/




















Text
Г.И.МАРЧУК
МЕТОДЫ
ВЫЧИСЛИТЕЛЬНОЙ
МАТЕМАТИКИ
Допущено Министерством
высшего и среднего специального образования СССР
в качестве учебного пособия
для студентов вузов, обучающихся по специальности
«Прикладная математика»
ИЗДАТЕЛЬСТВО «НАУКА»
ГЛАВЬЦЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
Москв-а 1977
518
(ИЗО
УДК 519.95
Методы вычислительной математики. М а р-
чук Г. И. Главная редакция физико-математической
литературы издательства «Наука», М., 1977, 456 стр.
Книга создана на основе монографии под тем же
названием, вышедшей в 1973 г. и получившей высо-
высокую оценку специалистов. Настоящее издание явля-
является более универсальным по подбору методов и на-
написано так, чтобы служить учебным пособием по
курсу «Численные методы» для студентов 4—5 кур-
курсов, обучающихся по специальности «Прикладная
математика».
Автор стремится акцентировать внимание на
сложных задачах математической физики, которые
в процессе решения сводятся, как правило, к более
простым, допускающим реализацию алгоритмов на
ЭВМ. В книге изложены многие современные подхо-
подходы к численные методам.
Книга может представлять интерес не только для
студентов, но и для аспирантов, г также для спе-
специалистов, работающих в области прикладной мате-
математики.
2 табл., 20 рис., библ.
© Главная редакция
физико математической литературы
издательства «Наука», 197?
ОГЛАВЛЕНИЕ
Предисловие
Введение . .
7
9
Г Л А В А 1
ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ РАЗНОСТНЫХ СХЕМ
1.1. Основные и сопряженные операторы 17
1.1.1. Оценки норм некоторых матриц B1). 1.1 2. Вычисление границ
спектра положительной матрицы B2). 1.1.3. Собственные числа и
функции оператора Лапласа C1). 1.1.4. Собственные числа и векторы
конечно-разностного аналога оператора Лапласа C3).
1.2. Аппроксимация 36
1.3. Счетная устойчивость 44
1.4. Теорема сходимости 52
ГЛАВА 2
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
ДЛЯ ДИФФЕ."-ЕНЦНЛЛЬНЫХ УРАВНЕНИЙ
2.1. Метод построения разностных уравнений для задач с разрывными
коэффициентами на основе интегрального тождества 56
2.2. Вариационные методы в математической физике 63
2.2.1. Метод Ритца F9). 2.2.2. Метод Галеркина G2). 2.2.3. Метод
наименьших квадратов G5).
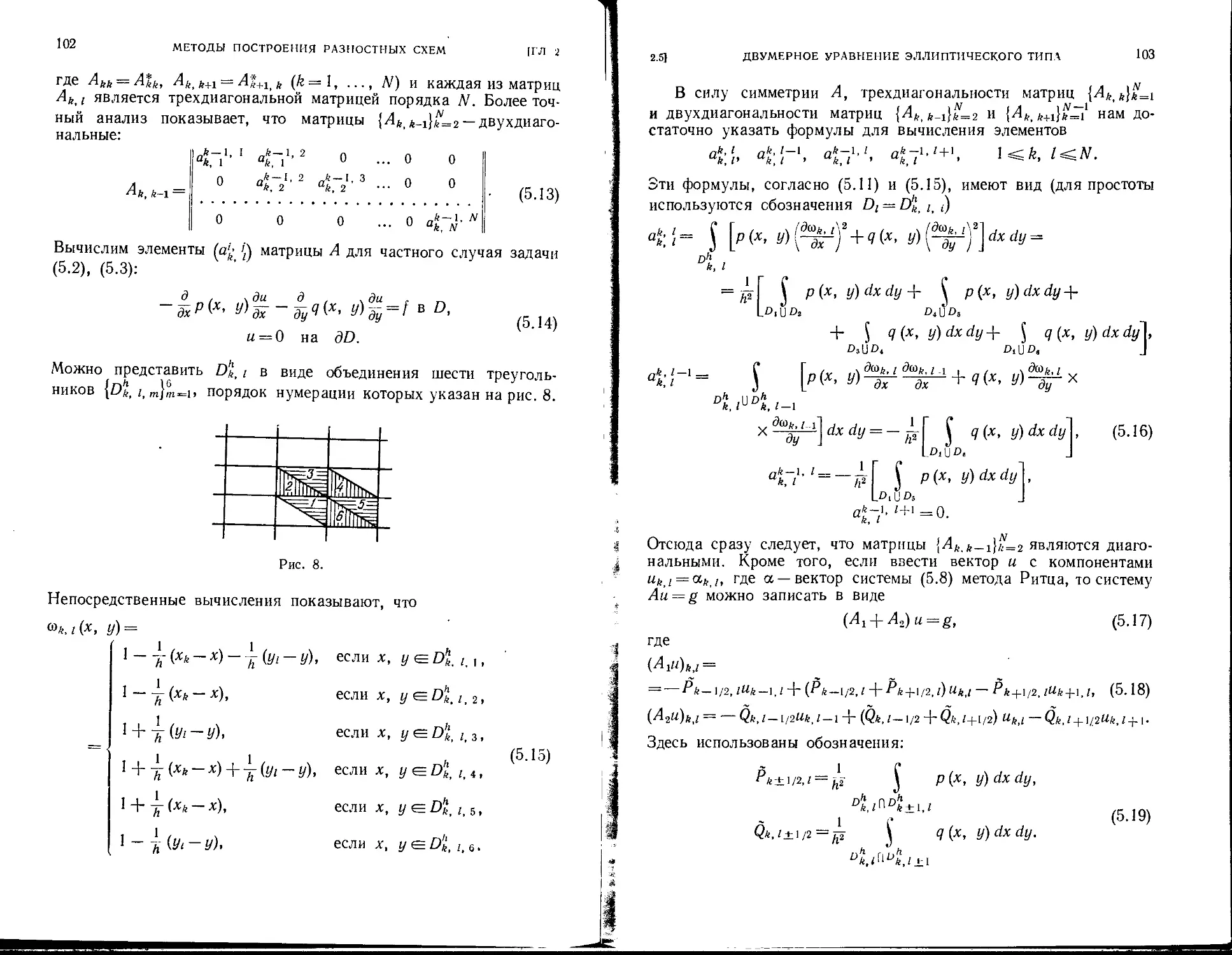
2.3. Разностные схемы для уравнений с разрывными коэффициентами,
основанные на вариационных принципах 77
2.3.1. Построение простейших разностных уравнений диффузии с по-
помощью метода Ритца G7). 2.3.2. Построение простейших разност-
разностных схем на основе метода Галеркина (конечных элементов) (81).
2.4. Некоторые принципы конструирования подпространств для решения
одномерных задач вариационными методами 83
2.4.1. Общий подход к построению вариационно-разностных схем
высокого порядка точности (84). 2.4.2. Построение базиса на ос-
основе тригонометрических функций и его использование в вариацион-
вариационных методах (88). 2.4.3. Вариационная форма интегрального тож-
тождества (92).
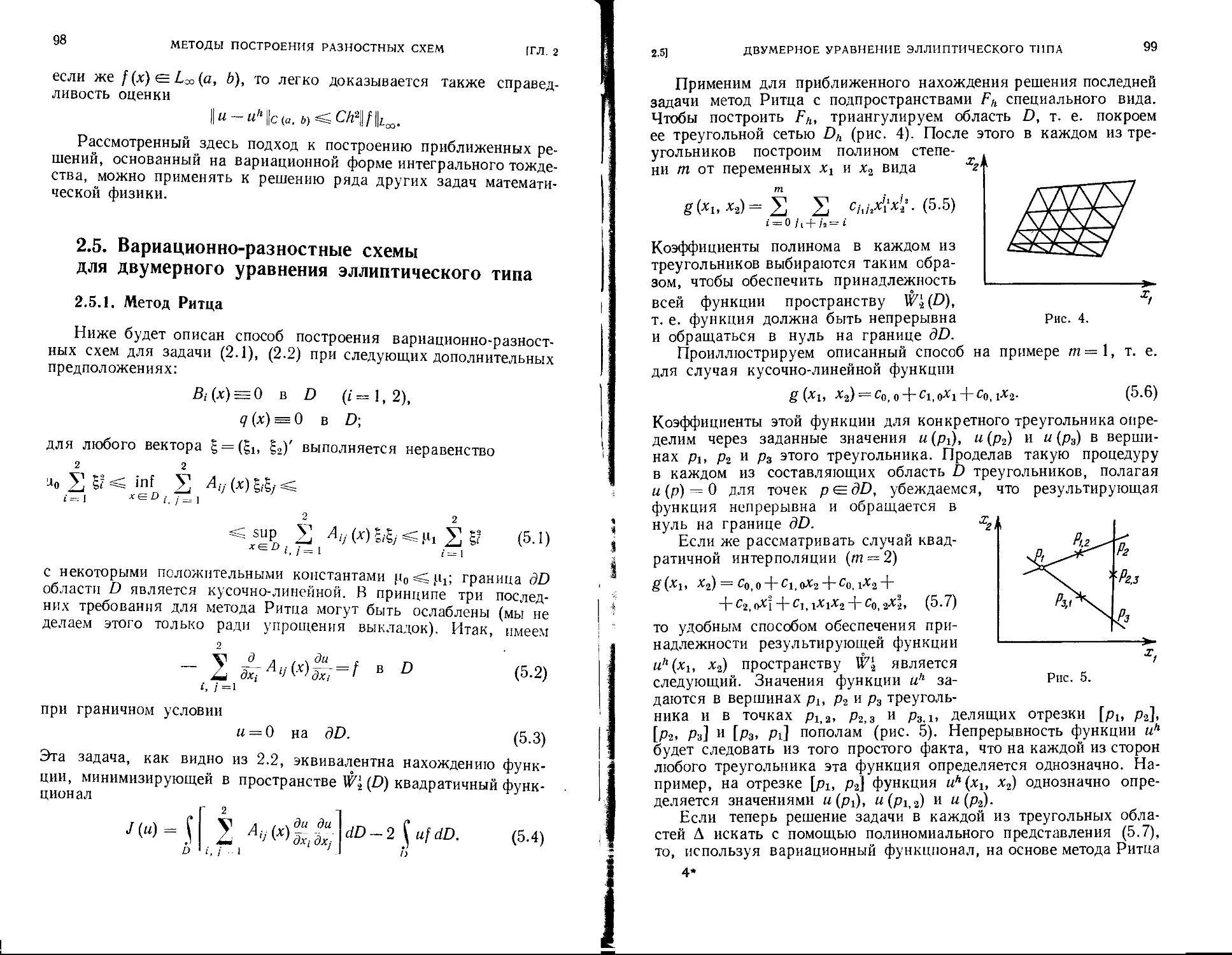
2.5. Вариационно-разностные схемы для двумерного уравнения эллипти-
эллиптического типа OS
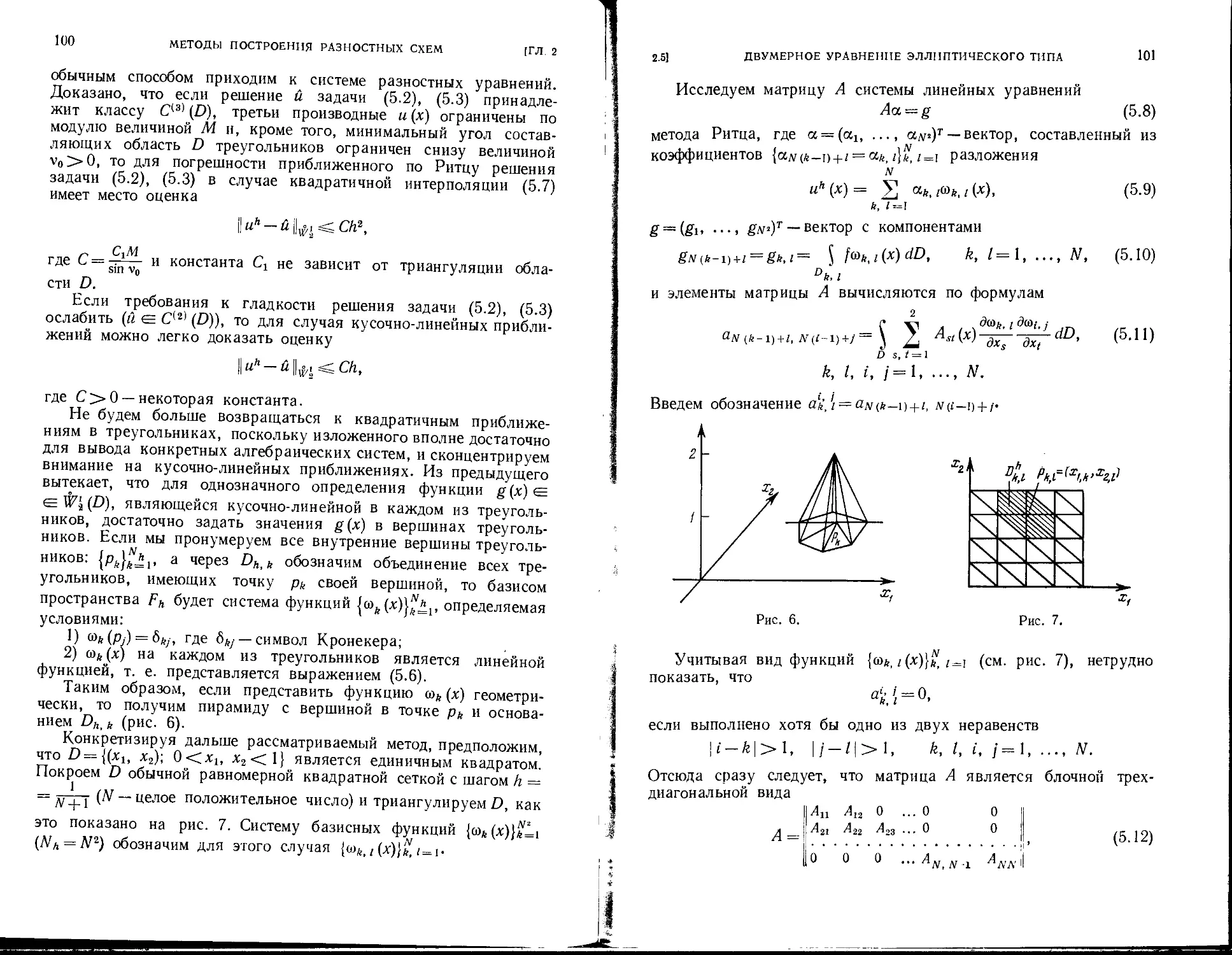
2.5.1. Метод Ритца (98). 2.5.2. Метод Галеркипа A04). 2.5.3. Спо-
Способы построения подпространств A08).
1*
* ОГЛАВЛЕНИЕ
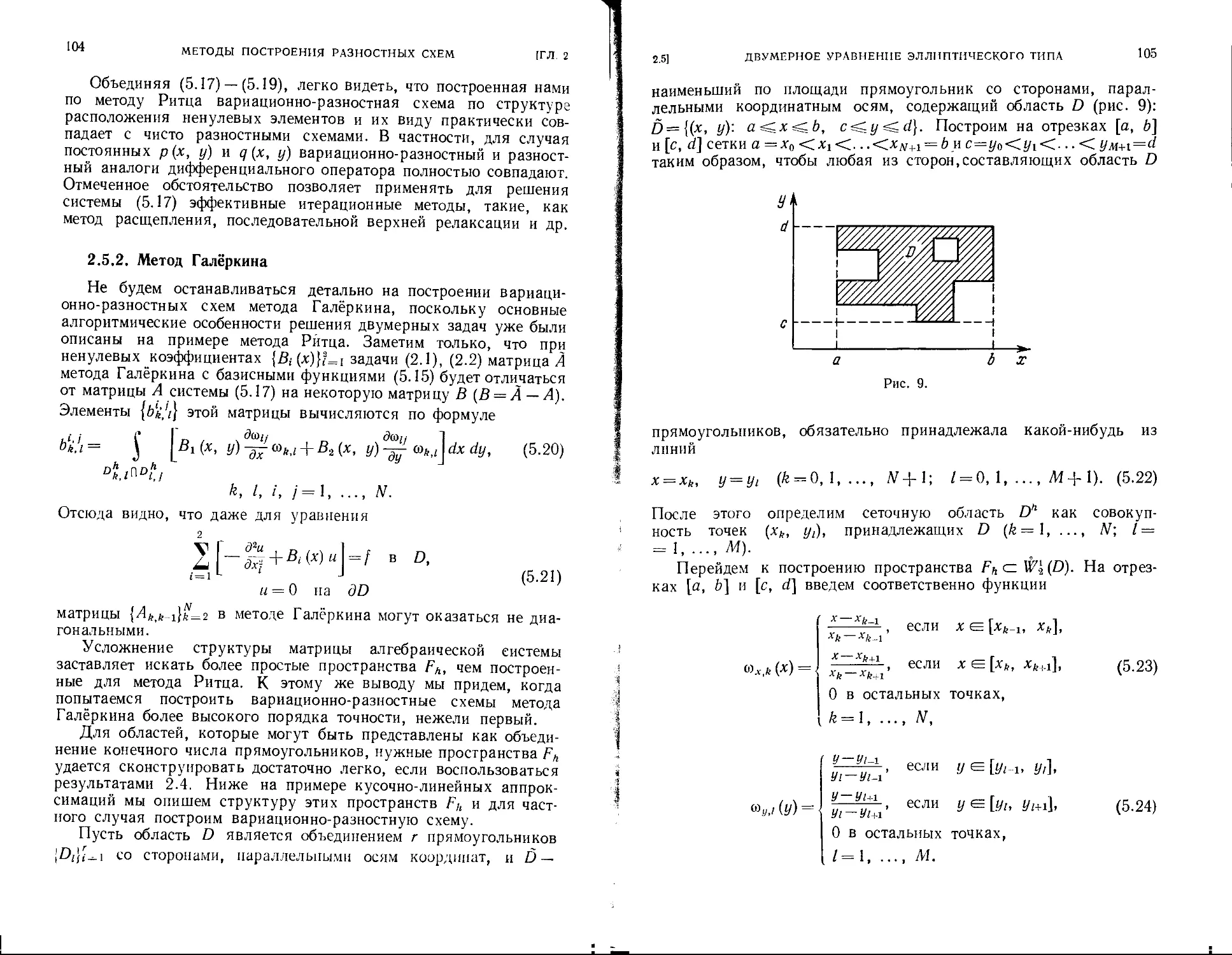
2.6. Вариационные методы для многомерных задач 111
2.6.1. Способы построения подпространств A11). 2.6.2. Покоорди-
Покоординатные методы построения вариационно-разностных схем A13).
2.7. Метод фиктивных областей 115
2.8. Экстремальные задачи с ограничениями и вариационные нера-
неравенства 121
2.8.1. Элементы общей теории A22). 2.8.2. Примеры экстремальных задач
A24). 2.8.3. Численные методы для экстремальных задач A31).
ГЛАВА 3
ИНТЕРПОЛЯЦИЯ СЕТОЧНЫХ ФУНКЦИЙ
3.1. Интерполяция функций одного переменного 138
3.1.1. Интерполяция функций одного переменного с помощью куби-
кубических сплайнов A38). 3.1.2. Кусочно-кубическая интерполяция со
сглаживанием A42). 3.1.3. Гладкие восполнения A44).
3.2. Интерполяция функций двух и многих переменных 146
3.3. л-гладкое приближение функций многих переменных 148
3.4. Элементы общей теории сплайнов 155
ГЛАВА 4
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
МАТЕМАТИЧЕСКОЙ ФИЗИКИ
4.1. Общие понятия теории итерационных методов 162
4.2. Некоторые итерационные методы и их оптимизация 165
4.2.1. Простейший итерационный метод A65). 4.2.2. Сходимость и
оптимизация стационарных итерационных методов A67). 4.2.3. Ме-
Метод последовательной верхней релаксации A71). 4.2.4. Чебышевский
итерационный метод A76). 4.2.5. Сравнение скорости сходимости
итерационных методов для систем разностных уравнений A85).
4.3. Нестационарные итерационные методы lg$
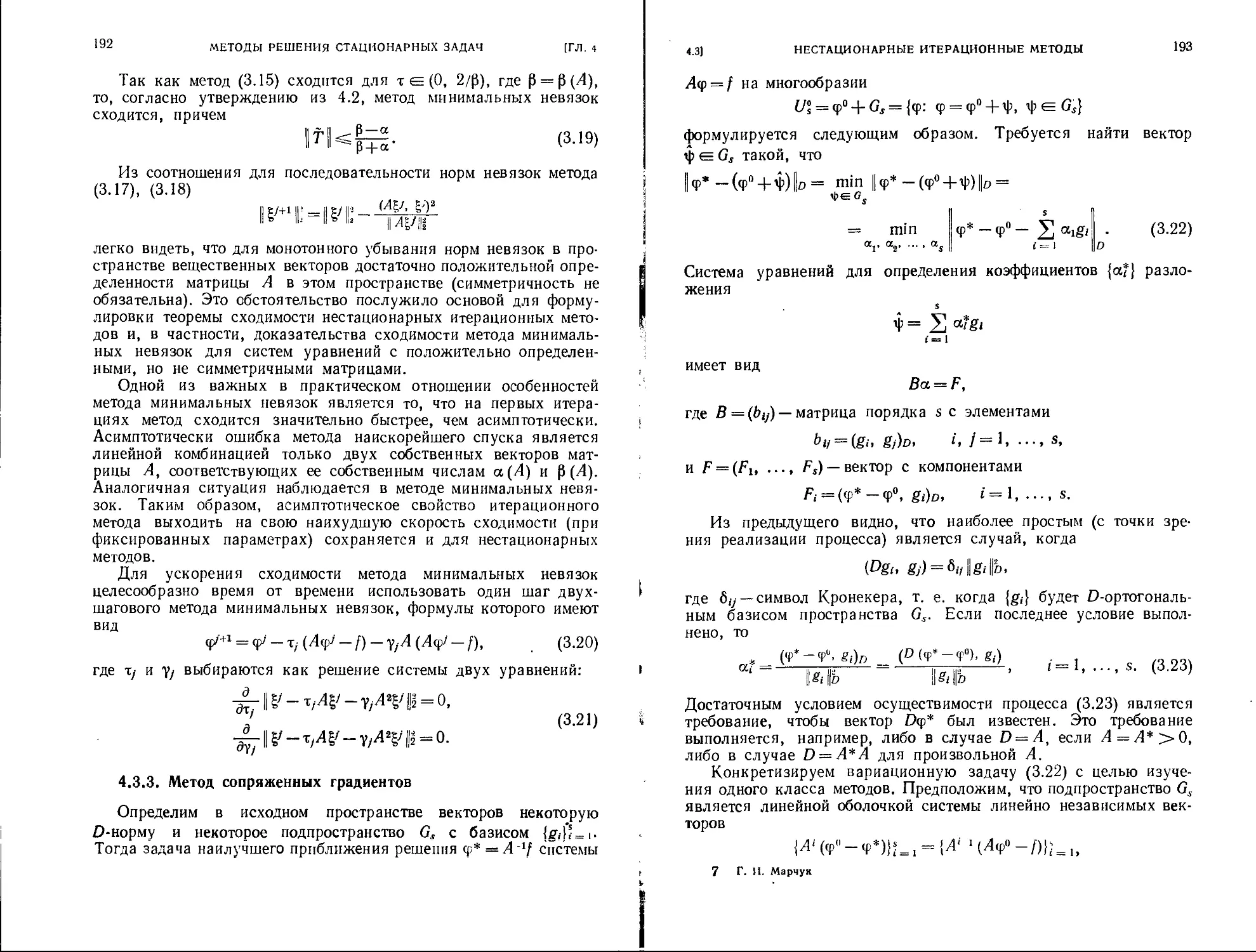
4.3.1. Теоремы сходимости A88). 4.3.2. Метод минимальных не-
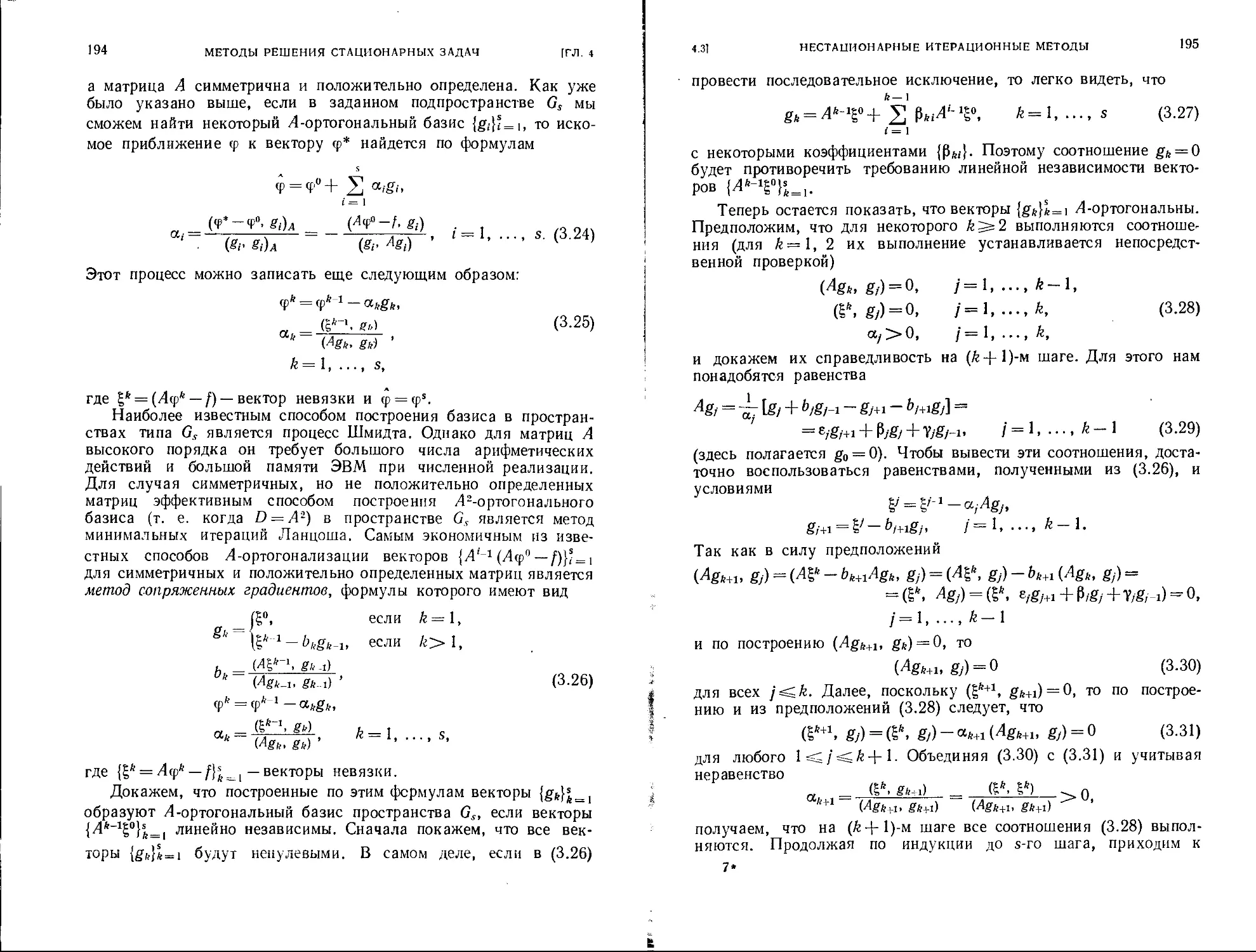
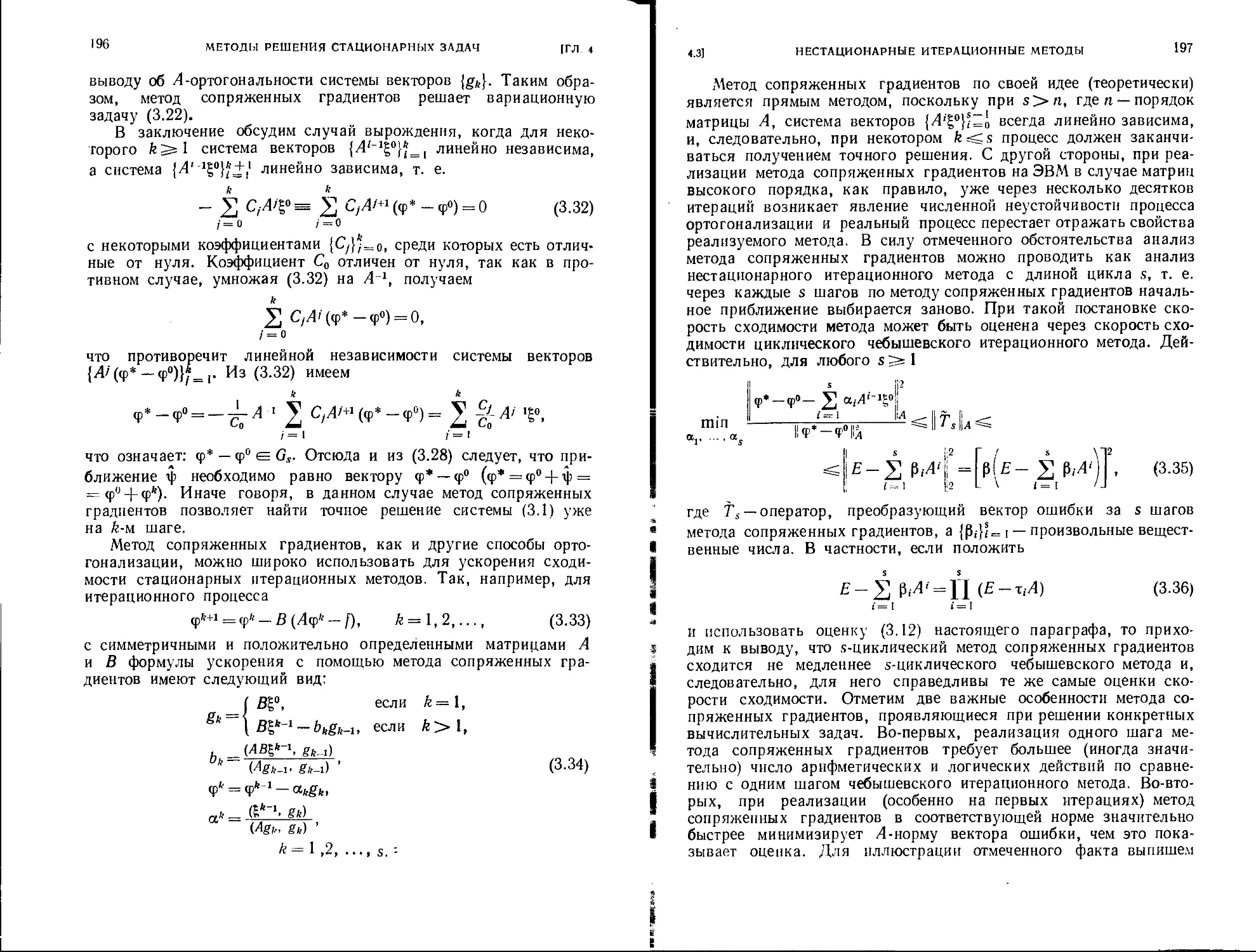
невязок A91). 4.3.3. Метод сопряженных градиентов A92).
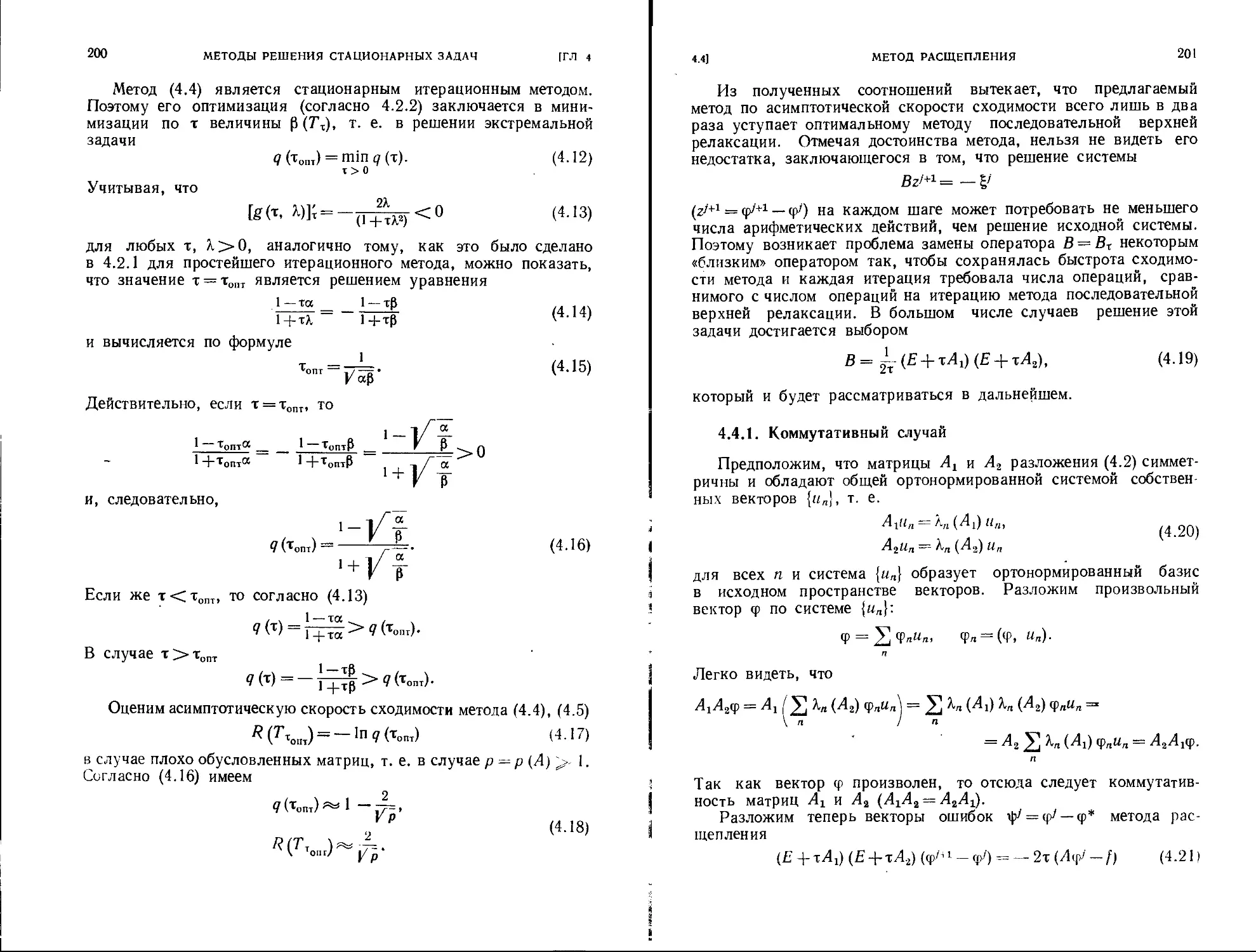
4.4. Метод расщепления igg
4.4.1. Коммутативный случай B01). 4.4.2. Некоммутативный слу-
случай B06). 4.4.3. Вариационная и чебышевская оптимизация мето-
методов расщепления B10).
4.5. Итерационные методы для систем с вырожденными матрицами . . . 212
4.5.1. Случай совместной системы B13). 4.5.2. Случай несовместной
системы B15). 4.5.3. Матричный аналог метода фиктивных областей
B17).
4.6. Итерационные методы при неточных входных данных 221
4.7. Прямые методы решения конечно-разностных уравнений 223
4.7.1. Быстрое преобразование Фурье B23). 4 7.2. Метод цикличе-
циклической редукции B28). 4.7.3. Факторизация разностных уравне-
уравнений B31).
ОГЛАВЛЕНИЕ а
Г Л А В А 5
МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
5.1. Разностные схемы второго порядка аппроксимации с операторами,
зависящими от времени 243
5.2. Неоднородные уравнения эволюционного типа 246
5.3. Методы расщепления нестационарных задач 247
5.3.1. Метод стабилизации B48). 5.3.2. Метод предиктор-коррек-
предиктор-корректор B52). 5.3.3. Метод покомпонентного расщепления B56). 5.3.4!
Некоторые общие замечания B61).
5.4. Многокомпонентное расщепление задач 262
5.4.1. Метод стабилизации B63). 5.4.2. Метод предиктор-корректор
B64). 5.4.3. Метод покомпонентного расщепления на основе элемен-
элементарных схем B66). 5.4.4. Расщепление квазилинейных задач B72).
5.5. Общий подход к покомпонентному расщеплению 273
5.6. Методы решения уравнений гиперболического типа 278
5.6.1. Метод стабилизации B78). 5.6.2. Сведение уравнения коле-
колебаний к эволюционной задаче B82).
Г Л А в А 6
ПОВЫШЕНИЕ ТОЧНОСТИ ПРИБЛИЖЕННЫХ РЕШЕНИЙ ПО РИЧАРДСОНУ
6.1. Обыкновенное дифференциальное уравнение первого порядка .... 288
6.2. Одномерное уравнение диффузии 294
6.2.1. Метод Галеркнна B94). 6.2.2. Разностный метод C00).
6.3. Метод расщепления для эволюционной задачи 307
6.4. Экстраполяция Ричардсона для многомерных чадач 311
ГЛАВА 7
ПОСТАНОВКА И ЧИСЛЕННЫЕ МЕТОДЫ РЕШЕНИЯ
НЕКОТОРЫХ ОБРАТНЫХ ЗАДАЧ
7.1. Основные определения и примеры 317
7.2. Решение обратных эволюционных задач методом рядов Фурье . . . 322
7.3. Обратная эволюционная задача с оператором, зависящим от вре-
времени 525
7.4. Постановка обратных задач на основе методов теории возмущений 331
7.4.1. Некоторые вопросы линейной теории измерений C32).
7.4.2. Сопряженные функции и понятие ценности C33). 7.4.3. Тео-
Теория возмущений для линейных функционалов C36). 7.4.4. Числен-
Численные методы решения обратных задач и планирование эксперимента
C38).
7.5. Формулировка теории возмущений для сложных нелинейных моделей 344
7.5.1. Основные и сопряженные уравнения C45). 7.5.2. Сопряженные
уравнения и теория возмущений C47). 7.5.3. Теория возмущений для
нестационарных проблем C49). 7.5.4. Спектральный метод и теория
возмущений C50).
6 ОГЛАВЛЕНИЕ
ГЛАВА 8
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
8.1. Уравнение Пуассона 352
8.1.1. Задача Дирихле для одномерного уравнения Пуассона C52).
8.1.2. Одномерная задача Неймана C54). 8.1.3. Двумерное урав-
уравнение Пуассона C57). 8.1.4. Проблема граничных условий C65).
8.2. Уравнение теплопроводности 367
8.2.1. Одномерная задача теплопроводности C67). 8.2.2. Двумерная
задача теплопроводности C72).
8.3. Уравнение колебаний 373
8.4. Уравнение движения 377
8.4.1. Одномерное уравнение движения C77). 8.4.2. Двумерное
уравнение движения с переменными коэффициентами C84)- 8.4.3.
Многомерное уравнение движения C90).
8.5. Нестационарное уравнение переноса 395
ГЛАВА 9
ОБЗОР МЕТОДОВ ВЫЧИСЛИТЕЛЬНОЙ МАТЕМАТИКИ
9.1. Теория аппроксимации, устойчивости и сходимости разностных схем 410
9.2. Методы численного решения задач математической физики 413
9.3. Условно корректные задачи 419
9.4. Вычислительные методы в линейной алгебре 420
9.5. Вопросы оптимизации численных методов 424
9.6. Некоторые тенденции в развитии вычислительной математики . . . 426
Литература 429
Предметный указатель 453
Указатель обозначений 455
ПРЕДИСЛОВИЕ
Предлагаемая книга является результатом обработки курса
лекций по вычислительной математике, который в течение ряда
лет читался автором для студентов математического факульте-
факультета Новосибирского государственного университета. Автор стре-
стремился акцентировать внимание на сложных задачах математи-
математической физики, которые в процессе решения, как правило, редуци-
редуцируются к более простым, хорошо изученным теоретически и допу-
допускающим эффективную реализацию алгоритмов на современных
вычислительных машинах. Именно с такими сложными задачами
зачастую сталкивается молодой исследователь в своей практиче-
практической работе после окончания высшего учебного заведения. Поэтому
данная книга прежде всего рассчитана на тех, кто впервые встре-
встречаете с необходимостью решения больших задач математической
физики и хочет получить рекомендации о рациональных подходах
к решению.
Автором избрана такая форма изложения, которая, по его
мнению, способствует привлечению внимания к проблемам вычис-
вычислительной математики более или менее широкого круга исследо-
исследователей. Эта форма потребовала известных уступок в изложении,
позволив сосредоточить внимание лишь на основных идеях и под-
подходах к решению задач. Что касается деталей, иногда существен-
существенных, и возможных обобщений, например таких, как минималь-
минимальные требования к гладкости функций, ограничения на входные
данные задач и т. п., то для специалистов они в большинстве
случаев очевидны, а для начинающего исследователя предоставляют
хорошие возможности для полезных упражнений.
Девятая глава основана на материалах доклада автора на
Международном математическом конгрессе в Ницце A970 г.). Эта
глава дает некоторое представление не только о методах и проб-
проблемах вычислительной математики, рассмотренных в курсе, но и
о тех направлениях, которые не вошли в книгу, но имеют сущест-
существенное значение как в теоретическом плане, так и для приложений.
Часть материала книги была изложена в монографии под тем
же названием, вышедшей в 1973 году. Настоящее учебное пособие
существенно отличается от нее. Включен ряд новых идей и алго-
ритмоз, которые представляют методический и практический
й ПРЕДИСЛОВИЕ
интерес. В частности, в книгу включены новые алгоритмы опти-
оптимизации на основе вариационных методов, вопросы автоматиза-
автоматизации вычислительного процесса на основе так называемого ме-
метода «фиктивных» областей, рассмотрен итерационный алгоритм
расщепления задачи в случае некоммутирующих операторов,
метод неполной факторизации и др. Расширен раздел книги,
посвященный интерполяции функций с помощью сплайнов.
В настоящем издании он выделен в самостоятельную главу.
Также в отдельную главу выделен круг идей, связанных с экст-
экстраполяцией по Ричардсону, для решения задач с повышенной
точностью. Ряд новых идей, таких, как представление непре-
непрерывных функций с помощью кусочно-разрывных базисов, по-
построение базисов, учитывающих особенности решения задачи,
и др., внесен в разделы книги, посвященные вариационно-раз-
вариационно-разностным методам. Глава, посвященная решению обратных за-
задач, дополнена новыми результатами по теории возмущений
для решения нелинейных задач математической физики и ана-
анализу чувствительности математических моделей по отношению
ко входным данным. Сделаны и другие дополнения.
Нам представляется, что этот новый материал позволит
лучше представить себе средства вычислительной математики
для решения сложных задач прикладной математики.
Автор выражает глубокую благодарность Ю. А. Кузнецову,
вклад которого в подготовку книги трудно переоценить. Автор
глубоко благодарен В. В. С нелову, В. П. Ильину, В. В. Шайду-
рову, В. И. Агошкову, В. А. Василенко, А. М. Мацокину,
Г. С. Ривину, В. А. Цецохо, а также В. И. Дробышевичу,
В. П. Дымникову и В. В. Пененко за помощь при подготовке
книги.
Книгу в рукописи прочли Н. С. Бахвалов, В. И. Лебедев,
М. К- Фаге и сделали ряд ценных замечаний по усовершенство-
усовершенствованию книги. Раздел книги по вариационным неравенствам был
написан по материалам, любезно предоставленным автору фран-
французскими математиками Лионсом и Гловинским. Всем им- автор
приносит свою искреннюю благодарность.
Г. И. Map чу к
ВВЕДЕНИЕ
Современные электронные вычислительные машины дали в руки
исследователей эффективное средство для математического модели-
моделирования сложных задач науки и техники. Именно поэтому количе-
количественные методы исследования в настоящее время проникают
практически во все сферы человеческой деятельности, а математи-
математические модели становятся средством познания.
Роль математических моделей далеко не исчерпывается проб-
проблемой познания закономерностей. Их значение непрерывно воз-
возрастает в связи с естественной тенденцией к оптимизации техниче-
технических устройств и технологических схем планирования экспери-
эксперимента. В процессе познания и в стремлении создать детальную
картину исследуемых процессов мы приходим к необходимости
строить все более сложные математические модели, которые
в свою очередь требуют универсального тонкого математического
аппарата. Реализация математических моделей на ЭВМ осущест-
осуществляется с помощью методов вычислительной математики, которая
непрерывно совершенствуется вместе с прогрессом в области
электронно-вычислительной техники.
Всякая редукция задач математической физики или техники
в конечном итоге обычно сводится к алгебраическим уравнениям
той или иной структуры. Поэтому предмет вычислительной мате-
математики, как правило, связан с методами сведения задач к систе-
системам алгебраических уравнений и их последующему решению.
Построение систем алгебраических уравнений, соответствую-
соответствующих той или иной задаче с непрерывно меняющимися аргументами,
обычно существенно опирается на априорную информацию, свя-
связанную с исходной задачей. Такой информацией может быть
принадлежность решения к тому или иному классу функций,
обладающих определенными свойствами гладкости, свойства опе-
операторов задачи, свойства входных данных и т. д. Априорная
информация во многих случаях оказывает решающее влияние на
выбор методов вычислительной математики, используемых для
решения указанных алгебраических уравнений. При этом, как
правило, должно иметь место соответствие между априорными
требованиями для исходной задачи и свойствами ее алгебраиче-
алгебраического аналога. Это прежде всего относится к операторам задач,
10
ВВЕДЕНИЕ
свойства которых должны быть по возможности сохранены при
редукции задачи от непрерывных аргументов к дискретным.
Такой принцип, по-видимому, является основополагающим
при решении многих задач. Одновременно следует отметить,
что преемственность свойств операторов задач при редукции
дает возможность опираться на хорошо разработанные методы
функционального анализа, что обычно позволяет простым и уни-
универсальным путем проводить исследования эффективности алго-
алгоритмов вычислительной математики.
Теперь мы переходим к краткому обзору книги, с тем чтобы
отразить главные моменты и новые идеи, предлагаемые читателю.
Первая глава посвящается общим вопросам теории разност-
разностных схем. Наряду с уже ставшими классическими понятиями
в теории разностных схем, такими, как аппроксимация, счетная
устойчивость и сходимость решений разностных уравнений, в этой
главе приведены некоторые важные результаты, связанные с
общими свойствами основных и сопряженных задач, которые
будут использованы во многих главах книги. Нам хотелось бы
особо выделить пункт 1.12, в котором приведены современные
алгоритмы для вычисления границ неотрицательного спектра
матриц. Как известно, верхняя граница спектра находится с по-
помощью хорошо разработанных итерационных процессов, и эта
проблема, как правило, не вызывает трудностей в реализации.
Что касается минимального собственного числа — нижней границы
спектра, то его вычисление обычно является сложной проблемой.
Теоретически наиболее простой подход, связанный с оценкой
максимального собственного числа обратного оператора, оказы-
оказывается алгоритмически малоэффективным. В книге изложен дру-
другой подход, связанный со сдвигом спектра операторов, который
позволяет достаточно просто находить нижнюю границу спектра.
На этом вопросе мы остановились подробно, поскольку многие
вычислительные алгоритмы, особенно связанные с оптимизацией
итерационных процессов, существенно опираются на априорную
информацию о границах спектра.
Во второй главе рассмотрены методы построения разностных
схем. При этом мы сконцентрировали свое внимание на двух
подходах: методе интегральных соотношений и вариационных
способах построения разностных схем. Каждый из этих подходов
имеет свои определенные преимущества и некоторые недостатки.
Отметим лишь, что эти подходы не являются независимыми
и при определенных условиях приводят к тождественным раз-
разностным схемам, аппроксимирующим исходные дифференциальные
задачи.
Тем не менее следует отметить, что вариационный подход
к построению разностных схем во многих случаях бывает более
предпочтительным, поскольку он приводит к сохранению свойств
ВВЕДЕНИЕ
11
определенности исходных операторов при переходе к разностным.
Важно отметить, что это происходит автоматически для широкого
класса задач.
В книге мы ограничились рассмотрением трех методов построе-
построения разностных схем на основе вариационных принципов: метода
Ритца, метода Галёркина и метода наименьших квадратов. Ко-
Конечно, они не исчерпывают всего многообразия вариационных
подходов, однако они позволяют познакомиться с общими прин-
принципами конструкции разностных схем, которые весьма просто
могут быть распространены и на другие случаи.
Несколько слов о методе конечных элементов. Можно сказать,
что этот метод является удобным средством для построения раз-
разностных схем на основе вариационных принципов. В своей мето-
методологической основе метод конечных элементов тесно связан с
методом рядов Фурье, где вместо привычных нам базисов функ-
функций (например, тригонометрических функций, многочленов
Лежандра, Эрмита и т. д.) здесь мы имеем дело также с мно-
многочленами, но отличными от нуля только в сравнительно неболь-
небольшой области изменения аргументов. Эти функции получили
название конечных элементов.
Применение вариационных принципов к построению разност-
разностных схем не случайно. В самом деле, из теории следует, что ва-
вариационный функционал, адекватно отражающий определенные
закономерности механики, математической физики, динамики и
т. д., достигает своего экстремального значения на решении инте-
интересующей нас задачи. Поэтому, если нам задан вариационный
функционал и определен класс функций, на которых следует мини-
минимизировать функционал, то дальнейшая задача состоит в алгорит-
алгоритмическом отыскании функции, доставляющей экстремум функцио-
функционала.
Если класс допустимых функций сужать, налагая на них до-
дополнительные ограничения, то минимизирующая функция не обя-
обязательно будет решением исходной задачи, она будет только при-
приближаться к точному решению.
В будущем, когда средства вычислительной техники станут
еще более мощными, роль вариационных функционалов в построе-
построении решений задач математической физики будет непрерывно воз-
возрастать. Появятся методы целенаправленного перебора пробных
функций, принадлежащих широким классам, позволяющие эффек-
эффективно находить экстремальные решения. Таким образом, исполь-
использование вариационных функционалов для решения задач все более
смыкается с проблемой оптимальной организации алгоритма полу-
получения решения задачи с заданной точностью, т. е. с теорией
оптимизации.
Наряду с классически поставленными задачами, при решении
задач пауки и техники зачастую приходится иметь дело с задачами,
12
ВВЕДЕНИЕ
ВВЕДЕНИЕ
13
поставленными неклассически. К ним, например, относится задача
с ограничениями. Правда, простейшие задачи с ограничениями
являются классическими. Ограничениями, например, являются
краевые условия для дифференциальных задач.
Более сложные задачи с ограничениями требуют для своего
решения и более сложного математического аппарата. Например,
если требуется решить задачу о прогибе мембраны под действием
различных сил, если ее положение сверху и снизу ограничива-
ограничивается заданными функциями координат, то обычный классический
подход оказывается бессильным. Тем не менее, если такой задаче
поставить в соответствие некоторый вариационный функционал
и отыскивать его минимум на классе функций, каждая из кото-
которых удовлетворяет заданному ограничению, то минимизирующая
функция будет доставлять решение нашей задачи.
Широкий комплекс исследований в этом направлении был
осуществлен французскими математиками. Ими введены в рассмо-
рассмотрение так называемые вариационные неравенства, специально
приспособленные для решения задач с ограничениями. Эти воп-
вопросы нашли свое отражение в параграфе 2.8.
В главе третьей рассмотрены вопросы интерполяции сеточных
функций. Проблема интерполяции возникает всякий раз, когда
требуется восполнить заданную на сетке функцию непрерывными
функциями на всю область. Сюда относятся задача продолжения
приближенного решения на всю область по его значениям в уз-
узлах сетки и задача обработки экспериментальных данных, извест-
известных на дискретном множестве точек.
Задача интерполяции становится фундаментальным звеном
в системе автоматизации проектно-конструкторских работ, где
в самом существе проблемы заложены способы графического ото-
отображения информации. Проблема интерполяции не является новой,
и в математической литературе классические методы изложены
достаточно лолно. Новым в последние десятилетия направлением
в теории интерполяции является использование так называемых
сплайновых интерполяций, описанию которых в основном и посвя-
посвящена третья глава.
Сплайновые интерполяции являются наилучшим средством
построения гладких восполнений сеточных функций на заданных
классах функций. Оптимальность сплайна связана с его специаль-
специальным экстремальным свойством. Сплайновые аппроксимации все
более широко применяются во всех областях науки и техники,
поэтому знакомство с ними читателя, по нашему мнению, является
необходимым.
Четвертая глава в основном посвящена итерационным методам
решения линейных алгебраических уравнений. Здесь изложены
как общие подходы к решению алгебраических систем, так и
специфические методы, связанные с особенностями аппроксимаций
задач математической физики с помощью разностных и вариа-
вариационно-разностных методов. Хотя литература по итерационным
методам весьма обширна и содержит описание многих эффектив-
эффективных алгоритмов, тем не менее в настоящей книге мы, наряду
с рассмотрением классических процессов, основное внимание
уделили итерационным методам, оптимизируемым с помощью
квадратичных функционалов. В этом состоит выражение нашего
общего подхода к вопросам оптимизации как при построении
вычислительных алгоритмов, так и при их реализации.
Касаясь специфических проблем, связанных с частным видом
матриц, возникающих при численном решении задач математиче-
математической физики, мы ориентируемся на методы расщепления матриц
на простейшие в общей схеме итерационного процесса. Метод
расщепления является естественным развитием метода поперемен-
попеременных направлений, сыгравшим исключительную роль в численном
решении задач математической физики. Метод расщепления имеет
различные модификации и обобщения, в том числе с использова-
использованием вариационных принципов.
Особого внимания заслуживают прямые методы решения конеч-
конечно-разностных уравнений, изложенные в конце этой главы. Это
прежде всего быстрое преобразование Фурье и метод циклической
редукции. Эти методы широко входят в технику решений сегод-
сегодняшнего дня, и их популярность непрерывно возрастает.
АЪетодам решения нестационарных задач посвящена пятая
глава книги. Эти методы в основном связаны с использованием
идеи расщепления сложных операторов задач на более простые.
Здесь не только проанализированы хорошо утвердившиеся в прак-
практике методы, такие, как метод стабилизации и метод предиктор-
корректор, но и детально описан наиболее эффективный, по нашему
мнению, метод покомпонентного расщепления, идея которого
изложена в 5.3.3 и 5.4.
Метод покомпонентного расщепления позволяет на каждом
временном шаге сводить сложную задачу математической физики
к последовательности простейших однокомпонентных задач.
В результате мы приходим к эффективному алгоритму реализа-
реализации на ЭВМ, абсолютно устойчивому и обеспечивающему второй
порядок аппроксимации решения как по пространственным пере-
переменным, так и по времени. Этот метод применяется для широ-
широкого класса нестационарных задач математической физики.
В шестой главе рассматриваются методы уточнения прибли-
приближенных решений, восходящие к Ричардсону и Рунге. Как изве-
известно, уточнение приближенных решений можно производить
различными методами. Обычно для этой цели используются
более точные аппроксимации дифференциальных или интеграль-
интегральных уравнений с помощью схем высокого порядка точности.
Ричардсон предложил для этой цели использовать разностную
14
ВВЕДЕНИЕ
аппроксимацию сравнительно невысокого порядка точности, но
примененную для различных сеток. Так, если исходное разност-
разностное уравнение соответствует аппроксимации на сетке с шагом h,
то следующее соответствует шагу /г/2 и т. д. В результате мы
приходим к разностным уравнениям, записанным для последова-
последовательности сеток. Оказывается, что при выполнении ряда требо-
требований относительно операторов и исходных данных задачи линей-
линейная комбинация приближенных решений на последовательности
сеток позволяет получить решение более высокого порядка точ-
точности по сравнению с исходными решениями.
Метод экстраполяции Ричардсона, первоначально предложен-
предложенный для обыкновенных дифференциальных уравнений, удалось
применить к решению краевых задач для уравнений эллиптиче-
эллиптического и параболического типов. Здесь, естественно, возникают
различные особенности, которые отмечены в схемах реализации.
Важно подчекнуть, что метод Ричардсона может быть применен
к решению задач с малым параметром или для решения услов-
условно-корректных задач на основе методов регуляризации. В этом
случае метод Ричардсона основывается на решении задач с раз-
различными параметрами, сходящимися к предельному их значению.
Таким образом, метод экстраполяции позволяет ввести в вы-
вычислительную математику новые идеи, которые с успехом исполь-
используются для оптимизации различных алгоритмов решения задач.
Следует также подчеркнуть оссбэе место, которое отводится
этому методу при решении задач вариационно-разностными мето-
методами. В самом деле, здесь имеет место обычно следующая аль-
альтернатива: либо получать решение разностных уравнений с очень
мелким шагом на основе довольно грубых разностных аппрокси-
аппроксимаций, либо с помощью схем высокого порядка точности, но при
более крупных шагах разностных схем.
Первый метод прост, но требует большого объема вычисле-
вычислений, второй логически значительно трудней, но требует меньшего
числа арифметических операций. Таким образом, ни тот, ни
другой метод не оказывается эффективным для задач математиче-
математической физики, если требуется высокая точность результатов. По-
Поэтому возникла мысль использовать наиболее простые вариаци-
вариационно-разностные схемы первого или второго порядка аппрокси-
аппроксимаций, но реализированные на последовательности сеток. Линей-
Линейная комбинация решений таких задач, как указано выше, во
многих случаях позволяет получить решение требуемого порядка
точности.
Седьмая глава посвящена постановке и численному решению
обратных задач. Методы математического моделирования сложных
задач науки и техники постоянно выдвигают перед исследователем
проблемы, связанные с восстановлением решения задачи по неко-
некоторым функционалам от решения или с восстановлением вида
ВВЕДЕНИЕ
15
оператора задачи. Этот класс обратных задач оказывается наиболее
трудным с точки зрения вычислительной математики, поскольку
он, как правило, связан с решением некорректных по Адамару
задач. В математике возникло целое направление исследований
некорректных задач, основные результаты которых были получены
советской школой математиков. А. Н. Тихонов ввел в рассмотрение
процесс регуляризации таких задач, и они вскоре нашли свое
обоснование и алгоритмическое оформление. В этой главе делается
акцент на постановку обратных задач по восстановлению структуры
дифференциальных операторов и входных данных. Хотя вид
дифференциального оператора фиксируется, но его коэффициенты
предполагаются неизвестными, требующими определения. Теория
обратных задач тесным образом связана с использованием основных
и сопряженных уравнений. Разработанный автором математический
аппарат оказывается эффективным для оценки малых возмущений
функционалов от решений задач в зависимости от вариаций
входных параметров. Следует особо отметить, что разработанная
теория возмущений может быть применена как для линейных,
так и для нелинейных задач математической физики.
В восьмой главе рассмотрены некоторые вопросы использования
методов, изложенных в предыдущих главах книги, в применении
к решению ряда конкретных задач математической физики.
Девятая глава посвящена обзору методов вычислительной
математики. Настоящая книга, разумеется, не могла включить
в себя огромного объема алгоритмов вычислительной математики,
разработанных к настоящему времени. Многие из них вообще
выпали из рассмотрения, поскольку хорошо описаны в учебни-
учебниках по вычислительной математике или в специальной литера-
литературе.
Мы не говорим здесь о таких классических основах численного
анализа, как кубатурные формулы, методы численного решения
обыкновенных дифференциальних уравнений, простейшие методы
интерполяции и др. Речь идет о новых методах современной
вычислительной математики, таких, как метод крупных частиц,
метод интегральных соотношений, универсальные методы линей-
линейной алгебры и др. Они отражены в обзоре.
Обзор методов вычислительной математики, данный в настоящей
главе.сопровождается постановкой ряда проблем вычислительной
математики и анализом тенденций их развития. По нашему
мнению, это поможет читателю не только сориентироваться в
проблемах вычислительной математики, но и определить наиболее
активно развивающиеся ее области.
Поскольку книга является учебным пособием, мы старались
в основном тексте избегать ссылок на библиографию, которые
могли бы отвлечь читателя от систематического ознакомления с
материалом. Этот пробел частично восполняется девятой главой,
16
ВВЕДЕНИЕ
где, кроме обзора методов вычислительной математики, даются
ссылки на соответствующие источники.
Особое место в книге отводится списку литературы. Этот
список систематизирован по различным вопросам вычислительной
математики, что позволит читателю быстро войти в круг инте-
интересующих его проблем.
Вся книга имеет общую цель — подготовить читателя к реше-
решению сложных задач вычислительной и прикладной математики.
В заключение следует отметить, что в книге широко исполь-
использованы новые результаты советских и зарубежных авторов и в первую
очередь сотрудников Вычислительного центра СО АН СССР. Это
прежде всего результаты Ю. А. Кузнецова, В. И. Агошкова,
В. А. Василенко, А. М. Мацокина, В. В. Смелова, В. А. Це-
цохо, В. В. Шайдурова и др.
ГЛАВА 1
ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ РАЗНОСТНЫХ СХЕМ
В настоящей главе приводятся краткие сведения по фундамен-
фундаментальным вопросам теории разностных схем, которые существенно
использованы в последующих главах книги. Поскольку нашей
основной задачей является знакомство с некоторыми современными
принципами построения вычислительных алгоритмов для решения
задач математической физики, то при рассмотрении вопросов
теории мы ограничимся только наиболее простыми случаями.
1.1. Основные и сопряженные операторы
Рассмотрим в я-мерном евклидовом пространстве Еп некоторую
область D. Сразу же отметим, что в прикладной математике
обычно не встречаются области столь сложного строения, чтобы
они не имели меры: площади —в двумерном случае, объема —
в трехмерном и т. д. Однако теория лебегова мероопределения
является основой и для последующих определений, поэтому
предполагается знакомство читателя с теорией меры и теорией
интеграла Лебега и др.
Обозначим через L2 (D) гильбертово пространство всех веще-
вещественных измеримых функций f(x), суммируемых с квадратом,
т. е. таких, что
$ f*(x)dx<oo,
D
со скалярным произведением
(/. g) = \fix)g[x)dx.
A.1)
Как обычно, норму функций / из L2 (D) определим равенством
(f fu/2 . М 91
Из гильбертова пространства L2 (D) выделим теперь некоторое
подпространство (линейное многообразие) Ф с t2 (D) так, чтобы
каждый элемент феФ удовлетворял некоторым дополнительным
условиям. Такими условиями в зависимости от рассматриваемой
18
ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ РАЗНОСТНЫХ СХЕМ
[ГЛ. 1
задачи могут быть, например, требования заданной гладкости,
удовлетворение предельным соотношениям на границе области D
и т. д. Указанные условия, однако, должны быть достаточными
для того, чтобы оператор Л задачи переводил элемент феФ
в элемент Ац> е L2 (D).
Линейный оператор А, определенный на линейном многооб-
многообразии Ф, называют положительно полуопределенным, если для
всех фёФ имеем
{А<р, <pM=0, A.3)
причем равенство нулю скалярного произведения (Лф, ср) допу-
допускается на элементе ср, тождественно не равном нулю. Это обычно
записывается так: Л^гО. Если равенство исключается, т.е.
(ЛФ, ф)>0 A.4)
О, то оператор А называют положительным и пишут:
при ф
А >0.
Наконец, в случае более сильного соотношения
(Лф, ф)=эу(Ф, ф),
A.5)
где у > 0 — некоторая положительная константа, общая для всех
феФ, оператор А называют положительно определенным.
Заметим, что если оператором А является квадратная мат-
матрица конечного порядка, то для нее из положительности следует
положительная определенность.
Подпространство Ф будем называть областью определения
оператора А и обозначать его Ф(А).
Введем, далее, в рассмотрение сопряженный оператор А*
с помощью тождества Лагранжа
= (g, A*h).
A.6)
()
Подпространства Ф(Л) и Ф(Л*) гильбертова пространства
L2(D), вообще говоря, не совпадают друг с другом, хотя функ-
функции, являющиеся их элементами, имеют одну и ту же область
определения.
В том случае, когда А = А* и Ф(Л) == Ф(А*), оператор А
называют самосопряженным.
Отметим одно важное следствие, связанное со свойствами
сопряженных операторов; именно, если Ф(Л)е=Ф(Л*), то из
условия Л > 0 следует Л*>0.
Для анализа алгоритмов большое значение имеют разложения
функций в ряды Фурье по собственным функциям основных и
сопряженных операторов.
Рассмотрим две следующие спектральные задачи для Л ;>= 0:
Аи = 1(А)и, А*и*=к(А*)и*. A.7)
1.П
ОСНОВНЫЕ II СОПРЯЖЕННЫЕ ОПЕРАТОРЫ
19
Предположим, что каждое из однородных уравнений A.7)
образует полный набор собственных функций {ип} и {и*}, кото-
которые нормированы следующим образом:
1- П = т' A.8)
О, пфт,
а соответствующие собственные числа "кп (Л) и К„ (А*) вещест-
вещественны. В этом случае, как известно, %„ (А) = Кп (Л*). Пусть соб-
собственные числа спектральных задач принадлежат интервалу [а, р"]:
Этот полный набор ссбственных функций будем называть биор-
тонормированным. Тогда в предположении полноты любые функ-
функции f из Ф и f* из Ф* (где Ф = Ф(Л), Ф*=Ф(Л*)) могут быть
представлены в виде рядов Фурье:
%, A.9)
где
/„ = (/, «*), /* = (/*, «„)•
A.10)
Важное значение для анализа вычислительных алгоритмов
имеют оценки норм операторов. Норму оператора А определим
следующим образом:
[ Л ||2 = sup -
A.11)
(в дальнейшем для простоты записи ограничение ф Ф 0 указы-
указываться не будет). Принимая во внимание соотношение
(ЛФ, Лф) = (Ф, ЛМФ),
квадрат нормы оператора Л можно записать в виде
цЛГ=5ир(Ф'/*Л<Р>. (Ы2)
11 " фЁф (Ф- Ф) V ;
Оператор Л*Л—симметричный и положительно полуопределен-
полуопределенный. Рассмотрим спектральную задачу
Л*Лй = Х(Л*Л)Й, A.13)
которая определяет набор ортонормированных собственных функ-
функций {пп} и собственных чисел А,„ (Л*Л) ;s=0. Будем предполагать,
что набор {Qn} полный. Представим тогда функцию ф в виде
ряда Фурье:
«. = у
A.14)
20
где
ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ РАЗНОСТНЫХ СХЕМ [ГЛ.
A.15)
А !2 =
sup
}
A.16)
где Q — пространство коэффициентов Фурье. Нетрудно убедиться,
что
что
А),
ax(A*A) = $(A*A),
где через Kmin(A*A) и Хтах(Л*Л) обозначены соответственно
точная нижняя и точная верхняя грани множества собственных
чисел {Хп(А*А)} спектральной задачи A.13). Величину р1 (Л*Л) =
= ^тах(А*А) обычно называют спектральным радиусом опера-
оператора А*А. Спектральным радиусом оператора А называют
Р(Л)=8ир{|Л(Л)|}
Р()8ир{|Л(Л)|}.
Пусть А — самосопряженный оператор. Рассмотрим спектраль-
спектральную задачу
Справедливо равенство
A.18)
A.19)
Нетрудно видеть, что для самосопряженного оператора имеет место
соотношение
)
Пусть в гильбертовом пространстве L2(D) задан некоторый
положительный оператор С. Тогда
(СФ, Ф)>0
A.21)
для всех ф Ф 0 из области определения Ф, всюду плотной в L2 (D),
т. е. такой, что для любого элемента /eL2 (D) найдется такой
элемент ^еФ, что будет выполняться соотношение!/ — gflsge,
где е — произвольно малая положительная константа. Пусть Ф* —
область определения сопряженного оператора С* — совпадает
с Ф и, таким образом, для всех (реФ существует С*ф. Тогда
ущу ф. Тогда
(С*ф, ф) = (ф, СФ) = (Сф, ф), где С = ~(С + С*). Оператор С
) рр
является симметричным положительным оператором, что позво-
позволяет в Ф ввести в рассмотрение новое скалярное произведение
1.1] ОСНОВНЫЕ И СОПРЯЖЕННЫЕ ОПЕРАТОРЫ
(f,g)c = (Q< g) и норму
21
Эту норму будем называть энергетической или С-нормой. Можно
получить следующую важную оценку:
1ф1с = 1ф|^1|С||!!ф[|2 = Р(С)!1ф12. A-22)
где р (С) — максимальное собственное число оператора С.
В заключение отметим, что при рассмотрении основных и
сопряженных задач математической физики бывает удобно поль-
пользоваться функциями пространства Соболева W-i(D). Оно является
гильбертовым и состоит из функций пространства L2 (D), которые
имеют в D суммируемые с квадратом обобщенные производные
до порядка / включительно. Скалярное произведение в таком
пространстве определяется следующей формулой
V) wl =
w
dD. A.23)
Здесь Ikj =
г... + а„, a 2j означает суммирование по всем
(*)
производным порядка \k\. Норма в пространстве W\(D) опреде-
определяется соотношением
Если функции ф принадлежат пространству Соболева W.i(D) и,
кроме того, удовлетворяют условию
Ф = 0 на границе dD области D,
то такое пространство принято обозначать U^.'(D).
1.1.1. Оценки норм некоторых матриц
Рассмотрим положительно полуопределенную матрицу
действующую на векторы из евклидова пространства.
место следующее соотношение (Е — единичная матрица):
для любых значений параметра as=0. Доказательство
важного утверждения проведем с помощью формулы
Положим
(ф> ф)
А^О,
Имеет
A.25)
этого
A.26)
)= (П-\-оА)
22
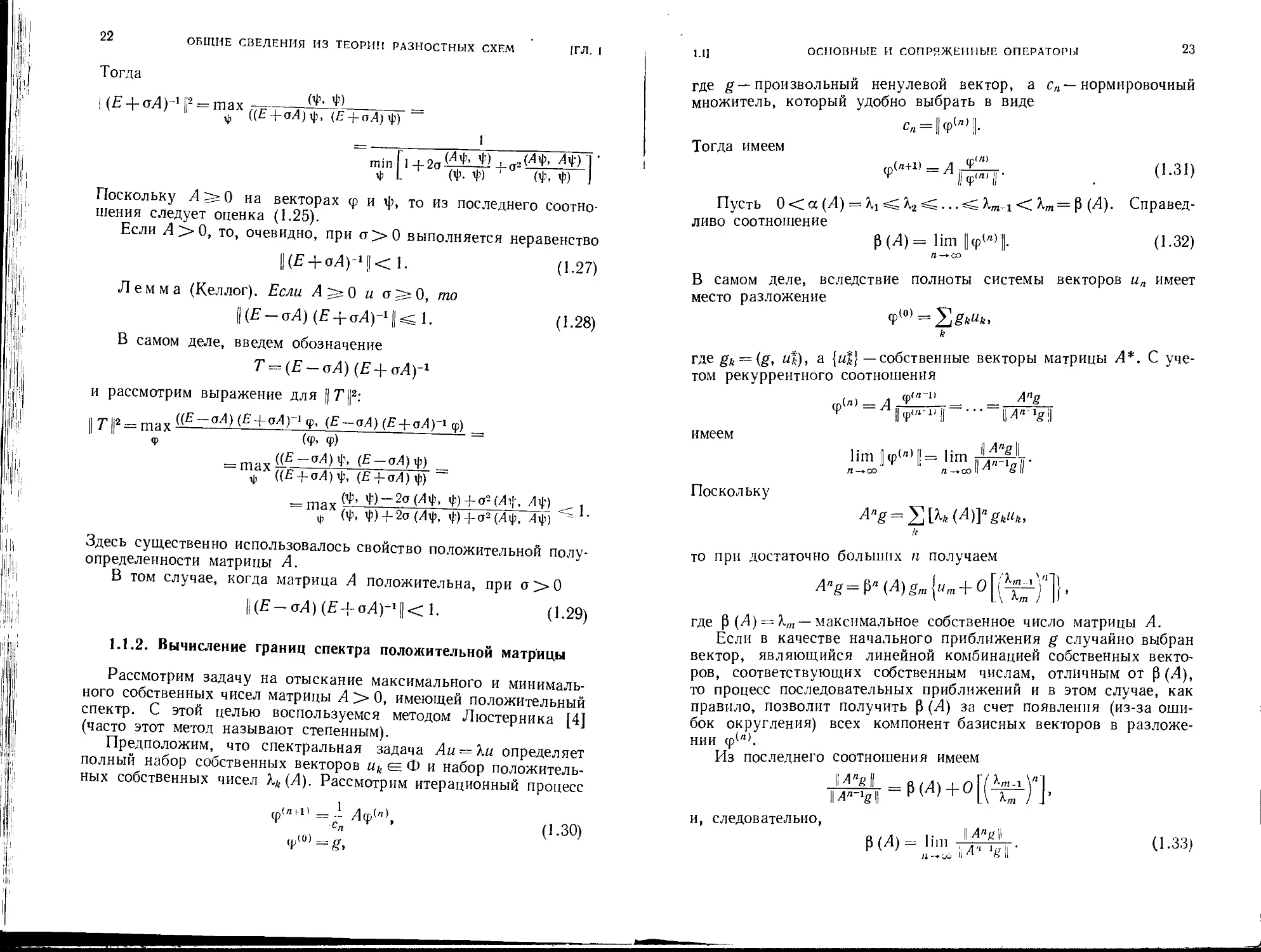
Тогда
ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ РАЗНОСТНЫХ СХЕМ
№.
[ГЛ. 1
min
№.V)'~r" №. Ч>)
Поскольку А^О на векторах ср и tj), то из последнего соотно-
соотношения следует оценка A.25).
Если Л >• 0, то, очевидно, при ст>0 выполняется неравенство
Лемма (Келлог). Если
, то
В самом деле, введем обозначение
Т = (Е - а А) (Е + о А)-1
и рассмотрим выражение для \Tf:
A.27)
A.28)
(Ф- Ф)
%
№.
1.
Здесь существенно использовалось свойство положительной полу-
полуопределенности матрицы Л.
В том случае, когда матрица Л положительна, при о > О
||(?-стЛ)(? + аЛ)-Ч1<1. A.29)
1.1.2. Вычисление границ спектра положительной матрицы
Рассмотрим задачу на отыскание максимального и минималь-
минимального собственных чисел матрицы Л >• 0, имеющей положительный
спектр. С этой целью воспользуемся методом Люстерника [4]
(часто этот метод называют степенным).
Предположим, что спектральная задача Аи = Ки определяет
полный набор собственных векторов ик e Ф и набор положитель-
положительных собственных чисел Хк (Л). Рассмотрим итерационный процесс
Ф
(»Ц1 __
1 /4ф(«),
A.30)
1.U
ОСНОВНЫЕ И СОПРЯЖЕННЫЕ ОПЕРАТОРЫ
23
где g— произвольный ненулевой вектор, а сп — нормировочный
множитель, который удобно выбрать в виде
Тогда имеем
Пусть 0<а(
ливо соотношение
n(/»+l)_
= Нт [
п -+со
). Справед-
A.32)
В самом деле, вследствие полноты системы векторов ип имеет
место разложение
Ф(о) =
где gk — (g, и*), а \и%) —собственные векторы матрицы А*. С уче-
учетом рекуррентного соотношения
"»-1> _ _ A"g
cpv"' =.
имеем
Поскольку
то при достаточно больших п получаем
где р (Л) = А,Ш —максимальное собственное число матрицы Л.
Если в качестве начального приближения g случайно выбран
вектор, являющийся линейной комбинацией собственных векто-
векторов, соответствующих собственным числам, отличным от Р(Л),
то процесс последовательных приближений и в этом случае, как
правило, позволит получить р (Л) за счет появления (из-за оши-
ошибок округления) всех компонент базисных векторов в разложе-
разложении ф(л).
Из последнего соотношения имеем
и, следовательно,
и -»из и
и л 8 i
A.33)
24
ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ РАЗНОСТНЫХ СХЕМ
[ГЛ. I
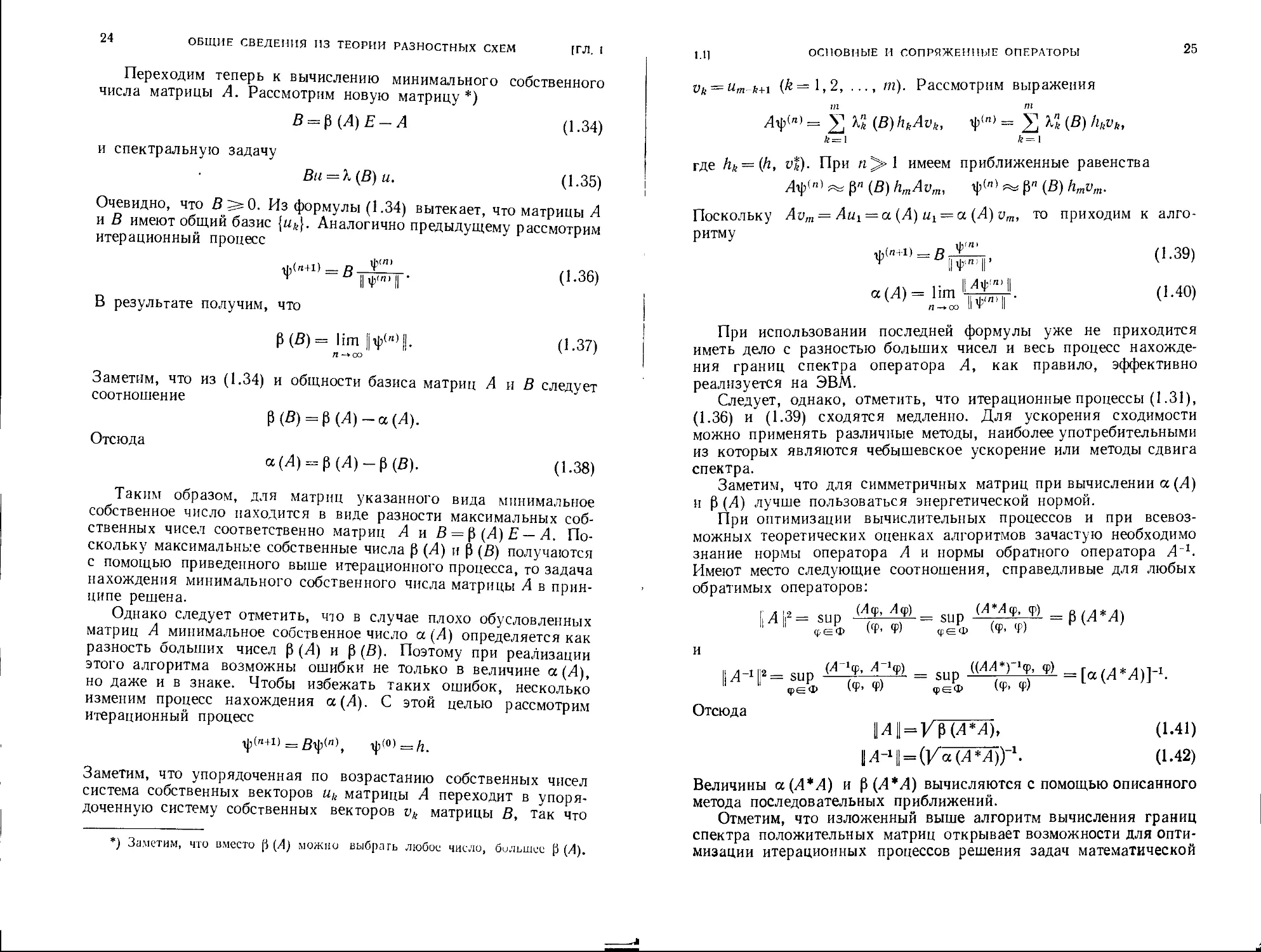
Переходим теперь к вычислению минимального собственного
числа матрицы Л. Рассмотрим новую матрицу*)
? = Р(Л)?-Л A.34)
и спектральную задачу
Ви = К(В)и. A.35)
Очевидно, что В 5=0. Из формулы A.34) вытекает, что матрицы А
и В имеют общий базис {uk). Аналогично предыдущему рассмотрим
итерационный процесс
В результате получим, что
= lim
п -+оэ
A.36)
A.37)
Заметим, что из A.34) и общности базиса матриц А я В следует
соотношение
Р(В) = Р(Л)-«(Л).
Отсюда
а(Л) = р(Л)-р(В). A.38)
Таким образом, для матриц указанного вида минимальное
собственное число находится в виде разности максимальных соб-
собственных чисел соответственно матриц А и В = Р(Л)? —Л. По-
Поскольку максимальные собственные числа р (Л) и Р (В) получаются
с помощью приведенного выше итерационного процесса, то задача
нахождения минимального собственного числа матрицы Л в прин-
принципе решена.
Однако следует отметить, что в случае плохо обусловленных
матриц Л минимальное собственное число а (Л) определяется как
разность больших чисел р (Л) и р (В). Поэтому при реализации
этого алгоритма возможны ошибки не только в величине а (Л),
но даже и в знаке. Чтобы избежать таких ошибок, несколько
изменим процесс нахождения а(А). С этой целью рассмотрим
итерационный процесс
Заметим, что упорядоченная по возрастанию собственных чисел
система собственных векторов ик матрицы А переходит в упоря-
упорядоченную систему собственных векторов vk матрицы В, так что
*) Заметим, что вместо fi (А) можно выбрать любое число, большее Р (А).
1.1] ОСНОВНЫЕ И СОПРЯЖЕННЫЕ ОПЕРАТОРЫ 25
vk = um^k+i (&=1,2, ..., т). Рассмотрим выражения
АЦМ = |] Я2 (В) hkAvk, !><«> = f] Kl (В) hkvk<
где hk — (h, v%). При и^>1 имеем приближенные равенства
Ац(п) ^ ря (В) hmAvm, уы щ р« (В) hmvm.
Поскольку Avm = Aui = a(A) u1 = a(A)vm, то приходим к алго-
алгоритму
-В^, A.39)
i = lim
<ni
A.40)
При использовании последней формулы уже не приходится
иметь дело с разностью больших чисел и весь процесс нахожде-
нахождения границ спектра оператора А, как правило, эффективно
реализуется на ЭВМ.
Следует, однако, отметить, что итерационные процессы A.31),
A.36) и A.39) сходятся медленно. Для ускорения сходимости
можно применять различные методы, наиболее употребительными
из которых являются чебышевское ускорение или методы сдвига
спектра.
Заметим, что для симметричных матриц при вычислении а (Л)
и Р (Л) лучше пользоваться энергетической нормой.
При оптимизации вычислительных процессов и при всевоз-
всевозможных теоретических оценках алгоритмов зачастую необходимо
знание нормы оператора А и нормы обратного оператора А'1.
Имеют место следующие соотношения, справедливые для любых
обратимых операторов:
феФ
Л~1||2= sup
(ф. ф)
= sup .
Ф6=ф (ф> ф)
, Ф) _ |
Отсюда
А), A.41)
lA-1\\ = {Va(A*A)Y1. A.42)
Величины а(Л*Л) и р(Л*Л) вычисляются с помощью описанного
метода последовательных приближений.
Отметим, что изложенный выше алгоритм вычисления границ
спектра положительных матриц открывает возможности для опти-
оптимизации итерационных процессов решения задач математической
-6 ОПЩИЕ СВЕДЕНИЯ ИЗ ТЕОРЩ1 РАЗНОСТНЫХ CXFM ГГЛ f
физики на основе хорошо разработанных методов (они будут рас-
рассмотрены в гл. 4). Такие процессы становятся конструктивными
и позволяют эффективно решать различные задачи математиче-
математической физики.
Помимо метода Люстерника, полезную оценку границ спектра
дает теорема Гершгорина: все собственные значения к (А) (вообще
говоря, комплексные) произвольной матрицы А порядка т с эле-
элементами аы принадлежат объединению кругов
\z-akk
где
т,
/ i
ЦЫг
Заметим кстати, что одним из следствий теоремы Гершгорина
является следующая оценка для спектрального радиуса матрицы:
\аы\-
* /=
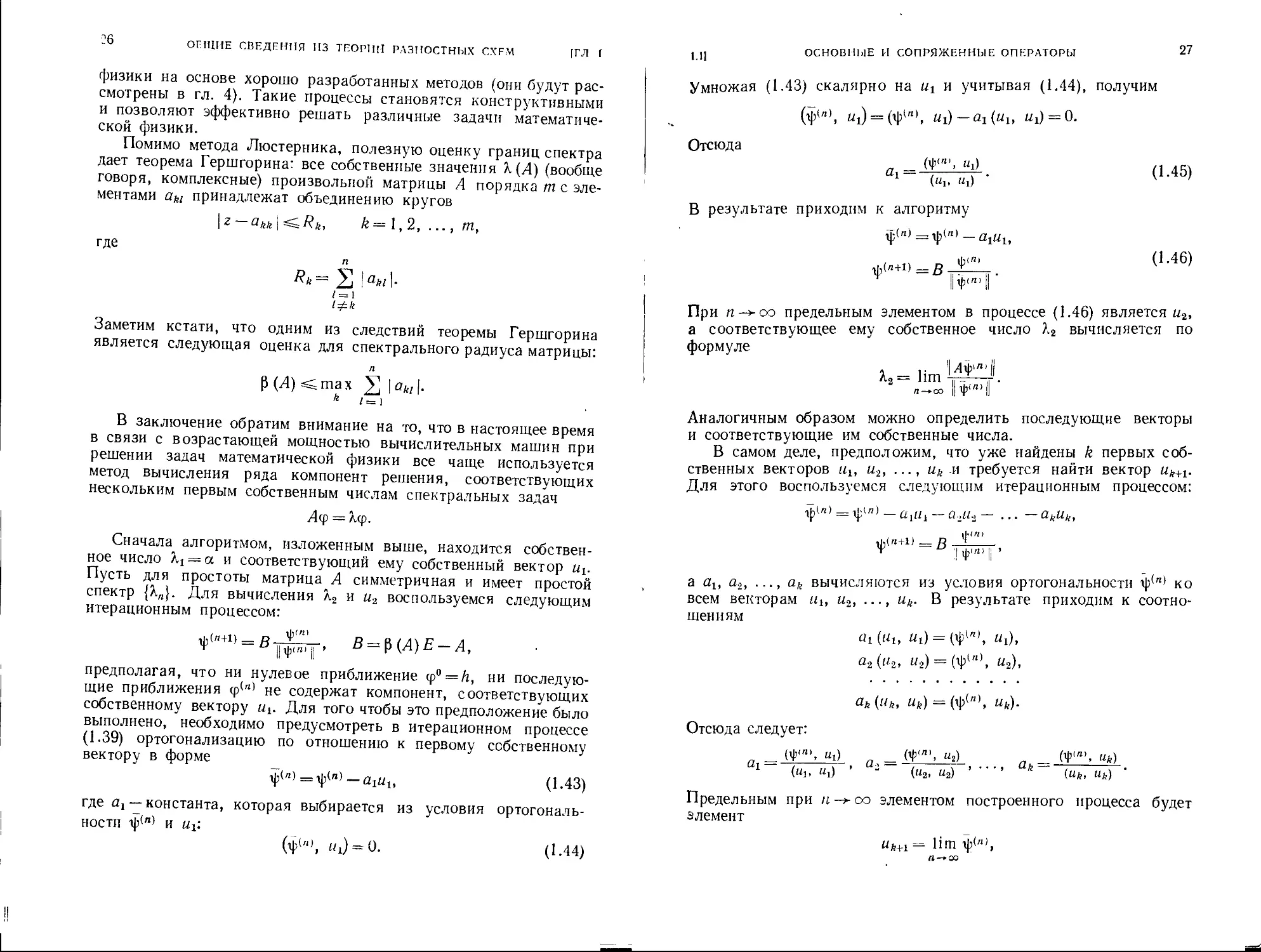
В заключение обратим внимание на то, что в настоящее время
в связи с возрастающей мощностью вычислительных машин при
решении задач математической физики все чаще используется
метод вычисления ряда компонент решения, соответствующих
нескольким первым собственным числам спектральных задач
Сначала алгоритмом, изложенным выше, находится собствен-
собственное число Xt = a и соответствующий ему собственный вектор ut.
Пусть для простоты матрица А симметричная и имеет простой
спектр {кп}. Для вычисления к2 и и2 воспользуемся следующим
итерационным процессом:
предполагая, что ни нулевое приближение ф° = /г, ни последую-
последующие приближения ф(я) не содержат компонент, соответствующих
собственному вектору ut. Для того чтобы это предположение было
выполнено, необходимо предусмотреть в итерационном процессе
A.39) ортогонализацию по отношению к первому собственному
вектору в форме
^(«) = ,j)(n)_aiUli A.43)
где а, — константа, которая выбирается из условия ортогональ-
ортогональности гЬ(я) и ш:
= 0.
A.44)
I ,j ОСНОВНЫЕ И СОПРЯЖЕННЫЕ ОПЕРАТОРЫ
Умножая A.43) скалярно на иг и учитывая A.44), получим
27
Отсюда
п1" (Hi. «,)
В результате приходим к алгоритму
A.45)
A.46)
При и->со предельным элементом в процессе A.46) является и2,
а соответствующее ему собственное число к2 вычисляется по
формуле
А.« = lim
II*1 II '
Аналогичным образом можно определить последующие векторы
и соответствующие им собственные числа.
В самом деле, предположим, что уже найдены k первых соб-
собственных векторов iii, «2, •••. и*-и требуется найти вектор ик+1.
Для этого воспользуемся следующим итерационным процессом:
- ам-, — ... —акик,
а аи а2, ..., а* вычисляются из условия ортогональности г|)(п) ко
всем векторам ии и2, ..., ик. В результате приходим к соотно-
соотношениям
«2 («2, «2) = №U), «2),
Отсюда следует:
1
(Hi. "l)
(«2, «2)
W>, uk)
* («ft, Hfc)
Предельным при п -*¦ со элементом построенного процесса будет
элемент
= lim и'"',
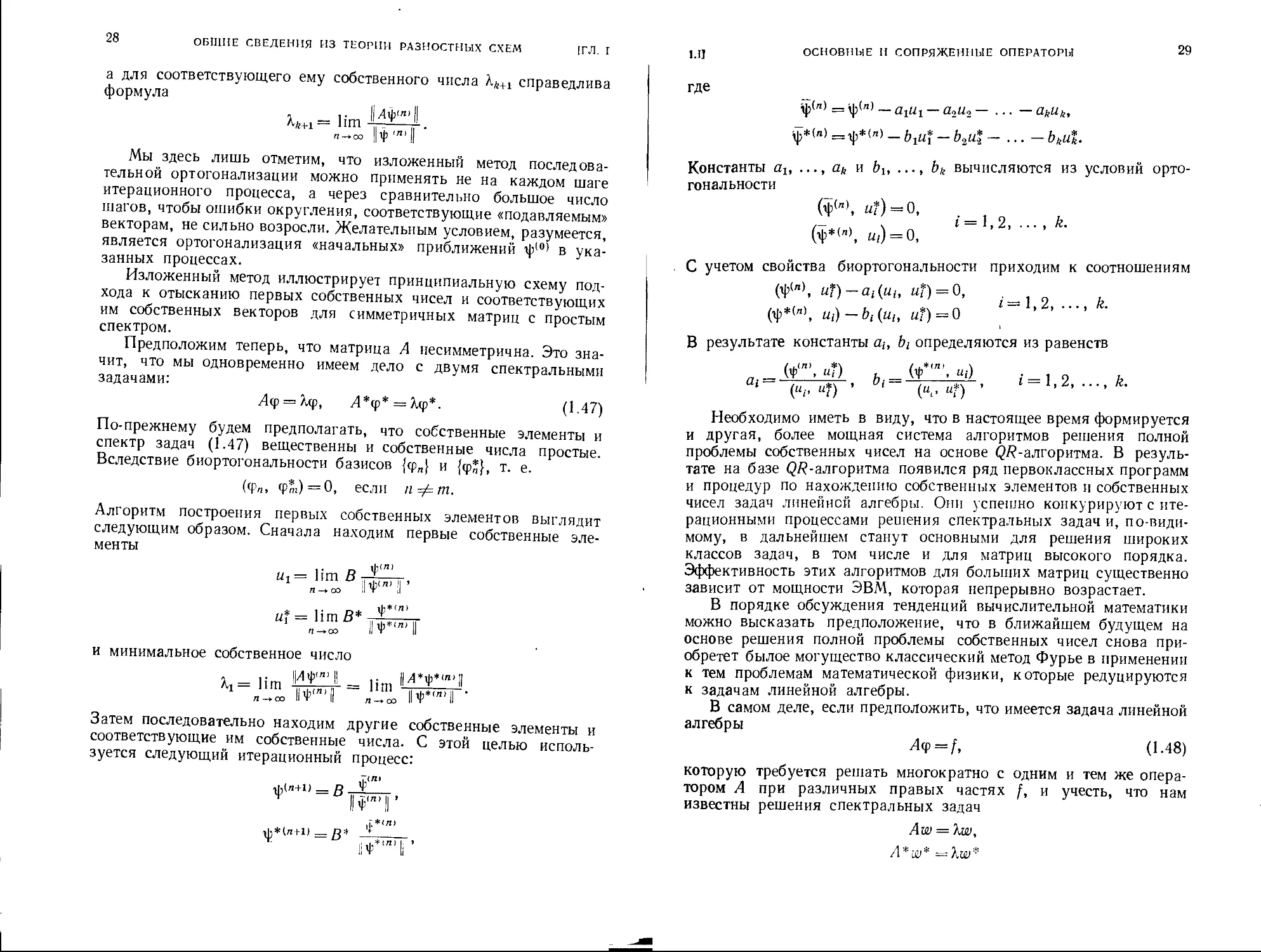
28
ОБШНЕ СВЕДЕНИЯ ИЗ ТЕОРИИ РАЗНОСТНЫХ СХЕМ
[ГЛ. I
а для соответствующего ему собственного числа Кк+1 справедлива
формула
lM— Urn
П~*СО
Мы здесь лишь отметим, что изложенный метод последова-
последовательной ортогонализации можно применять не на каждом шаге
итерационного процесса, а через сравнительно большое число
шагов, чтобы ошибки округления, соответствующие «подавляемым»
векторам, не сильно возросли. Желательным условием, разумеется,
является ортогонализация «начальных» приближений tj)(o) в ука-
указанных процессах.
Изложенный метод иллюстрирует принципиальную схему под-
подхода к отысканию первых собственных чисел и соответствующих
им собственных векторов для симметричных матриц с простым
спектром.
Предположим теперь, что матрица А несимметрична. Это зна-
значит, что мы одновременно имеем дело с двумя спектральными
задачами:
Лф = Хф, Л*ф* = Яф*. A.47)
По-прежнему будем предполагать, что собственные элементы и
спектр задач A.47) вещественны и собственные числа простые.
Вследствие биортогональности базисов {ср„} и {ф*}, т. е.
(фп, фт) = 0, если пфт.
Алгоритм построения первых собственных элементов выглядит
следующим образом. Сначала находим первые собственные эле-
элементы
л -> аэ II т il
и минимальное собственное число
Затем последовательно находим другие собственные элементы и
соответствующие им собственные числа. С этой целью исполь-
используется следующий итерационный процесс:
rim
^(л+1) _ R _Ф
1.П
где
ОСНОВНЫЕ И СОПРЯЖЕННЫЕ ОПЕРАТОРЫ
29
Константы аь ..., ak и &ь ..., Ьк вычисляются из условий орто-
ортогональности
С учетом свойства биортогональности приходим к соотношениям
«><»>, иТ)-а,(и,, иТ) = О,
(!>•<»>, u,)-b,(u,, ы?) = 0
В результате константы щ, bt определяются из равенств
1=1,2, ...,
/ = 1,2, ....
Необходимо иметь в виду, что в настоящее время формируется
и другая, более мощная система алгоритмов решения полной
проблемы собственных чисел на основе Q^-алгоритма. В резуль-
результате на базе Q^-алгоритма появился ряд первоклассных программ
и процедур по нахождению собственных элементов и собственных
чисел задач линейной алгебры. Они успешно конкурируют с ите-
итерационными процессами решения спектральных задач и, по-види-
по-видимому, в дальнейшем станут основными для решения широких
классов задач, в том числе и для матриц высокого порядка.
Эффективность этих алгоритмов для больших матриц существенно
зависит от мощности ЭВД1, которая непрерывно возрастает.
В порядке обсуждения тенденций вычислительной математики
можно высказать предположение, что в ближайшем будущем на
основе решения полной проблемы собственных чисел снова при-
приобретет былое могущество классический метод Фурье в применении
к тем проблемам математической физики, которые редуцируются
к задачам линейной алгебры.
В самом деле, если предположить, что имеется задача линейной
алгебры
A<p = f, A.48)
которую требуется решать многократно с одним и тем же опера-
оператором А при различных правых частях /, и учесть, что нам
известны решения спектральных задач
Aw = Kw,
А*ш* =Kw*
30
ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ РАЗНОСТНЫХ СХЕМ
[ГЛ. I
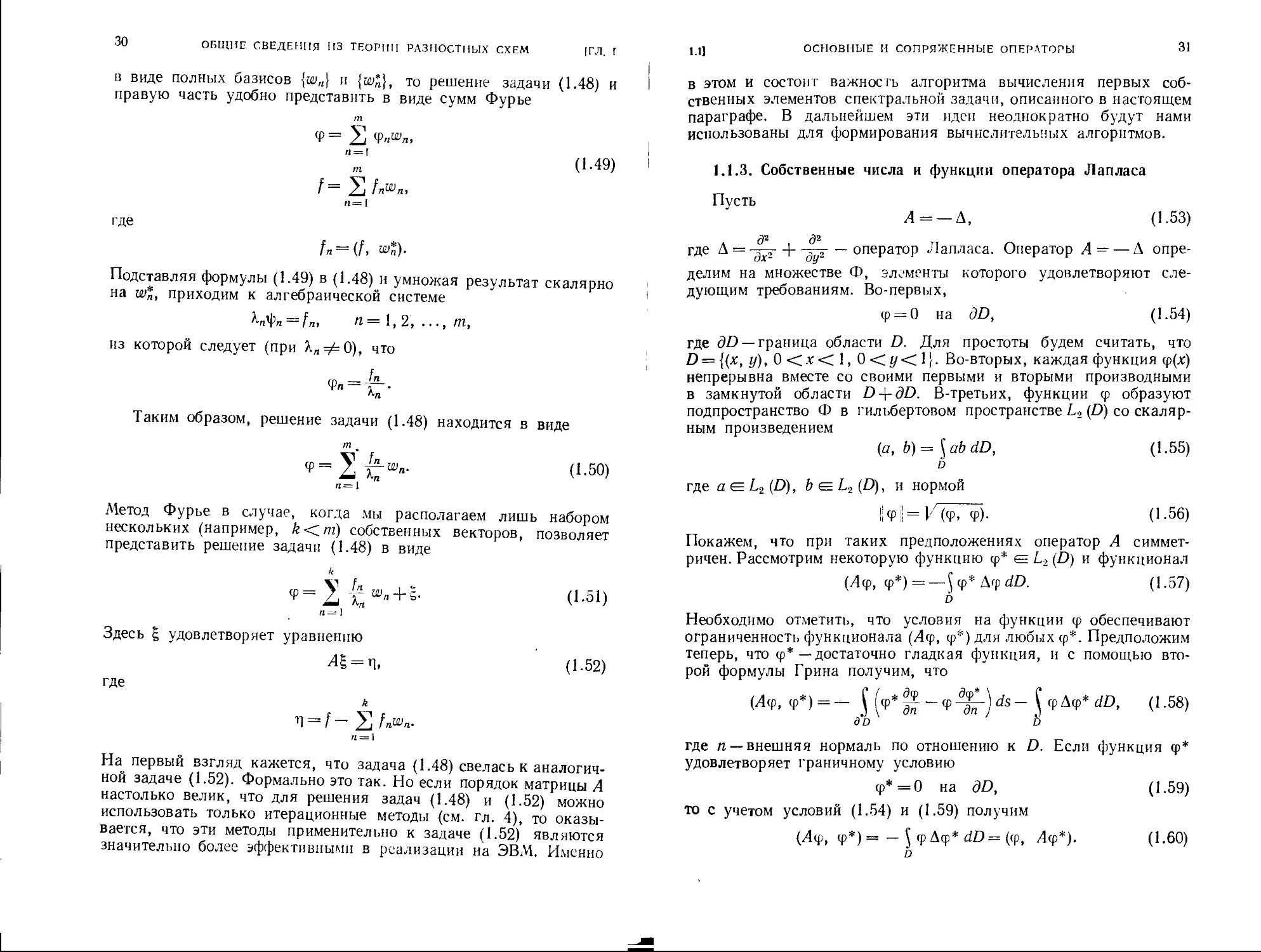
в виде полных базисов \wn\ и {w%}, то решение задачи A.48) и
правую часть удобно представить в виде сумм Фурье
Ф =
f=
A.49)
где
Подставляя формулы A.49) в A.48) и умножая результат скалярно
на w*, приходим к алгебраической системе
htyn = fn, n = 1, 2, ..., т,
из которой следует (при Х„=/=0), что
Таким образом, решение задачи A.48) находится в виде
A.50)
л=1
Метод Фурье в случае, когда мы располагаем лишь набором
нескольких (например, k<m) собственных векторов, позволяет
представить решение задачи A.48) в виде
ф =
Здесь I удовлетворяет уравнению
A.51)
A.52)
где
На первый взгляд кажется, что задача A.48) свелась к аналогич-
аналогичной задаче A.52). Формально это так. Но если порядок матрицы Л
настолько велик, что для решения задач A.48) и A.52) можно
использовать только итерационные методы (см. гл. 4), то оказы-
оказывается, что эти методы применительно к задаче A.52)' являются
значительно более эффективными в реализации на ЭВМ. Именно
ОСНОВНЫЕ И СОПРЯЖЕННЫЕ ОПЕРАТОРЫ
31
в этом и состоит важность алгоритма вычисления первых соб-
собственных элементов спектральной задачи, описанного в настоящем
параграфе. В дальнейшем эти идеи неоднократно будут нами
использованы для формирования вычислительных алгоритмов.
1.1.3. Собственные числа и функции оператора Лапласа
Пусть
Л=-Д,
A.53)
(92
где А =-r-j-+-5-J—оператор Лапласа. Оператор А — —А опре-
определим на множестве Ф, элементы которого удовлетворяют сле-
следующим требованиям. Во-первых,
Ф = 0 на 0D, A.54)
где 3D — граница области D. Для простоты будем считать, что
D= {(х, г/),0<.г<1,0<г/<1}. Во-вторых, каждая функция ф(х)
непрерывна вместе со своими первыми и вторыми производными
в замкнутой области D-\-dD. В-третьих, функции ср образуют
подпространство Ф в гильбертовом пространстве L2 (D) со скаляр-
скалярным произведением
{а, Ь)= \abdD, A.55)
где а <= L2(D), Ь eL2 (D), и нормой
|;<р1 = ЦфГф). A-56)
Покажем, что при таких предположениях оператор А симмет-
симметричен. Рассмотрим некоторую функцию ф* ^ L2 (D) и функционал
, ф*) = — $Ф* ArpdD. A.57)
Необходимо отметить, что условия на функции ср обеспечивают
ограниченность функционала (Лф, ср*) для любых ф*. Предположим
теперь, что ф*—достаточно гладкая функция, и с помощью вто-
второй формулы Грина получим, что
^)$<Ш, A.58)
(Лф,Ф*) = - $(Ф*^
dD D
где п — внешняя нормаль по отношению к D. Если функция ф*
удовлетворяет граничному условию
Ф*=0 на 3D, A.59)
то с учетом условий A.54) и A.59) получим
, ф*)= - $фДф*<Ю=(ф, Лф*). A.60)
32
ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ РАЗНОСТНЫХ СХЕМ
[ГЛ. I
1.11
основные И Сопряженные операторы
33
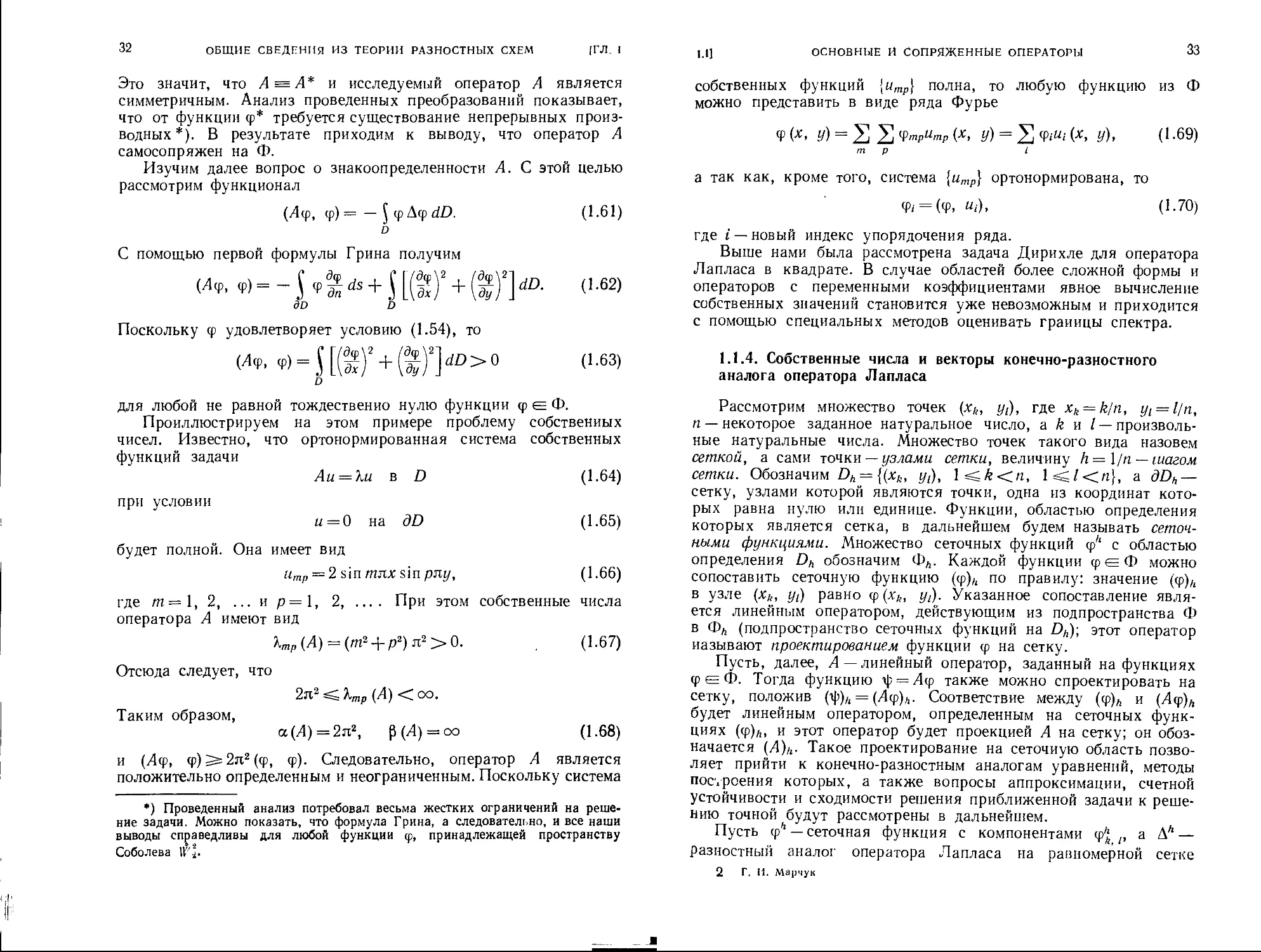
Это значит, что А = А* и исследуемый оператор Л является
симметричным. Анализ проведенных преобразований показывает,
что от функции ф* требуется существование непрерывных произ-
производных*). В результате приходим к выводу, что оператор Л
самосопряжен на Ф.
Изучим далее вопрос о знакоопределенности Л. С этой целью
рассмотрим функционал
(Лф, ф)= -
С помощью первой формулы Грина получим
A.61)
Поскольку ф удовлетворяет условию A.54), то
для любой не равной тождественно нулю функции ф бе Ф.
Проиллюстрируем на этом примере проблему собственных
чисел. Известно, что ортонормированная система собственных
функций задачи
Аи = Хи в D A.64)
при условии
ы = 0 на dD A.65)
будет полной. Она имеет вид
итр = 2 sin тлх sin рлу, A.66)
Где т—\, 2, ... и р=\, 2, .... При этом собственные числа
оператора А имеют вид
hmp (Л) = (/п2 + р2) л2 >0. A-67)
Отсюда следует, что
Таким образом,
а(Л) = 2л2, р(Л) = оо A.68)
и (Лф, фJг2я2(ф, ф). Следовательно, оператор Л является
положительно определенным и неограниченным. Поскольку система
*) Проведенный анализ потребовал весьма жестких ограничений на реше-
решение задачи. Можно показать, что формула Грина, а следовательно, и все наши
выводы справедливы для любой функции ф, принадлежащей пространству
Соболева \Х'\.
собственных функций \итр\ полна, то любую функцию из Ф
можно представить в виде ряда Фурье
ф {X, У) =
mp (X, У) =
С -69)
т р
а так как, кроме того, система \итр) ортонормирована, то
ф< = (ф, «<). A-70)
где i — новый индекс упорядочения ряда.
Выше нами была рассмотрена задача Дирихле для оператора
Лапласа в квадрате. В случае областей более сложной формы и
операторов с переменными коэффициентами явное вычисление
собственных значений становится уже невозможным и приходится
с помощью специальных методов оценивать границы спектра.
1.1.4. Собственные числа и векторы конечно-разностного
аналога оператора Лапласа
Рассмотрим множество точек (хк, yt), где xk = k/n, yl = l/n,
« — некоторое заданное натуральное число, a k и / — произволь-
произвольные натуральные числа. Множество точек такого вида назовем
сеткой, а сами точки — узлами сетки, величину h=l/n —шагом
сетки. Обозначим Dh = {(xk, yt), lsg&<«, ls?/<«}, a dDh —
сетку, узлами которой являются точки, одна из координат кото-
которых равна нулю или единице. Функции, областью определения
которых является сетка, в дальнейшем будем называть сеточ-
сеточными функциями. Множество сеточных функций фй с областью
определения Dh обозначим Фл. Каждой функции ф^Ф можно
сопоставить сеточную функцию (ф)й по правилу: значение (ф)й
в узле (xk, yt) равно (p(xk, г//). Указанное сопоставление явля-
является линейным оператором, действующим из подпространства Ф
в ФЛ (подпространство сеточных функций на Dh); этот оператор
называют проектированием функции ф на сетку.
Пусть, далее, А— линейный оператор, заданный на функциях
Ф ^ Ф. Тогда функцию ¦ф = Лф также можно спроектировать на
сетку, положив Aф)А = (Лф)А. Соответствие между (ф)А и (Лф)А
будет линейным оператором, определенным на сеточных функ-
функциях (ф)л, и этот оператор будет проекцией Л на сетку; он обоз-
обозначается (Л)А. Такое проектирование на сеточную область позво-
позволяет прийти к конечно-разностным аналогам уравнений, методы
построения которых, а также вопросы аппроксимации, счетной
устойчивости и сходимости решения приближенной задачи к реше-
решению точной будут рассмотрены в дальнейшем.
Пусть <ph — сеточная функция с компонентами ф^ р а Ал —
разностный аналог оператора Лапласа на равномерной сетке
2 Г. II. Марчук
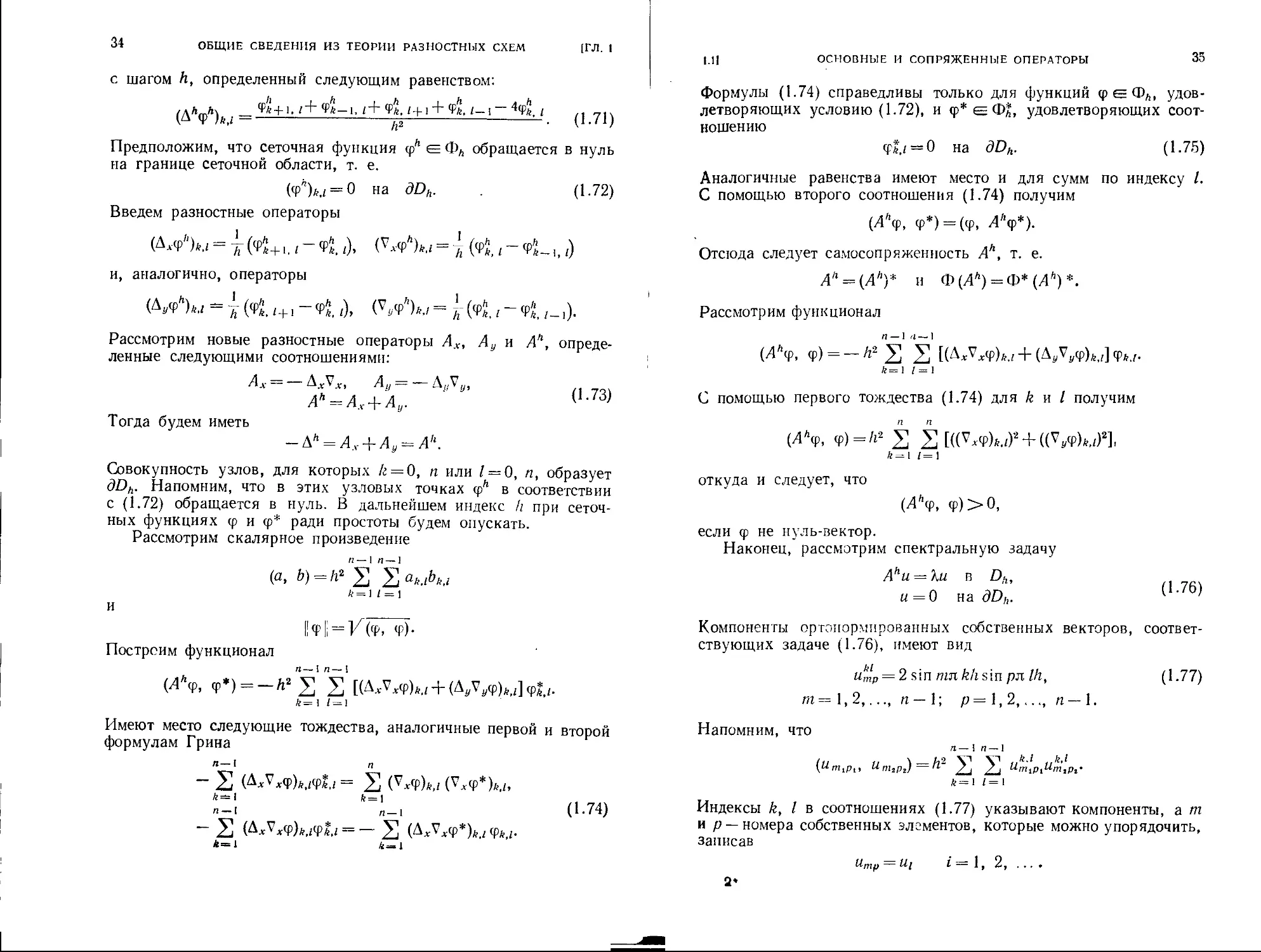
34 ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ РАЗНОСТНЫХ СХЕМ [ГЛ. 1
с шагом h, определенный следующим равенством:
(А*Ф*),.- ф"+'-/+ф"-|''+фЬ+1 + (рЬ-1-4ф?,/ (] 7])
Предположим, что сеточная функция cph e Фл обращается в нуль
на границе сеточной области, т. е.
(Ф*)*., = 0 на dDh. . A.72)
Введем разностные операторы
(Д,фа)*.< = \(Ф*+,,, - ф*. ,), (VA, = {(ф^, - ф*_(>,)
и, аналогично, операторы
I (ф* , - <р* ,_,).
Рассмотрим новые разностные операторы Ах, Ау и А", опреде-
определенные следующими соотношениями:
(L73)
Тогда будем иметь
Совокупность узлов, для которых /г = 0, п или 1 = 0, п, образует
dDh. Напомним, что в этих узловых точках фЛ в соответствии
с A.72) обращается в нуль. В дальнейшем индекс h при сеточ-
сеточных функциях ф и ф* ради простоты будем опускать.
Рассмотрим скалярное произведение
(а, &) =
и —1 п—1
к=]1=1
Построим функционал
^
*= 1 /=i
Имеют место следующие тождества, аналогичные первой и второй
формулам Грина
я—I
Т-\
A-74)
1.11
ОСНОВНЫЕ И СОПРЯЖЕННЫЕ ОПЕРАТОРЫ
35
Формулы A.74) справедливы только для функций фбФ4, удов-
удовлетворяющих условию A.72), и <р* е Ф|, удовлетворяющих соот-
соотношению
Ф!./ = 0 на dDh. A.7S)
Аналогичные равенства имеют место и для сумм по индексу /.
С помощью второго соотношения A.74) получим
(А\, ф*) = (ф, Л'У)-
Отсюда следует самосопряженность ЛЛ, т. е.
An = (Ah)* и Ф(ЛЛ) = Ф*(ЛЛ)*.
Рассмотрим функционал
(Л\р, ф) = -
| 5
*=i;=1
С помощью первого тождества A.74) для k и I получим
откуда и следует, что
(Л\р, ф)>0,
если ф не нуль-вектор.
Наконец, рассмотрим спектральную задачу
Ahu = Xu в Dh,
u=0 на dDh.
A.76)
Компоненты ортонормированных собственных векторов, соответ-
соответствующих задаче A.76), имеют вид
ump = 2 sin nm kh sin рл Ih,
tn= 1,2,.... n—1; p = 1, 2,..., n—\.
Напомним, что
A.77)
л—1 л—1
k=\ l=\
и
Индексы k, l в соотношениях A.77) указывают компоненты, а /л
и р —номера собственных элементов, которые можно упорядочить,
записав
Ump = Ul i=l| 2, ....
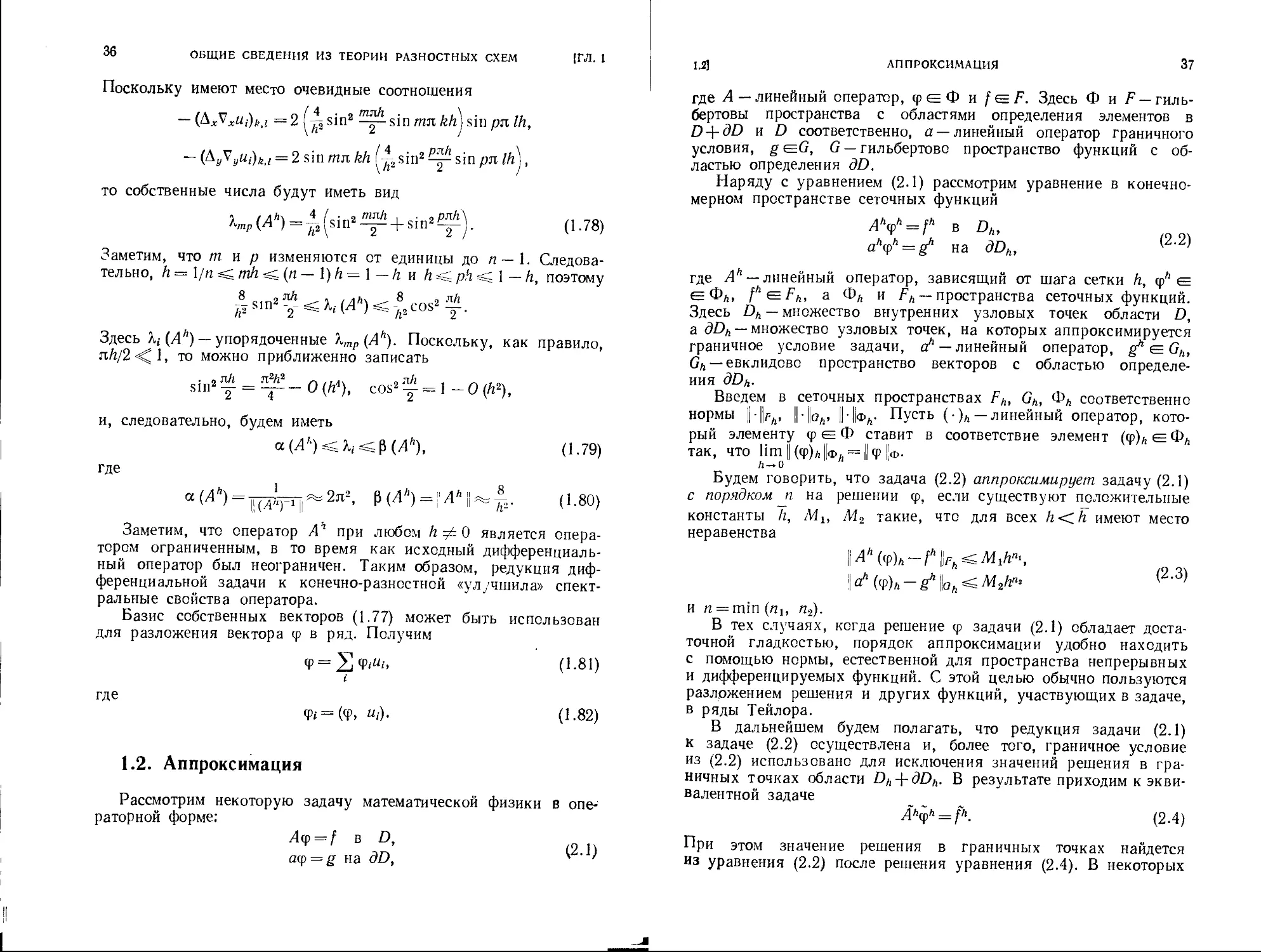
36 ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ РАЗНОСТНЫХ СХЕМ
Поскольку имеют место очевидные соотношения
., = 2 (j, sin2 ^sin тп Jfeft) sin pn Ih,
— (AyVyUi)kil = 2 sin тл kh (-j2 sin2 ^ sin pn lh\,
то собственные числа будут иметь вид
[ГЛ. 1
A.78)
Заметим, что тир изменяются от единицы до я —1. Следова-
Следовательно, h = 1/я s? m/г «с (n — 1) /г = 1 — h и h^ph^l—h, поэтому
Здесь X; (Лh) — упорядоченные Хтр (Ah). Поскольку, как правило,
я/г/2<!1, то можно приближенно записать
nh
sln T = ~i 0(/г)> cos T = 1 ~°(/г)'
и, следовательно, будем иметь
а(Л'')=?;Х(^Р(ЛЛ), A.79)
где
а(ЛЛ) = у~рп^2я2, Р(ЛА) = !'ЛА||я»-^. A.80)
Заметим, что оператор Ан при любом h ф 0 является опера-
оператором ограниченным, в то время как исходный дифференциаль-
дифференциальный оператор был неограничен. Таким образом, редукция диф-
дифференциальной задачи к конечно-разностной «улучшила» спект-
спектральные свойства оператора.
Базис собственных векторов A.77) может быть использован
для разложения вектора ф в ряд. Получим
Ф = 2ф<«/. A.81)
i
Ф< = (Ф, щ). A.82)
где
1.2. Аппроксимация
Рассмотрим некоторую задачу математической физики в опе-
операторной форме:
Лф = / в D,
a<p = g на dD, K '
1.2]
АППРОКСИМАЦИЯ
37
где Л —линейный оператор, феФ и f^F. Здесь Ф и F — гиль-
гильбертовы пространства с областями определения элементов в
D + dD и D соответственно, а —линейный оператор граничного
условия, g^G, G — гильбертово пространство функций с об-
областью определения dD.
Наряду с уравнением B.1) рассмотрим уравнение в конечно-
конечномерном пространстве сеточных функций
в Dh,
на dDh,
B.2)
где Ah — линейный оператор, зависящий от шага сетки h, фл е
еФ4, fh^Fh, а Фл и Fh — пространства сеточных функций.
Здесь Dh — множество внутренних узловых точек области D,
a dDh — множество узловых точек, на которых аппроксимируется
граничное условие задачи, ah — линейный оператор, gh^Gh,
G/, — евклидово пространство векторов с областью определе-
определения dD/,.
Введем в сеточных пространствах Fh, Gh, ФЛ соответственно
нормы |-|/=л, ||-|ол, ||-|фл. Пусть (•)/, — линейный оператор, кото-
который элементу ф se Ф ставит в соответствие элемент (ф)Л se Фл
так, что Нт|(ф)л||фА = |ф|!ф.
Л 0
Л—* 0
Будем говорить, что задача B.2) аппроксимирует задачу B.1)
с порядком п на решении ф, если существуют положительные
константы Л, Mlt M2 такие, что для всех h<ih имеют место
неравенства
' ,/, ' B.3)
I" VY/Л S HUfls==Jvl2n
и n = min (яь я2).
В тех случаях, когда решение ф задачи B.1) обладает доста-
достаточной гладкостью, порядок аппроксимации удобно находить
с помощью нормы, естественной для пространства непрерывных
и дифференцируемых функций. С этой целью обычно пользуются
разложением решения и других функций, участвующих в задаче,
в ряды Тейлора.
В дальнейшем будем полагать, что редукция задачи B.1)
к задаче B.2) осуществлена и, более того, граничное условие
из B.2) использовано для исключения значений решения в гра-
граничных точках области Dh-\-dDh. В результате приходим к экви-
эквивалентной задаче
ЛЛФЛ = /Л. B.4)
При этом значение решения в граничных точках найдется
из уравнения B.2) после решения уравнения B.4). В некоторых
38
ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ РАЗНОСТНЫХ СХЕМ
(ГЛ. I
случаях удобно пользоваться записью аппроксимационной задачи
в форме B.4), а в других случаях —в форме B.2). Итак,
в результате проведенной редукции и с учетом требуемой аппрокси-
аппроксимации задача с непрерывным аргументом B.1) приводится к задаче
линейной алгебры B.4). Дальнейшая задача состоит в решении
системы алгебраических уравнений.
Пример. Рассмотрим задачу
3D.
— Аф = / в D, ф =
на
B.5)
Здесь предполагается, что областью определения D является
квадрат {0 <; л; < 1, 0<г/<1}, а / — гладкая функция. Квадрат
D = D-\-dD покроем равномерной по х и по у сеткой с шагом 1г.
Узлы области будем отмечать двумя индексами (к, I), где первый
индекс k (O^k^n) соответствует точкам деления по координате х,
а второй индекс / @ sg/==?«) — по у. Рассмотрим следующие
аппроксимации:
где Ад;, Ау, Чх и Vy — разностные операторы, определенные в 1.1.4.
Тогда задача B.5) может быть аппроксимирована следующей:
-[A.vVAV + AyV^] = /ft в D\
Ф*./ = 0 на 3D,,
B.6)
где dDh — множество узлов, принадлежащих границе. С учетом
изложенного задача B.6) может быть приведена к виду
-ДУ = /" в Dh,
Ф" = 0 на dDh, (Z-'>
где фл и fh — векторы с компонентами ф? t и fhk , и
xk+ 1/2 У1+{/2
| J fdxdy
х!г—\/2 Vl—\/2
. ¦ h . h
±\J2—Xk±^ , У1 ±1/2= yi±Y
Введем в рассмотрение пространство решений Фй. За область
определения элементов из Фй примем Dh-\-dDh— {(xk, yt)\
Os^k^n, 0 «g / ^ п}. Вектор fh принадлежит пространству
F1' с областью определения D,t = {(xk, yi): I «S k sg n — 1,
1 «S /sS n — \). Разлагая решение по формуле Тейлора в окрестности
точки {xk, yt\ и предполагая ограниченность производных
|,2| АППРОКСИМАЦИЯ
по х и у вплоть до четвертого порядка, будем иметь
3
ф (*. Л = 2 i {[<*" **) й+{у - у* Ш *}*. I +
f!=0
+ ТГ \ (х — Х1г) 5~ + ('7 — 'У/) г ф
где (х, у)— произвольная точка области
39
xk+о, = ** + 9 Д yi + t,, = yi + Уг.
Аналогичное разложение будем иметь и для функции / (х, у).
Введем в качестве нормы в пространстве Fh величину
И/*
= тах 7'
¦а
h, I
Аналогичную норму введем в пространстве Gh. В качестве (ф)Л
возьмем вектор, компонентами которого являются значения
функции ф в соответствующем узле сетки. Тогда, используя
указанные выше разложения для ф и /, получим
||-Ал(Ф)л-/л|^<Л11Л2, B.8)
где
I
i IV
условий в этом случае является
Аппроксимация граничных
точной.
Из B.8) следует, что задача B.7) аппроксимирует задачу B.5)
со вторым порядком на решениях задачи B.5), имеющих огра-
ограниченные четвертые производные.
До сих пор рассматривалась аппроксимация задачи по про-
пространственным переменным. Аналогичным образом может быть
рассмотрена задача аппроксимации эволюционного уравнения *)
= / в
на
в D
B.9)
DxDh
dDxD,,
при ^ = 0.
Аппроксимацию задачи B.9) проведем в два этапа. Сначала эту
задачу аппроксимируем в области (DA + dDft)xD, по пространст-
пространственным переменным. В результате приходим к дифференциальному
*) Так будем называть уравнение, которое явно разрешается относительно
первой производной по времени и не содержит в А производных по времени.
40
ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ РАЗНОСТНЫХ СХЕМ
(ГЛ. I
уравнению по времени и разностному по пространственным пере-
переменным.
В полученной дифференциально-разностной задаче в ряде
случаев легко исключить решения в граничных точках области
(Dh-\-dDh)xDx на базе разностных краевых условий. Предполагая,
что это проделано, приходим к эволюционному уравнению вида
^-4-ЛфЛ=/Л, B.10)
где Л, /* и фл —функции времени /. В дальнейшем индекс h
в задаче B.10) будем опускать, предполагая, что мы имеем дело
с разностным аналогом по пространственным переменным исход-
исходной задачи математической физики.
Уравнение B.10) является, очевидно, системой обыкновенных
дифференциальных уравнений для компонент вектора фЛ.
Итак, рассмотрим следующую задачу Коши:
1 + Лф = ^ B.11)
y — g при / = 0.
Предположим, что оператор Л не зависит от времени. Рассмотрим
простейшие методы аппроксимации задачи B.11) по времени.
Наиболее употребительными разностными схемами в настоящее
время являются схемы первого и второго порядков аппроксима-
аппроксимации по /.
Сначала рассмотрим простейшую явную схему первого порядка
аппроксимации на сетке Dx:
. 14.1 I
-.pt <p° = g, B.12)
1.21
АППРОКСИМАЦИЯ
41
где т == ti+1 — tjt f — некоторая проекция функции f. Ради простоты
здесь можно принять fJ = f(tj).
Если рассматривается простейшая неявная схема, то имеем
= /\ ф° = ? . B.13)
и f1 выбираем в виде f(tj+i). Схемы B.12) и B.13) — первого
порядка аппроксимации по времени. В этом легко убедиться
с помощью разложения по формуле Тейлора по времени, допу-
допустив, например, существование ограниченных производных
(по времени) второго порядка от решения.
Разрешая схемы B.12) и B.13) относительно неизвестного,
приходим к рекуррентному соотношению
qy+i = 7y + TS/\ B.14)
где Т — оператор шага, а 5 — оператор источника, определяемые
следующим образом: для схемы B.12) Т = Е — тЛ, S = E, для
схемы B.13) Г = (? + тЛ) ', S - Г.
Разностные схемы типа B.14) для эволюционных уравнений
будем называть двухслойными.
Большое применение в приложениях имеет схема второго
порядка аппроксимации— схема Кранка —Николсона:
>^±vL = f,t ф0=^ BЛ5)
где р =/ (//+i/2). Схему B.15) можно также представить в форме
B.14) при
В некоторых случаях разностные уравнения B.12), B.13) и
B.15) удобно записывать в форме системы двух уравнений,
из которых одно аппроксимирует само уравнение в Dhx, а дру-
другое—граничное условие на dDhx. В этом случае разностный ана-
аналог задачи B.9) имеет вид
в Dht,
Ha dD
где
(Ф)ат - ghx \ahx *
B.16)
B.17)
В этих неравенствах, как и в B.3), (-)Лт есть оператор
проектирования на соответствующее сеточное пространство.
Разностное уравнение в канонической форме B.14) с помощью
введения вектор-функций и новых операторов, действующих
в пространстве DhxDx, где Dx есть совокупность {tj}, также
можно записать в виде
Lhx~yhx = ~fhx. B.18)
Таким образом, эволюционное уравнение с учетом граничных
условий и начальных данных редуцированно к задаче линейной
алгебры B.18). Заметим, что для анализа аппроксимации в раз-
разных случаях можно пользоваться либо сеткой Dh, либо DhxDx.
В частном случае к уравнению B.18) можно свести краевую
задачу эллиптического типа, интегральное уравнение и т. д.
При этом условие аппроксимации снова можно записать в форме
B.17), где аппроксимационным индексом будет только /г — макси-
максимальное значение из совокупности {Д.гЛ шагов по пространствен-
пространственным переменным-
42 ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ РАЗНОСТНЫХ СХЕМ (ГЛ. I
Пример. Рассмотрим задачу
Лф == ^-— Д<р = / в DxDh
Ф = 0 на dDxDt, B.19)
ф = ? В D ПрИ / = 0.
Областью определения решения будем считать (D + dD)xDit
где D, как и прежде, квадрат, a Dt = {0«g /sg T]. Перейдем
от D к Dh, от dD к д?>л и от D, к bt. Пусть ?>т — множество
точек /,• и tj+i — tj = x. Тогда в качестве аппроксимации задачи
B.19) примем следующую:
Л"У = /> в DhxDx,
ф/ = 0 на dDhxDx, B.20)
Ф° = ? в ОлХ{0}.
Рассмотрим простейшую явную аппроксимацию
**+_1/2
xk-\/2 У1—М2
«1+1/2
В этом случае
— 1/2 1П—\11
<7 = <
B.21)
B.22)
B.23)
B.24)
B.25)
B.26)
где Т = Е-\-ткн — Е — т (А1-\-А2) — оператор шага, а операторы
Л( (Л, = ЛЛ., Л2 = ЛУ) определены формулами A.73). Оценим
норму оператора Т. Для этой цели найдем максимальное
собственное число оператора Т:
Ти = к(Т)и в Dh,
и = 0 на dDh. i2'2)
Имеет место очевидное соотношение
Кроме того,
Ф>, ; = 0 на dDhxDx,
<p'i.i=gi<,i в DftXJ0}.
Рекуррентное соотношение B.24) представим в виде
1.2) АППРОКСИМАЦИЯ
Следовательно, норма оператора Т имеет вид
8т _. _, л/i
|| = max
, 8с , nh
l-h*cos Т
43
B.28)
и если т//12< 1/4, то |Г||< 1.
Наряду с явной аппроксимацией первого порядка по т можно
рассмотреть неявную аппроксимацию первого порядка по т и
второго порядка по h. Тогда вместо выражения B.21) примем
следующее:
'. B.29)
Величины /?, / и gkii определяются формулами B.22), B.23).
В данном случае уравнение B.20) уже явно не разрешается, и
мы приходим к операторному уравнению
= Ф1/ + */!/ в DkxDx, B.30)
которое должно быть решено при условиях
Ф*. /=0 на dDhxDx,
Ф*. i =ёь.1 в Dh х {0}.
Запишем уравнение B.30) в форме
B.31)
B.32)
где
В этом случае норма оператора Т будет равна
|| Т| = max/- ' '
8т
nil
B.33)
следовательно, ЦГЦ^! при любых т и /г.
Наконец, рассмотрим аппроксимацию по схеме Кранка — Никол-
сона. В этом случае операторы и функции в задаче B.20) опре-
определим следующим образом:
+/ +
Kk~\/> У1—1/2
"k-{-\12 W + I/2
gi i = ^ j j ,?(x, y)dxdy.
B.34)
B.35)
—1/2 4— 1/2
44 ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ РАЗНОСТНЫХ СХЕМ
Тогда приходим к задаче
[ГЛ. I
yJ , B.36)
Ф*./ = 0 на dDhXDx,
<P%.i = gk., в Dhx {0}. (^П
В этом случае уравнение B.36) формально разрешается относи-
относительно неизвестной ф?+' в виде
где
Норма оператора шага будет равна
4т „яЛ
II1"
|Г| = max
4т
Отсюда следует || Т || < 1.
B.38)
4т . ,лА
8
4т .
sm
B.39)
1.3. Счетная устойчивость
Мы не будем стремиться к возможной общности определения
понятия счетной устойчивости разностных схем, поскольку нас
в основном будут интересовать простейшие алгоритмические под-
подходы к анализу качества разностных схем, аппроксимирующих
задачи математической физики.
Для выяснения основных определений и понятий теории устой-
устойчивости рассмотрим сначала явную разностную схему B.12)
/, <p° = g. C.1)
Решение ф' ищется для O^t/ssT1.
Предположим, что оператор Л>0 имеет полную систему соб-
собственных функций {ип} и множество собственных чисел {А,„>0},
соответствующих спектральной задаче
Ли = ки.
Введем в рассмотрение следующие ряды Фурье:
C-2)
где фп = (ф', и*), f'n = (f, «*), gn = {g, «*); м* — собственные функ-
функции сопряженной спектральной задачи. Подставим C.2) в C.1) и
1.31
СЧЕТНАЯ УСТОЙЧИВОСТЬ
результат скалярно умножим на и%. Тогда придем к следующим
выражениям для коэффициентов Фурье:
ф(+1 = A-тАл)Ф( + <. C.3)
Поскольку
Ф° =
приходим к начальному условию
<P°n = gn. C.4)
Решение задачи C.3), C.4) получим последовательным исклю-
исключением неизвестных. В результате будем иметь
где
г„ = 1 — тЯ„.
Из равенства C.5) следует, что при т>0
C-5)
C.6)
i—i
Усилим последнее неравенство, заменив \fn ' под знаком суммы
на |/л|==тах|/',|. Получим
I Ф« I
gn\
C.7)
Джон Нейман ввел в рассмотрение так называемый спектраль-
спектральный критерий устойчивости, смысл которого состоит в следую-
следующем. Если для каждого коэффициента ц>'п ряда Фурье из C.2)
имеет место соотношение
фл
«=1,2
C.8)
где С1п, С2л — константы, равномерно ограниченные при /
^ Г, то разностная схема C.1) объявляется счетно-устойчивой.
Посмотрим, какие условия достаточно наложить на параметры
разностной схемы B.12), чтобы выполнялось соотношение C.8).
Анализ соотношения C.7) показывает, что критерий устойчивости
C.8) будет выполнен, если на параметр гп наложить ограничение *)
|г„|<1, п=1,2 C.9)
*) В дальнейшем будет введено более слабое ограничение C.27) на hod.mv
оператора шага. " '
46
ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ РАЗНОСТНЫХ СХЕМ
|ГЛ
Предположим, что спектр оператора А расположен в интер-
интервале
Тогда в соответствии с C.6) соотношение C.9) выполнится при
условии
Т<|ЩГ (ЗЛ°)
Соотношение C.10) и будет конструктивным условием устойчи-
устойчивости разностной схемы C.1). Заметим, что условие C.10) является
достаточным условием устойчивости, причем схема остается устой-
устойчивой и при
_ 2
В этом случае, очевидно, соотношение C.7) перейдет в следую-
следующее:
фя
\g«\+j*\f«
C.11)
Но /тг^Г, где Т фиксировано. Зто значит, что при малом т
рассматривается большое число шагов / и /-voo при т->-0, но
так, чтобы верхняя граница временного интервала Т оставалась
фиксированной. Тогда снова приходим к схемам, усюйчивым
по Нейману.
Рассмотрим теперь другие разностные схемы, основанные на
неявных разностных аппроксимациях. В случае неявной схемы
первого порядка аппроксимации B.13) получим выражение, ана-
аналогичное C.7):
C.12)
где
Очевидно, что для данной разностной схемы при \п (Л) > 0 имеет
место устойчивость при любом значении т>0, поскольку
Устойчивость в этом случае будем называть абсолютной.
Для схемы Кранка —Николсона B.15) оценка для коэффици-
коэффициентов Фурье решения имеет вид
1 и |,
C.13)
1.3]
СЧЕТНАЯ УСТОЙЧИВОСТЬ
47
где
1
1+у*л(Л) 1 + -2-ЫЛ)
Отсюда следует: |/¦„ | < 1 при любых т>0, если Я„(Л)>0.
Необходимо отметить, во-первых, что устойчивость по Нейману
основана на анализе спектра оператора задачи. Это значит, что при
таком подходе вычисление максимального собственного числа задачи
или его оценка сверху является необходимым элементом алгоритма.
Во-вторых, спектральный критерий устойчивости устанавливает
устойчивость решения по отношению к каждой гармонике ряда
Фурье, но иногда ничего не говорит об устойчивости решения
в энергетической норме. А между тем норма решения qV зачастую
оказывается единственной характеристикой решения задачи. Все
это побудило исследователей дать иные определения устойчивости,
связанные с нормами операторов задачи. Вместе с этим следует
подчеркнуть, что до сих пор анализ устойчивости по Нейману
играет исключительную роль в приложениях.
Перейдем теперь к более общему определению понятия счет-
счетной устойчивости. С этой целью рассмотрим задачу
|?-|-Лф = / в DxDt,
которая аппроксимируется разностной задачей
SfJ на DhxDu
C.14)
<3-15)
Будем гозорить, что разностная схема C.15) устойчива, если
при любом параметре h, характеризующем разнсстную аппрокси-
аппроксимацию, и / sg Г/т имеет место соотношение
WK^Cilghh + c,lfb>H, (зле)
где константы Сг и С2 равномерно ограничены на 0«^/«^Г и
не зависят от т, h, g и f.
Определение счетной устойчивости тесно связано с понятием
корректности задач с непрерывным аргументом. Можно сказать,
что счетная устойчивость устанавливает непрерывную зависимость
решения от входных данных в случае задач с дискретным аргу-
аргументом.
В самом деле, пусть в качестве входных данных задачи C.15)
выбраны / = /*, g = g*- Получим некоторое решение задачи C.15),
которое обозначим через ц>+. Далее, в качестве входных данных
48
ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ РАЗНОСТНЫХ СХЕМ
[ГЛ 1
выберем / = /* + ?, gr = gr* + 6. Новое решение обозначим ср.,,*;
тогда для разности решений е = ф.и.|: — ф„. будем иметь следующую
задачу:
6/+1 = Гб/ + т5^, е° = б.
При этом условие устойчивости примет вид
Отсюда следует, что малым вариациям входных данных fag
соответствуют малые вариации решения ф.
Легко видеть, что определение устойчивости в форме C.16)
уже связывает само решение с априорными сведениями о вход-
входных данных задачи. Такое определение более удобно для анализа
устойчивости многих задач, чем определение устойчивости по Ней-
Нейману, хотя и менее информативно. С этой точки зрения рассмот-
рассмотрим устойчивость схемы B.12). Для этого рекуррентное соотноше-
соотношение C.1) перепишем в форме
ч, Ф° = ёг, C.17)
где
а Л —оператор, аппроксимирующий
задачи C.17) имеет вид
C.18)
А. Формальное решение
T'-'f'-K C.19)
Оценив по норме решение C.19), получим
C.20)
Заменим под знаком суммы If'1]] максимальным значением по
всем / из фиксированного временного интервала. Пусть.
|| = max ||//1|,
тогда
Если предположить, что
II 7-IK 1.
C.21)
C.22)
то схема B.12) будет устойчивой в смысле определения C.16).
Естественно, что условие C.22) является достаточным условием
устойчивости. Можно было бы получить более тонкие критерии
1.3]
СЧЕТНАЯ УСТОЙЧИВОСТЬ
49
через нормы степеней операторов шага \\Т'\\ (i=l, 2, ..., /).
Однако ослабление условия затрудняет конструктивную проце-
процедуру установления критерия устойчивости. В практических расче-
расчетах, как правило, используется именно достаточное условие C.22).
Рассмотрим случай, когда оператор Л = Л*>0. Положим
(см. C.18)). Тогда
Пусть
(ф. ф)
C.23)
(ф. Ф)
(ф. ф)
Ф =
где {«„} — базис оператора Л. Тогда
C.24)
где
IX
Найдем условие, которому должно удовлетворять т, чтобы
У [ф] < 1, т. е.
Таким условием является
Отсюда, если р (Л) = |] Л| = max Ъп (Л) = Ях (Л), то
C.25)
пф\
Так как
1,
50
ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ РАЗНОСТНЫХ СХЕМ
[ГЛ 1
1.31
СЧЕТНАЯ УСТОЙЧИВОСТЬ
51
то приходим к следующему достаточному условию выполнения
неравенства J [cp] «g; 1:
2
В этом случае, согласно определению A.11) нормы оператора,
и, следовательно, счет будет устойчив в смысле определения
C.16). Заметим, что в случае самосопряженного оператора доста-
достаточные условия счетной устойчивости по Нейману C.10) и в смысле
определения C.16) совпадают.
Аналогичным образом можно рассмотреть устойчивость неяв-
неявных разностных уравнений B.13) и B.15). В этих случаях будем
иметь
где для схемы B.13)
а для схемы B.15)
S
Нетрудно показать, что построенные разностные схемы будут
абсолютно устойчивы в смысле определения C.IC), если А>0.
Несколько слов о предельных переходах. При решении раз-
разностных аналогов эволюционных задач математической физики
нам приходится иметь дело с аппроксимацией как по времени
с шагом т, так и по пространству с характерным шагом 1г. Это
значит, что оператор перехода Т = Т(т, h) зависит как от т, так
и от /г.
Проблема конструирования устойчивого алгоритма при заданном
способе аппроксимации обычно сводится к установлению связи
между т и /г, обеспечивающей счетную устойчивость. Если раз-
разностная схема оказывается устойчивой при любых значениях
т>0 и Л>0, то она объявляется абсолютно устойчивой. Если
же схема оказывается устойчивой только при определенной связи
между т и /г, то такая схема называется условно устойчивой.
Предположим, что связь параметров т и /г задается в форме
т^С/г", C.26)
где С и р — заданные константы, не зависящие от т и h. Сле-
Следует отметить, что соотношения такого вида устанавливаются
обычно при анализе амплитуды самого «короткого» возмущения.
Как правило, они отражают связь минимальных пространствен-
пространствени временных масштабов явлений, которые мы хотим опи-
описать с помощью разностной схемы.
Более крупные возмущения (порядка нескольких /г), разу-
разумеется, будут описываться более точно.
Предположим, что нам требуется повысить точность решения
задачи формальным уменьшением шага h. Тогда одновременно
мы должны уменьшить т так, чтобы снова выполнялось указан-
указанное выше неравенство, но уже с новыми параметрами сетки. Это
значит, что можно допустить и предельный переход при т-vO и
Л->0, обеспечив выполнение условия C.26), например, в виде
тр = const «s; С.
Наряду с изложенными выше определениями счетной устой-
устойчивости в литературе используются и другие определения, которые
позволяют расширить класс разностных схем, интересных для
приложений. Например, схема называется устойчивой, если
:). C.27)
Такое определение устойчивости при малых т допускает экспо-
экспоненциальное возрастание по времени погрешностей округлений.
Мы рассмотрели принципиальную схему исследования счетной
устойчивости разностной схемы в предположении, что оператор А
не зависит от времени. Такое предположение для ряда задач
математической физики является естественным. Вместе с тем оно
позволяет ввести в рассмотрение ряд дальнейших конструктив-
конструктивных приемов, широко используемых в вычислительной матема-
математике. В самом деле, исследование устойчивости сводится к оценке
нормы оператора шага Т. Как было указано в 1.1, квадрат
нормы оператора Т совпадает со спектральным радиусом само-
самосопряженного положительного оператора Т*Т и для определения
спектрального радиуса может быть использован итерационный
процесс
/T*Tfn(k) m'ft>\
|| 77= lim (/ 7 ф '
7
(ф1*
ф<*>
где ф(*> — элементы следующего процесса:
roU-n)^—!—T*Tw
• ii ._ I Ь\ И •
(ft)
C.28)
Таким образом, задача определения нормы оператора Т сво-
сводится к последовательной реализации рекуррентного соотноше-
соотношения C.28). Именно этот путь является конструктивно наиболее
разработанным применительно к ЭВМ. В случае самосопряжен-
самосопряженного оператора Т
IIГI
52
ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ РАЗНОСТНЫХ СХЕМ
ГГЛ.
1.41
Теорема сходимости
Сделаем теперь некоторые частные замечания. При исследо-
исследовании устойчивости разностных схем иногда используют метод
определения спектрального радиуса бесконечной, периодической
по пространственным координатам задачи. Для задач с непери-
непериодическими граничными условиями обязательно следует оценку
спектрального радиуса производить (с помощью метода Келлога)
для операторов Т, при конструкции которых уже учтены реаль-
реальные граничные условия.
Если оператор Л со временем меняется, то задача исследова-
исследования устойчивости неизмеримо затрудняется, так как норма опе-
оператора Т также будет изменяться со временем и, вообще говоря,
необходимо находить спектральный радиус на каждом шаге,
поскольку и он будет зависеть от номера временного шага.
В этом случае целесообразно идти по пути построения абсолютно
устойчивых разностных аналогов задач. Такие схемы будут спе-
специально рассмотрены в гл. 4.
В заключение отметим, что если аппроксимация эволюцион-
эволюционного уравнения исследуется в пространствах сеточных функций,
определенных на DflxDx, то и определение устойчивости полезно
дать в терминах тех же пространств. В самом деле, пусть раз-
разностная задача имеет вид
= /AT в DhxDx,
C.29)
Введем критерий устойчивости в следующем виде:
, ц/** \Fhx + с2 [jg*t ||
W
ht
Fhx
где Сх и С2 — константы на интервале
от h, т, /ft\ ghx
П
Олт,
(з.зо)
не зависящие
Пусть исходная задача математической физики аппроксими-
аппроксимируется с помощью разностного уравнения так, что граничные
условия уже учтены при его построении. Тогда критерий устой-
устойчивости удсбно ввести в следующей форме:
иф^ф^сцп^, ¦ (з.з1)
где С ограничена на интервале Qs^t^T.
1.4. Теорема сходимости
А. Ф. Филиппов определил устойчивость для произвольных
разностных задач
/^ЛТфйт _ fhx
как равномерную ограниченность оператора {Lhx)'1 и доказал,
что из аппроксимации и устойчивости следует сходимость реше-
решения разностной задачи к решению дифференциальной. П. Лаке
предложил для корректно поставленных эволюционных задач
такую систему определений аппроксимации и устойчивости, при
которой устойчивость имеет место одновременно со сходимостью,
если имеет место аппроксимация. Эта теорема известна под на-
названием теоремы Лакса.
Исследование сходимости разностного решения к решению
исходной задачи как для стационарных, так и для эволюцион-
эволюционных задач математической физики осуществляется на основе
одних и тех же принципов. Это позволяет проследить основную
идею доказательства на примере стационарной задачи
Лф = / в D,
D 1)
ay = g на dD, K
которая аппроксимируется следующей разностной схемой:
W в Dh,
l = gh на dDh.
D.2)
Имеет место следующая теорема сходимости:
Пусть 1) разностная схема D.2) аппроксимирует исходную
задачу D.1) на решении ф с порядком п;
2) Ah и ан — линейные операторы;
3) разностная схема D.2) устойчива в смысле C.30), т. е.
существуют положительные константы h, Сь С2 такие, что для
всех h<C.h, fh^Fh, gh^Gh существует, и притом единственное,
решение фл задачи D.2), удовлетворяющее неравенству
hhhn^C1\\fhlFh + C2\\g'4all. D.3)
Тогда решение разностной задачи ц>н сходится к решению ф
исходной задачи, т. е.
1ш1||(ф)а-фл|!ф =0,
А-0 *
причем имеет место следующая оценка скорости сходимости:
II (ф)А - ф" 11ф„ < (СгМ, + С2М2) А», D.4)
где Мх и М2 — константы из B.3).
Докажем это утверждение. Пусть Л —минимальное из /г, вве-
введенных в определениях аппроксимации и устойчивости. Тогда
в силу устойчивости для любых правых частей /Л и gh при /г< h
существует единственное решение фл, т. е. мы имеем право рас-
рассматривать для h<Ji разность (ф)Л —фЛ. В силу линейности Ah
получаем
, - ф"] = А" (ф)д - ЛлФ* = Ап (Ф)л - /*.
54 ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ РАЗНОСТНЫХ СХЕМ [ГЛ. I
Аналогично,
Так как Л<А, то в силу устойчивости и аппроксимации из
_ *1_ h V D-5)
следует, что
II (Ф)А - ф" |фл < С, || Ah (Ф)л - /* ||F/i + С21| ah (Ф)А - gh \\ah ^
s? dAf ,An- -f СаД^зЛ ^ (Ci^i + С2М2) А".
Не нарушая сбщности, можно считать, что/г<1. Доказатель-
Доказательство завершено.
Отметим, что при доказательстве теоремы использовано свой-
свойство линейности лишь для операторов Ah и ah.
В случае эволюционной задачи рассмотрим
8ghx == /Лт [(ф)л — фЛт] = /Лт (ф)Лт — g"T. ^'^
Из D.6) и условия устойчивости C.30) имеем
или, с учетом B.17),
vhx
D.7)
где
Оценка D.7) доказывает сходимость разностного решения
к точному и дает четкое представление о сходимости как по от-
отношению к пространственному шагу сетки Л, так и по отноше-
отношению к шагу т по временной оси.
В предположения теоремы было включено весьма жесткое
условие, что Ci и С2 не зависят от h и т. Особенно неприятным
является требование независимости этих констант от1 /г. Между
тем при Л-»-0 в некоторых случаях Сх и С2 могут стремиться
к бесконечности. Пусть
где тЗгО. Если учесть этот факт, то сходимость приближенного
решения к точному будет оцениваться следующим образом:
IIФ флх |ФЛх - -j- VT
Если k>m и т"А~т^О при т-»0, Л-»-0, то сходимость имеется.
Естественно, что теорема сходимости может быть сформулирована
и в тех случаях, когда С, и С3 зависят как от h, гак и от t.
ГЛАВА 2
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
ДЛЯ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Известны различные подходы к конструированию разностных
уравнений для задач математической физики. Особенно полно
этот вопрос изучен для уравнений с коэффициентами, обладаю-
обладающими (вместе с решением) достаточной гладкостью. В этом слу-
случае можно строить разностные схемы с высокой степенью аппрок-
аппроксимации. Интерес к таким схемам непрерывно возрастает,
поскольку темп формирования новых постановок сложных и
трудоемких задач науки и техники опережает темп развития
средств вычислительной техники. Поэтому в ряде случаев пред-
представляется целесообразным получать приближенное решение
с заданной точностью не за счет формального увеличения раз-
размерности подпространств (например, уменьшения шага сетки),
а путем построения более точных аппроксимаций исходной задачи
на основе априорной информации о гладкости решения *). Такая
точка зрения оказалась весьма плодотворной и привела иссле-
исследователей к удобным и достаточно универсальным методам построе-
построения разностных уравнений на основе вариационных методов Ритца,
Галёркина и метода наименьших квадратов.
Однако следует подчеркнуть, что класс задач с гладкими
решениями довольно узок, и поэтому основное внимание должно
быть уделено методам построения разностных уравнений для задач
с разрывными коэффициентами. Такие задачи возникают, напри-
например, при изучении диффузии субстанции, теплопроводности, гид-
гидродинамики и т. д.
В силу отмеченного обстоятельства мы пожертвуем возмож-
возможностью описания ряда оригинальных и весьма общих результа-
результатов по построению разностных уравнений высокого порядка точ-
точности ради идеи создания общего представления о путях кон-
конструирования разностных аналогов уравнений, решения которых
могут не обладать высокой гладкостью. Естественно, что все
подходы, которые мы будем рассматривать, автоматически при-
применимы для численного решения задач с гладкими данными и
решениями.
*) См. также г л Сь
56
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
ГГЛ 2
2.1)
МЕТОД ИНТЕГРАЛЬНОГО ТОЖДЕСТВА
57
Для того чтобы дать необходимое представление о путях раз-
развития научных идей в области построения разностных уравнений,
мы подробно рассмотрим сначала краевые задачи для обыкно-
обыкновенных дифференциальных уравнений и затем изложим более или
менее общие подходы к решению двумерных и многомерных задач
математической физики. Мы надеемся, что ссылки в гл. 9 на ориги-
оригинальную литературу помогут читателям более глубоко и всесто-
всесторонне познакомиться с вопросами теории и алгоритмами.
2.1. Метод построения разностных уравнений
для задач с разрывными коэффициентами
на основе интегрального тождества
В настоящее время известно большое число различных мето-
методов решения краевых задач для обыкновенных дифференциаль-
дифференциальных уравнений. Мы остановимся на некоторых из них, получив-
получивших довольно широкое распространение в литературе. Поскольку
задачей данной книги является ознакомление читателя с некото-
некоторыми принципиальными вопросами вычислительной математики,
будем рассматривать достаточно простые постановки задач, на
которых исследуемые методы иллюстрируются наиболее хорошо.
Заметим, что методы построения разностных аналогов крае-
краевых задач для обыкновенных дифференциальных уравнений
с гладкими коэффициентами изучены достаточно полно. Мы
остановимся на методах построения разностных схем для урав-
уравнений с разрывными коэффициентами. Задачи такого типа воз-
возникают во многих важных приложениях.
В настоящем параграфе будет рассмотрен метод построения
конечно-разностных уравнений диффузии на основе интеграль-
интегрального тождества, полученного автором.
Рассмотрим уравнение диффузии для одномерных областей.
Оно имеет вид
где р = р (х) э= Рй> 0 — коэффициент диффузии, q = q{x)^0 —
сечение поглощения частиц и f — f{x) — источники диффундирую-
диффундирующей субстанции. Будем считать, что р, q и / — кусочно-непре-
кусочно-непрерывные функции на отрезке [0, 1] с возможными точками раз-
разрыва первого рода.
Требуется найти решение уравнения A.1), обладающее диф-
дифференцируемым «потоком»
и удовлетворяющее граничным условиям
Ф@) = 0, <рA) = 0
A.2)
Рассмотрим на интервале изменения переменной х две системы
узловых точек: основную— {хк} и вспомогательную—'" '
Точки этих двух систем взаимно чередуются, т. е. у -* ¦
j. В дальнейшем предполагается, что
л—1/2 < Хп =
Хк + 1/2 —
Проинтегрируем уравнение A.1) по л-в пределах (jc*_i/2, jc* 4-1/2)-
В результате получим соотношение баланса
A.3)
к — \/2
где
±1/2
2 = J
Для нахождения Jk±i/2 поступим следующим образом. Про-
Проинтегрируем уравнение A.1) в пределах (^_1/2, х). Получим
соотношение
X
/)<*?• A-4)'
*А-1/2
Выражение A.4) разделим на р и проинтегрируем в пределах
{х/г-и хк). В результате получим
~
{qq>-f)dl. A.5)
xk-i
Хк—У2
Разрешая уравнение A.5) относительно Jk—\/2, приходим к сле-
следующему соотношению:
J к— 1/2 = ¦
С
1
dx
Т
'¦к
е —фА-1— ^
A-6)
¦*-1
Аналогичное выражение для 7*4-1/2 получаем, заменив в A.6)
индекс k на k-\-\. Таким образом, нам удалось потоки Jk±\/2
выразить через известные функции и решение задачи. Соотноше-
Соотношение A.6) точное. Подставив полученное выражение A.6) для
Jk~\/2 и соответствующее значение для Jk+i/2 в равенство A.3),
58 МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
приходим к соотношению
[ГЛ. 2
xk+\/2
Фк + 1 — 4>к , фА —
хк + 1 "*" xk
if i
^+ i
-/)</*=
А—1/2
xk+\/2
A.7)
Формулу A.7) будем называть основным тождеством для полу-
получения конечно-разностных уравнений.
Введем в рассмотрение оператор А, который на классе реше-
решений Ф уравнения A.1) определяется соотношениями
к+ 1/2
L_ f ^? P
\+l J P J
и вектор / с компонентами *)
**+1/2
**—1/2
He следует смешивать (f)k с / (д-д).
где
МЕТОД ИНТЕГРАЛЬНОГО ТОЖДЕСТВА
=Xk+\/2 — Xk-\/2, k=\, ..., ft— 1.
59
В дальнейшем ради простоты будем считать, что класс Ф
решений уравнения A.1) состоит из функций ф, имеющих опре-
определенную гладкость и удовлетворяющих граничным условиям
A.2). Объединяя соотношения A.7) для k=l, ..., я—1, полу-
получим систему
ЛФ = /. A.9)
Рассмотрим теперь различные аппроксимации уравнения
A.9). С этой целью введем в пространстве Fh сеточных функций
вида
заданных в точках xt, x2> ..., *„_,, норму
В качестве приближенной задачи рассмотрим задачу
A-10;
A.11)
где
h ,rh ,Ji ,Ji
I* dx 1' dx_
3 7" J 7
xk+\/2
xk—\,2
A.12)
"к + 1/2
fdx
для k=\, ..., ft—1 н, кроме того, ф2 = ф„ = 0. В соответствии
с определением аппроксимации, используя неравенство треуголь-
треугольника, получим *)
^) A.13)
*) Здесь и далее для любом непрерывной на [0, I] функции и обозначе-
обозначение (ц)Л принято для вектора размерности п—1 из F'Л с компонентами и (x/J.
60
где
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
1/2
[ГЛ. 2
**—1/2
___L/_!_Y* С
A** xk + l _ J P J
d? *л *ft + l/2
P
d* хь xb-\-\/2
Оценим величины \\h\Fh, \\nh\\Fh и ||вЛ||/гд. Предположим, что
q, /geQB)@, 1) и p <= Q13' @, 1), где Q(f> @, 1) - пространство
кусочно-непрерывных вместе с производными до s-ro порядка
функций на @, 1) с возможными разрывами первого рода в точ-
точках 0< г/i < у2 < ... <г/т < 1- В дальнейшем мы везде будем
предполагать, что множество точек {г/Л™=1 принадлежит множе-
множеству узлов сетки |хЛ|^~}. Это требование будет необходимо при
анализе погрешностей аппроксимации.
Из сделанных предположений следует, что решение ф задачи
A.1) будет непрерывной функцией, причем на каждом из отрез-
отрезков (ур у1+^р~^ решение будет непрерывно вместе с производ-
производными до четвертого порядка включительно, т. е. феC|4)@, 1).
Исследуем теперь поведение компонент векторов |Л, x\h и вл
в предположении /г<<1, где
h= max \хь+л—Хь\.
Используя обычное разложение по формуле Тейлора в окрестно-
окрестностях узлов сетки, нетрудно показать, что модули компонент
каждого из этих векторов мажорируются сверху соответствую-
соответствующими компонентами вектора соЛ, где
Nh, если хк является одной из точек yt (/=1, ..., т)\
М (\Ахк + \/2 — Axk_\/2\-\-h2) в остальных случаях;
М, N — некоторые положительные константы. Здесь введено обо-
обозначение Ахк+\/2 = хк+1 — хк. Предположим, что на интервале
@, 1) имеется точка разрыва коэффициентов x = xt (l^/sgn) и
41j
МЕТОД ИНТЕГРАЛЬНОГО ТОЖДЕСТВА 61
= Ал^-1/2 при кф1. Тогда на основании A.10) имеем
л —1
1°»* 11^ =
Предположим далее, что
2A — х„_i/2), 2xi/2}.
Учитывая соотношение
и используя при оценке членов в равенстве для квадрата нормы со
приведенные выше локальные оценки для (сол)А, получим оценку
отсюда
\ah\\F
Таким образом, для норм векторов погрешностей аппрокси-
аппроксимации |Л, T]ft и в* справедлива оценка
с некоторой положительной, не зависящей от h константой С,
если выполнено одно из условий: либо на каждом из отрез-
отрезков [0, «/J, [уи у2], -.., [ут, 1] сетка является равномерной;
либо сетка является квазиравномерной, т. е. при Л-»-0 нера-
неравенство
с некоторой положительной константой с нарушается лишь
ограниченное число раз. Перечень условий, при которых
выполняется оценка A.14), может быть продолжен. Однако мы
ограничимся этими двумя, наиболее часто встречающимися на
практике.
Заметим, что понижение гладкости любой из функций р, q
и / на порядок приводит к оценке
Рассмотренная нами разностная схема A.11) применяется на
практике весьма редко, так как явное интегрирование функций
Р. Ц и / может оказаться затруднительным. Поэтому вместо A.11),
62
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
1ГЛ 2
как правило, используется ее упрощенный вариант:
(лу%=--л!
1/2
~l/2
-\/2) + h-
1/2
**—1/2
k=\, 2 n-\.
Оказывается, что для этой простой схемы все сделанные выводы
о величине погрешности аппроксимации полностью сохраняются,
если, конечно, сохраняются соответствующие предположения
о гладкости данных задачи.
Перейдем к исследованию сходимости разностного решения
задачи A.11), A-12) к точному решению исходной задачи A.1)
при сделанных предположениях о гладкости функций р, q и /.
Для этого достаточно установить устойчивость схемы A.11) и
воспользоваться теоремой сходимости.
Приступая к доказательству устойчивости, оценим прежде
всего при помощи неравенства Коши — Буняковского скалярное
произведение (ф\ /л):
(ф\ /*)<|ф*К1/АК, A-15)
где скалярное произведение понимается в следующем смысле:
(х,
= 2]
п= 1
(X,
Исследуем подробнее левую часть неравенства A.15). Так как
по предположению q (х) >= 0 и р (х) ^ р0 > 0, то
(ср\ !н) = (ц>\ A\h) =
п— 1
1
*=1
. (...в,
*=1
Последнее неравенство вытекает из того факта, что вектор фЛ
не нулевой, ибо фА есть решение неоднородной задачи A.11)
с невырожденной матрицей Ah.
Учитывая, что фо = 0, можно записать
Ф* =
¦/-1/2
J2] ВАРИАЦИОННЫЕ МЕТОДЫ В МАТЕМАТИЧЕСКОЙ ФИЗИКЕ 63
откуда по неравенству Коши —Буняковского для сумм получим
1/ДХ/-1/2
7 = 1
Наконец,
л—1
"
1.17)
.._mj Л2
поскольку ^ Ах*< 1.
*=i
Из A.15) — A.17) получаем
11фл1М/л
так что
Последнее неравенство означает по определению устойчивость
разностного алгоритма. Следовательно, на основании теоремы
сходимости (в норме A.10)) получаем оценку
где К^г ЗС/р0 — некоторая положительная постоянная*).
2.2. Вариационные методы в математической
физике
Рассмотрим простейший функционал
J(u)= \n{x, и, u')dx, B.1)
где я = я(х, у, г) —заданная функция, непрерывная вместе со
своими производными до второго порядка включительно относи-
относительно переменных х, у, г в Е3 (Е3 — трехмерное евклидово про-
пространство, у и г —функции переменной х).
*) Нужно заметить, что для рассмотренного нами случая эта оценка груба.
Используя более тонкий анализ, можно показать, что || eft >\F «== Mh2.
64
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
[ГЛ i
Предположим, что функция и (х) непрерывна, имеет непре-
непрерывную производную и' (х) на (х0, хх) и на концах отрезка
[х0, Хх] принимает заданные значения
и(хо) = ио, м(д:1) = м1. B.2)
Определим е-окрестность функции и = и (х) как семейство
функций их(х), удовлетворяющих на всем отрезке [х0, Xi] нера-
неравенству
\ul(x)-u(x)\^e. B.3)
Найдем условие того, чтобы функционал / (и) в е-окрестности
имел экстремум. С этой целью рассмотрим функцию х\(х), удов-
удовлетворяющую условиям
n(JCo) = Tj(*i)=O. B.4)
Построим, далее, новую функцию
где а —малый параметр. Подставив эту функцию в функционал /,
получим
J (м„) = $ л (х, и (х) + ат) (х), и' (х) + arj' (х)) dx.
Разложим подынтегральную функцию в ряд Тейлора по пара-
параметру а. Ограничившись величинами первого порядка малости,
получим
J(ua) = J(u)+a6J(u). B.5)
Величину
6/(м) =
B.6)
будем называть вариацией первого порядка функционала /.
Формула B.5) описывает связь между вариацией функцио-
функционала /, варьируемой величиной а и направлением варьирова-
варьирования т) (х).
Обратимся теперь к выражению для 8J (и), определяемому
формулой B.6). После интегрирования по частям получим
6/(и) =
= О
B.7)
(здесь мы воспользовались условиями B.4)).
В силу произвольности функции т) (х) приходим к выводу,
что кривая и (х), доставляющая экстремум интегралу B.1), должна
2.2]
ВАРИАЦИОННЫЕ МЕТОДЫ В МАТЕМАТИЧЕСКОЙ ФИЗИКЕ
65
удовлетворять дифференциальному уравнению
B.8)
Уравнение B.8) обычно называют уравнением Эйлера.
Мы рассмотрели простейший случай одной функции и и одного
независимого переменного х. Аналогичным образом могут быть
рассмотрены более общие случаи. Пусть, например, задан функ-
функционал
/ = ^л(х, у, и, их, uy)dxdy, B.9)
D
где функция л обладает необходимой гладкостью.
Поставим задачу: найти функцию и (х, у), непрерывную вместе
со сеоими частными производными до второго порядка включи-
включительно, имеющую заданное значение на границе области и достав-
доставляющую экстремум функционалу /. Тогда, аналогично преды-
предыдущему, приходим к уравнению Эйлера следующего вида:
»¦-&««,-?% = °- B-10)
Распространение результатов на случай п переменных очевидно.
Итак, мы приходим к возможности одни и те же задачи мате-
математической физики толковать либо с позиций дифференциальных
уравнений (уравнений Эйлера), либо с позиций вариационного
функционала, достигающего на некоторой функции своего экстре-
экстремума. В этом случае экстремальная функция будет решением
уравнения Эйлера.
В качестве примера рассмотрим задачу
_d2u., _ ,
ИО)=1A)'=о, BЛ1)
где k и / — достаточно гладкие функции (функция k неотрица-
неотрицательна).
Рассмотрим вариационный функционал
B.12)
Найдем уравнение Эйлера для функционала B.12) Положим
Тогда
из соотношения
« — ^ я„' = 0
B.13)
3 Г. И. Марчук
66 МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
следует уравнение
К уравнению B.14) следует присоединить еще условие
н@) = мA) = 0.
1ГЛ. 2
B.14)
B.15)
()
Это значит, что если каждая функция из области определения
функционала / будет удовлетворять условию B.15), то экстремум
функционала B.12) на таких функциях будет доставлять решение
задачи B.11). Однако для строгого доказательства эквивалент-
эквивалентности этих двух постановок задач требуется осуществить неко-
некоторые дополнительные рассуждения.
С этой целью введем обозначение
Au== — ~ + ku
и предположим, что и (х) удовлетворяет определенным условиям
гладкости и
Пространство таких функций образует область определения Ф (Л)
оператора А. Тогда задачу B.11) можно формально записать
в виде
= f, н<=Ф(Л).
Рассмотрим функционал
J(u) = (Au, u)-2(f, u)=*
при условии, что иеФ(Л). Пусть
Тогда, как нетрудно убедиться, уравнением Эйлера будет задача
Au = f, ме=Ф(Л), B.16)
соответствующая вариационной задаче
J (и) = min / (у).
»6Ф (А)
B.17)
Найдем условия, при которых задачи B.16), B.17) эквивалентны.
Для этого рассмотрим более общее уравнение
Au=f,
2.2]
ВАРИАЦИОННЫЕ МЕТОДЫ В МАТЕМАТИЧЕСКОЙ ФИЗИКЕ
67
где Л —линейный, положительный, самосопряженный оператор
с областью определения Ф (Л), являющейся всюду плотным мно-
множеством в гильбертовом пространстве Н со скалярным произве-
произведением (,) и областью значений в пространстве Я, «еФ (Л)
и / — некоторый элемент из Н. Тогда имеет место следующее
утверждение: если решение задачи B.16) существует, то оно
доставляет минимум функционалу
J(u) = (Au, и)-2 (и, /)¦
Докажем это утверждение. Предположим, что элемент и0
является решением уравнения B.11), т. е.
Auo = f.
Пусть т) — произвольный ненулевой элемент из Ф(Л) и а —про-
—произвольное вещественное число. Определим элемент va соотноше-
соотношением
Тогда
Так как Л — самосопряженный оператор, то
, ц).
Отсюда получаем, что
/(»«) = /(Ио) + а1 04 Ч).
Из этого соотношения в силу положительности оператора Л сле-
следует неравенство
J(va)>J(u0) B.18)
для любого а=^=0. Это значит, что минимум функционала J (v)
достигается на решении уа = и0.
Имеет место и обратное утверждение. А именно, элемент и0
гильбертова пространства Н, доставляющий минимум функцио-
функционалу / и принадлежащий Ф (Л) является решением операторного
уравнения Au = f.
В самом деле, пусть н0 еФ (Л) — элемент, на котором дости-
достигается минимум функционала / (и), ц — произвольный элемент
из Ф(Л). Известно, что для любых и, »еФ(Л) элемент w = au-\-
+ Ру (а и р — константы) также будет элементом из Ф (Л).
Поэтому са = ы0 + ат) е Ф(Л). В силу предположения о том,
что на элементе ы0 функционал / достигает минимума, имеем
/(м0-far]) Ss/(н0). B.19)
Число а будем считать вещественным. Соотношение B.19) в пред-
предположении симметричности Л приводит к неравенству
2a(Auo-f, ц) +
68
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
[ГЛ. 2
Это возможно только в том случае, если
(Л«о-Л Ч) = О. B.20)
Таким образом, элемент Auo — f ортогонален ко всем элементам
множества Ф(Л). Поэтому имеет место равенство
Auo~f = O.
В дальнейшем мы приведем ряд сведений по вариационной
постановке задач математической физики и опишем основные
методы их решения.
Рассматриваемые вопросы будем иллюстрировать на примере
эллиптического дифференциального уравнения
и
—, ил/
x = (xlt x,)eD,
заданного в ограниченной области D с краевым условием вида
и = 0, x^dD B.22)
(первая краевая задача).
Будем предполагать, что оператор
i. j = i
действует в гильбертовом пространстве F~L2(D), его областью
определения является множество Ф(Ц), состоящее из функций
и еIj(Q) таких, что выполняется условие B.22) и Lou^L2(Q)
и он самосопряжен по Лагранжу и не вырождается, т. е. для
любого ненулевого вектора g = (?ь ?2) выполняется неравенство
2 2
inf 2] А1/(х)Ы,^1ъ?& ¦ B.24)
'?"(,/=1 i = l
с некоторой положительной константой ^. Далее, будем считать,
что функция q (x) неотрицательна в области D и что решение
задачи B.21), B.22) существует. Последнее предположение может
в дальнейшем вызвать у читателя вопросы о гладкости данных,
является ли решение классическим или обобщенным и т. д.
Будем, во-первых, предполагать, что решение задачи класси-
классическое и принадлежит пространству Соболева W\, которое состо-
состоит из функций пространства L2 (D), имеющих в D суммируе-
суммируемые с квадратом обобщенные производные и обращающихся в
пуль на границе 3D. Норма в пространстве W), определяется
2.21 ВАРИАЦИОННЫЕ МЕТОДЫ В МАТЕМАТИЧЕСКОЙ ФИЗИКЕ 69
соотношением (см. 1.1)
Будем считать, что входные данные задачи B.21), B.22),
например, гладкость коэффициентов и границы области, обеспе-
обеспечивают принадлежность решения данному пространству. Во-вто-
Во-вторых, если это потребуется при рассмотрении конкретных вопро-
вопросов, будем считать, что все нужные иам дополнительные требования
о большей гладкости решений или коэффициентов в правой части
уравнения также выполняются. Эти два условия позволяют иам
легче достичь основной цели главы —изучения принципов постро-
построения сеточных аналогов дифференциальных уравнений с частными
производными.
2.2.1. Метод Ритца
Сделаем дополнительное предположение, что В{ (i=\, 2)
тождественно равны нулю в D. Тогда нетрудно показать, что
для всех функций ф и ty из области определения Ф(Ь) опера-
оператора L выполняется интегральное тождество
dD =
B.26)
Поставим теперь в соответствие исходной задаче B.1), B.2)
вариационную задачу на нахождение элемента «еФ (L), на
котором квадратичный функционал
/(н)= \uLudD-2 \fudD
D D
достигает своего минимального значения.
Из B.26) видно, что область определения Ф (/) функционала /
содержит в себе область определения оператора L, т. е. Ф (L) s
Е Ф (У). Введем в Ф (/) новое скалярное произведение, опреде-
определив его соотношением
q (x) фф[ dD,
1
J A,j (х) -§- -g
и соответствующую норму
II ф !L = (ф, ф)Г.
Пополняя Ф(/) по введенной норме мы приходим к полному
нормированному пространству FL, которое называется эиергети-
70
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
ГГЛ. 2
ческим пространством порождаемым оператором L и каждая
функция которого в то же время принадлежит пространству F.
Поставим в соответствие задаче B.21), B.22) задачу на минимум
функционала / в пространстве FL. Тогда справедливо следующее
утверждение, которое было доказано выше.
Если функция ueO(L) есть решение задачи B.21), B.22),
то она минимизирует / в пространстве FL. С другой стороны, если
/ (и) = min / (у)
B.27)
и «еФ([), то ы является решением задачи B.21), B.22).
Так как мы везде предполагаем однозначную разрешимость
задачи B.21), B.22), то вполне естественно вместо этой задачи рас-
рассматривать вариационную задачу B.27) и исследовать методы
ее решения.
Наиболее известным методом решения задачи B.27) является
метод Ритца. Опишем его применительно к решению операторного
уравнения
Lu=f B.28)
в гильбертовом пространстве F со скалярным произведением (и, v)
при условии, что оператор L самосопряжен и положительно опре-
определен в F. Следуя сформулированному выше утверждению, делаем
вывод, что задача нахождения решения задачи B.28) равносильна
нахождению элемента гильбертова пространства FL, реализующего
минимум функционала
J(u) = (Lu, и)-2 (и, f). B.29)
Введем последовательность конечномерных подпространств
Fh ? Fi, которые определяются бесконечной последовательностью
параметров hu h2, ... с /гА^^0. Будем говорить, что последова-
последовательность {Fh} полна в FL, если для любых не/7 и е>0 суще-
существует h=h(u, 8)>>0 такое, что
inf |]и-ш||<е B.30)
для всех h<h. Иначе говоря, полнота последовательности под-
подпространств {Fh} означает, что всякий элемент и е F может быть
с любой степенью точности аппроксимирован элементами про-
пространств Fh.
В предложенной постановке метод Ритца формулируется сле-
следующим образом: требуется найти элемент uheFh, минимизи-
минимизирующий / (и) в пространстве Fh. Справедливо следующее утверж-
утверждение.
Если оператор L положительно определен в F,, и последова-
последовательность подпространств [Fh\ полна в Fl, to последовательность
I 4
J
2.2]
ВАРИАЦИОННЫЕ МЕТОДЫ В МАТЕМАТИЧЕСКОЙ ФИЗИКЕ
71
приближений \и"\ по Ритцу сходится в FL к решению и уравне-
уравнения B.28).
В случае, когда базис пространства/^ предполагается известным
и состоящим из функций {%}?Jtt, задача нахождения uh^Fh
эквивалентна нахождению коэффициентов {ai}tJ}l разложения
и*=2ч,' B.31)
из условия минимума функционала /. Как обычно, подставляя
, dJ (uh)
B.31) в функционал / и приравнивая нулю производные ^
(i—l,...,Nh), приходим к системе линейных алгебраических
уравнений
Aa = g, B.32)
где а и g суть Л^-мерные векторы, причем
g. = (f, аI?)
B.33)
a A = (atj) — матрица Грама системы векторов {ф,} в скалярном
произведении с оператором L, т. е.
Ф?), Ki, i^Nh. B.34)
Так как aif~a/it то матрица А симметрична и в силу неравенства
при ?^0 положительно определена.
В случае, если решение вариационной задачи является пре-
пределом последовательности элементов, каждый из которых не
удовлетворяет граничным условиям дифференциальной задачи, то
такие граничные условия называются естественными (например,
условия Неймана). Если каждый элемент этой последовательности
удовлетворяет граничным условиям, то они называются главными
(например, условие Дирихле). С помощью метода штрафов можно
задачу с главными граничными условиями приближенно свести
к вариационной задаче с естественными условиями. Например,
для задачи Дирихле в этом случае ставится задача на минимум
следующего функционала:
/е («е) = J (UtLue) dD-2\fuEdD+j J «? US,
D D dD
где е —достаточно малый параметр.
72
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
[ГЛ. 2
В случае задачи Дирихле для уравнения Пуассона можно
выбрать е = Л°, где а>0; тогда для / <= W\ имеется оценка
11«-«еЦ =
причем
H = min(y, k-l-jj-
Отсюда для заданного k можно так определить а, чтобы порядок \i,
определяющий скорость сходимости, был максимальным.
2.2.2. Метод Галёркина
Основным недостатком метода Ритца является то обстоятель-
обстоятельство, что он применим только для уравнений с самосопряженными
и положительно определенными операторами. От этого недостатка
свободен другой вариационный метод, называемый методом Галёр-
Галёркина (иногда его называют проекционным методом Бубнова —
Галёркина). Опишем этот метод применительно к решению опера-
операторного уравнения
Lu = f
в гильбертовом пространстве F (Ф (L) плотно в F), где L = L0-\- К,
Lo — симметричный и положительно определенный оператор и
Ф (Lo) ^Ф (К)- Как и в предыдущем пункте, введем последова-
последовательность конечномерных подпространств FhczFu (h — hi, h2, ...)
с базисами {ф/}^. Тогда приближение по Галёркину ищется
в виде
м" =
/ = i
B.36)
причем коэффициенты а,- выбираются так, чтобы невязка Luh—f
была ортогональна всем элементам из Fh, т. е.
s=l,..., Nh.
Следуя такому требованию, приходим к системе
где
= {Щ, ф*), gt = (/, фл), i,i=l,...,Nh
B.37)
B.38)
2.2]
ВАРИАЦИОННЫЕ МЕТОДЫ В МАТЕМАТИЧЕСКОЙ ФИЗИКЕ
73
После вычисления коэффициентов {а{\ приближенное решение легко
находим по формуле B.36). Нетрудно видеть, что для положи-
положительного и самосопряженного оператора L система B.37) совпадает
с системой B.32), полученной по методу Ритца.
Перейдем к изучению сходимости приближенных решений B.36).
Имеет место следующее утверждение.
Если решение и задачи Lu = f существует и единственно в F,
последовательность {Fh} полна в F (в смысле определения
пункта 2.2.1) и оператор L^'K вполне непрерывен в F, то после-
последовательные приближения uh, получаемые методом Галёркина,
сходятся в F к точному решению и.
Можно показать, что для модельной задачи B.21), B.22)
требования утверждения выполняются, если в качестве F выбрать
пространство W\. Заметим, что для метода Галёркина функции
{Bi(x))Ui уже не предполагаются тождественно равными нулю.
Рассмотрим теперь одну из модификаций метода Галёркина,
в которой Lo, вообще говоря, не является симметричным и
положительно определенным. Пусть существует ограниченный
оператор Ц1, определенный на всем F. Тогда рассматриваемое
уравнение эквивалентно следующему:
u + L?Ku = f', Г = № B-39)
Обозначим через Fi гильбертово пространство со скалярным
произведением (и, v)l — (Lou, Lov) и нормой ||m||1 = ||Lomj|. Метод
Галёркинадля уравнения B.39) можно сформулировать следующим
образом. Пусть FA — конечномерные подпространства из Fx с бази-
h
сами {tpflfl^f Приближенное решение ищется в виде uh = ^ адр(л ;
где неизвестные {a,-}f^, определяются из системы линейных урав-
уравнений
("*> <P?),+(V*«A. *?). = (/'• <#)., ' = !' •••• N,, B-40)
Ранее было отмечено, что если уравнение Lu = f имеет един-
единственное решение, последовательность {Fh) полна в F, и опера-
оператор ЦХК вполне непрерывен в Flt то последовательность иЛ
сходится к точному решению как в пространстве F, так и в Ft.
Замечание. Систему B.40) можно записать в эквивалент-
эквивалентной форме:
(V. ^„Ф?) + (К"Л. ЧФ?) = (Л ?,Ф?). » = 1 -'VA. B.41)
Формулы B.41) описывают также известный вариационный метод-
метод моментов.
Одним из сложных вопросов в рассматриваемом методе B.40)
(или B.41)) является вопрос о выборе базисных функций. Если
74 МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ [ГЛ. 2
априори задать функции {ф(л}^ с известными аппроксимирую-
аппроксимирующими свойствами, то часто трудно исследовать свойства системы
|ф*}/^1' где rf = 10ф(л. Это,в свою очередь затрудняет изучение
таких вопросов, как оценка скорости сходимости, учет особен-
особенностей решения и специфики задачи.
Рассмотрим один из алгоритмов построения базисных функций
в данном методе.
Пусть область значений оператора К и функция / принадлежат
некоторому подпространству F (К, f) с/\ Зададим в F( К, f) исход-
исходную систему координатных функций {'Ф^}^1 с финитными носи-
носителями порядка h так, чтобы последовательность ftf),^ (h = hlt
hit ...) была полна в F(K, f). Построим функции |ф*}г=ь где
Ф? = L—1^. Эти функции линейно независимы при каждом h.
Принимаем их за базисные при решении B.39) с помощью метода
Галёркина.
Отметим некоторые свойства рассмотренного алгоритма построе-
построения базисных функций.
По построению функции {ф,'г}г=?1 обладают особенностями реше-
решения и, свойственными оператору Lo, а за счет специального
выбора системы |i|>*}f=*j можно учитывать те или иные особенности
функции w = f — Ku, которые часто априори известны.
В некоторых случаях может оказаться, что w обладает луч-
лучшими дифференциальными свойствами по сравнению с самим
решением уравнения. Тогда можно попытаться с помощью малого
числа исходных базисных функций добиться эффективной аппрок-
аппроксимации w и надеяться на достаточно быструю сходимость ин к и.
Если решение уравнения B.39) зависит от переменных xt
(i—\, ..., п), a F(К, /) состоит из функций, зависящих лишь от
Х{, t=l, ..., т<Сп, то достаточно ввести координатные функции
{¦ф,Л},-^1> зависящие лишь отх( (i = l, ..., /и<«). и с их помощью
аппроксимировать w^F(K, /)• Само же решение и будет прибли-
приближаться посредством и" по всем переменным. Это обстоятельство
на практике приводит к значительному уменьшению количества
координатных функций, а, следовательно, порядка решаемой си-
системы B.40), что особенно важно при решении многомерных задач
математической физики.
Если переписать B.40) в эквивалентном виде:
2.2]
ВАРИАЦИОННЫЕ МЕТОДЫ В МАТЕМАТИЧЕСКОЙ ФИЗИКЕ
75
л Nh
b 1 1 = 1
?) + (/-
B-42)
то легко заметить, что в силу финитности ф? (/=1» •••> AM
в левой части B.42) возникает ленточная (либо разреженная)
матрица, что во многих случаях облегчает решение системы с по-
помощью итерационных методов. В силу фииитиости г|)л (/= 1, ..., N Л
упрощается также вычисление {ф,}/^, элементов матриц и зна-
значений (/, i|^).
В силу сказанного выше можно предположить, что метод
Галёркина при использовании специальных координатных функций
[ф*| может оказаться достаточно эффективным при решении неко-
некоторых краевых задач, в которых можно достаточно быстро строить
Lo1 (например, когда оператор Lo обратим в явном виде: диффе-
дифференциальный оператор в уравнении переноса, оператор Лапласа
в квадрате, круге и т. д.).
2.2.3. Метод наименьших квадратов
Метод наименьших квадратов получил широкое распростране-
распространение при решении краевых задач математической физики. Для
случая операторного уравнения
Lu = f B.43)
в гильбертовом пространстве F этот метод имеет слгдующую схему.
Пусть Fh — конечномерные подпространства F с базисами
Ф* t • • •. *V% . причем F4sO (L) — области определения L (заметим,
что можно рассматривать ие сам оператор L, а его расширение L
такое, чтобы Ф (L) было полным пространством).
Тогда приближенные решения B.36) строятся с помощью метода
наименьших квадратов, исходя из равенств
-±-\\Lu-f\\ = O, t = l,...,A/ft. B.44)
При этом возникает система линейных уравнений B.37) с матри-
матрицей А = (atJ) и вектором g = (gt), где
ay = (Z.q>*, Z.(p*)f ?, = (/, 1Ф?), Ki, /<#й. B.45)
Если оператор L — неособенный в Ф (L), то матрица А симметрична
и положительно определена.
Сформулируем достаточные условия сходимости метода наи-
наименьших квадратов.
Последовательные приближения иЛ метода наименьших квад-
квадратов сходятся в F к точному решению и уравнения B.43), если
оно однозначно разрешимо, последовательность LFh полна в Ф (L),
а оператор L~l существует и ограничен.
76
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
ГГЛ 2
Поясним смысл второго требования теоремы. Полнота про-
пространств LFh, как и в 2.2.1, означает*), что для любых ugO(L)
и е>0 найдется h—h(u, e)>0 такое, что
inf || Z.M-/-.»!<? B.46)
для всех Fh с h<ih. Далее, очевидно, что при единственности
решения и задачи B.43) требования теоремы будут обеспечивать как
^«" ttso Lu>
так и
Более сложным, чем для двух предыдущих методов, является
вопрос об удовлетворении предельного решения граничным усло-
условиям, когда метод наименьших квадратов применяется для реше-
решения краевых задач математической физики. Опишем кратко два
возможных подхода к решению этого вопроса.
Первый, наиболее очевидный путь — требовать от функций
пространств У7,, точного удовлетворения граничным условиям. Этот
подход уже в случае смешанной краевой задачи для эллиптиче-
эллиптического уравнения B.21) оказывается весьма сложным в практиче-
практической реализации.
Второй возможный путь — использовать «весовой метод» для
постановки дополнительной вариационной задачи. Идея подхода
заключается в следующем. Дифференциальному уравнению с част-
частными производными порядка 2т
Lu = f в D, B.47)
с краевыми условиями
LiU — fi на dD, i=l,
ставится в соответствие функционал
m
c,(h)jLiU-f,
B.48)
B.49)
где {с. (Л)}"'=, — положительные функции параметра h, характери-
характеризующего последовательность подпространств Fh. Для разностного
аналога самосопряженной задачи B.47), B.48) на гладких реше-
решениях имеем
*) Заметим, что выражение LF^ имеет смысл, так как по предположению
2.3]
ВАРИАЦИОННО-РАЗНОСТНЫЕ СХЕМЫ
77
где щ — порядок старшей производной в операторе L{. Прибли-
Приближения uh методом наименьших квадратов ищутся теперь как реше-
решения вариационных задач
inf Jh{u) = Jh(uh).
usFh
Функции uh сходятся к и при /z->-0, причем асимптотически
удовлетворяется как само уравнение B.47), так и краевые усло-
условия B.48). При этом функции подпространств Fh не обязательно
удовлетворяют краевым условиям.
2.3. Разностные схемы для уравнений
с разрывными коэффициентами, основанные
на вариационных принципах
В последние годы начался широкий поиск новых методов пост-
построения разностных уравнений на основе вариационных принципов.
В настоящее время это направление обогатилось рядом интерес-
интересных идей, центральной из которых, является использование
в качестве пробных функций, функций с конечным носителем, т. е.
таких, которые только в сравнительно небольшой (порядка шага
сетки) окрестности отличны от нуля, а вне ее тождественно равны
нулю. Оказалось, что решение искомой задачи зачастую удобно
искать в виде линейной комбинации функций с конечным носи-
носителем при неизвестных коэффициентах, которые выбираются на
основе минимума того или иного функционала, связанного с вари-
вариационным принципом. Эта методология была применена к различным
классам задач и привела к весьма эффективному алгоритму пост-
построения разностных систем, который мы постараемся проиллюст-
проиллюстрировать на задаче, связанной с одномерной диффузией субстанции.
2.3.1. Построение простейших разностных уравнений
диффузии с помощью метода Ритца
Как было отмечено, метод Ритца может быть использован только
для задач с самосопряженными операторами. Для нахождения
приближенного решения самосопряженной краевой задачи A.1),
A.2) введем в рассмотрение вариационный функционал
C.1)
Учитывая, что минимум функционала C.1), как было указано
в 2.2, достигается на решении задачи A.1), A.2) из 2.1, будем
строить приближенное решение на сетке Du так, чтобы свободные
78
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
[ГЛ. 2
параметры этого решения выбирались из условия минимума функ-
функционала C.1). С этой целью приближенное решение задачи будем
искать в виде кусочно-линейной функции, принадлежащей Wi:
*+ь
где kxk, 1/2 = *ft+i — Xk, а фА — приближенные значения решения
задачи ф (х) в узлах сетки. Эти значения, конечно, заранее неиз-
неизвестны, и задача состоит именно в их отыскании на основе мини-
минимизации функционала У(ф). На интервале xks^xs^xk+1 введем
в рассмотрение две линейные функции щ (х) и щ^х):
Лх) =
C.3)
-д- , Ш2 (X) =- -д-
а**+1/2 a*ft+l/2
Тогда интерполяционную формулу C.2) можно переписать в виде
ф" (X) = Щ (X) ф*+1 + С02 (X) ф*. /Q "ч
C.4)
Функции coi (л:) и со2(л:), вообще говоря, зависят от интервала,
на котором они определены. Поэтому их следовало бы обозначить,
например, а>{ k,l/2{x) и со2 k,l/2(x). В дальнейшем принадлеж-
принадлежность этих функций соответствующим интервалам будет предельно
ясной на любом этапе преобразований, поэтому ради простоты
индексы при функциях coi (x) и со2(*) будем опускать. Заметим,
что в соответствии с априорными сведениями о решении задачи
A.1), A.2) мы строим приближенное решение <ph(x) так, чтобы
оно было непрерывным на интервале 0 <; х <; 1. Функции р (х) :э=
S^poX), <7(*J=0 и f (х) предполагаются кусочно-непрерывными
с разрывами первого рода. Будем предполагать, что эти функции
имеют разрывы в точках xk. Ради удобства минимизирующий
функционал J (фЛ) представим в виде
п — 1
-2Мdx-
Подставляя выражение C.4) в формулу C.5) и учитывая соотно-
соотношения
dx
получим
dx
Ax
¦ft+1/2
Xk < X < ХЫ
— 2/ (
-f
C.6)
2.31
ВАРИАЦИОННО-РАЗНОСТНЫЕ СХЕМЫ
79
Значения фА (k= I, 2,..., л —1) выберем таким образом, чтобы
оии минимизировали функционал J (фл). Условием минимума
будут следующие соотношения:
dJ
= 0,
=1,..., п-\.
C.7)
Дифференцируя C.6) по фА и приравнивая результат нулю,
получим
Axk_
•ft-1/2
(Ф* -
Kk+\/2
-1 = /Г*) C.8)
где
Дд:
,/2 J
= ^щйх+ ]
Присоединим к разностному уравнению C.8) граничные условия
Уравнение C.8) вместе с граничными условиями можно запи-
записать в виде трехточечной разностной задачи:
C.9)
где
Pft-1 /2
Ддсй-1/2
Дл:
•fe+1/2
— qk-U/2,
C.10)
Рассмотрим частный случай, когда функции р и q постоянны
на каждом интервале xk < х < xkJrl. Тогда нетрудно получить, что
Pft- 1/2
^ft-1/2
bk =
—1/2
ft+1/2
1-1/2
C.11)
80
Здесь
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
[ГЛ 2
Предположим, что решение задачи C.9) найдено. Тогда непре-
непрерывное решение <pft (x) можно восстановить с помощью формул C.4).
Важным свойством вариационного подхода к решению задачи
является то, что мы априори строим приближенное решение
с помощью интерполяционного полинома и находим решение в виде
непрерывной кусочно-линейной функции, обеспечивающей по спо-
способу своего построения наилучшую аппроксимацию точного реше-
решения в классе непрерывных кусочно-линейных функций.
Разумеется, вариационный метод построения уравнений можно
использовать для получения приближенного решения любого
порядка точности. С этой целью необходимо вместо простейших
интерполяционных формул C.4) выбрать более точные. Здесь
можно идти и по пути формального использования интерполя-
интерполяционных полиномов Лагранжа.
Переходим теперь к анализу аппроксимации полученных раз-
разностных уравнений. Для этого уравнение C.8) удобно привести
к виду
1
А*.
Фа- п Ф*-Ф*-1
Рк- 1/2 "
\xt
— 1/2
где
Здесь
(,4.12)
C.13)
I— 1
Поскольку на интервалах xk < х < xk+1 решение <р (х) и все коэф-
коэффициенты р, q и / — непрерывные функции, обладающие высокой
степенью гладкости, то с помощью формулы Тейлора можно пока-
показать, что
где величина а определяется свойствами сетки (см. 2.1). Даль-
Дальнейший анализ совпадает с изложенным в 2.1, и поэтому мы его
опускаем.
I
2.31
ВАРИАЦИОННО РАЗНОСТНЫЕ СХЕМЫ
2.3.2. Построение простейших разностных схем
на основе метода Галёркина (конечных элементов)
Рассмотрим задачу A.1), A.2) собластью определения
Покроем эту область системой интервалов xk-\^x^
каждого k 5г 1 введем функцию из W\:
щ (х) =
о,
O)i (X),
0J (*).
О,
0 =
i X =SJ X\' = 1.
1.
и для
C.14)
N — 1)
Мы видим (рис. 1), что функции cofc (х) (k = \
в качестве области определения имеют весь отрезок
Они непрерывны и отличны от нуля только на интервале xk t <
<.х<.хш, где состоят из двух линейных участков и достигают
своего максимума, равного единице, ш
в точке x = xk. Такие функции обла- *
дают свойством, которое можно счи-
считать аналогом свойства полноты, а
именно: эта система полна в том смыс-
смысле, что любую непрерывную кусочно-
линейную функцию (p(x)i=Wz с воз-
возможными изломами в узловых точках
й
{х,,\ можно представить в виде линей-
линейной комбинации таких функций, т. е. хо0хыхн хы хя~' х
Рис. 1.
где в качестве коэффициентов Фурье ср„ стоят значения самой
функции (р(*) в точках хк.
Заметим, что функции % (х) обладают также некоторой орто-
ортогональностью, правда, в не совсем обычном виде. Именно, если
скалярное произведение определить формулой
то для функций Mi. (x) имеем
0,
. (x) a>n (x) dx =
6 Д*>-1/2.
[
1
т Да;* + ,/2,
0,
n=k-\,
), n = k, C.16)
82
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
[ГЛ 2
Из C.16) следует, что функции a>k(x) ортогональны всем а>п(х),
за исключением трех: to^-i, соА и соА+1. В этом состоит специфика
выбранного базиса функций.
После того, как функции a>k(x) определены, воспользуемся
ими для получения конечно-разностных уравнений. С этой целью
снова рассмотрим уравнение диффузии
d dm , с г.
-*rP-? + n = f B D' (з.17)
Ф@) = 0 ФA) = 0.
В соответствии с методом Галёркина умножим уравнение C.17)
скалярно на со*. Получим
1
Преобразуем C.18) к виду
C.19)
Здесь при интегрировании по частям мы воспользовались тем,
что coft @) = o>ft A) = 0. Так как функция а>к (х) равна нулю вне
интервала (хк-и хк^), то соотношение C.19) можно переписать
в следующем виде:
C.20)
Учитывая вид функции со* (х), нетрудно получить формулы
я
J dx
л*+1
C.21)
*¦* + 1/2
GФС0Д, dx = <7^'L 1
dx =
Обозначения здесь приняты в соответствии с C.8).
C.22)
2.41
ПРИНЦИПЫ КОНСТРУИРОВАНИЯ ПОДПРОСТРАНСТВ
83
Подставляя C.21), C.22) в C.20), получим разностное урав-
уравнение
*+1/2 (ф*+1 - ф
(ф ¦ - ф* - О -
Ax
k + 1/2
дкг-
где
fa>2dx=
i=Fk, C.23)
C.24)
Для полной определенности к уравнению C.23) следует добавить
граничные условия
ф0 = 0,
C.25)
Теперь задача поставлена полностью.
Сравнение разностных уравнений C.23) и C.8) показывает,
что они тождественны. Это значит, что методы Ритца и Галёр-
Галёркина на основе конечных функций в случае самосопряженных
уравнений приводят к одинаковым разностным аналогам задач.
Однако следует подчеркнуть, что метод Галёркина может быть
применен для решения как самосопряженных, так и несамосо-
несамосопряженных задач, т. е. он имеет более широкую область приме-
применения.
В том случае, когда коэффициенты уравнения — гладкие функ-
функции, можно на основе вариационных методов строить разностные
схемы более высокого порядка аппроксимации.
2.4. Некоторые принципы конструирования
подпространств для решения одномерных задач
вариационными методами
Настоящий параграф в основном предназначается для чита-
читателей, желающих углубить свои представления о дополнитель-
дополнительных возможностях вариационного подхода к решению задач
математической физики. Поэтому для изложения материала пара-
параграфа привлечены дополнительные сведения из функционального
анализа.
Вначале рассматривается более общий подход к построению
сеточных уравнений на основе вариационных методов, позволяю-
позволяющий получать разностные аппроксимации высокого порядка точ-
точности. Затем дается способ построения базиса, сформированного
из тригонометрических функций, для вариационного решения
задач с разрывными кусочно-гладкими параметрами.
В конце раздела рассматривается вариационный метод пост-
построения сеточных уравнений на основе интегрального тождества.
ГГЛ 2
84 МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
2.4.1. Общий подход к построению вариационно-
разностных схем высокого порядка точности
При решении вариационными методами одномерного уравнения
диффузии
с граничными условиями
0<*<1, D.1)
«(U) = «A) = O D.2)
весьма эффективным оказывается использование подпространств
кусочно-полиномиальных функций высокого порядка. Здесь мы
рассмотрим один из способов построения таких подпространств.
Пусть на отрезке вещественной оси [а, Ь] задана равномер-
равномерная сетка с шагом h и узлами a = xo<ix1 = a-}-h<i ... <LxN =
Ь—с
= a-\-Nh<.xN+i = b, где h =
N " и N — целое положительное
число. Через Н% (а, Ь) обозначим множество функций со (а), кото-
которые на каждом из отрезков [xk, xkll]cz[a, b] являются полино-
полиномами степени 2т +1 и для которых при любых O^i^tn и
O^ksS^N + 1 выполняются условия
со<'> (хк) = dki,,
где dk ,- — заданные числа, a со('> (х) обозначает г'-е произзочные
а(х) "(со(о) (*) = «(*))•
Предположим также, что со (й) = со (Ь) = 0, т. е. d0 0 = rfyv+i, о = 0.
Отсюда следует, что функции со (х) е Н'Ц (а, Ь) являются кусочно-
полиномиальными, принадлежащими Ст (а, Ь), т. е. т раз непре-
непрерывно дифференцируемыми функциями на отрезке [а, Ь], а раз-
размерность пространства Н'Ц(а,Ь) равна m(N-\-2)-\-N. Базисом
пространства Я™ (а, Ь) будет система т. (N + 2) -{-N функций {ык 1},
определяемых условиями
«*, о (х,) = б*,-, со100 (х,) = 0, D.3)
Л=1, .... Л^; / = 0,
т,
= 0,
= 0,
D.4)
т;
=1, 2, ..., т,
где б*у — символ Кроиекера.
Нетрудно витеть, что общее количество функций, определяе-
определяемых условиями D.3), равно N, а условиями DA) — m(N-\-2).
2.4]
ПРИНЦИПЫ КОНСТРУИРОВАНИЯ ПОДПРОСТРАНСТВ
85
Кроме того, так как любая функция со (х) е Н"^ (а, Ь) опреде-
определяется величинами {dki 0}*Li и dkA (k = 0, 1, ... , N-{-1; I =-
= 1, ... , rn), то должно иметь место разложение
©(*)=
*. о
D-5)
= i
* = 0 /=¦¦=!
Остановимся подробнее на вопросе, что представляют собой
функции {coft>,}. Ограничимся случаем т=\. Тогда размерность
пространства HlN (a, b) равна 2N + 2 и функции его базиса опре-
определяются из условий
*. ж
= 0,
у) = 6*/.
D.6)
*• / = °- !' ¦¦¦• ^+L D-7)
Из определения функций акз, видно, что они отличны от
нуля только на интервалах (xk—h, xk-\-h). Тогда для нахожде-
нахождения функции со^о(л;) на интервале (xk — h, xk-\-h) приходим
к двум задачам.
Первая задача формулируется на отрезке [хк — h, хк] и состоит
в восстановлении полинома
3
= 2 С)'{хк~ху
D.8)
при условии, что cofr. о (Хь — Л) = 0, о)*!,'о (хк — /г) = 0, со^. 0 (х,:) = 1,
w'ftVo (**) = 0- Отсюда получаем систему четырех уравнений для
определения четырех неизвестных [C"f~))_0:
D.9)
cj- - = о,
Решением системы D.9) являются
Аналогично для отрезка [хЛ,
получаем
w*,o(Jt)= 2 С/'Ч**-*O,
/ = о
D.10)
D.11)
86
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
[ГЛ 2
где с учетом условий coft>0 (xk + h) = О, со* о (**)=!. соГо
= 0, (oiiVo (•«*) = 0 коэффициенты {Q1+}?_0 принимают вид
о, +
3 =
h2
2
D.12)
Окончательно имеем
Q' (xk — xy, если
/=о
- Л, *ft],
? С?1 +(**-*)'. если *€=[*»,*» +А],
0 для остальных л; е [a, ft].
DЛЗ)
График функции со2, <,(*), когда а = 0, 6 = 2 и N = 3, изображен
на рис. 2.
0 0,5 1,0 1,5 X
Рис. 2.
0,125
О
-0,125
0,5 \ 1,0
Рис. 3.
Выведем формулу для функции со*, i (я) из D.7). Проделывая
выкладки, аналогичные приведенным выше, можно показать, что
функция со*, j (х) для любого 0 ==s k ==s W + 1 определяется формулой
coft, 1 (х) =
Су~(хк-хУ, если
= о
-A, дс*]П[а. ft].
2,Су + (хк-хУ, если
0 в противном случае.
a, 6J,
D'И)
2.4]
Здесь
ПРИНЦИПЫ КОНСТРУИРОВАНИЯ ПОДПРОСТРАНСТВ
С1, - Г)
0 —¦"!
87
Ч. + _ Г)
0 —и,
D.15)
h '
-Ч, + 1 /-Ч ¦ + '
1 — '« °3 — hi '
График функции со2, i (х) для случая а = 0, 6 = 2 и JV = 3 изо-
изображен на рис. 3.
Формулы для функций {cos, о} оказываются совсем простыми,
когда /л = 0. Тогда Н%(а, Ь) будет состоять из кусочно-линей-
кусочно-линейных функций (coJ^Lp удовлетворяющих условиям
со* (х,) = 8к/, k, / = 1, 2,
D.16)
Заметим, что функции {coft (д;)} рассмотрены нами в предыдущем
параграфе (см. рис. 1).
Опишем еще один способ построения пространства Fh. Для
этого, как и ранее, возьмем отрезок [a, b] вещественной оси и
построим на нем сетку с узлами a = xo<lx1<i ... <.xN<xN+1 = b,
где xk = a + kh (k = 0, 1, ..., N + l) и h = (b — a)/(N+ 1). Обо-
Обозначим через М^5 (a, 6) множество функций g(x), удовлетворяю-
удовлетворяющих следующим требованиям: во-первых, на каждом из отрезков
\xk, хк+1] функция g(x) является многочленом степени т\ во-вто-
во-вторых, для любых Ose&sgW и 0==S/sgm выполняются равенства
, i) = dkt f,
где xki / = xk
/
т. е.
и dk%l — заданные
всегда doo = dNim =
числа; наконец, g(a) =
. Отсюда следует, что
функция g е М™ (а, Ь) является кусочно-полиномиальной функ-
функцией пространства W\, т.е. g(x) — непрерывная функция с воз-
возможными разрывами первых производных в точках {л:А}^=1 .
Рассмотрим, как можно явно построить функцию g(x) через
значения {dkj}.
Выберем произвольное значение O^k^N и построим функ-
функцию g(x) на отрезке \хк, хш] (обозначим ее gu{x))- Как изве-
известно из теории аппроксимации, многочлен степени т, проходя-
проходящий через т + 1 точку dk0 dkim, существует и единствен.
Этим многочленом будет интерполяционный полином Лагранжа,
«» МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
который вычисляется по формуле
1 = 0 / = 0
Для случая т = 1 получаем обычную линейную функцию
[ГЛ. 2
D.17)
D.18)
Отсюда, в частности, следует, что пространство Mn (a, b)
совпадает с пространством H"N (a, b) и, следовательно, построен-
построенный для Н% базис является базисом и для пространства MlN.
Исследовать вопрос о базисе М™ (а, Ь) при больших значениях т
мы не будем.
Таким образом, для пространства F = W\{a, b) мы построили
два вида подпространств Fh (определяемых параметром h),
последовательность которых полна в Wli(a, b).
2.4.2. Построение базиса на основе тригонометрических
функций и его использование в вариационных методах
Для уяснения основных принципов метода рассмотрим кон-
конкретную задачу A.1), A.2), которая сводится к минимизации
функционала C.1).
Предположим, что параметры задачи р, q, f могут иметь
разрывы первого рода в точках {</(}f=1, а на каждом из проме-
промежутков iji<ix <</i+i имеют достаточно высокую гладкость. Пусть
гладкость параметров задачи обеспечивает гладкость решения ф
до v-ro порядка на упомянутых интервалах или, что то же,
fpe=Q(v)r0> 1] (СМ. 2.1).
При достаточно большом v для построения базисной системы
Jcoftl™=1 естественно, например, использовать хорошие аппрокси-
мационные качества тригонометрических полиномов, периоды
которых больше соответствующих промежутков гладкости. Изло-
Изложим более подробно это утверждение о тригонометрических
полиномах.
Если на промежутке 0 sc x sg 1 задана функция f(*)eC(v) [0, 1],
то ее всегда можно (неоднозначно) доопределить в остальных
точках действительной оси так, что расширенная функция f (х)
будет обладать следующими важными свойствами:
См[х0,
-oo<x<co,
для любого х0 е (—оо, оо),
2.4]
ПРИНЦИПЫ КОНСТРУИРОВАНИЯ ПОДПРОСТРАНСТВ
89
где 71> 1. Скорость сходимости ряда Фурье функции f (x) (как
в пространстве С[0, 1], так и в пространстве L2[0, 1]) допускает
оценку
const
D.19)
где
xN=
sin
Заметим одновременно, что, не ухудшая оценки D.19), можно
так изменить коэффициенты ак и Ьк, что дополнительно будем
иметь TA,@) = f@), xN{\) = f{\).
Возвращаясь к задаче A.1), A.2) и учитывая только что
сформулированное утверждение, будем аппроксимировать решение
задачи на каждом из промежутков гладкости yt «=: х ^ yi+1 три-
тригонометрическим полиномом
= 0, 1 т,
где, например,
Каждую из функций ы1к(х) можно считать определенной на
всем промежутке 0 ^ х ^ 1:
D.20), если х е= [г/,-, j/,+1],
0 вне этого промежутка.
D.21)
Систему функций D.21) (? = 0, ..., т; 6 = 0, 1, ...) можно при-
принять за последовательность базисных элементов (разрывных при
четном k) и искать приближенное решение задачи C.1) в форме
2/V,
2
1 = 1 к = 0
D.22)
В силу разрывности базисных функций D.21) их линейные ком-
комбинации D.22) автоматически не обеспечивают непрерывности ф
и pd(f/dx в точках {y\'"=i, а кстати, и выполнения краевых
90
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
ГГЛ. 2
условий *). Нетрудно установить, далее, что условия
Ф@) = ФA) = 0,
т
являются главными, а
dtp
~dx
dx
t = 1, 2, ... , m
— естественными.
Вариационный метод, основанный на минимизации функцио-
функционала C.1), требует выполнения главных условий и не требует выпол-
выполнения естественных; последние будут выполнены автоматически
на элементе ф° е Ф, решающем вариационную задачу. Таким
образом, от функции D.22) следует дополнительно потребовать
выполнения главных условий, т. е.
<Pn0 @) = Фл,т A) = 0, cpNii (Xi) = Фл,, (*,), D.23)
t = l, ... , т.
Нетрудно показать, что отклонение приближенного решения
Ф (*) вариационной задачи от точного ф° (л:) оценивается следую-
следующей формулой:
||ф —ф° it, [о, i]s? const
A/ = minA/,. D.24)
Опишем теперь кратко алгоритм численной реализации.
Минимизация функционала C.1) на функциях вида D.22) при
дополнительных требованиях D.23) с использованием метода
неопределенных множителей Лагранжа приводит к следующей
системе уравнений:
2N.
( + 1
= 0, 1,..., m\
s 2/V.
0, 1 2Nh
D.25)
где
t=s-l,
-a>l(xs), t=s,
0, i = s, s-1.
D-26)
*) Краевым условиям легко удовлетворить, если на промежутках [0, х,]
и \хт, 1] функции ш" (л:) и ш™ (х) определить не формулами D.20), а сле-
следующим образом:
2.4]
ПРИНЦИПЫ КОНСТРУИРОВАНИЯ ПОДПРОСТРАНСТВ
91
Система D.25) имеет блочную структуру:
А ВТ
В 0
X
Л
D.27)
где X —вектор, объединяющий множество всех а?; Л —вектор,
компоненты которого суть множители Лагранжа; Г —символ
транспонирования.
Из D.27) имеем
0, D.28)
откуда после исключения X формально получаем
(BA^B^A^BA^F. D.29)
Из поло^жительной определенности матрицы А следует существо-
существование А-1 и положительная определенность ВА~1ВТ. Действи-
Действительно,
{BA'lBTW, W) =
= (AV, V)>0,
где V = A~1BTW ф0 при WФ0 (обращение W в нуль при
№ = 0 элементарно следует из D.26) и D.20)).л
Из блочно-диагональной структуры матрицы А легко находим
BAlBT =
В{АТ1В1,
В A SF= У]
1=0
D.30)
где А1 и Bi — матрицы с элементами (Au)lk, со'), ($lks) соответ-
соответственно, a Ft — векторы с компонентами (/, соо), -•¦ , (/, <»2/v.).
Как следует из D.30), обращение матрицы А сводится
к обращению каждого из блоков этой матрицы, т. е., как пра-
правило, к обращению матриц невысокого порядка. Если, далее,
число m невелико, то порядок системы D.29) мал и эта система
с положительно определенной симметричной матрицей решается
без труда.
Наконец, из первого уравнения D.28) находим
D.31)
где
t = 0,
т.
В заключение следует отметить, что рассмотренный подход
к построению базиса является примером больших возможностей,
имеющихся в реализации вариационно-разностных методов реше-
решения задач математической физики.
92
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
2.4.3. Вариационная форма интегрального тождества
ГГЛ 2
В 2.1 был рассмотрен метод построения разностных уравне-
уравнений на основе интегрального тождества. Недавно было показано,
что метод интегрального тождества можно рассматривать как
один из вариационных методов. В самом деле, рассмотрим диф-
дифференциальное уравнение
dx
dx
« = / (*).
(а, Ь),
с краевыми условиями
и (а) = и (Ь) = 0.
Предполагается, что
р(дг)>0, q(x)^0, p(x), q(x)^Lxi
D.32)
D.33)
, b), f (х) е=L.2(a, b).
Метод интегрального тождества применительно к решению за-
задачи D.32), D.33) приводит к соотношению
J Р(х)
dx
P(x)
-k-1
1
- D.34)
=b — некоторый набор точек. Используя теперь ту или иную
аппроксимацию входящих в D.34) интегралов, получаем соответ-
соответствующую разностную схему.
Наша ближайшая цель —показать, что D.34) можно записать
в некоторой форме, которую будем называть «вариационной
формой интегрального тождества» и которая будет близка
к вариационным уравнениям метода Галёркина, но по сравнению
с последними она дает возможность использовать для построения
и
И
I
2.41
ПРИНЦИПЫ КОНСТРУИРОВАНИЯ ПОДПРОСТРАНСТВ
93
приближенных решений разрывные базисные функции и позво-
позволяет доказать сходимость приближенных решений при достаточно
общих предположениях о гладкости исходных данных.
Выполним ряд простых преобразований в D.34). Пусть
их'
к±л
С dx'
J plsy
Тогда
С dx
3 р~м
4+U2
Аналогичным образом получаем, что
** * **—1/2
(' _dx_ "k-i
J P (x)
**—1/2
"¦k-1
где
J pW
94
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
[ГЛ. 2
С учетом этих преобразований тождество D.34) примет вид
и{хк)--и (
,
¦ +
dx
j.
r*+1
*+1
J A-
x*-i
Пусть
~$рШ S Ml)'
-b **>•
0,
4
. D-35)
тогда тождество D.34) запишется в виде
"<**>" <**-'> + "<*>-"<**=!>¦ + (qu, Qk) = <f, Qk), D.36)
f'
=1 iV— 1.
где
Замечая, что
(ф. Ф) =
rfu dQk \_ и (xk) — и
d' d )~
) — u(xk_1)
dx' dx
dx С dx
перепишем соотношение D.36) следующим образом:
(?«.&) = (/. <W. k=l,...,N-l. D.37)
Если ввести теперь в рассмотрение некоторый интерполяР1т «, (х)
функции и (х), для которого «!(xt) = и (xi) (t = 0, ..., N) и имеет
2.4]
ПРИНЦИПЫ КОНСТРУИРОВАНИЯ ПОДПРОСТРАНСТВ
95
смысл производная dui/dx, то в силу равенства
rfu dQk\ = ( du^ dQk\
p dx' dx J \p dx ' dx)
выражение D.37) эквивалентно следующему:
*Й_, ^) + (?a, Q*) = (f. Qk), k=\ N-\. D.38)
QX uX J
Итак, показано, что тождество D.34) эквивалентно каждому
из соотношений D.36) —D.38). Это позволяет рассматривать
метод интегрального тождества как один из вариационных мето-
методов, а соотношения D.36) —D.38) использовать совместно с D.34)
для построения приближенных решений задачи при достаточно
широком выборе базисных функций. Соотношение D.37) есть
не что иное, как известное вариационное равенство, которое
в методе Галёркина применяется для построения приближенного
решения на основе использования Qk(x) в качестве базисных
функций. Из соотношения D.36) видно, что в данном случае
возможно использование разрывных базисных функций (с разры-
разрывами, не совпадающими с xt (t = 0,..., N)). Применение тожде-
тождества D.38) позволяет достаточно просто получить ряд оценок
в равномерной метрике.
Воспользуемся рассмотренными тождествами D.36) —D.38)
для построения приближенных решений задачи D.32), D.33),
выбирая базисные функции различными способами. Прежде всего
заметим, что при замене переменных
У= .) Р{1)
а
задача D.32), D.33) принимает вид
u@) = uG) = 0.
Следовательно, при /(x)eL2(a, b) имеем и (у) е WI, о @, Т).
С учетом этого замечания приступим к построению приближен-
приближенного решения, которое будем искать в виде
«"(*)= 2 «&¦(*).
где неизвестные а( определяются из однозначно разрешимой
системы
9G
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
[ГЛ. 2
т. е. приближенное решение строится с помощью обычного метода
Галёркина при базисных функциях {Qi(x)}. Заметим, что функ-
функции Qi(x) при замене
переходят в обычные кусочно-линейные базисные «функции-
крышки». Применяя известные результаты теории аппроксимации,
видим, что приближенное решение сходится к точному при
= max \
i
¦О
и имеют место оценки
\u-uh\k^O(h* -*), 6 = 0,1.
к 2
Для точного решения справедливо также соотношение D.38),
где
Тогда имеем
N — 1
'P
dx
dx
(q(u-Uh), U-uh) =
-«i). m-«iV'2.
Из последнего соотношения с учетом того, что
следует оценка
\\d2u
1Г dx ' dx j ' ^ v
Кроме того, так как при / е L«>
max \u(x) — «1 (х) | === С/г2
то получаем
Рассмотрим теперь еще два случая выбора базисных функций
()}. Пусть hi = Xj + i/2 — Xc-\/2, h = maxh{. Обозначим через
(p'l(x) характеристическую функцию интервала (jcj_i/2,
через фЦ1 (х) — интервала (х0, Jfi/2) и через ф^ (х) — интервала
2.4]
ПРИНЦИПЫ КОНСТРУИРОВАНИЯ ПОДПРОСТРАНСТВ
97
(Хлг-1/2, xN). Примем {фН^о в качестве базисных функций и
N
будем искать приближенное решение в виде «*(#)= 2 ^W? С*)»
1 = 0
/V-1
где ао = алг = 0. Тогда uh (х) = ^ с
i = i
ляются из соотношения (ср. D.36))
), где {a^fs]1 опреде-
li+
Р(х)
f dx
xk-i
k— 1 A/— 1
С помощью несложных выкладок можно доказать, что при
достаточно малых h система D.39) имеет единственное решение,
а приближенные решения uh сходятся к и (х) при /i-^О, причем
справедливы оценки
dx
где
dx
max |« (
i
/v-i
i - «A (*,-) | ^ Ch,
Ы, (X) =
N — \
[=1
i Приближенное решение можно строить также с помощью коор-
1 динатных «функций — крышек» /ф^1 (х)\У~1, которые кусочно-ли-
нейны на [а, Ь], причем ф* (х) равна нулю вне интервала
I (#м, ^i+i) и ф*(л;г) = 1. Решение здесь ищется в виде uh(x) ~
= У] а,ф!'(х), где неизвестные at определяются из системы ли-
линейных алгебраических уравнений
Предполагая в данном случае, что р (х) — кусочно-гладкая функ-
функция с возможными разрывами первого рода, совпадающими
с частью узлов xiy можно показать, что при достаточно малых
h — max | Xi — Xi-X \ система D.40) имеет единственное решение
{ai}i^l' и справедлива оценка погрешности
/ d("i-"?) d("i-"?)
Р dx
Г. И. Марчук
dx
98
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
ГГЛ. 2
если же f(x) e Loo (a, b), то легко доказывается также справед-
справедливость оценки
Рассмотренный здесь подход к построению приближенных ре-
решений, основанный на вариационной форме интегрального тожде-
тождества, можно применять к решению ряда других задач математи-
математической физики.
2.5. Вариационно-разностные схемы
для двумерного уравнения эллиптического типа
2.5.1. Метод Ритца
Ниже будет описан способ построения вариационно-разност-
вариационно-разностных схем для задачи B.1), B.2) при следующих дополнительных
предположениях:
В,(х) = 0 в D (i=l,2),
q (х) == 0 в D;
для любого вектора | = (|ь 12)' выполняется неравенство
IEO
2
i. 1 = 1
у;
E.1)
с некоторыми положительными константами Ио^Иь граница 3D
области D является кусочно-линейной. В принципе три послед-
последних требования для метода Ритца могут быть ослаблены (мы не
делаем этого только ради упрощения выкладок). Итак, имеем
-.2 ЩА"ЫЪ = 1 В D 'E-2)
при граничном условии
и = 0 на 3D.
E.3)
Эта задача, как видно из 2.2, эквивалентна нахождению функ
ции, минимизирующей в пространстве Щ (D) квадратичный функ
ционал
d ' i,
2
E.4)
2.5]
ДВУМЕРНОЕ УРАВНЕНИЕ ЭЛЛИПТИЧЕСКОГО ТИПА
99
Применим для приближенного нахождения решения последней
задачи метод Ритца с подпространствами Fh специального вида.
Чтобы построить Fh, триангулируем область D, т. е. покроем
ее треугольной сетью Dh (рис. 4). После этого в каждом из тре-
треугольников построим полином степе-
степени т от переменных хг и х2 вида хг\
т
Ч) =2 ? ?/,/,«• E-5)
Рис. 4.
т. е.
Коэффициенты полинома в каждом из
треугольников выбираются таким обра-
образом, чтобы обеспечить принадлежность
всей функции пространству W\ (D),
т. е. функция должна быть непрерывна
и обращаться в нуль на границе 3D.
Проиллюстрируем описанный способ на примере т = 1,
для случая кусочно-линейной функции
g(XU *2)=C0>0 + Cl,0*l + Co,l*2- E.6)
Коэффициенты этой функции для конкретного треугольника опре-
определим через заданные значения и (р^, и (р2) и и (р3) в верши-
вершинах рь р2 и рз этого треугольника. Проделав такую процедуру
в каждом из составляющих область D треугольников, полагая
и (р) = О для точек р е 3D, убеждаемся, что результирующая
функция непрерывна и обращается в
нуль на границе 3D.
Если же рассматривать случай квад-
квадратичной интерполяции {т — 2)
g(Xlt Х2) = Со ,0 + Cl,0^2"f"C0, 1^2 +
+ С2, 0*1+^,1*1*2 +С0, 2*1, E-7)
то удобным способом обеспечения при-
принадлежности результирующей функции
uh(xu x2) пространству W\ является
следующий. Значения функции uh за-
задаются в вершинах рь р2 и р3 треуголь-
треугольника и в точках pli2, p2i3 и рз, ь делящих отрезки [рь р2],
[Рг. Рз] и [Рз. Pi] пополам (рис. 5). Непрерывность функции и"
будет следовать из того простого факта, что на каждой из сторон
любого треугольника эта функция определяется однозначно. На-
Например, на отрезке [рь р2] функция uh(xu x2) однозначно опре-
определяется значениями «(pi), «(pi,2) и и(р2).
Если теперь решение задачи в каждой из треугольных обла-
областей А искать с помощью полиномиального представления E.7),
то, используя вариационный функционал, на основе метода Ритца
Рис. 5.
100
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
ГГЛ. 2
обычным способом приходим к системе разностных уравнений.
Доказано, что если решение й задачи E.2), E.3) принадле-
принадлежит классу СC) (D), третьи производные и (х) ограничены по
модулю величиной М и, кроме того, минимальный угол состав-
составляющих область D треугольников ограничен снизу величиной
vo>0, то для погрешности приближенного по Ритцу решения
задачи E.2), E.3) в случае квадратичной интерполяции E.7)
имеет место оценка
ин-Ц^2^Ск\
не зависит от триангуляции обла-
где С = -н1— и константа
sin v0
сти D.
Если требования к гладкости решения задачи E.2), E.3)
ослабить (и е СB) (D)), то для случая кусочно-линейных прибли-
приближений можно легко доказать оценку
где С>0 — некоторая константа.
Не будем больше возвращаться к квадратичным приближе-
приближениям в треугольниках, поскольку изложенного вполне достаточно
для вывода конкретных алгебраических систем, и сконцентрируем
внимание на кусочно-линейных приближениях. Из предыдущего
вытекает, что для однозначного определения функции g(x)^
е Wl (D), являющейся кусочно-линейной в каждом из треуголь-
треугольников, достаточно задать значения g(x) в вершинах треуголь-
треугольников. Если мы пронумеруем все внутренние вершины треуголь-
треугольников: {рЛ^р а через Dhjk обозначим объединение всех тре-
треугольников, имеющих точку ри своей вершиной, то базисом
пространства Fh будет система функций {®k{x))^±v определяемая
условиями:
1) щ(р/) = бк;, где б*/ — символ Кронекера;
2) ak(x) на каждом из треугольников является линейной
функцией, т. е. представляется выражением E.6).
Таким образом, если представить функцию юк (х) геометри-
геометрически, то получим пирамиду с вершиной в точке pk и основа-
основанием Dht к (рис. 6).
Конкретизируя дальше рассматриваемый метод, предположим,
что D — {(xu х2); 0<хъ л:2<1} является единичным квадратом.
Покроем D обычной равномерной квадратной сеткой с шагом h =
= дгтгг ^ ~~ целое положительное число) и триангулируем D, как
это показано на рис. 7. Систему базисных функций {(ak(x)\kLi
(Nh = N2) обозначим для этого случая {tok,i{x)\k,i=\-
2.5] ДВУМЕРНОЕ УРАВНЕНИЕ ЭЛЛИПТИЧЕСКОГО ТИПА 101
Исследуем матрицу А системы линейных уравнений
Aa = g E.8)
метода Ритца, где а = (аь ..., ajvOT~BeKTOP. составленный из
коэффициентов {aw(ft-n+/ = a*, i\k, i=\ разложения
N
""(*)= У] a*./°>*. / (*).
= (glt ...,
k,i
и элементы матрицы А вычисляются по формулам
*'
D s,i — l
k, I, i, /=1, .... N.
Введем обозначение aV, 'i = aN(h-\)+i, N(c-i) + i-
Рис. 6.
Рис. 7.
E.9)
— вектор с компонентами
,i= \ f®k,i(x)dD, k, 1=1, .... N, E.10)
Учитывая вид функций {®h,i{x))k,i=\ (см. рис. 7), нетрудно
показать, что
если выполнено хотя бы одно из двух неравенств
|t-fc|>l, |/-/|>1, k, I, i, /=I, ..., N.
Отсюда сразу следует, что матрица А является блочной трех-
диагональной вида
п
о ... о
А21 А22 А23 ... 0
0 0 0 ... А,
E.12)
102
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
[ГЛ 2
где Akk = Atk, Akik+1 = Al+1j, (k=l, ..., N) и каждая из матриц
Akt i является трехдиагональной матрицей порядка N. Более точ-
точный анализ показывает, что матрицы {Аь>к_1}ь=2 — двухдиаго-
нальные:
„k—l, I „4—1, 2 п
ak, I ak, i u
0 в* а*-3 ... 0 0
k-\, 2 4-1, 3 n
ак, 2 а4, 2 ... U
о
о
0
0
U
k~x- N
E.13)
Вычислим элементы (а? '') матрицы А для частного случая задачи
E.2), E.3):
E.14)
« = 0 на 3D.
Можно представить DhK t в виде объединения шести треуголь-
треугольников [Dk, i, m}m=i. порядок нумерации которых указан на рис. 8.
Рис. 8.
Непосредственные вычисления показывают, что
k, 1.
~ У),
если х, у <
если х, у еЩ, /_ 2,
если х, у ев Dhk, it з,
если х, у е Dhk, /_ 4,
если х, у ев D^ i,5,
если х, у ев Dhk, t, 6.
E.15)
2.5}
ДВУМЕРНОЕ УРАВНЕНИЕ ЭЛЛИПТИЧЕСКОГО ТИПА
103
В силу симметрии А, трехдиагональиости матриц {Акк}ь=1
и двухдиагональности матриц {Аь<к^1\к=2 и {Akk+1}k^[ нам до-
достаточно указать формулы для вычисления элементов
ak,i> ak,i > ak,i > ak,i < i=s=«, t^=«.
Зти формулы, согласно E.11) и E.15), имеют вид (для простоты
используются обозначения Dl — d?, /, ,)
- \
^ р(х, y)dxdy+ ^ р(х, y)dxdy +
q(x, y)dxdy+ $ q (x, y)dxdy\,
Dt\}D, J
. y)dxdy\, E.16)
J
flft-i./+i=0.
I Отсюда сразу следует, что матрицы {^4*.4_i}/;=2 являются диаго-
| нальными. Кроме того, если ввести вектор и с компонентами
" «*,/ = «*,/, где а —вектор системы E.8) метода Ритца, то систему
Au = g можно записать в виде
J (i41 + i42)« = g, E.17)
где
= — Pk- 1/2, /«4-1, / + (Pft —1/2, / + Pk+\/2, l) Uk,t — Pk + l/2, /«4+1, /, E. 18)
Здесь использованы обозначения:
л 1
Qk, / + 1/2—^2
^2
^ р(х, y)dxdy,
q(x, y)dxdy.
E.19)
104
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
ГГЛ. 2
Объединяя E.17) — E.19), легко видеть, что построенная нами
по методу Ритца вариационно-разностная схема по структуре
расположения ненулевых элементов и их виду практически сов-
совпадает с чисто разностными схемами. В частности, для случая
постоянных р(х, у) и q (х, у) вариационно-разностный и разност-
разностный аналоги дифференциального оператора полностью совпадают.
Отмеченное обстоятельство позволяет применять для решения
системы E.17) эффективные итерационные методы, такие, как
метод расщепления, последовательной верхней релаксации и др.
2.5.2. Метод Галёркина
Не будем останавливаться детально на построении вариаци-
вариационно-разностных схем метода Галёркина, поскольку основные
алгоритмические особенности решения двумерных задач уже были
описаны на примере метода Рйтца. Заметим только, что при
ненулевых коэффициентах {Bi(x)}f=i задачи B.1), B.2) матрица Л
метода Галёркина с базисными функциями E.15) будет отличаться
от матрицы А системы E.17) на некоторую матрицу В (В = Л — А).
Элементы {b'k,'i} этой матрицы вычисляются по формуле
хс1у, E.20)
к, I, /, /=1, ..., N.
Отсюда видно, что даже для уравнения
= / в D,
E.21)
и = О на 3D
матрицы {Ak<)l-i}k=2 в методе Галёркина могут оказаться не диа-
диагональными.
Усложнение структуры матрицы алгебраической системы
заставляет искать более простые пространства Fh, чем построен-
построенные для метода Ритца. К этому же выводу мы придем, когда
попытаемся построить вариационно-разностные схемы метода
Галёркина более высокого порядка точности, нежели первый.
Для областей, которые могут быть представлены как объеди-
объединение конечного числа прямоугольников, нужные пространства Fh
удается сконструировать достаточно легко, если воспользоваться
результатами 2.4. Ниже на примере кусочно-линейных аппрок-
аппроксимаций мы опишем структуру этих пространств Ff, и для част-
частного случая построим вариационно-разностную схему.
Пусть область D является объединением г прямоугольников
\Di\\^\ со сторонами, параллельными осям координат, и D —
2.5]
ДВУМЕРНОЕ УРАВНЕНИЕ ЭЛЛИПТИЧЕСКОГО ТИПА
105
наименьший по площади прямоугольник со сторонами, парал-
параллельными координатным осям, содержащий область D (рис. 9):
q={(x, у): a^x^b, c^y^d}. Построим на отрезках [а, Ь]
и [с, d] сетки а = х0 <Хг<...<xN+1 = b и c=yo<yi<... < yM+i=d
таким образом, чтобы любая из сторон,составляющих область и
b x
Рис. 9.
прямоугольников, обязательно принадлежала какой-нибудь из
линий
; / = 0, I ЛГ+1). E.22)
После этого определим сеточную область D" как совокуп-
совокупность точек (хк, у/), принадлежащих D (k=l, ..., Л/; / =
= 1,...,М).
Перейдем к построению пространства Fhc W\{D). На отрез-
отрезках {а, Ь] и [с, d] введем соответственно функции
)Л,* (х) =
х — Xk-i
если
если
6-1, Хк],
к, Хк+Л>
E.23)
0 в остальных точках,
k = \ N,
у
со</,/ (У) =
если
УО7=17ГГ' если У^1у*'
У i
E.24)
0 в остальных точках,
106
Положим
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
,/ (*. У) = ®х,к (х) toyj (у),
[ГЛ. 2
E.25)
и выберем в качестве Fh линейную оболочку функций {со*,}.
Так как система {соА,} линейно независима, то она, очевидно,
образует базис пространства Fh-
Выведем теперь систему линейных уравнений метода Галёр-
кина в подпространстве Fh с базисом E.25) для задачи
_ д2и _ ^u , ди _ ,
и = 0 на 5Z).
Если приближение «Л искать в виде
, У),
(Ч- «i
E.26)
E.27)
то, согласно 2.2, соответствующая алгебраическая система будет
иметь вид
Au = g, E.28)
где и и g— векторы с компонентами {и*,/} из E.27) и {gk,i}
tgk,i = \ f®kj dD\ соответственно; элементы (я^'Л матрицы А
вычисляются по формуле
E.29)
где со, = со,- (*), coj==coa(a:), co/ = co/ (y), al^al(y).
Так же, как и в предыдущем пункте, нетрудно видеть, что
а». /^ = 0, если выполнено хотя бы одно из двух неравенств
\i-k\>l, |/-/|>1.
Отсюда сразу следует, что А будет блочной трехдиагональной
матрицей вида E.12) Приведем окончательные значения элемен-
элементов {я^'Л, предполагая для простоты, что сетка равномерная и
2.5] ДВУМЕРНОЕ УРАВНЕНИЕ ЭЛЛИПТИЧЕСКОГО ТИПА
ее шаг равен h:
107
(!,/_ ' f Ay
±,
"ш yi
a"k l~l = A* J ^ J
3
** »/
- ^ C0A (X) С0А_! (ДС) - CO* (X) (At (у) CO,-! ((/)j = - у - ~ , E.30)
xk-i yi
. (-1) СО/
12'
- 4- А
~ 3^12'
Таким образом, оказывается, что построенная вариационно-
разностная схема при / (х, f/) = /=const совпадает с несколько
необычной разностной схемой
8 1 1 /1
UW ~ "з" м*,/-1 ~ з~ "*•'+! ~\~3 ' Т
/ 1 , А\ /1 . А\ / 1 Л
~ 1У + 12 j "*-!• '-1 - \ + Г2 j Uk -». '+1 ~ 1 ? ~ 3
'' ~
E.31)
Эту разностную схему легко построить с помощью обычных трех-
трехточечных аппроксимаций вторых производных, если предвари-
предварительно заменить дифференциальную часть уравнения E.26)
шв МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
в узлах DA на приближенную следующим образом:
д2и , д2и ди
[ГЛ. 2
ft+i
< = *— 1
где
i = i-\
= 4 и
д~и ди
Jx2xb
i
E.32)
2.5.3. Способы построения подпространств
При построении вариационно-разностных схем для двумерных
уравнений эллиптического типа возникает необходимость в кон-
конструировании конечномерных подпространств Fh из W^(D). Как
мы видели в 2.5.1 и 2.5.2, структура матриц вариационно-раз-
вариационно-разностных уравнений существенно зависит от выбора подпространств
FhCWt(D) и способа триангуляции области D. В этом пункте
мы рассмотрим простейшие способы построения триангуляции
ограниченной двумерной области D с гладкой границей S.
Сформулируем основные требования, которым должна удовлет-
удовлетворять сеточная область DA, являющаяся объединением конечного
числа треугольников Ak cz D, не имеющих общих внутренних
точек, с кусочно-линейной границей Sh.
1. Между точками Sh и 5 с помощью нормалей к S устанав-
устанавливается взаимно однозначное соответствие, и расстояния между
соответствующими точками не превосходят величины 8ih2, где
6i>0 и не зависит от h.
2. Длины сторон и площади треугольников Ак, из которых
составлена сеточная область, лежат соответственно в пределах
[Uh, lji\ и [yih2, y.2h2], где положительные константы /ь /2, уг
и уг не зависят от h.
Легко видеть, что для области D можно построить различные
сеточные области, удовлетворяющие перечисленным выше усло-
условиям, и, следовательно, у нас есть возможность наложить допол-
дополнительное требование на структуру сеточной области. Прежде
чем сформулировать такое дополнительное условие, напомним,
что для прямоугольных областей и областей, составленных из
прямоугольников в 2.5.1 и 2.5.2, триангуляции строились естествен-
естественным образом на основе прямоугольных сеток. В качестве дополни-
дополнительного требования на структуру сеточной области Dh целесооб-
целесообразно выбрать следующее условие.
3. Существует непрерывное взаимно однозначное преобразова-
преобразование сеточной области и1 на область, граница которой состоит
2.5]
ДВУМЕРНОЕ УРАВНЕНИЕ ЭЛЛИПТИЧЕСКОГО ТИПА
109
из отрезков, параллельных осям координат или образующих
с ними угол в 45°; это преобразование линейно на каждом тре-
треугольнике Aft и отображает его в прямоугольный треугольник
с катетами, равными h.
Из этого условия, например, следует, что общую вершину
могут иметь не более восьми треугольников сеточной области.
Один из наиболее простых способов построения таких триан-
триангуляции состоит в следующем. Заключим область D в прямо-
прямоугольник П и покроем П квадратной сеткой с шагом h. Узлы
построенной сетки, лежащие вблизи границы S области D, сдви-
сдвинем к S так, чтобы соединяющая их ломаная S хорошо при-
приближала границу (т. е. чтобы выполнялось первое требование
Л
1
\
ч
в
\
1
/
Рис. 10.
для сеточных областей). Затем разобьем все четырехугольники
на треугольники так, чтобы выполнялось второе требование.
Справедливость третьего условия следует непосредственно из
способа построения триангуляции. На рис. 10 приводится пример
такого построения.
Нетрудно вычислить конкретные значения постоянных, харак-
характеризующих длины сторон и площади треугольников таких триан-
триангуляции и не зависящих от конфигурации области D: /1 = 0,5,
12 = У 18/2, Yx = 0,125 и у2= 1,125. Естественно, что постоянная
бь характеризующая приближение границы, зависит от кривизны
кривой S.
Отметим, что описанный способ триангуляции применим как
к односвязным, так и к многосвязным областям и легко реализуем.
Для односвязных областей можно предложить способ постро-
построения сеточных областей, удовлетворяющих перечисленным ранее
трем условиям и преобразуемых непрерывным кусочно-линейным
преобразованием в прямоугольник.
Простоты ради ограничимся случаем, когда область D выпукла.
Идея построения сеточной области очень проста. Сначала область
по
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
[ГЛ. 2
D непрерывным преобразованием, имеющим разрывы производных
внутри области, переводится в прямоугольник. Полученный пря-
прямоугольник триангулируется так, чтобы стороны треугольников
не пересекали линии разрывов производных использованного ото-
отображения. Обратное преобразование дает криволинейную триан-
триангуляцию области D, спрямление которой и приводит к требуемой
сеточной области Dh.
Отображения на прямоугольник можно строить достаточно
просто; можно, например, заключить область D в квадрат и
вытянуть ее вдоль лучей, выходящих из точки пересечения диа-
диагоналей квадрата. Тогда эти диагонали и будут линиями разрыва
производной такого преобразования.
В действительности отображение на
прямоугольник используется только
для получения правила, по которому
строится сеточная область. Следова-
Следовательно, рассмотренный способ три-
триангуляции можно назвать методом
фиктивного отображения на прямо-
прямоугольник. На рис. 11 представлена
такая триангуляция для L-образной
области.
Теперь проиллюстрируем целесо-
целесообразность использования таких се-
сеточных областей. Обозначим через Fh
множество непрерывных функций,
линейных на каждом элементарном треугольнике Ак из Dh и
равных нулю вне области Dh. Известно, что система вариационно-
разностных уравнений для краевой задачи
-Аи(х, y) = f(x, у), (х, y)(=D,
и(х, у) = 0, (х, y)f=S
строится на основе приближенного вариационного уравнения
С Ida, dvn да, доЛ d С f dx d
J \ dx dx ' dy dy y ,)
Рис. 11.
для всех vh
¦Fh,
где uh e Fh есть искомое приближение решения краевой задачи.
Так как триангуляция сеточной области Dh топологически
эквивалентна простейшей триангуляции области, составленной
из прямоугольников, то мы можем занумеровать вершины тре-
треугольников согласно этому соответствию и определить в простран-
пространстве Fh базис \(лк(х, у)}, как это сделано в 2.5.3. Тогда структура
матрицы системы алгебраических линейных уравнений, получае-
2.6]
ВАРИАЦИОННЫЕ МЕТОДЫ ДЛЯ МНОГОМЕРНЫХ ЗАДАЧ
111
мой из приближенного вариационного уравнения, принципиально
не будет отличаться от структуры матрицы системы E.8).
В заключение отметим, что рассмотренные в этом параграфе
способы построения сеточных областей можно обобщить и на
случай трехмерных областей.
2.6. Вариационные методы для многомерных задач
Кратко остановимся на возможных путях конструирования
вариационно-разностных схем для многомерных задач, когда число
независимых переменных больше двух.
2.6.1. Способы построения подпространств
Предположим, что в пространстве трех переменных х, у и z
задана ограниченная область D с кусочно-линейной границей 3D.
Для этого случая наиболее известный способ построения подпро-
подпространств Fh cz Wi (D) заключается в следующем. Сначала осуще-
осуществляется пространственная триангуляция области, т. е. область
D покрывается конечным числом треугольных пирамид Ак, не име-
N
ющих общих внутренних точек, так, чтобы D= (J ДА. Если мак-
симальную длину ребер пирамиды Ак обозначить hk, то можно
легко построить последовательность пространств F-n кусочно-поли-
кусочно-полиномиальных функций, определяемых параметром h= max hk.
Такие пространства определяются аналогично одномерному и
двумерному случаям.
Проиллюстрируем это на примере кусочно-линейных аппрок-
аппроксимаций, когда область D = {%, у, г: 0<л:<;1, 0<//<<1, 0 <
<z<l| является кубом. Разобьем отрез'ок [0, 1] на равные
отрезки точками 0 = ^0<^ <... <gn+1 = 1, где |А = Д!--& (Д? =
= 1/(я+1)). Затем покроем область D одинаковыми элементар-
элементарными кубами со стороной Д?; для этого достаточно рассечь D
плоскостями
х = Ь, У = Ь, z = lk, k = 0, 1,..., я+1.
Триангуляцию элементарного кубика со стороной Д? можно осу-
осуществить различными способами. Одна из возможных триангуля-
триангуляции показана на рис. 12, где кубик предварительно разбит на
две призмы.
Таким образом, каждый элементарный кубик можно предста-
представить как объединение шести пирамид, причем длина максималь-
максимального ребра пирамиды равна h = |/Д? =У^З/(п + 1). Проделай
112
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
ГГЛ 2
такую триангуляцию для всех кубиков, получим, что область D
будет полностью покрыта N = 6- (п-\-1K пирамидами.
Пространство Fh конструируется следующим образом. В каж-
каждой пирамиде А* строится многочлен
gk(x, у, z) =
так, чтобы функция
g(x, у, z) =
(х, у, г), если (х, у, г) <= Д1(
gN(x, у, г), если (х, у, г) <= Д
F.1)
F.2)
¦лт
принадлежала пространству Wl(D), т. е. имела суммируемые
с квадратом первые производные и обращалась в нуль на гра-
границе (чтобы обеспечить выполнение этого условия, достаточно
Рис. 12.
потребовать непрерывности кусочно-полиномиальной функции g и
ее обращения в нуль на 3D).
В случае кусочно-линейных функций
gk(x, у, z) =
F.3)
для непрерывности g(x, у, г) достаточно определить коэффици-
коэффициенты функций gk через значения g в вершинах соответствующей
пирамиды ДА.
Описанный подход является достаточно универсальным и
может быть применен для областей с более общими границами.
Однако даже для простейших областей он весьма сложен алго-
алгоритмически. Ниже мы остановимся еще на одном способе констру-
конструирования подпространств Fh, который для многомерных областей
специального вида представляется нам предпочтительней первого.
Пусть D — область р-мерного евклидова пространства, которую
можно представить в виде объединения конечного числа р-мер-
ных прямоугольных параллелепипедов {Dv\, и пусть D={x,-: а, «ё
2.6]
ВАРИАЦИОННЫЕ МЕТОДЫ ДЛЯ МНОГОМЕРНЫХ ЗАДАЧ
ИЗ
ibi, i = 1, ..., р} — параллелепипед минимального объема,
содержащий D (предполагается, что стороны Д, параллельны
координатным гиперплоскостям). Тогда для каждого i (lsg/s^p)
на отрезке [a,-, bi] оси переменной х{ можно построить сетку
и определить сетку Dh как совокупность точек xk = (x\:hl, x2ik
.... xp,k ), принадлежащих области D (l^ki^Ni для t=l, ...
Если теперь на каждой одномерной сетке ввести набор одно-
одномерных базисных функций
gt.kt{x,) =
X — X,
С, k, — 1
x — x.
если
если
i,k, xitk.
F.4)
О в противном случае,
kt=\ Nu l^z
то систему функций
gk {x) = fl St,kt (*/), xk e D\ k = (klt k2, ..., kp), F.5)
можно выбрать как базис пространства кусочно-линейных функций
Fh cz w\ (D). Для случая двух переменных (р = 2) такой подход
достаточно полно рассмотрен в предыдущем параграфе.
2.6.2. Покоординатные методы построения
вариационно-разностных схем
Описанные выше приемы построения подпространств Fh и
самих вариационно-разностных схем для многомерных задач
очень сложны в реализации. Сюда относятся выбор базисных
функций (первый способ предыдущего пункта), расчет ненулевых
элементов матрицы системы и т. д. Эти трудности могут быть
преодолены, если совместить в одном методе и вариационный и
обычный разностный подходы. Конечно, в этом случае система
сеточных уравнений уже не будет строго разностной или вариа-
вариационно-разностной, но их совмещение в ряде случаев позволяет
ослабить требования одного подхода за счет использования эле-
элементов другого подхода. Проиллюстрируем сказанное на примере
р-мерного уравнения эллиптического типа.
114
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
Пусть дано уравнение
i= 1
[ГЛ. 2
F.6)
в ограниченной области D с границей 3D. Рассмотрим для него
первую краевую задачу
и = 0 на 3D. F.7)
В случае, когда р^=2 и область D не относится к областям, рас-
рассмотренным нами, или к тем, для которых можно легко построить
последовательность подпространств Fh с W\ (D), предлагается
следующий способ совмещения разностного и вариационного под-
подходов.
Введем в области D некоторую прямоугольную сетку Dh,
образованную пересечением области D с множеством гиперплоско-
гиперплоскостей, параллельных координатным плоскостям. Узлы Dh обозна-
обозначим через хк = (х\,/г1, x2,k2 xp,k ). Систему сеточных уравне-
уравнений составим из аппроксимаций задачи F.6), F.7) во всех узлах
сетки Dh, а сами аппроксимации будем строить с помощью одно-
одномерных вариационно-разностных схем. Последовательность дейст-
действий при этом следующая.
Если нам нужно построить аппроксимацию задачи F.6), F.7)
в точке xteD', то мы сначала записываем уравнение в виде
F.8)
где
Затем для каждого из членов суммы F.8) строится вариаци-
вариационно-разностная схема вдоль соответствующей прямой xt (I ==gi<:
^р), после чего одномерные схемы складываются. Иначе говоря,
если аппроксимация производится в точке xk, • то сеточный ана-
аналог F.8) имеет вид
F.9)
где (ZJ/l)«ft —/у) — вариационно-разностный аналог слагаемого
7. ~ li
- д р,
2.7]
МЕТОД ФИКТИВНЫХ ОБЛАСТЕЙ
115
вдоль отрезков оси переменной %;. Способы построения вариа-
вариационно-разностных схем для одномерных операторов детально
разобраны в 2.3.
Проиллюстрируем предлагаемый подход на примере кусочно-ли-
кусочно-линейных приближений, когда область D является р-мерным еди-
единичным кубом, с равномерной сеткой Dh (h = 11(N -\-1)). Из 2.4
и F.9) следует, что система сеточных уравнений для уравнения
F.8) имеет вид
, F.10)
Здесь использованы обозначения A =s?i=s?p):
«&2 + а=« (Xki, ..., Xkji, Xkf + a, xki+1, ¦¦¦>
а = 0, ±1;
F.11)
"к,
- 1/2
± 1/2.
2.7. Метод фиктивных областей
Рассмотрим эллиптическое дифференциальное уравнение
п
x = (xu .... xn)<=Dlt
заданное в ограниченной области Dt с краевым условием (первая
краевая задача) вида
и(х) = 0,
G.2)
Предположим, что коэффициенты и решение задачи G.1), G.2)
достаточно гладки, alj(x) = aji(x), c(x)^sO и выполняется усло-
условие эллиптичности
inf
аЧ (х) Ы/ ^ V-
G.3)
116
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
ГГЛ. 2
с положительной постоянной ц, не зависящей от произвольного
вектора ? = (|ь ..., ?„).
Трудности составления программ для численного решения
краезой задачи G.1), G.2) разностными или вариационно-разност-
вариационно-разностными методами во многом зависят от геометрии области Z?i. По-
Поэтому целесообразно строить программы не для конкретных
областей, а для более или менее широкого класса областей.
Одним из возможных путей решения этой проблемы является
замена краевой задачи G.1), G.2) на задачу, в определенном
смысле близкую к ней, но заданную в более простой области,
например, параллелепипеде. Такой подход получил название
метода фиктивных областей.
Метод, о котором пойдет речь, основан на хорошо известном
физикам факте, что в среде с относительно большими значениями
коэффициента диффузии изменение плотности диффундирующего
вещества относительно мало. В связи с этим естественно попы-
попытаться дополнить начальную область Dx до параллелепипеда и
доопределить коэффициенты пу(х) уравнения G.1) достаточно
большими значениями в добавленной области. Задав на границе
параллелепипеда краевое условие вида G.2), можно ожидать, что
решение полученной задачи будет мало отличаться от нуля
в добавленной области и будет почти совпадать с решением
задачи G.1), G.2) в исходной области Dv
Поясним эту идею на простом примере одномерной краевой
задачи
dx2
G.4)
и@) = ы@,5) = 0,
точное решение которой и (х) = х @,5 — х). Заменим G.4) задачей
G.5)
/(*) =
О, 0,Г)<*-<1.
2.7] МЕТОД ФИКТИВНЫХ ОБЛАСТЕЙ
Точное решение задачи G.5) имеет вид
117
v(x) =
2A+62)'
Очевидно, что
lim v (х) — и(х) для х е [0; 0,5],
= @,5; 1).
lim v (х) = 0 для
е-0
Следовательно, при достаточно малых е область 0,5<д:^1
можно рассматривать как фиктивную. Нечто подобное имеет
место и в многомерном случае.
Сформулируем теперь метод фиктивных областей для решения
первой краевой задачи G.1), G.2). Обозначим через D2 допол-
дополнение области Dx до параллелепипеда D и через S общую часть
границ Dt и D2. В области D рассмотрим уравнение
где
ait (x), i
0, xs
е, х
D
2>
D2, / = /,
v -
Заметим, что уравнение G.6) не обязательно выбирать одно-
Заметим, что ура
родным в области D2.
Для уравнения G.6) поставим краевую задачу
.l=i
= 0.
G.7)
G.8)
Здесь v —нормаль к границе S; [ ]\s обозначает скачок функции
на поверхности S.
Условимся считать решение и (х) задачи G.1), G.2) равным
нулю в области D2 и оценим разность w(x) = u (х) — v (x). Нетрудно
118
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
[ГЛ 2
видеть, что функция w (x) удовлетворяет следующей краевой задаче:
Lew(x) = 0, xt=D, xe?S, G.9)
w(x) = 0, xtEdD, G.10)
= 0, Г 2 ^/
I
/, / = 1
= <PM, G-11)
где <р(х)= ? «i/cosi
Умножая уравнение G.9) на w (x) и интегрируя по D с учетом
условий G.10) и G.11), получим тождество
D2 i = I
У
= — J <p(x)w(x)ds. G.12)
Отбрасывая первое слагаемое левой части (см. G.3)) и приме-
применяя неравенство Коши —Шварца к правой части равенства G.12),
получим
1 л у, (dw
& 3 Z \toi
dx
D2 i = 1
G.13)
Для того чтобы оценить правую часть полученного неравен-
неравенства, воспользуемся соотношением
J w4x) ds^cJb J w>(x)dx+
G.14)
которое справедливо для приграничной полосы сое ширины
0<бг^60, где б0 не зависит от функции w(x) и неравенством
Фридрихса
G.15)
D l = \
которое справедливо для функций w (x), равных нулю на части
границы области D.
Выбирая в G.14) б = б0 и расширяя интегрирование в правой
части неравенства, получим
G.16)
2.7J
МЕТОД ФИКТИВНЫХ ОВЛЛСТНП
119
Так как w(x) — Q при x^dD, то к первому слагаемому в правой
части G.16) можно применить неравенство G.15). Получим
$ $2 () G.,7)
Учитывая неравенство G.17), получим из G.13) следующую
оценку:
1/2
а из G.15) —
G.18)
G.19)
Аналогичным образом, из тождества G.12), используя условие
эллиптичности G.3) и неотрицательность функции / (х), получим
неравенство
2- G-20)
d, ;=i " s r s
Кроме того, используя обобщенное неравенство Фридрихса
J w* (х) dx < С, J w* (x) ds + ^2 (gJ dx) G.21)
?>, \ S 6,1 = 1 /
и оценки G.17), G.18) и G.20), приходим к неравенству
\ w2(x)dx^C7e2. G.22)
о,
Таким образом, мы доказали, что решение v(x) задачи G.6)—
G.8) приближает решение и (х) задачи G.1), G.2) в W& (DJ
с точностью е, т. е. (см. G.20) и G.22))
u~v
G.23)
где постоянная С8 не зависит от е.
Более тонкий анализ приводит к следующей оптимальной
по е оценке
|«-f|]c(D,)^C9e2. G.24)
Окончательно можно дать следующую схему приближенного
решения первой краевой задачи G.1), G.2) в произвольной
ограниченной области ?\. Заключим область D1 в наименьший
параллелепипед D. Выберем е так, чтобы решение задачи G.6)—
120
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
[ГЛ 2
G.8) приближало решение исходной задачи с нужной точностью.
Затем решим задачу G.6) —G.8) разностным методом с необхо-
необходимой точностью.
В заключение параграфа сформулируем метод фиктивных
областей применительно к решению третьей краевой задачи:
G.25)
G.26)
i, /=l
1 = 1
ди
ач (х) cos (v, *,) щ
Здесь а (л;) — достаточно гладкая и неотрицательная на dD1 функция.
Расширим область D1 до параллелепипеда D гэ Dx. Предпо-
Предположим, что существует сфера радиуса р>0, лежащая внутри
области Dt и такая, что ею можно коснуться изнутри области Dt
любой точки поверхности dD^ В приграничной полосе об-
области Dx ширины esgp определим функцию ае(х) по формуле
xt = xt — xcos(v, л;,),
где |т| —расстояние по нормали от точки х до dDt. В оставшейся
части области D положим функцию ае(х) равной нулю.
Рассмотрим в области D уравнение
§,)+ 2 fl'
/,/=1
где
At/(x) =
D.
G.27)
i*i,
2.8]
ВАРИАЦИОННЫЕ НЕРАВЕНСТВА
121
Для уравнения G.27) поставим краевую задачу
v(x) = 0, x<= 3D,
и условия согласования
А„ (х) cos (v, xt)
<,/=!
G.28)
= 0. G.29)
Для достаточно гладких коэффициентов задачи G.25)— G.26)
можно доказать следующую оценку
т, G-30)
где постоянная С10 не зависит от выбора е>0.
Переход от третьей краевой задачи G.25), G.26) к первой
краевой задаче G.27) —G.29) можно проделать следующим обра-
образом. Предположим, что решение задачи G.27) — G.29) при е->-0
сходится к некоторой функции и (х) в норме пространства W\(D).
Решение v(x) задачи G.27) —G.29) удовлетворяет интегральному
тождеству
G.31)
при любой функции ф е Щ (А) (для простоты мы положили
^(jc) = O). Устремляя в G.31) е к нулю, получим тождество
\ 7 а,, ——г-!- (tc-f I
,) ^>' у dxt dxi J
\ стиф as = X / ф i
D,
G-32)
справедливое для всех ф е W.^ (Di). Но так как решение задачи
G.25), G.26) удовлетворяет интегральному тождеству G.32), то
функции и (х) и и (х) в области Dx должны совпадать.
2.8. Экстремальные задачи с ограничениями
и вариационные неравенства
В предыдущих параграфах нами были изучены различные
вариационные постановки задач математической физики и при
ближенные методы решения соответствующих экстремальных
задач. Отличительной оссбеиностью при этом являлось рассмот-
рассмотрение экстремальной задачи во всем гильбертовом пространстве
без каких-либо дополнительных ограничений на искомое решение.
В то же время существует широкий круг проблем, возникающих
122
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
[ГЛ. 2
в физике, механике, геофизике, оптимальном управлении и
экономике, приводящих к экстремальным задачам, решение которых
ищется на более узком классе функций, чем это допускает об-
область определения соответствующих функционалов.
Ниже будут даны некоторые сведения о существовании и
единственности решений экстремальных задач с ограничениями
и дана характеристика этих решений с помощью вариационных
неравенств, приведен ряд примеров использования вариацион-
вариационных неравенств для анализа свойств решений экстремальных
задач с ограничениями и обсуждены возможные подходы к при-
приближенному решению подобных задач.
2.8.1. Элементы общей теории
Пусть U — гильбертово пространство над полем действитель-
действительных чисел со скалярным произведением (,)и и нормой ||-||у. Мы
предположим, что на U заданы непрерывная симметричная били-
билинейная форма я (u, v), непрерывная линейная форма L(v) и
выпуклое замкнутое множество UdciU. Введем в рассмотрение
квадратичный функционал
J(v) = n(v, v)-2L(v), (8.1)
предполагая при этом, что функционал n(v, v) положительно
определен в U, т. е. существует такая константа а>0, что
к(v,
(8.2)
для любого v e(/.
Справедливо следующее утверждение, подробное доказатель-
доказательство которого приведено в монографии Лионса [2].
Если выполнены сделанные выше предположения, то суще-
существует и единствен элемент и е Ud, являющийся решением задачи
J(u)= inf J (v). (8.3)
veud
Одним из наиболее универсальных и развитых подходов
к наглядному описанию экстремальной задачи (8.3) с целью изу-
изучения свойств ее решения является использование вариационных
неравенств. Сформулируем и докажем утверждение, которое лежит
в основе этого подхода.
Пусть выполнены сделанные выше предположения. Тогда эле-
элемент и efrf в том и только том случае является решением
задачи (8.3), если для любого вё^ выполняется неравенство
я (и, v-u)^L{v-u). (8.4)
Докажем необходимость. Предположим, что элемент и является
решением задачи (8.3). Тогда для любых i/ef/^ и 9ё@, 1)
2.8]
ВАРИАЦИОННЫЕ НЕРАВЕНСТВА
123
выполняется неравенство (здесь мы используем выпуклость Ud,
т. е. принадлежность элемента ф = A — в) w-\-<dv множеству Ud
для любых w, v^Ud и 0е(О, 1))
(8.5)
Отсюда имеем
J (и + в(у—и)) — J (и)
в
(8.6)
Устремляя в к нулю и используя конкретный вид функционала
J (v), получим
ljm J(u + e(v-u))-J(u) _
6-vo e
= lim {2[я(и, v — и) — L(v — u)]-f вл (v — u, v — u)\ —
= 2[я(ы, v-u)-L(v-u)]^0 (8.7)
для любого v e Ud. Тем самым неравенство (8.4) доказано.
Предположим теперь, что элемент и удовлетворяет неравен-
неравенству (8.4). Квадратичный функционал J (v) является выпуклым,
т. е. для любых ч, ие(/ и6е@, 1) выполняется неравенство
?A-е)УИ-
(8-8)
или эквивалентное ему неравенство
J(v)-J (w) 5г JJA^1
в
Подставляя в (8.8) элемент и вместо w, получим
Устремляя в последнем неравенстве в к нулю и учитывая соот-
соотношение (8.7) и неравенство (8.4), имеем
J(v)-J (и) 5э 2 [я (и, v — u) — L(v — и)] === 0.
Следовательно,
J{u)^J (v)
для любого v e Ud, т. е. элемент и является решением задачи (8.3).
Рассмотрим два конкретных случая использования доказан-
доказанного утверждения. Пусть Ud является подпространством простран-
пространства U, замкнутым в смысле нормы пространства U. Тогда,
полагая в неравенстве (8.4) v — u±(p, где ф —произвольный
элемент из Ud, приходим к двум неравенствам:
Я (U, ф)==г/,(ф),
— л (и, фJ= —L(<p).
124
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
[ГЛ 2
Отсюда следует, что при сделанном предположении элемент и
в том и только том случае является решением задачи (8.3), если
для любого феУ^ выполняется равенство
л (и, <p) = L(<p). (8.9)
Полученное соотношение является не чем иным, как уравнением
Эйлера для вариационной задачи
./(«) = inf J(v). (8.10)
d
Предположим теперь, что множество Ud является конусом.
(Напомним, что конусом называется замкнутое выпуклое мно-
множество К cz U, содержащее вместе с каждым ф (= К элемент
УФ для любого у^О и такое, что если ф, — ф е/<", то ф —нуле-
—нулевой элемент U.) Подставляя в (8.4) вместо элемента v элемент
v-\-u, приходим к неравенству
л (и, v)^L(v), (8.11)
которое выполняется для любого v (= Ud. Здесь мы использовали
тот факт, что вместе с любыми векторами v, w e ?/d конусу Ud
принадлежит также их сумма. Далее, полагая в (8.4) v = 0,
а в (8.11) v = u, соответственно получаем
— л (и, и)^ — L(u),
л (и, u)^L(u),
откуда
л (и, u) = L(u). (8.12)
Покажем, что (8.11), (8.12) эквивалентны (8.4). Для этого
достаточно показать, что (8.4) следует из (8.11), (8.12). Вычитая
из (8.11) равенство (8.12), мы получаем
откуда, в силу билинейности функционала л и линейности функ-
функционала L, приходим к неравенству
л (и, v~u)^L(v — u),
которое выполняется для любого v e Ud. Таким образом, если
Ud — конус, то (8.4) и (8.11), (8.12) эквивалентны.
2.8.2. Примеры экстремальных задач
При иллюстрации результатов предыдущего пункта для нагляд-
наглядности ограничимся одномерным случаем, когда элементы ие(/
являются функциями одной переменной х, a U является простран-
пространством Соболева Wlt@, 1). Скалярное произведение и норма в И
2.8]
ВАРИАЦИОННЫЕ НЕРАВЕНСТВА
125
задаются соответственно соотношениями
i
" du dv i
о
'(8.13)
Рассмотрим билинейный функционал
л (и, v) = (u, v)u
и линейный функционал
(8.14)
(8.15)
где / = / (х) — некоторый фиксированный элемент пространства
L2@, 1). Очевидно, что л(м, и) будет симметричным непрерыв-
непрерывным положительно определенным функционалом, a L (и) — непре-
непрерывным функционалом. Это следует из соотношений
л (и, v)^\\u\\u-\\v\\u,
л(и, v) = \\vfu,
L(O)< ||/Ik @.1)-II О Ik @.1) ^11/Ik @.1)-II О it/-
Таким образом, для квадратичного функционала
(8.16)
(8.17)
1
J(v) = (v, v)u-2\fvdx
(8.18)
будут выполнены все условия утверждений предыдущего пункта,
и, следовательно, если Ud <=, ?/—замкнутое выпуклое множество,
то элемент и е Ud, являющийся решением экстремальной задачи
J(u)= inf J(v), (8.19)
u
существует и единствен. При этом он однозначно определяется
неравенством
л (и, v-u)^L(v-u), (8.20)
которое выполняется для любого v e Ud. Необходимо отметить,
что поскольку любая функция v(x) ^W\@, 1) в то же время
принадлежит банахову пространству непрерывных функций С @, 1),
то решение и(х) задачи (8.19) всегда будет непрерывной функ-
функцией. Кроме того, существует такая константа а, что для любой
функции v (х) е 0 = W% @, 1) выполняется неравенство
Mho.n^aHly, (8.21)
т. е. из сходимости последовательности функций \vk (x)} к функ-
функции v-'(x) в норме пространства 11^@, 1) следует сходимость
126
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
[ГЛ. 2
последовательности \vk(x)} к Vе0 (х) в норме пространства С@, 1).
Перейдем к рассмотрению конкретных случаев.
Пусть Ud — U. Тогда U d является несобственным (совпадаю-
(совпадающим с II) подпространством U и, согласно первому примеру из
2.8.1, решение и (х) задачи (8.19) для любого v(x)^U удовлет-
удовлетворяет равенству
(и, v)u = L(v).
Отсюда, с помощью стандартных рассуждений, приходим к выводу,
что и (х) является обобщенным решением краевой задачи Неймана
d2u
F
¦« = /(*),
du
dx
= 0 при х = 0,
* 0
при x= 1.
(8.22)
Если, например, / (х) — непрерывная функция, то и(х) является
классическим решением этой задачи.
Предположим теперь, что Ud = W\@, 1). Известно, что Wl2@, 1)
является замкнутым подпространством в пространстве №?@, 1)
(так как W\{Q, 1) —полное пространство в метрике пространства
W|@, 1)). Поэтому, согласно первому примеру из 2.8.1, реше-
решение A(^N^@, 1) задачи (8.19) удовлетворяет для любого
v(x) (= W'i@, 1) равенству
(и, v)u = L(v).
Отсюда, аналогично предыдущему, приходим к выводу, что
и (х) является обобщенным решением краевой задачи Дирихле
« = /(*), 0<*<l,
u@) = u(l) = 0.
(8.23)
Рассмотрим случай, когда множество Ud не является подпро-
подпространством пространства U, т. е. имеет более сложную струк-
структуру. Определим множество Ud соотношением
Ud={u(x): u(x)<=W!2@, 1), и
для * е= @, 1)}, Г8.24)
т. е. Ud ягляется множеством функций из №.1@, 1), неотрица-
неотрицательных на интервале @, 1) и обращающихся в нуль на грани-
границах этого интервала. Покажем, что Ud является конусом
в Wi@, 1). Для этого нам нужно доказать следующее: 1) Ud
выпукло; 2) Ud замкнуто; 3) если v(x)<=Ud, то yv(x)^Ud для
любого y S? 0; 4) если v (х) и — v (х) принадлежат Ud, то v (х) == 0.
2.8]
ВАРИАЦИОННЫЕ НЕРАВЕНСТВА
127
Требование выпуклости означает, что вместе с и(х) и v (x)
из Ud элемент w (*) = A — в) и {x)-\-Qv (х) принадлежит Ud для
любого 6е@, 1). Выполнение этого требования вытекает из
неотрицательности функции w (x), так как она является линей-
линейной комбинацией неотрицательных функций с положительными
коэффициентами.
Докажем выполнение второго требования. Пусть vk (x), k =
= 0, 1,..., — последовательность функций из Ud, сходящаяся
в норме пространства №j@, 1) к некоторой функции a>°°(je)e
ё?5@, 1). Так как xf° (x) se С @, 1), то, согласно B.21), после-
последовательность \vk (x)) сходится в норме пространства С@, 1)
к функции ^@, 1). Таким образом, функция vm (х) будет неот-
неотрицательна, обращаться в нуль на границе интервала @, 1)
и, следовательно, будет принадлежать множеству Ud.
Выполнение третьего и четвертого требований устанавливается
тривиально.
Таким образом, если множество Ud определено соотношением
(8.24), то, согласно 2.8.1, решение и(х) задачи. (8.19) сущест-
существует, единственно и характеризуется тем, что для любого
v(x)^Ud выполняется неравенство
и, кроме того,
л (и, v)
л (и, u) = L{u).
(8.25)
(8.26)
Исследуем свойства решения и (х) сформулированной задачи.
Пусть в некоторой точке ? е @, 1) функция и (х) положительна.
Тогда, поскольку и (х) непрерывна, то существует такой интер-
интервал (|~, ?+) ? @, 1), что функция w (л:) положительна на этом
интервале и м (|~) = « (g+) = 0 (в частности, может оказаться, что
?~ = 0 и |+= 1). Обозначим через D(?~, ?+) множество бесконечно
дифференцируемых функций, финитных в интервале A~, ?+)
и тождественно равных нулю вне этого интервала. Как известно,
множество функций D (?-, |+) плотно в W\ (|~, |+) и любая функ-
функция ф(*)е?)(!~, |+) обладает тем свойством, что для всех
достаточно малых е > 0 функции
ve (х) = и (х) ± ёф (х) (8.27)
принадлежат множеству Ud. Подставляя функции v(x) = ve(x)
в неравенство (8.25), имеем
л (и, и)±ел(и, ф) ^ L (и) ± eL (ф). (8.28)
Отсюда, используя равенство (8.26), получаем
л (и, ф)==г/,(ф), (8.29)
— л(м, <f)Sa — L (ф), (8.30)
128 МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
и, следовательно,
л (u, <p) = L(<p)
[ГЛ. 2
(8.31)
для любого феО(|", |+).
Перепишем (8.31), учитывая, что ф(*) = 0 для х ф (?~, |+):
idx, (8.32)
1+),аи(х)евЩа-,^).
'-2 (i~, |+), то равенство
гдеф(х) — произвольная функция изD(?
Так как множество Z)(?~, |+) плотно в
(8.32) будет также выполняться для любой
О
?+
).
) у p^ ?)
Отсюда, согласно второму примеру из настоящего пункта, выте-
вытекает, что на отрезке [|~, ?+] функция и (х) будет являться обоб-
обобщенным решением задачи Дирихле
(8.33)
Таким образом, любой точке ^е@, 1), где решение и (х) задачи
(8.19) оказывается положительным, ставится в соответствие неко-
некоторый интервал (|~, |+), на котором функция и (х) будет являться
обобщенным решением задачи (8.33).
Резюмируя изложенное выше, можно сделать вывод, что
интервал П = @, 1) представим в виде
= ?2° U
(8.34)
где Q+ —открытое множество, являющееся объединением некото-
некоторого числа интервалов (возможно, счетного числа), на которых
функция и (х) положительна и является обобщенным решением
задач вида (8.33), и Q0—дополнение Q1" до Q (возможно, пустое),
на котором функция и (х) тождественно равна нулю.
Рассмотренная нами задача относится к задачам со свобод-
свободными границами, которые возникают, например, в механике
сплошной среды. Неизвестными здесь являются как границы
интервалов, составляющих множество ?2+, так и функция и (х)
на этих интервалах.
В заключение рассмотрим один интересный пример, когда Ud
не является ни подпространством пространства U, ни конусом
в этом пространстве. Для этого предположим, что на интервалэ
(О, 1) заданы две функции: Ft(x) и F2(x), принадлежащие про-
пространству W!z@, 1) и удовлетворяющие для всех х е @, 1) не-
неравенству
Г^хХР^х) (8.35)
2.8]
и неравенствам
ВАРИАЦИОННЫЕ НЕРАВЕНСТВА
Fi@)<0<F,@),
129
(8.36)
Определим множество Ud соотношением
для всех *<=@, 1)}. (8.37)
Множество Ud состоит из функций пространства WJ@, 1), обра-
обращающихся в нуль на границах интервала @, 1) и удовлетворя-
удовлетворяющих на этом интервале неравенству
*1 \Х) ^= W \Х) ^~^Г2 (X). [О.ОО)
Анализ, аналогичный использованному в предыдущем пункте,
показывает, что Ud является замкнутым выпуклым множеством
пространства W\@, 1). Отсюда и из 2.8.1 следует, что при таком
выборе Ua задача (8.19) имеет единственное решение.
Предположим, что в некоторой точке ^е@, 1)
?)¦ (8.39)
Тогда в силу непрерывности и (х), существуют такие точки
I", ?+ (= [О, 1], что | <= (?-, |+) и функция и (х) на интервале (?~, |+)
удовлетворяет неравенствам
F1(x)<u(x)<F2(x), (8.40)
а на границах интервала (?-, |+) —краевым условиям:
либо Z7! (g-),
(8.41)
"(?") =
либо F2
либо
Таким образом, интервал Q = @, 1) представим в виде
Q = fi°U^, (8.42)
где ?2+ является объединением интервалов, на которых функция
и (х) удовлетворяет неравенству (8.40), a Q0 дополняет Q+ до ?2,
причем на Q0 функция и (х) равна либо Рг(х), либо F2 (x). Заме-
Заметим, что если функции Fi (x) и F2(x) не обращаются в нуль на
границах интервала @, 1), то Q0 является замкнутым множест-
множеством, т. е. является объединением конечного числа отрезков
и изолированных точек, принадлежащих интервалу @, 1). При
этом на каждом из отрезков, входящих в ?2°, функция и (х)
равна либо только функции F1(x), либо только функции F2(x).
5 Г. И. Марчук
130
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
ГГЛ. 2
Исследуем теперь свойства функции и (х) на некотором интер-
интервале (?-, ^+) с О1. Так как для всех достаточно малых е>0
и для любой функции ф (я) (=?>(?-, g+) вместе с функцией и(х)
множеству Ud будут принадлежать функции ve (х) — и (х) ± еф (х),
то, подставляя в неравенство (8.20) вместо функции v (x) функ-
функции ve (x), приходим к неравенствам
п(и, ф)
— п(и, ф)
/,(ф),
Отсюда делаем вывод, что для любого ф (х) е D (?~, ?+) выпол-
выполняется равенство
л (и, Ф) = Мф) (8-43)
или эквивалентное ему
где и (х) удовлетворяет граничным условиям
a g и g+ определяются соотношениями
либо ri(s),
либо F2 (I'),
либо Ft (|+),
либо F2 (i+).
(8.44)
(8.45)
(8.46)
Теперь, на основании рассмотренных ранее примеров, заключаем,
что на каждом из интервалов (|~, g+) функция и (х) является
обобщенным решением задачи Дирихле
(8.47)
Таким образом, решение сформулированной задачи, в отличие
от предыдущей, заключается не только в нахождении границ
интервалов множества Q+ и вычислении функции и (х) на этих
интервалах, но и в определении значений функции и(х) на гра-
границах этих интервалов. Рассмотренная задача также относится
к задачам со свободными границами.
1
2.8]
ВАРИАЦИОННЫЕ НЕРАВЕНСТВА
131
2.8.3. Численные методы для экстремальных задач
Использование того или иного численного метода решения
экстремальной задачи тесно связано с конкретными свойствами
квадратичного функционала J (и) и множества Ud s U, на кото-
котором ищется решение этой задачи. Так, в случае первого и вто-
второго примеров, рассмотренных в предыдущем пункте, когда оты-
отыскание приближенного решения экстремальной задачи сводится
к нахождению обобщенного или классического решения линейной
краевой задачи для дифференциального уравнения, целесообраз-
целесообразнее решать непосредственно полученную краевую задачу. Такой
подход оказывается весьма затруднительным с практической
точки зрения для третьего и четвертого примеров, поскольку
границы областей, где нужно искать решение краевой задачи,
и сами краевые условия являются неизвестными. Тем не менее
существует много подходов для решения указанных задач,
использующих, например, регуляризацию, метод штрафов и
методы нелинейного программирования. В настоящем пункте мы
остановимся на другом подходе, который заключается в предва-
предварительном сведении задачи (8.3) к некоторой конечномерной
задаче и последующем решении экстремальной задачи для квад-
квадратичной функции п переменных на выпуклом ограниченном
множестве пространства п измерений.
Пусть Uh — некоторая последовательность конечномерных
подпространств размерности n = n(h) пространства U (n(h)-*-oo
при ft->-0), аппроксимирующих U в следующем смысле: для
любого v (х) е 11ц любого Д > 0 существует такое hA, что для
всех h<h\ в Uh найдется элемент if1 (x), аппроксимирующий
v (х) с точностью Д,т. е. для всех /г</гд выполняется неравенство
inf II у-
Ф
Задачу (8.3) заменим приближенной задачей
J{uh)= inf J (v),
(8.48)
(8.49)
где и1} = Ua П t/ft — замкнутое выпуклое множество. Очевидно, что
задача (8.49) также имеет единственное решение (см. 2.8.1),
которое, в силу предположения полноты последовательности Uh
в U, сходится при /г->-0 к решению исходной задачи (8.3).
Предположим, что функции ^(х), k=\, ..., п, образуют
базис пространства Uh и для некоторого v (x) справедливо соот-
соотношение
v(x)= J] «№(*)• (8-5°)
132
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
[ГЛ. 2
При этих предположениях
J(v)^O(a) = (Aa, a)-2(g, a), (8.51)
где А — симметричная положительно определенная матрица
порядка п с элементами
а,7 = л(^, ^), (8.52)
g и а — векторы размерности п с компонентами
(8.53)
w- ¦ —- w..
I I
соответственно, а через (,) обозначено обычное скалярное произ-
произведение в пространстве гс-мерных вещественных векторов. Теперь
задача (8.49) принимает вид
Ф(Р)= inf<D(a),
«6V,
где Vd определяется следующим образом: a
том случае, если функция
v (х) =
(8.54)
Vd в том и только
(8.55)
принадлежит множеству Ua. Очевидно, что Vd является замкну-
замкнутым выпуклым множеством пространства гс-мерных вещественных
векторов и задача (8.55) имеет единственное решение р, причем
функция
«*(*)=
(8.56)
является решением задачи (8.49).
В настоящее время для решения задачи (8.54) разработано
и исследовано большое количество алгоритмов. К наиболее рас-
распространенным относятся различные варианты метода спуска,
градиентные методы, методы возможных направлений, метод ло-
локальных вариаций и другие методы.
Опишем сначала один из вариантов метода релаксации.
Пусть ais) = (af\ ..., c^s>) e Vd является s-м приближением
к искомому решению р задачи (8.54). Тогда вычисление (s+l)-
го приближения состоит из п промежуточных шагов, которые
реализуются по формулам
a « =а
(8.57)
2.81
ВАРИАЦИОННЫЕ НЕРАВЕНСТВА
133
где et — вектор с компонентами ei/ = 8ij (/=1, ..., п) фу — сим-
символ Кронекера),
1—1
/= i
да.
.1^1, (8.57')
а = а
a q] является решением следующей одномерной экстремальной
задачи:
S-
I— 1
= inf Ф^а* ' " "
я
(8.58)
a
Vd.
Этот релаксационный метод относится к методам покоординат-
покоординатного спуска и в случае, когда Vd совпадает со всем простран-
пространством, переходит в известный метод Гаусса — Зейделя решения
систем линейных уравнений Aa = g с симметричной и положи-
положительно определенной матрицей А.
Поясним изложенное выше на примере решения задачи (8.19),
когда множество Vd определяется соотношением (8.37) при до-
дополнительном предположении, что функция F\{x) вогнута, а
функция F2 (х) выпукла, т. е. для любых х', х" е [О, 1] ибе [0, 1]
выполняются неравенства
Рассмотрим на отрезке [0, 1] для заданного п^\ равномерную
сетку
= 0,\,..., N+\, к=
(8.60)
и введем по формуле C.14) систему базисных функций tyk(x),
k=\, ..., п. Пространство Uh определяется как линейная обо-
оболочка системы функций {^ (*)}?= г Иначе говоря, пространство
Uh является пространством кусочно-линейных восполнений сеточ-
сеточных функций, определенных в узлах сетки QA и обращающихся
в нуль в точках хо = О и xNvl=\.
При сделанных предположениях относительно функций F± (x)
и F* (х) и пространства Uh множество Ud = Udf\Uh является мно-
множеством функций v (x) e Uh, удовлетворяющих неравенствам
v (xi) =s? F2 (x,), i = 1,
n.
Соответственно множеством Vd будет н-мерный прямоугольный
134
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
ГГЛ 2
параллелепипед, координаты а = (аь ..., а„) которого удовлет-
удовлетворяют неравенствам
)xi), i = l п.
Если же относительно функций Fi (х) и F2 (л;) не предпола-
предполагать соответственно их вогнутости и выпуклости, то требования
принадлежности функций v (x) множеству ?/$ (векторов а мно-
множеству Vd) могут оказаться значительно сложнее.
Для иллюстрации метода локальных вариаций рассмотрим
простейшую одномерную вариационную задачу. Пусть имеется
вариационный функционал
(ф) =
ф,
(8.61)
Требуется найти функцию ф (х), доставляющую минимум функ-
функционалу (8.61) и удовлетворяющую следующим ограничениям:
F1(x)^<p(x)^Fi(x). (8.62)
Заметим, что в некоторых точках отрезка [0, 1] ограничения мо-
могут отсутствовать. В этом случае мы формально считаем, что
имеется естественное ограничение: либо
либо
— со<ф,
ф < СО.
В такой трактовке граничные условия для функции ф (х) при
х = 0 и х=\ также удобно считать ограничениями. Это мы и
будем делать в дальнейшем.
Простейшим вариантом реализации метода является следую-
следующий. Разобьем интервал [О, I] на п равных частей точками хг =
= i'Ajc, Лл'=1/я (г = 0, 1, ..., п). Вариационный функционал
(8.61) представим в виде суммы частных функционалов:
J =
п - 1 xt+1
Ф>
dx-
1=0 х,
(8.63)
Каждый из интегралов в (8.63) аппроксимируем по формуле пря-
прямоугольников
п(х, ф, ф,) dxя« Ахп (*,.+1/2, ф(+1/2> Ф;+1/2),
где
' 2 #
2.8]
ВАРИАЦИОННЫЕ НЕРАВЕНСТВА
135
Таким образом, в выражение для частных функционалов войдут
только значения искомой функции в точках ф* и ф(+1. Введем
следующее обозначение:
Vi((pi, <pi+1) = Axn (хм/2, фг+1/2,
Приближенно будем иметь
га —I
(8.64)
Мы пришли к задаче отыскания такого набора чисел {фг}, кото-
который при заданных ограничениях
fiW<Ti<f>W (8.65)
доставляет минимум функционалу V.
Для решения задачи воспользуемся методом последовательных
приближений. Пусть нам известны приближения до номера k:
Ф*. Новые приближения ф* + 1 будем искать следующим образом.
Введем в рассмотрение некоторое число h и для каждого хг рас-
рассмотрим совокупность трех чисел <$\ — h, ф^, q>k.-\-h. Величина ф^,
по предположению, удовлетворяет ограничениям. Необходимо те-
теперь проверить выполнение ограничений для двух остальных ве-
величин. Если какое-нибудь ограничение не выполняется, то соот-
соответствующее число из рассмотрения исключается и мы имеем дело
только с парой чисел: либо tf — h, ф*, либо ф*, ф^ + /г.
Аналогично методу Гаусса —Зейделя, предположим, что нам
уже известны значения решения на (й+1)-м приближении для
всех индексов, меньших i, т. е. ф* + \ Ф* + 1, ..-, ф?+/- Естест-
Естественно эту информацию использовать для ускорения сходимости
метода. Поэтому, наряду с частными функционалами Vh удобно
ввести в рассмотрения другие:
(8.66)
Эти выражения учитывают в сумме (8.64) те два члена, которые
зависят от величины ф,- и соответствуют трем возможным ее ва-
вариациям: ф* — h, ф^, ф* + Л.
Дальнейшее сводится к определению такого из этих трех чи-
чисел, которое удовлетворяет заданным ограничениям и доставляет
минимум одному из трех функционалов (8.66). Именно это число
и объявляется новым приближенным значением ф*+1. После того,
как будут найдены значения <pf + 1 для всех i = 0, ..., п, можно
переходить к очередному приближению.
136
МЕТОДЫ ПОСТРОЕНИЯ РАЗНОСТНЫХ СХЕМ
[ГЛ. 2
В том случае, когда при данных параметрах Ах и h прибли-
приближенное решение получено с заданной точностью, этот процесс
нужно проводить с новым значением h, например уменьшенным
вдвое, и т. д. Естественно, что при организации этого нового
процесса следует использовать полученную информацию о при-
приближенном решении, взяв его в качестве начального. Затем необ-
необходимо уменьшить Ах и добиваться лучшей аппроксимации в ре-
решении задачи.
Мы рассмотрели наиболее простой случай ограничений, когда
известные требования накладываются на само решение ц>. В более
общем случае, когда ограничение задается соотношением
В (х, ф, ф.,:)<0,
необходимо воспользоваться для любого xt той или иной аппрок-
аппроксимацией и каждый раз проверять выполнение этого приближен-
приближенного условия.
Метод локальных вариаций распространяется и на многомер-
многомерные вариационные задачи с ограничениями, причем принципиально
сохраняются все этапы изложенного алгоритма. Например, в слу-
случае двумерной области вместо совокупности чисел, подлежащих
сравнению на основе функционалов и ограничений цц — h, ф,-,
ф< + Л, теперь будем иметь фу —Л, фу, ф/у- +Л, а частный функ-
функционал Vij будет состоять из четырех слагаемых:
которые содержат величину ф* Аналогичным образом определим
Ufj и Ulj, где вместо фу- следует подставить величины Ф;у + /г и
Фу- — h соответственно. Алгоритм для задач с большим числом
переменных формируется аналогичным образом.
В заключение следует подчеркнуть, что метод локальных ва-
вариаций не связан с выбором базиса и поэтому применим для
областей произвольной формы. Однако следует иметь в виду, что
решение вариационной задачи методом локальных вариаций мо-
может привести не к абсолютному минимуму, а к локальному. Что
касается сходимости метода к локальному минимуму, то она га-
гарантируется существом алгоритма.
Г Л А В А 3
ИНТЕРПОЛЯЦИЯ СЕТОЧНЫХ ФУНКЦИЙ
Проблема интерполяции величин, заданных на дискретном мно-
множестве точек, на всю область определения функции непрерывного
аргумента тесно связана с построением вариационно-разностных
схем и непрерывного представления решений разностных задач.
В самом деле, при построении разностных уравнений, как правило,
осуществляется процесс дискретизации оператора и решения задачи
с помощью подходящих методов проектирования. При этом реше-
решение разностной задачи обычно представляет собой приближенное
решение исходной задачи на дискретном множестве точек. Пред-
Предположим, что разностная задача решена и мы располагаем инфор-
информацией о приближенном решении этой задачи. Дальнейшее свя-
связано с интерполяцией полученных данных на всю область опре-
определения решения исходной задачи. Естественно, что при такой
интерполяции должны быть соблюдены некоторые условия,
а именно: если решение разностного уравнения получено с опре-
определенной степенью точности, то порядок интерполяции данных
должен согласовываться с порядком аппроксимации разностного
уравнения и быть не ниже последнего. Если мы располагаем
дополнительной информацией о погрешностях приближенного реше-
решения, то интерполирование приближенного решения можно осуще-
осуществить не по точным данным, а с учетом возможных погрешностей
в узлах. Тогда априорная информация о гладкости решения
в некоторых случаях позволит даже уточнить приближенное реше-
решение задачи, полученное с помощью тех или иных разностных
методов. Конечно, проблема интерполяции данных имеет и само-
самостоятельное значение.
Алгоритмы интерполяции функций по точным данным, опре-
определенным на дискретном множестве точек, как правило, основаны
на использовании интерполяционных многочленов Лагранжа. При
этом относительно интерполируемой функции <р(х) вводится апри-
априорное предположение о том, что она обладает производными
до некоторого порядка.
Другая, близкая к проблеме интерполяции, задача возникает
в том случае, когда значения заданной функции ф (х) известны
в узловых точках xk не точно, а с некоторой погрешностью,
максимальная величина которой для каждой точки задается в каче-
138
ИНТЕРПОЛЯЦИЯ СЕТОЧНЫХ ФУНКЦИЙ
[ГЛ 3
стве априорной информации. В этом случае задача состоит
в построении такой кривой, которая бы в известном смысле
наилучшим образом аппроксимировала функцию, заданную со
случайными погрешностями в узловых точках. Такая задача
обычно решается на основе метода наименьших квадратов.
В последние годы теория интерполяции обогатилась новыми
методами, получившими название сплайновых интерполяций. Сле-
Следует отметить, что сплайном обычно оказывается определенная
в области D кусочно-полиномиальная функция, т. е функция,
для которой существует разбиение D на подобласти такое, что
внутри каждого элемента разбиения функция представляет собой
многочлен некоторой степени т. Кроме того, эта функция, как
правило, непрерывна в области D вместе с производными до
(т— 1)-го порядка и имеет интегрируемую с квадратом производ-
производную порядка т. Наиболее употребительными в технике явились
сплайны —многочлены третьей степени.
3.1. Интерполяция функций одного переменного
3.1.1. Интерполяция функций одного переменного
с помощью кубических сплайнов
Пусть на отрезке [а, Ь] вещественной оси х задана сетка а =
= xo<Xj <;...<Xi = b, в узлах которой заданы значения {fk}i = 0
функции / (х), определенной на [а, Ь]. Тогда задача кусочно-куби-
кусочно-кубической интерполяции ставится следующим образом. На отрезке [а, Ь]
необходимо найти функцию g(x), удовлетворяющую требованиям:
1) g(x) принадлежит классу СB) (а, Ь), т. е. непрерывна вместе
со своими производными до второго порядка включительно;
2) на каждом из отрезков [хк-ъ хк] g(x) является кубическим
многочленом вида
= ?*(*)=
k=l, ..., n; A.1)
3) в узлах сетки
а = о выполняются равенства
/* (* = 0,1, .... л);
4) g" (x) удовлетворяет граничным условиям
A.2)
O. A.3)
Достоинства выбранной нами интерполяции выяснятся в даль-
дальнейшем, когда мы установим естественное экстремальное свойство
так определенной функции g(x).
3.1]
ИНТЕРПОЛЯЦИЯ ФУНКЦИЙ ОДНОГО ПЕРЕМЕННОГО
139
Покажем, что поставленная задача на нахождение интерполи-
интерполирующей кусочно-кубической функции g(x) имеет единственное
решение. Для этого воспользуемся сформулированными выше
условиями 1) —4).
Так как вторая производная функции g(x) непрерывна и
линейна на каждом отрезке сетки [хм, xt] (t = l, ..., /г), мы
можем записать при х^-г
X — Xt_!
_
A.4)
где hi — Xj — Xi-г, mk = g" (X/t). Проинтегрируем дважды обе части
равенства A.4). Получим
*?ь?^±, A.5)
где А{ и В, — некоторые константы интегрирования. Они вычис-
вычисляются из условия g(xl-i) = fi-1, g(xi)=fi. Подставляя x = xt
и x = Xi-i в A.5), получим
^
Окончательно имеем
li-x 6ft,-
(x -y,-_iK +
m-,h)\x.—x . i mjij \ x—x.
(X — Xj ,J . ft — /; , т.; — 1П:
1 Ы. A.7)
Из A.7) находим односторонние пределы производной в точ-
точках Xi, Х2, . • • , Хп-х'.
=li^!
Согласно условию 1) функции g" (х) и g' (x) непрерывны на [а, Ь].
Из условия непрерывности g' (x) в точках хъ х2, ..., хп-х полу-
получаем п — 1 уравнение
Дополняя эти уравнения из условий A.3) равенствами т0 =
= тя = 0, получаем линейную алгебраическую систему для
140
ИНТЕРПОЛЯЦИЯ СЕТОЧНЫХ ФУНКЦИЙ
нахождения неизвестных tn-i, m2,
ГПп-v
[ГЛ. 3
A.9)
Квадратная матрица А имеет вид
A =
hi
3
о
о
о
о
A.10)
Ля-1 К-
векторы т и / и прямоугольная матрица Я таковы:
к
m =
т1
т2
Я =
1
о
1
1
1 \ 1
A.11)
Матрица А симметрична, со строгим диагональным преоблада-
преобладанием. По теореме Гершгорина о локализации собственных зна-
значений она положительно определена и, разумеется, неособенная.
Значит, коэффициенты пг1, т2, ..., тпл определяются из системы
A.9) однозначно. Следовательно, сплайн-функция g (х) также
однозначно восстанавливается по формулам A.6) и задача
о нахождении кусочно-кубической функции g (х) имеет единст-
единственное решение.
Кубические сплайн-функции обладают очень важным свойст-
свойством, которое обусловливает высокую эффективность сплайн-интер-
сплайн-интерполяции. А именно, рассмотрим на отрезке [а, Ь] класс W| [а, Ь],
состоящий из функций, имеющих суммируемые с квадратом вто-
вторые производные. Поставим задачу отыскания интерполяционной
функции
«ef![fl, b], ы (**)=/*, k = 0,l,...;.n, A.12)
которая минимизирует функционал
ь
ф (и) = \ [и" (х)]2 dx A.13)
3.1]
ИНТЕРПОЛЯЦИЯ ФУНКЦИЙ ОДНОГО ПЕРЕМЕННОГО
141
на классе Щ[а, 6]. Утверждается, что минимум такого функ-
функционала достигается на кусочно-кубической сплайн-функции g(;t),
которую мы только что построили. В самом деле, рассмотрим
величину
ь
Интегрируя по частям и используя свойства функций ^име WI,
получим
Ф (и-g) = Ф (и)-Ф(§)-2\(и'-g')g"\*2ba-\ (и'-g')g'"dx] =
L а
п xk
= Ф(ы)-Ф(#-22 I (u'-g')g'" dx.
Но g'"=ck = const на отрезке [Xk-i, x^\, поэтому
п
Ф {и-g) = Ф (и) -Ф(g) -2 2 ck(u-g) xxZxxk =Ф(ы)-Ф(й)-
Отсюда и из A.14) вытекает, что
Ф (g) =Ф (и) - Ф (и -g) < Ф (и)
для любой функции
u<=Wh u{xk) = fk, k = 0, 1, ..., п.
A.15)
Таким образом, на кусочно-кубической функции g (x) реализуется
минимум функционала A.13). Нетрудно показать, что других
точек минимума у функционала нет.
Основываясь на A.12), A.13), можно дать другое, эквива-
эквивалентное определение кусочно-кубической сплайн-функции: это такая
функция из класса №![<з, Ь], которая принимает в узлах сетки
заданное значение и минимизирует функционал A.13). Такое
свойство сплайн-функций интересно тем, что функционал Ф (и)
можно интерпретировать как аналог потенциальной энергии упру-
упругого стержня, закрепленного в точках плоскости (xk, fk), и на
кубических сплайнах реализуется минимум этой энергии.
Кубические сплайн-функции обладают хорошими аппроксими-
аппроксимирующими свойствами. Если интерполируемая функция / принад-
принадлежит классу C(k) [a, b] (k = 0, 1,2,3,4), то для функции погреш-
погрешности ф (л;) = / (л;) — g (x) справедливы неравенства
max
| гр
(р)
Chk p,
A.16)
142
ИНТЕРПОЛЯЦИЯ СЕТОЧНЫХ ФУНКЦИЙ
[ГЛ. 3
где С —неотрицательная константа, не зависящая от сетки,
h= max IXi — Xi-x].
Оценка A.16) грубая; имеются и более точные оценки.
3.1.2. Кусочно-кубическая интерполяция со сглаживанием
В этом пункте мы опять рассмотрим задачу о гладком вос-
восполнении функции, которая определена на сетке
а = х0 <хх <... <х„ = Ъ.
Однако теперь значения функции }к в узлах сетки возмущены
некоторой погрешностью. В этом случае не имеет смысла строить
интерполяционную функцию, которая в узлах в точности совпа-
совпадает с заданными значениями. Более того, следует построить
функцию, которая проходила бы вблизи заданных значений
более «плавно», чем интерполяционная. Такие функции называют
уже не интерполяционными, а сглаживающими.
Потребуем, чтобы искомая сглаживающая функция g(x) мини-
минимизировала на классе WI [а, Ь] функционал
ь п
Фг (и) = $ [u"f dx + 2 pk [и (xk) - Uf, A.17)
а к = 0
где рк — некоторые положительные числа. В функционале Ф3 (и)
скомбинированы интерполяционные условия прохождения кривой
вблизи заданных значений и условие минимальности «изгибания»
функции. Чем больше весовые коэффициенты pk, тем больший
вклад в функционал вносят интерполяционные условия, тем
ближе к заданным значениям проходит сглаживающая функция.
Покажем, что решением вариационной задачи A.17) является
кубический сплайн, т. е. функция, удовлетворяющая требова-
требованиям 1), 2) и 4) из предыдущего пункта. Пусть «0 g W1 [а, Ь] —
решение задачи. Построим сплайн g(x) такой, что g (xk) = и0 (xk)
(k = 0, 1,...,и). Второе слагаемое в A.17) одинаково для функ-
функций g(x) и «о (л:), поэтому
A.18)
Но, как показано в предыдущем пункте, g(x) — единственная
функция, дающая при интерполировании ио(х) минимум выра-
ь
жения ^[u"]2dx. Поэтому uo=-g.
а
Итак, минимум функционала С?! (и) достаточно искать в классе
кубических сплайнов. Так как кубический сплайн однозначно
3.1]
ИНТЕРПОЛЯЦИЯ ФУНКЦИЙ ОДНОГО ПЕРЕМЕННОГО
143
определяется множеством его значений \\Лк}1=о, принимаемых
в узлах \xk}k = o, то минимизация Ф1 («) сводится к нахождению
минимума функции от переменных ц0, Щ, •••, М-л-
Мы уже знаем, что g" (x) — кусочно-линейная функция,
причем
к, ч xk—X . X—Xk 1 /. im
g (x)—mk-i—т \-rrik—j-5-^ A-19)
e /tk itk
при x e [xk-i, xk], ntk = g" (Xk), k—\, ..., n—\, ma = mn — 0.
Поэтому
ф. te) = 2 3 К1
^tt-1 dx+
k = l X
ft-1
A.20)
Производя в формуле A.20) интегрирование, получим, что
n
у с W, х-±=х • - х-х*^
mk+]^{Am,m). A.21)
Здесь А — известная матрица A.10) Итак,
a
Ф, (g) = (Am, m) + 2 Pu (И* - hJ-
A.22)
Ввиду A.9) m линейно выражается через \i = ([in, ць ..., \in),
а потому Ф1 (g) есть положительно определенная форма ст ц.
Ее экстремумом может быть только минимум, необходимым усло-
условием которого является
*? * ii,-f,)=0, s = 0, I п.
Но матрица А не зависит от [г. Поэтому в силу A.9)
д л
-г— (Лт, т) ='
Здесь Н определяется формулой A.11). Отсюда вытекает, что
в векторной форме условие минимума имеет вид
р = Р}, A.23)
J
144 ИНТЕРПОЛЯЦИЯ СЕТОЧНЫХ ФУНКЦИЙ
где / = (/о, fi, ••¦, fn), a P — диагональная матрица:
| Ро 0 ... О
/>= И Pi ••• °
I: 0 0 ... р„
Умножая A.23) слева на HP'1, получим, что
[ГЛ. 3
A.24)
или окончательно, учитывая A.9),
{A+HP-1H*)m =
A.25)
Матрица системы A.25) пятидиагональна, симметрична и поло-
положительно определена. Систему A.25) можно решить, например,
методом исключения Гаусса. После того, как вектор т опреде-
определен, необходимо найти вектор сеточных значений сглаживаю-
сглаживающего сплайна по формуле, которая легко следует из A.23):
VL = f-p-1H*m. A.26)
Затем по формуле A.6) восстановить сплайн g(x).
Сглаживание кубическими сплайнами— это не единственный
способ сглаживания. В параграфе 3.3 мы кратко познакомимся
с общей теорией сглаживания и некоторыми примерами.
3.1.3. Гладкие восполнения
Расскажем теперь о другом способе гладкого восполнения
сеточных функций, несколько отличном от методов теории сплайн-
функций, однако тоже весьма эффективном с алгоритмической
точки зрения.
Опишем очень кратко процесс построения интерполяционной
функции произвольного класса гладкости Ср< Пусть х1<^х2<С
< ... <Lxn.1 <.хп — некоторая фиксированная сетка, в узлах
которой известны значения функции fu f2, ..., fn. Предположим,
что п достаточно велико. Фиксируем целое число р-^п. Сначала
построим интерполяционную функцию класса гладкости Ср на
отрезке сетки (хь х2). Обозначим через Ро (х) многочлен Лагранжа
степени не выше р, совпадающий с заданными значениями
в узлах сетки хъ х2, ..., хр+1, а через Рг (х) — многочлен Лаг-
Лагранжа также степени не выше р, принимающий заданные зна-
значения в узлах х2, хя, ..., хр+2. Построим, далее, многочлен Q3 (x)
степени не выше 2р+1, который удовлетворяет условиям
dxk
dx"
X =.t,
6 = 0. 1.
dkP1
A.27)
3.1]
ИНТЕРПОЛЯЦИЯ ФУНКЦИЙ ОДНОГО ПЕРЕМЕННОГО
145
Очевидно, что такой многочлен Qx (x) существует и условиями
A.27) определен однозначно.
Пусть интерполяционная функция g(x) на отрезке (хи х2)
равна Qi(x). В качестве иллюстрации ограничимся рассмотре-
рассмотрением случая р=1. Тогда на отрезке (xlt x2) многочлен третьей
степени Q1 (x) запишется в виде
Qi (х) = а0 + ах(х~х
его коэффициенты вычисляются по формулам
A.28)
Интерполяционная функция g(x) на отрезке (х2, х3) строится
совершенно аналогично, если за начало отсчета принять точку х2.
Очевидно, такой процесс построения g {x) можно продолжить
до интервала (хп..р.и хп-р). Построенный интерполянт g(x) есть
кусочно-полиномиальная функция класса гладкости С; степень
полиномов на интервалах сетки равна 2p-f-l.
Если положить р = 2 (что соответствует гладкости кубических
сплайнов), то мы будем иметь дело с многочленами пятой сте-
степени. Степень многочлена выше на два, но зато для построения
g(x) не нужно решать линейной алгебраической системы.
Построение интерполяционных функций многих переменных
мало чем отличается от одномерного случая (к которому все и
сводится).
Гладкие восполнения обладают хорошими аппроксимирующими
свойствами. Именно, при интерполировании функции многих
переменных fsC' восполнением g (x) класса О, где p^q, для
самой функции и ее производных справедливы неравенства
\Dkf - Dkg\\c < С (р) Л?- i
где мультниндекс k = (k1, k2,
= 1
I sup max[Da/(x)
х |a| = q
.., kr) таков, что
дх х...дх г
A.29)
С (р) зависит только от р и не зависит от шага сетки h и функции /.
Т Гладкие восполнения обладают еще одним свойстеом. Если
§ построить базисную функцию, т. е. функцию, равную единице
146
ИНТЕРПОЛЯЦИЯ СЕТОЧНЫХ ФУНКЦИЙ
ГГЛ. 3
в одном узле и нулю в остальных, то для любого р она оказы-
оказывается финитной, причем «радиус» носителя не превышает р. Если
же построить базисную кусочно-кубическую сплайн-функцию, то
она вообще не финитна. Это обстоятельство делает гладкие вос-
восполнения очень удобными в вариационных задачах, которые
решаются методом конечных элементов.
3.2. Интерполяция функций двух и многих
переменных
Проблема двумерной интерполяции с помощью кусочно-бику-
кусочно-бикубических функций была предметом исследования многих авторов.
Мы кратко рассмотрим здесь следующую модельную задачу.
Пусть D = {х, у: as^x^b; с sg у ^ d} — некоторый прямо-
прямоугольник плоскости (х, у). Построим в D сетку
= {xk, yt: a =
= d}.
При таких предположениях задача кусочно-бикубической интер-
интерполяции функции f (x, у), заданной в точках Dh, заключается
в построении функции ^(л:, у), удовлетворяющей условиям:
1)
g (х, У) е С2 (D);
B.1)
2) в каждой ячейке сетки g (x, у) является бикубическим мно-
многочленом вида
з
g (x, y)=gk, i (х, У) = J all ' (Xk - xI (у, - уУ; B.2)
i. i = 0
3) на сетке Dh g(x, у) принимает заданные значения
g(Xk, yd = fu (A = 0, ..., n; 1 = 0, ...,m); B.3)
4) функция g(x, у) удовлетворяет условию
(здесь V —внешняя нормаль к границе Г области D).
Как построить такую функцию? Принципиально построение
ничем не отличается от одномерного случая. Вспомним, что для
вычисления одномерной сплайн-функции в любой точке по про-
простым формулам A.6) нужно знать значения самой функции и ее
вторых производных в узловых точках. Для того чтобы найти
эти вторые производные, нужно один раз решить линейную
алгебраическую систему с трехдиагональной матрицей. Какие же
предварительные вычисления нужно проделать, чтобы потом по
3.2]
ИНТЕРПОЛЯЦИЯ ФУНКЦИИ МНОГИХ ПЕРЕМЕННЫХ
147
явным формулам вычислять функцию в любой точке в двумерном
случае?
Рассмотрим сначала одномерные задачи кубической сплайн-ин-
сплайн-интерполяции на линиях сетки y = yj (/ = 0, 1, ..., т). Для этого
решим m-f-1 линейных алгебраических систем типа A.9). В ре-
результате мы найдем значения функции gxx(x, у) в узлах сетки
Dh. Затем аналогично решим л+1 задач одномерной сплайн-ин-
сплайн-интерполяции на линиях x = Xj (i = 0, I, ..., п) и найдем значение
функции gy,j{x, у) на Dh. Предположим теперь, что требуется
подсчитать значение g(x, у) в некоторой точке (х, у). Пусть
*м «S *<*,•, yM^y^yh
Мы можем найти значения g(x, у) в точках (xit у), (л'(_ь у)
по формулам, аналогичным A.6):
, .. (У) — УK . ., (У — У/-1?
[fi-u hi-
. B-5)
B.6)
Здесь и далее
it yj),
— Xi — AT;-!,
Если будут известны значения gXx(Xi^, у) и gxx(xi, у), то по
формулам типа A.6) можно найти значение g (x, у). Отметим, что
функция gxx(x, у) является кусочно-кубической по у. Решим
m-f-1 одномерных задач на линиях y = yj для функции gxx(x, у),
сеточные значения которой уже известны. В результате найдем
на сетке Dh функцию gxxyy(x, у). Обозначим Kij = gXXyy(Xi, yj).
Тогда
gxx(xi-i, у) = Кi-u
УK
(У-У/-1K
¦ mHl
iy>—yf
-1K I
I"
B.8)
148 интерполяция сеточных функций [гл. з
Используя снова формулу A.6), находим значение g(x, у):
g (х, у) = gxx (x,-lt у) &=??¦ + gxx (xh у) (*~*;-lK +
tr ,Л Sxx(.xi-i> У) hi \ xi — x ,
[Xi-i, У) 6 /~ftT~ +
-ТГ- B.9)
Резюмируя все сказанное выше, можно оценить объем вычис-
вычислений, необходимых для расчета бикубического сплайна g(x, у).
Прежде чем приступить к расчету функции g(x, у) в интере-
интересующих нас точках, необходимо один раз решить (п 4-1) -\- (т 4-1) 4-
-f-(m4-l)==2m4-n4-3 линейных алгебраических систем типа A.9)
и найти NtJ, Mtj, Kij (i = 0, ..., n; / = 0, ..., m). Далее,1 для рас-
расчета функции g(x, у) в одной точке области нужно пять раз
выполнить вычисление по формулам типа A.6), именно: B.5),
B.6), B.7), B.8), B.9). Цепочку этих формул можно использовать
для получения явного полиномиального выражения g(x, у) в каж-
каждой ячейке сетки. Но для хранения массивов коэффициентов
многочлена в оперативной памяти ЭВМ потребуется около 16/гт
ячеек, в то время как в нашем алгоритме требуется только \пт,
хотя количество операций при расчете функции в точке возрастет
тоже примерно в 4 раза.
В этом алгоритме можно поменять переменные местами, и тогда
нужно будет решать 2«-fm4-3 одномерных задач, но итоговый
результат не изменится, как не изменится и общее количество
операций.
Описанный алгоритм может быть легко обобщен на много-
многомерные области типа параллелепипеда.
3.3. r-гладкое приближение функций многих
переменных
В настоящем параграфе рассматривается один из возможных
подходов к задаче восполнения функций многих переменных,
заданных с ошибкой на хаотических сетках. Изложение относится
главным образом к описанию алгоритмической стороны предла-
предлагаемого метода, теоретические же аспекты его еще не разработаны
и освещаются эвристически. В основе метода лежит хорошо
известное в анализе понятие разбиения единицы.
Говорят, что последовательность (ф,) функций класса Сг (V)
(V сг Rm — открытое множество) образует разбиение единицы на
множестве Q сг V, если
О =^ ф( (х) sg 1 и У]ф;(д;) = 1 для всех лей.
г-ГЛАДКОЕ ПРИБЛИЖЕНИЕ ФУНКЦИИ МНОГИХ ПЕРЕМЕННЫХ
3.3] ЛАДКОЕ ПРИБЛИЖЕНИЕ ФУНКЦИИ МНОГИХ ПЕРЕМЕННЫХ 149
Обычно требуется, чтобы функция фг обращалась в нуль вне
заданного открытого множества Vi cr V. Совокупность (Vt), оче-
очевидно, покрывает множество Q. Разбиение единицы (ф,) называют
подчиненным этому покрытию.
Для прикладных целей естественны локально конечные покры-
покрытия стандартными множествами: m-мерными интервалами или
шарами. Центры и диаметры этих множеств должны выбираться
в соответствии со свойствами приближаемой функции /: U-+R.
В дальнейшем мы будем рассматривать покрытия т-мерными
кубами, а подчиненные им разбиения единицы строить следующим
образом.
Обозначим через |(l) центр куба V/, а через 6(l) —длину его
ребра. Зададимся (стандартной) функцией i|x Rm->-R класса Cr (Rm)
такой, что
\|)(л:)>0, если х
¦ф (л:) = 0, если х ф Vo.
Можно, например, положить (при х = (хи ..., ля) е FG)
или
и т. п. Положим теперь
{ 0
т
И
г (= V ¦
для каждого значения индекса i. Функции
ill. lv\
Ф;(Х)=-
являются функциями класса Сг (V) (V = \JVt\ и образуют раз-
биение единицы на Q, подчиненное покрытию (Vi).
Предположим теперь, что для функции f: Q-+R известна
последовательность {/г: V-*-R} функций класса Сг(V) такая, что
каждая из функций /; «близка» к f на V,-. Пусть в равномерной
норме для любого i
Тогда функция f, определяемая равенством
Hx)=11fi(x)<Pt{x), х^
C.1)
150
ИНТЕРПОЛЯЦИЯ СЕТОЧНЫХ ФУНКЦИЙ ' ГГЛ. 3
будет «близка» к / на Q. Действительно, в силу тождества
получаем, что для любого
: max sup | f (х) - f, (x)!
ф,- (х)
т. е.
\t-n-
: е.
Теперь используем разбиение единицы для восполнения функ-
функции f; если она задана в узлах некоторой сетки (х1-^ е Q), то
для каждого i нужно построить по некоторой совокупности узлов
(х{/)), близких к центру ?(/) куба Vt, ее локальное приближение
fi(x), а затем эти приближения «склеить» по формуле C.1). В даль-
дальнейшем мы будем считать, что узлы x(i) совпадают с центрами ?<'>
кубов Vi, а локальные приближения являются постоянными функ-
функциями, равными f(x{n).
Проведем оценку погрешности приближения для одного частного
случая:
f(x) = x, x<=R;
сетка — равномерная и бесконечная с узлами в точках xlr = kh,
k = 0, zlz I, ± 2, ...; центры ?(*> интервалов Vk совпадают с узлами
сетки, a 6U) = BN + 1) h, где N — некоторое натуральное число.
Пусть разбиение единицы {ф/г} принадлежит классу Cr (R), г^З,
функция ф0 (х) четна.
В этом случае остаток
о (х) = х — 2 хксрк (х)
к
представляет собой нечетную, периодическую с периодом h функ-
функцию, равную нулю в целых и полуцелых узлах сетки. Поэтому
достаточно рассмотреть случаи:
\\ п ^ о1* ^ ,-— 'г
Рассмотрим случай 1). Так как ф^ (х) = ф0 (х — хк) и функция ф0
четна, то
А * ft
Отсюда по формуле Тейлора имеем
^ ~х
~ "т" 2
3.3]
r-ГЛАДКОЕ ПРИБЛИЖЕНИЕ ФУНКЦИЙ МНОГИХ ПЕРЕМЕННЫХ 151
Второе слагаемое в правой части этого равенства, очевидно, равно
нулю, поэтому
х = — х^хк(р» (хк) — -^-^х^' (xk — Qkx). C.2)
Далее, применив к сумме
х = — х? хкц>'0 (хк)
преобразование Абеля, получим
* = — N >• = —
Поскольку
ft
h
r = —N
/V—1 к
k=—Nr=—i
где
то
-(ЛГ + 1/2)А
l(fe)
fmax j ф." (дс)
-(k + N
N — \
N-\
У ol(x)=x + x У
mm МШ
У
mm
C.3)
C.4)
* = —,
Из формул C.2) —C.4) получаем оценку
: (шах 1 Фо- (x) I
. C.5)
Здесь С — максимальное значение модуля третьей производной
функции x(y) = (po(yBN-{- \)h). Константа С зависит от N и
убывает с ростом N.
В случае 2) приходим к тому же результату.
Значение полученной оценки состоит в том, что она дает один
из возможных критериев выбора исходной функции i|), по которой
строится разбиение единицы, а именно: надо стремиться к тому,
чтобы третья производная функции 1|з была по возможности малой.
Аналогичные оценки можно получить для линейной функции
и в случае нескольких переменных.
152
ИНТЕРПОЛЯЦИЯ СЕТОЧНЫХ ФУНКЦИЙ
[ГЛ. 3
Поставим теперь основную задачу настоящего параграфа.
Пусть функция/: Q—>-R известна на нерегулярной сетке (лг('>),
i=\, 2, ..., п, с некоторой^ точностью е (в равномерной норме).
Требуется найти функцию f класса Сг такую, что выполняется
условие аппроксимации
,-f(*«>)
f-fi= max |f (
I = 1..... Л
C.6)
а также условие сглаживания, которое мы сформулируем здесь
эвристически, как требование «неосциллируемости» производных
функции f некоторого порядка.
Для решения этой задачи мы предлагаем метод, основанный
на многократном применении описанного выше способа воспол-
восполнения с использованием некоторой последовательности разбиений
единицы. При описании алгоритма будут указаны соотношения,
которые, по нашему мнению, обеспечивают, по крайней мере
в указанном выше эвристическом смысле, выполнение условия
сглаживания.
Обозначим через Lo оператор (сглаживающего приближения),
действующий из пространства сеточных функций {f: хи) —>-R)
в пространство дифференцируемых функций Сг(V) по формуле
1 = 1
C.7)
где (ср,) —разбиение единицы на Q описанного ранее вида, центры
носителей функций фг являются узлами #'" сетки.
Оценим норму отклонения f от Lo (/). Имеем
I! f - U (f) С = max
ф.
= max
f (*V)) A - Ф/ (*<»))-
i— 1
2If IIГ min Ф/(*<»)]. C.8)
L1 — / = 1 л J
Отсюда следует, что при однократном применении формулы C.7)
можно удовлетворить условию аппроксимации за счет выбора
такого разбиения единицы, что величина
К = min
;=i л
- (x{i))
C.9)
будет достаточно близка к единице. Но величина X близка к еди-
единице, если либо число узлов, попадающих в множества Vit мало,
либо функции фу «слишком куполообразны», что, как показывает
оценка C.5), ухудшает слаживающие свойства оператора Ln.
3.3]
r-ГЛАДКОЕ ПРИБЛИЖЕНИЕ ФУНКЦИЙ МНОГИХ ПЕРЕМЕННЫХ
153
Эти соображения указывают на то, что при однократном при-
применении оператора Lo невозможно, вообще говоря, получить
решение поставленной задачи. Поэтому мы поступаем следующим
образом.
Пусть {ф|*'к=1 2 —последовательность разбиений единицы,
подчиненных, для определенности, одному и тому же покрытию
множества Q, а (/^') —соответствующая последовательность опе-
операторов сглаживающего приближения, определяемых для каждого
(ф<*|) по формуле C.7). Будем искать f в виде
f= 2 LW") (ЗЛО)
А=1
с некоторым k0, где {f(*'} — последовательность сеточных функций,
определяемая следующим образом:
k = 0,
/=1,2, ..., п. Просуммировав эти равенства для k = 0, 1, ..., k0,
получим
так что для выполнения условия аппроксимации необходимо,
чтобы величина ||/(*о)|| не превосходила величины е. Это условие
всегда может быть удовлетворено за счет специального выбора
последовательности разбиений единицы |ф[А)}. Действительно, если,
к примеру, начиная с некоторого klt выполняется условие
1
= min
x, то, в силу C.8),
для всех
и, следовательно, |^s
Выбирая последовательность разбиений единицы {ф(.*'} таким
образом, чтобы величины Я(*> были по возможности малыми при
условии монотонного убывания последовательности {\\f (*J ||} с неко-
некоторой заранее фиксированной скоростью у> 1 (т. е. ||f(*'|!/i|fu+1)||^y),
можно добиться выполнения также и условия сглаживания (по-
(поскольку при этом «негладкий» вклад в сумму C.10) будет вноситься
уже малыми по норме значениями f-k)).
Для практических целей последовательность разбиений единицы
{ф[.*Н естественно строить следующим сбразом. Если г)I*1 (х) —
стандартная функция для разбиения (ф['г)). то стандартную
154 ИНТЕРПОЛЯЦИЯ СЕТОЧНЫХ ФУНКЦИЙ [ГЛ 3
функцию 1р(*+')(х) для разбиения (q>{*+0) выбираем в виде
где множитель g(*> (х) можно взять либо в форме
g<*> (х) = ехр [— цк (xi + xl + ... + *;„)], (.ц =з= О,
либо в форме
?<*>(*) = [ 1 + цй (*i + х| +...+ ^)]-i, цй^О,
и т. п.
Вычисления организуются так, что если \f(k'l)\1\^к)\^v, то
Цк — О, и fifc = fi;>0 в противном случае.
Таким образом, описанный алгоритм содержит три регули-
регулирующих параметра:
1) величину Хт = Х, определяемую по C.9);
2) скорость у>1 уменьшения невязки |/(*)||;
3) параметр ц, регулирующий скорость увеличения «дельто-
образности» разбиений единицы.
Понятно, что оптимизацией по этим параметрам можно мини-
минимизировать функционалы, значения . которых определяют то или
иное понятие «осциллируемости» производных функции f.
Замечание. Если взять последовательность разбиений еди-
единицы из одинаковых разбиений (фг), то в силу C.10), C.11)
получим
i = |
Может возникнуть мысль —ограничиться одним набором разбиения
единицы (ф,-) и искать решение f поставленной задачи в виде
< = i
определяя коэффициенты с,- из условия
п
f - 2! с'Ч" (*)
C.12)
C.13)
в предположении, что выполнено условие сглаживания.
В действительности эта постановка не отвечает существу дела,
так как данные /(.v(<)) заданы с ошибкой.
Действительно, если
det || Ф,-
C.14)
то условию C.13) можно удовлетворить с 8 = 0, но тогда ошибки
в «измеренных» /(*«>) распространятся и на полученное продол
3.4]
ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ СПЛАЙНОВ
155
жение C.12). Поэтому желательно стремиться к тому, чтобы
оценка C.13) по возможности «достигалась», а для этого есте-
естественно поставить условие
max |/(*<'>)-с, К?, ?>0, C.15)
i'. = 1 п
которое ограничивало бы норму \\f — c\\. Но у нас нет никаких
критериев выбора величины Е, а задаваясь этой величиной
произвольно (естественно задавать Е «малой»), мы приходим
к задаче, в общем неразрешимой (не говоря уже о том, что и
условие C.14) не всегда выполняется).
Из указанной противоречивости требований аппроксимации,
сглаживания и условия C.15) и возник описанный выше
алгоритм.
3.4. Элементы общей теории сплайнов
Как мы показали, кубические сплайн-функции возникают
при минимизации квадратичного функционала
который является аналогом энергии изгибания упругого стержня.
В связи с этой задачей можно сказать, что развитие теории
сплайн-функций шло в двух основных направлениях.
В первом направлении вместо оператора двукратного диф-
дифференцирования стали употреблять дифференциальный оператор L
общей формы с переменными и даже разрывными коэффициен-
коэффициентами и минимизировать функционал
ь
\ [1м {x)f dx.
а
Это сразу сделало теорию сплайнов очень гибкой и приспособило
ее для аппроксимации функций с минимизацией энергии, связан-
связанной с конкретной физической ситуацией.
Во втором направлении вместо простейшей ситуации, связан-
связанной с закреплением кривой в точках сетки, стали употреблять
другие линейные функционалы, задание которых более естест-
естественно в конкретной задаче. Так появились сплайны четной сте-
степени, которые строятся по интегральным средним от функции,
тригонометрические сплайны и другие популярные теперь конст-
конструкции. Конечно, все это сопровождалось развитием многомерной
теории сплайнов. Такая аппроксимация функций сопровождалась,
кроме того, сглаживанием.
156
ИНТЕРПОЛЯЦИЯ СЕТОЧНЫХ ФУНКЦИЙ
[ГЛ. Э
Общее определение интерполирующего и сглаживающего
сплайнов. Пусть X, Y — два гильбертовых пространства, Т:Х-+-
-*¦ Y — линейный ограниченный оператор, действующий из X
в Y. Над пространством X задана система линейных ограничен-
ограниченных функционалов kt (i ={,..., n), которая предполагается
линейно независимой. Интерполяционным сплайном называется
элемент сеХ, удовлетворяющий двум условиям:
1) kt (о) = (kt, а)х = /-,-, ? = 1,2 п;
2) (Та, To)Y = \\TofY = rnin. ( Л)
Здесь символами (,)х, (,)у обозначены скалярные произведения
в пространствах X и Y соответственно; rit i — \,n, — наперед
заданные числа. Значение функционала kt на векторе о заменено
скалярным произведением согласно известной теореме Рисса
о представлении линейного функционала в гильбертовом прост-
пространстве. Соответственно сглаживающим сплайном назовем эле-
элемент оа е X, который реализует минимум функционала
Фа (и) = а || Ти [|V + X [(klt и) - r,Y, а > 0.
D.2)
Для задач D.1) и D.2) сформулированы общие теоремы
существования и единственности сплайн-функции, которые нахо-
находят сейчас применение при построении разнообразных сплайн-
аппроксимаций. Имеется общий алгоритм построения интерполя-
интерполяционных и сглаживающих сплайнов. Показано, что в конечном
итоге задачи D.1) и D.2) сводятся к решению некоторых алгебраи-
алгебраических систем с симметричными положительно определенными
матрицами.
Мы приведем в этом параграфе несколько теорем сходимости
в достаточно общей форме. Эти теоремы можно применять как
в классической ситуации сходимости сплайнов на прямоуголь-
прямоугольных сетках, так и в более сложных ситуациях при построении
сплайнов на сгущающихся хаотических сетках или при анализе
сходимости сплайнов, построенных по произвольной системе
функционалов.
Прежде всего рассмотрим вопрос о сходимости интерполяци-
интерполяционных сплайнов. Пусть X — гильбертово пространство, ф*—эле-
ф*—элемент пространства X, который мы хотим аппроксимировать.
В пространстве X рассмотрим базисную систему векторов ku
k2, ... , kn, ... , вообще говоря, неортогональную. Если Т: X-+Y —
линейный ограниченный оператор, действующий в другое гильбер-
гильбертово пространство Y, то аппроксимирующий элемент будем искать
как сплайн а„:
3.4]
ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ СПЛАЙНОВ
157
Если предположить теперь выполнение требований, гарантирую-
гарантирующих существование и единственность сплайна ап для некоторого
п = п0, то сплайны ап будут существовать при любом п^п0.
Возникает вопрос о сходимости сплайнов оп к точному вектору ф*.
При выполнении требований теоремы существования и единствен-
единственности и при условии, что ядро оператора Т имеет конечную
размерность, наблюдается сходимость сплайнов оп к ф* и, что
гораздо важнее на практике, последовательность Топ сходится
к Тф* в норме пространства Y.
Такие общие теоремы сходимости могут быть с успехом при-
применены для получения оценок сходимости в терминах убывания
шага сетки. Например, применение к сплайнам, состыкованным
из многочленов степени 2/г—1, на отрезке [а, Ь] дает сле-
следующие оценки аппроксимации функции ф* е W% и ее производ-
производных сплайном aN:
1о59-Ф*('I1с[а.*] = о(А»-'-1/а), 1 = 0,1,..., я-1, D.4)
Общая теория сходимости может быть применена в ситуации,
когда использование ранее известных методов не дает результата.
Примером такой ситуации является анализ сходимости сплайнов,
построенных по беспорядочно разбросанным в двумерной области
интерполяционным узлам. Сплайн-функции в двумерной области
строились из условия минимизации функционала
Ф
<«>-H(
D.5)
если функция и принимает в фиксированной совокупности узлов
заданные значения. Если ф*е11!'|(й), то, применяя общую
теорию сходимости, можно получить оценку
D.6)
— ф* |!с
= о
Здесь адг —сплайн: h — характерный параметр сгущения хаоти-
хаотической сетки, определяемый как параметр е-сети, образуемой
интерполяционными узлами в области Q; Qa —любая б-внутрен-
ность области Q, т. е. совокупность точек области Q, отстоящих
от границы на расстояние, большее б.
Итак, мы кратко познакомились с теорией сходимости интер-
интерполяционных сплайнов. Однако задача об отыскании интерполя-
интерполяционного сплайна —это задача минимизации квадратичного функ-
функционала при линейных ограничениях, т. е. задача на условный
минимум. В то же время задача об отыскании сглаживающего
сплайна —это задача уже на безусловный минимум, и решать
такую задачу иногда проще. Сглаживающий сплайн* оа сходится
!58
ИНТЕРПОЛЯЦИЯ СЕТОЧНЫХ ФУНКЦИЙ
[ГЛ. 3
к интерполяционному сплайну а в норме пространства X при
о-*-0.
Следует отметить, что алгоритм построения интерполяционных
и сглаживающих сплайнов, являющийся универсальным с теоре-
теоретической точки зрения, на практике трудно применять уже
в двумерных задачах. Поэтому приходится пользоваться прибли-
приближенными методами построения. Именно, задача о построении
интерполяционного сплайна а заменяется задачей о нахождении
сглаживающего сплайна оа, который определяется из условия
минимума функционала
1
а>0,
D.7)
при малом а на всем пространстве X. Затем в пространстве X
рассматривается конечномерное подпространство Еь, элементы
которого аппроксимируют элементы X с устраивающей нас
точностью, и отыскивается минимум Фа (и) на Ек,,. Точка
минимума называется сплайном на подпространстве.
Такой подход может быть с успехом применен в следующей
задаче. Пусть Q — прямоугольная область, в которой беспорядочно
разбросаны интерполяционные узлы р,-, г = 1,..., s. Необходимо
построить гладкую в области Q интерполяционную функцию.
Задача решается так: на область Q наносим прямоугольную
сетку О/, и связываем с этой сеткой конечномерное пространство
гладких интерполянтов Ek.
Способы построения этих пространств мы уже рассматривали.
Это могут быть бикубические сплайны или интерполяции Рябень-
Рябенького класса гладкости С2. На этом пространстве будем решать
задачу минимизации функционала
Фа (ы) = а $ [ulx + 2и%у + 4
[и (/>,) - n] D.8)
при малом ос> 0. Такая задача приводит к линейной алгебраи-
алгебраической системе. Если в Ek удается выбрать базис, состоящий
из финитных функций, то матрица системы оказывается ленточной.
В качестве такого базиса могут быть взяты кубические 5-сплайны
или, что, на наш взгляд, удобнее, локальные базисные функции,
рассмотренные в 3.1.3.
В заключение этого параграфа мы рассмотрим еще один
практически важный вопрос — вопрос выбора параметра сглажива-
сглаживания. Существует несколько критериев выбора а. Мы остановимся
на одном из них, именно на так называемом «критерии невязки».
Этот способ выбора параметра естествен в широком круге задач.
Предположим, что решается задача сглаживания, т. е. за-
задача нахождения элемента аа, принадлежащего гильбертову
3.4)
ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ СПЛАЙНОВ
пространству X, который минимизирует функционал
Фа (и) = а|| Ти ||v + ? [(*,, и) - nf = а|| Ти [V +\Ku-r
i=i
Здесь К: X->-Rn — оператор, действующий по формуле
Ки = {(и, кг),..., (и, *„)},
159
D.9)
D.10)
а г = (ги гг,..., /¦„) — данный вектор. Критерий невязки состоит
в том, чтобы выбрать а из условия
II Ка« — г || = в, D.11)
где е (фиксированное число) — «допустимый уровень невязки».
Если ввести обозначение
ф (ее) = || /Ссга — г |j, 0<a< + oo, D.12)
то для определения а нужно решить нелинейное уравнение
Ф (а) = е.
Сделаем замену переменных а=1/р и рассмотрим уравнение
е D-13)
относительно р. Отметим, что функция if (P) строго монотонно
убывает и уравнение ty($) = e имеет единственное решение при
е<е0, причем е0 = || Ке — г ||, где е — решение задачи о наимень-
наименьших квадратах
|| Ке — г || = min \\Ku — r ||
и(=КегТ
на ядре оператора Т. Для решения нелинейного уравнения
D.13) естественно применить метод Ньютона. Возведем обе части
уравнения D.13) в некоторую вещественную степень q,
1>«(Р) = в«, D.14)
и при помощи q максимально увеличим скорость сходимости
процесса Ньютона. Допустимыми значениями ц, при которых
итерации Ньютона сходятся при любом начальном приближе-
приближении, являются — 1 sg<7<0, <7>0, причем максимальная скорость
сходимости обеспечена при q—— 1. Таким образом, необходимо
решить уравнение
f(P) l (lP) e-i. D.15)
D.16)
Итерации Ньютона реализуются по формуле
RP+1-ЛР-Ш1-йР-<№*?.
Р V г фР) Р ИМ <р'
Какой же объем вычислений нужно выполнить на каждом шаге
метола Ньютона? Чтобы посчитать ф A/р'') = ф (ос¦"), необходимо
160
ИНТЕРПОЛЯЦИЯ СЕТОЧНЫХ ФУНКЦИЙ
[ГЛ. 3
решить задачу сплайн-сглаживания при фиксированном пара-
параметре <х = а.Р, а это значит, что нужно решить некоторую линей-
линейную алгебраическую систему. Кроме того, необходимо знать
ф' (<хр). Для этого нужно решить ту же линейную алгебраическую
систему, только с другой правой частью.
В заключение отметим, что развитая в общей форме теория
сглаживания, конечно, полностью эквивалентна некоторому
методу регуляризации некорректно поставленных задач. Напри-
Например, мы можем считать, что /( — вырожденная матрица, интер-
интерполяционный сплайн и — нормальное решение совместной системы
IL <417>
Решение этой системы (интерполяционный сплайн) можно при-
приблизить при а->-0 решением иа регуляризованной системы
(сглаживающим сплайном)
D.18)
ГЛАВА 4
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
МАТЕМАТИЧЕСКОЙ ФИЗИКИ
Решение стационарных задач математической физики пред-
представляет собой более или менее самостоятельный раздел вычисли-
вычислительной математики, хотя решение многих стационарных задач
с положительными операторами можно рассматривать как пре-
предельное при /-vco решение нестационарной задачи. При реше-
решении стационарных задач методами асимптотического стациониро-
вания мы не обращаем внимания на промежуточные значения
решения, поскольку они не представляют интереса, тогда как
при решении нестационарных задач эти промежуточные значения
имеют физический смысл. Вообще говоря, именно в этом состоит
единство и различие этих классов задач. Проиллюстрируем ска-
сказанное на примере.
Пусть имеется задача
ЛФ = /,
где
Л>0, среФ и [ef.
Вместо этой задачи рассмотрим нестационарную *)
при ^ =
Представим ф, ^ и f в виде
где
ф* = (ф, «*), 1Фя = AФ, «*), /» = (/, Un),
а {ип) и {«*} — биортогональный базис. Тогда известными прие-
приемами приходим к задачам для коэффициентов Фурье:
*) В дальнейшем мы не будем специально указывать области определения
операторов задач.
6 Г. И. Марчук
162
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 4
С ОДНОЙ СТОрОНЫ, II
с другой. Решая эти задачи, получим
Ф — / . и,1, тр — / -г—^i—е ")ип.
П П
В предположении вещественности спектра оператора А имеем
>.„>0 (л = 1, 2, ...). Отсюда следует, что
Если оператор стационарной задачи имеет спектр произволь-
произвольной структуры, то в этом случае такой простой и прозрачной
связи между решениями задач уже может не быть.
Разумеется, нестационарную задачу для новой функции ip
можно решать разностными методами по /, например
Тогда
\J — f).
Если нашей целью является решение стационарной задачи,
то при определенном соотношении между х и Р(Л) имеем
lim т|>' = ф.
/-¦00
Параметр т может быть величиной как не зависящей, так и
зависящей от /. Во всяком случае при решении стационарной
задачи /' удобно считать номером шага не временного, а итера-
итерационного.
Здесь имеет место еще одна особенность: в нестационарных
задачах для обеспечения точности решения значения т должны
быть достаточно малы, в стационарных же— оптимальные итера-
итерационные параметры т выбираются из условия минимальности
числа итераций и могут принимать относительно большие значения.
4.1. Общие понятия теории итерационных методов
В дальнейшем на протяжении всей главы мы будем считать,
что оператором А является квадратная матрица. Следовательно,
исходная задача предполагается уже редуцированной к системе
линейных алгебраических уравнении. При этом везде, за псклю-
4.1)
ОБЩИЕ ПОНЯТИЯ ТЕОРИИ ИТЕРАЦИОННЫХ МЕТОДОВ
163
чением 4.5, предполагается невырожденность матрицы А и
всюду — вещественность участвующих векторов и матриц. Итак,
пусть требуется решить систему
ЛФ = /, A.1)
где Л —матрица, а ф и / — векторы.
Большинство итерационных методов, которые применяются
для решения линейных систем, могут быть объединены общей
формулой
-f). A-2)
где {Bj} — последовательность невырожденных матриц, а {т7-} —
последовательность вещественных параметров. Если ввести обо-
обозначение Hj = XjBjl, то процесс A.2) можно записать в эквива-
эквивалентном виде:
ф/+1==ф/-Я/(Ар/-/). A.3)
Векторы y = A(fi — f называются векторами невязок итерацион-
итерационного метода A.2), а векторы г|У = ф' — ф* (ф* = Alf — точное реше-
решение системы A.1)) называются векторами ошибок этого метода.
Вычитая из обеих частей соотношения A.3) вектор ф* и делая
замену f = Ац,*, приходим к соотношению для последовательно-
последовательности векторов ошибок:
У + 1 = Т&, A.4)
где матрица
A.5)
называется оператором j-го шага итерационного метода A.2).
Умножая A.4) на матрицу А, приходим к соотношению для
последовательности векторов невязок
/+* = (?-ЛЯ,) &/.
A.6)
Мы будем называть итерационный метод A.2) сходящимся,
если последовательность {ф'} сходится к точному решению ф*
системы A.1) при любом начальном векторе, и расходящимся —
в противном случае. Очевидно, что необходимым и достаточным
условием сходимости итерационного метода A.2) является схо-
сходимость последовательностей {г|У} и \1/\ к нулевому вектору для
любых f и 1° (А^о = 1°).
Итерационный метод A.2) называется стационарным, если
матрица Н; не зависит от номера итерации (оператор 7} является
постоянной матрицей), и нестационарным — в противном случае.
Особо мы выделим класс циклических итерационных методов,
164
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 4
i
которые могут быть отнесены как к стационарным, так и к не-
нестационарным итерационным методам.
Циклическими мы будем называть итерационные методы, кото-
которые обладают свойством Hj — H/JrS для любого /ЭгО и некото-
некоторого фиксированного s5=l. Нетрудно видеть, что, объединяя
каждые s последовательных итераций в одну, мы приходим
к стационарному итерационному процессу вида
где Н определяется из уравнения
S —1
A.7)
A.8)
С другой стороны, в первоначальной формулировке циклические
итерационные методы относятся к нестационарным.
Одной из основных наших задач при исследовании итерацион-
итерационных методов будет проблема их оптимизации, т. е. выбор после-
последовательности матриц \Hj) из заданного класса с целью полу-
получения более эффективного вычислительного процесса. Целевой
функцией, которую при этом мы должны минимизировать, является
общее число арифметических и логических действий, необходимых
для нахождения решения задачи с заданной точностью е>>0.
Полное решение сформулированной проблемы возможно лишь
в исключительных случаях, поэтому на практике осуществляется
минимизация некоторой функции
W({H,}, г).
A.9)
которая мажорирует сверху целевую функцию и в определенном
смысле достаточно хорошо ее приближает. В предположении, что
при любом Hj из заданного класса одна итерация метода A.2)
требует одно и то же число арифметических и логических дей-
действий Wo, оказывается целесообразным определить W соотноше-
соотношением
W=W0.N{{H,}, e),
A.10)
где N ({Hj}, е) — число итераций метода A.2), достаточных для
уменьшения некоторой нормы начальной ошибки \^° в 1/е раз.
Иначе говоря, N ({Hj}, е) равно числу итераций метода A.2),
достаточных для решения системы A.1) с точностью е, если
норма вектора ошибки ¦ф0 равна единице. В дальнейшем на конк-
конкретных примерах мы покажем, как определяется функционал N
н решается задача его минимизации.
4.2) НЕКОТОРЫЕ ИТЕРАЦИОННЫЕ МЕТОДЫ II ИХ ОПТИМИЗАЦИЯ
4.2. Некоторые итерационные методы
и их оптимизация
4.2.1. Простейший итерационный метод
Пусть матрица А системы
165
B.1)
симметрична, положительно определена и известны границы ее
спектра E = р (А) 5= <х — а.(А) >>0. Для решения этой системы
применим итерационный метод
/) B.2)
с некоторым начальным вектором ср° и вещественным парамет-
параметром т. Для векторов ошибок т|У = ф/' —ф* этого метода выпол-
выполняется соотношение
г|У+1 = 7>|>/, B.3)
где
Тх = Е-тА B.4)
— оператор шага.
Обозначим через {Х„} множество собственных чисел А, а через
{и„} — полную ортонормированпую систему соответствующих соб-
собственных Еектогов А. Тогда, разлагая векторы {т[У} по ортонор-
мированиому базису {ип}:
и используя B.3), получим
Отсюда следует, что для сходимости к нулю коэффициентов ty'n
при /-voo и любом г|5° необходимо и достаточно выполнение
неравенств
|1
а для сходимости к нулю евклидовой нормы вектора г|У:
необходимо и достаточно, чтобы выполнялось неравенство
<7(т.) = Р(Гт) = тах|1--Лп|<1. B.5)
п
Исследуем величину q(x). Рассматривая систему неравенств
— 1<1-тЛл<1, Я„е=[а, Р],
166
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ 4
которая эквивалентна неравенству B.5), приходим к выводу,
что B.5) будет выполняться только в случае
0<T<min-,— = ~,
B.6)
т. е. при т е @, 2/E). Таким образом, для определения области
изменения значений т, при которых метод B.2) сходится, нам
достаточно знать либо величину E, либо оценку сверху этой
величины.
Перейдем к изучению проблемы оптимизации метода B.2).
Используя неравенство
где в силу симметричности Тх
L B.7)
Г = [?(*)]', B.8)
нетрудно видеть, что для уменьшения ||ф°||, в 1/е(е<1) раз
достаточно провести N итераций, где N определяется из урав-
уравнения
= е.
B.9)
Отсюда, учитывая B.8), получим
-1. B.10)
Так как число арифметических и логических действий Wo на
одну итерацию метода B.2) не зависит от значения т, то функ-
функционал W из A.10) в данном случае определяется соотношением
-lj. B.11)
(Здесь предполагается, что те@, 2/E.)) Теперь легко видеть, что
проблема оптимизации (минимизации W по т) сводится к мини-
минимизации по те@, 2/E) функции q (т). Решим эту задачу.
Простейший анализ показывает, что
тах
1-та
B.12)
а оптимальное значение т является решением уравнения
1-топта = — (I — топтр)
и вычисляется по формуле
2
B.13)
4.2] НЕКОТОРЫЙ ИТЕРАЦИОННЫЕ МЕТОДЫ II ИХ ОПТИМИЗАЦИЯ 167
Подставляя это значение т в B.12), получим
<7опт = О (Топ г) = J^t = J+T ' B'14)
где величина
„ г, I А\ § /О 1 Г.Ч
Р === Р (,**) =^Г \^-^^7
называется числом обусловленности симметричной и положительно
определенной матрицы Л.-
Введем дополнительно величину
R(TT) = —]nq(T), B.16)
которую будем называть асимптотической скоростью сходимости
метода B.2). Очевидно, что R1 (Гт) равно числу итераций,
достаточных, а при произвольном 1|з0 также необходимых для
уменьшения !j^°|j2 в е раз, где е = 2,7 ... — основание натураль-
натуральных логарифмов. Асимптотическая скорость сходимости оказы-
оказывается удобным критерием для сравнения различных методов,
когда вопрос о числе арифметических и логических действий на
итерацию не обсуждается. С учетом введенной величины B.11)
принимает вид
B.17)
В заключение остановимся на случае плохо обусловленных
матриц, т. е. когда рг>\. Учитывая, что при р'^Л
<7оп
¦-!¦
получаем
и, следовательно,
R(TT),
B.18)
B.19)
B.20)
Подобный анализ оказывается очень удобным с точки зрения
качественного сравнения различных методов в случае плохо обус-
обусловленных матриц.
4.2.2. Сходимость и оптимизация стационарных
итерационных методов
В предыдущем пункте было показано, что необходимым и
достаточным условием сходимости итерационного метода B.2)
для любого начального приближения ф° является выполнение
168
неравенства
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 4
B.21)
где %п(Т) — собственные числа оператора шага Т. Сейчас мы
докажем, что выполнение неравенства B.21) является необхо-
необходимым и достаточным условием сходимости стационарного
метода
с оператором шага
= Е-НА.
являющимся постоянной матрицей.
Пусть
\\Ji О
О У2
О 0 ... J
— нормальная жорданова форма матрицы Т (т. е. Т =.
где столбцами матрицы 5 являются собственные и корневые
векторы матрицы Т) с клетками Жордана
h
0
0
1 '
с
0
1
h
0
0
0
0
1
и
0
0
... 0
... 0
... 0
... h
... 0
0
0
0
1
и
порядка ft,Ssl, которые соответствуют собственным числам
l-i = h(T), i=l, ..., /. Тогда, так как
где {р} — векторы ошибок, нетрудно видеть, что необходимым и
достаточным условием сходимости стационарного итерационного
метода является сходимость матриц Т1 (и, следовательно, матриц
J') к нулевой матрице при /-vco. Последнее выполняется только
в том случае, если для любого i (lsgisg/) матрицы j{ сходятся
к нулевой матрице при / ->• сю.
Таким образом, для доказательства сформулированного утвер-
утверждения о необходимом и достаточном условии сходимости стацио-
стационарного итерационного метода нам достаточно показать, что
матрицы J{ сходятся к нулевым матрицам при /->-оо только
в случае |?.;'<;1. Обозначим через а^, элементы матрицы j\.
Тогда путем непосредственного перемножения матриц нетрудно
4.2] НЕКОТОРЫЕ ИТЕРАЦИОННЫЕ МЕТОДЫ II ИХ ОПТИМИЗАЦИЯ
показать, что при /^/г,- —1
169
если s >> t,
если s = (,
s, если s</,
где
суть биномиальные коэффициенты. Иначе говоря,
4'-\'-'
О О
Н
для всех j^ki—l и 1 sg; i sc /. С помощью элементарных вык-
выкладок легко показать, что а'Д стремятся к нулю для всех
ls=;s, t^ckj при /-voo (соответственно J'. сходятся к нулевой
матрице) только в случае |Л,|<1. Утверждение доказано.
Известно, что этот результат справедлив для любого стационар-
стационарного итерационного метода.
В настоящем пункте мы рассмотрим общий подход к оптими-
оптимизации стационарных итерационных методов с точки зрения их
асимптотического поведения. Для этого нам потребуется извест-
известный факт из функционального анализа, который в случае матриц
формулируется следующим образом.
Для любой квадратной матрицы Т и любой матричной нормы
| выполняется равенство
lim II Г* I1'* = p (Г).
B.22)
Предположим теперь, что матрица Нх стационарного итера-
итерационного метода
ф/+1 = ф/_ Нх(Ац1 — \) B.23)
зависит от параметров ть х2, ..., xs. Тогда, если независимо от
значений параметров каждая итерация метода требует одного и
того же числа арифметических и логических действий Wo, то, сог-
согласно предыдущему (см. 4.1), проблема оптимизации метода
B.23) заключается в минимизации по ть ..., ts функции
W^WO-N{HX, г), B.24)
где N (Нг, к)—число итераций, достаточных для уменьшения
некоторой нормы вектора ошибки $" в 1/е раз.
ГтА']) =
170 МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ [ГЛ 4
Так как
WK\Tx\\iri B.25)
где Тх — Е — НХА, а ||-|) — некоторая норма, то уравнение для
определения зависимости N от Нх и е имеет вид
B.26)
Очевидно, что точное решение этого уравнения можно получать
лишь в исключительных случаях, как это было, например, сделано
в 4.2.1. Поэтому в конкретных ситуациях нужно ставить вопрос
о его приближенном решении при тех или иных дополнительных
предположениях.
Одним из возможных путей приближенного отыскания зави-
зависимости N от Нх и е является асимптотический подход; именно,
если предположить, что е-^1 и, соответственно, Л/^>1, то из
сформулированной выше теоремы будет слгдовать, что
N{HX, e).
line
' R(TX)'
где R (Тх) = — In p (Тх) — асимптотическая
метода B.23). Таким образом, функцию
соотношением
B.27)
скорость сходимости
W можно определить
B.28)
Заметим, что B.17) является частным случаем B.28).
Из полученной формулы B.28) следует, что при сделанных
предположениях проблема оптимизации метода B.23) заключа-
заключается в максимизации R (Тх) (минимизации Р (Гт)) по тем парамет-
параметрам т,, .... То, для которых Р(ТТ)<1.
Остановимся кратко на циклических итерационных методах
с периодом sS^l. Как уже было показано в 4.1, циклический
итерационный метод может быть приведен к обычному стационар-
стационарному итерационному методу A.7) с оператором шага
B.29)
(=0
Предполагая, что каждая итерация метода A.7) требует sWv
арифметических и логических действий, где Wo — аналогичная
неличина для одного шага циклического метода, получим
П7—П7 I'M
где
°Д(гт)'
\) = - ! \n\>(tr).
B.30)
4.2)
НЕКОТОРЫЕ ИТЕРАЦИОННЫЕ МЕТОДЫ II ИХ ОПТИМИЗАЦИЯ
171
Отсюда следует, что в случае циклических итерационных мето-
методов оптимизация этих методов при фиксированном s заключается
в минимизации величины Р(ТТ).
4.2.3. Метод последовательной верхней релаксации
Во многих приложениях большую популярность приобрел
итерационный метод, разработанный Янгом и Франкелом и назы-
называемый методом последовательной верхней релаксации. Проил-
Проиллюстрируем основную идею этого метода на примере системы
линейных алгебраических уравнений
Лф = / B.31)
с блочно-трехдиагоиальной матрицей
Е1 -Si ... 0 0
-R-, Е2 ... 0 0
А =
о
о
о
о
Rk
Еь
B.32)
где Е^ — единичные матрицы порядка пи a Rt и St — некоторые
матрицы порядка щ X «/-i и щ X nl+i соответственно. Отметим,
что системы с матрицами такого вида часто возникают при
редукции уравнений эллиптического типа к системам конечно-
разностных или вариационно-разностных уравнений.
Представим матрицу А в виде
A = E-R-S, B.33)
где
о
Ri
о
о
0 ...
0 ...
0 ...
0 ...
0
0
0
Rk
0
0
¦
0
0
0
0
0
0
Si
0
0
0
... о
... 6
... 0
... 0
0
0
Sk-i
0
R =
и Е — единичная матрица. Тогда, если ввести матрицу
B = R + S, B.34)
систему B.31) можно записать в виде
ф = Вф + /. B.35)
Далее мы везде будем предполагать, что итерационный метод
ф/+1 = ?ф/-}-/ B.36)
сходится (т. е. р (?)<!), все собственные числа матрицы В
вещественны и она обладает полной системой собственных век-
векторов.
•72 МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ [ГЛ 4
Перепишем B.31) в виде системы матричных уравнений
B.37)
при условиях
= 5ft = 0 и
где Ф, и /^ — векторные компоненты векторов ф и /. Тогда
метод последовательной верхней релаксации определяется форму-
формулами
ф'+' = ф; - т (ф{ - /?,ф>± ! - sM+. - л), /= 1 ,...,*, B.38)
где т—некоторый вещественный параметр. Соотношения B.38)
можно также записать в виде
/=1 k.
Из приведенных формул видно, что для каждого / процесс
вычислений осуществляется последовательно с первой по k-ю
группу компонент. При этом Ф'о+1 и Ф*+1 полагаются равными
нулю.
Перейдем от B.38) к уравнениям для векторов ошибок W'i =
= Ф' —Ф*, где {Ф*}—решение системы B.37):
Ч',' +' = Ч'{ -т(Ч» - R,W{± | - SW+,), / = 1 k. B.39)
Отсюда видно, что оператор шага метода B.37) определяется
равенством
Tt = (E-tR)-i[A-t)E + tS] B.40)
и зависит от одного параметра т, а спектральная задача
? B.41)
легко преобразуется к виду
b(rT)^ = ^-T[^-M7\)№-i-Wi], 1=1, .... k. B.42)
Решение этой спектральной задачи будем искать в виде
Ч', = [Ч7\)]'/2^, B.43)
где |^|*=, —векторные компоненты собственного вектора да
спектральной задачи
Bw = l(B)w, B.44)
4.2]
НЕКОТОРЫЕ ИТЕРАЦИОННЫЕ МЕТОДЫ И ИХ ОПТИМИЗАЦИЯ
173
a wo = Wi,+i = O. Подставляя B.43) в B.42) и учитывая B.44),
получим
W2 G\) [к G\) - xW~ (Tx) k(B) + x-l]wi = 0, 1=1,..., k. B.45)
Так как нулевые значения X (Тх) с точки зрения сходимости
метода последовательной верхней релаксации нас не интересуют,
а среди {w/\ есть хотя бы один ненулевой вектор, то из B.45)
получаем уравнение
X (Гх) - т^/2 (Т
которое связывает собственные числа матриц 7\ и В. Решив это
уравнение, получим
B.46)
Прежде чем переходить к анализу этой формулы, заметим,
что если X (В) — собственное число матрицы В, то величина
— X (В) также является собственным числом матрицы В. Дейст-
Действительно, если X(B)w = Bw, где w — собственный вектор мат-
матрицы В с векторными компонентами {да }*=1, то вектор w с век-
векторными компонентами &Р = {—l)pwp является собственным
вектором В, соответствующим ее собственному числу — X (В),
т. е.
— X(B)w = Bw.
B.47)
Из доказанного и формулы B.46) следует, что при анализе
Xi/2(TT) нам достаточно ограничиться случаем Х(В)^0.
Исследуем величину Х1>2(ТТ), как функцию параметра т,
считая, что X (В) < 1 — некоторое фиксированное неотрицательное
собственное число матрицы В. Сначала рассмотрим случай тг^О.
Как показывают несложные вычисления, при xsgO неравенство
<1
B.48)
не имеет решения, и, следовательно, требование положитель-
положительности параметра т необходимо для сходимости метода последова-
последовательной верхней релаксации.
Ограничиваясь в дальнейшем случаем положительных значе-
значений т и учитывая, что сходимость метода определяется только
максимальным но модулю собственным числом матрицы 7\,
174
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 4
нетрудно видеть, что теперь достаточно исследовать формулу
где при положительности подкоренного выражения значение
квадратного корня берется положительным.
Далее, для значений т е [ть т2], где
подкоренное выражение в B.48) неположительно и для этих
значений имеем
Если же т ф [ть т2], то подкоренное выражение в B.48)
всегда положительно, а Х^2(ТХ) неотрицательно. Учитывая это,
нетрудно показать, что при т е @, т^ неравенство
А,'/* (Гт) 5з 1
не имеет решения, а при т^=т2 выполняется неравенство
Из доказанных фактов вытекает следующее утверждение: при
сделанных выше предположениях условие
те @, 2)
необходимо и достаточно для сходимости метода последователь-
последовательной верхней релаксации B.38).
Остановимся теперь на исследовании величины
/т-1,
как функции параметра т. Так как для значений т е (О,
получаем
4 2]
НЕКОТОРЫЕ ИТЕРАЦИОННЫЕ МЕТОДЫ II ПХ ОПТПМИЗШНЯ
175
и №'2(ТХ)= 1 при т = 0, то график \ки2 (Тг)\ для различных Х(В)
имеет следующий вид (рис. 13).
\K(Tt)
Поскольку
Рис. 13.
1'2 (Гт)
то для значении т е @, 2)
( тр (В) -, AjfnH
- \ _ ) 2 ^ I' 4
I
>0 при т<ть
при
¦т+1 при т<ть
При
Из последней формулы сразу следует, что минимальное зна-
значение р (Гт) достигается при т = т1. Таким образом, значение топт,
максимизирующее асимптотическую скорость сходимости # (Гт)
метода последовательней верхней релаксации, вычисляется по
формуле
2 fi 1 ./ оч / п\ 1 2 ,„ до\
Ьппт
причем
B.50)
Проанализируем теперь формулы B.49), B.50) в случае плохо
обусловленных матриц (предполагая дополнительно, что мат-
матрица А симметрична), т. е. когда р (Л) = -§-тд|~5^ ^ • Так как
одновременно с. р (В) собственным числом матрицы В ипда
B.34) является величина — р (В) (это доказано ранее), то из
176 МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
соотношения В = Е — А вытекает, что
[ГЛ. 4
Отсюда следует, что а(Л) = 2 —Р(Л), а
означает выполнение соотношений
условие
Подставляя эти значения в B.49), B.50), асимптотически получим
4 г, /™ 4
"ОПТ
.2--
(Гтопт)
Vp
Ше| лг-
Vp.
B.51)
Таким образом, для плохо обусловленных матриц при опти-
оптимальных выборах параметров метод последовательной верхней
релаксации асимптотически сходится в 2 Vр раз быстрее метода
B.2). Необходимо отметить, что для любого конкретного номера
итерации (особенно на первых итерациях) сходимость метода
последовательной релаксации с оптимальным параметром мед-
медленнее, чем показывает третье из соотношений B.51). Причиной
этого является наличие в жордановой форме матрицы перехода
Тх клетки порядка два.
4.2.4. Чебышевский итерационный метод
Рассмотрим систему линейных алгебраических уравнений
Лср = / B.52)
с симметричной и положительно определенной матрицей А. Для
решения этой системы предложим итерационный метод
ф/+1 = ф/_Т/.(Лф/-/), B.53)
который часто называют методом Ричардсона первого порядка.
Проблема оптимизации этого метода заключается в выборе после-
последовательности параметров {тД, обеспечивающих наибыстрейшую
сходимость q>/ к точному решению системы B.52).
Циклический итерационный метод B.53) с'длиной цикла s^sl
может быть описан (см. 4.1) как стационарный итерационный
метод вида
ф * =
s, B.54)
4.2] НЕКОТОРЫЕ ИТЕРАЦИОННЫЕ МЕТОДЫ II ИХ ОПТИМИЗАЦИЯ
с оператором шага
177
B-55)
Так как матрица А симметрична, то
B.56)
и, согласно результатам 4.2.2, оптимизация метода B.53) сво-
сводится к минимизации р(fx) по параметрам ть ..., т^. В случае
s=l точное решение этой задачи было дано в 4.2.1. В случае же
s>l точное решение задачи невозможно, так как простого зна-
знания границ спектра А для этого недостаточно, а определение
всех собственных чисел Л—более сложная задача, чем решение
системы B.52) простейшим итерационным методом. Поэтому
с целью оптимизации метода осуществляют минимизацию
функции
)= max
ПA-тД)
B.57)
где 0<а = а(Л)=^р = Р(/4), которая мажорирует сверху вели-
величину рG\) и достаточно хорошо ее приближает на практике.
Наряду с задачей минимизации qs(T) рассмотрим задачу
построения многочлена Ps (К) степени s, являющегося решением
задачи
\Ps(b)\= max I ^)!. B-58)
min
max
где qs- множество всех Ps(k) степени s, удовлетворяющих
условию Я^@) = 1. Решение последней задачи было дано
А. А. Марковым с помощью многочленов Чебышева:
-а-2?ь \
где
B.59)
B.60)
' =i
•78 МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
rs — некоторая константа. Отсюда получаем
i= 1
17
[ГЛ. 4
B.61)
При этом
max I Ps (X) | = ¦
max
3 —а
max
B.62)
Вернемся теперь к проблеме оптимизации метода B.53), т. е.
к решению экстремальной задачи
<7Лтопт) = тт<7,(т), B.63)
где т обозначает последовательность параметров ть ... , ts. Если
обозначить через Vs множество многочленов Ps (X) степени s вида
s
Р*М = ЦA-аМ, B.64)
i= 1
то задача B.63) может быть сформулирована следующим обра-
образом: найти многочлен Ps (X), являющийся решением задачи
min max \PS(K)\= max \P(X)\.
B.65)
Так как Vs cr Qs, то очевидно, что
max _\PS(\)\:
a < ?. < p
max
(X) I. • B.66)
Поскольку решением задачи B.58) является многочлен PS(X)
вида B.64), т. е. принадлежащий Vs, то в B.66) выполняется
строгое равенство. Учитывая это, приходим к выводу, что в ка-
качестве Ps (X) может быть выбран многочлен Ps (X). Окончательно
отметим, что выбор
Ps(V = Ps(h) B.67)
единствен, так как единственно решение задачи B 58).
Если через xs = (ol, a2, ..., as), где l^a^^s и огфак при
1фк (t, /г= 1, 2, ... , s), обозначить целочисленную переста-
перестановку порядка s, то из B.62) следует, что для оптимального
4.2]
НЕКОТОРЫЕ ИТЕРАЦИОННЫЕ МЕТОДЫ И ИХ ОПТИМИЗАЦИЯ
179
итерационного метода B.54)
1
1=1 S,
B.68)
где
а хг —корни многочлена Ts(x). Итерационный метод B.54)
с выбранными по формуле B.68) параметрами мы будем на-
называть чебышевским итерационным методом.
Оценим теперь скорость сходимости чебышевского итерацион-
итерационного метода.
Покажем, что значение длины цикла s может быть выбрано
из условия, чтобы s итераций метода B.53) (одна итерация по
методу B.54)) обеспечивали уменьшение начальной ошибки
в 1/е раз. Рассмотрим уравнение
1
е =
Г,
Если ввести обозначения
и использовать соотношение
Y — * о — V »о
то после несложных преобразований имеем
е =
Рассматривая последнее соотношение как квадратное уравнение
относительно ys и учитывая, что у<1> получим
и, следовательно,
В случае 8^1 и
in
S == ¦
In v
это выражение принимает вид
I In 8 | V~P
180
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
(ГЛ. 4
откуда следуют соотношения
'¦?-. B-69)
Из этих соотношений вытекает, что асимптотически по ско-
скорости сходимости чебышевский циклический итерационный метод
в У р раз лучше простейшего одношагового метода, но в два
раза уступает методу последовательной релаксации.
Как следует из изложенного, для реализации чебышевского
итерационного метода нам необходимо знать границы аир
спектра матрицы А. Эта проблема весьма актуальна, поскольку для
значений х ф [—1, 1] наблюдается быстрый рост многочленов Чебы-
шева и, следовательно, ошибка в определении границ спектра
может привести к очень медленной сходимости процесса.
Верхнюю границу спектра Л, как правило, определяют
с помощью теоремы Гершгорина. Наиболее же сложная проб-
проблема—определение нижней границы. В ряде случаев здесь воз-
возможны априорные оценки, но, как правило, приходится рассмат-
рассматривать дополнительный итерационный процесс, например метод
Люстерника, описанный в первой главе, или метод минимальных
итераций Ланцоша.
Второй важной проблемой чебышевского итерационного меюда
является проблема упорядочения параметров. Дело в том, что
при произвольном порядке использования параметров т,- в ите-
итерационном процессе возникает неустойчивость при его численной
реализации. Вопросами упорядочения параметров занимались
многие исследователи, но лишь недавно эта проблема была ре-
решена. Опишем два простейших алгоритма упорядочения пара-
параметров.
Пусть s = 2r, где л —некоторое положительное целое, a n2r-i =
= (аи а2, ..., cts/2) — порядок номеров хи установленный- для
s = 2r'1 в соответствии с описываемым алгоритмом. Потребуем
теперь, чтобы в случае s = 2r порядок номеров х,- был следующим:
— ои сг2,
— аг crs/2, s+1 — crs/2).
Так, например, для s = 16 имеем
пи = A, 16,8,9,4, 13,5, 12,2, 15,7, 10,3, 14,6,11).
Рассмотрим второй алгоритм. Пусть s = 3r, где л —некоторое
положительное целое, а n3r-i = (Oi, аг> ¦••> tfs/з) — пор ядок номе-
номеров К:, установленный для s = 3/'-1 в соответствии со вторым
алгоритмом. Тогда в случае ь = Зг потребуем, чтобы порядок
4.21 НЕКОТОРЫЕ ИТЕРАЦИОННЫЕ МЕТОДЫ И ИХ ОПТИМИЗАЦИЯ 181
номеров Xj был следующим;
V = (*i, 2-У-1+ <Ti, 2-3'-1+1-<т1, .... 2-3'-1 + 1-сг5/3).
Так, например, для s = 9 второй алгоритм дает
«, = A,7,6,3,9, 4,2,8, 5).
При описанных алгоритмах операторы шага Tt — E — xtA
с большой нормой достаточно равномерно распределяются среди
операторов, уменьшающих норму ошибки.
Итерационный метод B.53) был описан как оптимальный для
заданного s. Новый класс итерационных процессов — устойчивые
бесконечно продолжаемые оптимальные методы типа B.53) с чебы-
шевскими параметрами — позволяют продолжить после s заданных
итераций метод B.53) так, чтобы он был устойчивым и для неко-
некоторых / = /* (jk-*-co, /s>s) снова становился оптимальным.
Изложим алгоритм построения параметров такого метода для
одного частного случая. Так как
cos Зх = cos х B cos 2x — 1),
то для многочленов Ts(t) и T3s(t) справедливо соотношение
T3s(t) = Ts(t){2T2s(t)-l),
которое показывает, что множество корней многочлена TSs(t)
состоит из множества B.61) — корней многочлена Ts(t) и множе-
множества корней многочлена 2Tis(t)—l:
-я, 2i Ф 1 (mod 3),
:3s.
Следовательно, если после s итераций, в которых в формулах
B.53) были использованы параметры B.68), мы продолжим ите-
итерационный процесс далее, взяв в B.68) за х,- (К; выражаются
через х,) соответствующим образом перемешанные параметры х,-,
то прн / = 3s снова получим оптимальный метод. Продолжая
процесс образования параметров аналогичным образом, мы полу-
получим бесконечную последовательность хи для которой метод B.53)
становится оптимальным при j = 3rs.
Приведем формулы, определяющие порядок использования х,-,
когда s = 2. Полагаем сначала х, = — 2-1'2, х2 = — х,. Пусть
порядок последовательности х,- (/ = 1,..., 2 • У'1) построен. Отрезок
последовательности х, (i = 2- ЗгЛ + 1, ..., 2-3') построим следую-
следующим образом: используя перестановку пз/~1, образуем величины
/,--!= Sill'
А-У
-л,
1-1
/ — 1, ...,
182
Тогда
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 4
- ч, л2-Зг~1 + Ц + 4 '
/ = 0 З-i-l.
Затем по перестановке пзг вычисляем х,(г = 2 • 3' + 1,... ,2 • 3r+1)
и т. д.
Анализ чебышевского циклического итерационного метода B.53)
показывает, что при его оптимизации нами нигде не исполь-
используется свойство B.56), а осуществляется минимизация функции
4s (T). которая зависит только от границ спектра и при постро-
построении которой принимается во внимание только вещественность
собственных чисел Л. В силу сказанного, при оптимизации рас-
рассматриваемого метода достаточно ограничиться требованием поло-
положительности собственных чисел и полноты собственных векторов
Л и отказаться от требования симметричности.
Сделанные замечания позволяют построить теорию оптими-
оптимизации для итерационных методов вида
ф/+1 = ф' - Т/Я (AqJ-f) B.70)
в предположении, что все собственные числа матрицы НА веще-
вещественны и принадлежат отрезку [а, р], где 0 <а = а (НА) ==s
<р = р (ЯЛ).
Покажем, что перечисленные требования относительно спектра
матрицы НА будут выполнены, если матрицы Я и Л симметрич-
симметричны и положительно определены. С этой целью введем понятие
положительного квадратного корня из симметричной и положи-
положительно определенной матрицы D. Пусть {vn\ — полная ортонорми-
рованная система собственных векторов D, соответствующих ее
положительным собственным числам {dn}. Тогда существует орто-
ортогональная матрица Р, столбцами которой являются векторы
\ик}, такая, что
где Do —диагональная матрица с собственными числами {dn\ мат-
матрицы D по диагонали. Определим матрицу Dl0/2 как диагональ-
диагональную матрицу с положительными числами {dj/2} по диагонали и
удовлетворяющую равенству
Очевидно, что по матрице Do матрица Di/2 определяется одно-
однозначно. Теперь матрица D1'2 определяется соотношением
DU2=PDqp Р*.
183
4.2] НЕКОТОРЫЕ ИТЕРАЦИОННЫЕ МЕТОДЫ И ИХ ОПТИМИЗАЦИЯ
Нетрудно видеть, что матрица Dl/2 симметрична, положительно
определена (так как она симметрична и ее собственные числа
dl!2\ положительны) и удовлетворяет равенствам
[
Основываясь на изложенном, видим, что матрица НА подобна
симметричной и положительно определенной матрице S = А1'2 НА1/2:
Л1'8 [ЯЛ] [Л>''2] 1 = Л'/2ЯЛ1/2.
Отсюда следует, что все собственные матрицы НА вещественны
и положительны.
Покажем теперь, что при сделанных предположениях матрица
НА обладает полной системой собственных вектороз (это поз-
позволяет применять для решения системы не только циклические,
но и бесконечно продолжаемые чебышевские итерационные методы).
Обозначим через \vn} полную ортонормированную систему собст-
собственных векторов матрицы S, соответствующих ее положитель-
положительным собственным числам {|а„}:
Умножая это соотношение на матрицу [Л1'2] и используя обо-
обозначение ш„ = [Л|/2]"х у„, получим
Таким образом, {\in} являются собственными числами матрицы
НА, a \wn\ —соответствующими им собственными векторами.
Так как система {vn\ образует базис в исходном пространстве
векторов и система \wn) получена из системы \vn\ при помощи
невырожденного преобразования, то \wn) также образует базис
и, следовательно, матрица НА обладает полной системой соб-
собственных векторов.
Рассмотрим еще один важный случай, когда собственные
числа матрицы НА вещественны и положительны. Предположим,
что матрица А имеет вид
Л =
— *\2
B.71)
где ?t и Е2 — единичные матрицы порядка пх и я2 соответственно,
a Si и /?2 являются матрицами порядка ^хп^ и п^Х'Ц. Кроме
того, предположим, что все собственные числа матрицы
В-\° Sl
вещественны и меньше единицы по модулю (т. е. |Я,(В)|<[1),
а матрица Я определена соотношением
= li ,, I? I,- B..II)
--я»
О
184
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 4
Такой выбор Н соответствует методу последовательной верхней
релаксации B.38) с параметром т=1 (см. 2.4.3). Очевидно, что
любое собственное число матрицы
либо равно единице, либо является собственным числом матрицы
Е2 — R2SX, все собственные числа которой вещественны и поло-
положительны. Для доказательства последнего факта достаточно
заметить, что любое собственное число матрицы ^Sj в то же
время является собственным числом матрицы
I о #2s
(собственные числа В2 положительны, так как они являются
квадратами вещественных собственных чисел матрицы В) и спра-
справедливы неравенства
) = X (В2) = X2
1.
Таким образом, все собственные числа матрицы НА вещественны
и положительны, что позволяет осуществлять оптимизацию
метода B.70) на основе разработанной выше теории выбора чебы-
шевских параметров. Нужно отметить, что при дополнительном
предположении симметричности матрицы A(R2 = S*) матрица НА
обладает полной системой собственных векторов.
В заключение оценим скорость сходимости итерационного
метода B.70) с чебышевским выбором параметров, когда матрицы
Л и Я определяются соотношениями B.71) и B.72), через
величину
Р = Р(А) = "'"
а (А)
в предположении р>1. Используя результаты из 4.2.3 и кон-
конкретный вид матрицы НА, нетрудно заметить, что
и, следовательно,
р (ИА\ — I -
{ ' а(Я/4)~2а(Л) ~ 4 а(Л) ~ 4"^-
Отсюда, согласно B.69), для процесса B.70) имеем
4
R(TX>
J Vp '
7u|lne,L?-.
B.73)
4.2]
НЕКОТОРЫЕ ИТЕРАЦИОННЫЕ МЕТОДЫ И ИХ ОПТИМИЗАЦИЯ
185
Тем самым показано, что асимптотическая скорость сходимости
рассматриваемого варианта циклического чебышевского итераци-
итерационного метода равна асимптотической скорости сходимости метода
последовательной верхней релаксации с параметром топт.
4.2.5. Сравнение скорости сходимости итерационных методов
для систем разностных уравнений
В предыдущих пунктах мы установили оценки скорости схо-
сходимости ряда итерационных методов, используя число обуслов-
обусловленности матрицы Л. Здесь мы рассмотрим применение этих
итерационных методов для решения систем конечно-разностных
уравнений, аппроксимирующих двумерные уравнения эллипти-
эллиптического типа.
Пусть система конечно-разностных уравнений записана в виде
где {k, l) пробегают некоторое множество индексов Q.
Предположим, что каждому узлу сеточной сбласти, на кото-
которой осуществлялась аппроксимация задачи, соответствуют только
одно значение <Pk,i и только одно уравнение, т. е. число уравне-
уравнений и число неизвестных равно числу узлов сетки. Тогда, чтобы
перейти к матричной формулировке системы конечно-разностных
уравнений, сначала осуществляют нумерацию узлов сетки, затем
в соответствии с нумерацией узлов сетки нумеруют компоненты
{ф*,;} и в такой же последовательности располагают конечно-раз-
конечно-разностные уравнения.
В качестве примера рассмотрим систему конечно-разностных
уравнений B.74), когда сеточной областью является квадратная
сетка, а областью определения решения — квадрат со стороной
единица. В этом случае в B.74) к, 1=1, ..., т, а порядок мат-
матрицы Л соответствующей системы
Лф = / B.75)
равен п = т2.
В качестве первого способа нумерации рассмотрим так назы-
называемый «шахматный способ», когда все компоненты разбиваются
на две группы: к первой относятся компоненты с четными зна-
значениями k-\-l, а ко второй —с нечетными значениями k-\-l.
После этого нумеруются сначала компоненты первой группы,
а затем — второй. В конкретном случае т = 3 нумерация имеет
вид, представленный на рис. 14.
Соответствующая матрица А = А1 системы B.75) определяется
соотношением (которое справедливо уже для произвольного т)
-Sill
a _i|
B.76)
186
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ 4
где порядок матрицы Ех равен числу компонент в первой группе,
а порядок Ег — числу компонент во второй группе.
Второй способ нумерации для т = Ъ приведен на рис. 15.
х2 хв
xff хЗ
х1 х7
Рис. 14.
Рис. 15.
Объединяя в одну группу Есе компоненты при одинаковых
значениях k, получим три группы компонент. Соответствующая
матрица А = Аг системы B.75) имеет вид (т = 3)
Аг =
Мп Л12 о II
л л л \\
Л21 Л22 Л23 ]|.
U Паз ''ЗЗ
B.77)
Умножая систему B.75) с такой матрицей А на матрицу D 1, где
Ап О О
О А,
О О
О
B.78)
— блочно-диагональная матрица, приходим к системе
I Ex — S, 0 1
ЛзФ = |-Я2 ?2 -S2I Ф = ^, • B.79)
II 0 -К, ?3||
где
/?, = — ЛйМ/,,.,, /=1, 2, 3.
При произвольном k — m матрица Аа имеет вид B.32).
Если операторы исходных эллиптических дифференциальных
задач симметричны, положительно определены и аппроксимация
осуществлялась либо с помощью интегральных соотношений
4.21
НЕКОТОРЫЕ ИТЕРАЦИОННЫЕ МЕТОДЫ И ИХ ОПТИМИЗАЦИЯ
187
баланса, либо вариационными методами, то построенные мат-
матрицы А обладают полной системой собственных векторов, а их
собственные числа положительны. В исключительных случаях
(например, прямоугольная область и постоянные коэффициенты)
границы спектра могут быть вычислены точно, как это сделано
в гл. 1 для разностного оператора Лапласа в квадрате, либо
оценены (иногда слишком грубо), либо вычислены с помощью
какого-нибудь итерационного метода (методы Люстерннка, Лан-
цоша и т. д.).
В качестве примера рассмотрим аппроксимацию задачи
Дирихле для уравнения Пуассона в единичном квадрате с по-
помощью обычных пятиточечных разностных отношений на квад-
квадратной сетке с шагом h ^ 1. При этом мы ограничимся случаем,
когда матрица А системы B.75) имеет вид B.76). Тогда, как
показывают непосредственные расчеты,
Л2/!2
2
4
B.80)
Объединим теперь данные по различным итерационным мето-
методам в одну таблицу, учитывая, что в силу А<^1 матрица А
системы B.75) плохо обусловлена.
ТАБЛИЦА I
Методы
Простейший итерационный метод
. Чебышевский циклический
итерационный метод
Метод последовательной
верхней релаксации
Чебышевский циклический итераци-
итерационный метод B.70) —(?.72)
Асимптотическая скорость
сходимости R (Г)
2 Л2Л2
Р~~ 2
2
Vp ^^
4 0
Vp ~ я
4
•88 МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
4.3. Нестационарные итерационные методы
[ГЛ 4
В этом параграфе будут рассмотрены нестационарные итера-
итерационные методы, осуществляющие последовательную минимиза-
минимизацию некоторого квадратичного функционала.
4.3.1. Теоремы сходимости
Пусть даны система линейных алгебраических уравнений
<4ф = / C.1)
и квадратичный функционал
У(ф) = (О(ф-ф*), ф-ф*), C.2)
где ф* = Л1 / — точное решение системы C.1), a D — симметричная
положительно определенная матрица.
Так как У(ф)>0 для любого ф^=ф* и У(ф*) = 0, то задача
решения системы C.1) эквивалентна задаче минимизации функ-
функционала C.2), т. е. нахождения вектора ф*, минимизирующего
J (ф). Если Ь = А*А, то функционал
У(Ф) = (ЛФ-/, Лф-/) = ||Лф-/[Ц C.3)
называется функционалом квадрата невязки.
Если предположить, что Л— симметричная положительно опре-
определенная матрица и D = A, то
р*. ф*),
где
/,(ф) = (Лф, ф) —2(ср, /). C.4)
Таким образом, / (ср) с точностью до константы (Лф*, ф*) =
= (/, ф*) совпадает с известным вариационным функционалом
Jl(q>). Заметим, что функционалы C.3) и C.4) не зависят от
искомого вектора ф*.
Сделанные замечания позволяют сформулировать новые прин-
принципы оптимизации итерационных методов, которые мы назовем
вариационными принципами. Рассмотрим итерационный метод
ф'+1 = ф' —Ят(Лф/ —/), C.5)
матрица Нх которого зависит от параметров х1 т^. Предпо-
Предположим, что для значений ть ..., xs из некоторого множества Q
метод C.5) сходится, причем последовательность значений {ф'}
осуществляет последовательную минимизацию функционала C.2).
В предыдущем параграфе мы выбирали значения ti, ..., т^ из
условия минимума спектрального радиуса р G\) матрицы шага
Тх = Е — НХА. В настоящем параграфе будут рассмотрены методы,
4.3]
НЕСТАЦИОНАРНЫЕ ИТЕРАЦИОННЫЕ МЕТОДЫ
189
для которых параметры ti, ..., т.* выбираются из условия мак-
максимальной минимизации на каждом шаге функционала C.2).
Так как матрица D положительно определена, то нетрудно
видеть, что соотношение
\В = (Щ, ярI
C.6)
определяет норму в пространстве векторов ошибок. Соответ
ственно соотношение
. 15 ||о = sup
C.7)
определяет норму матрицы В. Введенную норму часто называют
D-нормой. Ранее мы предположили, что при (ть ..., xs)^Q
функционал C.2) с некоторой матрицей D последовательно
минимизируется. Это означает, что для любого я|/ = ф' — ф*
||Гтгр/||о<|г|/||о. C.8)
Так как для стационарного итерационного метода матрица Тх
постоянна, то из последнего неравенства следует, что для любого
вектора ^ФО
\\Txz'\\D<l,
где 2/ = я|)'/||я|)'[|о. Далее, поскольку множество v = {z: ||z||D=l}
является ограниченным замкнутым множеством*), то величина
^ sup ||7\z||D = ||7\||D
достигается на некотором векторе г0. Отсюда и из C.8) вытекает
| * X \\D — \\ ' тг0 \\D <-. * • (д-™)
Итак, мы показали, что при сделанном предположении
Сформулируем теперь нестационарный метод, соответствующий
методу C.5):
ф'+1 = Ф/ —Я/(Лф/ —/), C.10)
где Hj = H(x\'\ ..., т<'-)) и параметры |т)''} удовлетворяют урав-
уравнению
./(ф'-Я,.(Лф'-/))= inf ./(ф'-Я^Лф'-/)). C.11)
Т1 xs
*) Здесь и в дальнейшем используются обозначения вида и = {г: ||г|]л=Н
которые означают, что множество v состоит из элементов г, каждый из кото-
которых удовлетворяет условию [ г ||о== 1.
190
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ 4
Справедливо следующее утверждение.
Если для итерационного метода C.5) выполнены сделанные
выше предположения (т. е. множество Q не пусто), то итерацион-
итерационный метод C.10), C.11) сходится, причем
l7'I|D<||7't|D C.12)
для любого T = (Tlt ..., xs)^Q, где Г —оператор шага метода
C.10), C.11).
Для доказательства этого утверждения достаточно показать
справедливость неравенства C.12). Пусть метод C.5) сходится
для значений хг т^ и для этого метода ||7'ti|/||d<;||i|j'||d для
любого я|)'. Тогда, как показано выше,
Далее, так как по определению
то
\V\\d
для любого \|г и, следовательно,
И1 = ?иР.-^7Г
что и требовалось доказать.
В заключение докажем еще одно утверждение, определив
предварительно асимптотическую скорость сходимости нестацио-
нестационарного итерационного метода соотношением*)
Если при любых ть ..., xs g Q, для которых метод C.5) схо-
сходится, выполняется соотношение
то асимптотическая скорость сходимости соответствующего неста-
нестационарного итерационного метода не ниже, чем асимптотическая
скорость стационарного метода с оптимальными параметрами.
Как было показано в 4.2.2,
*) Заметим, что, аналогично случаю стационарных итерационных методов,
/?(г)не зависит от способа введения нормы, т. е. способа выбора матрицы О.
\
4.3] НЕСТАЦИОНАРНЫЕ ИТЕРАЦИОННЫЕ МЕТОДЫ
С другой стороны,
191
пти
1I/A
о
\r\\D
-х Id.
Отсюда получаем
C.13)
Так как это неравенство справедливо для любых х1у ..., т5е
е Q, то утверждение доказано.
Из последнего утверждения следует, что если параметры
оптимизации выбирать из условия минимума D-нормы оператора
перехода 7"т, то вариационная оптимизация как на любой ите-
итерации, так и асимптотически обеспечивает, по оценке, более
быструю скорость сходимости.
4.3.2. Метод минимальных невязок
Выберем
= A*A
= хЕ
и М = хЕ C.14)
и предположим, что Л = Л*>0.
В 4.2.1 было показано, что в этом случае при те@, 2/р (Л))
итерационный метод
ф'+1 = ф' — т(Лср' — /) C.15)
сходится. При этом простейший спектральный анализ показывает,
что
\\E-xA ||о = | Е - хА |3 = р (Е - хА). C.16)
Рассмотрим соответствующий нестационарный процесс, назы-
называемый методом минимальных невязок:
C.17)
C.18)
где
(АУ,
(Al',A$J) || Ay HI
A/ = Ац>/ — /-вектор невязки). Из ГЗ. 17) следует, что
|| (Е - т/Л) I' ||Ь = || (Е - х,А) V % = inf J (ф/ - Tg/) =
Очевидно, что xt находится из уравнения
t \ II I' i|» - 2т (AV rJ) -и х* i| 4й'"-' - п
192
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 4
Так как метод C.15) сходится для те@, 2/р), где р = р(Л),
то, согласно утверждению из 4.2, метод минимальных невязок
сходится, причем
Из соотношения для последовательности норм невязок метода
C.17), C.18)
е/+1 II ¦• _ || у ill _
легко видеть, что для монотонного убывания норм невязок в про-
пространстве вещественных векторов достаточно положительной опре-
определенности матрицы Л в этом пространстве (симметричность не
обязательна). Это обстоятельство послужило основой для форму-
формулировки теоремы сходимости нестационарных итерационных мето-
методов и, в частности, доказательства сходимости метода минималь-
минимальных невязок для систем уравнений с положительно определен-
определенными, но не симметричными матрицами.
Одной из важных в практическом отношении особенностей
метода минимальных невязок является то, что на первых итера-
итерациях метод сходится значительно быстрее, чем асимптотически.
Асимптотически ошибка метода наискорейшего спуска является
линейной комбинацией только двух собственных векторов мат-
матрицы Л, соответствующих ее собственным числам а (А) и р (А).
Аналогичная ситуация наблюдается в методе минимальных невя-
невязок. Таким образом, асимптотическое свойство итерационного
метода выходить на свою наихудшую скорость сходимости (при
фиксированных параметрах) сохраняется и для нестационарных
методов.
Для ускорения сходимости метода минимальных невязок
целесообразно время от времени использовать один шаг двух-
шагового метода минимальных невязок, формулы которого имеют
вид
ф/+1 = ф/_т.(Лф/-Я-Т/Л(Лф/-Я, . C.20)
где %j и у/ выбираются как решение системы двух уравнений:
C.21)
4.3.3. Метод сопряженных градиентов
Определим в исходном пространстве векторов некоторую
D-норму и некоторое подпространство Gs с базисом {#/}*= i.
Тогда задача наилучшего приближения решения ф* = Л1/ системы
4.3] НЕСТАЦИОНАРНЫЕ ИТЕРАЦИОННЫЕ МЕТОДЫ
Aif — f на многообразии
193
формулируется следующим образом. Требуется найти вектор
ф е Gs такой, что
C.22)
= min
а,, а, а.
ф*-ф°-
Система уравнений для определения коэффициентов {а*} разло-
разложения
имеет вид
где В = фц) — матрица порядка s с элементами
bif = (gi, gj)D, I, /=1, ..., S,
и F = (Flt .... Fj) —вектор с компонентами
/\ = (Ф*-Ф°> gi)D, ' = 1. •••. s.
Из предыдущего видно, что наиболее простым (с точки зре-
зрения реализации процесса) является случай, когда
(Dgit gj) = bn\g,fD,
где бу — символ Кронекера, т. е. когда {gt) будет D-ортогональ-
ным базисом пространства Gs. Если последнее условие выпол-
выполнено, то
(Ф'-Ф". g,)D _ (°(Ф*-Ф°). Si)
осТ = ¦
\\Si\\b
Uftllb
i=lt ...,s. C.23)
Достаточным условием осуществимости процесса C.23) является
требование, чтобы вектор Оф* был известен. Это требование
выполняется, например, либо в случае D — A, если Л = Л*>0,
либо в случае D = A*A для произвольной Л.
Конкретизируем вариационную задачу C.22) с целью изуче-
изучения одного класса методов. Предположим, что подпространство Gs
является линейной оболочкой системы линейно независимых век-
векторов
7 Г. И. Марчук
194
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 4
а матрица А симметрична и положительно определена. Как уже
было указано выше, если в заданном подпространстве Gs мы
сможем найти некоторый Л-ортогональный базис {g,.}?= i> то иско-
искомое приближение ср к вектору ср* найдется по формулам
= Ф°
Этот процесс можно записать еще следующим образом:
ф* = ф* -
C.25)
* {Agk. gk) '
k=l, ..., s,
где |ft = (Лф* —/) — вектор невязки и ф = ф8.
Наиболее известным способом построения базиса в простран-
пространствах типа Gs является процесс Шмидта. Однако для матриц Л
высокого порядка он требует большого числа арифметических
действий и большой памяти ЭВМ при численной реализации.
Для случая симметричных, но не положительно определенных
матриц эффективным способом построения Л2-ортогонального
базиса (т. е. когда D = А2) в пространстве Gs является метод
минимальных итераций Ланцоша. Самым экономичным из изве-
известных способов Л-ортогонализации векторов {А'-1 (Лф° — /)}*=i
для симметричных и положительно определенных матриц является
метод сопряженных градиентов, формулы которого имеют вид
l\
I* '^-
k-i, gk-i) '
(lk-
если k = l,
если /г>1,
k=l, .... s,
C.26)
где {|* = Лф* — /}«^1—векторы невязки.
Докажем, что построенные по этим формулам векторы {gk}sk = l
образуют Л-ортогональный базис пространства Gs, если векторы
{Л*!0}^! линейно независимы. Сначала покажем, что все век-
векторы {gfr}*=i будут ненулевыми. В самом деле, если в C.26)
4.31
НЕСТАЦИОНАРНЫЕ ИТЕРАЦИОННЫЕ МЕТОДЫ
195
провести последовательное исключение, то легко видеть, что
gk = Л*-1!0 + 21 Р«А'~ Ъ0' k = 1 • • • •' s C
1= 1
с некоторыми коэффициентами {р«}- Поэтому соотношение gk = 0
будет противоречить требованию линейной независимости векто-
ров {Л*^°}' = 1.
Теперь остается показать, что векторы {g4i=i Л-ортогональны.
Предположим, что для некоторого k^2 выполняются соотноше-
соотношения (для k—l, 2 их выполнение устанавливается непосредст-
непосредственной проверкой)
(S*. gj) =
C.28)
/=1 k,
и докажем их справедливость на
понадобятся равенства
Ag [
шаге. Для этого нам
, i = 1, ..., k - 1 C.29)
(здесь полагается go = 0). Чтобы вывести эти соотношения, доста-
достаточно воспользоваться равенствами, полученными из C.26), и
условиями
l^l^-^Agj,
gi+i = tJ-b,+igj, /=1, .... k-\.
Так как в силу предположений
k, gj) = {Alk, gj)-bk+1{Agk, gj) =
j=\,...,k-\
и по построению (Agk+1, g*) = 0, то
{AgM,gj) = 0 C-30)
для всех /<;&. Далее, поскольку (|*+1, gfc+i) = 0, то по построе-
построению и из предположений C.28) следует, что
(Iм. gj) = &< gj) ~ аш (Agk+1, gj) = 0 C.31)
для любого l^i^k+l. Объединяя C.30) с C.31) и учитывая
неравенство
(lfe. gu+i) _ (lk, V) ^ о
получаем, что на (& + 1)-м шаге все соотношения C.28) выпол-
выполняются. Продолжая по индукции до s-ro шага, приходим к
7*
196
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ 4
выводу об Л-ортогональности системы векторов {gs}. Таким обра-
образом, метод сопряженных градиентов решает вариационную
задачу C.22).
В заключение обсудим случай вырождения, когда для неко-
некоторого ft Sal система векторов {Л'-11°}к=1 линейно независима,
а система {^'i°}f+,1 линейно зависима, т. е.
к к
- ? С,А>$° в ? С>А/+1 (Ф* - Ф°) = 0 C.32)
/ = о / = о
с некоторыми коэффициентами {С,}*=0, среди которых есть отлич-
отличные от нуля. Коэффициент Со отличен от нуля, так как в про-
противном случае, умножая C.32) на Л \ получаем
k
2 СУЛ/(ф*-фо) = О,
/ = о
что противоречит линейной независимости системы векторов
{Л/(ф*-ф°)}*=1. Из C.32) имеем
ф*-ф°=—^л -
что означает: ф*-ф°еСг Отсюда и из C.28) следует, что при-
приближение ty необходимо равно вектору ф* — ф° (ф* = ф°-)-гр =
= Ф° + Ф*). Иначе говоря, в данном случае метод сопряженных
градиентов позволяет найти точное решение системы C.1) уже
на k-м шаге.
Метод сопряженных градиентов, как и другие способы орто-
гонализации, можно широко использовать для ускорения сходи-
сходимости стационарных итерационных методов. Так, например, для
итерационного процесса
с симметричными и положительно определенными матрицами Л
и В формулы ускорения с помощью метода сопряженных гра-
градиентов имеют следующий вид:
если k=\,
Blk-*-bkgk-i, если k>l,
''. gft-i)
7^^' C-34)
-I
h -
i = (? l> Sk)
k=\,2 S.:
4.3]
НЕСТАЦИОНАРНЫЕ ИТЕРАЦИОННЫЕ МЕТОДЫ
197
Метод сопряженных градиентов по своей идее (теоретически)
является прямым методом, поскольку при s>m, где п — порядок
матрицы Л, система векторов {Л'|°}*=д всегда линейно зависима,
и, следовательно, при некотором fc=^s процесс должен заканчи-
заканчиваться получением точного решения. С другой стороны, при реа-
реализации метода сопряженных градиентов на ЭВМ в случае матриц
высокого порядка, как правило, уже через несколько десятков
итераций возникает явление численной неустойчивости процесса
ортогонализации и реальный процесс перестает отражать свойства
реализуемого метода. В силу отмеченного обстоятельства анализ
метода сопряженных градиентов можно проводить как анализ
нестационарного итерационного метода с длиной цикла s, т. е.
через каждые s шагов по методу сопряженных градиентов началь-
начальное приближение выбирается заново. При такой постановке ско-
скорость сходимости метода может быть оценена через скорость схо-
сходимости циклического чебышевского итерационного метода. Дей-
Действительно, для любого s^=l
mm
а,, ... ,ос
Ф'— q>° —
i = 1
I! ф*—ф° На
C.35)
где ts — оператор, преобразующий вектор ошибки за s шагов
метода сопряженных градиентов, а {р\-^=' — произвольные вещест-
вещественные числа. В частности, если положить
C.36)
1=1
1 = 1
и использовать оценку C.12) настоящего параграфа, то прихо-
приходим к выводу, что s-циклический метод сопряженных градиентов
сходится не медленнее s-циклического чебышевского метода и,
следовательно, для него справедливы те же самые оценки ско-
скорости сходимости. Отметим две важные особенности метода со-
сопряженных градиентов, проявляющиеся при решении конкретных
вычислительных задач. Во-первых, реализация одного шага ме-
метода сопряженных градиентов требует большее (иногда значи-
значительно) число арифметических и логических действий по сравне-
сравнению с одним шагом чебышевского итерационного метода. Во-вто-
Во-вторых, при реализации (особенно на первых итерациях) метод
сопряженных градиентов в соответствующей норме значительно
быстрее минимизирует Л-норму вектора ошибки, чем это пока-
показывает оценка. Для иллюстрации отмеченного факта выпишем
198
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 4
соотношение, вытекающее из C.22) для метода сопряженных гра-
градиентов (способа определения подпространства Gs):
Д f), C.37)
max \ХРЦХ)
где 1|з* — вектор ошибки на k-u шаге, 1|з° — вектор начальной
ошибки, а Рк (X) — многочлен степени к от X, удовлетворяющий
условию Pft@) = l. Теперь, если положить М=\ (этого всегда
можно добиться нормировкой матрицы А) и /я = 0 (без ограни-
ограничения общности), то, полагая
р /о, ч _ / 14ft cos [B? + 1) arccos Vk]
получим для метода сопряженных градиентов оценку
C.38)
C.39)
Заметим, что в силу /я = 0 оценка C.39) справедлива и в слу-
случае вырожденной матрицы А.
4.4. Метод расщепления
Среди итерационных методов решения стационарных задач
математической физики широкое применение имеет метод пере-
переменных направлений. В настоящее время известно довольно боль-
большое число различных модификаций этого метода и схем его реа-
реализации. Метод переменных направлений основывается на спе-
специальных релаксационных процессах с возможностью редукции
сложной задачи к последовательности простейших. Все методы
такой редукции будем называть методами расщепления. Именно
с этих позиций и рассмотрим ставший уже классическим метод
переменных направлений (см. 9.2).
Изложение будем вести на примере системы линейных алге-
алгебраических уравнений
Лф = / D.1)
в предположении, что
D.2)
где Ах и Л2 — положительно определенные матрицы. В 4.2 нами
было показано, что использование вместо итерационного процесса
/) D.3)
итерационного процесса последовательной верхней релаксации
В (с/11 - <$1) = — (Лф/ - /) D.4)
4.41
МЕТОД РАСЩЕПЛЕНИЯ
199
с матрицей В, зависящей от параметра т, позволяет значительно
повысить скорость сходимости метода практически без увеличе-
увеличения числа действий на итерацию. Недостатком метода оказалось
жесткое ограничение на вид матрицы А и свойства ее спектра.
Рассмотрим другой класс методов, когда матрица В = Вх опре-
определяется соотношением
Вх=±(Е+хА), D.5)
а матрица А предполагается симметричной и положительно опре-
определенной. В этом случае для векторов ошибок 1|>/ = ф/ —ф* имеем
(Е + тА)\р+1 = (Е хА)у1р1
или, что эквивалентно,
где
Л)-1 D.6)
— оператор шага метода D.4). Используя симметричность и по-
положительную определенность матрицы, нетрудно видеть, что опе-
оператор Тх определен для любого т>0, симметричен и
D.7)
D.8)
хпш
Здесь
0<а = а (Л) ^а„ (Л) ^2 Р
Введем и исследуем функцию
q (т) = max | g (т, Хп(А))
где
1 —тЛ.
D.9)
D.10)
Очевидно, что при ts^O функция q{x)~s^\ и, следовательно,
метод D.4) расходится. Поэтому необходимым условием сходи-
сходимости метода является требование т>0. Предположим, далее,
что т>0. Тогда, так как при т, Х>0
" *- 2т <0
и Хп (Л) е= [а, Р], то
= max<
. «);, \g{x,
1-та
1+та
1+тр
D.11)
Отсюда следует, что рассматриваемый метод D.4) сходится для
любого т > 0.
200
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ 4
Метод D.4) является стационарным итерационным методом.
Поэтому его оптимизация (согласно 4.2.2) заключается в мини-
минимизации по т величины РG\), т. е. в решении экстремальной
задачи
q (т0П1) = min q (т). D.12)
Учитывая, что
СО Г4.131
для любых т, ?i>0, аналогично тому, как это было сделано
в 4.2.1 для простейшего итерационного метода, можно показать,
что значение т = топг является решением уравнения
1—тес 1 — tft
1-fxp
1+тЛ
и вычисляется по формуле
*опт
Действительно, если т = топт, то
D.14)
D.15)
1 топтк
1-1/ ^
и, следовательно,
1-1/-
1 +
D.16)
Если же т<топт, то согласно D.13)
В случае т>топ
Оценим асимптотическую скорость сходимости метода D.4), D.5)
/?GЧ,пт) = -1п9(т°пт) D17)
в случае плохо обусловленных матриц, т. е. в случае р = р (Л) р.- 1.
Согласно D.16) имеем
Я (Топт) *^> 1 — у= ,
D.18)
4.4]
МЕТОД РАСЩЕПЛЕНИЯ
201
Из полученных соотношений вытекает, что предлагаемый
метод по асимптотической скорости сходимости всего лишь в два
раза уступает оптимальному методу последовательной верхней
релаксации. Отмечая достоинства метода, нельзя не видеть его
недостатка, заключающегося в том, что решение системы
(z'+1 = q^+1 — <р/) на каждом шаге может потребовать не меньшего
числа арифметических действий, чем решение исходной системы.
Поэтому возникает проблема замены оператора В — Вх некоторым
«близким» оператором так, чтобы сохранялась быстрота сходимо-
сходимости метода и каждая итерация требовала числа операций, срав-
сравнимого с числом операций на итерацию метода последовательной
верхней релаксации. В большом числе случаев решение этой
задачи достигается выбором
В=~(? + тЛ1)(? + тЛ2), D.19)
который и будет рассматриваться в дальнейшем.
4.4.1. Коммутативный случай
Предположим, что матрицы А1 и А2 разложения D.2) симмет-
симметричны и обладают общей ортонормированной системой собствен-
собственных векторов {и„), т. е.
Л1ня = Я„(Л,)м„,
Л2ип = кп(А2)ип
для всех п и система {ип} образует ортонормированный базис
в исходном пространстве векторов. Разложим произвольный
вектор ф по системе {«„}:
ф=Цф»«». фп = (ф, Un).
п
Легко видеть, что
A^Ajff = A1 f2 К (At) <f>nun) = 2 *» Hi) К (At) Ф„мл =
V л In
=л2 2 m^i) ф»«»=<Mi<p.
п
Так как вектор ф произволен, то отсюда следует коммутатив-
коммутативность матриц Аг и Л2 (^4^2 = ^42^4!).
Разложим теперь векторы ошибок \|У = ф^ — ф* метода рас-
расщепления
(? + тА) (Е + тА3) (Фч 1 - фО = - 2т (Лф/ - /) D.21)
202 МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
по системе {«„}:
п
В результате, используя D.21), получим
[ГЛ. 4
-%, D-22)
где для простоты использовано обозначение Л.,-, п = Л.„ (Л/) (/ = 1, 2).
Из D.22) вытекает (это, вообще говоря, следует уже из ком-
коммутативности матриц Лх и Л2), что оператор шага метода D.21)
Тх = Е - 2т (? + тЛ2)-' (? + тЛ i)-1 A =
= (Е + тЛ2)-! (Е + тЛх)-1 (? - тЛх) (? - тЛ2) D.23)
обладает полной ортонормированной системой собственных век-
векторов {«„}, а его собственные числа вещественны и вычисляются
по формуле
^ ^у1 1 1 — тЯ-i. „ 1 — тЯ-2, л
через собственные числа матриц Лх и Л2. Отсюда вытекает, что
матрица Тх симметрична и, следовательно,
D.24)
В соответствии с изложенной в 4.2.2 теорией оптимизации ста-
стационарных итерационных методов равенство D.24) означает, что
выбор параметра т = топт из условия минимизации
Р(Чпт) = тт;пИГт) D.25)
является оптимизацией не только с асимптотической точки зре-
зрения, но и для любого е > 0, если требуется уменьшить в 1/е раз
именно евклидову норму вектора ошибки. Заметим также, что
в силу положительности Kh п и Х2, п неравенство р (Тт) < 1 вы-
выполняется только при т>0, т. е. положительность т является
необходимым условием сходимости рассматриваемого метода рас-
расщепления.
Перейдем к решению задачи оптимизации D.25). В общем
случае это очень сложная проблема, котор'ая не решена до на-
настоящего времени. Поэтому вместо р G\) мы будем минимизиро-
минимизировать функцию
1^1*2. п
(т) = тах
•+¦*,.
max
п
D.26)
которая мажорирует р (Тт) сверху, достаточно хорошо ее при-
приближает, а в ряде частных случаев даже совпадает с ней.
4.4] МЕТОД РАСЩЕПЛЕНИЯ
Предположим теперь, что
а = а(Л1) = а(Л2), р = р (А,) = р (Л2).
Тогда, так как максимум модуля функции
203
D.27)
зависит только от границ интервала [a, jj], которому принадле-
принадлежат величины %i<n и Я,2, л (это было доказано в начале параграфа),
то при сделанном предположении D.27)
</2(т) = Г max \g(x, X
J
Следовательно, проблема оптимизации сводится к решению экстре-
экстремальной задачи
9(топт) = тт9(т), D.28)
т>0
которая была исследована ранее. Ее решение дается формулой
D.15):
топт = ^=. D.29)
Отсюда имеем
-УТТ
J +
Учитывая теперь, что
а = а (А) 5г а (Лt) + а (Л2) = 2а,
и, следовательно,
D.30)
D.31)
!*!<'•
а также используя монотонное убывание функции
на отрезке [0, 1] от единицы до нуля и неравенство D.30),
получаем
где р = Р/а —число обусловленности матрицы Л.
204
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
Окончательно, считая что р^> 1, приходим к оценкам
ч „ , 4
R(TX )^4--
V 'опт/ лГп
[ГЛ. 4
D.32)
Сравнивая полученные оценки с данными, приведенными
в таблице из 4.2.5, делаем вывод, что построенный метод с точки
зрения скорости сходимости не хуже, чем лучший из рассмотрен-
рассмотренных выше стационарных итерационных методов — метод последо-
последовательной верхней релаксации. Заметим также, что предлагаемый
метод расщепления с оптимальным параметром не менее чем в два
раза быстрее по скорости сходимости метода D.4), D.5) и в то же
время на практике оказывается значительно проще в реализации,
поскольку одним из требований расщепления D.2) является
простота обращения матриц E-\-xAt A=1, 2).
Одной из основных проблем метода расщепления является
оптимизация многопараметрических схем вида
(Е + TjAt) (Е + т;А2) («р/ч» - Ф/) = - 2т, (V -/). D.33)
Задача оптимизации ставится здесь следующим образом. Для
заданного s^l требуется определить последовательность пара-
параметров {т;};=!, минимизирующих некоторую норму или спект-
спектральный радиус оператора
/=]
D.34)
где
Г,- = (Е + т.Л)'1 (Е + T^i)-1 (Е - т,А) (Е - хЛг)- D.35)
В коммутативном случае это эквивалентно задаче отыскания
max
п
S
II
1 = 1
1— тДд, П 1—
= mm .
D.36)
Аналогично однопараметрическому случаю, эта задача заме-
заменяется минимизацией функции
= max
И
1— тД
D.37)
где
= min
I
f
I
4.4]
МЕТОД РАСЩЕПЛЕНИЯ
Очевидно, что
205
D.38)
для любых т(>0 (i=l, ..., s).
В задаче
q(x\, .... т^)= min q(xu ..., т^), D.39)
xv ¦ ¦ • Ts
при специальном выборе длины цикла s и параметров т =
= (ть ..., xs), являющихся приближенным решением задачи D.39),
в случае плохо обусловленной матрицы А достигается оценка
где р — р(А), С—константа, не зависящая от s и р. Иначе
говоря, по скорости сходимости этот метод является наилучшим
из всех рассмотренных ранее.
Остановимся еще на одном подходе к решению проблемы
оптимизации метода расщепления, ограничиваясь для простоты
однопараметрической схемой D.21). Из предыдущего следует, что
при любом т>0 метод расщепления на всех итерациях обеспе-
обеспечивает подавление любого коэффициента -ф^ разложения вектора
ошибки
причем при оптимальном выборе т обеспечивается наилучшее
равномерное подавление коэффициентов по всем значениям п.
Предположим теперь, что для собственных значений Хп е [ш, А],
где
m — min (a(A1), а(Л2))<А
и
соответствующие коэффициенты {if)i} в разложении вектора началь-
начальной ошибки i|)° значительно преобладают над остальными коэффи-
коэффициентами. В этом случае представляется целесообразным несколько
итераций по методу D.21) провести со значением параметра т,
выбираемым по формуле
т ^=
Такой выбор обеспечит наилучшее равномерное подавление выде-
выделенных преобладающих коэффициентов разложения за несколько
первых итераций, после чего мы можем продолжать процесс со
значением т, выбираемым по формуле D.29).
206
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 4
В практической ситуации преобладающими коэффициентами
оказываются коэффициенты разложения по собственным векторам
матрицы, соответствующим минимальным собственным значениям,
причем (с некоторой идеализацией) часто коэффициенты можно
даже считать монотонно убывающими с ростом %п. Физически
этот факт соответствует преобладающему влиянию крупномасш-
крупномасштабных процессов (малые значения Хп) по сравнению с мелко-
мелкомасштабными (большие значения %п). Очевидно, что конкретный
выбор величины А должен осуществляться в зависимости от
конкретных априорных сведений о задаче.
4.4.2. Некоммутативный случай
Перейдем к рассмотрению метода расщепления
/) D.40)
с некоммутирующими положительно определенными матрицами А1
и Л2. С этой целью введем симметричную и положительно опре-
определенную матрицу
Dx = Df,xDhx D.41)
и векторы
z* = DlitfJ. D.42)
Здесь
Dlit = (? + TA)M D.43)
и тр/ = ф/ —ф* —векторы ошибок. Очевидно, что
где Ъ.1 = Aq>> — f — векторы невязок.
С помощью стандартных преобразований легко показать, что
¦ф/+1 = Гт1р/, ' D.44)
D.45)
где
Тх = Е - 2т (Е + хА,)-i (Е + хА ,)-
-оператор шага метода D.40), и
где
Н ПР ГР
1 X — ' 1, X1 2, X
1 = 1,2.
D.46)
D.47)
D.48)
4.4]
МЕТОД РАСЩЕПЛЕНИЯ
207
Заметим, что при выводе равенств D.46) —D.48) мы использовали
соотношения
= (Е + х A j)-1 [(Е + хА О (Е + хА2) - 2тЛ ] (? + тЛ,) =
)-> (Я - тЛ,) (Я - тЛ2) (? + тЛ2) > =
= (? - тЛ,) (? + тЛО1 (Я - тЛ,I (Я + тЛ2)-1.
Таким образом, для любого вектора \!р {z = Dh тг|), х = T2i xz) cnpa-
ведливы формулы
II* к,
D.49)
D.50)
H^lb^ll^l^llT'i.tllal^.tll,.
Исследуем 1Т(,ТЦ2 (г == 1,2), предполагая, что для любого и
выполняются неравенства
(u, и),
(AiU, и), t = 1,2.
D.51)
По определению
_ (и, u) — 2r(AjU, u)+xi(Aiu,
(и,
I — 4т i
\iU)
(AiU, и)
сто- D-52)
* ' "tlM1^o("- «) + 2т(Л;и, «) + т2(Л^, А{и) '
I где и = (Я + хЛ,-)-1у. Из приведенных соотношений видно, что
отношение
11 Tif xv Ца
для любого ненулевого вектора v и любого i либо больше еди-
единицы при т<0, либо меньше единицы при т>0. Отсюда,
согласно равенствам D.49), следует, что необходимым условием
сходимости метода расщепления D.40) является положительность т.
В дальнейшем мы везде будем предполагать, что т>0.
Оценим ||Т1Т||2, используя неравенства D.51) и соотноше-
соотношения D.52):
и r p - ¦• .--.с (А^, и)
II ' i. х \[1 '
-4xinf
„™0(и, «)+2т (А^, и) + т*М(А,и, и)
inf (^' т)
l"=i 1+Bт + уМт2)(Л,-Ш, да)
= 1 - 4Т -Г-Г-7KZ
1 _ 4т inf
1 — 2тт + тМт2
208
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 4
4.4]
МЕТОД РАСЩЕПЛЕНИЯ
209
Здесь нами были использованы обозначения
= (Aiw, w)
и тот факт, что функция
\+at
монотонно возрастает при t^sQ для любого положительного а.
Итак, мы доказали, что при сделанных предположениях D.51)
справедлива оценка
для любого т > 0.
С целью приближенной оптимизации метода D.40) миними-
минимизируем по т функцию
4 ^ч
'
+ 2тт
Так как g(O) = q (+оо)= I, а при tg@, -f oo) функция
бесконечно дифференцируема и
то значение т = топт, минимизирующее q (т), является решением
уравнения
dq(x)
dx
= — 4/n
- тМх-
Отсюда получаем
причем
4>пт
m
T1
-in
I —
D.54)
. D.55)
D.56)
Чтобы проанализировать полученную оценку, предположим
что матрицы А1 и А2 симметричны,
*
•i
I
i
Тогда нетрудно видеть, что
и, следовательно,
Таким образом, в случае плохо обусловленных систем (р —
= Р(Л)^1) мы имеем оценку
R(T )
D-57)
В то же время непосредственный спектральный анализ (ана-
(аналогично тому, как это было в 4.4.1) показывает, что при т = то„,
i Ti x |L = max
i ' опт IN
1+т0П1А
1 —
m
M
1 +
m
M
D.58^
и, следовательно,
1
m
M
1-
m
Ж j
Ip+1
D.59)
В случае плохо обусловленных систем имеем соответственно
4
Р G\ ) =
" V. опт/
R(TX )
\ опт/"
1 -
D.60)
т. е. с точки зрения скорости сходимости метод расщепления
D.40) при т = топт не медленнее, чем любэй из рассмотренных
ранее стационарных итерационных методов. Необходимо отме-
отметить, что несовпадение оценок D.57) и D.60) вызвано тем обстоя-
обстоятельством, что первый способ построения оценок скорости схо-
сходимости является более общим, а использование дополнительных
свойств матриц Л, и Л2 позволяетэти оценки значительно улучшать.
В заключение остановимся кратко еще на одном важном под-
подклассе схем метода расщепления D.40). Пусть матрица А системы
Лф=/ симметрична и положительно определена,
А = А* + А" D.61)
Л Л1 *
210
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
ГГЛ. 4
Так как нами предполагается вещественность матриц Лх и Л2,
то в пространстве вещественных векторов при выполнении усло-
условий D.61) для любого -ф выполняются равенства
Отсюда следует, что вместе с матрицей Л всегда будут положи-
положительно определены матрицы А1 и Л2 и, согласно доказанному
выше, метод расщепления D.40) с такими матрицами будет схо-
сходиться при любом т>0.
Наиболее часто построение матриц Лх и Л2 по заданной
матрице Л осуществляется следующим образом. Сначала матрица Л
представляется в блочном виде
л л л
Л11 Л12 ••• Л1
21 22 " • • ft
с квадратными диагональными подматрицами Ai;, затем в каче-
качестве Лх выбирается блочно-треугольная матрица вида
УЛ" °
... о
— А 0
Ащ А^ъ •¦¦ п ki'
и Л2 полагается равной Л*. Простейшим частным случаем такого
способа построения Ах и Л2 является выбор Аа = ац, т. е. рав-
равными диагональным элементам Л. Тогда матрица Лх является
нижней треугольной матрицей, а Л2 —верхней треугольной.
4.4.3. Вариационная и чебышевская оптимизация
методов расщепления
В предыдущем пункте было показано, что для итерационного
метода расщепления
в случае ¦уу = 2т выполняются неравенства
\?Ь,
D.63)
при любом т>0, где
ЦЕ + хА,I,
4.4]
МЕТОД РАСЩЕПЛЕНИЯ
211
и t|V —вектор ошибки. Согласно результатам 4.3.1 это означает,
что нестационарный итерационный метод D.62) с параметрами у/,
являющимися решением уравнения
-±-1(Е-у,НхА)Ф1ох = 0, D.64)
т. е. выбираемыми из условия наибольшей минимизации на
каждом шаге функционала У(ф) = (?>т(ф* — ф), ф* — ф) = |]ф* — фЦЪ ,
будет сходиться. При этом, если обозначить через ТХгУ оператор
шага предлагаемого итерационного метода, то при любом т > 0
выполняется оценка
\TXi
y\\Dx
\Tx\\Dx<l.
Решая уравнение D.64), находим выражение для у/.
(НхАр, V)D
D.65)
D.66)
где \' = Aqi — f — вектор невязки.
Остановимся теперь на дополнительной оптимизации метода
расщепления D.40) в предположении, что НХ = Н*. Как следует
из предыдущих пунктов настоящего параграфа, такая ситуация
возникает либо в коммутативном случае, если дополнительно
Ai = A't, i = l, 2, либо в случае Л, = Л|:
Основываясь на сделанном предположении и выводах 4.2.4, при-
приходим к заключению, что параметры {yf} циклического итера-
итерационного метода
/) D.67)
с длиной цикла s можно выбирать, исходя из общей теории
чебышевских циклических итерационных методов, развитой
в 4.2.4. При этом величины а —а (А) и р = р(Л) необходимо
соответственно заменить на
т — а{НхА),
Для построения оценок величин т и М или для их вычисления
могут быть использованы либо оценки нормы оператора Тх =
= Е — 2тНхА, либо дополнительные итерационные методы типа
Люстерника.
Оценим, например, величины m и М в коммутативном слу-
случае, предполагая, что т = т0П1 (см. формулу D.29)) и Л — плохо
обусловленная матрица. Тогда из первого неравенства D.32)
212
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 4
4.5]
СИСТЕМЫ С ВЫРОЖДЕННЫМИ МАТРИЦАМИ
213
имеем
т = а {НХА) =э — —7===-,
v 2т Vp(A)
2т \ Vp{A)}'
Используя эти неравенства, приходим к соотношениям
Обращаясь теперь к оценкам B.69) и учитывая, что
при р(Л)^>1, получаем для метода D.67) в случае
D.68)
D-69>
, что
DJ0)
Таким образом, использование чебышевского итерационного
метода позволяет повысить эффективность метода расщепления
в V~P {A)/2 раз.
Другой подход к ускорению сходимости метода расщепления
в случае Ai=A* основан на использовании метода сопряжен-
сопряженных градиентов. В силу того, что матрица Нх симметрична и
положительно определена, можно непосредственно переписать
формулы C.34):
ъ =
к
¦ '
(Agk, gk) '
s.
Отметим, что асимптотическая скорость сходимости метода D.71)
будет не ниже, чем метода D.67) при любом s-циклическом выборе
параметров {Y/}.
4.5. Итерационные методы для систем
с вырожденными матрицами
Рассмотрим систему линейных алгебраических уравнений
ЛФ = / E.1)
с симметричной и положительно полуопределенной матрицей А.
Через {ы„} обозначим систему ортонормированных собственных
векторов А, соответствующих ее собственным числам {Кп}, а через
кегЛ обозначим нуль-пространство матрицы А, т. е. множество
таких векторов i|), что Лгр = О. Мы будем предполагать, что раз-
размерность кегЛ равна т, а нулевыми собственными числами
являются {knYl-i (соответственно ы„екегЛ для п=1, ..., т).
Разложим векторы / и ф системы E.1) по базису {ип):
Ф = 2j Ф»""-
п
Подставляя эти разложения в E.1), получим
^лфя = In
и, в частности,
Я«яфп = /я для п = 1, .... т.
Так как последние равенства возможны только в случае /„ = О
(п=1, .... т), то условием совместности системы является тре-
требование ортогональности / к кегЛ (/_1_кегЛ) или, что эквива-
эквивалентно,
(/, н„) = 0, /1=1,..., т.
В случае, когда система E.1) несовместна, под ее решением
часто понимают решение ф* соответствующей совместной системы
Лф = /, E.2)
где
/= .S
п >т
которое при этом называют обобщенным решением системы E.1).
Обобщенные решения, как нетрудно показать, минимизируют
евклидову норму вектора невязки. Если матрица А системы
E.1) произвольна, то вектор ф* называется обобщенным решением
этой системы, если он является решением задачи
4.5.1. Случай совместной системы
Предположим, что система E.1) совместна и для ее решения
применяется стационарный итерационный метод
В(ф/+1_(р/) = _(Лср/_/) E.3)
с симметричной и положительно определенной матрицей В. Иссле-
Исследуем условия сходимости этого метода. Если ввести векторы
214
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 4
j = q>/ —Ф*, где ф* — некоторое произвольное фиксированное
решение системы E.1), то итерационный процесс для векторов
{У} может быть записан в виде
E.4)
где через
Т = Е - В'1 А
E-5)
обозначен оператор шага итерационного метода E.3). Введем
теперь векторы z> = Bl/2\pf. Умножая E.4) на матрицу В'/2, получим
E.6)
E.7)
где
— симметричная матрица, причем матрица S = В~1!2АВ~^2 сим-
симметрична и положительно полуопределена (здесь B~li2 = [Bh'2]~1).
Обозначим через {va} полную ортонормированную систему
собственных векторов матрицы Т, соответствующих ее собствен-
собственным числам {[1„], и разложим векторы z' по этой системе:
Подставляя E.8) в E.6), приходим к соотношениям
2' + ' = Ll Z' =U'+12°
п г п п ' (I «•
Отсюда следует, что условия
E.9)
необходимы для сходимости метода E.3) при любых начальных
приближениях ф°. Действительно, если |ц„|>1 или \л„ = —1,
то последовательность z' соответственно либо расходится, либо
не сходится ни к какой конкретной величине для любого г"„фО.
Докажем, что условия E.9) достаточны для сходимости после-
последовательности {ф7} к некоторому решению ф* системы E.1) при
любом начальном приближении ф°. Очевидно, что неравенство
[in | < 1 всегда обеспечивает сходимость г'п к нулю при ;-*-оо,
а в случае \in = 1
Предположим теперь, что выполнены условия E.9) и кратность
ц,„=1 равна s (можно доказать, что s = m), причем ^1 = (х2==..,
4.5] СИСТЕМЫ С ВЫРОЖДЕННЫМИ МАТРИЦАМИ 215
... = HS=1. Тогда нетрудно видеть, что
s
Iim z^ = zOT= 2 z»°«-
/-<» ч=1
Из равенства Tzco = zca (так как fvn — vn для л=1, ..., s) выте-
вытекает, что
и, следовательно,
С другой стороны, имеем
B-!/2zCo = ]im B-l/2z/ = lim ^/ = ^00. E.11)
/ —v CO / —v 00
Окончательно, объединяя E.10) и E.11), приходим к выводу,
что последовательность {yi) итерационного метода E.3) сходится
к некоторому вектору
Ф^о = ф*-|-г|)со, E.12)
который, в силу 1|з°°екегЛ, является решением системы E.1),
т. е. фсо = ф*( и зависит от выбора начального приближения ф".
4.5.2. Случай несовместной системы
Рассмотрим два подхода к решению системы E.1) в случае
ее несовместности. Предположим сначала, что матрицы В и А
итерационного метода E.3) обладают общей полной системой
ортонормированных собственных векторов {«„}> т. е.
Bun = vnun,
E.13)
и для этого итерационного метода выполнены условия E.9).
Последнее, как было показано выше, означает, что метод E.3)
сходится для соответствующих совместных систем. Раскладывая
векторы ф' и / по базису {un)\
I ~ 2ij fnftni
получим
V v
216 МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ [ГЛ. 4
откуда, используя условия E.9), в свою очередь имеем
/
для к„ф 0 (п>т) и
для Хп = 0 (п^т). Таким образом, последовательность ц>> рас-
расходится, если fn?=0 хотя бы для одного п^т. Образуем наряду
с последовательностью {ф/} последовательность
z7 = ф7 — / (ф'+1 — ф7) E.14)
и разложим векторы z> по базису {ы„}:
В результате получим
1ФП',
и, следовательно,
lim z(; = <
Таким образом, вектор
z10 = lim
/->со
E.15)
E.16)
существует и является решением совместной системы E.2).
Рассмотрим другой подход к решению несовместных систем
на примере системы E.1). Предположим, что размерность нуль-
пространства матрицы А равна единице (т=1), матрица В ите-
итерационного процесса E.3) симметрична и положительно опреде-
определена и выполнены условия E.9). Очевидно, что нуль-пространства
матриц Ли В'1 А совпадают, все собственные числа матрицы В~}А
вещественны и она обладает полной системой собственных векторов
(последнее доказывается в 4.2.4).
Обозначим через \vn) систему собственных векторов матрицы
В1 А, а через \v%)— систему собственных векторов матрицы
(В *А)* = АВ1. Известно, что в случае полноты эти системы
образуют биортогональный базис в исходном пространстве векто-
векторов, т. е.
t
„8>
I
I
4.51
СИСТЕМЫ С ВЫРОЖДЕННЫМИ МАТРИЦАМИ
217
Будем считать, что v1<=ker(B~1A) = ker А. Разложим векторы х'
итерационного метода
х° =
¦ по системе {vn}. Получим
^шА Ч ft * Л \ Л/ •
Тогда, согласно E.9),
X°°
Предположение, что jc? = (В"'/, vf) = 0, будет означать, что система
совместна и, следовательно, совместна исходная система, что
противоречит предположению о ее несовместности. Таким сбра-
зом, хЧфО и вектор
ker A.
E.18)
E.19)
Ортогонализируя вектор f к вектору и00:
приходим к системе
которая совместна и эквивалентна исходной системе в смысле
множества обобщенных решений.
4.5.3. Матричный аналог метода фиктивных областей
Пусть дана система линейных алгебраических уравнений
/о E.20)
с симметричной положительно определенной матрицей Ао. Наряду
с этой системой рассмотрим систему
ЛФ = ^ E.21)
с матрицей А вида
]А0 0 1]
А =
О Аг
E.22)
где Ах — симметричная положительно полуопределенная матрица
= ,i — н / =
ll «Pi I)
218
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 4
4.5]
СИСТЕМЫ С ВЫРОЖДЕННЫМИ МАТРИЦАМИ
219
Очевидно, что А — симметричная положительно полуопределенная
матрица и для любого решения
<р =
системы E.21) вектор <р0 является решением системы E.20).
Для решения системы E.21) применим стационарный итера-
итерационный метод
ф/+1 = ф/-Я(Лф/-/) E.23)
с симметричной и положительно определенной матрицей Н и
оператором шага
Т = Е-НА, E.24)
собственные числа которого
уже было показано в 4.51,
удовлетворяют условию E.9). Как
скорость сходимости этого метода
в случае совместной системы E.21)
(а эта система будет всегда совмест-
совместна) определяется максимальным по
модулю, не равным единице собствен-
собственным числом оператора Т. Можно
показать, что при любой симметрич-
симметричной и положительно определенной
матрице Н оптимальным с точки зре-
зрения минимизации этой величины яв-
является выбор
Проиллюстрируем предлагаемый
метод на конкретном примере реше-
решения системы пятиточечных уравне-
уравнений, аппроксимирующих задачу Ди-
Дирихле для уравнения Пуассона в L-образной области D (рис. 16).
На этом рисунке крестиками отмечены узлы, в которых заданы
пятиточечные уравнения с учетом граничного условия; а кру-
кружочками — узлы, в которых заданы уравнения с нулевыми ко-
коэффициентами (это соответствует Лх = 0).
Исследуем случай, когда в качестве матрицы В = гН~1 выби-
выбирается пятиточечный разностный аналог оператора Лапласа во
всех узлах прямоугольной сетки с шагом h, покрывающих квад-
квадрат. При этом для максимального собственного числа матрицы Т
(не равного 1) устанавливается оценка (Л<^1)
| Ят«х | ==? 1 - Ch, E.25)
где С —константа, не зависящая от А.
Докажем оценку E.25). ПустьА = 1/(л+1), k — (n-\-\)/2. Введем
нумерацию узлов сетки так, чтобы сначала нумеровались узлы,
Рис. 16.
лежащие внутри L-образной области, затем — остальные. Выпи-
Выписывая последовательно пятиточечные уравнения
i
!2- = ft/ E.26)
согласно введенной нумерации и дополняя их уравнениями с нуле-
нулевыми коэффициентами, приходим к матричной задаче
вида E.21), E.22) с матрицей А порядка л2:
oil
А =
о о •
Матрица разностного аналога оператора Лапласа для введенной
нумерации узлов сетки имеет следующий вид:
R-II А° ~С II
\\-Ст В,]]'
где Вх — симметричная положительно определенная матрица.
Минимальное отличное от нуля собственное число матрицы
НА находится из уравнения
тЛ<р = Шр, E.27)
где ф = (ф0, ф^7" — соответствующий собственный вектор. Из этого
уравнения легко получить, что
<р1 = Вт'Ст<р0. E.28)
Умножая E.27) скалярно на ф и учитывая E.28), имеем
. ф) =
(Лрфр, фр)
E.29)
(Вф, ф) Иофо. фо) — (^1'СГфо, СГфо)
так как (Вф, ф)>0 и (Bl'CTq>0, Ст<ро)>0.
Предположим теперь, что А, = р есть максимальное собственное
число задачи E.27), а ф — соответствующий ему собственный
вектор. Введем квадратные матрицы порядка п
2—1 0 ... О О О
— 1 2 —1 ... О О О
1
О 0 0 ... —1 2—1
О 0 0 ... О —1 2
и векторы длины п, образованные из компонент вектора
Ф1/
*-! 011
о о
ф' =
ф/2
ЧЧп
1=1,..., п,
ф2/
Фп/
/=1, ..., п.
I
220 МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
Умножая E.27) скалярно на вектор ф, получим
[ГЛ 4
(Я
__. Иф. Ф) _
~т (ВФ> Ф) -
= Т
ft—!
( = 1
(=j
Заметим, что если какое-либо из скалярных произведений, стоя-
стоящих в знаменателе, обращается в нуль, то и соответствующий
вектор ф' или гр' также нулевой. Так как неравенство
max -~
1 < i < m "I
1 = 1
справедливо для любых at 5= 0, b{ > 0, то на его основе приходим
к неравенству
где ненулевой вектор g совпадает с одним из векторов ф', гр',
Величина (Ang,^g)/(Ang, g) не превышает спектрального радиуса
матрицы G = An An. Матрица G легко вычисляется:
Ik oil-
где Х^^м-едс^-Мн, У = Л*'С7'Х, а С-прямоугольная
(fe—1)хй-матрица с единственным отличным от нуля элементом
в нижнем левом углу, равным 1/Л2.
Отсюда следует, что спектральный радиус матрицы Q совпа-
совпадает с максимальным собственным числом задачи
Вычисляя явно произведение СА^'С7, легко свести эту задачу
к следующей:
1
1
*
ft
4.6] ИТЕРАЦИОННЫЕ МЕТОДЫ ПРИ НЕТОЧНЫХ ДАННЫХ
Отсюда сразу получим
221
Учитывая E.30), приходим к выводу, что
E.31)
Выбирая т = 8/?/A -f 6/г), получаем оценку E.25) с постоянной
4.6. Итерационные методы при неточных входных
данных
Рассмотрим операторное уравнение
Av = f, F.1)
где А — положительно определенная матрица и f — заданный вектор.
До сих пор при рассмотрении методов решения уравнений
вида F.1) мы предполагали, что матрица А и вектор f заданы
точно и, таким образом, требуется найти решение уравнения F.1)
при точных входных данных. Однако при решении практических
задач очень часто приходится иметь дело не с точными входными
данными, а с приближенными, т. е. вместо уравнения F.1) —
с уравнением
Л\рЛ=/\ F.2)
где индекс h показывает, что входные данные зависят либо от
погрешности аппроксимации, либо от различных статистических
погрешностей и случайных ошибок. Будем предполагать, что
ошибки в аппроксимации оператора и вектора нам известны.
Иначе говоря, априори заданы оценки вида
|| (Л - Л*) <р IKS (А), ||f-ПК л (А). F-3)
Попытаемся решить задачу F.1), имея в распоряжении урав-
уравнение F.2) и априорную информацию F.3). Поскольку наши
результаты тривиально распространяются на большинство рас-
рассмотренных итерационных процессов, ограничимся описанием
алгоритма приближенного решения задачи F.1) на основе про-
простейшей схемы. Рассмотрим итерационный процесс
[ф"]/+1 = [фЛу _ т (Л" [ФЛу - f), [<ph]» = 0, F.4)
где параметр т удовлетворяет условию * ...
q = \\E-xAh\\<\. F.5)
Возникает вопрос о том, как долго следует продолжать ите-
итерационный процесс, если заранее известно, что входные данные
222
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ 4
4.7]
ПРЯМЫЕ МЕТОДЫ
223
заданы с погрешностями в виде F.3). Естественно предположить,
что при заданных погрешностях последовательные приближения
следует продолжать до тех пор, пока ошибка итерационного про-
процесса не станет приблизительно равной ошибке, возникающей от
аппроксимации. Если ограничиться таким номером итерации, при
котором эти ошибки различной природы являются одинаковыми,
то ошибка в приближенном решении окажется неулучшаемой.
Более того, если матрица Л плохо обусловлена и, следовательно,
обратная матрица [Л*] может отличаться от Л1 очень значи-
значительно, то попытка продлить итерационный процесс F.4) может
привести не к улучшению, а наоборот, к существенному ухуд-
ухудшению результата. Именно поэтому возникает задача: по заданным
погрешностям во входных данных найти оптимальное число ите-
итераций, при котором происходит согласование всякого рода погреш-
погрешностей.
Проведем следующий анализ. Разрешим формально уравнения
F.1) и F.2) относительно неизвестных. Получим
С помощью этих соотношений запишем тождество
<ph — <p = [Ah]1[fl — f + (A — Лл)ф]. F.7)
Отсюда следует:
F.8)
или, с учетом априорных сведений F.3),
||ф"-ф!|<
Рассмотрим итерационный процесс F.4). Нетрудно получить
равенство
фА _ [у у = (Е- тЛАу [A"]-1 fh,
откуда
|]фа-[фаУ1
Но в силу неравенства треугольника имеем
1|ф-[фАУИ1|[фАУ-фА11+||ФА-Ф|,
откуда с учетом F.8) и F.9) получаем, что
F.9)
Первое слагаемое в правой части неравенства F.10) дает оценку
погрешности итерационного процесса, а второе слагаемое оцени-
оценивает погрешность за счет ошибок во входных данных. Потребуем,
чтобы эти ошибки были одинаковы:
F.11)
Мы получили уравнение для номера / = /0 итерации, на которой
процесс следует закончить:
• Г 1 1пЕ(й)+т)(*I
F.12)
Следует отметить, что в формуле F.12) норма обратного опе-
оператора отсутствует. Это существенно упрощает вычисление опти-
оптимального числа итераций.
Мы видим, что формула F.12), кроме априорной информации
° \{Щ> Л (А) и |/А||, еще содержит q = \E — %Ah\. В случае, когда
норма является евклидовой, [|-|2, эта величина может быть най-
найдена с помощью максимального собственного числа оператора
Т*Т, где Г = ?Л"
следует
Для вычисления верхней границы спектра оператора Т
воспользоваться методом, изложенным в 1.1.
4.7. Прямые методы решения конечно-разностных
уравнений
В последние годы появилось значительное количество работ
по применению прямых методов для решения систем конечно-раз-
конечно-разностных уравнений. В связи с этим в первую очередь следует
отметить метод Фурье, который применялся для решения разно-
разностных уравнений и раньше, но, как правило, в очень редких
случаях. Это объясняется тем, что по количеству арифметических
операций, необходимых для решения задачи, дискретный метод
Фурье уступает другим методам: большая часть работы приходи-
приходилась на расчет системы собственных функций, а затем —на нахо-
нахождение коэффициентов ряда Фурье и его суммы.
Весьма эффективным для решения систем конечно-разностных
уравнений является метод циклической редукции. В сущности,
метод циклической редукции является оригинальной модифика-
модификацией метода исключения Гаусса и является частным случаем
метода факторизации.
4.7.1. Быстрое преобразование Фурье
Идея быстрого преобразования Фурье высказывалась неодно-
неоднократно, но только недавно был изложен алгоритм, приведший
к значительному уменьшению количества необходимых операций,
что стимулировало большой интерес к методу.
Пусть имеется функция дискретного аргумента f(k), где пара-
параметр k = 0, 1, 2, .... N — 1. Представим эту функцию в виде
224 МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
конечного ряда (т. е. суммы) Фурье:
[ГЛ. 4
G-1)
Здесь введено следующее обозначение для главного корня N-u
степени из единицы:
Назовем операцией выполнение подряд двух действий в комп-
комплексной арифметике, а именно сложения и умножения. Тогда
из G.1) следует, что при заданных А (п) и Wkn потребуется N2
операций для нахождения f(k).
Идея состоит в том, что если N не является простым, то
можно значительно уменьшить число операций, представив G.1)
в виде кратной суммы.
В самом деле, рассмотрим случай N = Ni-N2, где Nt и N2 —
натуральные числа. Представим k и п в виде
Так как
то
A(nu
G.3)
Следовательно, нахождение суммы ряда G.1) сводится к нахожде-
нахождению двойной суммы G.3) или, что то же, к последовательному
нахождению сумм рядов
N,-1
§
л, = 0
G.4)
G.5)
Но из G.2) и G.4) следует, что для нахождения Ах требуется
операций. Зная Alt с помощью G.5) находим f(k), применяя
i операций. Следовательно, всего потрьбуется N(Ni + N2)
операций. Чем больше N, тем значительнее уменьшается число
операций.
4.7]
ПРЯМЫЕ МЕТОДЫ
225
Легко видеть, что если Ni — простое, a N2 — составное число,
то это преобразование можно применить к сумме G.4), в которой
tii является параметром, и еще уменьшить число операций, пред-
представив Af2 в виде произведения. И вообще, если N = NiXN2x...
...xNm, то вместо N2 операций мы придем к N (Ni-\-...-\-Nm)
операциям, причем наибольшее уменьшение получается при Ni =
= 2, 3 или 4. Если, например, Af = 256 = 28, то число операций
уменьшится в 256/(8x2)= 16 раз, а для ЛГ = 243 = 35 — в 243/E х
хЗ)=16,2 раза.
С точки зрения программирования наиболее удобен случай
Ni = 2 (t = l, 2, ..., т), хотя имеются экономичные варианты и
при других Ni (Ni = 4, 8). Рассмотрим этот случай: N = 2т. Для
получения соответствующих формул можно положить Nx = 2, N2 =
= 2т~1 и получить суммы типа G.4) и G.5), а затем продолжить
этот процесс. Имеем
где fe( и щ равны 0 или 1. Тогда
I Г 1 Г I
r(*m-l, •.., *o) — 2j \ 2u ••• 2j_ (Л(«т-1» •••. «o)X
X Wkn™-Jm~')... W"ni2] Wkn°]. G.6)
Так как
и т. д., то нахождение кратной суммы G.6) сводится к после-
последовательному вычислению т сумм:
Ai(k0, П„-г, .... «0)= 2 А(пт^, ..., tl^W^m-i2",
A2(klt k0, Пт..а «„)-
o> «m-2> • • • i «o/ X
X
G.7)
8 Г. И, Марчук
226
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 4
Следует отметить, что быстрое преобразование Фурье весьма
эффективно используется в корреляционном анализе обработки
статистических данных для случайных величин f (k) (k = 0, 1, ...
.... N-l).
Рассмотрим теперь задачу Дирихле для уравнения
— Аф -J- [Хф = f в D,
Ф = 0 на 3D. G'8)
Здесь [х —заданная константа, а /—заданная в D = {0s^x«^l,
Osg//^1} функция, обладающая необходимей гладкостью.
Поставим в соответствие задаче G.8) ее разностный аналог
— — ^ "^ L~±i+ ИФ*,/==/:*,/ в Dh>
Ф*,1 = 0 на dDh, G.9)
Если fiS=O, то решения задач G.8) и G.9) существуют и
единственны. В случае |х<0 требования существования решений
задач G.8) и G.9) накладывают дополнительные ограничения на
|Х И /.
Предположим, что решения задач G.8) и G.9) существуют и
единственны.
Введем обозначения:
i — \,i
=1 n-\,
2
— 1
0
0
— 1
2 ¦
0
0
0 ...
-1 ...
0 ...
0 ...
0
0
_ 1
0
0
0
2
j
0
0
J
2
А =
где Л —матрица порядка N— 1. Обозначим через Е единичную
матрицу того же порядка.
Перепишем задачу G.9) в следующем виде:
— ф2 =
-2 N-2,
G.10)
где B = A + B + [ih)E.
Отметим, что матрицы В и А имеют общий базис собственных
векторов и решение полной проблемы собственных значений
4.7]
имеет вид
ПРЯМЫЕ МЕТОДЫ
227
где u<,m) — компонента с номером k собственного вектора и{т\
k=\, 2, ..., iV-1; m=l, 2 N—\. Множитель J/2/ЛГ вве-
введен из условия нормировки
ЛГ-1
ft= I
Так как векторы ы(ш) образуют ортонормированный базис в
(W— 1)-мерном пространстве, то векторы ф, и ft (/=1 N — \)
можно представить в виде
N -\
;:!
m=\
А1")
Подставляя эти выражения в систему G.10) и умножая обе
части на вектор ы(т), получим для каждого фиксированного т
систему уравнений с трехдиагональной матрицей:
= 2, .... N-2, G.12)
Здесь Хт = Хт (В) = кт (А) + 2 + цЛ2.
Таким образом, для того чтобы решить систему G.10), доста-
достаточно вычислить W — 1 раз коэффициенты Фурье векторов /,, решить
N—1 систему с трех диагональными матрицами вида G.12), опре-
определяющими коэффициенты Фурье векторов ф, (/=1, ..., N — 1),
и вычислить ф, по G.11). Разложение в ряд Фурье можно осу-
осуществлять, используя быстрое преобразование Фурье. Для этого
формулы, определяющие коэффициенты Фурье Fm>i вектора fit
можно записать в следующем виде:
1 /
ЛГ-1
2
_2ЛГ-1
2
тлп -ш Г 2 VI
2тпп
гДе fo,i — fN,i = --- =
ного корня степени
-1,г = 0. Обозначим через w значение глав-
= 2N из единицы, тогда
м-\ .
fniiwnm\ пг—1, ..,, N—l,
228
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ 4
и для вычисления сумм можно непосредственно применять
описанный алгоритм. Аналогичным образом осуществляется и
вычисление векторов ф/.
Описанный алгоритм прямого решения уравнения Гельмгольца
применим не только к условиям Дирихле, но и к граничному
условию Неймана и условию периодичности функции <р (х, у) на
границах квадрата для уравнения вида
ду
4.7.2. Метод циклической редукции
= f(x, у).
Снова рассмотрим систему G.10) и предположим, что N = 2k+1.
Напомним, что этот случай является наиболее подходящим для
применения описанного алгоритма для вычисления конечных
рядов Фурье. Тем не менее при Af = 2*+1 существует прямой
метод решения системы G.10), сравнимый по количеству арифме-
арифметических операций с алгоритмом, основанным на использовании
разложений в ряд Фурье. Этим методом является метод цикли-
циклической редукции, и для его реализации не требуется знания
собственных векторов и значений матрицы В. Последнее является
несомненным преимуществом метода циклической редукции.
Идея метода состоит в том, что при четном N из системы
уравнений G.10):
-Ф^+ ?<р,-ф,+1 =/г2/,, /=1, .... N-1,
можно получить систему уравнений аналогичного вида, содержа-
содержащую ф; только с четным /.
Выпишем последовательно три матричных уравнения из G.10):
— %-2 + B<pi -1 — ф, = fffi _!,
— ф,_1 + Вф/ — Фт = h2fi,
— ф/ + 5ф/+1 - фг+2 = Щм
при четном /. Умножив обе части второго уравнения на матрицу
В и сложив затем эти три уравнения, получим
Г|", / = 2,4 N-2, G.13)
где Б<1> = Б2-2?, #" = fM + Bf, + fM, / = 2,4 N-2. Для
простоты записи будем полагать, что фо = фл' = /о = /л' = 0.
Для каждого нечетного /, при известных фг с четными /,
получаем систему уравнений
, /=1,3 N-1. G.14)
Описанный способ понижения порядка системы матричных
уравнений называется редукцией. Отметим, что систему уравне-
4.7]
ПРЯМЫЕ МЕТОДЫ
229
ний G.13) можно решить с помощью разложения в ряд Фурье,
так как матрица БA) имеет общий базис собственных векторов
с матрицами В а А.
Вернемся к системе G.13), состоящей из N/2—l матричного
уравнения. Так как Af = 2*+1, то к этой системе снова можно
применить редукцию и получить систему такого же вида из
N/4 — 1 матричного уравнения:
I RB)i-*\ гг\ ¦—— /j2f"' / , 1 О \11Л 1 /7 1 Е^\
где
gB) _ (?A)J _ 2Е,
Для каждого четного /, не кратного четырем, при известных
Ф, с /, кратными четырем, получим систему уравнений
B{1)<pi = h2f{1) + %-2 + 4n:2, / = 2,6,10 N — 2. G.16)
Применив циклически редукцию k раз, придем к уравнению
В^к)^2к = Щ% G.17)
остальные неизвестные определяются путем последовательного
решения систем
Б(г)Ф; = Л2^г) + Ф/_2г + Ф /+2Г' G-18)
r = k-l, k-2 1,0.
Матрицы Б(г) удовлетворяют соотношениям
В{0) = В, fi(r+1> = (?С>J — 2?, г = 0,1 А—1, G.19)
а векторы /jr) определяются по формулам
ГГЧ, /=1,...,ЛГ-1;
f('- + I)_t('-) , f(O _ I RC-)t(r) V '
/ = /-2r+1, / = 1,2 2*^-1,
r = 0, 1, ..., k-l.
Матрицу Б(Г) можно представить в виде произведения 2Г трех-
диагональных матриц. Действительно, рассмотрим последователь-
последовательность многочленов
Если b = 2со8ф, то
Р2, (Ь) = 2 cos 2гф.
230 МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ [ГЛ. 4
Следовательно, величины
Oi = Z COS оТ+Т 1 * = ltA •••» ^
являются корнями многочлена Р2г (Ь) и нужное нам разложение ^ !
&СИ
ДЯВ
4.7]
ПРЯМЫЕ МЕТОДЫ
231
2 и
ни
^3. Факторизация разностных уравнений
имеет вид
те
и
а
(
.е аш
Таким образом, в явном Е^ычислекии матрицы pfjP' нетЗлеоб-
ходимости и для ее обращения на вект§pg достаточно выполнить 2Г
прогонок для трехдиагональшйх ь
Следует отметить, что при вычи^ениях^гой формулам G.20)
компоненты векторов /]г> чр^звычйияо быстро увелаадваются,
что является следствием быстропг ^кта собственных значений
матриц В'г), и это приводит к, н^то^чивости счета. Рассмотрим
устойчивый (с вычислительной тЪчки доеняя) алгоритм реализа-
реализации метода циклической р$8$ктгии. еР, -щ
В этом алгоритме цектшш f'r> иэс7.20) представляются в виде
G.22)
-l.t
чие
и е
аэ н
ton
i q — некоторые Положите/
йвная функция аргумент.
' Непрерывное решение сформ и
л.е
иен;
в -НЗа последнее время в математической литературе появилось
d, ^ ^ол^шое число работ, посвященных прямым методам решения
и м конечно-разностных уравнений. Для широкого класса одномерных
уравнений эффективным оказался метод факторизации.
По-видимому, в настоящее время рассматривать вопрос о при-
приоритете в разработке этого метода не стоит, поскольку здесь мы
имеем дело с типичным возрождением старых хороших идей,
с расстановкой акцентов в них на новых местах, выбор которых
обусловлен современным состоянием и возможностями вычисли-
вычислительной математики и техники.
Сущность метода может быть продемонстрирована на простей-
простейшей задаче дифф^ии:
e комитанты, а / — заданная
ие ое и еааье baeaieab, и , Дь аи
иьыиеппаьь еаь ьеьаеь. шьмьльаьлеьР..ЛаАьтУР.м^ьееРьььамР.еьс^а А
к а в
аь и ьве еинпь ньььД^.ь ь ь ь гьs ььиь сиы ьеь ь
ваь ььь
е ььььь1Ь«ььаьФе.енеьРьо1
232
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ 4
4.7]
ПРЯМЫЕ МЕТОДЫ
233
Тогда уравнение диффузии сведется к эффективной системе урав-
уравнений первого порядка
Исходное уравнение G.25) запишем в векторно-матричной форме:
dx
dx
S-h>—«¦
Эту систему уравнений будем называть факторизованной.
Присоединим к ней граничные условия:
Р = 0 при л: = 0,
2 = 0 при х = 0,
<р = 0 при х=\.
Непосредственно убеждаемся, что при таком выборе «начальных»
данных задачи Коши для нашей системы уравнений граничные
условия в задаче диффузии: з^ = 0 при х = 0 и <р = 0 при х =
= 1—будут выполнены. Таким образом, вместо краевой задачи
для уравнения диффузии, мы пришли к задаче Коши для трех
обыкновенных дифференциальных уравнений первого порядка,
которые решаются последовательно одно за другим. При этом
для устойчивости счета вычисление р и z следует вести в сто-
сторону возрастающих значений х, а <р — в сторону убывающих.
Именно в такой редукции краевой задачи для уравнения второго
порядка к задачам Коши с уравнениями первого порядка и
состоит метод факторизации. Указанный метод весьма просто
обобщается на случай более сложных задач диффузии с кусочно-
разрывными функциями р, q и / и различными краевыми усло-
условиями.
Переходим к рассмотрению разностных уравнений. В этом
случае алгоритм факторизации или, как его обычно называют,
прогонки определяется следующим образом. Запишем исходное
разностное уравнение в виде
п.
G.25)
Будем полагать, что граничные условия для искомой функции ф
уже использованы, так что *)
G.26)
*) Граничные условия для функции <р, записанные в дискретной форме,
можно рассматривать и как самостоятельные уравнения.
где Ф
нение
где
о
1 ~~
= (Ф1.
G.27)
1 0
—а2 1
0 0
0 0
Фа
в
...
, ••-, фп)
виде
0
0
— «л-1
0
т
t
1
0
0
1
-ап
А
Ф =
F=(h,
СЯ^Ф
0
0
0
1
1
-F,
fit •
= F,
с
о2 —
• >
1
0
0
0
иу.
-ь
1
0
0
Представим
0 ... 0
-Ъ, ... о
0 ... 1 -
0 ... 0
G
.27)
урав-
G
0
0
1я
1
28)
а К — диагональная матрица, играющая роль коэффициента.
Обозначив S2A) = Z, /С^1 = Г, получим систему уравнений
SrZ = TF, S2O> = Z.
Запишем уравнения для Z и Ф покомпонентно:
G.29)
G.30)
ф; — 1;ф<+1 == Z\. G.31)
Для отыскания коэффициентов щ, \г и уг подставим в урав-
уравнение G.30) выражения для Z^x и Z; из G.31):
?;-i) ф; - ?;ф;+1 = Vi/i-
Сопоставляя результат с исходным уравнением G.25), получим
-ai = yiai, li = yiCit
G.32)
Уравнения G.30), G.31) перепишем окончательно в виде
G.33)
Известно, что для счетной устойчивости уравнений G.9), G.10)
достаточно выполнения условий ak^0, ck~s^0, bk>0, ak + ck^bk,
причем в последнем условии строгое неравенство должно иметь
место хотя бы для одного значения k.
Заметим, что обычно формулы для решения разностного урав-
уравнения G.25) записывают в следующем виде:
Рй-i = (Pi — afli)-1 ct,
zi+i = (Pi - afii)-1 (ал + ft), G.34)
i=
234
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 4
при условии
я = 2
я+1.
В дальнейшем метод факторизации был обобщен на случай
системы обыкновенных линейных дифференциальных уравнений
первого порядка с произвольными линейными ограничениями,
содержащими как частный случай многоточечные и краевые ус-
условия.
Алгоритм G.33), G.34) остается в силе, если функции <р; и fh
входящие в G.25), —векторы, а коэффициенты аи си р,—матрицы.
(Не следует только в формулах G.33), G.34) менять местами
множители.)
С учетом условий G.26) рекуррентные формулы G.33), G.34)
позволяют получить решение.
Метод матричной факторизации применительно к двумерному
разностному уравнению эллиптического типа оказывается эффек-
эффективным лишь в том случае, если по одной из переменных число
узловых точек невелико.
Рассмотрим простой и достаточно эффективный метод решения
двумерных и трехмерных разностных уравнений эллиптического
типа — метод неполной факторизации Булеева. Идея метода за-
заключается в следующем.
Пусть имеется, например, двумерное разностное уравнение
— йг*Ф/-1, k — С;*Фл-1, к — Ьц<4>1, k-i — dik(pit k+i+PiWik = fit, G.35)
i = l,2, ..., m; k=\,2, ..., n,
aik = cmk = ba = din = 0, Pik^aik + C(k + bilt + dik. G.36)
Запишем его в векторно-матричной форме:
где Ф = (фь ф2, .... флОг> F = (fi, /2 /л)Г. N = mn. Приба-
Прибавим к левой и правой частям уравнения вектор ВФ. Получим
(A + B)<l> = F + BQ>. G.37)
Матрицу В выберем так, чтобы матрица А-\-В могла быть пред-
представлена в виде произведения двух простых треугольных матриц Sx
и S2 и одной диагональной:
Уравнение G.37), по аналогии с уравнением G.27), заменяется
системой
которая будет решаться методом последовательных приближений.
4.71
ПРЯМЫЕ МЕТОДЫ
935
Заменим исходное двумерное уравнение G.35) системой урав-
уравнений вида
Zik =
i-lt k
,ft-i + Y.ftl
ik (ф) -
G.39)
(Индекс итерационного шага опускается; Dik (ф) = (?Ф);* с матри-
матрицей D = KB -f diag qik, A\agqik — диагональная матрица с элемен-
элементами qik.)
Для коэффициентов аш, f,ik, %lk, r\ik, ylk получим формулы,
аналогичные G.32), G.33):
Уik = (Pik — qik — CLikCi- i,*V«-i, * — blk&i, * iV<, k-i) ~l,
а для итерируемого оператора Dik (ф) — выражение
Dik (ф) = aik4i-\, *Фг-1, *+i + bikl,i,k-i4i+\, ki-
Коэффициент qik принимается равным 8(* (а1кЦ1-\, k + Ь1к\и
1
е<1.
Для обеспечения сходимости итерационного процесса G.39)
при 0>О к этим уравнениям добавляется простая итерация
^ G-40)
чтобы для получения (/+1)-го приближения функции ф,* в урав-
уравнение для Z;a+I) подставлялось 1-е приближение функции ф,-А.
Для схемы G.39), G.40) сформулированы некоторые доста-
достаточные признаки сходимости.
Рассмотрим другую схему неполной факторизации, которая
определяется следующими соотношениями:
Zlk = aikZi.lik + yik[fik+Dik((p)-qik(()tk], G.41)
ф;* — Р/Лф;, tt-l — SiktPi, ft+i = lik(Pin, ft + Zik.
При этом для коэффициентов aik, lik, $ik, 8ik, yik и для Dik(q>)
получились выражения
G-42)
yik = (pik - qik - aikci-lt *v<-i. ft).
Коэффициент qik принимался равным 0atk ($t-i.
01
-1, ft
), гДе
0^8^1
Естественно, возникает вопрос: как уменьшить относительный
вес итерируемого выражения в уравнениях вида G.41), т. е.
как получить достаточно простой факторизующип разностный
оператор А-[-В, «близкий» к заданному оператору Л?
236
Методы решения стационарных задач
ГГЛ 4
Итак, будем искать систему уравнений, эквивалентную исход-
исходному двумерному уравнению G.35), в следующем виде:
Z ^ Z Z
1~\, ft
t-i, ft-1
kZl-i, ft+i +
+ V/* Utk + Dik (Ф) - simk], G.43)
;ft<p;, ft+1 = |г*фг+1, * -f Z,b
где art, |$,ft, 6,*, |,ft, fi,ft, v;a, yik — пока неизвестные коэффи-
коэффициенты.
Используя Z;_i)A, 7-i-\,kx и Zbl>/t+1 из G.43), получим урав-
уравнение
— (P.ft — M-iftli-i. ft-i) Ф<, ft-i - (бг* —
li-i, ft
, ft+2 — v«ftAft (ф) = yikfik- G.44)
Сопоставляя уравнение G.44) с исходным уравнением G.35), по-
получим пять соотношений, связывающих коэффициенты alk, р;ь ...
• ••, Щк, vik, Ун с коэффициентами уравнения G.35), и выраже-
выражение для Д*(ф):
«с* — H-fA-i, ft-i — v/ftP;-!, A+1 =
{ '
Pi* — И«?*-1. *-x = Y»
1 + a.-*ii-i, * + Y./Aft = Y«*P«ft, G.46)
Aft (ф) = (а«Рг-1, ft — И-«) Фг-i, *-i + («гА-i, ft — vift) ФН| k+1 +
+ H-»Pi-i. ft-i<Pi-i, ft-2 + Viftfi^^!, ft+^j-i, k+2. G.47)
Поскольку неизвестных коэффициентов семь, а соотношений
пять, то два коэффициента могут быть взяты произвольно. По-
Положим
fA/ft = «iftPbi, *, У/А = а,-А6г-1(А. G.48)
Тогда главные члены итерируемого оператора ?>й(ф) обратятся
в нуль и соотношения G.46), G.47) примут вид
где еш = .—g « ^-т s ,
1 ~ Pi~i. ft°;-i. ft~i—o;_i, *Рг_1, *+1 G.49)
I
I/A =
6;* =
(ф) =
г l, *+i,
. ft).
+ 6, lf
G.50)
G.51)
4.7]
Прямые методы
237
Пусть значение коэффициента Y;*s« пропорционально сумме коэф-
коэффициентов в операторе y**A* (ф)-"
баг* (Рг-i, *Ры, ft-i + u-i, *вг-1, *+i), G.52)
С учетом G.52) и G.49) коэффициент уш будет вычисляться
по формуле
Y» = Ьг* - е<* (?/-1. * + 6Р«-1. *P*-i. *-i + ввы. A-i. ft+i)] -1- G-53)
Коэффициенты уравнения G.43) вычисляются в следующей
последовательности:
е;*1 Уш, аш, l/ft. Рг*. &ш-
Можно считать, что по формуле G.53) осуществляется явная
прогонка для вектора
Y* = (Y*i. Y.2 Уш).
Перепишем окончательно уравнение G.43) в следующем виде:
Zik = a«ft (Zi-i, * + Pi-i, kZi-i, ft-i + вы, kZi-i, ft+i) +
fik + aik [Рм, *Рг-1, ft~i (ф/-1, *-2 — бф1*) +
, ft+2 — бфа)], G.54)
1, ft + ^<ft-
Уравнения G.54) решаются методом последовательных прибли-
приближений. Сначала осуществляется явная прогонка для вектора
Zi = (Zn, Zj2 Zin), а затем неявная прогонка в обратном
направлении для вектора Фг = (ф11, ф;2, ..., ф;„).
Следует отметить, что если вектор Ф,- имеет две компоненты,
то схема G.54) дает точное решение.
Решение уравнения Пуассона в квадрате при произвольных
граничных условиях показывает, что итерационный процесс G.54)
сходится при значениях параметра 9 из интервала 0sg9sgl,
причем наилучшая сходимость имеет место при 9 = 0,8 — 0,9.
Для примера в таблице 2 приведена зависимость нормы
оператора шага итерационного процесса G.54), обозначенной
через <7, от параметра 9 для задачи Дирихле:
ф = 0 при х = ±1, ф = 0 при // = ±1 при шаге сетки Ах==А// =
== 1/12 E29 счетных узлов).
Согласно результатам, представленным в таблице 2, одна ите-
итерация в этой задаче по схеме G.54) при 9 = 0,7; 0,8 или 0,9
равносильна соответственно 44, 77 или 72 простым итерациям.
Таким образом, при оптимальных значениях параметра 9 схема
G.54) в приведенной выше задаче Дирихле оказывается более
238
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
ГГЛ 4
эффективной, чем известные лучшие методы переменных направ-
направлений при постоянном значении итерационного параметра т.
9
9
0
0,86
0,3
0,82
0,5
0,76
0,6
0,72
0,7
0,65
0,8
0,47
0,85
0,43
Т
0,9
0,49
А Б Л И
0,95
0,61
Ц А 2
1,0
1,0
На рис. 17 для примера представлено рассчитанное по схеме
G.54) первое приближение этой задачи на линии у = 0 при 0 = 0,8,
6 = 0,9 и 6= 1,0 (точное решение задачи есть ф = A — х2) A — у2)).
Как видно из рис. 17, более близким к точному решению задачи
оказалось первое приближение, полученное при 0 = 1. Однако
второе приближение, полученное при 9 = 0,9, оказывается уже
лучшим, чем второе приближение при 9 = 1. Средняя по модулю
ошибка шестых приближений, полученных при 6 = 0,8; 0,85 и
0,9, равна соответственно 0,013, 0,003 и 0,004, т. е. шестое при-
приближение, полученное при 6 = 0,85 или 6 = 0,9, в этой задаче
уже весьма близко к точному решению.
Схема G.54) в применении к задаче Неймана несколько усту-
уступает лучшим методам переменных направлений.
Естественно, что первая итерация по схеме G.54) будет близка
к точному решению задачи, если положить 6 равным единице
или близким к единице. Поэтому при решении трудоемкой задачи
с использованием схемы G.54) первую итерацию или несколько
итераций имеет смысл сделать при 0, равном единице или близ-
близком к единице, а затем перейти к оптимальному значению 6.
Следует отметить, что произвольность формы рассматриваемой
двумерной области и произвольность граничных условий для
4.71
ПРЯМЫЕ МЕТОДЫ
239
искомой функции ф при использовании схем неполной фактори-
факторизации не вносит никаких затруднений. Необходимо лишь, чтобы
граничное условие, записанное в разностной форме, содержало
искомую функцию в пределах стандартного пятиточечного шаб-
шаблона, т. е. имело бы вид, аналогичный G.35), причем два отлич-
отличных от нуля периферийных коэффициента этого уравнения, если
они положительны, в сумме не превышали бы коэффициент pik.
В этом смысле метод неполной факторизации обладает преиму-
преимуществом по сравнению с различными методами переменных
направлений, так как использование последних становится
затруднительным, если граница рассматриваемой области не
параллельна координатным линиям счетной сетки.
Как было отмечено выше, рассмотренные методы неполной факто-
факторизации оказались эффективными для решения задач Дирихле.
Попытки получения хороших схем для решения задач Неймана
привели к формулировке усовершенствованных схем неполной
факторизации. В операторной формулировке она состоит в сле-
следующем:
zik = aikZi-i.k + yik Uik + Dik(<P) — ?;а(ф)], д 55)
где о», p», lib, 6«, l,k - неопределенные коэффициенты, а опе-
оператор E содержит только функции <р с пятиточечного шаблона.
Эта система эквивалентна одному уравнению
A + «i*?* - 1, к) Ф;А — «Мф/ -1, А — ?/*Ф/ +1, к — Р/*Ф.\ к -1 —
A
Е«(Ф) = У»/». G.56)
Из сопоставления G.56) и G.35) следует, что
ytkDikity) = Я/ftPj-i, *Ф;-1, A-i + a;AOi-i, аФ;-1, а+ь (.' •01)
Положим
7/а^а(ф) = «;aP/-i, к (Щ1-1. а + ЛФ;, А-1 + стгС0Фг+1, а — 9/Ф«) +
+ cc;fc6;_li ft (пфг-j, А + ЛФг, a + i + ст<юФ< + 1, ft — б/Фг*). G.58)
где к, 11, со, 9, —пока неопределенные параметры*),
1 при г = 1,2, ..., т—\,
О при i = m.
*) Чтобы не нарушалась общая формула для Ецг(<р) в правом столбце из-за
введения множителя ат = 0, можно граничные условия справа, имеющие вид
— вт+i. Афт. А + фот+l. А = /т+1. k< U-Щ
использовать как самостоятельные уравнения. При этом на вертикали i=m-f 1
функции Dik(a>), Elk(<p) и zik Ht вычисляются, а уравнения G.55) начинают
решать на га-м столбце после исключения из них функций <pm + i, и с помощью
условий G.59).
240
МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ
ГГЛ 4
Слагаемые в выражении G.58), содержащие <ргь служат для
«усиления» главной диагонали факторизующейся матрицы (А -\-
-\-D-E), так чтов итоге линейная комбинация Щг~1л * + *№, *-i~b
-т-0ДОф1+1, * компенсирует сумму Ф/-1,л-1 + б,ф«, ' а линейная
комбинация 5<Ф;-1, fc + Wi, А+1 + о;соф;+1> j компенсирует сумму
Ф*-1. *+1 + б*ф«.
Потребуем, чтобы итерационные параметры к, ц, со, б, удов-
удовлетворяли условию
G.60)
где е —малая положительная величина или нуль.
Сопоставление уравнений G.56) и G.35) с учетом G.58) при-
приводит к следующим соотношениям, связывающим коэффициенты
системы G.55) с коэффициентами G.35):
G-61)
G.62)
или
G.63)
Ilk =
[Pik + A — *P;-1, * — xbi-i, ft) a,* X
Х(в*Р»-1.* + вА-1.*-Ь-1.*)]-1,
[1 - x (Pi-1, ft + 6,-i, ft)] v»a»,
i,ft,
i,k,
i-i, ft + 6,-j, ft).
Окончательно итерационную схему G.55) с учетом G.57) и
G.58) можно записать в виде
+ «*Л-1. ft (ф№+, Ч-в^/г» - иф^Г,'»* - W.+ ^+
G.64)
фЯ' - Р,*ф5_ i - б»ф{^+, = hWi+u к + zllK G.65)
Уравнение G.65) решается методом одномерной прогонки
G.66)
G.67)
4.7]
ПРЯМЫЕ МЕТОДЫ
241
Естественно, что в итерационной схеме G.55) нужно стре-
стремиться к тому, чтобы в операторе Dik (ф) — Eik (ф) сумма коэф-
коэффициентов была близкой к нулю, а сумма модулей коэффициен-
коэффициентов была как можно меньшей по сравнению с коэффициентом aik
исходного уравнения G.35).
Будем называть оператор (A-\-B)lk близким к оператору Alk
в смысле аппроксимации, если сумма коэффициентов оператора Bik
близка к нулю, и близким по норме невязки, если сумма моду-
модулей коэффициентов оператора Bik мала по сравнению со значе-
значениями коэффициента alk оператора Aik.
В рассматриваемой здесь схеме близость оператора (A-\-B)lk
к оператору Alk в смысле аппроксимации обеспечивается соот-
соотношением G.60).
Оптимальное значение б должно быть соизмеримым с коэф-
коэффициентом при ф(-1, ft-i и ф;-1, ft+i, т. е. должно быть величиной
порядка единицы. Если стремиться к тому, чтобы коэффициенты
Р;*, б,* и la были приближенно пропорциональны коэффициентам
bo,, dik и с а,', то параметры ц и со, согласно G.63), следует свя-
связать приближенным соотношением
Исследуем теперь пространственную счетную устойчивость
схемы G.64), G.65). Методом индукции можно показать, что
коэффициенты pift, 8lk и \ik удовлетворяют условию
Pift + fyft + ifft^l- G.68)
Действительно, при г = 1,2, ... , т—\ из соотношения G.60)
с учетом G.36) и G.61) можно получить, что
,-ft|;-i, и — 6a.ft (Pi-i.
-!, k
или
hk — wa;ft(Pi-i, ft + Si-i, *), G.69)
— Pi-t,ft — Si_i,ft +
Правая часть этого неравенства по предположению положи-
положительна; следовательно, условие G.68) выполняется.
Для анализа эволюции ошибок в итерационной схеме G.64)
и G.65) запишем рекуррентную формулу для г1к1\1к.
При /=1,2,..., т—\ получим
Zjft _ aik e z;..i. k I V/ft
~ — r *~i - л k v " ~l v
t.'ft S(i "" S/ -l. ft 6(ft
242 МЕТОДЫ РЕШЕНИЯ СТАЦИОНАРНЫХ ЗАДАЧ [ГЛ. 4
С учетом G.68) и G.63) можно написать теперь неравенство
— М /О i С \1
. G.70)
с« [1 -и (Pi-i,
Если принять х<1 и обозначить
то получим, что
g
ift
l, *
1 _,tt
G.71)
Выбором параметра со правая часть неравенства G.71) всегда
может быть сделана меньшей единицы *).
Таким образом, схема G.64), G.65) является пространственно-
устойчивой.
Как показал опыт решения задач Дирихле и Неймана,
эффективными значениями параметров х, х\, со и е для решения
уравнения Пуассона являются
х = 0,5ч-1, Ti=l, со = О-ьО,5, е = 0 (л + ю«*1). G.72)
*) Это очень важно, например, при расчете турбулентных течений
жидкости, где вязкость и теплопроводность являются сильно переменными
величинами.
ГЛАВА 5
МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
В качестве основного объекта исследования рассматривается
эволюционная задача математической физики
= / в DxD/, y = g в D при / = 0, A.1)
где А э=0, а решение ф, как и функции / и g, обладает необходи-
необходимой гладкостью. Будем предполагать, что на границе области 3D
решение задачи удовлетворяет некоторым граничным условиям *).
5.1. Разностные схемы второго порядка
аппроксимации с операторами, зависящими
от времени
Рассмотрим эволюционное уравнение
^+Лф = 0 В DxDh ср = ? в D при / = 0. A.1')
Разностное уравнение, соответствующее уравнению A.1), запишем
в виде
= 0, Ф°=?. A.2)
Нетрудно проверить, что при достаточной гладкости решения
задача A.Г) аппроксимируется приближенной задачей A.2)
со вторым порядком по т. Разностная схема A.2) обычно называ-
называется схемой Кранка — Николсона. Любопытно отметить, что схема
A.2) является результатом попеременного применения схем перво-
первого порядка точности, явной и неявной, записанных для интерва-
интервалов tj*^t^tj+\/2 и tf+i/2^t^t/+i соответственно (если А —
*) Всюду в этой главе, если не оговорено специально, оператор А считается
уже приведенным к конечно-разностному виду.
244 МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
линейный оператор, не зависящий от /):
(ГЛ. 5
A.3)
Исключая из системы разностных уравнений неизвестные
приходим к схеме Кранка —Николсона.
Предположим, что оператор А зависит от времени и в задаче
A.Г) аппроксимирован разностным оператором, который мы
обозначим через Л. Тогда мы будем иметь дело с задачей линей-
линейной алгебры, причем
(ЛЛр, cp)SsO
для любых функций из подпространства Ф.
Уравнение A.4) разрешим относительно q
1. Получим
A.4)
A.5)
A.6)
A.7)
A.8)
Для доказательства счетной устойчивости норму оператора
шага Т> можно не оценивать. Умножив A.4) скалярно на (ф/+1 +
-\-<fl)/2, получим
или
где Т1 — оператор шага:
2т
1.9)
Поскольку по предположению оператор Л' положительно полу-
полуопределенный (см. A.5)), то
т. е. устойчивость схемы обеспечена.
Тем не менее для анализа разностных схем важное значение
имеет оценка нормы оператора шага. Чтобы получить эту оценку,
воспользуемся соотношением A.10) и определением нормы опера-
оператора (см. 1.1). Тогда приходим к неравенству
\\Т'\^\. A.11)
Отметим, что неравенство A.11) можно непосредственно получить
с помощью леммы Келлога (см. 1.1), воспользовавшись A.8) и тем,
5.П
СХЕМЫ ВТОРОГО ПОРЯДКА АППРОКСИМАЦИИ
245
что Л^ЗгО и т>0. Если оператор А/ кососимметрический, т. е.
имеет место равенство
(Л'ф, ф) = О,
то вместо A.Ю) имеем равенство
| ф/+11| = || ф/1|. A.12)
Аналогично предыдущему, можно показать, что в этом случае
И х-/ И — 1. A.13)
Рассмотрим теперь вопрос об аппроксимации схемы Кранка —
Николсона при зависимости оператора Л от времени. Определим
оператор Я равенством
A.14)
A.15)
и оператор Нх — равенством
где (фУ —проекция функции ф на сетку Dx. Далее, введем в рас-
рассмотрение норму
КВД Центах ||(ЯТфУ||, A.16)
где ||.|—некоторая норма в пространстве, которому принадлежит
(Ятф>). Для оценки нормы A.16) разложим решение исходного
уравнения A.1) в ряд Тейлора. Тогда будем иметь
" ¦ • A.17)
A.18)
-... A.19)
Подставим A.19) в A.16). Тогда, с учетом A.15), получим
1(/-ятф)||ст =
Принимая во внимание очевидные соотношения
ЗА
где At = -zr, преобразуем ряд Тейлора A.17) к виду
= max
t,
|, A.20)
где /' — правая часть уравнения A.1), в данном случае равная
нулю.
246
МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
ГГЛ 5
Если в качестве аппроксимирующего оператора Л' выбрать
Л/ = Л/ = Л(/У), A.21)
то из A.20) следует, что
и мы имеем первый порядок аппроксимации. Заметим, что в част-
частном случае, когда А не зависит от /, аппроксимация в форме A.21)
обеспечивает второй порядок по т.
Предположим теперь, что аппроксимирующий оператор выбран
в виде
\'=*А' + ±А',. A.22)
В этом случае будем иметь
Отметим, что аппроксимация схемой Кранка — Николсона также
будет второго порядка по т, если оператор № выбрать в виде
2 A.23)
или
A.24)
В различных приложениях, особенно при численном решении
квазилинейных уравнений, применяется одна из трех описанных
форм A.22), A.23) или A.24) аппроксимации оператора А, обе-
обеспечивающих второй порядок точности.
5.2. Неоднородные уравнения эволюционного типа
В предыдущем параграфе были рассмотрены однородные урав-
уравнения. Рассмотрим теперь неоднородные уравнения
B.1)
> = g в D при t — Q.
Разностная аппроксимация задачи B.1) на основе схемы
Кранка —Николсона в предположениях, сформулированных в 4.1,
имеет вид
B.2)
5.3]
где
МЕТОДЫ РАСЩЕПЛЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
247
Нетрудно убедиться, что разностная задача B.2) аппроксими-
аппроксимирует B.1) со вторым порядком по т. Решение задачи B.2) запи-
запишем в виде
B.3)
В 5.1 в случае однородного уравнения было показано, что
при Л'5= 0 имеет место оценка
||7V||<1. B.4)
Из уравнения B.3) следует, что
B.5)
Л—1
Для установления устойчивости воспользуемся оценкой A.25)
из гл. 1. Поскольку т>0 и
(ЛЛр', ф^) 2э= 0, B-6)
то
It / _ \ 1 П
?1. B.7)
Следовательно, с учетом B.4) и B.7) неравенство B.5) преобра-
преобразуется к виду
|ф/+1||^|И| + т||//[|. B.8)
Полагая
с помощью рекуррентного соотношения B.8) получаем
B.9)
Таким образом, соотношение B.9) показывает устойчивость
разностной схемы. Кроме того, это соотношение является апри-
априорной оценкой нормы решения.
5.3. Методы расщепления нестационарных задач
Во многих случаях, когда требуется решить сложную задачу
математической физики, оказывается возможным свести ее к пос-
последовательному решению задач более простых, эффективно реша-
решаемых с помощью ЭВМ. Редукция сложных задач к более простым
обычно возможна в тех случаях, когда исходный положительно
248
МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
ГГЛ 5
полуопределенный оператор задачи представим в виде суммы
положительно полуопределенных простейших операторов. Такие
методы будем называть методами расщепления.
Первоначально методы расщепления формулировались и теоре-
теоретически обосновывались для простейших задач с коммутирующими
положительно опреденными операторами. Как теперь стало ясным,
для таких задач методы расщепления, введенные в рассмотрение
различными авторами, по существу оказались либо эквивалент-
эквивалентными и отличающимися только схемами реализации, либо
близкими.
В дальнейшем круг нетривиальных задач, решаемых с помощью
методов расщепления, существенно расширился, и к настоящему
времени методы расщепления стали мощным аппаратом решения
Еесьма сложных задач математической физики. Поскольку теория
методов расщепления особенно полно разработана в случае, когда
исходный оператор задачи представим в виде суммы двух более
простых, то именно с рассмотрения этого случая мы и начнем
изложение вопроса. Наиболее универсальным для приложения
является, по нашему мнению, метод покомпонентного расщепле-
расщепления. Это обстоятельство, надеемся, будет учтено читателем при
изучении материала данной главы.
Итак, рассмотрим эволюционное уравнение
=/ BDXDt,
C.1)
где оператор
А
ф=? в D при / = 0,
= 0 не зависит от времени и представим в виде
А = А! + Аг C.2)
при условии, что
^iSsO, Л2=>0. C.3)
Предположим, что решение задачи C.1) обладает необходимой
гладкостью. Там, где это необходимо для доказательства, будем
предполагать, что задача C.1) уже редуцирована к разностному
виду и, следовательно, операторами А, Лг и Аг являются матрицы.
5.3.1. Метод стабилизации
Рассмотрим разностную схему решения задачи C.1) —C.3)
в предположении, что / = 0:
Нетрудно показать, что при достаточной гладкости решения задача
C.4) аппроксимирует исходную задачу C.1) —C.3) с точностью
6.31
МЕТОДЫ РАСЩЕПЛЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
249
до величин второго порядка малости по т. В самом деле, урав-
уравнение C.4) с помощью алгебраических преобразований приводится
к виду
^^^ 0, ф° = ?. C.5)
Нетрудно заметить, что разностное уравнение C.5) при достаточ-
достаточной гладкости решения совпадает по порядку аппроксимации
со схемой Кранка —Николсона
Ф/+1-с
C.6)
Этот вывод следует из того, что сама схема C.6) имеет второй
порядок аппроксимации по т, и схемы C.5) и C.6) оказываются
эквивалентными друг другу по порядку аппроксимации.
Переходим теперь к анализу устойчивости разностного урав-
уравнения C.4). С этой целью преобразуем уравнение C.4) виду
C.7)
Разрешим разностное уравнение C.7) относительно ф/+1. Получим
-} Л2)ф/. C.8)
От неизвестной ф' перейдем к т|У по следующей формуле:
Е -
C.9)
Тогда для новой неизвестной 1|У приходим к соотношению
где Т — оператор шага:
С помощью C.10) получим оценку
C.10)
-lAt) '. C.11)
C.12)
Оценим норму оператора Т:
II ТII «=Г II Т IIII Т II
II ' II ^ II ' 1IIII ' 2 II»
где
т — (Р х А
C.13)
250 МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
Здесь использовано свойство
(ГЛ. 5
которое следует из очевидного тождества
В самом деле, умножив C.14) слева на
C.14)
и использовав проверяемую непосредственным умножением ком-
коммутативность операторов
Е-~Аа) и )
приходим к доказываемому свойству.
Таким образом, задача установления устойчивости свелась
к оценке норм операторов Та.
Применяя лемму Келлога для оценки норм операторов 7\ и
Т2 в соотношении C.13), приходим к выводу:
и, следовательно,
1^+1«<1Н|. (зле)
Однако нашей конечной целью является установление устой-
устойчивости исходной разностной задачи C.4). Поэтому воспользо-
воспользовавшись соотношением C.9), перепишем C.16) в виде
C.17)
Введем обозначение
где
=(С2ф,
C-18)
а = 1,2.
Нетрудно видеть, что Са>0 и Ц-Цс, действительно является
нормой.
Таким образом, в данной норме имеет место условие абсолют-
абсолютной устойчивости
11ф'+11Ь<!фЛ!с . C.19)
Итак, мы приходим к выводу, что если А1^0 и Л2>=0 и
элементы этих матриц не зависят от времени, то при достаточной
5.31
МЕТОДЫ РАСЩЕПЛЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
251
гладкости решения задачи C.1) разностная схема C.4) абсолютно
устойчива и аппроксимирует исходную задачу со вторым поряд-
порядком по т.
В заключение заметим, что разностная схема метода стабили-
стабилизации допускает удобную реализацию на ЭВМ. В самом деле,
разностное уравнение C.4) можно записать в виде
C.20)
Здесь |/+!/2 и l/+1 — некоторые вспомогательные величины, обес-
обеспечивающие редукцию задачи C.4) к последовательности про-
простейших задач C.20). Заметим, что первое и последнее уравнения
из C.20) являются явными соотношениями. Это значит, что
обращать операторы нужно лишь во втором и третьем уравне-
уравнениях, в которых присутствуют только простейшие операторы
Ах и А2.
Рассмотрим теперь неоднородную задачу
> = g при / = (
C.21)
где А = Аг-\-Л2, Лг^0, Л2;э=0. В этом случае схема метода
стабилизации запишется следующим образом:
-V Ф° = ?. C-22)
где
= /('/ +1/2)-
C.23)
При условии C.23) разностная задача C.22) аппроксимирует
исходную задачу C.21) со вторым порядком по т.
Исследуем устойчивость разностной схемы. С этой целью пре-
преобразуем уравнение C.22) к виду
где
Из уравнения C.24) следует, что
\\п
C.24)
C.25)
C.26)
Поскольку для случая однородного уравнения уже было уста
новлено, что
252 МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
то имеем
—11
(ГЛ. 5
C.27)
Легко видеть, что
. C.28)
С учетом соотношений C.18), C.25) и C.28) получим из C.27)
неравенство
II / _ \ _-1 ЦП/ _ \ 1 И
с C.29)
Воспользуемся оценкой
установленной при Ла
получим, что
I
Е + ~Аа) ||^1. C.30)
эО в гл. 1 (см. A.25)). В результате
lk'+1llc<№,+Tj/>lb. C.31)
Отсюда с помощью рекуррентных соотношений приходим к оценке
Wh^hh + Mfh, C.32)
где
ИЛЬ = max I/'[Ci. C.33)
Таким образом, если Лх:э=0, Лг^0 и элементы матриц А1г А2
не зависят от времени, то при достаточной гладкости решения <р
и функции / задачи C.1) разностная схема C.22) абсолютно
устойчива и аппроксимирует исходную задачу со вторым поряд-
порядком точности по т.
В заключение еще раз подчеркнем, что приведенное выше
доказательство справедливо только в том случае, когда исходный
оператор А не зависит от времени.
5.3.2. Метод предиктор-корректор
Рассмотрим метод расщепления, называемый методом предик-
предиктор-корректор. Смысл этого метода состоит в следующем. Весь
интервал O^t^T разбивается на частичные промежутки, и
в пределах каждого из элементарных промежутков tf^t^tJ+1
задача C.1) решается в два приема. Сначала по схеме первого
порядка точности и с довольно значительным «запасом» устой-
устойчивости находится приближенное решение задачи в момент вре-
5.3]
МЕТОДЫ РАСЩЕПЛЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
253
мени ti+i/2 = tj-\-x/2, этот этап обычно называется предиктором.
После этого на всем интервале (tj, t]+1) расписывается исходное
уравнение со вторым порядком аппроксимации, которое служит
корректором. Существенно именно то, что при конструкции кор-
корректора используется «грубое» решение при tj+i/2, найденное
с помощью предиктора.
Схема предиктор-корректор может быть записана, например,
в форме
C.34)
Изучим схему предиктор-корректор более внимательно. Прежде
всего из первых двух уравнений C.34) исключим вспомогатель-
вспомогательную функцию ф'+'/4. Тогда систему C.34) можно привести к сле-
следующей:
C.35)
Исключив из этих уравнений
, получим
Фо = ?. C.36)
Исследуем вопрос об аппроксимации. С этой целью перепишем
уравнение C.36) в виде
—1
где
Раскладывая правую часть последнего соотношения в ряд
по степеням т в предположении, что
получим, что
= Л+О(т2).
254
МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 5
С помощью оценки, использованной для метода стабилизации,
приходим к выводу, что метод предиктор-корректор имеет второй
порядок аппроксимации по т.
Исследуем устойчивость этого метода. С этой целью уравне-
уравнение C.36) запишем в виде
где
Разностное уравнение C.37) устойчиво, так как
Отсюда с учетом соотношений C.38) и C.18) получим
или
где
C.37)
C.38)
C.39)
C.40)
C.41)
Таким образом, устойчивость в метрике C.41) доказана.
Следовательно, если матрицы Лх;5=0, Л25=0 и элементы этих
матриц не зависят от времени, то при достаточной гладкости
решения ф задачи C.1) разностная схема C.34) является абсо-
абсолютно устойчивой и аппроксимирует исходную задачу со вторым
порядком точности по т.
В случае неоднородной задачи метод предиктор-корректор
сформулируем следующим образом:
C.42)
где
При выборе р в указанной форме можно показать, что C.42)
аппроксимирует исходную задачу со вторым порядком по т.
Устойчивость схемы C.42) устанавливается следующим образом.
5.31 МЕТОДЫ РАСЩЕПЛЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
Исключая ф' + '/2 и ф/+'/4, получим
255
А (Е + 1 А,)'1 (Е + 1 Л,)"' (Ф/+ 1//) = //. C.43)
Введем обозначение
Тогда соотношение C.43) приводится к виду
Отсюда
C.44)
Поскольку имеет место соотношение
хА(Е+*й А,)'' =
Е+-1А,)- ' =
то, согласно лемме Келлога и A.25) из гл. 1, получаем оценку
C-45)
где
т. е. при Os^t/^T снова имеем устойчивость разностной схемы.
Таким образом, если At^Q, Л2^0 и элементы матриц Ль
Л2 не зависят от времени, то при достаточной гладкости реше-
решения и правой части / задачи C.1) разностная схема C.42) абсо-
абсолютно устойчива и позволяет получить решение второго порядка
точности по т.
В заключение обратим внимание на то, что хотя разностная
схема C.34) абсолютно устойчива, но входящая в нее как часть
разностная схема для корректора, рассмотренная отдельно,
может быть абсолютно неустойчивой. Покажем зто. Для упро-
упрощения выкладок рассмотрим случай, когда А — разностный
т
256
МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
(ГЛ. 3
аналог двумерного оператора Лапласа, D — единичный квадрат, на
границе которого решение равно нулю.
В этом случае корректор имеет вид
1 = 0
2т
(так как теперь предиктор не участвует в вычислениях, то для
удобства рассматриваются только целые значения /).
Для этой разностной задачи укажем решение ф^, для кото-
которого не выполняется неравенство C.16) из определения устой-
устойчивости. Такое решение будем искать в виде
Ф> / = %J sin tnnkh • sin pnlh,
где / в левой части есть индекс, а в правой части — показатель
степени. Подставляя это выражение в разностное уравнение,
приходим к следующему характеристическому уравнению:
, trmh
где
атр = ]р
Взяв в качестве К величину
получаем, что при т->0 (так что т/Л2 = const)
т. е. схема абсолютно неустойчива.
Таким образом, несмотря на то, что разностная схема, исполь-
используемая в качестве корректора, является абсолютно неустойчивой,
но запас устойчивости, которым обладает предиктор, достаточен
для абсолютной устойчивости в целом.
5.3.3. Метод покомпонентного расщепления
Метод стабилизации и метод предиктор-корректор эквивалентны
по точности и абсолютно устойчивы при условии, что ЛаЭ=0.
Следует, однако, иметь в виду одно ограничение на операторы
Аа, которое мы сделали: они не зависят от времени. Это огра-
ограничение позволило нам довести до конца анализ устойчивости
при конструктивном предположении только положительной полу-
полуопределенности операторов Аа. К сожалению, в случае зависи-
зависимости этих операторов от времени анализ устойчивости в пред-
предлагаемой форме осуществить, вообще говоря, не удается. Исклю-
Исключением является метод покомпонентного расщепления, к форму-
формулировке которого мы приступаем.
5.31
МЕТОДЫ РАСЩЕПЛЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
257
Пусть в C.1) — C.3) Ах (t) Э= 0 и Аг (t) Э= 0. Рассмотрим аппрок-
аппроксимации этих матриц на интервале tj^t^t/+i в форме
в предположении, что их элементы имеют достаточную гладкость.
Построим систему разностных уравнений, состоящую из последо-
последовательности простейших схем Кранка —Николсона *):
C.46)
Система разностных уравнений C.46) при исключении вспо-
вспомогательных функций ф/+'/2 может быть приведена к одному
уравнению
фМ = 77ф/, C.47)
где
Изучим сначала проблему аппроксимации. Для этой цели
разложим оператор Т1 по степеням т, предполагая, что
В результате получим, что
Если операторы Ла коммутируют, т. е.
жение C.49) можно записать в виде
' = ?-тЛ/+^-(Л'J-...
C.49)
то разло-
разлоC.50)
Таким образом, если At (t) ^ 0, Л2 (t) 5= 0, то при достаточ-
достаточной гладкости элементов этих матриц и решения ф задачи
C.1) —C.3) разностная схема C.46) абсолютно устойчива (это
сразу следует из справедливого, согласно лемме Келлога, нера-
неравенства ||Г'||<;1) и аппроксимирует исходное уравнение C.1)
со вторым порядком по т в случае, если Л{ и Л? коммутируют,
и с первым порядком, если не коммутируют.
*) Теоретическое обоснование и модификации схемы даны автором кииги
в докладе на симпозиуме по численным методам решения уравнений с част-
частными производными, состоявшемся в США в 1970 г (SYN3PADE-1970).
9 Г, И. Марчук
258
МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 5
Теперь операторы Ax(t) и A2(t) будем аппроксимировать
на интервале tj^t^tj+i, как в C.46), а на интервале /у_:
^ t =^ t/+i. Положим
не
Рассмотрим следующие две системы разностных уравнений:
C.51)
, А/
C.52)
Цикл вычислений состоит именно в поочередном применении
разностных схем C.51), C.52). Аналогично предыдущему можно
показать, что на полном цикле вычислений с помощью C.51) и
C.52) имеем
ф/+1 = ТУ, C.53)
где
^ М
Е-^М
¦!Air(?~lAj)x
Если оператор шага V сравним с оператором шага схемы
Кранка— Николсона
"¦ = 0,
2т
то можно установить, что с точностью до величины т2 операторы
шага Т1 для двуциклической схемы расщепления и схемы
Кранка — Николсона, примененной к удвоенному интервалу по
времени, совпадают независимо от того, являются операторы Аа
коммутирующими или нет. Таким образом, этот прием снимает
весьма сильное требование коммутативности операторов.
Переходим к обсуждению вопроса о счетной устойчивости
метода. Из соотношения C.47) следует, что
5.3] МЕТОДЫ РАСЩЕПЛЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
Поскольку, как было показано выше,
259
при
, то
Отсюда непосредственно вытекает, что
C.54)
II*!- C.55)
Если рассматривается двуциклический метод, то на каждом
шаге цикла имеют место оценки вида C.54). Это означает, что
и двуциклический метод абсолютно устойчив.
Таким образом, если Ах (?) 5= 0 и Л2 (t) 5s 0, то при доста-
достаточной гладкости решения ф задачи C.1)—C.3) и элементов
матриц A1(t) и A2(t) система разностных уравнений C.51), C.52)
абсолютно устойчива, и схема C.53) аппроксимирует исходное
уравнение C.1) со вторым порядком по т.
Будем искать решение неоднородной задачи с помощью дву-
циклического полного расщепления. С этой целью рассмотрим
систему разностных уравнений вида C.51), C.52), записанных
в более удобной форме:
C.56)
где fi = f{jtj). Разрешая эти уравнения относительно ф/+1, получим
ф' +' = 7"ф;~' + 2xT{T'2flt C.57)
где
C.58)
C.59)
С помощью разложения по степеням малого параметра т
придем к соотношению
ф;+1 = \е- 2тА! + -^ (А>J] ф^1 + 2т (Е - тА') // + О (т3), C.60)
9*
260 МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
которое в свою очередь преобразуем к виду
¦ + АЦЕ-
[ГЛ. 5
^ т2). C.61)
Исключим ф^-1, используя разложение решения в ряд Тейлора
в окрестности точки thx. С точностью до т2 будем иметь
(^)М C.62)
C.63)
Производную -~ исключим с помощью соотношения
Подставим C.63) в C.62). Тогда
Ф> = (? - ттУ) q>M + xfl + О (т2).
Отсюда
C.64)
Подставим соотношение C.64) в C.61). В результате будем иметь
C.65)
Очевидно, что уравнение C.65) аппроксимирует исходное
уравнение C.1) на интервале thl sg t ==? tJ+1 со вторым порядком
по т. Таким образом, нами найдена разностная аппроксимация
неоднородного эволюционного уравнения второго порядка с по-
помощью двуциклического метода.
Устойчивость метода доказывается в энергетической норме
элементарно. В самом деле, оценим C.57) по норме
Выше было установлено, что Цг^Ц^!, следовательно,
Поэтому
W+4^W-4 + 2r\\ff\\. C.67)
С помощью рекуррентного соотношения C.63) получим, что
W\\^k\\+y\\f\\, C.68)
где
Из соотношения C.68) следует счетная устойчивость схемы на
любом конечном временном интервале.
I
Б.З]
МЕТОДЫ РАСЩЕПЛЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
261
Систему уравнений C.56) можно записать также в следующей
эквивалентной форме:
C-69)
Исключая неизвестные величины с дробными индексами, прихо-
приходим к разрешенному уравнению вида
= Т{ Ц Ц TW~' + 2тТ[
C.70)
которое совпадает с C.57). В некоторых случаях запись уравне-
уравнений в форме C.69) предпочтительнее, чем в форме C.56).
Итак, если Л^^О, A2(f)^0, то при достаточной гладкости
решения ф, функции f(t) и элементов матриц A1(t), A2(t) система
разностных уравнений C.56) абсолютно устойчива на интервале
O^t^T и аппроксимирует исходное уравнение со вторым
порядком по т.
5.3.4. Некоторые общие замечания
Прежде всего сопоставим рассмотренные в настоящем пара-
параграфе методы расщепления в предположении, что A, Alt Л2 не
зависят от времени, А1^?0, Л2^0 и Л1Л2 = Л2Л1. Это именно
тот простейший случай, который рассмотрен в литературе весьма
полно. Нетрудно видеть, что все схемы расщепления для эволю-
эволюционной задачи C.1) при / = 0, формально разрешенные на каж-
каждом шаге относительно искомого решения, эквивалентны друг
другу и, таким образом, являются лишь различными схемами
реализации. Эти схемы, в частности, могут быть приведены
к виду
ф/+1 =
где
i
262
МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 5
Схемы расщепления для неоднородной эволюционной задачи
оказываются эквивалентными только по порядку аппроксимации.
Это значит, что для неоднородных задач разные схемы расщеп-
расщепления, обладая вторым порядком аппроксимации по т, будут
приводить в пределах погрешности порядка т2 к различным
результатам, отличающимся на величину О (т.2).
Второе замечание касается использования схем расщепления
в случае, когда Аг 2г О, Л2 ^ О не зависят от времени и АгА2 ф
Ф A2At. Как было показано, в этом случае для приближенного
решения эволюционных задач могут быть использованы все три
рассмотренные схемы расщепления: метод стабилизации, метод
предиктор-корректор и метод покомпонентного расщепления. Все
эти методы хотя и эквивалентны по порядку точности, однако
существенно различаются, поскольку даже в случае однородной
эволюционной задачи они оказываются не тождественными друг
другу, т. е. имеют несовпадающие операторы шага Т. Сейчас
еще трудно дать рекомендации о сферах наиболее эффективного•
применения той или иной схемы, поскольку этот вопрос изучен
недостаточно. Однако уже сам факт, что для решения одной и
той же задачи можно использовать три различных (независимых)
метода, позволяет с большей уверенностью различными путями
подходить к решению сложных задач.
Третье замечание относится к самому общему случаю, когда
4t5s0, Л25г0, АхАгфАгАх и операторы Ах и Л2 зависят
от времени. В этом случае лучше использовать метод покомпо-
покомпонентного расщепления, который в двуциклической форме приво-
приводит к решению задачи со вторым порядком аппроксимации по т.
5.4. Многокомпонентное расщепление задач
До сих пор предполагалось, что исходный оператор А пред-
представлен в виде суммы двух операторов более простой структуры.
При решении сложных задач математической физики зачастую
приходится иметь дело с расщеплением операторов на большое
число слагаемых. Рассмотрим случай, когда
D.1)
а=1
причем Аа^0. Поскольку случай п = 2 подробно рассмотрен
в 5.3, остановимся только на случае п>2.
Прежде всего можно убедиться, что тривиальное распрост-
распространение методов расщепления, рассмотренных выше для случая
п = 2, в общем виде невозможно.
6.4] МНОГОКОМПОНЕНТНОЕ РАСЩЕПЛЕНИЕ ЗАДАЧ
5.4.1. Метод стабилизации
263
В предположении D.1) метод стабилизации может быть пред-
представлен в виде
п
где
fJ=f(tl+l/2).
Схема реализации алгоритма имеет следующий вид:
D.3)
J +
л —1
Легко проверить, что метод стабилизации в случае достаточной
гладкости решения имеет второй порядок точности по т. Счетная
устойчивость будет обеспечена при выполнении условия
где Г —оператор шага, определяемый формулой
D.5)
К сожалению, из условия Аа^г0 здесь не следует устойчивость
в какой-нибудь норме, как это имело место в случае п = 2.
Для установления устойчивости иногда пользуются следую-
следующим простым алгоритмическим приемом. Полагая // равным
нулю, приведем уравнение D.2), разрешенное относительно ф^+\
к следующему виду:
фМ = 7у. D.6)
Поскольку оператор Т предполагается не зависящим от времени
(т. е. от индекса /), то, решая задачу D.6) при начальном
условии
Ф°=? D.7)
264
МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 5
6.41
МНОГОКОМПОНЕНТНОЕ РАСЩЕПЛЕНИЕ ЗАДАЧ
265
и фиксированном параметре т, обеспечивающем необходимую
аппроксимацию, будем следить только за нормой ||ф/||. Если эта
норма не будет расти, то, по-видимому, |Г||<1 и, таким обра-
образом, можно считать, что условие для счетной устойчивости
выполнено. После этого можно переходить к решению неодно-
неоднородной задачи. Перепишем в следующем виде уравнение D.2):
D.8)
Отсюда
или, в силу неравенства D.4) и неравенства A.25) из гл. 1,
получаем
С помощью рекуррентной связи приходим к условию устойчи-
устойчивости
ЦфМИ + т/И/Ц. D.10)
где
Ш1 = тах||//||. D.11)
Заметим, что при проверке условия устойчивости |T||s=?l мы
использовали начальное условие D.7). Это совсем не обязательно.
В качестве начального условия можно было выбрать любую
функцию из того же класса гладкости, что и функции g и /.
5.4.2. Метод предиктор-корректор
Схема расщепления в этом случае имеет вид
D.12)
п — 1
" Где снова предполагается, что Ла^0 и // = / (^/ _j_ 1/2)- Система
уравнений D.12) сводится к одному уравнению вида
JJ
. D.13)
Метод предиктор-корректор при достаточной гладкости реше-
решения имеет второй порядок точности по т. Уравнение D.13) запи-
запишем в виде
D.14)
где 71 —оператор шага:
D.15)
Требование счетной устойчивости в конечном итоге сводится
к оценке нормы оператора Т. К сожалению, и в этом случае
конструктивное условие Ла^0 не позволяет доказать устойчи-
устойчивость схемы. Этот вопрос остается открытым.
Чтобы закончить анализ рассмотренных выше двух схем рас-
расщепления, остановимся на простейшем случае, когда операторы
Аа коммутируют друг с другом и имеют общий базис. Оказы-
Оказывается, этого дополнительного требования достаточно, чтобы из
условия Аа 5= 0 получить устойчивость рассмотренных схем.
В самом деле, при условии коммутативности операторы шага Т
для обеих схем совпадают друг с другом. Рассмотрим для про-
простоты однородную задачу D.6), D.7). Решение этой задачи будем
искать в спектральной форме
ф/= 2 Ф*ы*> D-16)
k
где «j — собственные функции задачи A.7) (см. гл. 1), а
<р? = (ф/, uj), где и*—собственные функции сопряженной задачи
A.7) из гл. 1. Поскольку {uk} является общим базисом, то
D.17)
»,, Подставляя разложения D.16) и соответствующие представле-
~ ния для функции g в D.6), D.7), получим для коэффициентов
I Фурье ф{ следующие формулы:
/ -1_ 1
D.18)
266
где
МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
Ть=\ —
ПКч)
[ГЛ. 5
D.19)
Выражение D.19) для Тк преобразуем к виду
т .
D.20)
где fift — положительные константы при условии ^"^0. Из D.20)
вытекает неравенство
|7\|^1, D.21)
из которого, в соответствии с 1.3, следует устойчивость.
Метод стабилизации и метод предиктор-корректор при п-ком-
понентном расщеплении могут быть применены и к случаю, когда
оператор А зависит от времени. Однако в данной ситуации апри-
априорное установление условия устойчивости оказывается более
сложной задачей. Поэтому трудно сказать, насколько оправдано
применение рассмотренных двух схем в общих ситуациях. Это
стимулировало автора к формулировке более или менее универ-
универсального подхода к решению различных сложных и достаточно
общих задач на основе идеи расщепления. Таким методом ока-
оказался двуциклический метод последовательного расщепления.
5.4.3. Метод покомпонентного расщепления на основе
элементарных схем
Попытаемся построить разностный аналог задачи, имеющий
второй порядок аппроксимации по т и абсолютно устойчивый во
времени. В соответствии с предположением о многокомпонентном
расщеплении будем полагать, что
л>=?л4,
а= 1
где все Л„ — положительно полуопределенные операторы:
Рассмотрим систему уравнений
D.22)
а=1,2 п. D.23)
В случае, когда Л^^О коммутативны и Ла = Ла+1/2 или
= (Л; +' + Лг)/2, схема D.23) является безусловно устойчивой
5.4]
МНОГОКОМПОНЕНТНОЕ РАСЩЕПЛЕНИЕ ЗАДАЧ
267
и имеет второй порядок аппроксимации. Этот факт можно уста-
установить довольно просто с помощью метода Фурье. Однако для
некоммутативных операторов А!а, как легко заметить, схема D.23)
будет, вообще говоря, схемой первого порядка точности по т
и поэтому менее интересна для приложений, чем следующая схема
второго порядка аппроксимации:
", а=1,2, .... л,
D.24)
а — I
2" , а = я+1,я + 2,..., 2л.
Попытаемся определить специальную конструкцию метода
полного расщепления на основе D.23), которая дает решение
задачи Коши для положительно полуопределенных и некоммута-
некоммутативных операторов Ai и обладает вторым порядком аппроксима-
аппроксимации. Это является в известном смысле полным решением проблемы
расщепления.
Заметим, что система уравнений D.23) сводится к одному
уравнению вида
D.25)
D.26)
D.27)
= ... = |?«. D-28)
Таким образом, абсолютная устойчивость этой схемы доказана.
Для того чтобы определить порядок аппроксимации, разложим
по степеням малого параметра т выражение (полагая 2"||Ла[]<1)
С помощью D.25) найдем оценку по норме
а=1
На основе леммы Келлога имеем
Если операторы кососимметричные, т. е. (Л4ф, ф) = 0, то
268
МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 6
Поскольку
то сначала разложим в ряд операторы
В результате будем иметь
D.29)
. D.30)
В случае, когда операторы Л? коммутативны, выражение, стоящее
под знаком двойной суммы, обращается в нуль, и мы имеем
l (Л/J + О (т3).
D.31)
Сравнивая D.31) с разложением оператора V из A.8) в ряд
по степеням tjV, где Л' определяется с помощью A.22)— A.24),
убеждаемся, что в этом частном случае схема D.23) имеет вто-
второй порядок аппроксимации по т. Если операторы Л? некомму-
некоммутативны, то схема расщепления оказывается только первого
порядка точности по т. Чтобы построить схему второго порядка
точности по т в некоммутативном случае, необходимо схему D.23)
заменить следующей:
Ф'=П Г'аФ'-
D.32)
Алгоритмически это означает, что сначала решается система
уравнений D.23) на интервале /у_!^/^/у для а = 1, 2, ..., п,
а затем такая же система на интервале t/^t<itj+u но в обрат-
обратной последовательности (а = л, п — 1, ..., 1):
D.33)
а=1, 2, .... п,
а = л, л— 1 1.
Очевидно, что для полного цикла D.33) имеем
1
МНОГОКОМПОНЕНТНОЕ РАСЩЕПЛЕНИЕ ЗАДАЧ
269
где
Таким образом, на интервале tj-i^t^tj+i схема D.33) имеет
второй порядок точности по т, если в качестве Л? взят один из
операторов, приведенных в A.22) —A.24).
В заключение заметим, что разностная система D.33) оказы-
оказывается абсолютно устойчивой для Л?:>=0.
Для неоднородного уравнения
D.34)
при / =
где А (/) =2= 0 и
на интервале //-
щепления:
, имеет место следующая схема рас-
расп—1
D.35)
где
Нетрудно убедиться, что эта схема имеет второй порядок аппрок-
аппроксимации по т и в предположении необходимой гладкости ф аб-
абсолютно устойчива.
270
МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 5
Так же, как и в случае п = 2, гс-компонентную систему урав-
уравнений D.35) можно записать в эквивалентной форме:
, (п+1) —а . (п + П —а4-1
«=1, 2 л,
Ф'
D.36)
¦(п+1)
а = 2, 3, .... п+1.
Перейдем к методу расщепления для неявных разностных
аппроксимаций. С этой целью рассмотрим задачу
D.37)
^ + ЛФ = 0 в DxDt,
Ф = ?*) в D при / = 0.
Предположим, что
а=1
все Ла=&0 и Ла не зависят от времени. Рассмотрим алгоритм
расщепления в следующем виде:
D.38)
Покажем, что такой алгоритм является абсолютно устойчивым.
Умножим уравнение
Г" ^аф' + а/" = 0
скалярно на ф/4-a/n. Получим соотношение
D.39)
Из положительной полуопределенности оператора Ла вытекает,
*) Из методических соображений рассматриваются однородные краевые
5.41
ИЛИ
Но так как
ТО
МНОГОКОМПОНЕНТНОЕ РАСЩЕПЛЕНИЕ ЗАДАЧ
271
B=1, 2, ..., П.
С помощью этого рекуррентного неравенства получаем
IIФ^1 К Ml- D.40)
Это означает, что при сделанных предположениях расчет по
схеме расщепления D.38) будет абсолютно устойчивым.
Нетрудно убедиться, что система D.38) аппроксимирует исход-
исходную задачу с первым порядком точности по т.
Рассмотрим теперь неоднородную задачу
D.41)
^ = / в DxDt,
Ф = ? в D при / =
и схему расщепления для этой задачи
5
D.42)
-2 S
Такая схема расщепления аппроксимирует исходное неоднород-
неоднородное уравнение с точностью до величин первого порядка по т.
Устойчивость схемы D.42) докажем следующим образом.
Умножим скалярно каждое из уравнений соответственно на
Ф/ + 1/", ..., ф/ + 1. Тогда, аналогично предыдущему, получим
||ф/+«/л||^|ф^+(а-1)/л| @5 = 1, 2, ...,Я— 1). D.43)
Последнее уравнение, полученное из D.42), рассмотрим более
подробно. Имеем
получим
Учитывая, что
272 МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
Так как
то
[ГЛ. 5
приходим к следующему неравенству:
Сокращая на
Исключая решение с дробными индексами, будем иметь
Учитывая, что
и исключая промежуточные значения решения, получим
где
D-44)
D-45)
Отсюда следует абсолютная устойчивость разностной схемы.
Данный алгоритм расщепления обобщается на случай, когда
оператор А зависит от времени. В этом случае в цикле вычисле-
вычислений по схеме расщепления вместо А следует взять подходящую
разностную аппроксимацию этого оператора на каждом интервале
5.4.4. Расщепление квазилинейных задач
Рассмотрим эволюционную задачу с оператором А, завися-
зависящим от времени и от решения задачи:
D.46)
= 0 в DxDlt
= ? в D при ? = 0.
Относительно оператора A (t, ф) предположим, что он неот-
неотрицателен, имеет вид
A(t,
Aa(t,
D.47)
Aa(t, фM=0 и обладает достаточной гладкостью. Предположим,
далее, что решение ф также является достаточно гладкой функ-
функцией времени. Рассмотрим на интервале tj-i^t«sify + i схему
1
5.5] ОБЩИЙ ПОДХОД К ПОКОМПОНЕНТНОМУ РАСЩЕПЛЕНИЮ 273
расщепления
? + Л' 2"
D.48)
где
D.49)
Методами, изложенными выше для линейных операторов,
зависящих только от времени, несложно доказать, что схема
расщепления D.48) при условиях D.49) имеет второй порядок
аппроксимации по т и абсолютно устойчива. Аналогичным обра-
образом определяется метод расщепления для неоднородных квази-
квазилинейных уравнений. Это открывает широкие возможности при-
применения схем покомпонентного расщепления к решению неста-
нестационарных квазилинейных задач гидродинамики, метеорологии,
океанологии и других важных областей естествознания.
5.5. Общий подход к покомпонентному
расщеплению
При решении многих задач математической физики возникает
необходимость расщепления исходных дифференциальных, интег-
интегральных или интегро-дифференциальных уравнений на более
простые с последующей редукцией их к разностной форме на
основе изложенных в настоящей главе алгоритмов. Этот вопрос
тесно связан с проблемой слабой аппроксимации исходных урав-
уравнений уравнениями более простой структуры.
Пусть имеется некоторая задача математической физики
в DxDt,
в D при ^ = 0.
E.1)
274 МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
Предположим, что
п
а=1
[ГЛ. 5
E.2)
причем Ла^0. Решение <р и функция / предполагаются доста-
достаточно гладкими. Задачу E.1) на каждом интервале 6, = {
представим в следующем виде:
в D при * = *,,
а=1, 2, .... п.
При этом введены следующие обозначения:
E.3)
Ф/+1. E.4)
Ранее было показано, что если к каждому из уравнений при-
применить схему Кранка —Николсона, то придем к системе раз-
разностных уравнений
ф/ + а/п_ф/+<а-1)/л ф/ + а/« ,/ + («-1)/„
5 Т + Аа* ±? = 0, «=1,2 п,
E.5)
где
Предположим, что каждый из операторов Аа в свою очередь
представим в виде
в=1
E.7)
где Лар^О. Возникает вопрос: целесообразно ли предварительно
оператор А «расщеплять» на Аа, а затем операторы Аа в свою
очередь расщеплять на ЛаC? Не проще ли сразу А представить
через набор операторов ЛаР? По этому поводу следует заметить,
что, несмотря на внешнюю эквивалентность этих подходов, во
многих случаях оказывается целесообразным сначала разложить
сложную задачу математической физики на более простые, кото-
которые в дальнейшем удобно независимо друг от друга сводить
к простейшим задачам.
Рассмотрим систему E.3) и с учетом E.7) расщепим ее на
еще более элементарные:
\-А
а$
= 0, E.8)
а=1, 2, ..., П; 0 = 1, 2 та>
5.5]
ОБЩИЙ ПОДХОД К ПОКОМПОНЕНТНОМУ РАСЩЕПЛЕНИЮ
275
где
Нетрудно видеть, что система расщепленных уравнений E.8)
аппроксимирует исходную задачу E.1) с точностью до величин
второго порядка по т, если операторы ЛаВ коммутативны. Дока-
Доказательство этого утверждения основано на том, что с учетом
E.2) и E.7) можно изменить упорядочение компонент расщеп-
расщепления, записав
a=l6=1 7=1
В этом случае мы приходим к задаче
— + АУ j
Y=l, 2 р.
E.9)
которая, как было показано в 4.4, аппроксимирует задачу E.1)
со вторым порядком точности по т. Этот результат остается в силе
и тогда, когда операторы Лав зависят от времени. В этом слу-
случае необходимо на каждом интервале tj^t^t/+i произвести
аппроксимацию операторов Лав = ЛаР со вторым порядком по т.
Если операторы Лар некоммутативны, то методом двуцикличе-
ской процедуры, описанной в 4.4, приходим к разностной схеме
второго порядка точности на каждом интервале tj~i^t^tJ + 1.
Резюмируя изложенное, можно утверждать, что если эволю-
эволюционную задачу вида E.1) при условии Аа^0 свести к част-
частным задачам эволюционного типа E.3) и затем рассматривать
их как набор новых эволюционных задач, то, если хотя бы одна
из элементарных эволюционных задач редуцируется к разностным
схемам первого порядка точности, тогда и аппроксимация исход-
исходной задачи E.1) будет первого порядка точности по т. Если же
каждая из таких задач имеет аппроксимацию второго порядка,
то в рамках двуциклической процедуры по а и р* приходим
к аппроксимации второго порядка по т. Заметим, что если опе-
операторы ЛаВ некоммутативны, то без двуциклической процедуры
мы приходим к аппроксимации задачи E.1) с первом порядком
точности. В случае некоммутирующих операторов исходной
задачей будет следующая:
|Н 2 л^=
а=1
E.10)
= <р> в D при t =
276 МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
Задачу E.10) редуцируем к системе
*Ра , л т _ л 1 _
[ГЛ. S
dt
« = 1,2,..., п. E.11)
Пусть Аа— 2] Aa.fi- Тогда каждую из задач E.11) будем
P = i
решать с помощью двуциклического метода:
Т/2
'^ 2т '^ 2т
- + И, * ш+* -0, ,-и» ш„,
/+
^Г7
2т"
а
2та+1-Р"
¦ , Р ;
ф а.)- ф
E.12)
¦=о,
, .... 2та.
т/2
Начальные условия для решения каждой из систем E.12) берутся
соответственно в виде
= Ф1',
Фа1', («= 2, .... п).
E.13)
Нетрудно проверить, что задача E.12) аппроксимирует на интер-
интервале tjs^t^tj + i любую из задач E.11) с точностью до тА
Чтобы весь алгоритм приводил к решению задачи E.1) с точ-
точностью до т2, необходимо, кроме того, чередовать и основные
циклы. Так, вместо E.11) на интервале t/-i^t^tj следует
иметь систему
дфа
di
а на интервале
(а=1, 2, ..., п).
E.14)
E.15)
При этом предполагается, что каждая из задач E.14) и E.15)
решается с помощью двуциклического метода вида E.12). Заметим,
что при условии Лар^О метод покомпонентного расщепления
является абсолютно устойчивым.
Ш
S.5]
ОБЩИЙ ПОДХОД К ПОКОМПОНЕНТНОМУ РАСЩЕПЛЕНИЮ
277
В заключение приведем общую схему расщепления для неодно-
неоднородного уравнения
E.16)
= ?г при
на интервале tj-i^t^t/+1 на основе двуциклического метода.
Рассмотрим схемы слабой аппроксимации в дифференциальной
форме.
На интервале thl^t^tj положим
«=1,2 «-1,
E.17)
а на интервале
E.18)
при условии, что
Ф1 (tf-i) = ф (t/-i), фа+1 (^y-l) = Фа ОД, « = 1, 2 Л E.19)
и, соответственно,
Фа+i (*/) = Фа (tl+i), « = л +1, п + 2 Т.п. E.20)
Если теперь для решения уравнений E.17) —E.19) на интер-
интервале tj^^t^tj+i воспользоваться схемами Кранка — Николсона,
положив / = //, то придем к системе D.35) для E.18).
Наряду с системой уравнений E.17), E.18) рассмотрим сле-
следующую. На интервале tj-i^t^tf
E.21)
на интервале
757^ = /
E.22)
278
МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
и на интервале
[ГЛ. 5
E.23)
Ь
= о.
Начальными условиями для системы E.21) будут
Ф1 ty-i) = ф (tj-i), Фа (*м) = Фа-i (*,) (а = 2, 3, .... я), E.24)
для уравнения E.22)
Ф«+1 (t/-i) = ф« (*/) E.25)
и для системы уравнений E.23)
Фа (*/) = Фа-i (*/+i), а = я + 2, л + 3, ..., 2я + 1. E.26)
Аппроксимация и устойчивость полученных схем гарантирует
сходимость (см. 1.4).
5.6. Методы решения уравнений гиперболического
типа
Широкий класс задач математической физики связан с урав-
уравнениями гиперболического типа, численные методы решения кото-
которых начали свое развитие с фундаментального исследования
Куранта, Фридрихса, Леви. Большой комплекс исследований
в дальнейшем был проведен советскими и зарубежными авторами.
В настоящее время предложен ряд эффективных алгоритмов ре-
решения задач, связанных с уравнениями гиперболического типа
в применении к теории колебаний, теории упругости и т. д. в случае
многомерных областей. Эти методы, основанные на специальных ал-
алгоритмах расщепления, будут рассмотрены в настоящем параграфе.
5.6.1. Метод стабилизации
Рассмотрим задачу
Ф = р, -щ- = q ъ D при t — 0.
F.1)
Будем считать, что оператор А является конечно-разностным
и не зависит от времени, а функции р и q обладают такими
5.6]
МЕТОДЫ РЕШЕНИЯ УРАВНЕНИИ ГИПЕРБОЛИЧЕСКОГО ТИПА
279
свойствами, что допускают достаточную гладкость решения. Пред-
Предположим, что оператор А положительно определен, т. е.
(ЛФ, ф)^т2(Ф. Ф)- F-2)
Напомним, что для положительно определенных операторов А
справедливо соотношение
/А*+А\
У2=а[-т-)
где а —минимальное собственное число оператора (Л + Л*)/2.
Рассмотрим разностную аппроксимацию уравнения F.1) в форме
¦-Р. F.3)
Нетрудно показать, что на гладких решениях разностная схема
F.3) аппроксимирует исходное уравнение из F.1) со вторым
порядком по т. Присоединим к уравнению F.3) начальные дан-
данные. Чтобы не нарушить второго порядка аппроксимации, наряду
с уравнением F.3) рассмотрим начальные данные в следующей
форме:
= (?_:?-Л) р-И<7 + ^-/о. F.4)
Последнее соотношение F.4) получено разложением решения задачи
F.1) в ряд Тейлора в окрестности точки / = 0 с последующим
исключением производных с помощью уравнения и заданных
начальных условий в задаче F.1).
Задача F.3), F.4) поставлена полностью. Теперь нам необ-
необходимо исследовать схему F.3) на счетную устойчивость. С этой
целью используем спектральный метод.
Пусть «„ и «* — собственные функции, а Кп = 0 — собственные
числа спектральных задач
Aun^Kiin, A*u% = Ku*n. F.5)
Предположим далее, что {«„} образуют базис. Решение уравнения
будем искать в виде
, F-6)
где
Подставив ряд Фурье F.6) в F.3) и умножив
получим уравнение для коэффициентов Фурье
ф/ =//
зультат на ы*,
F.7)
280
МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
[ГЛ. 5
Общее решение однородного уравнения, соответствующего F.7),
будем искать в виде степенной функции
Ф^^. F.8)
Подчеркнем еще раз, что в левой части равенства F.8) /' является
индексом, а в правой — показателем степени.
Подставляя F.8) в F.7) и полагая /? = 0, приходим к харак-
характеристическому уравнению для г\„:
F.9)
Легко видеть, что при условии
ll--
1
F.10)
корни уравнения F.9) будут комплексно-сопряженными (в слу-
случае строгого неравенства) и по модулю равными единице, т. е.
|Л„1 = 1- F.П)
Из условия F.10) получаем
— , я=1,2, ....
F.12)
Очевидно, что F.12) будет выполняться для всех К„, если
брать значения т такими, что
(А)
F.13)
где р (А) — верхняя граница спектра оператора А. Для случая
симметричных операторов {5(Л)=||Л| и, следовательно,
x^vk> FЛ4)
Переходим теперь к рассмотрению неявных разностных схем:
Ф^-у+уМ+/4фт+фМм/у> FЛ5)
Схема F.15) имеет второй порядок точности по т и вместе с F.4)
со вторым порядком аппроксимирует задачу F.1). Характери-
Характеристическое уравнение для F.15) имеет вид
*!« ^г-гь+1=0; F.16)
ш.
5.6] МЕТОДЫ РЕШЕНИЯ УРАВНЕНИИ ГИПЕРБОЛИЧЕСКОГО ТИПА
следовательно,
1
1+-
1
1+-
-1.
281
F.17)
Отсюда видно, что при любых тип выполняется равенство
h«| = i. F.18)
Схема F.15) является абсолютно устойчивой (см. Рихтмайер,
Мортон [3]).
Рассмотрим теперь случай, когда
= 2 Аа,
F.19)
причем все Аа^0. Для приближенного решения задачи F.1)
в этом случае используем разностную аппроксимацию в виде
-Р, F-20)
где
а=1
F.21)
Из F.20) и F.21) следует, что уравнение F.20) аппроксими-
аппроксимирует исходное уравнение F.1) с точностью до величин второго
порядка по т. Поскольку уравнение F.20) можно привести к виду
¦ ВЛР, F.22)
то из анализа Фурье будет следовать необходимое условие устойчи-
устойчивости схемы F.20), F.21)
2 F.23)
Таким образом, задача выбора параметра т, удовлетворяю-
удовлетворяющего условию устойчивости, свелась к вычислению максималь-
максимального собственного числа задачи
Аи = %Ви
F.24)
в предположении, что все собственные числа В М положительны.
Эта задача решается с помощью итерационного процесса Люстер-
ника.
282
МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
ГГЛ. 5
Запишем схему реализации разностной схемы, соответствующей
уравнению F.20):
F.25)
Решение этой задачи производится последовательно при / = 2, 3,...
с использованием начальных данных F.4). Схема F.20) является
схемой расщепления.
5.6.2. Сведение уравнения колебаний к эволюционной задаче
Построение абсолютно устойчивых разностных схем для урав-
уравнений гиперболического типа, обладающих вторым порядком ап-
аппроксимации и эффективно реализуемых на ЭВМ, привело к необ-
необходимости создания специальных методов расщепления, аналогич-
аналогичных рассмотренным в случае эволюционных задач.
Основную идею формального сведения гиперболической задачи
к эволюционной проиллюстрируем на простейшей задаче о коле-
колебании мембраны с периодическими относительно квадрата D =
Si} начальными условиями:
дх дх ' ду ду
р, 37=<7 В D При
F.26)
Здесь а2 = а2(х, у) — квадрат скорости распространения возмуще-
возмущений, р = р(х, у), q = q(x, у) — заданные функции. Периодическое
решение <р обладает достаточной гладкостью для проведения по-
последующих преобразований и построения разностных схем вто-
второго порядка точности по всем переменным х, у, t.
Прежде всего уравнение колебаний из F.26) представим
в виде системы уравнений
ди
dt
dv
dt '
(Эф
Tt
dx
дай dav\ _ „
дх "г <Э7/
F.27)
5.6]
МЕТОДЫ РЕШЕНИЯ УРАВНЕНИИ ГИПЕРБОЛИЧЕСКОГО ТИПА
283
В качестве начальных данных для функций «, v и ф выберем
следующие:
и = и*(х, у), v = v<>(x,y), <р = р(х, у) при t = 0. F.28)
Функции «° и v° можно выбрать более или менее произвольно,
лишь бы они были связаны зависимостью
dctu® dctv® / \ ic nn\
=;— — QIX, U). (O.Zv)
dx dy ^ ч v
Введем в рассмотрение матрицу А и вектор ф:
А =
0 —ai-
дх
0 -аг
д
0
Ф =
II
Тогда систему уравнений F.27) и начальные данные F.28) можно
представить в виде
где
:0 в DxDt,
Ф° в D при t = 0,
II "° II
ф° = W .
F.30)
Для исследования определенности оператора А составим функ-
функционал
(ЛФ, Ф) = - J [?х (оиф) + | (flwp)] dD = - J а«„Ф dS. F.31)
D S
Здесь «я — нормальная к границе S компонента вектора и =
= ui + vj. Вследствие периодичности а, ф (и производных от ре-
решения) в симметричных относительно центра квадрата точках
на противоположных сторонах D значения н„ будут равными
по абсолютной величине и противоположными по знаку. Поэтому
поверхностный интеграл в F.31) обращается в нуль, и мы при-
приходим к условию
(Л, ф) = 0. F.32)
Следует заметить, что если вместо условия периодичности ста-
ставится условие жесткого закрепления мембраны (ф = 0), то и в этом
случае, как видно из F.31), имеет место условие F.32). Это за-
замечание, конечно, справедливо для области D произвольной
формы.
284
МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
ГГЛ. 5
Условие F.32) обеспечивает единственность решения задачи.
В самом деле, умножая скалярно уравнение F.30) на ф и ис-
используя соотношение F.32), получим
F.33)
где
Предположим, что
м° = 0,
Тогда будем иметь
1!ф°1=о.
Решая уравнение F.33) при условии F.34), получим
= 0, ф° = 0.
F.34)
Это означает, что для всех моментов времени имеет место
м = 0, и = 0, ф = 0,
что и доказывает единственность решения задачи.
Перейдем теперь к формулировке метода расщепления для
задачи F.30). Введем в рассмотрение матрицы
О 0 —а-~
дх
0
о
А, =
0
0
0
0
0
д
а
0
-а
0
д
Очевидно, имеет место соотношение
F.35)
F.36)
Кроме того, аналогично предыдущему можно показать, что
(Лхф, ф) = 0, (Л2ф, ф) = 0.
Это означает, что задача F.30) на каждом интервале tj^t^tM
может быть решена с помощью одного из рассмотренных в 4.3
методов расщепления: либо метода стабилизации, либо предиктор-
корректора, либо, наконец, метода покомпонентного расщепления.
Заметим, что если вместо двумерного уравнения колебаний рассмат-
рассматривается многомерное, то для его решения желательно исполь-
использовать мзтод покомпонентного расщепления, который приводит
к абсолютно устойчивым разностным схемам второго порядка точ-
5.6]
МЕТОДЫ РЕШЕНИЯ УРАВНЕНИИ ГИПЕРБОЛИЧЕСКОГО ТИПА
285
ности при минимальных требованиях к определенности операторов
вида F.36).
Проведем редукцию задачи F.30) на каждом интервале tj<L
^t^tj+i, например, на основе метода покомпонентного расщеп-
расщепления. Тогда будем иметь
F.37)
= 0.
В скалярной форме эти уравнения можно представить в виде
~а
дх\
= 0,
д (
дх\
F.38)
Учитывая, что
нений F.38), F.39):
= 0,
д
= аТу{
~дЦ\а
= vft а
_ д
F.39)
= и/+1, упростим системы урав-
урав„/+«_„/ _ а /ф/+'+Ф/"+'/2
^ -°\ 2
_ а /
~ ду\п
F40)
F.41)
Из системы F.40) находим и/+1 и ф/+1/2, а из F.41) находим
у/+1 И ф/+1.
Разностные аппроксимации по х и у вводим так, чтобы прийти
к абсолютно устойчивым схемам для и, v и ф второго порядка
286
МЕТОДЫ РЕШЕНИЯ НЕСТАЦИОНАРНЫХ ЗАДАЧ
ГГЛ. 5
аппроксимации и, с сохранением условий F.36), в конечно-раз-
конечно-разностном представлении операторов At и А2. Положим
/ft, / V
1
-i,J'
-) 1-
F.42)
В первом уравнении использована разность «назад», а во вто-
втором—разность «вперед». Аналогично для системы F.41) имеем
*,
1/2
ft, /+1
~),j-
F.43)
Уравнения F.42) и F.43) записываем для k=l, 2, ..., N— 1
/=1, 2, ..., yv-l.
Рассмотрим случай, когда на границе области D задано ус-
условие
ср = О на 0DxD(. F.44)
Тогда при проектировании F.44) на сетку dDhxDx имеем
4 Ж ° ?о = Фи=° F-45)
= ° и
как для целых, так и для дробных индексов /.
Заметим, что соотношения F.42), F.43) вместе с F.45) дают
возможность по известным значениям ц>[ ,, ф?+//2 и ф^+,' полу-
получить «?+/ и у?+' во всех узловых граничных точках.
Уравнения F.42) и F.43) с помощью исключения неизвестных
«?+' и у?+' сведем к разностным уравнениям для величин фА/.
Для этого введем в рассмотрение вспомогательные величины
F.46)
Тогда уравнения F.42) и F.43) запишутся в виде
*2.
4Л 3/4 -
- <+,3/4 = - Я,13/4,
F.47)
1
5.6]
где
МЕТОДЫ РЕШЕНИЯ УРАВНЕНИИ ГИПЕРБОЛИЧЕСКОГО ТИПА
287
F.48)
Таким образом, приходим к следующему алгоритму числен-
численного решения задачи F.30).
Сначала определим начальные поля функций и%, и vl, i и ф?, /,
причем так, чтобы «2, / и vl, i удовлетворяли разностному ана-
аналогу условия F.29). Затем с помощью первой из формул F.48)
находим f'k+txii и решаем первое из разностных уравнений F.47)
при условии F.45) на границе Dh. По найденным значениям {/4
с помощью первой из формул F.46) находим
/ +
Далее решаем второе из уравнений F.47) с условием F.45). После
этого с помощью соотношений F.46) находим
Величины ф?+/ используются далее для нахождения и?+г' и vffi
с помощью первых соотношений из F.42) и F.43). Таким обра-
образом, алгоритм решения задачи определен полностью.
В заключение следует отметить, что этот метод решения весьма
просто обобщается на более сложные уравнения гиперболического
типа и обычно приводит к абсолютно устойчивым схемам вто-
второго порядка аппроксимации при минимальном требовании к опе-
операторам Аа.
ГЛАВА 6
ПОВЫШЕНИЕ ТОЧНОСТИ ПРИБЛИЖЕННЫХ РЕШЕНИЙ
ПО РИЧАРДСОНУ
Построение приближенных решений высокой точности является
весьма актуальной задачей вычислительной математики. Известны
различные подходы к построению таких решений. Наиболее ши-
широкую сферу приложений нашли разностные и вариационно-
разностные схемы повышенной точности — метод Рунге —Кутта,
метод предиктор-корректор и экстраполяция Ричардсона.
Основное внимание в настоящей главе будет уделено второму
подходу, который идейно восходит к Ричардсону [4] и назван им
экстраполяцией к пределу. Метод состоит в использовании после-
последовательностей сеток и соответствующих им однотипных аппрок-
аппроксимаций для построения приближенных решений заданного по-
порядка точности. Применение такого подхода позволяет использо-
использовать в расчетах только стандартные разностные аппроксимации
задач первого и второго порядка точности.
В настоящее время усилиями советских и зарубежных мате-
математиков обосновано применение экстраполяции к пределу для
самых разных задач, включая нелинейные. Из всего многообра-
многообразия этих задач автором отобраны и далее излагаются наиболее
простые.
6.1. Обыкновенное дифференциальное уравнение
первого порядка
В этом параграфе на примере простейшего линейного уравне-
уравнения мы детально рассмотрим эффект от применения экстраполя-
экстраполяции Ричардсона по шагу разностной сетки.
Пусть и (t) — решение дифференциального уравнения
u'+a(t)u=*f(t),
, 1),
с начальным условием
Относительно задачи A.1), A.2) предполагается, что
а@2*0, *е@, 1),
A.1)
A.2)
A.3)
6.1]
ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ ПЕРВОГО ПОРЯДКА
289
и гладкость всех функций достаточна для проведения дальней-
дальнейших выкладок.
Построим равномерное разбиение отрезка [0, 1] «целыми»
узлами
'/ = /*, / = 0, 1, ..., М A.4)
(М целое) с шагом т=1/М и с «промежуточными» узлами
, / = 0, 1, ..., М-1. A.5)
В соответствии со схемой Кранка —Николсона (см. 5.2) заменим
исходное дифференциальное уравнение A.1) в промежуточных
узлах приближенной системой алгебраических уравнений
/ = 0, 1, ..., М-1.
Если к этим формулам добавить начальное условие
«° = «о,
то все «> могут быть определены рекуррентно:
/=1, 2 М.
A.6)
A.7)
A.8)
Как уже не раз отмечалось, разностная задача A.6), A.7) имеет
второй порядок аппроксимации. Из рассуждений 5.2 с заменой
положительно определенной матрицы Л' на положительное
число а1 +1/2 вытекает оценка устойчивости
l >/»|. A.9)
max
/ < М - 1
Поэтому, согласно 1.4, решение разностной задачи прибли-
приближает решение дифференциальной задачи со вторым порядком
точности
iuy^C,?*, A.10)
max
о ^ / < м
где Ci — постоянная, не зависящая от т.
Проиллюстрируем эти теоретические оценки практическими
расчетами на ЭВМ для уравнения
u'+tu=*t, *е@, 1), A.Ц)
с начальным условием
и@)=2. A.12)
Легко проверяется, что точным решением задачи A.11), A.12)
является функция
ы(/)=е-<72+1. A.13)
10 Г. И. Марчук
290
ПОВЫШЕНИЕ ТОЧНОСТИ ПРИБЛИЖЕННЫХ РЕШЕНИЙ
[ГЛ. 6
Численный эксперимент состоял в построении приближенного
решения задачи A.4)—A.8) для М, равного последовательно 10,
20, 50, 100, 200, и в определении величины
?= max \u'-{u)'\. A.14)
Для наглядного изображения зависимости величины ? от М ре-
результаты расчетов приведены на рис. 18 в логарифмических
координатах.
Как легко видеть из рисунка, численные эксперименты под-
подтверждают оценку A.10). Дальнейшее сопоставление результатов
счета и наклона теоретической
прямой указывает на неулуч-
^s шаемость оценки A.10) по по-
*>ч рядку, т. е.
Х |=з: С2т2 A.15)
¦ч
хч с некоторой положительной кон-
чх стантой С2, не зависящей от т.
ss Таким образом, максимальная
4 погрешность приближенного ре-
решения A.14) оказалась вели-
¦- -*> чиной порядка xv с показателем
Рис. 18.
Детальные наблюдения не
максимальной погрешности, а
погрешности приближенного ре-
решения в каждой точке разностной сетки позволили Ричардсону
в 1910 г. выдвинуть гипотезу о следующем поведении погреш-
погрешности приближенного решения при т-vO:
= 0,
A.16)
При этом главная часть погрешности т.2 (v)i является произведе-
произведением т2 на значения в узлах разностной сетки функции v (t),
не зависящей от т, а остаточный член ц' для всех / = 0, I, ..., М
является величиной О (т.4).
В этом разделе мы ставим целью обоснование этого факта
для задачи A.1)—A.3).
Обоснование обычно проводится в три приема. Сначала
строятся некоторые необходимые услозия для выполнения A.16),
затем из них конструируется краевая задача, решением которой
будет функция v(t), а после этого уже доказывается ограничен-
ограниченность сеточной функции т//т4.
Итак, если соотношение A.16) выполнено, то можно записать
.»)/ + ..., / = 0, 1, ...,М, A.17)
6.1]
ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ ПЕРВОГО ПОРЯДКА
29!
где предположено, что остаточный член является величиной О (т4).
Зафиксируем / и, подставляя значения и1 в уравнение A.6), по-
получим
;
~
+ д /
Используя разложение Тейлора для функций и и v:
I/2+..., A.18)
приведем каждое слагаемое к значению функции в узле /+1/2:
Величины порядка О (т°) исключаются ввиду выполнения урав-
уравнения A.1) в узле /+1/2, поэтому для достижения равенства
при т-vO необходимо выполнение соотношения
24'
Отдельно рассмотрим равенство A.17) для / = 0:
A.19)
(v)° + ... A.20)
Из начальных условий A.2) и A.7) следует равенство и° = и0;
отсюда при т-vO приходим к условию для у0:
(у)° = 0. A.21)
На этом построение необходимых условий, вытекающих из ра-
равенства A.17), заканчивается. Теперь для определения функ-
функции v (t) потребуем большего: пусть A.19) выполняется не только
в узлах сетки, но и на всем интервале @, 1), т. е. справедливо
равенство
v>{t)+a{t)v{t) = -~u'"{t)-\au"{t), t<=@, 1). A.22)
Если это уравнение (относительно функции v (t)) дополнить на-
начальным условием
t»@) = 0, A.23)
вытекающим из A.21), то получается дифференциальная задача,
имеющая единственное достаточно гладкое решение v(t), причем
независимость функции v от т очевидна.
10'
292
ПОВЫШЕНИЕ ТОЧНОСТИ ПРИБЛИЖЕННЫХ РЕШЕНИИ
ГГЛ. в
Докажем теперь, что сеточная функция г\, определяемая М -\-1
соотношением
V = «^-(«y-x2(yy, A.24)
будет иметь своими значениями величины порядка О (т4).
Для этого зафиксируем некоторое / и подставим функцию ц
в разностный оператор задачи A.6):
Преобразуем правую часть этого соотношения. Из формулы A.6)
следует, что два первых слагаемых правой части равны числу
fi + '/2. Все функции в последующих слагаемых приведем к зна-
значениям в узле /+ 1/2, используя разложение A.18) с остаточ-
остаточными членами в форме Лагранжа:
24'
24
где I/ — некоторые точки интервала (tjt ^+)
Вспоминая, что функция и является решением уравнения A.1),
а у —решением уравнения A.22), упростим последнее равенство:
Если функции и и v имеют на отрезке [0, 1] непрерывные про-
производные, участвующие в A.26), то правая часть A.26) представ-
представляет собой величину, модуль которой ограничен числом С3т4
с константой С3, не зависящей от т. Используя этот факт, спра-
справедливый для всех / = 0, 1, ..., М, и оценку A.9), получаем
Вследствие A.21), A.7) и A.23) из определения ту вытекает, что
rf = O. Поэтому
| VI =s= С3т4, / = 0, 1, ..., М, A.27)
и гипотеза A.16) доказана.
ел]
ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ ПЕРВОГО ПОРЯДКА
293
Теперь изложим метод повышения точности, основанный на
этом разложении.
Пусть их и нт/2 — решения двух приближенных задач A.6),
A.7) с шагами т и т/2 соответственно. Несмотря на то, что точ-
точность каждого из решений является величиной порядка 0(т2),
мы довольно просто построим из них решение с четвертым по-
порядком точности на сетке с шагом т. Пусть 2у = т,— произволь-
произвольная точка разностной сетки с шагом т; тогда линейная комбинация
^ = y"i-y«?/2 A-28)
приближает точное решение и с четвертым порядком точности по т:
^С4т4, / = 0> 1, .... Л1. A.29)
с константой С4, не зависящей от т.
Докажем это. В точке /т справедливы разложения A.16) для
обоих приближенных решений
Поэтому из A.28) имеем
Отсюда вытекает, что
Учитывая оценку A.27) для функции т^, получаем неравенство
4.Г ^ 4- Г т*-ь
У °3 Тб" + °3 ~Г ~ Тг
откуда следует A.29) при условии, что С4 = 5/12С3.
Следует отметить, что сформулированный подход может быть
распространен на случай неравномерных сеток. Однако в этом
случае требуется более сложный анализ.
Возможно дальнейшее обобщение в сторону увеличения числа
слагаемых разложения A.16), что приводит к построению прибли-
приближенного решения с порядком точности более четвертого. Пример
такого обобщения будет приведен в следующем параграфе.
и@) = 0,
причем предполагается, что
294 ПОВЫШЕНИЕ ТОЧНОСТИ ПРИБЛИЖЕННЫХ РЕШЕНИИ ГГЛ. 6
»
6.2. Одномерное уравнение диффузии
В этом параграфе будет изучаться задача Дирихле для урав-
уравнения диффузии простейшего вида:
*е=@, 1), B.1)
= 0, B.2)
B.3)
а гладкость функций q, f и, следовательно, и достаточна для
проведения последующих выкладок.
Сначала мы рассмотрим на примере задачи B.1), B.2) моди-
модификацию экстраполяции к пределу, разработанную в последние
годы применительно к вариационно-разностному методу Галёркина.
Далее будет изучена экстраполяция к пределу для разностных
схем, дающая приближенные решения с точностью О (Л2*) для
?2г2 при /z-vO.
6.2.1. Метод Галёркина
В отличие от вариационно-разностных методов высокой точ-
точности, основанных на применении большего, чем обычно, числа
базисных функций высокой гладкости (пример таких базисных
функций приведен в 2.4), здесь излагается метод повышения точ-
точности приближенных решений, опирающийся на линейное комби-
комбинирование решений вариационно-разностных задач с разными
шагами сетки при использовании только кусочно-линейных базис-
базисных функций.
В целях построения приближенной задачи разобьем интервал
[0, 1] на N равных частей длины h=\/N точками
xk = kfi, /г = 0, 1 N, ¦ B.4)
и построим базисные функции ak из 2.3.2, которые имеют вид
0, если * 6= ( — оо, **_,],
(х);
1+-
если
если х
(xkt
О, если хе=[хш, +оо),
k=l, 2 N-l.
Умножим уравнение B.1) на каждую из базисных функций и про-
проинтегрируем полученные равенства. Если функция и (х) — решение
в-2] ОДНОМЕРНОЕ УРАВНЕНИЕ ДИФФУЗИИ
задачи B.1), B.2), то в результате получим тождества
295
~ J (-?-
jj
:=1 N-l. B.5)
Преобразуем их, проводя интегрирование по частям и используя
условия (ok(x/t±\) — 0:
du
Введем некоторые обозначения, упрощающие дальнейшие
выкладки:
(v, w) = j v (х) w (х) dx, [v, w] = J (-g. g- + qvw) dx.
о о
С их помощью предыдущие равенства записываются в виде
[«, ш*] = (Д щ), /=1, 2, .... N-l. B.6)
Основываясь на этих тождествах, будем искать приближен-
приближенное решение uh (x) в виде
N—\
B.7)
с некоторым набором констант а!\, определяемых из равенств,
полученных подстановкой ин (х) в B.6) вместо и (х):
N — l
1=1
= (/, (ok), k=*l, 2 N-l. B.8)
Система B.8) для наглядности может быть записана в матрич-
матричном виде
b,
a-i
0
0
I)
Сл
Ьг
a3
0
0
0
Сг
b3
0
0
... о
... о
... 0
... bN
... aN
0
0
0
-2 cN_
-I 6Л_
2
<
<
<
— 2
- 1
g|
S/V — 2
B.9)
296 ПОВЫШЕНИЕ ТОЧНОСТИ ПРИБЛИЖЕННЫХ РЕШЕНИИ
с элементами
1 ,
[ГЛ. 6
1 i
Н
¦*—
&*=4г
«*+i, Щ],
xk-l *k
Очевидно, что функция, не являющаяся полиномом степени
меньше 2, не может быть приближена равномерно на отрезке [0, 1]
с точностью более О (/г2) кусочно-линейными функциями с бази-
базисом из vfi (х). Поэтому трансформируем гипотезу Ричардсона
в следующую: для коэффициентов ahk при А-»-0 имеет место раз-
разложение
= 0,1 N,
B.10)
где и (х) — решение задачи B.1), B.2), v (x) — некоторая гладкая,
не зависящая от А функция, г}? — сеточная функция, модуль
которой равномерно по k ограничен величиной порядка О(А4):
K\^cihl BЛ1)
с константой Сь не зависящей от А и k.
Обоснование разложения проведем вновь в три этапа. Сна-
Сначала мы приведем некоторые рассуждения, поясняющие выбор
функции v (х), найдем эту функцию, а затем докажем оценку
B.11) для остаточного члена.
Итак, если соотношение B.10) имеет место, то, выделяя во
всех выкладках только два главных члена, получим
at = и (хк) + №v (xk) + О (А«).
Подставим это выражение в систему B.9):
kl) + bku (xk)+cku
B.12)
B.13)
=l, 2, ..., N-l,
где для общности положено а1 = с^-1=0. Величина остаточного
члена О (А4) не столь очевидна, так как простейшие подсчеты
6.2]
ОДНОМЕРНОЕ УРАВНЕНИЕ ДИФФУЗИИ
297
дают величину О (А3). Однако мы дальше покажем, что эта вели-
величина еще меньше.
По значениям функций и (х) и v (x) в узлах разностной сетки
построим непрерывные функции
JV — 1 N—1
«(*) = 2 " м ш' м и д (*)= 2 v м ш' (*)•
называемые далее кусочно-линейным и восполнениями и{х) я v (x)
соответственно. Вспоминая вид коэффициентов ak, bk, ck, gk,
приходим вместо B.13) к равенствам
[й, ш,] + А2[б, <»*] + О(А«) = (Л щ), А=1, 2, .... N-1. B.14)
Интегрированием по частям легко выводятся равенства
(X
jU (Xk) ~jU
•=¦¦*¦
j1
о о
k=*l, 2, .... yV-1.
Используем теперь разложения Тейлора для функций u(x)av(x):
и{х) = и (xk) + (x~ xk) -g- (xk) + {x-2XkJ -g- (xk) + О (А3),
<? (x) = <
- х„) -g-
dx2K~k) + O(h3)
на каждом интервале (xk-i, xk+i) для доказательства равенства
где
d*-u
Так как
й(х) =
1( xk),
(X -
то
и (x*) + (x* - x) и' (**) + (хк - x) ~ и" (хк) + О (А3)
для x<=(xk и xk),
и (хи) -\-(х-х„)и' (х„) +{х- хк) \ и' (xh) + О (А3)
ДЛЯ Х<=Е(Хк, Хк+1).
298
ПОВЫШЕНИЕ ТОЧНОСТИ ПРИБЛИЖЕННЫХ РЕШЕНИИ
[ГЛ. 6
Поэтому, используя последнее равенство и разложения B.16)
и проводя интегрирование полиномов под интегралами, получим
(qu, iah) = q{)
-h3(~-u (xk) q" (хк) + ±и' (хк) q (xk) + ~ и" (xk) q(xk)) + O (A3),
(qu, со*) = hu (xk) q (xk) -h3~(u (xk) q (xk))" + 0 (A*),
h*(w, со*) =
Сопоставление коэффициентов при членах порядка А и А3 и
доказывает равенство С2.17).
Объединяя равенства B.15) и B.17), получим
[и, ©*] = [«, со*] + А2 (да, со*) + О(А4). B.18)
Проведение этих выкладок для функции v(x) с меньшим чис-
числом членов разложений B.16) дает соотношение
A2 (v, со*) = А2(у, со*) + О(А*).
Привлекая для преобразования этого равенства тождество B.15),
справедливое для v (x), имеем
А2[5, со*] = А>, ю*] + 0(А«). B.19)
Наконец, замена слагаемых в левой части B.14) с помощью B.18)
и B.19) имеет своим следствием равенства
[и,
k=\, 2, ..., jV — 1.
*) = (/, со*), B.20)
Так как мы хотим выполнения тождества для всех А, то
потребуем совпадения коэффициентов при главных степенях.
Сравнение коэффициентов для степеней А0 и h2 дает равенства
[и, ©*] = (/, со*),
[v, e)J = _(a,f со,),
k=l, 2 jV— 1.
B.21)
B.22)
Этими равенствами построение необходимых условий заканчи-
заканчивается. Первая группа этих равенств совпадает с B.6), являю-
являющимся следствием уравнения B.1). Для выполнения последующих
равенств достаточно взять в качестве v (x) решение краевой
задачи
--5Г + ?»=-И*). B-23)
и@) = уA) = 0. B.24}
6.21
ОДНОМЕРНОЕ УРАВНЕНИЕ ДИФФУЗИИ
299
Таким образом, построение уравнения, определяющего функ-
функцию v(x), можно считать законченным. Остается доказать огра-
ограниченность B.11) сеточной функции, определяемой равенствами
П2 = «2-и (**)-#»(**), * = 0, 1 N. B.25)
Для доказательства построим по значениям т$ в узлах раз-
разностной сетки кусочно-линейное восполнение
/V —1
л*М-2
Тогда B.25) перепишется в виде
ту (Х) = uh (x) -й(х)~ h2v (х),
что влечет равенство интегралов
[f[(x), со*] = [ыл, щ]-[й, со*]-А2[5, со*].
B.26)
Полагая, что функции и и q имеют непрерывные произвол
ные на [0, 1] вплоть до четвертого порядка, получим разложе-
разложения Тейлора для функции и
з
d'u (y \ (х-**I , (x — *k)* d4" (x\
T\
41
аналогичное разложение для функции q и разложение для функ-
функции v(x), которые короче на два члена:
(Хъ-и
где точки ?,1 и р* лежат в интервале (xk-\, **+i). С указанными
разложениями повторим выкладки, проведенные ранее для полу-
получения необходимых условий. Тогда равенство B.26) приводится
к следующему виду:
[Л, «ft] = crft, B.27)
причем | сг* | «s С2А5; последнее обусловлено сокращением всех
членов порядка huh3 ввиду выбора функции v (x). Напомним,
что v(x) является решением задачи B.23).
Умножим каждое из равенств B.27) на ц? и сложим по всем /:
Заменим, далее, значения а, и т]* на максимальные. Тогда будем
иметь
[fj\ T|"]^WC2A5 max j rtf [ = CJi* max |i"i*(x)|. B.28)
300 ПОВЫШЕНИЕ ТОЧНОСТИ ПРИБЛИЖЕННЫХ РЕШЕНИЙ [ГЛ. 6
Теперь получим оценку снизу. Для этого привлечем неравен-
неравенство, являющееся следствием неравенства Коши —Буняковского
для функции у (х), равной нулю в точке х = 0:
х Ix \ 1/2 /лс \1/2
\у(х)\= \'()d [\\ [\)
\y'(t)dt
/2 /лс
\\dt\ [\(y'№dt
o / \o
l/2
l/2
Так как f\h (x) равна нулю в точке х = 0, то
, 1],
и из оценки B.28) получаем
max |fj"(*)|2s?[fj\ fj'
max
Таким образом,
B.29)
что и заключает обоснование разложения B.10).
Дальнейшие рассуждения аналогичны тем, которые были даны
в предыдущем параграфе. А именно, построим две равномерные
сетки с шагами А и Л/2 и найдем решения ан и ah/2 двух задач
B.9), соответствующих этим сеткам. Если xk = kh — точка сетки,
то решение с четвертым порядком точности строится в виде
линейной комбинации
U* = i<2-Jak- B-30)
Доказательство практически ничем не отличается от того, кото-
которое применяется в случае обыкновенных дифференциальных
уравнений первого порядка, и дает оценку
\uk-u(xk)
12
СМ*.
B.31)
Описанный метод обобщается на случай других краевых задач.
Кроме того, он может быть применен также и для решения
краевых задач для квазилинейных уравнений и уравнений с пе-
переменными коэффициентами.
6.2.2. Разностный метод
Возвращаясь к задаче B.1), B.2), изложим на ее примере
различные аспекты построения разложений по степеням /г2, что
даст нам повышение точности по h до шестого порядка и более.
6.2] ОДНОМЕРНОЕ УРАВНЕНИЕ ДИФФУЗИИ
Построим разностную сетку
xk = kh, k = 0, I, .... N,
301
с равномерным шагом h=l/N и от задачи B.1), B.2) перейдем
к приближенной:
=1, 2, .... N-l,
uo = uN = O B.32)
со вторым порядком аппроксимации.
Для этой задачи выдвинем следующую гипотезу о поведении
приближенного решения при A-vO:
i— 1
/=о
= 0, 1, ..., N.
B.33)
Здесь у. (л:) —гладкие, не зависящие от h функции, а ^ — сеточ-
сеточная функция, модуль которой равномерно по h ограничен вели-
величиной порядка /г2':
| Л» | «? Ci/г2' B.34)
с константой Сх, не зависящей от h и k.
Первый этап обоснования разложения (пояснительные пост-
построения) опирается на формулу Тейлора
(±Л), dr
B-35)
В результате подстановки разложения B.33) в левую часть
системы B.32) и использования формулы Тейлора B.35) полу-
получим равенства
'
Приведем в них подобные члены по степеням А:
/=o
6=1, 2, ..., N-l.
)f
B.36)
Разумеется, из непосредственной подстановки разложений не
следует, что остаточный член формулы B.36) имеет вид О (/г2/);
строгое обоснование этого факта будет дано ниже.
302
ПОВЫШЕНИЕ ТОЧНОСТИ ПРИБЛИЖЕННЫХ РЕШЕНИЙ
[ГЛ. 6
Приравнивая коэффициенты при величинах порядка h°, h% и
далее, получаем систему равенств
d2v
- -5jT (xk) + q (Xk) vQ (xk) = fk;
~ ~Ш (**) + q (Xk) vj (xk) - 2 B/-2,+2)i dxy-ll* (Xk) = 0,
/=1,2,3 1-Х, k=l, 2, ..., N-l.
Для точек х0 = 0 и л:^ = 1 ввиду однородности краевого усло-
условия B.2) разложение B.33) дает равенства
= 0,
B.37)
На втором этапе обоснования последовательно найдем функ-
функции Vj(x) как решения задач Дирихле для одного и того же
уравнения, но с различными правыми частями:
г=0
B.38)
39)
/=1, 2 /-1.
Легко заметить, что функция v0 (x) тождественно равна и (х)
решению задачи B.1), B.2).
Теперь определим сеточную функцию цн равенствами
Ё
/=о
и приступим к последнему этапу обоснования разложения —дока-
—доказательству оценки B.34). С этой целью подставим r\h в разност-
разностный оператор задачи B.32) и воспользуемся формулой Тейлора
B.35), но с остаточным членом в форме Лагранжа
*. B.40)
/=о
2 B/-
B/-2г+2I
6.2)
ОДНОМЕРНОЕ УРАВНЕНИЕ ДИФФУЗИИ
303
Ввиду того, что
е2 =
Л2/-2/-+4 т
B1-
@, 1), для равномерной ограниченности
¦С, до-
догде ёл
статочно, если q(x) и f(x) будут иметь 2/ непрерывных произ-
производных на [0, 1]. Это обеспечивает необходимую гладкость всех
функций Vj(x), имеющих по 21 — 2/ + 2 непрерывных производных
на [0, 1].
Учитывая теперь способ, с помощью которого получены
функции Vj(x), сократим ряд слагаемых в правой части B.40):
*=1, 2, .... tf. B.41)
Дополнительно к этой системе уравнений для цк выполняются
равенства
вытекающие из способа определения функции r\h в граничных
узлах и краевых условий задач B.32), B.38) и B.39).
Как следует из 2.1, система B.41), B.42) разрешима. Дока-
Докажем, что для решения справедлива оценка
max I Yj'< | sS C.2h2'. B.43)
о < a < .v ' '
Для этого умножим каждое уравнение B.41) на ц\ и сложим:
N /V-1
п=к21 2
к=\
к=\
Отбросив в левой части положительные слагаемые qk \
заменив е?, т]? на большие, получим
N
2 K-^
B.44)
Для оценки снизу привлечем неравенства предыдущего пункта
(в разностном виде), справедливые для любой сеточной функ-
функции у, равной нулю в узле х0 = 0:
\Ук
^-i ,
7=1
1/2
\1/2
304 ПОВЫШЕНИЕ ТОЧНОСТИ ПРИБЛИЖЕННЫХ РЕШЕНИИ
Так как rjg = 0, то отсюда, полагая yk — r\hk, получим
[ГЛ. 6
Объединение этого неравенства с B.44) дает неравенство B.43)
с точностью до множителя
-г- max \r\l\.
Тем самым неравенство B.34) доказано с константой С1 = С2, и
обоснование разложения B.33) закончено.
Рассмотрим теперь метод повышения точности приближенных
решений до порядка hn. Пусть х — общая точка / разностных
сеток с шагами hu h2, ..., ht. Построим на каждой сетке при-
приближенную задачу B.32) и найдем ее решение и '. Таким обра-
образом, в точке х имеется / приближенных значений и '(х). Если
числа yj являются решением системы
2 T/=l. S h**y= 0, s=l, 2, ..., /-1, B.45)
/i • ¦
1 = 1
то решение с порядком точности 2/ дается формулой
Л.-
B.46)
Докажем это. При подстановке / разложений в формулу B.46)
'
вместо и ' получим
п (х) = vo (х) i] Y, +
2 A?S
Ввиду того, что уу являются решением системы B.45), это равен-
равенство упрощается:
Я (*) = »„(*)+2 у,чн<(х).
Вспоминая, что о0==н и оценку для r\hl(x), получим
|в (*)-«(*)
B.47)
Но этим неравенством доказательство точности не заверша-
завершается, так как величины \у/\ могут оказаться сравнимыми с по-
положительными степенями N. Другим неясным вопросом является
6.2]
ОДНОМЕРНОЕ УРАВНЕНИЕ ДИФФУЗИИ
305
разрешимость системы B.45). Оба эти вопроса сводятся к иссле-
исследованию определителей Вандермонда
1 1 ... 1
.'-1
Как известно,
= П
B.48)
Так как определитель матрицы системы B.45) является опре-
определителем Вандермонда v(h\, A|, ..., AJ), то из формулы B.48)
видно, что он не обращается в нуль, если все Л/ попарно раз-
различны. Применим теперь метод Крамера для решения системы
B.45):
v(h\, .... h)_v 0, h)+1 Щ)
v(h\,
откуда
B.49)
Предположим теперь, что hf занумерованы по возрастанию и
^1^1+Сз B.50)
с константой С3 > 0; тогда очевидно, что
^-Зэ1+2С3 для />1.
Поэтому
hl ' <-o7^. если t</,
h)-h\ /^
—i— = 1 + -К7Г-, если i > /.
Из соотношения B.49), используя эти неравенства, получим
оценку
что и доказывает ограниченность всех
306
ПОВЫШЕНИЕ ТОЧНОСТИ ПРИБЛИЖЕННЫХ РЕШЕНИЙ
[ГЛ. 6
Таким образом, при условии B.50) необходимый набор уг
всегда существует, единствен и оценка погрешности приближен-
приближенного решения B.46) имеет вид (продолжение неравенства B.47)
с учетом B.51))
'1С,
B.52)
Этим неравенством доказательство завершается.
Обсудим теперь одно неудобство, не отмеченное ранее и ярко
проявляющееся для количества разностных сеток, большего двух.
Оно заключается в том, что мы указали способ нахождения ре-
решения высокой точности лишь в точках, являющихся узлами
всех разностных сеток, а таких точек может оказаться мало.
Даже в наиболее благоприятной ситуации выбора сеток с ша-
шагами h, /г/2, ..., h/l общих узлов только АЛ Для избежания
потери большого количества вычисленных значений и для вычис-
вычисления приближенных решений высокой точности возможно при-
применение методов интерполяции сплайнами, полиномами Ньютона
или Эрмита. Мы рассмотрим простейшую ситуацию с примене-
применением интерполяционных полиномов Ньютона.
Пусть / — произвольная точка отрезка [0, 1]. Зафиксируем
произвольный номер / и рассмотрим сетку с шагом hj. На этой
сетке у точки t имеются 2/ близлежащих узлов. Построим по
значениям приближенного решения uhi в этих узлах интерполя-
интерполяционный полином Ньютона степени 2/—1, который обозначим
через Р/ (,т; и"'). Из разложения B.33) следует, что
Р,(х; и'Ч) = 2 Ь"Р* (*: ок)+Р,(х; if).
Так как для гладких функций полином интерполирует их зна-
значения с точностью O(h2'), а его коэффициенты не зависят
от Л, то
t: «"') =
(t) + О (hf).
B.53)
Разложение B.53) справедливо для /=1, ..., /, поэтому оно
дает возможность применить способ уточнения решений
п @ = S V/P,- U' и''') B-54)
с теми же весами у/ из B.45). В этом случае
V
6.3]
МЕТОД РАСЩЕПЛЕНИЯ ДЛЯ ЭВОЛЮЦИОННОЙ ЗАДАЧИ
§0?
с константой С4, в которую входят константы интерполяционной
формулы и погрешности решения в узлах сетки. Доказательство
аналогично проведенному выше для точки, общей для всех сеток,
и поэтому опускается.
6.3. Метод расщепления для эволюционной задачи
В этом параграфе изучается дифференциальная задача
*i + A(f)u = f(f), *«=@, 1), C.1)
и @) = и0,
где A (t) — матрица с п х п элементами — функциями, a u(t) и
f(t) — вектор-функции с п компонентами. Предположим, что мат-
матрица А представима в виде суммы
где At (t) — положительно полуопределенные матрицы для каждого
*е[0, 1].
Разобьем отрезок [0, 1] на М равных частей точками
/ = 0, 1 М,
C.2)
с шагом т=1/М. Для численного решения задачи C.1) рассмот-
рассмотрим неявную схему расщепления
C.3)
/=1, 2, .... М, и° = и0,
где Е — единичная матрица.
Для я-мерных векторов введем норму
п \1/2
Из 4.4.3 вытекает оценка, характеризующая устойчивость этой
схемы:
max ||и/1|<||и»i+ max ||//fl. C.4)
о < / < м о < ,¦ < м
Поставим себе цель —доказать разложения
= 0, 1, .... М,
C.5)
г ~\
306
ПОВЫШЕНИЕ ТОЧНОСТИ ПРИБЛИЖЕННЫХ РЕШЕНИЙ
ГГЛ. 6
Таким образом, при условии B.50) необходимый набор у*
всегда существует, единствен и оценка погрешности приближен-
приближенного решения B.46) имеет вид (продолжение неравенства B.47)
с учетом B.51))
'"'V- B.52)
Этим неравенством доказательство завершается.
Обсудим теперь одно неудобство, не отмеченное ранее и ярко
проявляющееся для количества разностных сеток, большего двух.
Оно заключается в том, что мы указали способ нахождения ре-
решения высокой точности лишь в точках, являющихся узлами
всех разностных сеток, а таких точек может оказаться мало.
Даже в наиболее благоприятной ситуации выбора сеток с ша-
шагами /г, /г/2, ..., h/l общих узлов только N. Для избежания
потери большого количества вычисленных значений и для вычис-
вычисления приближенных решений высокой точности возможно при-
применение методов интерполяции сплайнами, полиномами Ньютона
или Эрмита. Мы рассмотрим простейшую ситуацию с примене-
применением интерполяционных полиномов Ньютона.
Пусть t — произвольная точка отрезка [0, 1]. Зафиксируем
произвольный номер / и рассмотрим сетку с шагом hj. На этой
сетке у точки t имеются 2/ близлежащих узлов. Построим по
значениям приближенного решения uh1 в этих узлах интерполя-
интерполяционный полином Ньютона степени 2/—1, который обозначим
через Р,-(х; и"'). Из разложения B.33) следует, что
/—i
РАх- uhf) = V hikPu(x- иЛ 4- Р- (х- r\h)
Так как для гладких функций полином интерполирует их зна-
значения с точностью О (/г2'), а его коэффициенты не зависят
от h, то
P,(f. «"'¦) =
/—I
B.53)
k=0
Разложение B.53) справедливо для /=1, ..., /, поэтому оно
дает возможность применить способ уточнения решений
Я @=2 y,P,it; uhi) B.54)
с теми же весами yf из B.45). В этом случае
6.3]
МЕТОД РАСЩЕПЛЕНИЯ ДЛЯ ЭВОЛЮЦИОННОЙ ЗАДАЧИ
§0?
с константой С4, в которую входят константы интерполяционной
формулы и погрешности решения в узлах сетки. Доказательство
аналогично проведенному выше для точки, общей для всех сеток,
и поэтому опускается.
6.3. Метод расщепления для эволюционной задачи
В этом параграфе изучается дифференциальная задача
*е@, 1), C.1)
dt
и @) = «о,
где A (t) — матрица с пхп элементами —функциями, a u(i) и
f(t) — вектор-функции с п компонентами. Предположим, что мат-
матрица А представима в виде суммы
л @ = ^@ + ^.@,
где А{ (t) — положительно полуопределенные матрицы для каждого
*е[0, 1].
Разобьем отрезок [0, 1] на М равных частей точками
/ = 0, 1, .... М,
C.2)
с шагом т=1/М. Для численного решения задачи C.1) рассмот-
рассмотрим неявную схему расщепления
C.3)
• 1 о Л/f О
/ === 1, z, ... , IVi, ti ^ UQt
где Е — единичная матрица.
Для я-мерных векторов введем норму
/ п \1/2
И°Ы2
Из 4.4.3 вытекает оценка, характеризующая устойчивость этой
схемы:
max |]«/||^||«о1+ max ||//||. C.4)
C.5)
Поставим себе цель —доказать разложения
i-i
308
ПОВЫШЕНИЕ ТОЧНОСТИ ПРИБЛИЖЕННЫХ РЕШЕНИЙ
ГГЛ. 6
с гладкими, не зависящими от т. вектор-функциями vk и сеточной
вектор-функцией цх, удовлетворяющей неравенству
KHQt.' (з.б)
с не зависящей от т и k константой Сг.
Для этого запишем систему C.3), исключив промежуточные
значения ы'~1/2:
(Е + хА1 (/,)) (Е + тА, ty)) uf = uf-1 + т/Л C.7)
Предположим вначале, что разложение C.5) существует. Подста-
Подставим в C.7) вместо и/ разложение C.5). Получим
(Е -f xA 1 (t,)) (E -f xA2 (tj)) 2 т*Уй (tj) =
i—i
*=o
,-!> + 0 (t'+1) -f т/Л C.8)
Для каждой функции уй применим разложение Тейлора в точке //:
i—k
-= 2 e&L
1 = 0
после чего приведем подобные члены по степеням т в правой
части C.8) и перемножим суммы в левой части:
'
+о (
Так как это равенство справедливо для всех т, приравняем коэф-
коэффициенты при старших членах:
= 2, 3, .... /-1,
6.3]
МЕТОД РАСЩЕПЛЕНИЯ ДЛЯ ЭВОЛЮЦИОННОЙ ЗАДАЧИ
309
Отбросим первое тривиальное равенство, сократим vk, встре-
встречающиеся в обеих частях равенства, и поменяем порядок сла-
слагаемых:
к—\
k=l, 2, .... /-1.
Теперь получим равенства, вытекающие из краевого условия
и — и0 и разложения C.5) в точке t0:
uo = u = vo(to), »»(*„) = 0, *=1 /-1. C.10)
Продолжим равенства C.9) с точек tf на весь интервал @, 1)
и дополним их краевыми условиями C.10). Имеем
, 1),
у0 @) = «о,
—
C.11)
C.12)
Л=1, 2, .... /-1.
Воспользуемся полученной системой для задания функций vk,
а именно: положим, что vk{t) — это последовательно найденные
из системы C.11), C.12) решения эволюционных задач. Очевидно,
что функция vo(x) совпадаете и {х) — решением задачи C.1), C.2).
Определим теперь сеточную вектор-функцию цх:
< = «/-S *>*У- /=°. 1 м,
к=0
и докажем неравенство C.6). Для этого подставим в равенство
C.7) вместо и> сумму
и применим разложение Тейлора для компонент векторов vk
с остаточным членом в форме Лагранжа:
4 = 0
*—1
4 = 0 i = 0
1
к =0
310
гювышениё точности приближенных решений
ггл в
Здесь для достаточно гладких компонент векторов vk остаточный
член имеет ограниченную норму
|е/|^С2т'+1 C.14)
для любых т и |.
Учитывая способ получения вектор-функции vk, приходим от
C.13) к равенству
(Е + хА, (*,)) (Е + тА2 (*,)) т]( = цМ + е(.
Из этого равенства на основании оценки устойчивости C.4) не-
немедленно следует, что
max
max
С2х'
и неравенство C.6) доказано с константой С1 = С2. Возможность
разложения C.5) тем самым доказана. Из него следует описанная
в предыдущем разделе возможность повышения точности до по-
порядка О (У) с той лишь разницей, что веса уг в линейной ком-
комбинации отыскиваются из системы
2
1=1
a=l,2 /-1.
k=\
Так как распространение этого результата на случай боль-
большего числа разбиений матрицы
А (/) =
At(t)
очевидно, то мы укажем еще одну разностную схему C.3), успешно
используемую для квазилинейной задачи
u = f(t, и),
Модификация такова:
(E + xA^tj, ^
(E-\-xA2{tf, uJ
, 1), и@) =
,, ui),
C.16)
xAn(tf, ui
/ = 0, 1, .... M-l,
C.17)
u° = щ.
Доказательство разложения типа C.5) строится аналогично про-
6.4]
ЭКСТРАПОЛЯЦИЯ РИЧАРДСОНА ДЛЯ МНОГОМЕРНЫХ ЗАДАЧ
311
веденному выше с использованием положительной полуопределен-
полуопределенности матриц Ai(t, и) и достаточной гладкости коэффициентов и
решения задачи C.16). Приближенное решение высокой точности
строится также в виде линейной комбинации (с весами yf, най-
найденными из системы C.15)) решений нескольких задач C.17)
с различными кратными шагами хк.
6.4. Экстраполяция Ричардсона
для многомерных задач
В многомерных задачах применение экстраполяции к простей-
простейшим разностным схемам оказывается делом более трудным по
ряду обстоятельств. Мы перечислим главные из них и укажем на
некоторые пути, позволяющие обойти эти трудности.
В качестве модели для применения метода в многомерном
случае рассмотрим двумерное уравнение Пуассона
с краевым условием
А« = / в D
= 0 на 6D.
D.1]
D.2)
В случае, когда область D имеет не гладкую криволинейную
границу 3D, простейшие разностные аналоги вблизи границы не
позволяют разложить ошибку аппроксимации по шагу сетки, ана-
аналогично тому как это делается при разложении ошибки аппрокси-
аппроксимации внутри области. В самом деле, в этом случае представление
*) + •¦¦• D-3)
uh (х) = и (х) -f hivl (х) + №v% (х) 4- •..,
естественное для рассмотренных ранее одномерных задач, уже не
имеет смысла для негладких границ dD. В этом случае вели-
величины Vi в разложении D.3) имеют разрывные данные и не при-
приводят к гладким решениям, которые позволили бы рекуррентно
определять все необходимые функции vk(k<.i).
Поэтому вблизи границы приходится отказаться от простейших
разностных аналогов и применять более сложные, которые обычно
приводят к большому количеству ненулевых коэффициентов урав-
уравнений вблизи границы. В результате этого удается получить
вид погрешности аппроксимации, совпадающей внутри и в пригра-
приграничной полосе области. Что касается метода конечных элементов,
то требование непрерывности вплоть до границы коэффициентов
разложения погрешности аппроксимации приводит к выбору в при-
приграничной полосе более сложных базисных функций, которые также
приводят к большему количеству неизвестных в приграничных
уравнениях.
312
ПОВЫШЕНИЕ ТОЧНОСТИ ПРИБЛИЖЕННЫХ РЕШЕНИЙ
(ГЛ. 6
В том случае, когда граница 3D состоит из отрезков прямых
и возможны простые регулярные построения разностной сетки и
конечных элементов вплоть до границы, применение метода экстра-
экстраполяции становится затруднительным из-за неограниченного роста
производных от решения вблизи углов области. В некоторых за-
задачах производные от решения настолько быстро возрастают
вблизи этих особых точек, что не удается получить даже мини-
минимальную точность. Аналогично обстоит дело с гладкостью реше-
решения вблизи пересечения границы и
/ 4 линий разрыва первого рода коэф-
коэффициентов уравнения. На рис. 19
приведены четыре типа особых точек,
причем первые три могут не дать
обычной точности решения порядка А.
Обойти указанные трудности
~дВ "* можно следующим образом. При по-
построении разностных уравнений на
основе метода Галеркииа целесооб-
целесообразно заменить обычные скалярные
произведения на взвешенные, с весами, стремящимися к нулю при
приближении к особым точкам. Пусть, например, особенность
имеет место в начале координат. Тогда вместо нормы
¦—~—~.
3 П,
Рис. 19.
1/2
D.4)
естественной для задачи D.1), D.2) и функций, обращающихся
в нуль на границе области, используем следующую:
D.5,
Здесь а —степень сингулярности решения, которая априори пред-
предполагается известной. Проводя обычные построения в методе
Галеркина, мы приходим к приближенному решению uh, удовлет-
удовлетворяющему оценке
II"-"AL.#j<cll«-flL.*i, D-6)
где й — интерполянт функции и в пространстве базисных функций.
Необходимо отметить, что возможности этого метода ограни-
ограничены, поскольку для доказательства оценки D.6) необходимо ис-
использовать такие свойства решения, которых в окрестности особых
точек зачастую не оказывается.
Другой возможностью является сгущение разностной сетки
или конечных элементов с тем, чтобы сделать погрешность аппрок-
аппроксимации задачи приемлемой. Эта погрешность слагается из инте-
инте4
6.41
ЭКСТРАПОЛЯЦИЯ РИЧАРДСОНА ДЛЯ МНОГОМЕРНЫХ ЗАДАЧ
313
гралов по элементарным областям, которые оцениваются вели-
величинами вида
I и D.7)
где h[ — диаметр t-й элементарной области или ячейки сетки,
1 и Ik/ — норма функции на этой области, содержащая k-ю произ-
производную, а С—константа, не зависящая от этих множителей. Тогда
разумно потребовать, чтобы величины D.7) оказались одинако-
одинаковыми в D. С этой целью можно уменьшать шаги ht обратно
пропорционально величинам |ы|*, < при подходе к особым точкам.
Однако сгущение сеток нельзя делать чрезмерным, так как число
Рис. 20.
обусловленности алгебраических систем методов Ритца и Галер-
Галеркина существенно зависит от величины
AmaxAmin (hm\n — ПИП hi),
которая оказывается тем большей, чем сильнее сгущается сетка.
В целях сгущения сеток вблизи особых точек используются
подходы, схематически изображенные на рис. 20. При этом обыч-
обычно способ а) оказывается более простым в алгоритмическом смыс-
смысле, так как он влечет за собой незначительное усложнение про-
программы на ЭВМ, в отличие от способа б), который оказывается
несколько сложнее, так как предполагает «склеивание» полярной
сетки с прямоугольной, либо с другими полярными сетками
в случае двух и более особенностей. Однако способ б) экономичнее
с точки зрения общего количества узлов, так как в этом случае
сетка сгущается только около особой точки, в то время как в
способе а) сгущение происходит по линиям, в том числе и вда-
вдали от особой точки.
Рассмотрим теперь ещё один метод повышения точности, суть
которого состоит в том, что к обычным базисным функциям
314
ПОВЫШЕНИЕ ТОЧНОСТИ ПРИБЛИЖЕННЫХ РЕШЕНИЙ
ГГЛ. 6
гл. 2 добавляются дополнительные, детально описывающие пове-
поведение производных от решения в окрестности особой точки.
Такой подход продиктован тем, что для правой части задачи D.1),
D.2) из W% (D) решение и представимо в виде суммы гладкой
функции !/еи* + ! (D) и конечного числа слагаемых, которые
в полярных координатах с центром в особой точке записыва-
записываются в виде
Wi = Hi (ф) г*1 \xflr,
где \i (ф) — аналитическая функция угловой переменной ф, уг —
вещественная положительная константа, р, —целое неотрицатель-
неотрицательное число. Проведение доказательства для каждого конкретного
случая обычно выявляет эти функции с точностью до постоянного
множителя. Таким образом, в методе Галеркина отыскиваются
не только веса в разложении гладкой составляющей по базисным
функциям метода конечных элементов, но и веса особых функций.
Основная трудность применения этого метода состоит в том, что
функции Wi усложняют структуру расположения ненулевых эле-
элементов алгебраической системы, так как носители этих функций
захватывают большое количество элементарных областей.
Использование особых базисных функций, детально описы-
описывающих поведение решения вблизи особых точек, делает возможным
применение внутри области простейших элементов с последующей
экстраполяцией по шагу сетки для достижения высокой точности.
Для задачи D.1), D.2) укажем только общую схему алгоритма
и его обоснования, так как двумерный случай предоставляет
большое число различных модификаций, которые здесь не рас-
рассматриваются.
Необходимо отметить, что исследование повышения точности
привлекает обширную информацию о гладкости решений эллип-
эллиптических уравнений на областях различной формы.
Пусть, для простоты, область является прямоугольником со
сторонами длиной а и Ь. Двумя семействами параллельных линий,
содержащих стороны прямоугольника, построим равномерную
прямоугольную сетку с шагами hx = a/N и hy = b/N соответственно
(целое jV>2). Для окончания триангуляции области в каждом
прямоугольнике сетки проведем диагональ, например, слева вверх.
Для удобства введем параметр h— l/N, характеризующий размеры
сетки и связанный с hx и hy равенствами hx — ahu hy = bh1.
Для каждого внутреннего узла Х{ введем базисную функцию фг
из гл. 2, линейную на каждом треугольнике. Кроме этих (N — IJ
функций, введем дополнительные базисные функции я|)ь равные
функциям Wt в некоторой области особых точек (углов прямо-
прямоугольника и пересечений границы с возможными линиями разрыва
коэффициентов, являющимися линиями разностной сетки) и гладко
продолженные на остальную часть области так, чтобы удовлет-
6.4] ЭКСТРАПОЛЯЦИЯ РИЧАРДСОНА ДЛЯ МНОГОМЕРНЫХ ЗАДАЧ
315
ворить краевому условию D.2). Число таких дополнительных
функций в каждой конкретной задаче зависит от степени точно-
точности, которую мы хотим получить.
В соответствии с методом Ритца или Галеркина мы получаем
решение
(Л — I)8 М
D-8)
(Л — I)8
которое в узлах разностной сетки (вершинах триангуляции)
разлагается по параметру /г:
т— I
и> (X) = и (X) + ? \?% (X) + h*mh (X) D.9)
?— 1
с функциями V[(X), не зависящими от I, и ограниченной сеточ-
сеточной функцией \h (X). В том случае, когда это разложение дока-
доказано, необходимо избавиться от членов порядка /i2, ..., h2m'2,
что и приводит к решению и (х) с точностью порядка h2m.
Обоснование этого разложения основано на возможности
разложения весов а1} и $hk в формуле D.8) также по степеням к.
= v {X,)
т~\
!~l
x (Xt)
D-Ю)
/=1
)
0;
где v(X) — гладкая составляющая решения и (X); функции Z
не зависят от h; сеточная функция щ ограничена при /i
а Ук, Цк.с и Ik.h — числа, причем yk и цк,с не зависят от/i, agftjft
ограничены при /г->0.
Проводя выкладки, вытекающие из разложений D.10), можно
сформулировать условия (вспомогательные дифференциальные
задачи), определяющие функции Zt(X) и константы \]kth которые
являются коэффициентами при функциях фк (X) в разложениях
решений вспомогательных задач на гладкие составляющие и( (X)
и особые функции фА (X). Такая схема реализации, конечно, дает
только указание к возможному подходу, который требует тща-
тщательного обоснования в каждом конкретном случае.
ГЛАВА 7
ПОСТАНОВКА И ЧИСЛЕННЫЕ МЕТОДЫ РЕШЕНИЯ
НЕКОТОРЫХ ОБРАТНЫХ ЗАДАЧ
В современной литературе термин «обратные задачи» исполь-
используется для ряда различных типов задач математической физики.
Мы рассмотрим два типа обратных задач. Первый тип —это
задачи определения состояния некоторого процесса в предыдущие
моменты времени. Примером может служить задача об определении
начального распределения температуры в теле, если известно поле
тепла к данному моменту времени. Второй тип —это задачи,
в которых требуется восстановить оператор с известной структурой,
но с неизвестными коэффициентами, подлежащими определению
на основе информации о функционалах от решений. Примером
может служить обратная задача для уравнения Штурма—Лиу-
вилля, в которой требуется определить коэффициент в дифферен-
дифференциальном уравнении второго порядка по свойствам спектральной
функции некоторой краевой задачи.
Обратные задачи математический физики часто оказываются
в классическом смысле поставленными некорректно. Малым изме-
изменениям в регистрируемых функционалах могут соответствовать
большие изменения в решениях задач. Понятие корректности
и пример некорректной задачи математической физики —задачи
Коши для уравнения Лапласа — были приведены в начале нашего
века Адамаром.
Долгое время так называемые некорректные задачи матема-
математической физики считались неинтересными и исследовались мало.
Интенсивное исследование этих задач началось в связи с необхо-
необходимостью решения задач интерпретации геофизических данных.
Большой вклад в развитие теории и методов решения задач мате-
математической физики, не являющихся корректными в классическом
смысле (по Адамару), внесли советские математики (см. 9.3).
Как было показано, решение некорректных в классическом
смысле задач становится устойчивым по отношению к изменениям
данных, если наложить на множество допустимых решений неко-
некоторые дополнительные ограничения. Поэтому задачи такого типа
получили название условно корректных.
В связи с необходимостью построения приближенных решений
условно корректных задач по приближенным данным было введено
7.1]
ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ И ПРИМЕРЫ
317
понятие регуляризирующего семейства по Тихонову, суть кото-
которого состоит в следующем. Условно корректной задаче сопоста-
сопоставляется семейство классически корректных задач (регуляризирую-
щее семейство), зависящее от параметра, причем при стремлении
параметра к некоторому пределу последовательность решений клас-
классически корректных задач должна стремиться к решению интере-
интересующей нас условно корректной задачи. Было показано, что при
соответствующем выборе параметра (параметра регуляризации),
зависящего от точности данных, решение задачи из регуляризирую-
регуляризирующего семейства по приближенным данным будет являться прибли-
приближенным решением нашей условно корректной задачи.
В работах отмеченных выше авторов исследован широкий круг
условно корректных задач. Мы рассмотрим только один класс
условно корректных обратных задач, связанных с эволюционными
уравнениями, и один метод их регуляризации на основе техники
рядов Фурье.
7.1. Основные определения и примеры
Рассмотрим гильбертово пространство функций F, каждый
элемент которого представим в виде ряда Фурье по некоторой
полной биортогональной системе функций {«„} и {и*}- Таким
образом, для элемента / рассматриваемого гильбертова простран-
пространства имеем
оо
f =?/»«». 0.1)
га = 1
где
/« = (/, и*п). A.2)
Построим подпространство Ф функций / таким образом, чтобы
в него были включены только такие элементы гильбертова про-
пространства, у которых в разложении A.1) отлично от нуля не
больше N гармоник, соответствующих наиболее крупномасштаб-
крупномасштабным возмущениям:
N
f = У, fnUn- A.3)
Рассмотрим задачу
A.4)
где Л—некоторый линейный оператор, имеющий неограниченный
обратный, и будем решать ее с помощью итерационного процесса
-/), ф° = 0, A.5)
318
ИЛИ
ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ
[ГЛ. 7
Ф° = 0, A.6)
где Т = Е — %А — оператор шага.
Предположим, что решение задачи A.4) существует, единст-
единственно и принадлежит подпространству Ф. Предположим далее,
что на всем гильбертовом пространстве определена норма
lT||^=sup '"
а на подпространстве Ф
^<1- 0-7)
При таких предположениях итерационный процесс A.6) на
функциях ф7 из Ф будет сходиться, а на функциях всего прост-
пространства F — расходиться. Поэтому, если мы хотим реализовать
сходящийся итерационный процесс, нам необходимо позаботиться
о том, чтобы на каждом шаге итерационного процесса прибли-
приближенное решение ф/ принадлежало Ф. Конструктивно это сделать
весьма просто.
Положим на некотором шаге ф/'-1 е Ф. Тогда с помощью
рекуррентного соотношения A.6) получим новый элемент фЛ
Функция Гф-' уже может не принадлежать подпространству Ф.
Для того чтобы ^еФ, необходимо разложить эти функции
в ряд Фурье
и отбросить в этом ряду все члены с номером n^>N. Алгорит-
Алгоритмически наиболее просто для этой цели определить только jV
первых коэффициентов Фурье
?=1, 2 N,
и построить конечную сумму
ф' =
A.8)
Если описанный процесс продолжить как итерационный, то все
функции ф^ — приближенные решения задачи —будут принадлежать
подпространству Ф. При некоторых дополнительных предположе-
предположениях (например, ортогональности базиса {«„}) последовательность
{ф'} будет сходиться к некоторой функции ф"°, которая прини-
принимается за приближенное решение уравнения A.4).
I
7.11
ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ И ПРИМЕРЫ
319
Мы рассмотрели простейший пример организации алгоритма
вычислений, который не выводит последовательность приближенных
решений из заданного подпространства. Таких примеров можно
было бы привести много.
Переходим теперь к условно корректным задачам математи-
математической физики. Снова рассмотрим уравнение A.4) с симметричным
положительным оператором А и предположим, что f е Ф и ф е Ф,
где Ф —некоторое подпространство гильбертова пространства F.
Задачу A.4) будем называть поставленной условно кор-
корректно, если ее решение принадлежит некоторому подпрост-
подпространству Ф гильбертова пространства F и на элементах Ф имеет
место априорная оценка
^Мо||Л|ф, A-9)
A.10)
A.11)
где Мо — константа и
||Л|ф<оо.
Разрешим уравнение A.4) относительно ф,
и оценим ф по норме на элементах этого подпространства. Тогда
получим
" " ^«Л-ЧфИШф. A.12)
Отсюда следует, что для корректности задачи достаточно выполнения
априорного условия
ЦЛ^Цф^М. A.13)
Обратим внимание на следующую важную деталь: если оператор Л
симметричный, то
'^^- A-14)
Легко видеть, что если Фе/7, то
Таким образом, корректность задачи может быть определена
не только условием A.9), но и эквивалентным ему условием A.13).
Более того, если константа М задана, то основной проблемой
организации вычислительного процесса оказывается определение
подпространства Ф, содержащего не только само решение задачи
Ф, но и всю последовательность его приближенных значений ф/.
Обратим внимание теперь на другую сторону проблемы решения
условно корректных задач, а именно, на точность задания вход-
входных данных. Обычно при решении условно корректных задач
приходится иметь дело по крайней мере с погрешностью за счет
320
ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ
ГГЛ. 1
аппроксимации задачи A.4) разностной задачей или за счет неточ-
неточных сведений о коэффициентах оператора Л и функции /.
Пусть Л —точный оператор, / — точный вектор, ф —точное
решение задачи
Лф = /,
причем
Л = Л + бЛ, f = J + 8f A.15)
и относительно 8А и б/ на множестве Ф известна их априорная
погрешность:
ь A.16)
A.17)
Тогда решение задачи A.4) сводится к организации такого итера-
итерационного процесса, который порождал бы новые приближения,
принадлежащие подпространству Ф. Если оператором Л является
положительно определенная матрица, то, как было показано
в гл. 4, для задач с такими матрицами существует целый набор
итерационных процессов, сходящихся к решению задачи A.4).
При этом подпространство приближенных решений Ф совпадает
со всем гильбертовым (евклидовым) пространством F. В этом,
кстати сказать, состоит одна из приятных особенностей задач
с положительными матрицами. Итерационный процесс
ф/+1 = ф/-т(Лф/-/), ф° = 0 A.18)
при соответствующем выборе параметра т будет сходиться, а
оптимизация процесса может быть произведена, например, с уче-
учетом априорной информации A.16), A.17) выбором числа шагов
итерационного процесса /0 (см. 4.6).
Предположим теперь, что в задаче A.4) оператор Л симмет-
симметричен и имеет как положительную, так и отрицательную часть
спектра.
Анализ показывает, что итерационный процесс A.18) в ука-
указанных предположениях будет расходиться.
В самом деле, пусть
Ф = 2фл«л, / = 2/л"» A.19)
п п
и {ип) — полная ортонормированная система собственных функций
оператора А. Подставляя A.19) в A.18) и скалярно умножая
результат на ип, приходим к рекуррентным соотношениям для
коэффициентов Фурье
1.4
ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ И ПРИМЕРЫ
321
или для невязки y = Aq> — f
Ъг = A — ™n) ?,п, ёя — — /я-
Решая уравнение A.20), получаем
ё« = (^ ^Я„) /л-
Следовательно,
A.20)
A.21)
A.22)
Естественно, что итерационный процесс A.18) будет сходиться
только в том случае, если
lim^ = 0.
/->оо
Если оператор Л своими собственными числами имеет только
положительные числа из интервала
то выбором т>0 из интервала
0<т<2/Р
A.23)
процесс A.19) можно сделать сходящимся.
Однако в рассматриваемом случае по предположению симмет-
симметричная матрица Л имеет как положительные, так и отрицатель-
отрицательные собственные числа. Пусть т выбрано из интервала A.23).
Тогда все гармоники невязки, соответствующие положительным Я,
будут от итерации к итерации подавляться со скоростью Т'п, где
Тп = A—тЯ„У < 1 и / — показатель степени. Что касается гар-
гармоник, соответствующих отрицательным собственным числам,
то для них
и такие компоненты невязки будут расти. Это и приводит
к расходимости итерационного процесса.
Таким образом, итерационный процесс A.18) с последова-
последовательностью пробных функций q/, принадлежащих всему гильбер-
гильбертову пространству, расходится.
Примером процесса, который бы не выводил последователь-
последовательность приближенных решений из Ф, является двухшаговый метод
минимальных невязок (см. 4.3.2)
ф/+1 = ф/ _ Ту (лф/ - f) - ЪА* (Лф/ - /).
Несколько слов о практическом подходе к численному решению
условно корректных задач. Такие задачи обычно сводятся к
системам линейных уравнений с плохо обусловленными матрицами
11 Г. И. Марчук
322
ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ
[ГЛ. ?
7.2]
МЕТОДЫ РЯДОВ ФУРЬЕ
323
общей структуры. Как правило, они решаются с помощью
многошагового метода минимальных невязок (см. 4.3.2), который
обеспечивает быструю сходимость итерационного процесса. Воз-
Возможно также применение метода сопряженных градиентов после
симметризации уравнений с помощью трансформации Гаусса.
Этот второй метод мы рассмотрим ниже в связи с решением
обратных эволюционных задач (см. 7.3). При решении задачи
итерационными методами процесс следует оборвать на шаге, где
норма невязки приближенно окажется равной априорной погреш-
погрешности входных данных, т. е. ||l/|f=**e1 + e2. В этом случае, как
отмечено в 4.6, мы приходим к максимально достижимой точно-
точности решения при заданных априорных погрешностях.
7.2. Решение обратных эволюционных задач
методом рядов Фурье
Пусть А — положительно определенная матрица, не зависящая
от времени, имеющая вещественный спектр в интервале а (А) ==?;
sg X sg P (А), ф — вектор-функция — решение следующей задачи
Коши:
= ? при / = 0,
B.1)
где g — заданное значение вектора в начальный момент времени.
Рассмотрим две спектральные задачи:
Аи^Хи, А*и* = Хи*. B.2)
Предположим, что они определяют два биортогональных базиса
собственных функций {«„} и {«?}. Функции ф и g представим
в виде сумм Фурье:
Ф = 2 Ф«и«» В = 2 Snun.
п
B.3)
Подставим эти суммы в B.1) и результат скалярно умножим
на к*. Получим систему обыкновенных дифференциальных урав-
уравнений для коэффициентов Фурье
фл=?Гл При t=0,
л=1, 2 N.
Решение каждого уравнения B.4) имеет вид
ф» = ?»еЧ п = 1, 2,..., ЛГ,
B.4)
B.5)
Г
i
!
*-*л "•-««,
B.8)
и, следовательно, решение задачи B.1) представимо в виде
N
ф(о= 2 &/»'«/.. B-6)
Итак, мы установили, что решение задачи B.1) представлено
в виде суммы Фурье, каждый член которой по времени экспонен-
экспоненциально растет в зависимости от величины л-го собственного
числа %„.
Предположим, что нас интересует физически определенное
решение этой задачи в интервале времени 0 ^t^t0. Рассмотрим
задачу, аналогичную B.1), но уже корректную:
^-лФ = о, °^^о, {27)
<p = h при / = /0-
Поступая аналогично предыдущему, получим
N
ф=2
л=1
Потребуем, чтобы решение B.8) при / = 0 совпадало с вектором g
из задачи B.1). Отсюда получим связь между коэффициентами
Фурье функции h и функции g
gn = hne-*-n<o. B.9)
Таким образом, функция g восстанавливается с помощью
функции h вполне просто:
N
g = 2 ^-VoUn. B.Ю)
л=1
Более того, малым ошибкам в h (или hn) будут соответство-
соответствовать малые ошибки в функции g. Однако наша задача обратна
к рассмотренной. Мы располагаем информацией о функции g,
а нам требуется восстановить функцию h по формуле
N
А=2г«^"'°и«. B.И)
л =1
Если бы мы располагали точной информацией о функции g
и имели возможность вести расчет с бесконечным числом значащих
цифр, то восстановление функции h по формуле B.11) не пред-
представляло бы труда. В данной ситуации, однако, функцию g
мы знаем с определенной погрешностью, которая априори
считается известной, и расчет проводится на ЭВМ с ограничен-
ограниченным числом знаков (словом), поэтому в процессе вычислений
11*
324 ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ [ГЛ. 7
появляются ошибки округления. Эти два обстоятельства делают
задачу вычисления h по формуле B.11) уже не такой простой.
Прежде всего предположим, что исследователю, пытающемуся
произвести обработку экспериментальных данных на основе реше-
решения обратной эволюционной задачи B.1), заранее известна
система собственных функций ы„ и он имеет возможность в резуль-
результате разложения исходных данных (функций g) по этой системе
выделить полезную информацию и с достаточной точностью оце-
оценить погрешность в каждой компоненте Фурье — gn.
Если задача носит статистический характер и допускает
многократное повторение, то на основе хорошо разработанных
методов корреляционного анализа в этом случае удается сущест-
существенно повысить точность данных в gn, даже если в единичном
измерении погрешность значительно превышает полезную инфор-
информацию. Во всяком случае предварительная обработка материалов
наблюдения позволяет сделать заключения о величине системати-
систематической (или случайной, если речь идет об единичном измерении)
погрешности в gn. Поэтому для любого п будем иметь
где gn — точное значение (априори нам неизвестное!), а б„ —
относительная погрешность, которую будем считать известйой.
Обычно погрешность б„ оказывается минимальной для наиболее
длинных волн возмущений и быстро растет в направлении высо-
высоких гармоник, как правило, описывающих мелкомасштабные
особенности решения. Поэтому, начиная с некоторого номера,
коэффициенты gn в основном описывают погрешность во входных
данных. Из формулы B.11) следует, что именно самые высоко-
высокочастотные компоненты имеют наибольший экспоненциальный вес.
Следовательно, если мы не позаботимся заранее о том, чтобы
исключить из рассмотрения эти паразитические гармоники,
то в итоге можем получить заведомо неверный результат, так
как для таких гармоник gn практически не содержат полезной
информации, но, будучи умноженными на большие коэффициенты
еХп'°, они могут внести крупный вклад в /г и тем самым исказить,
иногда непоправимо, решение задачи. Таким образом, первая и
основная задача состоит в определении информативности
коэффициентов gn.
Предположим, что на основе априорной информации установ-
установлено, что по первых коэффициентов gn имеют относительную
погрешность меньше ц, т. е. 6n<.i\, где х\ — максимально допусти-
допустимая погрешность. Тогда алгоритм восстановления функции B.11)
оказывается аналогичным уже рассмотренному при построении
элементов подпространства Ф в задаче B.1). Нам просто нужно
исключить из ряда B.11) те гармоники, которые являются
7.3]
ЗАДАЧА С ОПЕРАТОРОМ, ЗАВИСЯЩИМ ОТ ВРЕМЕНИ
325
паразитическими. В результате будем иметь
B.12)
4 = 1
За основу алгоритма решения частной спектральной задачи примем
итерационный метод, сформулированный в 1.1. Если необходимо
построить набор первых (наиболее крупномасштабных) собствен-
собственных функций ип или и* и соответствующих им собственных
чисел, то для этой цели можно воспользоваться алгоритмом
ортогонализации, описанным в 1.1.
7.3. Обратная эволюционная задача с оператором,
зависящим от времени
Рассмотрим эволюционную задачу
^?--Л(/)ф = 0, O^t^to,
Ф = ? ПРИ ^ = 0
с оператором А > 0, зависящим от времени. Как и раньше,
предполагается, что задача C.1) является результатом редукции
задачи математической физики по пространственным переменным
к системе обыкновенных дифференциальных уравнений. В этом
случае метод Фурье уже неприменим, и для решения задачи
C.1) необходимо использовать численные методы.
Переходим к обсуждению одного из возможных алгоритмов
численного решения. Задаче C.1) поставим в соответствие
модельную задачу, в известном смысле близкую:
C.2)
Ф = ? при t = 0,
где Л >0 — оператор, не зависящий от времени, имеющий положи-
положительный спектр
и в некотором смысле близкий к оператору А (/). Ради опре-
определенности будем полагать, что
где
\{t) = A+8A(t),
II б А @1<1 А ||
C.3)
C.4)
для любых / из интервала
326
ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ
[ГЛ. 7
Задача C.2) в дальнейшем позволит нам получить необходи-
необходимую априорную информацию для организации вычислительного
процесса решения основной задачи C.1).
Методами §§ 7.2 и 1.1 определим т информативных (с точки
зрения ошибок во входных данных) собственных элементов ип, и* и
собственных чисел Хп (п= 1, 2, ... , т). Остальные гармоники
ряда Фурье для gn (ra = m+l, /n + 2, .... N) должны быть
отброшены, так как ошибки при определении этих коэффициен-
коэффициентов превышают (иногда весьма значительно) полезную информа-
информацию. Тогда получим
ё= 2
л=1
C.5)
где
В результате решение модельной задачи ф на промежутке 0:
ttQ может быть представлено в виде
л=1
C.6)
Попытаемся теперь решить модельную задачу C.2) численно.
С этой целью рассмотрим, например, разностную схему второго
порядка точности относительно At = x:
/==1, 2 /0>
C.7)
Решение задачи C.7) будем искать с помощью метода Фурье,
предположив, что мы располагаем всем набором собственных
элементов и„ и и*. Такое предположение делается только с целью
теоретического анализа и получения некоторой априорной инфор-
информации о поведении решения. Тогда будем иметь
N
Ц1= 2 Ф«"«- C.8)
л = 1
В результате для коэффициентов Фурье с помощью C.7) при-
приходим к рекуррентным соотношениям
'+Ъ
/=1,2
C.9)
фя = gn-
1
7.3] ЗАДАЧА С ОПЕРАТОРОМ, ЗАВИСЯЩИМ ОТ ВРЕМЕНИ
Следовательно,
фл =
1 "
2
Таким образом, имеем
где
327
C.10)
C.11)
Т =-
1 л
1—-
Предположим, что шаг т выбран из условия, чтобы знамена-
знаменатель в выражении для Т„ не обращался в нуль ни для одного
значения п. Например,
т<—^г. C.12)
Заметим, что это условие согласовано с условием аппроксимации
крупномасштабных возмущений.
Формальный анализ решения модельной задачи в виде C.11)
показывает, что все Т„>1 и высокочастотные гармоники,
соответствующие большим номерам п, имеют быстро растущие
с номером амплитуды. Следовательно, для них Тп^1 и тем
более Т> J> 1. Поскольку при обработке входных данных g
мы отбросили все гармоники ряда Фурье C.5), начиная с/г = т + 1,
то на первый взгляд кажется, что этого достаточно для того,
чтобы сумма Фурье
m
- ^i
порождала решение с таким же числом членов
?= 2 T»gnUn-
C.13)
Такое положение было бы в действительности, если бы наши
ЭВМ позволяли вести расчет с бесконечным числом значащих
цифр. Однако из-за ограниченности машинного слова в процессе
вычисления вследствие ошибок округления сразу же появятся
компоненты gn для п>пг. И хотя они малы, но имеют большой
«вес» в решении, пропорциональный Тп^>1. Эти ошибки в конце
концов могут существенно исказить основное решение задачи.
328
ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ
[ГЛ. 7
Чтобы избежать катастрофического роста ошибок высокочастот-
высокочастотных компонент ряда Фурье, необходимо найти такую конструк-
конструкцию, которая автоматически переводила бы любой элемент век-
векторного пространства F в элемент некоторого подпространства Ф.
Определим Ф следующим образом: будем считать, что элемент
принадлежит подпространству Ф, если амплитуды последних
N — т гармоник суммы Фурье этого элемента по системе функции
ип в процессе численного решения задачи возрастают от шага
к шагу не быстрее, чем несколько амплитуд последней информа-
информативной гармоники с номером т. При конструкции такого под-
подпространства ошибки округления на его элементах будут воз-
возрастать не быстрее амплитуды /n-й гармоники. Зто обеспечит
корректность вычислительной схемы. Ряд авторов предложили
вместо оператора Л в модельной задаче C.2) рассматривать
оператор АЕ — А — еЛ2. В этом случае вместо задачи C.2) будем
иметь
'о,
= ? при / = 0,
C.14)
где е-пока произвольный параметр. Этот параметр выберем
из условия, чтобы решение задачи не выходило из множества Ф.
Ради простоты анализа предположим, что А = А*. Рассмотрим
разностную схему
--(Л-еЛ2)
— О,
>е = ?. C.15)
Решение задачи C.15) будем искать_ с помощью ряда Фурье
по собственным функциям оператора Л. Тогда получим
2
п=1
1 | тХп с^п
"
П
C.16)
Параметр е выберем из условия, чтобы относительная ошибка
в гармонике с номером т за счет введения оператора еЛ2
не превышала ц (обычно в качестве ц можно брать ti-<1
в зависимости от того, каково соотношение в гармонике п = т
между полезной информацией и неучитываемыми погрешностями
(«шумом»)). Из этого условия получаем соотношение
откуда
C.17)
C.18)
7.3]
ЗАДАЧА С ОПЕРАТОРОМ, ЗАВИСЯЩИМ ОТ ВРЕМЕНИ
329
Таким образом, мы приходим к определению одной из важней-
важнейших априорных величин, необходимых для дальнейшего числен-
численного расчета. Легко видеть, что при заданном параметре е
из C.18) амплитуды всех гармоник л>т будут возрастать
со временем не быстрее чем Т'т.
Наконец, нам понадобится еще одна априорная величина.
Для ее нахождения рассмотрим
ф/=
я=1
N
C.19)
C.20)
где
%К
Тп (е) =
Поскольку решение ср? принадлежит Ф, то без большой погреш-
погрешности его можно заменить на
Фв= У, gnT'n(*)Un,
C.21)
/2 = 1
где мы ограничились только первыми m членами. Решение в виде
C.21) находится конструктивно с помощью уже полученной
системы функций ип и и* (я = 1, 2, ... , т). Из выражений C.19)
и C.21) найдем величины q/ и Ф? при /=1, 2,..., /0. После
этого введем в рассмотрение векторы
Ф =
и подсчитаем норму
||Ф-Фв1 = б. C.22)
Это и будет последняя из искомых априорных величин. Две
другие —т и е-определены формулами C.12) и C.18).
Сформулируем численный алгоритм решения исходной задачи
C.1). С учетом изложенного выше анализа построим следующую
аппроксимацию задачи:
C.23)
ф1
ф2
ф'°
Фе =
_1
фе
_2
фе
Фе°
ф" = g,
330
ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ
[ГЛ. 7
где т и е выбираются на основе анализа априори изученной
простой модели:
*<ш e=dr C-24>
Введем в рассмотрение векторы
IIФ1
Ф = |
и матрицу
Л =
So
Ri
о
о
о
0
-St
О
О
О
о
о
Аз — 5з
О О
О
О
О
О
О
О
-5,
где
j = Е- \ (Л,- - eAf), Rj = E + ^(Aj- eAj),
Тогда приходим к задаче
Задачу C.25) симметризуем, умножив на Л*,
C.25)
C.26)
и сформулируем некоторый итерационный процесс. В частности,
для этой цели используется метод сопряженных градиентов, не
требующий априорного знания границ спектра Л*Л.
Формулировкой метода последовательных приближений описа-
описание алгоритма не исчерпывается. Необходимо еще определить
оптимальное число итераций k0, которые приводят к максимально
достижимой точности при заданных априорных условиях. По-
Поскольку такое число может быть найдено не с очень большой
точностью, будем полагать, что априорная оценка аппроксимации
C.22), полученная для модельной задачи, оказывается примени-
применимой и для задачи C.1). Предположим поэтому, что
||ф-Фе| = б, C.27)
где ф —точное решение задачи C.1) в узлах сетки, а фе —решение
разностной задачи с регулязирующим оператором. Тогда исполь-
используемый итерационный процесс естественно продолжать до тех
пор, пока ошибка итерационного процесса оказывается большей,
7.4]
ПОСТАНОВКА ОБРАТНЫХ ЗАДАЧ
331
чем ошибка аппроксимации C.27), и процесс следует закончить
при равенстве этих ошибок. Алгоритмически это сделать наиболее
просто следующим образом. Введем в рассмотрение вектор невязки
?* по формуле
-Ф). C.28)
C.29)
Тогда имеет место оценка
;||Л*ЛЦ|ф*-ф||.
Очевидно, величина ||ф — Фе| должна быть эквивалентна вели-
величине б, что приводит к требованию
||ЕЧ|<6||Л«Л||. C.30)
Это означает, что вычислительный процесс следует продолжать
до тех пор, пока норма невязки ||?*|| не будет сравнима с вели-
величиной в правой части C.30). Таким образом, приходим к пара-
параметрической оценке для &о
N. C.31)
Как видно, решение обратных эволюционных задач требует
большой подготовительной работы по изучению различных про-
простых моделей, которые позволяют получать необходимую априор-
априорную информацию для конструирования качественного вычислитель-
вычислительного алгоритма. В отдельных случаях возникают и более сложные
ситуации. Однако проведенное рассмотрение дает представление
о некоторых принципах формирования численных методов на
основе изучения возникающих погрешностей и анализа алгоритма
с помощью простых моделей. Нами обсуждена только одна точка
зрения на процесс регуляризации, но и она уже дает предста-
представление о возможных подходах к численному решению обратных
задач.
В заключение следует отметить, что изложенные методы и
идеи могут быть также применены к численному решению задачи
Коши для уравнений эллиптического типа. Эти задачи в клас-
классическом смысле поставлены некорректно и для своего решения
требуют привлечения методов, разработанных в теории условно
корректных задач.
7.4. Постановка обратных задач на основе
методов теории возмущений
Постановки некоторых обратных задач на основе теории сопря-
сопряженных функций и методов теории возмущений начинают играть
все большую роль в формировании вычислительных алгоритмов,
особенно при решении сложных задач математической физики,
332
ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ
[ГЛ. 7
7.4]
ПОСТАНОВКА ОБРАТНЫХ ЗАДАЧ
ззз
в которых априори трудно оценить влияние тех или иных фак-
факторов на решение задачи. Особое значение эти проблемы приобре-
приобретают в планировании экспериментов с целью получения наиболее
информативного набора функционалов.
7.4.1. Некоторые вопросы линейной теории измерений
В настоящее время теория измерений приобретает большое
значение в организации информационной системы. Измеритель-
Измерительная техника позволяет получить набор сведений (функционалов)
о процессе, анализировать процесс и направлять его. С помощью
таких функционалов интерпретируется физический процесс.
Мы не будем говорить об отдельных элементарных измере-
измерениях, таких как измерение напряжения, силы тока в отдельных
участках электрической цепи и т. д. Нас будут интересовать
только сложные физические явления и процессы, которые дол-
должны быть поняты и количественно оценены с требуемой точностью.
Аналогичные задачи возникают постоянно, особенно в новых обла-
областях техники. К примеру, нельзя разработать методы измерений
коэффициента размножения нейтронов в реакторе, если в деталях
не ясен физический процесс цепной реакции и диффузии нейтро-
нейтронов, не известны уравнения, описывающие поведение ядерного
реактора при изменении различных условий.
Несомненно, методы измерений и сами приборы существенно
совершенствуются вместе с развитием теории физического процесса.
Разработка теории и эксперимента, как правило, сопровождается
созданием новых или усовершенствованием прежних методов
измерений.
Возникает вопрос, нельзя ли в настоящее время сформулиро-
сформулировать более или менее общий подход к методам измерения при-
применительно к различным процессам с возможностью формального
математического описания алгоритма. Оказывается, такой подход
можно сформулировать по крайней мере для задач с линейными
операторами. В дальнейшем речь будет идти именно об' этом
классе задач.
Представляется, что основой теории измерений вариаций физи-
физических величин может служить теория возмущений. Суть дела
состоит в следующем. Предположим, что мы изучаем сложный
физический процесс с помощью прибора, имеющего определенные
физические характеристики. Показания такого прибора связаны
с исследуемым полем физической величины и являются функцио-
функционалами поля. В большинстве случаев, однако, экспериментатора
интересует не само поле физической величины, а отклонения
от него под влиянием обычно малых возмущений. Это значит,
что измерения должны быть проведены с достаточной точностью,
чтобы зарегистрировать указанные отклонения поля от некоторого
«стандартного» состояния. Предположим, что это первое необхо-
необходимое требование к прибору выполнено и мы располагаем изме-
измерениями отклонений показания прибора от нормы с требуемой
точностью. Спрашивается, достаточно ли этой информации для
удовлетворительной интерпретации эксперимента и можем ли мы
с достаточной точностью восстановить информацию о возмущен-
возмущенном состоянии системы. К сожалению, на этот вопрос обычно
дать ответ очень трудно. Объясняется это тем, что задачи вос-
восстановления информации о поле физической величины с помощью
измерительных приборов являются, как правило, некорректно
поставленными задачами математической физики.
Для того чтобы обойти эту принципиальную трудность обра-
обработки экспериментальных данных, необходимо с самого начала
связать отклонения показания прибора непосредственно с откло-
отклонениями изучаемых физических параметров процесса. В этом
случае ошибка в исследуемой характеристике будет пропорцио-
пропорциональна ошибке в отклонении показания прибора — вариации
функционала —и, следовательно, при интерпретации мы исполь-
используем максимальную информацию измерительного прибора. Именно
с этих позиций мы приходим к излагаемой ниже теории.
7.4.2. Сопряженные функции и понятие ценности
Рассмотрим функцию ц>(х), удовлетворяющую уравнению
1<р (ж) = ?(*), D.1)
где L — некоторый линейный оператор, a g (х) — распределение
источников в среде. При этом под х будем понимать совокуп-
совокупность всех переменных задачи (временная и пространственные
координаты, энергия, направление скорости), считая, что
функции ф и q являются действительными.
Ради определенности будем полагать, например, что иссле-
исследуемый процесс связан с диффузией или переносом субстанции,
хотя выводы теории выходят далеко за рамки такого рода задач.
Введем гильбертово пространство функций со скалярным про-
произведением
{g,h)==\g(x)h{x)dx, D.2)
где интегрирование ведется по всей области D определения
функций g и h.
При решении тех или иных физических задач обычно нужно
получить в результате значение некоторой величины, являющейся
функционалом от у(х). Любая величина, линейно связанная
с ц>(х), может быть выражена в виде такого скалярного произве-
произведения. Например, если нас интересует результат измерения
334
ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ
[ГЛ. 7
некоторого процесса в среде с характеристикой прибора 2 (х),
то это значение есть
Jz [ф] = $ ф (*) 2 (дс) d* = (ф, 2). D.3)
Таким образом, будем рассматривать физические величины,
которые могут быть выражены в виде линейного функционала
от <р(х):
•/Р[ф] = (ф. Р),
где величина р характеризует интересующий нас физический
процесс. Введем вместе с оператором L сопряженный к нему
оператор L*, определяющийся из условия
(g, Lh) = (h, L*g),
D.4)
для любых функций g и h. Наряду с уравнением D.1), которое
будем называть основным, введем сначала формально неоднород-
неоднородное сопряженное уравнение
L*<p* = p(x), D.5)
где р (х) — некоторая произвольная пока функция, а (р*еФ*.
Подставляя в формулу D.4) вместо функций hug решения
уравнений D.1) и D.5) ф и фр, получим^
(Ф*. 1ф) = (Ф, L*y*) D.6)
или, воспользовавшись уравнениями D.1) и D.5),
(Ф*, ?) = (Ф, Р); D.7)
иначе говоря,
Jq [фр] = Jp [ф].
Поэтому, ес"ли нам нужно найти значение функционала Ур[ф],
мы можем получить его двояко: либо решить уравнение D.1) и
определить эту величину по формуле
= (ф. р),
D.8)
либо решить уравнение D.5) и определить ту же величину по
формуле
•Мф] = -/ЛФр] = (Фр. ?)• D-9)
Следовательно, каждому линейному функционалу Jp [ф] =
= (ф, р) может быть поставлена в соответствие функция фр (х),
удовлетворяющая уравнению D.5), причем в качестве свободного
члена этого уравнения следует использовать именно функцию
р(х), характеризующую интересующий нас процесс.
7.4]
ПОСТАНОВКА ОБРАТНЫХ ЗАДАЧ
335
Пусть в среде имеется «источник единичной мощности», поме-
помещенный в точку х0, т. е.
q(x) = 8(x-x0). D.10)
Так как
(Ф(*), 6(*-*,)) = ф(Хо), D.Н)
то в этом случае
[ф] = •/«=«<*-*„) [фр] = Фр (*о).
D.12)
Следовательно, сопряженная функция ф? (х) описывает зависи-
зависимость функционала Ур[ф] = (ф, р) от точки помещения источника
единичной мощности.
Представим себе физическую систему (или прибор), в которой
измеряется некоторая величина Jp [<p], являющаяся линейным
функционалом от решения, связанного, например, с плотностью
частиц субстанции ф. Если в некоторую точку системы впустить
определенное количество частиц (или, наоборот, извлечь эти
частицы), то измеряемое значение величины Ур[ф] будет соответ-
соответственно увеличиваться или уменьшаться, причем это изменение
будет зависеть от той точки, в которой мы производим измене-
изменение числа частиц. Как видно из предыдущего, эта зависимость
описывается сопряженной функцией ф? (х), удовлетворяющей урав-
уравнению D.5). Следовательно, сопряженная функция фр(я) дает
вклад частиц, находящихся в той или иной точке системы,
в интересующий нас функционал J р. Поэтому функцию ф* (л:)
можно назвать ценностью субстанции в точке х по отношению
к функционалу ^р[ф] = (ф, р) *)•
Толкование сопряженной функции фр (х) как ценности суб-
субстанции позволяет дать ясную трактовку и теории возмущений
для любого функционала Jp [<р]. Действительно, если в элементе
объема Ах около точки х мы изменим число частиц на величину 6Af,
то соответствующее изменение величины Jp будет выражено сле-
следующим уравнением:
6J 8N*(x). D.13)
Если в рассматриваемой системе произведены некоторые малые
изменения параметров, так что оператор L переходит в оператор
Z. + 6Z-, то это соответствует изменению числа частиц в каждом
элементе Ах на величину 6N =— Ax8Lv. Общее изменение функ-
функционала Lp при таком изменении запишем в виде
dx. D.14)
Строгий вывод этого соотношения будет дан ниже.
*) Термин «ценность» весьма удачен в задачах теории переноса излучения.
Возможно, что в других задачах будет найден более подходящий термин,
336
ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ
ГГЛ. 7
Соотношение D.13) позволяет измерять распределение функ-
функции ценности в системе, изменяя известным образом число частиц
в разных точках х системы и измеряя при этом соответству-
соответствующее изменение величины Jp. Введенное понятие ценности может
быть полезным в теории различных измерительных приборов.
Действительно, прибор обычно предназначен для измерения какой-
либо одной величины Jp. Поэтому для каждого прибора может
быть введена вполне определенная функция ценности <р%(х),
которая может быть однажды измерена или сосчитана. Если
распределение субстанции и ее ценности известны, то соотношение
D.14) может быть использовано для измерений двояким образом.
Во-первых, измеряя величины 8JP при различных изменениях
параметров среды 6L, мы можем при помощи соотношения D.14)
определять величины 6L, т. е. различные характеристики взаимо-
взаимодействия частиц с веществом. Например, таким образом можно
измерить (по существу, так и делается) сечения взаимодействия
нейтронов с веществом для различных образцов, помещая эти
образцы в прибор и определяя 62=6L по изменению величины
Jp. Во-вторых, соотношение D.14) позволяет вводить поправки
в измеряемую величину Jp за счет различных возмущающих
факторов в приборе. Наконец, определение понятия ценности
позволяет получать уравнения для функции ц>$(х), исходя непо-
непосредственно из физического смысла этой величины, точно так же,
как уравнение для потока нейтронов получается из закона сохра-
сохранения числа нейтронов.
Приведенные выше формулы позволяют также получить тео-
теорему взаимности для функций Грина основного и сопряженного
уравнений G(x, х0) и G* (х, хх). Функция G (х, х0) удовлетво-
удовлетворяет уравнению D.1) при q(x) = 6(x — x0), а функция G* (х, хг) —
уравнению D.5) при р(х) = 8(х — х1).
Подставляя в формулу D.7)
Ф (х) = G (х, х0), ф* (х) = G* (х, xj
и приведенные выражения для q и р, получим
G(xlf x0) = G*(x0, Xl), D.15)
что и является формулировкой теоремы взаимности.
7.4.3. Теория возмущений для линейных функционалов
Если свойства среды, с которой взаимодействует поле, изме-
изменяются, т. е. если оператор уравнения D.1) переходит в
то изменяются и поле (р(х) и значение функционала /р[ф]:
7.4]
ПОСТАНОВКА ОБРАТНЫХ ЗАДАЧ
337
Установим связь между изменением оператора 8L и измене-
изменением функционала б/р. Возмущенная система описывается урав-
уравнением
//ф' = (? + 8?)ф' = <7. D.16)
Сопряженная функция невозмущенной системы, соответствующая
функционалу Jp, описывается уравнением
L*<p*p = p. D.17)
Помножив скалярно уравнение D.16) на ф*. уравнение D.17)
на ф', вычитая одно из другого и пользуясь определением сопря-
сопряженного оператора уравнения D.4), получим слева
(Ф*. Гф')-(ф\ ?*Ф*) = (ф*. Ылр'), D.18)
а справа в соответствии с уравнением D.7) будем иметь
Приравнивая выражения D.18) и D.19), получим общее соотно-
соотношение для приращения функционала
Если вместо уравнений D.16) и D.17) рассмотреть возмущенное
сопряженное уравнение
<p*p' = p D.21)
и невозмущенное основное уравнение D.1), то аналогичным путем
можно получить также соотношение
о г / fir* *'\ /Л 0О\
О</„ = (ф, 0L фр )у yi-^^l
которое, конечно, эквивалентно соотношению D.20).
Отметим важную особенность применения формул теории воз-
возмущений: так как эти формулы пишутся для вариации функци-
функционала, погрешность в которой обычно допустима в пределах
нескольких процентов, то для вычисления указанных вариаций
нет необходимости знать точное решение основной и сопряженной
задач, достаточно воспользоваться их приближенными решениями.
Если возмущение оператора L (а следовательно, и L*) столь
мало, что оно не очень сильно искажает функции ф и фр, то
в формулах D.20) и D.22) можно заменить приближенно ф'я«ф,
Ф*'^Ф*. При этом мы получим две эквивалентные друг другу
формулы теории малых возмущений *)
oJp = —(фр, оьф), D-^j)
f>Jp = — (ф, б?*фр). D.24)
*) Ради простоты в дальнейшем формулы для приращения функционалов
D.20) и D.22) будем также называть формулами теории возмущений.
338
ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ
ГГЛ. 7
Полученные формулы теории возмущений, кроме их прямого
использования для оценки различных эффектов и для анализа
измерений, могут иметь и еще одно весьма важное применение.
При теоретическом рассмотрении и в практических расчетах
часто пользуются методом замены исследуемой сложной системы
упрощенной моделью. Необходимым условием такой замены
является, очевидно, требование, чтобы она не приводила к изме-
изменению некоторых основных для рассматриваемого вопроса харак-
характеристик системы. Примером может служить замена в дифферен-
дифференциальных уравнениях переменных коэффициентов коэффициента-
коэффициентами постоянными. К числу таких методов относится и метод эффек-
эффективных граничных условий, заключающийся в замене истинных
условий некоторыми упрощенными, но такими, которые приводят
к правильному значению некоторого избранного функционала.
Полученные выше формулы теории возмущений позволяют
сформулировать весьма общий подход к различным задачам.
Пусть рассматриваемая система характеризуется оператором L,
причем наиболее существенной величиной является функционал
/р[ф]. Если искомая простая модель характеризуется операто-
оператором L' = L + 8L, то для того, чтобы величина Jp не изменялась
при переходе от истинной системы к модели, необходимо вы-
выполнение условия
б7, = -(Ф*, [Z/-L]«p') = O, т.е. (ф*. LV) = («pJ, Up'). D.25)
Если мы интересуемся несколькими величинами JPl, JPl
и т. д., то получим несколько условий типа D.25) с решениями
Ф*1. Фл и т- Д-
Требование D.25) не определяет однозначно искомой экви-
эквивалентной модели, но является ее необходимым условием и вместе
с другими может помочь ее нахождению. В частности, если опе-
оператор модели L', вид которого может быть найден из физических
соображений, содержит один или несколько параметров, то усло-
условия D.25) могут быть использованы для определения значений
этих параметров.
7.4.4. Численные методы решения обратных задач
и планирование эксперимента
располагаем набором функционалов
., п). Будем считать, что измерения
по своему характеру разнообразны, например, измерение произ-
производится одним и тем же прибором в разных «точках» области
определения решения или приборы регистрируют разные харак-
характеристики исследуемого явления. Ради простоты полагаем, что
статистические погрешности в измерениях устранены и мы имеем
дело уже с предварительно обработанной системой данных.
Предположим, что мы
(измерений) Jp. (/ = 1, 2, ..
ООП
74] ПОСТАНОВКА ОБРАТНЫХ ЗАДАЧ ооэ
Каждому функционалу JPl поставим в соответствие функцию
ценности для невозмущенной задачи, т. е. модели, в которой
оператор L и область его определения считаются известными.
Решим п различных задач
L*<p*Pl = Pu *' = !. 2 п. D.26)
Найдем заранее п функций ценности Ф*г и решим одну основную
задачу с модельным «невозмущенным» оператором L, сопряжен-
сопряженным L*: _.
L<p = q. D-27)
Будем считать, что Ф <= Ф и Ф* <= Ф*, где Ф и Ф* - области опре-
определения операторов L и L* соответственно. Далее построим п
формул теории малых возмущений
-6JPl, *• = !. 2 п, D.28)
(Ф
где 6L — разность между изучаемым оператором V и модельным/..
Предположим, что оператор L известен:
где Ak Bk и Ck — элементарные линейные операторы, например,
дифференцирования или интегрирования или комбинации тех и
других; ак(х) и р* (*) -искомые коэффициенты, обычно в грубом
приближении известные для невозмущенной (модельной) задачи.
Теперь нашей целью является восстановление коэффициентов
a'k и Р& в выражении
L'=
D.30)
С помощью выражений D.29) и D.30) получим
D.31)
где
Подставим D.31) в D.28). Тогда при соответствующих условиях
приходим к системе уравнений
*Р*адН-в/„(. D-32)
i=l, 2, .... п.
340
ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ
ГГЛ 7
Дальнейшая задача состоит в параметризации вариаций баА
и 6p"ft. Сначала рассмотрим простейший случай, когда 6(Jft = 0,
a Ьак — постоянные. В этих условиях D.32) переходит в задачу
линейной алгебры
1 = 1,2
п.
D.33)
Здесь (фрг, Акср) — элементы матрицы, которые при заданных ф,
Ф* и Ак могут быть рассчитаны.
Пусть у — вектор с компонентами 6ак, F — вектор с компонен-
компонентами—б^ и aik — fo^, А^ф) — элементы матрицы Л. Тогда при-
приходим к уравнению
Ay = F. D.34)
Если число функционалов п равно числу определяемых вариаций
коэффициентов ак, то система D.34) в принципе позволяет найти
6ак. Если число п. больше т, то система D.34) оказывается пере-
переопределенной и ее решение (если оно существует) обычно нахо-
находится с помощью метода наименьших квадратов в предположении,
что у доставляет минимум квадратичному функционалу:
[|Ai/-F|p=min.
D.35)
Вектор у, минимизирующий этот функционал, иногда называют
квазирешением уравнения D.34). Если п = т, то для решения
системы D.34) можно использовать методы, которые были нами
обсуждены в гл. 4 в связи с анализом итерационных процессов
при неточных входных данных.
Если баА(л;) и 6р\ (х)— функции, то решение обратной задачи
можно находить с помощью тех или иных методов параметри-
параметризации, сущность которых состоит в следующем. Предположим,
что на основании априорного анализа поведения физических
параметров (обычно в результате статистического и корреляцион-
корреляционного анализа) находятся некоторые полные ортогональные системы
функций uk,i(x) и vkJ(x) такие, что с их помощью возможно
достаточно хорошее приближение к функциям ак и р^ при малом
числе n(k), так что
«(ft)
D.36)
Р* (*) =
где akfi и bk,i — коэффициенты, подлежащие определению.
7.4] ПОСТАНОВКА ОБРАТНЫХ ЗАДАЧ 341
Подставим выражения D.36) в D.32) и получим
т п(к)
2 2 К'(<Ррг. ик<1Ак(р) + Ьк>1(ВЩ, v,
*=IJ=l
t = l, 2 п.
Упорядочим теперь величины ак<1, bkj и переобозначим их
через У) (/=1, 2, ...). Введем в рассмотрение матрицу Л такую,
что уравнение
D.37)
эквивалентно системе D.37). Тогда мы снова приходим к задаче
линейной алгебры D.37), решая которую, находим ак<1 и дк<1,
а следовательно, бак и 6{Jft.
Мы рассмотрели только тот случай, когда решение модельной
задачи близко к реальной, т. е. можно заменить ф' на ф и, таким
образом, воспользоваться теорией малых возмущений. Если невоз-
невозмущенное (модельное) состояние процесса существенно отличается
от истинного, то рассмотренный выше алгоритм можно считать
только первым приближением к решению обратной задачи. После
того, как вариации 6ак и 6{ift найдены, можно исправить коэф-
коэффициенты ак, pft и найти
После этого необходимо решить «возмущенную» задачу
с оператором
D.38)
к= 1
перейти к новому приближению в решении обратной задачи,
приняв вместо D.32) .более общую формулу возмущений
[{ч>
Р1,
D.39)
1 = 1, 2, ..., п,
и повторить цикл вычислений для уточнения вариации 6ак, 6pV
Это мы будем называть вторым приближением в решении обратной
задачи. Разумеется, указанный процесс может быть продолжен.
342
ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ
(ГЛ. 7
Сходимость методов последовательных приближений может
быть доказана с учетом конкретной информации об элементарных
операторах задачи Ak и области определения операторов L, L*.
Проиллюстрируем наш алгоритм на простом примере. Предпо-
Предположим, что рассматривается задача
-йН^ + аМф'= /М> Ф'(О) = Ф'A) = О D.40)
с неизвестными коэффициентами а (х) и р (х), относительно кото-
которых делается априорное допущение. Предполагается, например,
что они являются непрерывными функциями в области определе-
определения решения Osg^sSl и известны их приближенные значения а
и р, т. е.
а(х) = п + да(х), P (*) = р+бр (х). D.41)
Если на основе априорной информации можно выбрать значения
а(х) и р'(л;) в модели более точно, то не обязательно предпола-
предполагать, что они равны постоянным а и р.
Кроме того, на основе предварительного изучения делается
вывод о возможности представления 6а (х) и бр (х) в виде конеч-
конечной суммы:
ПA) nl\\
ба(*) = 2
где {и, (х)} и {vi (x)} — некоторые полные ортонормированные сис-
системы функций (например, тригонометрические полиномы, поли-
полиномы Лежандра и т. д.).
Пусть Pi(x), р2(х) рп(х) — характеристики измерений,
так что в каждом из измерений регистрируется функционал
i = l, 2 п.
D.43)
Функции pi (x) можно назвать характеристиками прибора в дан-
данном измерении.
Введем в рассмотрение невозмущенную (модельную) задачу,
соответствующую задаче D.40):
Ф@)=ФA) = 0.
D.44)
Наряду с задачей D.44) сформулируем п сопряженных задач,
соответствующих избранной модели:
d -I
D.45)
* = 1, 2, ..., п.
7.4]
ПОСТАНОВКА ОБРАТНЫХ ЗАДАЧ
343
Согласно общей теории будем иметь
JPl Ы = S Pi (x) <p(x)dx = \f {x) Ф*. (х) dx. D.46)
о о
Предположим теперь, что модельные задачи D.44) и D.45)
решены. Далее находим вариации функционала 8JPl по формуле
bJPl = J'Pl-JH, i = l, 2, .... п, D.47)
где /рг— измерение прибора с характеристикой ри соответствую-
соответствующее D.43) (в котором ф' нам не известно); JPl — функционал,
теоретически рассчитываемый на основе любого соотношения
в D.46). Здесь требуется такая точность в измерении, которая
бы гарантировала расчет вариаций 6/р..
Рассмотрим теперь формулы теории малых возмущений D.33):
д-р R — ~ — Г ——
л-с, d- dx, L, — dx.
С учетом граничных условий для ф*^ и ф получим
J(W*i + 6pg^)^ = -6^.
D.48)
Подставим выражения для 6а (х) и 6{J (x) из D.42) и D.48) и
получим, что
(lllWtl + \d?-d^dxj = -8JPl, D.49)
i = l, 2, ..., п.
Если п = 2п(\), то система уравнений D.49) полностью опре-
определена.
Решая эту систему, находим коэффициенты ah bt и на основе
представления D.42) получаем первое приближение для величин
а' и {}'. Эти величины можно уточнять, используя метод после-
последовательных приближений, рассмотренный выше. Так же могут
быть поставлены и решены более сложные обратные задачи и
в том числе задача по определению возмущений б/ в источниках.
Обсудим теперь проблему планирования сложного экспери-
эксперимента. Ее можно сформулировать следующим образом. Среди
всевозможного (практически реализуемого) набора измерений
необходимо выбрать тот, который оказывается наиболее информа-
информативным с точки зрения решения конкретной обратной задачи
по восстановлению требуемых характеристик среды (коэффици-
(коэффициентов уравнений). В общем плане оптимизации эта задача
344
ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ
[ГЛ. 7
оказывается очень сложной. Однако можно рассмотреть некоторые
частные подходы к ее решению.
Допустим, что перед осуществлением эксперимента строится
модель невозмущенной задачи, с ее помощью описываются линей-
линейные функционалы от решения и с учетом априорной информации
о точности измерений делается вывод о необходимой точности
измерения функционалов. Предположим, что необходимые требо-
требования к точности измерения функционалов 6Jp обеспечены.
Далее рассматриваются различные совокупности измерений и
выбираются те из них, которые приводят к наилучшей обуслов-
обусловленности матрицы Л. Полученная система линейных уравнений
в этом случае хорошо решается, и такой план эксперимента
является в известном смысле оптимальным из данной совокуп-
совокупности (конечно, здесь не рассматриваются экономические вопросы,
оказывающиеся иногда решающими при планировании экспери-
эксперимента.) Если же при заданном наборе информативных функцио-
функционалов, обеспечивающих наилучшую обусловленность матрицы Л,
не удается реализовать высоких требований к точности измерений
функционалов JP[, то возникает более сложная задача о плани-
планировании эксперимента при заданных ограничениях на точность
измерений, допускаемых разрешением приборной техники. Это
уже своеобразная задача на оптимизацию с ограничениями.
Мы не останавливаемся здесь на вопросах статистической
обработки экспериментальных материалов. Эти вопросы, освещен-
освещенные достаточно подробно в литературе, не вносят в теорию
постановки и решения обратных задач каких-либо принципиаль-
принципиальных трудностей.
7.5. Формулировка теории возмущений
для сложных нелинейных моделей
Обычно довольно сложно конструировать математическую
модель, описывающую сложные процессы и явления. Такие
модели должны учитывать, как правило, много различных
эффектов, не все из которых описаны с требуемой точностью.
Это значит, что в тот или иной момент времени мы используем
одну или другую упрощенную математическую формулировку,
которая позволяет нам описать лишь небольшое число характе-
характеристик процесса, абстрагируясь от многих, иногда очень важных
деталей. Однако такие рассмотрения позволяют в общем описать
физические процессы, как правило, с необходимой точностью.
Что касается оценки влияния эффекта, не учтенного математи-
математической моделью, то она, как это было показано в предыдущем
параграфе, может быть осуществлена с помощью специальным
образом определенной теории возмущения.
7.5]
ТЕОРИЯ ВОЗМУЩЕНИЙ ДЛЯ НЕЛИНЕЙНЫХ МОДЕЛЕЙ
345
В настоящем параграфе мы рассмотрим более или менее общий
подход к конструированию математических моделей и их анализу.
Новым в нашем параграфе по сравнению с рассмотренными
выше задачами является переход от линейных процессов к про-
процессам, описываемым нелинейными уравнениями. Мы покажем,
что в известных приближениях нелинейные процессы также
допускают для своего решения и анализа подходы, свойственные
задачам линейным. Разумеется, такие подходы возможны на базе
различных способов линеаризации.
7.5.1. Основные и сопряженные уравнения
Рассмотрим стационарный процесс, который описывается
уравнением в следующей операторной форме:
ЛФ = /, E.1)
где Л —есть матрично-дифференциальный оператор, зависящий
от решения вектор-функции ф и входных данных а1г а2, ..., а„ —
функций координат, f является заданным вектором источников —
функций координат и заданных параметров р\, р2, ..., f5m. Сле-
Следовательно, мы имеем
Л = Л(ф, аь а2) ..., а„)
и
/ = /(Pi, Pa, .... Ю-
Пусть аь а2, ..., а„ и р\, р2, .... $т — данные, соответствую-
соответствующие некоторому стандартному состоянию системы. Это состояние
будем называть невозмущенным. Естественно, что невозмущенное
состояние системы будет описываться уравнением
Л(ф, «! ал)ф = /(р\, ..., рт). E.2)
Если обозначить через
то уравнение E.2) перепишется в виде
Лф = /. E.3)
Мы предположим, что решение уравнения E.3) нам известно.
Примем далее, что истинное, или, как мы будем в дальней-
дальнейшем называть, возмущенное состояние системы описывается урав-
уравнением E.2), входные данные которого мало отличаются от стан-
стандартных, т. е.
346
ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ
[ГЛ. 7
где отклонения баг и 6р"г предполагаются малыми по сравнению
с зг и р( соответственно.
Тогда вместо E.2) имеем
Л(ф + бФ> в, + ва,)(ф + вФ) = /(р/ + вр/). E.4)
Здесь используется следующее представление:
Априори предположим, что бф много меньше ф. В предполо-
предположении достаточной гладкости оператора А, решения ф и входных
данных рассмотрим разложения
E.5)
Подставляя E.5) в E.4) и ограничиваясь членами первого
порядка, получаем
E.6)
E.7)
Это основное уравнение для определения малых отклонений реше-
решения ф от невозмущенного состояния.
Мы предположим теперь, что оператор невозмущенного состоя-
состояния А и источник / известны с ограниченной точностью, т. е.
Привлекая уравнение E.3), имеем
. дА -Л «. df
ЗА —
Здесь е —оператор ошибки модели:
и ? —ошибка вектор-функции источников:
Пусть
E.9)
7.5]
ТЕОРИЯ ВОЗМУЩЕНИЙ ДЛЯ НЕЛИНЕЙНЫХ МОДЕЛЕЙ
347
Здесь нормы оператора и вектор-функции определены в соответ-
соответствующих метрических пространствах.
Подставляя E.8) в E.7), имеем
E.10)
где
E.11)
В предположении E.9) уравнение E.10) можно переписать
в виде:
|1ф)вф-|Рвр/-||фв««+о<|в1+|Б0.
Следовательно, с точностью до малых величин
* = J^-Jl*a<- E-»2)
Уравнение, полученное выше, есть модель для вычисления
невозмущенного состояния системы при изменении входных данных
на величины ба( и 6{Jy.
Введем обозначения
E.13)
Тогда окончательно имеем
и формальное решение этой задачи записывается в виде
E.14)
E.15)
7.5.2. Сопряженные уравнения и теория возмущений
Формула E.15) в теории возмущений наиболее удобна для
случая, когда необходимо определить отклонения решения только
для одного набора входных данных. При планировании направ-
направленных изменений состояния модели весьма важно бывает сделать
серию тестовых вычислений. Мы должны принимать во внимание
тот факт, что для оценки чувствительности модели на изменение
различных параметров или для получения оптимального соотно-
соотношения между параметрами нужно иметь большое число различ-
различных решений. Следовательно, нам необходимо попытаться построить
более универсальные теории возмущений для функционалов.
348
ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ
[ГЛ. 7
которые позволят нам всесторонне изучить математическую модель
при изменении входных данных.
Вместе с основным уравнением
L6<p = 6F E.16)
так же, как и в линейном случае, введем сопряженное уравнение
L\* = p, E.17)
где L и L* операторы, сопряженные в смысле Лагранжа:
(Lg, h) = (g, L*h). E.18)
Здесь g и h — элементы гильбертова пространства из области
определения операторов L и L* соответственно. Функцию р пока
будем предполагать неопределенной.
Умножим скалярно E.16) и E.17) на <р* и 6<р соответственно
и вычтем результаты один из другого. Тогда
(«р\ L6<p)-F<p, L*cp*) = (<p*, 6F)-(p, бФ).
E.19)
Выражение, стоящее в левой части равенства E.19) с учетом
E.18), равно нулю. Следовательно, мы имеем
(р, бф) = (Ф*, 6F).
Рассмотрим теперь набор линейных функционалов
6Jn = (pn, Ьр).
Если, в частности, рп = 8(х— х„), то и в линейном случае
E.20)
E-21)
E.22)
Функцию ф*, соответствующую рп, будем обозначать через ф*.
Таким образом, на основе равенства E.20) мы будем иметь
набор функционалов
6/» = (фИ, 6F). E.23)
Предположим, что мы заранее выбрали N функционалов Ju J2, ...
..., Jm и соответственно решили N сопряженных задач
L*<p*n = pn, n = l, 2 N. E.24)
Из E.23) следует, что нет необходимости вычислять вариации
бф, соответствующие различным наборам параметров баг и бр"у,
поскольку, задавая ц>% (п=\, 2, ..., N), можно непосредственно
вычислить значения функционалов 6Jn при любых возмущениях
во входных данных.
7.5] ТЕОРИЯ ВОЗМУЩЕНИЙ ДЛЯ НЕЛИНЕЙНЫХ МОДЕЛЕЙ 349
7.5.3. Теория возмущений для нестационарных проблем
Рассмотрим теперь нестационарную задачу в абстрактной
форме
E.25)
E.26)
^ /, ф = ? при * = 0,
и поставим ей в соответствие сопряженную
=Г, Ф*=?* при t =
Здесь /* и g* — пока неопределенные вектор-функции, которые
будут выбраны позднее. Уравнения E.25), E.26) помножим соот-
соответственно на ф* и ф; полученные результаты вычтем один из
другого и проинтегрируем по t на сегменте О^^^Г. В резуль-
результате получим
т т
С[(ф*. Лф)-(Ф, Л*Ф*)]^ =
о
= Htf. Ф*)-(Г, Ф)]*- E-27)
о
Так как операторы Л* и Л сопряжены, т. е.
(Ф*, Лф)-(Ф, Л*Ф*) = 0,
то выражение E.27) с учетом соответствующих начальных усло-
условий представляется в виде
(?*, Фг) - (8,
i = $[(f, Ф*)~Г, Ф)]-
о
E.28)
где
Фг = Ф|/-г» фо=ф"г|/-о-
Теперь предположим, что нам требуется найти линейный
функционал от решения E.25), имеющий вид
/ = fe*. Фг)+ $(/*. Ф) Л. E-29)
о
С помощью тождества E.28) этот функционал перепишем в форме
J = ig, Фо) + ((/, <P*)dt. E.30)
о
Далее предположим, что входные данные в задаче E.25) возму-
возмущены, т. е. вместо g и / рассмотрим g' — g-{-8g и /'=/ + 6/.
Тогда, учитывая последнее выражение, мы получим формулу для
I-
350
ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ
вариации функционала
[ГЛ. 7
E.31)
Таким образом, для вычисления отклонения функционала /,
соответствующего различным изменениям во входных данных,
не нужно решать большое число задач вида
2L
= ?' при * =
E.32)
с различными f и g'. Достаточно решить одно сопряженное
уравнение E.26) и воспользоваться формулой E.31). Используя
E.31), можно построить обратную задачу для нахождения 8g и
б/ с помощью набора функционалов 6J.
Во многих задачах в математических моделях нестационар-
нестационарных проблем нас будут интересовать не сами функционалы от
решения, а их отклонения. Тогда методом, изложенным выше
в 5.5.2, можно прийти к основным уравнениям
dt
и сопряженным
5т бф -f- L бф = 8F, бф = бф0 при ^ =
Ф*=Ф*г при t=T.
E.33)
E.34)
Процедура решения обратных задач не отличается от тех,
которые рассматривались выше для нестационарных проблем.
7.5.4. Спектральный метод и теория возмущений
В настоящем параграфе рассмотрен другой подход к теории
возмущений, который бывает предпочтителен в тех случаях, когда
нужно определить не вариацию функционалов /, а само откло-
отклонение от решения невозмущенной задачи.
В этом случае мы будем исходить из уравнения E.14)'
L бф = 8F
и спектральной проблемы
E.35)
E.36)
вместе
E.37)
Пусть E.36) определяет полную систему собственных вектор-
й \\ б {h\
Так как L не является самосопряженным оператором,
с E.36) рассмотрим следующую сопряженную задачу:
у
функций
а задача
E.36
\wn\,
E3
соответствующих собственным значениям {hn\,
E.37) определяет {w*n) и {Я„}. Тогда имеет место
75]
ТЕОРИЯ ВОЗМУЩЕНИЙ ДЛЯ НЕЛИНЕЙНЫХ МОДЕЛЕЙ
ортогональность вектор-функций, именно,
(о>„, ау^) = О при тфп.
Эти системы можно пронормировать:
>„, W*m)
{ 1, п = т,
( 0, пфт.
351
E.38)
E.39)
Решение задачи E.35) представим в виде ряда Фурье по
собственным функциям E.36)
и аналогично
где
E.41)
р„ = (бф, w%), 8Fn--
Подставляя E.40) и E.41) в E.35) и скалярно умножая на w%,
получаем соотношение
^тбфт = б/^, т=\, 2, ... E.42)
Таким образом, решение задачи E.35) записывается в виде
— wn, E.43)
или
E.44)
Итак, отклонение решения от основного состояния мы получили
в форме ряда Фурье. Если мы интересуемся линейным функцио-
функционалом, а не самим решением, то
6/ = (р, бФ). E.45)
В этом случае
где
Здесь ф* есть решение задачи ?*ф* = р (ср. E.17)).
Мы рассмотрели стационарный случай. Аналогично может
быть рассмотрена нестационарная задача и получены соответ-
соответствующие формулы теории возмущения.
Г Л А В А 8
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
Рассмотрим ряд простых и вместе с тем типичных задач мате-
математической физики, на которых будут проиллюстрированы основ-
основные методы вычислительной математики.
8.1. Уравнение Пуассона
Попытаемся на некоторых моделях проиллюстрировать под-
подходы к численному решению задач, связанных с уравнениями
эллиптического типа.
8.1.1. Задача Дирихле для одномерного уравнения Пуассона
Сначала рассмотрим задачу Дирихле для одномерного урав-
уравнения Пуассона
<р@) = а,
A.1)
где f (х) — функция источников, а, Ь — заданные константы.
Разобьем промежуток 0г^л:й?1 точками хк на N равных
промежутков хк^х^хк+1 с постоянным шагом xk — xk-\ — h.
Тогда задача A.1) с аппроксимацией второго порядка относи-
относительно h переходит в следующую:
N—\,
Фо — a, <pN = Ь.
A.2)
В соответствии с общим принципом построения разностных
схем прежде всего из разностного уравнения A.2) следует исклю-
исключить граничные точки с помощью краевых условий, изменив,
таким образом, оператор задачи. Тогда приходим к следующей
8.11
задаче:
УРАВНЕНИЕ ПУАССОНА
353
b
1 = 2, 3 N-2,
A.3)
В результате получим систему Л/ —1 уравнений с неизвестными
Фь ф2, ..., флг-i, которую можно записать в матричной форме
ЛФ = ?, A.4)
где
2—1 0 0 ... О 0[|
|_1 2—1 0 ... О О
0—1 2—1 ... О О
Ф1
Ф =
О 0 0 0 ... —1 21
fk k = 2, 3, .... N-2,
Нетрудно установить, что при ф Ф 0
, Ф)>0.
Это обеспечивает однозначность разрешимости задачи. За-
Задачу A.3) будем решать с помощью метода факторизации. В резуль-
результате получим
о 1
, * = 2, ..., N- 1, A.5)
, k = N — l, N— 2, ..., 1.
Для отыскания начальных значений р2, г2 запишем третье из
уравнений A.5) при k=\
Pi Р2Ф2 г
и потребуем, чтобы при специальном выборе |}2 и г2 это урав-
уравнение было тождественно первому из уравнений системы A.3).
Нетрудно видеть, что для этой цели необходимо положить
A.7)
В качестве начальных условий для ф& примем
!/а 12 Г. И Марчук
354 НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
8.1.2. Одномерная задача Неймана
Рассмотрим теперь задачу Неймана:
[ГЛ. 8
dw
Й7 = а ПРИ
х = 0,
A.8)
-? = Ь при х=1.
где а и Ъ — заданные константы.
Уравнение из задачи A.8) проинтегрируем по всей области
определения решения и используем граничные условия. Тогда
приходим к соотношению
a-b = \f{x)dx,
A.9)
которое является необходимым условием разрешимости задачи A.8).
Это условие в случае а — Ъ означает, что суммарное количество
источников субстанции равно нулю, т. е. если где-то имеются
источники субстанции, то в другом месте субстанция должна
поглощаться.
Итак, пусть задача A.8) разрешима и <p0 (*) — ее решение.
Можно убедиться, что <р (х) = <р0 (х) + С (С—произвольная кон-
константа) также будет решением, причем этой формулой исчерпы-
исчерпывается все семейство решений.
Для получения разностного аналога второго порядка аппрок-
аппроксимации решение задачи при достаточной его гладкости удобно
продолжить вне области определения решения 0=^Ж1 еще на
один интервал h слева и справа от границ. Это значит, что мы
имеем дело с сеточной областью
xk = kh, k = — l, 0, ..., N, N + l, h=MN.
На этой сетке определим аппроксимацию задачи в виде
fk, tt — v, i, ..., iv,
A.10)
2h
Подготовительную работу к решению задачи A.8) начнем
с исключения граничных условий. С этой целью из задачи A.10)
исключим две новые неизвестные ф_х и флг+i следующим образом.
Разрешив граничные соотношения из A.10) относительно q>.lf
<Pjv+1, находим
2Л A.11)
8.1]
УРАВНЕНИЕ ПУАССОНА
855
Полученные значения подставим в разностные уравнения из A.10).
Тогда будем иметь
Введем в
и векторы
Ф =
???
Ф^
фо-
— ф*~1 + 2ф/г —
/г2
~<fN 1"
/г2
рассмотрение
А- 1
И
8 =
go
gl
g-L
gN
1
-ф1
V
Ф*+1
Ьфдг
/о
2
_ f
— /ft
to
~~ 2
матрицу
1 -1
-1 2
0 -1
0
0
8
0
0
k =
а
о .
|
2 .
0 .
0 .
f /о
2
/ь
к,
9 ^
Ь_ 1
.. 0
.. 0
.. 0
.. 2
.. —1
а
~Т'
Ь
N —
¦ ¦ ¦ , '»
0
0
0
—1
1
* = 0,
k=\, 2,
ife =
iV.
A.13)
..., N-\,
Тогда приходим к задаче
A.14)
Первый вопрос, который следует поставить при анализе мат-
матрицы А, это определенность. Матрица А в разностной задаче
Неймана сингулярна, поскольку ее наименьшее собственное число
обращается в нуль. В этом убедиться совсем просто, рассмотрев
спектральную задачу
которая имеет своим собственным вектором вектор «0 с равными
компонентами и соответствующее собственное число К = 0. Нетрудно
показать, далее, что (Лф, фJ=0. Такую задачу линейной
алгебры мы обстоятельно изучали в 4.5. Там было установлено
необходимое и достаточное условие разрешимости, которое в нашем
конкретном случае означает ортогональность g вектору «0, т. е.
Sft = 0. A.15)
V, 12*
356
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
[ГЛ. 8
Левая часть в A.15) может быть записана в виде
N
Но
fc=O
есть известная квадратурная формула трапеций для интеграла
\f{x)dx.
о
Следовательно, квадратная скобка в A.16) либо равна нулю,
либо близка к нулю, что обусловлено погрешностью квадратур-
квадратурной формулы. Чтобы A.14) привести в соответствие с условием
разрешимости A.15), нужно подправить возможную «невязку» и
взять, например, в качестве gk величины gk = gk — g, где
N
1
Мы добились того, что
A.17)
В 4.5 был описан итерационный метод решения совместной
системы
ЛФ = ?- П.18)
Однако систему A.18) с трехдиагональной матрицей можно решать
и методом факторизации, если в алгоритм ввести небольшое
изменение, обусловленное вырожденностью матрицы А. На при-
примере рассматриваемой модельной задачи можно легко провести
весь анализ метода факторизации и увидеть основные моменты
алгоритма,
Итак, обратимся к формулам факторизации. В рассматривае-
рассматриваемом конкретном случае
К = с0 = bN = aN = 1,
bk = 2, ak = ck=\, ?=1,2 N-\,
поэтому
= 0, 1 N — l.
8.1] УРАВНЕНИЕ ПУАССОНА
Из последнего равенства легко находим
357
zm+l —
и, в частности,
Наконец,
N — 1
N — 1
_
1-1
0^
Таким образом, в алгоритме факторизации встречается неопреде-
неопределенность. Это вполне естественно, если учесть, что 4>n = Zn+i
в силу неоднозначности решения может быть произвольным чис-
числом. Итак, в качестве фдг можно принять любое число и полу-
получить искомое решение. Разумеется, об особенности такого сорта
следует помнить и при решении задачи Неймана с более сложным
оператором, нежели — d2/dx*.
8.1.3. Двумерное уравнение Пуассона
Приступая к рассмотрению многомерных задач математиче-
математической физики, с самого начала следует отметить, что проблема
аппроксимации таких задач представляет собой задачу нетри-
нетривиальную. Возникающие при этом проблемы лучше всего пояс-
пояснить на случае двумерной задачи для уравнения Пуассона. Если
граница области определения решения гладкая и достаточную
гладкость имеют функции, заданные на границах, то второй
порядок аппроксимации уравнения и граничных условий при
наличии устойчивости будет гарантировать второй порядок точ-
точности решения. Если, однако, либо граница области, либо функ-
функции, заданные на границах, оказываются негладкими, то в реше-
решении задачи в окрестности особых точек возникают весьма суще-
существенные погрешности. В самом деле, пусть областью определе-
определения решения является прямоугольник или L-образная область
(см. рис. 11). Тогда, как хорошо известно, в окрестности угло-
угловых точек в задачах с эллиптическими операторами обычно воз-
возникают особенности либо логарифмического, либо дробного харак-
характера. Поэтому равномерная сетка и второй порядок аппроксима-
аппроксимации задачи по обеим переменным внутри области еще не
обеспечивает решения задачи со вторым порядком точности.
В таких случаях используют либо метод сгущения сеток в окре-
окрестности особенностей решений, либо метод предварительного
12 Г. И. Марчук
358
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
[ГЛ. 8
выделения особенностей с последующим численным решением регу-
регулярной задачи, уже обеспечивающим второй порядок точности.
Заметим, однако, что при определенной согласованности гранич-
граничных условий и правой части уравнения в особых точках гра-
границы решение может оказаться гладким, и в этом случае допол-
дополнительных проблем аппроксимации уже не возникнет. Эти воп-
вопросы были затронуты в гл. 6, и их следует иметь в виду при
численной алгоритмизации задач математической физики. Здесь
мы сосредоточим свое внимание только на методах решения раз-
разностных уравнений, возникающих при рассмотрении многомер-
многомерных задач математической физики.
Рассмотрим двумерное уравнение Пуассона
на dD,
A.19)
где областью определения решения D является квадрат {Osss^ss; 1,
0<*/<1}. Будем считать, что упомянутая согласованность здесь
имеет место и решение задачи ф обладает достаточной гладкостью.
В области D выберем сеть узловых точек (хк, yt) на пересе-
пересечении координатных линий х = хк и у = уь. Тогда приходим
к разностному уравнению
№¦
k, 1=1, 2, .... N-l,
A.20)
где
(здесь xk = kh, yt = lh).
В разностном уравнении A.20) исключим граничные условия
и результат запишем в векторно-матричной форме. С этой целью
сначала введем в рассмотрение матрицу А и векторы {щ gi\N — x;
2 — 1 0 о ... о о ~
-1 2—1 0 ... оо,
0—1 2 —1 ... 00
"-±
0
0
0
Н
0 ... — 1 2
fu + %
hi
\ ,pi
1
8.1] УРАВНЕНИЕ ПУАССОНА
Определив матрицу
359
запишем систему уравнений A.20) в виде
^ й. / = 1, 2,..., JV-1, A.21)
при условии, что
где
фо = С,
A.22)
С -—
N-l\
Из уравнения A.21) исключим граничные условия A.22). Тогда
будем иметь
1
"Л2"
1 = 2, 3, .... JV-2, A.23)
1 _,
Систему уравнений A.23) запишем с помощью блочных мат-
матриц и векторов
в —Е 0 0 ... 0 0
\—Е В —Е 0 ... 0 0
0 — Е В —Е ... 0 0
1
0 0 0 0 ... — Е В
1
ф =
Флг-1
где ? —единичная матрица. Тогда система уравнений A.23) при-
примет вид
Лф = Л A.24)
12*
360 НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ ГГЛ. 8
Матрицу Л представим в виде суммы Л = Л1-|-Л2 двух матриц
А 0 0 ... 0
О Л 0 ... О
О О Л ... О
О О О ... А
Нетрудно установить, что
2Е —Е О О ... О
— Е 2Е —Е 0 ... О
О — Е 2Е — Е ... О
О
2ф1-ф2
О
О ... 2Е
. A-25)
Введем новые обозначения векторов:
(Л,ф), = ЛФ„ /=1, 2 JV-1,
Л2
1
! = 2, 3 N-2, A.26)
При такой записи видно, что выражения (Л^), и (Л2ф)А
являются компонентами векторов Лхф и Л2ф, и при этом имеют
место весьма удобные покомпонентные их представления*
ьг —Фал
— Ф*-1, i+Wk. i — Щ + i.i
-1, i
¦?2 Bф*./-ф*./ + 1),
(
2 N-2,
/=1,2, .... Л/-1.
8,1]
УРАВНЕНИЕ ПУАССОНА
361
Аналогичным образом вектор F представляется в форме
N-1
I
Л2
+
Ct_
^~1 | i
Л2 Л2
hi
hi
f
= 2 N-2,
' 1, N-i ~^~ h?
h, JV-i + л2
/ +А
' 3, N-l ^ h?
'N-1
"ЛГ-1
- /г2 "*~ й2
В результате приходим к покомпонентной записи задачи:
>)i = /=•?. A-27)
Если теперь потребовать, чтобы индекс / в A.27) принимал все
значения /=1, 2, ..., /V — 1, то приходим к окончательной век-
торно-матричной форме записи задачи A.20):
(Лх + Л2)ф = Л A.28)
В этом случае, как нетрудно убедиться, каждая из компонент
уравнения A.28) будет соответствовать разностному уравнению
из A.20), в котором уже учтены заданные граничные значения
решения.
Для формирования алгоритма найдем верхнюю и нижнюю
границы спектра оператора Л. Поскольку собственные функции
матрицы Л имеют вид (см. 1.14)
ump = sin mnkh sin pnlh,
то
mnh
Отсюда следует, что
*, I, т, р=\, 2, .... JV-1, A.29)
-). A.30)
?-. A.31)
362
где
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
а = а(Л), р = р(Л).
[ГЛ. 8
Для решения уравнения A.28) воспользуемся одним из ите-
итерационных методов, рассмотренных в гл. 4:
ф/+1 = ф/-т/(Лф/-77), A.32)
который можно записать в следующем виде
Итерационный процесс A.32) необходимо продолжать до тех пор,
пока не будет выполнено неравенство
где е — априорная константа. Эта оценка имеет место, если
Л)е. A.33)
Скорость сходимости итерационного процесса, вообще говоря,
может быть повышена, если вместо итерационного процесса A.32)
рассматривается метод последовательных приближений вида
ф/+* = ф/ - Т/Б л (Лф/ -F),
A.34)
где
ff=FW' а=а(Л); Р = Р(Л).
Найдем границы спектра оператора В 1А. Поскольку матрицы
Ах и Л2 имеют общий базис, то собственные числа A,t матрицы
Лх и к2 матрицы Л2 будут связаны с собственными числами
задачи (см. 1.1.3)
Я^Ли = к (В~1А) и
следующим соотношением:
к {В1 А) =
а/2 s? ^i s? Р/2, а/2
Выражение A.35) приведем к виду
P/2.
A.35)
A.36)
1
8.1]
где
УРАВНЕНИЕ ПУАССОНА
- х+у
363
A.37)
Таким образом, для того чтобы определить границы спектра
матрицы Б~1Л, нам достаточно определить наименьшее и наи-
наибольшее значения функции f(x, у) в квадрате
у--
р/о.
Анализируя производные этой функции
df _ [—у 1 df _ \—х 1
дх 1+</ 0 -\-хJ ' ду 1 +
A.38)
нетрудно показать, что максимальное значение f(x, у) принимает
в двух угловых точках
max f(x, y) = /(/f. /?
а минимальное в двух других
Va/3 «*,
Отсюда и из A.36) следует, что
- (L40)
Это значит, что асимптотически при Р(Л);>а(Л) имеем
. (Ml)
/? =
(Л).
A.42)
Приведем теперь схему реализации итерационного процесса
A.34)
A.43)
где т/ вычисляется на основе избранного метода оптимизации.
364
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
ГГЛ. 8
В покомпонентном представлении второе и третье уравнения
системы A.43) расписываются следующим образом: сначала ре-
решается задача при /=1,2, ..., N — 1:
- oVktft + О + 2о)
?, г
1 -44)
затем решается задача при ?=1,2, ..., Af—-1:
- оЦ+,1., + Bо
.45)
Уравнения A.44) и A.45) решаются с помощью метода фактори-
факторизации.
В заключение отметим, что если мы имеем дело с двумер-
двумерной задачей Неймана, то аналогично предыдущему приходим
к задаче A.28), которая отличается от рассматриваемой тем, что
число компонент решения, подлежащих определению, будет не
(N — IJ, как это имело место в задаче Дирихле, а (N + 1J.
Существенное отличие схемы реализации разностного аналога
задачи Неймана от задачи Дирихле состоит в том, что в задаче
Неймана а (Л) = 0. Поэтому правая часть F и приближенное реше-
решение на каждом шаге ф> должны быть ортогональны к вектору
с одинаковыми компонентами. Это значит, что перед осуществле-
осуществлением нового шага итераций необходимо из каждой компоненты
вектора у вычесть постоянную составляющую
к, I
При такой процедуре ортогонализации, когда векторы с одина-
одинаковыми компонентами исключаются из элементов исходного гиль-
гильбертова пространства, переводя его в подпространство Ф, и пробные
векторы выбираются из этого подпространства, в качестве нижней
границы спектра можно взять наименьшее ненулевое собственное
число. Как известно, спектр задачи Неймана для разностного
аналога оператора Лапласа находится по формуле
mnh
т, р = 0,
и в качестве границ спектров имеем
A-46)
A.47)
8.11
УРАВНЕНИЕ ПУАССОНА
В этом случае параметр о следует выбрать по формуле
365
A-48)
а вместо оценки для окончания итерационного
необходимо принять следующую:
процесса A.33)
A.49)
В остальном алгоритм численного решения задачи Неймана для
уравнения Пуассона не отличается от рассмотренного алгоритма
решения задачи Дирихле.
8.1.4. Проблема граничных условий
На основе рассмотренных выше подходов к решению уравне-
уравнения Пуассона можно сделать важное общее заключение по поводу
построения эффективных алгоритмов решения краевых задач мате-
математической физики. Это прежде всего относится к проблеме гра-
граничных условий. Выше была последовательно проведена идея
исключения граничных условий, налагаемых в качестве дополни-
дополнительных связей на решение задачи, и модификации их с учетом
разностных аналогов исследуемых задач. В таком подходе заложен
глубокий смысл: если при решении задач математической физики
разностными методами граничные условия из рассмотрения исклю-
т чены, то для формирования того или иного вычислительного
* алгоритма уже не приходится специально заботиться об удовле-
I творении граничных условий, поскольку они автоматически учи-
(тываются в модифицированных разностных уравнениях. Это важно
при решении стационарных задач и особенно при решении задач
I нестационарных, проблема граничных условий в которых требует
' тщательного анализа. Именно поэтому в гл 5 мы отказались от
расщепления нестационарных задач на простейшие в дифферен-
дифференциальной формулировке, поскольку это потребовало бы дополни-
дополнительных исследований постановки граничных условий, согласо-
согласованных с расщепленной системой. Более просто, с нашей точки
зрения, поставить в соответствие исходной задаче математической
физики систему разностных уравнений по пространственным пере-
переменным и из этой системы исключить граничные значения функ-
функций, используя разностные аналоги краевых условий задачи,
согласованных по точности с самим разностным уравнением.
И только после этого можно проводить аппроксимацию уравнения
по времени иа основе методов расщепления или других алгоритмов.
Этот прием позволяет избежать согласования граничных условий
на каждом этапе построения вычислительного алгоритма с помощью
схем расщепления.
366
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
[ГЛ. 8
Обратим внимание на следующий факт, тесно связанный с про-
проблемой граничных условий. При решении некоторых задач мате-
математической физики с помощью разностных схем оказывается целе-
целесообразным воспользоваться методом представления решения в виде
ряда Фурье по собственным элементам оператора разностной задачи.
Этим приемом мы уже пользовались неоднократно при изучении
свойств вычислительных алгоритмов. Однако для применения этого
метода необходимо, чтобы разностная задача замыкалась с помощью
однородных граничных условий. Если граничные условия неодно-
неоднородны, то требуется предварительная трансформация задачи к виду,
где граничные условия являлись бы однородными. Такую транс-
трансформацию удобно провести методом, построение которого про-
проиллюстрируем на простейшем примере задачи A.1). С этой целью
рассмотрим систему разностных уравнений A.2). Область опреде-
определения решения \xk) (k = 1, 2, ..., N — 1) расширим на две узловые
точки х = 0 (k = 0) и х = 1 (k = N) и доопределим решение в этих
точках следующим образом:
Фо = 0, флг = 0.
Такое доопределение, конечно, носит только формальный характер
и не имеет никакого отношения к фактическому значению реше-
решения в точках х = 0 и х = 1, определяемых неоднородными гранич-
граничными условиями A.1). Это означает, что после решения задачи
мы должны снова сузить область решения, исключая из нее точки
& = 0 и k = N, в которых решение определено в форме A.1). Такой
метод позволяет вместо задачи A.2) рассмотреть следующую,
эквивалентную ей задачу:
=gk, «=1,2, ..., N— 1,
Фо = О, Флг=0,
A.50)
где
h,
К=1,
? = 2,3, ...,N-2,
A.51)
Таким образом, задача A.1) с неоднородными граничными усло-
условиями ценой некоторого изменения правой части разностных урав-
уравнений свелась к задаче однородной, подготовленной к решению
с помощью метода Фурье.
В случае неоднородной задачи Неймана A.10) область опреде-
определения решения следует расширить, присоединив к ней узловые
Ш
if
I*
т
8.2]
точки
УРАВНЕНИЕ ТЕПЛОПРОВОДНОСТИ
и *;v+i. В результате приходим к задаче
? = 0,1,2 N,
/г2
Ф-1 = ф1. ФЛЧ1 = 4>N-1.
367
A.52)
где
fk.
?=1,2 JV-1,
A.53)
2Ь
После того как решение задачи A.52), A.53) найдено, следует
из него исключить вспомогательные компоненты ф_х и Фдг-ц.
Аналогичный прием может быть применен и для многомерных
стационарных и нестационарных задач.
Конечно, при необходимости с системами уравнений A.50) —
A.53) можно поступать так же, как и с неоднородными задачами
A.1) и A.10), исключив из уравнений граничные значения функ-
функций. В этом случае мы снова приходим к рассмотренным задачам
A.3) и A.12).
В дальнейшем мы не будем рассматривать неоднородные краевые
условия, поскольку описанные выше алгоритмы позволяют либо
совсем исключить их из рассмотрения, либо свести их к одно-
однородным.
8.2. Уравнение теплопроводности
Задача теплопроводности является одной из типичных неста-
нестационарных задач математической физики. Исторически сложилось
так, что именно благодаря уравнению теплопроводности были
поставлены и решены многие принципиальные вопросы теории
вычислений и построены первоклассные алгоритмы решения задач
математической физики. Поскольку проблеме численного решения
уравнений теплопроводности посвящена серия специальных моно-
монографий и оригинальных статей, мы ограничимся рассмотрением
некоторых методов, получивших наибольшее применение в при-
приложениях.
8.2.1. Одномерная задача теплопроводности
Сначала рассмотрим простейшую задачу о распространении
тепла в однородном ограниченном стержне, нагреваемом за счет
внутренних источников, с источниками и стоками тепла на
368 НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
границах. В этом случае имеем следующую задачу:
1 d(f _ <Э2ф , , . ..
!* dt ~~ 1х*~ +' ( ' )г
Ф@, t)=a(t), ФA, /) = &(/),
[ГЛ. 8
где f, a, b и ф° —заданные достаточно гладкие функции, с = const,
переменные х и t пробегают все значения из области определения
решения ?>хД = {OsS*==? 1, 0</<Т}.
Решение задачи B.1) будем искать с помощью метода конечных
разностей. С этой целью прежде всего аппроксимируем задачу
B.1) по х со вторым порядком точности. Пусть, как и для задачи
A.1), интервал 0==?*й?1 разбит точками хк (?=1,2, ..., N— 1)
на N интервалов длины h=l/N. Тогда приходим к следующей
задаче, аналогичной A.2):
B.2)
са di
фА = ф! При ^ = О
?=1,2 tf-1
или в векторно-матричном виде
1 da>
) = Ф° при t=0,
B.3)
где А — положительная матрица, а ф (t) и g(t) — вектор-функции,
определенные для любого / в задаче A.4).
Используя соображения, высказанные в 8.1.4, систему урав-
уравнений B.2) можно записать в виде
1 "Tft i
с2 dt "*"
Фо = 0, i
B.4)
при * =
где gk определены формулами A.51).
В этом случае, как было отмечено в 8.1.4, решение задачи
B.4) имеет смысл только в узловых точках хъ х2, ..., xN1.
Займемся теперь решением системы обыкновенных дифферен-
дифференциальных уравнений B.4). С этой целью проинтегрируем каждое
из уравнений B.4) по времени на интервале // ==? t ^ t/+1.
8.2] УРАВНЕНИЕ ТЕПЛОПРОВОДНОСТИ
Получим
— +gk>
где
—bSebdt.
369
B.5)
B.6)
Кроме того, здесь приняты обозначения
Различные разностные уравнения будем получать на основе
тех или иных аппроксимаций в B.6). Предположим, что имеет
место одна из трех следующих простейших формул:
¦if
7+1
(Ф1,
si,
Тогда приходим к наиболее распространенным разностным схемам:
явной схеме треугольника (. : .)
B.7)
неявной схеме треугольника (• : •)
схеме Кранка — Николсона (: : :)
B.8)
-• B.9)
Т ~ "' 2/г2 ' 2/г2 :
К системам уравнений B.7) —B.9) необходимо присоединить гра-
граничные условия
К = °> <=°- B-Ю)
Схема треугольника (. : .) явно разрешается относительно
неизвестной
B.11)
'а)=0. И- = "л»
370
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
ГГЛ. 8
Неявная схема треугольника (• : •) имеет более сложную
реализацию, сводящуюся к решению разностного уравнения
B.12)
вид:
Наконец, схема Кранка - Николсона (: : :) имеет следующий
B.13)
где
Задачи B.12), B.13) эффективно решаются с помощью метода
факторизации.
Исследуем устойчивость разностных схем B.7) —B.9) при
условиях B.10). С этой целью разложим решение в ряд Фурье
по полной системе функций {sinnnkh}, где h= 1/JV, удовлетворяю-
удовлетворяющих условиям B.10). Пусть
/V-1
л=1
/V-I
л = 1
/„sin/глМ, B.14)
где
« = Tn 2 ф* sin nnkh> G'n = 4- 2 4 sin nnkh,
N — l
Подставим B.14) в B.7) —B.9), полученные соотношения умножим
на sin nnlh и просуммируем по /. В результате приходим к рекур-
рекуррентным соотношениям для коэффициентов Фурье. Для схемы
(. : .)
для схемы (• : •)
B.15)
B.16)
8.2] УРАВНЕНИЕ ТЕПЛОПРОВОДНОСТИ
для схемы (: : :)
^— +К 2 = 2
Здесь
. 4 . 2 nnh
^п — ~fp Sin 2~-
Решая уравнения B.15) —B.17), получим соответственно
—G'41
_1 п *
371
B.17)
B.18)
(D/+1
B.19)
ф/ +i _ z.
п . Т
Отметим, что
B.20)
При л/г/2 <^ 1 неравенства B.20) превращаются в асимптотические
л2 < К
/г2 -
Учитывая B.20), приходим к выводу, что при
/г2
B.21)
B.22)
схема треугольника (. : .) будет устойчивой, поскольку для всех п
имеет место неравенство
|1-тЛ„|<1. B.23)
Условие B.22) можно заменить достаточным
^ /г2
В случае неявной схемы треугольника и схемы Кранка
Николсона соответствующие неравенства
т
1
B.24)
<1
выполняются при любых п и т>0. Это значит, что схема (. : .)
устойчива при условии B.22), а схемы (• : •) и (: : :) абсолютно
372 НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ [ГЛ. 8
устойчивы. Наибольшее распространение в расчетах получила
схема Кранка —Николсона, которая является схемой второго
порядка аппроксимации.
В случае задачи Неймана для уравнения теплопроводности
оператор А и вектор-функции ф и g определяются из задачи
A.14). В результате приходим к уравнениям, аналогичным B.5),
B.6), решение которых не представляет труда. Вместе с тем
необходимо сделать следующее замечание. Если при решении
задачи Неймана для уравнения Лапласа гармоника решения,
соответствующая собственному числу ^ = 0, была паразитической
и «отфильтровывалась» от приближенного решения, то в задаче
распространения тепла эта гармоника уже необходима в решении,
поскольку она описывает общее повышение или понижение тем-
температуры стержня за счет внешних источников и стоков.
8.2.2. Двумерная задача теплопроводности
Сформулируем двумерную задачу теплопроводности:
- — Дф = Г В
= g или ^ = g на dDxDt,
— s(x, у) в D при ? = 0,
B-25)
где D — квадрат {Osgxsgl, Osgr/sgl}.
Прежде всего редуцируем эту задачу к конечно-разностной
по переменным (х, у). В результате преобразований, аналогич-
аналогичных проведенным при рассмотрении двумерной задачи Дирихле,
приходим к следующей задаче:
B2б)
= s при t — 0,
где матрицы Ль Л2 и вектор-функции ф и F определяются так
же, как и в задаче A.24). Разница состоит только в том, что
компоненты векторов ф и F теперь будут зависеть от перемен-
переменной t. Заметим, что в случае граничных условий Дирихле для
уравнения теплопроводности имеем
К > 0, Л2 > 0, B.27)
а в случае граничных условий Неймана
Разбивая отрезок 0
т = с2Л/, рассмотрим
/^ Т точками /
аппроксимацию
B.28)
на интервалы и полагая
задачи B.26) на основе
8.3]
УРАВНЕНИЕ КОЛЕБАНИЙ
373
метода покомпонентного расщепления. Тогда на отрезке /y_i =
tt будем иметь
? + -L Л2) <р/ = (? —1 Л,) ф/-'/а + xfi,
Е + \ Л,) «р/ + '/* = (? —1Л2) ф/ + xfi,
B.29)
Заметим, что правые части в B.29) в покомпонентном виде
вычисляются по явным схемам. Таким образом, мы имеем дело
с системой уравнений в покомпонентном виде, представляемых
в форме трехточечных схем, аналогичных A.43), где роль о
теперь играет параметр т/2, а роль ^ — компоненты правых частей
уравнений B.29).
Аналогично решается задача теплопроводности при граничных
условиях Неймана.
8.3. Уравнение колебаний
В приложениях существенное место занимают уравнения
гиперболического типа, численные методы решения которых изу-
изучены достаточно полно. Отличительной чертой уравнений гипер-
гиперболического типа является то, что область зависимости решения
таких уравнений ограничена характеристическим конусом, так
что область пространства DxDt, расположенная вне этого конуса,
не влияет на решение в рассматриваемой точке. Другой особен-
особенностью решений гиперболических уравнений является то, что
решения исходной задачи, как правило, допускают существова-
существование и негладких решений. Последнее обстоятельство особенно
важно иметь в виду при разработке численных схем.
Рассмотрим одномерную задачу, описывающую малые колеба-
колебания однородной струны:
с2 дР ~ дх*
Ф(О, t)=a(t),
Ф(х, 0) = р(х),
C.1)
, 0) =
где с —скорость распространения возмущений вдоль однородной
струны; a(t), b (t), f (x, t), p(x) и q (x) — заданные функции.
374
НЕКОТОРЫЕ ЗЛДЛЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
[ГЛ. 8
Одномерная теория колебаний изучена весьма полно. Нашей
задачей является обсуждение вопросов численного решения C.1).
С этой целью прежде всего проведем редукцию задачи к системе
обыкновенных дифференциальных уравнений по времени с помощью
разностных соотношений по переменной х. Методом, изложенным
в 8.2, задачу C.1) аппроксимируем следующей:
_1
с2 dt2
Фо = 0,
Л.
h2
— Ф*+1 _
n = 0, Фй = Ра,
*$- = qk при *=0,
C.2)
где функция gb(f), как и в B.4), определена формулами A.4).
Решение задачи C.2) <р*(*), как подчеркнуто ранее, имеет
смысл только в узловых точках k = l, 2, ..., N — 1. В точках
k = 0 и k = N решение определяется граничными условиями
из C.1), а однородные условия в C.2) являются результатом
специального расширения области определения решения и не
являются аппроксимациями функции ср (х, t) в точках х0 и xN.
Заметим, что задача C.2) имеет второй порядок аппроксимации
по h = A*.
Для конечно-разностной аппроксимации задачи C.2) по вре-
времени Еведем в рассмотрение систему узловых точек t = tj (причем
t/+i = tj-\-kt) и рассмотрим две наиболее употребительные схемы:
явную схему «крест» (¦ '¦ •)
ф{
{+'-У»+ф
Г'
фо = 0, <pk = 0, ср* = р„,
C.3)
где т — с At,
и неявную схему, аналогичную схеме Кранка —Никольсона,
(: ¦: :)
+ «i,
C.4)
фо ='
8.3]
УРАВНЕНИЕ КОЛЕБАНИЙ
375
Разложением в ряд Тейлора устанавливаем, что в случае
достаточно гладких решений ф (х, t) разностные схемы C.3) и
C.4) аппроксимируют исходную задачу со вторым порядком как
по h, так и по т.
Решение задач C.3), C.4) будем искать с помощью ряда
Фурье по системе собственных функций
ип (k) = sin nnkh, k, n = 1, 2, ..., N — I
аналогично тому, как это было в B.14). Тогда для коэффициен-
коэффициентов Фурье приходим к рекуррентным соотношениям:
для явной схемы «крест» (• • •)
nnh
п —
C.5)
где Фя, Gn, Рп и <?я - коэффициенты Фурье элементов <pfc, gk, pk
и qk соответственно;
для неявной схемы (: > :)
— I
-sin-5
Фя = Рп,
Ф!, = /
C.6)
2т2
nnh
С целью установления критерия счетной устойчивости для задач
с гладкими входными данными изучим поведение линейно неза-
независимых решений однородных задач C.5) и C.6) в зависимости
от индекса /. Решение будем искать в виде
Ф'я=ЛятI, C.7)
где Ап и т]я — константы, причем здесь цп возводится в степень
с показателем /. Полагая в C.5) и C.6) G'n — 0 и заменяя в них
Ф'п по формулам C.7), приходим к следующим выражениям
для т)я:
)я
в случае схемы «крест» (¦ '¦ •)
т|" — 2 A — |xi) Чя + 1 = 0;
в случае неявной схемы (: г :)
C.8)
C.9)
376
где
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
[ГЛ. 8
Л2
nnh
~2~'
Решая квадратные уравнения C.8) и C.9), получим соответст-
соответственно
C.10)
(ЗЛ1)
Рассмотрим сначала решение для схемы «крест». Легко видеть,
что если
:Vf-l.
C.12)
то
и, следовательно, разностная схема будет устойчивой. Необхо-
Необходимо, чтобы условие C.12) выполнялось для всех значений п =
= 1, 2, ..., N —1. Это условие, очевидно, выполняется для
любых п, если т и h связаны зависимостью
Л2
лп2
sm
лАп
C.14)
или, более просто, т и h связаны условием Куранта
7Г<1. C.15)
Нетрудно установить, что в случае неявной схемы (: • :) при
любых п и т>0 имеет место равенство
h»l = i. C.16)
Это значит, что данная разностная схема абсолютно устойчива.
Аналогичным образом может быть рассмотрена задача о малом
колебании мембраны. В этом случае мы приходим к уравнению
c2 dt* dx2 du2 ' ^ "' ' LJ r\IJt У.д-11)
при краевом условии
Ф = # на dDxDt, C.18)
и начальных данных
4> = р, ~f-=cj в D при / = 0.
8.4]
УРАВНЕНИЕ ДВИЖЕНИЯ
377
Решение этой задачи в квадрате D при достаточно гладких
входных данных находится с помощью метода конечных разно-
разностей, как и в случае уравнения малых колебаний струны. При
этом метод исследования с помощью рядов Фурье аналогичен
рассмотренному выше для двумерного разностного аналога урав-
уравнения теплопроводности. Не повторяя этого пути решения задачи
и его анализа, перейдем к рассмотрению более общей задачи
с уравнениями гиперболического типа.
8.4. Уравнение движения
К числу основных уравнений математической физики следует
отнести уравнение переноса субстанции вдоль траекторий частиц,
которое можно представить в виде
где
d
dt
д
dt
д
дх
д
ду
д
дг
— полная производная от функции ф (х, у, z, t) по времени, а и,
v и w — компоненты вектора скорости u = ui-\- vj -\- wk, причем
dx
и=1Г
v =
dt
dz
w=Tf
Рассмотренное уравнение решается при дополнительных усло-
условиях, простейшим из которых для неограниченной среды будет
следующее:
Ф(х, у, z, 0) = /(х, у, г).
Аналогичная задача возникает в качестве элемента общего
алгоритма при численном решении уравнений гидродинамики,
теории переноса излучения и многих других. Учитывая это
обстоятельство, проведем подробное обсуждение возможных путей
численного цешения задач такого вида.
8.4.1. Одномерное уравнение движения
При решении задач гидродинамики, гидротермодинамики,
прогноза погоды, динамики океана и других приходится иметь
дело с уравнениями переноса субстанции вдоль траекторий.
Простейшим уравнением такого вида является уравнение
.-^¦ = 0 в ?>хА,
в ?> при / = 0,
D.1)
378
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
ГГЛ. 8
где и — заданная скорость, а / (х) — начальное распределение ср.
Областью D является вся вещественная ось х, a Dt = {Osg /sg T\.
Предполагаем, что ф (х, f) и / (х) являются периодическими функ-
функциями по х с периодом 2л. Если и = const, то задача D.1) имеет
очевидное решение
<р(х, t) = f(x-ut) D.2)
при условии, что / (х) есть дифференцируемая функция. Реше-
Решение D.2) описывает процесс распространения начального возму-
возмущения вдоль характеристик
x — ut = const.
Это значит, что ф(х, /) = const на любой прямой х — ut = const.
Итак, задача D.1) при «>0 определяет процесс распростра-
распространения возмущения в сторону возрастающих значений х. Эти
хорошо известные положения следует иметь в виду при конст-
конструировании разностных аналогов задачи D.1). Если скорость
и = и(х, t) — переменная, то нахождение решения задачи D.1)
в аналитическом виде уже затруднительно. Именно в этих слу-
случаях оказывается необходимым применение численных методов,
основанных на разностных аппроксимациях.
Рассмотрим простейшие разностные схемы с и = const. Ради
определенности будем полагать и > 0. Тогда имеем явную схему
Ах
и неявную
, „
Ах
D.3)
D.4)
Обе схемы имеют первый порядок аппроксимации по Ах и т.
В самом деле, предположим, что начальное значение fix) и
решение ф(х, /) —достаточно гладкие функции. Решение уравне-
уравнения D.1) разложим в ряд Тейлора в окрестности точки х = хк
t = t,:
ф(*. О = (ф)*' + ЫИ'-'/Жф*I(х-**)+••• D.5)
Подставляя ряд D.5) в D.3), получим, в частности,
D.6)
дф . дц>' и Ах 32ф т 92ф
Ш + " дх = ~~2~ дх* ~~2д!*'
Отброшенные члены в D.6) имеют более высокий порядок ма-
малости. Из уравнения D.1) следует, что
/3/2 " " а& • {?•')
8.4]
УРАВНЕНИЕ ДВИЖЕНИЯ
Тогда выражение D.6) примет вид
9ф . 9ш и Ах—ты2 92ф
Анализ соотношения D.8) показывает, что при
379
D.8)
соотношение D.8) можно толковать как уравнение теплопровод-
теплопроводности с областью определения решения xk^ sc; x sg xft, /,- sg ^ sg fy+1.
Если предположить, что отброшенные члены в D.8) малы, то
в результате мы приходим к уравнению
ЁФ ! ,, ^Ф _ „ д2(Р
где
и Ах —
является так называемым коэффициентом искусствен-
искусственной или «счетной» вязкости. Заметим, кстати, что если
иг .
Ах ~ 1'
то |i и все отброшенные слагаемые будут равны нулю; явная
схема D.3) оказывается схемой бесконечного порядка аппрокси-
аппроксимации по Лх и т.
Особо следует отметить случай, когда
В этом случае мы приходим к уравнению
дх - ^
dt
дх2'
D.9)
Легко видеть, что уравнение D.9) при начальном условии
Ф = Ф°(х) при * = 0 D.10)
приводит к задаче, некорректно поставленной по Адамару. Реше-
Решение этой задачи неустойчиво по отношению к малым возмуще-
возмущениям в начальных данных. При построении разностных уравне-
уравнений для задач вида D.1) необходимо всегда учитывать условие
корректности задачи
380
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
ГГЛ. 8
Исследуем теперь проблему счетной устойчивости схемы D.3).
С этой целью сначала рассмотрим спектральную задачу
Ах
D.11)
на бесконечном сеточном интервале ?>А = (—oo<Cxft<C°o). Реше-
Решение уравнения D.11), ограниченное в Dh, имеет вид
= eikp Ax,
D.12)
где р — произвольное целое число. Подставляя D.12) в D.11),
приходим к выражению для собственного числа
sin
KP - Ax Г Sln 2
Уравнение D.3) запишем в операторной форме:
Решение уравнения D.14) будем искать в виде
ф
/ =
D.13)
D.14)
D.15)
р = — со
где ф'— коэффициент Фурье функции ф'. Для коэффициентов ф'
получаем уравнение
Отсюда
фр+'-Ч
= -/рФр»
где Тр= 1 — тХр — м но ж и те л ь перехода для коэффициен-
коэффициентов Фурье.
Найдем условие, при котором все компоненты ф' не воз-
возрастают по модулю. Таким условием будет следующее:
1.
D.16)
Это неравенство имеет место, если
их
Ах
1.
8.4]
В самом деле,
УРАВНЕНИЕ ДВИЖЕНИЯ
381
= ! _ 4 «
©2 D
sin-p Ax) =
D.17)
Из неравенства D.17) сразу следует D.16).
Таким образом, мы приходим к условию счетной устойчиво-
устойчивости разностной схемы. Легко видеть, что в рассматриваемом слу-
случае установленный критерий устойчивости совпадает с условием
корректности уравнения D.8).
Переходим теперь к обсуждению неявной разностной схемы
D.4). Методом, изложенным выше, нетрудно показать, что схема
D.4) также имеет первый порядок аппроксимации по Ах и т.
Применяя формулу Тейлора, при х = хк и t — tj приходим к «асимп-
«асимптотическому уравнению»
D.18)
дф
1дх~
дх*
где
и Ах + иН
Уже здесь можно констатировать принципиальное различие
соотношений D.8) и D.18). В последнем уравнении коэффициент
счетной вязкости всегда положителен. Следовательно, уравнение
D.18) при соответствующих достаточно гладких начальных дан-
данных всегда корректно. Нетрудно показать, что разностное урав-
уравнение D.4) устойчиво при любом соотношении шагов, т. е. абсо-
абсолютно устойчиво, поскольку множитель перехода для каждого
коэффициента Фурье равен
7„= '
Отсюда следует, что
|7Р|<1.
Из интересных и весьма употребительных разностных схем,
кроме D.3) и D.4), можно привести следующие:
1 —О
2Дх
т/+1/2_„/+1/2
Vk + l —<Pk-l _n
2Д^ U'
D.19)
D.20)
382
где
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
[ГЛ. 8
Нетрудно установить, что схема D.19) является схемой пер-
первого порядка аппроксимации по г и второго по Ах. Соответ-
Соответствующее этой схеме дифференциальное уравнение будет иметь
вид D.18), где
Устойчивость определяется операторами перехода для коэффи-
коэффициентов Фурье. Приходим к спектральной задаче
=± = Ъщ. D.21)
Решение уравнения D.21) будем искать в виде D.12). В резуль-
результате для 'кр получим следующее выражение:
%p = i^csmpAx. D.22)
Из D.19) непосредственно следуют уравнения для коэффициен-
коэффициентов Фурье
-Фя
или
где
ф
?+' =
D.23)
С учетом D.22)
и, следовательно,
Т =
1
. их
¦lssir
1
А
x
1.
Отсюда следует абсолютная счетная устойчивость схемы D.19).
Наиболее интересной в приложениях является схема К ранка —
Николсона D.20). Нетрудно убедиться, что эта схема имеет вто-
второй порядок аппроксимации по т и Ах и не диссипативна. Это
означает, что в дифференциальном уравнении D.18) ц = 0, а отбро-
8.4]
УРАВНЕНИЕ ДВИЖЕНИЯ
383
шенные члены имеют порядок хАх, т2 и Ах2. Что касается счет-
счетной устойчивости, то в данном случае
Т —-
Отсюда следует, что
и, таким образом, эта схема является абсолютно устойчивой. Сле-
Следует отметить, что если в схеме D.3) разностное выражение для
«-^ в форме
Ах
заменить на
и
Ах
то полученная разностная схема при и>0 окажется неустойчи-
неустойчивой при любом соотношении шагов.
В заключение рассмотрим еще один интересный метод числен-
численного решения задачи D.1) на основе так называемой схемы «бе-
«бегущего счета». Эта схема имеет вид
) V
Нетрудно показать, что эта схема второго порядка аппроксима-
аппроксимации по т и первого по х. Она реализуется рекуррентным соот-
соотношением
их их
1 —
1 +
2Дл:
1 + —
+ 2Дл:
D.25)
На основе анализа устойчивости по Нейману с помощью метода
Фурье нетрудно доказать, что схема D.24) абсолютно устойчива.
Аналогичным образом можно построить схему «бегущего счета»
для многомерной задачи движения и доказать ее устойчивость
в случае уравнения с постоянными коэффициентами.
Выше всюду предполагалось, что и постоянна и положительна.
Если и отрицательна, то заменой х на — х приходим к уравне-
уравнению D.1). Однако особый интерес для приложений имеет случай,
когда и = и(х, t). Уже самый простой анализ показывает, что
в этом случае, даже при использовании неявных диссипативных
384
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
[ГЛ. 8
разностных схем, возможно нарушение счетной устойчивости.
Особенно это проявляется в нелинейных задачах. Суть дела со-
состоит в следующем. Если разложить решение разностной задачи
и коэффициент и (хь tj) в ряд Фурье, то произведения рядов
Фурье приведут к гармоникам как более длинным, чем взаимо-
взаимодействующие, так и более коротким.
В результате такого процесса в ряде случаев может прои-
произойти перекачка «энергии» из длинных волн в наиболее корот-
короткие, и процесс вычислений окажется неустойчивым, несмотря
на то, что данная разностная схема с постоянным коэффициен-
коэффициентом будет счетно-устойчивой. Обычно такую неустойчивость на-
называют нелинейной. Она также иногда появляется и при реше-
решении линейных задач с переменными коэффициентами. Поэтому
построение разностных схем для нелинейных уравнений или
уравнений с переменными коэффициентами, устойчивых в отноше-
отношении к любым возмущениям, является чрезвычайно актуальной
задачей. В большинстве случаев подавление счетной неустойчи-
неустойчивости возможно с помощью диссипативных разностных схем, отве-
отвечающих определенному выбору коэффициента счетной вязкости ц.
Однако такие схемы, как правило, оказываются схемами первого
порядка аппроксимации либо по т, либо по Ах, либо и по т и
по Ах.
Особый интерес в приложениях имеют уравнения вида
|
D.26)
dt """ дх
где и = и(х, t).
Разностные схемы для уравнений такого типа, абсолютно
устойчивые и имеющие первый или даже второй порядок аппрок-
аппроксимации на некоторых классах коэффициентов, будут изучены
при рассмотрении многомерных уравнений вида D.26).
8.4.2. Двумерное уравнение движения с переменными
коэффициентами
Рассмотрим на плоскости (.v, у) задачу о движении ансамбля
частиц по заданным траекториям. В рамках методов механики
сплошной среды приходим к следующей задаче:
D.27)
dt ' дх ' ду
ф(Х, у, 0)=g В D.
Здесь u = w(x, у, t), y = u(x, у, t).
Далее предположим, что компоненты вектора скорости и, и в
каждый момент времени удовлетворяют уравнению неразрывности
D.28)
дх
- ? - О-
ду
8.4]
УРАВНЕНИЕ ДВИЖЕНИЯ
385
Пусть областью D является прямоугольник {
и решение задачи D.27) вместе с коэффициентами и и v является
периодическим, принимая на противоположных сторонах прямо-
прямоугольника одинаковые значения.
Эволюционные уравнения из D.27) запишем в операторной
форме:
^ + ЛФ = 0, D.29)
где
Ф = § при / = 0,
*=«? + "?•
Нетрудно показать, что в исследуемой задаче оператор Л удов-
удовлетворяет условию (Лф, ф)=0. В самом деле, вводя скалярное
произведение в гильбертовом пространстве, запишем
а Ь
(Лф, Ф) = J dx J dy [и g + v Ц)ф. D.30)
Подынтегральное выражение с учетом D.28) преобразуем к виду
дх
а Ф Л. Ф
2 *2
Поэтому
(Лф, ф) =
дх
—
дх
—
ду
D.31)
Отсюда с помощью условия периодичности решения на границах
получаем
(Лф, ф) = 0. D.32)
Таким образом, оператор Л допускает конструирование абсолютно
устойчивых разностных схем.
Попытаемся теперь расщепить оператор Л таким образом,
чтобы каждый из элементарных операторов Ла(а=1, 2) также
удовлетворял условию
(Лаф, ф) = 0.
D.33)
В этом случае разностная схема покомпонентного расщепления
позволит получить абсолютно устойчивую разностную схему вто-
второго порядка точности.
386
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
[ГЛ. 8
Формальное разложение оператора А на составные части
Аг = и±, Л2 = и| D.34)
не удовлетворяет условию D.33). Нетрудно убедиться, что имеют
место соотношения
а Ь
> <p)=-j \dx \^fxdy,
0 0
Это значит, что операторы А1 и Л2 не могут быть взяты в каче-
качестве элементарных для построения схемы последовательного рас-
расщепления.
Выберем операторы Аг и Аг в более сложной форме:
Каждый из операторов теперь удовлетворяет требованию D.33),
а сумма их в точности равна А. В самом деле, имеем
Здесь мы воспользовались тем, что коэффициенты и и и удовлет-
удовлетворяют уравнению D.28).
Итак, все необходимые условия для применимости метода
расщепления теперь выполнены, и мы приходим к схеме расщеп-
расщепления на отрезке tf-i^t^t
X '
ф/_ф/-'/2
.- д
2 ал:
Г
D.36)
дх'1' 2 дх)'
Если функции и и v и решение ф обладают достаточной гладкостью
по всем переменным, то схема D.36) имеет второй порядок аппрок-
аппроксимации и будет абсолютно устойчива в том смысле, что
1|ф/+111 = Иф/-111 = --- = 1к11- D.37)
Это поучительный пример того, как формальное расщепление
на операторы D.34) может скомпрометировать саму идею расщеп-
расщепления, и лишь дополнительные соображения приводят к схемам,
теоретически оправданным и эффективным в приложениях.
8.4]
УРАВНЕНИЕ ДВИЖЕНИЯ
387
После такого предварительного рассмотрения перейдем к пост-
построению разностных схем решения задачи D.27) по пространствен-
пространственным переменным и времени. Сначала обсудим вопрос о рациональ-
рациональных путях аппроксимации оператора А по пространственным пере-
переменным х и у. Как было отмечено в гл. 2, удобным методом
аппроксимации задач математической физики с сохранением адди-
аддитивных свойств оператора и его качественных особенностей
является метод покоординатной аппроксимации, которым мы и
воспользуемся для построения разностных схем.
Предположим, что коэффициенты и и v достаточно гладкие,
и рассмотрим уравнения D.27) в дивергентной форме
D.38)
Ф = ? в D при / = 0.
Для построения разностной схемы за основу возьмем опера-
оператор А, определяемый выражением
л <3ыф , дщ ф (ди
Л(Р - "Si + Ту ~ 5
Разностный аналог этого соотношения рассмотрим в виде
;+?.
D.39)
i
vk, l+i
ФА. I ( "ft+l- l — Uk-i. I
2 \ 2Дл-
2Д7/
Очевидно, разностное выражение D.40) аппроксимирует D.39) со
вторым порядком относительно Дх и Ау на достаточно гладких
функциях и, v и ф. Однако выражение D.40) имеет существенный
недостаток, поскольку в такой форме оператор Ah нарушает свою
кососимметрическую структуру, т. е. теперь
(Л"Ф, <р)#0. D.41)
Это значит, что привычная нам аппроксимация оказывается
неудовлетворительной для конструирования вычислительного алго-
алгоритма решения задачи D.27).
Покажем, что аппроксимация выражения D.39) в форме
\,l .
, l+\~Vk, <-
D.42)
удовлетворяет основному соотношению
(А\, Ф) = 0
D.43)
388
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
[ГЛ. 8
и аппроксимирует выражение D.39) со вторым порядком по Ах и Аг/.
Воспользуемся следующей аппроксимацией коэффициентов:
D.44)
«ft—1/2, ( = 1
uk, I — uk-l, I
„ _L Vk, I — vk, l-l
k. (-1/2 = 0*./-H 2
Подставив эти выражения в D.42), после несложных преобразо-
преобразований получим
I — uk-l,
5
vk.
<-1фй, l-l
,), D-45)
где величины Rktl и Qktl при Ах->0 и Аг/-->-0 стремятся к сле-
следующим:
п I д f ди д<р\ п 1 д I dv д<р
Предположим теперь, что коэффициенты uka, vKl удовлетво-
удовлетворяют соотношению
Щ
D.46)
Если коэффициенты и, v и решение ф имеют ограниченные произ-
производные третьего порядка по х и у, ¦ то выражение D.45) при
условии D.46) отличается от D.40) на тот же второй порядок
малости, что и выражение D.40) от D.39). Таким образом, мы
показали, что выражение D.42) аппроксимирует D.39) со вторым
порядком относительно Ад: и Аг/.
Покажем, что построенный оператор Ан удовлетворяет усло-
условию D.43) и, более того, каждый из операторов А\ и Л*, опре-
определяемых выражениями
D.47)
D.48)
°k, i+ i/гФй, i + l ~vk, i- i/гФб. i — l
также удовлетворяет условиям
8.4]
УРАВНЕНИЕ ДВИЖЕНИЯ
389
С этой целью введем в рассмотрение скалярное произведение для
векторных величин а, Ь:
(а, Ь) =
Имеем
, Ф) =
Ф) =
D.49)
1/2Ф*,' +1 ~
Приведя подобные члены в D.49), приходим к равенствам D.48).
Из условий D.48) немедленно вытекает условие D.43). Итак,
необходимые пространственные аппроксимации проведены. Теперь
задача состоит во временной редукции системы обыкновенных
дифференциальных уравнений
= 0 в DhXDt,
D.50)
= ?А в Dh при ? = 0,
где
Фй — вектор-функция с компонентами фА,, и Л? удовлетворяют
условию D.48). Это значит, что задача D.50) может быть решена
с помощью метода расщепления. Опуская для удобства индекс h
у функций и операторов на отрезке t/-i^t sS^+i, приходим
к системе
¦А[-
= 0.
D.51)
= 0-
Итак, задача D.27) редуцировалась к системе простейших одно-
одномерных разностных уравнений, решение которых возможно с по-
помощью метода факторизации трехточечных разностных урав
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
8.4.3. Многомерное уравнение движения
[ГЛ. 8
Рассмотрим теперь многомерное уравнение гидродинамического
переноса субстанции вдоль траектории
дФ
ОФ . X дФ .
а= 1
D.52)
в D.
Предположим, что коэффициенты в D.52) удовлетворяют уравне-
уравнению неразрывности
DxDt.
а= 1
D.53)
Задача D.52) с учетом D.53) может быть приведена к дивергент-
дивергентному виду
дФ . х диаф
~дГ+ 2 -шг=° в D<D"
а= 1
Ф(х, О) = /(лг) в D.
D.54)
Задача D.54) является основной при использовании методов рас-
расщепления.
Построим сначала разностное уравнение, соответствующее
уравнению из D.54), используя для этой цели схему Кранка —
Николсона:
D-55)
где
D.56)
Кроме того, в D.55) мы использовали некоторую аппроксимацию
коэффициентов va. Естественно выбрать эту аппроксимацию либо
первого, либо второго порядка по т. Например, для получения
первого порядка аппроксимации можно принять
а для второго порядка —
tj)
8.4]
Обозначим через
УРАВНЕНИЕ ДВИЖЕНИЯ
391
ди) Ф
2
Тогда уравнение D.55) можно записать в виде
фМ-ф/ | ,4У+1/2 = 0, 0я'2 = - (Ф
или
D.57)
Ради простоты предположим, что решение задачи периодическое,
относительно «-мерного параллелепипеда D. Если ввести скаляр-
скалярное произведение формулой
(а, Ь)= \abdD,
D
то нетрудно проверить, что имеет место равенство
(Л'Ф, Ф) = 0. D.58)
Разрешим уравнение D.57) относительно Ф/+1. Тогда получим
D.59)
Используя лемму Келлога и D.58), находим, что
Далее рассмотрим разностную аппроксимацию уравнения
D.55) в пространстве геометрических переменных. С этой целью
область D спроектируем на Dh и запишем, опуская у и, Ф те
индексы, которые не изменяются:
0> D.60)
где
Л?Ф = ъщ (uL, ka + 1/2Ф*а + 1 - «а, »а- 1/2Ф*а- l) , D.62)
причем ka — индекс, соответствующий номерам узловых точек
переменной ха. Введем в рассмотрение скалярное произведение
(а,Ь)= % аь
D.63)
..*_
392 НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
Нетрудно проверить, что
(Л'Ф, Ф) = О.
Следовательно, используя D.64), имеем
[ГЛ. 8
D.64)
где Ф'— решение уравнения D.60). Таким образом, при указан-
указанной разностной аппроксимации оператора А1 оператором Л' из
D.60)—D.62) снова приходим к абсолютно устойчивой схеме.
Теперь исследуем аппроксимацию А' с помощью Л'. В этой
связи рассмотрим сначала элементарные операторы А'а и Л?.
В дальнейшем используем в выражении Л«Ф в качестве коэффи-
коэффициентов величины
иа,
+ 1/2 = "а,
— ~2 \иа,
— "а, *а) >
«а, *а-1/2 = "а, *а-1+ 2-
D.65)
Тогда имеем
<
"а, кп-1
2Дл:„
--^R'a, D.66)
где
*
4
-К, *e-«L *в-1)(Ф».-Ф*в-.)]. D-67)
Если Ал:а->-0, то, принимая во внимание предположение о доста-
точной гладкости решения и коэффициентов и (х, t), получим
р/ д (dui дФ
Из D.66) следует, что оператор Л4, вообще говоря, не аппрок-
аппроксимирует оператор А'а.
Рассмотрим полный оператор Л' и изучим выражение Л'Ф.
Имеем
а=1
2Д.ги
а=1
8.4]
УРАВНЕНИЕ ДВИЖЕНИЯ
393
Предположим, что разностная запись уравнения неразрывности
такова, что
2 "а, *а + |—"а, ка~1
2Дл:а ~(
D.69)
где
{Лха}.
В этом случае вторая сумма в выражении D.68) обращается
в нуль, и мы имеем
,4.70,
Таким образом, из D.70) следует, что полный оператор Л' аппрок-
аппроксимирует А с точностью до величин второго порядка малости по
всем геометрическим переменным.
Переходим теперь к расщеплению задачи D.54). С этой целью
рассмотрим следующую двухциклическую схему:
а=1, 2, .... п,
D.71)
Коэффициенты в операторе Л? необходимо выбрать следующим
образом: u> = v(x, tj). Подходящий выбор обеспечит второй поря-
порядок аппроксимации системы на каждом отрезке
(,-1<'<*М- D.72)
Рассмотренный метод расщепления D.71) является абсолютно
устойчивым. В самом деле, поскольку аппроксимация операто-
операторов Ла такова, что сохраняется условие
(Л? Ф, Ф) = 0,
то нетрудно доказать с помощью леммы Келлога, что
1, се=1, 2, ..., а,
D.73)
13 Г. И. Марчук
394
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
[ГЛ. 8
и, следовательно,
Ф
. п—а
п-а+1
п
п—а + 1
Исключая промежуточные значения
a=l, 2, .... n,
a = n, n-l, ...,
получим
1!ФМ1- D-74)
Рассмотренный метод решения задач гидродинамического дви-
движения легко обобщается на случай квазилинейных уравнений
гидродинамики. Требуется лишь схему решения дополнить хоро-
хорошей схемой экстраполяции коэффициентов иа на момент времени th
зная их в предыдущие моменты.
Нами рассмотрена схема второго порядка аппроксимации по
пространственным переменным. Однако возможно распростране-
распространение алгоритма в случае более точных аппроксимаций. В самом
деле, пусть
-к («ft+m + «ft)
_m)
m=l
2 (отДха)
где fim удовлетворяет следующей системе уравнений:
J i
m=l m=l
Тогда, если ха = xfta, имеем
m=l
D.75)
D.76)
а=1
аФ
При этом предполагается, что коэффициенты удовлетворяют сле-
следующему соотношению:
п р
\
а=1 т=1
2>^
1~ил, kn — m
а — i
2тАха
D.77)
Используя далее алгоритм расщепления D.71), получаем реше-
решение задачи D.54) с точностью до O(/i2p + r2).
Указанный алгоритм обобщается на случай, когда гидроди-
гидродинамическая среда сжимаема. В этом случае основная система
8.5] НЕСТАЦИОНАРНОЕ УРАВНЕНИЕ ПЕРЕНОСА
уравнений имеет вид
п
аРФ
395
D.78)
а=1
Учитывая, что р является функцией по существу положи-
положительной, систему D.78) можно привести к виду
D.79)
2
а=1
1
Обозначая >АрФ = 'Ф, аппроксимируем D.79) выражением
= 0,
2Аха
D.80)
2Длг„
где
("a)fta+l/2 =
Нетрудно видеть, что D.80) аппроксимирует D.79) со вторым
порядком точности по т и Л, и, кроме того, выполняются соот-
соотношения
Для решения задачи D.80) применим метод, аналогичный D.71).
8.5. Нестационарное уравнение переноса
В этом параграфе рассматривается применение метода расщеп-
расщепления к одной из актуальных областей математической физики —
теории переноса излучения. Поскольку мы преследуем в основном
методические цели, то сосредоточим внимание на простейших, но
13»
396
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
[ГЛ, 8
вместе с тем практически интересных моделях. Хотя в качестве
основного математического аппарата решения нестационарных
задач выбран метод расщепления, основные идеи построения
разностных аналогов задач переноса могут быть использованы
и при других подходах.
Рассмотрим простейшую задачу теории переноса в плоско-
плоскопараллельной геометрии, которая с учетом начальных данных
имеет вид
$
Ф = 0 при
Ф = 0 при
Ф = Ф° при
= 0,
= H,
= 0,
E.1)
E.2)
E.3)
где ф (z, ц, t) —- плотность частиц в точке z, летящих со ско-
скоростью с *) под углом v к оси Oz в момент времени /, \к = cos v;
f(z, \n, t) — заданные источники излучения, функции o(z), as(z)
предполагаются кусочно-непрерывными, причем
О < а0
oo,
0 sg as
's < оо,
О < а
с0
ас = а — as.
Приведем некоторые удобные для дальнейшего преобразования
задачи. Решение E.1) для [г>0 обозначим через ф+ идляц<0
обозначим через ф~. Тогда уравнение переноса можно записать
в виде системы двух уравнений:
E.4)
Граничными условиями для функции ф+ и ф- будут следующие:
Ф+(г,
ф-(г,
при г = 0,
при г = Я.
*) В дальнейше.м ради простоты полагаем с= 1.
8.5]
НЕСТАЦИОНАРНОЕ УРАВНЕНИЕ ПЕРЕНОСА
397
Теперь сложим эти два уравнения и вычтем друг из друга. В ре-
результате приходим к новым двум уравнениям:
E.6)
ди
где
dv
Нетрудно убедиться, что граничные условия E.5) переходят
в следующие:
u + v = 0 при 2 = 0,
и — v = 0 при z= H
и начальными данными будут
= у° при ^ = 0.
E.8)
Задаче E.6) —E.8) придадим операторную форму записи. С этой
целью введем в рассмотрение вектор-функции да, да0, F и опера-
оператор А:
w —
Л =
E.9)
Рассмотрим в D = [0, Я]х[0, 1] гильбертово пространство
функции L2(D) со скалярным произведением
2 1 Н
(а, Ь)=
2 \
( = 10
E.10)
где а', Ь1 — компоненты вектор-функций а и Ъ.
398
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
[ГЛ. 8
Далее из этого пространства выделим подпространство вектор-
функций Ф, на элементах которого выполняется условие
(Aw,
E.11)
Здесь скалярное произведение является функцией времени. Этот
факт в дальнейшем специально оговариваться не будет. Потре-
Потребуем, чтобы компоненты вектор-функций да были в D непрерыв-
непрерывными и имели абсолютно непрерывные первые производные dw/dz.
Заметим, что гладкость функций и и v в D непосредственно сле-
следует из требования гладкости в D функций ф+ и qr. Наконец,
из подпространства Ф выделим множество вектор-функций, удов-
удовлетворяющих условиям E.7) и имеющих абсолютно непрерывную
первую производную по времени. Это подпространство обо-
обозначим Ф°. Очевидно, Ф° является областью определения
оператора
Тогда приходим к следующей задаче:
> = F в Dx[0, T],
О в D,
причем
), Т]), #ёФ, ш(/)еФ°.
w° при
E.12)
Нетрудно проверить, что на функциях Ф°, являющихся также
областью определения оператора А, имеет место соотношение
(Aw, да)>0. E.13)
Известно, что оператор А — положительно определенный, т. е.
(Aw, да) Say (да, да), E.14)
где у — положительная константа, связанная с характерным гео-
геометрическим размером области.
Переходим к разностной аппроксимации задачи E.6)—E.8)
по пространственной переменной z. С этой целью введем две си-
системы узловых точек: основную систему {zA}^Lo. zo = O, zN — H, и
вспомогательную {zk+1/2}k = o. Точки этих двух систем взаимно че-
чередуются, т. е. 2ft..1/2 < zk < zm/2.
8.5]
НЕСТАЦИОНАРНОЕ УРАВНЕНИЕ ПЕРЕНОСА
399
Проинтегрируем первое из уравнений E.6) по г в пределах
(Zo, zVi), (гА_1/2. Zk+i/t), k=l N— 1, (Zjv-i/2. zN), а второе —
в пределах (zft-b zk), k—\, ..., N. Тогда уравнения E.6) при-
примут вид
г1/2
г1/2
г1/2
z0
г1/2
= f dz
gdz,
z0
«о
г»
гк - 1/2
+
1/2
г* — 1/2 "к — 1/2
гк +1/2 1 г* +1/2
= ^ dz J а^и djji'+ j qdz, E-15)
гк
dt
vdz +
2N— 1/2
zN
J ffudz= J rdz,
«jv — I zN-\ zN-l
ZN ZN
ZN— 1/2
ZN 1
= 5 cfaj.
zn - i/a °
400 НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
Введем следующие обозначения:
Azo = z1/2 — z0, Azk = zk+l/2 — zk-i/2, k—l, ..., N—l,
AzN = zN — zN-l/2, Az,,-i/2 = zk — zk i, k = l, ..., N,
[ГЛ. 8
max(Az0, AzN, Azk, Azk+l/2),
E.16)
Azk
-1/2
А— 1/2
+ 1/2
E.17)
=Air J
*ft—1/2
¦1/2
Тогда при условии непрерывности функций и и v почти для всех
значений z и ц из D и кусочной. непрерывности функций a, as,
g и г с возможными разрывами первого ряда в точках zk с по-
помощью методов, изложенных в 2.3, и с учетом граничных усло-
условий приходим к следующей разностной аппроксимации уравне-
уравнений E.6):
ди0
~аГ0— + ff°"°= ffs0 3
dv
1/2
dt
Лг, .,
/2 = Г 1,2,
= a,k
"* + '/2 + Ц д*;1 "*
ОТ аг*+2
E.18)
1/2 - ^ + 1/2,
dv
N-\/2
1
"" ^
- 1/2
- 1/2
- 1/2,
ди.
;
= asN j uNdii'+gN.
8.5]
НЕСТАЦИОНАРНОЕ УРАВНЕНИЕ ПЕРЕНОСА
401
Пусть Mh @, 2N) есть гильбертово пространство вектор-функ-
вектор-функций a = (ao, ai/2, .... UN —1/2, адг) со скалярным произведением
и нормой
2JV 1
(a, b)= 2 $Дг1/2а
|а|| = (а, а)'/2, а, 6е
Введем в рассмотрение вектор-функции
0, 2N).
(НО,
, «1, -..,
Т — 1/2,
«Г,
и матричный оператор i4 = L —S, где L и S имеют вид
Д7» + С
— ^
Д*|/2
0
0
01/2
0
0
0
д*1/2
0
0
... 0
0
•• ° As
0
0
- 1/2
'Л' L
V-
AzN -
i/2
[ \
! = diag I cts, ,-/2^/2 d\
\ о
1, если i/2 —целое или нуль,
О, если i/2 — дробное.
С введением указанных выше определений систему E.18) можно
записать в операторной форме:
E.19)
J?
, *e=[0,
при ? = 0.
Рассмотрим некоторые свойства операторов задачи E.19).
Прежде всего заметим, что оператор S является в Mh @, 2N)
самосопряженным и положительным в силу сделанных предполо-
предположений относительно исходных данных задачи. Покажем теперь,
что операторы А и L положительно определены на МЛ. Действи-
Действительно, пусть w e Mh; тогда, рассматривая квадратичную форму
402
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
[ГЛ. в
(Lw, да), имеем
(Lw, да) = С (и.'^'д. W° + o0wo) Azowo dp +
1
nJ V Azi/2
о
'-1
( = 10
и- д^1
+ oNwN) wN dp =
2N 1
1
, E-20)
(Lw,
а также
, да) =
& V || да ||2, у = const > 0,
2N 1
- 2 Д*/2 S
? = 0 0
1
О
c0
Это и доказывает наши утверждения.
Получим теперь две априорные оценки для решения задачи
E.19). Умножим скалярно уравнение E.19) на функцию ф; по-
полученное соотношение проинтегрируем по области @, f) и получим
t t
/ t
f
^о
I
о
l/2 / t
у/2
:1J + \W0)T-
l/2
t у/2 / t /
^1фР@ + }(ЛФ, Ф)Л^ +1[ф»о)]«, E.21)
С = const > 0.
Воспользовавшись соотношением |a-ft|^7~a2 + eft2 (e>0) при
соответствующем выборе е, из последнего неравенства получим
!
8.3] НЕСТАЦИОНАРНОЕ УРАВНЕНИЕ ПЕРЕНОСА 403
априорную оценку для решения <р
|| Ф |2 @ + i (Аф. Ф) dfi ^ С (I || F ||« dp- +1 ф(»> |2), E.22)
о \о /
где константа С>0 и не зависит от t и ф.
С помощью E.22) можно доказать однозначную разрешимость
задачи E.19), при этом гладкость по t решения ф будет на по-
порядок выше соответствующей гладкости вектор-функции F. Однако
мы не будем здесь останавливаться на этом вопросе, а априори
предположим, что E.19) имеет единственное решение ф, обладаю-
обладающее отмеченной выше гладкостью по t.
Представим теперь оператор А в виде: A = B-\-D, где
D =
0 0
о о
о о
0 0 ...aN_{/20
0 0 ... О
Дг
N
Очевидно, что D — положительно определенный оператор
в М/, @, 2N). Поэтому уравнение из E.19) эквивалентно следую-
следующему:
|r(^iy) + D-1/M?>-1/2u = D-i/2f> E.23)
где и = й'/2ф. Умножим E.23) скалярно на и и результат про-
проинтегрируем по t в интервале @, tj). Тогда приходим к соотно-
соотношению
11ФI2 (У + \ (D~ WAD- >/Ч v) dt = $ (D- WF, v) dt + i
о о
из которого после простых оценок получаем неравенство
и
Ф'
.0 112
-2-1ФIP (ti) +
, v) dt ^
, v)dt:
l/2
E.24)
404
где
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
[ГЛ. 8
- + Oc,i
а.
'с. 1/2 ••
0 -ac.N-l,2 °
о ... о _?.
ас, N
Так как
0 0
где постоянная С1'>0 не зависит от и и Azi/2, то, используя
последнее неравенство, из E.24) получаем вторую априорную
оценку для ф
\vtdt.
)-l/2/
E.25)
где константа С>0 не зависит от ф и Дг,/2.
Воспользуемся теперь неравенствами E.25) для оценки погреш-
погрешности, с которой решение задачи E.19) приближает вектор-функцию
Фг=(«(г0, Ц, t),
p,
ц,
составленную по значениям точного решения E.6), предполагая,
что решение и исходные данные задачи E.6) —E.8) достаточно
гладкие по всем своим переменным, шаг сетки выбран равномер-
равномерным, т. е. h = H/N, Zi = ih, z,_i/2 = (i —1/2)Л, и h достаточно
мало. Оценки погрешности, которые получаются на этом сравни-
сравнительно узком классе функций, позволяют нам надеяться, что
рассматриваемый здесь метод аппроксимации будет эффективным
при решении ряда практических задач.
Отметим, что ошибки аппроксимации е;, i = 0, N, в первом
и последнем уравнениях в E.18) имеют первый порядок относи-
8.5]
НЕСТАЦИОНАРНОЕ УРАВНЕНИЕ ПЕРЕНОСА
405
тельно h, а остальные е^ порядка О (h2). Следовательно, заме-
заменяя ф в E.25) на фГ —ф и F на
елг—1/2,
получаем искомые оценки
eoft2
ul/2
1 - E-26)
max фт —'
1/2
4
Неравенство E.25) может быть использовано для получения
оценок погрешностей решений E.19) и при более слабых ограни-
ограничениях относительно гладкости исходных данных и решения
задачи.
Переходим к формулировке метода расщепления для решения
задачи E.19). Для этого введем операторы Аи А2, действующие
в уИл(О, 2W):
Дг
о
^
1/2
Дг1/2
0
0
0 0..
о о ..
Дг
:Л— 1/2
о
Дг
ЛГ—1/2
(г
Дг
лг
Az
N
42 = diag
- as
при этом
Легко показать, что Ах — положительный оператор, а, используя
406
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
[ГЛ. 8
соотношение
1
Коч
1 )d\i ^ aCf о \
/ о
доказать также и то, что Л2 положительно определен в Мл (О, 2N),
т. е.
, (A2a, а)
= const>0.
Условия определенности позволяют сформулировать алгоритм
решения на основе двуциклического покомпонентного метода
расщепления (см. 4.3). Сформулируем следующие задачи.
На интервале tj-x^t^tj
1 Л?) Ф/-т = (Е-\ Л?
на отрезке tj-x «=? t «=? tJ+1
и на отрезке
*)
E.27)
E.28)
E.29)
где /^ есть вектор с компонентами
'f-1
Из свойств Лх, Л2 следует, что схема E.27) — E.29) (при необ-
необходимой гладкости решения) аппроксимирует E.19) с точностью
до величины порядка О (г2) и устойчива:
тах||ф(/I^С(|ф^| + тах
E.30)
где C = const>0. Из аппроксимации и неравенства E.30) также
следует, что
-ф(/'ЧИ0(г2). E.31)
8.5]
НЕСТАЦИОНАРНОЕ УРАВНЕНИЕ ПЕРЕНОСА
407
Если справедлива оценка E.26), то решение задачи E.27) — E.29)
сходится в метрике пространства Mh (О, 2N) к значениям точного
решения исходной задачи при h, т-»-0, причем
max ft Фг (tj) - ф(^> | ^ О
In1 /2 -[
2},
E.32)
где
фГ
= (« (Zo, tf, \i), W(Z|/2, \i, tj), .... v(ZN_1/2, \l, tj), U(ZN, II, tj)).
Остановимся на решении системы E.27) — E.29). Так как
матрица
является трехдиагональной, то решение первого уравнения из
E.27) и второго из E.29) не представляет труда при любом
фиксированном \а. Матричный оператор
диагональный, так что решение второго уравнения из E.27)
сводится к вычислениям по формулам
i = 0, 1, ..., N,
E.33)
Аналогичные формулы выписываются и при решении первого
уравнения из E.29). Итак, численный алгоритм решения системы
E.27)-E.29) определен.
Выполним теперь разностную аппроксимацию уравнений по \и.
Для этого интервал 0^ц^1 разобьем на частичные интервалы
А^ узловыми точками \it так, чтобы обеспечить на заданном
классе решений наилучшую аппроксимацию интегралов в E.33).
Пусть
1 m
Sч> о*) dp = 2 sfli, ip,=
0 < 1
408
НЕКОТОРЫЕ ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
[ГЛ. 8
где Si — веса выбранной квадратурной формулы. Заменяя интег-
интегралы в E.27) — E.29) квадратурными формулами и рассматривая
систему при ц = Цг, /=1, ..., tn, приходим к системе линейных
алгебраических уравнений, аппроксимирующей исходную задачу:
Е + -Ь Л2, tU- '/з = (е -1.
E.34)
гДе ф?~' ф{' + '-векторы размерности BN + 1), t = \, ..., т,
а оператор Аг1 действует по формуле
, /Ф0//2 =
'72
Ч '72
S
. //2,
Как отмечалось, первое и последнее уравнения в E.34) легко
могут быть решены, например, с помощью метода прогонки;
решение же второго и четвертого уравнений E.34) реализуется
по формулам
1 = 0, .... W,
E.35)
.1—1/2'
1+-
для второго уравнения и по тем же формулам E.35) с заменой /
на / + 1 для четвертого уравнения.
Таким образом, алгоритм численного решения нестационарного
уравнения переноса определен полностью. В результате прихо-
приходим к абсолютно устойчивой схеме порядка точности
8.5]
НЕСТАЦИОНАРНОЕ УРАВНЕНИЕ ПЕРЕНОСА
409
на гладких решениях. Порядок точности по \i зависит от выби-
выбираемой квадратурной формулы. (Отметим, что в рассматриваемой
схеме в качестве узловой точки допускается также значение
До сих пор никаких ограничений на выбор параметров
схемы не накладывалось. Однако заметим, что если для решения
систем в E.34) применяется метод факторизации, то для его
устойчивости достаточно потребовать, чтобы T<min (Az^). По-
(
этому при решении практических задач это условие накладывает
ограничения на выбор временного шага.
Аналогичным образом могут быть рассмотрены и многомерные
уравнения переноса.
ГЛАВА 9
ОБЗОР МЕТОДОВ ВЫЧИСЛИТЕЛЬНОЙ МАТЕМАТИКИ
Высокопроизводительные электронные вычислительные машины
создали основу для алгоритмических построений и широких мате-
математических экспериментов во многих областях науки и техники.
Это способствовало привлечению новых научных кадров к проблемам
машинной математики. Ценный опыт, накопленный при решении
прикладных задач, в дальнейшем был использован для построения
эффективных методов и алгоритмов вычислительной математики.
В данной главе мы кратко перечислим основные направления
в вычислительной математике, которые сложились к настоящему
времени, и отметим основные тенденции их развития.
9.1. Теория аппроксимации, устойчивости
и сходимости разностных схем
Широкое использование метода конечных разностей для решения
дифференциальных уравнений математической физики вызвало
необходимость детального изучения тех свойств разностных урав-
уравнений, которые непосредственно влияют на качество разностных
схем. Такими свойствами прежде всего являются устойчивость
и сходимость.
Развитие теории устойчивости и сходимости началось после того,
как расчеты на быстродействующих машинах показали, что раз-
разностная схема, аппроксимирующая корректную дифференциальную
задачу, может оказаться неустойчивой (некорректной). Неустойчивая
схема чувствительна к ошибкам округления, допускаемым в процессе
счета, и поэтому может привести к решению, значительно отличаю-
отличающемуся от решения дифференциальной задачи. Эта отличительная
и своеобразная черта разностных уравнений вызвала усиленные
теоретические исследования по установлению связи между сходимо-
сходимостью и устойчивостью.
В середине 50-х годов А. Ф. Филиппов [6], Лаке [6, 7], Рихтмайер
[3, 6, 7], В. С. Рябенький [6], Дж. Нейман [7] почти одновременно
и с разных позиций сформулировали следующий основной результат,
получивший название теоремы эквивалентности: если линейная
однородная дифференциальная задача корректна и разностная
схема аппроксимирует эту задачу, то устойчивость разностной схемы
9.1]
АППРОКСИМАЦИЯ. УСТОЙЧИВОСТЬ И СХОДИМОСТЬ
411
является необходимым и достаточным условием сходимости решения
разностной задачи к решению исходной задачи. В окончательном
виде для абстрактного уравнения в банаховом пространстве эта тео-
теорема сформулирована и доказана В. С. Рябеньким и А. Ф. Филиппо-
Филипповым [6]. Теорема эквивалентности сформулирована в терминах одной
и той же нормы. Сходимость в других нормах, как правило, может
быть установлена на основе теорем вложения С. Л. Соболева [1].
Повышая требования гладкости к начальным данным, можно
ослабить требования на устойчивость схемы, на что первыми обрати-
обратили внимание В. С. Рябенький и А. Ф. Филиппов [6]. Эта идея последо-
последовательно проведена в теореме эквивалентности Стрэнга [7] с исполь-
использованием понятия слабой устойчивости.
Из исследований, связанных с поиском эффективных признаков
устойчивости, в первую очередь следует отметить работу Неймана
и Рихтмайера [7], в которой сформулирован локальный критерий
устойчивости. Однако этот критерий верен лишь для уравнений
с постоянными коэффициентами в случае самосопряженных задач,
в связи с чем начались усиленные поиски границ применимости
локального критерия.
Лаке и Ниренберг [6, 7] разработали теорию устойчивости
гиперболических разностных схем в терминах так называемого сим-
символа разностной схемы. В случае явных разностных уравнений
символ совпадает с обычной матрицей перехода, получаемой методом
Фурье, при этом локальный критерий устойчивости оказывается
справедливым, если коэффициенты имеют ограниченные вторые
производные по х.
Стрэнг [7] сформулировал теорему сходимости для систем квази-
квазилинейных гиперболических уравнений при условии локальной устой-
устойчивости разностных уравнений, соответствующих первой вариации
дифференциальной системы, и достаточной гладкости решения.
Изучение разностных схем с переменными коэффициентами
связано с использованием понятия диссипативности. Прежде всего
здесь следует отметить работу Крайса [6], который сформулировал
теоремы о связи порядка диссипативности разностных уравнений,
аппроксимирующих системы гиперболических уравнений, с по-
порядком их точности. При этом матричные коэффициенты разностных
уравнений предполагаются эрмитовыми и липшиц-непрерывными
как функции от х.
Интересный подход к исследованию устойчивости предложен
в работах Н. Н. Яненко и Ю. И. Шокина [7]: вместо разностного
уравнения рассматривается некое сопутствующее ему дифферен-
дифференциальное уравнение, называемое первым дифференциальным приб-
приближением, из некорректности которого следует' неустойчивость
разностной схемы.
Весьма важный класс разностных схем составляют схемы с
положительными операторами, рассмотренные Фридрихсом [2],
412
ОБЗОР МЕТОДОВ ВЫЧИСЛИТЕЛЬНОЙ МАТЕМАТИКИ
[ГЛ. 9
который ввел общее понятие положительных схем и установил для
них достаточный критерий устойчивости в L2.
С. К- Годунов и В. С. Рябенький [6, 7] ввели понятие спектра
семейства разностных операторов, что позволило им сформулировать
необходимое условие устойчивости разностных уравнений, хорошо
вскрывающее сущность неустойчивости. Введено новое понятие
ядра спектра семейства разностных операторов. В терминах ра-
радиусов ядер спектра даны оценки норм степеней операторов семейст-
семейства, причем эти оценки оказываются равномерными для всего семей-
семейства и могут быть использованы для исследования устойчивости.
Все рассмотренные выше признаки устойчивости можно назвать
спектральными, так как они основаны на изучении спектра разност-
разностных операторов. Эти признаки могут установить сходимость в норме
L2. Доказательства устойчивости разностных схем в С проводились
С. И. Сердюковой [6], Томэ [6], А. А. Самарским [7] и др.
Из неспектральных подходов к изучению устойчивости разно-
разностных аналогов уравнений параболического и гиперболического
типов необходимо указать на весьма общую теорию, построенную
А. А. Самарским [3, 6, 7] на основе энергетических неравенств и
априорных оценок. В этой теории для широкого класса двухслойных
и трехслойных схем содержатся достаточные условия устойчивости,
сформулированные в виде неравенств между операторными коэф-
коэффициентами разностных схем. Эти условия весьма конструктивны
и позволяют не только исследовать схемы на устойчивость, но и
строить новые устойчивые схемы.
Большое развитие в настоящее время получил энергетический
метод. Идея метода состоит в выборе такой нормы для вектора
решения, значения которой возрастают от шага к шагу не быстрее,
чем 1+0 (At), что означает устойчивость в этой норме.
Энергетический метод исследования устойчивости появился
еще в работе Куранта, Фридрихса и Леви [7] и был с успехом
развит О. А. Ладыженской [7], Лизом [7], Лаксом [7], Крайсом [6],
А. А. Самарским [3], А. Н. Коноваловым [15] и др.
Для гиперболических краевых задач весьма полное исследование
проблемы устойчивости проведено Крайсом [6]. Им установлены
достаточные условия устойчивости разностных аналогов при весьма
общих предположениях относительно входных данных задач.
Теория аппроксимации и сходимости с общих позиций функцио-
функционального анализа развита Л. В. Канторовичем и Г. П. Акиловым
[1], которые рассмотрели широкий класс операторных уравнений,
уделив особое внимание проблеме численного решения интеграль-
интегральных уравнений..
Важное значение для теории сходимости имеет разработанная
С. Л. Соболевым [1] теория замыкания вычислительного алгоритма,
широко используемая для теоретического обоснования прибли-
приближенных методов решения задач математической физики,
9.2]
МЕТОДЫ ЧИСЛЕННОГО РЕШЕНИЯ ЗАДАЧ
413
9.2. Методы численного решения задач
математической физики
Понятия аппроксимации, устойчивости и сходимости создали
необходимую базу широкого поиска эффективных разностных
схем для решения задач математической физики. Алгоритмы решения
задач с помощью конечно-разностных методов, как правило, пред-
представляют собой сочетание методов построения разностных аналогов
задач и методов их решения. Поэтому прогресс в конструктивной
теории конечно-разностных методов обязан взаимосогласованному
развитию указанных двух направлений исследований.
Если попытаться просуммировать богатейший опыт в развитии
конечно-разностных методов последних лет, то условно можно
выделить следующие важные направления.
Построение разностных схем. Одно из таких направлений связа-
связано с разработкой методов построения консервативных разностных
схем, основанных на законах сохранения, свойственных большин-
большинству физических процессов. Для конструирования консервативных
разностных схем исходят из уравнений балансов, записанных для
отдельной ячейки сеточной области, с последующим использованием
квадратурных и интерполяционных формул. Построенные разно-
разностные уравнения после необходимых преобразований и суммиро-
суммирования по всем точкам сеточной области удовлетворяют дискретным
аналогам интегральных законов сохранения.
Такие подходы рассмотрены О. А. Ладыженской [7], в работах
которой построены разностные операторы для уравнений с раз-
разрывными коэффициентами, имеющие единый вид для любой внутрен-
внутренней точки области. Для обоснования алгоритма использовано
понятие обобщенного решения и доказано, что решение разностной
задачи образует некоторый функционал, переходящий при h-*-0
в функционал дифференциальной задачи.
Консервативные разностные схемы сквозного счета в гидро-
гидродинамике разработаны С. К- Годуновым [4], Лаксом и Вендрофом
[6] на основе явных разностных аппроксимаций. Большое значение
для решения задач гидродинамики имеет метод интегральных
соотношений, предложенный А. А. Дородницыным [3] и развитый
О. М. Белоцерковским, П. И. Чушкиным [4] и др., в котором ис-
использована частичная разностная аппроксимация уравнений, запи-
записанных в дивергентной форме, на основе метода прямых. Эти методы
сыграли существенную роль в формировании общего взгляда
на конструкцию разностных схем для квазилинейных уравнений.
Интересные общие подходы к интегрированию уравнений гидроди-
гидродинамики также предложены в работах К. И. Бабенко, В. В. Русанова
[12], Фромма [4], Кроули [4], В. Ф. Куропатенко [4].
В последнее время большое внимание уделяется построению
решений задач математической физики высокого порядка точности.
414
ОБЗОР МЕТОДОВ ВЫЧИСЛИТЕЛЬНОЙ МАТЕМАТИКИ
[ГЛ. 9
Здесь в основном определились два направления. Первое связано
с повышенным порядком аппроксимации разностных уравнений.
Такие идеи рассмотрены в исследованиях А. А. Самарского [3],
Н. Н. Яненко и А. Н. Валиуллина [3], Митчелла [3] и др. Второе
направление связано с построением решений на основе разностных
уравнений сравнительно невысокого порядка на последователь-
последовательности сеток с изменяющимися шагами. Эти методы получили наз-
название экстраполяции по Ричардсону и нашли отражение в иссле-
исследованиях Е. А. Волкова [4], Фокса [4], В. В. Шайдурова [4] и др.
Методы построения разностных схем для уравнений эллипти-
эллиптического и параболического типов в классе разрывных коэффициентов
разработаны на основе интегро-интерполяционного метода А. Н. Ти-
Тихоновым, А. А. Самарским [4] и др.
Вариационные методы. В последние годы заметно повысился
интерес к вариационным методам решения задач математической
физики. Вариационные методы Ритца, Галёркина, Трефтца и др.
давно заняли в вычислительной математике важное место. Особенно
эффективны эти методы в тех задачах, где искомыми являются
функционалы от решения. Оказалось, что уже при сравнительно
невысоких приближениях функционалы получаются с большой
точностью. Наиболее полное теоретическое обоснование методов
дано в исследованиях С. Г. Михлина [1], который установил не-
необходимые и достаточные условия устойчивости вариационных
методов в пространствах с энергетической нормой. Активное развитие
вариационных методов обнаружило и некоторые их недостатки,
связанные с трудностью построения пробных функций, которые
отражали бы особенности решения задачи и при сравнительно малом
числе этих функций давали бы удовлетворительную аппроксимацию
решения.
Новое направление в методе построения разностных уравнений
для задач математической физики было развито на основе использо-
использования вариационных методов в сочетании со специальной конструк-
конструкцией пробных функций, отличных от нуля в некоторых сравнительно
небольших областях, принадлежащих всей области определения
решения. Первые работы Куранта [5], Л. А. Оганесяна [5], Лионса,
Темама [5], Сеа [5], Обэна [5], Биркгофа, Шульца, Варги [5], Брембе-
ла положили начало развитию этого направления. Развитие этих
методов обязано прежде всего работам Бабушки [5], Стрэнга и
Фикса [5], Зламала [5], Дугласа и Дюпона [5], В. Я. Ривкинда
[4] и др.
Решение многомерных стационарных задач. Интенсивное раз-
развитие методов решения линейных алгебраических уравнений с
якобиевыми и блочно-трехдиагональными матрицами приводит
к созданию ряда первоклассных численных алгоритмов решения
стационарных задач, основанных на факторизации разностного опе-
оператора задачи. Среди методов факторизации особое место занимают
9.2]
МЕТОДЫ ЧИСЛЕННОГО РЕШЕНИЯ ЗАДАЧ
415
различные варианты безытерационных методов матричной фактори-
факторизации, разработанные М. В. Келдышем [5], И. М. Гельфандом,
О. В. Локуциевским [12], К. И. Бабенко, В. В. Русановым [12],
Н. Н. Ченцовым, С. К. Годуновым [12], А. А. Абрамовым, В. Б. Анд-
Андреевым [12] и др.
На основе работ М. И. Вишика, С. Л. Соболева и Л. А. Люстер-
ника для решения краевых задач в областях сложной геометрии
В. К. Саульевым [4] был предложен метод фиктивных областей, ис-
исследованный впоследствии Мино [2], В. Д. Копченовым [4], Л. А. Ру-
ховцом [4], А. Н. Коноваловым [4] и др. Исследованию разностных
уравнений, аппроксимирующих краевую задачу, возмущенную
по методу фиктивных областей, посвящены, например, работы
В. И. Лебедева [4] и В. Я- Ривкинда [4].
В последнее время интенсивно развиваются безытерационные
методы решения разностных уравнений, соответствующих диффе-
дифференциальным задачам, допускающим разделение переменных. Раз-
Разработанная специальная техника быстрого преобразования Фурье
и циклической редукции позволяет существенно сократить объем
вычислительной работы. Это направление представлено работами
Кули и Таки [13], Бужби, Голуба и Нилсона [12], Хокни [13] и др.
Вместе с развитием методов точной факторизации активно разви-
развиваются методы приближенной факторизации, в которых факториза-
факторизация оператора комбинируется с методом последовательных прибли-
приближений. Необходимость в таких алгоритмах обнаружилась сразу же,
как только задачи математической физики начали редуцироваться
к большим алгебраическим системам. Первые работы Н. И. Булеева
[15], Бейкера и Олифанта [15] дали толчок к развитию новых методов
решения многомерных задач на основе быстросходящихся процессов.
Начало 60-х годов ознаменовалось крупным вкладом в вычисли-
вычислительную математику, связанным с именами Дугласа, Писсмана
и Рэчфорда [15], предложившими метод переменных направлений.
Успех метода был обеспечен использованием простой редукции
многомерной задачи к последовательности одномерных с матрицами
якобиевого типа, легко обращаемыми на ЭВМ. В конечном итоге
метод продольно-поперечных направлений сводится к итерационному
методу, в котором оптимизация вычислений осуществляется спе-
специальным подбором оператора сжатия, состоящего из произведения
более простых операторов и ряда свободных параметров релаксации.
При этом последовательное обращение простых операторов, как пра-
правило, осуществляется на основе одномерной факторизации. Такие
итерационные схемы весьма экономичны и эффективны при незна-
незначительном, по сравнению с явным методом Ричардсона, увеличении
объема вычислительной работы в расчете на одну итерацию. Метод
переменных направлений оказал существенное влияние на построе-
построение алгоритмов в различных областях прикладной математики и
развитие исследований по нелокальным и блочно-итерационным
416
ОБЗОР МЕТОДОВ ВЫЧИСЛИТЕЛЬНОЙ МАТЕМАТИКИ
[ГЛ. 9
процессам. Теоретическим исследованиям этого и родственных
ему методов посвящены работы Дугласа [15], Е. Г. Дьяконова [15],
А. А. Самарского [3], Биркгофа, Варги, Янга [15], Вакспресса [15],
Келлога [15], Ганна [15], Ю. В. Воробьева [15] и др.
Развиваются методы, основанные на однородных и неоднородных
аппроксимациях. В случае неоднородной аппроксимации каждая
из вспомогательных задач может и не аппроксимировать исходную
задачу, но в совокупности и в специальных нормах такая аппрокси-
аппроксимация имеет место. Эти методы были названы методами расщепления,
они развиты в работах советских математиков Н. Н. Яненко [3, 15],
Е. Г. Дьяконова [3, 15], А. А. Самарского [3,15], В. К. Саульева [3],
Г. И. Марчука [15] и др.
Большой цикл исследований посвящен выбору оптимизацион-
оптимизационных параметров схем расщепления на основе спектральных и вариа-
вариационных методов. Это работы А. А. Самарского [3, 15], Е. Г. Дьяко-
Дьяконова [15],В. П. Ильина [3, 15] и др.
Различные аспекты теории метода попеременных направлений
и метода расщеплений рассмотрены в работах В. Б. Андреева [15],
Видлунда [15], Фейрвезера, Митчелла [15] и др.
Решение многомерных нестационарных задач. Опыт решения
одномерных задач подготовил основу для формирования алгоритмов
решения более сложных задач математической физики. Важным
этапом в развитии методов решения нестационарных двумерных
задач явился метод попеременных направлений, основанный на
однородной аппроксимации; первоначально он был применен для
решения многомерных уравнений параболического типа и затем
получил широкое распространение во многих задачах математиче-
математической физики.
Развитие методов решения многомерных нестационарных задач
связано с методами расщепления, основанными, как правило,
на неоднородных разностных аппроксимациях исходной задачи.
Сущность метода расщепления состоит в редукции сложного опера-
оператора к простейшим. При таком подходе интегрирование данного урав-
уравнения сводится к последовательному интегрированию уравнений.бо-
лее простой структуры. При этом разностные схемы обязаны удовле-
удовлетворять условиям аппроксимации и устойчивости только в конечном
итоге. Это дает возможность гибкого построения схем по существу
для всех основных задач математической физики. Для явных
аппроксимаций метод расщепления был предложен К- А. Багринов-
ским и С. К- Годуновым [15]. Схемы расщепления для неявных
аппроксимаций предложены Н. Н. Яненко [15], Е. Г. Дьяконовым
[15], А. А. Самарским [15], Г. И. Марчуком [3] и др.
Эти методы нашли широкое применение для разнообразных по
своему характеру задач и. стимулировали формирование более
общего подхода к решению задач математической физики на основе
метода слабой аппроксимации, разработанного Н. Н. Яненко [3, 15],
МЕТОДЫ ЧИСЛЕННОГО РЕШЕНИЯ ЗАДАЧ
417
9.2]
A. А. Самарским 13, 15]. Оказалось, что метод расщепления можно
толковать как метод слабой аппроксимации исходного уравнения
некоторым другим, более простым. Условия, при которых имеет
место сходимость решения для метода слабой аппроксимации,
сформулированы в теореме Яненко — Демидова [15] и в работах
B. И. Лебедева [15] и Е. Г. Дьяконова [3, 15]. Метод слабой
аппроксимации нашел естественное применение в задачах гидро-
гидродинамики, метеорологии, океанологии, теории переноса излучения
и т. д. (Г.-И. Марчук [3, 17], Н. Н. Яненко 13]).
Широкое применение в задачах гидродинамики, метеорологии,
океанологии получила оригинальная схема типа предиктор-коррек-
предиктор-корректор Лакса—Вендрофа, в которой предиктор предложен в виде
явной разностной схемы. Эта схема является условно устойчивой,
она проста в реализации и имеет второй порядок аппроксимации по
всем переменным. Подробное исследование схемы приведено в книге
Рихтмайера и Мортона 13].
Различные варианты метода предиктор-корректор на основе
неявных разностных аппроксимаций предложены Брайеном 14],
Дугласом [15], И. Д. Софроновым [12], Г. И. Марчуком, Н. Н. Янен-
Яненко [15] и др. Оказалось, что все эти схемы в известном смысле
эквивалентны и различаются только методами реализации. В послед-
последней из перечисленных работ в качестве предиктора применена
неявная схема расщепления первого порядка точности с фактори-
зованным оператором. Для задач гидродинамики в качестве предик-
предиктора используются неявные мажорантные схемы.
Особый интерес представляет сформулированный Лионсом и
Темамом 15], а также Бенсусаном, Лионсом и Темамом [15],
метод декомпозиции и децентрализации, который примыкает к мето-
методам расщепления и слабой аппроксимации.
Метод частиц в ячейке. В последние годы интенсивно развивается
новый метод решения многомерных задач математической физики,
связанный с именем Харлоу [19]. Этот метод получил название мето-
метода больших частиц. Он широко применяется для расчета много-
многомерных гидродинамических течений с сильными деформациями
жидкости, большими относительными перемещениями и соударяю-
соударяющимися поверхностями раздела. Сущность метода состоит в следую-
следующем. Уравнения гидродинамики на основе слабой аппроксимации
на каждом малом временном интервале сводятся к двум более
простым системам, первая из которых описывает адаптацию
гидродинамических полей между собой без учета адвективных
членов и интегрируется обычными способами в неподвижной эйлеро-
эйлеровой сетке, а вторая описывает перенос субстанций в лагранжевой
системе координат. Именно при решении второй системы использу-
используется феноменологическое упрощение модели сплошной среды на
основе замены ее системой частиц в каждой ячейке эйлеровой си-
системы, так что суммарный баланс массы, импульса и энергии частиц
418
ОБЗОР МЕТОДОВ ВЫЧИСЛИТЕЛЬНОЙ МАТЕМАТИКИ
[ГЛ. 9
в ячейке отождествляется с соответствующими характеристиками для
сплошной среды. Как только некоторая частица, «несущая» опре-
определенную массу в соответствии со своей траекторией, рассчитывае-
рассчитываемой индивидуально, пересекает границу ячейки, масса, импульс
и энергия этой частицы вычитаются из покинутой ячейки и добав-
добавляются в новую ячейку, где теперь находится частица. Схема
Харлоу основана на явных методах решения уравнений первого
и второго этапа, в целом она условно устойчива. Особенно плодот-
плодотворным является использование в расчетах первого шага неявных
схем. В этом случае критерий устойчивости всей схемы совпадает
с известным условием Куранта. До сих пор еще не получены аб-
абсолютно устойчивые схемы метода частиц, однако в ближайшие
годы можно рассчитывать на существенный прогресс в этом
направлении.
В последнее время в работах В. Ф. Дьяченко [19], О. М. Бело-
церковского и Ю. М. Давыдова [19], Н. Н. Яненко, Н. Н. Анучиной,
В. Е. Петренко, Ю. И. Шокина [19] даны различные модификации
метода, которые существенно уменьшили свойственные ему флюк-
флюктуации плотности и давления, увеличили «запас устойчивости»,
и рассмотрены различные схемы реализации.
Можно надеяться, что применение абсолютно устойчивых ме-
методов и устранение флюктуации позволит распространить метод
частиц на слабосжимаемые течения жидкости. В ближайшие годы
можно ожидать существенного расширения сферы влияния этого
метода на решение многомерных задач.
Метод Монте-Карло, предложенный Нейманом и Уламом,
активно развивается уже более двух десятилетий. Первоначальный
оптимизм в применении метода через некоторое время уступил
место столь же необоснованному пессимизму. Дело в том, что уже
на первых этапах развития оказалось, что метод Монте-Карло
эффективен только при реализации на быстродействующих ЭВМ
с миллионами операций в секунду, поскольку он требует выполнения
большого числа статистических проб, понижающих среднюю квад-
квадратичную ошибку в получаемом результате.
Однако несмотря на трудности в осуществлении метода на ЭВМ
среднего класса, а может быть, и благодаря им, в теорию метода
были внесены усовершенствования, которые существенно повысили
эффективность метода в решении большого круга задач науки и
техники. Наиболее значительные усовершенствования связаны
с привлечением для расчетов условных вероятностей процессов
и статистических весов, определяемых на основе информации
о решениях сопряженных уравнений по отношению к существенным
функционалам задач. Такие методы на два порядка, а в некоторых
случаях и на четыре порядка, уменьшили дисперсию ошибки и,
следовательно, на два и четыре порядка сократили время счета
по сравнению с методами прямого статистического моделирования.
9.31
УСЛОВНО КОРРЕКТНЫЕ ЗАДАЧИ
419
В настоящее время ЭВМ третьего поколения создали необходи-
необходимую базу для активного применения этого метода к различным
сложным задачам математической физики. Метод Монте-Карло
уже имеет солидные позиции в теории переноса излучения, задачах
массового обслуживания, кубатурных и интерполяционных про-
процессах, решениях интегральных уравнений и систем алгебраических
уравнений. В последнее время он начинает использоваться для реше-
решения нелинейных уравнений Больцмана, в задачах линейного про-
программирования и т. д.
Большой вклад в теорию и алгоритмы решения задач матема-
математической физики методом Монте-Карло внесли работы В. С. Влади-
Владимирова, И. М. Соболя [18], Н. Н. Ченцова [18], Фано, Спенсера,
Бергера [18], С. М. Ермакова, В. Г. Золотухина [18], Г. А. Михай-
Михайлова [18], Н. П. Бусленко, Д. И. Голенко [18] и др. Простой и уни-
универсальный, метод Монте-Карло, несомненно, станет активным
средством вычислительной математики.
9.3. Условно корректные задачи
При решении задач математической физики численными методами
важную роль играет корректность постановки исследуемой задачи.
Понятие корректности было введено Адамаром. Известно большое
число классических задач математической физики, поставленных
корректно по Адамару. В связи с более глубоким изучением раз-
различных задач естествознания и техники возникла проблема решения
так называемых условно корректных задач. А. Н. Тихонов [16]
сформулировал требования, которые оказываются естественными
в постановке задач, некорректных по Адамару. Сущность этих
требований состоит в том, что в условия постановки задачи добав-
добавляется априорное предположение о существовании решения и
принадлежности его заданному компакту. Для установления
условной корректности необходимо доказать теорему единствен-
единственности.
Широкий цикл исследований по условно корректным задачам
проведен М. М. Лаврентьевым [16] и В. К. Ивановым [16]. Раз-
Различные аспекты теории условно корректных задач математиче-
математической физики рассмотрены в трудах Джона [16], С. Н. Мергеляна [16],
Дугласа [16], С. Г. Крейна [16] и др.
А. Н. Тихонов [16] ввел понятие регуляризации. Сущность
его состоит в том, что вместо неограниченного оператора, дающего
точную формулу решения некорректно поставленной задачи, рас-
рассматривается последовательность (регуляризующее семейство) не-
непрерывных операторов такая, что на каждом элементе, принад-
принадлежащем области существования решения, соответствующая после-
последовательность сходится к решению.
420
ОБЗОР МЕТОДОВ ВЫЧИСЛИТЕЛЬНОЙ МАТЕМАТИКИ
[ГЛ. 9
Одним из интересных подходов к постановке задач, некоррект-
некорректных по Адамару, является применение понятий и методов теории
вероятности. В наиболее полной форме такие исследования были
развиты М. М. Лаврентьевым и В. Г. Васильевым [16]. В работах
этого направления устанавливается понятие устойчивости, кон-
конструируются оптимальные в определенном смысле алгоритмы
решения различных классов задач при некоторых предположениях
о вероятностных свойствах погрешностей во входных данных
и о вероятностных свойствах множества искомых решений.
Лионе и Латтес [16] сформулировали численный метод решения
обратных эволюционных уравнений на основе так называемого
квазиобращения. К эволюционному уравнению добавляется регу-
ляризующий оператор с малым параметром, являющийся произ-
произведением исходного оператора на его сопряженный. Малый параметр
выбирается на основе специальным образом разработанных оп-
оптимальных оценок в решении. Метод квазиобращения весьма прост
в реализации для решения эволюционных задач математической
физики.
Автором и С. А. Атанбаевым [16] разработан метод решения
условно корректных задач эволюционного типа на основе примене-
применения метода минимальных невязок для всей пространственно-вре-
пространственно-временной области определения решения. Регуляризация в этом
методе производится за счет выбора оптимального числа шагов
итерационного процесса на основе априорной оценки погрешностей
во входных данных.
Весьма полное исследование по теории некорректно поставленных
задач и методов регуляризации дано в работах В. А. Морозова [14,16].
Тенденция развития методов решения условно корректных
задач свидетельствует о том, что используемые методы тесно при-
примыкают к методам оптимизации вычислительного процесса.
9.4. Вычислительные методы в линейной алгебре
Необходимо отметить все возрастающий интерес к решению
больших систем линейных алгебраических уравнений как с разрежен-
разреженными, так и плотными матрицами, решению плохо обусловленных
систем и спектральных задач для матриц произвольной структуры.
Большое внимание при этом уделяется использованию априорной
и апостериорной информации о задаче в ходе ее решения. Сущест-
Существенное влияние на пересмотр старых вычислительных методов ли-
линейной алгебры оказали ЭВМ, которые стимулировали интерес
к новым алгоритмам, приспособленным для автоматического счета.
Прямые методы линейной алгебры. Под
прямым методом линейной алгебры обычно понимают метод, которым
можно решить задачу за конечное число_арифметических действий.
ВЫЧИСЛИТЕЛЬНЫЕ МЕТОДЫ В ЛИНЕЙНОЙ АЛГЕБРЕ
421
9.4]
В вычислительной линейной алгебре прямые методы играют важ-
важную роль при решении систем линейных уравнений, вычислении
обратных матриц и определителей. Прямые методы позволяют
с помощью ряда элементарных преобразований получить разло-
разложение исходной матрицы в произведение двух, каждая из которых
легко обращается.
Классическими примерами прямых методов служат метод исклю-
исключения Гаусса, методы вращения и отражения. Вторую группу
составляют так называемые методы сопряженных направлений:
метод сопряженных градиентов Хестенса и Штифеля [11] и метод
минимальных итераций Ланцоша [3]. Работы этих авторов положили
также начало развитию методов, основанных на ортогонализации.
В последние годы прямые методы получили значительное раз-
развитие в первую очередь благодаря исследованиям Д. К- Фаддеева,
В. Н. Фаддеевой, В. Н. Кублановской [8], Бауэра[8], Хаусхолде-
ра [3], Уилкинсона [8], Хенричи [3], Форсайта, Молера [8], Голуба
112], В. В. Воеводина [8] и др.
Большой проблемой по-прежнему остается решение систем урав-
уравнений с плохо обусловленными матрицами, которая тесно связана
с решением условно корректных задач математической физики.
Сложность проблемы связана с сильной чувствительностью решения
к точности задания элементов матрицы и компонент вектора правой
части системы. Хотя уже получен ряд важных результатов, тем
не менее это только начало большого научного поиска, который
должен завершиться созданием общей теории.
Итерационные методы. Важнейшим средством решения задач
линейной алгебры являются итерационные методы, активное раз-
развитие которых привело к созданию ряда хороших алгоритмов,
эффективно реализуемых на ЭВМ. Этот прогресс в первую очередь
был вызван необходимостью решать задачи математической физики,
экономики и управления, приводящие к системам большого порядка
с матрицами специального вида. Прямые методы в большинстве
случаев оказываются малоэффективными при решении таких за-
задач, хотя каждый новый этап в развитии вычислительной техники
и расширяет их возможности.
К настояще\4у времени определились некоторые направления
в построении итерационных методов; мы ограничимся рассмотрением
только двух из них. Первое основано на использовании спектраль-
спектральных характеристик операторов, участвующих в процессе. Методы
этого типа можно описать следующим образом: строится итерацион-
итерационный процесс с матрицей перехода, зависящей от совокупности
параметров, и эти параметры выбираются либо одинаковыми для
всех шагов из условия минимизации спектрального радиуса матрицы
перехода, либо строится последовательность значений параметров,
зависящих от номера итерации так, чтобы вектор ошибки стремился
как можно быстрее к нулю равномерно по всем начальным
422
ОБЗОР МЕТОДОВ ВЫЧИСЛИТЕЛЬНОЙ МАТЕМАТИКИ
(ГЛ. 9
приближениям. Оба способа используют априорную информацию о
спектрах участвующих матриц. Выбор таких параметров является со-
составной частью проблемы оптимизации вычислительного алгоритма.
Наибольшую трудность этого этапа представляет, как правило,
определение границ спектров участвующих матриц.
Активный прогресс в области спектральной оптимизации итера-
итерационных методов стимулирует постановку ряда проблем. Следует
иметь в виду, что спектральные методы оптимизации особенно
эффективны в случае решения серии задач с одним и тем же опера-
оператором, но разными входными данными.
Второе направление связано с применением вариационных
принципов. Методы этого класса осуществляют последовательную
минимизацию некоторого функционала (как правило, квадратич-
квадратичного), который достигает минимального значения на искомом ре-
решении системы. Основы вариационного подхода к построению
итерационных методов заложены Л. В. Канторовичем [11], Лан-
цошем [3], Хестенсом, Штифелем [11], М. А. Красносельским,
С. Г. Крейном [11] и др. Из последних исследований нужно отметить
работы Петришина [9, 10], Форсайта [11], Даниеля [11], Г. И. Мар-
чука, Ю. А. Кузнецова [3, 11], С. К- Годунова, Г. П. Прокопова [11],
В. И. Лебедева [9], Н. И. Горбенко, В. П. Ильина [11] и др.
Достоинство вариационных методов типа наискорейшего спуска
и итерационного процесса с минимальными невязками состоит
в том, что параметры релаксации выбираются за счёт использования
апостериорной информации, получаемой на каждом шаге. Скорость
сходимости таких многошаговых методов не ниже, чем для методов,
использующих полиномы Чебышева. Существенным является
также то, что такие методы сходятся как для симметричных, так
и несимметричных матриц при условии их положительной опреде-
определенности. В последнее время удалось построить ряд эффективных
методов типа минимальных невязок для положительно полуопреде-
полуопределенных матриц.
Важным обстоятельством, сдерживающим до настоящего вре-
времени развитие нестационарных вариационных методов, является
необходимость хранить большее, по сравнению с чебышевскими
методами оптимизации, количество промежуточной информации.
В последнее время развиваются итерационные методы, в которых
сочетается подход спектральных и вариационных оптимизаций.
В. И. Лебедев сформулировал условия на операторы задач, для
которых итерационный процесс имеет неулучшаемую оценку числа
арифметических операций. Развивается еще один метод выбора
оптимальных параметров итерации, основанный на вероятностном
подходе. Ряд интересных результатов в этой области получен
Ю. В. Воробьевым [9]. До сих пор не утратил своего большого
значения ставший уже классическим метод верхней релаксации
Янга — Франкела [10]. Исследования этого метода обобщены в
9.4]
ВЫЧИСЛИТЕЛЬНЫЕ МЕТОДЫ В ЛИНЕЙНОЙ АЛГЕБРЕ
423
монографиях Вазова, Форсайта [3], Варги [3], Изаксона, Кел-
Келлера [3], Янга [10] и др. Обзор и систематизация итерационных
методов даны в книге Г. И. Марчука и В. И. Лебедева [17].
Большой круг исследований был выполнен по итерационным
методам решения линейных систем с особенными матрицами. Для
случая совместных систем автором и Ю. А. Кузнецовым [8, 11]
был предложен общий подход к исследованию сходимости стацио-
стационарных и нестационарных итерационных методов. Этот подход
позволил не только расширить область применимости известных
итерационных методов, но и дал возможность разработать новый
класс методов, получивших название матричных аналогов метода
фиктивных областей (см. Ю. А. Кузнецов, А. М. Мацокин [4]).
Итерационные методы решения несовместных систем были предло-
предложены в работах Ю. А. Кузнецова [8] и др.
Остановимся на итерационных методах решения полной пробле-
проблемы собственных значений для общих матриц. Рассмотрим только
степенные методы, поскольку именно здесь в последнее время
получены существенные результаты, чем мы обязаны исследованиям
Уилкинсона 18], Бауэра [8], Коллатца [3], В. В. Воеводина [8],
Френсиса [8], В. Н. Кублановской [8], Эберлейна [8] и многих
других.
Степенные методы основаны на последовательном приведении
исходной матрицы с помощью унитарных преобразований подобия
(метод Якоби, (^-алгоритм) или преобразований подобия с треуголь-
треугольными матрицами (/.^-алгоритм) к матрице, собственные значения
которой легко вычисляются. Такими матрицами являются диаго-
диагональная, треугольная или блочно-треугольная, порядки диаго-
диагональных блоков которой не выше двух.
До последнего времени существовали эффективные алгоритмы
решения проблемы собственных значений лишь для симметричных
матриц, такие как метод Якоби (Д. К. Фаддеев, В. Н. Фаддеева [8],
Рутисхаузер [8]). Разработка (^-алгоритма (В. Н. Кублановская [8],
Френсис [8], Уилкинсон [8]) и обобщенного метода вращений
(В. В. Воеводин [8]) позволяет говорить о решении проблемы для
произвольных матриц. Наиболее интенсивно в настоящее время
разрабатываются различные модификации Qft-алгоритма.
Прогресс в развитии проблемы собственных чисел имеется
также в связи с работами в области расчета ядерных реакторов,
стимулировавшими изучение итерационных методов решения част-
частной проблемы собственных чисел для неотрицательных матриц. Осно-
Основы теории заложены в трудах Перрона, Фробениуса и значитель-
значительно развиты в исследованиях Варги [3], Трауба [8], Марека [8]
и др.
Анализ ошибок округления. Если до последнего времени вы-
вычислительные методы сравнивались между собой по количеству
арифметических действий и объему памяти, которые требовались
424
ОБЗОР МЕТОДОВ ВЫЧИСЛИТЕЛЬНОЙ МАТЕМАТИКИ
[ГЛ. 9
9.5]
ВОПРОСЫ ОПТИМИЗАЦИИ ЧИСЛЕННЫХ МЕТОДОВ
425
для их реализации, то теперь к этим характеристикам еще доба-
добавилась точность. Это означает, что анализ ошибок округления при
реализации метода на ЭВМ стал одной из составных частей алгоритма.
Начало исследованиям в этой области положено работами
Неймана. Систематическое изучение ошибок впервые было проведено
Уилкинсоном [8]. Основу математического аппарата Уилкинсона
составил метод эквивалентных возмущений, с помощью которых
получены оценки норм возмущений для всех преобразований
линейной алгебры и построены оценки норм эквивалентных возму-
возмущений для большого числа методов.
Параллельно с методом эквивалентных возмущений интенсивно
развивалась статистическая теория анализа ошибок. Результаты,
полученные Н. С. Бахваловым [8], В. В. Воеводиным [8], Г. Д. Ким
[8] и др., положили начало исследованию действительного распреде-
распределения ошибок округления.
Комплексы стандартных программ. Следствием успехов, дос-
достигнутых в вычислительной линейной алгебре, явилась разработка
высококачественных стандартных программ для решения систем
линейных уравнений и нахождения собственных значений. Так,
например, в журнале Numerische Mathematik уже опубликовано
большое число различных процедур, которые широко используются
как для решения общих задач линейной алгебры, так и для ряда
специальных задач математической физики, экономики и т. д.,
связанных с матрицами специального вида.
Указанная проблема, несомненно, привлечет внимание исследо-
исследователей, и результатом их усилий должно явиться создание универ-
универсальной вычислительной системы решения задач линейной алгебры.
Можно указать по крайней мере на две тенденции, которые уже
наметились в развитии этого направления: одна связана с тщатель-
тщательной отработкой комплексов алгоритмов и программ решения общих
задач, другая состоит в создании универсальных методов, адаптирую-
адаптирующихся к конкретным особенностям классов задач. Обе тенденции
крайне интересны, поскольку прокладывают пути к системе уни-
универсального проблемно-ориентированного математического обеспе-
обеспечения для ЭВМ четвертого и последующих поколений.
9.5. Вопросы оптимизации численных методов
Важной целью вычислительной математики является отыскание
наиболее быстрых и экономически выгодных методов решения
задач, т. е. оптимизация вычислительных алгоритмов. Проблему
оптимизации решения при заданных ограничениях необходимо
изучать с помощью общих математических теорем и оценивать
минимально возможные затраты на решение конкретной задачи
из заданного класса или суммы задач, Рассмотрение одной изолиро-
изолированной математической задачи оптимизации большей частью не
решает практического вопроса. Однако, умея находить условный
экстремум, т. е. наилучший способ решения при заданных воз-
возможностях и средствах вычислений каждой локальной задачи,
мы тем самым подходим к решению общей проблемы. Эта концепция
теории оптимизации вычислительных методов, сформулированная
И. Бабушкой и С. Л. Соболевым [20], достаточно хорошо отражает
существо поставленной проблемы.
Во многих случаях, однако, построить оптимальный алгоритм
не удается, хотя и оказывается возможным построить алгоритм,
близкий к оптимальному. Такая ситуация типична, например,
при построении асимптотически оптимальных алгоритмов. Можно
отметить, что в настоящее время именно теория асимптотических
оценок является эффективным средством решения проблем оптими-
оптимизации алгоритмов для различных классов задач.
К настоящему времени наиболее развитой с точки зрения теории
оптимизации является теория кубатурных формул, разработанная
С. Л. Соболевым [1, 20], И. Бабушкой [20]. В их работах задача
оценки кубатурных формул приводится к решению задачи отыскания
минимума линейного функционала ошибок. Получены оценки
ошибки кубатурных формул с правильной решеткой на классах
периодических финитных и бесконечно дифференцируемых функций.
Методы исследования существенно используют асимптотические
оценки приближений. Теории кубатурных формул посвящены
исследования Н. С. Бахвалова [20] и И. М. Соболя [18], связанные
с оптимальными оценками сходимости кубатурных процессов,
с методами интегрирования типа метода Монте-Карло, а также
с отысканием наилучших способов численного интегрирования.
Несколько иной подход к построению кубатурных формул
на основе теоретико-числового анализа, заложенный трудами
И. М. Виноградова [20], развивается в работах Н. М. Коробова [20],
где строятся формулы, точные для конечных тригонометрических
полиномов, и даются оценки погрешностей на классе периоди-
периодических функций.
А. Н. Колмогоров [20] ввел в рассмотрение ряд понятий теории
множеств общего характера, позволяющих найти оценку границы
для необходимого числа действий при решении вычислительных
задач. Особое значение такие оценки имеют для направленного
поиска алгоритмов в тех случаях, когда асимптотики сверху и снизу
расходятся. Для линейных дифференциальных операторов, имею-
имеющих вполне непрерывный обратный, им дана оценка числа необ-
необходимых для решения действий. Эта оценка позволяет находить
алгоритмы, асимптотически близкие к оптимальным по числу
арифметических действий.
Н. С. Бахваловым [20] исследован комплекс алгоритмов решения
задач математической физики конечно-разностными методами. В
14 Г. И Марчук
426
ОБЗОР МЕТОДОВ ВЫЧИСЛИТЕЛЬНОЙ МАТЕМАТИКИ
[ГЛ. 9
9.6]
РАЗВИТИЕ ВЫЧИСЛИТЕЛЬНОЙ МАТЕМАТИКИ
427
частности, им даны оценки снизу количества действий при решении
задачи Дирихле для уравнения Лапласа.
Интересное направление в оптимизации решения задач мате-
математической физики развивается в работах В. И. Лебедева [9].
В качестве основного минимизируемого функционала рассматри-
рассматривается цена алгоритма и энтропия. С помощью этого метода рас-
рассмотрены некоторые задачи теории переноса.
При решении проблемы оптимизации зачастую приходится
абстрагироваться от многих факторов, таких, как методы округления
чисел в процессе реализации алгоритма, особенности осуществления
арифметических операций в регистрах конкретных ЭВМ и т. д.
Между тем именно эти факторы в ряде случаев определяют эффек-
эффективность алгоритма. Следовательно, здесь необходимо говорить
уже об оптимизации вычислительного процесса.
Изучению теории вычислительных процессов и их оптимизации
посвящено значительное число исследований Бабушки [20], Дальк-
виста [20], Хенричи [3] и др. Бабушка, Витасек и Прагер [3] ввели
понятие аА-последовательностей вычислительных процессов, кото-
которое отражает тот факт, что при увеличении длины последовательнос-
последовательности вычислений точность вычислений должна увеличиваться по
степенному закону. На основе теории (^-последовательностей было
введено понятие локальной и глобальной устойчивости численных
процессов, которое позволило провести анализ большого круга
реальных алгоритмов вычислительной математики.
В последние годы возникло направление в теории оценки точ-
точности реального алгоритма на ЭВМ, получившее название ин-
интервальной арифметики, разработанное в трудах Мура [20], Нике-
ла [20] и др. Основная цель интервальной арифметики состоит в по-
получении апостериорных оценок погрешности, получаемых двукрат-
двукратным счетом на одной и той же ЭВМ.
9.6. Некоторые тенденции в развитии
вычислительной математики
Прогресс в области вычислительной техники последних лет
оказал существенное влияние на многие направления вычисли-
вычислительных наук, проявляющих тенденцию к интеграции. Взаимосвязь
средств вычислительной техники, методов вычислительной и при-
прикладной математики, теории автоматического программирования
и языков становится настолько тесной, что выбор стратегии в реше-
решении конкретных задач в настоящее время является проблемой
первостепенной важности. Хотя оптимизация отдельных компонент
вычислительного процесса по-прежнему оказывается фундамен-
фундаментальным звеном теории, центр внимания все более и более пере-
перемещается к вопросам оптимизации всего вычислительного процесса.
Несомненно, что именно оптимизация вычислительного процесса
решения задач на ЭВМ в настоящее время является одной из цент-
центральных проблем в области вычислительных наук, которая стиму-
стимулирует поиск новых вычислительных алгоритмов и способов их
реализации.
Следующая тенденция связана с переходом от решения отдельных
задач к решению классов задач и стандартизации алгоритмов.
Большой поток информации, перерабатываемой ЭВМ, требует
систематизации и упорядочения. Ценный опыт, накопленный в про-
процессе решения задач науки и техники, позволяет во многих случаях
ориентироваться на создание универсальных методов решения
задач, способных обслужить более или менее широкие классы
математически однотипных проблем. По-видимому, рациональной
стратегией в этом направлении является построение универсальных
вычислительных алгоритмов, самонастраивающихся за счет ис-
использования апостериорной информации на оптимальный режим,
для решения разнообразных и не часто повторяющихся задач
и тщательная отработка специальных алгоритмов для многократно
повторяющихся задач. Эти два подхода взаимно дополняют друг
друга и создают основу для экономичного использования ресурсов
общества в создании эффективной системы математического обеспе-
обеспечения.
Процесс стандартизации программ и алгоритмов, большой
прогресс в использовании ЭВМ для решения инженерных, экономи-
экономических и управленческих задач, возросшие мощности электронной
вычислительной техники, а также повышение уровня системного
обеспечения ЭВМ привели к методологии создания пакетов приклад-
прикладных программ, обслуживающих целые области науки и техники.
Несомненно, что этот процесс будет активно развиваться, оказывая
влияние на методы вычислительной математики.
Системы ЭВМ новых поколений, обладая большим быстродейст-
быстродействием и большим объемом памяти, становятся эффективными храни-
хранителями ценной информации, доступной к немедленному использо-
использованию, а система коллективного пользования позволяет осуществить
контакт человека с ЭВМ на основе диалогового режима работы.
Поэтому стандартизация в построении системы математического
обеспечения вообще и алгоритмов вычислительной математики
в особенности оказывается назревшей проблемой.
Создание методов математического обеспечения ЭВМ поставило
перед вычислительной математикой ряд новых задач, таких, как
построение сеток для областей сложной формы, в некотором
смысле равномерно покрывающих исследуемую область опеределе-
ния решения задачи. Если для двумерных областей эта задача близка
к эффективному решению, то для трехмерных и многомерных
задач она только ставится. Проблема ввода и вывода информации
в ЭВМ также поставила перед исследователями ряд задач о графи-
14»
"?.
428
ОБЗОР МЕТОДОВ ВЫЧИСЛИТЕЛЬНОЙ МАТЕМАТИКИ
[ГЛ. 9
ческом представлении информации, что привело к развитию новых
методов интерполирования на классах функций.
Успехи в аналитических преобразованиях на ЭВМ практически
подводят нас к возможности решения задач математической физики
с помощью хорошо разработанных методов теории непрерывного
аргумента. По мере накопления средств для проведения анали-
аналитических выкладок на ЭВМ эти методы решения задач будут все
активнее проникать в сферу математического обеспечения ЭВМ.
Успехи в области аналитических преобразований на ЭВМ создают
для вычислительной математики новые возможности в разработке
эффективных методов решения задач.
В заключение следует отметить, что темпы развития исследо-
исследований в области вычислительной математики определяются уровнем
исследований в фундаментальных областях математики. Значение
фундаментальных исследований и темп их развития в эпоху тех-
технического прогресса существенно повышается. Только гармоничное
сочетание исследований во всех областях математики создаст
необходимые и благоприятные условия для развития математики
и ее приложений.
ЛИТЕРАТУРА
1. Функциональный анализ и вычислительная математика
Анселон (Anselone P. H. M.), Collectively Compact Operator Approximation Theory
and Applications to Integral Equations, Prentice-Hall Inc., Englewood Cliffs,
New Jersey, 1967.
Балакришнан (Balakrishnan A. V.), Applied Functional Analysis, Springer-Ver-
lag, New York, 1976.
Варга P., Функциональный анализ и теория аппроксимации в численном ана-
анализе, М., «Мир», 1974.
Вейнштейн, Стенгер (Weinstein A., Stenger W.), Methods of Intermediate Prob-
Problems for Eigenvalues: Theory and Ramifications, Acad. Press, London and
New York, 1972.
Канторович Л. В., Функциональный анализ и прикладная математика. —
«УМН», 3, 6 A948).
Канторович Л. В., Акиме Г. П., Функциональный анализ в нормированных
пространствах, М., Физматгиз, 1959.
Келдыш М. В., Лидский В. Б., Вопросы спектральной теории несамосопряженных
операторов. —В кн.: Труды IV Всесоюзного математического съезда, Ле-
Ленинград, 3—12 июля 1961 г. Т. I. Пленарные доклады, Л., Изд-во АН СССР,
1963.
Коллатц Л., Функциональный анализ и вычислительная математика, М.,
«Мир», 1969.
Колмогоров А. Н., Фомин С. В., Элементы теории функций и функционального
анализа, М., «Наука», 1976.
Красносельский М. А., Вайникко Г. М., Забрейко П. П. и др., Приближенное
решение операторных уравнений, М., «Наука», 1969.
Крейн С. Г., Линейные дифференциальные уравнения в банаховом простран-
пространстве, М., «Наука», 1967.
Лаврентьев М. А., Шабат Б. В., Методы теории функций комплексного пере-
переменного, М., Физматгиз, 1965.
Лионе (Lions J.), Equations differentielles operationnelles, Springer-Verlag, Ber-
Berlin—Gottingen—Heidelberg, 1961.
Люстерник Л. А., Соболев В. И., Элементы функционального анализа, М.,
«Наука», 1965.
Михлин С. Г., Вариационные методы в математической физике, М., «Наука»,
1970.
Натансон И. П., Теория функций вещественной переменной, М., «Наука»,
1974.
Никольский С. М., Приближение функций многих переменных и теоремы вложе-
вложения, М., «Наука», 1969.
Соболев С. Л., Некоторые применения функционального анализа в математиче-
математической физике, Л., Изд-во ЛГУ, 1950.
Соболев С. Л., Введение в теорию кубагурных формул, М., «Наука», 1974.
430
ЛИТЕРАТУРА
ЛИТЕРАТУРА
431
2. Дифференциальные уравнения в частных производных
и математическая физика
Бицадзе А. В., Краевые задачи для эллиптических уравнений второго порядка,
М., «Наука», 1966.
Боссави (Bossavit A.), Regularisation d'equations variationnelles et applications.
Centre National de la Recherche Scientifique, Institut Blaise Pascal, Juin
1970.
Векуа И. Н., Новые методы решения уравнений эллиптического типа, М., Гос-
техиздат, 1948.
Вишик М. И., Люстерник Л. А., Асимптотическое поведение решений
линейных дифференциальных уравнений с большими или быстро-
быстроменяющимися коэффициентами и граничными условиями. — «УМН», 15,
4 A964).
Владимиров В. С, Уравнения математической физики, М., «Наука», 1967.
Владимиров В. С, Обобщенные функции в математической физике, М., «Наука»,
1976.
Годунов С. К-> Уравнения математической физики, М., «Наука», 1971.
Канторович Л. В., Крылов В. И., Приближенные методы высшего анализа, М.,
Физматгиз, 1962.
Кондратьев В. А., Краевые задачи для эллиптических уравнений в областях
с коническими илн угловыми точками. — «Труды Московского математиче-
математического общества», М., 16A967).
Курант Р., Уравнения с частными производными, М., «Мир», 1964.
Курант Р., Гильберт Д., Методы математической физики, т. I, М., Гостехиз-
дат, 1953.
Лаврентьев М. А., Вариационный метод в краевых задачах для систем уравне-
уравнений эллиптического типа, М., Изд-во АН СССР, 1952.
Лаврентьев М. М., О некоторых некорректных задачах математической физики,
Новосибирск, Изд-во СО АН СССР, 1962.
Ладыженская О. А., Смешанная задача для гиперболического уравнения, М.,
Гостехиздат, 1953.
Лионе Ж.-Л., Некоторые методы решения нелинейных краевых задач, М., «Мир»,
1972.
Лионе Ж.-Л., Маженес Э., Неоднородные граничные задачи и их прило-
приложения, М., «Мир», 1971.
Миллер (Miller J. H.), ed. Topics in Numerical Analysis. Procs of the Royal Irish
Acad. Conf. on Numer. Analysis 1972, Acad. Press, London and New York,
1973.
Миллер (Miller J. H.), ed. Topics in Numerical Analysis. II. Procs of the Royal
Irish Acad. Conf. on Numer. Analysis 1974, Acad. Press, London and New
York, 1975.
Мино (Mignot A.), Methodes d'approximation des solutions de problems aux li-
mites. —Rend, del sem. Mat. della Univ. di Padova, 11 A968).
Петровский И. Г., Лекции об уравнениях с частными производными, М., Фнзмат-
гиз, 1961.
Рождественский Б. Л., Яненко Н. Н., Системы квазилинейных уравнений,
М., «Наука», 1968.
Смирнов В И., Курс высшей математики, т. 1—5, М.. Гостехиздат, 1948.
Соболев С. Л., Уравнения математической физики, М., «Наука», 1966.
Тихонов А. Н., Самарский А. А., Уравнения математической физики, М., «Наука»,
1966.
Фихтенгольц Г. М., Курс дифференциального и интегрального исчисления,
т. 3, М., Физматгиз, 1963.
Фридрихе (Friedrichs К.), Non-linear hyperbolic differential equations foi [unc-
[unctions of two independent variables. — «Amer. J. Math.», 70 A948).
3. Численные методы (монографии и учебные пособия)
Бабушка И., Витасек Э., Прагер М., Численные процессы решения дифферен-
дифференциальных уравнений, М., «Мир», 1969.
Балакришнан, Нойштадт (Balakrishnan А. V., Newstadt L. W.), Computing
Methods in Optimisation Problems, Academic Press, 1964.
Бахвалов Н. С, Численные методы, т. I, M., «Наука», 1973.
Беллман, Калаба, Локет (Bellman R., Kalaba R., Lockett J.), Numerical Inver-
Inversion of the Laplace Transform, Am. Elsevier Publ. Co. Inc., New York,
1966.
Березин И. С, Жидков Н. П., Методы вычислений, т. 1, 2, М., Физматгиз, 1962,
1966.
Блюм (Blum E. К.), Numerical Analysis and Computation: Theory and Practice,
Addison-Wesley Publ Сотр. Inc., London, 1972.
Брэмбл (Bramble J. H.), ed. Numerical Solution of Partial Differential Equations.
Proc. of a Symp. Held at the Univ. of Maryland, Acad. Press, London and
New York, 1966.
Вазов В., Форсайт Дж., Разностные методы решения дифференциальных урав-
уравнений в частных производных, М., ИЛ, 1963.
Валиуллин А. Н., Схемы повышенной точности для задач математической физики.
Лекции для студентов НГУ, Новосибирск, Изд-во НГУ, 1973.
Варга (Varga R. S.), Matrix Iterative Analysis, New York, 1963.
Воробьев Ю. В., Метод моментов в прикладной математике, М., Физматгиз,
1958.
Гельфонд А. О., Исчисление конечных разностей, М., «Наука», 1967.
Годунов С. К-, Разностные методы решения уравнений газовой динамики, Ново-
Новосибирск, Изд-во НГУ, 1962.
Годунов С. К-> Забродин А. В., Иванов М. Я- и др., Численное решение много-
многомерных задач газовой динамики, М., «Наука», 1976.
Годунов С. К-, Рябенький В. С, Введение в теорию разностных схем, М , Физ-
Физматгиз, 1962.
Годунов С. К-> Рябенький В. С, Разностные схемы, М., «Наука», 1973.
Дальквист, Бьйорк (Dahlquist G., Bjorck A.), Numerical Methods, Prentice Hall
Inc., Englewood Cliffs, New Jersey, 1974.
Дородницын А. А., Об одном методе численного решения некоторых нелинейных
задач аэрогидродннамикн. —«Труды III Всесоюзного математического
съезда», т. II, М., Изд-во АН СССР, 1956.
Дородницын А. А., Лекции по численным методам решения уравнений вязкой
жидкости, М., ВЦ АН СССР, 1969.
Дьяконов Е. Г., Итерационные методы решения разностных аналогов краевых
задач для уравнений эллиптического типа, Кнсв, Ин-т кибернетики АН
УССР, 1970.
Дьяконов Е. Г., Разностные методы решения краевых задач. Вып. 1 (стационар-
(стационарные задачи), М., МГУ, 1971, Вып. 2 (нестационарные задачи), М., МГУ,
1972.
Изаксон, Келлер (Isaacson E., Keller H. В.), Analysis of Numerical Methods, Wiley,
New York, 1966.
Ильин В. П., Разностные методы решения эллиптических уравнений, Новоси-
Новосибирск, Изд-во НГУ, 1970.
Ильин В. П., Численные методы решения задач электрооптики, Новосибирск,
«Наука», 1974.
КанторовичЛ. В., Крылов В. И., Приближенные методы высшего анализа, М.—Л.,
Физматгиз, 1962.
Келлер (Keller H. В.), Numerical Methods for Two-Point Boundary-Value Prob-
Problems, Blaisdell Publ. Сотр., New York, 1968.
Коллатц Л (Collatz L.), Численные методы решения дифференциальных урав-
иеий , М., ИЛ, 1953.
J
432
ЛИТЕРАТУРА
Коновалов А. И., Численное решение задач теории упругости, Новосибирск,
Изд-во НГУ, 1968.
Ланцош К-, Практические методы прикладного анализа, М., Физматгиз,
1961.
Лионе, Марчук (Lions J. L., Marchouk G. I.), Sur les methodes nymeriques en
sciences physiques et economiques, Dunod, Paris, 1974.
Марчук Г. И., Методы расчета ядерных реакторов, М., Атомиздат, 1961.
Марчук Г. И., Численные методы в прогнозе погоды, Л., Гидрометиздат,
1967.
Марчук Г. И. (Marchuk G. I.), Methods and problems of computational mathema-
thics. — Article from the Proceedings of the International congress of ma-
mathematicians, Nice, September 1970.
Марчук Г. И., Методы и проблемы вычислительной математики. — В кн.: Меж-
Международный конгресс математиков в Ницце. 1970. Доклады советских мате-
математиков, М., «Наука», 1972.
Марчук Г. И., Методы вычислительной математики, Новосибирск, «Наука»,
1973.
Миллер, Стрэнг (Miller J., Strang G.), Matrix theorems for partial differential
and difference equations. —«Math. Scandinavica», 18, 2A966).
Митчелл (Mitchell A. R.), Computational Methods in Partial Differential Equ-
Equations, Wiley, London, 1970.
Мысовских И. П., Лекции по методам вычислений, М., Физматгиз, 1962.
Некоторые проблемы вычислительной и прикладной математики, под ред.
М. М. Лаврентьева, Новосибирск, «Наука», 1975.
Обэн Ж.-П., Приближенное решение эллиптических краевых задач, М., «Мир»,
197 7.
Положий Г. Н., Численное решение двумерных и трехмерных краевых задач
математической физики и функций дискретного аргумента, Киев, Изд-во
КГУ, 1962.
ПонтрягинЛ. С, Болтянский В. Г., Гамкрелидзе Р. В., Мищенко Е. Ф., Матема-
Математическая теория оптимальных процессов, М., Физматгиз, 1961.
Рихтмайер Р. Д. (Richtmyer R. D-), Разностные методы решения краевых задач,
М., ИЛ, 1960.
Рихтмайер, Мортон (Richtmyer R. D., Morton К. W.), Difference Methods for
Initial-Value Problems, Wiley, New York, 1967.
Самарский А. А., Введение в теорию разностных схем, М., «Наука», 1971.
Самарский А. А., Андреев В. Б., Разностные методы для эллиптических уравне-
уравнений, М., «Наука», 1976.
Самарский А. А., Гулин А. В., Устойчивость разностных схем, М., «Наука»,
1973.
Самарский А. А., Попов Ю. П., Разностные схемы газовой динамики, М., «Наука»,
1975.
Саульев В. К-, Интегрирование уравнений параболического типа методом сеток,
М., Физматгиз, 1960. •
Сеа (Сеа J.), Optimisation theorie et algorithmes, Dunod, Paris, 1971.
Стрэнг Г., Фикс Дж., Теория метода конечных элементов, М., «Мир», 1977.
Трауб (Traub J. F.), Iterative Methods for the Solution of Equations, Prentice-
Hall Inc., Englewood Cliffs, New Jersey, 1964.
Фокс Л., Майерс Д. Ф. (Fox L., Mayers D. F.), Computing Methods for Scientists
and Engineers, Oxford, 1968.
Хаусхолдер А. С, Основы численного анализа, М., ИЛ, 1956.
Хенричи (Henrici P.), Error Propagation for Difference Methods, John Wiley and
Sons, New York, 1963.
Яненко Н. Н., Метод дробных шагов решения многомерных задач математиче-
математической физики, Новосибирск, «Наука», 1967.
Яненко Н. Н., Введение в разностные методы математическом физики, ч. 1, 2,
Новосибирск, Изд-во НГУ, 1968.
I
ЛИТЕРАТУРА
433
4. Метод сеток
Белоцерковский О. М., Чушкин П. И., Численный метод интегральных соотноше-
соотношений. — «ЖВМ и МФ», 2, 5 A962).
Брайен (Bryan К..), A scheme for numerical integration of the equations of mo-
motion on an irregular grid free of поп-linear instability. — «Monthly Weather
Review», 94, 1 A966). (Русск. перев. в сб.: Численные методы решения
задач динамики атмосферы и океана, Л., Гидрометиздат, 1968.)
Вакспресс (Wachspress E. L.), The numerical solution of boundary value problems.
Mathematical Methods for Digital Computers, New York, 1960.
Валиуллин А. И., Яненко И. И. Экономичные разностные схемы повышенной
точности для полигармонического уравнения. — «Изв. Сиб. отд. АН СССР.
Сер. техн. наук», 13, 3 A967).
Валицкий Ю. Н., О сходимости разностных аппроксимаций собственных значе-
значений и собственных функций двумерного эллиптического оператора. —
«ДАН СССР», 198, 2 A971).
Волков Е. А., Исследование одного способа повышения точности метода сеток
при решении уравнения Пуассона, В сб.: Вычислительная математика,
1, ВЦ АН СССР, М., 1957.
Волков Е. А., Решение задачи Дирихле методом уточнений разностями высших
порядков, ч. I, II. — «Дифференциальные уравнения», 1, 7, 8 A965).
Волков Е. А., Метод неравномерных сеток для конечных и бесконечных областей
с коническими точками. — «Дифференциальные уравнения», 10, 2 A966).
Волков Е. А., Развитие метода сеток для уравнения Лапласа на конечных и беско-
бесконечных областях с кусочно-гладкой границей. Автореф. докт. дисс., М.,
1967.
Годунов С. К-, Забродин А. В., О разностных схемах второго порядка точности
для многомерных задач. — «ЖВМ и МФ», 2, 4 A962).
Годунов С. К-, Прокопов Г. П., О расчетах конформных отображений и построе-
построении разностных сеток. — «ЖВМ и МФ», 7, 5 A967).
Годунов С. К-, Семендяев К- А., Разностные методы численного решения задач
газовой динамики. —«ЖВМ и МФ», 2, 7 A962).
Демьянович Ю. К-, Метод сеток для некоторых задач математической физики. —
«ДАН СССР», 159, 2 A964).
Джойс (Joice D. С.), Survey of extrapolation processes in numerical analysis. —
«SIAM Review», 13, 4 A971).
Келлер (Keller H.), A new difference scheme for parabolic problems. Numerical
solution of partial differential equations. — II. SYNSPADE-1970, Academic
Press, New York—London, 1971.
Келлог (Kellog R.), Singularities in interface problems. Numerical solution of
partial differential equations. — II. SYNSPADE-1970, Academic Press, New
York—London, 1971.
Коновалов А. Н., Метод фиктивных областей в задачах кручения. — В сб.: Чис-
Численные методы механики сплошной среды, Новосибирск, ВЦ СО АН СССР,
4, 2 A973).
Копченое В. Д., Приближение решения задачи Дирихле методом фиктивных
областей. —«Дифференциальные уравнения», 4, 1 A968).
Кроули (Crowley W.), Second order numerical advection. — «J. Сотр. Phys.»,
1, 4 A967).
Кузнецов Ю. А., Мацокин А. М., Решение уравнения Гельмгольца методом фик-
фиктивных областей. — В сб.: Вычислительные методы линейной алгебры, Ново-
Новосибирск, ВЦ СО АН СССР, 1972.
Кузнецов Ю. А., Мацокин А. М., Матричный аналог метода фиктивных областей
и его применения, Новосибирск, 1977.
Кузнецов Ю. А., Шайдуров В. В., О равномерной сходимости разностных схем. —
В сб.: Вычислительные методы линейной алгебры, Новосибирск, ВЦ СО
АН СССР, 1972.
434
ЛИТЕРАТУРА
Курихара, Холловэй (Kurihara Y., Holloway 1.), Numerical integration of a nine-
level global primitive equations model formulated by the box method. — «Mont-
«Monthly Weather Review», 95, 8 A967).
Куропатенко В. Ф., Метод построения разностных схем для численного интегри-
интегрирования уравнений газодинамики. — «Изв. вузов. Математика», 3 B8)
A962).
Ландау Л. Д., Мейман Н. Н., Халатников И. М., Численные методы интегри-
интегрирования уравнений в частных производных методом сеток. — «Труды III
Всесоюзного математического съезда», т. II, М., Изд-во АН СССР, 1956.
Лебедев В. И., Метод сеток для уравнений типа С. Л. Соболева. — «ДАН СССР»,
114, 6 A957).
Лебедев В. И., О методе сеток для одной системы уравнений в частных производ-
производных. — «Изв. АН СССР. Сер. матем.», 22, 5 A958).
Лебедев В. И., О задаче Дирихле и Неймана на треугольных и шестиугольных
сетках. — «ДАН СССР», 138, 1 A961).
ЛюстерникЛ. А., О разностных аппроксимациях операторов Лапласа. — «УМН»
IX, 2 A954).
Марчук Г. И., Лыжников В. П., Галин В. Я- и др., Гидродинамическая модель
общей циркуляции атмосферы и океана, Новосибирск, 1975.
Марчук Г. И., Ривин Г- С, Юдин М. И., Численные эксперименты с балансными
схемами. —«Изв. АН СССР. Сер. ФАО», 11 A973).
Марчук Г- И., Шайдуров В. В., О численном решении эволюционной задачи с ог-
ограниченным оператором. —«ДАН СССР», 216, 1 A974).
Марчук Г. И., Шайдуров В. В. (Marchuk G. I., Shaydourov V. V.), Increasing of
the assuraey of the projective-difference schemes Lecture Notes in Computer
Science, vol. 11, Springer-Verlag, 1974.
Мацокин А. М., Автоматизация триангуляции областей с гладкой границей при
решении уравнений эллиптического типа. Препринт № 15 семинара «Вычис-
«Вычислительные методы прикладной математики», ВЦ СО АН СССР, 1975.
Мацокин А. М., К развитию метода фиктивных областей. — В сб.: Вычислитель-
Вычислительные методы линейной алгебры, Новосибирск, ВЦ СО АН СССР, 1972.
Мацокин А. М., Вариационно-разностный метод решения эллиптических урав-
уравнений в трехмерных областях. — В сб.: Вариационно-разностные методы
в математической физике, Новосибирск, ВЦ СО АН СССР, 1976.
Мацокин А. М., О построении и методах решения систем вариационно-разност-
вариационно-разностных уравнений. Автореф. канд. дисс, Новосибирск, ВЦ СО АН СССР, 1975.
Пененко В. В., Вычислительные аспекты в задачах математического моделирова-
моделирования динамики атмосферных процессов. Автореф. докт. дисс, Новосибирск,
1976.
Равьяр (Raviart P. A.), Sur l'approximation de certaines equations devolution
lineaires et non lineaires. —«J. de Mathem. Pures et Appl.», 46, 1 A967).
Ривкинд В. Я-, Приближенный метод решения задачи Дирихле и об оценках
скорости сходимости решений разностных уравнений к решениям эллипти-
эллиптических уравнений с разрывными коэффициентами. — «Вестник Ленингр.
ун-та. Сер. матем.», 3 A964).
Ривкинд В. Я-1 Об оценке скорости сходимости однородных разностных схем
для эллиптических и параболических уравнений с разрывными коэффици-
коэффициентами. — В сб.: Проблемы математического анализа, Л., Изд-во ЛГУ, 1966.
Ричардсон Л. Ф. (Richardson L. F.), The approximate arithmetical solution by
finite differences of physical problems involving differential equations, with
an application to the stress in a masonry dam. — «Philos. Trans. Roy. Soc»,
London, Ser. A, 210 A910).
Руховец Л. А., Замечание к методу фиктивных областей. —«Дифференциальные
уравнения», 3, 4 A967).
Самарский А. А., О монотонных разностных схемах для эллиптических и пара-
параболических уравнений в случае иесамосопряжепиого эллиптического опсра-
юра. — «ЖВМ и МФ», 5, 3 A965).
ЛИТЕРАТУРА
435
Самарский А. А., О точности метода сеток для задачи Дирихле в произвольной
области. — «Apl. Math., 10, 3 П965).
Самарский А. А., Некоторые вопросы теории разностных схем. — «ЖВМ и МФ»,
6, 4 A966).
Саульев В. К.., Об одном методе автоматизации решения краевых задач иа быстро-
быстродействующих вычислительных машинах. — «ДАН СССР», 142, 3 A962).
Саульев В. К.-, О решении некоторых краевых задач на быстродействующих вы-
вычислительных машинах методом фиктивных областей. — «Сибирский матем.
журнал», 4, 4 A963).
Синяев В. Н., Об одном принципе построения конечно-разностных схем, основан-
основанных на законах сохранения полной энергии. — В сб.: Численные методы ме-
механики сплошной среды, Новосибирск, ВЦ СО АН СССР, 5, 2 A974).
Тихонов А. П., Самарский А. А., О разностных схемах для уравнений с разрыв-
разрывными коэффициентами. — «ДАН СССР», 108, 3 A956).
Тихонов А. Н., Самарский А. А., Об однородных разностных схемах. —«ЖВМ
и МФ», 1, 1 A961).
Тихонов А. Н., Самарский А. А., Однородные разностные схемы на неравномер-
неравномерных сетках. —«ЖВМ и МФ», 2, 5 A962).
Урванцев А. Л., Шайдуров В. В., Уточнение приближенного решения квазили-
квазилинейного уравнения Пуассона. — В сб.: Вариационно-разностные методы
в математической физике, Новосибирск, ВЦ СО АН СССР, 1976.
Фикера (Fichera G.), Further development in the approximation theory of eigenva-
eigenvalues. Numerical solution of partial differential equations—II. SYNSPADE
1970, Academic Press, New York — London, 1971.
Фокс, Хенричи, Молер (Fox L., Henrici P., Moler C), Approximations and bounds
for eigenvalues of elliptic operators. — «SIAM J. Numer. Anal.», 4, 1 A967).
Фромм (Fromm J. E.), Numerical method for computing nonlinear, time dependent,
buoyant circulation of air in rooms. —JBM J. of Reserch and Development,
15, 3 A971).
Чудов Л. А., Кудрявцев В. П., Об ошибках округления при решении разностны-
разностными методами задач с начальными условиями для эллиптических уравнений
и систем. — В сб.: Численные методы в газовой динамике, М., Изд-во МГУ,
1963.
Шайдуров В. В., Об одном методе повышения точности разностных решений. —
В сб.: Численные методы механики сплошной среды, Новосибирск, ВЦ СО
АН СССР, 3,2A972).
Яненко Н. Н., Сучков В. А., Погодин Ю. Я., О разностном решении уравнения
теплопроводности в криволинейных координатах. — «ДАН СССР», 128,
5 A959).
5. Вариационно-разиостиые методы
Агошков Б. И., О вариационной форме интегрального тождества Г. И. Марчука.
Препринт ВЦ СО АН СССР, Новосибирск, 1977.
Бабушка (Babuska I.), The finite element method for elliptic differential equations.
Numerical solution of partial differential equations — II. SYNSPADE-1970
Academic Press, New York — London, 1971.
Бабушка (Babuska I.), The rate of convergence for finite element method. —
SIAM J. Numer. Anal.», 8, 2 A971).
Биркгоф, Шульц, Варга (Birkhoff G., Schultz M. H., Varga R. S.), Hermite inter-
interpolation in one and two variables with applications to partial differential equ-
equations. — «Numer. Math.», 11, 3 A968).
Брембл (Bramble J.), A second order finite difference analog of the first biharmonic
boundary value problems. — «Numer. Math.», 9, 3 A966).
Брембл, Хаббард (Bramble J., Hubbard В.), On the formulation of finite difference
analogues of the Dirichlet problem for Poisson's equation. — «Numer. Math.»
4, 4 A962).
436
ЛИТЕРАТУРА
Брембл, Шатц (Bramble J., Schatz A.), On the numerical solution of elliptic bo-
boundary value problems by least squares approximation of the data. Numerical
solution of partial differential equations—II. SYNSPADE-1970, Academic
Press, New York — London, 1971.
Гловински (Glovinski R.), Introduction to the Approximation of Elliptic Varia-
tional Inequalities. Report 76006, Laboratoire d'Analyse Numerique de l'uni-
versite Paris, 6, A976).
Гловински, Лионе, Тремольер (Glovinski R., Lions J. L., Tremolieres R.), Ana-
Analyse Numerique des Inequations Variationnelles, v. 1, 2, Dunod, Paris, 1976.
Гловински, Марроко (Glowinski R., Marroco A.), Sur l'Approximation, par Ele-
Elements Finis d'Ordre Un, et la Resolution, par Penalisation — Dualite, d'Une
Classe de Problemes de Dirichlet Non Lineares, Revue Francaise d'Automatique,
Informatique et Recherche Operationnelle, 1975, R-2.
Дуглас, Дюпон (Douglas J., Dupont T ), Alternating-direction Galerkin methods
on rectangles. Numerical solution of partial differential equations—II.
SYNSPADE-1970, Academic Press, New York—London, 1971.
Дьяконов Е. Г., Некоторые классы операторов, эквивалентных по спектру, и
их применения. — В сб.: Вариационно-разностные методы в математической
физике, Новосибирск, ВЦ СО АН СССР, 1976.
Дюво, Лионе (Duvaur G., Lions J. L.), Les Inequations en Mecanique et en Physi-
Physique, Paris, Dunod, 1972. (English translation: Grundlehren der Math., Sprin-
ger-Verlag, 219, 1976).
Зенкевич О.. Метод конечных элементов в технике. М., «Мир», 1975.
Зламал (Zlamal M.), On the finite element method. — «Numer. Math.», 12, 5A968).
Зламал (Zlamal M.), On some finite element procedures for solving second order bo-
boundary value problems. —«Numer. Math.», 14, 1 A969).
Келдыш М. В., О методе Галеркина для решения краевых задач. —
«Изв. АН СССР. Сер. матем.», 6 A942).
Курант (Courant R.), Variational methods for the solutions of problems of equ-
equilibrium and variations. — «Bull. Amer. Math. Soc», 49, A943).
Лебедев В. И., Разностные аналоги ортогональных разложений основных диф-
дифференциальных операторов и некоторых краевых задач математической фи-
физики. — «ЖВМ и МФ», 4, 3, 4 A964).
Лионе, Темам (Lions J. L., Temam R.), Une methode d'eclatement des operateurs
et des contraintes en calcul des variations. — «C. R. Acad. Sci.», Paris, 263
A966).
Лионе, Стампакья (Lions J. L., Stampacchia), Variational inequalities. —
«Con. Pure Applied Math.», XX A967).
Марчук Г. И., Агошков В. И., О выборе координатных функций в обобщенном
методе Бубнова—Галеркина. — «ДАН СССР» (в печати).
Обэн (Aubin J. P.), Approximation des espaces des distributions et des operateurs
differentiels. — «Bull. Soc. Math. France», Memoire, 12 A967).
Обэн (Aubin J. P.), Behavior of the error of the approximate solutions of boundary
value problems for linear elliptic equations by Galerkin's and finite difference
methods. —«Ann. Scuola Norm. Super», Pisa, 21, 4 A967).
Обэн (Aubin J. P.), Best approximation of linear operators in Hilbert space. —
«SIAM J. Numer. Anal.», 5, 3 A968).
Обэн, Буршард (Aubin J. P., Burchard H. G.), Some aspects of the method of the
hypercircle applied to elliptic variational problems. Proceedings of SYNSPA-
DE. Acad. Press, 1971.
Оганесян Л. А., Численный расчет плит. — В сб.: Решение инженерных задач
на электронно-вычислительных машинах, Л., 1963.
Оганесян Л. А., Вариационно-разностная схема на регулярной сетке для задачи
Дирихле. —«ЖВМ и МФ», 11, 6 A971).
Оганесян Л. А., Ривкинд В. Я-, Руховец Л. А., Вариационно-разностные методы
решения эллиптических уравнений. I, II. — В сб.: Дифференциальные урав-
уравнения и их применение, вып. 5, 8, Вильнюс, 1974.
ЛИТЕРАТУРА
437
Оганесян Л. А., Руховец Л. А., О вариационно-разностных схемах для линейных
эллиптических уравнений второго порядка в двумерной области с кусоч-
кусочно-гладкой границей. —«ЖВМ и МФ», 8, 1 A968).
Оганесян Л. А., Руховец Л. А., Исследование скорости сходимости вариационно-
разностных схем для эллиптических уравнений второго порядка в двумерной
области с гладкой границей. —«ЖВМ и МФ», 9, 5 A969).
Руховец Л. А., Исследование скорости сходимости вариационно-разностных схем
для двумерных эллиптических уравнений второго порядка. Автореф. канд.
дисс., Л , 1970.
Сеа (Сёа J.), Approximation operationnelle des problemes aux limites. —«Ann.
Inst. Fourier», Grenoble, 14, 2 A964).
Сеа, Гловински (Сёа J., Glowinski R.), Sur des methodes d'optimisation par re-
relaxation, Revue Francaise d'Automatique, Informatique et Recherche Ope-
rationnelle, 1973, R-3, S-32.
Сеа, Гловински (Сёа J , Glowinski R.), Methodes numeriques pour l'ecoulement
laminaire d'un fluide vigide viscoplastique incompressible. — «Inf. J. of Сотр.
Math.», Ser. B, 3 A974).
Смелое В. В., Аппроксимация кусочно-гладких функций тригонометрическими
многочленами и использование последних в вариационных методах, Новоси-
Новосибирск, 1975.
Стрэнг (Strang G.), The finite element method and approximation theory. Nume-
Numerical solution of partial differential equations. — II. SYNSPADE-1970, Aca-
Academic Press, New York—London, 1971.
Стрэнг, Фикс (Strang G., Fix G.), A Fourier analysis of the finite element varia-
variational method. Preprint, 1970.
Федорова О. А., Вариационно-разностная схема для однородного уравнения диф-
диффузии. — «Матем. заметки», 17, 6 A975).
Хаббард (Hubbard В.), Remarks on the convergence in the discrete Dirichlet prob-
problem. Numerical solution of partial differential equations. Edited by James H.
Bramble, Academic Press, New York — London, 1965.
Шайдуров В. В., Экстраполяция Ричардсона для проекционно-разностной задачи
Штурма—Лиувилля. — В сб.: Вариационно-разностные методы в математи-
математической физике, Новосибирск, ВЦ СО АН СССР, 1974.
6. Теория устойчивости разностных схем
Ильин А. М., Устойчивость разностных схем задачи Коши для систем дифферен-
дифференциальных уравнений в частных производных. — «ДАН СССР», 164, 3 A965).
Келлер, Томэ (Keller H. В., Thomee V.), Unconditionally stable difference method
for mixed problems for quasilinear hyperbolic systems in two dimensions. —
«Comm. Pure Appl. Math.», 15, 1 A962).
Крайс (Kreiss H. O.), Uber die Stabilitatsdefinition fiir Differenzengleichungen
die partielle Differentialgleichungen approximieren. — «Nordisk Tidskr. In-
Informations Behandlung», 2, 2 A962).
Крайс (Kreiss H. O.), Qn difference approximations of the dissipative type for
hyperbolic differential equations. —«Comm. Pure Appl. Math.», 17, 3 A964).
Крайс {Kreiss H. O.), Initial boundary value problems for partial differential and
difference equations in one space dimension. Numerical solution of partial
differential equations — II. SYNSPADE-1970, Academic Press, New York-
London, 1971.
Лаке П., Об устойчивости конечно-разностных аппроксимаций решений гипербо-
гиперболических уравнений с переменными коэффициентами. — «Математика (сб.
переводов)», 6, 3 A962).
Лаке, Вендроф (Lax P. D., Wendroff В.), On the stability of difference schemes
with variable coefficients. —«Comm. Pure Appl. Math.», 15, 4 A962).
Лаке П., Ииренберг Г., Об устойчивости разностных схем; точная форма нера-
неравенства Горднига. —«Математика (сб. переводов)», 11, 6 A967J.
438
ЛИТЕРАТУРА
Рихтмайер Р. Д., О нелинейной неустойчивости разностных схем. — В сб.:
Некоторые вопросы вычислительной и прикладной математики, Новоси-
Новосибирск, «Наука», 1966.
Рябенький В. С, Филиппов А. Ф., Об устойчивости разностных уравнений, М.,
Гостехиздат, 1956.
Самарский А. А., Необходимые и достаточные условия устойчивости двухслойных
разностных схем. —«ДАН СССР», 181, 4 A968).
Сердюкова С. И., Исследование устойчивости в С явных разностных схем с по-
постоянными действительными коэффициентами, устойчивых в L. — «ЖВМ
и МФ», 3, 2 A963).
Стрэнг (Strang G.), Difference methods for mixed boundary value problem. — «Duke
Math. J.», 27, 2 A960).
Томэ (Thomee V.), Generally unconditionally stable difference operators. —
«SIAM J. Numer. Anal.», 4, 1 A967).
Федорюк М. В., Об устойчивости в С задачи Коши для разностных уравнений и
уравнений с частными производными. —«ЖВМ и МФ», 7, 3 A967).
Филиппов А. Ф., Об устойчивости разностных уравнений. —«ДАН СССР», 100,
6 A955).
7. Устойчивость и сходимость
Андреев В. Б., О сходимости разностных схем, аппроксимирующих вторую и
третью краевые задачи для эллиптических уравнений. — «ЖВМ и МФ»,
8, 6 A968).
О'Брайен, Хайман, Каплан (O'Brien G. G., Hyman M. A., Kaplan S.), A study
of the numerical solution of partial differential equations. —«J. of Math, and
Phys.», 29, 4 A951).
Вендроф (Wendroff В.), Well-posed and stable difference operators. — «SIAM J.
Numer. Anal.», 5, 1 A968).
Видлунд (Widlund О. В.), Stability of parabolic difference schemes in the maxi-
maximum norm. —«Numer. Math.», 8, 2 A968).
Годунов С. К-> Рябенький В. С., Канонические виды систем линейных
обыкновенных разностных уравнений с постоянными коэффициентами. —
«ЖВМ и МФ», 3, 2 A963).
Годунов С. К., Рябенький В. С, Спектральные признаки устойчивости краевых
задач для иесамосопряжеииых разностных уравнений. — «УМН», XVIII,
3 A963).
Джон (John F.), On the integration of parabolic equations by difference methods.
I. Linear and quasilinear equations for the infinite interval. — «Comm. Pure
Appl. Math.», 5, 2 A952).
Дюфорт, Франкел (Du Fort E. С, Frankel S. P.), Stability conditions in the nu-
numerical treatment of parabolic differential equations. — «Math. Tables' and
Other Aids Comput.», 7, 43 A953).
Курант, Фридрикс, Леей (Courant R., Friedrichs K., Lewy H.), Ober die parti-
ellen Differenzengleichungen der mathematischen physik. — «Math. Ann.»,
100, 32 A928). (Русский перевод: О разностных уравнениях математической
физики. —«УМН», VIII A940).
Ладыженская О. А-, Метод конечных разностей в теории уравнений с частными
производными. — «УМН», XII, 5 A957).
Лаке, Вендроф (Lax P. D., Wendroff В.), System of conservations laws. — «Comm.
Pure Appl. Math.», 13, 2 A960).
Лаке, Рихтмайер (Lax P. D., Richtmyer R. D.), Survey of the stability of linear
finite difference equations. —«Comm. Pure Appl. Math.», 9, 2 A956).
Лиз (Lees M.), A priori estimate for the solution of difference approximations to
parabolic partial differential equations. —«Duke Math. J.», 27, 3 A960).
Лиз (Lees M.), Energy inequalities for the solution of differential equations. —
«Trans. Amer. Math. Soc», 94, 1 A960).
ЛИТЕРАТУРА
439
I
Лионе (Lions J.), Equations differentielles operationnelles dans les espaces de Hil-
berh. Centro Int. Mat. Estivo, Varenna A963). (Equazioni differenziali astratte.
Cremonese, Roma 1963).
Нейман, Рихтмайер (Neuman J., Richtmyer R. D.), A method for the numerical
calculation of hydrodynamic shocks. — «J. Appl. Phys.», 21, 3 A950).
Рябенький В. С, Структура спектров семейств иесамосопряжеииых разностных
операторов. —В сб.: Материалы к совместному советско-американскому
симпозиуму по уравнениям с частными производными. Новосибирск,
1963.
Рябенький В. С, Спектр семейства разностных операторов над функциями иа
сеточном графе. —«ЖВМ и МФ», 7, 6 A967).
Самарский А. А , Некоторые вопросы общей теории разностных схем. — В сб.:
Дифференциальные уравнения с частными производными (труды симпозиума,
посвященного 60-летию академика С. Л. Соболева), М., «Наука», 1970.
Соболев С. Л-, Некоторые замечания о численном решении интегральных урав-
уравнений. — «Изв. АН СССР. Сер. матем.», 20, 4 A956).
Стрэнг (Strang G.), Accurate partial difference methods. I. Linear Cauchy prob-
problems. — «Arch. Rational Mech. Anal.», 12, 5 A963).
Стрэнг (Strang G.), Implicite difference methods for initialboundary value prob-
problems. — «J. Math. Anal. Appl.», 16, 1 A966).
Томэ (Thomee V.), On the rate of convergence of difference schemes for hyperbolic
equations. Numerical solution of partial differential equations — II. SYNSPA-
DE-1970, Academic Press, New York — London, 1971.
Филлипс (Phillips N. A.), The atmosphere and the sea in motion. Scientific Cont-
Contributions to the Rossby Memorial Volume, The Rockfeller Institute, 1959.
(Русский перевод: Пример нелинейной вычислительной неустойчивости. —
В ки.: Атмосфера и океаи в движении, М., ИЛ, 1963.)
Яненко Н. И., Бояринцев Ю. ?., О сходимости разностных схем для урав-
уравнения теплопроводности с переменными коэффициентами. — «ДАН СССР»,
139, 6 A961).
Яненко Н. Н., Шокин Ю. И., О связи корректности первых дифференциальных
приближений и устойчивости разностных схем для гиперболических систем
уравнений. — «Матем. заметки», 4, 5 A968).
Яненко Н. Н., Шокин Ю. И., О корректности первых дифференциальных приб-
приближений разностных схем. — «ДАН СССР», 182, 4 A968).
8. Вычислительные методы линейной алгебры
Абрамов А. А., Идеи теории возмущений в некоторых алгоритмах линейной ал-
алгебры. — В сб.: Вычислительные методы линейной алгебры, вып. 1, М.,
ВЦ АН СССР, 1968.
Бауэр, Фике (Bauer F. L., Fike С. Т.), Norms and exclusion theorems. — «Numer.
Math.», 2, 3 A960).
Бахвалов Н. С., Основы вычислительной математики. Курс лекций, М., Изд-во
МГУ, 1970.
Беллман Р., Введение в теорию матриц, М., «Наука», 1969.
Воеводин В. В., Ошибки округления и устойчивость в прямых методах линейной
алгебры, М., Изд-во МГУ, 1969.
Воеводин В. В., Численные методы алгебры. Теория и алгорифмы, М., «Нау-
«Наука», 1966.
Гантмахер Ф. Р., Теория матриц, М., «Наука», 1967.
Дородницын А. А., К задаче вычисления собственных чисел и собственных век-
векторов матриц. —«ДАН СССР», 126, 6 A959).
Дьяконов Е. Г. (D'yakonov E. G.), On the solution of some elliptic difference equ-
equations.—«J. Inst. Math. Appl.», 7 A971).
Икрамов X. Д., Матричные нормы и методы типа Якоби, М., Изд-во МГУ,
1969.
440
ЛИТЕРАТУРА
Ильин В. П., О некоторых оценках для методов сопряженных градиентов. —
«ЖВМ и МФ», 16, 4 A976).
Келлог, Нодерер (Kellogg R., Noderer L.), Sealed iterations and linear equations.—
«SIAM J.»: 8, 4 A960).
Ким Г., О распределении ошибок округления итерационных методов решения
систем линейных алгебраических уравнений, М., Изд-во МГУ, 1969.
Кублановская В. Н-, Применение ортогональных преобразований для решения
задач алгебры, Автореф. докт. дисс., Л., 1972.
Кузнецов Ю. А., Итерационные методы решения несовместных систем линейных
уравнений. Некоторые проблемы вычислительной и прикладной матема-
математики, Новосибирск, «Наука», 1975.
Кузнецов Ю. A., Iterative Methods for Solution of Noncompatible Systems of Li-
Linear Equations. — Lecture Notes in Economics and Mathematical Systems
Springer-Verlag, 134 A976).
Кузнецов Ю. А-, Марчук Г. И., Итерационные методы решения систем ли-
линейных уравнений с собственными матрицами, Acta UniversitatisCarobinse —
Mathematica et Physica, Praha, Czechoslovakia, 1974.
Кузнецов Ю. А., Марчук Г. И., Stationary Iterative Methods for the Solution of
Systems of Linear Equations with Singular Matrices. Gatlinburg VI, Sym-
Symposium on Numerical Algebra, Conference Manuscripts, Munich, Germany
1974.
Марек (Marec I.), Итерации линейных ограниченных операторов и процесс Кел-
лога, Диссертация, Прага, 1962.
Марек (Marec I.), On iteration of linear bounded operators and the convergence
of Kellog's iteration process. — «Cech. Mat. J.», 12 A962).
Марчук Г. И., Кузнецов Ю. А., Итерационные методы и квадратичные функ-
функционалы. — В сб.: Методы вычислительной математики, Новосибирск, «На-
«Наука», 1975.
Немчинов С. В., Либов С. Л., Прямой метод повышенной точности решения
краевых задач для уравнения Гельмгольца на сетке точек в прямоугольни-
прямоугольнике. — «ЖВМ и МФ», 4, 4 A964).
Стрэнг (Strang Ct.), Linear Algebra and its Applications, Acad. Press, New York
1976.
Трауб (Traub J.), Iterative Methods for the Solution of Equations, Prentice Hall,
Englewood Cliffs, 1964.
Уилкинсон Дж. X. Алгебраическая проблема собственных значений, М., «На-
«Наука», 1970.
Уилкинсон, Рейнш (Wilkinson J. H., Reinsch С), Linear Algebra, Springer-Ver-
Springer-Verlag, Berlin—Heidelberg, 1971.
Фаддеев Д. К., О некоторых последовательностях полиномов, полезных для по-
построения итерационных методов решения системы линейных алгебраичес-
алгебраических уравнений. — «Вестник ЛГУ. Сер. матем.», 7, 2 A958).
Фаддеев Д. К., Фаддеева В. Н., Вычислительные методы линейной алгебры, М.,
Физматгиз, 1963.
Фаддеев Д. К-, Фаддеева В. Н., Вычислительные методы линейной алгебры. Запис-
Записки научных семинаров ЛОМИ, т. 54, Л., «Наука», 1975.
Фаддеев Д. К-, Фаддеева В. Н., Кублановская В. Н., Линейные алгебраические
системы с прямоугольными матрицами. —В сб.: Вычислительные методы
линейной алгебры, М., «Наука», 1968.
Фландерс, Шортли (Flanders D. A., Shortley Ct.), Numerical determination of
fundamental modes. — «J. Appl. Phys.», 21 A950).
Форсайт Дж., Молер К., Численное решение систем линейных алгебраических
уравнений, М., «Мир», 1969.
Френсис (Frencis J.), The QR-transformation. Parts 1, II. — «Computer J.», 4
A961, 1962).
Штифель (Sticfel E.), Kernel polynomials in linear algebra and their numerical
applications. N. B. S., Appl. Math., Ser. 49, 1 A958).
ЛИТЕРАТУРА
441
Эберлейн (Eberlein P.), A Jacobi-like method for the automatic computation of
eigenvalues and eigenvectors of an arbitrary matrix. — «J. Soc. Industr. Appl.
Math.», 10 A962).
Янг (Young D. M.), Iterative Solution of Large Linear Systems, Acad. Press, Lon-
London, 1971
9. Спектральные методы оптимизации итерационных процессов
Абрамов А- А., Об одном способе ускорения итерационных процессов. — «ДАН
СССР», 74, 6 A950).
Бахвалов Н. С, О сходимости одного релаксационного метода при естественных
ограничениях на эллиптический оператор. — «ЖВМ и МФ», 6, 5 A966).
Воробьев Ю. В., Случайный итерационный процесс. — «ЖВМ и МФ», 4, 6 A964);
5, 5 A965).
Гавурин М. К-> Применение полиномов наилучшего приближения для улучше-
улучшения сходимости интерационных процессов. — «УМН», V, 3 A950).
Гавурин М. К-/ Нелинейные функциональные уравнения и непрерывные аналоги
итерационных методов. — «Изв. вузов. Математика», 5, 6 A958).
Голуб, Варга (Golub G. Н., Varga R. S.), Chebyshev semi-iterative methods, suc-
successive over-relaxation iterative methods and second order Richardson itera-
iterative methods. Parts I, II. — «Numer. Math.», 3, 2 A961).
Дьяконов Е. Г., О построении итерационных методов на основе использования
операторов, эквивалентных по спектру. — «ЖВМ и МФ» 6, 1, 4 A966).
Золотарев Е. И., Приложение эллиптических функций к вопросам о функциях,
наименее и наиболее отклоняющихся от нуля. — «Записки Российской
Академии наук», 1877.
Иванов В. К-> О сходимости итерационных процессов при решении систем линей-
линейных алгебраических уравнений. — «Изв. АН СССР. Сер. матем.», 4 A939).
Коллатц (Collatz L.), Fehlerabschatzung fur das Iterationsverfahren zur Auflosung
linear Gleichungssysteme. — «Z. Angew. Math. Mech.», 22 A942).
Ланцош (Lanczos C), An iteration methods for the"solution for the eigenvalue prob-
problem of linear differential and integral operators. —«J. Res. Nat. Bur. Stand.»,
45, 1 A950).
Ланцош (Lanczos C), Chebyshev polynomials in the solution of largescale linear
systems. Proc. Assoc. Comput. Math., Toronto Meeting (September 1952).
Лебедев В. И., Об итерационных методах решения операторных уравнений со
спектром, лежащим на нескольких отрезках. — «ЖВМ и МФ», 9,
6 A969).
Лебедев В. И., О построении операции Р в /СР-методе. — «ЖВМ и МФ», 9, 4
A969).
Лебедев В. И., Итерационный метод с чебышевскими параметрами для определе-
определения наибольшего собственного значения и соответствующей собственной
функции. — «ЖВМ и МФ», 17, 1 A977).
Лебедев В. И., Финогенов С. А., О порядке выбора итерационных параметров
в чебышевском циклическом итерационном методе. —«ЖВМ и МФ», 11, 2
A971).
Лебедев В. И., Финогенов С. А., Решение проблемы упорядочения параметров
в чебышевских итерационных методах. — «ЖВМ и МФ», 13, 1 A973).
Лебедев В. И., Финогенов С. А., Об использовании упорядоченных чебышевских
параметров в итерационных методах, — «ЖВМ и МФ», 16, 4 A976).
Марчук Г. И., Сарбасов К- Е., Об одном методе решения стационарной задачи. —
«ДАН СССР», 182, 1 A968).
Островский А. М. (Ostrowski A. M.), On the linear iteration procedures for sym
metric matrices. Univ. Roma, Inst. Naz. Alta Mat. Rend. Mat. e Appl., 14,
1-2 A954).
Петришин (Petryshyn W.), On a general iterative method for the approximate solu
tion of linear operator equations. — «Math. Comput.», 17, 1 A963).
442
ЛИТЕРАТУРА
Рейк (Reich E.), On the convergence of the classical iterative method of solving
linear simultaneous equations. — «Ann. Math. Statist.», 20, 3 A949).
Федоренко P. П., Релаксационный метод решения разностных эллиптических
уравнений. — «ЖВМ и МФ», 1, 5 A961).
Федоренко Р. П., О скорости сходимости одного итерационного процесса. —
«ЖВМ и МФ», 4, 3 A964).
Юнкоза, Милликен (Juncosa M. L., Milliken Т. М.), On the increase of convergence
rates of relaxation procedures for eltiptic partial of difference equations
«J. Assoc. Comput. Math.», 7, 1 A960).
10. Метод верхней релаксации
Бройден (Broyden С. G.), Some generalizations of the theory of successive over-
relaxation. — «Numer. Math.», 6, 4 A964).
Бройден (Broyden С G.), On convergence criteria for the method of successive over-
relaxation. — «Math. Comut.», 18, 85 A964).
Варга (Varga R. S.), P-cyclic matrices: a generalization of the Young—Francel
successive over-relaxation scheme. — «Pacific J. Math.», 9 A959).
Варга (Varga R. S.), Orderings of the successive over-relaxation scheme. —«Paci-
—«Pacific J. Math.», 9A959).
Гарабедян (Garabedian P.), Estimation of the relaxation factor for small mesh size.—
«Math. Tables and Other Aids Comput.», 10, 56 A956).
Гастинел (Gastinel N.), Sur le meilleur choix des parametres de sur-relaxation
(Precede de Peaceman — Rachford). — «Chiffres», 5, 2 A962).
Голуб (Golub G. H.), The use of Chebyshev matrix polinomials in the iterative
solution of linear equations compared with the method of successive over-relaxa-
over-relaxation. Doct. Thesis, Univ. of Illinois, 133 A959).
Ивенс (Evans D. J.), Note on the line over-relaxation factor for small mesh size. —
«Comput. J.», 5, 1 A962).
Ивенс, Форингтон (Evans D.-J., Forington С V.), An iterative process for
optimizing summetric successive over-relaxation. — «Comput J » 6
3 A963).
Линн (Linn M. S.), On the round-off error in the method of successive over-relaxa-
over-relaxation. — «Math. Comput», 18, 85 A964).
Островский (Ostrowski A. M.), On over- and under-relaxation in the theory of the
cyclic single step iteration. — «Math. Tables and Other Aids Comput.» 7
43 A953). ' '
Петришин (Petryshyn W.), The generalized over-relaxation method for the appro-
approximate solution of operator equations in Hilbert space. — «SIAM J » 10 4
A962). ' ' '
Петришин (Petryshyn W.), On the extrapolated Jacobi or simultaneous displace-
displacements method in the solution of matrix and operator equations — «Math
Comput.», 19, 89 A965).
Фаддеев Д. K-, К вопросу о верхней релаксации при решении систем линейных
уравнений. — «Изв. вузов. Математика», 5 A958).
Хаееман, Келлог (Hageman L. A., Kellogg R. В.), Estimating optimum over-rela-
over-relaxation parameters. — «Math. Comput.», 22, 101 A968).
Шелдон (Sheldon J.), On the numerical solution of elliptic difference equations. —
«Math. Tables Aids Comput.», 9 A955).
Якг (Young D. M.), Iterative methods for solving partial difference equations of
elliptic type. — «Trans. Amer. Math Soc.», 76 A954).
Янг (Young D. M.), A bound for the optimum relaxation factor for the successive
over-relaxation method. — «Numer. Math.», 16, 5 A971).
Янг (Young D. M.), Convergence properties of the symmetric and unsymmetric
successive over-relaxation methods and related methods. — «Math Comput.»
24, 112 A971).
ЛИТЕРАТУРА
443
11. Градиентные методы
Бирман М. Ш., Некоторые оценки для метода наискорейшего спуска. — «УМН»,
V, 3 A950).
Годунов С. К-> Прокопов Г- П., Вариационный подход к решению больших систем
линейных уравнений, возникающих в сильно эллиптических задачах, М.,
ИПМ АН СССР, 1968.
Годунов С. К. Прокопов Г. П., О решении разностного уравнения Лапласа. —
«ЖВМ и МФ», 9, 2A969).
Горбенко Н. И., Ильин В. П., О градиентных методах переменных направлений. —
В сб.: Некоторые проблемы вычислительной и прикладной математики,
Новосибирск, «Наука», — 1975.
Даниель (Danial J. W.), The conjugate gradient method for linear and non-linear
operator equations. —«SIAM J. Numer. Anal.», 4, 1 A967).
Даниель (Danial J. W.), Convergence of the conjugate gradient method with com-
computationally convenient modifications. — «Numer. Math.», 10, 2 A967).
Канторович Л. В., О методе наискорейшего спуска. — «ДАН СССР», 56, 3 A947).
Красносельский М. А., Крейн С. Г., Итеративный процесс с минимальными иевяз-
ками. — «Матем. сб.», 31 A952.)
Кузнецов Ю. А., К теории итерационных процессов. — «ДАН СССР», 184, 2 A969).
Кузнецов Ю. А., О симметризации итерационных процессов. — В об.: Вычисли-
Вычислительные методы линейной алгебры, Новосибирск, ВЦ СО АН СССР, 1969.
Кузнецов Ю. А., Некоторые вопросы теории и приложений итерационных методов.
Автореф. канд. дисс., Новосибирск, 1969.
Ланцош (Lanczos С.), Solution of the system of linear equations by minimized
iterations. — «J. Res. Nat. Bur. Stand.», 49, 1 A952).
Марчук Г И , Кузнецов Ю. А., К вопросу об оптимальных итерационных процес-
процессах. — «ДАН СССР», 181, 6 A968).
Марчук Г. И., Кузнецов Ю. А., Некоторые вопросы теории многошаговых итера-
итерационных процессов. —В сб.: Вычислительные методы линейной алгебры,
Новосибирск, ВЦ СО АН СССР, 1969.
Марчук Г. И., Кузнецов Ю. А-, К решению систем линейных уравнений итера-
итерационными методами. — В сб.: Вопросы точности и эффективности вычисли-
вычислительных алгоритмов, вып. 1, Киев, Изд-во Ин-та кибернетики АН УССР,
1969.
Самокиш Б. А., Исследование быстроты сходимости метода наискорейшего спус-
спуска. — «УМН», XII, 1 A957).
Форсайт (Forsythe G. E), On the asymptotic directions of the s-dimensional opti-
optimum gradient method. —«Numer. Math.», 11, 1 A968).
Форсайт, Мотцкин (Forsythe G. E., Motzkin T. S.), Asymptotic properties of the
optimum gradient method. — «Bull. Amer. Math. Soc», 57, 2 A951).
Форсайт, Мотцкин (Forsythe G. E., Motzkin T. S.), Acceleration of the optimum
gradient method. —«Bull. Amer. Math. Soc.», 57, 4 A951).
Форсайт, Форсайт (Forsythe A. I., Forsythe G. E.), Punchedcard experiments
with accelerated gradient methods for linear equations. Contributions to the
solution of linear aquations and the determination of eigenvalues. — N. B. S.
Appl. Math., Ser. 39 A954).
Фридман В. М., Новые методы решения линейного операторного уравнения. —
«ДАН СССР», 128, 3 A959).
Хестенс, Штифель (Hestenes M. R., Stiefel E.), Method of conjugate gradients for
solving linear systems. —«J. Res. Nat. Bur. Stand.», 49 A952).
12. Методы факторизации (прогонки)
Абрамов А. А., Андреев В. Б., О применении метода прогонки к нахождению перио-
периодических решений дифференциальных и разностных уравнений. — «ЖВМ и
МФ», 3, 2 A963).
444
ЛИТЕРАТУРА
Айне Э., Обыкновенные дифференциальные уравнения, М., ОНТИ, 1939.
Бужби, Голуб, Нильсон (Buzbee В., Golub G., Nilson E.), On direct methods for
solving Poisson's equations. —«SIAM J. Numer. Anal », 7, 4 A970).
Булеев H. И., Численный метод решения двумерных и трехмерных уравнений
диффузии. —«Матем. сб.», 51, 2 A960).
Булеев Н. И., Метод неполной факторизации для решения двумерных и трехмер-
трехмерных уравнений типа диффузии. — «ЖВМ и МФ», 10, 4 A970).
Владимиров В. С, Приближенное решение одной краевой задачи для дифферен-
дифференциального уравнения второго порядка. — «Прикл. матем. и мех.», 19, 3 A955).
Гельфанд И. М., Локуциевский О. В., Метод прогонки для решения разностных
уравнений. — В кн.: С. К- Годунов, В. С. Рябенький, «Введение в теорию
разностных схем», М., Физматгиз, 1962.
Годунов С. К-, Метод ортогональной прогонки для решения систем разностных
уравнений. — «ЖВМ и МФ», 2, 6 A962).
Дегтярев Л. М., Фаворский А. П., Потоковый вариант метода прогонки. — «ЖВМ
и МФ», 8, 3 A968).
Дегтярев Л. М., Фаворский А- П., Потоковый вариант метода прогонки для раз-
разностных задач с сильно меняющимися коэффициентами. — «ЖВМ и МФ»,
9, 1 A969).
Огнева В. В., Метод прогонки для решения разностных уравнений. — «ЖВМ
и МФ», 7, 4 A967).
Олифант (Oliphant Т. A.), An implicit, numerical method for solving two-dimentio-
nal time dependent diffusion problems. — «Quart. Appl. Math.», XIX, 3 A961).
Русанов В. В., Об устойчивости метода матричной прогонки. — В сб.: Вычисли-
Вычислительная математика, 6, М., 1960.
Софронов И. Д., О методе прогонки для решения краевых задач для разностных
уравнений. — «ЖВМ и МФ», 4, 2 A964).
Софронов И. Д., Разностная схема с диагональными направлениями прогонок для
решения уравнения теплопроводности. —«ЖВМ и МФ», 5, 2 A965).
Фаге М. К-, О методе прогонки. — «ДАН СССР», 191, 2 A970).
13. Быстрое преобразование Фурье
Бингем, Годфри, Таки (Bingham С, Godfrye M. D., Tukey J.), Modern techniques
of power spectrum estimation. — IEEE Trans., Audio and Electroacoustics,
AU-15 A967).
Голд, Радер (Gold В., Rader С. М.), Digital processing of signal, McGraw-Hill,
New York, 1969.
Клаудер, Прайс, Дарлингтон, Элберзгайм (Klauder J. R., Price A. C., Darling-
Darlington S. and Albersheim W. J.), The theory and design of chirp radars. — «Bell
System Tech. J.», 39 A960). (См. также: Клаудер, Прайс, Дарлингтон, Эл-
Элберзгайм, Теория и расчет импульсных радиолокационных станций с частот-
частотной модуляцией. — «Зарубежная радиоэлектроника», вып. 1 A961.).)
Кузнецов Ю. А-, Мацокин А. М., Решение уравнения Гельмгольца методом фик-
фиктивных областей. — В сб.: Вычислительные методы линейной алгебры, Ново-
Новосибирск, ВЦ СО АН СССР, 1972.
Кули, Льюис, Уэлч (Cooley J. W., Lewis P. A., Welch P. D.), The fast Fourier
transform algorithm and its applications. IBM Research Paper RC-1743, Feb.
1967.
Кули, Таки (Cooley J. W., Tukey J. W.), An algorithm for the machine calculation
of complexes Fourier series. — «Math. Comput», 19, 90 A965).
Немчинов С. В., О применении метода сеток к решению краевых задач для урав-
уравнений в частных производных с периодическими краевыми условиями. —
В кн.: Динамическая метеорология, Ташкент, «Наука», 1965.
Таки (Tukey J. W.), An introduction to the calculations of numerical spectrum
analysis. — In «Spectral Analysis ih Time Series», Bern Harris, L. D. Wiley,
New York, 1967.
ЛИТЕРАТУРА
445
Хелмс (Helms R. D.), Fast Fourier transform method for computing difference
equations and simulating filters, — IEEE Trans., Audio and Electroacoustics,
AU-15, A967).
Хокни (Hockney R. W.), A fast direct solution of Poissons equation using Fourier
analysis. — «J. Assoc. Сотр. Mech.», 12, 1 A965).
14. Интерполяция с помощью сплайнов
Алберг, Нильсон, Уолш (Alberg J. Н., Nilson Е. N., Walsh J. L.), Extremal ortho-
gonalines. — «J. Math. Anal. Appl.», 12, 1 A965).
Алберг Дж., Нильсон Э., Уолш Док., Теория сплайнов и ее приложения, М.,
«Мир», 1972.
Ананьин А. 3., Смелое В. В., Василенко В. А., Эффективный способ преобразова-
преобразования вариационной задачи сглаживания к линейной алгебраической системе,
Препринт ВЦ СО АН СССР, вып. 28, Новосибирск, 1976.
Анселон, Лоран (Anselon Р. М., Laurent P. J.), A general method for construction
of interpolating or smoothing spline-functions. — «Numer. Math.», 12, 1 A968).
Атья (Atteia M.), Generalisation de la definition et des propriete's des «spline fon-
ctions». — «C. R. Acad. Sci.», Paris. 260 A965).
Белоносов А. С, Цецохо В. А., Вычислительный алгоритм и процедуры сглажива-
сглаживания функций, заданных приближенно в узлах нерегулярной сетки на плоско-
плоскости. — В сб.^ Некорректные задачи математической физики и проблемы
интерпретации геофизических наблюдений (Математические проблемы гео-
геофизики), Новосибирск, ВЦ СО АН СССР, 1976.
Биркгоф, Гарабедян (Birkhof G., Garabedian P.), Smooth surface interpolation. —
«J. Math. Phys.», 39, 3 A960).
Бур (de Boor C), Bicubic spline interpolation. — «J. Math. Phys.», 41, 2 A962).
Василенко В. А., Сходимость сплайнов в гильбертовом пространстве. — В сб.:
Численные методы механики сплошной среды, Новосибирск, ВЦ СО АН
СССР, 3, 3 A972).
Василенко В. А., Переломов Е. М., Сплайн-интерполяция в прямоугольной области
с хаотически расположенными узлами. —В сб.: Машинная графика и ее
применение, Новосибирск, ВЦ СО АН СССР, 1973.
Василенко В. А., Сходимость операторных интерполирующих сплайнов. — В сб.:
Вариационно-разностные методы в математической физике, Новосибирск,
ВЦ СО АН СССР, 1973.
Василенко В. А., Сглаживающие сплайны на подпространствах и теоремы
компактности. — В сб.: Численные методы механики сплошной среды, Ново-
Новосибирск, ВЦ СО АН СССР, 5, 5 A974).
Василенко В. А., Конечномерная аппроксимация в методе наименьших квадра-
квадратов. — В сб.: Вариационно-разностные методы в математической физике,
вып. 2, Новосибирск, ВЦ СО АН СССР, 1975.
Завьялов Ю. С, Интерполирование кубическими многозвенниками. — В сб.: Вы-
Вычислительные системы, вып. 38, Новосибирск, 1970.
Завьялов Ю. С. Интерполирование бикубическими многозвенниками. — В сб.:
Вычислительные системы, вып. 38, Новосибирск, 1970.
Завьялов Ю. С, Экстремальное свойство кубических многозвенников и задача
сглаживания. — В сб.: Вычислительные системы, вып. 42, Новосибирск,
1970.
Завьялов Ю. С, Интерполирование мультикубическими сплайнами. — В сб.:
Вычислительные системы, вып. 65, Новосибирск, 1975.
Лебедев В. И., Об одном способе интерполяции в «-мерном пространстве по произ-
произвольным узлам и некоторых квадратурных формулах, Препринт ВЦ СО АН
СССР, вып. 10, Новосибирск, 1975.
Михалевич Ю. И., Омельченко О. К-, Процедуры кусочно-полиномиальной интер-
интерполяции функций одной и двух переменных, Новосибирск, Изд-во ВЦ СО
АН СССР, 1970.
446
ЛИТЕРАТУРА
Морозов В. А., О выборе параметра при решении функциональных уравнений
методом регуляризации. — «ДАН СССР», 175, 6 A967).
Морозов В. А., Теория сплайнов и задача устойчивого вычисления значений
неограниченного оператора. —«ЖВМ и МФ», 11, 3 A971).
Пивоварова Н. Б., Пухначева Т. П., Сглаживание экспериментальных данных
локальными сплайнами, Препринт ВЦ СО АН СССР, вып. 9, Новосибирск,
1975.
Рейнш (Reinsch С. Н.), Smoothing by spline functions. — «Numer. Math.», 10, 4
A967).
Рябенький В. С, Локальные формулы гладкого восполнения и гладкой интерпо-
интерполяции функций по их значениям в узлах неравномерной прямоугольной
сетки, М., ИПМ АН СССР, 1974.
Уолш, Алберг, Нильсон (Walsh J. L., AhlbergJ. H., Nilson E. N.), Best approxima-
approximation properties of the spline fit. — «J. Math. Mech.», 11, 2 A962).
Холидей (Holladey J. C), Smoothest curve approximation. — «Math. Tables Aids
Computation.», 11, 60 A957).
Цецохо В. А., Белоносов А- С., БелоносоваА. В., Об одном методе гладкого прибли-
приближения функций многих переменных, Препринт ВЦ СО АН СССР, вып. 8,
Новосибирск, 1974.
Шенберг (Schoenberg I. J.), Contributions to the problem of approximation of equi-
equidistant data by analitic functions. Parts A and B. — «Quart. Appl. Math.»,
4 A946).
Шумахер (Schumaker L. L.), Approximation by splines: Theory and applicatios
of spline functions. Academic Press, New York — London, 1969.
Яненко Н. H., Квасов Б. И., Итерационный метод построения поликубических
сплайн-функций. — В сб.: Численные методы механики сплошной среды,
Новосибирск, ВЦ СО АН СССР, 1, 3 A970).
15. Методы расщепления
Андреев В. Б., О разностных схемах с расщепляющимся оператором для общих
р-мерных параболических уравнений второго порядка со смешанными про-
производными. — «ЖВМ и МФ», 7, 2 A967).
Багриновский К- А., Годунове. К-> Разностные методы для многомерных задач. —
«ДАН СССР», 115, 3 A957).
Бейкер (Baker G. A.), An implicit numerical method for solving the «-dimensional
heat equation. — «Quart. Appl. Math.», 17, 4 A960).
Бейкер, Олифант (Baker G. A., Oliphant T. A.), An implicit numerical method for
solving the two-dimensional heat equation — «Quart. Appl. Math.», 17,
4A960).
Бенсусан (Bensoussan A.), Pure decentralization for interrelated payoffs. Symposium
on Optimization, Los Angeles, 1971.
Бенсусан А., Лионе Ж.-Л., Темам Р., Методы декомпозиции, децентрализации,
координации и их приложения. — В сб.: Методы вычислительной математики,
Новосибирск, «Наука», 1975.
Биркгоф, Варга (Birkhof G., Varga R.), Implicite alternating direction methods. —
«Trans. Amer. Math. Soc.», 92, 1 A959).
Биркгоф, Варга, Янг (Birkhof G., Varga R., Young D.), Alternating direction
implicit methods. Advances in Сотр., 3. Academic Press, New York — Lon-
London, 1962.
Булеев Н. И., Численный метод решения двумерных и трехмерных уравнений
диффузии. — «Матем. сб.») 51, 2 A960).
Вакспресс (Wachspress E. L.), Optimum alternating-direction-implicit iteration
parameters for a model problem. — «SIAM J.», 10, 2 A962).
Вакспресс (Wachspress E. L.), Extended application of alternating-direction-impli-
alternating-direction-implicit iteration model problem theory. — «SIAM J.», 11, 3 A9G3).
ЛИТЕРАТУРА
447
Вакспресс (Wachspress E. L), Iterative Solution of Elliptic Systems and Applicat-
Applications to the Neutron Diffusion Equations of Reactor Physics, Prentice-Hall,
Englewood Cliffs, N. Y., 1966.
Вакспресс, Хабетлер (Wachspress E. L, Habetler G. J.), An alternating-direction-
implicit iteration technique. — «SIAM J.», 8, 2 A960).
Варга (Varga R.), Some results in approximation theory with applications to nume-
numerical analysis. Numerical solution of partial differential equations — II.
SYNSPADE-1970, Academic Press, New York — London, 1971.
Видлунд (Widlund O.), On the rate of an alternating-direction-implicit method in
a non-commutative case. — «Math. Comput.», 20, 96 A966).
Видлунд (Widlund O,), On the effects of scalling of the Peaceman — Rachford
method. — «Math. Comput.», 25, 113 A971).
Воробьев Ю. В., Случайный итерационный процесс в методе переменных направ-
направлении. — «ЖВМ и МФ», 8, 3 A968).
Ганн (Gunn J. E.), The solution of elliptic difference equations by semi-explicit
iterative techniques. — «SIAM J. Numer. Anal.», 2, 1 A965).
Дуглас, Ганн (Douglas J., Gunn J. E.), Two high-order correct difference analogues
for the equation of multi-dimensional heat flow. — «Math. Comput.», 17, 81
A963).
Дуглас, Ганн (Douglas J., Gunn J. E.), A general formulation of alternating direction
methods. Part 1. Parabolic and hyperbolic problems. — «Numer. Math.», 6, 5
A964).
Дуглас, Джонс (Douglas J., Jones B. F.), On predictor-corrector methods for non-
nonlinear parabolic differential equations. —«J. Soc. Industr. Appl. Math.», 11, 1
A963).
Дуглас, Келлог, Варга (Douglas J., Kellogg R. В., Varga R. S.), Alternating direc-
direction methods for «-space variables. — «Math. Comput.», 17, 83 A963).
Дуглас, Пирси (Douglas J., Pearcy С. М.), On convergence of alternating direction
procedures in the presence of singular operators. — «Numer. Math.», 5, 2 A963).
Дуглас, Рэчфорд (Douglas J., Rachford H.), On the numerical solution of heat
conduction problems in two and three space variables. — «Trans. Amer. Math.
Soc.», 82, 2 A956).
Дьяконов Е. Г., Метод переменных направлений решения систем конечно-разност-
конечно-разностных уравнений. — «ДАН СССР», 138, 2 A961).
Дьяконов Е. Г., О некоторых разностных схемах для решения краевых задач. —
«ЖВМ и МФ», 2, 1 A962).
Дьяконов Е. Г., Разностные схемы с расщепляющимся оператором для многомер-
многомерных стационарных задач. — «ЖВМ и МФ», 2, 4 A962).
Дьяконов Е. Г., Решение некоторых многомерных задач математической физики
при помощи сеток. Автореф. канд. дисс., М., 1962.
Дьяконов Е. Г., Лебедев В. И., Метод расщепления для третьей краевой задачи. —
В кн.: Вычислительные методы и программирование, вып. IV. М., Изд-во
МГУ, 1967.
Дюпон (Dupont Т.), A factorization procedure for the solution of elliptic difference
equations.. —«SIAM J. Numer. Anal.», 5, 4 A968).
Ильин В. П., О расщеплении разностных уравнений параболического и эллипти-
эллиптического типов. — «Снб. матем. ж.», VI, 1 A965).
Ильин В. П., О явных схемах переменных направлений. — «Изв. СО АН СССР.
Сер. техн. наук», 13, 3 A967).
Келлог (Kellogg R. В.), Another alternating-direction-implicit method. — «j. Soc.
Industr. Appl. Math.», 11, 4 A963).
Келлог (Kellogg R. В.), An alternating direction method for operator equations. —
«J. Soc. Industr. Appl. Math.», 12, 4 A964).
Келлог, Спаньер (Kellogg R. В., Spanier J.), On optimal alternating direction para-
parameters for singular matrices. — «Math. Comput.», 19, 91 A965).
Коновалов А. Н., Метод дробных шагов решения задачи Коши для многомерного
уравнения колебаний. — «ДАН СССР», 147, 1 A962).
448
ЛИТЕРАТУРА
Коновалов А. Н., Применение метода расщепления к численному решению динами-
динамических задач теории упругости. — «ЖВМ и МФ», 4, 4 A964).
Коновалов А. #., Задачи фильтрации многофазной несжимаемой жидкости, Ново-
Новосибирск, Изд-во НГУ, 1972.
Кузнецов Б. Г. (Kuznetsov В. G.), Numerical methods for solving some problems
of viscous liquild. «Fluid Dynamics Transactions», 4 A969).
Лиз (Lees M.), Alternating direction methods for huperbolic differential equations.—
«J. Soc. Industr. Appl. Math.», 10, 4 (I960).
Лиз (Lees M.), Alternating direction and semi-explicit differencee methods for
parabolic partial differential equations. — «Numer. Math.», 3, 5 A961).
МарчукГ. И. (Marchuk G. I.), On the theory of the spliting-up method. Numerical
solution of partial differential equations — II. SYNSPADE-1970, Academic
Press, New York — London, 1971.
Марчук Г. И., Сужтангазин У. М., К обоснованию метода расщепления для урав-
уравнения переноса излучения. — «ЖВМ и МФ», 5, 5 A965).
Марчук Г. И., Яненко Н. #., Применение метода расщепления (дробных шагов)
для решения задач математической физики. — В кн.: Некоторые вопросы
вычислительной и прикладной математики, Новосибирск, «Наука», 1966.
Писман, Рэчфорд (Peaceman D. W., Rachford H. H.), The numerical solution of
parabolic and elliptic differential equations. — «SIAM J.», 3, 1 A955).
Самарский А. А., Об одном экономичном разностном методе решения многомер-
многомерного параболического уравнения в произвольной области. — «ЖВМ и МФ», 2,
5 A962).
Самарский А. А., О сходимости метода дробных шагов для уравнения теплопро-
теплопроводности. — «ЖВМ и МФ», 2, 6 A962).
Самарский А. А., Локально одномерные разностные схемы на неравномерных
сетках. — «ЖВМ и МФ», 3, 3 A963).
Самарский А. А., Об одном экономичном алгоритме численного решения систем
дифференциальных и алгебраических уравнений. — «ЖВМ и МФ», 4, 3
A964).
Самарский А. А., Экономичные разностные схемы для гиперболической системы
уравнений со смешанными производными и их применение для уравнений
теории упругости. — «ЖВМ и МФ», 5, 1 A965).
Самарский А. А., Аддитивные схемы. — В кн.: Тезисы докладов на Международ-
Международном съезде математиков в Москве, 1966.
Темам (Temam R.), Sur la stabilite et la convergence de la Methode des pas fraction-
naires. — «Annali di Mat. Рига ed Appl.», IV, 79 A968).
Темам (Temam R.), Quelques methodes de decomposition en analyse numerique. —
Acte du Congres Intern, des Math., vol. 3, 1970.
Фейрвезер, Митчелл (Fairweather G., Mitchell A. R.), Some computational results
of an improved A. D. I. method for the Dirichlet problem. — «Comput. J.», 9,
3 A966).
Фрязинов И. В., О разностных схемах для уравнения Пуассона в полярной, ци-
цилиндрической н сферической системах координат. —«ЖВМ и МФ», 11, 5
A971).
Хаббард (Hubbard В. Е.,) Alternating direction schemes for the heat equation in
a general domain. — «SIAM J. Numer. Anal.», 2, 3 A966).
Яненко Н #., Об одном разностном методе счета многомерного уравнения тепло-
теплопроводности. — «ДАН СССР», 125, 6 A959).
Яненко Н. Н., Об экономичных неявных схемах (метод дробных шагов). — «ДАН
СССР», 134, 5 (I960).
Яненко Н. #., О неявных разностных методах счета многомерного уравнения
теплопроводности. — «Изв. вузов. Математика», 4 B3) A961).
Яненко Н. Н., О сходимости метода расщепления для уравнения теплопровод-
теплопроводности с переменными коэффициентами. — «ЖВМ и МФ», 2, 5 A962).
Яненко Н. Я., О слабой аппроксимации систем дифференциальных уравнений. —
«Сиб. матем. ж.», V, 6 A964).
ЛИТЕРАТУРА
449
?
Яненко Н. #., Демидов Г. В., Метод слабой аппроксимации как конструктивный
метод построения решения задачи Коши. — В кн.: Некоторые вопросы вы-
вычислительной и прикладной математики, Новосибирск, «Наука», 1966.
16. Условно корректные задачи и некоторые обратные
задачи математической физики
Джон (John F.), Differential Equation with Approximate and Improper Data,
Lectures, New York Univ., 1955.
Дуглас (Douglas J.), On the relation between stability and convergence in the nume-
numerical solution of linear parabolic and hyperbolic differential equations. — «J Soc.
Industr. Appl. Math.», 4, 1 A956).
Иванов В. К-, О некорректно поставленных задачах. — «Матем. сб.», 61, 2 A963).
Кадомцев Б. Б., О функции влияния в теории переноса лучистой энергии. — «ДАН
СССР», 113, 3 A957).
Крейн С. Г., О классах корректности для некоторых задач. — «ДАН СССР»,
114, 6 A957).
Крейн С. Г., Прозоровская О. И., О приближенных методах решения некорректных
задач. —«ЖВМ и МФ», 3, 1 A963).
Лаврентьев М. A., Numerical solution of conditionally properly posed problems.
Numerical solution of partial differential equations — II. SYNSPADE-1970,
Academic Press, New York — London, 1971.
Лаврентьев M. M., О задаче Коши для уравнения Лапласа. — «ДАН СССР»,
102, 2 A956).
Лаврентьев М. М., О постановке некоторых некорректных задач математической
физики. — В кн.: Некоторые вопросы вычислительной и прикладной матема-
математики, Новосибирск, «Наука», 1956.
Лаврентьев М. М-, Васильев В. Г., О постановке некоторых некорректных задач
математической физики. —«Сиб. матем. ж.», VII, 3 A960).
Лаврентьев М. М., Романов В. Г., Васильев В. Г., Многомерные обратные задачи
для дифференциальных уравнений, Новосибирск, «Наука», 1969.
Ландис Е. М., О некоторых свойствах решений эллиптических уравнений. —
«ДАН СССР», 107, 4 A956).
Левитан Б. М., Разложение по собственным функциям дифференциальных урав-
уравнений второго порядка, М.—Л., Гостехиздат, 1950.
Левитан Б. М., Саргсян И. С, Введение в спектральную теорию, М., «Наука»,
1970.
Лионе, Латтес (Lions J., Lattes R.), Метод квазиобращения и его применения,
М., «Мир», 1970.
Марчук Г. И., Уравнения для ценности информации с метеорологических спут-
спутников и постановка обратных задач. —«Космические исследования», 11, 3
A964).
МарчукГ. И. (Marchuk G. I.) Formulation of the theory of perturbations for com-
complicated models. — «Appl. Math. Optim.», 2, 1 A975.)
Марчук Г. И., Атанбаев С. А., Некоторые вопросы глобальной регуляризации. —
«ДАН СССР», 190, 3 A970).
Марчук Г. И., Васильев В. Г., О приближенном решении операторных уравнений
первого рода. — «ДАН СССР», 199, 4 A970).
Марчук Г. И'., Дробышев Ю. П., Некоторые вопросы линейной теории измерений.—
«Автометрия», 3 A967).
МарчукГ. И., Орлов В. В., К теории сопряженных функций. — В кн:. Нейтронная
физика, М., Атомиздат, 1961.
Мергелян С. Н., Гармоническая аппроксимация и приближенное решение задачи
Коши для уравнения Лапласа. — «УМН», XI, 5 A956).
Морозов В. А., Методы решения неустойчивых задач (тексты лекций), М., Изд-во
МГУ, 1967, ротапринт.
Тихонов А Н., Об устойчивости обратных задач. — «ДАН СССР», 39, 5 A943).
450
ЛИТЕРАТУРА
Тихонов А. Н., О решении некорректно поставленных задач н методе регуляриза-
регуляризации. — «ДАН СССР», 151, 3 A963).
Тихонов А. Н., О регуляризации некорректно поставленных задач. — «ДАН
СССР», 153, 1 A963).
Тихонов А. Н., Арсенин В. Я-> Методы решения некорректных задач, М., «Наука»,
1974.
Усачев Л. Н., Уравнение для ценности нейтронов кинетического реактора и теория
возмущения. — В кн.: Реакторостроение и теория реакторов, М., Изд-во
АН СССР, 1955.
Фаддеева В. Н., Сдвиг для систем с плохо обусловленными матрицами. — «ЖВМ
и МФ», 5, 5 A965).
Франк Л. С, Чудов Л. А., Разностные методы решения некорректной задачи
Коши. —В кн.: Численные методы в газовой динамике, М., Изд-во МГУ,
1965.
Фукс (Fuks К.), Perturbation theory in neutron multiplication broblems. — «Proc.
Phys. Soc», 62, 791 A949).
17. Вычислительные методы в теории переноса
Агошков В. И., Вариационные методы в теории переноса. Автореф. канд. дисс.,
Новосибирск, ВЦ СО АН СССР, 1975.
Агошков В. И., Выбор базисных функций при решении некоторых эллиптических
уравнений. — В сб.: Вычислительная математика и программирование,
Новосибирск, ВЦ СО АН СССР, 1974.
Бардос (Bardos P. G.), Equations du premier ordere a coefficients reels. — «Ann.
Sci. Ёс. Norm. Sup.», 4e serie, 3 A970).
Боголюбов Н. Н., Проблемы динамической теории в статистической физике, М.,
Гостехиздат, 1946.
Владимиров В. С, Численное решение кинетического уравнения для сферы —
В сб.: Вычислительная математика, 3, ВЦ АН СССР, М., 1958.
Владимиров В. С.,, Математические задачи односкоростной теории переноса час-
частиц. — «Труды Матем. ин-та АН СССР», 61 A961).
Владимиров В. С, О некоторых вариационных методах приближенного решения
уравнения переноса. — В сб.: Вычислительная математика, 7, ВЦ АН СССР,
М., 1961.
Гермогенова Т. А., О сходимости некоторых приближенных методов решения урав-
уравнения переноса. —«ДАН СССР», 181, 3 A968).
Гермогенова Т. А., Обобщенные решения краевых задач для уравнения перено-
переноса. — «ЖВМ и МФ», 9, 3 A969).
Годунов С. К-, Использование интеграла энергии для оценки точности прибли-
приближенных собственных значений. — «ЖВМ и МФ», 11, 5 A971).
Годунов С. К-> Султангазин У. М., О дисснпативностн граничных условий
В. С. Владимирова для симметрической системы метода сферических гармо-
гармоник. — «ЖВМ и МФ». 11, 3 A971)
Гольдин В. Я-, Квазидиффузнонный метод решения кинетического уравнения. —
«ЖВМ и МФ», 4, 6 A964).
Иоргенс (Jorgens К.), An asymptotic expansion in the theory of neutron trans-
transport. — «Comm. Pure Appl. Math.», 11, 2 A958).
Карлсон Б., Белл Дж., Решение транспортного уравнения 5„-методом, — В кн.:
Физика ядерных реакторов, М., ИЛ, 1963.
Кузнецов Е. С, Марчук Г. И., Вычислительные методы в теории переноса излуче-
излучения. — В кн.: Труды IV Всесоюзного математического съезда. Ленинград,
3—12 июля 1961 г. Т. II. Секционные доклады, Л., «Наука», 1964.
Лебедев В. И., О нахождении решений кинетических задач теории переноса. Ав-
Автореф. докт. дисс, Новосибирск, 1967.
Лебедев В. Я, О /(Р-методе и разностных схемах для кинетического уравнения. —
В кн.: Вычислительные методы в теории переноса, М., Атомнздат, 1969.
ЛИТЕРАТУРА
451
Марек (Marec I.), On a problem of mathematical physics. — «Appl. Math.», 11, 89
A966).
Марчук Г. И., Численные методы расчета ядерных реакторов, М., Атомиздат,
1958.
Марчук Г. И., Кочергин В. П., Эффективный метод решения двумерного уравне-
уравнения диффузии для ячеек квадратной и шестиугольной формы. — «Атомная
энергия», 18, 6 A965).
Марчук Г. И., Лебедев В. И., Численные методы в теории переноса нейтронов,
М., Атомиздат, 1971.
Марчук Г. И., Султангазин У. М., О сходимости метода расщепления для урав-
уравнений переноса излучений. —«ДАН СССР», 161, 1 A965).
Марчук Г. И., Султангазин У. М., К вопросу о решении кинетического уравнения
переноса методом расщепления. — «ДАН СССР», 163, 4 A965).
Марчук Г. И., Яненко Н. Н-, Решение многомерного кинетического уравнения ме-
методом расщепления. —«ДАН СССР», 157, 6 A964).
Николайшвили Ш. С, Приближенное решение уравнения переноса методом мо-
моментов. — «Атомная энергия», 9, 2 A961).
Николайшвили Ш. С, О решении односкоростного уравнения переноса с исполь-
использованием приближения Ивона — Мартенса. — «Атомная энергия», 20, 4
A966).
Смелое В. В., Лекции по теории переноса нейтронов, М., Атомиздат, 1972.
Султангазин У. М., Дифференциальные свойства решений смешанной задачи
Коши для нестационарного кинетического уравнения, Новосибирск, 1971,
СО АН СССР, препринт.
Султангазин У. М., К обоснованию метода слабой аппроксимации для уравнения
сферических гармоник, Новосибирск, 1971, СО АН СССР, препринт.
Султангазин У. М., Слабая сходимость метода сферических гармоник, Новоси-
Новосибирск, 1971, СО АН СССР, препринт.
Шилов С. Б., Некоторые вопросы математической теории критического состояния
реактора. —«ЖВМ и МФ», 7, 1 A967).
18. Метод Монте-Карло
Бусленко Н. П., Голенко Д. И., Соболь И. М. и др., Метод статистических испыта-
испытаний (метод Монте-Карло), М., Физматгнз, 1962.
Владимиров В. С, Соболь И. М., Расчет наименьшего характеристического числа
уравнения Пайерлса методом Монте-Карло. — В сб.: Вычислительная мате-
математика, 3, ВЦ АН СССР, М., 1958.
Гельфанд И. М., Фролов А. С, Ченцов Н. П., Вычисление континуальных интегра-
интегралов методом Монте-Карло. —«Изв. ВУЗов., Математика», 5 A958).
Ермаков С. М., Метод Монте-Карло и смежные вопросы, М., «Наука», 1971.
Ермаков С. М., Золотухин В. Г., Полиномиальные приближения и метод Монте-
Карло. — «Теория вероятностей и ее применения», 5, 4 A960).
Ермаков С. М., Михайлов Г. А., Курс статистического моделирования, М., «На-
«Наука», 1976.
Кертис Д., Методы Монте-Карло для итерации линейных операторов. — «УМН»,
XII, 5 A957).
Марчук Г. И., Михайлов Г. А., Назаралиев М. А. и др., Метод Монте-Карло в ат-
атмосферной оптике, Новосибирск, «Наука», 1976.
Метрополис, У лам (Metropolis N., Ulan S.), The Monte-Carlo method. — «J. Amer.
Stat. Assoc», 44, 247 A949).
Михайлов Г. А., Некоторые вопросы теории методов Монте-Карло, Новосибирск,
«Наука», 1974.
Соболь И. М., Численные методы Монте-Карло, М., «Наука», 1973.
Спанье Дж., Гелбард 3., Метод Монте-Карло и задачи переноса нейтронов, М.,
Атомиздат, 1972.
ФаноУ., Спенсер Л., БерсерМ., Перенос гамма-излучения, М., Госагомиздат, 1963.
452
ЛИТЕРАТУРА
19. Метод крупных частиц
Белоцерковский О. М., Давыдов Ю. М., Нестационарный метод «крупных частиц»
для газодинамических расчетов. — «ЖВМ и МФ, 11,1 A971).
Ведешкина К- А., Левина 3. Ф., Ломнев С. П. и др., Решение задач методом «круп-
«крупных частиц», М., ВЦ АН СССР, 1970.
Дьяченко В. Ф., Об одном новом методе численного решения нестационарных задач
газовой динамики с двумя пространственными переменными. — «ЖВМ и МФ»,
5, 4 A965).
Харлоу (Harlow F.), Численный метод частиц в ячейках для задач гидродинамики. —
В кн.: Вычислительные методы в гидродинамике, М., «Мир», 1967.
Яненко Н. Н., Анучина Н. Н., Петренко В. Е., Шокин Ю. И., О методах расчета
задач газовой динамики с большими деформациями. — Новосибирск, ВЦ
СО АН СССР, 1, 1 A970).
20. Методы оптимизации алгоритмов
Бабушка И., Соболев С. Л., Оптимизация численных методов. — «Appl. Math.»,
10, 2 A965).
Бахвалов Н. С, Об оптимальных методах решения задач. — «Appl. Math.», 13, 1
A968).
Виноградов И. М., К вопросу об оценке тригонометрических сумм. — «Изв. АН
СССР. Сер. матем.», 29, 3 A965).
Дальквист (Dahlquist G.), Convergence and stability in the numerical integration
of ordinary differential equations. —«Math., Scand.», 4, 1 A956).
Колмогоров А- Н., Дискретные автоматы и конечные алгоритмы. — В кн.: Труды
IV Всесоюзного математического съезда, т. I, M., Изд-во АН СССР, 1963.
Коробов Н. М., Вычисление кратных интегралов методом оптимальных коэффи-
коэффициентов. — «Вестник МГУ. Сер. матем.», 4 A959).
Моисеев Н. Н., Численные методы, использующие варьирование в пространстве
состояний и некоторые вопросы управления большими системами. — В кн.:
Тезисы докладов Международного конгресса математиков, М., 1966.
Моисеев Н- Н., Красовский Н. Н., Теория оптимальных управляемых систем. —
«Изв. АН СССР. Техн. кибернетика», 5 A967).
Мур (Moor R.), Interval analysis, Prentice-Hall, 1966.
Никел (Nickel К.), Ober die Notwendigkeit einer Fehlerschranken-Arithmetic fur
Rechnenautomaten. — «Numer. Math.», 9, 1 A966).
Никел (Nickel K.), Bericht iiber neue Kalsruher Ergebnisse bei der Fhelererfassung
von numerischen Prozessen. — «Appl. Math.», 13, 2 A968).
Черноусько Ф. Л., Баничук Н. В., Петров В. М., Численные решения вариацион-
вариационных и краевых задач методом локальных вариаций. — «ЖВМ и МФ», 6, 6
A966).
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Анализ ошибок округления 423
Аппроксимация задачи 37
Асимптотическая скорость сходимости
итерационного метода 167
Быстрое преобразование Фурье 223
Вариационная форма интегрального
тождества 92
Вариационное неравенство 122
Вариационный функционал 65
Вариация первого порядка 64
Вектор невязки 163
— ошибки 163
Гладкое восполнение 144
Дивергентная форма уравнения дви-
движения 387
Интерполяция 137, 138, 142, 146, 158
Квазирешение системы линейных урав-
уравнений 340
Комплексы стандартных программ 424
Конус 124
Коэффициент «счетной» вязкости 379
Краевое условие главное 71
естественное 71
Критерий невязки 159
Лемма Келлога 22
Матрица блочная 101
— блочно-диагональная 186
— Грама 71
— ленточная 158
— трехдиагональная 102
Метод Галёрки на 72
— итерационный 163
циклический 164
чебышевский 176
— квазиобращения 420
— конечных элементов 81
— локальных вариаций 134
— Люстерника 22
— минимальных невязок 191
— моментов 73
— Монте-Карло 418
— наименьших квадратов 75
— Ньютона 159
— покоординатной аппроксимации 387
— последовательной верхней релакса-
релаксации 171
— построения разностных схем на
основе интегрального тождества 56
— предиктор-корректор 252
— расщепления 198, 201, 206, 210
покомпонентного 256
— релаксации 132
— Ритца 70
— Ричардсона первого порядка 176
— сопряженных градиентов 192
— стабилизации 248
— факторизации 232
неполной Булеева 234
— фиктивных областей 116
, матричный аналог 217
— Фурье 29
— циклической редукции 228
— частиц в ячейке 417
Нелинейная счетная неустойчивость
384
Неравенство Коши — Буняковского
63
— Фридрихса 118
Норма оператора 19
— энергетическая 21
Область определения оператора 18
Обобщенное решение системы 213
Обратная задача 316
эволюционная 325
454
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Оператор источника 40
— Лапласа 31
— —, разностный аналог 33
— положительно определенный 18
полуопределенный 18
— положительный 18
— проектирования 33
— самосопряженный 18
— сопряженный 18
— шага 40
Оптимизация итерационного метода
164
Основное интегральное тождество 58
Планирование эксперимента 343
Плохо обусловленная матрица 167
Полином Лагранжа 88
Преобразование Абеля 151
Приближение fl-гладкое 148
Пространство банахово 125
— гильбертово 17
— Ц (D) 17
— Соболева 21
Прямые методы линейной алгебры 420
Разностная схема двухслойная 41
двухциклическая 393
Кранка — Николсона 243
«крест» 374
неявная 40
— — счетно-устойчива я 45
— — неявная 40
— — устойчивая 51
— — — абсолютно 46, 50
условно 46, 50
— — явная 40
Регуляризация 419
Регуляризирующее семейство по Тихо-
Тихонову 317
Символ Кронекера 84
Собственные числа и функции опера-
оператора Лапласа 32
разностного оператора Ла-
Лапласа 35
Спектральный критерий устойчивости
45
— радиус 20
Сплайн бикубический 158
— интерполяционный 156
— кубический 138
— на подпространстве 158
— сглаживающий 156
Схема «бегущего счета» 383
Теорема взаимности для функции Гри-
Грина 336
— Гершгорина 26
— сходимости 53
Уравнение Гельмгольца 226
— гиперболического типа 278
— движения 377, 384, 390
— диффузии 294
— колебаний 278, 373
— неразрывности 384
— переноса излучения 395
— Пуассона 352
— теплопроводности 367
— эволюционное 39
— Эйлера 65
Условие Кураита 376
— счетной устойчивости 380
— эллиптичности 115
Условно-корректная задача 319
Формула малых возмущений 337
Функционал билинейный 124
— выпуклый 123
— квадратичный 187
Функция базисная 113
— сеточная 33
— ценности 35
Число обусловленности 167
Экстраполяция к пределу 288
— Ричардсона 288
УКАЗАТЕЛЬ ОБОЗНАЧЕНИЙ
Еп — евклидово пространство м-мер-
ных вещественных векторов 17
D — область в пространстве Еп 17
3D — граница области D 21
L2 (D)—пространство вещественных из-
измеримых функций, суммируемых
с квадратом в области D 17
(, ) — скалярные произведения в
L2 @) и в Еп 17
11-У — нормы в L2 (D) и в ?„ 17
А — оператор, действующий в про-
пространстве Ц ф), или матрица, дей-
действующая в Еп 18
А 3= 0 — положительно полуопреде
ленный оператор 18
А > 0 — положительный оператор 18
Ф (А) — область определения опера-
оператора А 18
А*—сопряженный оператор 18
А = А* —самосопряженный опера-
оператор 18
X (А) — собственное число оператора
А 19
\\д\\ — норма оператора А 19
а D) = A,min (A)— минимальное по мо-
модулю собственное число оператора
А 20
Р (Л) = \шп (А) — спектральный ра-
радиус оператора А 20
W{ (D) — пространство Соболева 21
( , )wi — скалярное произведение в
w[(D) 21
II • II w,i — норма в Wi(D) 21
Wl2 (D) — пространство Соболева функ-
функций пространства Wl (D), обра-
обращающихся в нуль на dD 21
Д —оператор Лапласа 31
Дл — разностный аналог оператора Лап-
Лапласа на равномерной сетке 33
Од — сеточная область 33
dDh — граница сеточной области D/, 33
(ф)* — проекция функции <р на сетку 33
(A)h — проекция оператора А на сет-
сетку 33
Дх — шаг сетки по переменной х 34
^x, Ду, у*. Vу — разностные опера-
операторы 34
Ан, ан — сеточные операторы 37
Fh, G^, Фй — пространства сеточных
функций 37
II ¦ 11^, II • llOft, II ¦ Нфй — нормы в прост-
пространствах F/,, G),, Фй 73
Н"м (а, Ь) — пространство кусочно-по-
кусочно-полиномиальных функций на отрез-
отрезке [а, Ь] 84
С™ (а, Ь) — пространство функций, не-
непрерывных вместе с производными
до порядка т включительно, на
отрезке [а, Ь] 141
Т — оператор шага 40
Гурий Иванович Марчук
МЕТОДЫ ВЫЧИСЛИТЕЛЬНОЙ МАТЕМАТИКИ
М, 1977 г., 456 стр. с илл.
Редактор Е. В. Шикин
Техн. редактор С. Я Шкляр
Корректор Л. С. Сомова
Сдано в набор 06. IV. 1977 г. Подписано к печати
П. VIII. 1977 г. Бумага 60X90Vie тнп. № 1. Фнз.
печ. л. 28.5. Условн. печ. л. 28,5. Уч.-нзд. л. 23,53.
Тираж 30 000 экз. Т-13275. Цена книги 1 р. 10 к.
Заказ № 1237.
Издательство «Наука»
Главная редакция физико-математической литературы
117071, Москва, В-71, Ленинский проспект, 15
Ордена Трудового Красного Знамени Ленинградское
производственно-техническое объединение «Печатный
Двор» имени А. М. Горького Союзполиграфпрома при
Государственном комитете Совета Министров СССР по
делам издательств, полиграфии и книжной торговли.
197136, Ленинград, П-136, Гатчинская ул., 26,