 0, ф'(а)=0, функции /*(х), ф'(х) диф-
ференцируемы и окрестности точки х = а и существует предел отношения
/*’(*)/ф’’(х) При х—>о, то
lim/V) = lirorw
ж-».ф'(х) »—ф"(х)
Другими словами, правило Лопиталя - Бернулли при выполнении соответст-
вующих условий можно применять несколько раз.
Правило Лопиталя - Бернулли применимо и при раскрытии неопределенно-
GO 0
стей вида —, поскольку се можно привести к неопределенности вида —. пред-
•• 0
ставив рассматриваемую дробь так:
/(х) 1 . 1
(15-2)
ф(х) ф(х) /(х)
_ - О о»
С помощью тождественных преобразований к основному ваду — или — можно све-
0 ~
0°, ~°.
сти неопределенности других вадов, таких, как 0
237
Неопределенность вида О-оо, т.е. произведение /(х)ф(х), где /(х)-»0,
о °°
ф (л) « при х —> а, приводится к виду — или — по формулам
О «О
Лх)ф(х)-/(х):—
ф(*) /(*)
а затем применяется правило Лопиталя - Бернулли.
Аналогично раскрывается неопределенность вила —-о», т. е. находится пре-
дел lim (/(х)-ф(х)) при условии, что lim/(x) = o=. lim <р(х)-~ С помощью
преобразования /(х)-ф(х) = |— --------—Г.——------ эта неопределенность
1ф(*) /с*М /с*)ф(*)
о ,
сводится к неопределенности вида —. '
Раскрыть неопределенность вида I” - значит найти предел hm (/(х))**’1
при условии, что lim/(x) = l, lim <р(х) = ~.
ж-*в
Раскрыть неопределенности вида 0®, ~° - значит найти предел
lim (/(х))”'» при соответствующем условии: I) lim/(x) = O, lim<p(x)-(X
2) lim /(х) = ' lim ф(х) 0.
Неопределенности 1”, 0°, раскрываются способом, в котором использу-
ется тождество (/(х))*(*’
При раскрытии этих неопределенностей данное выражение предварительно ло-
гарифмируют и находят предел его логарифма
Правило, выражаемое теоремой 15 1. сформулировано швейцарским математи-
ком И. Бернулли (1667 — 1748) и опубликовано в 1696 г. в первом печатном
учебнике анализа бесконечно малых, написанном французским математиком
Г. Лопигалем (1661 - 1704)
Пример 15.1. Найти lim ——-—.
—о In (1 + х)
При х»0 числитель и знаменатель дроби обращаются в нуль, имеем
0
неопределенность вида Чтобы раскрыть ее, применяем правило
Лопиталя - Бернулли:
lim----~— = Hm ——— » 2
*-»о|п(1+х) к-»о У(1+х)
п •<» « - cosx-cos7x
Пример 15.2. Найти lim--------------.
*-»о cosх- cos Эх
238
Для раскрытия этой неопределенности вида - правило Лопиталя - Бернулли
необходимо применить дважды:
cost-cos 7х -sinx + 7»n7x -cosx + 49cos7x
lim-----------»= lim-------------= lim --------------
cosx-cos3x xmo -sinx + 3sin3x »-»«> -cosx + 9cos3x
-1+49 .
Пример 15.3. Найти lim fl-----1—I
»-”>\x e* — 1/
Здесь имеем неопределенность вида Преобразуем данную разность
2 I _е'-1-х
х е*-! х(еж-1)
При х = 0 в правой части этого равенства имеем неопределенность вида
Применяя дважды правило Лопиталя - Бернулли, находим:
Пример 15.4. Найти lim —, где л - натуральное число
Применяя правило Лопиталя - Бернулли л раз, получаем
х" их"1
lim — « lim —— =
. ta "l-z1»-1..... lto
e" «-»♦- e’
Следовательно, при hcoi раиичснном возрастании аргумента степенная функ-
ция растет медленнее показательной функции.
Пример 15.5. Найти lim х'^ж<г*"1*.
При х = 0 получаем неопределенность вида 0°. Обозначим у = х'^"<ж<"|> и
прологарифмируем это равенство по основанию е.
। । •_ 1пх
In у ----------In х =---------.
In(e'-I) ln(«'-l)
В правой части этого равенства при х = 0 имеем неопределенность вида —.
239
Примени дважды правило Лопиталя — Бернулли, находим
Inx Vx «х_1
lim Iny = hm---------= lim —А-------= hm------—
*чв »-»о 1п(е" -I) е/(е* -1) хе'
= hm
= L
Следовательно, lim In у = 1, lim у = е1 = е, lim =
»-»о ж-»0 «-•#
15.2. Признаки постоянства, возрастания и
убывания функции
Необходимое и достаточное условие постоянства функции у = /(х) выража-
ется равенством у' = 0, т. е.
у' = О«=>у = с. (I5.3)
Функция у = /(х) называется возрастающей в промежутке (а, Ь\ если для
любых двух значений х, и х2 £ (а, Ь) из неравенства х, < Xj следует неравенство
(рис. 15.1, а).
Функция у = /(х) называется убывающей в некотором промежутке, если для
любых двух значений, принадлежащих этому промежутку, из неравенства х, < х2
следует неравенство /(х,)> /(х2) (рис. 15.1,6).
Достаточное условие возрастания (убывания) функции выражается следующей
теоремой.
Теорема 15.2. Если в данном промежутке производная функции положи-
тельна, то функция возрастает в этом промежутке: если производная отрица-
тельна, то функция убывает в соответствующем промежутке.
240
Замечание. Теорема имеет простой геометрический смысл. Если в не-
котором промежутке касательная к трафику функции у = /(х) образует с осью Ох
острый угол <х (tga>0), то функция возрастает в злом промежутке (рис. 15.1, о).
Если касательная к графику образует с осью Ох ту пой угол a (tg а < 0). то функ-
ция убывает (рис. 15.1, б).
Пример 15.6. Найти промежутки возрастания и убывания функции
/(х) = х’-6х’+»х-2.
Находим производную функции и разлагаем на множители соответствующий
квадратный трехчлен: /'(•*) = Зх2 - 12х + 9 - 3(х* - 4х +3). /'(х) = 3 (х -1) (х - 3).
Если х < I и х > 3, то /'(х) > 0; функция возрастает в интервалах (- 1),
(3, + <“>). Если 1<х<3, то /'(х)<0; функция убывает в интервале (1,3).
15.3. Экстремум функции
Рассмотрим функцию у /(х), областью определения которой является
промежуток (о, 6).
Если можно указать такую Б-окрсстность точки х,. принадлежащую проме-
жутку (в, Ь\ что для всех хе О(Х|, Б), х#х(. выполняется неравенство
(154)
то у, =/(*,) называют максимумом функции у = f\x) (рис. 152).
Максимум функции у- fix') обо-
значим через max /(х).
Если можно указать такую Б-
окрсстность точки хг, принадлежа-
щую Промежутку (a. hy что для всех
хеО(х2,6), х*х2, выполняется
неравенство
/{х2)</(х\ (15.5)
то у2 /(х2) называют минимумом функции у = /(х) (см. рис. 15.2).
Минимум функции у = /(х) обозначим через min /(х).
Другими словами, максимумом (минимумом) функции у- /(х) называют та-
кое ее значение, которое больше (меньше) всех других значений, принимаемых в
точках, достаточно близких к данной и отличных от нес.
Замечание 1. Максимум функции, определяемый неравенством
(15.4), называется строгим максимумом; нестрогий максимум определяется
неравенством Дх । )£ Дхг).
Замечание 2. Максимум и минимум функции имеют локальный харак-
тер (зло наибольшее и наименьшее значения функции в достаточно малой окрест-
241
ности соответствующей точки), отдельные минимумы некоторой функции могут
оказаться больше максимумов той же функции (рис. 15.3). Вследствие этого мак-
симум (минимум) функции называют локальным максимумом (локальным мини-
мумом) в отличие от абсолютного максимума (минимума) - наибольшего
(наименьшего) значения в области определения функции.
Максимум и минимум функции назы-
ваются экстремумом Латинское extremum
означает «крайнее» значение Значение
аргумента, при котором достигается экс-
тремум, называется точкой экстремума.
Необходимое условие экстремума выра-
жается следующей теоремой
Теорема 15.3. Я точке экстремума
дифференцируемой функции производная
ее равна нулю
Теорема имеет простой геометриче-
ский смысл: касательная к графику дифференцируемой функции в соответствую-
щей точке параллельна оси Ох (см. рис. 15.2).
Замечание 3. Если /*(х.) = 0, то отсюда еще нс следует, что х, -
точка экстремума Например, для функции /(х) = х5 /'(х) = 3х,1 /*(0) = 0, но
х, = 0 нс является точкой экстремума, так как /(х) > 0 при х > 0 и /(х) < 0 при
х < 0 (неравенство (15.4) или (15.5) здесь не выполняется).
Замечание 4. Функция может достигать экстремума также в точке, в
которой производная нс существует. Например, функция у = -|х + 4| не имеет
производной в точке х = -4, но достигает в ней максимума: у = 0 при х = -4. а
для всякой другой точки у<0 (рис. 15.4,а). Функция у* = -(1-Хуз)*2 нс
имеет конечной производной в точке х = 0, поскольку y' = (l-xJ'J)V2x"'/) при
х = 0 обращается в бесконечность, но в этой точке функция имеет минимум:
/(0) = -1, /(х)>-1 при х#0 (рис. 15.4,6),
I онорят, что функция у = /(х) меняет знак при переходе через точку х - х., если
/(X,)/(х2)< О для любых X) и х2 ю некоторой окрестности этой точки, удогыетво-
242
реющих неравенствам х, <х0 <х2, знак меняется с плюса на минус, если /(х,)>0, в
/(x2)<ft знак меняется с минуса на плюс, если /(х()<0, /(х2)>0.
Формулируя теоремы 15.4 и 15.5, будем предполагать, что функция у = /(х)
дифференцируема в некоторой окрестности точки х0.
Теорема 15.4. Если при х = хв производная функции у /(х) равна нулю и
меняет знак при переходе через это значение, то х(| является точкой экстрему-
ма. причем: I) х^- точка максимума. если знак меняется с плюса на минус.
2) хс - точка минимума, если знак меняется с минуса на плюс.
Теорема имеет следующий геометрический смысл: если в точке М0(хе,/(х^))
(рафика дифференцируемой функции касательная параллельна оси Ох, в точках сле-
ва от Л/о образует тупой угол с осью Ох. в точках справа острый, то хс - точка
минимума (рис. 15.5, в); если в точках слева от Мо касазелызая образует с осью Ох
острый угол, а в точках справа - тупой, то х^ - точка максимума (рис 15.5,6).
Замсчаиие. Теорема верна и в случае, если х0 - точка непрерыв-
ности функции /(х), производная в ней нс существует и меняет знак при
переходе через эту точку.
Достаточное условие экстремума можно выразить также с помощью
второй производной.
Теорема 15.5. Если в точке х = х0 первая производная функции у* f(x)
равна нулю, а вторая производная отлична от нуля, то х<, является точкой экс-
тремума. причем: I) х0 - точка минимума, если /"'(лс)> 0; 2) х^ - точка
максимума, если /'*(х0)<0.
Теорема /5.6. Пусть в точке х0 первые п производные равны нулю, а
(и + 1)-я отлична от нуля и непрерывна в этой точке, тогда: 1)если (л + 1) -
четное число, то х0 - точка экстремума: точка максимума при /<"‘|,(х0)<0
и точка минимума при fiK*>i(xo)>O; 2) если (и + 1) -нечетное число. то хсне
является точкой экстремума
243
Пример 15-7. Найти экстремумы функции -10х2 +11
Поскольку /'(*) = 4л ’ - 20х = 4х (х2 - 5), то точкам и, для которых /*(х) = О,
являются х, =-Vs, хг=0, Xj-Vs. Исследуем знак второй производной
/"(х) = 12х* - 20 в этих точках: /*’(—</5) = 12-5-20>0, /*(т/5) =
= 12 5-20>0, /*(0) = -20<а
Следовательно, х, =-V5, хг=~Л - точки минимума, х: = 0 - точка мак-
симума; min/(x) = /(-V5) = /(Vi) “ 25-10-5+15 = -10, max/x)=/0)= 15.
Пример 15.8. Вычислить значения экстремумов функции /(х) =
«х5-5х4 + 5х’+9.
Первая производная /*(х)= 5х*-20xJ + 15х2 = 5х2(х2-4х + 3) обращается в
нуль при х(=Ю, Xj=l, xj=3. Вторая производная /“(х) = 20г5 - 6QC + ЗОЬг в этих точках
принимает соответственно значения /~(0)=0, /"(1) = -10<0. /”(3)-90>0
Следовательно. х2 = I - точка максимума, х, = 3 - точка минимума, причем
тах/(х) = /(!) = 10, min/(x)=/(3) =-18 Чтобы исследовать точку Х|=0,
обратимся к третьей производной /"'(х) = 60х2 - 120х + 30. Поскольку
/"(0) = 30 * 0, п +1 = 3, то X, = 0 нс является точкой экстремума
Пример 15.9. Найти точки экстремума функции /(х) = х*+4х’ +
+ 6х2 + 4х+3
Первая производная /*(х)« 4х’ + 12х2 + 12х + 4 = 4 (х’ + Зх2 + Зх +1) равна ну-
лю в единственной точке х = - I. Находим выражения последующих производных
и их значения в критической точке х = -I: /”(х) = 12х" + 24х +12, /"(-I) = 0,
/~(х)=24х + 24. /"(-I)- 0, /rv(x)=24. Поскольку /•*(-!) >0 и л+1 = 4
(четное число), то х = -1 - точка минимума, причем min /(х) = /(-1) = 2.
15.4. Направления выпуклости, точки перегиба
График функции у = /(х) называется выпуклым вниз (вогнутым вверх) в дан-
ном промежутке, если он целиком расположен выше касательной в его произволь-
ной точке (рис. 15.6, а).
График функции у - f(x) называется выпуклым вверх (вогнутым вниз) в дан-
ном промежутке, если он целиком расположен ниже касательной в его произволь-
ной точке (рис. 15.6, б).
Теорема 15.7. Если вторая производная функции у = /(х) в данном
промежутке положительна, то график ее является выпуклым вниз
в этом промежутке: если /**(х)<0, то график функции является
выпуклым вверх в соответствующем промежутке.
244
Точкой перегиба графика функции у = f(x) называется такая его точка
Мо (рис. 15.7), в которой выпуклость меняется на вогнутость (по отноше-
Тсорема 15.8. Если вторая производная функции у = /(х) при х = х0 об-
ращается в куль и меняет знак при переходе через х0, то M0(xQ,f(xo)) -
точка перегиба графика этой функции.
Пример 15.10. Найти интервалы выпуклости и точки перегиба
графика функции /(х)«х’-6х2+9х + 1.
Поскольку вторая производная /*(х) = 6х -12 = 6 (х - 2) обращается в нуль при
х п 2 и меняет знак при переходе череп -лтэ значение, то х 2 - абсцисса точки пере-
гиба, ордината этой точки у = /(2) = 3, т. е. М (2,3) - точка перегиба
Так как /"(х)<0 при х<2 и /"(х)>0 при х>2, то график функции является
выпуклым вверх в интервале (- ®», 2) и выпуклым вниз в интервале (2, + »).
15.5. Асимптоты
Асимптотой линии называется прямая, к которой неограниченно приближается
данная линия, когда ее точка неограниченно удаляется от начала координат.
По виду уравнений относительно выбранной декартовой системы координат
различают асимптоты вертикальные (параллельные оси Оу) и наклонные
(пересекающие ось Оу).
Прямая х = а называется вертикальной асимптотой графика функции
у =/(х\ если хотя бы одно из предельных значений lim /(х), lim /(х)
г-» я-О г-•«♦()
является бесконечным. Например, прямая х = 2 является вертикальной асим-
птотой графика функции > = ^'(х-2), так как
lim й/(х-2)=-®о, lim 8^(х-2)= + ««.
г-»2-0 х-*2.0
Предположим, что функция у = /(х) определена при сколь угодно
больших (по модулю) значениях аргумента; для определенности будем
рассматривать положительные значения аргумента
245
Прямая
у —kx + b
(15.6)
называется наклонной асимптотой (рафика
функции y-f{x), если эта функция пред-
ставима в виде
/(x) = fa + 6+a(xX (IS?)
где lim a(x)=O.
График функции у»=/(х) имеет при
х —* + •» наклонную асимптоту (15.6) тогда
и только тогда, когда существуют два ко-
нечных предела:
lim Z^ = *. Urn (/(х)-fa)=6. (15.8)
Пример 15.11. Найти асимптоты
jf® + х
рафика функции /(х) =---—.
Прямая Х = 1 является вертикальной асимптотой (рис. 15.8), так как
2 *
lim/(л) = «">. Поскольку f(x)~ —+ * = х + 2+ и lim У(х-1) = 0, то гре-
ж-»1 л-1 л-1 «-»!
фик функции имеет и наклонную асимптоту у “ х ♦ 2.
15.6. Исследование функций и построение
их графиков
Под исследованием функций понимают изучение их изменения в зависимости
от изменения аргумента Ни основании исследования функции строя i ее график,
предварительно изображая характерные точки.
Исследование функций и построение их графиков можно проводить по сле-
дующей схеме,
1. Найти область определения функции, ее точки разрыва.
2. Изучить изменение функции при стремлении аргумента к концам проме-
жутков области определения.
3. Найти точки экстремумов, промежутки возрастания и убывания функции
4 Вычислить значения экстремумов, построить соответствующие точки.
5. Определить промежутки выпуклости и вогнутости (рафика, найти точки
перегиба
6. Найти точки пересечения (рафика с координатными осями.
7. Найти асимптоты графика функции.
Порядок исследования иногда целесообразно выбирать исходя из
конкретных особенностей данной функции.
246
Если рассматриваемая функция четная или нечетная, то ее достаточно иссле-
довать при положительных значениях аргумстпа из области ее определения и при-
нять во внимание, что график четной функции симметричен относительно оси
ординат, а график нечетной - относительно начала координат
Отметим также, что графики взаимно обратных функций симметричны относи-
тельно прямой, на которой лежит биссектриса первого координатного ут ла.
х2+1
Пример 15.12. Исследовать функцию /(х) = —j— и построить се график
1. Функция нс определена лишь при х = -1 и х = I. Следовательно, область оп-
ределения состоит из трех интервалов (-“.-!), (-1,1), (!, + »•), два из которых
являются бесконечными.
2. При стрем гении аргумента к концам промежутков области определения со-
ответственно получаем
х’-М , х’+ 1 х’ + 1
lim -I— = I, hm -=—- = + «•, hm —»— = - «.
ж-»--х -I .-.-1.0 XJ_]
lim hm = + ~ hm
.-.1.0 X2 - 1 I
3. Находим производные данной функции:
rw._rAs_ ./-(„.«Дум)
(»’-if (?-tf
Поскольку при x< —I и —|<х<0, то функция возрастает в интер-
валах (-•»,-!) и (-1,0). Так как /*(х)<0 при 0<х<1 и х>1, то футгкцня
убывает в интервалах (0,1) и (I, + “=).
Поскольку /'(х) = 0 нри\,=Ои f(xQ) = /"(0)<0, тохо=0 - точка максимума
Других критических точек нет, ибо /'(•») нс определена только при х = -1 и х =1, но
в этих точках нс определена и сама функция
4. Вычисляем значение максимума функ-
ции max/(x) = /(0) = -I.
5. Поскольку /*(х)>0 при х<—1 и
х > I, то график фу нкции является выпук-
лым вниз в интервалах (-~,-|) и
(!, + ••). Так как /"(х)<0 при -1<х<1,
то график функции является выпуклым
вверх в интервале (-1.1).
Точек перегиба график данной
функции нс имеет, ибо вторая производ-
ная в нуль нигде не обращается и
не определена в тех же точках, в кото-
рых не определена и сама функция.
247
6. Г рафик функции не пересекает Ось Ох, так как уравнение (х2 + i)/(x2 -1)= О
нс имеет действительных корней Если х=0 (уравнение оси Оу), то у = -1, в точке
В (0,-1) график пересекает ось Оу.
7. Из п. 2 следует, что график функции имеет две вертикальные асимптоты
х = -1 и х = I и горизогггальнуто асимптоту у = L Последнее вытекает также из
х2 + 1 , 2 2 Л
того, что —=— 1 ♦ —в— и hm -=— = (1
х2-1 х2-1 —- х2-1
Заметив еще, что /(х)>0 при х<-1 и x>i, /(х)<0 при стро-
им график функции (рис. 15.9).
15.7 . Задачи на наибольшие и наименьшие
значения
Наибольшим значением (абсолютным максимумом) функции у = f(x) на от-
резке [а, />| называют такое ее значение, которое больше всех других значений,
принимаемых функцией на данном отрезке Чтобы найти наибольшее значение
функции на отрезке, необходимо вычислить значения максимумов на пом отрез-
ке, значения функции на концах отрезка, а также во всех точках отрезка в кото-
рых производная нс определена, из полученных чисел выбрать самое большое
Аналогично определяется и разыскивается наименьшее значение функции
(абсолютный минимум).
В математике, физике, химии, технических и других науках, а также в повсе-
дневной жизни часто встречаются задачи на отыскание наибольших и наименьших
значений некоторых функций.
Общая схема решения таких задач состоит в следующем. Сначала устанавливает-
ся зависимость рассматриваемой величины у от некоторой независимой перемен-
ной величины х (обозначения, разумеется, могут быть другими). Из условия задачи
определяется промежуток, в котором может изменяться аргумент функции. Функция
у = /(х) исследуется с помощью теории, рассмотренной в предыдущих главах.
Пример 15.13. Найти наименьшее значение суммы двух положительных
чисел, произведение которых постоянно и равно а.
Обозначим искомые числа через х и у. По условию ху = а, где а > 0, поэтому
у = а/х. Сумма этих чисел я = х + у, я (х)=х + а/х является функцией перемен-
ной х; в соответствии с условием х > (1
Находим производные функции я(х):я'(х)»!-в/х2, х”^2а/х'.
Приравнивая нулю первую производную, получаем уравнение I - а/>?- 0, из
которого находим критические точки xt=-Ja, х2 = уа, первое значение не
принадлежит области изменения аргумента данной функции
Поскольку У*(-/а)>0, то x = -Ja - точка минимума,
причем minя (х)= s(y[a)=2yfa.
248
Пример 15.14. Найти наибольшее и наименьшее значения функции
/(x) = xJ - 12л+ 7 на отрезке [0,3]. •
Найдем сначала экстремумы данной функции: /*(х) = Зх1 -12, f(x) = 6.x,
/*(х)=0, 3.x2-12 = О, х(«-2, х2 = 2. Точка х, =-2 не принадлежит данному
отрезку Так как /”(2)>0, то х = 2 - точка минимума, причем
min/(х) = /(2) = -9. Находим значения функции на концах отрезка: /(0)=7,
/(3) = -2. Сравнивая эти три числа, заключаем, что наибольшее значение данной
функции на заданном отрезке равно 7, а наименьшее -9.
Пример 15.15. Прямоугольник
вписан в эллипс с осями 2а и 25. Каковы
должны быть стороны прямоугольника,
чтобы его площадь была наибольшей?
Рассмотрим прямоугольник ABCD, впи-
санный в данный эллипс (рис I5.10X с ос-
нованием 2и и высотой 2v. Площадь пря-
моугольника определяется формулой
x = 2u'2v = 4av, где v = (b/a)4a2 - и2
(получено из уравнения эллипса) Следова-
тельно, я = (4Ь/а)и 4 а2 - и2 — функция
я’ - (4Ь/а)(аг - 2иг )/ 4а2- и2 , то /»-0 при
переменной и. Гак как
и = я/72. Поскольку />0 при
и<.а/^2 и я' <0 при «>e/V2, то и = о/-/2 - точка максимума функции
я-я(и). Если и = а/42.
то v~(bfa) 4а2 -и2
•• b/ Ji Следовательно, площадь
прямоугольника будет наибольшей, когда его стороны равны 2а/-]2, 2//-J2
(тогда площадь равна 2аЬ).
15.8 . Дифференциал длины дуги кривой
Пусть на отрезке (а, 5) задана дифференцируемая функция у- /(ж), графи-
ком которой является дуга АВ (рис. I5.I I). Отрезок [о, 5] разобьем на п частей
точками х1,х2,..,,хя_|. Этим точкам будут соответствовать точки М„
дуги АВ. Соединим их отрезками прямых. Ломаную
АМ,М2 ... М„_ХВ называют вписанной в дугу АВ. Периметр этой ломаной обо-
значим через /„, т.е.
i«l
249
Длиной дуги называется предел периметра вписанной в нее ломаной, когда
число звеньев М^М^ неограниченно возрастает, а длина наибольшего из них
стремится к нулю:
м
где X - длина наибольшего звена
Будем отсчитывать длину дуги от некоторой сс точки, например, от точки Л;
пусть в точке М(х,у) длина дуги AM равна /, а в точке Л/'(х + Дх.у+Ду)
длина дуги AM' равна I + AJ, где Л/ — длина дуги ММ' (рис 15.12). Очевидно,
1 = 1 (ж), бесконечно малая дуга линии и стягивающая ее хорда жви валентны:
Дифференциал длины дуги плоской кривой, заданной уравнением * = /(*).
выражается формулой
dJ = y[dx2+dy2.
'.Ута формула имеет простой геометрический смысл: она выражает теорему Пифагора
для бесконечно малого треугольника MTN (рис. 15.12, <Л=ЛГГ, Д/- ММ').
Дифференциал дуги пространственной кривой выражается формулой
dl = -Jcfx3 + dy2 У dx2.
15.9 . Кривизна плоской кривой
Рассмотрим плоскую линию, определяемую уравнением у = f(x). Проведем
касательную к этой линии в ее точке Мо(*о. УоХ обозначим через а угол, образо-
250
ванный касательной с осью Ох (рис, 15,13). Пусть касательная в точке А/ образует
с осью Ох угол а + Да.
Угол Да между касательными н указанных точках называют углом смежно-
сти Можно сказать, что при переходе из точки Л/с в точку А/ данной линии каса-
тельная к ней повернулась на угол Ла. которому будем 1гриписывать соответст-
вующий знак в зависимости от направления поворота.
Г»
Средней кривизной дуги М0М дайной линии называется абсолютное значе-
ние отношения угла смежности Да к длине А/ дуги М0М:
Кривизной линии в данной точке Мо на-
зывается предел средней кривизны дуги
М0М при М -» А/о:
A- lim ^1, lim I—I. (15.9)
м-.м. А/ Г а/-.о| А/ I
Отмстим, что для прямой к = 0, а для ок-
ружностн радиуса R кривизна к - =1/R
Кривизна линии, заданной уршзненисм у- /л),
вточке Af0(x0, у0) вычисляется по формулам
1Г<У>1 „
<1 ♦</<»»»')”
или к
(15.10)
Если линия задана параметрическими уравнениями х = х(/), >' = >(,), то с
учетом (14.2Q) и (14.22) формула (15.10) принимает вид
(1511)
Кривизна линии, заданной уравнением р = р(ф) в полярных координатах, вы-
числяется по формуле
_|р’+2р'2-рр2]
(Р'Чр2)*3
(1512)
Пример 15.16. Найти кривизнукосинусоиды y = cosx вточке А/о(О,1).
Поскольку у' w -sinx, у” = -cosx, кривизна косинусоиды в ее произвольной
точке определяется формулой
I-008*!-.
(i+sin’x)*
При х = 0 получаем 4 = ^(1+0)^ = 1.
251
15.10 . Окружность кривизны. Центр и радиус
кривизны. Эволюта и эвольвента
Радиусом кривизны данной линии в данной ее точке называется величина R.
обратная кривизне к этой линии в рассматриваемой точке:
На нормали к кривой в точке Л/ отложим отрезок Л/С = R в сторону вогнуто-
сти кривой (рис. 15.14). Точка С называется центром кривизны данной линии в
точке М. Окружность радиуса R с центром в точке С называется окружностью
кривизны этой линии в точке М. Очевидно, в данной точке Л/ кривизна кривой и
кривизна окружности равны между собой
Ктюрдинаты центра кривизны определяются формулами
х-х-^+И
К У
Если кривая задана параметрическими уравнениями х = х (Г\
формулы (15.14) с учетом равенств (14.20) и (14.22) примут вил
(15.14)
то
(15.15)
Множество всех центров криви шы дан-
ной линии называется се эволютой. Но отно-
шению к своей эволюте исходная линия на-
зывается эвольвентой (или разверткой).
Если линия задана уравнением у = f(x),
то уравнения (15.14) можно рассматривать
как параметрические уравнения се энолюзы
(с параметром х).
В случае параметрического задания кри-
вой уравнения (15 15) являются параметриче-
скими уравнениями эволюты (входящие в
правые части этих уравнений величины зависят от параметра /).
15.11 . Переменная векторная величина.
Вектор-функция скалярного аргумента
Рассмотрим точку М(х, у, г), движущуюся по некоторой линии у в про-
странстве (рис. 15.15). Радиус-вектор г - ОМ точки Л/будет иметь определенное
направление и длину в фиксированный момент времени t. С течением
времени направление и длина вектора ОМ будут изменяться
252
Таким образом, здесь имеем дело с перемен-
ным вектором ОМ или с переменной векторной
величиной
г=г(а
(15.16)
зависящей от времени t. Равенство (15.16) называет-
ся векторным уравнением движения точки М.
Координаты переменного вектора
ОМ = г(0 = {*(<Х>'0)>^(0} являются также пере-
менными величинами (скалярными), зависящими от
времени Г.
*-*(<1 у-у(Г). *-*(<)•
Рис. 15.15
(15.17)
Уравнения (15.17) являются параметрическими уравнениями рассматри-
ваемой линии у.
Переменная векторная величина и называется вектор-функцией (или
векторной функцией) скалярного аргумента Г, если каждому значению
/0 € Т, где Т — некоторое множество действительных чисел, соответствует
определенный вектор и(/0); в этом случае пишут и=и(Г).
Если и = •(<), то и проекции u,.iij,,u, переменного вектора и на оси декар-
товой системы координат будут (скалярными) функциями аргумента t: и, и,(г),
и, = «,(*)•
Пример всктор-функцни скалярного аргумента лает рассмотренный выше
случай радиус-вектора г = г (/) точки, движущейся по некоторой линии в
пространстве.
Годографом переменной векторной величины называется геометрическое
место концов векторов всех ее отдельных значений при условии, что они от-
ложены из одной точки. Годографом постоянного век-
тора является точка (конец вектора). Годограф всктор-
функции и = и (Г) представляет собой некоторую ли-
нию. Если вектор сохраняет постоянную длину, то его
годограф - линия, лежащая на сфере. Годографом ра-
диуса-вектора г=ОМ движущейся точки М является
траектория этой точки.
Пусть а- некоторый вектор (постоянный) и г = г(1) -
вектор-функция, определенная в некоторой окрестности
точки г0, кроме, был, может, самой точки tg.
Вектор а называется пределом вектор-функции
г = г(/) при если для любого £>0 существует
такое 8 = 8(е)>0, что |г(0~>|<£ для всех I, удовле-
творяющих неравенству 11 - Го | < б, t*t0 (рис. 15.16).
Рис. 15.16
253
Обозначения предела веюор-функции:
11Ш г (/) = , (15.18)
г(г)-* а при
Очевидно, равенство (15.18) эквивалентно равенству
Шп|г(О-«|=а (15.19)
Если г (I)-{ж(t), у (I), ж(,!)} и а-(аиаг,а3}, то равенство (15.18) выполня-
ется тогда и только тогда, когда 4
lim ж (Т)=а,, Hnjr(t)sa2> lim z(t)=ay.
Если всктор-функции Г| (/) и г2 (/) определены в некоторой окрестности точ-
ки t0 и существуют пределы
lim г. (Г) = a, lim г2 (Г) = Ь,
t-*t9
lim г. (О lim г2 (() = l b, (lim r( (/X ,im <”> (О | = |а. Ь],
скалярная функция ДО имеет предел при t —» t0, то существуют также пределы
lim (^ (Т)+г2 (z))=a + b,
lim (/(/)г, (/)) = lim /(/) lim г( (Г),
»-»«. •-»», t-ч,
Jim г, (f)r2 (/)= b,
lim [r, (ty.r2 (O]«|a.b).
Вектор-функция r = r (/), определенная в точке Zo и некоторой ее окрестно-
сти, называется непрерывной в этой точке, если lim г (/) = г (»0).
Из эквивалентности условий (15.18) и (15.19) следует, что вектор-функция
г (Г) = {•*(<), У (<),«(/)) непрерывна в точке г0 тогда и только тогда, когда не-
прерывны в ней функции х (/), у (Z),г (О
15.12 . Дифференцирование вектор-функций
11редел отношения приращения вектор-функцни к приращению аргумента, ко-
гда последнее стремится к нулю, называется производной всктор-функции
и = и (v) а точке у:
И'(у)=* = lim 4v^^)-«(v)
dv Лг-«О Ду
Необходимым и достаточным условием существования производной всктор-
функции
и (у)=(*(*). У (*).* О')} (15J0)
254
в некоторой точке является дифференцируемость функций x(vXy(v), z(v) в
этой точке; причем в данном случае
“'(')= (х' (»Х У ( VX г' (v) ).
Правила дифференцирования векгор-функции аналогичны правилам обычного
дифференциального исчисления. Если u, = U|(vX u2 = u2(v) -
дифференцируемые вектор-функции скалярного аргумента у, с - постоянный
вектор, /(у) - дифференцируемая скалярная функция, к - постоянная скалярная
величина, w - скалярный аргумент, связанный с V формулой *«w(v), где
w(v) - дифференцируемая функция, то эти правила дифференцирования выра-
жаются следующими формулами:
2) d(M| *i»2)_ du, ( du,
dv dv dv dv
З)^).#и|+/Л,
dv dv dv
36)^-.*
dv dv dv dv
.. d(u.u,) du, du, . . d(cu,) du,
dr' dv dv dv dv
S)
^l "J -
dv dv _ [ dv
6)
du, _ du, dw
dv dw dv
Геометрический смысл производной
u'(v)#O: производная векгор-функции в дан-
ной точке есть вектор, направленный по каса-
тельной к годо>рафу данной векгор-функции в
соогвстству ющей точке (рис 15.17).
Отмстим, что при другом значении V получим
новое значение и' (у), т. е производная векгор-
функции также является вектор-функцией. Век-
тор-функция, имеющая производную, называется
дифференцируемой.
Дифференциалом векгор-функции u = u(v)
называется произведение ее производной на
дифференциал аргумента du = u'(v)dv, где
dv = Дг. отсюда u' = du/dv.
О
Рис. 15.17
255
Пусть
Г = г(г), г = x(r)i+y(/)j+z(r)k -
векторное уравнение движения точки Л/ в пространстве. Приращению Дг времени
t соответствует приращение Дг=Л/0Л/ вектор-функцин г = г(/). Отношение
br/lsi называется вектором средней скорости, -пот вектор направлен по прямой
М0М. Предел указанного отношения при Д/ -» О называется вектором скорости
в MOMciri z0 (или вектором мгновенной скорости), обозначим его через V, т.е.
» = г'(/) = £ (13.21)
at
Следовательно, вектор мгновенной скорости (или вектор скорости) движущей-
ся точки направлен по касательной к ее траектории Вектор г* (Ж) характеризует
направление и быстроту движения точки.
Если для всктор-функции г = г (/) в качестве параметра t выбрать длину дуги
ж, отсчитываемой от некоторой точки Мо, то производная вектор-функнни будет
равна единичному вектору, направленному по касательной. Обозначив «тот вектор
через Т, получим
= L (13.22)
Оз 1 1
Второй производной всктор-функции и - и (v) называется производная от сс
производной u'(v): u"(v) = (u'(v))'.
Для функции (15.20) имеем
u" (v) = (х” (vX у" (vX *'(»)).
если существуют вторые производные функций ж (v), У (*Х г (*)•
Аналогично определяются производные более высокого порядка для вектор-
функции u = u(v).
15.13 . Уравнения касательной к
пространственной линии.
Кривизна пространственной линии
Рассмотрим пространственную линию у (рис. 15.18), заданную векторно-
параметрическим уравнением
г = г«Х г(0-ж(0<+У(01+«(0к (13-23)
или параметрическими уравнениями
х = х(<Х > = >('). х = «(*Х
256
где x(l),y(t).z(t)- дифференцируемые функции переменной t. Зафиксируем
значение t0 параметра I, ему соответствует точка М0(х0, у0, zt), гае x0-x(t0),
Уо = У(‘о), жо = *(<о)
Уравнения касательной к пространственной
М0(Хо, у0.г0) имеют вид
х-л0 _у-уо _ z-zt
*'('«) у'(10) г'(‘о)
(15 25)
Нормальной плоскостью к пространствен-
ной линии в данной ее точке Л/ называется
плоскость, проходящая через точку М и
перпендикулярная касательной к данной кри-
вой в той же точке.
Нормальная плоскость к линии (15.24) в точ-
ке М0(х0, >’о»жо) имеет уравнение
линии (15.24) в точке
Рис. 15.18
*'(|,)а-л,)+/(/,}(у-л)+Н(,)(1ч.)-а (15.26)
Если л - длина дуги, то единичный вектор касательной t к линии у опреде-
ляется формулой (15.22). Придав аргументу t приращение А/, получим точку М
линии у и соответствующий вектор касательной t + At. Степень изогнутости кри-
вой можно характеризовать скоростью поворота вектора т.
Кривизной к линии у в точке Мо называется модуль производной всктор-
функции t = t (з) в данной точке, т. е.
к =
(15.27)
Это определение равносильно определению кривизны плоской кривой.
Кривизна линии, заданной уравнениями (15.24), выражается формулой
(15 28)
Кривизну линии можно выразить в координатах. Поскольку г(г)=
W0. ИО, НО). T'(t) = (X'(t), /(г), z'(/>). Г"(/) ж (x~U). y”(r), z'(r)). то
i
J k
У' z‘
y- z-
(15-29)
и
х"
(1530)
9 3ж I
257
Отметим, что формула (15.11) является частным случаем формулы (15.30).
Пример 15.17. Записать уравнения касательной, уравнение нормальной
плоскости и вычислить кривизну линии г(<)=2sinJri + 2cos’rj+sin2A вточке,
для которой ip = я/4.
Перейдем к параметрическим уравнениям данной линии
x = 2sin2/, y = 2cos2/, 2 = sin 2/. (I)
Найдем координаты точки Мо (я©, у©. Ze): *© = x(r0) = 2sin2(a/4) =
= 2(т/2/2)2 =1, у0 = у(Г0)=2сов2(Я/4)=1, 2© =z(f0) = sin2(n/4) = l; Мс(1,1,1).
Найдем производные функций (I) и их значения при (р = п/4:
к'= 2 2sin/cos/= 2sin2z, y' = -2sin2z, t' = 2cos2/; (11)
*'«©)-2sin2(K/4)-2, у'(f0) = - 2sin 2 (л/4)« -2, 2'(»©) = Q
В соответствии с равенствами (15.25) получаем уравнения касательной
к данной линии
(х-1)/2 = (у-|У(-2)-(г-1уО, или (ж-1)/2 =(у-1)/(-2), 2-1=0,
Подставляя соответствующие значения в формулу (15.26), находим уравнение
нормальной плоскости: 1(ж-1)-1(у-1)+0(2-1) = 0, или ж-yeft
Для вычисления кривизны линии в точке Л/о(1,1,1) нужны значения
вторых производных функций (I) при г0 = л,'4. Так как x' = 4cos2/, у” =
= -4cos2/, 2” = -4sin2/, ж''(/р) = 0, у"(Го) = 0, ж" (<©)“-4, то по
формуле (15.30) находим
к_ /((-2)(-4)-о о)2-ь(2(-4)-о о)2->-(2 о-оег»2 в -Дм ж
(22 +(-2? +02)*2 “ в*2 “2
258
Глава 16
НЕОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ
16.1. Неопределенный интеграл и его свойства.
Таблица основных неопределенных
интегралов
Функция F(x), определенная в промежутке (о. Ь), называется первообразной
данной функции /(х) в этом промежутке, если для любого значения хе (а, Ь)
выполняется равенство
F*(x) = /(x). (16.1)
Например, функция F(x) = x’ - первообразная функции /(х)=5х* в про-
межутке (-«», + “), поскольку (х’)' = 5х4 для всех х; функция F(x)=lnx -
первообразная функции /(x) = Vx в промежутке (0, + “>), так как (1пх)' = 1/х;
функция F(x)»arccosx — первообразная функции /(х)= -^Jl-x2* в ин-
тервале (-1,1), ибо (arc cost)'--^т/1-х2
Если F(x) - первообразная функции /(х), то
®(x)=F(x)+C, (16.2)
где С - произвольная постоянная, также является се первообразной.
Выражение (16.2), в котором функция F(x) удовлетворяет условию (16.1Х
определяет множество всех первообразных данной функции /(х) в заданном
промежутке (в, Ь).
Неопределенным интегратом от данной функции /(х) называется множество
всех ее первообразных:
J/(x)A-F(x)+C, (163)
где F'(x) = /(х). Знак I называется знаком неопределенного интеграла, функ-
ция /(х) — подынтегральной функцией, выражение f(x)dx -
подынтегральным выражением.
Операция нахождения первообразной данной функции называется
интегрированием.
Неопределенный интеграл обладает следующими основными свойствами.
259
I. Проигводная неопределенного интеграла равна подынтегральной функции;
дифференциал неопределенного интеграла равен подынтегральному выражению:
-/(хХ (16.4)
d jf(x)dx = Дх)<Ь. (16.5)
2. Неопределенный интеграл от дифференциала некоторой функции равен
сумме этой функции и произвольной постоянной:
JeAp(x)= <р(ж)+<£ (16.6)
3. Постоянный множитель можно выносить за знак неопределенного интеграла:
j tf(x)dx = i J/(x)<fc (A = const, 1*0). (16.7)
4. Если функции /Дж) и /2(х) имеют первообразные, то функция
/i(x) + ft(x) также имеет первообразную, причем
f(/i(*)+/j(*))<fa = fZ(*)‘6 +(16.8)
Таблицу простейших неопределенных интегралов метрудно получить, восполь-
зовавшись тем, что интегрирование является операцией, обратной дифференциро-
ванию. Будем исходить из форму лы (16.6), которую запишем следующим образом:
если dF(x) = /(x)<fc, то J/(x)dr - Г(х)+С. Например, поскольку
c/(sinx) = cosxdx, то Jcosxdx - sinх + С.
Применяя аналогичное рассуждение к каждой из формул основных дифференциа-
лов (см п. 14.4), получаем следующие простейшие неопределенные интегралы:
I . jl <& = J<f»=x+C,
Г . х"4 5'
2 Iх Л-----+ С (a#-IX
J а+1
4. fa‘dx- — + С (о>0Х
J In а
5. р'л=г+с,
б Jcosxdtr = sinx + C,
260
7. Jsinxrtr = -cosx + C,
& J _*_ = tgJf + C,
J cos x
9. [^ ^-ctgx + C,
J sm x
f dx
10. I •=arcsinx + C=-arccosx+C1,
J Vl-x2 •
II. f—--y- arctgt+C=-arcclg x + C,
J l+x2
12. Jshx4ix = chx + C,
13. Jchx = shx+C,
14. = thx + C,
J ch2x
IS --cthx + C.
J sh’x
Отмстим, *по вес указанные формулы справедливы в тех промежутках, в кото-
рых определены соответствующие функции. Например, формула 3 справедлива
для любого промежутка, не содержащего гонку х = О, формула 10 - для иктерва-
ла (-1.1) ит. п.
Замечание. В таблице основных ишегралов вместо х везде можно за-
писать и = и(хХ где и(х) - любая дифференцируемая функция независимой
переменнойх: J</n«= и+С, J — = 1п|и| + С ит.д
При использовании формул этой таблицы для преобразования подынтеграль-
ного выражения к виду f(x)dx ~ g(u)du применяются простейшие преобразова-
ния дифференциалов: 1) dx = d(x + b\ где 6 = const, 2) dx = =-' d(ax), o#0,
a
3) dx=(\ra)d(ax + b), a#0, 4) xdx = (V2)d(x2 + 6), 5) sinxA » d(- cosx), \
6) cosxxZx = </(sinx\ 7) <p’(x)<ix = <йр(х>.
Например,
Г . - , f . , 1 ... . If-. ... . cosSx „
J sinSxdix = J sinSx- d(5x)=- J sin5x«/(5x) = —+C,
r2+l J x2+l 2 J x2+l 2
261
К наиболее важным методам интегрирования относятся следующие:
1) непосредственное иитетрироваиие; 2) метод замены переменной, 3) метол ин-
тегрирования по частям.
16.2 . Непосредственное интегрирование
I кпосредлвавюе интп рированне основано на свойстве 4 нсопрстслеянос о интараа.
Если функции /(х), /2(х ),...,/,(х) имеют первообразные в некотором про-
межутке, то функция /(х) = /(х) + /г(х) + /э(*)+'" + /»(*) так*е имеет перво-
образную в том же промежутке, причем
J(/|(*)+Л<*)+•••,+/.(X)) dx = J/Дх) Л + j/2(х) dx + ••• J/я(х) dx, (16.9)
тх неопределенный интеграл от алтебраичсской суммы конечного числа функций
равен такой же алгебраической сумме неопределенных иттгегралов от слагаемых
Пример 16.1. Найти неопределенный ннтетрал
J(x’-6x2+4x-5)A.
Пользуясь свойствами неопределенного интеграла, формулой (16 9) и первыми
двумя формулами простейших неопределенных интегралов, находим
J(XS - 6х2 + 4х - 5) dx = J x’dx - j 6х2dx + J 4xdx - J Sdx -
J x*dx - 6 J x2dx + 4 J xdx — 5 J — 6 ^- + 4 5x + C"
» ——2x’+2x2-5x+C.
4
Замечание. Постоянное слагаемое не записано при нахождении каж-
дого интеграла алгебраической суммы, а лишь один раз, так как сумма произволь-
ных постоянных величин есть величина постоянная.
гГ 1Y
Пример 16.2. Найти интеграл I 1 + — <&.
J \ х)
Преобразуя подынтегральную функции! и пользуясь первыми тремя формула-
ми неопределенных И1ПГ1разюв, получаем
262
Пример 16.3. Найти неопределенный интеграл J —у J dx.
С помощью формул 2 и 3 простейших иотара, юн (при а = - и а = -2) получаем
[f—+х‘^-x‘2l dr = ln|x| + 2-Jx + — +C
* \x 4x X ) Jv* J *
Пример 16.4. Найти интеграл J tg2 xdx.
Преобразуя подынтегральную функцию и пользуясь формулами интегра-
лов I и 8, находим
J J cos2* J cos * J cos4ж J
С cos2jc<£k
Пример 16.5. Найти интеграл I —=——г—.
J cos * sin X
Преобразуя подынтегральную функцию и пользуясь формулами 9, 8, получаем
г~гм. .г<«И»-*.»оа., [4 -.С
J сое х sin х J cos х sin х J sin x J cos x
Пример 16.6. Найти интеграл J cos’(x/2) dx.
Поскольку cos2(x/2) = (V2)(1+cosxX to
J cos’(x/2) dx = 1 J (1 + cosx) dr=^Jdx + ^J cos “ j,+
f x*dx
Пример 16.7. Найти интеграл I—?—
J x +1
Преобразуя подынтегральную функцию, с помощью формул 1 и 11 простей-
ших интегралов, находим
(4* . U- f 4—x-aragx + C
Jx2+1 J X2+I j Jx2+1
16.3 . Метод подстановки
Интегрирование путем введения новой переменной (метод подстановки)
основано на формуле
j/(х) Л =[/(<₽(/)) <р'(О <*. (16 Ю)
где х = ф(«) — дифференцируемая функция переменой I.
263
Пример 16.8. Найти интеграл
Введем новую переменную t по формуле х* = I, откуда 4x’dx = dt,
х’Ав-’л, **=(**/=?.
4
Переходя к новой переменной и используя формулу 10 простейших интегра-
лов, получаем
Возвращаясь к переменной х, находим
Замечание. Результат можно проверить дифференцированием. Так как
то на основании формулы (16.4) заключаем, что пример решен верно.
Г х3 dx
Пример 16.9. Найти интеграл I -
з/о2-х1
В случае, когда подынтегральное выражение содержит -/о2 -к2, целесооб-
разно применить тригонометрическую подстановку x-asinf или x-acost
Положим x = asin», тогда dx = acostdl, поэтому
Jx'dx _ f о1 sin2 t o cos td/ _ t a3 sin31 a cos tdt _
Jа3 -x3 J Vo2 -o2 sin2» * о cos»
a1 J sin2 tdt- o2 J sin2 »sin idi = -a’J(1 - cos2») d (cos»)=
= o J (cos »-!)</ (cost) =------a cost t-C.
Заметив, что sin t = x/a, cast = -Jl - sin2» = y/l~xy/a3 = 7(fl2-*2)/o. получим
Пример 16.10. Найти интеграл Г /
J ух3 +а
264
Применим так называемую подстановку Эйлера 4хг + а *t-x, где t «юная
переменная. 11ерсписав это равенство в виде Г = х +Vx2 +а и взяв дифференциа-
лы от его обеих частей, получим
откуда
Итак,
(16П)
16.4 . Метод интегрирования по частям
Если и = и (х), v = v (х) - дифференцируемые функции от х, то из формулы
для дифференциала произведения двух функций d (wv) = udv + vdu получается
формула интегрирования по частям
J|лЛ- = wv- J w/u.
(16.12)
Эта формула применяется в случае, когда подынтегральная функция представ-
ляет собой гроизведсние алгебраической и трансцендентной функций В качестве
и обычно выбирается функция, которая упрощается дифференцированием, в ка-
честве dv - оставшаяся часть подынтегрального выражения, содержащая dx, из
которой можно определить V путем интегрирования.
В некоторых случаях для сведения данного интеграла к одной из формул про-
стейших интегралов формула (16.12) применяется несколько раз Иногда искомый
интеграл определяется из алгебраического уравнения, получающегося с помощью
интегрирования по частям
Пример 16.11. Найти интеграл Jх 3‘dx.
Полагаем х = и, Ydx = dv, откуда dx = du, V“3’/ln3 (по формуле 4 про-
стейших интегралов). Подставляя эти выражения в формулу (16.12), получаем
In 3 J In 3 1лЗ (In З)2
265
Замечание. Результат можно проверить дифференцированием:
Гх-З' З1 t/| _ У f х У(1пЗ) У1пЗ_, у
[ 1пЗ (1пЗ)2 ) ~ 1пЗ (1пЗ) (1пЗ)2
Пример 16.12. Найти интеграл Jarctgxdr.
Полагая u-arctgx, dv = dx, находим du«<&/(l+x2), v=x.
По формуле (16.12) получаем
Г _ . Г xdx „.1 Гd(*’+!)
I arctgxdr «xarctgx-I --=- = xarctgx~- I—5— — =
J J 1+x 2 J x'+l
= xarvtgx—i ln(x2 + I)+C.
Пример 16.13. Найти интеграл Jx’sinxdr.
Полагая « = ха, dv = sinx<& = d (-cosx), получаем du = 2xdx, v = -cosx.
Следовательно.
jx2 sin x4tx = x’(-cosx)-|(-cosx)2xdx =-x2 cosx+ 2 Jxcosxdx. (I)
Полученный интеграл снова находится интегрированием по частям Его можно
найти и не вводя явно функции и и V.
Jxcosx<fr = Jxrf(sinx) = xsinx-Jsinxdt = х sin х + cosx + С,
Подставляя зге выражение для интеграла в формулу (I), находим
Jx’sinxtfx =-х1 cosx + 2 J х cosxdbt«-х2 cosx + 2 (xsinx + cosx+С()=
= -x’cosx+2(xsinx+cosx) + C (C«2Q).
Пример 16.14. Найти интеграл J(arccosx)2dr.
Полагая u = (arccosx)2, dx - dv, получаем v = x, du =
в-гапхоххтбг/^!-*1 По формуле (16.12) имеем
xarccos x<fx/Vl-x2.
ГУгот интеграл также находим методом интегрирования по частям:
к = arccosx, dv = xtfa/Vl-х2 , Л=*-<£гА/1-х2 , v = --Jl-x'
xarccosx , Г. 2
—, ......dx = - v 1 - x arccosx -
,2
arccosx-x + Cj.
266
Следовательно,
J(arccosх/dx-x (arccosx)2 - 271-x 2 arccosx- 2x + C.
Пример 16.15. Найти интеграл Je*“ cos0xdx.
Полагая н = е‘“, </v = cos0«&, находим б/и = ае'“Л, v = (V0)sin0x; следо-
вательно,
J em cos0xrZx = e“,^sin0x-J^sin0x- ae^dx,
(I)
Je“ cos^rdr = -p еш sin 0x - J e“ sin [tufa
Интеграл в правой части равенства (I) также находим методом интегри-
рования по частям:
je“sinPxdx >= je0* р d(-cosP») = - е1
cosflx+Ji cos|lx aea'dx
« - 7- е“ cos0x + a [е“* cosfWx.
0 0 J
Подставив выражение (II) в равенство (I), получим
COS [lx 4
. 0
J e“* cosflxdr = | em sin fix -
= —e“sinPur + -^-e“cos0jr-% [e‘“cos0x</x.
0 0 0 J
Перенося интеграл в левую часть, получаем уравнение
1
ет cosfWr
’ е*° sin^r + е“ cos0x,
0 0
ит которого находим
fe" cos0xdx =—г-?—r e“(acosPx+psinPx) + C
J a’ +0
Пример 16.16. Найти интеграл j'Jx’+adx.
Г~9 а а Х^Х ,
Положим u = \* +a, dx = dv, отсюда —гч -du, v=x.
Vx2 + a
(16.12) получаем
(П)
По формуле
Преобразуем интеграл в правой части
267
Замечание. Этот интеграл можно найти с помощью
подстановки x = asin/.
268
16.5 . Интегрирование рациональных дробей
с квадратным трехчленом в знаменателе
Интеграл вида Л = J + ЯХ + Г) путем дополнения квадратного трехчле-
на до полного квадрата по формуле рх2 + дх + г = р Цх + к)2 ± а1) сводится к од-
ному из двух интегралов:
Г du 1 и
[-j^»-arctg^+C. (16.15)
J tr +о а а
J и -а 2а I u+fl |
где и^х + к.
Интеграл
, Г тх +я , ... .
А" —j-----------Л (16.17)
J рх + gx+r
сводится к интегралу (16.15) или (16.16) и интегралу
«^Inlu2+а|+С. (16.18)
J и +а 2 1 •
11ри нахождении неопределенного и tn с грата от рациональной функции с квад-
ратным трехчленом в знаменателе, т. е.
Р,(х) ax2+bx+c
сначала производят деление, в результате получают Я(х)=£>»(х)+ (far+Ma? +6х+с), где
(?ж(х) - многочлен, степень которого ниже степени многочлена Р„(х).
Первообразная от многочлена Q„(x) находится непосредственно, а от остатка
(Ja+l)/(ax2 + bx +с) - как ишетрал вида(16.17)
Пример 16.18. Найти интеграл Г-,
J х + 4х-12
Дополняя квадратный трехчлен до полного квадрата и интегрируя на основа-
нии формулы (16.16) для случая, когда и “ х + 2, а = 4, находим
f f_______dx________ f dx
J x2+4x-12 " J (x2 +4x+4)-4-12 ~ J (x + 2)2 -16
= f d(x + 2) 1 I (x+2)-41
J(x + 2)J-4I 2 4 I (x + 2) + 4 |
269
Пример 16.19. Найти интеграл I —=-.
J х -6х+34
Выделяя полный квадрат и применяя формулу (16.15) для случая, когда
w®x-l а = 3, находим
Г dx _ Г dx__________________ _ f_dx_____
J x2-6x+34“ J (x2-6x+9)-9 + 34 J(x-3)2+25
r d(x-3) i . <х-з').х,
Ч"ГГС
Пример 16.20. Найти .
k K Jx’+4x + 20
Преобразуя подынтегральное выражение, получаем
г <*tg> -ф,1 г 2*.+16. ру+<)±12Л=
J x2 +4x + 20 2 J x2 +4x+20 2 J x2 +4x + 20
.1 f (2x+4)<fr +6 f___A _=1 ((x2+4x + 20fdx +
~2Jx2+4x + 20+ Jx2+4x + 20 2 J x2+4x + 20
+6 f-^£±3L.-lln(jr’ + 4x+20)+6
J(x + 2)’+42 2 4 4
= ’ ln(x2 + 4x + 20) + ’ aretgii-2 +c.
2 2 4
_ >^4. U fX* +5x’-3x2 +7x + 3 ,
Пример 16.21. Найти I-----1-------dx.
J r +1
_ x* +5x*-3x2 + 7x + 3 j - . a2x+7 ч
Tax как------z-------x +Sx-4 + —-—to
x2+l x2+l
J x4+5xJ-3x2 ^7х-ьЗ Л = +2 _ 4x + in (jt» +))+7arctgx +C.
16.6 . Интегрирование рациональных функций
Рассмотрим неопределенные интегралы вида |я(х)А, где Я(х) -
правильная рациональная дробь, т. е.
Я(х)«
Q.W
(п < т).
Нахождение указанных интегралов основано на разложении рациональной
270
дроби в сумму элементарных дробей, т. с. дробей вида
А __&*+£_
(*-а)“ ’ (x*+px+q? '
где а, р - натуральные числа; в, р, q, А, В, С - действительные числа;
р2/4 - q < 0 (корни трехчлена являются комплексными).
Эго разложение определяется теоремой 8.5 (см. п. 8.7).
Пример 16.22. Найти Г7*
J х’ + 1
_ 7ха-х + 1 3 . 4х-2 , „
Т К ха+1 *7+1 «*-«+1 (СМ "РНМСР8,8>’ТО
Г7ха-х + 1^_зр(х+1)[2 f(^-x_+l)'^3
J x’ + l J х + 1 J ха—х + 1
-3ln|x + l| + 2ln|xa-x + l|+C.
Пример 16.23. Найти [ Д 1 <fc.
J х1 —Зх + 2
Поскольку
х2+х + 1 1 2 ___I
х*-Зх + 2 " 3(х + 2) + 3(х-1) + (х-Р*
(см. пример 8.19), то
f х’+ж+l ul f</(x + 2) 2 rrf(x-l) f</(x-l)
Jx’-3x + 2 3J x + F+jJ x-l
= l|n|x + 2|+|to|x-l|--lT + C.
In I (x + 2)(x-l)al-Ц + С.
3 1 1 x-l
Пример 16.24. Найти интеграл [ —: --------x-----.
J x*-x*+2x’-2xa+x-l
Разлагая знаменатель на множители, получаем х*-х* + 2х’ -2ха +х-
-1-х4(х-1)+2х2(х-1)+(х-1)=(х-1)(х4 + 2х,+1) = (х-1)(х,+1)2.В данном
случае разложение в сумм)' элементарных дробей должно иметь вид
1 Л t flx + C t Д» + £
(х-1)(х2+1)2 “х-1 х2+1 (х’+1)?’
откуда
I = А (хг +1)2 + (Вх + С) (х -1) (х2 +1)+(Dx + Е) (ж -1).
Полагая в этом тождестве х = 1, находим 1 = А 4, т.е. А = \А Придавая х со-
ответственно значения х = 0, х = -1, х = 1 = ^-1, поллчасм уравнения
271
l = A~C~E; 1= 4Л+4£-4C + 2D-2£; 1 = (Di+ £)(/-!), или 1 =
=—D-Di+ Ei-E, т.е. I = -D-£ + (£-D)i, откуда l = -D-£, £-D = 0.
Решив полученные уравнения, найдем В = —1/4, С = -1/4, D=—1/2, Е=-1/2.
Таким образом,
1
Lx’+x + l J^4(x-1) 4(x’+l) 2(x*+1)’
I fd(x-l) 1 f xdr 1 f dx
±1п|ж-1|-11п(жа + 1)-
1 Г xdx If dx
2 J (x2+l)2 2 J(x,+I)2
1 - 1 fd(x2 ________
4 4 J (jt2+|)2 2 J (*> + !)» ~
= i ln|x-l|- in(x2 +1)-j arctgx+4 —Д
4 4*2 4
- — arctgx - — —+ C = ' In
4*4 1 + x2 4
1 ____ 1-х
— arctgx +----г---
2 * 4(х2+1)
Замечание. Интеграл Jнайден с помощью подстановки
х = tg». Так как dx = dl/coS11, то
f—*— = [cos’**» Г =
J(x,+1)2 J(tg2» + 1)2 J J 2
1 « . I . lx
= —»+—sxn2» = — arctgx ;-----+ C
2 4 2 2 *’ +1
| sin2r = 2sinrcosr = 2 —П- cos2»= 2tgrcos2r = 2x—tI-
V cos» 1+x J
16.7. Интегрирование простейших
иррациональных функций
Неопределенный интарал I , выделением полного кнддрала в
' у[ах* + Вх+С
подкоренном выражении и введением новой переменной и = х+Ь в зависимости
от знака А приводится к одному из интегралов:
[ - г = arcsin — + С, (16.19)
}->1а2-иг а
272
(16.20)
Неопределенный интеграл I V Ал1 + Bx+Cdx в зависимости от знака А приво-
дится к одному из интегралов:
J+Ju2+а + ” bi| и +л/и2+а | + С, (16.21)
[Vo2-«’</« = — Vo2 +— arcsin — +С (16.22)
J 2 2 а
(см. формулы (16.13) и (16.14)).
Неопределенный интеграл [ -р. дх'*’^ dx нриво.тихя к интегралам вила
J у]Ахг +Вх + С
(16.23)
(16.24)
/ =
(1625)
Интеграл вида
(16.26)
где /?• рациональная функция и p{Jqt,„.,~ Целые числа, с шмощью 1Юлстановки
ах+Ь^
cx + d
где л-наименьшее общее кратное чисел 4i><h........?*. приводится к
интегралу от рациональной функции.
Интеграл от дифференциального бинома
/ = jx"(a + bx" У dx.
(16.27)
где т.п.р - рациональные числа; а, Ь - постоянные, отличные от нуля, сво-
дится к интегралу от рациональной функции в трех случаях.
1) когда р — целое число, - разложением на слагаемые по формуле бинома Нью-
тона при р>0, подстановкой х = Г*, где N - общий знаменатель дробей m и л;
2) когда (т + 1)/и - целое число,- подстановкой а + bx” = Г*, где з -
знаменатель дроби р;
3) когда (т + 1)/л-ир - целое число,- подстановкой ах~“ +b = l‘.
Пример 16.25. Найти [ .
J V3x2 +6х + 4
273
Так как 3х2+6х + 4 = 3(х2+2x + l)-3+4 = 3(x + l)J+1 = 3((х + 1)2 + 1/3), то,
положив х +1 = и, по формуле (16.20) получим
f * 1 f d(*+V
J 7зх2+6х + 4 л/з * ^(x + l)2 + 1/3
= -у-ln|(x+l)+-J(x + l)2+V3 | + С.
Пример 16.26. Найти J Vx2+6х+13dx.
Поскольку л2 + 6х + 13 = (х2 + 6х + 9)+4 = (х + 3)2 +4, то, полагая и = = х + 3,
по формуле (16.21) находим
j Jx2 +6х + I3A = Р* + 4+-4 I*11 + +^2 | +С =
=£±2Vx2 + вх +13 + 2In| х + 3 + J? +6х +13 | + С.
г 9 — 4л
Пример 16.27. Найти --dx.
J Vs + 8x-4x2
Поскольку (5 + 8х - 4х2 )' = 8 - 8х “ - 8(х -1), 9 • 4х = -4х 44+5= -4 (х-1) + 5,
5 + 8х-4х2 = ~4((х2 - 2х +1)-1) + 5 =-4(х-I)2+9 = 4х х (9/4 - (х -1)2). тона
основании формул (16.19) и (16.24) получаем
f »-4* dx = [А =
J у5 + 8х-4х2 J V5 + 8x-4x2 J VS + 8x-4x2
+ f *** - 1 f -»(«-»)* +J f___d(x-l) =
» /5 + 8x-4x2 2 J t/5+8x-4x2 •» 2^9}4-(х-Г?
= V5 + 8x-4x2 +-arcsin
2 3
Пример 16.28. Найти интеграл
dx
(х-1)т/х2-2
/ Перейдем к новой переменной г по формуле x-l = l/t, откуда dx =
= -<й/г2, х2-2 = (1 + 2/-/2Уг2.
Следовательно,
f ф _ f Л _ f rfp-1) ______________________________________
J(x-l)Vxa-2 JVl + 2»-r2 J -JcVif-O-l)2 *2
Возвращаясь к переменной x, находим
г . -j2(x-2)
, = arcsin---s-----
I^~2 2(*-«)
274
Пример 16.29. Найти I —,
J -Тх+З+^+З)2
Это интеграл вида (16.25). причем а = 1, Ь = 3, с = 0, </=1. pj<h~ = 1/2.
/Ъ/9»=^3, и = 6. Подстановка (16.26) принимает вид х+3=А Отсюда следу-
ет, что х=г‘-3, А = 6г’Л, Л|^ТЗ)=(х + 3)р=(г‘)*’“Л ^(х + З? = Л
Г = (х + 3)^, t2 = (x + 3)v’. Таким образом,
[ -* -Л*-.«р*.
' ч/Т+З+^х+З)2 J,+' Jr*(l+O Jl+r
- 6 — -6t +61n 11 + f| + C~ 3(x + 3)v’ -6(x + 3)‘* + 6In | 1 +(x + 3)*|+C.
Пример 16.30. Найти J * <*»•
Переписав интеграл в виде Jx*v’(1 + x^y^dx и сравнив с интегралом (16.27),
заключаем, что т = -2/3, и = 1/3, р = \]2. Так как (тя + 1)/л =
= (-2/3 + 1)/(1/3) = 1 есть целое число, то имеем вюрой случай жггсгрирусмости
дифференциального бинома. Подстановка о + Лл" = т* в данном случае примет
вид (l+xv’) = ra, откуда (V3)«"*’<fr = 2fc/f, x~v,dx= =6tdt. Под-
ставив эти выражения в интеграл, получим
Jx-^l +х^dx = J(l +*V’)V2x-V’A «6иП - 6 jt2dl =
-6j+C-2(l+x*,)*,+C.
16.8. Интегрирование некоторых
тригонометрических выражений
Неопределенные интегралы вида
j”sinaxsinhx<ir, J cosax cosbxdx, J sinaxccsbxdx (16.28)
275
с помощью тригонометрических формул
sin a sin 0 « i (cos (а - 0) - cos (а+0)),
cosa cos0 = i (cos (а - 0)+cos (а+0Д
sinacos0 = i(sin(a-0) + sin(a + 0))
приводятся к интегралам
f sinfct cosfar _
Jcoskxdr = —-— + C; JsinktzZx =------—+C.
Неопределенные интегралы ищи „ = Jsin"xcos"x<fc, где m и n -натуральные
числа, находятся с помощью тригонометрических формул sin’x =(1-cos2x)/2,
cos2x = (l+cos2x)/2, sinxcosx = (sin2x)/2, если т ип четные.
Если хотя бы одно из чисел тип- нечетное, то от нечетной степени отделяется
множитель и вводится новая переменная. В частности, если п « 2к +1, то
/^„ = J sin" х cos2**1 xdx = J sin" x cos2* x cosxdx =
« Jsin" x (I - sin2 x)* </(sin x) = J w"(l - ц2)*<Й1
Последний интеграл находится непосредственно (как интеграл от алгебраиче-
ского многочлена)
Неопределенный интеграл J#(sinx,cosx)<fr, где «(sinx, cosx) - рацио-
нальная функция от sinx и cosx, путем введения новой переменной по формуле
te| = r (1&29)
приводится к интегралу
( „( 2t 1-Г2 A 2dt Гп/_, .
J'W
где K,(t) - рациональная функция переменной t.
Пример 16.31. Найти интеграл J sin I4x sin 6х<£х.
Эго первый из интегралов типа (16.28), в данном случае а = 14, 6 = 6
Применяя первую из приведенных выше тригонометрических формул, прсоб-
276
разуем подынтегральную функцию и интегрируем:
Jsinl4xsin6x<£c
ж у J (cos 81 - cos 20jt) dx =
[cos8x<Zt-1 [ cos 20xcix = — sin8x~ — sin20x+C.
2 J 2 J 16 40
Пример 16.32. Найти интеграл Jcosl0xcos7xdx.
Преобразуя поды hi тральное выражение, находим
J cos 10* cos 7хdx = J (cos Зх + cos 1 lx ) dx -
I f .If , sin3i sin!7x _
• — I cos3x<ix + I cos!7x«Zx =-+-----+C.
2J 2J 6 34
Пример 16.33. Найти J sin* x cos’ xdx.
Поскольку одна из степеней является нечетной (п = 5), то интеграл можно
найти следующим образом:
J sin* xcos* xdx = J sin* xcos* x cosiJx = J sin* x (1 - sin1 x)*d (sinx)«
' Jsin*x(l-2sin2x + sin4x)</(sinx)= j(sin*x-2sin*x +sin'°x)c/(sinx)-
_ sin’x 2s»ntx + sinnx +
7 9 * T1 *
n Ku ii н f 5-sinx+ 3cosx ,
Пример 16.34. Найти I------------dx.
J 3 + sinx-3cosx
Преобразуя подынтегральное выражение, получаем
f 3~”n* + 3cosx ж f 8-(3 + sinx-3cosx)
J 3+sinx-3cosx J 3+sinx-3cosx
= 8[- ±---------[dx
J 3+sinx-3cosx J
Чтобы найти первый интеграл, применим подстановку (16.29):
f f_______У(14->)__________л= f А_.
J 3 + sinx-3cosx J 3+2r/(l+r,) + 3(»J-l)/(l + r’) J3?+i
= ff--T^-lc* = ln|rl-in|3r + l|+C-ln|—+c.
JV 3r + lJ 111 1 | 3tg(x/2)+l 1
Следовательно,
5-sinx+3cosx .
--------------ax ж о in
3+sinx-3cosx
«8(^/2)
3tg(x/2) + l
Глава 17
ОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ
17.1. Определенный интеграл,
его геометрический смысл и свойства
Понятие определенного интеграла. Пусть дана функция у = J\x\ опреде-
ленная на отрезке [я, Ь]. где a < b. Отрезок (я, />] точками a = х0 <
<х( <х2 <...<xB_( <х„ = Ь разобьем на п -элементарных отрезков [я, xj,
—длины которых обозначим через Дх4, т.е. Дх4=х4-х4ч
(к = 1,2,.... и, х0 - я, х„ 6). В каждом из элементарных отрезков [xt_(, х, J вы-
берем произвольно одну точку £4, значение функции в этой точке /(^») умно-
жим на длину отрезка Дх4, получим произведение /(^4)Дх4. Составим сумму
всех таких произведений
(17.1)
*-|
Сумма (17.1) называется интегральной суммой для функции у =/(х)
на отрезке |я, б].
Обозначим через X длину наибольшего из элементарных отрезков [х1.|,х4]
(к ~ 1,2,..., л), т.е. Х=тахДх4 (4»1,2,.... л).
Число S называется пределом интегральной суммы (17.1), если для любого
числа е > 0 можно указать такое число 6 > 0, что при X < 6 выполняется нера-
венство |S„-S|<e независимо от выбора точек t>t на отрезках [х4_|,х4].
Определенным интегралом от функции у ж/(х) на отрезке [я, б] называется
конечный предел ее интегральной суммы, когда число элементарных отрезков
неограниченно возрастает, а длина наибольшего из них стремится к нулю. Опре-
*
деленный интеграл обозначается символом J f(x)dx (читается: определенный
в
интеграл от я до Ь). /(х) называется 1юдынте1ральной функцией, х- перемен-
ной интегрирования, я - нижним, b - верхним пределами интегрирования
Следовательно, по определению
J/(x)A-bm ^/(^)Аж*. (17.2)
в
278
Из определения следует, что величина определенного интеграла не зависит от
обозначения переменной интегрирования, т.е.
* * *
j /(х) dx = J f(t) Л ж... ж j/(и) du (17.3)
0 0 0
Функция. для которой существует предел суммы (17.1), называется интегри-
руемой на отрезке (а, />].
Очевидно, если функция /(х) интегрируема на отрезке [а, hj, то она и ограни-
чена на лом отрезке Обратное утверждение нс верно: существуют ограниченные
функции, нс являющиеся интегрируемыми. К ним относится функция Дирихле, рав-
ная единице в рациональных точках и нулю - в иррациональных На любом отрезке
(о, 6[ зта функция ограничена, но не является интегрируемой на нем.
Соответственно по определению
0
J/(x)A = 0, (17.4)
0
где /(л) - любая функция;
ь 0
J7(x)<fr~- j/(x)<fc, (17.5)
« »
где /(х) - функция, интегрируемая на отрезке (5, о] (Ь < в).
Справедливы следующие утверждения.
1. Если функция /(х) инте1рируема на отрезке [a, Ь), то она интегрируема
на любом отрезке [с, d], содержащемся в [а, Л]
2. Если функция /(х) непрерывна на отрезке (в, />], то она и интегрируема
на этом отрезке.
3. Если функция /(х) имеет на отрезке [а, 6] конечное число точек разрыва
первого рода, то она интегрируема на [fl, h]
Геометрический смысл определенного интеграла. Если а < Ь, /(х)2 0, то
а
j/(x)A=S.
0
т.е определенный интеграл от функции у = /(х) по отрезку (a, fc] равен площади
криволинейной трапеции, ограниченной сверху графиком функции у = /(х), слева
и справа - отрезками прямых х = а, х = Ь. снизу - отрезком оси Ох (рис 17.1).
Если а<Ь и /(х)50,то
»
j/(x)A = -S,
0
279
т. е определенный интеграл от функции, принимающей неположительные
значения, равен площади соответствующей криволинейной трапеции,
взятой со знаком минус (рис. 17.2).
Рис. 17.1
Рис. 17.2
Если а < b и /(х) меняют знак на отрезке [а, А>[, то агрслс:1енный интеграл равен
алгебраической сумме площадей соответствующих криволинейных трапеций (рис 173).
ь
j/(x)A-S,-S3+5,.
а
Основные свойства определенного интеграла. Определенный югтеграл об-
Рис. 17.3
лалагг следующими свойствами
I. Если функция /(х) интегри-
руема на наибольшем из отрезков
[a, 6J, [о, с], [с, />]. то она интегри-
руема на двух отрезках, причем
к с »
J/(х)dx « J/(х) dx + |/(х) dx
вас
при любом расположении точек а,Ь,с-
2. Если функция f (х) интегрируе-
ма на отрезке [а, Ь|, то функция
* /(х), гас к - const, также интегрируема на этом отрезке, причем
» »
J*/(x)A = A ]7(х)А
а а
3. Если функции /(х) и ф(х) интегрируемы на отрезке [а, И то их сумма и
разность также интегрируемы на этом отрезке, причем
» ь ь
j(/(x)±<p(x))A = J/(x)A± j<p(x)A.
280
4. Если функция/х) интегрируема на отрезке [ц/>1.гжа<2>, и/х)20д.тя всех хе [<с6],то
J/ООлга
5. Если функции /(х), ф(х) интегрируемы на отрезке [а, 6], где а<Ь, и
/(х)£ф(х) для всех х€(а, 6], то
J/(x)dxS |ф(х)Л.
6. Если функция /(*) интегрируема на отрезке [а, 6J. где а<Ь, то функция
|/(х)| также интегрируема на [о. 6|. причем
||/(х)|Л.
17.2. Определенный интеграл с переменным
верхним пределом.
Формула Ньютона - Лейбница
Рассмотрим функцию у = /(х), интегрируемую на отрезке [а. Ь]. Если хе [а, Ь],
то функция /(х) интегрируема также на любом отрезке (д.х). Предположим. что х
меняется на отрезке [а. 6|. тогда т та этом отрезке определена функция
(17.6)
(Переменную интегрирования обозначили буквой г, переметший верхний предел
- буквой х\
Теорема 17.1. Если функция у = f(x) интегрируема на отрезке [о, 6|. то
функция (17.6) непрерывна на этом отрезке
Теорема 17.2. Если подынтегральная функция непрерывна, то производная
определенного интеграла с переменным верхним предела» существует и равна
значению подынтегральной функции для этого предела те
Ф'(х)=/(х). или J f(t)dt = /(х).
Следствие I. Если функция fx) непрерывна на отрезке lab/, то при любам я
/(О Л = - /(хХ или Г /(Г) di = - /(х\
281
Следствие 2. Определенный интеграл с переменным верхним пределом
является одной из первообразных для непрерывной подынтегральной функции
Другими словами, для любой непрерывной функции существует первообразная
Замечание. Интеграл с переменным верхним пределом интегрирова-
ния используется при определении многих функций. К таким функциям относятся,
например:
1) Si(x)=J“~Л (интегральный синус);
о
2) G(jr)=-J^^df (интегральный косинус);
X
3) li(x)= Г— (интегральный логарифм);
J In*
-о
4) Ei(*)= J— dt (интегральная показательная функция);
*»
г ж
5) 5(х)» Jsin/’Л, С(х)= Jcos/’Л (интегралыФренеля);
о о
6) Ф(х)= -i- (интеграл вероятностей)
Эти функции не являются элементарными; первообразные указанных подынте-
гральных функций не выражаются через элементарные функции.
lice приведенные функции хорошо изучены, для них составлены таблицы зна-
чений, эти функции находят широкое применение
Связь между определенными и неопределенными интегралами выражает сле-
дующая теорема Ньютока - Лейбница, называемая основной теоремой интеграль-
ного исчисления.
Теорема 17.3. Определенный интеграл от непрерывной функции равен разности
значений любой ее первообразной дзя верхнего и нижнего предела интегрирования:
»
J/(x)A = F(6)-F(eX (17.7)
где
Формула (17.7) называется формулой Ньютона — Лейбница, ее можно пе-
реписать в виде
*
J/(x)dr = F(x)|*, F(x)|‘ = F(Z>)-F(o),
282
левая часть втч>рой формулы читается так: «двойная подстановка от а до Ь для
функции F(x)».
Пример 17.1. Вычислить инте1 рал J (32 + 2Кх-9х2)А
2
Принимая во внимание свойства определенного и яге! рала. получаем
4 4 4 4
(32 + 28л - 9х2 ) dx - j 32dx + j 28х dx - jftr’dr =
2 2 2 2
<2
Пример 17.2. Вычислить инте! рал Jcos4<pd«p
-чЧ
Переменная и>пс1рирования обозначена буквой ф Преобразуя подынтеграль-
ную функцию, получаем
сое*Ф = '+ »|(1 + 2сов2ф + соа22ф).
Следовательно,
<2 <2
|сов4фсЛр = - |(1 + 2со52ф + со52 2ф)<Ар =
-чЧ -чЧ
ЧЧ 4/1 ч/1
- J<AP+-~ |со«2ф</(2ф)Д |(1 + соь4ф)</ф-
-чч -чЧ
I _ | 4/1 I . _ . 4/1 1 | 4/1 1 . . . 4/1 3
-ф +—Бш2ф „+-ф _ + — ып4ф _ « я.
4 '-чЧ 4 т ।-4/1 1-ч« 32 g
17.3. Замена переменной в определенном
интеграле. Интегрирование по частям
Теорема 17.4. Если выполнены условия. I) функция /(я) непрерывна на
отрезке (а, />]; 2) отрезок [а, Ь] является множеством значений функции
х = ф (<Х определенной на отрезке а < / < Р и имеющей на нем непрерывную
производную: 3) ф(а)=а, ф(р)=Ь, то справедлива формула
283
3 0
J/(x)<fc = j7(<p(0)<p'(0<* (17 8)
Теорема 17.5. Если функции и = и(х\ v = v(x) имеют непрерывные про-
изводные на отрезке [a. 5], то справедлива формула
» з
Ju(x)v'(x)dr = u(x)v(x)|* - Jv(x)n'(x)dx. (17.9)
г
Пример 17.3. Вычислил» интеграл Jx-~j2-xdx.
। ________________________________________
Введем новую переменную по формуле t- 72-х, из которой получим
Р = 2-х, х-2-/1. dx = -2tdt
Вычислим новые пределы интегрирования с помощью формулы г«-J2-X. По-
скольку при х = 1 t - V2-1 ж I, то а = Г, далее. при х 2 I 0. поэтому Р = &
Формула (17.8) принимает вид
2 0 0
Jx^2-xdx = j(2- Г2 ) t (- 2tdt)- J(2z* -4/2)dt.
1 1
Вычисли последний интеграл, находим
j(2/*-4?)df = 2 |АЛ-4 |ЛЛ-2у
I | ।
2
Следовательно, Jx^7a = 14/15.
I
2
Пример 17.4. Вычислить интеграл jx2^S-2x2dx.
Л
Введем новую переменную но формуле x = 2sin/. Поскольку dx ~2cosfcA,
I “ arcsin (x/2), lt - n/4 при x ’ -Ji, t3 = я/2 при x = 2, то
° P ° 2 4 £4
3 ,"'5 3 15-
2
_________
J (2 sin r)2 -^8-2(2 sin t)’ 2 cos tdt =
кН
= j4sin2c/8-8sin2/2cosft*= JieVisin2 rcos2 idt =
Я/* •/*
f . . к *P
<4
284
2я
Пример 17.5. Вычислить интеграл J х sin (х/2) Л.
о
Интегрируя по частям, находим
<0
Пример 17.6. Вычислить интеграл J/2sin«dt.
о
Дважды интегрируя по частям, получаем
<1 <1 х,1
Jf2 sin/dr =- Jr2d (сое/)» ~/2 cost |^*+ J 2r cos edr =
оо о
° 2 Jid (sin/)= 2/sin/ |'2 -2 Jsin/dr = x+2cos/«x-2.
о 0
17.4. Оценка определенного интеграла.
Теорема о среднем
Теорема 17.6. Если функция f(x) интегрируема на отрезке [а, 6]. где
а <Ь, и для всех х е (а, 6] выполняется неравенство т S f(x)i М, то
л
m(b-a)sjf(x)dx£M(b-a). (17.10)
О
С помощью неравенств (17.10) можно оценить определенный интеграл, т.е.
указать границы, между которыми заключено его значение. Неравенства (17.10)
выражают оценку определенного интеграла
Теорема 17.7. Если функция f(x) интегрируема на отрезке [а,6] в для
всех х е [а, Ь] 'выполняются неравенства mi f(x)< М, то
л
|/(я)Л =ц(6-оХ (17.11)
а
где m S ц £ М.
Эта теорема называется теоремой о среднем.
285
Замечание. В случае, когда функция /(х) непрерывна на отрезке
[о, 6], равенство (17.! 1) принимает вид
Рис. 17.4
а
J/(x)A=/(e)(ft-aX (1712)
а
где с е [о, ft).
Число р - f(c\ определяемое формулой
(17.12), называется средним значением функции
/(ж) на отрезке (о, ft].
Равенство (17.12) имеет следующий геометриче-
ский смысл: площадь криволинейной тралении,
ограниченной непрерывной линией >=/(*)
(/(х)2 0Х равна площади прямоугольника с тем
же основанием и высотой, равной ординате некого
рой точки этой линии (рис. 17.4).
Пример 17.6. Оценить интеграл
Поскольку подынтегральная функция /(/)= ^^1+-(9/16)sin2 г в данном про-
межутке |0, л| имеет наименьшее значение «и = 4/5 и наибольшее А/ =1, то в
соответствии с формулой (17.10) получаем
4 f Л
5 J 7l + (<yi6)sin2/
17.5. Несобственные интегралы
При введении понятия определенного интеграла предполагаюсь, что выпол-
няются условия: 1) пределы интегрирования а н Ь являются конечными.
2) подынтегральная функция /(х) ограничена на отрезке [a, ft). В этом случае
определенный интеграл называют собственным. Если хотя бы одно из указанных
условий не выполняет ся, то интеграл называют несобственным
Интегралы с бесконечными пределами. Пусть функция у = /(х) непрсрывгга
при любом х 2 а. Рассмотрим интеграл с переменным верхним пределом:
/(*) = {/(*)* (17.13)
а
Предположим, что при ft-> + ~ функция (17.13) имеет конечный предел; этот
предел называется сходящимся несобственным интегралом от функции /(х) по
286
промежутку [а. + «*) и обозначается так:
♦- ь
= j/(x)dx. (17.14)
0 0
Если предел (17.14) не существует или равен бесконечности, то несобственный
интеграл называется расходящимся
Геометрически несобственный интеграл от неотрицательной функции выражает пло-
щадь бесконечной криволинейной трапеции, ограниченной сверху графиком функции
У = f(x\ слева - отрезком прямойх=о, снизу - осью Ох (рис 17.5), в стучас сходяще-
гося интеграла эта площадь является конечной, в случае расходящегося - бесконечной.
Если Г (я) - первообразная для f(x\ то
♦- ь
J/(x)<fr- *lim_ J/(x)<fc«»lim (F(b)-F(fl)) = F(+->)-F(e),
0 0
где F(+»») = lim F (b).
Аналогично определяется несобственный интеграл с бесконечным нижним пределом
* *
J/(x) dx « j/(x) dx
—• 0
и несобственный интеграл с обоими бесконечными пределами
J /(х) dx - J/(х) dx + f /(х) dx,
где с - любая точка из интервала (- + ~).
Теорема 17.8. Если при xia выполнены неравенства О£ф(х)$/(х) и
♦w ♦«* 4*
|/(х)<бт сходится, то сходится и J«p(x)A, причем |ф (х) dx S J /(х) dx-.
♦ 4«»
если J ф (х) dx расходится, то расходится и J /(х) dx.
0 0
Геометрическое значение этой теоремы иллюстрируется на рис. 17.6.
287
Теорема 17.9. Если в промежутке (я, +~) функция f(x) меняет знак и
Jlzool
dx сходится, то сходится также
J /(*) dx
Интегралы от неограниченных функций. Если функция > = /(х) неограни-
ченна в окрестности точки с отрезка (а, Ь] и непрерывна при aSx<c н
с < х S Ь, то несобственный интеграл от этой функции опредсл яется форму пой
г с-л »
{f(x)dx = lim [/(x)A+lim f/(x)A, (17.16)
J «-»o J ч-»о J
« *»n
где e>0, i)>0. В случае c = b или c = a получаем
t *-<
J/(*) dx = lim j/(x)dx, (17.17)
a a
* *
f/(x)dr=lim [/(x)dr. (17.18)
J n-»o J
а «»ч
Несобственные интаралы (17.17) и (17.18) называются сходящимися, если су-
ществует конечный предел соответствующего определенного интеграла; в про-
тивном случае инте«ралы называются расходящимися
Несобственный интеграл (17.16) называется сходящимся, если существуют оба
предела в правой части.
Для интегралов от нео|раниченных функций справедливы теоремы, аналогич-
ные теоремам 17.8 и 17.9. Они применяются для исследования вопроса о сходимо-
сти несобственных интегралов и оценки их значений.
Пример 17.7. Исследовать, сходится ли несобственный интарал
f
J х2+х+1
— I
Преобразуем подынтегральную функцию, выделив в знаменателе полный квадрат:
I_____ ______£_____________I
x’+x + l ‘ хз + 2.1,+1_1+1 (* + (/2)2+У4
2 4 4
Применяя формулы (16.15) и (17.15\ находим
-1+1/2 | 2 ( п к 'I _ 4л
VJ/2 -/j(г +б)" эТГ
Итак несобственный интеграл сходится и его значение равно 41^3^ («>2,4184).
288
Пример. 17.8. Исследовать при каких значениях а > 0 сходится несоб-
»
t dx
огненный интеграл I-----— (б>а).
J
а
Если а = 1, то
d(x-a) ,
—s----L- hm In (x-e)
x-a *-»<»
lim (In (h-a)-ln (o + e-e)) = ln (b-a)- lim ln£ = + «.
Следовательно, при a = I несобспк-нный югтсграл расходится. Если a # t, то
» »
f------— = lim f(x-a)’ad(x-a)= lim - !—(x-o)lai =
J (x-o) «-”» J «-»o|-a
. = lim-,— ((/>-a)*'e-e'-eX
»-»o i-a
Этот предел будет бесконечным при l-a<0, или col, он будет равен постоянной
(b-a)le/(l-a) при 1чх>0, или а<1. Итак, данный интеграл сходится при а<1.
Пример 17.9. Исследовать, сходится ли несобственный
Так как
. 1_и_1_=_______________ '_____<±
Vl+x* ^x’d + l/x1) x*yjl + l/x* х*
J х* Зжэ|, 3’
то сходится и данный интеграл
Пример 17.10. Иседедоващ|риювао;ао£одипз1ноообстеоя&Ат*пегред J —
I
Если а # I, то
lim Um = lim —!—(*'•*'-I).
J x® x“ *-к«--а+1 *— -l-a
i i ।
Следовательно,
f<*r I , ~f dx
J—= —приа>|. J-_- + «» при a<l.
10 Зш. I
289
В случае <х = I J—= 1пх|”»~. Итак несобственный интеграл сходится при а>1.
। *
17.6. Интегралы Эйлера
Гамма-функция, или эйлеров интарал второго рода, определяется формулой
(17.19)
о
Этот интеграл является несобственным, так как верхний предел бесконечен; кроме
того, при р-1<0 подынтегральная функция нс ограничена в окрестности точки х = О
Интеграл (17.19) сходится прирМ). Каждому положительному значению р соответст-
вует bi к> лне см грелеленное значение Г(р). Функция Г (р) не является элементарной.
С помощью метода интегрирования по частям можно доказать, что
Г(р+1)=рГ(р). (17.20)
При р = I интеграл находится непосредственно:
Г(1) = /е-*А»-«-'|; = 1
о
Подставляя в формулу (17.20) значения р = 1,2,...,л, получаем
Г(2) = 1Г(1) = 1 = И, Г(3)-2Г(2) = 2 1 = 2!. Г(4)-ЗГ(3) = 3 2 1 = 3!,
Г(я+1) = и(и-1)...2 1"л1. (17-21)
Итак, при натуральных значениях аргумента гамма-функция совпадает с фак-
ториалом, т.е. с функцией /(л)»л!. Но гамма-функция определена нс только
при натуральных я, но и при любых положительных значениях аргумента. Из
формулы (17.21) следует, что можно считать 0!=Г(1)=1. График «амма-функции
изображен на рис. 17.7.
Гамма-функция определяется и при отрицательных значениях р. В этот случае
необходимо применить формулу (17.21), переписав се в виде
Г(р) = (17.22)
Р
Если -1<р<0, то 0<р+1<1, поэтому правая часть формулы (17.22)
имеет смысл, ею и определяется Г (р) при этих значениях р, отметим, что в
таком случае Г(р)<0. .Продолжая аналогичные рассуждения, убеждаемся в
том^ что гамма-функция определена для всех отрицательных значений р.
кроме р = -4, где 4 = 1,2,3,..., и кроме р = 0.
290
I рафик гамма-функции при отрицательных значениях р изображен на рис 17.8.
Гамма-функция определена и для комплексных значений аргумента, кроме
Р = “*. *=0,1,2,...
Бета-функция, или зйлеров интеграл первого рода, определяется формулой
I
B(p.g)=Jx^,(l-*r'A (ПЛЗ)
о
Подынтепшльная функция не О1раничсна в окрестности точки х = 0 при
р -1 < 0 ив окрестности точки х = 1 при q -1 < (1
Интеграл (17.23) сходится при р>0, q>(l.
Значения бета-функции при различных значениях параметров р и q связаны
между собой следующими соотношениями:
В(р, <?)= В(<7, р), В(р,?)»——!-В(р,$-)Х <?>1;
р + д-1
справедлива формула В (р, I - р) » л/sin рл, 0<р<1.
В случае комплексных р и q интеграл (1773) сходился, когда Rep > 0, Rc q > 0.
Между бета- и гамма-функциями существует связь, выражаемая формулой
В(р,,)=17(^1Г-^ (р>0,д>0) (1724)
Г(р+?)
291
Пример 17.11. Вычислить Г (1/2) с помощью формулы (17.24).
Полагая в формуле (17.24) р = <у = 1/2, получаем
) = ««in (2х -1) | °
(1/4)—(х- V2)2
Так как Г(р)>0 при р>0, то Г(1/2) = V»t -1,772
Пример 17.12. Вычислить
о
При вычислении этого интеграла используем результаты примера 17.11.
Полагая x = -Jr, находим
1 fe-'l-^Лж! = 1
2 J 2 J 2
О о
Следовательно,
(17.25)
о
17.7. Площадь криволинейной фигуры
Площадь криволинейной трапеции аАВЬ, ограниченной сверху графиком
функции у /(х), слева и справа - прямыми я = а и я = b соответственно,
снизу - осью От (рис. 17.9), вычисляется по формуле
»
S= |/(х)А. (17.26)
Площадь криволинейно трапеции cCDd (рис 17.10), ограниченной справа
(рафиком функции х = ф(у), сверху и снизу - соответственно прямыми у = d,
у'‘с, слева - осью Оу, определяется формулой
w
5~j<p(y)dy (>727)
Г
Площадь криволинейной фигуры А^В^, ограниченной сверху графиком
функции у2 = /2(х), снизу - графиком функции У\=/{я). слева и справа -
прямыми я = а. х = Ь (рис. 17.11), вычисляется по формуле
292
*
S = Jc/i(*)-ZU))* (17.28)
<r
Площадь фигуры C^DjC^, ограниченной слева и справа соответственно гра-
Рис. 17.9 Рис. 17.10
фиками функций х,-ф|(у), х2-ф2(у), снизу и сверху - прямыми у = с,
у *d (рис. 17.12), определяется формулой
d
(17.29)
С
Если линия, ограничивающая криволинейную трапецию сверху, задана
параметрическими уравнениями х = ф,(1Х >’ = Фа(*). где a^l^P,
ф,(а)= о. ф,(Р)=>6. то
Д
5 = |ф1(0фК0Л (17.30)
а
Площадь сектора ОАВ (рис. 17.13), о|раничснною дугой линии, заданной
уравнением в полярных координатах р = р (ф), и двумя полярными радиусами ОЛ
293
Рие. 17.13
и 08, соответствующими значениям ф|=а,
<р2 = fl, определяется формулой
₽
S = ljp> (1731)
а
Пример 17.13. Найти площадьфигуры,
ограниченной линией у = 2л —х‘ +8 и осью Ох.
Чтобы определить пределы югтсгрироваиия.
найдем точки пересечения линии (параболы) с осью
Ох (рис. 17.14). Решая систему уравнений
у = 2*-я2+8, у = 0, получаем х,=-2,
х2 - 4; следовательно, а - 2, Ь = 4.
По формуле (17.26) находим
4 4 4 4
S- |(2х-х2 + 8)А «2 jxdx- Jx’A+8 |а =
-2 -2 -2 -2
Пример 17.14. Найти площадь фигуры, ограниченной линией х =
= у-уг+6 и осью Оу.
Данная фигура представляет собой криволинейную трапецию, прилежащую к
оси Оу (см. рис. 17.15). Найдем точки пересечения линии с осью Оу, для чего ре-
шим систему уравнений х = > - >2 + 6. х = 0. Из этой системы полу чаем у, = - 2.
у2=3; это означает, что в формуле (17.27), которой здесь необходимо пользо-
ваться, нужно по дожить с = - 2, d - 3.
294
Следовательно,
S= J(>-/ +6) dy = ^-
-2
+бЯ12-
5
6*
ограниченной линиями
-(9-4)-1(27 + 8) + 6(3 + 2)=205
2 3
Пример >7.5. Вычислить площадь
х2+4у2 = 8. х*-4у = а
Данная фигура ограничена сверху дугой
эллипса х2 + 4>>2 =8, снизу — дугой пара-
болы х2 =4у (рис 17.16).
Площадь вычислим по формуле (17.28).
Решал систему уравнений х2+4у2=8, х2=4у,
находим Х|=-2, xj=2 - абсциссы точек пе-
ресечения заданных линий; следовательно,
a=-2J>=2: Каждое из уравнений разрешаем
относительно у. у(=х74, у2 = у8-х /2.
(В формуле (17.28) через у2 = /2(х)
обозначена функция, график которой
ограничивает фигуру сверху.)
Таким образом, искомая площадь
фщуры.
2
2 4
S= I
-г
Для вычисления первого шгтеграда применим подстановку х = 2-Ji sin Г. тогда
dx = 2-^2costdt, а--к/4, р = я/4.
2 _ чМ
$(=1 х2А=- |з/в-8яп2(272Л =
-2 -<«
нН •
= 2 J(1 + cos2f) Л = 2
-*1*
2+— sin 2/
2
Поскольку
I х ах =----
J 4 3
1 4
— (8 + 8) = —,
12' ' 3
то S = Sl-Sa=K+2-4/3=Jt + y3.
295
Пример 17.16. Вычислить площадь области, ограниченной эллипсом
x = acosr, y = fcsinf
В силу симметрии эллипса относительно координатных осей достаточно вы-
числить площадь части области, лежащей в первой четверти, и результат умно-
жить на 4 Заметим, что в этом случае х меняется от О до а, поэтому t будет ме-
няться от л/2 до 0. По формуле (17.30) находим
о <-
S « 4 J(fcsin/)(-asinr)dt = 4оЛ j sin2 tdf =
<2 О
Ц/2 Z \ V1
. , f l-cos2/ . , sin2/1 . „ .
= 4oh I-------dt = lab I1-----I = nab, S - nab.
о 2 t 2 7 о
Замечание. В частном случае, когда а = b = Л. получаем $ = nR2 —
площадь крута радиуса R
Пример 17.17. Вычислить площадь области, ограниченной лемни-
скатой р’« a1 sin2<p
Принимая во внимание симметрии» линии относительно ее оси (см. п. 2 10), по
формуле (17.31) получаем
•!* •!*
A S - J- a2 sin 2<pftp ~ в’ J яп 2<?с/ (2<р) =
о о
о2 - »а2 „ !
.-—сойф), = 5 = в .
17.8. Длина дуги кривой
Если линия задана параметрическими уравнениями
*"*(')> У-Ф>(»Х г = Ф>(0 (а^»«Д). (1732)
где <₽,(/) (/-1,2,3) - дифференцируемые функции аргумента I, то дифферен-
циал длин ы ее дуги выражается формулой
dj » Jx'1 + у'2 + г'2Л. (17.33)
Интс1рируя равенство (17.33) по промежутку [а. (3|, получаем формулу для
вычисления длины дули линии (17.32):
₽ ____________
x = J1/?r+/’+x'2dr (17.34)
а
Если линия (1732) лежит в плоскости Оху, то г = 0 при всех / 6 (а, 0], поэтому
a = (17-35)
296
В случае, когда плоская линия задана уравнением >»/(х) (aixib), где
f(x) - дифференцируемая функция, последняя формула принимает вид
*
j«J^1+/2A. (17.36)
а
Если плоская линия задана уравнением р = р(ф) (а£/^р) в полярных
координатах, то
Р
г = J 7р2+р'2<*р (17.37)
а
Пример 17.18. Вычислить длину дуги линии у = In sin х между точка-
ми, для которых х, » л/3, х2 = п/2.
Искомую длину вычисляем по формуле (17.36).
Поскольку y=Lnsinx, у' = cosx/sinx, то
«0
J sinx
<2
b-cosx
i + cosx
0
10
•ft *ft
J cos’x-l 2
•ft
-hi - = -In 3-0,5493
2 3 2
Пример 17.19. Найти длину дуги линии х- 4 (cos/+ /sin/), у-
4 (sin/-/cos/) (OSlSs/2).
Применяем формулу (17.35), полагая в ней а = 0, р = п/2.
Так как х' = 4(-sinГ + sin/+/cos/) = 4/cos/, у' 4 (сое/ cos/ +t sin/)
2 cos21 + 16r2 sin2 f «4<, то
Я'2
s = j4/d/ = 2/2 I** = it2/2.
Пример 17.20. Вычислить длину дуги винтовой линии x = acos/,
y = osin/, z = bt между точками, для которых /= 0, / = р.
Поскольку x' = -asin/, у'* а сое/. х' = 6, ^х'2 +у'2 +z'2 = Ve2 +Ьг, то
по формуле (17.34) находим
j = J Vo2 +b2dt = 4а1 +b2i | = -Jа2 +62p.
о °
297
Пример 17.21. Найти длину кардиоды р = 2а(1-совф).
Так как p' = 2asin<p, р2+р'2 =4a2sin2«p + 4a2(l-cos<p)2 =8а2(1-
- cos<p) = 16а2 sin2 —, то по формуле (17.37) получаем
5 = 2 f 4аsin dp = 16а [sin — d i | = -16acos —
J 2 J 2 Uj 2
о о
я 16a.
о
17.9. Объем тела. Площадь поверхности вращения
Если задана функция S = S(x) (а £ х 5 Ь), определяющая площадь попереч-
ною сечения тела плоскостью, перпендикулярной осн Ох, то его объем вычисля-
ется по формуле
ь
F = Js(x)<fc (17.38)
а
Объем тела, полученного вращением вокруг осн Ох криволинейной трапеции
АаЬВ (рис. 17.17), где АВ - дуга кривой у = /(х). вычисляется по формуле
» *
1', «Я Iy2dx, или Е, = я [/2(x)dr.
(1739)
Объем тела, полученного вращением вокруг оси Оу криволинейной трапеции
CcdD (рис 17.18), где CD - дута кривой х р(у), определяется формулой
д »
^ = xjx2dy, или Ех=я J<p2(y>)dy. (17.40)
298
Площадь поверхности, образованной вращением вокруг оси Ох дуги кривой
y-f(x) (aixiby, определяете» формулой
* _______
S = 2kJp71 + /2A (1741)
а
Пример 17.22. Вычислить площадь поверхности, образованной вра-
щением вокруг оси Ох дуга линии y = chx, где OixSl (поверхность эта
называется катеноидом).
Так как y' = shx, то по формуле (17.41) с учетом равенства ch2 к- sh2x = 1
получаем
______ I I
5 2я Jchx7l + sh2 xdx = 2я Jchхchxdx 2я J-(ch2x +1)dx =
о о g
= ж J ch 2xdx + я J dx XS^2jI | + яг | ° - 2 + я - 8,84.
0 0 0
Пример 17.23. Вычислить объем тела, полученного вращением во-
круг оси Ох криволинейной трапеции, ограниченной параболой у2=6х.
прямой х = 2 и осью Ох.
В соответствии с условием задачи находим пределы интегрирования а О,
6=2 (рис. 17.19).
По формуле (17.39) получаем
г 1
Г = я j y2dx = я J 6xdx = Зхх21 ’ = 12х
о о
Пример 17.24. Найти объем тела, полученного вращением вокруг оси Оу
криволинейной трапеции, ограниченной парабо.юй х 2 = 4у. прямой у = 4 и осью Оу.
Замечая, что пределы интарирования с = 0,</ = 4, по формуле (17.4Л) находим
4 4
У - я J x’dy = я 14ydy = 2яу2 | * = 32я.
о о
Пример 17.25. Найти объем тела, полученного вращением вокруг оси
Оу криволинейной трапеции, ограниченной гиперболой ху = 6, прямыми у = 1,
у = 6 и осью Оу (см. рис. 17.20).
299
Из уравнения кривой ху = 6 находим х = fyy. х2 = Зб/у2.
Принимая во внимание, что с = 1, d = 6, по формуле (17 40) получаем
Пример 17.26. Вычислить объем тела. полученного вращением эллипса
Ь2х2 У а1 у2 - а2Ъ2 вокруг оси Ох (это тело ограничено эллипсоидом вращения).
Из уравнения эллипса находим выражение для у2 : у2 = Ь2 - Ъ2х21а2.
По формуле (17.39) получаем
F = я jfft1* Idx = яб’JtfctJx2dx =
Следовательно. Г = (4/3) mb2. При
а = b = R получаем 1'=(^3)яЯ’
(объем шара).
300
Г^зва 18
ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕ
ФУНКЦИЙ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ
18.1. Множества в n-мерном пространстве
Упорядоченную совокупность п действительных чисел х,,х,.х, называют
точкой, а сами эти числа - ее координатами. Запись М (x,,xt,...,x,) означает,
что точка М имеет координаты х|,х1,...,хв. Множество всевозможных точек
называется арифметическим (координатным) л-мерным пространством и обозна-
чается символом А" или А„.
Арифметическое л-мерное пространство А" называется л-мерным евклидовым
пространством, если для любых двух точек М'(х{.х\.х'). Л/'(хГ,х2,....х^),
принадлежащих А", определено расстояние по формуле
р (М\ М~) - Ю’ + «- х^)’ +... + (я.'- <)*.
Евклидово л-мернос пространство обозначается через Е" или Е„.
Примеры множеств в л-мерном евклидовом пространстве Е".
1. Если для координат всех точек множества [ А/, выполняется неравенство
р(М, А/о)< R , или
(х, -х(°)2 +(х,-х?)2 + -. + (*« < №,
то (М) называется открытым л-мерным шаром
2. Множество {М} точек М (х(, х2,...,хя), координаты которых удовлетво-
ряют неравенству р (М, Мо) 5 R , или
(х, -х{*)2 +(х2 -х2°)2 + ... + (хв-хв°)2 < №.
называется замкнутым л-мерным шаром радиуса R с центром в точке
М0(х,°,х®.х„°).
3. Множество {М) точек М(xl,xi,...,xK\ дзя которых р(М, Af0)= R, или
(х, -х,°)2 +(х2 -xj)2 +... + (х„ -xf)2 = №,
называется (л-1)-мсрной сферой радиуса R с центром в точке
Af0(x,°,xJ..х°).
301
4. Множество точек Л/(х(,х2....х„), координаты которых заданы как не-
прерывные функции х, =хДг) (| = 1,2,...,«), определенные на некотором отрезке
[о, 6], называется непрерывной кривой в пространстве £" . Аргумент / называется
параметром кривой Точка 4 (х((а),х2(в),...,х,,(о)) называется началом, точка
В (х, (Ь), х2 (Ь),... ,х„ (£)) - концом дайной кривой
Множество точек М «-мерного евклидова пространства Е", для каждой из ко-
торых расстояние до фиксированной точки Мо меньше £>0, называется £-
окрестностью точки Мо. Другими словами, £-окрестностью точки А/о называет-
ся «-мерный открытый шар радиуса £ с центром в точке Мо.
Пусть {М} - некоторое множество точек «-мерного евклидова пространства
Е". Точка А называется предельной точкой (или точкой и у тения) множества
(А/}, если любая ее окрестность содержит по крайней мерс одну точку этого
множества, отличную от А. Предельная точка может принадлежать или не принад-
лежать ему. Например, точки х, X х2 = 7 являются предельными для отрезка
(3,7| и интервала (3,7), но первому они приналтежат, а второму не принадле-
жат Множество, содержащее все свои предельные точки, называется замкнутым.
Если существует окрестность точки В множества (М) , нс содержащая никаких
других точек этого множества, кроме самой точки В, то эта точка называется изо-
лированной точкой множества {М}.
Точка М множества {М} называется внутренней точкой этого множества, ес-
ли существует такая ее Е-окрестность, все точки которой принадлежат множеству
{М}. Открытым множеством называется множество, все точки которого внут-
ренние. Множество называется связным, если любые две его точки можно соеди-
нить в нем непрерывной кривой Областью назывался открытое связное множество
Точка М называе|ся граничной точкой множества {М |, если любая сс Е-окрсспюстъ
содержит как точки множества (А/), так и точки, непрннцд.к.-жащисему.
Совокупность всех граничных точек множества {М} называется его границей
Если к области присоединить его границу, то полученное множество называется
замкнутой областью Например, множество точек М (х, у) плоскости Оху, для
которых х2 +у2 51, является замкнутой областью; к области, определяемой не-
равенством х2 + уг <1, присоединены все его граничные точки, т.е. точки окруж-
ности х2+у2= 1. .
Множество называется ограниченным, если все его точки находятся внутри
некоторого «-мерного шара
Диаметром ограниченного множества {№} называется верхняя грань расстоя-
ний между его любыми двумя точками.
Число А называется верхней гранью числового множества {А}, если:
1) х^Л для всех хе X; 2) для любого числа е>0 существует такое х, еХ, что
302
х, > Л-€. Верхняя грань множества X обозначается через sup А' или supx. На-
мХ
пример, для сегмента X - [1,8) supx = 8; для интервала X = (2,9) sup X = 5>.
Число а называется нижней гранью числового множества X. если:
I) х 2 а для всех хе X; 2) для любого числа е > 0 существует такое xt е X, что
х,<в + е. Нижняя грань множества А'обозначается через inf X или infx. На-
пример, если X = (4,5), то inf X = 4; если X = [6,7j, то inf X = 6.
Всякое непустое множество действительных чисел, ограниченное сверху, име-
ет конечную верхнюю грань, а ограниченное снизу - конечную нижнюю грань У
всякого множества действительных чисел верхняя (нижняя) грань единственна
18.2. Понятие функции нескольких переменных
Функция, определенная на некотором множестве X арифметического п-
мерного пространства, называется функцией п аргументов
У - /(*!.*!...
где х|,х2,...,хя - координаты точки Л/(Х|,х2,...,хя) данною множества. В
этом случае говорят, что задана функция точки М, и пишут у- f(M\ или
w х = (х,.х2.............xj.
Рассмотрим случаи, когда л = 2 и л = 3. Предположим, что X - некоторое
множество точек плоскости, Г - тюдмножсство множества всех действительных
чисел Так как в фиксированной декартовой прямоугольной системе координат
Ox,Xj каждой точке М соответствуег упорядоченная пара действительных чисел
х,. х2 - се координаты, то функция, заданная на указанном множестве X. являет-
ся функцией двух аргументов, т.е. у = /(X|,Xj), где х(,х2 - координаты точки
М (х(,х2). Если координаты точки М обозначить буквами хну, а функцию -
буквой z, то z - f(x,y). I временные хну при этом называются аргументами функ-
ции z или независимыми переменными Значение функции z = f(x,y}, которое она
принимает при х = а, у = Ь, обозначается через /(о. Ь).
Область определения функции двух переменных представляет собой некоторое
множество точек плоскости.
Графиком функции z = /(x, у) называется множество точек N (х,у,/(х,у\у
т.е. некоторое множество точек пространства. Например, график функции
г = х-у представляет собой плоскость в пространстве, проходящую через начало
координат и пересекающую координатную плоскость Оху по прямой, образующей
равные углы с осями Ох и Оу, геометрическим изображением функции z х2 +у2
является поверхность параболоида вращения, а функции z »^9-х2 -у2 -
полусфера радиуса /? = 3 с центром в начале координат, расположенная выше
303
плоскости Оху. Отметим, что первые две функции определены на всей плоскости
Оху. третья - в крут е радиуса R = 3 с центром в начале координат, т е в области,
заданной неравенством х2 +у2 i 9.
Функцию
• х = /(х.у) (18.1)
можно представит ь так: z - /(х, у) = 0, или в более общем виде
F(x,y,z) = O. (18.2)
Функция, заданная формулой (18 1), называется явной, функция, определяемая
уравнением (18.2), называется неявной.
Действительная функция, определенная на некотором множестве (А) точек
пространства, т.е. точек М (х,у.г). где х,у,г декартовы координаты, называ-
ется функцией трех переменных x,y,z. Функцию трех переменных x.y.z обо-
значим буквой к, тогда u = /(x,y, z) Значение функции u = /(x,y,z) при х = а,
у = Ь, z~ с обозначается через f(a, b, с). Областью определения функции трех
переменных является некоторое множество точек пространства Нанрятмср. об-
ласть определения функции к = у/1-х2 -у2 —г2 представляет собой шар радиуса
К -1 с центром в начале координат, областью определения функции
и = l/y/1-х2 -у2-г2 является множество точек, лежащих внутри указанного та-
ра (граничные точки, т.е. точки сферы х2 +у2 + z2 = I, исключаются).
18.3. Предел и непрерывность функции
нескольких переменных
Полное приращение функции двух переменных z = fix. у) в точке Mix. у) опре-
деляется формулой
Дг-Дх + Лх, у + Ду)-f{x,y\ (183)
а ее частные приращения (по х и у соответственно) в той же точке - формулами
A,z = /(x + Ai,y)-/(x,yX (18.4)
= /(*.,>' +Ду)-/(*. У). (18.5)
х, у, х+Ах, у+ Ду принадлежа! области определения функции.
Аналогично определяются полное и частные приращения функции
большего числа переменных.
Замечание. Частное приращение функции по одному из аргументов
есть разность между двумя сс значениями, когда приращение получает только
данный аргумент, полное приращение функции - разность между двумя значе-
ниями, когда приращения получают все сс аргументы.
304
Число А называется пределом функции и = /(М) при Af, стремящемся к
Л/0,если для любого е>0 существует .такое 6 > О, что при всех М, расстояние
которых до точки Мо меньше 8. тл.
0<p(M, MJ<S, (18.6)
выполняется неравенство
|/(М)-л|<£. (18.7)
Функция и = /(М) называется непрерывной в точке Af„ если выполияегся условие
Jim, /(Af) = /(Л/Д (18.8)
Необходимое и достаточное условие непрерывности функции и* f(M) в точ-
ке Af0 выражается равенством
lim Ди = О, или lim (/( М) - /(Af0)) = О,
Лр *0 Лр-»0
где Лр = р(М. МД Ла = /(М)-/(М0).
Теорема 18.1. (об устойчивости знака непрерывной функции).
Если функция u^f(M) непрерывна в точке Мое X и f(Mo)eO. то суще-
ствует 8-окрестность точки Л/о. в которой f(M) не обращается в нуль и
имеет знак. совпадающий со знаком /( Af0).
Теорема 18.2. Если функция z = f(x,y) непрерывна в ограниченной
замкнутой области, то она ограничена в этой области и достигает в
ней своего наименьшего и наибольшего значения.
Если в некоторой точке Afc не выполнено условие (18 8), то ла точка называ-
ется точкой разрыва функции u » f(M).
Точки разрыва функции двух переменных мо<ут заполнять <ллслы1ые линии (>синии
разрыва) Например, для функции и = I /(х2 +у2 -1) линией разрыва являлся окруж-
ность х2 +у2 -1" 0 в плоскости Оту. Точки разрыва функции трех переменных могут
заполнять отдельные поверхности (поверхность разрыва) Так, для функции
и- 1/(х-х2 -у2) поверхностью разрыва является параболоид вращения х = х2+у2.
18.4. Частные производные функции
нескольких переменных
Частной производной функции нескольких переменных по одной из
них в фиксированной точке называется предел отношения соответствую-
щего частного приращения этой функции к приращению данной перемен-
ной, когда последнее стремится к нулю.
305
Для функции х*=/(х,у) частные производные в точке М0(х0,у0) по хну со-
ответственно определяются формулами:
(дг > „ /(хо + Д’.Л'о)-/^^)
— I ° пт --- ,
\дх J Аг"*° Дх
GH = lim Л*о» У» + ДУ>~/(*<>» Уо>
l^/м, д*_,° л>
Употребляются ч и другие обозначения: х*(х0,у0\/,'(х0,у0),
<(хо.>оХ //(*о.Уо)
Частная производная функции г = /(х,у) по переменной х выражает скорость
изменения функции в данном направлении (у = у0) или скорость изменения
функции /(х, у0) одной переменной
Частные производные функции г = /(х,у) имеют следующую геометриче-
скую интерпретацию:
A'(xo.yo)-tga, 4'(х0. у0) = tg Р.
где a - угол между осью Ох и касательной в точке N (х0, у0, /(хв, у0)) к линии
пересечения поверхности г = /(х,у) и плоскости у = у0, Р - угол между осью
Оу и касательной в той же точке к линии пересечения данной поверхности с плос-
костью t = Jj (рис 18.1).
Очевидно,
А *-«. *
т.е. частная производная в данной точке равна производной функции одной псрс-
менпой, вычисленной при соответствующем значении аргумента, поэтому при
нахождении частных производных пользуются обычными правилами дифферен-
цирования.
При переходе от точки М0(х^,у0) к точке М (х,у) получим новые значения
частных производных. Следовательно, частные производные функции /(х,у>)
также являются некоторыми функциями двух переменных:
Д-лх«.л ^=/;<х.ух
dx dy
Пример 18.1. Найти значения частных производных функции
г= /(х,у) = 2х’ + 3х2у+6ху-у’ вточке Мо(-1,2).
306
Считая у постоянной и дифференцируя г, как функцию х, находим
Рис. 18.1
частную производную по х, вычисляем ее значение в точке Мо:
zj - (2х ’ )', + (Зх’у К + (6х у У, - (у*У, = 6х2 + 6х у + 6 у - 0 = 6 (х2 + х у + у);
1,2) = 6 ((-1)2 + (-1) 2 + 2) - 6
Считая х постоянной и дифференцируя г, как функцию у, находим
частную производную по у и се значение в точке
< -(ь’);+(3х2у);+(бху); —(у’)' = о + з? + бх-з/-з(? + 2я./);
1,2) = 3 ((-1 )2 + 2(-1) - 22) = -15.
18.5. Полный дифференциал функции
нескольких переменных
Если полное приращение функции z=/(x,y) в точке М0(х0,у0) предста-
вимо в виде
Дг = РЬл + @Ду + еДр,
где Р. Q - постоянные, Лр = ^Лх1 + Ду2 и £—>0 при Др-»О, то РЛх + QAy
называют полным дифференциалом данной функции в этой точке и обозначают
через dz: dz- РЛх + Qty. Следовательно,
Дг = Л+ЕДр, е-зОпри Др—зО. (189)
Полный дифференциал функции двух переменных равен приращению аппли-
каты z касательной плоскости в точке М0(хп,у0,г0) к поверхности, являющейся
307
графиком этой функции, когда аргументы х и у получают приращения Дт и Лу
(рис 18.2, Дг - КМ, dz = KN).
Рис. 18.2
Функция, обладающая непрерывными частными производными, имеет полный
дифференциал, причем
- /,'(*о, у0) Дх + //(х0, у0) Ду.
(18.10)
Дифференциалы независимых переменных совпадают с их приращениями,
т.е. <(х = Дх, rfy = Ду.
Полный дифференциал функции /(х,у) является функцией х, у при фик-
сированных dx и dy.
Эт dz
dz ~—dx+—dy, илиdz /ж'(х,у)dx + /'(х,у)dy.
dx ay z
Функция, имеющая полный дифференциал, называется дифференцируемой.
Если функция дифференцируема в некоторой точке, то она и непрерывна в ней.
Из формулы (18.9) следует, что Дх - dz, или
/(хо + Дх. у0 + Ду) - /(х0, у0) - /ж'(х0, у0) Дх + /Дх0, у0) Ду, (18.11)
откуда
/(х0 + Дх, у0 + Ду) - /(Хр, у0) + /;(х0, у0) Дх + //(Хо, у0) Ду. (18.12)
308
Если вес первые частные производные функции u = f(x1fx2....,xK) непрерыв-
ны, то полный дифференциал выражаете! формулой
Эи Эи ди
du = ——dx,+——<£х2+...+——Л„. (18.13)
dt| dx2 dxn
Каждое слагаемое правой части этой формулы называется частным дифферента юм
В частности, полный дифференциал функции трех переменных вычисляется по
формуле
du . ди ди .
du* — dx+—dy + — dz. (18.14)
дх ду да
Пример 18.2. Дана функция г = /(х,у) = х’+3ху-6х и две точки
Л (4; I), В (3,96; 1,03). Требуется: 1) вычислить значение z функции в точке в. 2)
вычислить приближенное значение г, функции в точке В исходя из значения г0
функции в точке Л. заменив приращение функции при переходе от точки Л к точке
В дифференциалом.
Вычисляем значения данной функции в точках Л и В:
«о-ГМ)-/(Хо.>о)-/(*.0-4,+31 4-6 4-4, х-/(В)-/(х„>,)-
= /(3.96; 1,03) -(3.96)2 + 3 3,96 1,03- 6 3,96= 4.158.
Находим приращения аргументов: Дх = х, - х0 - 3.96 - 4,00 = -0.04,
Ду=Pi “Уо®1»03-1.00 = 0,03; значения частных производных
//(».>)*= 2т+ 3у-6. //-Зх в точке Л: /,'(*».>•)/,'(4.1)-
-2-4+3-I-6-5, //(х0,у0)-//(^. 0 = 3-4 = 12; значение дифференциала в
точке Л по формуле (18.10): <£ = 5(-О,О4) +12 0,03 = 0,16; значение функции в
точке В по формуле (18.12): х, = /(х,,у,)» /(3,96,1,03) - 4 + 0,16= 4,16.
Пример 18.3. Вычислить приближенно еО.о1-(о.»)’>
Рассмотрим функцию z = . Искомое число можно считать приращенным
значением этой функции при х»1, у = 1. Дт-0,1, Ду = -0,1. Поскольку
/(х.^-е*’'*’ = е° = 1, Дх = Л = 2е'>'л>(xdx-yrfy) = 2c°(ai +0,1)-241.2 = 0.4, то
е('’’*^-е,-*+Д.-= 1 + 0,4 =1.4.
Пример 18.4. Вычислить полный дифференциал функции и-хух при
переходе от точки М(6; 4; 2) к точке ^(5,92; 3,95; 2,07)
Так как u' = уг, и' = xz, и' = ху, то в соответствии с формулой (18 14)
du = yzdx + xzdy+xydz. Подставив в эту формулу значения х = 6,у = 4. г = 2,
dx = Дх = 5,92 - 6 = -0,08, dy « Ду = 3,95 - 4 = -0,05, dr = Дг = 2,07-2 = 0,07,
получим du = 4 2 (-0,08) + 6 2(-0,05) + 6 4 0.07 --р,64-0,6+1,68 = 0,44.
Пример 18.5. Как изменится диагональ прямоугольника со сторонами а = 8
см, 6 = 6 см. если сторону а уменьшить на 3 мм, а сторону 6 увеличить на 7 мм?
309
Диагональ прямоугольника / через его стороны а и Ь выражается формулой
l-Ja2 +Ь2. Введем в рассмотрение функцию z = ^/х2 +У2 • Поскольку
к=8,у.6.Дх = -аХДу = а7.Л = ^^,тоЛ-=^Н^= =(ц8.
Jx2 +у2 № +62
Следовательно, диагональ увеличится на 0.18 см.
18.6. Частные производные и дифференциалы
высших порядков. Формула Тейлора
Частные производные функции нескольких переменных навивают также частны-
ми производными первого порядка или первыми частными производными
Частными производными второго порядка (или вторыми частными производ-
ными) данной функции называются соответствующие частные производные от ее
первых частных производных.
Для функции г /(х.у) по определению имеем
d2z д | — 1 —/Г'Гг «AV - fir «А
Зх2 йх 1 1 ” VJ Я\Х» У))ж JУ)*
д2г j)_(
Эу2 dyl 1=(/,(*. у)), /„(*.
д2! д (dz
дхду ду Т- я (/. (*. У»г ж fl) (х. у\ \дх) '
d2z д
1 ЗВ —— Эудх дх к-я(/;(Ау));=л;(х.у). \°yj
Вторые частные производные обозначаются также символами
z" z", z", Производные z“ z" называются смешанными частными
производными.
Частные производиькг появились в трудах И Ньютона, Г Лейбница, Я Бернулли
&
и И. Бернулли. Обозначения —, — ввел Лежандр (1786), //, г* -
ах аг
Л2,
Ж. Лагранж (1797, 1801), —Г, —----К Якоби (1837).
Эх охру
Теорема 18 3. Если функция z-f(x,y) и ее смешанные производные
z“ . z£, определены в некоторой окрестности тонки М0(х0,у0) и непрерывны в
этой точке. то f“(x^,у0) = /'(*<>. у0).
Дифференцируя частные производные второго порядка как по х. так и по у. полу-
чаем частные производные третьего порядка или третьи частные производные:
310
d'z d’z Э4 d*z Э2г Э’г d’z
йх’ ’ йх2йу ’ йхйуйх ’ йхйу2 ’ <hth2 ’ йуйхйу ’ ду2дх ' йу1
Вообще. частная производная л-го порядка функции z = f(x,y) есть первая
частная производная от се частной производной (л -1) -го порядка
Аналогично определяются и вычисляются частные производные второго и
высших порядков от функции трех и большего числа переменных.
Полным дифференциалом второго порядка некоторой функции называется
полный дифференциал от ее полного дифференциала
Полным дифференциалом л-го порядка называется полный дифференциал от
полного дифференциала (и -1) -го порядка. Если г м f(x, у\ dz = z’„dx + z'ydy, то
d1z^d (dz) = z^dx 2 + Zz^dxdy + z^dy2,
d2z-d(d2z) = ^dxl+3-^dx2<fy+3^^dxdy2 ....
ax dx dy dxdy dy
'**(*
л(л-1)...|л-((-1)|
*!
Эту формулу записываю! и в следующем символическом виде:
d"z
Формула Тейлора для функции двух переменных
Дх.У) - f(a. Ъ) + У '*»»> + Г^**^**)
Z? *’ (л+1)!
(18.15)
ИЛИ
где М'(а + ОЛх, Ь+вЛу) - точка области S.
Формула Тейлора для функции большего числа переменных
w - /( М), М (х,, х2.*,), аналогична формуле (18.16).
Замечание. При л«1 формула (18.15) принимает вид
/(*.У) /(в. *) + (//(о. Ь) Ат + //(о. Ъ) Ду) +
+|(/„(4. П) Аг1 +2/;(^ П) ДхДу + f-(^ П) Ду2).
где ^ = а + вДх, Т) = 6 + вДу, 0< в < 1.
Пример 18.6. Дана функция z = xf +2л’у-8ху2 +у’. Найти се
частные производные второго порядка Находим сначала первые производные:
z' =3х2 +4ху-8у2, z' =2х2 — 16ху+3у2.
311
Пользуясь определениями и правилами дифференцирования, получаем
z£ = 6х+4у, z* =4х-16у, z" =4х-16у, z' = -16х + 6у.
, я я Э2и
Пример 18.7. Дана функция и = х ycos3/+y z . Найти ,
dxdydt
д*и Э5ц
dy'dz2 ’ Зг*'
Дифференцируя по одной из переменных, считаем все другие постоянными
ди д2 и д3и
— = 2xvcos3t —— »2xcos3f, -------=— блмпЗт.
3l ZXVCOS.H. zxu м.
3« Я - - « З’и „ J д*и
— «x’cos3/ + 2yz , —r = 2z’
ду ду1
W, ёг-aov. тг=6°/г
dz Зг Зг
’ dy2dz ,Ог*’ dy2dz2 40г’;
д*и i З’и . >« 1
—r=l2Oy’z. -у=12О>'2.
dz dz
Пример 18.8. Дана функция z= In(jra +уг +2х + 1). Показать, что
z“+z*eft
Найдем частные производные первого и второго порядка;
йг _ (хг -Ууг +2л + 1)'г_2х + 2
дх х,+у2+2л + 1 х2+у1+2х + 1’
Зг (х*+/+2х + 1); 2у
ду ха+у2+2х + 1 х2+у2+2х + Г
Э2г = ( 2х>2 _ 2(х2+/+2л + 1)-(2х+2)(2х+2) _
.дх1 [х’+у2+2х + |)ж “ (ж2+/+2х + 1)2
2yf-2x1-4x-2
“(х’+у2+2х + 1)2’
д1г___Э ( 2у 2(хг+уг+2х+1)-2у2у 2ж*-2у2 4-4х-»2
ду1 Зу ^х2 4-у1 +2x + l) (х2 +уг +2х + 1)2 (х2+у2+2х+1)2
Составим сумму z" +z" вторых частных производных и убедимся, что она
тождественно равна нулю:
дгг д2г 2у2-2х2-4х-2 , 2х2 -2у2 + 4х + 2 _р
дх1+ду2 (х2+/+2х+1)2+(х,+/+2х+1)2 ”
312
18.7. Дифференцирование неявных и
сложных функций
Функция л переменных х,,х2,....хя называется неявной, если она задана
уравнс>тсм
.................................л».«) = 0. (I8.17)
нс разрешенным относительно и.
Частные производные неявной функции, заданной уравнением (18.17), нахо-
дятся по формулам
du_ ±L-J«L *L_ ZL
a»," Fj’ax," f;.........dx." f;'
В частности, если у - функция одной переменной х, заданная
уравнением F(x, у)«0, то
/ = ~4; (18.18)
гу
если z - функция двух переменных х, у, заданная уравнением F (х, у, г) = 0. то
d^ _£_
йх 3 г,' ду /j’
Если w = F(v„v1,...,v1,X где v( =/|(х|,х1,....хяХ
v2 =х2,...,х,Д =/„(х|,х1,...хяХ т° функция и называется сложной
функцией независимых переменных X|,Xj,...,x,. Переменные v|tVj,....v, назы-
ваются промежуточными аргументами
Частная производная-c ложной функции по одной из независимых переменных
равна сумме произведений се частных производных поупромежуточным аргумен-
там на частные производные этих аргументов по данной независимой переменной
du 3x, du du dv2 , A du dv„
dv, du dx, dv2 *1 . du dx, dv„ dx, ’ dvj , du dv„ dij dv„ dx2 ’ (18.19)
Их, dv. dx, dv2
du du dvt du dv, du dv„
dx. dV| dxw dv2 dx„ dv, dx„
Если все промежуточные аргумеигы являются функциями одной независимой
переменной I, то функция будет сложной функцией от t. Полная производная этой
функции находится по формуле
du ди dv. ди dv-j Эк dv,
dt dv, di dv2 dt dv„ dt
313
18.8. Экстремум функции нескольких
переменных
Максимумом (минимумом) функции 2 = f(x,y) вточке М0(х^,у0) называется та-
кое ее значение /(х0,у0Х которое больше (меньше) всех других ее значений, принимае-
мых в точках М (х,у\ достаточно близких к точке MQ и отличных от нее.
Максимум и минимум функции называется се экстремумом. Точка, в которой
достигается экстремум, называется точкой экстремума.
Экстремум функции трех и большего числа переменных опредс-июся аналогично
Необходимые условия экстремума. В точке экстремума дифференцируемой
функции нескольких переменных частные производные се равны нулю.
Если Л/0(х0.у0) - точка экстремума дифференцируемой функции ; =/?х.у), то
Л'(*о.У0) = а/;(ло.>о) = 0 (>820)
Из этой системы уравнений находятся стационарные точки. Система (18.20)
эквивалентна одному уравнению
#(*о.Уо) = 0. (18.21)
В общем случае в точке экстремума Ме(х^,у0) функции z = /(x,y) выполня-
ется равенство (18.21) или df(xQ,y0) нс существует.
Достаточные условия экстремума. Пусть Л/оС^о-Л) ~ стационарная точка,
т.е. точка, для которой выполняется равенство (18.21):
1)если
</2/(хо,у0)<0(приdr1+dy’>0), (18.22)
то /(х0,у0) - максимум функции z = /(x, у);
2) если
d2/(xo,yo)>0(npHd?+dy2 >0), (18.23)
то /(х0,у0) - минимум функции z = /(x,y).
Эги условия эквивалентны следующим пусть /ж'(*о.Уо) = °> /Дхо.Уо) = ° и
Хж/ж(*о.>оХ В = /'(х0,у0ХС = /'(х0,у0Х (1824)
Д = ЛС-Йа, (18.25)
тогда
1) если Д>0, то функция /(х,у) имеет экстремум в точке Мо: максимум
при А < 0 (или С < 0), минимум при А > 0 (или С > 0);
2) если Д < 0, то экстремума в точке Мс нет.
Для функции трех и большего числа переменных необходимые условия
экстремума аналогичны условиям (18.20), а достаточные условия аналогич-
ны условиям (18.22), (18.23).
314
Пример 18.9. Найти экстремум функции fix, у )= х*+у2-4х+бу+17.
Поскольку /; = 2х-4./;«2у+6./--2,/1; = 0./>; = 2,/;-а/; = 0 при
х = 2, у “-3, А = 2’2-0= 4 > 0, Л = 2> О, то в точке Л/О(2,-3) функция имеет
минимум, причем min /(х, у) = /(2,-3) = 4.
Пример 18.10. Найти наибольшее и наименьшее значения функции
z = /(x.y) = 3-2х2-ху-у2 в замкнутой области, заданной системой нера-
венств: х S 1, у > 0, у £ х.
Область представляет собой треугольник ОАВ (рис. 18.3), причем
О (0,0), А (1, ОХ 0(1, IX Находим экстремум
функции: /ж' = -4х-у, //= -х-2у,/; = 0,//= 0
прих = 0. у-ft/'» -4,/; = Ц = -L/;--2,
А = ЛС-В2 =(-4)(-2)-(-1)’ =7>0, Л = -4<(Х
в точке (0,0) функция достигает максимума:
max /(х, у)» /(0,0) = 3. Найдем экстремумы на гра-
нице области: на стороне О А (у = 0) функция
z - /(х, 0) = 3 - 2х2 = <р (х) зависит от одной пере-
менной х.<р'(х)--4х, <р"(х)--4, <р'(х) = 0 Рис. 18.3
прих=(Х ф"(0) = -4<0, х = 0 - точка максимума: ф(0) = /(0,0) = 3. На пря-
мой АВ (х = 1) функция z»/(l,y) = 3-2-y- -у2 = 1-у-у2 -ф(у) зависти
только от у, ф'(у)»-1-2у, ф'(у) = ()при у»-|/2, но эта точка не принадле-
жит отрезку АВ. На стороне ОВ (у = х) функция зависи: только от х:
z = /(x,x) = = 3-2х2 —х2-х2 = 3-4х2 =ф(х\ ф'(х) = -8х, <р~(х) = -8. ф = 0
при х = 0, ф'’(0) = -8<0,/(0,0) = 3. Вычисляем значения функции в точках А и
й: /М) = /(1.0) = l,/(B) = /(i.1)»-L Следовательно, в заданной области наи-
меньшее значение данной функции равно “X а наибольшее равно 3.
Пример 18.11. Найти наибольшее и наименьшее значения функции
z = х2 +>Я-2х-2у+4 в круге x2+y2S4.
Данная функция имеет минимум в точке М (1,1), лежащей в заданной области.
причем min (х, у) = /(1,1) = 2.
Исследуем изменение функции на |ранице области, т.е. на окружности
х2+у* = 4. Воспользуемся параметрическими уравнениями этой окружности
x»2cosZ,y = 2sinZ(0SzS2n). На данной окружности функция становится
функцией одной переменной Г. z = z(Z) = 4cos2T + 4sin2T-4cosZ-4sinz + 4 =
= 8-4cosZ-4sinz. Поскольку z'(0 = 4sinz-4cosZ, z'(Z) = 4sinZ-4cosZ = 0,
tgZ = k Z|=n/4, z2=(3/4)n, z',(Z) = 4cos+4sinZ, zM(Z|)>0, z'(/j)<0, to Z, -
315
точка минимума, Г2 - точка максимума, причем ттж(1) = ж(л/4) =
= 8- 4Л - 2,344. max? (Г) = ж((5/4) и)=8+4^2 - 13,656
Рассматривая полученные экстремальные значения функции, заключаем, что в
указанном круге наибольшее значение функции равно 8+1V2 - 13,656, достигается
оно в точке N (-2,-2), лежащей на границе окружности; наименьшее значение
функции равно 2, достигается в точке минимума М (1,1).
18.9. Условный экстремум
Если разыскивается экстремум функции многих переменных, которые связаны
между собой одним или несколькими уравнениями (число уравнений должно быть
меньше числа переменных), то говорят об условном экстремуме. При решении
задачи можно пользоваться методом неопределенных множителей Лагранжа.
Чтобы найти условный экстремум функции ж = /(*,>) при наличии уравнения
связи ф(х,у) = 0, составляют функцию Лагранжа
F (*. У) = /(*, Я+ М> (*.>). (I«26)
где X - неопределенный постоянный множитель, и ищут се экстремум. Необхо-
димые условия экстремума функции (18.26) выражаются системой трех уравнений
с тремя неизвестными ж, у, X:
(„27,
дх дх аг ду ду ду
Вопрос о существовании и характере условного экстремума решается на осно-
вании изучения знака второго дифференциала функции Лагранжа
d2F = F“dx2 + 2F"dxdy.+ F“dy2 для испытуемой системы значений ж, у, X, полу-
ченной из системы (18.27) ггри условии, что dr и dy связаны уравнением
т— dx + т;~ dy = 0 (dr2 + dy2 * 0).
аг ду
Функция f(x,y) имеет условный максимум, если dtF<0, и условный мини-
мум, если d2F>0.
Аналогично находится условный экстремум функции трех или большего числа
переменных ггри наличии уравнений связи.
Если, например, требу ется найти экстремум функции f (ж, у, г) ггри условиях
Ф (ж,у, ж) = 0, у (ж,у,ж) = 0, (18.28)
то вводят функцию
F (ж, у, ж) - /(ж, у, ж) + Хф (ж, у, г)+рф(ж, у, х)
и к уравнениям (18.28) присоединяют еще три уравнения: Fy = 0, F'-O, F'=0
316
Пример 18.12. Найти экстремум функции х = 9-8х-6у при условии,
что ее аргументы удовлетворяют уравнению хг +уг = 25.
Геометрически задача сводится к нахождению экстремальных значений
аппликаты zточек пересечения плоскости г = 9-&х-6у с круговым цилин-
дром х2 +уг - 25.
Составляем функцию Лагранжа, определяемую формулой (18.26):
F(x.y) = 9-8x-6y + X(x2+у2-25), находим ее частные производные
F' = - 8 + 2Хх, F’ = - 6 + 2Ху. Система уравнений (18.27) принимает вид
-8 + 2Ал = 0, -6+2Х.у = 0,х2 +у2 =25,
или
кх-4 = 0, Ху-3» 0, х2+у2 = 25
Решив эту систему, получим: !)>.,= 1, *, = 4, у, = 3; 2) Х2=-1, ха=-4.
уг = -3. Находим вторые частные производные F" = 2Х, F" - 0, f ' = 2). и
второй дифференциал </2F=k(dx2+</у2). Так как </2F>0 при
X, = 1, х, = 4, >| = 3, то функция /(х, у) в точке (4,3) имеет условный минимум,
причем min/(x,y) = /(4,3) = -41. Поскольку d1F<0 при Ха=-1, ха = -4.
уа=-3, то в точке (-4,-3) функция имеет условный максимум /(-4,-3) = 59.
18.10. Касательная плоскость и нормаль
к поверхности
Касательной плоскостью к поверхности в данной точке М (точке касания) на-
зывается плоскость, в которой лежат касательные в этой точке к всевозможным
кривым, проведенным на данной поверхности через указанную точку.
Нормалью к поверхности называется перпендикуляр к касательной плоскости в
точке касания. Координа,ы вектора нормали п = (а,Ь,с) к поверхности
F(x,y,z) = 0 (18.29)
в точке Л/0(х0,у0,20) пропорциональны значениям соответствующих частных
производных функции F(x,y,z) в этой точке: e = X.(F,')0, 6 = Х(/^')0,
с* Х(?7)о, где (F,')o ^'(Хв.Уо.Хо). (F/)o = F,’(x0, у0, z0), (F^o =
= F/(x0, y0,z0) '
Координаты вектора п входят в уравнение касательной плоскости к поверхно-
сти в точке A/0(x0,y0,z0):
+ . (18.30)
317
а также в уравнение нормали к данной поверхности в той же точке:
(лд> (f;>0 (f,% ’
(18.31)
Пример 18.13. Записать уравнения нормали и касательной плоскости к
поверхности г = хг+уг в точке Мо(1,-2,5).
Поскольку Г(я,у,я) = я2 +у2-г, F"^ 2я, F} = 2y, F’--\, хс«1, у0 = -2,
ко = 5, F;(x0,y0,z0) = 2, Fy(xv,y0.z0)-~4. то на основании уравнений (18.3ОХ
(18.31) получаем 2(я-1)-4(у+2)-(»-5) = 0, 2я-4у-я-5=0 (уравнение
„ . я-! у+2 г-5
касательной плоскости), —— = —— = —— (уравнения нормали),
2 —4 —I
18.11. Семейства линий и их огибающие.
Семейства поверхностей и их огибающие
Однопарамегричсским семейством линий, лежащих в плоскости Оху, называ-
ется множество линий, определяемое уравнением
F(x,y.O)-0. (18.32)
в котором параметр С может принимать различные действительные
значения (при каждом фиксированном значении С получаем определенную
линию семейства).
Огибающей семейства линий называется такая линия, которая в каждой точке
касается некоторой линии семейства.
Множество всех точек, удовлетворяющих сист емс уравнений
F (я, у, Q = 0, А?(я. у. Q - 0. (18.33)
называется дискриминантной линией семейства (18.32).
Если в точках дискриминантной линии частные производные F^hF}
одновременно в нуль не обращаются, то дискриминантная линия совпадает
с огибающей семейства.
Множество линий, определяемое уравнением
Flx.y.Q.Q.....С„) = 0,
где С|,С2..С, - независимые параметры, называется «-параметрическим се-
мейством линий (параметры называются нетависимыми или существенными, если
их число нельзя уменьшить путем введения новых параметров).
Однопараметрическим семейством поверхностей называется множество по-
верхностей, определяемое уравнением
318
F(x,y,z,C) = O (18.34)
Огибающей семейства поверхностей называется поверхность, погорая в каж-
дой своей точке касается некоторой поверхности семейства.
Огибающая семейства поверхностей (18.34) удовлетворяет системе
уравнений
F(x,y,r,Q = O, F^(x,y,z,C) = G (18.35)
Пример 18.14. I 1айти огибающую однопараметрического семейства ли-
ний х1 +(у-Ср = R1.
Система уравнений (18.33) запишется так:
х2+(>-С^-Я2 =0. 2(y-Q = Q
Из лой системы находим, что
х2-Я2=0, или х а — Я, х« R.
Прямые х«-Я, х-Я являются огибающей
данного однопараметрического семейства ли-
ний - множества окружностей радиуса Я с
центрами на оси Оу (рис 18.4).
Пример 18.15. Найти огибающую одно-
параметричсского семейства поверхностей
х2+у2+(х-С)2 = Я2.
Система уравнений (18.35) принимает вил
х2+у2+(х-С)2-Я2 =0, 2(х-С) = а
откуда следует, что х2 +у2 = Я2.
Круговой цилиндр радиуса Я, ось которого
совпадает с осью Ог, является огибающей
данного однопараметрического семейства
сфер радиуса Я, центр каждой из которых на-
ходится на оси Ог.
Рис. 18.4
319
Главе 19
ДВОЙНОЙ ИНТЕГРАЛ
19.1. Понятие двойного интеграла,
его геометрический и механический смысл
На плоскости Оху рассмотрим область .S площади .S, ограничено у то замкнутой кривой у
(рис 19.1). Пусть в области S определена функция х “ /(х,у). Разобьем область S сетью
линий на конечное число областей (AS(),(AS2),....(AS„). площади которых
AS,. AS'j,... ,Л5„. В каждой »-й элементарной области (AS,) выберем произвольную
точку М,(х,,у,}, значение функции в этой точке f(xt. у,) умножим на площадь AS,
соответствующей области и все произведения сложим. Полученная сумма
№1
называется интегральной суммой функции f(x,y) в области 5.
Двойным интегралом от функции /(х,у) по области S называется конечный
предел / интегральной суммы /в при X. -»0, где X наибольший из
диаметров элементарных областей (AS,):
/-ИиУ/(х„Л)Д5,. (19.1)
А-40М
Рис. 19.1
Рис. 19.2
320
Обозначения двойного интеграла: / - JJ /(х.у) dS, 1 » JJ /(х, y)dxdy.
s s
Функция z = f(x,y\ для которой предел (19.1) существует и конечен, называ-
ется интегрируемой.
Если функция z = /(x, у) непрерывна в области S, то она интегрируема
в этой области.
Геометрический смысл двойного интеграла. Если /(х,у)>0, то двойной
интеграл от функции z = f(x, у) по области 5 равен объему тела, ограниченного
сверху поверхностью г = /(х, у), с боков - цилиндрической поверхностью, об-
разующие которой параллельны оси Oz, а направляющей служит контур у фигуры
5, снизу - плоскостью г = 0 (рис 19.2).
Механический смысл двойного интеграла. Двойной интеграл от функции
х = /(х, у) > 0 по области S представляет собой массу фигуры 5, если подынте-
гральную функцию /(х.у) считать плотностью этой фигуры в точке М(х,у).
Свойства двойного интеграла.
• JJc/(x,y)dS»cJJ/(x,y)<iS(c* const)
S S
2- jJ(/(x,y)±(<p(x,y))dS= JJ/(x,y)dS ±JJ<p(x,y)dS.
s s s
3. Если /(x, у) S p (x. у), to JJ /(x, y) dS i JJ ф (x, y) dS.
s s
5 JJ Ж У) “ J J f(*, У) dS + JJ /(x, y) dS.
f ’ s, s2
где 5, и S2 - области, на которые раэбига область S.
6. Если в области 5 т i f(x, у) S М, то
mS « JJ /(х, у) dS i MS. (19.2)
откуда
JJ/U.y)цЛ/).
Пример 19.1. Оценить двойные интегралы
II Зм I
321
где S2 - квадрат |х|+|у|5 5, 5, - крут х2+у2£ 16.
Оценим первый интеграл. Областью интегрирования является круг радиуса
Л-4. площадь которого 5=16п Так как в данной области функция
/(х,у)=1/^25-х2 -у2 удовлетворяет соотношениям 1/V25-0 5
<,\] ^25-хг-у2 51/V25-16, т.е. Х/З^у]^25-х2-у2 51/3. то в соответствии
с неравенствами (192) получаем (1£/5) к 5 /, 5 (16/3) к.
Переходим к оценке второго инторала Областью ишетрироваиия является квадрат
с вершинами А(-5,0), ЖОД), 0(5,0), D(0,-5). Длина его стороны а = bfi, а площадь
S=50. Поскольку 1/275|/(25+$т’(я+у) + соя2у)5 51/25, то 1,855/252.
19.2. Вычисление двойного интеграла
в декартовых прямоугольных координатах
Различают два основных вида области интегрирования:
I) область первого вида 5(, т.е. область А^В-^, ограниченную слева и
справа прямыми х = о, х = Ь(а<Ь) соответственно, снизу - кривой у = ф|(х),
сверху - кривой у=ф}(*) (ф|(х)^1р2(х)Х каждая из которых пересекается с
вертикалью х ж а (а 5 а 5 Ь) только в одной точке (рис. 19.3);
2) область второго вида 52, т.е. область ограниченную снизу и
сверху прямыми у-с, y-d соответственно, слева - кривой x = Vi(y), справа
- кривой х = v2(y) (ViCy)^ VjCy)), каждая из которых пересекается с горизон-
талью у = р (с 5 Р 5 </) только в одной точке (рис. 19.4).
3ам сч а н ие. 13 некоторых случаях точки Л, и Л,, Я, и Bj, С, и Сг,
D, и Dj могут сливаться в одну.
Если для функции f(x,y\ определенной в области существует двойной
интеграл, а при каждом постоянном значении х из (а, 6| простой интеграл
/(*) j/(^<y)dy.
Я|<»>
то существует также и повторный интс!рал
* nW * п<’>
|<й J /(x,y)dy = J { Jf(x,y)tfy}dx
« ♦>(«) • *<*)
и выполняется равенство
* »>(»)
jj/(x.y)dS = jdx jf(x,y)dy. (19.3)
• s « Я1(»)
322
В случае области второго рола Sj
d
jjf(*.y)dS* jdy J/(x.y)A (19.4)
S «• ¥|W
в предположении, что наряду с двойным hi net ралом существует определенный
интеграл по х при постоянном у.
Рис. 19.3 Рис. 19.4
Если область 5 можно рассматривать как область первого пила 5, и как об-
ласть шорою вида $2, то при выполнении указанных условий применимы обе
формулы (19.3) и (19.4). поэтому
* ♦>(»> d »><»)
Ja J /(x,y)dy = jdy j/(x,y)dr.
• ♦>(*) « Vi(>>
По этой формуле осуществляется изменение порядка интегрирования при вычис-
лении соответствующего двойного интеграла.
Пусть область 5 является прямоугольником со сторонами, параллельными
осям координат. причем aixib.ciyid (рис. 19.5). обозначим
его так: S = fa, b; с, rfj.
Если функция /(к, у), удовлетворяет в этом прямоугольнике условиям, о ко-
торых говорилось выше, то
a d
|J/(*.>')<£ = У) (19.5)
S ас
/ *
= jdy J/(x,y)A. (19.6)
5 с а
323
Если функция /(х, у), интегрируемая в прямоугольнике 5 = [а, b; с, d], может
быть представлена в виде произведения функции только от х на функцию только
от у. f(x,y) = ф(х) ф (?)• то
» И
U Ф М V О') = |<р(х)Л |ф(у)ф>. (19.7)
Пример 19.2. Вычислить JJ xydxdy, где область S является
s
прямоугольником [4,8; 1,2].
Задача сводится к вычислению повторного интеграла с помощью формулы (19.5).
По пой формуле интс1р«рованнс выполняется сначала по у. в пределах от с до </,
при произвольном постоянном х, а потом - пох, в пределах от а до 6.
Формула (19.5) в данном случае принимает вид
• 1
jj-ГИМ = jxytfy
S 4 I
Так как
Jxyrfk = x^l =у(4-1) = ух,
I '•
то
]dx\xydy=]^xdx^]xdx^
« I « «
= 4(64-16)^36.
4
Следовательно, JJxyA4v = 36
s
Замечание. Тот же результат можно получить и по формуле (19.6).
324
Действительно,
= |(64-I6) = 24y,
поэтому
2 I 2
jdy |х>Л = J24ydv - 12y’|’ = 12(4 -1) = 36
I 4 I
Пример 19.3. Вычислить JJxiydufy, S - область, осраниченная ли-
s
ниями y=-x2,x = y2.
Данные линии пересекаются в двух точках 0(0.0), М(1,-1) (рис 19.6). Область S
можно рассматривать как область первого вида 5’, и как область второго вила 5j.
Рассмагривая ее как область первгяо вида, получаем следующие пределы интегриро-
вания о-О. 6ж1, у-фДх)--,/?. у = ф2(х)ж-х2. По формуле (19.3) имеем
Так как
то
2 2 2’
Следовательно, JJ х’уАф, ж - .
Замечание. Рассматривая /санную область как область второго вида,
находим следующие пределы интегрирования: с = -1, d = 0, х = у,(у) = у2,
х«Уг(у)-4~У' поэтому
Вычислив повторный интеграл, получим тот же результат.
325
Пример 19.4. Вычислить двойной интеграл где 5-
s
прямоугольник [1,3; 2,4].
Подынтегральная фут пения представляет собой произведение функции только от х
на функцию только от у, т.е. х*у3 = ф (л) V(y). где <p(x)»x2, фСу)^’, поэтому
при вычислении двойною интеграла можно пользоваться формулой (19.7):
s
У
4
3
= -(27-1)(64-4)- 520.
Рис. 19.7
Пример 19.5. Вычислить
треугольник с вершинами О (О,0), А (0.1), В (1,1).
Данная область шраничсна прямыми у = х, х = 0, у = 1
(рис 19.7) Рассматривая ее как область первого bkia находим
о
S
Интеграл Je ‘<Л является «нсберущимся»' интегралом.
Мы не можем выразить его черет элементарные функции.
Поменяв порядок интегрирования, получим
о
Таккак Je">’«fc = xe'>> | = уе'>>,то1
о
jje ,г<Ь<^= «-^+у-О3161.
S о
19.3. Замена переменных в двойном интеграле.
Двойной интеграл в полярных координатах
Криволинейные координаты на плоскостм. Рассмотрим непрерывно диффе-
ренцируемые функции м и v прямоугольных декартовых координат х ну.
« = ф(дг,уХ v-\f(x,y}. (19.8)
326
Предположим, что уравнения (19.8) однозначно разрешимы относительно хи у.
x = tpl(u,v),y=yfl(u,v), (19.9)
где ф|(«, vXYi(h, v) - непрерывно дифференцируемые функции и и v.
Придавая поочередно виг различные (возможные для них) постоянные зна-
чения, получаем два семейства линий на плоскости (рис. 19.8, а); эти линии назы-
вают координатными линиями. Положение точки М на плоскости определяется
парой чисел (л, у) или парой чисел и, v, где и и v выражены формулами (19.8).
Числа и, v называются криволинейными координатами точки М на плоскости.
Примером криволинейных координат являются полярные координаты, в этом
случае и = р, v = ф; координатные линии - концентрические окружности и полу-
прямые, исходящие из начала координат (рис 19.6.6). Прямоугольные координа-
ты - также частный случай криволинейных и “ х, v “ у. координатные линии -
прямые, параллельные осям координат (рис. 19.8, в).
Рис. 19.8
Замена переменных в двойных интегралах. Если непрерывно дифференци-
руемые функции (19.9) осуществляют взаимно однозначное отображение области
5 плоскости Оху на область G плоскости Ои\ (рис. 19.9), то
JJ/(*.У) = JJZ(*Pi(«. Л у2(в. v)) М dudv, (19.10)
s а
где J (и, v) - функциональный определитель (якобиан):
J(«.v) =
At At
Эн
«Ь* Эу ди dv ди dv
ди dv
(19.11)
В случае перехода к полярным координатам р, ф(х = рсо$ф,
формула (19.10) принимает вид
JJ /(*. У) dxdy ~ JJ/(Р созф, р sin ф) рdpt/ф.
s с
у = ряпф)
(19.12)
так как |7]= р.
327
Если область G (рис. 19.10) ограничена лучами, образующими с полярной осью
углы <р, = <х, Ч>} “Р. и кривыми р = рДф) и р-р2(ф) (Р|(Ф) < Pi(Ф)Х то
Р оно)
JJ/(p cos<p, р sin4>)pdp<*p = |«йр j/(pcoe«p,p ыпф)рф. (19.13)
С о ₽!<♦>
Если область G охва i ываст начало координат, то
г* р(о)
Д/(рсо>ф, р5>пф)рар1Лр-|<Лр |/(рсо5ф.psin«p)pdp (19.14)
(3 оо
Пример 19.6. Вычислить JJ(x2+у2) Аф1, где область 5 ограничена
s
линиями у = х,у«73х и дугой окружности х’+у2 =8. лежащей в первой чет-
верти (рис 19.11).
Применим формулы (1912), (19.13), предварительно выразив уравнения ipa-
ниц области и подынтегральную функцию в полярных координатах. Так как
х = р cosip, у = р sirup, то уравнения границ области принимают вид рсо$ф =
= psin5p, tgip = l, <р, =я/4; рsinf = VIpcos?, lgq> = V3, ф2="/3;
Рис. 19.11
Рис. 19.10
328
р2сов2ф+р25т2ф = 8, p = -Л, а подынтегральная функция x2 +>2 =
= p2 cos2 ф + p2 sin2 <p = p2. Следовательно,
= JV <*p=
Я/« 0 <«
Пример 19.7. Вычислить JJJ к1 -x2/o2 -y2 /b2 dxdy, tdkS - область.
s
ограниченная линиями x2/o2 +y2/h2 = 1, x2/*2 а2 Уу^/^к2 = I, k> 1.
Для вычисления данного двойного HHTcipana введем так называемые обобщен-
ные полярные координаты:
x/a = pcos<p, y/fe = psin<p, или к = op cos<p, у = ip sin<p (I)
Найдем якобиан данного преобразования (считая р - ь. ф = v). Так как
х'=осо5ф. х'и-орчтф, у'=/>51Пф, у'=брсо5ф, то, по формуле (19.11)
получим
Лр.ф)-
дх дз^
др | а сохф
Э>’ fy | />81Пф
др дф
- ар Sin ф
Ьр со$ф
= abp.
Подынтегральная функция и уравнения границ области примут вид
Jk2 -х2/а2 -у2 /Ь2 « Jk2 -p2(cos2 ф + ьт’ф) = Jk1 -р2,
х2/о2 + у2/б2 =р2 cos2 ф + р2 sin2 ф = р2, р2 = 1, Р| - I,
х2/к2а2 Уу2/к2Ь2 -1, х2/а2 Уу2/Ь2 = к2, р2 = к2, р2 = *.
Итак, область S, ограниченную эллипсами, преобразование (I) переводит в дру-
гое кольцо, ограниченное окружностями радиусов р = I и р - к с центром в точ-
ке О, угол ф меняется от 0 до 2л. По формуле (19 14) находим
JJ^к2-х21а2-у2/b2dxdy = jj jk2 -p2 dpd<p = ab J<Лр J Jk2 -p2 pdp =
s c oi
329
=-llo-(*2-i)*J|flH>l = ^р(*’-1)*
19.4. Вычисление площадей плоских областей
Площадь .V плоской области S выражается формулой
S = jj ds, или S = JJ dxdy.
s s
В криволинейных координатах этот интеграл имеег вид
(I9I5)
S = JJ|j(K,v)|di«A-, (19.16)
о
в полярных координатах
S-jJp4>dp. (19.17)
о
Пример 19.8. Вычислить площадь области, ограниченной линиями
х=у2 + 1, х = 5
Данная область ограничена параболой х»у' + 1 и прямой х-5 (рис. 19.12).
Решая систему уравнений х = у2 +1, у = О, находим точку А (1,0) пересечения
параболы с осью Ох. Из системы уравнений х = у1 +1, х = 5 находим лас точки
пересечения параболы с прямой х = 5: в (5,2), С (5, -2). Область АВС можно
рассматривать как область первого вида и как область второго вида
Применяя формулу (19.15) и рассматривая область АВС как область первого
вида, находим
» V77 »
S=|jdxdy = Jdx Гф< = jy|'/^L dx =
1 -Лд ।
= |[(5-l)*,-(l-DW]=10|.
330
Замечание. Рассматривая область ЛВС как область второго вида,
получаем
2 5 2 2
S=Ja J А= J(5-y2-l)4-=|(4-y2)</y =
-1 /♦! -2 -2
Пример 19.9. Вычислить площадь области, отраниченной линиями
у = 2 - х2, у3 = х5.
По формуле (19.15) получаем
Пример 19.10. Вычислить площадь фигуры, ограниченной лемнискатой
Бернулли (х2 +у2)2 = 2а1 (х2 -у2)
В силу симметрии кривой относительно осей координат достаточно вычислить
площадь одной четверти данной фитуры. Переходим к полярным координатам,
полагая х = рсо«ф, y-psintp. Полярное уравнение лемнискаты имеет вид
р2 = 2л2 cos 2ф, или р = а ^2 cos 2ф. Для части фи1 уры расположенной и первом
координатном углу, имеем ф, = 0, ф2 = я/4, р, - 0, р, - a ^2cm2ff.
Обозначая площадь ттой фигуры через 5,, по формуле (19.17) получаем:
Рис. 19.12
Рис. 19.13
331
Пример 19.11. Найти щющадь фигуры, ояраниченной линиями:
у1 = рх, у1 = qx. y=ax,y = bx (0<p<.q, 0<a<b).
Фигура представляет собой криволинейный четырехугольник, ограниченный
двумя параболами и двумя прямыми, проходящими через начало координат
(рис. 19.13). Введем новые криволинейные координаты и, v. связанные с коорди-
натами х и у формулами
и-уг!х, v = y/x, (pi uiq. aivi b). (I)
Эта замена переменных подсказана видом области интегрирования (в качестве
новых переменных взяты параметры, входящие в уравнения линий, ограничиваю-
щих данную фигуру). Из уравнений (1) выражаем х и у через им и:
x-u/v1 ,y-ujv.
Находим якобиан преобразования (2):
дх дх
ди dv
По формуле (19.16) полу чаем
(2)
1
И
£
V
2и
v’
и
2и и
V* V*
— dudv =
v
„1 я2
——£—dv
2v*
v
2 3
,1
б’ а1
?-p>)(b’-J)
6u'b'
19.5. Вычисление объемов тел
Объем цилиндроида, ограниченною сверху непрерывной поверхностью
z » /(х, у), снизу плоскостью 2 = 0 и с боков прямой цилиндрической поверхно-
стью, вырезающей из плоскости Оху область S (см. рис. 19.2), вычисляется по
формуле
Y-jjf(x,y)<bdy. (19.18)
s
Пример 19.12. Вычислить объем тела, ограниченного плоскостями
x + 2y-z = 0, 2х + Зу-18 = Ц х-2у-2 = 0, z = 0.
Данное тело ограничено сверху плоскостью х + 2у - z = 0, или
z = x+2y, (1)
с боков плоскостями
2x + 3y-18=U х-2у-2»0, х = 3, (2)
параллельными оси Oz (уравнения не содержат координаты z), и снизу -
плоскостью 2 = 0 (плоскостью Оху).
332
В плоскости Оху ( z = 0) уравнения (2) являются уравнениями прямых, по ко-
торым плоскости (2) пересекают плоскость Оху. Решая каждые два из них, нахо-
дим три точки пересечения: А (3,4), В (6.2), С(3,1/2) Следовательно, плоскости
(2) вырезами в плоскости Оху область S, которая является треугольником АВС
(рис. 19.14). На плоскости (1) точкам А. В. С будут соответствовать точки
Р (3,4,1IX Q (6,2,10), Я (3,1/2,4) - вершины данного тела.
Так как в данном случае г ш f(x, у) = я ♦ 2у, пределы интетрирования по х:
х, = 3, х2 = 6, пределы интегрирования по у: у, = 6- 2х/3, у, = х/2 -1 (получено
из уравнений прямых АВ и SC), то по формуле (19.18) находим
Пример 19.13. Вычислить объем тела, ограниченного поверхностью
х’+у2 —г-0, координатными плоскостями и плоскостями х=о, у = б.
(о>0, 6>0).
Данная поверхность является параболоидом вращения с вершиной в на-
чале координат и осью, совпадающей с осью Oz. Тело, ограниченное этой
поверхностью и указанными плоскостями, изображено на рис. 19.15. Об-
ласть 5, вырезаемая плоскостями х = а, у = 0, у = Ь. является прямо-
угольником ОАСВ.
Рис. 19.14
Рис 19.15
333
Так как z^x2+y\ то по формуле (19.18) имеем
а Ь
V - J|(x2 + у1) dxdy = /(-*Х +Уг>е,У-
S 0 0
Пример 19.14. Найти объем тела,
ограниченного поверхностью z = с2 - X1 - у2 и
плоскостями х = ±о, у = ±b (а1 + Ь2 <е2).
Поверхность, смраничивакиная цилиндриче-
ское тело сверху, является параболоидом враще-
ния с вершиной точке А (0.0, с\ область и>и
тарироваиия - прямоутольник BCDL со сторо-
нами 2а, 2Ь и центром в начале координат (рис 19.16)
Объем тела
^(Зс2-(в’+Л2)).
Замечание. Исходя из соображений симметрии, данный объем можно
вычислить по формуле
a b а , j \
И-4 J AJ(e2-х2-y2)dy = 4 Пс2Ь-х2Ь-Idx = —(Зс*-(о2 + 6’)).
оо о' '
Пример 19.15. Вычислить объем тела, ограниченного поверхностью
х2+у2+х-4 = 0 и плоскостью z = 0.
Разрешая первое уравнение относительно г, получаем х= 4-х2 -у2. 'Но
уравнение определяет параболоид вращения с вершиной в точке А (0,0,4),
являющейся высшей точкой поверхности (рис. 19.17). Параболоид
г= 4-х2 -у2 и плоскость z = 0 пересекаются по окружности, уравнение
которой в плоскости Оху имеет вид х2 +у2 = 4.
334
Формула (19.18) в данном случае запишется так:
r = J|(4-x2-/)A^.
3
где область S о)раничена окружностью х2 +у2 = 4.
Чтобы вычислить интеграл, перейдем к полярным координатам по форму-
ламл = рсо5<р, у = рялф. Так как 4-х2 -у2 =. 4-р’, J(p,ф) = р. р,=0,
Pi -2. <Pi =0. <Р, =2я. то
Пример 19.16. Вычислить объем тела, ограниченною поверхностями
х2 +у2 -z + 1-0, х2 +у2 +3z-7»Q
Данное тело ограничено двумя параболоидами (рнс 19.18). Линии пересечения
параболоидов определяются системой уравнений z = 1+х 2 + у2, Зе = 7 - х2 - у2.
Исключая из этих уравнений Z, получаем X2 + у2 = 1. Из первого уравнения при
х2+у2 = 1 имеем z = 2. Итак, линией пересечения является окружность
х2 + у2 = 1, z = 2 (пересечение прямого кругового цилиндра к2 +у2 = 1 и плос-
кости 2 = 2) Проекция этой линии на плоскость Оху также является окружностью
335
х2 + у2 = 1, z = 0. Искомый объем равен разности объемов двух цилиндрических
тел с одним основанием и ограниченных сверх) и снизу сситгветственно поверхно-
стям: z=(7-x2->г)/з, z = 1+x2 +у2, т.е.
Г = Г, - F, = (7-х2 -у2 )<М - JJ(1 + х2 +у2) dxdy,
S S
где область 5 есть круг х2 У у2 SI.
Переходя к полярным координатам, находим
2я I 2« I
и- Jj(7p-p’)4>-J(p+p’)4> =
0 0 0 0
19.6. Вычисление площадей поверхностей
Случай некого задания поверхности. Площадь 5 гладкой поверхности
г = z (х, у) выражается формулой
s=jjji+z;2+x;2 dxdy, (19.19)
р
где Р - проекция данной поверхности на плоскость Оху.
Если поверхность имеет уравнение вида у = у (х, z), то
$ = JJ Jl+yf+y? dxdz, (19 20)
Л
где /’, - проекция поверхности на ось Oxz.
Если поверхность задана уравнением х = х (у, z), то
S= jjjl+x;2+x',2 dydz, (19.21)
б
где Р2 - проекция поверхности на ось Оу:
Случай неявного заданна поверхности. Площадь $ поверхности, заданной
уравнением F (х,у, z) = 0, выражается интегралом
Я^+г;г+г,л
' ----— dxdy. (19.22)
где Р - проекция поверхности на плоскость Chy.
Случай параметрического задания поверхности. Если поверхность задана
параметрическими уравнениями
х =x(u, v),у = у(ь, z=z(u. v), (19.23)
336
где (u, v) e P и P - ограниченная замкнутая квадрируемая область, в которой
функции х,у, г непрерывно дифференцируемы, то
5
-JP
EG-F1 dudv.
(19 24)
где
Е«х'2 +у'2 + z'2, G = x'2 +у? + z'2, F = х[х', +у'иу’, + z^z'.
(1925)
Пример 19.17. Найти площадь части поверхности цилиндра
х2 + уг - Rx = 0, заключенной внутри сферы х2 + у2 + z2 = R2 (боковая поверх-
ность «тела Вивиани», рис. 19.19).
Применим формулу (19.20). Поскольку плоскостью Охг цилиндр разделяется
на две равные части, то можно вычислить половину искомой площади поверю ю-
Рис. 19.19
Так как
сти. Вычислим площадь той част и поверх-
ности, уравнение которой у = jRx-x2.
Для определения области интегрирования Р
следует спроецировать на плоскость Охг
линию пересечения поверхностей, уравне-
ние которой находится исключением у из
данных уравнений. Вычитая одно уравнение
из другого, получаем z2 = Я2 - Rx. Это
уравнение параболы, лежащей в плоскости
Oxz, с вершиной на оси Ох на расстоянии R
от начала координат и пересекающей ось Ог
в точках г » R, z = - R. Дуга указанной
параболы вместе с соответствующим отрез-
ком оси Ог составляют границу области
то
(Я-2х)2
4(Rx-x2)
R
*2R1,S^4R2.
337
Пример 19.18. Вычислить площадь поверхности конуса
л2 + у2 - z2 = 0, заключенной внутри цилиндра х2 +у2 - 2ах = 0.
Цилиндр отсекает на поверхности конуса две части, симметричные относительно
плоскости Оху На рис 19.20 изображена только верхняя часть (z й 0). Вычислим пло-
щадь Sзгой части, проекция которой на плоскость Оху есть круг х2 +у2 < 2ах.
Так как для рассматриваемой части кону са z = Jx2 + у2 “ = . .
Vх' + У1
Л у I (йг V (г~
— = । ।, .|1+| — I +1 — 1 =72,топо формуле (19.19) получаем
❖ Vx’+y2 1 '°*' кФ1/
Si = JJ dxdy, где Р - окружность х2 +у2 - 2ах = 0.
р
Переходя к полярным координатам, находим
к/з
= ^2 J402 cos2 = 2о2 ^2 J(l +cos 29)4/9 =
о о
Следовательно, вся искомая площадь S = 2S, = 2лл2 V2.
Пример 19.19. Найти площадь поверхности, вырезанной цилиндром
х2 + у2 = г2 из сферы х2 + у2 +z2 = К2 (г < Я).
Цилиндр вырезает из сферы две части, верхняя из них изображена на рис. 19.21.
Вычислим площадь 5, поверхности этой сферы. Для верхней полусферы
Эг -у
ду~ J^-x2-у2 ’
Следовательно, 5. = [[ . . .dxdy, Р - крут х2 + у2<г2.
JJ^-x2-/
Переходя к полярным координатам, находим
338
S, - jdp J-=L_ pjp . Я J<*p |(Я2 -p2)-V*(1 d (R1 -P2>1 =
о о “P oo '
»-*J(/?2-p2)V2
0
dp = -2лЯ «Я2 -г2) - Я) = 2хЯ (R-Jr2 -г2).
Игах, 5 = 25, - 4яЯ (R-’Jr2-^).
• Рис 19.20 Рис. 19.21
Пример 19.20. Вычислить площадь частей сферы л2+у2+т2 = Я2,
вырезанных из нее цилиндром х2 + у2 = Ri, воспользовавшись параметрическими
уравнениями сферической поверхности: л = Я sinucosv, у» Я sin к sin v,
z^Rcmu (05u5x, 05v52x).
Здесь идет речь о вычислении площади верхнего и нижнею оснований стела
Вивиаки» (см. рис. 19.19). Воспользуемся формулой (19.24), для чего предвари-
тельно найдем коэффициенты £ F. G. Так как л’ » Я cos и cos v, у'= R соей sin v.
г£=-Явти, л’= — Я sinu sin v, у'=Я5тисо5У, г' = 0, то по формулам (19.25)
находим £ = Я2, F-0, G« Я2 sin3 и. Следовательно, 'JeG-F2 = Я2 sin к.
Ограничимся рассмотрением четверти изучаемой поверхности, лежащей в пер-
вом октанте. Для точек «кривой Вивиани», т.е. кривой пересечения сферы и ци-
линдра (в пределах первою октанта), u + v = л/2. Действительно подс1авляя вы-
ражения у и л через к и v в уравнение цилиндра л2 +у2 - Rx, получаем
sin u - cos v, и поскольку для рассматриваемых точек, очевидно.
05 u5n/2, 0£viit/2, то отсюда следует, что и + и = к/2.
339
Установив на основании сказанного пределы изменения и и v, по формуле
(19.24) получим
к/1 ч/2-r я/г чй-»
S = 4RI, 2 J dv J sin и du = 4Л2 J (-oosu) dv =
oo оф
- 4Я2 |(l - sin v) Л = 4№(я/2 -1).
0
19.7. Приложения двойных интегралов в
механике
Масса и статические моменты пластинки. Если 5 - область плоскости Оху,
занятая пластинкой, а р(х,у) - поверхностная плотность в точке Р(х,у), то
масса пластинки т выражается формулой
m= JJ p(x,y)dxdy, (19.26)
s
а статические моменты М, и Му относительно осей Ох и Оу определяются
двойными интетралами
мя xjjyp(*.y)<bd>. M,*jjjip(x,y)dxdy (19.27)
X х
Если пластинка однородна, то р (х, у) = const; згу постояннато часто полагают
равной I.
Координаты центра тяжести пластинки. Если С(х0.у0) - центр тяжести
пластинки, то
*о - Mf/m. у0 = М,/т, (19.28)
где т - масса пластинки. A/,, М, - ее статические моменты относительно
осей координат, определяемые соответственно формулами (19.26) и (19.27).
В случае однородной пластинки формулы (19.28) с учетом формул (19 26),
(19.27) принимают вид
х0 = || xdxdy /1| dxdy, >0 = || ydxdy /1| dxdy. (19 29)
3 I 3 з / s
(В формулах (19 29) знаменатель дроби - площадь пластинки, центр тяжести
которой отыскивается).
Момент инерции пластинки. Момстгты инерции пластинки относительно
осей Ох и Оу соответственно определяются формулами:
I, = 4 = jjx2p(x,y)dxdy, (1930)
s s
340
момент инерции пластинки относительно начала координат
Л» = JJ (х’ + / ) Р (*. У) =/, + /,- (1931)
я
Полагая р(х,у) = 1 в формулах (19.30) и (19.31), получаем геометрические
моменты инерции плоской фигуры.
Координаты центра тяжести тела. Если C(x0,y0,z0) - центр тяжести од-
нородного вертикального цилиндрического тела. имеющего своим основанием
область 5 иа плоскости Оху и ограниченного поверхностью z = /(л, у\ то
х0 “ М^/т, у0 = Ma/m, г0 М^/т,
(19.32)
где т - масса тела, а , Ма. Мt> - статические моменты тела относительно
плоскостей Oyz, Oxz, Оху, определяемые формулами
Л/м -jjxzdxdy, Ма ^jjyzdxdy, Mv Jjz’dxdy. (19.33)
я я я
Моменты ннерцнн цилиндрического теля. Моменты инерции цилиндриче-
ского тела, ограниченного поверхностью z = /(х, у), сс проекцией 5 на плоскость
Оху и проецирующим цилиндром с образующими, параллельными оси О:, относи-
тельно этой оси и относкгелыю плоскостей Ozx. Оуг выражают ся формулами
/, « JJ(х* +/) zdxdy, (19.34)
/„ - JJ y2zdxdy, /„ - jfx2zdxd> (19.35)
я я
При вычислении двойных интегралов в формулах (19.26) - (19 35) во многих
случаях целесообразно перейти к полярным координатам.
Пример 19.2). Найти массу круглой пластинки радиуса R, если поверх-
ностная плотность р(х,у) материала пластинки в каждой точке Р(х,у) пропор-
циональна расстоянию точки Р от центра круга.
Начало прямоугольной декаргоной системы координат поместим в центре кру-
га, тогда координаты любой его точки удовлетворяют соотношению jr’-r/slr.
Расстояние от точки Р(х.у) до начала координат определяется формулой
d-^х2 + у2 .поэтому в соответствии с условием будем иметь
Р (я. у) = * Vх1 + У* •гле * ~ коэффициент пропорциональности.
По формуле (19.26) имеем т« JJ кJx2 +y2dxdy, где 5 - круг х1 ♦ у2*R1
S
Переходя к гюлярным координатам, находим
2* Я 2> ,
т= |<*р J*ppdp = *
0 0 о
‘*р =—ф
о
= -*хЯ’.
о 3
341
Пример 19.22. Найти статические моменты М, и фигуры, лежа-
щей в первой четверти, ограниченной эллипсом x2/e2 +у2/ь1 “1 и координат-
ными осями, если в каждой точке фигуры плотность пропорциональна произведе-
нию координат этой точки.
По условию имеем р (х, у) = кху, где * - коэффициент пропорциональности,
поэтому формулы (19.27) для данного случая примут вцд
s
(x Sr 0. у > 0) и
где S - область, ограниченная дугой эллипса
координатными осями.
Найдем сначала статический момент данной фигуры относительно оси Ох:
«.-JJ
S
о
Гак как
о
кх b
3 а
о
J 3 а За J
о о
to1 (О2-Х2)у>
бе’ У2
Аналогично находим статический момент фигуры относительно оси Оу
My = Jjkx2yrfxaFy = J<fc |*yr2cfy = ‘Jfct2
s ooo
kb1 xi “ th2 x* kb'a*
2 3 „ 2o2 5 ' 15 *
0 0
342
Пример 19.23. Найти центр тяжести фигуры, указанной в примере 19.22.
Координаты центра тяжести плоской фигуры определяются формулами
(19.28). Статические моменты Мг, найдены в примере 19.22, осталось вычис-
лить массу данной фигуры.
По формуле (19.26) находим
m-
о о
o
о
i
о
* kb2 х*
0~2а2 4
Так как М, - kb'a2l\S, М, - Jti’a’/lS,
х0 8а/15, Уо - М./т = 86/15.
Пример 19.24. Найти центр тяжести однородной фигуры, ограниченной
о
kb2 X2
dx
в
' kb2a2
= '
о 8
то по формулам (19.28) имеем
параболой у2 = 4ох + 4л2 и прямой у - 2а - X.
Воспользуемся формулами (19.29), для чего
вычислим предварительно входящие в них двой-
ные интегралы
Найдем сначала и1гтетрал, стоящий в знамена-
теле; он выражает площадь данной фигуры Решая
совместно уравнения у2 = 4ах + 4а2, у 2а - х,
находим точки Л (0,2а), В (8а,-6а) пересечения
параболы и прямой (рис 19.22).
В области АВС при фиксированном у х меняет-
ся от (у2 - 4а2)/4о (абсцисса точки М) до 2а -у
(абсцисса точки N; выражения для абсцисс точек
М и N получены из уравнений линий решением относительно х), а у меняется от
-6а (ордината точки В) до 2а (ордината точки Л). Следовательно.
343
2а 2о-л 2в , , х
jjydxdy- J |>фЛт = ^в1.
S -Ы (/-4o’^«a -во' 1
По формулам (19.29) находим координаты центра тяжести:
(256/5) о’ 12а -(12Я/3)в’ „
*° (64/3)в2 5 *Л (б4/3)а2
19.8. Несобственные двойные интегралы
Интегралы, распространенные на неограниченную область. Рассмотрим
функцию /(х, у), определенную в неограниченной области S Предположим, что
функция /(х,у) интегрируема в любой конечной части S' области S, т.е. суще-
ствует двойной интеграл
/-Д/(*.У)ЛФ-. (19.36)
г
Кривую у. отсекающую область 5', всеми се точками станем удалять в бссконгчность так,
чтобы наименьшее расстояние Л от се точек до начала координат неограниченно возрас-
тало, а отсекаемая ею перемс иная область 5' постепенно охватывала нее точки области S.
Несобственным интегралом от функции /(х,у) в неограниченной области S
называется предел (конечный или бесконечный) интеграла (19.36) при
JJ/(*. >) = дЬт JJ/(х.у) dxdy. (19.37)
я г
В случае существования конечного предела интеграл (19.37) называется схо-
дящимся. а в противном случае - расходящимся.
Функция, для которой интеграл (19 37) сходится, называется интегрируемой (в
несобственном смысле) в области S.
Приведение двойного интеграла к повторному. Путь функция /(х,>)
задана в неограниченной области любого вида Полагая сс равной нулю
вне тгой области, всегда можно свести дело к случаю неограниченной
прямоугольной области - одному из прямоугольников: Pt = [в, Ьг, с, ~],
Р2 — [°> “J с> d], Р = [fl,Ь, “=].
344
Если в каждом конечном прямоугольнике [a,b;c, d] (при любых b> a, d>c)
существует в собственном смысле двойной интеграл от данной неотрицательной
функции f(x,y) и простой интеграл по у, то
JJ /(*. y)dtdy = jdxj Дх.у) dy.(P = (<». -X. Ч). (19.38)
Р а е
где
- * л
jdx J/(x,y)4- = Jim j/(x,y)dy (19.39)
a r a c
в предположении, что повторный интеграл сходится.
Если функция f(x,y) меняет знак в бесконечной области S, то формула
(19.28) верна при дополнительном условии сходимости повторного интеграла от
абсолютной величины данной функции:
р*/|/(*.>)|ф- (19.40)
• * а Ь
Двойные интегралы от неограниченных функций. Пусть функция f(x,y)
задана в ограниченной области 5, но оказывается неограниченной в окрестности
некоторой точки Мс(х0,у0), а в любой части области 5, нс содержащей згой точ-
ки, она является интегрируемой в собственном смысле.
Выделим особую точку Мо, окружив сс кривой у0. Если удалить из области S
окрестность, ограниченную кривой у0, то получим область S’, для которой су-
ществует двойной интеграл
Isfj/(*.y)dxdy. (19.41)
Станем «стягивать» кривую у0 в точку Мо т ак, чгобы диаметр d области, ог-
раниченной у0, стремился к нулю.
Несобственным интсгрдюм от неограниченной функции f(x,y) по области 5
называется предел интеграла (19.41) при d —» 0:
/(х, у) dxdy. (19.42)
Если указанный предел существует и конечен, то интеграл (19 42) называется
сходящимся, в противном случае - расходящимся.
Лналозично определяется несобственный интеграл в случае, когда имеется не-
сколько отдельных особых точек или у казанные точки заполняют особую линию.
Замена переменных в несобственных двойных интегралах. В плоскости Оху
и Ouv рассмотрим ограниченные области S и о, связанные формулами преобразо-
вания: х = ф|(«,v),у— уДи.и) или обратными им: н = <р(х, у), и = ф(х,у) с
Д/(х,у)Лфе fan
S
345
соблюдением условий о которых шла речь в а 19.3 (см. формулы (19.8) и (19.9)).
Пусть в области 5 задана функция /(х, у), непрерывная всюду, за исключением ко-
нечного числа отдельных точек или даже кривых, где она обращается в бесконечность
В этом случае выполняется равенство
JJ/(*. У) <^dy = JJ/(ф) (и. v), ф, (и, н)) | J (и, v) | dudv. (19 43)
s 0
если сходится один из этих интегралов (сходимость другого следует отсюда)
Формула (19.43) верна и для случая неограниченных областей Замена пере-
менных наряду с переходом к повторному интетралу - удобное средство для ус-
тановления сходимости несобственных двойных интегралов.
Пример 19.25. Исследовать, сходится ли двойной интеграл
s Х
где область $ определена неравенствами х £ I, ху £ 1.
Данный двойной интеграл является несобственным, так как область интег-
рирования — бесконечная часть первого квадранта, ограниченная слева пря-
мой х=1 и снизу гиперболой ху=1 (рис. 19.23, а). Рассмотрим конечную
часть облает 5> - область S', ограниченную линиями х * 1, х = 6, у = 1/х,
y-d (рис. 19.23, б, область MDAB) В области S' двойной интеграл сущест-
вует в собственном смысле (при любых b > 1, d > 1):
( 2 * (. П 2( I Л
= | I + г “ I I 1 +“71 —I
У л/|| л2 I \ b) d \Ь* )
Поскольку подынтегральная функция положительна во всей области 5, то в со-
ответствии с формулами (19.38) и (19.39) имеем
Следовательно, данный несобственный двойной интеграл сходится и
равен единице.
346
Рис 19.23
Пример 19.26. Исследовать, сходится ли I , । , где S-
круг х1 +у2 S R2.
Данный двойной интеграл является несобственным, так как подынтегральная
функция не ограничена в данной области (на границе области, т.е. на окружности
х2 +у2 = R1, она обращается в бесконечность) Для решения вопроса о сходимо-
сти интеграла перейдем к полярным координатам по формулам
х-рсояф,y = psin«p. Имеем \/^R2 -х2-у2 *\f^R2-р2, J(p,<p) = p. пределы
интегрирования: а»0, Р = 2к, р((ф)-О, р,(ф) = R.
Формула (19.43) в данном случае принимает вид
Так как
। Н*-р*)*
2 J 1/2
о
2яЯ,
то
= 2кЛ,
т.е. двойной несобственный интеграл сходится и равен 2кЛ.
Пример 19.27. Установить условия сходимости интеграла
(а > О. Р > 0), где область S определена неравенствами у i I, ху £ L
X '
Областью интегрирования является бесконечная часть первого квадранта, ог-
раниченная прямой у = 1 и гиперболой ху = 1.
347
Рассмотрим конечную часть S’ данной области, ограниченную линиями
x=\]y,x = b,y=\.y = d(b> I. d> 1); двойной интеграл по области S' сущест-
вует. Действительно.
Ьа"
1-а
а-1
dy=b
1-а -р+1 (
-frKl
(а-1)(а-р) ( (1-а)(1-р)' (а-1)(а-₽)’
Предел этого интеграла при b -+ “>, d -» ~ существует, когда -а + 1<0,
-р+а<0, т.е. а>1, Р>а. При выполнении этих условий (ф> а >1)
Jj>VW=V(P -а)(а-1).
Пример 19.28. Доказать, что
Рассмотрим квадрат этого интеграла, для чего воспользуемся формулами
(I7.3X (19.7) и перейдем к полярным координатам при вычислении полученного
двойного интеграла:
je~rdx jе~‘ dx je~’>dx = je~r dx je~^d} =
,0 j о о о 0
348
Глава 20
ТРОЙНОЙ ИНТЕГРАЛ
20.1. Понятие тройного интеграла.
Оценка тройного интеграла
Рассмотрим замкнутую пространственную область (У) и функцию /(x,y,z),
определенную в этой области. Область (Р) разобьем произвольным способом на п
элементарных областей (ДР,), (ДР’2),....(ЛГ'1,) с диаметрами </,.</2.d„ и объ-
емами ДИ|, Д12,..., ДР„. Наибольший из диаметров обозначим буквой d. В каж-
дой элемстггарной области (ДI,) выберем произвольно одну точку
(х*. Д’* • *») и образуем произведение f (xt, yt, z4) ДI i.
Интегральной суммой для функции f(x,y,z) по области V называется
п
суммавща /(х,,у,.х,) ДР,.
*-|
Тройным интегралом от функции f(x,y,z) по области V называется конечный
предел ее интегральной суммы при d -» О
JTJ/(*. У.«) dV = Um У f(xt, yt. zt) ДPi.
Если функция f(x,y,z) непрерывна в ограниченной области V, то указанный
предел существует и конечен (он нс зависит от способа разбиения области V на
элементарные и от выбора точек А/, ).
В прямоугольных декартовых координатах тройной интеграл обычно запи-
сывают в виде JJJ f (х, у, г) dxdydz.
v
Основные свойства тройных интегралов аналог ичны свойствам двойных инте-
гралов.
Если в области V т S f(x, у, z) 5 М, то
mJ sjjjf(x,y,z)dn АЛ(20.1)
где V - объем области V. Эти неравенства выражали оценку тройного ишеграла
349
Пример 20.1. Оценить тройной интеграл
I
где область V определена неравенствами х2 + у1 + z2 i 9, х2 +у2 +г2 516.
В данном случае область V ограничена двумя сферами: х2 +у2 +г2 =9,
х2 +у2 +z2 = 16. ее объем равен разности объемов двух шаров радиусов Л, = 3 и
Я, - 4 с центрами в начале координат
у = - У, = | | я (4 ’ - 3 ’)=«•
Подынтегральная функция принимает наибольшее значение на сфере
x2+y2+z2 =16, причем М« I/V25-I6 = УЗ, а наименьшее - на сфере
x2+y2+a2=9, m=l/V25-9 = V4.
Следовательно, в соответствии с соотношениями (20.1) имеем
1148 I 148 37 „.148
Kili- — Я, или — КШ— Я.
4 3 3 3 3 у
20.2. Вычисление тройного интеграла
в декартовых прямоугольных координатах
Если область и1ггегрирования 1’ определяется неравенствами xt£x£xt,
y,(x)Sy Sy2(x), zt(x,y)iz iz2(x,y), где у,(х), у2(х), гДх.у), г2(х,у) -
непрерывные функции своих аргументов, то тройной интеграл вычисляется
по формуле
•1 л(»> »»(»./>
jjjf(x,y,z)dt(fydz- |<Л J dy j/(x,y,z)dz, (20.2)
»' »i н(») «!<«>)
область V ограничена сверху поверхностью z = z2(x,y), снизу - поверхностью
z = Z|(x,y), а с боков - цилиндрической поверхностью с образующими, парал-
лельными оси Oz (рис. 20.1), вырезающей на плоскости Оху область Sv, опреде-
ленную неравенствами XjixSxj, yI(x)SySy2(x).
Отмстим, что порядок интегрирования можег быть изменен, тройной иггтеграл
можно вычислить шестью различными способами (в формуле (20 2) первое интег-
рирование совершается по z, второе — по у, третье - по х, оставив первое интег-
рирование по z, можно поменять местами второе и третье, далее, можно совер-
шить первым интегрирование по х. а так же по у).
В частном случае, если функции У|(х), у2(х), z,(x, у) и z2(x, у) являются по-
стоянными У1,У2, Г|, х2. область интегрирования представляет собой прямо-
350
угольный параллелепипед. и формула (20.2) принимает вид
JJJ f(x, у, х) dxdydz = /(х, у, z) dz.
v *1 Л «I
Пример 20.2. Вычислить тройной интеграл
(20.3)
о о
Эго интеграл вида (20.3) Пределы интегрирования в каждом из интегралов постоян-
ные. Область интегрирования - прямой прямоугольный парапслепипсл с измерениями
a-l, fr=3, с=2, одна ю вершин которого находится в начале координат Вычисляем слича-
ла внутренний интеграл, заключенный в квадратные скобки, считая х и> постоянными:
1 Z .
о
2
2х + 2у + 2 •= 2(x + y + I).
Второй ишетрал, находящийся в фи-
гурных скобках, принимает вид
1
J(x+y+z)<fc </> =
I
= J2(x + y + l)rfy = 2 J(x + у + l)dy,
о о
нахолим тип интеграл, счшам х послан-
ным
2 J(x + y + l)dy =
= 2(3x + 9/2 + 3)"6x + 15.
Вычислим, наконец, внешний ишетрал:
I
л.|(ь*и>Л.<зР+1Ь)|>т
о
Замечание. Интегрирование можно производить и в другом порядке. В
частности,
351
Рис. 20.2
Прежде всею расыавим пределы интегрирования в данном тройном интеграле
Плоскость2х+у+х-4 = 0 пересекает плоскость Оху по прямой
2x+y+z-4 = 0. z = 0, или 2х+у-4 =0, z = 0. В плоскости Оху эта прямая, про-
ходящая через точки А и В (рис. 20.2, б), определяется уравнением 2х+у-4 =0.
Треугольник ОАВ и его внутренние точки являются областью Sv изменения пе-
ременных х и у (в эту область проектируется данная пирамида на плоскость Оху).
Очевидно, х изменяется в промежутке (0, 2], т.е. 05 х £ 2, при фиксированном х
из этою промежутка (абсцисса точки М) у будет изменяться от 0 (ордината точки
Л/) до 4-2л (ордината точки N; получена из уравнения прямой 2х + у-4 = 0).
При фиксированных х и у из области z будет изменяться от 0 до 4-у-2х
(получено из уравнения плоскости 2x + y+z-4 =0).
Таким образом.
2 4-2г 4-У-1*
JJJ ydxdydz = Jdx J dy jydz
r ooo
Поскольку
4-X-lr
jydz = yz | ^'z'2>= у (4 - у - 2x) = 4y - / - 2xy.
0
352
= (4 - 2xrf2 - ж] = 1 (4 - 2я)’,
\ * / V
TO
2 4-2» 4-у-2ж 2 2
/<* J dy Jydr = j|(4-2x)J<*=-^J(4-2x),</(4-2x) =
0 0 0 0 0
1 (4-2x)4 2 1 4* 16
12 4 “ 12 4 “ 3
0
Замечание. Тот же результат можно получить, меняя порядок интег-
рирования. В частности, проецируя пирамиду на плоскость Oyz, сводим данный
тройной интеграл к следующему:
« 4-* (4-Т-«>Д
jjjydttfytb = J<fr j tty = |ydr=-y.
У ООО
20.3. Замена переменных в тройном интеграле
Если ограниченная замкнутая область I пространства Оху: взаимно однознач-
но отображается на область Г, пространства Otuv* с помощью непрерывно
дифференцируемых функций
я = х (и, V, в), У У (•>. V, * = г (и, V, и ) (20.4)
и якобиан
&» <Ъг Эх
дв dv Эм>
J- Эу Эу du dv д» (20.5)
дг di dz
du dv du
в области Г| не обращается в нуль, т.е. J * 0, то замена переменных в тройном
интеграле осуществляется по формуле
dxdytk -
“ К У (“. v, w), я (•». V, *)) IJI dudvdv . (20.6)
h
В частности, при переходе от декартовых координат х, у, z к цилиндрическим
координатам р, ф, г (см. п. 1.14), связанным с я, у, г формулами
x = pcos<p,y = psinq>. х = т (OSp<+«~, 0Sф<2л, -~<г<+=»), (20.7)
12 3м. I
353
якобиан преобразования J = р, поэтому
|JJ /(х, у,х) dxdydz = JJJ /(р со®ф, р sin 9, х) pdpdydz. (20.8)
г Ъ
При переходе от декартовых координат х, у, z к сферическим р, ф, 6, связан-
ным с х, у, г соотношениями
х = р sin© созф, у = р sin© sin<p, z ж р cos© (20.9)
(0Sp<+®», 0Sp<2x, OS©5 x),
якобиан преобразования J “ p’ sin© и формула (20.6) принимает вид
, у, г) dxtfydz ~
у
= JJJ /(р53п©сс«ф, psinSsinp, peas©) р’sin ©dpdpd© (20.10)
Ч
Пример 20.4. Вычислить тройной интеграл JJJ (х’ +уг +х’ ) dxdydz,
v
где область V есть шар хг У у2 ♦ z’ S R2.
Перейдем к сферическим координатам по формулам (20.9). В области t\, яв-
ляющейся образом области V, при преобразовании (20.9) переменные р, ф и © ме-
няются в следующих пределах; ротОлоЛ, фот0до2х,©от0лох.
Так как подынтегральная функция х’+у'’+х’=р25зп^©сов’ф +
ч-р’sin’© sin’ф + р’cos’© = р’sin’© + р’cos’© = р’, а якобиан преобразования
(20.9) равен р’ sin©, то по формуле (20.10) получим
К я 2«
JJJ(ж2 +у* +х2) dxdydz = j dp j d6 Jp2p2 sinOdtp «
у coo
Я ж Зж .
= J p4dp j stn©dB J dp = —.
00 0
Пример 20.5. Вычислить тройной интеграл JJJ zdxdydz, где V -
к
область, ограниченная верхней частью конуса (х’ +>’)/R1 жz’/Л’ и плос-
костью z = Л (Л > 0).
Введем цилиндрические координаты по формулам (20.7). Уравнение
конуса принимает вид рг/Я2 = х’/Л1, или z = ±(.h/R) р.
354
Новые переменные в области И, изменяются в следующих пределах: р от 0 до
Я. ф от О до 2к, z от р до Л.
Но формуле (20 8) получаем
л
к
о о л^/л
К 1ж ,
©L Ар/Я
рт
с/ф dp
»-*»/л
о
л '
о
О
о
p<fy dp
Л 9
idi2 р
0~ * 4
1л2/г
S
о 4
= /(Я1 - Р1) pdp = «*’ у
• о
Пример 20.6. Вычислить JJJJ\-x2/a2 -y2/b2 -х2/с2 dxdydz, где
в
область V ограничена эллипсоидом х2/а’ + у2 /Ь2 +z2/c2 = 1.
Введем так натыкаемые обобщенные сферические координаты по формулам
х - ар sinO cos«p, у bp sin© s»n<p, z = ср cosO. (20.11)
Якобиан преобразования (20.11), определяемый формулой
Ж₽
>Р
a sinO со$ф
b sinO вшф
CCOS0
ар cos© совф - ар sinO sin«p
bp cosO япф bp sinO сояф
-ср sinO 0
равен abep2 sinO. Подынтегральная функция по формулам (20 11) преобразуется к
виду у/1-л’/а1 -у2/Ь2 —z2/с2 = 71 ~ра. уравнение эллипсоида запишется так:
р2=1, или р=1.
В области I , переменные р, 0, <р изменяются в следующих пределах: р от 0 до
1,0 от 0 до к, ф от 0 до 2я.
По формуле (20.6) получаем
________________ 2я я I
JJ Jl-x2/a2-у2/Ь2-z2/c2 dxdydz - JЛ? J-J\-p2abcp2 sinO^ =
» ’ ooo
i« i ____
= abc Jdip JsinOdB J^\-p2p2dp.
oo о
355
С помощью подстановки р = sin/ находим первый интеграл:
cos 4/) А =77
16
Далее. Jsin©</9 = 2. полому
о
jJJ Jl-J/a1 -уг1ьг -t'/c1 dxdydz = abc 2 J /Лр
v о
Пример 20.7. Вычислить тройной интеграл Дрх’+у+т’рЛфЛ,
Г
где область V ограничена цилиндром х* +«2 * = I и плоскостями у 0, у = I.
Перейдем к цилиндрическим координа! ам по формулам х = р cos<p.
z = р япф, у-у, тогда уравнение цилиндра х2 +х2 = I примет вид р2 = I, р = I,
а 1юдынте|ральная функция запишется так:
(х2 +у+к2)’ = (р2 +у)2 =р‘ +Зр4>’ + ЗрУ +/.
При таком переходе к цилиндрическим координатам замена переменных в
тройном интеграле будет осуществляться по формуле
ШУ* = JJJtos<p’ у’р sin’₽) рф/*₽А
Следовательно,
JJJ (х1 +У+»1 ? dxdydz = JJJ (р2 yy)'pdpdtfdy =
г г
1я I I
= J dy J ф J (р’ + Зр V+Зр У + ру’) dp »
ООО
о о
j«.
г/Ч
JU
о
1,1.1
— у + — у + —
4Z 4Z 8
I 1 I
tfo= I—+ —+—+—
Jl8 4 4 8
о ®
0
356
Пример 20.8. Исследовать, сходится ли несобственный тройной инте-
грал JJJ , где _ щар хг +^i +tj s
Данный интеграл является несобственным, гам как подынтегральная функция
нс ограничена в рассматриваемой области (она обращается в бесконечность на
границе области, г.е. на сфере х»+/+,’ = *).
Выражаем этот интеграл в сферических координатах. Так как в данном случае
05р5Я, 0S0SK, 05ф^2к, то по формуле (20.10) получаем
Следовательно, данный несобственный интеграл сходится и равен к’/?2.
20.4. Приложения тройных интегралов
Объем V области V выражается формулой
Г = JJJdxdnfr
v
В сферических координатах этот интеграл имеет вид
И = JJJр2 sinOdpdOc/ф,
h
а в цилиндрических координатах
Г-jJJpdMM:.
h
(20 12)
(20.13)
(20.14)
357
Если тело занимает объем V и p^p(x,y,z) - плотность его в-точке
М (х, у, z\ то масса тела равна
т = р(х, у, z) dxdydz. (20.15)
к
Координаты центра тяжести тела вычисляются по формулам
*0=— ffГр(ж»>»х)Уо —
"у (2016)
*о = ^х'у’ zdu№<
У
где т масса тела
Моменты инерции тела относительно координатных плоскостей определяются
интегралами
lv = JJJ pz2dxdydz, l„ = J|jpy2 dxdydz. I„ “ JJJpx1 dxdydz.
г У г
Монет инерции тела относительно оси Ои определяется интегралом
/, JJJ pr2 dxdydz.
V
где г - расстояние точки N (х.у.х) тела от оси Ои В частности, моменты инерции
тела относительно координатных осей Ox, Оу, Oz определяются формулами
/, [JJ Р (/ +*’ ) dxdydz, /, = JJJр (д’ + z1) dxdydz,
у у (20.17)
/, “ JJJР (*’ +/ ) dxdydz
»
Момент инерции тела относительно начала координат определяется формулой
/0 = JJJ Р (** + *’ ) d^^bdz
Очевидно, верны следующие соотношения: /, = =
Ц ™ * Лх’ ~ v+ + ^n•
Ньютоновым потенциалом тела в точке Р (^, Я О называется интеграл
роле)
У ______________________
гдеУ - объем тела, р-р(х,ул) - плотность тела, r*^(x-\)2 +(у-Л)г +(г-02•
Материальная точка массы т притя1ивается телом с силой, проекции которой
F,, F?, Ft на оси координат Ох, Оу, Oz равны:
F’=яж кт Жр dxdy<b’
358
= (20 19)
1 V Г
F‘=*"* =*” Шр dxt^dz-
V
Пример 20.9. Найти объем тела, ограниченного поверхностями
х2 +уг +х2 = а2, хг +y2+t* = h2 (0<а<6), х2 +у2 =х2 (xiO).
Данное тело о(раничс»ю сферами радиксов а и b с центрами в начале коорди-
нат и конусом с вершиной в начале координат и осью, совпадающей с осью Oz.
Оно расположено над плоскостью Оху Сечение зтого тела плоскостью Oyz нэо-
Сражено на рис. 20.3.
Для вычисления объема тела перейдем к сферическим координатам по форму-
лам (20.9). Уравнение сферы х2+у2+х2=в2 примет вид р = о. так как
х2 + у2 + х2 = р2 sin2 0 cos2 ф + р2 sin2 0 sin2 ф + р2 cos20 = p2sin20(cos2p +
+ sin^) + p2cos26 = p2(sin20 + cos20) = p2. Аналогично преобразуется уравнение
второй сферы р = b Уравнение конуса х2 + у2 = г2 примет вид 0 = д/4, потому что
х2 +/ =р2 sin2 0, х2 = р2 cos2 0, р2 sin2 0 = р2 cos2 0, откуда tg20 = I.
По формуле (20.13) находим
» •/* г» э j
И = jjjР' sinOdpApdO = Jp2dp J sm0J9 j <*p « - (2- -fi) я.
И a О О
Пример 20.10. Вычистить объем тела, ограниченною поверхностями
х2+,у2+х2 - 4, х2+у2=3х.
Рис. 20.3 Рис 20.4
Данное тело ограничено сферой х2 +>2+х2=4 и параболоидом вращения
х2 +у2 = Зх; сечение тела плоскостью Oyz изображено на рис. 20.4. Для вычисле-
ния объема тела перейдем к цилиндрическим координатам по формулам (20.7) В
цилиндрических координатах получаем р2 +х2 =4 (уравнение сферы), р2 =3х
359
(уравнение параболоида). Отмерим, что при постоянных значениях р и ф внутри
тела z изменяется от р2/з (для точки N пересечения с поверхностью параболоида)
до г = ^4-р2 (для точки М пересечения с верхней частью поверхности сферы).
При постоянном <р р изменяется от 0 (для точек, лежащих на оси Oz ) до наиболь-
шего значения в точках линии пересечения данных поверхностей, так ха* с воз-
растанием Z р для поверхности параболоида возрастает, а для шара убывает (что
видно из уравнений поверхностей). Для линии пересечения поверхностей
х2+у2+х2=4 и х2 +у2 = 3z имеем т2+Зт-4 = 0, откуда zt = 1,za=-4
(второй корень лает мнимые значения для р). Следовательно, для точек пинии
пересечения г = 1, р = 73; внутри тела р изменяется от 0 до Уз. Заметив еще, что
Ф изменяется от 0 до 2я, по формуле (20.14) получим
у-
19
Лр = —к.
О
Пример 20.11. Вычислить объем тела, ограниченного эллипсоидом
х2/о2+у2/б2+х2/с2-1.
При наличии выражения х2/о2 +у2/б2 + rJ/c2 в уравнении поверхности по-
лезен переход к обобщенным сферическим координатам по формулам (20 II).
Якобиан а этом случае равен abep2 sin 6
Уравнение данной поверхности в новых координатах примет вид р=1 (ибо
х2/о2 +уг/Ь2 + гг/с2 = p2sin20coe2p+p2stn26sin2p+p2cos2e = p2), поэтому
для данного тела р изменяется от 0 до 1. Заметив, что 0S 65 к, 0£ф£2к, по
формуле (20.6) получим
1* Я I
Р = JJJdxdydz = j dry j <Л jabep2 sinftdp =
» 000
2* 2«
= abc J dip sinOdB = — J(-coeO) |*dp =-^ mibc
00 0
Итак, 1' = (4/3) nabc; в частном случае, при а - b = с » Я, получаем объем ша-
ра х2 +у2 +х2 = R2, V = (4/3)
Замечание. Поскольку эллипсоид симметричен относительно коорди-
натных плоскостей, то можно найти объем 1/8 части данного тела. При вычисле-
нии интеграла нужно иметь в виду, что в этом случае OSpSl,
360
0£в5л/2, 05ф^к/2, т.е. верхние пределы интегрирования по в и ф отличны
от предыдущих.
Пример 20.12. Найти массу шара х2 у у2 +х2 5 2Лт, если плотность в
каждой точке обратно пропорциональна расстоянию се до начала координат.
Пусть N (х.у, г) — произвольная точка данного шара, тогда ее расстояние d до
начала координат выражается формулой d - Jx2 +у2 + z2, поэтому плотностьр в
соответствии с условием задачи определяется формулой
р (х, у, г) = */7х2 +у2 + z1, где к - котффициснт пропорциональности. По
формуле (20.15) имеем
т = f [ Г . 1 dxdydz.
JJJ Jx1 ууг+г2
где область V ограничена сферой х2+у2+а2 = 2Яг. Для вычисления данного
интеграла перейдем к сферическим координатам по формулам (20.9). Подынте-
гральная функция k/Jx1 у у1 + х2 = к/p, а уравнение сферы х2 у у2 У г2 • 2Rz
примет вил р = 2R cosO.
По формуле (20.10) находим
" ‘ ф 777/77' * ЯНр’ drM*> ’
1* я/1 ТЛсшО 1* <2
= *J<ApJ</9 J р sinO ф = A J сЛр cos’Osin 0J8 =
Пример 20.13. Найти центр тяжести шара х2 Уу2 + х2 S2fc,
если плотность в каждой точке его обратно пропорциональна расстоянию
до начала координат.
Воспользуемся формулами (20.16). Масса m была определена в предыдущей
задаче (см. пример 20.12). Из соображений симметрии следует,
что х0 = 0, >0 = 0. Найдем z0:
I fff kzdxdydz
teW«"JVx2+>2+/
361
Вычислим этот и>л еграл, перейдя к сферическим координатам:
2w к/2 1Ка»Ь
JJI ь“Х,. - J*/* J
к V-* тУ т ооо
1« «Л гясио 1> чЧ j }
j <*₽ j sin0 cosGdB J p2dp = k J dip J — sin© cosO d0 =
oo о oo
, 1я ч/г , 2x . <2
Ш* f f <nj, г» 8АЛ fcos’6 . 16 to,
=-----— dip cos ©d (cos©) =-------------— I - d<? = —Ш?
J or Ж J Or 1
0 0 0 °
Следовательно,
«.--ИГ,**** -—
” JJJ чтм’ и s
Замечание. Координаты x, = 0 и уе “ 0 можно получить с помощью
первых двух формул (20.16).
Пример 20.14 Вычислить момент инерции однородного куба относи-
тельно одного из его ребер.
Начало прямоугольной декартовой системы координат поместим в одной hi
вершин куба, а оси направим вдоль трех взаимно перпендикулярных ребер Обо-
значим через а ребро куба и найдем его момент инерции относительно оси Ог,
воспользовавшись третьей из формул (20.17). Так как куб является однородным,
то в указанных формулах можно положить р - I:
I, = JJJ(x2+y,)dxdpdr = J J J(x’ yy2)dxdydz -
v ooo
-jdx jdy j(x2 +y2)dt = a jdx j(x2 +у3)ф> =
ООО 00
362
Г/iaea 21
КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ
21.1. Криволинейные интегралы первого рода
Рассмотрим пространственную кусочно-гладкую кривую, ограниченную точ-
ками А и В (рис. 21.1), и определенную на ней непрерывную функцию
/(х,у,х) = /(А/Х где М (х, у, z) - точка кривой. Дугу АВ разобьем точками
Мр Мг.....на л элементарных дуг М,^М, (ii = 1.2,...,л; М, = А,
М„ = В), длины которых обозначим соответственно
наибольшую из этих длин - через X. На каждой из
элементарных дут М^М, выберем произвольно
одну точку МЦх!,у',,г^ и составим сумму
(21.1)
1-1
называемую интегральной суммой для функции
/(х, у, z) по длине дуги кривой АВ.
Криволинейным интегралом первого рода или
криволинейным интегралом по дуге кривой АВ от
функции /(х, у, z) называется предел югтеграль-
через Л/,, ДУ2....Д/„, а
ной суммы (21.1) при X —> О
[ /(*» y,z)<u= lim У /<х,', у/, о гц.
J д-»0
АЙ '•»
На кривой АВ, целиком лежащей на плоскости Оху, функция/от координаты z
не зависит, петому по определению имеем
J /(х, у) dl = lim У /(х/. К) Д/(
Если подынтегральную функцию /(х,у,х)>0 рассматривать как линейную
плотность кривой АВ, то криволинейный интеграл первого рола представляет со-
бой массу этой кривой.
Основные свойства криволинейного интеграла первого рола следующие.
1. Криволинейный интеграл первого рода не зависит от направления пути
интегрирования:
f/(*/)<«- j/W)dl
Ай ВЛ
363
2.
AB AB AB
3. jcf(M)d/~c j/(M)d/ (c = const).
AB AB
4. Если Путь интегрирования L разбит на части Л|э Lj,..., то
, J/(M)dZ = |/(M)d/ + J/(M)dZ+... + J/(A/)dZ
£ А 4.
Вычисление криволинейною интеграла первого рола сводится к вычислению
определенного интеграла
Если пространственная кривая L задана параметрическими уравнениями
х-х(<)» у -у (О, г-г(1) (aSl^PX то
Р
J /(х. y,z)dl~j Дх (/), У ОХ * (О) № +Х1 +<’<* (212)
L а
Если кривая L лежит в плоскости Оху, то
О
J /(х.у) dl = J/(x 1/У.у (О) А'1 ♦К'гЛ (21 3)
I а
В частности, для плоской кривой, заданной уравнением у ><х) (о S х £ by, имеем
»
J f(x,y} = J /(х.у (х)) Vl +y*dx. (214)
l а
Если плоская кривая задана уравнением р - р (<р) (a 5 гр S Р) в полярных
координатах, то
₽
J /(х, у)Л = 1 /(р cosrp, р ыпгр) 7р’ +р'’лр (2! .5)
L a
Если кривая задана уравнением х = гр О') (с S у S d), то криволинейный интеграл
вычисляется по формуле
а
| /(х. у) Л = j /(гр О). >-) Vl+х'Ч' (21.6)
L t
Пример 21.1. Вычислить криволинейный интеграл J(х* + 8л>) dl, где L
L
- дуга кривой 4у = х* между т очками, для которых х = 0, х = 1
Поскольку у' = х’, гй = 71+х‘А и на дуге кривой 4у*х* функция / U >) =
-Ir’+exy) = xs+4y-2x = х5+х*2х = Зх5,то по формуле(21.4)находим
364
J (x*+ вху) dl = J 3x* Vl + x‘dx = 3 J(1+x‘ )v? jd (I + x‘) ж
l. о 0
1 (I + X*)*2
2 У2 •
Пример 21.2. Вычислить J у -Jу2 + \dl, где L - дуга кривой x*lny
4 л
между точками, для которых у = I, у = 4
Применяем формулу (21.6). В данном случае с = 1. d = 4, х = ф (у) Iny,
-у dy^ -^y2+\dy. поэтому
4 = Vy< di
Пример 21.3. Вычислить криволинейный интеграл J(2x+y)<fl, где L -
контур треугольника Л ВО (рис 21.2) с вершинами А(1,0), 6(0,2). 0(0,0).
В соответствии со свойством 4) криволинейного икгарала
первого рода имеем
J <2Ьг +>) dl = j (2х+у) dl + J(2x +y)dl + J(2x + y) dl.
i. ли во at
1 la отрезке <4By=-2x+2, поэтому >'=-2, dl = ^1+y'1 dx = Jidx
На отрезке ВО ж “ 0, x‘ = 0, dl = Vl + x'2dy = dy, на отрезке
OA y«0, /«О, <й = ^1+у'2 dx-dx. Принимая во внимание
свойство 1) криволинейною интс1рала. используя формулы
(21.4) и (21.6), получаем
= 3+2Л.
Пример 21.4. Вычислить J(x+y)<fl, где L - лепесток лемнискаты
L
р = a^sin 2ф, расположенный в первом координатном углу.
365
Линия L задана уравнением в полярных координатах, поэтом) здесь целесооб-
разно воспользоваться формулой (21.5).
Так как р' = a cos 2<p/^sin 2«р, то
^р2 + р'2 - Ja1 sin 2<p + (a2 cos2 2«p)/sin 2ф = a/^sin 2<р = о2/р.
Заметив еще, что О S <р S л/2, т.е. а = О, Р = х/2, по формуле (21.5) получим
<2 2
J(x+y)d/ = J (pcos<p + psin«p)‘^-^- =
с о ₽
яЛ
= e2 J(cos«p + sinq»)c/ip = a,(smq>-cos<p)|^3 = 2аг.
о
Пример 21.5 Вычислить J(2х + 4у-4z + 7)<tf, где L - отрезок прямой
i
между точками А/,(8,9,3\ М2(6,10,5).
Составим сначала уравнения прямой, проходящей через точки Mt и Mt .
х—8 у-9 г-3 х-8 у-9 г-3
6-8° 10-9 “5-3* ИЯИ -2“ 1 “ 2
Таким образом, получаем парамезрические уравнения прямой:
x-8-2/,y=9 + l, z = 3 + 2/
Точка М пробегает отрезок М,Мг. когда г изменяется от 0 до 1, т.е. /, =0,
«2=1. Так как х' = -2,у' = 1, z' = 2, то dl = ^х'2 +у'2 +z'2
= dt ^3di
По формуле (21.2) находим
।
J(2x + 4y-4z + 7)A- J(2 (8-2/J + 4 (9 + <)-4 (3 + 2г)+7) 3<й «
L О
I
=3 |(47-8г)<* = 3(47<-4,’)|°= 3(47 - 4) =129.
о
Пример 21.6. Вычислить Jxpff, где L - дуга винтовой линии
L
х = a cos/, у = a sin/, г = bt, ограниченной точками, для которых 1 = 0, t= к/2.
Применяем формулу (21.2). Поскольку x' = -osin/, у'= a cost,
г’ = Ь, то 7*'1 +У1 +z'2 = Vo2 +62 и
366
a cos/ b sintva* ♦ b2 dt
Jw«-J
L 0
____Up __«Л
= ab -Ja1 + b1 J cos/ sintdt = ab J a1 ♦ bJ J sin/d (sin/) =
о
^4^.
о
21.2. Криволинейные интегралы второго рода
Пусть дана дута пространственной кусочно-! ладкой кривой, шраничснная точ-
ками А и Я (см. рис. 21. IX и определенная на ней непрерывная вектор-функция
F (х, у, х) = Р (х. у, х) I ♦ Q (х, у. г) j + R (х, у, г) к. (21.7)
Дугу АВ разобьем на и элементарных дуг A,tA, (/ -1.2 к, 4, = А. А, = В)
точками ЛДХр^.хД Л1(х1,у1,г,Х...,4^,(х1^|,уя_|,гя_|). На каждой дуге
4-i4 выберем произвольно точку M,(x,,yi,z') значения функций в точке
/’(хА>Ах,')=/’(МД 2(хА>’АхЭ = С(ЧХ Л(х'.у,’,х,Э = Я(Ч) умножим на
проекции пой дуги соответственно на оси Ох, Оу, Oz, которые обозначим через
Ах(. Ab. причем Дх, - л, -Хц, Ду, “у, -ут_ь Дх, -х, -zM. Из полученных
произведений составим сумму
вХ(Р(А/-)Дх< ♦О(Ч)Д>) +Я(М,)ДхД (21.8)
м
называемую интегральной суммой по координатам для всктор-функции (21.7).
Обозначим через X длину наибольшей из проекций Дх,, Ду,, Дх,.
Криволинейным интегралом второго рода или криволинейным интегралом по
координатам х,у, г называется предел интегральной суммы (21.8) при 1 -» Ot
J Р (х, у, z) dx + Q (х, у, z) dy + R (х. у, х) dz =
АВ
“ Х“?о ( М>)ЛХ‘ + Q ( М‘ + R ( М' >
/I
I ia кривой L, целиком лежащей в плоскости Оху, функции Р, Q, R нс зависят от
z, Дг, = 0, dz = 0, поэтому
J Р (х. у) dx + Q (х, у) dy = Пет। £ (Р (М,)Дх, ♦ Q ( М, )Ду,).
367
Ксли функции P, Q, R рассматривать как проекции некоторой переменной они F
на координатные оси. то криволинейный интеграл второго рода выражает работу
силы F = (Р, Q, R), точка приложения которой описывает кривую L.
Криволинейный интеграл второго рода зависит от выбора направления обхода
кривой; если изменить направление обхода, то интеграл меняет знак:
J Pdx + Qdy + Rd: = - J Pdx + Qdy + Rd:
ЛВ BA
Криволинейные интегралы первого и второю рода связаны формулой
J Pdx + Qdy+Rd: = J (Р cosa + Q cos₽ + R cosy) dl,
АН AB
где a, P, у - углы между осями координат и направлением касательной к линии
АВ, отвечающим направлению интегрирования для интеграла в левой части.
Вычисление криволинейного интеграла второго рола также сводится к вычис-
лению определенного интеграла.
1'сли линия L задана параметрическими уравнениями х = x(t). у = у(Г),
г = z(r) (a 51 5 Р) и значению а соответствует точка А, значению р - точка В, то
J Р(х, у, z) dx + Q (х. у, t)dy + R(x, y,z)dz-
лв
= J {Р(Л (г), у<1), z(t) J х'(г)+0(Я (г), ио. *0 ]/(О +
♦Я (х «Х у (Г), х (4) ]*'(«))<*• (21.9)
В частности, для кривой L, лежащей в плоскости Оху, получаем
Р
^P(x,y)dx^Q(x,y)dy^^{P[x(t),y(t)]x'(l)A-Q[x(l),y{l)]y'(l)}dl (21.10)
АВ a
Если плоская кривая L тана уравнением у = у (л) (д £ х £ 6), то
J Р (х, у) dx + Q (х, у) dy = J (Р [х, у (х) ]+Q [х. у (х)) у' (х) }dx (2l.il)
ЛВ а
Пример 21.7. Вычислить криволинейный интеграл второго рода
jx2dx+xy2<fy, ijkL - отрезок прямой от точки Л (0,1) лоточки В (1,2).
L
Уравнение прямой, проходящей через точки А и В, имеет вид > = х+1, поэто-
му на отрезке АВ dy = dx. Подставляя в подынтегральную функцию вместо у его
выражение через х (у = х +1) и замечая, что при перемещении от А к В х меняется
от 0 до I, по формуле (21.11) получаем
г
Jxjdx+xy2dy = Jx2dr+x(x+l)’dx = J(x2 +х(х2 +2х + 1))<£г =
4 0 о
368
= f (xJ + 3x’ +x)dx = f^-+x’
J 14 2
о v <
7
~ 4
о
Пример 21.8. Вычислить J (хэ+>')<£г + (х+у,)</у, где L - ломаная
, L
ЛВС (рис. 21.3), причем А (1,1), В(3.1), С(3,5).
Так как контур интегрирования L состоит из двух отрез-
ков АВ и ВС, то
J(x’+у)<Ь + (х+у’)</>>« |(x’+>')<fa+(x+y,)<fy +
L АВ
+ j (x’+>')<fr+ (*+>’’) dy-
er
На отрезке АВ, )раштснис которого у = 1, имеем dy - 0; на
отрезке ВС. уравнение которого х = 3, имеем dx = 0, по лому
>
| (*’ + Г) d* + (х+у’)</у ° J(x’ + l)dx + (x’ +1)0+
L I
J 3 s
+ J(3’+>)O+(3+/)dy = J(x’ + I)dx* J(3 + /)dy =
i i i
= 190
Пример 21.9. Вычислить криволинейный интеграл второго рода
Jyjdx+(x2 ♦ x)d>'+(x+y-Kx2)<fc, где L - отрезок прямой в пространстве от
L
точки А(1,0,2) лоточки В(3,1,4).
Составим сначала уравнения прямой, проходящей через точки Л и ft
х-1 у-0 г-2
3-1 ~ 1-0 4-2’
Из параметрических уравнений прямой х=1 + 2г,у-г, г = 2 + 2/ получаем
dx - 2dt, dy = dt, dz - 2dt.
Из этих же уравнений видно, что при перемещении от точки А к точке В пара-
метр i меняется от 0 до I, т.е. пределы интегрирования в формуле (21.10), которой
воспользуемся, равны соответственно а = 0,0 = 1.
По формуле (21.10) находим
jy2dx+(x2 +г)dy + (x+yyz2) dz =
L
369
14/’
95
a
3
о
= J/22d/+((l + 2/)2+(2 + 2/))dr + ((l + 2/) + l + (2 + 2/)2)2df =
О
I
= J[2/2+(l + 4/ + 4/’+2 + 2/)+2(l + 3/ + 4 + 8/ + 4/2)]d/ =
О
= J(I4/2+28/+ 13)d/=f-^y—+14/’ +13/
О '
Пример 21.10. Вычислить J(у2 + z2)dx-yzdy + xdz, где L - дуга вин-
i
товой линии х = I, у = 2 cos/, г = 2 sinz (OS t S л/2).
Поскольку dx = dt, dy**-2 sinftft, dz = 2 costdt, to
3
J(/ +z2)dx - yzdy+xdz “
L
<2
= J(4 cos2 / + 4 sin2 /)d/-4 sin/ сое/ (-2 sin/d/) + 2/ cos/dr «
о
f , ?
= |(2/coer+8sin2/cos/ + 4)d/=2 J / cos/d/+
о о
+8 J sin2 td (sin/) + 4 Jd/ = 2/sin/|*‘ +2 cos/|'" ♦
о о
•/J
Замечание. Интеграл J/cos/dr вычислен с помощью метода
о
интегрирования по частям:
<з «Л
J/ costdt = jtd (sin/) = I sin/ -
о о
«/3
f . . |*/2 |ц/2 Л
r- | sm/dz = / sin/1 +cos/ L =—-1-
I < 0 10 7
0
370
21.3. Формула Грина. Условия независимости
криволинейного интеграла от пути
интегрирования
Если L - кусочно гладкий контур, ограничивающий на плоскости Оху область
S, а Р(х,у), Q(x,y) - функции, заданные в замкнутой области S и имеющие в
ней непрерывные частные производные, то справедлива формула Грина
(21.12)
где обход контура выбирается так, чт обы область 5 оставалась слева
Криволинейный интеграл | Р (х, у) dx + Q (х, у) dy, где контур I. целиком ле-
L
жиг внутри односвязной области 5, в которой функции Р(х,у) и Q(x,y) непре-
рывны вместе со своими частными производными, не зависит от пути интегриро-
вания тогда и только тогда, когда
дР до
ду~ дх
(21 13)
В этом случае подынтетрадытос выражение представляет собой полный диф-
ференциал некоторой функции P(x,y)dx + Q(x,y')dy = dU (х,у) и
Jp(x.y)dx + 0(x,y)<(> =О(х„у1)-(/(Х|.у1Х (21.14)
L
где Mtixt,yt) — начальная, Л/2(х1.у1) - конечная точки пути интегрирования.
Криволинейный интеграл по замкнутому контуру в этом случае равен нулю:
(х, у) dx + Q (х, у) dy - ft
L
Криволинейный интеграл
1 = J P(x,y,z)dx + Q(x,y,z)d> + R(x.y,z)dz, (21.15)
I
где L - контур, целиком лежащий в односвязтюй области (Г), в которой функ-
ции Я(х,у, z), (?(х,у, z), Я(х,у, z) непрерывны вместе со своими частными про-
изводными, не зависит ot пути итггсгрирования тогда и только тотда, котла вы-
полняются равенства
до дР ЭЯ dQ дР ЭЯ
= ЗГ=3~' ЗГ”з-- (2116)
дх ду ду dz dz дх
В этом случае подынтегральное выражение представляет собой полный диффе-
ренциал некоторой функции:
Р (х, у, z) dx + Q (х, у, z) dy + Я (х, у, z) dz = dll (х, у, z)
371
I Pdx + Qdy+Rdz = U(xl,y2,x1)-U(x„yl,x}y (21.17)
Криволинейный интеграл по замкнутому контуру в таком случае равен нулю:
jpdx + Qdy+Mz = O.
L
Пример 21.11.С помощью формулы Грина вычислил, криволинейный инте-
грал второго рода / = ^7Jf2 +>'’<&+>’(In (* + V*2 +у2 )+ау)Ф’. гле L - контур
I
прямоугольника с вершинами А (3,2), В(6,2), С(6,4), D (3,4).
Преобразуем этот интеграл по формуле Грина Поскольку
ag э Цту+1п(х+/х2-fry2 )1У> у№ +У* +1
<hr йх & +/
дР дфг+уг) у
Эу ду Jx2*/
то по формуле (21.12) имеем
где 5 - область, ограниченная контуром L, в
данном случае прямоугольник
ABCD (рис. 21.4)
Вычисляем полученный двойной интеграл по
прямоугольнику ABCD-.
Пример 21.12. Вычислить криволиней-
ный интеграл второго рола
/ = J(12xy+4z,)<£г+(6x, -15y’z)</y + (8jc-5>’)<fc по пути Lс началом вточ-
ке О (0,0,0) и концом в точке В (1,1,1), предварительно установив, что он не
зависит от пути интегрирования.
Это интеграл вида (2I.15X для которого Р=12ху+4хг,
Q~6x2-\Sy2z, P = 8xz-5y2.
372
. Так как Р>12х. (£ = 12х. P,'=8z. tf=8z, 0«-15у’,Я;«-15у*.1о
» О'. %= If,, ff. * /%, т.е. выполнены условия (21.16).
Следовательно, интеграл не зависит от пути интегрирования. Вычислим его но
отрезку прямой, проходящей через точки Ом В. Параметрические уравнения пря-
мой имеют нид X = t, у = t, z - t, поэтому dx = dl, </> =<*. dz = dl. Так как на от-
резке OB 05/51, то
| ।
/-|(12/2+4/’+6/’- 15/’+8/1-$/’)<* = J(30»’-20/’)<* =
о о
-(lO/’-S?)^ = 5.
Замечание. Этот пример можно решить и с помощью формулы
(21.17). Действительно, так как выполнены условия (21.16), то подынтаралыюс
выражение является полным дифференциалом некоторой функции
dU = (12ху + 4z2) dx + (6х2 -13y2z) dy• у (8хг - 5/) <fc
С другой стороны,
ди . dL' di-
do -——dx+——dy+-r~dz
дх ду dz
Сравнивая два выражения для dl.', получаем
дь , . j ди л . , . ди в .
— = !2xy+4z , -—= 6х2 - 15y2z, -тг-= влг-Зу1.
«X ф оЬ
Из первого равенства, считая у и г постоянными, находим
U «6x2y + 4z2x + Cj; постоянная интегрирования С, является постоянной по
отношению к х, но она зависит от у и г, т.е. С, «<р (у, z).
Итак. U = 6х2у+4z2x+<р (у, z). Находя частную производную по у от функции U:
и'уъЬх2 y<p'(y,z) и сравнивая с выражением U' = 6х2 - 15ylz, получаем
6х2+<p'(y,z)«6x2-ISy’z, откуда <p'(y,z)«-13y2z, те. ф(у.г) =-Sy’z т 41 (z),
поэтому U (х, у, г) = бх’у + 4z2x - 5y2z + у (z).
Поскольку U' » 8х2 - Зу’ + y'(z) и U" = 8xz - Зу’, то v'(*) = 0, т.е. у (z) = С.
Слсдоввтельно, U (х, у, д = 6*5' + 4Z2* - Зу^г + С. По формуле (21 17) находим
J(12ху + 4z2) dx + (6х2 - 13y2z) dy + (8xz -Sy2) dz = U (1.1.1) -U (0,0.0) 5.
/.
21.4. Приложения криволинейных интегралов
Длина I дуги АД плоской или пространственной линии вычисляется по формуле
/= j/fl.
АВ
373
Если пространственная линия задана параметрическими уравнениями х = х (/),
>=>(/), z = z(t) (cxSf S0), то
i = j^x'2+y,2+z,2dt (21.18)
Площадь S фигуры, расположенной в плоскости Оху и ограниченной замкну-
той линией L, находится по формуле
S~^xdy-ydx. (2119)
L
Масса т материальной дуги L определяется формулой
т = J (21.20)
С
где р (х, у, г) - линейная плотность вещества в точке. М (х, у, г) этой дуги.
Прямоугольные координаты центра тяжести материальной дуги
находятся по формулам
Хо=— [xp(x,y,z)dl,
т J
L
У» {ур(*.У>*)<М. x0- — fzp(x,y,z)d/, (21.21)
mJ mJ
L L
где m определяется формулой (21.20).
Если F (х, у, 2) = X (х, у, х) 1 + X (х, у, х) j +Z (х, y,z) k - переменная сила,
совершающая работу W адоль пути L, и функции X ж X (х.у, z), V (х.у.х),
7. = Z (х.у, z) непрерывны, то
jxdx+Ydy+Zdz. (21.22)
L
Пусть сила F имеет потенциал, т.е. существует функция V (х, у, z) такая, что вы-
ражение Xdx + Ydy+Zdz является ее полным дифференциалом
dU = Xdx + Ydy + 7zb, тогда работа независимо от пути L |тавна
м. ль
\Xdx+Ydy+Zdz= jdU^Uix^yj.z^-UlXy.y^z^,
м,
где Л^ДХрУнХ,) — начальная. Мг (х2, у2, х2) — конечная точки пути.
Замечание. Если линия L лежит в плоскости Оху, то формулы
(21.18), (21.20) - (21.22) упрощаются.
Пример 21.13. Найти массу материальной дуги кривой 2у = х2 между
точками А (0,0), fi(l, 1/2К ссли линейная плотность вещества в точке М (х,у)
пропорциональна абсциссе этой точки.
374
Найдем выражения линейной плотности р(х,у) и дифференциала дуги. Из
условия следует, что линейная плотность выражается формулой р (ж. у) = кх. где
* - коэффициент пропорциональности. Из уравнения линии у - 1/2 ж2 находим
у’ ж, поэтому dl« J\ + y'2dx = 71 +л2 dr Согласно формуле (21 20), имеем
Jp(x,y)d/ = jb 7l + x2dx = к j(l + xI)V2-irf(l + xJ) =
£ о о
к
2 3/2
I
- 4(272-1)
о
Пример 21.14 Найти центр тяжести дуги винтовой линии
Ж • a cost, у «= a sin/, г Ы (0 51 i л/2), если линейная плотность в точке
М (ж.у.г) пропорциональна произведению первых двух координат
Так как ж' *-а sin/, у' = a cos/. t‘ = Ь, то Л = 7ж'2 +у’2 +z'2di *
= Ve2sin2/ + fl2 cos’ /+Ь2Л Ja2 +b2dt.
Согласно условию, линейная плотность выражается формулой р(ж.у.г) = кху,
где к - коэффициент пропорциональности.
По формуле (21.20) находим массу данной дуги
т - J Р (*»>.») dl J kxydl = J ka2 cost sin/ 7a2 + b2dt -
L L L
Итак, m*ka2Ja2 + b2 /“1.
Вычислим интегралы каждой из формул (21.21). обозначив их через /,. /2,
соответственно:
/( = Jxp(x,y.z)<// = jxkxydl = к jx2ydl
L L L
чР _______ У»
= * J д2 сое1 /д sin/ Vo2 +b1di = -ka,^ai +b2 Jcos2/«/(cos/) =
о о
, j / j .j COS /
= -taVa +b j
Лж j УР (xt У>г) d/= jykxyd/^k j xy2dl =
L LI
375
4/2 ________ __________Ф
= к Jo costa1 sin21Ja2 +b2dt« a1 к J a1 + b2 J sin2 td (sinr) =
*,=л^Е
3 . 3
/3 = j zp (x, у, г) dl = j zkxydl = к J tyzdl -
. V г П Tij ka2bja2+b2 "f „ ,
= Л J a cost asmr bt ya +b dl--------J t sin 2tdt ~
о о
_ ★I’2 ( r cos 2/ I sin 21 1 ka2b Ja2 +b2 к
2 [ * 4 о ) 2 7
По формулам (21.21) находим координаты центра тяжести:
/, aWo2+62 о2*Уо2+62 2о
*° m ° 3 2 " 3 1
/2 а1 к Ja2 + б2 а2к Ja1 +b2 2о
*.---------j---:------2------Г
/, iUta2b^la2 +b2 а2к Ja2 +/>’ nb
----5-------:---5------Т-
Таким образом, искомый центр тяжести находится в точке
С(2а/3,2а/3,пЬ/4у.
Пример 21.15. Найти работу, производимую силой F = 4x6i + xyj вдоль
дуги кривой у = х’ отточки О (ЦО) лоточки В (1,1).
Проекции силы X и Y на координатные оси соотпстстпенно равны
X(x,,y) = 4x*, ¥(х,у)^ху. Чтобы найти работу, необходимо воспользоваться
частным случаем формулы (21.22):
IF = J X (х,у) dx^Y(x, у) dy.
L
По этой формуле получаем
10 о
376
Гпооа.22
ИНТЕГРАЛЫ ПО ПОВЕРХНОСТИ
22.1. Поверхностные интегралы первого рода
Рис. 22.1
Пусть дама функция /(x,y,z), непрерывная на некоторой т;идкой поверхно-
сти (О). Разобьем поверхность (О) сетью произвольно проверенных кривых
(рис. 22.1) на ряд частей (ДоД (До2),...,(Доя). В каждой из этих частей
(До,) выберем произвольно одну точку
М,(х, .у^.хД вычислим значение дан-
ной функции в этой точке и. умножив
его на плошаль соответствующей части
поверхности, составим сумму всех
таких произведений
№
L = (22.1)
называемую инторалыюй суммой Обо-
значим через d, диаметр элементарной
часзи поверхноегм (Ал,), d -
наибольший из указанных диаметров
Интегралом первого рода ст функции /(х.у.х) по поверхности (о) называет-
ся предел интегральной суммы (22.1) при где d - наибольший из
диаметров области До/.
JJ /(*. y.x)do= (22.2)
Интеграл первого рода обладает свойствами, аналогичными свойствам криво-
линейных интегралов первого рода.
Если /(х,у,х)>0 и функцию / рассматривать как поверхностную плотность
массы материальной поверхности (ок то интеграл (22 2) определяет массу
этой поверхности.
Когда поверхность задана уравнением х = х (х, у), интеграл (22.2) вычисляется
по формуле
JJ /(*> у. z) <ta з= JJ /(х, у, х (х, у)) Jl+х/ +xj’<duty. (22.3)
о S
377
Если (О) - кусочно-гладкая двусторонняя Поверхность x = x(n,v),
у = у(и, v), z-z(u, v) ((u,v)eQ), а функция f(x,y.z) определена и непрерывна
в точках поверхности (О), то
JJ f(»,ytz)do*jjf(x (и, v), у (и, v\ z (и, v)) 4EG - F2 diuiv, (22.4)
о Q
где
Е = х'2 +у'2 +z'2, G = x'2 +у’2 + z'2, F»x'x'+у'у'+z^z'. (22.5)
Формула (22.3) является частным случаем формулы (22.4) при г = г (х, у).
Рис. 22.2
Пример 22.1. Вычислить поверхно-
стный интеграл первого рода
|| 7l+4xa + 4y’<fo, где о - конечная часть
поверхности z = 1-х2-у2, отсеченная плос-
костью z = 0 (рис 22.2).
Проекцией рассматриваемой части данного
' параболоида крашения ;=1-х2-у2 на плоскость Оху
является область, ограниченная окружностью
х2 +у2 = 1 (получено ю уравнений поверхности
и плоскости). Следовательно, областью S в формуле (223) является крут х2 +у2 S 1.
Так как z' = - 2х, z' = - 2у, то в охинстслики с формулой (22.3) получаем
jj Jl + 4x2 + 4у3</о JJJl + Ax2 + 4у2 Jl + 4x2 + 4y2dxdy »
о S
ж |[(1 + 4х2+4у2)Ли/у.
Для вычисления полученною двойного интеграла перейдем к полярным коор-
динатам х « р сомр, у = р sin<p. Замечая, что в области 5 <р меняется от 0 до 2л и
р - от 0 до 1, находим
Пример 22.2. Вычислить ||(3х2 +5у2 +3z-2)«to. где о - часть по-
верхности y=Vx2+z2, отсеченной плоскостями у = 0, у = Ь
378
Поверхность задана уравнением, разрешенным относительно у. Для вычисле-
ния юггсграла по поверхности первого рода воспользуемся формулой
JJ /(*. y.z)do = fj f(x, у (х. z). z) J\+y'2 +y'2dxdz,
° S,
где S2 — проекция поверхности о на плоскость Oxz.
Поскольку у\ = х/Vx* +z2 , у' - г/4х2 + z2 . то
^l+yj’+X1 = 7, + х’/(*’ +z2)+z2/(x2 +z2) ~-Ji.
Проекцией s2 данной поверхности на плоскость Oxz является крут
х2 +z2 ib2 (рис. 22.3), поэтому при переходе к полярным координатам
x"pcos<p, y = psin<p будем иметь 0£<р£2я, ОS р£ Ь.
По указанной формуле находим
JJ(Зх2'+ Sy2 + 3z2 - 2) do = JJ(3 (х2 + z2 ) + 5(я2 +z2)-2] Jldxdz =
о
2ж А 2я b
-Л |<*р|(8р2-2)рф = Л J<Ap j(8p’-2p)dp =
0 0 0 0
2« 2ж
- ,/2 j(2p4 -р2) | \/<p - Л J(22>4 -62) dp = 2^я (22>4-b2).
о о
Пример 22.3. Вычистить JJx(y+z)da. где о - часть цилиндриче-
О
ской поверхности х = Jb2-у2, отсеченной плоскостями z = 0, z = с.
Так как поверхност ь задана уравнением, разрешенным относительно х, то не-
обходимо воспользоваться формулой
У, z) = jj f(* (У, z), у.х) J\+x’2 +х'2 dydz,
О «I
где 5| - проекция поверхности о на плоскость Oyz.
Поскольку х' = -у/^Ь2 -у2 . х' = 0, то
^1+х;2+х;2ж ^+у2/(Ь2-у2) = ь/^ь2-у2 = ь/х.
Заметив еще, что в данном случае
область S, представляет собой
прямоугольник ABCD (рис. 22.4), опреде-
ляемый неравенствами -biyib, OSz^c,
по указанной формуле найдем:
379
22.2. Поверхностные интегралы второго рода
Пусть в точках двусторонней поверхности о задана непрерывная функция
f(x,y, z\ Выберем на поверхности определенную сторону. Разобьем поверхность
Рис. 22.4
о сетью произвольно проведенных кривых на
части До,. ДО,......Ааи.
В каждой части (До,) выберем по произ-
вольной точке W,(x,.y,.z,). вычистим в ней
значение данной функции. Это значение
/(x,,y,,z,) умножим на проекцию AS, части
(До,) на плоскости Оху (а не на площадь До,.
как это было в случае интеграла первою рола)
При этом числу AS, приписывается определен-
ный знак, а именно если в точках (До,) нор-
маль, отвечающая выбранной стороне поверхно-
сти составляет с осью Oz острый угол, то через
AS, обозначаем площадь проекции До,, взятую
со знаком плюс, если упомянутая нормаль составляст с осью Oz тупой угол, то пол
AS, будем понимать площадь этой проекции, взятую со знаком минус, ( оставим
сумму всех таких произведений:
I. (22.6)
>=t
Интегралом второго рода от функции /(x.y.z) по поверхности О называется
предел суммы (22.6) при d—»0, где d - наибольший из диаметров
элементарных областей До,:
JJ /(*. У. г) <bdy = Hm У /(к,, у,, z,) AS,
(22.7)
380
Аналогично определяются интегралы
jjf(x,y,z) dxdz , j| f(x,y, x) dydz .
О о
причем для выбора знака проекции элемента служит угол между ио[1ма.1Ью. отве-
чающей выбранной стороне, и осью Оу или Ох.
Наиболее общим видом интеграла второго рода служит интеграл
I * JJ Р (x,y,t) dydz + Q (х, у,х) dxcb + R (х, у,г) duty,
О
где Р. Q. R - функции от х, у, z, определенные и непрерывные в точках двусто-
ронней поверхности о.
Июстрал второго рода обладает всеми свойствами интеграла первого рода за ис-
ключением одного: при изменении стороны поверхности интеграл (22 7) меняет знак
Интегралы первого и второго рода связаны формулой
JJ Pdydz У-Qdak + Rdxdy = JJ(A* cosa t-Q cosp + R cosy) de.
о о
где cosa, а»Р, cosy - направляющие косинусы нормали, направленной в ту
сторону поверхности, по которой берется интеграл второго рода
Июегралы второго рода вычисляются следующим образом. Если поверхность о
однозначно проецируется в область 5 плоскости Оху и г^/(х, у) -ее уравнение, то
JjM'.y.*)^ «± JJ^(K,y,/(jr.y))A4. (22.8)
о «I
где знак плюс берется в том случае, козла на выбранной стороне поверхности
cosy > 0, и знак минус, когда cos к < 0. Аналогично, если о однозначно проеци-
руется в область S2 (или S,) на плоскости Охх (или Oyz}, т.е. может быть задана
уравнением укр(х.я) (или х = у(у.х)), то
JJ<? (*,У. х) ddz «± JJo(x,«»Or,*M)A«fc, (22.9)
JJ/>(x,y,z)<^ =± JJ/"(V(y,Ay,x)dKfc. (22.10)
° h .
где в случае (22.9) берется знак cosP, а в случае (22.10) - знак cosa.
Пример 22.4. Вычислить поверхностный интеграл второго рода
jjfy*+гг)Му, где о - верхняя сторона поверхности я-Ve1-я1,
о
отсеченной плоскостями у - 0, у = Ь (рис. 22.5, о).
381
Нормаль п в точке М, соответствующая укатанной стороне поверхности, со-
ставляет с осью Ог острый угол (точнее OS a S я/2), поэтому в формуле (22.8),
которой следует воспользоваться, нужно взять знак плюс Проекцией 5, данной
поверхности на плоскость Оху является прямоугольник Л BCD (рис. 22.5, б), опре-
деляемый неравенствами - a S х S a, О S у S />.
По форму ле (22.8) находим
______ а »
JJ(у2 +z’) dxdy - JJ(у2 +(Vo2-*2 )2) dxdy - jdx J(у2 +oa -x2) dy =
о S, -• 0
X Г-» a, , ,
—+fl2y-x2y| dx = fl — + агЬ-хгЬ I dx =
3 J г_г, Л 3 J
Пример 22.5. Вычислить JJ(x2 +z2 + ay1) dxdz, где О - внешняя сторо-
в
на поверхности y = Vxa +ха. отсеченной плоскостями у=0, у = Ь (см. рис. 22.3)
Нормаль к поверхности в точке М образует с осью Оу тупой угол, поэтому в
формуле (22.9) следует взять знак минус.
Проекцией S, данной поверхности на плоскость Охз является крут
х2 + z2 < Ьг. По формуле (22.9) получаем
JJ(*’ +(Q'i)dxdz = -JJ(x2 +z2 +a(Vx2 +z2 )2)d«t =
О S?
Рис. 22.5
382
Переходя к полярным координатам х = р cos ф, г = р sin <р, находим
Д(х2 +z2)dxdz =. рф Jp’p* = j£-
Si о о о
. 2дЛ4 nb*
Следовательно,
JJ(я2 + г2 +ау2) dxdz = - (а + I) JJfa2 + z2) dxdz - -
О s.
Пример 22.6, Вычислить 1Г (ах2 + бу2 + te2) dydz, где о - внутренняя
сторона части полусферы х “ ^R2 -у2 - г2, вырезанная конусом я ж /y2+z2.
В формуле (22.10), которой воспользуемся, следует взять знак минус, так как
нормаль, соответствующая выбранной стороне поверхности, составляет с положи-
тельным направлением оси Ох тупой угол:
JJ (ах2 + by2 + bz2) dydz « - JJ (a (R2 - y2 - z2)+by2 + bz2) dydz -
« ' A
- - JJ (aR2 + (b - a) (y2 + z2)) dydz.
Так как S, есть круг у2 + z2 S R2/2 (получено из уравнений
x*^R2 -у2-z2, х = ^у2 + z2 ), то, переходя к полярным координатам, находим
Ха К/Л
JJ(a^2 +(b-a)(y2 +z2))dydz= J сЛр J(aR2 + (b - а) р2) pdp =
4 оо
7 о2
J<ty J (a/?3p + (6-a)p’)dp= J a№^-+(/>-a)£j- I dtp*
oo o' ' о
, (aR* v R*) kR* v
= 21^—+(fc-e)—J = — (fc + 3a).
Итак, JJ(a*2 +by2 +bz2)dydz = -~—(b+3a).
383
22.3. Формула Стокса. Формула Остроградского
Если функции Р = Р (х, у, z), Q = Q (х, у, х), R = Я (х, у, г) непрерывно диффе-
ренцируемы и L - замкнутый кусочно-гладкий контур, ограпичивакчтшй конечную
кусочно-гладкую двустороннюю поверхность а, то справедлива формула Стокса
Ф Р (х, у, х) dx + Q (х, у. х) dy + R (х, у, z) dz =
i (22.11)
K'(dR Эе) (dP dR\ _ (dQ dP} '
coea+ —cos0+ ^=--— cosy do,
I <J> дг ) \dz дх J ( dx ду J
о L J
где cos a, cos 0, cosy - направляющие косинусы нормали к поверхности О,
причем направление нормали определяется так, чтобы со стороны нормали обход
контура / соверша тся против часовой стрелки (в правой системе координат).
Формула Стокса может быть записана в следующем символическом виде:
Если о - кусочно-гладкая поверхность, ограничивающая объем V. и
Р= P(x,y,z), Q=Q(x,y,z), R- R(x,y,z) - функции, непрерывные вместе со
своими частными производными первого порядка в области Г +О. то справедли-
ва формула Осгроградского
cos a + Q cos 0 + R cos
dP dQ dR}^^
+ I dxdydz, (22.12)
dx ду dz )
где cos a, cos 0, cos у - направляющие косинусы внешней нормали к поверхности о.
Пример 22.7. С помощью формулы Стокса вычислить криволинейный
интеграл I = <£ydx + zdy + xdz, где L - окружност ь х2 + у2 ♦ z2 = а1, х ♦ у + г=0,
L
пробегаемая против часовой стрелки, если смотреть с положите, тиной стороны оси Ох.
В данном примере P(x,y.z)^y, Q(x,y,z)-z, R(x,y,z) = x, поэтому
^=o,e; = i,p>o. я; = 1. «=0.^-1
По формуле (22.11) имеем
j>ydx + zd>+xdz = JJ(-cosa-cos0-cosy)do,
L о
где о - часть плоскости х+у+х’О, ограниченная дайной окружностью. При-
водя уравнение плоскости х + у + х = 0 к нормальному виду, находим
cosa = соб0 -cos у = |/7з.
384
Таким образом, §ydx + zdy + xdz^--j^ JJ Ат =-лд27з, где a - радиус кру-
га, ограниченного указанной окружностью.
Пример 22.8. С помощью формулы Остроградского вычислить
II (х2 cosa+у2 cosP + x2 cos у) do, где о - часть конической поверхности
x2 +>’ =*z2 (0<x«AX cosa, cosP, cosy - направляющие косинусы внешней
нормали к этой поверхности.
Формула Остроградскою применима в случае замкнутой поверхности. Чюбы
получить замкнутую поверхность, присоединим к поверхност и конуса состветст-
вующую часть плоскости : = А, х2 + у2 х2. Обозначив эту часть плоскости через
о,, по формуле Остроградского получим
11 (x’cosa+y2 cosP + x’cos
cosa+>2 cos P + x2 cosy) <ta
JJJ +2*) dxdydz
»•
Чтобы решить задачу, достаточно вычислить шорой и третий интегралы В
случае области о, cosa, cosp, cosy - косинусы углов с осями координат нор-
мали к плоскости x = h, а именно: cosa -O, cosp = 0, cosy = l, поэтому
h2da- A2itA2 »xA*.
jj (х2 cosa+y2 cosP + x2 cosy) do =
так как на плоскости о, г = А и двойной интеграл равен площади круга радиуса А,
получающегося при пересечении конуса с плоскостью
Вычисляем третий интеграл, производя в нем сначала интегрирование по г от
г = Jx2 + у2 до г - А, а затем двойной интеграл по области S в плоскости Оху
(эта область является крутом х2 + у2 < А2, г = 0; она получается проецированием
объема V на плоскость Оху).
Таким образом.
JJJ (2л + 2y + 2z) dxdydz = 2
-2JJ
(х + у + г)А
dxdy =
2
13 Зяк. I
385
Обозначая последний интеграл через / и переходя к полярным координатам по
формулам х = р cos<p, у = р sirup, находим
о о
р(cos<p + sin9) (*-р)+уЛ2-jp:
7Гл\ . 4 h* , а*
I — (cosf + sintp)- —(cos<p + sinq>)+—-- <*₽ =
J 3 4 4 <5
0L J
Л4 h
— (cos9 + sinq>) + — <Ap =
lx Я
ou
— (sm<p-cos<p) + —L
C 4
кА4
2 ‘
0
Я
(x1 cosa +y2 cosP + z2 cosy) do = —— xh* - ——
22.4. Приложения интегралов по поверхности
Площадь о поверхности (о) вычисляется по формуле
(22.13)
Если р-p(x,y,z) - поверхностная плотность массы материальной поверх-
ности (о), то масса всей этой поверхности определяется интегралом
м =
(22.14)
Координаты центра тяжести Со(хо,у9,г9) поверхности о вычисляются по
формулам
(22.15)
т
где т определяется формулой (22.14).
Моменты инерции 1у, 1г относительно координатных осей Ох, Оу, Ог на-
ходятся соответственно по формулам
386
I, = JJ (*’+/) p(x,y,x)<*J, = [[(х1+z2)p(x,y, z)do.
о 1 (22.16)
/1=JJ(x2+y2)p(x.y.x)dO
Моменты инерции lf, lt относительно координатных плоскостей Oxy,
Oxz, Oyz вычисляются соответственно no формулам
Ap - JJt’p(x.y,x) da, la - JJy2p (x.у, x) da, /„ = JJx’p (x,y. x) da (22.17)
ООО
Пример 22.9. Вычислить массу части поверхности z = ху (х>0,у>0),
вырезанной цилиндром (х2 +у2)2 = 8ху. если поверхносгная плотность
p(x.y.x)-V,+jtl +/ •
Так как х' = у, х‘ =х, da = Jl+x2 +y2dx<fy, то
m = JJi/l + x’ + y2do = JJ7l+*x2 + y2 д/l + x2 +y2dxdy
e s
= JJ<, + jrl +У2)^.
s
raeS - лепесток лемнискаты (x2 +y2)2 =8x>. для которого x^O, y^O.
В полярных координатах x = pcos<p, у = psin<p уравнение границы области
имеет вид р = 2^sin2<p (0 i <р 5 я/2), поэтому
<2 t/1 X&Oii
[f(l+x2+y2)dxdy= f <*p [(1 + p2) рф = [dp [(рдр’)ф =
5 0 0 0 0
= -cos2<p|^+2<p|^--5y£| =2 + K;m=Jt+Z
Пример 22.10. Найти массу части цилиндрической поверхности
y = ^9-z2, отсеченной плоскостями х = 0, х=2, если поверхностная
плотность р (х, у, г) = fy (х+х).
387
По формуле (22.14) находим
m = JJ*y (x+z)dtr = * JJy(x+z) —- 3* j dz j(x+z)dx =
a 3 -3 в
J 3
= 3k J(x2/2 + xz)|^<fc = 3* J(2 + 2z) dz = 3* (2z + zJ) | ’, = 36*.
-j -э
Пример 22.11. Вычислить момент инерции относительно оси Oz части
однородной поверхности сферы х1 + у1 +z2 = R1, для которой х 2 0, >20, z20.
Так как поверхность однородная, т.е. р (х, у, z) = const, то в формулах (22.16)
можно положить I.
Третья из формул (22.16) принимает вил
Поскольку в данном случае F (х, у, z) = х2 + уг + z2 - Л2,
то
^4х2 +4/ +4z2 Rdxdy
2» V«2-x2-/
Следовательно.
где$ - четверть круга x’+y2^/?2 при х20,у20.
Переходя к полярным координатам получаем
(Последний интеграл вычислен с помощью подстановки p = flsinz). Итак.
/, = /?пл7з=ля73
388
Гпава 23
ЧИСЛОВЫЕ РЯДЫ
23.1. Основные понятия. Необходимый
признак сходимости
Рядом называется выражение вида
«и, +к,
М
где И|, и2, и,.«*,... - последовательность чисел или функций Слагаемые
Up и,, и,,..., и,.... называются членами ряда Если все члены ряда являю!ся
числами, то ряд называется числовым, если члены ряда - функции, то ряд назы-
вается функциональным.
Рассмотрим числовой ряд
—
Х"‘ = о,+а, +о, + ... (23 1)
4М
Ряд (23.1) задан, если известен его общий член а, = <р (к), те известно правило,
по которому каждому номеру к (Л = 1,2,3,...) ставится в соответствие вполне
определенный член ряда.
Суммой конечного числа п первых членов ряда натыкается сто п-й частичной су ммой
S„ “в, +а, +а, + ...+а„
Конечный или бесконечный предел частичной суммы при л —♦ ~ называется
суммой ряда:
S= lim
Ряд, имеющий конечную сумму, называется сходящимся Если ряд (23.1) схо-
дится и его сумма равна S, то используют запись
Xе* =S
*->
Если предел частичной суммы не существует или бесконечен, то ряд называет-
ся расходящимся.
Ряд, члены которого неотрицательны, называется положительным Положи-
тельный ряд всегда имеет сумму; эта сумма будет конечной (и, следовательно, ряд
- сходящимся), если его частичные суммы ограничены сверху, и бесконечной (а
ряд - расходящимся), если суммы сверху не ограничены.
389
Если в ряде (23.1) отбросить первые т членов, то получится ряд
+«w*j +а«1 + —. (23.2)
М
называемый остатком ряда (23.1) после m-го члена.
Теорема 23.1. Если сходится ряд (23.1). то сходится и любой из его ос-
татков (23.2); обратно, их сходимости остатка (23.2) вытекает сходимость
исходного ряда (23.1).
Теорема 23.2. Если ряд (23.1) сходится, то сумма г„ его остатка (23.2)
после т-го члена с возрастанием т стремится к нулю lim г_ = О
Теорема 23.3 (необходимый признак сходимости). Если ряд (23.1) сходит-
ся, то его общий член стремится к нулю. те.
hmaj-Q (23.3)
я-»—
Следствие. Если общий член ряда к нулю не стремится. то ряд расходится
1(римеры числовых рядов: геометрический ряд
=o+og + o92+од’+..., (23.4)
1-1
гармонический ряд
Ёт-144*-- <215)
Отмстим, что геометрический ряд сходится тогда и только тогда, когда | q | < I;
его сумма определяется формулой S = al(\-q), гармонический ряд расходится.
Замечание. Условие (23.3) не является достаточным для сходи-
мости ряда (23.1).
Пример 23.1. Найти сумму ряда
у 1 1 t 1 + 1
"(с+4)(с + 4 + 1) (с + 1)(с+2) (с + 2)(с + 3) (с + 3)(с + 4)
где с - постоянная (с*-4, 4 = 1,2,3,...).
Составим n-ю сумму данною ряда:
1 1_____________________1 t 1
" = (с+1)(с+2) + (с + 2)(с + 3) + (с + 3)(с+4)+"*(с + л)(с+л+1)'
Чтобы упростить выражение для S„, преобразуем формулу общею члена ряда,
разлагая at на элементарные дроби. Положим
1 А В
(с+4)(с+4 + 1) с+4 с+4 + l
390
отсюда
I (А + В)к + (А + В)с+А
(c + *)(c + 4 + l) ~ (с + *)(с+* + 1) ‘
Сравнивая коэффициенты при одинаковых степенях * в числителях обеих частей
равенства, получаем А 4 В=0, (Л + В)с+ А = I. откуда А = 1, В=-1, поэтому
1 1 1
(с + *)(с+* + 1) с+к с+к+Г
Выражение для S„ принимает вид
„ ( I I W I И
(.с+1 с+2) (х+2 с+3)
...+(-J_—L-W-L---------L_)
\,С + И-1 с + п) (с + л с + п+\)
Приводя подобные члены и переходя к пределу, получаем
,, V । 1
Следовательно, > ------------------------,
^(с + к}{с+к + \) с+1
Замечание. В частных случаях при с = 0, с = к, с = 1, с 41 по этой
формуле получаем соответственно:
+ ' £-(к+*)(я + * + 1)'к + Г
у 1 1 у 1 I
~(* + 1)(* + 2) = 2' £(72+*)(Л + * + 1) Л + 1
Пример 23.2. Найти сумму ряда
у_______1___________I + I
“(c+t)(c+A+2) - (с+1)(с + 3) + (с + 2)(с + 4) +
, 1 I
(с + 3)(с+5) + '"+ (с+*)(с+* + 2) + “‘*
где c=const(c#-*, * = 1,2,3,...).
Разложив общий член на элементарные дроби, получим
1 , 1 f 1 1 1
(с+*)(с + * + 2) г1с+* с + к + 2)
391
Составим п-ю частичную сумму данного ряда и преобразуем ее:
„ । । «
с _-------------+-----------+----------+ ...
" (с+1)(с + 3) (с+2)(с + 4) (с+3)(с+5)
1 = 1Г(_2_____L.1+f _!_______!_1+
(с + л)(с + л+2) 2 [(.с+1 C+3J (с+2 c+4j
( 1 । 1 ( 1 1 1 ( I
+ 1 — I+... + 1 — 1 + 1 —
(.с+3 с+5у (с+л-2 с+п) у.с+л-1
I } ( 1 1 'll
— —— I+1-----------— - -1 L
с+л+iy \«+л c + n+2JJ
„ 1 ( 1 I I 11
5, = —I---+------------------I.
2\с+1 с+2 с+л+1 с+л+2/
Следовательно,
„ „ I ( I 1 А „ 2с + 3
»— ’ 2(c+l c + 2/ 2(c+l)(c + 2)
В частном случае при с = 0 находим
У—— .2,
£*(*4-2) 4
Пример 23.3. Найти сумму ряда
--------------------- (с = const; с#-к, к = 1,2,3,...).
и(с + *-1)(с+4)(с+* + 1) '
Разлагая общий член ряда на элементарные дроби, получаем
__________I________= 2 । I
(с+к-1)(с+к) (с + к + 1) 2(с+4-1 с+А с+к + 1}
Составляя л-ю частную сумму и преобразу я ее, находим
s =_J__________+_______1_______+„ +____________!________
" с(с+1)(с+2) (с+1) (с+2) (с+3) (с + л-1)(с+л)(с+л+1)
1 (fl 2 1 If 1 2
2 с+1 c+2j Vc+1 с+2
392
I W 1 2 И ( 1 2
— | + | 4" I + ...+I • —— -f-
c + 3J \c+2 с+3 с+4/ \c+n-3 c+n-2
• ''Vf > 2 . 1 W I 2
+ I +1 — —— 4------I +1--— — — —
c+n-ij \c+n-2 c+n-l c+nj ^.с + л-l c+n
i Л1 i<i i i i
-f- I > = 1 — — ~ I
c+n+l/J 2V« c+l c+n c+n+\J
Переходя к пределу, получаем
Следовательно,
У----------1---------.
^(с + *-1)(с+*)(с + * + 1) 2е(с + 1)
В частности, при с= 1 из последней формулы находим
У-----!------1
f^*(* + l)(* + 2) 4
Пример 23.4. Выяснить, сходится или расходится ряд
1 2 3 4 5 *
—+ —+—+—+—+...+-------+ ...
2 3 4 5 6 *+!
А т“
* + !
Общий член ряда выражается формулой
^lirn о4 = Jim —j = Jim —“ '• т.е. общий член к нулю не стремится, то на
основании следствия из необходимого признака заключаем, что данный ряд рас-
ходится
Пример 23.5. Исследовать, сходится или расходится ряд
j,«rccos(l/2*).
Общий член ряда определяется формулой ак • arccos^l/2*). Так как
^lim а4 = Vim arccos(l/2*) = anxosO = к/2, т.е. предел общего члена нс равен
нулю, то на основании следствия из необходимого признака сходимости заключа-
ем, что данный ряд расходится
393
23.2. Ряды с положительными членами.
Признаки сходимости. Признаки сравнения.
Интегральный признак Коши
Рассмотрим числовые ряды с положительными членами
У = О| + а2 + я, +..., (23.6)
М
^bt -6,+6,+6, + ... (23.7)
М
Теорема 23.4 (первый признак сравнения) Если для всех к 2 к^
atibt (23.8)
и ряд (23.7) сходится. то сходится и ряд (23.6).
Если д.ля всех к > к0
а^Ь> (23.9)
и ряд (23.7) расходится. то расходится и ряд (23.6).
Теорема 23.5 (второй признак сравнения). Если существует конечный и
отличный от нуля предел
lim^-»/xO. (23.10)
то ряды (23.6) и (23.7) сходятся или расходятся одновременно
Теорема 23.6 (интегральный признак Коши). Если f(x)
неотрицательная невоврастающая функция при х>0, то ряд
У*о2 =в, +я2 +я, + ..., я»»f(k) (23.11)
сходится или расходится одновременно с интегралам
1- j/(x)dx . (23.12)
Замечание. Нижним пределом интегрирования в интеграле (23.12) может
быть любое другое положительное число из области определения функции f(x\
Пример 23.6. Выяснить, сходится или расходится ряд
2 . 2’ . 2s .2*
1+ "Ч~ + '7^ +----51" + •••
1 + 21 1 + 2* 1 + 2* 1 + 2“
Все члены данного ряда положительны, обший член определяется формулой
я* = 2*/( 1 + 2* ). Сравним данный ряд с геометрическим рядом
, 1 1 1 I .1
1ч--1—z~+—*т*+...+“т~+..., 6* — т".
2 2’ 2’ 2* 2*
394
Так как
2* 2* I
= (^5^. *-СЦ.2,Х..Д
т.е. выполнено условие (23.8) и ряд У |/2* сходится (геометрический рад, для
-• Z?
которого q = 1/2 < I), то на основании первого признака сравнения заключаем,
что исходный ряд также сходится.
Пример 23.7. Выяснить, сходится или расходится ряд
Сравним данный ряд с расходящимся гармоническим рядом (23.5).
Поскольку
= lim —₽ = lim —= = I,
*V* ‘—V*
т.е. выполнено условие (23.10), то из расходимости гармонического ряда следует
расходимость данного ряда.
Пример 23.8. С помощью интегрального признака Коши доказать схо-
димость ряда
у_1_________1 , I I I
+1 ~ 1 + 1 + 22+1 + З1+1 + 42+1 + ”
д—I
Рассмотрим функцию /(х) = \J(x* +1). Эта функция удовлетворяет условиям
инге1рального признака Коши: она принимает положительные значения и >бывает
с возрастанием *, причем /(к) = \/(к* +1) = а„. Исследуем сходимость интеграла
(23.12) для данного случая:
fax _, । - .. . . я к к
—- = arctgx = lim arctgx-arctgl
x'+l " <-»- 2 4 4
I
Так как интеграл сходится, то сходится и данный ряд.
Пример 23.9. С помощью интегрального признака Коши исследовать,
V' к+2
сходится или расходится ряд >——.
м '
Функция f(x) = (я + 2)/х2 удовлетворяет условиям теоремы 23.6.
395
Поскольку
т.е. интеграз вила (23.12) расходится, то расходится и данный ряд
Пример 23.10. Исследовать, сходится или расходится данный ряд
Применим интегральный признак, рассмотрим функ11ию/6^=1/х1пл (х>3) Так как
, f—у^- = Inlnx |" =—,
J X In X 1 ’
J
т.е. интеграл расходится, то расходится и данный ряд
Пример 23.11. Исследовать, при каких р сходится ряд Дирихле
Если р 5 0, то общий член ряда не стремится к нулю, о4 = l/А * = к~г 2 I, по-
этому ряд расходится (на основании следствия из необходимою признака сходи-
мости) В случае р>0 применим интегральный признак Коши Функция
f(x) - \Jxr положительна и не возрастает при х 21. Пусть р>\. Положив
р = 1 + Л (Л > ОХ получим
Поскольку интеграл вида (23.12) сходится, то сходится и ряд Дирихле. Если р « 1, то
Г dx । _
1 — = In х |! = lim in.r = о»
i
Интеграз расходится, поэтому расходится и ряд Дирихле (при />= I получаем
гармонический ряд).
Итак, ряд Дирихле сходится при р > I и расходится при р S1.
Замечание. Сходимость многих рядов может быть исследована срав-
нением с соответствующим рядом Дирихле. Вопрос о сходимости ряда
где Р„(к) и Q,(A) - многочлены от к степени тип соответственно, решается
396
сравнением с рядом Дирихле ^1/К, где р-т-п. При этом целесообразно
применять второй признак сравнения.
Пример 23.12. Доказать сходимость ряда У-----------!--
дж| * ** •/ **
Преобразуем формулу для общего члена данного ряда:
I I 111
°* ' (3* -1) 3* (3*)’(1 -1/3*) 9* 2(1 - J/З*) “ 9*2 (I - УЗ*) ’
Рассмотрим ряд с общим членом bt 1/9*2. Ряд
У—=-У—
9tr*‘
сходится, ибо это ряд вида (23.13), где р-2 Так как
, а* ( I 1 И .. I
‘->-6* *_-^9*’ (l-уз* 9*’J *— i-уз*
т.е. выполнено условие (23.10), то данный ряд также сходится.
„ .. ,, V' *2+ 2*-3
Пример 23.13. Исследовать сходимость ряда > —;-;---г--.
“*4+5*’+4*2+7
1
Это ряд вида (23.14), причем Ря(*) = *’+2*-3, т = 2,
(?,(*)= *4+5*’ ♦ 4*2 + 7, л = 4. Тах как рж т-п = 2-4 = -2, сравним данный
ряде рядом
Хтг» кот°р“я
является рядом Дирихле и сходится, ибо р > 1.
Поскольку
lim
( *’+2*-3 Н - *4+2*’-3*2
*-•*^*4+5*’+4*2 + 7 кг) *—*4+5*’+4*2+7
т.е. выполнено условие (23.10), то данный ряд сходится.
23.3. Признак Д’Аламбера. Признак Коши.
Другие признаки
Рассмотрим числовой ряд с положительными членами
(23 15)
397
Теорема 23.7 (признак Д’Аламбера). Пусть для ряда (23.15) существует
lim^*- = o. (23.16)
*— at
Если q<\, то ряд (23.15) сходится, если q>l, то ряд расходится
Замечание. Если <7 = 1, вопрос о сходимости ряда остается открытым.
Теорема 23.8 (признак Коши). Пусть для ряда (23.15) существует
lim l[a[ = q. (23.17)
Если q < 1, то ряд сходится; если q > I, то ряд расходится
Теорема 23.9 (признак Раабе) Пусть для ряда (23.15) существует
lim 4| —*--1 | = р. (23.18)
*-»- )
Если р> 1, то ряд сходится; если р< I, то ряд расходится
Теорема 23.10 (признак Гаусса) Пусть для ряда (23.15)
a»f _ * + &,к___+2 (23.19)
о* Л"+€,*"’+2 +сж
Если с, -b, > I, то ряд сходится; если C,-b, S 1, то ряд расходится.
‘ Пример 23.14. Доказать сходимость ряда
Общий член ряда определяется формулой а, « ТГ/з1. Заменяя в згой форму-
ле А на 4 + 1, получаем последующий член о,., = V4 + 1/21**. Составим отноше-
ние последующего члена к предыдущему
Найдем предел (23.16):
. 1 . ГУ 1 1 1
hm-*®-» hm-----— hm J1+— =— 1 =—.
‘—а, *— 2V4 2* — I 4 2 2
Так как q = 1/2 < 1. то на основании признака Д' Атамбсра заключаем, что рад сходится.
Пример 23.15. Доказать сходимость ряда V 4* sin1 -Г
Применяем признак Коши. Поскольку at = 4* sin1 ((/24X tfa^ = к sin (1/24),
hm (/o7 = Jim_4 sin(1/24) = Jirn МП^2* - = у ^lim =y. rx.q= 1/2< I.
то ряд сходится.
398
Замечание. Сходимость данного ряда также можно установить с по-
мощью признака Д'Аламбера.
Пример 23.16. Исследовать, сходится или расходится ряд
2 13 I 13 5 I 1 3 5 7 1 (24-1)!! 1
2 + 2-4 2 + 2-4-6 3 + 2 4 6-8 4 +’’’ (2*)!! 4*~‘
Общий член данного ряда определяется формулой
(24^1
* (2Л)П *
Заменяя в этой формуле А на к +1, получаем формулу
(2(4 + 1)-!)!! (24 + 1)1!
°‘и " (к +1) (2 (4 +1))!! (к + 1) (2* + 2)!!
Составляем отношение последующего члена к предыдущему:
ам _ (24 + 1)!! (2Л -1)!! _ (2А 4-1)!!(2А)!!*
at ~ (4 + 1) (24+2)!! 4(24)!! (24 -1)!! (24+2)!! (4 + I)
(24+1)4 2кг+к
’ (2*4-2)(* + 1) 2Л’+4*+2‘
Находим предел (23.16):
. в*.1 « 2к2+к 2
hm —L = hm —;--------«-»1.
at *-*-2к2 4-444-2 2
Поскольку q = I, то притнак Д’Аламбера не дает ответа на вопрос о сходимо-
сти ряда Обратимся к признаку Раабе Найдем предед (23.18);
2к2+к + 3к
2кг+к
lim к
—1 lim к
-1
,. 34’+2* 3
= hm---;---- -.
*—24’4-2 2
Um к
г 34 + 2
= hm 4 1+—я—
*— I 2кг +2
Так как в данном случае р 3/2 > I, то на основании при така Раабе заключаем.
что ряд сходится.
Пример 23.17. Исследовать условия сходимости гнпсргеомегричсского ряда
. ар + а(а-«-l)P(P-t-l) * а(« + 1)(а + 2)Р(р+1)(р + 2)
1 у 1-2 у(у + 1) I 2 3 у(у + 1)(у+2)
+ t а(а + 1).(а + 4-1)(а44)р...(р + 4)
(4 + 1)!у(у + 1)...(у+4)
где а > О, р > 0, у > 0.
Общий член данного ряда определяется формулой
а(а + 1)...(а+4-1)Р(Р+1)..(р4 4-1)
4!у(у + 1)...(у + 4-1)
399
Поскольку
<x(g + l)...(g + t-l)(g + *)P(P + l)...(P + *-l)(P + *)
°**'= (* + l)!T(T + l)...(T + *-l)(Y + *)
то
ам = (а + к}ф+к) = P+(g+P)t+gp
в* (* + 1)(у + *) к1 +(y + I)4+y
Из последнего выражения видно, что применение к данному ряду признака
Д’Аламбера не дает ответа на вопрос о сходимости lim »11
* V”- вя J
Применим признак Гаусса. Так как в данном случае =g+p, с, =у + 1, то
при с,-6, = у + 1-g-Р> 1 ряд сходится, при с,-Л| =y + l-g-Pi I ряд расхо-
дится. Преобразуя полученные неравенства, заключаем, что ряд сходится при
Y-g~P>0 и расходится при y-g-p^O.
23.4. Знакопеременные ряды
Ряд, содержащий как положительные, так и отрицательные члены, называется
знакопеременным. Знакопеременный ряд
-6* + />,+*>+ — (23.20)
сходится, если сходится ряд. составленный из модулей его членов. т.е. ряд
S м-1м*1*>1*1 ы*~ (2321)
Ряд (23.20) в этом случае называется абсолютно сходящимся. Сумма абсолют-
но сходящегося ряда нс зависит от порядка слагаемых
Если ряд (23.20) сходится, а ряд (23.21) расходится, то ряд (23.20) называется
условно (нсабсолюпю) сходящимся. Сумму условно сходящеи>ся ряда путем пе-
рестановки его членов можно сделать равной любому данному числу, конечному
или равному +«».
Ряд (23.21) является рядом с положительными членами, поэтому для исследо-
вания вопроса о сп) сходимости можно применять ранее рассмотренные признаки
(признаки сравнения, интегральный признак, признак Коши, Д’Аламбера и др.).
Замечание 1.Из расходимости ряда (23.21) в общем случае исследует
расходимость ряда (23.20).
Ряд, у которого любые два соседних члена имеют разные знаки, называется
знакочередующимся.
Теорема 23.12 (признак Лейбница). Знакочередующийся ряд
^(-1)**'а* = а, -а, +а, -в. +a,-af + ...+(-1)‘*'а4 + ... (о. >0)
М
400
сходится, если выполнены условия:
at г ам (к - 1.2,3.о, 2 в, г а, г ..Д (23.22)
Вт а* = Q (23.23)
При замене суммы сходящегося знакочсрсцуюшаося ряда суммой п «о первых
членов ошибка не превышает абсолютного значения первого кт отброшенных членов, те
(2324)
Теорема 23.13 (признак Дирихле). Знакопеременный ряд
Y/>>bt (23.25)
ES
сходится, если: I) частные суммы Вя ограничены, те | В„|S С
(л = 1.2,3,...); 2) числа at (Л “ 1,2,3,...) образуют монотонную последователь-
ность. стремящуюся к нулю
Замечание 2. Признак Лейбница является частным случаем признака
Дирихле. В самом деле, если а4. монотонно убывая, стремится к нулю, а
Ьл (—!)* ', то ряд (23.25) принимает вид ^(-l)*'lot. для которого выполне-
*-
пы условия признака Лейбница
Теорема 23.14 (признак Абеля). Ряд (23.25) сходится. если: I) сходится
а»
ряд />t; 2) числа at (k = I, 2,3,...) образуют монотонную и ограниченную
*•>
последовательность
Пример 23.18. Исследовать сходимость знакопеременного ряда
. I I 1 II 1 I
3 З1 З1 З4 3* 3* з’ 3‘
Составляем ряд из модулей членов данного ряда:
3 3* 3’ З4 3*
Последний ряд сходится, как геометрический ряд со знаменателем Следова-
тельно, данный ряд также сходится; он является абсолютно сходящимся рядом (в
соответствии с определением абсолютной сходимости ряда)
Пример 23.19. Исследовать сходимость ряда
Ы *
Составим ряд из модулей членов данного ряда.
401
Так как | sin 4 |< 1, то каждый член не превосходит соответствующего члена
сходящегося ряда
£*’=1,+2’+3’+ ’
(ряд (2) является рядом Дирихле, т.е. рядом вида (23.13), где р = 3 > I). Согласно
первому признаку сравнения ряд (1) сходится, поэтому сходится и данный ряд,
причем абсолютно.
Пример 23.20. Исследовать характер сходимости знакочередующегося ряда
111111 (-•)**'
I — + —-/в —+—= =+—=+...+- = + ...
Ji JI V5 V6 <7 V*
Поскольку ряд, составленный из модулей членов данного ряда, т.е. ряд
У -jb, расходится (ряд Дирихле; р = |/2 < 1), то о сходимости ряда пока ничего
нельзя сказать (см. замечание 1). Применим к данному знакочередующемуся ряду
признак Лейбница. Условия признака Лейбница здесь выполнены:
1 I I 1 „
I>-?=•>-=>-₽>..., lim-?=- = 0.
J1 Л Ji
Следовательно, этот ряд сходится Так как ряд из модулей расходится, то дан-
ный ряд сходится условно (неабсолютно).
Пример 23.21. Сколько нужно взять членов ряда
y(.irj_.I_j_+4.4+.,.+kir+...,
к1 2* 3* 4’ *’
чтобы вычислить его сумму с точностью до 0,001?
Данный ряд является знакочередующимся рядом, удовлетворяющим условиям
признака Лейбница
, I 1 1 . I П
—> — > — hmp- = 0.
Следовательно, данный ряд сходится, причем абсолютно, так как ряд
является сходящимся (ряд Дирихле; р > 1 )-
Чтобы вычислить сумму ряда с указанной точностью, необходимо найти такой
член, абсолютная величина которого меньше 0,001, т.е.
1 _______ 1 1
— < 0,001, или —г<
*’ 4’ 1000
402
Последнее неравенство выполняется, когда *’>1000, или к >10. Следова-
тельно- нужно взять 10 членов данного ряда. Так как <□,, = 1/1 Is < 1/101 =0,001, то
не формуле (23.24) получаем следующую оценку для остатка ряда: r10Sau<0,001.
Пример 23.22. Исследовать характер сходимости ряда
,1111111
I 4- — — — — •+• — -#• —• “ — — 4- 4- 4-
2345678 *
Ряд, составленный из модулей членов данного ряда, является гармоническим
рядом, который расходится. Сравнение данного ряда с тармоничссхим не решает
вопрос о его сходимости (см. замечание I).
Применим признак Дирихле. Данный ряд можно представить в виде
где ak = \jk (* = 1,2.3,...), />, = (-l)'* '»4 ^ (* = 1,2,3,...), те.
Л-1
= I. = 1, 6, Ъ< =-1, = 1, \ = I Ь = -1. \
Поскольку at монотонно стремится к нулю (l>y>-j>..., Iimat=oj ча-
Я
стяыс суммы В. = ограничены (В„ <. 2 (я = 1,2,3,...), ибо fit=l, Bj=2,
й, = 1. й, =0, fi, = 1, В„ = 2, в, = I. в, =0,...,Ви_, -1, B^j=2. в«. ,=1. Ви=0...').
то, согласно признаку Дирихле, ряд сходится. Так как ряд из модулей его членов
расходится, то данный ряд сходится условно (нсабсолютно).
Пример 23.23. Доказать сходимость ряда
0L9<*-3>
Применим признак Абеля. Этот ряд можно записать в виде
I I
Поскольку ряд СХОДИТСЯ ибо СХОДИТСЯ ряд у1 -у-
*-i V »-i 3 J
___________________________________ fi. 2
4
монотонную о«раниченную 1Юслсдовагельность
а числа at образуют
так как
( 3Y ( 3 T 1 I
1+-Г < 1+t , lima. =--------------------—r = —;
I k) L * + lJ *— !tm(l + 3/*)4 e1
A-м»
Абеля, данный ряд сходится.
то, согласно признаку
403
23.5. Действия над рядами
Суммой двух рядов
=в, +<4 +о, + ..., (23.26)
л«|
$>=*> +6, +6,+... (23.27)
называется ряд
+^)ж(в| +6|) + (а3 +Ь}) + (а} +bj)+... (23.28)
i-i
Аналогично определяется разность двух рядов:
(23.29)
1-1
Ряды (23.28) и (23.29) сходятся, если сходятся оба ряда (23.26), (23.27).
Если У д^.Л, 6t = В, то
i-i i-i
^(д1-6.)=Л-/?.
Л-1 Л-1
Прогаволсимем ряда (23.26) на число с называется ряд
У = со( +са2 +<»j +•••
Л-1
•а »
Если “ А, то У ед, -сЛ.
i-i i-i
Произведением рядов (23.26) и (23.27) называйся ряд
—
Xе* “С|+«1+С,+...+Са+...,
1-1
где
ct -а,^ +a2/>j_| +...+ а,6) (* = 1.2,3,...).
(23.30)
(23.31)
(23.32)
Если ряды (23.26) и (23.27) сходятся абсолютно, то ряд (23.31) также сходится
абсолютно и его сумма равна произведению сумм данных рядов
Замечание. Если из двух сходящихся рядов (23.26) и (23.27) хоть один
сходится абсолютно, то их произведение - сходящийся ряд.
404
Пример 23.24. Найти сумму ряда 2 —+- t- .
Этот ряд является суммой двух рядов:
у_!_=|+1+±+±+ ук21ж1_1+± '
2-4- 4 4’ 4’ -2- 5* 5 5’ 5J
Каждый из этих рядов есть геометрический ряд
I-’-1-Л
Для первою ряда а = I, q = 1/4, поэтому 5,
4
1-1/4 ~ 3
Для второго ряда
Следовательно, сумма исходного ряда
5 = 5,+5, =4/3 с уб= 13/6.
Пример 23 25 Найти сумму ряда — - -—р—
Данный ряд является разностью двух сходящихся геометрических рядов
V 1 , . 1 1 1 е I
ftp1" +2+2»*2»*-— 1 1-|/2 ’
±^...S2 = . J ,2
ft? 3* 3 3J 3’ 2 I-(-1/3) 4
Значит исходный ряд имеет сумму 5 = 5, - 5, = 2- 3/4 = 3/4
23.6 . Некоторые числовые ряды и их суммы
2£м* + ,)Ж| 3£*(* + 2) = 4
4 У—*—=21. 5 У_____1___«2
f-*(* + 3) 18 (2k-1) (21 + 1) 2
405
6. у-------1-------1.
£-4 (* + !)(*+2) 4
8 У____________!_________= ±
' £(2*-1)(2* + 1)(2* + 3) 12'
10. У---------’---------Л
£-[а+(*-1)Л](а + ЛЛ) ah
12 У 1 ~8
2-(4*’-d’ ~ 16 •
14. У (-I)*'1--5------ sin 1 = sin57" 17*45” = 0.84147...
£ (2*-1)1
15. У (-1)*—— = cosl = cos57"l7*45” = 0,54030...
(2*)!
7. У-----'----=1
£(*-1)(* + 1) 4
9. У---------------1
£-[1+(4-1)АН1 + АЛ) л
11. У------!----=1--.
£(4*-1)(44 + 1) 2 8
16. > ---------------— ------г И ~ целое число)
17. У --------------------- —г (я* - четное число).
19 У____!___-£
±-(2*-1)’ 8
А-!
(-0*41
(2Л-1)1
23 У 5,5
£(2*-1)’ 1536
25. У — = е-2,71828...
А*’
*•<
„ к 1
27. 2 > ----= —
£(24 + 1)! е
29. У—1—=1
Х-(2* + 1)! 2
е-- |=1.17520
22. У—i-r = —
t-(2*-D4 *•
24 У —-— = 1.
^(Л + 1)!
26 У= 1=036787...
tr *’ е
28. У—!— = lfe + l)= 1,54308
^-(24)! 2 ( е)
30. £(-1)**11 = 1п2 = 0,6931...
м
406
31. У—-j-=ln2.
Ttk2
33. УЦ1 = 1+1П1
35. —^т = — -In2.
(4 + 1)1 12
37. У-------= - (1пЗ-1).
£{к(9к*-\) 2
39. У---'---_2-Ь2.
к (442 -I)2 2
41. у—<z>£—a0_ta2>.
£*(24-1)24(24+1) 2* Ь
« Ь-ч'-'згтЧ^-1"2}
«. У(-Ч‘4—Т--
“ т1 т2+1
46. У----1----.1_Д(Л + 1).
fa (U -1) (8* +1) 2 1б' '
2*
32. у—7 = 1113 = 1,0986...
34. У(*+^)2 =2 + ta3.
к3‘
36. У--------= 21п2-1.
ГГ*Н* -о
38. У l2A*~' =21п2.
£*4 (442-1)2
40. £--------1------= 1п2~ —
£*(24-1)24(24 + 1) 2
42. У(-1)**,~г—-
лы 34-2 3
К . ~
Т» + 1п2
77-^4*2’’-
1
47. У(-1)^—1-= -^|к + 2Ь(Л+1)].
48. у ——.----------!----.
^(ж+4-1)! (т-2)(т-1)!
49. У----L----= -3+—1пЗ + 21п2.
^4(3642-1) 2
50. У-----------!---------= 1_Л|лЗ+ я-
(34 + 1) (34+2) (34 + 3) (34 + 4) 6 4
407
Гnaeg 24
ФУНКЦИОНАЛЬНЫЕ РЯДЫ
24.1. Сходимость функциональных рядов
Пусть дан функциональный ряд
^,«1 (*) «iM + «iW + +.... (24.1)
м
т.е. ряд, члены которого ut(x) - некоторые функции от х.
При каждом фиксированном значении х = х^ функциональный ряд (24.1) ста-
новится числовым рядом
У, «* (-4) и “| (*0)♦“а ( Ч) ♦ «з(*о) + — (24.2)
м
Если ряд (24.2) сходится, то значение аргумента х = х0 называется точкой схо-
димости ряда (24.1). Множество всех точек сходимости х функционального ряда
(24.1) называется его областью сходимости, а функция
5(х) = limS,(x) = lim
" * 4-1
- С) мной данного ряда Функция
/^(х)-5(х)-5я(х) (24.3)
называется Остатком ряда (24.1).
Если ряд (24.2) расходится, то значение х = х<> называется точкой расхо-
димости ряда (24.1).
В простейших случаях дтя определения области сходимости ряда (24.1) можно
применять к нему известные признаки сходимости, считая х фиксированным В
частности, при применении признака Д'Аламбера или Коши случая когда q = I,
исследуется особо, с помощью других признаков сходимости.
Функциональный ряд (24.1) называется абсолютно сходящимся на множестве
X, если при всех х е X сходится ряд из модулей его членов:
XI (л) 1=1 М») Н *»<*> Н “j(x) 1+ •••
. *"•
Пример 24.1. Найти область сходимости ряда
х-1 (х-11 (х-1)
-----н----1 +...+I---- +...
х+1 \х+М \Л+1/
408
Данный ряд является геометрическим рядом со знаменателем q = (х - 1У1х + IX Гео-
метрический ряд сходится та да и только тогда, когда | q | < L Следовательно, данный ряд
сходится лишь в случае | (х - 1)/(х +1) | < 1. Последнему неравенству равносильны нере-
венства-1<х-1У(л+1><1. Если (х+1)>0, то-х-1<х-1<х+1,т.е. -x-l<x-1 их-1<х+1.
Нгорое из этих неравенств выполняется для всех х, первое верно только для х > 0 Если
(х+1)<0, то —х— 1>х- 1>х + Е тс. х+1<х —1 и х —!<-*-1. Первое из полу-
ченных равенств противоречиво, второе ньпюлняется при х < 0. Но при х<0|9|>|.
Таким образом, ряд сходится при х > 0, т.е. область»»' его сходимости является
открытый промежуток (0, +~). (При х = 0. как и следовало ожидать, получаем
расходящийся ряд -1 + 1-) + ...).
Пример 24.2. Найти область сходимости ряда
X х1 X*
2 + х* + 2 + х4 +"+ 2 + х“ + "
Общий член данного ряда определяется формулой и1(х) = х*/(2 + х1*). Так
как |х‘/(2 + х“) |»|х* |/(2 + x“)s|x|* при |х|< I и ряд У]х|* сходится при
»-i
|х|<1, то и данный ряд сходится для |х|<1. Поскольку
при |х|> I и ряд У |х| * сходится при |х|> 1, то данный ряд сходится и для
|х|> I. Если х = ±1, то |“*(1)| = 1/3; ряд расходится. Итак, данный ряд сходится
при всех х, кроме х = ±1.
Пример 24.3. При каких х сходится ряд (1 +1/4)* 2Ь ?
Применим к данному ряду признак Коши, для чего сначала найдем предел
Jim^Hjcg. Так как и, =(1 + 1/4)* 2**, ^|н4 |-(1 + 1/4) 2’, то
hjrn Кл1(1+уЛ)2ж-2'.
Найдем значения х, при кот орых этот предел меньше I, для чего раним нера-
венство 2Ж<1. Последнее неравенство выполняется для x<ft При х = 0 данный
. Этот ряд расходится, так как для него нс вынол-
ряд принимает вид
ней необходимый признак сходимости (общий член к нулю нс стремится:
lim а* - lim (1 + 1/4)* = е). Итак, ряд сходится при х < 0.
409
24.2. Равномерная сходимость
функциональных рядов
Функциональный ряд (24.1) называется равномерно сходящимся в некотором
промежутке, если, каково бы ни было е > 0, существует такое Л', нс зависящее от
х, что при л > Л’ для всех х из данного промежутка выполняется неравенство
|ад|<Е,
где Я„(х) - остаток ряда определяемый формулой (24.3).
Теорема 24.1 (признак Всйерштрасса). Функциональный ряд (24.1) сходит-
ся абсолютно и равномерно в некотором промежутке. если существует сходя-
щийся числовой ряд с положительными членами
/ д, =в( +д2 +а, + ... (24.4)
такой, что
|«Дх)|5д4 (* = 1.2.3....) (24.5)
для всех х из данного промежутка.
Ряд (24.4) в этом случае называется мажорантным рядом для ряда (24.1).
Свойства функциональных рядов выражаются следующими теоремами.
Теорема 24.2. Сумма равномерно сходящегося ряда функций, непрерывных в
замкнутом промежутке (а, b], есть функция, непрерывная в данном промежутке
Теорема 24.3. Если члены сходящегося ряда (24.1) имеют непрерывные произ-
водные при aixib и ряд У м4(х) сходится равномерно в замкнутом прамежут
3-1
ке |о, />], то ряд (24.1) в этом промежутке можно дифференцировать почленно
• •
Хм*) =5^“it»)-и™.Xu‘(jt)I= (246)
к д-i ) V *-| J *-i
Теорема 24.4. Если члены ряда (24.1) непрерывны при а£х£Ь и ряд этот
сходится равномерно в замкнутом промежутке [а, 6], то его можно интегри
ровать почленно в данном промежутке:
" - *
J |Eu‘w u4(x) dx
в \ Л-l a
Теорема 24.5. Если ряд (24.1) сходится равномерно в некоторой области. и
каждый член ряда имеет конечный предел lim ut (х) = с,, где а — точка сгуще-
г-мя
ния данной области, то к пределу можно перейти почленно, те
410
hm 51"» <*)=У,im м*)=У
r-»a^ r-4«
cos At
Пример 24.4. Исследовать, равномерно ли сходится ряд > —-j—.
i-i !
Так как |cosAx|£ 1 для всех х, то |cosAx/34|s 1/3* (к = 1, 2,3,.,-Х т е. каждый
член данного ряда нс превышает соответствующего члена сходящегося числового ряда
£(1/3* ) (геометрический ряд, д = 1/3). Последний ряд является мажорантным для
А«1
данного рядд В соответствии с признаком Всйсрштрасса зак.тючаем, что данный ряд
сходится абсолютно н равномерно для всех к, т е на всей действительной оси
•в
Пример 24.5. Докатать, что сумма ряда sin Ах/А2 является непре-
рывной функцией при всех х.
Прежде всего каждый член данного ряда u4(x) = sinkx/k1 (А «1,2,3,...) есть
функция, непрерывная при всех х. Ряд сходится равномерно при всех х, поскольку
| sin Ах/А2|5(/*’ и для данного ряда существует мажорантный ряд (1/А;) -
м
сходящийся числовой ряд с положительными членами (ряд Дирихле; р«2>1).
Согласно теореме 24.2, сумма данного ряда есть функция, непрерывная при всех х
(как сумма равномерно сходящегося ряда непрерывных функций).
Пример 24.6. Можно ли почленно дифференцировать ряд У*япАх/А4
Л «И
в области его сходимости?
Каждый член данного ряда есть функция ut (х) = sin кх/к 4 , дифференцируемая
при всех х, причем и, «= cos кх/к 1.
Составим ряд производных cosAx/A2. Каждый член нового ряда -
А»1
непрерывная функция u4(x) = cosAx/A2. Так как |k4(x)| = |cosAx|/a’ 5 \/к}
аа
(А = 1,2,3, ...), то для него существует мажорантный ряд У(1/А}).
ям
Следовательно, ряд производных разномерно сходится при всех х, поэтому. со-
гласно теореме 24.3, исходный ряд можно дифференцировать почленно. По фор-
муле (24.6) получаем
Гу sin Ах
П cos lx
& kl
411
Пример 24.7. Можно ли почленно дифференцировать ряд } —-j—?
4-1 2
Этот ряд сходится равномерно при всех х, ибо для него существует мажоршггный
ряд У (1/2*) (так как |sin2* rcr/2*|s 1/2*). Каждый член ряда
ut(x) = sin2* кл/2* есть функция дифференцируемая, причем гц(х) =
= л cos2* ял Ряд производных я У cos2* пл расходится в каждой точке, ибо ни в
*•1
одной точке нс выполняется необходимый признак сходимости (общий член к нулю
нс стремится) Следовательно, исходный ряд почленно дифференцировать нельзя
«
Пример 24.8 Можно ли почленно интегрировать ряд У 1/(х2 + Л2)?
1-1
Каждый член данного ряда ut (х) 1/(х2 + к2) есть функция, непрерывная для
всех х, ряд сходится равномерно на всей числовой оси. Действительно, так как для
всех х выполняется неравенство l/(x2 +Л2)< l/k2, то для данного ряда сущсст-
«в
вует мажорантный ряд ^(1/*2)
Таким образом, согласно теореме 24.4, данный ряд можно интегрировать по
любому промежутку из его области сходимости, в частности по промежутку
[О, х]. Интегрируя, полу чаем
О О
24.3. Степенные ряды.
Действия над степенными рядами
Степенным называется функциональный ряд вила
Уи,(х)- У и,(х-а)* =e0+e,(x-a) + e2(x-e)1 + ..., (24 7)
1Ы> 1Ы>
где о, (* ж 0,1.2,3,...) - постоянные числа, называемые коэффициентами ряда.
При а - 0 ряд принимает вид
Уаах* =a0+a,x + OjX2 ♦ ... (24 8)
Теорема 24.6 (признак Абеля). Если степенной ряд (24.8) сходится при х=з,
(хо#0), то он сходится абсатотно и равномерно при любом х,дхя которого Ixjclx*/.
412
Радиусом сходимости ряда (24.8) называется число Я такое, что при |х|< R
ряд сходится, а при |х|> Я расходится. Интервал (-Я, Я) в этом случае называ-
ется интервалом сходимости указанного ряда. На концах промежутка [- Я, Я) ряд
может или сходится или расходится.
Если степенной ряд (24.8) сходится на всей числовой оси, то полагают, Я « •»,
если он сходится только при х = О, полагают Я = 0. Степенной ряд сходится абсо-
лютно и равномерно на любом отрезке, принадлежащем интервалу сходимости.
Аналогично определяется радиус и интервал сходимости для ряда (24.7): если
при |х-о|<Я этот ряд сходится, а при |х-о|>Я расходится, то Я - радиус
его сходимости, (а-Я, о + Я) - интервал сходимости
Радиус сходимости степенного ряда находится с помощью признака
Д’Аламбере или признака Коши.
Радиус сходимости можно вычислить по одной из формул
4 = 4,im VN * “ Ип> — L (24.9)
« *-»’ *-»- О*,| I
если соответствующий предел существует.
Простейшим примером степенного ряда является геометрический ряд
1 + х+х’ + х’ +... + Х* + Этот ряд сходится прм ?«|х|<1. Следовательно, для
данного ряда радиус сходимости Я= I. а интервал сходимости (- I, I) Сумма этого
ряда равна 5(х) = 1/(1-х) (в соответствии с формулой 5 = о/(1 -q), в = 1. </ = х),
поэтому для функции /(х) =1/(1“*) имеем следующее разложение в степенной pat
V(l-x) = l+x+x,+x’+x<+x’+... + x*+... (|x|<l). (24.10)
Действия над степенными рядами. Рассмотрим степенные ряды
^о*(х-о)* =a0 + o,(x-o) + o1(x-e),+.... (24.11)
£/>д(х-о)д = <\>+Ь1(х-о)+£>а(х-в)3 +... (24.12)
4-0
с общим интервалом сходимости (о - Я, а + Я).
Сумма (разность) рядов (24.11) и (24.12) определяется соответственно формулами
£о,(х-в)* +^(х-о)* =£(в, +4)(х-в)‘. (24.13)
i-0 i-G i-Ф
£аДх-в)*-£йь(х-в)* =£(о* -Ь*)(х-о)*, (24.14)
i-Ю А-0 1-Ф
а их произведение - формулой
^аДх-О)*^(х-О)* = £са(х-в)*, (24.15)
i«O ix.j Л-С
413
г
где
ct +eA-i +°A-j +-. +о*Д)- (24.16)
Ряды (24.13) - (24.15) имеют тот же радиус сходимости Я, что и ряды (24,11) и (24.12).
В частном случае, если ряды (24.11) и (24.12) совпадают, формула (24.15) об-
ращается в формулу для возведения ряда в квадрат:
[“ у -
У оДх-о)* = У (ДоД* +о|вд_| +а2о^2 + ... + а1а0)(х-а)‘.
М) Z »ы>
Стеленной ряд в пределах промежутка сходимости можно возводить в степень
с любым натуральным показателем т.
Степенной ряд (24.11) внутри сто интервала сходимости можно почленно
дифференцировать и интегрировать:
/. у -
= £(* + 1)01>1(х-0)‘, (24.17)
k 4-0 *-<!
(24.18)
Ряды (24.17) и (24.18) имеют тот же радиус сходимости, что и ряд (24.11).
Теорема 24.7. Если ряды (24.11) и (24.12) в окрестности точки Х = а
имеют одну и ту же сумму, то они тождественны, т.е at*bt (А =0,1,2....).
Эта теорема устананлииас! единственность разложения функции в степенной ряд
Пример 24.9. Найти радиус сходимости степенного ряда I + Зх +
+ 9х2 +27х’ + 81х4 + .., + 3*х* + .„
Это степенной ряд вида (24.8), все коэффициенты его отличны от нуля Вос-
пользуемся первой из формул (24.9). Тах как at =3*. lim V?" = 3, 1/Л=3, то
радиус сходимости данного ряда Я =1/3, а интервал сходимости (-1/3.1/3).
Замечание. Данный ряд является геометрическим рядом со знаменателем
q = 3x. Геометрический ряд сходится при 191 <1, т е. при |3х|<1,илипри1/3<х<1/3.
Пример 24.10 Найти радиус и интервал сходимости степенного риза
£(Ах)* = х + 4х2+27х’+256х*+... + (Ах)*+...
м
Применим вторую из формул (24.9). Поскольку
ot _ k* _ f А А* _1_
"(*+!)**' l* + lJ А + Г
lim-^-= limf ‘ 1 -1- = -0=0,
+ А 4-1 *
то радиус сходимости ряда равен пулю Ряд сходится в единственной точке х = 0.
414
Замечание. Тот же результат можно получить и по первой формуле
(24.9): Hm^4*|= Нт 4 = -. 1/Я-~, Я = 0
Пример 24.11. Найти радиус и интервал сходимости степенного
Так как lim L^- L ton U-: 1 L lim = Hm (k +1) = то Л=~
Ряд сходится при всех х, т.е. в интервале (-•», +«•).
Пример 24.12. Найти область сходимости степенного ряда
у(х-2)ц-' х-2 . (х-2)1 (х-2)» .
2- *’ 1 8 27 -
Применим признак Д'Аламбера, для чего найдем предел lim=о.
ut I
В данном случае
(х-2)М~' (ж-2),<**‘н (х-2)"*'
4» * (4 + 1)’ ’ (4 + 1)» ‘
Ь±1_ _ (х-2)м>| .(х-2)**~* _ (х-2^'41 к1
“a (4 + 1)’ ’ 41 (x-2)“'(4 + i)’ ' ' (4 + I)1’
“U-2)j.
Так как при (х-2)2<1, или |х-2|<1, ряд сходится, а при (х-2)2 >1. или |х-2|>1,
ряд расходится, то в соответствии с определением радиус сходимости данного
ряда Я = 1. Неравенство |х-2|< I равносильно неравенствам —1<х-2<1 или
1 < х < 3; интервалом сходимости является интервал (1,3). Этот интервал можно
найти, полагая а = 2, Л-1 в общем выражении (о-Я.о + Л). Исследуем сходи-
мость ряда на концах этого интервала. При х - 3 получаем ряд
Этот ряд сходится (ряд Дирихле; р=3>1). При х=1 имеем
у(1-2)цч _yj_
Р X- Р х-г’
*•1 а-i а-i я
Этот ряд также сходится, ('ледоватслыю, данный ряд сходится при 1 S х 5 X т.е.
областью его сходимости является отрезок (1,3].
415
Пример 24. J 3- Найти область сходимости степенного ряда
Применяем признак Д’Аламбера. В данном случае
(х + 3)2<**” (х + 3)2‘
*+1 ’ “*=“Т“
14^
id
ut<fl _ (х+3)м** (х + 3)2* = А(х+3)ц*2 = _к_
и* "* + !’* (* + 1)(х + 3)“ “* + 1
^^Г*ЭД77<Ж*’*’=(х+3)2
Поскольку при (х+3)2<1, т.е. при |х + 3|<1, ряд сходится, а при (х + 3)2>1,
т.е. при |х + з|> 1, ряд расходится, то радиус сходимости данного ряда Я® I, а
интервал сходимости (-4,-2). Исследуем сходимость ряда на концах промежут-
ка [-4,-2]. При х«-4 получаем ряд
у (~< + 3)2* у (-!)“ у I
4-1 М 4-1
Этот ряд расходится (гармонический ряд). При х = —2 также получаем расходя-
щийся гармонический ряд. Следовательно, областью сходимости данного ряда
является интервал (-4,-2).
Пример 24.14. Найти область сходимости ряда
у (* + 2)*
~*(5*+1)
Применяем признак Д’Аламбера, считая х фиксированным Поскольку
2fi±L - (* + 2)**' (х + 2)* |x + 2|t(5*+l)
и* (* + 1)(5**'+1) *(5*+1) (* + 1)(3**' + 1)’
ТО
.. *(5‘ + t)|x + 2|
= •un--------ТП-----1
*— (*+1)(5*** + 1)
) (1 + 5-*)|х + 2| |х + 2|
~Ml + V* (5+Г*) 5
Ряд сходится, когда полученный предел меньше единицы, т.е. |х + 2|/5<1, или
|х+2|<5. Так как при |х + 2|<5 ряд сходится а при |х + 2|>5 ряд расходится,
то радиус сходимости Я = 5; интервал (-7,3) является интервалом сходимости.
Исследуем поведение ряда на концах промежутка [-7,3]. Прм х = -7
получаем знакочередующийся ряд
416
у (-7 + 2)* у (-5)* у (-1)*
£й(5*+1) £*(5*+D tr*(l+F4)’
Этот ряд удовлетворяет условиям признака Лейбница, поэтому он сходится При
х = 3 получаем ряд
у (3 + 2)* у 5*_______ у I
tr*(5*+i) f-*(5*+l) f-4l+5-*)
Полученный ряд расходится, так как каждый его член больше соответствующего
члена расходящеюся 1армонического ряда £ (/(* + !). те.
м
1/й (1+5~*) >У(4 +1), ибо 4(1+Г*)<* + 1.
Следовательно, областью сходимости данного ряда является полуоткрытый
промежуток (-7,3).
24.4. Ряд Тейлора. Ряд Маклорена
Если функция f(x) разлагается в степенной ряд
/(х) = с0 + с|(х-о)+с^(х—в)* + ...+с*(х-а)‘ +...
в некоторой окрестности точки а, т.е. в интервале (а-й,о+й), то коэффициенты
этого ряда определяются но формулам
с0'/(о), с4 (*-1,2,3....). (24.19)
Следовательно,
/(х) = /(а)+^-^(х-а)+^^(х-о),+... + ^у^(х-а)* +... (24.20)
Ряд стоящий в правой части формулы (24.20), называется рядом Тейлора для
функции /(х).
Равенство (24.20) выполняется (ряд Тейлора сходится к /(х) в интервале
(а - h. а + Л)), если остаток ряда Тейлора
гДх) = р(х)-/(в)- (х ' в>*
стремится к нулю при неограниченном возрастании и:
limr),(x) = 0
при всех х из интервала (о - й, а + й).
Достаточное условие разложимости функции в ряд Тейлора. Если функция
/(х) бесконечно дифференцируема в интервале (о-й,о+й) и сс производные
14 Зак. I
417
равномерно О1раничеиы в этом интервале. т.е. существует такое положительное
число С (не зависящее от л), что
|Г(х)|$С (и= 1,2,3,...)
при всех х из (о - А, а + Л), то верно равенство (24.20) во всем интервале (а - Л, а + Л).
Формула (24.20) в частном случае при а - 0 определяет разложение функции в
ряд Маклорсна:
.... <24.21)
При разложении функций в степенные ряды часто используется формула
(24.10) и разложения в ряд Маклорена следующих функций:
. , V х* , х хг я’ я* ,|1
' " (И<"*
£<->'(Й-444- <и<->
1п(1+я) = £(-1)*-,4-я-у + у-^-+... (-1<я51Х
—'и*-*
«-1
(-1<я< I).
Пример 24.15. Разложить в ряд по степеням я функцию /(я)= У(1 + я).
Воспользуемся разложением (24.10). В формуле ^(1-я)=1+я+я,+
+я’+я4+я’+...+я* +... запишем (-я) вместо я:
|/(1-(-я))= 1+(-я) + (-я)2 +(-я)’ +(-я)4 + ...+(-я/ ♦ ...
Таким образом, получено следующее рад южение данной функции в степенной ря.1
У(1 +я)= 1-я+я’ -я* 4-я4 -... +(-!)*я* +... (24.22)
Этот ряд сходится при |я| < 1.
Замечание. Формулу (24.22) можно получить и другим путем. Рад
1-х+я2 -я’ + ... + (-!)*Я4 + ... является геометрическим рядом со знаменателем
418
q--x; ом сходится при |дг|< 1, его сумма S(x)=l/(l + x) (получено по формуле
5 = e/(l-9), a = l, q — —x).
Пример 24.16. Разложить в ряд по степеням х функцию/?*) = 1/(1 -/).
В формуле (24.22) вместо х запишем -хг:
1/(1 —х2) = 1 +х2 +х* +х* + ...+х24 +...
Полученный ряд сходится при | х | < 1.
Замечание. Этот пример можно решить и другим способом. Так как
I «Г» , । \
1-х2 2^1+Х 1-х/
то в соответствии с разложениями (24.10) и (24 22) по определению суммы сте-
пенных рядов (формула (24.13)) полунаем
~Тжу[(1-х+х2-х1+х4-...) + (1+х+х2 + х’+х4 +...)! =
= y[(l + l)+(-x+x) + (x2+x2) + (-x1+x’) + (x4+x4) + ...J =
= |(2 + 2х,+2х4+...)=1 + х,+х4 + ...+х24 ♦ ...
Пример 24.17 Разложить в ряд по степеням (х+2) фу нкциюДх)=1/ (I - х).
Преобразуем данную функцию следующим образом:
I I_________I____________I___ 1 I
t-х 1—(х+2)+2 " 3-(х + 2) “ 3(1-(х + 2)/3) “ 3 1-(х + 2)/3’
Введем новую переменную I, полагая х + 2=1; воспользуемся разложением
(24.10), записывая в нем r/З вместо х:
Ill I ________________1_
1-х ~ 3 (1 —(х + 2)/3) “ 3 (1-//3) '
или
I 1 Х + 2 (х+2)2 . (х + 2)1 (х + 2)4 .
i-х з з2 з’ з4 " З*4*
Ряд (I) сходится при |//з|< 1, т.с. при |г|< 3, или -3<1<3, а ряд (2) сходит-
ся при -3<х+2<3, или при -5<х<1.
419
Пример 24.18. Разложить в рал по степеням х функцию
/(Х)“ (1 + х)(1-Зх)*
Разлагая данную функцию в сумму элементарных дробей, получаем
4 1 3
(l+x)(l-3x)' 1+х + 1-Зх
Так как
1/(1+х)-1-х+х’-х’+х4-х' + ...+(-1)‘**+-. (3)
У(1 - Зх) = I + Зх+(Зх)2 + (Зх)’ +(Зх)4 +... + (Зх)* +..., (4)
то по формуле (24.13) находим
(петф-,,'’'*Фм‘ «
Рид (3)сходится при |х|< I, ряд (4)сходится при |х|< 1/3, поэтому ряд (5) также
сходится при |х | < 1/3, т.е. в интервале (-1/3.1/3).
Пример 24.19. Найти разложение в степенной ряд функции
f (х) = arctg х с помощью степенного ряда для ф (х) = 1/(1 + х2).
Прежде всего напишем степенной ряд для функции ф(х\ записывая в
формуле (24.10) х2 вместо (-х), получаем
(/(1 + х2)ж|-х2 + х4-х‘+х*-...+(- 1)*х“ +...
Этот ряд сходится при |х | < I, т.е. в интервале (—1,1); следовательно, его можно
интегрировать почленно по любому промежутку, содержащемуся в указанном ин-
тервале. Интегрируя ряд по промежутку [0, х|, где 0 < х < 1, находим
J-^-»j(|-x’+x4-x‘+x’-...+(-l)*x2*+...)dx =
Поскольку I-у - arctg х, то
J 1+х
о
X X X . а.. д X
arc^x = x-T+y-y + ... + (-D
Этот ряд имеет радиус сходимости Я = 1. На концах промежутка [-1,1] ряд
также сходится. В частности, при х = 1 получаем ряд
ж , 1 1 1 I
S I — “ + “ — ...
4 3 5 7 9
420
24.5. Применения рядов в приближенных
вычислениях
С помощью рядов можно вычислить значения тригономстричских функций,
логарифмов чисел, корней, определенных интегралов.
Значения тригонометрических функций (синуса и косинуса) можно вычислить
с помощью их разложений в степенные ряды.
Для вычисления натуральных логарифмов чисел применяется формула
ln-^-^-to(W-i-i)-lnN-2|
Л I
которая г юлу чается из формулы
1 I I
I I
2N + I ’ 3 (2tf + l)’ ' 5 (2Л+1)’
(24.23)
In——«2 —+ — + —
1-я 11 3 5
24-1
при х = l/(2W +1).
Погрешность при замене суммы ряда (24.23) суммой его п первых членов оп-
ределяется формулой
I
I
1
ая = 2
2л +1 (2N +1)2”*' 2л + 3 (2N +1)
+_1___________I ( ]
”'+2л + 5 (2tf4-l)2’H +”J
Очевидно,
2__________1
2л + 1 (2Л ч^ I)2'"’
1+-
(2N + 1)’ (2W + 1)‘
I
или
I_________I__________1
ая<2(2л+1) (2N + 1)2*'' tf(/V + 1)
Для вычисления корней применяют биномиальный ряд, т.е. степенной ряд для
функции /(х) = (1+х)“. Предположим, что нужно вычислить ^А, причем уже
известно приближенное значение а этого корня, по требуется улучшить его. Если
Л/Я" = 1+х, где х - небольшая правильная дробь, то можно преобразовать ко-
рень следующим образом:
А = а
(24.24)
и применить биномиальный ряд при а = \/т.
Если подынтегральная функция разлагается в степенной ряд, а пределы интег-
рирования принадлежат области сходимости лого ряда, соответствующий опре-
деленный интеграл можно вычислить приближенно.
421
Пример 24.20. Вычислить J17 с точностью до 0,0001.
Преобразование (23.24) в данном случае принимает вид
Vi?=V16+I = ^i6(i+vi6) - 4 (г+ i/i6)V2.
Воспользуемся биномиальным рядом Полагая в нем х = 1/16, а - 1/2, получаем
Л ±Y\i 1-L V2(V2-0f ' V l/2(V2-l)(l/2-2)p у t
l 1б) 2 16* 12 liej * 12 3
V2 (1/2-1) (1/2-2) (1/2-3) M у+
12 3 4 lie;
(. I V1 . 1 I . 1 5
Полученный ряд (если нс принимал. во внимание первый члеи) является знако-
чередующимся рядом, удовлетворяющим условиям признака Лейбница Гйхрсш-
ность при вычислении сто суммы не превышает первого отброшенного члена. I ак как
I_=_l_ I
2*16’ " 66536* 10000
0,0001,
то достаточно взять сумму первых трех членов ряда. чтобы получить искомое
значение корня с заданной точностью:
. 1 ,1-4,1230
2’ 16’J
24.6. Ряды Фурье
Рядом Фурье функции f(x) называется тригонометрический ряд
+У (о, совлх + Ь„ яппх), (24.25)
«•I
коэффициенты которого определяются формулами
а„ = — f /(х) cosnxdx (я = 0,1,2,3,...), (24.26)
л J
-Ж
Ь„=— [/(x)sinnutr (я = Ц2,3,...\ (24.27)
я J
-ж
Ряды Фурье периода 2л Если функция /(х) с периодом 2л кусочно
дифференцируема в промежутке |-л, л], то ее ряд Фурье сходится в любой точке
х0 и имеет сумму
5(х<,)=/(Л°~0)^/(Д°— (24.28)
422
В частности, я точке непрерывности функции /(х) сумма ее ряда Фурье равна
значению самой функции /(х). ,,а концах промежутка (-я, я] имеем
S (-я) ” /(-я), 5 (я) = /(я), если функция /(х) непрерывна в точках х = 1я, и
5(1я) = /(-я+О)/2+/(-я + О)/2, если она разрывна и этих точках
Ряд Фурье четной функции содержит только члены с косинусами, ряд Фурье
нечетной функции содержит только члены с синусами.
Кусочно-дифференцируемая функция, заданная на полу периоде [0. я), может
быть продолжена а промежуток [-я,0) либо как четная, либо как нечетная, в
соответствии с чем ее можно разложить в ряд Фурье или только по косинусам, или
только по синусам кратных дуг.
Ряды Фурье периода 21. Если функция /(х) и се производная /'(х) в проме-
жутке (—/. I] либо нет1рс[>ывны, либо имеют лишь кгягечное чисто точек разрыва пер-
вого рода, то во всех точках непрерывности тгого промежутка справедливо разложение
ч VЛ I ПКХ . ППХ ’| _ Л
/(*)=^+2До*с“~7_+ь'1МП_7~} (24 29)
где
/
вя=7 J/(x)cos-^-dx (Л-0.1.2Д..Д (24 30)
-/
/
/\,-у//(х)ат"^Л (я-1.2.3....). (24.31)
-I
В точках разрыва функции /(х) и на концах х = 1/ промежутка |—/./] сумма
ряда Фурье определяется формулой (24.28).
В случае разложения функции /(х) в ряд Фурье в произвольном промежутке
|а, а + 2/| длины 21 пределы интегрирования в формулах (24.30), (24.31) следует
заменить соответственно через а и а + 21.
Вад Фурье (24.25) можно представить в комплексной форме
•Я ЛЛ
^- + ^(aMcosnx+6wsinnx)= У.е,***.
Л"1
где
ж
[/(х)е *"Л („ = 0.11.12,...).
ZK J
-в
Аналогично представляется в комплексной форме и ряд Фурье в правой части
формулы (24.29).
Пример 24.21. В промежутке (-я, я) разложить в рад Фурье
функцию /(х)-ух+5.
423
По формулам (24.26), (24.27) находим коэффициенты
+ — sinnx «-------^(coszrtt -cos(-rrtt))--—(sinzm -sin (-пл)) = О,
ял |_я 2ял ял
cosmt cos(-nn)
п п
I
----r-Slnx -
2хя I-,
Следовательно,
5 . , ч. 2я cos/rtc
-----|cQs/m - cos (-лк)) ---------------
кп---2ял
1 . . V > яонх
-х+5=5+ > (-1) -------.
2 п
*•1
Пример 24.22. Разложил, в ряд Фурье функцию
{-хпри -xSxSG,
О при 0<х< я.
С помощью полученного разложения показать, что
Я2 У’ 1 111
8 " “(2Л-1)2 " + З2 + 52 + 72 +*“
По формулам (24.26) и (24.27) находим коэффициенты ряда Фурье:
Я О Я 9 ° 9
1 f , 1 f, . . ' Гл . 1 X Я2 Я
-Я -Я О ••
я О я
e„=— I /(х) cosnxdx = — l(-x)cosrtx<£r+—|Odx =
424
о
и
1
-------х sinnx
пп
о
о
о
1 cosпл
ял л
2
»„ =---j- при л нечетном, а, = 0 при л четном;
—Ц-(созО-со5ля)« —Ц-(cosnn - cosO) ж —Ц-( (-1)"-Ц,
ял кп‘ Хл
о »
b„ J/(х) sinnxA = — J(-x)sinnxdx + — JО sinnxdx
о
о
1 г
I cosm
— X----
я л
о
1 f совлх I 1 sinnx
— I------Лг« — |О совО-(-я)сови(-я) |----------
я J л ял ял л
° _ к cosnrt (-1)"
_ ял л
Таким образом.
. Я 2 cos (2Л -1) х тт* sin nt
ZW-7"X <«-> *Р'" ~
При х = 0 получаем
„ я 2 v* 1 я2 V* I
0=------> -------г-, или —= > -------г.
4 я£-(2*-|)’ 8 f-(2*-l)‘
Пример 24.23. Функцию/х)=х в промежутке [0,п| разложил. по косинусам.
В данном случае требуется получил. разложение функции в промежутке | О, я]
длины я (а не 2п). I (родолжая функцию в промежуток [-я, 0] четным обрати, заклю-
чаем. 'по се разложение в ряд Фурье содержит только косинусы, те. все />, = 0 Козф-
фицие>пы а„ находим по форму лам, ixviy чающимся из ферму; i (2426) для па о случая:
ж ~~ (я sin ля — 0 sinO)+—- ——— I = —(совпя - cosO)« —1 (-1)" -11
ял ял л |0 ял ял2
т.е. aj, = 0, а2,_, = -4/я(2*-1)2 (к = 1,2,3,..Д
425
Следовательно,
л 4 у cos(2t- I) х
к £ (2*-1)’
(OSxSn).
Пример 24.24. Разложил» в рад Фурье функцию в промежутке (-1.1).
Данная функция является нечетной, полому разложение (24.29) будет содер-
жать только члены с синусами, все а„=0 (л = 0,1,2,3,...). Коэффициенты Ьп в
пом случае можно определять по формуле
Ь„ = — J/(x) sin^—dx, или 6W = 2 J х ’ sin лтсххАг (л = 1,2,3,...).
о о
Найдем эти коэффициенты:
Г 1.1 “СОЯЛЯХ 1 _ ) cos лях 6 Г J ______ .
Л = 2 х’</ ----------- = -2х------- +— Ь со5лях<2х =
" J { пк I пк „ пк J
о °
2 , ( sin пкх ’I
-- (1-совля-0 CosO) +— I х а - =
пк----------------------------------------пк J \ пк J
о
ж - + 6 х1 sinиях---------—г [ х sinrncxdx =
пк п к о ("«) *
. ,v«i 2 >2
(—1) + -т-т-хсовлях
ПК ПК
I
12 fcosnxx
Л
° о
(л = 1,2,3;...).
Следовательно, при -1 < х < 1 получаем
(-0‘6
ля п к
sin лях =
2 уГ(-1Г
я и
л—1
Sinnnx.
426
24.7. Степенные ряды с комплексной переменной
Рассмотрим две комплексные переменные величины z = x+iy и w = u+h>. где
х. у, и, v - действительные переменные, »= ^-7 - мнимая единица. Если каж-
дому значению переменной z из некоторого множества соответствует единствен-
ное значение переменной »•, то говорят, что н есть функция от г.
•* = /(*) = « (* У) +« (т.у)
Здесь и(х,у) и v (х, у) - действительные функции от х и у, задание одной
функции от одной комплексной переменной означает задание двух действитель-
ных функций от двух действительных переменных
Комплексным функциональным рядом называется ряд
^Н,(я)"И|(х)+мэ(х)+... + и|,(я) + ..., (24.32)
tr I
члены которого являются функциями комплексной переменной
Значения г, при которых ряд (2432) сходится, называются точками сходимо-
сти. Множество всех точек сходимости называется облаезью сходимости этого
ряда Для каждого числа z из области сходимости
lim S,(z) = S(z),
где S„(z) - частная сумма ряда (24.32), a 5(z) - его сумма.
Ряд (2432) сходится, если сходится ряд из модулей его членов.
Степенным рядом с комплексными членами называется ряд вида
~ *о)" я «о + ei(*“ *о) + aiU-Хр)1 ♦.... (2433)
где z - комплексная переменная, z0 - данное комплексное число, коэффициен-
ты а„ (л = 0,1,2,...) — данные комплексные числа
В частном случае, при z0 = 0. получаем комплексный степенной ряд, располо-
женный по степеням г.
^\„z" =ac + e|Z+o1z1+... (24.34)
„-о
Для каждого степенного ряда (24.33) существует крут радиуса R с центром в
точке Mq (т.е. |z-z0|< Я), внутри которого данный ряд сходится, а вне его расхо-
дится (т.е. при |г-г0|>Л). Этот крут называется кругом сходимости. Его радиус
называется радиусом сходимости стеленного ряда (/?«., если степенной ряд схо-
дится во всей плоскости, R = 0, если он сходится лишь в центре круга, в точке Л/с)
Во всех точках внутри крута сходимости стелен ной ряд абсолютно сходится.
427
При отыскании радиуса сходимости степенного ряда могут применяться при-
знаки сходимости Д’Аламбера и Коши В частности, радиус сходимости степенно-
го ряда (24.33) можно вычислить по форму.»
Л= lim
(24.35)
Показательная и тригонометрические функции комплексной переменной опре-
деляются формулами
е,-,+2-м",+ п*21+й+-
iml
!*!
- -J" ,3 г* -»
Ряды в правых частях формул (24.36) - (24.38) сходятся
комплексных z (Я = “>)-
Связь между этими функциями устанавливают формулы Эйлера
еЛ = cosz + i sinz, е“ = cosz-i sinz,
cosz«(e" + е'°)/2, sinr = (e*-e“*j/2/.
Отметим, что
е^е*’е**2"=е‘, е* = e"(cosy-Z sin у).
(24.36)
(24.37)
(2438)
при всех
(2439)
(24.40)
(24.41)
где z=x+fy.
Вторая из формул (24.40) означает, что функция г' имеет период 2». Форму-
ла (24.41) представляет комплексное число z = х + fy в показательной форме (г -
модуль, <р - аргумент).
Пример 24.25. Найти область сходимости ряда и его сумму.
Составим ряд из модулей членов данного ряда:
Ё1’Г-нН*КГ*-
»-ю
Полученный ряд является рядом с действительными членами, он представляет
собой геометрический ряд. Следовательно, этот ряд сходится, когда |z|<l, т.е. в
круге радиуса Я = 1 с центром в начале координат. Таким образом, данный ряд
также сходится в круге | z | < 1, который и является его областью сходимости.
428
Так как частная сумма ряда выражается формулой
—1“-^
<-»0 при и-><~ (|z|<l, z" = |z|"(cosn<p+« sinn«p)), то сумма ряда
S(z)= lim S„(z) = —-
Я-Ф- I —
Итак, получаю следующее разложение:
I
Пример 24.26.11айти область сходимости ряда У~-
*г=С *
Рассмотрим ряд. составленный из модулей членов данного ряда
V' I . I I I
Хкгш,+П+ГУ+кР + "
Этот ряд является геометрическим. Так как q = 1/|z|, то ряд сходится при |т/|< I,
т.е. при (l/|z|)< I. или при |z|> I.
Итак, областью сходимости является множество точек, лежащих вне круга ра-
диуса Я = 1 с центром в начале коердюят.
Пример 24.27. Найти радиус сходимости степенного ряда У,77-
Поскольку а„ 1/2", 1/2"*1
Я = lim -^в-
. то
= lim
я-*«» j
I I
Итак, радиус сходимости данного ряда Я = 2.
Пример 24.28. Найти область сходимости ряда 1 + V" —.
“ и!
Поскольку а„ = \]п\, а„| = 1/(л + Dt то
a„ I I
и! (я+1)!
и
а„
R- lim —— = Hm (и + 1) = <“-
Данный ряд сходится на всей комплексной плоскости.
Пример 24.29. Найти сумму cosx + cos2x+... + cos«x.
429
Используя третью из формул (2439), получаем costa = (еЛ + е*41 )/2, поэтому
Суммируя геометрические про1рессин, находим
,<(»♦)* --Л _
S(*)=|
, вторую на е”й’4, получим
1-е“
Разделив почленно первую дробь на е"'2
1 Г/*73
Д(х)=2[Т^~-ё^ 4
я 2 -е <2*>»1^)/2i-(e^ -е tt/2)/2i sin (л ж 1/2) л _ J
. 2 {et^-ea'1)l2i 2sin(z/2) 2
Итак, tcHfa^W'-l.
A 2s>n(x/2) 2
Пример 2430. С помощью разложения —-—
l-z
в re
= г (со$ф + I sin ф), | z | с 1) получить следующие:
1-ГСОбф ’Г' Гв1Пф
.—X----z Z «««Ф. “—Z-----------------Г“ У г 5шлф
1-2гсовф+г 1-2гсо5ф+г’
Первое разложение получено в пример 24.25. ПодстАвнв в него выражение
z = г (совф+i здпф), найдем
—-------т;— = У г"соьлф + /У г" язплф
(1-Г СО5ф)-/Г 8И1ф “
Преобразуем левую часть данного равенства:
I(1-Г СО8ф) <• 5>Пф___________________________________________
(1-гсо$ф)-й- яшф | (1-г совф)-ir sinф)| (1-г совф)-Mr sinф]
_ (l-г совф) + зг втф________I-г совф г вшф
(1-г совф)2-i2r2 sin2 ф 1-2гсовф + г2 1-2гсовф+г2
Следовательно,
1-г совф Гвшф
1-2гсовф + г2 1-2гсовф+г
откуда
1—г совф п г sintf
J-« Уг*С0вЛф-П' У/"взплф.
430
IV
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
Дифференциальным уравнением называется уравнение относительно неизвестной
функции и се производных различных порядков Г1оркдком дифференциальноео урав-
нения называется порядок старшей производной, входящей в это уравнение.
Если искомая функция зависит от одной переменной, то соответствующее
дифференциальное уравнение называется обыкновенным. Если искомая функция
зависит от нескольких переменных, то соответствующее дифференциальное_у рав-
нения называется уравнением с частными производными. В главах 25 и 27 рас-
сматриваются обыкновенные дифференциальные уравнения.
Обыкновенное дифференциальное уравнение n-го порядка в общем виде
можно записать так:
Г(х,У.У.у”.....
где х независимая переменная; у=у(х) - искомая функция переменной г. /.y*,...,yw-
сс производные, F (х, у, у', у" у<")) - заданная функция своих аргументов.
Отмстим, что функция F может не содержать некоторых своих аргумсгпов, но непре-
менно должна зависеть от у*") (когда речь идет об уравнении тио порядка)
Если данное уравнение разрешимо относительно производной и-го порядка,
его можно представить н виде
уw = /(х, у. У, у"..... у^ ).
Функция у-у (х), определенная и непрерывно дифференцируемая п раз в ин-
тервале (а, 6), называется решением дифференциального уравнения в этом ин-
тервале, если она обращает данное уравнение в тождество, т.е.
F (х, у (х\ / (х), Г (хХ..., у-<"»(х)) . О
для всех х€(а,Ь).
Г рафик решения дифференциального уравнения n-го порядка называется инте-
гральной линией (или интегральной кривой).
Термин «дифференциальное уравнение» принадлежит Лейбницу (1676, опуб-
ликовано в 1684 г.). Начало исследований по дифференциальным уравнениям вос-
ходит ко временам Лейбница, Ньютона, в работах которых исследовались первые
задачи. приводящие к таким уравнениям. Лейбниц, Ньютон, братья Я. и
И. Бернулли разрабатывали методы интегрирования обыкновенных дифференци-
альных уравнений. В качестве универсального способа использовались разложе-
ния интегралов дифференциальных уравнений в степенные ряды. Некоторые клас-
сы уравнений были приведены к к уравнению с разделяющимися переменными.
Возникновение теории дифференциальных уравнений в частных производных
было связано с расширением в XVIII в. области приложений математического анали- )
за Оно стимулировалось теми задачами естествознания, механики, физики, в кото-
рых появилась необходимость в функциях нескольких переменных
Первые примеры интегрирования уравнений с частными производными даны в
работах Эйлера (1734). Теорию уравнений с частными производными интенсивно
развивали Эйлер, Д'Аламбер, Д. Бернулли,. Новые идеи в этой области в конце
XVIII в. предложены в сочинениях Лагранжа, Лапласа, Монжа.
В 1807 г. Фурье вывел уравнение теплопроводности и для его решения разра-
ботал метод разделения переменных, названный его именем Решением задач,
возникавших в теории теплопроводности занимались многие математики, в том
числе Гаусс, Пуассон, Грин, М. В. Остроградский и др.
431
[nsai25
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
ПЕРВОГО ПОРЯДКА
Дифференциальным уравнением первого порядка называется уравнение, свя-
зывающее независимую переменную. искомую функцию этой переменной и ее
производную. Если у = у (х) - функция независимой переменной х, то в общем
виде уравнение записывается так:
Е(х,у,у')^О.
Если это уравнение разрешимо относительно у’, то
У =/(*.>).
откуда dy-/(х,у) dx = 0. или в более общем виде
P(x,y)dx + Q(x,y) = 0.
Решением дифференциального уравнения называется всякая функция
у = ф (х), обращающая уравнение в тождество. В случае, если эта функция задана
в неявном виде, решение называют иигстралом График решения дифференциаль-
ного уравнения называется интегральной кривой.
Общим решением дифференциального уравнения первого порядка называется
функция у»9(х, Q, где С - произвольная постоянная, обращающая данное
уравнение в тождество.
Общее решение Ф(х,у,С) = 0, заданное в неявном виде, называется общим
интегралом этого уравнения.
Геометрически общее решение (и общий нитезрал) представляет собой семей-
ство интегральных кривых на плоскости, зависящее от одного параметра С.
Частным решением уравнения называется решение, полученное из общего ре-
шения при фиксированном значении С. y»ip(x,C0), где Со - число. Анало-
гично определяется частный иитезрал Ф (х.у, Со) п 0.
Задача Коши. Найти решение у- f(x) дифференциального уравнения первого
порядка, удовлетворяющее начальному условию у=у, при х=х^. Другими словами,
найти интегральную кривую этого уравнения, проходящую через точку MqUo. Уь)-
25.1. Уравнение с разделяющимися переменными
Дифференциальным уравнение первого порядка с разделяющимися перемен-
ными называется уравнение вида
X(x)Y(y)dx + Xt(x)Y,(y)dy-b (25.1)
где Л'(х),Л'1(х) - функции только от х, Y (у), У|(у) - функции только от у.
3
432
Предположив, что А',(х) У (у)# 0, и разделив обе части уравнения (25.1) на
это произведение, получим уравнение
А^л+^)ф,=0.
*|W УМ
которое называют уравнением с разделенными переменными; оно имеет общий юпстрал
рШ*+рШ</у=с.
Jx,(x) J ГСи)
Корни уравнений А,(х) = 0, У (у)-0 являются реше-
Замечание.
ниями уравнения (25.1).
Пример 25.1.
у' = (1 -х)/(2 +у). Найти решение, удовлетворяющее условию у = 1 при х = 5.
Эго уравнение можно записать в виде
dy/dx = (l-x)/(2+y), или (x-l)dr+(y + 2)rfy = 0;
Интегрируя, получаем
(х-1)72 + (у + 2)72 = С|, или (ж-1)Ч(у4-2)*«С* (C’-IQ).
Общий интеграл данного уравнения геометрически представляет собой множество
концентрических окружностей с центром в точке 5(1,-2) Найдем решение,
удовлетворяющее указанному условию. Подставив в выражение для общего инте-
грала значения х = 5, у» I, определим С: (5-1)2 ♦(! +2)1 = С2, С2 =25. Сле-
довательно, искомый частный интеграл имеет вид (х-l)1 + (у + 2)2 =25; он оп-
ределяет окружность, проходящую через точку М (5,1).
Проинтегрировать дифференциальное уравнение
(25.2)
25.2. Однородные уравнения
Функция F(x,y) называется однородной измерения т, если для любых t
выполняется тождество
F (ft, (у) = r“F (х, у).
Дифференциальное уравнение первого порядка
P(x.y)dx + Q(x,y')dy-0 (25.3)
называется однородным, если Р(х,у) и Q(x,y) — однородные функции одного
и того же измерения.
С помощью новой переменной и, вводимой по формуле
У = «*. (25.4)
однородное уравнение приводится к уравнению с разделяющимися переменными
Уравнение
ax + by + c
(25 5)
433
также можно привести к однородному уравнению с помощью преобразования
х = и+А, у = v+Л, где Л и к определяются системой уравнений
вЛ + М+с = 0, OjA + biA+q =0,
в случае, когда
I а b
Д= *0.
I «1
Уравнение (25.5) сводится к уравнению с разделяющимися переменными с по-
мощью преобразования ах + by = г в случае, когда
b
= 0.
Пример 25.2. Найти общее решение дифференциального уравнения
ху'-у 1п(у/х).
Эго уравнение приводится к виду (25.3), где P(x,y) = yln(y/x), Q(x,y) = -x
— однородные функции первого измерения; они удовлетворяют условию (25.2)
при т«1. Полагая у/х^и, или у-их (см. (25.4)), находим у' = ц'х + их' Под-
ставляя пи выражения в исходное уравнение, получаем х (u'x + ux*) = их 1п»,
du du dx
u'x=ubiu-u, x—=u(lnu-l), ——--------— = —.
dx и (mu-1) x
Вводя новую переменную t по формуле 1пи = Г и интегрируя, находим
— =tax + lnC, ln(lnu-l) = lnx + lnC,
X
откуда Сх= inu-l, Cx=h(y/x)-l, Сх +1 = In(у/х), у/х = е<’*1, уч/"1.
Следовательно, у = хе<1*1 - общее решение.
25.3. Линейные уравнения. Уравнение Бернулли
Уравнение
ф|(х)у' + <Р2(х)ут<р,(х)-О.
или
у'+р(х)у»д(х), (25.6)
называется линейным дифференциальным уравнением первого порядка
Решение линейного уравнения ищут в виде произведения двух функций:
' y(x) = u(x)v(x). (25.7)
Подстановка выражений для у и у' в уравнение (25.6) приводит его к виду
434
”«<*)•
ax \dx )
В качестве v выбирают одну иэ функций, удовлетворяющих уравнению
v'(x) + p(x) v = 0, тогда функция и определяется уравнением m' (я) = q (х)
Для решения уравнения (25.6) можно применить метод вариации произвольной
постоянной, состоящий в следующем: сначала находят общее решение соотвстсг-
вующего однородного уравнения (т.е. уравнения, для которого q (х) = 0); ветчи-
ну С, входящую в это общее решение, полагают функцией х и находят се.
Уравнением Бернулли называется уравнение
У + р(х)у = 9(х)уи.
где а - действительное число. Это уравнение является линейным в случае
а = 0. а = I В других случаях оно своди тся к линейному с помощью
подстановки « = у'°.
Пример 25.3. Проинтегрировать дифференциальное уравнение
Данное уравнение является линейным. Решение этого уравнения ищем в ви-
де (25.7). Поскольку у = uv, у' “ u'v + hv', to
du dv 2x « .
V —+ и
<и
(I)
4-1
В качестве v выберем одну из функций, обращающих в нуль ко >ффицис1гг при
и в уравнении (I), т.е. решение уравнения
dv
(2)
v = 0
Уравнение (2) является уравнением с разделяющимися переменными v и х.
Разделив переменные, получим
<А' 2xdv
откуда lnv= 1п(х2+1)+1пС, v = C(x2 + 1).
Полагая С»1, получаем v=x2 +L Уравнение (1) с учетом (2) сводится к
уравнению
1 . du , j .. .а du я
V — = х’+1, или — (х2 +1) = (х2 + I), —=1,
dx dx dx
из которого определяется и х + С. По формуле (25.7) находим общее решение
y = uv = (х+С)(х2 + 1).
435
25.4. Уравнения в полных дифференциалах
Уравнением в полных дифференциалах называется уравнение
P(x,y)dx + Q(x,y)dy = Q, (25.8)
левая часть которого являс!ся полным дифференциалом некоторой функции. т.е.
P(x,y)dx + Q(x,y)dy = dU (х,у\ (25.9)
Общий интеграл уравнения (25.8) определяется формулой
U (х,у) = С. (25.10)
Поскольку
dU = -r— dx + -r— dy, (25.11)
ax dy
то из равенств (25.9) и (25.11) следуют уравнения
ДГt Xf ’
^--Р(х,у), — = е(х.А (25.12)
которыми определяется функция U = V (я, у\ входящая в формулу (25.10).
Необходимое и достаточное условие того, что уравнение (25.8) является урав-
нением в полных дифференциалах, выражается равенством
дР dQ
ду дх
(25.13)
Если левая часть уравнения (25.8) не является полным дифференциалом. ио
становится таковым при умножении на некоторую функцию р=р(х,у)
(р (Pdx + Qdy) = dU), то р = р (х. у) называется интегрирующим множителем
Интегрирующий множитель зависит только от х, т.е. р = р(х), если
и зависит только от у, если
Пример 25.4. Проинтегрировать дифференциальное уравнение
(2х - Зу) dx + (2 у - Зх) dy = 0.
Для данного уравнения
/>(х.у) = 2х-3у. (?(х,у)=2у-3х; />/ = -3, «=-3.
436
Так как выполнено условие (25.13), то данное уравнение является уравнением в
полных дифференциалах; следовательно, равенства (25.12) принимают вид
U'-2x-3y, U*-2y-3x. (1)
Интегрируя первое из этих уравнений (у при этом считается постоянным),
находим
U(x,y) = x1 -Зху+фО), (2)
где <р О') - функция, подлежащая определению.
Дифференцируя по у функцию U - U (х. у) и принимая во внимание второе из
равенств (1X получаем - Зх + ф' (у) = 2у - Зх, откуда
Ф'О’) = 2>’. dq>-2ydy, ф(у) = /+С,.
dy
Подставив выражение для ф (у) в равенство (2), найдем
U (х,у) = хг-Зху+у* +Си
В соответствии с формулой (25.10) получаем
х* -Зху+у1 +С( 'С,, или х1 -Зху+у’ =С, где С «С, -Ct.
Итак, х2-Зху+у’=С - общий интсрал данного уравнения.
Замечание. Это уравнение является также однородным, его можно
проинтегрировать с помощью формулы (25.4).
25.5. Задачи, приводящие
к дифференциальным уравнениям
Решение многих научных и технических задач приводит к интегрированию
дифференциальных уравнений. В этих задачах требуется установить зависимость
между переменными величинами некоторого физического, химического или дру-
гого процесса, найти уравнение линии или поверхности и т. п.
При решении таких задач можно руководствоваться следующим.
1. Необходимо сначала составить дифференциальное уравнение из условия за-
дачи.
2. Определить тип полученного уравнения и выбрать метод решения.
3. Найти общее решение уравнения.
4 Получить частное решение, удовлетворяющее данным начальным условиям.
5. В случае необходимости вычислить значения вспомогательных параметров
(коэффициент пропорциональности и др.).
6. Если это требуется, найти численные значения искомых величин.
Составление дифференциального уравнения по условию научной или техниче-
ской задачи состоит в определении математической зависимости между переменны-
ми величинами и их приращениями, в нахождении выражения для производной
В некоторых случаях приращения целесообразно сразу заменить соответст-
вующими дифференциалами.
437
При составлении диффе;>енциальньгх уравнений используются соответственно
геометрический или механический смысл производной; кроме того, в зависимости
* от условия задачи применяются соответствующие
’ законы физики, механики, химии и других наук.
д Пример 25.5. Найти линию, у которой
Т/ отрезок нормали а любой ее точке, заключенный
между осями координат, делится пополам в этой
1\лУг У = УДО точке Составить уравнение такой линии, прохо-
• дяшей через точку А/(5,4).
' | Пусть А/о(хо,уо) “ произвольная точка
О А X (рис. 25.1) искомой линии у = у(х), где у(х)
пока неизвестная функция аргумента х Уравне-
ние. 25.1 ние нормали к линии у = у (х) в точке А/о
Обозначим через А и И точки пересечения нормали с координатными осями.
Положив в этом уравнении у = 0, найдем хвХо+Уоу'СХо) - абсциссу точки А;
при х = 0 из того же уравнения найдем у = у0 + ——— — ординату точки В.
/М
Поскольку Мо - середина отрезка АВ, то
Хс+УоУЧх») Ля+Хо/УСх,)
2 2 '°
Каждое из этих уравнений приводится к уравнению
/(*о)Уо-*о =0 (*)
Уравнению (1) удовлетворяют координаты любой точки М (х, у) искомой
линии, поэтому
у'(х)у-х = 0 (2)
Уравнение (2) является уравнением с разделяющимися переменными. Разделяя
переменные и интегрируя, получаем общий интеграл
/-х,=С. (3)
Общий интеграл (3) определяет множество равносторонних гипербол с действи-
тельной осью Оу при С > 0, множество равносторонних гипербол с действитель-
но осью Ох при С<0; пару прямых у=х, у=-х при С = 0 Найдем ту линию,
которая проходит через точку М (5,4). Подставив а уравнение (3) координаты
точки М, определим значение параметра Q 4* 2 -52 =С, С=-9. При С=-9
уравнение (3) принимает вид у1 -X2 = -9, или х2 -у2 = 9.
438
Гпа&& 26
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
ВТОРОГО ПОРЯДКА
Дифференциальным уравнением второго порядка называется уравнение отно-
сительно искомой функции, ее первой и второй производной. В общем виде это
уравнение можно записать так:
*г(*.У././') = <>1
где F (х, у, у’, у") - заданная функция указанных apt у ментов
Общим решением дифференциального уравнения второго порядка называется
функция у <р (я, С,, С2) от х и двух независимых произвольных тюстояиных С,
и С2, обращающая данное уравнение в тождество Общее решение, заданное в
неявном виде Ф (х, у, С,, С,) = 0, называют общим интегралом.
Частным решением уравнения F (х, у, у', у") = 0 называется решение
у “ ф (х, С|°, С^), получающееся из общего путем фиксирования значений произ-
вольных постоянных: Q = Cf*. С, = CJ.
Чаля ч а Коши. Найти решение у = у(х) дифференциального уравнения вюрти о по-
рядка, удовлетворяющее условиям: у«у0. у’ = у'о при х = х0 Числа Cf, Cf, опреде-
ляющие искомое частное решение, находятся из системы уравнений
>’о ~ Ф (•*<>• G•Q )• Уо " Ф» (*о. G, С\ ).
26.1. Простейшие дифференциальные уравнения
второго порядка. Случаи понижения порядка
Если уравнение F (х, у, у‘, у") = 0 разрешимо относительно старшей произ-
водной, то его можно представить в виде
з"ж/(х,у,у') (26.1)
К простейшим интегрируемым дифференциальным уравнениям второго поряд-
ка относятся уравнения, для которых функция, стоящая в правой части равенства
(26.1). зависит только от одного из трех аргуметпов:
> * = /(*), (26.2)
> ' = /№ (26.3)
> * = /(/) (26.4)
Общее решение уравнения (26.2) находится дву кратным интегрированием
439
Уравнения (26.3) и (26.4) интегрируются подстановкой
у' = Р. (26.5)
которая даст возможность свести их к сравнениям с разделяющимися переменными
z = = = = п^ = /(уХ
' dx dy dx dy' dy'P dy
Z dx dx dx
Уравнение
Z-/(*,/) (26.6)
подстановкой (26.5) приводится к уравнению первого порядка
$"/(*₽)
ах
с неизвестной функцией р.
Уравнение
>'-/(у.уЭ
той же подстановкой сводится к уравнению первого порядка
₽-£“/(лЛ
dy
в котором роль независимой переменной играет у.
Пример 26.1. Проинтегрировать дифференциальное уравнение
у" = cosx- sinx.
Эго уравнение вида (26.2). Преобразуя исходное уравнение, получаем
у" = (у/)'« ^—= cosx - sinx, dy' = (cosx - smx) dx.
dx dx
Интегрируя последнее уравнение, находим производную искомой функции
у’- sinx + cosx+С(. Так как
dy dfy
— = sinx + cosjc + Сн dy = (sinx + cosx+ С}) dx,
dx dx
то в результате интегрирования полученного уравнения находим общее решение
у = sinx - cosx + С|Х + Q.
Пример 26.2. Найти частное решение дифференциального уравнения
2у"у = удовлетворяющее условиям: у = 0, у' = 1 при х = I.
Данное уравнение можно разрешить относительно у", правая часть его будет
зависел» только от у, это уравнение вида (26.4).
Применяем подстановку (26.5), т.е. полагаем у’ = р, тогда
Z = ^7 = ^. 237р=|’ 2РФ = Л-
dx dx dx
откуда р3 = х + Сх, p = ±Jx + Ct. Из начального условия р = у' = \ при х=1
440
определяем С|=0, поэтому у' = р = Jx, у’ = -/х, dy = 4xdx,
y-jx^+Q. (I)
Используя начальное условие у = 0 при х = 1, определяем С}=-2/3 Функция (1)
принимает вид у = (2/3) (х^1 -1), она определяет искомое частное решение.
Пример 26.3. Найти общее решение дифференциального уравнения
y"+y'tgx = sin2x.
Ого уравнение вида (26.6). Применяем подстановку (26.5). Так как
У’ = Р (I)
и у" = р', то исходное уравнение можно записать так:
p' + ptgx = sin2x. (2)
Уравнение (2) является линейным дифференциальным уравнением первого поряд-
ка относительно неизвестной функции р. Полагая
P=«v. (3)
находим p' = u'v + «v* и подставляем выражения для р и р' в уравнение (2):
u'v ♦ uv' + uv tg х » sin2x.
du . sinx
u cosx
К)
(5)
(6)
uv' + v (и' + u tg x) = sin2x.
В качестве и = и (х) возьмем функцию, для которой
и' + и tg х = О,
тогда уравнение (4) примет вид
Hv'=sin2x.
Из уравнения (5) находим и = и (х):
. sinx „ du sinx
и +и-----= 0, — + и------= 0.
cosx dx cosx
du d (cosx)
— = —------и = схкх.
и cosx
Подставив это выражение в уравнение (6), получим
dv
cosx — = sin2x, dv = 2 sinxdr, v = -2cosx+C|.
dx
По формуле (3) найдем p. p = wv = cosx(-2cosx + C|X p= C, cosx-2cos2 x.
Уравнение (l) примет вид
у'= C,cosx-2сое2x, dy = (Cjcosx-2cos2x)dx,
откуда
. - f i+cos2x . _ , I , _ _
y = J CjCosxzZx-2 J---dx, y=C,stnx-x-— sin2x + C7.
441
26.2. Линейные однородные дифференциальные
уравнения второго порядка с постоянными
коэффициентами
Уравнение вида
в>-” + (у'+су = /(х\ (26.7)
где а, Ь, с - постоянные (в # 0), называется дифференциальным уравнением
второго порядка с постоянными коэффициентами.
Если /(х) 0, то уравнение (26.7) называется линейным однородным диффе-
ренциальным уравнением с постоянными коэффициентами или уравнением без
правой части: ay" +Ьу'+су = 0.
Последнее уравнение можно привести к виду
y" + py’+qy = 0. (26.8)
Уравнение
к*+рк+д = О (26.9)
называется характеристическим уравнением для уравнения (26.8).
В зависимости от корней А, и А, характеристического уравнения (26,9) полу-
чаем общее решение уравнения (26.8) в виде
у- С,е‘'’ + (26.10)
если корни действительны и различны;
у-(С)Х ♦ С,)/-. (2611)
если корни действительны и равны,
yKe^tCjCosPx + QsinPxX (26 12)
если At - а - тр, А2 » а + ф - комплексные числа.
Пример 26.4. Проинтегрировать дифференциа льное уравнение
у" + 2у' - Зу = 0, найти частное решение, удовлетворяющее условиям: у = 2,
у' = 2 при х = 0.
Характеристическое уравнение (26.9) для данного уравнения принимает вил
А2+2А-3 = 0. Так как А, = 1. А2=—3, то общее решение в соответствии с
(26.10) определяется формулой
у=С)еж+С,в1г. (1)
Чтобы найти указанное частное решение, подставим начальные данные х = 0,
у = 2, у' = 2 в выражения для у и у’ = С}е’-ЗС2е-э* :2 = С, + С2.
2 = С| - ЗС2. Из этой системы находим С, = 2, С2 = 0
При этих значениях С, и Сг функция (I) принимает вид у-2е’. Итак,
у = 2е* - искомое частное решение.
442
Пр и мер 26.5. Проинте1рировать уравнение 16у"+8у'+у = 0.
Характеристическое уравнение 16*2 + 8* + I = 0 имеет два ранных корня
Л| = кг =-1/4. Общее решение данного дифференциального уравнения в соот-
ветствии с (26.11) определяется формулой у = (С| + С2х) .
П р»и м с р 26.6. Найти общее решение уравнения у' - 2у' + 5у = 0.
Характеристическое уравнение Л2-2Л + 5 = 0 имеет комплексные корни
4, = 1 + 2/, к2 = 1-2/. Общее решение определяется формулой (26.12), в которой
нужно положить a=l, P = 2:y = e*(C|Cos2jr + CjSin2jt).
< Пример 26,7. Решить уравнение 16у~+у = 0.
Характеристическое уравнение 16*’+1 = 0 имеет чисто мнимые корни
=-—/• Пользуясь формулой (26 12), полшая в ней (1 = 0, 0 = 1/4,
। юлучасм общее решение у - С, cos (л/4) + С} sin (х/4)
26.3. Линейные неоднородные дифференциальные
уравнения второго порядка с постоянными
коэффициентами
Если в уравнении (26.7) /(х)^гО, то оно называется неоднородным диффе-
ренциальным уравнением второю порядка с постоянными ко зффициопамн; это
уравнение может быть приведено к виду
у" + ру'+<7У = ф(х). (26.13)
Общее решение уравнения (26.13) определяется формулой
У“Л+Л. (26.14)
где у0 - общее решение соответствующего однородного уравнения
у" + ду+ду = 0, а у, - частное решение уравнения (26.13).
В простейших случаях, когда функция ф(х), входящая в уравнение (26.13),
является показательной или многочленом, указанное частное ранение находится с
помощью метода неопределенных коэффициентов.
Если
ф(х) = аеь, (26.15)
где а, к - постоянные, то частное решение уравнения (26.13) ищут в виде
у, = Яеь, (26.16)
когда к не является корнем характеристического уравнения или в виде
у, = Аге*1, когда к — простой корень характеристического уравнения, или
у, = Ахгеь, когда к - кратный корень указанного уравнения.
443
Если ф (х) = a cos кх + b sin far, где a,b,k - постоянные, то частное решение
уравнения (26.13) ищут в виде yt = A coskx + В sin кх, когда р2 +(q - к2)2 * 0, ив
виде у, =x(.4cosfar + Bsinfa:), когда р = 0, q-k2.
Если ф(х)=Р„(х), где Р„(х) - многочлен степени л, то частное решение
уравнения (26.13) ищут в виде У|=С„(х) в случае, когда <7*0, ив виде
>»1 xfi,(x), когда <7 = 0, р * 0, где ££, (х) - многочлен степени п
Пусть дано неоднородное уравнение
>~ + д>''+4У = Ф|(х) + Ф2(х), (26.17)
правая часть которого есть сумма двух функций ф,(х) и ф,(х). Если у, является
частным решением уравнения у" + ру' + <ту = ф|(х), а у2 - частным решением
уравнения у“+ру’+ qy*42(x), то у, +у2 - частное решение уравнения (26.17).
Пример 26.8. Прон «тарировать уравнение у" + 4у' + 20у = 34е’х.
Найдем сначала общее решение со«1вегстнующс1 о однородного уравнения
у* + 4у' + 20у = 0. Характеристическое уравнение к2 +44 + 20 = 0 имеет корни
к, = - 2 + 4/, *з=-2-4/. Следовательно, общее решение однородного уравнения
определяется формулой у0 = е"2,(С1 cos4x +С2 sin4x).
Переходим к отысканию частного решения исходного уравнения. Так как в дан-
ном случае ф(х) = 34е'* (т.е. имеет вид(26.15): /(х) = «е"", где « = 34. т = -1)
и м = -1 не является корнем характеристического уравнения, то в соответствии с
формулой (26.16) ищем частное решение в виде у, - Ае~’. Находя производные
этой функции yj =-Ле-', у"=Ае~* и подставляя выражения для у,. yf, у" в
исходное уравнение, получаем Ае~’ -4Ле“* + 20Ае~‘ = 34е"'. Так как у, —
решение уравнения, то последнее равенство выполняется для всех х, т.е является
тождеством: 17Ле*''= 34е'1г, откуда 17Л = 34, А = 2. Следовательно, частное
решение имеет вид у=2е~*. На основании формулы (26.14) получаем общее решение
у = е’2'(С| cos4x +С, ып4х) + 2е~‘.
Пример 26.9. Найти общее решение уравнения
у" + 5у' + 4у = 8х2 —4х-14.
Правая часть данного уравнения является полиномом второй степени
/(х) = ах2+Ьх+с, где о = 8, 6 = -4, с = -14.
Так как q*0, то частное решение ищем в виде у, = Ах2 + Вх + С Подставляя вы-
ражения для у,. y’t=2Ax+B, у"=2А в данное уравнение, получаем
2Л+5(2Ал+В)+4(Аг+вх+О8С-4л-14. или4А?+(1ал+4Я)х+{24т5в+4О= 8?-4х-14.
Поскольку у, - решение дифференциального у равнения, то последнее равен-
ство должно выполняться при всех х, т.е. являться тождеством, поэтому коэффи-
444 •
циенты при одинаковых степенях к, стоящие в разных частях, равны между собой:
4А = 8, 10А + 4В = -4, 2А + 5В + 4С«-14.
Из полученной системы уравнений находим, что А = 2, В = -6, С = 3, по-
этому yt « 2х2 - 6х +1 Общее решение соответствующего однородного уравне-
ния у" + 5у' + 4у = 0 определяется формулой y=Cte’ *С2е'*ж ,*7ак как характе-
ристическое уравнение А?+5*+4 = 0 имеет корни =—1, к2 «-4.
На основании формулы (26.14) получаем общее ранение
у - С|«~* + Q*-4* + 2х2 - 6х + 3.
Пример 26.10. Проинтарировать уравнение
у"—2у‘ + 2у » - 85cos3x.
Это уравнение вида (26.13), где 9(x) = acos3x + 6sin3x. причем a = -85.
6 = 0. Част ное решение данного уравнения ищем в виде у, = А созЗх + В sin Зх,
тогда у, = -ЗА sin3x + 3Bcos3x, у’=-9Я созЗх- 9В sin3x. Подставив эти
выражения в исходное уравнение, получим тождество
-9 A cos3x-9fi sin Зх-2 (-ЗА sin3x + 3ficos3x) + 2 (Л cos3x ♦ В sin Зх) = -85совЗх,
или -(7A + 6e)cos3x + (6A-7e)sin3x = -85cos3x, откуда -(7Л + 6в) = -85,
6Л-7В=0. Решив последнюю систему уравнений, найдем, что А = 7, В =6
Следовательно, у, = 7 совЗх + 6 sin Зх.
Общее решение соответствующего однородного уравнения у”-2у'+2у = 0
определяется формулой у0 =(C1cosx + CIsinx)e* (см (26.12)), так как характе-
ристическое уравнение к2-2к +2 = 0 имеет комплексные корни kt = l-i,
42=I+i. На основании формулы (26.14) получаем общее решение
у = (С| cosx + С2 sinx) еж +7cos3x+6sin3x.
Пример 26.11. Проинтегрировать уравнение у" - бу' + Яу = 14е2’.
Соответствующее однородное уравнение у" - бу' + 8у = 0 имеет общее решение
у0 = Cteu + С2е4’ (получено по формуле (26.1 ОХ ибо X, = 2, кг = 4 - различные
действительные корни характеристического уравнения к2 - бк + 8 = 0. Исходное
уравнение является уравнением вила (26.13). где функция ф (х) определяется форму-
лой (26.15), причем a = 14, i = 2 и i = 2 - корень характеристического уравнения.
Частное решение данного неоднородного уравнения в этом случае следует ис-
кать в виде у!=Лхех*. Так как у, = Ае1’ + 2Ахе2ж, у2 = 4Ае2ж+4Лхе2ж, то
подстановка выражения для yt, у[, у" в исходное уравнение приводит к тождест-
ву 4Ле2ж + 4Лхе2ж-6(Аеи +2Лхе2') + 8Лхе2' = 14е2*, или -2Аеи = 14си,
откуда -2А = 14, А = -7. Таким образом, У| = -7xeb, у=ур+у|= С,е2ж -»-С2е4ж 7хе2'.
445
Гnasa 27
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
ВЫСШИХ ПОРЯДКОВ
СИСТЕМЫ ДИФФЕРЕНЦИАЛЬНЫХ
УРАВНЕНИЙ
27.1. Основные понятия
Дифференциальным уравнением л-го порядка называется уравнение, связы-
вающее независимую переменную х, искомую функцию у = у(х) и сс производ-
ные до порядка п включительно:
Г(х.У.у'.У'.У~..У”)=а (27.1)
Решением дифференциального уравнения л-го порядка называется функция
у = у (х\ подстановка которой и ее производных в это уравнение обращает его в
з ождсспю Г рафик решения называется интегральной кривой.
Задача Коши. Найти решение >=>(х) уравнения (27.1). удовлетворяющее условиям
УяУо. У-Уо. У""Уо.—•У-XT1 ПРИ (27.2)
где х0,у0,у^,...,у^~п - заданные числа, называемые начальными данными решения.
Теорема 27.1. Ec.ni в уравнении у*"’=/(х.у,у',...,у,“’,>) функция
f(x,y, уу’"*1*) и ее частные производные по у, у',... .у1"’1' непрерывны в
некоторой замкнутой области G, определяемой неравенствами
|х-х0|$а. |у-у0|$6, |y'-yj|sb,...,|y<"’l)-yj* -0|s6 (o>0,6>0),
и. следовательно. ограничены в ней. т.е.
(* = 0,1»...,л-!,уо«уХ
где С>0. С,>0. W(x,y.y',...,y<"'>)eG. A/0(x0.y0.y;.....yJ*’,‘)€G.
то существует единственное решение у- у (х) данного уравнения, удовлетво-
ряющее условиям:
У=Уо. У’“У’о.У1"4’-У^0 при х = Хо.
446
Это решение определено и непрерывно вместе с производными до порядка п
включительно в промежутке | я - к0| 5 Л, где
г ' 1
b
п = min а,------; :----г——-т-
пих(С,|/|,....|у<^|)
Общим решением дифференциального уравнения л-го порядка (27.1) называ-
ется функция
У-Ф(*.С„А.......СД (27.3)
обладающая следующими свойствами 1) при любых значениях произвольных посто-
янных С,,С2,...,СИ она обращает уравнение (27.1) в тождество; 2) значения постоян-
ных С|,С2,...,С1, можно подобреть так, чтобы она удовлетворяла условиям (27 2).
Частным решением дифференциального уравнения л-го порядка называется
решение, получающееся из общего решения (27 3) при фиксированных значениях
произвольных постоянных, т.е. функция у = ф(х.С?,С£,...,С?), где
— некоторые числа.
Решение дифференллиальною у равнения л-го порядка. в каждой ломке которого
нарушается единственность решения задачи Коши, называется особым.
Общим иитаралом дифференциальною уравнения л-го порядка называется
соотношение вида
Ф(ж,>,С1,С1....,Сж)-<К (27.4)
неявно определяющее общее решение у = <р (х,С(, С2.С.) этого уравнения.
Частным инга ралом дифференциальною уравнения л-го порядка называется со-
отношение Ф(х,>',С|,Са,...,Сж) = (1 полученное из общего интеграла путем
фиксирования значений произвольных постоянных.
27.2. Простейшие интегрируемые
дифференциальные уравнения
высших порядков
Если дифференциальное уравнение л-го порядка (27.1) разрешимо относитель-
но старшей производной, то его можно представить в виде
...А0)- (27.5)
Рассмотрим некоторые частные случаи уравнений (27.1) и (27.5). Пусть уравне-
ние (27.1) не содержит к -1 первых последовательных производных, т.е имеет вид
.....у<",) = 0. (27.6)
Это уравнение подстановкой y<4,=z приводится к уравнению
F(jr,z,z',z"....,z<*'*>) = 0, порядок которого равен л-к.
447
Если правая часть уравнения (27.5) зависит только от я, тогда
=/(х). (27.7)
Общее решение уравнения (27.7) находится л-кратиым интегрированием.
Пример 27.1 Проинтегрировать дифференциальное уравнение у“ = sh х+х.
Эго ура» кз вс вида (27.7), его общее решение находится трехкратным и> гiярированием:
у"" = (уу = ^7~ = shjr + x, </>" = (sh x + x)dx,
ах dx
у"- J(sh x + x)dx = chx+x,/2 + Cl. <^' = (chx+x’/2 + C,)<fc,
y'-j (ch x + *’/2 + C() dx = sh x + л’/б+ C,x +C2,
J(shx + x76+C,x + C2)dx. y=dix + x4^4+(C,/2)x,+C,x + C,.
Пример 27.2. Найти решение уравнения xy(lv> -у" = 0, удовлетворяю-
щее условиям: у0 - 4, у' - 3, у"- -4, у~= 24 при х0 ж I.
Найдем сначала общее решение данного уравнения, являющееся уравнением
вида (27.6). Введем новую переменную г по формуле у~ = z, тогда y(,v) ж г'.
Исходное уравнение примет вид хг'-г = О. Интегрируя это дифференциальное
уравнение первого порядка, находим
dz dz dx
x--z = 0,----ж—, Inz = lni+ InC., z-C,x.
dx z x
Так как y*" = z, то ym = Ctx. Находим общее решение этого уравнения:
dy" = Clxdx, у" = (С,/2) х1+Ct, 4y'-((C,/2)x2+Q)dx.
У =—Ь- + Срг + С2, dy= —— + С2х*С, dx,
О I о
> = ^-+^-*1+С,х + С4. (I)
Поставляя в выражения для значение х0 = I и учитывая началь-
ные данные, получаем систему уравнений
C|/24 + C2/2 + Cj+C4 »4, С,/6+С^+С,-Х C,/2+q=-4, С,=24
Из згой системы определяем значения произвольных постоянных: Ct = 24,
С2 =-16, С3 = 15, С4 =-4. Подставив эти значения в формулу (1), найдем ис-
комое частное решение у=х*-Кх2 +15х-4.
448
27.3. Линейные однородные уравнения л-го
порядка с постоянными коэффициентами
Линейным дифференциальным уравнением л-го порядка называется у равнение
У00 + а^""0 +... + с,у - f{x),
где коэффициенты О|, а2,..., а,, - функции от х или постоянные.
Если /(х)КО, то уравнение называется неоднородным; если /(х)яО, урав-
нение называют однородным, последнее имеет вид
у'"1+а|у(*'|)+...+а„у = 0. (27.8)
Если функции у, жу,(х), yj жу2(х), ... , у„ ту„(х) являются линейно неза-
висимыми решениями уравнения (27.8), то его общее решение определяется фор-
мулой
y-C1y)+Gy,+... + Qy1,t (27.9)
где С|,Сз,...,Ся - произвольные постоянные.
В случае, когда коэффициенты уравнения (27.8) - постоянные величины,
уравнение называется линейным однородным уравнением л-го порядка с постоян-
ными коэффициентами. Общее решение его находится так же, как и в случае
уравнения второго порядка:
I) составляется соответствующее характеристическое уравнение
к" + ахк"~' + ... +ая.,к + а„ »0;
2) находятся корни характеристического уравнения kt, tj,..., 4„;
3) выписываются частные линейно независимые решения, причем принимает-
ся во внимание, что:
а) каждому действительному простому корню к соответствует частное
решение е**;
б) каждой паре комплексно-сопряженных корней 4(|)«а + ф,
4<’> ici # соответствуют два частных решения: e“cosPx, cmsinPx;
в) каждому действительному корню к кратности р соответствуют ц ли-
нейно независимых частных решений: eb, хе**, x2efa,...,x‘l4efa;
г) каждой паре комплексно-сопряженных корней к{П = а + /р.
= а-(р кратности ц соответствует 2ц частных решений: e^cosPx,
хе *“ сверх, ....Х**-**"* соя Рх; emsinpx. xe<BsinPx,...,x’*'le,“sinPx,
число частных решений равно степени характеристического уравнения
(или порядку данного линейного дифференциально! о уравнения);
4) общее решение получается по формуле (27.9), в которой у^у,....,у„ -
линейно независимые решения
15 Зак I
449
Замечание. Функции
У|(*ХУз(А- -.>.(*) (27.10)
называются линейно зависимыми на отрезке [а, 6], если существуют действи-
тельные числа а,,а2,....а,, не все равные нулю, такие, что для всех i£[o,i]
выполняется тождество
<ЧМ*)+«ЧЛ<*)+•••+О«У.(Х) °- (27.11)
Функции (27.10) называются линейно независимыми, если тождество (27.11)
выполняется лишь в случае, когда а, = а2 =... = а„ = 0.
Если функции у, = У|(х), Уг =У»(*Х — .у„ = уя(х) линейно зависимы на от-
резке (а,Ь], зо определитель Вронского W (х) * W ty,, у2,, у„) тождественно
равен нулю на этом отрезке, где
Ут У1 У»
X Уз — у".
1Г(х) = у“ Уг - у2
хГ’ у<-> ... уГ”
Для линейно независимых функций определитель Вронскот о не равен нулю ни в
одной точке этого отрезка.
Пример 27.3. Проитпсгрировать дифференциальное уравнение
у" - Зу" - 4у' + 12у = 0.
Характеристическое уравнение 41 - 34 2 -44*12 = 0 имеет корни 4(=-2,4j=2,4j=3
(так как 4*-342 -44 +12 = 42(4-3)-4 (4-3)= (42-4) (4-3)). Этим корням
соответствуют линейно независимые решения >т = е 2*. = е2*. у, =ete. В соот-
ветствии с формулой (27.9) получаем общее решение у= С|С~2' + C2eI* +CJe1*.
Пример 27.4. Проинтстрировать дифференциальное уравнение
y(,V) + у~ _ -уу- _ Чу' - 2у = 0.
Составляем характеристическое уравнение к* +4’ - 342 - 54 - 2 = 0. Поскольку
44 + 4,-34,-54 - 2 = 4*+4’-342 - 34 - 24 - 2 = 4,(4 + 1)-
-34 (4 +1)-2 (4 +1) = (4 +1)(4’-34 - 2) = (4 + 1)(4Э-4-24-2) =
= (4 + 1)(4(42-1)-2(4 + 1)] = (4 + 1)2(4 (4-1)-2) =
= (4 +1)*(42 - 4 -2) = (4 +1)’(4-2\
то (4 + 1)’(4-2) = 0, откуда
4l=42 = 4j=-t. *4=2.
450
Корень *=-! является трехкратным, ему соответствуют линейно незави-
симые решения у<| =е~‘, у2 = хе~”, = х2е'*, простому корню *4 =2 соответ-
ствует решение У4=е2’. Общее решение определяется формулой
y = Cte~’ + С1хе'* + С,х2е~* + С4е2', или у = (С| + Сгх + С,х2)е" +С4е2*.
Пример 27.5. Проинтегрировать дифференциальное уравнение
у""-у"+ >'->= О
Характеристическое уравнение *1 - к2 + к -1 = 0 имеет корни *, = I, к2 = -i,
k}=t (поскольку **-к2 + *-1 = *2(*-1) + (*-1) = (*-1)(*2 + 1)). Общее-ре-
шение имеет вид у = Qe* + С2 cosx + С, sinx.
Пример 27.6. Проинтегрировать дифференциальное уравнение
-81y' + 81y = ft
Характеристическое уравнение к2-к*-81* +81 = 0 имеет корни *, = I,
*,-3, *,--3. к4=И, *,=-3i (так как Р-Г-81*+81 =
= **(*-1)-81 (*-!) = (*-1) (*4-81) = (*-!)(*2-9) (*2+9)). Следовательно.
уравнение имеет общее решение у=С|Г* + С^е21 + С*2' + С, cos Зх + С, sin Зх.
27.4. Линейные неоднородные уравнения л-го
порядка с постоянными коэффициентами
Рассмотрим линейное неоднородное уравнение л-го порядка с постоянными
коэффициентам и
/"» + в1у<^') +О1?-2’ + ...+я>чу'+ажУ=/(х) (27 J2)
и соответствующее ему однородное у равнение
ум +а)у<*_,) + о1у<"-2> + ... +ая_|У'+а„у = 0, (27.13)
у которого коэффициенты тс же, что и в уравнении (27.12).
Общее решение уравнения (27.12) определяется формулой
УУо+Хы (27.14)
где у0 - общее решение уравнения (27.13), у, - частное ранение уравнения (27.12).
Частное решение уравнения (27.12) можно находить способом вариации про-
извольных постоянных. В простейших случаях, когда правая часть этого уравне-
ния - алгебраический или тригонометрический многочлен и др., частные реше-
ния находят с помощью метода неопределенных коэффициентов:
1. Пусть
/(х)=/»я(х)е“, (27.15)
где Р„(х) - многочлен степени п, число а не является корнем характеристиче-
ского уравнения, тогда
У, =&(*)*“. (27.16)
45!
где С„(х) - многочлен той же степени л с неопределенными коэффициентами,
если а - корень кратности к названного уравнения, тогда
2. Пусть /(x) = acosPx + 6sin|Jx, где а, b, р - постоянные, и р/ не являет-
ся корнем характеристического уравнения, тогда у, = А cos 0 т + В sin Ра где А и В
- постоянные неопределенные коэффициенты. и yt =xx(XcosP.t + fisinPjr), если
Pi — корень кратности X характеристического уравнения.
3. Пусть
/(*) = Ря(х) е™ cosPx + Q„(x) е“ sin0x,
где Р„(х) и (?„(х) - многочлены отх. тогда
у, »l/v(x)e“'cosPx + l/v(x)e<" sinPx, v = max (т,и)
в случае, когда число а + ф нс является корнем характеристического уравнения, и
у, =xx(C/v(x)emcosPx + rv(x)ea’ sinpx)
в случае, когда a ♦ ф корень кратности X указанного уравнения.
Пример 27.7. Проинтегрировать линейное неоднородное уравне-
ние у~ - 2у"-у’ + 2у = 4х’ - 4х2 - 20х +15.
Соответствующее однородное уравнение у**—2у“-у'+2у = О имеет общее
решение у0 = СуГ* + Суе' + С,е2‘.
Найдем частное решение исходного уравнения, правая часть которого яв-
ляется многочленом третьей степени (функция (27.15) в случае л = 3,
а = О, /j(x)= 4х’-4х2-20х +15). В соответствии с формулой (27.16)
полагаем у, = Ax' + Вх2 у Сх + D. Поскольку у, = ЗАх1 у 2Вх+С,
у" = 6Ах у2В, у|“*= 6А, то
6Л-2(6Лх + 2В)-(ЗЛх2+2Вх + С) + 2(Лх’ + Ях2 +Cr + D)-
= 4х’-4х2-20х + 15,
или
2Ах' +(2В-ЗА)х* +(2С-2в-12Л)х + (6Л-4В-ЗС + 2О) =
ж4х’-4х2-20х + 15.
Приравнивая коэффициенты при одинаковых степенях х, получаем систему
уравнений
2Л = 4, 2в-ЗЛ = -4, 2С-2В-12Л = -20, 6Л-4й-С+2О= 15,
из которой находим А =2, 8=1, С=3, D=5. Следовательно. у,=
= 2х’+х2+Зх + 5. По формуле (27.14) получаем общее решение
у = С,е" + С2еж + + 2х’ + х1 + Зх + 5.
452
27.5. Системы линейных дифференциальных
уравнений с постоянными коэффициентами
Системой линейных дифференциальных уравнений с постоянными ко эффици-
сигами называется совокупность л уравнений вида
+Щ1У1 ♦•••+ei«z,+/tUk
Ух "°п>т +впЛ+•••+«*.>'» +/1UX (27 |7)
К ,ом>'| +««1Ъ +—+/.(*Х
где У| = У|(х). у2 Уг(х),..., у„ = У,(х) - неизвестные функции переменной ж,
ал (т, А » 1,2,..., л) - постоянные величины, ft(x) (к « 1.2,..., л) - заданные
функции. Если /д(х)«0 (А = 1,2.л), то система называется однородной, в
противном случае - неоднородной
Решением системы называется совокупность л функций
>|=ф|(*Х У2 “ф,(л). -.У.=’Р.(*Х
обращающих каждое из уравнений этой системы в тождество.
Задача Коши. Найти решение системы (27.17), удовлетворяющее условиям:
yi-bi. Л=^.....................У„‘Ь„ при х = х0.
Методом исключения (л-1) неизвестных функций систему (27.17) в некото-
рых случаях можно привести к линейному дифференциальному уравнению л-го
порядка с постоянными коэффициентами относительно одной из функций
Замечание. Если аргумент функций обозначить через /, систему
(27.17) можно записат ь так:
Л =£<w,+/*(') (* = 1.2,....л), (27.18)
Г-1
где yt - производная функция yt =y»(f) по этому аргументу.
Пример 27.8. Найти общее решение системы дифференциальных урав-
_ dx - dy
нений с постоянными коэффициентами — = 3х+у, -^=8х + у.
Данную систему запишем в виде
х = 3х+у, у = 8х+-у.
Дифференцируя по t первое уравнение системы и используя данные уравне-
ния, находим х = 3х + у = 3£+(8х + у)=3х + 8х + (х-3х)=4х + 5х. £-
-4х-5х =0. Полученное уравнение второго порядка с постоянными коэффици-
ентами имеет общее решение х = Схе~' +С1е*. Поскольку у = х-3х и
х —Q-'+SGe**, то у--С>-’+5Ое*-3(Ое"' + О«*)«2С|е’'-4С<'.
453
Следовательно, общее решение данной системы определяете! форм} лам и
х = Су*+СУ*, у = 2С2е5'-4Су'.
Пример 27.9. Проинтегрировать систему дифференциальных уравнений
х = 12х-11у + Г, у — 13х-12у-Г.
Эта система является неоднородной. Дифференцируя первое уравнение и учи-
тывая данные уравнения, получаем х» I2i-lly+ 1 = 12(12х-11у+ /)-
-П(13х-12у-/) + 1 = х + 23/ + 1. Интегрируя неоднородное дифференциальное
уравнение второго порядка с постоянными коэффициентами х-х = 23/+ 1, нахо-
дим его общее решение х = Су'+СУ - 23/-I. Поскольку
к = - Cte~' +С}с' - 23, то из первого уравнения системы можно найти у.
У -1 (12х - к+/)-± (12 (€>-' + С2е* - 23/-1)-
- (- С,е'' + СУ - 23) + /(= || СУ* + СУ - 25/ + L
Следовательно, данная система имеет общее решение
х - С,е“ + СУ - 23/ -1. у = (IУ11) С,«’* + СУ - 25г ♦ I.
27.6. Нормальные системы дифференциальных
уравнений
Нормальной системой дифференциальных уравнений называется система вила
~-=^(Х.У,.У2^"’УЛ
ах
(fy.
А ....Kk (27.19)
*М*.У|.Л....УЛ
ах
где у*=у»(х) (* = 1,2,..., л) - искомые функции независимой переменной х,
*i(x> Ъ.---. ><.) “ заданные функции указанных аргументов. Порядком нор-
мальной системы называется число входящих в нес уравнений. Решением системы
(27.19) в интервале (а. Ь) называется совокупность л функций у, = уДх),
у2 = у2(х),..., ул = у„(х), определенных и непрерывно дифференцируемых в этом
интервале, если она обращает в тождество каждое из уравнений данной системы:
Ж*)и^*(х.Л(*)>Л(хХ “»К(х)) (*«1.1...,Л) для всех хе(в.б).
Задачи Коши для системы (27.19). Найти решение
У1«Л(*Х....К=К(*Х (2720)
454
удовлетворяющее условиям:
>'|(*о) = У°. >ъ(*о)” Уг.M*o)“
где Xq, у°, у%.у® - заданные числа.
Совокупность п функций
y.-ZiUq.q............................ед
—.С.),
(2721)
(27.22)
называется общим решением системы (27.19), если:
I) система (27.22) разрешима относительно произвольных постоянных
Ф|(*.У|.Л....К)"С|.
$»(*.»• Л....У.)я(т.
(2723)
фя(х.У|.Ъ....У.)=С.;
2) совокупность функций (27.22) является решением системы (27.19) при всех
значениях постоянных С(,Са.....С„. определяемых формулами (27.23).
Решение, получающееся из общего решения при фиксированных значениях
произвольных постоянных, называется частным
Каждое из равенств (27.23), т.с. ф*(х.у\.уа,...,ув)«С* (i «1,2,.... л), на-
зывается первым иигег ралом системы (27.19), а каждая из функций
Фз жФ>(*.Л«Ъ»-«>») ~ интегралом этой системы. Совокупность первых ин-
тегралов называется общим интегралом системы (27.19). ,
Первые интегралы (27.23), образующие общий интеграл системы (27.19), обла-
дают тем свойством, что интегралы ф,.ф2, ...,<₽„ независимы, т. е. между функ-
циями <р|,ф2,...,ф„ нс существует соотношения вида Ф(ф!.ф2....ф„) = 0 ни
при каком выборе функции Ф.
При некоторых условиях, наложенных на правые части уравнений системы
(27.19), эта система имеет л независимых интегралов.
Перепишем систему (27.19) так:
dx dy, dy, dy„
V= г “ г ="’= c • <2724)
• F,
пк F, = F£x,у„ уг....у,) (/«1,2,3,.... и).
Система (27.24) дифференциальных уравнений первого порядка называется
системой в симметрической форме, соответствующей нормальной системе (27.19).
455
Это частный случай системы в симметрической форме общего вида:
Ф| _ а... =
....х»*г) •^2(хг»хз» — »х»+г) Л»*|(х1»х2»”-»х»м)
Если дана система дифференциальных уравнений в симметрической форме
---------------=-------—J-------= — =--------, (27.25)
*|(Хн*1....х») Х2(х„х2,... ,x„) Хя(х„х2...........*,)
то, принимая хя за независимую переменную, се можно привести к следующей
нормальной системе (л—1)-го порядка:
*1-^1 <^"-1 -
dx„ Хя’ dxn Хк""‘ dxK Хя'
(27.26)
Решение, игпеграл, первый интеграл, общее решение и общий интеграл систе-
мы (27.26) называют соответственно решением, интегралом, первым интегралом,
общим решением и общим интегралом сист емы (27.25).
dy у d? 2s
Пример 27.10. Найти общий nmeipa/i системы — - —, — « ---.
dx х dx х
Интегрируем эту нормальную систему дифференциальных уравнений:
4..*
ln|z|=-2ln|x| + ln|Q|,
у = С,/х« x-Cjx1, (I)
ху = С], x2z-C2.
(П)
Формулы (I) определяют общее решение системы. Каждое из равснсгв (II) яв-
ляется первым интегралом системы, а их левые части - интегралы системы. По-
скольку интегралы гр, = ху и ф2 = x2z независимы, то общий интеграл системы
определяется равенствами (II).
Замечание. Данную систему можно записать и а симметрической форме
dx _ dy _ dz
I ~ y/x -2z/jr’
dx _ dy
x -y -1z.
Из последней системы следует, что имеется еще один первый интеграл
у2/г = С3 Соответствующий интеграл ф3 = у2/г выражается через независимые
интегралы ф, =ху и ф2 =х2х, а именно <р3 = ф2/ф2.
456
27.7. Применение матриц к решению систем
дифференциальных уравнений
с постоянными коэффициентами
Производная от матрицы. Рассмотрим матриц}' |ad(/)), элементами которой
являются дифференцируемые функции ом(г) аргумента г:
вн(0 вц(О — аы(!)
°л(0 «и(0 —
М/))-(<3М(/)] =
. в=г(О °=т(0 ••• °—(0.
Производной матрицы («(/) ] называется матрица, элементы которой являются
производными соответствующих элементов матрицы [о(/) J:
Употребляют следующие символические записи этого равенства;
4м')1=Г4а-*')1
at [at
at I at
Матричная запись системы дифференциальных уравнений с постоянными
коэффициентами и ее решений. Рассмотрим систему п линейных дифференци-
альных уравнений с искомыми функциями х,=х,(г), х2 = = х2(/)....,х<, =х,(/):
i, = a,iX(+а(2х2 + ••• + а|1Гх1,,
*1 = в2|л, + а22х2 + ••• + в2яхя,
(2727)
= “гЛ + "«Л + — + «яг*».
где it-dxjdt (/ = 1.2,.... л), ал - постоянные.
457
Если
то систему (27.27) в матричной форме можно записать так:
или ^=ах.
at at
гдех-М“|х(01 e = (<'l=l"-L,
Решение системы (27.27) в матричной форме имеет вид [.» J - (а) х [Се**), или
(27 28)
где kltkj...А,, — корни характеристического уравнения матрицы [aaL»,:
Я|1~Л «ц ... а1н
в21 °к “ * — °2»
(27.29)
458
числа a'j (j = 1,2,....и), соответствующие каждому значение к, определяются из
системы уравнений [а-кЕ] [а] = 0, или
Так как
получена матричная форма данной системы уравнений.
Составляем характеристическое уравнение (по формуле (27.29)) и систему
(27.30) для определения значений а, и at:
4-* -5 (4-*)а,-5а2 =0,
«а
3 —4-i За, (4+*)а2-0.
Характеристическое уравнение -(4-*)(4 + *) +15 = 0, *!-1 = 0 имеет корни
Л, = -1, Л2 = I Системы уравнений для определения чисел о, и и, принимают вил
5а.-5а, = 0, За,-5а, =0,
(I) (II)
За,-За2=0, ° За,-5а2-0. . '
Из системы (I) следует, что а2 = а,. Полагая а[ = 1, получаем а2 = 1 Из систе-
мы (II) находим а3»(3/5)а,. Полагая а’ = 1, вычисляем а2=0,6 В соответст-
вии с (27.28) получаем общее решение системы в матричной форме
* 1 Г • 1 Q”
U 0,б][с2е'
или в обычном виде х, = С,е** + Ср*, х2 = С,е'' + 0,6С2е'.
459
Гnaw 28
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
С ЧАСТНЫМИ ПРОИЗВОДНЫМИ
28.1. Основные определения
Дифференциальным уравнением с частными производными называется урав-
нение относительно неизвестной функции нескольких переменных, се аргумостов
и частных производных различных порядков Если искомая функция и зависит от
л переменных х,,х2,. т.е. в = и(Х|,х2,...,х11Х то дифференциальное урав-
нение с частными производными имеет вид
ди ди ди
"" * дх, ' д.»2 * ’ дх„
где + к, +... + к„ = т, F - заданная функция.
Порядком дифференциального уравнения с - частными производными
называется порядок старшей производной, входящей в сто уравнение.
Решением дифференциального уравнения с частными производными
называется функция, имеющая соответствующие частные производные
и обращающая это уравнение в тождество. Проинтегрировать дифференци-
альное уравнение с частными производными - значит найти
все его решения.
Пример 28.1. Проинтс1рировать уравнение и, (х, у) = 0.
Этому уравнению уловлетворяес любая дифференцируемая функция и « /(у),
зависящая только от у, так как f' (у) = 0.
Пример 28.2. Проинтегрировать уравнение т£(х. у) = 0.
Обозначим a'=v, тогда n"=(u')^=v' и v'«0, v = /(y), где /(у) -
произвольная функция переменной у. Поскольку и' v = /(у), то
“ (*. У) = J/О') 4г + V (*Х где у(х) - произвольная функция аргумента х.
Первое слагаемое последней формулы представляег собой произволысухс функ-
цию от у, обозначим се через <р(уХ тогда и (х, у) = у (х) + <р (у).
Полученное решение содержит две произвольные функции.
460
28.2. Линейные дифференциальные уравнения с
частными производными первого порядка
Дифференциальное уравнение с частными производными первого порядка от
функции и = и (х„ х2,..., х„) в общем виде можно записать так:
F(x„x2,...,x„, .....xj.) = <\ (281)
где F - заданная функция своих аргументов
Линейным однородным дифференциальным уравнением с частными производ-
ными первого порядка называется уравнение вида
-+Хя^- = о, (28.2)
«Х| (7.<2
где
= *'|(*|.*з. —.•»«). *» = Л'И*!.*».—.*.). Х„ = Л'Дх,.х2,...,х,) (28.3)
-заданные функции п аргументов х(.х,............х„, и-и(х,.х2.......х„) -
неизвестная функция
Наряду с уравнением (28.2) рассматриваю! соответствующую ему систему
дифференциальных уравнений в симметрической форме:
dx, _ dxt _ _ dx„
X, “ Х2 X„ ’
(284)
в которой функции X,, Х2,..., Хя определяются формулами (28.3). Систему
(28 4) можно записать и в нормальной форме:
dx. X. dx2 Х2 dx„. Х_,
-^=v •-г2=/.............‘J (2Я5)
dx„ Хя dxn Xя dx„ Хя
Теорем а 28.1. Если ф(х|,ха,...,х„) - интеграл системы (28,4) или (28 5).
то н = ф(х|,ха,...,хя) - решение уравнения (28.2).
Тео р ем а 28.2. Если и = <р(х1,х2,...,х„) - решение уравнения (28.2К то
ф (*|. х2,..., х„) - интеграл системы (28.4) или (28.5)
Теорема 28.3. Если Ф, (х|.х1.....х«), фа (Х|.ка,....х„),...,
Ф»-| (•»!. хг,...,х„) - нех1висимые интегралы системы (28.4), то
“ = *‘(ф|.Ф1....Ф«-1). (286)
где F - произвольная функция, имеющая непрерывные частные производные по
аргументам ф,. ф2.....фя, является решением уравнения (28.2).
Линейным неоднородным (или квазилинейным) уравнением с частными произ-
водными первого порядка называется уравнение вида
+ + - + ЗГ=и- (28 7>
<W| ох2 ахк
461
где заданные функции л + 1 аргументов Х|,х2,...,хя, н выражаются формулами
X, = Jft(X|,Xj,..., х„, и), Хг - Х2(хь х,...х„, к)....,
X. = X„(x„xt.......x,.u), l/ = t/(xl.x2,...,x.,«X (28 8)
u»n(X|,Xj.......х„) - неизвестная функция. Не исключается случай, когда
1/(Х|,х2,...,х„, н)«0, но хотя бы одна из функций X, (* = 1.2,._, п) зависит от и.
Наряду с уравнением (28.7) рассматривают систему дифференциальных
уравнений
(289)
Фт, _ dx2 dx„ du
Xt " JT2 " " Ля = V
Если ф,.ф2,...,фя (фа =ф|(х|,х2,...,хя,пк *-1,2,...,л) - независимые
интегралы системы (28.9), то
/Г(Ф..Ф1... .Ф.) = О. (28.10>
где Г(ф|,ф2,...,ф„) - произвольная дифференцируемая функция своих аргу-
ментов, будет решением.
Пример 28.3. Проинтегрировать уравнение —— — = 0.
ох ду
Это уравнение вида (28.2), в котором и- х, х,-х. х2 - у, Х(=1. ЛГ} = -1
Записываем систему (28.4) и интегрируем се:
— dr + dy=0, rf(x + y)=Q, х + у-С, Ф(х,у) = х + у.
I —I
Формула (28.6) принимает вид х = F (ф)-К(ф(х,у))= F(x + у), z =
= F(x + y), где F - произвольная дифференцируемая функция.
Пример 28.4. Проинтегрировать уравнение х --- + у — = 2г.
ат ду
Это уравнение вида (28.7), в котором х = а, х, =х, х2 = у, X, =
U = 2г. Записываем систему (28.9) и интегрируем ее:
d* dy
х у 2г ’ х у ’
dx dz у г -
= - • = j ж^3’
х 2г х х
Ф|(дг.У.*)в^. ф1(*.У.?) = -т-
X X
В соответствии с формулой (28.10) получаем решение F(y/x;z/x’)= =0,
где F - произвольная дифференцируемая функция.
462
28.3. Линейные дифференциальные уравнения с
частными производными второго порядка
Уравнение с частными производными второго порядка называется линейным
относительно старших производных. если оно содержит эти производные лишь в
первой степени.
Линейное дифференциальное уравнение с частными производными второго поряд-
ка относительно функции и=и(х, у) двух переменных х и у можно записать так
Э2и Э2и д2и I du du ।
А(х,у)^ + 2В(х,у)-^-+С(х,у)1:т+ F х.у.и,—,— = 0, (28 11)
dx2 ахду ду V дх дУ)
где Л»Л(т,у), В=В(х,у), С=С(х,у\ F- Г(х,у, и, и',, и') - заданные
функции своих аргументов. Уравнение (28.11) называется уравнением 1иперболи-
ческого типа в данной области, если fi2 - АС > 0 в этой области, уравнением па-
раболического типа, если В2-АС=О, уравнением эллиптического типа, если
В1 - АС < 0. Если выражение в2 - АС в данной области меняет знак, то уравне-
ние (28.11) называется уравнением смешанного типа
Уравнение (28.11) можно привести к каноническому виду переходом к новым
переменным £ и Т| по формулам
$ = $(*.>)> (28 12)
где £(х, у), 1) (х, у) - дважды непрерывно дифференцируемые функции аргумен-
тов х. у. Чтобы найти эти функции, рассматривают характеристическое уравнение
Ady2 - 2Bdxdy + Cdx2 = 0. (28.13)
которое равносильно системе двух уравнений
=_____Д______, * =------±„ ,. (28 14)
4 В+ЧВ^-АС л B--Jb2-AC
где А. В, С те же, что и в уравнении (28.11).
Интегральные кривые уравнения (28.13), или. что то же самое, уравнений
(28.14), называются характеристиками уравнения (28.11). Если уравнение (2811)
гиперболического типа, то первые интегралы <p,(x. y) = Ct и фа(х, у)=С, дейст-
вительны и различны. Они определяют два различных семейства действительных
характеристик уравнения (28.11). С помощью замены переменных £ = <₽, (х.у),
Г| = ф2(х, у), П* фДх.уХ Ф2(*,у) “ интегралы системы (28.14), уравнение
(28.11) приводят к каноническому виду уравнения гиперболического типа;
д2.
ди ди |
Замечание. Уравнение гаперболичсского типа с помощью замены пе-
ременных £ = |1 + V, т) = ц — V можно привести кдрутому каноническому виду
463
ди ди |
dp’ dv)
д2и д2и
дц2 dv2
Если уравнение (28.11) параболического тина, то уравнения (28.14) совпадают;
в этом случае получают один первый интарал системы (28.14) <р (х, у) = С. Фор-
мулы (28.12) принимают вид £ = <р(х, у), П = V(x.yX ф(х, у) - интеграл
системы (28.14), а ф(х, у) - любая функция, удовлетворяющая условию-
якобиан функций <р и у отличен от нуля:
дх
dv
дх
dy
#0.
(28.15)
Уравнение (28.11) приводят к каноническому виду параболического уравнения:
d2u Л
^ = «*1
ди ди
du du ]
n,“’d^’di{J
Если уравнение (28.11) эллиптического гопа, то первые интегралы системы
(28.14) будут комплексно-сопряженными: ф(х, у)+/ф(х, y)«CJ,
<р(х, у)-Лу (х, у) = С2. С помощью замены переменных по формулам
£ = <р (х, у), Л = V (х, у) уравнение (28.11) приводят к виду
d2u d2i
<*’+дп:
называемому каноническим видом уравнения эллиптического вида
Пример 28.5. Привести к каноническому виду уравнение
х2f-p_y2ТТ+1'Г'3)'1 =0 (Х*°.У*°)
дх2 ду дх ду
и проинтегрировать его.
Эго уравнение гиперболического типа во всех точках плоскости, кроме точек,
лежащих на осях координат, поскольку для пего Л = х2, 8 = 0, С = -у2,
В2-АС = -х2(-у2) = х2у2>0, если х#0, у *6 Уравнение характеристик
(28.13) принимает вил x*dy2 -y^dx2 = 0, или y2dx2 -x2dy2 = 0; оно равносильно
двум уравнениям: ydx + xdy = 0, ydx-xdy = 0. Интегрируя эти уравнения, полу-
чаем ху = Сь у!х-Сг. Введем новые переменные £ и Т) по формулам (28 12):
£ = ху, г\ = у/х. Находим частные производные:
du _ du _ у ди
дх~Уд(, х2 дг/
464
Эл _ du 1 du
dy dt, x dq
d2u j d2u d2u I d2u
dy2 < d^dn X2 dr)2
d2u 2 d2u y* d2u >2 d2u у du
dx2 d^2 x2 d^dr) x* dr)2 x’ dr)
Подставляя ЭТИ выражения в исходное уравнение, получаем
_^ + ±^я0. —+1—-О.
d^dr) ху dr] d^dr) £ dr)
»7»» + |Д = 0. •п|«г|*1пЦ|-1п|»|(П)^ *Л = <Р|(П).
^u = J«p,(r)) <ft) + Vi(U = Ф (П) + Vi(£) Следовательно,
Проинтегрируем уравнение u£, +(l/£) Ц, = 0. Обозначим «ц = w. тогда u^ = w£,
+()/£) * = 0,
<^=ф|(ПХ
и = (1/£)ф(П)+ ф(£), где ф и у - произвольные дважды дифференцируемые
функции своих аргументов. Возвращаясь к переменным х. у, получаем
и*’(1/ху)ф(у/х)+ф(яу).
Пример 28.6. Найти общее решение уравнения
2 d’u _ d2u . 2 d2u .du du „
* ——+*—+У—"0-
dx dxdy dy dx dy
Ого уравнение параболического типа на всей плоскости Оху, так как для него
4=х2, В*-ху, С-у1, Я2-ЛС»(-ху)2-х2у2 =0. Уравнение характеристик
(28.13) принимает вид x2dy2 + Ixydxdy + у1 dx1 =0. (xdy-ь + ydr)2 = 0,
xdy + ydx = 0. Поскольку xdy + ydx -d(xy}, то d(xy)^0, откуда xy = C.
Ф(х, y)«=xy. В формулах (28.12) положим ^ = ху. а в качестве функции т] возь-
мем любую функцию, удовлетворяющую условию (28.15Х в частности г\^у.
Прсобратуем данное уравнение, введя новые переменные и т) по формулам
= ху, г) = у. Находим выражения для частных производных по х и у через ча-
стные производные Т):
du _ du du du du
d2U 2 d2U
dx2 =y dV’
d2u du d2u d2u
dxdy d^ d^ d^dr)
465
d2u гд*и д2и - д2и
—г = х—т +—г + 2х—
ду2 Э^2 Эл2 Э^т)
Подставляя эти выражения в исходное уравнение, получаем
Э2и ди _ _ д2и . Эн Л
>T-f + 7Z = 0. Ч^-у + ^- = 0.
Эт) Л) Л) от)
Введем новую функцию н по формуле w = и^, тогда
dw d2u dw ’*4 1
з-=тт. пт-+*-а —+--о,
от) от) от) * П
ln|w| + ln|n| = ln|<p(^)|, *П = ф(£), Ч)П = ф(5).
«<;=(Уп)ф(О. “=ф(^)1п|п|+ф(^
Следовательно, общее решение уравнения определяется формулой
и = ф(ху)1п|у( + ф(хуХ W ф(ху), ф(ху) - произвольные дважды дифферен-
цируемые функции от произведения ху аргументов хну. ‘
Пример 28.7. Найти решение уравнения и" + и“п = 0 в полосе
О£х£а, 05у£ + «>, удовлетворяющее условиям и (0, у)=0, и (а, у)=0,
и(х, 0)= А (1-х/о), и(х, + о“)=0.
Эго каноническое уравнение эллиптического типа Решение будем искать с
помощью метода Фурье (метода разделения переменных). Искомую функцию
и (х, у) представим в виде произведения
и(*.У)= X(x)Y(y\ (1)
где X (х) - функция только от х, Y (у) - функция только от у. Так как
и" = А" (х) Y (у), и’^ = X (х) )" (у\ то уравнение принимает вид
^"(х) Р(у)+Х(х))"(у)=О, откуда А"(хУА’(х)+Г’’(уУГ(у) = а или
У"(у)/К(у)=-А’*'(х)/Л'(х). Поскольку функция (1) - решение уравнения, то
последнее равенство должно выполняться /тля всех х и у, что возможно лишь
тогда, когда обе части не зависят ни от х, ни от у, т. е. являются постоянными.
Обозначив эту постоянную буквой с, получим два обыкновенных дифференци-
альных уравнения с постоянными коэффициентами:
Г(у)-сР(у) = О, Л~(х)+сГ(х) = а (II)
Считая с = А2 > 0, находим решения этих уравнений:
К(у)« Ле'2*+&**, X (x)=CcosAx + D sin Ах
(характеристические уравнения для уравнений (П): А2 - А2 = 0, к2 + А2 = 0).
Следовательно, формула (I) примет вид
« (*. У) = (Ле*1* + Be2* )(Ccos Ах + Osin Ах).
466
Так как u(0, у) = 0, т.е. Ccos0+£>sin0 = 0, то С = 0. Условие и(а,у) = 0 при-
водит к равенству (+ Be2'*) Dsin Ха = 0, откуда sin 1а = 0, Ха = т
(и = 1,2,3,...), Х=кп/а. Поскольку и(х, + ~) = 0, или (Ае~*~ + Be*")*
xZ)sinAx = 0, то В=0. Таким образом u(x, у)= zie^Dsinkr, гае 1 = их/а, т.е.
решением является любая функция
«„(х.у) = A^'l"*Ja)>'D„ sin (их/a) x = sin (их/a) x.
где b„ = A„DK, и ряд из этих функций
*
и (*. У) и sin (их/а) х.
»т=1
Постоянные Ь„ определим так, чтобы выполнялось условие и(х, 0) = А(1-х/а):
1 Frttx ||| х ।
> Lan------ /411— I.
“ a \ o)
«I
Значит, числа Л„ являются коэффициентами ряда Фурье для функции А(1-х/а).
Эти коэффициенты находим по формуле
. 2 f xV тх ,
ft, = — I Л 1--stn----ах.
aJ [ а) а
о
Вычислив интеграл, получим В„ ® 2А/пп.
Следовательно, искомое решение определяется формулой
. . 2А v 1 -(«bn, • "Xl
и(х, у)=— > — е ’^’'sm----------
я п а
*•1
28.4. Основные дифференциальные уравнения
математической физики
Волновое уравнение - уравнение вида
^ = e2A«+g(A/,r), f“=a2Aa. (28.16)
а»2 а»2
где Ди - оператор Лапласа, - функция точки М из данной области
(одномерной, двумерной, трехмерной) и времени t; первое называют неоднород-
ным. второе - однородным. Волновыми уравнениями описываются различные
колебательные процессы. Каждое волновое уравнение имеет бесконечное
множество решений. Чтобы найти решение, описывающее соответствующий
физический процесс, необходимо задать дополнительные условия.
467
Одномерное волновое уравнение, или уравнение ко,тебаин Я струны, имеет вид
д2и
Эт2
2 д\ д’н 2
= а -T + g(x,r); —2~а
дх2 дг
д2и
а?’
где и (х, I) - отклонение от положения равновесия точки струны с абсциссой х в
момент времени Г. а- постоянная; g(x.t) - заданная функция 11ервое из этих
уравнений называется уравнением вынужденных колебаний, второе - уравнением
свободных колебаний Дополнительные условия состоят из начальных и краевых
11редположим, что струна имеет длину /, левый конец ее закреплен в точке х “ О,
правый - в точке х = /. Если за начальный момент времени принять t “ 0, то
начальные условия запишутся так; ы(х,0)=/(х), и'(х,0)= F(x), где /(х),
F(x) - известные функции, определенные на отрезке |0. /|. Так как концы
струны закреплены, то краевые условия имеют вид и (О, /) = Q, и (1,1)= О (I > 0)
Задача, содержащая только начальные условия, называется задачей Коинг, задача,
содержащая начальные и краевые условия, - смешанной задачей
Задача Коши для одномерного волнового уравнения. Най-
ти решение и=м(х. Г) линейного однородного уравнения
<М17)
dt2 дх2
удонлстпориющсе начальным условиям
и(*.0|/м>-/(*). -F(xX (28.18)
где /(х), F(x) - заданные функции, определенные в бесконечном
промежутке (-“>, + “>).
Для решения задачи о свободных колебаниях бссконеч1К<й струны используют
метод характеристик, или метод Д’Аламбера.
Уравнение (28.17) является уравнением гиперболического типа (в чем можно
убедиться, положив 1 = у и сравнив его с уравнением (28.11)). Уравнение
характеристик (28.13) принимает вид a2dt2 - dx2 = 0, или dx2 -a2dl2 =0.
Оно распадается на два уравнения dx-adt = 0, dx + adt=0, откуда
получаем x-ai = Cl, х + « = С;. Введя новые переменные и т) формулами
£ = х-от, т) = х + «, уравнение (28.17) преобразуем к виду i^, = 0, откуда
(см. пример 28.2) « = <₽(£)+у (т)Х или
к = ф(х-ат) +V (х + от), (28.19)
где <р и у - произвольные дважды дифференцируемые функции. Если эти функ-
468
ции выбрать так, чтобы удовлетворить условиям (28.18). то
м(х,о- /<*•*•*)4-A jF(z)dr. (28 20)
t-a
Эта формула, называемая формулой Д'Аламбера, дает решение задачи Коши
для уравнения колебаний неограниченной струны.
Уравнения теплопроводности — уравнения вида
^ = д’Ди или — = а1 Au + g (М, /), (28 21)
at at
где Ди - оператор Лапласа, а - постоянная. g(M,I) - заданная функция точки
М данной области (одномерной, двумерной, трехмерной). 11ервос уравнение назы-
вают однородным, второе - неоднородным
Запишем соответственно трехмерное, двумерное и одномерное однородные
уравнения вида (28.21):
ди * j (д’и д’и д’и I
дг ^дх’ ду2 dz’J
ди _ 2 | д2и д2и 1 ди _ 2 д*и
dt ^дх’ ду1J’ dt дх’
Первое из этих уравнений описывает распространение тепла в пространстве.
ВТорос - в пластинке, третье - в стержне.
Уравнением вила (28 21) описываются различные процессы: диффузия, движе-
ние вязкой жидкости и др
Начальное условие для уравнения теплопроводности в пространствс определя-
ется равенством
«(х.У.х.О|,_о«/(х,у.х). (28 22)
оно задает температур) каждой точки тела в начальный момент времени /р = 0
(/(*. У.*) - известная функция).
Краевое условие имеет вид
| (28 23)
где и - температура окружающей среды на границе Г. и температура тела,
h - коэффициент теплообмена, к — коэффициент теплопроводности, и' —
производная функции и = и (х, у, г, t) по направлению внешней нормали к
поверхности Г.
Краевое условие (28.23) принимает вид “»|г=0 при 6 = 0 (на границе
тела нет теплообмена с окружающей средой) или и | = и при h -»~
(на границе поддерживается постоянная температура)
469
Уравнение Лапласа имеет вид
Дк = О, (28 24)
где Ди - оператор Лапласа. Уравнению (28.24) удовлетворяет стационарное (не
зависящее от времени) распределение температуры в теле, потенциал стационар-
ного электрического поля в области, где отсутствуют заряды. К уравнению Лапла-
са приводят и другие задачи. Функция, удовлетворяющая уравнению Лапласа,
называется гармонической.
Краевая задача для уравнения Лапласа. Найти функцию
и = и (я, у, zX гармоническую внутри области, ограниченной замкнутой поверх-
ностью Г, и удовлетворяющую граничному условию
я^ = и| -и. (28.25)
дп '1
где Н и и - функции, заданные на границе Г.
Важный частный случай краевой задачи получается при Н = 0: и | = и. Эта
краевая задача называет ся задачей Дирихле.
Задача Дирихле для круга: найти функцию u = u(r, ф), удовле-
творяющую уравнению Лапласа (в полярных координатах)
I д ( ди А I д2и _ .
г дг \ dr ) г1 Эф2
и условию и (г, ф) | = /(ф), где /(ф) - заданная функция, R - радиус круга.
Решение данной задачи выражается формулой
2я J Я2 -2Ягсо$(/-ф) + г2
Этот интеграл называется интегралом Пуассона
Пример 28.8. Найти решение u*u(x,l) уравнения и^ = аги^, удовле-
творяющее условиям: и(х, 0) = ет, и^(х, 0) = ст
Эго частный случай задачи Коши для уравнения (28.17) при f(x) = e‘,
F (х) = <ях. В соответствии с формулой (28.20) получаем искомое [хщниие
470
ГД9ва 29
ЭЛЕМЕНТЫ ВЕКТОРНОГО И
ТЕНЗОРНОГО АНАЛИЗА
29.1. Скалярное поле. Поверхности и линии
уровня скалярного поля
Пусть У - область а пространстве или на плоскости Говорят, что и области
У задано скалярное поле, если каждой точке М из У поставлено в соответствие
некоторое число и(М) Если введены декартовы координаты, го скалярное поле
можно представить в виде функции координат точки М:
и = и (х, у, а), и = и (х, у). В этом случае понятие скалярного поля совпадает с
понятием функции трех или двух переменных
Поверхностью уровня скалярного поля и(М, называется геометрическое место
точек, в которых поле имеет данное фиксированное значение С.
Уравнение поверхности уровня имеет вид
и(з,ут)«С. (29.1)
Поверхности уровня называют еще эквипоненциальными поверхностями
(поверхностями одинакового потенциала) или изсповерхностями.
Если поле задано в плоской области, то равенство
«<(х.у)-С (29 2)
определяет некоторую линию. 'Зги линии называют линиями уровня или изолиниями
Скалярные поля иногда обладают специальными свойствами симметрии. Если
значения u(W) зависят лишь от расстояния точки М от некоторой фиксирован-
ной точки Мо, то поле называют сферическим Поверхности уровня сферическо-
го поля - концентрические сферы.
Если в пространстве существует направление. при сдвигах вдаль которого поле
и (М) переходит само в себя, т е существует такая декартова система координат, в кото-
рой поле можно задать функцией двух переменных и - и (к, у), то зто поле называют
। сюскопараллсльным или двумерным Поверхности уровня таких полей цилиндрические.
Если поле и(М) переходит само в себя при повороте пространства на произ-
вольный угол вокруг некоторой оси, иначе, если сушествуег цилиндрическая сис-
тема координат, в которой поле может быть задано фу нкцией, зависящей лишь от
р = -Jjr2 +уа и z. то такое поле называю! осесимметрическим.
Поверхности уровня зтого тюля — поверхности вращения. Если поверхностями
уровня являются круговые цилиндры, то и (М) называют цилиндрическим
471
Пример 29.1. Найти поверхность уровня скалярного поля
и = 2х2-Зу2+ 16х-18у—12г+43, проходящую через точку М(-1,1,1).
Совокупность поверхностей уровня данного поля определяется уравнением
2х2 -Зу2 + 16х-18у - I2z + 43 = С. Среди этих поверхностей выберем ту, которая
проходит через точку М, для чего нужно определить значение С. Подставляя ко-
ординаты точки М в левую часть уравнения, находим
2(-1)*-3 1а+16(-1)-18 1-12 1 + 43 = С, или 2-3-16-18-12+43 = С,
С = -4. Следовательно, уравнение искомой поверхности имеет вид
2ха-Зу2+ 16x-18y-l2z+43 = -4, или 2ха-Зуа+16х-18у-12г + 47 = й Вы-
деляя полные квадраты в левой части этого уравнения, получаем
2(х + 4)а-3(у+3)а = 12(х +1), или Ха/3-Га/2 = 22, где Х = х + 4, Г-у+Х
Z=x + L
Итак, поверхностью уровня является гиперболический параболоид
Пример 29.2. Найти линии уровня плоского скалярног о поля, заданно! о
функцией и = ха-у2.
В соответствии с формулой (29.2) линии уровня данного поля определяются
уравнением х2 — у2 =С. При С> 0 получаем равносторонние гиперболы с дейст-
вительной осью Ох. при С< 0 имеем сопряженные им гиперболы (с действитель-
ной осью Оу), при С = 0 получаем асимптоты всех указанных гипербол
29.2. Градиент скалярного поля.
Производная по направлению
Линейной формой <р (Дг) относительно вектора Дг шгывакп скалярное проигвеле-
ние вектора Дг на некоторый вектор g. не зависящий от Дг. г = г (х, у, г) рааиус-
всктор точки М. Дг -вектор, соединяющий точки М и Мо.
Скалярное поле и (М) называется дифференцируемым в точке Мс из области
V, если приращение поля Ди в этой точке можно представить в виде
Ди = 8-Дг + о(р), (293)
где р = р(Л/0, М) - расстояние междуточками Мои М,' Ьи = и(М)-и(Мй).
Градиентом дифференцируемого в точке Мо скалярного поля называют век-
тор g(A/0) из (29.3). Обозначение: gradu(A/(l)=g(Af0).
Если поле дифференцируемо в каждой точке области V, то оно дифференци-
руемо в V. В этом случае gradu(A/) = g(A/).
При заданной декартовой системе координат
gradu = |^ i + j+к (29.4)
дх ду dz
472
Величина gradu определяется формулой
(29.5)
Свойства ipatwema:
1) grad с = О, с = const;
2) grad (u + v)= grad и + grad v, a, v - дифференцируемые скалярные поля;
3) grad(uv)= ugradv +vgradu,
4) grad (см) = c grad u, c = const;
5) grad(i^v)-(vgradu-ugradv)/v] (v*0);
6) grad f(u)=f'(u)gradu, f - дифференцируемая функция;
7) grad|r| = r/|r|.
Если - базис в ортогональной криволинейной системе координа!
ft.Ri.ft. то
%nrtu =
I ди
1 дм 1 ди
*' H.dg,
где Я|, Нг, Н}
- параметры Ламе, определенные формулой
2
.2
/ = 1,2.3;
(29.6)
в цилиндрической системе координат
ди 1 ди ди
gradu- —е+- — е+—е,;
др ₽ р дф dz
в сферической системе координат
. ди . 1 дм 1 ди
gradu = — е, +— — е„ +----------------------------е_.
дг г д0 rsinG дф *
Дифференциалом скалярного поля и(М) называют скалярное произведение gradu Лг
du = gradu-Дг.
Пусть е - единичный вектор, указывающий направление / в точке Мс об-
ласти Г, М-произвольная точка И. отличная от Мс и такая, что вектор М0М
коллинеарен вектору е.
Предел limЛи/p (Ди = м(Л/)-и(Л/с)), (р = р(Мо, М) - расстояние между
р-йО
точками Мо и АГ), если он существует, называют производной поля и(М) в точ-
ке Л/о по направлению е и обозначают символом
ди Ди
— = lim —.
де р-»о р
473
В декартовой системе координат
Эи Эи , Эи о , Эи
— = — cosa + — cosp + — cosy,
де дх ду “
где
е = (cosa, coeP, cosy),
ИЛИ
(29.7)
ди
h
grad и е = пр, grad и.
Если е имеет направление grad и. то
sL-i-h
Пример 29.3. Найти величину и направление градиента скалярного поля
«x’ + y’+z2-3xyz вточке А/о(2,1,-1).
Находим частные производные функции и
^-3х2-3уг, ^ = 3у2-3хг, ^=3г2-Згу,
дх ду дх
их значения в точке А/о:
ди .. ди
Аг м. ” Ф'
По формуле (29.4) получаем grad и ( Мо ) = 15» + 9j - 3k.
Величину градиента находим по формуле (29.5):
| gradM(A/c)|~^l52 + 92+(-3)2 - 3735.
Пример 29.4. Найти производную поля и = х2у - Зхух + xz2y2 в точке
М(/1 Д-1) по направлению вектора е, обрв«уюшен> с координатными осями острые углы
а, Р = х/4, у = л/3. Установить характер изменения поля в данном направлении
Частные производные функции и вточке Мо имеют значения:
(у! =(2*у-Зя + А,)1 «И = (х2-3хг + 2х>«2)| =8.
k от 7 о 1м« (.Ф'А
(£1 -(-3xy+2ry2z)l —14.
V oz Jo **•
По условию задачи cos0 = cosJt/4 = -j2/2, cosy = cosк/3= V2. Поскольку
cos2a + cos2p + cos2у = 1, а угол a - острый, то cosa = ^l-[/2-\/4 =V2. По
формуле (29.7) находим
^ = И l + 8^+(-14)|^4V2.
де 2 2 2
du
Гак как - > 0, скалярное поле и (А/) возрастает в данном направлении
474
29.3. Векторное поле. Векторные линии
Если каждой точке М области V поставлен я соответствие некоторый вектор
F (МУ, то говорят, что в V задано векторное поле.
В декартовой системе координат V (МУ можно прсдстави!ъ совокупностью
трех скалярных функций, являющихся координатами вектора F (М). Обозначим
их Р (х. у, х), Q (х, y,z\ R (х, у, х), тогда
F(A/)=P(x, y,z)i+Q(x,y,z) ]+Л(х, y,x)k
Иногда векторные поля обладают специальными свойствами симметрии.
Векторное поле F ( М) называют одномерным, если существует декартова сис-
тема координат такая, что координаты F(A/) имеют вид Р(х), 0,0.
Если существует такая цилиндрическая система координат, что F (М) зависит
от р и г, но не зависит от <р, то тюле F (М) называют осесиммстричсским. Если
F( Му зависит лишь от р, то тюле называют цилиндрическим
Векторное поле F(M) называют плоскопараллельным, если существует де-
картова система координат такая, что координаты F (М) можно задать функция-
ми двух переменных Р (х, уУ, Qix.y}, R(x.y).
Векторной линией (силовой линией, линией тока) векторного поля F ( М) на-
зывается линия L, лежащая в И, если в каждой точке L направление касательной
к ней совпадает с направлением F (Му в згой точке
Параметрическое дифференциальное уравнение векторной линии, проходящей
через точку Мо, выражается формулами
r'(r)=XF, г («,,)= г0,
где г„ - радиус-вектор начальной точки Мо, к - произвольное число, iD -
начальное значение параметра, г = г(Т) — уравнение векторной линки.
Система дифференциальных уравнений векторных линий
* = * = (29.8)
Р Q R '
При непрерывно дифференцируемых функциях Р, Q, R. ни в одной точке V
не обращающихся одновременно в нуль, через каждую точку У пройдет единст-
венная векторная линия.
Часть пространства, в котором задано векторное поле F (Му, ограниченное неко-
торой поверхностью О, называется векторной трубкой, если в каждой точке поверхно-
сти а нормаль к ней ортогональна F (Му в этой же точке, т. е векторная трубка -
часть пространства, состоящая из целых векторных линий, каждая из которых или
целиком лежит внутри векторной трубки или целиком находящаяся вне ее.
475
Пример 29.5. Найти векторные линии векторного пол» F = -yi + xj.
Система (29.8). из которой находятся векторные линии, в данном случае имеет
dx dy dz „ ___ _ dx dy
вид ----- -£- = . Эту систему уравнений можно записать так: —=• ,
-у х 0 -ух
dz - Ol Из этих уравнений находим х2 +у2 = С2, г • С,. Эти уравнения опреде-
ляют векторные линии - окружности в плоскости z = С>.
29.4. Поток векторного поля через поверхность.
Дивергенция. Соленоидальное поле.
Теорема Остроградского
Погоном векторного поля F (М) через поверхность а в сторону, определяем)к>
единичным вектором п нормази к поверхности о. называют интеграл
n = J|F iufo = Д^Лг-JJf do.
о о 4 о
В декартовой системе координат. если п (cosa. cos0. cosy), то
П = JJ (/’cosa + £)cos0 + Rcosy) da
о
*= jj (*» у.«) +C (*. y.«) <*• У-
в
Способы вычисления этого поверхностного интеграла указаны в п. 22.2.
Пусть Г (а) - с/тьсм области I'. отраииченной замкнутой поверхностью о В этом
случае поток через внешнюю сторону поверхности О записывают в виде JJ Л„4о.
О
Дивергенцией (расходимостью) векторного поля F( М) в точке М области Г
называется lim -Я-----. если такой предел существует. Следовательно,
о-м К(о)
divF(A/) = lim -Я-----= lim -Я----------.
с-.м V (о) о-»** Г'(о)
Теорема 29.1. Если Р. Q, R непрерывны вместе со своими частными прои /
во^ны-ми в области V, то дивергенция поля F, заданного координатами Р. Q. R
существует во всех точках области Г и в любой декартовой системе координат
выражается формулой
дх ду dz
(299)
476
Если drvF(A/)>0, то точка М- источник векторных линий, если
div F { М) < 0, то точка М — сток силовых линий.
Свойства дивергенции:
I) dive = 0, с - постоянный вектор;
2) div (F, + F, ) = div F, + div F2;
3) div («F) = wdiv F+ F gradu, u — скалярное поле.
В криволинейных ортогональных координатах
divf = 1 (+ Э(Л,//,//,). 3(VW)
"Л", ( dg, dg2 dg, ]’
где Л|.Л2,Л, -координаты F в базисе //„//,. Я, - параметры
Ламе, определенные формулой (29.6); в цилиндрических координатах
. в 1 Э(ртС) 1 эл, ал,
р Эр р Эф Э?
в сферических координатах
divF.J ^Ч)+_1_Э1«пвД,) + _|_а<1
г2 де г sin 6 дО гsinO дф ’
(x = rcos<psin0( у « г sin ф sin 0, 2 = ГСОв0).
Векторное поле, дивергенция в каждой точке которого равна нулю, называется
соленоидальным или трубчатым.
Теорема 29.2 (теорема Остроградского). Формула (22.12) для векторного
поля F ( М) имеет вид
JJ hKdo = JJJ div F<«'. (29.10)
о V
Пример 29.6. Найти поток векторного поля F = x,i+yJj+z>k через
внешнюю сторону поверхности х2 + у2 + у1 = №.
Воспользуемся формулой (29.10), выражающей поток векторного поля через
тройной интеграл. Так как div F= = Зх2 + Зу2+3z2 = Зг2, то по
дх дуdz
формуле (29.10) имеем /-„do = 3 |||r2dJ Введя сферические координаты
о к
x = rcos9sin6. у = гяпф5тп6, z-rcosO, вычислим тройной интеграл:
1« « к
JJ|r2dl' = JdpJ sinOdB j r*dr = (4/5) яЯ’.
У ООО
Следовательно, ^Fr<*j = (1^5)k№.
477
Пример 29.7. Найти дивергенцию векторного поля
F (М) = (2хгу - 3xz’ + Sx’yz) i + (4х/ + xyz + fc2) j + (6xy2z1 - 7xr2 + 9уг) k в
точке Л/(1,1,1).
Вычислим в точке М (1,1,1):
(^)o = (4x>'-3z’ + lSx’^)|Jl/=16. (^)о*(12^2+уг)|м=и
(/?,')0=(18*y2z,-14Jtz + 9y)|M-ll
Подставляя полученные значения в формулу (29.9), получаем div F | м = 42
29.5. Циркуляция векторного поля
Циркуляцией векторною поля F (Л/) вдоль липин £ называется криволиней-
ный интеграл
|л;<а = Jf тЛ.
L I
где £ - гладкая или кусочно-гладкая линия. Л, - тангенциальная составлякяцая
поля F(A/) на £, Т — единичный вектор касательной к линии £ в точке М.
В декартовой системе координат
г /
P,Q,R- непрерывные составляющие ноля F. Вычисление полученного криво-
линейною интеграла второго рода описано в п. 21.2.
Если P(M\Q(M},R(M) - силовое поле, то его циркуляция вдоль
линии £ представляет собой работу этого поля вдоль линии £.
Пример 29.8.11айти работу, производимую силой F ( М) = уЛ + xzj+xyk
вдоль линии £, описываемой уравнениями х t1, y-t4, z-th (0 S1S1).
По формуле, выражающей циркуляцию в декартовой системе координаг, находим
। ।
= JPdx + Qdy+ Rdz = |(2г" +4г" +6г")Л = J 12/"dr « ?21 # = 1
L L О °
29.6. Ротор векторного поля. Теорема Стокса
Ротором (вихрем) поля F(A£) вточке Л/называется
JJ(nxF)<ta
rotF(A/)= Um -s---------,
o-»M V
478
если этот предел существует. Здесь F - область, ограниченная замкнутой глад-
кой или кусочно-гладкой поверхностью о, V - объем области V, п - нормаль
к поверхности о в точке М.
Для декартовой системы координат с непрерывными вместе со своими част-
ными производными Р, Q, R
<»ч>
dy dz ) (.dr dx ) (, dx ду )
В символической форме
i j k
„ д д д
rotF = — — — .
да ду dz
Р Q R
Свойства ротора: rote = 0, с = const, rtXr’O, r = xi+>4 + zk.
’ rot(F, + F2) = rotF, + rotF2, rot (»<F)=uro<F +grad uxF.
В ортогональных криволинейных координатах
„,F—
, I (Э(Л,Я,) Э(у/,й + I (Э(у/2) Э(АЯ,)1
W|Wj I dgj fa ) 2 H,Ht ( dg, dgi J ”
где 4,Л2, A, - координаты F в базисе Hj, Ht - параметры
Ламе (см. формулы (29.6));
в цилиндрических координатах
rotF =
rotF»——
psin©
।
pstn© dp
I 34, ЭД, L +f^-^4-)e + Г|Э(Л*Р) 1 ЭЛ*
р Эф dzjp(jr ^pj* 1р Ф р^ф
в сферических координатах
Э(Л, sin©) 34,^
эе " " dp Je₽ +
_ 1 d(pyV fl Э(рл,>
р dp Je[p др Р д© J *
(х =pcos<psin©, у- рsinфstn©, z = pcos©).
Формула Стокса. Формула (22.11) в векторной форме имеет вид
p;rf«JJ(rotF)RAj.
L О
т. е. циркуляция векторного тюля F вдоль некоторого замкнутого контура L рав-
на потоку роторе этого векторного поля через поверхность, ограниченную этим
479
контуром. Из последней формулы
(ro< F (МУ)„ = Jim, -L——.
S - площадь поверхности с, (rotF (*/))„ - проекция ротора на нормаль.
Пример 29.9. Найти вихрь векторного поля F«y2z*i+x2z2j + +x2y2k
в произвольной точке.
Находим частные производные: /^ = 0, Р^~2ух2, Р",=2у2х, d=2xz2,
gr=O, Q,~2x2x, К,=2ху\ R'>-2xly, %=0. По формуле (29.11) имеем
ro<F(Af) = 2x2(y-z)i + 2y2(z-x)j + 2z2(x-y)k.
29.7. Потенциальное поле
Пусть Г - односвязная область, в которой задано поле F (Л/).
Векторное поле F(A/) называется потенциальным, если его можно предста-
вить в виде традиекта некоторого скалярного поля и (М):
F(A/)=gradB(M).
Поле F потенциально в V тогда и только тогда когда rol F (М) = 0, т.е.
= dg dg ЭЯ dR дР
<h' dx дх ду дх дх
Эго условия (21.16) При непрерывных P,Q,R со своими частными произ-
водными задача о нахождении потенциала свелась к задаче восстановления функ-
ции по ее полному дифференциалу (см. п. 21.3).
Пример 29.10. Найти потенциал поля
F = (4ху + 12x’z) I + (2х2 - 3?) j + (4х ’ - 9уг2) к.
если он существует.
Исследуем потенциальность поля:
ro»F=(«;-(X)i+(/T-д!) j+«X - =
= (-9z2 + 9z2)i + (12x2 - 12х2) j + (4x-4х) к =0.
Поле F потенциально. Так как = Р, u'f = Q, и' = R, то получаем
и (х. у, х) -J(4j^ +1 2x2z) dx + <р (у. z) « 2х2у + 4х’z + <р (у, Л
и(х, у, z) = J (2х2 - Зг’) dy + ф (x.z) - 2х2у - Зуг1 + V (х, z),
«(*.>. г) = j (<*’ -9уг2)<& +/(х. у)= 4x’z - Зуг’ +/(х,у).
Следовательно, и (х, у. z) = 2х’у - Зуг’ + 4х ’г + С.
480
29.8. Оператор Гамильтона. Операции второго
порядка в векторном анализе.
Оператор Лапласа
Оператор Гамильтона (оператор набла) - линейный дифференциальный опе-
ратор по определению записывают в виде
v=Ai+Ai+±k.
Их ду dz
С учетом этою оператора основные операции теории тюля можно записать так:
grad и Vu, div F = V F, rot F = V x F
С помощью оператора набла удобно получать и записывать различные формулы
векторною анализа, причем эти формулы приобретают в такой записи большую
наг ладность и выразительность. При выполнении действий с оператором V следует
учитывать, что это оператор дифференциальный и векторный, т е. пользоваться
правилами дифференциальною исчисления и векторной атгебры. При этом следует
помнить, что, если V действует на какое-либо произведение, то в первую очередь
учитывают его дифференциальные свойства, а затем векторные. Входящие в состав
формулы величины, которые подвергаются воздействию оператора набла, обозна-
чают стрелкой, в окончательном результате они должны стоять слева от него Рас-
смотрим операцию взятия дивергенции от векторною произве.тения полей F, и F2:
div(FlxF2)«V(F1xF2)=V(F1xF2)+V(F1xF2) =
« F2 (VxF^-F, (VxF2)= F2 ro»F( - Ц -rotF,.
I 1
rot (F, x F2)= Vx Fj x F2 = Vx F|X F2 + V x F, x F2 =
4
- V x F2 x F,+V x F, x F2 = - F2 (V F,) + (F2 V) F, +
+F, (V F2)-(F| V) F, - F, div F2 - F2 div F, + (F2 V) F, - (F, V) F2.
'Ixa. была нспользовакз форму .'в axhxc-bас) - d»b) С неттотькяянисм поехдней получим
grad(F| F2) = V(F, •F2) = V(Fi F2)+ V(F, F2) = F2x(VxF,) + F,x(VxF2) +
+(F2 V)F,+ (F, V)F2- FjX rot F,+ + F,x rot F2+ (F, V) F,+(F, V) F2.
Если Fy =(P/.QJ. Rj). / = 1.2, to
Эту операцию можно рассматривать как результат применения операции
(F( • V) к каждой составляющей вектора F2.
16 3а*. 1
481
Попарные комбинации операций градиента дивергенции и ротора называют
операциями второго порядка Применительно к скалярному полю имеют смысл
две операции rot grad и и div grad и:
rot grad и = V х Vu « О,
div grad и - VVu = (V V)u =—t+~~v+ TT-
dx dy dz
Символ V V называют оператором Лапласа и обозначают Д:
—
Применительно к векторной величине F = (Р, Q, R)
ДР = ДР» + Д0+Д/?к.
В криволинейных ортогональных координатах
I Г d f HjHy du d f H)//| du A d f H\H2 du
'dg, [ H, 3|rJ Hj dg2) dgjt W> fa
в цилиндрических координатах
I d ( du^i * d’a^d2»»
p Эр [P dp J + p2 Эф2 + dz1 ’
в сферических координатах
1 d ( jdu^l I d
r2 dr \ dr J r’sin© de
I__d\
r2sill2© d«p2 '
x » r cos<psin6, > = rsin9sin0, e = rcos6,
(см. формулы (29.6)).
Я,. ff}, H} - параметры
Ламе
Операции второ» о порядка для векторного поля:
div rot F, rot rot F. grad div F;
divrotF = V VxF = 0 - поле, являющееся ротором некоторого поля F,
соленоидально;
rotrotF«V-xVxF=V(V F)-(V V)F = graddivF -AF;
graddivF = V(V F) =
d'P^ d*Q d2/H
dr2 dxdy dxdc)
dxdy dy2 dydz J [dxdi dydz dr2
(F=(p,e./?)x
482
29.9. Полилинейные функции векторного
аргумента. Понятие тензора
Если каждому вектору х из Е„ поставлено в соответствие число ф = = ф (х)
так, что для любых векторов х, и х, из V„ <р(х( + х2)= <р(х,)+ + ф(х2)идля
любого числа а (а*0) <р(ах) = а<р(х), то ф(х) называют линейной функцией
или линейной формой.
Обозначая J. if,Z координаты вектора х в базисе в|,*2...е„, получаем
1-£**е* иф(х)жф =^Ф (**'») *^*‘ф(«*) = Х,х*’р*
*-| Ч*»| ) *-1 >-•
Числа ф|=ф(е|), ф2 =ф(е2),...,фя = ф(е„) называют коэффициентами линей-
ной формы. Линейную форму считают заданной, если в некотором базисе заданы
ее коэффициенты.
Если любым векторам 1|, х2,..., из V, поставлено в соответствие число
Ф-ф(х(, х2,...,х/>) так, что ф(Х|,х2,...,х/|) - функция линейная относитель-
но всех своих аргументов, то ф(хр х2,..., хр) называют полилинейной функцией
или полилинейной формой.
В этом случае при
Ф(«|. «з...
Я я я
“X X ^м, *,•
a,-I i,-i *,-i
Числа ф4 41 4 =ф(е*1,е21,...,е4 ) называют коэффициентами полилинейной
формы. Всего их пр. При р-2 форму называют билинейной.
В тензорном исчислении принято соглашение о суммировании: если в некото-
ром одночленном выражении одинаковый буквенный индекс встречается
483
дважды - один раз вверху и один раз внизу, то это означает сумму выражений
этого рода для значений индекса 1,2,.... я Например,
Обозначение индексов суммирования нс играет роли: a' = a} = aj.
Если в V„ выбраны два базиса
*1» *1» •••• *•
и
•г. «г....«Ж.
то каждый вектор системы (29.13) можно разложить по базису (29 12):
ег = +/,2.е, + ••• + £е, = 1>л,.
•г - фе, + + ••• + /2'е, -
(29 12)
(29 13)
(29 14)
«»• = 4*» +4*з++4*. С*/-
Матрица перехода от базиса (29.12) к базису (29 13) имеет вид
4 4 ... 4
т- 4 4 ••• 4 (29.15)
.4 4 — 4.
Матрица перехода от базиса (29.13) к базису (29.12) является обратной
матрице (29.15):
Учитывая соглашение о суммировании, формулы (29 14) можно записать в виде
*/='/•> (У = 1.Х....п;/ = Г.Г......л') (29.17)
Аналогично, учитывая матрицу (29.16) и соглашение о суммировании, получаем
-»/•/. (29.18)
484
Преобразования, в которых участвуют элементы матрицы (29.15), называют
ковариантными (согзрсобразующимися, изменяющимися так же). 11реобраэоеания,
с участием элементов матрицы (29.16), называют контравариазгпзыми
(противопреобразукхцимися).
fol
Ковариантным тензором ранга q (тензором тина (0, <?) или ) называется вс-
\Ч)
личина, которая в каждом базисе векторного пространства 1'„ задается л* упорядо-
ченными системами чисел а,,Л.„Л « базисе (29.12) и , в базисе (29.13)).
которые при переходе от базиса (29.12) к базису (29 13) преобразуются по закону
t'e - элементы матрицы (29.15). Раит тензора называют также валентностью.
Пусть <р(Х|,12> •••»«,) - линейная форма порядка q с коэффициентами
ФМ1 ...I, в бимсе (29.12) и ф,г4>_ , в базисе (29.13). Учитывая определение коэф-
фициентов поли линейной формы, соотношение (29.17) и свойства линейности,
можно получить
Ф.г,г = Ф (Ч • ......% )» Ф <С*-.. tfo......=
-4С .......сс ••<>..., л-
Таким образом. линейная форма порядка q является ковариантным тензором зила
(О, q). Удобно считать, что и тензор типа (0, q) является линейной формой порядка q.
Козправариантным тезгзором ранга р (тензором типа (р, 0) или
называется
величина, которая в каждом базисе векторного пространства 1'„ задается яг упоря-
доченными системами чисел аАЛ " У» в базисе (29.12) и ahh в базисе (29.13))
которые при ззсрсходс от базиса (29.12) к базису (29 13) преобразуются по закону
a**"**' =t*t£ ,
/1 П Jp
t'j - элементы матрицы (29.16).
(2920)
Если х*,х2,...,х" координаты вектора х в базисе (29.12) хг,хг,...,х" - в
базисе (29.13), то х-х'е^ и =х/е/. Следовательно. х^е,-=х7еу =хЧ'е,..
Приравнивая координаты при ег, получаем
х'^ЛгЛ
Таким образом, вектор - это контравариантный тензор, т.е. тензор типа (1,0).
Наоборот, тензор типа (1,0) можно рассматривать как вектор.
Числа x',x2,...,x" называют контравариантными координатами вектора^
485
Тензором типа (р. q) (q раз ковариантным и р раз контравариазггным) называется
величина, которая в каждом базисе векторного пространства I „ задается упоря-
доченными системами чисел (вАА/' в базисе (29 12) и a''h ' в базисе (29. В»,
которые при переходе от базиса (29.12) к базису (29.13) преобразуется по закону
*г*г Л Л А Л *r V Мэ-->
Г^*,4 - злемезпы матриц (29.15) и (29.16). Числа вАА /' называют координатами
тензора в базисе (29.12), аАА - координатами тензора в базисе (29.13)
29.10. Действия над тензорами
Пусть заданы два тензора одинакового строения (p,q), т. е. заданы координа-
ты a'\h, б/*7* :>г. Их суммой будет тензор того же строения с координатами
—А/>'“h
•
Сказанное остается в силе и при сложении нескольких тензоров одинако-
вого строения
Если оАЛ- координаты тензора типа (о, q) и rf'/' координаты
тензора типа (г, к), то произведением этих тензоров будет тензор, координаты
которого выражаются следующим образом:
4s “4s Л ». •
т.е. в калитом базисе каждую координату первого тензора умножают на каждую
координату второго тензора и по лученные произведения принимают за координа-
ты нового тензора типа (p + r,q + s). Указанным способом можно перемножать
любое число тензоров Результат умножения зависит не только от типа сомножи-
телей. но и от их порядка
Операция свертывания тензора имеет специфически тензорный характер, и
применяется к тензорам смешанного типа. Пусть дан произвольный тензор,
имеющий хотя бы один верхний и хотя бы один нижний индексы. Индексы выби-
рают произвольно и отбирают те координаты тензора, для которых выбранные
индексы имеют одинаковые значения 1.2,...,п. Это означает, что производится
суммирование всех выбранных координат при фиксированных значениях осталь-
ных индексов. Получаем тензор, утративший по сравнению с исходным по одному
нижнему и верхнему индексу. Если тип исходного тензора (р. д\ то полученный
486
тензор имеет тип (p-l.^-l). Пусть выбираем, например, индексы Jt и
i, и рассматриваем т.е.
_ЛЛ -Л _'Л-4 . *А b .
В связи с тем, что валентность тензора при свертывании понижается на две
единицы, па операция является весьма важным источником получения инвариан-
тов - величин, нс зависящих от выбора базиса Если у тензора одинаковое число
верхних и нижних индексов, то, применяя операцию свертывания столько раз,
сколько верхних или нижних индексов, получают число. 11ри сворачивании тензо-
ра типа (1,1) получаем о/-а} +а* +aj + — + a" =а - слел соответствующей
матрицы Особенно часто применяется свертывание к тензорам, полученным как
произведение Гак, запись линейной формы ф (ж) = х'ф, можно рассматривать как
получение инварианта ф(ж) путем свертывания произведения тензоров жг и ф,.
Транспонирование тензоров (операция подстановки индексов) по двум ковари-
антным или двум контравариаятным индексам - преобразование рассматриваемо-
го тензора в тензор того же типа координаты которого отличаются от координат
исходного тензора порядком транспонируемых индексов. Например,
А/. .Л = алл./,
‘Л-Л "л-Г, ’
Операция симметрирования по труппе р ковариантных или коптравариаитных
индексов заключается в следующем' транспонируют тензор, совершая всевозмож-
ные перестановки индексов выбранной труппы. Полученные таким образом рУ
тензоров складывают и делят згу сумму на рУ. Полученный тензор обозначается
заключением выбранной группы индексов в круглые скобки. Так. тензор .
симметрированный по индексам т,. it, t4, имеет вид
+ + ОМ«<Л + а¥«мЛ
Операция альтернирования (альтернации) по группе р ковариантных или кон-
гранариантных инлексов производится следующим образом: транспонируем тен-
зор, совершая всевозможные перестановки инлексов выбранной группы. Получа-
ем рУ тензоров. Далее складываем тензоры, полученные четными перестановками
и из згого результата вычитаем тензоры, полученные нечетными перестановками,
окончательный результат делим на рУ. Полученный тензор обозначается заклю-
чением выбранной группы индексов в квадратные скобки. В результате атьтерни-
487
1, „ „
роман и я тензора av получаем «(,] = - (a4~ajt). Альтернирование тензора
ah,, , по индексам Л, б:
+<Л>. +
°*МЛ ~в*МЛ ~“'АМ« ~eWA
Тензор называют кососимметрическим го нескольким одноименным индексам,
если он умножается на -I при транспонировании любых двух из этих индексов
Примером кососимметрического тензора может быть тензор типа (0,2), координа-
ты которого образуют кососимметрическую матрице о* =-а;,, т.е. матрице вида
О —Он 1
, или тензор типа (0, 3), координаты которого обладают свойством
. «л 0 J
°г?» = - °ь> “ “°/1* = ач> ~ алг
В результате альтернирования получают кососимметрический тензор по индексам,
участвующим в альтернации.
29.11. Тензоры в евклидовом пространстве
В евклидовом пространстве Е„ введено скалярное произведение двухвекторов -
би линейная форма Иначе говоря, евклидово пространство - это линейное простран-
ство, в котором определен тензор типа (0,2). Если х =х'е,, у = у7еу, то
х у = (х'«, = где «,=(•<••/)(*/••.)«>• Сим-
метричный тензор g4 называют метрическим В результате свертывания тенгоров
gtl и х' получают числа ковариантные координаты вектора х: g^x' a*j. Кова-
рна! иные координаты - зто проекции вектора х на базисные векторы, гак как
х, =gyx/ = (е,•*/)х/ =(е, х'еу), т. с. х, - хе,. Дважды контраварнаитный тен-
зор g9 с матрицей, обрат ной матрице тензора g9, называют контравариантным
метрическим тензором. Любой одновалентный ковариантный тензор xf путем
свертывания с тензором g9 можно преобразовать в контраварнаитный
g*x;=x*. Операцию перехода от контравариаггпгых координат вектора к его
ковариантным координатам называют операцией «оггускання индекса», а опера-
цию перехода от ковариантных координат к контравариантным - операцией
«поднятия индекса». Операцию опускания или поднятия индекса в евклидовом
пространстве применяют к тензорам любой структуры.
488
Если базис ортонормирован, то нет необходимости различать ковариантные и
коитравариантиые тензоры, так как матрица (29.16) получена в этом случае транс-
понированием матрицы (29.15) и во всех преобразованиях участвуют лишь эле-
менты матрицы (29.15). В этом базисе х, = х‘.
I [римсром двухвалентного тензора является тензор деформации, который оп-
ределяет положение точек тела после деформации по отношению к их положению
до деформации. Если Х|,х2,х] — декартовы прямоугольные координаты точки
тела до деформации, ц.з^.н, - координаты вектора перемещения и деформация
I ( Эн Эк I
мала, то координаты тензора деформации имеют вид и = — I _£* + '
• 21 яху дх, I
и матрица этого тензора
29.12. Тензорное поле
Если каждой точке Л/ области Кс£л поставлен в соответствие тензор од-
ного и того же типа, то говорят, что в области И задано тензорное иоле. При
переходе от одной системы координат (ж*. л1....,*") к другой
(х1 ,х2л") базисные векторы преобразуются следующим образом:
дх‘
ег = —г е,. 11олс тензора валентности р + q определяется в каждой системе
от
координат функциями точки в** ’/'(АО. которые при переходе к дру-
гой системе координат преобразуются по закону
_/,з, 1, „ дх* АЛ дх1' м,
дх* ЛЛ “ дх*'
Чтобы определить изменение тензора при переходе от одной точки к другой,
надо учитывать не только изменение компонент тензора, но и изменение локаль-
ного базиса Например, для контравариантного векторного поля и7 приращение
489
векторного ноля (с точностью до бесконечно малых высшего порядка) равно
Du' = Л/+Ци'А*. (29.21)
- символы Кристоффе.тя:
Л 2 \ дх* дх' дх" J
Слагаемое du' в (29 21) учитывает зависимость координат приращения теннра от
приращения его координат, а слагаемое Г^н'тбг* учитывает зависимость компонент
приращения тензора от изменения системы координат при переходе от точки к точке.
Вектор От? называют ковариантным или абсолютным дифференциалом век-
торного поля. Ковариантной или абсолютной производной этого поля называют
совокупность величин
vy-^+r'*'.
ОХ
Аналогично вводят ковариантную производную ковариантного векторного поля
_ дн,
v'“'"a7-r'4
Для тензорного поля н/ ковариантная производная вычисляется по формуле
ох
Так же определяется ковариантная производная для тензорного поля любой
структуры. Ковариантная производная тензорного поля - тензорное поле, ковари-
антная валентность которого на единицу выше исходною поля.
Абсолютный дифференциал любого тензорного поля Т: ОТ = V,Tdx'
В прямоугольных системах координат 1J =0 и ковариантное дифференциро-
вание переходит в обычное.
Ковариантное дифференцирование перестановочно со свертыванием
Правила ковариантного дифференцирования для суммы и произведения
тензоров совпадают с правилами обычного дифференцирования.
490
V
ЧИСЛЕННЫЕ МЕТОДЫ
Гпава 30
ПРИБЛИЖЕННОЕ РЕШЕНИЕ УРАВНЕНИЙ
30.1. Отделение корней уравнения
Корнем уравнения
/(*)-0 (301)
называется такое значение х =* lj арзумента функции /(х), при котором это
уравнение обращается в тождество: /(^) = О Корень уравнения (30.1) геометри-
чески представляет собой абсциссу точки пересечения, касания или другой обшей
точки графика функции и = Дх) и оси Ох (рис. 30.1, о в).
Отделить корень уравнения - значит найти такой конечный промежуток,
внутри которого имеется единственный корень данного уравнения. Отделение
корней уравнения (30.1) можно выполнить графически, построив i рафик функции
у = f(x\ по которому можно судить о том, в каких промежутках находятся точки
пересечения его с осью Ох. В некоторых случаях целесообразно представить
уравнение (30.1) в эквнвалс>птюм виде:
/!(*)=/з(*) ' (30.2)
с таким расчетом, чтобы графики функций у> = /,(х) и у = ft(x) строились по
возможности проше. Корень уравнения (30.2) представляет собой абсциссу точки
пересечения графиков у = f(x) и у = Таким способом можно, например.
491
найти корни уравнения х’ + рх + q = 0; это будут абсциссы точек пересечения
прямой y = -px-q и линии у = х’.
Для отделения корней уравнения (50.1) применяют следующий критерий, если
на отрезке [а, Ь] функции /(х) непрерывна и монотонна, а сс значения на кон-
цах отрезка имеют разные знаки, то на этом отрезке имеется один и только один
корень уравнения. Достаточным признаком монотонности функции /(х) на от-
резке является сохранение знака ее первой производной (если /'(х) > 0, то функ-
ция возрастает; если f'[x)< 0, функция убывает)
Пример 30.1. Отделить корни уравнения х’ + х - 4 = 0.
В данном случае /(х)=х* + х-4, /'(*) = Зх2 + 1. Так как Г(х)> 0 при всех х,
то функция /(х) возрастает в промежутке (-«>. + «•). Корень считается отделенным^
если указан конечный промежуток (а, Ь), на котором он находикя Метолом проб
находим отрезок (о, Ь], для которого /(о) /(b) <0 Для этого вычислим значения
функции при некоторых значениях аргумента: /(0)=-4<0, /())«l + l-4 = -2<ft
/(2) = 2’ +2-4 = 6>0. Поскольку /(0) /(I) > 0, то на отрезке |0.1] корня нет, так
как /(1) /(2) < 0. то корень уравнения находится на отрезке (1.2]
Замечание I. Можно у казал, отре-
зок меньшей длины, которому принадлежит ко-
рень Взяв середину отрезка (1,2]. т.е. поло-
жив х “ 1,5, получим / (15) = 15’ ♦ ♦ 1.5 - 4 =
0,875 > 0; значит, корень находится на отрезке
(1; 1,5]. Этот процесс можно продолжать
Замечание 2. Корень данного урав-
нения можно отделить и графически. Придадим
уравнению вид х* м-х + 4. те. вид (30.2). и
построим графики функций у = х’. у = -х + 4
(рис. 30.2). Эти графики пересекаются в точке Л/.
абсцисса которой принадлежит интервалу (1.2).
30.2. Метод хорд
Метод хорд, или метод секущих, приближенного решения уравнения (30.1) имеет
следующую ।«©метрическую иллюстрацию: вместо точки пересечения оси Ох и гра-
фика функции /(х), входящей в это уравнение, рассматривается точка пересечения
данной оси и отрезка прямой, соединяющей концы дуги графика (рис. 30.3).
Если известно (п -1) -е приближение, то и-е вычисляется по формуле
_ bftx^-x^J^b) _ )
492
в случае (рис. 30.3, а, б), когда
/(Ь)/"(х)>0, (30.4)
или по формуле
х = (305)
" /(*«ч )"/(<>)
в случае (рис. 30.3, в, г), когда
/(в)/'(х)>0. (30.6)
11оследовательность чисел х„ (л- 1,2,3,...) сходится к корню lim х„ =
Вычисления приближений Xi.Xj.Xj,... следует производить до тех пор. пока два
последовательных приближения х„, хя+| не совпадут на заданное число знаков.
Для промежуточных выкладок надлежит брать один-два запасных знака
Оценка абсолютной погрешности определяется формулой
(30.7)
где М 2 min |/'(х)|. /'00*0.
493
Пример 30.2. Метолом хорл найти действительный корень уравнения
х’+х-1 = 0.
В данном случае /(х) = х’+х-1, /'(х)=3х2 +L Поскольку /(0,5)<0,
/(I) > 0, /'(х)> 0 для всех х, то на отрезке [0,5; I] находится единственный дей-
ствительный корень урав1»енияТак как /"(х) = 6х и /(1)/"(х)>0, т.е. выполне-
но неравенство (30.4), то пользуемся формулой (30.3), положив в ней 6=1,
хо=0,5. Вычислим сначала /(х0), /(6), входящие в эту формулу;
/(х0)=/(0,5)= 0.5’+0.5-1 = -0,375; /(/>)«/(!)= l’+1-1 = 1. По формуле
(30.3), полагая п = 1,2, вычисляем
. У(^)-У(») „ К-0Л75)-0Л1.
’ /(х0)-/(6) -0375-1
_ У(х,)-х,/(6) = 1 (-0.Ю5935)-0,634364 _
7(Х|)-/(Ь) -0.105935-1
Аналогично вычисляем последующие приближения: • Xj = 0,679662,
х« =0,681691, х$ =0,682176, xt= 0,682292, х7 = 0,682319, х, = 0,682326,
х, = 0,682327. Следовательно, с точностью ло 0,0001 получено значение
корня £ = 0,6823
30.3. Метод касательных
Метол касательных (или метод Ньютона) отличается от метода хорл тем, что
здесь рассматривается нс секущая, соединяющая концы дуги графика, а касатель-
ная к графику. Точка пересечения касательно с осью Ох лает приближенное зна-
чение корня (рис. 30.4).
В методе касательных (л + 1)-с приближение вычисляется по формуле
определяется формулой (30.7).
Пример 30.3. Методом
уравнения х’ + х-3 = 0.
(л = Ц1.2,...), (30.8)
/(».)
в которой за нулевое приближение х0 прини-
мается такое значение из отрезка [а, 6], для
которого выполняется условие
/(Xo)/'(*)>tt (309)
Оценка погрешности, как и в метоле хорл,
с
касательных найти действительный корень
494
В данном случае /(х) = х5 + х-3=0, /'(х)= Зх2+1. Огделив корень уравне-
ния, видим, что он принадлежит отрезку [12, 1,3]. В качестве начального прибли-
жения возьмем х0 = 1,25 (середину этого отрезка); в точке х^ = 1,25 выполняется
условие (30.9), так как /'(х)>0 и /(х0) =/(1Д5)> 0. Результаты вычислений,
выполненных по формуле (30 8), заносим в табл. 30.1, из которой видно,
что £= 121341.
Таблица 30.1
Л «! /(*.) Г(«.)
0 1.250000 1.953125 0203125 5,687500 0,0357140 1.214286
1 1214286 1,790452 0,004738 5,423470 0,0008740 1,213412
2 1.213412 1,786590 0,000002 5,417107 0.0000004 1.213412
30.4. Метод итераций
Если каким-либо способом получено приближенное значение х0 корня уравне-
ния (30.1), го уточнение корня можно осуществить методом последовательных при-
ближений или методом терапий. Дтя этого уравнение (30 I) представляв ч в виде
Л = Ф(*Х (30.10)
что всегда можно сделать и притом mhoi ими способами, например
х»х+</(х), (30.11)
где с — произвольная постоянная.
Пусть число х, есть результат подстановки х0 в правую часть уравнения
(30.10): х(=ф(х0), х2 = <р(х,), х,^ф(хД...,
“<₽(*»-.) (30.12)
Процесс последовательного вычисления чисел х„ (л = 1,2,3,...) по формуле
(30.12) называется методом последовательных приближений или методом итера-
ций. Процесс итераций сходится (lim х, = £). если выполнено условие
|<р'(х)|*9<1 (30.13)
на отрезке (а, 6], содержащем корень £.
Пример 30.4. Метолом итераций найти действительный корень уравне-
ния х’+х-3=0.
Корень этого уравнения принадлежит отрезку [12; 1,3]. Данное уравнение
можно записать так: х = ф(х), где ф(х) = 3-х’; однако этим представлением
пользоваться нельзя, поскольку max |ф'(*)|3 max | - Зх’|-5,07 >1.
т.е. не выполнено условие (30.13).
495
В соответствии с формулой (30.11) получаем ф(х) = х+</(х) = х +
+ с(х’+х-3). Условие (30.13) будет выполнено, например при с = -0,2
Ф (х) = х - 0,2 (х* + х - ЗХ ф' (х) = 1 - 0,2 (Зх1 +1),
max |ф'(х)1 = maxi 1-0,2(Зх1 + 1)1 = 0,214 < L
«•(•Л РУ 1 1 1
Взяв в качестве Хо любое значение х из отрезка [1,2,1Д], например х0 = 1.21,
проведем вычисления по формуле хяИ = ф (хя), гае ф(х„)=хя~
- 0,2 (хя + хя - 3), ф (х„ ) = х„ - 0,2/(хя X и представим их в табл. 30.2, из которой
видно, что £ “ 1,21341 - корень уравнения.
Таблица 30.2
п »! /(».) •<».>
0 1,210000 1,771561 -0,018439 1,213688
1 1,213688 1.787810 + 0.001498 1,213388
2 1,213388 1,786483 - 0,000129 1,213414
3 1,213414 1,786599 + 0,000013 1,213411
4 1,213411 1,786585 -0,000004 1,213412
ЗОЛ. Метод Чебышева
Если а — приближенное значение корня уравнения /(х) = 0, то уточнение
этого значения можно осушсстюпь по формуле Чебышева:
,-а Лс> (/(«)? л<«) (Л«)У( Г(«) Г'(а)1
7'(а) 2/'(а) U'(a)J (2(/'(а))’ 6/'(a)J
/(о) Y ( ЯГ(а))’ _ 5Г(а)/~(а) + Л^(«)7
/'(a)J ^«(/'(а))’ >2 (Ла))2 Ла) J
(30 14)
Замечание. Если в этом разложении ограничится двумя членами, то
получим формулу (30.8), т. с. метол Ньютона является частным случаем
метода Чебышева.
Пример 30.5. Методом Чебышева найти действительный корень урав-
нения х’ + 8х - 6 = О.
Корень уравнения принадлежит интервалу (0,1). Взяв а = х0 = 0,5, по форму-
ле (30.14) вычислим Х| = 0,705868. Применив эту формулу снова, при
х,= 0,705868 получим х2 = 0,706011. Аналогично находим х,= 0,706011. Следо-
вательно, £ = 0.706011 - корень уравнения.
496
гпава 31
ИНТЕРПОЛИРОВАНИЕ ФУНКЦИЙ
31.1. Интерполяционный многочлен Лагранжа
Интерполяционным многочленом Лагранжа называется многочлен
/> (ж) = у л (x-x0)(x-xl)...(x-xt.l)(x-xtH)...(х-х,) (3| ()
и*-*о)(**-*|) -(**-**-|)(**-**я)" (ъ-*-)
'Нот многочлен удовлетворяет условиям /Цх*) = уа, * = 0,1,2,....л. где х, -
узлы (или полюсы) интерполяции, yt - заданные числа
Интерполяционной формулой Лагранжа называется формула
/<Н-Уп (^~^) (312)
fa (х*-х0)(х4 -х|)...(х*-х*_|)(ха-х|4|)...(х,-х,)
Формулы (31.1) и (31.2) можно записать так:
Р,(х) = <о(х)У.----------; /(х)-<о(х)У------й-------,
где
<о(х) = (х-хо)(х-х,)...(х-х,Х (313)
«'(*) = (»* ~x9)(xt -х,)...(х* -Xj.JCx, -ха4|)...(х* -хя)
Производя юпсрполированис функции /(х) по формуле Лагранжа (31.2), за-
меняют эту функцию полиномом Р„(х), совпадающим с ней в л + 1 данных точ-
ках отрезка (а, Ь). В остальных точках этого отрезка разность /<, = /(х)- Р„(х)
отлична от нуля и представляет собой погрешность метола 'ha разность, назы-
ваемая остаточным членом интерполяции, определяется формулой
в которой <о(х) выражается равенством (31.3), £ - точка промежутка [<з, 2>|,
зависящая отх.
Пример 31.1. Найти интерполяционный многочлен Лагранжа, который в
точках хо= -3, х,= -1, xj=2 принимает соответственно значения >^= -5. у(= -11, у >=10.
При я = 2 формула (31.1) имеет вид
р (х)= . (*-Х1 И»-*») + (х-х0)(х-х?) + (х-хв)(х-х|)
(*о-*|)(*о~*з) 1 (*|“*2) 2 (*з-*о)(*з~*»)
497
Подставляя в эту формулу заданные значения, находим
»(х)=-5 Ji+lMi-JL- 11 + ю(£±?)<1±1),
’ (—3+1)(—3—2) (-I+3M-1-2) (2 + 3)(2 + 1)
А(х)—|(ха-х-2)+^(хЧх-б)+^(х,+4х+3)-
2 о 3
= -[-3(х1-х-2)+11(х1+х-6)+4(х1+4х + 3)]«^(12х1+Зах-48).
6 о
Итак, Рг(х)=2хг + 5х-8.
Пример 31.2. Найти интерполяционным многочлен Лагранжа Д(х\ для
которого 7J(-1) =—11, /JO)—X /М2)"1. /з(3)=И
В данном случае х0--1, х(=1, ха»2, Xj=3, ус—II, У|=-3, Уа“1.
у, = 13. При л=3 формула(31.1) принимает вид
P(X\=V (х-*|)(х-«а)(*-*1) (х-х^Дх-х^х-х,) +
’ (Xo-xOUo-XjMxo-*») (*i-*o)(*i-*»)(*. ~*э)
+ (х-хб)(х-х,)(х-х,) + у (х-х„)(х-х,)(х-ха)
(Xj-XoXXj-XiXXj-X,) (Xj-XoMXj-xJCXj-Xj)
11одспшляя в эту формулу данные значения, получаем
ffxl- 11 <х—1)(х-2)(х-3) э(х+1)(х-2)(х-3) f
(-1-1)(-1-2)(-1-3) (1 + 1)(1-2)(1-3)
+ । (х + 1)(х-1)(х-3) + (х + 1)(х-1)(х-2) =
(2 + 1)(2-1)(2-3) (3+1)(3-1)(3-2)
_ ,, (ха-3х-г2)(х-3) 3(х1-т-2)(д-3)1(х1-1)(х-3)|
-24 4 -3
+ в (х*~1)(х-2) _ 21 (хз _ +1 u_ 6у_ 3_ _ дх1 + я + 6)-
8 24 4
_1(х’ -Зх1 -х + 3)+^(х’ -lx1 -х+2) = х’ М1_2_1+Дк
3 о \24 4Jo/
а( И , . 132 <121 3 1 132
( 4 4J 1 24 4381
( 11 18 , 132 j , 2 , , -
+---------1 + — =х-2х +Зх-1
1 4 4 4J
Следовательно, /э(х) = х*-2х2+Зх-1
Термин «интерполяция» впервые употребил Д. Валлис (1656) при составлении
астрономических и математических таблиц
498
31.2. Разности различных порядков.
Разделенные разности
Рассмотрим значения У,=/(х() функции y-f(x) в точках х, (i~
= 0,1.2,...): у0=/(х0), У|«/(х1к У, “/(х,),... Выделим всевозможные пары
соседних значений: (у0, у(), (у,.у2Х (у,»У,Х... и в каждом случае вычтем пре-
дыдущее значение из последующего, получим разности У|-у0, У,_У|.
У, “У,,..., У„-У„-|.... Эти разности называют конечными разностями первою
порядка или просто первыми разностями Обозначения первых разностей:
АУоиЛ“Уо. АУ|=У,-У|.....Ду.-|=У«"У-|. (31 4)
или
Ah-Лн’Л (( = 0.1.2,...).
Разностями второю порядка или вторыми разностями называют рашости пер-
вых разностей Дуо.Ду^Д^....Дуи,... Обозначают вторые разности через
Д’у.-Ду.ы-Ду.:
Д’у0-Ду,-Ду». Д’у, = Ду, ~ Ду,. Д’у, = Ду,-Ду„ (31.5)
Д’у. а = Ду. “ Ду.-а. Д’У. = Ду.,1 - Ду.
. Разности третьего порядка (или третьи разности) определяются и обозначаю, -
ся следующим образом:
Д’Уо « Д’Уа - Д’Уо. Д*У| = Д’у, ~ Д’Уа.Д*У. - Д’у»ы - Д’У» -
Аналогично определяются последующее разнос,и. Разности (л + 1)-го порядка
получаются из разностей л-го порядка по формулам
Д"иу0-Д'^-Д’у,,, ДТ^-Д'Уз-Д'у,.... (31.6)
Таблица разностей различных порядков строится согласно схеме (табл 31.1).
Таблица 31.1
X У Аг а’/ а’х а’/
и" 4* «Г >7 к ••• Уо У. Уг Уг У< Уг АУо Ду, Ду, Ду, Ду< ДгУо Д’у. Д’у, Д’у, Д’Уо Д’у. д’у, Д4Уо А*У| Д’Уя
Каждое число из этой таблицы (начиная с третьего столбца) является разно-
стью двух смежных чисел столбца слева (из нижнего числа вычитается верхнее;
разность записывается в следующем столбце между этими числами). Третий стол-
бец содержит первые разности, четвертый - вторые и т. л.
499
Для конзроля вычислений при составлении таблицы разностей пользуются
следующим утверждением: сумма чисел в каждом столбце разностей равна разно-
сти крайних чисел предыдущего столбца
Разделенные разности первого порядка определяются формулами
/(xltx0)-^-&, /(х2,х,)=Л^........../(Хя,х>.|) = 2лЛХК1. (3*1.7)
Х|-Хо Х2-Х,
Разделенные разности второго порядка получаются из разделенных разностей
первого порядка по формулам
/(х2. *0)= , /(Xjt Xj> Х|) = (31.8)
Xj-Jto *з-*1
Аналогично определяются разделенные разности третьего порядка:
/ft'*» *1>~
Х2-*0
019)
Разделенные разности n-го порядка получаются из разностей (л-1)-го поряд-
ка по формулам
/(х„ х,и....х„ х„)= *<Н...V1.................Xg) (31 10)
В случае равноотстоящих >злов с шагом h (хл = xe+kh) раз леченные разно-
сти различных порядков имеют вид:
/(Х,.*,)-4?. /(x,.X|)=^L....../(x„x_)=4W; (31.11)
П fl П
^У1
/(хз.х„х0) = —f. /(Xj Xg,*,)-—J-,...;
2.Л Z.ft k (3! I2)
Д’у.
....“•'Jr
Пример 31.3. Составить таблицу разностей различных порядков при
следующих значениях х и у = /(х):
х0 =-3. X, = —2, х2 =-1, х, = 1. X, =2,
Уо = 62. У|=12- Л-2. Уз = 6. >4=32
По формулам (31.4) находим первые разности: Ду0 =>( ->0 = 12 - 62 = -50,
Д>1 =>2~>1 =2-12--10. Ду2 =>,->, =6-2=4, Ду, »>4“>з = 32-6=26. В
соответствии с формулами (31.5) получвем разности второго порядка:
500
Д2Уо = ^|-Дуо=-1ОЧ-5О)=4О, Д,Л»Д^-Д и,-Н-10М4. Д2Л = Ду, - Л и, =
=26-4=22. Аналогично находим разности третьего порядка.
Д’уо = Д2У| - Д2у0 = 14 - 40 = - 26, Д’у, =Д2у1-^у, = 22-14 = 8 и разность
четвертого порядка Д*у0 = Д’у( - £?уе = 8 - (- 26) = 34.
Полученные разности можно представить в виде табл. 31.2.
Табл и на 31.2
X Z Аг А* у а’/
-3 62
-50
-2 12 40
-10 -26
-1 2 14 34
4 8
I 6 22
26
2 32
I -30 76 -18
S -30 76 - 18
Замечание. Последние две строки служат для контроля вычислений в
строке X числа равны суммам всех чисел, расположенным в соогастс-гиующс.м
столбце, в строке 5 - разности последнего и первого числа соответствующего
столбца. Совладение этих чисел (Х( = 5,. Х2 = 52, Х2 = 5\; в таблице - по диа-
гонали) означает, что вычисления таблицы верны
31.3. Интерполяционный многочлен Ньютона
Интерполяционным многочленом Ньютона называется многочлен
/>.и) = Уо+(*-*о)/(*о.*|) + (*-Ко)(х-К|)/(*о.К|.Л1)+"
••+(х-х0)(х-Х1).„(х-хв_1)/(х0,Х|.*.). (31.13)
в котором /(A> Jt|). хо, xb.... х,) - разделенные разности различных порядков
Этот многочлен удовлетворяет условиям у* =/(xt)=/J,(x*) (* = 0.1,2,..., л).
Интерполяционной формулой 1 (ьютона называется формула
/(х)-Уо+(х-Хо)/(х0,Х|)+(х-х0)(х-х|)/(хс>,х1,х2)+-.-
—+(х-х0)(х-х|)...(х-хя_,)/(х0,х...,х,). (31.14)
Замечание 1. Поскольку любой i-й член многочлена Ньютона зави-
сит только от к первых узлов интерполяции и от значений функции в этих узлах,
добавление новых узлов вызывает в формуле (31.13) лишь добавление новых
501
членов без изменения первоначальных. Это является существенным преимуще-
ством многочлена Ньютона по сравнению с многом леном Лагранжа.
Замечание 2. В силу единственности интерполяционного многочлена
л-й степени интерполяционный многочлен Ньютона перегруппировкой членов
можно преобразовать в интерполяционный многочлен Лагранжа и обратно.
В случае равноотстоящих узлов интерполяции (x(=x0 + /t, х3=х0 +
+2А,...,х„ + nh) из формулы (31.14) с учетом (31.12) получается интерполя-
ционная формула Ньютона для «интерполирования вперед»:
/(*)- Уо + (х -*о)+ 2,^ (* "*•)(*"*i)+
+ Л-^(х-х0)(х-х,)(х-х3)+- + ^^ (х-х0)(*-х,) - (х-х„,) (31.15)
3!А п!А
Формула (31.15) удобна при интерполировании функций для значений х, близких
к наименьшему узлу х0.
Интерполяционная формула Ньютона для «и i перколирования назад»:
fix) - у„ + - х. ) + "*• X* ♦
п лп
дЗ
+ —ЦА(х-хяХ*-хя_|Хх-х„_1)4—+ (31.16)
3!Л’
+ —^Чх - X. Хх - Х._().. ,(х - X, ).
• пт
Формула (31.16) удобна при интерполировании функций для значений х. близких
к наибольшему узлу х„.
Замечание 3. В формуле (31.15) в коэффициенты многочлена входят
конечные разности различных порядков, принадлежащие верхней (нисходящей)
строке таблицы разностей (см. табл. 31.1). В формуле (31.16) в коэффициенты
многочлена входят разности различных порядков, принадлежащие нижней
(восходящей) строке таблицы разностей
Пример 31.4. Найти интерполяционный многочлен Ньютона для функ-
ции у /(хХ если известны се значения: /(1) = 6, /(3)=24, /(4) =45.
В данном случае х0 «1, х, = 3, х3 = 4, у0 = 6, у( = 24, у2 = 45. Отметим, что
узлы не являются равноотстоящими (так как х( -х0 X Х3 - х,). Интерполяционный
многочлен (31.13) при п = 2 с учетом равенств (31.11) принимает вид
/2(х) = у0+(х-х0)/(х|,х0) + (х-х0)(х-х1)/(х2,х|,х0).
Вычисляем разделенные разности
502
. *1. *0) = ^x-i,xi)~^xi,xg). 2!—?=<
x2-*o 4-1
11олсганляя в выражение для Рг{х) соответствующие значения, находим интергю-
ляциокный многочлен Ньютона Рг (х) = 6+9 (х -1)+4 (х -1) х (х - 3).
Замечание 4. Раскрывая скобки и группируя члены, получаем
Pj(x)=4xJ-7x+9.
Пример 31.5. Найти интерполяционный многочлен Ньютона для функ-
ции /(х)= 2* по се значениям в точках х0 * -1, х,=0, х2=1, х, = 2, х4=3 и
вычислить /(-ОД) и /(2,5).
Вычислим сначала значения функции в данных равноотстоящих узлах:
Ъ-/(*в)“/(-П = 2-'=0Д у,=/(х,)-/(0)-2°-1, ъ=/(х2) = /(!)= = 2,
уj = /(xs) = /(2) = 4, у< = /(х4)“/(3)=8. Составим таблицу разностей различ-
ных порядков (табл. 31.3).
Таблица 31 3
X Ду О а‘>
-1 03
0 03
1 03
1 2 1 — 0,5
2 4 2 1 1 03
2 S
3 8 4 =3 ж
у
Числа, подчеркнутые одной чертой входят в интерполяционную формулу Нью-
тона для «интерполирования вперед». Многочлен в правой части формулы (31.15)
в данном случае (Л »1) принимает вид
Р,(х) = ОД+ОД (х +1)+-^-(х +1) х +
+ ^(х + 1)х(х-1)+^(х + 1)х(х-1)(х-2).
J! 4!
Р,(х) = | + |(х + 1)+1(х + |)х +
2 2 4
+ ^(х + 1)х(х-1)+^(х + 1)х(х-1)(х-2) (1)
С помощью этого многочлена вычислим значение функции /(х) = 2‘ при
х=—0,5 (значение аргумента ближе к х0 = -1). Подставляя значение
х =—0,5 в формулу (I), находим
503
( й । ii । И । if «У
,1 — =—+—+— — +-— — +
X 2) 2 2 2 4 2{ 2j 12 2< 2Д 2j
111.1 15 ЛЧЛЛ
— + —-——+—— — -- в 0,700.
2 4 16 32 48 16
+ 48 2Г2Д 2Д 2
Числа табл. 31.3, подчеркнутые двумя чертами (и число 0,5 в столбце Л4у),
входят в интерполяционную формулу Ньютона для «интерполирования назад».
Многочлен в правой части формулы (31.16) в данном случае принимает вцд
2 1
/’Дх)=8 + 4(х-3)+^(л-3)(х-2)+-(х-3)(х-2)(х-1)+
+ ^(х-3)(*-2)(х-1)д,
/;(х) = 8+4(х-3)+(х-3)(х-2)+|(х-3)(л-2)(х-1)+
6
+ ^(х-3)(х-2)(х-1)х. (ID
С помощью многочлена (II) вычислим значение данной функции /(х)«2* при
х = 2,5 (это значение аргумента ближе к х4=3). Подставляя значение х = 2,5 в
формулу (II), получаем
Л(2,5)- 8 + 4 (-ОЛ)+(-О,5)(ОЛ)+4 <~0>5)0’5 ’-5+
6
+ —-(-0,5)0,5 1,5 2,5 = 8-2-О,25-*О,375-
48 6
- — 0,9375 = 5,658;
48
/(2,5) - г2-’ - 5,658. Следовательно, /(- 0,5) = 0,700, /(2,5) = 5.658
Замечание 5. Многочлены (I) и (11) различаются лишь формой за-
писи. Действительно, раскрывая скобки и приводя подобные члены, получаем
/>,(х)= />,(х)“ — х4 +—х’+ ~х,+-^х + 1
* " 48 24 48 24
504
Глава 32
ПРИБЛИЖЕННОЕ ВЫЧИСЛЕНИЕ
ОПРЕДЕЛЕННЫХ ИНТЕГРАЛОВ
32.1. Формулы прямоугольников
Формулы прямоугольников имеют вид
* »-1
|/(х)Л *О'о+>| +Ъ+-..+Л-|Х (32.1)
a
b а
|/(ж)АмЛ^л «*(/,+>,+ ...+/,), (32.2)
о *-1
где
h = (b-a)ln, >„ xt=a + kh (к =0,1.2,...,л). (32.3)
Формула (32.1) называется формулой левых прямоугольников (рис 32 1, а),
формула (32.2) - формулой правых прямоугольников (рис. 32.1. 6).
Абсолютная погрешность метода прямоугольников определяется неравенством
|W)|S<»Z5£«.
2л
(32.4)
где М = maxj /'(*)|-
505
Пример 32.1. По формулам прямоугольников, приняв и = 4.
я
Г dx
вычислить I-—.
J *+2
1
В данном случае /(*) = l/(x + 2), сг=1,6=9. С помощью формул (32.3) находим
h 2, *0 = I, Х| ” 3, х2 = 5, х, = 7, х4 = 9 (хс = а = 1. х4 = b = 9);
.. . I II ,, . 1 I
* 'ы '77?"3- '< " 77?‘?
Л-Л»,)*у.
По формулам (32.1) и (32.2) получаем
-*(З-о+Л+Л+>»)= 2 (j+|+y+|] = U7044
', =*(* +А +Л +Л) = 2 (|+|+|+^) = 1,0751
Пример 32.2 На сколько частей следует разбита промежуток интегрн-
7
Г
рования, чтобы с точностью до 0,1 вычислить I z ?
1^2
Абсолютная погрешность при вычислении определенного интеграла по метолу
прямоугольников определяется формулой (32.4). Если ставится задача что-
бы!/(,(/)|Se, т. е. (b-a)2 M/lniz, то nlt(b-a)2 М/2е. В данном случае
а = 2, 6 = 7, £ = 0,1. Так как /(*)=(/V* + 2, /'(*)=~V2x 1/7(* + 2)’,
М = maxj /'(*)| = то л 2 (7 - 2)’ (1/16)/2 0,1 - 7Л Поскольку л - цс-тое чис-
ло, можно принял, л=8 (для удобства вычислений можно шял. п =10. так как b - а =5 ).
32.2. Формула трапеций
Формула транадий имеет вил
|/(*)А=Л^Д.+Л+Л+...+Л_1+^. # (32.5)
где h = (b-a)lп, xt=a + kh yt = /(*»), (*=0,1.2.л).
Правая часть этой формулы выражает площадь фигуры, состоящей из трапе-
ций, высота каждой из которых равна А (рис 32.2). Если /?„ - остаточный член
приближенной формулы (32.5), то
| Д, |s(6-e)’Л//12ла, (32.6)
где М = тах|/ч’(*)|.
506
Пример 32.3. Вычислить
трапеций, приняв и = 5.
В данном случае по расчетной
формуле **=*0 + *Л (* = 1,2,....5),
где Л = (1 - 0)/5 = ОД, получаем
*, = 0 +1 0,2 = 0,2, *,=0.4. *, = 0,6,
*« = 0,8, х, = L Так как у = 1/(1 + *),
то yt - !/(!+*>) (* = 0,1.....5).
Находим значение УЬ=1/(1+*о)=1,
у, = 1/(1 + *,) = (/1Д = 0,833, уа =
-V(I + *2) = VU = O.7I4, Ъ = 0,625,
>4 =0,556, >, = ОДОО.
По формуле (32.5) получаем
I
--------ОД (0500 + 0,833 + 0,714 + 0,625 + 0.556 + 0,250 ) = 0,696
J I + *
t>
Пример 32.4. На сколько частей нужно разбить промежуток иитегриро-
4
вания, чтобы по формуле трапеций вычислить инзирал J* (In* -1) dx с точно-
стью Е, = ол Еа = 0,01?
Для определения числа л отрезков, на которые нужно разбить промежуток ин-
тегрирования, воспользуемся формулой (32.6). Неравенство | Л„|< Е будет выпол-
нено, если - (6-о)’Л//12л2 SE, откуда пi^(6-в)1 Л//12Г Поскольку
/(*) = х(In*-IX /'(*) = •"*, /''(*)“ I/*, М = max(|/*) = 1, то И| г
2 ^(4-3)’ 1/12 0.1 = ^225, «j = 5. Аналогично находим п. = 15
32.3. Формула парабол
Формула парабол (или формула Симпсона) имеет вид
J/(*)dx = y(ye +4(у,+>,+...+yto_l) + 2O-J+>’4+...y2>_2) + yJ>X (32.7)
где
Л = (Л-в)/2л, *» =а + *А, yt =f(xk) (к =0,1,...Дл). (32.8)
507
Правая часть формулы (32.7)
выражает площадь фигуры, со-
ставленной ю параболических
трапеций ХоМоМ^х?. и
тл. (рис. 323). Дута М0М}Мг
графика полыйигральной функ-
ции здесь заменена дугой парабо-
лы. проходящей через
точки А/о, Л/,, Л/2. Аналогичная
замена произведена и для осталь-
ных дуг.
Для остаточного члети формулы (32.7) выполняется неравенство
|яя|$(6-а)*Л//180(2л)*, (32.9)
где М- m«|/flv'(*)|.
Пример 32.5. По формуле парабол вычислить
, приняв 2л=8.
По первой из формул (32.8) находим А = (6-а)/2л = (1-0)/8 = 0,125. Состав-
ляем таблицу значений yt = /(**)= V(x* + 0 (табл 32.1). В последней строке
этой таблицы стоят числа, равные суммам чисел, находящихся в соответствующих
столбцах.
Таблица 32.1
к Зо-Ъ. у, (к нечетное) у, (к четное)
0 0 1,00000 1.0
1 0,125 1.01563 у, = 0.98461
2 0,250 1,06250 у, =0.94118 •
3 0,375 1,14063 у, «0.87670
4 0,500 1,25000 • у4 =030000
5 0,625 139063 у, =0,71910
6 0,750 1,56250 у* =0.64000
7 0,875 1,76563 у, -036637
8 1,000 2,00000 оз •
Е 1.5 3,14678 2,38118
508
По формуле (32.7) получаем
“у [к +40’. +Л+У, +ъ)+2(Ъ+>. +>.)+>.] =
—77(1+4 3,14678 + 2 238118 + 03)«т7 (1+12,58712 +
24 24
+4,76236 + 03) = 0,785395.
32.4. Приближенное вычисление определенных
интегралов с помощью рядов
Если подынтегральная функция разлагается в степенной ряд. а пределы интег-
рирования принадлежат области сходимости этого ряда, то соответствующий оп-
ределенный интеграл можно вычислить с заданной точностью.
V* .
„ ______ Г san дс .
Пример 32.6. Вычислить интеграл I ——dx с точностью до o,ooooi.
о Я
Разделив почленно ряд для sin лг на *, получим
sin* , х‘ ж* х‘
— = 1 - — 4- —— — —— +
* 3! 5! 7!
Интегрируя этот ряд почленно (это возможно, так как пределы интегрирования
принадлежат интервалу сходимости данного ряда), получаем
Отраничиваясь первыми двумя ч ленами этого ряда, находим
_1______1_
4 3 ЭИ*
- 0,25000- 0,00087 = 0.24913.
о
509
Погрешность не превзойдет первого отброшенного члена:
I_____ I = 1 < 1
5 5? 4’ 5 120 1024 ” 614400 < 100000
VJ _____
Пример 32.7 Вычислить интеграл IV1 +д’dt с точностью до 0,001.
о
Подынтегральная функция разлагается в степенной ряд
(Ы<1)
Z о Ю 1Хо
Интегрируя этот ряд почленно в промежутке [0,1/2), находим
Д Ц_ J__L 1 1___________5 J_
2 + 8 2* 56 27 + 160 210 1664 2П +
Поскольку 1/56 27 = 1/56 128 = 1/7168 < 0,001, то для вычисления данного интеграла
с укатанной точностью достаточно взять два первых члена получение! о ряда, тс.
1+_L= 0.508
2 128
510
Глава 33
ПРИБЛИЖЕННОЕ РЕШЕНИЕ
ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
33.1. Интегрирование дифференциальных
уравнений с помощью рядов
Решения многих дифференциальных уравнений не выражаются в элементар-
ных функциях. В этих случаях гюльзузотся приближенными методами интегриро-
вания дифференциальных уравнений. Одним из таких методов является представ-
ление решения уравнения в виде степенного ряда; сумма конечно! о числа членов
этою ряда будет приближенно равна искомому решению. Укатанный степенной
ряд находят способом неопределенных коэффициентов или способом, основан-
ным на применении ряда Тейлора (Маклорена).
Способ неопределенных коэффициентов особенно удобен в применении к ли-
нейным уравнениям, т. е. уравнениям вида
+ Р|(«) У*'” + — + ) У + Л(«) >-/(*).
и состоит в следующем. Если все коэффициенты pt(x) (4 = 1,2,..., и) этого
уравнения и свободный член /(х) разлагаются в рады по степеням (х-в), схо-
дящиеся в интервале (а - Л, a + Л), то искомое решение у = /(х) также представ-
ляется степенным рядом
у (*)=Q +С|(* - ®)+G(* - в)2 + —+С,(* - в)’+•••,
сходящимся в этом же интервале. Подставляя в уравнение функцию у (ж) и ее
производные, приравнивают коэффициенты при одинаковых сюленях (х-а). Из
полученных при этом уравнений и заданных начальных условий находят
коэффициенты Q,Ct, Q,...
Способ основанный на применение ряда Тейлора (Маклорена), заключается в по-
следовательном дифференцировании данного уравнения. Это дает возможность най-
ти значения производных, входящих в выражения для коэффициентов ряда
y(x) = y(fl) + /(fl)(x-fl)+2^>(x-fl)I+... + /'',l?2(x-fl)"+...,
2? л!
являющегося решением уравнения.
511
Пример 33.1. Найти первые пять членов разложения в ряд решения
уравнения у’-х2+у2, удовлетворяющего условию у-\/2 при х = 0.
Найдем выражения для трех последующих производных, дифференцируя данное
уравнение у* = *2 + у2:
у" - 2х + 2уу', у"" = 2 + 2ул + 2уу", у^ = 4у'у" + 2у'у“ + 2уу~.
Вычислим значения этих производных при х = 0, принимая во внимание началь-
ное условие у (0) = V2:
у'(0) = 0 + ± = 1, у-(0) = 2 0 + 211-1.
у-(0)-2+2±+211-« y<~>(O)-Jl.
Подставляя эти значения в формулу (I), получаем
, . I 1 1 а 19 , 11 4 .
' 2 4 8 48 96
Пример 33.2. С помощью степенного ряда проинтегрировать уравнение
(1-*)у" + ху*-у = х2-2х + 2
Пусть y-Q+Qr + Cj*2+G*,+C,4x«+Gjr* + •••, тогда
У - С, + 2С,х + ЗС>2 + 4С>’ + 5Cfx* + •,
у" = 2С,+2 ЗС,х + 3 4С4х2 + 4 5С^х, + -
Подставляя выражения для у, у', у" в данное уравнение, получаем
(1-*)(2С2 + 2 ЗС,х + 3 4С4х2 + 4 5С^г’+ •)+*(Cl+2Qx+3CJx2+4C4*’ +
+ 5Qx* + -)-(Q + С,я + Cjx2 + С>’ + Ctx* + Qx’ + •••) = x2 - 2x + 2
или ___
(2Q-q,)+(2 3C,-2C,+C,-C,)* + (3 4C4-2 3C^ + 2Cj-Cj)x2 +
+ (4 5C$-3 4C4+3Q-G)x’+(5 6C4-4 5Cs+4G-C«)*<+ =
= x2-2x + Z
512
Так как у - решение уравнения, то последнее равенство выполняется тожде-
ственно; коэффицис1гты при одинаковых степенях х в обеих частях равенства
равны между собой:
2C,-Q=2.
2 M,-2Cj =-2.
3 4<’«-2 3C, + Cj = l,
4 5С,-3 4С;+2С,=0,
5 6Q-4 5C,+3Q=O,
(я + 1)(я + 2)С(М,-п(л + 1)С(М|+(я-1)Ся =0,
Решая эту систему, находим
Таким образом, все коэффициенты, начиная с С,, выражены через коэффици-
ент Со, который остается произвольным; остается произвольным и С, (этот ко-
эффициент не входит в полученную систему). Следовательно, искомое решение
представляется рядом
y-Q + Qr+fl+^lx’+S x’ + Sf х« + ^х*+^х‘+-.-,
г 2 J 3! 4! 5! 6!
сходящимся при всех х. Это решение является общим:
y = Q^l + i+^ + i| + -J + (Cl-Q)x + *’, у = С>'+С'х+х2,
где С| -Со = С - произвольная постоянная.
Пример 33.3. Найти первые пять членов разложения в ряд частного ранения
уравнения у“-2у' + у = е", удовлетворяющего началы!ымусловиям:>(0)=О.>'(0)=1.
Пусть искомое решение представляется сходящимся степенным рядом
у(х) = С0 + С,х + С^х2 +Сэх’ +С4х4 + С5х* +••• Дважды дифференцируя этотряд
в его интервале сходимости, получаем
/(х) = С, + 2С2х + ЗС,х2 + 4С4х2 +5С,х* + •,
у"(х) = 2С2 +2 ЗС,х + 3 4С«х2 +4 5С,х’ +••
17 Зак I
513
При х = 0 имеем >(0) = Q, y'(O)~Ct', принимая во внимание начальные усло-
вия >(0) = 0, у'(0)=1, находим два первых коэффициента разложения для
у (х): Q = О, Q = 1. Подставив в данное дифференциальное уравнение выражения
для у(х), у'(х), у"(х) и разложение в ряд функции е', получим
2Q+2 ЗС^ + З 4С^2+4 5С,х’+ -—2(1+2С,х + ЗС,х2+4С«х* +
+ 5С,х4 +-•)+х + С,х’ + С,х’ + С«х* + Qx* + •••
, X х1 х’ X* X* .
= 1+—+—+— + —+— + •,
I! 2! 3! 4! 5!
или
(2С3 -2)+(2 ЗС, - 4С2 + 1)х +(3 4С« -2 ЗС, +С2)х* +(4 ЗС, - 2 4С« +
+ С,)х’+(5 6Q-2 5Q+C4)x*+ ...«i + £ + ^ + ii+^ + ...
11риравкнвая коэффициенты при одинаковых степенях х в обеих частях этого ра-
венства, получаем систему уравнений для определения коэффициентов
с2, С,,
2С2-2=1, 2 3C,-4C2+1-L 3 4G-2 3C,+G-V2.
4 SC,-2 4Q+C, = V3!. 5 6Q-2 5C, + C,-V4!....
Решая эту систему, находим С, “ 3/2, С, = 1, С4 = 3/12, С, = 1/8,... Таким обра-
зом, частное решение выражается формулой
33.2. Метод Эйлера
Пусть требуется решить задачу Коши: найти решение дифференциального
уравнения
//(*.>). 03-0
удовлетворяющее начальному условию у (х0) = у0.
При численном решении уравнения (33.1) задача ставится так: в точках
х0,Х|,х2,...,хя найти приближения у>4 (* = 0,1, 2,.... п) для значений точного
решения у(х4). Разность Дх, “**_|-х* называется шагом сетки. Во многих
случаях величину Лх4 принимают постоянной h, тогда
х*=х0+*Л (* = ai,2,....n). (33.2)
514
Метод Эйлера основан на непосредственной замене производной разностным
отношением по приближенной формуле Лу/Лх — f(x, у), где
Лу = у(х + Л)-у (я); Лх = (х + h)~x = h.
Приближенное значение у, в точке xt = xe + kh вычисляется по формуле
Ъч-Ъ + ¥(Х».Л) (* = 0,1,2,...,»). *' (33.3)
Пример 33.4. Методом Эйлера найти значения решения дифференци-
ального уравнения у'-2х-у, для которого >(!)=!, в пяти точках отрезка
П;1,5), приняв Л = 0,1.
По формулам (33.2) находим точки я0 = 1, я, = 1,1, я, = 12. я, = 1,3,
х4 = 1,4, я, = 1,5. Значения искомой функции у = у (я), удовлетворяющей
условию данной задачи Коши, вычисляем по формуле (33.3). Результаты вычисле-
ний занесены в табл. 33.1.
Таблица 33.1
к У» ** 2л* -Ч -л ¥<»»./.> -0.1(2., ¥(*..я.)«Л
0 1,0000 1.0 го 1,0000 0,1000 1,1000
1 1,1000 1.1 22 1,1000 0,1)00 12100
2 1,2100 12 2,4 1,1900 0,1190 13290
3 1,3290 1.3 2,6 12710 0,1271 1,4561
4 1,4561 1,4 2,8 1,3439 0,1344 1,5905
5 1,5905 1.5 3,0 1,4095 0,1410 1,7315
33.3. Метод Рунге - Кутта
Пусть требуется найти численное решение уравнения у' = /(я,у\ удовлетво-
ряющее условию у (я0 ) = ув.
Идея метода Рунге - Кутта состоит в представлении разности
ky{x)=y(x+h)-y(x) (33.4)
в виде суммы поправок kt с коэффициентами р{. Лу = P)kt + ргк2+— ргк,, где
*i = ¥(*. У). *2 = ¥(* ♦ а,А, у + *,),..., к, ж hf(я+а,Л, у + Р,, *, +
+₽,Л+-
Коэффициенты pf, aJt находят сравнением разложений Лу и к,
по степеням к В случае г = 4 получаем
515
(335)
(33.6)
(337)
(33 8)
(339)
*i - hf(x, y\ k2 = hf(x + h/2,y + *,/2).
*, = Л/-(х + ^2,У + *1/2Х к^Щх + Ьу + Ы
Ay = (V6)(*,+2*3+2*1+*4).
При x = x0 с помощью формул (33.4)— (33.6) находим
Ум1 = У<+Ду< (1 = 0,1,2....),
где
Ау^СУбХЛ.'+^+^+С),
М -VU-уД *2 - hf(x, +h/2,y, +k'tfa
k'-hHx.+hft.y, + AJ/2), *: -hf(x+h,y, +4J).
Метод Рунге - Кутта - один из наиболее употребительных методов повышен-
ной точности
Пример 33.5. Методом Рунге - Кутта найти решение задачи Коши для
уравнения у' = у - х2, у (1) = 0, х 6 [1, 2] в первых пяти точках, взяв Л = 0,1
Поскольку в данном случае /(х.у)-у-х2 и в силу условия х0 = 1, ус = 0, то
7(*о-Ув) = Уо“хо = 0-1«-1. По формулам (33.9) находим: к', -
- VUo. Уо) = 0.1 (-1) = -0,1; ’ 0,17(1.05; -0,05) = 0,11 (-0Д)-(1,05)21 =
«-0,1152; *}= 0.1/(1,05,-0^76) = 0,1 ((-0,0576)-(1,05)’|= -0,1160; *« =
»0,17(l.l;-0,1160)«ail(-ail60)-(l.l),] = -0,1326. По формуле (33.8) вычис-
лим Ду0/у = (1/6) | (-0,1) + 2 (-0,1152) + 2 (-0.1160) + (-0,1326) J = -0,1158
Значение у, вычислим по формуле у, = у0 + Ду0 (см. формулу (33.7) при i = 0):
у, = 0+(-0,1158) = -0,1158. Таким образам, получено приближенное значение
решения у( = -0,1158 при х(«1,1.
С помощью формул (33.9) при t = 1 найдем приближенное значение у2 при
хг = 1,2, решив новую задачу Коши для того же уравнения
у'-у-х2, у(1,1) =-0,1158.
Аналогично находим значения yj.y^.y». Результаты решения исходной зада-
чи представлены в табл. 33.2, из которой следует, что yj = y4+A>,4 =
= - 0.6981+(- 0.2944) = - 0,9925
516
Таблица 33.2
i xi У< » -у. p, гД Ak, -
0 1.00 0 1,0000 - 1,0000 -0,1000 1 -0,1000
1,05 - 0.0500 1,1025 -1,1525 -0,1152 2 -0.2304
1.05 - 0,0576 1,1025 - 1,1601 -0,1160 2 -03320
1.10 -0,1160 1,2100 - 1,3260 -0,1326 1 -0,1326
- 0.6950 -0,1158
1 1.10 -0,1158 1.2100 - 1,3258 -0,1326 1 -0,1326
1,15 -0,1821 1,3225 - 1,5046 -0,1505 2 -0.3010
1,15 -0,1910 13225 -1,5135 -0,1514 2 -0.3028
1,20 -03672 1,4400 - 1,7072 -0.1707 1 -0,1707
-0,9071 -0.1501
2 1,20 - 0,2659 1,4400 - 1.7059 -0,1706 I -0.1706
1.25 -0,3512 1,5625 - 1,9137 -0.1914 2 - 0,3828
135 - 03616 1,5625 -1,9241 -0,1924 2 -0.3848
130 -0,4583 1,6900 -2,1483 -0,2148 1 -0,2148
-1,1530 -0,1925
3 1.30 - 0,4584 1,6900 -2.1484 -0Д148 1 -0,2148
1.35 - 0,5858 1,8225 -23883 -0,2388 2 - 0,4776
1,35 -0.5778 1,8225 -2,4003 -0,2400 2 -0.4800
,1.40 - 0,6984 1,9600 -2,6584 - 03658 1 - 0.2658
- 1,4382 -0.2397
4 1,40 -0,6981 1,9600 -2,6581 - 0,2658 1 -0.2658
1.45 -0,8310 2.1025 - 2,9335 -03934 2 -0,5868
1.45 - 0,8448 2,1025 - 2.9473 -0,2947 2 -0.5894
1,50 -0,9928 2.2500 -2.2428 -0,3243 1 -0.3243
-1.7663 -0.2944
517
VI
ТЕОРИЯ ВЕРОЯТНОСТЕЙ
И МАТЕМАТИЧЕСКАЯ ОБРАБОТКА
РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ
Гпава 34
СЛУЧАЙНЫЕ СОБЫТИЯ
И ИХ ВЕРОЯТНОСТИ
34.1. Классификация событий
Опытом или испытанием называют всякое осуществление комплекса условий
или действий, при которых наблюдается соответствующие явление Возможный
результат опыта называют событием. Событие называется достоверным в данном
опыте, если оно обязательно произойдет в пом опыте. Событие называется не-
возможным в данном опыте, если оно в этом опыте произойти не может Случай-
ным называется собы! ис, которое в данном опыте может произойти, а может и не
произойти. Дна события называются совместными в данном опыте, если появле-
ние одною из них не исключает появления другого в пом опыте, и несовместны-
ми, если они нс могут произойти вместе при одном и том же испытании Два со-
бытия называются противоположными, если появление одного из них равносиль-
но непоявлению другого. События считают равновозможными, если нет основа-
ний полагать, что одно событие является более возможным, чем другие. Множе-
ство событий Л|, Aj,..., 4, называют полной группой, если они попарно несовме-
стны, появление одного и только одного из них является достоверным событием
Например, полную группу образуют события >4» гас At
(к = 1,2,.... 6) - событие «верхней гранью оказалась грань с цифрой к» (при под-
брасывании игрального кубика).
34.2. Действия над событиями.
Соотношения между событиями
Суммой или объединением двух событий называется событие, состоящие в появ-
лении хотя бы одного из них Сумма двух событий А и В обозначается через Л(_) Я
или А + В. Аналогично определяется и обозначается сумма и событий:
518
U 4 = 4lM2U...U4,. ^4-4+Л + •+А-
Г-1 1-1
Эта сумма означает событие, заключающееся в появлении хотя бы одного из них
Произведением или пересечением двух событий называется событие, состоя-
щее в одновременном их появлении Произведение двух событий Ан В обо; кача-
ется чере; АГ) Я или АВ Произведение и событий
JJ4 = 4A,...4,. р| 4«АПЛП...П4,
означает событие, состоящие в появлении всех событий АуАг ...А„.
Понятия суммы и произведения событий распространяются на бесконечные
последовательности событий, в этих случаях соответственно применяют, напри-
мер, обозначения
(J 4 = 4U4U...U4,U ... р 4 = 4П4П...ПЛП...
<-i т-i
Разностью событий А и В называется событие С. которое означает, что на-
ступает событие А и не происходит событие В Разность событий Айв обозна-
чается так: А\В или Л-в.
Если при каждом осуществлении комплекса условий, при котором происходит
событие А, происходит и событие в, то говорят, что А влечет за собой в, или А
является частным случаем в, и обозначается так: Ас В. Если Ас В и Вс А,
то говорят, что А и в равносильны. А “ В.
34.3. Различные определения вероятности
события
Классическое определение вероятности. Вероятность события А определяет -
ся формулой
Р(А) = т/п, (34.1)
где пх - число всех равновозможных, образующих полную группу элементарных
исходов опыта, т - число элементарных исходов, благоприятству ющих событию
А. Свойства вероятности события: 1) вероятность достоверного события равна
единице: 2) вероятность невозможного события равна нулю; 3) вероятное; ь слу-
чайного события выражается положительным числом, меньшим единицы,
4) вероятность любого события удовлетворяет неравенствам 0 5 Р (А) S I.
Геометрическое определение вероятности. Если событие А — попадание в
область я точки, брошенной в область G, то его вероятное; ь «тределяегся
формулой
F(A)=mesg/mesG. (34.2)
519
где roes# - мера области g (длина, площадь, объем). Для одномерной двумер-
ной и трехмерной области эта формула соответственно принимает вид
>>U) = /,//c. Р(А}~Уг/Ус.
где I - длина, 5 — площадь, V — объем соответствующей области.
Статическое определение вероятности. Относительная частота события А
(или просто частота) определяется формулой
W(A)=m/n, (34.3)
где т — число опытов, в которых появилось событие А, п - число всех проведен-
ных опытов. Условной называется частота одного события, вычисленная при ус-
ловии, что другое событие наступило Частота события обладает теми же про-
стейшими свойствами, что и вероятность, а также следующими свойствами:
а) частота суммы двух несовместимых событий равна сумме частот этих событий:
W (А + В) = И' (4)+»' (Я); б) частота произведения двух событий равна произве-
дению частоты одного на условную частоту другого: И'(АВ)>*
= И'(4)хй'(В/4), W (AB)-W (B)W (A/В).
Вероятностью события называется число, около которого группируются зна-
чения относительной частоты данного события в различных сериях большого
числа испытаний.
Аксиоматическое определение вероятности. Пространством элементарных
событий называют произвольное множество £2, а его элементы ш -
элементарными событиями. Эти понятия являются первоначальными. В реальных
опытах элементарным событиям соответст вуют взаимоисключающие итоги опыта
Подмножества множества 12 называют событиями и обозначают заглавными бук-
вами А, В, С и т.п. Пустое множество 0 называют невозможным событием, а
множество £2 - достоверным событием. Случайным событием называют любое
собственное (т.е. отличное от 0 и £2) подмножество £2. Событие А = £2-4
называют про ihhoiki ложным событию А, событие 4 означает, что A зк произошло
События Ли В называют несовместными, если АВ = 0.
Пусть £2 - пространство элементарных событий, L — некоторая система
случайных событий. Система I. случайных событий называется алгеброй собы-
тий, если выполнены условия; 1)£2е/.; 2) если 4 61, BeL, т АВ е L,
(A+B)eL, (A-B)el.. Из этих условий следует, что 0eL. Алгебра событий
называется О-алгеброй или борелевской алгеброй, если из того, что А„ € L,
м «в
л = 1,2,..., следует J4„e£, five
«I *-1
Числовая функция Р (4). определенная на алгебре событий L, называется ве-
роятностью, если выполнены следующие аксиомы.
520
1. Каждому событию A el. ставится в соответствие неотрицательное
число Р(А) - его вероятность, т.е. Р(А)^0 для любого AeL.
2. Вероятность достоверного события равна единице Р (Я) = I.
3. Вероятность суммы двух несовмест ных событий равна сумме вероятностей
этих событий, т.е. Р(А + В)-Р(А)+ Р (В), если Лв = 0.
4. Для любой убывающей последовательности 4 ° А э —э А э —
собыгийиз /, такой, что А„ = 0, справедливо равенство lim Р(А„)= 0.
Л-1
Тройка (Я, L,P\ в которой L является О -алгеброй и функция Р(А) удовле-
творяет аксиомам I - 4, называется вероятностным пространством.
Простейшие следствия из аксиом вероятности.
I. Сумма вероятностей противоположных событий равна единице:
Р(А)+ Р(А)“ I. Если Р(А)~ р, P(A) = q, то p + q- 1, p-\-q.
2. Вероятност ь невозможного события равна нулю: Р (0) 0
3. Для любых событий Лив верны соотношения
Р(Л + в)=Р(Л)+Р(В)-Р(Лв).
Р(А + В)£Р(А)+Р(В).
4. Если события А,, А3,...,А„ попарно несовместны (т. е. Л,Лу = 0 при лю-
бых I, J • 1,2,..., и), то
Р(А|+Л1+- + Ля)=Р(Л|)+Р(А) + "+Р(А)-
5. Для любых событий At, Аг..... А„ выполняется неравенство
Р(А, + А1+-+Ая)£Р(А,)+Р(А2)+ - + Р(А)
6. Если событие А влечет событие В (А с В), то
P(A)SP(B).
7. Вероятность любого события выражается неотрицательным чистом, не
превосходящим единицы: 0<P(A)Sl; другими словами, область значе-
ний функции Р(А) принадлежит отрезку |0,1|-
8. Если события А|, Л...... А„ - попарно несовместны и A-
*1
то Р(А)=£р(Ая).
521
9. Если Л, oXjЭ...Э Д,э... и 4». 70 Ьт ^(4.)
• 1Г«1 .
10. Если Д с Аг с...С А„ с... и A =|^J А„ то Р(Л) = lim Р(4>).
Л-1
Пример 34.1. Найти вероятность появления верхней трани с числом оч-
ков, кратным 3, при бросании трального кубика
Поскольку всего элементарных исходов шесть, а благоприятных исходов лва:
А, (появилось 3 очка), А^ (появилось 6 очков), то P(X) = ^6=V3-
Пример 34.2 Производится стрельба по
мишени, имеющей форму круга и равномерно
вращающейся вокруг центра О (рис. 34.1)
11опаданис в круг событие достоверное
Сектор ОАВ, площадь которого равна одной
шестой части площади всего круга, окрашена
в черный цвет. Найти вероятность попадания в
сектор ОАВ.
В данном случае Sr,=S, 5Ж=(У6)5. где
5 - площадь рассматриваемого круга, поэтому
P(A)-SJSc=(l/6)S/S~V6
Пример 34.3. В результате 20 выстрелов по мишени получено IS попа-
даний. Какова относительная частота попаданий?
Так как m = IS, л» 20, то по формуле (34.3) получаем И'(Л) = 1^20= 3/4
34.4. Условная вероятность.
Теорема умножения вероятностей.
Независимость событий
Вероятность события В при условии, что произошло событие А. называется ус-
ловной вероятностью события В и обозначается так: Р(В/А) или РЛ(В\
Условиыс вероятности определяются формулами
Р(В/Л)= ^^, Р(А/В)= Р^-,
' Р(А) 1 Р(В)
где />(Л)>0, Р(В)>0.
Теорема 34.1. Вероятность произведения двух событий равна произведе-
нию вероятностей одного из них на условную вероятность другого при условии,
что первое событие произошло
Р(АВ)= Р(А)Р(В/А), Р(АВ) = Р(В) Р(А/В). (34.4)
522
По определению, событие В не зависит от события А, если
F(B/A)=/>(B). (34.5)
В этом случае также P(AjB)= Р(А\ т. е. событие А не зависит от события В.
Свойство независимости собызий является взаимным. Если события А и В неза-
висимы, то независимы события А и В, А и В, А мВ. Если события А м В
независимы, то формулы (34.4) с учетом равенства (34.5) принимают вид
Р(АВ)=Р(А)Р(В),
т. е. вероятность произведения независимых событий равна произведению
их вероятностей
Теорема 34.2. Вероятность произведения п событий равна произведению
вероятностей одного из них на условные вероятности всех остальных в предпо-
ложении. что все предыдущие события наступили:
ПА,Л,.....Ля)=/’(Л|)/’(Л,/Л1)/’(Л,/Л|Л2)...Р(А/Л,А,...Ля). (34.6)
В частности, для трех событий А, В, С эта формула имеет вид
Р(АВС)=Р(А)Р(В/А)Р(С/АВ). (34.7)
События Л|, Аг,..., А„ называются независимыми в совокупности (или просто
независимыми), если каждое из них и произведение любого числа к остальных
(* = 1.2..л -1) являются независимыми.
Замечание. Из попарной независимости событий не следует их незави-
симость в совокупности.
Если события Л(, А3,..., А„ независимы, то
P(At,At.....Ая)^ Р(А,)Р(А1)...Р(АЯ} (34 8)
Если А - появление хотя бы одного ю независимых событий Л,, Л2,..., А„, то
P(A) = ]q,q3...q„. (349)
где qt “ P(At\ 4 = 1,2,...,л; (Л4 - событие, противоположное А*).
Если все независимые события Л|( А2,..., Ая имеют одну и ту же вероятность
р, то вероятность появления хотя бы одного из них определяется формулой
Р(Л)-1-«".
Пример 34.4. В урне имеется 6 красных, 8 синих и 4 белых шара. Каж-
дое испытание состоит в том, что из урны берут наудачу один шар и нс возвраща-
ют образно. Найти вероятность того, что при первом испытании будет вынут
красный шар (событие А), при втором - синий (событие В\ при третьем -
белый (событие С).
Поскольку Р(А)= ^18 = уз, P(B/A)=$/VJ, Р(С/АВ)^ А/\6=\'4. то по
формуле (34.7) получаем Р (АВС ) = V3 8/17у4 « 2/51.
523
Пример 34.5. В каждом из трех ящиков имеется по 24 детали; при этом
в первом ящике 18, во втором 20, в третьем 22 стандартные детали. Из каждого
ящика берут по олной летали. Найти вероятность того, что вес три извлеченные
детали окажутся стандартными. .
Введем обозначения: извлечение стандартной детали из первого ящика
событие Д. из второго - событие А2, из третьего - событие Д, тогда
Р(4) = 1^24 = У4, Р(4) = 20/24 = 5/6. Р(А, ) = 22/24 - Itfl2, по формуле
(34.8)при л«3 получаем Р(А,А3А,)=5/4 5/6 1^12 = 55/96.
Пример 34.6. Три стрелка в одинаковы и независимых условиях произ-
вели по одному выстрелу по одной и той же цели. Вероятность поражения пели
первым стрелком равна 0,9, вторым - 0,8, третьим - 0,7. Най ти вероятность того,
что: а) только один из стрелков попадет в цель; б) только два стрелка попадут в
цель; в) все три стрелка попадут в цель.
Введем обозначения: поражение цели первым стрелком - Д, вторым 4-
третьим - Д; попадание в цель только первым стрелком - Д, только вторым
стрелком - Bj, только третьим - Д. Пусть />(Д)=Д. /’(4)= = р2,
Г(4)«д, тогда /’(4) = ?,, /’(Л) = 9з- /,(4) = «.- Поскольку Д =444.
4 = 444. В, «444 и события Д, Bj, В, несовместны, то вероятность
того, что только один стрелок попадет в цель, выражается формулой
Р(Д+В2+Д)«/’(Д)+/’(Д2)+Р(Д). Так как />(Д)= = Р(А,Л2А, )« p,q2q,.
P(B2)-P(A2\A,)-p2q,q„ Р(В,)-Р(АА,А2)- - p,q.q3, TO
P(B, + B2+BJ*p,q3q, +РзЯ,Я, + РЯЯг (•)
Пусть С, - попадание в цель только вторым и трет ьим стрелками, Сг - только
первым и третьим. С, — только первым и вторым, т. е. С, = 44 4 • Q « 444,
С, = Д 44 • тогда вероятность того, что только два стрелка попадут в цель, вы-
разится формулой
Р(С, +С1+С,)«=р1А9, +P.PAh + Р,РгЯ. (П)
Вероятность того, что три стрелка попадут в цель, определяется формулой
/*(444)= дйа 0П)
По условию задачи д = 0,9, д. = 0,8. д = 0,7. Следовательно, q, = 1 - д =
«0,1, q3 = 1 - pj « 0,2, q, «I - д = 0,3. Подставляя эти значения в формулы (1) -
(111), находим искомые вероятност и:
Р,=Р(В, + Д + Я,)= 0,9 0,2 03 + 0,8 0,1 03+0.7 0.10,2 = 0,092,
Р3 = Р (С, + Cj + С,) - 0,8 0,7 0,1 + 0,9 0,7 0,2 + 0,9 0,8 03 = 0398,
Р. = Р (Д 44) = 0,9 03 0.7 = 0,504
524
34.5. Формула полной вероятности.
Формулы Бейеса
Предположим, что событие А может осуществляться с одним из несовместных со-
бытий Н„ Н,,..., Н„. для которых известны вероятности Г(Я() и условные вероят-
Я ,
ности P(AjHt). Друтими словами, положим, что А - У АН„ тала
»«•
P(A)^P(H,)P(AjH,y (34. i0)
Эго равенство называют формулой полной вероятности.
Произведен опыт, в результате которого появилось событие А. Требуется най-
ти условные вероятности P(Ht/A), <: = 1,2,.... л.
Согласно теореме умножения вероятностей
Р (Л W* ) - Р (А) Р(Ht/A) = Р() Р(AJH, X
откуда
Р(ЯД/А)= Р(Я4)/’(Дад/ЦА).
или
Р(Н,/А^Р(Н^Р(А/Н^^Р(Н,)Р1А/Н,). (34 и)
где к = 1,2,..., п.
Формулы (34.ii) носят название формул Ьейеса
В применениях формул Бсйеса события Ht называют гипотезами,
П//») - априорными вероятностями гипотез, P(Ht/A) - апостериорными вероят-
ностями пих гипотез.
Пример 34.7. Имеется 5 урн с белыми и черными шарами: i урны - по з бе-
лых и 3 черных шара (состав Н, ), i урны - по i белому и 4 черных шара (стхлав Н,).
1 >Р*ы - 4 белых hi черный шар (состав //j). Из одной наудачу выбранной урны выну т
шар, который оказался черным (событос Л). Чему ранка апостериорная верояпюегь того,
что шар вынут из ypiaj второго состава9
Полагая в (34.ii) А = 2, л = 3, получаем формулу, которой надлежит пользо-
ваться в данном случае:
P(HJA^-----------------__________________________
Р(Н,) Р(А/Н, )+Р(Н, )Р(А]Н,)+ Р(Н}) Р(А/Н}у
Найдем соответствующее вероятности: P(W,)=2/5. Л//,)=2/5. Р(Н,)=М5.
PiMH^yi, P(A!H})=MS, Р(А/Н,)ж\/5 и подставим их в данную формулу
1>(И,/И)--------А».А.
V5 ¥3+2/5 4/5 + V3-V3 1^25 15
Аналогично можно найти P{HJA)= ty!5, Р(ЯЭ/Л)=У15.
525
Гпаеа35
СЛУЧАЙНЫЕ ВЕЛИЧИНЫ,
ИХ РАСПРЕДЕЛЕНИЯ
И ЧИСЛОВЫЕ ХАРАКТЕРИСТИКИ
35.1. Дискретные случайные величины
Для вероятностного пространства (П,£,Р) случайной величиной называ-
ется действительная функция X (<о), определенная для ш е D и такая,
что при всех действительных значениях х множество {а>:Х((О)<х}
принадлежит с-алгсбрс L
Случайная величина - это переменная величина, принимающая в зависи-
мости от случая тс или иные значения с определенными вероятностями
Важнейшей характеристикой случайной величины служит се распределение
вероятностей.
Случайная величина называется дискретной, если она принимает конечную
или бесконечную последовательность значений
Законом распределения случайной величины X называется соответствие между
ее значениями Х|,х2,х„... и их вероятностями р^р^р^,...
Закон распределения дискретной случайной величины X, принимающей конеч-
ное множество значений Х|,х,,...,хя соответственно с вероятностями
Pi. Pi’ ••• • А». можно задать схемой
X Х|. х, хэ ... хя
? Р Pi Pt — Л
или формулами
/•(Л-х*)-Л, *=1,2,...,я; (351)
м
Аналогично задается закон распределения дискретной случайной величины X,
принимающей бесконечную последовательность значений х„х„х„... соответст-
венно с вероятностями р^, р^,
р(Л=х»)-А. * = 1,2,3,...; Х77*'1- (352)
м
526
35.2. Функция распределения.
Плотность распределения
Функцией распределения случайной величины X называется функция F(х)
действительной переменной, определяемая равенством
F(x)=P(X<x\ (35.3)
где Р(Х <х) - вероятность того, что случайная величина X примет значение,
меньшее х Вероятность того, что случайная величина X примет значение из полу-
интервала [а, р), равна разности значений ее функции распределения в концах
этого промежутка
P(aZX<fo-F(V)-F(a).
Свойства функции распределения F (х).
1. Все значения функции распределения принадлежат отрезку [0,1). т.е.
0SF(x)SL
2. Функция F(x) является неубывающей; F(x,)< F(x2\ если х,<х2
3. F(x) непрерывна слева при любом х.
4 lim F(x) = 0, lim F(x)=l
Г рафик функции распределения целиком расположен в полосе между прямыми
у = 0, у = 1 (рис. 35.1).
Функция распределения дискретной случайной величины имеет вид
. F(x)-^/>(X»x1). (35.4)
где символы х* < х означают, что суммируются вероятности тех значений, ко горыс
меньше х. Функция F (х) для дискретной случайной величины является разрывной.
Случайная величина X называется непрерывной, если существует неотрица-
тельная функция р(х) такая, что
F(x)-jp(H)</u (35.5) н
Функция р(х), входящая в это равенство, /
называется плотностью распределения всро- ——
ятносгей случайной величины X. График y=F(x)
функции р(х) называется кривой распрсдс- .
ления. Вероятность попадания значений еду-
чайной величины X в полуинтервал [а, б) ~~------------------------►
О X
равна определенному интегралу от плотности
распределения р(х) по отрезку [о, />): р .
527
P(aSX<b)* j p(x)dx. (35.6)
в
Свойства функции p(x) - плотности распределения.
1. Функция р(х) является неотрицательной: р(х)£О.
2. В точках дифференцируемости F (х) производная функции распределения
равна плотности распределения вероятностей:
Г(х)=р(х). (35.7)
3. Интеграл по бесконечному промежутку (- от плотности распреде-
ления вероятное! ей р(х) равен единице:
Jp(x)<£k«1. (35.8)
Пример 35.1. Случайная величина X задана функцией распределения
Л*) =
О прмх<0;
х1 при 0<i S 1;
1 прмх>1.
Найти плотность распределения р(хХ построить графики функций F(x) и р(л).
В соответствии с равенством (35.7) находим
О при х £ 0;
Р(х) =
при 0 < х $ 1;
0 при х > I.
Графики функций F(x) и р(х) изображены на рис. 35.2 и 353.
Пример 353. Найти функцию F (х) для дискретной случайной величи-
ны, закон распределения которой залай схемой
528
X
о
1
2
3
Р(Х = х4) ОД 0,4 0,3 0J
Функцию F(x)
строим с помощью формулы (35.4). При х£0
С (х>) = ^Р(Х = х»)=0ЕслиО<х<Л.
Ч«о
тоЕ(х) = ^Р(Х = х,) =ЛХ-0>0.2
Ч«1
^При |<х£2 Их) = Их = 0) +Р(Х“1)
= 0,2 + 0,4= = 0,6. Если 2 < х £ 3, то
Ил) =Р(х = 0) + />(х = I) ♦ Р(х =2)=0,9.
При x>3Hx) = /4x = 0) + Р(х-1) +
+Р(х = 2) + Их 3) =1. График функ-
ции F(x) изображен на рис. 35.4.
35.3. Математическое ожидание случайной
величины
Математическое ожидание случайной величины X с законом распределе-
ния (35.1) определяется формулой
M(X)^xtPt. (35.9)
м
Если случайная величина X задана законом распределения (35.2), то
M(X)^xtPt (3510)
*-|
при условии, что ряд сходится.
Математическое ожидание называется средним значением, а также па пром распреде-
ления. Для математическою ожидания употребляются и другие обозначения: ЕХ, т. т, а.
Математическое ожидание непрерывной случайной величины X, все значения
которой принадлежат отрезку |а, 0], определяется формулой
Р
M(X)=j\p(x)dr. (35.11)
а
Если случайная величина может принимать любые значения из промежутка
(-*». +“). то
♦ •В
М(Х)- jxp(x)dx (35.12)
при условии, что интеграл сходится.
529
Математическое оЖХЛВнне случайной величины обладает слелучмцими свойс:вами
I. Математическое ожидание случайной величины заключено между се наи-
меньшим и наибольшим значениями.
2. Математическое ожидание постоянной равно этой постоянной: М (С) = С.
3. Постоянный множитель можно выносить за знак математического ожида-
ния, те. Л/(СА) = СЛ/(Х).
4. Математическое ожидание суммы двух случайных величин равно сумме их
математических ожиданий: M(X+Y) = М (Х)+ М (Y).
5. Математическое ожидание произведения двух независимых величин равно про-
изведению их математических ожиданий: M(XY )= М(Х) xM(Y).
Пример 35.3. Найти математическое ожидание дискретной случайной
величины по ее закону распределения, заданному схемой
X 3 4 5 6
Р 0.1 0,2 0.3 0.4
По формуле (35.9) находим: М (X) = 3- 0,1 + 4 ОД + 5 0,3+6- ОЛ 5
Пример 35.4. Найти математическое ожидание непрерывной случайной
величины, указанной в примере 35.1.
По формуле (35.12) получаем
♦- о I ♦-
W(X)= Jxp(x)dx = Jxp(x)dx + |хр(х)Л + jxp(x)A =
-- О I
0 1 ♦“ I 4 I
= J xOdx + J xlx’dx + J xOdx = J 3x’dx “ ~ =
0 10 °
Название «математическое ожидание» происходит от понятия «ожидаемое зна-
чение выигрыша» (математическое ожидание вышрыша), впервые появившеюся в
теории азартных игр в трудах Б. Паскаля и X. Гюйгенса в XVII в. Термин
«математическое ожидание» ввел П. Лаплас (1795). В полной мере это понятие
впервые оценено и использовано II. Л. Чебышевым.
35.4. Дисперсия случайной величины
Дисперсией (или рассеянием) случайной величины X называется математиче-
ское ожидание квадрата се отклонения X - М (X):
D(X)= М((Х- M(X))2), (35.13)
D(X)= М(Хг)-(М(ХУ^. (35.14)
Дисперсия случайной величины обладает следующими свойствами
1. Дисперсия постоянной величины равна нулю: D (0 ж 0.
530
2. Постоянный множитель можно выносить за знак дисперсии, возводя сто в
квадрат: D(C¥)« C*D(X).
3. Дисперсия суммы двух независимых случайных величин равна сумме их
дисперсий: D(A+Г)= О(Л)+О(Г)-
4. Дисперсия разности двух независимых случайных величин равна сумме их
дисперсий: D(X-Г)= О(Х)+О(Г).
Дисперсия дискретной случайной величины с законом распределения (35.1)
определяется формулой
O(X)-£(x*-W (*)/₽» (35.15)
i-l
Если дискрета* случайная величина имеет закон распределения (35.2Х то
£>(*) = £(х*-М(*))’Л (35.16)
*1
при условии, что этот ряд сходил ся
Дисперсия непрерывной случайной величины X с плотностью распределения
р(х) определяется формулой
О(Х)= J(x-Л/(Л))2р(х)Л, (35.17)
если этот интеграл сходится, или
Р(Л)= |х,р(х)Л-(М(Х))’
Средним квадратическим отклонением (или стандартным отклонением) а (Д')
случайной величины X называется корень квадратный из сс дисперсии:
O(X)»7D(X). (35.18)
Пример 35.5. Найти дисперсно случайной величины. указанной в примере 35.1.
В примере 35.4. было показано, что дтя данной случайной величины
М(Х) = 3/4. По формуле (35.17) находим
О(Л)= J(x-3'4)2p(x)dx- J(x-y4)20dx+ J(x-3'4)’3x2A ♦
-«• о
531
Пример 35.6. Дискретная случайная величина X может принимать
только два значения х, и х2, причем х,<х2 Известны вероятность pi=0,5,
математ ическое ожидание М(Х) = 3.5 и дисперсия £>(Х)=0,25. Найти закон
распределения X.
Поскольку р| + р2 = 1 (см. вторую формулу (35.1)) и pi = 1 -р, = I - 0,5 = 0,5, то
М(Х) = Ж|р1 +х3р2 =0,5Л| +0,5зг2 =3.5, откуда зц+х2 = 7. По формуле (35.15)
находим £>(Х) = (х,-3,5)2р,+(х2-3,5)’р, = 0,25; x’+xj = 25. Решая систему
уравнений Х|+х2=7. х’+х’ = 25 и учитывая условие х, <х2, получаем х,=3,
х2 = 4. Следовательно. Р (х = 3) = 0,5, Р (х = 4) = 0,5.
35.5. Некоторые другие числовые характеристики
Ковариацией двух случайных величин X и У называется математическое
ожидание произведения их отклонений от соответствующих математических
ожиданий:
cov (X.У) = М ((X - М (X)) (У - М (У))).
Для ковариации верны равенства:
cov(X, Г) = М(ХУ)- cov(X. X)-О(Х),
cov (X, У) = cov (У. X), D(X + Г) - D(X) + D (У) + 2cov (X,У)
Если случайные величины X. У независимы, то их ковариация равна нулю:
cov (X, У) = 0. Если cov (X, У) * 0, то случайные величины зависимы.
Коэффициентом корреляции р(Х, У) случайных величины X, У называется
отношение их ковариации к произведению средних квадратических отклонений
этих величин:
р(Х, У) = О
о(Х)с(У)
Свойства коэффициента корреляции: 1) | р (X, У) 151; 2) если величины X, У
независимы,то р(Х,У) = 0; 3)ссли У = АХ + В, то |р(Х,У)| = 1.
Начальным моментом Л-го порядка случайной величины X называется матема-
тическое ожидание к-й степени этой величины: v4 = М (А'*). Центральным мо-
ментом Л-го порядка случайной величины X называется математическое ожидание
Л-й степени отклонения этой величины от ее математического ожидания
а :р4 = М ((Х-а)д). Математическое ожидание и дисперсия случайной величи-
ны - частные случаи моментов, а именно v( = М (X), ц2 = D (X).
532
»
35.6. Некоторые законы распределения
случайных величин
Пусть производятся испытания, в каждом из которых может появится событие А.
Если вероятность события А в одном испьпании нс зависш от появления ап в любом
другом, то испытания называют независимыми относительно события А Будем счи-
тал., что испытания происходят в одинаковых условиях и вероятность появления собы-
тия А в каждом испытании одна и та же; обозначим злу вероятность через р, а через q
- вероятность появления события А, противоположного событию А (д = 1-р).
Вероятность того, что в серии из л независимых испытаний событие А появит-
ся ровно к раз (и нс появится п-к раз), выражается формулой Бернулли
(35.19)
где
£ = Ю1И . я!
р - вероятность события А в каждом испытании, q - вероятность события A (q =1 - р).
Закон распределения дискретной случайной величины, определяемый форм) -
лой Бернулли, называется биноминальным. Биноминальный закон распределения
дискретной случайной величины можно представить в виде схемы
X О I к ... л
Р q“ "Г'Р - С&Г* ... р”
Для случайной величины, распределенной по биноминальному замшу с пара-
метрами л и рг.
М (А') = пр, D(X)= npq, C(X)^^npq
Геометрическим распределением называется распределение дискретной слу-
чайной величины X, определяемое формулой
Р(Х=т) = (1-рГ-'р (0<р<I), « = 1,2»...
Это название связано с тем, что ряд вероятностей Р(Х = т) представляет собой
бесконечно убывающую геометрическую проярессию со знаменателем q = 1 - р,
сумма тгого ряда равна единице. Для геометрически распределенной случайной
величины М (Л) = |/р, О(А')»(1-р}/р1.
Распределением Пуассона называется распределение дискретной случайной
величины, определяемое формулой
Для случайной величины, распределенной по закону Пуассона,
М(Х) = а, D(X)-a, где а = пр.
533
Случайная величина X называется равномерно распределенной на отрезке
[а, Р|, если плотность распределения всроягностей этой величины постоянна на
данном отрезке и равна нулю вне его:
V(P-a) npMaSA'Sp
Р(х)=
0 при х<а и х>Р
Для случайной величины X, равномерно распределенной на отрезке [а, Р|, ве-
роятность попадания в изггервал (у, 6), принадлежащий этому отрезку, пропор-
циональна длине интервала;
Р(у<Х<6) = [р(х)А= —
J р-а
Функция распределения Г(х) этой величины имеет вид
О
При
F(jt) =
(х-ауф-а) при
1
при
Для этой случайной величины М (X) = (Р + а)/2,
Показательное распределение определяется формулой
0 при х 5 0;
О(Х)=(Р-а)’/12.
ае “ при ж > 0 (а > 0).
Кривая распределения всроятпоястсй этой величины представлена на рис. 35.5.
Функция распределения F (х) в этом случае имеет вид
0 при х«0;
^(х) =
1-е *“ при х>0.
I рафик функции F (х) изображен на рис. 35.6. Для этой случайной величины
А/(Л)=Уа, D(X) = l/a*.
534
Нормальным распределением (или распределением Гаусса) называется распре-
деление случайной величины, определяемое формулой
р(х)» —* «-('-‘•’Л*'’» (О>0). ’ (35.20)
о<2я
Параметры распределения дна
нормальной случайной величины X име-
ют следующие значения; а-М(Х),
О1 = D(X). График функции р(х) назы-
вают нормальной кривой или кривой
Гаусса. На рис. 35.7 представлены три
кривые при одном а и различных а.
Вероятность попадания значений
нормально распределенной случайной
величины X в интервал (а, (3) определя-
ется формулой
Р(а< Л<Р) = ф(&--
\ О ) \ О
(35.21)
где Ф(х) - функция Лапласа:
(35.22)
С помощью згой функции выражается вероятность нсравенсгва | X-а |<8 для
нормальной случайной величины X:
/>(| Х-в|<8) = 2ф(Р(| Л-а|<о») = 2Ф(/).
При I“ 3, т. с. at = За последнее равенство принимает вид
Р(| Л - в | < За) = 0,9973
и выражает правило трех сигм: если случайная величина распределена но нор-
мальному закону, то модуль ее отклонения от математическси о ожидания нс пре-
восходит утроенного средне о квадратического отклонения.
Пример 35.7. Найти вероятность попадания в интервал (4,9) значе-
ний нормальной случайной величины X, для которой математическое
ожидание а = 8, среднее квадратическое отклонение о = L
535
Применяем формулу (35.21), которая в данном случае примет вид
Ло-вЛ (л-кА
Р(4< Д"<9) = ф| —у—1-ф| —у— 1 = Ф(1)-Ф(-4).
Поскольку функция Лапласа (35.22) является нечетной. то Р(4<Л<9) =
жф(|)-ф(-4)=Ф(1)+Ф(4)=0,3413 + 0,499968 = 0,84126в. (Значения Ф(1) и
Ф (4) найдены по таблице значений функции Лапласа)
35.7. Основные теоремы теории вероятностей
Теорема 35.1 (теорема Чебышева). Если случайные величины
Х„ Хг,..., Х„ попарно независимы. имею математические ожидания и диспер-
сии. каждая из которых ограничена одним и тем же числом С. то дзя любого
числа £ > О выполняется неравенство
откуда
(3523)
В частном случае, когда все случайные величины имеют одно и то же математи-
ческое ожидание а: М (Xt)”a, k * 1,2...., п. равенство (35.23) принимает вид
г
lim Р
с
<е =1.
Теорема 35.2 (теорема Бернулли). Если т - число наступлений события Л
в п независимых испытаниях up- вероятность наступления события Л в каж-
дом из испытаний, то при любом £ > О
L
Теорема 35.3 (теорема Ляпунова). Если Х„Хг,...,Хп - независимые слу-
чайные величины, имеющие одно и то же распределение С математическим ожида-
нием а и дисперсией о2, то при неограниченном возрастании п закон распределения
суммы X = У Xt неограниченно приближается к нормальному.
М
536
1 с о р с м a 35.4 (локальная теорема Лапласа). Если вероятность наступления
события А в каждом из п независимых испытаний равна одной и той же посто-
янной р (0< р< I), то вероятность Р„(к) того, что во всех этих испытаниях
событие А наступит ровно к раз. приближенно выражается формулой
(35.24)
Вероятность (35.24) можно вычислил, так:
/»(*)—Д- «POQ. <₽(*)= -4—«
^npq v -?2я
при х = (* - np)]^npq; для функции <р (к) составлены таблицы.
Теорема 35.5 (интегральная теорема Лапласа). Если вероятность наступ-
ления события А в каждом из п независимых испытаний равна одной и той же
постоянной р (0<р<1), то вероятность P^tk^kj) того, что в этих испыта-
ниях событие А насту пит не менее к, раз и не бохее к} раз. приближенно вы-
ражается формулой
Р.Ц, *з) = А I *1 ’ • *1 = Ч — (35.25)
-72 л J jnpq -\Прц
Вероятность Ря{к>,кг) можно подсчитать по формуле
РК(к„кг)‘Ф(х2)-Ф(х1),
(35.26)
где Ф(х) - функция Лапласа (см. формулу (35.22)).
Пример 35.8. Вероятность поражения мишени стрелком при одном вы-
стреле равна 0,75. Найти вероятность того, что при 100 выстрелах мишень будет
поражена нс менее 70 и нс более 80 раз.
По условию л = 100, к, = 70, ka=80, />=0,75, поэтому д-0.25. Воспользу-
емся формулой (35.26), предварительно вычислив л, и к, но второй и третьей
формуле (35.25):
70-100 Д75 ... 80-100 0,75 ...
/ = -1,15, к, = । = 1,15,
V100 0,75 0,25 V1OT 0-75 А25
/1<ю( 70,80) = Ф (Ц 5) - Ф (-1,15) = 2Ф (1.15) ж 2 03749 = 0,7498.
537
Гпава 36
ЭЛЕМЕНТЫ МАТЕМАТИЧЕСКОЙ
СТАТИСТИКИ И МАТЕМАТИЧЕСКОЙ
ОБРАБОТКИ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ
36.1. Основные понятия математической
статистики
Выборочным методом называют метод исс тедзтнаиия общих свойств совокупности
каких-либо объектов на основе изучения свойств лишь части ттих объектов, имгтых на
выборку Генеральной совокупностью натывастся множество однородных объектов, и>
которою выделяется нсктпорое подмножество, натыкаемое выборочной совокупно-
стью или выборкой. Объемом совокупности (генеральной или выборочной) называется
число се объектов. При изучении некоторою признака выборочной совокупности про-
водят испытания (наблюдения) Пусть посредством независимых испытаний, прове-
денных в одинаковых условиях, получены числовые значения х||,,*(2,,...,х("), где
п - объем выборки Располагают зти значения в порядке возрастания:
х„х2,...,хя (ж, S*2 S...Sx„)
и называют полученную последовательность дискретным вариационным рядом, а
сами значения х, вариантами. Среди вариант могут оказаться равные, тотда
дискретный вариационный ряд можно записать так:
X, х2 ... xt,
(36 1)
. Л| л2 ... л*.
где л, - частота появления значения х,, причем
£л,-л. (36.2)
nt
Относительной частотой и, варианты х, называется отношение се частоты к
объему выборки:
М ВЦ
Статистическим распределением выборки называется соответствие между ва-
риантами и их частотами (или относительными частотами). Статистическое рас-
пределение может быть задано, например, с помощью таблицы
538
Эмпирической функцией распределения (функцией распределения выборки)
называется функция, определяющая для каждого значения х относительную час-
тоту собьпия X <х:
F*(x)= njn,
где л, - число вариант, меньших г, и -объем выборки Функция F"(x) обладает сле-
дующими свойствами: 1) OS F*(x)S I; 2) F’(x) - неубывающая функция; 3)ссли а-
наименыпая. b - наибольшая варианты, го Л'*(х) = О при xSa; Л*(х)=1 при хЪЬ
Пусть случайная величинах имеет распределение F (х.ау, содержащее неизвестный
параметр а Оцентлъ параметр а - значит приближенно определить сто значение по
некоторой выборке х„. Оценку параметра а обозначим через
a ct = а(Х|,х2,...,хп). Оценка а параметра а называется несмещенной, если
Л/(<х)=а, и смещенной, если Л/(а)/а. Оценка а параметра а называется состоя-
тельной, если Ппз /^ | <1 — <х | < е) = 1 при любом е>0. Оценка а называется эффек-
тивной, если при заданномп она имеет наименьшую дисперсию, т.е O(a) =
Генеральной средней х, называется среднее арифметическое значений
1 V'
х,,Xj,..., xN генеральной совокупности объема N: х,= у х,.
/!
Выборочной средней х, называется среднее арифметическое выборки
Х|.ха,...,х„ объема л: х, «—V*х(, или
1 лД
x.»-yVi. (36.3)
если выборка имеет вид (36.1).
Выборочную среднюю принимают в качестве оценки генеральной средней. Эта
оценка является несмещенной и состоятельной, так как
М(Х,) = х„ lim P(|JT.-x,|<e)=L
Генеральной дисперсией D, натыкается среднее арифметическое квадратов оттсю-
нения значений (енеральной совокупности х„х,.хх от их среднего значения х,:
1*1
Генеральным средним квадратическим отклонением ar называется корень
квадратный из генеральной дисперсии: а, = -/о,.
539
(364)
Выборочной дисперсией D, называется среднее арифметическое Квадрате,
отклонения значений выборки х,, х,....х„ от их среднего значения х,:
D, = — V" (х, -х,)’ или D, = —
л “ л
если выборка имеет вид (36. i).
Выборочное среднее квадратическое отклонение а. определяется формулой
о. =7^- (36.5)
Для вычисления выборочной дисперсии можно пользоваться формулой
D. =х.’ -(х,)’, где
*. --Ум,. = -У.м’
и п *•*
Ня »«
(л( - частота хо л, +л, + --- + n4 = л). Аналогичная формула верна и для гене-
ральной дисперсии.
Так как М (О,) = (л - l)/n)Dr. т.е. А/ (Dt) # Dr, то выборочная дисперсия я. -
лается смещенной оценкой генеральной дисперсии. Чтобы получить нссмсшснну ю
опенку, тснсральной дисперсии Dr, вводят понятие эмпирической (или исправ-
ленной) дисперсии s':
»’ я* иДх,-х.У.
л-1 Л-1 “
Для оценки генерального среднего квадратического отклонения служит ис-
правленное среднее квадратическое отклонение, или эмпирический стандарт х
(36.6)
различны, т. с. п, = I.
В случае, когда «се значения .ыборки х,,х,
А = л, формулы для я’ и я принимают .ид
Если «ыборка задана . .ндс распределения равноотстоящих вариант, то .ыбо-
рочнос среднее х, и выборочную дисперсию D, удобно находить методом про-
изведений по формулам
х. = А/.А + С. D, = (А< -(ЛО’)А*. (36.7)
где С — варианта, имеющая наибольшую частоту (ложный нуль), h - шаг. АГ
- условный момент первого порядка, М\ - усло.ный момент второго порядка;
540
h, и,, M*, Mj определяются соответственно формулами:
А = 0=1.2,....п-1). ц=(х,-С)/Л; (368)
А/Г=-\лл. М’г=- VniH1; (36.9)
и « и «
'-I Iwl
и, - условная варианта, л- объем выборки, л, - частота варианты х,
fcvl
\ /-I J
Пример 36.1. Методом произведений найти выборочную среднюю, вы-
борочную дисперсию и выборочное среднее квадратическое отклонение по дан-
ному статистическому распределению выборки:
10,2 10,9 11,6 123 13.0 IJ.7 14.4
п, 8 10 60 12 S 3 2
Данная выборка является равноотстоящей, так как разности между двумя по-
следующими вариантами постоянны: x,tt-xt = h при / = 1.2,..., 6, причем
А = 0,7. По формуле (36.2) находим я =100 Наибольшую частоту имеет варишпа
х, = 11,6, т. е. С = 11,6. С помощью второй из формул (36.8) находим условные
варианты и, и составляем таблицу (табл. 36.1) значений величин, входящих в
формулы (36.7). По формулам (36.9) находим М,'= 12/100 = 0,13,
А/J = 133/100= 1,31 С помощью формул (36.7) получаем
х. = 0,13 0,7 +11,6 = 11,691 «11,7, D. =(1,33 - 0,13’) 0,7’ = 0,643419 - 0,64. В
соответствии с формулой (36.5) находим о, = ^0,М = 0,8
Таблица 36.1
1 Ж, «, •А »
1 10,2 8 -2 -16 32
2 10,9 10 -1 -10 10
3 11,6 60 0 0 0
4 12.3 12 1 12 12
5 13,0 5 2 10 20
6 13,7 3 3 9 27
7 14,4 2 4 8 32
I 100 13 133
541
36.2. Доверительный интервал. Доверительная
вероятность
Оценка, определяемая одним числом, называется точечной Оценка, опреде-
ляемая двумя числами - концами интервалов, называется интервальной.
Доверительной вероятностью (надежностью) оценки а параметра а называет-
ся вероятность у, с которой осуществляется неравснст во | а - а | < Б. т е.
/>(|а-а|<Б)=у или /’(а-Б<а<а+6) = у.
Эта формула означает следующее: вероятность того, что интервал (а -8. а + 6)
заключает в себе (покрывает) неизвестный параметр а, равна у. Интервал
(а-6, а+ 6), который покрывает неизвестный параметр а с заданной надежно-
стью у, называется доверительным интервалом. Концы доверительного интервала
называют доверительными границами.
Если случайная величина X имеет нормальное распределение с заданным средним
квадратическим отклонением о и неизвестным математическим ожиданием а, то
Р\х,--'<а<ж, + ¥- | = у, (36.10)
где
6--SL. 2Ф(0-Т. (36.11)
Jn
т. с. доверительный интервал
/ = (ж,-О//7л,ж,+а//7л) (36.12)
покрывает неизвестный параметр а с надежностью у. Значение у задано зара-
нее; число Ф(г) определяется второй из формул (36 11); значение / нахо-
дится с помощью таблиц значений функции Лапласа, точность оценки Б вы-
ражается первой из формул (36.11).
Пример 36.2. Найти доверительный интервал для оценки математического
ожидания а нормалыюй сл>чайной величины с надежностью у = 0,95, зная выборочную
среднюю ж, - 75,15, объем выборки л = 64, среднее квадратическое отклонение 0 = 8
Доверительный интервал определяется формулой (36.12). Чтобы найти концы
доверительного интервала, необходимо знать значение t (значения ж,, л, о зада-
ны). Второе из равенств (36.11) примет вид 2Ф(/) = 0,95, откуда Ф(/) = 0,475 По
таблице значений функции Далласа находим / = 1,96 Подставляя значения
ж,, О, /, п в выражения для концов доверительного интервала, получаем
ж.~^= 75,15-^т^ = 75,15-1.96 = 73,19, ж, +-SL = 77,1 L
>'л >'64 л/л
Следовательно, 73,19 <о<77,П,тх. (73.19; 77,11) - искомый доверительный интервал.
542
36.3. Оценка точного значения
измеряемой величины
Пусть в итоге и независимых измерений некоторой величины X получены сле-
дующие результаты:
Х|,х2,...,хя. (36.13)
Будем предполагать, что эти результаты свободны от грубых и систематических оши-
бок (неверные результаты отброшены. на систематические ошибки введены поправки)
Оценить точное значение а измеряемой величины - значит:
а) определить функцию а«а(Х|,х2,...,хя), которая обеспечивает достаточ-
но близкое приближение к значению а;
б) указать границы интервала (a-S|,a + 62). который с заданной вероятно-
стью у покрывает истинное значение а.
Среднее арифметическое значение (среднее значение) х результатов (36.13),
среднее квадратическое отклонение s’ этих результатов от их среднего значения .<
и эмпирический стандарт д определяются соответственно формулами:
ж--Ух,; (36.14)
Л
• /•!
г’^ -Утх.-х)2; (36.15)
и л “
1 <-|
(*!-*?• (36.16)
V л ~ I
1 м
Если вес измерения проведены с одинаковой точностью, то в качестве опенки
точного значения а измеряемой величины при ним аки среднее арифметическое
значений результатов (36.13):
а--Ух,. (36.17)
Л "
Ml
Эта оценка является несмещенной и состоятельной. Введенная оценка сказывается и
эффективной при дополнительном предположении о том, что случайные ошибки
измерений подчинены нормальному закону распределения. Это предположение име-
ется в ваду и в дальнейшем. Оценка (36.17) относится к числу точечных оценок.
Симметрические доверит ельные оценки имеют вид
|а-х|<Б, или х-8<в<х + Б (Б>0) (36.18)
где х- среднее значение, определяемое формулой (36.14) Величина Б (точность оценки)
определяется по заданной доверительной вероятности у (надежности оценки)
Если известно среднее квадратическое отклонение о, то доверительная оценка
(36.18) имеет вид
|а—х|<<я/х/й, (36.19)
543
где п — число измерений, а значение t “ t (у) определяется по заданной довери-
тельной вероятности у из условия 2Ф(/) = у и находится с помощью таблиц. Точ-
ность оценки 6 в этом случае выражается формулой
(3620)
Если средняя квадратическая погрешность о заранее неизвестна, то вместо
нее применяют эмпирический стандарт я, который служит оценкой параметра о.
Доверительная оценка (36.18) принимает вил
|в-*|<л/л/л (36.21)
или
|a-x|<x*r/V* (к-п-IX (36.22)
где s’ и s определяются соответственно формулами (36.15) и (36.16), а множи-
тель t = t (у, А) зависит не только от доверительной вероятное! и у, но и от числа
измерений л (к л -1). Значения этого множителя определяются по таблицам.
I (равило трех сигм представляет собой л оверите льну hi оценку
|в-ж|<3о/7я (36.23)
при известной величине О или доверительную оценку
|в-д|<3з/з/л (36.24)
при неизвестной величине О. Оценка (36.23) имеет надежность 2Ф (3) = 0,9973 незави-
симо от числа измерений Оценка (3624) зависит от числа измерений п (зависимость гга
устанавливается с помощью соответствующих таблиц)
36.4. Оценки точности измерений
Предполагается, что измерения являются независимыми и равноточными (с од-
ной и той же дисперсией), а их псярешности - случайными, причем распределены
они по нормальному закону. В качестве показателя точзюсти измерений оценивается
дисперсия этого закона о2 или средняя квадратическая погрешность о ® Vo2.
Точечные оценки дисперсии. 1. Если измеряют известную величину а, то в
качестве эффективной оценки дисперсии О2 применяют квадрат среднею ква.|ра-
тичсского отклонения Z результатов измерений (36.13) от значения а:
о2 - /2 =* - У (х, - а/. (36.25)
2. При измерениях неизвестной величины в качестве оценки дисперсии а2
применяют эмпирическую дисперсию х2:
О2-?—*- У (х, -X)2, (36.26)
п — 1
где х- среднее арифметическое значений х,.х2.х„. Оценка (36.26) является
несмещенной и состоятельной, но не является эффективной (она асимптотически
544
эффективна, т. с. се дисперсия стремится к наименьшем) значению при неограни-
ченном увеличении числа измерений л).
3. Если проводится т серий измерений некоторой величины и и звестны коли-
чества измерений и,, л,,..., п., а также средние арифметические результаты
х,. х2,..., х. в каждой серии, то в качестве оценки дисперсии применяют эмпири-
ческую дисперсию s2 из средних:
О2 - = -Ц У Ч (*. - *)’. (3627)
т-1
/I
где
* = N = n, + —л_. (36.28)
1=1
Эта оценка является несмещенной, состоятельной (и асимптотически
эффективной при т-»•«).
Доверительные оценки средней квадратической погрешности. Прм большом
числе измерений доверительную щенку средней квадрапщеской погрешности о запи-
сываю! в виде оценки относительного отклонения оцениваемого значения о от эмпи-
рического стандарта s (или /, или i). Эта оценка имеет вид | (о-х)/г|<^, или
*(1-?)<О<«(1+$Х (3629)
коэффициент q = q (у, к) находится с помощью соответствующих таблиц в зави-
симости от доверительной вероятности у (надежности оценки) и от числа степеней
свободы к (А = 1 вслучас), Л = л-1 в случае 2, А = т-1 вслучасЗ).
При малом числе измерений симметричная оценка (36 29) приводит к неоправ-
данно большим доверительным интервалам, в этом случае применяют асиммет-
ричные доверительные оценки вида , к( < о < xz2, где s - эмпирический стан-
дарт; значения коэффициентов z, = zt (у, к), zt = z2(y, Л) находятся по таблицам.
36.5. Эмпирические формулы
Во многих науках (физика, химия, технические науки и др) приходится поль-
зоваться эмпирическими формулами, составленными на основании результатов
наблюдений. Параметры эмпирических формул определяются по способу наи-
меньших квадратов, ('начала устанавливается вид зависимое: и между двумя вели-
чинами. Эго можно выполнить разными способами, например графически. Пусть
результаты измерений представлены схемой
х х, х2 X, ... X.
У У1 У2 У1 — У.
Упорядоченные пары чисел (х,,у,Х / = 1,2,...,и, рассматриваются как пря-
моугольные декартовы координаты точек на плоскости Л/Дх^уД
М2(хг,уг\..., М„(х,,у,). В выбранной системе координат строят
точки Л/,(х,,у,Х /=Х2,...,л
18 Зак I
545
Если построенные точки Л/,(х,,х) незначительно уклоняются от некоторой прямой,
то полагают, что между величинами хи у существует линейная зависимость, т.с.
у=ах+Ь. (36.30)
Параметры а и Ь эмпирической формулы (3630) определяются из системы уравнений
о£х’ + б£х, = j^x.y,, о£х, + Ъп = (36.31)
•*1 »«> <! г*1 <•!
Если точки М, (i = 1. 2,.... л) незначительно уклоняются от дуги некоторой
«шраболы, то естественно предположить, что между величинами х и у существует
квадратичная зависимость, т. е.
у~ах2 ybx+c. (36.32)
I Ьрамегры а, Ь, с эмпирической формулы (36.32) определяются из системы уравнений
° Xх*+b &+с
г*1 г«| «! «!
а У,♦ Ь *с x,yt* (36-33)
••I 1-1 <-1 /-1
а&+ь Xх'+т “iz-
<•1 «! <!
Пример 36.3. Экспериментально получены пять значений искомой
функции у - f(x) при пяти значениях аргумента:
х I 2 3 4 5
У 4,7 5.7 4.2 2.2 2,1
Методом наименьших квадратов найти функцию у = /(х) в виде у = ах + Ь.
Результаты измерений и их обработки запишем в табл. 36.2.
Таблица 36.2.
1 •а а
1 1 4,7 4.7 1
2 2 5.7 11.4 4
3 3 4.2 12,6 9
4 4 2.2 8.8 16
5 5 2.7 13.5 25
Е 15 19,5 51,0 55
Система уравнений (36.31) принимает вид
55о + 15/>-51.0. 150 + 56=19,5.
Решая эту систему, находим а = -0,75, 6 = 6,15 Следовательно, получена эмпи-
рическая формула у = -0.75х + 6,15.
546
VII
ТЕОРИЯ ФУНКЦИЙ
КОМПЛЕКСНОЙ ПЕРЕМЕННОЙ
И ОПЕРАЦИОННОЕ ИСЧИСЛЕНИЕ
Гпава 37
ЭЛЕМЕНТЫ ТЕОРИИ ФУНКЦИЙ
КОМПЛЕКСНОЙ ПЕРЕМЕННОЙ
37.1. Понятие функции комплексной
переменной. Предел и непрерывность
Комплексное число z - х + iy, где х и у - действительные числа, i - мнима*
единица изображается точкой комплексной плоскости с координатами
(ж. у). Пусть D - область (открытое связное множество) комплексной плоскости
С. Если каждой точке 2 е D по определенному правилу f поставлено в соответ-
ствие единственное комплексное число w = и + iv, то говорят, что в области Р
определена однозначная функция комплексной переменной z = x + iy и пишут
и> = f(z\ zeD. Функцию f(t) = /(ж + iy) можно рассматривать как ком-
плексную функцию двух действительных переменных хну, определенную в об-
ласти D. Задание такой функции равносильно заданию двух действительных функ-
ций и = и(х,у), v-v(x,y\ (x,y)eD, w = u + tv. Таким образом, если
z=x+fy, w=u + iv, то
»* = /(*) = «<*.>’)+#»'(ж,>). (37.1)
Комплексное число с называется пределом однозначной функции
w = f(z) при z -» в, если для всякого числа £ > О существует такое число
8>0, что из неравенства |ж-а|<е следует неравенство |/(ж)-с|<Е.
В этом случае пишут lim f(z)^c.
Функция w = f(z) называется непрерывной в точке 20,если
1ш>/(ж) = /(ж0Х (37.2)
547
Функция, непрерывная в каждой точке некоторой области D, называется непре-
рывной в этой области.
Область D называется односвязной, когда она ограничена замкнутой лини-
ей Г, ис пересекающей себя (рис. 37.1). Область D называется двусвязной,
когда она ограничена двумя замкнутыми линиями Г( и Г„ которые не пере-
секаются и каждая не пересекает себя (рис. 37.2); внутренняя линия Г2, в ча-
стности, может вырождаться в точку или в дугу непрерывной линии. Анало-
гично определяется трехсвязная, четырехсвязная и тл. области.
Замечание. Если существуют значения г е D, каждому и) которых постав-
лены в соответствие несколько значений w, то функция w = f(z) называется много-
значной.
Рис 37.1
Пример 37.1. Найти значения функции /(г) = я’- 2г’+ 5г при сле-
дующих значениях аргумента: I) я=1; 2) я =1-1; 3) я = 2+1.
Принимая во внимание значения степеней мнимой единицы (см формулы (7 19)),
получаем: /(l)-l’-21’+51 =-1 + 2 + 5/= 2 + 41. Поскольку (l-О’» I - 21 + I2 »
=1-21-Т=-21, (1-0* - (I-0’(1 -0--21(1-0 = -21 +21’«-2 -21. то/1 -1) = (1 - if -
-2(1-1)’ +5(1-1) =-2-21-2 (-21) + 5-5т= -2-21+41+5-51 = 3-31 Далее.
/(2 + 1) = (2 + 1)‘-2(2 + 1)2+5(2 + 1) =
» 21+3-2’1+ 3-21’+ /’-2(4+41+ 1’)+5(2 + 1) =
= 8 + 121 + 61’ +/’-8-81-21’ +10+51» 8 +121-6-1-8-8/+ 2 +10 + 51 = 6 + 81
П р и м е р 37.2. Дана функция /(г) = 1/(х - (у), где z-x+fy. Найти ее
значения при г = 1+J, z=i, г = 3 - 21.
Сначала придадим функции вид (37.1):
, 1 x+fy________x + iy x+iy
x-iy (x-iy) (x+iy) x1-i2y2 x2+y2'
548
_ . . . , ... _ 1 , I I , I 1+1
Если ₽!+*, то x=l, y=l, поэтому /(1 + 0= +'1~2+~р = 2+/7""2~’
При z=t, это значит х=0,у=1, получим/0=1 В случае z=3 -2т, т.е. х=3.у= -2, находим
«м ш 3 . “2 3 2/ 3-2/
21- 32 +(-2)2 + 32+(-2)2 " 13 13~ 13’
Замечание. Данную функцию можно записать и в таком виде:
/(*) = , * . С учетом этой формулы находим /(1+0=——. /(«) = «,
ж + у 2
/(3-20-^.
Пример 37.3. Доказать, что функция w = ж1 является непрерывной при
любом значении г.
Зафиксируем значение z0 и рассмотрим разность z2 -zj = (z-z0X-T + z0)- Ко-
гда z -+ Zo.to существует такое положительное число М, при котором выполня-
ются неравенства z | < М, |z0 | < М, поэтому
|z2-z7| = |z-z0||z+zc|<|.’-z0|(|z|+|z0|)<2A/|z-z0|.
Выберем Б = е/2А/. Из неравенства |z-z0|<8 следует, что
|z2-z2|<2W8«2A/ -1-же, lz-z’l<£.
Следовательно, lim z2 = zj. Поскольку выполняется равенство (37.2), то функция
w = Z2 непрерывна в точке ze. Точка z0 была зафиксирована произвольно; зна-
чит, функция w = z2 непрерывна в любой точке.
37.2. Основные элементарные функции
комплексной переменной
Функции комплексной переменной е‘, sinz, cosz определяются как суммы соот-
ветствующих степенных рядов, сходящихся на всей комплексной плоскости:
г=1+'+£1+£1+... 1! 2! 3! z’ z’ z7 smz = z + + - 3! 5! 7! (37.3) (37 4)
cosz = 1— —— + ——-—— +*•• (37.5)
2! 4! 6!
Показательная функция е‘ имеет следующие свойства: 1) е‘,*г’ =ег' е*’, где
z,. Zj - произвольные комплексные числа, 2) е‘*22x1 =е* (1 = 0, + 1 + 2,.. ), т.е.
ег является периодической функцией с периодом 2л/.
549
Тригонометрические функции sinz, cosz - периодические с действительным
периодом 2л; они имеют только действительные нули г ~ кп и г = т^'2 + Лл со-
ответственно, где к =0,±1.±2,....
Для функций е*. sinz, cosz справедливы формулы Эйлера
е“ =cosz + isinz, е “ = cosz-isinz. (37.6) •
откуда е“+е"“ е“-е'“ COSZ = f sinz . 2 2i (37.7)
Если z = я + ту, то e* = e"** = Xх e*. поэтому
e' eM(cosy + /siny). (37.8)
Тригонометрические функции tgz, ctg z определяются формулами
Все формулы тригонометрии остаются справедливыми и для три1хчюмстричс-
ских функций комплексной переменной.
Гиперболические функции shz, chz, thz, cthz определяются формулами:
shz=e—- *-, diz = <‘ (37.9)
2 2
thz = —, cthz = —. (37.10)
chz shz
Функции shz, chz можно рассматривать как суммы пененных рядов, сходя-
щихся на всей комплексной плоскости:
2+ 3! * Я + 7! + "
Z1 2* 2
1+ —+ + +•••
2! 4! 6!
(37.11)
Тригонометрические и гиперболические функции связаны между собой сле-
дующими равенствами:
sinz = -i shiz, shz = —i siniz,
coez = chic, chz = cosiz,
tgz = -ithiz, thz--/tgiz.
ctgz= i cthiz, cthz = ctgiz
(37.12)
Логарифмическая функция Ln z, где z * 0, определяется как функция, обрат-
ная показательной, причем
Lnz = ln|z|+iArgz = ln|z|+iargz + 2fau (Л = 0,±1,£2,—) (37.13)
550
Эта функция является многозначной. Главным значением Lnz называется такое
значение, которое получается при 4 = 0; оно обозначается через In г
lnz = in|z| + iargz. (37.14)
Очевидно, что
Lnz = lnz + 24rU, (4 = O.±Lt2, •) (37.15)
Справедливы следующие равенства:
Ln(z, z2) = Lnz, +Lnz2, Ln I | = LnZ|-Lnz2,
Ln(z")=nLnz, LnVz=Ln z/a
Обратные тригонометрические функции Arcsinz, Arccosz. Arctg z, Arcctgz
определяются как функции, обратные соответственно функциям sin», cos»,
•gw, etgw Например, когда z = sinw, то к называется арксинусом числа z и
обозначается н = Arcsinz.
Все зти функции являются многозначными; они выражаются через .имариф-
мическис функции следующими формулами:
Arcsinz = -/ Ln (tz + Vl-z2 X (37.16)
Arccosz =-i Ln (z + Vz2 -1X (37.17)
i, l + « Arctgz = - Ln , (37.18)
Arcctgz = Ln . (37.19)
2 i-l
Главные значения обратных тригонометрических функций arcsinz, arccosz,
arctgz, arcctgz получаются, когда рассматриваются главные значения соответст-
вующих логарифмических функций.
Общая степенная функция w = z“, где а = а + ф - любое комплексное число,
определяется формулой
z*-e*u,'> (37.20)
ее главное значение равно
z'-e'"'. (37.21)
Общая показательная функция w = а' (оКО - любое комплексное число) оп-
ределяется формулой
e'«e’u'; (37.22)
главное значение этой многозначной функции равно
в*-г***. (37 23)
551
Пример 37.4. Доказать, что «*=-1, е"*2»/.
Число к/ можно рассматривать как комплексное число 2 = х + (у,где
х = (), у = к, поэтому в соответствии с первой из формул (37.6) находим
еш = cosx+/sinx = -l + /-0 = -l.
Аналогично получаем второе равенство:
е*^г = cos — + /sin - = 0 + / 1 = /.
2 2
Пример 37.5. Найти: I) cos/; 2) sin (1 + 2/).
По первой из формул (37.7) получаем
е"+е~“ е‘ +е е"' +е' .
cos/ =--------=------------------= ch I = 1,5431.
2 2 2
В соответствии со второй из формул (37.7) находим:
sin (I + ЭД-------------------J------------£-------
_ е'1 (cosl + /sinl)-e2(cosl-/sinl) = cosl(e’2 -e2)+/sinKe2 »е~а>1г
2/ " 2/
*»+*-» «’-в"*
=---------sinl+/-------cosl »ch2sinl + »sh2cosl =
2 2
- 3,7622 0,8415 ♦ /3,6269 (0403 = 3,1650 + 1.9596/.
Пример 37.6 Найти: I)M-lfc2)Ln(-1>. 3) In /; 4) Ln/, 5) W3+40; Ln(3+4i).
Поскольку | -11 = 1, а главное значение аргумента равно it, то в соответствии с
формулой (37.14) получим In (-1) = In 1 + х/; по формуле (37.15) найдем:
Ln(-l)-x/ + 2*iu = (2* + l)xi (* = 0,±1.12,...).
На основании тех же формул и с учетом того, что | /| = 1, arg/ = х/2, находим
ln/^ lnl+ */ = */. Lni = */+2*x/ (* = U±l,±2....X
Так как |3+4/|« л/з2+42 =5, arg (3 + 4/)^ arctg то 1п(3 + 4/) =
= ln5+/arctg Ln(3+4/) = In5 +/arctg ^-+ 2Дто (*=0,±1,±2,...).
Пример 37.7. Найти 1) /; 2) 2м.
В соответствии с формулой (37.20) или (37.22) при а = /. : = / и с учетом то-
го, что Ln/ = — /+2*х/ (см. пример 37.6) получаем
2
Г = ?= е' "*2+2Ы» = е-^2-2** (* = 0. ± 1, ± 2,...).
Главное значение /’ равно е-4^2.
552
На основании формулы (37.22) при а =2, z = l+i находим:
2м _r<woui .e(uoo.2*u-> = е^2-ш^г^ .eM-M"(Cosln2+/sinln2).
Замечание. Здесь использована формула (37.8).
Пример 37.8. Найти: 1) Arcsin 2; Aretg (20.
С помощью формул (37.13) и (37.16) находим
Arcsin2 = -/Ln(2i±»\/3)- -iLn[ (2±т/3)i] = - ipn (2±л/3)-М * + 2кл] =
- *-/ln(2±V3)+2Jbr (* = 0,±L±2....).
В соответствии с формулами (37.13) и (37.18) получаем
Aretg(20 Ln (-’) = - ^(In ^ + ш + 2*1и) =
"2*^T+fat <*”*Н±2,...).
37.3. Дифференцирование функций
комплексной переменной
Рассмотрим функцию w = /(zX определенную в некоторой области D ком-
плексной плоскости. и точки zeD, (z + Az)eD. Обозначим:
Aw = /(z +Ar)-/(z), Дг = Дх + гДу.
Производной функции и ® f(z) в точке г называется конечный предел отно-
шения txw/bz, когда Дг произвольным образом стремится к нулю:
/'(,). |im lim /£♦*>-/<*) (37.24)
Ли О Ду Al-. О Ду '
Функция, имеющая производную в точке z, называется дифференцируемой
в 31 ой точке.
Если z^x + ty, w = f(z)~u(x,y)+tv(x,y), то в каждой точке дифференци-
руемости функции f(z) выполняются равенства
ч
Эи dv du dv
дх ду' ду дх' <37 25)
которые называют условиями Д’Аламбера - Эйлера (или условиями
Коти- Римана).
Обратно, если в некоторой точке (х.у) функции u=u(x, у), v = v(x.y) диф-
ференцируемы как функции действительных переменных х, у и. кроме того, удов-
летворяют соотношениям (3725), то функция /(z)=u + rv является дифференци-
руемой в згой точке z - х + iy как функция комплексной переменной z.
553
Функция w = /(z) называется аналитической вточке zeD, если она диффе-
ренцируема в ней и некоторой ее окрестности Функция /(z) называется анали-
тической в области D. если она дифференцируема в каждой сс точке.
Для всякой аналитической функции /(z) производная /'(z) выражается че-
рез частные производные функций u«w(x,>), v = v(x,у):
.du dv _ dv .du du _ du _dv dv
ch ch dy dy dx dy dy dx
Геометрический смысл модуля и аргумента производной. Если функция
/(z) -аналитическая в точке ге и f(ze) * 0. то |/'(z0) равен коэффициенту рас-
тяжения в точке z0 при отображении w = /(z) плоскости z на плоскость и, точ-
нее: при | f'(z„)| > 1 будет растяжение, а при | /'(z0)| <1 “ сжатие. Аргумент про-
изводной /"(а0) равен углу, на который необходимо повернуть касательную в точке
z„ к любой гладкой кривой на плоскости z, которая проходи! через точку z0, 410-
бы получить направление касательной в точке и0 = /(z0) к обра<у этой кривой на
плоскости в при отображении и = /(г). Отмстим, что при <р = arg/'(z)>0 пово-
рот осуществляется против часовой стрелки, а при <р < 0 по часовой стрелке.
Отображение с помощью аналитической функции и = /(z) называется
конформным отображением.
Дифференцирование элементарным функций. Производные элементарных
функций z". lnz, е*. sinz, cosz, arcsinz, arccosz, aretgz, shz, chz находят-
ся по формулам:
(z"/-»*’1, (lnz)'-
z
(r1)'»?, (sinz)'= cosz, (cosz)'=-sinz.
(arcsin z)' = -1 - — , (arccosz f = — * , (aretgz)' ——p,
Vl-Z2 Vl-x2 1+2
(shz)'= chz, (chzy = shz.
Гармоническая функция. Функция <p(x, у) называется гармонической в об-
ласти D, если она имеет в ней непрерывные частные производные второго порядка
и удовлетворяет в этой области уравнению Лапласа
+ = (37.26)
a»1 dy1
Если функция /(z) = u + rv аналитическая в области D, то ее действительная
часть и=и(х,у) и мнимая часть v = v(x,у) являются гармоническими
функциями в этой области.
554
Однако, если и}(х,у), V| (х,у) - две произвольные гармонические функции, то
функция /|(z)=u,(x, y)+rv|(x, у) вовсе не обязана быть аналитической функци-
ей: для аналитичности /|(2) НУЖНО, ЧТОбЫ фуНКЦИИ U,=U,(x.y), V|»V|(x, у)
удовлетворяли условиям Д’Аламбера - Эйлера.
Пример 37.9. Выяснить, является ли аналитической функция и = г2.
Поскольку г = х + iy, той = (я + гу? = хг + 2ixy + i1 у1; w = (x2-y2)+ +2йу,
“(х, у) = ** _>2. v(x,y)«2xy. Находим частые производные функций
и *"•»(*. уХ v = v(x,y):
du „ Эи _ dv _ dv _
- -2х, —--2у, — = 2у, -=2х
дх ду дх ду
Следовательно, if, “ v', и' = -v'; условия (37.25) выполнены для всех точек плос-
кости Оху. Значит, функция и = z2 является аналитической на всей плоскости.
Пример 37.10. Выяснить, является ли аналитической функция и- - г.
Если w>"i, то u + /v = x-ty, u«x, v = -y, откуда
ди _. ди _ dv _ dv _ ди ди
дх ду Эх ду ' Эх ду
Следовательно, первое из условий (37.25) не выполняется Функция и = z нс имеет
производной ни в одной точке плоскости и по пому не является аналитической
Пример 37. II. Выяснить, является ли аналитической функция н^Лег.
Если *«zRez, то u+?v « (х+ (у)х = х2+uy; u = x2, v = xy, откуда
ди _ ди п dv dv
Равенства (37.25) выполняются только при х ж 0 и у = 0. Таким образом, функция
w = z Rez дифференцируема только в точке 2 = 0 и нигде не яатястся аззалишческой
Пример 37.12. Найти аналитическую функцию /(zX если известна сс
мнимая часть v (х, у) 2х2 - 2у2 +х.
Поскольку
dv dv
— «4х + Е х~“-4у.
dx ду
то из равенств (37.25) получаем
_-4,. ^-*.-1
Из первого уравнения находим и= j- 4ydx = -4ху + ф(уХ где <р(у)-
произвольная функция. Для определения функции <р (у) продифференцируем по
у функцию и=-4ху+ф(у) и подставим полученную производную во второе
уравнение: -4x + <p'(y) = -4x-1, откуда ф'(у) = -1, ф(у) = -у+С. Слелова-
555
тельно, u = -4xy-y + C, поэтому w=u+h> = -4xy-y+C+i(2x1- 2/♦ зг) =
= 2i (х2 -уг +2ixy)+i (х+iy)+С, w = /(z) = 2iz2 + tz+C, где z-x + iy.
Пример 37.13. Найти аналитическую функцию /(z), если ее
действительная часть и (х, у) = хг - у2 -х.
Так как
Эи
то из равенств (37.25) следует, что
dv
&У
Эи
Эу
dv
2х-\, £-2у.
ах
v = J(2x-l)<^ = 2xy-y+<>(xX гле <р(х) -
определения функции <p(jr) находим
Из первого уравнения находим
произвольная функция. Для
v' = 2у + ф'(х) и подставляем во второе уравнение 2у + ф' (х) = 2у. откуда
<р’(х) = О, ф(х)=С. Значит, v ~2ху-у+С. поэтому /(z)-u + /v = jr2-y2-
-х + Ц2ху-у+С)*х2 - у2 + 2ixy-(x + iy) + Ci = (х + iy)2-(х + iy)+Cl, или
/(z)«z2-z + CZ
Пример 37.14. При каком условии трехчлен и = ах2 + 2Ьху + су2 являет-
ся гармонической функцией?
Находим частные производные первого и второго порядка: u' - 2ах + +2Ьу,
u' = 2bx + 2су, и" = 2а, и" = 2с. Вторые частные производные удовлетворяют
уравнению (37.26), т.е. 2а + 2с = О, когда а+с = О При этом условии данный
трехчлен будет гармонической функцией.
37.4. Интегрирование функций
комплексной переменной
Рассмогрим однозначную функцию /(z), определенную и непрерывную в области
D. Пусть С - кусочно-гладкая дута линии. которая целиком принадлежит области О.
дуга С ограничена точками ze (начальная) и Z (конечная). Разделим дут у С на п
элементарных дут, занумеруем точки деления z4 в направлении от точки JK> конеч-
ной точки Z, причем xu = Z (рис. 37.3, п = 5 ). Введем обозначения: Де, жг*~«4-|
(Л = 1,2,.... л), 1 = max|Azt|. На каждой элементарной дуге zt_(, zt выберем одну
точку z’t (один из концов или внутреннюю точку) и запишем сумму
/.=^/и;)Дг,-
м
556
Интегралом от функции /(х) по дуге С на-
зывается конечный предел суммы !„ при Х.-»О
j/(z)dz = bm X /(«*) А»*-
Интеграл от функции комплексной пере-
менной имеет следующие свойства:
1. J(/(z)4^(x))<fe«J/(z)<fc+j<p(x)<fc
С с с
2. jaf(z)dz = aff(z)dz (а — постоянная).
С с
3. Если дута С геометрически совпадает с дутой С, но имеет направление, про-
тивоположное направлению дуги С(для С начальная точка 2, а конечная 20), то
J/(x)dr—J/(x)<fr.
( с
4. Если дуга С состоит из дуг C|t Q,.... Q (рис. 37.4, л = ЗХ то
J /(x) dz - J /(х) dz + J f(z) dz + - + J Лх) dz.
C c, c, c.
5. jdz = Z-zc.
6. Если |/(x)|< M во всех точках дуги С и длина дуги С равна /, то
J/U)*
с
5 Ml.
jf(z)dz sj|/(x)||<fc|,rfle J|/(x)||<fc|» lim J |/«)||Ar*|.
c c c *«i
Вычисление интеграла от однозначной функции /(z)= u(x,>)+iv (х. у)
комплексной переменной z = х + iy сводите я к вычислению обычных криволинейны \
интегралов:
J f\z}dz =J udx - vdy+ij vdx + udy, (37.27)
c c
где w = u(x,>X v =
557
Интеграл J f(z) dz, вообще говоря, зависит
с
от пути интегрирования С.
Если /(z) - аналитическая функция в од-
носвязной области D, то значение интеграла
jf(z)dz не зависит от линии С, а только от
С
начальной и конечной точки этой линии
Теорема 37.1 (Коши). Для всякой функ-
ции f(z), аналитической в некоторой одно-
связной области D, интеграл по ЛЮ~
г
бому замкнутому кусочно-гладкому контуру Г, целиком принадлежащему об-
ласти D, равен нулю;
j/(z)cfr = O.
г
Если кривая С задана параметрическими уравнениями x-xft). y=y(tk r0 £ f S r|t то
j/(z)<fc = jnz(Ok'(O<*. (37 28)
где z(O-z(»)+(y(O
Если функция /(z) аналитическая в однозначной области D, содержащей точ-
ки г0 и Z|, то справедлива формула Ньютона-Лейбница
j/(z)<fc = F(z1)-F(z0) = F(z)|*. (37 29)
•»
где F(z) - первообразная для функции /(z),T.e. F" (z)-f(z} в области Л>
Если функции /(z) и <p(z) - аналитические в односяячной области D, a z0 и z, -
произвольные точки згой области, то справедлива формула юпе1риронан1и по частям:
J/(z)t'(*)*-l/(z)f(*)]|X-j’P(z)r(z)A (37.30)
«• »•
Замена переменной в интегралах от функций комплексной переменной прово-
дится аналогично случаю функции действительной переменной. Если аналитиче-
ская функция г = ф(н) отображает взаимно однозначно линию Q в и-плоскости
на линию С в г-плоскости, то
J/(z)dr=J/lp(w))p'(w)rf* (3731)
с с,
558
Если путь интегрирования является лучом, исходящим из точки z0 или окруж-
ностью с центром в точке z0, то целесообразна подстановка
* -ze = peT (37 32)
В первом случае <р~-const, р - действительная переменная интегрирования. во
втором случае р = const, а ф - действительная переменная интегрирования
Пример 37. IS. Вычислить интеграл J :dz, где L - линия, соедиияю-
L
щая точки z = —1, z = l, причем: 1) L — отрезок действительной оси от точки
z = -l лоточки z = l, 2) L - верхняя полуокружность |z| = l.
Поскольку для комплексного числа z = x+iy сопряженным является число
Z = я-«у, то на действительной оси г “X. Л = </« и х=х. В первом случае получаем
= 0.
Верхнюю полуокружность |z|«l можно задать так: z = e**, где 0£ф£х,
причем <р убывает Поскольку ?«”*, dz =»*'•, то во втором случае
о о
J zdz ~ J?*'*»'*<*₽ i j Лр =« -Л.
L я
Замечание. Функция w = z не является аналитической (для
функций w = z«x-ry не выполняются условия (37.25)); значение интегра-
ла от этой функции зависит от пути интегрирования, соединяющего
указанные точки.
Пример 37.16. Вычислить интеграл J (l + /-2z)<fe, где L - отре зок
L
прямой между точками z, = 0, z2 = I + L
Перепишем подынте1ральную функцию в виде (37.1)
1 + « —2i = l+(-2(x-(y)=l-2x + /(l + 2y),
здесь и(х,у)=1-2х, v(x.y)=l + 2y.
На основании формулы (37.27) получаем
J(l + Z—2z)dz = J(l—2x)dx-(l + 2у) dy + iJ (1 + 2y) dx+(\-2x)dy.
L l i
559
Отреюк прямой между точками zt»0, z,=l + j имеет уравнение у = х
(05х 51), поэтому dy = dx; пределы интегрирования соответственно равны:
а = О, 6 = 1. Следовательно,
I 1
J(l + i-2z)<fc» Jl(l-2x)-(U2jr)ldx + >J((l + 2x)+(1-2x)lA-
to о
1 I
= -4jxA + 2/Jdx--2+2r = 2(l-l).
о о
Пример 37.17. Вычислить интеграл Г , где L - окружность ра-
J х-а
диуса г с центром в точке а. 1
Переходим к новой переменной в соответствии с формулой (37.32):
х = а + ге*, 0 < <р 5 2л. На основании формулы (37.31) получаем
L A L,
Поскольку £, - отрезок действительной оси от точки 0 до точки 2л, то
Jrfip = |<Лр = 2 л.
z, °
Таким образом, J-^- = /J<Ap«2w.
L L,
зы
Пример 37.18. Вычислить интеграл J(3z’*2z)<fc.
i-i
Поскольку подынтегральная функция /(z)=3z2+2i является аналитической
везде, то с помощью формулы Ньютона-Лейбница находим:
J(3z2 + 2г) dz = (х} + х2)|’” = (2♦ i)’ + (2+/)’ -О -О’ -0-О* •
= (2+1У) + (3+4<)-(-2-2г)-(-2з) = 7+19«
t
Пример 37.19. Вычислить интеграл J х sin zdz.
о
Функция /(z) = zsinz является аналитической на всей плоскости z, поэтому ин-
тарал от нее не зависит от пути интегрирования, соединяющего точки z = 0 и z = L
560
На основании формулы интегрирования по частям (37.30) и формулы
Ньютона-Лейбница получаем
* 1 '
zsinzdz = Jz(-cosz)'<fr = -zcoszj^ + Jeoszdr =
оо о
= -zcosz£ + sinz^ = -icos/ + sin/ = /(<*il-chl) = /(1,1752-1,5431)--03679г
Замечание. Здесь использованы равенства shz--/sin u,
ch z- cos tz при z = l (см. формулы (37.12)): shl--/sini, chi = cos/,
поэтому -/cos/--/chi, sin/=/shl
37.5. Интегральная формула Коши
Если функция /(z) является аналитической в облаети G, ограниченной кусоч-
но-гладким котпуром L, и на самом контуре, то верна интегральная формула Коши
(«••<* (37.33)
где контур L обходится так, чтобы область G все время оставалась с лева (обход
контура против часовой стрелки).
Если функция /(г) аналитическая в области G и иа ее границе L, то для
любого натурального п верна формула
где ZofiG, zeL, fl”\z0) значение п -ой производной функции /(z) в точке ze.
Формулы (37.33) и (37.34) дают возможность вычислить следующие интегралы:
<fc = 2Tu/(z0) (37.35)
J z ze
f /(»)*
2 л/
л!
(37.36)
Пример 37.20. Вычислить интеграл
гае L - окружность радиуса
Я=1 с центром в точке г=ч причем обход контура осуществляется против часовой стрелки
Чтобы воспользоваться формулой (37.35), преобразуем подынтегральную
функцию следующим образом:
z2+l (z-/)(z + i) z-i z-t' ' z*i'
561
Функция /(z) = l/(z + r) является аналитической внутри рассматриваемого
круга и на его границе, поэтому справедливы формулы (37.33) и (37.35). В coot- ’
встствии с последней формулой получаем
L L
Пример 37.21. Вычислить интеграл J- ~dz, где L - любой замк-
I 1
нутый контур, который не проходит через точку z = 0. Обход контура со-
вершается против часовой стрелки.
_ ,, , ._______sin 2 -
Если точка z = О находится вне контура £, то функция —— будет аналити-
2
ческой на контуре £ и в области, ограниченной этим контуром, поэтому в соот-
ветствии с теоремой 37.1 интеграл равен нулю:
L
Если точка z = 0 принадлежит области, ограниченной контуром £, то
справедливыми будут формулы (37.34) и (37.36) для функции /(z) = sin z, z0 = О,
л-L На основании формулы (37.36) для этого случая, поскольку
/'(*)“ (яп zy = cosz, получим
Лж2шсовО=2Ж.
L Х
Г с1 dz
Пример 37.22. Вычислить интеграл I —---------, где L-окружность
J г -6z
|z-2|-S
В области, ограниченной окружностью |z-2| = 5, имеются две точки z = 0,
z = 6, в которых знаменатель дроби равен нулю. Формулой (37.33) непосредст-
венно пользоваться нельзя. В этом случае вычислить интеграл можно следующим
обратом. Разложим дробь l/(z2-6c) на элементарные дроби
1 _ 1 г !__Н
zz-6z б(я-б z)
С учетом этого равенства и в соответствии с формулой (37.35) получаем (при
z0 » 6 и z0 = 0 соответственно):
f e‘‘dz I fZrfc IfZfe 1 _ j* 1 e*-l .
I —-----= —I-------1-------= -2яи> - —2Ш =—-—Ki.
J z1 —6z 6J z—6 6J z 6 6 3
L L L
562
ЯП7Е , .
р—где *- “ окружность
Пример 37.23. Вычислить интеграл
Подынтегральная функция sin Rz/(z2 -1)2 является аналитической в области
12 —1| S1 везде. кроме точки z0 = 1 Выделим под знаком интеграла функцию /(z),
аналитическую в крутс | z -11S1. Для этого запишем п<ьтыктсгральную функцию в виде
sin тсс _ япях/(т + 1)2
(?^F= (x-l?
и качестве f(z) рассмотрим функцию sinKz/(z + l)2.
На основании формулы (37.36) при л=1 и х0 = 1 получим
Найдем производную функции f(z) = sinxz/(z + l? и сс значение при г = t
zv.c ( “niu ) ncosxz (z + l)-2sinxz ..... 2kcosk я
/w4<77ipJ-------------------(То?----------rm—р—т
Следовательно,
sin яг , i?i
(?^А""Г
37.6. Ряд Тейлора. Ряд Лорана
Функция /(г), однозначная и аналитическая в точке z = z0, разлагается в ок-
рестности этой точки в ряд Тейлора
(37.37)
коэффициенты С„ которого определяются формулами
где Г - окружность с центром в точке 2 = z0, расположенная в окрестности точ-
ки 20, в которой функция /(z) аналитическая Центр окружности круга сходимо-
сти находится в точке z0; эта окружность проходит через особую точку £ функции
/(z), ближайшую к точке z0, те радиус сходимости ряда (37.37) будет равен рас-
стоянию от точки zc до ближайшей особой точки функции /(z).
563
Для функций 1/(1—г)» 1/(1+г). (1 + г)в, In(1 + г) ряда Тейлора имеют
следующий вид.
— -l + z + z2+z, + -+z" + ••• (Я = 1), (37.39)
1-2
-L-l-2+zJ-z’+ •+(-1Г2*+- (Я=1), (37.40)
(Uzf -? ^(«-Dta-^p +...+
+ a(a-l)-(п-(я 1))>и>... (R = 1)^ (37.41)
nl
1п(1 + х) = г-4+ ~ + •+(-1Г'— + ••• (Л-1). (37.42)
2 3 л
Формула (37.42) определяет разложение в ряд Тейлора в окрестности точки
z-О главного значения логарифма Чтобы получить, ряд Тейлора для других зна-
чений многозначной функции l.n(l + z), необходимо в правой части добавить
числа 2ля/, л = ±1,±2,...:
г2 ?
Ln (I + г) = г - — + -- - — + 2лю.
Функция /(z), однозначная и аналитическая в кольце r<|z-zc|<Я (не ис-
ключены случаи г = 0, /? = +<»), разлагается в этом кольце в ряд Лорана
/(,) ж Ёс-{г =Ё с-(г ч r * Sc-(г (37 43)
«в» ел Я«0
коэффициенты которого определяются формулами
'’-an±i k <”44’
где Г - произвольная окружность с центром в точке zq, рааюложенная
внутри этого кольца.
В формуле (37.43) ряд
называется главной частью ряда Лорана, а ряд
^C„(z-z0)" =Cv + Ci(z-z0)+C2(z-z0)2+ —
называется правильной частью ряда Лорана.
564
П р и м е р 37.24. Разложить в ряд Тейлора функцию /(z) = V(2-z)
в окрестности точки z0 = 0.
Преобразуем эту функцию следующим образом.
1 = 1__ = 1 1 _
2-z 2 (1 — д/2) 2 l-z/2'
Поскольку (см. формулу (37.39))
-L-l+f+r,+r, + ... ф|<1Х (37.45)
то при l»z/2 получим
I , z z1 z’ ( z| Л
l-z/2 “ + 2 + 21+2j + [ 21 )
Следовательно,
2-z ~ 2 l-z/2 2^ 2 2’ 2* J’
_j—i+*+4+4+•+—«••••
2-z 2 2* 21 2 2**’
Полученный рад сходится при | z/21 < 1, или | г | < 2
Пример 37.25. Разложить в рад Тейлора функцию /(z)= V(5-3z) в ок-
рестности точки z0 1.
Преобразуем данную функцию:
1 _ 1 = 1 = 1 ж £ I
5-31“5-3(i-l)-3 2-3(1-1) ~2(l-3(z-l)/2) “ 2 ' ( _3(*
В соответствии с формулой (37.45) при /»3(z-l)/2 получаем
Итак,
II 1 1 Г 1 V V
Полученный рад сходится при 13 (i -1)/21 < 1, или | z -11 < ^3.
П р и м е р 37.26. Разложить в ряд Тейлора функцию /(z)=tgz в
окрестности точки z0 = 0.
565
Ближайшая от начала координат особая точка функции tgz есть z-J^'2, поэтому'
функция tgz разлагается вряд Со+C,z+C2z2 + +С2г’+- вкруге |z|<ty'2.
Заметив, что tgz - нечетная функция, поэтому в разложении будут только
члены с нечетными показателями, использовав равенство sinz« cosz-tgz и ряды
для sinz и cosz (см. формулы (37.4) и (37.5)), получим
z- —+ —- —+ (1- —+ —- —+ •l(C1z + C1z,+Ciz’+CTzT + --•).
3! 5! 7! [ 2! 4! 6! J Г
Сравнивая коэффициенты при z.z’,z5,z’,.. в обеих частях равенства. находим
«Ч-Чл 4е-
Из этих уравнений определяем коэффициенты: Ct=l,Cj=l/3, С$ = У15, Су = 17/315.
Следовательно,
3 15 315
(37 46)
Пример 37.27. Найти первые три члена ряда Тейлора по степеням z
функции /(z)»e-al.
Поскольку (см формулу (37.3))
/.i+Z+<+£1+....
1! 2! 3!
то при t = sin z получим
Итак,
Пример 37.28. Разложить функцию /(z)« ———- в ряд Лорана в сле-
z(l-z)
дующих «кольцах»: 1) 0<|z|< t 2) |z|>l; 3) 0<| z—1|< L
566
Во всех этих кольцах данная функция является аналитической и поэтому мо-
жет быть разложена в них в соответствующий ряд Лорана Представим эту функ-
цию в виде суммы элементарных дробей:
Дг)‘~7Г^~~+Т~
z(l-z) г 1-х
I Поскольку | г | < 1, то с учетом формулы (37.39) получим
1 1 . 1 1 .. 2 з
——-— = - + \ + z+z +х+--.
z(l-z) г 1-х z
Главная часть ряда Лорана здесь имеет только один член
2. Если |z|> 1, то | Vz|<1, поэтому
1 1 । • 1 1 (. । 1 .
z(l-z) г г l-Vz г х< х хг )’
1 = __!__2 _ 1 _
x(l-x) z2 zJ х*
В этом разложении отсутствует правильная часть
3. Если 0<|г-1|<1, то функцию - нужно разложить в геометрический ряд
со знаменателем х-1
Главная часть полученного ряда Лорана содержит только один член
Пример 37.29. Фу нкцию f(z} \j(z -1) (х - 2) разложить в ряд Лорана,
приняв Zq я 0.
Данная функция имеет две особые точки: х-1, z = 2, Следовательно, име-
ется три кольца с центром в точке 0, в каждом из которых функция аналши-
чес кая: I) круг |z|<l; 2) кольцо l<|z|<2; 3) внешность крути |х|<2, т.е.
|z|>2
Функцию f(z) разлагаем на элементарные дроби:
1 1 1.1 II
(x-l)(z-2) = z-2 z-Г х-2~ 2 l-z/2'
1. Поскольку | z | < 1, | z/21 < 1, то с учетом (3739) получим
1 nJ I * I ** I I *" I
l-z/2 2 2’ 2*
567
z-2 2 l-z/2 2 2* 2? 2Г*'
—L=_L=i+z+Ji+...+z-+.... (id
Z-l l-z
Сложив ряды (I) и (II), найдем, что
____1______iJt'Uf, Л,- 'Ь*....
(,-1Х,-2> 2 V 1. г*/ к г")
Полученный ряд является рядом Тейлора
2. Если 1 <|z|<2, то ряд (I) сходящийся (ибо (|z/2|<l), но ряд (II) расхо
дится (так как | z | > 1). Разложение (II) заменим другим:
• ' 1 I '
= — — • ш — — I I +
z-l------------z l~Vz z( г z1
(HI)
Ряд (HI) сходится, поскольку I Z | > 1 H | \jz I < L
Сложив ряды (I) и (III), получим ряд Лорана для данной функции:
। _ । z Z2_______________z"_______2 j___________।
(z-l)(z-2)“ 2 2’ ~ 2* 2**' z ? г"
в котором Ся=-^2**' (««0.1,2,...), С_я«-1 (« = 1.2,...).
3. Когда |z| >2, то равенство (III) верно, поскольку и |z|> 1, но ряд в правой
части формулы (I) уже будет расходящимся Разложение (I) заменим другим:
1 1 I |(. 2 2\ 2J )
z-2 z l~2Jz z ( z г2 г1 J
Этот ряд сходится, так как |z|>2 и, следовательно, 12]г | < L Сложив (111)
и (IV) получим разложение данной функции в ряд Лорана
I I 21-! 2’-1 2Г'-1
(z-l)(z-2) = zJ + zJ + z* + ” ’* г"
для которого С„ = 0 (« = 0,1,2,..,), С_я=2*‘,-1 (« = 1,2,3,...).
568
Пример 37.30. Функцию /(z) = z*/(z-2)2 разложить в ряд
Лорана по степеням z-2.
Обозначим г-2 = 2, тогда
„ . г* (Z + 2)* Z*+8Z’+24Z2 + 32Z + 16
-----------е--------
16
Z‘
+ + 24 + 8Z+Z2,
Z
т.е.
—^Ц- = —^-r + -^- + 24 + 8(z-2)+(z-2)2.
(z-2)2 (z-if г-2
Здесь главная часть ряда Лорана имеет два члена, а правильная - три члена
Поскольку полученное разложение содержит только конечное количество членов,
то оно справедлива для любой точки плоскости, кроме г = 2.
37.7. Нули функции. Особые точки
Нули функции. Рассмотрим функцию /(г). аналитическую в точке го- Точка го
на тыкается нулем функции/z) порядка (или кратности) и, когда выполняются условия:
/(*о)"О. /'(20)“0...../<*-,»(z<)) = 0. /’”(z0)#a
(37 47)
Если л = 1. то точка z0 называется простым нулем.
Значение z0 тогда и только тогда является нулем пто порядка функции /(z),
аналитической в точке z0. когда в некоторой ее окрестности верно равенство
/(z) = (z-z0)',<p(zX
(37.48)
где <р(л) - функция, аналитическая вточке z0 и <p(z0)#Oi
Особые точки. Особой точкой функции /(z) называется точка z0, в которой
эта функция нс является аналитической. Точка z0 называется изолированной осо-
бой точкой функции /(z), когда существует окрестность этой точки, в которой
/(z) аналитическая всюду, кроме Особая точка функции /(л) называется
устранимой, когда существует конечный предел этой функции в данной точке:
lim /(z)«c. Точка z0 называется полюсом функции /(z), когда lim /(z) = —.
Для того, чтобы точка z0 была полюсом функции /(г) необходимо и доста-
точно, чтобы эта точка была нулем функции
<₽(*) =
1
/(»)
(37.49)
569
Точку z0 называют полюсом порядка и (л «51) функции /(г), когда эта
точка является нулем порядка и для функции ф(г) = !//(?) В случае л=1
полюс называют простым.
Для того, чтобы точка z0 являлась полюсом порядка п функции /(z), необ-
ходимо и достаточно, чтобы функцию /(z) можно было привес! и к виду
/(z)=-^-, (37.50)
где ф(г) - функция, аналитическая в точке z0 и ф(г0)хО.
Точка z0 называется существенно особой точкой функции /(z), котла в ней
функция /(z), нс имеет ни конечною ни бесконечного предела.
Справедливы следующие утверждения.
1. Точка z0 является устранимой особой точкой функции /(z) тогда и только
тогда, когда ее лорановскос разложение в окрестности точки z0 не содер-
жит главной части.
2. Точка z0 является полюсом функции /(z) тогда и только тогда, когда
главная часть сс лорановского разложения в окрестности точки z0 содер-
жит только конечное число членов:
+• + — + Ус.(я-ясГ (С4*0). (37.51)
(z-zor z-z0 X-
Наибольший из показателей степени разности z-z0 в знаменателях
совпадает с порядком полюса
3. Точка z0 является существенно особой точкой функции /(z) тогда и толь-
ко тогда, когда главная часть сс лоранонекого разложения в окрестности
точки z0 содержит бесконечное множество членов
Пример 37.31. Доказать, что точка zc = 0 является нулем второю по-
рядка для функции /(z)“l-cosz.
Разложим в ряды данную функцию и ее первую и вторую производные:
( z1 z* г*
/(z)°l-cosz-l- 1- — + -— —+ —
' (2! 4! 6!
/(Г)=2|"7?+«'"’ Л’)=Х-зГ+5!--
570
Поскольку /(0) = 0, /'(0)=0. /*(0)*0, т.е. выполняются условия (37.47)
при п = 2, то zo=O -нуль второго порядка для функции /(z) = 1-coez.
Пример 37.32. Найти порядок нуля ze = О для функции/г)=г7Дг - sin г).
Использовав разложение функции sin г в ряд Тейлора, получим
z7
z-sinz z-(z-z73’+z7S—•) “ z,/3l-z*/5t+—*
Л’>”‘ w /«'»<* »<•>--v—J>:..
Таким образом, функция /(z) записана в виде (37.48), где <p(z) - функция,
аналитическая в точке Zo=0, причем <р(0) = 6#0. Значит, точка zo = 0 - нуль
четвертого порядка для данной функции.
Пример 37.33. Найти нули функции 4^+1 Ain? и определить их порядки
Когда /(z) = 0 или (z2+l)’sinz = 0, то z2 + l = 0 либо sinz = 0. Из первого
равенства следует, что г = —i, г = /, а со второго, что г = кк (Л-0, ±1, ±2,---).
Пусть z = -i, тогда функцию /(z) можно представить в виде (37.48):
/(z)-(z + O’«p(z), где функция <p(z)»(z-i)3sioz является аналитической в
точке z = -i, причем <p(-i) = -8jsini = 8shl#0. Значит, точка z = -i есть нуль
третьего порядка Аналогично доказывается, что z = i - нуль третьего порядка
Функция sinz имеет нули г-кк (* = 0,11,12,...) Действительно,
sin z = (-!)* sin (z-*it)=(-!)*[ (»-*x)-l£^^.+l?-J^t_..
Это нули первого порядка для функции /(z) = (z2 + l)’sinz: /(*к) = 0, но
/'(*к)#0, ибо /'(z) = 6г (z’+l)2 sin z + (z2 + l)’cosz.
Пример 37.34. Доказать, что точка г»=0 для функции /(z) =
= (е*-1)/г является устранимой особой точкой.
Действительно, поскольку е* =1 + z ——-=! + — +
2! 3! z 2!
*“+•••. lim /(z) = lim -—- = I, to z» » 0 - устранимая особая точка.
3! «-»o »-»o г
Пример 37.35. Найти полюсы функции f (z)
_________z________
(?-IXz2+D’’
Так как для функции p(z) = l//(z) = (z2-l) (? +1)’/г точки z, = -l, z, = l -
нули первого порядка. Zj = -t, z4 = « -нули второго порядка, то для функции
/(z) точки 11 — полюсы первого порядка, точки 1» - полюсы второго порядка.
571
Замечание. Если f(z)-P(z)/Q(z), где P(z) и Q(z) - многочлены,
не имеющие общих корней, то корни многочлена Q(z) (и только они) являются
полюсами функции /(z). Порядок полюсов /(z) совпадает с кратностью соот-
ветствующих корней многочлена <p(z). Например, когда
/(z>"(z+n(z-3),a+4),‘
то Zi = 4 - простой полюс, и= 3 - ПОЛОС второго порядка. zy= -4- полюс третьего порядка
Пример 3736. Исследовать особые точки функции
Поскольку z’+z2-z-1 «z2(z + l)-(z + l) = (z + l)(z2 -l) = (z + l)2 х x(z-l),
то функция имеет особые точки z = -l, z»l. Исследуем точку z = -l. Функцию
f(z) приведем к виду (37.50):
/(’)= (z + lf f<X) ’ Ф(,)= »-!’
где ф (г) - функция, аналитическая в окрестности точки z = -1. причем
<p(-|)=s,"*“ V Следовательно, точка z«-l является полюсом второго порядка
Аналогично, записав функцию /(z) в виде
z-l z-1 (z + l)
заключаем, что z = I - простой полюс данной функции.
Пример 37.37. Найти особые точки функции f(z}=tv‘ и опреде-
лить их типы.
Принимая во внимание, что (см. (37.3))
е'я1 + 1 + < + ... + ?: + ...,
I! 2! л!
при t = \jz получим
= 1 + + - + —+ —------+ „.
Hz 2!z2 л!я”
Этот ряд сходится всюду, кроме точки 2 = 0. Его можно рассматривать как
разложение функции ev‘ в ряд Лорана в окрестности точки z = 0. Поскольку
главная часть ряда имеет бесконечное множество членов, то точка z = 0
является существенно особой точкой для функции е’1*.
572
37.8. Вычеты функций
Вычетом однозначной аналитической функции /(г) в изолированной особой
точке z0 называется число, которое обозначают через res/fzo)1* и
определяют формулой
res/(z0)=-^f/(z)<fr, (37.52)
ZX4 J
т
где интеграл взят в положительном направлении по контуру у. (Используются и
другие обозначения: res [/(z), z0], res /(а)). В качестве контура у рассматрива-
ется окружность с центром в точке z0 достаточно малого радиуса; такою, чтобы
окружность не выхолила за пределы области аналитичности функции /(z) и не
содержала внутри других особых точек пой функции Вычет функции равен ко-
эффициенту при минус первой степени лоранонском разложении функции /(z) в
окрестности точки zq:
mflz^^C.,. (37.53)
Вычет функции в устранимой особой точке равен нулю.
Если z0 - полюс л-го порядка функции /(z), то
re*/(zc)° L . lim —r(/(j)(I-Zef). (37.54)
(л-1)! «-•«. dz
В случае простого полюса (л = 1)
res/(z0)= fan Lf(*)U-*o)J. (37.55)
Если функция /(z) в окрестности точки z0 является частным двух аналитиче-
ских функций
¥(«)
причем <p(zo)*0, v(zo) = O, a y'(zo)#O, т.е.*#- простой полюс функции fa), то
= (37.56)
▼ 1*0/
Если z0 является существенно особой точкой функции /(z), то для
нахождения res/(z0) необходимо найти коэффициент С_, в лорановском
разложении функции /(z) в окрестности точки z0; это и будет res/(z0).
u res - сокращение французского слова r^sidu, «по означает вычет.
573
Теорема 37.2. Если функция f(z) является аналитической на границе Г
области G и всюду внутри области, за исключением конечного числа особы х
точек Х|,Х2,...,хя, то
Г /(x)<fc = 2iu^res/(x4) (37.57)
г
Этой теоремой (ее называют теоремой Коши о вычетах) пользуются при вы-
числении определенных интегралов и нахождении сумм рядов.
Вычет функции относительно бесконечно удаленной точки. Говорят, что функ-
ция /(х) является аналитической в бесконечно удаленной точке z - •», если функция
Я> Ф = /
аналитична вточке £ = 0. Например, функция /(x)=sin 1 аналитична вточке
х = ~. поскольку функция <₽(£) = /(l/£) = sinE, аналитична в точке £ = 0.
Пусть функция /(х) аналитична в некоторой окрестности бесконечно удален-
ной точки (кроме самой точки х = ««•).
Говорят, что z - является устранимой особой точкой, поляком или сущест-
венно особой точкой функции /(х) в зависимости от того, конечен, бесконечен
или вовсе не существует предел этой функции при х —> “
Критерии типа бесконечно удаленной особой точки, связанные с рядом Лора-
на, изменяются в сравнении с критериями для конечных особых точек.
Теорема 37.3. Если х = «• является устранимой особой точкой функции
f(z\ то ее лорановское разложение в окрестности данной точки не содержит
положительных степеней Z. когда Z " °» полюс. то это разложение содержит
конечное число положительных степеней z, в случае существенно особой точки -
бесконечное множество положительных степеней z.
При этом лорановским разложением функции /(х) в окрестности бесконечно
удаленной точки называют разложение /(х) в ряд Лорана, сходящийся всюду вне
круга достаточно большого радиуса R с центром в точке х«0 (кроме, быть мо-
жет, самой точки х = “>).
Рассмотрим функцию /(z), аналитическую в некоторой окрестности точки
х = »< (кроме, быть может, самой этой точки).
Вычетом функции /(х) в бесконечности называется величина
r»/(~)-^-.f/(x)<fc, (37.58)
X/М J
т
где у - окружность достаточно большого радиуса | z j = р, которую точка х
проходит по часовой стрелке (при этом окрестность точки х = <~ остается слева,
как и в случае конечной точки х = х0).
574
Из этого определения следует, что вычет функции в бесконечности равен ко-
эффициенту при z'1 в лорановском разложении f(z) в окрестности точки z = ~>,
взятому со знаком минус:
res/(~)»-C.t. (37.59)
Известные разложения функций t', sinz. cosz, shz, chz (см. п. 37.2) мож-
но рассматривал ь как лорановские ряды в окрестности точки z = ~ Поскольку
каждый ряд содержит бесконечное множество положительных степеней г, то ука-
занные функции имеют в точке z = существенную особенность.
Теорема 37.4. Если функция f(z) имеет в расширенной комплексной плос-
кости конечное число особых точек z,, z2, ...,z., то сумма всех ее вычетов,
включая и вычет в бесконечности, равна нулю:
««/(-)+j^res/(z,)«=O, (37.60)
res /(-)=- У res /(z,)
«•I
Последнее равенство используется при вычислении некоторых юггег радов.
Пример 37.38. Найти вычет функции /(z) =
Данную функцию можно записать так; /(z)= + - и рассматривать эту сумму
* г
как разложение в ряд Лорана по степеням z. для которого С_, = 1. В соогветсгеии с
формулой (3733) находим, что res/(O)=l (zo=O - особая точка).
Замечание. Вычет можно найти и с помощью формулы (37.54). По-
скольку Zo = 0 - полюс второго порядка, то
lim ««»У> »>. <ЩЩ.,
.-»0 ^2
Пример 37.39. Найти вычеты функции /(z) =------------.
(z-2)(z-4)
'Эта функция имеет два простых полюса: z = 2 и г = 4. В соответствии с фор-
мулой (37.55) находим:
res/(2)= lim----3-----(z - 2)= lim — • — « -1,
.-J(z-2)(z-4) -2z-4 2-4
res/(4)= lim V
•-« (z-2)(z-4)
lim —— = —— = 2
•-«z-2 4-2
575
2
Пример 37.40. Найти вычет функции /(г) «----3.
(2-1)
Поскольку х0 = 1 - полюс третьего порядка, то на основании формулы (37.54)
получаем
dr2 2!»-»> dr2 2!
Пример 37.41. Найти вычет функции /(х) = х2 cos .
1 очка х0 = 1 являете» единственной конечной особой точкой функции /(х).
Чтобы найти res/(l), разложим /(х) а ряд Лорана в окрестности точки zP = l,
при этом используем ряд Тейлора для cos/ (см. (37.5))
/2 /*
cos/»!-----—
2! 4!
при I = (/(х-1). Это разложение принимает вид
/(x) = x2cos —— = U + (x-l)f 1--------—1+----"—<
J ’ x-l [ 2!(x-l)2 4!(x-l)
= (l + 2(x-!)+(x-l)2] I---!—«- +---*—г-...
L 4!(x-IJ* J
Нас интересует только ко .ффициент при l/(z -1). Соответствующий член ряда
(-1 1 -1
——I ---------. Знач ит, С i=-1. поэтому res/П) = С. ।ж -1.
Пример 37.42. Вычислить интеграл J 1,1 — dr, где у - окружность
т
| z | - 1/2, которую точка z проходит в положительном направлении.
В круге |х|<1/2 содержится только одна особая точка подынтегральной
функции - это полюс второго порядка z « 0. Вычет фу нкнии f(z) в точке х = 0
найдем в соответствии с формулой (37.54):
res/(0)= lim [ х2 'П = lim (ln(x + 2) f = lim —?—= i.
»-»ol i* i-*o »-»0x + 2 2
На основании формулы (37.52) получаем:
l=J_p<*+2) ГМ£ + 2)*я1а
2 2iu J x2 J zJ
T T
576
Пример 37.43. Вычислить интеграл Г----—------- в следующих случа-
J z(z + 2)(z + 4)
1
«х: 1)у - окружность |z| = l; 2) у - окружтюсгь |z| = 3; 3)у - окружность j z | = 5.
В соответствии с формулой (37.55) найдем сначала вычеты функции
/(z) «l/z (z + 2) (z + 4) относительно простых полюсов Z, = О, z, = -2, z, = -4:
res/(0)« limzf(z)= lim----?-----= —,
—• >-»« (z+2)(z+4) 8’
res/(-2)- lim (z + 2)/(z)= lim -!--
.-»-z •-»-! z(z + 4) 4
res/(-4)« lim (z + 4)/(z)= lim -?--= *.
•-»-« • -»-4z(z + 2) 8
Инте1ралы найдем с помощью формулы (37.57).
В первом случае в области, О1раяиченной окружностью |z| = L, находится
только один полюс z = 0, поттому
f/(z)A.2«l-^.
Т
Во втором случае окружность |z| = 3 ограничивает область, которая содержит
полюсы z( = О и Zj = -2, тогда
f/(z)<fc-2»u(l-l)--^.
J u 4J 4
т
В третьем случае втгутри области, ограниченной контуром | z | = 5, находятся
три полюса: zt=0, z,=-2, z,=-4. по лому
ff(z)dz = 2M
l-l + i
8 4 + 8
= 0.
193« I
577
Глава 38
ЭЛЕМЕНТЫ ОПЕРАЦИОННОГО
ИСЧИСЛЕНИЯ
38.1. Оригинал и изображение
Функцией-оригиналом называется любая комплекснозначная функция /(Г)
веществен ной переменной Г, удовлетворяющая следующим условиям:
1. /(<) интегрируема на любом конечном промежутке оси Ot (локально ин-
тегрируема)
2. /(О 0 для всех t < 0.
3. | /(0| возрастает нс быстрее показательной функции, т. е. существуют та-
кие постоянные М > 0 и я, что для всех /
Нижняя грань .% всех чисел з, для которых выполняется зто неравенство, на-
зывается показателем роста функции f(l).
Простейшей функцией-оригиналом является единичная функция Хевисайда
(1при/>0,
П(0 = 1„ л (38Л)
[0 при г < 0.
Очевидно, что
(/) при I >0,
’(')’’<<) = {опри?<о;
если ф(/) удовлетворяет условиям 1 иЗ, то ф(/)т)(/) является функцией-орщ-иналом
Для сокращения записи вместо <р (Г) Т) (/) пишут /(/), считая, что /(/) = 0 при t < 0.
Изображением функции /(/) называется функция F (р) комплексной пере-
менной р = 1 + ю, определяемая формулой
F(P)-U«2)
о
Интеграл в правой части равенства называют иигегралом Лапласа, а переход от
оригинала к его изображению - преобразованием Лапласа-
Тот факт. что F\p) является изображением fit), символически записывают гак:
/(О—F(p)
578
и называют операционным (или операторным) равенством Употребляют и другие
обозначения, например: F(p)-»/(О; F(p)=2/(i); f(t)= U'F\p).
Теорема 38.1. Функция F(р) определена в полуплоскости Rep~s>s0, где
л,, - показатель роста fit), и является в этой полуплоскости аналитической функцией
Следствие. Изображение F(p)—»0, если р—э^ так. что- Rep = s
неограниченно возрастает, а р находится в полуплоскости Rcp>T0:
lim F(p) = (l
р-*~
Теорема 38.2. Преобразование Лапласа
F(l>)-J/(0<"<*
о
единственно в том смысле, что две функции ffit) и ffit), имеющие одинаковые преоб-
разования Лапласа, совпадают во всех точках непрерывности дхя всех t>0.
Пример 38.1. Показать, что функция
|ev sin2/ при t > О.
[о при t < 0,
является функцисй-оригина.юм
Убедимся в том, что все три условия, определяющие функцию-оригинал, вы-
полняются для данной функции fit). Действительно, функция fit) локально интег-
рируема: интеграл
je“sin2xdr
<
существует для любых конечных Г, и г,. Условие 2 ныполняется в соответствии с
определением функции /(») (/(Г)=0 при Г<0). Наконец, | е* sin 211 S е* для лю-
бых вещественных t, так что в качестве М в условии 3 можно взять число £ 1, = 3.
Пример 38.2. Найт и изображение единичной функции Хевисайда, опре-
деляемой формулой (38.1X
В соответствии с формулой (382) получаем
F(p) = [1 e'^dt« lim (в~*Л= lim —— = lim f-—-в'**].
о о в ' 7
Если Rep>0, то lim е"*“ = О, в этом случае
«-«♦•В
[я’*'* = 1. , (38J)
i р
F (₽) = -. П(0=“ (38 4)
Р Р
579
Замечай не. Изображение (38.4) получено при условии Re р = s > 0. При
15 0 шгтсграл Лапласа не существует Однако функция |/р аналитическая на всей
плоскости комплексной переменной р. кроме р = 0, и ее значение для Rep<0
можно рассматривать как значения изображения F(p) при Rep<0. Для функции
/(0 = 1 равенство 1 = 1/р будет выполнятся для всех рхО.
Пример 38.3. Найти изображение функции /(О = eh
Принимая во внимание равенство (38.3), получаем
«* = = je-^'dr =
0 0^
(38.5)
Р~*
когда Re (р- А)>0. Поскольку функция 1/(р-к) аналшнческая при всех pt к,
то ее можно рассматривать как изображение функции «•*' для таких р
38.2. Основные правила и формулы
операционного исчисления
Свойство линейности. Если /,(/)=» F,(p). /2(r)=F2(p). а С,. С2-
произвольныс постоянные, то
С|/,(/)+ОЛ(О^С|Г,(р) + ^^(рХ (386)
В частности, изображение суммы функций определяется формулой
/|(0+/з(0“Г|(р)+^1(рХ
Дифференцирование оригинала. Если функции /(/),/'(IX—./*"’(*> явля-
ются функциями-оригиналами и /(O=F(pX то
/'(O^=pF(p)-/(0k
/”(/)=paF(p)-pf(0)-/'(0),
(38.7)
/<->(,)=; p"F(p) - р-‘/(0) - р-’/'(0)--------------/«"-’’(О).
где /‘*’(0) (4 = 1.2,...,л-1) есть lim /<1>(0. /(0)= lirn /(<)
/-♦♦О г-*+0
580
Если /(0) = 0, f(k> (0) = 0 (*=1,2,.... л-1), то эти формулы принимают вид
/'(t)=pF(p), /"(O^p2F(pX,..,/('>(z)=p"F(p). (388)
Интегрирование оригинала. И|гге|рирование оригинала сводится к делению
изображения на р. если f (t)^=F (р). го
|/(Г)Л«-^ (38.9)
о Р
Дифференцирование изображения. Дифференцирование изображения сво-
дится к умножению оригинала на (-/) если F(p)^=/(<), то
^'(₽)=-'/(О; (38 10)
в общем случае
^(P)f=<-»>"/(0 (38.11)
Интегрирование изображения. Если шпеграл J F (р) dp сходится, то он яв-
ляется изображением функции
Z1£1_Jf(w)A<. (38.12)
С помощью формулы (38.12) можно вычислять некоторые несобственные ин-
тегралы. Если /(r)=F(p) и интеграл dt сходится, то
о
dt = ^F(p)dp, (38.13)
о о
где интеграл в правой части вычисляется по положительной полуоси.
Предельные соотношения. Если F(i)==/(pX то
hm pF(p) = /(0X (38.14)
где р —» ®о вдоль положительного направления вещественной оси.
Если/(/)== F(p) и существует tim /(<) = /(••)» то
limo pF (р) =/(-у (38.15)
Пример 38.4. Найти изображения тригонометрических функций:
1) sin at; 2) cosa г.
581
На основании формулы (38.5) получаем
• p-ta • р + Лх
В соответствии с формулой (38.6) при /!(») = е'®’, /j(0G“V2Z,
С2 =~V2i находим:
. 1 - I ( I 1)1 2йх а .
sinaz= — (е -е )=—--------:-----— = ——5-----Г “5----Г*
2i 2/^p-ia p + «xj 2» p2+a2 p2 +a2
при C, = 1/2 Q = 1/2 получим
i . .». —. • i Г i । p
2 * 2\p-ta p + ia) p + a2
Таким образом,
. • <* * P
sinaz=—----г. cosaz=—. r .
* p2 +a * p +a
Пример 38.5. Найти изображения гиперболических функций:
I) shaz; 2) ch az
Принимая во внимание формулы (38.5) и (38.6), находим:
shaz = —(е -е )=у
1_____1
p-а р+а
а
Р1 -«
I,. 1 Р
chaz-—(е +е )=Т -----+---- ------Г-
2 2\р-а р+а) р -а
Следовательно,
t - a . • р
р -а р —а
Пример 38.6. Найти изображение функции /(z)=sinaz с помощью
дифференцирования оригинала.
Используем первую из формул (38.7): f’(t)^=‘pF(p)-f(fi}. Поскольку
/(0) = 0, то формула принимает вид /'(<)?=Р^(Р); /'(О"2sinzcosz =
. • 2
»sin2z, sin2/f=pF(p). Как известно (см. пример 38.4), sin2/™ поэто‘
МУ ~г—1-рР<Р\ откуда F(p)«- ? , sin21~— , •
р2 + 4 р(р +4) р(р +4)
582
Пример 38.7. Найти изображение функции J e’rfr
В соответствии с формулой (38.5), при к = I, получим в' =—?—. На основа-
* Р~1
ним формулы (38.9) найдем, что
J р J р(р->)
• •
Пример 38.8. Найти изображение функции /(/) = /", где л-
иатуральное число.
Из равенства 1=1/р (см. замечание к примеру 38.2), пользуясь правилом ин-
тегрирования оригинала, находим:
J • р’ J I 2* р1 J 12 1-2 3- р‘ ’
Г x’ rfr t" • I . tA
J I 2...(л-1) ~1 2„.л ‘ p” ' ' p" '
Пример 38.9 Найти изображения функций: I) г sin а/; 2) temat
Поскольку sincu=-a/(p’ + а')> cosa/=p/(p' +а’) (см пример 384), то с
помощью правила дифференцирования изображения (см формулу (38 10)) получим:
-/sma/^^'-kOt,.)-2Pa----------.
(Р* ♦в*)’ (р’+а1)1
_tcosa/—1 (/? >СХ')~2Р р = Р' +д’ ~2Р‘ = _ Р‘ -°'
(р*+а’)’ (р‘ +а’)‘ (р*+<х’)'
Таким образом,
, • 2ра • р' -а'
/sina/ =—— -----, zcosa/=—.
• (p’+a1)' ‘ (р' +a')*
Пример 38.10. Найти изображение функции /(/)=("<“, где л
нэтуралыюе число.
Из формулы е“ — \J(p-a) (см. равенство (38.5)) л-кратным дифференциро-
ванием изображения (см. формулу (38.11)) получаем
—-—.
• (р-аГ’’ • (р-а)*
583
- sin Г
Пример 38.11. Найти изображение функции /(О = —.
На основании равенства sinty=l/(p2 +1) (см. пример 38.4) и правила интег
рирования изображения (см. формулу (38.12)) находим
smf • Г du _ i»~ К _ ____
-----~---------7 = arctg « = — - arctg р = arccig р.
t * J l + l? '* 2
sin t •
------= arcctg p.
(Для многозначных функций Arctg x, Ln z и т. д. рассматривают ветви, для кото-
рых arctg 1 = П/4, In 1 = 0 ит. д).
Пример 38.12. Вычислить интеграл I------Л
о
Принимая во внимание равенство sint —1/(р2-*•!) = Л (рХ с помощью фор-
мулы (38.13) получаем
о о
Пример 38.13. Проверить, выполняются ли предельные соотношения
для следующих функций: !)(/), sin г. е", где а - вещественное число.
Равенство (38 14) выполняется для всех этих функций. Действительно, по-
скольку т)(Г)=|/р, , еш = 1/(р-а), то lun р- = I «т)(0),
• ‘ р +1 ’ F-»« р
lim — = 0 = sin 0, lira —— = I е°.
р—р +1 р-»-р-а
Равенство (38.1S) для функции sin / не выполняется, так как lim sin t не суще-
ствует, для функции е" при а > 0 оно также не выполняется по той же причине
Для функций Т)(О и еш при а<0 это равенство будет справедливым,
lim р— = lim Т)(Г)=1, lim —= lun е“ =0.
р t-*- р-.о р-а »-»♦-
584
38.3. Основные теоремы операционного
исчисления
Теорема 38.3. (Теорема подобия). Если f(t)~F (р) и Х>0, то умноже-
ние аргумента оригинала на положительное число приводит к делению изобра-
женил и его аргумента на это число:
/(X/)—-J-fU). (38.16)
Теорема 38.4. (Теорема смещения). Если f(t)=F(p) и а произвольное
комплексное число, то изменение (смещение) аргумента изображения на величину
а приводит к умноженлоо оригинала на величину еш:
Г(р-а)^еш/(Г). (38 17)
Теорема 38.5. (Теорема запаздывания). Если f(t) = F(p) и ©>0. то за-
паздывание аргумента оригинала на положите льное число О приводит к умно-
жению изображения на величину е~^:
(38 18)
Теорема 38.6. (Теорема умножения) £сли F] (р)=/,(Г) Fa(p)==/2(/) то
F, (р) Fj Д(Г-Т) А (38 19)
о
Замечание. Minerрал в правой части этой формулы называется склад-
кой. или сверткой функции /,(») и /2(Г) а операция получения склалки называется
свертыванием функций. В связи с этим теорему умножения можно сформулировать
так: умножение изображений приводит к свертыванию их оригиналов. "Try теорему
называют также теоремой свертывания и теоремой Бередя.
Свертка функций обладает переместительным свойством:
F| (р) Ft (р)—J/3(T) /,(f-t) А
О
I
Поскольку функция <р(0 = J/|(t)/j(/-T) А равна нулю при 1 = 0. то, поль-
о
зуясь правилом дифференцирования оригинала, получаем следующую -запись тео-
ремы умножения:
Pf'i (Р> Fa (Р)=-^ |7|(Т) /,(<-<) А (38.20)
at J
о
585
Интеграл в правой части этой формулы называется ингезралом Д юамеля. Если выпол-
нить дифференцирование в интеграле Дюамеля, то теорема умножения примет вил
f
pF, (Р) F, (p)^f (Г) Д (0) + J f (г) Д'(* - г) А.
или. учитывая равноправность функций F, (р) и F, (р),
pF, (р) F, (р)=Д (Г) Д (0) + J Д (Т) Д'(Г - Т) А.
Примененное здесь правило дифференцирования интеграла по переменной,
входящей в качестве параметра в подынтезральную функцию и в верхний предел
интегрирования, определяется формулой
-Лми/диОА
(3821)
I кюлслиис две записи теоремы умножения можно ннлоизмени|Ъ, если учесть, что
J Д СО Д'(< - т) А = J Д'(т) Д (г - <*) А
м
t I
J7, (*)/,'(/-т) А=рДт) ДО-’) а •
• •
Теорема 38.7. Если f(t) — оригинал с периодом со > 0. то его изображе-
ние выражается формулой
(38 22)
1-е
где
со
cp(p)-J«-',/(O<* (38 23)
•
Эту теорему называют теоремой об изображении периодического ори i и пала
Теорема 38.8. Если F (р) — аналитическая функция в окрестности беско-
нечно удаленной точки и равна в ней нулю и если яорановское разложение F (р) в
окрестности бесконечно удаленной точки ииеет вид
(38.24)
то оригиналам F (р) служит функция
586
л«-Е;Йй'м- <э,25>
причем этот ряд сходится при всех t.
Эту теорем)’ называют первой теоремой разложения.
Пример 38.14. Найти изображение мп (5т. зная изображение яп t.
Поскольку sin с —1/(р2+1), то в соответствии с теоремой подобия
(см. (38.16)) получаем
*,р'7=7мг
Пример 38.15. Найти изображение функций: I) е“ sin рг. 2) е*“ cos ₽с
Пользуясь формулами
р +р р +р
с помощью теоремы смещения находим
Пример 38.16.11айти изображение функции sin (С — I)Т)((— I), где ц (Г)
- функция Хевисайда (см. 38.1).
Вид функции показывает, что здесь имеется запаздывание apt умента на величину
0 = 1. С помощью теоремы запаздывания и формулы sin Г -»l/(p2 +1) полу«см
sin (1-1)Я(/-1)т=Ц---
Р +
Замечание. Если бы запаздывания аргумента не было, т.е. рассматри-
валась функция sin (/-1)Т)(<) (такую функцию условились обозначать просто
sin (t - 1)Х то изображение имело бы совсем другой вид. а именно:
• .. .> . . . , . • cos I pwn 1
sin (t -1) = san teas I -cos t s»n 1 =—=-,-.
* p2+l p2+l
Пример 38.17. Найти изображение функции /(C) = |sinr^
Поскольку j sin г | — периодическая функция с периодом со = к, то изображе-
ние F(p) = cp(p)/(l-e4’) (см. формулу (38.22)), где
Ж ж
<р (р) = J «?’*' | sin 11 dl = J<”** sin tdl.
о о
587
Дважды проинтарировав по частям, получим
ф(р)=-Г
cosr + psint
"VT.~
’ t V+1
.“V7T
Следовательно,
Пример 38.18. Найти изображение периодического оригинала /(г) с
периодом со = 2я, который равен sin t при 0 < t < я и нулю при к < t < 2к
Оригинал для/> 0 можно записать так: /(r) = stnc i)(sinr). Искомое изобра-
жение имеет вид /г(р)=ф(р)/(,_е,’гХ где
2* Я
л г 1+е”^
<р(р) = I е ''smr T) (sin с) Л = I е*** since* =—j-
о о Р
(см. пример 38.17). Итак,
F, > в !♦•"* = I
(p,+1)(1-»-,v) (р’ + 1)(1-« *)’
Пример 38.19. Найти оригинал /(«) по его изображению Г(р) =
1
„ ,_ „ I I I _
Изображению приладим другой вил: —,—=--= р . —•— и будем счи-
Р (р +1) Р Р +1
1 1
таи., что F, (р)-—^—-=sin/ = /,(/), F, (р) = —=— '/20); здесь иаюльэо-
р +1 Р О
• ц |
нано равенство при п = 3 (см. пример 38.8) С помощью теоремы ум-
Р
ножения (см. формулу (38.20)) получаем
j____fo-o1
Р р* р* +1 ’ dt J 6
г о
sinxc/T.
В соответствии с формулой (38.21) находим производную
I3 sintrfr.
о
588
Дважды интегрируя по частям, получаем
<
2 sif|'t<^ = ~[G_T)2(-cosT)-2(r-t)sinT + 2cosT]|^ = P/2+a»t- I.
о
Следовательно, /(r) = r’/2 + cosr-l.
Пример 38.20.11айти оригинал fit) для изображения F (р) = In (1 + 1/р).
Использовав разложение функции In (1 + е) в ряд Тейлора (см. п. 37.6)
ln(l + z) = r-y+ -+(-1Г'^ + ... (|х|<1К
получим
* +...+(_|j^_L + ... (|р|>|).
Р 2р пр
В соответствии с теоремой (38 8) находим оригинал
„ „ . 1 Г I I2
2 1! *3 2!
(-1Г _с_
л (л-1)1
38.4. Решение дифференциальных
уравнений и их систем
Методы операционного исчисления применяются при инта-рнроваиии
дифференциальных уравнений и их систем С помощью этих методов ин-
тегрирование некоторых классов линейных дифференциальных уравнений
сводится к решению алгебраических уравнений; из алгебраического урав-
нения находят изображение решения данного уравнения, после чего по изо-
бражению восстанавливают само решение.
Пусть требуется найти решение линейного дифференциального уравнения с
постоянными коэффициентами
+ оУ”” ♦ «U-У + а.У • ЛЬ (38 26)
удовлетворяющее нулевым начальным данным
у(0) = /(0) = -- = у(’'|)(0) = 0 (3821)
Предположим, что искомая функция у = у (г), се производные у', у",..., у*"’
и данная функция /(г) являются оршинатами. Обозначим изображения функций
589
y(t) и /(г), соответственно, через У (р) и Г(р) или короче У и F Пользуясь
ими и правилом дифференцирования оригинала (см формулы (38 8)). находим
у-» У, У -» рУ,у”-» р*У,....У0”** -» Р*‘'Ку‘” -» Р'У- О» 28)
Поскольку f(>) = F(p\ то на основании свойства линейности (см. формулу
(38.6)) получим у равнение в изображениях
р',У+а|р*-'У+- + в.У = Г(рХ (3829)
которое соответствует данному дифференциальному уравнению. Из уравнения
(38 29) найдем изображение У искомого решения
У--------LiPl-------. (38.30)
p" + flip"" +
Найдя изображение F (р) функции /(f), получим изображение У и вопрос будет
сведен к отысканию соотвстствукянеп» оршмнала, который является решением данно-
го дифференциального уравнения и удовлетворяет нулевым начальным данным
Таким образом, чтобы решил, уравнение (38.26), необходимо знать, как по
оригиналу найти изображение и по данному изображению - оригинал.
При интегрировании дифференциальных уравнений находит применение ише-
грал Дюамеля (см. формулу (38 20)). Пусть необходимо найти решение дифференци-
ального уравнения (38.26), удовлетворяющее условиям (38.27) Запишем дифферен-
циальное уравнение с гакой же левой частью и правой частью, равной единице-
г*"* ♦ ♦ • • ♦ ,z' + aj = 1. (38.31)
Булем искать решение этого уравнения, удовлетворяющее начальным нуле-
вым данным:
О832)
Обозначим изображение решения r(f) через Z, получим уравнение в изображениях
p’Z+ajf-'Z + — +a^lpZ+a„Z=—, (38.33)
Р
откуда
Z«—----------(38.34)
р(р" +ахр” + —+ 0.-1Р + 0»)
Из этого равенства и равенства (38.30) находим, что
Y~pF(p)Z(p). (38.35)
Пользуясь интаралом Дюамеля, получаем
У = 4 f/(t)rO-T)A,
at J
590
или
> = 4 Ге(т)/(г-т)Л (38 36)
at J
о
Таким обраюм, когда известно решение уравнения (38.26) при /(0 = 1, удовлетво-
ряющее нулевым начальным данным. то можно срар найти в квадратурах решение
этого уравнения для любой функции /(<) при тех же начальных данных
Замечание I. Если начальные данные не являются нулевыми, то изо-
бражения производных находятся с помощью формул (38 7) Например, если
у(0)#0. то /-эрУ-ДО) ит. д.
Замечание 2. Если за начальный момент взято значение <0#0. а нс
( = 0. то вводят новую переменную т по формуле т = Г-Г0, Г = Т + Г0. тогда
Т = 0 при r = V
С помощью операционно! о исчисления можно найти решения систем диффе-
ренциальных уравнений с постоянными коэффициентами, а в некоторых случаях
- решения дифференциальных уравнений с переменными коэффициентами, ре-
шения дифференциальных уравнений в частных производных
Пример 38.21. Найти решение уравнения у"-у' = 1. удовлетворяющее
условиям: у(0)«0, /(0)»0
Обозначим через У изображение функции у(1): У~У. тогда у'=рУ.
у"™РгУ- Поскольку 1“1/р. то уравнение в изображениях имеет вид
p2Y-pY^l/p, откуда
у-_ 1 I . 1 1 | 1
Р(Р1~Р> AP-I) Р2 Р->' р’ Р Р-1
Принимая во внимание формулы ——ж=г, —=1, —!—==«*, подумаем
Р Р’ Р-1*
искомое решение у = е'-Г-1. Легко проверить, что эта функция удовлетворяет
данному уравнению и нулевым начальным данным.
Пример 38 22 Найти решение уравнения y~ + y = 2cosr, удовлетво-
ряющее условиям: у (0) = 0, у’ (0) = -L
Изображение функции у обозначим через а изображения производных
найдем с помощью формул (38.7):
У'—Е./;-рГ-у(0) = рГ, у"^р2У-рГ(0)-Г(0) = р,Г + 1
591
Поскольку cosr=p/(p2+1), то уравнение в изображениях принимает вид
p2K+i + У = 2р/(р2 +1), откуда
Так как (см. примеры 38.4 и 38.9)
1 2р • .
—;---= ЯП/, , ‘ , —/ЯП/,
р2+Г (Р2*!)’-
то >»rsin/-sin/ Получено решение > = (r-l)sinf.
Пример 38.23. Проинтегрировать уравнение y" + 4y = 8sin2f при на-
чальных условиях: y(O) = t;, у'(0) = С2.
Обозначим через К изображение решения у (t), а изображения производных
найдем с помощью формул (38.7): y=Y, у"=рУ-С,, y"«-p2y-C,p-Q.
Поскольку sin2/—2/(р2+4) (см. пример 38.4), то операторное уравнение
принимает вид
р2Г-С,р-С2 +4Г- или (р2 + 4) У =
р +4 р + 4
откуда
Г- *6 +G-F—•
(р’ + 4)2 р2+4 р +4
Для двух последних слагаемых имеем:
Р • „ । 12 • I , _
-f-—=cos2z, — ——5 —— sin 2/.
р2 +4 ‘ р +4 2 р2 +4’ 2
Что касается оригинала для первого слагаемого. то его найдем с помощью
формулы 4р/(р2 +4)2 —» tsin 2/ (см. пример 38 9) и правила интегрирования ори-
гинала (см. формулу (38.9)) следующим образом:
_.16 .«.I.
(р2+4)2 р (р2+4)2
.Г I । п
= 4 —tcos2t + — яп 2т
L 2 4
-»4 tsin 2tz/t =
= sin 2t -2t cos 2t.
592
Значит, искомое решение имеет вид
y^Clccs2t + -^ sin 2l + sin 21 — 2tсо»21,
или
y = qcos2/ + Csin2/-2/cos2r (C^Q/2 + l).
Пример 38.24. Проинтегрировать уравнение у" + у' = 1 при начальных
данных у(0) = У (0) = 0.
Найдем сначала решение уравнения z" + z' = ) при нулевых начальных дан-
ных. Уравнение в изображениях имеет вид рг7- + р7- = —. откуда
Р
г'.-----------1. w-i.
p’(p+l) PJ(P+I) р+1 р1 р
На основании формулы (38.36) получаем
XO-4-f(«^+x-,X»-t)A»|(<-’+t-lXt-T)Jtw+
alJ
о
Пример 38.25. Найти решение уравнения у“~у"~6у = 2с4', удовле-
творяющее условиям: у(0)“ 0. У(0)~0.
Операторное уравнение в заданном случае принимает вид
р2Р(р)-рР(р)-бР(р) = —,
Р-4
откуда
________2________ _________2________
(р-4)(р* - р-6) (р-4)(р-3)(р + 2)
Разлат ая эту дробь на элементарные дроби, находим
, I । 21.11
F < Я " 77 • ТТ7 " 7 • Т7 ♦ •—
Следовательно, искомое решение определяется формулой
15 5 3
Пример 38.26. Найти решение задачи Коши: y“-3y, + 2y~tei',
у(1)-|, y'(i)=L
593
В отличие от предыдущих примеров, здесь за начальный момент взято значе-
ние I = 1, а не I = 0. Введем новую переменную t = t -1, откуда I = т +1. Обозна-
чим у(0=>’(^+,)=>’(т). тогда уравнение и начальные данные принимают вид:
у"-3у' + 2у = (1+\)е'е*; у (0) = у'(0)= 1. Найдем решение этого уравнения:
у = У, у'=рУ-1, у"—/?У-/7-1. (t+l)«*-tt*+e** —
• I I p-2
“(p-3)’ + p-3~ (p-3)*’
(р,-Зр + 2)Г = е’7£-^г+р-2;
(p-3)
(р-1)(р-2)Г = е’^^х + (р-2); (р-1)Г = <»—* +1;
(р-ЗГ (р-3)
(р-УЙр-з/ + р-Г
Поскольку
—-----♦ «’,
р-1
ТО
у - -<>(•’ -е* ♦ )+ е»; у - [— + 11 е1 ♦ —
4 ( 4 I 4
Возвращаясь к переменной г (Т = f - 1), получаем решение исходной задачи Коши
У =
е*+4? t 2f-3t>
4е 4
Пример 38.27. Найти решение уравнения y“+y" = t, удовлетворяющее
условиям у(1) = к /0)=0
Положим r = t + l, y(0=y(t+l)=y(tX тогда уравнение и начальные
условия примут вид у“ + у’* т + 1, у(0)=1, у'(0) = 0. Составим оператор-
ное уравнение для этого дифференциального уравнения Пусть
у(т)=У(р), тогда у'(т)=рУ(р)-1, у“(1)^= ргУ(р)~р, операторное
уравнение и сто решение запишутся так:
р’У(р)-р+рГ(р)-1-Л + -- Пр)-4+“-
. Р Р Р Р
Переходя к оригиналам, получаем у(т)=1 + т2/2. Возвращаясь к пере-
менной | (заменив т на t-l), найдем искомое решение исходной задачи
Коши у(/)=! + (t-1//2.
594
Пример 38.28. Найдем решение системы дифференциальных уравнений
y' + 3y+z = 0, z'-y + z-0
при начальных условиях у (0)=1, z(O) = l.
При обозначениях Y —> у, Z —» г система в изображениях принимает вид
рГ-1 + ЗГ+г = О, pZ-l-r + Z = O,
или
(p + 3)K+Z = l,
-r+(p+l)Z=l.
Решение системы получим с помощью формул Крамера У = ДГ/Д, Z = bjb,
где Д- определитель системы, ДЛ, Дж- определители, полученные из опреде-
лителей системы заменой ко зффициентон при соответствующих нейзвесп<ых сво-
бодными членами. Поскольку
Д = (р + 3)(р + 1) + 1 = р2 + 4р + 4 = (р + 2)2,
Д?=р + 1-1*р, Д, «р + 3 + 1 = р + 4,
Р т(р»2)-2_ I 2
(р + 2)2 (р+2)2 р+2 (р + 2)2’
М4 _(p+2)+2w | t 2
(р+2)2 (р + 2)2 р + 2 (р+2)2’
---Ц-=«е“2'.
р+2* (р + 2)2*
то
y-e*(l-2t), х-е-2*() + 2»Х
Пример 3829. Найти решение системы
y'-2y-4z = cosz, z' + y + 2z»sinr
при начальных условиях у (0) = z (0) = ft
Система в изображениях принимает вид
(p-2)P-4Z = -^-, r+(p+2)Z-^-.
p'+l pJ+1
Изображения Y и Z определяем с помощью формул Крамера. Поскольку
Д = (р-2)(р + 2) + 4 = р2,
(р + 2)р 4 р2+2р + 4 р-2 р 2
* р2 + 1 р2+Г р2+) • ' = р2+| р2+Г р2+г
595
у_ р2 + 2р + 4 = 4ра+4 + 2р-Зр2 = 4 2р(ра + 1-ра) 3
Р2(Р2+П р2(р2+1) р1+ р2(р2 + о р2+Г
у_ < t з 2р_______3 .
р2 р p2+i р’+Г
Zs__ 3 _(1+р2)-р2 2 . 2
Р2(Р2+1) р2(р2 + 1> ’ р2 р2+Г
то
Stn f, —;-=>cosZ
Р+1’
у = 41 + 2 - 2 cos I — Зств I, Z“-2f + 2sinf.
Пример 38.30. Найти решение системы
x' = x + y+z, у' = х-у+г. z' = x+y-z
при начальных данных х(0) > 0, y<OJ=l, z(0) = 0.
В изображениях система принимает вид
pX = X+Y+Z. (1-р) Х+У+Z-O,
pY-t-X-Y+Z, или X-(l + p)r+Z = -l,
pZ=Jf+r-Z, X+Y-(l + p)Z~0
Изображения X, Y, Z находим с помощью формул Крамера I (оежольку
Д«(р + 1)(р + 2)(2-рХ Дг=-(р + 2), Д,-2-р2. Д,=-р. то
х=— ~^а>_________________!_______. г - Jв
(р + 1)(р + 2)(2-р) (р + 1)(р-2) (р + 1)(р + 2)(2-р)
=----------------1 z=---------------________£_______
(р + 1)(р + 2)(р-2) (р + 1)(р+2)(2-р) (р+()(р + 2)(р-2)"
Разлшая полученные дроби на элементарные, найдем, что
X = L _J__- —, У- 1 1 | 1 1 t 1 1
3 р-2 3 Р+Г 3 р+1 2 р+2 6 р-2’
Z-1—1—*—+1._
3 р + 1 2 р+2 6 р-2
Принимая во внимание равенсгао е" -+-, получаем искомое решение системы
р-а
596
ПРИЛОЖЕНИЕ
Некоторые оригиналы и их изображения.
Оригиналы /(/) Изображения F(p)-j/(i)e'dr 0
1 2 3
1 1 Vp
2 Г (и-1.2,3,...)
3 (а>-1) Г(аз-1)/р°-'
4 е" (с = в + /6) V(₽-c)
5 Ге* (и-1,2,3,...) "Нр-сГ”
6 г“<* (а>-1) Г«х + 1)/(р-сГ*
7 sin0« (0>О) ₽/(р’+Р’)
8 COS0Z р/(р’+₽’)
9 sh|k Р/(р’-02)
10 ch 0/ Р/(Р’-Р2)
II е" sin0/ Р/Кр-О’+Р2]
12 е" cospz (р-Н/Нр-^+Р2!
13 е* sh0z » Р/Кр-с)2 -р’|
14 е’ ch0z (р-^/Кр-сУ-Р2!
13 г sin 0z 2рР/(р2+Р2)’
16 Icos0z (p’-p’j/^+p’)1
597
Некоторые оригиналы и их изображения (продолжение).
1 2 3
17 tshflt 2p₽/(p3-p2)2
18 1 ch fit (p2^fi2)/(p2-fi2/
19 sm (Г-t) (t>0) • ’7(p2+l)
20 сое (Г-t) pt'*/(p2+l)
21 sin f/г arcctg p
22 f sin x Sil - J dx 0 arcctg p P
23 Cir = -J^A 1 lln ’ p +•
24 Erff “ L 2 ]t^dx \2ylt J -Jn J P
25 -(!-*“) r In 11 + --1 I p)
26 In I — In— -У . У»0.57722 ... P\ P J
In
27 I p-b
f-e* 1
28 a-b (p-e)(p-6)
cos at- cos bt P
29 b2-a2 (р2+а2)(рг+Ь2)
1 — cosat 1
30 a2 Pf^+e2)
598
НЕКОТОРЫЕ МАТЕМАТИЧЕСКИЕ ЗНАКИ
И ДАТЫ ИХ ВОЗНИКНОВЕНИЯ
Обозначение Значение Автор Дата
п Отношение длины окру жно- У Джонс 1706
сти к диаметру Л. Эйлер 1736
е Основание натуральных лога- рифмов Л. Эйлер 1736
i Корень квадратный из - 1 Л. Эйлер 1777
©о Бесконечность Дж. Валлис 1655
|] Целая часть числа, антьс К. Гаусс 1808
1.1 к Единичные векторы У. Гамильтон 1853
г Вектор О. Коши 1853
а, Ь,с Постоянные Р. Декарт 1637
х,у.г 11с известные или переменные величины Р. Декарт 1637
+.- Сложение, вычитание Я. Видман 1489
X Умножение У. Оутред 1631
• Умножение Г. Лейбниц 1698
• Деление Г. Лейбниц 1684
Степени Р Декарт 1637
м <г Корни К. Рудольф 1525
lx>g Логарифм И Кеплер 1624
log Б. Кавальерн 1632
In Натуральный логарифм А. Принсхейм 1893
sin, cos Синус, косинус Л. Эйлер 1748
tg Тангенс Л. Эйлер 1753
arcsin Арксинус Ж. Лагранж 1772
sh Гиперболический синус В. Риккати 1757
ch Г иперболический косинус В Риккати 1757
dx, ddx, d2x, dix,... Дифференциалы различных порядков Г. Лейбниц 1675
d dx Производная Г. Лейбниц 1675
f'(*\ / Производная Ж. Лагранж 1770
599
Обозначение Значение Автор Дата
d а» Частная производная А Лежандр 1786
Jr* Интеграл Г. Лейбниц 1675
J/00* Определенный интеграл Ж. Фурье 1819
Лх Разность, приращения Л. Эйлер 1755
I Сумма Л. Эйлер 1755
п Произведение К. Гаусс 1812
! Факториал К. Крамп 1888
|x| Модуль К Вейернпрасс 184)
IM Норма Э. Шмвдт 1908
lim Предел С. Люи лье 1786
lim У. Гамильтон 1853
lim Многие мате- нач.
матмки XX в.
г Гамма-функция А. Лежандр 1808
в Бета-функция Ж. Бине 1839
д Дельта (оператор Лапласа) Р Мерфи 1833
. V Набла (оператор Г амильтона) У. Гамильтон 1853
<^x Функция И. Бернулли 1718
/(>) Функция Л. Эйлер 1734
= Равенство Р. Рекорд 1557
0 11риближенное равенство А Гюнтер 1882
>.< Больше, меньше Т Гарриот 1631
« Тождество Б. Риман 1857
II Параллельность У. Оутред 1677
1 Перпендикулярность П, Эригон 1634
Пересечение, объединение Дж. Пеано 1888
с.э Содержится, включается Э. Шредер 1890
€ Принадлежность Дж. Пеано 1895
600
БИОГРАФИЧЕСКИЙ СЛОВАРЬ
Абель Нильс Хенрик (1802 - 1829)- норвежский математик. С 16 лет проявил
исключительные математические способности Окончил университет в Осло (1825).
В 1825-1827 гт. был в Берлине, Париже, еле встречался со многими известными
математиками. Доказал, что алгебраические уравнения степени выше 4-й неразре-
шимы в радикалах (1824). Развил теорию сходимости степенных рядов, впервые
полностью исследовал проблем) сходимости биномиального ряда для комплексных
значений переменных (1826). Изучал интегралы от алгебраических функций-
абелевы интегралы (1827). Заложил основы теории интегральных уравнений (1823)
За создание теории эллиптических функций ему (посмертно). совместно с Якоби,
присуждена премия Парижской академии наук (1830). Работы Абеля оказали боль-
шое влияние на развитие математики, привели к возникновению новых математиче-
ских дисциплин. На родине при жизни Абель не был признан, жил в нужде В 1908 г.
в Осло ему воздвипзут памятник.
Аньези Мария Газтяна (1718-1799)-итальянский математик, профессор
университета в Болонье (1750). Сочинение «Основания анализа...» (1748) принес-
ло ей известность за пределами Италии. В этом сочинении, в частности, доказано,
что любое кубическое уравнение имеет три корня; рассмотрена линия, которую в
ее честь назвали «локоном Аньези».
Безу Этьенн (1730— 1783) - французский математик, член Парижской акаде-
мии наук (1758). Преподавал математику в Училище гардемаринов (1763) и в Ко-
ролевском арт иллерийском корпусе (1768) Основные его работы относятся к ал-
। сбрс (исследование систем анебраических уравнений высших степеней, исклю-
чение неизвестных в таких системах и др.). Автор шеститомного «Курса матема-
тики» (1764- 1769), неоднократно переиздававшегося.
Бернулли - семейство швейцарских математиков, родоначальник которого Якоб
Бернулли (умер в 1583 г.) - выходец из Голландии В различных поколениях Бернулли
математиками были: Якоб (1654- 1705), Иоганн (1667- 1748), Николай (1687- 1759),
Николай (1695- 1726), Даниил (1700-1782). Исга»ш()744-18071 Якоб(1759- 1789)
Даниил в 1725 - 1733 гт. работал в Петербургской академии наук, ззпем был из-
бран ее почетным членом. В Петербурге он написал сочинение «Гидродинамика^
(опубликовано в 1738 г.), в котором вывел основное уравнение стационарного дви-
жения идеальной жидкости, носящее его имя. Ему принадлежат важные работы по
алгебре, теории всрояпкктей, исчислению бесконечно малых, теории рядов, диффе-
ренциальным уравнениям и другим разделам математики. 1 !рофсссором математики
(1725) в Петербургской Академии был Николай (1695- I726X который занимался
дифференциальными уравнениями (уравнение Риккати. метод ишегрмрующего
множителя). Якоб (1759-1789) также работал в Петербургской Академии наук
(адъюнкт - 1786, академик - 1787) Основные труды его относятся к дифференци-
альным уравнениям, механике, музыкальной акустике. Многие члены семейства Бер-
нулли являлись видными деятелями, занимали высшие государственные должности.
Среди них были профессора красноречия, юристы, медики, живописец, аптекарь
Бернулли Иоганн (1667- 1748) - швейцарский математик, профессор мате-
матики Гронингенскою (1695) и Базельского (1705) университетов, почетный
член Петербургской Академии наук (1725). Ему принадлежит первое систематиче-
60)
ское изложение дифференциального интегрального исчисления. Конспект лекций,
прочитанных им Лопиталю, был положен в основу составленного Лопиталем
«Анализа бесконечно малых для исследования кривых линий» (1696). Ои является
автором «Курса интегрального исчисления» 1742).
И Бернулли разработал методы интегрирования дифференциальных уравнений
(однородное и линейное уравнения первого порядка, линейные равнения с постоянны-
ми коэффициентами, уравнения Бернулли). Дал определение понятия функции как ана-
литического выражения, составленного из переменных и постоянных, исследовал показа-
тельные функции. Вел исследования по механике и математической физике
Бернулли Якоб (1654 - 1705) - швейцарский математик, профессор Базель-
ского университета (1687). Ему принадлежит важные заслужи в развитии анализа
бесконечно малых. Я. Бернулли применил новые идеи к изучению свойств ряда
кривых: открытой нм лемнискаты, логарифмической спирали, цепной линии и др
Он вычислил площади многих плоских фигур, площади поверхностей и длины
линий. Известны работы Я. Бернулли по алгебре, арифметике, геометрии, теории
рядов, теории вероятностей, а также физике. Его книга «Арифметические прило-
жения о бесконечных рядах и их конечных суммах» явилась первым руководством
по теории рядов. В книге «Искусство предположений» доказана теорема
(названная позже его именемХ имеющая важное значение в теории вероятностей и
ее приложениях к статистике.
Буняковский Виктор Яковлевич (1804 - 1889) - русский математик, член
Петербургской Академии наук (1830, адъюнкт-с 1828 г.) и ее вице-президент
(1864- 1889) Математическое образование получил за |раницей, в Париже защи-
тил диссертацию и получил степень доктора математики (1825). С 1826 г. начина-
ется его педагогическая и научная деятельность в Петербурге. Преподавал сначала
в Первом кадетском корпусе, затем в Морском корпусе (1827 - 1862). в Институте
инженеров путей сообщения (1830- 1846). Читал курсы аналитической механики,
теории вероятностей и математического анализа в Петербургском университете
(1846 1859). Составит обширный «Лексикон чистой и прикладной математики»
(вышел только I том в 1839 г.), написал учебник арифметики для средней школы (1844.
1849) Опубликовал 128 научных работ, около половины из них относится к теории
вероятностей, остальные - к проблемам анализа, геометрии, алгебры «Ос нования ма-
тематической теории вероятностей» (1846) включали оригинальное игюжение теоре-
тических вопросов и приложения к страхованию, демографии и т.п. С 1858г. был
главным экспертом правительства по вопросам статистики и страхования.
Вейерштрасс Карл Теодор Вильгельм (1815 - 1897)- немецкий математик. В
1842-1855 гг. преподавал математику в средних учебных заведениях г. Дейч-
Кронса и Броунберга, с 1856 г. - профессор Берлинского университета, член Бер-
линкой академии наук Исследования его посвящены математическому анализу,
теории функций, вариационному исчислении!, дифференциальной теометрни и
линейной алгебре. Ввел во всеобщее употребление понятие и признак равномер-
ной сходимости функционального ряда (признак Вейерштрасса), построил пример
непрерывной функции, не имеющей производной ни в одной точке, доказал воз-
можность сколь угодно точного приближения многочленами произвольной функ-
ции, непрерывной на отрезке (теорема Вейершграсса). Учениками Вейеригтрасса
602
были многие математики, в том числе и С. В Ковалевская. Всйерилрасс был ино-
странным членом-корреспондентом (1864) и иностранным почетным членом Пе-
тербургской Академии наук (1895).
Вивиаин Винченцо (1622 - 1703) - итальянский математик и'фкзик, член Италь-
янской и других академий Ученик Г. Галилея. Основные работы посвящены геометрии
Построил касательную к циклоиде, исследовал конические сечения, решил проблему три-
секции утла с помощью равносторонней гиперболы 11ереводил математические сочине-
ния древних авторов. Его именем названа одна из пространственных кривых.
Виет Франсуа (1540- 1603)-французский математик, юрист по профессии
Заинтересовавшись астрономией, начал изучать тригонометрии» и алгебру Алгебра в
сто трудах стала общей наукой об алгебраических уравнениях, основанной на бук-
венном исчислении Впервые ввел буквенные обозначения для коэффициентов урав-
нений (1591) Предложил новые методы решения алгебраических уравнений (до
четвертой степени включительно). Установил связь между корнями,и ко»ффииисн-
тами уравнений (формулы Виета). Дал полное решение задачи об определении всех
элементов плоскою или сферического треугольника по трем данным. нашел разло-
жения sinx, cosx., по степеням sinx, cosx. Впервые рассмотрел бесконечное
произведение, впервые употребил фигурные скобки
Вроньский Юзеф Мария (1776 - 1853) - польский математик и философ.
(Настоящая фамилия Хене, известен также как ГСне-Вронский ) Окончил Варшав-
ский кадетский корпус. Был артиллерийским офицером в армии Костюшко, затем
служил в штабе А. В Суворова, с 1797 г. в отставке. В 18(Х) г. уехал во Францию,
где вел математические исследования по теории anебрдических и дифференциаль-
ных уравнений. Его именем назван введенный им в 1812 г. функциональный опреде-
литель, имеющий важное значение в теории линейных дифференциальных уравнений
Галуа Эпарист (1811 - 1832) - французский математик, основоположник со-
временной алгебры. Независимо от Руффини и Абеля доказал невозможность ре-
шения в радикалах произвольных ал!ебраических уравнений выше 4-й степени.
Нашел необходимое и достаточное условие, которому удовлетворяют уравнения
данной степени, разрешимые в радикалах. Ввел такие фундаментальные понят ия.
как труппа, подгруппа и др. Созданная нм общая теория оказала существенное
влияние на развитие не только алгебры, но и всей математики XIX в Идеи и мето-
ды теории групп нашли применение в естествознании; в современной квантовой
механике, кристаллографии. В возрасте 21 года Галуа был убит на дуэли. В письме к
друту, написанном накану не дуэли, он сформулировал основные теоремы об изггс-
гралах от алгебраических функций, вновь открытые значительно позже в работах
Б Римана Математическое наследие Г ату а составляет небольшое число кратко на-
писанных работ, не понятых его современниками
I ал илей Галилео (1564 - 1642) - итальянский физик, механик, астроном и ма-
тематик, член Национальной академии леи Линчеи в Риме (161I) В 1589 г. получил
кафедру математике в Пизе, а в 1592 - в Падуе Основные работы относятся к меха-
нике: открыл закон инерции, закон падения тел и др. В сочинении «Диалог о двух
главнейших системах мира, ггтолсмсевой и коперниковой» (1632) Галилей развивал
учение Коперника о движении Земли. Эго сочинение вызвало гнев инквизиции и
было запрещено. После допросов в июне 1633 г. отрекся от учения Коперника. Гали-
603
лей является одним из предшественников основагелей теории вероятностей В частно-
сти, он первый явно сформулировал вероятностные свойства случайных погрешностей.
Гамильтон Уильям Роуан (1805 - 1865) - ирландский математик, член Коро-
левской ирландской академии (1837), в 1837-1845 гг. ее президент; член-
корреспондент Петербургской академии наук (1837). Способности Гамильтона
проявились рало: в три года умел читать, неплохо знал арифметику и географию, к
13 голам овладел 12 языками, изучил на латинском языке «Начала» Евклида С 13
до 17 лет изучал сочинения И Ньютона и П. Лапласа. В 22 года окончил Дублин-
ский университет и работал там же, с 1827 г. - профессор астрономии и директор
университетской астрономической обсерватории. Почти одновременно с Г. 1 рассма-
ном дал точное формальное изложение теории комплексных чисел. Гамильтон по-
строил теорию кватернионов, впервые ввел термины: вектор, ассоциативный закон.
Основные роботы относятся к механике и теории дифференциальных уравнений.
Гаусс Карл Фридрих (1777 -1855)- немецкий математик, астроном, фюик и
геодезист, член Лондонского королевского общества (1804), Парижской ака.юмии
(1820), Петербургской академии наук (1824). Родился в Брауншвейге в семье водо-
проводчика. В раннем детстве обнаружил вьиакмциеся магемз1ические способности
Учился в I бттингенском университете (1795 - 1798) Посте зашиты дисссргации полу-
чи.'! право на приват -доцентуру в Брауншвейге (1799). С 1807 г. - профессор математи-
ки и астрономии I Сттмнгенсжом университете, директор астрономической обсервато-
рии Работы I аусса оказали большое влияние на развитие алгебры, теории чисел, диф-
ференциальной геометрии, теории вероятностей, геодезии, небесной механики, астро-
номии, теории электричества и магнетизма. Гаусс предложил несколько вариантов
доказательства ооювной теоремы алгебры (любой многочлен с комплексными ко зф-
фнциезггами имеет комплексный корень), построил теорию комплексных чисел. Он
исследовал у равнения х" -1 = 0, установил связь между методами решения этих урав-
нений и построением правильных многоугольников Нашел все тс значения п. для ко-
торых правильный п-угольник можно построить циркулем и линейкой В частности,
решив уравнение я” -1 = 0, Гаусс дал построение правильного 17-утольника с помо-
щью циркуля и линейки. В 1818 Г. Гаусс пришел к мысли о возможности построения
неевклидовой геометрии Опасаясь, что его идеи не будут поняты, он далее нс разраба-
тывал их и не публиковал К публикациям Н И Лобачевского по неевклидовой геомет-
рии Гаусс отнеся с большим вниманием По инициативе Гаусса II И Лобачевский был
злбран членом—коррсспоцдеггтом 1 Сттит г гейского ученого общества Ряд работ по фи-
зике Гаусс выполнил совместно с В. Вебером (1804- 1891). Вместе с ним он создал
абсолюптуто систему электромагнитных единиц (1832) сконструировал первый в Гер-
мании электромагнитный телеграф (1833)
Горнер Уильям Джордж (1786 - 1837) - английский математик Основные ис-
следования относятся к теории алгебраических уравнений Разработал способ
приближенного решения уравнений любой степени В 1819 г. ввел важный для
алгебры способ деления многочлена на даучлен х-а (схема Горнера).
Грин Джордж (1793 - 1841)-английский математик и физик Математику изу-
чал самостоятельно. В сочинении «Опыт применения математического анализа к
теориям электричества и магнетизма» (1828) ввел понятие потенциала и развит соот-
ветствующую теории!, опираясь на найденное им соотношение между интегралами
604
по объему и по поверхности, ограничивающей объем. В том же году независимо от Грила
эту формулу получил М В. Остроградский (формула Остроградского, именем Грина на-
звана другая формула) Грин вывел основные уравнения теории упругости (1839)
Гюйгенс Христиан (1629 - 1695) - голландский механик, физик, математик
Учился в университетах Лейдена (1645-1647) и Бреды (1647- 1650). В 1665-
1681 гг. жил в Париже, с 1681 г. - в Гааге. Первый иностранный член Лондонского
королевского общества (1663). член Французской академии наук (1666) и ее первый
президент (1666-1681). Создал волновую теорию света, развил ряд важнейших
понятий механики, заложил основы теории удара, построил первые часы с маятни-
ком, Гюйгенс совместно с Р. I ухом установил постоянные точки термометра - точку
таяния льда и точку кипения воды. В 22 года он опубликовал первую математиче-
скую работу об определении длин дут окружности, эллизгеа и гиперболы В после-
дующих математических трактатах им исследованы циклоида, логарифмическая
отирать, цепная лизгия (он ввел этот термин) и друзие линии. Написал одно из пер-
вых сочинений по теории вероятностей.
Д'Аламбер Жяи Лерон (1717- 178,3) французский математик, механик, фило-
соф, член Парижской (1741X Фраизгузской (1754) и других академий, почетный член
Петербургской Академизз наук (1764). Вззсрвыс сформулировал общие гзравила состав-
леззия лизффереишзальных уравнений движения любых материальных систем, сведя
задачи динамики к статике-так называемый принцип Д'Аламбера (1743). Этот прин-
цип был прмменезз им дтя обоснования гидродинамики (1774), основания которой за-
ложил в «Трактате о равновесии и движении жидкостей» (1744). Д’Азамбер является
одним из основоположников методов прикладной механики Основные математические
исследования его относятся к теории лифферегпщалызгях уравнений, обоснованию
исчиозения бесконечно малых и теории рядов Вз ервз.зс высказа з идею о времени как
четвергом и змерении Занимался также литературной деятели гостью и был избран
членом Французской академии «Сорока бессмертных».
Декарт Реие, латинизированос имя Картезий (отсюда картезианство) (1596 -
1650) - французский философ, математик, физик, физиолог. Образование полу-
чил в иезуитском колледже Ла-Флсш в Азоку (1604 - 1612), затем самостоятельно
усиленно изучал математику и другие науки В 1617- 1621 п. служил в армии и
несколько лет путешествовал по Европе. В 1629 г. переехал в Нидерланды, где
провел двадцать лет в уединении, занимаясь наукой. В 1649 г. по приглашению
шведской королевы переехал в Стокгольм, где вскоре и умер. В сочинении
«Геометрия» (1637) Декарт заложил основы аналитической геометрии Ввел об-
щепринятые теперь обозначения переменных и искомых величин (jr.y.z,...), бук-
венных коэффицжзгтов (а,6,с,...), а также степеней (а1, л5,...). Декарт положил
начало исследованиям свойств алгебраических уравнений, сформулировал положе-
ние о том. что число действительных и комплексных корней уравгзения равно его
степени, привел правило знаков для определения чзгела положительных и отрица-
тельных корней уравнения, поставит вопрос о границах действительных корней.
Дирихле Петер Густав Лежеи (1805 - 1859)- немецкий математик, член Бер-
ззизгекой, иностразгзгый ч.гезз корреспондент Пегербхргской (1837) и член других ака-
демий Учился в Бер лине, Геттингене и Париже. Работал в университетах Германии -
605
Берлинском (1831 - 1855) Геттингенском (1855 - 1859) Основные исследования отно-
сятся к теории чисел, математическому анализу, ряд работ посвящен механике и мате-
матической физике Ввел функциональные ряды особого вида (ряды Дирихле), сфор-
мулировал понятие условной сходимости ряда. установил признак сходимости знако-
переменного ряда (признак Дирихле) Дал строгое доказательство возможности разло-
жения в ряд Фурье функции, имеющей конечное число максимумов и минимумов
Каледин Альфредо (1855 -1910)-итальянский математик, член Националь-
ной академии леи Линчем в Римс (1901). Родился в Милане, учился в университе-
тах Рима и Павии. В Берлинском университете слушал лекции Всйерштрасса и
Кронскера Был профессором математики университета в Палермо (1881) и Не-
аполитанского университета (1886). Его лекции по алгебре (1895) при жизни авто-
ра выдержали четыре издания.
Кардано Джероламо (1501 - 1576)- итальянский математик, философ, врач. Ро-
дился в Павии, где затем окончил университет (1521) Доктор медицины (1526) был
практикующим врачом. С 1534 г. читал лекции по математике и медицине в Милан-
ском университете Профессор Павийского университета (1539), Болонского универси-
тета (около 1560 г.) Его математические работы сыграли большую роль в развитии
алгебры. Именем Кардано названа формула решения в радикалах неполного кубическо-
го уравнения, которая им гю заимствована у Н Тарт альи Одним из первых в Европе
рассматривал отрицательные и мнимые корни уравнений В механике занимался вопро-
сами передачи движения, теорией рычагов (карданная передача. карданов подвес)
Ковалевская Софья Васильевна (1850- 1891)- русский математик, механик,
писатель и публицист; первая в мире женщина профессор математики и первая
женщина, избранная в Петербургскую Академию наук (1889) Детство ее прошло в
селе Пал ибн но Витебской губернии в имении сети генерал лейтенанта В. В. Корвин
Круковсжого. Получила всестороннее образование и рано обнаружила незауряднзис
маземагичсскис способности. Доступ женщинам в университеты России в то время
был закрыт. Вступив в фиктивный брак (ставший позднее фактическим) с
В. О. Ковалевским, она в 1869 г. уехала в Гейдельберг, где изучала математику и
другие науки В 1874 г. переехала в Берлин, где четыре года занималась под руково-
дством К Вейерпгтрасса, согласившегося давать ей частные уроки (в Берлинский
университет женщины также нс допускались) За три ее работы, прслстаатснныс
Вейсрппрассом Геттингенскому университету, в 1874 г. С В Ковалевской заочно
присуждена степень доктора философии с высшей похвалой Поиски работы по спе-
циальности в России и во Франции оказались безуспешными. В ноябре 1883 г. вы-
ехала в Швецию, по .туч ив приглашение занять должность приват-доиента в Сток-
гольмском университете (с 1884 г.-профессор). За работы о вращении твердого
тела Ковалевская получил* удвоенную премию Парижской (1888) и премию Коро-
левской шведской академий (1889). Один из основных полученных ею математиче-
ских результатов - теорема о существовании решений нормальной системы уравне-
ний с частными производными (теорема Коши-Ковалевской) Является автором
повести «Нигилистка» (1884), «Воспоминаний детства» (1890) и др.
Коши Огюстеи Луи (1789- 1857)-французский математик, член Парижской
(1816) почетный член Петербургской (1831) и многих других академий. Родился в
Париже, где окончил Политехническую школу (1807) Школу мостов и дорог
606
(1810). Работал инженером на сооружении военного порта в Шербуре (1810 —
18I3X преподавал в Политехнической школе и в Коллеж де Франс (1816- 1830),
в Парижском университете и в Коллеж ле Франс (1848 - 1857). Труды Коши отно-
сятся к математическому анализу, дифференциальным уравнениям, математиче-
ской физике, теории функций комплексной переменной, алгебре, геометрии, тео-
рии чисел, теории упругости, оптике и др.
Крамер Габриель (1704- 1752)- швейцарский математик Родился и полу-
чил образование в Женеве. С 1724 г. преподавал математику в Женевской
кальвинистской академии (с 1734 г. - профессор). Основные направления
исследований - высшая алгебра и аналитическая геометрия. Заложил основы
теории определителей, установил правило решения систем п линейных урав-
нений с л неизвестными, исследовал алгебраические линии высших порядков
(особые точки, кривизну и т. п.).
Кронекер Леопольд (1823 - 1891) - немецкий математик, член Берлинской
(1861), член-корреспондент Петербургской Академий (1872). Окончил Берлинский
университет (1845). там же преподавал (1861. профессор -с 1883 г). Основные работы
оттюсятся к ал!ебре, теории чисел. Был сторонником «арнфмет кташш» математики,
которая, по его мнению, должна быть сведена к арифметике целых чисел.
Кутта Мяртин Вильгельм (1867 - 1944)- немецкий математик и физик Пре-
подавал в Высшей технической школе в Штутгарте. В 1901 г развил метол
К. Рунге численного решения задачи Коши для системы обыкновенных диффе-
ренциальных уравнений (метол Рунге - Кутта).
Кэли Артур (1821 - 1895)-английский математик, член Лондонского коро-
левского общества (1852) член-корреспондент Петербургской Академии наук
(1870). Родился в Ричмонде, детство и юность провел в Петербурге В 1841 г.
окончил Кембриджский университет. В течение двадцати лет занимался адвокату-
рой. В этот период появились почти все его основные математические работы,
относящиеся к алгебре, алгебраической геометрии, дифференциальным уравнени-
ям С 1863 г. - профессор Кембриджского университета. Кэли висл общепринятое
теперь обозначение для определителя (1841).
Лагранж Жозеф Луи (1736- 1813)-французский математик и механик, член
Берлинской академии (1759) и директор се физико-математического класса (1766-
1787), почетный член Парижской (1772) почетный член Петербургской ак.щемий
(1776) Родился в Турине (Италия), где окончил университет и с 17 лет начал препо-
давать математику в Артиллерийской школе. В 1759 - 1787 гт. работал в Берлине, а с
1787 г.-в Париже: профессор Нормальной школы (1795). Политехнической школы
(1797). Лагранж вместе с 'Эйлером заложили основы вариационного исчисления. Ему
принадлежат выдающиеся исследования по математическому анализу (его именем
названы: форма остаточного члена рада Тейлора, формула конечных приращений,
функция и множители для определения условного экстремума, интерполяционная
формула^ по ратличным вопросам дифференциальных уравнений (теория особых
решений, метол вариации произвольных постоянных и др Х по алгебре и теории
чисел, механике, астрономии, математической картографии и др. Лагранж впервые
ввел в рассмотрение тройные интегралы, предложил обозначения для производной
(У./’(*)) и для функции арксинус (arcsin). Парижская академия наук дважды при-
суждала премии Лшранфу за его научные работы
607
Ламе Габриель (1795 - 1870) - французский математик, физик и инженер, член
корреспондент Петербургской (1829), член Парижской академий (1843), профессор
Политехнической школы (1832-1863), Парижского университета (1848-1863). Ро-
дился в Туре, окончил в Париже Политехническую (1817) и Горную школы (1820). В
1820-1831 гг. работал в Институте корпуса инженеров путей сообщения (Петербург),
где читал высшую математику, физику, прикладную механику, разрабатывал проекты
мостов, консультировал строителей Исаакиевского собора. Основные научные иссле-
дования относятся к математической физике и теории упругости Ламе (совместно с
Клапейроном) впервые ввел цилиндрические координаты (1828) Разработал общую
теорию криволинейных координат (1833), ввел специальный класс функций
(функции Ламе, 1839) и ныне называемые коэффициенты Ламе (1859).
Лаплас Пьер Симом (1749-1827)-французский математик, физик и астро-
ном, член Парижской (1785, адъюнкт-с 1773 г.\ Французской (1816), почетный
член Петербургской (1802) академий Родился в крестьянской семье в провинции
Нормандия, учился в школе бенедиктинцев. В 1766 г. приехал в Париж, где с помощью
Д’Аламбера получит должность профессора математики в Военной школе. Активно
участвовал в реорганизации системы высшего образования во Франции. в создании
Нормальной и Политехнической школ. В 1790 г. он назначен председателем Палаты
мер и весов, руководил введением в практику новой метрической системы мер Во вре-
мена Наполеона был министром внутренних дел (1799). Лаплас развил методы небес-
ной механики и завершил почти все то, что нс удалось сто предшественникам в объ-
яснении движения тел Солнечной системы на основе закона всемирного тяготения
Ньютона В области магемагики ему принадлежат фундаментальные исследования
по дифференциальным уравнениям, теории вероятностей, алгебре
Лейбниц Готфрид Вильгельм (1646-1716)-немецкий математик, физик и
изобретатель, философ, крист, историк, языковед, член Лондонского королевско-
го общества (1673), член Парижской академии (1700). Изучал право и философию
в Лейпцигском и Йенском университетах, затем был на службе у курфюрста
Майнца. В 1672 - 1676 гт. с дипломатической миссией находился в Париже. Здесь
познакомился с основными достижениями математики. Возвратившись в Герма-
нию, он в последующие 40 лет состоял на службе у ганноверских герцогов, снача-i
ла в качестве придворного библиотекаря, затем герцогского историографа и тай-1
ного советника юстиции. С целью сбора материала для «Истории Брауншвейга.»
совершил поездку по Южной Германии, Австрии и Италии (1687 -1690). Лейбниц
трижды (1711, 1712, 1716) встречался с Петром 1, по просьбе которого разработал
ряд проектов развития образования и государственного упраалеггия в России Важ-
нейшая заслуга Лейбница в математике - разработка им (наряду с И. Ньютоном)
дифференциального и интегральгюго исчисления, имевшая огромное значение для
дальнейшего развития математики и естествознания. Лейбниц сделал важные откры-
тия в других об гастях математики алгебре. геометрии, комбинаторике Он ввел ряд
математических терминов: функция, дифференциал, дифференциальное исчисление,
дифференциальное уравнение, абсцисса, ордината, координата, алгоритм, предложил
знаки дифференциала, шггсграла, логическую символику и др.
Лобачевский Николай Иванович (1792- 1856)-русский математик. Родит-
ся в Нижнем Новгороде, почти всю жизнь провел в Казани; учился в гимназии
608
(1802-1807), в университете (1807-1811), работал в нем (1811 - 1846, с 1816 г.-
профессор). Он был ректором Казанского университета (1827 - 1846). помощником
попечителя Казанского учебного округа (1846- 1856) Важнейшим научным дости-
жением Лобачевского, поставившим его в первые ряда математиком мира, явилось
создание неевклидовой геометрии. С первым сообщением о новой теомстрии Лоба-
чевский выступил 23 февраля 1826 г., первый мемуар «О началах геометрии» поя-
вился в 1829 г. в «Казанском вестнике». Изложение нового учения дано в раде ста-
тей. опубликованных в «Ученых записках Казанского университета» (1833- 1838)
Эти работы были встречены современниками крайне недоброжелательно Ученые
других стран познакомил ист. с неевклидовой геометрией по брошюре, изданной в
Берлине на немецком языке (1840). К. Ф. Гаусс высоко оценил открытие Лобачев-
ского. По предложению I ау сса Лобачевский был избран ч.зсноы-корресттонлеигом
Геттингенского научней о общества Лобачевскому принадлежит также работы по
алгебре, математическому анализу, численным методам.
Лопиталь Гийом Франсуа Антуатуаи (1661 - 1704)-французский матема-
тик. Автор первого учебника по дифференциалi.ному исчислению (1696), в основу
которого положены лекции И Бернулли. Этот учебник неоднократно переизда-
вался во Франции и других странах Уже после смерти Лопиталя было опублико-
вано другое его сочинение, посвященное теории линий второго тюрядка Лопиталь
исследовал ряд трудных задач математического анализа, в частности дал одно из
решений знаменитой задачи о брахистохроне (кривой скорейшего спуска)
Ляпунов Александр Михайлович (1857- 1918)- русский математик и меха-
ник. академик Пстсрбурт ской (1901, члсн-корреспондснг - с 1900 г.X иностран-
ный члсн-корреспонде1гг Парижской (1916) академий. Окончил Петербургский
университет (1880). Ученик П. Л. Чебышева. Преподавай в Харьковском универ-
ситете (доценг-с 1885 г., профессор -с 1892 г.). Работал в Петербурге (1902) и в
Одессе (1917). Создал современную теорию устойчивости равновесия и движения
механических систем, определяемых конечным чистом параметров Выдающейся
заслугой Ляпунова является построение общего метола решения задач об устой-
чивости На его идеях и методах основаны все работы отечественных и зарубеж-
зых ученых по теории устойчивости, выполненные после исс.'тсдоааний Ляпунова,
впервые строго поставил вопрос и посредством тонкого математического анализа
исследовал устойчивость фигур равновесия равномерно вращающейся жидкости
Ему принадлежит также работы по математической физике и теории вероятностей.
Мяк.торен Кол ни (1698 - 1746) - шотландский математик, член Лондонского ко-
ролевского общества (1719). В 12 лет поступил в университет в Глазго, в 20 лет полу-
чил кафедру математики в Абердине С1722 по 1726 г работал во Франции Возвра-
тившись на родину, занял кафедру в Эдинбургском университете Основные научные
труды относятся к теории рядов, исчислению конечных разностей, теории плоских
кривых высших порядков, механике. Парижская академия наук дважды присуждала
ему премии: за работу о падении тел (1724) и работу по при. тинам и отливам (1740)
последняя быта разделена между Маклореном, Л. Эйлером и Д Бернулли.
Монж Гаспар (1746—1818) - французский математик, механик и обществен-
ный деятель, член Парижской академии (1780), профессор Мезьсрской военно-
инженерной школы (1768), один из создателей и профессор Политехнической шко-
20 Зак. I
609
лы в Париже (1794). Творец начертательной геометрии 1*ещил ряд задач аналитиче-
ской геометрии в пространстве. Дал обстоятельное изложение дифференциальной
геометрии пространственных кривых и поверхностей. Предложил геометрическое
истолкование уравнений с частными производными и, с другой стороны, изложение
геометрических фактов на языке ттих уравнений. В период Великой французской
революции входил в состав Палаты мер и весов, был морским министром (1792 -
1793). заведовал пороховыми и пушечными заводами республики Во времена Пер-
вой империи Монж стал сенатором, получил титул графа. В период Реставрации был
лишен всех прав, изгнан из Политехнической школы и академии наук (1816)
Ньютон Исаак (1643 - 1727) - английский физик и математик, член Лондон-
ского королевского общества (1672) и его презнленг (1703). иностранный член
Парижской академии (1699). Родился в семье фермера в Вулсторпе (около Гран-
тема). Окончил Кембриджский университет (1665). В 1668 г. Ньютон получил
степень ма1мстра. а в следующем году его учитель И Барроу передал ему почет-
ную лкжасовскую физико-математическую кафедру Кембриджского университета,
которую он занимал до 1701 г. В 1695 г. назначен на должность смотрителя Мо-
нетного двора. Ньютону удалось привести в порядок расстроенное монетное дело
Англии, зв что он получил в 1699 г. пожизненное высокооплачиваемое звание
директора Монетного двора. В 1705 г. за научные труды возведен в дворянское
звание Похоронен в английском национальном пантеоне - Вестминстерском аббат-
стве, С именем Ньютона связаны открытие закона всемирного тяготения, создание
теоретических основ механики и астрономии. разработка дифференциального и ин-
тегрального исчисления (одновременно с Г. Лейбницем и независимо от него), рабо-
ты по теоретической и экспериментальной оптике, алгебре, геометрии, интерг «пиро-
ванию, теории рядов, численным методам Разработка дифференциального и инте-
грального исчисления яви .'иск важной вехой в развитии математики. В основу ново-
го исчисления Ньютон положил понятия флюксии (производной) и флюенты
(интеграла). Флюентой он называл непрерывную переменную величину, а флюк-
сией - скорость изменения флюенты.
Остроградский Михаил Васильевич (1801 - 1862)- русский математик, ака-
демик Петербургской (183О,адъюнкт-с 1828 г.), иностранный член Парижской
(1856) и многих других академий. Учился в Харьковском университете (1816-
1820), слушал лекции в Париже знаменитых французских математиков О. Коши,
П. Лапласа, Ж. Фурье и др. (1822- 1828). По возвращении на родину преподавал в
учебных заведениях Петербурга Основные труды оттюсятся к математическому
анализу, теоретической механике, математической физике Известен рабогами по
алгебре, теории чисел, теории вероятностей. Его именем названа теорема о связи
тройного интеграза по объему с интегралом по поверхности, ограничивающей этот
объем, метод выделения рациональной части интеграла Первым установил правила
замены переменных в двойном и тройном интегралах. Ему принадлежит ряд попу-
лярных статей, педагогических исследований, а также превосходных учебников
Остроградский создал русскую школу прикладной механики Его учеником был и
уроженец Рсчицког о уезда (ныне Гомельской области) Н. Ф Ястржембский (1808-
1874), профессор Института корпуса путей сообщения (Петербург), лауреат Деми-
довской премии, инженер, по проектам и под руководством которого на территории
Белоруссии построен ряд участков дорог, мостов и других сооружений.
610
Паскаль Блез (1623 - 1662) - французский математик, физик, философ и пи-
сатель В 16-чстнсм возрасте написал первую научную работу, в которой со-
держалась одна из важных теорем проективной геометрии, позже названная его
именем. Через два года сконструировал счетную машину, окончательный вари-
ант которой построил в 1844 г. Опубликовал ряд работ по арифметике, алгебре,
теории чисел и теории вероятностей. Первым предложил метод математической
индукции и применил его дл* доказательства теорем. Паскаль-один из пред-
шественников Ньютона и Лейбница, создавших дифференциальное и инте-
ральнос исчисление.
Пеано Джузеппе (1858— 1932)- итальянский математик, работал в Туринском
университете (с 1890 г. - профессор). Исследовал основные понятия и методы
анализа (вопросы об условиях существования решений дифференциальных урав-
нений. о понятии кривой и др ). Занимался формально-логическим обоснованием
математики, предложит аксиоматику натуральных чисел (аксиоматика Пеано). По-
строил пример непрерывной кривой, целиком заполняющей некоторый квадрат
Поиселе Жан Виктор (1788- 1867) -французский математик, механик и ин-
женер, основоположник проективной геометрии, член Парижской академии
(1834), се вице-президент (1841) и президент (1840. 1842, избирался на годичный
срок), иностранный член-корреспондент Петербургской Академии наук (1857).
Учился в Политехнической школе в Париже (1807 - 1810), в Школе приложений
(Инженерной и артиллерийской шкале) в Мене (1810- 1812). Лейтенант инже-
нерных войск наполеоновской армии, По нее ле участвовал в войне с Россией. по-
пал в плен в бою под Красным (1812). Находясь в плену в Саратове (1813—1814),
написал трактат о проективных свойствах фигур (опубликован во Франции в 1822 г.,
переиздан в 1865 г.). По возвращении на родину несколько лет работал инженером
на строительстве военных объектов, потом преподавая в школе приложений в Мецс
(профессор прикладной механики в 1824-1835 гт.) и в Парижском университете
(1837 -1848). Экзаменатор Политехнической шкалы (1835 - 1848), начальник Пати-
технической школы, бригадный генерал (1848 - 1850). Основные работы относятся к
проективной геометрии, теории машин, индустриальной механике, эксперименталь-
ной механике. Понссслс - один из предшественников П. Л Чебышева в сот. танин
теории приближения функций.
Пуассон Симеон Дени (1781 - 1840) - французский математик, механик, фи-
зик, член Парижской (1812), иностранный почетный член Петербургской акаде-
мий (1826). Окончил Политехническую школу в Париже (1800), работал в Париж-
ском университете (с 1806 г. - профессор) Основные груды о гносятся к теорети-
ческой и небесной механике, математической физике. Ему принадлежат работы по
интстралыюму исчислению (интеграл Пуассона), теории вероятностей, где он
впервые ввел термин «закон больших чисел», доказал одну из предельных теорем
(теорема Пуассона), предложил названное его именем распределение вероятно-
стей случайных величин. В теории потенциала ввел так называемое уравнение
Пуассона и применил сю к решению задач по гравитации и электростатике Ре-
шил ряд задач теории упругости Исследовал вопросы теплопроводности, магне-
тизма, капиллярности и др.
611
Раабе Иозеф Людвиг (1801-1859) - швейцарский математик, профессор универ-
ситета в Цюрихе (1843). Вел научные исследования по анализу, алгебре, геометрик тео-
рии функций. теории рядов (признак Раабе сходимости числового ряда).
Ролль Мишель (1652- 1719)-французский математик, член Парижской АН
(1685). Разработал метол отделения действительных корней алгебраических урав-
нений, основанный на частном случае теоремы, позже названной его именем Ис-
следовал решения в целых числах неопределенных линейных уравнений с двумя
неизвестными. Выступал с критикой исчисления дифференциалов Г. Лейбница,
вызвавшей оживленную дискуссию.
Руиге Карл Тольме (1856—1927)-немецкий математик и физик. Учился в
университетах Мюнхена (1876— 1877) и Берлина (1878- 1880). Работал в Берли-
не, Ганновере. Геттингене. Основные математические работы относятся к числен-
ному решению дифференциальных уравнений (метол Рунге - Кутта).
Сильвестр Джеймс Джозеф (1814 - 1897) - английский математик, член Лон-
донского королевского общества (1839), иностранный член-корреспондент Петер-
бургской Академии наук (1872). Окончил Кембриджский университет (1837). Од-
но время был адвокатом. Профессор Виргинского университета (1841 -1845),
математик в страховой компании (1845- 1855), профессор Королевской академии
в Вулидже (1855- 1870) В 1876-1883 гт. - профессор университета Джона Гоп-
кинса в Балтиморе (США) Основатель и первый редактор первого американского
математического журнала (1878 1883). По возвращении в Англию получил кафед-
ру в Оксфордском университете (1883 - 1897) Основные работы по алгебре, теории
чисел, механике и математической физике
Симпсон Томас (1710- 1761)- английский математик, член Лондонского ко-
ролевского общества (1746). Математику изучал самостоятельно Был ткачом
шелковых тканей, школьным учителем, а затем профессором математики Вулидж-
ской военной академии (1743). Основные работы по геометрии, тригонометрии,
математическому анализу и сто приложениям к механике. В 1743 г. вывел форму-
лу приближенного интегрирования (формула Симпсона).
Стокс Джордж Габриэль (1819- 1903)-английский физик и математик, член
Лондонского королевского общества (1851X его секретарь (1854- 1885) и прези-
дент (1885 - 1890). Окончил Кембриджский университет (184IX там же работал (с
1849 г. - профессор) Основные работы по физике Математические труды по ана-
лизу. Одновременно с немецким астрономом и математиком Ф. Л. Зсйдслем
(1821 - 1896) и независимо от него ввел понятие равномерной сходимости после-
довательности и ряда (1848). В 1854 г. предложил формулу, устанавливающую
связь между интегралом по поверхности и криволинейным интегралом по конту-
ру, ограничивающему эту поверхность (формула Стокса).
Таргалья Николо (ок. 1499 - 1557) - итальянский математик. Самостоятельно
изучал латинский и греческий языки, математику. В 1535 г. прославился б.эсстяшсй
победой на публичном математическом диспуте с математиком Фиоре Темой диспу-
та был вопрос о решении кубического уравнения, не известного до того времени в
науке. Открытый им метод решения уравнения третьей степени был опубликован
Д. Кардано в книге (1545X Основные труды относятся к арифметике, алгебре, геомет-
рии, механике, баллистике, геодезии, фортификации. В сочинении «Новая наука»
612
(1557) Тартанья показал, что траекторией полета снаряда является парабола и что наи-
большая дальность полета снаряда соответствует наклону орудия под утлом в 45°.
Тейлор Брук (1685 -1731)-английский математик, член Лондонского коро-
левского общества (1712) и его непременный секретарь (1714 - 1718). Основные
исследования относятся к математическому анализу', механике и баллистике В
1712 г. нашел формулу /тля разложений функции в степенные ряды, позже назван-
ные его именем. Эта формула опубликована н сочинении «Прямой и обратный ме-
тод приращений» (1715), в котором положено начало изучению задачи о колебаниях
струны. Предложи,! правило дифференцирования функции, обратной данной Зани-
мался также вопросами оптики, астрономии и философии
Ферма Пьер (1601 - 1665)-французский математик. По профессии юрист, с
1631 г. работал советником Кассационной палаты парламента в Тулузе. Матема-
тикой занимался и свободное время, при жизни почти ничего не опубликовал
Полученные им математические результаты становились известными ученым бла-
годаря переписке и личному общению. Ферма - один из создателей теории чисел, в
которой с сто именем связаны дне (еоремы; великая теорема Ферма (для любого
натурального п > 2 уравнение х" + у“ = г" нс имеет решений в целых положитель-
ных числах х, у, г) и малая теорема Ферма (если р -простое число и а - целое чистю,
нс делящееся на р, то а*’"1 -1 делится на р) Ферма наряду с Декартом является ос-
новоположником аналитической геометрии Предложил правило нахождения зке-
грсмумов, а также общие правила дифференцирования и интс|рир<ч»ания степенной
функции, которые затем распространил на случаи дробных и отрицательных показа-
телей. Занимался и вопросами физики
Фурье Жан Ботист Жозеф (1768 1830) - французский математик, член Па-
рижской (1817), иностранный почетный член Петербургской (1820) академий Окон-
чил военную школу в Осере, гае затем был праюлаватстем Преподавал в Политех-
нической школе в Париже (1796 - 1798). Вместе с другими учеными принимал уча-
стие в Египетской экспедиции Наполеона Бонапарта (1798- 1801), был секретарем
Каирского института По возвращении во Францию Фурье - префект департамента
Изер (1802 - 1815). В 1817г переехал в Париж. Основные работы относятся к тео-
рии тепла и теории уравнений с частными производными Фурье вывез уравнение
теплопроводности и развил методы его интегрирования при различных граничных
условиях, чем заложил основы математической физики Разработал учение о пред-
ставлении функции в виде тригонометрических рядов (ряды Фурье). Его первые
научные работы относились к алгебре, он доказал теорему о числе действительных
корней алгебраического уравнения, расположенных в заданном интервале.
Чебышев Пяфнутий Львович (1821 - 1894)-русский математик и механик,
академик Петербургской (1856, адъюнкт - с 1853 г.), иностранный член Берлинек<й
(1871) и MHOIHX других академий. Окончил Московский университет (1841), здесь
защитил магистерскую диссертацию «Опыт элементарного анализа теории вероят по-
ст ей» (М.. 1845) Работал в Петербургском университете, где защитил докторскую
диссертацию « Теория сравнения» (СПб. 1849), за которую ему прису Адена Демидов-
ская премия (1849). Длительное время принимал активное участие в работах артил-
лерийского отделения военно-ученого комитета и ученого комитета Министерства
613
народного образования Прекратив чтение лекций в университете. целиком отдался
научной работе, продолжавшейся до последних дней его жизни Основатель Петер-
бургской математической школы, наиболее крупными представителями которой
были А. М Ляпунов. А А. Марков, В. А. Стеклов и др. Характерной особенностью
его творчества была тесная связь теории и практики, что он сам неоднократно под-
черкивал. Основные труды относятся к интегральному исчислению, теории чисел,
теории вероятностей, теории механизмов, другим областям математики и смежных
наук. Чебышев является основоположником теории приближения функций
Эйлер Леонард (1707 - 1783) - математик, физик, механик, астроном. Родился в
Базеле (Швейцария). Окончил Базельский университет (1724). По приглашению Пе-
тербургской Академии приехал в Россию (1727). В Петербурге работал с 1727 по
1741 г. и с 1766 до конца своей жизни. За 14 лет первого петербургского периода
жизни подготовил около 80 и опубликовал свыше 50 работ. С 1741 по 1766 г. Эйлер
жил и работал в Берлине, нс переставая итттснснвно трудится для Петербургской
Академии наук, сохраняя звание се почетного члена и получая пенсию Участвовал а
подготовке русских математиков, командированных на учебу в Бертин, приобретал
литературу и оборудование для Петербургской Академии наук и т п. За 17 лет вто-
рого петербургского периода им было подготовлено около 400 работ, среди которых
несколько больших книг (всего написано свыше 800 рабог) Круг научных занятий
Эйлера охватывал все разделы современной ему математики и механики, теорию
упругости, математическую физику, оптику, теорию машин, картографию, баллисти-
ку. морскую науку, страховое дело, теорию музыки и др. Свои результаты и резуль-
таты, полученные другими учеными, Эйлер систематизировал в раде классических
монографий, большая часть которых вошла затем в учебные пособия для высшей и
отчасти средних школ Трудно перечислить все теоремы и методы Эйлера, только
немногие фигурируют в у*гебной литературе под сто именем: теоремы Эйлера, тож-
дества Эйлера, зйлеронскис постоянные, функции, углы, интегралы, формулы, урав-
нения, постановки и т. д. В трудах Эйлера многие математические формулы и сим-
волика получили современный вил Ему принадлежат обозначения: е, к
(постоянные),((мнимаяединица) sinx, cosx, tgx (тригонометрические функции).
Дх (разность, приращение), Е (знак суммы),/(х) - обозначение функции и др
Якоби Карл Густав Якоб (1804- 1851)-немецкий математик, член Берлин-
ской (1836), иностранный почетный член Петербургской (1833) и других
академий. Брет физика и электротехника Б. С. Якоби (1801 - 1874), с 1835 г. рабо-
тавшего в России. Окончил Берлинский университет (1825), работал там же (1825
-1829), а также в Кенигсбергском университете (1829- 1835). С 1836 г. жил в
Берлине, занимался научной работой Сделал важные открытия в области
линейной алгебры, теории чисел, вариационного исчисления, теории дифференци-
альных уравнений, в особенности в теории уравнений с частными производными
первого порядка. Исследовал дифференциальные уравнения динамики, предложив
новые методы их решения. Ввел в употребление функциональные определители,
указал их роль при замене переменных в кратных интегралах и при решении
уравнений с частными производными. Эти определители по предложению
Дж. Сильвестра названы якобианами.
614
Предметный указатель
А
Абсцисса 16
Алгебре событий 520
- борелевская (0-алгебра) 520
А-чтебраическая линт n-tv гн ym.it а 14
- <|*’Т*ма комплексного числа 128
Алгебраический многочлен 137
Алгебраическое дополнение 106
- уравнение n-ой степени 142
Альтернирование тензоров 487
Аппликата 15
ApiyMewi комплексного числа 132
- функции у - fix) 200
- - промежуточный 223,313
Артумеиты функции г -fix. у) 303
- ~yfi^. *1..х»>303
Аснмгггоза(ы) 245
- вертикальная 245
- гиперболы 27
- графмка функции 246
- наклонная 246
Астроида 46
Аффинные координаты 70
Б
Базис 69
- сакли,К»га пространства 158
- линейного пространства 153
-ортогональный 160
- ортонормированный 160
Бесконечно малые функции 207
— - высшего порядка 208
- - k-го порядка 208
— несравнимые 209
- - одного порядка 208
- - равносильные (эквивалентные) 208
Бета-функция (эйлеров интеграл першяо
рода) 291
Бином Ньютона 234
В
Валентность тензора (ранг) 485
Варианта 538
Вариантный ряд дискретный 538
Вектор 4, 55.150
- единичный 55. 59
- касательной к линии 257
- нормали к поверхности 317
- нормированный 160
- нулевой 55
- переменный 253
Векторная линия (силовая линия) 475
- трубка 475
Векторное поле 475
- одномерное 475
- (Несимметрическое 475
- - плоскопараллельное 475
- - потенциальное 480
- - соленоидальное (трубчатое) 476
- цилиндрическое 475
Векторное проитвсленис двух векторов 65
Вектор-функция 253
- - дифференцируемая 255
- - непрерывная 254
Векторы базисные 60. 153
- коллинеарные 55
- - линейного пространства 152
- компланарные 56
— линейного пространства I S3
- линейного пространства 150
- ортогональные 160
- противосюжвкные 56
- равные 55
- составляющие (комптятенты) 59
Величина направленнего отрезка 4
Вероятность события 519
- - аксиоматическая 520
- - геометрическая 519
- - классическая 519
- - статистическая 520
- условная 522
Версьере (локон Аньези) 41
Взаимное расположение двух плоскостей 81
---прямых 83
— прямой н плоскости 86
Винтовая линия 74
Выборка (выборочная совокупность) 538
Выборочная дисперсия 540
- средняя 539
Выборочный метод 538
Выпуклость трафика функции 244
Вычет функции 573
Вычисление объемов тел 298
площадей плоских областей 292,330
- - поверхностей 299,337
615
г
Гамма-функция (эйлеров интеграл
второго рода) 290
Геликоид 97
Генеральная дисперсия 539
- совокупность 538
- средняя 539
Генеральное среднее квадратическое
отклонение 539
Геометрический смысл дифференциала 230
- - интеграла двойней о 321
- - - определенного 279
- модуля и аргумента гроктволктй/fcl 554
- - полного дифференциала функции
двух переменных 308
— производной 220
- - частной прон людной 306
Г нпербола 27
- параметрические уравнения 31.32
- уравнение, отнесенное к вершине 31
- уравнение относительно асимптот 31
- равносторонняя 27
Гипербо ти ческий косинус 218
- котангенс 218
-синус 218
-тангенс 218
Гиперболоид вращения двуполостный 90
- - одиополостный 90
- дауполостный 91
- однополостный 91
Гипотрохоида 47
Г игкншктюида 47
Годотраф всктор-функции 253
Гомоморфизм трупп 198
Градиент скалярного поля 472
1 рань последовательности верхняя 203
- - нижняя 204
-числового множества верхняя 302
— - нижняя 303
График функции^ fix) 201
— * 303
Группа 187
- абе.тева (коммутативная) 187
- аддитивная 187
-бесконечная 187
- вращений правильного многоуголь-
ника 193
- единичная 189
- конечная 187
- мультипликативная 187
— полная линейная 188
- преобразований множества 191
— линейных 199
- симметрии треугольника 193
- симметрическая пой степени 190
- событий полная 518
- унимещу .-тарная 190
- циклическая шрялка л 193
д
Двойгюй интеграл 320
- - в декартовых координатах 322
- - в полярных координатах 327
- - несобственный 345
Действия над питейными преобразованиями 170
Декартов лист 39
Декартовы прямохтп.и.кмскоирлинттты вектора 59
------точки 5.15
Деление отрезка в джином отношении 20,61
Дефект линейного преобразования 163
Дивсртсини я векторного тюля (расходимость) 476
Директриса параболы 29
- эллипса 26
Директрисы гиперболы 27
Днскрнмина1гт уравнения квадратного 142
- - кубического 144
Дискриминантная линия 318
Дисперсия случайной величины 530
- ₽- выборочная 540
генеральная 539
- -•"эмпирическая (исправленная) 540
Дифференциал всктор-функции 255
длины дуги кривой плоской 250
------пространственной 250
- функции 228
- - второго порядка 231
- - п- го гк рядка 231
- - нескольких переменных полный 307
------частный 309
Дифференциалы высших пг рядков 231. 310
Дифференциальные уравнения 431
— Берну дли 434
- - обыкновенные 431
------второго гктрядка 439
------линейные неоднородные с
постоянными коэффициентами 443
---------однородные с постоянными
коэффициентами 442
------первого тхрялка 432
------в полных диффереицидтах 436
616
----—- линейные 434
--------однородные 433
--------С разделяющимися
переменными 432
----л-го порядка 446
--------линейные 449
- ------неоднородные с постоянными
коэффициентами 451
--------однородные с постоянными
коэффициентами 449
- - с час1ными пронмюднымн 460
--------первого порядка 461
—.— второю гм ря дка 463
---------- гиперболического типа 463
--------параболического типа 463
--------эллиптического типа 463
- - магсма гнчсской фишки 467
Дифференцирование 222
- изображения 581
- неявной функции 313
- оригинала 580
- сложной функции 313
- степенных рядов 410
- функции комплексной переменной 553
Длина вектора в координатах 66
- дуги линии плоской 296
----пространственной 296
Довергпеткная aepcarniocib (надежность) 542
Доверительные границы 542
Доверительный интервал 542
Е
Евклидово пространство 157
Единица мнимая 128
3
Зависимое п, между матрицамиолнгго и-
того же преобразования в различных
базисах 165
- между непрерывностью и
дифференцируемостью фу нкцин 222
Задача Дирихле 470
-Коши 439.453,468
- - для системы 453,454
- смешанная 468
Задачи на наибольшие и наименьшие
значения 248
- приводящие к дифференциальным
уравнениям 437
Закон распределения случайной ве личины 526,533
Замена переменной в определенном интеграле 283
Замена переменных в двойном интеграле 327
-------несобственном 347
— в тройном интеграле 353
Значение аргумента 200
- собственное вектора линейного грсобраэо-
вания 167
- — матрицы 168
--т-кратное 168
- функции 200
- - наибольшее (абсолютный максимум) 248
— наименьшее (абсолютный минимум) 248
- - среднее 286
И
И гменение порядка интегрирования в дгюйгияи
интеграле 323
Июморфигм групп 194
- линейных пространств 153
Инвариатптгость формы перги я о днфферен
циана 231
Интеграл вероятностей 282
- дифференциального уравнения 432
--общий 432,439.447
--частный 447
- Дюамеля 586
- Лапласа 578
- неопределенный 259
- несобственный 286
- определенный 278
- .- с переменным верхним пределгы 281
- от функции Лг) 557
- поверхностный 377
- - второго рода 380
- - первого рода 377
- повторный 322
- Пуассона 470
- собственный 286
Интегралы Френеля 282
Интегральный косинус 282
- логарифм 282
- синус 282
Интетрнроваиис диффережгиалыгых биномов 273
— уравнений с помощью рядов 511
- изображения 581
- иррациональных функций 272
- непосредственное 262
- оригинала 581
- mi частям 265, 283
617
- рациональных дробей с квадратным
трехчленом в знаменателе 269
— функций 270
- тригономпричсских выражений 275
Иитерооляцииниая формула Лагранжа 497
— Ньютона 501
Ингср1кшяциинный М1кяпч лен Лагранжа 497
— Ньютона 501
Исследование функций 246
К
Каноническое уравнение гиперболы 27
— окружности 25
- -параболы 28
Канонические уравнении прямой 80
- - сферы 72
— эллипса 25
Каппа 44
Кардиола 44
Касательная плоскость 317
- прямая 220
Катеноид 96
Квадратичная форма 174
- - действительная 174
— вырожденная 174
— зншаюпределениая 178
— кантжнческая 176
---нгрмальная 176
— комплексная 174
— невырожденная 174
- -неопределенная 178
— отрицательносюре деленная 178
— потки* ите ль ноопределенная 177
— попухятрслелениая 178
Квадра гриса 51
Классы сопряженных элементов 197
Ковариация случайных величин 532
Комплексная плоскость 130
Комплексные числа 128
— сопряженные 129
Композиция функций 202
Конические сечения 31
Конус вращения 91
- второго порядка 91
Конхоида 42
- гиперболической спирали 51
Координата точки на прямей 4
Координаты вектора единичного 71
— заданного двумя точками 61
— лннейнгго пространства 154
— линейной комбинации вектор<эв 61
- полярные 6
— обобщенные 329
- Пронтвеления вектора на число 61
- разности двух векторов 61
- середины отрезка 5.7.62
- суммы двух векторов 61
- сферические 18
— обобщенные 355
- на плоскостм 5
— в пространстве 154
- точки пересечения медиан треугольника 8
- «-мерного пространства 301
---на плоскости 327
- цилиндрические 17
Корень алгебраического мнгяочлена 139
кратный 140
---простой 140
- уравнения 130
- квадратного уравнения 142
- кубического уравнения 143
- квадра гный из комплексного числа 131
- многочлена характеристического 166
- функции 232
Корни n-ой степени из единицы 135
---из комплексного числа 135
Косинус утла между векторами евклидова
пространства 160
Косинусы направляют цис 60
Коэффициент корреляции 532
Коэффициенты ряда степенного 412
— Фурье 422
Кривая Внвиаии 339
— Гаусса (нормальная кривая) 535
- непрерывная в £„ 302
Кривизна линии плоской 251
- - пространственной 251
Криволинейный интеграл второго рода 367
- - первого рода 363
- -. условия независимости от пути гвлегрн
рования 371
Круг сходимости степенного рала 428
Л
Лемниската Бернулли 41
Линейная зависимость векторов 69
— - линейного пространства 152
- комбинация векторов 59, 152
---нетривиальная 152
---тривиальная 152
618
- независимость векторов 70
линейного пространства 152
Линии координатные 327
Линин уровня 471
Линии свода 54
М
Максимум функции 241
- - абсолютный 248
— локальный 242
— нескольких переменных 314
— нестрогий 241
— строгий 241
Математическое ожидание случайной
величины 529
Матрица 99
- диагональная 100
- единичная 101
- квадратная 100
— вырожденная (особенная) 109
--невырожденная (неособенная) 109
— обратная 109
— симметрическая 100
квадратичной формы 174
- кватитрсуголы|ая (ступенчатая.
трапециевидная) 101
- линейного преобразования 164
линейной системы основная 117
— расширенная 117
— нулевая 100
- . приводимая к диагональному виду 169
- ортогональная 172
- противоположная 102
— системы векторов 155
-скалярная 100
- столбец (столбцевая) 100
-- строка (строчная) 100
- транспонированная 101
-треугольная 101
-унитарная 161
Матрицы равные 99
- перестановочные (коммутативные) 103
- подобные 165
Метод Гаусса 122
- Д'Аламбера (метол характеристик) 468
Жордана НО
- интегрирования по частям 265,283
- итераций 495
- касательных (метол Ньютона) 494
- подстановки (замены переменной) 263
- Рунге-Кутта 515
- Фурье (ратде.зение переменных) 466
- хорд 492
- Чебышева 496
- Эйлера 514
Минимум функции 241
— абсолютный 248
— локальный 242
--нескольких переменных 314
Минор базисный 12!
- главный квадратичной формы 178
- матрицы 114
- элемент а определителя 106
Многочлен от квадратной матрит ля 104
- аннулирующий 104
- характеристический 166
Множество замкнутое 302
- ограниченное 302
- открытое 302
- связное 302
- точек п-мерного пространства 302
Множитель Лагранжа 316
Модуль вектора 55
- комплексного числа 132
Моменты инерции материальной поверхгкст и 387
- пластинки 340
- тела 341, 358
- статические 340
- случайной величины начальные 532
—- центральные 533
н
Наибольший общий делитель многочленов 138
Направляющий вектор прямгй 80
Непрерывность вектор--функт тип 255
-функциикомплексной перемени! Гт 547 548
-функцииy^ftx) 214
- - нескольких переменных 304
Неравенство Кошн-Буняковского 159
- треугольника 159
I крма вектора екклн.ква пространства 158
------а координатах 160
I ктрмаль к линии 221
Нормаль к поверхности 317
Нормальный делитель 196
Нули функции/г) 569
О
Область замкнутая 302
- двусвязная 548
- значений функции 200
- интегрирования 322
619
- односвязная 548
- определения функции 200, 303
- сходимости функционального ряда 408
Объем совокупности 538
- - выборочной 538
- - генеральной 538
- тела вращения 298
- параллелепипеда 67
треугольной пирамиды 68
Овалы Касснни 42
Однопараметрическос семейство линий,
огибающая 318
- - поверхнос тей, о мбающая 319
Окрестность точки 203
Окружность 25
- кривизны 252
Октант 16
Оператор 200
- Гамильтона (оператор набла) 481
Лапласа 482
линейный 162
Операционное (операторное) равенство
578-579
Определитель (детерминант) - второго
порядка 105
- Вронского 450
линейной системы уравнений 119
- пт о порядка 107
- произведения мктрнтт 108
- третьего порядка 107
Опыт (испытание) 518
Ордината 16
Орты 59
Остаток ряда 390
Остаточный член а форме Лагранжа 233
----Пеано 233
Ось абсцисс 15
- аппликат 15
- кехтрдинатная 4
- полярная 6
- ординат 15
Отображение множества в множество 200
— на множество 200
Отрезок направленный 4
Оценка довсрителыюсти 543
- интеграла двойного 321
— определенного 285
— тройного 349
- интервальная 542
- несмещенная 543
- параметра 544
- смсщсиная 539
- состоятельная 539
- средней квадрагичсской погрешности 545
- точечная 543
- - дисперсии 544
- точного значения и (меряемой величины 543
- точности измсрений 544
- эффективная 539
п
1 парабола 28
Параболоид вращения 91
- гиперболический 92
- эллиптический 92
Параллельный перенос 14
Параметры Ламе 473
Первообразная 259
- для непрерывной функции 282
I (ерссечеине линий 11
Период функции 202
Плотность распреде ления 527
Площадь криволинейной фигуры 292
- napa i к jkярамма 66
> повсрх1н«пи вращения 298
- треугольника 9.66
Поверхности второго порядка 9)
- вращения 89
- - второго порядка 91
- уровня (экяилотеицнатьные поверхности) 471
- цилиндрические 89
Поворот координатных осей 14
Подгруппа 189
- инвариантная (нормальный делитель) 196
- несобственная (тривиальная) 190
- собственная (истинная) 190
Подпространство линейного пространства 151
Подстановка 191
-Эйлера 265
I ктлыитетратьное выражение 259
Показатель роста функции 578
Полюс 6
Последовательность 202
- монотонная 204
- ограниченная 203
- - сверху 203
— снизу 203
- расходящаяся 203
- сходящаяся 203
- чис.кжая 203
620
Поток векторного поля 476
Правила дифференцирования 223
Правило замыкающей 56
- Лопиталя-Берну лли 237
- параллелепипеда 57
- параллелограмма 56
- треугольника 56
- трех сигм 536, 544
Предел всктор-функции 254
- интегральной суммы 278
- интегрирования верхний 278
— нижний 278
- последовательности 202
- функции 205
— комплексной переметил 547
— нескольких переменных 303
— ггри х ~ 206
- односторонний 205
— слева 205 '
— справа 205
- ~/x)“(sjnr)/x при х -» 0 211
Представления групп 199
— линейные 199
I IpeoOpoaoaaiгие взаимно однозначное
(биективное) 162
- квадратичной формы 175
- Лапласа 578
- линейного пространства 162
- линейное (линейный оператор) 162
- - в координатах 164
- - вырожденное 171
-невырожденное 171
- -обратное 171
- - ортогональное 173
- переменных 190
- унитарное 162
- множества 190
11реобразованнс декартовых коорди-
нат 14,62
- координат век тора 156
Приближенное вычисление корней
уравнения 491
- - определенных интегралов 505
11рнвс,'гсние двойного интеграла к
повторному 322
Признак Абеля 401
- Всйерш грасса 410
- возрастания функций 240
- Гаусса 398
- Д’Аламбера 398
- Дирихле 401
- интегральный 394
- Котин 398
- Лейбница 401
- полного дифференциала 372
- постоянства функций 240
- Раабе 398
- сравнения рядов второй 394
-----первый 394
- сходимости ряда необходимый 390
- убывания функций 240
11риложения двойных интегралов 330,341
- интег pajfoe по поверхности 386
- криволинейных интегралов 373
- тройных интегралов 357
Приращение аргумента 214
- функции 214
- - поггное 304
— частное 304
Проекция вектора на ось 58
- точки на плоскость 87
Произведение вектора на число 58. 61
- двух пар упорядоченных чисел 127
- комплексных чисел 130
- матриц 103
- матрицы на число 102
- преобразований 170
- ряда на число 4G4
-рядов 404
- событий (пересечение) 519
- тетпгров 486
11роигвол>гая 220
— бесконечная 221
- вскгор-фу нкиин 255
- логарифмической функции 225
- неявной функции 226
- обратной функции 223
- односторонняя 221
- от матрицы 457
показательной функции 225
- произведения функций 223
- слева 221
- сложной функции 223
— справа 221
- суммы (разности) функций 223
- функции, заданной параметрически 226
- функции комптгекеггей переменной 553
- функции и" 226
- частная второго порядка 310
-----смешанная 310
621
- -n-го порядка 311
- - первого порядка 306
- частого двух функций 223
11роииюдные высших порядков 227
- гиперболических функций 226
- обратных тригонометрических
функций 225
- степенных функций 224
- тригонометрических функций 224
11росгранство<а)
- арифметическое п мерное 301
- вероятноетисе 52!
- линейное (векторное) 150
- - бесконечное 154
— действите льное 150
- - изоморфные 154
- - комплексное 150
- конечгмгмергкге 153
-представления iруппы 199
-унитарное 161
- элементарных событий 520
Простое отношение трех точек 5
Прямая как пересечение двух гтюскостей 85
Прямая на плоскости 19
- в пространстве 80
11рямолннсйныс образующие поверх-
ности 94
- гиперболический параболоида 94
— тгднополостного ।иперболоила 94
Пучок плоскостей 86
11ссвдосферо 98
Р
Работа переменной силы 374
Радиус-вектор 59
Радиус кривизны 252
- полярный 6
- схолкмости степенного ряда 413,428
Разложение вектора по двум
неколлинеарным векторам 69
- - по трем некомтишнарным векторам
60.69
- группы по подгруппе 195
- определителя по элементам строки
(столбца) 107
- элсмсгпа линейного пространства по
базису 154
Размерность линейного пространства 153
Разности разделенные 499
- различных порядков 499
Разность векторов 57
-двух матриц 102
- - пар упорядоченных чисел 127
— рядов 404
- событий 519
Ранг квадритичнтй формы 174
— линейного преобразования 163
-матрицы 114
- системы векторов линейного пространства 155
Раскрытие неопределенностей 237
Распределение вероятностей с.тучайжгй
величины 526
- биноминальное 533
- геометрические 533
- нормальное (Гаусса) 535
- показательное 534
- Пуассона 533
- равномергкте 534
Расстояние между двумя точками в
пространстве 16
-----л мерном пространстве 301
------- на плоскости 7
- от точки до прямой 23, 84
-----до плоскости 82
- между двумя прямыми 84
Ранение диффере>гциа1ыкто у равнения
обыкновенного 432
-----общее 432,439.447
- —-особое 447
- - - - частное 432, 439. 447
-----с частными производными 460
Рога 45
- трсхлспсстковая 46
- четырех лепестковая 45
Ротор векторного поля (вихрь) 478
Ряд Лорана 564
- Тейлора 563
Ряд числовой 389
— абсолютно сходящийся 400
- - гармонический 390
- геометрический 390
- - гипергеомстрический 399
--Дирихле 396 .
- - знакопеременный 400
- - знакочередующийся 400
— мажорантный 410
- - исабсолютно (условтю) сходящийся 400
- - расходящийся 389
- - сходящийся 389
- функциональный 389
622
-- биномиальный 421
— степенной 412
-----в комплексной области 427
-----Маклорена418
-----Тейлора 417
— сходящийся абсолютно 408
-----равномерно 410
— Фурье 422
-----для функций, «адаиный на отрезке
(-/./) 423
-----в комплексной форме 423
С
Свертка функций 585
Свертывание тензора 486
Семейства линий 318
- поверхностей 318
Сигнатура квадратичной формы 177
Симметрирование тензоров 487
Chcivmb векторов ортитопальная 160
- ортонормированная 160
- координат полярная 6
- левая и правая 1$, 65
- линейных алгебраических уравнений 116
- дифференциальных уравнений с
постоянными коэффициентами 453
Скалярное поле 471
- - дифференцируемое 472
- - осесиммегрическое 471
- - плоскопараллельное 471
- - сферическое 471
- произведение двух векторов 62, 158
в координатах 63
------------ - - в ортонормированием
базисе 16!
Скалярный квадрат вектора 63. 158
Случайная величина 526
- - дискретная 526
- - непрерывная 527
Смешанное произведшие трех векторов 67
-----в координатах 68
Собственные векторы линейного
преобразования 167
Событие 518, 519
- достоверное 518, 519
- невозможное 518, 519
-случайное 518,519
элементарное 520
События независимые 523
- несовместные 518, 520
- противоположные 518, 520
- равновотможные 518
- совместные 518
Совокупность выборочная (выборка) 538
- генеральная 538
Спираль алгебраическая 50
— жезл'51
- Архимеда 49
- Галилея 51
- логарифмическая 51
- параболическая 51
- Ферма 51
Способ неопределенных коэффициентов 443
( редисе квадратическое сихлоиение 531
---выборочное 540
---генеральное 539
---исправленное (эмпирический стандарт) 540
Статистическое распределение выборки 538
Строфоида 40
Сумма векторов 56
-двух пар упорядоченных чисел 127
- - рядов 404
- иггтегральная 320, 349,363, 367. 377
- комплексных чисел 130
- матриц 102
- преобразований 170
— рзтда.389
- - частичная 389
- событий (объединение) 518
- тензоров 486
Суперпозиция функций 202
Сфера 72
- (»-1) мсрная 301
Схема Горнера 139
т
Таблица Кади 192
- неопределенных интегралов 260
- основных дифференциалов 231
Тензор 485
- ковариантный 485
- коягтравариаитный 485
- кососимметрический 488
Тензорное поле 489
Теорема Абеля 412
-аннулирования 107
-Бету 139
-Бсйсса525
- Бернулли 536
- Вейерштрасса 410
623
-замещения 107
- запаздывания 585
- Коши 232. 558
-Крамера 119
- Кронекера Каттелли 121
- Кэли 199
-Лагранжа 196,232
— Ляпунова 536
- об устойчивости знака непрерывной
функция 211, 305
- о переходе к пределу в |геравснспмт 211
- о среднем 285
- Остроградского 477
- подобия 585
- разложения 586 587
- Ролля 232
- смещения 585
- Стхжса 479
- умножения (теорема Боре ля) 585
- - вероятностей 522
- Чебышева 536
Теоремы Лапласа 537
- о пределах 211
Тор 96
Точка внутренняя 302
- граничная 302
- изолированная 302
- касания 317
- п-мерного пространства 301
особая 569
- икитированная 569
- - полюс 570
- - существенно 570
- - устранимая 570
- перегиба 245
- предельная 302
- разрыва функции 217
---второго рода 217
---первого рода 217
- - устранимого 217
- расходимости функционального
ряда 408
- сходимости функционального ряда 408
- экстремума 314
Точность оценки 543
Трактриса S3
Транспонирование тензоров 487
Трансцендентная линия 49
Тригонометрическая форма комплекс-
ного числа 133
Тройка векторов 64
— левая 64
— правая 64
Тройки одной ориентации 64
- различной ориентации 64
Тройной интеграл 349
- - в сферических координатах 354
— в цилиндрических координатах 354
У
Угловой коэффициент прямой 19
Угол между векторами евклидова простраи
стка 160
- - двумя плоскостями 81
-----прямыми 21.83
- - прямой и плоскостью 86
- полярный 6
-смежности 251
Улитка Паскаля 44
Умножение поворотов 193
-подстановок 191
Упорядоченная пара чисел 127
Уравнснис(я)
- алгебраическое второй степени относительно
хну 19
— первой степени относительно х и у 19
- биссектрис углов между прямыми 23
векторного движения точки 253
- касательной прямой 221.257
-- плоскости 318
-квадратное 142
- координатных осей 73
— плоскостей 72
- кубическое 143
- линии на плоскости 10
- - -- в декартовых координатах 10
-----в полярных координатах 12
-----параметрические 13
- - в пространстве 72
-----параметрические 73
- нормали к линии 221
— к поверхности 318
- нормальней плоскости 257
- окружности 25
- плоскостм (различные виды) 75-78
- поверхности 72
— вращения 91
-----параметрические 96
— параметрические 73
- полярное гиперболы, параболы, эллипса 30
624
- прямой в пространстве (различные
виды)80
— на плоскости (различные виды) 19
- четвертой степени 145
Условия Д'ЛламбсргнЭйлера (Кошм
Римана) $53
- коллинеарности двух векторов 58,61,65
- компланарности трех векторов 67, 68
- линейной зависимости векторов 69
- ортогональности двух векторов 160
- параллельности двух прямых 21,83
- перпендикулярности двух векторов 63
------прямых 21, 83
- экстремума достаточное 243
необходимое 242
Ф
Фактор-группа 197
Фигура второго порядка типерболичес
кого типа иа плоскости 181
- - в пространстве 183
------на тоюскости 180
- - нспсн । ptun нал в пространстве 184
---- на плоскости 181
— - цегпральная в пространстве 184
------на плоскости 181
------эллиптического типа наплпсатхлм 181
Фокальный параметр 30
Формула Бейсса 525
- Бернулли 533
- Грина 371
/ГАламбсра 469
- Кардано 144
- Коши интегральная 561
- Маклорена 233
-Муавра 135
Ньютона-Лейбница 281
- Острогралского 384
- парабол (формула Симпсона) 507
- полной всроя । пости 525
- Стокса 384
- Тейлора 233,311
- трапеций 506
Формулы Виста 140
- дифференцирования 224
- Крамера 119
- преобразования координат 14, 62, 156
- приближенные 235
- прямоугольников 505
- Эйлера 428, 550
Функция 200
- аналитическая 554
- бесконечно большая 210
— малая 207
- возрастающая 240
- гармоническая 470, 554
- двух переменных 303
- дифференцируемая 221. 229,308, 553
- дробная рациональная 147
- изображение 578
- интегральная показательная 282
- интегрируемая 279, 321
- комп лексной переменной 547
---многозначная 548
---однозначная 547
- Лагранжа 316
- Лапласа 535
- непрерывная в точке 214
— на интервале 215
— на отрезке 215
- нескольких переменных 303
- нечетная 202
- неявная 201, 304,313
- обратная 201
ограниченная 202
- однородная 433
- оригинал 578
- сложная (от функции) 202,313
первообратная 259
- периодическая 202
- тктдытггегральная 259
- показательная (экспоненциальная) 218
- полилинейная 483
- распределения случайной величины 527
- - эмпирическая 539
- трех ггременных 304
- убывающая 240
- Хевисайда 578
- целая рациональная 147
- четная 202
- числовая 200
- явная 201, 304
Функции гиперболические 218
— комплексной переменной 550
- линейно-зависимые 450
- линейно независимые 450
- нескольких переменных 303
- элементарные комтотексной переменной 549
625
X
Характеристики уравнения с частными
производными 463
Характеристический многочлен
линейного преобразования 166
Характеристическое уравнение
линейного преобразования 16$
- - дня дифференциального у равнения
442,449,463
Характеристические числа линейного
преобразования 165
ц
I (елая по южительная степень матрицы 104
Центр кривизны 252
- тяжести материальной дут и 374
----поверхности 386
— пласт инки 340
— системы масс 9
— тела 341,358
- распределения 529
Цепная линия 55
Циклоида 13
- удлиненная 50
- укороченная 50
Цилиндр гиперболический 92
- параболический 92
- эллиптический 92
1(иркуляция векторного тюля 478
Циссоида 39
ч
Частная производная функции
нескольких переменных 305
Часпкте двух пар упорялоченных чисел 127
Частные проигводные высших
гктрядков 310
Частота события 520
— относительная 520
— условная 520
- варианты 538
— относительная 538
Числовые характеристики случайных
величин 532
Число* 212
- мнимое 128
ш
lUap n-мерный замкнутый 301
— открытый 301
э
Эвольвента 252
Эволюта 252
Экстремум функции у-fix) 241
— нескольких переменных 314
— условный 316
Эксиенгриситет гиперболы 27
- эллипса 25
Элсмент(ы) группы 187
- - нейтральный 187
• - обратный 187
- - сопряженные 197
- линейного пространства (вектор) 150
--нормированный 160
- - - нулевой 150
--противоположный 150
- матрицы 99
- определителя 106
- 1к*следовательности 203
Элемеигарныс дроби 148
• преобразования матриц 102
— линейной системы уравнений 117
- функции 202
- - основные 202
Эллипс 25
- вершины 32
параметрические уравнения 31
- уравнение, огнесенное к вершине 31
Эллипсоид 91
' вращения 90
Эмпирические формулы 545
Эпитрохоида 48
Эпициклоида 48
Я
Якобиан (функциональный определитель)
327,353
626
СОДЕРЖАНИЕ
Предисловие
3
I АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ
4
Глава 1. Координаты на прямой, на плоскости, в пространстве 4
1.1. Координаты на прямой 4
1.2. Координаты на плоскости 5 .
1.3. Расстояние между двумя точками 7
1.4. Деление отрезка в данном отношении 7
1.5. Центр тяжести системы масс 9
1.6. Площадь треугольника 9
1.7. Уравнение линии в декартовых координатах 10
1.8. Пересечение линий II
1.9. Уравнение линии в полярных координатах 12
1.10. 11арамстрнчсские уравнения линии 13
1.11. 11реобраэования декартовых 14
1.12. Прямоугольные декартовы координаты в пространстве 15
1.13. Расстояние между двумя точками в пространстве 16
1.14. Цилиндрические и сферические координаты 17
Глава 2. Линии на плоскости 19
2.1. Прямая на плоскости 19
2.2. Окружность 25
2.3. Эллипс 25
2.4. Гипербола 27
2.5. Парабола 28
2.6. Полярное уравнение эллипса, гиперболы, параболы 29
2.7. Некоторые другие виды уравнений линий второго порядка 31
2.8. Упрощение уравнения второй степени, не содержащего члена с
произведением координат 33
2.9. Упрощение общего уравнения второй степени 35
2.10. Некоторые алгебраические линии высших порядков 39
2.11. Некоторые трансцендентные линии 49
627
Глава 3. Векторы 35
3.1. Основные понятия 55
3.2. Линейные операции над векторами 56
3.3. Проекция вектора на ось 58
3.4. Декартовы прямоугольные координаты вектора в пространстве.
Дтина вектора Направляющие косинусы вектора 59
3.5. Переход от векторных соотношений к координатным 61
3.6. Скалярное произведение двух векторов 62
3.7. Правые и левые тройки векторов. Правые и левые системы
координат 64
3.8. Некторное произведение двух векторов 65
3.9. Смешанное произведение трех векторов 67
3.10. Линейная зависимость векторов 69
3.11. Аффинные координаты 70
Глава 4. Поверхности и линии в пространстве 72
4.1. Уравнение поверхности. Уравнения линии в пространстве 72
4.2. Параметрические уравнения линии и поверх пост и 73
4.3. Различные виды уравнения плоскости 75
4.4. Различные вилы у равнений прямой в пространстве 80
4.5. Задачи, относящиеся к плоскост ям 81
4.6. Задачи, относящиеся к прямым в пространстве 83
4.7. Задачи на прямую и плоскость 85
4 8. Цилиндрические поверхности Поверхности вращения 89
4.9. Поверхности второго порядка 91
4.10. Некоторые другие поверхности 96
II АЛГЕБРА 99
Глава 5. Матрицы и определители 99
5.1. Матрицы. Основные определения 99
5.2. Линейные действия над матрицами 102
5.3. Произведение матриц. Многочлены от матриц 103
5.4. Определители и их свойства 105
5.5. Обратная матрица 109
5.6. Ранг матрицы 114
628
Глава 6. Системы линейных уравнений
116
6.1. Линейные системы. Основные определения 116
6.2. Матричная запись линейной системы 117
6.3. Невырожденные линейные системы 119
6.4. Произвольные линейные системы 121
6.5 Метол Гаусса 122
Глава 7. Комплексные числа 127
7.1. Упорядоченные пары действительных чисел и операции нал
ними 127
7.2. Понятие комплексного числа Алтебраическая форма
комплексною числа 128
7.3. Геометрическое изображение комплексных чисел 129
7.4. Действия нал комплексными числами 130
7.5. Модуль и аргумент комплексного числа. Тригонометрическая
форма комплексного числа 132
7.6. Действия над комплексными числами, заданными в
тригонометрической форме 134
Глава 8. Алгебраические уравнения 137
8.1 Алгебраические многочлены 137
8.2. Корни многочлена Теорема Безу 139
8.3. Квадратные уравнения 142
8.4. Кубические уравнения 143
8.5. Уравнения четвертой степени 145
8.6. Решение алгебраических уравнений способом разложения
многочлена 146
8.7. Разложение дробной рациональной функции в сумму
элементарных дробей 147
Глава 9. Линейные пространства 150
9.1. Линейное пространство Подпространство 150
9.2. Линейная зависимость и линейная независимость векторов
линейного пространства 152
9.3. Размерность и базис линейного пространства. Изоморфизм
линейных пространств 153
9.4. Координаты вектора линейного пространства 154
629
9.5. Ранг системы векторов линейного пространства 155
9.6. Преобразование координат вектора при изменении базиса 156
9.7. Евклидово пространство 157
9.8. Унитарное пространство 161
Глава 10. Линейные преобразования (линейные операторы) 162
10.1. Линейное преобразование и его матрица 162
10.2. Линейное преобразование в координатах 164
10.3. Зависимость между матрицами одного и того же
преобразования в различных базисах. Подобные матрицы 165
10.4. Характеристическое уравнение линейного преобразования 165
10.5. Собственные векторы линейного преобразования 167
10.6. Приведение матрицы линейного преобразования к
диагональному виду 169
10.7. Действия над линейными преобразованиями 170
10.8. Невырожденные линейные преобразования. Преобразование,
обратное данному 171
10.9. Ортогональные матрицы 172
10.10. Ортогональные преобразования 173
Глава 11. Квадратичные формы 174
11.1. Квадратичная форма и ее матрица 174
11.2. Преобразование квадратичной формы при линейном
однородном преобразовании переменных 175
11.3. 11ривсление действительной квадратичной формы к
нормальному виду 176
114. Закон инерции квадратичных форм 177
11.5. Знакоопрсделснные квадратичные формы 177
11.6. Приведение квадратичной формы к каноническому виду
ортогональным преобразованием переменных 178
11.7. Упрощение уравнений фигур второго порядка на
плоскости 180
11.8. Упрощение уравнений фигур второго порядка в
прос1ранстве 183
Глава 12. Группы 187
12.1. Понятие группы. Основные определения 187
12.2. Примеры групп 188
12.3. Подгруппа 189
12.4. Группы преобразований. Симметрическая труппа
и-й степени 190
630
12.5. Группа вращений правильного многоугольника. Циклические
группы. Группа симметрий правильного треугольника 193
12.6. Изоморфизм групп 194
12.7 Разложение группы по подгруппе 195
12.8. Нормальный делитель 196
12.9. Классы сопряженных элементов 196
12.10. Фактор-i ру ина 197
12.11. Гомоморфизм групп 198
12.12. Представления ipynn 199
III МАТЕМАТИЧЕСКИЙ АНАЛИЗ 200
«*•
Глава 13. Функции и пределы 200
13.1. Понятие функции. Основные определения 200
13.2. Предел последовательности 202
13.3. Предел функции 205
13.4. Бесконечно малые функции и их свойства 207
13.5. Сравнение бесконечно малых функций 208
13.6. Бесконечно большие функции 210
13.7. Основные теоремы о пределах функций 211
13.8. Некоторые важные пределы 211
13.9. Непрерывность функции 214
13.10. Точки разрыва функции 216
13.11. Показательная функция Гиперболические функции 218
Глава 14. Производным и дифференциалы 220
14.1.1 1онятис производной, ее геометрический и физический
смысл 220
14.2. Основные правила дифференцирования 223
14.3. Основные формулы дифференцирования 224
14.4. Дифференциал функции 228
14.5. Основные теоремы дифференциального исчисления 232
14.6. Формула Тейлора 233
14.7. Формула Тейлора для некоторых функций 234
14.8. Приближенные формулы 235
Глава 15. Приложения Производной 237
15.1. Правило Лопиталя-Бернулли 237
15.2. Признаки постоянства, возрастания и убывания функции 240
15.3. Экстремум функции 241
15.4. Направления выпуклости, точки перегиба 244
15.5. Асимптоты 245
631
15.6. Исследование функций и построение их (рафиков 246
15.7. Задачи на наибольшие и наименьшие значения 248
15.8. Дифференциал длины дуги кривой 249
15.9. Кривизна плоской кривой 250
15.10. Окружность кривизны. Центр и радиус кривизны. Эволюта и
эвольвента 252
15.11. Переменная векторная величина Вектор-функция скалярного
аргумента 252
15.12. Дифференцирование всктор-функций 254
15.13. Уравнения касательной к пространственной линии Кривизна
пространственной линии 256
Глава 16. Неопределенный интеграл 259
16.1. Неопределенный интеграл и его свойства. Таблица основных
неопределенных интегралов 259
162. Непосредственное интегрирование 262
16.3. Метод подстановки 263
16.4. Метод интегрирования по частям 265
16.5. Иигетрированне рациональных дробей с квадратным
трехчленом в знаменателе 269
16.6. Интегрирование рациональных функций 270
16.7. Интегрирование простейших иррациональных функций 272
16.8. Интегрирование некоторых тригонометрических выражений 275
Глава 17. Определенный интеграл 278
17 1. Определенный интеграл, его геометрический смысл и
свойства 278
17.2. Определенный интеграл с переменным верхним пределом
Формула Ньютона - Лейбница 281
17.3. Замена переменной в определенном интеграле.
Интегрирование по честям 283
17.4. Оценка определенного интеграла. Теорема о среднем 285
17.5. Несобственные интегралы 286
17.6. Интегралы Эйлера 290
17.7 Площадь криволинейной фигуры 292
17.8 Длина дуги кривой 296
17.9. Объем тела Площадь поверхности вращения 298
Глава 18. Дифференциальное исчисление функций нескольких
переменных 301
18.1. Множества в л-мерном пространстве 301
18.2. Понятие функций нескольких переменных 303
18.3. Предел и непрерывность функций нескольких переменных 304
632
18.4. Частные производные функции нескольких переменных 305
18.5. Полный дифференциал функции нескольких переменных 307
18.6. Частные прои зводные и дифференциалы высших порядков
Формула Тейлора 310
18.7. Дифференцирование неявных и сложных функций 313
18.8. Экстремум функции нескольких переменных 314
18.9. Условный экстремум 316
18.10. Касательная плоскость и нормаль к поверхности 317
18.11. Семейства линий и их огибающие. Семейства поверхностей и
их огибающие 318
Глава 19 Двойной интеграл 320
19.1. Понятие двойного интеграла, его геометрический я
* механический смысл 320
19.2 Вычисление двойного интеграла в декартовых прямоугольных
координатах 322
19.3. Замена переменных в двойном интезрале. Двойной интеграл в
полярных координатах 326
19.4. Вычисление площадей плоских областей 330
19.5. Вычисление объемов тел 332
19.6. Вычисление площадей поверхностей 336
19.7. 11риложсния двойных интегралов в механике 340
19 8. Несобственные двойные интегралы 344
Глава 20. Тройной интеграл 349
20.1. Понятие тройное о интезраза Оценка тройное о интеграза 349
20.2. Вычисление тройзюго изпеграла в декартовых прямоу гользгых
коордиззазах 350
20.3. Замена переменных в тройном интеграле 353
20.4. 11риложения тройных изпезралов 357
Глава 21. Криволинейные интегралы 363
21.1. Криволинейные интегралы первого рода 363
21.2. Криволинейные интегралы второе о рода 367
21.3. Формула Грина. Условия независимости криволинейное о
интеграла от пути интегрирования 371
21.4. Приложения криволинейных изпезралов 373
Глава 22. Интегралы по поверхности 377
22.1. Поверхностные интезралы первого рода 377
22.2. 11овсрхностныс интезралы второго рода 381»
22.3. Формула Стокса. Формула Остро градского 384
22.4. 11риложения изпезралов по поверхности 386
633
Глава 23. Числовые ряды 389
23.1. Основные понятия. Необходимый признак сходимости 389
23.2. Ряды с положительными членами. 1 (ризнаки сходимости.
Признаки сравнения. Интегральный признак Коши 394
23.3. Признак Д’Аламбера. Признак Коши Другие признаки 397
23.4. Знакопеременные ряды 400
23.5. Действия над рядами 404
23.6. Некоторые числовые ряды и их суммы 405
Глава 24. Функциональные ряды 408
24.1. Сходимость функциональных рядов 408
24.2. Равномерная сходимость функциональных рядов 410
24.3. Степенные ряды. Действия над степенными рядами 412
24.4. Ряд Тейлора. Ряд Маклорена 417
24.5. Применения рядов в приближенных вычислениях 421
24.6. Ряды Фурье 422
24.7 Степенные ряды с комплексной переменной 427
IV ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ 431
Глава 25. Дифференциальные уравнения первого порядка 432
25.1. Уравнение с разделяющимися переменными 432
25.2. Однородные уравнения 433
25.3. Линейные уравнения Уравнение Бернулли 434
25.4 Уравнения в полных дифференциалах 436
25.5. Задачи, приводящие к дифференциальным уравнениям 437
Глава 26. Дифференциальные уравнения второго порядка 439
26.1. 11ростейшие дифференциальные уравнения второго порядка
Случаи понижения порядка 439
26.2. Линейные однородные дифференциальные уравнения второю
порядка с постоянными коэффициентами 442
26.3. Линейные неоднородные дифференциальные уравнения
второго порядка с постоянными коэффициентами 443
Глава 27. Дифференциальные уравнения высших порядков.
Системы дифференциальных уравнений 446
27.1. Основные понятия 446
27.2. Простейшие интегрируемые дифференциальные уравнения
высших порядков 447
634
27.3. Линейные однородные уравнения n-го порядка с постоянными
коэффициентами 449
27.4. Линейные неоднородные уравнения п-го порядка с
постоянными коэффициентами 451
27.5. Системы линейных дифференциальных уравнений с
постоянными коэффициентами 453
27.6. Нормальные системы дифференциальных у равнений 454
27.7. Применение матриц к решению систем дифференциальных
уравнений с постоянными коэффициентами 457
Глава 28. Дифференциальные уравнения с частными
производными 460
28.1. Основные определения 460
28.2 Линейные дифференциальные уравнения снастными
производными первого порядка 461
. 28.3. Линейные дифференциальные уравнения с частными
производными второго порезка 463
28.4. Основные дифференциальные уравнения математической
физики 467
Глава 29. Элементы векторного и тензорного анализа 471
29.1. Скалярное поле. I loeepx пости и линии уровня скалярного поля 471
29.2 Градиент скалярною поля. Производная по направлению 472
29.3. Векторное поле. Векторные линии 475
29.4. Поток векторною поля через поверхность Дивергенция
Соленонлальиое поле. Теорема Остроградского 476
29.5 Циркуляция векторною поля 478
29.6. Ротор векгорног о поля. Теорема Стокса 478
29 7.11отенциальнос поле 480
29.8. Оператор Гамильтона Операции второю порядка в векторном
анализе Оператор Лапласа 481
29.9. Полилинейные функции векторного аргумента. Понятие
тензоре 483
29.10. Действия над тензорами 486
29.11. Тензоры в евклидовом пространстве 488
29.12. Тензорное поле 489
V ЧИСЛЕННЫЕ МЕТОДЫ 491
Глава 30. Приближенное решение уравнений 491
30.1. Отделение корней уравнения 491
30.2. Метод хорд 492
635
30.3. Метод касательных 494
30.4. Метод итераций 495
30.5. Метод Чебышева 496
Глава 31. Интерполирование функций 497
31.1. Интерполяционный многочлен Лагранжа 497
31.2. Разности различных порядков Разделенные разности 499
313. Интерполяционный многочлен Ньютона 501
Глава 32. Приближенное вычисление определенных интегралов 505
32.1. Формулы прямоугольников 505
32.2. Формула трапеций 506
32.3. Формула парабол 507
32.4. Приближенное вычисление определенных интегралов с
помощью рядов 509
Глава 33. Приближенное решение дифференциальных уравнений 511
33.1. Интегрирование дифференциальных уравнений с помощью
рядов 511
33.2. Метол Эйлера 514
33.3. Метод Рунге - Кутта 515
VI ТЕОРИЯ ВЕРОЯТНОСТЕЙ И МАТЕМАТИЧЕСКАЯ
ОБРАБОТКА РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ 518
Глава 34. Случайные события и их вероятности 518
34.1. Классификация событий 518
34.2. Действия над событиями. Соотношения между событиями 518
34.3. Различные определения вероятности события 519
34.4. Условная вероятность. Теорема умножения вероятностей
Независимость событий 522
34.5. Формула полной вероятности Формулы Вейсса 525
Глава 35. Случайные величины, их распределения и числовые
характеристики 526
35.1. Дискретные случайные величины 526
35.2. Функция распределения Плотность распределения 527
35.3. Математическое ожидание случайной величины 529
35.4. Дисперсия случайной величины 530
636
35.5. Некоторые другие числовые характеристики 532
35.6. Некоторые законы распределения случайных величин 533
35.7. Основные теоремы теории вероятностей 536
Глава 36. Элементы математической статистики и
математической обработки результатов измерений 538
36.1 Основные понятия математической статистики 538
36.2. Доверительный интервал Доверительная вероятность 542
36.3. Опенка точного значения измеряемой величины 543
36.4. Оценки точности измерений 544
36.5. Эмпирические формулы 545
VII ТЕОРИЯ ФУНКЦИЙ КОМПЛЕКСНОЙ ПЕРЕМЕННОЙ
И ОПЕРАЦИОННОЕ ИСЧИСЛЕНИЕ 547
Глава 37. Элементы теории функций комплексной переменной 547
37.1. Ноняпге функции комплексной переменной Предел и
непрерывность 547
37.2. Основные элементарные функции комплексной переменной 549
37.3. Дифференцирование функций комплексной переменной 553
37 4 Интегрирование функций комплексной переменной 556
375. Интегральная формула Коши 561
37.6. Ряд Тейлора. Ряд Лорана 563
37.7. Нули фу нкции. Особые точки 569
37.8. Вычеты функций 573
Глава 38. Элементы операционного исчисления 578
38.1. Оригинал и изображение 578
38.2. Основные правила и формулы операционного исчисления 580
38.3. Основные теоремы операционного исчисления 585
38.4. Решение дифференциальных уравнений и их систем 589
11риложение. Некоторые оригиналы и их изображения 597
Некоторые математические знаки и даты их возникновения 599
Биографический словарь 601
Предметный указатель 615
637
Справочное издание
Гусак Алексей Адамович
Гусак Галина Максимовна
Бричикова Елена Алексеевна
Справочник но высшей математике
Главный редактор А.Ф Мясников
Редактор С В Процко
Дизайн обложки С.А.Дсмидовой и Н.Б.Борковского.
Подписано в печать 22.12.98.
Формат 60x84 1/16. Бумага для офсетной печати Гарнитура Таймс.
Печать офсетная. Печ.л. 40. Усл.печ.л. 67.2. Тираж 5000 зкз.
Заказ I
НТООО “ТетраСистемс” (Лицензия ЛВ№76от 19.11.97 до 19 11.2002).
220036. Минск. пср.Домашсвский, IIA-508.
11ри участии ООО "НТЦ АНИ' (Лицензия Л В Nr 52 от 22.10.97 до 22.10.2002)
220102, Минск, ул.Социалистичсская. 9-102.
Качест во печати соответствует качеству представленных
издателем диапозитивов.
Отпечатано с готовых диапозитивов заказчика
в типографии издательства “Белорусский Дом печати"
220013, Минск, пр.Ф.Скорины, 79.