/


Author: Петров В.П.
Tags: ракеты аэродинамика ракетная техника космонавтика издательство досааф ссср управляемые снаряды
Year: 1957




Text
В.П.ПЕТРОВ
^pGAJLiiJeMb^
СНАРЯДЫ
и РАКЕТЫ
ИЗДАТЕЛЬСТВО ДООААФ
Мое ива — 19Б7
В. П. ПЕТРОВ
УПРАВЛЯЕМЫЕ СНАРЯДЫ
И РАКЕТЫ
ИЗДАТЕЛЬСТВО ДОСААФ
МОСКВА — 1957
В этой брошюре популярно изложены ос-
новные принципы реактивного движения, дается
классификация реактивных двигателей, управ-
ляемого реактивного оружия и систем его уп-
равления, приводятся тактико-технические дан-
ные и описания устройства и принципа действия
основных современных управляемых снарядов и
ракет главным образом США и частично Анг-
лии. В ней дается также описание реактивного
оружия, созданного в Германии и применявше-
гося во время второй мировой войны, расска-
зывается об устройстве одного из полигонов
США, на котором в настоящее время произво-
дятся испытания управляемых реактивных даль-
нобойных снарядов.
В конце брошюры кратко рассказывается о
применении сверхдальнобойных управляемых ра-
кет для научных целей и о задачах на будущее
в области освоения межпланетных пространств,
создания искусственного спутника Земли и за-
атмосферной космической станции-лаборатории.
Брошюра предназначена для широкого круга
читателей, особенно для молодежи — учащихся
старших классов средней школы, и ремесленных
училищ.
ИЗ ИСТОРИИ РАКЕТЫ
Принцип реактивного движения был известен чело-
вечеству много тысяч лет назад. Еще древнегреческий
ученый Герои Александрийский, живший 2500 лет тому
назад, придумал машинку, работавшую на основе исполь-
зования реактивного действия струи водяного пара.
Ракеты как оружие впервые были применены китай-
цами в 1232 г. в качестве зажигательных снарядов при
осаде укреплений. Горючим веществом являлся порох.
Сам принцип действия ракеты был известен им еще в
IX в. В XIII в. стрелы с реактивными ускорителями при-
менялись арабами и монголами.
В 1782 г. индусский раджа Гайдер-Алихан Мейсор-
ский организовал корпус ракетных стрелков численно-
стью в 1200 человек для защиты своей родины от англий-
ских войск. Оружие этих стрелков представляло собой
пороховую ракету с железной гильзой весом от 3 до 6 кг,
снабженную бамбуковой палкой — стабилизатором. С
помощью ракет — не известного в то время англичанам
оружия — раджа и его сын Типо-Саиб вели успешную
борьбу, в ходе которой было сожжено много кораблей и
уничтожен ряд английских гарнизонов. Это заставило ап-
3
гличан приостановить военные действия и заняться изу-
чением нового боевого средства индусов, которое было
впоследствии усовершенствовано полковником Конгревом
и принято па вооружение английского флота и армии.
Во время войны с Наполеоном с помощью ракет Кон-
грева англичанами были сожжены в 1806 г. французский
порт Булонь и в 1807 г. столица Дании г. Копенгаген.
В России в 1680 г. было организовано ракетное заве-
дение для изготовления фейерверков. Несколько позднее
Петр I ввел в армии сигнальные ракеты стандартных' об-
разцов, которыми успешно пользовались почти до настоя-
щего времени.
В 1815 г. русский изобретатель генерал Засядко, а в
1850 г. генерал Константинов и другие разработали и
развили ряд образцов ракетного оружия, которое приме-
нялось для борьбы с противником. Это оружие успешно
использовалось, например, во время Крымской войны
1855—1856 гг. при обороне Севастополя. Но в связи с
развитием в семидесятых и восьмидесятых годах XIX
столетия нарезной артиллерии работы над ракетным ору-
жием прекратились и оно было предано забвению,
правда, временному.
Однако научные работы, посвященные использованию
принципа реактивного движения (в особенности для меж-
планетных путешествий), продолжались. В этой связи
нельзя не отметить предложение известного русского ре-
волюционера-народовольца Кибальчича, который в 1881 г.,
уже будучи приговоренным к смертной казни, впервые в
мире предложил проект устройства аппарата, передви-
гающегося по воздуху с помощью ракет, для перевозки
людей и грузов на больших высотах и на большие рас-
стояния «с неведомой доселе скоростью».
Основоположником научного развития ракетного де-
ла является русский ученый Константин Эдуардович
Циолковский. Его труды как практического, так и теоре-
тического характера не потеряли значения и до настоя-
щего времени. Теории К. Э. Циолковского успешно раз-
вивали такие известные специалисты, как Тихонравов,
Кондратюк, Цандер, Костиков и др.
Перед второй мировой войной созданием управляе-
мых ракет дальнего действия занялись во многих стра-
нах мира. Особенно интенсивно велись эти работы, начи-
ная с 1929 г., в Германии.
4
В заключение краткого исторического обзора объяс-
ним, как возник термин «ракета». Первые ракеты исполь-
зовались в Европе для фейерверков и в большинстве
случаев имели вид палки или же были веретенообразной
формы. В Италии, куда, очевидно, впервые проникла ра-
кета с востока, слово «raccetto» означает веретено,
стержень. Этим словом и стали по внешнему сходству
называть «чудесные огневые палки».
О развитии ракетного оружия и ракетной техники
вообще мы попытаемся кратко рассказать в этой книжке.
НЕМНОГО МЕХАНИКИ
Из физики нам хорошо известен так называемый тре-
тий закон механики, или иначе третий закон Ньютона.
Сущность его заключается в том, что действия двух тел
друг на друга всегда равны и направлены в противопо-
ложные стороны.
В справедливости этого закона легко убедиться, при-
помнив несколько знакомых примеров. Гребец, откиды-
вая при помощи весел известные массы воды в одну сто-
рону, заставляет лодку двигаться в противоположном
направлении. Точно так же гребной винт, перемещая мас-
сы воды, заставляет идти корабль вперед.
Заметим одну особенность. В примере с лодкой, так
сказать, посредником между лодкой, человеком и водой
являются весла. Этот «посредник» в технике называется
движителем. Движителями будут являться также греб-
ное колесо или гребной винт парохода, пропеллер самоле-
та, гусеница трактора и т. д. Движитель не нужно путать
с двигателем. В приведенных примерах на лодке двига-
телем будет человек, на пароходе — машина, на само-
лете — мотор и т. д.
Постараемся запомнить роль «посредника» — движи-
теля. С ним нам придется встретиться, читая эту книжку
дальше. Однако примеры, иллюстрирующие третий закон
механики, который мы привели выше, не единственные.
Оказывается, используя упомянутый закон, можно соз-
дать движение и без движителя.
Предположим, вы находитесь на лодке и не работаете
веслами. Лодка не движется. Но вот вы бросаете назад
большой камень, и спокойно стоявшая лодка начинает
двигаться вперед. Сила вашего броска вызвала такую же,
5
но обратно направленную силу. Она-то и двинула лодку.
Эта сила называется реактивной.
Теперь поставим на корму лодки пушку, ствол которой
направлен назад, и начнем стрелять из нее холостыми за-
рядами. Лодка снова двинется вперед. И она будет про-
должать двигаться до тех пор, пока мы не прекратим
стрельбу. Сила выстрела, или, точнее, сила пороховых га-
зов, вырывающихся с большой скоростью из ствола ору-
дия, вызовет обратно направленную реакцию, так назы-
ваемую отдачу, под действием которой и поплывет наша
лодка.
Такой принцип движения называется реактивным, а
двигатели, построенные на этом принципе, т. е. вызываю-
щие движение непосредственно, без движителя, называ-
ются двигателями прямой реакции. Как мы увидим
дальше, все современные управляемые реактивные аппа-
раты имеют двигатели прямой реакции.
Но мы ведем с вами речь не о лодках или судах, а о
ракетах, т. е. аппаратах, летающих в воздухе и даже в
безвоздушном пространстве. Попробуем выяснить, поче-
му для ракет, достигающих колоссальных скоростей, не-
обходим обязательно двигатель прямой реакции. Почему,
например, нельзя было бы обойтись просто усиленным
авиационным поршневым двигателем с винтом (пропел-
лером) ?
В связи с этим вспомним, что представляет собой всем
хорошо знакомое явление — сопротивление воздуха, ко-
торое испытывают вее движущиеся в атмосфере тела.
И пешеход, и мотоциклист, и самолет, и снаряд при дви-
жении испытывают сопротивление воздуха. Разумеется,
в каждом из этих случаев сопротивление будет разным.
В самом деле, если пешеход его почти не ощущает, то
уже на мотоциклиста, едущего с большой скоростью, оно
давит с силой почти в 16 кг. Следовательно, чем больше
скорость, тем больше сопротивление воздуха.
Откуда же берется эта сила? Дело в том, что перед
движущимся предметом воздух сперва уплотняется, за-
тем расступается, обтекает его и после этого уже за' ним
смыкается вновь. За движущимся предметом образуется
разреженное пространство, которое воздух стремится за-
полнить. В результате этих явлений вокруг летящего
предмета образуются воздушные волны и завихрения.
Энергия, которая затрачивается на их образование, и
расходуется в основном для преодоления летящим телом
сопротивления воздуха (а оно, как мы уже сказали, тем
больше, чем выше скорость полета).
Первые винтомоторные самолеты летали со скоростью
около 40 км/час. Теперь такие же самолеты летают со
скоростью порядка 800 км/час. Скорость современных ар-
тиллерийских снарядов достигает 3500 км/час и более.
Но есть одна скорость, значительно меньшая, чем ско-
рость снарядов, имеющая огромное значение. Это — ско-
рость распространения звука в воздухе, иначе называе-
мая звуковой скоростью. Она составляет около
1200 км/час (330 м/сек) и часто обозначается знаком ЛАа*.
Советуем запомнить эту величину и ее обозначение,
так как в дальнейшем нам придется очень часто сталки-
ваться с ней. Чем же она замечательна? Оказывается, в
атмосфере никакие механические колебания или толчки
не могут распространяться со скоростью, превышающей
скорость звука.
Какое значение может иметь это в нашем случае?
Очень большое. Мы только что упомянули о снаряде, ле-
тящем со скоростью 3500 км/час, почти в три раза быст-
рее, чем распространяется звук. Воздух не успевает рас-
ступиться перед снарядом, потому что колебания распро-
страняются только со звуковой скоростью. Образуется
плотная воздушная подушка, которую снаряд вынужден
толкать перед собой; кроме того, возникают волны и за-
вихрения, на создание которых тратится огромная рабо-
та. Словом, при скорости, близкой к звуковой, а тем бо-
лее превышающей ее, сопротивление воздуха резко воз-
растает.
Вернемся к нашему самолету с пропеллером, т. е. вин-
томоторному. С приближением скорости его полета к
звуковой сопротивление воздуха будет резко увеличи-
ваться.
Бороться с этим можно тремя путями. Первый из
них — улучшение обтекаемости (конструктивных форм)
самолета. Но в настоящее время формы его настолько со-
вершенны, что дальнейшее улучшение их почти ничего не
дает. Второй путь — это увеличение потолка, т. е. высоты
полета самолета. Ведь чем дальше от земли, тем больше
разреженность воздуха и, стало быть, меньше его сопро-
* Точнее под знаком Ма следует понимать отношение скоро-
сти полета снаряда к скорости распространения звука.
1
тивление. Казалось бы, выход найден. Однако мы забыли
о свойствах авиационного поршневого мотора, который в
конечном счете является разновидностью известного всем
двигателя внутреннего сгорания. Такой двигатель может
действовать только в воздухе. Из воздуха он берет необ-
ходимый для своей работы кислород, которого с увеличе-
нием высоты самолета в атмосфере становится все мень-
ше и меньше. Поэтому при подъеме мощность мотора
начнет падать, и наступит момент, когда он вообще ос-
тановится.
Остается последний, третий путь—увеличить мощность
мотора. Посмотрим, как она используется. Часть ее непо-
средственно расходуется па вращение винта и на преодо-
ление сопротивления воздуха. Другая же ее часть затра-
чивается на создание тяги, т. е. на само движение само-
лета. С приближением скорости самолета к звуковой
впит мотора должен был бы вращаться еще быстрее, при-
чем возникло бы явление, о котором говорилось выше. А
это создало бы такое сопротивление вращению винта, ко-
торое не в силах преодолеть никакой мотор. Естественно,
что на тягу в таком случае мощности уже не останется. В
таких условиях никакой винтомоторный самолет лететь
не сможет.
О росте сопротивления воздуха молено составить пред-
ставление, основываясь на таком примере. Если бы мы
увеличили скорость самолета всего в два раза, допустим;
с 600 до 1200 км/час, то сопротивление воздуха возросло
бы в 32 раза.
Нам становится ясно, что самолет с воздушным вин-
том принципиально никогда не сможет достичь скорости
звука. Одним из основных виновников этого, как мы ви-
дим. является винт, т. е. тот самый «посредник», о ко-
тором мы советовали запомнить.
Как же перейти этот предел? Каким образом «пере-
скочить» через звуковой порог? Вот здесь нам и приходит
на помощь двигатель без «посредника», двигатель пря-
мой реакции, который часто для краткости называют реак-
тивным. Сопротивление воздуха для него не страшно.
Достаточно самолету или ракете, имеющим такой двига-
тель, подняться на большую высоту, и эта трудность бу-
дет преодолена. Более того, он может действовать и в
безвоздушном пространстве. Кислород воздуха ему не
нужен.
4?
Остановимся на этом подробнее. Прежде всего уточ-
ним одно положение. Ракета или снаряд с реактивными
двигателями в полете ни от чего не отталкиваются. Их
движение происходит за счет взаимодействия двух масс:
массы исходящих из двигателя газов и массы реактивно-
го летательного аппарата. Чем больше за единицу време-
ни истекает газов и чем больше при этом их скорость,
тем больше скорость ракеты, самолета или снаряда.
Воздух, создающий сопротивление истечению газов и
движению аппарата, только мешает. Исключением яв-
ляются лишь снаряды, имеющие воздушно-реактивные
двигатели, которые берут кислород из воздуха.
Но газы в реактивном двигателе образуются в резуль-
тате сгорания топлива. Откуда же берется необходимы:'
для всякого горения кислород, если ракета летит в без-
воздушном пространстве? Оказывается, ракета несет его
с собой. Кислород содержится в жидком виде в специаль-
ных баках или находится в самом топливе (например, в
порохе).
Как мы увидим дальше, все современные управляе-
мые ракеты и снаряды имеют двигатели прямой реакции,
потому что никакие другие двигатели не могут обеспе-
чить необходимых больших скоростей и огромных дально-
стей полета.
Подробнее о ракетных двигателях мы расскажем ниже.
СТРАННОЕ ОРУЖИЕ
В одну из июльских почей 1944 г. жители Лондона и
его окрестностей были разбужены завыванием сигнала
воздушной тревоги. Вскоре послышались отдаленные глу-
хие взрывы большой силы. В окнах то и дело вздраги-
вали стекла. В городе слышалась трескотня зенитные
орудий. Небо обшаривали длинные световые лучи про-
жекторов.
Но странное дело! Как ни старались всматриваться в
небо сотни глаз наблюдателей противовоздушной оборо-
ны, бомбардировщиков противника обнаружить им не
удалось. Через несколько дней с одного из наблюда-
тельных пунктов ПВО (противовоздушной обороны) в
центральный штаб ПВО доложили, что ясно видели два
самолета неизвестной национальности, пикировавших в
окрестностях Лондона. Эти самолеты вели себя весьма
9
странно. Оба они, не выходя из пикирования, упали на
землю, вызвав взрывы большой силы. Расположенные
вблизи места падения самолетов коттеджи получили пов-
реждения, а несколько жителей, не успевших вовремя
укрыться в бомбоубежище, были ранены.
Что же это за самолеты? Может быть, подбитые не-
мецкие бомбардировщики? Но их силуэты не были похо-
жи ни на один из известных типов бомбардировщиков
противника. И никто не видел, чтобы из падавших на
землю самолетов кто-либо выпрыгнул, спасаясь на пара-
шюте.
Вскоре загадка была разгадана. Произошло это так.
Поднявшиеся в воздух истребители защитной зоны ПВО
Лондона обнаружили на высоте 900 м самолеты против-
ника, которые летели по направлению к городу со ско-
ростью 600 км]час и не имели опознавательных знаков.
Английские истребители атаковали противника и очень
быстро расправились с ним. При этом англичан удивило
то, что противник не оказывал никаких признаков сопро-
тивления. Вражеские самолеты даже не маневрировали,
давая возможность английским истребителям подойти
почти вплотную и в упор их расстреливать, а некоторые
из них, далеко не долетев до Лондона, пикировали в Ла-
Манш и скрылись в темной пучине моря.
Стало понятно, что самолеты врага — беспилотные.
Стало быть, они управляются автоматическими пилота-
ми, которые ведут самолеты по заранее намеченному пу-
ти — по траектории полета. Через некоторое время воз-
душная и наземная разведки добыли точные сведения о
местах расположения тщательно замаскированных на
оккупированной гитлеровцами территории Бельгии, Гол-
ландии и Франции стартовых устройств для запуска так
называемых самолетов-снарядов «Фау-1».
Гитлеровцы возлагали большие надежды на это новое
оружие. Они рассчитывали подавить моральный дух тыла
английских войск и терроризировать население круп-
ных административно-промышленных центров Англии,
прежде всего Лондона. Однако немецко-фашистское ко-
мандование просчиталось и не достигло ожидаемого успе-
ха своей авантюристической затеи. Из 8000 выпущенных
по столице и другим городам Англии самолетов-снарядов
в районе Лондона и его окрестностей упало только 2300,
или 29 проц. Остальные самолеты-снаряды были сбиты
10
с помощью специально разработанных средств ПВО или
сами упали в море в силу невысокого качества приборов
их управления. В то же время англо-американская бом-
бардировочная авиация подвергла энергичной бомбовой
обработке места расположения стартовых устройств са-
молетов-снарядов. Успешным действиям англо-американ-
ской авиации в значительной мере способствовала воен-
ная разведка, оперативно доставлявшая сведения о
вновь построенных стартовых устройствах «Фау-1». Пер-
вый этап боевого применения реактивных управляемых
снарядов во время второй мировой войны закончился
для гитлеровцев неудачно.
Но 1 сентября 1944 г. Лондон вновь потрясли сильные
взрывы. На этот раз враг был невидим. Так начался вто-
рой этап обстрела Лондона управляемыми ракетами —
оперенными реактивными снарядами дальнего дей-
ствия типа «Фау-2».
Эти снаряды имели улучшенные приборы управления,
состоявшие из комбинации автономного управления и те-
леуправления, осуществляемых с помощью специально
разработанной сложной радиоаппаратуры. Большие уп-
равляемые ракеты длиной 14 ле и весом 12,5 т имели ско-
рость 5400 км/час, т. е. в девять раз большую, чем ско-
рость полета самолетов-снарядов «Фау-1». К тому же они
имели и меныпее рассеивание. Обнаружить такие снаря-
ды и бороться с ними вследствие их огромной скорости,
превосходящей в пять раз скорость звука, было значи-
тельно труднее.
Названия снарядам «Фау-1» (V-1) и «Фау-2» (V-2)
немцы дали по начальной букве слова «Vergeltung», что
означает «возмездие».
Однако и на этот раз надежды гитлеровцев на новое
оружие не оправдались. Англичане приняли ряд мер для
борьбы со снарядами «Фау-2». Они реорганизовали ПВО,
в которой участвовали 5000 мужчин и 1000 женщин, ис-
пользовали новейшие технические достижения в области
радиолокации и артиллерии, а также вновь разработан-
ные неконтактные радиовзрыватели. Все это принесло ан-
гличанам большие положительные результаты. По имею-
щимся данным, за время с 1 сентября 1944 г. по март
1945 г. гитлеровцы выпустили с оккупированных терри-
торий во Франции и Голландии 4320 снарядов «Фау-2»,
из них 1120 по Лондону и 2500 по целям, расположенным
11
на европейском континенте; остальные снаряды были вы-
пущены с учебными целями. По данным бюллетеней граж.
данской обороны, обстрел Англии снарядами «Фау-2» на-
чался 8 сентября 1944 г., причем было зарегистрировано
1056 попаданий. Снаряды, разорвавшиеся в районах ан-
глийской столицы, вызвали значительные жертвы мирно-
го населения: было убито 550 и ранено 800 человек*.
Дальнобойные оперенные снаряды «Фау-2» могли
дать боевой эффект лишь при условии массового их при-
менения по целям, занимающим достаточно большую тер-
риторию. Но массовое применение этих снарядов оказа-
лось невозможным ввиду сильно понизившейся производ-
ственной мощности заводов Германии и малых запасов
готовых снарядов. К тому же изготовление этих снарядов
обходится дорого. Например, стоимость одного выстрела
снаряда «Фау-2» определяется в 1,6 миллиона рублей.
Самолеты-снаряды были новым, еще плохо освоенным
видом оружия. Точность стрельбы даже «Фау-2» была та-
кова, что снаряды попадали в круг радиусом около 5 км.
ЗАЧЕЛ! ПОНАДОБИЛАСЬ РАКЕТА?
В минувшую войну авиация явилась мощным средст-
вом воздействия на противника. Стоит вспомнить масси-
рованные налеты на Ковентри (Англия), на Дюссель-
дорф и бассейн Рура (Германия), в результате которых
были разрушены целые города и полностью нарушена
жизнь громадных промышленных районов.
Однако в ходе войны и особенно в конце ее были соз-
даны мощные и разнообразные средства защиты ПВО,
способные активно противостоять боевой деятельности
авиации. Эти средства, основанные на новейших достиже-
ниях пауки и техники (радиолокация, точные приборы уп-
равления огнем и неконтактные взрыватели), значитель-
но снизили в конце войны боевое значение авиации.
Начались поиски путей к восстановлению боевого
значения воздушных средств нападения. Каковы эти пу-
* В порядке сравнения, приведенного в книге К. Гэтланда
«Развитие управляемых снарядов» (Москва, Издательство иност-
ранной литературы. 1956 г., стр. 165), отмечено, что между 13 ию-
ня и 4 сентября 1914 г. немцы выпустили 8070 самолетов-снарядов
«Фау-1» по объектам юго-восточной Англии. Из этого количества
29 проц, упало на территорию Лондона, 46 проц, уничтожено сред-
ствами ПВО и 25 проц, не достигло цели.
12
ти? Ответом на заданный вопрос служит появление двух
видов реактивных снарядов, которыми гитлеровцы обстре-
ливали Англию в конце второй мировой войны. Попытаем-
ся несколько подробнее представить, в чем было дело.
Конец войны для немцев, как известно, складывался
неблагоприятно. Победоносное наступление советских
войск на Востоке почти ежедневно приводило к ломке
линии фронта, и гитлеровское командование никогда не
знало, где можно иметь установившийся фронт и где бу-
дут его тылы через неделю. С другой стороны, массиро-
ванные налеты англо-американской авиации также умень-
шали военную мощь фашистской Германии. Гитлеровцы
искали средство, которое помогло бы им изменить тече-
ние войны.
Во время войны 1914—1918 гг. немцам удавалось из
пушки «Большая Берта» с расстояния свыше 100 км об-
стреливать Париж. Установка одного такого орудия тре-
бовала столько материальных затрат и времени, сколько
хватило бы на постройку среднего механического завода.
При том же оно могло сделать всего несколько выстрелов.
Неустойчивость линии восточного фронта в конце вто-
рой мировой войны не давала гитлеровцам возможности
даже подумать о таком предприятии. Что касается Ан-
глии, то ни одно из существовавших тогда орудий не мог-
ло обстреливать ее через Ла-Манш.
Учитывая эти условия, германское командование уско-
рило разработку самолетов-снарядов, т. е. самолетов, ле-
тающих без пилотов, без участия человека.
Познакомимся с первыми образцами этого оружия.
Многие из вас, участвуя в кружках моделистов, может
быть, сами создавали модели самолетов или кораблей,
управляемых автоматически. Идея автоматического уп-
равления была заложена и в основу первого самолета-
снаряда «Фау-1».
У всякого управляемого снаряда или ракеты имеются
реактивный двигатель и система приборов управления.
Для того чтобы в дальнейшем все было ясно, предвари-
тельно остановимся на двух вопросах.
Первым из них будет вопрос о двигателе.
Несмотря на многообразие конструкций двигателей,
все они, как уже упоминалось в начале этой книжки, яв-
ляются двигателями прямой реакции (прямого действия).
13
Поэтому сначала мы ознакомимся в общих чертах с их
основными типами.
Второй вопрос касается системы приборов управления.
Во всех системах приборов управления полетом ракет и
самолетов-снарядов используется прибор, носящий наз-
вание гироскопа. С ним также придется предварительно
познакомиться.
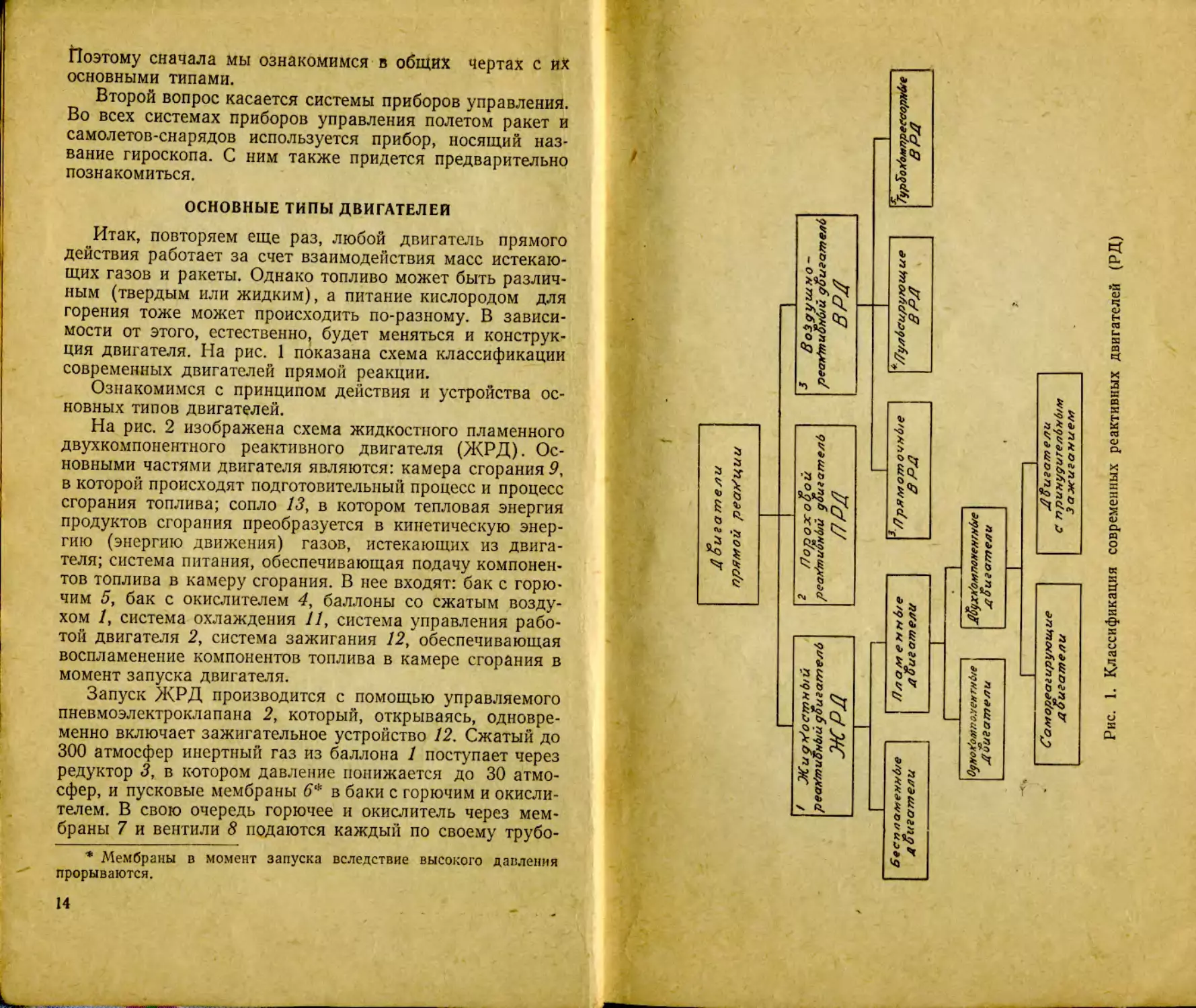
ОСНОВНЫЕ ТИПЫ ДВИГАТЕЛЕЙ
Итак, повторяем еще раз, любой двигатель прямого
действия работает за счет взаимодействия масс истекаю-
щих газов и ракеты. Однако топливо может быть различ-
ным (твердым или жидким), а питание кислородом для
горения тоже может происходить по-разному. В зависи-
мости от этого, естественно, будет меняться и конструк-
ция двигателя. На рис. 1 показана схема классификации
современных двигателей прямой реакции.
Ознакомимся с принципом действия и устройства ос-
новных типов двигателей.
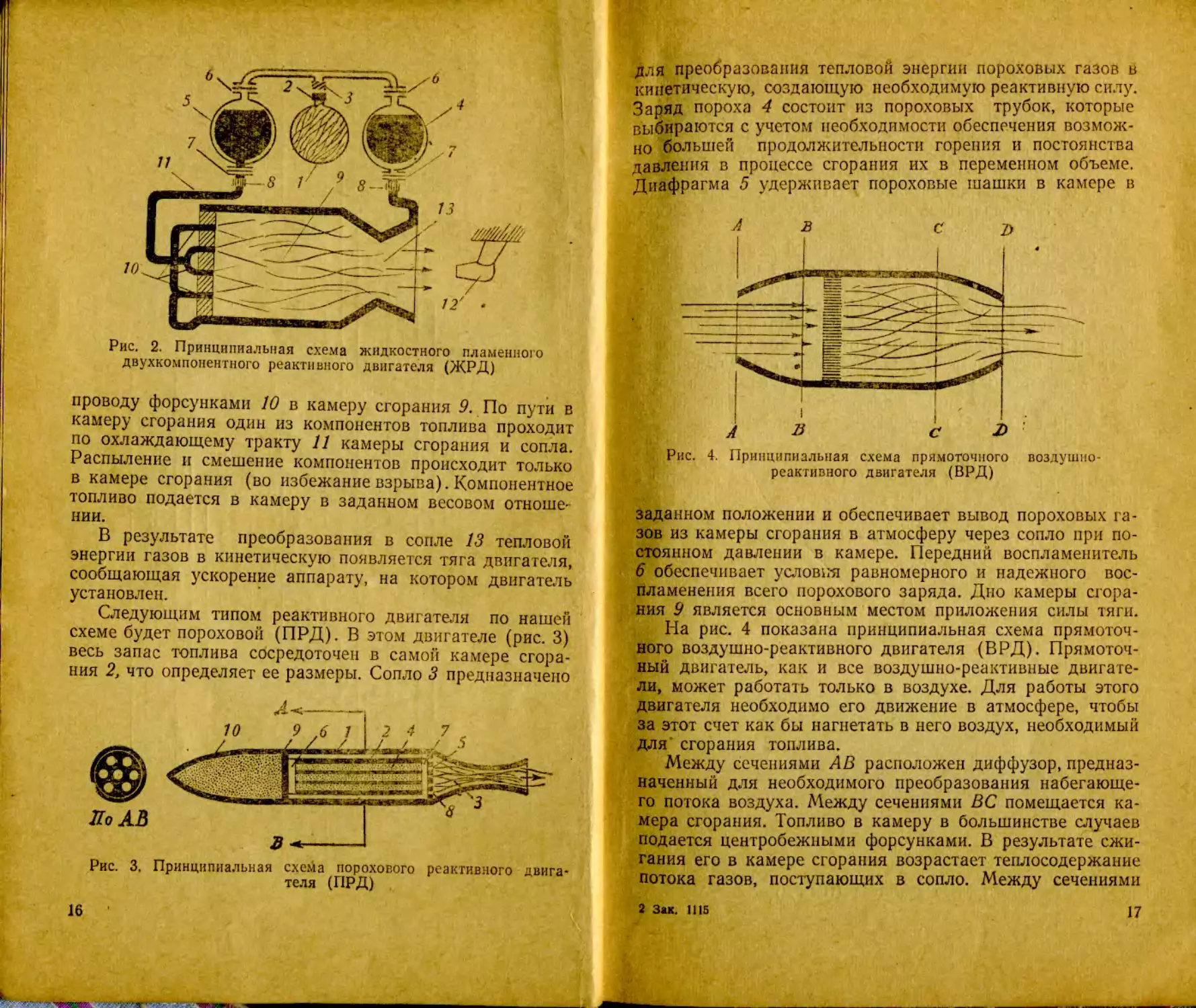
На рис. 2 изображена схема жидкостного пламенного
двухкомпонентного реактивного двигателя (ЖРД). Ос-
новными частями двигателя являются: камера сгорания 9,
в которой происходят подготовительный процесс и процесс
сгорания топлива; сопло 13, в котором тепловая энергия
продуктов сгорания преобразуется в кинетическую энер-
гию (энергию движения) газов, истекающих из двига-
теля; система питания, обеспечивающая подачу компонен-
тов топлива в камеру сгорания. В нее входят: бак с горю-
чим 5, бак с окислителем 4, баллоны со сжатым возду-
хом 1, система охлаждения 11, система управления рабо-
той двигателя 2, система зажигания 12, обеспечивающая
воспламенение компонентов топлива в камере сгорания в
момент запуска двигателя.
Запуск ЖРД производится с помощью управляемого
пневмоэлектроклапана 2, который, открываясь, одновре-
менно включает зажигательное устройство 12. Сжатый до
300 атмосфер инертный газ из баллона 1 поступает через
редуктор 3, в котором давление понижается до 30 атмо-
сфер, и пусковые мембраны б* в баки с горючим и окисли-
телем. В свою очередь горючее и окислитель через мем-
браны 7 и вентили 8 подаются каждый по своему трубо-
* Мембраны в момент запуска вследствие высокого давления
прорываются.
14 - . =
Рис. 1. Классификация современных реактивных двигателей (РД)
Рис. 2. Принципиальная схема жидкостного пламенного
двухкомпонентного реактивного двигателя (ЖРД)
проводу форсунками 10 в камеру сгорания 9. По пути в
камеру сгорания один из компонентов топлива проходит
по охлаждающему тракту 11 камеры сгорания и сопла.
Распыление и смешение компонентов происходит только
в камере сгорания (во избежание взрыва). Компонентное
топливо подается в камеру в заданном весовом отноше-
нии.
В результате преобразования в сопле 13 тепловой
энергии газов в кинетическую появляется тяга двигателя,
сообщающая ускорение аппарату, на котором двигатель
установлен.
Следующим типом реактивного двигателя по нашей
схеме будет пороховой (ПРД). В этом двигателе (рис. 3)
весь запас топлива сосредоточен в самой камере сгора-
ния 2, что определяет ее размеры. Сопло 3 предназначено
По AB
В +--------
Рис. 3. Принципиальная схема порохового реактивного двига-
теля (ПРД)
16
для преобразования тепловой энергии пороховых газов в
кинетическую, создающую необходимую реактивную силу.
Заряд пороха 4 состоит из пороховых трубок, которые
выбираются с учетом необходимости обеспечения возмож-
но большей продолжительности горения и постоянства
давления в процессе сгорания их в переменном объеме.
Диафрагма 5 удерживает пороховые шашки в камере в
Рис. 4. Принципиальная схема прямоточного воздушно-
реактивного двигателя (ВРД)
заданном положении и обеспечивает вывод пороховых га-
зов из камеры сгорания в атмосферу через сопло при по-
стоянном давлении в камере. Передний воспламенитель
6 обеспечивает условия равномерного и надежного вос-
пламенения всего порохового заряда. Дно камеры сгора-
ния 9 является основным местом приложения силы тяги.
На рис. 4 показана принципиальная схема прямоточ-
ного воздушно-реактивного двигателя (ВРД). Прямоточ-
ный двигатель, как и все воздушно-реактивные двигате-
ли, может работать только в воздухе. Для работы этого
двигателя необходимо его движение в атмосфере, чтобы
за этот счет как бы нагнетать в него воздух, необходимый
для сгорания топлива.
Между сечениями АВ расположен диффузор, предназ-
наченный для необходимого преобразования набегающе-
го потока воздуха. Между сечениями ВС помещается ка-
мера сгорания. Топливо в камеру в большинстве случаев
подается центробежными форсунками. В результате сжи-
гания его в камере сгорания возрастает теплосодержание
потока газов, поступающих в сопло. Между сечениями
2 Зак. 1115
17
CD имеется сопло, предназначенное для преобразования
тепловой энергии газов (вследствие их расширения) в
кинетическую. Предварительно сжатый в диффузоре и
подогретый в камере сгорания воздух, истекая из сопла
двигателя с большой скоростью, создает тягу.
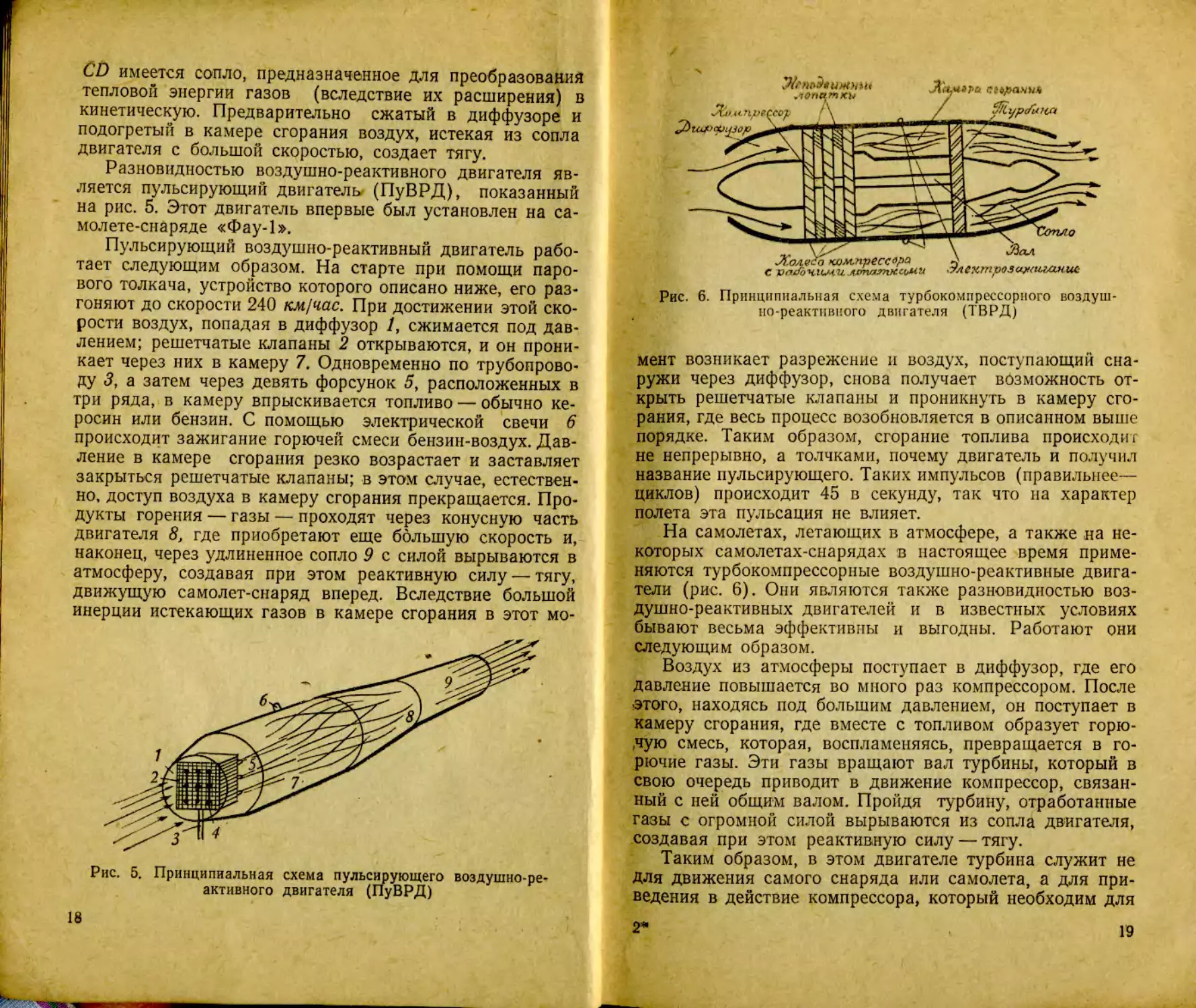
Разновидностью воздушно-реактивного двигателя яв-
ляется пульсирующий двигатель (ПуВРД), показанный
на рис. 5. Этот двигатель впервые был установлен на са-
молете-снаряде «Фау-1».
Пульсирующий воздушно-реактивный двигатель рабо-
тает следующим образом. На старте при помощи паро-
вого толкача, устройство которого описано ниже, его раз-
гоняют до скорости 240 км/час. При достижении этой ско-
рости воздух, попадая в диффузор 1, сжимается под дав-
лением; решетчатые клапаны 2 открываются, и он прони-
кает через них в камеру 7. Одновременно по трубопрово-
ду 3, а затем через девять форсунок 5, расположенных в
три ряда, в камеру впрыскивается топливо — обычно ке-
росин или бензин. С помощью электрической свечи 6
происходит зажигание горючей смеси бензин-воздух. Дав-
ление в камере сгорания резко возрастает и заставляет
закрыться решетчатые клапаны; в этом случае, естествен-
но, доступ воздуха в камеру сгорания прекращается. Про-
дукты горения — газы — проходят через конусную часть
двигателя 8, где приобретают еще большую скорость и,
наконец, через удлиненное сопло 9 с силой вырываются в
атмосферу, создавая при этом реактивную силу — тягу,
движущую самолет-снаряд вперед. Вследствие большой
инерции истекающих газов в камере сгорания в этот мо-
Рис. 5. Принципиальная схема пульсирующего воздушно-ре-
активного двигателя (ПуВРД)
18
Рис. 6. Принципиальная схема турбокомпрессорного воздуш-
но-реактивного двигателя (ТВРД)
мент возникает разрежение и воздух, поступающий сна-
ружи через диффузор, снова получает возможность от-
крыть решетчатые клапаны и проникнуть в камеру сго-
рания, где весь процесс возобновляется в описанном выше
порядке. Таким образом, сгорание топлива происходит
не непрерывно, а толчками, почему двигатель и получил
название пульсирующего. Таких импульсов (правильнее—
циклов) происходит 45 в секунду, так что на характер
полета эта пульсация не влияет.
На самолетах, летающих в атмосфере, а также на не-
которых самолетах-снарядах в настоящее время приме-
няются турбокомпрессорные воздушно-реактивные двига-
тели (рис. 6). Они являются также разновидностью воз-
душно-реактивных двигателей и в известных условиях
бывают весьма эффективны и выгодны. Работают они
следующим образом.
Воздух из атмосферы поступает в диффузор, где его
давление повышается во много раз компрессором. После
этого, находясь под большим давлением, он поступает в
камеру сгорания, где вместе с топливом образует горю-
чую смесь, которая, воспламеняясь, превращается в го-
рючие газы. Эти газы вращают вал турбины, который в
свою очередь приводит в движение компрессор, связан-
ный с ней общим валом. Пройдя турбину, отработанные
газы с огромной силой вырываются из сопла двигателя,
создавая при этом реактивную силу — тягу.
Таким образом, в этом двигателе турбина служит не
для движения самого снаряда или самолета, а для при-
ведения в действие компрессора, который необходим для
2*
19
сжатия поступающего в двигатель атмосферного воздуха,
чтобы в камере сгорания получилось большое давление,
что в свою очередь обеспечивает большую скорость исте-
чения газов, т. е. тягу.
На классификационной схеме (рис. 1) были указаны
беспламенные двигатели. Это такие двигатели, в которых
образование рабочего вещества (газа) происходит без на-
личия свечения (пламени). Обычно рабочим веществом
являются газы, образующиеся в результате катализа-
ции — разложения перекиси водорода. Температура газов
невысокая (500—800 градусов Кельвина); скорость исте-
чения их и удельная тяга * значительно меньше, чем у
пламенных двигателей. Такие двигатели применялись на
воздушных торпедах типа «Хепшель-293».
Нам осталось еще познакомиться с важнейшим при-
бором — гироскопом, входящим в любую систему управ-
ления снарядом или ракетой.
РАССКАЗ О ГИРОСКОПЕ
Летающий без пилота снаряд или самолет — машина
очень сложная. Понятно, что попасть в цель — это са-
мое важное требование, которое предъявляется к снаря-
ду. Чтобы попасть в цель, нужна довольно сложная си-
стема приборов, которая в случае отклонения снаряда от
заданного направления возвращала бы его на правиль-
ный путь.
Физикам давно известен прибор, называющийся ги-
роскопом. Гироскоп — это волчок, обладающий замеча-
тельным свойством. Когда он быстро вращается, его ось
сохраняет свое положение в пространстве. Он сопротив-
ляется любым силам, пытающимся изменить положение
его оси. Этим-то свойством гироскопических приборов и
воспользовались военные техники для управления поле-
тами реактивных снарядов и самолетов.
Теперь ни одни из современных самолетов военной
или гражданской авиации не обходится без автоматиче-
ского пилота, «душой» которого является гироскоп. По-
явившись впервые на флоте в различных устройствах,
гироскоп вскоре проник и прочно обосновался в авиации,
а затем и в управляемых снарядах и ракетах. Без него
* Тяга, получающаяся в результате сгорания единицы веса топ-
лива за одну секунду, называется удельной тягой.
20
немыслимы управление движением и стабилизация в по-
лете. С его помощью измеряют отклонение снаряда от
заданного положения в трех взаимно перпендикулярных
плоскостях: в плоскости стрельбы, в плоскости, перпен-
дикулярной ей, и в горизонтальной плоскости. Кроме
того, при помощи гироскопических приборов особого ти-
па — гиротахометров — измеряются угловые скорости,
т. е. скорости изменения угла отклонения снаряда отно-
сительно любой из указанных плоскостей.
С помощью гироскопов таким образом осуществляют
стабилизацию самолета, ракеты или снаряда на задан-
ном направлении. На заданное направление снаряд воз-
вращается от командного сигнала, вырабатываемого ги-
роскопом как чувствительным элементом, воздействую-
щим на силовые моторы стабилизации, приводящие в
движение рули. Таким образом, гироскопы широко ис-
пользуются в качестве чувствительных элементов систем
стабилизации снарядов в пространстве в приборах, изме-
ряющих угловое положение и угловую скорость откло-
нений снаряда, летящего к цели. Проследим на примере
«Фау-1», как это практически осуществлялось.
«ФАУ-1»
По внешнему виду первый немецкий самолет-снаряд
«Фау-1» походил на обычный самолет. Но бросалась в
глаза укрепленная сверху его хвостовой части труба,
представлявшая собой пульсирующий воздушно-реак-
тивный двигатель (рис. 7).
Скорость этого самолета-снаряда достигала 640 км/час,
т. е. отнюдь не превосходила и даже была меньше ско-
ростей существовавших к тому времени истребителей
(около 750 км/час). Количество взрывчатого вещества,
доходившее до 1 т, также не являлось его преимуще-
ством по сравнению с существовавшими в то время авиа-
бомбами.
Система приборов управления полетом «Фау-1»
На рис. 8 показано схематическое расположение при-
боров управления самолетом-снарядом. Каждый из этих
приборов представляет собой весьма сложную конструк-
цию, ознакомление с которой требует специальных зна-
ний. Поэтому ниже мы даем только название каждого
прибора с кратким указанием его назначения.
Рис. 7. «Фау-1»
В корпусе или фюзеляже снаряда, состоящем из ряда
отсеков (обычно шести), располагается ветрянка 1, вра-
щающаяся под напором встречного воздуха и отсчиты-
вающая с помощью счетчика пути 11 пройденное снаря-
дом расстояние относительно атмосферы, а не Земли. В
этом заложен тактический недостаток системы, потому
что может иметь место встречный или попутный ветер,
вызывающий отклонения в показаниях счетчика пройден-
ного пути; дальность полета снаряда относительно Земли
будет отсчитана в этом случае неверно, а следовательно,
и точность попадания в цель будет недостаточная вследст-
вие значительного разброса в дальности.
Отсчитав в полете заданную па старте дальность поле-
та снаряда, счетчик пути подавал командный импульс
(электрический сигнал) на два пиропатрона 13, при под-
рыве которых срабатывали через провод 15 рычаги фик-
сации рулей глубины 14, переводившие снаряд в пикиро-
вание. При этом одновременно механическим ножом 16
перерубалась воздушная магистраль, питающая рулевые
машинки 12 сжатым воздухом, после чего они прекраща-
ли работу. В головной части снаряда находился магнит-
ный корректор курса 2, который, являясь чувствительным
2?
элементом системы стабилизации, работал совместно с
прибором виража 4, выводящим снаряд через определен-
ный промежуток времени на заданное направление (курс)
после старта, а также с главным гироскопом 6 и гиро-
тахометром курса 7. Эти приборы и удерживали снаряд на
заданном по программе курсе.
В головной части снаряда помещались заряд взрывча-
того вещества и электрический взрыватель 3. В следую-
щих отсеках помещались цистерна с горючим (см. рис. 7)
и два баллона шарообразной формы /7, наполненные
сжатым воздухом под давлением 150 атмосфер. Сжатый
воздух по трубкам из баллона поступал в схему через по-
нижающий редуктор 5, обеспечивая работу автопилота и
подачу горючего в камеру сгорания реактивного двига-
теля.
Для удержания снаряда в полете на заданной высоте
(обычно 900—920 л«) применялся высотный корректор 9,
или, иначе говоря, высотомер, работавший совместно с
главным гироскопом 6 и гиротахометром тангажа* 10.
Все эти приборы, отрегулированные соответствующим об-
разом на старте, позволяли снаряду совершать полет по
заранее рассчитанной траектории и выполняли тем самым
роль летчика.
Однако мало решить, что из известного пункта будет
обстреливаться какая-либо цель. На полет самолета-сна-
ряда большое влияние оказывают ветер, дождь, влажность
воздуха и путь, который проходит снаряд, а также враще-
ние Земли вокруг своей оси. При современных скоростях
полета даже летчик, имеющий в своем распоряжении са-
мые совершенные приборы, корректируя полет самолета,
не всегда может полностью учесть и своевременно реаги-
ровать па все условия внешней среды и вынужден пользо-
ваться автопилотом.
Расчет полетов самолетов-снарядов—дело очень слож-
ное и доступно лишь высококвалифицированным матема-
тикам. Перед запуском «Фау-1» приходилось точно оп-
ределять расстояние до цели, назначать высоту полета,
рассчитывать точку пикирования, причем проделывать
это с учетом влияния всех обстоятельств, перечисленных
выше.
* Угол, образуемый продольной осью снаряда и плоскостью
горизонта.
24
Полученные в результате подобных расчетов указания
и выполняются соответствующими приборами в полете
после того, как они должным образом настраиваются опе-
ратором перед взлетом снаряда. Эти указания называют-
ся программными, а определяющийся ими путь — про-
граммной траекторией.
Прежде всего необходимо, чтобы во время полета сна-
ряд не отклонялся от заданного направления. Для этой
цели на помощь приходит уже описанный выше гироскоп.
Перед стартом «Фау-1» ось главного гироскопа 6 ав-
топилота устанавливалась точно в соответствии с направ-
лением продольной оси снаряда. При отклонении снаря-
да от заданной траектории гироскоп подавал командные
сигналы, под воздействием которых рулевой привод воз-
вращал снаряд на расчетный курс.
Но обладавши!) инерцией снаряд, достигнув генераль-
ного направления или первоначального положения, не
останавливался, а переходил заданное ему положение,
создавая новое отклонение.
Это вызывало появление командного сигнала обратно-
го знака, в результате чего руль отклонялся в другую сто-
рону. В связи с этим часто возникал колебательный про-
цесс и снаряд совершал зигзагообразные колебания око-
ло своего генерального направления полета.
Для погашения этих колебаний, кроме восстанавливаю-
щей силы, подобно рулевому на корабле или шоферу ав-
томашины, старающимся удержаться на прямом курсе,
создают еще так называемую демпфирующую (сдер-
живающую) силу, пропорциональную угловой скорости
отклонения и направленную противоположно ей. Дости-
гается это с помощью особого гироскопа с двумя степеня-
ми свободы, называемого гиротахометром.
Для погашения зигзагообразных колебаний снаряда
во время полета в плоскости стрельбы вокруг поперечной
оси применялся гиротахометр тангажа 10, а для пога-
шения зигзагообразных колебаний в плоскости, перпенди-
кулярной к плоскости стрельбы вокруг вертикальной оси,
—гиротахометр курса 7.
Вследствие перемещения снаряда из одной точки на
Земле в другую и вращения Земли, а также за счет недо-
учитываемых погрешностей ось главного гироскопа от-
клоняется от заданного направления. Ее положение
корректируется магнитным корректором, который при от-
клонении от курса подает электрические сигналы на
электромагниты, поворачивающие ось главного гироскопа.
Но и сама указанная выше аппаратура управления и
стабилизации, удерживающая снаряд на траектории, об-
ладает известной инертностью механических и электриче-
ских звеньев. Это значит, что между моментом поступле-
ния командного сигнала и действием прибора проходит
известное время. Как бы мало это время ни было, его до-
статочно для того, чтобы снаряд отклонился на угол,
больший, чем нужно.
Но и это еще не все. Выше мы сказали, что гироскоп
удерживает снаряд в заданном направлении. Однако, ес-
ли снаряд, не меняя направления своего полета, изменя-
ет высоту или смещается в сторону параллельно своему
курсу, не меняя высоты, то гироскоп на это не реагирует.
Поэтому для удержания снарядов на расчетной высоте
применялся высотомер, а боковые перемещения на сна-
ряде «Фау-1» не учитывались, что отрицательно сказыва-
лось па точности попадания в намеченную цель.
Совокупность перечисленных выше приборов и яв-
ляется автоматическим пилотом.
Конечной задачей снаряда «Фау-1» являлось, естест-
венно, поражение определенной цели. Поэтому было не-
обходимо, чтобы самолет-снаряд, пролетев известное рас-
стояние, перешел в нужном месте в положение пикирова-
ния, превратившись таким образом в бомбу. Этот момент,
как уже указывалось выше, определялся расчетом, а са-
мо пикирование выполнялось при помощи ветрянки и
счетчика пройденного пути.
Запуск «Фау-1»
Старт самолета-снаряда происходил со специальных
стартовых площадок (рис. 9). Это осуществлялось сле-
дующим образом. На корпусе снаряда снизу имелось при-
способление, необходимое для связи снаряда со старто-
вой тележкой, которая в свою очередь связывалась с
поршнем. Поршень выталкивался давлением пара из тру-
бы, вмонтированной под углом 7—12 градусов в железо-
бетонное стартовое устройство, увлекая за собой тележку
со снарядом. В конце стартовой дорожки тележка отделя-
лась и падала на землю, на снаряде начинал пульсиро-
вать воздушно-реактивный двигатель. Снаряд продолжал
Рис. 9. Стартовое устройство самолета-снаряда
полет по заданной на старте траектории, набирая ско-
рость.
Как показал опыт, при посылке снаряда на большое
расстояние, несмотря на обилие приборов, никогда не
удается с достаточной точностью учесть все факторы,
влияющие на полет на всем его протяжении.
Самолеты-спаряды «Фау-1», посылаемые во время
второй мировой войны в Англию, при одинаковой про-
грамме полета рассеивались на площади круга около 10
км в поперечнике.
Из этого следует, что снаряды подобного типа пригод-
ны только для стрельбы по крупным площадям-целям,
т. е. для обстрела больших городов, крупных промышлен-
ных центров, военных или военно-морских баз и пр.
Итак, новый вид оружия — самолет-снаряд — был
создан. Однако уже в начале его боевого применения
немецкому командованию стало ясно, что он обладает
рядом существенных недостатков. О них говорилось вы-
ше, и здесь мы их только вкратце суммируем; скорость,
уступавшая скорости истребителей, позволяла последним
легко перехватывать снаряды на лету и уничтожать их;
небольшая высота полета (900 ле) позволяла использо-
вать против них зенитную артиллерию.
27
Момент перехода в пикирование на цель определялся
пройденным путем, который отсчитывался воздушной
вертушкой. Но на вертушку в полете оказывали воздейст-
вие встречные или попутные воздушные течения, кото-
рые нельзя было учесть заранее. В результате этого счет-
чик фиксировал пройденный путь, не соответствующий
действительности, и зачастую снаряды пикировали с
большим недолетом.
Значит, требовалось повысить скорость, увеличить вы-
соту полета и обеспечить большую точность поражения
цели.
«•Фау-2»
Пути к решению этих задач были найдены при созда-
нии снаряда-ракеты «Фау-2». В отличие от самолета-сна-
ряда «Фау-1» снаряд-ракета «Фау-2» являлся ракетой,
имевшей хвостовое оперение и встроенный внутрь ее ра-
кетный двигатель. Схематичное изображение этой ракеты
с указанием главных ее частей и аппаратуры дано на
рис. 10.
Корпус снаряда имеет цилиндрическую форму, заост-
ренную в носовой части. В хвостовой части корпуса укреп-
лены четыре широких пера 24 с аэродинамическими руля-
ми 30, расположенными крестообразно, и четыре газовых
графитовых руля 37. Каркас 8 снаряда состоит из набо-
ра поперечных (шпангоутов а) и продольных (стринге-
ров б) креплений, к которым крепится обшивка из ли-
стовой стали. Шпангоуты 6 в местах стыков средней ча-
сти с хвостовой и головной частями корпуса усилены.
Корпус снаряда обычно разделяется на шесть отсе-
ков.
В первом отсеке, расположенном в головной части кор-
пуса снаряда, помещаются боевой заряд 12, взрыватель
11, детонатор 14, центральная трубка 13 и прибор управ-
ления взрывателем.
Во втором отсеке, разделенном перегородками 15 на
четыре части, расположены: автопилот 9 с гиросистемой
18; моторное реле времени; радиоустройство, удерживаю-
щее снаряд в плоскости стрельбы при помощи равносиг-
нальной зоны; радиоустройство, служащее для измере-
ния скорости полета снаряда; радиоустройство для вы-
ключения реактивного двигателя 16; баллоны со сжатым
азотом; стабилизированная платформа 17 для чувстви-
тельных элементов гиросистемы.
Рис. 10. Схема оперенного дальнобой-
ного снаряда с размещением приборов
управления:
1—цепные приводы аэродинамических
рулей; 2 — электромоторы привода аэ-
родинамических рулей; 3 — форсунки,
впрыскивающие в камеру сгорания
жидкий кислород; 4 — трубопроводы;
5 — баллоны со сжатым азотом в отсе-
ке машинного агрегата; 6 — шпангоуты
(поперечные кольца, скрепляющие кор-
пус ракеты); 7 — управляемый клапан;
8 — каркас снаряда, состоящий из
шпангоутов «а* и продольных стринге-
ров «б», к которым крепится стальная
обшивка корпуса снаряда; 9—автопи-
лот; 10—трубка баллонов сжатого азо-
та; 11— взрыватель; 12— боевой заряд
1000 кг; 13—центральная трубка;
14 — детонатор; 15 — перегородки;
16 — баллоны со сжатым азотом при-
борного отсека; 17—стабилизированная
платформа с чувствительными элемен-
тами гиросистемы; 18 — гиросистема;
19 и 21—горловины баков 34 и 33;
20 — трубка, соединяющая турбонасос-
ный агрегат со спиртовым баком; 22—
гибкое соединение; 23 — бачок с пере-
кисью водорода; 24— плоскости хво-
стовых стабилизаторов снаряда; 25 —
бачок с водным раствором перманганат
натрия; 26 — распределительное устрой-
ство жидкого кислорода; 27 — трубка
для выхода пара и газа из турбины;
28 — патрубки, подводящие спирт от
насоса в рубашку сопла; 29 — сопло двигателя; 30— аэродинами-
ческие рули; 31 — камера сгорания; 32 — турбонасосный агрегат
мощностью 500 л. с.; 33 — бак с жидким кислородом (5000 кг);
34 — бак с этиловым спиртом (3500 кг); 35 — приборный отсек;
36 — головная часть корпуса снаряда; 37—графитовые рули снаряда
В третьем отсеке помещен бак 34 с топливом — этило-
вым спиртом — в количестве около 3500 кг.
В четвертом отсеке помещен бак 33 с жидким кисло-
родом, используемым как окислитель, в количестве до
5000 кг с температурой. 183 градуса Цельсия.
Пятый отсек содержит турбонасосный агрегат 32, сое-
диненный со спиртовым и кислородным баками при по-
мощи гибкого соединения 22. Один конец трубы,
входящий в бак со спиртом, имеет управляемый клапан 7,
другой оканчивается гибким соединением 22.
29
В шестом (хвостовом) отсеке размещена силовая ус-
тановка — жидкостный реактивный двигатель, состоя-
щий из камеры сгорания 31 с соплом, трубопроводов и
другой арматуры, связанной с работой двигателя.
Воздушные рули расположены на плоскостях стабили-
заторов 24. Управление ими осуществляется автоматиче-
скими приборами 35, находящимися во втором отсеке.
Рули эти приводятся в действие электромоторами 2 че-
рез цепные приводы 1.
Турбонасосный агрегат 32 включает в себя турбину и
два насоса. Турбина работает на смеси пара и газа и
приводит в действие насосы, нагнетающие горючее и окис-
литель (125 кг в секунду) в камеру сгорания.
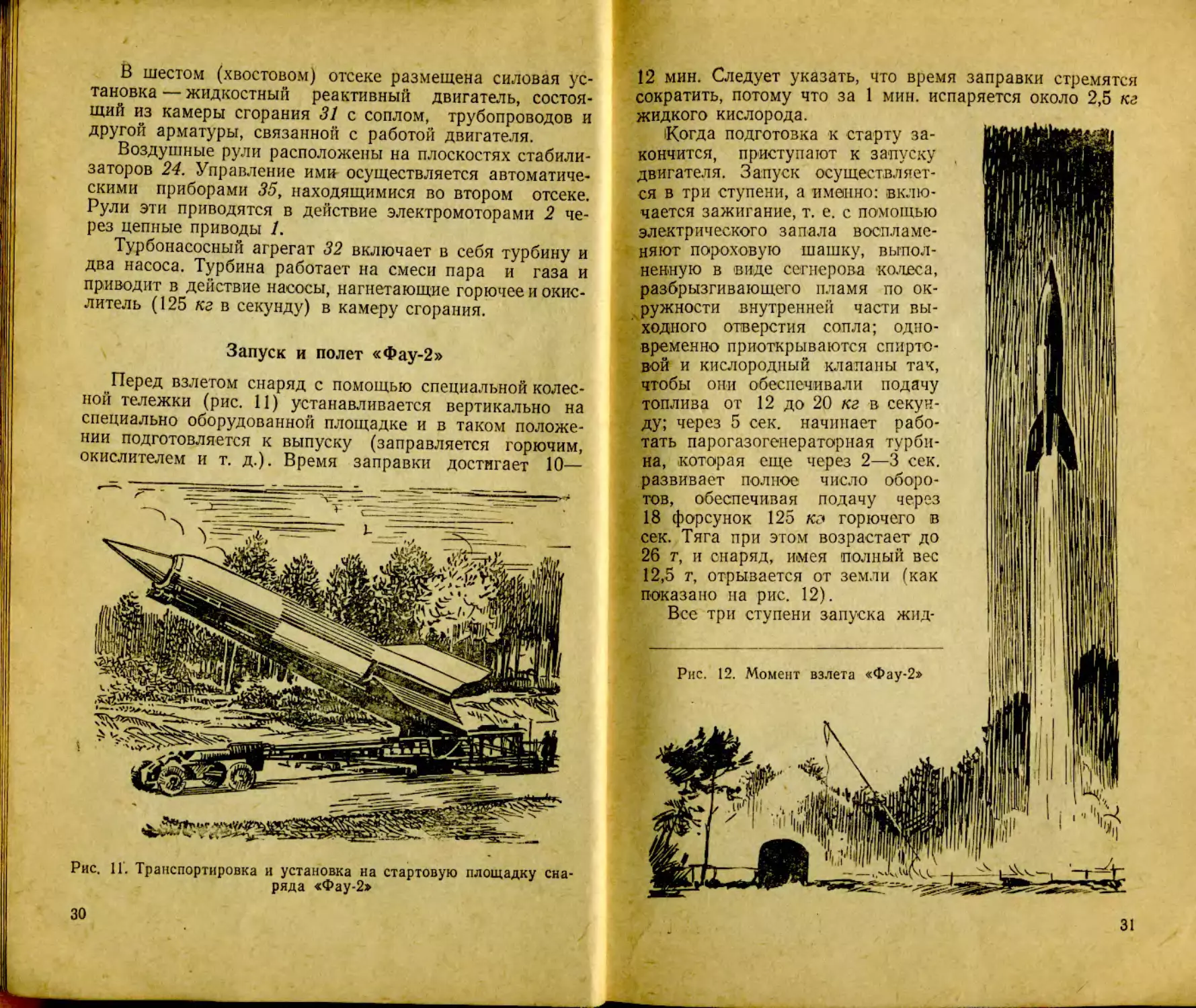
Запуск и полет «Фау-2»
Перед взлетом снаряд с помощью специальной колес-
ной тележки (рис. 11) устанавливается вертикально на
специально оборудованной площадке и в таком положе-
нии подготовляется к выпуску (заправляется горючим,
окислителем и т. д.). Время заправки достигает 10—
Рис. 11. Транспортировка и установка на стартовую площадку сна
ряда «Фау-2»
30
12 мин. Следует указать, что время заправки стремятся
сократить, потому что за 1 мин. испаряется около 2,5 кг
жидкого кислорода.
Когда подготовка к старту за-
кончится, приступают к запуску
двигателя. Запуск осуществляет-
ся в три ступени, а именно: вклю-
чается зажигание, т. е. с помощью
электрического запала воспламе-
няют пороховую шашку, выпол-
ненную в виде сегперова колеса,
разбрызгивающего пламя по ок-
ружности внутренней части вы-
ходного отверстия сопла; одно-
временно приоткрываются спирто-
вой и кислородный клапаны так,
чтобы они обеспечивали подачу
топлива от 12 до 20 кг в секун-
ду; через 5 сек. начинает рабо-
тать парогазогенераторная турби-
на, которая еще через 2—3 сек.
развивает полное число оборо-
тов, обеспечивая подачу через
18 форсунок 125 /со горючего в
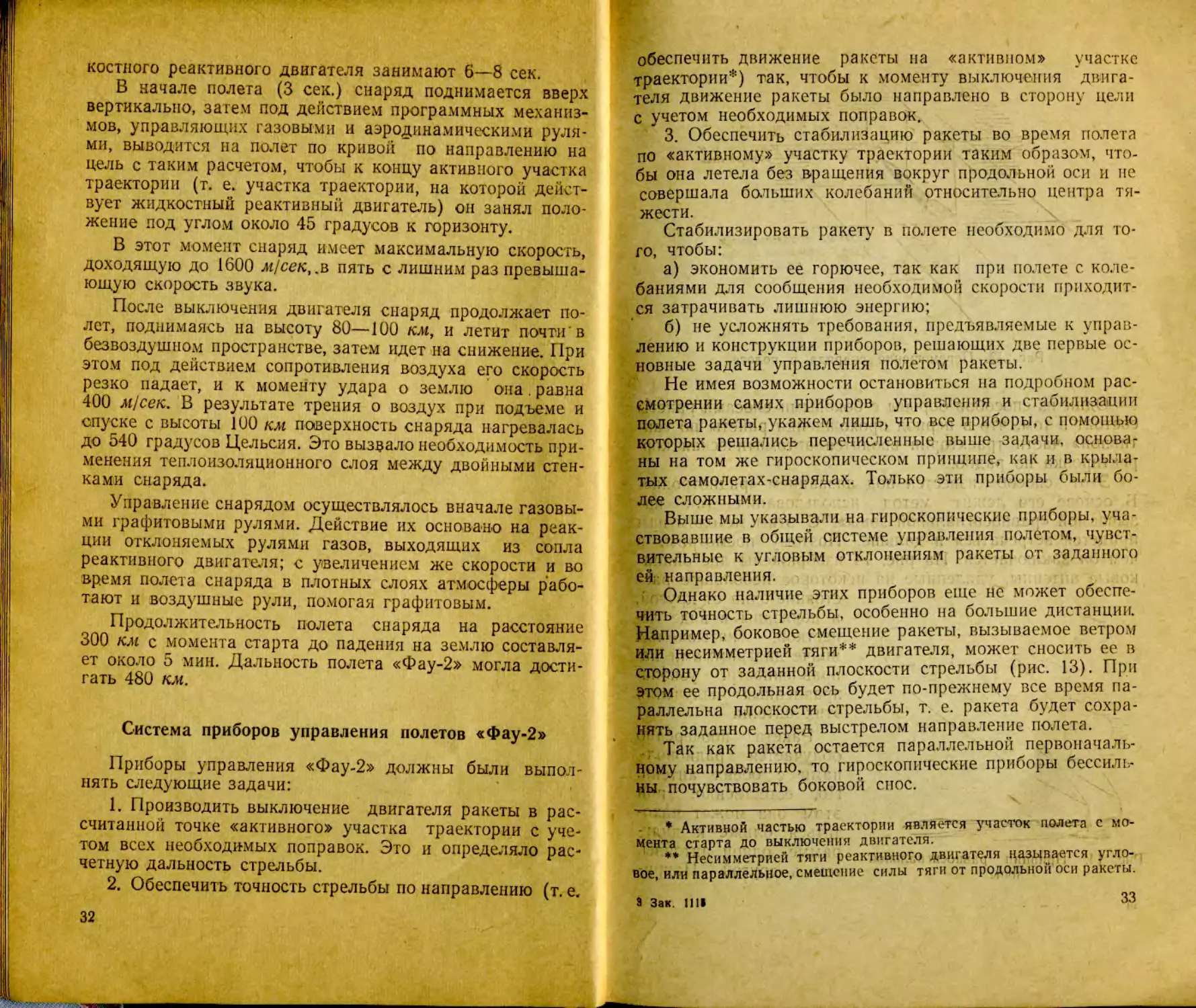
сек. Тяга при этом возрастает до
26 т, и снаряд, имея полный вес
12,5 т, отрывается от земли (как
показано па рис. 12).
Все три ступени запуска жид-
Рис. 12. Момент взлета «Фау-2»
31
костного реактивного двигателя занимают 6—8 сек.
В начале полета (3 сек.) снаряд поднимается вверх
вертикально, затем под действием программных механиз-
мов, управляющих газовыми и аэродинамическими руля-
ми, выводится на полет по кривой по направлению на
цель с таким расчетом, чтобы к концу активного участка
траектории (т. е. участка траектории, на которой дейст-
вует жидкостный реактивный двигатель) он занял поло-
жение под утлом около 45 градусов к горизонту.
В этот момент снаряд имеет максимальную скорость,
доходящую до 1600 м/сек,.в пять с лишним раз превыша-
ющую скорость звука.
После выключения двигателя снаряд продолжает по-
лет, поднимаясь на высоту 80—100 км, и летит почти’в
безвоздушном пространстве, затем идет на снижение. При
этом под действием сопротивления воздуха его скорость
резко падает, и к моменту удара о землю она. равна
400 м/сек. В результате трения о воздух при подъеме и
спуске с высоты 100 км поверхность снаряда нагревалась
до 540 градусов Цельсия. Это вызвало необходимость при-
менения теплоизоляционного слоя между двойными стен-
ками снаряда.
Управление снарядом осуществлялось вначале газовы-
ми графитовыми рулями. Действие их основано на реак-
ции отклоняемых рулями газов, выходящих из сопла
реактивного двигателя; с увеличением же скорости и во
время полета снаряда в плотных слоях атмосферы рабо-
тают и воздушные рули, помогая графитовым.
Продолжительность полета снаряда на расстояние
300 км с момента старта до падения на землю составля-
ет около 5 мин. Дальность полета «Фау-2» могла дости-
гать 480 км.
Система приборов управления полетов «Фау-2»
Приборы управления «Фау-2» должны были выпол-
нять следующие задачи:
1. Производить выключение двигателя ракеты в рас-
считанной точке «активного» участка траектории с уче-
том всех необходимых поправок. Это и определяло рас-
четную дальность стрельбы.
2. Обеспечить точность стрельбы по направлению (т. е.
32
обеспечить движение ракеты иа «активном» участке
траектории*) так, чтобы к моменту выключения двига-
теля движение ракеты было направлено в сторону цели
с учетом необходимых поправок.
3. Обеспечить стабилизацию ракеты во время полета
по «активному» участку траектории таким образом, что-
бы опа летела без вращения вокруг продольной оси и не
совершала больших колебаний относительно центра тя-
жести.
Стабилизировать ракету в полете необходимо для то-
го, чтобы:
а) экономить ее горючее, так как при полете с коле-
баниями для сообщения необходимой скорости приходит-
ся затрачивать лишнюю энергию;
б) не усложнять требования, предъявляемые к управ-
лению и конструкции приборов, решающих две первые ос-
новные задачи управления полетом ракеты.
Не имея возможности остановиться на подробном рас-
смотрении самих приборов управления и стабилизации
полета ракеты, укажем лишь, что все приборы, с помощью
которых решались перечисленные выше задачи, основа;
ны на том же гироскопическом принципе, как и в крыла-
тых самолетах-снарядах. Только эти приборы были бо-
лее сложными.
Выше мы указывали на гироскопические приборы, уча-
ствовавшие в общей системе управления полетом, чувст-
вительные к угловым отклонениям ракеты от заданного
ей направления.
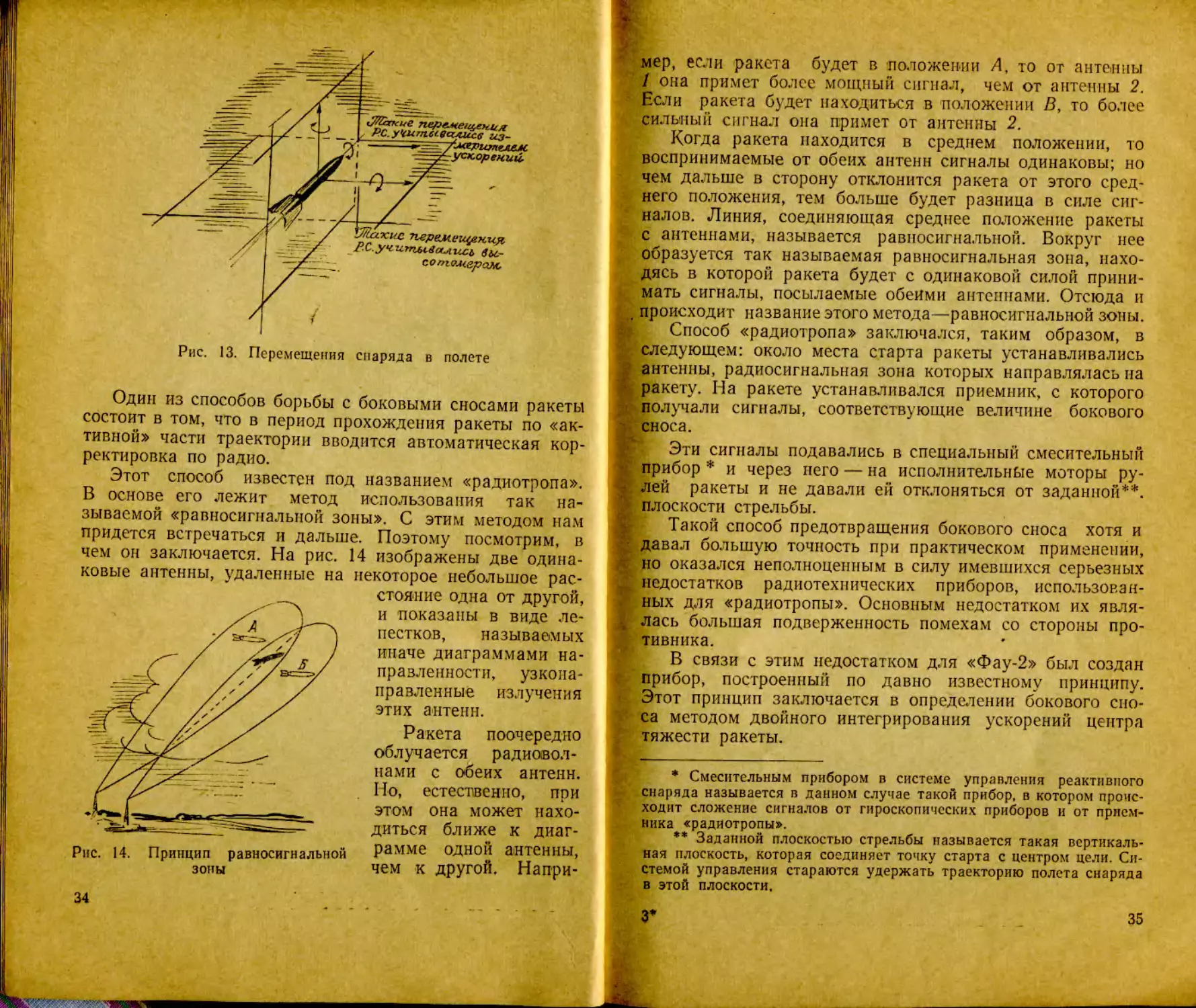
Однако наличие этих приборов еще нс может обеспе-
чить точность стрельбы, особенно на большие дистанции.
Например, боковое смещение ракеты, вызываемое ветром
или несимметрией тяги** двигателя, может сносить ее в
сторону от заданной плоскости стрельбы (рис. 13). При
этом ее продольная ось будет по-прежнему все время па-
раллельна плоскости стрельбы, т. е. ракета будет сохра-
нять заданное перед выстрелом направление полета.
Так как ракета остается параллельной первоначаль-
ному направлению, то гироскопические приборы бессиль-
ны почувствовать боковой снос.
* Активной частью траектории является участок полета с мо-
мента старта до выключения двигателя.
* * Несимметрией тяги реактивного двигателя называется угло-
вое, или параллельное, смешение силы тяги от продольной оси ракеты.
з Зак. 1111
33
Рис. 13. Перемещения снаряда в полете
Один из способов борьбы с боковыми сносами ракеты
состоит в том, что в период прохождения ракеты по «ак-
тивной» части траектории вводится автоматическая кор-
ректировка по радио.
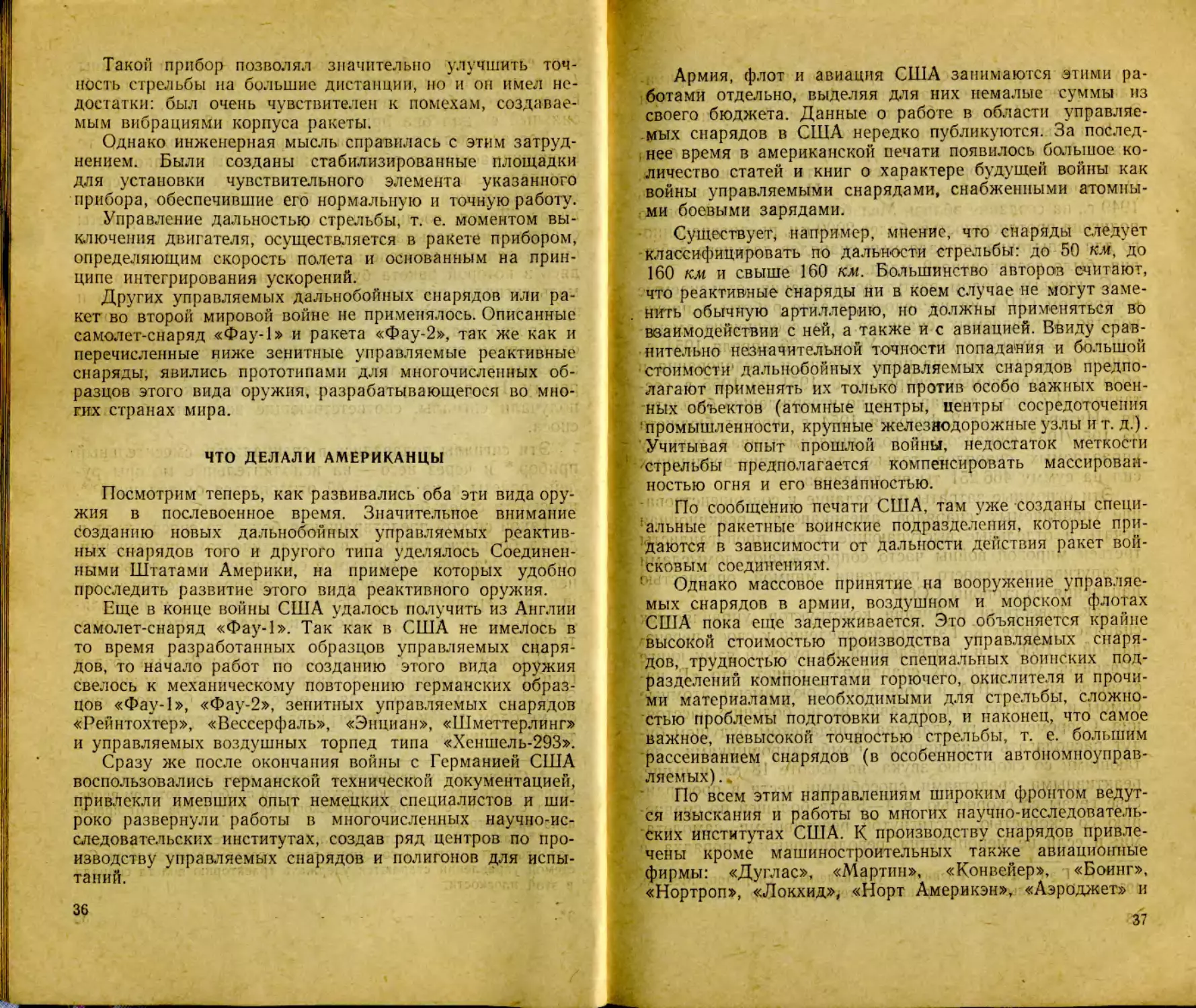
Этот способ известен под названием «радиотропа».
В основе его лежит метод использования так на-
зываемой «равносигнальной зоны». С этим методом нам
придется встречаться и дальше. Поэтому посмотрим, в
чем он заключается. На рис. 14 изображены две одина-
ковые антенны, удаленные на
Рпс. 14. Принцип равносигнальной
зоны
34
некоторое небольшое рас-
стояние одна от другой,
и показаны в виде ле-
пестков, называемых
иначе диаграммами на-
правленности, узкона-
правленные излучения
этих антенн.
Ракета поочередно
облучается радиовол-
нами с обеих антенн.
Но, естественно, при
этом она может нахо-
диться ближе к диаг-
рамме одной антенны,
чем к другой. Напри-
мер, если ракета будет в положении А, то от антенны
1 она примет более мощный сигнал, чем от антенны 2.
Если ракета будет находиться в положении В, то более
сильный сигнал она примет от антенны 2.
Когда ракета находится в среднем положении, то
воспринимаемые от обеих антенн сигналы одинаковы; но
чем дальше в сторону отклонится ракета от этого сред-
него положения, тем больше будет разница в силе сиг-
налов. Линия, соединяющая среднее положение ракеты
с антеннами, называется равпосигнальной. Вокруг нее
образуется так называемая равносигнальная зона, нахо-
дясь в которой ракета будет с одинаковой силой прини-
мать сигналы, посылаемые обеими антеннами. Отсюда и
происходит название этого метода—равносигнальной зоны.
Способ «радиотропа» заключался, таким образом, в
следующем: около места старта ракеты устанавливались
антенны, радиосигнальная зона которых направлялась на
ракету. На ракете устанавливался приемник, с которого
получали сигналы, соответствующие величине бокового
сноса.
Эти сигналы подавались в специальный смесительный
прибор * и через него — на исполнительные моторы ру-
лей ракеты и не давали ей отклоняться от заданной**,
плоскости стрельбы.
Такой способ предотвращения бокового сноса хотя и
давал большую точность при практическом применении,
но оказался неполноценным в силу имевшихся серьезных
недостатков радиотехнических приборов, использован-
ных для «радиотропы». Основным недостатком их явля-
лась большая подверженность помехам со стороны про-
тивника.
В связи с этим недостатком для «Фау-2» был создан
прибор, построенный по давно известному принципу.
Этот принцип заключается в определении бокового сно-
са методом двойного интегрирования ускорений центра
тяжести ракеты.
* Смесительным прибором в системе управления реактивного
снаряда называется в данном случае такой прибор, в котором проис-
ходит сложение сигналов от гироскопических приборов и от прием-
ника «радиотропы».
** Заданной плоскостью стрельбы называется такая вертикаль-
ная плоскость, которая соединяет точку старта с центром цели. Си-
стемой управления стараются удержать траекторию полета снаряда
в этой плоскости.
3* 35
Такой прибор позволял значительно улучшить точ-
ность стрельбы на большие дистанции, по и он имел не-
достатки: был очень чувствителен к помехам, создавае-
мым вибрациями корпуса ракеты.
Однако инженерная мысль справилась с этим затруд-
нением. Были созданы стабилизированные площадки
для установки чувствительного элемента указанного
прибора, обеспечившие его нормальную и точную работу.
Управление дальностью стрельбы, т. е. моментом вы-
ключения двигателя, осуществляется в ракете прибором,
определяющим скорость полета и основанным на прин-
ципе интегрирования ускорений.
Других управляемых дальнобойных снарядов или ра-
кет во второй мировой войне не применялось. Описанные
самолет-снаряд «Фау-1» и ракета «Фау-2», так же как и
перечисленные ниже зенитные управляемые реактивные
снаряды, явились прототипами для многочисленных об-
разцов этого вида оружия, разрабатывающегося во мно-
гих странах мира.
ЧТО ДЕЛАЛИ АМЕРИКАНЦЫ
Посмотрим теперь, как развивались оба эти вида ору-
жия в послевоенное время. Значительное внимание
созданию новых дальнобойных управляемых реактив-
ных снарядов того и другого типа уделялось Соединен-
ными Штатами Америки, на примере которых удобно
проследить развитие этого вида реактивного оружия.
Еще в конце воины США удалось получить из Англии
самолет-снаряд «Фау-1». Так как в США не имелось в
то время разработанных образцов управляемых снаря-
дов, то начало работ по созданию этого вида оружия
свелось к механическому повторению германских образ-
цов «Фау-1», «Фау-2», зенитных управляемых снарядов
«Рейнтохтер», «Вессерфаль», «Энциан», «Шметтерлинг»
и управляемых воздушных торпед тина «Хеншель-293».
Сразу же после окончания войны с Германией США
воспользовались германской технической документацией,
привлекли имевших опыт немецких специалистов и ши-
роко развернули работы в многочисленных научно-ис-
следовательских институтах, создав ряд центров по про-
изводству управляемых снарядов и полигонов для испы-
таний.
36
Армия, флот и авиация США занимаются этими ра-
ботами отдельно, выделяя для них немалые суммы из
своего бюджета. Данные о работе в области управляе-
мых снарядов в США нередко публикуются. За послед-
нее время в американской печати появилось большое ко-
личество статей и книг о характере будущей войны как
войны управляемыми снарядами, снабженными атомны-
ми боевыми зарядами.
Существует, например, мнение, что снаряды следует
классифицировать по дальности стрельбы: до 50 км, до
160 км и свыше 160 км. Большинство автороз считают,
что реактив-ные снаряды ни в коем случае не могут заме-
нить обычную артиллерию, но должны применяться во
взаимодействии с ней, а также и с авиацией. Ввиду срав-
нительно незначительной точности попадания и большой
стоимости дальнобойных управляемых снарядов предпо-
лагают применять их только против особо важных воен-
ных объектов (атомные центры, центры сосредоточения
промышленности, крупные железнодорожные узлы и т. д.).
Учитывая опыт прошлой войны, недостаток меткости
-стрельбы предполагается компенсировать массирован-
ностью огня и его внезапностью.
По сообщению печати США, там уже созданы специ-
альные ракетные воинские подразделения, которые при-
даются в зависимости от дальности действия ракет вой-
сковым соединениям.
' Однако массовое принятие на вооружение управляе-
мых снарядов в армии, воздушном и морском флотах
США пока еще задерживается. Это объясняется крайне
высокой стоимостью производства управляемых снаря-
дов, трудностью снабжения специальных воинских под-
разделений компонентами горючего, окислителя и прочи-
ми материалами, необходимыми для стрельбы, сложно-
стью проблемы подготовки кадров, и наконец, что самое
важное, невысокой точностью стрельбы, т. е. большим
рассеиванием снарядов (в особенности автбпомноуправ-
ляемых).
По всем этим направлениям широким фронтом ведут-
ся изыскания и работы во многих научно-исследователь-
ских институтах США. К производству снарядов привле-
чены кроме машиностроительных также авиационные
фирмы: «Дуглас», «Мартин», «Конвейер». «Боинг»,
«Нортроп», «Локхид», «Норт Америкэн», «Аэроджет» и
37
другие. В разработке систем приборов управления прини-
мают участие такие известные фирмы, как «Вестерн
Электрик», «Дженерал-Электрик», «Белл-Телефон».
В пустынях американского континента и на побе-
режье Атлантики появляются ракетные центры и базы
с полигонами, которые тянутся на тысячи километров.
Например, как сообщает журнал «Интеравиа» за июнь
1949 г., на создание вблизи Мельбурна (Флорида) нового
полигона протяженностью более 2000 км, предназначенно-
го для испытания управляемых снарядов дальнего дейст-
вия, было ассигновано 2 млрд, долларов.
С каждым годом растут ассигнования, отпускаемые
конгрессом США на исследовательские работы и произ-
водство управляемых снарядов. По сообщению амери-
канского журнала «Авиейшп Уик» от 26 апреля 1954 г.,
общие расходы США на производство и исследования в
области управляемых снарядов с 1951 по 1955 г. сос-
тавляют 4,7 млрд, долларов, а, по утверждению бюллете-
ня «Интеравиа» от 2 февраля 1954 г., проект бюджета
на 1954/1955 финансовый год предусматривал закупку
управляемых снарядов только для военно-воздушных
сил на сумму 466 251 тысяч долларов.
Эти огромные затраты на создание и совершенствова-
ние управляемых снарядов американская реакционная
печать и отдельные выступающие в ней пропагандисты
третьей мировой войны часто сопровождают домыслами
и запугиванием своего населения мнимой опасностью
нападения со стороны СССР.
Так, известный в Англии конструктор управляемых
снарядов и ракет К. Гэтланд во введении к своей переиз-
данной в 1956 г. и переведенной на русский язык книге
«Развитие управляемых снарядов»* пишет, что «В на-
стоящее время США и Советский Союз имеют атомные
бомбы и средства для доставки их на большие расстоя-
ния. Современные государства в недалеком будущем бу-
дут располагать реактивными бомбардировщиками, ле-
тающими со скоростью звука на высоте 18 км и выше,
реактивными средствами, способными нести в простран-
стве грузы со скоростью в 4—5 раз большей по сравне-
нию со скоростью, достигнутой реактивными самолета-
ми; и если не мероприятия революционного порядка в
* К. Гэтланд. Развитие управляемых снарядов. Москва,
1956 г., Издательство иностранной литературы., стр. 11.
38
деле организации эффективной обороны, начало третьей
мировой войны грозит опустошить большие площади ци-
вилизованного мира».
Причисляя себя к цивилизованному миру, автор ука-
занной книги несколькими строками ниже пишет, что
«Англия может быть не только воздушной базой для на-
несения ударов против объектов на континенте и в самой
России, но она может сыграть роль трамплина для воз-
можного нападения союзников против материка Ев-
ропы».
Небезынтересны соображения К. Гэтланда и по
вопросам военной экономики, связанной с расширением
производства управляемых снарядов. Сопоставляя про-
изводство ракет дальнего действия с производством бом-
бардировщиков, он пишет: «Установлено, что стоимость
производства немецкого самолета-снаряда «Фау-1» со-
ставляла 3000 фунтов стерлингов, а стоимость ракеты
«Фау-2» — от 10 000 до 16 000 фунтов стерлингов. Стои-
мость ракеты «Фау-2» составляет Ve по стоимости и
'/з по трудоемкости в пормочасах, потребных для произ-
водства одного эквивалентного по ударной мощности
бомбардировщика, так что, хотя ракета всегда расходо-
валась за один раз, опа была еще более экономична, чем
бомбардировщик, которому не всегда удавалось осуще-
ствить 4—5 полетов... Ракета «Фау-2» состояла из
30 000 деталей, производившихся па маленьких заводах
и в цехах, разбросанных по всей Германии и оккупиро-
ванным странам, и эти части затем направлялись для
сборки в центральный большой сборочный цех Нордхау-
зен (бывшая соляная шахта с тоннелем, простирающим-
ся на километр под городом, где были размещены сбо-
рочные конвейеры и цехи). Таким образом, ракета могла
быть уничтожена только в процессе транспортировки к
стартовым площадкам.
Выпуск ракет достигал максимально 30 штук в день,
при трудоемкости 3000—7000 человеко-часов на одну ра-
кету. Большинство рабочих, занятых па сборке, были
невольниками из Польши, Чехословакии и СССР, не
имевшими соответствующей квалификации. Поэтому
вначале производилось 3600 ракет в год. Между авгу-
стом 1944 года и февралем 1945 года производство со-
вершенствовалось так быстро, что только за этот период
на стартовые площадки было доставлено около 3000 ра-
39
кет. Немцы пытались довести выпуск до 5000 ракет в
год. Было установлено, что для достижения такого выпу-
ска ракет потребуется ежемесячно 24 000 т стали, 5200 т
алюминия, 477 т меди, 3,2 т серебра и 244 т различных
сплавов.
В дальнейшем потребовалось 6000 строительных ра-
бочих, необходимых для постройки нового сборочного
центра, чтобы можно было принять еще 70 000 новых ра-
бочих для основного производства».
Далее К. Гэтланд указывает в своей книге, что раке-
та экономически и стратегически ставится значительным
оружием, так как «наиболее дорогой, имеющийся в эк-
сплуатации сегодня американский межконтинентальный
бомбардировщик В-36 стоит 1,5 миллиона фунтов стер-
лингов и требует более чем половины этой суммы для
замены различных деталей (главным образом моторов)
в течение одного года эксплуатации.
Высокая стоимость производства бомбардировщика
дополняется стоимостью эксплуатации, в то время как
управляемый снаряд совершает всего лишь один полет
и в периодической эксплуатации не нуждается. Ракета
«Фау-2» проще в изготовлении и требует менее квали-
фицированной рабочей силы и минимума прецизионной
техники».
КЛАССИФИКАЦИЯ УПРАВЛЯЕМОГО РЕАКТИВНОГО
ОРУЖИЯ
Широкий размах работы в области реактивного во-
оружения в США привел к большому разнообразию ти-
пов снарядов как по назначению, так и по конструкциям.
Для того чтобы легче было разобраться в большом
количестве разнообразных управляемых снарядов, бомб
и торпед, составим классификацию управляемого реак-
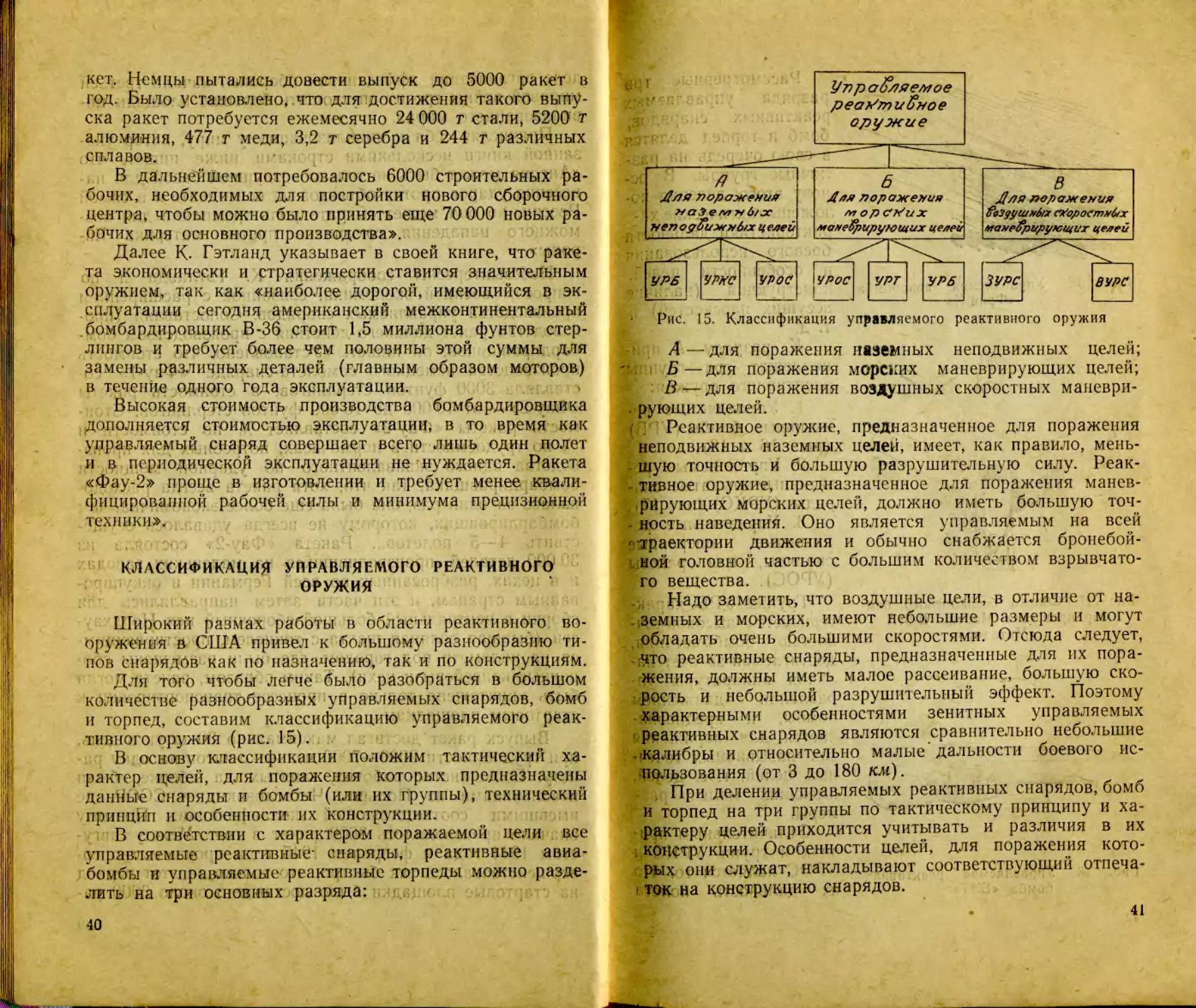
тивного оружия (рис. 15).
В основу классификации положим тактический ха-
рактер целей, для поражения которых предназначены
данные снаряды и бомбы (или их группы), технический
принцип и особенности их конструкции.
В соответствии с характером поражаемой цели все
управляемые реактивные’ снаряды, реактивные авиа-
бомбы и управляемые реактивные торпеды можно разде-
лить на три основных разряда:
40
Рис. 15. Классификация управляемого реактивного оружия
А—для поражения наземных неподвижных целей;
Б—для поражения морских маневрирующих целей;
В—для поражения воздушных скоростных маневри-
. рующих целей.
< } Реактивное оружие, предназначенное для поражения
неподвижных наземных целей, имеет, как правило, мень-
щую точность и большую разрушительную силу. Реак-
• тивное оружие, предназначенное для поражения манев-
рирующих морских целей, должно иметь большую точ-
ность наведения. Оно является управляемым на всей
траектории движения и обычно снабжается бронебой-
ной головной частью с большим количеством взрывчато-
го вещества.
Надо заметить, что воздушные цели, в отличие от на-
земных и морских, имеют небольшие размеры и могут
обладать очень большими скоростями. Отсюда следует,
что реактивные снаряды, предназначенные для их пора-
жения, должны иметь малое рассеивание, большую ско-
рость и небольшой разрушительный эффект. Поэтому
характерными особенностями зенитных управляемых
реактивных снарядов являются сравнительно небольшие
- калибры и относительно малые дальности боевого ис-
пользования (от 3 до 180 км).
При делении управляемых реактивных снарядов, бомб
и торпед на три группы по тактическому принципу и ха-
рактеру целей приходится учитывать и различия в их
конструкции. Особенности целей, для поражения кото-
рых они служат, накладывают соответствующий отпеча-
ток на конструкцию снарядов.
41
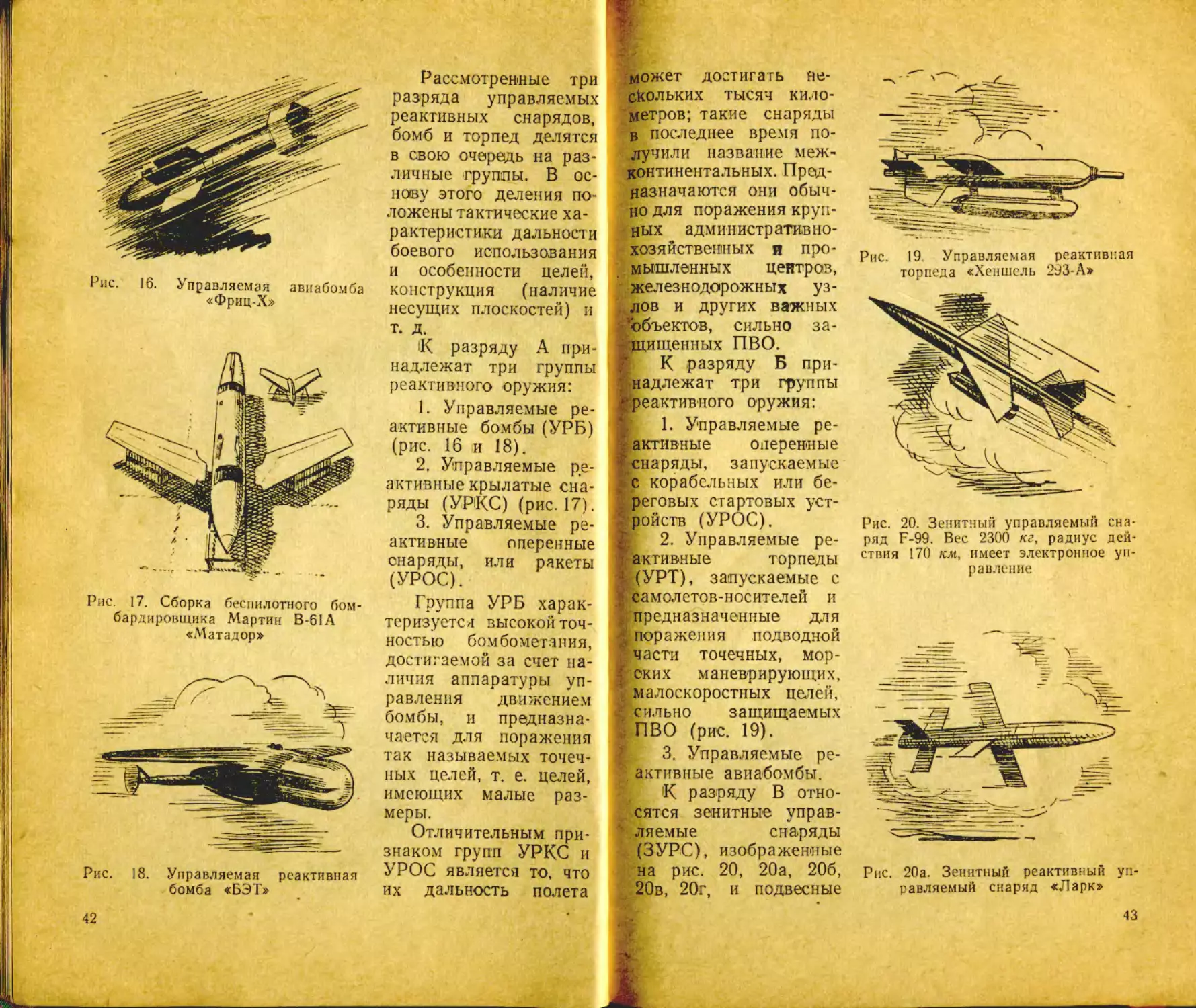
Рис. 16. Управляемая авиабомба
«Фриц-Х»
Рис. 17. Сборка беспилотного бом-
бардировщика Мартин В-61 Л
«.Матадор»
Рис. 18. Управляемая реактивная
бомба «БЭТ»
Рассмотренные три
разряда управляемых
реактивных снарядов,
бомб и торпед делятся
в свою очередь на раз-
личные группы. В ос-
нову этого деления по-
ложены тактические ха-
рактеристики дальности
боевого использования
и особенности целей,
конструкция (наличие
несущих плоскостей) и
т. д.
К разряду А при-
надлежат три группы
реактивного оружия:
1. Управляемые ре-
активные бомбы (УРБ)
(рис. 16 и 18).
2. Управляемые ре-
активные крылатые сна-
ряды (УРКС) (рис. 17).
3. Управляемые ре-
активные оперенные
снаряды, или ракеты
(УРОС).
Группа УРБ харак-
теризуетс/i высокой точ-
ностью бомбометания,
достигаемой за счет на-
личия аппаратуры уп-
равления движением
бомбы, и предназна-
чается для поражения
так называемых точеч-
ных целей, т. е. целей,
имеющих малые раз-
меры.
Отличительным при-
знаком групп УРКС и
УРОС является то, что
их дальность полета
42
может достигать не-
скольких тысяч кило-
метров; такие снаряды
в последнее время по-
лучили название меж-
континентальных. Пред-
назначаются они обыч-
но для поражения круп-
ных административно-
хозяйственных я про-
мышленных цеятроз,
железнодорожных уз-
лов и других важных
'объектов, сильно за-
-щищенных ПВО.
К разряду Б при-
надлежат три группы
^реактивного оружия:
1. Управляемые ре-
активные оперенные
«снаряды, запускаемые
с корабельных или бе-
реговых стартовых уст-
Зройств (УРОС).
2. Управляемые ре-
• активные торпеды
1 (УРТ), запускаемые с
• самолетов-носителей и
Е предназначенные для
£ поражения подводной
части точечных, мор-
( ских маневрирующих,
’ малоскоростных целей,
сильно защищаемых
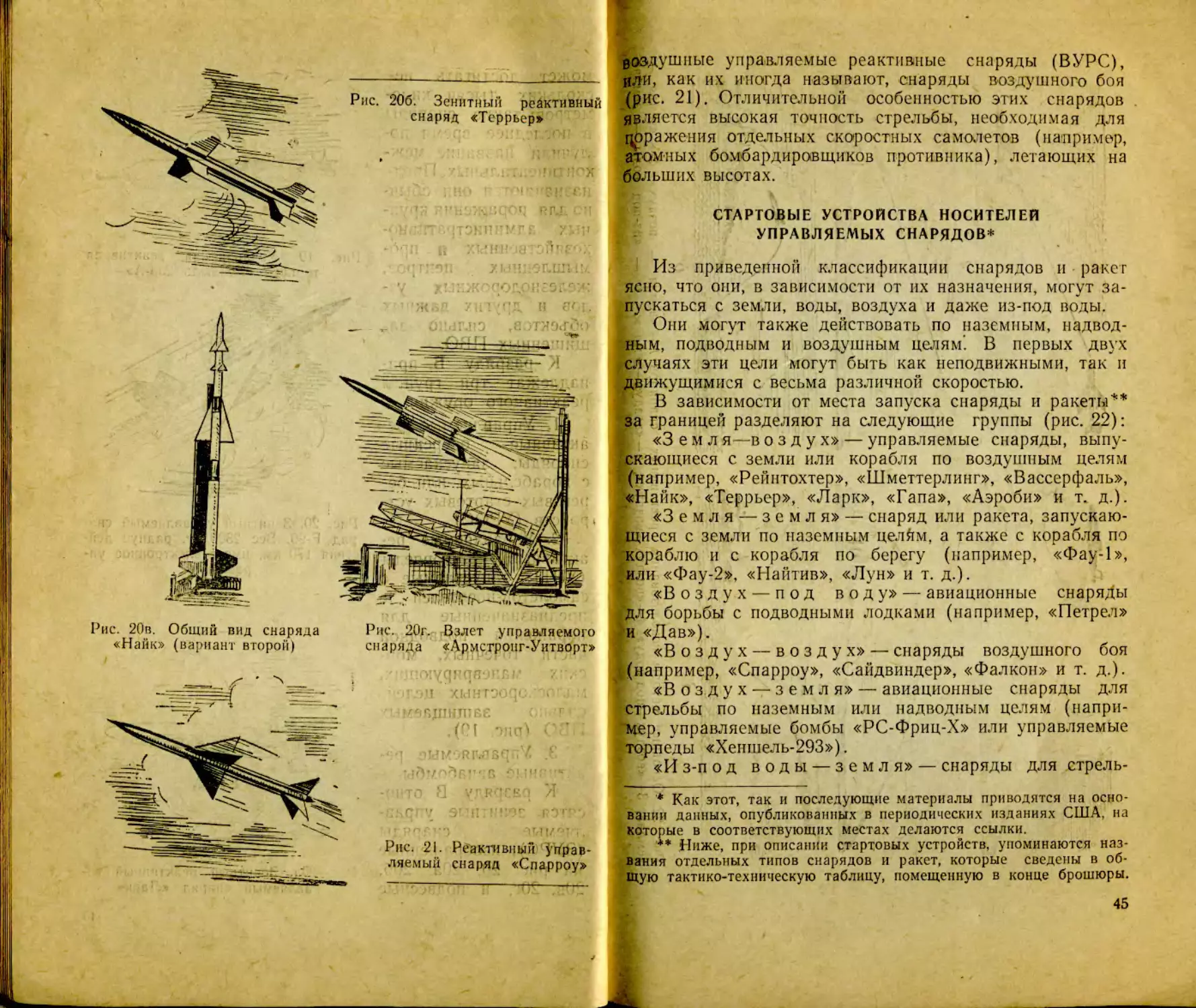
ПВО (рис. 19).
3. Управляемые ре-
активные авиабомбы.
К разряду В отно-
сятся зенитные управ-
ляемые снаряды
(ЗУРС), изображенные
на рис. 20, 20а, 206,
20в, 20г, и подвесные
Рис. 19. Управляемая реактивная
торпеда «Хеншель 293-А»
Рис. 20. Зенитный управляемый сна-
ряд F-99. Вес 2300 кг, радиус дей-
ствия 170 км, имеет электронное уп-
равление
Рис. 20а. Зенитный реактивный уп
равляемый снаряд «Ларк»
43
воздушные управляемые реактивные снаряды (ВУРС),
или, как их иногда называют, снаряды воздушного боя
(рис. 21). Отличительной особенностью этих снарядов
является высокая точность стрельбы, необходимая для
црражения отдельных скоростных самолетов (например,
атомных бомбардировщиков противника), летающих на
больших высотах.
СТАРТОВЫЕ УСТРОЙСТВА НОСИТЕЛЕЙ
УПРАВЛЯЕМЫХ СНАРЯДОВ*
Из приведенной классификации снарядов и ракет
ясно, что они, в зависимости от их назначения, могут за-
пускаться с земли, воды, воздуха и даже из-под воды.
Они могут также действовать по наземным, надвод-
ным, подводным и воздушным целям'. В первых двух
случаях эти цели могут быть как неподвижными, так и
движущимися с весьма различной скоростью.
В зависимости от места запуска снаряды и ракеты**
за границей разделяют на следующие группы (рис. 22):
«3 е м л я—в оз дух» — управляемые снаряды, выпу-
скающиеся с земли или корабля по воздушным целям
(например, «Рейптохтер», «Шметтерлинг», «Вассерфаль»,
«Найк», «Террьер», «Ларк», «Гапа», «Аэроби» и т. д.).
«Земля — з е м л я» — снаряд или ракета, запускаю-
щиеся с земли по наземным целйм, а также с корабля по
кораблю и с корабля по берегу (например, «Фау-1»,
или «Фау-2», «Найтив», «Лун» и т. д.).
«Воздух — под воду» — авиационные снаряды
для борьбы с подводными лодками (например, «Петрел»
и «Дав»).
«Воздух — воздух» — снаряды воздушного боя
(например, «Спарроу», «Сайдвиндер», «Фалкон» и т. д.).
«Воздух —земля»— авиационные снаряды для
стрельбы по наземным или надводным целям (напри-
мер, управляемые бомбы «РС-Фриц-Х» или управляемые
торпеды «Хепшель-293»).
«Из-под воды — з е м л я» — снаряды для стрель-
* Как этот, так и последующие материалы приводятся на осно-
вании данных, опубликованных в периодических изданиях США, на
которые в соответствующих местах делаются ссылки.
** Ниже, при описании стартовых устройств, упоминаются наз-
вания отдельных типов снарядов и ракет, которые сведены в об-
щую тактико-техническую таблицу, помещенную в конце брошюры.
45
бы с подводных лодок по берегу. Такие снаряды имеют
атомные заряды.
Естественно, что для всех этих типов снарядов стар-
товые устройства одинаковыми быть не могут.
Запуск большинства ракет или снарядов производит-
ся с помощью стартовых ускорителей. В иностранной пе-
чати ускорители часто называются бустерами.
Что же представляют собой стартовые ускорители?
Чаще всего это — пороховая или жидкостная ракета
(одна или несколько), которые подвешиваются к снаря-
. ду и начинают действовать до того, как двигатель успел
создать ракете полную скорость.
Таким образом, их назначение — обеспечить ракете
8 или снаряду начальную скорость, достаточную для ак-
£ тивного действия аэродинамических рулей снаряда в на-
I чале его полета. Как только снаряд начнет слушаться
| рулей (а это произойдет при определенном давлении на
рних встречного потока воздуха), стартовые ускорители
1уже не нужны.
Выполнивший свое назначение ускоритель сбрасы-
| вается, и снаряд продолжает иолет под действием оспов-
| ного двигателя.
Запуск каждой ракеты или снаряда сопровождается
К весьма сильным факелом огня и дыма, вылетающим из
. сопла двигателя. Все это требует соответствующей
г прочности любого стартового устройства и достаточной
площади для него.
Сделав эти предварительные замечания, перейдем к
| характеристике отдельных типов стартовых устройств,
| с которых запускаются управляемые снаряды.
По степени сложности их можно разделить на стар-
ft товые устройства, имеющие постоянный угол возвышения,
?, и устройства с переменным углом. Если снаряд или ра-
. кета предназначены для стрельбы по площадям, притом
на большие расстояния, то достаточно иметь постоянный
ВУгол возвышения, который для ракет (например, «Фау-2»)
; обычно составляет 90 градусов к горизонту, т. е. ракеты
имеют так называемый вертикальный старт.
С другой стороны, если снаряд имеет незначительную
скорость (например, «Фау-1» или «Лун»), то для него
устанавливается также постоянный угол возвышения
очень небольшой величины (7—12 градусов).
Совсем другое дело, если снаряды или ракеты имеют
47
большую скорость, действуют на относительно близких
расстояниях (например, ракетные зенитные установки
«Найк» или «Террьер»), да еще по движущимся целям.
При запуске таких снарядов без переменного угла
возвышения стартового устройства не обойтись: ведь
цели могут находиться на различном расстоянии от места
старта управляемого снаряда и маневрировать с боль-
шой скоростью. Такие установки имеют более сложную
конструкцию.
На сложность конструкции, независимо от ее типа
(постоянный или переменный угол возвышения), влияет
также и се местоположение. Если стартовая установка
расположена на земле, то площадь се размещения и ее
вес являются обычно неограниченными. Легче можно
осуществить и конструкции необходимой прочности (на-
пример, создать железобетонные наклонные стартовые
дорожки). Если же стартовая установка проектируется
на корабле, то ее вес и занимаемая ею площадь должны
быть минимальными. Естественно, что конструкция здесь
будет гораздо сложнее, тем более, что в некоторых слу-
чаях стрельба ракетами (например, зенитными) должна
учитывать условия качки.
Еще сложнее дело обстоит, когда речь идет о старто-
вых устройствах, расположенных на подводной лодке и
Рис. 23. Управляемый снаряд «Регулус» па передвижной пусковой
установке, находящейся на взлетной палубе авианосца
48
Рис. 24. Подводная лодка — носитель управляемых снарядов
стреляющих из подводного положения. Здесь остаются
те же требования, что и для надводного корабля, но еще
более жесткие, как и вообще для подводных лодок.
К тому же стрельба ракетами из-под воды выдвигает
ряд специфических условий и требует более сложной
конструкции стартового устройства.
Относительно простыми являются стартовые устрой-
ства на самолетах. Там снаряды обычно подвешиваются
под крыльями. Стрельба сводится к тому, что снаряд,
''имея начальную скорость самолета-носителя, сбрасывает-
ся с подвешивающего устройства, причем одновременно
с помощью электрической искры производится запуск
его двигателя.
Выше, при описании самолета-снаряда «Фау-1», мы
сказали несколько слов о стартовом устройстве и прпве-
ли его фотографию.
I Рис. 25. Запуск самолета-снаряда «Луп» с борта подводной лодки
«Карбонеро»
4 Зак. 1115
49
Рис. 26. Управляемый самолет-сна-
ряд В-61 «Матадор»
Стартовое устройст-
во «Фау-2» является
довольно простым.
«Фау-2» предназначена
для стрельбы на боль-
шие расстояния по
площадям, не имеет ус-
корителей и запускает-
ся вертикально, причем
старт ее может быть
произведен как с зем-
ли, так и с корабля.
Перевозилась дально-
бойная ракета «Фау-2»
на специальной длин-
ной колесной раме
(см. рис. 11). Эта рама была связана с электромотора-
ми, с помощью которых она вместе с ракетой поднима-
лась в вертикальное положение и устанавливалась почти
под углом 90 градусов на простой пусковой стол разме-
ром 2X2 л, после чего крепление снималось и начина-
лась заправка горючим. На пусковом столе под соплом
реактивного двигателя ракеты устанавливалось сегнерово
колесо, состоящее из пороховых шашек, которые, как
указывалось ранее, воспламеняли топливо в камере сго-
рания реактивного двигателя ракеты. Через 6—8 сек. по-
сле воспламенения топлива двигатель создавал реактив-
ную силу (тягу в 26 т), под действием которой ракета
отрывалась от земли,
быстро набирая высо-
ту. Эта реактивная си-
ла эквивалентна тяго-
вому усилию пяти же-
лезнодорожных экс-
прессов.
Для иллюстрации
вышеизложенного при-
ведем ряд фотографий
существующих старто-
вых устройств и их но-
сителей — надводных
кораблей, подводных
лодок, самолетов.
Рис. 27. Зенитный снаряд «Эрликон»
50
Рис. 28. Четырехснарядная пусковая
установка для снарядов «Найк»
ограждения рубки был сооружен
Рис. 29. Палубный реактивный ист-
ребитель «Скайнайт»
На рис. 23 показа-
1 на часть взлетной па-
лубы американского тя-
желого авианосца «Ми-
дуэй» с расположенной
на ней передвижной
пусковой установкой
I для запуска управляе-
мых снарядов «Регу-
В лус».
На рис. 24 показа-
на подводная лодка
:«Карбонеро» — нсси-
тель управляемых сна-
Е рядов, переоборудовап-
Е- ная из лодки типа «Ба-
| лао». На лодке позади
S водонепроницаемый ангар для размещения в нем одного-
ft двух управляемых снарядов типа «Лун» или «Регулус».
к Здесь же были установлены аппаратура наведения и
1 стартовое устройство для запуска снарядов.
Момент выстрела самолета-снаряда «Лун» с борта
г подводной лодки «Карбонеро» показан на рис. 25.
Выстрел с передвижной наземной стартовой установ-
I ки управляемого самолета-снаряда В-61 «Матадор» за-
| печатлен на рис. 26, на котором отчетливо видна работа
| двух пороховых ускорителей, разгоняющих снаряд на
' начальном участке его полета, пока еще не включился
к в работу основной турбореактивный двигатель.
На рис. 27 изобра-
1 жена установка зенит-
I ного снаряда «Эрли-
I кон» на его стартовом
t устройстве во время ис-
I пытаний, проводивших-
| ся в Швейцарских Аль-
Е пах при сильном моро-
* зе. Снаряд управлялся с
L помощью радиолокаци-
г онной установки.
Самая распростра-
s ненная в вооруженных
г силах США четырёх-
s' 4*
51
I
снарядная пусковая установка для зенитных управ-
ляемых снарядов «Найк» изображена на рис. 28.
На нем отчетливо видно, как один из снарядов батареи
подготовлен к старту и ждет только момента запуска его
стартовых ускорителей, чтобы огненной стрелой взмыть
в небо навстречу высоко летящему бомбардировщику-
мишени. Остальные три снаряда покоятся на своих местах
в ожидании очереди на старт.
На рис. 29 показан палубный реактивный истреби-
тель «Скайпайт» с подвешенными реактивными управ-
ляемыми снарядами воздушного боя «Спарроу». Такой
снаряд после выпуска его из-под крыла самолета сам
себя наводит на самолет противника с помощью аппара-
туры самонаведения.
КЛАССИФИКАЦИЯ СИСТЕМ ПРИБОРОВ УПРАВЛЕНИЯ
СНАРЯДАМИ И РАКЕТАМИ
Мы рассказали о нескольких системах приборов уп-
равления полетом, принципиально отличающихся друг
от друга. Посмотрим теперь, как можно классифициро-
вать реактивное оружие по принципу управления.
Рис. 30. «Командная система» управления снарядами
52
Рис. 31. «Оседланный луч»
В настоящее время получили развитие и практическое
применение три принципа управления: 1) автономное
управление, 2) телеуправление и 3) самонаведение.
1) Если курс и точка пикирования управляемого сна-
ряда задаются программой до начала его полета, а в по-
лете он не связан управлением с местом старта, то такая
система приборов управления называется программной,
а снаряд — автономно управляемым. В этом случае все
приборы управления находятся на самом снаряде (см.
рис. 8) и автоматически управляют его полетом так, что-
бы он все время находился на заданном положении от-
носительно земной поверхности.
2) Следующая система, так называемая система при-
боров телеуправления, заключается в том, что снаряд
все время получает сигналы, руководящие его полетом
с места запуска. Эта связь может осуществляться при по-
мощи команд, передаваемых прибором-вычислителем
(«командная система»), как .это показано на рис. 30.
Другой вид телеуправления, применяемый в основном
для зенитных установок, заключается в том, что снаряд
следует в узком луче равносигнальной зоны радиолока-
Рис. 32. Система приборов самонаведения полуакгивного типа
Рис. 33. Навигационная система управления
тора, выслеживающего воздушную цель («лучевая си-
стема» или «оседланный луч»), что изображено на
рис. 31. Дистанция стрельбы в этом случае ограничена
радиусом действия луча. Такая система применяется
только при стрельбе по целям, которые расположены
сравнительно недалеко.
3) Одной из наиболее широко применяющихся си-
стем является также самонаводящаяся система, принцип
действия которой заключается в том, что снаряд ищет
7 цель с помощью приборов, находящихся в нем самом.
Чувствительный элемент этой системы (координатор
"цели) может реагировать на самые различные физиче-
ские явления: радиоволны, тепловые (инфракрасные)
вручи, световые лучи, звук и пр. Из этого следует, что
’снаряд пойдет на цель только тогда, когда он окажется
в зоне чувствительности координатора цели, установлен-
ишого на снаряде.
На рис. 32 показана система приборов самонаведения
Вполуактивного типа.
Ш Интерес представляет сравнительно новая система
-^управления, называемая навигационной (рис. 33). Она
-^’заключается в том, что полет снаряда по определенному
курсу осуществляется при помощи различных ориенти-
йров, например небесных светил (астронавигационная си-
стема). В этой системе за положением светил автомати-
вчески наблюдают астрономические приборы, установлен-
|ные на снаряде. Приборы управления также находятся
?на снаряде, как и в системах приборов автономной и са-
монаведения. Поэтому указанную систему относят к ав-
Гтономному управлению (как одну из его разновидно-
Iстей).
Чаще всего применяются комбинированные системы,
' которые, как показывает само название, представляют
собой комбинацию двух или нескольких описанных выше
систем приборов управления. Например, для зенитных
снарядов применяют систему телеуправления в комби-
' нации с системой самонаведения. Первая из них доводит
снаряд до вероятного местонахождения цели, а вторая с
помощью чувствительных элементов и других приборов
непосредственно наводит снаряд на цель. Момент начала
процесса самонаведения, как ясно из предыдущего, опре-
деляется зоной чувствительности головки самонаведения
снаряда.
К комбинированной нужно отнести также и существо-
вавшую систему управления на ракете «Фау-2», на кото-
рой употреблялась система телеуправления в сочетании с
программной (автономное управление).
ПРИНЦИПЫ РАБОТЫ СИСТЕМ ПРИБОРОВ УПРАВЛЕНИЯ
Теперь рассмотрим вкратце, в чем заключается прин-
цип работы каждой из этих систем приборов управления
и какими основными приборами это управление дости-
гается.
О программной системе, т. е. о простейшей системе
приборов автономного управления, мы уже говорили вы-
ше. Напомним, что автопилот с помощью гироскопиче-
ских устройств в этом случае удерживает снаряд на кур-
се, высотомер — на определенной высоте, измеритель ус-
корения следит за боковыми перемещениями и, наконец,
воздушная вертушка совместно со счетчиком определяют
точку пикирования.
Ошибки определения точки пикирования и неточность
расчета программы при автономном управлении не мо-
гут быть подправлены в процессе полета и приводят к
большому разбросу снарядов. Поэтому на больших даль-
ностях стрельбы (несколько сот километров) с помощью
систем приборов автономного управления трудно попасть
лаже в площадь радиусом 8—10 км.
Однако положительные свойства снарядов с автоном-
ным управлением — помехоустойчивость и дешевизна, о
чем говорилось выше, заставили искать пути их совер-
шенствования.
И такие пути нашлись. Один из них (особенно эффек-
тивный) — это применение астронавигационных методов,
позволяющих определять текущее положение снаряда
над земной поверхностью и точно измерять его отклонение
от заданной траектории.
Принцип устройства астронавигационной системы уп-
равления заключается в следующем. На снаряде имеются
соответствующие астрономические приборы, автоматиче-
ски определяющие точное направление от снаряда на
две какие-либо яркие звезды, по которым строго ориенти-
рован курс полета снаряда.
Если снаряд под влиянием какой-либо причины смес-
тится с заданной ему траектории полета, то отклонение
KR
с помощью электронных приборов автоматически вычис-
ляется и в соответствии с этим па рулевые машинки сна-
ряда поступает сигнал, возвращающий его на заданную
траекторию. В момент достижения точки пикирования,
определяемой не вертушкой, как это имело место у
«Фау-1», а астроориентатором, с учетом местоположения
относительно земной поверхности, снаряд переводится в
пикирование на цель.
Таким образом, снаряд с астронавигационной систе-
мой управления сам находит себе дорогу к цели, сам про-
кладывает и рассчитывает свой курс, ориентируясь по
заранее выбранным звездам.
Главное преимущество астронавигационных систем
управления перед простейшими гироскопическими авто-
номными системами управления состоит в том, что они
обладают большей точностью и, кроме того, точность на-
ведения снарядов с их помощью не зависит от дальности
стрельбы. Далее, астронавигационная система приборов
управления способна автоматически исправлять ошибки
в определении точки пикирования снаряда.
Но есть одна отрицательная сторона всех автономных
систем управления, имеющая отношение и к астронавига-
ционной: они никак не реагируют па изменение положе-
ния цели. Другими словами, если цель переместится за
время полета снаряда, то а-втономно управляемый снаряд
не попадет в нее. Это свойство и определяет их приме-
нение. Поэтому автономно управляемые снаряды и при-
меняют только по неподвижным или мало подвижным
целям, которые с момента выпуска снаряда до момента
встречи с ним не могут переместиться па расстояние, пре-
вышающее радиус поражаемого пространства.
Допустим, что па расстояние 100 км произведен за-
пуск воздушной автономно управляемой торпеды по тя-
желому авианосцу, имеющему скорость хода 32 узла, что
соответствует 16 м в секунду*. Если принять скорость по-
лета снаряда «Раскал» равной 1200 м'сек, то для полета
снаряда до цели на расстояние 100 000 м потребуется 83
сек. За это время цель — в нашем случае тяжелый авиа-
носец — переместится с места, которое он занимал в мо-
мент запуска снаряда, на 1328 м. Очевидно, что при мень-
шей скорости полета снаряда авианосец успел бы еще
больше переместиться.
* Один узел соответствует скорости 0,51 mJ сек.
R7
Приняв во внимание, что тяжелый авианосец может
получить тяжелое повреждение только при прямом попа-
дании торпеды в его корпус, можно заключить, что он ос-
танется невредим. Автономно управляемая торпеда, при
самом точном расчете ее траектории и точки пикирования,
пройдет более чем на километр от авианосца. И вот, что-
бы этого не произошло, т. е. чтобы эта торпеда, выпущен-
ная с расстояния тех же 100 км, наверняка попала в авиа-
носец, дополнительно к ее системе автономного управле-
ния применяют еще и систему самонаведения. Если
стрельба производится ночью, то, очевидно, может быть
применена в качестве этой дополнительной системы теп-
ловая головка самонаведения, с принципом работы кото-
рой мы познакомимся ниже.
Перейдем к системе приборов телеуправления. Ее за-
дачей является доведение снаряда или ракеты до цели.
Вполне понятно, что оператор, контролирующий полет
снаряда, должен все время видеть цель. На небольших
расстояниях для этого достаточно невооруженного глаза
или оптических приборов (бинокль, дальномер и др.).
В этом случае применяется простейший метод телеуп-
равления, т. е. метод совмещения или метод трех точек.
Заключается он в том, что снаряд при наведении непре-
рывно удерживается на прямой, соединяющей командный
пункт с целью. Оператор, находящийся на командном
пункте, все время видит снаряд как бы совмещенным
с целью.
Для сравнения можно сказать, что это подобно прице-
ливанию из винтовки по движущейся мишени. Прорезь
прицела можно сравнить с командным пунктом, мушку—
с управляемым снарядом, а подвижную мишень—с
целью.
Но управляемые снаряды посылаются на более даль-
ние расстояния, порядка многих десятков и даже сотен
километров. Как же в этом случае оператор может все
время видеть цель? Здесь приходит на помощь замеча-
тельное устройство, называющееся радиолокатором. Это-
му изобретению всего 12—15 лет от роду, хотя появление
его предсказали гениальный русский ученый А. С. Попов
и его помощник Рыбкин еще в 1897 г. при производстве
опытов по увеличению дальности радиосвязи. Ими было
замечено очень важное обстоятельство: когда между дву-
мя кораблями, державшими связь по радио, проходило
58
третье судно, связь обрывалась. Радиоволны, посланные
одним из кораблей, встретив постороннее судно, отража-
лись обратно. Отражение радиоволн от кораблей, а также
и от других объектов стало с успехом использоваться в
радиолокации.
Радиолокатор состс пт из ряда радиотехнических при-
боров, устройство которых является довольно сложным.
Идея же его заключается в том, что в определенном на-
правлении его антенной посылаются в пространство ра-
диоволны (так называемые радиоимпульсы), а затем, че-
рез некоторый промежуток времени (паузу) от встречен-
ных на их пути препятствий той же антенной принимают-
ся отражения в виде радиоэха. По времени же между по-
сылкой и возвращением радиоимпульса судят о расстоя-
нии до предметов, так как скорость распространения ра-
диоволн является постоянной и известной (300 000 км/сек).
С помощью радиолокатора определяют расстояние
до предметов и направление па них. Предмет — корабль,
самолет, ракета — может двигаться с большой скоростью.
Радиолокатор своим лучом следит за его движением, не-
прерывно и точно определяя изменяющиеся расстояния
и направления.
Дальность действия радиолокатора очень велика. Уда-
лось даже получить радиоэхо от луны. Однако на земле
и на море дальность его действия ограничивается нали-
чием на пути препятствий (горы, высокие сооружения, на-
конец сама кривизна земной поверхности).
Из этого следует, что радиолокатор будет действовать
тем дальше, чем выше он расположен над земной поверх-
РрГс 34. Элвктронтолучевая трубка
ностыо. Играют роль также и размеры предмета, от ко-
торого мы хотим получить отражения. Чем больше пред-
мет, тем сильнее будут отраженные волны. Разумеется, в
связи с этим немаловажное значение имеет и чувстви-
тельность самой аппаратуры.
Так вот, это устройство и является «глазами» операто-
ра, руководящего полетом ракеты.
Итак, оператор «увидел» цель. Хотя мы поставили
слово увидел в кавычки, он действительно видит, но, ко-
нечно, не саму цель, а ее изображение па экране элект-
роннолучевой трубки, такой же как в телевизоре
(рис. 34). Он может даже отличать цели, неодинаковые по
размерам, например линкор от эсминца. Поймав цель,
оператор должен все время держать ее в перекрестии ни-
тей этой трубки.
Но это — только половина задачи. Производится вы-
стрел реактивным снарядом (или ракетой), причем он по-
падает в зону излучения другого радиолокатора, ан-
тенна которого расположена па одной раме с первой. Оба
радиолокатора находятся как бы в одной точке и одновре-
менно направлены на цель. Поэтому изображение ракеты
появится на том же экране, на котором оператор уже дер-
жит цель в перекрестии нитей. Это изображение на экра-
не может то приближаться к перекрестию нитей, то уда-
ляться от него. Когда изображение ракеты придет в пере-
крестие нитей экрана, то это будет значить, что ракета
идет прямо на цель.
На ракете находится приемное устройство, которое
связано с ее рулевым управлением (см. рис. 30). Опера-
тор может с помощью находящихся па командном пункте
приборов передающей радиоаппаратуры, двигая шарнир-
ную ручку радиоуправления, посылать управляющие
команды: «вверх», «вниз», «вправо», «влево». Команды
принимаются приемником, находящимся на снаряде. При
помощи их оператор изменяет направление полета раке-
ты и в конце концов приводит ее изображение в перекре-
стие нитей. Дальнейшей задачей оператора является
удержание тем же путем изображения снаряда в пере-
крестии нитей электроннолучевой трубки. Тогда цель и
снаряд неизбежно встретятся.
Ниже, при описании процесса стрельбы зенитными уп-
равляемыми снарядами в системе ПВО, мы приведем в
с,п
качестве примера схему (рис. 39), показывающую рабо-
ту системы приборов телеуправления при ведении зенит-
ною огня по бомбардировщику.
Мы описали командную систему приборов телеуправ-
ления.
Другой системой телеуправления является лучевая
(см. рис. 31). В ней также присутствуют радиолокатор,
следящий за целью, радиолокатор, следящий за полетом
ракеты, и приемное устройство на самой ракете, связан-
ное с рулевым управлением. Но оператор команд па ра-
кету не посылает. Его задачей является удержание в
направлении цели узкоиаправленного луча стрельбовой
радиолокационной станции. Приемные же приборы, на-
ходящиеся на ракете, когда она попадает в этот луч,са-
ми автоматически направляют ее на цель по равносиг-
j нальной зоне узкого луча стрельбового радиолокатора.
, Следует заметить, что если целью является самолет, то он
резким маневром может выйти из зоны следящего за ним
iлуча. Это в свою очередь потребует резкого изменения
| направления луча, а следовательно, и снаряда, маневр
которого ограничен. Так цель может обезопасить себя от
поражения управляемым снарядом. Но при очень резком
маневре скоростного самолета летчик может потерять соз-
. пание и даже умереть от разрыва кровеносных сосудов.
Еще лучшие возможности для точного наведения сна-
| ряда на цель на больших дальностях открывает приме-
нение так называемых телевизионных головок наведения.
«Глаз» оператора, следящий за целью, в этом случае как
бы переносится в головную часть снаряда. Происходит
это следующим образом. Установленный на снаряде не-
большой телевизионный передатчик включается с прибли-
жением снаряда к цели и передает на командный пункт
изображения. Когда на экране телевизионного приемника
командного пункта появляется изображение цели, опера-
тор производит точное наведение снаряда на нее, посылая
: командные сигналы. Все было бы хорошо, если бы не сла-
гбая помехозащищенность такой системы приборов управ-
ления, что весьма ограничивает ее применение.
Согласно приведенной нами классификации третьей
системой управления является самонаведение. Выше мы
Говорили о ее принципе, который заключается в том, что
[наводящие приборы, установленные на снаряде, реагиру-
ет на отдельные виды энергии, излучаемые целью. 1 la-
61
пример, если речь идет об электромагнитной энергии, то
ее источником могут быть радиостанции, станции помех,
радиомаяки и т. д. Целью, излучающей тепловую энер-
гию, может быть доменная печь, урановый котел, тепло-
вые цехи крупных предприятий и даже труба движущего-
ся корабля. Источником световой энергии могут быть лю-
бые цели, достаточно контрастно выделяющиеся на фоне
окружающей среды, например горящий ночью маяк, па-
луба корабля на фоне моря, крупные гидросооружения и
т. д. Головка самонаводяшегося снаряда, которая только
воспринимает энергию от цели, называется пассивной.
В отличие от нее, существует активный метод наведе-
ния снаряда на цель. Он основан на том, что некоторые
объекты хотя и не излучают сами электромагнитной энер-
гии, но способны отражать электромагнитные волны го-
раздо интенсивнее, чем окружающие их предметы. Чаще
всего это крупные металлические предметы — железно-
дорожные мосты, большие скопления танков, соединения
кораблей, крыши зданий и пр.
Используется это свойство следующим образом. Летя-
щий снаряд периодически излучает на цель радиоволны,
а затем принимает их отражение, что и позволяет ему с
помощью известных приборов самому наводиться па цель.
Это и есть активный метод наведения.
Следует заметить, что головки самонаведения, незави-
симо от их типа, могут, как говорят, переориентироваться.
Представим себе, что на пути летящего самонаводящсго-
ся снаряда, реагирующего на свет, встретится источник
света, более сильный, чем цель. Тогда наш снаряд от-
клонится в направлении этого источника и в цель не по-
падет. Кроме того, ввиду относительно небольших раз-
меров снарядов размещаемая в них аппаратура само-
наведения обладает ограниченной дальностью действия.
Головки самонаведения, реагирующие на электромаг-
нитные волны (так называемые радиолокационные),
можно использовать независимо от погоды и времени су-
ток. Что же касается световых и тепловых, то на их дей-
ствие, естественно, оказывают влияние метеорологические
факторы и ряд других обстоятельств.
Необходимо упомянуть еще раз о телевизионном теле-
управлении. Эта система является как бы промежуточной
между телеуправлением и самонаведением. Головка сна-
ряда с помощью телевизионной аппаратуры позволяет
62
«видеть» цель, и не только видеть, но и передавать ее
изображение на командный пункт. Оператор все время
следит за взаимным расположением снаряда и цели и при
помощи уже описанной системы телеуправления направ-
ляет полет ракеты.
О недостатках системы самонаведения мы уже упоми-
нали. Указанные системы сильно подвержены воздейст-
вию искусственных и естественных помех, не обладают до-
статочной дальностью действия и поэтому почти всегда
применяются в комбинации с другими системами управ-
ления. Например, применяется комбинация автономного
телеуправления на основной части пути снаряда с
самонаведением на конечном участке, вблизи от цели.
Современный уровень развития автоматики и радио-
техники дает возможность обеспечить надежную и безот-
казную работу систем приборов управления, основанных
на любом из изложенных принципов. Поэтому не подле-
жит сомнению, что в будущей войне найдут применение
все перечисленные принципы управления полетами сна-
рядов.
ПРИНЦИП ДЕЙСТВИЯ ТЕПЛОВОЙ головки
САМОНАВЕДЕНИЯ
Принцип действия тепловой головки самонаведения,
состоящей из объектива, двух дисков с растрами, конден-
сора, усилителя, четырех фильтров и релейного блока,
заключается в следующем (рис. 35).
Инфракрасное излучение какой-либо цели (например,
горячей трубы корабля) воспринимается объективом го-
ловки самонаведения. Объектив 1 рисует изображение це-
ли на плоскости растров, находящихся на вращающихся
дисках 2. На эти диски, являющиеся основным управляю-
щим органом головки самонаведения, нанесены по два
растра* из поперечно чередующихся прозрачных (а) и не-
прозрачных (б) секторов.
В зависимости от того, на какой растр попадает изо-
бражение цели (на растрах 1—диска «вправо-влево»,
на растрах 2—диска «вверх-вниз»), ее излучение будет
модулироваться вращающимися дисками с той или иной
частотой. Появление этих частотных сигналов характери-
зует отклонение продольной оси снаряда относительно
* Растром называются непрозрачные штрихи, нанесенные с
определенной частотой на диске.
63
Рис. 35. Схема действия головки самонаведения
цели вправо, влево, вверх или вниз. Модулированное из-
лучение, прошедшее сквозь вращающиеся диски, соби-
рается конденсором 3 на фотоэлемент 4. Ток, даваемый
фотоэлементом, усиливается в усилителе 5, на выходе ко-
торого имеются фильтры 6, пропускающие только то на-
пряжение, которое соответствует частотам модуляции
светового потока цели (/i, /,). Частота же моду-
ляции этого светового потока соответствует направлению
отклонения оптической оси снаряда от светового потока
цели. Каждый фильтр в свою очередь связан с реле, уп-
равляющим работой мотора рулевой машинки.
Если с фотоэлемента на усилитель попадает ток опре-
деленной частоты, то срабатывает реле от данного фильт-
ра, настроенного на частоты, находящиеся в пределах
полосы пропускания только этого фильтра, и приведет в
действие соответствующий мотор рулевой машинки, кото-
рая, воздействуя, например, на руль глубины, отклоняет
ракету либо вверх, либо вниз.
Ввиду того, что продольная ось снаряда совмещена с
оптической осью головки самонаведения или параллельна
ей, снаряд всегда будет направлен на цель. Его головка
самонаведения стремится принять такое положение, что-
бы проекция цели всегда находилась точно на оптической
оси. В этом случае на усилитель поступят равные напря-
жения всех выбранных частот, рулевые машинки останут-
64
ся в Покое и снаряд будет следовать по неизменному кур-
су строго в направлении на цель. Как только цель вновь
сместится по отношению к оптической оси головки само-
наведения, проекция ее изображения отклонится, вызывая
неравенство напряжений. Это повлечет за собой соответ-
ствующее срабатывание приборов управления, которые
вновь приведут реактивный снаряд на правильный курс.
Таким образом, цель, попавшая в угол обзора голов-
ки самонаведения, установленной на снаряде (если ско-
рость и маневренность последнего выше скорости и ма-
невренности цели), всегда будет находиться на оптиче-
ской оси головки. И этим обеспечивается встреча снаря-
да с целью.
ОПИСАНИЕ СИСТЕМЫ РАБОТЫ ПРИБОРОВ
САМОНАВЕДЕНИЯ
В
соответствии с ранее рассмотренной схемой работы
|головки самонаведения проследим ее работу, заключаю-
цуюся в анализе движения цели по двум координатным
(осям (см. рис. 36).
Рнс. 36. Схема работы головки самонаведения
Зак. 1115
65
Йа выходные фильтры усилителя попадают напряже-
ния четырех частот (/i, /2, /з, Л), соответствующие необхо-
димости поворота рулен снаряда вправо, влево, вверх,
вниз. На выходе каждого фильтра включены обмотки ре-
ле Pi, Рг, Рз и Р4.
Предположим, что в момент, когда кулачок 1 коммута-
тора 3 замыкает цепь тангажа (т. е. подъема снаряда
вверх), на фильтры поступает напряжение частоты /з, со-
ответствующее отклонению оптической оси головки само-
наведения вверх. Когда сработает реле Р», язычок К зам-
кнет нижний контакт, отчего реле Р& тоже сработает, зам-
кнув в свою очередь контакт К», и тем самым включит
цепь рулевой машинки руля высоты для отработки
команды «вниз».
Если положение цели по отношению к оптической оси
головки таково, что при включении контактов кулачка 2,
замыкающих цепь руля поворота, на фильтры поступает
частота /\, соответствующая отклонению оптической оси
головки самонаведения влево, то включится реле Р\, язы-
чок С замкнет нижний контакт и сработает реле Рв,
замкнув в свою очередь контакт Л'б, и тем самым вклю-
чит цепь рулевой машинки для поворота руля вправо.
Аналогично схема будет действовать и при получении
других команд.
На том же принципе построены и навигационные, в
частности, астронавигационные системы управления.
Только ими фиксируется, как вы уже знаете, не тепловое
излучение трубы корабля, а, например, световое излуче-
ние какой-либо яркой звезды. Напомним, что полет сна-
ряда в этом случае определится углом между направле-
нием светового луча и каким-либо географическим на-
правлением (север, юг и т. д.).
ПРИНЦИП УПРАВЛЕНИЯ ПОЛЕТОМ И НАВЕДЕНИЯ НА
ЦЕЛЬ УПРАВЛЯЕМЫХ ВОЗДУШНЫХ ТОРПЕД
Управление УРТ в полете осуществлялось по радио
путем подачи команд «вверх», «вниз», «вправо» и «влево».
Пилот подводил самолет к цели на заданное расстояние
и сбрасывал УРТ, которая командами с «матки» — носи-
теля удерживалась на линии визирования, приближаясь
к цели по нисходящей кривой траектории (рис. 37). При
подходе к цели па 100—200 м УРТ уходила под воду, про-
должая свой путь по инерции, и поражала подводную
66
Рис. 37. Траектория полета реактивной управляемой торпеды
«Хеншель 293-Л»
часть корабля. При ударе о водную поверхность УРТ те-
ряла крылья, двигатель и хвостовую часть, следуя далее
как обыкновенная морская торпеда. В отличие от других
типов, такая УРТ, предназначенная для поражения бро-
нированных кораблей, имела бронебойную головную часть.
Преимуществом такого управления полетом УРТ яв-
ляется удаление самолета-носителя от зоны воздействия
зенитного огня цели (корабля). Недостатком же его сле-
дует считать то обстоятельство, что на всем пути торпеды
к цели оператору необходимо направлять ее иногда в ус-
ловиях плохой видимости (туман пли дымовая завеса) и
воздействия истребительной авиации, причем точность
наведения на цель при этом, конечно, значительно сни-
жается.
Кроме того, эффективность применяемых целью (ко-
раблем) радиопомех будет возрастать по мерс приближе-
ния УРТ к цели и удаления ее от носителя. Дело в том,
5'
67
одновременно для
что управляющие сиг-
налы с удалением УРТ
от носителя ослабева-
ют. Однако, учитывая
возможность массово-
го применения УРТ, ра-
ботающих па разных
волнах, возможность создания помех
всех управляемых торпед практически исключается.
На рис. 38 показана схема управления рулем высоты
и элеронами* управляемой реактивной торпеды «Хеншель
293-А». Как видно из этой схемы, при помощи рукоятки
управления вырабатываются управляющие импульсы, по-
стоянные по величине, но изменяющейся продолжительно-
сти. Эти импульсы посту-
пают в специальный генера-
тор, который модулирует
волну передатчика. Сигналы
Ate/юх
Оолсс ли
лихи ар
Эле к-тронагнит
Рис. 38. Схема управления реактивной торпедой «Хеншель 293-А»
* Элероны—подвижные поверхности у кромок задних крыльев,
предназначенные для изменения подъемной силы крыльев и созда-
ния тем самым крена снаряда.
68
передатчика через передающую антенну посылаются в
эфир и принимаются приемником, установленным на УРТ.
Здесь эти сигналы в соответствующей радиоаппаратуре
фильтруются, усиливаются, детектируются и посылаются
на приборы управления рулем высоты или элеронами, в
зависимости от поданной команды.
Таким образом, от рукоятки, которой манипулирует
оператор, находящийся на самолете-носителе, на электро-
магниты элеронов управляемой торпеды непрерывно по-
ступают командные импульсы. В силу этого элероны при
полете УРТ все время вибрируют с определенной часто-
той. Изменяя продолжительность командных импульсов
при помощи той же рукоятки управления, оператор изме-
няет положение элеронов или производит отклонение ру-
ля высоты торпеды, доводя ее до соприкосновения с во-
дой в направлении на цель.
СИСТЕМА ПРИБОРОВ УПРАВЛЕНИЯ СТРЕЛЬБОЙ
ЗЕНИТНЫМИ УПРАВЛЯЕМЫМИ СНАРЯДАМИ
Приборы управления артиллерийским зенитным огнем
(ПУАЗО) нарезной артиллерии должны вырабатывать
координаты точки встречи снаряда с целью, предвари-
тельно решив задачу встречи. При стрельбе зенитными уп-
равляемыми реактивными снарядами эту задачу решать
нет надобности. Управляемый по радио реактивный сна-
ряд системой приборов управления удерживается на ли-
нии визирования на цель и таким образом приводится в
точку встречи. Необходимо лишь решить задачу вывода
снаряда на линию визирования.
Приборы, входящие в комплекс всей системы управ-
ления стрельбой зенитными реактивными снарядами, вы-
полняют следующие функции:
1. Одновременное визирование снаряда и цели.
2. Определение углов наводки пускового устройства и
его наведения с подготовленными для выстрела снаря-
дами.
3. Выработка команд управления и передача их на
снаряд.
Состав аппаратуры приборов управления снарядом
В комплекс всей системы приборов управления реак-
тивной стрельбой (ПУРС) для решения указанных выше
задач входят (см. рис. 39):
69
а) Комплект оптических или радиолокационных при-
боров обнаружения цели и слежения за нею (дальномер
Д или радиолокатор обнаружения /).
б) Электрический счетно-решающий прибор 3, пред-
назначенный для учета геометрических, баллистических
и аэродинамических факторов, оказывающих влияние
на изменение траектории полета снаряда на неуправляе-
мом участке до момента входа в зону управления* с та-
ким расчетом, чтобы обеспечить вывод его на линию
«визир-цель» по кратчайшему расстоянию.
Таким образом, счетно-решающий прибор для реше-
ния данной задачи необходим только в период подготов-
ки управляемого снаряда к выстрелу. В дальнейшем
счетно-решающий прибор решает задачу определения уг-
ла т, так называемого угла «скручивания» координат
снаряда и визира.
С пульта управления снарядом 7 в прибор " поступа-
ют электрические командные сигналы. Здесь они склады-
ваются с поправочными командами, выработанными при-
бором ', и поступают в передатчик команд 9. В передат-
чике эти команды шифруются и через передающую ан-
тенну 8 посылаются в приемник снаряда для управления
его рулями. Прибор т, следовательно, необходим для
учета утла «скручивания» координатных осей радиолока-
тора на земле по отношению к координатным осям сна-
ряда, находящегося в воздухе.
в) Прибор наведения, находящийся на командном по-
сту, обеспечивает возможность наблюдения за взаимным
расположением снаряда и цели. На приборе имеется ру-
коятка управления, с помощью которой путем передачи
на снаряд команд, вырабатываемых аппаратурой, управ-
ляют рулями снаряда.
г) Специальная аппаратура выработки команд и при-
емно-передающая радиостанция 4.
Процесс стрельбы зенитными управляемыми снарядами
Процесс стрельбы зенитными управляемыми снаряда-
ми следующий:
Радиолокатор 1 станции дальнего обнаружения (по-
исковый) непрерывно производит поиск самолетов про-
* Неуправляемый участок траектории у зенитных управляемых
реактивных снарядов различен. Так, у немецкого снаряда «Рейн
тохтер» он составляет 1440 л, а у снаряда «Шметерлинг» — 540 л.
70
Рис. 39. Процесс стрельбы зенитными управляемыми снарядами
тивника во всех четвертях полусферы, вращая систему
радиолокатора по азимуту* и углу места**.
Ширина лепестка диаграммы направленности антен-
ны радиолокационной станции обнаружения / довольно
большая (угол направленности 15—25 градусов). Вслед-
ствие этого угловая точность невысока, но вполне доста-
* Азимутом, или пеленгом, называют угол, лежащий между ме-
ридианом и линией, соединяющей точку наблюдения с направлением
на предмет.
** Углом места называют угол между направлением на цель и
его проекцией на горизонтальную плоскость, проходящую через
точку наблюдения.
71
точна для обнаружения далеко летящего самолета (в Лю-
бой четверти полусферы) и определения его координат.
Координаты обнаруженного самолета с помощью
электрической синхронно-следящей системы автоматиче-
ски передаются на приборы наводки антенны стрельбо-
вого (орудийного) радиолокатора 2. Его антенна имеет
более узкую диаграмму направленности и обеспечивает
гораздо большую точность наводки.
Затем текущие данные места цели со стрельбовой
(орудийной) радиолокационной станции также при помо-
щи синхронно-следящей системы передаются в счетно-
решающий прибор 3 и на приборы наводки рамы прибора
наведения 4, на которой находятся две антенны, имею-
щие форму параболоида, одновременно точно направлен-
ные на летящую цель. Одна из этих антенн 6 является
антенной радиолокатора, работающего во взаимодейст-
вии с радиолокационным ответчиком, находящимся на
борту управляемого снаряда. Вторая антенна 8 служит
для передачи команд телеуправления на снаряд. Радио-
сигнал, принятый антенной 6 от находящегося на снаряде
передатчика, поступает на радиолокационный приемник,
на экране 5 которого можно наблюдать взаимное положе-
ние летящего снаряда и цели. Так как антенна 6 все вре-
мя направлена на цель, то изображение цели как бы по-
стоянно находится в перекрестии нитей электроннолуче-
вой трубки радиолокатора. Задачей оператора является
подача с помощью ручки управления 7 таких команд, ко-
торые, воздействуя на соответствующие рули летящего
снаряда, удержали бы его также в перекрестии нитей
электроннолучевой трубки. Это значит, что в каждый
данный момент времени траектория управляемого опера-
тором снаряда проходит через цель, обеспечивая встречу
с ней.
Так было на немецких зенитных снарядах «Рейнтох-
тер» и на первых образцах снарядов «Найк». В настоящее
время на последних вместо ручного управления выработка
команд управления происходит автоматически, в зави-
симости от взаимного расположения снаряда и цели.
УСТРОЙСТВО БАТАРЕИ ЗЕНИТНЫХ УПРАВЛЯЕМЫХ
СНАРЯДОВ
Как мы уже упоминали, батарея зенитных снарядов
«Найк» состоит из четырех стартовых устройств, а каж-
72
1
Рис. 40. Схематическое изображение батареи снарядов «Найк»
дое из них содержит по четыре снаряда. Комплект обо-
рудования батареи можно перебрасывать с одного места
на другое на автомашинах или самолетах.
В 1954 г. было опубликовано решение правительства
США о формировании дивизионов управляемых снарядов
«Найк» четырехбатарейного состава. Эти батареи уста-
навливаются вокруг крупных политических и администра-
тивных центров США. По свидетельству бюллетеня «Ин-
теравиа» от 3 июня 1954 г., вокруг Вашингтона будет
установлено шестнадцать таких батарей1.
На полигоне Уайт-Сенде в 1953 г. были проведены ис-
пытания снарядов «Найк», заключавшиеся в том, что ими
производилась стрельба по радиоуправляемому четырех-
моторному самолету-мишени «QB-17», за которым следи-
ла радиолокационная станция.
После выстрела другая радиолокационная станция за-
секала и сопровождала снаряд до цели. Снаряд манев-
рировал в соответствии с командными сигналами, кото-
рые он получал от наземного электронно-счетно-решаю-
щего прибора. Данные испытания оказались удовлетвори-
тельными.
На рис. 40 дано схематическое изображение батареи
6 Зак. 1115
73
снарядов «Найк»* •. На нем показаны батарея зенит-
ных управляемых снарядов «Найк» и обслуживающие ее
пункты.
Заметим, что стартовое устройство удалено от поста
управления, где находятся все радиолокационные средст-
ва, примерно на 1,5 км. Стартовое устройство обслужи-
вается командой, состоящей из двух офицеров и 36 сол-
дат. На посту управления заняты пять офицеров и 44
солдата.
Район действия снаряда составляет около 80 км. Сна-
ряд может достигать целей, находящихся на высоте 18
км (по другим источникам — 23 mi).
Американцы считают, что в сочетании с другими обыч-
ными средствами ПВО батареи «Найк» смогут создать
непреодолимую преграду для бомбардировщиков против-
ника.
На приведенном нами рисунке показаны: 1— луч
слежения за целью; 2 — луч наведения снаряда на цель;
3 — защищаемый объект; 4 — радиолокатор обнаруже-
ния цели; 5 — зона, контролируемая радиолокатором; 6—
стартовое устройство на огневой площадке; 7 — элеватор
и место хранения снарядов; 8 — здание администрации
батареи; 9 — пункт испытания (испытательная станция);
10— цех сборки управляемых снарядов; 11 — защитные
земляные валы; 12 — склад горючего.
НЕКОНТАКТНЫЕ ВЗРЫВАТЕЛИ
Ознакомление с некоторыми существующими снаря-
дами и ракетами мы закончили описанием группы зенит-
ных снарядов. Для того чтобы в этот последний раздел
внести большую ясность, мы должны сказать об одном
устройстве, которое является непременной принадлежно-
стью зенитных управляемых снарядов. Это — неконтакт-
ные взрыватели.
Как известно, в обыкновенных артиллерийских зенит-
ных снарядах для их взрыва применяются дистанционные
трубки. Характерной особенностью дистанционных трубок,
как это вытекает из самого названия, является их сраба-
тывание на обусловленной (заданной) дистанции. Дру-
гими словами, точка разрыва снаряда при его примене-
нии зависит только от заданной дистанции, на которую
* Арми энд Комбат форсис, 1955 г V 5, № 6, стр. 16—17.
74
устанавливается дистанционная трубка, и ни в каков
степени не зависит от местоположения цели.
А что это значит? Зенитный расчет получает от при-
бора текущие данные местоположения пели и согласно нм
устанавливает столько-то делений дистанционной трубки,
т. е. столько-то секунд, по прошествии которых (с момен-
та выстрела) снаряд должен разорваться. Но при совре-
менных скоростях и маневренности самолетов почти не-
возможно учесть всю сумму различных ошибок, приводя-
щих к тому, что место разрыва зенитного снаряда не сов-
падает с местом положения цели. Прямое же попадание
снаряда в самолеты, летящие с огромными скоростями,—
явление очень редкое. Такая зенитная стрельба в совре-
менных условиях малоэффективна. В связи с этим воз-
никла необходимость в устройствах, способных обеспе-
чить разрыв снаряда в следующих условиях:
а) При отсутствии прямого попадания в цель.
б) При таком относительном расположении снаряда
и цели, которое приблизило бы вероятность поражения к
100 проц.
Очевидно, что такой разрыв могут обеспечить :>.•.• ко
устройства, которые срабатывают от воздействия самой
цели при приближении к ней снаряда на заданное рас-
стояние.
Таким устройством является неконтактный взрыватель
(НВ), применение которого значительно повышает ве-
роятность поражения воздушных целей.
С появлением управляемых реактивных снарядов необ-
ходимость в IIB особенно увеличивается. Объясняется
это тем, что: 1) корабль или самолет-носитель может
иметь относительно небольшой запас управляемых реак-
тивных снарядов; 2) сложность и дороговизна управляе-
мых реактивных снарядов должны оправдываться боль-
шой вероятностью поражения цели; 3) УРС большого
калибра могут обеспечить достаточное воздействие на
цель при взрыве снаряда на некотором расстоянии от нее;
4) ни одна из систем приборов управления полетом УРС
не может обеспечить 100 проц, вероятности прямого по-
падания, вследствие чего снаряд может пройти мимо цели
и будет потерян.
На основании сказанного выше можно считать, что в
зенитных управляемых снарядах неконтактный взрыва-
тель является обязательным элементом.
6* 75
Для обеспечения без-
отказного разрыва сна-
рядов, проходящих
вблизи (мимо) цели, не-
обходимо соблюдение
следующих требова-
ний:
1) чтобы дистанция
чувствительности НВ
была меньше малой
полуоси эллипсоида
рассеивания снаряда а
(рис. 41);
2) чтобы убойные
элементы разорвавше-
гося снаряда обязатель-
но наносили поражение
цели; дистанция убой-
быть больше или равна
Рис. 41. Условие 100-проц. пораже-
ния цели
кого действия осколков должна
дистанции чувствительности НВ;
3) чтобы ПВ для определенного типа снаряда облада-
ли с возможно большей точностью одинаковой дистанци-
ей чувствительности при примерно одинаковом угле об-
зора; эти данные определяют рассеивание разрывов;
4) чтобы от момента выработки НВ первичного управ-
ляющего сигнала до момента разрыва снаряда протекал
возможно меньший промежуток времени; это время долж-
но быть тем меньше, чем выше скорость полета УРС к
моменту его разрыва (около 1 миллисекунды);
5) чтобы действие НВ не зависело от времени суток
и атмосферных условий и чтобы его параметры не меня-
лись с изменением этих условий.
По физическому принципу действия НВ могут быть:
а) радиотехнические или высокочастотные, б) оптиче-
ские, в) магнитные, г) акустические, д) аэродинамиче-
ские или барометрические.
Использование акустических НВ маловероятно, так
как скорости снарядов или равны скорости звука, или да-
же превышают ее. Кроме того, уровень собственных шу-
мов летящего снаряда очень велик, в силу чего невозмож-
но создать НВ необходимой чувствительности.
Применение магнитных и аэродинамических НВ так-
же маловероятно, так как они способны обеспечить даль-
76
ности действия только
в диапазоне 3—5 м.
Наиболее реальны-
ми явились НВ радио-
технического типа. По-
этому рассмотрим их
устройство и принцип
действия.
Конечным (испол-
нительным) элементом
любого радиотехниче-
ского взрывателя (РВ)
является устройство с
тиратроном, показанное
на схеме (рис. 42).
Здесь цепь электроза-
пала Ro, как видно из
схемы, замыкается в
момент подачи па уп-
равляющую сетку ти-
ратрона напряжения
управляющего сигнала
и*. В момент подачи
на управляющую сетку
тиратрона положитель-
ного потенциала отри-
цательное смещение,
запиравшее ранее тира-
Рис. 42. Схема неконтактного радио-
взрывателя (исполнительная часть)
трон, «снимается» и ти-
ратрон вспыхивает. Анодный ток тиратрона обеспечивает
воспламенение электрозапала Ro и взрыв снаряда. Все
предварительные устройства НВ служат для выработки
управляющего сигнала и подачи его на исполнительную
часть НВ.
Момент подачи сигнала должен соответствовать та-
кому положению PC относительно цели, при котором
обеспечивается наибольшая вероятность ее поражения.
В зависимости от места расположения первичного
источника радиоволн, используемых для получения упра-
* Нормально на сетку тиратрона подано постоянное отрица-
тельное смешение Eg, запирающее тиратрон; его анодный ток равен
нулю (воспламенение электрозапала Ro невозможно, и взрыв снаря-
да исключен).
77
Рис. 43. Радиовзрыватель пассив-
ного типа
Рис. 44. Радиовзрыватсль полу-
активного типа
вляющсго сигнала, РВ мо-
гут быть: а) пассивного
типа, б) полуактив1ного
типа, в) активного типа.
Для РВ пассивного ти-
па (рис. 43) характерным
является то, что он дей-
ствует в тот момент, ког-
да до него доходит радио-
сигнал, исходящий от це-
ли, т. е. летящего самоле-
та. Чувствительный эле-
мент РВ отрегулирован
таким образом, что вос-
принимает сигнал цели
только на расстоянии,обе-
спечивающем ее пора-
жение.
Рис. 45. Радиовзрыватель
активного типа
Для РВ полуактивного типа (рис. 44) необходимо,
чтобы с земли (или с корабля) был послан сигнал от
первичного излучателя на цель и на снаряд. Восприняв
на известном расстоянии отраженную от цели волну,
снаряд взорвется.
РВ активного типа (рис. 45) действует таким же об-
разом с той только разницей, что сам направляет с
помощью своих приборов волну на цель и взрывается,
получив от цели отражение собственной волны.
ЦЕНТР ПО ИСПЫТАНИЮ УПРАВЛЯЕМЫХ СНАРЯДОВ
Произведенные за конструкторским столом расчеты
тактико-технических данных различных управляемых
снарядов и их сложных приборов тщательно проверяются
в сотнях различных специальных лабораторий. Но и этого
еще недостаточно, чтобы быть уверенным в правильной,
слаженной работе всех частей и систем управляемого
снаряда, взятых вместе, во взаимодействии. Для получе-
ния такой уверенности и окончательного подтверждения
расчетных тактико-технических данных управляемых
снарядов их подвергают всесторонним и многократным
полигонным испытаниям.
Так как управляемые снаряды являются оружием ра-
зового действия, то ясно, что испытывать каждый снаряд
в отдельности перед принятием его на вооружение армии,
флота или авиации не представляется возможным. Да в
этом и нет необходимости.
Испытываются обычно несколько снарядов одной се-
рии, определенного типа. В ходе этих испытаний оконча-
тельно определяются точность работы бортовой и назем-
ной аппаратуры управления или наведения, предельно
возможные скорости, дальность, высота, меткость и т. д.
Рис. 46. Расположение полигона для испытания управляемых
дальнобойных снарядов
79
Для получения всех этих сведений недостаточно ограни-
читься испытанием одного снаряда. Обычно приходится
запускать несколько десятков снарядов данного типа или
серии.
Проведение испытаний управляемых снарядов — дело
очень сложное и требует участия многих ученых и инже-
неров различных специальностей. Кроме того, некоторые
из снарядов, например зенитные, для проведения испыта-
ний требуют участия управляемых по радио самолетов-
мишеней. Одновременное нахождение в воздухе летаю-
щей мишени и снаряда требует от персонала, прово-
дящего испытания, большой технической оперативности,
натренированности и слаженности в работе.
Большими и всесторонними знаниями должен обла-
дать оператор-испытатель. Дело в том, что длительность
полета снаряда и мишени может быть от нескольких се-
кунд (зенитные управляемые снаряды) до нескольких де-
сятков минут (дальнобойные управляемые снаряды). Про-
делать же за это коротенькое время необходимо боль-
шую, очень сложную и трудоемкую работу. Оператору
помогают все это выполнить десятки автоматически дей-
ствующих электронных, телемеханических, оптических и
радиолокационных приборов.
После второй мировой войны возникло много различ-
ных центров и полигонов по испытанию всевозможных
управляемых снарядов и ракет. Как же устроен такой
центр по испытанию управляемых снарядов? Для того
чтобы представить себе всю грандиозность такого соору-
жения, познакомимся с одним из полигонов, его объекта-
ми и аппаратурой*.
В 1949 г. на мысе Коноверел (штат Флорида) был
организован центр военно-воздушных сил США по испы-
танию управляемых дальнобойных снарядов. К середине
1953 г. район испытаний (включая контрольные станции)
протяженностью 1280 км доходил до Гранд Терка.
После окончания всех работ протяженность трассы
полета будет составлять 1600 км, а в случае необходимо-
сти может быть удлинена до 8000 км. Для управления
запуском снарядов на мысе Коноверел выстроен спе-
циальный блокгауз. Две громадные перископические амб-
разуры служат для наблюдения. На крыше блокгауза
* Описание заимствовано из журнала «Вопросы ракетной тех-
ники» № I., 1955 г., стр. 1391—143.
80
(на мачте) установле-
ны метеорологические
приборы и громкогово-
рители. Одной из ти-
пичных работ этого
центра были обширные
испытания дальнобой-
ных управляемых сна-
рядов В-61 «Матадор»
перед отправкой их в
Европу. Эти снаряды
могут взлетать с перед-
вижной стартовой ус-
тановки. После запуска
снаряда вступают в
действие наземные
Рис. 47. Киноаппарат для съемки
контрольные станции. взлета снарядов
Взлет снаряда регист-
рируется киноаппаратами, показанными на рис. 47. Од-
новременно могут работать 30 таких аппаратов с диамет-
ром объектива 100 мм. В 5 км от блокгауза находится
центральный контрольный пункт. Во время полета снаря-
дов центральный пост непрерывно ведет наблюдение. На
рис. 48 показан момент наблюдения за полетом по прибо-
ру, вычерчивающему путь снаряда. Если снаряд собьется
с курса или потерпит аварию, наблюдающий за полетом
офицер службы безопасности нажатием кнопки немедлен-
но дает сигнал в район полета.
Рис. 48. Наблюдение за Рис. 49. Группа наблюдения на цепт-
полетом снаряда ральном пункте
81
Рис. 50. Контрольная станция: 1 — радиолокационная и оптическая
аппаратура; 2—телеметрическая станция; 3 — посадочная пло-
щадка для самолетов; 4— метеостанция; 5 — жилые дома обслу-
живающего персонала; 6 — служба безопасности; 7 — пульт связи
Район испытаний, занимающий несколько тысяч квад-
ратных километров, находится под постоянным контро-
лем группы наблюдения на центральном контрольном
пункте (рис. 49). Эта группа при помощи радиолокато-
ров постоянно получает сведения о всех самолетах и ко-
раблях, находящихся в районе полета снарядов. Полу-
ченные сведения немедленно
Рис. 51. Приемная антенна
наносятся на схему.
Как только снаряд
взлетает, контрольные
станции начинают свою
работу (рис. 50). Они
тщательно контролируют
весь полет при помощи
радиолокаторов, дально-
меров и оптической аппа-
ратуры.
Электронные приборы
внутри снаряда восприни-
мают и передают на зем-
лю показания датчиков
давления, температуры,
ускорения и т. д. На рис.
51 показан момент, когда
оператор для получения
этих сигналов направля-
ет антенну на пролетаю-
82
щий снаряд. Через эту антенну радиосигналы снаряда
поступают на телеметрическую станцию, где они и ре-
гистрируются самопишущими приборами.
Полученные данные обрабатываются на центральном
контрольном пункте.
ЗАЩИТА ОТ УПРАВЛЯЕМЫХ СНАРЯДОВ
Мы рассмотрели различные виды нового оружия, воз-
никшего во время второй мировой войны, и уже знаем,
что оно обладает колоссальной скоростью. Дальность его
действия может достигнуть многих сотен километров.
Знаем и то, что оно обладает значительной разрушитель-
ной силой, особенно если его сделать носителем атомного
заряда. По сведениям печати США, такие снаряды и ра-
кеты уже имеются. Точность стрельбы все время возра-
стает. Мы видели, что эти снаряды в некоторых случаях
могут сами находить цель и этим грозным оружием мож-
но управлять на значительных расстояниях.
Может возникнуть вопрос: не является ли это оружие
таким, против которого не существует средств защиты и
массовое применение его может само по себе обеспечить
выигрыш войны? Кстати сказать, такие мнения иногда
высказываются в зарубежной печати.
Ответим на этот вопрос сразу.
Ни один из видов оружия, каким бы мощным оно пи
было, включая и атомное, не может сам по себе решать
исход войны. Не существует также оружия, против кото-
рого не было бы найдено эффективных средств защиты.
Такие средства есть и в данном случае.
Укажем вкратце на основании того, что мы уже
знаем, в чем они заключаются.
Все снаряды и ракеты, управляемые ва расстоянии с
помощью электро-радиоаппаратуры, какую бы скорость
они ни имели, обладают одним существенным недостатком,
радиоприборы, находящиеся на них и управляющие их
полетом, получая команды с земли, сильно подвержены
воздействию радиопомех. Если организовать эффектив-
ную систему радиопомех, то боевое воздействие таких ра-
кет может быть в сильной степени ограничено.
В этом отношении исключение составляют самолеты-
снаряды с автономным управлением. Но, не будучи свя-
заны с землей, они обладают весьма незначительно:'! точ-
83
ностью стрельбы и относительно небольшой скоростью,
что дает возможность перехватывать их при помощи ист-
ребительной авиации и ракет-перехватчиков. Снаряды с
самонаведением и астронавигационные также подверже-
ны воздействию помех. Если, например, создать ложный
источник тепловых лучей большей мощности, чем тот, ко-
торый преследовал снаряд, то последний отклоняется на
ложный источник и в цель не попадает.
Еще из опыта прошлой войны можно привести пример
использования средств маскировки и отвлечения против-
ника на ложную цель.
Англичане в целях защиты от мощного зенитного огня
немцев, управлявшегося с помощью радиолокаторов, вы-
брасывали с самолетов огромное количество станиолевых
лент, которые долго держались в воздухе. Эти ленты соз-
давали металлизованное облако, которое пеленговалось
радиолокаторами, и немецкие батареи открывали по нему
огонь, т. е. они стреляли по пустом}' месту. А бомбарди-
ровщики англичан в это время выходили из зоны зенитно-
го огня.
Продолжим нашу мысль. Кроме перечисленных средств
защиты от ракетного оружия, предполагается применять
ракету против ракеты. Что это значит? Для обнаружения
снарядов или ракет, летящих с большой скоростью, когда
есть опасение, что за время их полета обычные системы
защиты ПВО не успеют заблаговременно обнаружить
противника, в направлении ожидаемого удара выносятся
далеко вперед средства радиоразведки, например на
надводных и подводных кораблях и самолетах. Эта мера
позволяет вовремя обнаруживать реактивные снаряды
противника и перехватывать их с помощью заградитель-
ных эскадрилий, снабженных управляемым ракетным
оружием, обладающим большей скоростью, чем ожидае-
мые ракеты противника.
Одним из эффективных срелств в настоящее время
является заблаговременное обнаружение стартовых уст-
ройств противника и разрушение их всеми доступными
средствами.
Таким образом, мы видим, что уже сейчас против уп-
равляемых ракет и снарядов, несмотря на их значитель-
ные преимущества, намечаются эффективные способы
борьбы. Несомненно, что в дальнейшем эти средства сде-
лаются еще более действенными.
84
БОЕВЫЕ УПРАВЛЯЕМЫЕ СНАРЯДЫ И РАКЕТЫ
БУДУЩЕГО
В заключение нашей беседы о существующих боевых
управляемых ракетах и снарядах нужно сказать несколь-
ко слов о перспективах и направлениях развития этого
вида оружия.
В связи с этим необходимо заметить, что уже сейчас
в США имеется ряд ракет, которые не приняты на воору-
жение армии или флота, но широко используются для
различного рода высотных и других исследований, свя-
занных с развитием управляемого реактивного ору-
жия.
Перейдем теперь к рассказу со слов самих американ-
цев о ближайших перспективах развития у них реактив-
ного оружия.
Как сообщает американская пресса, в США работают
над созданием беспилотных истребителей, вооруженных
ракетами «воздух-воздух».
Такие истребители, выпу-
скаемые с помощью старто-
вых ракет, смогут быстро до-
стигать огромных высот и,
невидимому, будут доста-
точно эффективными. Воз-
можно, что посте залпа они
будут возвращаться па ба-
зу. В ближайшее время для
управляемого перехватчика
будет использована также
летающая мишень «Райан
Файэрби», сборочная схема
которой показана на рис. 52.
По последним данным*, та-
кой снаряд-мишень на уров-
Рис. 52. Сборочная схема
летающей мишени Райан
«Файэрби»
не моря развил максималь-
ную скорость 975 км/час, а на высоте 12 000 м—
908 к.м1час. При запуске с самолета радиус действия сна-
ряда-мишени равен 1215 км, а продолжительность полета
при скорости 920 км/час — I ч. 20 м. Скороподъемность
на уровне моря равна 2590 м/мин.
* Журнал «Вопросы ракетной техники», № 5 (29), 1955 г.,
стр. 141.
85
Вариант этого снаряда Q-2A, предназначенного для
военно-воздушных сил, имеет турбореактивный двигатель
Континенталь V-69-T-19 с тягой 454 кг. На снарядах
военно-морских сил (КДА-1) и сухопутных сил (ХМ-21)
установлен двигатель Фэйрчайлд Y-44-R-20. .
В статье «Управляемые снаряды как основа будущей
обороны», опубликованной в «Аэронаутнкл энжиниринг
ривью» 8, № I за 1949 г., дается краткое изложение заяв-
ления американского конструктора Д, Нортропа о перспек-
тивах развития управляемых снарядов па ближайшие де-
сять лет. Нортроп заявляет, что управляемые снаряды в
I960 г. составят основу наступательной и оборонительной
техники военно-воздушных сил. К этому времени, по его
мнению, должны определиться два основных типа управ-
ляемых снарядов. Первый из них — самолет-снаряд даль-
него действия, обладающий скоростью полета свыше
1600 км/час и способный поражать любую цель в пределах
одного полушария. Второй тип — зенитный снаряд, снаб-
женный устройством для автоматического наведения на
цель. Указывается, что такие сняояды станут единствен-
ным эффективным средством защиты от массовых нале-
тов вражеских управляемых снарядов дальнего дей-
ствия.
Другой американский журнал «Аэронаут» 20 № 2 за
1949 г. в статье «Американское оружие дальнего действия
со сложной системой навигации» сообщает некоторые све-
дения о программе разработок в США беспилотных уп-
равляемых самолетов далтяего действия. Указывается,
что такие управляемые самолеты с дальностью полета
16 000 км и точностью попадания в цель порядка 1—2 км
должны быть изготовлены по плану примерно через де-
сять лет. По данным журнала, скорость полета управляе-
мых самолетов достигнет 2500 км/час. Беспилотные само-
леты будут снабжены сложной системой навигации: уп-
равление на первоначальном участке полета будет осу-
ществляться по радио, при полете над территорией про-
тивника — системой астронавигации, а при приближении
к цели — посредством системы самонаведения.
МИРНОЕ ИСПОЛЬЗОВАНИЕ УПРАВЛЯЕМЫХ РАКЕТ
То, о чем мы рассказали в разделе о существующем
ракетном оружии, показывает, как далеко шагнули в этом
направлении наука и техника.
86
Действительно, скорости до 6000 км/час, высота поле-
та более 400 «л — все это достижения, которые несколько
лет назад казались фантастическими. Но так же как и
атомная энергия, ракетная техника может быть использо-
вана в мирных целях овладения тайнами природы.
Ракета в мирных целях используется с незапамятных
времен. Не говоря уже об известных еще в глубокой древ-
ности фейерверках, основанных на ракетном принципе,
ракетные двигатели довольно давно применяются в тех-
нике.
В 1736 г. Даниил Бернулли создал теорию реактив-
ного движения водяной струи, развитую впоследствии
знаменитым русским ученым Н. Е. Жуковским. В XIX в.
возникает ряд проектов двигателей для различных видов
транспорта, основанных на ракетном принципе.
Предложение А. Федорова (1896 г.) о новом принципе
воздухоплавания, т. е. об использовании ракеты для дви-
жения в пустоте, послужило толчком к всемирно извест-
ным и уже упоминавшимся нами работам К. Э. Циолков-
ского. Его идеи уже с начала XX в. получили широкое
распространение во всех странах мира. В двадцатых го-
дах нашего столетия появился ряд проектов космических
кораблей и исследований возможности полета в межпла-
нетное пространство. Одновременно с этим все шире на-
чинают применяться ракеты для изучения различных
районов стратосферы, причем некоторые из них проника-
ют и за ее пределы.
В последних главах мы хотим рассказать, как и для
чего в наше время применяется управляемая ракета в
мирных целях, а также коснуться вопросов будущего: соз-
дания постоянного спутника Земли, межпланетной косми-
ческой станции и полетов в космос.
В разделе, посвященном исследовательским ракетам,
мы уже сказали, что они используются также и для мир-
ных целей: для исследования космических лучей, собст-
венного излучения атмосферы, состояния земного магнит-
ного поля, состава верхних слоев атмосферы, изучения
земной поверхности с больших высот и т. д. (см. напри-
мер, на стр. 90 фотографию земли, сделанную с высоты
162 км).
Пока одна часть конструкторов занимается разработ-
кой типа космического корабля и аппаратуры для управ-
87
ления им, другая их часть уже создала и продолжает со-
вершенствовать ряд автоматически управляемых ракет,
посылаемых в мировое пространство.
Приводим таблицу, которая наглядно характеризует
высоты, уже достигнутые различными ракетами*.
Дата испытания Типы ракет Высота, км
17 декабря 1946 г. «Фау-2» 183
21 ноября 1950 г. «Викинг» 174
7 августа 1951 г. «Викинг» 219
22 августа 1951 г. «Фау-2» 213
30 апреля 1952 г. «Аэроби» 128
7 мая 1953 г. «Викинг-11» 255
февраль 1949 г. Комбинированная «Вак- 403
Корпорал» плюс «Фау-2»
В недалеком будущем ракеты предполагают исполь-
зовать в таких, казалось бы, необычных областях, как,
например, почтовые сообщения, прокладка кабеля, по-
стройка мостов в труднопроходимых местах. Возможно,
что впоследствии они будут использованы и для пасса-
жирских перевозок. Этот вид использования ракеты осо-
бенно соблазнителен. Ведь даже при современных ско-
ростях ракеты (порядка 6000 км/час) человек смог бы
облететь вокруг земного шара менее чем за 7 часов.
Но самым увлекательным, без сомнения, является
осуществление давнишней мечты человечества — полета в
космос. И эта мечта в недалеком будущем должна вопло-
титься в жизнь.
В последнее время в газетах, журналах, отдельных
брошюрах и книгах уделяется большое внимание вопро-
сам межпланетных путешествий. Эта огромная тема
сама по себе может составить предмет целой книги.
В последнем разделе мы попытаемся дать читателю
общие представления о тех задачах, которые предстоит
разрешить науке в будущем в области освоения космоса.
Освоение межпланетного пространства без ракеты не-
«Вопросы реактивной техники» № 1, 1955 г., стр. 8.
88
Рис. 53. Снимок земной поверхности, полученный с высоты 162 к.к
над пустыней Белые пески (штат Нью-Мексико) 7 марта 1917 г.
Слева — фотография района, лежащего по направлению на юго-за-
пад от места съемки. Отчетливо видны Калифорнийский залив и
полуостров Нижняя Калифорния. Линия горизонта находится на
расстоянии 1500 к.и к западу. Справа — схематическая карта тер-
ритории, изображенной на снимке. Пунктирные черты прямые —
примерные границы сфотографированной области
возможно. Мы попытаемся показать читателю, насколько
сложным является этот вопрос, какие самые различные
отрасли знаний участвуют в его разрешении, какие са-
мые различные специальности должны быть привлечены
для того, чтобы добиться успеха.
То, о чем мы будем рассказывать ниже, не охваты-
вает всего многообразия задач, которые предстоит разре-
шить науке для осуществления этой великой цели. Все
это становится возможным благодаря развитию промыш-
ленности и науки. Настало время, когда мысль о косми-
ческом пространстве особенно занимает умы крупных
ученых и специалистов различных стран, инженеров и
техников, а сама проблема осуществления космических
полетов стала практической задачей ближайших лет.
В выполнении этой почетной задачи у нас сейчас прини-
мают участие деятели различных научно-исследователь-
ских организаций Академии наук СССР и различных
7 Зак. 1115
89
министерств. Советские люди полны уверенности в том,
что наша наука и наши производственные организации
готовы решить эту грандиозную проблему.
Именно верой в реальную возможность овладения
космическим пространством можно объяснить ежеднев-
ный поток писем в Комитет по межпланетным сообще-
ниям при Президиуме Академии наук СССР от граждан,
желающих принять активное и непосредственное участие
в разработке проблем астронавтики, чтобы принести
максимальную пользу в этом новом наступлении чело-
века на неизведанные силы природы.
Как и всегда в этом отношении, особый интерес к
трудным и, может быть, небезопасным делам проявляет
наша учащаяся молодежь, выбирающая свою будущую
профессию. Многие хотели бы посвятить свой жизненный
путь делу борьбы за овладение космосом, делу, которо-
му принадлежит будущее, которое влечет их своей герои-
ческой романтикой и исключительно богатой перспекти-
вой научного познания.
Именно этими стремлениями определяется их горячее
желание полнее знать о перспективах, а также о тех за-
дачах астронавтики, которые предстоит решать науке.
Мы коснемся лишь некоторых вопросов, связанных с
созданием искусственного спутника Земли, чтобы на их
примере показать, как к решению частных задач огром-
ной проблемы могут быть привлечены широкие слои
представителей различных отраслей науки и техники.
Какова же цель и польза от создания искусственного
спутника Земли?
Главная цель создания искусственного спутника Зем-
ли была высказана еще К- Э. Циолковским. Это — иметь
промежуточную станцию как трамплин для дальнейшего
проникновения человека в межпланетное пространство.
Искусственные спутники Земли могут быть полезны
также для метеорологических наблюдений, для наблю-
дения за движением льдов в Арктике и прилегающих к
ним морях и океанах, в качестве трансляционных стан-
ций для коротковолновых передач, например телевиде-
ния, проверки теории относительности, исследования
сжатия Земли, космических лучей, собственного излучения
атмосферы, состояния земного магнитного поля, состава
верхних слоев атмосферы, изучения земной поверхности
с больших высот.
90
Вернемся к нашей мысли о спутнике Земли как про-
межуточной межпланетной станции. Так как такая про-
межуточная межпланетная станция движется с большой
скоростью, то при посадке на станцию ракета сохра-
няет свою скорость, которую она затем использует при
отлёте в межпланетное пространство. При возвращении
экипажа космического корабля на Землю межпланетная
станция явится пересадочным пунктом, откуда люди, пе-
ресев в космический планер, будут совершать призем-
ление.
ПЕРВЫЙ ЭТАП МЕЖПЛАНЕТНЫХ СООБЩЕНИЙ
Полет в межпланетное пространство близок, но еще
не осуществлен. Какие же основные задачи осталось еще
решить, чтобы он воплотился в жизнь?
Начнем со скорости.
Для того чтобы ракета взлетела и не упала на зем-
лю, а продолжала полет, вращаясь вокруг Земли в ка-
честве спутника, в качестве, так сказать, созданной ру-
ками человека новой миниатюрной Луны, необходимо
следующее. Она должна взлететь на определенную высо-
ту и, двигаясь вокруг Земли, получить такую скорость,
чтобы ее центробежная сила уравновесила силу тяже-
сти и тем самым позволила бы ей оборачиваться вокруг
Земли, не падая на нее.
При определенной скорости такой результат (в отно-
шении центробежной силы) можно получить и на не-
большой высоте, даже порядка нескольких километров,
но тут в дело вмешивается воздух. Выше мы видели, что
воздух является едва ли не одним из главных противни-
ков высоких скоростей, а в нашем случае скорость раке-
ты должна быть огромной. Кроме того, вспомним, что
даже ракета «Фау-2», пролетая через атмосферу, нагре-
валась выше 500 градусов Цельсия.
При скоростях же гораздо больших, чем у «Фау-2»,
ракета просто сгорит. Следовательно, нужно найти та-
кую минимальную высоту полета ракеты над Землей,
при которой можно было бы пренебречь влиянием ат-
мосферы.
Естественно, что для получения нужной центробежной
силы необходимо подобрать и соответствующую скорость
полета ракеты.
7*
91
Многие ученые занимались расчетами в этой области,
в результате чего была выведена формула для характе-
ристической скорости, которая имеет следующий вид:
Гх = 11190]/ 1 сек. (1)
Здесь г0— это радиус земли, равный 6 378 000 м, а
г = гг,4-й, где h — это высота полета спутника над Зем-
лей. Надо заметить, что скорость Ух, если проследить ее
вывод, зависит от количества энергии, которое необхо-
димо сообщить массе искусственного спутника Земли
(ИСЗ) для того, чтобы он не упал на землю и мог сво-
бодно совершать движение вокруг земного шара. Из
приведенной формулы (1) видно, что эта скорость Ух из-
меняется в зависимости от удаления орбиты спутника от
поверхности Земли.
Наименьшее ее значение, очевидно, будет при
г = г0, т. е.
1/х= 11190 | = 7912 м сек. (2)
Эту скорость принято называть первой космической
скоростью. Но, как мы уже установили ранее, свободный
полет ИСЗ в плотных слоях атмосферы осуществить
невозможно, так как он здесь быстро затормозится и
сгорит.
Из формулы (1) видно, что наибольшее значение
скорости Vx получим, удалив орбиту ИСЗ в бесконеч-
ность.
При г - •> ос У х -> 11190 м/сек — это будет так называ-
емая вторая космическая скорость.
Промежуточные значения скорости Ух в зависимости
от высоты h приведены в табл. 2, на которой показано
также изменение круговой скорости Укр в зависимости
от h.
Надо иметь в виду, что при определении потребных
числовых значений Ух и Укр следует обязательно учиты-
вать вращение Земли.
Относительно выбора высоты орбиты спутника суще-
ствуют самые разноречивые мнения. Так, конструктор
известной дальнобойной ракеты «Фау-2» Вернер фон
Браун предлагает орбиту спутника установить на высо-
те 1730 км от поверхности Земли. Это удобно в том от-
ношении, что спутник будет совершать один оборот
92
ТАБЛИЦА
Значения Vx и VKp спутника для разл. А ч (h)
11 — средняя вы- сота полета спут- ника в км Vx = 11190 р/ 1 М V V\p2 -go—м/сек м ' КР (сек)
_ г» 2г
200 8033 7789
220 8043 7777
250 8061 7759
265 8069 7/51
280 8076 7742
300 8089 7730
320 8099 7719
350 8116 7702
400 8143 7673
500 8194 7617
600 8246 7562
640 8266 7541
700 8294 7509
800 8342 7456
966 8417 7371
1000 8431 7354
1730 8716 7016
П р и меча н и е. При определении потребных численных значений
Vx и \ кр> следует обязательно учитывать враще-
ние земли.
ровно за 2 часа, т. е. за сутки он 12 раз облетит вокруг
Земли.
Другие ученые высказывают мнение о том, что нужно
иметь две орбиты для спутников, основную из них — на
высоте 1000 км над поверхностью Земли. Подсчитано,
что ИСЗ, запущенный по орбите на высоте 1000 км, сни-
зится до высоты 646 км за 5486 лет, т. е. по сути дела
будет существовать почти вечно. Вторую орбиту, как бы
вспомогательную, предполагают иметь для спутника, со-
вершающего круговые движения, как можно чиже, но
вне плотных слоев атмосферы, например на высоте
265—300 км, где спутник может просуществовать около
года, пока под действием сопротивления среды не войдет
по спирали в более плотные слои атмосферы и сгорит.
93
Такой спутник может совершить один оборот вокруг
Земли за 90 мин., при этом его скорость будет достигать
приблизительно 29 000 км/час. Связь с такими спутника-
ми и наблюдение за ними представят большие трудности
из-за огромной скорости прохождения их над Землей.
Удобнее всего было бы, чтобы ИСЗ оставался неподвиж-
ным относительно точки наблюдения с Земли. Оказы-
вается, это практически осуществимо. Действительно,
если заставить спутника проходить вокруг Земли не за
полтора, а за 24 часа, то он будет двигаться с такой ско-
ростью, что относительно места наблюдения с Земли будет
казаться неподвижным, будет как бы висеть над ним.
Было подсчитано, что для этого орбита спутника
должна быть удалена от поверхности Земли на 35 800к.ч,
Для того чтобы ракета не превратилась в спутника
Земли, а полетела в космос, необходима еще большая
скорость, более 11 км/сек (более 40 000 км/час). На-
помним, что такую скорость могут обеспечить только
двигатели прямой реакции.
Следовательно, вторым вопросом, которого нам при-
дется коснуться, будет вопрос о двигателях и тесно свя-
занный с ним вопрос о топливе.
Несмотря на то что реактивные двигатели при не-
большом весе обладают, как мы знаем, значительной
'мощностью, одноступенчатая ракета не в состоянии доне-
сти ИСЗ на его орбиту. Потребовалось бы разместить на
лей слишком большой запас топлива, что неосуществимо.
Когда мы говорили о боевых ракетах, то встречались
с термином «ускоритель». Вспомним, что он служил для
того, чтобы создать начальную скорость, «разогнать»
ракету на первом этапе ее пути до вступления в дейст-
вие основного двигателя. Этим достигалась экономия
в весе самой ракеты и значительное увеличение дально-
сти ее полета.
Вспомним также, что в качестве такого ускорителя
использовалась вторая дополнительная ракета (напри
мер, «Фау-2» для ракеты «Вак-Корпорал»), которая,
выполнив свое назначение, отваливалась от основной,
уменьшая тем самым ее массу и, следовательно, позво-
ляла еще более увеличить ее скорость. Мы уже говорили,
что такие ракеты называются составными.
Что же произойдет, если мы построим ракету, которая
будет состоять не из двух, а из трех, четырех и более ра-
94
кет, которые, как и'в приведенном примере, будут авто-
матически отпадать, выполнив поочередно свое назначе-
ние? Естественно, что в этом случае ракета приобретет
еще большую скорость.
Вот такой-то составной тип ракеты был предложен
К. Э. Циолковским в результате глубокого изучения и
исследования им вопроса выбора оптимальных взлетных
режимов для ракеты-спутника, т. е. изменения величины
тяги реактивного двигателя во времени и характера изме-
нения наклона касательной к траектории по отношению
к земной нормали. Дело в том, что во-первых, начальный
участок траектории полета ракеты-спутника при ее подъе-
ме с поверхности Земли на 20—25 км проходит через са-
мые плотные слои атмосферы, на преодоление сопротив-
ления которых затрачивается около 70 проц, всего запа-
са горючего ракеты-спутника. Во-вторых, так как ракета-
спутник набирает скорость не мгновенно, а постепенно
(более 10 мин.), то сила земного притяжения за этот про-
межуток времени может поглотить силу тяги реактивного
двигателя. Поэтому к характеристической скорости Ух,
определяемой по формуле (I), необходимо прибавить
некоторую величину скорости ДУ=ДЦВ + АУг , учиты-
вающую потерю реактивного импульса на преодоление
силы сопротивления воздуха и силы тяготения Земли в
период разгона ракеты.
Чтобы преодолеть земное тяготение, нужно совер-
шить огромную работу. Эта работа равна 6 378 000 кг м
на каждый килограмм взлетного веса ракеты-носителя
спутника Земли.
Задача инженеров, рассчитывающих программу взле-
та спутника, состоит в том, чтобы найти такую програм-
му, при которой потери скорости АЦ, и ДУг в сумме
составляли бы наименьшую величину. Расчеты показы-
вают, что практически эти потери для ракеты-носителя
ИСЗ могут быть доведены до 10—15 проц, от значения
скорости Vx. Из табл. 2 видно, что при высоте траекто-
рии ИСЗ, равной 265—300 км, характеристическая ско-
рость его Ух в этом случае должна быть без учета по-
терь A V порядка 8080 м/сек-, если же при этом А У,, Ц-
АЦ, в сумме составят 15 проц, от скорости Ух, то,
следовательно, орбитальная скорость (скорость Циолков-
ского — У„) у ракеты-спутника с учетом потерь A V
должна быть 9292 м/сек.
95
Эта скорость Уц подсчитывается по известной фор-
муле Циолковского:
I/ =Ul —
V II—»
где U — скорость истечения газов из сопла двигателя;
1 п — знак натурального логарифма; Мо — началь-
ная масса ракеты; М — масса ракеты в конце активного
участка полета. Иногда отношение обозначают чис-
лом Циолковского z, т. е. отношением начальной массы
ракеты (на старте) к ее конечному значению, когда все
топливо, предназначенное для сжигания в ракетном дви-
гателе, будет израсходовано. Скорость 9300 м/сек будет
отвечать числу Циолковского z = 42. Осуществить такое
высокое соотношение весов в одноступенчатой ракете
пока не представляется возможным. Отсюда и идея мно-
гоступенчатых ракет.
Теперь несколько слов о топливе.
При сравнении отдельных типов двигателей мы гово-
рили, что в настоящее время наиболее перспективным из
них является жидкостно-реактивный двигатель, так как
до сих пор только жидкие виды топлива, при наимень-
шем их объеме, обеспечивают самые большие скорости
истечения газов, отчего в конечном счете и зависит мощ-
ность двигателя.
Теоретически наиболее выгодным оказалось бы жид-
ко-водородпое топливо. Но, к сожалению, водород даже
в жидком состоянии имеет очень малый удельный вес и
требует для сжижения очень низких температур. Эти об-
стоятельства препятствуют его использованию.
Однако в настоящее время получены достаточно
эффективные виды топлива (например, жидкий кисло-
род — бензин).
Высказывались идеи об использовании в качестве топ-
лива уже отработавших частей составной ракеты. Но эта
заманчивая мысль еще не осуществлена. Очевидно, что
самым эффективным топливом впоследствии будет ядер-
ное горючее, и над этим вопросом усиленно работают уче-
ные всех стран.
В настоящее время в лабораторных условиях уже
разработаны типы двигателей и различные виды топли-
ва, могущие обеспечить ракете скорость, необходимую
для превращения ее в спутника. Но трудности этим не
исчерпываются.
9В
Существует ряд нерешенных вопросов, касающихся
взлета ракеты, оснащения ее необходимыми приборами
автоматики, управления ею в полете, стабилизации и
т. д., которых мы коснемся ниже.
Уже то, о чем мы только что рассказали, дает не-
которое представление о трудностях, связанных с общим-
решением задачи.
Теперь будет понятно, почему в настоящий момент не
ставится вопрос о полете, скажем, на Луну или на Марс.
Эту проблему, как уже упоминалось, предполагается ре-
шить к 1980 г. Сейчас же очередной задачей всех стран
считается создание искусственного спутника Земли к
1958 г.
ЭТАПЫ ОСУЩЕСТВЛЕНИЯ ЗАПУСКА ИСЗ
Задаче создания ИСЗ отводится все большее место в
специальной литературе (иностранной в особенности).
Причем ИСЗ рассматривается как весьма удобная проме-
жуточная станция для заправки горючим ракет, отправ-
ляющихся в межпланетное пространство.
«Судя по литературным данным, — пишет академик
В. Г. Фесенков в своей статье «Проблемы астронавтики»,
помещенной в журнале «Природа» № 6 за 1955 год,—
через 5—7 лет можно надеяться осуществить внеземную
лабораторию, как подготовительный этап для космиче-
ских путешествий».
Освоение межпланетных пространств будет произво-
диться строго последовательно. Сначала будет создан ис-
кусственный спутник небольших размеров, даже лишен-
ный каких-либо приборов. Наблюдение за этим спутни-
ком позволит разрешить отдельные неясные вопросы, свя-
занные с полетом вокруг Земли на огромных скоростях и
больших высотах. Будут уточнены также условия наблю-
дения за такйм спутником с Земли, проверены сущест-
вующие оптические и радиолокационные средства наблю-
дения и созданы новые.
Вторым этапом будет создание спутника уже боль-
ших размеров и снабженного сложной аппаратурой, кото-
рая позволит установить связь с Землей во время поле-
та, даст возможность в случае необходимости регулиро-
вать с Земли его скорость и, что самое главное, заклю-
ченные в нем приборы позволят изучить ряд физических
явлений, весьма важных для межпланетных полетов (кос-
97
Рис. 54. Внутреннее устройство искусственного спутника Земли
мкческие лучи, солнечная энергия, микрометеориты, рас-
пространение радиоволн и пр.). На рис. 54 изображено
внутреннее устройство такого спутника* диаметром 600 мм
и весом 45 кг. Стоимость его около 50 000 долларов.
Для доставки его на орбиту предполагается использовать
* Фотография заимствована из сборника «Реактивная техника
и радиолокация», выпускаемого Домом техники (Москва, № 3,
1954 г., стр. 50).
98
Рис. 55. Общий вид межпланетной станции, вращающейся вокруг
Земли на высоте 1730 км. Диаметр станции 76 м, полный период
обращения 2 часа. Для создания «искусственного тяготения» стан-
ция вращается вокруг своей оси со скоростью 3 об/мин. В центре
станции видны две башни, у входа одной из них находится
«пространственное такси», служащее для сообщений между стан-
цией и ракетными кораблями, прибывающими с Земли
трехступенчатую ракету усовершенствованного типа
«Фау-2».
Третий этап будет состоять в том, что па спутник, в
общем подобный предыдущему, поместят некоторых жи-
вотных. Они будут связаны с особыми приборами, кото-
99
Рис. 56. Рисунок предполагаемой трехступепчатой ракеты, пред-
назначенной для сообщения с искусственным спутником Земли:
1— приборный отсек; 2—кабина летчика; 3—место для экипажа;
4—место для груза; 5 — азотная кислота; 6-—гидразин; 7 — на-
сосы для подачи гидразина и азотной кислоты; 8— четыре основ-
ных двигателя и один для крейсерского режима; 9 — вертикаль-
ные стабилизаторы; 10 — насосы для подачи гидразина и азотной
кислоты; 11—смонтированные на шарнирах двигатели для управ-
ления (четыре группы по три двигателя); 12— основные ракет-
ные двигатели; 13—цистерны для перекиси водорода: 14—руль
вертикального управления; 15— выхлопное отверстие; 15 — 51 дви-
гатель, включая 12 смонтированных па шарнирах для системы уп-
равления; 17 — отсек для парашютов; 18 — руль горизонтального
управления; 19—перекись водорода для насосных турбин; 20 —
посадочный щиток; 21 — руль; 22 — элерон
100
рые Дадут возможность следить с Земли за их состояни-
ем, физиологическими изменениями и поведением.
Результаты наблюдений над спутниками первых трех
типов, а затем над животными будут тщательно изучены
и позволят сделать выводы о возможности полета челове-
ка в космос. После этого будет создан четвертый тип спут-
ника, оснащенный всем необходимым, на котором уже
смогут находиться люди. Для этого четвертого (а возмож-
но, и третьего) вида спутника должна быть предусмотре-
на возможность возвращения на Землю.
Наконец после обобщения всех собранных материа-
лов приступят к созданию пятого вида спутника, который
будет являться промежуточной станцией для межпланет-
ных сообщений (рис. 55). Между этим спутником и Зем-
лей будет установлена при помощи ракет регулярная
связь.
Предполагается, что части межпланетной ракеты (ска-
жем, для полета на Луну или Марс) будут доставлять на
эту промежуточную станцию; на ней соберут, а затем и
запустят космический корабль.
Для чего же нужна такая промежуточная станция?
Опять-таки вспомним о нашем давнишнем противнике —
воздухе. Выше мы говорили, что начальная скорость ра-
кеты, летящей в космос, должна быть более 11 км/сек. Но
такая огромная скорость нужна в основном только для
преодоления силы притяжения Земли и плотных слоев ат-
мосферы, т. е. при старте ракеты с Земли.
Если ракета будет стартовать с искусственного спут-
ника Земли, практически находящегося вне пределов ат-
мосферы, то ее скорость должна составлять всего около
3,5 км/сек. Такое значительное уменьшение скорости
происходит за счет того, что ракете не придется преодо-
левать сопротивление воздуха и бороться с земным при-
тяжением (мы знаем, что на спутнике оно уравновешено
центробежной силой).
Уменьшение скорости, само собой разумеется, даст
возможность увеличить полезный объем ракеты, взять
больше топлива и, стало быть, во много раз увеличить
дальность полета.
Вернемся теперь к тому, над чем работают ученые в
настоящее время, пытаясь преодолеть указанные трудно-
сти.
101
УПРАВЛЕНИЕ И АСТРООРИЕНТИРОВКА ИСЗ В ПОЛЕТЕ
Выше мы уже коснулись вопросов скорости полета,
двигателя и топлива для ракет. Мы отмстили, что при
всей их важности они являются далеко не единственны-
ми. В самом деле, вспомним нашу беседу об управляемых
ракетах и снарядах, в частности об астронавигационных
системах управления. Там ракета держала заданный
Рис. 57. Орбита спутника Земли
курс при помощи сложной системы приборов, которые
были ориентированы на какое-либо небесное светило. Но
ракета и заключенные в ней приборы летели на относи-
тельно небольшой высоте от Земли и никогда не дости-
гали круговой скорости. Направление полета могло
корректироваться, и средством ориентировки служил ги-
рокомпас или' магнитный корректор курса.
Понятно, что и спутник, вращающийся вокруг Земли,
должен взлететь по вполне определенной траектории (ка-
кой именно — мы расскажем ниже). Затем необходимо,
чтобы спутник, так же как и боевая ракета, сохранял
свое положение при полете и, следовательно, мог бы ав-
томатически определять свое положение в пространстве
102
и по отношению к географическим координатам Земли.
Назовем это астроориентировкой.
Одной из вех в этом случае точно так же может слу-
жить какое-либо небесное светило, па которое будут
ориентироваться соответствующие приборы спутника (оп-
тические приборы слежения). Но как быть с ориентиров-
кой относительно Земли? Ведь для определения места от-
носительно Земли одной вехи на светило, которым может
служить хотя бы Луна, недостаточно. Нужно ориентиро-
ваться еще и на какую-то вполне определенную точку на
Земле. В случае с боевой ракетой нам помогали магнит-
ный корректор курса и другие приборы. Однако мы уже
видели, что на все элементы конструкции и приборы
спутника земное притяжение и земной магнетизм прак-
тически не действуют. Следовательно, и существующие
приборы ориентировки, основанные на прежних принци-
пах, непригодны. Как же быть?
На помощь приходит так называемая плоскость искус-
ственного горизонта. Что это такое, мы сейчас увидим.
Па рис. 57 изображены Земля и орбита вращающего-
ся вокруг нее спутника. Заметим сразу, что положение
плоскости орбиты определенного спутника по отношению
к Земле и звездам не всегда является неизменным. Если
Рис. 58. Фиксированная вертикаль
или плоскость искусственного гори-
зонта ИСЗ
орбита ИСЗ проходит
не через полюсы Зем-
ли, то вследствие ее
сжатости (земля не
шар, как представляет-
ся глобусом, а геоид) и
неравномерного распре-
деления масс к эквато-
ру плоскость орбиты
спутника будет медлен-
но вращаться около
2—3 градусов за сутки.
Это обстоятельство вы-
зывает еще большую
сложность аппаратуры
ориентирования поло-
жения спутника во
время полета над Зем-
лей. До пересечения с
любой точкой орбиты
103
(а следовательно, и до любого положения спутника на
орбите) мы можем провести продолженный земной ради-
ус. Плоскость, перпендикулярная этой линии и находя-
щаяся в точке пересечения ее с орбитой, будет плос-
костью 'искусственного горизонта для спутника, находя-
щегося в данной точке. На рис. 58 изображены четыре
положения спутника и соответствующие им четыре поло-
жения плоскости искусственного горизонта.
Предположим, что на спутнике имеется система опти-
ческих приборов, которая все время автоматически от-
мечает текущее значение угла, образованного направле-
нием на небесное светило и плоскостью искусственного
горизонта, а также оптический высотомер (радиоальти-
метр здесь неприемлем, так как он вместе с необходимы-
ми источниками его питания имеет значительный вес),
непрерывно измеряющий высоту спутника над поверхно-
стью Земли.
Из того же рисунка ясно, что с помощью соответст-
вующих приборов в любой момент полета, имея фикси-
рованную вертикаль к центру Земли и зенитное расстоя-
ние* до светила, можно определить положение спутника
в отношении Земли. В этом и заключается смысл астро-
ориентировки.
Трудность состоит в том, что ученым и конструкторам
еще не вполне ясен вопрос, каким образом можно прак-
тически создать плоскость искусственного горизонта на
спутнике в условиях невесомости и почти абсолютного ва-
куума. Можно предположить, что в этом отношении по-
мощь окажет все тот же замечательный прибор — гиро-
скоп, о котором мы упоминали много раз. Однако еще не
ясно, как поведет себя гироскоп в тех условиях, в кото-
рых будет находиться искусственный спутник Земли.
В этом направлении предстоит еще ряд разнообразных и
сложных научных исследований, например испытание ра-
боты различных гироскопических устройств в вакууме
при отсутствии воздействия силы тяжести, что в земных
условиях воспроизвести чрезвычайно затруднительно.
Приборы, обеспечивающие искусственный горизонт,
должны обладать высокой точностью. Ведь если орбита
* Зенитным расстоянием называется угол между вертикалью
и направлением на светило
104
спутника проходит от Земли па расстоянии 111 км, то
ошибка определения вертикали всего па один градус при-
ведет к ошибке в определении места на земной поверхно-
сти более чем па 100 км. С увеличением же расстояния
спутника от Земли эта ошибка будет возрастать во мно-
го раз.
Следует также помнить, что любой, самый совершен-
ный гироскоп принципиально не может работать без оши-
бок, вызываемых трением в подшипниках подвеса. Прав-
да, при некоторых условиях, применяя особые гироскопы,
эти ошибки конструкторами сводятся до минимума, но
все же они в любой гироскопической системе всегда име-
ют место.
Какие ошибки могут быть в гироскопических устрой-
ствах астроориентировки и какое влияние они будут иметь
на точность работы этих устройств, можно судить лишь
после проведения большого количества сложных исследо-
вательских работ.
Нет сомнения, однако, что задача создания искус-
ственного горизонта или других каких-либо устройств аст-
роориентировки со временем будет успешно разрешена
современной наукой.
Одним из путей решения этой задачи может быть соз-
дание астроориентатора с высокой точностью измерения
навигационных координат, необходимой для нормальной
работы аппаратуры научных наблюдений, располагаемой
на спутнике (например, для фотографирования земной
поверхности). Такой астроориентатор должен иметь два
телескопа или один, но с переключением на два небесных
светила (звезды) и фиксированную относительно земли
вертикаль — опять-таки ту же плоскость искусственного
горизонта. Он должен иметь малый вес, малые габариты
и требовать возможно меньшей мощности источников
питания. Очевидно, что для создания такого астроориен-
татора потребуются различные сочетания гироскопиче-
ских и астрономических систем, включающих в себя те-
лескопы, фотоэлектрические устройства, гироскопы и ряд
элементов автоматики и телемеханики. Но размещение
этих устройств в самом спутнике окажется невозмож-
ным, так как они могут занять значительный его объем.
Поскольку эти элементы должны быть связаны оптически
с Землей и небесными светилами, размещение астро--
ориептатора внутри ИСЗ привело бы к необходимости
8 Зак. 1115
105
Рис. 59. Астроориентатор с телескопом, переключающимся на две
звезды, с фиксированной вертикалью на землю
иметь открытые части его оболочки. Например, они по-
требовались бы для телескопов, перемещаемых по по-
верхности спутника во время полета для слежения за
ориентирами (заранее намеченными звездами для ориен-
тации).
Учитывая все это, астроориентатор может быть выне-
сен за пределы оболочки ИСЗ и связан с ним кардано-
вым подвесом, как это показано на рис. 59. Искусствен-
ный спутник Земли стабилизируется по направлению на
Солнце с помощью специальных устройств, способных
создавать управляющие моменты в условиях невесомости
и в безвоздушном пространстве.
Стабилизация ИСЗ относительно положения Солнца
необходима для того, чтобы он большее время полета был
обращен одной стороной к солнечным лучам. В этом слу-
чае установленное на спутнике полупроводниковое зер-
кало будет воспринимать солнечные лучи и вырабатывать
электрическую энергию, необходимую для питания всех
его приборов.
Как же ИСЗ во время полета установит свое место-
106
положение относительно земных координат с помощью
такого астроориентатора? В течение всего времени поле-
та ИСЗ телескоп вертикали как бы «ощупывает» види-
мые края земной поверхности, в результате чего обра-
зуется треугольник, биссектриса угла которого и будет
являться вертикалью. Она же будет являться и высотой
полета спутника над Землей. Но, чтобы эта вертикаль бы-
ла фиксированной относительно земных географических
координат, т. е. широты и долготы места, ее надо непре-
рывно ориентировать, связывать с определенными не-
бесными ориентирами. Эту связывающую роль и выпол-
няют телескопы, часовой механизм и другие элементы
астроориентатора, определяющего географическое место
ИСЗ.
Вполне возможно, что астроориентпровка спутника
будет осуществляться и иначе, например с помощью не-
прерывного вычисления его положения относительно зем-
ных координат посредством интегрирования дифферен-
циальных уравнений движения. Выполнение астроориен-
тировки таким методом потребует наличия специальной
электронной счетно-решающей аппаратуры, прибора от-
счета точного времени и прибора, определяющего на-
правление вектора скорости спутника.
Запуск аппаратуры астроориентировки по этому спо-
собу производится сразу же после выхода его на орбиту
свободного полета. Место выхода спутника на орбиту
фиксируется с Земли тремя координатами х, у, z по кана-
лу связи, и в это же время запускаются приборы астро-
ориентировки.
Через несколько минут вся траектория полета спут-
ника уже рассчитана, и его экипаж, пользуясь этим рас-
четом, может по точным часам всегда определить свое
положение относительно Земли.
В том случае, когда спутником является автоматизи-
рованная ракета, расположенные на ней приборы сами
периодически запрашивают свои координаты с Земли и,
получив их, делают сравнение с заданной программой по-
лета. Но это не так-то просто. Дело в том, что при движе-
нии спутника вокруг Земли следует считаться с двумя
возмущениями, отклоняющими траекторию полета спут-
ника от плоскости его орбиты. Одно из этих возмущений
вызвано неравномерным распределением масс к эквато-
ру вследствие сжатия Земли. Другое возмущение вызы-
107
вастся действием сил тяготения Солнца и Луны, ко-
торые по-разному воздействуют на Землю и па ее спут-
ника. Кроме того, под действием годового вращения Зем-
ли вокруг Солнца орбита ИСЗ будет поворачиваться
вместе с Землей относительно Солнца на один градус в
сутки. Видимо, надо также принять во внимание возмож-
ные отклонения спутника в результате встречи его с по-
токами метеоритной пыли и вихрями, которые, оказы-
вается, имеют место на -высоте до 500 км (см. журнал
«Природа» № 1 за 1956 г., статья проф. Альперта). По-
этому движение спутника будет довольно сложным. Еще
более прогрессивный способ создания фиксированной вер-
тикали -на ИСЗ может быть основан на магнитометриче-
ских приборах, принцип работы которых основан на ис-
пользовании магнитного поля Земли. Такой способ не
требует открытых частей корпуса ИСЗ и надежно обеспе-
чивает его продолжительную стабилизацию с помощью
малогабаритных источников питания.
ПРОБЛЕМЫ ВЗЛЕТА ИСЗ НА ОРБИТУ
До сих пор мы все время говорили об основных усло-
виях, которые должны быть выполнены для того, чтобы
мог быть создан искусственный спутник Земли. Допу-
стим, что ракета-спутник уже создана. Каким же образом
вывести ее на орбиту?
Мы уже знаем, что ракета, предназначенная стать
спутником Земли, будет преодолевать значительные пре-
пятствия, пролетая через плотные слои атмосферы. Здесь
будет действовать сила сопротивления воздуха, замед-
ляющая полет; трение воздуха о ракету будет ее нагре-
вать. На этом же участке наиболее сильно сказывается
и сила притяжения Земли.
Таким образом, место взлета и его направление долж-
ны быть выбраны с таким расчетом, чтобы насколько
возможно уменьшить влияние перечисленных выше фак-
торов. Выбор такой траектории и ее математическое выра-
жение представляют собой весьма трудную задачу.
Приведем два примера. Оба они будут относиться к
направлению полета ракеты—спутника Земли.
Сила земного притяжения при разных направлениях
полета ракеты действует неодинаково; сильнее всего она
сказывается на ракете, запущенной строго вертикально.
Поэтому оказывается, что хотя при полете по вертикали
108
путь ракеты через атмосферу будет наименьшим, но из-за
силы притяжения Земли такое направление избрать нель-
зя. С другой стороны, при направлении ракеты почти по
касательной к поверхности Земли сила притяжения будет
наименьшей. По в этом случае потребовались бы огром-
ные затраты горючего и ракете пришлось бы пройти
очень большой путь в плотных слоях атмосферы. А это,
как мы знаем, невозможно, ибо ракета может даже сго-
реть. Следовательно, и это направление неприемлемо.
Приходится рассчитывать какой-то иаивыгоднейший угол,
под которым должна быть запущена ракета, чтобы влия-
ния силы тяжести и атмосферы были более или менее
приемлемы.
Далее, скорость вращения Земли на экваторе состав-
ляет около 400 м/сек. Значит, если мы запустим ракету по
направлению вращения Земли, то эта скорость будет помо-
гать взлету. Если же запустить ракету в направлении, об-
ратном вращению Земли, то это будет препятствовать ее
взлету. Этим обстоятельством также пренебрегать нельзя.
Если запустить спутник так, как показано на рис. 57,
то его орбита пройдет через Крымский полуостров, Чер-
ное море, Иран. Индийский океан, Южную Америку, Ти-
Рпс. 60. Путь спутника за сутки
109
хий океан и снова над территорией Советского Союза в
районе Камчатки. Появляясь дважды в течение семи обо-
ротов над СССР, занимающим территорию по долготе бо-
лее 150 градусов, спутник получает таким образом воз-
можность 14 раз за сутки контролировать свое положе-
ние относительно земных географических координат.
Принимая во внимание скорость и направление дви-
жения Земли, а также то, что спутник, как мы уже знаем,
совершает на высоте 265 км один полный оборот вокруг
Земли на 90 мин., мы увидим, что через 16 оборотов его
орбиту пройдут все страны мира, т. е. он через определен-
ное время пролетит по очереди над всеми странами, как
показано на развернутой мировой карте (рис. 60).
Чрезмерно большое ускорение в начале взлета может
привести к порче и выходу из строя приборов автомати-
ки, установленных в ракете. Следовательно, при запуске
спутника требуется определенное нарастание скорости.
Особое значение этот вопрос приобретет в том случае,
когда в спутнике будут находиться люди.
Этих далеко не исчерпывающих примеров достаточно,
чтобы иметь представление о трудностях, связанных с
взлетом ракеты. Неудивительно поэтому, что к расчету
траектории взлета привлекаются виднейшие ученые-аст-
рономы, математики и специалисты в области астронави-
гации.
Предположим, что траектория взлета вычислена. Пос-
ле запуска ракеты-спутника вступают в действие уже
принципиально знакомые нам приборы управления; раз-
личные программные механизмы и приборы стабилиза-
ции, с помощью которых контролируется полет на этом
начальном участке траектории.
Ракета вышла на орбиту. В этот момент выключается
двигатель, и она продолжает свой полет по инерции,
превратившись тем самым в спутника. В этот же момент
вступают в действие приборы автоматической астроориеп-
тировки.
Выше мы сказали, что первые ракеты будут запуще-
ны, вероятно, на высоту порядка 300 км от поверхности
Земли. Практически на этой высоте сопротивлением воз-
духа можно пренебречь. Однако все же в какой-то мере и
на этой высоте оно имеется и с течением времени его
влияние вызовет постепенное уменьшение скорости раке-
ты. В этом случае ракета, продолжая двигаться вокруг
но
Земли и постепенно приближаясь к ней, начнет описывать
спираль. В конце концов она войдет в плотные слои ат-
мосферы и сгорит. Чтобы заранее знать, когда это слу-
чится, па ракете должен быть прибор, чутко реагирую-
щий на всякое уменьшение скорости полета спутника. Та-
ким прибором может быть, например, применявшийся
еще на «Фау-2» интегратор ускорений. Назначение тако-
го прибора будет состоять в том, чтобы он фиксировал
некоторые изменения скорости полета для введения их
в качестве поправок в приборы управления и астронави-
гации ракеты-носителя спутника Земли.
Все рассказанное выше относится к созданию ракеты-
носителя спутника Земли и автоматизированного спут-
ника. Скажем несколько слов о тех особых трудностях,
которые возникнут, когда речь пойдет о полете человека
в космос.
Всем известно неприятное чувство, которое испытыва-
ет человек, например, при передвижении на быстроход-
ном лифте или при катании на американских горах. А
ведь скорость спутника будет во много раз превышать
скорость современного реактивного самолета даже на пи-
кировании. Как же быть в данном случае? Этим вопросом
давно занимаются многочисленные научные организации
всех стран мира. Оказалось, например, что степень влия-
ния ускорений на человека зависит от того, в каком поло-
жении человек находится относительно Земли при
взлете.
Выяснилось, что наиболее выгодным является лежа-
Рис. 61. Способность человека переносить ускорения в зависимости
от положения его тела. Светлые кружки — данные клиники Мэйо;
черные кружки — английские данные; треугольники—немецкие
данные; квадраты — данные США
111
чее положение (навзничь). Результаты исследования в
этом направлении наглядно показаны на рис. 61.
Кроме того, неизвестно, как будет себя чувствовать ор-
ганизм, скажем, в условиях невесомости, где нет верха
и низа. Весь этот комплекс вопросов, относящийся уже
в основном к области медицины и биологии, а не к обла-
сти техники, имеет чрезвычайно важное значение. Вот
почему такое большое внимание уделяется опытам
над животными, заключенными в ракету, о которых уже
сообщалось в газете «Труд» 16 февраля 1957 г.
Существует еще и ряд других проблем, которые тес-
но связаны с полетом в космос. Возьмем, например, ме-
теориты. Это — тела разных размеров, несущиеся с ог-
ромной скоростью в межпланетном пространстве. Иног-
да, как известно, метеориты падают и на Землю. Однако
это случается с довольно крупными метеоритами, кото-
рые не успевают сгореть, пролетая через атмосферу.
Большинство же из них, нс долетая до Земли, сгорает
полностью.
Инос дело в космическом пространстве. Там искусст-
венный спутник не имеет надежной защиты в виде плот-
ного воздушного слоя и метеориты представляют для не-
го большую опасность. Ведь нужно помнить, что метеорит
даже весом в 1 г, имеющий колоссальную скорость, бу-
дет обладать пробивной способностью много большей,
чем, например, винтовочная пуля.
А таких и еще больших метеоритов проносится в ми-
ровом пространстве неисчислимое множество. Правда,
некоторые подсчеты ученых в этом направлении подсказы-
вают, что встречи ИСЗ с такими мелкими метеоритами
возможны, вероятно, один раз в три года, а с более круп-
ными— один раз в 240 лет. С метеоритной же пылыо
встречи возможны почти ежедневно.
Тем не менее ясно, что защита от метеоритов также
представляет собой весьма важную и далеко не легкую
проблему.
Примерно то же можно сказать и в отношении воздей-
ствия на спутника космических лучей, от которых еще
не найдено падежных защитных средств, имеющих лег-
кий вес.
Наконец действие солнечных лучей, которые па Земле
являются источником жизни и всяких благ, в нашем слу-
чае тоже оказывает вредное влияние. Известно, что до
Н2
Земли доходит только незначительная часть тепловой
энергии Солнца, а большая часть поглощается атмосфе-
рой. Но в космосе дело будет обстоять совсем не так.
Сторона спутника, обращенная к Солнцу, будет нагре-
ваться более чем до 100 градусов Цельсия, тогда как про-
тивоположная теневая сторона может иметь температуру
в двести с лишним градусов ниже нуля. Такой значитель-
ный перепад температуры нс может не оказать воздейст-
вия на конструкцию спутника, и с этим также нельзя не
считаться.
Можно было бы привести еще много примеров, иллю-
стрирующих препятствия, возникающие в процессе разре-
шения задач космического полета. Однако человеческий
гений не знает преград в овладении силами природы, в их
подчинении своей воле.
КОГДА БУДЕТ ЗАПУЩЕН ПЕРВЫЙ ИСКУССТВЕННЫЙ
СПУТНИК ЗЕМЛИ
Широко развернутые работы в нашей стране и за
границей в направлении освоения космоса являются на-
дежной гарантией того, что в скором времени Земля по-
лучит искусственного спутника. Некоторые ученые наз-
начают даже сроки освоения межпланетных пространств.
Академик т. Несмеянов, выступая на сессии Всемирного
Совета Мира в Вене, сказал, что наука достигла такого
состояния, когда реальна посылка стратоплана на Луну,
создание искусственного спутника Земли.
В сообщении ТАСС от 2 августа 1955 г., опубликован-
ном в советских газетах, говорится о предполагаемом за-
пуске в США в 1957—1958 гг. первого искусственного
спутника Земли и об одобрении этой цели президентам
США. Советская пресса опубликовала также сообщение
о происходившем в августе 1955 г. очередном ежегод-
ном Международном конгрессе астронавтов в Копенга-
гене, на котором был зачитан ряд докладов и планов
создания искусственного спутника Земли и подняты дру-
гие вопросы, связанные с осуществлением межпланетных
сообщений в течение ближайших 30 лет. Присутствовав-
шие па этом конгрессе в качестве наблюдателей советские
ученые академик Л. И. Седов и профессор К. Ф. Огород-
ников сделали заявление на пресс-конференции о работах
советских ученых в области астронавтики и, в частности.
113
о намечающемся создании искусственного спутника Зем-
ли в ближайшие два года.
Интересно подчеркнуть, что этот международный конг-
ресс по астронавтике проходил уже под знаком перехода
проблемы межпланетных сообщений из стадии проек-
тов в стадию практического осуществления. Следующий
VII конгресс, проводившийся в октябре 1956 г. в Риме,
раскрыл миру новые, еще более интересные практические
результаты, достигнутые в области астронавтики.
Все эти усилия на пути создания внеземной космиче-
ской лаборатории и станции искусственного спутника
Земли являются, как мы уже сказали, неизбежным эта-
пом па пути завоевания мирового пространства ввиду
ограниченных возможностей ракеты на жидком топливе
при старте ее с поверхности Земли.
Как сообщает журнал «Вельтраумфарт» за 1953 г.
№ 31, для получения предварительных данных о физио-
логическом действии космических лучей и длительного от-
сутствия тяжести через пять-семь лет будет сооружен ис-
кусственный спутник Земли—лаборатория, а через 10—
15 лет — межпланетная станция.
Все это стало возможно лишь благодаря значитель-
ному росту промышленности и обогащению ее новыми
достижениями науки и передовой техники. Настало вре-
мя, когда работой по овладению космическим простран-
ством стали практически заниматься тысячи крупных спе-
циалистов-инженеров и техников. Проблема осуществле-
ния космических полетов поставлена перед учеными и
промышленностью на разрешение в самые ближайшие
годы и привлекла широчайшие слои представителей раз-
личных отраслей науки и техники. Первое слово здесь
принадлежит создателям новых, еще не виданных по га-
баритам и энергетической концентрации управляемых
ракет—спутников Земли, а затем и ракетных межпланет-
ных кораблей, ибо ракетное движение является единст-
венно возможным для осуществления запуска спутника
Земли, а затем и полета к другим планетам.
Много новых и труднейших задач предстоит решить
представителям науки и промышленности. Первой из них
является повышение скорости полета ракет для преодо-
ления силы земного тяготения. Это в свою очередь ставит
перед химиками задачу создания нового топлива, обеспе-
чивающего большую скорость истечения газов, и перед
ш
механиками, которым предстоит создать оольшие состав-
ные ракеты, способные развить скорость до 30 000 км/час.
А мы уже знаем, что в этом направлении достигнуты боль-
шие успехи. Еще в 1949 г. двуступенчатая ракета «Вам-
пир», состоявшая из ракет «Фау-2» и «Вак-Корпорал»,
развила скорость 8000 км/час, достигнув высоты 403 км.
Надо полагать, что к настоящему времени эти результаты
превзойдены как в СССР, так и в США.
Огромные и интересные задачи предстоит решить ра-
дио технической и другим отраслям промышленности, что-
бы создать прочную, надежную, малогабаритную, облег-
ченную аппаратуру автоматики и телемеханики, радиоло-
кации и фотоэлектронной техники. В решении этой зада-
чи примут участие металлурги, радиофизики, механики,
специалисты в области электронной техники, техники по-
лупроводников, создатели сложных математических элек-
тронных счетных машин, запоминающих устройств и т. и.
Создание автоматизированного спутника Земли, а тем бо-
лее космического корабля с его средствами радиосвязи,
сложным автоматическим регулированием реактивных
двигателей и приборами управления движением ракеты
в межпланетном пространстве потребует большого коли-
чества новых, более качественных радиодеталей, точных
и быстродействующих автоматических аппаратов, прин-
ципиально отличных от тех, которые применяются в на-
стоящее время.
Одной из многих важнейших проблем является обес-
печение электроэнергией всей автоматической аппарату-
ры искусственного спутника Земли и межпланетного ко-
рабля в течение многих дней, если не месяцев непрерыв-
ной работы (а не минут или часов, как это имело место в
реактивных снарядах). Здесь нс пригодны даже самые
легкие аккумуляторы, известные техникам. Для спутника
Земли необходим принципиально иной источник электро-
энергии. Им могут явиться фотоэлементы на полупровод-
никовой основе. Коэффициент полезного действия таких
фотоэлементов, как известно, уже сейчас достигает 10
проц. Так как в пределах солнечной системы ракета будет
двигаться в мощном световом потоке, который можно бу-
дет использовать для выработки электрической энергии,
фотоэлементы могут быть широко привлечены для ука-
занной цели. Вместо фотоэлементов для производства
электроэнергии на ракете-спутнике может быть использо-
115
ван и другой источник, например атомная электрическая
батарейка. В основе ее работы лежит свойство некоторых
искусственных радиоизотопов (например, радиостропция)
излучать электроны большой энергии. Проходя через слой
полупроводника, эти электроны извергают из него целый
ливень электронов меньшей энергии. Для увеличения си-
лы тока необходимо совместное действие многих таких
крошечных элементов, объединенных в батарейку разме-
ром в спичечную коробку, способную давать энергию в тече-
ние 25—30 лет.
Проблема создания точных приборов управления и
астроориентировки межпланетных ракетных кораблей
весьма существенна в том отношении, что правильный
выбор направления полета с учетом сил тяготения может
обеспечить движение в космосе по сложным траекториям
без значительного расходования топлива. Например, в ре-
зультате соответствующего маневрирования космического
корабля вблизи Луны или Марса скорость корабля может
быть изменена (увеличена или уменьшена) за счет кине-
тической энергии массивного тела, т. е. без затраты реак-
тивного топлива.
Этот выбор курса реактивного корабля, предусматри-
вающий использование гравитационных полей, можно
сравнить с выбором /направления движения парусного
корабля, использующего попутный ветер и попутные мор-
ские течения.
Задача создания приборов управления и астроориснти-
ровки спутника Земли и тем более межпланетных реак-
тивных кораблей гораздо сложнее, чем создание таких же
приборов для реактивных самолетов и ракет дальнего
действия, летающих в условиях атмосферы, где исполь-
зуется естественная — земная система координат. В каче-
стве ориентиров будут использованы, например, сравни-
тельно близкие Луна и Солнце. Знание их размеров и за-
конов их движения поможет уточнить положение кораб-
ля и следить за его движением. В решении этой задачи
значительную помощь могут оказать специалисты.
Современные достижения в области фотоэлектриче-
ских систем автоматического регулирования позволяют
разработать такую автоматическую систему, которая не
только обеспечит определение координат корабля, но
и будет управлять его траекторией в полете в соответст-
вии с заранее рассчитанной трассой, вводимой в програм-
116
мпые приборы системы приборов управления полетом.
Перед астрономами в настоящее время стоят те же зада-
чи, которые они уже научились решать, создавая астрона-
вигационные системы управлеия боевыми ракетами. За-
дачи эти состоят в разработке еще более совершенных
способов ориентации в космическом пространстве, выборе
тех светил для наблюдений, по которым наиболее выгод-
но будет ориентироваться при движении по заранее наме-
ченным маршрутам.
Проблема контроля за движением космического кораб-
ля тесно связана с определением скорости его полета. Она
является основным фактором во всей проблеме межпла-
нетных сообщений. Возможно, что здесь основную роль
будут играть радиолокационные методы. По, может быть,
выгоднее будет применять оптические методы, не требую-
щие затрат энергии на питание, или удастся использовать
для этой цели все тот же гироскоп с малым трением в
подвесе, совершенно новой конструкции, так называемый
«вибрационный», или другой, жидкостный.
Над созданием таких гироскопов сейчас уси-
ленно -работают во всех странах мира. Во всяком
случае и здесь, как и в предыдущих проблемах,
непочатый край работы для исследователей различных
специальностей.
Немаловажные задачи предстоит решить и связистам.
Осуществление связи в космическом пространстве встре-
чает также ряд трудностей. Жесткие требования, предъ-
являемые к массе полезного груза космической ракеты,
превращают проблему радиосвязи космического корабля
с Землей в одну из трудных технических задач. Связь по
радио на сотни тысяч и даже миллионы километров по-
требует исключительно мощных излучателей и весьма
чувствительных приемных устройств, создание которых со-
пряжено с огромными техническими трудностями. При на-
личии двусторонней радиосвязи можно будет с
Земли не только следить за движением ракеты, ио и
управлять ею, как это имело место в дальнобойных
управляемых реактивных снарядах. Все эти далеко не
полно перечисленные задачи, которые еще предстоит
разрешить на пути осуществления ракеты — спутника
Земли и ракеты — межпланетного корабля, очень труд-
ны, но вполне разрешимы средствами современной науки
и техники.
117
ЗАКЛЮЧЕНИЕ
Заканчивая наше краткое популярное обозрение реак-
тивного управляемого оружия и принципов устройства си-
стем приборов управления полетом снарядов и ракет, мы
видим, что современное развитие науки и техни-
ки, в особенности точного машиностроения, авто-
матики, телемеханики, радиолокации, реактивной тех-
ники, газовой динамики, химии топлива, дало воз-
можность внести коренные качественные изменения
в военную технику и тактическое ее использова-
ние.
Одним из наиболее важных событий в этой области
явилось внедрение реактивного двигателя в самолет, сна-
ряд, бомбу и торпеду. Сочетание этого двигателя с раз-
личными автоматическими системами привело к появле-
нию управляемых снарядов и ракет, которые при мини-
мальном участии человека или вообще без его участия
могут летать с огромными скоростями. Эти скорости пре-
вышают в несколько раз скорость современного реактив-
ного истребителя, позволяют преодолевать простран-
ства в несколько тысяч километров. Сами снаря-
ды находят заранее выбранную цель. Они же,
используемые в качестве защитных средств ПВО,
могут даже на дальних подступах встретить и
уничтожить нападающего неприятеля, будь это атом-
ный бомбардировщик или реактивный беспилотный са-
молет-снаряд. ,
Описывая здесь принципы устройства и боевого при-
менения реактивного управляемого оружия па основе ана-
лиза иностранной литературы последних пяти лет, мы
полагаем, что это даст известное представление будуще-
му воину Советской Армии о новых видах вооружения,
в частности реактивного.
Самым замечательным и прогрессивным направле-
нием в развитии реактивной техники и, в частности, в соз-
дании управляемых ракет является, как и в проблеме ис-
пользования атомной энергии, ее мирное применение в
целях дальнейшего развития пауки и достижения новой
победы над силами природы, которые могут быть ис-
пользованы в интересах улучшения жизни и прогресса
человечества.
ОГЛАВЛЕНИЕ
Из истории ракеты................................ 3
Немного механики................................ 5
Странное оружие................................. 9
Зачем понадобилась ракета? ..................... 12
Основные типы двигателей........................ 11
Рассказ о гироскопе ............................ 20
«Фау-1»......................................... 21
«Фау-2»......................................... 28
Что делали американцы........................... 36
Классификация управляемого реактивного оружия 40
Стартовые устройства носителей управляем'.,'; сна-
рядов ......................................... 45
Классификация систем приборов управления сна-
рядами и ракетами.................. 52
Принципы работы систем приборов управления 56
Принцип действия тепловой головки самонаведе-
ния ........................................... 63
Описание схемы работы приборов самонаведения 65
Принцип управления полетом и наведения на цель
управляемых воздушных торпед................... 66
Система приборов управления стрельбой зенитны-
ми управляемыми снарядами...................... 69
Устройство батареи зенитных управляемых сна-
рядов ......................................... 72
Неконтактные взрыватели........................ 74
Центр ио испытанию управляемых снарядов . 79
Защита от управляемых снарядов................. 83
Боевые управляемые снаряды и ракеты будущего 85
Мирное использование управляемых снарядов 86
Первый этап межпланетных сообщений ... 91
Этапы осуществления запуска ИСЗ .... 97
Управление и астроориентировка ИСЗ в полете 102
Проблемы взлета ИСЗ на орбиту................... 108
Когда будет запущен первый искусственный спут-
ник Земли............................ , । . 113
Заключение.................................... 118
Петров Виктор Павлович
УПРАВЛЯЕМЫЕ СНАРЯДЫ И РАКЕТЫ
Редактор Н. М. Успенский
Худ. редактор Б. А. Васильев
Техн, редактор Л. Т. Цигельман
_______Корректор М, А. Заозерская
Сдано в набор Э/Х—56 г.
Подписано к печати 2/1V—57 г.
Формат 8-1^1081/32; 3.75 физ. п. л.=6,15 уел. п. л.
Уч.-изд. л. =6.18
Г-31411 Тираж 50 тыс. экз. Изд. № 2/708
Цена 2 р.
Издательство ДОСААФ, Москва, Б 66.
Ново-Рязанская ул.. 26
Типография Изд-ва ДОСААФ, г. Тушино.
Зак. 1115