/











































Text
СССР
МИНИСТЕРСТВО СТАНКОСТРОИТЕЛЬНОЙ И ИНСТРУМЕНТАЛЬНОЙ ПРОМЫШЛЕННОСТИ
УПРАВЛЕНИЕ КАДРОВ И УЧЕБНЫХ ЗАВЕДЕНИЙ
ИНСТИТУТ ПОВЫШЕНИЯ КВАЛИФИКАЦИИ РУКОВОДЯЩИХ РАБОТНИКОВ И СПЕЦИАЛИСТОВ
Кафедра автоматизации производственных процессов
ПРИНЦИПЫ стыковки
И НАСТРОЙКИ УСТРОЙСТВА ЧПУ "ЭЛЕКТРОНИКА НЦ-31"
Часть II
(Методическая разработка)
МОСКВА
СССР
Министерство станкостроительной и инструментальной промышленности
Управление кадров и учебных заведений
ИНСТИТУТ П0ЛГ_ЗПИР КВАЛИФИКАЦИИ РУКОВОДЩИХ РАБОТНИКОВ И СПЕЦИАЛИСТОВ
Кафедра автоматизации производственных процессов
ЛЛЕДШЫ СТЫКОВКИ И НАСТРОЙКИ УСТРОЙСТВА ЧПУ "ЭЛЕКТРОНИКА НЦ-31"
Часть П
(Методическая разработка)
Москва
1985
Составители: доцент, канд.воен.наук
Г.Д.Диденко
и доцент, канд.техн.наук
3.Л.Тихомиров
Научный редактор - зав.кафедрой АЛЯ, доцент, канд.техн.наук
В.Г.Серебренный
Работ а одобрена на кафедре "Автоматизация производственных процессов"
22.04.85. Заказ 153. Тираж 500. Бесплатно.
Рот.уч-к Станкостр.техн. IS706I. Л-д, Петроградская наб.,32.
I. ПОРЯДОК УСТАНОВКИ JW "НЦ-31" В СТАНОК
Перед установкой устройства ЧПУ в станок необходимо произвести внешний осмотр УЧПУ "Электроника НЦ-31", проверить его комплектность. Особенно тщательно следует рассмотреть разъемы УЧПУ, обратив главное внимание на контакты разъемов: ХТЗ, ХТЧ модуля КИП; ХТЗ, ХТЧ модуля КП; ХТЗ, ХТЧ модуля КЗ; XTI8, XTI9 соединительного устройства (рис.1).
Подъем, перенос и установка УЧПУ производится при помощи специальных ручек, которые ввинчены в технологические отверстия, расположенные на передней панели УЧПУ.
УЧПУ "Электроника НЦ-31" выпускается в виде конструкции встраиваемого типа, т.е. без защитного корпуса, поэтому к месту его установки предъявляются следующие требования:
I. Наличие принудительного воздушного охлаждения. Отверстия для входа - выхода воздуха из защитного корпуса защищаются фильтрами, обеспечивающими надежную фильтрацию поступающего в место расположения УЧПУ воздуха, и располагаются в местах, недоступных для эмульсии, масла и стружки от работающего станка.
2. Во избежание попадания в УЧПУ эмульсии, масла, стружки между защитным корпусом, его крышками и передней панелью пульта предусмотрены резиновые прокладки толщиной 2 - 4 мм.
3. Для предохранения УЧПУ от случайного повреждения пульт оператора закрывается прочным прозрачным экраном-крышкой.
4. Технологические ножки должны быть сняты.
После установки УЧПУ в защитный корпус технологические ручки, расположенные на передней панели УЧПУ, снимаются,и на их место ставятся заглушки. Перед подключением станка необходимо проверить работу цепей электроавтоматики и правильность соединения датчиков и привода. Подключение УЧПУ к станку осуществляется с помощью следующих разъемов (рис.2):
Рис» I
Рис. 2
6
а) с электроавтоматикой станка - ХТ4, ХТЗ контроллера электроавтоматики КЗ;
б) с фотоимпульсными датчиками - ХТ4, ХТЗ контроллера измерительных преобразователей КИП;
в) со сладяшим электрическим приводом - ХТ4, ХТЗ контроллера приводов КП;
г) с сетевой цепью станка (220 В, 50 Гц) - ХТЗ.
Соединение УЧПУ с ОЗУ-ВП осуществляется с помощью разъемов XTI8, XTI9 соединительного устройства, а соединение его с отладочным комплексом - через разъем ХТ20 ОЗУ-ВП.
I.I. Подключение УЧПУ к электроавтоматике станка
Выдача информации на электроавтоматику станка происходит через разъем ХТ4 контроллера электроавтоматики, а прием информации со станка - через разъем ХТЗ. Напряжение сигнала "0" оптрона выходного регистра (разъем ХТ4) - не более 1,5 В. Максимальное напряжение , коммутируемое оптроном выходного регистра,- не более 30 В. Максимальный выходной ток оптрона выходного регистра равен 200 мА. Перечень контактов и сигналов разъемов ХТ4 и ХТЗ приведен в табл.1 и 2.
Таблица I Перечень контактов и сигналов разъема ХТ4
Контакты Сигналы КЗ Сигналы на станок
I 2 3
Развид ; ых:дногм эегистза
BI8 0 Выход 1-2°
А20 1-й Выхоп Т-2’ Числовая шход 1 £ подадрес-
В20 2-й Шход 1-2 ная ин-
В24 3-й Выход 1-2’ . формация
AI8 4-й Выход Ю-2<
В22 5-й Выход 10-2 ( подадрес-
А22 6-й Выход 10-2’
А24 7-й , формация Выход 10-2’J
В26 8-й Смена м
Продолжение табл.I
I 2 3
А26 9-й Смена 5
А28 10-й Смена Т
АЗО 11-й Автоматический режим
ВЗО 12-й Ручной режим
В32 13-й Считывание - запись
В28 14-й Готовность УГЛУ
А32 15-й Признак вида передачи
AIO +24 В станка + 24 В от станка
BIO + 24 В станка + 24 В от станка
AI4 - 24 В станка - 24 В от станка
BI4 - 24 В станка - 24 В от станка
Таблица 2
Перечень контактов и сигналов разъема ХТЗ
Контакты Сигналы КЗ Сигналы от станка
Разряд входного регистра
А04 0 Ограничение + X
В02 I Ограничение - X
А06 2 Ограничение + Z
AI0 3 Ограничение -Z
BIO 4 Свободный
AI4 5 Свободный
В28 6 Прерывание подачи
АЗО 7 Готовность станка
В06 8 Свободный
А02 9 Свободный
В04 10 Свободный
BI2 II Свободный
BI4 12 Свободный
AI6 13 Свободный
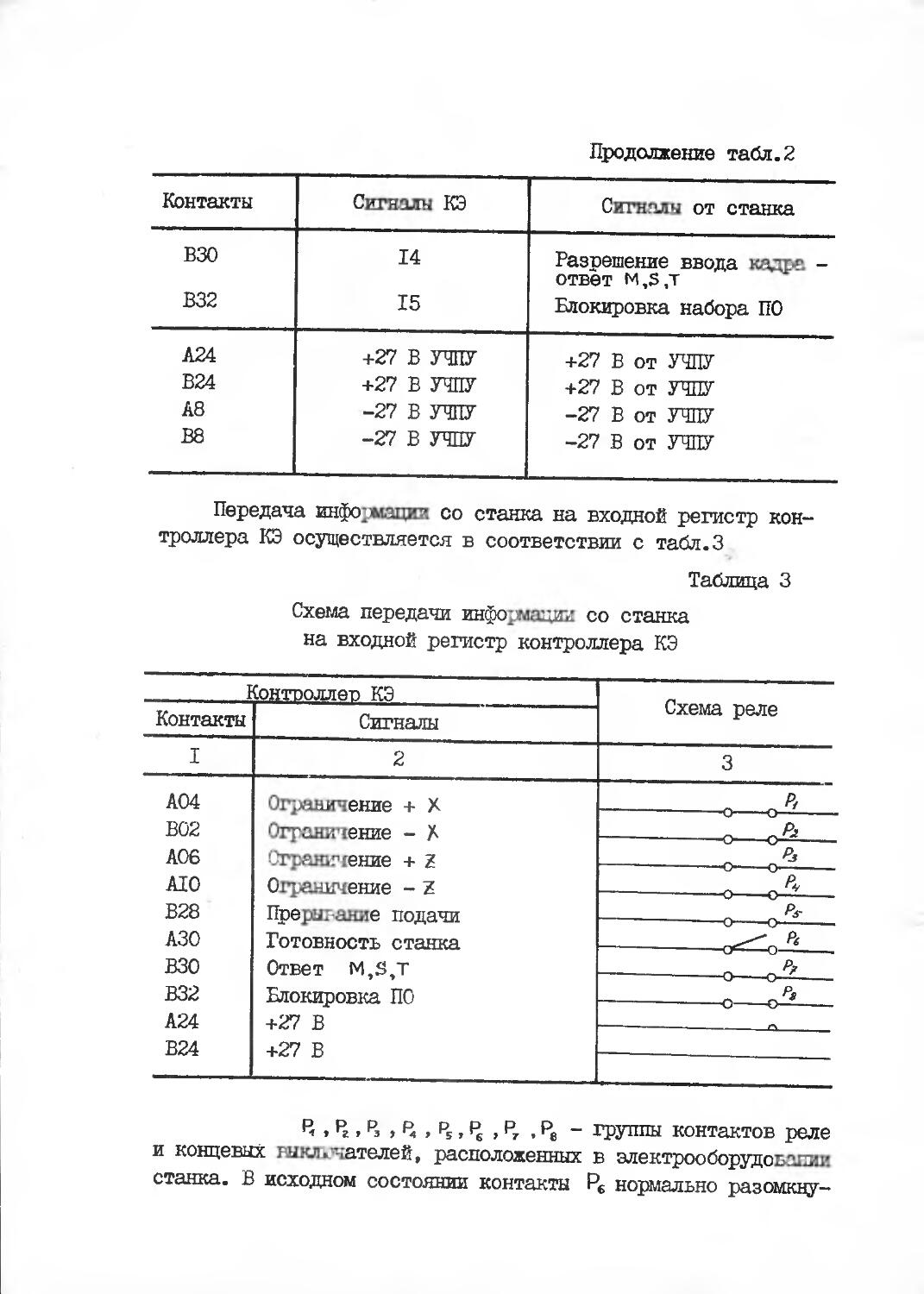
Продолжение табл.2
Контакты Сигналы КЗ Сигналы от станка
ВЗО 14 Разрешение ввода кадре -ответ м,3,т
В32 15 Блокировка набора ПО
А24 +27 В УЧПУ +27 В от УЧПУ
В24 +27 В УЧПУ +27 В от УЧПУ
А8 -27 В УЧПУ -27 В от УЧПУ
В8 -27 В УЧПУ -27 В от УЧПУ
Передача информации со станка на входной регистр контроллера КЗ осуществляется в соответствии с табл.З
Таблица 3
Схема передачи информации со станка на входной регистр контроллера КЗ
Контроллер КЗ Схема реле
Контакты Сигналы
I 2 3
А04 Ограничение + X Р, о о—
В02 Ограничение - X о о-^
А06 Стражпение + Z о- -
AIO Ограничение - Z -о Л
В28 Прерыгание подачи ?£ о О
АЗО р£
ВЗО р,
В32 Блокировка ПО ps о о
А24 +27 В а
В24 +27 В —
В . рг. Р, , Р< , р5, > рт • ре “ группы контактов реле и концевых выключателей, расположенных в электрооборудовании станка. В исходном состоянии контакты Р6 нормально разомкну
9
ты, а контакты остальных семи реле - нормально замкнуты. Различают два вида взаимодействия УШ с электроавтоматикой станка:
I. Импульсная выдача числовой подадресной информации (рис.З).
2. Потенциальная выдача числовой подадресной информации (рис.4).
Выпфнемие сигна^оЬ но&ой
группы t ipMipoaSTOMaruKt I
Нобар группа. Сигна-Л
poS
Рис. 3
Сигналы контроллера электроавтоматики и выполняемые ими функции:
0...7 - разряды выходного регистра - числовая подадресная информация;
8 - разряд - "СменаМ";
9 - разряд - "Смена 3";
10 - разряд - "Смена I”.
По сигналам 8-, 9-, 10-го разрядов происходит стирание в электроавтоматике станка предыдущих данных и снятие сигнала от станка "ОТВЕТ M.S,Т ".
4 t
Ч
3
j нобой группы j
| 1 I
| де£ф1 группа, счгнароб j
-------------*—"-----j--------L
1 1
I Si I
----U---------j------------------ ।
Рис. 4
II - разряд - "АВТОМАТИЧЕСКИЙ rEHM". Этот сигнал свидетельствует об отработке управлгющей программы в автоматическом режиме. Вад сигнала - импульсный. Отмена сигнала "АВТОМАТИЧЕСКИЙ РЕЖИМ" осуществляется сигналом "РУЧНОЙ РЕЖИМ".
12 - разряд - "РУЧНОЙ РЕЖИМ". Этот сигнал указывает на ручное управление станком. Вид сигнала - импульсный. Отмена сигнала" РУЧНОЙ РЕЖИМ" осуществляется сигналом "АВТОМАТИЧЕСКИЙ РЕЖИМ".
13 - разряд - считывание. По этому сигналу происходит запись информации с контроллера электроавтоматики в систему электрооборудования станка.
14 - разряд - "ГОТОВНОСТЬ УЧПУ". Сигнал "I" сообщает о готовности работы УЧПУ во всех режимах в любой момент времени, например, разрешение включения следующих приводов и т.д. Сигнал "О" появляется при нарушении работы УЧПУ (например, отсутствие любого из питающих напряжений УЧПУ, зависание процессора). По этому сигналу происходит полная остановка станка.
15 - разряд - "ПРИЗНАК ВВДА ПЕРЕДАЧИ". Сигнал "ПРИЗНАК ВИДА ПЕРЕДАЧИ" кодируется вместе с 14 разрядом "ГОТОВНОСТЬ УЧПУ".
II
При коде 10 - 14 разряд имеет состояние "I", 15 разряд-состояние "О" - происходит выдача сигналов M,S,T в кодированном виде.
При коде II сигнал "ГОТОВНОСТЬ УЧПУ" сохраняется, а новая информация с выходного регистра контроллера КЭ электроавтоматикой станка не воспринимается.
Разряды входного регистра 0 - 3 - соответствуют сигналам " + Х ", "-Х", "+? ", "-Z " и являются сигналами ограничения рабочей зоны станка по координатам " X " и " X ”. Сигналы (формируются с помощью конечных выключателей, расположенных на станке. При срабатывании любого концевого выключателя перемещение прекращается. Продолжение перемещения возможно только в сторону, противоположную тому перемещению, которое вызвало срабатывание конечного выключателя.
6 - разряд входного регистра. Сигнал "ПРЕРЫВАНИЕ ПОДАЧИ" формируется переключателем, расположенным на станке. Сигналом "I" дается запрет на отработку перемещений.
15 - разряд входного регистра. "БЛОКИРОВКА НАБОРА ПО" -сигнал блокировки пульта оператора. Сигналом "О" дается разрешение на работу с пульта оператора.
14 - разряд входного регистра. Сигнал "РАЗРЕШЕНИЕ ВВОДА КАДРА" поступает от станка - "ОТВЕТ М,5,Т". После снятия этого сигнала разрешается ввод новых команд в электроавтоматику станка (см.рис.3,4).
7 - разряд входного регистра. Сигнал "ГОТОВНОСТЬ СТАНКА" формируется в электроавтоматике станка в соответствии с временной диаграммой (рис.5) взаимодействия УЧПУ и электрооборудования станка при включении и аварийном выключении.
Рис. 5
13
Гальваническая развязка между входами и выходами контроллера электроавтоматики станка производится с помощью оптронов (рис.6,7).
Рис. С
Рис.7
14
.2. Подключение ЧПУ к фото/v льсннм датчикам станка
Прием информации от фото им; ульсных датчиков, расположенных на станке,происходит через разъемы ХТЗ и ХТ4 контроллера измерительных преобразователей. Распределение контактов и cnrafiioB разъема ХТЗ приведено в табл.4.
Таблица 4
Распределение контактов и сигналов разъема ХТЗ
Контакты Сигналы КИП Сигналы датчика Устройство
I 2 3 4
А8 Вход ОСН-3 Выход лиг Датчик
В8 Вход ОСН-3 Выход зйъ Шпинделя
В2 Вход СМ-3 Выход cos
В6 Вход СМ-3 Вкод cos Станка
В4 Вход НО-3 Выход 0
А6 Вход НО-3 Выход U
BI2 Вход ОСН-4 Выход лиг
BIO Датчик
Вход ОСН-4 Выход Лиг.
BI4 Вход СМ-4 ЕЫХОД COS Штурвала -
AIO Вход СМ-4 ЕИход cos маховичка
AI4 Вход НО-4 Выход 0
AI2 Вход НО-4 Выход 0
Примечания:!. ОСН - основной сигнал с датчика. —
2. ОСН - основной инверсный сигнал с датчика.
3. СМ - смещенный сигнал с датчика.
4, СМ - смещенный инверсный сигнал с датчика.
5. НО - сигнал нуль-метки с датчика.
6. НО - инверсный сигнал нуль-метки с датчика.
7. Цифра, стоящая после наименования сигнала, указывает на порядковый номер датчика.
15
Распределение контактов и сигналов разъема ХТ4 приведено в табл. 5.
ТаЛлил 5
Распределение контактов и сигналов разъема ХТ4
Контакты Сигналы КИП Сигналы датчика Устройство
I 2 3 4
В24 Вход OCH-I Виод Sin
— Датчик
А26 Вход OCH-I Выход sin
В20 Вход СМ-1 Выход CCS привода -
А24 Вход СМ-1 Выход CCS
А22 Вход НО-1 Виод 0 ось X
В22 Вход НО-1 Выход 0
В32 Вход ОСН-2 Выход Sin Датчик
В26 Вход ОСН-2 Выход Зиг
А32 Вход СМ-2 Виод СОЗ привода -
В28 Вход СМ-2 Выход cos
ВЗО Вход НО-2 Выход 0 ось Z
— .
А28 Вход НО-2 Выход 0
Питание датчиков осуществляется от блока питания БПС I8-I-I.
Перечень подавиэмпх с разъема ХТ4 пита.- лх напряжений на датчики приведен в табл.6.
Таблица 6
Перечень передаваемых напряжений с разъема ХТ4 на датчики
Номер контакта разъема ХТ4 Напряжение питания, В Максимально допустимые токи, А
I 2 3
I
2 3 5 ± 5% 8
4
16
Продолжение табл.6
I 2 3
5 6 7 8 Общий -5
9 10 II 12 -15 ± 5% 0,5
13 14 15 16 Общий -15
17 18 19 20 +15 ± 5% 1,25
Галылиическая развязка между входами контроллера КИП и выходами фотоимпульсных датчиков осуществляется с помощью оптронов (рис.8), на рис.9 приведена временная диаграмма распределения сигналов фотоимпульсного датчика. Контроллер КИП по/эшюдастся к фотоимпульсным датчикам типа BE-I78 или РОД-630. Соединение разъемов контроллера КИП с фотоимпульс-ными датчиками выполняется жгутами из экранированных про-р
водов сечением 0,12 мм . Экраны должны быть изолированы. Допустимая длина жгутов равна 15 м. Схема подключения датчиков типа РОД-630 и BE-I78 к устройству "Электроника НЦ-31" показана в табл.7.
УЧПУ
Рис. 9
Та'лида 7
Схема подключения датчиков типа РОД-630 и BE-I78
к устройству "Электроника НЦ-31"
Наименование сигнала РОД-630 BE-I78 НЦ-31 Приме-чания
РОД-630 BE-I78 НЦ-31 цвет провода и сечение, ммг й клеммы МЫ координата й разъема, клемма
I 2 3 4 5 6 7 8 9
+ иосв Общий ±15 В Коричневый, 0,5 А 6 X Z "Шпиндель" "Штурвал" ЕПС XT4-I3 БПС XT4-I4 ЕПС XT4-I5 БПС XT4-I6 БПС -блок питания ста-билизи-рован-ный
- Иосв -15 В -15 В Белый 0,5 В 7 X Z "Щдвдель" "Штурвал" ЕПС ХТ4-9 БПС XT4-I0 БПС XT4-II ЕПС XT4-I2
[ 2 3 4
+ и т злекгр +15 В +15 В Сгний 0,2
и электр Общий ±15 В Белый 0,2
к 1а 1 — Виод sin. Вход OCHI Вход 0СН2 Вход ОСНЗ Вход 0СН4 Коричневый 0,2
Й а1 Выход биг Вход ОСШ Вход 0СН2 Вход ОСНЗ Вход 0СН4 Зеленый 0,2 <
Продолжение табл.7
5 6 7 8 9
Н 5 X Z "Шпиндель "Штурвал" БПС XT4-I7 БПС XT4-I8 "БПС XT-I9 БПС ХТ4-20
Д 6 X Z "ипичдель" "Штурвал" БПС XT4-I3 БПС XT4-I4 БПС XT4-I5 БПС XT4-I6
Е I X Z "Шпиндель" "Штурвал" КИП ХТ4-В24 КИП ХТ4-В32 КИП ХТЗ-А8 КИП XT3-BI2 КИП-кон-троллер измерительного преобразователя
f 2 X Z "Плндель" "Штурвал" КИП ХТ4-А26 КИП ХТ4-В26 КИП ХТЗ-В8 КИП XT3-BI0
I 2 3 4
- И Q2 — Выход COS Вход CMI Вход СМ2 Вход СМ3 Вход СМ4 Серый 0,2
И ° Выход cos Вход CMI Вход СМ2 Вход СМ3 Вход СМ4 Розовый 0,2
к о Шход 0 Вход H0I Вход Н02 Вход НОЗ Вход Н04 Красный 0,2
10 Выход 0 Вход H0I Вход Н02 Вход НОЗ Вход Н04 Черный 0,2
Продолжение табл.7
5 6 7 8 9
G 3 X Z "ПЛиндель" "Штурвал" КИП ТХ4-В20 КИП ХТ4-А32 КИП ХТЗ-В2 КИП XT3-BI4
К 4 X Z "Шпиндель" "Штурвал" КИП ХТ4-А24 КИП ХТ4-В28 КИП ХТЗ-В6 КИП XT3-AI0
L 10 X Z "Шпиндель' "Штурвал" КИП ХТ4-А22 КИП ХТ4-В30 'КИП ХТЗ-В4 КИП XT3-AI4
М 9 X Z "'квддель" "Штурвал" КИП ХТ4-В22 КИП ХТ4-А28 КИП ХТЗ-А6 КИП XT3-AI2
21
1.3. Подключение УЧПУ к следящему электрическому приводу
Выдача управлял .ей информации на следящие электрические приводы производится через разъемы ХТЗ и ХТ4 контроллера привода. В табл.8-9 приведено распределение контактов и сигналов разъемов ХТЗ и ХТ4.
Таблица 8
Распределение контактов и сигналов на электрический привод в разъеме ХТЗ
Контакты Сигналы контроллера привода Сигналы на электрический привод Устройства
В24 Шход цифроаналогового преобразователя -10 В Выход ±10 В Привод
АЗО; А24 Общий Выход общий Оси X
Таблица 9
Распределение контактов и сигналов на электрический привод в разъеме ХТ4
Контакты Сигналы контроллера привода Сигналы на электрический ПРИВОД Устройства
В8 Выход цифроаналогового Преобразователя ±10 В Выход ±10 В Привод
А8 Общий Выход общий Оси Z
Минимальная величина квантования выходного сигнала контроллера привода равна 5 мВ. Максимальная положительная величина квантования выходного сигнала контроллера привода равна +10 В, а минимальная отрицательная величина равна -10 В. Максимальный выходной ток равен 10 мА. Соединение контроллера привода КП со следящими электроприводами производится кабелями из витых пар экранированных проводов сечением
22
0,12 мм2. Экраны изолируются. Допустимая ;ушна кабелей не должна превышать 6 м. Гал ььаи лаская развязка между выходами контроллера КП и входами следящих электроприводов осуществляется с помощью оптронов (рис.10).
1.4. Расчет путевого контура электропривода подач с устройством' НЦ - 31“
функциональная укрупненная блок-схема привода подач с управлением от НЦ-31 приведена на рис.II.
Рис.II
23
Функция управления следыдам приводом (контроля заданного положения) в'НЦ-31'реализуется программно-аппаратными средствами:
- контроллер измерительных преобразователей КИП, имеющий регистры „анных о перемещении механизмов станка по контролируемым осям;
- контроллер привода КП, преобразующий код заданной (вычисленной) скорости в аналоговый сигнал от-10 В до +10 В;
- микропроцессор с прог;.-тммндм обеспечением, реализующий функцию (алгоритм) регулятора (пропорционально интег-рально-диф{мренциального).
Включение (замыкание) путевого контура осуществляется при наличии команды "ГОТОВНОСТЬ СТАНКА", которая инициируется командой "ГОТОВНОСТЬ УЧПУ". Если рассогласование между заданным и фактическим положением механизма станка превышает допустимое значение (обычно 32767 дискрет), то автоматически снимается команда "ГОТОВНОСТЬ УЧПУ".
Наладка путевого контура выполняется после проверки приводов в регулируемом (замкнутом по скорости) режиме. Настройка регулятора скорости осуществляется в тиристорном или транзисторном преобразователе привода. Перед отладкой скоростного контура необходимо обеспечить правильную полярность подключения элементов привода, при которой обратная связь по скорости будет отрицательная (если связь окажется положительной, то необходимо перекоммутировать обмотку якоря двигателя или тахогенератора). Следует обеспечить включение таким образом, чтобы при здглкии положительного направления перемещения от"НЦ-ЗГ'механизм двигался бы в положительном направлении (по оси X - от оси шпинделя, по оси Z - слева направо).
Правильная полярность подключения путевого контура обеспечивается за счет переключения сигналов ОСН, ОСН (основного и инверсного), СМ и СМ (смещенного на 90° и инверсного) измерительного канала соответствующей координатной оси.
Настройка путевого контура заключается в предварительном определении и последующем занесении в память УЧПУ предельных рассогласований по перемещению и ускорений.
24
При первом пуске в эксплуатацию станка с УЧПУ (практически во всех случаях после нажатия клавиши , которому предшествовало диагностическое сообщение о несовпадении суммы массива параметров с контрольным заключением), в область параметров заносится исходный массив констант, определяющих стандартную конфигурацию (сопряжение) устройства с приводом. Для оптимального согласования УЧПУ и регулятора скорости привода в УЧПУ имеется возможность устанавливать различные коэффициенты усиления (посредством К пл , называемой коэффициентом передачи ошибки положения) в зоне рабочих подач отдельно от зоны ускоренных ходов.
Статическая характеристика управления приводом приведена на рис.12. Характеристика разбивается на 2 зоны: зону рабочих подач и зону ускоренных ходов. Зона рабочих подач определяется по оси ординат, максимальной дан данного станка рабочей подачей Vpas , а по оси абсцисс - соответствующим рассогласованием £1 (точкаА). Для максимального обеспечения точности обработки в зоне рабочих подач коэффициент передачи Кп устанавливается одинаковым по координатным осям станка КПЛ= I, машинное значение веса Кпл= I в восьмеричной системе 100000 8 .
Примечание. Кпл зафиксирован в УЧПУ и равен единице.
Вторая зона определяется максимальной скоростью ускоренных ходов для каждой координатной оси станка и соответствующим рассогласованием £г. Дтя исключения п .ререгулирования по скорости при разгоне и перерегулирования по перемещению при позиционировании характеристика во второй зоне выполняется с меньшей крутизной, т,е. обычно выбирается
К п2 = 0,875 \.в восьмеричной системе счисления 700008 ).
Величину рассогласования (ошибку положения) £, при максимальной рабочей подаче можно определить;
VpaS (. haaX) jo еоТ ’
где Vpnj/m<ix) - максимальная рабочая минутная подача, “ мм/мин;
Z> - добротность, 1/см;
<Г - ^адичияа дискретности измерительной системы 60 - коэ5>»яциент перевода скорости из мц/мин в мм/с.
г' Н
При этом о = —— ,
Ма
где Н - шаг ходового винта станка, мм;
N - число импульсов на оборот измерительного преобразователя (ИП);
а - коэффи'иент умножения частоты ИП в УЧПУ.
Исходя из отечественной и зарубежной практики,добротность £ для первой зоны принимается равной 16’1/с. После
расчета рекомендуется дополнительно определить экспериментально величину £,. Для этого необходимо:
- установить режим ввода параметров:
26
- установить значение максимальной подачи в мм/мин
в параметрах с номерами 4(Х)и 5(Z) :
мХ' 1200 KOu^' 1200^
» У
- установить режим
индикации рассогласования:
Режим шцхкацил
параметр
рассо- "ввод"
гласо-яапия
индикацил
заданного положения
- установить режим
- поочередно задавать безразмерные перемещения по одной
и определить среднее ари<|метическое значение рассогласования по индикации;
- ввести вычисления значения в номере параметров.
Если экспериментальное значение £, существенно отличается от теоретически рассчитанного, то следует повторить всю процедуру с вновь введенными параметрами Кп .
Аналогично определяются £* и £* , при этом в параметрах 4, 5Р необходимо установить значения максимальных скоростей перемещений. На время эксперимента £г можно установить с некоторым превышением для исключения превышения максимально допустимого рассогласования.
27
Динамик", привода (рис. 13) обеспе-гиваатся на 50% за счет статической характеристики и на 50% - за счет задания интенсивности разгона и торможения. Под интенсивностью разгона и торможения понимается максимальный наброс частоты в
ось X - N4F)
г 1-я зона ось Z - N5F J
ось X - N6F)
f П-я зона ось z - N7F J
дудоер, Скорости 10 м/мин соответствует рассогласование по координате Z , равное 2000 дискрет.
Путь торможения по оси Z
5г - £г d. = 2000 • 0,005 = 10 мм.
Время равнозамедаенного торможения с; _ Vmox - t-
। 2 * IQ мм pi toc n
откуда t = —n------------*—;— = O,lzo c.
V мах 160 мм/с
Если мы хотим установить время разгона 'Ьразг = 0,2 с
то максимальный код на ЦАПе будет равен
W = -------
Т-разг(^орМ) ' Hz
где и. - количество ступеней разгона (торможения), т.е.
W = —2222— _ юо дискрет на ступеньку.
0,2 -100
Компенсация люфта (зазора) в механладах приводов подач Компенсация люфтов станка задается по адресу N 10. Вид параметра РХХХХ. Левые две цифры соответствуют люфту в дискретах по оси X , правые две цифры - люфт по оси Z .
В системе введено ограничение на максимальную величину компенсации люфта: по оси Х4-. 8 дискрет, по оси Z < 5 дискрет.
Пример ввода коррекций:
осьХ ось?
- компенсация фактического люфта.
Величина компенсации люфта вычисляется:
где К - вводимое значение компенсации;
ЛФТ - значение люфта f мкм;
cL - цена дискреты измерительной системы по данной оси ( ах = 2,5 мкм, аг = 5 мкм).
Вводимые значения округляются до целых. Например,
если X = 3 мкм и Z = 19 мкм, Кх= _ р,2;
2,5 мкм
округляя Кх= I, Кг = = 3t8; округляя Кг - 4.
5 мкм
Вводим следующее значение параметра.
N 1 Р О 1 О 4
29
Параметры по адресу М > используемые для настройки ИП и привода, приведены в табл.10.
Таблица 10
Параметры по адресу М, используемые для настройки ИП и привода
Номер ячейки области Адрес группы Исходное! состояние Функционирование Примечание
условное обозначение в систе-ме пояснение
признака
I 2 3 4 5 6
0 11 2) 3 4 5 6 7 8 М м м м м м м м 4 Не и 0 0 177777 2000. ‘Жа 1001 при 0JI024 и дискр Допустимая зона выхода в позицию и допустимый сдвиг нуля ЦАПа по обеим осям. Исх.состояние 4 дискрет запись N0M4 □пользуется Индекс масштабного коэффициента по ОСИ X Индекс масштабного коэффициента по Z пример записи N 4 Коэффициент пересчета дискреты маховика N 5 М 177777, Число деления датчика шпинделя f Величина,обратная Л МШШП ь МШХ 0- I- 2- МШ, 3- 1 4- 5- Од ни ВИ МШм 2 С ШШП ум ча СИ ИППЮ1 Ст 1 ча ппшпо; lu ча 1 ё ф 1 си СО т.т> ё я о в Т-2 i •, I т а> 1:4 SSS I:8)o о 1:10ёёЙ но деле-е махо-ка соотв. цел. ИП учетом ножения стоты в стеме аршая оть адсая зть
30
Продолжение табл.10
I 2 3 4 5 6
II М 2 Масштаб скорости уско- Старшая
ренных ходов 1При обработке запро- часть
12 М 21042 граммированной скорое- МСКУХ Младшая
'.и возможность коррек- ироьаяии ее) часть
14 м 0 Ко эИлгадент передачи скоростной ошибки поХ КН, X) ^ифференц. составляю-
15 м 0 Коэффициент передачи КН/' щая сигна-
скоростной ошибки noZ (от 0 до потери устойчивости привода) ления регулятора
16 м 70000, Ко ггы!диент передачи ошибки положения для
второй зоны - ось X К 02 =
(I канал), размерность 5 • 2 15 млв/ВДИС К иг = 0,875
17 м 70000, Коэффициент передачи ошибки положения для второй зоны - ось Z (второй канал) Размерность 5 • 2 ~iS wib/ВДИС К пг Кпг= = 0,875
м 100000, Коэффициент передачи
(зафик- ошибки положения для
сирован с УЧПУ) первой зоны, размерность МЛВ/ЩЖ К„1 КП1= I
равен
5 мв/
<1 дискр.
31
Параметры признаков группы F приведены в табл.II.
Таблица II
Таблица параметров признаков группы F (ключ)
Номер области Адрес Исход- Примечание
ное зна- Дискрет- 1 vnjFcm-
челне (в дискретах) .ункщюнирование ность ное обозначение Е системе Пояснение
I 2 3 4 5 6 7
0 I 2 3 4 5 6 7 F F F F F F F F 400 200 4000 4000 250 150 200 200 Ось X . Предельная величина рассогласования в 1-й зоне ( <ГХ = 2,5 мкм) Ось Z . Предельная величина рассогласования в 1-й зоне ( <^= 5 мкм) Ось X . Ограничение величины рассогласования Ось х . Ограничение величины рассогласования Предельное ускорение для первой зоны Ось X Ось Z . Предельное ускорение для первой зоны Ось X . Предельное ускорение для второй зоны Ось Z . Предельное ускорение для второй зоны ° ° о О й й й й сл СЛ СЛ СП й s s S O|W O|W О|И о|ы ° < < < < (Y, (V) Й XJ" _Г4 *? _/*• N гм хэ у -» n * X м х * •* х Исходное значение Для I6K20 з-да "Кр. Пролетарий" В н о S ft О) 05 ft си и 7 ° § о ф I и
32
Окончание табл.II
I 2 3 • 4 5 6 7
8 F 320 Ось X . Контролируемое значение пре эльной рабочей подачи V,'
9 F 320 Ось Z . Контролируемое значение предельной рабочей подачи 50^® V,2
10 F 640 Ось X . Контролируемое значение предельней подачи при резьбона-резании 50вдс v;
II F 640 Ось Z . Контролируемое значение предельной подачи при резьбона-резании 50вдс V₽M
12 F 99 Контролируемое значение (предельное) вводимого люфта. Ось X ЖИС ЛФТ I
13 F 99 Ось Z . Контролируемое (предельное) значение вводимого люфта вдис ЛФТ 2
1.5. Подключение к УЧПУ оперативного запоминающего устройства ОЗУ-ВП
Обмен информацией между УЧПУ и устройством ОЗУ ВП происходит через разъемы XTI8 и XTI9. Разъем XTI8 соединительного устройства соединяется с разъемом XTIO устройства ОЗУ-ВП с помощью кабеля. Распределения контактов и сигналов разъемов XTI8 и XTI9 приведены в табл.12, 13.
33
Таблица 12
Распределение контактов и сигналов разъема XTI8
Контакты Сигналы
А2 В2 +5 В Ел +5 В Е,
А4 Общий Е1, Е6
В4 Общий Е,, Е6
А6 В6 А8 В8 BI2 AI4 BI4 AI6 BI6 А22 Стоп 2 Стоп I Пуск Ш 2 Пуск Ш I зм Общий Е, , Е€ ПтЗ АСП АИП Общий Е, , Е6
А26 В28 Уст +5 В Eg
АЗО ВЗО А32 В32 Вц ДЗП ДИТ Обмен
Разъем XTI9 соединительного устройства соединяется с разъемом XTII устройства ОЗУ-ВП с помощью кабеля.
34
Таблица 13
Распределение контактов и сигналов разъема XTI9
Контакты Сигналы
В2 А4 В4 А6 В8 AIO BIO AI2 РЗГЛ И2 ОШВ РПР 2И РПР 1И ЗПР 2 ЗПР 1 ОТВ Общий Е, , Et
BI2 AI4 BI4 AI6 BI6 AI8 BI8 А20 В20 А22 В22 А24 В24 А26 В26 А28 В28 АЗО АД - разряд О АД разряд I АД разряд 2 АД разряд 3 АД разряд 4 АД разряд 5 АД разряд 6 АД разряд 7 Общий Е, , Е6 АД разряд 8 АД разряд 9 АД разряд 10 АД разряд II АД разряд 12 АД разряд 13 АД разряд 14 АД разряд 15 Общий Е, , Е6
ВЗО Общий Е, , Ео
А32 +5 В Е^
В32 +5 Б Е,
35
В УЧПУ применяют две разновидности ОЗУ-ВП, в которых используются два вида кассет памяти:
I. Устройство КВП емкости 4К слов,
2. Устройство 3509 емкостью 512 слов.
При работе с кассетой внешней памяти КВП корректор включается переключателем А,,расположенным на плате СОПР ОЗУ ВП. Переключатель А5 устанагливается в положение "I". При работе с устройством 3509 корректор должен быть выключен. В рабочем состоянии переключатели АКК и ft на кассете должны находиться в положении "АКК" и " V " соответственно.
Перед эксплуатацией кассеты памяти следует обратить внимание на то, что аккумуляторы автономного источника питания должны быть заряжены от сети переменного тока 220 В, 50 Гц через блок питания 0202, входящий в комплект ОЗУ-ВП. При этом разъем XTI кассеты должен быть подключен к разъему ХТ2 соединительного устройства. Зарядка аккумуляторов должна производиться в течение 15 часов в условиях, исключающих попадание на блок питания металлических стружек, эмульсии, масла. При эксплуатации кассеты памяти подзарядка аккумуляторов должна производиться один раз в пять суток. В процессе зарядки аккумуляторов сохранность информации не гарантируется. В отключенном УЧПУ кассету памяти хранить не следует.
При отсутствии необходимости в сохранении информации в кассете памяти аккумуляторы отключают переключателем "АКК", устанавливая его в положение "V ". Контроль степени разряда аккумулятора производится по индикатору $ , включаемому переключателем Д , путем установки его в положение . Вышедшие из строя аккумуляторы немедленно заменяются.
ОЗУ-ВП конструктивно размещаются в корпусе станка в местах, исключающих попадание в устройство металлической стружки, эмульсии, масла. ОЗУ-ВП не следует размещать в корпусе станка в непосредственной близости от не защищенных экранами мощных переключателей, контроллеров, коммутаторов и силовых цепей питания. Кабели, соединяющие ОЗУ-ВП с УЧПУ, располагаются в местах, надежно защищенных экранами от раз
36
личных источников помех (переключатели, контакторы, силовые цепи питания), а также от попадания эмульсии и масла.
1.6. IIojjuii чение к УЧПУ блоков питания БПС I8-I-I и БПС I8-I-2 и вентилятора УЧПУ
Разъем ХТЗ кабеля блоков питания подсоединяется к однофазной сети электрооборудования станка - 220 В (+10%-15%) и 50^1 Гц. Распределение контактов и сигналов разъема ХТЗ приведено в табл.14.
Таблица 14
Распределение контактов и сигналов разъема ХТЗ
Контакты Сигналы
2 220 В 50 Гц
3 220 В 50 Гц
4 Корпус
Разъемы XTI блока питания БПС I8-I-I и ХТ2 блока питания БПС I8-I-2 соединяется между собой кабелем, поставляемым в комплекте с УЧПУ.
Подключение вентилятора УЧПУ. С разъема ХТЗ блоков питания выходит жгут, который присоединяется к клеммам 1,2 клеммной колодки , расположенной на УЧПУ (см.рис.1). Экранирующая оплетка жгута подсоединяется к клемме 3 клеммной колодки УЧПУ.
2. НЕКОТОЕЫЕ ВОПРОСЫ ЭКСПЛУАТАЦИИ СИСТЕМЫ "ЭЛЕКТРОНИКА НЦ-31"
2.1. Организация архива управляющих программ
В устройстве предусмотрена возможность хранения временно не используемых программ в архивах системы и на кассете внешней памяти с подпиткой. Кассету удобно использовать в качестве оперативного носителя между устройством и постоянным архивом программ, находящимся, например, на магнитном носителе. Архив состоит из нескольких областей (см.рис.П).
Обмен между областями производится массивами по 250 кадров. В каждой области может храниться одна управляющая программа емкостью 250 кадров или несколько программ меньшей емкости, в общей сложности не превышающих 250 кадров.
37
Обычно архив устройства состоит из шести областей с номерами 0-5. О - область, где хранится текущая програм-
ма, т.е. программа, которую можно просматривать, вводить и отрабатывать в автоматическом режиме. Программами, находящимися в других областях, можно пользоваться, переписав их в текущую рабочую область - 0.
В кассете внешней памяти можно хранить восемь областей с номерами 6-13. Переписывать программу из нулевой области в другую и обратно можно только в режиме ввода, когда память деблокирована и над клавишей |^> [ горит лампочка. Номер области чтения, из которой переписывается программа, набирается на индикаторе номера. Номер области, в которую переписывают программу, набирается на числовом индикаторе под буквенным адресом М. Затем нажимается клавиша |ж~| . Если набор выполнен правильно, над клавишей |<$> | начинает мигать лампочка. В этом случае устройство готово к переписи, которая осуществляется нажатием клавиши l<$> I . По окончании пере-
писи индикация сбрасывается, гасятся лампочки над клавиша-
Пример переписи программы из области I (в архиве устройства) в область номер 10 (область архива на кассете).
Набираем номер области чтения
Набираем номер области записи
Нажимаем клавишу [х | . Над клавишей [<g> j начинает мигать лампочка. Нажимаем клавишу |~> I - производится пере-
пись.
аждая программа, находящаяся в архиве, перед переписью должна быть проконтролирована на сохранность.
В случае появления ошибок в программе выдается сообщение об аварийном состоянии. После переписи испорченной программы в область 0 выдается сообщение о сбое памяти управляющей программы. Корректировка программы осуществляется
38
нажатием клали г [<П . После этого программа просматривается и, при необходимости, исправляется.
2.2. Характерные неисправности и методы их устранения
Во время работы устройства могут возникнуть три группы неисправностей, вызванных следующими причинами:
а) отсутствием питающего напряжения;
б) отсутствием контактов в разъемах;
в) неисправностями элементов в модулях.
Отсутствие питающего напряжения может быть вызвано перегоранием плавких предохранителей блока питания, обрывом в шнуре питания или неисправностью самого блока питания. Замена любого элемента блока питания производится только при выключенном блоке и отключенном от сети шнуре питания.
Исправление контактов в разъемах достигается протиркой контактирующих элементов спиртом.
Неисправности элементов в модулях обнаруживаются резидентным проверяющим тестом в фоновом режиме. Код неисправности высвечивается на цифровых индикаторах пульта оператора. Неисправности в модулях устраняются только специалистами с помощью использования группового ЗИП. При невозможности устранения неисправностей устройства необходимо обратиться на завод-изготовитель или в специальную ремонтную службу.
2.3. Техническое обслуживание
Необходимо периодически осматривать вентилятор, проверять сопротивление изоляции, его токоведущих частей и, при необходимости, очищать от пыли. Подшипниковый узел вентилятора необходимо периодически заполнять маслом ВНИИНП-6 ТУ38-00-П68 - 74. Периодичность пополнения маслом определяется условиями эксплуатации, но не реже одного раза через каждые 1000 часов эксплуатации, для осмотра и пополнения вентилятора маслом УЧПУ отключается и извлекается из защит-ного корпуса.
эксплуатация УЧПУ с порванным защитным чехлом клавиатуры категорически запрещена.
Адена аккумуляторов блока питания MIC I8-I-I произво
39
дится в соответствии с указаниями, изложенными в инструкции по эксплуатации на блок питания БИС I8-I-I.
Периодичность чистки воздушных фильтров определяется условиями эксплуатации, но не реже одного раза каждые шесть месяцев эксплуатации.
ЗАКЛЮЧЕНИЕ
Опыт создания и эксплуатации станков с ЧПУ показывает, что надежная работа комплекса может быть обеспечена только при выполнении конструкций электрооборудования станков и связей с УЧПУ в строгом соответствии с настоящей методической разработкой.
В виде исключения в специальных случаях отключение в части электрооборудования станка и схемы стыковки с УЧПУ может быть допущено лишь при согласовании с заводом-изготовителем УЧПУ.
СОДЕРЖАНИЕ
Стр.
I. ПОРЯДОК УСТАНОВКИ УЧПУ "НЦ-31" В СТАНОК..... 3
I.I. Подключение УЧПУ к электроавтоматике станка 6
1.2. Подключение ЧПУ к щотоимпульсннм датчикам станка 14
1.3. Подключение УЧПУ1 к сле^ще*^ электрическому приводу...........................................21
1.4. Расчет путевого коцтура электропривода по-
дач с устройством "НЦ-31"..............................22
1.5. Подключение к УЧПУ оперативного запоминающего устройства ОЗУ-ВП. ........................... 32
1.6. Подключение к УЧПУ блоков-питания БПС I8-I-I
и БПС I8-I-2 и вентилятора УЧПУ......................36
2. НЕКОТОРЫЕ ВОПРОСЫ ЭКСПЛУАТАЦИИ СИСТЕМЫ "ЭЛЕКТРОНИКА НЦ-31"................................ 36
2.1. Организация архива управляющих. программ.... 36
2.2. Характерные неисправности и методы их устранения......................................... .38
2.3. Техническое обслуживание.............. 38
ЗАКЛЮЧЕНИЕ.................................... 39