/




















































































































































































































































































































































































































































































































































































































































































































































































































Author: Воробьев А.А.
Tags: физика математика математическая физика кинематика классическая механика
Year: 2016




Text
ОГЛАВЛЕНИЕ
Принятые сокращения и обозначения............................. 11
Предисловие................................................... 20
1. Механика................................................... 23
1.1. Кинематика............................................ 24
1.1.1. Кинематика материальной точки. Кинематика
поступательного движения твердого тела............... 24
1.1.2. Кинематические характеристики вращательного движения 32
1.2. Динамика.............................................. 36
1.2.1. Первый закон Ньютона. Инерциальные системы отсчета . 36
1.2.2. Принцип относительности Галилея. Преобразования
Галилея................................................ 38
1.2.3. Второй закон Ньютона. Некоторые задачи динамики
движения тел........................................... 41
1.2.4. Третий закон Ньютона................................ 49
1.2.5. Классификация сил в механике........................ 49
1.2.6. Неинерциальные системы отсчета. Силы инерции.
Принцип Д’Аламбера..................................... 52
1.2.7. Система материальных точек. Внутренние и внешние силы 55
1.2.8. Задание состояния системы материальных точек... 58
1.2.9. Динамика вращательного движения..................... 59
1.3. Работа, энергия и мощность............................... 67
1.3.1. Работа силы и момента силы.......................... 67
1.3.2. Мощность............................................ 69
1.3.3. Кинетическая энергия................................ 70
1.3.4. Силовое поле........................................ 72
1.3.5. Потенциальная энергия............................... 75
1.4. Законы сохранения в механике............................. 81
1.4.1. Закон сохранения энергии в механике................. 81
1.4.2. Закон сохранения импульса........................... 83
1.4.3. Закон сохранения момента импульса................... 84
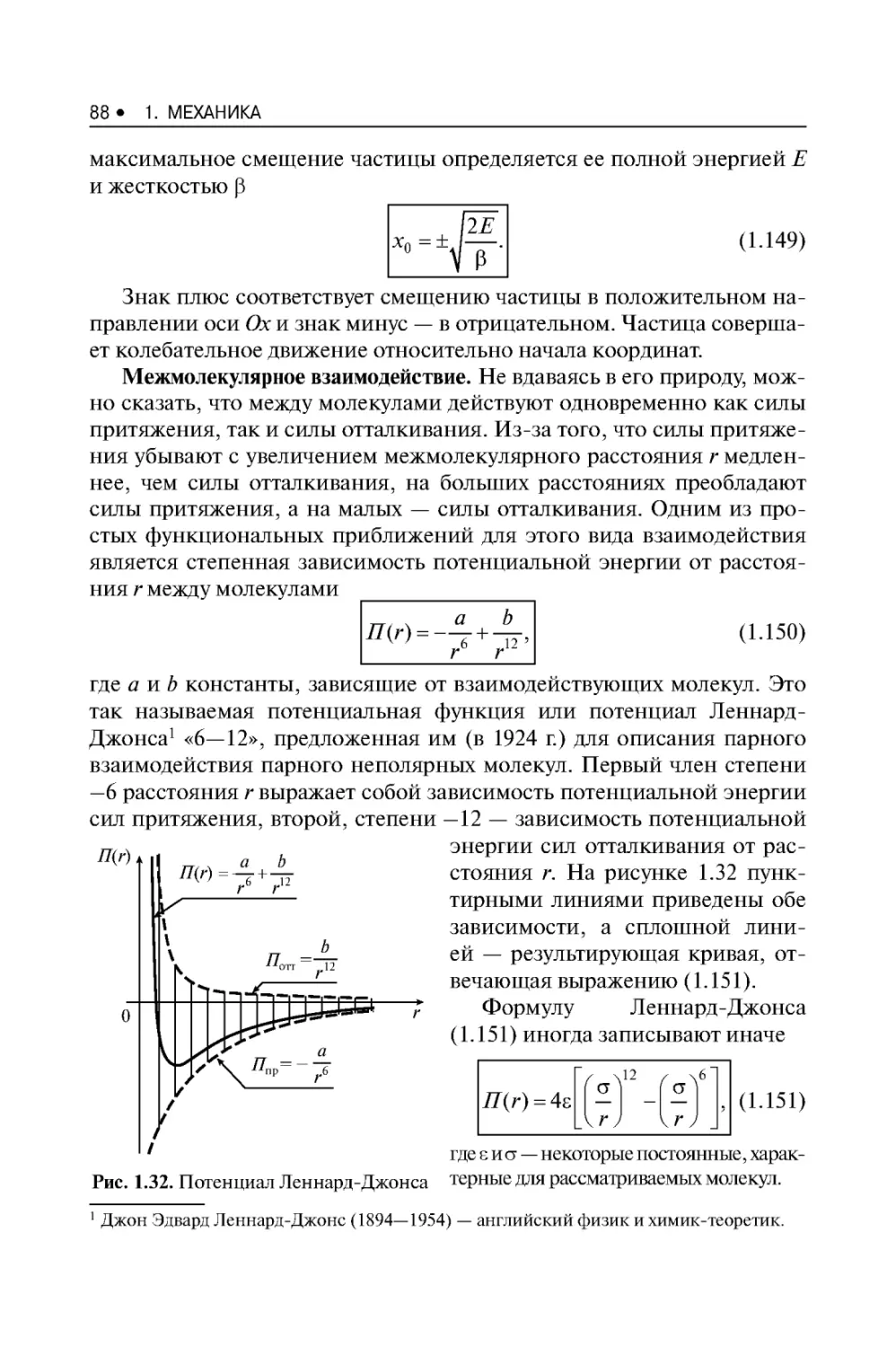
1.4.4. Потенциальные кривые................................ 85
1.4.5. Столкновения частиц................................. 91
1.5. Общие представления о пространстве, времени, энергии, массе
и гравитации.............................................. 100
1.5.1. Общие положения теории относительности............. 100
1.5.2. Специальная теория относительности................. 103
1.5.3. Гравитация (основные принципы общей теории
относительности Эйнштейна)............................ 123
1.5.4. Основные выводы.................................... 126
4 • ОГЛАВЛЕНИЕ
2. Колебания и волны....................................... 128
2.1. Колебательное движение............................... 128
2.2. Кинематика гармонических колебаний................... 130
2.3. Сложение гармонических колебаний..................... 137
2.3.1. Сложение колебаний одного направления.......... 137
2.3.2. Сложение двух колебаний одного направления с мало
отличающимися частотами. Биения....................... 140
2.3.3. Сложение взаимно перпендикулярных колебаний.... 142
2.4. Динамика гармонического колебательного движения...... 145
2.4.1. Дифференциальное уравнение гармонических колебаний . 145
2.4.2. Пружинный маятник.............................. 145
2.4.3. Математический маятник......................... 147
2.4.4. Физический маятник............................. 148
2.4.5. Двухатомная молекула как линейный гармонический
осциллятор............................................ 150
2.5. Энергия гармонических колебаний...................... 152
2.6. Затухающие колебания................................. 155
2.7. Вынужденные колебания................................ 160
2.8. Волны................................................ 167
2.8.1. Общие сведения................................. 167
2.8.2. Уравнение плоской бегущей волны................ 171
2.8.3. Энергия волн................................... 176
2.8.4. Акустический эффект Доплера.................... 181
2.9. Сложение волн........................................ 183
2.9.1. Принцип суперпозиции волн...................... 183
2.9.2. Стоячие волны.................................. 186
2.9.3. Колебания струны............................... 189
2.9.4. Группа волн. Групповая скорость................ 190
2.9.5. Понятие о фононах.............................. 193
3. Элементы механики сплошных сред......................... 195
3.1. Основы гидростатики.................................. 195
3.1.1. Передача давления в жидкости................... 195
3.1.2. Закон Паскаля.................................. 196
3.1.3. Выталкивающая сила Архимеда.................... 199
3.1.4. Сила поверхностного натяжения.................. 200
3.2. Гидродинамика. Течение несжимаемой жидкости.......... 202
3.2.1. Ламинарное и турбулентное течение. Число Рейнольдса.
Закон Хагена — Пуазёйля............................... 203
3.2.2. Условие неразрывности потока................... 206
3.2.3. Давление жидкости на стенки трубы. Уравнение Бернулли. 208
3.2.4. Формула Торричелли............................. 212
4. Молекулярная физика..................................... 214
Оглавление • 5
4.1. Молекулярно-кинетическая теория идеального газа............... 216
4.1.1. Функция распределения................................... 216
4.1.2. Модель идеального газа.................................. 222
4.1.3. Абсолютная температура и температурные шкалы..... 228
4.2. Распределение молекул газа по потенциальной энергии
(распределение Больцмана)................................... 229
4.2.1. Идеальный газ во внешнем силовом поле................... 229
4.2.2. Барометрическая формула................................. 232
4.2.3. Центрифугирование....................................... 233
4.2.4. Распределение Больцмана и фактор Больцмана.............. 236
4.3. Распределение молекул идеального газа по кинетическим
параметрам (распределение Максвелла)........................ 238
4.3.1. Классическое распределение Максвелла — Больцмана . . . 238
4.3.2. Распределение Максвелла по абсолютным значениям
скорости частиц......................................... 239
4.3.3. Распределение Максвелла по кинетическим энергиям
частиц.................................................. 244
4.4. Статистические флуктуации..................................... 246
4.5. Тепловые свойства систем, состоящих из многих частиц... 249
4.5.1. Кинетическая теория теплоты............................. 250
4.5.2. Тепловая энергия........................................ 251
4.5.3. Основы термодинамического метода........................ 252
4.5.4. Равновесные состояния................................... 253
4.5.5. Нулевой закон термодинамики — распределение энергии
между частицами в ТДС................................... 255
4.5.6. Закон о равномерном распределении энергии
по степеням свободы..................................... 257
4.5.7. Первое начало термодинамики............................. 262
4.5.8. Теплоемкость идеального газа. Работав изопроцессах . . . 265
4.5.9. Теоретические и экспериментальные значения
теплоемкостей идеальных газов.................................. 271
4.5.10. Второе начало термодинамики. Цикл Карно................ 275
4.5.11. Энтропия. Другие термодинамические функции...... 285
4.5.12. Тепловая теорема Нернста............................... 296
4.6. Газ Ван-дер-Ваальса........................................... 298
4.6.1. Уравнение состояния ван-дер-ваальсовского газа... 298
4.6.2. Внутренняя энергия реального газа....................... 304
4.6.3. Эффект Джоуля — Томсона................................. 305
4.7. Элементы физической кинетики.................................. 308
4.7.1. Процессы переноса. Релаксация........................... 309
4.7.2. Явления переноса в идеальных газах...................... 311
4.7.3. Макроскопическое представление коэффициента переноса 313
4.7.4. Диффузия................................................ 316
6 • ОГЛАВЛЕНИЕ
4.7.5. Теплопроводность................................. 318
4.7.6. Вязкость или внутреннее трение................... 320
4.7.7. Сопоставление характеристик явлений переноса..... 323
4.7.8. Явления переноса в условиях вакуума.............. 325
4.7.9. Особенности движения тел в вязкой среде.......... 329
4.8. Химические реакции..................................... 333
4.8.1. Закон Аррениуса.................................. 333
4.8.2. Разветвленные цепные химические реакции.......... 337
5. Статическое поле электрических зарядов. Диэлектрические
свойства вещества............................................. 340
5.1. Электростатическое поле................................ 340
5.1.1. Основные законы электростатики................... 341
5.1.2. Напряженность электростатического поля........... 342
5.1.3. Теорема Остроградского — Гаусса.................. 346
5.1.4. Работа сил электростатического поля. Потенциал... 359
5.1.5. Электрический диполь............................. 363
5.1.6. Потенциал поля произвольно распределенного
в пространстве заряда.................................. 367
5.2. Диэлектрические свойства веществ в связи с их строением . ... 371
5.2.1. Проводники и диэлектрики. Общие положения........ 371
5.2.2. Феноменологические (макроскопические) свойства
диэлектриков........................................... 373
5.2.3. Мйкроскопические характеристики диэлектриков..... 377
5.2.4. Типы поляризации................................. 380
5.2.5. Зависимость поляризуемости от частоты переменного
электрического поля.................................... 387
5.2.6. Локальное поле в диэлектрике. Поле Лоренца....... 390
5.2.7. Формула Клаузиуса — Мосотти...................... 393
5.2.8. Опытное определение поляризуемости и электрического
дипольного момента молекул............................. 396
6. Поле постоянных токов. Магнитные свойства вещества........ 399
6.1. Основные характеристики магнитного поля................ 399
6.1.1. Постоянный электрический ток..................... 399
6.1.2. Магнитная индукция поля токов.................... 406
6.1.3. Закон полного тока (тока проводимости)........... 411
6.1.4. Действие магнитного поля на проводник с током
и на движущийся заряд................................... 414
6.1.5. Магнитный дипольный момент в магнитном поле...... 421
6.1.6. Электромагнитная индукция. Закон Фарадея......... 423
6.2. Магнитные свойства магнетиков.......................... 428
6.2.1. Атомный магнетизм................................ 429
6.2.2. Макроскопические свойства магнетиков............. 431
Оглавление • 7
6.2.3. Магнитное поле в магнетике....................... 433
6.2.4. Микроскопическая картина намагничивания.......... 436
6.3. Магнитоупорядоченные состояния........................ 448
6.3.1. Ферромагнетизм................................... 449
6.3.2. Домены. Кривая намагничивания ферромагнетика.... 451
6.3.3. Антиферро- и ферримагнетики...................... 454
6.4. Уравнения Максвелла................................... 455
6.4.1. Ток смещения..................................... 457
6.4.2. Электромагнитная волна........................... 459
6.4.3. Уравнение непрерывности в электродинамике........ 468
7. Волновая оптика и квантовооптические явления.............. 469
7.1. Физика электромагнитных волн оптического диапазона... 470
7.2. Интерференция......................................... 474
7.2.1. Сложение двух световых волн одинаковой частоты
и направления распространения.......................... 474
7.2.2. Интерференция в тонких пленках................... 475
7.3. Дифракция............................................. 484
7.3.1. Принцип Гюйгенса — Френёля. Зоны Френеля......... 484
7.3.2. Дифракция на одной прямоугольной щели............ 486
7.3.3. Дифракционная решетка............................ 488
7.3.4. Дифракционная решетка как спектральный прибор... 491
7.3.5. Дифракция рентгеновских лучей.................... 493
7.4. Поляризация........................................... 495
7.4.1. Поляризованный свет.............................. 495
7.4.2. Закон Малюса..................................... 497
7.4.3. Поляризация при отражении. Закон Брюстера........ 498
7.4.4. Вращение плоскости поляризации................... 498
7.4.5. Двойное лучепреломление. Призма Николя........... 500
7.5. Дисперсия света....................................... 504
7.6. Квантово-оптические явления........................... 506
7.6.1. Экспериментальные законы излучения абсолютно
черного тела............................................ 506
7.6.2. Теория излучения абсолютно черного тела с точки зрения
волновых представлений. Формула Рэлея — Джинса .... 511
7.6.3. Гипотеза квантов. Формула Планка. Свет с волновой
и квантовой точек зрения............................... 514
7.6.4. Фотоэффект и другие квантово-оптические явления .... 518
7.7. Теория атома Бора..................................... 527
7.7.1. Краткая предыстория современного атомизма........ 527
7.7.2. Постулаты и правило квантования Бора............. 531
7.7.3. Недостатки теории Бора и ее дальнейшее развитие.
Принцип соответствия.................................... 535
8 • ОГЛАВЛЕНИЕ
8. Элементы квантовой механики.............................. 538
8.1. Корпускулярно-волновой дуализм....................... 538
8.1.1. Гипотеза де-Бройля.............................. 538
8.1.2. Дифракция электронов и нейтронов................ 539
8.2. Соотношение неопределенностей Гейзенберга............ 542
8.3. Волновая функция и уравнение Шредингера.............. 546
8.3.1. Вероятностная трактовка волновой функции и квадрата
ее модуля.............................................. 546
8.3.2. Уравнение Шредингера............................ 548
8.3.3. Стандартные условия, которым должна удовлетворять
волновая функция....................................... 550
8.4. Наиболее общие задачи квантовой механики............. 551
8.4.1. Свободная частица............................... 551
8.4.2. Частица в бесконечно глубокой потенциальной яме
и потенциальной яме конечной глубины................... 553
8.4.3. Потенциальная ступень........................... 560
8.4.4. Потенциальный барьер. Туннельный эффект......... 562
8.4.5. Туннельный эффект в химии....................... 566
8.5. Атом водорода........................................ 569
8.5.1. Уравнение Шредингера для атома водорода: переход
к сферическим координатам и разделение переменных. . . 570
8.5.2. Собственные значения проекции L- орбитального
момента импульса электрона............................. 573
8.5.3. Решение уравнения Шредингера для абсолютного
значения момента импульса ротатора. Векторы момента
импульса в квантовой механике, пространственное
квантование. Магнитный момент одноэлектронного атома 575
8.5.4. Решение уравнения Шредингера для радиальной части
волновой функции. Квантование энергии электрона . ... 581
8.5.5. Спин электрона.................................. 583
8.5.6. Квантовые числа, характеризующие состояние электрона
в атоме водорода....................................... 585
8.5.7. Атомные орбитали................................ 586
8.5.8. Спин-орбитальное взаимодействие................. 592
8.6. Многоэлектронный атом................................ 594
8.6.1. Типы связи электронов в атоме................... 594
8.6.2. Магнитный момент и векторная модель
многоэлектронного атома. Фактор Ланде............. 597
8.6.3. Атомные термы................................... 601
8.6.4. Характеристическое рентгеновское излучение. Закон
Мозли.................................................. 602
8.7. Атом в магнитном поле: эффект Зеемана................ 605
8.8. Квантовый осциллятор и квантовый ротатор............. 610
Оглавление • 9
8.8.1. Квантовый гармонический и ангармонический
осцилляторы............................................. 611
8.8.2. Квантовый жесткий ротатор........................ 617
8.9. Основные положения квантовой статистики............... 618
8.9.1. Задание состояний системы частиц в квантовой статистике 618
8.9.2. Статистика Бозе — Эйнштейна...................... 627
8.9.3. Статистика Ферми—Дирака.......................... 630
8.9.4. Статистика Больцмана............................. 630
8.9.5. Особенности распределения Бозе — Эйнштейна....... 632
8.9.6. Особенности распределения Ферми — Дирака......... 637
9. Основы физики ядра, элементарные частицы.................. 643
9.1. Ядро атома. Общие характеристики ядер................. 643
9.2. Электрические и магнитные характеристики ядра......... 644
9.2.1. Момент импульса и магнитный момент ядра.......... 644
9.2.2. Распределение электрического заряда в ядре....... 646
9.2.3. Квадрупольный момент ядра........................ 648
9.3. Ядерныесилы........................................... 651
9.4. Модели ядра........................................... 653
9.5. Ядерные реакции....................................... 656
9.6. Радиоактивное излучение и его взаимодействие с веществом. . . 661
9.7. Внутриатомные электронно-ядерные взаимодействия....... 670
9.7.1. Электростатическое взаимодействие ядра
с окружающими его зарядами.............................. 670
9.7.2. Кулоновское взаимодействие электронной оболочки
с точечным ядром........................................ 673
9.7.3. Кулоновское взаимодействие электронной оболочки
с ядром конечных размеров. Химический (изомерный)
сдвиг................................................... 674
9.7.4. Энергия взаимодействия квадрупольного момента ядра
с градиентом напряженности электрического поля.
Квадрупольное расщепление............................... 677
9.7.5. Взаимодействие магнитного момента ядра с электронной
оболочкой............................................... 678
9.7.6. Резонансное поглощение у-квантов. Эффект Мессбауэра . 680
9.7.7. Ядерный магнитный резонанс....................... 685
9.8. Элементы дозиметрии и радиационной безопасности....... 689
9.9. Элементарные частицы.................................. 692
9.9.1. Классификация элементарных частиц................ 693
9.9.2. Кварковая модель адронов......................... 696
9.9.3. Элементарные частицы и космология................ 698
10. Физика твердого тела..................................... 703
10.1. Структура кристалла, кристаллическая решетка......... 703
10 • ОГЛАВЛЕНИЕ
10.2. Электроны в кристаллах................................... 709
10.2.1. Образование энергетических зон...................... 709
10.2.2. Элементы квантовой статистики электронов в кристаллах 712
10.2.3. Зонная теория твердых тел........................... 716
10.3. Динамика решетки и теплоемкость твердых тел.............. 718
10.3.1. Модель Борна — Кармана и дисперсионные кривые.... 718
10.3.2. Энергия колебаний и теплоемкость твердого тела. 724
10.4. Дефекты в кристаллах..................................... 738
10.4.1. Точечные дефекты.................................... 739
10.4.2. Дислокации.......................................... 741
10.5. Явления переноса в твердых телах и жидкостях............. 744
10.6. Некоторые практически важные электрические свойства
кристаллов................................................. 750
11. Экспериментальные физические методы.......................... 759
11.1. Понятие об атомной и молекулярной спектроскопии.......... 760
11.2. Резонансные методы....................................... 764
11.2.1. Гамма-резонансная (мессбауэровская) спектроскопия... 765
11.2.2. Применение ядерного магнитного резонанса в химии ... 771
11.2.3. Электронный парамагнитный резонанс.................. 781
11.2.4. Возможности ядерного квадрупольного резонанса.. 784
11.3. Рентгеновский флюоресцентный анализ...................... 785
11.4. Нейтронно-активационный анализ........................... 788
Предметный указатель.............................................. 791
Список литературы................................................. 799
ПРИНЯТЫЕ СОКРАЩЕНИЯ И ОБОЗНАЧЕНИЯ
АДФ ATT АТФ ГРС ИКС КИЭ кпд МТ НАА НУ ОТО ПМР РФА СВЧ СИ СТО тдс тмс тит УФС ЦЕРН эдс ЭПР ЯКР ЯМР а осат О^ион О^ор 0СБ [ос] р — аденозиндифосфат — абсолютно твердое тело — аденозинтрифосфат — гамма-резонансная спектроскопия — инфракрасная спектроскопия — коэффициент использования энергии — коэффициент полезного действия — материальная точка — нейтронно-активационный анализ — нормальные условия — общая теория относительности — протонный магнитный резонанс — рентгеновский флюоресцентный анализ — сверхвысокая частота — System International (международная система единиц) — специальная теория относительности — термодинамическая система — тетраметилсилан — тринитротолуол — спектроскопия ультрафиолетового излучения — Европейский центр ядерных исследований — электродвижущая сила — электронный парамагнитный резонанс — ядерный квадрупольный резонанс — ядерный магнитный резонанс — поляризуемость, постоянная тонкой структуры — поляризуемость атомная — — ионная — — электронная — — ориентационная — угол Брюстера — удельная постоянная вращения — жесткость (коэффициент упругости), коэффициент ква- зиупругости связи
X — магнитная восприимчивость, коэффициент температуро- проводности
12 • ПРИНЯТЫЕ СОКРАЩЕНИЯ И ОБОЗНАЧЕНИЯ
Худ Хм Г 1 — магнитная восприимчивость удельная — магнитная восприимчивость молярная — естественная ширина спектральной линии — фаза колебаний, показатель адиабаты (коэффициент Пуас- сона), коэффициент ангармоничности
А — символ приращения (изменения), оптическая разность хода лучей, оператор Лапласа
А7 Ах ^Рх ЛЕ А1/2 AQ АГ 5 — физически бесконечно малый объем — неопределенность координаты — — импульса — — энергии — слой половинного ослабления — объем ячейки фазового пространства — ячейка в фазовом пространстве — коэффициент затухания колебаний, межмолекулярное рас- стояние, химический (изомерный) сдвиг спектральной линии
52 8, 8 8 — приращение тепловой энергии (не полный дифференциал) — угловое ускорение — диэлектрическая проницаемость, кинетическая энергия молекулы, энергия кванта (фотона)
So — электрическая постоянная — средняя кинетическая энергия молекул, средняя энергия осцилляторов, приходящаяся на одно колебание
° вер ф Фд Ф(ср) ф ф Зв X — наиболее вероятная кинетическая энергия — поток, число фаз в ТДС — диффузионный поток — поток теплоты — компонента угловой части волновой функции — угловое перемещение — угол поворота, фаза колебаний, потенциал — диэлектрическая восприимчивость, мультиплетность терма — логарифмический декремент затухания, длина волны, сред- няя длина свободного пробега молекул, постоянная распада
X %- ц ц — длина волны (Х/2л) — диамагнитный момент — магнитный момент парамагнитной частицы — пространство (фазовое пространство) — приведенная масса, магнитная проницаемость, химиче- ский потенциал, линейный коэффициент ослабления (по- глощения)
Принятые сокращения и обозначения • 13
ц — ц-мезон (частица)
ц7 — магнитный момент ядра
цл — спиновый магнитный момент электрона
Цо — магнитная постоянная
ц5 — магнетон Бора
ця — ядерный магнетон
ц/ — орбитальный магнитный момент
цд z — проекция магнитного момента ядра на выделенное направ-
ление
цш — массовый коэффициент ослабления
v — частота колебаний, частота соударений молекул, количе-
ство моль вещества
ve — нейтрино (частица)
уе — антинейтрино (частица)
П — потенциальная энергия, молярная поляризация
Пэл — молярная поляризация электронная
Пат _ _ _ атомная
Пор _ _ _ ориентационная
71-, 71+-,
тс--, л°--71-мезоны (частицы)
г| — смещение при колебаниях, динамическая вязкость, (коэф-
фициент динамической вязкости), коэффициент полезно-
го действия (КПД)
0(0) — компонента угловой части волновой функции
Эя — характеристическая температура Эйнштейна
Эи — характеристическая температура Дебая
р — плотность вещества, объемность плотность электрического
заряда, удельное сопротивление проводника
рк — критическая плотность вещества
о — поверхностное натяжение, поверхностная плотность элек-
трического заряда, удельная электропроводность, эффек-
тивное сечение столкновений, постоянная экранирования,
постоянная в законе Стефана—Больцмана
о' — поверхностная плотность связанных зарядов
т — единичный вектор в направлении касательной
т — постоянная времени, время релаксации, время оседлой
жизни молекулы, линейная плотность электрического за-
ряда, время удержания плазмы, время жизни возбужденно-
го состояния, ядра
со. со — угловая (циклическая, круговая, радиальная) скорость (ча-
стота)
14 • ПРИНЯТЫЕ СОКРАЩЕНИЯ И ОБОЗНАЧЕНИЯ
со о — угловая частота свободных колебаний
со£ — частота ларморовской прецессии
®рез — резонансная частота
со£ — характеристическая частота Эйнштейна
со D — характеристическая частота Дебая
£(Z) — смещение от положения равновесия при колебаниях
Т — потокосцепление (полный магнитный поток)
V]/ — волновая функция
<|/* — комплексно сопряженная волновая функция
| V]/12 — квадрат модуля волновой функции
V — векторный оператор набла (оператор Гамильтона)
А — амплитуда колебаний, активность радиоактивного веще-
ства, массовое число, работа
— активность поверхностная, объемная, удельная
Лрез — резонансная амплитуда
Аых — работа выхода
а, а — ускорение
щ — касательное (тангенциальное) ускорение
ап — нормальное ускорение
а — поправка Ван-дер-Ваальса
а (со, 7) — поглощательная способность или коэффициент черноты
b — поправка Ван-дер-Ваальса, постоянная в законе Вина, под-
вижность носителей тока
В — индукция магнитного поля (магнитная индукция)
с — скорость света в вакууме
сУд — удельная теплоемкость
С — теплоемкость тела, электрическая емкость, емкость кон-
денсатора, константа Кюри
Су — теплоемкость при постоянном объеме
Ср — — при постоянном давлении
См — молярная теплоемкость
См>у — — — при постоянном объеме
См>р — — — при постоянном давлении
С* — коэффициент подъемной силы
Д D — индукция электрического поля (электрическая индукция)
D — Дебай (единица электрического дипольного момента),
энергия диссоциации, коэффициент диффузии, коэффи-
циент прозрачности потенциального барьера
Ар — угловая дисперсия дифракционной решетки
D} — линейная дисперсия дифракционной решетки
Принятые сокращения и обозначения • 15
d — эффективный диаметр молекулы, ширина потенциального
барьера, постоянная дифракционной решетки, межпло-
скостное расстояние в кристаллах
dl — элемент длины
df — фрактальная размерность
dU — приращение внутренней энергии (полный дифференциал)
Д Е — напряженность электрического поля
Док — локальное электрическое поле в диэлектрике
Е — полная энергия
Ei — энергия ионизации
Ео — энергия покоя
Еп — — /2-го квантового уровня
Eg — — запрещенной зоны (ширина)
— — Шотки
Ef — — Ферми
Ес — коэрцитивная сила для сегнетоэлектрика
g - эдс
— ЭДС индукции
— ЭДС самоиндукции
е — заряд электрона, электрон (частица), основание натураль-
ного логарифма (число)
е~ — электрон (частица)
е+ — позитрон (частица)
|е| — элементарный электрический заряд
eQ — электрический квадрупольный момент ядра
eQz — проекция квадрупольного момента ядра на выделенное на-
правление в пространстве
Е, F — сила, энергия Гельмгольца
Fc — сила сопротивления
// — сила Архимеда
Д — сила Лоренца
f (х) — функция распределения
/(со, 7) — функция Кирхгофа
/' — вероятность эффекта Мессбауэра (фактор Дебая — Баллера)
G — гравитационная постоянная, добротность, энергия Гиббса
G(r) — функция радиального распределения
g — ускорение свободного падения, группповая скорость, гиро-
магнитное отношение, фактор Ланде (g-фактор)
ga — ядерный g-фактор
16 • ПРИНЯТЫЕ СОКРАЩЕНИЯ И ОБОЗНАЧЕНИЯ
g(«>) Н, Н Н нс h h I — плотность фононного спектра — напряженность магнитного поля, энтальпия — постоянная Хаббла — коэрцитивная сила ферромагнетика — постоянная Планка — постоянная Планка (Л/2тг) — момент инерции, электрический ток (сила тока), интенсив- ность излучения (поглощения)
Iz Im 4 J, J Jm 4д j — момент инерции относительно оси Oz — мнимая часть комплексного числа — молекулярный ток — мнимая единица (), число степеней свободы — намагниченность магнетика — молярная намагниченность — удельная намагниченность — полное внутреннее квантовое число многоэлектронного атома
4ac Jr J, J Jew Jtn j — намагниченность насыщения — остаточная намагниченность ферромагнетика — плотность электрического тока — ток смещения — плотность потока массы жидкости — вращательное квантовое число, внутреннее квантовое число
к к к k k — кривизна кривой, скорость химической реакции — мезон (частица) — керма — волновой вектор — коэффициент сжимаемости, волновое число, показатель цикла (коэффициент использования (преобразования) энергии), коэффициент размножения нейтронов, порядок максимума (минимума)
kT Kn k къ Z, L — изотермический коэффициент сжимаемости — число Кнудсена — пространство (пространство волновых векторов) — постоянная Больцмана — момент импульса (механический момент), орбитальный момент
Принятые сокращения и обозначения • 17
L — приведенная длина физического маятника, длина объекта
(линии, контура, образца), индуктивность (коэффициент
самоиндукции), коэффициент линейной передачи энер-
гии, коэффициент ионизационных потерь, функция Лан-
жевена
Ln — квантованный момент импульса в теории Бора
Ls, Ls — спиновый момент импульса электрона
Ls, Ls — полный спиновый момент импульса атома
Lz — проекции момента импульса L на ось Oz (момент импуль-
са относительно оси Oz)
Ls z — проекция спинового механического момента на ось Oz
Lj — момент импульса (механический момент) ядра
Lj z — проекция момента импульса ядра на выделенное направ-
ление
Ll, Ll — полный орбитальный механический момент (момент им-
пульса) атома
Lj — полный механический момент атома
Lj z — проекция полного механического момента на ось Oz
I — плечо электрического диполя
I — орбитальное квантовое число электрона
М — момент силы относительно полюса
М — момент силы относительно оси, молярная масса
Mj, Mj — полный магнитный момент атома
т — масса, магнитное квантовое число
та — масса ос-частицы
— — фотона
те — — электрона
/77п — — атома водорода
mt — ядерное магнитное квантовое число
тп — масса нейтрона
тр — масса протона
mi — магнитное орбитальное квантовое число
— полное магнитное квантовое число
ms — магнитное спиновое квантовое число электрона
mt — ядерное магнитное квантовое число
п — вектор нормали (нормаль), единичный вектор направления
п — концентрация, показатель преломления, главное кванто-
вое число, нейтрон (частица)
18 • ПРИНЯТЫЕ СОКРАЩЕНИЯ И ОБОЗНАЧЕНИЯ
п na Р, Р -^эфф Р <Р> Р, Р Р Ратм Рк Рт <р> р Q — антинейтрон (частица) — число Авогадро — поляризованность — эффективный дипольный момент единицы объема — мощность, мощность дозы — средняя мощность — импульс, электрический дипольный момент — давление, протон (частица) — атмосферное давление — критическое давление — магнитный момент — среднее давление — антипротон (частица) — секундный объемный расход жидкости, тепловая энергия, электрический заряд, высота потенциального барьера
q *7эфф Г = И Г — электрический заряд, обобщенная координата — эффективный заряд молекулы — заряд протона — радиус-вектор — модуль радиус-вектора — коэффициент сопротивления, внутреннее сопротивление источника тока
Г(Ю, Т), r{K Т) — спектральная плотность энергетической светимости (ча- стотная, волновая)
Гп R — радиус/2-й боровской орбиты — радиус, универсальная газовая постоянная, постоянная Ридберга, сопротивление проводника, пробег частицы в веществе, энергия отдачи ядра, разрешающая сила спект-
Rc Rx R) 7?(r) Re рального прибора — радиус-вектор центра масс — постоянная Холла — энергетическая светимость — радиальная часть волновой функции — число Рейнольдса, действительная часть комплексного числа
R^kp R* Rnq — критическое значение числа Рейнольдса — радиус ядра — — зарядовый
Принятые сокращения и обозначения • 19
Кят S — — массовый — плотность переносимой волной энергии (вектор Умова- Пойнтинга)
S — площадь поверхности, энтропия, полное спиновое кванто- вое число атома
Sy S т — энтропия при постоянном объеме — спиновое квантовое число электрона — кинетическая энергия, период колебаний, температура в шкале Кельвина, время спин-решеточной релаксации
Л Тс Т\/2 t и — критическая температура — температура Кюри — время полураспада — время — потенциальная энергия, внутренняя энергия, разность потенциалов
Um Ux u0 — молярная внутренняя энергия — холловская разность потенциалов — энергия нулевых колебаний, высота потенциального
Vc V Vk Ум ^.т ^ж V, V V барьера — скорость центра масс — объем — критический объем — молярный объем — объемы фаз системы в тройной точке твердого тела — — жидкости — — газа — скорость, фазовая скорость — колебательное квантовое число
»е ^вер V кв <V> — скорость электрона — наиболее вероятная скорость — среднеквадратичная скорость — средняя скорость молекул
— вероятность события, объемная плотность энергии
х, y,z <х2> У(0, Ф) Z — декартовы координаты — средний квадрат величины х — угловая часть волновой функции — статистическая сумма, заряд ядра
ПРЕДИСЛОВИЕ
Данная книга представляет собой учебное пособие по общей фи-
зике. Если считать (так полагают некоторые авторитеты в области
науки и методики преподавания), что никакой другой физики вообще
не существует, тем не менее, современная физика столь многообъ-
емлюща, что претендовать на изложение всех ее аспектов, доступных
специалистам в своих областях этой науки мы не можем. Область на-
шего рассмотрения — физика в картине мира современного человека,
получающего высшее образование в нефизическом вузе, т.е. высшем
учебном заведении, где она не является профильной специальностью,
но включена в программу подготовки специалистов.
Авторы, используя свой опыт педагогической работы на кафедре
общей физики Российского химико-технологического университета
им. Д.И. Менделеева, надеются, что книга поможет освоению вузов-
ского курса общей физики, а также позволит читателю расширить свои
представления об окружающем мире и лучше подготовиться к реше-
нию прикладных задач, связанных с наукоемкими технологиями бу-
дущего, основанными на разнообразных явлениях природы и особен-
ностях строения вещества. Мы проанализировали общую ситуацию
с современными учебниками по физике, учебную нагрузку студентов,
другие факторы и наряду с общими вопросами стандарта 3-го поколе-
ния по общей физике уделили значительное внимание современным
физическим представлениям, в частности, о строении атомов и мо-
лекул и методах исследования их свойств. При этом предполагалось,
что в трехуровневой образовательной программе вуза первый уровень
(бакалавриат) обеспечивает общее изложение физических понятий
и законов, а магистратура — расширение и применение полученных
на нижнем уровне знаний к выбранной специальности с углубленным
изучением фундаментальных основ. Уровень «специалист» — проме-
жуточный и соответствующий ранее принятому стандарту инженер-
ной подготовки, также «обеспечен» соответствующим материалом
учебного пособия.
Современная общая физика XXI в. вырастает из физических пред-
ставлений, сформировавшихся к концу XX в. Формируя методологиче-
скую базу новых открытий и современные технологических прорывы,
она базируется на теоретических основах, заложенных еще Г. Галилеем
и И. Ньютоном (XVI—XVIII вв.) и развитых их успешными последо-
вателями в области современной физической теории (Д.К. Максвелл,
Предисловие • 21
М. Планк, Н. Бор, А. Эйнштейн и многие наши современники). Ожи-
дание результатов новых теорий (теория всеобщего объединения,
теория струн и др.) связывается с развитием суперсовременной экс-
периментальной базы (адронный коллайдер, сверхчувствительные
радиотелескопы и микро- (нано-, пико-) зонды, межпланетные кос-
мические аппараты и др.), но не сдерживает эффективного внедрения
уже существующего знания в наш повседневный опыт.
Поэтому материал книги изложен традиционно: механика, физи-
ка колебаний и распространения волн, гидродинамика, молекуляр-
ная физика, электрические свойства и магнетизм веществ, квантово-
оптические явления и квантовая и атомная физика, ядерная физика
и элементарные частицы, физика твердого тела. Эти разделы допол-
нены рассмотрением вопросов космологии, радиационной безопас-
ности применением основных физических методов исследования,
используемых при изучении свойств вещества. Все это стимулирует
развитие естественнонаучных представлений студентов о современ-
ной физике, физической химии и химической технологии, технике
и материаловедении, а также помогает ориентироваться в смежных
областях знаний.
Физика является фундаментальной наукой, т.е. основой всех есте-
ственных наук, поэтому наша книга представляет собой изложение об-
щих физических представлений, необходимых для понимания многих
естественнонаучных явлений, в том числе и механизма химических
превращений, т.е. содержит трактовку основных задач общей и теоре-
тической химии (вспомним, что, по сути, «химия — это физика ва-
лентных электронов»). Вместе с тем предлагаемая Вашему вниманию
книга является учебным пособием по общей физике и поэтому вклю-
чает описание фундаментальных физических законов, на базе которых
строится современная теоретическая химия, в том числе и химическая
физика, и физическая химия. Внимательное изучение многих из рас-
сматриваемых в пособии вопросов может быть полезным для студен-
тов, аспирантов и преподавателей физических и технических отделе-
ний университетов и других вузов.
При рассмотрении материала авторы ориентировались на ис-
ходный уровень подготовки читателя в рамках школьных программ
физики, математики и химии, развивая его в последовательном изло-
жении. При этом имеется в виду, что курс высшей математики изуча-
ется в вузе согласованно по времени с курсом общей физики. Поэтому
наша книга кроме выполнения функции учебника для вузовской под-
готовки по физике может служить также и в качестве пособия для бо-
22 • ПРЕДИСЛОВИЕ
лее углубленного изучения и практического применения материала по
математике и химии, а также способствовать преподаванию этих пред-
метов в средней общеобразовательной школе и колледже. Изложение
теоретического материала пособия методически согласовано со сбор-
ником «Задачник по физике» А.Г. Чертова и А.А. Воробьева, предпо-
ложительно используемого при проведении семинарских занятий.
Для подготовки настоящего учебного пособия были использованы
многочисленные методические материалы по различным разделам
курса, выпущенные кафедрой физики РХТУ им. Д.И. Менделеева,
а также опыт лекционной, семинарской и лабораторной работы ка-
федры. В ней участвовали ведущие преподаватели кафедры: профес-
сор В.М. Кузнецов (особая благодарность авторов за благожелатель-
ное участие и практическую поддержку), доценты В.С. Арутюнов,
А.Н. Жилова, А.И. Карабутов, Е.А. Карабутова, Е.Ф. Строганов,
В.А. Турдакин, О.П. Шаркова, Г.А. Юнницкий, Г.А. Ярхо и другие
наши коллеги, среди которых особо отметим Л.М. Тарасову, Л.В. Ко-
марову, Л.А. Симонову, Н.Л. Алексееву, С.С. Бучурину. Выражаем
им свою искреннюю благодарность, отдавая дань памяти ушедшим,
а также высоко оценивая работу всех сотрудников кафедры.
Данная книга была задумана профессорами Е.Ф. Макаровым
и Р.П. Озеровым и завершена совместно профессорами Р.П. Озеро-
вым и В.И. Хромовым при непосредственном участии доцента
А.А. Воробьёва на основе опыта их преподавательской деятельности
в МХТИ (РХТУ) им. Д.И. Менделеева и в предшествующей этому ра-
боты в ИХФ им. Н. Семенова РАН РФ (Е.Ф. Макаров и В.И. Хромов)
и НИФХИ им. Л. Карпова (Р.П. Озеров). Скоропостижный уход
из жизни профессора Е.Ф. Макарова не позволил ему участвовать
в завершении начатого, однако его мысли и идеи присутствуют в учеб-
ном пособии, которое читатель держит в руках.
Авторы
1. МЕХАНИКА
Механика является наукой об особом виде движения — механиче-
ском движении. Она рассматривает взаимные перемещения тел в про-
странстве и во времени и взаимодействия (контакты, столкновения,
влияние друг на друга на расстоянии) материальных тел. Таким обра-
зом, механическое движение есть изменение с течением времени по-
ложения материальных тел в пространстве или взаимного расположе-
ния частей одного тела. Под механическим понимают такое действие
на тело других тел или силовых полей, которое приводит к изменению
его состояния движения (изменению скорости и величины и (или)
направления движения) тела, а также действие, следствием которого
является изменение взаимного положения его частей (например, воз-
никает деформация).
В зависимости от масштабности рассматриваемых явлений раз-
личают конкретные области физической теории. Болыпйм (по срав-
нению с атомными) массам и малым скоростям (по сравнению
со скоростью света с « 3-108 м/с — скорость света в вакууме) отвеча-
ет классическая нерелятивистская область физики, состояния малых
(атомного масштаба) объектов, перемещающихся с малыми (г << с)
скоростями, описываются квантовой нерелятивистской теорией.
При скоростях макро- и микрообъектов, сравнимых со скоростью
света, пользуются релятивистской^ теорией.
Соответственно, механика подразделяется:
1) на классическую нерелятивистскую механику, рассматриваю-
щую законы движения макроскопических (состоящих из огромного
числа атомов или молекул) тел, со скоростями v « с. Движение узлов
машин и механизмов, жидкостей или сыпучих тел по трубопроводам
в технологических процессах, газов и продуктов их переработки, ракет
и спутников, небесных тел, насекомых и бактерий — описывается за-
конами классической нерелятивистской механики;
2) классическую релятивистскую механику, которая изучает дви-
жения при скоростях близких к скорости света (у ~ с). Например,
движение внутренних (наиболее близких к ядру) электронов в атомах
или ядерных частиц в ускорителях (синхротронах), а также перемеще-
ния материи вблизи черных дыр и в районах больших звездных скоп-
лений во Вселенной;
1 Латинский термин «релятивизм» соответствует русскому «относительность».
24* 1. МЕХАНИКА
3) квантовую нерелятивистскую механику, определяющую законы
движения, энергетическое состояние и пространственные распреде-
ления взаимодействующих микрочастиц. В частности, электронов,
атомов и молекул в их свободном состоянии и при взаимодействиях
в конденсированных средах — жидкостях и твердых телах, а также ва-
лентных электронов в атомах, обусловливающих химические связи.
Как правило, эти движения происходят со скоростями существенно
меньшими скорости света;
4) квантовую релятивистскую механику, связанную с законами
движения частиц в силовых полях, проявляющих дискретные свой-
ства, с сильным взаимодействием между частицами при скоростях их
перемещения, близких к скорости света.
Принципиальным отличием квантовой механики от классической
является постулирование минимального кванта момента импульса
(момента количества движения) тела, равного постоянной Планка
h
h « 6,63 • 10-34 Дж-с (также используется постоянная Планка h = — =
2л
= 1,05 10-34 Дж-с). В классической механике этого ограничения не су-
ществует, как не существует и самого понятия квантов.
В соответствии с главной задачей учебного пособия основное вни-
мание в нем будет уделено классической нерелятивистской и квантовой
физике, изучаемой в техническом вузе по специальностям нефизиче-
ского профиля. Будут также кратко изложены основы классической ре-
лятивистской теории (специальной теории относительности — СТО).
1.1. Кинематика
1.1.1. Кинематика материальной точки. Кинематика
поступательного движения твердого тела
Кинематика — раздел механики, изучающий движение материаль-
ных тел с точки зрения их пространственно-временных отношений
без учета масс и действующих на них сил.
Для описания движения точки в пространстве и во времени тела и
связанной с ним точки-маркера необходимо выбрать систему отсче-
та. Системой отсчета^ называется совокупность прибора для отсчета
1 Систему отсчета следует отличать от системы координат — чисто геометрического по-
нятия, в котором нет массы. Для выполнимости принципа относительности Галилея—
Эйнштейна (см. далее подраздел 1.2.2) необходимо связывать с системой отсчета массу,
много большую массы любого, движущегося относительно нее тела.
1.1. Кинематика • 25
времени (часов) и набора тел, условно принимаемых за неподвижные,
по отношению к которым рассматривается движение. Время пред-
ставляется непрерывно меняющейся скалярной величиной, отсчи-
тываемой по единой для всех систем отсчета шкале, причем обычно
предполагается, что отрицательным оно быть не может. В задачах ки-
нематики время i рассматривается в качестве независимого перемен-
ного (аргумента), а остальные кинематические параметры рассматри-
ваются как функции времени.
С системой отсчета может быть связана система декартовых (пря-
моугольных), полярных (цилиндрических) или сферических коор-
динат. Точка (и точка-маркер) при своем движении в пространстве
описывает некоторую непрерывную линию, которую называют тра-
екторией. В ряде случаев сама траектория задает направление дви-
жения (например, железнодорожные рельсы задают движение пере-
мещающихся по ним вагонов). В фиксированный момент времени,
которому соответствует определенное положение тела, в качестве
естественных осей могут быть приняты: касательная, проведенная
через данную точку траектории, главная нормаль и бинормаль1.
Главная нормаль перпендикулярна к касательной и направлена к цен-
тру кривизны. Для плоских движений необходимость во введении
бинормали отпадает. Направление касательной и нормали задаются
единичными векторами — ортами т и п.
Напомним некоторые сведения из области дифференциальной гео-
метрии. Если к двум разным точкам А и В плоской кривой провести
касательные, заданные ортами Tj и т2 (рис. 1.1), а затем провести
из точки А прямую, параллельную т2, то образованный таким образом
угол Дер принято называть углом смежности.
При сближении точек А и I? длина дуги АВ — А1
стремится к нулю. В пределе отношение
Дер/Д/ дает кривизну К траектории в данной
точке:
Дер dep
л = lim —- = —. (1.1)
А/^0 М dZ
Величина, обратная кривизне R — \/К,
есть радиус кривизны кривой в данной точ-
Рис. 1.1. Угол смежности Дер
dtp
и кривизна л = -jj-
траектории
1 Бинормаль (нормаль двоякой кривизны) — перпендикуляр, восстановленный из точ-
ки на кривой к соприкасающейся плоскости, те. это прямая, перпендикулярная главной
нормали и касательной к кривой в данной точке.
26* 1. МЕХАНИКА
ке А. Для плоской кривой, задаваемой функцией у =/(х), радиус кри-
визны может быть найден из формулы1
3
dy(*)~|2
ад—
dx
d2X*)
dx2
(1-2)
Радиусом кривизны окружности является ее радиус, радиус кривиз-
ны прямой бесконечность.
Простейшим объектом исследования в механике является матери-
альная точка (МТ). Под материальной точкой понимается тело, раз-
мерами и формой которого в условиях данной задачи можно прене-
бречь. Материальные объекты в разных задачах могут рассматриваться
по-разному: материальной точкой может быть представлена молекула,
ударяющаяся о стенку сосуда, элемент объема dPдвижущейся жидко-
сти (его масса dm = pdP, р — плотность жидкости), Земля при ее дви-
жении вокруг Солнца и др. Те же объекты в других условиях (много-
атомная молекула во вращательной спектроскопии, Земля при ее
вращении вокруг собственной оси и др.) уже не могут считаться мате-
риальными точками, так как размеры объекта становятся существен-
ными для анализа его поведения.
Под твердым телом далее будем понимать абсолютно твердое тело
(АТТ) — расстояние между любыми двумя точками в котором не из-
меняется при любых внешних воздействиях.
Движение АТТ называется поступательным, если любой отрезок
прямой, жестко связанный с телом, перемещается при его движении
Рис. 1.2. Поступательное движение
твердого тела. Прямая АВ,
связанная с телом, перемещается
параллельно самой себе
параллельно самому себе (рис. 1.2).
Поступательное движение может
быть и движением по окружности
(не вращательным, а именно по-
ступательным), как это имеет ме-
сто, например, при движении (без
качания) кабины колеса обозрения
или педали велосипеда. Оно может
быть прямолинейным (с радиусом
кривизны R -> оо), когда его траек-
торией является прямая линия и,
в общем случае, криволинейным.
1 Здесь и далее наиболее важные формулы и соотношения будут выделяться рамкой.
28* 1. МЕХАНИКА
Скорость точки есть физическая величина, численно равная про-
изводной по времени от радиус-вектора этой точки в рассматриваемой
системе отсчета.
Выясним, что будет представлять собой вектор мгновенной ско-
рости по модулю (абсолютной величине) и направлению. Для этого
в уравнении (1.4) умножим числитель и знаменатель на величину дли-
ны дуги AZ. Тогда
v = lim--------- lim---lim—. (1.5)
д/—>о д/ А/ л/ >о д/ л/ >о д/
ПриД^->0 lim
А/—>0
Аг л .. AZ dZ
— = 1, а 11 m — = —, поэтому
AZ л/ >о д/ dZ
.,=^=м
dt
(1-6)
Что касается направления вектора г, то в пределе при AZ -> 0 секу-
щая займет положение касательной к траектории в точке Л, следова-
тельно, вектор мгновенной скорости направлен по касательной к тра-
ектории (см.рис. 1.2), а по модулю равен первой производной
по времени от функции Z(Z), выражающей уравнение движения точки.
Радиус-вектор r(t), определяющий положение точки в простран-
стве в момент времени t, может быть представлен в виде разложения
по ортам декартовой системы координат
г(О = х(0г +y(bJ+z(t)k. (1-7)
Тогда v(t) = (1-8)
и вектор скорости можно представить в виде
v = ivx+ jvy + kvz, (1-9)
где их, сд и vz — проекции вектора скорости на координатные оси.
Сопоставляя (1.8) и (1.9), приходим к выводу, что
Vx =x(t), vy=y(t), Vz =z(t). (1.10)
Модуль вектора скорости, представленный как диагональ паралле-
лепипеда, построенного на проекциях этого вектора, составит
v = ^v2+v2y+v2z. (1.11)
30* 1. МЕХАНИКА
Рис. 1.4. К вычислению —
d/
Выражение (1.18) показывает, что ускорение есть сумма двух векто-
ров, из которых один (первый член суммы) направлен по касательной,
и по модулю равен производной от модуля скорости по времени.
Для определения модуля и направления второго члена этой суммы не-
обходимо показать сущность производной dr/dZ.
Пусть направление вектора скорости в двух смежных положениях
(точках Л и В), отделенных промежутком времени At при перемещении
МТ из А в В, задано ортами и т2 (рис. 1.4).
Тогда изменение вектора т за вре-
мя At выразится вектором Ат = т2 - .
Будем рассматривать производную
dr Ат
—, как предел отношения — при
dZ At
At -> 0. Из равнобедренного (векторы
Tj и т2 единичные, т1 = АС = т2 = AD =
= т = 1) треугольника ACD найдем
значение модуля вектора Дт:
CD/l Ат/2 Ат/2 . Аср
----- = ---- = ----- = sin—тогда
т т 1--------------2
Ат . Аср л л
— = sm—, или Дт -> Аср, так как при
Аср -> 0 (для At -> 0 угол Аср стремится к нулю) sin(Acp/2) « Аср/2.
Тогда
dr Дт Аср
— = lim — = lim —L. (1.19)
dZ д/—>o At Д/->о At
Умножая числитель и знаменатель функции Acp/AZ на длину дуги AZ,
получим
dx АсрА/ Аср А/
— = lim —L—= lim—L lim—. (1.20)
dZ a/->o At Al A/ >G AZ A/ >G AZ
Рассмотрим каждый из этих пределов. Поскольку угол Аср есть угол
смежности, то lim— равен кривизне (К = 1/7?, см. (1.1)) кривой
д/^о д/
в точке А. Второй предел представляет собой модуль скорости
^.=VK = -. (1.21)
at r
1.1. Кинематика • 31
Для определения направления вектора (с!т/с1/) проведем из точки Л
прямую параллельную вектору Дт (отрезку CD) и исследуем, какое
значение примет в пределе At -> 0 угол САЕ. Как видно из рис. 1.4,
ZCAE =ZCAE + + В пределе при At -> 0 угол смежности
с!т Дт
Дер -> 0, а ZCAE -> л/2. Следовательно, вектор —= lim— будет на-
dt а^о д?
правлен по нормали п к центру кривизны в точке А и может быть
представлен как
с1т v _
— = —п.
dt R
(1-22)
Возвращаясь к сумме (1.18), запишем
_ ch; v2 _
а =—тн-п.
dt R
(1-23)
Таким образом, полное ускорение а при криволинейном движе-
нии может быть разложено на две составляющие: на касательное уско-
рение
dr
\ —
dt
(1-24)
и нормальное ускорение
Касательная (тангенциальная) составляющая влияет на абсолют-
ное значение скорости, тогда как нормальная — на ее направление
(и только на направление). Модуль полного ускорения составляет
(1-26)
Выведенные выше соотношения справедливы для общего случая
движения точки по криволинейной траектории с произвольным ре-
жимом изменения скорости.
При прямолинейном движение: R -> оо, ап — 0, а = а -т. То есть при
равнопеременном (ускоренном или замедленном) прямолинейном
движении ат — а — const ф 0, ап — 0. В этом случае легко получить вы-
ражение для скорости точки и пройденного ею пути в любой момент
32* 1. МЕХАНИКА
времени. Действительно, интегрирование выражения dr/dZ = щ = а
(1.24) по времени дает
v(t) = jfldZ + С = vQ +at, (1-27)
где и0 — скорость в момент времени t = 0.
Пройденный при прямолинейном движении путь можно получить
из выражения (1.27) повторным интегрированием
2
x(t) = xo+vot + ^~, (1.28)
где х() — координата точки в начальный момент времени.
Рассмотрим далее кинематические характеристики вращательного
движения материальной точки и твердого тела.
Как указывалось ранее, все полученные результаты можно перене-
сти на описание поступательного движения твердого тела (точнее АТТ).
1.1.2. Кинематические характеристики
вращательного движения
Вращательное движение распространено в природе не менее (а мо-
жет быть и более), чем поступательное движение. Действительно, дви-
жение электронов вокруг ядра (в рамках боровской модели атома — см.
далее подраздел 7.7), Земли и планет вокруг Солнца, вращение деталей
и узлов в технике, вращение колеса — все это примеры вращательного
движения. Можно видеть, насколько вращательное движение много-
образно, а впоследствии мы узнаем, к каким непривычным для нас яв-
лениям приводят его закономерности. Под вращательным движением
АТТ понимают вращение его как целого вокруг неподвижной оси, на-
зываемой осью вращения. При этом все точки твердого тела вращают-
ся около этой оси в параллельных плоскостях, описывая окружности
с центрами, лежащими на оси вращения.
При вращении все точки АТТ имеют разные по величине и направ-
лению линейные скорости, зависящие от расстояния точки до оси
вращения. Поэтому для описания вращательного движения вводятся
угловые кинематические характеристики, единые для всего тела: угло-
вое перемещение, угловая скорость и угловое ускорение.
Ограничим себя здесь рассмотрением одного случая — случая вра-
щения вокруг оси, положение которой не меняется со временем.
1.1. Кинематика • 33
Угловое перемещение. Рассмотрим тело, вращающееся вокруг оси Oz
(рис. 1.5). Выделим в теле произвольную, не лежащую на оси вращения
точку А. В соответствии с определением вращательного движения эта
точка описывает окружность, центр которой О'лежит на оси Oz. Поло-
жение точки определяется с помощью радиус-вектора г, проведенного
из начала координат (точка О) в рассматриваемую точку А. Проекция
этого вектора на плоскость, перпендикулярную оси вращения, — это
радиус R окружности, которую описывает при своем движении точка Л.
При вращении АТТ перпендикуляр-
ные плоскости, проходящие через ось
вращения и радиус-векторы всех его то-
чек, поворачиваются на одинаковый
угол. Пусть тело повернулось на угол d$,
называемый угловым перемещением. Для
того чтобы указать, в какую сторону про-
исходит поворот, условились угловое пере-
мещение считать вектором, направление
которого определяется правилом пра-
вого винта (правилом буравчика). На-
помним, как применяется это правило:
если винт с правой резьбой совместить
с осью вращения (направление острия
Рис. 1.5. Вектор углового
перемещения dcp
винта произвольно вдоль или противо-
положно направлению оси) и поворачивать его в направлении, совпа-
дающем с вращением тела, то направление поступательного переме-
щения винта по оси вращения совпадет с направлением вектора с1ф.
Векторы, направления которых связыва-
ются с направлением вращения, называют-
ся аксиальными векторами. Угловое переме-
щение с1ф есть аксиальный вектор, равный
по абсолютной величине отношению длины
дуги dZ, описываемой точкой, к радиусу вра-
щения R и направленный вдоль оси враще-
ния по правилу правого винта
df dZ Г
dtp = — = —£, (1.29)
К к
где к — орт, ориентированный по оси вращения Oz.
Угловой скоростью й называется предел,
к которому стремится отношение малого
Рис. 1.6. Соотношение
между угловой ®
и линейной v скоростью
34* 1. МЕХАНИКА
углового перемещения Дф (рис. 1.6), определенного за некоторый ин-
тервал At времени, к величине этого интервала при его стремлении по-
следнего к нулю
(Ъ= lim — = = (1.30)
At dt т
Угловая скорость есть первая производная от вектора углового пе-
ремещения по времени. Она показывает быстроту изменения угла по-
ворота. Угловая скорость со также является аксиальным вектором, на-
правление которого совпадает с направлением вектора d$.
Угловым ускорением е называется предел, к которому стремится
До)
среднее ускорение —, определенное за некоторый интервал времени
At
At, при стремлении этого интервала к нулю
_ г Доз,- dc5(O - Z1_n
8 = lim —k =----= oo(Z) = ф(0- (1.31)
A/^o At d/
Угловое ускорение также является аксиальным вектором.
Возможна разная взаимная ориентация векторов угловой скорости
и углового ускорения: угловая скорость нарастает (dco >0), тогда век-
тор углового ускорения совпадает по направлению с вектором угло-
вой скорости (оба направлены вдоль оси вращения); угловая скорость
убывает (dec < 0), тогда вектор углового ускорения противонаправлен
вектору угловой скорости.
Между угловыми и линейными характеристиками существует
связь. Так, из рисунка 1.5 видно, что dl — ТМф. Значит, абсолютная
dep dl
величина угловой скорости определится из го = —-, где бф = —, как
dt R
оз = ——, где dl/dt — v — линейная скорость точки. Поэтому cd = v/R
или
|и = О)7?.|
(1-32)
Аналогично получим связь между угловым ускорением е и линей-
ным ускорением ят. Абсолютная величина углового ускорения равна
s = dco/dZ, где со = v/R, тогда s = dv/{Rdt). Поскольку dv/dt есть линей-
ное (тангенциальное) ускорение ат, то е = uT/R или
ат = sR.
(1.33)
1.1. Кинематика • 35
Приведенные формулы (1.32), (1.33) связывают между собой угло-
вые и линейные кинематические характеристики1. Эту связь можно
представить и в виде векторных соотношений
v = |(7)г ] (1-34)
и
а = dr /dt = аТ+ап = с!сЪ _ —г _ dt + dr о— dt _ = |sr ] + ],
где прямые скобки означают операцию векторного умножения.
Из определения со (1.30) и е (1.31) интегрированием при s = const
можно получить связь между угловой скоростью и угловым ускорени-
ем при равнопеременном (ускоренном или замедленном) вращении
C£)(t) = СО о + st, (1.36)
где ©о — угловая скорость в начальный момент времени.
Аналогично двукратным интегрированием (1.31) можно получить
соотношение и для модуля углового перемещения
<р(/) = (ро + со0/+ s/2/2. (1-37)
Здесь сро — угловое положение вращающейся точки (тела) в началь-
ный момент времени.
Выражения (1.36), (1.37) по структуре эквивалентны тем, что были
получены для поступательного движения (формулы (1.27) и (1.28)).
Забегая вперед, можно утверждать, что практически во всех случаях,
структура выражений для поступательного и вращательного движений
формально одинакова, надо только характеристики поступательного
движения заменить соответствующими характеристиками вращатель-
ного движения.
Тем не менее вращательное движение отличается от поступатель-
ного тем, что оно периодично во времени, т.е. значения угла ср (положе-
ния тела в пространстве) повторяются через определенные промежутки
времени. Если эти промежутки повторения одинаковы (равномерное
вращение при cd = const), то для характеристики такого движения мож-
но ввести понятие периода Т, как времени одного полного поворота
(на 2л или 360°) и, соответственно, частоты вращения — числа полных
оборотов в единицу времени v = 1/Т. Имея в виду, что один оборот
1 С учетом (1.32) и (1.33) формула (1.23) может быть представлена как а = Л(ет + ш2й),
а (1.26) — а = R\l£2 + ш4.
36* 1. МЕХАНИКА
соответствует угловому перемещению равному 2л радиан, для угловой
скорости получаем: со = 2лv = 2л/Т.
Отличие угловых векторных характеристик вращательного движе-
ния от соответствующих характеристик поступательного движения
в том, что аксиальные угловые векторы ориентированы не в направ-
лении (или против направления) движения каждой из точек твердого
тела, а вдоль оси вращения (перпендикулярно плоскости вращения).
С этим связаны многие свойства вращательного движения, речь о ко-
торых пойдет далее (см. подраздел 1.2.9).
В общем случае произвольное движение твердого тела, или МТ, мо-
жет быть представлено в виде сочетания поступательного движения
материальной точки, расположенной в его центре масс (см. подраздел
1.2.7) и вращения относительно этого центра.
1.2. Динамика
1.2.1. Первый закон Ныбтона. Инерциальные
системы отсчета
Динамика занимается изучением движения материальных тел, обла-
дающих массой, под действием приложенных к ним сил (случаи, когда
равнодействующая всех сил равна нулю, рассматривает статика).
До сих пор молчаливо предполагалось, что все величины кинема-
тические рассматриваются в неподвижной относительно также не-
подвижного пространства системе координат, которая, выбирается
произвольно. Однако от этого выбора зависят величина и ориентация
радиус-вектора рассматриваемой точки или тела. Кроме того, если
одна из систем отсчета движется относительно другой, то возникают
дополнительные эффекты, связанные с этим движением. Эти вопро-
сы являются предметом теории относительности, рассматривающей
связь между физическими законами в системах отсчета, движущихся
друг относительно друга.
Классическая теория относительности основана на постулатах
Г. Галилея и И. Ньютона1. Отличительной ее чертой является разде-
ление понятий пространства и времени и векторное сложение скоро-
стей. Законы классической теории относительности отвечают повсед-
1 Галилео Галилей (1564—1642) — итальянский ученый, основатель экспериментальной
физики. Исаак Ньютон (1643—1727) английский физик и математик, основоположник
классической (ньютоновской) механики.
1.2. Динамика • 37
невным представлениям об изотропном и однородном пространстве
(все направления эквивалентны и метрика всюду постоянна — метр
везде метр) и независимости интервалов времени от системы отсчета
(один час в Москве по продолжительности равен одному часу в Нью-
Йорке и т.п.). Оказалось, что эта теория и законы из нее следующие,
прекрасно оправдываются при анализе движений материальных тел
со скоростями г, не сопоставимыми со скоростью с света в вакууме
(и « с) в любой выбранной системе отсчета.
Вообще же говоря, одно и то же физическое явление в различ-
ных системах отсчета описывается по-разному. Возникает желание
отыскать одну систему отсчета, в которой законы того или иного яв-
ления природы выглядели бы наиболее просто. Более того, интерес-
но было бы найти в окружающем нас мире такую систему отсчета
или точку в пространстве, которая покоилась бы, и по отношению
к которой можно было бы рассматривать всякое движение. Можно ли
это сделать? Для ответа на этот вопрос проанализируем простейший
вид движения — свободное движение тела постоянной массы. Свобод-
ным телом называется тело, настолько удаленное от всех остальных
тел, что их силовое воздействие на данное тело пренебрежимо мало.
Такое тело (или состояние тела) и такое движение является, конечно,
физической абстракцией, ибо его невозможно реализовать в полной
мере. Однако эта модель в развитии физики — от Аристотеля1 до Гали-
лея и Ньютона — сыграла очень важную роль.
Не испытывая никаких внешних воздействий, свободное тело
должно двигаться прямолинейно и равномерно. Это реализуется, од-
нако, не во всех системах отсчета, а только в тех, которые относятся
к числу инерциальных систем. Инерциальной называется такая система
отсчета, в которой свободное движение тела с постоянной массой про-
исходит с неизменной по величине и направлению скоростью, либо
в этой системе данное тело покоится2.
Само существование инерциальных систем отсчета есть следствие
определенных свойств пространства и времени, а именно однород-
ности и изотропности пространства и однородности времени. Одно-
родность пространства и времени означает эквивалентность всех по-
1 Аристотель (384—322 в. до н. э.) — древнегреческий философ, заложивший основы
научного естествознания.
2 Очевидно, что основанное на представлении об идеальном свободном теле понятие
инерциальной системы также является физической идеализацией. То есть системы от-
счета, в которой тело, обладающее массой, движется с заданной постоянной скоростью
или покоится, строго говоря, в природе не существует.
38* 1. МЕХАНИКА
ложений свободного тела в пространстве во все моменты времени,
а изотропность — эквивалентность различных направлений в нем.
Поэтому можно дать иное определение инерциальной системы отсче-
та: система отсчета, по отношению к которой пространство однородно
и изотропно, а время однородно, называется инерциальной.
Утверждение о существовании инерциальных систем отсчета как
систем, в которых свободное движение тела описывается прямоли-
нейным и равномерным движением, составляет содержание закона
инерции', свободное тело сохраняет состояние покоя или равномерного
прямолинейного движения до тех пор, пока другое тело не выведет его
из этого состояния. Закон инерции был введен Ньютоном в систему
основных законов динамики и получил название первого закона дина-
мики, или первого закона Ньютона.
Может показаться, что, отыскав инерциальную систему отсчета,
можно найти ту единственную и «на самом деле» неподвижную систе-
му отсчета, относительно которой и происходит «в действительности»
всякое движение тел во Вселенной. Но это не так, ибо инерциальных
систем отсчета существует бесчисленное множество. Убедимся в этом
путем простого рассуждения. Пусть две системы отсчета движутся
друг относительно друга равномерно и прямолинейно, причем извест-
но, что одна из них является инерциальной. Утверждаем, что и другая
система также будет инерциальной. Действительно, тело, находящее-
ся в состоянии движения с постоянной скоростью в первой системе
отсчета (о которой мы знаем, что она инерциальная), будет двигать-
ся равномерно и прямолинейно и во второй системе отсчета (правда,
с другой скоростью), но тогда и вторая система отсчета также будет
инерциальной. Таким образом, всякая система отсчета, движущаяся
прямолинейно и равномерно относительно некоторой инерциальной
системы, также является инерциальной.
1.2.2. Принцип относительности Галилея.
Преобразования Галилея
Существует, следовательно, бесчисленное множество инерци-
альных систем отсчета. Более того, оказывается, что физически не-
возможно отличить одну инерциальную систему от другой, все инер-
циальные системы отсчета эквивалентны. Последнее утверждение
составляет содержание принципа относительности, который для ме-
ханических явлений составляет сущность принципа относительности
Галилея (механический принцип относительности). Можно дать следу-
1.2. Динамика • 39
ющую формулировку принципу относительности Галилея: никакими
механическими опытами, поставленными в пределах данной инерциаль-
ной системы отсчета, невозможно установить, движется ли эта си-
стема отсчета прямолинейно и равномерно или находится в состоянии
покоя. Находясь, например, в трюме равномерно и прямолинейно
движущегося корабля (пример взят у Галилея) или на борту самоле-
та, наблюдатель не сможет, ставя всевозможные механические опыты
(удар шаров, бросание предметов по различным направлениям, сво-
бодное падение тел и т.д.), установить, движется ли корабль (морской
или воздушный) прямолинейно и с постоянной скоростью или нахо-
дится в покое.
Механический принцип относительности, объединенный с пред-
положением об одинаковости течения времени во всех инерциальных
системах отсчета, составляет принцип относительности Галилея.
Найдем соотношения, позволяющие переходить от одной инерци-
альной системы к другой. Пусть имеются две инерциальные системы
отсчета К(х, y,z,t)vL К'(х ',y',z'->t'), причем вторая система (К') движется
относительно первой (К) в направлении оси Ох с постоянной скоро-
стью vq (рис. 1.7). Если в начальный момент времени пространствен-
ные положения этих координатных систем совпадали, то в момент
времени t координаты х и х', определяющие положение точки А отно-
сительно первой системы, будут связаны соотношением х = х' + vQt.
При произвольном поступательном движении двух систем в трехмер-
ном пространстве возникают аналогичные соотношения между
остальными координатами, так что получается система уравнений
Гх = х' +
у = у' +
[>£ = / +
где vQx, vQy, vQz — соответствующие про-
екции вектора скорости и0 на коорди-
натные оси системы К.
Эта система уравнений может
быть записана в обобщенной век-
торной форме
(1-39)
Формулы (1.38) и (1.39) вместе
с выражением тождественности те-
r = rf + vQt.
40* 1. МЕХАНИКА
чения времени (t = Г) в обеих системах называются преобразованиями
Галилея.
Преобразования Галилея позволяют переходить от описания явле-
ний в одной инерциальной системе координат к соответствующему
описанию в другой инерциальной системе координат.
Эквивалентность всех инерциальных систем отсчета аналогич-
на утверждению, что законы механики инвариантны по отношению
к преобразованиям Галилея. Термин «инвариантны» означает, что за-
коны механики, и их математическая запись, одинаковы во всех
инерциальных системах. Вместе с тем физическая величина может
изменяться при переходе от одной системы к другой, т.е. быть не-
инвариантной.
Для примера продифференцируем левую и правую части выраже-
ния (1.39) по времени, — найдем известный закон сложения скоро-
стей:
dr dr' _
---=-----+
dt dt 0
(1-40)
или
v = vQ+vf, (1-41)
где v и v1 — скорости движения точки (тела) в инерциальных системах К и К’
соответственно.
Из формулы (1.41) следует, что скорость не инвариантна (и^иг)
по отношению к преобразованиям Галилея. Если взять вторую произ-
водную по времени от (1.39),
получим
а=а', (1.43)
т.е. ускорение инвариантно по отношению к преобразованиям Гали-
лея. Отсюда следует, что все физические величины, связанные со ско-
ростью (например, импульс, кинетическая энергия и др.), не инва-
риантны, а величины, связанные с ускорением (например, силы)
инвариантны по отношению к преобразованиям Галилея. Примером
других инвариантов могут быть масса, расстояние, температура и т.д.,
и, конечно,время.
1.2. Динамика • 41
А. Эйнштейн1 обобщил принцип относительности Галилея. Соглас-
но принципу относительности Эйнштейна не только механическими,
но и никакими иными физическими опытами (электрическими, магнит-
ными или оптическими, в частности), проводимыми внутри инерциальной
системы, невозможно установить, находится ли она в состоянии покоя
или равномерного и прямолинейного движения. Это утверждение состав-
ляет основу релятивистской механики.
Теперь следует решить вопрос, какие же из реальных систем от-
счета, с которыми мы часто имеем дело, практически можно считать
инерциальными. Многие задачи механики рассматриваются в лабора-
торной системе отсчета, жестко связанной с поверхностью Земли. Яв-
ляется ли эта система отсчета инерциальной? Строго говоря — нет, так
как Земля участвует в суточном вращении, и точки земной поверхно-
сти, за исключением полюсов, обладают ускорением, направленным
перпендикулярно оси вращения Земли. Однако по сравнению с уско-
рением свободного падения g это ускорение мало, и для подавляющего
числа практических задач лабораторную систему, связанную с Землей,
можно считать инерциальной. Вносимую при этом погрешность мож-
но оценить, сравнивая нормальное ускорение определенной точки
земной поверхности с ускорением свободного падения.
1.2.3. Второй закон Ньютона. Некоторые
задачи динамики движения тел
Всякое изменение характеристик движения тела или взаимораспо-
ложение его частей вызывается действием на него других тел. Количе-
ственная мера механического воздействия на тело со стороны других
тел или воздействия силового поля называется силой (векторная ха-
рактеристика). Это воздействие может проявляться либо в изменении
скорости тела (появлении ускорения), либо в изменении его формы —
деформации. И то и другое может быть измерено, поэтому и сила мо-
жет быть количественно определена экспериментально.
Второй закон Ньютона устанавливает связь между изменением
скорости движения и силой F, вызывающей это изменение. Обобще-
нием большого числа экспериментальных фактов было установлено,
что сила F пропорциональна ускорению (F ~ а). Этот закон был
сформулирован следующим образом: изменение скорости движения
1 Альберт Эйнштейн (1879—1955) — основатель современной теоретической физики,
создатель специальной теории относительности.
42* 1. МЕХАНИКА
тела пропорционально приложенной силе и происходит по направлению,
совпадающему с направлением действия силы.
При действии одной и той же силы на различные тела приобретае-
мые ими ускорения различны. Эти ускорения зависят от массы тел.
В данном случае масса выступает в качестве коэффициента пропор-
циональности между силой, действующей на тело, и его ускорением.
Такая масса называется инертной или инерционной (в отличие от грави-
тационной, о которой речь пойдет далее). Можно сказать, что масса
есть мера инертности тела при его поступательном движении.
Математическое выражение второго закона Ньютона для движения
тел постоянной массы в векторной форме имеет вид
F = т— = та,
d/
(1-44)
и в координатной форме
mx = Fx, my = Fy, mz = Fz. (1-45)
Уравнения (1.44), (1.45) называются дифференциальными уравнени-
ями движения.
При произвольной (в том числе и зависящей от времени) массе,
уравнение (1.44) можно представить в обобщенной форме
dt dt
Это уравнение представляет собой наиболее общее математическое
выражение второго закона Ньютона, справедливое для всех случаев
(для релятивистской и квантовой механики также). В него введен век-
тор р, равный произведению массы тела и скорости его движения, на-
зываемый импульсом1
р = то.
(1-47)
Направление импульса совпадает с направлением вектора скорости.
Величина импульса материальной точки (или тела) может быть вы-
ражена через проекции вектора скорости в декартовой системе коор-
динат
p = mv = imvx + jmvy+kmvz=ipx + jpy+kpz, (1-48)
где/д./ди /у_ — проекции вектора р на оси декартовой системы координат.
1 Иногда в литературе можно встретить синоним импульса — количество движения.
1.2. Динамика • 43
Уравнение (1.46) дает связь между силой и изменением импульса,
которое она вызывает
= Fdt.
(1-49)
Это выражение показывает, что изменение импульса тела пропорцио-
нально силе, действующей на него, и времени ее действия. Произведение
Fdt называется элементарным импульсом силы.
Второй закон Ньютона можно переформулировать следующим об-
разом: изменение импульса тела пропорционально приложенной к нему
силе и происходит по направлению прямой,
по которой она действует (рис. 1.8).
Принцип независимости действия сил.
Когда мы говорим о силе, действующей
на тело, то подразумеваем действие какой-
либо одной силы. Однако во многих слу-
чаях тело находится под одновременным
действием нескольких сил. В этом случае
справедлив так называемый принцип незави-
симости действия сил.
Сущность его заключается в следующем:
если на тело одновременно действует несколь-
ко сил, то ускорение, приобретенное телом
Рис. 1.8. Второй закон
Ньютона: связь между
направлением силы
и приращением импульса
материальной точки
под действием каждой силы в отдельности, не зависит от того, дей-
ствуют ли на тело в данный момент другие силы или нет.
Пусть на тело одновременно действует несколько сил F\, F2, F3, ....
Тогда z-я сила сообщит телу ускорение ai = FJm. При одновременном
действии всех сил тело приобретает ускорение, равное векторной сум-
ме всех ускорений, или
(1.50)
что является обобщением второго закона Ньютона на случай од-
новременного действия нескольких сил. Векторная сумма сил,
действующих на тело, называется равнодействующей (или резуль-
тирующей) сил, приложенных к нему. Ускорение телу сообщает ре-
зультирующая сила, направление ускорения совпадает с ее направ-
лением.
44* 1. МЕХАНИКА
Уравнения движения тела, к которому приложены Nсил, можно за-
писать и в координатной форме
тх = ^Fxi,
/=1
my = YFyi’
(1.51)
/=1
mz = YFzi’
где в правых частях равенств стоят суммы соответствующих проекций всех
У сил, действующих на тело, на оси декартовой системы координат.
Две основные задачи динамики материальной точки. Структура динамиче-
ских уравнений определяет содержание двух основных задач динамики мате-
риальной точки. Рассмотрим эти задачи на примере прямолинейного движе-
ния точки (тела) вдоль оси х, описываемого уравнением тх = Fx.
Первая задача', задано кинематическое уравнение движения МТ: х = /(/).
Зная массу т точки, определить силу. Решение сводится к двукратному диф-
ференцированию уравнения движения и последующей подстановке найден-
ной второй производной, умноженной на я в дифференциальное уравнение
движения.
Вторая задача', задана сила. Зная массу МТ, требуется определить кине-
матическое уравнение движения. Эта задача связана с решением дифферен-
циального уравнения второго порядка. Поскольку сила может являться более
или менее сложной функцией времени, положения тела или (и) его скорости,
то решение уравнения иногда сопряжено с определенными математическими
трудностями.
Рассмотрим несколько примеров.
Сила является линейно возрастающей функцией времени Fx = kt (где к — по-
стоянный коэффициент) и направлена вдоль оси х; кроме того, известно,
что при t = 0 скорость vx = г>о, а отсчет расстояния ведется от начального нуле-
вого положения, т.е. при t = 0 х0 = 0. Дифференциальное уравнение движения
будет иметь вид: тх - kt. После понижения порядка производной и разделе-
ния переменных получим
л л
dux -—tdt.
Первое интегрирование дает
1.2. Динамика • 45
Постоянную интегрирования находим из начального условия — при t = О
,, kt2 _ dx
vx = vQ. Подставляя его, получим с{ = т.е. vx =-+ и0. Так как vx =—, то
2т d/
dx kt2 „
— =---+vG. Разделяем переменные и интегрируем
d/ 2т
x(t) = — + v0t + c2.
6т
При t = 0 координата х = 0, следовательно, и с2 = 0. Итак, окончательно,
уравнение движения
x{t) = — + v^t.
6т
Сила является линейной функцией смещения: F(x) = — рх (такая зависимость
характерна для упругих сил, например, при сжатии или растяжении пружи-
ны). Примем также начальные условия предыдущего примера, а именно: при
t = 0 vx = v0 и х0 = 0. Дифференциальное уравнение движения будет иметь вид:
тх = -рх. Понижаем порядок производной, тогда т—^ = -рх. Попытка раз-
dZ
делить переменные в этом уравнении наталкивается на затруднение потому,
что этих переменных не две, а три. Необходимо перейти в левой части от аргу-
di’
мента t к аргументу х. Это можно сделать, умножив и разделив выражение —-
d/
л тт - di\ dx dux ..
на dx. Действительно, — ----= —-vx. Произведя замену и разделив пере-
dx d/ dx
менные, получим
, Р л Р*2
I’di’ =-—xdx, — = -----+Ci.
т 2 2т
2
Используя начальные условия, получим Тогда
2 2 2
2 2ш 2
или
Так как vx -— то, разделив переменные, получим
d/
46* 1. МЕХАНИКА
Интегрирование дает
arcsin
При t = 0 координатах() = 0, поэтому с2 = 0. Тогда
Э,
т.е. под действием упругой силы тело совершает периодическое колебательное
движение по закону синуса (или при преобразовании фазы у/р/т Т
в (yfy/m-t-п/2 ) по закону косинуса).
Сила является линейной функцией скорости. Этот случай характерен для дви-
жения тела в тормозящей среде (вода, воздух и др.), когда действующая на него
сила является силой сопротивления, препятствующей движению. Найдем
уравнение движения шара массой т, падающего под действием силы тяжести
mg в вязкой среде, создающей силу сопротивления движению Fc = —kvx (где
к — некоторый постоянный коэффициент, зависящий от вязкости среды), по-
лагая Г) = 0 и А'о = 0 при t = 0 (ось х направлена вертикально вниз).
Дифференциальное уравнение движения будет иметь вид mx = mg- kvx.
Выполнив все необходимые предшествующие интегрированию операции,
получим
dr>
----^- = d/.
к
g~vx —
m
т ( к
Интегрирование дает-----In g----v.
к { ///
т
С использованием начальных условий находим с}=---Ing.
к
Итак:
m. ( к \ m,
-—In g—vx = /—-Ing;
к m ) к
к /
g vx к r к C
m —z , к —* , . mg L —*
-----— = e m ; 1 v = e m ; vdt) = — \1 — e m
g mg-к
,, dx
Подставляя — и разделяя переменные, получим
, mgL — ч , mg\ т
dx =—\1-е т /d/; х = — t-\—е т
к к\ к ) 2
1.2. Динамика • 47
z ч2
при / = 0 и х() = 0. найдем с2 = - — g. Тогда
\к )
/ л2 к<
т т \ —I
*<t> = -gt-\- \
к \к )
Таково уравнение движения падающего в вязкой среде шара.
Возвращаясь к зависимости и(/), заметим,
что с увеличением времени t выражение, стоя-
щее в скобках, приближается к единице, и со-
ответственно vx mg/к (рис. 1.9). Практически
это означает, что по прошествии времени
(в пределе при t оо) скорость становится по-
стоянной (установившееся движение). Это со-
ответствует равенству силы тяжести mg силе со-
противления среды. Определение к из соотно-
шения и(оо) = mg/k (установившаяся скорость
иуст = ^(°°) находится из эксперимента) являет-
ся широко используемым способом измерения
вязкости среды (см. подраздел 4.7.10, формула
(4.201)).
Рис. 1.9. Зависимость
от времени скорости
движения тела при наличии
силы сопротивления,
пропорциональной скорости
Движение тела с переменной массой. В некоторых задачах механики
масса тела в процессе движения не остается постоянной. Примером
могут служить системы, работа которых основана на сгорании топли-
ва, запасенного в самой движущейся системе. Выведем основные за-
коны такого движения на примере движения ракеты (рис. 1.10).
В полете ракета выбрасывает продукты горения,
воздействуя на них изнутри камеры сгорания с боль-
шой силой. С той же по величине силой R, но проти-
воположно направленной, эти продукты действуют
на ракету, сообщая ей ускорение. При старте с Земли
на ракету, кроме того, действует сила тяжести F— т$
(где mG — стартовая масса ракеты), направленная
вертикально вниз. Во время полета из-за расхода
топлива масса ракеты уменьшается, т.е. является
зависящей от времени функцией m(t). Скорость v
ракеты также зависит от времени Л За время d/ мас-
са и скорость ракеты получат приращения dm и du,
причем величина dm отрицательна (масса ракеты
уменьшается). Через d/ импульс ракеты станет равен
(m + dm)(и + du), а мгновенный импульс переведен-
ного в газообразное состояние топлива — dmrun где
Рис. 1.10.
Движение ракеты
48* 1. МЕХАНИКА
d/nr — изменение массы газа за время dt, a vr — скорость истечения
газов, т.е. скорость частичек сгоревшего топлива относительно раке-
ты. Приращение импульса ракеты за время dt получится вычитанием
из конечного импульса его начального значения. Эта разность соглас-
но уравнению (1.49) равна импульсу силы Fdt. В проекции на ось, вдоль
которой направлены скорость ракеты и внешняя сила /’(сила притя-
жения Земли или планеты, с которой производится старт) для системы
ракета-газы имеем уравнение
[(m + dm)(v + dv) + dmpjT]-mv = Fdt. (1.52)
Раскрывая скобки и учитывая, что dmr = —dm (изменение массы
ракеты обусловлено расходом топлива), а также вводя готн = vT — v
(готн — скорость истечения газов относительно ракеты) и пренебрегая
членом (dmdr) второго порядка малости, получим: mdv = n0THdm + Fdt
или
dr dm _ Z1 __4
'я-г-^отн-г- + F- (1 53)
dt dt
Это уравнение второго закона Ньютона. Однако масса здесь не по-
стоянна, она меняется со временем из-за сгорания топлива. Кроме
r dm D
того, к внешней силе прибавляется дополнительный член готн — = л,
dt
который представляет собой реактивную силу или силу тяги ракеты
(рис. 1.10). Это уравнение впервые было выведено И.В. Мещерским1
и носит его имя.
Если отсутствует (или пренебрежимо мала) внешняя сила (сила тя-
жести, в нашем случае), т.е. F— 0 (движение в космическом простран-
стве вдалеке от Земли и тяготеющих небесных тел), на ракету действует
только реактивная сила. Из решения уравнения (1.53) при начальных
условиях: стартовая масса m(0) = /п0 и стартовая скорость г(0) = г0,
и постоянной скорости истечения газов (dm/dt — const, что соответ-
ствует постоянному расходу топлива) следует: под действием реак-
тивной силы движение ракеты происходит со скоростью, зависящей
от времени по закону
и(0 = Ц)-Ц,тн1п——
/и(0
(1-54)
1 Иван Всеволодович Мещерский (1859—1935) — российский ученый, основоположник
механики тел переменной массы.
1.2. Динамика • 49
Из уравнения (1.54) можно получить связь между мгновенной мас-
сой и скоростью ракеты (при неподвижной на старте ракете, г0 = 0):
m(t) = mQ exp ——-
\ ^отн .
(1.55)
Два последних соотношения называются формулами Циолковского1.
1.2.4. Третий закон Ньютона
До сих пор мы говорили о том, что на рассматриваемое тело дей-
ствуют другие тела. Количественно это действие определялось силой.
Как показывает опыт, такое действие не может быть односторонним,
нельзя подействовать некоторой силой, не испытав противодействия.
Другими словами, всякое действие носит характер взаимодействия.
Силы «действия» и «противодействия» равноправны и неразличимы.
Они одновременно возникают и одновременно исчезают, но прило-
жены к разным телам. Все это составляет содержание третьего закона
динамики или третьего закона Ньютона: силы, с которыми тела дей-
ствуют друг на друга, всегда равны по величине и противоположны
по направлению. Это значит, что при взаимодействии двух тел сила
Fn, с которой первое тело действует на второе, равна по абсолютной
величине и противоположна по направлению силе F2X, с которой вто-
рое тело действует на первое, т.е.
Р\2 - Л1-
(1.56)
1.2.5. Классификация сил в механике
Говоря о мере воздействия на тело со стороны других тел, отметим,
что все существующие в природе взаимодействия могут быть сведены
к небольшому числу основных видов сил. В первую очередь к ним сле-
дует отнести гравитационные и электромагнитные силы. К последним
относятся силы межатомного и межмолекулярного взаимодействия,
макроскопическим проявлением которых являются силы упругости
(за пределами нашего рассмотрения здесь остались короткодейству-
ющие ядерные силы, связывающие нуклоны в ядрах, и слабые взаимо-
действия, проявляющиеся в их распаде).
1 Константин Эдуардович Циолковский (1857—1935) — русский и советский ученый,
основоположник современной космонавтики.
50* 1. МЕХАНИКА
Силы гравитационного притяжения самые слабые из всех, они дей-
ствуют между всеми материальными телами. Их действие осуществля-
ется через гравитационное поле и распространяется на большие рас-
стояния. сила гравитационного притяжения между двумя точечными
массами Мит определяется законом всемирного тяготения Ньютона
F = -G^-~, (1.57)
_______г г
где G = 6,67-10-11 м3/(кг с2) — гравитационная постоянная; г — радиус-вектор,
проведенный из одной материальной точки в другую, по абсолютной величи-
не равный расстоянию между ними.
Эти силы определяют взаимодействия небесных тел друг с другом,
применительно к телам, находящимся на поверхности Земли, они вы-
зывают появление силы тяжести, которую не следует путать с весом
тела, приложенным к опоре и зависящим от состояния движения тела
(т.е. его ускорения относительно центра притяжения).
Закон всемирного тяготения справедлив не только для точечных
МТ, но и для любых тел, в частности, для однородных шаров, масса
которых распределена сферически симметрично (тогда г представляет
собой расстояние между центрами тел). При расчете космических тра-
екторий это условие можно считать выполненным.
В приведенном законе мы снова встречаемся с понятием «масса».
Здесь масса является гравитационной. Это, вообще говоря, не та инерт-
ная масса, с которой мы уже встречались в уравнении второго закона
Ньютона. Однако практика показывает (и никакие эксперименты это-
го не опровергают), что масса инерционная равна массе гравитацион-
ной, т.е. масса есть объективная характеристика тела, одинаково про-
являющаяся и в законе инерции, и в гравитационном законе.
Электромагнитные силы удерживают электроны в атомах, связы-
вают атомы в молекулах и кристаллах, определяют взаимодействие
атомов и молекул между собой. Электромагнитные силы являются
дальнодействующими (т.е., как и гравитационные, они медленно ~ 1 /г2
убывают с расстоянием).
При решении практических задач механики приходится иметь дело
с силами тяжести, упругости и трения (сопротивления). Эти силы,
как было сказано, сводятся к уже перечисленным: сила тяжести есть
результат проявления гравитационного взаимодействия, силы упру-
гости и трения — проявление электромагнитного взаимодействия
атомов и молекул как внутри тел, так и между ними. Примером ма-
1.2. Динамика • 51
кроскопических сил упругости могут служить силы, действующие
со стороны подвеса, на котором закреплен груз. Подвес под действием
груза растягивается (деформируется), и, как следствие этого, возника-
ют силы упругости. Силы упругости, возникающие в подвесе, принято
называть силами натяжения. Силы, действующие со стороны опоры
на находящийся на этой опоре груз, также являются силами упруго-
сти. В этом случае силы упругости возникают в результате деформа-
ции опоры под действием груза. Силы упругости в этом случае приня-
то называть силами реакции опоры (или просто реакцией опоры). Силы
упругости при малых деформациях связаны с деформацией линейной
зависимостью, т.е., подчинены закону Гука: величина деформации про-
порциональна деформирующей силе и противоположна ей по знаку
ЛпР=~Н (1.58)
где р — коэффициент пропорциональности (коэффициент упругости или жест-
кости); х — абсолютная величина деформации растяжения или сжатия.
В отношении сил, описываемых выражением (1.58) в физике часто
употребляется термин «квазиупругая» (как бы упругая) сила даже в том
случае, когда по своему существу они силами упругости не являются
(например, сила межатомного взаимодействия в двухатомной молеку-
ле). При больших деформациях сила упругости может зависеть от сме-
щения х нелинейно
F= —рх + У1Х2 + у2х3 - (1-59)
Коэффициенты у1? у2, ... называют коэффициентами ангармонич-
ности.
Силы трения скольжения возникают при непосредственном контак-
те тел и обусловлены явлениями, происходящими в поверхностных
слоях соприкасающихся тел. Такое трение, которое действует между
поверхностями различных соприкасающихся тел, называется внеш-
ним. Из школьного курса физики известно, что сила трения в этом
случае пропорциональна силе 7V нормального давления
Др =Ж (1-60)
где f — коэффициент трения.
Этот коэффициент зависит от материала, состояния поверхностей
соприкосновения, наличия смазки и других факторов. Сила трения
всегда направлена против направления движения тела и лежит в пло-
скости соприкосновения тел.
52 • 1. МЕХАНИКА
Трение может проявиться также и при взаимодействии различных
частей одного тела, например, между различными слоями жидкости
или газа (см. подраздел 4.7.7), движущимися с различными скоростя-
ми. Такое трение называется внутренним, а его проявление — вязко-
стью. Сила внутреннего (вязкого) трения появляется при движении
твердого тела в жидкости или газе, так как непосредственно примыка-
ющие к телу молекулы среды, окружающей тело, «прилипают» к нему
и движутся вместе с ним. При малых скоростях тела сила трения может
линейно зависеть от скорости
F^=-kv, (1.61)
где к — коэффициент, зависящий от свойств среды и формы тела.
При возрастании скорости зависимость силы трения от v изме-
няется, может стать нелинейной (см. подраздел 4.7.10). В некотором
определенном интервале скоростей сила трения оказывается пропор-
циональной квадрату скорости:
/1р=-А1и2р (Гл, = -Л1р2). (1-62)
Коэффициент кх также зависит от свойств среды в которой проис-
ходит движение и формы движущегося тела.
Приведенные сведения о природе сил в физике не дают ответа
на простой вопрос: что удерживает атомы в молекулах? Более того,
доказано, что силы одной только электростатической природы не мо-
гут обеспечить стабильности молекул. Надо признать, что в рамках
классической физики ответа на этот вопрос вообще получить нельзя.
Квантовые законы приводят к так называемым обменным взаимодей-
ствиям, создающим дополнительные силы, стабилизирующие моле-
кулы. Можно сказать, что обменные силы — это результат проявления
квантовых свойств вещества.
1.2.6. Неинерциальные системы отсчета. Силы
инерции. Принцип Д’Аламбера
До сих пор мы рассматривали случаи, когда движение материаль-
ной точки (тела) можно описать в инерциальной системе координат.
Существует, однако, много задач, когда сделать этого нельзя и необ-
ходимо пользоваться неинерциальной системой отсчета. Примером
этому служит движение частиц по круговой траектории в центрифуге
или движение с ускорением в лифте или ракете. В неинерциальных
1.2. Динамика • 53
системах отсчета соотношения (1.50), (1.51) не выполняются. Неинер-
циалъной назовем такую систему отсчета, относительно которой сво-
бодное движение тел не является прямолинейным и равномерным.
Следовательно, неинерциальной будет любая система отсчета, кото-
рая движется относительно некоторой инерциальной системы с уско-
рением. Это ускорение может быть связано и с поступательным (ат 0)
и с вращательным (ап ф 0) движением. В общем случае ускорения раз-
личных точек неинерциальной системы отсчета будут различными.
А это значит, что пространство, связанное с телами отсчета неинерци-
альной системы, уже не будет ни однородным, ни изотропным.
Уравнение движения материальной точки в неинерциальной систе-
ме выглядит иначе, чем в инерциальной. Убедимся в этом на частном
примере. Пусть неинерциальная система отсчета К'(х\ у', z) движется
поступательно с ускорением а0 относительно некоторой инерциальной
системы К(х, у, z) (см. рис. 1.6 с соответствующим предположением).
Предположим далее, что материальная точка (тело) в инерциальной си-
стеме обладает ускорением а и это ускорение является результатом дей-
ствия сил F2,..., FN. Тогда согласно (1.50) можно записать
n
та =
(1.63)
Та же материальная точка в системе К будет обладать ускорением а’
(относительное ускорение), которое складывается из ускорения а
и ускорения 50 неинерциальной системы относительно инерциаль-
ной, т.е. аг = а - 50. Умножим левую и правую части этого равенства
на массу т материальной точки и вместо (1.63) получим
n
та = y^Fi -та$
(1-64)
Полученное выражение отличается от уравнения движения (1.63)
в инерциальной системе членом -та$. Появлением этого дополни-
тельного члена обусловлено невыполнение второго закона динамики
в форме (1.63). В частном случае, когда геометрическая сумма сил,
действующих на тело, равна нулю, получим 5' = 30, тогда как, согласно
второму закону Ньютона, ускорение тела должно было бы быть равно
нулю. Произведение массы т тела на ускорение 30 в неинерциальной
системе отсчета, взятое с обратным знаком, называется силой инерции'.
F„=-ma0.
(1.65)
54* 1. МЕХАНИКА
Несмотря на то, что сила инерции проявляет себя реально (напри-
мер, величину этой силы можно измерить пружинным динамоме-
тром), ее относят к разделу особого рода сил. Дело в том, что в неи-
нерциальной системе отсчета мы не можем указать тело, действием
которого можно было бы объяснить появление силы инерции1. А это
значит, что законы Ньютона в неинерциальной системе отсчета не вы-
полняются. Образно говоря, есть сила «действия», т.е. сила инерции,
но отсутствует сила «противодействия». Эти особенности сил инерции
не позволяют в неинерциальной системе отсчета выделить замкну-
тую систему тел, т.е. механическую систему, на которую не действуют
внешние силы, либо их действие скомпенсировано, так как для лю-
бого из тел неинерциальной системы отсчета сила инерции является
внешней силой. Вследствие этого в неинерциальной системе отсчета
не выполняется закон сохранения механической энергии и закон со-
хранения момента импульса, которые будут рассмотрены далее (см.
подраздел 1.4). Не следует считать, что силы инерции это не реальные,
а некоторые «воображаемые» силы. В их реальности мы постоянно
убеждаемся, находясь в салоне трогающегося с места или тормозящего
транспорта, они ответственны за разрушение лопаток турбин, махови-
ков при больших скоростях вращения и др.
Принимая во внимание силы инерции, можно пользоваться всеми
тремя законами динамики Ньютона так, как если бы они происходили
в инерциальной системе. С учетом (1.64) и (1.65) выражение второго
закона Ньютона (1.50) в инерциальной системе принимает вид:
(1.66)
Если тело в неинерциальной системе покоится (5 = 0), то уравне-
ние (1.66) упрощается:
/=1 /=1
(1-67)
где FN+l — сила инерции,
и задача динамики (в неинерциальной системе отсчета) решается
при равенстве нулю суммы равнодействующей всех сил и силы инер-
ции, т.е. сводится к задаче статики в инерциальной системе отсчета.
Утверждение, что задачи динамики могут быть сведены к задачам ста-
1 Вообще говоря, это «тело» можно было бы указать как объект, который движет саму
не инерциальную систему отсчета.
1.2. Динамика • 55
тики путем добавления к обычным силам, действующим на тело, сил
инерции называется принципом Д'Аламбера. В статике задачи решают-
ся более простыми методами, чем в динамике.
Известный интерес представляет один частный случай проявления
сил инерции. Речь идет о равномерном движении материальной точки
по окружности. Материальная точка, участвующая в таком движении,
обладает нормальным (центростремительным) ускорением ап. Тогда,
очевидно, система отсчета, связанная с этой точкой, будет неинерци-
альной. В этой неинерциальной системе отсчета на материальную точ-
ку массой т, помимо других сил, действует сила инерции Д =-тап,
которая называется центробежной силой инерции.
1.2.7. Система материальных точек.
Внутренние и внешние силы
Системой материальных точек (или тел) называется любая, выде-
ленная нами их совокупность. Каждое тело системы может взаимодей-
ствовать как с телами, принадлежащими этой системе, так и с телами,
не входящими в нее. Силы, действующие между телами системы, на-
зываются внутренними силами. Силы, действующие на тела системы
со стороны тел, не входящих в данную систему, называются внешними
силами. Система называется замкнутой (или изолированной), если она
включает в себя все взаимодействующие тела. Таким образом, в замк-
нутой системе действуют только внутренние силы.
Строго говоря, замкнутых систем в природе не существует. Однако
практически всегда можно так сформулировать задачу, чтобы внешни-
ми силами можно было пренебречь (из-за их малости или скомпенси-
рован пости, т.е. взаимоуничтожения) по сравнению с внутренними.
Выбор воображаемой поверхности, ограничивающей систему, явля-
ется прерогативой (свободной волей) субъекта, т.е. должен осущест-
вляться исследователем на основе анализа внутренних и внешних сил.
Одна и та же система тел может считаться замкнутой или открытой
в различных условиях, зависящих от постановки задачи и от заданной
точности ее решения.
В замкнутой системе тел все явления описываются с помощью
простых и общих законов, поэтому, если допускают условия задачи,
то следует пренебречь малым действием внешних сил и рассматривать
систему как замкнутую. Это и есть то, что часто называют физической
моделью объективной реальности.
56* 1. МЕХАНИКА
Частным случаем идеальной механической системы является аб-
солютно твердое тело, которое не может ни деформироваться, ни из-
меняться в объеме, ни тем более разрушаться (очевидно, что таких тел
в природе нет): расстояние между отдельными материальными точ-
ками, образующими такую систему, остаются постоянными при всех
видах взаимодействия.
Теперь введем очень важное в механике понятие центра масс (цен-
тра инерции) системы материальных точек. Возьмем систему, состоя-
щую из 7V материальных точек. Центром масс механической системы
называется точка С, радиус-вектор положения которой в произвольно
выбранной системе отсчета задан соотношением:
N
Yml?l
где — масса материальной точки; — радиус-вектор, проведенный из на-
чала координат системы отсчета в точку, где находится
Если поместить начало координат в точку С, то Rc = 0 и тогда
(1.69)
/=1
что приводит к другому определению центра масс: центр масс механи-
ческой системы — это такая точка, для которой сумма произведений
масс всех материальных точек, образующих механическую систему,
на их радиус-векторы, проведенные из этой точки, как начала коор-
динат, равны нулю. На рисунке 1.11 это проиллюстрировано на при-
мере системы, состоящей из двух
тел (например двухатомной моле-
кулы).
Радиус-вектор Д этой систе-
мы МТ в декартовой системе ко-
ординат имеет координаты Хс, Yc,
Zc (общий трехмерный случай).
При этом положение центра масс
может быть определено следую-
щими уравнениями1:
1 При выбранной в примере системе координат Zc = 0 (плоский одномерный случай).
Рис. 1.11. Центр масс С
на примере системы двух тел
1.2. Динамика • 57
N
miXi
м
N N
—---, Zc= —--
м с м
(1.70)
N
где М — суммарная масса механической системы МТ, М =
До сих пор мы оперировали совокупностью N дискретных матери-
альных точек. А как быть с определением центра масс протяженного
тела, масса которого распределена в пространстве непрерывно? Есте-
ственно перейти в этом случае от суммирования в (1.68)—(1.70) к ин-
тегрированию. При этом в векторной форме мы получим
-* If-
= Т7 rdm’
м . j.
м
а в координатной
|xdm j yd/и | zdi
м. y — м_• z — м
M ’ c M ’ c M
(1-71)
(1-72)
Для имеющих плоскость симметрии (как в примере) тел центр масс
располагается в этой плоскости. Если тело обладает осью симметрии
(ось х в нашем примере), то центр масс непременно должен лежать
на этой оси, если тело обладает центром симметрии (например, как в
случае однородного шара), то этот центр должен совпадать с положе-
нием центра масс.
Для того чтобы определить, как движется центр масс системы, за-
пишем выражения (1.70) в виде mixi = МХС, mz yz = MYC,
/=i /=i
N
= MZC и продифференцируем их дважды по времени (все мае-
сы полагаем постоянными)
N # .. х
mixi = тХс, mzу. = т Yc, miZi = mZc.
Сопоставив полученные равенства с выражениями (1.51), получаем
MXc=^Fxi, MYc=^Fyi, MZc=XFzi
58* 1. МЕХАНИКА
или (в векторной форме)
/=1
(1.73)
Эти уравнения, называемые дифференциальными уравнениями дви-
жения центра масс, совпадают по структуре с дифференциальными
уравнениями движения материальной точки. Это позволяет сформу-
лировать теорему о движении центра масс: центр масс механической
системы движется как материальная точка, масса которой равна мас-
се всей системы и к которой приложены все внешние силы, действующие
на систему.
Если на систему не действуют внешние силы (= 0 или = О,
т.е. действие внешних сил скомпенсировано), то *
7?(= = const, (1-74)
т.е. скорость движения центра масс замкнутой системы всегда остает-
ся постоянной (сохраняется). Внутренние силы на движение центра
масс системы никакого воздействия не оказывают. Если, в частности,
в данной инерциальной системе координат центр масс замкнутой си-
стемы в один из моментов времени покоится, то это значит, что он бу-
дет находиться в покое всегда.
Многие задачи механики решаются наиболее просто в системе ко-
ординат, связанной с центром масс.
1.2.8. Задание состояния системы
материальных точек
Рис. 1.12. К заданию состояния
материальной точки
Задать состояние системы — это зна-
чит иметь возможность описать ее кон-
фигурацию (т.е. положение всех эле-
ментов) в начальный момент времени
и вычислить эту конфигурацию в любой
момент времени.
Положение материальной точки
в пространстве (рис. 1.12) может быть
задано радиус-вектором г, который
в свою очередь задается тремя числами
(например, декартовыми координатами
х, у, z). Сколько величин необходимо
1.2. Динамика • 59
знать, чтобы иметь возможность установить положение системы в лю-
бой последующий момент времени? Пусть за время d/ одна точка сме-
стится из положения 1 в положение 2, т.е.
г (t + dZ) = г (О + dr = f (Z) + (1-75)
Отсюда видно, что для определения г (t + dZ) необходимо знать r(t)
и v(t) (так как mv(t) = p(t), то задание скорости точки можно заменить
заданием импульса р, отнесенного к массе, что не меняет дела), т.е.
всего шесть (три координаты для r(t) и столько же для v(t)) величин.
Если система содержит 7Vчастиц, то число параметров становится рав-
ным 6N.
Для задания состояния системы вводится так называемое фазо-
вое пространство (см. также подраздел 4.5.11). Размерность этого
пространства равна числу параметров, определяющих состояние си-
стемы в данный момент времени, а изменение состояния во времени
определяется совокупностью точек, т.е. линией. Элемент объема фа-
зового пространства dr записывается с помощью шести координат
в виде
di = Hdx,dyA/d/\,dMP3-. (1-76)
/=1
Сказанным мы воспользуемся далее в главе 4 «Молекулярная фи-
зика».
1.2.9. Динамика вращательного движения
Рассматривая в подразделе 1.1.2 кинематические характеристики
вращательного движения, мы ограничились рассмотрением враще-
ния твердого тела около неподвижной оси. В этом подразделе мы до-
бавим к этой простейшей модели еще одну — движение материальной
точки в плоскости около неподвижной точки (полюса). Эти модели
не исчерпывают всего того, что связано с вращательным движением,
но охватывают большой класс явлений. Начнем с изложения зако-
номерностей вращения тела относительно неподвижной оси, а затем
перенесем полученные результаты на движение точки относительно
полюса.
Динамика вращения твердого тела относительно неподвижной оси.
Предположим, что к точке А вращающегося тела (рис. 1.13), закре-
пленного на оси Oz, приложена сила F, произвольно направленная
в пространстве. Разложим вектор силы на две составляющие: одну, па-
60* 1. МЕХАНИКА
Рис. 1.13. К динамическим
характеристикам
вращательного движения
раллельную оси вращения F,
и другую, лежащую в плоскости,
перпендикулярной оси вращения
Fl. Лишь одна составляющая — FL
оказывает влияние на вращение,
составляющая F только оказывает
давление на подшипники, в кото-
рых находится ось вращения в ре-
альном техническом устройстве.
Моментом силы М относительно
оси Oz называется скалярная вели-
чина1
M = F±Asina = F±/z,| (1.77)
где а — угол между радиусом круговой
траектории точки А и направлением
действия силы F±; h = Asina — плечо силы — длина перпендикуляра, опу-
щенного из точки О на линию действия составляющей силы Т±.
Момент силы есть мера силового воздействия одного тела на дру-
гое при вращении. Момент силы может равняться нулю, если линия
действия силы проходит через ось вращения или параллельна ей, хотя
при этом сила нулю не равна.
Так как разные точки твердого тела находятся на разных расстояни-
ях от оси вращения, их линейные скорости и, следовательно, импуль-
сы оказываются разными. Для того чтобы найти динамические харак-
теристики вращающегося тела, выделим около точки А бесконечно
малый элемент массы dm = pdF, где р — плотность тела; dV — соот-
ветствующий dm элемент объема. Моментом импульса элемента dm от-
носительно Oz назовем величину
dLz=Rdp = Rvdm,\ (1.78)
где R — расстояние от элемента dm до оси вращения; v — линейная скорость
этого элемента.
Имея в виду соотношение (1.32), получим
dLz = G)zR2dm = ®zdlz, (1.79)
где op — угловая скорость точки А (или АТТ) относительно оси Oz.
1 Момент силы М (вектор) относительно точки (полюса) вводится на с. 65 (далее).
1.2. Динамика • 61
Величина
dIz=R2dm
(1.80)
называется моментом инерции элемента dm (материальной точки) от-
носительно оси Oz. Интегрируя (1.80) по всему телу, получим Lz =
= о. JdZz = щ_ f A2dm. В этом выражении
Iz = p?2d/w= Jp/?2dK,
M V
(1.81)
где p — плотность тела является его моментом инерции относительно оси Oz.
Таким образом, получается
(1.82)
Момент импульса тела относительно неподвижной оси1 Ozравен про-
изведению его момента инерции относительно Ozu угловой скорости вра-
щения относительно той же оси.
Выведем формулы для моментов инерции некоторых простых симметрич-
ных и однородных (плотность во всех точ-
ках одинакова) геометрических тел по от-
ношению к их центральным осям (осям,
проходящим через центр масс), явля-
ющимися в то же время осями симметрии.
Расположение осей видно из рисунков.
Стержень. Найдем момент инерции тон-
кого (имеющего малые поперечные размеры
по сравнению с длиной) однородного стерж-
ня длиной I и массой т относительно оси г,
проходящей через центр масс стержня пер-
пендикулярно ему (рис. 1.14). Выделим эле-
ментарный участок длиной dx, удаленный
Рис. 1.14. К расчету момента
инерции тонкого стержня.
Теорема Гюйгенса — Штейнера
от оси z на расстояние х. Масса этого участка
dm = (m/l)dx. Воспользуемся формулой (1.80) и полу-
чим
4=^7^=—
zJ/2 12
(1-83)
Тонкое кольцо (обруч). Рассматривается коль-
цо массой т и радиусом А, поперечное сечение
которого настолько мало, что можно не делать
Рис. 1.15. К расчету
момента инерции обруча
1 Момент импульса L (вектор) относительно точки
(полюса) вводится на с. 64.
62* 1. МЕХАНИКА
различий между его внешним и внутренним радиусами (рис. 1.15). Следует
определить момент инерции такого кольца относительно оси zz', проходящей
через его центр (точку О) перпендикулярно плоскости кольца. Выделим
ш
на кольце элементарный участок длиной d/, масса которого dm =-d/. Тогда
2лА
(1.84)
2nR ™
I = [ R2—dl = mR2.
' oJ
Диск (цилиндр). В сплошном однородном круглом диске с массой т и ради-
усом R (рис. 1.16) выделим элементарный объем в виде цилиндра радиусом г,
высотой h, с толщиной стенки dr. Масса dm объема
d И составит dm = pdK. Так как р = m/V= m/nR2h, то
dm = ™ Inrhdr = -^rdr.
nR2h R2
2mRr 3 2m A4
Тогда L =^~ г dr=^-—, или окончательно
z A2 A2 4
mR2
~г
(1.85)
Рис. 1.16. К расчету
момента инерции диска
Во многих случаях необходимо бывает вычислить моменты инерции
относительно оси z', расположенной параллельно центральной оси z-
На рисунке 1.14 приведена схема такого расчета на примере вычисле-
ния момента инерции стержня. Момент инерции тела Iz относительно
оси z, проходящей через центр инерции, считается известным. Рассто-
яние между параллельными осями обозначено буквой d. Требуется
определить момент инерции относительно оси z \ т.е. 1\. Если обозна-
чить координату элементарной массы dm в системе координат связан-
ных с осью z через х, то по отношению к новой оси z 'координата z 'будет
d + х. Тогда момент инерции относительно оси запишется как
+1/2
т т f / \2 т
^=-Г (d + x)2dl = -
1 -1/2 1
(+1/1 +1/2 +1/2
J <72d/ + 2d j xd/+ J
k-//2 -1/2 -1/2
1/2 1/2 1/2 1/2 72
тт Г ,2 , , ,2 Г , , ,2 ^ , Г , /Л Г з /Л/
Но — [d2d/ = — d2 \dl = md\2d— [xdx = 0, — x2d/ =-------------=
I J l J l J l J 12
-1/2 -1/2 -1/2 -1/2
//2
| x2dm = /z, и мы получаем
-//2 ----------7"|
Iz.=Iz+md\ (1.86)
что и составляет суть теоремы Штейнера (Гюйгенса—Штейнера) —
теоремы о параллельном переносе осей.
1.2. Динамика • 63
В молекулярной физике (при изучении скоростей химических ре-
акций, в молекулярной спектроскопии и др.) широко используется
понятие момента инерции молекул и проводятся их расчеты.
Рассмотрим снова двухатомную молекулу, вращающуюся вокруг оси, про-
ходящей через центр ее масс перпендикулярно линии связи, на которой нахо-
дятся составляющие молекулу атомы -
является выразить момент инерции
молекулы относительно этой оси и ки-
нетическую энергию вращения через
ее параметры, которые полагаются из-
вестными. На рисунке буквами и т2
обозначены массы атомов молекулы,
а буквой d — межатомное расстояние.
Точка С является центром масс, через
нее проходит ось вращения молекулы.
Имея в виду свойство центра масс
(1.69), получим Х\т{ = х2т2. Отсюда
, т2 ,
при + х2 = d следует, что =-----—d
+т2
и х2 =---1— d.
т{ + т2
жесткий ротатор (рис. 1.17). Задачей
Рис. 1.17. Двухатомная молекула
как жесткий ротатор
Момент инерции молекулы теперь можно вычислить как
I = mxxl + т2х2 = т[Ш2 J2 - pirZ2, (1.87)
+ т2
где ц =——-------так называемая приведенная масса молекулы.
т{ \ т2
Из соотношения (1.87) видно, что вращение двухатомной молекулы отно-
сительно центра масс сведено к вращению одной массы (приведенной мас-
сы ц) относительно оси, находящейся на расстоянии d от нее. В выражение
(1.87) входят характеристики молекулы, которые можно найти в физико-
химических справочниках.
Важной динамической характеристикой вращательного движения
является кинетическая энергия1 вращения, которая может быть пред-
ставлена в виде
Л®2
rT1 _ Z ____ _Z
2 ~ 2/,
(1.88)
Полученные соотношения используются при анализе вращатель-
ных спектров молекул.
1 Общее определение кинетической энергии будет дано в подразделе 1.3.3.
64* 1. МЕХАНИКА
Рассмотрим теперь динамические свойства вращающегося во-
круг неподвижной оси тела. Продифференцируем сначала соот-
ношение (1.82) (при постоянном моменте инерции Л) по времени
и получим
dZz d da)z
—~ = —(4ю?) = Д —- = 4s? -
dt dt z z z dt z z
(1-89)
Подействуем силой F на элемент массы тела dm, по касательной
к описываемой им при движении окружности. Под действием этой
силы dm получит ускорение ах (ат = ezR)\ dF = axdm = 7?szdm. Умножим
это уравнение на R слева и справа. Получим dMz = ezdlz, где dMz — мо-
мент силы dF относительно оси Oz, dlz — момент инерции элемента
dm относительно этой оси. Интегрирование последнего соотношения
по всему телу дает
MZ=IZ&Z.\ (1.90)
Структурно это выражение соответствует второму закону Ньютона
для поступательного движения. Сравнивая (1.89) и (1.90), получим
Mz =^,
z dt
(1-91)
или, обобщая на N сил (с соответствующими им моментами Mzi),
dT N
dt h
(1-92)
Это уравнение представляет обобщенную форму записи второго
закона Ньютона для вращения тела относительно оси Oz (основной
закон динамики вращательного движения): изменение во времени про-
екции момента импульса на ось Oz равно сумме проекций на ту же ось
моментов всех приложенных к телу сил.
Плоское движение материальной точки около полюса. Представим
себе материальную точку массой т, движущуюся по плоской траекто-
рии около полюса О со скоростью v (и, следовательно, с импульсом
р = mv ), как показано на рис. 1.18. Моментом импульса материальной
точки (относительно полюса О) назовем вектор, равный векторному
произведению г и р
L=[rp],
(1-93)
где r — радиус-вектор точки, т.е. радиус-вектор, проведенный из полюса О
в точку приложения импульса (см. рис. 1.18).
1.2. Динамика • 65
Соответственно определению, вектор
L перпендикулярен плоскости, в кото-
рой лежат векторы г и р (т.е. плоскости
движения), и направлен так, что г, р
и L образуют правовинтовую систему.
Продифференцировав (1.93) по вре-
мени, получим
dZ Г dr Л Г-dp
— = —р + г — .
d/ d^ dZ
Рис. 1.18. Момент L импульса
относительно полюса
Так как — = г, а Р = ти, то первое
слагаемое в последнем выражении равно нулю, ибо оба вектора колли-
/ \ ™ Ф г
неарны (т.е. сонаправлены). Имея в виду, что — = г, второе слагаемое
d/
можно записать в виде [ЯГ]. Этот вектор — результат векторного про-
изведения г и F называется моментом силы относительно полюса
(точки) О:
Поэтому M = [rF]. (1-94) (1-95)
- &L М = —, d/
т.е. производная по времени вектора момента импульса материальной
точки равна моменту приложенной к ней силы относительно полюса О.
Это выражение представляет собой математическую запись второго
закона Ньютона для вращательного движения материальной точки
по плоской траектории (кстати, движение по произвольной криволи-
нейной траектории в каждый момент времени можно рассматривать,
как «мгновенное вращение» вокруг меняющего свое положение полю-
са). Если представить уравнение (1.95) в проекции на ось Oz,
то —= Mz, и мы получим известное нам выражение (1.91).
Можно использовать полученные результаты для объяснения явления, из-
вестного как гироскопический эффект. Представим себе тело (в виде диска),
которое вращается в горизонтальной плоскости вокруг оси Oz (рис. 1.19).
Момент импульса L этого тела-гироскопа направлен вдоль этой же оси. Пусть
к оси вращения приложена отклоняющая (опрокидывающая) сила Fx, дей-
ствующая в направлении оси Ох. Момент этой силы М относительно оси Оу
66* 1. МЕХАНИКА
Рис. 1.19. Гироскопический эффект
есть вектор, направленный (см. фор-
мулу (9.14)) вдоль оси Оу. Согласно
уравнению (1.95) приращение dZ
вдоль вектора момента силы, т.е. вдоль
оси Оу (индексы х и у у векторов отра-
жают на рисунке тот факт, что сила на-
правлена вдоль оси Ох, а М и dZ —
вдоль оси Оу). Таким образом, сила,
направленная вдоль оси Ох, создает
дополнительное вращение вектора L
в плоскости yOz — так называемую
прецессию. Целесообразно сравнить
этот результат с представленным
на рис. 1.8, где отмечено, что вектор приращения dp при поступательном
движении совпадает по направлению с силой.
Таким образом, при любом изменении горизонтального положения гиро-
скопа возникает момент силы, стремящийся вернуть его в исходное положе-
ние (см. далее подраздел 1.4.3 — закон сохранения момента импульса) — гиро-
скопический эффект.
Гироскопический эффект проявляется во многих физических явлениях,
например, он обусловливает процессию магнитных моментов (атомов и ядер)
в магнитном поле и др., многие из которых лежат в основе методов исследова-
ния, используемых в физической химии. На этом явлении основано действие
технических устройств, предназначенных для стабилизации положения тел
в пространстве — гироскопов.
В заключение еще раз отметим, что структура формул кинемати-
ки и динамики вращательного движения тела относительно непод-
вижной оси аналогична структуре формул поступательного движения.
Эту аналогию мы представляем в табл. 1.1. Из этой таблицы видно,
что специального запоминания формулы вращательного движения
не требуют. Нужно только знать какие характеристики надо формаль-
но заменить при переходе от поступательного движения к вращению.
Таблица 1.1
Соотношения между характеристиками поступательного
и вращательного движения
Поступательное движение (вдоль оси х) Вращательное движение (относительно оси z)
X Координата Ф Угловая координата (угол)
v = dx/d/ Скорость со = dcp/d/ Угловая скорость
а = di?/d/ Ускорение s = dco/d/ Угловое ускорение
1.3. Работа, энергия и мощность • 67
Окончание
Поступательное движение (вдоль оси х) Вращательное движение (относительно оси z)
т Масса тела 4 Момент инерции тела от- носительно оси
Fx Проекция силы ч Момент силы относитель- но оси
Рх = mvx Проекция импульса тела F~ /-io Момент импульса тела относительно оси
dpx = Fxdt Основной закон дина- мики поступательного движения dLx = Mzdt Основной закон динами- ки вращательного движе- ния
dA = Fxdx Элементарная работа силы dA = M-dcp Элементарная работа мо- мента силы
P = Fxvx Мощность P = Mz®z Мощность
1.3. Работа, энергия и мощность
1.3.1. Работа силы и момента силы
Пусть материальная точка (тело) под действием силы F совершила
элементарное перемещение dZ (рис. 1.20). Элементарная работа силы
есть скалярная мера эффективности ее действия, равная скалярному
произведению вектора силы на вектор элементарного перемещения
точки (тела)
dA = (Fdl)
или
dL4 = Fdl cos a = FzdZ,
где a — угол между векторами F и dZ.
В зависимости от значения угла а между
направлением силы и перемещения (см.
рис. 1.20) элементарная работа может быть
положительна или отрицательна: при л/2 >
> ос > 0 работа положительна, при л/2 <
< ос < л — отрицательна, а при a = л/2 —
(1.96)
Рис. 1.20. К вычислению
работы силы F
на перемещении dZ
68* 1. МЕХАНИКА
равна нулю. Работа силы на конечном перемещении L определяется
по формуле
А = J(M),
L
(1-98)
т.е. работа равна криволинейному интегралу, взятому от скалярного
произведения F и df вдоль дуги кривой <£, описанной точкой при-
ложения силы при ее перемещении. В частном случае, когда сила F
постоянна, а точка ее приложения перемещается по прямой, выраже-
ние (1.98) упрощается до
А = 77 cos а = F/Z,
(1-99)
где Fi — проекция силы F на направление вектора I (направление движе-
ния).
Если силу F, приложенную к некоторой точке вращающегося тела
(рис. 1.21), разложить на три составляющие: в направлениях оси Oz
вращения ( F ), в направлении нормали к окружности с центром О
(Fr)w касательной к траектории точки (Д), то согласно (1.97) только
последняя составляющая ( Л) совершает элементарную работу на пе-
ремещении dl: dL4 = 7\dZ. Так как dl = 7?dcp, то dL4 = 7\7?dcp или
dA = M,dcp,
(1.100)
Рис. 1.21. К вычислению работы
силы F на перемещении dZ
при вращательном движении
где Mz — момент силы F относительно
оси Oz.
Работа момента силы на конеч-
ном угловом перемещении ср
А = jA/.d(p.
ср
Если Mz = const, то
А = Mzcp.
(1.101)
(1.102)
Работа сил упругости. Силы упругости представляют собой силы, завися-
щие от деформации (перемещения) х по линейному закону F(x) = — рх (см.
формулу (1.58)). Простейшим примером возникновения сил упругости может
служить деформация пружины. Совместим начало координат с телом, когда
пружина находится в ненагруженном состоянии (рис. 1.22, а). Предположим,
что тело может двигаться без трения вдоль оси Ох. Подействуем на свободный
1.3. Работа, энергия и мощность • 69
конец пружины внешней растягивающей
силой F (рис. 1.22, б); при любой дефор-
мации этой силе будет противодейство-
вать внутренняя сила упругости Тщ рав-
ная ей по величине и противоположная
по направлению. Элементарная работа
против силы упругости на перемещении
dx определится как
сЬ4внеш = F(x)dx = -рх<7х, (1.103)
а полная работа (рис. 1.22, в) на конечном
перемещении х составит
4неш=-1₽^Х = -^- (1-Ю4)
о 2
Рис. 1.22. Работа силы упругости
При переходе пружины от деформированного состояния к свободному работа
сил упругости положительна:
4»™=^. (1-105)
Итак, работа внешней силы по абсолютной величине равна работе вну-
тренней силы (силы упругости) и противоположна ей по знаку (Лвнеш = —Лвнугр).
1.3.2. Мощность
Поскольку работа совершается во времени, может возникнуть во-
прос о том, насколько быстро она совершается? Так мы приходим
к понятию мощности. Пусть за промежуток времени А/ совершена ра-
бота ЛА. Тогда средняя за данный промежуток времени мощность
<р> = —
At
(1.106)
При AZ -> 0 получим мощность, развиваемую силой в данное мгно-
вение, т.е. мгновенную мощность
„ ЛА дА
Р = 11 m — = —
Д'->о Л1 d/
(1.107)
Имея в виду (1.96) для мощности постоянной силы, можно запи-
сать
P = d(^d/)=(fg)
d/
(1.108)
70* 1. МЕХАНИКА
Мощность постоянной силы есть величина, равная скалярному
произведению силы на скорость перемещения точки ее приложения.
В том случае, когда работа совершается постоянным моментом
силы MZ{F), приложенным к телу, вращающемуся относительно оси Oz
с угловой скоростью CD, мощность
р = ^^ = м (1.109)
d/
1.3.3. Кинетическая энергия
При движении тело (или МТ) обладает запасом механической энер-
гии, связанным интенсивностью движения (скоростью) и его массой.
Кинетическая энергия материальной точки есть скалярная мера меха-
нического движения, равная половине произведения массы точки
(тела) и квадрат ее скорости
2
(1.110)
С использованием импульса р выражение (1.110) можно перепи-
сать в виде
Т = —
2т
(1.111)
Как видно, кинетическая энергия всегда положительна.
Снижение скорости означает потерю кинетической энергии, уве-
личение скорости — ее накопление. Изменение кинетической энергии
идет на совершение работы. Кинетическая энергия задается в опреде-
ленной инерциальной системе отсчета. При переходе к другой инер-
циальной системе значение кинетической энергии (вследствие из-
менения скорости) будет иным, т.е. кинетическая энергия (так же,
как и скорость) не инвариантна по отношению к преобразованиям Гали-
лея.
Кинетическая энергия механической системы, состоящей из сово-
купности N материальных точек (тел), представляет собой сумму ки-
нетических энергий всех этих элементов:
Г = miF
2
(1-П2)
где пн — масса z-й точки (тела); v-t — ее скорость.
1.3. Работа, энергия и мощность • 71
Рассмотрим выражение кинетической энергии при разных видах
движения.
Поступательное движение. Учитывая, что при поступательном дви-
жении скорости всех точек тела одинаковы, получим:
Л, тц2 V2 Л, Mv2
Т = У —— = — У т} =-,
tr 2 2 tr 2
(1.113)
где М — общая масса тела; v — скорость любой его точки.
Вращательное движение. При вращательном движении относитель-
но неподвижной оси скорость произвольной точки тела = со где
со — угловая скорость тела; Rs — расстояние соответствующей точки
от оси вращения. Тогда
N
Т = ^Ш1
i=\
ю2Д2
2
(1.114)
но поскольку последняя сумма представляет собой момент Iz инерции
данного тела относительно оси вращения, то
т Lor L\
2 ~ 21 z
(1.115)
Общий случай движения тела. Для произвольной системы МТ (тел)
справедлива теорема Кёнига: кинетическая энергия механической сис-
темы равна сумме кинетической энергии всей массы системы, сосредото-
ченной в одной ее точке (центре масс) и движущейся вместе с ней, и ки-
нетической энергии всех элементов (частей) системы по отношению к ее
центру масс.
Применим теорему Кёнига к произвольному движению тела.
В этом случае движение может быть разложено на поступательное
(со скоростью движения центра масс) и вращательное — относительно
оси, проходящей через центр масс. Согласно теореме Кёнига, общая
кинетическая энергия тела в этом случае равна сумме кинетических
энергий поступательного движения тела (со скоростью vc его центра
масс) и кинетической энергии его вращательного движения (с угловой
скоростью со и моментом инерции /с) относительно оси, проходящей
через центр масс:
r=ww|-+7^ (1П6)
72 • 1. МЕХАНИКА
Теорема об изменении кинетической энергии. Пусть материальная
точка массой т под действием приложенной к ней силы F получила
перемещение dZ. Проецируя векторы уравнения F = та на касатель-
ную к траектории в месте положения точки, получим таТ = Д, где аТ —
модуль касательного ускорения точки, а Е - соответствующая проек-
тт dr dr dZ rdr ,
ция силы. Ho aT = — = = ~dj~’ тогда mv^v = Рассматривая
правую часть данного равенства как элементарную работу силы dL4,
а левую часть — как дифференциал кинетической энергии МТ, полу-
( ти2
чим d ---- = d/L или
I 2 ) ________
dT = cL4,| (1-117)
т.е. дифференциал кинетической энергии равен элементарной работе
силы. В интегральной форме полученное соотношение примет вид
Т2-Тх = А,\ (1.118)
т.е. изменение кинетической энергии равно работе приложенных к точке
сил.
При выводе последнего выражения мы не накладывали никаких
ограничений на природу сил. Поэтому оно справедливо для всех си-
стем и должно учитывать все силы, действующие в системе, — внеш-
ние и внутренние.
Теорема об изменении кинетической энергии может быть распро-
странена и на систему материальных точек.
1.3.4. Силовое поле
Физическое поле — особая форма материи, связывающая частицы
вещества и передающая (с конечной скоростью) воздействие одних
тел на другие. Каждому типу взаимодействия в природе соответству-
ет свое поле. Силовым полем называют область пространства, в кото-
рой на помещенное туда материальное тело действует сила, зависящая
(в общем случае) от координат и от времени. Силовое поле называется
стационарным, если действующие в нем силы не зависят от времени.
Силовое поле, в любой точке которого сила, действующая на данную
материальную точку, имеет одно и то же значение (по модулю и на-
правлению), является однородным.
Можно характеризовать силовое поле силовыми линиями. В этом
случае касательные к силовым линиям определяют направление дей-
1.3. Работа, энергия и мощность • 73
ствия силы в этом поле, а густота силовых ли-
ний пропорциональна величине силы.
Центральной называется сила, линяя дей-
ствия которой во всех положениях проходит
через некоторую определенную точку, называ-
емую центром силы (точка О на рис. 1.23).
Поле, в котором действует центральная
сила, — центральное силовое поле. Величина
силы F(r), действующей на один и тот же ма-
териальный объект (материальную точку, тело,
электрический заряд и др.) в разных точках та-
Рис. 1.23. Схематическое
представление
центрального поля
кого поля, зависит только от расстояния г до центра сил, т.е.
Рис. 1.24. Схематическое
представление на плоскости
хОу однородного ПОЛЯ
Г = Г(г)-, (1.119)
Г
г
( — = п — единичный вектор в направлении вектора г ). Все силовые
г
линии такого поля проходят через одну точку (полюс) О; момент цен-
тральной силы в этом случае относительно
полюса тождественно равен нулю Мо (F) =
= 0. К центральным относятся гравитацион-
ные и кулоновские поля (и силы соответ-
ственно).
На рисунке 1.24 приведен пример одно-
родного силового поля (его плоская проек-
ция): в каждой точке такого поля действую-
щая на одно и то же тело сила одинакова
по величине и направлению, т.е.
F = const (1.120)
и
8F(x, у, z) Q. 8F(x,y,z) Q.
8z ’ ду
8F(x,y,z) Q
8z
На рисунке
неоднородного
у, z) const и
Рис. 1.25. Схематическое
представление на хОу
неоднородного поля
1.25 приведен пример
поля, в котором F (х,
dF(x, у, z) dF(x, у, z)
дх ’ ду
74 • 1. МЕХАНИКА
dF(x, у, z) i r .
и —-—-—- не равны нулю1. Густота силовых линии в различных обла-
dz
стях такого поля не одинакова — в области справа поле более сильное.
Все силы в механике можно разбить на две группы: консерватив-
ные силы (действующие в потенциальных полях) и неконсервативные
(или диссипативные). Силы называются консервативными (или потен-
циальными), если работа этих сил не зависит ни от формы траектории
тела, на которое они действуют, ни от длины пути в области их дей-
ствия, а определяется только начальным и конечным положением то-
чек перемещения в пространстве. Поле консервативных сил называет-
ся потенциальным (или консервативным) полем.
Покажем, что работа консервативных сил по замкнутому контуру
равна нулю. Для этого разобьем замкнутую траекторию произвольно
на два участка 1<д2 и 1Ь2 (рис. 1.25). Так как силы консервативны,
то Л1й2 = Л1й2. С другой стороны Л1й2 = -Л2М. Тогда Л1а2М = Л1й2 + А2Ь1 =
= Л1й2 — Л1й2 = 0, что и требовалось доказать. Справедливо и обратное
Рис. 1.26. Работа
консервативных сил
утверждение: если работа сил по произ-воль-
ному замкнутому контуру ср равна нулю,
то силы консервативны, а поле потенциаль-
но. Это условие записывается в виде контур-
ного интеграла
(1-121)
L
что означает: в потенциальном поле циркуля-
по замкнутому контуру
Рис. 1.27. К доказательству
консервативности
центральных сил
ция (j)Fdl вектора F по любому замкну-
L
тому контуру L равна нулю.
Работа неконсервативных сил в об-
щем случае зависит как от формы тра-
ектории, так и длины пути. Примером
неконсервативных сил могут служить
силы трения и сопротивления.
Покажем, что все центральные силы
относятся к категории консервативных
сил. Действительно (рис. 1.27), если
сила F центральная, то ее можно пред-
1 Представленное на рис. 1.23 центральное силовое поле также является неоднородным
полем.
1.3. Работа, энергия и мощность *75
-г -*
ставить в виде F(r)—. В этом случае элементарная работа силы F
г
-* - -
на элементарном перемещении dZ будет dA = Fdl = F(r) —dZ или
г
dL4 = F(r)dl cos a = F(r) dr (так как rdZ = rdl cos ос, a dZ cos a = dr ). Тогда
работа
Л12 = Jr(r)dr = /(r2)-/(r1), (1.122)
rl
где /(г) — первообразная функция.
Из полученного выражения видно, что работа Л12 центральной
силы F зависит только от вида функции F(r) и расстояний и г2 точек
1 и 2 от силового центра О и не зависит от длины пути от 1 к 2, что и от-
ражает консервативный характер центральных сил.
Приведенное доказательство является общим для любых централь-
ных сил и полей, следовательно, охватывает упомянутые выше силы —
гравитационные и кулоновские.
1.3.5. Потенциальная энергия
Если в системе действуют только консервативные силы (потенци-
альное поле), то ее состояние можно охарактеризовать значением по-
тенциальной энергии как функции координат.
Выберем какое-либо положение системы, которое условно примем
за нулевое (положение 0), этому положению системы припишем по-
тенциальную энергию Ло, равную нулю. Предположим теперь, что нам
нужно определить потенциальную энергию системы в каком-то дру-
гом положении, которое назовем положением 1, т.е. величину Лр По-
тенциальной энергией системы в положении 1 называется величина,
численно равная работе сил поля, которая совершается при переходе
системы из данного положения в то, где потенциальная энергия вы-
брана равной нулю
Аю=Пх-Па=П^ (1.123)
Вследствие того, что поле потенциально, работа А10 не зависит от пути
от 1 к 0, а характеризует систему в точке 1 по отношению к точке 0.
Если вслед за этим система перешла в положение 2, то ее потенци-
альная энергия стала Л2, при этом по определению Л21 = Л2 — Ль Так
какЛ21 = —Л12, работа
Л12 (внутренних сил) = П} - Л2 = -АЛ,
(1-124)
76* 1. МЕХАНИКА
т.е. работа внутренних сил (сил поля) равна убыли потенциальной энер-
гии. Наоборот, работа внешних сил, действующих против сил поля,
приводит к приращению потенциальной энергии
^(внешних сил) = П2 - П} =/\П. (1.125)
Положение 0 было выбрано произвольно; за нулевое можно
было бы выбрать любое другое положение и приписать ему значение
П— 0. Это значит, что потенциальная энергия определяется с точностью
до постоянного слагаемого константы С. Этот «произвол» не является
практически существенным, так как при вычислении разности по-
тенциальных энергий (см. например, выражения (1.123) — (1.125)) по-
стоянные С в разности взаимно уничтожаются. Также не влияет при-
сутствие постоянной С на производную от функции потенциальной
энергии по координатам.
Полученные соотношения показывают, каким образом можно
вычислить потенциальную энергию системы в определенном по-
ложении. Единой универсальной формулы (как это имеет место,
например, для вычисления кинетической энергии) для этого нет.
Соотношения (1.123) — (1.125) показывают путь (дают алгоритм
или рецепт) определения потенциальной энергии системы посред-
ством вычисления работы сил, приведших систему в данное поло-
жение.
В качестве примера разберем ряд важных случаев.
1. Вычислим потенциальную энергию упруго деформированной пружины.
На рисунке 1.22, а приведена схема пружины в первоначально недеформи-
рованном состоянии: левый конец пружины жестко закреплен, другой конец
под действием внешней силы может перемещаться вдоль оси Ох. Изображена
также растянутая под действием внешней силы F2 пружина (см. рис. 1.22, б).
В состоянии покоя на конец растянутой пружины вдоль оси х действуют две
противоположно направленные силы: внешняя сила F2 и сила упругости Тщ
причем F{ = —F2. За нулевое положение (с нулевой потенциальной энергией)
выбираем состояние недеформированной пружины (х = 0). В соответствии
с (1.103) d/l = —pxdx (р — коэффициент жесткости) и
х х п 2
П(х) = - jcL4 = р Jxdx =
О О 2
На графике (рис. 1.22, в) наклонная прямая линия выражает зависимость
Еупр от х, а потенциальная энергия П(х) определяется затемненной площадью.
2. Второй пример связан с определением потенциальной энергии тела в грави-
тационном поле Земли. Обозначим массу Земли буквой М, а расстояние от цен-
1.3. Работа, энергия и мощность • 77
тра Земли до тела массой т символом г. Тогда согласно закону всемирного тя-
готения (1.57)
F(r) = -G^.
Г
(1.126)
За состояние с нулевой потенциальной энергией примем бесконечное уда-
ление тела от Земли (77(оо) = 0). По определению потенциальную энергию тела
в данной точке г гравитационного поля найдем как работу этой силы при пере-
dr
мещении тела из положения г в положение г оо Щг) = -GMm j— = G--- .
После подстановки пределов получим rr r г
II(r) = -G—.
Г
(1.127)
Величину ср = — называют потенциалом гравитационного поля.
т
Потенциал гравитационного поля есть физическая величина, численно рав-
ная потенциальной энергии, которой обладает тело единичной массы, находя-
щееся в данной точке поля. Потенциал гравитационного поля, создаваемого
точечным телом (МТ) или однородным шаром, выражается формулой
(1.128)
Если известен потенциал поля в точке с координатой г, то потенциальная
энергия тела определяется простым соотношением
//(г) =//?(р(г).
(1.129)
3. Рассмотрим потенциальную энергию сжатого газа. Для этого представим
себе цилиндр с поршнем, под которым находится газ. Подействуем внешней
силой F на поршень. Под действием этой силы поршень, сжав газ, переме-
стится на величину dx. Работу силы F над газом определим как dA = Fdx. Так
как давление р = F/S, то F=pSndA = pSdx. где 5dx =d V— величина изменения
объема под цилиндром. Получили, что работа внешних сил dA равна увеличе-
нию потенциальной энергии газовой системы d //. То есть
|d/7 = pdK. |
(1.130)
Рассмотрим связь потенциальной энергии с силой. Так как потен-
циальная энергия и консервативные силы порознь являются функция-
ми одних и тех же параметров (координат), между этими физически-
ми величинами должна существовать связь. Установив эту связь, мы
будем иметь возможность по заданной функциональной зависимости
силы от координат точки поля (х, у, z), где эта сила F(x, у, z) действует,
находить выражение для потенциальной энергии П(х, у, z) тела, на-
78* 1. МЕХАНИКА
ходящегося в той же точке. Для установления этой связи рассмотрим
тело в неизменном во времени (стационарном) поле. В каждой точ-
ке такого поля на тело будет действовать определенная сила F(x, у, z).
В этой же точке поля тело будет иметь определенную (с точностью до
константы С) потенциальную энергию П(х, у, z). Осуществим элемен-
тарное перемещение точки (тела) на величину dZ. Внутренние силы
поля в этом случае совершат работу dA, равную убыли потенциаль-
ной энергии, т.е. dL4 = — d/7. Вследствие того, что по формуле (1.97)
dA = F/dZ, изменение потенциальной энергии приравнивается работе
d/7 = —Fidl, откуда
F Ш
(1.131)
Проанализируем полученное выражение для трех случаев.
Одномерное движение вдоль оси Ох\ dZ = dx. Тогда
F(x) = _d^(x)
dx
(1.132)
Движение в центральном поле\ dZ = dr
dr
(1.133)
Общий трехмерный случай (в декартовых координатах):
(дП т дП дП -Л
F = - — i + —j + — к = -gradЯ(х, у, z),
I dx ду dz )
(1.134)
т.е. сила равна взятому со знаком минус градиенту (антиградиенту)
потенциальной энергии. Напомним, что градиентом является век-
тор, направление которого совпадает с направлением максимально-
го возрастания скалярной функции (в нашем случае потенциальной
энергии); его абсолютная величина определяет скорость возрастания
функции в этом направлении (антиградиент имеет противоположное
направление).
Как уже говорилось ранее, то, что потенциальная энергия определе-
на с точностью до постоянного слагаемого, не влияет на результат вы-
числений по формулам (1.131) — (1.134). При дифференцировании это
слагаемое не дает отличного от нуля вклада в выражение для силы.
Применим полученные соотношения для определения потенци-
альной энергии в уже известных нам случаях.
1. Потенциальная энергия упругой пружины. Так как F(x) — —рх х
х (F(x)) — упругая сила, ах — смещение конца положения равновесия,
1.3. Работа, энергия и мощность • 79
и так как F(x) = — (d77/dx), то рх = d77(x)/dx, отсюда дЩх) = pxdx. Ин-
Вх2
тегрируя, получим U(х) = + С. Приняв 77(0) = 0, найдем, что С = 0,
Вх2
и тогда 77(х) = . Работа Л12 сил упругости при деформации пружи-
ны от значения Xt до х2 выразится равенством
Л12 =-Д77 = Пх-П2 =1р(х12 -х22). (1.135)
2. Потенциальная энергия гравитационного взаимодействия
(рис. 1.28). Так как для поля гравитационных сил справедливо соот-
Мт
ношение F(r) = -G—то находим
г
(1.136)
или после интегрирования: 77(r) = -G^^--\- С.
Постоянную интегрирования С
определим, приняв потенциальную
энергию взаимно бесконечно удален-
ных тел за нуль, т.е. 77(оо) = 0. Тогда
С = 0. Следовательно,
Мт
Jl(r) = -G—. (1.137)
При определении постоянной ин-
тегрирования можно было поступить
иначе, а именно, принять потенциаль-
ную энергию взаимодействия равной
нулю, когда тело находится на поверх-
ности Земли (при r = R). Тогда выраже-
Рис. 1.28. Зависимость
потенциальной энергии
от высоты поднятия тела
над поверхностью Земли
n(R) = -G— + C = 0, откуда
7?
ние (1.137) перепишется в виде
Мт
С = G---. В этом случае потенциальная энергия тела, находящегося
7?
на высоте h над поверхностью Земли, выразится соотношением
„ Мт Мт GMmh
ll(n) = —G-----1- G--=---------
R + h R R(R + h)
(1.138)
80* 1. МЕХАНИКА
Мш
При условии, что h « R, имеем 11(h) ®G——Л, а так как из
R
Мт М
G—— = gm следует G— = g (g — ускорение свободного падения
R R
на поверхности Земли), то получаем знакомую формулу
11(h) = mgh. (1.139)
Так выражается потенциальная энергия поднятого на высоту h
над Землей тела при h « R.
В общем случае, гравитационное поле Земли, как всякое централь-
ное поле, является неоднородным (силовые линии поля не парал-
лельны друг другу, ускорение свободного падения зависит от высоты h
М
как = Однако если рассматривать поле при неболь-
ших А, то в пределах определенной точности можно считать его одно-
родным, a g постоянным. Это только частный случай, очень важный
на практике.
На рисунке 1.28 приведен график функции П(г)\ гиперболическая
зависимость П(г)--(1/г) лежит в области отрицательных значений по-
тенциальной энергии. Видно, что при г -> оо П(г) -> 0. В случае если
за нуль потенциальной энергии принять положение тела на поверхно-
сти Земли (г — R), то начало координат (точка 0) смещается на величину
-G---- по оси ординат и на величину R по оси абсцисс. При h« R за-
R
висимость 11(h) изображается прямой линией. Из рисунка видно, что
кривая П(г) и линейная зависимость 11(h) в области малых h практиче-
ски совпадают. Простые расчеты показывают, что с точностью до 1%
формулой (1.139) можно пользоваться до значений h = 50 км. Иными
словами, гравитационное поле Земли до указанной высоты в пределах
точности 1% можно считать однородным. Конечно, нуль потенциаль-
ной энергии не обязательно связывать с уровнем поверхности Земли;
потенциальную энергию можно отсчитывать от любого уровня.
Потенциальная энергия тела (например, спутника Земли), вычис-
ляемая по (1.137), отрицательна; это связано с тем, что значение П(г)
при бесконечном удалении его от Земли, было выбрано равным нулю.
По соотношению (1.119) потенциальная энергия поднятого над Зем-
лей тела всегда положительна.
Потенциальная энергия зависит от взаимного расположения
взаимодействующих друг с другом тел. Так как расстояние является
1.4. Законы сохранения в механике • 81
инвариантным по отношению к преобразованиям Галилея, то и по-
тенциальная энергия также инвариантна по отношению к этим пре-
образованиям (напомним, что кинетическая энергия не инвариантна
из-за зависимости скорости тела от выбора системы координат).
Работа гравитационных сил при перемещении тела из некоторой
точки 1 в точку 2 в общем случае выразится через его гравитационные
потенциалы срг и ср2 следующим образом (см. формулы (1.124), (1.128),
(1.129)):
Л12 = — £Л= Щ — П2 — —GMm \ —| = /^(ф! — ср2), (1.140)
И Г2)
а в случае однородного поля силы тяжести при g = const
Л12 — mgQh — — mgkh. (1.141)
1.4. Законы сохранения в механике
1.4.1. Закон сохранения энергии в механике
Пусть 1 и 2 — два различных положения материальной точки (тела)
в потенциальном силовом поле, а П} и П2 — соответствующие значе-
ния ее потенциальной энергии в этих положениях. Согласно теореме
об изменении кинетической энергии (см. подраздел 1.3.3)
2 2
mv2 mvx
^2-^= =Л12, (1-142)
где Л12 — работа сил, внутренних или внешних, консервативных или диссипа-
тивных, приложенных к материальной точке при ее перемещении из точки 1
в точку 2.
Если ограничиться только консервативными (потенциальными)
системами и исключить внешние силы (наложить условие замкнуто-
сти системы), то согласно (1.125):
Л12 — П\ — п2.
Сопоставив два последних уравнения, получим
Т2 +Я2 = Т\ +ПЪ (1.143)
Поскольку были взяты два произвольных положения, то можно за-
писать общее выражение
Т + П = Е = const,
(1.144)
82* 1. МЕХАНИКА
справедливое для МТ, любых тел системы и для такой системы в целом;
здесь Е — полная механическая энергия. Итак, полная механическая
энергия замкнутой консереатиеной системы при любых ее перемещениях
и перемещениях ее частей сохраняется.
Данное определение включает в себя условия, при отмене которых
закон сохранения механической энергии перестает быть справедли-
вым. Действительно, если ввести диссипативные силы (например,
силу трения), т.е. сделать систему не консервативной, а диссипатив-
ной, то при внутренних перемещениях тел часть механической энер-
гии переходит в теплоту1, и закон сохранения механической энергии
нарушается. Но если принять во внимание другие формы существо-
вания энергии (тепловая, электрическая и др.), то условие консер-
вативности системы будет излишним. Общая энергия, включающая
все ее виды, в любой замкнутой системе сохраняется — это условие
выражает собой общефизический закон сохранения и превращения
энергии.
В дифференциальной форме закон сохранения механической энер-
гии может быть выражен соотношением АП + dT = 0, или
|d/7 = -dT.| (1.145)
Это означает, что в системе, находящейся в состоянии относитель-
ного покоя, кинетическая энергия может появиться только вследствие
уменьшения потенциальной энергии. Если же потенциальная энергия
системы в данном состоянии имеет из всех возможных самое малое
значение и ее уменьшение невозможно, то движение просто не возни-
кает. Следовательно, система находится в устойчивом равновесии, если
ее потенциальная энергия минимальна.
Как мы знаем, потенциальная энергия является функцией коорди-
нат тела, а кинетическая — зависит от его скорости (или от импульса),
поэтому полная механическая энергия представляется суммой
Е(г, р) = Щг)+Т(р) = П(х, у, z)+T(px, ру, pz).
В подразделе 1.2.8 отмечалось, что для задания состояния си-
стемы необходимо знание координат и импульсов всех точек, т.е.
тех же параметров, которые определяют энергию. В этом смысле го-
ворят, что полная механическая энергия является функцией состояния
системы.
1 Здесь и далее под «теплотой» или «теплом» будем иметь в виду особый вид энергии —
тепловую энергию, связанную с хаотическим движением молекул нагретого вещества
и передаваемую либо при непосредственном контакте тел, либо посредством излучения.
1.4. Законы сохранения в механике • 83
При изменении состояния системы изменяется и ее энергия. Ра-
бота в этом случае выступает как мера изменения энергии системы.
В этом заключен физический смысл работы.
Закон сохранения энергии наряду с законами сохранения им-
пульса и момента импульса является одним из важнейших законов
механики.
Закон сохранения полной механической энергии инвариантен
по отношению к преобразованиям Галилея: во всех инерциальных систе-
мах полная механическая энергия замкнутой системы сохраняется. Это
не означает, однако, инвариантности полной энергии по отношению
к преобразованиям Галилея, поскольку кинетическая энергия по от-
ношению к разным системам отсчета будет иметь различные значения,
отличающиеся на постоянную величину. Постоянная, характеризую-
щая полную энергию, в каждой системе будет своя.
1.4.2. Закон сохранения импульса
Возвращаясь к соотношению (1.46) — второму закону Ньютона,
рассмотрим случай, когда на тело не действуют никакие силы, т.е. ког-
да левая часть этого уравнения обращается в нуль. Тогда dp = 0 и, сле-
довательно,
p = mv = const,
(1.146)
т.е. при отсутствии внешних сил импульс материальной точки остает-
ся неизменным.
Распространим полученные результаты на механическую систему.
Если система N тел замкнута, то импульс внешних сил равен нулю,
следовательно, скорость ее центра масс vc — const. При постоянной
массе т системы также неизменным остается ее полный импульс
Р = mvc:
Р = const.
(1-147)
Если на замкнутую систему не действуют внешние силы или их дей-
ствие скомпенсировано, то полный импульс Р такой системы сохраня-
ется. В отличие от закона сохранения механической энергии импульс
сохраняется в любой замкнутой системе как консервативной, так
и диссипативной.
Исходя из закона сохранения импульса, можно сформулировать
ряд его следствий.
84* 1. МЕХАНИКА
1. Система координат, связанная с центром масс замкнутой меха-
нической системы является инерциальной. Действительно, если
Р = const, то при неизменной массе также является постоянной и ско-
рость vc центра масс. А это есть признак инерциальности системы от-
счета.
2. Центр масс замкнутой системы сохраняет состояние покоя
или прямолинейного равномерного движения, несмотря на любые
взаимные перемещения (под действием внутренних сил) элементов
системы. Отсюда ясно, что одними только внутренними силами нель-
зя изменить положение центра масс замкнутой системы.
Можно еще отметить несколько частных случаев.
Система не является замкнутой, но равнодействующая внешних
сил равна нулю. В этом случае импульс системы сохраняется.
Системе не замкнута, но одна из проекций внешних сил (напри-
мер, Fx) равна нулю. Тогда Лрх = 0 и рх = const. Следовательно, закон
сохранения распространяется только на одну из проекций импульса.
Этот случай соответствует, например, движению тела без трения в поле
силы тяжести вдоль горизонтальной оси с отличной от нуля начальной
скоростью (в этом случае vx — const).
1.4.3. Закон сохранения момента импульса
Обратимся к основному закону динамики вращательного движе-
ния (1.95). При моменте сил М относительно полюса равном нулю
изменение момента импульса dZ = 0 и, следовательно,
L = const,
(1.148)
т.е. при отсутствии моментов внешних сил момент импульса системы
остается неизменным. Это утверждение касается как материальной
Рис. 1.29. Движение
в центральном поле
точки, так и системы материальных точек,
а также твердого тела. Иными словами: мо-
мент импульса замкнутой системы сохраня-
ется.
Применим теперь закон сохранения мо-
мента импульса к анализу движения мате-
риальной точки под действием централь-
ной силы (рис. 1.29). Пусть центральная
сила F приложена к материальной точке т
так, что при всех ее положениях линия дей-
1.4. Законы сохранения в механике • 85
ствия силы проходит через одну точку (здесь — центр окружности,
точка О). Тогда М = 0, соответственно dZ/cfr = 0 и L = const. Отсюда
видно, что если движение совершается под действием центральной
силы, вектор L фиксируется как по величине, так и по направлению.
Это, в свою очередь, фиксирует плоскость, в которой лежат векторы г
и р = тб (так как [jp] = L ). Следовательно, под действием централь-
ной силы тело совершает движение по плоской круговой, эллиптиче-
ской или гиперболической орбите, так что [jp] = const. Примерами
такого движения является движение планет вокруг Солнца (управля-
емое законами Кеплера), движение электронов в атоме (в рамках мо-
дели Бора) и др.
1.4.4. Потенциальные кривые
Законысохраненияявляютсянаиболееобщими,фундаментальными
законами природы. Они имеют огромное научно-методологическое
значение. Их важность определяется тем, что решение огромного чис-
ла задач может быть получено с их помощью без подробного анализа
частных обстоятельств и деталей. Мы остановимся на двух проблемах:
на использовании представлений о потенциальных кривых и на тео-
рии столкновений в областях науки, близких к химии.
Одной из главных задач в области физической химии является ис-
следование взаимодействий между частицами — электронами, ядра-
ми, атомами и молекулами. При этом наиболее широко распростра-
ненным способом описания этого взаимодействия является язык
потенциальных кривых. Потенциальная кривая П(г) представляет
собой зависимость потенциальной энергии от расстояния между взаи-
модействующими телами (частицами). Начало координат при этом
связывается с одной из частиц, тогда г представляет собой расстоя-
ние между частицами. Как говорилось ранее, при взаимодействии,
определяемом силовым полем, потенциальная энергия может при-
ниматься равной нулю, когда частицы «разнесены» на бесконечное
расстояние (г -> оо).
Несмотря на то, что кривая П(г) отражает только изменение потен-
циальной энергии, с ее помощью, основываясь на законе сохранения
механической энергии, можно найти также значение кинетической
энергии в каждой точке (при заданной полной энергии Е).
Потенциальная энергия гравитационного взаимодействия. Пусть
имеются два точечных тела (МТ) массой т} и т2, находящиеся на рас-
стоянии г друг от друга, тогда в соответствии с законом всемирного
86* 1. МЕХАНИКА
тяготения потенциальная энергия их взаимодействия /7(г) = -G ,
г
как это было показано выше. В случае сил притяжения (рис. 1.30, а)
взаимная потенциальная энергия тел возрастает по мере удаления их
друг от друга. На бесконечности потенциальная энергия взаимодей-
ствия достигает максимума. По принятому условию, этому максиму-
му будет отвечать нулевое значение потенциальной энергии (/7Л -> 0).
Но если этот максимум есть нуль, то все значения потенциальной
энергии сил притяжения на конечных расстояниях будут отрицатель-
ны, что и отвечает приведенной формуле.
Рис. 1.30. Потенциальные кривые сил:
а — силы притяжения; б — силы отталкивания
Потенциальная энергия электростатического взаимодействия. Эта
энергия выражается (в СИ) зависимостью П(г) = —-—(закон Ку-
4лв0 г
лона1), где qx и q2 — величины точечных электрических зарядов; е0 —
электрическая постоянная, г — расстояние между зарядами (знак по-
тенциальной энергии здесь учитывается «автоматически» за счет
знаков взаимодействующих зарядов, что следует из закона Кулона —
рис. 1.30, а или б). В случае разноименных зарядов потенциальная
энергия взаимодействия (притяжения) отрицательна. Характер зави-
симости потенциальной энергии от расстояния между разноимен-
ными зарядами такой же, как в случае гравитационного взаимодей-
ствия. В случае одноименных зарядов (оба положительные или оба
отрицательные) потенциальная энергия их, разведенных на бесконеч-
ность, по-прежнему является минимальной (нулевой), следовательно,
одноименные заряды (заряды одного знака), расположенные на ко-
нечных расстояниях, обладают положительной потенциальной энер-
гией (энергия отталкивания (рис. 1.30, б)).
1 Закон Кулона и другие законы электростатики будут подробно рассмотрены в главе 5.
1.4. Законы сохранения в механике • 87
Потенциальная энергия упругого взаимодействия. В подразделе 1.2.5
были рассмотрены особенности сил упругого взаимодействия (форму-
ла (1.58)). Отмечалось, что этого вида силы проявляют себя и в макро-
и в микромире. Деформируя тело или «растягивая» межмолекулярную
связь, внешние силы совершают работу. Величина этой работы будет
численно равна потенциальной энергии упругого взаимодействия и,
1 2
как указывалось в подразделе 1.3.5, П(х) = —$х , где х — величина аб-
солютной деформации (растяжения-сжатия).
Графически эта зависимость изображается параболой, симметрич-
ной относительно начала координат (рис. 1.31). Так как силы упруго-
сти консервативны, то согласно закону сохранения механической
энергии полная энергия Е постоянна. Это изображено на графике го-
ризонтальной прямой линией Е = const. В произвольной точке, соот-
ветствующей смещению х = а, величина потенциальной и кинетиче-
ской энергии выражается вертикальными отрезками П(а) и Т(а).
В этой точке на частицу со стороны «пружины» действует сила, на-
правленная к началу координат. По мере приближения к началу коор-
динат кинетическая энергия Т частицы возрастает (как на качелях)
и в точке х = 0, отвечающей положению равновесия, достигает макси-
мума (Ттах = Е, так как здесь 77(0) = 0). Продолжая движение по инер-
ции, частица теряет свою кинетическую энергию до тех пор, пока она
не станет равной нулю в точке х = х0 (также и в точке —х0). В этой точке
потенциальная энергия достигает максимума и равна полной энергии
1 2
77тах = —Рхо =Е, где х0 — максимальное смещение. Таким образом,
Рис. 1.31. Потенциальная энергия упругого взаимодействия
88* 1. МЕХАНИКА
максимальное смещение частицы определяется ее полной энергией Е
и жесткостью р
2Е Р '
Знак плюс соответствует смещению частицы в положительном на-
правлении оси Ох и знак минус — в отрицательном. Частица соверша-
ет колебательное движение относительно начала координат.
Межмолекулярное взаимодействие. Не вдаваясь в его природу, мож-
но сказать, что между молекулами действуют одновременно как силы
притяжения, так и силы отталкивания. Из-за того, что силы притяже-
ния убывают с увеличением межмолекулярного расстояния г медлен-
нее, чем силы отталкивания, на больших расстояниях преобладают
силы притяжения, а на малых — силы отталкивания. Одним из про-
стых функциональных приближений для этого вида взаимодействия
является степенная зависимость потенциальной энергии от расстоя-
ния г между молекулами
я<г)=-4+4’ <115°)
_______г г
где а и b константы, зависящие от взаимодействующих молекул. Это
так называемая потенциальная функция или потенциал Леннард -
Джонса1 «6—12», предложенная им (в 1924 г.) для описания парного
взаимодействия парного неполярных молекул. Первый член степени
—6 расстояния г выражает собой зависимость потенциальной энергии
сил притяжения, второй, степени —12 — зависимость потенциальной
ПС) И пм а b 1 П(г) - ^6+ к \ ь \ п = . jjott 12 к а / f / / Рис. 1.32. Потенциал Леннард-Джонса энергии сил отталкивания от рас- стояния г. На рисунке 1.32 пунк- тирными линиями приведены обе зависимости, а сплошной лини- ей — результирующая кривая, от- вечающая выражению (1.151). Формулу Леннард-Джонса (1.151) иногда записывают иначе Г< V2 ( \6~| Л(г) = 4е - -- ,(1-151) |_к г ) ч г ) J где s и су — некоторые постоянные, харак- терные для рассматриваемых молекул.
1 Джон Эдвард Леннард-Джонс (1894—1954) — английский физик и химик-теоретик.
1.4. Законы сохранения в механике • 89
Исследуем изменение силы, действующей на частицу 2 по мере при-
ближения ее к началу координат, где находится частица 1. Для этого
можно воспользоваться связью центральной силы с потенциальной
энергией в форме (1.133) и провести графическое дифференцирование
зависимости П(г) (рис. 1.33). Видно, что на больших расстояниях произ-
водная мала (мал тангенс угла наклона касательной КК} к оси абсцисс)
и положительна (угол а — острый). Сила F, действующая на частицу 2,
при этом отрицательна (см. (1.133)). Это значит, что эта сила направлена
в сторону, противоположную положительному направлению оси г, т.е.
к началу координат (сила притяжения). По мере приближения второй
частицы к первой производная--- растет и в точке Л (на рис. 1.33) до-
dr
стигнет своего максимума (угол наклона касательной имеет в этой точке
наибольшее значение). В этой точке сила F отрицательна и имеет мини-
мум (максимальное значение силы притяжения). Затем ---- начнет
dr
убывать и в точке г0 обращается в нуль (касательная к кривой Щг) парал-
лельна оси абсцисс). В этой точке силы притяжения и отталкивания,
действующие на частицу 2, взаимно уравновешены. Расстояние г0 при-
нято называть равновесным расстоянием. На расстояниях г < г0 угол а
становится тупым (например, в точке В), и тангенс угла наклона каса-
тельной изменяет знак (< 0). Это значит, что сила F изменяет свое
dr
направление — становится положительной (F > 0) силой отталкивания,
и затем быстро растет по мере приближения частицы 2 к началу коорди-
нат. График зависимости Г(г) показан внизу на рис. 1.33.
Рис. 1.33. Зависимость потенциальной энергии
и силы от расстояния между частицами
90* 1. МЕХАНИКА
При рассмотрении кривой Щг) (см. рис. 1.32 и 1.33), выражающей
зависимость потенциальной энергии взаимодействия от координаты
частицы, можно убедиться в том, что, только находясь в состоянии
с минимальной потенциальной энергией (положение равновесия), ча-
стица не испытывает силового воздействия. При смещении частицы
вправо или влево от положения, в котором потенциальная энергия ми-
нимальна, возникают силы, направленные всегда к положению равно-
весия. Поэтому можно сказать, что частица всегда будет стремиться
занять положение, отвечающее минимальному значению потенциаль-
ной энергии (но силы инерции ей этого сделать не позволяют, если,
конечно, при этом не происходит диссипация энергии).
Проследим теперь за изменением кинетической и потенциальной
энергии при сближении молекул. Пусть полная энергия Е > 0 (везде
положительна). Как мы уже условились, потенциальная энергия взаи-
модействия на бесконечно большом удалении равна нулю. Следова-
тельно, кинетическая энергия Т здесь равна полной энергии Е
(рис. 1.34). По мере приближения молекулы к началу координат ее ки-
нетическая энергия будет возрастать, и в точке равновесия (г0, см.
рис. 1.34) достигнет максимума. При дальнейшем сближении (г < г0)
кинетическая энергия молекулы будет убывать до тех пор, пока не ста-
нет равной нулю в точке г — о. Согласно закону сохранения механиче-
ской энергии, полная энергия в этой точке будет равна максимальной
потенциальной энергии Е = П(ф = IZmax. Минимальное расстояние о
(см. рис. 1.34), на которое могут сблизиться центры масс молекул, на-
зывается эффективным диаметром молекул. После почти мгновенной
остановки все явления будут протекать в обратной последовательно-
сти, и молекула вернется в перво-
начальное положение (удалится
на «бесконечность»), обладая
той же кинетической энергией,
которая была у нее до сближения.
В этом случае движение частицы
не ограничено в пространстве.
Такое не ограниченное в про-
странстве движение называется
инфинитным.
Иначе будет вести себя части-
ца, полная энергия которой ока-
зывается отрицательной (П < 0,
но \П\ > Г, тогда Е < 0). В этом
Рис. 1.34. Движение частицы в силовом
поле с потенциалом Леннард-
Джонса при полной энергии Е > 0.
s — глубина потенциальной ямы
1.4. Законы сохранения в механике • 91
случае частица окажется «за-
пертой» в потенциальной яме
шириной rmax - rmin (рис. 1.35).
Частицы не могут сойтись
ближе, чем до расстояния rmin,
и не могут и удалиться дальше,
чем на расстояние rmax. Такое
ограничение в пространстве
движения называется финит-
ным {ограниченным). При этом
частицы будут совершать ко-
лебательное движение около
положения равновесия (точка
r=r0).
Из анализа качественно по-
Рис. 1.35. Движение частиц в поле
с потенциалом Леннард-Джонса
при полной энергии Е < О
лученных результатов можно сделать один важный вывод. Если полная
энергия системы двух частиц положительна {Е > 0), то связанного со-
стояния частиц не возникает {предполагается, что внутреннее состо-
яние частиц при этом не изменяется), если полная энергия частиц от-
рицательна {Е < 0), то возникает связанное состояние. Этим критерием
мы будем пользоваться в дальнейшем при оценке возможности воз-
никновения связанного состояния атомов и молекул.
1.4.5. Столкновения частиц
В этом подразделе мы применим законы сохранения механической
энергии и импульса к процессам столкновения частиц. Те выводы, ко-
торые мы получим, очень важны для разных подразделов нашего кур-
са, особенно для главы 4 «Молекулярная физика».
Под столкновением понимают любое кратковременное взаимодей-
ствие тел. В отличие от столкновения макроскопических тел, где пред-
полагается непосредственное касание тел и их деформация в процессе
удара, взаимодействие атомных частиц осуществляется не при непо-
средственном контакте, а посредством полевого взаимодействия1.
В этом смысле можно говорить о столкновении электрически заря-
женных частиц, которые взаимодействуют через свои электрические
поля, можно говорить о столкновении нейтронов — в этом случае вза-
имодействие осуществляется посредством поля ядерных сил и т.д.
1 Поэтому в этом случае лучше говорить не о столкновении, а взаимодействии микро-
частиц (атомов, молекул и др.).
92* 1. МЕХАНИКА
В рамках классической механики можно было бы детально рас-
смотреть процесс столкновения частиц (например, однородных ша-
ров) и из анализа сил взаимодействия (их изменения в этом процессе),
сделать заключение о результатах столкновения, т.е. указать направле-
ния и величины скоростей частиц после столкновения. Однако такое
детальное рассмотрение для классических объектов весьма затрудни-
тельно, а для квантовых объектов и принципиально невозможно. Так,
например, нельзя описать детально процесс столкновения нейтронов
хотя бы потому, что неизвестен точно закон изменения ядерных сил
с расстоянием. Вообще ничего нельзя сказать о механизме столкно-
вения нейтрона с фононом (см. главы 4 и 10), у-кванта с электроном
и т.д. Абсолютно точное описание процесса столкновения микроча-
стиц вообще невозможно из-за квантово-механического соотношения
неопределенностей (см. подраздел 8.2).
Оказывается, что во многих практических случаях такое деталь-
ное рассмотрение взаимодействия и не нужно. Для определения
скоростей частиц после столкновения достаточно применения меха-
нических законов сохранения. Поскольку при этом детали процесса
столкновения не рассматриваются, то полученные результаты спра-
ведливы как для частиц, которые взаимодействуют через посредство
полей, так и для непосредственно контактирующих макроскопиче-
ских тел.
Различают столкновения (взаимодействия) двух видов: упругие
и неупругие.
Упругое соударение частиц. Соударение тел называется абсолютно
упругим, если их суммарная кинетическая энергия до и после столкно-
вения не изменяется. При абсолютно упругом столкновении проис-
ходит лишь перераспределение кинетической энергии, а внутреннее
состояние частиц (до и после столкновения) остается неизменным.
Рассмотрим в общем виде столкновение двух невзаимодействую-
щих вне контакта частиц (т.е. будем считать, что их взаимная потен-
циальная энергия равна нулю). Удар называется прямым (или лобовым),
если векторы скоростей взаимодействующих частиц (и их центров
масс) лежат на одной прямой. Если это условие не выполняется,
то удар называется косым.
Исследуем прямое столкновение двух частиц (с массами и т2 со-
ответственно), двигающихся поступательно (без вращения)(рис. 1.36)
вдоль оси х. Их скорости щ и г2 (и импульсы рх ир2) до удара направ-
лены вдоль этой оси (причем щ> v2 — иначе столкновения не будет),
и поэтому векторную запись закона сохранения импульса в проекции
1.4. Законы сохранения в механике • 93
на ось х (символ х у проекций для упрощения записи опускается) мож-
но заменить скалярной. Скорости частиц после столкновения обозна-
чим символом и и и2 соответственно).
тх
Рис. 1.36. Схемы соударения частиц
Если пренебречь действием посторонних тел (сила тяжести пер-
пендикулярна направлению движения, поэтому на взаимодействие
вдоль оси х влияния не оказывает) и при этом считать систему двух
частиц замкнутой (консервативной), то можно применить к соуда-
рению оба закона сохранения: закон сохранения механической
энергии
2 2 2 2
! т2и2 тхщ ! т2и2 (1152)
2 2 2 2’
и закон сохранения импульса в форме
+ m2v2 — m\U\ + т2и2. (1.153)
Выражения (1.152) и (1.153), рассмотренные совместно, представ-
ляют собой нелинейную (в формуле (1.152) неизвестные скорости щ
и и2 входят квадратично) систему двух уравнений с двумя неизвест-
ными U\ и и2. Для решения этой системы ее надо сделать линейной —
линеаризовать. Преобразуем уравнения (1.152) и (1.153) к виду:
(ц2 -и^} = т2(и2 -v2)
и
— Щ) ~ ^2(^2 — V2).
Затем, разделив (1.154) на (1.155), получим
V1 + и\ ~ и2 + v2-
Далее уравнение (1.155) разделим на /щ, тогда
т? т2
ц - щ = и2------v2.
тх
Таким образом, из соотношений (1.156) и (1.157) получается систе-
ма двух линейных уравнений. Для того чтобы найти скорость второй
(1.154)
(1.155)
(1.156)
(1.157)
94* 1. МЕХАНИКА
частицы после столкновения, сложим левые и правые части этих ра-
венств в одно уравнение
2ц = и2
(л тЛ (л тЛ
1 + — + ц 1--------- .
т}) т})
Отсюда
2ц-ц 1-^-
I пъ
U2 = ---:
1+^
тх
(1.158)
(1.159)
Аналогично определяется скорость первой частицы после столкно-
вения (в силу симметрии рассмотрения взаимодействия частиц можно
просто заменить у всех величин, входящих в уравнение (1.159), ин-
декс 2 на 1)
(1.160)
Можно преобразовать эти формулы и записать их в виде:
+ m>v2 щ = -ц + 2—— — + т2 (1.161)
и
П/ЦЦ + m2v2 r
и2 = -ц+2——----—. (1.162)
Дроби в формулах (1.161) и (1.162) представляют собой скорость vc
движения центра масс (формулу (1.69) можно продифференцировать
по времени и убедиться в этом) соударяющихся тел. Тогда
щ = ~vi + 2г>с, (1.163)
w2 = ~и2 + 2ц-, (1.164)
где
1 /цц -\-m2v2 ’с - (1.165)
тх +т2
1.4. Законы сохранения в механике • 95
Еще раз отметим, что щ и г2 — скорости каждой из частиц, а ис —
скорость их центра масс в лабораторной (т.е. неподвижной, связанной
с Землей) системе координат. Зная ть т2, и2, т.е. исходные данные,
определить vc не составляет труда. Вспомним, что для двух рассматри-
ваемых соударяющихся тел, представляющих собой замкнутую систе-
му, скорость центра масс при их соударении не изменяется (см. фор-
мулу (1.74)).
Если перейти к движущейся со скоростью vc системе координат,
связанной с центром масс (т.е. принять vc = 0), то выражения (1.163)
и (1.164) предельно упростятся:
Щ, и2 — — v2. (1.166)
То есть в этой системе отсчета при любых ть т2, Vi и у2 частицы
после соударения меняют направление движения, но так, что их ско-
рости по абсолютной величине не изменяются.
Определенный интерес представляют некоторые частные случаи.
1. Одна из частиц в лабораторной системе покоиться. Например,
пусть это будет вторая частица (v2 = 0).Тогда
-ц 1--!-
\nh ГЩ-ГПу /л -1
щ=----=(1.167)
। т2 +
т2
и
Э ги
и2=----'—vx. (1.168)
тх+т2
Из формулы (1.168) видно, что покоившаяся (вторая) частица при-
обретает после столкновения скорость и2, направление которой всегда
совпадает с направлением движения до столкновения первой (нале-
тающей) частицы. Вместе с тем направление движения первой части-
цы после столкновения зависит от соотношения масс частиц. Если
тх < т2, то первая частица, как это видно из формулы (1.167), изменит
направление движения на противоположное. Если > т2, то направ-
ление движения останется прежним.
Если при этом масса обеих частиц одинакова (т2/т\ — 1), то
щ =0, и2 =ц, (1.169)
т.е., в случае центрального упругого столкновения частиц одинаковой
массы происходит обмен скоростями, а следовательно, и кинетиче-
96* 1. МЕХАНИКА
скими энергиями. При столкновении, когда г2 = 0 происходит сле-
дующее: движущаяся частица останавливается (после столкновения
Wi = v2 = 0), а покоившаяся частица начинает движение со скоростью
и2 = т.е. со скоростью, которой обладала до столкновения движуща-
яся частица. В этом случае движущаяся частица полностью передает
первоначально покоившейся всю свою кинетическую энергию.
2. Рассмотрим столкновение частиц, сильно различающихся
по массе (т} « т2). Пусть для определенности частица с меньшей
массой (пц) движется со скоростью щ, а частица с большей массой по-
коится (v2 = 0). Тогда из формулы (1.167), пренебрегая отношением
масс тх/т2 по сравнению с единицей, получим
Щ щ
(1.170)
и
и2=-^-®0.
1 + ^
(1-171)
Таким образом, частица с меньшей массой после соударения изме-
няет свою скорость на противоположную без потери кинетической
энергии, а вторая остается практически неподвижной.
Этот эффект оказывается существенным в химической кинетике.
Например, в экзотермических реакциях при образовании в качестве проме-
жуточного продукта атомарного водорода, очень легкого по сравнению с дру-
гими реагентами, его средняя энергия может значительно превышать квази-
равновесную. Это явление в кинетике называют «эффектом горячих атомов».
Замедленная передача энергии от легкой частицы к тяжелой определяет и ре-
лаксационные процессы в лазерах, рабочим телом которых являются соедине-
Рис. 1.37. Удар частицы
о неподвижную стенку
ния галогенидов с водородом.
Полученный результат выполняется
с еще большей точностью при столкнове-
нии частиц с неподвижной стенкой (на-
пример, удар молекулы газа о стенку со-
суда (рис. 1.37), когда т2/тх -> оо). В этом
случае частица, движущаяся по нормали
к поверхности стенки, «отразится» от нее
с прежней по величине и противополож-
ной по направлению скоростью щ щ
и импульсом (см. рис. 1.37, внизу).
1.4. Законы сохранения в механике • 97
Определим изменение импульса Др частицы при прямом упругом
столкновении ее со стенкой Ар = р{ — рь гдерх = тхщ и р{ = mpi\, тог-
да Ар = — щ), а так как щ = — щ, то Ар = — 2тхщ или Apt = — 2рь
Знак минус показывает направление изменения импульса, которое со-
впадает с направлением «силы упругости», действующей со стороны
стенки на частицу во время столкновения. В результате действия этой
силы и происходит изменение импульса частицы.
Если частица падает на стенку под углом а к нормали, то состав-
ляющая скорости (импульса) на ось, параллельную поверхности стен-
ки, не претерпевает изменения, и только составляющая скорости
вдоль оси х принимает участие в передаче импульса стенке (т.е. Ар =
= —2pt cos а) (см. рис. 1.37, вверху).
Как это следует из полученных результатов, частица при столкно-
вении со стенкой не изменяет своей кинетической энергии, а стенка
получает от частицы импульс, равный 2рь
Можно показать (это мы предоставляем читателю), что при пря-
мом центральном абсолютно упругом столкновении с покоящейся
частицей массой т2 налетающая частица массой передает ей кине-
тическую энергию
Г2=|А7]|= 4OTlffl2 Г1; (1.172)
+ т2)
относительная потеря энергии частицей при таком столкновении со-
ставляет
И- (1.173)
7] (тх + т2)
Нетрудно видеть, что при равенстве масс = т2) первая части-
ца полностью теряет свою энергию, т.е. &Т\/Т\ = 1. При столкновении
со стенкой тх/т2 -> 0, и тогда 1хТ\/1\ -> 0, т.е. кинетическая энергия
налетающей на стенку частицы не изменяется.
На явлении передачи «быстрой» частицей своей энергии покоящейся
частице основан процесс замедления нейтронов в атомных реакторах. Дело
в том, что в элементарном акте цепной реакции деления (см. подраздел 9.5)
выделяются только быстрые нейтроны. Для осуществления последующего
акта цепной реакции — поглощения нейтрона ядром урана-235, например,
необходимо замедлить нейтроны до энергии, соизмеримой с энергией теп-
лового движения молекул. Это осуществляется при соударении нейтронов
с атомными ядрами вещества замедлителя. Судя по приведенным формулам,
98* 1. МЕХАНИКА
лучшим замедлителем было бы вещество, содержащее водород: при одно-
кратном лобовом соударении с протоном атома водорода нейтрон теряет всю
свою кинетическую энергию (масса нейтрона и масса протона атома водо-
рода почти равны и, без учета также малой массы «водородного» электрона
имеем щ ® 0). Однако протоны легко вступают в реакцию с нейтронами, они
захватывают нейтрон (с образованием дейтрона — изотопа водорода) и выво-
дят нейтроны из цепной реакции. Поэтому чаще пользуются тяжелой водой
D2O (тогда ЛТ1/Г1 = 0,9) или графитом (ХТ[/Т[ = 0,28). Например, отношение
ДГ1/Г1 для ядер вольфрама составляет 0,02, т.е. удар нейтрона о ядро вольфра-
ма ближе к случаю «удара о стенку» с незначительной потерей кинетической
энергии нейтрона.
Неупругое соударение частиц. Соударение частиц (тел) называется
неупругим, если их суммарная кинетическая энергия до столкновения
не равна (больше) суммарной кинетической энергии после столкно-
вения, — кинетическая энергия частично или полностью переходит
во внутреннюю энергию (т.е. взаимодействующие тела меняют свое
внутреннее энергетическое состояние, например, температуру — на-
греваются или возникает излучение). Признаком абсолютно неупругого
столкновения является такое их взаимодействие, при котором проис-
ходит частичная или полная потеря кинетической энергии участву-
ющих в нем частиц, при этом частицы после столкновения соединя-
ются и двигаются вместе, как единое целое (или покоятся). Если тела
после удара расходятся и движутся независимо друг от друга (некото-
рые из них могут покоиться), то столкновение просто неупругое (не
абсолютно упругое).
При неупругом (абсолютно и не абсолютно) ударе закон сохранения
механической энергии не выполняется, так как система диссипативна
(механическая энергия переходит в другие виды энергии). Выполня-
ется, конечно, общефизический закон сохранения и превращения энергии,
но применить этот закон для определения скоростей после столкнове-
ния мы не можем, так как не знаем заранее, какая часть кинетической
энергии переходит во внутреннюю энергию. Поэтому здесь (напри-
мер, при неупругом столкновении двух частиц) можно воспользовать-
ся только законом сохранения импульса:
Р\ + Pi = P = const, (1.174)
где Р — суммарный импульс1 частиц после абсолютно неупругого столкно-
вения.
1 После неупругого столкновения обе частицы объединяются (например, слипаются)
и обладают общим импульсом и скоростью.
1.4. Законы сохранения в механике • 99
При прямом абсолютно неупругом столкновении все векторы ско-
рости (и импульсы) лежат на одной прямой, проходящей через центр
масс частиц. В проекции на ось х, совпадающей с направлением дви-
жения, закон сохранения импульса запишется в виде (значок х у про-
екции импульса и скорости снова опущен)
+ m2v2 — (тх + т2)и,
(1.175)
где и — общая скорость частиц после столкновения.
Из написанного выражения можно найти скорость частиц после
столкновения
и = т^ + ^. (1.176)
т1-\-т2
Теперь можно определить ту часть суммарной кинетической энер-
гии, которая при столкновении перешла в их внутреннюю энер-
гию. Обозначим, как это принято, в частности, в молекулярной фи-
зике, изменение внутренней энергии частиц через AU, тогда AU =
= Т\ + Т2— Г, где Г — суммарная кинетическая энергия частиц после
столкновения. В развернутом виде можно записать
ВД2 ! ^2^2 (jih+m^u2 (1177)
2 2 2 1 ‘ ’
Формула (1.178) приводится к виду
АГ = |ц(ц-р2)2 (1.178)
(мы рекомендуем читателю сделать это самостоятельно), где ц — вве-
денная ранее (см. также формулу (1.87)) приведенная масса системы
из двух частиц
ц = (1.179)
т} ± т2
Из формулы (1.176) видно, что если частицы одинаковых масс дви-
жутся навстречу с одинаковыми скоростями, то их скорость после аб-
солютно неупругого столкновения равна нулю, и, следовательно, вся
кинетическая энергия переходит в этом случае во внутреннюю (част-
ный случай абсолютно неупругого взаимодействие). То же имеет место
и для разных масс, когда импульсы тел до удара равны по величине
и противонаправлены.
100* 1. МЕХАНИКА
Для студентов-химиков следует специально отметить, что при-
веденное выше рассмотрение процессов столкновения не может
быть прямо перенесено на случай атомно-молекулярных столкно-
вений даже в классическом случае. Это связано, в частности, с тем,
что в реальных атомно-молекулярных системах процесс взаимодей-
ствия во многом зависит от так называемого адиабатного фактора,
т.е. от соотношения времени столкновения и собственных молеку-
лярных частот.
Приведенное выше рассмотрение процессов столкновения не мо-
жет быть прямо перенесено на случай атомно-молекулярных столкно-
вений даже в классическом случае. Это связано, в частности, с тем, что
в реальных атомно-молекулярных системах процесс взаимодействия
во многом зависит от так называемого адиабатного фактора, т.е. от со-
отношения времени столкновения и собственных молекулярных ча-
стот.
1.5. Общие представления о пространстве,
времени, энергии, массе и гравитации
1.5.1. Общие положения теории относительности
Многие результаты данного подраздела приводятся нами без под-
робного обоснования, так как являются предметом изложения в «про-
фессиональных» курсах теоретической и экспериментальной физики
и заимствованы нами оттуда для соответствующего адаптирования
(так же и из оригинальных статей).
Существуют различные теории, описывающие одни и те же фи-
зические законы в различных системах отсчета, в том числе и дви-
жущихся друг относительно друга. Эти теории называются теориями
относительности. Прежде чем рассматривать, как видоизменяются
представления о массе, импульсе и энергии в различных системах
отсчета, необходимо выяснить, как различные наблюдатели ви-
дят в различных движущихся системах один и тот же покоящийся
или движущийся предмет, иными словами, как преобразуются ко-
ординаты и скорости (и время!) при переходе от одной системы от-
счета к другой. Классическая теория относительности (см. подраз-
делы 1.2.1, 1.2.2), оперирующая понятием «инерциальная система»,
предполагает разделение пространства и времени (считает их неза-
1.5. Общие представления о пространстве, времени, энергии, массе... *101
висим ыми друг от друга субстанциями) и постулирует, что время те-
чет во всех инерциальных системах отсчета одинаково. Например,
секунда по часам в Москве равна секунде по часам в Нью-Йорке
(США) или Сиднее (Австралия), или на Луне. Ее положения основы-
ваются на постулатах Галилея и Ньютона, согласно которым, при пе-
реходе от одной инерциальной системы отсчета к другой к скорости
движения объекта в одной системе просто прибавляется скорость
относительного движения систем друг относительно друга. Причем
это сложение осуществляется по правилу сложения векторов. В слу-
чае неинерциальных систем, также справедлив принцип относитель-
ности, и преобразование координат и скоростей материальных тел
при переходе от одной системы отсчета к другой также осуществля-
ется по правилам векторного сложения. Это отвечает нашим повсед-
невным представлениям о пространстве, времени и скоростях дви-
жения материальных тел.
Однако в 80-х гг. XIX в. выяснилось, что эти постулаты, считав-
шиеся ранее само собой разумеющимися и общим и для любых объ -
ектов и скоростей их движения, вызывают сомнения. Например,
из опытов А. Майкельсона и Е.В. Морли следовало, что скорость
распространения света в вакууме, в различных движущихся системах
отсчета одинакова. Это противоречило постулату о сложении ско-
ростей. Сразу же было отмечено, что существует также и принципи-
альное противоречие между классической теорией относительности
и уравнениями Дж. К. Максвелла, сформулированными им в 1865 г.
и описывающими распространение электромагнитных волн. Назрела
необходимость в новой теории относительности, которая, с одной сто-
роны, не должна была противоречить классической теории, а с дру-
гой — описывать новые экспериментальные данные. Чтобы устранить
противоречия классической теории, А. Эйнштейн для построения
новой теории относительности предложил исходить не только из те-
оретических постулатов, а использовать экспериментальные данные
по постоянству скорости света в качестве исходного пункта теории.
Так, в начале XX в. (в 1905 г.) была создана специальная (или частная)
теория относительности Эйнштейна (СТО), применимая к описанию
движений объектов с любыми скоростями, вплоть до скорости света
в вакууме — релятивистская механика. В этой теории пространство
и время неразрывно связаны. Общая теория относительности (ОТО),
созданная позже также Эйнштейном (1911 г.) ставила своей целью
объяснение гравитационных явлений и была основана на постулате
эквивалентности гравитацио иной (полученной из закона всемирного
102* 1. МЕХАНИКА
тяготения Ньютона) и инертной (полученной из первого и второго за-
кона Ньютона) массы.
Прямыми измерениями показано, что гравитационная и инертная массы
для данного материального тела одинаковы с точностью, лучшей чем 10~12
от их величины. Тем самым постулат Эйнштейна количественно подтвержда-
ется на опыте.
Классическая теория относительности прекрасно описывала ме-
ханику движений тел со скоростями много меньшими скорости света
в вакууме.
Иногда возникает вопрос, стоит ли уделять такое большое внимание ре-
лятивистской механике, если большинство движений в повседневной жизни
происходят при скоростях много меньших скорости света. Здесь имеется не-
сколько причин.
1. Одной из основных задач физики природных явлений является изуче-
ние свойств электромагнитных волн (свет, радиоволны, тепловое излучение,
рентгеновские и у-лучи), для которых скорость распространения равна ско-
рости света.
2. Теория электромагнетизма, которая лежит в основе также и химических
взаимодействий и на которой построены многочисленные технические до-
стижения современной жизни (приборы и оборудование, использующее маг-
нитные поля; электромагнитная индукция, лежащая в основе действия этек-
трических машин и преобразователей электрической энергии), существенно
связана со скоростью распространения света.
3. В ядерной и квантовой физике, в физике элементарных частиц часто
рассматриваются движения частиц со скоростью близкой к скорости све-
та (например, движение заряженных частиц в ускорителях или внугренних
электронов в тяжелых атомах) и со скоростью света (у-кванты, световые фо-
тоны и др.).
4. В современной астрономии также приходится сталкиваться с реляти-
визмом. Например, удаленные галактики, движутся со скоростями, близкими
к скорости света. Природа нейтронных звезд, пульсаров, черных дыр также
связана с проявлением релятивистских эффектов.
5. Интерпретация эффектов взаимодействий микрочастиц — основа кван-
товой механики, тесно связана с релятивистскими соотношениями между
массой, энергией и импульсом, а не соотношениями, следующими из класси-
ческой механики.
6. Большинство образованных людей в общих чертах должны быть зна-
комы с такими понятиями, как соотношение между энергией и массой тела
(соотношение Эйнштейна), замедление времени, сокращение длины, и знать,
что ни одна частица или сигнал не могуг распространяться быстрее, чем свет
распространяется в вакууме. В эпоху научно-технической революции это зна-
ние является частью нашей общей культуры.
1.5. Общие представления о пространстве, времени, энергии, массе... • 103
1.5.2. Специальная теория относительности
1.5.2.1. Опыт Майкельсона и Морли. Преобразования Лдренца
Несмотря на общепризнанный успех классической теории отно-
сительности Галилея—Ньютона, уже в конце XIX в. было обнаруже-
но, что она вступает в неустранимые противоречия с экспериментом
при описании явлений в области электричества и магнетизма. Такие
явления, как свет, радиоволны, инфракрасное и ультрафиолетовое
излучения и т.п., прекрасно описывались уравнениями Максвелла,
которые оказались не инвариантными относительно преобразований
Галилея, то есть преобразования Галилея нарушали принцип относи -
тельности при применении их к уравнениям Максвелла. Эйнштейн
предположил, что, с одной стороны, принцип относительности должен
оставаться неизменным, а с другой стороны — и уравнения Максвелла
также должны оставаться в неизменной форме, как получившие без-
условное подтверждение в опыте. Это требование выполнил Х.А. Ло-
ренц1 , предложивший заменить преобразования Галилея (см. подраз-
дел 1.2.2) на такие (преобразования Лоренца), при которых уравнения
Максвелла остаются инвариантными. Получение этих преобразований
было стимулировано результатами фундаментальных опытов по изуче-
нию с корости р аспространения света в движущихся системах отсчета.
Майкельсон и Морли предложили и в 1881 г. осуществили очень
точный экспериментальный способ обнаружения возможного изме-
нения скорости света в зависимости от направления и величины ско-
рости его источника, расположенного на поверхности Земли. Теорети-
ческой основой этого эксперимента явился постулат о существовании
покоящегося мирового пространства, заполненного особой средой —
эфиром, в котором свет распространяется с неизменной скоростью с
в любом направлении (по аналогии, например, с распространением
звуковых волн в воздухе). По предположению, эфир не имеет мас-
сы и пронизывает все материальные тела, заполняя также и вакуум.
До создания специальной теории относительности это представление
было широко распространено среди физиков.
Опыт Майкельсона и Морли состоял в следующем. Если предпо-
ложить существование неподвижного мирового пространства (эфира),
в котором распространяется свет (как звук в воздухе, например), то ве-
личина скорости света с' на поверхности Земли в точке наблюдения,
согласно преобразованиям Галилея (формула (1.41) при произвольной
взаимной ориентации векторов скорости и движения источника света
1 Хендрик Антон Лоренц (HA. Lorentz) (1853—1928) — выдающийся голландский физик.
104* 1. МЕХАНИКА
на Земле и направления ё его распространения в неподвижном эфире
(рис. 1.38), где йэф скорость системы Солнце-Земля относительно не-
подвижного эфира), может быть записана в виде:
= с — (ие),
(1.180)
где с’ — наблюдаемая скорость света (относительно неподвижного на поверх-
ности Земли прибора или наблюдателя); с — скорость света относительно не-
подвижного мирового пространства; v — скорость точки на Земле, где рас-
положен принимающий свет прибор (относительно неподвижного мирового
пространства); ё — единичный вектор, задающий направление распростра-
нения света в экспериментах.
Скорость и любой точки на Земле относительно предполагаемого
покоящимся мирового пространства изменяется по направлению
во времени (из-за вращения Земли и движения ее вокруг Солнца) (см.
рис. 1.38). Для каждого момента времени можно определить вклад
в нее от движения Земли вокруг Солнца (приблизительно 30 км/с),
и собственного суточного вращения Земли (от 0 до 450 м/с в зависимо-
сти от места расположения точки наблюдения на поверхности Земли
и времени суток (на рис. 1.38 не отражено). Таким образом, для кон-
кретной точки расположения прибора на Земле наблюдаемая скорость
света с'в соответствии с (1.180) должна зависеть от направления е его
распространения и от времени.
«Покоящееся» мировое пространство (эфир) играет в такой мо-
дели вспомогательную роль — роль инерциальной системы отсче-
та, в которой все галактики и звезды также имеют свои траектории.
Для измерений предполагаемой зависимости с' от положения точки
наблюдения и направления распространения света (по отношению
к скорости Земли в точке наблюдения — точки А и В на рис. 1.38) был
предложен и осуществлен очень точный экспериментальный способ
обнаружения возможных, чрезвычайно малых изменений в скорости
света (опыт Майкельсона и Морли). С этой целью был использован
Рис. 1.38. Схема движения
Земли относительно Солнца
световой пучок одной длины волны
(монохроматический) и названный,
по имени автора оптический при-
бор — интерферометр Майкельсона.
В этом интерферометре используются
эффекты изменения интенсивности
света на экране при наложении двух
когерентных (имеющих одинаковую
частоту и постоянную разность фаз
колебаний) монохроматических волн,
1.5. Общие представления о пространстве, времени, энергии, массе... • 105
полученных «расщеплением» одного луча света на два, и прошедших
разные оптические пути или временные отрезки до экрана (явление
интерференции света описано в подразделе 7.2).
На рисунке 1.39 приведена схема интерферометра Майкельсона. Световой
пучок от источника S с помощью полупрозрачного посеребренного зеркала
частично проходит, а частично «расщепляется» на перпендикулярный луч, иду-
щий к зеркалу М2. Затем, с помощью отражений от зеркал М2 и 7И3, два световых
пучка вновь совмещаются на экране. Если оба пучка проходят одну и ту же
оптическую длину пути (см. подраздел 7.2.2), то при интерференции на экране
свет усилится (амплитуды обеих волн сложатся). В противном случае на экране
будет наблюдаться ослабление света от максимума интенсивности. Экспе-
римент состоял в том, что сначала подбирались положения зеркал, обеспечи-
вающие наиболее сильную интерференцию — усиление интенсивности света,
а затем в процессе вращения Земли вся установка поворачивалась на 90°,
и вновь наблюдалась интерференционная картина. За счет движения Земли от-
носительно неподвижного мирового про-
странства (если таковое существует, что было
исходным предположением) разница (из-за
сложения-вычитания скоростей) во времени
прохождения светом пугей от источника света
до экрана в этих двух случаях должна была бы
изменить интерференционную картину. Даже
мала г скорость Земли (v = 30 км/с) по сравне-
нию со скоростью света (с ® 300000 км/с)
должна была бы дать по оценкам Майкельсона
и Морли наблюдаемый эффект.
Если принять размер установки ~1 м (ре-
альный размер), то считая скорость движения
Рис. 1.39. Схема
интерферометра Майкельсона
Земли относительно Солнца равной 30 км/с получаемое различие во времени
распространения света вдоль и перпендикулярно скорости точки наблюдения
на Земле должно составлять несколько единиц 10-17 с, а в длинах волн прохо-
димое сгетом расстояние — 1/40 длины световой волны, что с помощью интер-
ферометра, предложенного Майкельсоном, должно было заметно проявиться.
Однако опыт Майкельсона и Морли дал отрицательный результат.
Не было обнаружено никакой разницы в скоростях распространения
света в опытах при движении по направлению линейной скорости точ-
ки на поверхности Земли относительно мирового пространства, пер-
пендикулярно этому направлению и против него. О казалось, что ско-
рость света с' = с и не зависит от величины и направления скорости
интерферометра. Следовательно, преобразования Галилея не выполня-
ются для света/Но существование постоянной скорости распростране-
ния света в вакууме, не зависящей от скорости наблюдателя, находит-
ся в полном согласии с уравнениями Максвелла. Поэтому Эйнштейн
106* 1. МЕХАНИКА
предположил, что должна существовать новая теория относительно-
сти для систем, которые могут обладать очень большими скоростями.
При этом скорость с света в вакууме играет в ней роль максимально
допустимой скорости передачи сигнала (в том числе и светового).
Специальная теория относительности внесла кардинальные изме-
нения в классическое понимание относительности. При этом прин-
цип относительности остается неизменным, преобразования Галилея
заменяются преобразованиями Лоренца, и уравнения Максвелла со-
храняются неизменными в любой инерциальной системе отсчета.
Кроме того, Эйнштейн показал, что в определенных случаях можно
формально сохра нить вид ньютоновых законов механики и их инва-
риантность к преобразованиям Лоренца. Преобразования Лоренца
при скоростях движения много меньших скорости света в вакууме
должны переходить (и переходят) в преобразования Галилея так же,
как и релятивистская механика Эйнштейна (механика объектов дви-
жущихся со скоростями близкими или равными скорости света в ва-
кууме) переходит в обычную меха нику (нерелятивистскую) Ньютона,
справедливую для объектов, движущихся со скоростями, много мень-
шими скорости света в вакууме. Таким образом, Эйнштейн создал
более полную теорию относительности, чем классическая теория от-
носительности Галилея—Ньютона, не противоречивую при описании
движений не только с малыми скоростями, но и со скоростями вплоть
до скорости света, удовлетворяющую фундаментальным уравнениям
электромагнетизма. Однако при этом потребовалось заменить преоб-
разования координат и времени Галилея на новые преобразования.
Преобразования Лоренца заменяют преобразования Галилея и в слу-
чае, когда система координат х\ Г движется относительно систе-
мы координат х, у, £, t со скоростью й вдоль оси Ох (их — и, иу — 0,
1.5. Общие представления о пространстве, времени, энергии, массе... • 107
Здесь координаты определяют положения точки в соответствую-
щих системах отсчета, время измеряется также в этих системах.
Из преобразований Лоренца, в частности, вытекает независимость
скорости света от движения системы координат, т.е. в любой непод-
вижной или движущейся со скоростью и системе координат скорость
света остается неизменной и равной скорости с света в вакууме.
Наглядный пример: два наблюдателя, один из которых неподвижен по от-
ношению к удаленной звезде, а другой движется к ней с большой скоростью
на ракете. Если каждый из них измерит скорость света от звезды, то оба по-
лучат одинаковый результат. При этом не только свет, но и лишенные массы
частицы (такие как фотоны любой частоты или у-кванты) должны всегда дви-
гаться относительно всех наблюдателей со скоростью v = с.
Уравнения (1.181) получены Х.А. Лоренцом в 1904 г. как математи-
ческие выражения — преобразования координат и времени при пере-
ходе от одной движущейся системы координат к другой, при которых
сохраняют стой вид и уравнения классической электродинамики
(уравнения Максвелла) во всех инерциальных системах отсчета. Эти
преобразования использовал Эйнштейн в рамках предложенной им
специальной теории относительности, основанной на постулате о рав-
ноправии всех инерциальных систем отсчета и экспериментальных
данных о независимости скорости распространения света в вакууме
от движения источника света. Выражения (1.181) показывают, что вре-
мя и пространство тесно взаимосвязаны . Таким образом, по Эйнштей-
ну общепринятое представление о времени как «независимой пере-
менной» кардинально меняется.
Поясним ход его рассуждений на часто используемом в литературе примере.
Рассмотрим пару так называемых «световых часов» А и В (рис. 1.40).
Каждые из часов представляют собой два зерка-
ла, установленные параллельно друг другу
на расстоянии D. Между этими зеркалами бега-
ет запущенный в часы световой зайчик. Пусть
т — время, за которое зайчик света, отразив-
шись от нижнего зеркала, достигает верхнего
зеркала, и часы тикают каждый раз, когда про-
исходит это отражение. Пусть имеется пара та-
ких совершенно идентичных часов, причем ча-
стота их хода синхронизирована (оба зайчика
одновременно отражаются от своих зеркал)
и период «тиканья» одинаков т = D/c. Пусть те-
перь часы В движутся вправо со скоростью б,
как это изображено на рис. 1.40 и 1.41. Прежде
импульсы
Рис. 1.40. Система световых
часов в момент времени t = 0
108* 1. МЕХАНИКА
Рис, 1.41. Световые часы
спустя время t = Тс начала
движения В относительной
всего применим принцип относительности,
из которого следует, что длина (размер D) ча-
сов для наблюдателей в системах Л и В не мо-
жет быть разной. По прошествии времени
t = Т отметим, что наблюдателю, неподвиж-
но расположенному в системе, связанной
с часами Л, путь светового луча от одного
края часов В представляете я более длинным,
чем в собственных часах А в соответствии
уже с другим принципом — постоянства ско-
рости света (независимости скорости света
от скорости движения системы отсчета, под-
твержденной в экспериментах Майкельсона
и Морли). Используя рисунок 1.41 и приме-
няя теорему Пифагора, получаем (сТ)2 = (vT)2 + (ст)2, где Т — время в движу-
щихся часах с точки зрения неподвижного наблюдателя, отсюда следует, что
(1.182)
То есть покоящийся наблюдатель отмечает, что промежуток времени Т
между «тиканьем» движущихся часов больше соответствующего промежутка
времени т в его системе отсчета. Следовательно, любой наблюдатель обнару-
живает (по своим часам) замедление хода движущихся относительно него ча-
сов в Т/т = раз, где
(1.183)
Величина т в (1.182) называется собственным временем, т.е. представляет
собой измеренный неподвижным наблюдателем промежуток времени между
двумя событиями, которые он видит в одной и той же точке пространства в си-
стеме, жестко связанной с ним. Величина Т— это промежуток времени между
теми же двумя событиями, но измеренный движущимся равномерно и пря-
молинейно наблюдателем по тем же часам. Эйнштейн постулировал, что эф-
фект замедления времени не имеет ничего общего с устройством конкретных
часов, а обязан свойствам самого времени (что вытекает также из требования
принципа относительности). Поэтому в равномерно и прямолинейно дви-
жущихся системах отсчета (по сравнению с неподвижными) замедляют ход
не только движущиеся часы, но и все физические процессы, в том числе и хи-
мические и биохимические реакции. Поскольку биохимическое проявление
жизни связано с протеканием комплекса таких реакций, то и течение жизни
(обмен веществ) замедляется в соответствующее число раз. Конечно, любое
1.5. Общие представления о пространстве, времени, энергии, массе... • 109
живое существо или растение в быстро движущемся, например, космическом
корабле не обнаружат этого изменения — для них сохраняется привычный
временной ритм.
Из преобразований Лоренца следует, что метрика (т.е. взаимосвязь
пространство — время) в СТО существенно отличается от ньютоновой.
Для того чтобы и законы Ньютона также были инвариантны к преоб-
разованиям Лоренца, необходимо, как показал Эйнштейн, принять
в качестве ведущих соотношений теории относительности для свободной
частицы (свободно движущегося материального тела) — соотношения,
связывающие ее полную энергию Е, импульс р и массу т
Е2 - р2с2 = т2с\ (1.184)
а также импульс р и скорость v с энергией Е
(1.185)
Для энергии покоящегося (р = 0) тела вводится энергия покоя
Ей=тс2. (1.186)
Это знаменитая формула (соотношение) Эйнштейна, устанавлива-
ющая связь (эквивалентность) между массой и энергией (веществом
и излучением).
Специально подчеркнем, что принципиальным отличием реляти-
вистской теории от классической механики является то, что энергия
покоящегося тела (при v — 0, р — 0) не обращается в нуль, а становит-
ся равной энергии покоя Е$.
При v — с соотношение (1.1 £5) дает Е — рс, что при подстановке
в (1.184) приводит к т — 0, и позволяет заключить, что со световой
скоростью могут двигаться только «безмассовые» частицы (таков, на-
пример, квант света — фотон).
Из соотношения (1.186) следует очень важное практическое за-
ключение о том, что в покоящейся материи (инертной массе) хранятся
огромные запасы энергии, извлечением которой занимается ядерная
и топливная энергетика (примеры см. далее).
Так же, как и в классической теории, в теории относительности
остаются справедливыми законы сохранения энергии и импульса изо-
лированной частицы (тела), а также справедлива их аддитивность, т.е.
E=Y.Ei и р=Ек
(1.187)
110* 1. МЕХАНИКА
Масса в теории относительности та же, что и механике Ньютона,
в изолированной системе она также сохраняется, но свойством адди-
тивности уже не обладает.
В качестве примера рассмотрим систему, состоящую из связанных
протона и электрона — атом водорода, энергия покоя которого может
быть представлена четырьмя слагаемыми:
Е$ = трс2 + тес2 + Т+ Л, (1.158)
где тр — масса протона; те — масса электрона; ТжП — кинетическая и потен-
циальная энергия электрона соответственно.
Совместное применение закона Кулона и условия равновесия сил
взаимодействия электрона с ядром к вычислению полной энергии
(без учета энергии покоя) атома водорода в модели Бора дает (см. да-
лее в подразделе 7.7.2)
т v2
Т + П = -Т = --^. (1.189)
Если для оценки скорости электрона в атоме водорода принять
ve« с/\ .37 (вполне реалистичное значение, также получаемое из боров-
ской модели), то, вычисляя массу
Eq /л
mff=^- = mp+me-^-, (1.190)
с 2с
получим, что она оказывается на 1/1372 долей меньше, чем тр + те, т.е.
массы атома водорода в целом. Для более тяжелых изотопов водорода
и водородоподобных ионов с массивным ядром, где скорость электро-
на больше, различия становятся еще более заметными.
Рассмотренный эффект уменьшения массы системы, возника-
ющий за счет взаимодействия кистей при ее образовании, называет-
ся дефектом масс (см. подраздел 9.3). Обратный эффект превращения
энергии покоя в кинетическую энергию возникает (вследствие закона
сохранения энергии) в случае, когда суммарная масса частей системы
больше ее конечной массы после их объединения, например, в ядер-
ных (см. подраздел 9.5) и химических реакциях.
Приведем несколько примеров превращения массы в энергию1.
1. При реакции термоядерного синтеза, происходящей на Солнце (благо-
даря которой, кстати, оказывается возможной жизнь на Земле), происходит
1 Эти примеры имеют непосредственное отношение к подразделу 9.5 «Ядерные реак-
ции» .
1.5. Общие представления о пространстве, времени, энергии, массе... *111
превращение четырех протонов (р) и двух электронов (е) в ядро атома гелия
(4Не) и образование двух нейтрино (v) по схеме
4р + 2е -> 4Не + 2v + Екин. (1.191)
При этом выделяется кинетическая энергия Екии = 29,3 МэВ. Если учесть,
что масса протона, выраженная в энергетических единицах, составляет
938 МэВ, то соответствующий дефект массы оказывается равным Ет/т =
= 8 • 10-3 (около 1%).
2. В химической реакции горения метана в газовой горелке, которая про-
текает по схеме
СН4 + 2О2 -> СО2 + 2Н2О, (1.192)
при сгорании одного кубического метра метана выделяется энергия 35,6 МДж.
При пересчете на массу сгоревшего топлива оказывается, что Ет/т = 10-10,
т.е. на 8 порядков (!) меньше, чем при термоядерной реакции на Солнце.
Таким образом, химические реакции оказываются на 7—8 порядков менее
эффективными, чем ядерные в части превращения исходных продуктов (то-
плива) в кинетическую энергию, потребляемую нами по цепочке дальней-
ших преобразований в виде теплоты, света и др. Проиллюстрируем это дру-
гим примером.
3. Энергия, получаемая при сгорании 1 кг угля, равна приблизитель-
но 7 • 106 кал = 2,9 • 107 Дж, тогда как заключенная в 1 кг обычного песка —
эквивалентна 9 • 1016Дж. Таким образом, собственная энергия одного 1 кг песка
в 3,1 миллиарда раз превышает химическую энергию, выделяющуюся при сго-
рании 1 кг угля. Из этого примера видно, что если высвобождается лишь одна
тысячная доля собственной энергии (т.е. ЕЕ/Е = Ет/т ~ 10-3), то и это коли-
чество в миллионы раз больше того, что могут дать обычные химические ис-
точники энергии.
Однако существует строгое ограничение на величину энергии, которую
практически можно извлечь из вещества (теория утверждает лишь эквива-
лентность массы и энергии, но не возможность полного преобразования), так
как одним из основных (фундаментальных) законов природы является закон
сохранения так называемых барионов (см. подраздел 9.9.1). Согласно этому
закону, полное число протонов и нейтронов в данном образце (веществе-
топливе) должно оставаться постоянным (не существует способов уменьше-
ния массы протона).
Поэтому также и не существует способов, с помощью которых мы мог-
ли бы извлечь из 1 кг песка энергию даже 9 • 1013 Дж. Однако в случае тяжелых
ядер может происходить их деление и соответствующее перераспределение
протонов и нейтронов, при котором масса уменьшится примерно на 0,1 % (так
как нейтрон тяжелее протона). Аналогичный «выигрыш» в энергии получает-
ся при синтезе легких ядер (термоядерные реакции).
4. Энергия, выделяющаяся при взрыве водородной бомбы, составляет ве-
личину, приблизительно равную энергии, выделяющейся при взрыве 106 тонн
112* 1. МЕХАНИКА
(1 мегатонна) обычной «классической» взрывчатки — тринитротолуола
(ТНТ). Известно, что при таком взрыве выделяется энергия, равная 1015 кал =
= 4,15 • 1015 Дж. Если эквивалентный взрыв осуществить с помощью ядерной
мегатонной бомбы, то для этого нужно израсходовать всего 46 г из массы всей
ядерной взрывчатки. Известно, что в я дерном взрыве, основанном на синте-
зе и делении ядер, только 10-3 часть рабочего вещества превращается в энер-
гию взрыва. Поэтому начальная масса ядерной взрывчатки должна составлять
не менее 50 кг (для осуществления ядерного взрыва эквивалентного по мощ-
ности одной мегатонне ТНТ), что непосредственно следует из выражения
(1.186).
5. Первое экспериментальное подтверждение правильности соотноше-
ния Эйнштейна между массой и энергией было получено при изучении энер-
гии, высвобождающейся при радиоактивном распаде атомных ядер, т.е.
при сравнении масс исходного ядра и конечных продуктов. Например, сво-
бодный нейтрон распадается самопроизвольно на три частицы: протон (р),
электрон (е_) и антинейтрино (ve) (при условии, что масса нейтрино равна
нулю1): п -^р + е~ + ve. Это так называемый процесс p-распадаядер. При этом
суммарная кинетическая энергия протона, электрона и антинейтрино равна
1,25 • 10-13 Дж. Масса нейтрона превышает суммарную массу покоя всех ко-
нечных продуктов распада: протона, электрона, нейтрино, на 13,9 • 10-31 кг
(эта масса сопоставима с массой покоя электрона — 9,1 • 10-31 кг). Такому
уменьшению массы должна соответствовать энергия ЛЕ = (13,9 • 10-31) х
х (3 • 108)2 = 1,25 • 10-13 Дж, что совпадает с величиной кинетической энергии
всех продуктов распада.
6. Известны примеры, когда кинетическая энергия переходит в массу.
Очень яркий эксперимент, когда протон с огромной кинетической энерги-
ей в 300 ГэВ сталкивается с протоном, который можно считать покоящимся
в специальном детекторе, который называется пузырьковой камерой (замкну-
тый объем, наполненный жидким водородом), при этом рождаются 22 новых
частицы (главным образом элементарные частицы — пионы).
7. В связи с дальнейшим обсуждением темы «Молекулярная физика» (гла-
ва 4) важно отметить, что изменением массы тела сопровождается соответ-
ствующее изменение внутренней энергии тела (энергии теплового движения
его атомов и молекул):
при нагревании железного утюга на 200 °C его масса возрастает в Лт/т =
= 10-12 раз;
при превращении льда в воду Лт/т = 3,7 • 10“12 и др.
Из эквивалентности массы и энергии следует, что энергии фотона
hv (v — частота фотона, h — 6,63 • 10-34 Дж-с — постоянная Планка) со-
ответствует масса Av/c2. Эта масса (как и любая масса) при падении
с высоты Н в поле силы тяжести Земли приобретает кинетическую
1 В подразделе 9.9.3 вопрос о массе нейтрино обсуждается более подробно.
1.5. Общие представления о пространстве, времени, энергии, массе... • 113
энергию ДЕ = mgH = —gH, что должно проявиться в увеличении ча-
с
стоты фотона. Для относительного изменения этой частоты получаем
Av _ ДЕ _ gH
v Е с2
Такое изменение частоты действительно было обнаружено для
у-квантов в опытах Паунда и Ребки (1969 г.) с использованием эффек-
та Мёссбауэра (см. подраздел 9.7.6).
Соотношения (1.184) и (1.185) при совместном использовании по-
зволяют связать полную энергию тела массой т с его скоростью v фор-
мулой
Е =
— = тс\
Г?
V С2
(1.193)
где = у >
и для импульса тела массой т получить выражение
(1.194)
Из (1.193) и (1.194) следует, что при т 0 энергия и импульс тела
стремятся к бесконечности, когда и -> с, что также указывает на недо-
стижимость скорости света массивными (не безмассовыми) объекта-
ми1.
Энергия движущегося тела (кинетическая энергия) в СТО опреде-
ляется как разность его полной энергии Е и энергии покоя Е$, т.е.
Т = Е -Eq =тс2 Л 1 у -1 ) = тс2(а-\),
(1.195)
что при v « с вместо (1.194) и (1.195) дает хорошо известные формулы
ньютоновой механики
р = mv
1 Именно поэтому зарегистрированное в сентябре 2011 г. учеными из Европейского
центра ядерных исследований (ЦЕРН) и требующее тщательной проверки превышение
скорости света элементарными частицами — нейтрино, обладающими малой (не равной
нулю) массой, так всколыхнуло научное сообщество.
114* 1. МЕХАНИКА
и
Т = р2/2т.
(1.196)
В СТО выполняется второй закон Ньютона, из которого с исполь-
зованием определения ускорения а = du/dZ получается релятивист-
ское выражение для силы (приводим без вывода)
- т
F = =а +
И
--- \— а | = ma^ + \mv(va)^, (1.197)
в котором первое слагаемое представляет собой составляющую силы,
сонаправленную с ускорением 5, а второе — совпадает по направле-
нию со скоростью v. Это принципиально отличает релятивистское
определение силы от классического.
Из (1.197) видно, что с помощью силы F конечной величины не-
возможно ускорить тело с отличной от нуля массой т до скорости,
равной скорости с света в вакууме.
Из соотношения (1.197) следует, что в частных случаях Flu
и F v сила определяется как
F = та^ и F = — mv(v, а}Е
(1.198)
соответственно.
Таким образом, классическое определение инертной массы е виде
отношения силы, действующей на тело, к приобретаемому им ускоре-
нию в СТО оказывается несостоятельным. То же относится и к грави-
тационной массе, которая в СТО представляется десятимерной вели-
чиной — тензором энергии-импульса1. Величина гравитационной
массы релятивистской частицы зависит не только от ее энергии,
но и от взаимного направления радиус-вектора г, определяющего
положение тела относительно выбранной системы координат, и его
скорости v. При v г гравитационная масса т — Е/с2, а при v ± г —
Е(, иЧ „ 2£
т = — 1 + —г — для «массивной» частицы, и т = —-----для безмас-
с с ) с
совых частиц (фотона, в частности). Таким образом, оказывается,
1 В курсе математики большинства технических вузов тензорное исчисление обычно
не изучается. Для наших читателей отметим, в частности, что трехмерный тензор явля-
ется хорошо известным нам обычным вектором.
1.5. Общие представления о пространстве, времени, энергии, массе... *115
что для вертикально (в выбранной системе отсчета) движущегося
фотона масса оказывается вдвое меньше горизонтального. Значит,
в СТО понятие гравитационной массы так же неприменимо, как и по-
нятие массы инерционной.
Сопоставим в таблице 1.2 кинематические и динамические харак-
теристики и соотношения между ними, используемые в классической
и релятивистской механике.
Таблица 1.2
Сопоставление некоторых классических и релятивистских
механических величин и соотношений между ними
Физическая величина В клас- сической механике Ньютона В теории относитель- ности Эйнштейна
Положение в пространстве (координаты, радиус-вектор) Г (x,y,z) f (x,y,z)
Скорость v = dr /dt v = dr /dt
Ускорение а - dd/dt a - dd/dt
Масса m \e2 p2 m = d—~— V с c
Масса покоя m m-—^ c
Импульс p - mv mv p = , = mvt c
Кинетическая энергия T mv2 2 T = E-E0 = 7 f / V2 7 = me2 1/ A 1 - -у- -1 = mc2(/ -1) </ V c )
Энергия покоя T=d Eo = m0c2
Связь силы с ускорением pjl d/ dp 1 ,3-z—. г = — = ma^ + —m/ v(va) d/ c
Связь энергии с импульсом T = — 2m E2 — p2c2 = m2c4
Связь импульса с энергией и скоростью vE p--
Изменение внутренней энергии U в механических процессах \U=\T AU = AE0
116* 1. МЕХАНИКА
Подчеркнем еще раз — Эйнштейн изменил привычные интуи-
тивные представления о пространстве и времени и создал новую, на-
званную специальной (или частной), более общую, применимую для
любых скоростей перемещения физических объектов теорию относи-
тельности, основываясь на двух основных положениях:
первое — это постоянство (экспериментальный факт) скорости
света для всех наблюдателей, движущихся равномерно и прямолинейно,
что в более общей форме означает, что существует предельная скорость
с — 2,998 • 108м/с, больше которой не может иметь ни одна частица
и ни один сигнал, несущий энергию',
второе — принцип относительности, впервые введенный Галилеем
для механических движений, был расширен и переформулирован так: лю-
бые законы физики (не только законы механики) должны быть одинако-
выми для всех наблюдателей, движущихся с постоянной скоростью друг
относительно друга, независимо от величины и направления скорости.
С этой точки зрения эти наблюдатели и наблюдаемые ими законы
должны быть эквивалентны.
Здесь утверждается, что не должно существовать выделенной (привиле-
гированной) системы отсчета, равно как и способа определения абсолютной
скорости, внутри равномерно и прямолинейно движущейся системы отсче-
та (если, например, лететь в космическом корабле с постоянной скоростью,
то никакими физическими, химическими или биологическими эксперимен-
тами, проведенными внутри этого корабля, нельзя обнаружить, движется он
или находится в покое) — все результаты экспериментов будут такие же, как
и в покоящейся относительно Земли системе отсчета.
Теория Эйнштейна переопределяет также содержание понятия мас-
сы по сравнению с классической механикой. В ней масса уже не являет-
ся мерой его инертности (также нет и гравитационной массы) — это мера
вещества и энергии, заключенной («спящей») в покоящемся теле. Введение
релятивистской массы стирает грань между веществом и полем, припи-
сывая излучению свойства материальных тел. В отличие от классической
механики суммарная масса системы не равна массе составляющих частиц,
так как частично «уходит в энергию» при ее образовании (закон сохранения
массы в замкнутой системе без учета излучения «не работает»).
Для физических объектов и систем координат, движущихся со ско-
ростями v « с или и « с соответственно, СТО приводит к результатам
классической нерелятивистской механики. При этом преобразования
Лоренца переходят в преобразования Галилея, принцип относитель-
ности Эйнштейна и принцип относительности Галилея в этих услови-
ях сопрягаются.
1.5. Общие представления о пространстве, времени, энергии, массе... • 117
1.5.2.2. Некоторые следствия специальной
теории относительности
Хотя общие положения и результаты СТО уже изложены, на неко-
торых следствиях этой теории следует остановиться более подробно
(в силу их особой важности).
Релятивистское сложение скоростей. Если материальная точка (тело)
движется со скоростью v'(v'x, 0, 0) в инерциальной системе с коорди-
натами х', уД которая в свою очередь движется относительно дру-
гой инерциальной системы координат х, у, z, tco скоростью и(их, 0, 0),
то скорость v(vx, 0, 0) этой точки в другой системе х, у, z, t, согласно
преобразованиям Лоренца, записывается в виде:
(1.199)
(1.200)
Действительно, v =— ии - —. Поэтому
t t’
Ut’ + x’ U + X/tf
v =-------7 =-----A
t +UX /с л x | 1 I
1 l + w—
t'Vc2 )
Соотношение (1.199) является первым следствием преобразова-
ний Лоренца: оно называется релятивистским правилом сложения ско-
ростей. Очевидно, что результирующая скорость v здесь уже меньше
суммы скоростей и и v'. Однако если обе скорости малы по сравнению
со скоростью света, то результирующая скорость очень близка к сумме
скоростей. Из (1.199) следует, что:
во-первых, скорость света одинакова в любой инерциальной систе-
ме отсчета, так как при v' = с величина v = с для любых и < с;
во-вторых, тело с не равной нулю массой т не может ни в какой
инерциальной системе отсчета достичь скорости, равной скорости
света в вакууме, или превысить ее, так как из vr < с и и < с следует,
что V — с.
Действительно, при v'= с выражение (1.199) может быть записано
и иначе:
V =---
1 + и
118* 1. МЕХАНИКА
а при и = с
C + V
V =--z Л = С-
1 + Д1
(с J
(1.202)
Последние выражения подтверждают исходный пункт релятивист-
ской теории о конечности предельной скорости.
Таким образом, правило сложения скоростей в релятивистском слу-
чае отличается от правила сложения скоростей в механике Галилея-
Ньютона.
Приведем несколько конкретных примеров.
Пусть два реактивных сверхзвуковых самолета идут на встречных парал-
лельных курсах и их скорости относительно Земли равны соответственно 1500
и 3000 км/ч. Какой будет скорость первого самолета, измеренная пассажиром
второго самолета? В этом случае выражение (1.199) записывается в виде: v =
= -------1500 + 3000------ = 4499,9999999926 км/ч (скорость с в км/ч), тог-
1 + 1500-3000/(3-105-3600)2
да как согласно преобразованиям Галилея должно было быть 4500 км/ч.
Казалось бы, различие ничтожно. Это еще раз иллюстрирует, что классиче-
ская физика обеспечивает очень хорошее приближение даже в случае очень
быстрых, с точки зрения повседневного опыта, скоростей движения. Однако
в микромире — мире ядерных частиц и электронно-ядерных взаимодей-
ствий — это различие может быть большим. Например, в свободном состоя-
нии нейтрон является нестабильной частицей и распадается натри частицы:
протон, электрон и нейтрино. Скорость электрона v при этом обычно со-
ставляет около 0,8 с (если нейтрон до распада покоился). Возникает вопрос,
какую скорость v имел бы электрон, если бы нейтрон до распада двигался
со скоростью 0,9 с (реалистичное допущение в области ядерных реакций)
в том же направлении, что и электрон? Итак, система отсчета движется
со скоростью и = 0,9 с, а электрон — со скоростью v’= 0,8 с. Из выражения
(1.199) находим: v = 0,988 с. Другими словами, здесь это различие реляти-
вистского результата по сравнению с результатом сложения по галилеевым
преобразованиям более заметно.
Таким образом, преобразования Лоренца меняют наше представ-
ление о простом сложении скоростей в движущихся системах отсчета
при скоростях их движения, близких к скорости света (и « с).
В теории относительности произведение ct ведет себя как четвертая
пространственная координата. Из преобразований Лоренца следует,
что произведение ct и координата х могут «перемешиваться» в зависи-
мости от скорости наблюдателя (с математической точки зрения вели-
чины ct их равноценны и ведут себя сходным образом).
1.5. Общие представления о пространстве, времени, энергии, массе... • 119
Релятивистское сокращение длины. Если в движущейся со скоро-
стью и инерциальной системе с координатами х', уz ’,t 'лежит располо -
женный вдоль оси х' стержень длиной L\ то при измерении его длины
из покоящейся системы х, у, z, t будет обнаружена меньшая длина Z:
L < А'(при этом предполагается, что положения обоих концов стержня
Z'фиксируются в один и тот же момент времени Z):
Из преобразований Лоренца следует, что длины объектов, расположенных
в движущихся системах отсчета, оказываются уменьшенными в направлении
движения при измерении их из покоящейся системы координат. Действитель-
но, если величина А'ограничена точками х[ = 0 и х2 = L',a величина А ограни-
ченна точками Xi = Xq и х2 = X так, что А = X — Xq, применяя преобразование
Лоренца к паре координат х[ ->Xi, х2 ->х2, получим выражение (1.203). Напри-
мер, для и = 0,5с и L’= 1 м величина А = 0,87 м. При этом направление скорости и
движения подвижной системы координат не влияет на конечный результат.
То, что различные наблюдатели (в разных инерциальных системах
отсчета) видят одну и ту же линейку объектом разной длины с точки
зрения физики, можно объяснить несовпадением для них понятия од-
новременности, т.е. события одновременные для одного наблюдателя
не являются таковыми для другого.
Так как некоторые выводы релятивистской механики противоречат
нашему повседневному опыту, трудно (но нужно!) поверить в ее спра-
ведливость. Она является одним из первых примеров описания явле-
ний природы, очевидным образом противоречащим «здравому смыс-
лу» (в дальнейшем мы увидим, что подобные «несуразности» имеют
место и в квантовой физике «на каждом шагу»).
Замедление времени в движущейся системе отсчета. Рассмотрим мо-
дель: инерциальная система координатх', у', z', t'движется относитель-
но инерциальной системы координат х, у, z, t со скоростью й {и, 0, 0).
Если в движущейся системе в начале координатх'= 0, у'= 0, ^'= 0 про-
исходят два события Л'и В'с временным промежутком Д^', то в соот-
ветствии с преобразованиями Лоренца наблюдатель в неподвижной
системе обнаружит, что временной интервал между этими событиями
(см. также выражение (1.182)):
А/ (х = ut, у = 0, Z = 0) = А?(х =0,y^0,z =0), (1.204)
„2
где Д/ > ДА — т.е. увеличился.
120* 1. МЕХАНИКА
С точки зрения покоящегося наблюдателя, время в движущейся
системе течет медленнее. Например, для и = 0,5 с, f = 1 с, t = 1,15 с.
Поскольку замедление времени в движущихся системах это свойство самого
времени, то, как уже упоминалось, замедляют свой ход не только движущиеся
часы, но и все физические процессы (в том числе и скорости химических и био-
логических реакций). Последнее означает, что замедляется и старение живых
организмов. Однако реальные скорости космических кораблей в настоящее
время еще много меньше скорости света и эффект замедления старения кос-
монавта будет очень мал. Действительно, с точки зрения наблюдателя на Земле
ход всех физических процессов (включая саму жизнь) в космическом корабле,
движущемся со скоростью и, замедлился бы в (1 — и2/с2)~и2 раз. Если бы кос-
мический путешественник мог двигаться со скоростью света, то с точки зре-
ния земного наблюдателя он не старел бы совсем. Иными словами, космиче-
ские путешественники будут стареть не так быстро, как их близнецы на Земле
(фотоны «не стареют» вообще). Действительно, если бы биологический про-
цесс старения не замедлялся в такой же пропорции что и время, то, прикрепив
к движущимся световым часам биологический объект, способный отсчитывать
время (например, по числу ударов сердца), мы обнаружили бы, что световые
и биологические часы отсчитывают разное время, и, таким образом, можно
получить детектор абсолютного движения, что нарушает принцип относитель-
ности. Конечно, любое живое существо (также и растение) не заметит замедле-
ния жизненного ритма, находясь в быстро движущемся космическом корабле.
Как указывалось, из-за малости (по сравнению со скоростью света) скоростей
современных космических кораблей эффект замедления времени в них мал,
но замедление физических процессов ярко проявляется в явлениях распада
радиоактивных частиц и, в частности, в мессбауэровских экспериментах, де-
тальное описание которых будет дано в подразделе 9.7.6.
В мессбауэровских «часах» используются у-кванты, испускаемые ядрами
радиоактивного изотопа, например железа, внедренного в монокристалл
обычного нерадиоактивного железа. Двое идентичных мессбауэровских «ча-
сов» показывают одно и то же время с относительной точностью до 10“16.
Сдвиг по времени в экспериментах с мессбауэровскими «часами» проявля-
ется в увеличении скорости счета у-квантов, причем этот сдвиг может быть
измерен количественно. Например, в экспериментах по замедлению времени
на мессбауэровских «часах» вся установка вращалась (т.е. быстро двигалась от-
носительно неподвижного источника у-квантов), и было обнаружено замед-
ление времени в £ раз по сравнению с абсолютно такими же, но покоящимися
мессбауэровскими «часами».
Другое подтверждение реальности замедления времени получено в экс-
периментах с использованием вместо отдельных ядерных частиц или атомов
железа макроскопических часов. Наиболее точные макроскопические часы
в настоящее время — атомные часы, работают на атомах цезия. Эти часы «ти-
кают» 9 192631 770 раз в секунду. В 1971 г. американскими учеными был про-
веден эксперимент по сравнению показаний двух идентичных цезиевых ча-
1.5. Общие представления о пространстве, времени, энергии, массе... • 121
сов, когда одни из них в течение целого месяца находились в полете вокруг
Земли на обычных реактивных лайнерах, а другие оставались на Земле. В со-
ответствии с предсказаниями специальной теории относительности летающие
на самолетах часы должны были отстать от часов на Земле на (184 ± 23) нс.
Наблюдаемое отставание составило (203 ± 10) нс. Таким образом, согласова-
ние с теорией находится в пределах погрешностей эксперимента.
Наконец, из опытов с ядерными частицами известно, что среднее время
жизни распадающегося положительно заряженного ц-мезона, движущего-
ся со скоростью, близкой к скорости света, измеренное в лаборатории, пре-
вышает во много раз время жизни покоящегося ц-мезона, равное 2 • 10-4 с.
Как и в случае сокращения длины, замедление времени не зависит от направ-
ления скорости и движения объекта.
Относительность одновременности. Если два события А и В проис-
ходят в движущейся со скоростью и инерциальной системе х',у', z\ t'
в один и тот же момент времени tfA = tfB в различных точках простран-
ства, например, при значениях координат х' = 0,5а и х" = —0,5а, где
а — некоторая постоянная длина, то эти же события не являются одно-
временными для наблюдателя в покоящейся инерциальной системе
х, у, z, t. Для них существует временной промежуток
т.е. А/ 0, даже если AZ' = tfA - t'B = 0.
Этот результат также можно получить из преобразований Лоренца.
Приведем численный пример.
Для Af = tfA - tfB = 0, и — 0,99с, а = 1000 км, получаем: AZ = 0,023 с.
В рамках нерелятивистской (классической) теории относитель-
ности понятие «одновременности» событий не содержит неясностей.
В СТО это утверждение имеет смысл только для избранной (т.е. той,
в которой происходят события) системы координат.
Оптический эффект Доплера. Начнем с аналогий. Хорошо известно,
что если наблюдатель движется к источнику звука (или наоборот — ис-
точник к наблюдателю), то, как будет показано в подразделе 2.8.4, ча-
стота воспринимаемого им звука увеличивается, а при взаимном уда-
лении — уменьшается. Обычным примером служит гудок движущегося
поезда, проходящего мимо неподвижного наблюдателя. По мере того,
как поезд проходит мимо и удаляется, частота (высота тона) гудка по-
нижается. Подчеркнем, что здесь предполагается, что звук распростра-
няется в неподвижном (скорость ветра в расчет не принимаем) воздухе
122* 1. МЕХАНИКА
и источник звука (поезд) движется относительно неподвижного воз-
духа. Это предположение в действительности необходимо, так как зву-
ковой сигнал может распространяться только в материальной среде.
Если бы существовал эфир, то можно было бы распространить это
рассмотрение и на световые волны. Однако, как это следует из опытов
Майкельсона и Морли, эфира не существует. Свет распространяется
и в отсутствии материальной среды, например, в вакууме космического
пространства. В таком случае, что будет с частотой света при движении
источника света относительно наблюдателя? Оказывается, существу-
ет подобный звуковому оптический эффект: если источник света дви-
жется к наблюдателю (или, что равнозначно, — наблюдатель движется
к источнику}, то воспринимаемая наблюдателем частота света, испу-
скаемого источником, увеличивается (возникает так называемое «синее
смещение», т.е. спектр излучения смещается в сторону более коротко-
волновой области — синей части солнечного спектра, если рассматри-
ваются световые волны}, и наоборот, при взаимном удалении источника
и наблюдателя возникает так называемое «красное смещение» спектра —
частота света уменьшается, а длина волны — увеличивается. Звуковой
эффект Доплера вычисляют, используя классическую механику (звук
распространяется в материальной среде — воздухе со скоростью много
меньшей скорости света), а для расчета оптического эффекта Доплера
требуется теория относительности. На рисунке 1.42 приведена схема
такого опыта.
Излучение источника света в точке В системы XY регистрируется
наблюдателем, находящимся в точке А системы ХТ'. Пусть источник
в точке В удаляется от наблюдателя в точке А со скоростью v. Пред-
положим, что с точками А и В связаны одинаковые часы, которые
в момент прохождения источника света рядом с наблюдателем по-
казывают одинаковое время (не нарушая общности, предположим,
что в этот момент времени начинается отсчет и исходное время равно
нулю — начальное нулевое время).
Рис. 1.42. К оптическому
эффекту Доплера
Пусть в момент времени Тв (по ча-
сам, связанным с источником)
он испускает световой импульс
(вспышку света). В какой мо-
мент времени ТА эта световая
вспышка достигнет наблюдателя
в точке А (по его часам)? Как мы
теперь знаем, его часы идут
быстрее движущихся часов —
в любой момент времени t часы
1.5. Общие представления о пространстве, времени, энергии, массе... • 123
в А показывают время tA = fyB (£ > 1). Нас интересует время ТА, ког-
да свет из В достигает наблюдателя в А (отмеченное по его часам).
В системе отсчета X'Y', связанной с Л, время распространения све-
та из точки А в точку В равно х'/с, и момент появления вспыш-
ки в точке А (по часам в А) есть: ТА = tA + время распространения =
= tA+ х'/с, где tA — время в точке А (по часам в Л) в момент испускания
света в точке В. Если теперь заменить tA на tTB и исключить х' с учетом
того, что за время tA расстояние, пройденное движущимся источником
В, составляет х' = vtA = v^TB, то получим: ТА = ^Тв + и^Тв/с или ТА =
= Ш + р)Гр,гдер = и/с.
Значит, интервал времени или период повторения между двумя по-
следовательными импульсами света (световыми вспышками) в систе-
ме, где находится точка Л, определяется выражением: тл = ^(1 + Р)тл,
где тв — интервал между теми же импульсами, измеренными у источ-
ника света в точке В. Частота f световых вспышек (число импульсов
в секунду) связана с периодом их повторения т соотношением:/= 1/т.
Записывая обратные величины от обеих частей равенства ТА = ^(1 +
+ Р)Т§ и учитывая выражение для £ (1.183), получаем
или
/а - /в у 1-р 1+₽
(1.206)
(1.207)
Из (1.207) видно, что в случае сближающихся (у < 0, р < 0) источ-
ника света и наблюдателя в точке наблюдения происходит увеличение
частоты — возникает «синее смещение» (длина световой волны укора-
чивается), а при взаимном удалении (и > 0, р > 0) — «красное смеще-
ние» (уменьшение частоты, увеличение длины волны). Естественно,
этот результат справедлив не только для света, но и для электромаг-
нитных волн любого диапазона частот.
1.5.3. Гравитация (основные принципы общей
теории относительности Эйнштейна)
К 1911 г. Эйнштейн сформулировал релятивистскую теорию гра-
витации — так называемую общую теорию относительности (ОТО).
В теории тяготения Ньютона силы между массами и т2, располо-
женными на расстоянии г, действуют мгновенно. Это противоречит
124* 1. МЕХАНИКА
СТО, согласно которой не существует скорости распространения сиг-
нала, превышающей скорость света в вакууме. Действительно, если
силы могут действовать на расстоянии мгновенно, то это означает,
что сигнал или энергия мгновенно передается от массы т} к массе т2.
Тем самым нарушается основное положение специальной теории от-
носительности, по которому ни один сигнал и ни один вид энергии
не может распространяться в пространстве со скоростью, большей
скорости света в вакууме. Из рассмотрения этого и других противо-
речий двух теорий возникла задача создания релятивистской теории
тяготения. Эта теория, по мнению Эйнштейна, должна была удовлет-
ворять принципу относительности и автоматически приводить к эк-
вивалентности гравитационной и релятивистской масс. Поэтому он
постулировал так называемый принцип эквивалентности: действие
гравитационного поля эквивалентно действию ускоренно движущейся
системы отсчета.
Например, при наборе высоты с ускорением пассажир ощущает, что его вес
растет или увеличивается сила тяжести. Также, если ракета имеет ускорение
3g, то на космонавтов и на все предметы действует сила, вчетверо (сила при-
тяжения и «инерционная» сила складываются) превышающая обычное значе-
ние силы веса (при этом нагрузки на сердце и на сосудистую систему человека
также возрастают). Эта дополнительная сила «псевдогравитации» в точности
пропорциональна инертной массе. Ни один физический эксперимент, прове-
денный на ракете, не может дать ответ на вопрос, возросла ли вчетверо сила
тяжести за счет внезапного увеличения земного притяжения или же ракета
стала ускоренно двигаться относительно Земли.
В общей теории относительности принцип эквивалентности по-
требовал описания процессов с помощью довольно сложного матема-
тического аппарата. Полученные математические выражения могли
быть интерпретированы так, что любая масса «возмущает» вокруг себя
пространство (лежащее на плоской упругой поверхности тело своим
весом прогибает плоскость), в результате чего все другие тела, находя-
щиеся рядом, будут двигаться по траекториям, искривленным в окрест-
ности возмущающей массы, и приближаться к ней. Уравнения общей те-
ории относительности связывают величину кривизны этих траекторий
с массой источника гравитации. С точки зрения классической физики
это означало бы, что любое тело, движущееся по искривленной тра-
ектории, должно ускоряться, а следовательно, испытывать действие
некоторой дополнительной силы. В общей теории относительности
ускорение обусловлено свойствами самого пространства, проявлением ко-
торых и объясняется явление гравитации. Поскольку «возмущено» само
1.5. Общие представления о пространстве, времени, энергии, массе... • 125
пространство, все инертные массы подвержены одному и тому же его
воздействию, и принцип эквивалентности удовлетворяется автомати-
чески. Эффект искривления пространства, а следовательно, большие
скорости и ускорения проявляются особенно сильно около массивных
космических тел.
В соответствии с этим сверхточные атомные часы на поверхности Солнца
должны идти медленнее, чем на поверхности Земли. Общая теория относи-
тельности предсказывает замедление любых часов в гравитационном поле.
Это приводит к одному из главных выводов (следствий) общей теории отно-
сительности: гравитационному «красному смещению» — увеличению длины
световой волны при излучении света массивным космическим телом. Этот эф-
фект называется гравитационным «красным смещением» (см. также подраздел
9.9.3). Например, если одинаковые часы на Земле расположены на разной вы-
соте на расстоянии 10 м друг от друга, то нижние часы будут идти медленнее,
причем это различие составит приблизительно 10“15 от интервала измеряемого
времени. Чтобы измерить эту величину с достаточной точностью, необходимо
иметь часы, работающие с относительной точностью не хуже 10-16. Впервые
часы с такой точностью работы были созданы в 60-х гг. XX в. В них исполь-
зуются фотоны, излучаемые радиоактивными атомами железа, внедренными
в кристалл. Столь высокую точность часов обеспечивает уже упомянутый эф-
фект Мёссбауэра (см. подраздел 9.7.6). Благодаря появлению новых стандар-
тов частоты удалось в лабораторных условиях продемонстрировать замедление
времени, обусловленное гравитацией. Первые такие эксперименты были про-
ведены в 1960 г. в Гарвардском университете на 20 метровой башне (упомяну-
тый ранее опыт Паунда и Ребки).
Другой эффект, предсказываемый ОТО, — искривление траектории
при распространении светового луча вблизи поверхности Солнца. Теория
позволяет вычислить гравитационную силу, действующую между Солнцем
и фотоном, движущимся со скоростью света. Оказалось, что при наблюдени-
ях за звездами во время солнечных затмений, когда световой луч от звезды
проходит вблизи солнечного диска, видимые расположения звезд сдвинуты
на расстояние, предсказываемое теорией Эйнштейна, по отношению к их по-
ложениям, когда световой луч проходит вдали от Солнца.
Еще одно явление, предсказываемое ОТО и вызывавшее до 1970 г. изумле-
ние с недоверием, — это то, что при весьма обычных условиях звезда, израс-
ходовавшая свой запас внутренней энергии (обычно ее представляют как тер-
моядерную энергию), должна испытывать коллапс, превращаясь в конечном
счете в «черную дыру» — звездный объект, поверхность которого не может
покинуть ни свет, ни какой-либо другой материальный объект или сигнал.
Такая звезда должна полностью и навсегда исчезнуть из поля зрения любых
наблюдателей. Коллапсирующие звезды удалось наблюдать в процессе их сжа-
тия. Согласно ОТО ускоряющаяся масса (например, коллапсирующая звезда
или объект, образовавшийся после столкновения звезд) должна излучать гра-
126* 1. МЕХАНИКА
витационные волны подобно тому, как ускоряющийся электрический заряд
испускает электромагнитное излучение. Теория «черных дыр» и эксперимен-
тальное их наблюдение составляют задачу современной астрофизики.
Общая теория относительности играет очень важную роль в разде-
ле астрофизики, называемой космологией, занимающейся вопросами,
связанными с происхождением, размерами, строением и эволюцией
Вселенной (см. подраздел 9.9.3). Основной перечень стандартных во-
просов, на которые должна дать ответ космология: конечны или бес-
конечны размеры Вселенной? Увеличиваются ли они (расширяется ли
Вселенная)? Как и когда сформировалась наша Солнечная система
и Галактика? Много ли имеется галактик и как они распределены
во Вселенной? Как они сформировались, и что представляла собой
Вселенная, до того как галактики возникли? Чтобы попытаться отве-
тить на эти и другие вопросы, стоящие перед космологией, нужно кро-
ме общей теории относительности познакомиться с атомной и ядер-
ной физикой (см. главы 8 и 9).
1.5.4. Основные выводы
Релятивистское правило сложения скоростей (1.199), которое мож-
но получить из преобразований Лоренца (1.181), сильно отличается
от правила сложения скоростей в теории относительности Галилея-
Ньютона.
Длины объектов, расположенных в движущихся системах отсчета,
оказываются уменьшенными при измерении их из покоящейся систе-
мы координат (1.203).
Время в движущихся системах отсчета по сравнению с неподвиж-
ными системами течет медленнее (1.182), (1.204).
Релятивистские определения энергии и импульса (1.184) — (1.185)
позволяют утверждать, что они будут сохраняться в любых инерци-
альных системах отсчета при условии, что они сохраняются хотя бы
в одной из таких систем. Этот вывод полностью соответствует законам
сохранения в классической теории относительности.
Массе тела соответствует энергия покоя (1.186). Когда масса
уменьшается, энергия покоя преобразуется в другие формы энергии
(в частности, в кинетическую и в энергию излучения). Таким обра-
зом, релятивистская масса тела является мерой заключенной в нем
энергии. Отсюда следует, что для безмассовых частиц существует от-
личная от нуля релятивистская масса, проявляющаяся в движении.
Релятивистская масса замкнутой системы (с учетом существующего
1.5. Общие представления о пространстве, времени, энергии, массе... • 127
в ней излучения) сохраняется, поскольку сохраняется полная энергия
системы.
Кинетическая энергия свободной частицы (1.195) имеет вид, отли-
чающийся от выражения для кинетической энергии в механике Нью-
тона.
Энергия и импульс связаны между собой соотношениями (1.184)
и (1.185), и эта связь существенно отличается от принятой в механике
Ньютона.
На релятивистскую массу действуют гравитационные силы. Введя
принцип эквивалентности, Эйнштейн построил релятивистскую тео-
рию гравитации, которая называется общей теорией относительности.
Естественно, все выражения релятивистской теории переходят
в простые соотношения механики Галилея — Ньютона при скоростях
тел и скоростях движений систем отсчета малых, по сравнению со ско-
ростью света в вакууме. Введенные релятивистские принципы не про-
тиворечат общим положениям теории относительности Галилея-
Ньютона, а углубляют и развивают их.
2. КОЛЕБАНИЯ И ВОЛНЫ
2.1 Колебательное движение
г
._ся
Н
2.2 . Кинематика гармонических колебаний
р
р
п
2.3 . Сложение гармонических колебаний
2.3 1 Сложение колебаний одного направления
2.3 2 Сложение двух колебаний одного направления
с мало отличающимися частотами Биения
2.3 3 Сложение взаимно перпендикулярных колебаний
р
р
2.4. Динамика гармонического
колебательного движения
2.4 1 Дифференциальное уравнение
гармонических колебаний
г
1
Е
О
2.4.2 Пружинный маятник
Pi
Г1
«с.4.3 Математический маятник
г
I__________________I
р
г
L
т
2.4 4 Физический маятнгх
2.4. 5 Двухатомная молекула как линейный
гармонический осциллятор
Р..<- _ 14
!__ J
2.5. Энергия гармонических колебаний
: - !
Г 1
I_______________________
J'
2.6. Затухающие колебания
р
в
р
в
о
2.7. Вынужденные колебания
в
Значения пор су величин аобротност!
2.8. Волны
2.8 1. Общие сведения
a
। ;f Ч ш
।ill। 'hi
I I I 1 1 Г " ' И : ,
a
IW IS
Н
Р
В
]
2.8 2 Уравнение плоской бегущей волны
2.8 3 Энергия волн
1
IV'
2.и 4 Акустический эффект Доплера
2.9. Сложение волн
2.9 1 Принцип суперпозиции волн
2.9 2 Стоячие вол нм
2.9 3 Колебания струны
2.9 4 Группа волн, Групповая скорость
2.9 5 . 1онятие о фононах
3. ЭЛЕМЕНТЫ МЕХАНИКИ
СПЛОШНЫХ СРЕД
3.1. Основы гидростатики
3.1 1 Передача давле--1я в жидкости
р
3.1 2 Закон Паскалг
1
р
3 13 Выталкивающая сила Архимеда
3-1.4 Сила поверхностного натяжения
3.2 Гидродинамика. Течение
несжимаемой жидкости
п.
3.2 . Ламинарное и турбулентное течение
Число Рейнбльдса. Закон Хёгена Пуазёйля
I
I
3.2 2 Условие неразрывности потока
pi
3.2 3 Давление жидкости на стенки
трубы Уравнение Бернулли
в
3.2 4 Формула Торричелли
р
4. МОЛЕКУЛЯРНАЯ ФИЗИКА
р
4.1 Молекулярно-кинетическая
теория идеального газа
4.11 Функция распределения
4.1 2. Модель идеального газа
п
о
4.1 3 Абсолютная температура
и температурные шкалы
4.2. Распределение молекул газе
по потенциальной энергии
(распределение Больцмана)
4.2.1 Идеальный гаг во вн_ инем силовом поле
4.2 2 Барометрическая формула
4.2.3 Центрифугирование
<
р о
р, Б.
Р
Р
4.3. Распределение молекул идеального
газа по кинетическим параметрам
(распределение Максвелла)
4.3 1. Классическое распределение
Максвелла Больцмана
р
Р1 Г Р'
4.С 2 Распределение Максвелла по абсолютным
значениям скорости частиц
р
Л'
п
4.3 3 Распределение Максвелла
по кинетическим энергиям частиц
(
п
4.4. Статистические флуктуации
4. J. Тепловые свойства систем,
состоящих из многих частиц
4.5 1 Кинетическая теория теплоты
4-5.2 Тепловая энергия
п.
4.5 3 Основы термодинамического метода
1 р
р:
Р Р
О
Р
.5.4 Равновесные состояния
I4JI
Р
В
гг
тл
Ф.
4.5 5 К/левой закон термодинамики распределение
энергии между частицами в ТДС
4.5 6. Закон о равномерном распределении
|нергии по степеням свободы
р
4.5 7 . 1ервое начало термодинамики
р
1
4.5-8 Теплоемкость идеального газа -
Работа в изопроцессах
1 "IK p
pi
p
p
4.5.9 Теоретические и экспериментальные
значения теплоемкостей идеальных газов
Ь' Р
в
.5.10 Второе начало тепмодинамики. Цикл Карно
< I
КПД Ка
л
а
4.5 11 Энтропия, Другие термодинамические функциг
в
п г
Ni
I
в
Б
1 P
X 1
1
4.5 12 Тепловая теорема Нернста
н
4
Д'
4.6. Газ Ван-дер-Ваальса
4.6 1 Уравнение состояния
ван-дер ваальсовского газа
в
о
и В
I
4.6 2 Внутренняя энергия реального газа
4 6 3. Эффект Джоуля Томсона
Г р 'т
г В
Верхняя и нижия т< патуры нверсии дл эторых газов
Р
Р'
Е
1
В
-г. /. Элементы физической кинетики
в
р
Ч
D
4.7.1 Процессы переноса. Релаксация
4.7 4 Явления переноса в идеальных газах
л
4.7.3 Макроскопическое представление
коэффициента переноса
р
4.'. 4 Диффузия
4.7 5 Теплопроводность
4.7 6 Вязкость или внутреннее трение
p
Рчс
4.7.7 Сопоставление характеристик
явлений переноса
р
Явлелг—п закит ил рг' ры
Вел1 ишыкоэф^ 1енто в законах я лений перенос п о^лальнь dl jhx
Экспериментальнь 1 значения х:
перс осади., .азов приНУ)
1 I
л 7.8 Явления переноса в условиях вакуума
к.
с р
н
Рис J3.
4-7-9 Особенности движения тел в вязкой среде
Р 4
г
4.8. Химические реакции
4.8 1 Закон Аррениуса
3
с
р
<
.8 2 Разветвленные цепные химические реакции
р
я
г
Н I- I
5. СТАТИЧЕСКОЕ ПОЛЬ
ЭЛЕКТРИЧЕСКИХ ЗАРЯДОР.
ДИЭЛЕКТРИЧЕСКИЕ
СВОЙСТВА ВЕЩЕСТВА
р
н
5.1. Электростатическое поле
5.1 1 Основные законы электростатика
.12 Напряженность электростатического пеня
D
I
p 11
; '—I
Pl . I
5.1 3 Теорема Остроградского Гаусса
Рис
s
9
L!
5.1 4 Работа сил электростатического поля. Потенциал
DO
5.1 5 Электрический диполь
5.1 6 Потенциал поля произвольно
распределенного в пространстве заряда
^.2. диэлектрические свойства веществ
в связи с их строением
5.2.1 Проводника и диэлектрики, Общие положения
в
5.2.2 Феноменологические (макроскопические)
свойства диэлектриков
5.2.3 Микроскопические характеристики диэлектриков
н
Hl
р
тричес» le д >льш мип ты н <oroi >ix мш к;
F
эед
5,z 4 Типы поляризации
некоторых атоми
мет эффективных заряд! . . омги :отопых
мо а? ля? 1та| о заряда 1
I 1
р
5.2.5 Зависимость поляризуемости от частоты
переменного электрического поля
5.2 6 Локально^ поле в диэлектрике. П"ле Лоренца
о
5.2.7 Формула Клаузиуса Лосотти
5.2-8 Опытное определение поляризуемости
"1 электрг-еского дипольного момента молекул
6. ПОЛЕ постоянных токов.
МАГНИТНЫЕ СВОЙСТВА ВЕЩЕСТВА
6.1. Основные характеристики магнитного поля
6.1 1 Постоянный электрический ток
р р
р-
О р
р
р
п
н -
ф|
р р
= i
Та..
6.1.2 Магнитная индукция поля токов
I в
1 Р; ч-т;
чачале лил< догори* лдаеч в центре внгк~ круговой
гок ш ок проводин-а гоко ри 6.
’ Ра считаем тел рьло; озда____... . .лом
те ущ..м по прямоли чноду ку проводник:
6.1 3 Закон полного тока (тока проводимости)
U f
llpi in ta о ноготока да чета
гнитн интукции поля идааемого со.
___адом Н.
Рис 0.1'
]
г
'Jd =ф« =
= 1" Ч™ J d'+p
6.1 4 Действие магнитного поля на проводник
с током и на движущийся заряд
.1 1<
Пр
IL
[1 П z ?= |° _ _ I
и n®\- |i.
и ©
6-15 Магнитный дипольный момент в магнитном поле
I
6.1 6 Электромагнитная индукция
Закон Фарадея
□
6.2. Магнитные свойства магнетиков
6.2 1 Атомный магнетизм
п
6.2 2 Макроскопические свойства магнетиков
Магнитное поле в магнетике
Рис V.
6.2 4. Микроскопическая картина намагничивания
р1
LZ”_ ]
Ри< 3(1
Ри 12
6.3. Магнитоупорядоченные состояния
6.3 1 Ферромагнетизм
‘ Э|
ф<
6.3.2. Домены Кривая намагничивания
ферромагнетика
и Е.
.f 10
6.3 3 Днтиферро- и ферримагнетики
4. Уравнения Максвелла
л
6.4 । Ток смещения
Риг *
6.4 2 Электромагнитная волна
Л П
7. ВОЛНОВАЯ ОПТИКА
И КВАНТОВООПТИЧЕСКИЕ
ЯВЛЕНИЯ
н
7.1 Физика эл ектромагн итн ых волн
оптического диапазона
a
P
гр
В p
Ou :
р
—I---------1---------1---------1---
7.2. Интерференция
pi
7.2 1 Сложение двух световых волн одинаковой
частоты и направления распространения
п п
п
п
7.2.2 Интерференция в тонких пленках
R
R ...
7.3. Дифракция
p
ф
7.3 1 Принцип Гюйгенса Френёля Зоны Френеля
ф
7.3 2 Дифракция на одной прямоугольной щели
Ри< .1*
а
7.з 3 ^фракционная решетка
р
о 1
pi
в
р
7.3 4 Дифракционная решетка
как спектральный прибор
7.3 5 Дифракция рентгеновских лучей
7.4 . Поляризация
7.4.1. Поляризованный свет
пиши
р
7.4.2 Закон Мйлюса
р
р
7.4 3 Поляризация при отражении
Закон Брюстера
. .4 Вращение плоскости поляризации
к"
Е
Т . D
7.4.5 Двойное лучепреломление Поизма Николя
XVII
в
н
р
.30
р
7.5. Дисперсия светг
п'
в
7.6. Квантово-оптические явления
7.6 1 Экспериментальные законы излучения
абсолютно черного тела
A
Bp
L-l
I
I_________________________________________________________ J
Рис
в
Е
В
. .и
7.6 2 .еория излучения абсолютно черного тела
с точки зрения волновых представлений
Формула Рэлея Джинса
р
р
р
в
о,
г
7.6 3 Гипотеза квантов Формула Планка.
Свет с волновой и квантовой точек зрения
'.6 4 Фотоэффект и другие квантово-
оптические явления
Ф
р
н
Ги JI.
7.7 . Теория атома Бора
7.7.1. Кратка., предыстория современного атомизм»
кх
к.
Г Ф
9 В
Or
к
7.7.2 Постулаты и правило квантования Бора
р
р
Г ic. 41
Bl
т
Б
7.7 3 Недостатки теории Бора и ее дальнейшее
развитие. Принцип соответствия
о
Е Б
Б Пр
8. ЭЛЕМЕНТЫ КВАНТОВОЙ
МЕХАНИКИ
8.1. Корпускулярно-волновой дуализм
8.1 1 Гипотеза де Бройля
Бр
8.1 2 Дифракция электронов и нейтронов
р
р
Л
р
№ 8.1
>|
8.2. Соотношение неопределенностей
Гейзенберга
8.3. Волновая функция и уравнение
Шредингера
8.3 1 Вероятностная трактовка волновой
функции и квадрата ее модуля
р f
XX ш
П. В Г р
ф|
8.3 2 Уравнение Шредингера
Ш1
8.3 3 Стандартные условия, которым должна
удовлетворять волновая функция
г ш
8.4. Наиболее общие задачи квантовой механики
84 1 Свободная частица
t v. Шр.
I
ш*-
8.4 2 Частица в бесконечно глубокой потенциальной
яме и потенциальной яме конечной глубины
pi
ш
I 11
J
><1
8-4 з Потенциальная ступень
Uli
П
ОТ]
о.4 4 Гэтенциальный барьер Туннельный эффект
п
I
—-м—
II: « *
III
В
M
I
1 1 P
[T
P
I)
8.4 5 Туннельный эффект в химии
О |
J
Рир X
8.5. Атом водорода
8.5 1 Уравненгз Шредингера для атома
водород: . переход к сферическим
координатам и разделение переменных
Шр
шг |
р
г
О
тр
............ 'I
Рис, _
lb Pl
I___________________________________________________:_____________________________________________
.5 2 Собственные значения проекции L
орбитального момента импульса электоона
8.5 3 Решение уравнения Шредг-тера
для абсолютного значения момента
импульса ротаторг Векторы момента
импульса в квантовой механике,
пространственное квантование. Магнитный
момент одноэлектронного атомг
Ри 8
8.5 4 Решение уравнения Шредингера
для радиальной части волновой функции,
квантование энергии электрона
Цл
Р
3. 1
8.5 5 Спин электрона
Гер.
О
р
d.5 6 Квантовые числа, характеризующие
состояние электрона в атоме водорода
р
и
и
р pi
р
Ri
8.5 7 атомные орбиталь
в
КТ]
р р
и
В
- К р
гр
н
1
Ри< Я-
8.с 8 Спин орбитальное взаимодействие
1 1Г р
в
п; к;
I . Г)
< В
8.6 Многоэлектронный атом
ш
I р'
Р'
8.6 1 Типы связи электронов в атоме
:тр
В
8.6 2 Магнитным момент и векторная модель
многоэлектронного атома- Фактор Лйнде
3
8.6 3. Атомные термы
8.6 4. Характеристическое рентгеновское
излучение Закон Мбзли
F
8.7. Атом в магнитном поле эффект Зеемана
Рис. 8.2“
С]
8.8. Квантовый осциллятор
и квантовый ротатор
.8 1 Квантовый гармонический
-i ангармонический осцилляторы
Рис я
Fi 8
8.8 2 Квантовый жесткий ротатор
8.9. Основные положения
квантовой статистики
8.9 1 Задание состояний системы частиц
в квантовой статист!,.ке
" с. 8
D
У
Z
.9 2 Статистика Бозе Эйнштейна
- - - 5
8.9 3 Статистика Ферми Дирака
П— — г
1
R.9 4 Статистика Больцмана
8.^ 5 Особенности распределения Бозе Эйнштейна
г-----------------
__________I
:а
8.9 С Особенности распределения Ферми Дирака
9. ОСНОВЫ ФИЗИКИ ЯДРА.
ЭЛЕМЕНТАРНЫЕ ЧАСТИЦЫ
9.1. Ядро атома. Общие характеристики ядер
z
9.2. Электрические и магнитные
характеристики ядра
9.2 1 Момент импульса и магнитный момент ядра
HJ
a.2.3 Квадруполычык момент ядра
Яави имос-^nai ме.,
ичнь гл
_1Ч_, rnrorw емого
hi 1М тками и
И 1Н"к; КИ iiifl
9.3. Ядерныесилы
9.4. Модели ядра
ф
9.5. Ядерные реакции
9.6. Радиоактивное излучение и его
взаимодействие с веществом
в
9.7. Внутриатомные электронно-
ядерные взаимодействия1
р ।
9.7 1 Электростатическое взаимодействие
ядра с окружающими его зарядам
9.7 2 Кулоновское взаимодействие электронной
оболочки с точечным ядром
9.7 3 Кулоновское взаимодействие электронной
оболочки с ядром конечных размеров
Химический (изомерный) сдвиг
о
I
I
9.7 4. Энергия взаимодействия квадрупольного
момента ядра с градиентом
напряженности электрического поля.
Квадрупольное расщепление
9.7.5. Взаимодействие магнитного момента
ядра с электронной оболочкой
9.7 6 Резонансное поглощение у-квантов
Эффект Мессбауэра
JVJ.
n
?’W'
9.7 7 Яцерный магнитный резонанс
ЯМ"
ЯЧ’
ЯМ1
Б
ЯМ
[К1 н
1*ис.
9.8 . Элементы дозиметрии
•л радиационной безопасности
р
Зн it н коэц |циента к
*'Л
9.? Элементарные частицы
-.9 1 Классификация элементарных частиц
е Д
в
9.9 3 Элементарные частицы и космология
г r Р
Г Р
в
10. ФИЗИКА ТВЕРДОГО ТЕЛА
в
10.1 Структура кристалла,
кристаллическая решетка
.-л,'
10 2 Электроны в кристаллах
1С Q 1 Образование энергетических зон
I I I I
Ри
L.
H f
10 2.2 Элементы квантовой статистики
электронов в кристаллах
10.2.3 Зонная теория твердых те
Ри 1 'О.
10 3 Динамика решетки
и теплоемкость твердых тел
1С 3.1 Модель Борна "армана
*1 дисперсионно ~ кривые
Р'
к
в
н
10-3.2 Энергия колебаний и теплоемкость
твердого тела
10.Г 2 Классическая теория теплоемкости
Р
Ю? 2 2. Квантовые теории теплоемкости
Значег- д^ вг-сойтем! гуры 6 для рядя
"ЧТВМ СОСТО™«1
10 4 Дефекты в кристаллах
р
1С 4.1 Точечные дефекты
О 4.2 Дислокаци i
gsgsswg
ж
Pl
p
10 5 Явления переноса в твердых
телах и жидкостях
Е р
В
Я ’| с
Б
10 6 Некоторые практически важные
электрические свойства кристаллов
р
р
Б
Н
I
Сег... гб_,л ктрич einO
И. ЭКСПЕРИМЕНТАЛЬНЫЕ
ФИЗИЧЕСКИЕ МЕТОДЫ
.11. Понятие об атомной и молекулярной
спектроскопии
Ill Illi IIII^IMI I
I I 111 I I
I:
Рис. 1_
Р с. Г -
р
11.2. Резонансные методы
г
:тр
Я
PC
11.21 Гамма-резонансная (мессбауэровская)
спектроскопия
М. р
р ГР(
р
ГРС
Р'
в т
11.'
p; S F
11.2 2 Применение ядерного магнитного
резонанса в химии
Я] IP
В
ЯК.Р
р
Я л11’
ЯЛ.Р
л.
в
яг.
Е
Р
ОН
uvir F
В
В
Я1мР
id
F 11.1 М
р лР Р
в
Я Р
як.р
ЯР F
11.2 3 Электронный парамагнитный резонанс
р
В 1 к
ЯКи
I
ЧМР
ям
в °
- IP
IP
11.24 Возможности ядерного
квадрупольного резонанса
113 Рентгеновский флюоресцентный анализ
11.4 Ней трон но-активационный анализ
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
к:
О
это
р
Б
о-'
п
h Н
И
Н
Н
ш
ш
С ГН/It >:< ЛИТЕРАТУРЫ
1. Бондарев Б.В., Калашников Н.П., Спирин Г.Г. Курс общей физики. М. :
Высшая школа, 2003. Кн. 1—3.
2. Винтайкин Б.Е. Физика твердого тела. М. : Изд. МГТУ им. Баумана,
2006.
3. Гольдин Л.Л., Новикова Г.И. Введение в квантовую физику. М. : Наука,
1983.
4. Даниэле Ф., Олберти Р. Физическая химия : пер. с англ. М. : Мир, 1978.
5. Детлаф А.А., Яворский Б.М. Курс физики. М. : Академия, 2003.
6. ДжанколиД. Физика. В 2 т. : пер. с англ. М. : Мир, 1989.
7. Дикерсон Р., Грей Г, Хейт Дж. Основные законы химии. В 2 т. М. : Мир,
1989.
8. Драго Р. Физические методы в химии. В 2 т. : пер. с англ. М. : Мир, 1981.
9. Китель Ч. Введение в физику твердого тела. М. : Наука, 1978.
10. Кузнецов В.М. Концепции мироздания в современной физике. М. : НКЦ
Академкнига, 2006.
11. Макаров Е. Ф., Озеров Р. П. Физика для химико-технологических специ-
альностей, М. : Научный мир, 2002.
12. Мартинсон Л.К, Смирнов Е.В. Квантовая физика. М. : Изд. МГТУ им.
Баумана, 2006.
13. Матвеев А. Н. Атомная физика. М. : Высшая школа, 1989.
14. Матвеев А. Н. Молекулярная физика. М. : Высшая школа, 1981.
15. Матвеев А. Н. Электричество и магнетизм. М. : Высшая школа, 1983.
16. Матвеев А. Н. Механика и теория относительности. М. : Высшая школа,
1986.
17. Наркевич И.И., Волмянский Э.И., Лобко С.И. Физика. Мн.: Новое знание,
2004.
18. ОрирДж. Физика. В 2 т. : пер. с англ. М.: Мир, 1981.
19. Ракобольская И.В. Ядерная физика. М. : Изд. МГУ, 1981.
20. Савельев И.В. Курс физики. В 3 т. М. : Наука, 1989.
21. Савельев И.В. Курс общей физики. В 5 кн. М. : Астрель, ACT, 2003.
22. СивухинД.В. Общий курс физики. В 5 ин. М. : Физматлит, 2006.
23. Трофимова Т.Н. Курс физики. М. : Высшая школа, 2003.
24. Фейнман Р., Лейтон Р., Сэндс М. Фейнмановские лекции по физике (10 то-
мов). Едиториал УРСС, 2004.
25. Физические величины. Справочник. М. : Энергоатомиздат, 1991.
26. Фрауэнфельдер Г, Хенли Э. Субатомная физика : пер. с англ. М. : Мир,
1979.
27. Чертов А.Г., Воробьев А. А. Задачникгю физике. М. : Физматлит, 2001.
28. Шпольский Э.В. Атомная физика. В 2 т. М. : Наука, 1974.
29. Эткинс И. Физическая химия. В 2 т. М. : Мир, 1980.
30. Яворский Б.М., Детлаф А.А. Справочник по физике. М. : Наука, 1964.
800 • СПИСОК ЛИТЕРАТУРЫ
Дополнительная
1. Анималу А. Квантовая теория кристаллических твердых тел. М. : Мир,
1981.
2. Гольданский В.И., Трахтенберг Л.И., Флёров В. И. Туннельные явления
в химической физике. М. : Наука, 1986.
3. Ибрагимов М.Х. Атомная энергетика. Физические основы. М. : Высшая
школа, 1987.
4. Касаткин А. Г. Основные процессы и аппараты химической технологии.
М. :ГХИ, 1961.
5. Кузнецов В.М., Хромов В. И. Фр остальное представление теории Дебая
для исследования теплоемкости макро- и наноструктур // ЖТФ, 2008,
Вып. 11. С. 11.
6. Макаров Е.Ф. Химические применения мессбауэровской спектроско-
пии /подред. В.И. Гольданского. М. : Мир, 1970.
7. Окунь Л.Б. Понятие массы (Масса, энергия, относительность) // УФН,
1989. Т. 158. Вып. 3. С. 511.
8. Паперно Т.Я., Позднякова В.П., Смирнова А.А., Елагин Л.М. Физико-хи-
мические методы исследования в биологической и органической химии.
М. : Просвещение, 1977.
9. Рубцов ЕЙ., Троицкий С.В. Какие элементарные частицы самые энергич-
ные в мире? // Природа. 2011. № 6. С. 11.
10. Свободная энциклопедия Википедия. URL : http ://ш. wikipedia.org/wiki/
11. Тарасов В. В. Проблемы физики стекла / под ред. ГМ. Бартенева. М. :
Стройиздат, 1979.
Тематическая подборка издательства «КН О РУС»
Савельев И.В. Курс общей физики : в 4 т. : учеб, пособие. М. : КНОРУС, 2015.
Трофимова Т.И. Краткий курс физики с примерами решения задач : учеб, по-
собие. М. : КНОРУС, 2015.
Трофимова Т.И. Курс физики с примерами решения задач : в 2 т. : учебник. М. :
КНОРУС, 2015.
Трофимова Т.И. Основы физики. Волновая и квантовая оптика : учеб, посо-
бие. М. : КНОРУС, 2015.
Трофимова Т.И. Основы физики. Молекулярная физика. Термодинамика :
учеб, пособие. М. : КНОРУС, 2015.
Трофимова Т.И. Основы физики. Электродинамика : учеб, пособие. М. :
КНОРУС, 2015.
Трофимова Т.И. Физика от А до Я : справ, издание. М. : КНОРУС, 2015.
Шапкарин И.И. Общая физика. Сборник задач : учеб, пособие. М.: КНОРУС,
2015.