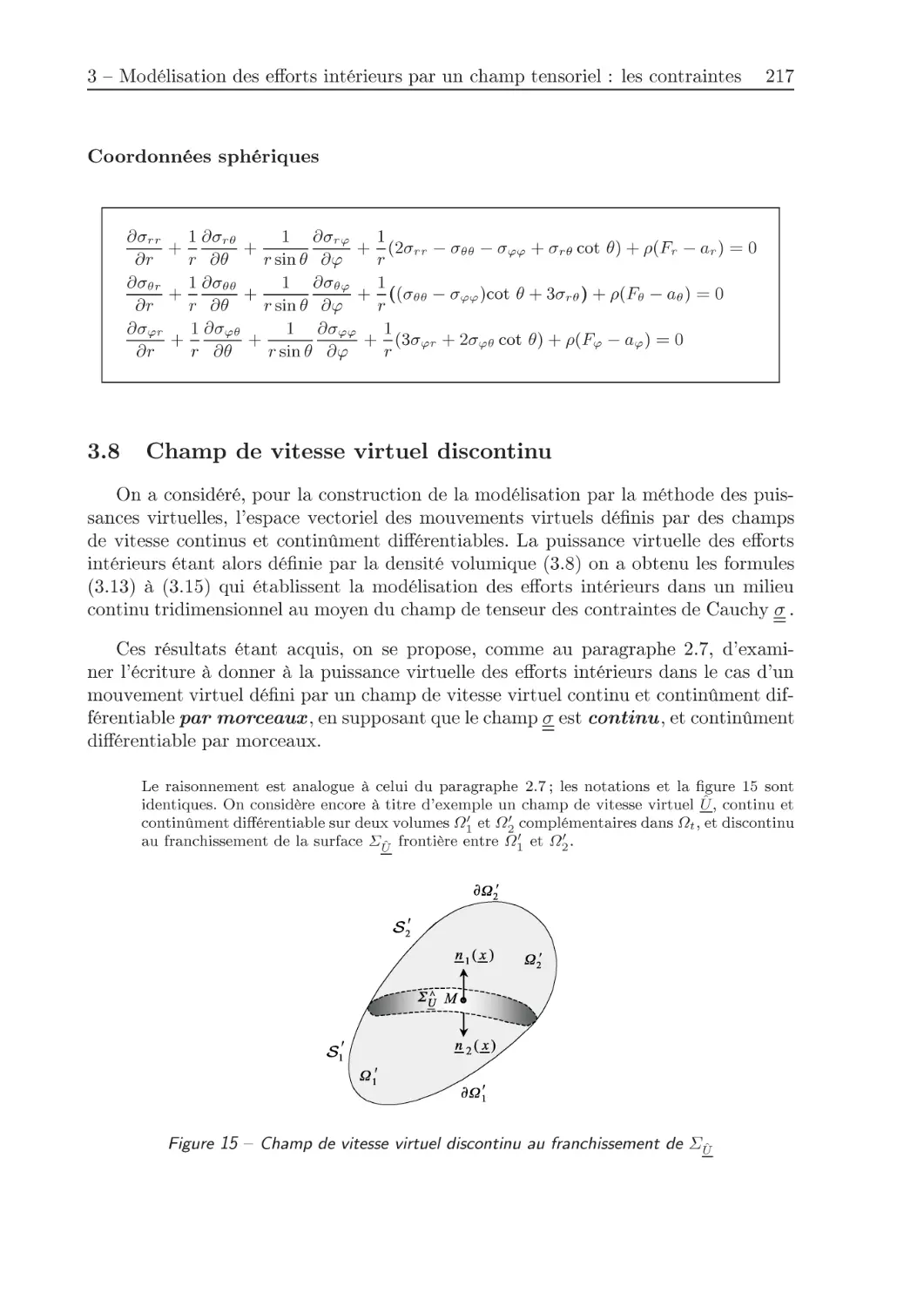
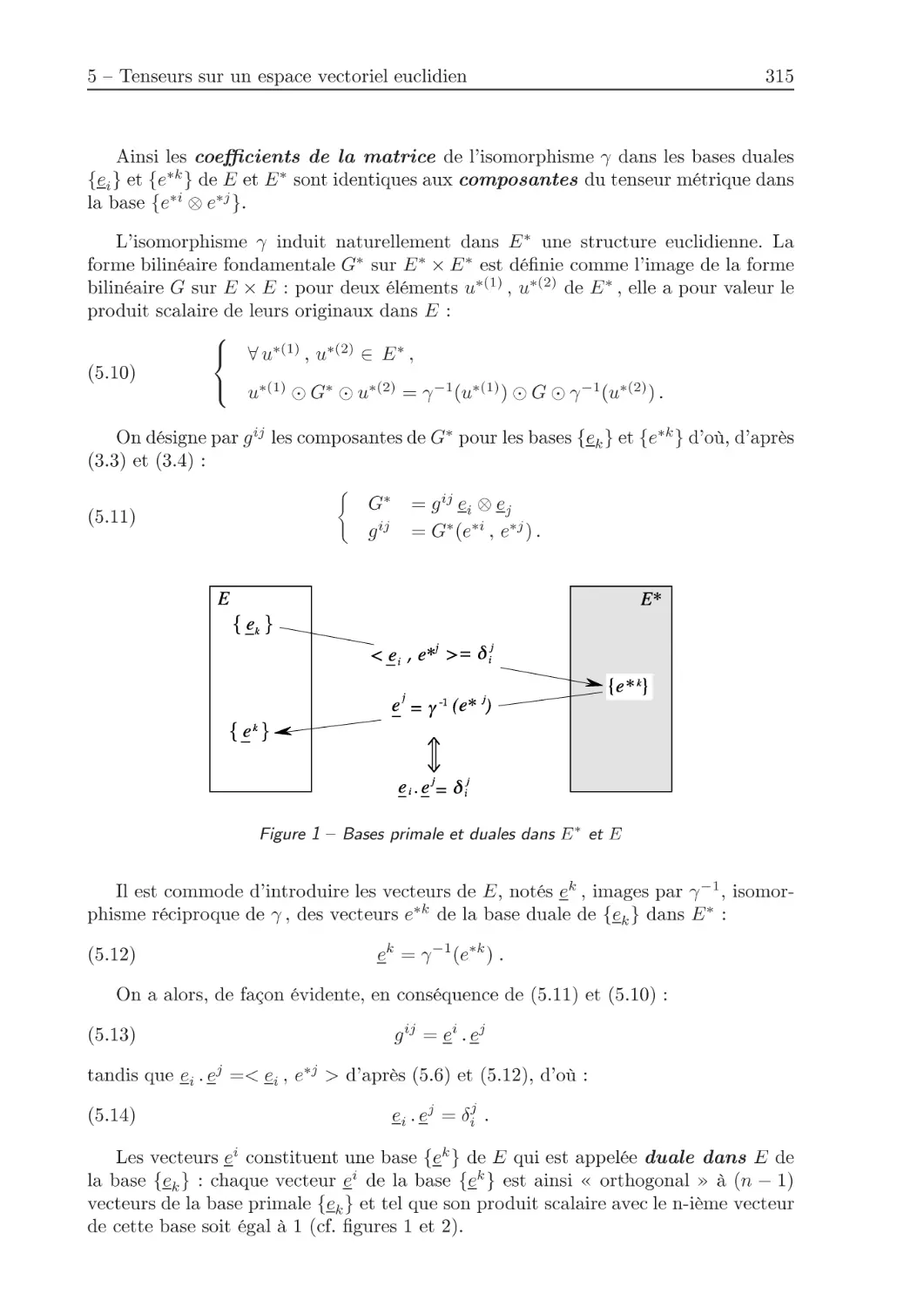
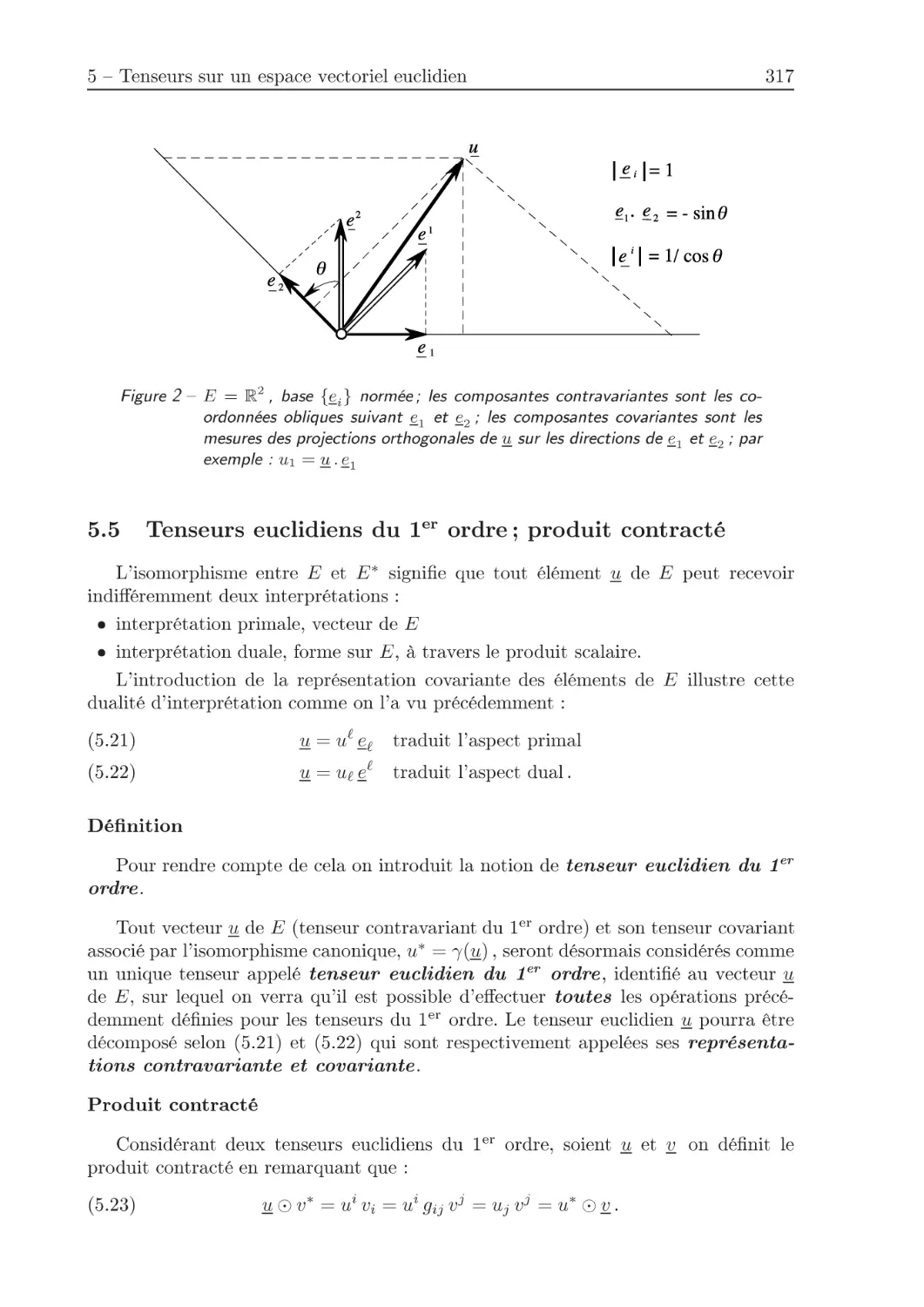
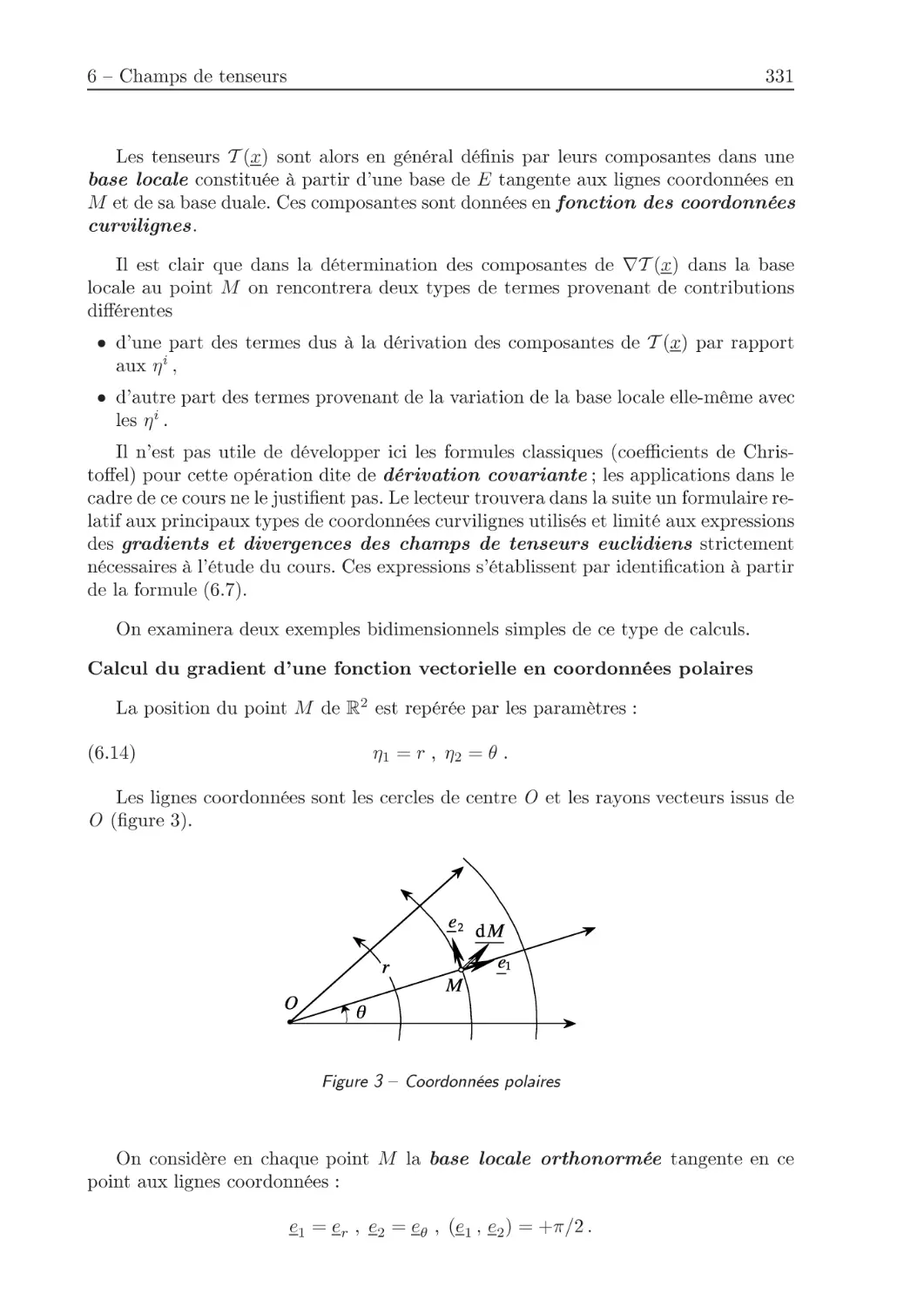
/













































































































































































































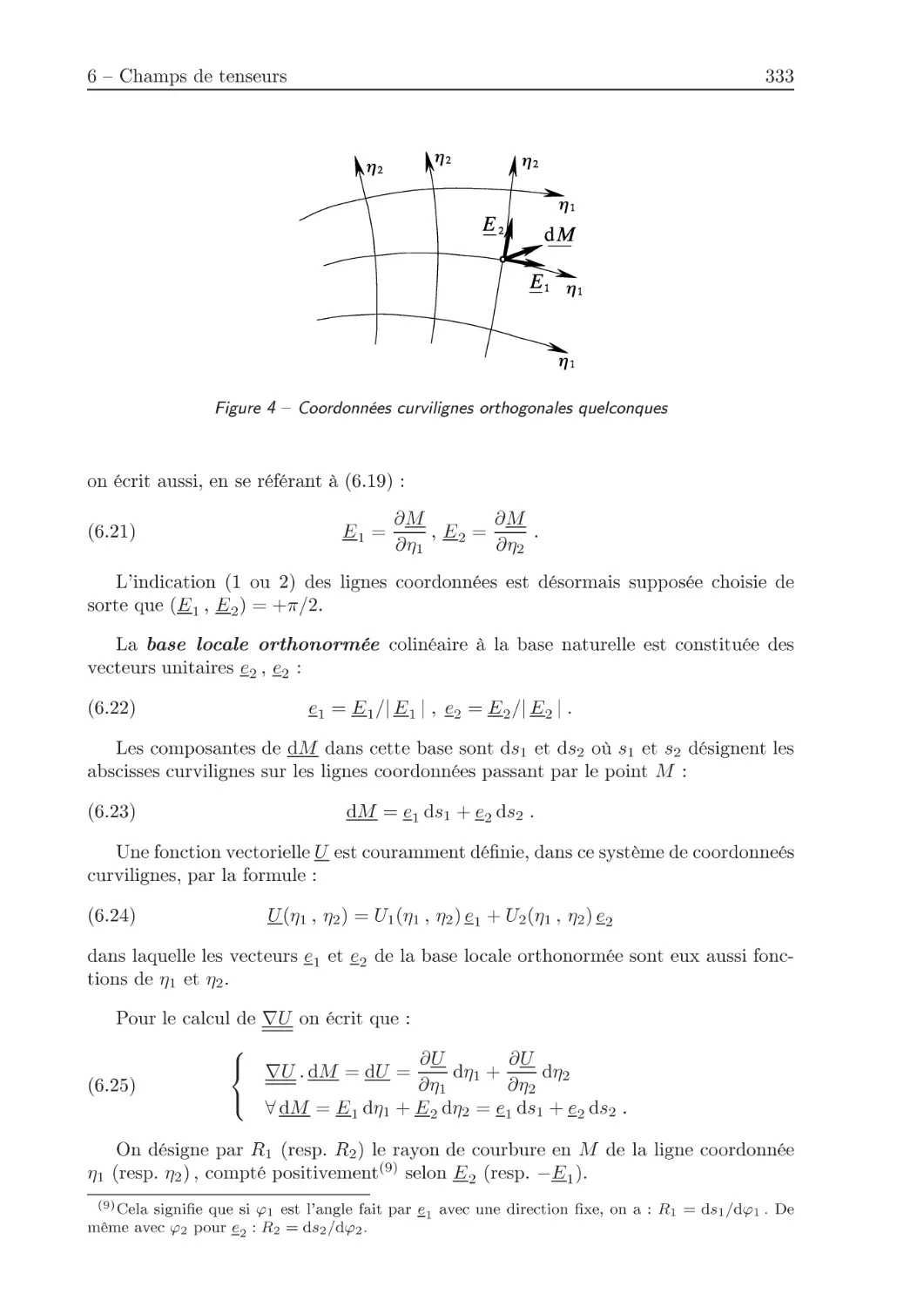














Text
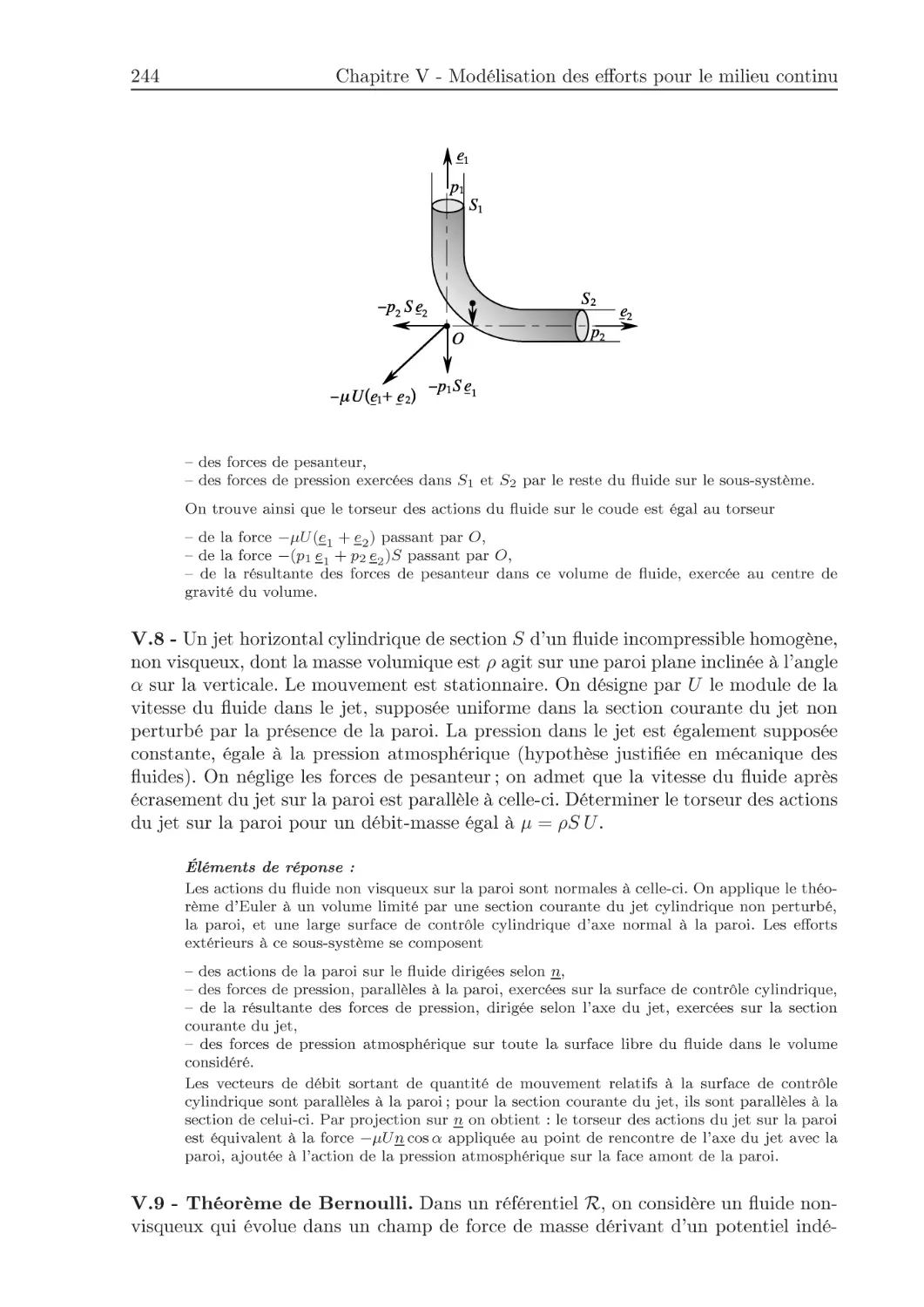
La première partie de l'enseignement est consacrée à l'introduction des concepts généraux de la
mécanique des milieux continus. On présente d'abord la description et la modélisation géomé-
triques du milieu continu puis la modélisation des efforts et l'introduction des contraintes. Des
compléments mathématiques relatifs au calcul tensoriel sont disponibles.
Sommaire
Modélisation géométrique
Chapitre I. Le milieu continu : une modélisation
Chapitre II. Étude des déformations du milieu continu
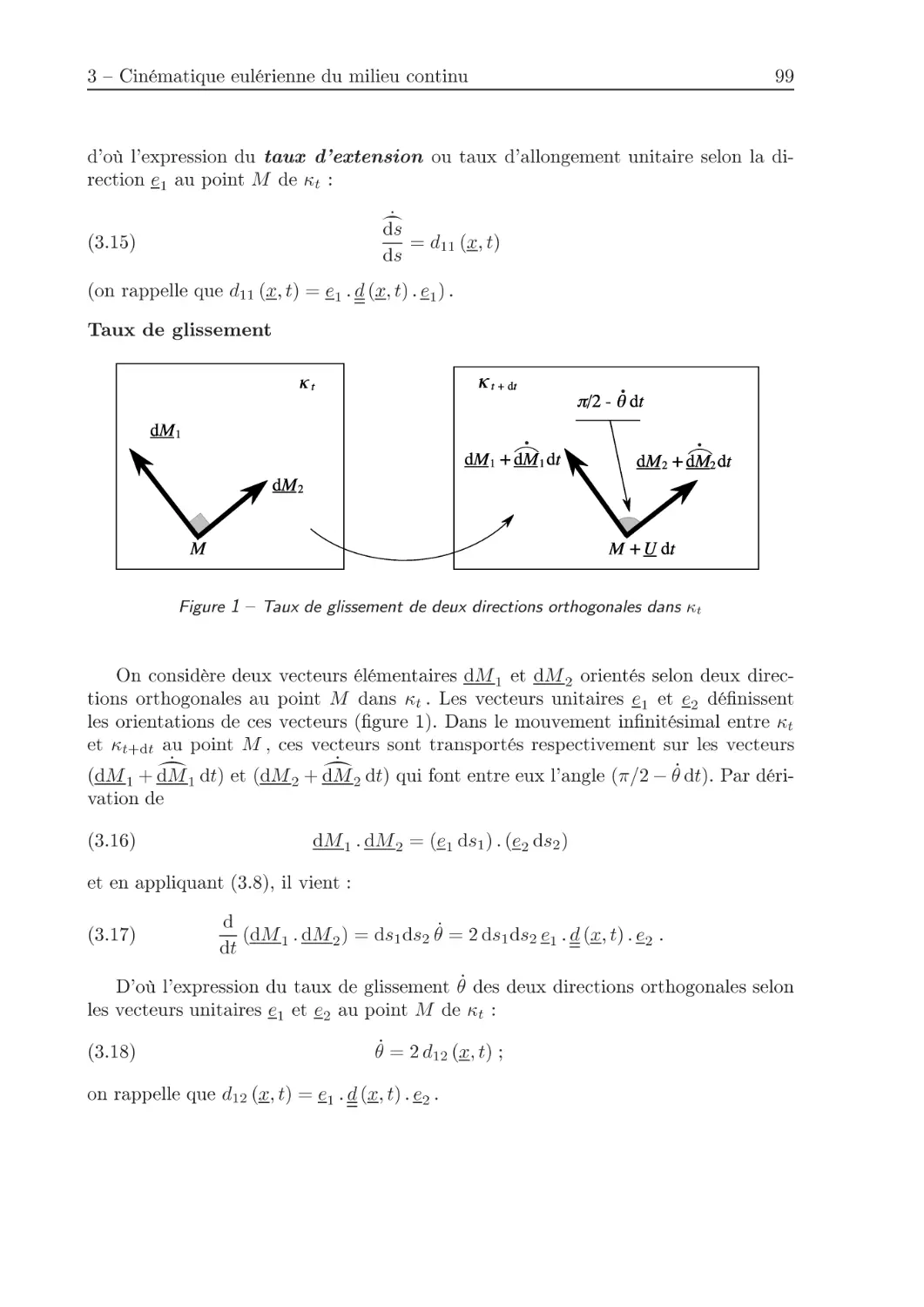
Chapitre III. Cinématique du milieu continu
Modélisation des efforts
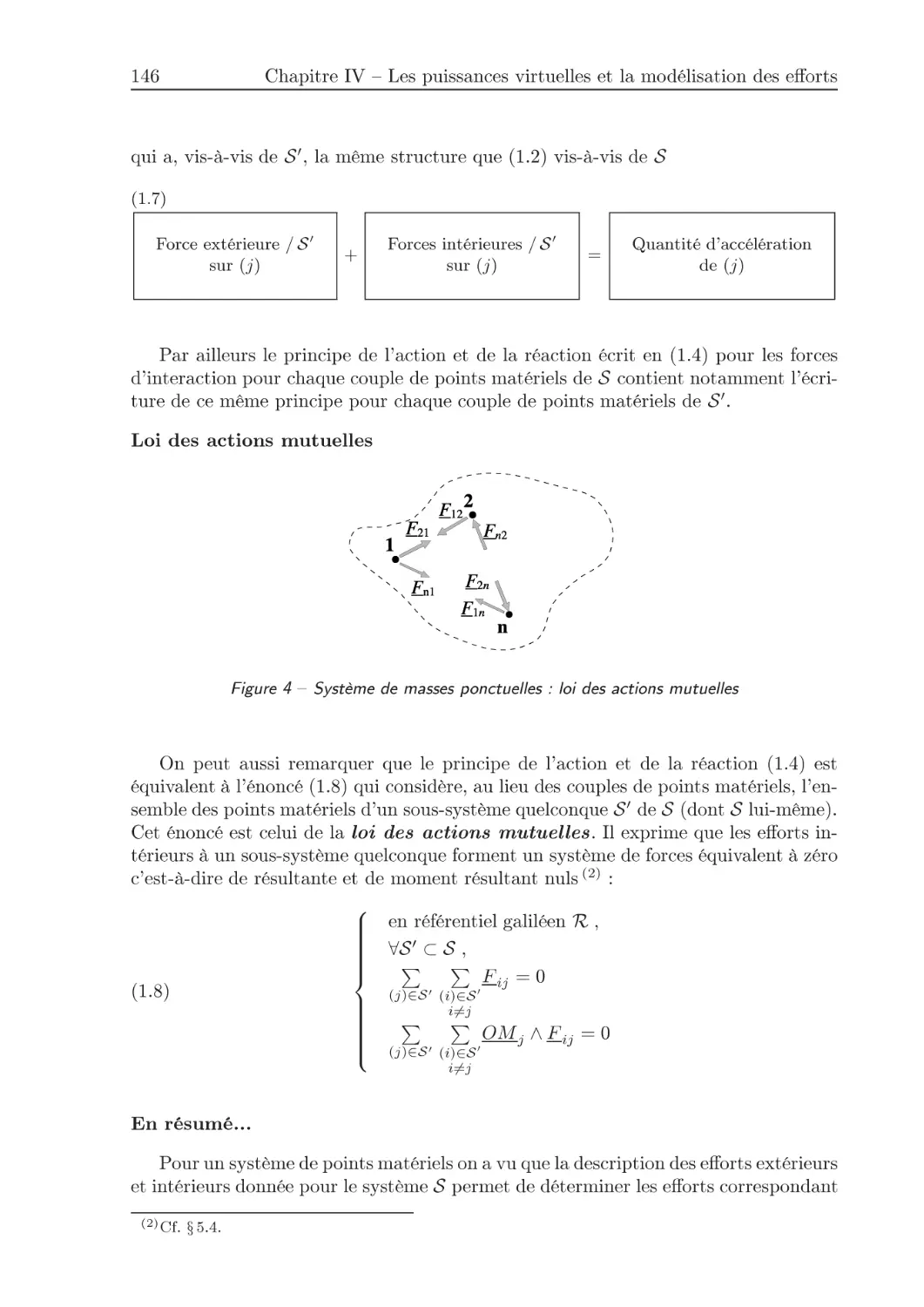
Chapitre IV. Les puissances virtuelles et la modélisation des efforts
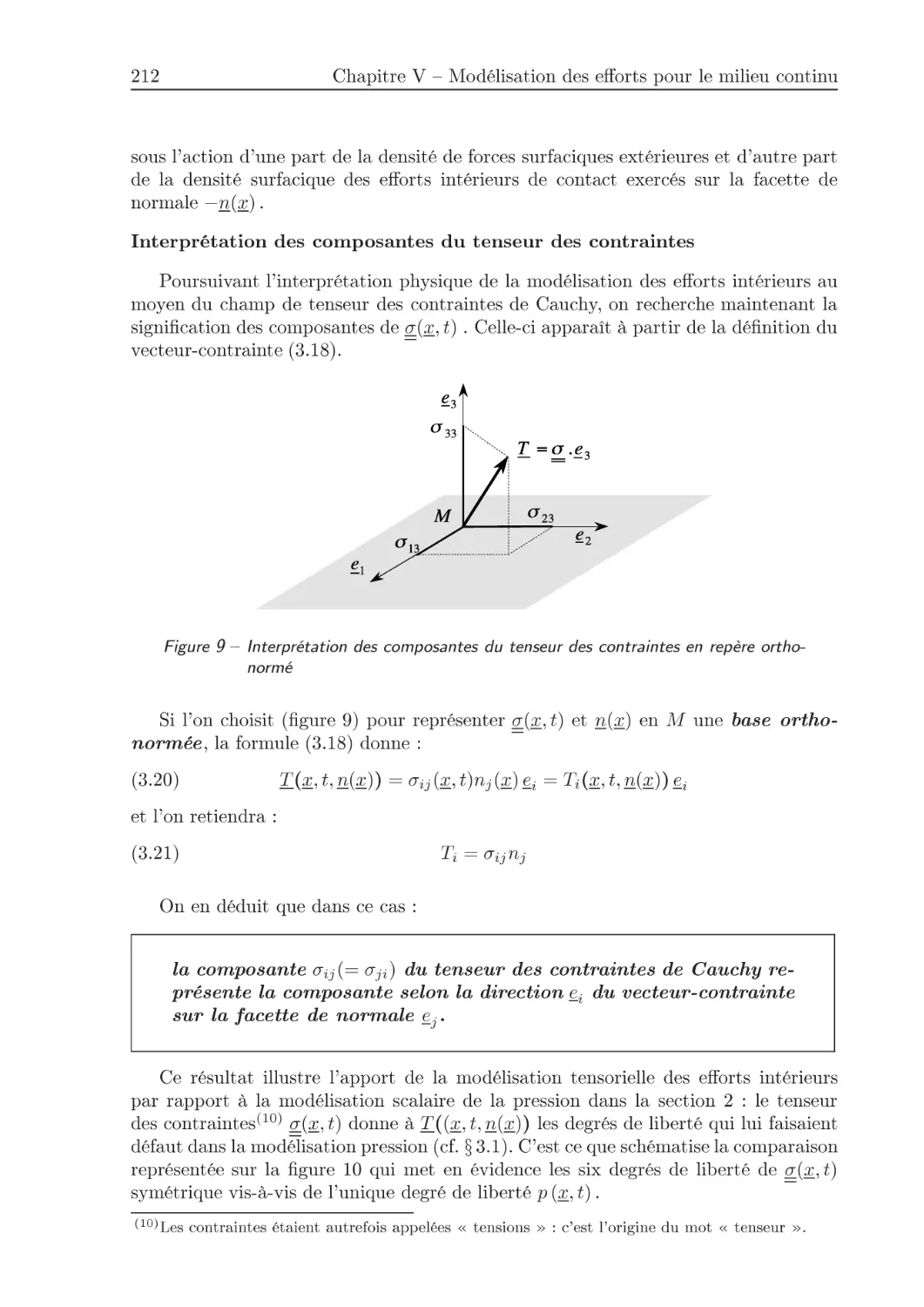
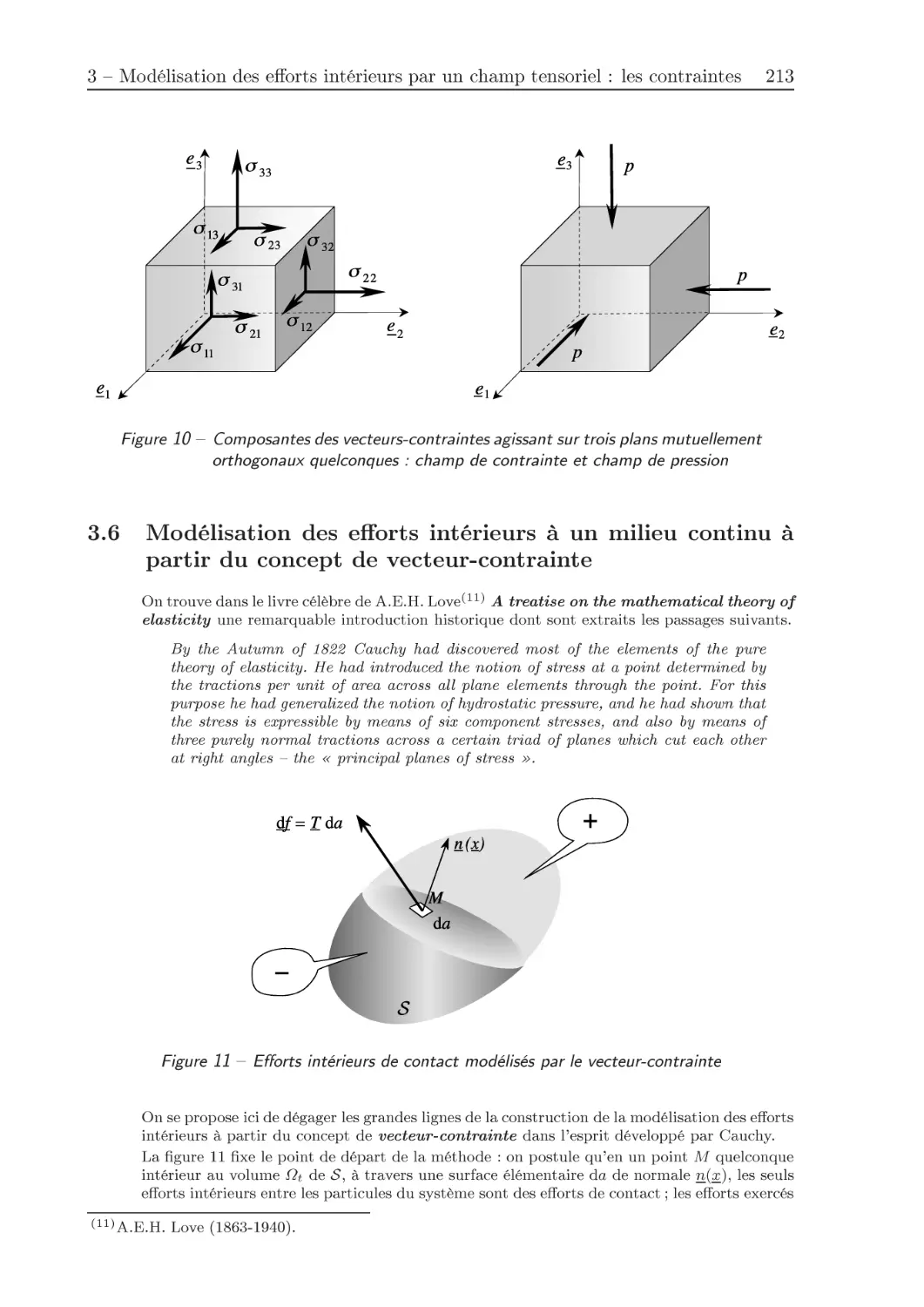
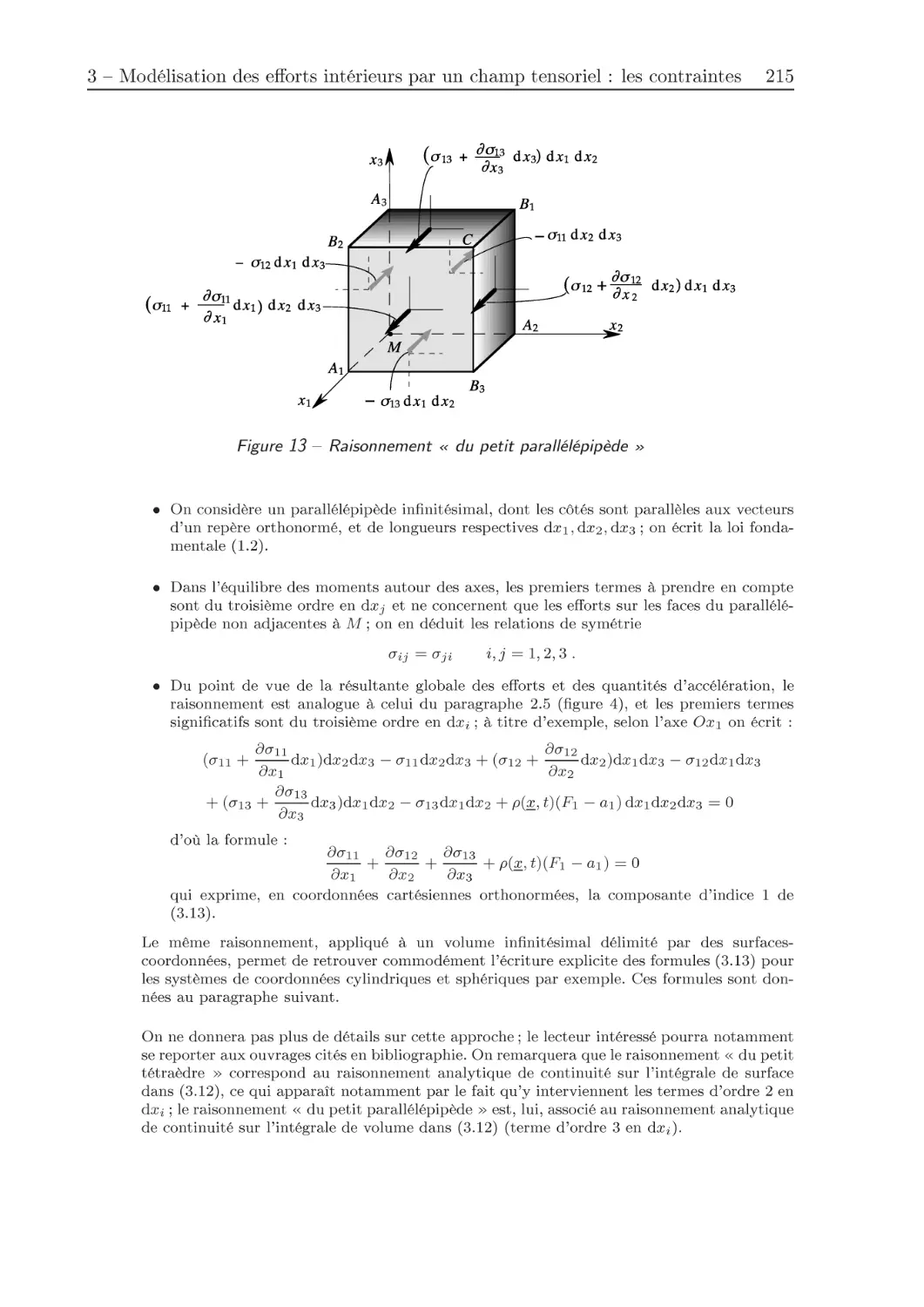
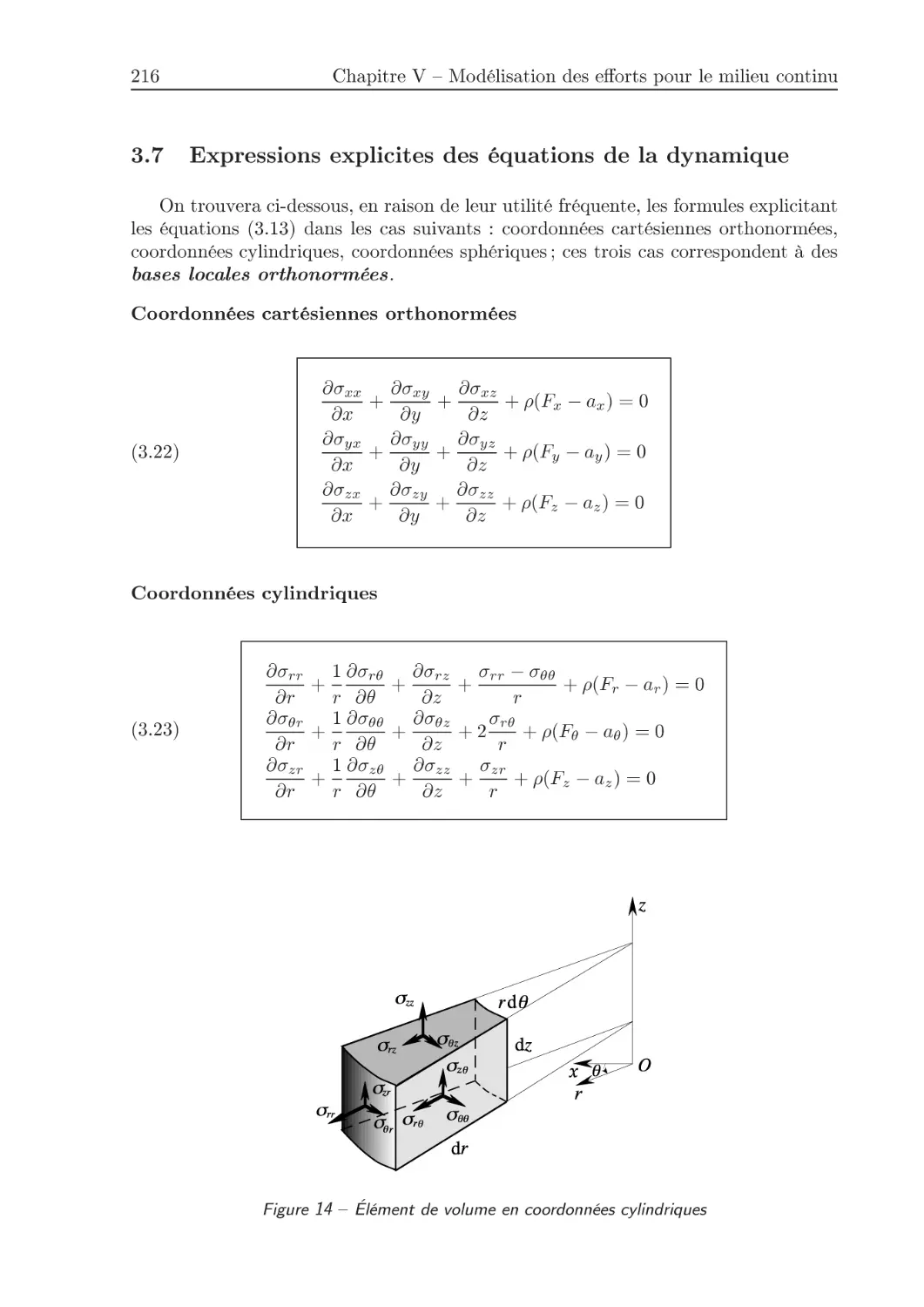
Chapitre V. Modélisation des efforts pour le milieu continu
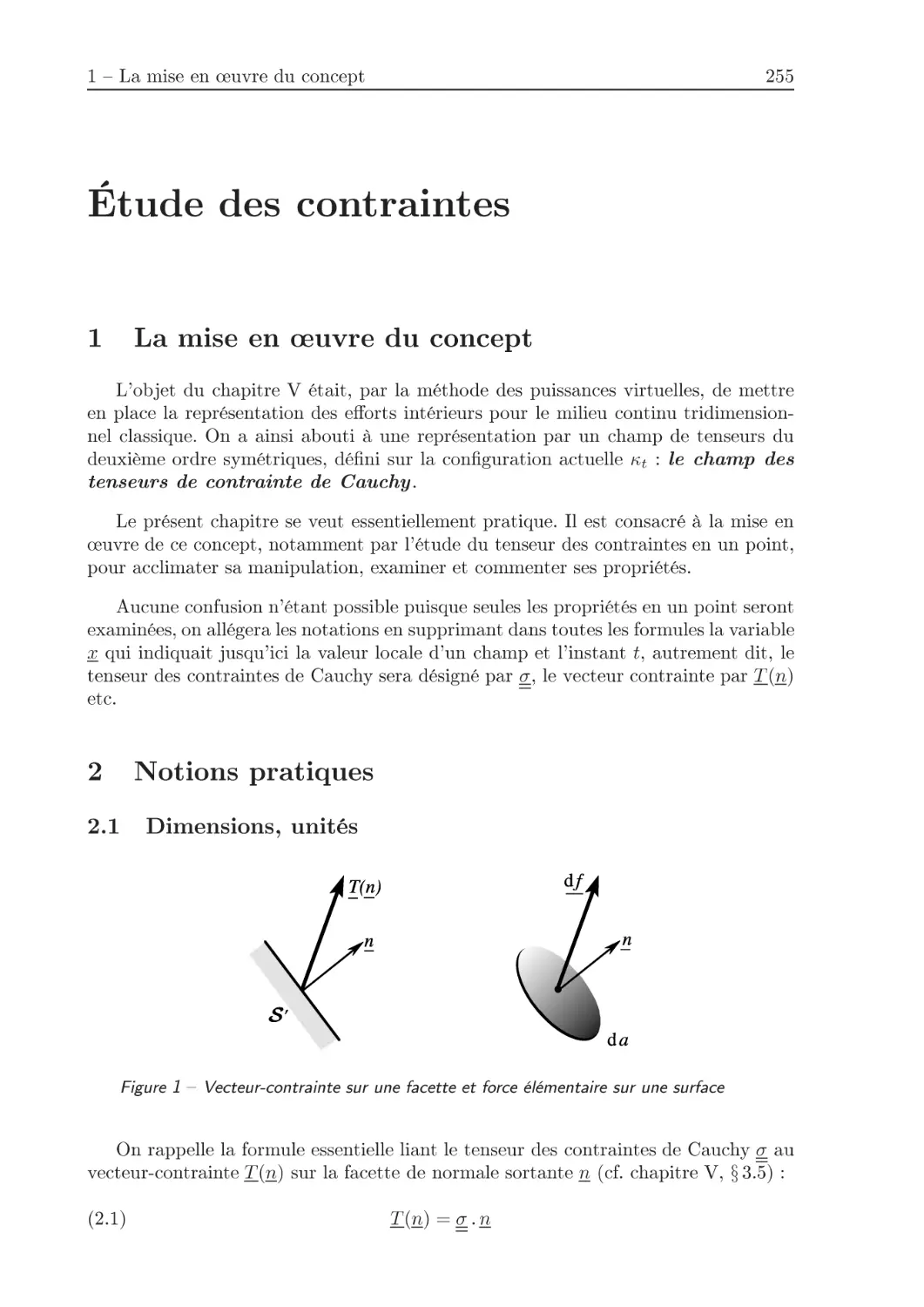
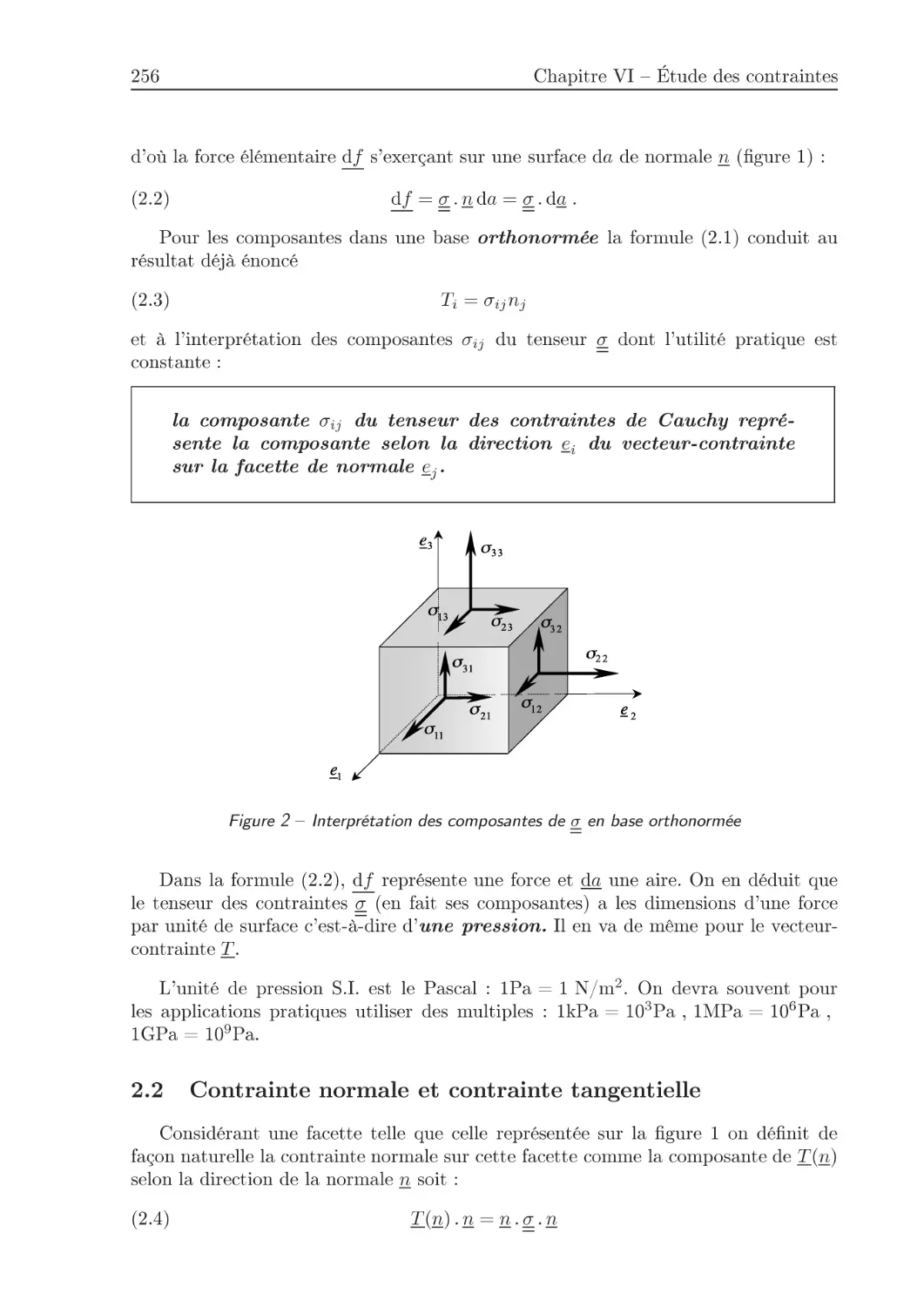
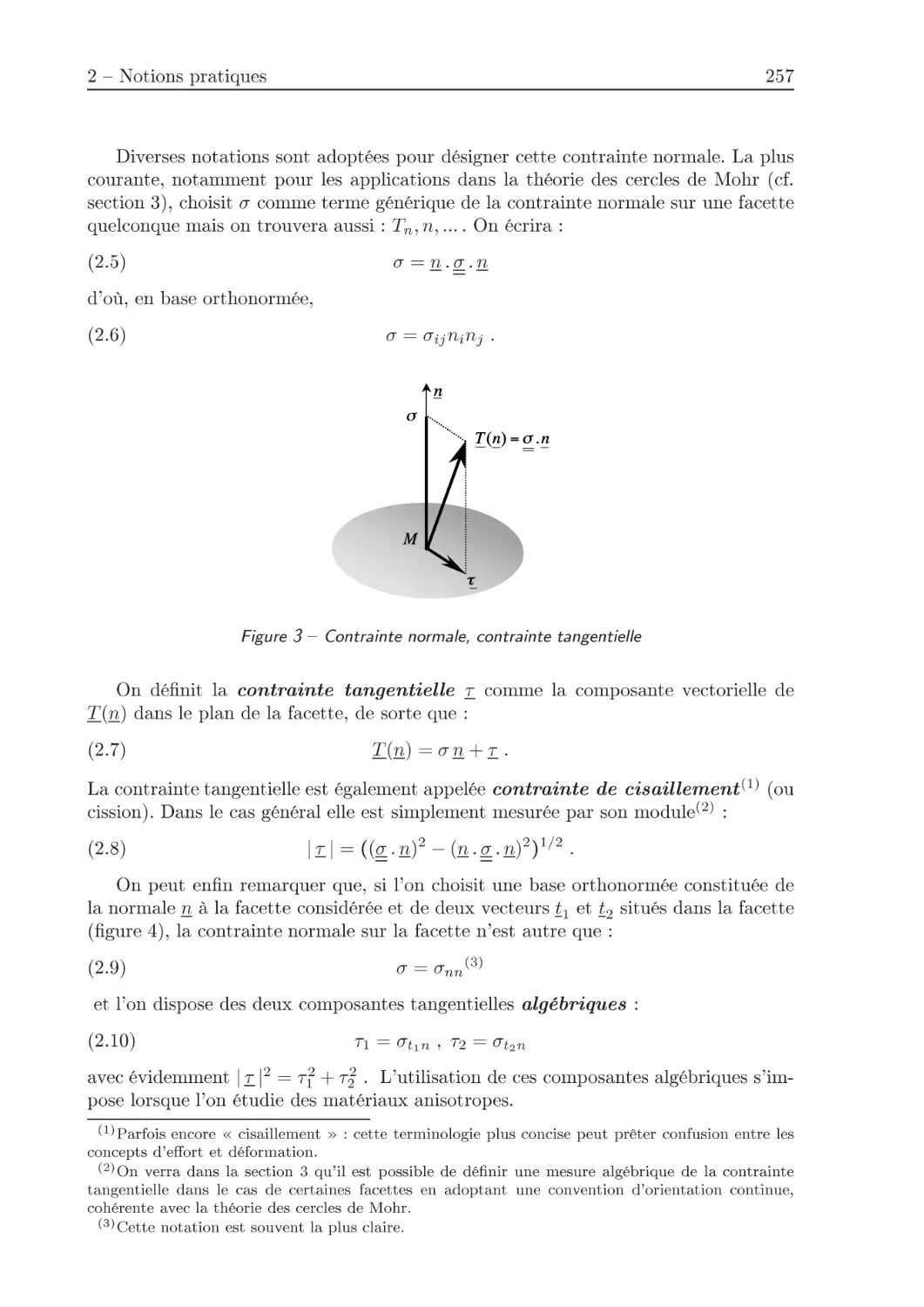
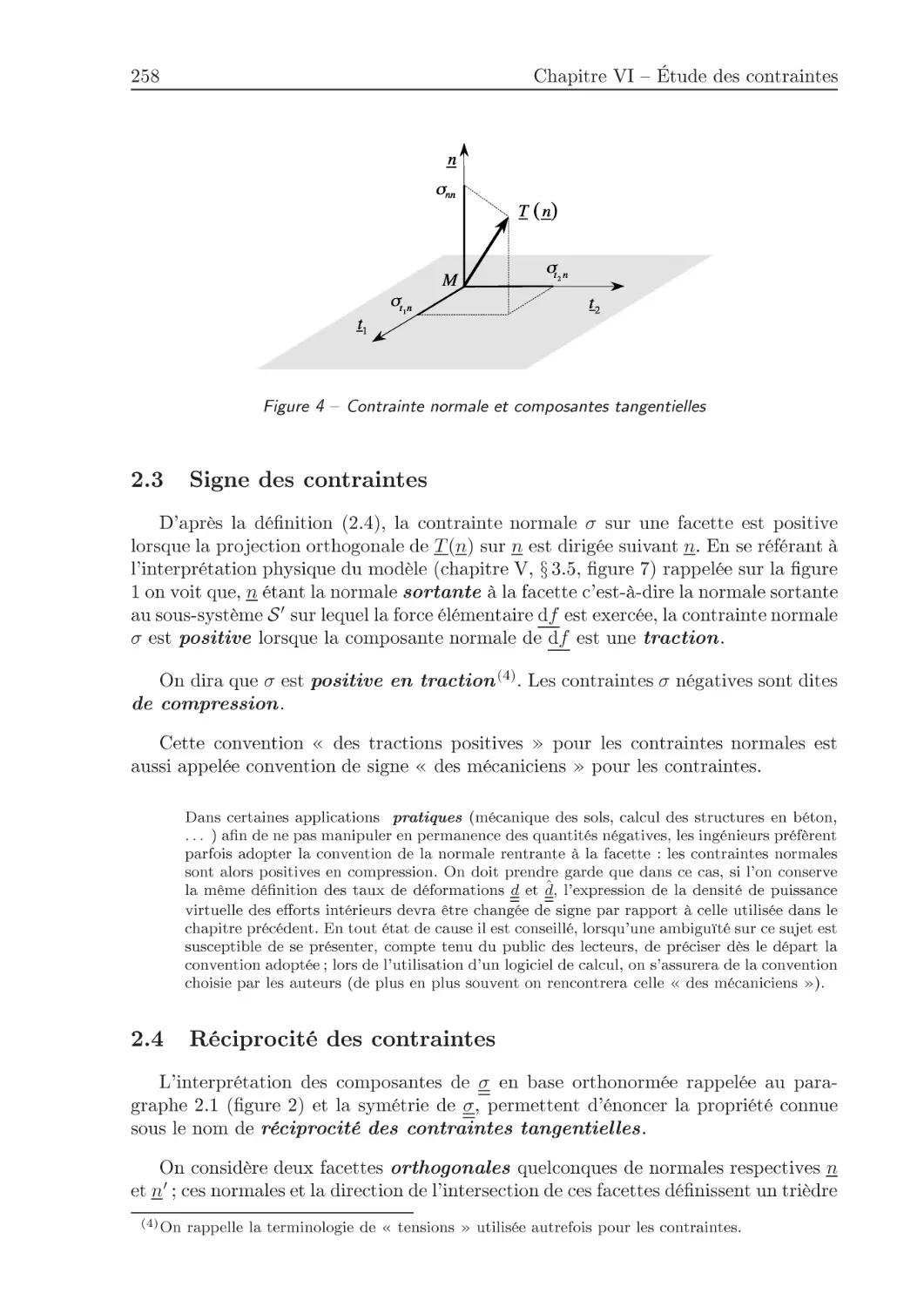
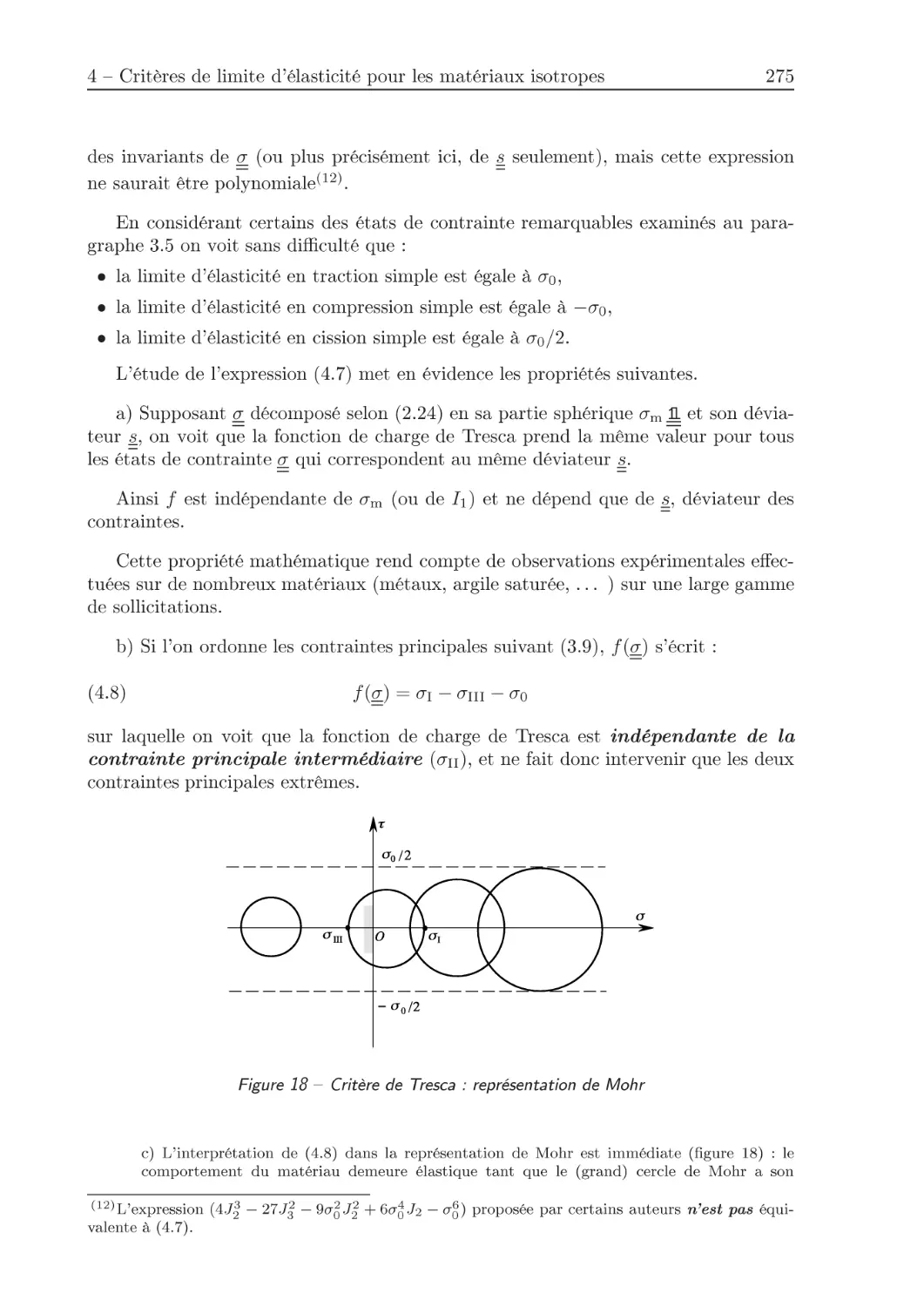
Chapitre VI. Étude des contraintes
Compléments mathématiques
Annexe I. Éléments de calcul tensoriel
Annexe II. Opérateurs différentiels : formules essentielles
Glossaire
Bibliographie
Index alphabétique
Mécanique des milieux continus.
Tome I - Concepts généraux
Chapitre I
Le milieu continu :
une modélisation
MOTS CLÉS
Échelle. Modélisation. Validation.
Référentiel. Repère. Con guration.
Lagrange. Euler.Vitesse.
Continuité. Domaine matériel.
Tr a jectoire. Ligne de courant. Ligne d émission.
9
Chapitre I Le milieu continu : une modélisation
11
En bref
Le concept de milieu continu est une modélisation physique macrosco-
pique issue de l expérience courante, dont la pertinence est avérée selon
les problèmes abordés et en fonctiondel échelle des phénomènes mis en
jeu (section 1).
Dans la formulation mathématique classique de ceconcept,unsystème
mécanique est représenté par un volume constitué, au niveau différentiel,
de particules .L ét
a
tgéo
métrique de ces particules, de façon semblable
àc
eluid un point matériel, est caractérisé par la seule connaissance de
leur position. La perception intuitive de la continuité se réfère à l évolu-
tion du système : au cours de celle-ci, des particules initialement voisines
demeurent voisines (section 2).
Pour préciser cette modélisation la description lagrangienne identi e
les particules par leur position dans une con guration du système prise
comme référence ,e
tdéc
ritlem
o
u
vement en dé nissant la position de
chaque particule, ainsi indexée, au cours de l évolution, c est-à-dire en se
donnant sa trajectoire et son horaire de parcours. La continuité du milieu
s exprime par la continuité spatiale et temporelle de la correspondance
entre la position initiale de la particule et sa position actuelle. Des condi-
tions de continue différentiabilité sont de plus imposées. Toutes les gran-
deurs physiques sont dé nies de cette façon. La validation expérimentale
du modèle montre qu il y a lieu d affaiblir les hypothèses de régularité en
ne les imposant que par morceaux (section 3).
En adoptant le point de vue incrémental, la description eulérienne dé-
nit le mouvement du système par la donnée, à chaque instant, du champ
des vitesses des particules. Elle se place sur la con guration actuelle et
les variables spatiales qui y apparaissent ont une signi cation purement
géométrique. La notion de continuité dans la description eulérienne corres-
pond auxc
ontinuité et continue différentiabilité spatiales et temporelles,
par morceaux, du champ des vitesses. Toutes les grandeurs physiques sont
dé nies de cette façon à chaque instant sur la con guration actuelle en
fonction des coordonnées des particules. Les descriptions lagrangienne et
eulérienne sont équivalentes. (section 4).
12
Chapitre I Le milieu continu : une modélisation
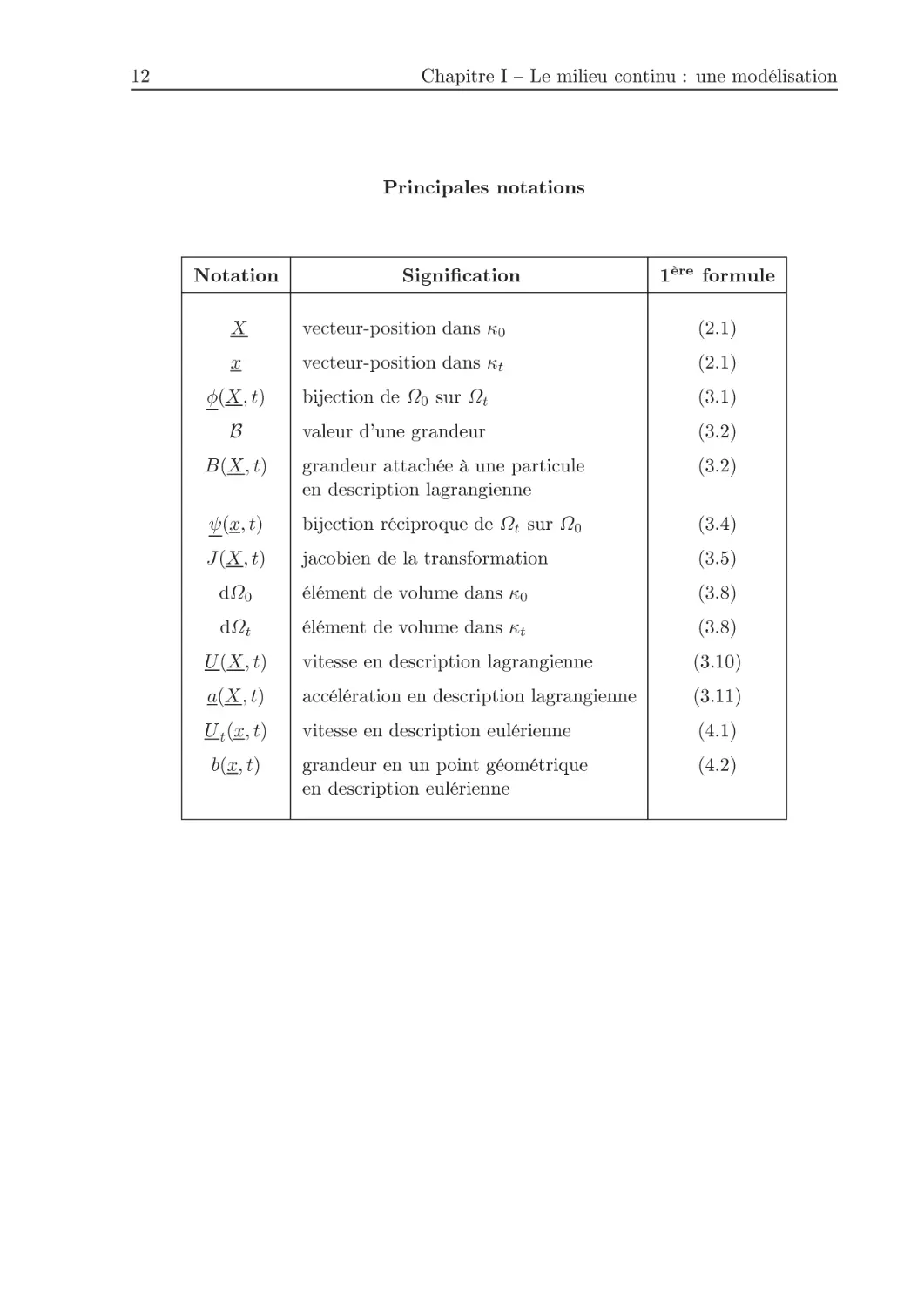
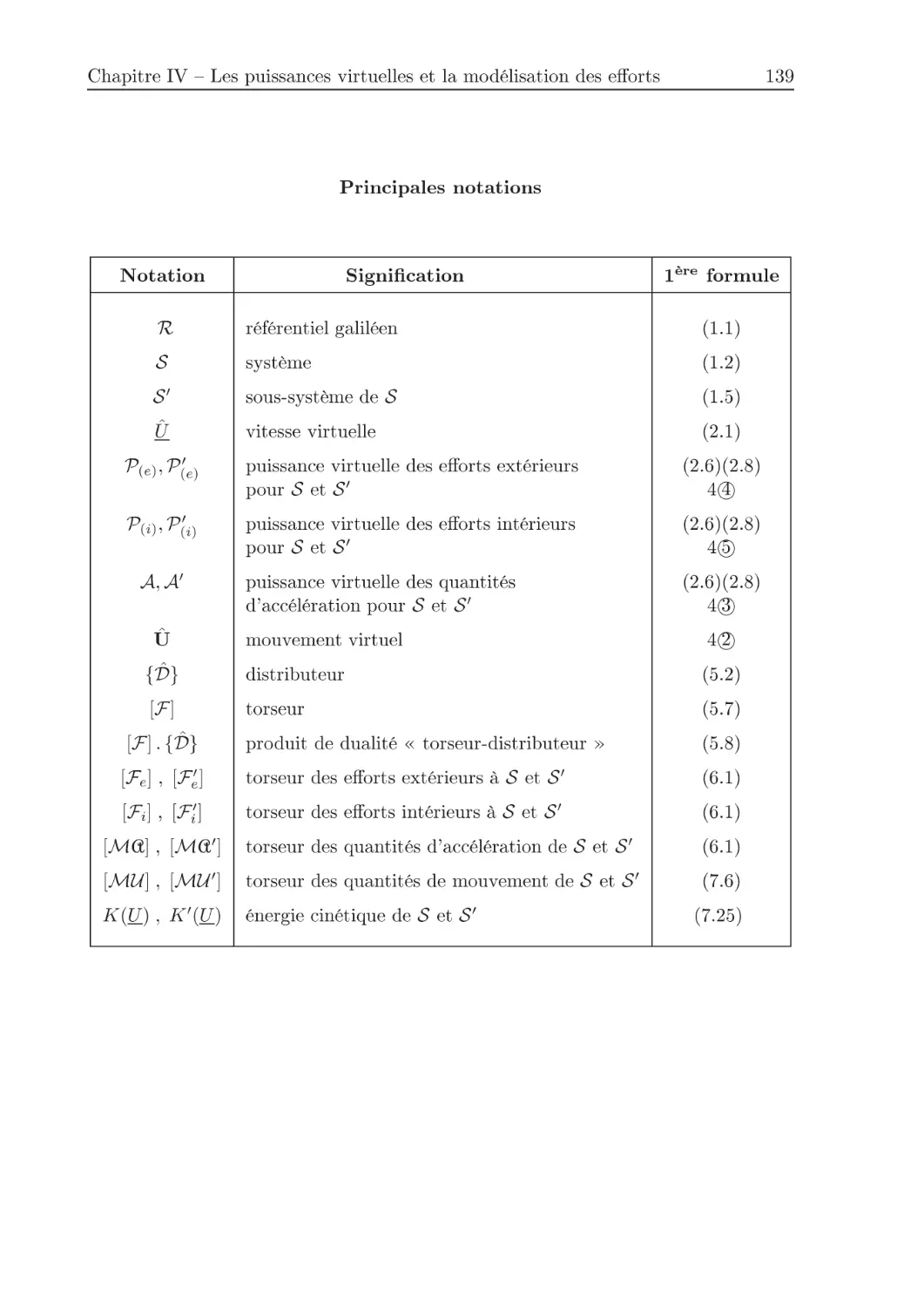
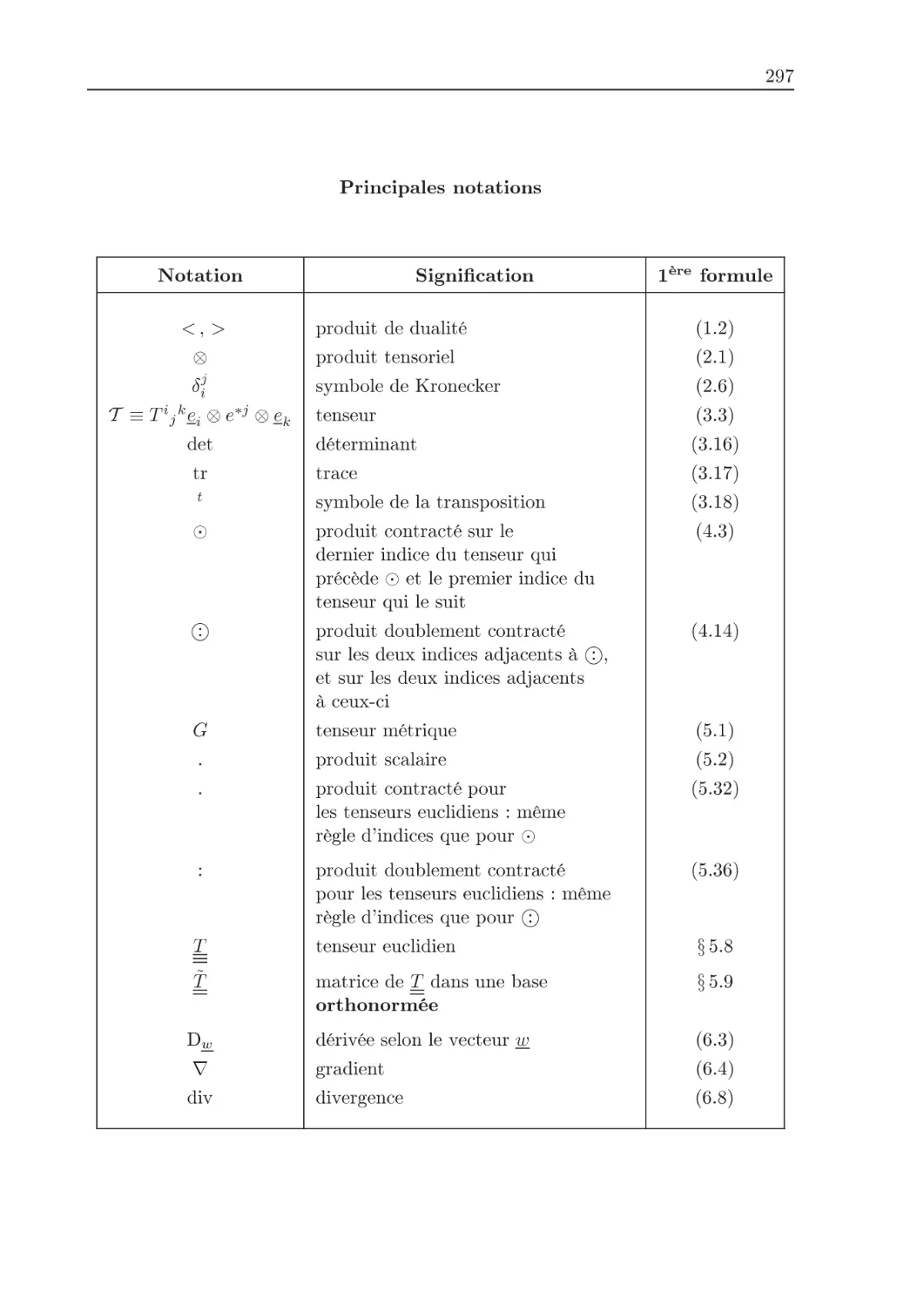
Principales notations
Notation
Signi cation
1ère formule
X
vecteur-position dans κ0
(2.1)
x
vecteur-position dans κt
(2.1)
φ(X ,t) bijection de Ω0 sur Ωt
(3.1)
B
valeur d une grandeur
(3.2)
B(X ,t) grandeur attachée à une particule
(3.2)
en description lagrangienne
ψ(x,t) bijection réciproque de Ωt sur Ω0
(3.4)
J(X,t) jacobien de la transformation
(3.5)
dΩ0
élément de volume dans κ0
(3.8)
dΩt
élément de volume dans κt
(3.8)
U(X ,t) vitesse en description lagrangienne
(3.10)
a(X ,t) accélération en description lagrangienne (3.11)
U t(x,t) vitesse en description eulérienne
(4.1)
b(x,t) grandeur en un point géométrique
(4.2)
en description eulérienne
Chapitre I Le milieu continu : une modélisation
13
1É
chelle,modélisation, validation .............. 15
2L
es concepts et leur formulation .............. 16
2.1L
idée directrice ...................... 16
2.2R
éférentiel,repère.
.................... 17
2.3C
o
n gurations du système ................. 18
2.4O
bjectivité .
........................ 19
3D
escription lagrangienne ................... 20
3.1D
é
nition .......................... 20
3.2H
ypothèsesdecontinuité ................. 21
3.3 Pertinence du modèle : affaiblissement des hypothèses de
continuité .......................... 23
3.4 Interprétation physique de la description lagrangienne :
trajectoires .
........................ 24
3.5L
ignesd émission ...................... 24
3.6V
itesse d une particule. . ................. 25
3.7C
o
n gurationderéférence abstraite.
.
......... 25
4D
escription eulérienne .................... 26
4.1D
é
nition .......................... 26
4.2D
étermination destrajectoires.
............. 27
4.3L
ignesdecourant .
.................... 28
4.4M
ouvementsstationnaires (oupermanents) .
...... 29
4.5M
ouvementssemi-permanents ............... 30
4.6N
otations pour la vitesse ................. 30
5C
o
mmentaires ......................... 31
Récapitulatifdes formules essentielles ............. 35
Exercices .............................. 36
1 Échelle,modélisation, validation
15
Le milieu continu :
une modélisation
1É
chelle, modélisation, validation
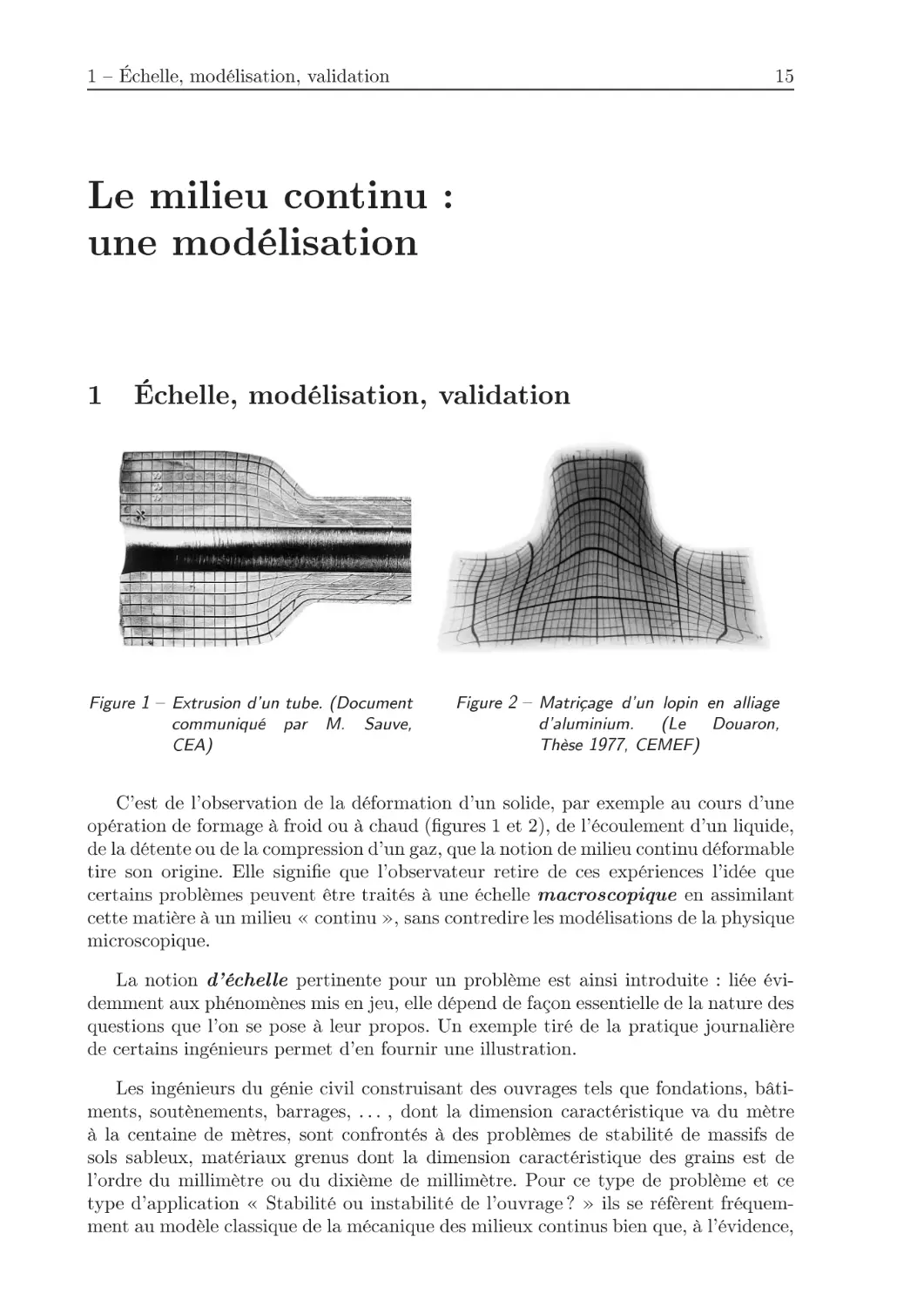
Figure 1 Extrusion d un tube. (Document
communiqué par M. Sauve,
CEA)
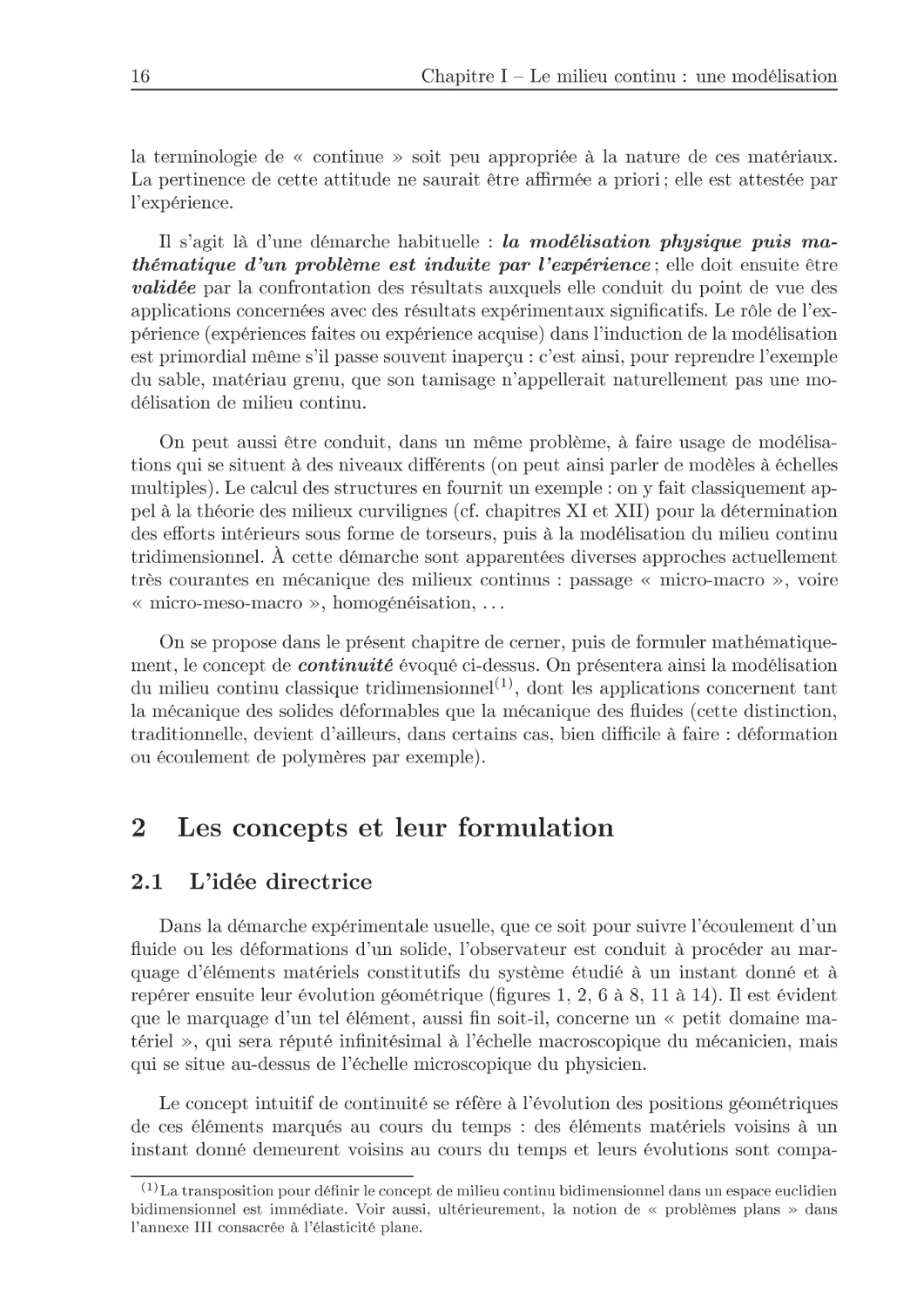
Figure 2 Matriçage d un lopin en alliage
d aluminium. (Le Douaron,
Thèse 1977, CEMEF)
C est de l observation de la déformation d un solide, par exemple au cours d une
opération de formage à froid ou à chaud ( gures 1 et 2), de l écoulement d un liquide,
de la détente ou de la compression d un gaz, que la notion de milieu continu déformable
tire son origine. Elle signi e que l observateur retire de ces expériences l idée que
certains problèmes peuventêtretraitésàune échelle macroscopique en assimilant
cette matière à un milieu continu , sans contredire les modélisations de la physique
microscopique.
La notion d échelle pertinente pour un problème est ainsi introduite : liée évi-
demment aux phénomènes mis en jeu, elle dépend de façon essentielle de la nature des
questions que l on se pose à leur propos. Un exemple tiré de la pratique journalière
de certains ingénieurs permet d en fournir une illustration.
Les ingénieurs du génie civil construisant des ouvrages tels que fondations, bâti-
ments, soutènements, barrages, ... ,do
ntladim
e
n
sion caractéristique va du mètre
àlacentaine de mètres, sont confrontés à des problèmes de stabilité de massifs de
sols sableux, matériaux grenus dont la dimension caractéristique des grains est de
l ordre du millimètre ou du dixième de millimètre. Pour ce type de problème et ce
type d application Stabilité ou instabilité de l ouvrage ? ils se réfèrent fréquem-
ment au modèle classique de la mécanique des milieux continus bien que, à l évidence,
16
Chapitre I Le milieu continu : une modélisation
la terminologie de continue soit peu appropriée à lan
atu
r
edec
e
smatériaux.
La pertinence de cette attitude ne saurait être affirmée a priori ; elle est attestée par
l expérience.
Il s agit là d une démarche habituelle : la modélisation physique puis ma-
thématique d un problème est induite par l expérience ;elle doit ensuite être
validée par la confrontation des résultats auxquels elle conduit du point de vue des
applications concernées avec des résultats expérimentaux signi catifs. Le rôle de l ex-
périence (expériences faites ou expérience acquise) dans l induction de la modélisation
est primordial même s il passe souvent inaperçu : c est ainsi, pour reprendre l exemple
du sable, matériau grenu, que son tamisage n appellerait naturellement pas une mo-
délisation de milieu continu.
On peut aussi être conduit, dans un même problème, à faire usage de modélisa-
tions qui se situent à des niveaux différents (on peut ainsi parler de modèles à échelles
multiples). Le calcul des structures en fournitunexemple:onyfaitclassiquement ap-
pelàla théorie des milieux curvilignes (cf. chapitres XI et XII) pour la détermination
des efforts intérieurs sous forme de torseurs, puis à la modélisation du milieu continu
tridimensionnel. À cette démarche sont apparentées diverses approches actuellement
très courantes en mécanique des milieux continus : passage micro-macro , voire
micro-meso-macro , homogénéisation, ...
On se propose dans le présent chapitre de cerner, puis de formuler mathématique-
ment, le concept de continuité évoqué ci-dessus. On présentera ainsi la modélisation
du milieu continu classique tridimensionnel(1),dontle
sapplications concernent tant
la mécanique des solides déformables que la mécanique des uides (cette distinction,
traditionnelle, devient d ailleurs, dans certains cas, bien difficile à faire : déformation
ou écoulement de polymères par exemple).
2L
e
s
c
o
n
c
epts et leur formulation
2.1 L idée directrice
Dans la démarche expérimentale usuelle, que ce soit pour suivre l écoulement d un
uide ou les déformations d un solide, l observateur est conduit à procéder au mar-
quage d éléments matériels constitutifs du système étudié à un instant donné et à
repérer ensuite leur évolution géométrique ( gures 1, 2, 6 à 8, 11 à 14). Il est évident
que le marquage d un tel élément, aussi n soit-il, concerne un petit domaine ma-
tériel , qui sera réputé in nitésimal à l échelle macroscopique du mécanicien, mais
qui se situe au-dessus de l échelle microscopique du physicien.
Le concept intuitif de continuité se réfèreàl évolution des positions géométriques
de ces éléments marqués au cours du temps:de
sélém
e
ntsm
atériels voisins à un
instant donné demeurent voisins au cours du temps et leurs évolutions sont compa-
(1)La transposition pour dé nir le concept de milieu continu bidimensionnel dans un espace euclidien
bidimensionnel est immédiate. Voir aussi, ultérieurement, la notion de problèmes plans dans
l annexe III consacrée à l élasticité plane.
2 Lesconcepts et leur formulation
17
rables. À l évidence, la validité de ce concept sera prioritairement dépendante de la
possibilité réelle d identi er les petits domaines matériels pertinents.
La modélisation mathématique du concept physique de continuité sera donc
d abord géométrique.
Du point de vue géométrique la modélisation du milieu continu classique part de
l idée que le système mécanique considéré S est représenté par un volume Ω dont
les dΩ représentent les constituants élémentaires appelés particules . L état
géométrique de ces particules est caractérisé uniquement par leur position : le mouve-
ment est entièrement dé ni par un champ de vitesse. Ceci explique la terminologie de
pointsm
atériels employée aussi pour désigner les particules qui signi e qu elles
sont représentées géométriquement par un point ; on doit bien entendre qu il s agit en
quelque sorte de points matériels dilués , c est-à-dire que les grandeurs physiques
extensives qui sont introduites relativementausystèmepour en dé nir certaines carac-
téristiques apparaissent comme des intégrales de densités volumiques (et non comme
des sommes discrètes).
Le concept de continuité étant lié à l observation de l évolution du système,on
souhaite assurer au cours de celle-ci pour des particules voisines :
• la conservation de la proximité géométrique,
• l évolution comparable des propriétés physiques.
2.2 Référentiel, repère
La formulation mathématique des idées précédentes nécessite que l on procède à
la description et au repérage du système étudié tout au long de son évolution au cours
du temps.
On introduit d abord la notion de référentiel, liée à celle d observateur :le
référentiel est pour ainsi dire l espace euclidien entraîné par l observateur . Pour
en donner une dé nition plus mathématique :
1
on suppose choisie, une fois pour toutes, la chronologie,c est-à-dire l échelle
du temps (mécanique classique) valable pour tous les observateurs ;
2
on appelle alors référentiel l ensemble des points de l espace euclidien animés
du mouvement de corps rigide (isométrie directe fonction du temps) de l observateur.
Le référentiel, noté R,estditlié à l observateur.
Une telle dé nition ne permet, en fait, que de dé nir un référentiel par rapport à
un autre. On sait, et on y reviendra au chapitre IV ( 1.1), que la mécanique classique
postule l existence d un référentiel absolu, ou galiléen, doté de certaines propriétés.
Pour repérer les positions spatiales des particules du système dans un référentiel R,
on peut utiliser un repère R (souvent orthonormé, sans que cela soit une nécessité),
d origine O.Cerepère, animé du mouvement de corps rigide du référentiel R,peutêtre
considéré comme matérialisant R.Dansunréférentiel R,changer le repère R pour le
repère R consiste à effectuer à chaque instant la même transformation de coordonnées
18
Chapitre I Le milieu continu : une modélisation
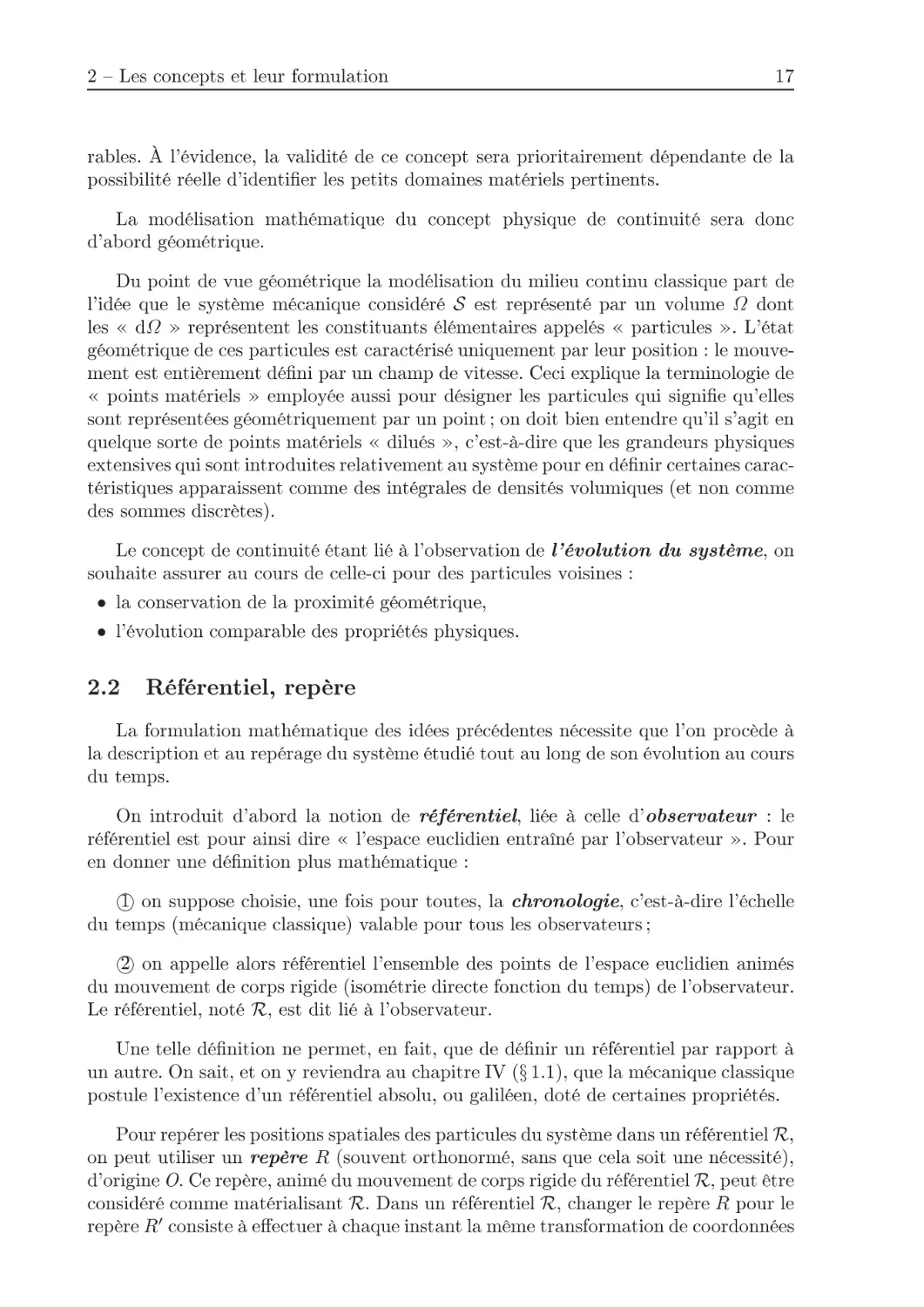
sur les composantes des êtres intrinsèques (vecteurs ou tenseurs)quel on introduira
pour représenter les grandeurs physiques dans ce référentiel ( gure 3).
Figure 3 Changement de repère dans le référentiel R
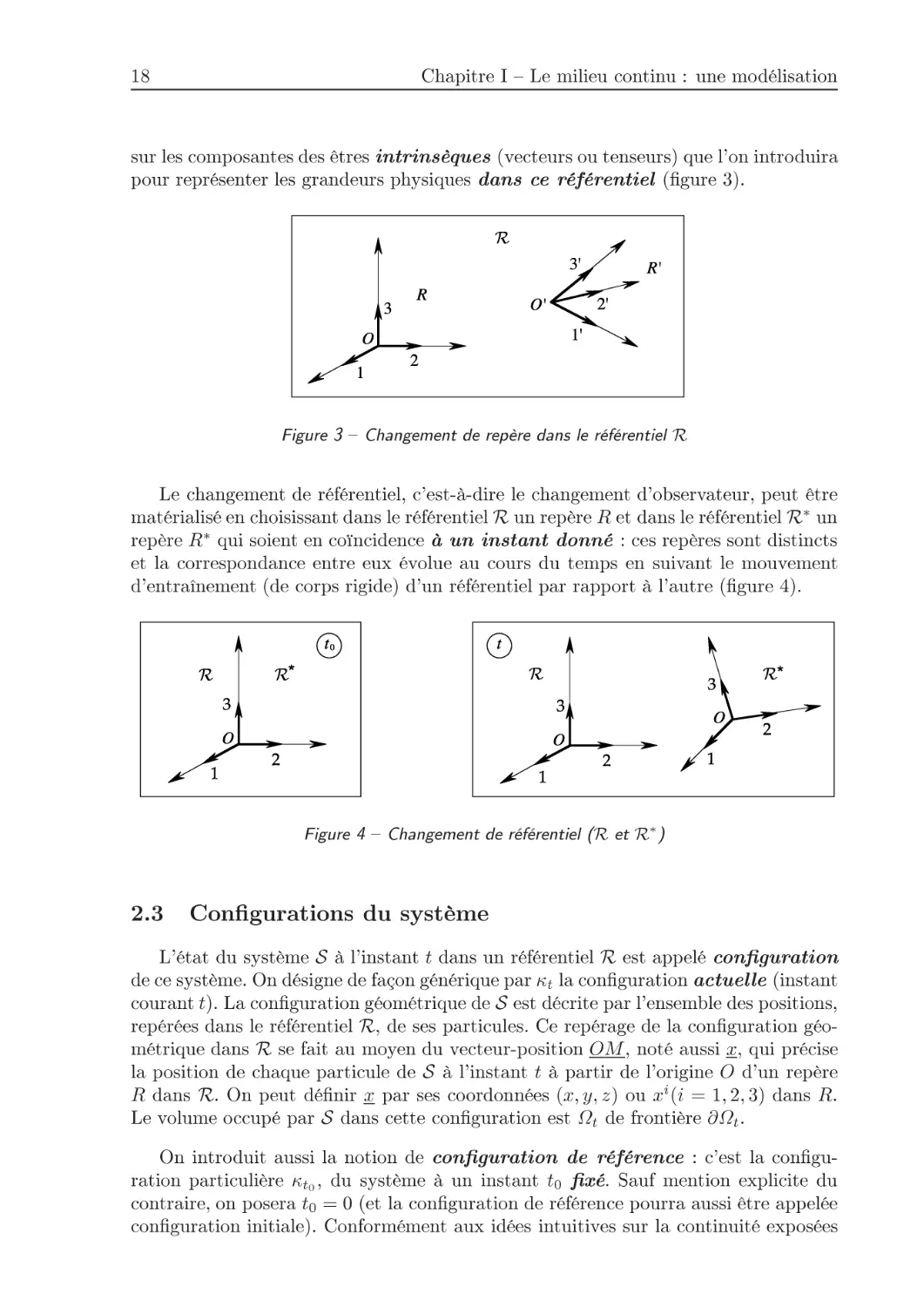
Le changement de référentiel, c est-à-dire le changement d observateur, peut être
matérialisé en choisissant dans le référentiel R un repère R et dans le référentiel R∗ un
repère R∗ qui soient en coïncidence àu
nin
sta
nt donné : ces repères sont distincts
et la correspondance entre eux évolue au cours du temps en suivant le mouvement
d entraînement (de corps rigide) d un référentiel par rapport à l autre ( gure 4).
Figure 4 Changement de référentiel (R et R∗)
2.3 Con gurations du système
L état du système S à l instant t dans un référentiel R est appelé con guration
de ce système. On désignedefaçon générique par κt la con guration actuelle (instant
courant t). La con guration géométrique de S est décrite par l ensemble des positions,
repérées dans le référentiel R,desesparticules. Ce repérage de la con guration géo-
métrique dans R se fait au moyen du vecteur-position OM ,notéaussi x,quiprécise
la position de chaque particule de S à l instant t àpartirdel origine O d un repère
R dans R.Onpe
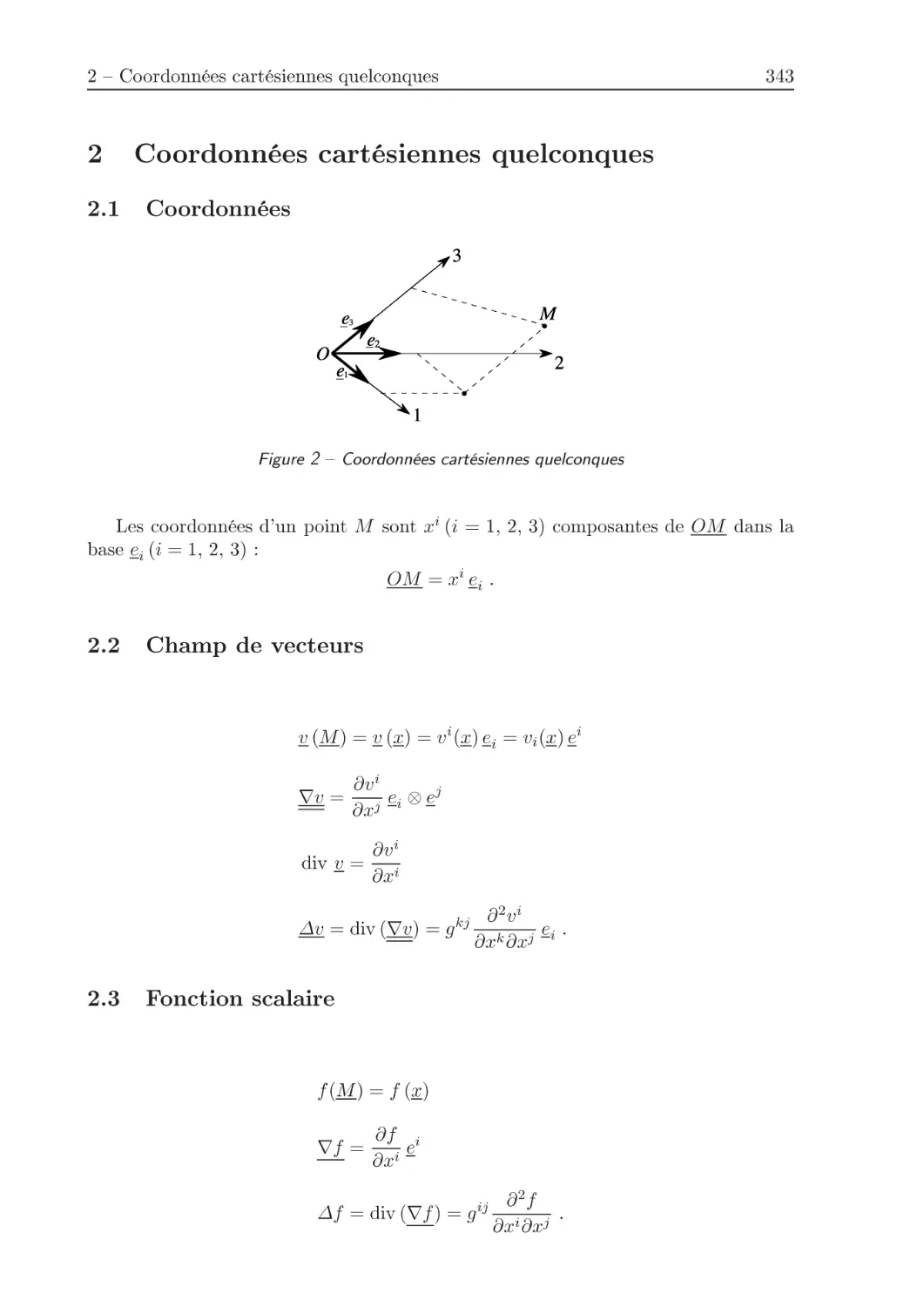
utdé nir x par ses coordonnées (x, y, z) ou xi(i =1, 2, 3) dans R.
Le volume occupé par S dans cette con guration est Ωt de frontière ∂Ωt.
On introduit aussi la notion de con guration de référence :c
e
stla con gu-
ration particulière κt0 ,dusystèm
eàu
nin
sta
ntt0 xé.Sa
ufm
e
ntion explicite du
contraire, on posera t0 =0(et la con guration deréférence pourra aussi être appelée
con guration initiale). Conformément aux idées intuitives sur la continuité exposées
2 Lesconcepts et leur formulation
19
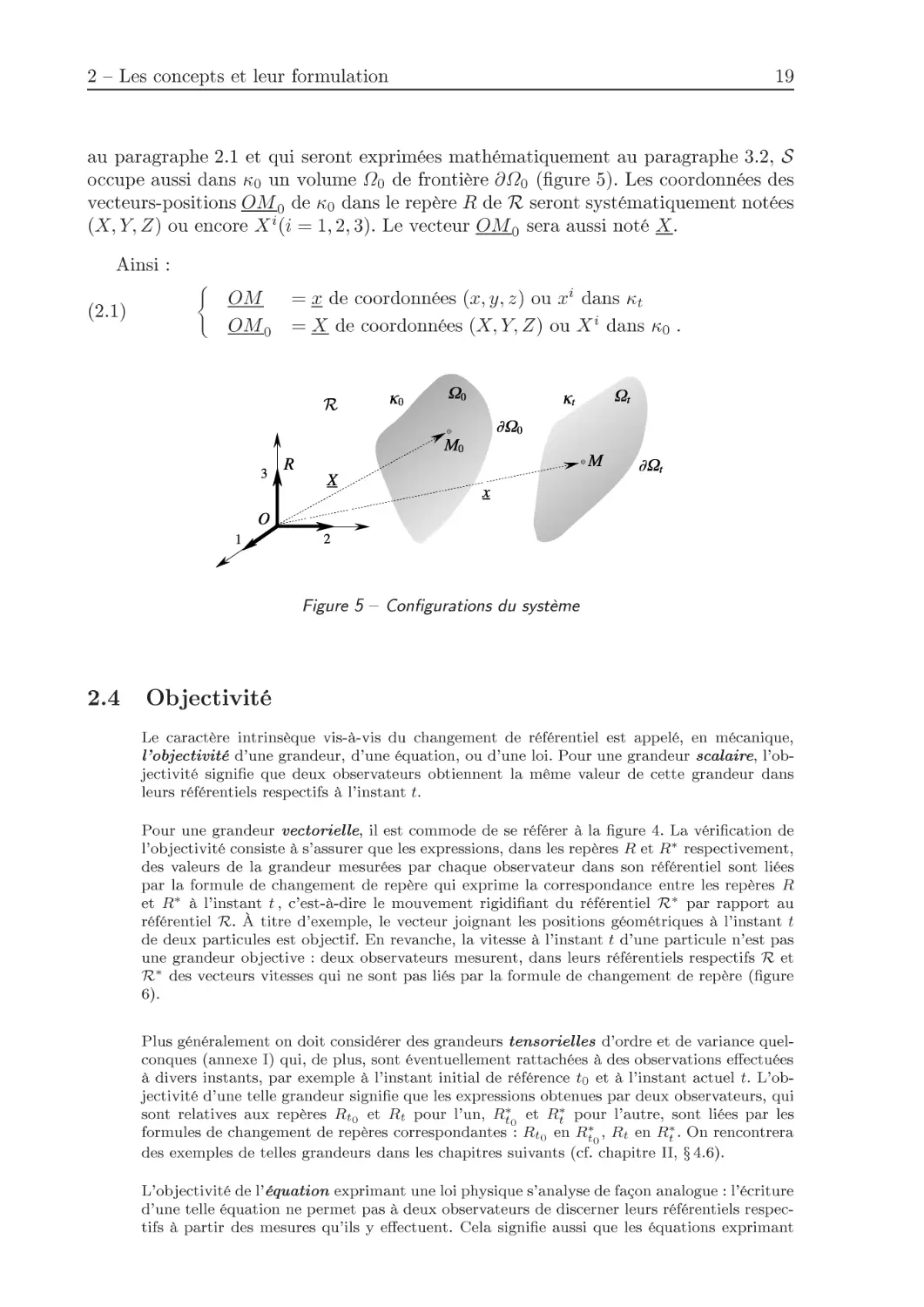
au paragraphe 2.1 et qui seront exprimées mathématiquement au paragraphe 3.2, S
occupe aussi dans κ0 un volume Ω0 de frontière ∂Ω0 ( gure 5). Les coordonnées des
vecteurs-positions OM 0 de κ0 dans le repère R de R seront systématiquement notées
(X, Y, Z) ou encore X i(i =1, 2, 3).Levecteur OM 0 sera aussi noté X.
Ainsi: OM = xde coordonnées(x,y,z)ou xi dans κt
OM0 =X de coordonnées(X,Y,Z)ou Xi dans κ0 .
(2.1)
Figure 5 Con gurations du système
2.4 Objectivité
Le caractère intrinsèque vis-à-vis du changement de référentiel est appelé, en mécanique,
l objectivité d une grandeur, d une équation, ou d une loi. Pour une grandeur scalaire, l ob-
jectivité signi e que deux observateurs obtiennent la même valeur de cette grandeur dans
leurs référentiels respectifs à l instant t.
Pour une grandeur vectorielle,ile
stc
o
mmode de se référer à la gure 4. La véri cation de
l objectivité consiste à s assurer que les expressions, dans les repères R et R∗ respectivement,
des valeurs de la grandeur mesurées par chaque observateur dans son référentiel sont liées
par la formule de changement de repère qui exprime la correspondance entre les repères R
et R∗ à l instant t ,c
e
st-à-dire le mouvement rigidi ant du référentiel R∗ par rapport au
référentiel R.Àtitred exemple, le vecteur joignant les positions géométriques à l instant t
de deux particules est objectif. En revanche, la vitesse à l instant t d une particule n est pas
une grandeur objective : deux observateurs mesurent, dans leurs référentiels respectifs R et
R∗ des vecteurs vitesses qui ne sont pas liés par la formule de changement de repère ( gure
6).
Plus généralement on doit considérer des grandeurs tensorielles d ordre et de variance quel-
conques (annexe I) qui, de plus, sont éventuellement rattachées à des observations effectuées
àdivers instants, par exemple à l instant initial de référence t0 et à l instant actuel t.L
ob-
jectivité d une telle grandeur signi e que les expressions obtenues par deux observateurs, qui
sont relativesa
u
xr
epères Rt0 et Rt pour l un, R∗
t0etR∗
t pour l autre, sont liées par les
formules de changement de repères correspondantes : Rt0 en R∗
t0,RtenR∗
t .Onrencontrera
des exemples de telles grandeurs dans les chapitres suivants (cf. chapitre II, 4.6).
L objectivité de l équation exprimant une loi physique s analyse de façon analogue : l écriture
d une telle équation ne permet pas à deux observateurs de discerner leurs référentiels respec-
tifs à partir des mesures qu ils y effectuent. Cela signi e aussi que les équations exprimant
20
Chapitre I Le milieu continu : une modélisation
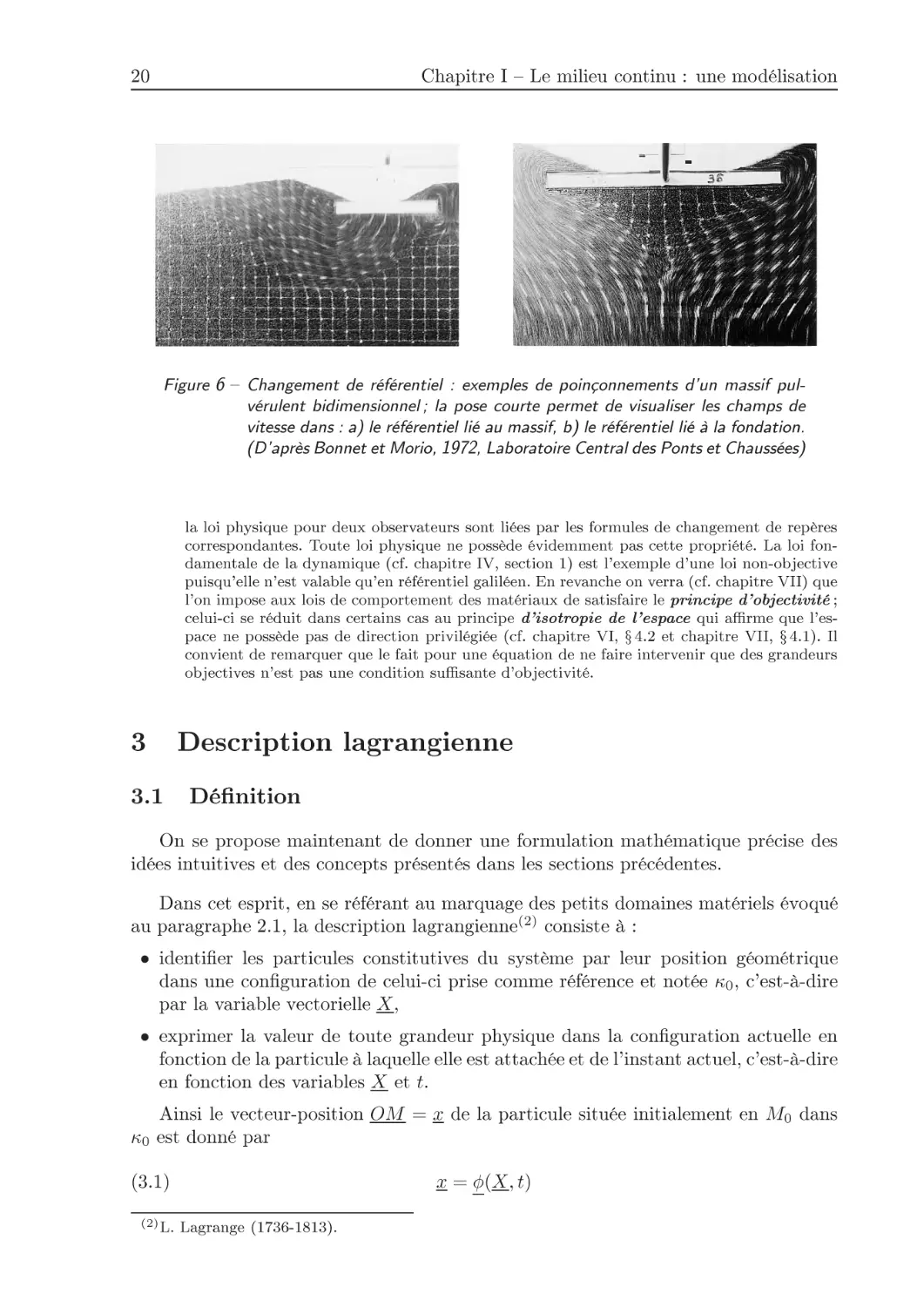
Figure 6 Changement de référentiel : exemples de poinçonnements d un massif pul-
vérulent bidimensionnel ; la pose courte permet de visualiser les champs de
vitesse dans : a) le référentiel lié au massif, b) le référentiel lié à la fondation.
(D après Bonnet et Morio, 1972, Laboratoire Central des Ponts et Chaussées)
la loi physique pour deux observateurs sont liées par les formules de changement de repères
correspondantes. Toute loi physique ne possède évidemment pas cette propriété. La loi fon-
damentale de la dynamique (cf. chapitre IV, section 1) est l exemple d une loi non-objective
puisqu elle n est valable qu en référentiel galiléen. En revanche on verra (cf. chapitre VII) que
l on impose aux lois de comportement des matériaux de satisfaire le principe d objectivité ;
celui-ci se réduit dans certains cas au principe d isotropie de l espace qui affirme que l es-
pace ne possède pas de direction privilégiée (cf. chapitre VI, 4.2 et chapitre VII, 4.1). Il
convient de remarquer que le fait pour une équation de ne faire intervenir que des grandeurs
objectives n est pas une condition suffisante d objectivité.
3D
e
s
c
r
iption lagrangienne
3.1 Dé nition
On se propose maintenant de donner une formulation mathématique précise des
idées intuitives et des concepts présentés dans les sections précédentes.
Dans cet esprit, en se référant au marquage despetitsdomaines matériels évoqué
au paragraphe 2.1, la description lagrangienne(2) consiste à :
• identi er les particules constitutives dusystèm
epa
rle
u
rpo
sition géométrique
dans une con guration de celui-ci prise comme référence et notée κ0,c est-à-dire
par la variable vectorielle X,
• exprimer la valeur de toute grandeur physique dans la con guration actuelle en
fonction de la particule à laquelle elle est attachée et de l instant actuel, c est-à-dire
en fonction des variables X et t.
Ainsi le vecteur-position OM = x de la particule située initialement en M0 dans
κ0 est donné par
x = φ(X,t)
(3.1)
(2)L. Lagrange (1736-1813).
3 Description lagrangienne
21
et la valeur d une grandeur physique attachée à cette particule, soit B est :
B=B(X,t).
(3.2)
Dans la formule (3.1) φ est une fonction vectorielle dé nie sur Ω0, ∀t,etquivéri e
évidemment :
φ(X,0)=X,
(3.3)
tandis que, suivant la nature de la grandeur physique concernée, B est une fonction
scalaire, vectorielle, ou tensorielle d ordre quelconque, qui véri e la formule homologue
de (3.3).
La fonction φ décrit ainsi la correspondance géométrique entre les con gurations
(spatiales) κ0 et κt.Enfonctiondet c est toute l évolution géométrique du système
S,c est-à-dire son mouvement (cf. 3.4), qui est ainsi donnée.
3.2 Hypothèses de continuité
On va naturellement examiner maintenant les conditions mathématiques sur φ qui
permettent de rendre compte convenablement du concept intuitif de continuité dégagé
au paragraphe 2.1.
On propose les hypothèses suivantes :
• φ est une bijection de Ω0 sur Ωt dont on désigne par ψ la bijection réciproque(3) :
∀t,∀M0 ∈Ω0
∀t,∀M ∈Ωt
⇐⇒
x = φ(X,t)
X = ψ(x,t)
(3.4)
• φ et ψ sont continues par rapport à l ensemble des variables d espace et de
temps.
• φ et ψ sont en règle générale supposées de classe C1 voire C2 .
En ce qui concerne la grandeur physique typique B,lafo
n
ctio
nB est supposée
continue et, en règle générale, de classe C1 ou C2 par rapport à l ensemble des variables
Xett.
Ces hypothèses ont les conséquences classiques suivantes qui permettent d exami-
ner la validité de cette modélisation par comparaison avec l expérience.
1◦)De
u
xpa
rticules qui occupent dans κ0 des positions in niment voisines ,
restent in niment voisines dans toute con guration.
(3)ψ sera occasionnellement notée aussi φ-1 .
22
Chapitre I Le milieu continu : une modélisation
2◦)De
spa
rtic
ules qui occupent dans κ0 un domaine connexe, occupent dans κt
un domaine connexe de même ordre (volume, surface, courbe). Ceci permet la dé ni-
tion mathématique du concept de domaine matériel :domaine transporté par le
mouvement c est-à-dire qu il s agit à chaque instant du domaine géométrique occupé
par le même ensemble de particules.
3◦)Lesparticules qui se trouvent dans κ0,àl intérieur d une surface fermée, restent
àtoutinstantt à l intérieur de la surface transportée. Ainsi la frontière d un volume
matériel est une surface matérielle.
4◦)Enparticulier, la frontière de S est une surface matérielle ce qui signi e qu elle
est toujours constituée des mêmes particules.
5◦)Enc
onséquence des hypothèses de continue différentiabilité : soit J(X ,t) le
déterminant jacobien de φ à l instant t en (X 1,X2,X3),c
e
st-à-dire le déterminant
de la matrice jacobienne des dérivées premières des xi par rapport aux X i :
J(X,t)= D(x1,x2,x3)
D(X1,X2,X3) .
(3.5)
φ étant continue et continûment dérivable de même que ψ,onendéduit que J(X ,t)
est continu par rapport à X et t.Deplusilnepeutêtreni nul ni in ni, puisque
les matrices jacobiennes de φ et de ψ doivent être inversibles. Il conserve donc un
signe constant sur Ω0 et au cours du mouvement.
Il résulte alors de (3.3) où l on a :
J(X,0)=1 ∀M0∈Ω0,
(3.6)
que J(X,t) est positif et ni ∀M0 ∈ Ω0 , ∀t :
0 <J(X,t) < +∞
(3.7)
Anticipant sur des résultats qui seront développés au chapitre II ( 2.3 et 4.2) on
peut d ores et déjà donner l interprétation physique de J(X ,t).SoitdΩ0 le volume
d un domaine matériel élémentaire au point M0 dans la con guration κ0 et dΩt le
volume du domaine transporté en M dans la con guration κt ; J(X,t) s interprète
comme la dilatation volumique dans le mouvement entre les con gurations κ0 et
κt,ensuiv
antlaparticule de M0 à M :
dΩt = J(X,t)dΩ0 (4) .
(3.8)On peut donc traduire sous forme imagée le résultat (3.7) : le volume de la
particule conserve son signe, et ne peut devenir ni nul, ni in ni.
(4)Ce résultat se rattache à des théorèmes classiques d analyse. L image de la mesure
J(X,t)dX 1dX 2dX 3 par l application φ est la mesure dx1dx2dx3 .Siler
epèr
eR est orthonormé
la mesure dx1dx2dx3 (ou dX1dX2dX3)e
stlam
e
sure de volume. On en déduit que, pour un do-
mainein nitésimal qui converge vers le point M0 ,danslacon guration κ0 et pour son image par φ
en M,le
sv
olu
me
sdΩ0 et dΩt sont liés par la formule (3.8). Le résultat est conservé si R n est pas
orthonormé car la mesure dx1dx2dx3 est alors proportionnelle à la mesure de volume.
3 Description lagrangienne
23
3.3 Pertinence du modèle : affaiblissement des hypothèses
de continuité
Les conséquences énoncées ci-dessus apparaissent conformes à l intuition de la
continuité qui est à l origine même de la modélisation. On est toutefois amené à
nuancer quelque peu les hypothèses mathématiques de façon à être en mesure de
traiter plus commodément certains phénomènes observés.
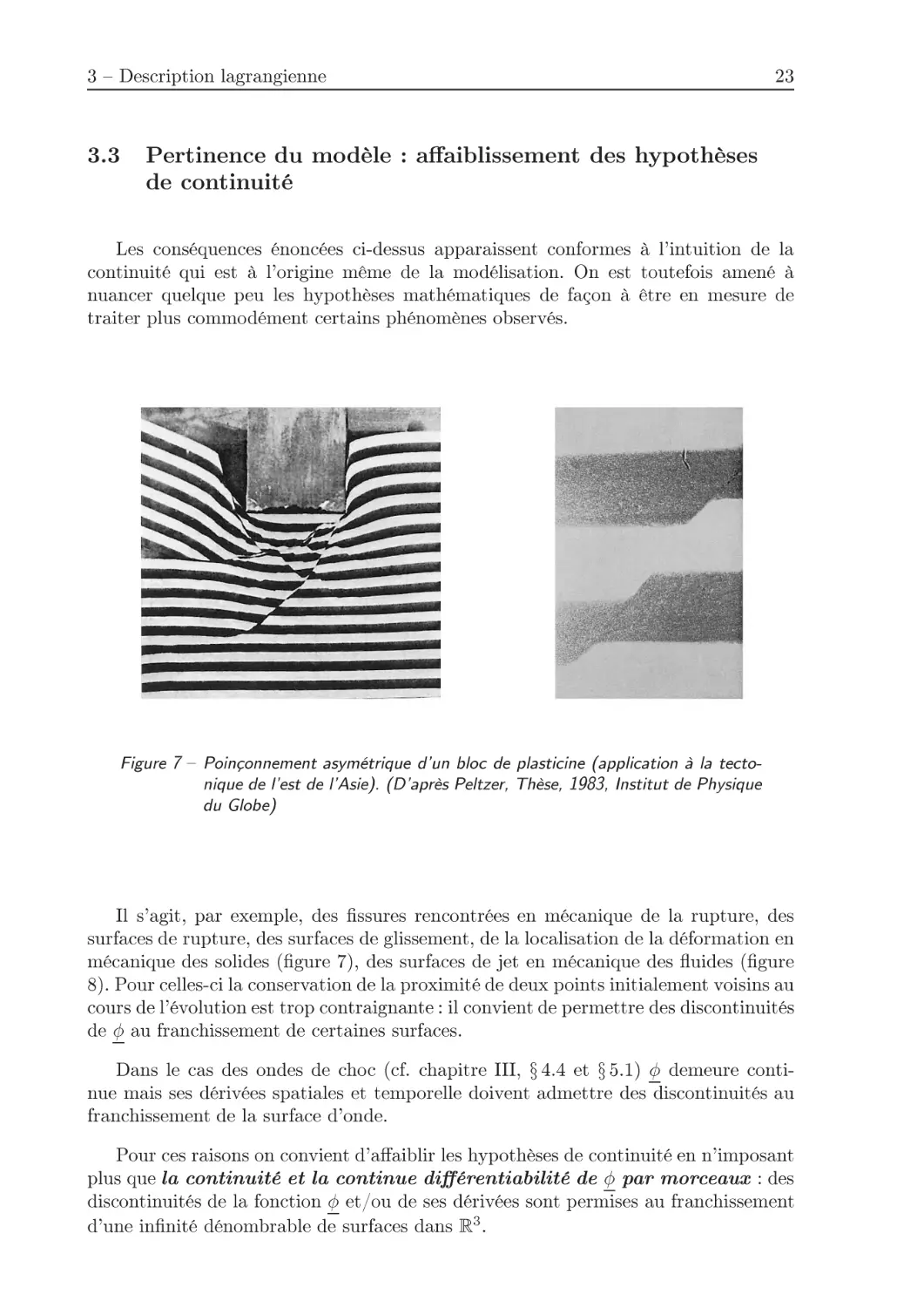
Figure 7 Poinçonnement asymétrique d un bloc de plasticine (application à la tecto-
nique de l est de l Asie). (D après Peltzer, Thèse, 1983, Institut de Physique
du Globe)
Il s agit, par exemple, des ssures rencontrées en mécanique de la rupture, des
surfaces de rupture, des surfaces de glissement, de la localisation de la déformation en
mécanique des solides ( gure 7), des surfaces de jet en mécanique des uides ( gure
8). Pour celles-ci la conservation de la proximité de deux points initialement voisins au
cours de l évolution est trop contraignante : il convient de permettre des discontinuités
de φ au franchissement de certaines surfaces.
Dans le cas des ondes de choc (cf. chapitre III, 4.4 et 5.1) φ demeure conti-
nue mais ses dérivées spatiales et temporelle doiventadmettre des discontinuités au
franchissement de la surface d onde.
Pour ces raisons on convient d affaiblir les hypothèses de continuité en n imposant
plus que la continuité et la continue différentiabilité de φ par morcea ux :des
discontinuités de la fonction φ et/ou de ses dérivées sont permises au franchissement
d une in nité dénombrable de surfaces dans R3.
24
Chapitre I Le milieu continu : une modélisation
Figure 8 Écoulement autour d une plaque plane. (Document communiqué par
l ONERA)
3.4 Interprétation physique de la description lagrangienne :
trajectoires
La description lagrangienne est la formulation mathématique d une réalité expé-
rimentale simple. En effet (cf. 3.1) la formule (3.1) décrit le mouvement de chaque
particule du système : si l on considère la particule identi ée par X,(3.1) fournit la
description de sa trajectoire, paramétrée en fonction dutemps,dansleréférentiel R :
x=φ(X,t) où X est xé.
Pour cette raison on dit aussi que la description lagrangienne est une description
partrajectoires .
Concrètement, la visualisation de la trajectoire d une particule à partir d un ins-
tant t0,s obtient en marquant une particule à l instant donné t0 , puis en faisant une
prise de vue en pose du mouvement du système à partir de l instant t0.Cetype
d expériences est réalisé couramment en mécanique des solides et en mécanique des
uides.
3.5 Lignes d émission
La prise d une vue en instantané conduit à introduire un autre type de courbes
géométriques, les lignes d émission,dé nies comme suit ( gure 9).
En un point géométrique P dans R,decoordonnées xiP ,etàpartir de l instant
t0,o
nm
a
rqu
echaque particule passant par P ;o
nobserve, à l instant T>t
0,le
s
positions de ces particules dans R :lacourbe géométrique correspondante est la
ligne d émission du point P observée à l instant T .
L équation, paramétrée en t ,dec
ette courbe s obtient à partir de (3.1) et (3.4)
3 Description lagrangienne
25
en suivant la particule X qui, passant à l instant t en P ,aétémarquée et se trouve
en x à l instant T sur la ligne d émission :
x=φ(ψ(xP,t ),T) t0≤t ≤T.
(3.9)
Ces expériences sont couramment réalisées en mécanique des uides ( gures 11 à
13).
Figure 9 Ligne d émission (en pointillé, la trajectoire de la particule X)
3.6 Vitesse d une particule
La vitesse, dans le référentiel R,delaparticule identi ée par sa position X dans
κ0 s obtient immédiatement à partir de (3.1). C est le vecteur :
U(X ,t)= ∂φ(X,t)
∂t.
(3.10)
Le vecteur vitesse U(X ,t) dans R est évidemment tangent à la trajectoire de la
particule dans R au point x = φ(X,t).
De même l accélération de laparticule s écrit :
a(X ,t)= ∂2φ(X ,t)
∂t2 .
(3.11)
3.7 Con guration de référence abstraite
La description lagrangienne du mouvement donnée ci-dessus, identi e chaque par-
ticule par sa position dans R,danslacon guration κ0.
On peut bâtir le même type de description en introduisant, pour indexer chaque
particule, un jeu de trois paramètres ai(i =1, 2, 3) qui sont appelés coordonnées de la
particule dans la con gu ration abstraite de référence κa .Lemouvementestalors
dé ni de façon analogue à (3.1) par la donnée de la fonction vectorielle φ :
x = φ(a1 ,a2,a3,t)(
a1,a2,a3) ∈Da
(3.12)
26
Chapitre I Le milieu continu : une modélisation
où Da désigne le domaine occupé par le système dans κa ;ona,pourlacon guration
κ0:
X = φ(a1,a2,a3, 0) .
(3.13)
φ doit encore être bijective, continue et continûment différentiable par morceaux de
même que sa bijection réciproque ψ.
Le jacobien
J(a1,a2,a3,t)= D(x1 ,x2 ,x3)
D(a1,a2,a3)
est continu par rapport aux variables a1,a2,a3 et t,etn
epeut être ni nul ni in ni
(inversibilité de la matrice jacobienne). Il conserve donc un signe constant sur Da
et au cours du mouvement ,maisiln estplus nécessairement positif. La dilatation
volumique entre deux con gurations κ0 et κt pour la particule indexée par (a1,a2,a3),
s obtient évidemment par :
dΩt = J(a1,a2,a3,t)
J(a1,a2,a3, 0)dΩ0 .
(3.14)
Pour citer un exemple simple d une telle représentation lagrangienne à partir d une
con guration abstraite : si l on indexe chaque particule par les coordonnées cylin-
driques R, Θ et Z de sa position M0 dans κ0 ,lesparamètres R, Θ et Z constituent un
jeu de coordonnées lagrangiennes abstraites, le domaine Da étant dé ni dans l espace
(R, Θ, Z).Enpartic
ulier, si la position dans la con guration actuelle est, elle aussi,
repérée par les coordonnées cylindriques (r, θ, z) on a, pour la dilatation volumique,
la formule :
dΩt=r
R D(r,θ,z)
D(R,Θ,Z)dΩ0 .
(3.15)
4D
e
s
c
r
iption eulérienne
4.1 Dé nition
En se référant à l interprétation physique de la description lagrangienne à partir
de la prise de vues en poses longues, on peut introduire la description eulérienne(6)
par l idée intuitive suivante exposée sur l aspect géométrique : le cliché obtenu en
pose peut être reconstitué par la superposition d une succession de prises de vues
instantanées.
Dans une formulation plus mathématique, la description eulérienne de l évolution
consiste à prendre à chaque instant la con guration actuelle comme con guration de
référence pour décrire l évolution in nitésimale entre t et (t +dt).
Ainsi pour l aspect géométrique la description eulérienne dé nit le mouvement du
système par la donnée, à chaque instant t,delavitesse U t de la particule située au
(6)L. Euler (1707-1783).
4 Description eulérienne
27
point géométrique M dans κt :
∀t,∀M ∈Ωt ,U
= Ut(x,t).
(4.1)On retrouve bien encore la donnée d une fonction vectorielle de 4 variables scalaires
mais, à la différence de (3.1),lesvariablesspatialesx1,x2 ,x3 sont relatives à la con -
guration actuelle et non plus à une con guration de référence : elles n identi ent
donc plus les particules au cours du temps.
To u t e gr a ndeur physique est, de même, dé nie sur κt sous la forme :
∀t,∀M∈Ωt , B=b(x,t).
(4.2)En règle générale on convient, pour permettre un décodage des formules à vue ,
de désigner par des lettres minuscules (comme x)lesfonctionsrelatives à la descrip-
tion eulérienne, et par des lettres majuscules (comme X)le
sfo
n
ctio
n
sr
elatives à
la description lagrangienne. La vitesse est ici l exception qui con rme la règle ; on y
reviendra dans la suite ( 4.6).
4.2 Détermination des trajectoires
Il est clair que la description eulérienne de l évolution d un système S s obtient
de façon immédiate dès que l on en connaît la description lagrangienne. En effet en
égalant les deux expressions de la vitesse de la particule X dans R à l instant t , puis
les deux expressions de la grandeur B pour la particule X à l instant t il vient :
U t(x,t)=U(X,t)=U(ψ(x,t),t)
b(x,t)=B(X ,t)=B(ψ(x,t),t) .
(4.3)
On remarque que U t est alors continue et continûment différentiable par morceaux
(si φ est C2 par morceaux).
Inversement il convient de véri er que la description eulérienne, introduite de façon
intuitive au paragraphe précédent, est bien équivalente à la description lagrangienne.
Pour cela il suffit de véri er que (4.1) permet effectivement de reconstituer la fonction
φ de la formule (3.1), c est-à-dire qu il faut résoudre le problème : déterminer la
fonction vectorielle φ solution de
∂φ(X,t)
∂t = U t(φ(X,t),t)
φ(X , 0) = X , condition initiale .
(4.4)
Il s agit en fait (cf. 3.4) de déterminer la trajectoire de toute particule avec son
horaire de parcours. Ce problème peut aussi s écrire sous la forme différentielle :
dx = U t(x,t)dt
x|t=0 = X , condition initiale
(4.5)
28
Chapitre I Le milieu continu : une modélisation
qui représente un système de 3 équations différentielles pour les 3 fonctions scalaires
inconnues x1,x2 ,x3 ,delav
ariablet.
Sous réserve de conditions de régularité sur la fonction U t,onpeutendéterminer la
solution unique pour chaque condition initiale, qui se met ainsi sous la forme cherchée :
x =φ(X,t),
ce qui achève la détermination des trajectoires.
L ensemble des trajectoires dans R de toutes les particules constitue une famille
de courbes à 3 paramètres (coordonnées X i de M0).
L expression lagrangienne (3.2) de la valeur d une grandeur physique B attachée à
la particule située en x à l instant t s obtient alors de façon évidente à partir de (4.2),
formule inverse de (4.3) :
B = B(X ,t)=b(φ(X ,t),t) .
4.3 Lignes de courant
Il est utile, pour certaines applications, d introduire une troisième famille de
courbes géométriques issues de la dé nition du mouvement d un milieu continu.
Àu
ninstant donné T ,o
nappelle lignes de courant du mouvement dans le
référentiel R,leslignes enveloppes du champ des vecteurs vitesses U t(x,T) .
Ces lignes sont donc dé nies dans R par le système différentiel :
dx1
U1
t (x,T) = dx2
U2
t (x,T) = dx3
U3
t (x,T) ;
(4.6)
c est un système différentiel de 2 équations en x1 ,x2,x3 .Leslignes de courant dans R
à l instant T constituent une famille de courbes géométriques à 2 paramètres.
Figure 10 Lignes de courant à l instant T (enpointillé : trajectoires de deux particules)
4 Description eulérienne
29
Aucune confusion n est à faire entre ces lignes et les trajectoires dé nies au pa-
ragraphe 3.4 et retrouvées au paragraphe 4.2 car la différence designi cation est
évidente du point de vue physique, et les systèmes différentiels (4.5) et (4.6) sont fon-
damentalement différents : variable temps dans le premier, temps xé dans le second
( gure 10).
Du point de vue expérimental, la construction des lignes de courant à l instant T
nécessite l obtention du champ des vitesses dans le référentiel R à cet instant. Pour
poursuivre dans le registre des références photographiques utilisées aux paragraphes
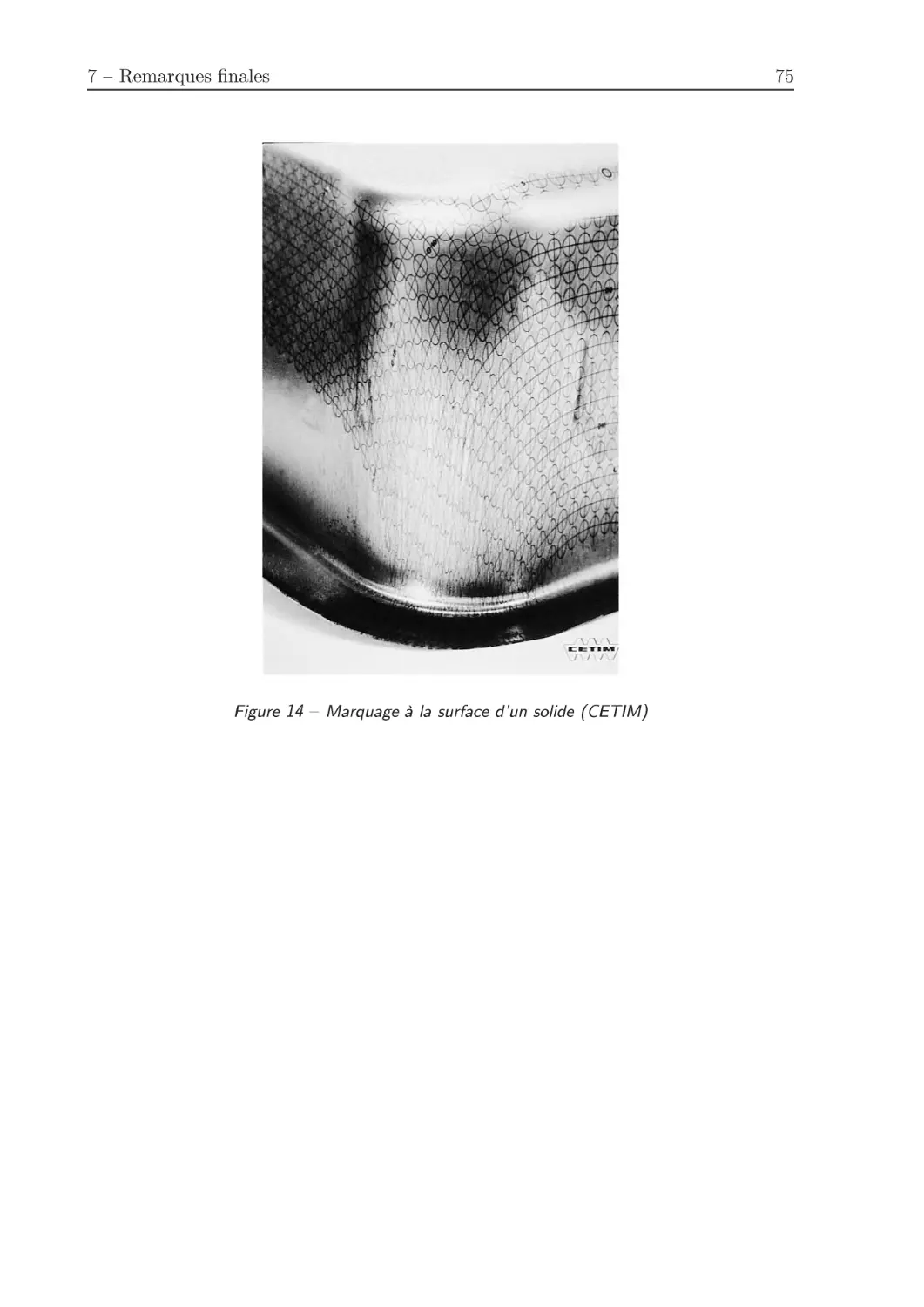
3.4et4.1, celui-ci résulte d une prise de vue en pose courte à l instant T ( gure 14),
ce qui manifeste clairement la différenceentrelignes de courant et trajectoires.
4.4 Mouvements stationnaires (ou permanents)
Le mouvement est dit stationnaire (ou permanent) dans un référentiel R si, dans
sa description eulérienne, U t(x,t) est indépendante de t et n est fonction que des
coordonnées du point géométrique M .Ilenrésultelespropriétés suivantes.
• Dans la recherche des trajectoires et de leurs horaires de parcours par le système
différentiel (4.5) le problème se découple en un problème purement géométrique et un
problème d horaire de parcours.
En effet, puisque :
Ut(x,t) ≡ U(x)
(4.7)
on tire de (4.5) le système :
dx1
U1(x) = dx2
U2(x) = dx3
U3(x) ;
(4.8)
celui-ci est identique à celui qui, à chaque instant T ,permetdedéterminer les lignes
de courant (4.6), lui aussi indépendant de T .
Ainsi les trajectoires forment alors une famille de courbes géométriques
à2paramètres,identiqueàlafamilledes lignes de courant qui deviennent,
dans ce cas, indépendantes du temps.
• On peut alors déterminer l horaire de parcours de ces courbes par les particules.
En effet on obtient à partir de (4.5) et (4.7) :
dx = U(x)dt
(4.9)
qui montre, le problème géométrique étant résolu, que le mouvement est invariant
par translation dans le temps.
Cela signi e que la position M à l instant t de la particule qui se trouvait en M
à l instant t ne dépend que de M et de la différence (t - t ) :
x = φ(x ,t- t ) .
(4.10)
30
Chapitre I Le milieu continu : une modélisation
Cette formule donne, en fonction du paramètre τ = t - t , l équation de la trajec-
toire passant par M .
On en déduit que les fonctions φ et ψ de (3.4) possèdent, dans le cas d un mouve-
ment stationnaire, la propriété fonctionnelle :
φ(ψ(x ,t ),t) = φ(x ,t- t ) .
(4.11)
• Compte tenu de (4.11) on voit que l équation (3.9) donnant, paramétrée en t ,
la ligne d émission observée à l instant T ,dupointP ,s écrit :
x =φ(ψ(xP,t ),T)≡φ(xP,T-t ) t0≤t ≤T.
(4.12)
Ceci montre, par comparaison avec (4.10), que la ligne d émission de P est
identique à la partie aval de la trajectoire passant par P ,c
equirés
ult
e
directement du fait que toutes les particules passant par P suivent la même trajectoire.
Il en résulte pratiquement, une méthode commode de visualisation des trajectoires
dans le cas des mouvements stationnaires.
4.5 Mouvements semi-permanents
On introduit parfois aussi la notion de mouvementsemi-permanent dans un référentiel, dé nie
par la propriété caractéristique :
U t(x,t)=λ(t)U (x) .
(4.13)
On véri era que dans ce typedemou
v
ement:
• les lignes de courant sont indépendantes du temps ;
• les trajectoires forment encore une famille de courbes géométriques à 2 paramètres, iden-
tique à celle des lignes de courant ;
• la ligne d émission d un point P est identique à la partie avaldelatr
ajectoire passant
par ce point : en effet, en introduisant une fonction θ(t) primitive de λ(t),onmontreque
les fonctions φ et ψ véri ent encore une relation analogue à (4.11).
4.6 Notations pour la vitesse
L usage courant est que l on adopte pour la fonction décrivant la vitesse sur la
con guration κt en représentation eulérienne la notation U ,ide
ntique à la notation
lagrangienne sur la con guration κ0 ;autrementdit on écrit, à la place de la formule
(4.1) :
∀t,∀M ∈Ωt ,U=U(x,t).
(4.14)
Cette convention sera adoptée dans toute la suite.
Elle n est que très rarement susceptible d engendrer des confusions car les conven-
tions d écriture sur les variables spatiales (X et x) et sur les opérateurs différentiels
(cf. chapitre II, 5.3) suffisent le plus souvent à lever l ambiguïté. En cas de nécessité
on peut toujours avoir recoursàlanotation précise (4.1).
5 Commentaires
31
5C
o
mmentaires
Cette présentation de la modélisation milieu continu dans sa forme classique appelle,
pour conclure, quelques commentaires. Ceux-ci sont suggérés par les techniques expérimen-
tales d observation telles qu elles apparaissent sur les gures 11 à 14 par exemple ou dans les
nombreux lms disponibles sur le sujet. On y voit que le marquage d une particule n est
évidemment qu abstraction : l opération concerne toujours un domaine, volume de matière,
souhaité aussi petit que possible, voisin du point considéré.
Quelles sont alors la signi cation physique et la pertinence de la notion de particule intro-
duite comme base de la modélisation ? Une réponse à cette question pourra être formulée
comme suit.
Conçue pour la prédiction,lam
odélisation doit revêtir une forme mathématique, pour la-
quelle on recherche la simplicité maximale compatible avec une représentation convenable
des phénomènes observés. La modélisation milieu continu présentée ci-dessus attache au
point matériel, repéré par sa position géométrique dans κt par exemple, des grandeurs qui
caractérisent l évolution physique de la matière autour de ce point. C est dire que ce point
matériel ou particule recèle physiquement une microstructure , dont on cherche à décrire
au mieux l évolution.
Dans la modélisation classique on considère que le champ de vitesse U suffit à décrire conve-
nablement la cinématique de la microstructure attachée à la particule.
Dans certains cas on devra sortir de ce cadre. Ainsi par exemple on pourra introduire, outre
le champ U de vitesse de la particule, un champ de vecteur-rotation, indépendant de U ,qui
chercheraàtraduire la rotation propre de la microstructure : un tel type de milieu continu
tridimensionnel, non classique, sera examiné au chapitre V (section 5), tandis que le chapitre
XI (section 3), traitant des milieux curvilignes, en fournira un exemple unidimensionnel dont
les applications pratiques sont quotidiennes.
32
Chapitre I Le milieu continu : une modélisation
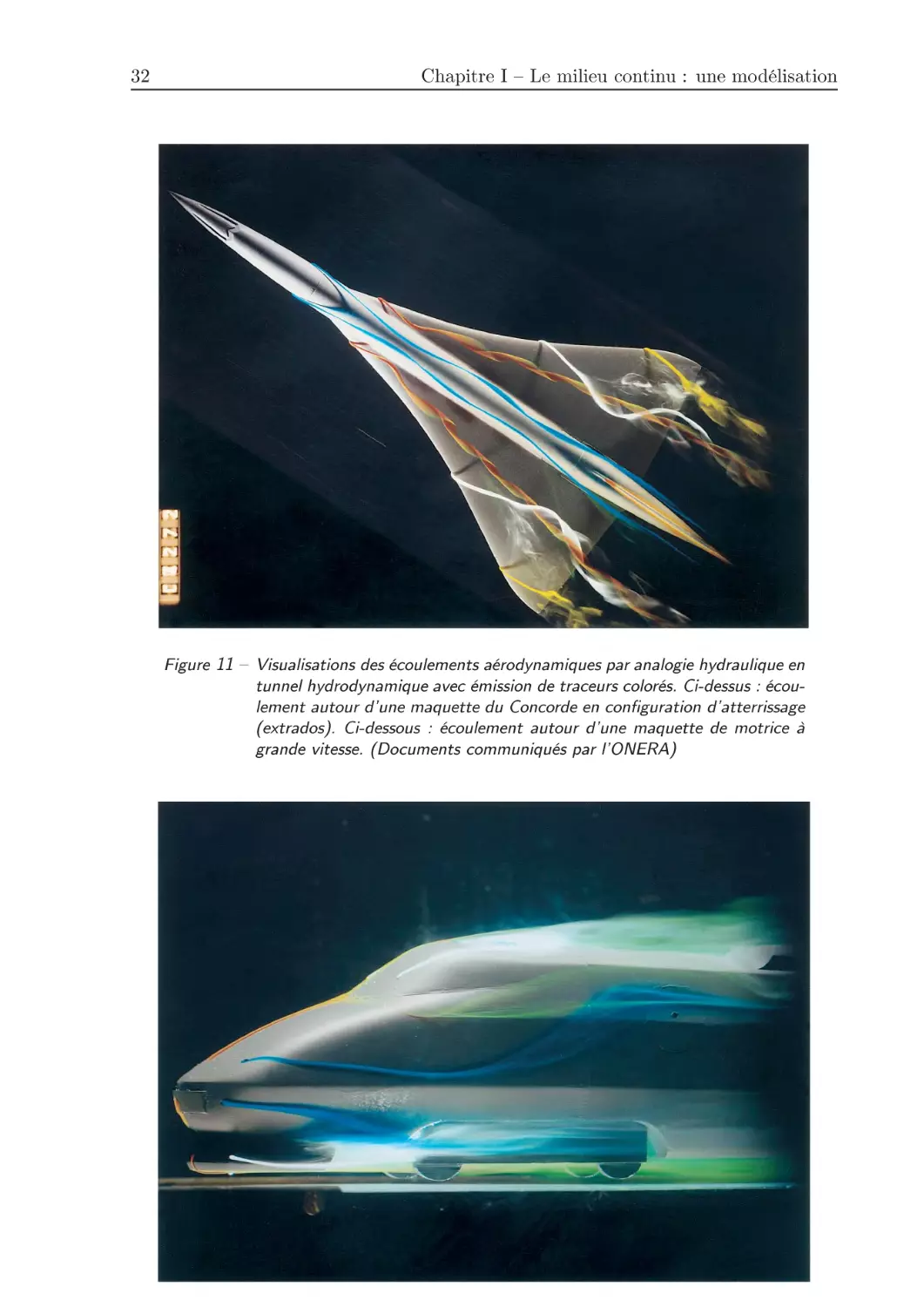
Figure 11 Visualisations des écoulements aérodynamiques par analogie hydraulique en
tunnel hydrodynamique avec émission de traceurs colorés. Ci-dessus : écou-
lement autour d une maquette du Concorde en con guration d atterrissage
(extrados). Ci-dessous : écoulement autour d une maquette de motrice à
grande vitesse. (Documents communiqués par l ONERA)
5 Commentaires
33
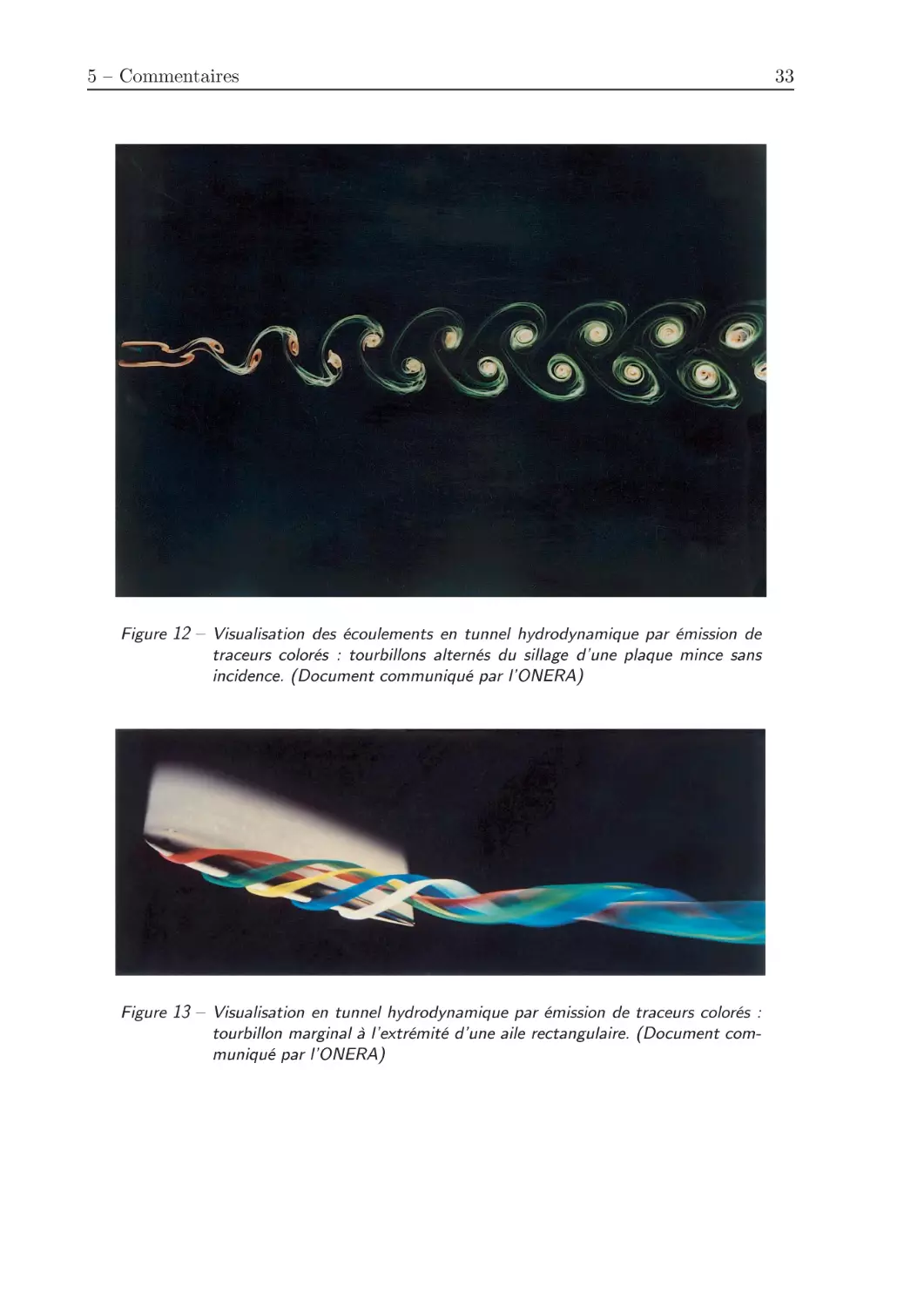
Figure 12 Visualisation des écoulements en tunnel hydrodynamique par émission de
traceurs colorés : tourbillons alternés du sillage d une plaque mince sans
incidence. (Document communiqué par l ONERA)
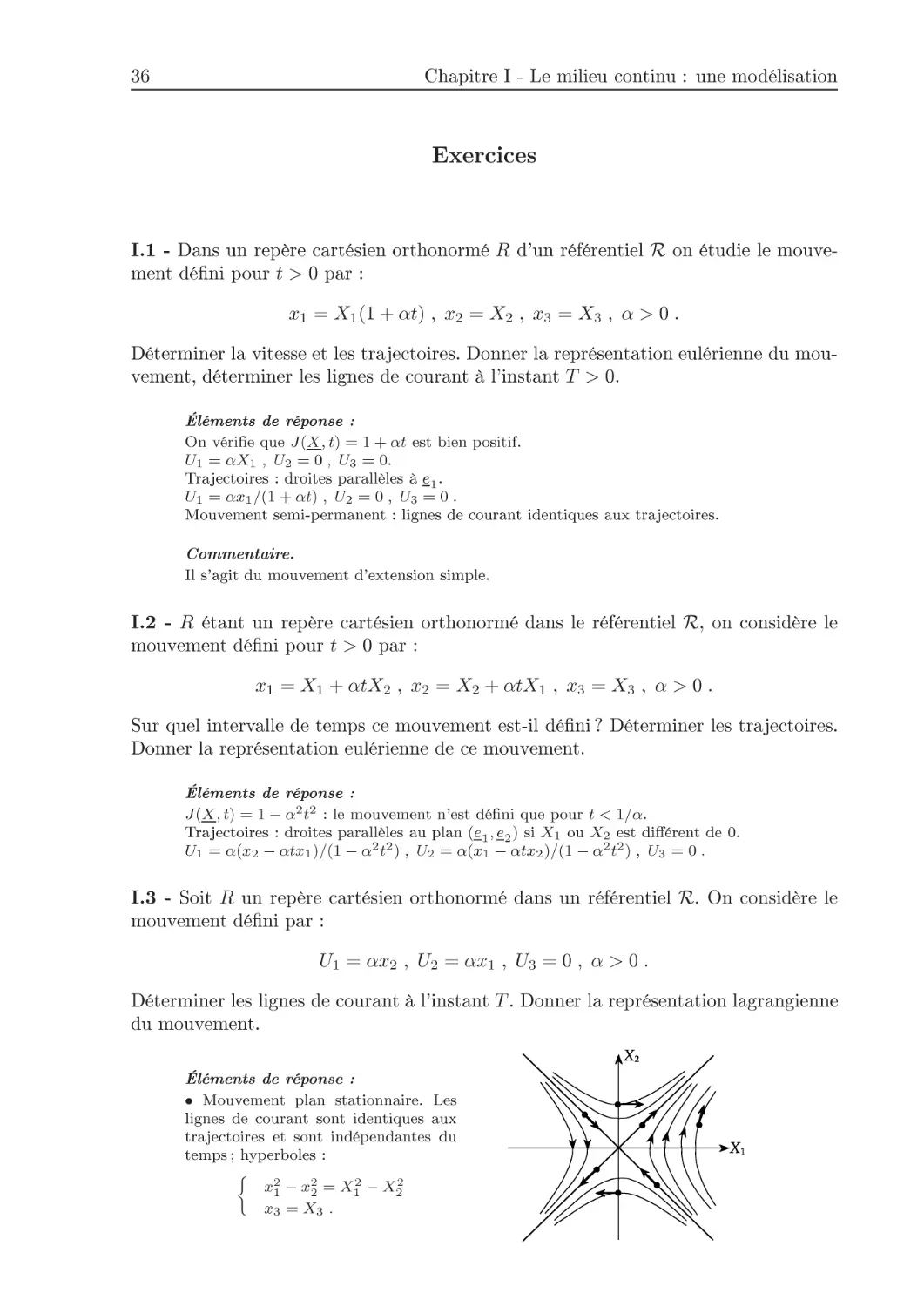
Figure 13 Visualisation en tunnel hydrodynamique par émission de traceurs colorés :
tourbillon marginal à l extrémité d une aile rectangulaire. (Document com-
muniqué par l ONERA)
34
Chapitre I Le milieu continu : une modélisation
Figure 14 Visualisation en tunnel hydrodynamique ; méthode du plan de lumière pour
la visualisation à l aide de bulles d air : écoulement à basse vitesse sur une
maquette du Concorde en con guration d atterrissage (coupe transversale
arrière). (Document communiqué par l ONERA)
Récapitulatif des formules essentielles
35
Récapitulatif des formules essentielles
• Lagrange
x = φ(X,t) (trajectoires)
X = ψ(x,t)=φ-1(x,t)
J(X,t)= D(x1,x2,x3)
D(X 1,X2,X3)
0 <J(X,t) < ∞
dΩt = J(X ,t)dΩ0
U(X,t)= ∂φ(X ,t)
∂t
• Euler
U = Ut(x,t)
trajectoires :
dx
dt = U t(x,t)
x|t=0 = X
lignes de courant à l instant t ;
dx1
U1
t (x,t) = dx2
U2
t (x,t) = dx3
U3
t (x,t)
36
Chapitre I - Le milieu continu : une modélisation
Exercices
I.1 - Dans un repère cartésien orthonormé R d un référentiel R on étudie le mouve-
ment dé ni pour t>0 par :
x1 =X1(1+αt),x
2=X2,x
3=X3,α>0.
Déterminer la vitesse et les trajectoires. Donner la représentation eulérienne du mou-
vement, déterminer les lignes de courant à l instant T>0.
Éléments de réponse :
On véri e que J(X ,t)=1+αt est bien positif.
U1 = αX1 ,U2 =0,U3 =0.
Tr a jectoires : droites parallèles à e1 .
U1 = αx1/(1 + αt) ,U2 =0,U3 =0.
Mouvement semi-permanent : lignes de courant identiques aux trajectoires.
Commentaire.
Il s agit du mouvement d extension simple.
I.2 - R étant un repère cartésien orthonormé dans le référentiel R,o
nc
o
n
sidèr
ele
mouvement dé ni pour t>0 par :
x1=X1+αtX2,x
2=X2+αtX1,x
3=X3,α>0.
Sur quel intervalle de temps ce mouvement est-il dé ni ? Déterminer les trajectoires.
Donner la représentation eulérienne de ce mouvement.
Éléments de réponse :
J(X ,t)=1- α2t2 :lemou
v
ementn
estdé ni que pour t<1/α.
Tr a jectoires : droites parallèles au plan (e1 ,e2) si X1 ou X2 est différent de 0.
U1 = α(x2 - αtx1)/(1 - α2t2) ,U2 = α(x1 - αtx2)/(1 - α2t2) ,U3 =0.
I.3 - Soit R un repère cartésien orthonormédansu
nréférentiel R.Onc
o
n
sidèr
ele
mouvement dé ni par :
U1=αx2,U2=αx1,U3=0,α>0.
Déterminer les lignes de courant à l instant T .Donner la représentation lagrangienne
du mouvement.
Éléments de réponse :
• Mouvement plan stationnaire. Les
lignes de courant sont identiques aux
trajectoires et sont indépendantes du
temps ; hyperboles :
x2
1-x2
2=X2
1 -X2
2
x3=X3.
Exercices
37
• Représentation lagrangienne.
Par intégration du système dx1 = αx2 dt, dx2 = αx1 dt, dx3 =0,a
v
e
cles conditions
initiales xi = Xi pour t =0,o
nobtie
nt:
x1 =X1chαt+X2 shαt
x2=X1shαt+X2chαt
x3=X3
(paramétrage en t des hyperbolesci-de
ssus).
I.4 - Houle trochoïdale . R étant un repère cartésien orthonormé dans le
référentiel R,onétudie le mouvement dé ni, à partir d une con guration de référence
abstraite, par la représentation lagrangienne :
x1 = a1 + R(a2)cos(ωt + λ(a1))
x2 = a2 - R(a2)sin(ωt + λ(a1))
x3=a3
a2<0.
Déterminer les fonctions R(a2) et λ(a1) pour que ces équations représentent un mou-
vement sans variationdev
olu
m
e
.Déte
r
min
er les trajectoires des particules dans le
référentiel R et interpréter les coordonnées lagrangiennes abstraites ai .Préciser
les conditions pour que le mouvement soit effectivement dé ni ∀(a1 ,a2 < 0,a3).Mon-
trer que ce mouvement est stationnaire dans le référentiel R∗ animé par rapport à
R d une vitesse de translation uniforme parallèle à e1 que l on déterminera. Montrer
que les lignes de courant dans R∗ sont dé nies par les équations lagrangiennes : a2 =
Constante = α2 ,a
3=Constante=α3.
Éléments de réponse :
• J(a1,a2,a3,t)=1-( dλ
da1 R(a2)+ dR
da2)sin(ωt+λ(a1))+ dλ
da1
dR
da2 R doit être indépendant
de t.
D où, k, α et R0 étant des constantes arbitraires :
λ= -ka1+α,R=R0exp(ka2).
(On fait α =0 par changement d origine des temps).
• La trajectoire de la particule de coordonnées abstraites a1 ,a2 ,a3 ,estlecercle :
(x1 -a1)2+(x2 -a2)2 = R2
0 exp(2ka2) ,x
3 = a3 qui est décrit avec l angle horaire (ωt-ka1).
a1 ,a2 ,a3 sont les coordonnées du centre du cercle trajectoire.
• J(a1,a2,a3,t)=1- k2R2
0 exp(2ka2) doit conserver un signe constant et demeurer ni sur
Da ,dé niicipara2 < 0 ;d où:k>0 et R0 < 1/k (on convientdechoisir R0 > 0).
• On considère R∗ animé, par rapport à R,delavitesse e1 ω/k ;onprend dans R∗ le repère
R∗ coïncidant avec R pour t =0.Lavite
sse U ∗ dans R∗ s écrit dans R∗ :
U∗
1 = -ωR0( exp(ka2)) sin(ωt - ka1) - ω/k
U∗
2 = -ωR0( exp(ka2)) cos(ωt - ka1)
U∗
3=0
tandis que x∗ = φ∗(a1 ,a2 ,a3 ,t) s écrit :
x∗
1=a1-ωt
k + R0( exp(ka2)) cos(ωt - ka1)
x∗
2 = a2 - R0( exp(ka2)) sin(ωt - ka1)
x∗
3=x3=X3=a3.
38
Chapitre I - Le milieu continu : une modélisation
Ces dernières équations montrent que (ka2) et (ωt- ka1) ne sont fonctions que de x∗
1etx∗
2.
On en déduit que la représentation eulérienne du mouvement par rapport à R∗ sera de la
forme U ∗ = U ∗(x∗), indépendante de t.
• À l instant T,(a2 = α2 ,a3 = α3) dé nissent dans R∗ la courbe paramétrée en a1 ,d équa-
tions
x∗
1=a1-ωt
k + R0( exp(ka2)) cos(ωT - ka1)
x∗
2 = a2 - R0( exp(ka2)) sin(ωT - ka1)
x∗
3=a3
et on véri e que U ∗(x∗) est tangente à cette courbe au point x∗ .
Commentaire.
Ces lignes de courant dans R∗ ,ide
ntiques aux trajectoires, sont des trochoïdes. Une telle
courbe est engendrée par un point géométrique P situé à la distance R0 exp(kα2) du centre
d un cercle de rayon 1/k qui roule sans glisser sous l horizontale d ordonnée à l origine α2 +1/k
(composition du mouvement par rapport à R et du mouvement d entraînement de R par
rapport à R∗ avec la vitesse U ∗
e = -e1 ω/k).
Chapitre II
Étude des déformations
du milieu continu
MOTS CLÉS
Tr a n s p ort convectif.
Tr a n sformation. Gradient de la transformation.
Tr a n sformation homogène tangente.
Tr a n sformation rigidi ante. Isométrie.
Dilatations. Déformations. Déplacement.
Compatibilité géométrique.
Tr ansformation in nitésimale.
39
Chapitre II Étude des déformations du milieu continu
41
En bref
Dans une représentation lagrangienne, la comparaison entre la con gu-
ration actuelle et la con guration initiale, sans aucune référenceàl histoire
intermédiaire du système considéré, introduit au plan géométrique deux
concepts essentiels : le transport et la déformation.
Le transport convectif,do
n
tl exemple le plus simple est relatif à la
particule ou point matériel, exprime la correspondance entre les positions
actuelle et initiale des éléments matériels. La déformation dégage, locale-
ment, en quoi la transformation subie par le système d une con guration
à l autre diffère d une isométrie directe :elle mesure le changement de
forme local (section 1).
L étude du cas particulier où le système subit une transformation
homogène,c
e
s
t
-
à
-dire identique en tout point, permet de se dégager
d abord du caractère local. La transformation est une application linéaire.
Les formules de transport d un point, d un vecteur, d une surface ou
d un volume matériels, font intervenir le tenseur euclidien associé à cette
application linéaire (section 2).
La déformation, qui se réfère à la métrique, introduit pour cela le ten-
seur des dilatations et le tenseur des déformations qui permettent d ex-
primer les variations de longueurs et les variations angulaires. On met en
évidence que la transformation du système se compose de deux contribu-
tions : la déformation pure qui est une affinité selon les trois directions
principales orthogonales de la déformation, et une rotation (section 3).
Le cas général où la transformation du système est quelconque fait ap-
pel à la notion de transformation homogène tangente ;c
elle
-
cie
st dé nie
par le tenseur gradient de la fonction vectorielle qui exprime le transport
convectif de la particule : c est le gradient de la transformation.L idée
directrice est que, localement, la transformation subie par l élément in ni-
tésimal est, en chaque point, quasi homogène : on dé nit, pour les éléments
in nitésimaux de longueur, de surface ou de volume, les mêmes concepts
qu en transformation homogène pour lesélém
e
nts nis, avec lesfo
r
m
ule
s
homologues (section 4).
Lorsque la transformation est in nitésimale les formules se simpli ent
par linéarisation (section 5).
42
Chapitre II Étude des déformations du milieu continu
Concrètes et mesurables, les déformations sont, pour le mécanicien, la
voie d accès à l analyse des structures et à l identi cation des caractéris-
tiques des matériaux (section 7).
Lesdéformations sont engendrées par des sollicitations extérieures mé-
caniques, thermiques, hygrométriques, par des évolutions chimiques et des
réorganisations structurelles, etc. Le problème de leur compatibilité géo-
métrique se pose alors : savoir si ces déformations sont compatibles avec la
continuité du milieu et avec les conditions éventuellement imposées sur les
déplacements au contour du système étudié. Lorsque les déformations im-
posées ne sont pas compatibles, elles induisent des efforts intérieurs qui,
s ils sont excessifs, peuvent entraîner des désordres, voire des ruptures
(section 6).
Chapitre II Étude des déformations du milieu continu
43
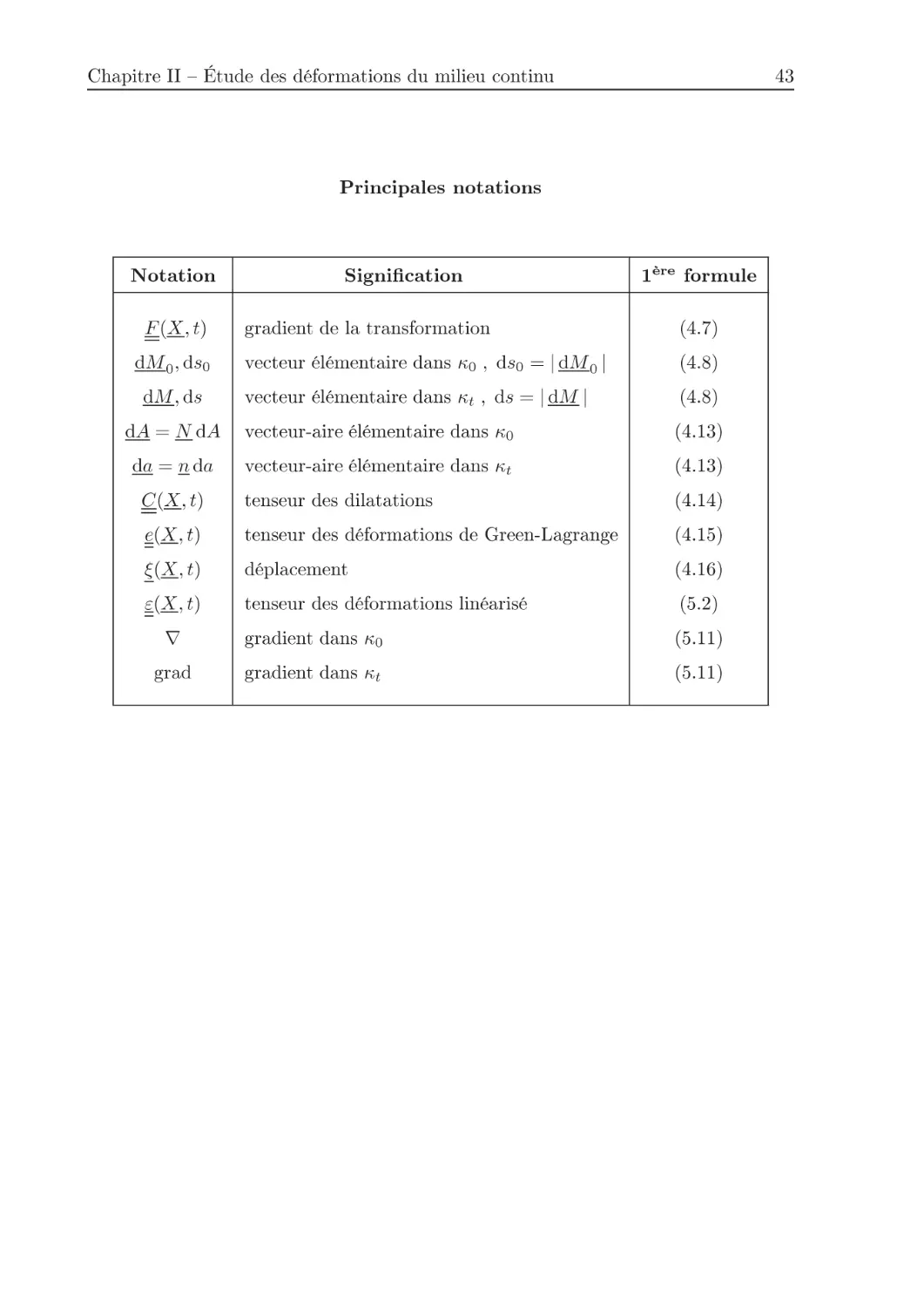
Principales notations
Notation
Signi cation
1ère formule
F (X ,t) gradient de la transformation
(4.7)
dM 0, ds0 vecteur élémentaire dans κ0 , ds0 = | dM 0 | (4.8)
dM,ds
vecteur élémentaire dans κt , ds = | dM |
(4.8)
dA = N dA vecteur-aire élémentaire dans κ0
(4.13)
da = n da vecteur-aire élémentaire dans κt
(4.13)
C(X,t) tenseur des dilatations
(4.14)
e(X ,t) tenseur des déformations de Green-Lagrange (4.15)
ξ(X ,t) déplacement
(4.16)
ε(X ,t) tenseur des déformations linéarisé
(5.2)
gradient dans κ0
(5.11)
grad gradient dans κt
(5.11)
44
Chapitre II Étude des déformations du milieu continu
1T
ransport,transformation, déformation .......... 45
2T
r
a
n
s
p
o
rt convectif en transformation homogène . . . . 46
2.1T
ransformationhomogène ................. 46
2.2V
ecteur matériel,transport convectif. . ......... 47
2.3T
ransport d un volume,dilatation volumique ...... 48
2.4T
ransport d une surfaceorientée ............. 50
3D
éformation en transformation homogène ........ 51
3.1T
enseur desdilatations. . ................. 51
3.2 Utilisation du tenseur des dilatations .
.
.
.
.
...... 53
3.3T
enseur desdéformationsdeGreen-Lagrange ...... 55
3.4D
écomposition polaire.
.
................. 57
4D
éformation d un milieu continu : cas général ...... 58
4.1T
ransformationhomogène tangente ............ 58
4.2F
ormulesdetransport ................... 60
4.3D
éformations ........................ 61
4.4D
éplacement ........................ 61
4.5 Décomposition polaire et transformation rigidi ante .
.62
4.6O
bjectivité .
........................ 63
5T
ransformation in nitésimale ................ 63
5.1D
é
nition .......................... 63
5.2T
enseur desdéformations linéarisé ............ 64
5.3 Gradient d un champ de tenseurs sur la con guration
actuelle ........................... 65
6C
ompatibilité géométrique d un champ de déformation
linéarisée ............................. 66
6.1P
ositionduproblème .................... 66
6.2 Conditions de compatibilité .
.
.
............. 66
6.3C
o
mmentaires ....................... 69
6.4A
pplication.
........................ 70
7R
emarques nales.
...................... 71
7.1T
ransformationetdéformation .
............. 71
7.2 Utilisation d un paramétrage lagrangien relatif à une
con gurationabstraite ................... 72
7.3É
t
ude pratique desdéformations ............. 72
Récapitulatifdes formules essentielles ............. 76
Exercices .............................. 79
1 Transport, transformation, déformation
45
Étude des déformations
du milieu continu
1T
r
a
n
s
p
o
rt, transformation, déformation
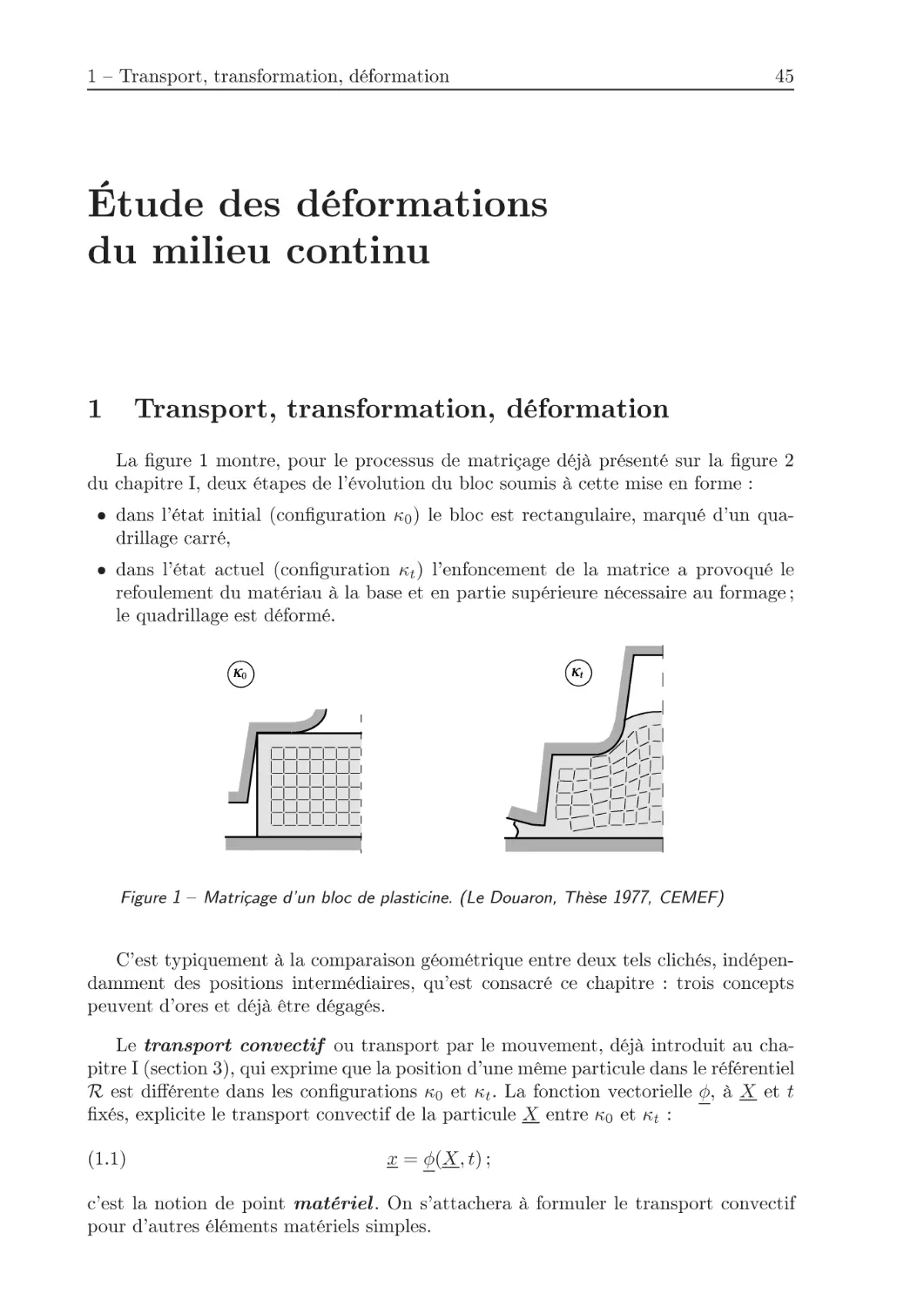
La gure 1 montre, pour le processus de matriçage déjà présenté sur la gure 2
du chapitre I, deux étapes de l évolution du bloc soumis à cette mise en forme :
• dans l état initial (con guration κ0)lebloce
str
ectangulaire, marqué d un qua-
drillage carré,
• dans l état actuel (con guration κt) l enfoncement de la matrice a provoqué le
refoulement du matériau à la base et en partie supérieure nécessaire au formage ;
le quadrillage est déformé.
Figure 1 Matriçage d un bloc de plasticine. (Le Douaron, Thèse 1977, CEMEF)
C est typiquement à la comparaison géométrique entre deux tels clichés, indépen-
damment des positions intermédiaires, qu est consacré ce chapitre : trois concepts
peuvent d ores et déjà être dégagés.
Le transport convectif ou transport par le mouvement, déjà introduit au cha-
pitre I (section 3), qui exprime que la positiond une même particule dans le référentiel
R est différente dans les con gurations κ0 et κt.Lafo
n
ctio
nv
ectorielle φ,àX et t
xés, explicite le transport convectif de la particule X entre κ0 et κt :
x = φ(X,t);
(1.1)
c est la notion de point matériel .Ons
attachera à formuler le transport convectif
pour d autres éléments matériels simples.
46
Chapitre II Étude des déformations du milieu continu
La transformation subie par le système étudié (c est-à-dire le bloc), ou par une
partie de celui-ci, entre κ0 et κt,estdé nie du point de vue géométrique par la fonction
φ à t xé, X parcourant le volume Ω0 occupé par le système S dans κ0.
La déformation entre κ0 et κt retient, dans la transformation, le changement de
forme c est-à-dire en quoi la transformation géométrique subie par le système entre
κ0 et κt diffère d une isométrie directe.
Il est essentiel de retenir que c est bien de la comparaison géométrique entre deux
clichés, l un choisi comme référence κ0, l autre choisi comme transformé κt,qu il s agit
sans aucunement faire appel à la connaissance du processus intermédiaire. L argument
t dans (1.1) ou dans κt est un paramètre et non une variable.
On a choisi, pour les formules apparaissant dans cet ouvrage, de mettre en valeur
l expression intrinsèque faisant intervenir les êtres vectoriels, tensoriels, ... eu-
clidiens (on rappelle que les notations correspondantes sont dé nies dans l annexe
I, section 5).
2T
r
a
n
s
p
o
rt convectif en transformation homogène
2.1 Transformation homogène
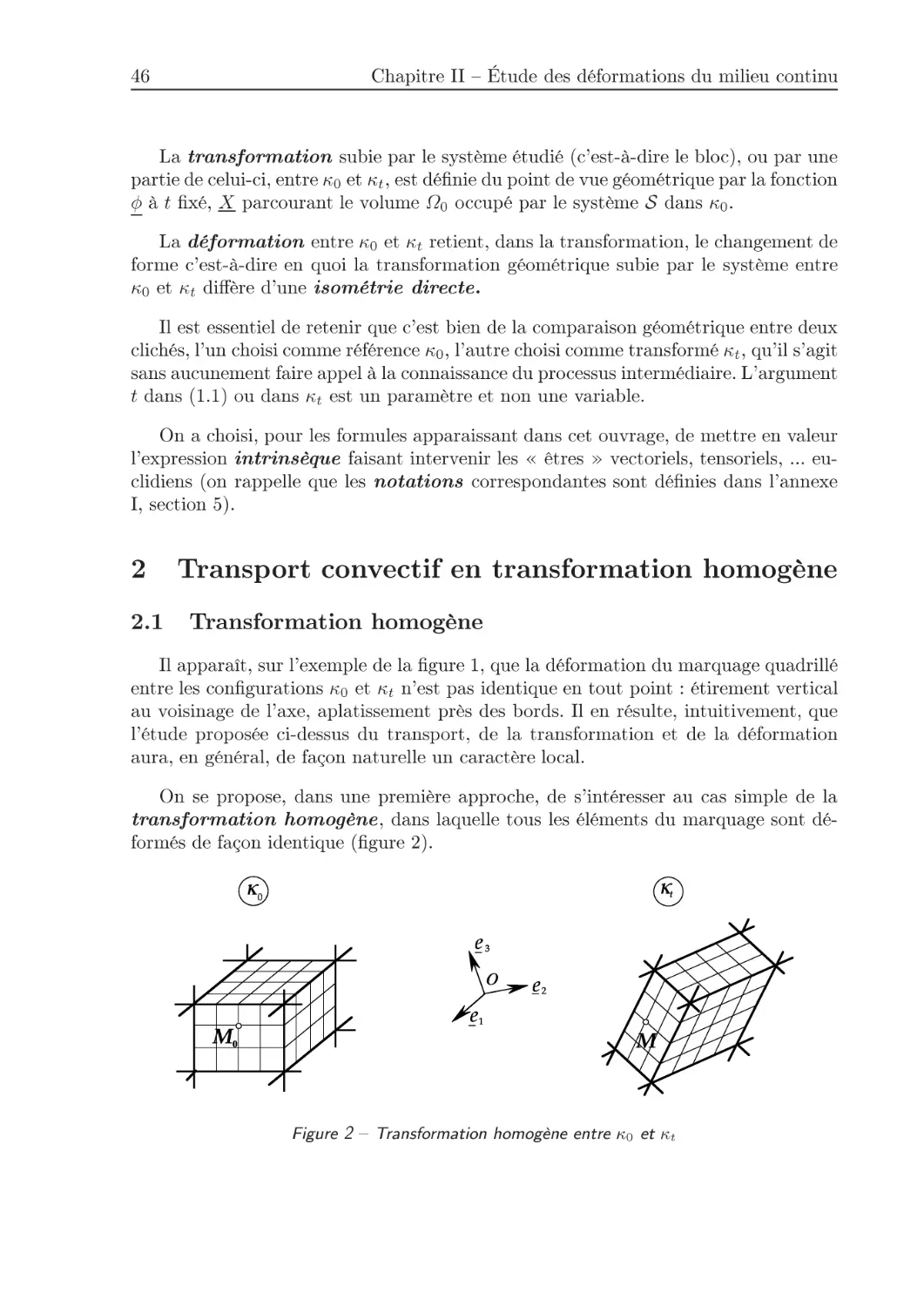
Il apparaît, sur l exemple de la gure 1, que la déformation du marquage quadrillé
entre les con gurations κ0 et κt n est pas identique en tout point : étirement vertical
au voisinage de l axe, aplatissement près des bords. Il en résulte, intuitivement, que
l étude proposée ci-dessus du transport, delatr
a
n
sfo
rmation et de la déformation
aura, en général, de façon naturelle un caractère local.
On se propose, dans une première approche, de s intéresser au cas simple de la
transformation homogène ,danslaquelle tous les éléments du marquage sont dé-
formés de façon identique ( gure 2).
Figure 2 Transformation homogène entre κ0 et κt
2 Transport convectif en transformation homogène
47
A n de formuler mathématiquement cette notion, on choisit un repère R quel-
conque (O, e1,e2,e3) du référentiel R dans lequel sont observées les con gurations κ0
et κt.Lesnotations M 0 ,M,Xi,X,xi ,x,ayantlesmêmes signi cations qu au chapitre
I( 2.3)latransformation homogène entre κ0 et κt est dé nie par le fait que φ dans
(1.1) s explicite comme une correspondance affine entre les coordonnées X j et xi :
xi =Fij(t)Xj +ci(t) i=1,2,3(1) .
(2.1)
Considérant alors l application linéaire de l espace euclidien (référentiel R)s
u
r
lui-même dé nie par les F ij(t) dans le repère R,letenseur euclidien du second ordre
qui lui est associé s écrit :
F(t)=F ij(t)ei ⊗ ej
(2.2)
et la formule (2.1) prend la forme intrinsèque
x = F(t).X+c(t)
(2.3)
où c(t) désigne le vecteur ci(t) ei .
La fonction φ ainsi dé nie par (2.3) véri e évidemment les conditions de continuité
et différentiabilité par rapport à X souhaitées au chapitre I ( 3.2). Elle doit de plus
satisfaire la condition :
0 <J(X ,t)= D(x1 ,x2,x3)
D(X1,X2,X3) < ∞ .
Ici il apparaît que :
J(X ,t)=detF (t)
(2.4)
d ou la condition
0<detF(t)<∞
(2.5)
qui assure, en fait, la bijectivité de l application φ.
2.2 Vecteur matériel, transport convectif
On considère ( gure 3) l ensemble des particules occupant dans la con guration
de référence un segment M0M 0.Enr
ais
o
nduc
aractère affine de la relation (2.3),
ces particules occupent à l instant t,unsegmentMM .Onpeutdoncparler, au sens
introduit au paragraphe 3.2 du chapitre I, de vecteur matériel :levecteur M0M 0,
dans son transport par le mouvement entre les con gurations κ0 et κt,de
m
eure un
vecteur.
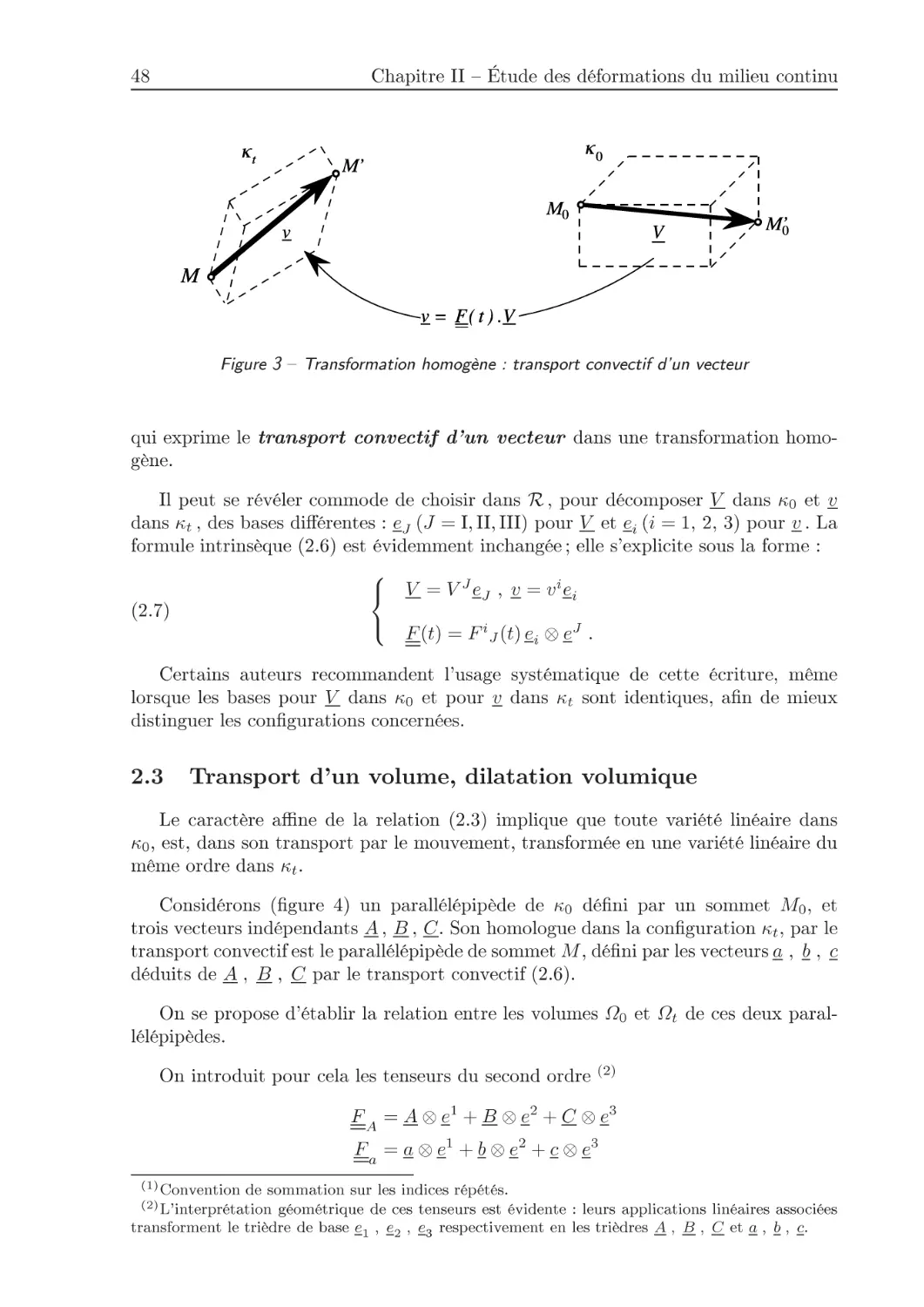
En désignant par V un vecteur M0M 0 de κ0,parv le vecteur correspondant MM
de κt,letransport par le mouvement reliant v à V s écrit à partir de (2.3) :
v = F(t).V
(2.6)
48
Chapitre II Étude des déformations du milieu continu
Figure 3 Transformation homogène : transport convectif d un vecteur
qui exprime le transport convectif d un vecteur dans une transformation homo-
gène.
Il peut se révéler commode de choisir dans R ,po
u
rdécomposer V dans κ0 et v
dans κt ,desbasesdifférentes : eJ (J = I, II, III) pour V et ei (i =1, 2, 3) pour v .La
formule intrinsèque (2.6) est évidemment inchangée ; elle s explicite sous la forme :
V =VJeJ ,v=viei
F(t)=FiJ(t)ei ⊗ eJ .
(2.7)
Certains auteurs recommandent l usage systématique de cette écriture, même
lorsque les bases pour V dans κ0 et pour v dans κt sont identiques, a n de mieux
distinguer les con gurations concernées.
2.3 Transport d un volume, dilatation volumique
Le caractère affine de la relation (2.3) implique que toute variété linéaire dans
κ0,est,danssontransport par le mouvement, transformée en une variété linéaire du
même ordre dans κt.
Considérons ( gure 4) un parallélépipède de κ0 dé ni par un sommet M0,e
t
trois vecteurs indépendants A ,B,C.Sonhomologue dans la con guration κt,parle
transport convectif est le parallélépipède de sommet M ,dé ni par les vecteurs a ,b,c
déduits de A ,B,Cpar le transport convectif (2.6).
On se propose d établir la relation entre les volumes Ω0 et Ωt de ces deux paral-
lélépipèdes.
On introduit pour cela les tenseurs du second ordre (2)
FA=A⊗e1+B⊗e2+C⊗e3
Fa =a⊗e1+b⊗e2+c⊗e3
(1)Convention de sommation sur les indices répétés.
(2)L interprétation géométrique de ces tenseurs est évidente : leurs applications linéaires associées
transforment le trièdre de base e1 ,e
2,e
3 respectivement en les trièdres A ,B,Cet a ,b,c
.
2 Transport convectif en transformation homogène
49
Figure 4 Transformation homogène : transport convectif d un volume
qui, compte tenu de (2.6), sont liés par la relation :
Fa =F(t).FA .
(2.8)On en déduit que :
detFa =detF(t)×detFA .
(2.9)Il est alors commode de choisir pour e1,e2,e3 une base orthonormée. Dans ce cas
on reconnaît en det F a et det F A les produits mixtes (a,b,c) et (A,B,C),égaux aux
volumesalgébriques Ωt et Ω0 des parallélépipèdes dans κt et κ0(3)
detFa =Ωt
detFA=Ω0.
(2.10)
On obtient ainsi, en regroupant (2.9) et (2.10) la relation entrelesdeux volumes
homologues par le transport convectif dans une transformation homogène :
Ωt =Ω0detF(t).
(2.11)
Le résultat ainsi établi s étend évidemment au cas d un volume Ω0 de forme
quelconque dans κ0 puisque la transformation est homogène.
J(t)=detF (t) est la dilatation volumique dans la transformation homogène
entre les con gurations initiale et actuelle.(4)(5)
On retrouve bien l interprétation donnée au chapitre I ( 3.2) de la condition (2.5)
imposée à J(X ,t)=detF (t) :conserv
ation de l orientation du volume entre κ0 et κt
et dilatation volumique ni nulle, ni in nie.
(3)Si la base n est pas orthonormée ces deux déterminants sont proportionnels à Ω0 et Ωt .
(4)Bien noter que la dilatation volumique désigne le rapport volume actuel/volume initial et
non le rapport variation de volume/volume initial .
(5)Si F (t) est décomposé selon (2.7), le calcul de detF (t) nécessite évidemment d exprimer l une
des bases {ei} ou {eJ } en fonction de l autre : ei = αK
i eK .Onaalors : detF (t)=det[αK
i FiJ(t)].
On peut remarquer que si les deux bases sont orthonormées et de même orientation on a toujours
detF (t)=det[F iJ (t)] .Cerésultatestvalable defaçon générale si {ei} et {eJ } se correspondent par
une rotation.L utilisation de la formule (3.5) du paragraphe 3.1 pourra aussi se révéler commode
dans certains cas.
50
Chapitre II Étude des déformations du milieu continu
2.4 Transport d une surface orientée
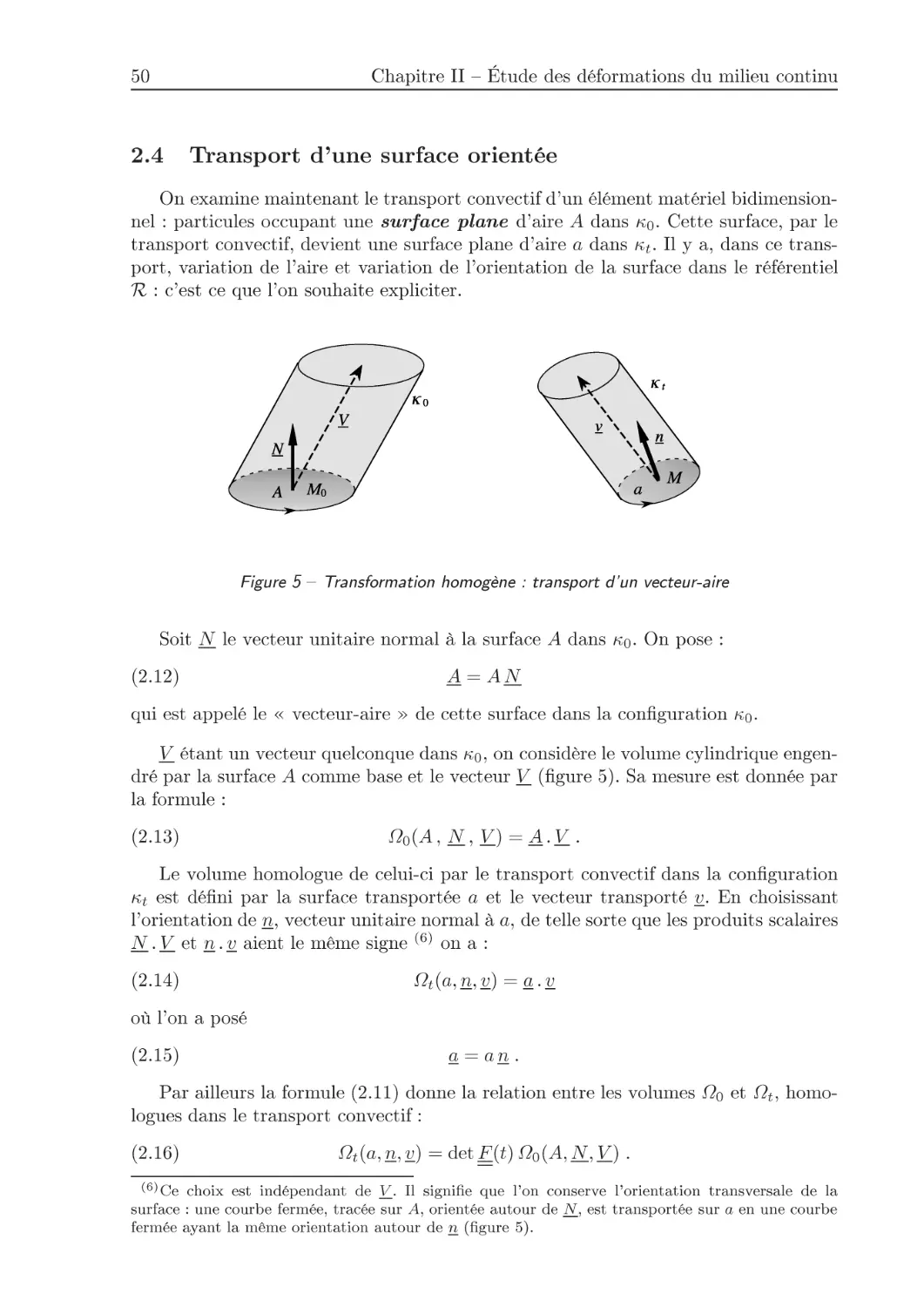
On examine maintenant le transport convectif d un élément matériel bidimension-
nel : particules occupant une surface plane d aire A dans κ0.Cette surface, par le
transport convectif, devient une surface plane d aire a dans κt.Ilya,danscetrans-
port, variation de l aire et variation de l orientation de la surface dans le référentiel
R :c estcequel on souhaite expliciter.
Figure 5 Transformation homogène : transport d un vecteur-aire
Soit N le vecteur unitaire normal à la surface A dans κ0.Onpose:
A=AN
(2.12)
qui est appelé le vecteur-aire de cette surface dans la con guration κ0.
V étant un vecteur quelconque dans κ0,onconsidèrele volume cylindrique engen-
dré par la surface A comme base et le vecteur V ( gure 5). Sa mesure est donnée par
la formule :
Ω0(A, N ,V)=A .V .
(2.13)
Le volume homologue de celui-ci par le transport convectif dans la con guration
κt est dé ni par la surface transportée a et le vecteur transporté v.Enchoisissant
l orientation de n,vecteur unitaire normal à a,detelle sorte que les produits scalaires
N.Vetn.vaientlemêmesigne(6)ona:
Ωt(a, n,v)=a .v
(2.14)
où l on a posé
a=an.
(2.15)
Parailleurs la formule (2.11) donne la relation entre les volumes Ω0 et Ωt,homo-
logues dans le transport convectif :
Ωt(a, n,v)=detF (t) Ω0(A, N ,V) .
(2.16)
(6)Ce choix est indépendant de V .Ilsigni e que l on conserve l orientation transversale de la
surface : une courbe fermée, tracée sur A,orientéeautourdeN ,esttransportée sur a en une courbe
fermée ayant lamêmeorientation autour de n ( gure 5).
3 Déformation en transformation homogène
51
En regroupant alors les formules (2.6), (2.13), (2.14) et (2.16), il vient :
∀V ,a.F(t) .V =(detF (t)) A .V
(2.17)
d où :
a =(detF (t)) tF -1(t) .A
(2.18)
qui exprime le transport d une surface orientée dans une transformation homogène.
3D
é
f
o
r
m
a
t
i
on en transformation homogène
3.1 Tenseur des dilatations
On se propose d étudier les déformationssubies par la géométrie du système dans
la transformation homogène entre la con guration κ0 et la con guration κt.Intuiti-
vement la notion de déformation s oppose à celle d isométrie, et plus précisément
d isométrie directe (produit dans R3 de translations et de rotations) : il n y a pas
de déformation du système dans la transformation de κ0 et κt si les distances entre
les positions géométriques des points matériels dans ces deux con gurations sont in-
variantes et si l orientation est conservée.
Cette idée sera exploitée dans la suite,n
otamment au paragraphe 3.4 où l on
verra par la décomposition polaire , qu un domaine entourant M0 dans κ0 subit,
dans son transport convectif dans κt,o
utr
elatr
a
n
slation amenant M0 en M ,de
u
x
transformations de natures différentes : une déformation pure et une rotation.
A n de mettre en évidence l aspect déformation du système entre κ0 et κt,
qui se réfère à la métrique, on va s intéresser à l évolution du produit scalaire de deux
vecteurs matériels quelconques considérés dans les con gurations κ0 et κt .
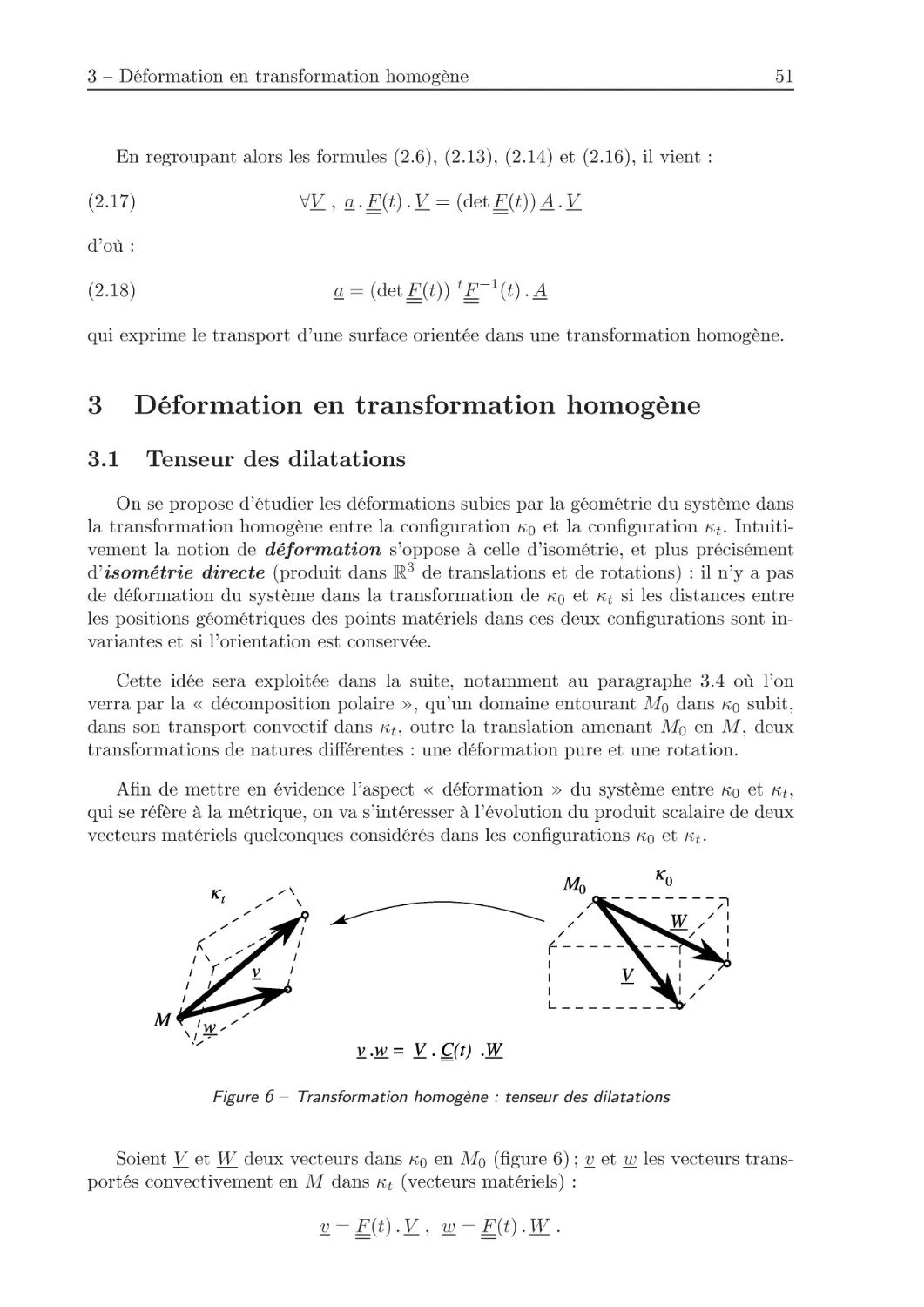
Figure 6 Transformation homogène : tenseur des dilatations
Soient V et W deux vecteurs dans κ0 en M0 ( gure 6) ; v et w les vecteurs trans-
portés convectivement en M dans κt (vecteurs matériels) :
v = F(t).V ,w= F(t).W .
52
Chapitre II Étude des déformations du milieu continu
Le produit scalaire des vecteurs v et w s écrit :
v .w=(F(t).V).(F(t).W),
soit (cf. annexe I, 5.7) :
v .w=(V . tF(t)).(F(t).W)= V .(tF(t).F(t)).W .
(3.1)Cette formule met en évidence le tenseur du deuxième ordre
C(t)=tF (t) .F(t)
(3.2)
qui est appelé tenseur des dilatations entre les con gurations κ0 et κt ,o
ue
n
-
core tenseur de Cauchy (7).Ilpermetd exprimerleproduit scalaire des vecteurs
transportés en fonction des vecteurs initiaux :
v.w=V.C(t).W.
(3.3)Le tenseur C(t) apparaît ainsi sur κ0,pourleproduit scalaire des vecteurs trans-
portés dans κt,comme l homologue du tenseur métrique 1l qui permet, lui, d exprimer
le produit scalaire des vecteurs initiaux (cf. annexe I, (5.50)) :
V.W=V.1l.W.
(3.4)C(t) est symétrique, comme on le véri e sur (3.2) : la forme bilinéaire (3.3) est
symétrique. La forme quadratique qui lui est associée est dé nie positive puisque φ
donnée par (2.3) est bijective :
∀V ,V.C(t).V =|v|2 ≥ 0;V .C(t).V =0 ⇔ V =0.
On a de plus, à partir de (3.2) et compte tenu de (2.5) qui assure la bijectivité de
(2.3) :
0 < detC(t)=(detF(t))2 < ∞ .
(3.5)Si la base e1 ,e
2,e
3 est orthonormée (cf. annexe I, 5.9) on a :
C(t)=Cij(t) ei ⊗ ej
avec
Cij(t)=Fki(t)Fkj(t) .
En base quelconque, la représentation la plus naturelle de C(t) àpartirdelaformulede
dé nition (3.3) est la représentation deux fois covariante :
C(t)=Cij(t) ei ⊗ ej ;
en explicitant la formule (3.2) avec la représentation naturelle de F (t) donnée par (2.2) il
vient :
Cijei⊗ej=(Fkiei⊗ek).(F je ⊗ej)
d où
Cij =(ek .e )F kiF j
Cij =gk FkiF j .
Si,comme évoqué au paragraphe 2.2, on utilise des bases différentes dans κ0 et κt la formule
(3.2) s explicite en :
C(t)=(FkI eI ⊗ek).(F J e ⊗eJ)
soit encore C(t)=CIJ(t) eI ⊗ eJ
avec CIJ =(ek .e )FkIF J .
(7)A. Cauchy (1789-1857).
3 Déformation en transformation homogène
53
3.2 Utilisation du tenseur des dilatations
Le tenseur des dilatations recèle toutes les informations concernant la différence
de métrique entre κ0 et κt.
Dilatation dans une direction
Il s agit de comparer la longueur d un vecteur V dans la con guration initiale κ0
et la longueur de son transporté dans la con guration κt,c
o
mme cela est courant
dans la pratique expérimentale (cf. gure12).
En faisant dans (3.3), V = W ,onobtient:
|v|2 = V .C(t).V .
On appelle dilatation dans la direction V le rapport :
λ(V )= |v|
|V | = (V .C(t) .V)1/2
|V| .
(3.6)
λ(V ) représente le rapport de la longueur du vecteur transporté v à celle du vecteur
V dans la con guration initiale κ0,(lasigni cation donnée ici au mot dilatation
est bien cohérente avec celle du paragraphe 2.3). λ(V ) est strictement positif et ni.
L allongement unitaire dans la direction V est dé ni par :
δ(V)=(|v|-|V|)/|V|=λ(V)-1.
(3.7)
Àn
ote
rqu
esiV est dirigé selon le vecteur unitaire e1,d
une base quelconque
ona:
λ(V )= C11 .
Glissement dans un couple de directions orthogonales
La variation de la métrique induit évidemment des variations angulaires. On s in-
téresse en particulier à la variation de l angle de deux vecteurs matériels initialement
orthogonaux (cf. gure 14 pour une transformation quelconque).
V et W étant deux vecteurs dans κ0,orthogonaux entre eux en M0 ( gure 7), on
dé nit le glissement θ de ce couple de directions orthogonales dans la transformation
entre κ0 et κt comme l opposé de la variation de l angle qu elles forment :
θ = |(V ,W)|-|(v,w)| , |(v,w)| = π/2 - θ.
(3.8)
On a alors par (3.3) :
sinθ=
V .C(t) .W
(V .C(t) .V)1/2(W .C(t) .W)1/2 .
(3.9)
Cette formule peut avantageusement être écrite en composantes en choisissant
une base dont les vecteurs unitaires e1 et e2 sont dirigés selon V et W orthogonaux.
54
Chapitre II Étude des déformations du milieu continu
Figure 7 Transformation homogène : glissement θ dans κt,po
u
ru
nc
o
uple dedir
ec-
tions orthogonales dans κ0
Il vient :
sinθ= C12
√C11C22 .
(3.10)
Directions principales, dilatations principales
Les directions principales de C(t),tenseureuclidien symétrique réel, sont dé nies
comme indiqué dans l annexe I ( 5.10). Ce sont les directions propres de l application
linéaire associée à C(t).Ils agit donc de trois directions orthogonales entre elles dans
la con guration κ0 .
En choisissant alors une base orthonormée e1 ,e
2,e
3 dirigée selon les direc-
tions principales et en désignant par Ci(i =1, 2, 3) les valeurs principales de C(t),
on obtient l expression simple (toutes les représentations de C(t) coïncident) :
C(t)=C1e1⊗e1+C2e2⊗e2+C3e3⊗e3;
(3.11)
dans cette base la matrice ˜
C(t) de C(t) est diagonale (8).
Les valeurs principales de C(t) sont toutes trois strictement positives car la forme
quadratique V .C(t) .V = |v|2 est dé nie positive. On convient de poser :
Ci=λ2
i ,λi>0(
i=1,2,3)
(3.12)
où l on voit par (3.6) que :
λi =λ(ei),
c est-à-dire que λi représente la dilatation dans la direction principale ei.Pourcette
raison les λi sont appelées dilatations principales .
(8)La méthode générale de détermination des directions principales consiste à rechercher les di-
rections propres de C(t) sur une représentation mixte, par exemple contravariante-covariante. En
pratique, il sera souvent plus avantageux de choisir une base orthonormée quelconque, (dans laquelle
toutes les représentations coïncident), et de chercher à diagonaliser ˜
C (t).
3 Déformation en transformation homogène
55
En appliquant la formule (3.10) aux directions principales prises deux à deux on
met en évidence leur propriété géométrique essentielle. En effet, en conséquence de
la diagonalisation de ˜
C (t) manifestée par (3.11), on trouve que pour tout couple
de directions principales de C (t) on a : sin θ =0.Autr
e
m
e
ntdit, il n y a pas de
glissement dans le transport convectif entre κ0 et κt pour les directions principales
de C (t) .Deplu
s
,c
o
mpte tenu de la positivité de det F (t) ,letrièdre trirectangle
des directions transportées dans κt a même orientation que le trièdre initial des
directions principales dans κ0 .
Réciproquement, tout trièdre de directions orthogonales dans κ0 qui demeure
orthogonal (et de même orientation) dans le transport convectif entre κ0 et κt est un
trièdre de directions principales pour C (t).Eneffet,e
nchoisissant une base ortho-
normée dans κ0 selon les directions considérées, on trouve par (3.10) que la matrice
˜
C (t) dans cette base est diagonale.
La propriété est donc caractéristique des directions principales. Elle fournit un
moyen commode pour leur détermination expérimentale ( gure 14) ou géométrique.
Les directions principales de C(t) dans la con guration κ0
sont transportées convectivement dans κt selon des directions
orthogonales.
On a évidemment :
det C(t)=λ2
1λ2
2λ3
3,
d où, en application de (2.5) et (3.5), le résultat
det F (t)=λ1 λ2 λ3
qui est immédiat géométriquement si l on considère le transport convectif du cube (e1 ,e2 ,e3)
et la formule (2.11).
3.3 Tenseur des déformations de Green-Lagrange
Dé nition
Les formules (3.6) et (3.4) mettent en évidence la parenté existant entre les ten-
seurs C(t) et 1l pour l expression des produits scalaires des vecteurs transportés et
initiaux. Aussi, de même que l on a introduit en (3.7), à partir de la dilatation dans
une direction, l allongement unitaire dans cette direction, on compare maintenant le
produit scalaire v .w de (3.1) à sa valeur dans la con guration de référence, en formant
la différence :
v .w-V .W= V .(tF(t).F(t)-1l).W.
On dé nit alors un nouveau tenseur symétrique,notée(t),par:
e(t)= 1
2(tF(t).F(t) - 1l) .
(3.13)
56
Chapitre II Étude des déformations du milieu continu
Ce tenseur est appelé : tenseur des déformations de Green-Lagrange (9) et
l on retiendra la formule ( gure 8) :
v.w-V.W=2V.e(t).W.
(3.14)
Figure 8 Te n s e u r d es déformations de Green-Lagrange
Propriétés
Le tenseur des déformations de Green-Lagrange a évidemment mêmes directions
principales que C(t).Lesv
aleu
rsprincipales ei sont appelées déformations princi-
pales et sont reliées de façon évidente à celles de C(t) :
ei=1
2 (λ2
i -1).
Les formules (3.6) à (3.10) donnant la dilatation, l allongement unitaire et le glissement
s expriment en fonction de e(t) en se référant à la dé nition (3.13). On obtient notamment,
àpartirde(3.10) :
sinθ=
2 e12
(1+2e11)(1+2e22).
On prendra garde au fait que l allongement unitaire dé ni par (3.7) n est pas relié linéairement
àe(t)!
Il est commode, pour certaines applications, de connaître l expression de det F (t) en fonction
des invariants (annexe I, 5.7), notés ici I i ,dee :
I 1=tre,I 2=1
2tr(e.e)=1
2tre2,I 3=1
3 tr(e .e.e)= 1
3tre3;
ona:
det C(t)=( det F(t))2 = λ2
1λ2
2λ2
3 =1+2I 1 +2(I 1)2 - 4I 2 + 4
3(I 1)3 - 8 I 1I 2 +8I 3 ;
de même :
λ2
1λ2
2+λ2
2λ2
3+λ2
3λ2
1 =3+4I 1 +2(I 1)2 - 4I 2
et:
λ2
1+λ2
2+λ2
3 =3+2I 1 .
(9)G. Green (1793-1841).
3 Déformation en transformation homogène
57
Te n s e u r d e G reen-Lagrange et transformation rigidi ante
Dans une transformation rigidi ante entre κ0 et κt,isométriedirecte, on a :
∀V,∀W,v.w=V.W
d où, pour le tenseur des dilatations
C(t)=tF (t) .F(t)=1l
(l application linéaire associée à F (t) est une rotation).
Le tenseur des déformations de Green-Lagrange est alors nul :
e(t)=0.
(3.15)
C est la raison même de l introduction de ce tenseur car il facilite notamment l écri-
ture linéarisée des formules pour les petites déformations ( e 1):cf.parexemple
au chapitre VII (section 5) la linéarisation de la loi de comportement thermoélastique.
On peut, par ailleurs, examiner le problème inverse de la proposition précédente
pour savoir si la propriété :
∀M0 ∈ Ω0 ,e(t)=0
(3.16)
implique que le système subit entre κ0 et κt une transformation rigidi ante, est vraie.
La démonstration n en est pas immédiate car il n est pas acquis, a priori, que (3.16)
implique l homogénéité de la transformation. On se reportera à ce propos aux para-
graphes 4.5, 6.3 et 7.1.
3.4 Décomposition polaire
On considère ( gure 9) les directions principales de C(t) dans κ0 et les directions homologues
de celles-ci par le transport convectif dans κt .Co
mme on l a dit ( 3.2) les orientations
des trièdres trirectangles ainsi obtenus dans les deux con gurations sont identiques en con-
séquence de la positivité de det F (t).
Soit alors la rotation de l espace euclidien amenant en coïncidence les directions du trièdre
dans la con guration κ0 sur celles du trièdre dans la con guration κt.Ondésigne par R(t)
le tenseur associé. On pose :
F (t)=R(t) .S(t)
(3.17)
qui dé nit le tenseur S(t) :
S(t)=R-1(t) .F(t) .
(3.18)
Pour étudier l application linéaire associée à S(t),o
nc
o
n
sidèr
eun vecteur V de κ0 dirigé
suivant une direction principale de C(t) et on forme :
S(t) .V = R-1(t) .F(t) .V ;
on voit que :
• le vecteur F (t) .V dans κt est dirigé selon la direction déduite dans κt de la direction
principale initiale dans κ0 par le transport convectif
58
Chapitre II Étude des déformations du milieu continu
Figure 9 Directions principales de C(t) dans κ0 et directions homologues par le trans-
port convectif dans κt
• en lui appliquant la rotation R-1(t) ,inversedecelle du trièdre des directions principales
dans le transport convectif, on obtient le vecteur R-1(t) F (t) .V qui est dirigé comme le
vecteur initial V et dont la longueur est |F(t).V|= λ(V)|V |.
Autrement dit :
S(t).V =λ(V)V ,λ(V)>0.
(3.19)
Les directions principales de C(t) sont directions propres pour l application linéaire
associée à S(t) et les valeurs propres correspondantes sont positives.
On a ainsi mis en évidence la décomposition polaire de F (t) exprimée par la formule (3.17) :
la transformation du système est constituée d une rotation composée avec une application
linéaire admettant les directions principales de C(t) pour directions propres avec des valeurs
propres positives. Cette dernière s appelle la déformation pure du système.
Dans la base orthonormée des directions principales de C(t) ,S(t) s écrit d après (3.19) :
S(t)=λ1e1⊗e1+λ2e2⊗e2+λ3e3⊗e3 .
Le tenseur S(t) est symétrique et l on a :
C(t)=tF (t) .F(t)=S(t) .S(t)=(S(t))2 .
(3.20)
La décomposition polaire peut aussi se faire dans l ordre inverse sous la forme :
F (t)=S (t) .R(t)
et l on trouve que S (t) est lié à S(t) par :
S (t)=R(t) .S(t) .R-1(t) .
Cette décomposition est plus particulièrement rattachée à la con guration κt et à d autres
tenseurs de déformation (tenseur d Almansi,...).
4D
éformation d un milieu continu : cas général
4.1 Transformation homogène tangente
On se propose maintenant de reprendre l étude du transport et des déformations
dans le cas général où le milieu continu subit une transformation quelconque entre
4 Déformation d un milieu continu : cas général
59
κ0 et κt.Lafonctionvectorielle φ dans la formule :
x = φ(X,t)
(4.1)
est donc supposée quelconque sous les conditions de continuité et continue différen-
tiabilité imposées au chapitre I ( 3.2) ; en particulier on a :
0 <J(X,t)= D (x1,x2,x3)
D (X1,X2,X3) < ∞ .
(4.2)
Le principe fondamental sur lequel s appuie toute cette étude consiste à remplacer
localement ,enchaquepointM0 dans κ0,latransformation par une transformation
homogène, fonction de M0,quiluisoittangente .Enappliquant à cette dernière les
résultats des sections 2 et 3 ci-dessus on obtient les formules dé nissant le transport
et les déformations entre κ0 et κt pour la transformation quelconque au point M0.
C est ce que représente symboliquement la gure 10.
Figure 10 Transformation homogène tangente en M0
Les hypothèses de continue différentiabilité sur φ dans (4.1) permettent d écrire,
àpartirdupointM0 et pour un point courant M 0 dans κ0,lesformules (i =1, 2, 3) :
x i = (∂φi(X,t)
∂Xj X j)+(xi - ∂φi(X,t)
∂Xj Xj) + |M0M 0 |o(M0,M 0)
(4.3)
avec
lim
M
0 →M0 o (M0 ,M 0)=0.
(4.4)
Les deux parenthèses dans ces formules dé nissent une correspondance affine entre
les coordonnées X j et x i d une particule dans κ0 et κt.Cette correspondance est
tangente àlacorrespondance (4.1) au voisinage de M0 (en raison de(4.4)). Reprenant
alors les notations de (2.1) et (2.4) pour cette transformation homogène tangente
en M0 àlatransformationquelconque donnéepar(4.1)ona:
F ij(X,t)= ∂φi(X,t)
∂Xj
(4.5)
60
Chapitre II Étude des déformations du milieu continu
et
F (X,t)= ∂φi(X,t)
∂Xj ei⊗ej.
(4.6)
F (X ,t) apparaît comme le gradient du champ de vecteur φ(X ,t) à l instant t
dans κ0 (annexe I, 6.2) :
F (X ,t)= φ(X ,t) .
(4.7)
Il est appelé gradient de la transformation en M0.
4.2 Formules de transport
Ce sont, au changement de notations près (dépendance en X), les formules des
paragraphes 2.2, 2.3 et 2.4.
S agissant de la transformation homogène tangente en M0,o
nac
o
utume, a n
de rappeler que ces formules ne sont valables que localement au voisinage de M0,de
les écrire sous forme différentielle en introduisant des vecteurs élémentaires ,
volumesélémentaires , etc.(10)
Transport d un vecteur
dM = F(X,t).dM0 .
(4.8)
Cette formule n est autre que la différentiation de (4.1) :
dx = φ(X,t).dX .
(4.9)
Du point de vue pratique, elle se révèle bien souvent la plus commode pour le calcul
du gradient de la transformation F (X ,t) ,enparticulier lorsque l on utilise, comme
indiqué au paragraphe 2.2, des bases différentes eJ (J = I, II, III) et ei (i =1, 2, 3)
enM0etenM.
On écrit
dxi ei = φ(X,t).(dXJ eJ)
(4.10)
et l on procède à l identi cation des termes pour obtenir
F(X,t)=FiJ(X,t)ei ⊗eJ .
(4.11)
Transport d un volume
dΩt =dΩ0 det(F (X,t))
(10)Du point de vue mathématique, latransformation homogène tangente concerne les éléments des
espaces vectoriels tangents en M0 et M aux con gurations géométriques du système dans κ0 et
dans κt .
4 Déformation d un milieu continu : cas général
61
soit, compte tenu de (4.5) :
dΩt = J(X ,t)dΩ0
(4.12)
En particulier, s il y a invariance du volume en M0 dans la transformation entre
κ0 et κt ,ona:
det(F (X,t)) =1.
Transport d une surface orientée
da = J(X,t)tF -1(X,t). dA .
(4.13)
4.3 Déformations
Tenseur des dilatations
dM .dM =dM0 .C(X,t).dM 0
C(X ,t)=tF (X ,t) .F(X ,t)
(4.14)
Te n s e u r d es déformations de Green-Lagrange
e(X ,t)= 1
2(tF(X,t).F(X,t) - 1l) .
(4.15)
En coordonnées cartésiennes orthonormées :
eij(X ,t)= 1
2(∂φk(X,t)
∂Xi
∂φk(X,t)
∂Xj -δij).
Il est d usage de désigner par ds0 la longueur du vecteur élémentaire dM 0 dans la
con guration κ0 et par ds celle de son transporté dM :
ds0 =|dM0|, ds =|dM|.
On a alors, en application immédiate des formules ci-dessus :
ds2 - ds2
0 =2dM0 .e(X,t).dM0 ,
formule dite du ds2,quis écrit en composantes, en repère cartésien orthornormé :
ds2 - ds2
0 =2eij(X ,t)dXidXj .
4.4 Déplacement
Il est commode d introduire dans un référentiel R,ledéplacement ξ(X ,t) de la
particule située en M0 dans κ0,entrelescon gurations κ0 et κt.Cevecteur s obtient
par :
ξ(X,t)=M0M=x-X.
(4.16)
62
Chapitre II Étude des déformations du milieu continu
Figure 11 Déplacement de la particule entre κ0 et κt
On a ainsi, à chaque instant t,da
n
sR et dépendant évidemment du choix de R
(car on compare des positions à des instants différents, 0 et t), un champ de vecteurs
dé ni sur κ0 .Onaalors, de façon immédiate, en conséquence de (4.16) :
F (X,t)= φ(X ,t)=1l + ξ(X ,t)
(4.17)
où ξ(X,t) est le gradient du champ de déplacement à l instant t en X .
On en déduit les expressions de C(X,t) et e(X,t) ;ainsi:
e(X ,t)= 1
2 ( ξ(X ,t)+t ξ(X ,t)+t ξ(X,t) . ξ(X,t))
(4.18)
et en composantes, en coordonnées cartésiennes orthonormées :
Fij(X,t)=δij + ∂ξi(X,t)
∂Xj
eij=1
2( ∂ξi
∂Xj + ∂ξj
∂Xi + ∂ξk
∂Xi
∂ξk
∂Xj).
Cette formule met en évidence la non-linéarité de la relation entre le champ de
déplacement et le champ de déformation de Green-Lagrange.
4.5 Décomposition polaire et transformation rigidi ante
Décomposition polaire
Comme dans le cas de la transformation homogène explicité au paragraphe 3.4, on peut
effectuer sur F (X ,t) la décomposition polaire :
F (X ,t)=R(X ,t) .S(X ,t) .
(4.19)
Le tenseur S(X ,t),symétrique, admet pour directions principales les directions principales de
C(X ,t) dans κ0 avec, pour valeurs principales, les dilatations principales λi(X ,t) .Letenseur
R(X ,t) est le tenseur euclidien associé à la rotation amenant les directions principales de
C(X ,t) dans κ0 sur leurs transportées dans κt .
5 Transformation in nitésimale
63
Transformation rigidi ante
La réciproque de la propriété énoncée au paragraphe 3.3 sur la transformation rigidi ante
suppose que, à l instant t :
e(X,t)=0 ∀M0 ∈ Ω0 .
On en déduit par (4.15) et (4.19) puisque S(X ,t) as
e
sv
ale
u
r
spropres positives et puisque
detF(X,t) > 0 :
S(X ,t)=1l et F (X ,t)=R(X ,t) avec det R(X ,t)=+1 ∀M0 ∈ Ω0 .
(4.20)
Pour démontrer que la transformation du système entre κ0 et κt est bien rigidi ante il reste
maintenant à démontrer que R(X ,t) est indépendant de X .Lerés
ultate
stintuitivement
évident si l on imagine le système dans κ0 décomposé en volumes in nitésimaux, parallélé-
pipédiques pour xer les idées : chacun d eux est indéformé dans κt , puisque S(X ,t)=1l et
ne subit que la rotation associée à R(X ,t) entre κ0 et κt ;maistous constituent dans κt un
système continu, comme dans κ0 ,c est-à-dire qu ils demeurent jointifs. La réponse immédiate
est que R(X ,t) doit être le même pour chaque élément, c est-à-dire indépendant de X ,auquel
cas le système ne subit lui aussi que cette même rotation.
Cette approche intuitive dégage l idée de la démonstration mathématique : elle se réfère à la
continuité du milieu. Conformément à la dé nition de F (X ,t) donnée par (4.7) on exprime
que F (X ,t)=R(X ,t) doit être le gradient d une fonction vectorielle φ(X ,t).Po
u
rcela on
peut rappeler l expression générale de la matrice ˜
R(X ,t) en repère orthonormé (au moyen
des angles d Euler) :
˜
R(X,t)= cosφcosψ- cosθsinφsinψ -cosφsinψ- cosθsinφcosψ sinφsinθ
sinφcosψ+cosθcosφsinψ -sinφsinψ+cosθcosφcosψ -cosφsinθ
sinθsinψ
sinθcosψ
cosθ
En écrivant l égalité des dérivées secondes croisées de φ(X ,t) on démontre que les angles
φ, ψet θ sont indépendants de X .
4.6 Objectivité
Reprenant la dé nition donnée au chapitre I ( 2.2 et 2.4) on voit que F (X ,t)= φ(X ,t)
est objectif. On peut le démontrer en procédant explicitement à la véri cation indiquée
au chapitre I ( 2.4) pour les grandeurs tensorielles, ou en remarquant que celle-ci résulte
immédiatement de la formule dM = F (X ,t) . dM 0 où dM et dM 0 sont eux-mêmesobjectifs.
Le tenseur des dilatations C(X ,t) et le tenseur des déformations e(X ,t) sont également
objectifs, comme le montre l objectivité du scalaire dM . dM =dM 0 .C(X ,t) . dM 0 .
5T
ransformation in nitésimale
5.1 Dé nition
La transformation du milieu entre les con gurations κ0 et κt dans le référentiel R
est dite in nitésimale si elle est telle que :
ξ(X,t) 1 ∀M0 ∈ Ω0 .
(5.1)
ξ(X ,t) sera alors pris comme in niment petit principal.
64
Chapitre II Étude des déformations du milieu continu
5.2 Tenseur des déformations linéarisé
Dans cette hypothèse (5.1),letenseurdes déformations de Green-Lagrange donné
par (4.18) se réduit, au premier ordre(11),a
ut
e
n
s
e
u
rdes déformations linéarisé
ε(X,t) :
ε(X,t)= 1
2 ( ξ(X ,t)+t ξ(X,t))
(5.2)
Celui-ci apparaît comme la partie symétrique du gradient du déplacement.
Ses composantes s écrivent, dans le cas de coordonnées cartésiennes orthonormées :
εij(X,t)= 1
2( ∂ξi(X ,t)
∂Xj + ∂ξj(X,t)
∂Xi ).
Les valeurs principales de ε(X ,t),quis
o
ntnotées εi (i =1, 2, 3),s
o
ntr
eliées,
àl ordre d approximation adopté,àc
elles de C(X,t) ou, plus exactement, de
S(X,t) par :
εi λi-1.
(5.3)De même on obtientpo
u
rl allongement unitaire d un vecteur dM 0 l expression
linéarisée :
δ(dM 0)= ds - ds0
ds0 dM0 .ε(X,t).dM0
|dM0|2
(5.4)
soit, si dM 0 ,estdirigésuivant le vecteur unitaire e1 d une base quelconque :
(ds - ds0)/ds0 ε11(X ,t) .
(5.5)Le glissement pour deux vecteurs matérielsdirigés suivant les vecteurs unitaires
e1 et e2 d une base orthonormée s écrit sous la forme linéarisée de (3.10) :
θ 2ε12(X,t).
(5.6)Au même ordre d approximation on a alors pour :
J(X,t)=det(1l + ξ(X ,t))
l expression linéarisée
J(X,t) 1+tr ξ(X ,t)=1+divξ(X ,t)=1+tr ε(X ,t) .
(5.7)On en déduit : (dΩt - dΩ0)/dΩ0 tr ε(X,t)=divξ(X ,t) .
(5.8)
On peut aussi, dans cette même hypothèse de la transformation in nitésimale, examiner la
décomposition polaire. On trouve, à partir de (3.20), les relations :
S(X,t) 1l + ε(X,t) d où R(X,t) 1l + 1
2( ξ(X,t) - t ξ(X,t)) .
(11)Ànoterquesi ξ(X ,t) est antisymétrique on a, en transformation quelconque :
e(X,t)=1
2 t ξ(X,t). ξ(X,t) et J(X,t)=1+ tr e(X,t).
5 Transformation in nitésimale
65
5.3 Gradient d un champ de tenseurs sur la con guration
actuelle
On considère un champ quelconque (scalaire, vectoriel, ou tensoriel de manière
générale), dé ni sur κ0,àl instant t,soitT (X,t).Onpeutdé nir sur κt,àl instant t
un champ de même nature, noté T t(x,t),quiprend la même valeur que le champ T à
l instant t au point géométrique homologue par la bijection φ du transport convectif
entre κ0 et κt,c est-à-dire(12) :
T t(x,t)=T (ψ(x,t),t)
(5.9a)
que l on écrira aussi :
T t(x,t)=T (X ,t)
(5.9b)
avec :
x = φ(X,t)=X + ξ(X,t) .
(5.10)
On conviendra de noter grad T (x,t) le gradient du champ T dans la con guration
actuelle κt(13).
On a alors, entre les gradients des deux champs pris en des points homologues
dans les con gurations κ0 et κt,larelation:
T (X ,t)=grad T (x,t) . φ(X ,t)
(5.11)
soit, par (4.17) :
T (X,t)=grad T (x,t)+grad T (x,t) . ξ(X ,t) .
Il en résulte que, dans l hypothèse de la transformation in nitésimale, on
peut confondre, au premier ordre en ξ(X,t) ,le
sde
u
xopérateurs gra-
dients en des points homologues de κ0 et κt.Enparticulier pour le déplacement
lui-même, on confondra :
ξ(X,t) et grad ξ(x,t) ,
notamment dans l écriture (5.2) de ε(X ,t) :
ε(X,t) 1
2(grad ξ(x,t)+tgrad ξ(x,t)) où x = φ(X ,t) .
(5.12)
(12) On rappelle (cf. chapitre I, 3.1) que ψ désigne la bijection réciproque de φ,a
u
ssi notée φ-1.
L ordre du tenseur considéré peut être quelconque : on a choisi T pour xer les idées.
(13) Le changement de la notation pour le gradient permet ainsi, sans ambiguïté, de supprimer l indice
t pour le champ dé ni en (5.9a) ; cf. chapitre I ( 4.6).
66
Chapitre II Étude des déformations du milieu continu
6C
ompatibilité géométrique d un champ de
déformation linéarisée
6.1 Position du problème
La formule (4.18) indique comment à partir du champ de déplacement ξ(X ,t)
entre les con gurations κ0 et κt dans un référentiel R,o
nc
o
n
str
uitle champ de
déformation de Green-Lagrange e(X ,t).
On peut aussi se poser le problème inverse : étant donné un champ de tenseurs du
second ordre symétriques dé ni sur κ0,àquelles conditions ce champ est-il un champ
de déformation de milieu continu, c est-à-dire existe-t-il un champ de déplacement
ξ(X ,t) dont il dérive au sens de la formule (4.18) ?
Ce problème général, dit de la compatibilité géométrique d un champ de
déformation , correspond du point de vue physique au fait que la continuité du
milieu ,ausensindiqué dans le chapitre I, doit être conservée par ce champ. On y
reviendra au paragraphe 6.4.
On a déjàétéconfrontéàunproblème de cette nature au paragraphe 4.5 pour le
champ F (X,t) àpr
opo
sdelatr
a
n
sformation rigidi ante : en effet c est en écrivant
la compatibilité géométrique du champ de tenseurs F (X ,t),c est-à-dire en exprimant
qu il est le champ de gradient d une fonction vectorielle φ(X,t),oudefaçon équiva-
lente qu il dérive d un champ de déplacement ξ(X ,t) de milieu continu par (4.17),
que l on démontre que R(X,t) dans (4.20) est indépendant de X .
Il est clair, du point de vue mathématique, que des conditions de compatibilité
doivent nécessairement exister pour qu un champ de déformation à six composantes
indépendantes dérive effectivement par (4.18) d un champ de déplacement à trois
composantes (milieu continu tridimensionnel). Ces conditions peuvent être établies
dans le cas général des déformations nies. Dans la suite on ne rencontrera ce problème
que pour des déformations linéarisées du type (5.2) : ce sera notamment le cas au
chapitre VIII (section 6) dans larés
olutio
ndes problèmes d élasticité linéarisés. On
sera aussi confronté au même problème mathématique à propos de la compatibilité
d un champ de taux de déformation eulérien au chapitre III ( 3.7).
On établira ici les conditions de compatibilité pour un champ linéarisé ε(X ,t)
donné par ses composantes εij , l espace étant rapporté à un repère cartésien or-
thonormé .
6.2 Conditions de compatibilité
Principe du raisonnement
L espace est rapporté à un repère cartésien orthonormé. Le principe du raisonne-
ment s inspire des constatations suivantes.
ξ(X,t) étant le gradient d un champ de vecteurs, chacun des vecteurs-lignes de
6 Compatibilité géométrique d un champ de déformation linéarisée
67
sa matrice ˜
ξ(X ,t) apparaît comme le gradient d une fonction scalaire (la compo-
sante de ξ correspondante). De même, chaque vecteur-colonne de t ˜
ξ(X,t) apparaît
aussi comme le gradient d une fonction scalaire (composante de ξ). La condition né-
cessaire et suffisante pour qu un champ de vecteurs soit un champ de gradient (de
fonction scalaire) sur un domaine simplement connexe étant classique, rotationnel
nul
,e
ns
appuyant sur celle-là on établira les conditions nécessaires et suffisantes
de compatibilité d un champ de déformation.
Établissement des conditions de compatibilité
On établit souvent ces conditions en introduisant les notations suivantes.
Soit T (X ,t) un champ de tenseurs euclidiens du second ordre ; on dé nit en chaque point X
les matrices ˜
rotg(˜
T)et ˜
rotd( ˜
T ) (14) par les formules donnant leurs coefficients :
˜
rotg(˜
T) Rg
ij = δi m ∂Tmj
∂X
˜
rotd( ˜
T) Rd
ij = δj m ∂Tim
∂X
(6.1)
dans lesquelles(15) :
δijk =
i,j,k∈(1,2,3)
0 si ijk comprend deux indices identiques
1 si ijk permutation paire
-1 si ijk permutationimpair
e
autrement dit, ˜
rotd( ˜
T) apo
u
rv
ecteurs-lignes les rotationnels des vecteurs-lignes de ˜
T ,et
˜
rotg(˜
T) apou
rv
ecteurs-colonnes les rotationnels des vecteurs-colonnes de ˜
T.
Avec ces notations il est clair que la condition nécessaire et suffisante pour que chaque
vecteur-ligne de ˜
T soit le gradient d une fonction scalaire s écrit :
˜
rotd( ˜
T )=0
(6.2)
ou aussi de façon équivalente :
˜
rotg(t˜
T )=0.
(6.3)
On en déduit, à partir de (5.2), la condition nécessaire de compatibilité pour
le champ ε(X ,t) :
˜
rotg( ˜
rotd(˜
ε)) =0= ˜
rotd( ˜
rotg(˜
ε))(16) .
(6.4)
Cette condition matricielle s explicite sous la forme de 6 équations concernant
les dérivées secondes des coefficients de ˜
ε car la symétrie de ˜
ε implique celle de
˜
rotg( ˜
rotd(˜
ε)) :
δmki δphj εij,hk =0
ou encore :
(14) Pour alléger les formules on ne fait plus apparaître la dépendance en X ,t.
(15) Dans la littérature (notamment anglo-saxonne) on rencontre souvent les symboles ε ou e .Le
choix de δ s explique ici par les notations adoptées pour les composantes de la déformation.
(16) On a en effet, par (6.2), ˜
rotd( ˜
ξ)=0qui s écrit, en introduisant w dé ni par (6.6) : ˜
rotd(˜
ε)+
˜
rotd(˜
w)=0.Or ˜
rotd(˜
w)=- 1
2t˜
(rot ξ), d où ˜
rotg(˜
ε)= 1
2˜
(rot ξ) et, par (6.2) : ˜
rotd( ˜
rotg(˜
ε)) =0.
68
Chapitre II Étude des déformations du milieu continu
2 ε23,23 = ε33,22 + ε22,33
+perm
utation circulaire
(6.5)
ε13,23 - ε12,33 - ε33,21 + ε32,31 =0
+perm
utation circulaire
où les indices situés après lavirgule indiquent les dérivations spatiales.
Méthode pratique d intégration du champ ε(X,t)
Les conditions de compatibilité (6.5) peuvent être établies explicitement par une
méthode directe dont la réciproque fournitlepr
o
cédé pratique d intégration d un
champ ε(X,t) compatible.
Pour cela on introduit le tenseur euclidien w(X,t),p
a
r
t
i
ea
n
t
i
s
ymétrique de
ξ(X ,t) :
w(X ,t)= 1
2( ξ(X,t) - t ξ(X,t))
(6.6)
dont les composantes dans le repère cartésien orthonormé sont :
wij(X ,t)= 1
2(∂ξi(X,t)
∂Xj - ∂ξj(X,t)
∂Xi ).
On remarque, à partir de (5.2) et (6.6),qu
ele
sdérivées des composantes de w
sont reliées à celles de ε par :
wij,k = εki,j - εjk,i .
(6.7)
On en déduit les conditions nécessaires de compatibilité du champ ε(X,t) en
écrivant que :
∀i,j,k, =1,2,3 wij,k = wij, k
(6.8)
On obtient ainsi des équations de la forme :
εij,k + εk ,ij - εik,j - εj ,ik =0
où i, j, k,et sont quelconques égaux à 1, 2, 3,c est-à-dire les six équations (6.5).
Réciproqu ement ,lechamp de tenseurs ε(X,t) symétriques étant connu et sup-
posé satisfaire (6.5), ces conditions assurent l intégrabilité des formes différentielles :
dwij = wij,k dXk
(6.9)
où les wij,k ,antisymétriques sur les indices i et j,sontdé nis par (6.7). Elles permet-
tent donc de construire un champ de tenseurs antisymétriques w(X ,t) si le domaine
de dé nition est simplement connexe.
6 Compatibilité géométrique d un champ de déformation linéarisée
69
On véri e ensuite que, en conséquence évidente de (6.7), les conditions d intégra-
bilité des formes différentielles :
dξi =(εij + wij)dXj
(6.10)
sont identiquement véri ées, ce qui permet de construire un champ vectoriel ξ(X ,t)
si le domaine de dé nition est simplement connexe.
Compte tenu de l antisymétrie de w(X,t),ε(X ,t) apparaît bien comme la partie
symétrique du gradient du champ ainsi construit.
6.3 Commentaires
• Les conditions (6.5) sont donc nécessaires et suffisantes pour qu un champ de
tenseurs euclidiens, du second ordre, symétriques, ε soit la partie symétrique du
gradient d un champ vectoriel ξ,dansl hypothèse d un domaine de dé nition
simplement connexe. Ces conditions ont été établies par Saint Venant (17) ;
la première démonstration rigoureuse dele
u
rc
a
r
actère suffisant serait due à
Beltrami.
• Si le domaine est multiplement connexe, des conditions supplémentaires doi-
vent être adjointesàc
elles-là, dites conditions de fermeture,quia
ssurent
l uniformité de la fonction vectorielle φ c est-à-dire son caractère bijectif.
• Il peut sembler étonnant d aboutir à 6 conditions de compatibilité alors que
le champ ε correspond à 6 composantes indépendantes et le champ ξ dont
il dérive, à 3. En fait on peut montrerqu
ele
ssix équations (6.5) ne sont
pas indépendantes entre elles : ces équations seront toutes véri ées dans un
domaine Ω0 pour peu que l on s assure que trois d entre elles sont véri ées
dans ce domaine et les trois autres au contour.
• On remarque que les conditions (6.5) portent sur les dérivées secondes
des composantes εij en coordonnées cartésiennes orthonormées. Il
s ensuit en particulier que tout champ ε dont les composantes εij
sont des fonctions affines des Xk est intégrable .
• On retiendra que dans la pratique l intégration d un champ de déformation
géométriquement compatible pour obtenir le champ de déplacement correspon-
dant s effectue en s appuyant sur (6.7), (6.9) et (6.10). Le champ ξ(X ,t) est
déterminé, dans le respect de l hypothèse de la transformation in nitésimale,
àu
nchamp de déplacement rigidi ant additif près .Cecha
mpe
ste
n
effet introduit par les constantes qui apparaissent dans les deux intégrations
successives : un tenseur antisymétrique constant dans l intégration de (6.9), dé-
nissant une rotation in nitésimale ,unvecteur constant dans l intégration
de (6.10) dé nissant une translation .
• Ce résultat ne doit pas surprendre. En effet, dans l hypothèse de la transformation in ni-
tésimale qui permet la linéarisation des formules, l addition d un champ de déplacement
rigidi ant (dont la rotation est in nitésimale) n induit aucune déformation du système. Il
(17) A. Barré de Saint Venant (1797 1886) ; E. Beltrami (1835-1900).
70
Chapitre II Étude des déformations du milieu continu
est donc logique que la donnée d un champ ε géométriquement compatible ne permette de
déterminer le champ ξ que sous la réserve d un champ de déplacement rigidi ant in nitésimal
arbitraire.
On peut aussi y apporter un complément. Comme on l a vu par exemple au paragraphe
4.5, une transformation rigidi ante composée avec une transformation quelconque n induit
aucune modi cation du champ de déformation e.Ilenrésultequ encomposant une transfor-
mation rigidi ante quelconque avec un champ de déplacement ξ déterminé, en transformation
in nitésimale, à partir du champ ε,onobtientune transformation nie dans laquelle le champ
de déformation e est égal au champ ε linéarisé du champ original ξ.C
e
stpa
re
xemple le
cas lorsque l on s intéresse, dans un référentiel R∗ ,a
ucha
mpde déplacement associé à une
transformation in nitésimale dans le référentiel R.
• Le champ de déplacement ξ doit aussi satisfaire des conditions en déplacements
imposées au contour du domaine de dé nition de ε.Onr
e
n
contre alors typi-
quement l une ou l autre des deux circonstances suivantes. Ou bien la forme
obtenue pour ξ,etn
ota
mment le champ rigidi ant indéterminé introduit par
les constantes d intégration, permet d assurer la compatibilité du champ ξ avec
les données du contour : ceci peut éventuellement déterminer complètement le
champdedéplacement rigidi ant in nitésimal demeuré arbitraire. Ou bien les
conditions imposées au déplacement auc
o
nto
u
rdu domaine ne peuvent être
satisfaites par aucun champ ξ résultant de l intégration de ε et il y a donc
incompatibilité avec ces données.
• L application de la méthode d intégration du paragraphe 6.2 dans le cas où le
champ donné est
ε(X ,t)=0 ∀M0 ∈ Ω0
(6.11)
permet de véri er immédiatement que, en transformation in nitésimale ,
la condition (6.11) caractérise les transformations rigidi antes entre κ0 et κt
pour le domaine Ω0.
6.4 Application
On peut donner, en anticipant de façon élémentaire et intuitive sur certains
concepts introduits dans la suite (chapitres V et VIII), un exemple d application des
conditions de compatibilité géométrique énoncées plus haut : celui des déformations
thermiques.
Le champ de température, ou plus exactement de variation de température τ(X)
dans un solide, induit dans celui-ci, le plus souvent par une correspondance linéaire,
un champ de déformation ετ (X) .
Si ce champ ετ (X) est géométriquement compatible, il existe un champ de dépla-
cement ξτ (X) déterminé à un déplacement rigidi antprès,quirespecte la continuité
du milieu et dont dérivent les déformations thermiques. Si aucune condition n est
imposée au contour du solide du point de vuedesdéplacements ou si, plus générale-
ment, les conditions en déplacements imposées au contour du solide sont satisfaites
par un champ ξτ (X),onpeutconclure que la transformation du solide due aux écarts
de température peut se produire sans faire naître, dans celui-ci, des efforts intérieurs
(contraintes).
7 Remarques nales
71
Dans les cas contraires, c est-à-dire si le champ ετ (X) n est pas géométriquement
compatible ou si, étant compatible, aucun champ ξτ (X) correspondant ne permet de
satisfaire les conditions en déplacements imposées au contour du solide, des efforts
intérieurs apparaissent nécessairement dans le solide pour que la continuité du milieu
soit conservée. Ils engendrent eux aussi un champ de déformation ε(X) et sont tels
que le champ de déformation total ετ (X)+ε(X) soit géométriquement compatible et
qu un champ ξτ (X) qui résulte de son intégration permette de satisfaire les conditions
en déplacements imposées au contour.
Si ces efforts intérieurs, nécessaires au maintien de la continuité géométrique du
milieu, sont trop importants vis-à-vis des capacités de résistance du matériau, ils ne
peuvent s instaurer : une autre solution géométriquement compatible par morceaux
se met alors en place avec ruptures localisées dans le solide (phénomène bien connu
avec des matériaux fragiles).
7R
e
m
a
r
q
u
es nales
7.1 Transformation et déformation
Homogénéité
Les formules de la décomposition polaire (3.17, 3.20, 4.19) mettent bien en évi-
dence que seule une partie de la transformation induit la déformation du milieu. En
conséquence, s il est évident que l homogénéité de la transformation, c est-à-dire l in-
dépendance de F (X,t) par rapport à X ,implique celle de la déformation e(X ,t),on
peut s interroger sur le problème inverse : l homogénéité de la déformation e implique-
t-elle celle de la transformation ? C est en particulier la question qui a été posée au
paragraphe 3.3 à propos de la caractérisation des transformations rigidi antes par la
formule (3.16).
La réponse découle encore de la compatibilité géométrique (cf. 6.1) comme in-
diqué au paragraphe 4.5 : en exprimant(18) que F (X,t) doit être le gradient d une
fonction vectorielle φ(X ,t),o
nvéri eque le champ e(X,t)=e(t) est effectivement
compatible et que la transformation correspondante est homogène (19).(Cette véri-
cation est immédiate lorsque l on est dans l hypothèse de la transformation in nité-
simale, en appliquant la méthode d intégration donnée au paragraphe 6.2).
Caractère in nitésimal
Il est clair que l hypothèse de la transformation in nitésimale implique que la
déformation l est aussi. La réciproque de cette proposition est évidemment fausse
comme suffit à le montrer le contre-exemple des transformations rigidi antes.
(18) Avec les notations (6.1) lacondition sur le champ F s écrit : rotd( ˜
F )=0.
(19) Le résultat est intuitivement évident si l on imagine, comme au paragraphe 4.5, le système dans
κ0 ,découpé en volumes in nitésimaux cubiques selon les directions principales de C(t) ;lesvolumes
transformés, parallélépipèdes rectangles identiques, doivent être jointifs pour respecter la continuité
du milieu : ils subissent donc tous la même rotation.
72
Chapitre II Étude des déformations du milieu continu
On peut néanmoins remarquer que l hypothèse de la déformation in nitésimale,
caractérisée par e 1,suffitàassurer la validité des formules homologues de (5.5)
à(5.7) avec les composantes de e sous la forme :
(ds - ds0)/ds0 e11(X ,t)
θ 2 e12(X,t)
(dΩt - dΩ0)/dΩ0 tr e(X ,t) .
(7.1)
7.2 Utilisation d un paramétrage lagrangien relatif à une
con guration abstraite
To u t le présent chapitre, traitant des déformations, se rattache à une con guration initiale
de référence du système, par rapport à laquelle on mesure les déformations. Aussi utilise-t-on
pour repérer les particules, les coordonnées X de leurs positions dans cette con guration κ0 .
On peut aussi être amené, pour ce repérage, à utiliser des paramètres lagrangiens relatifs à
une con guration de référence abstraite κa (chapitre I, 3.7), la description du mouvement
étant mise sous la forme :
x = φ(a1,a2,a3,t) .
(7.2)
L étude des déformations quant à elle n a évidemment de sens que par rapport à une con -
guration réellement occupée par le système, soit κ0 .Endésignant par X les coordonnées de
la position d une particule dans cette con guration (t =0)
X = φ(a1,a2,a3,0).
(7.3)
on sera ramené à l étude précédemment faite (sections 2 à 6) en substituant à la fonction
φ(X ,t) qui y apparaît la fonction Φ(X ,t) dé nie par :
x = Φ(X,t)=φ(·, ·, ·,t) ◦ φ-1(X, 0) ;
(7.4)
toutes les formules précédemment données demeurent alors valables : c est ainsi en particulier
que l on obtient, à partir de (4.12) le résultat déjà donné au chapitre I :
dΩt =dΩ0 D(x1 ,x2 ,x3)
D(a1 ,a2 ,a3) /D(X1 ,X2 ,X3)
D(a1 ,a2 ,a3) .
7.3 Étude pratique des déformations
L étude des déformations est un aspect essentiel dans la modélisation des milieux
continus, principalement pour ses applications à la mécanique des solides déformables.
On retiendra le caractère tensoriel des grandeurs introduites : C(X,t),e(X,t),
ε(X,t) , ...
Cette propriété, outre l intérêt mathématique qui apparaîtra notamment dans la
formulation des lois de comportement (par exemple en élasticité), présente des consé-
quences pratiques importantes :
aussi bien pour les déformations nies (Green-Lagrange) que pour les déformations
linéarisées, on procèdera souvent en premier lieu à la détermination des directions
principales et au calcul des dilatations et des déformations principales ;
7 Remarques nales
73
les formules de changement de base (annexe I, 3.2 et 5.9) permettent ensuite de
calculer de façon systématique les composantes des tenseurs dans les bases les plus
appropriées : notamment le passage d un repère principal à un repère commode pour
le calcul par (3.6) et (3.7) de la dilatation ou de l allongement unitaire dans une
direction donnée.
Du point de vue physique on retiendra que les dilatations et les déformations sont
des grandeurs sans dimensions .
La détermination expérimentale des tenseurs correspondants s appuie sur des me-
sures de dilatation et d allongement unitaire et sur les formules (3.6) ou (3.7). Elle
nécessite donc la comparaison, à l échelle locale lorsque la transformation n est pas
homogène (cas général), des longueurs d un vecteur matériel dans la con guration
initiale de référence et dans la con guration actuelle. Les techniques expérimentales
employées sont nombreuses.
• Extensomètres à l résistant (jauges électriques de déformation) : le principe de
la méthode consiste à faire subir à un l la même extension que celle du maté-
riau dans une direction donnée, et àmesurer la variation de résistance électrique
correspondante (l effet est ampli é en repliant le l plusieurs fois sur lui-même).
Ces extensomètres, collés à la surface du solide étudié, sont groupés en rosettes (3
jauges), de façon à recueillir suffisamment d information pour la détermination de
la déformation dans le plan tangent à la surface du solide ( gure 12).
• Méthode du moiré : ils
agit d une technique de marquage de la surface du so-
lide par un réseau de traits ns et rapprochés (gravure, ou procédés d impres-
sion divers). On compare le réseau déformé au réseau initial par observation et
dépouillement des réseaux de franges de moiré ( gure 13).
• Méthodes optiques diverses : holographie, moiré interférométrique, méthode de
granularité, stéréophotogrammétrie.
• Marquage : à la surface d unsolide, par de petits cercles (∅ =quelques millimètres)
et observation des ellipses obtenues après déformation ( gure 14), à l intérieur d un
solide par un réseau (cf. chapitre I, gures 1 et 2) ou par des inclusions.
• Ve r nis c r a q u elants et substances analogues déposées à la surface d un solide.
Les dernières méthodes citées ci-dessus sont surtout qualitatives.
En n il est bon de connaître quelques ordres de grandeur de déformations typiques
pour les solides :
l allongement unitaire pour une éprouvette d acier en traction, à sa limite d élas-
ticité initiale est de l ordre de 10-3 ;
l allongement unitaire pour une éprouvette d acier doux à l issue de son palier
plastique est de l ordre de 10-2 ;
l allongement unitaire d une éprouvette de béton en compression sous charge de
courte durée avant ruine est de l ordre de 10-3 ;
l allongement unitaire local dans une expérience de striction en traction d une
éprouvette métallique est de l ordre de 1 ; pour les polymères les ordres de grandeur
des déformations sont beaucoup plus élevés.
74
Chapitre II Étude des déformations du milieu continu
Figure 12 Jauge extensométrique unidirectionnelle et rosettes de jauges bi- et tri-
directionnelles (photos : J. Salençon).
a) principe
b) exemple de franges observées
Figure 13 Méthode du moiré (Laboratoire Central des Ponts et Chaussées)
7 Remarques nales
75
Figure 14 Marquage à la surface d un solide (CETIM)
76
Chapitre II Étude des déformations du milieu continu
Récapitulatif des formules essentielles
• Tra n sformation quelconque
x = φ(X,t)
0 <J(X,t)= D (x1,x2,x3)
D (X1,X2,X3) < +∞
Gradient de la transformation :
F (X,t)= φ(X ,t)
dM = F(X,t).dM0
Transport :
dΩt =dΩ0 det (F (X ,t)) = J(X,t)dΩ0
da = J(X,t)tF -1(X,t). dA
Dilatations déformations :
dM .dM =dM0 .C(X,t).dM 0
C(X ,t)=tF (X ,t) .F(X ,t)
e(X,t)= 1
2(C(X,t) - 1l)
ds2 - ds2
0 =2dM0 .e(X,t).dM0
Déplacement :
ξ(X ,t)=φ(X ,t) - X
e(X,t)= 1
2( ξ(X,t)+t ξ(X,t)+t ξ(X ,t) . ξ(X ,t))
Récapitulatif des formules essentielles
77
• Tra n sformation in nitésimale : ξ(X,t) 1
ε(X,t)= 1
2 ( ξ(X ,t)+t ξ(X,t))
ε(X,t) 1
2 (grad ξ(x,t)+tgrad ξ(x,t)) ,x
= φ(X ,t)
(dΩt - dΩ0)/dΩ0 tr ε(X ,t)=divξ(X ,t)
(ds - ds0)/ds0 ε11(X,t)
θ 2 ε12(X,t)
Conditions de compatibilité géométrique : (en coordonnées cartésiennes
orthonormées)
εij,k + εk ,ij - εik,j - εj ,ik =0
Composantes de ε en coordonnées cylindriques (cf. annexe II)
ξ=ξrer+ξθeθ+ξzez
εrr = ∂ξr
∂r
εθθ=1
r ∂ξθ
∂θ+ξr
r
εzz = ∂ξz
∂z
εrθ=1
2 ∂ξθ
∂r -ξθ
r+1
r ∂ξr
∂θ
εθz=1
2 1
r ∂ξz
∂θ+∂ξθ
∂z ξzr=1
2 ∂ξr
∂z+∂ξz
∂r
trε=∂ξr
∂r+1
r ∂ξθ
∂θ+ξr
r+∂ξz
∂z
78
Chapitre II Étude des déformations du milieu continu
Composantes de ε en coordonnées sphériques (cf. annexe II)
ξ=ξrer+ξθeθ+ξφeφ
εrr = ∂ξr
∂r εθθ=1
r ∂ξθ
∂θ+ξr
r
εφφ= 1
r sinθ∂ξφ
∂φ+ξθ
r cotθ+ξr
r
εrθ=1
2 1
r ∂ξr
∂θ+∂ξθ
∂r -ξθ
r
εθφ=1
2 1
r ∂ξφ
∂θ+ 1
rsinθ∂ξθ
∂φ - cotθ
r ξφ
εφr=1
2 1
rsinθ∂ξr
∂φ+∂ξφ
∂r -ξφ
r
trε=∂ξr
∂r+1
r ∂ξθ
∂θ+ 1
rsinθ∂ξφ
∂φ+ξθ
r cotθ+2ξr
r
Exercices
79
Exercices
II.1 - Extension simple. R étant un repère cartésien orthonormé dans le référentiel
R,onconsidère la transformation homogène dé nie, à l instant t>0,par:
x1 =X1(1+αt),x
2=X2,x
3=X3,α>0.
Déterminer le tenseur F (t) de la transformation. Étudier le transport d un vecteur,
d un volume, d un vecteur aire. Calculer le tenseur des dilatations et le tenseur des
déformations de Green-Lagrange. Déterminer leurs directions principales. Préciser
l hypothèse de la transformation in nitésimale ; donner les expressions linéarisées cor-
respondantes.
Éléments de réponse.
• F(t)=(1+αt)e1⊗e1+e2⊗e2+e3⊗e3
v =(1+αt)V1e1+V2e2+V3e3
Ωt =(1+αt)Ω0 (cf. Ex.I.1)
n=
1
N2
1 +(1+αt)2(N 2
2+N2
3 ) (N1 e1 +(1+αt)(N2 e2 + N3 e3))
a=A N2
1 +(1+αt)2(N 2
2+N2
3).
• C(t)=(1+αt)2e1⊗e1+e2⊗e2+e3⊗e3
e(t)=(αt + α2t2/2) e1 ⊗ e1 .
Directions principales de C(t) et e dans κ0 : e1 et toute direction orthogonale à e1 .
Dilatations principales : λ1 =1+αt , λ2 = λ3 =1;
déformations principales : e11 = αt + α2 t2/2 ,e
22=e33=0.
• ξ 1 ⇔|
αt| 1
ε=αte1⊗e1,trε=αt.
II.2 - Glissement simple. Soit R =(O, e1,e2 ,e3) un repère cartésien orthonormé
dans le référentiel R.Onc
onsidère la transformation homogène dé nie à l instant t
par :
ξ =2αtX2 e1 .
Calculer F (t),C(t) ;déterminer les dilatations principales et les directions principales
de C(t). Étudier le cas de la transformation in nitésimale.
Éléments de réponse.
• F(t)=e1⊗e1+2αte1⊗e2+e2⊗e2+e3⊗e3 .
det F (t)=1:pasdev
ariation de volume.
C(t)=1l +2e(t)=1l +2αt (e1 ⊗ e2 + e2 ⊗ e1)+4α2t2 e2 ⊗ e2 .
80
Chapitre II - Études des déformations du milieu continu
• Les valeurs principales de C(t) et ses directions principales dans κ0 s obtiennent im-
médiatement par le calcul à partir de l expression ci-dessus, puisque la base (e1 ,e2 ,e3)
est orthonormée ; on détermine les directions propres et valeurs propres de l application
linéaire associée à C(t) :
λ2
1 =1+2αt√1+α2 t2 +2α2 t2 d où λ1 =(√1+α2 t2 + αt) ,
λ2
2 =1- 2αt√1+α2 t2 +2α2 t2 d où λ2 =(√1+α2 t2 - αt) ,
λ2
3 =1d où λ3 =1.
On véri e que λ1λ2λ3 =1.
Les directions principales correspondantes sont, dans κ0 :
eV = e1cosφ+e2sinφ,eW = -e1sinφ+e2cosφ,e3,
avec tanφ = λ1 =1/λ2,(tan2φ = -1/αt).
Le transport convectif des vecteurs eV ,eW ,e3 donne respectivement les vecteurs
λ1(e1 sin φ + e2 cos φ),λ2(-e1 cos φ + e2 sin φ),ete3 dont on véri e l orthogonalité.
En posant ev = e1 sin φ + e2 cos φ et ew = -e1 cos φ + e2 sin φ,ladécomposition polaire
F (t)=R(t) .S(t) s explicite en :
S(t)=λ1ev⊗eV +λ2ew⊗eW+λ3e3⊗e3 ,
R(t)=ev⊗eV +ew⊗eW+e3⊗e3 ou encore
R(t)=sin2φ(e1 ⊗e1 +e2 ⊗e2)+cos2φ(e2 ⊗e1 - e1 ⊗e2)+e3 ⊗e3
qui représente la rotation d angle (π/2 - 2φ) autour de e3 .
Ces résultats peuvent aussi s obtenir géométriquement en remarquant que le losange de
κ0 ,constr
uit sur les vecteurs unitaires OA0 = e1 et OB0 =(-αt e1 + e2)/√1+α2 t2 se
transforme à l instant t en le losange de κt construit sur les vecteurs unitaires OA = e1
et OB =(αt e1 + e2)/√1+α2 t2 .Dansκ0 , (OA0 ,OB0)=2φ ;lesvecteurs eV et eW sont
dirigés selon les bissectrices intérieure et extérieure de cet angle parallèles aux diagonales
du losange. Elles sont transportées convectivement à l instant t selon les bissectrices in-
térieure et extérieure de l angle (OA,OB)=(π - 2φ) dans κt dont ev et ew sont les
vecteurs unitaires.
• Tr ansformation in nitésimale.
ξ 1 ⇔|
αt | 1:
ε(t)=αt(e1 ⊗e2 +e2 ⊗e1),w(t)=αt(e1 ⊗e2 - e2 ⊗e1)
ε1(t)=αt , ε2(t)=-αt , ε3(t)=0.
Directions principales de ε(t) :
eV =(e1 + e2)√2/2 ,e
W =(e2 - e1)√2/2 ,e
3=0
ε(t)=αt(eV ⊗eV - eW ⊗eW);
les directions principalessontlesbissectrices de (e1 ,e2) et e3 ,etlesdéformations princi-
pales εi dans le plan (e1 ,e2) sont égales en valeur absolue et de signes opposés (tr ε =0:
absence de variation de volume).
II.3 - Double glissement . R est un repère cartésien orthonormé dans le
référentiel R.Onconsidère la transformation homogène dé nie à l instant t>0 par :
ξ=αt(X2e1+X1e2),α>0.
Calculer la dilatation volumique dans ce mouvement, le tenseur des dilatations et le
tenseur des déformations de Green-Lagrange. Déterminer les directions principales de
ces tenseurs et les expressions de ceux-ci dans le repère principal orthonormé. Préciser
l hypothèse de la transformation in nitésimale et donner les expressions linéarisées
correspondantes.
Exercices
81
Éléments de réponse
• Dilatation volumique = det F (t)=1- α2 t2
(|αt|< 1 cf. Ex.I.2)
C(t)=1l +2αt (e1 ⊗ e2 + e2 ⊗ e1)+α2t2(e1 ⊗ e1 + e2 ⊗ e2)=1l +2e(t) .
• Trièdre principal de C(t) et e(t) dans κ0 :
eV =(e1 + e2)/√2 ,e
W =(e2 - e1)/√2 ,e
3.
C(t)=(1+αt)2eV ⊗eV +(1- αt)2eW ⊗eW +e3 ⊗e3
e(t)=(αt + α2t2/2)eV ⊗ eV +(-αt + α2t2/2)eW ⊗ eW .
• ξ 1 ⇔|
αt | 1
ε(t)=αt(e1⊗e2+e2⊗e1)=αt(eV ⊗eV -eW⊗eW)
det F(t) 1+tr ε =1.
Commentaire.
En transformation nie le double glissement induit une variation de volume ; les direc-
tions principales de la déformation sont dirigées selon les bissectrices de e1,e2 . En transfor-
mation in nitésimale le double glissement s effectue sans variation de volume ; du point de
vue de la déformation le double glissement est équivalent au glissement simple (Ex.lI.2).
II.4 - R =(O, e1,e2,e3) est un repère cartésien normé dans lequel e3 est orthogonal
à e1 et e2.Étudier la transformation homogène dé nie à l instant t par :
ξ = αt(X2e1 +X1e2) α>0 .
Éléments de réponse :
• ξ=αt(e1⊗e2+e2⊗e1),F(t)=1l+ ξ
dilatation volumique = det F (t)=1- α2t2 (⇒ αt < 1) .
• C(t)=1l+2αt(e2⊗e1+e1⊗e2+g12(e2⊗e2+e1⊗e1))
+(αt)2(e2⊗e2+e1⊗e1+g12(e2⊗e1+e1⊗e2))
avec gij = ei .ej
• En regroupant les termes :
C(t)=1l +2αt((e1 + g12 e2) ⊗ e2 +(e2 + g21 e1) ⊗ e1) +(αt)2((e1 + g12 e2) ⊗ e1
+(e2+g21e1)⊗e2)
d où la représentation mixte de C(t)
C(t)=1l+(αt)2(e1 ⊗e1 +e2 ⊗e2)+2αt(e1 ⊗e2 +e2 ⊗e1).
On en déduit les directions principales de C(t) dans κ0 ,comme dans Ex.II.3 :
eV =(e1 + e2)/ 2(1 + g12) ,e
W =(e1 - e2)/ 2(1 - g12) ,e
3 avec lesdilatations
principales(1+αt),(1-αt), 1.
C(t)=(1+αt)2eV ⊗eV +(1- αt)2eW ⊗eW +e3 ⊗e3 .
Commentaire.
Il s agit du double glissement en coordonnées obliques, identique à celui traité en coor-
données orthogonales (Ex.II.3).
82
Chapitre II - Études des déformations du milieu continu
II.5 - Ellipsoïde des dilatations. On considère, à l instant t,latr
a
n
sfo
rmation
homogène qui laisse invariante l origine O et qui est caractérisée par le tenseur gradient
F (t).Déterminer le domaine Ω0 dont le transporté par le mouvement est, à l instant
t, une sphère de centre O et de rayon R.Déterminer le domaine Ω t transporté par le
mouvement, à l instant t,d une sphère Ω 0 de centre O et de rayon R0 dans κ0.
Éléments de réponse :
• Le domaine Ωt transporté de Ω0 apo
u
réqu
ation x2 = R2 .D
oùl équation de Ω0 :
X .C(t) .X = R2 qui s écrit dans les axes principaux de C(t) dans κ0 :
(λ1X1)2 +(λ2X2)2 +(λ3X3)2 = R2 .
Ω0 est l ellipsoïde de demi-axes R/λ1 ,R/λ2 et R/λ3 selon les directions principales de
C(t) dans κ0.
• L équation de Ω 0 est X2 = R2
0 ,d oùpou
rΩ t : x.(F .tF(t))-1 .x=R2
0.
Ω t est l ellipsoïde dont les axes sont obtenus par le transport convectif dans κt des
directions principales de C(t) dans κ0 .Demi-axes : λ1R0 ,λ2R0 ,λ3R0 .
L équation de Ω t dans la base orthonormée correspondante (e 1 ,e 2 ,e 3), principale pour
F (t) . tF (t):(x 1/λ1)2 +(x 2/λ2)2 +(x 3/λ3)2 = R2
0.
Commentaire.
Pour R =1,Ω
0 estappelé ellipsoïde réciproque des déformations .
Ω t ,pou
rR0 =1,est l ellipsoïde des déformations .
II.6 - Tourbillon ponctuel . On considère le mouvement plan dé ni en coor-
données cylindriques, pour r =0,par:
U(r,θ,z,t)= Γ
2πr eθ où Γ est une constante réelle.
Déterminer les trajectoires et donner la représentation lagrangienne de ce mouvement.
Calculer le gradient de la transformation entre M0,dec
o
o
rdonnées (R, Θ, Z) dans
la con guration κ0(t =0)et M de coordonnées (r, θ, z) dans κt,etlete
n
seur des
dilatations C ;c
o
mpa
r
e
ra
v
e
cle
srésultats de Ex.II.2 et commenter : en déduire les
directions principales de C en M0 et la rotation de ce trièdre dans le transport convectif
de M0 à M .Étudier le cas de la transformation in nitésimale après en avoir explicité
les hypothèses.
Exercices
83
Éléments de réponse.
• En coordonnées cylindriques
U=erdr
dt +eθrdθ
dt +ezdz
dt
d où ici, pour la particule située en M0 dans κ0 :
r(R,Θ,Z,t)=R, θ(R,Θ,Z,t)=Θ+ Γ
2πR2t=Θ+α(R)t, z(R,Θ,Z,t)=Z.
Les trajectoires sont des cercles d axe Oz.
• On calcule F par : dM =F(X,t).dM0 .
dM0 = eRdR + eΘRdΘ + eZdZ dans (eR,eΘ,eZ) base locale orthonormée en M0 ;
dM = er dR + eθ(RdΘ - 2α(R)t dR)+ezdZ dans (er ,eθ ,ez) base locale orthonormée
enM;
d où:F(R,Θ,Z,t)=er⊗eR-2α(R)teθ⊗eR+eθ⊗eΘ+ez⊗eZ.
•OncalculeCparC=tF.F:
C(R,Θ,Z,t)=1l-2α(R)t(eR ⊗eΘ +eΘ ⊗eR)+4α2(R)t2eR ⊗eR .
On peut aussi,pou
ru
ncalcul direct de C,utiliser la formule du ds2 quidonne :
4α2(R)t2(dR)2 - 4α(R)tRdΘ dR =2dM 0 .e(R, Θ, Z, t) . dM 0.
• La comparaison de l expression obtenue pour C avec les résultats de Ex.II.2 montre que la
déformation est localement assimilable à celle correspondant au glissement simple dé ni
dans Ex.II.2 où le trièdre (-eΘ ,eR ,eZ ) jouerait en M0 le rôle du trièdre (e1 ,e2 ,e3) et
α(R) remplaçant α.
Plus précisément, en introduisant : U(R, t)=er ⊗ eR + eθ ⊗ eΘ + ez ⊗ eZ
on a : F(R,Θ,Z,t)=U(R,t).(1l - 2α(R)teΘ ⊗ eR)
qui montre que la transformation homogène tangente en M0 est le produit du glissement
de Ex.II.2 dé ni avec α(R) dans les axes (-eΘ ,eR ,eZ) suivi de la rotation d angle α(R)t
autour de eZ qui correspond à U(R, t).
On en déduit également que : det F (R, Θ, Z, t)=1;il n y a pas de variation de volume.
• Les directions principales de C(R, Θ, Z, t) en M0 sont, d après les résultats de Ex.II.2,
les bissectrices intérieure et extérieure de l angle (-eΘ ,eR + α(R)teΘ).
La décomposition polaire de F (R, Θ, Z, t) montre que, dans le transport convectif de M0
à M,c
etrièdre subit, autour de eZ la rotation d angle ω(R, t)=-Arctan (α(R)t) cor-
respondant au glissement simple, puis la rotation d angle α(R)t correspondant à U(R, t) ;
soit, au total, la rotation autour de eZ ,d a
ngle :
β(R, t)=α(R)t - Arctan (α(R)t) dans la décomposition polaire de F (R, Θ, Z, t).
• Tr ansformation in nitésimale.
ξ 1 ⇔|α(R)t | 1 c est-à-dire | θ - Θ | 1.
Les directions principales de ε sont les bissectrices de (-eΘ ,eR) et eZ ,avecpourv
aleurs
principales εi correspondantes : α(R)t, -α(R)t, 0. La rotation β(R, t) est nulle au 1er
ordre (elle est du 3ème ordre en α(R)t).
Commentaire.
Le mouvement étudié ici correspond à un modèle classique pour un uide incompressible. Il
sera repris dans Ex.III.3 du point de vue cinématique, justi ant la terminologie de tour-
billon ponctuel .
84
Chapitre II - Études des déformations du milieu continu
Le lien mis en évidence avec le glissement simple ne doit pas surprendre puisque le mou-
vement s effectue par rotation autour de Oz de couches cylindriques concentriques dont la
vitesse angulaire croît au fur et à mesure que l on se rapproche de l axe. On remarque que
la transformation in nitésimale est ici liée à la valeur de l angle α(R)t =(OM 0 ,OM) dont
ato
u
r
nélaparticule, qui doit demeurer faible : elle correspond à des durées d autant plus
brèves que la particule est plus proche de l axe.
II.7 - Cercle deMohrde
sdéfo
rmations. On se place dans l hypothèse de la
transformation in nitésimale. R =(O, ex ,ey ,ez) est orthonormé. La déformation est
plane parallèlement à (ex ,ey) c est-à-dire que εxz = εyz = εzz =0.Onétudie le
tenseur ε(X,t) en un point X donné à l instant t.Ondésigne par (e1 ,e2,e3 ≡ ez)
la base orthonormée de ses directions principales et par ε1,ε2,ε3 =0les valeurs
principales correspondantes. On introduit les variables
Θ = ε1 + ε2 ,r=(ε1 - ε2)/2 ,φ=(ex,e1).
Exprimer les composantes de ε(X ,t) dans R en fonction de Θ, r, φ.Endéduire les
directions du plan (e1,e2) pour lesquelles l allongement unitaire est extrémal, ainsi
que celles pour lesquelles le glissement est maximal lorsque ε(X,t) est donné.
Éléments de réponse ;
• Par les formules de changement de repères :
εxx = Θ/2+r cos 2φ, εyy = Θ/2-r cos 2φ, εxy = εyx = r sin 2φ, autres εij nuls dans R.
• On xe e1 ,e2 ,Θ et r.Onsuppose ε1 >ε2 .Enfaisantv
arierφ on étudie par εxx = δ(ex)
et 2εxy ,le
sv
a
riatio
n
sde l allongement unitaire et du glissement : allongement unitaire
maximal pour φ =0,εxx = ε1 = Θ/2+r ;minimal pour φ = π/2 ,ε
xx =ε2=Θ/2-r.
Glissement maximal pour φ = π/4 , 2εxy =2r = ε1 - ε2 .
Commentaire.
On rapprochera cet exercice de la représentation de Mohr pour les contraintes exposée au
chapitre VI section 3.
II.8 - Extensométrie. On se place dans l hypothèse de la transformation in ni-
tésimale. On suppose que la déformation est plane perpendiculairement à la direction
du vecteur normé e3 .Onétudie le tenseur ε(X ,t) en un point X donné, à l instant t.
A n de déterminer expérimentalement ce tenseur, on dispose selon les directions de
trois vecteurs normés ea ,eb,ec orthogonaux à e3,de
sjauges extensométriques don-
nant les allongements unitaires : δ(ea)=δa ,δ(eb)=δb,δ(ec)=δc .Onsuppose, selon
la pratique courante, que eb est la bissectrice de l angle (ea ,ec)=2α.
Donner l expression de ε(X ,t) dans la base normée (ea ,ec ,e3).Déterminer les
directions principales et les valeurs principales de ε(X,t) dans les deux cas classiques
pour les applications pratiques : α = π/4 et α = π/3.
Exercices
85
Éléments de réponse :
• εaa = δ(ea)=δa ,ε
cc = δ(ec)=δc
eb =(ea + ec)/2cosα ⇒ εac = εca =2δb cos2 α - (δa + δc)/2
ε(X,t)=εaaea⊗ea+εacea⊗ec+εcaec⊗ea+εccec⊗ec
• On pose φ =(ea ,e1),e1 ,e2 ,e3 directions principales de ε(X ,t).Av
e
cle
sn
otations et
les résultats de Ex.II.7
δa =Θ/2+rcos2φ, δb =Θ/2+rcos2(φ-α),δ
c =Θ/2+rcos2(φ-2α).
• α=π/4
Θ=δa+δc ,
r cos 2φ =(δa - δc)/2 ,rsin 2φ =(2δb - δa - δc)/2 d où ε1 ,ε2 ,φ,(ε3 =0).
• α=π/3
Θ=2(δa+δb+δc)/3
r cos 2φ =(2δa - δb - δc)/3 ,rsin 2φ = √3(δb - δc)/3 d où ε1 ,ε2 ,φ,(ε3 =0).
II.9 - Compatibilité des déformations thermiques. On se place dans l hypo-
thèse de la transformation in nitésimale. On considère un solide homogène, constitué
d un matériau isotrope, que l on soumet à un champ d écart de température τ(X) à
partir du champ detempérature T0(X) dans la con guration de référence. On suppose
que les déformations thermiques correspondantes, par rapport à la con guration de
référence sont linéaires et de la forme :
ετ(X)=ατ(X)1l ,
où α est la constante thermique caractéristique de ce matériau isotrope. Quelle doit
être la forme du champ τ pour que ces déformations thermiques soient géométrique-
ment compatibles horsdeto
utec
o
ndition sur les déplacements imposée au contour
du solide ? Montrer que la condition trouvéeestsuffisante même si le solide étudié est
multiplement connexe.
Éléments de réponse :
• Àpartirdes conditions écrites sur les εij,k il vient :
τ,22 + τ,33 =0,τ
,11 + τ,22 =0,τ
,11 + τ,33 =0,τ
,21 =0,τ
,23 =0,τ
,31 =0.
Le champ τ doit être une fonction affine des coordonnées cartésiennes (orthonormées ou
non).
86
Chapitre II - Études des déformations du milieu continu
• On pose ατ = a1 X1 + a2 X2 + a3 X3 + b, en coordonnées cartésiennes orthornormées.
L intégration de ετ donne le champ ξτ de composantes :
ξ1=a1
2 (X2
1 -X2
2 -X2
3)+a2X1X2 + a3X1X3 + bX1 - rX2 + qX3 + λ1
ξ2=a2
2 (X2
2 -X2
1 -X2
3)+a1X2X1 + a3X2X3 + bX2 - pX3 + rX1 + λ2
ξ3=a3
2 (X2
3 -X2
1 -X2
2)+a1X3X1 + a2X3X2 + bX3 - qX1 + pX2 + λ3
où (p, q, r) sont les composantes du vecteur rotation et (λ1 ,λ2 ,λ3) celles du vecteur
translation d un mouvement rigidi ant arbitraire. Une fois ces constantes déterminées,
le champ ξτ est une fonction univoque de X :le
s c
o
nditions de fermeture à véri er
dans le cas d un domaine multiplement connexe sont donc automatiquement véri ées.
II.10 - Déformations thermiques. On se place dans l hypothèse de la transforma-
tion in nitésimale. Une plaque de section circulaire, d axe OX3,derayonR,d épais-
seur uniforme, repose sur le plan X3 =0le point O étant xé. Sa température initiale
est uniforme égale à T0 dans la con guration de référence. On porte la face supérieure
de la plaque (X3 = h) àlatempérature uniforme T <T0,cequi induit dans la plaque
un champ d écart de température τ(X) par rapport à T0 qui est supposé fonction
linéaire de la cote X3.Onsuppose que les déformations thermiquessontdelaforme
ετ (X)=ατ(X)1l.Calculerles déplacements des points de la plaque dus à cet écart
de température. Comment se transforment les plans d équations X3 = Constante
feuillets de la plaque ?
Éléments de réponse :
• En appliquant les résultats de Ex.II.9 on obtient pour ξτ (X) :
ξ1 =a3X1X3-rX2+qX3+λ1
ξ2 =a3X2X3-pX3+rX1+λ2
ξ3=a3
2 (X2
3 -X2
1 -X2
2)-qX1+pX2+λ3
avec a3 = α(T -T0)/h.
λ1 = λ2 = λ3 =0. On peut prendre p = q = r =0(rotation d ensemble nulle).
Le feuillet X3 = constante = c se transforme en :
x1 =X1(1+a3c),x
2 = X2(1+a3c),x
3=c(1+a3
2c)-a3
2( x2
1
(1+a3c)2+ x2
2
(1+a3c)2).
On remarque que a3 c = α(T - T0)c/h 1.L équation du transformé du feuillet X3 = c
peut donc être simpli ée en : x3 = c - a3
2 (x2
1+x2
2),pa
r
aboloïde de révolution de som-
met (0, 0,c),d a
x
ee3 et de rayon de courbure au sommet -1/a3 = -h/α(T - T0).
Commentaire.
Le problème traité se place en fait dans le cadre de l hypothèse des petits déplacements qui
sera exposée au chapitre VIII ( 2.1). On peut alors assimiler les surfaces transformées des
feuillets de la plaque à des calottes sphériques parallèles, de rayon -h/α(T - T0).
C est au chapitre X que seront énoncés et démontrés les théorèmes d unicité pour la solution
d un problème d équilibre thermoélastique linéarisé qui fournissent la pleine justi cation des
résultats trouvés ici.
Chapitre III
Cinématique du milieu
continu
MOTS CLÉS
Ta u x de déformation.
Ta u x de déformation volumique.
Ta ux de rotation. Vecteur tourbillon.
Dérivée particulaire. Te r m e de c o n v ection.
Conservation de la masse. Équation de continuité.
87
Chapitre III Cinématique du milieu continu
89
En bref
Le point de vue incrémental pour la description de l évolution d un
système peut être abordé en description lagrangienne ou en description
eulérienne.
Dans la description lagrangienne, ladériv
ation par rapport au temps
s identi e à la dérivée particulaire qui suit l évolution d une grandeur at-
tachée à une particule, à un ensemble discret de particules ou, plus géné-
ralement, à un domaine matériel (sections 2 et 4). Au plan géométrique, la
cinématique du milieu continu se déduit directement de l étude du trans-
port convectif, de la transformation et de la déformation entre une con -
guration initiale de référence et la con guration actuelle.
Ainsi apparaissent naturellement les notions de taux lagrangiens d ex-
tension, de dilatation volumique, de déformation, qui désignent les dérivées
temporelles des grandeurs correspondantes dé nies dans la comparaison de
la con guration actuelle avec la con guration de référence. Ils présentent
toutefois l inconvénient de caractériser l évolution in nitésimale à venir à
l instant actuel en se référant à l instant initial (section 2).
C est dans la description eulérienne, dont il est le fondement, que le
point de vue incrémental trouve sa pleine cohérence. À chaque instant
l évolution in nitésimale à venir y est dé nie sur la con guration actuelle.
Au plan géométrique, le mouvement étant donné par le champ des vi-
tesses, c est le gradient de ce champ sur la con guration actuelle qui dé nit
localement la transformation in nitésimale. Le tenseur taux de déforma-
tion (eulérien), partie symétrique de ce gradient, y caractérise l évolution
de la déformation, rapportée à la con guration actuelle qui joue ainsi, à
chaque instant, le rôle de con guration de référence. La partie antisymé-
trique du gradient du champ de vitesse est le taux de rotation .Ildé nit
localement le mouvement in nitésimal de rotation de la matière, auquel
s ajoute le mouvement in nitésimal de déformation pure, dé ni par le ten-
seur taux de déformation (section 3).
La description eulérienne, dé nissant les grandeurs sur la con guration
actuelle en fonction des variables géométriques et du temps, n identi e pas
les éléments matériels. La dérivation particulaire doit alors y être effec-
tuée comme la dérivation par rapport au temps en suivant la particule ou
90
Chapitre III Cinématique du milieu continu
l élément matériel concerné .Ce
cie
xplique la structure des formules cor-
respondantes où l on trouve de façon systématique un terme qui exprime la
dérivation partielle par rapport au temps les variables géométriques étant
maintenues constantes (point ou domaine géométrique gé ), auquel
s ajoute un terme de convection .Celui-ciestlacontribution due au trans-
port convectif de lapa
rtic
uleo
udu domaine matériel auquel est attachée
la grandeur considérée (section 4).
Une attention particulière est apportéeàladériv
ation particulaire des
intégrales de volume en raison du rôle privilégié qui leur revient pour dé -
nir les grandeurs physiques relativesàunsystème dans la modélisation du
milieu continu. Ainsi la masse d un système s exprime-t-elle comme l inté-
grale desamasse volumique. La loi de conservation de la masse se traduit
parlan
ullité de la dérivée particulaire de cette intégrale. L exploitation
de cette équation globale conduit, au plan local, à l équation de continuité
qui s exprime, en description eulérienne, par une équation différentielle et
l équation de saut associée (section 5).
Chapitre III Cinématique du milieu continu
91
Principales notations
Notation
Signi cation
1ère formule
U(X ,t) gradient lagrangien du champ de vitesse (2.7)
grad U(x,t) gradient eulérien du champ de vitesse
(3.4)
d(x,t) taux de déformation (eulérien)
(3.9)
˙θ
taux de glissement
(3.18)
Ω(x,t) taux de rotation
(3.21)
Ω(x,t) vecteur tourbillon
(3.22)
d
dtou˙
symboles de la dérivation particulaire
(2.2)
a(x,t) accélération en représentation eulérienne (4.16)
W
vitesse de propagation
(4.30)
[[ ]] symbole du saut ou discontinuité
(4.32)
ρ(x,t) masse volumique dans κt
(5.1)
ρ0(X) masse volumique dans κ0
(5.8)
92
Chapitre III Cinématique du milieu continu
1P
résentation .......................... 93
2C
inématique lagrangienne du milieu continu ....... 93
2.1T
ransport convectifetdérivationparticulaire ...... 93
2.2T
auxdedéformation lagrangien .
............. 95
3C
inématique eulérienne du milieu continu ........ 96
3.1P
roblématique ....................... 96
3.2D
érivée particulaire d un vecteur ............. 96
3.3T
auxdedéformation (eulérien) .
............. 97
3.4 Utilisation du tenseur taux de déformation .
...... 98
3.5 Taux de rotation. Taux de déformation volumique .
.
. 100
3.6 Comparaison avec la déformation linéarisée en transfor-
mation in nitésimale .
.
.
................. 103
3.7 Compatibilité d un champ de taux de déformation .
.
. 104
3.8M
ouvement rigidi ant ................... 105
3.9 Formulation faible de la compatibilité géométrique .
.
. 106
3.10 Hypothèsedelatransformationin nitésimale ...... 106
3.11 Objectivité.
........................ 107
4D
érivées particulaires .....................107
4.1 Dérivées particulaires en description lagrangienne .
.
.
. 107
4.2 Dérivées particulaires en description eulérienne .
.
.
.
. 108
4.3D
érivée particulaire d une fonction de point....... 109
4.4D
érivée particulaire d une intégraledevolume ...... 1
10
4.5D
érivationparticulaired une circulation ......... 119
4.6D
érivationparticulaired un ux ............. 121
5C
onservationdelam
a
sse ...................122
5.1É
quationdecontinuité. . ................. 122
5.2F
orme intégrale ....................... 124
5.3 Dérivée particulaire de l intégrale d une densité massique
en descriptioneulérienne .
................. 125
Récapitulatifdes formules essentielles .............126
Exercices ..............................130
1 Présentation
93
Cinématique du milieu continu
1P
r
é
s
e
n
t
a
t
i
o
n
Au chapitre précédent on s est attaché à la comparaison entre la con guration
de référence et la con guration actuelle, essentiellement au plan géométrique, sans
considération de l histoire intermédiaire du système étudié. Comme on l a dit alors,
l argument t intervenait dans les diverses expressions comme le paramètre indexant
la con guration actuelle.
On se propose maintenant de suivre l évolution du système en fonction de la
variable temps.
On s intéressera d abord à l aspect purement géométrique de cette évolution :
c est l étude de la cinématique du milieu continu tridimensionnel. À partir de celle-
ci on examinera d autres aspects de cette évolution, notamment en considérant les
grandeurs physiques attachées au système ou à ses éléments constitutifs, dans leurs
représentations lagrangiennes ou eulériennes, et les dérivations temporelles de ces
grandeurs.
Sous une forme suggestive, qui se réfère au propos initial concernant le chapitre
II, on pourrait décrire l objet du présent chapitre comme le suivi du lm de
l évolution du système par la comparaison de ses images vue par vue .
2C
inématique lagrangienne du milieu continu
2.1 Transport convectif et dérivation particulaire
Dans un référentiel R ,ladescription lagrangienne (chapitre I, section 3) repose sur
la donnée de la correspondance qui dé nit, à chaque instant t ,laposition géométrique
x de la particule identi ée par sa position X dans la con guration de référence κ0 :
x =φ(X,t).
(2.1)
La fonction φ ,do
nto
nado
nné les conditions de régularité spatiales et tempo-
relles (chapitre I, 3.3), explicite le transport convectif de la particule X entre la
con guration κ0 et la con guration κt .Danstoute la suite de cette section, on sup-
pose que la fonction φ est continueetcontinûment différentiable (C2) sur le domaine
considéré au cours de l évolution.
La vitesse de la particule X à l instant t est obtenue par dérivation de l équation
94
Chapitre III Cinématique du milieu continu
(2.1) par rapport au temps :
˙
x = U (X,t)=∂φ(X,t)
∂t.
(2.2)
Dans cette formule apparaît la notation générique ˙
a , qui sera utilisée dans
toute la suite pour désigner la dérivée par rapport au temps de la grandeur a attachée
àu
nélém
e
ntmatériel, en suivant cet élément matériel dans son mouvement. Ici la
grandeur a est le vecteur-position x attaché à la particule X .Cette dérivée est appelée
dérivée particulaire de la grandeur a .Elle sera également notée da
dt.
En description lagrangienne la dérivée particulaire s identi e évidemment à la
simple dérivée partielle par rapport à la variable temps puisque les variables spatiales
yrepèrent l élément matériel concerné.
Au chapitre II ( 4.2) a été dé ni le transport convectif d un vecteur élémentaire
dM 0 attaché à la particule X dans une transformation quelconque entre κ0 et κt .Le
tenseur gradient de la transformation entre les con gurations κ0 et κt :
F (X ,t)= φ (X ,t)
(2.3)
fournit l expression de ce transport convectif
dM = F(X,t).dM0
(2.4)
qui signi e, du point de vue physique, que les particules matérielles qui constituent
le vecteur élémentaire, c est-à-dire in nitésimal, dM 0 en X sont transportées dans κt
sur le vecteur in nitésimal dM en x .Ensuivantletransport convectif de ce vecteur
entre les instants t et (t +dt) on dé nit la dérivée particulaire ˙
˜
dM dont l expression
résulte immédiatement de (2.4) :
˙
˜
dM = ˙F(X,t).dM0 .
(2.5)
Compte tenu de (2.3) on a :
˙F (X,t)= ∂
∂t ( φ (X,t))
(2.6)
qui n est autre que le gradient du champ de vitesse U sur la con guration κ0 :
˙F (X ,t)= U (X ,t) .
(2.7)
Pour un volume matériel élémentaire dΩ0 dans κ0 ,attaché à la particule X ,le
transport convectif dans κt s exprime par :
dΩt = J(X,t)dΩ0
J(X,t)=det(F (X ,t)) .
(2.8)
2 Cinématique lagrangienne du milieu continu
95
La dérivée particulaire ˙
ˉ
dΩt est donc :
˙
ˉ
dΩt= ˙
J (X,t)dΩ0
(2.9)
où
˙
J (X,t)=
˙
ˆ
det (F (X ,t))(1)
(2.10)
On peut aussi s intéresser au transport d une surface élémentaire :
da = J(X,t)tF-1(X,t).dA
(2.11)
qui fournit l expression de la dérivée particulaire du vecteur aire élémentaire
˙
Ù
da= ˙
J(X,t)tF-1(X,t).dA+J(X,t) ˙
ˉ
tF-1(X,t).dA
(2.12)
avec
˙
ˉ
tF -1(X,t)= ∂
∂t(tF -1(X,t)) .
2.2 Taux de déformation lagrangien
La formule (2.9) donne l expression du taux de dilatation volumique lagran-
gien :
˙
ˉ
dΩt
dΩ0= ˙
J (X,t) .
(2.13)
L évolution de la métrique attachée à la particule X dans le transport convectif
est mesurée par la dérivée du produit scalaire de deux vecteurs matériels élémentaires
attachés à cette particule. De
dM .dM =dM0 .(1l+2e(X,t)).dM 0
(2.14)
et
dM .dM =dM0 .(t φ(X,t). φ(X,t)).dM 0
(2.15)
il résulte, par dérivation :
d
dt(dM .dM )=2dM0 . ˙e(X,t).dM 0
(2.16)
avec
˙
e(X,t)=1
2(t U (X,t). φ(X,t)+t φ(X,t). U (X,t)) .
(2.17)
Le taux de déformation lagrangien ˙
e (X,t) fournit l expression de la déri-
vée particulaire du produit scalaire de deux vecteurs matériels élémentaires, forme
bilinéaire symétrique sur la con guration de référence κ0 .
(1)qui n est pas égal à det ( U(X,t)) !
96
Chapitre III Cinématique du milieu continu
Remarques
• L argument essentiel dans tous les raisonnements qui précèdent est que, par dé -
nition même de la description lagrangienne, la dérivée particulaire s identi e à la
dérivée partielle parrapportau temps.
• Du point de vue physique, on retiendra que les taux de dilatation et de déformation
ontladimension de l inverse d un temps.
3C
inématique eulérienne du milieu continu
3.1 Problématique
Si l on se réfère à l objet du présent chapitre tel que décrit de façon schématique
dans la section 1, l approche ci-dessus de la cinématique n est que partiellement sa-
tisfaisante : on s y intéresse aux dérivées particulaires à l instant t de divers éléments
matériels, comparant ainsi deux con gurations in niment voisines κt et κt+dt mais
on exprime le résultat de cette comparaison sur la con guration de référence κ0.
Un point de vue incrémental pur nécessite que ces dérivations soient exprimées sur
la con guration actuelle. Ceci conduit à considérer la description eulérienne (chapitre
I, section 4).
On rappelle que la dé nition eulérienne d un mouvement (chapitre I, 4.1) consiste
en la donnée, à chaque instant t,delavitesse U en fonction des coordonnées spa-
tiales dans la con guration actuelle κt :
U = Ut(x,t) .
(3.1)Dans toute la suite de cette section la fonction U t est supposée continue et conti-
nûment différentiable.
3.2 Dérivée particulaire d un vecteur
Dans le cadre de la description eulérienne, l objectif est ici d exprimer la dérivée
particulaire ˙
˜
dM ,dé nie au paragraphe 2.1, sous forme purement eulérienne.
En rapprochant les expressions(2.4) et (2.5, 2.7) pour dM et ˙
˜
dM respectivement,
il vient
˙
˜
dM = U(X.t).(F-1(X,t)).dM .
(3.2)Cette formule, qui conserve les variables lagrangiennes n apparaît pas encore
constituer l expression cherchée.
Il faut alors rappeler la relation entre les descriptions lagrangienne et eulérienne
du champ de vitesse U : U (X ,t)=U t (x,t)
avec x =φ(X,t).
(3.3)
3 Cinématique eulérienne du milieu continu
97
En notant, comme indiqué au chapitre II ( 5.3), par grad U (x,t) le gradient de
la fonction U t par rapport à lav
ariablex sur κt ,c est-à-dire le gradient eulérien
du champ de vitesse ,ondéduit de (3.3) :
∀dX∈κ0,
dU = U (X,t).dX =gradU (x,t).dx =gradU (x,t). φ(X,t).dX
(3.4)
d où
U (X,t) .F-1 (X ,t)=grad U (x,t)
avec x =φ(X,t).
(3.5)
Il en résulte que (3.2) se met dans la forme purement eulérienne :
˙
˜
dM =gradU (x,t) . dM
(3.6)
Une démonstration plus intuitive de cette formule essentielle peut être donnée
en remarquant que, comme indiqué du chapitre I ( 4.1), la description eulérienne
peut être envisagée à chaque instant comme une description lagrangienne qui prend
la con guration actuelle gée comme con gurationderéférence. La formule lagran-
gienne (2.5, 2.7) fournit alors le résultateulériencherché (3.6) en substituant à dM 0
et U (X,t) respectivement dM et grad U (x,t) .
3.3 Taux de déformation (eulérien)
Àpartirdelaformule (3.6) il est aisé d exprimer la dérivée particulaire du produit
scalaire dM . dM introduite au paragraphe 2.2 :
d
dt (dM . dM )=dM . (grad U (x,t)+tgrad U (x,t)) . dM
(3.7)
que l on met sous la forme
d
dt (dM . dM )=2dM .d(x,t) . dM
(3.8)
en introduisant le tenseur symétrique d (x,t)
d (x,t)= 1
2 (grad U (x,t)+tgrad U (x,t)) .
(3.9)
Le tenseur d (x,t) est le taux de déformation (eulérien)(2).Onv
oits
u
rla
formule (3.9) que ce tenseur n est autre que la partie symétrique du gradient
(2)En l absence de précision, l expression taux de déformation désigne le tenseur d (x,t) .
98
Chapitre III Cinématique du milieu continu
eulérien du champ de vitesse U .Dansunrepère cartésien orthonormé ses com-
posantes ont la forme simple :
dij=1
2 ∂Ui
∂xj + ∂Uj
∂xi également notées dij = 1
2(Ui,j + Uj,i) .
(3.10)
Les expressions des composantes de d (x,t) en coordonnées cylindriques ou sphé-
riques sont données dans le formulaire à la n du présent chapitre.
Le tenseur taux de déformation d (x,t) fournit, par (3.8), l expression de la dérivée
particulaire du produit scalaire de deux vecteurs matériels élémentaires, forme bili-
néaire symétrique sur la con guration actuelle κt .Cette expression est l homologue
de (2.16) ; on ne manquera pas de remarquer que les expressions de ˙
e(X,t) et d(x,t)
en fonction de U (X ,t) et grad U (x,t) ne sont pas semblables. Il est utile pour cer-
taines applications (cf. chapitre V, 4.1) d établir la relation entre ˙e (X ,t) et d (x,t) :
en rapprochant (2.16) et (3.8) compte tenu de (2.4) on obtient
d(x,t)=tF -1 (X,t). ˙
e(X,t).F-1 (X,t)
oùx =φ(X,t).
(3.11)
3.4 Utilisation du tenseur taux de déformation
En exploitant la présentation de la description eulérienne comme une description
lagrangienne à l instant t sur la con guration actuelle gée , on pressent que l uti-
lisation du tenseur taux de déformation d (x,t) sera, dans le mouvement in nitésimal
entre les instants t et (t +dt) ,s
e
mblableàcelle du tenseur des dilatations C (X ,t)
entre les con gurations κ0 et κt .
Plus précisément on dé nit, à partir du tenseur taux de déformation, le taux
d extension et le taux de glissement.
Ta u x d extension
On considère un vecteur élémentaire dM orienté selon le vecteur unitaire e1 d une
base quelconque au point M dans κt .Ondésigne,comme au chapitre II ( 4.3), par
ds la longueur de ce vecteur :
dM=e1ds
(3.12)
ds2 =dM.dM .
(3.13)
Dans le mouvement in nitésimal entre κt et κt+dt au point M ,lev
ecteur dM
est transporté sur le vecteur (dM + ˙
˜
dM dt) de longueur (ds + ˙
i
ds dt) .Pardérivation
de (3.13) d une part, et en appliquant (3.8) compte tenu de (3.12) d autre part, on
obtient
ds˙
i
ds =(ds)2 e1 .d(x,t) .e1
(3.14)
3 Cinématique eulérienne du milieu continu
99
d où l expression du taux d extension ou taux d allongement unitaire selon la di-
rection e1 au point M de κt :
˙
i
ds
ds = d11 (x,t)
(3.15)
(on rappelle que d11 (x,t)=e1 .d(x,t) .e1) .
Ta u x de glissement
Figure 1 Ta ux de glissement de deux directions orthogonales dans κt
On considère deux vecteurs élémentaires dM 1 et dM 2 orientés selon deux direc-
tions orthogonales au point M dans κt .Le
sv
ecteurs unitaires e1 et e2 dé nissent
les orientations de ces vecteurs ( gure 1). Dans le mouvement in nitésimal entre κt
et κt+dt au point M , ces vecteurs sont transportés respectivement sur les vecteurs
(dM1+ ˙
˜
dM1dt)et(dM2+ ˙
˜
dM 2 dt) qui font entre eux l angle (π/2 -
˙θ dt).Pardéri-
vation de
dM1 .dM2 =(e1 ds1).(e2 ds2)
(3.16)
et en appliquant (3.8), il vient :
d
dt (dM 1 . dM 2)=ds1ds2 ˙θ =2ds1ds2 e1 .d(x,t) .e2 .
(3.17)
D où l expression du taux de glissement ˙θ desdeux directions orthogonales selon
les vecteurs unitaires e1 et e2 au point M de κt :
˙θ =2d12 (x,t);
(3.18)
on rappelle que d12 (x,t)=e1 .d(x,t) .e2 .
100
Chapitre III Cinématique du milieu continu
Directions principales
Le taux de déformation d (x,t) ,tenseureuclidien symétrique réel admet dans κt
un trièdreorthogonal de directions principales (cf. annexe I, 5.10). Dans la base
orthonormée de ses directions principales, d (x,t) s écrit :
d(x,t)=d1(x,t)e1 ⊗e1 +d2(x,t)e2 ⊗e2 +d3(x,t)e3 ⊗e3
(3.19)
où d1 (x,t) ,d
2 (x,t) et d3 (x,t) sont les taux d extension dans les trois directions
principales.
Il résulte immédiatement de l application de la formule (3.18) que pour chaque
couple de directions principales au point M on a ˙θ =0.Autrement dit : un trièdre
de vecteurs matériels élémentaires attachés au point M ,colinéaires à trois directions
principales orthogonales de d (x,t) ,demeure orthogonal dans la transformation in -
nitésimal entre les instants t et (t +dt) ;sonorientation est évidemment conservée.
La réciproque de cette propriété découle directement de(3.18) (comme au chapitre
II, 3.2). Il s agit d une propriété caractéristique des directions principales du taux
de déformation.
Dans le mouvement à l instant t dé ni par le champ de vitesse
U = U t(x,t) sur κt ,letrièdr
eorthogonal des directions principales
de d (x,t) en M demeure orthogonal.
En outre, si l on considère en M un vecteur dM (i) de κt dirigé selon une direction
principale de d(x,t),parexemple la direction ei ,onaévidemment à partir de (3.19) :
d(x,t) . dM (i) = di(x,t)dM (i)
(3.20)
qui rappelle que les directions principales de d (x,t) en M sont les directions propres
de l application linéaire qui lui est associée ( gure 2).
3.5 Taux de rotation. Taux de déformation volumique
Ta u x de rotation
La formule (3.9) montre que la partie symétrique du gradient du champ de vi-
tesse est le taux de déformation en M .Ilestnatureld introduire, pour compléter la
décomposition de grad U (x,t) ,lapartieantisymétrique de ce tenseur :
Ω (x,t)= 1
2 (grad U (x,t) - tgrad U (x,t)) .
(3.21)
3 Cinématique eulérienne du milieu continu
101
Ce tenseur antisymétrique est appelé taux de rotation en M (la terminologie sera
justi ée dans la suite). Illuiestassocié le vecteur Ω (x,t) ,appelévecteur tourbillon
du champ de vitesse en M ,dé ni par :
∀dM ∈ κt ,Ω(x,t).dM =Ω(x,t)∧dM (3)
(3.22)
On véri e, par exemple en calculant les composantes de Ω (x,t) dans un repère
orthonormé, que :
Ω (x,t)= 1
2rotU(x,t).
(3.23)
Avec cette décomposition, la formule de dérivation particulaire d un vecteur (3.6)
devient :
˙
˜
dM =d(x,t).dM +Ω(x,t)∧dM .
(3.24)
En particulier, si l on considère un vecteur élémentaire dM (i) colinéaire à une direction
principale ei du taux de déformation d (x,t) au point M on a, en application de (3.20)
˙
˜
dM(i) = di(x,t)dM(i) +Ω(x,t)∧ dM(i) .
(3.25)
L interprétation physique du vecteur tourbillon et la justi cation de la terminologie
tauxderotation découlent directement de l équation (3.25). En effet, considérant
un trièdre de vecteurs matériels élémentaires dM 1 , dM 2 , dM 3 attachés à M ,
colinéaires à trois directions principales orthogonales (e1 ,e
2,e
3) de d (x,t) ,onaen
application de (3.25) :
˙
˜
dM1 = d1(x,t)dM1 +Ω(x,t)∧ dM1
˙
˜
dM2 = d2(x,t)dM2 +Ω(x,t)∧ dM2
˙
˜
dM3 =d3(x,t)dM3+Ω(x,t)∧dM3 .
(3.26)
Ces trois équations montrent que, dans la transformation in nitésimale entre les
instants t et (t +dt) ,letrièdre de vecteurs matériels ,qui demeureo
rthogonal
comme on l a déjà démontré, subit la rotation in nitésimale dé nie par le vecteur
Ω (x,t)dt tandis que chacun des vecteurs matériels considérés subit l allongement
unitaire di (x,t)dt .Autrement dit :
Ω(x,t) est le vecteur vitesse de rotation instantanée du trièdre des
directions principales de d(x,t),àl instant t dans le transport par
le mouvement.
(3)Dans toute base orthonormée directe (e1 ,e2 ,e3) la relation entre Ω (x,t) et Ω (x,t) s explicite
sous la forme :
Ω=pe1+qe2+re3 ,Ω= -(p(e2⊗e3-e3⊗e2)+q(e3⊗e1-e1⊗e3)+r(e1⊗e2-e2⊗e1))
ouΩ= -(Ω23e1+Ω31e2+Ω12e3).
102
Chapitre III Cinématique du milieu continu
On peut aussi introduire la notion de mouvement moyen de la matière en M à l instant t :
c est le mouvement rigidi ant dans lequel le torseur des quantités de mouvement (cf. chapitre
IV, 7.2) d un petit volume sphérique δΩt ,decentre M et de diamètre δ est identique à celui
du même petit volume dans le mouvement réel à l instant t. P désignant le point courant
de δΩt et αi les coordonnées de MP selon les directions principales de d(x,t) de vecteurs
unitaires ei ,ona(aupremierordreenδ):
U(P, t)=U(x,t)+Ω(x,t) ∧ MP + i
αidi(x,t) ei ;
on en déduit que le mouvement rigidi ant moyen en M à l instant t est dé ni par le champ
de vitesse :
U(P, t)=U(x,t)+Ω(x,t) ∧ MP .
Le vecteurtourbillon Ω(x,t) apparaît alors comme le vecteur vitesse de rotation moyenne
instantanée delam
atièr
ee
nM . Ω(x,t) peut être mis en évidence expérimentalement au
moyen du vorticimètre, petit équipage ottant à la surface d un écoulement de uide dont la
rotation permet de visualiser le vecteur tourbillon.
La dé nition (3.22, 3.23) adoptée ici pour le vecteur tourbillon est classique. On
dé nit aussi le vecteur vorticité (vorticity vector dans la terminologie anglo-saxonne),
égal au rotationnel de U ,do
ntl usage tend actuellement à se substituer à celui du
vecteur tourbillon.
Ta u x de dilatation volumique
Figure 2 Trièd r e d evecteurs matériels colinéaires aux directions principales de d (x,t)
Des équations (3.26) résulte également l expression du taux de dilatation volu-
mique. Le volume dΩt du parallélépipède construit, en M ,s
u
rle
smêm
es vecteurs
matériels dM 1 , dM 2, dM 3 dans κt ( gure 2) est le produit mixte (4) :
dΩt =(dM1,dM2,dM3)
(3.27)
d où
˙
ˆ
dΩt=(˙
˜
dM1,dM2,dM3)+(dM1,
˙
˜
dM2,dM3)+(dM1,dM2,
˙
˜
dM3).
(3.28)
(4)L ordre des trois vecteurs est choisi de manière à constituer un trièdre direct.
3 Cinématique eulérienne du milieu continu
103
Compte tenu de (3.26), en simpli ant les notations, (3.28) se transforme en :
˙
ˆ
dΩt =(d1+d2+d3)(dM1 , dM2 , dM3)+(Ω∧dM1 , dM2 , dM3)
+(dM1 ,Ω∧ dM2 , dM3)+(dM1 , dM2 ,Ω∧ dM3)
(3.29)
Les trois derniers termes de (3.29) sont nuls puisque les vecteurs dM 1 , dM 2 et
dM 3 sont mutuellement orthogonaux ; d où l expression du taux de dilatation volu-
mique :
˙
ˉ
dΩt
dΩt = tr (d (x,t)) =divU (x,t)
(3.30)
Une conséquence immédiateetimpo
rta
ntedec
erés
ultate
stqu
u
nm
o
u
v
e
m
e
nt
dans lequel il n y a pas de variation de volume à l instant t au point M (mouve-
ment isochore en M à l instant t)estcaractérisé par la condition
div U (x,t)=0.
(3.31)
Ce sera le cas, en particulier, des écoulements de uides (modélisés comme) in-
compressibles et des évolutions de solides, tels que le caoutchouc, soumises à la liaison
interne d incompressibilité (cf. chapitre VII, 4.3), pour lesquels on écrira :
∀x∈ Ωt , divU(x,t)=0.
(3.32)
En rapprochant l expression (3.30) du taux (eulérien) de dilatation volumique et
le résultat (2.13) obtenu par le taux lagrangien, on obtient entre ces deux grandeurs
la relation :
tr d (x,t)= ˙
J(X,t)J-1 (X,t)
oùx=φ(X,t) (5).
(3.33)
Remarque
Les résultats qui précèdent concernant la vitesse de rotation du trièdre des directions princi-
pales matérialisées et le taux de dilatation volumique con rment la signi cation géométrique
des terminologies rotationnel et divergence . On prendra garde toutefois au facteur
1/2 dans la dé nition (3.23) du vecteur tourbillon.
3.6 Comparaison avec la déformation linéarisée en
transformation in nitésimale
La comparaison ( gure 3) des formules (3.8, 3.9, 3.15, 3.18, 3.21 et 3.30) avec les
formules linéarisées écrites, dans l hypothèse de la transformation in nitésimale, au
chapitre II (section 5) s impose. La similitude est évidente.
(5)On peut rapprocher ce résultat de l expression (3.5) de grad U (x,t) .Ainsiona:
grad U (x,t)=( ∂
∂t φ(X,t)).( φ(X,t))-1 et div U (x,t)=( ∂
∂t det φ(X,t))/det φ(X,t) .
104
Chapitre III Cinématique du milieu continu
Cette constatation ne doit pas surprendre. En effet, l opération de dérivation à
laquelle il est procédé ici correspond à une transformation in nitésimale à partir
de la con guration actuelle prise comme référence. Mais il convient de bien noter
que la validité des formules relatives à ε est liée à l hypothèse ξ 1 de la
transformation in nitésimale. Ceci précise la signi cation du taux de glissement ˙θ
vis-à-vis du glissement θ introduit au chapitre II ( 3.2).
Ta u x de déformation
Déformation linéarisée
d =(grad U +tgrad U)/2
ε =( ξ +t ξ)/2
Ω =(grad U -tgrad U)/2
w =( ξ -t ξ)/2
˙
¸
dM .dM =2dM .d.dM
dM.dM -dM0 .dM 0 2dM0 .ε.dM 0
˙
Ù
ds/ds = d11
(ds - ds0)/ds0 ε11
˙
i
dΩt/dΩt =divU
(dΩt - dΩ0)/dΩ0 div ξ
˙θ =2d12
θ 2ε12
Figure 3 Ta u x de déformation et déformation linéarisée
3.7 Compatibilité d un champ de taux de déformation
Le problème posé est analogue à celui examiné au chapitre II (section 6).
Étant donné un champ de tenseurs du second ordre symétriques dé ni sur la
con guration κt ,àquelles conditions ce champ constitue-t-il véritablement un champ
de taux de déformation, c est-à-dire dérive-t-il d un champ de vitesse U(x,t) par les
formules (3.9) ?
Comme on l a signalé ci-dessus, la formule (3.9) reliant d(x,t) à U(x,t) est iden-
tique à la formule (5.2) du chapitre II reliant, dans l hypothèse de la transformation
in nitésimale, la déformation linéarisée ε(X,t) au déplacement ξ(X ,t).Leproblème
de la compatibilité d un champ de taux de déformation se trouve donc résolu par
simple changement de notations à partir des résultats du chapitre II (section 6).
L espace étant rapporté à un repère cartésien orthonormé, les conditions néces-
saires et suffisantes (si le domaine d étude est simplement connexe) pour la compati-
bilité d un champ de taux de déformation s écrivent :
dij,k +dk ,ij -dik,j -dj ,ik =0 i,j,k, =1,2,3
(3.34)
3 Cinématique eulérienne du milieu continu
105
ou encore : 2 d23,23 = d33,22 + d22,33 et permutation circulaire ,
d13,23 - d12,33 - d33,21 + d32,31 =0et permutation circulaire .
(3.35)
On insistera à nouveausu
rlefait que ces formules concernent, en toute géné-
ralité ,letenseurtaux (eulérien) de déformation. Elles diffèrent en cela des résultats
homologues énoncés au chapitre II qui nesontvalables que dans le cadre de la trans-
formation in nitésimale pour la déformation linéarisée.
L intégration d un champ de taux de déformation compatible d(x,t) pour
construire les champs de vitesse U(x,t) dont il dérive se fait par la méthode indi-
quée au chapitre II ( 6.2) pour l intégration d un champ de déformation linéarisée
ε(X,t) ;lete
n
s
e
u
rta
ux de rotation Ω(x,t) joue ici, vis-à-vis de d(x,t),lerôlede
w(X,t) vis-à-vis de ε(X,t). Le champ U(x,t) est déterminé à un champ de
vitesse rigidi ant près.
3.8 Mouvement rigidi ant
On suppose ici que le mouvement dé ni à l instant t par le champ de vitesse U
sur Ωt est rigidi ant sur une partie Ω t de Ωt ,c est-à-dire que, sur Ω t ,U(x,t) est
de la forme
U (x,t)=U 0 (t)+ω (t) ∧ OM
(3.36)
ou encore, en introduisant ω (t) ,lete
n
s
e
u
rdu second ordre, antisymétrique, associé
au vecteur ω (t) (cf. 3.5) :
∀x ∈ Ωt ,U(x,t)=U0(t)+ω(t).OM .
(3.37)
Il résulte de façon évidente de (3.37) que
∀x∈Ω t⊂Ωt,
grad U (x,t)=ω (t)
d (x,t)=0,Ω(x ,t)=ω (t) .
(3.38)
En d autres termes si le mouvement de Ω t à l instant est rigidi ant, le champ de
taux de déformation sur Ω t est nul. (On remarque qu en conséquence de (3.11) le
champ de taux lagrangien de déformation ˙
e est également nul sur Ω 0.)
Pour la réciproque on suppose qu à l instant t ,s
u
run domaine Ω t le champ de
taux de déformation d est connu, identiquement nul :
∀x∈Ω t,d
(x,t)=0.
(3.39)
Alors, en appliquant à ce champ d sur Ω t la méthode d intégration rappelée au
paragraphe précédent, on constate que le champ est évidemment compatible, et dé-
rive du champ de vitesse nulàu
nm
o
uvement rigidi ant près, c est-à-dire que le
mouvement de Ω t àl instant t est un mouvement rigidi ant .
106
Chapitre III Cinématique du milieu continu
3.9 Formulation faible de la compatibilité géométrique
On a vu au chapitre II ( 6.2) comment les formules exprimant la compatibilité d un champ
de déformation linéarisée ε,ouicid un champ de taux de déformation d,sonthomologues de
la condition rotationnel nul pour qu un champ de vecteurs soit un champ de gradient.
La formulationfaiblede cette dernière condition est connue en analyse fonctionnelle. Sous
réserve que les espaces fonctionnels sur lesquels on opère soient convenablement dé nis, on
établit la condition nécessaire et suffisante suivante pour qu un champ de vecteur u dé ni
sur un volume Ω de R3 soit un champ degradient:
∀v
àsupport compact sur R3 ,
div v =0sur Ω,
v(x) .n(x)=0sur ∂Ω
(n(x): normale extérieure au point courant de ∂Ω) .
Ω v(x) .u(x) dΩ =0.
(3.40)
La formulation faible des conditions (3.34) pour la compatibilité d un champ de tenseurs
symétriques d(x,t) dé ni à l instant t sur le volume Ωt dans la con guration κt est analogue :
le champ d est compatible, c est-à-dire dérive par (3.9) d un champ de vecteur U dé ni sur
κt ,sietseulementsi
∀σ
symétrique ,
àsupport compact sur R3 ,
divσ=0surΩt,
σ(x) .n(x)=0sur ∂Ωt
(n(x): normale extérieure au point courant de ∂Ωt) .
Ωt σ(x):d(x,t) dΩt =0.
(3.41)
L interprétation mécanique des champs σ qui permettent, dans cette formulation, de carac-
tériser par dualité les champs d compatibles, apparaîtra au chapitre V ( 3.13) à travers la
modélisation des efforts intérieurs par les contraintes de Cauchy.
Dans le même ordre d idées on peut remarquer qu en conséquence directe de (3.40) on écrira
la formulation faible de la condition de compatibilité d un champ de tenseurs F (X ,t) dé ni
à l instant t sur un volume Ω0 dans la con guration κ0 ,c
e
st-à-dire la condition nécessaire
et suffisante pour que F (X ,t) soit le gradient d une fonction vectorielle φ(X ,t) (cf. chapitre
II, 6.1) :
∀B
àsupport compact sur R3 ,
divB=0surΩ0 ,
B(X) .N(X)=0sur ∂Ω0
(N (X): normale extérieure au point courant de ∂Ω0) .
Ω0
tB(X):F (X ,t) dΩ0 =0.
(3.42)
L interprétation mécanique des champs B considérés ci-dessus apparaîtra également au cha-
pitre V ( 4.2).
3.10 Hypothèse de la transformation in nitésimale
Dans l hypothèse de la transformation in nitésimale on a montré (chapitre II, 5.3) qu en
ne conservant que les termes du premier ordre on peut confondre les gradients pris sur les
con gurations initiale et actuelle en des points homologues. On peut alors, au premier ordre :
4 Dérivées particulaires
107
• d une part assimiler d(x,t) à ( U(X ,t)+t U(X ,t))/2= ˙
ε(X,t) avec x = φ(X,t),
• d autre part, à partir de (2.15) dans laquelle φ(X ,t)=1l + ξ(X ,t),
assimiler ˙
e(X ,t) à ( U(X ,t)+t U(X ,t))/2.
On peut donc, dans cette hypothèse, confondre au premier ordre les taux de déforma-
tion lagrangien et eulérien en des points homologues de κ0 et κt .
3.11 Objectivité
Comme on l a dit au chapitre I ( 2.4), la vitesse U n est pas une grandeur objective. En effet
les vitesses U(x,t) et U ∗(x∗ ,t) observées pour une même particule à l instant t située en x
dans R et en x∗ dans R∗ (x et x∗ points géométriquement coïncidants de R et de R∗ à
l instant t)sontliéesparlaformule de composition des vitesses :
U(x,t)=U ∗(x∗ ,t)+U e(x∗ ,t)
(3.43)
où U e(x∗ ,t) est la vitesse du point x∗ de R∗ par rapport au point x de R dé nie par le
mouvement rigidi ant de R∗ par rapport à R à l instant t.
L objectivité du tenseur taux de déformation résulte de l objectivité du scalaire d
dt(dM .dM )
qui exprime le taux de variation du produits
c
a
l
a
ire dM.dM àt
r
a
v
e
rs la formule
d
dt (dM .dM )=2dM .d(x,t) . dM où dM et dM sont eux-mêmesobjectifs.
En revanche le gradient du champ de vitesse et le taux de rotation ne sont pas objectifs : ob-
servés dans les référentiels R et R∗ à l instant t les gradients sont respectivement grad U(x,t)
et grad U ∗(x∗ ,t) liés par la relation (3.44) conséquence de (3.43) :
grad U(x,t)=grad U ∗(x∗ ,t)+Ωe(t)
(3.44)
où Ωe(t) désigne le tenseur antisymétrique associé au vecteur Ωe(t),rotation instantanée de
R∗ par rapport à R à l instant t.Demême:
Ω(x,t)=Ω∗(x∗ ,t)+Ωe(t) .
(3.45)
Cesrésultats sont conformes à l intuition : ˙
Ù
ds est objectif mais ˙
ˆ
dM ne l est pas en raison de
la rotation relative de R∗ par rapport à R à l instant t.
4D
é
r
ivées particulaires
4.1 Dérivées particulaires en description lagrangienne
On a introduit au paragraphe 2.1 la notion de dérivée particulaire d une gran-
deur attachée à une particule matérielle, ou à un élément matériel (ligne, surface,
volume).
Du point de vue lagrangien, une telle grandeur, quelle qu en soit la nature (scalaire,
vectorielle, tensorielle), est dé nie en fonction de la particule ou de l ensemble de
particules concerné et du temps (chapitre I, 3.1).
108
Chapitre III Cinématique du milieu continu
Lorsque la grandeur est attachée à une particule ou à un nombre discret de par-
ticules, il s agit d une fonction :
B = B(X,t)
(4.1)
ou
B = B(Xα,Xβ,... ,t)
(4.2)
où X désigne le vecteur-position de la particule dans κ0 (resp. X α ,Xβ ,... pour les
particules en nombre discret).
Pour une grandeur attachée à un système matériel, on doit considérer l intégrale
de volume, de surface ou de ligne prise sur le domaine (Ω0 ,Σ0 ou L0)occupé par le
système dans la con guration κ0,d une fonction B0(X,t) qui est la densité volumique,
surfacique ou linéique de la grandeur concernée dans la con guration de référence :
I = I(Ω0 ,t)= Ω0 B0(X,t)dΩ0
(4.3)
ou
I = I(Σ0 ,t)= Σ0 B0(X,t)dΣ0
(4.4)
ou
I = I(L0,t)= L0 B0(X ,t)dL0
(4.5)
La dérivée particulaire s obtient alors, dans tous les cas, par simple
dérivation partielle par rapport au temps. (B(X ,t) et B0(X,t) sont supposées
continues et continûment différentiables par rapport à t).
˙
B=∂B
∂t
(4.6)
˙I=∂I
∂t = ∂B0
∂t.
(4.7)
4.2 Dérivées particulaires en description eulérienne
Le calcul des dérivées particulaires en description eulérienne n est évidemment
pas aussi simple. Les grandeurs sont en effet dé nies en fonction des positions géo-
métriques dans la con guration κt,etdute
mpst (chapitre I, 4.1) : fonctions de
point (ou de points), intégrales de densités volumiques, surfaciques ou linéiques dans
la con guration actuelle. On a ainsi :
B = b(x,t)
(4.8)
4 Dérivées particulaires
109
ou
B = b(xα ,xβ ,... ,t);
(4.9)
et aussi :
I = i(Ωt,t)= Ωt b(x,t)dΩt
(4.10)
I = i(Σt,t)= Σt b(x,t)dΣt
(4.11)
I = i(Lt,t)= Lt b(x,t)dLt
(4.12)
On doit alors dériver ces fonctions ou ces intégrales par rapport au
temps en suivant la particule ou l ensemble de particules concerné.
Plusieurs méthodes peuvent être employées pour procéder au calcul de ˙
Bou ˙I
àpa
rtirde
sfo
r
m
ules de dé nition (4.8) à (4.12) : on doit procéder à la dérivation
totale par rapport au temps en considérant que les variables x ou (xα ,xβ ,...) dans
(4.8, 4.9), et les domaines Ωt ,Σt,Lt dans (4.10 à 4.12) dépendent du temps par les
formules du transport convectif.
Une méthode sûre (mais parfois assez lourde) pour ce type de calculs consiste à
se ramener en description lagrangienne où l on applique les résultats du paragraphe
4.1, et à repasser ensuite en description eulérienne pour obtenir la forme eulérienne
cherchée. Les paragraphes suivants sont consacrés à la dérivationpa
rtic
ulaire, en
description eulérienne, pour des grandeurs dé nies par (4.8, 4.10 à 4.12).
4.3 Dérivée particulaire d une fonction de point
La grandeur B,dé nie par (4.8) en description eulérienne, s écrit aussi en descrip-
tion lagrangienne :
B = b (x,t)=b(φ(X ,t),t) = B(X,t)
(4.13)
d où, en application de (4.6) avec les hypothèses de continuité et différentiabilité sur
betφ:
˙
B=∂b
∂t +(grad b) . ∂φ
∂t
soit encore pour ˙
B également notée db
dt:
110
Chapitre III Cinématique du milieu continu
˙
B = db(x,t)
dt = ∂b(x,t)
∂t +(grad b(x,t)) .U(x,t) (6)
(4.14)
(formule valable quel que soit l ordre de la grandeur tensorielle B).
La formule (4.14) s écrit aussi en introduisant la dérivée de b selon le vecteur U
(cf. annexe I, 6.2) :
˙
B = db(x,t)
dt = ∂b(x,t)
∂t +DUb(x,t).
(4.15)
La structure des formules (4.14) et (4.15) met en évidence que la dérivée par-
ticulaire de la grandeur B en description eulérienne est la somme de deux contri-
butions. Le premier terme ∂b(x,t)
∂t correspond à la variation de b au point géomé-
trique x en fonction du temps : il correspond à la seule cause de variation de B si
la particule est immobile à l instant t dans le référentiel considéré. Le second terme,
DU b (x,t)=( grad b (x,t)) .U(x,t) correspond à la variation de la grandeur B due au
mouvement de la particule dans le référentiel, c est-à-dire à son transport convectif :
il constitue la seule cause dev
ariation de B si le champ b est stationnaire à l instant
t .Cesecond terme, appelé terme de convection ,dépend linéairement de U (x,t) .
La formule (4.14) permet notamment de calculer l accélération d une particule en
description eulérienne :
a (x,t)= dU(x,t)
dt = ∂U(x,t)
∂t +gradU(x,t) .U(x,t) (7)
(4.16)
soit, en coordonnées cartésiennes orthonormées :
ai=∂Ui
∂t +∂Ui
∂xjUj=∂Ui
∂t +Ui,jUj .
4.4 Dérivée particulaire d une intégrale de volume
Soit I dé nie par (4.10) en description eulérienne. En appliquant les résultats
des chapitres I et II, on peut ramener l intégration sur le volume Ω0 occupé par les
particules dans la con guration de référence κ0 :
I = i (Ωt ,t)=I(Ω0,t)= Ω0 b(φ(X ,t),t)J(X,t)dΩ0
(4.17)
(6)On rappelle que ∂φ(X ,t)
∂t = U(X ,t)=U t(x,t) noté U(x,t),oùx = φ(X ,t).
(7)On véri era que l on peut aussi transformer cette expression en : a(x,t)= ∂U
∂t +grad U 2
2 +
(rot U) ∧ U ,particulièrement utile en mécanique des uides.
4 Dérivées particulaires
111
qui est formellement identique à (4.3) avec pour densité volumique à l instant t dans
la con gurationderéférence κ0 :
B0(X ,t)=B(X ,t)J(X,t)
où B(X,t) est dé nie par (4.13).
Cas classique : fonctions continues et continûment différentiables.
On suppose la continuité et la continue différentiabilité des fonctions B et φ sur
Ω0,d oùcelles de b et U sur Ωt.
Approche lagrangienne
On obtient par dérivation sous le signe somme de la formule (4.17) :
˙I = Ω0
∂B(X ,t)
∂t J(X,t)dΩ0 + Ω0 B(X,t) ˙
J(X,t)dΩ0 .
Cette formule peut maintenant être écrite enreprésentationeulérienne (intégrale
sur Ωt)comptetenudeceque,par(2.9)et(3.30) :
˙
J(X ,t)dΩ0 =
˙
ˉ
dΩt =divU(x,t)dΩt ;
(4.18)
on obtient ainsi avec (4.14) en allégeant les notations :
˙I=d
dt Ωt bdΩt = Ωt db
dt+bdivU dΩt
(4.19)
ou encore :
˙I = Ωt ∂b
∂t +(gradb).U+b div U dΩt .
(4.20)
Les formules ci-dessus sont valables quel que soit l ordre de la grandeur tensorielle
B.
Elles mettent en évidence que, formellement, la dérivée particulaire de I s obtient
en effectuant la dérivation particulaire ,s
ouslesigne somme de l intégrale
eulérienne, de la mesure b dΩt :
I=d
dt Ωt bdΩt = Ωt
˙
˘
b dΩt
(4.21)
avec
˙
˘
bdΩt = db
dtdΩt+b ˙
ˉ
dΩt = db
dt+bdivU dΩt .
(4.22)
On peut aussi remarquer que, dans le cas où B est une grandeur scalaire, on sait
que :
div(bU)=(gradb) .U + b div U ;
(4.23)
112
Chapitre III Cinématique du milieu continu
cette formule se généralise sans peine (par exemple en explicitant les opérations) au
cas d une grandeur B vectorielle ou tensorielle d ordre quelconque sous la forme :
div(b ⊗ U)=(gradb).U + b div U .
(4.24)
En transformant (4.20) on obtient pour ˙I la nouvelle forme :
˙I = Ωt ∂b
∂t +div(b ⊗ U) dΩt (8)
(4.25)
d où, en application de la formule de la divergence, (annexe I, 6.3)
˙I=d
dt Ωt bdΩt = Ωt
∂b
∂t dΩt + ∂Ωt(b⊗U).da
(4.26)
où da = n da désigne le vecteur-aire élémentaire dans κt.
On retrouve, dans la formule (4.26), la structure mise en évidence, dans le cas
d une grandeur B dé nie par une fonction, sur les formules (4.14) et (4.15). La dérivée
particulaire ˙I est, en effet, à nouveau la somme de deux contributions. Le premier
terme Ωt
∂b(x,t)
∂t dΩt correspond à la variation de l intégrale I = i(Ωt ,t) en fonction
du temps sur le volume Ωt considéré comme gé : seule cause de variation de I en
l absence de variation du domaine Ωt ,c est-à-dire si le domaine Ωt est stationnaire à
l instant t .Les
econd terme ∂Ωt (b (x,t) ⊗ U (x,t)) da correspond à la variation de
l intégrale I = i (Ωt,t) due au transport convectif du domaine Ωt :c est,notamment
la seule cause de variation de I si le champ b est stationnaire sur Ωt à l instant t .
Ce terme, appelé encore terme dec
o
n
v
e
ction ,dépend linéairement du champ U .
On remarque que c est bien le transport convectif du domaine Ωt qui engendre ce
terme : en particulier, le terme de convection peut être nul sans que le champ U soit
nul sur Ωt à l instant t .
˙I=d
dt i(Ωt,t)= ∂
∂t i (Ωt,t)+∂Ωt i (Ωt,t)
(4.27)
dérivée
particulaire = dérivée
sur Ωt gé + terme de
convection
Approche eulérienne
L analyse, qui vient d être faite, de la structure de la formule (4.26) et la remarque
nale révèlent la démarche eulérienne et guident la démonstration directe illustrée sur
la gure 4.
L idée en est, en suivant le volume matériel entre les instants in niment
voisins t et (t +Δt),defaire le bilan de l intégrale attachée à ce volume. Celui-ci
se compose, au premier ordre en Δt (> 0),dedeuxtermes additifs dus :
(8)On rappelle que si b est un scalaire, (b ⊗ U) n est autre que le produit bU.
4 Dérivées particulaires
113
Figure 4 Dérivée particulaire d une intégrale de volume
• pour les points géométriques situés à la fois dans Ωt et Ωt+Δt,àlav
a
riation
de la grandeur intégrée en fonction du temps (à x xé),
• pour les points géométriques situés dans Ωt et qui n appartiennent plus à Ωt+Δt,
et pour les points géométriques situés dans Ωt+Δt et qui n appartenaient pas à
Ωt ,àla perte ouau gain correspondant sur la grandeur intégrée.
Au premiero
rdre en Δt,lepr
e
mie
rdeces deux termes fournit la contribution
égale à :
ΔI1 =Δt Ωt
∂b
∂t dΩt
(4.28)
dans la variation de l intégrale I,etles
e
c
o
nd,quic
oncerne le volume algébrique
balayé par la frontière ∂Ωt,fournitla contribution :
ΔI2 =Δt ∂Ωt b(U .n)da =Δt ∂Ωt(b ⊗ U). da .
(4.29)
Par passage à la limite sur ΔI1+ΔI2
Δt quand Δt 0,onretrouvelaformule (4.26)
pour ˙I.
Cas où b et U sont continues et continûment différentiables, par morceaux.
Les formules précédentes ont été établiesdans les hypothèses de continuité et de
continue différentiabilité des fonctions B et φ sur Ω0, b et U sur Ωt.Enpa
rticulier
le passage de (4.25) à (4.26) utilise la formule de la divergence en supposant (b ⊗ U)
continue et différentiable.
On se propose maintenant d examiner le cas où les fonctions B sur Ω0 , b et/ou
U sur Ωt sont continues et continûment différentiables par morceaux , φ demeurant
continue.
114
Chapitre III Cinématique du milieu continu
Approche eulérienne
La méthode de démonstration précédente en représentation eulérienne permet
d aborder ce problème en restant proche de l intuition physique.
Figure 5 Dérivée particulaire d une intégrale de volume dans le cas de discontinuité :
le terme de saut
Pour cela on désigne par Σt une surface géométrique au franchissement de laquelle,
dans la con guration κt,b(x,t) et/ou U(x,t) sont discontinues ( gure 5). En chaque
point M de Σt on dé nit la vitesse de propagation de la surface géométrique
Σt,s
oitW (x,t),pa
rlafo
r
m
ule (4.30) où MΔ désigne lepointsitués
u
rlas
u
rfa
c
e
géométrique Σt+Δt,àl intersection de celle-ci avec la normale en M à Σt :
W (x,t)= lim
Δt→0(MMΔ/Δt) , (Δt>0) ;
(4.30)
W (x,t) est donc, par dé nition, normale à Σt en M :
W (x,t)=W (x,t) n(x,t)
(4.31)
où n(x,t) désigne un vecteur normal unitaire à Σt au point M .
On convient de repérer par les indices inférieurs 1 et 2 les régions situées de part et
d autre de Σt franchie dans le sens de n(x,t) ; ces mêmes indices sont aussi utilisés
pour distinguer les valeurs de b et de U de part et d autre de Σt.Lesymbole[[ ]]
désigne la discontinuité de la grandeur concernée au franchissement de Σt dans le sens
de n(x,t).Ainsi:
∀x ∈ Σt , [[ b(x,t)]]= b2(x,t) - b1(x,t)
(4.32)
et de même pour [[ U]](9).
(9)To u t e s le s fo r mules sont algébriques. L orientation transversale de Σt est quelconque, c est-à-dire
que n(x,t) et W (x,t) peuvent ne pas être de même sens. Bien noter que la dé nition du saut [[ ]]
est liée à l orientation de n et non à celle de W .Enpa
rticulier, si W>0, [[ b ]] est égale à la
différence (valeur aval - valeur amont) et est l opposé du saut ressenti en un point géométrique au
franchissement de la surface de discontinuité : c est l explication du signe moins dans la formule
(4.34).
4 Dérivées particulaires
115
On reprend la méthode du bilan de l intégrale attachée au volume matériel.
On doit alors, dans le calcul de la variation ΔI,examineravecattention les points
géométriques situés àlafoisdansΩt et dans Ωt+Δt.Eneffet,parmiceux-ci il en est
qui, situés en aval de la surface de discontinuité Σt (à l instant t), voient passer
cette surface pendant l intervalle de temps Δt,etsetrouventsitués en amont de
la surface Σt+Δt (à l instant t +Δt).Cespointsgéométriques, qui correspondent au
volume balayé par la surface de discontinuité ( gure 5) entre les instants t et (t +Δt),
introduisent un nouveau terme additif dans la variation de l intégrale : pour chacun
d eux il y a un gain (algébrique) de la grandeur intégrée égal à valeur amont moins
valeur aval =b1-b2 = -[[b]].
La contribution correspondante, à ajouter à ΔI1 et ΔI2 toujours données par
(4.28) et (4.29), est ainsi, au premier ordre en Δt,égale à :
ΔI3 =Δt Σt(b1 - b2)W .ndΣt = -Δt Σt[[ b]] W dΣt .
(4.33)
Par passage à la limite sur ΔI1+ΔI2+ΔI3
Δt
quand Δt 0,o
nobtie
ntla nouvelle
formule pour ˙I :
˙I=d
dt Ωt b dΩt = Ωt
∂b
∂t dΩt - Σt[[b]]W dΣt + ∂Ωt(b⊗U).da
(4.34)
On retrouve dans cette formule la structure de (4.14) et de (4.26) qui est apparente
dans la démonstration : les deux premiers termes de ˙I sont issus de (ΔI1 +ΔI3) : ils
correspondent à la variation de l intégrale sur le volume géométrique gé. Le troisième
terme est le terme de convection : c est le seul terme qui manifeste la dépendance de
˙I par rapport au champ U ;ile
stide
ntiqu
eàcelui obtenu dans (4.26) et dépend
linéairement du champ U sur ∂Ωt.
Il est possible de transformer (4.34) en utilisant la formule de la divergence géné-
ralisée au cas d une fonction tensorielle f continue et continûmentdifférentiable par
morceaux qui s écrit(10) Ωt div f dΩt + Σt[[ f ]] .n dΣt = ∂Ωt f.da .
(4.35)
On obtient ainsi à partir de (4.34), avec f = b ⊗ U dans (4.35) et en regroupant
les termes :
˙I=d
dt Ωt bdΩt = Ωt (∂b
∂t +div(b ⊗ U))dΩt + Σt[[ b ⊗(U - W)]].ndΣt .
(4.36)
(10) Cette formule se démontre en appliquant la formule de la divergence classique séparément sur
les volumes découpés dans Ωt par Σt et en rassemblant les résultats obtenus. Elle peut aussi être
interprétée dans le cadre de la théorie des distributions .Lepr
e
mie
rmembre de (4.35) n est autre
que l intégrale Ωt div f prise au sens des distributions, où la distribution div f s explicite en :
div f = {div f} +[[f ]] .nδΣt , avec {div f} la distribution dé nie par la fonction div f ,etδΣt la
distribution de Dirac sur Σt .Cette même méthode fournit immédiatement l écriture de (4.14) si b
est continue et continûment différentiable par morceaux.
116
Chapitre III Cinématique du milieu continu
Approche lagrangienne
Il est évidemment possible d établir la formule (4.36) en suivant la démarche adoptée pré-
cédemment, c est-à-dire en se ramenant en représentation lagrangienne. Ceci nécessite au
préalable d introduire quelques concepts et notations de portée générale.
Vitesses de propagation, célérités.
On désigne par Σ0 la position géométrique de la surface de discontinuité à l instant de
référence t =0,da
n
slac
on guration κ0 .Onn
oteX 0 le vecteur-position du point courant
M0 de Σ0.
Figure 6 Surfaces de discontinuité dans les con gurations initiale et actuelle
Σt peut être décrite à partir de Σ0 en introduisant un homéomorphisme, fonction de t,qui
exprime le transport géométrique de Σ0 sur Σt ,soitx = δ(X 0 ,t) , dé ni sur Σ0 en écrivant
qu à chaque instant t la vitesse de propagation de Σt ,introduite en (4.30) est :
W (x,t)= ∂δ(X 0 ,t)
∂t ,∀M0∈Σ0
(4.37)
avec la condition initiale évidente δ(X 0 , 0) = X 0 , ∀M0 ∈ Σ0 .
Parailleurs l homéomorphisme de la description lagrangienne du mouvement permet de dé -
nir, pour chaque instant t,lasurfacegéométrique Σ0t dans κ0 dont les points sont transportés
sur Σt dans κt dans le transport convectif entre les instants 0 et t ( gure 6). Pour le point
courantMdeΣt on adoncàlafois : x =δ(X0,t) et x=φ(X0t,t)oùX0tdésignele
vecteur-position du point M0t ,antécédent de M dans κ0 par φ.
On en déduit la correspondance qui relie, dans κ0 ,lespointsM0 et M0t associés à un même
point géométrique M de Σt par le transport géométrique et par le transport convectif :
φ(X0t,t)=x = δ(X0,t)
(4.38)
ou encore
X 0t = φ-1(δ(X 0 ,t),t) .
La surface géométrique Σ0t n est, en général, pas xe dans la con guration κ0 .Onpe
ute
n
dé nir la vitesse de propagation dans κ0 de manière analogue à W par (4.30) :
V 0(X0t ,t)=V0(X0t ,t) N 0t avec V0(X0t,t)=N 0t . ∂X0t(X0,t)
∂t
.
V 0 n est autre que la célérité de la surfacededis
c
o
n
tinuité, ou onde ,pa
rr
apport à la
matière dans l état de référence.
La célérité de l onde par rapport à la matière dans l état actuel est :
V (x,t)=(W (x,t) - U(x,t) .n) n
(4.39)
où U(x,t)= ∂φ(X 0t ,t)
∂t.
4 Dérivées particulaires
117
En dérivant la correspondance (4.38) par rapport à t et compte tenu de (4.37) on obtient :
W (x,t) - U(x,t)= φ(X 0t ,t) . ∂X0t(X 0 ,t)
∂t
.
Cette formule peut être transformée en introduisant les vecteurs-aires élémentaires da sur Σt
et dAt sur Σ0t (cf. chapitre II, formule (4.13)) et il vient :
J(X0t,t)V 0(X0t,t).dAt = V(x,t).da .
(4.40)
On remarque que si δ est identique à φ ou, plus généralement, si ∂X0t
∂t=d
dt φ-1(δ(X 0 ,t),t)
est tangente à Σ0t ,iln
y apas propagation de Σ0t dans κ0 ,etΣt suit la matière dans κt :
V0=0et V=0.
Discontinuités. Relations cinématiques de compatibilité.
En écrivant la formule (4.40) sur Σ0t on doit évidemment préciser le côté de la surface qui
est considéré : U peut, par hypothèse, y être discontinu (et donc V )etc
ette discontinuité
implique celles de φ et de J comme on l expliquera plus loin. On écrira donc sur Σ0t ,de
partetd autre : J1V0.dAt =(W-U1).da
J2V0.dAt =(W-U2).da .
(4.41)
On doit alors remarquer que, φ étant supposée continue sur Ω0 et par rapport au temps, les
discontinuités de ses dérivées sur Σ0t ne sont pas indépendantes : il y a continuité des dérivées
de φ selon les directions tangentes à Σ0t dans l espace-temps {X 0t × t}.Celasigni e
que lorsque l on suit Σ0t dans sa propagation dans κ0 ,c
e
st-à-dire pour des accroissements
dX et dt liés par la seule relation (en M0t ,àl instant t):
N0t.dX=V0dt
qui assure que le point géométrique de vecteur-position (X 0t + dX) se trouve sur Σ0,t+dt,
ona:
[[ φ(X 0t ,t)]]. dX +ïï ∂φ(X 0t ,t)
∂t òòdt =0.
On en déduit la forme nécessaire de [[ φ(X 0t ,t)]] et de [[ U ]] :
[[ φ(X0t,t)]]=λ ⊗ N0t
[[ U ]] =ïï∂φ(X0t,t)
∂t òò= -λV0
(4.42)
où λ est un vecteur arbitraire, ou la relation équivalente si V0 =0 :
[[ φ(X0t,t)]]= - 1
V0[[U]]⊗N0t siV0 =0.
Une conséquence importante des relations (4.42) vaut d être signalée ici :
V0 =0 (etdoncV1 =0etV2 =0)⇒[[U]]=0 ;
ce résultat signi e qu une onde de discontinuité de vitesse n est compatible avec l hypo-
thèse dec
o
ntin
uité(φ continue sur Ω0) que si sa célérité par rapport à la matière est
non nulle (résultat physiquement évident(11) ;cf.aussi 5.1).
Le raisonnement mis en œuvre ci-dessus pour établir les formules (4.42), qui exploite la conti-
nuité d une fonction (ici φ)aufranchissement d une surface de discontinuité de ses dérivées,
(11) Si la discontinuité devite
sse était stationnaire, elle concernerait toujours les mêmes particules,
induisant ainsi un saut de φ,contradictoire avec l hypothèse.
118
Chapitre III Cinématique du milieu continu
est dû à Hadamard(12) .Le
sr
elatio
n
sc
orrespondantes (4.42) sont souvent appelées : rela-
tions cinématiques de compatibilité d Hadamard .One
nr
e
n
contrera d autres exemples
(cf. chapitre VIII).
Dérivée particulaire d'une intégrale de volume.
On reprend l intégrale I dé nie par la formule (4.10), que l on ramène en représentation
lagrangienne, comme indiqué par (4.17), sous la forme :
I = Ω0t1
B(X ,t)J(X ,t)dΩ0 + Ω0t2
B(X ,t)J(X ,t)dΩ0
où Ω0 est séparé en Ω0t1 et Ω0t2 par la surface Σ0t ,àlatr
a
v
e
r
séedelaquelle B ou J sont
discontinues à l instant t.
Le calcul de la dérivée de I par rapport au temps doit tenir compte du fait que les domaines
Ω0t1 et Ω0t2 évoluent en raison de la propagation de Σ0t dans κ0 àlavitesse V 0 .Onobtient
ainsi :
˙I = Ω0t1
∂
∂t(BJ)dΩ0 + Ω0t2
∂
∂t(BJ)dΩ0 +
+ Σ0t
B1(X,t) J1(X,t) V 0(X,t) . dAt - Σ0t
B2(X,t)J2(X,t)V 0(X,t).dAt .
(4.43)
Le passage en représentation eulérienne se fait sans difficulté en utilisant la formule (4.41).
On retrouve ainsi lafor
m
ule(4.36) :
˙I=d
dt Ωt b dΩt = Ωt (∂b
∂t +div(b⊗U))dΩt + Σt[[b⊗(U -W)]].da .
Formules de bilan
Même si l on s est référé au point de vue lagrangien pour asseoir quelques démons-
trations, c est évidemment le point de vue eulérien qui se révèle le mieux adapté et le
plus fécond en cinématique. La méthode du bilan utilisée plus haut en est un exemple.
Du point de vue mathématique, le problème posé par le calcul de la dérivée parti-
culaire d une intégrale de volume en description eulérienne est celui de la dérivation
par rapport au temps de l intégrale d une fonction des variables d espace et de temps
sur un volume d intégration qui dépend lui-même du temps (le problème est classique
pour une intégrale simple). Les formules (4.26) et (4.34) mettent en évidence que le
caractère variable du volume d intégration se traduit dans cette dérivée par un terme
additif de ux, qui correspond au volume balayé par la frontière du volume d intégra-
tion et qui dépend linéairement du champ de vitesse sur cette frontière. C est, dans
(4.26) et (4.34) le terme : ∂Ωt(b ⊗ U). da.
Les démonstrations données dans l approche eulérienne pour les formules (4.26)
et (4.34) par la méthode du bilan ne font pas explicitement référence au fait que le
champ de vecteurs U sur κt est le champ de vitesse (réel) des particules du système : il
s agit purement et simplement d une comptabilité qui compare les intégrales sur
deux volumes géométriques aux instants in niment voisins t et (t +Δt).C
e
stain
si
que la description eulérienne permet l extension des résultats établis pour les dérivées
particulaires.
(12)J. Hadamard (1865-1963).
4 Dérivées particulaires
119
Considérant une grandeur b dé nie en description eulérienne, c est-à-dire par la donnée de
b(x,t),o
ns
epropose de calculer à l instant t la dérivée par rapport au temps de l intégrale
de b prise sur un volume Ωt fonction du temps dont la variation à l instant t est dé nie par
un champ de vecteurs u continu et continûment différentiable par morceaux sur ∂Ωt .En
désignant cette dérivée par δI
δt u
,onaenreprenant (4.34) :
δI
δt u
= Ωt
∂b
∂t dΩt - Σt[[b]]W dΣt + ∂Ωt(b ⊗u).da .
(4.44)
Ainsi, en choisissant le champ u =0, δI
δt 0 n esta
utre queladérivée de l intégrale prise
suru
nv
olume géométrique xe (c est le volume gé des démonstrations précédentes) :
δI
δt 0 = Ωt
∂b
∂tdΩt - Σt[[b]]W dΣt ;
(4.45)
en choisissant u = U ,onretrou
v
eladérivée particulaire
δI
δt U = ˙I = δI
δt 0 + ∂Ωt(b ⊗U).da .
(4.46)
Il est commode de poser, par analogie avec (4.14, 4.15)
∀u , ∂Ωt(b⊗u).da =DuI ,
(4.47)
et l on obtient la formule générale : δI
δt u
= δI
δt 0+DuI.
(4.48)
Il est fait usage de cette formule en mécanique des uides car elle permet de choisir la surface
de contrôle (frontière de Ωt et champ u)lamieuxadaptée au problème étudié. La dé nition
de la dérivation δ
δt u et les raisonnements correspondants sont possibles en description
lagrangienne, avec une certaine lourdeur ; ils reposent fondamentalement sur le fait que les
dérivées par rapport au temps qui interviennent sont toujours des dérivées à droite et que
l on peut donc, à l instant t,choisir ∂φ
∂t indépendamment de la connaissance de φ.
4.5 Dérivation particulaire d une circulation
Circulation d une quantité vectorielle
La grandeur considérée ici est la circulation d une fonction vectorielle b(x,t) sur une courbe
Ltdeκt:
I = i(Lt ,t)= Lt b(x,t) .τ(x)dLt
(4.49)
où τ (x) est le vecteur unitaire tangent au point M de Lt .
La dérivée particulaire de I s intéresse à l évolution de I dans le transport convectif de la
courbe Lt ,domaine matériel. Sur cette courbe matérielle, τ (x)dLt n est autre que le vecteur
matériel élémentaire dM et l on peut écrire :
I = i(Lt ,t)= Lt b(x,t) . dM .
(4.50)
120
Chapitre III Cinématique du milieu continu
Le calcul direct de l expression eulérienne de la dérivée particulaire ˙I = di
dt correspond à la
dérivation formelle sous le signe somme (cf. (4.21) pour l intégrale de volume) :
˙I=d
dt Lt b . dM = Lt
˙
˘
b.dM = Lt
db
dt .dM+ Ltb.
˙
ˆ
dM (13) .
(4.51)
Compte tenu de l expression (3.6) de ˙
ˆ
dM ,ilvientainsi:
˙I=d
dt Lt b.τdLt = Lt(db
dt +b.grad U).τdLt .
(4.52)
Cette équation se développe aussi en
˙I = Lt
∂b
∂t .τdLt + Lt((grad b).U+b.grad U).τdLt
(4.53)
dont la deuxième intégrale représente le terme de convection.
Circulation d une quantité tensorielle
Si I est donnée comme la circulation d une fonction tensorielle quelconque, par exemple :
I = Lt b(x,t) .τ dLt
(4.54)
on montre aisément, comme au paragraphe 4.5, et en s appuyant sur (4.53), que l on a :
˙I=d
dt Lt b .τ dLt = Lt(∂b
∂t +gradb.U+b.grad U).τdLt .
(4.55)
Remarque
Les raisonnements qui précèdent sont liés à la forme particulière de l intégrale de ligne i(Lt ,t)
dont on cherche la dérivée particulaire : s agissant de la circulation d une quantité, on a pu
reconnaître que l élément d intégration sur Lt n est autre que le vecteur matériel élémentaire.
Comme on l a expliqué à propos de la dérivée particulaire d une intégrale de volume, le
résultat établi ci-dessus peut aussi être appliqué en substituant, dans (4.52, .. . ,4.56),a
u
champ de vitesse U un champ de vecteur u continu et continûment différentiablequelconque
dé ni sur Lt .Ilfou
r
nitalors l expression de la dérivée δI
δt u homologue de (4.44).
(13)Cette équation s explicite en description lagrangienne :
˙I = L0
∂B(X ,t)
∂t .F(X,t). dM0 + L0
B(X ,t) .
˙
F(X,t).dM0
où B(X ,t)=b(x,t) avec x = φ(X ,t) ;etl on rappelle que ˙
F (X ,t) .F-1(X ,t)=grad U(x,t).
4 Dérivées particulaires
121
4.6 Dérivation particulaire d un ux
Flux d une quantité vectorielle
La grandeur considérée est le ux d une fonction vectorielle b(x,t) àtr
a
v
e
rs une surface Σt
deκt:
I = i(Ωt ,t)= Σt b(x,t) .n(x)dΣt .
(4.56)
Dans le transport convectif de la surface Σt ,domaine matériel d intégration, n(x)dΣt n est
autre que le vecteur-aire élémentaire da :
I = i(Ωt ,t)= Σt b(x,t) . da .
(4.57)
La dérivée particulaire ˙I s obtient par dérivation formelle sous le signe somme :
˙I=d
dt Σt b . da = Σt
˙
ˉ
b.da = Σt
db
dt .da+ Σtb.
˙
Ù
da,
(4.58)
et nécessite le calcul de la dérivée particulaire ˙
Ù
da du vecteur-aire da.
Le raisonnement est semblable à celui mis en œuvre au chapitre II ( 2.4) pour établir la
formule de transport du vecteur-aire. On a, ∀ dM ∈ κt ,
d
dt (dM . da)=
˙
˜
dΩt =(divU)dM . da
et
d
dt(dM .da)=(gradU .dM).da +dM .
˙
Ù
da.
D où l expression de ˙
Ù
da:
˙
Ù
da =dadivU-tgradU.da .
(4.59)
On en déduit l expression de la dérivée particulaire ˙I :
˙I=d
dt Σt b .ndΣt = Σt(db
dt +bdivU-b.tgrad U).ndΣt (14) .
(4.60)
En explicitant la dérivée particulaire db
dt on obtient :
˙I = Σt
∂b
∂t .ndΣt + Σt ((grad b).U - (grad U).b+ b div U).ndΣt
(4.61)
dont la deuxième intégrale représente le terme de convection.
(14) L explicitation de ce raisonnement en description lagrangienne est sans surprise. Comme au
paragraphe 4.5, c estlaforme particulière de l intégrale de surface considérée ( ux d une quantité)
qui permet de reconnaître le vecteur-aire élémentaire comme élément d intégration.
122
Chapitre III Cinématique du milieu continu
Flux d une quantité tensorielle
L intégrale I est donnée sous la forme du ux d une fonction tensorielle ; par exemple :
I = Σt b(x,t) .ndΣt .
(4.62)
En décomposantlete
n
se
u
rb(x,t) on aura :
I = ei ⊗ Σt bij(x,t)ej .ndΣt .
La dérivée particulaire de chacune des intégrales (indice i)secalculecomme ci-dessus et l on
obtient :
˙I=d
dt Σt b .ndΣt = Σt(∂b
∂t +gradb.U-b.tgrad U +bdivU).ndΣt
(4.63)
Remarque
La même remarque qu au paragraphe (4.5) concernant le calcul de la dérivée ( δI
δt )u en sub-
stituant à U dans (4.60, ... ,4.63) un champ continu, continûment différentiable quelconque
dé ni sur Σt ,v
autégalement ici.
5C
o
n
s
e
r
v
a
t
i
o
ndelam
asse
5.1 Équation de continuité
La conservation de la masse de tout système matériel au cours des transformations
qu il subit est un principe fondamental de la mécanique classique.
La notion de milieu continu tridimensionnel implique que la masse d un système
matériel occupant un volume Ωt dans la con guration κt s obtient comme l intégrale
d une densité volumique nie, appelée masse volumique dans la con guration κt :
M = m(Ωt ,t)= Ωt ρ(x,t)dΩt .
(5.1)
ρ(x,t) joue dans cette intégrale le rôle de b(x,t) dans la formule (4.10). L homologue
de B(X,t) dé nie par la formule (4.13) est alors P (X ,t) obtenue par :
P (X,t)=ρ(φ(X,t),t)
(5.2)
en sorte que :
M = m(Ωt ,t)=M(Ω0 ,t)= Ω0 P (X ,t)J(X,t)dΩ0 .
(5.3)
Le principe de la conservation de la masse implique que pour tout système matériel
la dérivée particulaire des intégrales (5.1) ou (5.3) soit nulle.
5 Conserv
ation de la masse
123
Cas où ρ et U sont continues et continûment différentiables
La conservation de la masse s exprime alors, conformément aux résultats du
paragraphe 4.4, par :
∀Ωt, ˙
M=dm
dt = Ωt(∂ρ
∂t + div ρU)dΩt =0
(5.4)
d où, compte tenu de ce que Ωt est arbitraire :
∂ρ
∂t +div ρU =0
(5.5)
et les formules équivalentes :
dρ
dt+ρdivU=0
(5.6)
ou
∂ρ
∂t +(gradρ).U+ρdiv U =0.
(5.7)
Chacune de ces équations, qui traduit la conservation de la masse, est aussi appelée
équation de continuité.
On remarque que la nullité de la dérivée particulaire ˙
M,signi e que l intégrale
(5.3) ne dépend pas du temps t,autrement ditqueP (X ,t)J(X,t),quijoue le rôle de
B0(X ,t) dans (4.3), est indépendant de t et est donc égal à la masse volumique ρ0(X)
au point courant M0 à l instant t =0quand le système occupe la con guration κ0 :
P (X,t)J(X ,t)=ρ0(X) .
(5.8)C est l équation de continuité endescription lagrangienne.
On notera ainsi :
dm = ρ0(X)dΩ0 = ρ(x,t)dΩt
(5.9)
la masse du même volume matériel élémentaire.
On peut aussi écrire l équation (5.8) sous la forme :
ρ(x,t)=ρ0(X)/J(X ,t) .
(5.10)
Cas des ondes de choc : ρ et U continues et continûment différentiables
par morceaux
La conservation de la masse s exprime alors à partir de la formule (4.36) :
∀Ωt, ˙
M=dm
dt = Ωt(∂ρ
∂t +divρU)dΩt + Σt[[ ρ(U - W)]].ndΣt .
(5.11)
124
Chapitre III Cinématique du milieu continu
En exploitant le caractère arbitraire de Ωt on en déduit, outre l équation (5.5), ou
(5.6), valable hors des surfaces de discontinuité Σt, l équation (5.12) à satisfaire sur
Σt:
[[ ρ(U - W)]].n=0 sur Σt
(5.12)
qui signi e que le débit en masse de matière à travers la surface géométrique
Σt se conserve.
Cette formule montre aussi qu un saut de vitesse [[ U ]] au franchissement de Σt,
s il n est pas tangentiel à Σt,implique un saut [[ ρ ]] non nul de la masse volumique et
inversement. On est alors en présence d une onde de choc(15).
5.2 Forme intégrale
En utilisant la formule (4.26), ou (4.34) pour inclure l éventualité d ondes de choc,
la conservation de la masse s écrit aussi :
∀Ωt, ˙
M=dm
dt = Ωt
∂ρ
∂t dΩt - Σt[[ρ]]W dΣt + ∂Ωt ρU .da =0,
(5.13)
qui met en évidence le terme de convection : ux de masse sortant à travers ∂Ωt.
Figure 7 Tube de courant
Il est souvent utile en mécanique des uides d appliquer cette formule à des volumes Ωt de
forme particulière. Ces volumes, appelés tubes de courant ( gure 7), sont limités latéra-
lement par les lignes de courant à l instant t s appuyant sur une courbe fermée C,eta
u
x
extrémités par deux sections S1 et S2 .
On obtient alors :
Ωt
∂ρ
∂t dΩt - Σt[[ ρ]] W dΣt + S1
ρU .nda + S2
ρU .nda =0.
(5.14)
(15)On rappelle (cf. 4.4) que pour respecter l hypothèse de continuité (φ continue sur Ω0 et par
rapport au temps), une surface de discontinuité de vitesse ([[ U ]] =0)ne peut être stationnaire
par rapport à la matière : (U1 - W).n =0,(U2 - W).n =0; ceci implique que ρ1 et ρ2 ne
sont ni nuls ni in nis dans (5.12). Plus généralement, si l on se place dans le cadre de l hypothèse
plus faible φ continue et continûment différentiable, par m orceaux (cf.chapitre I, 3.3), les
surfaces de discontinuité de φ sont nécessairement stationnaires par rapport à la matière, car leur
propagation induirait au passage, pour les particules concernées, des vitesses en δ (Dir
ac).Une
discontinuitédevite
sse [[ U ]] stationnaire est alors possible au franchissement d une telle surface :
elle est nécessairement tangentielle ; l équation (5.12) est trivialement véri ée.
5 Conserv
ation de la masse
125
Si l on s intéresse par exemple à un écoulement de uide incompressible homogène, ou à un
écoulement stationnaire de uide quelconque, les deux premiers termes de l équation (5.14)
sont nuls. Considérant alors un tube de courant in niment n limité par des sections
droites élémentaires, S1 à l amont et S2 à l aval, la formule (5.14) signi e, compte tenu des
orientations opposées des normales sur S1 et S2 ,que:
ρ1U1S1 = ρ2U2S2
(5.15)
(où U désigne le module de la vitesse U):ilyaalors conservation du débit de masse le long
d une ligne de courant.
5.3 Dérivée particulaire de l intégrale d une densité massique
en description eulérienne
On considère une intégrale de volume I telle que (4.10) dé nie maintenant par
une densité massique et non plus volumique, c est-à-dire que l on a, avec (5.9) :
I = i(Ωt,t)= Ωt b(x,t)dm.
(5.16)
On véri e alors sans difficulté, par exemple en passant en représentation lagran-
gienne, que ˙I s exprime sous la forme :
˙I=d
dt Ωt bdm = Ωt
db
dt dm (16)
(5.17)
Cette formule, valable quelle que soit la nature (scalaire, vectorielle, tensorielle)
de la grandeur B,estparticulièrement commode ; aussi cherchera-t-on, chaque fois que
cela sera possible lorsque l on devra calculer la dérivée particulaire d une intégrale de
volume, à exprimer cette dernière au moyen de la mesure dm.
(16) Par dérivation formelle sous le signe somme :
˙I=d
dt Ωt b dm = Ωt
˙
ˉ
b dm = Ωt
db
dt dm puisque ˙
ˆ
dm =0.
126
Chapitre III Cinématique du milieu continu
Récapitulatif des formules essentielles
• Description eulérienne :
U = U(x,t)
˙
˜
dM = grad U(x,t). dM
taux de dilatation volumique
˙
ˆ
dΩt = div U(x,t)dΩt
taux de déformation :
d
dt(dM . dM )=2dM .d(x,t) . dM
d(x,t)= 1
2(grad U(x,t)+t grad U(x,t))
˙
i
ds
ds = d11(x,t)
˙θ =2d12(x,t)
taux de rotation :
Ω(x,t)= 1
2(grad U(x,t) -t grad U(x,t))
tourbillon :
Ω(x,t)= 1
2 rot U(x,t)
Ω(x,t).dM =Ω(x,t)∧dM , ∀dM
compatibilité d un champ de taux de déformation :
dij,k +dk ,ij -dik,j -dj ,ik =0 i,j,k, =1,2,3
• Ta u x de déformation eulérien et lagrangien :
d(x,t)=tF -1(X ,t) . ˙e(X ,t) .F-1(X,t) ,x= φ (X ,t)
Récapitulatif des formules essentielles
127
• Dérivées particulaires en représentation eulérienne :
(B :grandeur tensorielle d ordre quelconque)
•B
= b(x,t)
˙
B=db
dt=∂b
∂t + grad b.U
•I
= Ωt b(x,t)dΩt
˙I = Ωt(db
dt+bdivU)dΩt
˙I = Ωt
∂b
∂t dΩt + ∂Ωt(b ⊗ U).da = Ωt (∂b
∂t+ div(b⊗U))dΩt
•I
= Ωt b(x,t)dΩt ,bet/ou U discontinues sur Σt
˙I = Ωt
∂b
∂t dΩt - Σt[[b]]W dΣt + ∂Ωt(b⊗U).da
˙I = Ωt (∂b
∂t + div(b⊗U))dΩt + Σt[[b⊗(U -W)]].ndΣt
•I
= Σt b(x,t) . da
˙I = Σt( ˙
B+bdivU-b.tgradU).da
•I
= Lt b(x,t) .τ(x)dLt
˙I = Lt( ˙
B +b.grad U).τdLt
• Conservation de la masse, équation de continuité
• dm = ρ(x,t)dΩt = ρ0(X)dΩ0
dρ
dt+ρdivU=0 ⇔ ∂ρ
∂t+divρU=0
[[ ρ(U - W)]].n=0 sur Σt
Ωt
∂ρ
∂t dΩt - Σt[[ρ]]W dΣt + ∂Ωt ρU .da =0
•I
= Ωt b(x,t)dm
˙I = Ωt
db
dt dm
128
Chapitre III Cinématique du milieu continu
Fo r m u les explicites dans les systèmes
de coordonnées visuelles
(cf. Annexe II)
• Coordonnées cartésiennes orthonormées
U=Uxex+Uyey+Uzez
gradU = ∂Ui
∂xj ei⊗ej
d=dijei⊗ej dij=1
2(∂Ui
∂xj + ∂Uj
∂xi )
divU=∂Ui
∂xi = ∂Ux
∂x+∂Uy
∂y +∂Uz
∂z
˙
B=db
dt=∂b
∂t+∂b
∂xi Ui (B scalaire ou tensorielle d ordre quelconque)
• Coordonnées cylindriques
U=Urer+Uθeθ+Uzez
grad U est donné dans l annexe II
drr = ∂Ur
∂r dθθ=1
r ∂Uθ
∂θ+Ur
r dzz =∂Uz
∂z
drθ=1
2(∂Uθ
∂r -Uθ
r+1
r ∂Ur
∂θ)
dθz=1
2(1
r ∂Uz
∂θ+∂Uθ
∂z)dzr=1
2(∂Ur
∂z +∂Uz
∂r)
divU=∂Ur
∂r +Ur
r+1
r ∂Uθ
∂θ+∂Uz
∂z
˙
B=db
dt=∂b
∂t+∂b
∂rUr + ∂b
∂θ Uθ
r +∂b
∂z Uz (B scalaire)
B=brer+bθeθ+bzez
˙B=db
dt = (dbr
dt - bθUθ
r )er+(dbθ
dt + brUθ
r )eθ+dbz
dt ez
(B vectorielle)
a=dU
dt = (dUr
dt -U2
θ
r )er +(dUθ
dt + UrUθ
r )eθ+dUz
dt ez
Récapitulatif des formules essentielles
129
• Coordonnées sphériques
U=Urer+Uθeθ+Uφeφ
grad U est donné dans l annexe II
drr = ∂Ur
∂r dθθ=1
r ∂Uθ
∂θ+Ur
rdφφ=1
rsinθ∂Uφ
∂φ+Uθ
r cotθ+Ur
r
drθ=1
2(1
r ∂Ur
∂θ+∂Uθ
∂r -Uθ
r)
dθφ=1
2(1
r ∂Uφ
∂θ+ 1
rsinθ∂Uθ
∂φ - cotθ
r Uφ)
dφr=1
2(1
rsinθ∂Ur
∂φ+∂Uφ
∂r -Uφ
r)
divU=∂Ur
∂r+1
r ∂Uθ
∂θ+ 1
rsinθ∂Uφ
∂φ+Uθ
r cotθ+2Ur
r
˙
B=db
dt=∂b
∂t+∂b
∂rUr + ∂b
∂θ Uθ
r+∂b
∂φ Uφ
r sin θ (B scalaire)
B=brer+bθeθ+bφeφ (Bvectorielle)
˙B=db
dt = (dbr
dt -bθUθ+bφUφ
r )er +(dbθ
dt + brUθ
r - cotθbφUφ
r )eθ
+( dbφ
dt +cotθ bθUφ
r +brUφ
r )eφ
a=dU
dt = (dUr
dt -U2
θ+U2
φ
r )er +(dUθ
dt +UrUθ-U2
φ cotθ
r )eθ
+( dUφ
dt + UrUφ+UθUφ cotθ
r
)eφ
130
Chapitre III - Cinématique du milieu continu
Exercices
III.1 - R =(O, e1,e2,e3) est un repère cartésien orthonormé dans le référentiel R.
On considère le mouvement dé ni par :
U1(x,t)=φ1(x2 ,t) ,U2(x,t)=φ2(x1 ,t) ,U3(x,t)=0,
où φ1 et φ2 sont des fonctions continues et continûment différentiables. Calculer le
tenseur taux de déformation ; déterminer ses directions principales et ses valeurs prin-
cipales. Calculer le taux de dilatation volumique dans ce mouvement. Déterminer le
tenseur taux de rotation et le vecteur tourbillon ; à quelle condition le mouvement
étudié est-il irrotationnel ?
Éléments de réponse :
d(x,t)= 1
2 ∂φ1
∂x2 + ∂φ2
∂x1 (e1⊗e2+e2⊗e1);
directions principales : bissectrices de (e1 ,e2),ete3 ;
valeurs principales : 1
2 ∂φ1
∂x2 + ∂φ2
∂x1 , -1
2 ∂φ1
∂x2 + ∂φ2
∂x1 , 0.
˙
˜
dΩt/dΩt = div U(x,t)=0.
Ω(x,t)= 1
2 ∂φ1
∂x2 - ∂φ2
∂x1 (e1 ⊗ e2 - e2 ⊗ e1) ,Ω(x,t)=1
2 ∂φ2
∂x1 - ∂φ1
∂x2 e3 .
Mouvement irrotationnel : Ω(x,t) ≡ 0 si et seulement si
φ1(x2 ,t)=α(t)x2 + a1(t) ,φ2(x1 ,t)=α(t)x1 + a2(t) .
Commentaire.
Àr
approcher de Ex. II.3.
III.2 - Source ponctuelle. Dans un système de coordonnées cylindriques (O, r, θ, z)
on considère le champ de vitesse dé ni pour r =0,par:
Ur(x,t)=β(t)/r , Uθ(x,t)=0,Uz(x,t)=0.
Déterminer le tenseur taux dedéfo
r
m
ation et calculer le taux de déformation volu-
mique. Calculer le vecteur tourbillon.
Éléments de réponse :
grad U(x,t)=d(x,t)=- β(t)
r2(er⊗er -eθ⊗eθ)
er ,eθ ,ez sont les directions principales de d(x,t) .
˙
˜
dΩt/dΩt = tr d(x,t)=0
Ω(x,t)=0:mou
v
ementirrotationnel.
Commentaire.
Le mouvement plan dé ni pour r =0par Ur(x,t)=β(t)/r uides incompressibles : mouve-
ment induit par une source (ou un puits) ponctuel en O de débit 2πβ(t).
Exercices
131
III.3 - Tourbillon ponctuel. On considère le mouvement plan dé ni en coordonnées
cylindriques, pour r =0,par:
U(x,t)=U(r, θ, z, t)= Γ
2πr eθ où Γ est une constante réelle .
Calculer le tenseur taux de déformation d(x,t),leta
u
xdedilatation volumique, le
tenseur taux de rotation et le vecteur tourbillon Ω(x,t),lacir
c
ulation du vecteur
vitesse U(x,t) sur une courbe fermée entourant Oz.
Éléments de réponse :
• Le mouvement est stationnaire
grad U(x)=- Γ
2πr2(er⊗eθ+eθ⊗er)≡d(x);
directions principales de d(x) :bissectrices de (er ,eθ) et ez ;
valeurs principales : - Γ
2πr2,Γ
2πr2 , 0.
˙
˜
dΩt/dΩt = tr d(x)=0.
• Ω(x)=0,Ω(x)=0:
L étant une courbe fermée entourant Oz : L U(x) .τ(x)dL = Γ .
Commentaire.
Il s agit de l aspect cinématique du mouvement étudié dans Ex. II.6. Les résultats obtenus
icir
ejoignent ceux obtenus dans Ex. II.6 pour la transformation in nitésimale (cf. 4.4) :
notamment Ω(x)=0correspond à β(R, t)=0démontré alors dans ce cas.
rot U(x)=2Ω(x) est nul et la circulation de U(x) sur toute courbe entourant l axe Oz est
égale à Γ : ceci n est pas contradictoire avec la formule de Stokes puisque l axe Oz(r =0)ne
fait pas partie du domaine de dé nition du mouvement. On peut l y inclure en considérant
que rot U est, en tout point de Oz, une mesure de Dirac ponctuelle d intensité Γ dirigée selon
ez :d où la terminologie de tourbillon ponctuel .
III.4 - Mouvements irrotationnels sans variation de volume. Dans un ré-
férentiel R on considère un domaine Dt simplement connexe dans la con guration
κt.Donner la forme générale des champs de vitesse U pour lesquels le vecteur tour-
billon est nul en tout point de Dt à l instant t.Àqu
elle condition ces mouvements
irrotationnels correspondent-ils à un taux de dilatation volumique nul ?
Éléments de réponse :
• U(x,t)=grad φ(x,t),
φ,deuxfoiscontinûment différentiable quelconque, est appelée potentiel des vitesses.
• Δφ(x,t)=0.
(Gradient et laplacien par rapport aux variables d espace).
III.5 - Équations de Geiringer. R =(O, ex ,ey ,ez) étant un repère cartésien
orthonormé dans le référentiel R,o
nc
o
n
sidèr
eun domaine D du plan (ex ,ey).On
donne dans D deux familles de courbes continues et à tangente continue, dites familles
αetβ,o
rthogonales entre elles, telles qu en tout point de D passe une courbe et
une seule de chaque famille ; on désigne par eα et eβ les vecteurs normés tangents
à ces courbes au point courant, orientés de façon que (eα ,eβ)=+π/2,etpa
rRα
et Rβ les rayons de courbure algébriques correspondants (cf. annexe I, 6.4). On
132
Chapitre III - Cinématique du milieu continu
considère les champs de vitesse en déformation plane parallèlement au plan (ex ,ey),
que l on dé nit par la donnée de leurs composantes en chaque point de D dans la base
(eα ,eβ ,ez):Uα(x,t),Uβ(x,t) indépendants de z, Uz(x,t)=0.Donner les expressions
de grad U(x,t) et de d(x,t).Montrerquetout champ de vitesse en déformation plane
ainsi dé ni, qui satisfait les équations différentielles
(1) Deα Uα(x,t) - Uβ(x,t)/Rα(x)=0 le long des lignes α ,
(2) Deβ Uβ(x,t)+Uα(x,t)/Rβ(x)=0 le long des lignes β ,
correspond à un taux de dilatation volumique nul ; déterminer alors les directions
principales de d(x,t) et les valeurs principales correspondantes ; interpréter les lignes
α et β.Étudier le cas particulier où les lignes α sont des droites issues de O et les
lignes β les cercles de centre O :donner alors la forme générale des champs de vitesse
satisfaisant (1) et (2) ; déterminer, parmi ces mouvements, ceux qui sont irrotationnels.
Éléments de réponse :
•On s appuie surlaformulegradU.w=DwU quel on appliqueàw = eα,w= eβ,w= ez,
comme dans l annexe I ( 6.4).
Noter que Deα et Deβ s écrivent aussi couramment ∂
∂sαet∂
∂sβ .Onremarqueque:Deα eα =
eβ/Rα , Deαeβ = -eα/Rα , Deβeα = eβ/Rβ , Deβeβ = -eα/Rβ .
D où :
grad U(x,t)=(Deα Uα - Uβ/Rα) eα ⊗ eα +(Deα Uβ + Uα/Rα) eβ ⊗ eα+
+(DeβUα -Uβ/Rβ)eα ⊗eβ +(DeβUβ +Uα/Rβ)eβ ⊗eβ
div U(x,t)=Deα Uα - Uβ/Rα + Deβ Uβ + Uα/Rβ est nulle si (1) et (2) sont satisfaites. Alors :
d(x,t)= 1
2(DeαUβ +Uα/Rα+DeβUα -Uβ/Rβ)(eα⊗eβ +eβ ⊗eα).
Les directions principales de d(x,t) sont les bissectrices de (eα ,eβ) et ez ;le
slignes α et β
sont les enveloppes des directions pour lesquelles le taux de glissement est maximal.
• Dans le cas particulierindiqué on retrouve :
gradU=∂Ur
∂r er⊗er+∂Uθ
∂r eθ⊗er+(1
r ∂Ur
∂θ-Uθ
r)er⊗eθ+(1
r ∂Uθ
∂θ+Ur
r)eθ⊗eθ.
(1) et (2) imposent : Ur = -∂f(θ, t)/∂θ Uθ = f(θ, t)+g(r, t) .
On a :Ω(x,t)=1
2(g +f /r+(f+g)/r)(eθ⊗er -er⊗eθ).
Mouvement irrotationnel si et seulement si :
Ur(x,t)=α(t)cosθ + β(t)sinθ, Uθ(x,t)=-α(t)sinθ + β(t)cosθ + γ(t)/r .
Commentaire.
Cet exercice se rattache à la théorie de la plasticité en déformation plane pour les matériaux
de Tresca ou de von Mises : les équations (1) et (2) sont les équations de Geiringer. Si le champ
de vitesse est connu sur un arc de courbe (ni α ni β), les équations (1) et (2) permettent,
Exercices
133
par intégration, de le calculer dans tout un domaine (lignes caractéristiques et domaine de
détermination pour un système d équations aux dérivées partielles hyperbolique linéaire).
Dans le cas particulier, les deuxpr
e
mie
r
stermes dé nissent un mouvement de translation
uniforme U(x,t)=α(t)ex + β(t)ey (solution banale), le troisième correspond au mouvement
étudié dans Ex. III.3.
III.6 - Soit v un champ de vecteurs différentiable, dé ni à chaque instant t sur la
con guration κt .Ondésigne par O un point xe dans le référentiel R,parM le point
courant dans un domaine Dt de volume Ωt dans κt.Établir les formules :
Ωt ρ˙
v dΩt = Ωt
∂
∂t(ρv)dΩt + ∂Ωt (ρv) U .n da
ΩtOM∧ρ˙
vdΩt= ΩtOM∧∂
∂t(ρv)dΩt + ∂Ωt OM ∧ ((ρv)U .n)da - Ωt U ∧ ρv dΩt .
Examiner le cas particulier où le champ v est le champ de vitesse U .
Éléments de réponse :
On applique les formules de la dérivation particulaire aux intégrales
Ωt
ρv dΩt et Ωt OM ∧ ρv dΩt.
Commentaire.
Dans le cas particulier, le résultat établi sera utilisé au chapitre IV section 7 : il indique que le
torseur des quantités d accélération est égal à la dérivée particulaire du torseur des quantités
de mouvement, et il exprime cette dernière au moyen de densités volumique et surfacique.
III.7 - Théorème deKelvin;théorème de Helmholtz. On considère, dans un
référentiel R,unmouvement dont le champ des accélérations en représentation eulé-
rienne dérive à chaque instant d un potentiel uniforme. On désigne par Lt une courbe
fermée dans la con guration κt,etparΓ la circulation du vecteur vitesse U(x,t) sur
cette courbe Lt.Onsuppose que Lt ne rencontre aucune surface de discontinuité de
vitesse. Démontrer que la dérivée particulaire de Γ est nulle. On désigne par Σt une
portion de surface dans la con guration κt,supposée ne rencontrer aucune surface de
discontinuité de la vitesse, et par φ le ux du vecteur tourbillon Ω(x,t) àtravers Σt :
évaluer la dérivée particulaire de φ.Ondé nit à chaque instant t,dansκt,leslignes-
tourbillons : lignes enveloppes du champ des vecteurs tourbillons qui constituent une
famille à deux paramètres ; on dé nit aussi les surfaces-tourbillons : surfaces engen-
drées par les lignes-tourbillons s appuyant sur une courbe donnée arbitraire. Démon-
trer que les surfaces-tourbillons et les lignes-tourbillons sont des éléments matériels.
Calculer la dérivée particulaire du vecteur Ω(x,t)/ρ(x,t).
Éléments de réponse :
•˙
Γ = Lt(˙
U+U.grad U).dM = Lt
a .dM + Lt(grad(U2
2 )) . dM d après (4.52) ,
d où ˙
Γ =0sous les hypothèses indiquées.
LtdésignantlafrontièredeΣt on a2φ=Γ d où:2˙φ= ˙
Γ =0.
• Less
urfaces-tourbillons sont caractérisées par le fait que le long de toute courbe fermée,
réductibleàun point, tracée sur une surface-tourbillon, la circulation de la vitesse est nulle.
Le transport convectif d une surface-tourbillon à l instant t conserve cette propriété puisque
134
Chapitre III - Cinématique du milieu continu
˙
Γ =0:lasurface transportée demeure donc une surface-tourbillon. En considérant une ligne-
tourbillon comme l intersection de deux surfaces-tourbillons on démontre le résultat relatif
aux lignes-tourbillons.
• On écrit que, pour un vecteur-aire quelconque da :
˙
Ù
dφ=
˙
˝
Ω(x,t) . da =0;
en appliquant la formule (4.59) qui donne la dérivée particulaire du vecteur-aire on obtient :
˙
Ω= -ΩdivU+(gradU).Ω
et,puisquedivU= - ˙ρ/ρ,ilvient: ˙
˘
(Ω/ρ) =(grad U) . (Ω/ρ).
Commentaire.
L existence d un potentiel des accélérations uniforme se démontre en mécanique des uides
lorsque les forces de masse dérivent elles-mêmes d un potentiel uniforme et si le uide consi-
déré est barotrope . Le résultat établi, concernant la conservation de la circulation de la
vitesse dans les conditions indiquées, est le théorème de Kelvin. Le caractère matériel des
lignes et surfaces-tourbillons est l objet du théorème de Helmholtz. Le dernier résultat établi
montre que lev
ecteur Ω(x,t)/ρ(x,t) subit un simple transport convectif, c est-à-dire évolue
comme le vecteur matériel dM .
Chapitre IV
Les puissances virtuelles
et la modélisation
des efforts
MOTS CLÉS
Système. Sous-systèmes.
Efforts extérieurs. Efforts intérieurs.
Quantités d accélération.
Référentiel galiléen.
Loi fondamentale. Loi des actions mutuelles.
Dualisation. Principe des puissances virtuelles.
Vitesses virtuelles. Mouvement virtuel.
Mouvement virtuel rigidi ant.
Distributeurs. Torseurs.
Quantités de mouvement. Théorème d Euler.
Théorème de l énergie cinétique.
135
Chapitre IV Les puissances virtuelles et la modélisation des efforts
137
En bref
La modélisation des efforts suppose, en préalable, la modélisation géo-
métrique du système étudié et doit être cohérente avec elle. C est ainsi que
le concept de force (concentrée) est lié à celui de point matériel pour lequel
la position suffit à décrire l état géométrique, et la vitesse le mouvement.
Sur cet exemple il apparaît que la loi fondamentale de la dynamique est
équivalente à une formulation mathématique dualisée qui exprime l égalité
du produit scalaire de cette force par un vecteur quelconque et du produit
scalaire de la quantité d accélération du point matériel par ce même vec-
teur : on dit qu il y a égalité des puissances virtuelles de la force appliquée
et de la quantité d accélération dans toute vitesse virtuelle du point ma-
tériel (sections 1 et 2).
Cette idée est le fondement de l approche par les puissances virtuelles.
L exemple d un système de points matériels met en évidence la notion
de sous-systèmes d un système donné et la distinction à établir entre efforts
extérieurs et efforts intérieurs au système ou à un sous-système.
Les vitesses virtuelles de chacun des points matériels constitutifs du
système (ou d un sous-système) engendrent les mouvements virtuels de ce
système (ou sous-système).
Les efforts extérieurs, intérieurs et les quantités d accélération dé nis-
sent pour le système ou le sous-système des formes linéaires sur l espace
vectoriel de ses mouvements virtuels. La formulation dualisée de la loi fon-
damentale de la dynamique apparaît sur l espace vectoriel des mouvements
virtuels : la somme des puissances virtuelles des efforts extérieurs et des
efforts intérieurs est égale à la puissance virtuelle des quantités d accélé-
ration en repère galiléen, dans tout mouvement virtueldusystème (ou
du sous-système). La dualisation de la loi desa
ctio
n
sm
utu
elles se réfère
aux mouvements virtuels rigidi ants :lapuissance virtuelle des efforts
intérieurs au système (ou au sous-système) est nulle dans tout mouvement
rigidi ant le système (ou le sous-système) (sections 1 et 2).
Ces deux énoncés des puissances virtuelles sont alors posés en prin-
cipe .Ilsconstituent le fondement de la méthode des puissances virtuelles :
138
Chapitre IV Les puissances virtuelles et la modélisation des efforts
àpa
rtirdel intuition issue de l expérience ,
• cerner les concepts que l on souhaiteformaliser dans cette modélisation,
sur cette base
• dé nir la modélisation géométrique du système et notamment ses mou-
vementsréels,
• dé nir l espace vectoriel des mouvements virtuels, et les formes linéaires
sur cet espace qui expriment les puissances virtuelles des efforts exté-
rieurs, des efforts intérieurs et des quantités d accélération,
par application du principe des puissances virtuelles
• affiner, si nécessaire, ces expressions pour assurer la cohérence du
modèle,
• déduire la formulation, dans le cadre de la modélisation construite, de
la loi des actions mutuelles et de la loi fondamentale de la dynamique
(sections 3 et 4).
Le rôle essentiel joué par les mouvements virtuels rigidi ants conduit à
leur étude particulière. On introduit ainsi la notion de distributeur .Pa
r
dualité apparaît la notion de torseur (section 5).
On met alors en évidence des résultats généraux, valables pour toute
modélisation mécaniquement cohérente, qui expriment la loi fondamentale
de la dynamique et la loi des actions mutuelles en termes de torseurs (section
6).
Si l on s intéresse plus particulièrement aux milieux continus classiques,
sans précisions supplémentaires sur la modélisation des efforts, la loi fonda-
mentale de la dynamique prend aussi la forme des théorèmes de la quantité
de mouvement en termes de torseurs, et conduit au théorème de l énergie
cinétique (section 7).
Chapitre IV Les puissances virtuelles et la modélisation des efforts
139
Principales notations
Notation
Signi cation
1ère formule
R
référentiel galiléen
(1.1)
S
système
(1.2)
S
sous-système de S
(1.5)
ˆ
U
vitesse virtuelle
(2.1)
P(e), P (e) puissance virtuelle des efforts extérieurs
(2.6)(2.8)
pourSetS
44
P(i), P (i) puissance virtuelle des efforts intérieurs
(2.6)(2.8)
pourSetS
45
A, A
puissance virtuelle des quantités
(2.6)(2.8)
d accélération pour S et S
43
ˆ
U
mouvement virtuel
42
{ˆ
D} distributeur
(5.2)
[F] torseur
(5.7)
[F].{ˆ
D} produit de dualité torseur-distributeur
(5.8)
[Fe] , [F
e] torseur des efforts extérieurs à S et S
(6.1)
[Fi] , [F i] torseur des efforts intérieurs à S et S
(6.1)
[MA] , [MA ] torseur des quantités d accélération de S et S (6.1)
[MU] , [MU ] torseur des quantités de mouvement de S et S (7.6)
K(U) ,K (U) énergie cinétique de S et S
(7.25)
140
Chapitre IV Les puissances virtuelles et la modélisation des efforts
1P
roblématique de la modélisationdes efforts .......143
1.1 Modélisation des efforts pour un système de points ma-
tériels ............................ 143
1.2L
améthode des puissances virtuelles. .......... 148
2D
u
a
lisation et puissances virtuelles pour un système de
points matériels.
.
......................148
2.1S
ystème constituéd unpoint matériel .
......... 148
2.2S
ystème de points matériels ................ 149
2.3 Vitesses virtuelles, mouvements virtuels, puissances vir-
tuelles ............................ 151
2.4É
noncédes puissances virtuelles ............. 153
2.5 Modélisation des efforts et mouvements virtuels .
.
.
.
. 153
3M
é
t
h
o
de des puissances virtuelles pour un système de
points matériels.
.
......................154
3.1 Présentation de la méthode des puissances virtuelles .
. 154
3.2E
xemple de mise en œuvre ................ 154
3.3 Commentaires sur cette application de la méthode des
puissances virtuelles .................... 157
3.4 Compatibilité géométrique des ˆ
˙δij .Systèm
e
sdeba
rres
articulées .......................... 158
4L
améthode des puissances virtuelles ............160
4.1P
résentationgénéraledelaméthode ........... 160
4.2 Récapitulatif de la méthode des puissances virtuelles .
. 162
4.3C
o
mmentaires ....................... 163
4.4C
hangementderéférentiel.Objectivité .
......... 163
5M
o
u
v
e
m
e
n
t
s
r
i
g
idi ants ; distributeurs, torseurs . . . . . 164
5.1D
istributeurs ........................ 164
5.2T
orseurs ........................... 165
5.3 Restriction d une forme linéaire dé nie sur un espace de
mouvements virtuels aux mouvements virtuels rigidi ants 166
5.4T
orseur d un systèmedeforces.
............. 166
5.5 Champs de distributeurs et de torseurs ; dérivation .
.
. 167
6R
ésultats généraux ......................169
6.1 Dé nition du système et des mouvements considérés .
. 169
6.2P
uissances virtuelles .................... 170
6.3 Loi des actions mutuelles et loi fondamentale de la dy-
namique ........................... 170
6.4C
o
mmentaires ....................... 171
7T
h
é
o
r
è
m
es de la quantité de mouvement et de l énergie
cinétique .............................172
7.1 Dé nition du système et des mouvements considérés .
. 172
7.2 Torseur des quantités d accélération ; torseur des quan-
titésdemouvement .................... 172
7.3C
onservationdelaquantitédemouvement .
...... 173
7.4T
héorèmed Euler .
.................... 174
Chapitre IV Les puissances virtuelles et la modélisation des efforts
141
7.5T
héorèmedel énergie cinétique. ............. 176
7.6 Champ de vitesse réel discontinu : ondes de choc .
.
.
. 177
8E
t
m
a
i
n
t
enant ...
.......................181
Récapitulatifdes formules essentielles .............182
Exercices ..............................184
1 Problématique de la modélisation des efforts
143
Les puissances virtuelles
et la modélisation des efforts
1P
roblématique de la modélisation des efforts
Les trois chapitres précédents ont été consacrés à la modélisation géométrique
du milieu continu déformable àpartir de l intuition expérimentale. A n d en
établir la modélisation mécanique il est maintenant nécessaire d introduire, pour le
milieu continu, le concept d efforts et d établir les lois qui régissent le mouvement
et l équilibre d un système dans cette modélisation.
1.1 Modélisation des efforts pour un système de points
matériels
Point matériel
Pour la mécanique du point matériel de masse m,laloi fondamentale de la
dynamique postule l existence d un référentiel galiléen R dans lequel on énonce :
en référentiel galiléen R ,F
=ma.
(1.1)
La modélisation des efforts est fondée sur la notion de force représentée par le
vecteur F de R3,ta
ndis que a est l accélération de la masse ponctuelle considérée
dans le référentiel R.Leproduit ma est la quantité d accélération de la masse m.
Système de points matériels
On considère maintenant un ensemble de n points matériels dans sa con guration
κt à l instant t.Po
u
rchaqu
epoint matériel (j) de masse mj l effort à introduire au
premier membre de la loi fondamentale (1.1) résulte de la composition vectorielle
de la force F j exercée sur (j) par le monde extérieur à l ensemble des n points
matériels considérés, et des efforts exercés sur (j) par les autres points matériels (i)
de l ensemble (i = j, i =1, 2,... ,n).Ens
upposant que ces efforts correspondent
uniquement à des interactions binaires découplées, on désigne par F ij la force exercée
par le point matériel (i) sur le point matériel (j), (i = j, i =1, 2,... ,n).
L ensemble des n points matériels ci-dessus constitue un système mécanique S
pour lequel on vient de procéder à une modélisation des efforts qui met en évidence
les efforts extérieurs F j et les efforts intérieurs F ij ( gure 1).
Pour ce système les lois de la mécanique s expriment par les lois de Newton de
la façon suivante.
144
Chapitre IV Les puissances virtuelles et la modélisation des efforts
Figure 1 Système demasses ponctuelles : efforts extérieurs et efforts intérieurs
D une part, l écriture de la loi fondamentale de la dynamique (1.1) pour
chaque pointmatérieldusystèmeS :
en référentiel galiléen R ,
∀(j) ∈S,Fj +
(i)∈S
i =j
Fij = mjaj (1)
(1.2)
où l on reconnaît la structure
Force extérieure
sur (j)
+ Forces intérieures
sur (j)
= Quantité d accélération
de (j)
(1.3)
D autre part, l écriture du principe de l action et de la réaction qui régit les
forces d interaction pour chaque couple de points matériels et exprime que la force
exercée par (i) sur (j) forme avec la force exercée par (j) sur (i) un système de forces
équivalent à zéro :
en référentiel galiléen R ,
∀(i) ∈S, ∀(j) =(i) ∈S,
Fij+Fji=0
OMi∧Fji+OMj∧Fij=0.
(1.4)
où O désigne un point géométrique arbitraire dans κt .
Sous-système
En considérant une partie du système précédent on dé nit un sous-système S de
S.Pourcesous-système la distinction entre effortsextérieursetintérieurs se réfère à
S etnonplusàS.
(1)Dans ce chapitre la convention de sommation sur les indices répétés ne sera pas utilisée :toutes
les sommations seront explicitées.
1 Problématique de la modélisation des efforts
145
Figure 2 Système demasses ponctuelles : principe de l action et de la réaction
Compte tenu des hypothèses faites danslade
s
c
riptio
nde
seffo
rtspo
u
rc
equi
concerne les forces d interaction entre les points matériels, la force extérieure F j
sur un point matériel (j) de S est déterminée de façon évidente à partir des efforts
FjetFij:
∀S ⊂S, ∀(j) ∈S ,
F j=Fj+
(i)/∈S F ij .
(1.5)
Les efforts intérieurs sur le point matériel (j) de S se réduisent à ceux exercés par
les autres points matériels de S : F ij , (i) ∈S ,i = j.
Figure 3 Sous-système S :effortsextérieurseteffortsintérieurs
Il en résulte que la loi fondamentale de la dynamique (1.2) peut aussi être mise
sous la forme :
en référentiel galiléen R ,
∀(j) ∈S ⊂S,
F j+
(i)∈S
i =j
Fij = mjaj
(1.6)
146
Chapitre IV Les puissances virtuelles et la modélisation des efforts
qui a,vis-à-vis de S ,lamêmestructure que (1.2) vis-à-vis de S
Force extérieure /S
sur (j)
+ Forces intérieures /S
sur (j)
= Quantité d accélération
de (j)
(1.7)
Parailleurs le principe de l action et de la réaction écrit en (1.4) pour les forces
d interaction pour chaque couple de points matériels de S contient notamment l écri-
ture de ce même principe pour chaque couple de points matériels de S .
Loi des actions mutuelles
Figure 4 Système demasses ponctuelles : loi des actions mutuelles
On peut aussi remarquer que le principe de l action et de la réaction (1.4) est
équivalent à l énoncé (1.8) qui considère, au lieu des couples de points matériels, l en-
semble des points matériels d un sous-système quelconque S de S (dont S lui-même).
Cet énoncé est celui de la loi des actions mutuelles .Ilexprimeque les efforts in-
térieurs à un sous-système quelconque forment un système de forces équivalent à zéro
c est-à-dire de résultante et de moment résultant nuls (2) :
en référentiel galiléen R ,
∀S ⊂S,
(j)∈S
(i)∈S
i =j
Fij =0
(j)∈S
(i)∈S
i =j
OMj∧Fij=0
(1.8)
En résumé...
Pour un système de points matériels on a vu que la description des efforts extérieurs
et intérieurs donnée pour le système S permet de déterminer les efforts correspondant
(2)Cf. 5.4.
1 Problématique de la modélisation des efforts
147
àto
uts
ous-système S de S.Le
slois de la mécanique s expriment par la loi fonda-
mentale de la dynamique et la loi des actions mutuelles, sous la même forme, pour le
système S et pour tout sous-système S de S.
Référentiels non galiléens
Les énoncés de la loi fondamentale (1.1, 1.2, 1.6) et de la loi des actions mutuelles
(1.4) qui dé nissent la modélisation des efforts sont relatifs à un référentiel galiléen.
La question se pose alors d en déduire la modélisation dans un autre référentiel.
Pour cela on rappelle les formules (cf. chapitre III, 3.11) exprimant la com-
position des vitesses et des accélérations lors d un changement de référentiel .
Le référentiel R∗ étant animé, par rapport au référentiel R,dumouvementd entraî-
nement dé ni par le champ de vitesse rigidi ant U e dont la vitesse instantanée de
rotation est ωe ,ona:
U(x)=U ∗(x∗)+U e(x∗)
(1.9)
a(x)=a∗(x∗)+ae(x∗)+2ωe ∧ U ∗(x∗) ,
(1.10)
dans lesquelles U(x) et U ∗(x∗) d une part, a(x) et a∗(x∗) d autre part, désignent
respectivement la vitesse et l accélération du point matériel en x par rapport au
référentiel R et x∗ par rapport au référentiel R∗ ,ae(x∗) est l accélération en x∗ du
point géométrique lié à R∗ dans le mouvement d entraînement par rapport à R et
2 ωe ∧ U ∗(x∗)=ac(x∗) est l accélération complémentaire (ou de Coriolis(3)).
Un changement de référentiel galiléen est caractérisé par le fait que U e ,est
un champ de vitesse de translation indépendant du temps (ωe =0,ae =0).One
n
déduit que la modélisation établie dans un référentiel galiléen demeure identique dans
tout autre référentiel de ce type.
Dans le cas d un changement de référentiel quelconque la loi des actions
mutuelles conserve la même expression (1.8) avec la mêmereprésentation des efforts
intérieurs (la précision en référentiel galiléen est ainsi inutile dans cet énoncé).
En revanche, en appliquant la formule de composition des accélérations (1.10) à la loi
fondamentale (1.2) écrite dans le référentiel galiléen R on obtient l expression de la
loi fondamentale en référentiel non galiléen :
dans le référentiel R∗ ,
∀(j) ∈S,Fj +
(i)∈S
i =j
Fij -mj(ae)j -2mjωe∧U∗j = mja∗j ,
(1.11)
et la formule homologue à partir de (1.6). On peut interpréter cette formule en disant
que la loi fondamentale conserve la même forme que (1.2) en référentiel non galiléen
àc
o
nditio
nd
ajo
ute
r
,àlar
eprésentation des efforts extérieurs établie en référen-
tiel galiléen, les forces ctivesd inertie d entraînement -mj(ae)j et les forces ctives
complémentaires -2 mj ωe ∧ U ∗j .
(3)G. Coriolis (1792-1843).
148
Chapitre IV Les puissances virtuelles et la modélisation des efforts
1.2 La méthode des puissances virtuelles
Le problème de la modélisation des efforts pour le milieu continu concerne la
représentation des efforts extérieurs et intérieurs pour tout système S dé ni
dans le cadre de la modélisation géométrique établie dans les chapitres précédents, et
pour tout sous-système S de S,ain
siqu
el écriture des équations exprimant la loi
fondamentale de la dynamique et la loi des actions mutuelles ,ho
m
ologues
de (1.2), (1.6) et (1.4).
Diverses approches peuvent être employées pour cette construction. On a choisi
la méthode des puissances virtuelles qui présente l avantage de mettre en relief
la cohérence entre la modélisation géométrique et la modélisation des efforts et qui
a une portée générale : suivant l intuition issue de l expérience elle permet, à partir
de la description géométrique adoptée, la construction de représentations des efforts
cohérentes et l obtention des équations correspondantes. La méthode sera appliquée à
plusieurs reprises, pour le milieu continu tridimensionnel au chapitre V et pour les mi-
lieux curvilignes au chapitre XI : on pourra ainsi remarquer le caractère systématique
de la démarche en même temps que la structure commune des équations obtenues.
Les sections suivantes (2 et 3) ont pour objet d introduire le concept de puissances
virtuelles et la méthode correspondante en partant du modèle connu examiné ci-
dessus, celui des systèmes discrets constitués de points matériels.
2D
ualisation et puissances virtuelles pour un
système de points matériels
2.1 Système constitué d un point matériel
La dualisation de la loi fondamentale pour un point matériel s opère de façon
évidente. En désignant par ˆ
U un vecteur quelconque de R3, l équation (1.1) est équi-
valente à l énoncé :
en référentiel galiléen R ,
∀ˆ
U∈R3
F.ˆ
U=ma. ˆ
U.
(2.1)
En dé nissant sur R3 les formes linéaires P et A par
P(ˆ
U)=F. ˆ
U
A(ˆ
U)=ma . ˆ
U,
(2.2)
on aboutit à la formulation duale de (1.1)
en référentiel galiléen R ,
∀ˆ
U∈R3,P(ˆ
U)=A(ˆ
U).
(2.3)
2 Dualisation et puissances virtuelles pour un système de points matériels 149
2.2 Système de points matériels
On considère à nouveau le système S représenté sur la gure 1, constitué de n
masses ponctuelles mj affectées aux points matériels (j) situés en Mj à l instant t
dans la con guration κt.
Dualisation de la loi fondamentale de la dynamique
Pour le système S
Pour chaque point matériel (j) de S,ladualisation de la loi fondamentale de la
dynamique (1.2) nécessite, comme ci-dessus, l introduction d un vecteur arbitraire ˆ
Uj
de R3.Onobtientainsi l énoncé dual, équivalent à (1.2) :
en référentiel galiléen R ,
∀(j)∈S, ∀ˆ
Uj∈R3,
Fj. ˆ
Uj+
(i)∈S
i =j
Fij. ˆ
Uj=mjaj. ˆ
Uj.
(2.4)
Il est évident, compte tenu du caractère arbitraire de chacun des n vecteurs ˆ
Uj,
que l énoncé précédent est équivalent à l énoncé global :
en référentiel galiléen R ,
∀ˆ
U1,... , ˆ
Un∈R3×...×R3,
(j)∈SFj . ˆ
Uj+
(j)∈S
(i)∈S
i =j
Fij. ˆ
Uj=
(j)∈Smjaj . ˆ
Uj.
(2.5)
En dé nissant sur R3 × ... × R3 les trois formes linéaires
P(e)( ˆ
U1,... , ˆ
Un)=
(j)∈SFj . ˆ
Uj
P(i)( ˆ
U1,... , ˆ
Un)=
(j)∈S
(i)∈S
i =j
Fij. ˆ
Uj
A(ˆ
U1,... , ˆ
Un)=
(j)∈Smjaj . ˆ
Uj
(2.6)
on aboutit à la formulation duale de la loi fondamentale de la dynamique
pour le système S :
en référentiel galiléen R ,
∀ˆ
U1,... , ˆ
Un∈R3×...×R3
P(e)( ˆ
U1,... , ˆ
U n)+P(i)( ˆ
U1,... , ˆ
U n)=A( ˆ
U1,... , ˆ
Un).
(2.7)
Pour un sous-système S
Pour un sous-système quelconque S de S,ladémarchededualisation est identique
àpartirdel équation (1.6) qui ne concerne que les points matériels de S .Onassocie
150
Chapitre IV Les puissances virtuelles et la modélisation des efforts
un vecteur arbitraire ˆ
Uj de R3 àchacu
ndeces points et la partition, explicitée par
(1.5) et (1.7), entre forces extérieures et intérieures relativement à S conduit à dé nir
pour S les formes linéaires suivantes sur R3 × ...× R3 :
S =( ),... ,(p) ,
∀ˆ
U ,... , ˆ
Up∈R3×...×R3,
P (e)( ˆ
U ,... , ˆ
Up)=
(j)∈S F j . ˆ
Uj
P (i)( ˆ
U ,... , ˆ
Up)=
(j)∈S
(i)∈S
i =j
Fij. ˆ
Uj
A ( ˆ
U ,... , ˆ
Up)=
(j)∈S mjaj . ˆ
Uj.
(2.8)
L expression dualisée de la loi fondamentale de la dynamique pour le sous-système
S s exprime alors par la formule (2.9) homologue évidente de (2.7) :
en référentiel galiléen R ,
S =( ),... ,(p) ⊂S,
∀ˆ
U ,... , ˆ
Up∈R3×...×R3,
P (e)( ˆ
U ,... , ˆ
U p)+P (i)( ˆ
U ,... , ˆ
U p)=A ( ˆ
U ,... , ˆ
Up) .
(2.9)
Dualisation de la loi des actions mutuelles
La loi des actions mutuelles est exprimée par la formule (1.8) qui représente un
système de deux équations vectorielles pour chaque sous-système S de S,ycompris
S lui-même. La dualisation de chaque tel système de deux équations se fait en intro-
duisant deux vecteurs arbitraires de R3,s
oie
ntˆ
U0etˆ
ω0.Ain
si(1.8) est équivalente
à:
en référentiel galiléen R ,
∀S ⊂S,
∀ˆ
U0∈R3,∀ˆ
ω0∈R3,
(
(j)∈S
(i)∈S
i =j
Fij). ˆ
U0+(
(j)∈S
(i)∈S
i =j
OMj ∧Fij). ˆ
ω0 =0.
(2.10)
On peut alors poser :
∀ˆ
U0∈R3,∀ˆ
ω0∈R3,
∀(j) ∈S ,
ˆ
Uj= ˆ
U0 +ˆ
ω0∧OMj,
(2.11)
ce qui permet de mettre (2.10) sous la forme :
en référentiel galiléen R ,
∀S ⊂S,
∀ˆ
U0∈R3,∀ˆ
ω0∈R3,
(j)∈S
(i)∈S
i =j
Fij. ˆ
Uj =0 si (2.11).
(2.12)
2 Dualisation et puissances virtuelles pour un système de points matériels 151
On reconnaît dans (2.12) la forme linéaire P (i) dé nie en (2.8). D oùlaformulation
duale de la loi des actions mutuelles (1.8) :
en référentiel galiléen ,
∀S =( ),... ,(p) ⊂S,
∀ˆ
U0∈R3,∀ˆ
ω0∈R3,
P (i)( ˆ
U ,... , ˆ
U p)=0 si (2.11) .
(2.13)
On peut remarquerquelesvecteurs ˆ
U j astreints à satisfaire (2.11) sont tels que :
∀(i) ∈S , ∀(j) ∈S
MiMj .(ˆ
Uj- ˆ
U i)=0 si (2.11) ,
(2.14)
c est-à-dire que si les points géométriques Mj , (j) ∈S ,dansκt étaient animés, dans
le référentiel R,desvitesses ˆ
U j dé nies par (2.11) à partir de ˆ
U0etˆ
ω0 leurs distances
respectives (|MiMj|)s
e
r
aient conservées. Le mouvement instantané correspondant
n est autre que le mouvement rigidi ant dé ni dans R par les vecteurs arbitraires
ˆ
U 0,(vitesse du point O)et ˆ
ω0 (vitesse de rotation). Cette remarque sera mise à pro t
dans la suite.
2.3 Vitesses virtuelles, mouvements virtuels, puissances
virtuelles
Point matériel
Dans le cas d un point matériel, pour lequel l effort est modélisé par une force F
appliquée au point M dans κt à l instant t,leproduit scalaire F . ˆ
U qui apparaît dans
(2.1) associe à tout vecteur ˆ
U de R3 la puissance de la force F dans le mouvement
du point matériel considéré qui serait animé dans le référentiel R de la vitesse ˆ
Uà
l instant t.
A n d insister sur le caractère arbitraire du vecteur ˆ
U de R3 dans (2.1), qui im-
plique notamment que ˆ
U n a rien à connaître des restrictions éventuelles imposées à
la vitesse du point matériel en M dans son mouvement réel, la terminologie choisie
est la suivante.
ˆ
U est la vitesse virtuelle du point matériel en M dans le référentiel R ;elle
dé nit, dans R,unmouvement virtuel de ce point matériel.
P(ˆ
U)=F. ˆ
U est la puissance virtuelle de la force F dans ce mouvement
virtuel.
A(ˆ
U)=ma . ˆ
U est, par assimilation, la puissance virtuelle de la quantité
d accélération ma du point matériel dans cemouvementvirtuel.
Système de points matériels
Les mêmes arguments peuvent être repris pour un système S de plusieurs points
matériels.
152
Chapitre IV Les puissances virtuelles et la modélisation des efforts
L ensemble des vecteurs ˆ
U1,... , ˆ
U n arbitraires dans R3 introduits dans (2.5) est
une distribution de vitesses virtuelles dans κt pour les pointsm
atériels (j) de S
dans le référentiel R.Ildé nit, dans ce référentiel, un mouvement virtuel (m.v.)
du système S.
P(e)( ˆ
U1,... , ˆ
Un)=
(j)∈SFj. ˆ
U j est, pour S,lapuissance virtuelle des efforts
extérieurs dans ce mouvement virtuel ;
P(i)( ˆ
U1,... , ˆ
Un)=
(j)∈S
(i)∈S
i =j
Fij. ˆ
U j est, pour S,lapuissance virtuelle des
efforts intérieurs ;
A(ˆ
U1,... , ˆ
Un)=
(j)∈Smjaj . ˆ
U j est la puissance virtuelle des quantités d ac-
célération .
De même pour un sous-système ( ),... ,(p)=S ,lemouvement virtuel de S est
dé ni dans R par ˆ
U ,... , ˆ
U p et les puissances virtuelles, homologues des précédentes
sont P (e)( ˆ
U ,... , ˆ
Up), P (i)(ˆ
U ,... , ˆ
Up) et A (ˆ
U ,... , ˆ
U p) dé nies par (2.8).
Il est clair que, pour le système S ou pour un sous-système S quelconque, l en-
semble des mouvements virtuels à une structure d espace vectoriel.
Parmi ces mouvements virtuels, la dualisation de la loi des actions mutuelles ne
porte que sur les distributions de vitesses virtuelles ˆ
U j qui satisfont sur S ou sur le
sous-système S considéré la condition (2.11). Mettant à pro t la remarque faite au
paragraphe 2.2 à partir de la formule (2.14) il est naturel d adopter pour cette classe
de mouvements virtuels la terminologie de mouvement virtuel rigidi ant (m.v.r.)
le système S ou le sous-système considéré.
Changement de référentiel
Les vecteurs ˆ
U j introduits aux paragraphes 2.1 et 2.2 sont les instruments mathématiques
de la dualisation de la loi fondamentale et de la loi des actions mutuelles écrites dans le
référentiel R.Ce
sv
ecteurs quelconques de R3 sont dé nis à l instant t sur la con guration
actuelle du système étudié, et ne sont en rien concernés par le concept de changement de
référentiel.
En revanche, l interprétation, qui vient d être donnée, de chacun de ces vecteurs ˆ
U j comme
la vitesse virtuelle de la masse ponctuelle en M dans le référentiel R,etdel ensemble de ces
vecteurs comme dé nissant un mouvement initial dans R du système de masses ponctuelles
(j) ou de ses sous-systèmes, introduit pour ces m ouvements virtuels le concept fécond
de changement de référentiel. Il s agit, considérant deux référentiels R et R∗ quelconques,
d énoncer que deux distributions de vecteurs ˆ
Ujetˆ
U ∗j dé nissent, dans R et R∗ respective-
ment, le même mouvement virtuel si elles sont liées par la relation (1.9) valable pour les
mouvements réels, soit ici : ˆ
Uj= ˆ
U∗j +(U∗
e)j.
On remarque alors qu un changement de référentiel quelconque est sans effet sur la valeur
de la puissance virtuelle des efforts intérieurs. En effet on a, par exemple pour S ,
(j)∈S
(i)∈S
i =j
Fij. ˆ
Uj = P (i)(ˆ
U ,... , ˆ
Up)=P (i)(ˆ
U∗
,... ,ˆ
U∗
p)+P (i)((U e) , ... ,(U e)p)
(2.15)
2 Dualisation et puissances virtuelles pour un système de points matériels 153
dont le dernier terme est nul puisque les (U e)j correspondent à un mouvement rigidi ant.
On peut ainsi énoncer, avec la dé nition précédente, que la puissance virtuelle des efforts
intérieurs au système ou à un de ses sous-systèmes est indépendante du référentiel dans lequel
est observé le mouvement virtuel considéré. On reviendra sur cette question au paragraphe
4.4.
2.4 Énoncé des puissances virtuelles
En conclusion, pour le système de points matériels étudié avec la modélisation
des efforts présentée dans la section 1, on a montré l équivalence entre les lois de la
mécanique (lois de Newton) et l énoncé suivant dit des puissances virtuelles ,
avec les dé nitions données plus haut :
en référentiel galiléen ,
∀S =( ),... ,(p) ⊂S ,
(2.16) ∀ˆ
U ,... , ˆ
Upm.v.deS ,
P (e)( ˆ
U ,... , ˆ
U p)+P (i)( ˆ
U ,... , ˆ
U p)=A ( ˆ
U ,... , ˆ
Up),
(2.17) ∀ˆ
U ,... , ˆ
Up m.v.r. de S ,
P (i)( ˆ
U ,... , ˆ
U p)=0
(2.18)
dont la première proposition(2.16, 2.17) dualise la loi fondamentale de la dynamique,
et la seconde (2.16, 2.18) la loi des actions mutuelles.
2.5 Modélisation des efforts et mouvements virtuels
L objectif annoncé de cette présentation était, à partir d une modélisation connue
desefforts et des énoncés correspondants des lois de la mécanique, de dégager les
principes de la dualisation ainsi que des énoncés qui pourraient être posés, dans la
suite, comme principes fondamentaux (cf. section 3).
Dans cette démarche, les espaces sur lesquels est effectuée la dualisation pour un
système ou pour ses sous-systèmes sont évidemment directement déterminés par la
connaissance préalable que l on a de la modélisation : les efforts étant modélisés par
des forces, c est-à-dire des vecteurs de R3 ,ladualité à travers le produit scalaire
euclidien introduit les vecteurs arbitraires ˆ
Uj de R3.
On pourrait imaginer de partir d une autre modélisation des efforts où, abandon-
nant le concept de masses ponctuelles, interviendraient en Mj ,outredes forces F j et
F ij comme dans le cas précédent, des couples Γ j et Γ ij .Ladualisation introduirait
alors, outre les vecteurs ˆ
U j ,unautrejeudevecteurs arbitraires ˆ
rj de R3.Cesˆ
rj ,as-
sociés à des couples dans le produit scalaire, prendraient la signi cation de vitesses
de rotation virtuelles en chaque point Mj ,etde
spr
oduitsdutypeΓ. ˆ
r vien-
draient compléter les expressions de P(e)( ˆ
U1,... , ˆ
Un, ˆ
r1,... ,ˆ
rn), P (e), P(i), P (i)...
Un mouvement virtuel de S serait alors dé ni, dans un référentiel R,p
a
r
(ˆ
U1,... , ˆ
Un, ˆ
r1,... ,ˆ
rn).Lesmouvements virtuels rigidi ant S ,surlesquels P (i) se-
154
Chapitre IV Les puissances virtuelles et la modélisation des efforts
rait nulle, seraient dé nis par (2.11) pour ˆ
U ,... , ˆ
Up avec, de plus :
ˆ
r = ...=ˆ
rp= ...=ˆ
ω0.
(2.19)
On reviendra sur cette idée au chapitre V (section 5) et au chapitre XI mais on
doit déjà insister sur le lien existant entre les mouvements virtuels considérés dans la
dualisation et la modélisation mêmedesefforts à laquelle on aboutit.
3M
éthode des puissances virtuelles pour un
système de points matériels
3.1 Présentation de la méthode des puissances virtuelles
L idée directrice de la méthode des puissances virtuelles consiste à aborder le
problème de la modélisation des efforts par dualité en s appuyant sur le principe des
puissances virtuelles(2.16 à 2.18) posé aprio
ricomme fondamental.
Après la dé nition géométrique du système étudié qui implique celle de ses mou-
vements réels, la démarche impose de commencer par dé nir les mouvements vir-
tuels qui vont être considérés pour le système et pour ses sous-systèmes et qui doivent
constituer des espaces vectoriels.
Puis, en se donnant les expressions des formes linéaires P(e), P (e), P(i), P (i), A, A
sur ces espaces vectoriels, on va esquisser laformedelamodélisation des efforts que
l on souhaite construire : les cofacteurs introduits par ces formes traduisent la repré-
sentation des efforts extérieurs et intérieurs.
L exploitation du principe des puissances virtuelles permettra d achever la modé-
lisation en aboutissant aux équations de la dynamique pour le système étudié.
Le choix des espaces vectoriels des mouvements virtuels, instruments mathéma-
tiques de la construction par dualisation, est, à la fois, totalement libre et essentiel.
Les mouvements virtuels n ont rien à connaître des limitations éventuelles imposées
aux mouvements réels du système considéréda
n
ss
on évolution mécanique particu-
lière, mais ils doivent évidemment, pour que la construction faite ait une quelconque
utilité pratique, inclure tous ces mouvements réels.
3.2 Exemple de mise en œuvre
On se propose, sans entrer dans les détails de démonstration ni répéter l argumen-
tation de dualisation de la section 2, de montrer comment la modélisation des efforts
qui a servi de point de départ dans la section 1 peut être construite par la méthode
des puissances virtuelles.
Modélisation géométrique ; mouvements réels
Le système S est décrit comme constitué de n points matériels (j) de masse mj ,
qui occupent dans la con guration κt,lespositionsgéométriques Mj .Unsous-système
3 Méthode des puissances virtuelles pour un système de points matériels
155
S est une partie de S constituée des points matériels ( ),... ,(p).S agissant de points
matériels la con guration géométrique du système est dé nie par la donnée des seules
positions géométriques des points Mj à cet instant. Les mouvements réels du système
S sont dé nis sur κt,parlesvitesses U j de ces points.
Espaces vectoriels des mouvements virtuels
Dans le but de décrire un système dans lequel les efforts sont modélisés par des
forces l espace vectoriel choisi pour les mouvements virtuels du système S est engendré
par n vitesses virtuelles ˆ
U j (vecteurs de R3)affectées aux points Mj .Lesmouvements
virtuels d un sous-système S sont dé nis de la même manière. Ces espaces vectoriels
contiennent évidemment les mouvements réels du système S (ou dusous-système S )
et les mouvements rigidi ant S (ou S ).
Écriture des formes linéaires P(e) et P (e)
Ces choix étant faits, l écriture la plus générale de P(e),formelinéaire sur l espace
vectoriel engendré par les ˆ
Ujest:
P(e)( ˆ
U1,... , ˆ
Un)=
(j)∈SFj . ˆ
Uj
(3.1)
où les F j sont des cofacteurs arbitraires.
De même pour P (e) relative à S :
P (e)( ˆ
U ,... , ˆ
Up)=
(j)∈S F j . ˆ
Uj
(3.2)
où les F j cofacteurs affectés à Mj dépendent a priori du sous-système S considéré
auquel appartient le point matériel (j).
Les F j et les F j modélisent les efforts extérieurs à S et à S respectivement.
Écriture des formes linéaires A et A
Les mouvements réels du système dé nissent les accélérations aj des points ma-
tériels, d où les quantités d accélération mj aj .Lapuissance virtuelle des quantités
d accélération s écrit donc :
A(ˆ
U1,... , ˆ
Un)=
(j)∈S
mjaj. ˆ
Uj pourS,
(3.3)
A ( ˆ
U ,... , ˆ
Up)=
(j)∈S
mjaj. ˆ
Uj pourS .
(3.4)
Écriture des formes linéaires P(i) et P (i)
Comme pour P(e) l écriture la plus générale de P(i) est
P(i)( ˆ
U1,... , ˆ
Un)=
(j)∈SΦj . ˆ
Uj,
(3.5)
156
Chapitre IV Les puissances virtuelles et la modélisation des efforts
et pour S
P (i)( ˆ
U ,... , ˆ
Up)=
(j)∈S Φ j . ˆ
Uj,
(3.6)
où les Φ j dépendent du sous-système S considéré contenant le point matériel (j).
On fait l hypothèse (de découplage) portant sur les cofacteurs Φj et Φ j ,s
elo
n
laquelle pour tout sous-système S ,ycomprisS lui-même, on a :
P (i)( ˆ
U ,... , ˆ
Up)=
(j)∈S
(i)∈S
i =j
Fij. ˆ
Uj
(3.7)
où les F ij ,aprio
riarbitraires, sont indépendants du sous-système considéré,
et sont donc dé nis commodément à partir des sous-systèmes constitués de deux
éléments.
Cette hypothèse signi e que la puissance virtuelle des efforts intérieurs pour le
système S (ou pour uns
o
u
s
-
système S )da
n
su
nm
ouvement virtuel ( ˆ
U1,... , ˆ
Un)
quelconque est la somme des puissances virtuelles des efforts intérieurs, dans ce mou-
vement virtuel, pour tous les sous-systèmes de deux éléments identi ables dans S
(ou dans S ).
Application du principe des puissances virtuelles
Énoncé dual de la loi des actions mutuelles
On considère les sous-systèmes S constitués de deux points matériels quelconques (i) et
(j),po
u
rle
squ
els la proposition (2.16, 2.18) du principe des puissances virtuelles s écrit :
P (i)(ˆ
Ui, ˆ
U j)=0dans tout mouvement virtuel rigidi ant S .Onr
etr
o
u
v
eévidemment, par
le raisonnement du paragraphe 2.2, le principe de l action et de la réaction :
(en référentiel galiléen R) ,
Fij+Fji =0
OMi∧Fji+OMj∧Fij=0,
(3.8)
et l expression (3.7) de P (i) pour le sous-système considéré devient alors :
P (i)( ˆ
Ui, ˆ
Uj)=Fij .(ˆ
Uj- ˆ
Ui).
(3.9)
Avec les notations
eij = MiMj/|MiMj| (vecteur unitaire) ,
(3.10)
Fij= -Fijeij,
(3.11)
ˆ
˙δij =(ˆ
Uj- ˆ
Ui).eij ,
(3.12)
l expression (3.9) de P (i) pour le sous-système de deux points matériels devient :
P (i)(ˆ
Ui, ˆ
Uj)=-Fijˆ
˙δij .
(3.13)
Dans cette formule ˆ
˙δij désigne le taux d allongement virtuel de la longueur |MiMj| dû aux
vitesses virtuelles ˆ
Uietˆ
U j des points géométriques Mi et Mj ,terminologie qui rappelle que
3 Méthode des puissances virtuelles pour un système de points matériels
157
la formule (3.12) est identique à celle qui donne le taux d allongement réel ˙δij de |MiMj|
pour des vitesses réelles U i et U j ; Fij est positive si la force F ij est attractive. Pour un
sous-système S quelconque, y compris S lui-même, on aura alors l expression transformée
de (3.7) :
P (i)( ˆ
U ,... , ˆ
Up)=-
(j)∈S
(i)∈S
i>j
Fij ˆ
˙δij .
(3.14)
Lesformules (3.13) et (3.14) illustrent bien l interprétation donnée plus haut pour l écri-
ture (3.7) de P (i)(ˆ
U ,... , ˆ
U p).Eneffe
t
,(3.13) permet d identi er clairement les termes
de l expression (3.14) pour un sous-système quelconque S :cha
c
u
nd eux correspond à un
sous-système constitué de deux éléments et ne fait intervenir que le taux de déformation
virtuelle de ce sous-système binaire. Ainsi (3.13) dé nit en quelque sorte une densité
discrète de puissance virtuelle des efforts intérieurs ,leniv
e
a
uélémentaire correspon-
dant étant représenté par les sous-systèmes binaires : le calcul de P(i) ou P (i) se fait par
sommation de cette densité sur le système ou le sous-système quelconque considéré.
Ceci achève de préciser la forme de la modélisationdesefforts intérieurs : ils sont représentés
par un jeu de n(n - 1)/2 scalaires indépendants Fij .
Énoncé dual de la loi fondamentale
On applique la proposition (2.16, 2.17) du principe des puissances virtuelles au système S.
Par le raisonnement du paragraphe 2.2 on retrouve immédiatement la loi fondamentale sous
la forme
(en référentiel galiléen R) ,
∀(j) ∈S,Fj +
(i)∈S
i =j
Fij=mjaj.
(3.15)
De même, l application de (2.16, 2.17) à un sous-système ( ), ... ,(p)=S quelconque de S
fournit l énoncé :
(en référentiel galiléen R) ,
∀(j) ∈S ,F j +
(i)∈S
i =j
Fij=mjaj.
(3.16)
En identi ant (3.15) et (3.16) on obtient la formule (3.17) qui explicite les efforts extérieurs
à S exercés sur (j) ∈S :
∀(j)∈S ,F j =Fj+
(i)/∈S Fij .
(3.17)
3.3 Commentaires sur cette application de la méthode des
puissances virtuelles
La mise en œuvre de la méthode des puissances virtuelles a donc permis, à partir
d un choix d hypothèses, guidée par l expérience et par le type de modélisation auquel
on souhaite aboutir, qui porte sur les espaces vectoriels des mouvements virtuels et
sur l écriture des formes linéaires exprimant les diverses puissances virtuelles sur ces
espaces, d assurer la cohérence mécanique delac
o
n
str
u
ctio
neffectuée et d obtenir,
sans ambiguïté, toutes les équations qui régissent le système.
158
Chapitre IV Les puissances virtuelles et la modélisation des efforts
On remarque en particulier que, malgré la similitude des notations, il y a une
différence de point de vue essentielle entre l écriture de (2.16, 2.17) pour le système
S et pour un sous-système S quelconque autre que S :danslepremiercas, les forces
extérieures F j sont connues, elles font en quelque sorte partie des données , dans
le second cas les forces extérieures F j font partie des inconnues et sont explicitées,
à l issue de la construction de la modélisation, par la formule (3.17).
3.4 Compatibilité géométrique des ˆ
˙δij .Systèm
e
sdeba
rres
articulées
Compatibilité géométrique
Considérantle
spo
sitio
n
sgéométriques des n points M1 , ... ,Mn on peut se poser le pro-
blèmedec
ompatibilité géométrique suivant : étant donné un jeu de taux d allongement
virtuels ˆ
˙δij ,àquelle condition ceux-ci dérivent-ils, au sens de (3.12), d un mouvement virtuel
(ˆ
U1,... , ˆ
Un) dans R ?Larépo
n
s
eàcette question peut évidemment s obtenir directement
àpa
rtirde
séquations de dé nition (3.12) en y éliminant les ˆ
Ui.Un
ea
utr
eméthode, que
l on va exposer ci-dessous, résulte de l application du principe des puissances virtuelles, la
modélisation des efforts pour le système étant maintenant acquise .
Pour cela, on considère toutes les distributions d efforts intérieurs F ij qui satisfont la loi
des actions mutuelles (3.8) et la loi fondamentale (3.15) avec des efforts extérieurs F j et des
quantités d accélération mj aj nuls :
∀(i) ∈S, ∀(j) ∈S,
Fij = -Fijeij ,Fij = -Fji ;
∀(j) ∈S ,
(i)∈S
i =j
Fij =0.
(3.18)
Une telle distribution d efforts intérieurs est dite autoéquilibrée pour le système S.L
e
n
-
semble de ces distributions autoéquilibrées constitue un espace vectoriel noté A.Ondéduit
alors de (2.16, 2.17) et (3.14) :
∀(Fij,i =j =1,2,... ,n)∈ A ,
∀(ˆ
U1,... , ˆ
Un) m.v. pour S ,
-
n
j=1
i>jFij ˆ
˙δij =0.
(3.19)
Cette formule fournit, sous forme dualisée, les conditions nécessaires(4) de compatibilité géo-
métrique des taux d allongement virtuels ˆ
˙δij pour que ceux-ci dérivent de n vitesses virtuelles
ˆ
U j .Onpe
utvéri er que cette condition d orthogonalité des taux d allongement virtuels
géométriquement compatibles aux efforts intérieurs autoéquilibrés est suffisante.
Système de barres articulées
L intérêt de ce résultat géométrique n est guère apparent sur le système considéré ici d un
ensemble de particules ponctuelles. En revanche on peut remarquer que la description donnée
(4)Dans R3 la dimension de A est égale à 0 pour n ≤ 4,età(n - 3)(n - 4)/2 pour n ≥ 5.Ile
n
résultequepour n≤4les ˆ
˙δij n onta
ucune condition de compatibilité à satisfaire, tandis que pour
n ≥ 5 la formule (3.19) laisse (3n - 6) degrés de liberté aux ˆ
˙δij qui sont au nombre de n(n - 1)/2.
3 Méthode des puissances virtuelles pour un système de points matériels
159
au paragraphe 3.2 est également adaptée à l étude de la statique d un système de barres, non
chargées entre leurs extrémités, assemblées entre elles en des nœuds articulés ( gure 5) où
sont appliqués les efforts extérieurs au système.
Les points géométriques Mj représentent les nœuds de la structure : ils correspondent à des
points matériels de masses nulles. Tous les nœuds de la structure ne sont pas nécessairement
reliés entre eux par une barre : deux nœuds M et Mm qui ne sont pas ainsi reliés n exercent,
l un sur l autre, aucun effort et F m =0.
Figure 5 Système de barres articulées
Pour un telsystème les équations de la statique (équations d équilibre) sont identiques aux
équations (1.2) et (1.4) où mj aj =0,etleprin
cipede
spuissances virtuelles s exprime par
(2.16 à 2.18) avec les expressions explicitées ci-dessus pour les diverses puissances virtuelles
où mj aj =0dans (3.3) ou (3.4).
Homologue du problème posé aux chapitres II ( 6.2) et III ( 3.7) pour le milieu continu, le
problème de la compatibilité géométrique des taux d extension des barres constitutives du
système vise à déterminer les conditions nécessaires et suffisantes sur les ˆ
˙δij correspondants
pour que la continuité géométrique du système de barres soit maintenue : en d autres termes,
les barres soumises aux taux d extension ˆ
˙δij doivent demeurer assemblées en tous les nœuds,
ceux-ci étant alors animés de vitesses ˆ
Ui,...,ˆ
Uj.
Lesc
o
nditionsdec
ompatibilité sont données par (3.19) en y imposant la nullité des F m
associées aux nœuds M et Mm non reliés entre eux par des barres : les ˆ
˙δij dans les barres
du système sont orthogonaux au sous-espace de A dont les F m sont xées à zéro pour ces
nœuds.
Si l on désigne par k(5) la dimension du sous-espace vectoriel de A lorsque ces F m sont xées
à zéro, deux circonstances sont possibles :
• k =0,les
o
u
s
-
e
spa
ce vectoriel en question se réduit à la seule distribution des efforts
intérieurs nuls (∀i, j, Fij =0);(3.19) n impose aucune restriction aux ˆ
˙δij donnés, c est-à-
dire qu il n y a pas de condition de compatibilité géométrique à satisfaire par ces ˆ
˙δij ;
• k ≥ 1,et(3.19) est la formulation dualisée de k conditionsdecompatibilité géométrique à
satisfaire par les ˆ
˙δij donnés.
Le point de vue développé dans ce paragraphe est évidemment à rapprocher de ce qui a été
dita
uchapitre III ( 3.9) àproposdelaformulation faible de la compatibilité géométrique
et sera repris au chapitre V ( 3.13 et 4.2).
(5)k est appelé degré d hyperstaticité (cf. chapitre X, 6.1, et chapitre XI, 4.5).
160
Chapitre IV Les puissances virtuelles et la modélisation des efforts
4L
améthode des puissances virtuelles
4.1 Présentation générale de la méthode
La section précédente a développé, sur l exemple d un système de points maté-
riels, l application de la méthode des puissances virtuelles dont l esprit a été présenté
au paragraphe 3.1. Comme on l avait annoncé cette analyse n avait pour but que
d acclimater la méthode des puissances virtuelles, par une présentation induc-
tive, l objectif poursuivi étant la formulation d une méthode générale, à caractère
systématique, pour la construction de la modélisation des efforts.
On se propose désormais de retenir l énoncé des puissances virtuelles ,telqu il
aété dégagé au paragraphe 2.4 dans le cas des systèmes discrets constitués de points
matériels, comme principe fondamental d une méthode de modélisation des efforts en
ygénéralisant la signi cation des notions de vitesses virtuelles, mouvements virtuels
et puissances virtuelles introduites sur l exemple au paragraphe 2.3.
Le choix des espaces vectoriels des mouvements virtuels pour le système et
ses sous-systèmes, après la modélisation géométrique qui implique la dé nition des
mouvements réels, est l étape primordiale de la méthode. C est vis-à-vis des mouve-
ments virtuels, qui jouent en quelque sorte lerôledes fonctions-tests de certaines
théories mathématiques, que sont dé nies lesreprésentation
sdeseffortscon
str
uites.
Ils en délimitent donc le domaine de validité. Pour cette raison il est essentiel que l es-
pace vectoriel des mouvements virtuels du système contienne les mouvements réels de
celui-ci, faute de quoi la modélisation des efforts construite n aurait pas de pertinence
pratique(6).Ilc
on
vie
nticid in
sister sur la signi cation de la terminologie mouve-
ments réels : il s agit, une fois posée la modélisation géométrique du système, des
mouvements qui sont pris en compte dans les évolutions réelles du système dans le
cadre de cette modélisation ; on trouvera au chapitre XII ( 2.1 et 2.5), à propos des
milieux curvilignes, une illustration de cette discussion.
Àpartirdecechoix essentiel on exprime, par des formes linéaires continues
sur l espace vectoriel des mouvements virtuels, les puissances virtuelles des efforts
extérieurs, des efforts intérieurs et des quantités d accélération pour le système. On
procède de même pour les sous-systèmes, dont les mouvements virtuels sont dé nis
par restriction sur la géométrie correspondante à partir des mouvements virtuels du
système.
L application du principe des puissances virtuelles permet alors :
• d abord, par l énoncé dual de la loi des actions mutuelles, de contrôler a priori
la conformité des expressions proposées pour la puissance virtuelle des efforts
(6)Les choses sont, en fait, un peu plus subtiles et les mouvements réels ont, dans l espace vectoriel
des mouvements virtuels, un statut particulier dont l explicitation nécessiterait des développe-
ments mathématiques hors de propos ici faute de disposer d exemples permettant de les illustrer.
Une manifestation de ce particularisme apparaîtra dans le cas du milieu continu tridimensionnel
lorsque lechampde vitesse réel est discontinu (onde de choc) aux paragraphes 7.6 de ce chapitre et
3.11 du chapitre V : on y verra notamment comment sont alors dé nies les formes linéaires A(U ) et
P(i)(U) exprimant la puissance réelle des quantités d accélération et la puissance réelle des efforts
intérieurs.
4 Laméthode des puissances virtuelles
161
intérieurs pour le système et pour ses sous-systèmes ; éventuellement, de préciser
ces expressions de façon à ce que cet énoncé soit satisfait ;
• par l énoncé dual de la loi fondamentale, si les expressions proposées pour les
diverses puissances sont cohérentes entreelles du point de vue mathématique (co-
hérence des hypothèses physiques sous-jacentes), d obtenir les équations de la dy-
namique qui correspondent à la modélisation construite pour le système et pour
tout sous-système, et aussi d expliciter les efforts extérieurs sur un sous-système
quelconque.
Le caractère systématique et structuré de la méthode est mis en évidence dans
le tableau récapitulatif donné au paragraphe 4.2. Il doit néanmoins demeurer clair
qu il ne s agit pas d une méthode axiomatique ! Les divers choix auxquels on doit
procéder soulignent que des hypothèses, guidées par l expérience, par l intuition et
par le type de modèle mathématique de la réalité physique auquel on veut aboutir,
sont introduites. La validation du modèle obtenu par une telle construction est, bien
entendu, l étape ultime.
Il convient d ajouter que la méthode des puissances virtuelles n est pas la seule
façon de construire les modélisations qui seront présentées dans la suite. Aussi bien
pour le milieu continu (chapitre V) que pour les milieux curvilignes (chapitre XI) on
dispose d autres approches qui seront évoquées le moment venu, complétant utilement
la présentation par les puissances virtuelles pour la bonne compréhension des modèles.
L intérêt essentiel de cette méthode réside dans son caractère unitaire et systématique
qui permet notamment la construction cohérente de modélisations plus originales.
162
Chapitre IV Les puissances virtuelles et la modélisation des efforts
4.2 Récapitulatif de la méthode des puissances virtuelles
1 On procède à la dé nition géométrique du système S et de ses sous-
systèmes S et à la description de ses mouvements réels dans le
cadre de cette modélisation géométrique ,dan
ssacon guration
actuelle .
2 On choisit l espace vectoriel des mouvements virtuels (m.v.) que l on
va considérer pour la modélisation mécanique du système. Cet espace
vectoriel doit contenir les mouvements rigidi ant le système, et ses mou-
vementsréels.
Les mouvements virtuels d un sous-système quelconque sont les restric-
tions à ce sous-système des mouvements virtuels du système.
(Un mouvement virtuel est, dans la suite, représenté symboliquement
par ˆ
U.)
3 Sur cet espace vectoriel on écrit lesformeslinéaires continues A( ˆ
U) et
A ( ˆ
U) qui expriment la puissance virtuelle des quantités d accélé-
ration du système S ou d un sous-système quelconque S .Lescofacteurs
sont les quantités d accélération.
4 On postule les expressions des formes linéaires continues P(e)( ˆ
U) et
P (e)( ˆ
U) pour la puissance virtuelle deseffo
rtse
xtérie
u
r
sau sys-
tème S ou à un sous-système quelconque S .Le
scofacteurs introduits
constituent la représentation des efforts extérieurs correspondants.
5 On postule les expressions des formes linéaires continues P(i)( ˆ
U) et
P (i)( ˆ
U) pour la puissance virtuelle deseffo
rtsintérie
u
r
sau sys-
tème S ou à un sous-système quelconque S .Le
scofacteurs introduits
fournissent la modélisation correspondante des efforts intérieurs.
6 On écrit le principe des puissances virtuelles :
en référentiel galiléen R , ∀S ⊂S,
∀ˆ
U m.v.r. S ,
P (i)( ˆ
U)=0
(4.1)
∀ˆ
Um.v.,
P (e)( ˆ
U)+P (i)( ˆ
U)=A ( ˆ
U)
(4.2)
7 En exploitant les énoncés (4.1) puis (4.2),
o
nc
o
n
t
rôle la conformité des expressions proposées pour P(i)( ˆ
U) et
P (i)( ˆ
U),quel on précise éventuellement ;
o
n véri e la c
ohérence des expressions retenues pour P(e)( ˆ
U),
P (e)( ˆ
U) et P(i)( ˆ
U), P (i)( ˆ
U);
o
ndéduit les équations de la dynamique pour le système S et pour
tout sous-système S ;
o
ne
xplicite la représentation des efforts.
4 Laméthode des puissances virtuelles
163
4.3 Commentaires
L écriture des formes linéaires continues A( ˆ
U)etA (ˆ
U) ne pose guère de problème
puisque, les mouvements réels du système et de ses sous-systèmes étant connus à partir
de la modélisation géométrique, les quantités d accélération le sont également (7).
La similitude des notations adoptées pour les formes linéaires relatives au système
S lui-même et à ses sous-systèmes permet une écriture commune des équations du
principe des puissances virtuelles, (4.1) et (4.2), pour S .Ceci ne doit pas occulter la
différence essentielle entre le système S,quel on peut appréhender concrètement et sur
lequel on peut expérimenter, et ses sous-systèmes qui sont découpés par la pensée .
Cette différence se manifeste notamment lors de l écriture des formes linéaires P(e)( ˆ
U)
et P (e)(ˆ
U) : l expérience guide couramment l écriture de P(e)( ˆ
U) (comme on en verra
des exemples aux chapitres V et XI) ; les effortsextérieurscorrespondants, cofacteurs
dans P(e)( ˆ
U),ont,enquelque sorte, le statut de données . En revanche, pour un
sous-système S ,lesefforts extérieurs du moins ceux exercés par (S-S ) sur S
ne béné cient pas d un tel support expérimental et l écriture de P (e)( ˆ
U) repose sur
des hypothèses et des intuitions ; ces efforts extérieurs, cofacteurs dans P (e)( ˆ
U),
ont quant à eux le statut d inconnues .
L écriture des formes linéaires continues P(i)( ˆ
U) et P (i)(ˆ
U),a
str
einte
sàvéri e
r
(4.1), découle également d hypothèses qui doivent être cohérentes avec celles faites
pour P(e)( ˆ
U) et P (e)(ˆ
U).
4.4 Changement de référentiel. Objectivité
Il est utile de reprendre ici, au plan général, les considérations évoquées au paragraphe 2.3
sur l exemple du système discret constitué de points matériels. Un mouvement virtuel du sys-
tème S ou d un sous-système quelconque S est dé ni dans le référentiel R.Le
spuissances
virtuelles sont des formes linéaires sur le champ de vitesses virtuelles (de déplacement, de
rotation) qui décrit ce mouvement virtuel dans R.Obs
e
r
védans un autre référentiel quel-
conque R∗ ,lemêmemou
v
ementvirtuelest décrit par un autre champ de vitesses virtuelles
(de déplacement, de rotation) lié au précédent par la relation (1.9).
On peut alors remarquer que la forme linéaire continue qui exprime la puissance virtuelle des
efforts intérieurs prend la même valeur pour le champ de vitesses qui décrit le mouvement
virtuel dans R et pour celui qui le décrit dans R∗ .Onaeneffet, par la linéarité de P (i) :
∀S ⊂S, P (i)(ˆ
U)=P (i)( ˆ
U∗)+P (i)(U e)
(4.3)
où P (i)(U e) est nulle en application de (4.1) puisque U e est le champ de vitesse du mouve-
ment rigidi ant d entraînement de R∗ par rapport à R.
Le résultat s applique en particulier si ˆ
Uetˆ
U∗ représentent un même mouvement réel du
système observé dans deux référentiels R et R∗ :lafo
r
m
ule(4.3) exprime alors, selon la
dé nition donnée au paragraphe 2.4 du chapitre I, l objectivité de la puissance des efforts
intérieurs. On dira de même que, dans le cas général, (4.3) exprime l objectivité de la puis-
sance virtuelle des efforts intérieurs .
(7)Seule, la dé nition de ces formes lorsque le champ de vitesse réel présente des discontinuités et
que l on choisit pour champ de vitesse virtuel ce même champ de vitesse réel nécessite une écriture
particulière, explicitée au paragraphe 7.6 dans le cas du milieu continu classique.
164
Chapitre IV Les puissances virtuelles et la modélisation des efforts
5M
o
u
v
e
m
e
n
t
s
r
igidi ants ; distributeurs, torseurs
5.1 Distributeurs
Les développements précédents mettent en évidence le rôle essentiel joué par les
mouvements virtuels rigidi ants qu illustre notamment l énoncé du principe des puis-
sances virtuelles relatif à la puissance virtuelle des efforts intérieurs.
Le champ de vitesse virtuel pour un tel mouvement est, comme on l a rappelé au
paragraphe 2.2, dé ni par une formule telle que :
ˆ
U(x)= ˆ
U0 +ˆ
ω0∧OM
(5.1)
oùˆ
U(x) est la vitesse au point courant M, O est un point géométrique donné, ˆ
U0
etˆ
ω0 sont deux vecteurs arbitraires de R3 qui représentent respectivement la vitesse
virtuelle au point O et la vitesse de rotation virtuelle en ce point.
On ditqu
eO, ˆ
U0, ˆ
ω0 ,dé nissent le distributeur de vitesse du champ ˆ
U .Ce
distributeur sera noté : { ˆ
D}={O, ˆ
U0, ˆ
ω0},
(5.2)
ˆ
U0etˆ
ω0 étant ses éléments de réduction au point O.
Ces formules mettent en évidence la dépendance linéaire des champs de vitesse ˆ
U
des mouvements virtuels rigidi ants de l espace euclidien R3 en fonction des vecteurs
ˆ
U0etˆ
ω0 qui les dé nissent par rapport à un même point géométrique O.
L ensemble de ces champs de vitesse, identi able à l ensemble des distributeurs,
est un espace vectoriel de dimension 6.
Un même champ de vitesse virtuel rigidi ant ˆ
U peut évidemment être dé ni en se
référant à un autre point O .Enappliquant la formule (5.1) il vient :
ˆ
U0 =ˆ
U0 +ˆ
ω0∧OO
ˆ
U(x)= ˆ
U0 +ˆ
ω0∧O M
qui con rment que le distributeur { ˆ
D} est (naturellement) dé ni en O par ˆ
U0 et
ˆ
ω0 =ˆ
ω0: {ˆ
D}={O, ˆ
U0, ˆ
ω0}={O ,(ˆ
U0 +ˆ
ω0∧OO ), ˆ
ω0}.
(5.3)Il est commode, pour certaines applications, d introduire le tenseur du second
ordre antisymétrique ˆ
ω0 dé ni, à partir du vecteur ˆ
ω0 quelconque, par la formule :
∀v∈R3,
ˆ
ω0∧v=ˆ
ω0.v (8).
(5.4)
Le champ de vitesse ˆ
U est alors également décrit par laform
ule(5.5) équivalente à
(5.1) :
ˆ
U(x)= ˆ
U0 +ˆ
ω0.OM.
(5.5)
(8)Dans une base orhonormée directe (e1 ,e2 ,e3) la relation entre ˆ
ω0etˆ
ω0 =ˆ
pe1 +ˆ
qe2 +ˆ
re3
s écrit : ˆ
ω0=-(ˆ
p(e2⊗e3-e3⊗e2)+ˆ
q(e3⊗e1-e1⊗e3)+ˆ
r(e1⊗e2-e2⊗e1)).
5 Mouvementsrigidi ants ; distributeurs, torseurs
165
5.2 Torseurs
L énoncé du principe des puissances virtuelles incite, pour connaître l expression
des puissances des divers efforts dans les mouvements virtuels rigidi ants, à étudier
les formes linéaires sur l espace vectoriel des champs de vitesse virtuels correspon-
dants.
Soit F une forme linéaire quelconque sur l espace vectoriel des mouvements virtuels
rigidi ants. Considérant un distributeur { ˆ
D}={O, ˆ
U0, ˆ
ω0 } et le champ de vitesse
virtuel rigidi ant ˆ
U qu il dé nit, F( ˆ
U) est nécessairement de la forme :
F(ˆ
U)=F0 . ˆ
U0+C0. ˆ
ω0,
(5.6)
forme linéaire de ˆ
U0etˆ
ω0 qui est dé nie, par rapport au point O,pa
rle
sv
ecteurs
F0 et C0.
On ditqueF 0 et C0 sont les éléments de réduction en O du torseur noté [F] :
[F]=[O, F0 ,C0 ] .
(5.7)Le torseur [F] est une forme linéaire sur l espace vectoriel des distributeurs, et l on
note par : [F].{ˆ
D}=[O,F0 ,C0].{O, ˆ
U0, ˆ
ω0}=F0. ˆ
U0+C0. ˆ
ω0
(5.8)
le produit de dualité correspondant.
Les torseurs ainsi dé nis par dualité sur l espace vectoriel des distributeurs dé-
pendent linéairement de leurs éléments de réduction en O et constituent un espace
vectoriel de dimension 6.
La dé nition du même torseur [F] par rapport à un autre point O s obtient à
partir de (5.3) et (5.8) en écrivant l invariance du produit de dualité :
∀{ˆ
D} [F].{ˆ
D}=F0.(ˆ
U0 -ˆ
ω0∧OO )+C0. ˆ
ω0
=F0. ˆ
U0 +(C0+O O∧F0). ˆ
ω0
qui montre que les éléments de réduction de [F] en O sont F 0 = F 0 et C0 =
C0+O O∧F0 :
[F]=[O,F0 ,C0]=[O ,F0 ,C0+O O∧F0] (9) .
(5.9)En introduisant le tenseur du second ordre antisymétrique C0 dé ni à partir de
C0 comme ˆ
ω0 àpartirde ˆ
ω0 par la formule (5.4), on véri e que le produit de dualité
s exprime aussi sous la forme :
[F].{ˆ
D}=F0. ˆ
U0-1
2C0:ˆ
ω0.
(5.10)
(9)La comparaison des formules (5.3) et (5.9) montre que les règles opératoires pour les éléments
de réduction du distributeur { ˆ
D}={O, ˆ
U0, ˆ
ω0 } sont les mêmes que celles qui seraient appliquées
aux éléments de réduction d un torseur [ ˆ
D]dé ni par[ˆ
D]=[O, ˆ
ω0, ˆ
U 0 ].Certainsauteurs, après
avoir introduit la notion de torseur pour un système de vecteurs (forces ; cf. 5.4), tirent avantage
de cette remarque pour dé nir les mouvements rigidi ants par des torseurs du type de [ ˆ
D] ci-dessus.
166
Chapitre IV Les puissances virtuelles et la modélisation des efforts
5.3 Restriction d une forme linéaire dé nie sur un espace de
mouvements virtuels aux mouvements virtuels rigidi ants
Pour tout système S ou sous-système S on a vu (cf. section 4) que l espace vec-
toriel des mouvements virtuels introduit dans la modélisation pour l application de la
méthode des puissances virtuelles, quel qu il soit, contient toujours l espace vectoriel
des mouvements rigidi ant le système ou le sous-système concerné. Cet espace est
toujours identi able à l espace R6 des distributeurs { ˆ
D}.
Il en résulte qu une forme linéaire P dé nie sur l espace des mouvements virtuels
dé nit toujours, par sa restriction à l espace des mouvements rigidi ants, un torseur
[F].
L identi cation de ce torseur se fait en explicitant le produit de dualité correspon-
dant :
∀{ˆ
D}, [F].{ˆ
D}=P(ˆ
U) pour S
(5.11)
(et formule homologue pour un sous-système S )où ˆ
U est la restriction à S (ou à S )
du champ de vitesse engendré par { ˆ
D} dans R3.
5.4 Torseur d un système de forces
L étude du cas particulier des systèmes de forces permet de concrétiser la
notion de torseur introduite au paragraphe (5.2).
On considère par exemple un système S pour lequel certains efforts sont représentés
par un système de forces et de couples, concentrés et répartis :
• des forces ponctuelles F i et des couples concentrés Ci en des points Mi ,
• des densités de forces et de couples, linéiques F L(x) et CL(x) sur des lignes L,
surfaciques F Σ(x) et CΣ(x) sur des surfaces Σ,volumiques F Ω(x) et CΩ(x) sur
des volumes Ω.
On désigne par P la forme linéaire qui exprime la puissance de ces efforts dans un
mouvement virtuel quelconque de S.
La restriction de P aux mouvements virtuels rigidi ants engendrés par les distri-
buteurs { ˆ
D}={O, ˆ
U0, ˆ
ω0 } selon la formule (5.1) s écrit :
P(ˆ
U)= Fi . ˆ
U(xi)+ Ci . ˆ
ω0 + L(F L(x). ˆ
U(x)+CL(x). ˆ
ω0)dL + Σ + Ω
qui permet d identi er selon (5.11) le torseur [F]=[O, F0 ,C0 ],appelétorseur
5 Mouvementsrigidi ants ; distributeurs, torseurs
167
du système de forces .Ontrouvepourleséléments de réduction :
F0 = Fi + LFL(x)dL+ Σ FΣ(x)da+ ΩFΩ(x)dΩ
(5.12a)
C0 = OMi ∧Fi + LOM ∧FL(x)dL+ ΣOM ∧FΣ(x)da+ ΩOM ∧FΩ(x)dΩ
(5.12b)
+ Ci + L CL(x)dL + Σ CΣ(x)da + Ω CΩ(x)dΩ
c est-à-dire que F 0 est la résultante du système de forces considéré et C0 son moment
par rapport à O.
5.5 Champs de distributeurs et de torseurs ; dérivation
On rencontrera, dans la suite, des champs de distributeurs et des champs de torseurs, dé nis
sur l espace euclidien tridimensionnel (chapitre V, section 5) ou sur une variété unidimension-
nelle dans cet espace (chapitre XI). D autres exemples apparaissent aussi dans la modélisation
des plaques, des coques, etc.
Dé nition
Prenant, pour xer les idées, le cas de champs dé nis sur l espace tridimensionnel on désigne
par{ˆ
D(x)} et [F(x)] les valeurs deschampsnotés{ ˆ
D} et [F],aupointcourant M(OM = x).
En règle générale la dé nition de ces champs est donnée, de façon naturelle, par les champs
de vecteurs ˆ
Uetˆ
ω pour{ˆ
D} ,Fet C pour [F] qui déterminent les éléments de réduction
du distributeur { ˆ
D(x)} ou du torseur [F(x)] au point courant M :
{ˆ
D(x)}={M, ˆ
U(x), ˆ
ω(x) }
(5.13)
[F(x)] = [ M,F(x) ,C(x)].
(5.14)
Dérivée d un champ de distributeurs
En supposant la dérivabilité des champs ˆ
Uetˆ
ω,ladérivée en M du champ de distributeur
{ˆ
D} selon la direction w est le distributeur dé ni par le passage à la limite :
Dw{ ˆ
D(x)} = lim
λ→0{ˆ
D(x + λw)}-{ˆ
D(x)}
λ
.
(5.15)
Le calcul des éléments de réduction de ce distributeur en M nécessite d expliciter cette formule
après avoir transporté les éléments de réduction de { ˆ
D(x + λw)} au point M par application
de (5.3). On a ainsi :
{ˆ
D(x+λw)}={M, ˆ
U(x+λw)- ˆ
ω(x+λw)∧λw , ˆ
ω(x+λw)}
(5.16)
et, en effectuant le passage à la limite :
Dw{ ˆ
D(x)} = { M,(grad ˆ
U(x)).w- ˆ
ω(x)∧w ,(grad ˆ
ω(x)) .w} .
(5.17)
En particulier, si w est un vecteur ei d une base en M ,lafo
r
m
ule(5.17) donne la dérivée
partielle :
∂
∂xi{ˆ
D(x)} = M, ∂ ˆ
U(x)
∂xi +ei∧ˆ
ω(x), ∂ˆ
ω(x)
∂xiTM.
(5.18)
168
Chapitre IV Les puissances virtuelles et la modélisation des efforts
Dans le cas d un champ de distributeurs dé ni sur une courbe de R3 en fonction de l abscisse
curviligne s du point courant M sur cette courbe, on obtient la dérivée d
ds{ˆ
D(s)} par un
calcul analogue au précédent. La formule, semblable à (5.18), s écrit :
d
ds{ˆ
D(s)} = M, dˆ
U(s)
ds +t(s)∧ˆ
ω(s) , dˆ
ω(s)
dsTM
(5.19)
où t(s) désigne le vecteur unitaire tangent en M àlacou
rbe,(cf.chapitre XI).
Gradient d un champ de distributeurs
La formule (5.17) met en évidence la linéarité de Dw{ ˆ
D(x)} par rapport à w.Ondé nit
ainsi le gradient en M du champ de distributeur { ˆ
D}notégrad{ˆ
D(x)} ;c est le distributeur
tensoriel :
grad{ˆ
D(x)} = {M,grad ˆ
U(x)- ˆ
ω(x) , grad ˆ
ω(x)}
(5.20)
oùˆ
ω est dé ni par (5.4). La formule grad { ˆ
D(x)}.w = Dw{ˆ
D(x)} est explicitée par (5.17)
qui donne aussi, pour le transport des éléments de réduction du distributeur tensoriel
grad{ˆ
D(x)},le
smêmes règles opératoires que pour { ˆ
D(x)}.
Dérivée d un champ de torseurs
Les raisonnements précédents peuvent être repris avec les aménagements nécessaires dans le
cas des champs de torseurs, en se référant en particulier à la formule (5.9) pour le transport
des éléments de réduction.
On obtient letorseurDw[F(x)],dérivée en M du champ [F] selon le vecteur w :
Dw[F(x)] = [M,(grad F(x)).w , (grad C(x)).w+ w ∧ F(x)]
(5.21)
et la dérivée partielle :
∂
∂xi [F(x)] = M, ∂F(x)
∂xi , ∂C(x)
∂xi +ei ∧F(x) .
(5.22)
Le gradient du champ de torseurs [F] en M est le torseur tensoriel
grad [F(x)] = [M,grad F(x) , grad C(x) - F (x)]
(5.23)
pour lequel la formule (5.21) explicite le produit grad [F(x)] .w = Dw[F(x)] et fournit les
règles de transport des éléments de réduction.
Dans le cas d un champ de torseurs dé ni sur une courbe de R3 ,onobtientla dérivée :
d
ds[F(s)] = M, dF(s)
ds , dC(s)
ds + t(s)∧ F(s)
(5.24)
où t(s) est le vecteur unitaire tangent à la courbe en M d abscisse curviligne s,(cf.chapitre
XI).
Commentaires
Les formules de dérivation démontrées ci-dessus véri ent évidemment la formule de dérivation
du produit de dualité :
Dw([F].{ˆ
D})=Dw[F].{ ˆ
D}+[F].Dw{ˆ
D}
6 Résultats généraux
169
ou, pour des champs dé nis sur une courbe :
d
ds([F(s)].{ˆ
D(s)})= d
ds[F(s)].{ˆ
D(s)} +[F(s)] . d
ds{ˆ
D(s)}
(5.25)
quiserautilisée au chapitre XI.
Comme cela est apparent sur les formules de dérivation ci-dessus, la constance d un champ
de distributeurs { ˆ
D} ou d un champ de torseurs [F] n implique pas, sauf cas particulier, la
constance des champs ˆ
Uetˆ
ω ou F et C qui le dé nissent par (5.13) ou (5.14). On sera
ainsia
mené, dans l utilisation qui sera faite ultérieurement de ces concepts mathématiques,
àrechercher où se situe la pertinence physique c est-à-dire par exemple quel(s) champ(s), de
[F] ou de F et C,correspond(ent) à un concept mécanique du point de vue du matériau ou
du système étudié. (Cf. chapitre XI, 3.7 et 3.11, et chapitre XII, 2.1).
6R
é
s
u
l
tats généraux
Le chapitre V sera consacré à la modélisation des efforts pour le milieu continu
classique (essentiellement), par la méthode des puissances virtuelles. Cette méthode
permet d ores et déjà de dégager des résultats généraux immédiatement accessibles,
c est-à-dire sans qu il soit besoin de préciser les espaces vectoriels des mouvements
considérés dans la modélisation ni les formes linéaires construites sur ces espaces, et
qui sont valables pour toute modélisation .
6.1 Dé nition du système et des mouvements considérés
Figure 6 Dé nition du système et des sous-systèmes
S et S désignent respectivement le système considéré et un sous-système quel-
conque dont la gure 6 fournit une représentation schématique.
Les espaces vectoriels de mouvements réels et virtuels considérés satisfont aux
conditions indiquées à la section 4 : l espace vectoriel des mouvements virtuels contient
l espace vectoriel des mouvements réels, et contient les mouvements rigidi ants pour
S (ou S ).
170
Chapitre IV Les puissances virtuelles et la modélisation des efforts
6.2 Puissances virtuelles
On conserve pour les puissances virtuelles des divers types d efforts et des quantités
d accélération les notations génériques de la section4:c
es
ont des formes linéaires
sur l espace vectoriel des mouvements virtuels.
Leurs restrictions aux sous-espaces vectoriels des mouvements rigidi ants dé nis-
sent, comme indiqué au paragraphe 5.3, des torseurs .Ainsiondé nit et on identi e
pour S ou pour S quelconque :
le torseur des efforts extérieurs
[Fe] ou [F
e],
le torseur des efforts intérieurs
[Fi] ou [F i] ,
le torseur des quantités d accélération [MA] ou [MA ]
par les formules, pour S :
∀{ˆ
D}
[Fe].{ˆ
D}= P(e)(ˆ
U),
[Fi].{ˆ
D}= P(i)(ˆ
U),
[MA].{ˆ
D}=A(ˆ
U),
(6.1)
et les formules homologues pour S ,où ˆ
U désigne la restriction à S (ou à S )duchamp
de vitesse du mouvement virtuel rigidi ant dé ni par { ˆ
D}.
6.3 Loi des actions mutuelles et loi fondamentale de la
dynamique
L application du principe des puissances virtuelles impose à ces torseurs des condi-
tions nécessaires.
L énoncé (4.1) implique immédiatement :
pour S [Fi]=
0
∀S [F i]=
0
.
(6.2)
Autrement dit :
pou r S et pour tout sous-système S , le torseurde
sefforts inté-
rieurs est nul.
C est la formulation de la loi des actions mutuelles.
L énoncé (4.2), appliqué aux mouvements rigidi ants, implique ensuite, compte
tenu de (6.2)
en référentiel galiléen R ,
pour S [Fe]=[MA]
∀S [F
e]=[MA ] .
(6.3)
6 Résultats généraux
171
Autrement dit :
en référentiel galiléen, pour S et pour tout sous-système S , le
torseur des efforts extérieurs est égal au torseur des quantités
d accélération.
C est l énoncé de la loi fondamentale de la dynamique pour S ou un sous-
système quelconque S .
6.4 Commentaires
Il est essentiel de prendre garde à une interprétation erronée de ces résultats
qui consisterait à croire que leur validité est restreinte aux seuls systèmes ou sous-
systèmes indéformables ou encore aux systèmes ou sous-systèmes indéformés dans le
mouvement réel. Il s agit là d une confusionentremouvements virtuels et mouvements
réels : le fait d exploiter le principe des puissances virtuelles sur le sous-espace des mou-
vements virtuels rigidi ant S (resp. S )n
aau
c
une relation avec une quelconque
indéformabilité du système dans son mouvement réel associé aux efforts considérés.
Bien au contraire,lesénoncés (6.2) et (6.3) sont les résultats les plus généraux
que l on peut obtenir sans aucune hypothèse sur le choix de l espace vectoriel des
mouvements virtuels (étape 2 de la méthode, 4.2), ni sur la modélisation des ef-
forts construits sur cet espace (étapes 3 à 5 ). Il s agit d énoncés à caractère global
exprimés en termes de torseurs, qui s imposent à toute modélisation des efforts méca-
niquement cohérente. Ceci sera illustré dans la suite (chapitre V, 2.6 et 3.4 ; chapitre
XI, 2.6 et 3.7).
Si l on applique la loi fondamentale (6.3) à un système en équilibre dans un réfé-
rentiel galiléen R on a, dans ce référentiel :
pour S [Fe]=0
∀S [F
e]=0 ;
(6.4)
on dit que (6.4) traduit l équilibre global du système S ou du sous-système S
considéré : c est la loi fondamentale de la statique .
On véri era sans difficulté que la formulation (6.3)delaloifondamentale permet
de démontrer le résultat suivant : si l on considère deux sous-systèmes disjoints S 1 et
S 2 de S on a, avec des notations évidentes,
[F21]+[F12]=0
(6.5)
qui exprime le principe de l action et de la réaction pour les deux sous-systèmes
S 1 et S 2.
172
Chapitre IV Les puissances virtuelles et la modélisation des efforts
7T
h
é
o
r
è
m
es de la quantité de mouvement et de
l énergie cinétique
7.1 Dé nition du système et des mouvements considérés
On particularise maintenant l analyse au cas du milieu continu classique dont la
modélisation a été faite au chapitre I. La géométrie étant celle représentée à la gure 6,
les mouvements réelssontdé nis par les champs de vitesse U(x,t),supposés continus
et différentiables(10),de
spa
rtic
ules constitutives du système dans la con guration
actuelle.
L espace vectoriel des mouvements virtuels est l espace des champs de vecteurs ˆ
U
dé nis sur Ωt dont on précisera la continuité et la dérivabilité.
7.2 Torseur des quantités d accélération ; torseur des quantités
de mouvement
Cette description précise la forme de la puissance virtuelle des quantités d accélé-
ration.
ρ(x,t) désigne la masse volumique du milieu au point géométrique M dans la
con guration actuelle ; a(x,t)= dU(x,t)
dt est l accélération en ce point. La quantité
d accélération de l élément de matière dm = ρ(x,t)dΩt est par dé nition :
a(x,t)dm = ρ(x,t)a(x,t)dΩt =dm dU(x,t)
dt,
(7.1)
ce qui précise les formes linéaires A( ˆ
U) et A (ˆ
U);pourS :
A(ˆ
U)= Ωt ρ(x,t)a(x,t) . ˆ
U(x)dΩt
(7.2)
et formule homologue pour A ( ˆ
U).
Le torseur des quantités d accélération dé ni par (6.1) s explicite alors comme
indiqué au paragraphe 5.4 (torseur d un système de forces) ; ainsi pour S :
[MA]=[O, A,δ0 ]
(7.3)
avec
A = Ωt ρ(x,t)a(x,t)dΩt = Ωt
a(x,t)dm
δ0 = Ωt OM ∧ ρ(x,t)a(x,t)dΩt = Ωt OM ∧ a(x,t)dm
(7.4)
(10)Le cas où U est continu et différentiable, par m orceaux ,e
ste
n
vis
agé au paragraphe 7.6 de ce
chapitre et au chapitre V ( 3.9 et 3.11).
7 Théorèmes de la quantité de mouvement et de l énergie cinétique
173
et formules homologues pour S ,sous-système quelconque.
On peut aussi dé nir la quantité de mouvement de l élément de matière dm :
U(x,t)dm = ρ(x,t)U(x,t)dΩt
(7.5)
dont la quantité d accélération est la dérivéeparticulaire. Ce champ de vecteurs dé nit
lui aussi un torseur par la formule (5.12), appelé torseur des quantités de mouvement,
noté [MU] pour S et [MU ] pour S quelconque, et dont les éléments de réduction
sont :
[MU]=[O, Ωt U(x,t)dm, Ωt OM ∧ U(x,t)dm ] .
(7.6)
On démontre alors l identité, pour S :
[MA]= d
dt[MU]
(7.7)
(formule homologue pour S sous-système quelconque), où d
dt [MU] est le torseur,
dérivée particulaire de [MU].Cetorseurs explicite en effet sous la forme :
d
dt [MU]=[O, d
dt Ωt U(x,t)dm, d
dt Ωt OM ∧ U(x,t)dm]
(7.8)
où l on voit que :
d
dt Ωt U(x,t)dm = Ωt
a(x,t)dm = A
(7.9)
et
d
dt Ωt OM ∧ U(x,t)dm = Ωt (U(x,t) ∧ U(x,t)+OM ∧ a(x,t))dm = δ0 ,
(7.10)
ce qui démontre l identité annoncée.
7.3 Conservation de la quantité de mouvement
L identité (7.7) signi e que le torseur des dérivées particulaires des quantités
de mouvement des éléments du système S,c
e
st-à-dire [MA],e
stégal à la dérivée
particulaire du torseur des quantités de mouvement des éléments du système S.
On obtient ainsi une nouvelle expression de la loi fondamentale de la dynamique
(6.3) :
en référentiel galiléen R ,
pour S [Fe]= d
dt[MU]
∀S [F
e]= d
dt [MU ]
(7.11)
174
Chapitre IV Les puissances virtuelles et la modélisation des efforts
En particulier, si le système S est isolé,c est-à-dire n est soumis à aucune action
extérieure, on a l énoncé :
en référentiel galiléen le torseur des quantités de mouvement d un
système isolé se conserve.
Théorème du centre d inertie
Considérant un sous-système S quelconque de S on désigne par G son centre d inertie dans
la con guration κt ,c
e
st-à-dire le point géométrique dont le vecteur-position dans κt est
dé ni par :
xG =1
M Ω t
xdm
(7.12)
où M = Ω t dm désigne lamasse de S .
L évolution de ce point géométrique dans le mouvement réel du système permet d en dé nir
la vitesse U G et l accélération aG .Ilvientimmédiatement :
UG = dxG
dt=1
M Ω t
U(x,t)dm
(7.13)
et
aG = dUG
dt=1
M Ω t
a(x,t)dm,
(7.14)
c est-à-dire, en se reportant à (7.6) et (7.4) que :
• la résultante du torseur [MU ] des quantités de mouvement de S ,cou
ramment appelée
quantité de mouvement du sous-système S ,estégale à la quantité de mouvement de
la masse M de S animée du mouvement du point géométrique G , centre d inertie de
ce sous-système ;
• de même la résultante A de [MA ], quantité d accélération du sous-système S ,e
st
égale à la quantité d accélération de la masse M de S dans le mouvement du point
géométrique G , centre d inertie de S .
Ceci permet de déduire de la loi fondamentale sous ses formes (6.3) ou (7.11) un énoncé,
homologue de (1.1), pour le mouvement du point géométrique, centre d inertie de tout sous-
système S de S.
F e désignant la résultante de [F
e] on obtient ainsi :
en référentiel galiléen R ,
∀S ⊂S,
F e =M aG = d
dt(M UG ) .
(7.15)
7.4 Théorème d Euler
En supposant le champ de vitesse réel U continu et différentiable, on peut pour-
suivre la transformation de la formule (7.8) au moyen des expressions générales de la
dérivée particulaire d une intégrale devolume(chapitre III, formule (4.34)).
7 Théorèmes de la quantité de mouvement et de l énergie cinétique
175
OnaainsipourA:
A = Ωt
∂(ρU)
∂t dΩt + ∂Ωt(ρU ⊗ U). da
(7.16)
où da désigne le vecteur-aire élémentaire au contour ∂Ωt de Ωt .
Pour δ0 on obtient :
δ0 = Ωt
∂(OM ∧ ρU)
∂t dΩt + ∂Ωt(OM ∧ ρU)U .da ;
(7.17)
or, dans la première intégrale on a :
∂
∂t(OM ∧ ρU)=OM ∧ ∂(ρU)
∂t
car ∂(OM)
∂t =0(dérivée partielle par rapport à t, O et M étant xés); d où :
δ0 = Ωt OM ∧ ∂(ρU)
∂t dΩt+ ∂ΩtOM ∧(ρU)U.da .
(7.18)
Ainsi, par les formules (7.16) et (7.18), A et δ0 apparaissent comme les éléments
de réduction en O (résultante et moment) du torseur constitué par :
la densité volumique de forces
∂(ρU)
∂t
dans Ωt
(7.19)
et la densité surfacique de forces(11)
(ρU)U.n=ρ(U⊗U).n sur∂Ωt .
(7.20)
Figure 7 Théorème d Euler
(11) Il s agit bien de forces volumiques et surfaciques du point de vue des équations aux dimensions.
176
Chapitre IV Les puissances virtuelles et la modélisation des efforts
On obtient donc une nouvelle expression de la loi fondamentale pour S (énoncé
homologue pour S ,sous-système quelconque de S):
en référentiel galiléen R ,
le torseur des efforts extérieurs [Fe] est égal à la somme
du torseur des forces ∂(ρU)
∂t dΩt réparties dans le volume Ωt ,
et du torseur des forces ρ(U ⊗ U) . da réparties au contour ∂Ωt .
(7.21)
Ce résultat constitue le théorème d Euler où l on remarque que ρ(U ⊗ U) . da
représente le ux sortant de quantité de mouvement à travers l aire élémentaire da
qui est toujours dirigé vers l extérieur(12).
7.5 Théorème de l énergie cinétique
Comme on l a vu, les mouvements réels du système étudié appartiennent à l espace
vectoriel des mouvements virtuels considérés. En appliquant la proposition (4.1) du
principe des puissances virtuelles au système S (ou à un sous-système S quelconque)
avec un mouvement réel U on obtient :
en référentiel galiléen R ,
P(e)(U)+P(i)(U)=A(U) ,
(7.22)
formule danslaquelle P(e)(U) et P(i)(U) représentent donc les puissances des efforts
extérieurs et intérieurs au système S dans le mouvement réel U ,etoùA(U ) s écrit,
compte tenu de (7.2) :
A(U)= Ωt ρ(x,t)a(x,t) .U(x,t)dΩt
(7.23)
soit encore
A(U)= Ωt U(x,t) . dU(x,t)
dt dm.
(7.24)
En désignant par K(U) l énergie cinétique du système S dans le mouvement
réelU:
K(U)=1
2 Ωt U 2(x,t)dm,
(7.25)
on reconnaît dans (7.24) la dérivée particulaire de K(U) :
A(U)= d
dtK(U)
(7.26)
(12)On a en effet: n.ρ(U⊗U).n=ρ(U.n)2≥0.
7 Théorèmes de la quantité de mouvement et de l énergie cinétique
177
(formule homologue pour S ,sous-système quelconque).
On obtient donc alors, à partir de (7.22), l expression du théorème de l énergie
cinétique :
en référentiel galiléen R ,
pour SP
(e)(U)+P(i)(U)= d
dtK(U)
∀S P (e)(U)+P (i)(U)= d
dtK (U)
(7.27)
autrement dit :
en référentiel galiléen, la dérivée particulaire de l énergie ciné-
tique de tout sous-système S dans le mouvement réel est égale à
la somme des puissances de tous les efforts, extérieurs et inté-
rieurs à S , dans ce même mouvement.
7.6 Champ de vitesse réel discontinu : ondes de choc
Puissances virtuelles des quantités de mouvement et des quantités
d accélération
On peut, de manière analogue à la puissance virtuelle des quantités d accélération A( ˆ
U)
donnée par (7.2), dé nir la puissance virtuelle des quantités de mouvement soit :
V(ˆ
U)= Ωt
ρ(x,t)U (x,t) . ˆ
U dΩt
(7.28)
(et formule homologue pour V ( ˆ
U) relative à S ,so
u
s-système quelconque de S).
Supposant d abord le champ de vitesse virtuel ˆ
U continu et continûment différentiable, on
remarque que, lorsque le champ de vitesse U est continu et continûment différentiable, A( ˆ
U)
apparaît formellement comme la dérivée particulaire, calculée à l instant t,deV(ˆ
u)oùle
champ ˆ
u est une fonction de x et de t astreinte à satisfaire à l instant t :
ˆ
u(x,t)= ˆ
U(x)
dˆ
u(x,t)
dt =0
(7.29)
c est-à-dire que le champ ˆ
u est engendré par le champ virtuel ˆ
U entraîné par le mouvement ;
en effet on a, compte tenu de (7.29)
A(ˆ
U )= Ωt
dU(x,t)
dt.ˆ
U(x)ρ(x,t)dΩt = Ωt
d(U(x,t) . ˆ
u(x,t))
dt
ρ(x,t)dΩt ,
soit :
A(ˆ
U)= d
dt Ωt
ρ(x,t)U (x,t) . ˆ
u(x,t)dΩt = d
dt V(ˆ
u).
(7.30)
Lorsque le champ de vitesse virtuel ˆ
U est continu et continûment différentiable par morceaux,
on véri e, en appliquant la formule (4.36) du chapitre III pour le calcul de d
dt V(ˆ
u) que
l équation (7.30) demeure valable en raison des conditions (7.29) imposées au champ ˆ
u:
celles-ci impliquent en effet qu à l instant t la surface de discontinuité du champ ˆ
u suit le
mouvement de la matière.
178
Chapitre IV Les puissances virtuelles et la modélisation des efforts
Expression de la puissance virtuelle des quantités d accélération dans le
cas des ondes de choc
Dans le cas où le champ de vitesse U est discontinu, la dé nition de A( ˆ
U ) par la formule
(7.2) est incomplète : des termes correspondant à la contribution de la discontinuité [[ U ]]
au franchissement des surfaces de discontinuité Σt doivent en effet y intervenir en plus des
termes réguliers (13) .
En revanche, la dé nition (7.28) de V( ˆ
U) n est aucunement affectée par l existence éventuelle
de discontinuités de U ,po
u
r
v
uqu
aucune des surfaces de discontinuité du champ virtuel ˆ
U
ne coïncide avec celles du champ réel U .L idée est alors d obtenir l expression complète de
A(ˆ
U) àpa
rtirdeV( ˆ
U) en appliquant la formule (7.30), associée à (7.29), prise ainsi comme
dé nition pour ces champs ˆ
U.
Partant de (7.30) on doit effectuer le calcul de la dérivée particulaire. En se référant à la
formule (4.36) du chapitre III, il vient, compte tenu de (7.29) et en simpli ant les notations :
A(ˆ
U)= Ωt (d(ρU)
dt.ˆ
U+(ρU. ˆ
U) div U)dΩt + Σt[[ρU . ˆ
U (U - W )]].ndΣt
(7.31)
oùˆ
U est supposé continu au franchissement des surfaces de discontinuité Σt de U .
En tenant compte de la conservation de la masse (formules (5.5) et (5.12) du chapitre III), il
vient :
A(ˆ
U)= Ωt
ρdU
dt. ˆ
U dΩt + Σt
ρ[[U]]. ˆ
U(U-W).ndΣt .
On reconnaît dans cette expression de A( ˆ
U ) le terme régulier de la formule (7.2) auquel
s ajoute le terme de discontinuité sur Σt qui est non nul dans le cas des ondes de choc
(discontinuités de vitesse non stationnaires) :
A(ˆ
U)= Ωt
ρa. ˆ
U dΩt + Σt
ρ[[U]]. ˆ
U(U -W).ndΣt
(7.32)
(formule homologue pour A ( ˆ
U))où ˆ
U est supposé continu sur Σt).
Conservation de la quantité de mouvement
La relation entre le torseur des quantités d accélération et le torseur des quantités de mou-
vement se déduit directement des formules (7.30) et (7.29). En considérant un mouvement
virtuel rigidi ant ˆ
U dé ni par{ˆ
D} quelconque on a :
[MA].{ˆ
D}= d
dt([MU].{ˆ
d})
(7.33)
où le distributeur { ˆ
d}, fonction de t est astreintàsatisfaire vis-à-vis de { ˆ
D} les conditions
homologues de (7.29) :
à l instant t,
{ˆ
d}={ˆ
D}
d
dt{ˆ
d} =0
(7.34)
d où en explicitant (7.33) :
∀{ˆ
D}, [MA].{ˆ
D}= d
dt[MU].{ˆ
D}.
(13)On rappelle que Σt désigne de façon générique les surfaces de discontinuité de U et que W est
la vitesse de propagation de Σt : W est normale à Σt (cf. chapitre III, 4.4).
7 Théorèmes de la quantité de mouvement et de l énergie cinétique
179
On retrouve l identité (7.7), établie maintenant en présence d onde de choc :
[MA]= d
dt[MU]
(énoncé homologue pour S ,so
u
s-système quelconque de S), dont on déduit le théorème de
la conservation de la quantité de mouvement sous la forme (7.11).
Théorème d Euler
La formule (7.31) s écrit aussi :
A(ˆ
U)= Ωt (∂(ρU)
∂t + div(ρU⊗U)). ˆ
U dΩt
+ Σt[[ ˆ
U.ρU⊗U]].ndΣt - Σt[[ρU]]. ˆ
UWdΣt.
(7.35)
On peut alors identi er le torseur des quantités d accélération en examinant l expression de
A(ˆ
U ) pour les mouvements virtuels rigidi ants (cf. 5.3).
Pour celaonrappelle l identité :
ˆ
U. div(ρU⊗U)≡ div(ˆ
U .(ρU ⊗U))-tgrad ˆ
U:(ρU⊗U)
dont le dernier terme est nul lorsque ˆ
U est rigidi ant dé ni par { ˆ
D}={O, ˆ
U0, ˆ
ω0 },c
a
r
alors grad ˆ
U=ˆ
ω0 est antisymétrique.
On obtient ainsi, à partir de (7.35) :
∀{ˆ
D}, [MA].{ˆ
D} = Ωt
∂(ρU )
∂t.ˆ
U dΩt + Ωt div (ˆ
U .(ρU ⊗U))dΩt
+ Σt [[ ˆ
U .ρU⊗ U]] .ndΣt - Σt[[ ρU ]] . ˆ
UWdΣt.
Dans cette formule, le terme entre crochets se transforme par application de la formule de
la divergence pour les fonctions continues et continûment différentiables par m orceaux (cf.
chapitre III, formule (4.35)) ; il vient :
∀{ˆ
D}, [MA].{ˆ
D} = Ωt
∂(ρU)
∂t.ˆ
U dΩt + ∂Ωt
ˆ
U.(ρU⊗U).da- Σt
ˆ
U.[[ρU]]WdΣt .
(7.36)
II en résulte que le torseur [MA] des quantités d accélération est dé ni par le système
de forces suivant :
la densité volumique de forces :
∂(ρU)
∂t
dans Ωt ,
(7.37)
la densité surfacique de forces
ρ(U ⊗U).n
sur ∂Ωt ,
(7.38)
et la densité surfacique de forces
-[[ρU]]W surΣt
(7.39)
180
Chapitre IV Les puissances virtuelles et la modélisation des efforts
(énoncé homologue pour S ,sous-système quelconque de S).
L énoncé du théorème d Euler doit donc être complété en présence d ondes de choc par
l addition dans la formule (7.21) du terme (7.39) qui représente les forces surfaciques
sur les surfaces d onde, dues à la discontinuité de U .
Théorème de l énergie cinétique
La formule (7.32) ne permet évidemment pas le calcul de la puissance des quantités d accé-
lération dans le champ de vitesse réel puisqu elle suppose le champ ˆ
U continu sur Σt .Le
s
expressions de A(U ) et A (U) s obtiennent alors en partant de la formule (7.26) prise comme
dé nition :
A(U)= d
dt K(U)= d
dt Ωt
1
2 ρ(x,t)U 2(x,t)dΩt
(7.40)
(formule homologue pour A (U)).
En explicitant la dérivée particulaire ci-dessus par la formule (4.36) du chapitre III on obtient
A(U )= Ωt
ρa .UdΩt + Σt
ρ[[ U2]]
2 (U -W).ndΣt
(7.41)
(formule homologue pour A (U))oùl on reconnaît, en plus du terme régulier de la formule
(7.23), le terme de discontinuité sur Σt qui est non nul dans le cas des ondes de choc. On
peut aussi remarquer que l expression (7.41) de A(U) s obtient formellement à partir de (7.32)
pour A( ˆ
U) en y remplaçant, sur Σt, ˆ
U par la moyenne(U1 +U2)/2 des valeurs de U de part
et d autre de Σt .
Compte tenu de la dé nition (7.40) ainsi adoptée pour A(U) àpa
rtirdeK(U) le théorème
de l énergie cinétique apparaît comme la formulation de l énoncé des puissances virtuelles
appliqué au mouvement réel, sous réserve que les formes linéaires exprimant les puissances
virtuelles des efforts extérieurs et des efforts intérieurs soient dé nies sur le mouvement réel ;
en fait on verra au chapitre V ( 3.11) que c est àtr
a
v
e
rs le théorème de l énergie cinétique
que l on obtient alors l expression de la puissance des efforts intérieurs dans le champ de
vitesse réel.
Remarque
On rencontre ici une manifestation du particularisme des mouvements réels annoncé
dans la section 4, à propos de l écriture de la forme linéaire exprimant la puissance virtuelle
des quantités d accélération. Lorsque le champ de vitesse réel U est continu et continûment
différentiable, A( ˆ
U ) est dé nie par (7.30) pour tous les champs ˆ
U continus et continûment
différentiables, par morceaux, ce qui comprend le champ U lui-même.
En revanche, lorsque le champ de vitesse réel U est discontinu, cette dé nition explicitée par
(7.31) ou (7.32) n est valable que pour les champs de vitesse virtuels ˆ
U dont les surfaces
de discontinuité sont distinctes de celles de U ,c
equie
x
clut notamment de choisir pour ˆ
U
le champ U lui-même. La dé nition de A(U ) procède alors de la dérivation particulaire de
l énergie cinétique explicitée par (7.41). Le résultat ainsi obtenu permet ensuite, par linéarité,
de calculer la puissance virtuelle des quantités d accélération pour les champs ˆ
U dont des
surfaces de discontinuité coïncident avec celles de U .
On doit évidemment se poser la question de la cohérence de ces dé nitions avec la continuité
de la forme linéaire A.D
une façon générale cette cohérence est assurée par la formulation
suivante.
8 Etmaintenant ...
181
La puissance virtuelle des quantités de mouvement, V( ˆ
U),e
st une forme bilinéaire continue
sur l espace produit des champs de vitesse réels et des champs de vitesse virtuels(14) :
V(ˆ
U)=K(U, ˆ
U)
(7.42)
(formule homologue pour V ( ˆ
U)), dont la forme quadratique associée est supposée dé nie
positive. L énergie cinétique du système dans le mouvement réel est :
K(U)= 1
2K(U,U).
(7.43)
La puissance virtuelle des quantités d accélération est dé nie par (7.29 et 7.30), d où :
A(ˆ
U)= d
dtK(U, ˆ
u) sous (7.29)
(7.44)
lorsque les champs virtuels ˆ
U sont continus au franchissement des surfaces de discontinuité
de U ;etlapuissance des quantités d accélération dans le mouvement réel est dé nie par
(7.40), d où :
A(U)=1
2
d
dtK(U,U).
(7.45)
8E
t
m
a
i
n
t
enant ...
La méthode des puissances virtuelles sera utilisée dans la suite pour la construction
de diverses modélisations des efforts :
au chapitre V, où l on s intéressera au milieu continu classique avec un clin
d œil vers les milieux micropolaires ;
au chapitre XI, pour les milieux curvilignes, où après l étude des ls, variété unidi-
mensionnelle de milieu continu classique, on modélisera les poutres, variété concrète
de milieux micropolaires.
Pour le mécanicien l intérêt de l approche puissances virtuelles ne se limite pas
àcetyped application ! En effet une fois la modélisation des efforts écrite et acquise,
le principe des puissances virtuelles est l instrument privilégié pour la dualisation des
équations, fondement des méthodes variationnelles de résolution, comme on le verra
au chapitre X dans le cas de l élasticité.
(14) Cf. Mécanique ,tomeI,chapitre III,par Paul Germain, Ellipses, 1986.
182
Chapitre IV Les puissances virtuelles et la modélisation des efforts
Récapitulatif des formules essentielles
• Principe des puissances virtuelles
en référentiel galiléen R ,
∀S ⊂S,
∀ˆ
U m.v.r. pour S P (i)( ˆ
U)=0.
∀ˆ
U m.v. P (e)(ˆ
U)+P (i)( ˆ
U)=A ( ˆ
U)
• Distributeursetto
r
s
e
u
r
s
{ˆ
D}={O, ˆ
U0, ˆ
ω0}={O , ˆ
U0 +ˆ
ω0∧OO , ˆ
ω0}
[F]=[O,F0 ,C0]=[O ,F0 ,C0+O O∧F0]
[F].{ˆ
D}=F0. ˆ
U0+C0. ˆ
ω0
∂
∂xi{ˆ
D(x)} = M, ∂ ˆ
U(x)
∂xi +ei∧ˆ
ω(x), ∂ˆ
ω(x)
∂xi
∂
∂xi [F(x)] =ïM, ∂F(x)
∂xi , ∂C(x)
∂xi +ei∧F(x)ò
• Résultats généraux
loi fondamentale :
en référentiel galiléen R ,
[F
e]=[MA ]
loi des actions mutuelles :
[F i]=0
• Conservation de la quantité de mouvement
en référentiel galiléen R ,
[F
e]= d
dt [MU ]
Récapitulatif des formules essentielles
183
• Théorème d Euler
en référentiel galiléen R ,
∀S ⊂S, [F
e]=
∂(ρU)
∂t dΩt
sur Ω t ,
ρ(U⊗U).da sur∂Ω t ,
-[[ρU]]WdΣt surΣ t siondede choc
• Théorème de l énergie cinétique
K (U)=1
2 Ω
t ρ(x,t)U 2(x,t)dΩt
en référentiel galiléen R ,
∀S ⊂S, P (e)(U)+P (i)(U)= d
dtK (U) .
• Changement de référentiel
U(x)=U ∗(x∗)+U e(x∗)
a(x)=a∗(x∗)+ae(x∗)+2ωe ∧ U ∗(x∗)
184
Chapitre IV - Les puissances virtuelles et la modélisation des efforts
Exercices
IV.1 - Statique des ls : chapitre XI, section 2.
IV.2 - Dynamique des uides parfaits : chapitre V, section 2.
IV.3 - Statique des poutres : chapitre XI, section 3.
IV.4 - Dynamique des milieux continus : chapitre V, section 3.
IV.5 - Théorème d Euler : Ex.V.7, Ex.V.8.
IV.6 - Conditions de compatibilité géométrique : Ex. XI.4, Ex. XI. 9, Ex. XI.13.
IV.7 - Calcul à la rupture : Ex.VI.12, Ex.VI.13, Ex. XI.11 à 13.
Chapitre V
Modélisation des efforts
pour le milieu continu
MOTS CLÉS
Fo r ces volumiques. Forces surfaciques.
Pression. Fluide parfait. Fluide visqueux.
Statique des uides.
Tenseur des contraintes de Cauchy.
Actions de contact. Vecteur-contrainte.Facette.
Équations de ladynamique.
Te n s e u r des contraintes de Piola-Kirchhoff.
185
Chapitre V Modélisation des efforts pour le milieu continu
187
En bref
La construction de la modélisation des efforts en mécanique des milieux
continus classique part delam
odélisation géométrique : les mouvements
réels d un système sont dé nis, en description eulérienne, par le champ
des vitesses des particules donné sur la con guration actuelle.
Pour l application de la méthode des puissances virtuelles on choisit,
comme espace vectoriel des mouvements virtuels, l ensemble des champs
de vecteurs (vitessesv
ir
t
u
e
lles) continus et continûment différentiables
dé nis sur la con guration actuelle du système et on élargit ensuite cet
espace aux champs de vecteurs continus et continûment différentiables par
morceaux .
Les efforts extérieurs au système étudié sont modélisés, à travers l ex-
pression de leur puissance virtuelle, par des densités de forces, volumiques
à l intérieur du système, et surfaciques às
o
nc
o
n
t
our. Pour un sous-
système quelconque, on fait l hypothèse que les efforts extérieurs (au sous-
système) se décomposent de la même façon. On suppose, de plus, que les
particules du système n exercent aucun effort à distance les unes sur les
autres.
On postule que la puissance virtuelle des efforts intérieurs se met sous la
forme d une densité volumique ,indépendante du sous-système considéré,
qui est une forme linéaire des valeurs locales du champ de vitesse virtuel
et de son gradient. La mise en œuvre duprincipedes puissances virtuelles
précise d abord l expression de cette densité de façon à satisfaire la loi des
actions mutuelles. On véri e ensuite que les hypothèses faites dans l écri-
ture des formes linéaires, qui expriment les diverses puissances virtuelles,
sont cohérentes entre elles : on obtient les équations de la dynamique pour
le système et pour un sous-système quelconque et on montre que les ef-
forts intérieurs ainsi modélisés correspondent effectivement à des actions
de contact entre les particules du système (sections 2 et 3).
Dans une première approche les effortsintérieurssontmodélisés par le
champ d un scalaire qui est, dans la densité de puissance virtuelle corres-
pondante, la variable duale du taux virtuel de dilatation volumique. Les
équations de la dynamique déterminent le gradient de ce champ scalaire
et dé nissent les équations au contourdusystèm
eo
ud
un sous-système
188
Chapitre V Modélisation des efforts pour le milieu continu
quelconque. L interprétation mécanique conduite à partir de ces équations
identi e le concept de pression .Les conditions de compatibilité sur les don-
nées imposées par les équations de la dynamique, notamment la condition
de normalité des efforts surfaciques auc
o
nto
u
rdu système, montrent les
limitations de ce modèle dont le domaine depertinence couvre néanmoins
les uides parfaits et la statique des uides en général (section 2).
L approche la plus générale dans le cadre xé par le choix de l espace
vectoriel des mouvements virtuels modélise les efforts intérieurs par le
champ d un tenseur du deuxième ordre, nécessairement symétrique pour
respecter la loi des actions mutuelles. Ce tenseur est, dans la densité de
puissance virtuelle des efforts intérieurs, la variable duale du taux de défor-
mation virtuel (au signe près). Les équations de la dynamique fournissent,
pour ce champ tensoriel symétrique, trois équations aux dérivées partielles
du premier ordre et trois équations au contour du système ou d un sous-
système quelconque.
L interprétation mécanique de la modélisation montre que les efforts
intérieurs, réduits à des actions de contact entre les particules du système,
sont schématisés de la façon suivante : les particules situées de part et
d autre d un élément géométrique plan à l intérieur du système, in niment
près de celui-ci, exercent les unes sur les autres des efforts représentés par
des forces surfaciques distribuées sur cet élément appelé aussi facette .
La densité surfacique correspondante est le vecteur-contrainte s
u
rla
facette. Le champ tensoriel symétrique delamodélisation est le champ des
tenseurs des contraintes de Cauchy (section 3).
La modélisation des efforts intérieurs est naturellement faite sur la
con guration actuelle. Le transport,s
u
rl
ac
o
n guration initiale de ré-
férence, de l intégrale donnant la puissance des efforts intérieurs fait appa-
raître que le taux de déformation lagrangien y est associé par dualité à un
tenseur symétrique qui est, de ce point de vue, l homologue du tenseur des
contraintes de Cauchy : c est le tenseur des contraintes de Piola-Kirchhoff
(section 4).
Le concept de contrainte, caractéristique de la mécanique des milieux
continus classique, se révèle pertinent pour un très grand nombre de pro-
blèmes, associé à des matériaux divers ( uides et solides, homogènes ou
composites) et à des échelles variées, bien que les phénomènes physiques
microscopiques qu il modélise ainsi à travers la notion d efforts intérieurs
puissent être de natures différentes (section 5).
Chapitre V Modélisation des efforts pour le milieu continu
189
Principales notations
Notation
Signi cation
1ère formule
F (x,t) force massique
(2.4)
T Ω(x,t) force surfacique au contour de S
(2.5)
dfΩ
force de surface élémentaire au contour de S (2.5)
T Ω (x,t) force surfacique au contour de S
(2.8)
dfΩ
force de surface élémentaire au contour de S (2.8)
p(x,t) pression
(2.14)
σ(x,t) tenseur des contraintes de Cauchy
(3.8)
T (x,t,n(x)) vecteur-contrainte
(3.18)
π(X,t) tenseur des contraintes de Piola-Kirchhoff
(4.10)
B(X ,t) tenseur des contraintes de Piola-Lagrange
(4.19)
190
Chapitre V Modélisation des efforts pour le milieu continu
1P
ositionduproblème .....................191
2M
o
d
é
lisation des efforts intérieurs par un champ sca-
laire:la pression ........................192
2.1 Mouvements virtuels. Puissance virtuelle des quantités
d accélération ........................ 192
2.2P
uissancevirtuelle deseffortsextérieurs ......... 193
2.3P
uissancevirtuelle deseffortsintérieurs ......... 196
2.4É
quations de la dynamique ................ 197
2.5P
ertinencedumodèle:champdepression ........ 200
2.6L
oi fondamentaledeladynamique ............ 201
2.7C
hamp de vitesse virtueldiscontinu.
.
......... 201
3M
o
d
é
lisation des efforts intérieurs par un champ ten-
soriel:les contraintes.....................203
3.1 Mouvements virtuels. Puissances virtuelles des quantités
d accélération et deseffortsextérieurs.
......... 203
3.2P
uissancevirtuelle deseffortsintérieurs ......... 204
3.3É
quations de la dynamique ................ 206
3.4C
o
mmentaires ....................... 207
3.5 Tenseur des contraintes de Cauchy. Vecteur-contrainte . 210
3.6 Modélisation des efforts intérieurs à un milieu continu à
partir du conceptdevecteur-contrainte ......... 213
3.7 Expressions explicites des équations de la dynamique .
. 216
3.8C
hamp de vitesse virtueldiscontinu.
.
......... 217
3.9D
iscontinuitésduchamp de contrainte .
......... 219
3.10 Théorème d Euler.
.................... 223
3.11 Théorème de l énergie cinétique. ............. 225
3.12 Puissancededéformation ................. 226
3.13 Retour sur la compatibilité géométrique :
formulationfaible. . .................... 226
3.14 Formulation faible des équations de la dynamique .
.
. 227
3.15 Objectivité du tenseur des contraintes de Cauchy .
.
.
. 227
4L
es contraintese
ndescription lagrangienne ........227
4.1T
enseur descontraintes de Piola-Kirchhoff. . ...... 2
27
4.2 Tenseur des contraintes de Piola-Lagrange. Équations de
la dynamique ........................ 231
5B
ilanetperspectives .....................233
5.1 Mécaniciens et Physiciens ...
.
............. 233
5.2T
ableau récapitulatif .................... 234
5.3 Milieux micropolaires .
.
................. 235
Récapitulatifdes formules essentielles .............239
Exercices ..............................241
1 Position du problème
191
Modélisation des efforts
pour le milieu continu
1P
o
s
i
t
ion du problème
La mise en œuvre de la méthode des puissances virtuelles a permis dans la section
6duchapitreprécédent de dégager des énoncés généraux, exprimés en termes de
torseurs, qui s imposent à toute modélisation :
• La loi des actions mutuelles, équivalente à l énoncé (4.1 du chapitre IV) qui exprime
la nullité de la puissance virtuelle des efforts intérieurs dans tout mouvement
rigidi ant, pour S [Fi]=0
∀S [F i]=0,
(1.1)
• la loi fondamentale de la dynamique,
en référentiel galiléen R ,
pour S [Fe]=[MA]
∀S [F
e]=[MA ] .
(1.2)
On s est ensuite intéressé au milieu continu, dans la modélisation géométrique
qui en a été introduite au chapitre I, obtenant ainsi les théorèmes de la quantité de
mouvement et de l énergie cinétique.
On se propose maintenant, en précisant les expressions des formes linéaires P(e) et
P (e), P(i) et P (i),d aboutir à travers la méthode des puissances virtuelles, à la modé-
lisation des efforts extérieurs et intérieurs pour le milieu continu. Les choix successifs
qui seront faits ici permettront de dégager deux modèles emboîtés , distincts pour
la modélisation des efforts intérieurs :
d abord, la représentation des efforts intérieurs par un champ scalaire identi able
àlapression ,modélisation adaptée aux uides parfaits et à la statique des uides
en général,
puis la représentation par un champ tensoriel d ordre deux, appelé champ de
contrainte ,qui est la modélisation générale pour la mécanique des milieux conti-
nus tridimensionnels classique.
192
Chapitre V Modélisation des efforts pour le milieu continu
On a, au chapitre IV (section 4), donné une démarche très systématique pour
l application de la méthode des puissances virtuelles, dans laquelle les expressions des
puissances virtuelles des quantités d accélération, des efforts extérieurs et des efforts
intérieurs sont écrites préalablement à (et indépendamment de) toute application des
énoncés (4.1) et (4.2). Il va de soi que cette formulation ne visait qu à une présentation
claire et n a rien de contraignant : il sera souvent avantageux de tenir compte de
l énoncé (4.1), ou de la loi des actions mutuelles qui lui est équivalente (1.1), par
exemple dès l expression de la puissance des efforts intérieurs, de façon à ne pas
introduire des termes a priori inutiles. C est de cette façon que l on appliquera la
méthode dans la suite.
En n, on rappelle que l énoncé (4.2) du principe des puissances virtuelles se réfère
àu
nréférentiel galiléen (ou absolu) ; cette condition ne sera plus mentionnée dans
toute la suite mais sera sous-entendue à chaque application de la méthode : toutes les
équations obtenues (équations de la dynamique) supposeront que le mouvement du
système est observé dans unréférentiel galiléen.
2M
odélisation des efforts intérieurs par un champ
scalaire : la pression
Le système considéré est décrit comme au chapitre IV (section 7) dans la con -
guration actuelle κt par le volume Ωt ,occupé par ses particules ; ∂Ωt en désigne la
frontière. De même pour un sous-système : Ω t ,∂Ω t.
Les mouvements réels, qui correspondent à la modélisation géométrique du milieu
continu telle qu elle a été construite au chapitre I, sont décrits par l évolution des
positions géométriques des particules du système à chaque instant, avec les conditions
de continuité et de régularité qui ont été exposées alors. Ainsi, du point de vue des
champs de vitesse réels à l instant t sur la con guration κt,(indépendamment de
conditions supplémentaires qui pourraient être dues au comportement spéci que du
matériau constitutif), on a vu que la modélisation du milieu continu considère les
champs U continus et continûment différentiables par morceaux .
2.1 Mouvements virtuels. Puissance virtuelle des quantités
d accélération
Mouvements virtuels
Les mouvements virtuels considérés dans les constructions auxquelles on va pro-
céder sont dé nis par les champs de vecteurs ˆ
U ,vite
sses virtuelles, dé nis sur κt,
auxquels on impose d abord les conditions de continuité et de continue différen-
tiabilité sur Ωt .Unmouvementvirtuelseradésormaisdésignépar ˆ
U.
On montrera ensuite, pour chacune des deux modélisations présentées, sa mise en
œuvre sur l espace vectoriel des mouvements virtuels dé nis par des champs de vitesse
virtuels ˆ
U continus et continûment différentiables par morceaux ( 2.7 et 3.8).
2 Modélisation des efforts intérieurs par unchampscalaire : la pression
193
Puissance virtuelle des quantités d accélération
On reprend ici les arguments du chapitre IV ( 7.2) compte tenu de la forme des
mouvements réels.
En supposant le champ de vitesse réel continu et continûment différentiable sur
Ωt(1),laquantité d accélération de l élément dm = ρ(x,t)dΩt est :
a(x,t)dm = ρ(x,t)a(x,t)dΩt .
(2.1)
La puissance virtuelle des quantités d accélération s écrit pour S :
A(ˆ
U)= Ωt
a(x,t) . ˆ
U(x,t)dm = Ωt ρ(x,t)a(x,t) . ˆ
U(x)dΩt ,
(2.2)
et formule homologue pour A ( ˆ
U) relative à S ,sous-système quelconque de S.
On rappelle que l on a introduit au chapitre IV (section 6), le torseur [MA] des
quantités d accélération pour S :
[MA]=[O, A,δ0 ] ,
dont les éléments de réduction pour une origine O quelconque sont (chapitre IV,
7.2) :
A = Ωt
a(x,t)dmδ
0 = Ωt OM ∧ a(x,t)dm ;
(2.3)
et formule homologue pour [MA ] relativement à S .
2.2 Puissance virtuelle des efforts extérieurs
Comme on l a vu au chapitre IV l écriture même de la forme linéaire exprimant
la puissance virtuelle des efforts extérieurstraduit directement les hypothèses faites
quant à la modélisation adoptée pour ces efforts.
Système S
On fait ici l hypothèse que les efforts extérieurs agissant à chaque instant t sur S
sont de deux types ( gure 1).
• D une part, des forces de volume dé nies par une densité massique F (x,t).
Sur l élément de volume dΩt en M la force de volume élémentaire est donc :
F (x,t)dm = ρ(x,t)F (x,t)dΩt .
(2.4)
(1)Le cas où le champ réel U est continu et continûment différentiable par m orceaux sera traité
au paragraphe 3.9.
194
Chapitre V Modélisation des efforts pour le milieu continu
Figure 1 Efforts extérieurs agissant sur le système
• D autre part, des forces de surface exercées au contour ∂Ωt de S.Ce
sfo
rces
sont dé nies en chaque point de ∂Ωt par une densité surfacique T Ω(x,t) :laforce
de surface élémentaire agissant sur l élément de surface da de ∂Ωt en M est
égale à :
dfΩ = T Ω(x,t)da.
(2.5)
La puissance virtuelle des efforts extérieurs s écrit alors pour S :
P(e)( ˆ
U)= Ωt ρ(x,t)F (x,t) . ˆ
U(x)dΩt + ∂Ωt T Ω(x,t). ˆ
U(x)da.
(2.6)
Sous-système S de S
Figure 2 Efforts extérieurs sur un sous-système
Pour un sous-système S quelconque de S on supposequ
ele
seffo
rtse
xtérie
u
r
s
,
c est-à-dire exercés sur S par l extérieur de S ,yc
o
mpris(S-S ),s
o
ntdemêm
e
nature ( gure 2).
2 Modélisation des efforts intérieurs par unchampscalaire : la pression
195
• Les forces de volume sont dé nies en chaque point M de Ω t,pa
rlade
nsité
massique F Ω (x,t).
On construit ici la modélisation en faisant l hypothèse que
∀S ⊂S,FΩ (x,t) ≡ F(x,t) ,
(2.7)
c est-à-dire que la densité massique defo
r
ces de volume est indépendante de la
partition de S.Dupointdev
u
ephysique cela signi e que cette modélisation se
place dans l hypothèse où les actions à distance entre les particules de S sont
nulles(2).
• Les forces de surface exercées au contour ∂Ω t de S sont, quant à elles, dé nies
en chaque point par la densité surfacique T Ω (x,t),donnant ainsi la force de surface
élémentaire agissant sur l élément de surface da de ∂Ω t en M :
dfΩ = T Ω (x,t)da.
(2.8)
La puissance virtuelle des efforts extérieurs s écrit ainsi, pour un sous-système S
quelconque de S :
P (e)( ˆ
U)= Ω
t ρ(x,t)F (x,t) . ˆ
U(x)dΩt + ∂Ω
t TΩ (x,t). ˆ
U(x)da.
(2.9)
Remarque
Il importe ici d insister (cf. chapitre IV, 4.3) sur la différence des points de vue
que traduisent les notions de système et de sous-systèmes, qui peut être occultée par
la similitude des notations dans (2.6) et (2.9). Pour le système S,lesefforts extérieurs
dé nis par les champs F sur Ωt ,TΩ sur ∂Ωt sont des données .Pourunsous-système
S quelconque de S,s
u
rle
spo
rtions de sa frontière ∂Ω t qui ne sont pas communes
avec ∂Ωt,lecha
mpT Ω des forces extérieures surfaciques sera déterminé par la
modélisation quand sa construction sera achevée (cf. les formules (2.23) et (3.15)).
On peut aussi préciser que, sur ces portions de ∂Ω t , T Ω représente la densité surfacique des
forces exercées par (S-S ) sur S ,etnecomprendaucune contribution due à l extérieur de
S.Eneffetune telle contribution, lorsqu elle doit être prise en compte, apparaît également
dans l expression de P(e)( ˆ
U ) pour le système S lui-même où elle fait l objet d une intégrale
séparée semblable à la première intégrale de (2.9) (cf. 3.9 à propos de l équation (3.39)).
(2)La modélisation classique ainsi construite n est donc valable que pour des systèmes où ce type
d interaction entre les particules est effectivement négligeable vis-à-vis des autres actions qui entrent
en jeu. Il s agit d un choix de présentation habituel, simpli cateur, qui se révèle pertinent pour la
grande majorité des applications pratiques. Il n est pas limitatif quant à l emploi de la méthode des
puissances virtuelles comme le montre d ailleurs l exemple choisi au chapitre IV (sections 1 à 3) pour
a
c
climater les puissances virtuelles. La méthode des puissances virtuelles se révèle très sûre
pour la construction des modélisations homologues de celles présentées dans les sections 2 et 3 de ce
chapitre,horsdel hypothèse (2.7).
196
Chapitre V Modélisation des efforts pour le milieu continu
To r s e u rs des efforts extérieurs
Les efforts extérieurs étant ainsi décrits par (2.6) et (2.9) pour S et pour tout
sous-système S , l identi cation du torseur des efforts extérieurs par ses éléments de
réduction par rapport à une origine O quelconque est immédiate. On pose :
pour S [Fe]=[O, Fe ,C0 ]
∀S [F
e]=[O, F e ,C 0 ]
(2.10)
et l on a, en pro tant de la similitude des notations, pour S ⊂S :
F e = Ω
t F (x,t)ρ(x,t)dΩt + ∂Ω
t T Ω (x,t)da
C 0 = Ω
t OM ∧ F (x,t)ρ(x,t)dΩt + ∂Ω
t OM ∧ T Ω (x,t)da.
(2.11)
2.3 Puissance virtuelle des efforts intérieurs
On fait l hypothèse que la forme linéaire continue, fonctionnelle du champ ˆ
U ,qui
exprime la puissance virtuelle des efforts intérieurs pour S ou pour tout sous-système
S ,s obtient par intégration surlevolumedeS ou de S ,d une densité volumique
p(i)( ˆ
U), indépendante de S ,fonctionlinéaire des valeurs locales du champ ˆ
Uetde
ses gradients : ˆ
U(x), grad ˆ
U(x), ...
On écrit ainsi :
∀S ⊂S,
P (i)( ˆ
U)= Ω
t p(i)( ˆ
U)dΩt .
(2.12)
Modélisation des efforts intérieurs par un champ scalaire
Si l on retient pour p(i) ( ˆ
U) une expression linéaire en fonction des valeurs locales
deˆ
U et de son premier gradient, celle-ci est nécessairement de la forme
p(i)(ˆ
U)=A(x,t). ˆ
U (x) - t (x,t):gr
adˆ
U (x,t)
(2.13)
où A (x,t) désigne un vecteur et t (x,t) un tenseur euclidien du second ordre(3).
L étude de cette modélisation dans sa forme la plus générale (2.13) fera l objet
de la section 3 et on examinera ici, d abord, le cas particulier où A (x,t)=0et
t (x,t)=-p (x,t) 1l , ∀x ∈ Ωt ,soit:
p(i)(ˆ
U)=p (x,t) tr (grad ˆ
U (x)) = p (x,t)div ˆ
U (x)
(2.14)
et
∀S ⊂S, P (i)(ˆ
U)= Ω
t p(x,t) div ˆ
U(x)dΩt .
(2.15)
(3)Le signe moins dans cette formule est cohérent avec l expression classique des équations de
la dynamique ( 3.3) et la convention de signe sur les contraintes (chapitre VI, 2.3).
2 Modélisation des efforts intérieurs par unchampscalaire : la pression
197
Cette expression de la puissance virtuelle des efforts intérieurs véri e la loi des
actions mutuelles :
∀S ⊂S, ∀ˆ
U m.v.r. pour S , P (i)(ˆ
U)=0
(2.16)
puisque ˆ
Um.v.r.⇒divˆ
U(x)≡0.
Dans cette modélisation les efforts intérieurs sont donc modélisés par le champ
scalaire p sur Ωt.
2.4 Équations de la dynamique
Il reste à examiner les implications de l autre proposition contenue dans le principe
des puissances virtuelles :
∀S ⊂S, ∀ˆ
U m.v. , P (e)(ˆ
U)+P (i)( ˆ
U)=A ( ˆ
U),
(2.17)
qui s écrit ici :
∀S ⊂S, ∀ˆ
Um.v.,
Ω
t ρ(x,t)F (x,t) . ˆ
U(x)dΩt + ∂Ω
t TΩ (x,t). ˆ
U(x)da + Ω
t p(x,t) div ˆ
U(x)dΩt
= Ω
t ρ(x,t)a(x,t) . ˆ
U(x)dΩt .
(2.18)
En supposant la continuité, et la continue différentiabilité par morceaux, du champ
scalaire p et compte tenu de la continuité et de la continue différentiabilité du champ
ˆ
U ,ona:
p(x,t) div ˆ
U(x)=div (p(x,t) ˆ
U(x)) - ˆ
U(x) . grad p(x,t)
(2.19)
que l on peut substituer dans (2.18) où, par application du théorème de la divergence,
ilvient:
∀S ⊂S, ∀ˆ
Um.v.,
Ω
t ( - grad p(x,t)+ρ(x,t)(F (x,t) - a(x,t))) . ˆ
U(x)dΩt
+ ∂Ω
t (T Ω (x,t)+p(x,t)n(x)) . ˆ
U(x)da =0.
(2.20)
Cette dernière formule est d exploitation commode selon la démarche de duali-
sation exposée au chapitre IV. Elle se compose d une intégrale de volume et d une
intégrale au contour où chacun des intégrandes apparaît comme le produit scalaire
d un cofacteur vectoriel par ˆ
U(x).Lechamp ˆ
U yestarbitraire continu etcontinûment
différentiable sur Ωt .
Considérant l équation (2.20) écrite pour le système S on s appuie sur le caractère
arbitraire du champ ˆ
U continu et continûment différentiable. On démontre d abord
198
Chapitre V Modélisation des efforts pour le milieu continu
quesurΩtona:
∀x∈Ωt
-grad p(x,t)+ρ(x,t)(F (x,t) - a(x,t)) =0
(2.21)
puis, compte tenu de (2.21), on a sur ∂Ωt :
∀x∈∂Ωt
p(x,t)n(x)=-T Ω(x,t)
(2.22)
en supposant ici et dans toute la suite la régularité des frontières ∂Ωt et ∂Ω t (la
régularité par morceaux estégalement acceptable).
Considérant ensuite S ,sous-système quelconque de S,onobtient par les mêmes
arguments, sur ∂Ω t(4) :
∀Ω t ,∀x∈∂Ω t
T Ω (x,t)=-p(x,t) n(x)
(2.23)
Ce sont les équations de ladyn
a
miqu
epour un système dont les efforts inté-
rieurs sont modélisés par un champ scalaire p selon la formule (2.15).
Cohérence du modèle et interprétation physique
Équations de champ
L équation (2.21) représente trois équations de champ ,équationsaux dérivées
partielles du premier ordre, pour le champ scalaire p sur Ωt.
Elle montre que la modélisation des efforts intérieurs par un champ scalaire selon
(2.15) est mécaniquement cohérente avec les efforts extérieurs donnés dans S sous la
forme de densité massique (ou volumique), à la condition que le champ ρ(F - a) soit
irrotationnel :
rot(ρ(F - a)) =0sur Ωt .
(2.24)
Condition aux limites
L équation au contour (2.22) fournit la condition aux limites pour le champ scalaire
p sur le bord ∂Ωt du système S.
(4)La mise en œuvre sur Ω t du même raisonnement que sur Ωt n apporte aucune information sup-
plémentaire. Ceci est évidemment lié aux hypothèses cohérentes concernant les densités volumiques
de forces extérieures et de puissance virtuelle des efforts intérieurs qui sont supposées indépendantes
de S .
2 Modélisation des efforts intérieurs par unchampscalaire : la pression
199
Elle montre que la modélisation des efforts intérieurs par le champ scalaire p selon
(2.15) est mécaniquement cohérente avec des efforts extérieurs donnés sur la frontière
de S par une densité surfacique de forces, à la condition que cette densité soit normale
au contour ∂Ωt :lafo
r
c
eextérieure élémentaire exercée sur l élément de surface da
de normale (sortante) n(x) au point M de ∂Ωt doit donc être de la forme
dfΩ = TΩ(x,t) n(x)da = TΩ(x,t)da
(2.25)
qui xe la condition aux limites pour le champ p sur ∂Ωt :
p(x,t)=-TΩ(x,t) sur ∂Ωt .
(2.26)
On remarque de plus que les équations(2.21) et (2.26) impliquent que, sur ∂Ωt,
l équation (2.27) de compatibilité des données au contour avec les équations de champ
soit satisfaite :
∀P ∈ ∂Ωt , ∀Q ∈ ∂Ωt ,TΩ(Q)- TΩ(P)+ ˆ
PQρ(F - a).dM =0
(2.27)
où˜
PQ est un arc quelconque joignant P à Q,tracédans Ωt ou sur ∂Ωt.
Efforts extérieurs surfaciques sur un sous-système
La signi cation de l équation au contour (2.23) est différente. Cette équation dé-
termine, sur le bord ∂Ω t d un sous-système S quelconque, la densité surfacique de
forces extérieures T Ω (x,t) : celle-ci est obtenue à partir du champ des efforts inté-
rieurs dans S (et elle s identi e évidemment à T Ω(x,t) sur les éventuelles parties de
∂Ω t en coïncidence avec ∂Ωt).
Elle révèle la cohérence entre les formes choisies a priori(5) pour les efforts exté-
rieurs à S et les efforts intérieurs à S,maiselle a, en outre, des conséquences physiques
importantes.
Elle montre que T Ω (x,t) est normal à ∂Ω t au point x.
Elle montre surtout que T Ω (x,t) ne dépend que du point x sur ∂Ω t et de la
normale n(x) en ce point à ∂Ω t.Celasigni e que T Ω (x,t) ne dépend de Ω t qu à
travers sa normale n(x) et l on écrira ainsi :
T Ω (x,t)=T (x,t,n(x)) sur ∂Ω t .
(2.28)
En conséquence la force extérieure élémentaire exercée sur l élément de surface da
de normale n(x) au point x de ∂Ω t,quie
stdf Ω donnée par (2.8), se révèle indé-
pendante du sous-système S considéré tangent à da avec n(x) normale extérieure :
df Ω =df = T (x,t,n(x)) da = -p(x,t)da .
(2.29)
L interprétation physique de ce résultat est que la force de surface élémentaire df
ne dépend de S et de (S-S ) que localement à travers x, da et n(x).Elle correspond
(5)Il faut se garder d une fausse naïveté. Comme on l a dit, la structuration stricte du tableau du
chapitre IV (section 4) a un objectif didactique : les choix des formes des puissances virtuelles des
efforts extérieurs et intérieurs ne sont pas effectués en aveugle.
200
Chapitre V Modélisation des efforts pour le milieu continu
àlam
odélisation d actions exercées localement par l extérieur sur S ,c
e
st-à-dire
d actions de contact exercées par (S-S ) sur S .
En conclusion, les particules du système S n exercent les unes sur les autres que des
actions de contact : ce sont les efforts intérieurs au système S .Lesefforts extérieurs
surfaciques au contour d un sous-système S quelconque sont le résultat de ces actions
de contact exercées, sur ∂Ω t ,parlesparticules de (S-S ) sur les particules de S .
Ceci conduit à l interprétation physique du champ p lui-même : le champ p qui
modélise les efforts intérieurs traduit les actions de contact entre les particules de S.
2.5 Pertinence du modèle : champ de pression
Figure 3 Efforts extérieurs au contour d un sous-système in nitésimal
On peut poursuivre l identi cation physique du modèle en s appuyant sur la for-
mule (2.23). On y voit que tout sous-système S de S est, dans le cadre de ce modèle,
soumis à son contour à une densité surfacique d efforts extérieurs purement normale .
Si l on imagine que S correspond à un volume in nitésimal entourant un point M ,
la valeur algébrique de cette densité est, en première approximation constante sur le
contour ∂Ω t et égale à -p(x,t) ( gure 3).
On reconnaît là la notion de pression dont la présentation classique part de la
formule (2.23) posée comme principe.
La gure 4 rappelle schématiquement la démonstration des équations de la dy-
namique (2.21) dans cette présentation : en utilisant des coordonnées cartésiennes
orthonormées par exemple, on écrit la loi fondamentale de la dynamique (1.2) pour
un volume parallélépipédique in nitésimal orienté suivant les axes. Ceci correspond
au raisonnement analytique fondé sur la continuité, appliqué à la première intégrale
de (2.20) pour obtenir (2.21) par la méthode des puissances virtuelles.
Du point de vue physique, cette modélisation des efforts intérieurs par un champ
de pression se révèle pertinente pour l étude des uides parfaits ,c est-à-dire dé-
pourvus de viscosité.
Pour les uides visqueux ,elle est valable pour l étude des problèmes d équilibre :
les équations (2.21 avec a(x,t) ≡ 0) ,(2.22) et (2.23) sont ainsi les équations de la
statique des uides .
2 Modélisation des efforts intérieurs par unchampscalaire : la pression
201
Parcontre elle ne permet pas l étude générale des milieux continus (cf. 3.1).
Figure 4 Schéma de la démonstration classique des équations de la dynamique
2.6 Loi fondamentale de la dynamique
La modélisation mécaniquement cohérente construite ici véri e évidemment la loi fondamen-
tale de la dynamique (1.2) comme on l a établi au chapitre IV ( 6.3). On peut d ailleurs
s en assurer directement à partir des expressions (2.3) et (2.11) des éléments de réduction de
[MA ] et [F
e] ;e
npr
océdant aux intégrations compte tenu de (2.21), (2.22) ou (2.23) et en
remarquant que Ω t
-grad p(x,t)dΩt = Ω t
- div (p(x,t)1l) dΩt = ∂Ω t
-p(x,t)n(x)da
(2.30)
on retrouve bien : F e = A et C 0 =δ 0.
2.7 Champ de vitesse virtuel discontinu
L application de la méthode des puissances virtuelles au système S et à tout sous-système S ,
en considérant les mouvements virtuels dé nis par des champs de vitesse virtuels continus
et continûment différentiables, a permis d établir les équations (2.21) à (2.23) à partir de
l écriture (2.18) pour la formule fondamentale (2.17) :
∀S ⊂S, ∀ˆ
U m.v. P (e)(ˆ
U)+P (i)(ˆ
U)=A (ˆ
U).
Àpa
rtirde
srés
ultats ainsi acquis concernant la modélisation des efforts intérieurs par un
champ scalaire p,onseproposed étendre l écriture du principe des puissances virtuelles au
cas où l on considère des mouvements virtuels dé nis par des champs de vitesse virtuels conti-
nus et continûment différentiables par m orceaux en supposant la continuité ,etlacontinue
dérivabilité par morceaux, du champ p.
Soit, à titre d exemple, un champ de vitesse virtuel ˆ
U ,contin
uetcontinûment différentiable
sur deux volumes Ω 1 et Ω 2 complémentairesdansΩt ,etdiscontinu au franchissement de la
surface Σ ˆ
U frontière entre Ω 1 et Ω 2 ( gure 5).
Le principe des puissances virtuelles peut être appliqué séparément sur chacun des deux
sous-systèmes S 1 et S 2 de volumes respectifs Ω 1 et Ω 2 .
• Ainsi pour S 1 ,ondécompose la frontière, ∂Ω 1 de Ω 1 en deux parties complémentaires :
d une part, Σ 1 ,identique à la surface Σ ˆ
U ,etorientéetransversalement par la normale sortante
n1àΩ 1;
d autre part, ∂Ω t1 partie commune aux frontières ∂Ω 1 de Ω 1 et ∂Ωt de Ωt .
202
Chapitre V Modélisation des efforts pour le milieu continu
Figure 5 Champ de vitesse virtuel discontinu au franchissement de Σ ˆ
U
La formule (2.17) s explicite alors en :
Ω 1
ρ(x,t)F (x,t) . ˆ
U(x)dΩt + ∂Ω t1
TΩ 1(x,t). ˆ
U(x)da + Σ ˆ
U
TΩ 1(x,t). ˆ
U 1(x)da
+ Ω 1
p(x,t)div ˆ
U(x)dΩt = Ω 1
ρ(x,t)a(x,t) . ˆ
U(x)dΩt
(2.31)
oùˆ
U 1(x) désigne la vitesse virtuelle au point M de Σ ˆ
U considéré comme appartenant à S 1 .
• On procède de la même manière pour S 2 ,enremarquant que, en un même point M de Σ ˆ
U,
ona:
n2(x)=-n1(x)
on obtient :
Ω 2
ρ(x,t)F (x,t) . ˆ
U(x)dΩt + ∂Ω t2
TΩ 2(x,t). ˆ
U(x)da + Σ ˆ
U
TΩ 2(x,t). ˆ
U 2(x)da
+ Ω 2
p(x,t)div ˆ
U(x)dΩt = Ω 2
ρ(x,t)a(x,t) . ˆ
U(x)dΩt .
(2.32)
• En appliquant l équation (2.23) sur Σ ˆ
Uona:
T Ω 1 (x,t)=-T Ω 2 (x,t)=-p(x,t)n1(x) .
La même équation (2.23) montre que sur ∂Ω t1 on a T Ω 1 (x,t)=T Ω(x,t) et sur ∂Ω t2 on a
T Ω 2 (x,t)=T Ω(x,t) .
• On obtient alors, en additionnant (2.31) et (2.32), la formule :
Ωt
ρ(x,t)F (x,t) . ˆ
U(x)dΩt + ∂Ωt T Ω(x,t). ˆ
U(x)da
+ Ωt
p(x,t)div ˆ
U(x)dΩt + Σ ˆ
U
p(x,t)[[ ˆ
U(x)]].n(x)da = Ωt
ρ(x,t)a(x,t) . ˆ
U(x)dΩt
(2.33)
dans laquelle, pour l intégrale sur Σ ˆ
U,o
ndésigne par n(x) une normale à Σ ˆ
UenMetpar
[[ˆ
U(x)]] la discontinuité de ˆ
U(x) en M ,aufranchissement de Σ ˆ
Udansle sensde n(x):
[[ˆ
U(x)]]= ˆ
U2(x)- ˆ
U1(x) .
(2.34)
3 Modélisation des efforts intérieurs par un champ tensoriel : lescontraintes 203
Cette démonstration, qui a évidemment une portée générale pour un champ ˆ
U continu et
continûment différentiable par m orceaux quelconque, a ainsi permis d établir le résultat sui-
vant.
Pour un milieu continu dont les efforts intérieurs sont modélisés par un champ scalaire p
(pression), dans le cas d un mouvement virtuel dé ni par un champ de vitesse virtuel ˆ
U
continu et continûment différentiable par morceaux les deux énoncés du principe des puis-
sances virtuelles sont conservés mais le calcul de la puissance virtuelle des efforts intérieurs
doit prendre en compte les discontinuités éventuelles de ˆ
U :lapuissance virtuelle des efforts
intérieurs est obtenue par intégration, sur le volume du système (ou d un sous-système), de
la densité volumique p(x,t)div ˆ
U(x) et par intégration, sur les surfaces de discontinuité Σ ˆ
U
deˆ
U intérieures au volume dusystèm
e(o
ud
u
ns
o
u
s
-
systèm
e),deladensité surfacique
égale à :
p(x,t)[[ ˆ
U(x)]].n(x)
(2.35)
c est-à-dire que l on a pour S,etpou
rtout sous-système S :
P (i)(ˆ
U)= Ω t
p(x,t)div ˆ
U(x)dΩt + Σ ˆ
U ∩Ω t
p(x,t)[[ ˆ
U(x)]].n(x)da
(2.36)
On remarquera que la formule (2.36) s interprète dans le cadre de la théorie des distribu-
tions ,c
o
mme l intégrale de la densité volumique (2.15) où la divergence du champ ˆ
U est
prise au sens des distributions (cf. chapitre III, formule (4.35)).
On rappelle que la démonstration ci-dessus et le résultat correspondant exprimé par (2.36)
supposent la continuité du champ de pression p sur les surfaces Σ ˆ
U (cf. 3.9).
3M
odélisation des efforts intérieurs par un champ
tensoriel :
les contraintes
3.1 Mouvements virtuels. Puissances virtuelles des quantités
d accélération et des efforts extérieurs
La modélisation des efforts intérieurs construite dans la sectionprécédente se ré-
vèle, on l a dit, insuffisante pour l étude de la dynamique des milieux continus hormis
les uides parfaits ou la statique des uides. Un exemple simple suffit à illustrer ce
propos : celui de l équilibre d un solide de forme cylindrique, reposant par sa base sur
une surface plane horizontale, soumis à la seule action de la pesanteur et de la pres-
sion atmosphérique, et aux réactions de son appui ( gure 6). En effet, l intégration
de l équation de champ (2.21) à partir de la condition aux limites (2.22) écrite sur la
face supérieure (z =0)conduit à la distribution dite hydrostatique de p dans le
solide, p = pa - ρgz,quiestévidemment incompatible avec la condition aux limites
(2.22) écrite sur la surface latérale du cylindre ; ceci illustre le fait que la condition
(2.27) n est pas véri ée par les données.
204
Chapitre V Modélisation des efforts pour le milieu continu
Figure 6 Équilibre d un solide pesant
L objet de la présente section est, considérant le même espace de mouvements
virtuels et la même modélisation des efforts extérieurs à travers leur puissance virtuelle
que ceux utilisés aux paragraphes 2.1 et 2.2, par le choix d une forme plus élaborée
pour la puissance virtuelle des efforts intérieurs, d aboutir à une modélisation de ceux-
ci qui présente plus de degrés de liberté pour permettre l étude générale des milieux
continus classiques . Cette modélisation devra inclure, comme cas particulier, celle
présentée dans la section 2, dont la pertinence est avérée dans certains cas.
L espace vectoriel des mouvements virtuels est donc encore dé ni par les champs
de vitesse virtuels ˆ
U continus et continûment différentiables.
L expression (2.2) de la puissance virtuelle des quantités d accélérationest conser-
vée.
Les effortse
x
térie
u
r
ss
o
n
te
n
c
o
r
em
odélisés par la densité massique de forces
F (x,t),s
upposée indépendante de la partition de S selon (2.7), et par les densités
surfaciques de forces T Ω(x,t) sur ∂Ωt pour S et T Ω (x,t) sur ∂Ω t pour S .Lapuis-
sance virtuelle des efforts extérieurs conserve les expressions (2.6) pour P(e)( ˆ
U) et
(2.9) pour P (e)( ˆ
U).
3.2 Puissance virtuelle des efforts intérieurs
Poursuivant l idée mise en œuvre au paragraphe 2.3 on fait l hypothèse que la
forme linéaire continue, fonctionnelle de ˆ
U ,quie
xprime la puissance virtuelle des
efforts intérieurs pour un sous-système quelconque S de S se met sous la forme
(2.12), intégrale d une densité volumique p(i)( ˆ
U) indépendante de S .Co
mme
annoncé alors on écrit maintenant p(i)( ˆ
U) ,sousforme linéaire en ˆ
Uetgradˆ
U(x) ,de
la façon la plus générale soit :
p(i)( ˆ
U)=A(x, t). ˆ
U(x) - t(x,t):grad ˆ
U(x) .
(3.1)
En adoptant les notations du chapitre III (formules (3.9) et (3.21)), et la termi-
nologie correspondante pour le champ de vitesse virtuel ˆ
U,o
nintr
oduit les parties
3 Modélisation des efforts intérieurs par un champ tensoriel : lescontraintes 205
symétrique et antisymétrique de grad ˆ
U(x) :
ˆd(x)= 1
2 (grad ˆ
U(x)+t grad ˆ
U(x))
(3.2)
ˆ
Ω(x)= 1
2 (grad ˆ
U(x) -tgrad ˆ
U(x))
(3.3)
que l on appellera respectivement taux de déformation et taux de rotation vir-
tuels au point M dans le champ ˆ
U .Ladensitép(i)( ˆ
U) s explicite alors sous la forme :
p(i)( ˆ
U)=A(x,t) . ˆ
U(x) - α(x,t): ˆ
Ω(x) - σ(x,t):ˆd(x)
(3.4)
où α(x,t) et σ(x,t) désignent respectivement les parties antisymétrique et symétrique
de t(x,t).
La loi des actions mutuelles (1.1) impose depréciser cette expression. Pour
cela il convient d identi er, pour un sous-système S quelconque de S,letorseur des
efforts intérieurs [F i] qui correspond à la densité p(i)( ˆ
U) donnée par (3.1)o
u(3.4).
On procède, comme on l a indiqué au chapitre IV ( 6.2), en considérant l espace
vectoriel des mouvements rigidi ants dé nis par les distributeurs { ˆ
D}={O, ˆ
U0, ˆ
ω0}
arbitraires.
Dans un tel mouvement on a, sur Ωt : ˆd(x)=0, ˆ
Ω(x)= ˆ
ω0,∀x∈Ωt,oùˆ
ω0 est
le tenseur antisymétrique associé au vecteur ˆ
ω0(6).Ile
nrés
ulte
,pa
r(2.12) et (3.4),
pour identi er [F i], l équation :
∀Ω t⊂Ωt,∀{ˆ
D}
(3.5)
[F i].{ˆ
D}= ˆ
U 0 . Ωt A(x,t)dΩt +ˆ
ω0 : Ωt(x ⊗A(x,t)- α(x,t))dΩt .
La loi des actions mutuelles impose alors que :
∀Ω t ⊂Ωt , Ω
t A(x,t)dΩt =0,
(3.6)
d où la nullité du champ A sur Ωt puis, α(x,t) étant antisymétrique,
∀Ω t ⊂Ωt , Ω
t
α(x,t)dΩt =0
(3.7)
c est-à-dire la nullité du champ α sur Ωt .Letenseu
rt(x,t) est donc nécessairement
symétrique .
L expression la plus générale de p(i)( ˆ
U) comme forme linéaire de ˆ
U(x) et grad ˆ
U(x)
respectant le principe des puissances virtuelles s écrit :
p(i)( ˆ
U)=-σ(x,t):grad ˆ
U(x)
σ(x,t) symétrique
(3.8)
(6)Cf. chapitre III, 3.5.
206
Chapitre V Modélisation des efforts pour le milieu continu
égale aussi à :
p(i)( ˆ
U)=-σ(x,t):ˆd(x) .
(3.9)
Les effortsintérie
u
r
ss
o
ntm
odélisés par un champ de tenseurs
euclidiens du deuxième ordre, symétriques (7).
3.3 Équations de la dynamique
La forme (3.8) ayant été adoptée pour la densité de puissance virtuelle des efforts
intérieurs, on se propose maintenant d exploiter la proposition (2.17) du principe des
puissances virtuelles qui devient :
∀S ⊂S, ∀ˆ
Um.v.,
Ω t
ρ(x,t)F (x,t) . ˆ
U(x)dΩt + ∂Ω t T Ω (x,t). ˆ
U(x)da
+ Ω t
-σ(x,t):grad ˆ
U(x)dΩt = Ω t
ρ(x,t)a(x,t) . ˆ
U (x)dΩt .
(3.10)
Le raisonnement mis en œuvre est analogue à celui du paragraphe 2.4 ; il nécessite
d abord la transformation de la troisième intégrale de (3.10).
Pour cela on remarque que, le champ σ étant supposé continu, et continûment
différentiable par morceaux, on a l identité(8) :
-σ(x,t):grad ˆ
U(x)= ˆ
U(x). div tσ(x,t) - div (σ(x,t) . ˆ
U(x)) ,
(3.11)
que l on peut substituer dans (3.10) où, par application du théorème de la divergence,
ilvient:
∀S ⊂S, ∀ˆ
Um.v.,
Ω
t ( div tσ(x,t)+ρ(x,t)(F (x,t) - a(x,t)) . ˆ
U(x)dΩt
+ ∂Ω
t (T Ω (x,t) - n(x) .σ(x,t)) . ˆ
U(x)da =0.
(3.12)
Cette équation a une structure comparable à l équation (2.20), qui permet de tirer
parti du caractère arbitraire du champ ˆ
U continu et continûment différentiable sur
Ωt en se plaçant du point de vue de la dualité. On rappelle que ∂Ωt et ∂Ω t sont
supposées régulières ( 2.4).
(7)Cette représentation contient évidemment celle de la section 2 à laquelle correspond le champ σ
isotrope dé ni par : σ(x,t)=-p(x,t) 1l sur Ωt .
(8)Ona:grad(σ. ˆ
U)=σ . grad ˆ
U+ˆ
U.gradtσd où:div(σ. ˆ
U)=σ :grad ˆ
U+ˆ
U.div tσ.
3 Modélisation des efforts intérieurs par un champ tensoriel : lescontraintes 207
Considérant le système S on démontre d abord que sur Ωt on a, compte tenu de
la symétrie de σ :
∀x∈Ωt,
div σ(x,t)+ρ(x,t)(F (x,t) - a(x,t)) =0
(3.13)
puis, compte tenu de (3.13) et de la symétrie de σ ,onasur∂Ωt :
∀x∈∂Ωt,
σ(x,t) .n(x)=T Ω(x,t)
(3.14)
Considérant ensuite S ,s
o
u
s
-
système quelconque de S,o
nobtie
ntde même, sur
∂Ω t(9) :
∀Ω t,∀x∈∂Ω t,
T Ω (x,t)=σ(x,t) .n(x)
(3.15)
Ce sont les équations de ladyn
a
miqu
epour un système dont les efforts inté-
rieurs sont modélisés par un champ tensoriel du deuxième ordre σ selon la formule
(3.8).
3.4 Commentaires
Ces équations appellent évidemment des commentaires, dont certains sont proches
de ceux déjà faits au paragraphe 2.4 : ils ne seront alors que brièvement repris.
Équations de champ
Les équations de champ pour cette modélisation des efforts intérieurs par un champ
tensoriel sont constituées :
• de l équation(3.8) où est imposée la symétrie de σ(x,t),
• des trois équations aux dérivées partielles du premier ordre représentées par l équa-
tion (3.13), pour les six fonctions scalaires, composantes indépendantes du champ
tensoriel symétrique σ.
On remarque que la situation est très différente de celle correspondant à (2.21) où
l on avait obtenu trois équations aux dérivées partielles pour la seule fonction scalaire
p.
(9)Même remarque qu au paragraphe 2.4 à propos de l exploitation de l équation (2.20).
208
Chapitre V Modélisation des efforts pour le milieu continu
Il apparaît aussi que la modélisation des efforts intérieurs par le champ tensoriel σ
est cohérente avec des efforts extérieurs donnés par une densité massique, sans aucune
restriction sur les champs de forces de masse et de forces d inertie.
Conditions aux limites
L équation au contour (3.14) fournit les conditions aux limites pour le champ
tensoriel symétrique σ sur la frontière ∂Ωt du système S.
On y voit la cohérence de la modélisation avec des efforts extérieurs donnés au
contour de S par une densité surfacique de forces, sans aucune restriction sur ces
données : T Ω(x,t) peut être quelconque sur ∂Ωt.
La compatibilité des données au contour avec les équations de champ s exprime
par la loi fondamentale de la dynamique pour S établie au chapitre IV ( 6.3) : [Fe]=
[MA].
Efforts extérieurs surfaciques sur un sous-système
C est l équation au contour (3.15) qui détermine la densité surfacique de forces
extérieures T Ω (x,t) au bord d un sous-système quelconque S de S,àpa
r
tir du
champ des efforts intérieurs dans S.Onyr
etr
o
u
v
equ
eT Ω (x,t) ne dépend de Ω t
qu à travers la normale n(x) et l on écrira ainsi, à nouveau :
T Ω (x,t)=T (x,t,n(x)) .
(3.16)
La force extérieure élémentaire sur l élément de surface da de normale sortante
n(x) au point x de ∂Ω t est indépendante du sous-système considéré ( gure 7) :
df Ω =df = T (x,t,n(x)) da = σ(x,t) .n(x)da = σ(x,t) . da .
(3.17)
L interprétation physique de ce résultat est identique à celle donnée au paragraphe
2.4 : df correspond à la modélisation d actions exercées localement par l extérieur
sur S ,c est-à-dire à la modélisation des actions de contact exercées par (S-S )
sur S .
Ainsi, les particules de S n exercent les unes sur les autres que des actions de
contact : ce sont les effortsintérie
u
r
sa
usystèm
eS .Auc
o
nto
u
rd un sous-système
S quelconque, les efforts extérieurs surfaciques sont le résultatdeces actions de
contact exercées sur les particules in niment voisines de ∂Ω t à l intérieur de S par
les particules in niment voisines de ∂Ω t à l extérieur de S .
Le champ tensoriel symétrique σ qui modélise les efforts intérieurs, traduit les
actionsde contact entre les particules de S.
Loi fondamentale de la dynamique
La modélisation qui vient ainsi d être établie en s appuyant sur le principe des puissances
virtuelles véri e par construction la loi fondamentale de la dynamique (1.2), comme cela
aétédémontréde façon générale au chapitre IV ( 6.3). La véri cation directe de ce résultat
peut aussi être faite en calculant les éléments de réduction de [F
e] et [MA ] àpa
rtirde
s
expressions (2.3) et (2.11) : en procédant aux intégrations correspondantes compte tenu de
3 Modélisation des efforts intérieurs par un champ tensoriel : lescontraintes 209
(3.13) et (3.15) on retrouve aisément, en appliquant la formule de la divergence, que F e = A ;
la véri cation de C 0 = δ 0 se révèle plus laborieuse : une méthode élégante, souvent utilisée,
consiste à véri er que ∀ˆ
ω0onaˆ
ω0 .C 0 =ˆ
ω0 .δ 0 ce quifacilite l application de la formule
de la divergence (on rejoint ainsi, en fait, la démonstration générale donnée au chapitre IV
( 6.3)).
Un bilan ...
Ainsi, dans le même esprit qui avait conduit à la notion de pression, on a construit
une modélisation des efforts intérieurs dont les degrés de liberté permettent de lever
les restrictions qui rendaient la modélisation pression insuffisante pour l étude
générale des milieux continus classiques. Ceci est bien conforme à l objectif que l on
s était xé initialement.
Il est clair que cette libération de la modélisation est apportée par le caractère
tensoriel de σ (cf. 3.5).
... et quelques remarques.
On a véri é ci-dessus la cohérence de la modélisation avec des efforts extérieurs
donnés sous forme de forces volumiques (ou plus couramment, massiques) sur Ωt et
de forces surfaciques sur ∂Ωt.Onv
e
rra au paragraphe 3.9 qu elle permet également
d envisager des densités surfaciques de forces extérieures données à l intérieur de Ωt
et l on établira les équations correspondantes. Par contre elle n est pas directement
compatible avec la donnée d efforts extérieurs sous la forme de densités de forces
linéiques ou ponctuelles : il est alors nécessaire d introduire des singularités du champ
σ.
Ce contrôle (annoncé au chapitre IV, 4.1 et 4.2) de la cohérence mathématique des écri-
tures proposées pour les formes linéaires P(e)( ˆ
U), P (e)(ˆ
U), P(i)(ˆ
U) et P (i)(ˆ
U ) ,c est-à-dire,
en fait, de la cohérence physique des modélisations proposées pour les efforts extérieurs et
intérieurs pour le système et pour ses sous-systèmes, est rendu nécessaire par le mode de
présentation adopté ici. On a souhaité en effet mettre en évidence les rôles de l intuition
physique dans la mise en œuvre de la méthode des puissances virtuelles. Cela a conduit à
l introduction d hypothèses surabondantes du point de vue mathématique, qui doivent se
révéler redondantes, c est-à-dire physiquement cohérentes.
Il est clair, a posteriori, qu il suffirait par exemple de poser, de façon axiomatique, l écri-
ture intégrale (2.12) pour la puissance virtuelle des efforts intérieurs, qui postule l existence
d une densité volumique de puissance virtuelle des efforts intérieurs indépendante du sous-
système considéré ,a
v
e
cl expression (3.4) pour cette densité. Le principe des puissances
virtuelles impose d abord la forme (3.9) qui détermine la modélisation des efforts intérieurs.
Ensuite, par les raisonnements du paragraphe 3.3, il permet de montrer que la seule modéli-
sation des efforts extérieurs, compatible avec la modélisation posée pour les efforts intérieurs,
est constituée d une densité de forces volumiques indépendante du sous-système considéré (il
n y a donc pas d interaction à distance entre les particules du système : conséquence directe
de (2.12)), et d une densité de forces surfaciques sur la frontière de S .Pourunsous-système
S quelconque, le principe des puissances virtuelles fait en n apparaître, outre les forces vo-
lumiques, des forces surfaciques au contour qui résultent des seules actions locales de contact
de (S-S ) sur S et qui ne dépendent que des éléments différentiels du premier ordre de
la frontière de S c est-à-dire de da = n(x)da (en particulier, elles ne dépendent pas de la
courbure, 3.5).
210
Chapitre V Modélisation des efforts pour le milieu continu
3.5 Tenseur des contraintes de Cauchy. Vecteur-contrainte
Tenseur des contraintes
Le champ tensoriel du deuxième ordre, nécessairement symétrique, introduit ici
pour modéliser les efforts intérieurs, est appelé champ des tenseurs des contraintes
de Cauchy .Ilest,comme tout ce qui a été mis en œuvre jusqu ici dans l application
du principe des puissances virtuelles, dé ni sur la con guration actuelle κt.La
section 4 examinera les possibilités de représentations lagrangiennes.
On voit que cette modélisation tensorielle est celle qui est naturellement
associée à la description qui a été donnée auchapitre III pour la cinématique des dé-
formations réelles du milieu continu tridimensionnel, à partir du gradient du champ
de vitesse : le principe des puissances virtuelles, qui impose la symétrie du tenseur
des contraintes de Cauchy, met en évidence que seul le tenseur taux de déforma-
tion virtuel , doit intervenir dans l expression de la puissance virtuelle des efforts
intérieurs.
On peut revenir sur l interprétation physique du modèle à partir de la formule
(3.15) déjà abordée auparagraphe précédent.
Ve c t e u r-contrainte
Figure 7 Efforts extérieurs au contour d un sous-système. Dé nition du vecteur-
contrainte
En chaque point M intérieur audomaine Ωt ,laformule(3.17) détermine la force
élémentaire df qui s exerce sur l élément d aire da orienté transversalement par la
normale n(x):df = σ(x,t) .n(x)da.Cette force df ,quir
eprésente les actions
locales de contact en M sur n importe quel sous-système S qui y admet n(x) pour
normale sortante, est exercée sur les particules de S in niment voisines de da du côté
intérieur parlesparticules de S in niment voisines de da du côté extérieur .
Ainsi, du point de vue des efforts extérieurs surfaciques le concept de sous-système
n a plus qu un caractère local et il est pertinent de ne se référer qu à l élément d aire
orienté transversalement, qui reçoit le nom de facette orientée par la normale
n(x) en M ( gure 7).
3 Modélisation des efforts intérieurs par un champ tensoriel : lescontraintes 211
Sur cette facette, la densité surfacique d efforts extérieurs est donnée par le vecteur
T (x,t,n(x)) = σ(x,t) .n(x)
(3.18)
qui est appelé vecteur-contrainte en M sur la facette de normale n(x) .
L équation (3.18) exprime que le vecteur-contrainte en M sur une facette
dépend linéairement de l orientation de celle-ci : le tenseurdesc
ontr
aintes
de Cauchy explicite cette dépendance .
Interprétation physique de la modélisation
Comme on l a expliqué plus haut ( 3.4), les efforts extérieurs surfaciques sur S
sont le résultat sur ∂Ω t des effortsintérieursausystèmeS .Ainsi,levecteur-contrainte
(de Cauchy) T (x,t, n(x)) apparaît comme la vision physique concrète de la
modélisation construite pour les efforts intérieurs.
En chaque point M de S les efforts intérieurs ne résultent que d actions de
contact entre les particules. Ils y sont décrits par l ensemble des vecteurs-contraintes
T (x,t, n(x)) agissant sur toutes les facettes passant par M .Enraisondelalinéarité
manifestée par(3.18), ils sont décrits en M par le tenseur des contraintes de Cauchy
σ(x,t) symétrique, c est-à-dire par six composantes scalaires.
Vecteur-contrainte au contour de S
La dé nition (3.18) du vecteur-contrainte en un point M intérieur à Ωt s applique
aussi sur la frontière ∂Ωt :àpartirde la connaissance de σ(x,t) au point M de ∂Ωt on
dé nit, pour toute orientation n(x) ,lev
ecteur T (x,t,n(x)) par cette même formule
(3.18).
Figure 8 Vecteur-contrainte au contour de S
La condition aux limites fournie par l équation au contour (3.14) s écrit alors
T (x,t,n(x)) = T Ω(x,t) sur ∂Ωt ,
(3.19)
c est-à-dire que, sur ∂Ωt,levecteur-contrainte est égal à la densité de forces surfaciques
extérieures exercées sur le système.
Àtitred interprétation physique de ce résultat ( gure 8), on peut remarquer que
(3.19) s écrit aussi : T Ω(x,t)+T (x,t,-n(x)) = 0 .L élément d aire da est en équilibre
212
Chapitre V Modélisation des efforts pour le milieu continu
sous l action d une part de la densité de forces surfaciques extérieures et d autre part
de la densité surfacique des efforts intérieurs de contact exercés sur la facette de
normale -n(x) .
Interprétation des composantes du tenseur des contraintes
Poursuivant l interprétation physique de la modélisation des efforts intérieurs au
moyen du champ de tenseur des contraintes de Cauchy, on recherche maintenant la
signi cation des composantes de σ(x,t) .Celle-ci apparaît à partir de la dé nition du
vecteur-contrainte (3.18).
Figure 9 Interprétation des composantes du tenseur des contraintes en repère ortho-
normé
Si l on choisit ( gure 9) pour représenter σ(x,t) et n(x) en M une base ortho-
normée ,laformule(3.18) donne :
T (x,t,n(x)) = σij(x,t)nj(x) ei = Ti(x,t,n(x)) ei
(3.20)
et l on retiendra :
Ti = σijnj
(3.21)
On en déduit que dans ce cas :
la composante σij(= σji) du tenseur des contraintes de Cauchy re-
présente la composante selon la direction ei du vecteur-contrainte
sur la facette de normale ej .
Ce résultat illustre l apport de la modélisation tensorielle des efforts intérieurs
par rapport à la modélisation scalaire de la pression dans la section 2 : le tenseur
des contraintes(10) σ(x,t) donne à T ((x,t,n(x)) les degrés de liberté qui lui faisaient
défaut dans la modélisation pression (cf. 3.1). C est ce que schématise la comparaison
représentée sur la gure 10 qui met en évidence les six degrés de liberté de σ(x,t)
symétrique vis-à-vis de l unique degré de liberté p (x,t) .
(10)Les contraintes étaient autrefois appelées tensions : c est l origine du mot tenseur .
3 Modélisation des efforts intérieurs par un champ tensoriel : lescontraintes 213
Figure 10 Composantes des vecteurs-contraintes agissant sur trois plans mutuellement
orthogonaux quelconques : champ de contrainte et champ de pression
3.6 Modélisation des efforts intérieurs à un milieu continu à
partir du concept de vecteur-contrainte
On trouve dans le livre célèbre de A.E.H. Love(11) Atreatiseonthe mathematical theory of
elasticity une remarquable introduction historique dont sont extraits les passages suivants.
By the Autumn of 1822 Cauchy had discovered most of the elements of the pure
theory of elasticity. He had introduced the notion of stress at a point determined by
the tractions peru
nitofa
r
e
aa
c
r
o
s
sallplane elements through the point. For this
purpose he had generalized the notion of hydrostatic pressure, and he had shown that
the stress is expressible bym
e
a
n
sofsixc
omponent stresses, and also by means of
three purely normal tractions across a certain triad of planes which cut each other
at right angles the principal planes of stress .
Figure 11 Efforts intérieurs de contact modélisés par le vecteur-contrainte
On se propose ici de dégager les grandes lignes de la construction de la modélisation des efforts
intérieurs à partir du concept de vecteur-contrainte dans l esprit développé par Cauchy.
La gure 11 xe le point de départ de la méthode : on postule qu en un point M quelconque
intérieur au volume Ωt de S,àtraversune surface élémentaire da de normale n(x),lesseuls
efforts intérieurs entre les particules du système sont des efforts de contact ; les efforts exercés
(11) A.E.H. Love (1863-1940).
214
Chapitre V Modélisation des efforts pour le milieu continu
par les particules in niment voisines de da du côté ⊕ surles particules in niment voisines
de da du côté sont supposés modélisables par une force élémentaire T da appliquée en
M (en première approximation).
On démontre alors la dépendance linéaire de T en fonction de n(x) par le raisonnement dit
du petit tétraèdre ( gure 12).
Figure 12 Raisonnement du petit tétraèdre
• En base orthonormée on écrit la loi fondamentale (1.2) pour un tétraèdre in nitési-
mal d arêtes MA1 ,MA2 ,MA3 dirigées suivant les vecteurs de base, et de longueurs
dx1 , dx2 , dx3 quelconques. Au deuxième ordre en dxi ,le
sfo
r
ces de volume et les quan-
tités d accélérations n interviennent pas(12) et l on doit seulement écrire l équilibre, du
point de vue de la résultante globale, des efforts au contour c est-à-dire sur les facettes
MA1A2,MA2A3,MA3A1 et A1A2A3.
• Pour cela on introduit les 9 composantes σij des densités surfaciques sur les facettes de
normales respectives e1 ,e2 ,e3 (opposées aux normales sortant du tétraèdre)
MA2A3
σ11 ,σ21 ,σ31
MA3A1
σ12 ,σ22 ,σ32
MA1A2
σ13 ,σ23 ,σ33 .
En appliquant la loi des actions mutuelles ( action-réaction ) et en écrivant l équilibre
de la résultante en projection sur chacun des axes, on obtient, pour les composantes de
la densité surfacique sur A1A2A3 ,lafo
r
m
ule:
Ti = σijnj i,j=1,2,3
où les nj désignent les composantes du vecteur normal à A1A2A3 (sortant du tétraèdre).
On démontre ensuite la symétrie des composantes σij ,etleséquations de la dynamique (3.13)
par le raisonnement dit du petit parallélépipède ( gure 13).
(12)Elles sont du troisième ordre en dxi .
3 Modélisation des efforts intérieurs par un champ tensoriel : lescontraintes 215
Figure 13 Raisonnement du petit parallélépipède
• On considère un parallélépipède in nitésimal, dont les côtés sont parallèles aux vecteurs
d un repère orthonormé, et de longueurs respectives dx1 , dx2 , dx3 ;onécrit la loi fonda-
mentale (1.2).
• Dans l équilibre des moments autour des axes, les premiers termes à prendre en compte
sont du troisième ordre en dxj et ne concernent que les efforts sur les faces du parallélé-
pipède non adjacentes à M ;onendéduit les relations de symétrie
σij = σji i,j=1,2,3.
• Du pointdev
ue de la résultante globale des efforts et des quantités d accélération, le
raisonnement est analogue à celui du paragraphe 2.5 ( gure 4), et les premiers termes
signi catifs sont du troisième ordre en dxi ;àtitre d exemple, selon l axe Ox1 on écrit :
(σ11 + ∂σ11
∂x1 dx1)dx2dx3 - σ11 dx2dx3 +(σ12 + ∂σ12
∂x2 dx2)dx1dx3 - σ12dx1dx3
+(σ13 + ∂σ13
∂x3 dx3)dx1dx2 - σ13 dx1dx2 + ρ(x,t)(F1 - a1)dx1dx2dx3 =0
d où la formule : ∂σ11
∂x1 + ∂σ12
∂x2 + ∂σ13
∂x3 + ρ(x,t)(F1 - a1)=0
qui exprime, en coordonnées cartésiennes orthonormées, la composante d indice 1 de
(3.13).
Le même raisonnement, appliqué à un volume in nitésimal délimité par des surfaces-
coordonnées, permet de retrouver commodément l écriture explicite des formules (3.13) pour
les systèmes de coordonnées cylindriques et sphériques par exemple. Ces formules sont don-
nées au paragraphe suivant.
On ne donnera pas plus de détails sur cette approche ; le lecteur intéressé pourra notamment
se reporter aux ouvrages cités en bibliographie. On remarquera que le raisonnement du petit
tétraèdre correspond au raisonnement analytique de continuité sur l intégrale de surface
dans (3.12), ce qui apparaît notamment par le fait qu y interviennent les termes d ordre 2 en
dxi ;leraisonnement du petit parallélépipède est, lui, associé au raisonnement analytique
de continuité sur l intégrale de volume dans (3.12) (terme d ordre 3 en dxi).
216
Chapitre V Modélisation des efforts pour le milieu continu
3.7 Expressions explicites des équations de la dynamique
On trouvera ci-dessous, en raison de leur utilité fréquente, les formules explicitant
les équations (3.13) dans les cas suivants : coordonnées cartésiennes orthonormées,
coordonnées cylindriques, coordonnées sphériques ; ces trois cas correspondent à des
bases locales orthonormées .
Coordonnées cartésiennes orthonormées
∂σxx
∂x + ∂σxy
∂y + ∂σxz
∂z + ρ(Fx - ax)=0
∂σyx
∂x + ∂σyy
∂y + ∂σyz
∂z + ρ(Fy - ay)=0
∂σzx
∂x + ∂σzy
∂y + ∂σzz
∂z + ρ(Fz - az)=0
(3.22)
Coordonnées cylindriques
∂σrr
∂r +1
r ∂σrθ
∂θ + ∂σrz
∂z +σrr-σθθ
r +ρ(Fr -ar)=0
∂σθr
∂r +1
r ∂σθθ
∂θ + ∂σθz
∂z +2σrθ
r +ρ(Fθ-aθ)=0
∂σzr
∂r +1
r ∂σzθ
∂θ + ∂σzz
∂z +σzr
r +ρ(Fz -az)=0
(3.23)
Figure 14 Élément de volume en coordonnées cylindriques
3 Modélisation des efforts intérieurs par un champ tensoriel : lescontraintes 217
Coordonnées sphériques
∂σrr
∂r +1r∂σrθ
∂θ+1
rsinθ∂σrφ
∂φ + 1r(2σrr - σθθ - σφφ + σrθ cot θ)+ρ(Fr - ar)=0
∂σθr
∂r +1r∂σθθ
∂θ+1
rsinθ∂σθφ
∂φ + 1r((σθθ - σφφ)cot θ +3σrθ) + ρ(Fθ - aθ)=0
∂σφr
∂r +1r∂σφθ
∂θ+1
rsinθ∂σφφ
∂φ + 1r (3σφr +2σφθ cot θ)+ρ(Fφ - aφ)=0
3.8 Champ de vitesse virtuel discontinu
On a considéré, pour la construction de la modélisation par la méthode des puis-
sances virtuelles, l espace vectoriel des mouvements virtuels dé nis par des champs
de vitesse continus et continûment différentiables. La puissance virtuelle des efforts
intérieurs étant alors dé nie par la densité volumique (3.8) on a obtenu les formules
(3.13) à (3.15) qui établissent la modélisation des efforts intérieurs dans un milieu
continu tridimensionnel au moyen du champ de tenseur des contraintes de Cauchy σ .
Ces résultats étant acquis, on se propose, comme au paragraphe 2.7, d exami-
ner l écriture à donner à la puissance virtuelle des efforts intérieurs dans le cas d un
mouvement virtuel dé ni par un champ de vitesse virtuel continu et continûment dif-
férentiable par morceaux ,ensupposant que le champ σ est continu ,etcontinûment
différentiable par morceaux.
Le raisonnement est analogue à celui du paragraphe 2.7 ; les notations et la gure 15 sont
identiques. On considère encore à titre d exemple un champ de vitesse virtuel ˆ
U,c
o
ntin
uet
continûment différentiable sur deux volumes Ω 1 et Ω 2 complémentairesdansΩt ,etdiscontinu
au franchissement de la surface Σ ˆ
U frontière entre Ω 1 et Ω 2 .
Figure 15 Champ de vitesse virtuel discontinu au franchissement de Σ ˆ
U
218
Chapitre V Modélisation des efforts pour le milieu continu
En appliquant le principe des puissances virtuelles sous sa forme (3.10) séparément aux deux
sous-systèmes S 1 et S 2 de volumes respectifs Ω 1 et Ω 2 on obtient les équations :
Ω 1
ρ(x,t)F (x,t) . ˆ
U(x)dΩt + ∂Ω t1
TΩ 1(x,t). ˆ
U(x)da + Σ ˆ
U
TΩ 1(x,t). ˆ
U 1(x)da
+ Ω 1
-σ(x,t):ˆd(x)dΩt = Ω 1
ρ(x,t)a(x,t) . ˆ
U(x)dΩt ,
(3.24)
(3.25) identique à (3.24) en changeant l indice 1 en 2.
Le champ σ étant supposé continu sur Σ ˆ
U on a, par la formule (3.15) :
T Ω 1 (x,t)=σ(x,t) .n1(x)
(3.26)
T Ω 2 (x,t)=σ(x,t) .n2(x) ,
(3.27)
et compte tenu de ce que n1(x)=-n2(x) , on obtient immédiatement, par addition de (3.24)
et (3.25) l expression valable pour le système S globalement :
Ωt
ρ(x,t)F (x,t) . ˆ
U(x)dΩt + ∂Ωt T Ω(x,t). ˆ
U(x)da + Ωt
-σ(x,t):ˆd(x)dΩt +
+ Σ ˆ
U
-[[ ˆ
U(x)]].σ(x,t) .n(x)da = Ωt
ρ(x,t)a(x,t) . ˆ
U(x)dΩt ,
(3.28)
dans laquelle, pour l intégrale sur Σ ˆ
U,o
ndésigne par n(x) une normale à Σ ˆ
UenMetpar
[[ˆ
U(x)]]la discontinuité de ˆ
U(x) en M ,aufranchissement de Σ ˆ
U dans le sens de n(x)=n1(x) :
[[ˆ
U(x)]]= ˆ
U2(x)- ˆ
U1(x) .
La démonstration ci-dessus, qui a évidemment une portée générale pour un champ ˆ
U continu
et continûment différentiable par m orceaux quelconque, établit ainsi le résultat suivant.
Pour un milieu continu dont les efforts intérieurs sont modélisés par le champ
tensoriel du deuxième ordre σ des contraintes de Cauchy, dans le cas d un mouvement
virtuel dé ni par un champ de vitesse virtuel ˆ
U continu et continûment différentiable
par morceau x ,lesdeux énoncés du principe des puissances virtuelles sont conservés
mais le calcul de la puissance virtuelle des efforts intérieurs doit prendre en compte
les discontinuités éventuelles de ˆ
U.
La puissance virtuelle des efforts intérieurs est obtenue par intégration, sur le
volume du système (ou d un sous-système), de la densité volumique :
-σ(x,t):ˆd(x)=-σ(x,t):grad ˆ
U(x)
(3.29)
et par intégration, sur les surfaces de discontinuité Σ ˆ
Udeˆ
U intérieures au volume du
système (ou d un sous-système) d une densité surfacique égale à :
-[[ ˆ
U(x)]].σ(x,t) .n(x)
3 Modélisation des efforts intérieurs par un champ tensoriel : lescontraintes 219
c est-à-dire que l on a pour S et pour tout sous-système S
P (i)( ˆ
U)= Ω
t
-σ(x,t):ˆd(x)dΩt + Σ ˆ
U ∩Ω
t
-[[ ˆ
U(x)]].σ(x,t) .n(x)dΣ ˆ
U
(3.30)
où le champ σ est supposé continu, et continûment différentiable par morceaux. On
verra au paragraphe 3.9 que la validité de cette formule s étend au cas où σ est continu
et continûment différentiable, par morceaux, en l absence d onde de choc sur Σ ˆ
Uce
qui assure la continuité du vecteur-contrainte σ .n au franchissement de Σ ˆ
U.
La formule (3.30) peut être interprétée dans le cadre de la théorie des distributions. L expres-
sion de P (i)( ˆ
U ) n esta
utre que l intégrale Ωt
-σ :grad ˆ
U prise au sens des distributions,
où la distribution grad ˆ
U s explicite en grad ˆ
U={grad ˆ
U}+[[ˆ
U]]⊗nδΣˆ
U avec {grad ˆ
U} la
distribution dé nie par la fonction grad ˆ
UetδΣˆ
U la distribution de Dirac sur Σ ˆ
U (cf. aussi
les formules (4.35) du chapitre III et (3.33) du présent chapitre).
3.9 Discontinuités du champ de contrainte
Les équations de la dynamique des milieux continus, (3.13) à (3.15) ont été éta-
blies en supposant le champ de contrainte σ continu, et continûment différentiable
par morceaux. On se propose maintenant d affaiblir cette hypothèse en supposant σ
continu et continûment différentiable par morceaux .
La question posée est de savoir si des discontinuités de σ sont possibles dans le
cadre de la modélisation et, dans l affirmative, quelles équations elles doivent véri er.
Àtitred exemple on suppose que σ est discontinu au franchissement d une sur-
face Σσ .Ondésigne par Ω 1 et Ω 2 les deux volumes complémentaires délimités par
Σσ dans le volume Ωt du système S,o
uda
n
slev
olu
m
eΩ t d un sous-système S
quelconque de S ( gure 16).
Champ de vitesse réel continu et continûment différentiablesu
rΩt
La formule initiale (3.10) à partir de laquelle ont été établies les équations de la
dynamique est inchangée. En revanche la suite du raisonnement du paragraphe 3.3
ne peut être menée qu en considérant séparément les volumes Ω 1 et Ω 2 sur lesquels
l équation (3.11) et le théorème de la divergence sont applicables sous leurs formes
classiques qui concernent les fonctions continues et continûment différentiables. On
obtient ainsi, sans difficulté, sur le volume Ωt de S,o
us
u
rlevolume Ω t d un sous-
220
Chapitre V Modélisation des efforts pour le milieu continu
Figure 16 Champ de contraintediscontinu sur Ωt au franchissement de Σσ
système S , l équation :
∀S ⊂S, ∀ˆ
Um.v.,
Ω
t ( div tσ(x,t)+ρ(x,t)(F (x,t) - a(x,t))) . ˆ
U(x)dΩt
+ ∂Ω
t (T Ω (x,t) - n(x) .σ(x,t)) . ˆ
U(x)da
+ Σσ∩Ω
t
-(n1(x) .σ1(x,t)+n2(x) .σ2(x,t)) . ˆ
U(x)dΣσ =0.
(3.31)
Cette équation, qui remplace l équation (3.12), est valable quel que soit ˆ
U continu
et continûment différentiable sur Ω t .So
ne
xploitation compte tenu de la symétrie
deσ,e
nc
o
n
sidérant d abord le système S, puis un sous-système S quelconque, et
en s appuyant sur le caractère arbitraire du champ ˆ
U ,conduit aux mêmes équations
(3.13) à (3.15) qui correspondent à l annulation des cofacteurs de ˆ
U(x) dans la pre-
mière et la deuxième intégrale.
Mais, de plus, on obtient par le même raisonnement la nullité du cofacteur de ˆ
U(x)
dans la troisième intégrale, c est-à-dire, sur Σσ :
σ1(x,t) .n1(x)+σ2(x,t) .n2(x)=0.
Compte tenu de ce que les vecteurs normaux extérieurs à Ω 1 et Ω 2 en M sont
opposés, et en posant :
[[ σ(x,t)]]= σ2(x,t) - σ1(x,t)
(3.32)
on écrira :
∀M∈Σσ
[[ σ(x,t)]].n(x)=0
(3.33)
3 Modélisation des efforts intérieurs par un champ tensoriel : lescontraintes 221
où n(x) désigne la normale à la surface de discontinuité du champ de contrainte en
un point M de celle-ci, et [[ σ(x,t)]] la discontinuité de ce champ lorsque l on franchit
la surface Σσ en M dans le sens de n(x).
Le résultat qui vient d être obtenu est aussi important que l équation (3.13) qu il
complète dans le cas, fréquemment rencontré, d un champ de contrainte continu et
continûment différentiable par morceaux (par exemple : système constitué de maté-
riaux à comportements différents).
En rappelant la dé nition (3.18) du vecteur-contrainte sur une facette on voit que
(3.33) peut aussi s énoncer :
au franchissement d une surface de discontinuité du champ de
contrainte, il y ac
o
ntin
uitéduv
ecteur-contrainte sur la facette
tangente à cette surface.
La continuité ainsi démontrée du vecteur-contrainte au franchissement de Σσ
montre que la validité de la formule (3.30) établie au paragraphe précédent s étend
au cas où le champ de contrainte σ est discontinu au franchissement de Σ ˆ
Uen
l absence d onde de choc sur Σ ˆ
U.
On peut remarquerquelacondition (3.33) implique dans le cas de la modélisation
des efforts par un champ de pression où σ(x,t)=-p(x,t) 1l,qu
ec
edernier est
nécessairement continu :
[[ p(x,t)]]= 0 .
(3.34) • Il est utile de donner une démonstration imagée de l équation (3.33), schématisée
sur la gure 17, dans l esprit des démonstrations du petit tétraèdre et du petit
parallélépipède représentées sur les gures 12 et 13.
Figure 17 Discontinuité du champ de contrainte
La surface de discontinuité Σσ est dédoublée en deux surfaces parallèles Σ1 et Σ2
in niment voisines (distance λ), situées de part et d autre dans les volumes Ω 1 et Ω 2 res-
222
Chapitre V Modélisation des efforts pour le milieu continu
pectivement. On considère un petit volume parallélépipédique, in niment plat selon Σσ ,
limité par ces deux surfaces. La loi fondamentale (1.2) appliquée à ce volume implique,
à l ordre zéro en λ, l équilibre des efforts exercés sur ses faces Σ2 et Σ1 respectivement
par les sous-systèmes Ω 2 et Ω 1 .Ile
nrés
ulte
,àpa
rtir de la formule (3.17) qui exprime
la force élémentaire sur un élément de surface, et compte tenu des orientations opposées
des normales à considérer sur Σ2 et Σ1 , l équation :
σ2(x,t) .n(x)da - σ1(x,t) .n(x)da =0
(3.35)
(les forces de masse et les forces d inertie sont du premier ordre en λ).
Ce raisonnement est formellement identique à celui donné au paragraphe 3.5 ( gure 8) à
propos du vecteur-contrainte au contour de S.
• Du point de vue mathématique on peut aussi obtenir l équation (3.33) en reprenant le
raisonnement du paragraphe 3.3 directement sur S (ou sur S ), sans se référer à la parti-
tion (Ω 1 ,Ω 2), en se plaçant dans le cadre de la théorie des distributions. Les distributions
div(tσ) et div(σ . ˆ
U) sont dé nies, et la formule de la divergence est appliquée, comme
indiqué au chapitre III, formule (4.35)(13) .
Ondes de choc
Le raisonnement décrit sur la gure 13 permet de pressentir que l équation (3.33) n est pas
valable si Σσ est une surface de discontinuité Σt du champ de vitesse telle que déjà rencontrée
au chapitre III ( 4.4 et 5.1) et au chapitre IV ( 7.6). On a vualorsquelapuissance virtuelle
des quantités d accélération A( ˆ
U ) comporte dans ce cas un terme intégré sur Σt qui manifeste
la contribution de la discontinuité [[ U ]] ,etestnon nul dans le cas des ondes de choc :
A(ˆ
U)= Ωt
ρa. ˆ
U dΩt + Σt
ρ[[U]]. ˆ
U(U -W).ndΣt
(3.36)
où le champ ˆ
U est supposé continu au franchissement de Σt (formule homologue pour A ( ˆ
U)).
• Physiquement ce termes interprète comme une densité surfacique dequ
a
ntitéd accé-
lération sur Σt ,quifournit donc un terme d ordre zéro en λ ( gure 17), pour l équation
(3.35). On obtient ainsi, au lieu de (3.33) :
∀M∈Σt
[[ σ(x,t)]].n(x)=ρ(x,t)[[ U(x,t)]](U(x,t) - W (x,t)) .n(x)
(3.37)
On rappelle qu il n y a pas d ambiguïté dans le calcul des intégrales de (3.36) et (3.37)
en raison de l équation de conservation de la masse au franchissement de Σt (chapitre
III, 5.1) :
[[ ρ(x,t)(U(x,t) - W (x,t)) ]] .n(x)=0.
• La démonstration par le principe des puissances virtuelles con rme évidemment ce ré-
sultat. Avec l expression (3.36) pour A( ˆ
U) ou A (ˆ
U) la formule (3.31) est modi ée dans
son dernier terme qui devient :
...+ Σt(([[σ]]-ρ[[U]]⊗(U -W)).n). ˆ
U dΣt =0.
(3.38)
On en déduit, à la place de (3.33), l équation (3.37) sur Σt par le raisonnement maintenant
habituel.
(13)D une façon générale on a, avec les notations déjà explicitées, les distributions :
grad( )={grad( )}+[[ ]]⊗nδΣ et div( )={div( )}+[[ ]].nδΣ (qui en résulte),
d où la formule de la divergence : Ω div ( ) = ∂Ω()
.nda.
3 Modélisation des efforts intérieurs par un champ tensoriel : lescontraintes 223
Le résultat ainsi établi s énonce alors :
le passage d une onde decho
c(discontinuité de vitesse non station-
naire) implique une discontinuité du vecteur-contrainte.
En particulier, dans le cas de la modélisation des efforts intérieurs par le champ de pression
où σ(x,t)=-p(x,t) 1l,ona:
-[[ p(x,t)]]n(x)=ρ(x,t)[[ U(x,t)]](U(x,t) - W (x,t)) .n(x) ,
qui implique que le saut devitesse est normal à Σt .
Densité surfacique de forces extérieures à l intérieur du système
Les raisonnements ci-dessus, aussi bien sur la gure 17 que par la méthode des puissances
virtuelles, sont immédiatement transposables au cas où les efforts extérieurs appliqués au
système S et à ses sous-systèmes comportent, en plus des forces volumiques et surfaciques
décrites par les équations (2.5) à (2.9), des forces extérieures exercées à l intérieur de S,
dé nies par une densité surfacique F Σ(x,t) sur une surface Σ intérieure à Ωt .Lapuissance
virtuelle des efforts extérieurs comporte alors, pour S,leter
mecomplémentaire :
Σ FΣ(x,t). ˆ
U(x)dΣ,
et l on obtient, par l un ou l autre raisonnement, l équation pour la discontinuité du champ
σ au franchissement de Σ(14) : ∀M ∈ Σ
[[ σ(x,t)]].n(x)+F Σ(x,t)=0.
(3.39)
3.10 Théorème d Euler
Conservation de la quantité de mouvement
Le théorème de la conservation de la quantité de mouvement a été énoncé au
chapitre IV ( 7.3) :
en référentiel galiléen R ,
pour S [Fe]= d
dt[MU]
∀S
[F
e]= d
dt[MU ] .
(3.40)
Il est maintenant précisé par la connaissance de la modélisation des efforts exté-
rieurs qui permet notamment d expliciter les torseurs [Fe] et [F
e] par la formule (2.11).
De plus les équations (3.14) et (3.15) expriment T Ω(x,t) et T Ω (x,t) en fonction du
champ des efforts intérieurs σ.Onobtientalors le théorème de la conservation de la
(14) Cf. chapitre VIII ( 4.2).
224
Chapitre V Modélisation des efforts pour le milieu continu
quantité de mouvement dans le cadre de cette modélisation sous la forme (notations
simpli ées) :
en référentiel galiléen R ,
∀S ⊂S,
d
dt [MU ]=[O, Ω
tρF dΩt , Ω
tOM∧ρFdΩt]
+[O, ∂Ω
t
σ.da , ∂Ω
tOM∧σ.da].
(3.41)
Théorème d Euler
De même le théorème d Euler (chapitre IV, 7.4), dans le cas où le champ de
vitesse réel U est continu et continûment différentiable sur Ωt,s explicite maintenant
sous la forme :
en référentiel galiléen R ,
∀S ⊂S,
le torseur des forces
(ρF - ∂(ρU)
∂t ) dΩt réparties dans le volume Ω t ,
(σ - ρ(U ⊗ U)). da réparties au contour ∂Ω t ,
est nul.
Dans le cas où le champ de vitesse U est discontinu (onde de choc) et/ou en présence de
forces extérieures surfaciques à l intérieur de Ωt ,onseréfère aux formules (7.37) à (7.39) du
chapitre IV et le théorème s énonce :
en référentiel galiléen R ,
∀S ⊂S,
le torseur des forces
(ρF - ∂(ρU)
∂t )dΩt réparties dans le volume Ω t ,
(σ - ρ(U ⊗ U)). da réparties au contour ∂Ω t ,
[[ ρU ]]W dΣt réparties sur Σt,FΣ dΣ réparties sur Σ,
est nul.
Remarque sur la terminologie loi de conservation
Le terme loi de conservation appliqué à l équation (3.41) s entend de la façon suivante.
Cette équation exprime que le taux de variation (dérivée particulaire) du torseur des quan-
tités de mouvement relatif au système S (ou à un sous-système quelconque S )e
stégal au
torseur des efforts extérieurs. Celui-ci représente la source de variation de la quantité de
mouvement : il est constitué de deux termes, volumique et surfacique, dus respectivement
3 Modélisation des efforts intérieurs par un champ tensoriel : lescontraintes 225
aux forces de masse et aux vecteurs-contraintes T (n)=σ .n dé nis par (3.18).
Il convient de signaler que la conservation de la quantité de mouvement sert de point de
départ à une méthode alternative pour la construction de la modélisation des efforts. On pose
aprioriquelesefforts exercés sur unsous-système S par (S-S )traduisent des actions de
contact sous la forme de forces surfaciques qui ne dépendent que de l orientation de l élément
de surface concerné ; l exploitation de (3.40) posée comme principe permet alors de construire
la modélisation par le tenseur des contraintes de Cauchy.
3.11 Théorème de l énergie cinétique
Le théorème de l énergie cinétique a été énoncé au chapitre IV (7.5). Il est mainte-
nant précisé par la connaissance de la modélisation des efforts extérieurs et intérieurs.
Si le champ de vitesse réel est continu et continûment différentiable les expressions
de A(U), P(e)(U) et P(i)(U) s obtiennent immédiatement à partir des équations (2.2),
(2.6) et (3.8) respectivement en y substituant U à ˆ
U .Onaainsil énoncé, pour S :
en référentiel galiléen ,
Ωt ρF .UdΩt + ∂Ωt TΩ .Uda - Ωt
σ :gradU dΩt
=d
dt Ωt ρU2
2 dΩt = Ωt ρa .UdΩt ,
(3.42)
(énoncé homologue pour S ,quelconque).
Lorsque le champ de vitesse réel est discontinu (onde de choc au franchissement de Σt dont
la vitesse de propagation est W ), on a vu que la puissance des quantités d accélération dans
le champ de vitesse réel s écrit (formule (7.41) du chapitre IV) :
A(U)= d
dt Ωt
ρU2
2 dΩt = Ωt
ρa .U dΩt + Σt
ρ[[ U2]]
2 (U-W).ndΣt .
(3.43)
Il apparaît maintenant que la dé nition de la puissance des efforts extérieurs dans le champ
de vitesse réel s obtient sans difficulté particulière à partir de (2.6) en y substituant U à ˆ
U
puisqu il n y a pas de densité surfacique de forces extérieures répartie sur Σt .
Par contre, l expression de la puissance des efforts intérieurs dans le champ de vitesse réel
ne peut être obtenue à partir de (3.8) puisque le champ U est discontinu. Elle ne peut l être
non plus à partir de (3.30) car cette formule suppose la continuité du vecteur-contrainte
sur la surface de discontinuité du champ de vitesse virtuel considéré, alors que l on a établi
l équation de saut (3.37) pour le champ σ au franchissement de l onde de choc Σt.Da
n
sc
e
cas, c est l écriture du théorème de l énergie cinétique qui permet d obtenir l expression de la
puissance des efforts intérieurs dans le champ de vitesse réel.
Pour cela on écrit le théorème de l énergie cinétique sous la forme (3.42) applicable sépa-
rément à chacun des sous-systèmes S 1 et S 2 de volumes Ω 1 et Ω 2 séparés dans Ωt par Σt
(comme sur la gure 16) ; en additionnant les deux équations correspondantes il vient :
en référentiel galiléen,
Ωt
ρF .UdΩt + ∂Ωt TΩ .Uda
+ Σt
n .(σ1 .U1 - σ2 .U2)dΣt - Ωt
σ :gradU dΩt = Ωt
ρa .UdΩt .
(3.44)
226
Chapitre V Modélisation des efforts pour le milieu continu
Parailleurs le théorème de l énergie cinétique pour le système S avec l expression de P(i)(U)
cherchée, et A(U ) donnée par (3.43), s écrit :
en référentiel galiléen,
Ωt
ρF .UdΩt + ∂Ωt TΩ .Uda + P(i)(U)= Ωt
ρa .UdΩt + Σt
ρ[[ U2]]
2 (U-W).ndΣt .
(3.45)
En rappelant que, par (3.37),
[[σ]].n= σ2.n-σ1.n=ρ[[U]](U-W).n,
et en rapprochant les équations (3.44) et (3.45), on obtient l expression de P(i)(U) :
P(i)(U)=- Ωt
σ :gradU dΩt - Σt[[ U ]] .
σ1+σ2
2 .ndΣt .
(3.46)
On peut remarquer que, formellement, cette expression de P(i)(U ) s obtient à partir de (3.30)
pour P(i)( ˆ
U ) en y remplaçant, sur Σt ,σpar la moyenne (σ1 + σ2)/2 de ses valeurs de part
et d autre de Σt.
On retrouve là une nouvelle manifestation du particularisme des mouvements réels
annoncé au chapitre IV (section 4).
3.12 Puissance de déformation
On désigne souvent sous le nom de puissance de déformation d un champ de
contrainte σ dans un champ de vitesse virtuel ˆ
U , l opposée de la puissance virtuelle
des efforts intérieurs correspondant à ces deux champs.
3.13 Retour sur la compatibilité géométrique : formulation
faible
On a vu au chapitre III ( 3.9) que la condition de compatibilité géométrique d un champ de
tau
xdedéformation s exprime par la formulationfaiblesuivante.
Soit d(x,t) un champdetenseurs symétriques, dé ni à l instant t sur Ωt .Cecha
mpe
stla
partie symétrique du gradient d un champ de vecteurs dé ni sur Ωt ,sietseulementsi
∀σ
symétrique,
àsupport compact sur R3 ,
divσ=0surΩt,
σ(x) .n(x)=0sur ∂Ωt ,
(3.47)
ona:
Ωt
σ(x):d(x,t)dΩt =0.
(3.48)
Il est maintenant possible d interpréter mécaniquement cet énoncé (et de justi er, a
posteriori ,lan
otation adoptée). On remarque que (3.47) et (3.48) font intervenir, sur Ωt ,
les champs de contrainte de Cauchy qui sont en équilibre c est-à-dire que le champ a est
nul dans (3.13) avec des efforts extérieurs nuls sur Ωt et ∂Ωt : ces champs sont appelés
champs d autocontrainte sur Ωt .Lacondition (3.48) exprime donc que la puissance de tout
champ d autocontrainte sur Ωt dans le champ d donné est nulle. Ce résultat est évidemment
l homologue de celui énoncé au chapitre IV ( 3.4) à propos des systèmes de points matériels.
4 Lescontraintes en description lagrangienne
227
3.14 Formulation faible des équations de la dynamique
Dans le même ordre d idées que ci-dessus, en se plaçant cette fois du point de vue des
contraintes, on peut remarquer que l écriture même du principe des puissances virtuelles
fournit la formulation faible, dualisée, des équations de la dynamique. En rassemblant les
arguments et les résultats développés jusqu ici on peut énoncer la formulation suivante.
Soit σ un champ de tenseurs symétriques, continu et continûment différentiable par morceaux,
dé ni sur Ωt .Cechampsatisfait les équations de la dynamique avec(15) des champs F ,a sur
Ωt ,TΩ sur ∂Ωt ;c est-à-dire satisfait les équations locales :
div σ(x,t)+ρ(x,t)(F (x,t) - a(x,t)) =0dans Ωt
[[ σ(x,t)]].n(x)=0sur Σσ
σ(x,t) .n(x)=T Ω(x,t) sur ∂Ωt
(3.49)
si et seulement si, ∀ ˆ
U continu et continûment différentiable, on a :
Ωt
σ(x,t):ˆd(x)dΩt = Ωt
ρ(x,t)(F (x,t) - a(x,t)) . ˆ
U(x)dΩt + ∂Ωt T Ω(x,t) . ˆ
U(x)da.
(3.50)
Le caractère nécessaire de (3.50) se démontre à partir de (3.49), le caractère suffisant résulte
de la construction même à laquelle il a été procédé dans la présente section.
En présence d onde de choc on adjoint (3.37) sur Σt (surface d onde) à la deuxième équation
de (3.49) ; la formulation faible comporte, au deuxième membre de (3.50), le terme additionnel
(cf. (3.36)) :
- Σt
ρ(x,t)[[ U(x,t)]]. ˆ
U(x)(U(x,t) - W (x,t)) .n(x)dΣt .
Il faut remarquer que l existence d un tel champ σ en équilibre avec les champs F ,a sur
Ωt ,TΩ sur ∂Ωt ,([[ U ]] sur Σt s il y a lieu) implique que ces données satisfont l égalité de la
loi fondamentale ou de la conservationdelaqu
a
ntitédemou
v
ement:
[Fe]=[MA]= d
dt[MU]
(cf. le paragraphe 3.10 ci-dessus pour l explicitation du torseur du troisième membre).
3.15 Objectivité du tenseur des contraintes de Cauchy
On se réfère ici à l extension du concept d objectivité aux mouvements virtuels qui a été
expliquée au chapitre IV ( 4.4). On a alors démontré la propriété générale d objectivité de la
puissance virtuelle des efforts intérieurs. Ceci implique, dans le cas présent, l objectivité de
la densité volumique de puissance virtuelle des efforts intérieurs : p(i)( ˆ
U )=-σ(x,t):ˆd(x)
est objective. Il en résulte, compte tenu de l objectivité du taux de déformation virtuel ˆd(x),
l objectivité du tenseur des contraintes de Cauchy σ(x,t).
4L
e
s
c
o
n
t
r
a
intes en description lagrangienne
4.1 Tenseur des contraintes de Piola-Kirchhoff
To utes les analyses présentées dans les sections précédentes, fondées sur la méthode
des puissances virtuelles se placent du point de vue eulérien : la modélisation des
(15) On dira aussi : est en équilibre avec ... .
228
Chapitre V Modélisation des efforts pour le milieu continu
efforts intérieurs par le champ des tenseurs des contraintes de Cauchy est dé nie sur
la con guration actuelle κt.
On se propose maintenant d examiner la description des efforts intérieurs sur la
con guration initiale de référence.
Puissance des efforts intérieurs dans le mouvement réel
Dans ce but on considère l expression de la puissance des efforts intérieurs décrits
par le champ σ sur κt,pourlesystèmeS ou pour un sous-système S quelconque, dans
le mouvement réel à l instant t dé ni par le champ de vitesse U supposé continu et
continûment différentiable :
∀S ⊂S
P (i)(U)= Ω
t
-σ(x,t):d(x,t)dΩt ,
(4.1)
qu il est commode d écrire en introduisant l élément d intégration dm = ρ(x,t)dΩt :
P (i)(U)= Ω
t
- σ(x,t)
ρ(x,t) : d(x,t)dm.
(4.2)
Il est aisé alors de transporter cette intégration sur la con guration initiale de référence
κ0 en utilisant le transport convectif dé ni par :
x =φ(X,t),
(4.3)
où la conservation de la masse s écrit (chapitre III, 5.1)
dm = ρ0(X)dΩ0 = ρ(x,t)dΩt .
(4.4)
En rappelant la correspondance établie au chapitre III ( 3.3) entre les taux de
déformation eulérien etlagrangien en des points homologues par (4.3) :
d(x,t)=tF -1(X ,t) . ˙
e(X ,t) .F-1(X ,t) ,
(4.5)
on obtient P (i)(U) sous la forme d une intégrale sur le volume Ω 0 du sous-système S
dans κ0 :
P (i)(U)= Ω 0
- σ(x,t)
ρ(x,t) : (tF -1(X,t) . ˙
e(X ,t) .F-1(X,t)) dm
(4.6)
où x = φ(X,t) . Le résultat, établi dans l annexe I ( 5.7),
(A .B):C =(C .A):B =(B .C):A
(4.7)
permet de modi er l écriture des produits contractés qui apparaissent dans (4.6) :
P (i)(U)= Ω 0
-(F -1(X ,t) . σ(x,t)
ρ(x,t) . tF -1(X ,t)) :˙
e(X,t)dm,
(4.8)
4 Lescontraintes en description lagrangienne
229
ou encore
P (i)(U)= Ω 0
-( ρ0(X)
ρ(x,t) F -1(X,t) .σ(x,t) . tF -1(X,t)) :˙
e(X,t)dΩ0 .
(4.9)
Cette équation met en évidence comme cofacteur du taux de déformation lagran-
gien ˙
e(X ,t),ho
m
ologue de σ(x,t) cofacteur de d(x,t) dans (4.1), le tenseur noté
π(X ,t) dé ni par :
π(X,t)= ρ0(X)
ρ(x,t) F -1(X,t) .σ(x,t) . tF -1(X,t)
x = φ(X,t)
(4.10)
(on rappelle que ρ0(X)/ρ(x,t)=J(X ,t)=detF (X,t)).
Il est commode de retenir la dé nition de π sous la forme (notations simpli ées) :
π
ρ0 =F-1. σ
ρ.tF-1.
(4.11)
On démontre immédiatement, compte tenu de la symétrie de σ,quecetenseur π est
symétrique .
Le champ tensoriel π est appelé champ des tenseurs des contraintes de Piola-
Kirchhoff (16) et l on a :
∀S ⊂S, pour le mouvement réel U ,
P (i)(U)= Ω 0
-π(X ,t): ˙
e(X,t)dΩ0 = Ω 0
- π(X ,t)
ρ0(X) :˙
e(X,t)dm.
(4.12)
Les formules (4.5) et (4.11) expriment respectivement le transport convectif pour les taux
de déformation et pour les contraintes. On constate qu elles ont la même structure sans être
semblables. Ceci s explique en rapprochant les expressions (4.2) et (4.12) de P (i)(U) :
Ω t
σ(x,t)
ρ(x,t) : d(x,t)dm = Ω 0
π(X ,t)
ρ0(X) :˙
e(X ,t)dm.
π(X ,t) est ainsi, comme ˙
e(X ,t) un tenseur purement lagrangien .
On dit que (4.5) exprime le transport convectif 2 fois covariant de d et (4.11) le transport
convectif 2 fois contravariant de π
ρ0 (cf. chapitre VI, 5.2).
Expression lagrangienne de la puissance virtuelle des efforts intérieurs
Pour un mouvement virtuel quelconque ˆ
U la puissance virtuelle des efforts inté-
rieurs s écrit sur la con guration actuelle
P (i)( ˆ
U)= Ω
t
-σ(x,t):ˆd(x)dΩt .
(4.13)
(16) G. Piola (1791-1850) ; G. Kirchhoff (1824-1887).
230
Chapitre V Modélisation des efforts pour le milieu continu
Cette intégration peut être transportée sur la con guration initiale, comme on l a
fait pour obtenir (4.6) à partir de (4.1), en tenant compte de la dé nition (4.10) du
tenseur π(X ,t).Ilvientainsi,enpermutant à nouveau l ordre des produits contractés
par applicationde(4.7) :
P (i)( ˆ
U)= Ω 0
-π(X ,t):(tF (X,t) . ˆd(x) .F(X ,t)) dΩ0 .
(4.14)
Il apparaît alors naturel d adopter, pour la dé nition du taux de déformation
virtuel lagrangien ˆ
˙e(X ,t) la formule(4.5) où ˆd(x) est substitué à d(x,t) d où :
ˆ
˙e(X ,t)=tF (X,t) . ˆd(x) .F(X ,t) ,x= φ(X ,t)
(4.15)
Avec cette dé nition de ˆ
˙
e(X,t) l expression lagrangienne de la puissance virtuelle
des efforts intérieurs est le prolongement sur les mouvements virtuels de la formule
(4.12) établie pour lesmouvements réels :
∀S ⊂S, ∀ˆ
Um.v.,
P (i)( ˆ
U)= Ω 0
-π(X,t):ˆ
˙
e(X ,t)dΩ0 .
(4.16)
Interprétation du tenseur des contraintes dePiola-Kirchhoff
Il est naturel d essayer d interpréter le tenseur des contraintes de Piola-Kirchhoff,
comme on l a fait pour le tenseur des contraintes de Cauchy, en se référant au concept
de vecteur-contrainte qui a été dé ni sur la con guration actuelle ( 3.5).
Figure 18 Vecteur-contrainte de Piola-Kirchhoff et transport convectif des forces élé-
mentaires
Sur l élément de surface orienté transversalement da,lafo
rc
eexercée est d après
(3.17) :
df = σ(x,t).da .
Soit alors dA l élément de surface orienté dans la con guration κ0 transporté sur
da dans κt (chapitre II, 4.2) :
da = J(X,t)tF -1(X,t). dA .
(4.17)
4 Lescontraintes en description lagrangienne
231
En explicitant le produit π(X,t) . dA compte tenu de (4.10) et (4.17) on obtient :
π(X,t).dA = F-1(X,t).σ(x,t).da
ou encore
π(X,t).dA = F-1(X,t).df .
(4.18)
On voit ainsi que le tenseur des contraintes de Piola-Kirchhoff correspond au
transport convectif de la force sur un élément de surface orienté comme
si cette force était un vecteur matériel ( gure 18).
4.2 Tenseur des contraintes de Piola-Lagrange.
Équations de ladyn
a
miqu
e
La formule (4.18) montre que, si l on introduit le tenseur B(X ,t) dé ni par
B(X ,t)=F (X ,t) .π(X ,t)
(4.19)
on a évidemment
B(X,t).dA = σ(x,t).da =df .
(4.20)
Le tenseur B(X ,t) est appelé tenseur des contraintes de Piola-Lagrange ou tenseur des
contraintes de Boussinesq (17) .Ils écrit aussi, en simpli ant les notations :
B=ρ0
ρ σ.tF-1 ouencore: B
ρ0=
σ
ρ .tF-1 .
(4.21)
Le tenseur des contraintes de Piola-Lagrange correspond au transport parallèle de la force
sur un élément de surface orienté. Il n est pas symétrique .L introduction du tenseur des
contraintes de Piola-Lagrange permet aussi d écrire les équations de la dynamique en descrip-
tion lagrangienne (équations de champ). En effet la transformation effectuée au paragraphe
4.1 sur l expression de P (i)( ˆ
U) ape
r
misd
obtenir une forme purement lagrangienne de la
puissance virtuelle des efforts intérieurs dans laquelle ˆ
˙
e(X ,t) correspond au transport paral-
lèle du champ ˆ
U sur la con guration κ0 :
sur κ0
ˆ
U(X,t)= ˆ
U(φ(X,t)) sur κt .
Cette forme (4.16) ne permet pas l application du théorème de la divergence comme au
paragraphe 3.3. Aussi, compte tenu de ce que la dé nition de ˆ
U(X ,t) implique (chapitre II,
5.3) que :
grad ˆ
U(x,t)= ˆ
U(X,t) .F-1(X,t)
(4.22)
on effectue sur l expression de P (i)( ˆ
U) les transformations suivantes :
P (i)(ˆ
U)= Ω t
-σ(x,t):grad ˆ
U(x)dΩt = Ω 0
-J(X ,t) σ(x,t):( ˆ
U(X ,t) .F-1(X ,t)) dΩ0
= Ω 0
-J(X,t) (F -1(X,t) .σ(x,t)) : ˆ
U(X ,t)dΩ0
(17) J. Boussinesq (1842-1929).
232
Chapitre V Modélisation des efforts pour le milieu continu
soit :
P (i)(ˆ
U)= Ω 0
-tB(X ,t): ˆ
U(X ,t)dΩ0
(4.23)
On en déduit (cf. 3.3) :
P (i)(ˆ
U)= Ω 0 ((div B) . ˆ
U-div(tB. ˆ
U))dΩ0
(4.24)
où les divergences sont prises dans la con guration κ0 .
La puissance virtuelle des quantités d accélération (2.2) se met sous la forme :
A (ˆ
U)= Ω 0
ρ0(X) a(φ(X,t)) . ˆ
U(X ,t)dΩ0
(4.25)
et la puissance virtuelle des efforts extérieurs s écrit, avec des notations évidentes :
P (e)(ˆ
U)= Ω 0
ρ0(X) F(φ(X,t)) . ˆ
U(X ,t)dΩ0 + ∂Ω 0
ˆ
U(X,t). df(φ(X,t)) .
(4.26)
On obtient alors,pa
rapplication du théorème de la divergence à div (tB . ˆ
U) dans (4.24)
et par le même raisonnement qu au paragraphe 3.3, les équations de champ en description
lagrangienne :
div B(X ,t)+ρ0(X)(F (φ(X ,t)) - a(φ(X ,t))) =0
(4.27)
tandis que l on retrouve que :
df(φ(X,t)) = B(X,t). dA
c est-à-dire (4.20).
Ainsi, en description lagrangienne, les équations de la dynamique, homologues de
(3.13) et (3.15) font intervenir le tenseur des contraintes de Piola-Lagrange.
On peut ici encore revenir sur la condition de compatibilité géométrique d un champ de
tenseurs F (X ,t) dé ni à l instant t sur Ω0 dans κ0 (cf. chapitre III, 3.9). On rappelle que
l on a la formulation faible suivante. Le champ F est le gradient d un champ de vecteur dé ni
sur Ω0 ,sietseulementsi:
∀B
àsupport compact sur R3 ,
divB=0surΩ0,
B(X) .N(X)=0sur ∂Ω0 ,
(4.28)
ona:
Ω0
tB(X):F (X ,t)dΩ0 =0.
(4.29)
On remarque que (4.28) et (4.29) font intervenir les champs de contrainte de Piola-Lagrange
quis
onte
néquilibre avec des efforts extérieurs nuls selon les formules (4.20) et (4.27) : ces
champs sont les champs d autocontrainte sur Ω0 en description lagrangienne. La condi-
tion (4.29) exprime donc que la puissance de tout champ d autocontrainte en description
lagrangienne dans le champ F donné est nulle.
5 Bilanetperspectives
233
5B
ilan et perspectives
5.1 Mécaniciens et Physiciens ...
Tr ois a p plications de la méthode des puissances virtuelles à l étude de la dyna-
mique du milieu continu tridimensionnel ont jusqu ici été présentées : chapitre IV
sections 6 et 7, et ci-dessus sections 2 et 3. Le tableau du paragraphe 5.2 récapitule
les résultats correspondants.
Le caractère systématique des démarches qui ont conduit aux modélisations suc-
cessivement présentées, fondées sur la méthode des puissances virtuelles, est séduisant
et sécurisant. La mise en œuvre de la méthode nécessite, comme on l a vu, de partir
d idées a priori, issues de l expérience dans tous ses aspects, sur la forme de la mo-
délisation que l on veut construire en adéquation avec la nature des problèmes qui
sont à traiter. La méthode des puissances virtuelles est ainsi, en quelque sorte, essen-
tiellement un instrument de mise en forme. Par sa clarté, elle peut conduire à une
meilleure compréhension nale des modélisations construites et donc en permettre
une exploitation plus profonde. (On en fera à nouveau usage au chapitre XI lors de
l étude de la statique des milieux curvilignes.)
La modélisation développée dans la section 3, qui aboutit à la notion de contrainte,
est la base de la mécanique des milieux continus classique adaptée à l étude d une vaste
classe de problèmes tant pour les solides que pour les uides. On ne doit toutefois pas
perdre de vue que les efforts intérieurs ainsi représentés traduisent, au niveau micro-
scopique de la physique, des interactions entre les particules constitutives du milieu
continu ; l unicité du formalisme, l unicité de la procédure mathématique qui a per-
mis de construire cette modélisation, n impliquent en rien l identité des phénomènes
physiques sous-jacents. C est ainsi que la contrainte, concept macroscopique du mé-
canicien, recouvre des phénomènes physiques bien différents au niveau microscopique
selon que le milieu continu considéré modélise un solide cristallin, un polymère ou un
uide, et selon les sollicitations qu il subit. La vision du mécanicien se révèle complé-
mentaire de celle du physicien, et féconde, en dégageant les structures communes qui
permettent le traitement mathématique des problèmes au niveau macroscopique.
ˆ
U
A ( ˆ
U)
P (e)( ˆ
U)
P (i)( ˆ
U)
Équations de ladyn
a
miqu
e
Commentaires
m.v.r.
∀S ⊂S
{ˆ
D} [MA ].{ˆ
D} [F
e].{ˆ
D}
0
(1) [F
e]=[MA ]
(1) ⇒ Théorème d'Euler
(2) [F
i]=0
(3) ∀M∈Ωt
-gradp+ρ(F -a)=0
Ω t
pdiv ˆ
UdΩt (4) ∀M∈∂Ωt
pn= -TΩ
(3)+(4)ou(5)⇒(1)et(2)
(5) ∀S ⊂S, ∀M ∈∂Ω
t
TΩ = -pn
Ω t
ρF. ˆ
U dΩt
ˆ
U C1 Ω t
ρa. ˆ
U dΩt
+
∂Ω t
TΩ . ˆ
Uda
(6) ∀M ∈Ωt
div σ+ρ(F-a)=0
Ω t
-σ:ˆ
ddΩt (7) ∀M ∈∂Ωt
σ.n=TΩ
(6)+(7)ou(8)⇒(1)+(2)
(8) ∀S ⊂S, ∀M ∈ ∂Ω
t
TΩ =σ.n
5 Bilanetperspectives
235
5.3 Milieux micropolaires
Àtitre d ouverture sur les théories de milieux continus non classiques on donnera ci-après
une présentation succincte de la statique des milieux micropolaires ,milieux continus tridi-
mensionnels pour lesquels chaque particule ou point matériel du système considéré représente
en fait une microstructure (cf. chapitre I, section 5). L esprit de cette présentation et l arti-
culation des raisonnements sont identiques à ceux que l on retrouvera au chapitre XI (section
3) pour les milieux curvilignes, milieux continus unidimensionnels pour lesquels la notion de
microstructure est par ailleurs plus facile à appréhender physiquement et qui peuvent, de ce
fait, fournir un support plus concret à la notion de milieux micropolaires tridimensionnels.
Description géométrique. Mouvements réels
La description du système demeure tridimensionnelle : le système S est dé ni par l ensemble
des particulesquioccupent le volume Ωt de contour ∂Ωt dans la con guration κt .(Demême
pour S :v
olu
meΩ t ,contou
r∂Ω t .)
L évolution du système est décrite par l évolution de la position géométrique de chaque
particule du système, et par l évolution de l orientation d une microstructure associée à cette
particule. Les mouvements réels du système sont dé nis sur Ωt par deux champs vectoriels :
U ,vitesse de la particule, et r,vite
sse de rotation de la microstructure associée.
Mouvements virtuels
Les mouvements virtuels sont dé nis sur Ωt par deux champs vectoriels ˆ
Uetˆ
r continus et
continûment différentiables, ou encore par le champ de distributeur {ˆ
U}:
∀M∈Ωt,{ˆ
U(x)} = {M, ˆ
U(x), ˆ
r(x)} .
(5.1)
Un mouvement virtuel sera noté ˆ
U.
Puissance virtuelle des efforts extérieurs
D une manière générale on pose :
∀S ⊂S, ∀ˆ
Um.v.,
(5.2) P (e)(ˆ
U)= Ω t (ρ(x,t)F (x,t) . ˆ
U(x)+ρ(x,t)G(x,t) . ˆ
r(x)) dΩt
+ ∂Ω t (T Ω (x,t) . ˆ
U(x)+CΩ (x,t) . ˆ
r(x)) da.
On introduit ainsi des forces de masse F et des couples dem
a
sse G,le
sunes et les autres
indépendants du sous-système considéré, et des forces surfaciques T Ω (x,t) et des couples
surfaciques CΩ (x,t) avec la différence de signi cation déjà signalée ( 2.2) entre les données
au contour de S et les efforts exercés au contour de S .
On écrira aussi :
P (e)(ˆ
U)= Ω t
ρ[F(x,t)] . {ˆ
U(x)}dΩt + ∂Ω t [TΩ (x,t)] . {ˆ
U(x)}da,
(5.3)
où [F(x,t)] désigne le torseur deseffo
rtsdemasse :
∀M ∈ Ωt , [F(x,t)] = [M, F(x,t) ,G(x,t)] ,
(5.4)
et [TΩ (x,t)] le torseurde
sefforts surfaciques sur S :
∀M ∈ ∂Ω t , [TΩ (x,t)] = [M, TΩ (x,t) ,CΩ (x,t)] .
(5.5)
236
Chapitre V Modélisation des efforts pour le milieu continu
Puissance virtuelle des efforts intérieurs
La densité de puissance virtuelle des efforts intérieurs, p(i)(ˆ
U),s
upposée indépendante du
sous-système considéré est postulée comme une forme linéaire des valeurs locales des champs
ˆ
Uetˆ
r et de leurs gradients. De façon équivalente, en se référant à la formule (5.20) du
chapitre IV qui dé nit le gradient du champ de distributeur {ˆ
U} au point M ,distributeur
tensoriel égal à :
grad {ˆ
U(x)} = {M,grad ˆ
U(x)- ˆ
r(x) , grad ˆ
r(x)}
(5.6)
oùˆ
r(x) est le tenseur antisymétrique associé à ˆ
r(x),o
npe
utdir
equ
ep(i)(ˆ
U) est postulée
comme une forme linéaire des distributeurs {ˆ
U(x)} et grad {ˆ
U(x)}.Onécrit :
p(i)(ˆ
U)=-[a(x,t)] . {ˆ
U(x)}-[tt(x,t)] : grad {ˆ
U(x)}
(5.7)
où [a] désigne un champ de torseurs, et [t] un champ de torseurs tensoriels :
[t(x,t)] = [M, t(x,t) ,c(x,t)]
(5.8) [tt(x,t)] : grad{ˆ
U(x)} =t t(x,t):(grad ˆ
U(x)- ˆ
r(x)) + tc(x,t):grad ˆ
r(x)
(5.9)
(l introduction des transposés se révèle commode pour l écriture des équations d équilibre et
l interprétation de la modélisation).
La loi des actions mutuelles (1.1) impose la nullité du champ de torseur [a],etlafo
r
m
ela
plus générale permise pour p(i)(ˆ
U) àpartirde(5.7) s écrit :
p(i)(ˆ
U)=-[tt(x,t)]:grad{ˆ
U(x)}
(5.10)
que l on peut expliciter en décomposant t(x,t) et grad ˆ
U(x) en leurs parties symétriques et
antisymétriques :
t(x,t)=σ(x,t)+α(x,t) , grad ˆ
U(x)=ˆd(x)+ ˆ
Ω(x) ,
p(i)(ˆ
U)=-σ(x,t):ˆd(x) - α(x,t):(ˆ
r(x)- ˆ
Ω(x)) - tc(x,t):grad ˆ
r(x) .
(5.11)
Équations d équilibre
Leséquations d équilibre (puissance virtuelle des forces d inertie nulle) s obtiennent en ex-
ploitant l énoncé du principe des puissances virtuelles :
∀S ⊂S, ∀ˆ
Um.v.,
Ω t ρ[F(x,t)] . {ˆ
U(x)}dΩt + ∂Ω t [TΩ (x,t)] . {ˆ
U(x)}da
- Ω t [tt(x,t)] : grad{ˆ
U(x)}dΩt =0.
(5.12)
L écriture compacte de cette équation en termes de distributeurs et torseurs vectoriels et
tensoriels montre que sa structure est identique à celle de l équation (3.10) du paragraphe
(3.3). On en déduit par application du théorème de la divergence :
les équations de champ pour [t] ∀M ∈ Ωt ,
div [t(x,t)] + ρ[F(x,t)] = 0 ,
(5.13)
les équations au contour de S (conditions aux limites)
∀M∈∂Ωt,
[t(x,t)] .n(x)=[TΩ(x,t)] ,
(5.14)
5 Bilanetperspectives
237
les équations au contour de S ,sous-système quelconque :
∀S ⊂S,∀M∈∂Ωt,
[TΩ (x,t)] = [t(x,t)] .n(x) .
(5.15)
Ces équations présentent évidemment la même structure que les formules (3.13) à (3.15)
établies pour la modélisation classique (cf. aussi, au chapitre XI, section 3, les équations de
la statique des milieux curvilignes).
L explicitation des équations (5.13) à (5.15), ou leur établissement direct à partir de (5.2) et
(5.3), donne :
pour les équationsdechamp
∀M∈Ωt,
div t(x,t)+ρ(x,t)F (x,t)=0
(5.16)
div c(x,t)+2α(x,t)+ρ(x,t)G(x,t)=0
(5.17)
où α(x,t) désigne le vecteur associé au tenseur antisymétrique α(x,t) ;
pour les conditions aux limites àlafrontière de S
∀M∈∂Ωt,
t(x,t) .n(x)=T Ω(x,t)
(5.18)
c(x,t) .n(x)=CΩ(x,t);
(5.19)
pour les efforts extérieurs au contour de S
∀S ⊂S,∀M∈∂Ω t,
T Ω (x,t)=t(x,t) .n(x)
(5.20)
CΩ (x,t)=c(x,t) .n(x) .
(5.21)
Interprétation du modèle. Pertinence
• On observe sur (5.15) l indépendance du torseur des efforts surfaciques [TΩ (x,t)] vis-à-
vis du sous-système S considéré : il s agit d actions de contact entre les particules du
système, purement locales.
D où les notations uniques : T (x,t,n(x)) ,C(x,t,n(x)) , [T(x,t,n(x))].
• La représentation des efforts intérieurs dans cette modélisation est constituée des deux
champs de tenseurs t et c.
Lesformules (5.20) et (5.21) en donnent l interprétation physique : T (x,t,n(x)) étant
le vecteur-contrainte sur la facette de normale sortante n(x) et C(x,t,n(x)) le couple-
contrainte sur cette même facette, on obtient pour t(x,t) et c(x,t) l homologue de la
présentation àla Cauchy pour le milieu continu tridimensionnel classique. t(x,t) est
le tenseur des contraintes et c(x,t) le tenseur des couples-contraintes .
On peut aussi dire que les efforts intérieurs sont représentés par le champ de torseur
tensoriel [t].
• Du point de vue physique cette modélisation recouvre trois cas typiques selon les charge-
ments imposés (présence ou non de couples de masse) et les caractéristiques du matériau
modélisé (tolérance ou non de couples surfaciques).
238
Chapitre V Modélisation des efforts pour le milieu continu
a) Le milieu continu tridimensionnel classique, pour lequel il n y a ni couples de masse
ni couples surfaciques. Les champs c et α sont nuls et t est symétrique.
b) Lesmilieux soumis à des couples de masse (d origine électrostatique ou magnétique
par exemple), sans couples surfaciques. Le champ c est nul et l on a :
α(x,t)=- ρ(x,t)
2 G(x,t)
(5.22)
d où
t(x,t)=σ(x,t) - ρ(x,t)
2 G(x,t)
(5.23)
G(x,t) étant le tenseur antisymétrique associé à G(x,t).Letenseurdes contraintes n est
pas symétrique. Sa partie antisymétrique est déterminée. La partie symétrique σ(x,t) est
régiepar les équations (5.16) à (5.21) qui se ramènent au cas du milieu continu tridi-
mensionnel classique en y modi ant les forces de masse et les forces surfaciques. C est le
modèle à employer pour l étude des phénomènes d électrostriction ou de magnétostriction
par exemple.
c) Lesmilieux micropolaires proprement dits ou continus de Cosserat (18) ,dansles-
quels il y a des couples surfaciques avec ou sans couples de masse. Ce cas est entièrement
distinct du milieu continu classique. Parmi les applications de ce modèle on cite l étude
des cristaux liquides ; on peut aussi penser à la modélisation, à travers la méthode d ho-
mogénéisation, de certains matériaux composites renforcés par des inclusions raides .
(18)E. Cosserat (1866-1931), F. Cosserat (1852-1914).
Récapitulatif des formules essentielles
239
Récapitulatif des formules essentielles
A ( ˆ
U)= Ω
t ρ(x,t)a(x,t) . ˆ
U(x)dΩt
P (e)( ˆ
U)= Ω
t ρ(x,t)F (x,t) . ˆ
U(x)dΩt + ∂Ω
t TΩ (x,t). ˆ
U(x)da
• Champ scalaire p (pression)
P (i)( ˆ
U)= Ω
t p(x,t)div ˆ
U(x)dΩt + Σ ˆ
U ∩Ω
t p(x,t)[[ ˆ
U(x)]].n(x)da
-grad p(x,t)+ρ(x,t)(F (x,t) - a(x,t)) =0 sur Ωt
-p(x,t) n(x)=T Ω(x,t) sur Ωt
T Ω (x,t)=-p(x,t)n(x) sur ∂Ω t
• Champ tensoriel σ (contrainte de Cauchy)
P (i)( ˆ
U)= Ω
t
-σ(x,t):ˆd(x)dΩt + Σ ˆ
U ∩Ω
t
-[[ ˆ
U(x)]].σ(x,t) .n(x)da
σ(x,t) symétrique
div σ(x,t)+ρ(x,t)(F (x,t) - a(x,t)) =0 sur Ωt
[[ σ(x,t)]].n(x)=0 (sauf onde de choc)
[[ σ(x,t)]].n(x)=ρ(x,t)[[U(x,t)]](U(x,t) - W (x,t)) .n(x)
(si onde de choc)
vecteur-contrainte :
T (x,t,n(x)) = σ(x,t) .n(x)
df = σ(x,t).da
Ti = σijnj
T (x,t,n(x)) = T Ω(x,t) sur ∂Ωt ,
T Ω (x,t)=T (x,t,n(x)) sur ∂Ω t .
240
Chapitre V Modélisation des efforts pour le milieu continu
• Champ tensoriel π (contrainte de Piola-Kirchhoff)
P (i)( ˆ
U)= Ω 0
-π(X,t):ˆ
˙e(X ,t)dΩ0
π
ρ0=F-1.σ
ρ.tF-1
π(X ,t) est symétrique
• Équations de la dynamique (expressions explicites)
coordonnées cartésiennes orthonormées
∂σxx
∂x + ∂σxy
∂y + ∂σxz
∂z + ρ(Fx - ax)=0
∂σyx
∂x + ∂σyy
∂y + ∂σyz
∂z + ρ(Fy - ay)=0
∂σzx
∂x + ∂σzy
∂y + ∂σzz
∂z + ρ(Fz - az)=0
coordonnées cylindriques
∂σrr
∂r +1
r ∂σrθ
∂θ + ∂σrz
∂z +σrr-σθθ
r +ρ(Fr -ar)=0
∂σθr
∂r +1
r ∂σθθ
∂θ + ∂σθz
∂z +2σrθ
r +ρ(Fθ-aθ)=0
∂σzr
∂r +1
r ∂σzθ
∂θ + ∂σzz
∂z +σrz
r +ρ(Fz -az)=0
coordonnées sphériques
∂σrr
∂r +1
r ∂σrθ
∂θ+1
r sinθ∂σrφ
∂φ
+1
r (2σrr - σθθ - σφφ + σrθ cot θ)+ρ(Fr - ar)=0
∂σθr
∂r +1
r ∂σθθ
∂θ+1
rsinθ∂σθφ
∂φ
+1
r ((σθθ - σφφ)cotθ +3σrθ) + ρ(Fθ - aθ)=0
∂σφr
∂r +1
r ∂σφθ
∂θ+1
r sinθ∂σφφ
∂φ
+1
r (3σφr +2σφθ cot θ)+ρ(Fφ - aφ)=0
Exercices
241
Exercices
V.1 - Un uide incompressible homogène (c est-à-dire que ρ est constant) est supposé
en équilibre (U =0,a=0)sous l action d un champ de force de masse F dans un
référentiel R.Déterminer les surfaces isobares (surfaces d égale pression).
Étudier le cas où, R étant galiléen, les forces de masse se réduisent aux forces de
pesanteur dont l accélération g est supposée constante.
Étudier le cas où le uide pesant est en équilibre par rapport à un référentiel animé
d un mouvement de rotation uniforme autour d un axe vertical xe par rapport au
référentiel galiléen ( vase tournant ) avec la vitesse ω = ωez .
Éléments de réponse :
• Le champ F doit être irrotationnel : F (x)=- grad V(x).Le
ss
u
rfa
ces isobares sont les
équipotentielles de V .
• Les surfaces isobares sont des plans horizontaux. p ne dépend que de z : p = -ρg z + K
où la constante K est déterminée à partir des conditions aux limites (surface libre par
exemple).
• Le référentiel par rapport auquel le uide est en équilibre n est plus galiléen : les forces
de masse comprennent, outre les forces de pesanteur, les forces d inertie d entraînement
(les forces d inertie complémentaires sont nulles puisque le uide est immobile dans le
référentiel tournant ). On véri e que ces forces de masse dérivent bien d un potentiel :
le problème est donc possible ; on trouve, en coordonnées polaires autour de l axe de
rotation vertical : V(x)=gz - ω2 r2/2.
Les surfaces isobares sont des paraboloïdes de révolution autour de l axe de rotation ; en
particulier la surface libre du uide est une telle surface, ce qui détermine la constante
dans la formule exprimant la distribution de la pression dans le uide :
p(x)=ρω2 r2/2 - ρgz+ c.
Commentaire.
L exemple nal est typiquement celui de la centrifugeuse. On traiterait tout aussi facilement
le cas de l équilibre relatif d un uide incompressible dans un référentiel en mouvement de
translation uniformément accéléré par rapport au référentiel galiléen.
V.2 - On considère un uide incompressible homogène pesant en équilibre dans un
référentiel galiléen. On suppose que ce uide baigne une face d une paroi plane inclinée
à l angle i sur la verticale. Déterminer les efforts ainsi exercés par le uide sur une
surface S de cette paroi.
Éléments de réponse :
ez dirigé vers le bas ; z0 cote de la surface libre p = pa ;o
rigin
echoisie telle que pa = ρg z0 .
Distribution de pression : p = ρg z.
Effort sur la surface élémentaire dS en un point M de S : df = -ρgzndS dont la composante
verticale df .ez = ρgzcos i dS est égale au poids du cylindre ( ctif) de uide situé au-dessus
de l élément de surface dS jusqu à lac
otez =0.
Le torseur des efforts exercés sur la surface S apourrésultanteR = -ρgzGSn où zG est la
cote du centre de gravité de la surface S,dirigée selon -n et dont la composante verticale
est égale au poids du cylindre uide surmontant S jusqu à z =0.
242
Chapitre V - Modélisation des efforts pour le milieu continu
Le point d application de R sur S est la projection verticale du centre de gravité de ce cy-
lindre de uide.
Commentaire.
Le résultat concernant la composante verticale de R et sa ligne d action s obtient immédiate-
ment en appliquant la loi fondamentale de la dynamique (1.2), avec [MA ]=0,a
ucylindre
de uide introduit ci-dessus.
V.3 - Théorème d Archimède. Soit un uide incompressible homogène en équilibre
dans un référentiel R,s
o
u
misàu
nchamp defo
r
c
ede masse F irrotationnel. On
considère un corps C de volume V et de surface S immergé dans le uide et maintenu
immobile par rapport à celui-ci. Déterminer le torseur des actions exercées par le
uide sur ce corps.
Éléments de réponse :
Action exercée en M de S de normale extérieure nv sur l élément dS de S :df = -pnv dS.
Le champ de pression satisfait l équation de champ grad p(x)=ρF (x) dans le domaine
occupé par le uide. Ce champ, déterminé à partir des conditions au bord, est identique à
celui quis établirait si le uide, en équilibre, occupait aussi le domaine V du corps C.
On démontre alors en appliquant la loi fondamentale (1.2) au sous-domaine Ω t ≡ V ,a
v
e
c
[MA ]=0,que:
le torseur des efforts df = -pnv dS exercés sur S est l opposé du torseur des forces de volume
ρF exercées dans V .
V.4 - Équilibre d un uide compressible dans un champ de force de masse dérivant
du potentiel V :r
e
che
r
cher les surfaces isobares et les surfaces d égale valeur de la
masse volumique ρ(x).Cas particulier du uide pesant en équilibre dans un repère
galiléen.
Éléments de réponse :
• À l équilibre : grad p(x)=ρ(x)F (x)=-ρ(x)gradV(x).
Les surfaces isobares sont les équipotentielles de V : p ne dépend de x qu à travers V ;
donc ρ ne dépend de x qu à travers V et les surfaces d égale valeur de ρ(x) sont les
équipotentielles de V .
De façon plus détaillée : à l équilibre on a rot (ρF )=ρ rot F +gradρ ∧ F =0.Ile
n
résulte, puisque rot F =0,quegrad ρ(x) est colinéaire à F (x)=-grad V(x).
Exercices
243
• p et ρ ne sont fonctions que de z,m
ais dp
dz = -ρ(z)g ne permet pas de déterminer les
fonctions p(z) et ρ(z) àpartirdesconditions aux limites ; il faut introduire une équation
de comportement du uide.
V.5 - On étudie l équilibre d un uide compressible pesant dans un référentiel galiléen.
On suppose que l équation d état du uide est celle du gaz idéal, p/ρ = rT où r = R/M
(R constante universelle des gaz parfaits =8, 314 J/K ; M masse molaire), et que
la répartition de température est connue, fonction uniquement de la cote z, T(z).
Déterminer la loi de répartition de la pression. Cas particulier de l équilibre isotherme.
Éléments de réponse :
• ÀpartirdeEx.V.4: dp
p=-g
r
dz
T(z) ,
d où : ln p
p0 = -g
r z
0
dz
T(z) (p=p0pourz=0).
• ln(p/p0)=-gz/rT0 .
Commentaire.
Ces formules sont appliquées au nivellement barométrique.
V.6 - On étudie l équilibre d un uide compressible pesant dans un référentiel galiléen.
On suppose que l équilibre est établi en respectant la relation p = kργ(γ =1, 4).
Déterminer les distributions de ρ, p et T en fonction de z ;onintroduira en particulier
la hauteur de l atmosphère dé nie dans ce modèle par p(H)=0.
Éléments de réponse :
ÀpartirdeEx
.V.4etcompteten
udep=kργ on a :kγργ-2dρ= -gdz,
d où:ρ=ρ0 1- z
H 1
γ-1 ,p=p0 1- z
H 1
γ-1
avecp=p0,ρ=ρ0,pourz=0,etH= p0
ρ0g
γ
γ-1.
L équation d état du gaz idéal donne : T/T0 =1- z/H.
Commentaire.
Cette analyse, appliquée à l atmosphère terrestre, conduirait à une hauteur approximative
de 27 km et à un gradient de température de -0, 01 K/m.
V.7 - On considère l écoulementstationnaire d un uide incompressible homogène,
non visqueux, dans une conduite de section constante S.Ondésigne par μ le débit-
masse dans cet écoulement et par U le module de la vitesse du uide supposée
constante dans chaque section : μ = ρS U .Lac
o
nduite présente un coude à angle
droit dont les sections amont et aval sont respectivement notées S1 et S2,etoùla
pression du uide est égale à p1 (resp. p2). Déterminer le torseur des efforts exercés
par le uide sur le coude.
Éléments de réponse :
On applique le théorème d Euler au volume limité par la paroi du coude et les sections amont
et aval de celui-ci. Les efforts extérieurs sur ce sous-système uide se composent
desactions du coude sur le uide (transmises par la paroi),
244
Chapitre V - Modélisation des efforts pour le milieu continu
desforces de pesanteur,
des forces de pression exercées dans S1 et S2 par le reste du uide sur le sous-système.
On trouve ainsi que le torseur des actions du uide sur le coude est égal au torseur
delaforce-μU (e1 + e2) passant par O,
delaforce-(p1 e1 + p2 e2)S passant par O,
delarés
ulta
nte des forces de pesanteur dans ce volume de uide, exercée au centre de
gravité du volume.
V.8 - Un jet horizontal cylindrique de section S d un uide incompressible homogène,
non visqueux, dont la masse volumique est ρ agit sur une paroi plane inclinée à l angle
α sur la verticale. Le mouvement eststationnaire. On désigne par U le moduledela
vitesse du uide dans le jet, supposée uniforme dans la section courante du jet non
perturbé par la présence de la paroi. La pression dans le jet est également supposée
constante, égale à la pression atmosphérique (hypothèse justi ée en mécanique des
uides). On néglige les forces de pesanteur ; on admet que la vitesse du uide après
écrasement du jet sur la paroi est parallèle à celle-ci. Déterminer le torseur des actions
du jet sur la paroi pour un débit-masse égal à μ = ρS U .
Éléments de réponse :
Les actions du uide non visqueux sur la paroi sont normales à celle-ci. On applique le théo-
rème d Euler à un volume limité par une section courante du jet cylindrique non perturbé,
la paroi, et une large surface de contrôle cylindrique d axe normal à la paroi. Les efforts
extérieurs à ce sous-système se composent
desactions de la paroi sur le uide dirigées selon n,
des forces de pression, parallèles à la paroi, exercées sur la surface de contrôle cylindrique,
delarésultante des forces de pression, dirigée selon l axe du jet, exercées sur la section
courante du jet,
de
sfo
r
ces de pression atmosphérique sur toute la surface libre du uide dans le volume
considéré.
Les vecteurs de débit sortant de quantité de mouvement relatifs à la surface de contrôle
cylindrique sont parallèles à la paroi ; pour la section courante du jet, ils sont parallèles à la
section de celui-ci. Par projection sur n on obtient : le torseur des actions du jet sur la paroi
est équivalent à la force -μU n cos α appliquée au point de rencontre de l axe du jet avec la
paroi, ajoutée à l action de la pression atmosphérique sur la face amont de la paroi.
V.9-Théorème de Bernoulli. Dans un référentiel R,onconsidèreun uide non-
visqueux qui évolue dans un champ de force de masse dérivant d un potentiel indé-
Exercices
245
pendant du temps : V(x).L écoulement du uide est supposé stationnaire : p, ρ et
U sont indépendants du temps en représentation eulérienne. Démontrer la relation :
˙p
ρ+˙V+d
dt(U2/2)= 0 .
Éléments de réponse :
En application de la formule de dérivation particulaire (4.14) du chapitre III on a :
˙p
ρ+˙V+d
dt(U2/2) = 1
ρ(∂p
∂t +gradp.U)+(∂V
∂t +gradV .U)+ d
dt(U 2/2)
Puisque l écoulement est stationnaire, il vient :
˙p
ρ+˙V+d
dt(U2/2) =(1
ρgradp+gradV +a).U
qui est nul en application de (2.21).
Commentaire.
Dans le cas d un uide incompressible (ρ constant) ou, plus généralement, d un uide en
évolution barotrope (ρ = h(p)) on obtient en introduisant une primitive de 1/h(p) :
dp
h(p)+V+U2
2 = Constante le long de toute ligne de courant.
C estlethéorèmedeBernoulli.
V.10 - Un tube cylindrique de rayons intérieur et extérieur a et b et de hauteur h est
soumis aux conditions au contour en contraintes suivantes (coordonnées cylindriques) :
z=0:Tr =Tθ=0,Tz = -σ; z=h:Tr =Tθ=0,Tz =σ;
r=a:Tr=p,Tθ=Tz=0 ;r=b:Tr= -p,Tθ=Tz=0.
Il n y a pas de force de masse. Déterminer le champ de contrainte σ en équi-
libre avec ces données, dont l expression dans la base orthonormée des coordonnées
cylindriques est identique en tout point.
246
Chapitre V - Modélisation des efforts pour le milieu continu
Éléments de réponse :
Àpartirdesconditions au contour et des équations (3.23) :
σ = -p(er⊗er+eθ⊗eθ)+σez⊗ez.
Ce champ est homogène dans le cylindre :
σ = -p1l+(σ+p)ez⊗ez.
V.11 - Équations de la dynamique en coordonnées cartésiennes quel-
conques. Expliciter les équations de la dynamique (3.13) et la formule (3.18) dé nis-
sant le vecteur-contrainte dans un système de coordonnées cartésiennes quelconques.
Interpréter σij .
Éléments de réponse :
• e1 ,e2 ,e3 trièdre cartésien.
σ=σijei⊗ej,gradσ=∂σij
∂xk ei⊗ej⊗ek,divσ=∂σij
∂xj ei.
F =Fiei ,a= aiei.
• Équations de la dynamique (3.13) : ∂σij
∂xj +ρ(Fi - ai)=0.
• Vecteur-contrainte : n = nj ej ,T(n)=T i ei = σij nj ei .
• Interprétation de σij : 1
|ej | σij est la composante, selon la direction ei ,duv
ecteur-
contrainte sur la facette dé nie par les deux vecteurs de base complémentaires de ej .
V.12 - On étudie l équilibre d un demi-espace tridimensionnel, constitué d un maté-
riau homogène pesant, limité par une surface libre plane inclinée à l angle β sur l hori-
zontale. On utilise le repère cartésien Oxyz dé ni comme suit : Ox horizontal dans la
surface libre, Oy ligne de pente de la surface libre, Oz verticale ascendante. Compte
tenu des données de ce problème on chercheàdéterminerle champ de contrainte σ
dans le massif de milieu continu comme une fonction continûment différentiable de
la seule coordonnée z.Qu
elle est la forme d un tel champ σ ?Déterminer alors le
vecteur-contrainte sur une facette parallèle à la surface libre à la cote z = -h<0.
Éléments de réponse :
• σ=σijei⊗ej.
Leséquations d équilibre (3.13) se réduisent à (cf. Ex.V.11) :
dσxz
dz =0 dσyz
dz =0 dσzz
dz =ρg.
Les équations au contour (3.14) permettent d écrire les conditions à la surface libre :
n = ez cosβ,T= σ.n=0pour z =0d où: σxz = σyz = σzz =0pour z =0.
Cela détermine, dans tout le massif :
σxz =σzx≡0,σ
yz =σzy≡0,σ
zz =ρgzpour z<0;
les autres composantes de σ demeurent des fonctions indéterminées de z<0.
• Pour la facette parallèle à la surface libre à la cote z = -h<0 on a :
n = ez cosβ,σzz = -ρghd où T = -ρghez cosβet df= -ρghez cosβda.
Commentaire.
Le problème étudié est en particulier celui de l équilibre d un massif de sol (mécanique des
sols). Il est compréhensible (cf. 3.4) que les équations de la dynamique ne permettent pas,
Exercices
247
àelles seules, de déterminer le champ σ,mêm
ea
v
e
cl hypothèse ap
rio
risur la dépen-
dance en z uniquement ; mais on remarque que, cette hypothèse une fois admise, le vecteur
contrainte sur toute facette paral lèle à la surface libre est déterminé : l effort élémentaire
df est vertical, compressif , égal au poids de la colonne de matériau située au-dessus de
cette facette. Le calcul des composantes du champ σ laissées indéterminées par la statique
nécessite la connaissance de la loi de comportement du matériau et, en général, de l histoire
du chargement subi.
V.13 - Le tenseur de contrainte de Cauchy en un point étant supposé être un tenseur
de pression isotrope, déterminer le tenseur de contrainte de Piola-Kirchhoff ; exami-
ner en particulier le cas où la transformation du milieu est une dilatation isotrope
composée avec une rotation, et celui où c est une extension simple.
Éléments de réponse :
•σ=-p1l π=-pρ0
ρ C-1 (C =tF.F).
•F=λα
avec tα.α=1l, detα =+1,λ>1:
π = -λp1l.
• e1 ,e2 ,e3 orthonormé
F=λe1⊗e1+e2⊗e2+e3⊗e3 ,λ>1 (cf.Ex.II.1):
π = -p(λ-1e1⊗e1+λe2⊗e2+λe3⊗e3).
V.14 - Oxyz est un repère orthonormé. Soit, dans la con guration initiale, un échan-
tillon cylindrique de révolution d axe Oz,delo
ngueur 0 et de rayon r0 .Da
n
sla
con guration actuelle cet échantillon est un cylindre de révolution d axe Oz de lon-
gueur et de rayon r ;onsuppose que la transformation entre les deux con gurations
est homogène, et que les vecteurs matériels colinéaires à ex ou ey le restent dans la
transformation. Le champ de contrainte de Cauchy y est également supposé homo-
gène, induit par les seuls efforts suivants appliqués au contour :
deu
xforces axiales (selon Oz), opposées, d intensité Q (en traction) appliquées
sur les bases,
une pression normale uniforme d intensité p appliquée sur la surface latérale.
Déterminer les tenseurs de contrainte de Cauchy et de Piola-Kirchhoff.
Éléments de réponse :
• σ= -p(ex⊗ex+ey⊗ey)+Q
πr2 ez⊗ez
F=r
r0(ex⊗ex+ey⊗ey)+
0 ez⊗ez
detF = r
r0 2
0
π=-p
0(ex⊗ex+ey⊗ey)+Q
πr2
0
0
ez⊗ez
Commentaire.
Le résultat peut aussi s obtenir de façon plus artisanale en s appuyant sur la formule :
π.dA=F-1.σ.da.
Chapitre VI
Étude des contraintes
MOTS CLÉS
Contrainte normale. Contrainte tangentielle.
Réciprocité des contraintes.
Contraintes principales. Invariants.
Contrainte moyenne. Déviateur.
Plan de Mohr.Cercles de Mohr.
Domaine d élasticité. Fonction de charge.
Symétries de la matière. Isotropie.
Critère de Tresca.Critère de von Mises.
249
Chapitre VI Étude des contraintes
251
En bref
Le tenseur des contraintes de Cauchy en un point dé nit l application
linéaire qui détermine le vecteur-contrainte pour toute facette passant par
ce point. Il permet notamment de calculer la contrainte normale et la
contrainte tangentielle sur cette facette (section 2).
Dans le cas général, pour un état de contrainte donné, ile
xistetr
ois
facettes sur lesquelles le vecteur-contrainte est normal. Ces facettes sont
orthogonales aux directions principales des contraintes ; les contraintes
correspondantes sont les contraintes principales (section 2).
Pour un état de contrainte donné, dé ni par le tenseur des contraintes
de Cauchy, il se révèle utile du point de vue des applications pratiques de
suivre la variation du vecteur-contrainte agissant sur une facette lorsque
celle-ci pivote autour du point considéré. La représentation géométrique
de Mohr repère cette évolution par rapport à la normale à la facette, dans
un diagramme où sont reportées la contrainte normale et la contrainte
tangentielle. On y met en évidence le domaine parcouru par l extrémité
du vecteur-contrainte : ile
stdélimité par trois cercles (section 3).
Du point de vue du comportement des matériaux, le tenseur des
contraintes apparaît comme le chargement de l élément de matière. La
fonction de charge fournit une mesure scalaire de ce chargement pour dé-
limiter le domaine de pertinence du modèle de comportement élastique
avant l apparition des déformations irréversibles de la plasticité : critère
de limite d élasticité,o
udeplasticité (section 4).
La dérivation temporelle du tenseurde
sc
o
ntr
ainte
spose lepr
oblèm
e
du choix d un référentiel pertinent pour l étude du comportement d un
matériau (section 5).
252
Chapitre VI Étude des contraintes
Principales notations
Notation
Signi cation
1ère formule
σ
contrainte normale
(2.5)
τ
contrainte tangentielle
(2.7)
σ1,σ2 ,σ3 contraintes principales
(2.15)
I1 ,I2,I3 invariants de σ
(2.16à2.18)
σm
contrainte moyenne
(2.22)
s
déviateur de σ
(2.23)
J2,J3 invariants de s
(2.26)
σeq
contrainte équivalente (de von Mises) (4.11)
Chapitre VI Étude des contraintes
253
1L
amisee
nœ
uvre du concept ................255
2N
otions pratiques.
.
.....................255
2.1D
imensions, unités..................... 255
2.2C
ontraintenormale et contrainte tangentielle ...... 256
2.3S
igne descontraintes .................... 258
2.4R
éciprocité descontraintes ................ 258
2.5C
hangementdebase .................... 260
2.6D
irectionsprincipales,contraintes principales ...... 261
2.7 Invariants du tenseur des contraintes. Théorème de re-
présentation .
........................ 262
2.8T
enseur déviateurdes contraintes ............. 264
3R
eprésentationdeMohr ...................265
3.1R
eprésentationdeMohr.................. 265
3.2C
ercles de Mohr ...................... 266
3.3D
escription descercles principaux ............ 268
3.4Q
uelquesconséquencespratiques ............. 269
3.5É
tats de contrainte remarquables ............. 269
4C
r
i
t
è
res de limite d élasticité pour les matériaux isotropes272
4.1P
résentation ........................ 272
4.2P
rincipes généraux .
.................... 273
4.3C
ritère de Tr esca ...................... 274
4.4C
ritère de vonMises .................... 276
5D
é
r
i
v
a
t
ion temporelle du tenseur des contraintes . . . . 277
5.1D
érivée particulaire .................... 277
5.2D
érivée intrinsèque(dérivéedeTruesdell) ........ 278
5.3D
érivée corotationnelle (dérivée de Jaumann) ...... 279
Récapitulatifdes formules essentielles .............280
Exercices ..............................281
1 Lamiseenœuvredu concept
255
Étude des contraintes
1L
a
m
i
s
e
e
n
œ
u
v
re du concept
L objet du chapitre V était, par la méthode des puissances virtuelles, de mettre
en place la représentation des efforts intérieurs pour le milieu continu tridimension-
nel classique. On a ainsi abouti à une représentation par un champ de tenseurs du
deuxième ordre symétriques, dé ni sur la con guration actuelle κt : le champ des
tenseurs de contrainte de Cauchy .
Le présent chapitre se veut essentiellement pratique. Il est consacré à la mise en
œuvre de ce concept, notamment par l étude du tenseur des contraintes en un point,
pour acclimater sa manipulation, examiner et commenter ses propriétés.
Aucune confusion n étant possible puisque seules les propriétés en un point seront
examinées, on allégera les notations en supprimant dans toutes les formules la variable
x qui indiquait jusqu ici la valeur locale d un champ et l instant t,autrem
ent dit, le
tenseur des contraintes deCauchyseradésigné par σ,levecteur contrainte par T (n)
etc.
2N
o
t
i
o
ns pratiques
2.1 Dimensions, unités
Figure 1 Vecteur-contrainte sur une facette et force élémentaire sur une surface
On rappelle la formule essentielle liant le tenseur des contraintes de Cauchy σ au
vecteur-contrainte T (n) sur la facette de normale sortante n (cf. chapitre V, 3.5) :
T (n)=σ .n
(2.1)
256
Chapitre VI Étude des contraintes
d où la force élémentaire df s exerçant sur une surface da de normale n ( gure 1) :
df=σ.nda=σ.da.
(2.2)
Pour les composantes dans une base orthonormée la formule (2.1) conduit au
résultat déjà énoncé
Ti = σijnj
(2.3)
et à l interprétation des composantes σij du tenseur σ dont l utilité pratique est
constante :
la composante σij du tenseur des contraintes de Cauchy repré-
sente la composante selon la direction ei du vecteur-contrainte
sur la facette de normale ej .
Figure 2 Interprétation des composantes de σ en base orthonormée
Dans la formule (2.2), df représente une force et da une aire. On en déduit que
le tenseur des contraintes σ (en fait ses composantes) a les dimensions d une force
par unité de surface c est-à-dire d une pression. Il en va de même pour le vecteur-
contrainte T .
L unité de pression S.I. est le Pascal : 1Pa = 1 N/m2.Onde
v
r
as
o
uvent pour
les applications pratiques utiliser des multiples : 1kPa = 103Pa , 1MPa = 106Pa ,
1GPa = 109Pa.
2.2 Contrainte normale et contrainte tangentielle
Considérant une facette telle que celle représentée sur la gure 1 on dé nit de
façon naturelle la contrainte normalesurcette facette comme la composante de T (n)
selon la direction de la normale n soit :
T(n).n= n .σ.n
(2.4)
2 Notionspratiques
257
Diverses notations sont adoptées pour désigner cette contrainte normale. La plus
courante, notamment pour les applications dans la théorie des cercles de Mohr (cf.
section 3), choisit σ comme terme générique de la contrainte normale sur une facette
quelconque mais on trouvera aussi : Tn ,n,.
.
..Onécrira :
σ=n.σ.n
(2.5)
d où, en base orthonormée,
σ = σijninj .
(2.6)
Figure 3 Contrainte normale, contrainte tangentielle
On dé nit la contrainte tangentielle τ comme la composante vectorielle de
T (n) dans le plan de la facette, de sorte que :
T (n)=σn+ τ .
(2.7)
La contrainte tangentielle est également appelée contrainte de cisaillement (1) (ou
cission). Dans le cas général elle estsimplement mesurée par son module(2) :
|τ|=((σ .n)2 -(n .σ.n)2)1/2 .
(2.8)On peut en n remarquer que, si l on choisit une base orthonormée constituée de
la normale n àlafacette considérée et de deux vecteurs t1 et t2 situés dans la facette
( gure 4), la contrainte normale sur la facette n est autre que :
σ = σnn(3)
(2.9)
et l on dispose des deux composantes tangentielles algébriques :
τ1=σt1n,τ
2=σt2n
(2.10)
avec évidemment|τ|2 = τ2
1+τ2
2 . L utilisation de ces composantes algébriques s im-
pose lorsque l on étudie des matériaux anisotropes.
(1)Parfoisencore cisaillement : cette terminologie plus concise peut prêter confusion entre les
concepts d effort et déformation.
(2)On verra dans la section 3 qu il est possible de dé nir une mesure algébrique de la contrainte
tangentielle dans le cas de certaines facettes en adoptant une convention d orientation continue,
cohérente avec la théorie des cercles de Mohr.
(3)Cette notation est souvent la plus claire.
258
Chapitre VI Étude des contraintes
Figure 4 Contrainte normale et composantes tangentielles
2.3 Signe des contraintes
D après la dé nition (2.4), la contrainte normale σ sur une facette est positive
lorsque la projection orthogonale de T (n) sur n est dirigée suivant n.Enseréférant à
l interprétation physique du modèle (chapitre V, 3.5, gure 7) rappelée sur la gure
1onvoitque,n étant la normale sortante àlafacettec est-à-dire la normale sortante
au sous-système S sur lequel la force élémentaire df est exercée, la contrainte normale
σ est positive lorsque la composante normale de df est une traction .
On dira que σ est positive en traction (4).Lescontraintes σ négatives sont dites
de compression .
Cette convention des tractions positives pour les contraintes normales est
aussi appelée convention de signe des mécaniciens pour les contraintes.
Dans certaines applications pratiques (mécanique des sols, calcul des structures en béton,
... )a nde ne pas manipuler en permanence des quantités négatives, les ingénieurs préfèrent
parfois adopter la convention de la normale rentrante à la facette : les contraintes normales
sont alors positives en compression. On doit prendre garde que dans ce cas, si l on conserve
la même dé nition des taux de déformations d et ˆd, l expression de la densité de puissance
virtuelle des efforts intérieurs devra être changée de signe par rapport à celle utilisée dans le
chapitre précédent. En tout état de cause il est conseillé, lorsqu une ambiguïté sur ce sujet est
susceptible de se présenter, compte tenu du public des lecteurs, de préciser dès le départ la
convention adoptée; lors de l utilisation d un logiciel de calcul, on s assurera de la convention
choisie par les auteurs (de plus en plus souvent on rencontrera celle des mécaniciens ).
2.4 Réciprocité des contraintes
L interprétation des composantes de σ en base orthonormée rappelée au para-
graphe 2.1 ( gure 2) et la symétrie de σ,pe
r
m
ettent d énoncer la propriété connue
sous le nom de réciprocitédes c
ontr
aintesta
ngentielles .
On considère deux facettes orthogonales quelconques de normales respectives n
et n ; ces normales et la direction de l intersection de ces facettes dé nissent un trièdre
(4)On rappelle la terminologie de tensions utilisée autrefois pour les contraintes.
2 Notionspratiques
259
Figure 5 Réciprocité des contraintes
trirectangle sur lequel on peut construire une base orthonormée (n,n ,k) comme re-
présentée sur la gure 5. La symétrie de σ implique notamment pour les composantes
de σ dans cette base de relation :
σnn = σn n .
(2.11)
Ainsi : la composante selon n de la contrainte tangentielle sur la facette de normale
n est égale à la composante selon n de la contrainte tangentielle sur la facette de
normale n .
On retiendra la gure 5 en remarquant que (2.11) exprime une égalité entre des
composantes algébriques des contraintes tangentielles sur les deux facettes, et que les
vecteurs associés à ces composantes qui sont portés par n et n sont, soit tous deux
convergents vers l intersection des facettes, soit tous deux divergents à partir de cette
intersection.
Plus généralement, on peut énoncer le théorème de réciprocitédescontraintes
pour deux facettes non nécessairement orthogonales entre elles, de normales respec-
tives n et n .Enapplication de (2.1) on a en effet T (n)=σ .n et T (n )=σ .n d où,
en raison de la symétrie de σ,
T(n).n = n .σ.n= T(n ).n
(2.12)
qui signi e que : la projection sur n du vecteur-contrainte s exerçant sur la
facette de normale n,e
stégaleàla projection sur n du vecteur-contrainte
s exerçant sur la facette de normale n .
Il en résulte en particulier que si le vecteur-contrainte sur la facette de normale
n est contenu dans la facette de normale n ,alorsle vecteur-contrainte sur la facette
de normale n est contenu dans la facette de normale n :lesdeux facettes sont alors
dites conjuguées(5).
(5)Ces résultats de réciprocité doivent être rapprochés du raisonnement du petit parallélépi-
pède donné au chapitre V ( 3.6) : ils traduisent, sur un parallélépipède rectangle pour (2.11), et
sur un parallélépipède quelconque pour (2.12), l équilibre des moments dans la loi fondamentale de
la dynamique.
260
Chapitre VI Étude des contraintes
2.5 Changement de base
Le caractère tensoriel de σ permet, par simple application des formules données
dans l annexe I, de procéder à des changements de base et de connaître les nouvelles
composantes de σ en fonction des anciennes.
Dans la circonstance, très fréquente, d un changement de base orthonormée (par
exemple : passage des coordonnées cartésiennes orthonormées aux coordonnées cy-
lindriques) les formules systématiques font appel aux cosinus directeurs αik de la
nouvelle base {e i} par rapport à l ancienne {ek} et s écrivent ( gure 6) :
e i=αikek,α
ik=e i.ek
σ ij = αi αjmσ m
(2.13)
Figure 6 Cosinus directeurs
En fait et bien que cette démarche soit évidemment strictement équivalente à
l application de (2.13), il est souvent plus commode dans la pratique de substituer les
expressions des vecteurs de base ek en fonction des vecteurs e i dans l écriture explicite
de σ et d identi er les composantes :
σ=σk ek⊗e =σ ije i⊗e j.
(2.14)
Cette méthode, qui évite tout effort de mémoire, permet de tenir compte de la forme
particulière du tenseur σ en cause dans chaque cas. C est aussi la méthode la plus
simple dans le cas de changement de bases non orthonormées (on rappelle qu il est
alors nécessaire de préciser les représentations choisies pour le tenseur euclidien σ).
La gure 7 présente les formules de changement de base orthonormée telles qu elles
furent établiesparCauchy(6).
(6)D après Exercices de Mathématiques (1829), Œuvres complètes d Augustin Cauchy, 2ème édi-
tion, IIe série, tome IX, Gauthier-Villars, Paris 1891.
2 Notionspratiques
261
Figure 7 Formules de Cauchy pour les contraintes
2.6 Directions principales, contraintes principales
Les directions principales de σ ,te
n
s
e
u
reuclidien symétrique réel, sont dé nies
comme indiqué dans l annexe I ( 5.10). Ce sont les directions propres de l application
linéaire associée à σ.Ellessont orthogonales entre elles.
Les valeurs principales de σ sont appelées contraintes principales et notées :
σ1,σ2,σ3 .
Dans une base orthonormée dirigée selon les directions principales des contraintes
de Cauchy, la matrice ˜
σ est diagonale et σ s écrit :
σ=σ1e1⊗e1+σ2e2⊗e2+σ3e3⊗e3.
(2.15)
En se référant à la notion de vecteur-contrainte on énonce la propriété caractéris-
tique des directions principales de σ .
262
Chapitre VI Étude des contraintes
Sur une facette orientée perpendiculairement à une direction
principale de σ,lev
e
cte
ur-
c
ontrainte est purement normal (il n y
apa
sde contrainte de cisaillement sur la facette) et sa mesure
est égale à la contrainte principale correspondante .
Figure 8 Vecteurs-contraintes sur les facettes normales aux directions principales de σ
La gure 8 reprend la gure 2 lorsque les facettes concernées sont normales aux
directions principales des contraintes.
La comparaison avec la gure 10 du chapitre V rappelle que le concept de
contrainte pour la modélisation des efforts intérieurs inclut, comme cas particulier, ce-
lui de pression : les trois contraintes principales sont alors égales (σ1 = σ2 = σ3 = -p)
et toutes les facettes sont principales.
Malgré la simpli cation apportée par la symétrie de σ,lar
eprés
e
ntation géomé-
trique du tenseur des contraintes au moyen de six composantes, telle que celle donnée
sur la gure 2, demeure difficile à appréhender. La représentation de la gure 8 est
plus suggestive : elle montre que les six degrés de liberté sur σ correspondent à trois
paramètres d orientation (des directions principales) et trois paramètres d intensité
(des contraintes principales). Ce mode de représentation est souvent adopté pour les
champs de contrainte obtenus par calculs numériques (cf. chapitre X) ou par l expé-
rience (par exemple : photoélasticimétrie).
2.7 Invariants du tenseur des contraintes.
Théorème de représentation
σ étant un tenseur euclidien du second ordre sur l espace tridimensionnel, on sait
que les trois polynômes I1 ,I2 ,I3,dedegré1à3pa
rr
apport aux composantes de
σ ,dé nis par contractions totales de produits tensoriels (annexe I, 5.7) sont des
2 Notionspratiques
263
scalaires invariants dans tout changement de base :
I1=trσ
(2.16)
I2=1
2tr (σ .σ)=1
2tr (σ2)
(2.17)
I3 = 13tr(σ .σ.σ)=13tr(σ3).
(2.18)
On rappelle que le calcul de I1 ,I2 ,I3,s
effectue sur une représentation mixte du
tenseur euclidien σ (cette précision est inutile en base orthonormée) :
I1 = σii ,I2 =(σijσji)/2 ,I3 =(σijσjkσki)/3
(2.19)
I1 ,I2,I3 s expriment évidemment sans difficulté en fonction des contraintes prin-
cipales. Ce sont des fonctions symétriques des contraintes principales : elles sont
invariantes par permutation circulaire sur σ1 ,σ2,σ3 .
I1=σ1+σ2+σ3
I2 =((σ1)2 +(σ2)2 +(σ3)2)/2
I3 =((σ1)3 +(σ2))3 +(σ3)3)/3 .
(2.20)
Les invariants I1 ,I2 ,I3 ont été introduits (annexe I, 4.6 et 5.7) en substitution au jeu
d invariants polynomiaux constitués par les coefficients du polynôme caractéristique en
λ,det(σ - λ 1l).Ce
sin
v
a
ria
n
t
sII ,III,IIII étanta
u
ssi utilisés dans certaines formules, on
en donne ici les expressions :
II =σii=σ1+σ2+σ3 (≡I1)
III=1
2(σiiσjj - σijσji)=σ1σ2 + σ2σ3 + σ3σ1 (≡ I2
1/2 - I2)
IIII =detσ = σ1σ2σ3 .
(2.21)
L utilité d introduire les invariants apparaîtra notamment au paragraphe 4.2 où
l on fera appel au théorème de représentation (cf. annexe I, 5.7), que l on peut
énoncer comme suit à propos de σ.
Soit f une fonction scalaire isotrope de σ,c
e
st-à-dire que la valeur de cette
fonction, qui est nécessairement calculée en se reférant aux composantes de σ dans
une base, est invariante si l on effectue sur cette base une isométrie quelconque ; on
dit aussi que cette fonction f est une fonction du seul tenseur σ pour signi er
qu elle ne dépend d aucun argument spéci ant des directions privilégiées dans l espace.
Cette dé nition implique, en choisissant pour base une base orthonormée selon les
directions principales, que la fonction f est une fonction symétrique des contraintes
principales σ1,σ2 ,σ3.Mais
,plus précisément, σ étant symétrique ,o
ndispo
s
edu
théorème de représentation suivant, qui ne suppose pas que la fonction considérée
soit polynomiale (annexe I, 5.7).
264
Chapitre VI Étude des contraintes
Toute fonction isotrope,àv
aleurscalaire ,deσ s exprime comme une fonction
symétrique des contraintes principales σ1,σ2 ,σ3,o
ue
n
c
o
r
e, de façon équiva-
lente, comme une fonction des invariants I1 ,I2 ,I3 ou II ,III,IIII.(7)
2.8 Tenseur déviateur des contraintes
Il est courant de décomposer σ en ses parties dites sphérique et déviato-
rique .
Pour cela on dé nit la contrainte moyenne σm :
σm =(tr σ)/3=I1/3 .
(2.22)
La partie sphérique de σ est, par dé nition, le tenseur isotrope σm 1l dont
les trois valeurs principales sont égales à σm (toutes les directions de l espace étant
principales pour ce tenseur isotrope). On a évidemment : tr (σm 1l)=I1 .
La partie déviatorique de σ ,appelée aussi déviateur de σ,estletenseurs dé ni
par :
s=σ-σm1l
(2.23)
qui est de trace nulle :trs =0.
On peut résumer l ensemble de ces dé nitions par les formules :
σ =σm1l+s
(2.24)
trs=0
Le tenseur déviateur s amêmes directions principales que σ.Sesvaleursprincipales
si sont liées aux valeurs principales de σ par :
si=σi-σm
c est-à-dire explicitement :
si =(2σi - σj - σk)/3
(2.25)
où (i, j, k) est une permutation quelconque de (1,2,3).
Le premier invariant de s est, par dé nition, nul : J1 = tr s =0;les deux autres
sont désignés par J2 et J3 : J2 = tr(s2)/2
J3 = tr(s3)/3 .
(2.26)
(7)Pour aider à la compréhension de ce théorème : son équivalent dans le cas d une fonction scalaire
isotrope d un vecteur v énonce qu une telle fonction s exprime nécessairement en fonction de | v |
seulement.
3 Représentation de Mohr
265
Les invariants I2 et I3 de σ s expriment en fonction de I1 ,J2,J3 par les formules
suivantes : I2 =J2+I2
1/6
I3 = J3 +2I1J2/3+I3
1/27 ;
(2.27)
ainsi toute fonction scalaire isotrope du (seul) tenseur σ s écrira comme fonction de
I1 et des invariants J2 et J3 de s.
On donne parfois une interprétation des invariants I1 et J2 .e
nr
e
m
a
rquant que, sur une
facette dite octaédrale dont la normale a pour composantes (√3/3, √3/3, √3/3,)da
n
s
le repère des directions principales de σ ( gure 9), la contrainte normale et la contrainte
tangentielle sont respectivement égales à :
σoct = I1/3=σm , |τoct|= 2J2/3 .
(2.28)
σm = σoct et | τ oct| sont ainsi appelées respectivement contrainte octaédrale et cission
octaédrale .
Figure 9 Facette octaédrale
3R
e
p
r
é
s
e
n
t
a
t
ion de Mohr
3.1 Représentation de Mohr
La représentation étudiée dans cette section s intéresse fondamentalement au vecteur-
contrainte.
T (n),v
ecteur-contrainte sur la facette de normale n,éta
ntdé ni par (2.1), on va mettre en
évidence, à partir de la connaissance de σ au point considéré, certaines propriétés concernant
la variation de T (n) en fonction de n.L idée essentielle consiste à utiliser une représentation
de T (n) dans un plan lié à la facette que l on va maintenant préciser.
Soit une facette quelconque de normale n et T (n) le vecteur-contrainte correspondant. On
considère le plan dé ni par n et T (n),quic
o
ntie
nt évidemment la contrainte tangentielle τ
( gure 10). On désigne par t un vecteur unitaire orthogonal à n dans ce plan : on a ainsi
τ=τt,a
v
e
cτ algébrique de module donné par (2.8). On oriente transversalement le plan
(n,T(n)) de façon à ce que (n,t)=+π/2.
266
Chapitre VI Étude des contraintes
On introduit alors un plan auxiliaire xe, dé ni par des axes Oσ et Oτ orthogonaux avec
(Oσ,Oτ)=+π/2,danslequelonreportepour chaque vecteur T (n),sescomposantes σ et τ
ce qui dé nit un point T .Ceplanestappelé le plan de Mohr ( gure 10).
Figure 10 Représentation de Mohr : facette et plan de Mohr
La construction du point T de coordonnées (σ, τ ) dans le plan de Mohr, correspond donc
au repérage du vecteur-contrainte T (n) dans la base (n,t) qui tourne autour du point M
considéré en suivant n dans le plan dé ni par n et T (n).Cette interprétation est rappelée
sur la représentation de Mohr( gure 10) par la schématisation d une facette dont Oσ est la
normale sortante, qui sera conservée dans toute la suite.
Le signe de τ dans le plan de Mohr sur la gure 10 dépend naturellement du choix initialement
fait pour le vecteur t :selo
nl orientation de ce vecteur unitaire, le vecteur-contrainte sur la
facette de normale n sera représenté, dans le plan de Mohr, par le vecteur OT comme sur la
gure 10 ou par son symétrique par rapport à l axe Oσ.Po
u
rc
ette raison, la théorie de la
représentation de Mohr est souvent présentée en se limitant au demi-plan de Mohr dé ni par
σ en abscisse et |τ | en ordonnée.
Malgré cette ambiguïté on continuera, pour la représentation de Mohr, à donner un caractère
algébrique à τ .Eneffet,s il n est pas possible de dé nir une règle continue d orientation du
vecteur t ,quiseraitvalable pour toutes les orientations de la facette autour du point courant
et lèverait ainsi, de manière générale, l indétermination sur le signe de τ , une telle règle se
révèle possible lorsque l on considère les facettes qui pivotent autour des axes principaux qui
seront envisagées dans l étude du paragraphe 3.2 mettant alors en évidence les cercles (et
non les demi-cercles) principaux ou cercles de Mohr.
3.2 Cercles de Mohr
Connaissant le tenseur σ on se propose de déterminer le domaine engendré par l extrémité
du vecteur-contrainte dans le plan de Mohr ,lo
r
squ
en varie.
Il est commode, pour cette étude, de prendre une base orthonormée e1,e2 ,e3 ,dirigée suivant
les directions principales de σ.Onaalors les relations suivantes :
• pour les composantes de n,
n2
1+n2
2+n2
3=1
(3.1)
n2
1≥0,n
2
2≥0,n
2
3≥0;
(3.2)
• pour le vecteur-contrainte,
T1 = σ1n1,T
2 = σ2n2,T
3=σ3n3;
(3.3)
• pour la contrainte normale,
σ=σ1n2
1+σ2n2
2+σ3n2
3;
(3.4)
• pour la contrainte tangentielle,
τ2+σ2=σ2
1n2
1+σ2
2n2
2+σ2
3n2
3.
(3.5)
3 Représentation de Mohr
267
L ensemble des équations 3.1, 3.4 et 3.5 constitue un système de trois équations linéaires pour
les variables n2
1 ,n2
2 ,n2
3 ,dontlescoefficients sont fonctions de σ1 ,σ2 ,σ3 ,σ et τ .Larésolution
de ce système donne :
n2
1=τ2+(σ-σ2)(σ-σ3)
(σ1 - σ2)(σ1 - σ3)
(3.6)
n2
2=τ2+(σ-σ1)(σ-σ3)
(σ2 - σ1)(σ2 - σ3)
(3.7)
n2
3=τ2+(σ-σ1)(σ-σ2)
(σ3 - σ1)(σ3 - σ2)
(3.8)
dans l hypothèse où les contraintes principales sont distinctes.
Les formules (3.6) à (3.8) permettent de délimiter le domaine parcouru par l extrémité du
vecteur-contrainte en tenant compte des conditions de positivité (3.2). Pour simpli er la
discussion on supposera les trois contraintes principales ordonnées suivant :
σI ≥ σII ≥ σIII où (σI ,σII,σIII)=(σi ,i =1, 2, 3) .
(3.9)
La positivité de n2
I ,n2
II,n2
III fournit les inégalités :
τ2+(σ -σII)(σ -σIII)≥0
(3.10)
τ2+(σ -σI)(σ -σIII)≤0
(3.11)
τ2+(σ-σI)(σ-σII)≥0
(3.12)
dont l interprétation dans le plan de Mohr est aisée.
On remarque, par exemple, que (3.10) s écrit aussi :
σ- σII+σIII
2 2+τ2≥ σII-σIII
2 2
(3.13)
ce qui montre que le point T est, dans le plan de Mohr, extérieur au cercle, centré sur Oσ
au point d abscisse (σII + σIII)/2,etder
ayo
n(σII - σIII)/2.L inégalité (3.12) conduit à un
résultat analogue avec σI et σII.L inégalité (3.11), quant à elle, montre que T est intérieur
au cercle centré sur Oσ au point d abscisse (σI + σIII)/2 et de rayon (σI - σIII)/2.
Autrement dit ( gure 11), après avoir marqué sur Oσ les pointsd
abs
cisses σIII,σII,σI ,o
n
trace les cercles de diamètres, σI σII,σ
IIσIII et σI σIII.Lerés
ultatobtenu ci-dessus montre
que : pour toute facette l extrémité T du vecteur-contrainte se trouve àl e
xtérieur des deux
plus petits cercles (diamètres σI σII et σIIσIII)etàl intérieur du grand (diamètre σI σIII).
Les frontières de ces cercles sont atteintes, respectivement pour nIII =0,nI =0,nII =0.
Les cercles de la gure 11 sont appelés cercles principaux ou cerclesdeMohr .Plu
sspé-
ci quement le grand cercle est appelé le cercle de Mohr.
Figure 11 Cercles principaux ou cercles de Mohr
Il reste à examiner la réciproque : savoir si tout point du domaine délimité par les cercles de
Mohr est atteint au cours de la variation de n.Lerés
ultatdécoule des équations (3.1, 3.2,
3.4 et 3.5).
268
Chapitre VI Étude des contraintes
En effet σ et τ étant donnés véri ant (3.10 à 3.12), les formules (3.6 à 3.8) déterminent
toujours, par n2
1 ,n2
2etn2
3 ,lesvecteurs n tels que σ et |τ | prennent les valeurs prescrites. Ces
formules conduisent, dans le cas général où n1 n2 n3 =0,àhuito
rientations distinctes pour
le vecteur n,oppo
sées deux-à-deux, et symétriques deux-à-deux par rapport aux facettes
principales(8).Enparticulier chaque cercle principal est lui-même entièrement décrit lorsque
la facette tourne autour de la direction de la contrainte principale qui ne le concerne pas, à
condition que l on prenne soin de dé nir de façon continue l orientation du vecteur t au cours
de la rotation de la facette. La continuité d orientation du vecteur t ne peut, par contre, être
assurée lorsque n prend toutes les orientations dans R3 ;c
e
stc
equ
em
a
nife
stel existence
des deux zones symétriques délimitées par les cercles de Mohr qui sont ainsi atteintes.
3.3 Description des cercles principaux
Figure 12 Description du (grand) cercle de Mohr
Àtitred exemple, compte tenu de son intérêt pratique, on va étudier la description du (grand)
cercle de Mohr. (Les résultats obtenus seront transposables aux autres cercles principaux).
Les facettes concernées sont parallèles à la direction de la contrainte principale intermédiaire
σII.Onc
o
n
stitu
ea
v
e
cles directions I,III,II un trièdre direct ; la normale n évolue dans le
plan (I,III) et on dé nit l angle θ ( gure 12) :
θ =(I,n);
(3.14)
l expression de n dans la base eI ,eIII,eII est donc : n = eI cos θ + eIII sin θ.
Il résulte de (2.3) que le vecteur contrainte T (n) est contenu dans le plan (I,III) où évolue n
avec pour composantes dans la même base :
TI = σI cosθ,TIII = σIIIsinθ,TII =0.
(3.15)
Ceci permet de donner une règle d orientation continue du vecteur t pour les facettes
considérées, a n de compter algébriquement les contraintes tangentielles :
t est construit de sorte que le trièdre (n,t, II) soit direct .
(3.16)
Le calcul des composantes σ et τ est immédiat par projection de T (n) donné par (3.15) sur
les axes n,t.Onpeutaussi utiliser les formules tensorielles de changement de base (2.13) qui
donnent :
σ =σnn =σIcos2θ+σIIIsin2θ
τ = σtn = -σIcosθsinθ+σIIIcosθsinθ
σtt =σIsin2θ+σIIIcos2θ
(8)Fa cettes orthogonales aux directions principales.
3 Représentation de Mohr
269
soit encore :
σ= σnn = σI+σIII
2 +σI-σIII
2 cos2θ
τ= σtn= -σI-σIII
2 sin2θ
σtt = σI+σIII
2 -σI-σIII
2 cos2θ
(3.17)
Les deux premières équations de (3.17) montrent que le point T ,e
x
t
r
é
mit
édu vecteur-
contrainte, décrit le cercle de diamètre σIIIσI comme on l avait indiqué au paragraphe précé-
dent. On retrouve aussi que pour θ =0 on a σ = σI et τ =0,etpo
u
rθ=π/2onaσ=σIII
et τ =0,cequicorrespond aux deux facettes principales normales aux directions I et III. Au
cours de la variation de n,lecercle de diamètre σIIIσI est entièrement décrit.
Géométriquement, en désignant par le centre du cercle de Mohr, les formules (3.17) mon-
trent que le rayon-vecteur T fait un angle égal à -2θ avec l axe Oσ.Ondéduit de cette
propriété la règle suivante.
Lorsque la facette tourne autour de la direction de la contrainte principale σII d un
angle donné, l extrémité du vecteur-contrainte (point représentatif de la facette) tourne
sur le cercle de Mohr d un angle double dans le sens opposé (autour du centre du cercle).
En conséquence on voit que, sur deux facettes symétriques par rapport aux directions prin-
cipales, s exercent des contraintes normales égales et des contraintes tangentielles opposées.
Comme on l a dit au début de ce paragraphe, le cas du (grand) cercle de Mohr n a été choisi
ici qu à titre d exemple, et les mêmes résultats sont valables pour les deux autres cercles
principaux ; on prendra soin dans chaque cas, de dé nir l orientation de t par :
(n,t)=+π/2
cet angle étant compté positivement selon la même conventionquel angle de rotation de la
facette dans l espace.
3.4 Quelques conséquences pratiques
On déduit immédiatement de la représentation de Mohr les résultats suivants :
1. La contrainte normale maximale est égale à σI .Elle s exerce sur la facette normale à la
direction principale I.
2. La contrainte normale minimale est égale à σIII.Elle s exerce sur la facette normale à la
direction principale III.
3. La contrainte tangentielle maximale en valeur absolue est égale à (σI - σIII)/2.Elle s exerce
sur les facettes parallèles à la direction principale II et inclinées à ±π/4 sur les directions
principales I et III.
3.5 États de contrainte remarquables
Sur la gure 11 on a donné la représentation de Mohr de l état de contrainte en un point
dans le cas général. On va maintenant examiner quelques cas particuliers.
Te n s e u r d es contraintes en un point d une surface libre de contrainte
On suppose que le point M considéré est situé sur la frontière ∂Ωt d un système, et qu en
ce point la surface ∂Ωt est libre de contrainte c est-à-dire que le vecteur-contrainte sur cette
surface est imposé nul ( gure 13) :
T (n)=σ .n =0.
(3.18)
270
Chapitre VI Étude des contraintes
Figure 13 État de contrainte en un point d une surface libre
Sur cette facette la contrainte tangentielle estdo
n
cn
ulle
,c
equisigni e que la direction
normale à la surface libre est direction principale ( 2.6) ; la contrainte normale sur cette
facette étant également nulle, on en déduit que la contrainte principale correspondante est
nulle. Dans le plan de Mohr on a donc nécessairement l un des trois diagrammes de la gure
13 (si les trois contraintes principales sont distinctes).
Tr a c t i o n ou compression simple ; état de contrainte uniaxial
C est l état de contrainte que l on tente de réaliser en tout point d une éprouvette lors d une
expérience de traction simple ou de compression simple . Deux contraintes principales
sont nulles :
σ2=σ3=0
(3.19)
σ1 est positive ou négative (traction ou compression). Le tenseur des contraintes est dit
uniaxial . Le vecteur-contrainte, sur toute facette, est dirigé selon la direction principale
1; en effet dans une base orthonormée e1 ,e2 ,e3 prise selon des directions principales, on a :
T1=σ1n1,T2=T3=0.
(3.20)
De plus on voit que le vecteur-contrainte est nul pour les facettes parallèles à la direction
principale 1(n1 =0).
Figure 14 État de contrainte uniaxial
La théorie des cercles principaux faite au paragraphe 3.2 dans le cas où les contraintes prin-
cipales sont distinctes, est ici complétée. On a par (3.4) et (3.5) :
σ=σ1n2
1
τ2+σ2=σ2
1n2
1
d où :
(σ - σ1/2)2+τ2 =(σ1/2)2 .
(3.21)
3 Représentation de Mohr
271
On en déduit que le domaine engendré par l extrémité du vecteur-contrainte dans le plan de
Mohr se réduit au seul cercle de diamètre Oσ1 ( gure 14).
On note que ces resultats procèdent de celui obtenu au paragraphe précédent, si xant σ1 =0
et σ3 =0,o
nfaittendre σ2 vers σ3 :lecercle de diamètre σ3 σ2 tend vers le cercle point
σ2 = σ3 =0,ta
ndis que le cercle σ2 σ1 tend vers le cercle σ3 σ1 ,etledo
m
aine engendré sur
la gure 11 se trouve réduit à ce même cercle.
Cission simple
Une contrainte principale est nulle, σII =0,etlesdeux autres sont opposées : σI = -σIII > 0.
Dans le plan de Mohr, on a la représentation de la gure 15. On remarque sur cette gure que
la contrainte de cisaillement (cission) maximale en valeur absolue s exerce, comme indiqué
au paragraphe 3.4, sur les facettes parallèles à la direction II de la contrainte principale nulle,
et inclinées à π/4 sur les directions des contraintes principales I et III. Sur ces facettes la
contrainte normaleestn
ulle (points situés sur l axe des τ dans la représentation de Mohr) et
la cission est égale à :
τ = σI pour la facette dont la normale α est inclinée à -π/4 sur la direction I,
τ = -σI pour la facette dont la normale β est inclinée à +π/4 sur la direction I.
On en déduit que, le tenseur σ qui s écrit dans la base (eI ,eIII,eII) :
σ =σI(eI⊗eI-eIII⊗eIII)
(3.22)
a, dans la base (eα ,eβ ,eII) déduite de la précédente par rotation de -π/4 autour de eII,
l expression :
σ =σI(eα⊗eβ+eβ⊗eα).
(3.23)
Figure 15 Cission simple
État de contrainte triaxial de révolution
C est l état de contrainte que l on tente de réaliser en tout point d une éprouvette dans l essai
à l appareil dit triaxial en mécanique des sols par exemple. Il généralise l essai de traction
ou de compression simple : les deux contraintes principales σ2 et σ3 sont égales entre elles,
mais non nulles : σ2 = σ3 .Ondits
o
u
v
e
n
tque le tenseur σ est cylindrique , toutes
lesdirections orthogonales à la direction 1 étant principales. La représentation de Mohr est
semblable à celle de la gure 14 :
• un cercle point σ2 = σ3,
• deux cercles principaux confondus de diamètres σ3 σ1 et σ2 σ1 ,
• le domaine engendré par l extrémité du vecteur-contrainte se réduit au seul cercle de dia-
mètre σ3 σ1 ( gure 16).
272
Chapitre VI Étude des contraintes
Figure 16 État de contrainte triaxial de révolution
Traction ou compression triple ou isotrope
Figure 17 Traction isotrope
Le tenseur des contraintes est sphérique . Les trois contraintes principales sont égales
entre elles et toutes les directions sont principales. On a
σ=σm1l,T(n)=σmn ∀n.
(3.24)
La représentation de Mohr correspond à trois cercles points situés à l abscisse σm ( gure 17).
Commentaires
De même que d autres notions introduites précédemment, telles que le déviateur au para-
graphe 2.8, la représentation de Mohr n est pas spéci que au tenseur des contraintes σ :elle
peut être utilisée pour tout tenseur euclidien du second ordre, symétrique, par exemple pour
les tenseurs d ou ε.Onretiendra en particulier les formules 3.17, souvent utiles.
4C
ritères de limite d élasticité
pour les matériaux isotropes
4.1 Présentation
On étudiera ultérieurement (chapitre VII) le comportement élastique des maté-
riaux. Il s agit d une modélisation du comportement réel, dont les limites de validité
sont expérimentalement xées par l intensité de la sollicitation subie par l élément de
matière. Plus précisément, l expérience montre que l on peut déterminer un domaine
d élasticité initial du matériau tel que, si le tenseur des contraintes σ reste à l in-
térieur de ce domaine, le comportement du matériau sous la sollicitation caractérisée
par σ demeure élastique.
4 Critères de limite d élasticité pour les matériaux isotropes
273
La dé nition du domaine d élasticité initial dans l espace R9 (ou R6 compte tenu
de la symétrie de σ)sefaitaumoyen d une fonction scalaire f du tenseur σ,appelée
fonction de charge ,oucritère de limite d élasticité : la fonction de charge sert, en
quelque sorte, à mesurer l intensité de la sollicitation subie ; elle est choisie de façon
que : f<0 ⇔ comportement élastique
f =0 ⇔ limite d élasticité initiale du matériau.
(4.1)
On se propose de présenter ici, en application des résultats énoncés et des no-
tions introduites dans les sections précédentes, quelques critères de limite d élasticité
adoptés pour les matériaux isotropes .
4.2 Principes généraux
Principe d isotropie de l espace
La fonction de charge, fonction scalaire de σ,estcalculée à partir des composantes
du tenseur σ dans une base. En supposant, pour xer les idées et simpli er les nota-
tions, que cette base est la base orthonormée d un repère R , l expression explicite de
la fonction de charge sera notée :
fR (˜
σ )où˜
σ désigne la matrice de σ dans R .
(4.2)
La fonction de charge est une caractéristique physique intrinsèque de l élément de
matière ; il est donc naturel de considérer de façon particulière son expression dans un
repère R qui possède une signi cation physique liée à l élément de matière et permette
par exemple d en xer l orientation dans l espace :
fR(˜
σ)(
˜
σ matricede σdansR).
(4.3)
Le principe de l isotropie de l espace po
s
equ
ec
ette expression 4.3 est indé-
pendante de l orientation de l élément de matière dans l espace et est bien intrinsèque
au matériau.
L expression de fR dans un repère quelconque R se déduit de fR par la relation :
fR (˜
σ )=fR(˜
σ)=fR(t ˜
α.˜
σ . ˜
α)
(4.4)
où˜
α désigne la matrice de changement de repère orthonormé entre R et R.
Principe de respect des symétries de la matière
Par sa constitution microscopique(9) le matériau possède des symétries qui dé -
nissent un groupe d isométries, appelé groupe des symétries matérielles, soit G.La
(9)Échelle microscopique du point de vue de la modélisation réputée macroscopique .
Les considérations exposées ici ne sont qu une première approche qui nécessiterait d être affinée, en
particulier les propriétés de symétrie matérielle sont relatives à une con guration qui doit être mieux
précisée.
274
Chapitre VI Étude des contraintes
fonction de charge f ,caractéristique physique du matériau, doit rendre compte de ces
symétries : c est le principe du respect des symétries delam
atièr
e.
Ainsi, dans le repère physique R précisé ci-dessus, deux sollicitations ˜
σet˜
σ∗ liées
l une à l autre par une isométrie de G sont équivalentes pour la fonction de charge :
∀˜
σ,∀˜
α∗ ∈G fR(˜
σ)=fR(t ˜
α∗. ˜
σ.˜
α∗) .
(4.5)
Matériau isotrope
Le matériau isotrope correspond au cas où G est le groupe de toutes les isomé-
tries.Ona ainsi: ∀˜
σ,∀˜
α∗ telque t˜
α∗. ˜
α∗=˜
1l,
fR(˜
σ)=fR(t ˜
α∗. ˜
σ.˜
α∗) ,
(4.6)
qui, compte tenu de l équation (4.4), implique pour fR la même propriété dans un
repère R quelconque.
Ces formules traduisent bien la perception physique du concept d isotropie : le ma-
tériau étant isotrope la valeur de la fonction de charge f ne dépend pas de l orientation
du tenseur σ dans R,etdonc,par(4.4) dans R quelconque.
Du point de vue mathématique on retrouve alors la notion de fonction scalaire
(isotrope) du (seul) tenseur σ rappelée au paragraphe 2.7(10).
Pour le matériau isotrope, en application du théorème de représentation énoncé
au paragraphe 2.7, la fonction de charge f s exprime donc en fonction de σ,defaçons
équivalentes :
• soit comme une fonction symétrique des contraintes principales,
• soit comme une fonction des invariants de σ,
• soit, compte tenu des relations (2.27) entre les invariants de σ et ceux de s,comme
une fonction de I1 et des invariants J2 et J3 de s.
4.3 Critère de Tresca
Ce critère fut introduit par Tresca(11) en 1864 à la suite d expériences sur le plomb.
La fonction de charge correspondante s écrit :
f(σ)=sup{σi - σj - σ0|i,j =1,2,3}
(4.7)
dans laquelle les σi désignant les contraintes principales, et où σ0 est une constante
caractéristique du matériau qui a les dimensions d une contrainte.
On remarque que cette fonction de charge est bien mise sous la forme d une fonc-
tion symétrique des contraintes principales. Elle pourrait aussi s exprimer en fonction
(10)L écriture classique f(σ) pour la fonction de charge est, dans ce cas, pleinement justi ée du point
de vue mathématique.
(11)H. Tr esca (1814-1885).
4 Critères de limite d élasticité pour les matériaux isotropes
275
des invariants de σ (ou plus précisément ici, de s seulement), mais cette expression
ne saurait êtrepolynomiale(12).
En considérant certains des états de contrainte remarquables examinés au para-
graphe 3.5 on voit sans difficulté que :
• la limite d élasticité en traction simple est égale à σ0,
• la limite d élasticité en compression simple est égale à -σ0,
• la limite d élasticité en cission simple est égale à σ0/2.
L étude de l expression (4.7) met en évidence les propriétés suivantes.
a) Supposant σ décomposé selon (2.24) en sa partie sphérique σm 1l et son dévia-
teur s,onvoitquelafonction de charge de Tresca prend la même valeur pour tous
les états de contrainte σ qui correspondent au même déviateur s.
Ainsi f est indépendante de σm (ou de I1)etn
edépend que de s,déviateur des
contraintes.
Cette propriété mathématiquerendcomptedeobserv
ations expérimentales effec-
tuées sur de nombreux matériaux (métaux, argile saturée, ... )surune large gamme
de sollicitations.
b) Si l on ordonne les contraintes principales suivant (3.9), f(σ) s écrit :
f(σ)=σI - σIII - σ0
(4.8)
sur laquelle on voit que la fonction de charge de Tresca est indépendante de la
contrainte principale intermédiaire (σII),etnefaitdoncintervenirquelesdeux
contraintes principales extrêmes.
Figure 18 Critère de Tresca : représentation de Mohr
c) L interprétation de (4.8) dans la représentation de Mohr est immédiate ( gure 18) : le
comportement du matériau demeure élastique tant que le (grand) cercle de Mohr a son
(12) L expression (4J 3
2 -27J2
3 -9σ2
0J2
2 +6σ4
0J2-σ6
0)proposéepar certains auteurs n e s t pa s équi-
valente à (4.7).
276
Chapitre VI Étude des contraintes
diamètre inférieur à σ0 ,c
e
st-à-dire demeure compris dans la bande délimitée dans le plan
de Mohr par les deux droites d équations |τ | = σ0/2.
Physiquement (cf. 3.4) cela signi e que le comportement du matériau demeure élastique
tant quelacontraintedecisaillement sur une facette d orientation quelconque ne dépasse
pas la valeur σ0/2.
Ceci explique le nom de critère de cission maximale donné au critère de Tresca.
4.4 Critère de von Mises
Ce critère fut proposé indépendamment par Beltrami (1903), Huber (1904), von
Mises (1913) et Hencky (1924).
La fonction de charge correspondante rend compte de la même propriété a) énoncée
pour le critère de Tresca : f ne dépend que du déviateur des contraintes s.Expriméen
termes d invariants ceci implique que f ne dépend que des invariants de s c est-à-dire
J2 et J3 dé nis par (2.26),àl exclusion de I1.
La fonction de charge de von Mises est une expression très simple satisfaisant cette
propriété :
f(σ)= J2 - k
(4.9)
où k est une constante caractéristique du matériau, qui a les dimensions d une
contrainte.
f peut évidemment s écrire sous la forme d une fonction symétrique des contraintes
principales σ1,σ2 ,σ3 :
f(σ)= 16 [(σ1 - σ2)2 +(σ2 - σ3)2 +(σ3 - σ1)2]TM1/2
-k.
(4.10)
En considérant les mêmes états de contrainte qu au paragraphe précédent, on voit
que :
• la limite d élasticité en traction simple est égale à k√3,
• la limite d élasticité en compression simple est égale à -k√3,
• la limite d élasticité en cission simple est égale à k .
Les résultats d expériences effectuées surle
sméta
u
x
,par exemple en traction-
compression et torsion, indiquent que le critère de limite d élasticité initiale pour
ces matériaux est plus proche du critère de von Mises que de celui de Tresca : en
particulier le rapport des limites d élasticité en traction simple et en cission simple
est plus proche de √3 que de 2.
La fonction de charge de von Mises est aussi le fondement de la notion de
contrainte équivalente (de von Mises) à un état de contrainte quelconque donné.
Il s agit de la quantité
σeq = 3J2 ,
(4.11)
qui correspond à la contrainte de traction simple qui donne la même valeur à la
fonction de charge f(σ) du critère de von Mises que l état de contrainte complexe
5 Dériv
ation temporelle du tenseur des contraintes
277
considéré. La contrainte équivalente est très utilisée dans les applications pratiques,
notamment pour visualiser les résultats de calculs (ou de mesures) de contraintes et
repérerles zones les plus sollicitées dans une pièce ou dans une structure (13).
5D
érivation temporelle du tenseur des contraintes
5.1 Dérivée particulaire
Le tenseur des contraintes de Cauchy étant naturellement dé ni sur la con guration actuelle
κt on se retrouve en ce qui le concerne, en présence d une description eulérienne. Le calcul de
sa dérivée particulaire ˙
σ relève donc de l application de la formule (4.14) du chapitre III.
Il vient ainsi (en simpli ant les notations par la suppression des arguments x et t):
˙
σ=dσ
dt=∂σ
∂t +gradσ .U
(5.1)
dans laquelle le dernier terme grad σ .U est le terme dec
o
n
v
e
ction .
Il est intéressant d effectuer ce même calcul en passant en description lagrangienne, à partir
de la dé nition du tenseur des contraintes de Piola-Kirchhoff :
σ(x,t)= 1
J(X,t) F(X,t).π(X,t). tF(X,t)
avec x = φ(X ,t) et J(X ,t)=ρ0(X)/ρ(x,t) .
(5.2)
On en déduit (en sous-entendant à nouveau les arguments) :
˙
σ=-
˙
JJ-2F .π. tF + J-1(˙
F.π.tF+F.π.t˙
F)+J-1F . ˙
π.tF;
(5.3)
compte tenu des relations démontrées au chapitre III
˙
F .F-1 =gradU et ˙
JJ-1 =divU
cette formule s écrit aussi :
˙
σ = -σdivU+gradU.σ+σ.tgradU+J-1F. ˙
π.tF.
(5.4)
Par identi cation des termes dans les expression (5.1) et (5.4) de ˙
σ,comptetenudelarelation,
issue de l identité (4.24) du chapitre III
div(σ ⊗ U)=σ div U +gradσ .U ,
on obtient notamment l expression de la dérivée partielle de σ par rapport au temps qui sera
reprise dans les paragraphes suivants :
∂σ
∂t = -div(σ⊗U)+gradU.σ+σ.tgradU+J-1F. ˙
π.tF.
(5.5)
L examen de l expression (5.4) de ˙
σ montre que, bien que le tenseur des contraintes de
Cauchy σ soit objectif (chapitre V, 3.15), sa dérivée particulaire ˙
σ n est pas unegr
a
nde
u
r
objective en raison du terme (grad U .σ + σ . tgrad U)(cf.chapitre III, 3.11). On y voit
aussi que ˙
σ résulte de l addition de deux contributions : d une part trois termes linéaires en
grad U ,d
a
utr
epart un terme linéaire en ˙
π.Ile
nrésulte en particulier que la nullité de ˙
π
n implique pas celle de ˙
σ si σ =0et grad U =0.Onreviendra sur les conséquences pratiques
de ce résultat au paragraphe suivant.
(13) Compte tenu de l interprétation de J2 rapportée à la facette octaédrale par la formule (2.28), le
critère de von Mises est aussi appelé critère de cission octaédrale et on a σeq =3|τoct|/√2.Il
s interprète aussi, à partir de résultats établis au chapitre VII ( 5.4), comme un critère de limitation
de l énergie élastique de distorsion.
278
Chapitre VI Étude des contraintes
5.2 Dérivée intrinsèque (dérivée de Truesdell)
L idée directrice dans la dé nition de cette dérivée du tenseur σ par rapport au temps
est de la construire à partir de la dérivée temporelle ˙
π du tenseur des contraintes de Piola-
Kirchhoff, par la même correspondance (5.2) qui lie σ et π.Ondé nit ainsi la dérivée
intrinsèque ,icidérivéedeTr
uesdell du tenseur σ :
Dσ
Dt T
=J-1F. ˙
π.tF
(5.6)
où l on reconnaît le terme linéaire en ˙
π de (5.4).
Elle est évidemment objective .Soncalculen description eulérienne est immédiat à partir de
(5.5) : Dσ
Dt T
=∂σ
∂t+div(σ⊗U)-gradU.σ-σ.tgradU;
(5.7)
l équation (5.4) fournit la correspondance entre dérivée particulaire et dérivée intrinsèque :
Dσ
Dt T
=˙
σ+σdivU-gradU.σ-σ.tgradU.
(5.8)
On remarque évidemment que, par construction :
Dσ
Dt T
=0⇔˙
π=0 ⇔ π=Cte.
(5.9)
Il en résulte que, dans cec
a
s,lete
n
seur sur κt
ρ0
ρσ=F.π.tF
conserve des composantes constantes dans toute base constituée de vecteurs matériels ,
c est-à-dire dans toute base transportée convectivement(14) .
L application de ce résultat au cas particulier où le mouvement en M à l instant t est rigidi-
ant met en valeur l intérêt de l introduction de cette dérivée. On a alors :
grad U = ω antisymétrique ,
Dσ
Dt T
=˙
σ-ω.σ-σ.tω,
(5.10)
et Dσ
Dt T =0signi e que le tenseurdescontraintes σ subit à l instant t la même rotation que
l élément de matière en M c est-à-dire que les contraintes principales demeurent constantes
tandis que le trièdre des directions principales de σ tourne comme l élément de matière.
Àtitre d illustration physique de cette propriété on peut considérer l exemple d une éprou-
vette soumise à un effort de traction (cf. chapitre VII, 2.2). Une modi cation de l orientation
de cette éprouvette et de son chargement dans la con guration actuelle modi e évidemment
l orientation de σ de la même façon, mais correspond à Dσ
Dt T =0.Dupointdev
u
edu
comportement du matériau on conçoit aisément que cette modi cation d orientation dans le
référentiel de l observateur extérieur n a aucune importance : c est le principe de l isotropie
de l espace , déjà évoqué au paragraphe 4.2. En conséquence, l intervention de la dérivée
intrinsèque Dσ
Dt T dans une loi de comportement apparaît alors naturelle .
(14)On véri e en effet, par exemple en décomposant F ,que:∀a , ∀b on a F . (a ⊗ b) .t F =(F .a) ⊗
(F .b). Soit alors {eK}, (K =1, 2, 3) une base dans κ0,ona:π = πIJeI ⊗eJ et ρ0
ρσ=πIJF.(eI⊗
eJ). tF = πIJ(F .eI)⊗(F .eJ),c
equidémontre le résultat annoncé. (Cf. aussi la terminologie de
transport convectif 2-contravariant évoquée au chapitre V, 4.1).
5 Dériv
ation temporelle du tenseur des contraintes
279
5.3 Dérivée corotationnelle (dérivée de Jaumann)
L idée qui préside à la construction de cette dérivée du tenseur σ par rapport au temps
procède de la remarque précédente à propos de la dérivée intrinsèque, et de la formule (5.10).
On se propose, à partir de ˙
σ ,dedé nir et de calculer une dérivée de σ par rapport au temps,
dont la nullité caractérise le fait que le tenseur σ suit un mouvement rigidi ant signi catif
pour la matière en M ,dé ni même lorsque le mouvement réel en M n est pas lui-même
rigidi ant.
Comme tel mouvement il est naturel de choisir le mouvement rigidi ant du trièdre des direc-
tions principales du tenseur taux de déformation d,m
atérialisé dans κt comme expliqué au
chapitre III ( 3.5). On rappelle que ce mouvement, dont le taux de rotation est déterminé par
le vecteur tourbillon Ω ou par le tenseur antisymétrique Ω,tauxderotation en M ,estaussi
le mouvement rigidi ant moyen de la matière M : ceci justi e son caractère signi catif .
On dé nit alors la dérivée corotationnelle ou dérivée de Jaumann par la formule :
Dσ
Dt J
=˙
σ-Ω.σ-σ.tΩ.
(5.11)
Cette dé nition correspond bien à l objectif poursuivi. En effet
Dσ
Dt J
=0⇔˙
σ =Ω.σ+σ.tΩ
(5.12)
et cette dernière équation implique que σ conserve des composantes constantes dans tout re-
père animé du mouvement rigidi ant de vitesse de rotation Ω autour de M (15) .Onremarque
évidemment que si le mouvement réel est rigidi ant les dérivées intrinsèque (de Truesdell)
et corotationnelle (de Jaumann) sont identiques (formules 5.10 et 5.11) et que, dans le cas
général, elles sont liées par : Dσ
Dt T
= Dσ
Dt J
-d.σ-σ.d+σ(trd)
(5.13)
où le gradient du champ de vitesse n intervient que par le taux de déformation d et qui met
bien en évidence l objectivité de la dérivée corotationnelle.
Lesdérivées intrinsèque et corotationnelle sont l une et l autre utilisées dans l écriture des lois
de comportement, ainsi que d autres dérivées objectives du tenseur des contraintes (dérivées
d Oldroyd, de Cotter-Rivlin).
(15) Par exemple dans le repère orthonormé des directions principales de d on a σ = σij ei ⊗ ej ,dont
la dérivation par rapport au temps donne : ˙
σ=˙
σijei⊗ej+σij(˙
ei⊗ej+ei⊗˙
ej)où˙
ek=Ω.ek;
d où ˙
σ=˙
σij ei ⊗ ej + Ω .σ+ σ . tΩ.L équation (5.12) implique donc ˙
σij =0(i, j =1, 2, 3).
280
Chapitre VI Étude des contraintes
Récapitulatif des formules essentielles
Vec t eur-contrainte
T (n)=σ .n
Ti = σijnj
Contrainte normale :
σ = n.σ.n= σijninj
Contrainte tangentielle :
τ =T(n)-σn
|τ|=((σ .n)2 -(n .σ.n)2)1
2
Invariants :
I1 =trσ=σ1+σ2+σ3
I2 = tr (σ2)/2=((σ1)2 +(σ2)2 +(σ3)2))/2
I3 = tr (σ3)/3=((σ1)3 +(σ2)3 +(σ3)3)/3
Déviateur :
σm = I1/3
s =σ-σm1l
J1 =0,J2 = tr(s2)/2 ,J
3 = tr(σ3)/3
Critère de Tresca :
f(σ)=sup{σi - σj - σ0|i,j =1,2,3}≤0
Critère de von Mises :
f(σ)=√J2-k ≤0
f(σ)= 16[(σ1 - σ2)2 +(σ2 - σ3)2 +(σ3 - σ1)2]TM1
2
-k≤0
σeq = √3J2 (contrainte équivalente)
Exercices
281
Exercices
VI.1 - Exprimer la densité volumique de puissance virtuelle des efforts intérieurs
pour un milieu continu en séparant les contributions déviatorique et sphérique.
Éléments de réponse.
Déviateur du taux de déformation virtuel : ˆd = ˆd - 1
3 (tr ˆd)1l
p(i)( ˆ
U)=-s : ˆd -σm(tr ˆd)=-s : ˆd -σmdiv ˆ
U.
VI.2 - On considère une enveloppe sphérique de rayons intérieur et extérieur ri et re
respectivement, soumise à une pression extérieure pe xée et à une pression intérieure
variable pi ≥ pe .Iln yapasdeforcedemasse.Cette enveloppe est constituée d un
matériau homogène dont la résistance estdé nie par le critère de Tresca. Détermi-
ner la forme générale des champs virtuels de vitesse radiale fonctions uniquement de
r (coordonnées sphériques), ˆ
U=ˆ
Ur(r) er ,pou
rqu
eletaux de dilatation volumique
virtuel correspondant soit nul. En déduire que l équilibre de l enveloppe sphérique
sous les pressions pe et pi ne peut être réalisé sans violer en aucun point le critère de
Tr e s ca, lorsque pi dépasse une certaine valeur. Déterminer pour pi = pe +2σ0 ln(re/ri)
un champ de contrainte en équilibre avec ces données et qui ne viole pas le critère de
Tr e s ca. Démontrer l unicité de ce champ.
Éléments de réponse.
•ˆ
Ur = α/r2 ,α constante arbitraire.
• Le principe des puissances virtuelles appliqué à la sphère montre que tout champ d efforts
intérieurs en équilibre avec les efforts extérieurs doit véri er :
∀ˆ
U m.v . P(e)(ˆ
U)+P(i)(ˆ
U)=0.
D où, avec ˆ
U=(α/r2)er ,pi-pe = - 1
4π 2σrr -σθθ-σφφ
r
sinθdθdφdr.
La condition de résistance de Tresca doit être respectée en tout point par les efforts in-
térieurs. La représentation de Mohr permet de voir que cette condition impose que :
-2σ0≤2σrr -σθθ-σφφ≤2σ0.
Les bornes sont atteintes pour σθθ = σφφ ,σ
rr - σθθ = σ0 (borne inférieure) ou
σrr - σθθ = -σ0 (borne supérieure), autres σij nulles.
Ainsi, si pi >pe +2σ0 ln(re/ri),iln
est pas possible d assurer l équilibre de l enveloppe
en respectant le critère de Tresca.
• Le champ cherché doit admettre er ,eθ ,eφ pour directions principales, véri er σθθ = σφφ
et σrr - σθθ = σ0 ou -σ0 en tout point, autres σij nulles, (conséquences de l analyse
précédente). Les équations d équilibre montrent que ce champ ne dépend que de r,etse
réduisent à :
dσrr
dr +2σrr - σθθ
r
=0.
282
Chapitre VI - Études des contraintes
La solution satisfaisant lesc
onditions aux limites avec pi >pe est unique, correspond à
σrr-σθθ= -σ0ets écrit:
σrr = -pe+2σ0ln r
re
,σ
θθ = σφφ = σrr +σ0 ,autresσij =0.
Commentaire.
Le résultat est à rapprocher de celui donné au chapitre IX ( 6.4) pour la limite d élasticité
de l enveloppe sphérique. La valeur trouvée ici est la pression limite applicable à l enveloppe
lorsque celle-ci est constituée d un matériau élastique-parfaitement plastique : elle correspond
àlaplasti cation totale de l enveloppe.
VI.3 - Pour un matériau dont le critère de limite d élasticité est le critère de Tresca
déterminer le domaine d élasticité pour une sollicitation dé nie, dans un repère or-
thonormé ex ,ey ,ez ,pa
r:σ = τ(ex⊗ey+ey⊗ex)+σez⊗ez , τ etσétantdes
paramètres.Mêmequestionpour : σ = σex⊗ex+τ(ex⊗ey+ey⊗ex).
Éléments de réponse.
• Contraintes principales : σ1 = τ, σ2 = -τ, σ3 = σ ; domaine d élasticité dé ni par :
sup{|2τ|, |σ - τ|, |σ + τ|} ≤ σ0 (domaine hexagonal dans le plan σ, τ).
• Contraintes principales :
σ1(resp. σ2)=σ±√σ2+4τ2
2
,σ
3 =0toujours intermédiaire ; domaine d élasticité
dé ni par :
σ2+4τ2≤σ2
0 (domaine elliptique dans le plan σ, τ ).
Commentaire.
Les frontières des deux domaines construits ci-dessus passent évidemment par les points
(σ = ±σ0 ,τ =0)et(σ =0, |τ | = σ0/2)quicorrespondent aux limites d élasticité en traction
et compression simples et en cission simple. Les états de contrainte complexes envisagés
sont réalisés expérimentalement de façon plus ou moins pure dans des éprouvettes soumises à
certains essais pour la détermination et l étude du comportement des matériaux en mécanique
des solides.
VI.4 - Mêmes questions que dans Ex.VI.3 pour un matériau dont le critère de limite
d élasticité est le critère de von Mises.
Éléments de réponse.
Àpartirdeséléments donnés pour Ex.VI.3 on trouve dans les deux cas que le domaine d élas-
ticité est dé ni par : σ2+3τ2≤3k2 .
Commentaire.
La frontière passe par les points (σ = ±k√3,τ =0)et (σ =0, |τ | = k) correspondant aux
limites d élasticité en traction et compression simples etencission simple. On remarque que,
si l on se réfère à la limite d élasticité en traction simple prise comme donnée expérimentale,
le domaine d élasticité dé ni pour le deuxième état de contrainte à partir du critère de von
Mises est plus grand que celui dé ni à partir du critère de Tresca.
VI.5 - σi(i =1
, 2, 3) désignant les contraintes principales de σ quelconque, on
convient de représenter cet état de contrainte par le point Σ dont les coordonnées
sont (σ1 ,σ2,σ3) dans un repère orthonormé xe. Déterminer le domaine d élasticité
délimité dans cet espace par le critère de Tresca.
Exercices
283
Éléments de réponse.
Prisme parallèle à l axe (√3/3, √3/3, √3/3)etdont la section est un hexagone régulier.
VI.6 - L état de contrainte σ quelconque étant représenté par le point Σ dé-
ni en Ex.VI.5, on appelle plan déviateur passant par Σ le plan normal à l axe
(√3/3, √3/3, √3/3)etondésigne par P le point d intersection de ce plan avec l axe
ci-dessus. Interpréter OP et PΣ,etendéduire la forme du domaine délimité dans cet
espace par le critère de von Mises.
Éléments de réponse.
•OP=σm√3;
en désignant par S le point représentatif de s déviateur de σ : PΣ = OS et PΣ = √2J2 .
• cylindre circulaire d axe (√3/3, √3/3, √3/3)etderayonk√2.
Commentaire.
Le plan déviatorique passant par O est aussi appelé plan π
VI.7 - Déterminer, dans la représentation de Mohr, le lieu des extrémités des vecteurs-
contraintes sur les facettesdontlecosinus directeur nI a une valeur donnée α.
Éléments de réponse.
On s appuie sur la formule (3.6) qui se transforme en
τ2+(σ- σII+σIII
2 )2=(σ-σII-σIII
2 )2 + α2(σI - σII)(σI - σIII),
équation d un cercle, de même centre que le cercle de Mohr relatif à nI =0,etdontilconvient
de ne retenir que les arcs délimités par les autres cercles de Mohr.
Commentaire.
Il n est pas possible de rendre compatibles l orientation continue de t lorsque l on décrit com-
plètement le grand cercle de Mohr et une orientation continue de t lorsque n tourne autour
de l axe I en respectant nI = α ;c
onserver la première continuité conduit à introduire une
discontinuité dans le deuxième cas : deux points correspondent à (nI = α, nIII =0)permet-
tant de sauter d un arc sur l autre.
Les arcs de cercles se construisent aisément car ils sont limités sur les deux cercles de Mohr
par les rayons-vecteurs correspondant à nI = α, nII ou nIII =0,nIII ou nII = ±(1 - α2)1/2 .
Le résultat appliqué aussi à nII xé ou à nIII xé permet de construire le vecteur-contrainte
correspondant à un vecteur n quelconque sur le diagramme de Mohr (on a représenté, comme
exemple, le cas de la facette octaédrale).
284
Chapitre VI - Études des contraintes
VI.8 - Équations de Hencky. Oxyz est un repère orthonormé. On considère un
champ dec
o
ntr
ainte σ continu et continûment différentiable, indépendant de z,et
pour lequel ez est direction principale en tout point. σ1 et σ2 sont les contraintes
principales dans le plan Oxy.Aupointcourant, e1 et e2 sont les vecteurs unitaires
des directions principales du plan Oxy tels que e1,e2 ,e3 soit un trièdre direct, et
l on introduit les vecteurs eα =(e1 - e2)/√2 et eβ =(e1 + e2)/√2 ;le
slignes (α)
et (β) sont, dans le plan Oxy,le
slignes enveloppes de eα et eβ .Onpo
s
e:p =
-(σ1 + σ2)/2,R =(σ1 - σ2)/2,ω =(ex ,e1).
Déterminer les composantes de σ dans la base eα ,eβ ,ez .Expliciter les équations
différentielles de la dynamique dans le système de coordonnées curvilignes dé nies
par les lignes (α) et (β) en substituant aux composantes de σ les inconnues p, R
et ω.Étudier en particulier l équilibre d un matériau homogène, incompressible (ρ
constant), dans un champ de force de masse dérivant d un potentiel ρV ,ensupposant
que le champ σ atteint en tout point la limite d élasticité du matériau dé nie par le
critère de Tresca et que σz est contrainte principale intermédiaire.
Éléments de réponse.
• par les formules (3.17) :
σ = -p(eα⊗eα+eβ⊗eβ)+R(eα⊗eβ+eβ⊗eα)+σ3ez⊗ez .
• On calcule grad σ àpa
rtirdeDw σ =gr
adσ .w appliquée pour w = eα ,eβ et ez avec
Dez σ =0.
On remarqueque :gradeα =eβ⊗gradω et gradeβ= -eα⊗gradω.
D où :
gradσ = -(eα⊗eα+eβ⊗eβ)⊗gradp+(eα⊗eβ+eβ⊗eα)⊗gradR
+2R(-eα⊗eα+eβ⊗eβ)⊗gradω.
• Équations de la dynamique :
-gradp+eαDeβR+eβDeαR- 2ReαDeαω +2ReβDeβω +ρ(F - a)=0.
• R = σ0/2 constant ,a =0,F = - grad V ,ρconstant.
Équationsd équilibre :
-grad(p+ρV)- σ0 eαDeαω+σ0 eβDeβω =0;
avec les notations courantes
∂
∂sα(p+ρV+σ0ω)=0, ∂
∂sβ (p + ρV-σ0 ω)=0.
ou encore
p + ρV + σ0 ω = cte lelongdelaligne(α) ,p+ ρV-σ0 ω = cte lelongdelaligne(β) .
Exercices
285
Commentaire.
Les équations de la dynamique peuvent être obtenues de façon artisanale en considérant,
dans le plan Oxy,unpetitélément limité par des arcs de lignes (α) et (β) in niment voisines.
Lesdernières équationsé
tablies interviennent dans la théorie des équilibres limites plans
pour les matériaux régis par les critères de Tresca ou de von Mises. Ce sont les équations de
Hencky ; elles impliquent notamment des propriétés angulaires pour le réseau des lignes (α)
et (β). Elles permettent la détermination du champ de contrainte, par intégration, à partir
des conditions au contour (problème hyperbolique, méthode des caractéristiques). La même
méthode s applique dans le cas de matériau non homogène si la variation de σ0 en fonction
de x et y estconnue;e
n n la méthode peut aussi être utilisée pour le dépouillement d essais
en photoélasticité dans lesquels R =(σ1 - σ2)/2 est déterminé expérimentalement.
VI.9 - Critère de Coulomb. Le critère de résistance de certains matériaux est dé ni
par la condition suivante : au point courant les contraintes normale et tangentielle sur
une facette quelconque doiventrespecter la limitation |τ|≤-σ tan φ + C où C ≥ 0
et 0 ≤ φ<π/2 sont des constantes caractéristiques du matériau. Interpréter cette
condition en utilisant la représentation de Mohr pour les contraintes, et donner son
expression en fonction des contraintes principales σi (i =1, 2, 3).Danslecasoù l état
de contrainte atteint la limite de résistance, déterminer les facettes sur lesquelles la
condition |τ| = -σ tan φ + C est véri ée.
Éléments de réponse
• Le (grand) cercle de Mohr doit être intérieur ou tangent au domaine délimité par les
deux demi-droites |τ|= -σtanφ+C.
• sup
i=1,2,3
j=1,2,3{σi(1 + sin φ) - σj(1 - sin φ) - 2C cos φ}≤0
ou σI(1+sinφ)-σIII(1+sinφ)-2Ccosφ≤0.
• Fa c e ttes parallèles à la direction principale II et inclinées à ±(π/4+φ/2) sur la direction
I. Le vecteur-contrainte sur une telle facette est alors parallèle à l autre (cf. Ex.VI.10).
Commentaire.
Le critère de résistance considéré ici est appelé critère de Coulomb ; C et φ sont respectivement
la cohésion et l angle de frottement du matériau. Pour φ =0on retrouve le critère
de Tresca. Le critère de Coulomb est indépendant de la contrainte principale intermédiaire
σII mais il est sensible à la contrainte moyenne σm .
VI.10 - Soient eα ,eβ ,e3 trois vecteurs normés tels que e3 soit normal à eα et eβ et
que (eα ,eβ)=π/2+φ,(0 ≤|φ| <π/2).Déterminer le tenseur des contraintes de
286
Chapitre VI - Études des contraintes
Cauchy σ dé ni par les conditions suivantes :
sur une facette de normale eα/|eα| : T = Sαeα
sur une facette de normale eβ/|eβ| : T = Sβeβ
sur une facette de normale e3 :
T=S3e3.
Déterminer les directions principales de σ et les contraintes principales correspon-
dantes dans le cas où Sα = Sβ = -p cos φ,etétudier la représentation de Mohr
de σ (on examinera en particulier les points représentatifs des facettes de normales
unitaires eα/|eα| et eβ/|eβ| dans l hypothèse p>0).
Éléments de réponse
• σ=σijei⊗ej,σij=σji,(i,j=α,β,3).
Les conditions données imposent les relations :
cos φ(σαα eα + σβαeβ + σ3α e3)=Sαeα
cos φ(σαβ eα + σββeβ + σ3β e3)=Sβeβ
σα3eα + σβ3eβ + σ33e3 = S3e3
d où: σ =(Sα/cosφ)eα⊗eα+(Sβ/cosφ)eβ⊗eβ+S3e3⊗e3.
• La représentation mixte de σ s obtient aisément à partir de :
eα =eα-eβsinφ,eβ=eβ-eαsinφ,e3=e3.
σ=Sα
cosφeα⊗eα -Sαtanφeα⊗eβ-Sβtanφeβ⊗eα+ Sβ
cosφeβ⊗eβ+S3e3⊗e3.
Les directions principales de σ sont les directions propres de l application linéaire as-
sociée à lar
eprés
e
ntatio
nmixte
.Av
e
cSα = Sβ = -p cos φ on trouve pour directions
principales :
e1 =(eα + eβ)/2cos(π/4+φ/2) ,σ1 = -p(1 - sin φ)
e2 =(eβ + eα)/2sin(π/4+φ/2) ,σ2 = -p(1 + sin φ)
e3 ,σ
3=S3.
• Cercle de Mohr pour les facettes parallèles à e3 :abscisse du centre = -p,rayon= p sin φ .
Commentaire.
Ce type d état de contrainte avec Sα = Sβ = -p cos φ<0 et -p(1 + sin φ) <S3 <
-p(1 - sin φ) se rencontre en mécanique des sols, dans l étude des équilibres limites des sols
pulvérulents en déformation plane . Les facettes conjuguées de normales unitaires eα/|eα|
et eβ/|eβ| sont alors les facettes sur lesquelles le vecteur-contrainte est à l obliquité maximale
sur la normale, égale à φ (condition de résistance de Coulomb pour le sol).
VI.11 - Équations de Kötter. Oxyz est un repère orthonormé. On considère un
champ decontrainte σ continu et continûment différentiable, indépendant de z ,etpour
lequel ez est direction principale en tout point. σ1 et σ2 sont les contraintes principales
dans le plan Oxy et e1 et e2 sont les vecteurs unitaires desdirections correspondantes
au point courant ; en ce point on dé nit les vecteurs unitaires eα et eβ dans Oxy tels
que e1 soit bissectrice intérieure de l angle (eα ,eβ)=π/2+φ (φ constant) et l on
Exercices
287
désignepa
r(α) et (β) les lignes enveloppes de eα et eβ .ω est l angle (ex ,e1).On
suppose que le champ σ est tel que, en tout point, on ait :
sur une facette de normale eα/|eα| : T = -peα cos φ
sur une facette de normale eβ/|eβ| : T = -peβ cos φ.
Expliciter les équations différentielles de la dynamique dans le système de coordonnées
curvilignes dé nies par les lignes (α) et (β).
(β)
pcosφ
pcosφ
(α)
eα
eβ
Éléments de réponse
• D après Ex.VI.10, σ s écrit en tout point :
σ = -p(eα⊗eα+eβ⊗eβ)+σ3ez⊗ez;
Le calcul de grad σ s appuie sur :
gradeα = 1
cosφ(eβ+eα sinφ)⊗gradω,grad eβ = 1
cosφ(eα+eβsinφ)⊗gradω
d où, puisque σ est indépendant de z :
gradσ = -(eα⊗eα+eβ⊗eβ)⊗gradp-2ptanφ(eα⊗eα -eβ⊗eβ)⊗gradω.
• Équations de la dynamique
-eαDeαp - eβDeβp - 2ptanφ(eαDαω - eβDeβω)+ρ(F - a)=0
soit, avec les notations courantes où ∂
∂sαet∂
∂sβ désignent les dérivées le long des lignes
(α) et (β)par rapportàl abscisse curviligne :
∂p
∂sα +2ptan φ ∂ω
∂sα -ρ(Fα - aα)=0, ∂p
∂sβ-2ptanφ∂ω
∂sβ -ρ(Fβ - aβ)=0.
Commentaire.
On notera que ces équations, dans lesquelles les positions des indices pourraient surprendre,
sont relatives aux lignes (α) et (β) particulières introduites, qui correspondent en chaque
point à la base dans laquelle la matrice des composantes 2-contravariantes de σ est diagonale
is
otr
opee
nα, β . Connues sous le nom d équations de Kötter, elles interviennent dans
la théorie des équilibres limites plans des matériaux régis par le critère de résistance de Cou-
lomb (avec l hypothèse σ2 ≤ σ3 ≤ σ1) :s
ols, matériaux grenus,... Elles permettent, comme
celle établies dans Ex.VI.8, de déterminer le champ de contrainte par intégration à partir des
conditions au contour (problème hyperbolique, méthode des caractéristiques). Elles peuvent
être établies de façon artisanale en considérant un petit élément plan limité par des arcs
de lignes (α) et (β) in niment voisines.
288
Chapitre VI - Études des contraintes
Lesproblèmes pratiques abordés dans le cadre de la théorie des équilibres limites plans (avec
les équations de Hencky ou de Kötter, ou par d autres méthodes) concernent notamment le
formage des métaux (extrusion, poinçonnement,...), la mécanique des sols (capacité portante
de fondations, stabilités d ouvrages,...).
VI.12 - Champd
a
u
t
o
c
o
n
t
r
ain
t
e
.Pour un système S donné on considère les
champs de contrainte σ en équilibre (a(x)=0sur Ω) avec des forces de masse nulles
sur Ω et des forces surfaciques nulles sur ∂Ω.Mo
ntr
e
rqu
epo
u
ru
ntelchamp de
contrainte on a : Ω σ(x)dΩ =0.
Montrer que, saufpo
u
rlecha
mpσ =0,ile
xisteto
ujo
u
r
spour un tel champ de
contrainte, en certains points du système, des facettes soumises à des contraintes
normales de traction (resp. compression).
Éléments de réponse
• On applique le principe des puissances virtuelles avec le champ ˆ
v dé ni par :
ˆ
v(x)=α .x où α est un tenseur symétrique arbitraire.
Il vient : ∀α symétrique, α : Ω
σ(x)dΩ =0;
d où, puisque σ est symétrique Ω
σ(x)dΩ =0.
• Avec le champ ˆ
v dé ni par : α = 1l,soitˆ
v(x)=x,
on obtient par le principe des puissances virtuelles : Ω tr σ(x)dΩ =0.
D où, si σ =0:tr σ(x)=σ1(x)+σ2(x)+σ3(x) (contraintes principales) ne conserve
pas un signe constant sur Ω ;enparticulier une des contraintes principales au moins doit
être strictement positive en certains points de Ω ce qui permet de démontrer le résultat
annoncé du point de vue de la traction (et raisonnement homologue pour la compression).
Commentaire.
Les champs étudiés sont des champs d autocontrainte .Lerésultatdémontré indique que tout
tel champ d autocontrainte, à part le champ nul, induit nécessairement des tractions dans
le système (en particulier les champs d autocontrainte engendrés par une incompatibilité
de déformations thermiques (cf. chapitre II, 6.4)). Il prouve aussi que pour un système
constitué en chacun de ses points d un matériau sans résistance à la traction le seul champ
d autocontrainte possible est le champ nul (de même pour un matériau sans résistance à la
compression).
VI.13 - Limite de résistance d un anneau en rotation. On considère dans sa
con guration actuelle κt ,unsolide qui a la forme d un anneau cylindrique d axe Oz,
de rayons intérieur a et extérieur b,d épaisseur h selon Oz.Cetanneau est animé, dans
le référentiel galiléen de l observateur, d une vitesse de rotation uniforme autour de
son axe Oz, ω = ωez .Lesbordsintérieur (r = a) et extérieur (r = b) de l anneau sont
libres de tout effort extérieur de même que les surfaces inférieure (z =0)et supérieure
(z = h).Onc
o
n
vie
ntdenégliger les forces de pesanteur. Le matériau constitutif de
l anneau est supposé homogène dans la con guration κt.Ondésigne par ρ sa masse
volumique et on suppose que sa résistance est dé nie par la condition de Tresca.
max{|σ1 - σ2|,|σ2 - σ3|,|σ3 - σ1|}≤σ0
Exercices
289
où σ1 ,σ2 et σ3 désignent les contraintes principales et σ0 est la caractéristique de
résistance du matériau.
On considère le champ de vitesse virtuel ˆ
Udé nipar: ˆ
U(r, θ, z)=
ˆ
α
rer,ˆ
α>0,
constant. En appliquant le principe des puissances virtuelles à un champ de contrainte
quelconque satisfaisant les équations de la dynamique pour le problème et au champ
de vitesse virtuel ˆ
U ci-dessus, montrer que pour que la condition de résistance du
matériau soit respectée en tout point du disque, la vitesse ω doit demeurer inférieure
à une valeur maximale ωd que l on déterminera.
On se propose de déterminerlechampde contrainte σ qui satisfait les équations de
la dynamique dans l anneau, en faisant les hypothèses suivantes : σ est continu et
continûment différentiable, les composantes de σ(r, θ, z) en coordonnées cylindriques
sont indépendantes de θ et de z, σθθ(r) ≡ σ0 dans tout l anneau. Montrer qu un
tel champ existe pour une valeur particulière ωc de vitesse de la rotation ω que l on
déterminera et expliciter complètement ce champ σc .Véri er que le champ σc respecte
la condition de résistance de Tresca en tout point de l anneau.
Déduire de ce qui précède que, si ω<ω
c,o
npe
utc
o
n
str
uir
ed une façon simple à
partir de σc un champ de contrainte σ satisfaisant les équations de la dynamique et
respectant la condition de résistance de Tresca en tout point de l anneau et expliciter
ce champ.
Comparer les résultats obtenus pour ωd et ωc .
Éléments de réponse
• Toutes les forces extérieures sont données nulles.
Le champ d accélération est a(r, θ, z)=-ω2 rer .
On a, pour le champ ˆ
U considéré :
ˆd(r, θ, z)=
ˆ
α
r2 (eθ ⊗ eθ - er ⊗ er);on remarque que tr ˆd =divˆ
U =0.
Pour les champs indiqués le principe des puissances virtuelles s écrit P(i)( ˆ
U)=A(ˆ
U)
avec :
A(ˆ
U)=- Ω
ˆ
αρω2rdrdθdz = -2πhˆ
αρω2b2-a2
2
P(i)(ˆ
U)=- Ω
ˆ
α
r2 σθθ(r, θ, z) - σrr(r, θ, z) r dr dθ, dz,
d où:ρω2=
2
2 πh(b2 - a2) Ω σθθ(r, θ, z) - σrr(r, θ, z) dr
r dθdz.
La condition de résistance de Tresca implique, en tout point du disque, la majoration :
σθθ(r, θ, z) - σrr(r, θ, z) ≤ σ0 . D où, tous calculs faits, la condition sur ω :
ω2≤ 2σ0/ρ
b2-a2lnb
a =(ωd)2 .
Enposantλ=b/a on a(ωd)2 = 2σ0
ρa2 lnλ
λ2-1,λ > 1. La méthode des équa-
tions aux dimensions montre que le second membre ci-dessus a pour dimensions :
(ML-1 T -2)/(ML-3) × L2 = T -2 qui est bien la dimension de (ωd)2 .Lac
r
oissance
de la borne supérieure (ωd) proportionnellement à √σ0 lorsque les paramètres géomé-
triques a et λ sont xés est conforme à l intuition. Il en va de même de la décroissance
290
Chapitre VI - Études des contraintes
de ωd en fonction du rayon intérieur a lorsque λ = b/a est constant, et en fonction de λ
(c est-à-dire de b)lorsquea est constant.
• Les équations de la dynamique s écrivent
∂σrr
∂r +1
r ∂σrθ
∂θ + ∂σrz
∂z +σrr-σθθ
r +ρω2r=0
∂σθr
∂r +1
r ∂σθθ
∂θ + ∂σθz
∂z +2 σrθ
r=0
∂σzr
∂r +1
r ∂σzθ
∂θ + ∂σzz
∂z +σzr
r=0
avec les conditions aux limites
σrr =0,σ
rθ =0,σ
rz =0
r=a, 0≤z≤h,
σrr =0,σ
rθ =0,σ
rz =0
r=b, 0≤z≤h,
σzr =0,σ
zθ =0,σ
zz =0
a≤r≤b, z=0,
σzr =0,σ
zθ =0,σ
zz =0
a≤r≤b, z=h.
Les conditions aux limites sur les surfaces intérieure et extérieure (r = a et r = b), qui
portent sur les composantes σrr ,σrθ ,σrz ,sontindépendantes de z et de θ.Lesconditions
aux limites sur les surfaces inférieure et supérieure (z =0et z = h), qui portent sur les
composantes σzr ,σzθ,σzz ,sontindépendantes de θ et identiques pour la même valeur de
r (a<r<b).L ensemble des conditions aux limites est donc compatible avec l hypothèse
faite d indépendance des composantes de σ en coordonnées cylindriques vis-à-vis de θ et
z.
Il en résulte que σzr(r)=0,σ
zθ(r)=0,σ
zz(r)=0, (a ≤ r ≤ b):Oz est direction
principale de σ en tout point de l anneau et correspondàune contrainte principale nulle.
σ(r, θ, z) se réduit à
σ(r, θ)=σrr(r) er ⊗ er + σrθ(r)(er ⊗ eθ + eθ ⊗ er)+σθθ(r) eθ ⊗ eθ ,
auquel les conditionsa
u
xlimites imposent
σrr(a)=0,σ
rθ(a)=0,σ
rr(b)=0,σ
rθ(b)=0.
La troisième équation de champ est automatiquement satisfaite. La seconde se réduit à
dσθr
dr +2σrθ
r =0dont l intégration, compte tenu des conditions aux limites ci-dessus
sur σrθ ,donne :
σrθ(r)=0 (a≤r ≤b).
La première équation de champ se réduit à
dσrr
dr + σrr(r) - σθθ
r
+ ρω2r =0.
En tenant compte de la dernière hypothèse sur le champ σ cherché,
σθθ(r)=σ0 (a ≤ r ≤ b),
on obtient σrr sous la formegénérale :
σrr=A
r -ρω2
3 r2 + σ0 , (A constante à déterminer)
qui doit satisfaire les conditions aux limites pour r = a et r = b :
σrr(a)= A
a-ρω2
3 a2+σ0 =0,σ
rr(b)= A
b -ρω2
3 b2+σ0=0.
On en déduit la valeur particulière ωc de ω pour laquelle ces équations sont compatibles
et la valeur de la constante A.D oùl expression de σrr :
σrr(r)
σ0 =1-1
r
ab(a + b)
a2+ab+b2 pour(ωc)2 =3σ0
ρ
1
a2+ab+b2 ,
et le champ de contrainte s écrit :
σc(r, θ)=σ0 er ⊗ er 1 - 1
r
ab(a + b)
a2+ab+b2 -
r2
a2+ab+b2 +σ0eθ⊗eθ .
• Puisque σθθ = σ0 et σzz =0,ler
e
spect de la condition de résistance de Tresca impose
de véri erque0≤σrr(r)≤σ0,a≤r≤b.
Exercices
291
On constate que σrr ,n
ullepourr=aetr=b,e
stm
a
ximale pour r3 = ab(a + b)/2
et vaut σrr
σ0 =1- 3 ab(a + b)/2 2/3/(b2 + ab + a2) qui satisfait bien la condition de
résistance.
• Le champ de contrainte σc qui satisfait les équations de la dynamique avec ωc respecte la
condition de résistance de Tresca en tout point de l anneau. Cette condition est d ailleurs
partout saturée c est-à-dire que l on a σθθ(r) - σzz = σ0 en tout point de l anneau.
Pour ω<ω
c il suffit alors de considérer le champ de contrainte déduit de σc pa
r
homothétie : σ = σc ω
ωc 2 .
On véri e que ce champ satisfait les équations de la dynamique avec ω.Ilr
e
specte la
condition de résistance de Tresca en tout point de l anneau sous la forme σθθ(r) - σzz =
σ0 ω
ωc 2 <σ0 , puisque ω<ωc .
• On a déterminé ωd qui dé nit une condition nécessaire ω2 ≤ (ωd)2 pour l existence
d un champ de contrainte σ satisfaisant les équations de la dynamique et respectant
la condition de résistance de Tresca. On vient de démontrer que la valeur ωc dé nit
une condition suffisante ω2 ≤ (ωc)2 pour l existence d un tel champ. Ces résultats sont
cohérents. On a, avec le paramétrage indiqué
(ωc)2 = 3σ0
ρa2
1
λ2+λ+1≤2σ0
ρa2 lnλ
λ2 - 1 =(ωd)2
Cette formule fournit un encadrement de la vitesse de rotation maximale permise pour
l anneau par le respect de la condition de résistance de Tresca en tout point.
Commentaire
La borne supérieure pourrait être améliorée en considérant des champs de vitesse ˆ
U plus raf-
nés du point de vue de la dépendance vis-à-vis des coordonnées r et z,quidoivent toujours
être choisis à divergence nulle. De même on améliorera la borne inférieure en construisant des
champs de contrainte plus élaborés. Le choix optimal de ces champs, qui permettrait de dé-
terminer exactement la valeur limite cherchée, dépend notamment du paramètre géométrique
h/a caractérisant l épaisseur de l anneau.
Ainsi pour h/√ab → 0,(a
nneau d épaisseur très faible), la valeur limite de ω tend vers ωc
comme on peut le démontrer en reprenant le raisonnement initial avec le champ de vitesse
virtuel ˆ
U(r, θ, z)= ˆ
α(er-z-h/2
r ez),ˆ
α>0 constant. On aboutit alors en effet à la condition
nécessaire :
ω2 <ω2
c 1+ h2
48ab .
On doit ajouter que la signi cation mécanique complète de la vitesse de rotation limite ainsi
déterminée nécessite, pour être précisée, que l on connaisse complètement le comportement
du matériau (ductilité, ... ).
Annexe I
Éléments de calcul tensoriel
MOTS CLÉS
Fo rmemultilinéaire. Tenseur. Variance.
Produit tensoriel. Décomposition.
Contraction. Produit contracté.
Invariants.
Tenseurs euclidiens.
Champ de tenseurs. Gradient. Divergence.
Coordonnées curvilignes.
293
295
En bref
Étant donné un espace vectoriel E et son espace dual E∗ ,lan
otio
nde
tenseur est liée à l étude des formes multilinéaires sur un espace F produit
de E et de E∗ de degré n quelconque (section 1).
Une méthode évidente pour produire de telles formes consiste à consi-
dérer les formes dont la valeur est donnée par le produit des valeurs prises
par n formes linéaires sur E ou sur E∗ .Un
efo
r
m
en-linéaire sur F ainsi
obtenue est appelée tenseur décomposé d ordre n,etonlanoteparlesym-
bole ⊗ entre chacune des formes sur E ou sur E∗ ,quisontelles-mêmes des
éléments de E∗ ou de E respectivement, qui la constituent (section 2).
Ce mode de construction ne suffit pasp
o
u
re
n
g
e
ndrer tout l espace
des formes n-linéaires sur F .Pa
rc
o
ntr
eilpermet, par exemple à partir
d une base de E et de la base duale dans E∗ ,dep
r
oduire une base de
l espace vectoriel des formes n-linéaires sur F .Touteslesformes cherchées,
appelées tenseurs (d ordre n)s
u
rF ,s
o
nte
nge
ndrées à partir d une telle
base (section 3). L espace vectoriel correspondant est identi é à un produit
tensorield ordre n de E et de E∗ .
On dé nit sur les tenseurs deux opérations fondamentales.
D une part le produit tensoriel,n
oté⊗,quipe
r
m
et,àpartir de deux
tenseurs d ordres p et q dé nis sur des espaces Fp et Fq ,dec
o
n
stitu
e
ru
n
tenseur d ordre (p + q) sur l espace F produit de Fp par Fq (ou inversement)
en généralisant la procédure de construction des tenseurs décomposés à
partir des éléments de E∗ et de E (section 2).
D autre part la contraction qui permet, sous certaines conditions, à
partir d un tenseur d ordre n sur F ,d obtenir des tenseurs d ordre (n - 2),
(n - 4), ... sur des espaces Fn-2,... (section 3).
Ces opérations peuvent être combinées : on obtient le produit contracté
de deux tenseurs, dont la mécanique fait grand usage (section 4).
On sait que pour un espace E muni d une structure euclidienne, on met
en évidence un isomorphisme dit canonique qui permet d identi er
E et son dual E∗ en substituant au produit de dualité le produit scalaire
dans E.Cetis
o
m
orphisme permet aussi de montrer que les espaces pro-
296
Annexe I Éléments de calcul tensoriel
duits de E et de E∗ de degré n quelconque sont isomorphes entre eux. Il
en résulte l isomorphisme des espaces de tenseurs sur ces espaces. De la
même façon que l on identi e une forme linéaire sur E,élém
e
ntdeE∗ ,à
son vecteur associé, élément de E,par l isomorphisme canonique, intro-
duisant ainsi la notion de vecteur euclidien, on identi era les 2n tenseurs
d ordre n quis
ec
orrespondent par l isomorphisme à celui d entre eux qui
est élément du produit tensoriel d ordre n de E par lui-même : c est le
tenseur euclidien correspondant. Les deux opérations fondamentales in-
troduites auparavant sont transportées de façon cohérente sur les tenseurs
euclidiens. La contraction est alors toujours possible ; les règles opératoires
en sont simpli ées et s expriment toutes au moyen du produit scalaire dans
E (section 5).
Une application importante du calcul tensoriel apparaît dans la pos-
sibilité de généraliser à des ordres supérieurs les notions de gradient et
de divergence. Pour un champ de tenseurs d ordre n,dé ni sur un espace
affine dont E est l espace vectoriel associé, le gradient en un point est le
tenseur d ordre (n+1) dont le produit contracté parunvecteur élémentaire
de E (élément différentiel) donne la variation différentielle correspondante
du champ de tenseurs en ce point. La divergence est obtenue par contrac-
tion du tenseur gradient : c est un tenseur d ordre (n - 1).Laformule de
la divergence transformant une intégrale de surface de type ux en
intégrale de volume est étendue aux tenseurs d ordre quelconque (section
6).
297
Principales notations
Notation
Signi cation
1ère formule
<,>
produit de dualité
(1.2)
⊗
produit tensoriel
(2.1)
δji
symbole de Kronecker
(2.6)
T≡Tijkei ⊗ e∗j ⊗ ek tenseur
(3.3)
det
déterminant
(3.16)
tr
trace
(3.17)
t
symbole de la transposition
(3.18)
produit contracté sur le
(4.3)
dernier indice du tenseur qui
précède et le premier indice du
tenseur qui le suit
:
produit doublement contracté
(4.14)
sur les deux indices adjacents à : ,
et sur les deux indices adjacents
à ceux-ci
G
tenseur métrique
(5.1)
.
produit scalaire
(5.2)
.
produit contracté pour
(5.32)
les tenseurs euclidiens : même
règle d indices que pour
:
produit doublement contracté
(5.36)
pour les tenseurs euclidiens : même
règle d indices que pour :
T
tenseur euclidien
5.8
˜
T
matrice de T dans une base
5.9
orthonormée
Dw
dérivée selon le vecteur w
(6.3)
gradient
(6.4)
div
divergence
(6.8)
298
Annexe I Éléments de calcul tensoriel
1T
enseurss
ur un espace vectoriel ..............299
1.1D
é
nition .......................... 299
1.2 Tenseurs du 1er ordre.
.
................. 300
1.3 Tenseurs du 2ème ordre.
................. 300
2P
roduittensoriel de tenseurs ................301
2.1D
é
nition .......................... 301
2.2E
xemples.
.
........................ 301
2.3T
enseursdécomposés .................... 302
3D
écomposition d un tenseur .................303
3.1D
é
nition .......................... 303
3.2C
hangementdebase .................... 304
3.3 Tenseursmixtesdu2ème ordre.
............. 305
3.4 Tenseurs du 2ème ordre 2 fois contravariants ou 2 fois
covariants .......................... 307
3.5C
omposantes d un produittensoriel ........... 307
4C
ontraction ...........................308
4.1D
é
nition de la contractiond untenseur ......... 308
4.2M
ultiplicationcontractée ................. 309
4.3 Produit doublement contracté de deux tenseurs .
.
.
.
. 311
4.4C
ontraction totale d un produittensoriel ........ 312
4.5D
é
nition d un tenseurpar dualité ............ 312
4.6 Invariants d un tenseur mixte du 2ème ordre. ...... 313
5T
enseurss
ur un espace vectorieleuclidien ........313
5.1D
é
nition d un espace euclidien. ............. 313
5.2 Tenseur des dilatations dans une application linéaire .
. 314
5.3 Isomorphisme entre E et E∗ ............... 314
5.4 Repérage covariant d un vecteur de E .
......... 316
5.5 Tenseurs euclidiens du 1er ordre ; produit contracté .
.
. 317
5.6 Tenseurs euclidiens du 2ème ordre décomposés ; produits
contractés .......................... 318
5.7 Tenseurs euclidiens du 2ème ordre ............. 320
5.8 Tenseurseuclidiens d ordre n ............... 325
5.9 Choix d une base orthonormée dans E .
......... 325
5.10 Directions principales et valeurs principales d un tenseur
euclidien du 2ème ordresymétrique, réel ......... 326
6C
hampsdetenseurs......................327
6.1D
é
nition .......................... 327
6.2 Dérivation d un champ de tenseurs ; gradient d un champ
de tenseurs .
........................ 328
6.3D
ivergenced unchamp de tenseurs ............ 329
6.4 Calculs en coordonnées curvilignes .
.
.
.
.
.
...... 330
Récapitulatifdes formules essentielles .............335
1 Tenseurssurun espace vectoriel
299
Éléments de calcul tensoriel
L objectif poursuivi dans ce texte est, sans souci de formalisme mathématique dis-
ponible dans d autres ouvrages, de donner au lecteur les connaissances élémentaires
suffisantes pour l utilisation du calcul tensoriel dans la présentation proposée de la
mécanique des milieux continus tridimensionnels. Cette introduction au calcul tenso-
riel est articulée en trois parties. La première est consacrée à la dé nition des tenseurs
sur un espace vectoriel et à la présentation de leurs propriétés et des opérations es-
sentielles du calcul tensoriel ; elle occupe les sections 1 à 4. La deuxième partie traite
des tenseurs euclidiens : c est la section 5. La troisième aborde la question des champs
de tenseurs et de la dérivation de ces champs.
Du point de vue des applications immédiates dans l ouvrage, ce sont les deuxième
et troisième parties (en ce qui y concerne leste
n
s
e
u
r
se
u
clidiens) auxquelles il sera
fait essentiellement appel : c est d ailleurs pour cette raison que le récapitulatif des
formules essentielles disponible à la n de cette annexe ne concerne que les résultats
relatifs aux tenseurse
u
clidiens. Il a pourtant semblé préférable d adopter une pré-
sentation initiale indépendante de la structure euclidienne de l espace dans le but de
mieux dégager l intervention de la dualité.
1T
e
n
s
e
u
r
s
s
ur un espace vectoriel
1.1 Dé nition
E désignant un espace vectoriel de dimension nie n (sur R ou C)etE∗ le dual
de E,onappelle tenseur p fois contravariant et q fois covariant toute forme
multilinéaire T dé nie sur (E∗)p × (E)q .
En notant u∗(i) p vecteurs quelconques de E∗ i =1,...,p
v(j) q vecteurs quelconques de Ej
=1,...,q
une telle forme associe aux vecteurs arguments u∗(i) et v(j) pris dans cet ordre, le
scalaire :
T (u∗(1) ,...,u∗(p) ,v(1) ,...,v(q)) .
(1.1)La somme (p + q) est appelée ordre du tenseur .Le
sn
o
mbr
e
spetqsontles
variances .L ordre dans lequel les vecteurs arguments apparaissent dans T doit être
spéci é dans la dé nition de la forme : ici on a choisi, pour simpli er, d ordonner les
arguments en prenant d abord les vecteurs de E∗ puis ceux de E.
Il est clair que l ensemble des tenseurs de variances p et q déterminées, et cor-
respondant au même ordre des vecteurs arguments, admet une structure d espace
vectoriel.
300
Annexe I Éléments de calcul tensoriel
On peut examiner, à titre d exemples, les cas des tenseurs du 1er ordre et du 2ème
ordre dont l usage est très fréquent en mécanique des milieux continus.
Notation :
On convient de noter par :
<u∗ ,v>=<v,u∗ >
(1.2)
le produit de dualité entre un vecteur u∗ de E∗ et un vecteur v de E.
1.2 Tenseurs du 1er ordre
Tenseur contravariant du 1er ordre
C est, par dé nition, une forme linéaire T sur E∗ que l on identi e classiquement
par le produit de dualité à un vecteur T de E.Onécrit :
∀u∗ ∈ E∗ , T(u∗)=<T,u∗ >.
(1.3)
Les tenseurs du 1er ordre contravariants sont les vecteurs de E.
Tenseur covariant du 1er ordre
C est, par dé nition, une forme linéaire sur E qui est donc identi ée à un vecteur
de E∗.
Les tenseurs du 1er ordre covariants sont les vecteurs de E∗.
1.3 Tenseurs du 2ème ordre
Tenseur covariant du 2ème ordre
C est une forme bilinéaire sur E × E.
En mécanique des milieux continus, les tenseurs de déformation et de taux de
déformation sont des tenseurs 2 fois covariants (cf. chapitres II et III).
Tenseur contravariant du 2ème ordre
C est une forme bilinéaire sur E∗ × E∗ .
En mécanique des milieux continus, les tenseurs de contrainte sont des tenseurs 2
fois contravariants (cf. chapitre V).
Tenseur mixte contravariant-covariant du 2ème ordre
C est une forme bilinéaire T sur E∗ × E associant à deux vecteurs quelconques u∗
deE∗ et v deE le scalaireT(u∗ ,v).
Elle permet de dé nir, par dualité, une application linéaire de E dans E,soit
2 Produittensoriel de tenseurs
301
φ,enécrivant :
∀u∗ ∈ E∗ , ∀v ∈ E,T(u∗ ,v)=<u∗ ,φ(v)>.
(1.4)
Réciproquement ,lado
nnée d une application linéaire φ de E dans E permet
de dé nir un tenseur mixte T du deuxième ordre contravariant-covariant par la for-
mule (1.4). Ce type de dé nition se rencontre fréquemment en mécanique des milieux
continus.
En particulier on dé nira le tenseur inverse du tenseur T ,n
otéT -1 comme le
tenseur associé à l application linéaire réciproque de φ si elle existe, soit φ-1 ;c
e
st
encore un tenseur mixte contravariant-covariant :
∀u∗ ∈ E∗ , ∀v ∈ E,T-1(u∗ ,v)=<u∗ ,φ-1(v)>.
(1.5)
Une démarche analogue peut être suivie en se plaçant du point de vue des appli-
cations linéaires de E∗ dans E∗ .
2P
r
o
duit tensoriel de tenseurs
2.1 Dé nition
Soient, à titre d exemple, les deux tenseurs :
T ,forme trilinéaire sur E × E∗ × E,
T ,forme bilinéaire sur E∗ × E,
on dé nit le tenseur T ,produit tensoriel de T par T ,notéT = T ⊗T par :
∀ v(1) ,v(2) ,v(3) ∈ E,∀ u∗(1) ,u∗(2) ∈ E∗
T (v(1) ,u∗(1) ,v(2) ,u∗(2) ,v(3))=T (v(1) ,u∗(1) ,v(2))T (u∗(2) ,v(3)) .
(2.1)
L opération produit tensoriel est distributive (à gauche et à droite) par rapport
à l addition, et associative. Elle n est pas commutative.
2.2 Exemples
Produit tensoriel de 2 vecteurs de E
Soienta,b∈ E T =a⊗bestdé nipar(2.1);ilvient:
∀ u∗(1) ,u
∗(2)∈ E∗ ,(a⊗b)(u∗(1),u
∗(2))=<a,u
∗(1)><b,u
∗(2) >.
(2.2)
Ainsi T = a ⊗ b est une forme bilinéaire sur (E∗)2 .
Produit tensoriel d un vecteur de E par un vecteur de E∗
Soienta∈Eetb∗∈E∗ ,T=a⊗b∗estdé nipar(2.1);ilvient:
∀u∗∈E∗ , ∀v∈E,(a⊗b∗)(u∗ ,v)=<a,u∗><v,b∗>
(2.3)
302
Annexe I Éléments de calcul tensoriel
et l on voit que T = a ⊗ b∗ est un tenseur mixte contravariant-covariant.
L application linéaire φ de E dans E correspondante, dé nie par (1.4), peut ici
être explicitée ; d après (2.3), T (u∗ ,v) s écrit aussi :
T (u∗ ,v)=<u∗ ,a<v,b∗ >>
d où :
∀v ∈ E, φ(v)=<v,b∗ >a
(2.4)
2.3 Tenseurs décomposés
Soit T un tenseur d ordre n = p + q, p-contravariant et q-covariant. On dit que
T est décomposé s il peut être mis sous la forme du produit tensoriel, dans l ordre
voulu ,dep vecteurs de E par q vecteurs de E∗ .
Désignant par {ek} une base de E,ondé nit {e∗k} la base duale de celle-ci dans
E∗ c est-à-dire telle que
<ei ,e∗j >= δji
(2.5)
où δji ,symboledeKronecker, prend les valeurs :
δji =1 si i=j,δji =0 si i =j.
(2.6)
On peut alors décomposer les vecteurs de E et E∗ sur ces bases suivant les for-
mules :
v=v e
(2.7)
u∗ =u e∗
(2.8)
dans lesquelles on adopte la convention dite des indices muets (ou répétés)
c est-à-dire qu il y a sommation par rapport aux couples d indices répétés
placés l un en haut et l autre en bas(1).
Considérant alors, à titre d exemple, le tenseur décomposé :
T=ei⊗e∗j⊗ek
(2.9)
ona:
∀ u∗(1) ,u
∗(2) ∈ E∗ , ∀v ∈ E,(ei ⊗ e∗j ⊗ ek)(u∗(1) ,v,u∗(2))=u(1)
i vj u(2)
k.
(2.10)
(1)La convention sur la position des indices est d usage général. Elle présente l intérêt, comme on
le verra dans la suite, par son caractère systématique de faciliter la lecture et l écriture des formules
(cf. par exemple 3.2).
3 Décomposition d un tenseur
303
3D
é
c
o
m
p
o
s
i
tion d un tenseur
3.1 Dé nition
Soit, à titre d exemple, T un tenseur d ordre 3, 1-contravariant, 1-covariant et
1-contravariant.
Avec les bases {ek} et {e∗k} introduites ci-dessus, on pose
T (e∗i ,ej ,e∗k)=T ij k ,i,j,k =1,... ,n .
(3.1)
On en déduit, T étant linéaire, que :
∀u∗(1),u∗(2) ∈ E∗ ,∀v∈ E
T (u∗(1) ,v,u∗(2))=u(1)
i vj u(2)
k T (e∗i ,ej ,e∗k)
ou encore
T (u∗(1) ,v,u∗(2))=u(1)
i vj u(2)
k Tijk
(3.2)
avec la convention de sommation sur les indices répétés qui sera sous-entendue dans
toute la suite sauf mention explicite du contraire.
Par comparaison de (3.2) avec (2.10) on obtient les formules essentielles :
(3.3)
T≡Tijkei⊗e∗j⊗ek
(3.4)
Tijk =T(e∗i ,ej ,e∗k)
La formule (3.3) donne la décomposition du tenseur T 1-contravariant, 1-covariant,
1-contravariant quelconque sur les n3 tenseurs décomposés ei ⊗ e∗j ⊗ ek (i, j, k =
1,...,n).
De plus la formule (2.10) assure l indépendance de ces n3 tenseurs décomposés.
En effet on remarque que l on peut écrire compte tenu de (2.5) :
∀ i, j, k, p, q, r =1,...,n , (ei ⊗ e∗j ⊗ ek)(e∗p ,eq ,e∗r)=δp
iδjqδr
k.
(3.5)
Ainsi les tenseurs décomposés ei ⊗ e∗j ⊗ ek (i, j, k =1,...,n) constituent une
base de l espace vectoriel des tenseurs T dont la variance a été indiquée plus
haut. Les T ijk sont les composantes de T dans cette base.
Désignant alors par u∗(1) ,u∗(2) ,v,de
sv
ecteurs arguments quelconques de T ,
décomposés selon (2.7) et (2.8), on obtient immédiatement, par application de (2.10)
et (3.3) la valeur de T (u∗(1) ,v,u∗(2)) :
T (u∗(1) ,v,u∗(2))=T ij k u(1)
i vj u(2)
k.
(3.6)
Les résultats énoncés dans ce cas particulier de tenseurs T sont évidemment de
portée générale.
304
Annexe I Éléments de calcul tensoriel
Remarque
La notion de produit tensoriel de tenseurs a été introduite au paragraphe 2.1.
Une présentationmathématiqueplusgénérale dé nit la notion de produit tensoriel
d espaces. On peut alors montrer que l espace vectoriel des tenseurs T choisiscomme
exemples pour la démonstration qui précède de la décomposition d un tenseur est
isomorphe au produit tensoriel d espaces vectoriels E et E∗ noté E ⊗ E∗ ⊗ E.Ilest
commode d identi er ces deux espaces, écrivant ainsi pour les tenseurs T ci-dessus :
T∈E⊗E∗⊗E,
notation cohérente avec la formule de décomposition (3.3). Cette écriture sera adoptée
de manière générale dans toute la suite.
3.2 Changement de base
On considère encore, à titre d exemples, les mêmes tenseurs T de l espace E ⊗
E∗⊗E.
On suppose connus, outre les bases duales {ek} et {e∗k} de E et de E∗ utilisées
au paragraphe précédent, un autre couple de bases duales de ces mêmes espaces, soit
{e k} et {e∗ k} ,etl on dé nit la nouvelle base {e k} de vecteurs de E dans l ancienne
base {ek} par la formule :
e i=αk
iek
(3.7)
(αk
i :composantesdelanouvelle base de E dans l ancienne base). L inversion de cette
formule exprime l ancienne base dans la nouvelle :
ek =βjke j
(3.8)
avec la relation
αk
iβjk =δji
(3.9)
(qui rappelle que les matrices de coefficients αk
i et βjk sont évidemment inverses).
Les relations entre la nouvelle et l ancienne base duale dans E∗ s obtiennent par
identi cation à partir des formules précédentes dans l expression même du produit de
dualité :
<e∗ j ,e >= δj ,
d où l expression de la nouvelle base duale dans l ancienne :
e∗ j = βjk e∗k
(3.10)
et la formule inverse :
e∗k=αk
ie∗ i.
(3.11)
3 Décomposition d un tenseur
305
To u t e s ces formules de passage étant établies, on s intéresse maintenant à la dé-
composition de T dans la base {e i ⊗ e∗ j ⊗ e k} :
T =T ijke i⊗e∗ j⊗e k.
Les nouvelles composantes s obtiennent sans difficulté en exploitant, dans (3.3),
les formules (3.8) et (3.11) compte tenu de la distributivité du produit tensoriel de
tenseurs. Il vient :
T ijk =βi αm
jβk
nT mn
(3.12)
et les formules inverses :
Tijk = αi βm
jαk
nT mn .
(3.13)
L application de ces formules au cas d un tenseur du 1er ordre T = Ti e∗i élément
de E∗ forme linéaire sur E,c est-à-dire 1-covariant ( 1.2), fournit la relation :
T i=α iT
qui explique la terminologie : le tenseur est dit covariant parce que ses composantes,
dont les indices sont inférieurs ,setransforment, dans le changement de base, comme
la base primale elle-même, dont les vecteurs ont eux aussi des indices inférieurs.
Pour un tenseur du 1er ordre de E,soitT = T j ej ,onobtient:
T j =βjkTk
qui explique, de la même manière, la terminologie de contravariance .
On peut alors retenir la formule générale pour un tenseur T quelconque sous la
forme : chaque covariance, indice inférieur, introduit un facteur α etchaqu
e
contravariance, indice supérieur, introduit un facteur β (2).
3.3 Tenseurs mixtes du 2ème ordre
Soit T un élément de E ⊗ E∗ et φ l application linéaire de E dans E qui lui est
associée par (1.4). On désigne par φij les coefficients de la matrice (3) de φ dans
la base {ek} de E,c est-à-dire que :
∀v=vjej,φ(v)=φijvjei.
(3.14)
Soient d autre part T ij les composantes de T dans la base {em ⊗ e∗n} de E ⊗ E∗ .
On a alors en appliquant (3.4) et (1.4) :
T ij = T (e∗i ,ej)=<e∗i ,φ(ej) >
(2)Dans la pratique, lorsque l on procède à de tels changements de bases, il est souvent plus com-
mode, plutôt que d appliquer la formule générale (3.12), de reproduire sur le cas particulier considéré
le raisonnement qui permet de l obtenir par identi cation.
(3)1er indice : ligne ; 2ème indice : colonne.
306
Annexe I Éléments de calcul tensoriel
d où, avec(3.14) :
Tij = φij ∀i,j=1,...,n.
(3.15)
Ainsi, les composantes de T dans la base {em ⊗ e∗n} sont identiques aux coef-
cients de la matrice de l application linéaire de E dans E associée à T dans la base
{ek}.
Il s ensuit que les composantes T ij de T possèdent vis-à-vis des changements
quelconques de bases {ek} dans E,lesbases{e∗k} dans E∗ étant toujours les bases
duales, les propriétés connues pour les coefficients de la matrice d une application
linéaire.
En particulier on sait que dans ces changements de base certaines expressions
polynomiales sont invariantes .Onrappelle que det [ φij ] est un invariant , donc :
det [ T ij ]=detT est un invariant .
(3.16)
Il en va de même de tous les coefficientsdupolynôme caractéristique en λ obtenu
en écrivant l invariance du déterminant de la matrice de l application linéaire de E
dans E dé nie par :
∀v ∈ E → φ(v)-λv ∈ E (λscalaire quelconque).
Ces coefficients constituent une base de n invariants polynomiaux indépendants
de degrés 1 à n en φij .Parmiceux-ci, outre det[ φij ] de degré n,ontrouvetr[ φij ]
dedegré1:
T ii = tr T est un invariant
(3.17)
(on le véri e d ailleurs directement sans difficulté puisque par (3.12) on a : T i i =
βij αk
i Tjk = δkj Tjk = Tkk). Cette opération trace estu
nc
a
spa
rtic
ulier de la
contraction étudiée dans la suite. De même on utilisera souvent en mécanique une base
de n invariants polynomiaux indépendants de degrés 1 à n, autre que celle évoquée
ci-dessus, obtenue par contraction (cf. 4.6).
On introduit aussi le tenseur tT transposé de T ;c
e
st l élément de E∗ ⊗ E
dé nipar: ∀u∗∈E∗,∀v∈E
tT (v ,u∗)=T (u∗ ,v)
(3.18)
tT se met sous la forme :
tT =(tT)ij e∗i ⊗ ej
et l on a, par (3.4) et (3.18), la relation :
(tT)ij =Tji .
(3.19)
Si T est un tenseur décomposé T = a∗ ⊗ b,onaévidemment : tT = b ⊗ a∗ .
3 Décomposition d un tenseur
307
3.4 Tenseurs du 2ème ordre 2 fois contravariants ou 2 fois
covariants
On considère à titre d exemple les tenseurs du 2ème ordre 2 fois covariants.
• Tenseurs symétriques.
Par dé nition, T∈E∗ ⊗ E∗ est symétrique si l on a :
∀ v ,v ∈ E,T (v ,v )=T (v ,v );
d où, pour toute base {ei} de E et base duale {e∗j} de E∗ ,d après(3.3) et (3.4) :
T=Tije∗i⊗e∗j,Tij=Tji.
(3.20)
• Tenseurs antisymétriques.
De même, T∈E∗ ⊗ E∗ est antisymétrique si l on a
∀ v ,v ∈ E, T (v ,v )=-T (v ,v )
d où, comme ci-dessus :
T=Tije∗i⊗e∗j,Tij= -Tji.
(3.21)
• Tout tenseur T∈E∗ ⊗ E∗ peut être mis, de façon unique, sous la forme de la
somme d un tenseur symétrique Ts et d un tenseur antisymétrique Ta de E∗ ⊗ E∗ :
T=Ta+Ts.
(3.22)
Ces tenseurs Ts et Ta sont en effet dé nis de manière unique par :
∀ v ,v ∈ E, Ts(v ,v )= 1
2(T (v ,v )+T (v ,v ))
∀ v ,v ∈ E, Ta(v ,v )= 1
2(T (v ,v )-T(v ,v )) ,
(3.23)
qui implique, pour toute base {ej} de E et base duale {e∗k} de E∗ :
(Ts)ij = 1
2(Tij + Tji)(
Ta)ij = 1
2(Tij - Tji).
(3.24)
• Les mêmes résultats, aux positions supérieures des indices près, sont valables pour
les tenseurs 2 fois contravariants.
3.5 Composantes d un produit tensoriel
Soient,àtitred exemple,T ∈E∗⊗E⊗E∗ etT ∈E⊗E∗ :
T =T ijke∗i⊗ej⊗e∗k
T =T me ⊗e∗m
308
Annexe I Éléments de calcul tensoriel
alors on a évidemment, pour T = T ⊗T :
T =Tijk me∗i⊗ej⊗e∗k⊗e ⊗e∗m
avec :
Tijk m = T ijkT m .
(3.25)
Ainsi, dans le cas particulier d un tenseur T décomposé tel que :
T =a⊗b∗⊗c⊗d
on aura :
Tijk =aibjckd .
(3.26)
4C
o
n
t
r
action
4.1 Dé nition de la contraction d un tenseur
Soit, à titre d exemple, un tenseur T élément de E ⊗ E∗ ⊗ E∗ ⊗ E.
Soit {ek} une base de E et {e∗j} la base duale de E∗.
Alors l élément Tc dé ni par :
∀v ∈ E,∀u∗ ∈ E∗ , Tc(u∗ ,v)=T(u∗ ,ei ,v,e∗i)(4)
(4.1)
est indépendant du choix de la base {ek} et est un tenseur élément de E ⊗ E∗ .
En effet {e k} désignant une autre base de E,onaaveclesnotations du paragraphe
3.2 :
T (u∗ ,e i ,v,e∗ i)=αji βik T (u∗ ,ej ,v,e∗k)
d où, d après (3.9) :
T (u∗ ,e i ,v,e∗ i)=T (u∗ ,ej ,v,e∗j) .
L élément Tc ,dé ni par (4.1) estdoncbienintrinsèque :c est une forme bilinéaire
sur E∗ × E,c est-à-dire un tenseur 1-contravariant 1-covariant.
Ce tenseur Tc est dit contracté de T sur les vecteurs arguments 2 et 4, ou sur les
indices 2 et 4. On remarquera que la contraction nepe
uts
efair
equ
es
u
rde
s
indices correspondant à des vecteurs arguments pris l un dans E l autre
dans E∗.
Du point de vue des composantes, onvéri era sans peine que l on a :
(Tc)ij = Tikjk
(4.2)
(sommation sur les indices en position 2 et4situésl unenbaset l autre en haut).
La dé nition donnée sur cet exemple est générale. La contractiond untenseur
d ordre n et de variances p et q conduit à un tenseurd
o
rdre(n-2)etde
variances (p - 1)et(q - 1).
(4)Bien remarquer la sommation sur les indices répétés.
4 Contraction
309
4.2 Multiplication contractée
La multiplication contractée de deux tenseurs T et T consiste à effectuer le
produit tensoriel T = T ⊗T que l on contracte ensuite suivant un indice de T et
un indice de T de variance contraire.
Le cas le plus courant est celui où le produit tensoriel T = T ⊗T est contracté
sur le dernier indice de T et le premier indice de T ,sousréserve bien entendu
que cette opération soit possible c est-à-dire que les variances correspondantes soient
contraires. Le résultat de cette multiplication contractée sera noté :
Tc =T T .
(4.3)
L opération (4.3) se rencontre fréquemment en mécanique et on en examinera dans
la suite quelques cas particuliers.
On remarque que la multiplication contractée est distributive à gauche et à droite
par rapport à l addition.
Produit contracté de a ∈ E et b∗ ∈ E∗
Ona:
T=a⊗b∗ =aibjei⊗e∗j
d où :
Tc=a b∗=aibi
qui n est autre que le produit de dualité <a,b∗ > :
a b∗ =<a,b∗>.
(4.4)
Produit contracté de T∈E ⊗ E∗ et v ∈ E
Ici :
T⊗v=Tijvkei⊗e∗j⊗ek
d où :
T v=Tijvjei
qui n est autre que le vecteur de E image de v par l application linéaire φ associée au
tenseur mixte du deuxième ordre donné :
T v = φ(v).
(4.5)
On remarquera aussi que si l on considère le produit tensoriel de v et tT soit v ⊗tT ,
sa contraction conduit au résultat :
v tT =T v=φ(v).
(4.6)
310
Annexe I Éléments de calcul tensoriel
Produit contracté de deux tenseurs mixtes du 2ème ordre
Soient T et T ∈ E ⊗ E∗ ,φ et φ les applications linéaires de E dans E
correspondantes. On véri e sans difficulté que le produit contracté
Tc =T T
est, lui aussi, un tenseur mixte du deuxième ordre, élément de E ⊗ E∗ et que, si l on
désigne φc l application linéaire de E dans E associée à Tc ,ona:
(φc)ij =(Tc)ij = T ik T kj = φ ik φ kj .
qui montre que φc est le produit des applications linéaires φ et φ :
φc =φ ◦φ .
(4.7)On en déduit aussi le résultat :
∀v∈E, (T T ) v=T (T v)
(4.8)
qui exprime l associativité de la multiplication contractée dans ce cas et permet
d écrire, sans autreprécision, des formules du type :
T T T v, etc.
En particulier, soit T∈E ⊗ E∗ et T -1 le tenseur inverse dé ni au paragraphe
1.3. On a, par application immédiate de (4.8) :
T-1 T=T T-1=I,
(4.9)
où l on désigne par I le tenseur de E ⊗ E∗ associé à l application identique de E dans
E.
Pour les composantes,onaévidemment :
Tij(T-1)jk =δik .
(4.10)
En n, il est immédiat de véri er à partir de (4.6) et (4.8) que, si T et T sont
deuxélémentsdeE⊗E∗ on a :
t(T T )=tT tT .
(4.11)
Produit doublement contracté de T∈E∗ ⊗ E∗ ,v ∈ E et v ∈ E
En se référant à la dé nition du symbole donnée plus haut (formule 4.3), on
voit que la notation :
Tc =v T v
s interprète sans ambiguité et correspond à la double contraction du tenseur T =
v ⊗T⊗v sur sesindices1et2etsur sesindices3et4.
On véri e que Tc n est autre que le scalaire :
Tc =Tijv iv j,
(4.12)
c est-à-dire que, d après (3.6) :
v T v = T(v ,v ).
(4.13)
4 Contraction
311
4.3 Produit doublement contracté de deux tenseurs
T et T désignant deux tenseurs d ordres supérieurs ou égaux à 2, on considère le
produit tensoriel T = T ⊗T .Leproduit doublement contracté, noté : ,correspond
àladouble contraction de T sur le dernier indice de T et le premier indice
de T , puis sur l avant dernier indice de T et le second indice de T ,si
ces deux contractions sont possibles c est-à-dire si les variances correspondantes sont
effectivement contraires(5).
On écrit ainsi :
Tc =T : T .
(4.14)
Le produit doublement contracté est évidemment distributif, à gauche et à droite,
par rapport à l addition.
Produit doublement contracté d un tenseur 2 fois covariant et d un tenseur
2foisc
ontravariant du 2ème ordre
Soient deux tenseurs du deuxième ordre :
A=aije∗i⊗e∗j∈E∗⊗E∗ et B=bijei⊗ej∈E⊗E.
Pour ces deux tenseurs, le produit doublement contracté dé ni par (4.14) s écrit :
Tc =A: B=aijbji,
(4.15)
scalaire qui s identi e aussi à :
A : B= tr (A B).
(4.16)
On remarquera que, dans ce cas, le produit doublement contracté est commutatif :
A : B=B : A.
En application des résultats du paragraphe 3.4, on peut mettre chacun des tenseurs
A et B sous la forme de la somme de sa partie symétrique et de sa partie antisymétrique
obtenues par la formule (3.23) : A = As + Aa
B =Bs+Ba.
(4.17)
On véri e alors, en explicitant par exemple As : Ba par la formule (4.15) compte
tenu des propriétés caractéristiques de As et Ba ,que:
As : Ba =(as)ij(ba)ji =(as)ij(-ba)ij = -(as)ji(ba)ij = -As : Ba
(5)La convention adoptée ici relativement aux indices concernés par la double contraction symbo-
lisée par : sera conservée aux paragraphes 5.6 et 5.7 pour les tenseurs euclidiens et leur double
contraction symbolisée par : . Elle n est pas générale dans la littérature (on peut rencontrer des
cas, notamment pour les tenseurs euclidiens, où la double contraction, symbolisée de la même façon,
porte d abord sur l avant-dernier indice de T et le premier indice de T , puis sur le dernier indice
de T et le deuxième indice T )etils
e
r
ado
n
cpr
udent de contrôler la signi cation des notations
employées.
312
Annexe I Éléments de calcul tensoriel
d où
As : Ba =0 et de même Aa : Bs =0.
(4.18)
Il s ensuit que :
A : B=As : Bs+Aa : Ba .
(4.19)
Le produit doublement contracté : apparaît ainsi comme un produit de dualité
entre les espaces E∗ ⊗ E∗ et E ⊗ E.Laformule(4.19) en donne l expression lorsque
E∗ ⊗ E∗ sont décomposés sur les tenseurs symétriques et antisymétriques selon (4.17).
4.4 Contraction totale d un produit tensoriel
D une façon générale, étant donnés deux tenseurs d ordre n,dontlepremierA est
p fois contravariant et q fois covariantetlesecond B est q fois contravariant et p fois
covariant, on peut effectuer la contractiontotale du produit tensoriel T = A⊗B;
tous les couples d indices de variances contraires sur lesquels on effectue la contraction
doivent étre énoncés ; on obtient ainsi un scalaire Tc .
Le produit doublement contracté d un tenseur 2 fois covariant et d un tenseur 2
fois contravariant examiné au paragraphe précédent est évidemment un cas particulier
de cette contraction totale, de même quelepr
oduit contracté d un vecteur de E et
d un vecteur de E∗ .
4.5 Dé nition d un tenseur par dualité
Soit, à titre d exemple, A un tenseur donné de E ⊗ E∗ ⊗ E.
Soit X un tenseur quelconque de E∗ ⊗ E ⊗ E∗.
On effectue le produit tensoriel :
T =A⊗X.
(4.20)
La contraction totale de ce produit tensoriel, sur les couples d indices 1 et 4, 2 et
5, 3 et 6 donne un scalaire Tc fonction linéaire de X .
Ainsi, à partir du tenseur A donné de E ⊗ E∗ ⊗ E,o
npe
utdé nir une forme
linéaire a sur E∗ ⊗ E ⊗ E∗,c est-à-dire un élément de (E∗ ⊗ E ⊗ E∗)∗.
E⊗E∗⊗Eet(E∗⊗E⊗E∗)∗ sontisomorphes.
En mécanique des milieux continus (cf. par exemple le chapitre V, section 3 pour
la représentation des efforts intérieurs) on utilisera la réciproque de cette propriété :
la donnée d une forme linéaire a sur un espace vectoriel de tenseurs X , p fois contra-
variants et q fois covariants, dé nit un tenseur A de variances contraires (on précisera
les couples d indices sur lesquels on effectue la contraction totaleduproduit tensoriel
(4.20)).
5 Tenseurssur un espace vectoriel euclidien
313
En particulier, une forme linéaire a donnée sur E ⊗ E dé nit un tenseur A de
E∗ ⊗ E∗ àtravers le produit de dualité : par la formule :
∀X∈E⊗E A: X=a(X);
(4.21)
si la forme linéaire a n est dé nie que sur le sous-espace des tenseurs symétriques de
E ⊗ E,soitpour X∈(E ⊗ E)s ,alorsle tenseur A associé à a par la formule :
∀X∈(E⊗E)s A: X=a(X)
(4.22)
n est connu qu à un tenseur antisymétriquea
rbitraire près car, en conséquence de
(4.19), la formule (4.22) ne détermine que la partie symétrique de A.
4.6 Invariants d un tenseur mixte du 2ème ordre
T désignant un tenseur mixte contravariant-covariant, on a vu au paragraphe 3.3
que les n coefficients du polynôme caractéristique en λ,quis
écrit det[T ij - λδij ],
sont des invariants dans tout changement de base {ek} de E ,laba
s
e{e∗k} de E∗
étant la base duale.
Il est courant en mécanique de substituer à ces n invariants polynomiaux classiques
(tr T ,..., det T ) de degrés 1 à n par rapport aux composantes T ij ,leje
uden
invariants polynomiaux indépendants de degrés 1 à n,obte
n
us par les contractions
totales suivantes :
I1=trT=Tii
I2=1
2 tr (T T)= 1
2TijTji
I3 = 13tr(T T T)=13TijTjkTki
etc.
In=1
n tr (T T T ... T)= 1
nTijTjk ...Tpi.
(4.23)
5T
e
n
s
e
u
r
s
s
ur un espace vectoriel euclidien
5.1 Dé nition d un espace euclidien
L espace vectoriel E est muni d une structure euclidienne par la donnée d une
forme bilinéaire symétrique fondamentale dé nie positive sur E × E,s
oitG
appelée produit scalaire .
Avec la notation (4.13) on écrit :
∀v ,v ∈ E,G(v ,v )=v G v ,
(5.1)
et en adoptant la notation usuelle pour le produit scalaire :
∀ v ,v ∈ E,G(v ,v )=v .v ,
(5.2)
314
Annexe I Éléments de calcul tensoriel
expression sur laquelle on reviendra au paragraphe 5.5.
Ge
stappelétenseur métrique .Ondésigne par gij ses composantes pour une
base {ek} de E et la base duale {e∗k} de E∗ ;ona,enconséquence de (3.3) et (3.4) :
G=gije∗i⊗e∗j,gij=G(ei,ej)=ei.ej.
(5.3)
5.2 Tenseur des dilatations dans une application linéaire
Soit φ une application linéaire de E dans E ,etF le tenseur mixte de E ⊗ E∗ associé à
celle-ci.
On cherche à évaluer, pour deux vecteurs quelconques v ,v ,lepr
oduit scalaire de leurs
images dans E par φ soit : φ(v ) .φ(v ).C est évidemment une forme bilinéaire symétrique
de v et v ,quiestdé nie positive si φ estinversible. En utilisant les expressions de φ(v ) et
φ(v ) données par (4.6) il vient :
φ(v ) .φ(v )=(v tF) G (F v ).
(5.4)
En introduisant le tenseur C = tF G F,élém
e
ntde E∗ ⊗ E∗,o
nvéri equ
ela formule
(5.4) possède une propriété d associativité et que l on peut écrire :
φ(v ).φ(v )=v (tF G F) v = v C v .
(5.5)
Le tenseur C = tF G F est le tenseur 2 fois covariant sur E ⊗ E donnant le produit scalaire
des images par φ de deux vecteurs quelconques de E.Lac
o
mpa
r
aison de ce tenseur C avec
le tenseur métrique G permet de caractériser la déformation du milieu par l application
linéaire φ (cf. chapitre II, section 3).
5.3 Isomorphisme entre E et E∗
On sait que la structure euclidienne de E permet de mettre en évidence un iso-
morphisme dit canonique entre E et son dual E∗ .Cetis
o
m
orphisme, noté γ,e
st
dé ni par :
∀v ∈ E,∀v∈ E,v .v=<v
,γ(v) >
(5.6)
où γ(v) est l image dans E∗ de v par γ(6).
En introduisant le produit contracté G v on peut expliciter (5.6) dont on déduit
alors de façon évidente que :
γ(v)=G v.
(5.7)
Avec les bases {ei} dans E et {e∗k} duale dans E∗ ,ondésigne par γij les coeffi-
cients de la matrice de γ dé nis par :
γ(ej)=γij e∗i .
(5.8)
Par comparaison avec (5.7)ilvient:
gij=γij.
(5.9)
(6)En d autres termes l isomorphisme γ associe à v la forme linéaire γ(v) telle que son produit de
dualité avec tout vecteur v ,deE soit égal au produit scalaire de v avec ce même vecteur v .
5 Tenseurssur un espace vectoriel euclidien
315
Ainsi les coefficients de la matrice de l isomorphisme γ dans les bases duales
{ei} et {e∗k} de E et E∗ sont identiques aux composantes du tenseur métrique dans
la base {e∗i ⊗ e∗j}.
L isomorphisme γ induit naturellement dans E∗ une structure euclidienne. La
forme bilinéaire fondamentale G∗ sur E∗ × E∗ est dé nie comme l image de la forme
bilinéaire G sur E × E :pourdeuxélémentsu∗(1) ,u∗(2) de E∗ ,elle a pour valeur le
produit scalaire de leurs originaux dans E :
∀ u∗(1) ,u∗(2) ∈ E∗ ,
u∗(1) G∗ u∗(2) = γ-1(u∗(1)) G γ-1(u∗(2)).
(5.10)
On désigne par gij les composantes de G∗ pour les bases {ek} et {e∗k} d où, d après
(3.3)et(3.4): G∗ =gijei⊗ej
gij = G∗(e∗i ,e∗j) .
(5.11)
Figure 1 Bases primale et duales dans E∗ et E
Il est commode d introduire les vecteurs de E,notések ,images par γ-1,isomor-
phisme réciproque de γ ,desvecteurs e∗k de la base duale de {ek} dans E∗ :
ek = γ-1(e∗k) .
(5.12)
On a alors, de façon évidente, en conséquence de (5.11) et (5.10) :
gij=ei.ej
(5.13)
tandis que ei .ej =<ei ,e∗j > d après (5.6) et (5.12), d où :
ei.ej=δji .
(5.14)
Les vecteurs ei constituent une base {ek} de E qui est appelée duale dans E de
la base {ek} :chaqu
ev
ecteur ei de la base {ek} est ainsi orthogonal à (n - 1)
vecteurs de la base primale {ek} et tel que son produit scalaire avec le n-ième vecteur
de cette base soit égal à 1 (cf. gures 1 et 2).
316
Annexe I Éléments de calcul tensoriel
Les composantes γij de l isomorphisme réciproque γ-1 sont données par :
γ-1(e∗j)=γij ei = ej
et l on déduit de (5.13) et (5.14) que :
gij=γkjei.ek=γij
(5.15)
d où :
ej=gijei
(5.16)
et aussi, en rapprochant (5.9) et (5.15) :
gik gkj = δji
(5.17)
et
ei=gijej
(5.18)
(on rappelle que G et G∗ sont symétriques).
On retiendra les formules
ei.ej=δji
gij=ei.ej,gij=ei.ej
(5.19)
gik gkj = δji
ei=gijej,e
i=gijej
On remarque que si la base primale {ek} est orthonormée, sa base duale
{ek} dans E lui est identique .
5.4 Repérage covariant d un vecteur de E
La construction de la base duale dans E àlaqu
elle on a procédé ci-dessus per-
met maintenant de dé nir, pour tout vecteur de E,cequel on appelle son repérage
covariant sous la forme :
∀u∈E,u=u e ,
(5.20)
dans laquelle les u sont désignées comme les composantes covariantes du vecteur
u.
La justi cation de cette terminologie tient au fait que les composantes u dé nies
par (5.20) sont aussi les composantes de la forme linéaire γ(u) dans la base duale
{e∗k} de E∗ :
γ(u)=u γ(e )=u e∗ ;
ces composantes se transforment selon la règle de covariance exposée au paragraphe
3.2.
La gure 2 illustre les résultats (5.19) et (5.20) sur le cas concret où E = R2 .
5 Tenseurssur un espace vectoriel euclidien
317
Figure2 E=R2,ba
s
e{ei} normée ; les composantes contravariantes sont les co-
ordonnées obliques suivant e1 et e2 ;le
scomposantes covariantes sont les
mesures des projections orthogonales de u sur les directions de e1 et e2 ;par
exemple:u1 =u.e1
5.5 Tenseurs euclidiens du 1er ordre ; produit contracté
L isomorphisme entre E et E∗ signi e que tout élément u de E peut recevoir
indifféremment deux interprétations :
• interprétation primale, vecteur de E
• interprétation duale, forme sur E,àtraversleproduit scalaire.
L introduction de la représentation covariante des éléments de E illustre cette
dualité d interprétation comme on l a vu précédemment :
u = u e traduit l aspect primal
(5.21)
u = u e traduit l aspect dual .
(5.22)
Dé nition
Pour rendre compte de cela on introduit la notion de tenseur euclidien du 1er
ordre .
To u t v ecteur u de E (tenseur contravariant du 1er ordre) et son tenseur covariant
associé par l isomorphisme canonique, u∗ = γ(u) ,serontdésormais considérés comme
un unique tenseur appelé tenseur euclidien du 1er ordre ,ide
nti éa
uv
ecteur u
de E,s
u
rlequ
elo
nv
e
rra qu il est possible d effectuer toutes les opérations précé-
demment dé nies pour les tenseurs du 1er ordre. Le tenseur euclidien u pourra être
décomposé selon (5.21) et (5.22) qui sont respectivement appelées ses représenta-
tions contravariante et covariante .
Produit contracté
Considérant deux tenseurs euclidiens du 1er ordre, soient u et v on dé nit le
produit contracté en remarquant que :
u v∗ =uivi=uigijvj=ujvj=u∗ v.
(5.23)
318
Annexe I Éléments de calcul tensoriel
C est cette valeur, obtenue en contractantundesvecteurs avec la forme linéaire
associée à l autre, qui est naturellement adoptée pour le produit contracté des
tenseurs euclidiens u et v.L
e
x
a
m
e
ndelafo
r
mule (5.23) rappelle de plus que
u v∗ =u∗ v n estautrequeleproduitscalaire u.vde u etv vecteursdeE.
Il est ainsi possible d utiliser désormais le symbole . pour noter la contraction
de deux tenseurs euclidiens du 1er ordre :
u.v=uigijvj=uivi=uivi.
(5.24)
L utilisation du symbole . manifeste que le produit contracté de
deux tenseurs euclidiens du 1er ordre s obtient simplement en calculant
le produit scalaire des vecteurs u et v de E compte tenu des relations (5.19) et
(5.20) ; ainsi par exemple :
u .v =(ui ei).(vj ej)=ui vj(ei .ej)=gij ui vj
ou encore
u .v =(ui ei).(vj ej)=ui vj(ei .ej)=ui vi = ui vi ,
(5.25)
où l on voit l intérêt de l introduction de la représentation covariante.
5.6 Tenseurs euclidiens du 2ème ordre décomposés ; produits
contractés
L isomorphisme γ établi entre E et E∗ ,e
ntr
aîn
en
aturellement que les espaces
produits E × E,E × E∗ ,E∗ × E et E∗ × E∗ sont isomorphes. Il en résulte alors
que les espaces de tenseurs du 2ème ordre, E∗ ⊗E∗ ,E∗ ⊗E,E⊗E∗ et E ⊗E
sont, eux aussi, isomorphes. On se propose, pour examiner les conséquences de ces
isomorphismes, de considérer d abord le cas des tenseurs décomposés.
a et b désignant deux vecteurs de E les isomorphismes entrelesespaces de tenseurs
ci-dessus mettent en correspondance les tenseurs décomposés
a⊗b,a⊗b∗ ,a∗⊗b eta∗⊗b∗ ,
oùa∗ =γ(a) etb∗ =γ(b)
(5.26)
en sorteque, considérantpar exempleT =a⊗betT =a∗⊗b∗ on a :
∀u,v∈ E T (u,v)=T(u∗ ,v∗)
(5.27)
oùu∗ =γ(u) et v∗ =γ(v).
En explicitant T (u∗ ,v∗) et T (u ,v) selon (2.2), (4.4) et (4.13) il vient :
T (u∗ ,v∗)=u∗ T v∗ =(a u∗)(b v∗)
(5.28)
et
T (u,v)=u T v =(a∗ u)(b∗ v).
(5.29)
5 Tenseurssur un espace vectoriel euclidien
319
Dé nition
La comparaison de ces formules avec (5.23) et (5.24) qui dé nissent le produit
contracté de deux tenseurs euclidiens du 1er ordre, montre que, de façon cohérente,
• on dé nira le tenseur euclidien du 2ème ordre décomposé, noté T ,ide
nti éa
u
tenseur a ⊗ b de E ⊗ E ,dont(5.26) fournit les quatre formes associées :
T=a⊗b ;
• on notera par le symbole . la contraction de ce tenseur avec un tenseur
euclidien du 1er ordre (en conservant les conventions antérieures cf. (4.3) et
(4.13) au paragraphe 4.2 sur les indices concernés) :
T(u,v)=u.T.v=u.(a⊗b).v ;
(5.30)
• cette expression s explicite en :
u .(a ⊗b).v =(a .u)(b.v)
(5.31)
• qui fait intervenir les produits contractés des tenseurs euclidiens du 1er ordre a et
u ,bet v ,calculables comme indiqué plus haut par (5.25).
Produit contracté d un tenseur euclidien du 2ème ordre décomposé et d un
tenseur euclidien du 1er ordre
De même on véri e la cohérence de la notation
T.v=(a⊗b).v
(5.32)
pour le produit contracté d un tenseur euclidien du 2ème ordre décomposé et d un
tenseur euclidien du 1er ordre dé ni comme le produit contracté selon (4.5) de la
forme mixte associée à T dans E ⊗ E∗ et du vecteur v de E.Cette formule s explicite
en:
(a⊗b).v= a(b.v)
(5.33)
qui en permet le calcul selon (5.24) et (5.25) .
Produit contracté de deux tenseurs euclidiens du 2ème ordre décomposés
On dé nit aussi le produit contracté de deux tenseurs euclidiens du 2ème ordre
décomposés, T = a ⊗ b et T = a ⊗ b ,parlacontraction du produit des formes
mixtes associées à T et T dans E ⊗ E∗ .Onvéri eàpartir de (5.32) et (5.33), que
la notation
T =T .T =(a ⊗b ).(a ⊗b )
(5.34)
est bien cohérente pour ce produit qui s explicite en :
320
Annexe I Éléments de calcul tensoriel
T =(b .a )a ⊗ b
(5.35)
dont le calcul est aisé en termes de tenseurs euclidiens.
Produit doublement contracté de deux tenseurs euclidiens du 2ème ordre
décomposés
Le produit doublement contracté des tenseurs euclidiens décomposé T et T ci-
dessus est dé ni comme le produit doublement contracté selon (4.4) de deux formes
associées respectivement à T et à T dont les variances concernées sont contraires.
On adopte pour ce produit la notation
T :T =(a ⊗b ):(a ⊗b );
(5.36)
sa dé nition est bien univoque (c est-à-dire indépendante du choix particulier des
formes associées à T et à T )etl ona:
(a ⊗ b ):(a ⊗ b )=(a .b )(b .a )
(5.37)
qui en permet le calcul aisé.
5.7 Tenseurs euclidiens du 2ème ordre
Les résultats précédents pour les tenseurs du 2ème ordre décomposés ont montré :
• l introduction de la notion de tenseur euclidien ; celui-ci est identi é à l élément
de E ⊗ E et les quatre formes (5.26) lui sont associées par l isomorphisme
canonique γ ;
• que toutes les opérations de contractiondé nies dans la section 4 sous condi-
tions de variances contraires, sont maintenant toujours dé nies sur les ten-
seurs euclidiens ;
• que ces opérations s expriment toutes au moyen du produit scalaire
sur E,cequi conduit à des règles opératoires très simples.
Ces résultats essentiels s étendent aux tenseurs d ordre 2 en général en s appuyant
sur la décomposition (section 3) et sur la distributivité du produit tensoriel de ten-
seurs.
Dé nition
L isomorphisme entre E ⊗ E, ... ,E∗ ⊗ E∗ induit par l isomorphisme γ est établi
par des formules telles que (5.27).
Considérant le tenseur
T=Tijei⊗ej de E⊗E
(5.38)
5 Tenseurssur un espace vectoriel euclidien
321
illuiestassociédansE⊗E∗ ,dansE∗⊗E,etdansE∗⊗E∗ :
T =Tikei⊗e∗k avec Tik=Tijgjk,
T =Tkje∗k⊗ej avec Tkj=gkiTij,
T =Tk e∗k⊗e∗ avec Tk =gkiTijgj .
(5.39)
Le tenseur euclidien correspondant à ces quatre tenseurs associés est T ,identi é
àl élémentdeE⊗E:
T=Tijei⊗ej
(5.40)
La distributivité du produit tensoriel par rapport à l addition ( 2.1) étant évidem-
ment conservée au niveau des tenseurs euclidiens à travers cette dé nition, on peut
dans (5.40) décomposer les vecteurs ei et ej sur labaseduale {ek} selon (5.19). On
obtient alors pour T de nouvelles expressions ; par exemple :
T =Tijei ⊗(gjkek)=Tijgjkei⊗ek
c est-à-dire, selon (5.39) :
T =Tikei⊗ek avec Tik=Tijgjk,
T =Tkjek⊗ej avec Tkj=gkiTij,
T =Tk ek⊗e avec Tk =gkiTijgj .
(5.41)
On dit que (5.40) et (5.41) constituent les quatre représentations du tenseur
euclidien T :respectivement représentations 2 fois contravariante, 1-contravariante
1-covariante, 1-covariante l-contravariante, 2 fois covariante. Cette terminologie se
justi e, comme au paragraphe 5.4, par la comparaison de ces expressions avec celles
des différents tenseurs associés à T .Onin
siste
ra toutefois sur le fait que (5.40) et
(5.41) représentent quatre expressions du même tenseur T élément de E ⊗ E.
Produits contractés
La notion de tenseur euclidien du 2ème ordre étant ainsi introduite dans le cas
général, toutes les dé nitions et tousle
srés
ultatsr
elatifsa
ux tenseurs décomposés
sont généralisables, en remarquant notamment la distributivité du produit contracté
de tenseurs euclidiens par rapport à l addition qui permet le calcul aisé des produits
contractés.
Àtitr
ed exemple :
T.v=(Tijei⊗ej).(vkek)=Tijvk(ej.ek)ei =Tijgjkvkei =Tijvjei =Tikvkei;
et aussi
T .T =(T ijei ⊗ej).(T k ek ⊗e )
=T ijT k (ej.ek)ei⊗e =T ij gjkT k (ei⊗e )=T ijT j ei⊗e = etc.
ou bien
T .T =(T ijei⊗ej).(T k ek⊗e )=T ijT j ei⊗e ;
et encore, pour le produit doublement contracté
T :T =(Tij ei⊗ej):(T k ek⊗e )=T ijT k (ej.ek)(ei .e )=gi T ijgjkT k
T :T =T jT j .
322
Annexe I Éléments de calcul tensoriel
On remarquera aussi l identité (utilisée notamment au chapitre V) :
(A .B):C =(C .A):B =(B .C):A
(valable aussi pour un nombre plus élevé de tenseurs), qui est évidente dans le cas des tenseurs
décomposés A = a⊗a ,B= b⊗b ,C= c⊗c car alors (A.B):C =(c .a)(a .b)(b .c), et
qui s étend sans difficulté au cas général.
Les exemples ci-dessus mettent en évidence que les contractions sont toujours
possibles pour les tenseurs euclidiens et qu elles se calculent en adoptant pour les
tenseurs en cause des représentations tellesqu
elesindices concernés soient toujours
l un supérieur et l autre inférieur. On voit aussi qu une méthode sûre et systématique
pour calculer les produits contractés, tant que l on n est pas familier avec ce genre
d exercice, consiste simplement à expliciter les produits scalaires dans E qui
correspondent aux diverses contractions.
Transposition
Àpartirdeladé nition donnée au paragraphe 3.3 et de la propriété caractéristique
(4.6) on dé nit le transposé du tenseur euclidien T ,notétT ,parlaformule:
∀v,T.v=v.tT
(5.42)
équivalente à dire que le tenseur mixte associé à tT dans E∗ ⊗ E est le transposé du
tenseur mixte associé à T dans E ⊗ E∗.
Les représentations de T étant T = Tij ei⊗ej = Tij ei⊗ej = Tijei⊗ej = Tij ei⊗ej
on trouve pour les tT les représentations :
tT=(tT)ijei⊗ej=Tjiei⊗ej,
tT=(tT)ijei⊗ej=Tjiei⊗ej,
tT=(tT)ijei⊗ej=Tjiei⊗ej,
tT=(tT)ijei⊗ej=Tjiei⊗ej,
(5.43)
qui montrent que pour les représentations 2 fois contravariante et 2 fois covariante
les coefficients de T et de tT se correspondent par permutation des deux indices, et
que pour les représentations mixtes il y a permutation de l ordre des deux indices qui
conservent leur position (supérieure ou inférieure).
Àcestadeilestintéressant de reprendre l exemple du calcul du tenseur des dilatations dans
une application linéaire de E dans E traité au paragraphe 5.2. Il vient :
φ(v ).φ(v )=(F .v ).(F .v )=v .C.v avec C = tF .F .
On peut expliciter C ,pa
re
x
emple sous la forme C = ((tF)ik ei ⊗ ek).(F j e ⊗ ej) d où
C =(tF )i k gk F j ei ⊗ej où l on retrouve l écriture de la formule (5.5), et qui devient compte
tenude(5.43):C=Fkigk F jei⊗ej.
Te n s e u r s euclidiens du 2ème ordre symétriques et antisymétriques
On dé nit la symétrie d un tenseur euclidien T par la symétrie (cf. 3.4) de
ses tenseurs associés dans E ⊗ E ou dans E∗ ⊗ E∗ (l une implique l autre).
5 Tenseurssur un espace vectoriel euclidien
323
Pour un tel tenseur on a donc les relations de symétrie suivantes pour les repré-
sentations 2 fois contravariante, 2 fois covariante et mixtes :
T=Tijei⊗ej avec Tij=Tji,
T=Tijei⊗ej avec Tij=Tji,
T=Tjiej⊗ei=Tijei⊗ej avecTji=Tij.
(5.44)
La symétrie de T s exprime aussi par la propriété caractéristique :
∀u,v,u.T.v= v .T.u.
(5.45)
De la même manière on dé nit les tenseurs euclidiens antisymétriques pour
lesquels les formules ci-dessus (5.44 et 5.45 ) sont modi ées par adjonction d un signe
moins : ∀ u ,v,u
.T.v= -v .T.u
Tij = -Tji ,T
ij=-Tji,Tji=-Tij.
(5.46)
La comparaison de ces formules avec les résultats donnés plus haut pour la trans-
position met en évidence les propriétés caractéristiques :
T symétrique
⇔ T=tT
T antisymétrique ⇔ T = -tT .
(5.47)
Suivant la démarche du paragraphe 3.4, on peut décomposer un tenseur euclidien
du 2ème ordre quelconque en ses parties symétriqueeta
ntisymétrique ; les formules
deviennent :
T =Ts+Ta
Ts=1
2(T + tT)
Ta=1
2(T -tT).
(5.48)
Considérant alors deux tenseurs T et T décomposés selon (5.48) leur produit dou-
blement contracté s exprime sous laforme:
T :T =T
s :T
s+T
a :T
a
(5.49)
car
T
s :T
a=0etT
a :T
s =0.
Convention de notation
La forme bilinéaire G sur E × E, élément de E∗ ⊗ E∗ ,c
o
rrespond au tenseur
euclidien identi é à l élément gij ei ⊗ ej de E ⊗ E.Onconviendra d adopter pour ce
tenseur euclidien la notation 1l
1l=gijei⊗ej=δijei⊗ej=δjiei⊗ej=gijei⊗ej.
(5.50)
On remarquera, à titre de justi cation de cette notation, que :
∀T,T.1l=T.
324
Annexe I Éléments de calcul tensoriel
Invariants d un tenseur euclidien du 2ème ordre
Les invariants dé nis par (4.23) des tenseurs mixtes associés à un tenseur euclidien
T dans E ⊗ E∗ et dans E∗ ⊗ E sont égaux et s expriment en termes de tenseurs
euclidiens de la façon suivante :
I1=T:1l=trT (7)
I2=1
2T:T=1
2 tr(T2)
I3 =13(T.T):T=13tr(T3)
etc.
In=1
n(T .T...):T = 1
n tr(Tn).
(5.51)
On a là un jeu d invariants principaux de T .
On peut également dé nir det T de façon analogue : par (3.16) sur les tenseurs
mixtes associés à T dans E ⊗ E∗ ou E∗ ⊗ E.Ilestinvariantparchangement de base,
et l on a aussi
det(T .T )=detT × det T .
L importance des invariants principauxenmécanique (cf. chapitres VI et VII par
exemple) tient au résultat qui suit.
Fo n c t i o n i s otrope d un tenseur euclidien du 2ème ordre symétrique
Considérons une fonction du tenseur T àv
ale
u
rs
calaire. Une telle fonction est
invariante par changement de base : cela signi e que la valeur de cette fonction pour
un tenseur T donné, qui résulte évidemment de calculs algébriques effectués sur les
composantes de T après choix d une base {ek} dans E ,estindépendante du choix de
cette base. Pour insister sur cette caractéristique on diraqu
il s agit d une fonction
du seul tenseur T ou encore d une fonction isotrope de T (8).
On a alors l énoncé suivant appelé théorème de représentation , pour les ten-
seurs T symétriques :
To ute fo n ctio n (isotrope) du (seul) tenseur T symétrique s exprime en
fonction des seuls invariants principaux de T (ou d un jeu équivalent).
Il en va évidemment ainsi pour det T .
(7)On remarque qu avec la convention adoptée ici pour les indices concernés par la double contrac-
tion notée . , explicitée au paragraphe 4.3, on a : A : B = tr (A.B), (A.B):C = tr (A.B.C),
etc.
(8)Cf. chapitre VI ( 2.7 et 4.2) pour une explication de cette terminologie.
5 Tenseurssur un espace vectoriel euclidien
325
5.8 Tenseurs euclidiens d ordre n
La construction faite au paragraphe précédent pour les tenseurs euclidiens d ordre
2peutêtrereprise pour les tenseurs euclidiens d ordre n quelconque.
On adoptera pour désigner un tenseur euclidien d ordre n le symbole d une lettre
(le plus souvent capitale) soulignée d un nombre de traits égal à l ordre du tenseur.
Cette notation deviendrait évidemment rapidement impraticable si n était grand.
Pour les applications qui en seront faites à la mécanique elle se révèle commode
malgré une apparente lourdeur car elle permet de distinguer à vue la nature
scalaire, vectorielle ou tensorielle des êtres mathématiques qui interviennent dans
les formules et d en contrôler l homogénéité de ce point de vue.
5.9 Choix d une base orthonormée dans E
Comme on l a remarqué au paragraphe 5.3 le choix d une base primale {ek} or-
thonormée dans E implique que la base duale correspondante dans E,{ek} ,luiest
identique. On a alors, cf. (5.19) :
ei≡ei
gij=δji =gij
dont il résulte que pour tout tenseur euclidien les diverses représentations coïncident :
Tijk =Tijk =Tijk = ...
Autrement dit, si la base est orthonormée, la position des indices n a
plus d importance.
On notera aussi que dans le cas de bases orthonormées les formules de changement
de base et de transformation des composantes données au paragraphe 3.2 se simpli ent
considérablement.
On posera désormais (tous indices inférieurs) :
e i=αikek
où, par suite de l orthonormalité de la base {ek} ,
αik=e i.ek;
la formule inverse s écrit alors, la base {e k} étant elle aussi orthonormée :
ek=αike i.
La formule de transformation des composantes devient alors, pour un tenseur
euclidien quelconque (ici, par exemple, T ):
αik=e i.ek
T ijk = αi αjm αkn T mn
(5.52)
326
Annexe I Éléments de calcul tensoriel
Pour les tenseurs euclidiens du 1er ordre et du 2ème ordre les opérations de contraction
peuvent être écrites sous forme matricielle : en base orthonormée on introduira le symbole
˜ pourdésigner par ˜
T la matrice du tenseur T (1er indice : ligne ; 2ème indice : colonne)
etpar˜
v la matrice colonne du vecteur v ;(ils agit des tableaux correspondants dans la base
orthonormée donnée). On obtient alors, le point notant ici le produit matriciel :
(
T.v)=˜
T.˜
v,
('
T .T .v)= ˜
T .
˜
T . ˜
v,
v .T.v = t˜
v .
˜
T.˜
v ,
(T .v ) . (T .v )=t˜
v .t˜
T.
˜
T.˜
v .
5.10 Directions principales et valeurs principales d un tenseur
euclidien du 2ème ordre symétrique, réel
Soit T un tenseur euclidien du 2ème ordre, symétrique ,réel. On se propose de
rechercher les vecteurs propresetv
aleu
rspropres de l application linéaire associée à
T ,c est-à-dire les vecteurs vi non nuls et les scalaires λi(i =1, 2,...,n) tels que :
T.vi=λivi
sans sommation .
(5.53)
La détermination des λi conduit à la résolution de l équation polynomiale en λ
( 4.6) :
det(T - λ1l)=0
dont les racines sont réelles ouimaginaires conjuguées.
La symétrie de T permet de démontrer les résultats classiques suivants.
• Les vecteurs propres correspondant à deux valeurs propres distinctes sont ortho-
gonaux.
Onaeneffet:
v1.T.v2=v1.λ2v2=λ2v1.v2
(5.54)
et aussi, par la symétrie de T (cf. (5.45)) :
v1.T.v2=v2.T.v1=λ1v1.v2
(5.55)
d oùv1.v2=0 si λ1 =λ2.
• Toutes les valeurs propres sont réelles.
Si λi est une valeur propre et λi la valeur imaginaire conjuguée, les vecteurs propres corres-
pondants sont aussi imaginaires conjugués :
T .vi = λivi ⇒ T . vi = λi vi car T est réel, et les formules (5.54) et (5.55) donnent
alors :
λivi.vi=λivi.vi
dont les seules solutions sont : λi = λi ⇒ vi =0et vi =0⇒ λi = λi.
L analyse du cas des valeurs propres multiples est classique et l on démontre
que l on peut toujours ainsi construire une base de vecteurs propres orthogonaux
e1 ,e2 ,...,en correspondant aux n valeurs propres λ1 ,λ2 ,...,λn (éventuellement
multiples).
6 Champsdetenseurs
327
Dans cette base et sa base duale {ek} ,T s explicite de façon simple à partir de
(5.53): T=λ1e1⊗e1+λ2e2⊗e2+···+λnen⊗en
T=λ1e1⊗e1+λ2e2⊗e2+···+λnen⊗en .
(5.56)
On en déduit, pour la forme bilinéaire u .T .v :
u.T.v=λ1u1v1+···+λnunvn =λ1u1v1+···+λnunvn .
(5.57)
Il est commode de choisir labasee1 ,e1 ... ,en orthonormée (cf. 5.9); alors :
T=λ1e1⊗e1+···+λnen⊗en
u.T.v=λ1u1v1+···+λnunvn
et la forme quadratique u .T .u s écrit :
u .T .u = λ1(u1)2 + ···+ λn(un)2 .
(5.58)
Les directions dé nies par les vecteurs propres de l application linéaire associée à
T , et les valeurs propres correspondantes, sont appelées directions principales et
valeurs principales du tenseur euclidien T .
Les invariants de T s expriment de façon simple en fonction des valeurs principales,
ainsi :
I1 =λ1+λ2+···+λn
I2=1
2(λ2
1+λ2
2+···+λ2
n)
etc.
In=1
n (λn
1+λn
2+···+λn
n),
(5.59)
et aussi :
detT=λ1λ2...λn .
(5.60)
6C
h
a
m
p
s
d
e
t
enseurs
6.1 Dé nition
On suppose, comme c est le cas en mécanique des milieux continus, que l espace
vectoriel E àpa
rtirduquel on a dé ni les tenseurs au paragraphe 1.1, est l espace
vectoriel associé d un espace affine :chaquepointM de l espace affineestcarac-
térisé par son vecteur-position M ou x,àpartird une origine xée dans cet espace.
On dé nit un champ de tenseurs sur cet espace affine en associant à chaque
point M un tenseur d un type déterminé (variances précisées) : la valeur du champ
de tenseurs au point courant M ,c
e
st-à-dire le tenseur correspondant, sera notée
328
Annexe I Éléments de calcul tensoriel
T(x);o
ndésign
e
r
atypiquement par H l espace vectoriel des tenseurs T (x) et l on
dira que l on a affaire à un champ de H -tenseurs.
On désigne par {ek} une base de E ,par{e∗k} la base duale dans E∗ .Levecteur
position x apourcoordonnées xk dans la base {ek}.
6.2 Dérivation d un champ de tenseurs ; gradient d un champ
de tenseurs
On considère un champ de tenseurs T (x) et l on fait l hypothèse de la dérivabilité
de ses composantes par rapport aux coordonnées xk du vecteur position x.
Soit alors w un vecteur quelconque de E.Onsaitdé nir, au pointcourantM ,la
dérivée du champ T suivant le vecteur w :c est,leH -tenseur noté DwT (x) dé ni par
le passage à la limite :
DwT (x)= lim
λ→0T(x +λw)-T(x)
λ
∈H.
(6.1)
Les hypothèses de dérivabilité sur les composantes de T (x) assurent l existence de
cette limite et permettent de démontrer que DwT (x) dépend linéairement de w .
En particulier, en choisissant pour w chacun des vecteurs de la base {ek} on
obtient :
DekT (x)= ∂T (x)
∂xk
(6.2)
et par linéarité
DwT (x)=∂T (x)
∂xk wk =(DekT(x)⊗e∗k) w .
(6.3)
Cette formule met en évidence le tenseur Dek T (x) ⊗ e∗k qui est associé à l appli-
cation linéaire de E dans H :
w →DwT(x);
ce tenseur, élément de H ⊗ E∗ est appelé gradient du champ de tenseurs au point
M et noté T(x):
T(x)=DekT(x)⊗ e∗k = ∂T(x)
∂xk ⊗ e∗k
(6.4)
et
DwT(x)= T(x) w .
(6.5)
Gradient d un champ de tenseurs euclidiens
L espace E étant maintenant supposé muni d une structure euclidienne on consi-
dère le champ de tenseurs euclidiens dont H constitue un espace de tenseurs associés,
soit par exemple le champ T pour xer les idées.
6 Champsdetenseurs
329
La dé nition du gradient donnée ci-dessus est transposable sans ambiguïté, et les
formules essentielles s écrivent (en sous-entendant la dépendance en x pour alléger les
expressions) :
T=DekT⊗ek=∂T
∂xk⊗ek
(6.6)
T.w=DwT
(6.7)
ou encore, sous forme différentielle ,
T.dM=dT.
6.3 Divergence d un champ de tenseurs
On suppose que le champ de H -tenseurs concerne des tenseurs dont le dernier
indice estc
o
ntr
avariant .
On dé nit alors, en chaque point M la divergence du champ T par la contraction
du tenseur T (x) ∈ H ⊗ E∗ sur ses deux derniers indices .
D où, à partir de la formule (6.4) :
div T (x)=∂T (x)
∂xk e∗k =DekT(x) e∗k ,
(6.8)
ce qui correspond à la double contraction de T (x) avec le tenseur I de E ⊗ E∗ :
I=δijei⊗e∗j=ek⊗e∗k;
ainsi
divT(x)= T(x) : I= T : (ek⊗e∗k).
(6.9)On obtient donc un nouveau champ de tenseurs qui ne présente plus l ultime indice
contravariant des tenseurs du champ initial.
Dansle casparticulier oùT(x)∈H=E⊗E par exemple, on a :
divT(x)∈E;
c est un vecteur et l on véri e que l on a :
div T (x)=∂Tij(x)
∂xj ei.
(6.10)
Divergence d un champ de tenseurs euclidiens
L intérét essentiel de la notion de divergence apparaît dans le cas où E est muni
d une structure euclidienne. En se plaçant désormais dans cette hypothèse, on ne
s intéressera plus, pour simpli er l exposé, qu aux tenseurs euclidiens.
330
Annexe I Éléments de calcul tensoriel
Pour un champ de tenseurs euclidiens T l opération divergence est toujours
possible. On la dé nit par la formule :
divT= T:1l,
(6.11)
homologue évidente de (6.9), et qui revient à appliquer la dé nition (6.9) à l un
quelconque des champs de tenseurs associés à T pour lesquels cela est possible.
Cette dé nition permet la généralisation de la formule de la divergence , bien
connue pour les champs de vecteurs (tenseurs euclidiens du 1er ordre) aux champs de
tenseurs euclidiens d ordre quelconque.
Considérant par exemple :
T=Tijkei⊗ej⊗ek
ona:
divT = ei⊗ej∂Tijk
∂xk = ei⊗ejdiv(Tijkek).
On voit alors que, pour un volume Ω ,danslesconditions classiques d application
du théorème de la divergence à chacun des vecteurs T ijk ek à i et j xés, c est-à-dire
si les T ijk sont de classe C1 ,ilvient:
Ω divT dΩ = ei ⊗ej ∂Ω(Tijk ek).nda
(6.12)
où da désigne l élément d aire de ∂Ω et n sa normale sortante.
En regroupant les termes de (6.12) on reconnaît au second membre le tenseur T
et l on aboutit à la formule : Ω div T dΩ = ∂Ω T .nda
(6.13)
valable quel que soit l ordre du champ de tenseurs euclidiens concerné.
6.4 Calculs en coordonnées curvilignes
Les formules précédentes relatives au gradient ou à la divergence d un champ
de tenseurs, dans lesquelles interviennent les dérivées par rapport aux variables xi ,
concernent le cas où les points de l espacee
u
clidien sont repérés par les coordon-
nées xi de leur vecteur-position dans un repère d origine xée et de base {ei} xée
(coordonnées cartésiennes).
Il peut se faire aussi que l on ait à considérer des champs de tenseurs dans lesquels
les points M sont repérés par des paramètres ηi dé nissant dans l espace euclidien un
système de coordonnées curvilignes .
C est le cas par exemple pour les coordonnées cylindriques et les coordonnées
sphériques couramment employées.
6 Champsdetenseurs
331
Les tenseurs T (x) sont alors en général dé nis par leurs composantes dans une
base locale constituée à partir d une base de E tangente aux lignes coordonnées en
M et de sa base duale. Ces composantes sont données en fonction des coordonnées
curvilignes .
Il est clair que dans la détermination des composantes de T (x) dans la base
locale au point M on rencontrera deux types de termes provenant de contributions
différentes
• d une part des termes dus à la dérivation des composantes de T (x) par rapport
auxηi,
• d autre part des termes provenant de la variation de la base locale elle-même avec
lesηi.
Il n est pas utile de développer ici les formules classiques (coefficients de Chris-
toffel) pour cette opération dite de dérivation covariante ;lesapplications dans le
cadre de ce cours ne le justi ent pas. Le lecteur trouvera dans la suite un formulaire re-
latif aux principaux types de coordonnées curvilignes utilisés et limité aux expressions
des gradients et divergences des champs de tenseurs euclidiens strictement
nécessaires à l étude du cours. Ces expressions s établissent par identi cation à partir
de la formule (6.7).
On examinera deux exemplesbidimensionnels simples de ce type de calculs.
Calcul du gradient d une fonction vectorielle en coordonnées polaires
La position du point M de R2 est repérée par les paramètres :
η1=r,η2=θ.
(6.14)
Les lignes coordonnées sont les cercles de centre O et les rayons vecteurs issus de
O ( gure 3).
Figure 3 Coordonnées polaires
On considère en chaque point M la base locale orthonormée tangente en ce
point aux lignes coordonnées :
e1=er,e
2 = eθ ,(e1,e2)=+π/2.
332
Annexe I Éléments de calcul tensoriel
Une fonction vectorielle U est couramment dé nie, dans ce système de coordonnées
polaires, par la formule :
U(r, θ)=Ur(r, θ) er + Uθ(r, θ) eθ
(6.15)
dans laquelle les vecteurs er et eθ sont eux-aussi fonctions de r et θ.
Une méthode commode pour le calcul de U consiste à exploiter la formule (6.7)
sous la forme différentielle :
U.dM=dU=∂U
∂rdr+∂U
∂θ dθ
∀dM=erdr+eθrdθ.
(6.16)
Compte tenu de la variation de la base locale caractérisée par :
∂er
∂r =0, ∂eθ
∂r =0
∂er
∂θ=eθ,∂eθ
∂θ=-er
(6.17)
il vient :
U.er =∂U
∂r =∂Ur
∂r er+∂Uθ
∂r eθ
U.eθ=1
r∂U
∂θ=1
r ∂Ur
∂θ -Uθ er+1
r ∂Uθ
∂θ +Ur eθ .
On en déduit, par identi cation, l expression de U :
U=∂Ur
∂r er⊗er+1
r ∂Ur
∂θ -Uθ er⊗eθ+∂Uθ
∂r eθ⊗er+1
r ∂Uθ
∂θ +Ur eθ⊗eθ .
(6.18)
Calcul du gradient d une fonction vectorielle en coordonnées curvilignes
orthogonales quelconques
Généralisant l exemple précédent, la gure 4 représente les lignes coordonnées d un
système de coordonnées curvilignes orthogonales :
lelongdechaque ligne η1 ,η1 varie tandis que η2 reste constant le long
de chaque ligne η2 ,η2 varie tandis que η1 reste constant.
En chaque point M repéré par les paramètres η1 et η2
OM=M(η1,η2),
(6.19)
on dé nit la base locale naturelle tangente aux lignes coordonnées, constituée
des vecteurs E1 ,E2 àpartirdelaformule différentielle :
dM=E1dη1+E2dη2;
(6.20)
6 Champsdetenseurs
333
Figure 4 Coordonnées curvilignes orthogonales quelconques
on écrit aussi, en se référant à (6.19) :
E1=∂M
∂η1,E2=∂M
∂η2 .
(6.21)
L indication (1 ou 2) des lignes coordonnées est désormais supposée choisie de
sorte que (E1 ,E2)=+π/2.
La base locale orthonormée colinéaire à la base naturelle est constituée des
vecteurs unitaires e2 ,e2 :
e1 =E1/|E1|,e
2 =E2/|E2|.
(6.22)
Les composantes de dM dans cette base sont ds1 et ds2 où s1 et s2 désignent les
abscisses curvilignes sur les lignes coordonnées passant par le point M :
dM=e1ds1+e2ds2 .
(6.23)
Une fonction vectorielle U est couramment dé nie, dans ce système de coordonneés
curvilignes, par la formule :
U(η1 ,η2)=U1(η1 ,η2) e1 + U2(η1 ,η2) e2
(6.24)
dans laquelle les vecteurs e1 et e2 de la base locale orthonormée sont eux aussi fonc-
tions de η1 et η2.
Pour le calcul de U on écrit que :
U.dM=dU=∂U
∂η1dη1+∂U
∂η2 dη2
∀dM=E1dη1+E2dη2 =e1ds1+e2ds2 .
(6.25)
On désigne par R1 (resp. R2)lerayondecourbure en M de la ligne coordonnée
η1 (resp. η2), compté positivement(9) selon E2 (resp. -E1).
(9)Cela signi e que si φ1 est l angle fait par e1 avec une direction xe, on a : R1 =ds1/dφ1 . De
même avec φ2 pour e2 : R2 =ds2/dφ2 .
334
Annexe I Éléments de calcul tensoriel
La variation de la base locale orthonormée est caractérisée par les formules clas-
siques :
∂e1
∂s1=1
R1 e2 ∂e2
∂s1=-1
R1 e1
∂e1
∂s2=1
R2 e2 ∂e2
∂s2=-1
R2 e1
(6.26)
en notant, de façon plus parlante(10)
De1=∂
∂s1 etDe2=∂
∂s2 .
(6.27)
Il vient alors :
U .E1 = DE1U= ∂U
∂η1 = e1 ∂U1
∂η1 -U2 1
R1|E1| +e2 ∂U2
∂η1 +U1 1
R1|E1|
U .E2 = DE2U= ∂U
∂η2 = e1 ∂U1
∂η2 -U2 1
R2|E2| +e2 ∂U2
∂η2 +U1 1
R2|E2| .
On en déduit l expression de U :
U = ∂U1
∂s1 -U2
R1 e1 ⊗ e1 + ∂U1
∂s2 -U2
R2 e1 ⊗ e2
+ ∂U2
∂s1+U1
R1 e2 ⊗ e1 + ∂U2
∂s2+U1
R2 e2 ⊗ e2
(6.28)
De cette formule on déduit évidemment l expression de div U :
divU = ∂U1
∂s1 -U2
R1+∂U2
∂s2+U1
R2.
Le calcul du rotationnel du champ U s effectue en écrivant que, dans R3 :
∀v ∈R3 ,(rotU)∧v =( U - t U).v
d où ici :
rotU = ∂U2
∂s1+U1
R1-∂U1
∂s2+U2
R2 e3 .
(10) ∂
∂s1=1
|E1| ∂
∂η1et∂
∂s2=1
|E2| ∂
∂η2 .
La fonction U ne peut être dé nie en fonction de s1 et s2 (siles coordonnées curvilignes sont
authentiques) car s1 et s2 ne constituent pas un système de coordonnées ; les dérivées partielles par
rapport à s1 et s2 ont la signi cation donnée par (6.27).
Récapitulatif des formules essentielles
335
Récapitulatif des formules essentielles
Base primale dans E : {ek}
Base duale dans E : {ek}
ei.ej=δji ,e
i.ej=gij,e
i.ej=gij
Te n s e u r e uclidien (représentations)
T =Tijkei⊗ej⊗ek=Tijkei⊗ej⊗ek= ···=Tijkei⊗ej⊗ek
1l =gijei⊗ej=δjiei⊗ej=δijei⊗ej=gijei⊗ej
Produit tensoriel (exemple)
A⊗B =(Aij k ei⊗ej ⊗ek)⊗(Bmn em⊗en)=Aij k Bmn ei⊗ej ⊗ek⊗em⊗en
Contraction (exemples)
T =Tijk ei⊗ej⊗ek⊗e
Tc
=Tijk (ej.ek)ei⊗e =Tikk ei⊗e
T c =Tijk (ei.ej)ek⊗e =gijTijk ek⊗e
Produit contracté (exemples)
A.B =(Aijk ei⊗ej⊗ek).(Bmn em⊗en)
=AijkBmn(ek.em)ei⊗ej⊗en =AijkgkmBmnei⊗ej⊗en
A.C =(Aijk ei⊗ej ⊗ek).(Cmn em⊗en)
=AijkCmn(ek.em)ei⊗ej⊗en =AijkCknei⊗ej⊗en
Produit doublement contracté (exemple)
A:B =(Aijkei⊗ej⊗ek):(Bmnem⊗en)
= Aijk Bmn(ek .em)(ej .en)ei = Aijk gkm Bmj ei
336
Annexe I Éléments de calcul tensoriel
Te n s e u rs du 2ème ordre (propriétés et formules remarquables)
•T.v =φ(v)
φ : application linéaire de E dans E dont la matrice par
rapport à la base {ek} apourcoefficientsT ij .
•T.T-1= T-1.T=1l
T -1 : tenseur inverse, correspond à φ-1 (s il existe) .
•T.v=v.tT
tT : tenseur transposé
(tT)ij =Tji,(tT)ij =Tji,(tT)ij =Tji,...
t(A .B)=tB . tA
• tenseur symétrique : T = tT
tenseur antisymétrique : T = -tT
T=Ts+Ta,Ts=1
2(T+tT),Ta =1
2(T - tT)
A:B=As:Bs+Aa:Ba
• Invariants
I1=trT=T:1l
I2=1
2 tr (T2)=1
2T:T
I3 = 13 tr (T3)=13(T .T):T
...
In=1
ntr (Tn)
det(T .T )=detT ×detT
Récapitulatif des formules essentielles
337
Gradient d un champ de tenseurs (exemple)
T=∂T
∂xk⊗ek
T.dM =dT
Divergence d un champ de tenseurs (exemple)
divT= T:1l
Ω div T dΩ = ∂Ω T .nda formulede la divergence
Annexe II
Opérateurs différentiels :
formules essentielles
1C
oordonnées cartésienneso
rthonormées ..........341
1.1C
oordonnées ........................ 341
1.2C
hamp de vecteurs .
.................... 341
1.3F
onctionscalaire.
.
.................... 342
1.4 Champ de tenseurs du 2ème ordre ............. 342
2C
oordonnées cartésiennesquelconques ...........343
2.1C
oordonnées ........................ 343
2.2C
hamp de vecteurs .
.................... 343
2.3F
onctionscalaire.
.
.................... 343
2.4 Champ de tenseurs du 2ème ordre ............. 344
3C
oordonnées cylindriques ..................344
3.1P
aramétrage ........................ 344
3.2C
hamp de vecteurs .
.................... 345
3.3F
onctionscalaire.
.
.................... 345
3.4 Champ de tenseurs du 2ème ordre symétriques ..... 345
4C
oordonnées sphériques ...................346
4.1P
aramétrage ........................ 346
4.2C
hamp de vecteurs .
.................... 346
4.3F
onctionscalaire.
.
.................... 347
4.4 Champ de tenseurs du 2ème ordre symétriques ..... 347
339
1 Coordonnéescartésiennes orthonormées
341
Opérateurs différentiels :
formules essentielles
1C
o
o
r
d
o
n
n
ées cartésiennes orthonormées
1.1 Coordonnées
Figure 1 Coordonnées cartésiennes orthonormées
Les coordonnées d un point M sont xi(i =1, 2, 3) notées aussi x,y,z;c
es
o
nt
les composantes de OM dans la base ei(i =1, 2, 3) notée aussi (ex ,ey ,ez) :
OM=xiei.
1.2 Champ de vecteurs
v(M)=v(x)=vi(x) ei = vi(x) ei .
Ici les composantes contravariantes et covariantes sont égales, et les bases {ei} et
{ei} sont identiques :
v(x)=vx(x) ex + vy(x) ey + vz(x) ez
v(x)= ∂vi
∂xj(x)ei ⊗ej
342
Annexe II Opérateurs différentiels : formules essentielles
˜
v=
∂vx
∂x ∂vx
∂y ∂vx
∂z
∂vy
∂x ∂vy
∂y ∂vy
∂z
∂vz
∂x ∂vz
∂y ∂vz
∂z
divv=∂vi
∂xi = ∂vx
∂x+∂vy
∂y+∂vz
∂z
Δv =div( v)= ∂2vi
∂xj∂xj ei .
1.3 Fonction scalaire
f(M)=f(x)
f=∂f
∂xi ei
Δf =div( f)= ∂2f
∂xi∂xi .
1.4 Champ de tenseurs du 2ème ordre
T(M)=Tij (x)ei ⊗ ej
T (M)= ∂Tij
∂xk ei⊗ej⊗ek
divT=∂Tij
∂xj ei
ΔT =div( T )= ∂2Tij
∂xk∂xk ei ⊗ ej
2 Coordonnéescartésiennes quelconques
343
2C
o
o
r
d
o
n
n
ées cartésiennes quelconques
2.1 Coordonnées
Figure 2 Coordonnées cartésiennes quelconques
Les coordonnées d un point M sont xi (i =1, 2, 3) composantes de OM dans la
base ei(i=1, 2, 3):
OM=xiei.
2.2 Champ de vecteurs
v (M)=v (x)=vi(x) ei = vi(x) ei
v=∂vi
∂xjei⊗ej
divv=∂vi
∂xi
Δv =div( v)=gkj ∂2vi
∂xk∂xj ei .
2.3 Fonction scalaire
f(M)=f (x)
f=∂f
∂xi ei
Δf =div( f)=gij ∂2f
∂xi∂xj .
344
Annexe II Opérateurs différentiels : formules essentielles
2.4 Champ de tenseurs du 2ème ordre
T(M)=Tij(x)ei ⊗ej = Tij(x)ei ⊗ej = ...
T (M)=∂Tij
∂xk ei⊗ej⊗ek
divT=∂Tij
∂xj ei
ΔT =div( T )=gk ∂2T ij
∂xk∂x ei⊗ej.
3C
o
o
r
d
o
nnées cylindriques
3.1 Paramétrage
er=∂M
∂r
eθ=1
r∂M
∂θ
ez =∂M
∂z
Figure 3 Coordonnées cylindriques
La position d un point M est repérée par les paramètres r, θ, z ( gure 3). La base
locale orthonormée est er ,eθ ,ez :
dM=erdr+eθrdθ+ezdz;
sa variation est donnée par
∂er
∂r=0,∂eθ
∂r=0 ,∂ez
∂r =0
∂er
∂θ=eθ ,∂eθ
∂θ=-er ,∂ez
∂θ =0
∂er
∂z=0,∂eθ
∂z=0 ,∂ez
∂z =0.
3 Coordonnées cylindriques
345
3.2 Champ de vecteurs
Un vecteur v au point M est décomposé dans la base locale orthonormée
er ,eθ ,ez .Sescomposantes sont vr ,vθ ,vz :
v(M)=vr(r,θ,z)er +vθ(r,θ,z)eθ +vz(r,θ,z)ez .
(3.1)
On a, dans cette base :
˜
v=
∂vr
∂r
1
r ∂vr
∂θ-vθ ∂vr
∂z
∂vθ
∂r
1
r ∂vθ
∂θ +vr ∂vθ
∂z
∂vz
∂r
1
r ∂vz
∂θ
∂vz
∂z
divv=∂vr
∂r+vr
r+1
r ∂vθ
∂θ+∂vz
∂z
Δv =div( v)=(Δvr - 2
r2 ∂vθ
∂θ-vr
r2)er +(Δvθ + 2
r2 ∂vr
∂θ-vθ
r2)eθ+Δvzez .
3.3 Fonction scalaire
f (M)=f (r,θ, z)
f=∂f
∂rer+1
r∂f
∂θeθ+∂f
∂z ez
Δf =div( f)= ∂2f
∂r2+1
r∂f
∂r+1
r2 ∂2f
∂θ2 + ∂2f
∂z2 .
3.4 Champ de tenseurs du 2ème ordre symétriques
T(M)=T(r,θ,z)=Tij(r,θ,z)ei ⊗ej
on se limitera à l expression de div T (r, θ, z) :
div T (r,θ, z)= ∂Trr
∂r +1
r ∂Trθ
∂θ + ∂Trz
∂z +Trr -Tθθ
r er
+ ∂Tθr
∂r +1
r ∂Tθθ
∂θ + ∂Tθz
∂z + 2Trθ
r eθ
+ ∂Tzr
∂r +1
r ∂Tzθ
∂θ + ∂Tzz
∂z +Tzr
r ez .
346
Annexe II Opérateurs différentiels : formules essentielles
4C
o
o
r
d
o
nnées sphériques
4.1 Paramétrage
er =∂M
∂r
eθ=1
r∂M
∂θ
eφ= 1
rsinθ∂M
∂φ
Figure 4 Coordonnées sphériques
La position d un point M est repérée par les paramètres r, θ, φ ( gure 4). La
base locale orthonormée est er ,eθ ,eφ :
dM=erdr+eθrdθ+eφrsinθdφ;
sa variation est donnée par :
∂er
∂r =0
, ∂eθ
∂r =0
, ∂eφ
∂r =0
∂er
∂θ=eθ
, ∂eθ
∂θ=-er
, ∂eφ
∂θ =0
∂er
∂φ = eφ sin θ,∂eθ
∂φ = -eφ cos θ,∂eφ
∂φ= -ersinθ-eθcosθ.
4.2 Champ de vecteurs
Un vecteur v au point M est décomposé dans la base locale orthonormée
(er ,eθ ,eφ) :
v(M)=vr(r,θ,φ)er +vθ(r,θ,φ)eθ +vφ(r,θ,φ)eφ .
4 Coordonnéessphériques
347
On a dans cette base :
˜
v=
∂vr
∂r
1
r ∂vr
∂θ-vθ 1
r 1
sin θ ∂vr
∂φ-vφ
∂vθ
∂r
1
r ∂vθ
∂θ +vr 1
r 1
sin θ ∂vθ
∂φ-vφcotθ
∂vφ
∂r
1
r ∂vφ
∂θ
1
r 1
sin θ ∂vφ
∂φ +vθ cotθ+vr
divv=∂vr
∂r+1
r ∂vθ
∂θ+ 1
r sinθ∂vφ
∂φ+vθ
r cotθ+2vr
r.
Δv =div( v)= Δvr - 2
r2(vr+ 1
sinθ∂
∂θ(vθ sinθ)+ 1
sin θ ∂vφ
∂φ) er +
+ Δvθ + 2
r2 (∂vr
∂θ- vθ
2sin2θ- cosθ
sin2 θ ∂vφ
∂φ) eθ +
+ Δvφ + 2
r2 sin θ (∂vr
∂φ +cot θ ∂vθ
∂φ- vφ
2sinθ ) eφ .
4.3 Fonction scalaire
f (M)=f (r,θ,φ)
f=∂f
∂rer+1
r∂f
∂θeθ+ 1
r sinθ∂f
∂φ eφ
Δf =div( f)= ∂2f
∂r2+2
r∂f
∂r+1
r2 ∂2f
∂θ2+1
r2 cot θ∂f
∂θ+ 1
r2 sin2 θ ∂2f
∂φ2 .
4.4 Champ de tenseurs du 2ème ordre symétriques
T(M)=T(r,θ,φ)=Tij(r,θ,φ)ei ⊗ej
div T (r, θ, φ)= ∂Trr
∂r +1r∂Trθ
∂θ+ 1
r sinθ∂Trφ
∂φ +1r(2Trr -Tθθ-Tφφ+Trθ cotθ) er
+ ∂Tθr
∂r +1r∂Tθθ
∂θ+ 1
r sinθ∂Tθφ
∂φ + 1r ((Tθθ - Tφφ)cotθ +3Trθ) eθ
+ ∂Tφr
∂r +1r∂Tφθ
∂θ+1
r sinθ∂Tφφ
∂φ + 1r(3Trφ +2Tθφ cot θ) eφ .