/












































































































































































































































































































































Text
И. КООЙ и И. ЮТЕНБОГАРТ
ДИНАМИКА
РАКЕТ
ОБО Р ОНГИ 3
19 5 0
И. КООЙ и И. ЮТЕНБОГАРТ
ДИНАМИКА РАКЕТ
Перевод с английского
А. Н. РУБАШОВА
Под редакцией профессора
доктора физико-математических наук
А. А. Космодемьянского
ГОСУДАРСТВЕННОЕ
ИЗДАТЕЛЬСТВО ОБОРОННОЙ ПРОМЫШЛЕННОСТИ
Москва 1950
Редактор М. С- Румянцева Техн, редактор Н. Н. Пискарева
Т01811. Подп. в печ. 11/1 1950г. Печ. л. 201/2+3 вкл. Уч.-изд. л. 19,03.
Формат бумаги 60x92Vie. Цена 18 р. Зак. 575/1259.
Типография Оборонгиза
ПРЕДИСЛОВИЕ РЕДАКТОРА
Ведущая роль в создании теории и в разработке проблем
полета при помощи ракетных двигателей принадлежит русским
ученым и инженерам. Достаточно назвать выдающегося уче¬
ного Константина Эдуардовича Циолковского, впервые научно
обосновавшего возможность практического применения реак¬
тивных двигателей и ракет, Ф. А. Цандера, создавшего еще
околб 20 лет назад ракетные двигатели на жидком топливе,
Ю. В. Кондратюка, давшего ряд глубоких идей при разработке
проблем полета ракеты.
Многочисленные работы русских ученых и техников, посвя¬
щенные проблемам реактивного движения, хорошо известны;
многие из этих работ издавались повторно*.
Предлагаемая вниманию читателя книга голландских спе¬
циалистов Коой и Ютенбогарта не содержит никаких принципи¬
ально новых научно-технических открытий. По сути дела она
является подведением технических итогов применения гитлеров¬
ской Германией дальнобойных ракет для обстрела Лондона в
последнем периоде второй мировой войны.
Однако такое систематизирование и суммирование имеюще¬
гося опыта, несомненно, представляет известный интерес, тем
более что некоторые разделы книги имеют элементы новизны.
Интересна, например, по идеям глава V настоящего издания,
где авторы широко применяют методы небесной механики к за¬
дачам космонавтики. Представляют интерес и главы VI и VII,
содержащие достаточно подробное описание и ориентировочные
расчеты двух немецких реактивных аппаратов: самолета-снаря¬
да ФАУ-1 и ракеты дальнего действия ФАУ-2.
При переводе книга была несколько сокращена. Первые
пять глав голландского издания опущены. Они содержали осно¬
вы векторного исчисления, аналитической механики и методов
численного интегрирования. На русском языке есть превосход¬
* К. Э. Циолковский, Труды по ракетной технике, Оборонгиз,
1947.
Ф. А. Цандер, Проблема полета при помощи ракетных аппаратов,
Оборонгиз, 1947.
Ю. В. Кондратюк, Завоевание межпланетных пространств, Обо¬
ронгиз, 1947.
3
ные руководства по этим разделам науки и поэтому помещать
их в книге было явно нецелесообразно. Однако в настоящем
издании сохранены главы, посвященные теории гироскопа и
баллистике артиллерийского снаряда, так как на выводы, сде¬
ланные в этих главах, авторы ссылаются достаточно часто.
В связи с этим изменена нумерация глав. Внесены также неко¬
торые изменения в принятые авторами обозначения.
Следует оговорить, что для облегчения сравнения приводи¬
мых в книге данных с другими источниками сохранена голланд¬
ская транскрипция всех географических пунктов в тексте и на
прилагаемых картах.
Необходимо отметить недобросовестность авторов (типичную
для буржуазной литературы), почти полностью замалчивающих
приоритет и заслуги русских ученых в деле развития ракетной
техники. Даже в том единственном месте книги, где автор не
мог не упомянуть имени К. Э. Циолковского, дана ссылка не на
основную работу К. Э. Циолковского 1903 года, а на дополне¬
ние к этой работе, изданное в 1913 г.
Уделяя в главе IV большое внимание обратным задачам ди¬
намики ракет, авторы не упоминают, что общие методы решения
таких задач были указаны И. В. Мещерским еще в 1897 г.
Число подобных примеров можно было бы увеличить.
А. А. Космодемьянский
Глава I
СНАРЯД КАК МАТЕРИАЛЬНАЯ ТОЧКА
§ 1. Введение
Баллистика — наука, изучающая движение снаряда, выбра¬
сываемого из орудия. Обычно ее разделяют на внешнюю бал¬
листику, изучающую движение снаряда после выхода его из ка¬
нала ствола, и внутреннюю баллистику, изучающую процессы,
происходящие в самом канале ствола. Здесь мы будем рассма¬
тривать только задачи внешней баллистики.
Движение снаряда как твердого тела можно разделить на
движение его центра тяжести и на движение снаряда вокруг
центра тяжести. Траекторию, описываемую центром тяжести,
называют траекторией снаряда. В определении этой траектории
заключается основная задача внешней баллистики.
Положение снаряда относительно его траектории оказывает
большое влияние на геометрическую форму самой траектории,
так как аэродинамические силы, действующие на снаряд, изме¬
няются в зависимости от его положения. Таким образом в об¬
щем случае движение центра тяжести и движение снаряда во¬
круг центра тяжести не могут быть разделены аналитически.
Однако в большинстве случаев делается упрощающее предполо¬
жение о том, что снаряд движется таким образом, что продоль¬
ная ось его направлена по касательной к траектории центра
тяжести. Это в большей или меньшей степени имеет место на
практике благодаря тому, что снаряду сообщают большую утло1
вую скорость вокруг его продольной оси. (У авиационной бом¬
бы совпадение продольной оси с направлением движения до¬
стигается при помощи хвостового оперения.)
О снаряде, продольная ось которого совпадает с направле¬
нием движения, говорят, что он «послушен». В этой главе мы
будем предполагать, что снаряд является идеально послушным
и что единственной аэродинамической силой, действующей на
него, является сила сопротивления воздуха, направленная в сто¬
рону, противоположную движению. Благодаря такому упроще¬
5
нию снаряд можно рассматривать как материальную точку,
в которой сосредоточена вся масса снаряда и к которой при¬
ложены все внешние силы,
§ 2- Движение снаряда в пустоте в однородном поле
силы тяжести
Рассмотрим движение снаряда, выпущенного под углом а с
начальной скоростью и0 (фиг. 1). Пренебрегая сопротивлением
воздуха. и считая гравитационное поле однородным, получаем
горизонтальную и вертикальную составляющие скорости;
■ux = i>0cos а, |
= ©о sin а—gt, )
где g — ускорение силы тяжести.
Пути, пройденные в горизонтальном и вертикальном направо
лениях, К: не которому моменту времени t равны:
X = (t/0 cos a)t, )
у = sin a) t '-gt*. j
Исключая из уравнений (2) время t, получаем уравнение
траектории
j = xtga 1— . (3)
л 6 2^ cos' a v 7
.Траектория, таким образом, является параболой.
Вершина параболической траектории достигается в момент:
vosin а
g
Подставляя это значение в уравнение (2), получаем высоту
траектории
г)? sin' а
= • (4)
2g
В момент
I 2v0 sin а
i;\ V ' ' g
6
фиг. 1.
снаряд упадет на землю. Так как горизонтальная составляющая
скорости оо cos а является постоянной, то горизонтальная даль¬
ность равняется:
2v% sin a COS а
s=— , (5)
g
а полное время полета снаряда равняется
у, 2г>0 sin а
g
Если начальная скорость иа и горизонтальная дальность s
заданы, то для определения угла бросания следует разрешить
уравнение (5) относительно а.
Вводя в уравнение (5) tga, получим
2«о tg“
S =
g l + tg’a
ИЛИ
tg2a -tga-f-1 =0,
gs
откуда
tga = — ± g^. (6)
gs gs
Следовательно, мы получаем два значения угла и а2, со¬
ответствующие настильной или навесной стрельбе. Каждый из
этих углов обеспечивает заданную горизонтальную дальность $.
При этом
2«о
tg (ai + аг) = tg ai+tg °2- = ——— = оо (
1 —tgajtgajj 1 — 1
так что «14-а2 = -^-.
Если
'П0 = К^> (7)
то два корня (6) совпадают и а=~ •
Если задано и требуется определить угол а, соответствую¬
щий максимальной горизонтальной дальности, то нужно соглас¬
но уравнению (5) положить
d 1
— Sinacosa = 0
da
ИЛИ
— sin2 a + cos2 a = 0,
7
откуда
я
а = —.
4
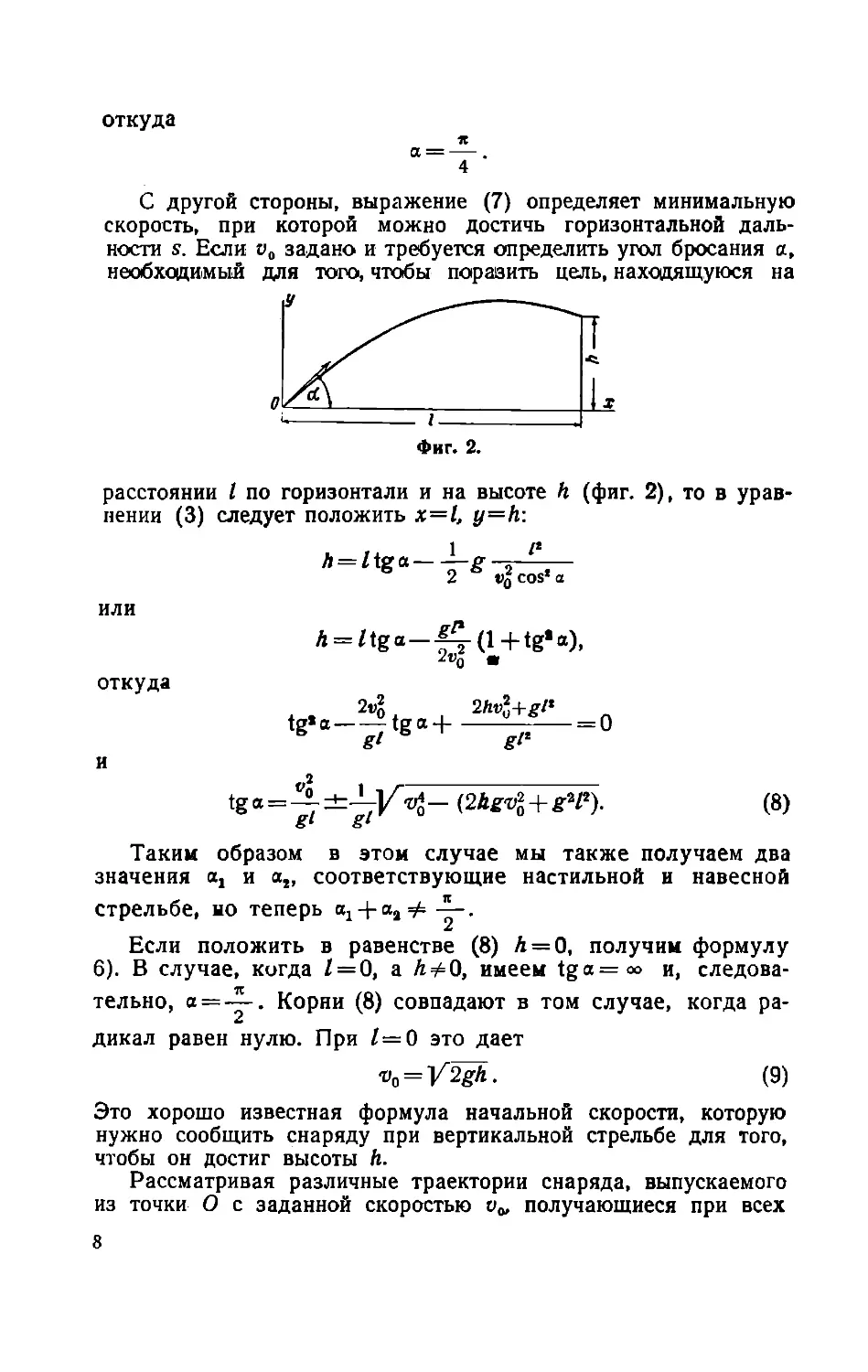
С другой стороны, выражение (7) определяет минимальную
скорость, при которой можно достичь горизонтальной даль¬
ности s. Если и0 задано и требуется определить угол бросания а,
необходимый для того, чтобы поразить цель, находящуюся на
8
Фиг. 2.
расстоянии I по горизонтали и на высоте h (фиг. 2), то в урав¬
нении (3) следует положить x=l, y=h-.
Л = I tg а g —5
2 Vq COS* а
или
А = Ztga — (1 +tg*a),
откуда
2«о 2hv2+g/‘
tg» а ° tg а 4 — = О
gl gF
и
2
tg а = — (2&^о + ёг12). (8)
Таким образом в этом случае мы также получаем два
значения оц и а,, соответствующие настильной и навесной
стрельбе, но теперь 04 + ^=#
Если положить в равенстве (8) А = 0, получим формулу
6). В случае, когда / = 0, а Ау=0, имеем tga=oo и, следова¬
тельно, а = -^-. Корни (8) совпадают в том случае, когда ра¬
дикал равен нулю. При / = 0 это дает
-п0 = /2^А. (9)
Это хорошо известная формула начальной скорости, которую
нужно сообщить снаряду при вертикальной стрельбе для того,
чтобы он достиг высоты А.
Рассматривая различные траектории снаряда, выпускаемого
из точки О с заданной скоростью получающиеся при всех
возможных углах бросания а, мы можем определить граничную
кривую (так называемую параболу безопасности), обладающую
тем свойством, что ни одна точка, лежащая выше нее, не может
быть поражена.
Рассматривая а как переменный параметр, запишем урав¬
нение (3) в виде
f(x, у, а) = 0. (10)
Искомая граничная кривая является огибающей семейства
траекторий (10).
Рассмотрим две близкие траектории этого семейства:
f(x, у, а) =0 и /(х, у, a + da) = 0.
Точка пересечения этих кривых принадлежит искомой гра¬
ничной кривой. Следовательно, она должна удовлетворять урав¬
нению
/(*, У, л + Л)-/(х, у, а) = 0
или
-^=0. (11)
иа
Таким образом, огибающая найдется путем исключения а из
уравнений (10) и (11).
Согласно уравнению (3)
/(X, у, ,)-.у-х1е.+_Я£_ = 0, (12).
так что
¥ =—+ (13).
да cos2 a 2«q COS® а
Из уравнения (13) следует:
vo
— cos а + gx sin а = 0 или tga =—.
gx
Подставляя это выражение в уравнение (12), получаем
®О gx* / vо \
у—-+Ь- =°
g 2”о \ g'x*}
или
v0 с0 gx*
у—-+ —+^=о
g 2g
ИЛИ
/ Vq \2г>у
. (14)
\2g / g
Следовательно, граничной кривой, представляемой уравне¬
нием (14), является парабола (парабола безопасности) с осью»/
9
в качестве оси симметрии (фиг. 3). Уравнение (14) можно по¬
лучить также, приравнивая нулю подкоренное выражение в
формуле (8) и полагая в нем l=x, h=y.
Полагая в выражении (14) х=0, получаем
УГ.„ = ОА=±,
т. е. максимальную высоту, которой достигает снаряд, выпущен¬
ный вертикально вверх с начальной скоростью и0.
Полагая в уравнении (14) z/=0, находим максимальную го¬
ризонтальную дальность:
с4 г-2
, со го
хт., = И X = .
£2 g
Полагая в выражении (4) а =и в выражении (5) а = -^-,
получим, разумеется, те же результаты.
При стрельбе с углом бросания а и начальной скоростью
v0 угол места цели f (фиг. 4) определяется выражением
(l>osina) gt*
tg 7 = ,
(v0 COS a) t
10
Фиг. 4.
Фиг. 3.
откуда находим время полета снаряда от точки О до точки Л:
Z=— (sina — cosatgf). (15)
s
Горизонтальную дальность можно получить путем подста¬
новки выражения (15) в первое уравнение (2). Расстояние до
цели тогда будет
ОА = ОВ sec у.
Эту формулу можно применять и в случаях, когда угол у
отрицателен.
§ 3- Общий метод расчета траектории с учетом
сопротивления воздуха
Возьмем систему координат ху в плоскости движения снаря¬
да, ось х направим горизонтально, ось у — вертикально. Пусть
начальная скорость снаряда будет и0.
По выходе из канала ствола снаряд находится под действием
двух сил: сопротивления воздуха /?, действующего в сторону,
противоположную движению, и веса mg,
где т— масса снаряда, а g— ускорение
силы тяжести. Эти силы остаются все вре¬
мя в плоскости движения снаряда ху.
Если через & обозначить угол между на¬
правлением движения и положительным на¬
правлением оси х, то уравнения движения
запишутся в следующем виде:
тх= — /?cos&, 1
}• (Io)
ту = — /?sin& — mg.)
Сопротивление воздуха R является функцией скорости v и,
кроме того, зависит от плотности воздуха и формы снаряда.
Можно записать
R=kf(v), (17)
где k — коэффициент, зависящий от формы снаряда и плотности
воздуха р.
Если пренебречь изменением р с высотой, то k можно счи¬
тать постоянным.
Обозначим
—=А1;
т
тогда
х = — kj(v) cos &, (18)
у = — й/Сп) sin 8 — g. (19)
11
Фиг. 5.
Кроме того,
х = v cos &, (20}
_y = 'usln&. (21)
Возьмем теперь за независимое переменное угол 6. Тогда
(22}
dt d» dt v '
(23>
dt d* dt 4 r
Нормальное ускорение снаряда будет равно:
v-^-= — gcos&. (24)
Из уравнений (20), (22) и (24) следует, что
dx ( гсозЭХ л dx v*
( — )=VCOS& или =
Л\ v J dS g
или
в
х = — f— db + x0. (25)
V
Далее из уравнений (21), (23) и (24) получаем
^/_gcos_8X sin&
4Й \ V )
или
fL = _21tg&
d» £ 6
или
У= — f—tgW& + ^0. (26)
V
Через х0, уа и Оо обозначены значения х, у и 8 при £ = 0.
Далее, из уравнения (24) следует
dt v
d§ gcos d
И
»
t= — f— sec&rf». (27)
V
12
Из уравнений (18) и (20) получаем
d^c°lV = _ kJ (у) cos 8, (28)
ио из уравнения (24) следует, что
d (у cos 9) rfO d (у cos 8) / g cos 8\ • (с)л\
d8 dt dv \ v / ’
так что уравнение (28) принимает вид
djycos^f _£cos8\ = _ V(t,)cos &
d8 \ v J u '
или
d {v cos 8) = . vf(v) ,3qv
d8 1 g '
Последнее уравнение называют основным уравнением внеш¬
ней баллистики. Это уравнение можно записать также в виде
= v tg 8 + k. sec 8. (31)
Если проинтегрировать уравнение (31) и найденное o = t> (ft)
подставить в интегралы (25), (26) и (27), то можно будет по¬
средством квадратур определить х, у и t в зависимости от ft,
а следовательно, х и у в зависимости от t.
§ 4. Интегрирование основного уравнения в том случае, когда
= а + cvn
Даламбер считал, что в общем случае зависимость между
сопротивлением воздуха и скоростью может быть представлена
формулой
Ai f{v) = а + сип. (32)
В этой формуле а, с и п — постоянные, зависящие от формы
снаряда, плотности воздуха и порядка величины скорости.
Подставляя выражение (32) в уравнение (30), получаем
d(vcos8)=_tL(a Я)
rf8 g ’
ИЛИ
geos bdv—v (а4- sin 0) db = co’+,dft.
Полагая теперь •o~n = u и, следовательно, du = —nv~n~'idv,
получаем
du = _ _2£_. (33)
M g cos 8 g cos 8
13
Обозначим
n(fl+gsin8) = Q-a^
g cos 6
и
—— = RW, (35>
g cos v
где Q и /? —функции Я. Тогда уравнение (33) примет вид
^-+(?(&)«=/? (в). (33')
ао
Уравнение (33') является линейным дифференциальным урав¬
нением первого порядка и может быть легко проинтегрировано.
Будем пользоваться методом вариации постоянных. Рассмотрим
сперва уравнение
^ + (2(в)ц=о. (33"}
Из уравнения (33") имеем
^-=_Q(»)d&,
откуда
и = Се~^^. (36)
Функцию и, представленную формулой (36), можно считать
решением уравнения (33'), если рассматривать С как функ¬
цию 0.
Эта функция должна быть определена таким образом, чтобы
удовлетворялось уравнение (33'). Из равенства (36) получаем
_ CQ (d) g-fWM» + .
Подставляя это выражение, а также выражение (36) в
уравнение (33'), получаем
откуда
С = №<№d»R(b)db + K'.
Таким образом общее решение уравнения (33') можно за¬
писать в следующем виде:
-J Q(»)dS I J <?(»)<*»
и = е »• |J е»° R(b)d& + К =ъ~п. (37>
»0
14
При & = &0 имеем v = v0, так что в равенстве (37) должно
быть
Х = 1»0-я.
Далее, из формулы (37) получаем
®=~. (38}
Vй
Таким образом из формул (34), (35), (37) и (38) v находит¬
ся как функция &.
§ 5. Интегрирование основного уравнения в случае,
когда &]/(‘u) = cDn
Предположим теперь, что
V(^) = ™"- (39)
Тогда из уравнения (30) получаем
rf(ttcos&) с ,40)
g
Умножая обе части равенства на созя+16, получаем
d(v cos 8) cosn+i^ _ /v cos &)„+i
dt g' '
ИЛИ
d (v cos 8) c d$
(t>cos8)n+1 g cos"+l8 ’
откуда получим
1 1 с f* f 41)
n (i>cos8)n g J cosn+I8
»o
При & = &0 имеем t = v0, так что
К'= — - 1 •
Л (у0СО580)Я
В равенстве (41) мн имеем интеграл типа
(* dx
J cos”X
Рассмотрим интеграл
. Jcos”x dx.
Интегрируя по частям, получаем
fcos"xrfx=— cos”~’xsinx+ 1 fcosn~2xdx.
J л nj
15
Полагая п—2=—т, получаем рекурентную формулу
С dx sin х т — 2 Г dx (л<у\
Jcosmx— (т - 1)совя’-1ж + т - 1J cosm-2^ ' '
Этой рекурентной формулой можно пользоваться для
интегрирования выражения, стоящего в правой части равен¬
ства (41).
§ 6. Интегрирование основного уравнения в случае,
когда сопротивление воздуха пропорционально v*
Если скорость снаряда не превосходит 200 м/сек, то со¬
противление воздуха можно считать пропорциональным квад¬
рату скорости, так что kj(y) = cv2.
Тогда согласно уравнению (41) имеем
1 1 с Г ЛЭ ,
2 v* cos' 8 g J cos’ 8
Рекурентная формула (42) дает
f ЛЭ sin 8 . 1 f ЛЭ 1 . „ a , 1 1 Zx a I
I ——- = -—— 4 1 — = — tg ft sec 0 4 In (tg ft + sec ft) =
J cos’8 2cos*8 2 J cos 8 2 2 6 ’
= Y tg » Vl+tgaft + y-ln (tg & + /1+tg’ft).
Полагая tgft = p, запишем равенство (4Г) в виде
4г-1 = к - 7 [нУТ+Р“+ in (р+/1+7">],
откуда
v = 1 / —«Л. (43)
V к-с1р/Г+1? + 1п(р+/ц-р«п
Когда v = v0, p = tgft0 = p0, и, следовательно,
«=+ С +1П ( Но + У1+1$)] • С*4)
Если теперь в интегралах (25), (26) и (27) принять р за
новую независимую переменную, то получим:
^ = dtgft = -^- = (l + p2)rfft
cos' о
и
db = -^—. (449
1+р*
16
Подставляя выражения (43) и (44') в равенства (25), (26) и
(27), получаем
и
х = — С . + х0, (45)
J К-С [(1/1 +и« + 1п((х+/1 +|Л’Л
Рю
И
С . t лс\
У J К - с [(1 /Г+f^+ln ((1 + /l+p) ] + Jo* ( }
Ио
t= L f rf|X- = . (47)
ygJ^K-c [(1 /i + |x2+ln ((i+j/l+(i2)]
Эти интегралы не выражаются в элементарных функциях и
должны вычисляться приближенными методами.
Примером движения, при котором сопротивление воздуха
пропорционально квадрату скорости (у<200 м/сек), может
служить движение бомбы, сброшенной с самолета.
Если в момент сбрасывания бомбы t=0 самолет пикирует,
то p.= (i0 отрицательно и К нужно вычислять по формуле (44).
Если же самолет летит горизонтально, то ро=0 и
(*8)
Радиус кривизны р в какой-либо точке траектории бомбы мо¬
жет быть определен из формулы для нормального ускорения.
Это ускорение равно:
а V*
geos 0 = ,
р
откуда
Р = —(49)
geos 8
где
—= sec 0 = 1/1
cos 8
или согласно формуле (43)
р= (50)
э
С помощью этой формулы можно построить приближенную
траекторию бомбы как последовательность малых дуг окружно¬
стей. Для произвольного элемента траектории можно написать
ds = ? d$.
Положим Оо = <р, 4>1 = <р — ЛЯ, &2 = ср —2Л6, &3 = ср —ЗАО и
т. д. и вычислим по формуле (50) значения р, соответствую-
2 Динамика ракет
17
щие в0, &2, д8 и т. д. Приближенную траекторию можно
тогда получить как последовательность дуг окружностей:
ds0 = p0A&, ds1 = p1^^, rfs2 = p2A&, ds3 = p3A& и т. д.
Такое построение показано на
фиг. 6. На этой фигуре изображена
траектория бомбы, сброшенной с са¬
молета при горизонтальном полете,
так что ср =0.
§ 7. Случай, когда сопротивление
воздуха пропорционально v3
В диапазоне скоростей от 400 до
600 mJ сек (сопротивление воздуха
можно считать пропорциональным 3-й
степени скорости. В этом случае мож¬
но написать
А]/(‘Ц) = С1>3
и равенство (41) принимает вид
—! ? = — . (51)
3 (г> cos 8)9 g J cos4 8
Но
= f (l+tg2&)dtg& = tg& +
J cos4 8 J
4—tg'».
Следовательно,
3
(i+tg'8)2 =
Полагая tg& = p, получаем
(52)
Постоянная интеграции К равняется
2
(1+^« Зе/ 11
К 3 + г Г“+ з
18
Фиг. 6.
Подставляя выражения (52) и (44') в интегралы (25), (26)
и (27), находим
р-
Л=~тС?7г <53>
J V
Рч
и
Л" ■ if +*• <54)
J и r-vO-v-)]
14
1 • (55)
Но
Эти интегралы можно вычислить приближенными методами.
§ 8. Случай, когда сопротивление воздуха пропорционально v*
В случае очень больших скоростей сопротивление воздуха
можно считать пропорциональным четвертой степени скорости *.
В этом случае можно написать
kj(v) = cv*.
Равенство (41) при этом принимает вид
— ! = — . (56)
4 (v cos Э)4 g J cos8 8 '
Согласно формуле (42) имеем
f sin 8 3 Г Л sin 8 3 Г sin 8
J cos8 8 4 cos4 8 4 J cos9 8 4 cos4 8 4 [ 2 cos' 8
+ 4-ln (tg 8 + sec 8)1 = А + 4 И4® &/l+tg1 2& +
2 4 4 [_ 2
+4-in(tg&+ /i+tg28)] = -4h/(1+h2)3+4 k/i+T' +
2 J 4 8
+ 1п(р. + У 1 4-p-2)].
1 Случай, когда сила сопротивления пропорциональна 4-й или 5-й
степени скорости, имеет место, как показал еще Маиевский, для весьма
ограниченного интервала скоростей при переходе через скорость звука.
Прим. ред.
2*
19
Таким образом:
=к- —к/(1+н2)8+— [и/1+ЙГ+
v4 g ' 2
+ 1п(р. + ]/1 +На )]},
)
откуда
v = У' + г* . (57)
^/(Т+^Г + -|~[|л/Г+7+1П(1х+/Т+й]}
Постоянная интеграции равняется
к=-Ц^~+-7 но’|Л(Т+П)5+4 h/i+iT+
H-ln Go + K 1 +^о )]| -
Подставляя выражения (57) и (44') в интегралы (25), (26)
я (27), тгаходим
х= __Lр _ ।
6 ) V к~7{^T^)r+i-hx/rHrt+ln(>*+/1+^)1}
+ -*о» (58)
у = - J- С +
8 т]/ ^~у{ ^/O+i^)8+-|-[и/1 + н2+1п([1+/1+^)]}
+Ь« (59)
• р-
f=~тС- •
J у к--^-{рУ0+й¥ +-|-[(1/1+?+1п(mVHT2)1}
(60)
Эти интегралы могут быть вычислены приближенными
методами.
20
§ 9. Случай, когда сопротивление воздуха
пропорционально
В этом случае1 kj(y) = cvb и равенство (41) принимает вид
—! ? =_£-f_^-+/C. (61)
5 (« cos 8)8 g J cos® 8
Интегрируя, получим
f —— = fsec4 М tg ft = f(l + 2 tg2 ft + tg4 &)<Z tg ft =
J cos® 8 J j
= tg $ + 4 te’& + “Г te® °-
о 0
Таким образом равенство (61) принимает вид
к~ +4 ‘8з&
V8 cos5 8 g \ 3 5 /
или
5
<1±^=К_^+3
V6 g \ 3 5 /
откуда
У=-.г /1 + ^ . (62)
,5/ 5с/ 2 1 \
1/ К — ц+—[Х8+—|Л8 1
У g \ з 5 /
Подставляя выражения (62) и (44') в интегралы (25), (26)
и (27), получаем
р-
* = - — С-'Ч - - - + *0, (63)
14
р-
У V Г V +■>'•' <М)
g 1 / Г„ 5с ( 2 1 \ |а
J V Г-т+т^+т^)]
Рю
р-
^=-—("-57= - (65)
JV K-7V+^+Ttt )
14
Эти интегралы также могут быть вычислены приближенным
способом.
1 См. примечание на стр. 19.
21
§ 10. Интегрирование уравнений движения снаряда методом
Рунге-Кутта 1 * *
Вместо того чтобы решать основное уравнение внешней бал¬
листики, можно также интегрировать дифференциальные урав¬
нения движения снаряда по методу Рунге-Кутта.
Положим
£ = vcos&, T] = ‘i>sin8, F(v)=^^-.
V
При этом сопротивление воздуха R = cmf(v), где т — масса
снаряда.
Тогда мы получим систему четырех совместных дифферен¬
циальных уравнений первого порядка:
-^-=—cF(v)B, ^= — cF(v)-n—g,
„ „ <66>
r dx dy
Е = -—, 7i = ^->
dt dt
где с—коэффициент, зависящий от формы снаряда и плот¬
ности воздуха.
К системе (66) следует добавить еще одно соотношение:
Интегральные кривые системы (66) представляют собой
кривые в пятимерном пространстве х, у, 5, т] и t.
Будем искать интегральную кривую, проходящую через
точку х0, уй, Ео, t]0, t0 (t = t0 соответствует моменту вылета).
Обозначим через k, I, т и п приращения х, у, Ей т), соот¬
ветствующие приращению h независимого переменного t.
Тогда получим следующую схему расчета:
х->А, у->1,
— А2 + — As + —
о о 3 о
■/=— /2+—z2+—13 +—Z4;
6*336
1 , 1 ,1 ,1
т =—Н т2Н та-\ тл
6 1 з з б 4
1 Подробнее с методом Рунге-Кутта можно ознакомиться в книгах
по приближенному вычислению, например, в книгах Ветчинкина В. П.,
Безиковича Я- С. и др. (Прим, перев.).
22
п~ ~T~ni+ “7“ "2+ — Л8 + -i- П4;
О О О Q
61 = Е(Л 4 = ^; mt= — срУ Ц +
Аг = + ~~^ А’ = (^о + ~2^) ~
= -СУ(Е.+^+(,.+ Ьу(Е. + ^) Л;
*3=(X+v)A; Z3=f’lo + v-') 4; т3 =
= -*q/ (Е"+т)1+(1»+тУ(5+104;
А4 = (£0 + /из)Л; /4 = 0% + пэ) А; /п4 =
= — cPV(Ео + /п3)2 + (7]0 + п3)2 (Ео + т3) h\
п^—сру е2+т]2 Т)0А —gh\
п3=—ср^ (X 4~у+(’’о+'т'У S>+ir) h~ ^h'
п3=-сР^(^о+^У+^о +y)2(’lo+-y) Л-gA;
n4 = — cPV (50 + m3)2 + (т% + л3)2(7|0 + n3) A—gh.
Приводим числовой пример x.
Калибр снаряда 2R=0,088 м.
Вес снаряда G=7,5 кг.
Начальная скорость и0=442 м/сек.
Угол бросания а=10°.
Удельный вес воздуха у земли П=1,22 кг/м*- Коэффициент
с=1,08.
Таким образом
и0 cos а=435,
о0 sin а=76,7.
Изменением с с высотой пренебрегаем. Полагаем далее А=
= 1 сек. Ниже приводится таблица значений k, I, v, т и п для
первого интервала времени:
А1=435, /1=76,7, »0=442, -т^вг.г -^=24,3,
Л2=394, /2=64,5, t»'=399, —m2=64,0, -п2=20,4,
*з=403, /3=66,5, v'=408, -m3=61,8, -n3=21,2,
*■4=373, /4=55,5, v"' =377, -7714=56,0, -/14=18,1.
1 Взято из книги С. С г a n z, Lehrbuch der Ballistik.
23
В этой таблице
va = VX + ^o , = j/*(e0 + + (tj0 +-7У ’
= 4+т)2+0о + 4)2’ *,''=^о + тз)г + (71о+«3Г.
Из таблицы получаем А=400; /=65,7; т=—65,0; п=20,9, так
что координаты центра тяжести снаряда по истечении первой се¬
кунды будут равны: х1=400 м, yt=&>,7 м.
После 12 интервалов, т. е. по истечении времени Т'=12 сек.,
находим Г/г=х=3384 м, Yl=y=l,5 м, о=227 м!сек.
Результаты отстрелов показали следующие значения:
х=3400 м, Г=12,1 сек., v=222 м!рек.
Таким образом, принимая А=1 сек., мы получаем достаточ¬
но хорошее приближение.
§ 11. «Послушность» снаряда
Обозначим угол между продольной осью снаряда и направ¬
лением движения через 8, а момент аэродинамических сил от¬
носительно центра тяжести через М. Тогда можно написать
M=Rh sin 8,
где R — сопротивление воздуха. Точка Р, лежащая на продоль¬
ной оси снаряда на расстоянии h от центра тяжести Z, является
точкой приложения силы сопротивления
воздуха.
Если ш — угловая скорость снаряда
вокруг продольной оси и 1а — момент
инерции относительно этой оси, то ки¬
нетический момент снаряда, созданный
вращением, будет равен:
В = 1а<а,
где вектор В направлен по оси снаряда в ту сторону, откуда
вращение снаряда кажется происходящим против часовой стрел¬
ки (фиг. 7).
Для снаряда, изображенного на фиг. 7, вектор-момент аэро¬
динамических сил перпендикулярен плоскости чертежа и на¬
правлен на нас (правая система координат). Вектор В описы¬
вает конус прецессии вокруг касательной к траектории.
Согласно теореме о кинетическом моменте, В=М. Следова¬
тельно,
| в| = Rh sin 8,
24
Фиг. 7.
Из этого равенства можно получить период прецессии
Т= 2"sln84°>_ = 2TC Чц (57)
/?Л sin 8 Rh
В формуле (67) 8 сокращается; следовательно, можно сде¬
лать заключение, что период прецессии не зависит от 3. Это,
впрочем, справедливо лишь для малых значений угла 8. Для
больших значений (не встречающихся на практике) h зависит
от 8, и, следовательно, Т также зависит от 8.
Если мгновенная ось вращения не совпадает точно с про¬
дольной осью снаряда, то снаряд будет, кроме того, совершать
еще одно вращательное движение — нутацию, описывая не¬
большой конус вокруг продольной оси, с периодом
т = 2« , (68)
(4-4) <»
где 1ь — момент инерции снаряда относительно поперечной оси,
проходящей через центр тяжести (экваториальный момент инер¬
ции). Период нутации мал по сравнению с периодом прецессии;
нутация обычно настолько незначительна, что в первом прибли¬
жении ею можно пренебречь.
Угловая скорость поворота касательной к траектории рав¬
няется:
лэ
7- лэ dt Z лэ лэ 1
dt ds v ds рЛЭ р
dt
то согласно формуле (24)
2 v g cos Э
р V
Для того чтобы снаряд был в достаточной степени послуш¬
ным, нужно, чтобы угловая скорость поворота касательной к
траектории была мала по сравнению с угловой скоростью пре¬
цессии, т. е. требуется, чтобы
Таким образом мы получаем условие, необходимое для то¬
го, чтобы снаряд был достаточно послушным:
gcosft «Rh (6Э)
v <ofa
25
Фактически совершающееся прецессионное движение снаря¬
да весьма сложно, так как сопротивление воздуха R во время
прохождения снарядом всей траектории изменяется по величине
и направлению.
При этом происходит некоторое отклонение снаряда от пер¬
воначальной плоскости стрельбы и траектория его становится
пространственной кривой. Это отклонение будет направлено вле¬
во или вправо, в зависимости от направления вращения снаря¬
да. Более подробно этот вопрос мы рассмотрим в главе III.
§ 12. Разбивка траектории на участки
Если траектория снаряда проходит на больших высотах, то
следует учитывать изменение р с высотой, вследствие чего ко¬
эффициент k в равенстве (17) также будет изменяться. Кроме
того, если изменения скорости значительны, то следует учиты¬
вать также изменение закона, устанавливающего связь между
сопротивлением воздуха и скоростью снаряда. Для скоростей, не
превышающих 200 м/сек, сопротивление воздуха можно считать
пропорциональным квадрату скорости; для больших скоростей—
пропорциональным третьей степени скорости и т. д.
Если написать в общем случае
то траекторию можно будет разбить на несколько частей по
высоте и для каждого участка брать свои значения А и п.
Если нужно получить более точные результаты (например,
при расчетах на очень большие дистанции), то следует учесть
также изменение силы тяжести с высотой, кривизну поверхности
земли и вращение земли. При приближенном интегрировании
(например, по методу Рунге-Кутта) эти изменения легко могут
быть учтены.
§ 13. Ускорение Кориолиса
Прежде чем переходить к вопросу о влиянии вращения Зем¬
ли на движение снаряда, сделаем небольшое отступление и
остановимся сначала на ускорении
Кориолиса.
Возьмем неподвижную систе|му
координат xyz и систему координат
x'y'z', вращающуюся с постоянной
угловой скоростью ц относительно
системы xyz. Точка О является об¬
щим началом обеих систем (фиг. 8).
Пусть радиус-вектор движущейся
точки Р (с координатами х, у, z)
будет г.
26
Фиг. 8.
Если через i, J, k обозначить единичные векторы по на¬
правлениям осей х, у, г, а через С, j", k' — единичные век¬
торы по направлениям осей х', у', z’, то можно будет на¬
писать
г = ix + jy + kz = i'x' + J'у’ + k'z'.
Дифференцируя по времени, получаем
г = ix +Jy + kz= i'x' + j'y' + k'z' + i’x' + f y' + k'z'. (70)
В этом уравнении
i'x + j’y' + k'z’ =vol№ = относительная скорость точки
P, т. e. та скорость, которую имела бы точка Р, если бы
система координат x'y'z' не вращалась, а
i'x' +j’y' +k'z' = vnep= переносная скорость, т. е. ско¬
рость, которую имела бы точка Р, если бы она была непод¬
вижна относительно системы x'y'z'.
Следовательно, равенство (70) можно записать в виде
'»=®отн +Хер, (71)
где “П—скорость точки Р относительно неподвижной системы
координат xyz.
Дифференцируя равенство (70), получаем
г = ix + j y-\-kz = i'x' + j'y' + k'z' +
+ 2 (f x' + j'y' + k'z'} + i'x' + j'y' + k'z'. (72)
В этом уравнении
i' x' + j' y' + k' z' — аоти = относительное ускорение точ¬
ки P, т. e. ускорение, которое имела бы точка Р, если бы
система x'y'z' была неподвижной, а
i'x’ + j'y' + k'z' = а„ер = переносное ускорение точки Р, т. е.
ускорение, которое имела бы точка Р, если бы она не дви¬
галась относительно системы x'y'z'. Следовательно, перенос¬
ное ускорение является нормальным или центростремитель¬
ным ускорением ап.
Вектор 2 (i'х’ + j'y' + k'z') = акор называется ускорением
Ко риолиса.
Так как на основании формул Пуассона
di — — dj — — dk — -г
— = <uXi- — — tt>xj\ — = mxk,
di dt J dt
27
то _ _
Лкор = 2 (их<тн). (73)
Теперь мы можем равенство (72) записать в виде
® ^отн “Ь ^кор ^пер> (74)
где а — ускорение точки Р относительно неподвижной системы
координат хуг.
Вообразим теперь, что точка Р является материальной точ¬
кой с массой т.
Тогда сила, действующая на эту материальную точку, будет
F=ma = тата + /пажор + тапер.
Обозначая теперь _
т ®отн ^отн»
получаем _ _
ForH = F-maKOJI-man.
Следовательно, если рассматривать движение точки т по
отношению к подвижной системе координат x'y'z', то, кроме
силы F, на нее будут действовать также силы инерции:
—такор = /\ор = сил а Кориолиса,
— тап —Fn= центробежная сила.
Следовательно, уравнение движения относительно систе¬
мы координат x'y'z’ имеет вид
mr' =F+'Ftop + Fn, (75)
где F — радиус-вектор материальной точки, рассматриваемой от¬
носительно системы х', у', z'.
В качестве примера рассмотрим теперь плоское движение
материальной частицы т, неподвижной относительно системы
координат ху, в то время как система
х'у' вращается относительно системы
ху с угловой скоростью и, как пока¬
зано на фиг. 9. Обе системы имеют
общее начало координат в точке О.
Вектор угловой скорости перпенди¬
кулярен плоскости чертежа и направ¬
лен на нас.
В системе ху никакие силы на
точку т не действуют, так что она
продолжает оставаться в этой систе¬
ме неподвижной.
28
Фиг. 9.
По отношению к системе х'у' частица описывает окружность
радиуса г, с центром в точке О, двигаясь по ней по часовой
стрелке с постоянной угловой скоростью и.
В системе координат х'у' на частицу действуют следующие
силы инерции:
1) центробежная сила, равная по величине тигг, направ¬
ленная по радиусу от точки О, и
2) сила Кориолиса /7кор = — 2т(и, Х®) = 2m(vXu),
где V—скорость частицы относительно системы х'у'. В этом
случае v J_u, так что
| v X «I = “vu = иг-и = и2г,
причем (т> X и) направлено к центру О. Следовательно, ре¬
зультирующая сила, действующая на частицу т, в системе
х'у' равняется
Fpe3 = Чти? г— тигг= та2 г
и направлена по радиусу к центру О.
Под действием этой силы частица т в системе координат
х'у' будет двигаться по окружности радиуса г с постоянной угло¬
вой скоростью и.
§ 14. Движение снаряда в пустоте с учетом вращения Земли
Рассмотрим движение снаряда относительно системы коор¬
динат xyz, вращающейся вместе с Землей; ось z направим вер¬
тикально вверх, ось х — на восток и ось у — на север (фиг. 10).
Так как Земля вращается с запада на восток, то угловая
скорость и, с которой вращается система хуг, направлена к
северному полюсу мира.
29
Фиг. 10.
Если через tn обозначить массу снаряда, то дифференциаль¬
ное уравнение движения запишется следующим образом:
mr =tng+ Fn + 2m (vXu), (76)
где_£—ускорение силы тяжести;
Fn — центробежная сила;
v — скорость снаряда относительно системы координат
xyz;
г—радиус-вектор снаряда.
Положим
т
Вектор g'—ускорение, создаваемое равнодействующей силы ве¬
са и центробежной силы, обусловленной вращением Земли. Его
также можно считать направленным по вертикали. Измене¬
нием g' с высотой в этой главе мы будем пренебрегать.
Тогда уравнение (76) можно записать в виде
_ 7 7 k
r = g’ 4-2 vxvyv2 (77)
UX Uy «2
или, проектируя на оси,
x = 2(vyui—vxuy)\ у’=2(ъгих—z = 2(vxuy — vyux)—g'.
Если географическая широта точки О будет равна <р, то
будем иметь
ux = 0, иу = ti cos <р, иг = и sin ср,
и так как
фх = х, vy=y, Ф2=г,
то
х = 2 (у и sin р—zu cos ср),
У = 2(—xu sin ср), (78)
z = 2xu cos ср—g'.
Интегрируя один раз третье и второе уравнения (78), по¬
лучаем
У= — 2xKsincp + &, у
z = 2xucos<?—g’t+c. f ' 7
В уравнениях (79) b и с —постоянные интегрирования,
определяемые начальными значениями х0, у0 и z0.
30
Подставляя выражения (79) в первое уравнение (78), по¬
лучаем
х = 2и sin <р (— 2хи sin ср + b) — 2и cos <р (2xucos ср—g't + с) =
= — 4иг (sin2 ср + cos2 <р) х 4- 2ub sin <р + 2ug'1 cos ср — 2ис cos ср
или
х + 4и2х = 2ug’t cos ср + 2и (b sin ср — с cos ср). (80)
Обозначая
2«g'coscp = A, 1
2« (6 sin ср —с cos ср) = /, J ' '
получаем
х + 4и2х = kt +1. (82)
Решением соответственного однородного уравнения
х-(-4и2х = 0
будет
х = А sin2u^4-Bcos2u4 (83)
где А и В—постоянные интегрирования.
Частное решение уравнения (82) будем искать в виде
x^pt + q. (84)
Тогда
Xi =Р, хг = 0.
Подставляя (84) в (82), получаем
4ц2 (pt + q) = kt + l,
откуда следует, что
k I
р= — , q = —.
г 4иг 4иг
Таким образом полным решением уравнения (80) будет
х = A sin 2ut + Вс os 2ut + ^~(s' cos <st + В sin <p — c cos cp). (85)
Постоянные интеграции А и В определяются из начальных
условий: в момент t = 0, х = х0 и х = х0.
Из уравнений (79) получаем
у= — 2usin cpjx Л+ W
2 = 2и cos срJx dt —^86)
31
где согласно равенству (85)
{xdt=—— cos 2ut+ — sin 2ut + X x
J 2u 2u 2u
X -^-g' cos?Z2 + (Asin? — ccos?)/j.
Постоянные интегрирования Kx и Ra определяются из на
чальных условий: в момент t = 0, у=у0 и z = z0.
§ 15. Движение снаряда в сопротивляющейся среде с учетов
вращения Земли
Так как отклонение, вызываемое вращением Земли, мало, тс
его можно рассматривать как некоторое возмущение и считан
приближенно, что ускорение снаряда в произвольный момет
времени представляет векторную сумму ускорения, получающе¬
гося при отсутствии вращения Земли, и ускорения Кориолиса,
Если
г = ix + jy + kz
представляет радиус-вектор снаряда в произвольный момент
времени, а
г' = я +_/■»)+а;
радиус-вектор снаряда в случае отсутствия вращения Земли для
того же момента времени, то можно написать
г = г’ + 2 (v X «). (87)
Выберем систему координат, как показано на фиг. 10. Урав¬
нение (87) в проекциях на оси тогда запишется следующим
образом:
х— $! + 2 (yusin?— zu cos ?),
у = т]—2x«sin®, (88)
z = С + 2х« cos ®.
Здесь 5, -г) и С — координаты снаряда, найденные с учетом
сопротивления воздуха [а также, может быть, ветра (см. § 22)]
и с учетом эффекта, вызванного вращением снаряда (см. гла¬
ву III), но без учета вращения Земли.
Эти координаты ?, т) и С могут быть вычислены одним из
изложенных выше методов, так что их можно считать извест¬
ными функциями времени; то же можно сказать о функциях
t 7], С И Ё, 7], С-
32
Интегрируя уравнения (88), получаем
х= ?4-2 (jusincp — 2z«cos<p), ]
j/= v] — 2x«sin ср, | (89)
Z= C+ 2xUCOScp. J
Постоянные интегрирования в уравнениях (89)равны нулю,
так как в момент f = 0 (момент вылета) х0 = Ё0, у0 = i]0,z0 = С 0,
а х0 = 0, у0 = 0, г0 = 0.
Подставляя теперь второе и третье уравнения (89) в первое
уравнение (88), получаем
х + 4и2х = 2т]и sin ср— 2C«coscp4-£. (90)
Здесь т], С и Ё являются известными функциями времени,
а и, sin ср и cos ср — постоянные величины. Следовательно, вся
правая часть уравнения (90) является известной функцией
времени.
Полагая
2T]«sincp — 2C«coscp+
находим общее решение соответствующего однородного урав¬
нения
х + 4и2х = 0,
х = A sin 2а£+ В cos 2ut. (а)
Рассматривая теперь найденное х как решение полного
уравнения (90), но считая Л и В функциями t, можем написать
х = 2uA cos 2иt—2иВ sin 2at + (sin 2at) + (cos 2at) .
Пусть
(sin2«£)— + (cos2«/) — = 0. (6)
dt dt
Тогда после вторичного дифференцирования получим
х= — 4u2 A sin 2ut—4u2Bcos2ut +
+ (2ucos2ut)^-—(2usin2ut)^-. (в)
Подставляя выражения (а) и (в) в полное уравнение (90),
получаем
(2acos 2ut)^ — (2asin2«i)~=/(0- (г)
3 Динамика ракет
33
Определяя — и — из уравнений (б) и (г), интегрируя и
dt dt
подставляя в формулу (а), находим общее решение уравне¬
ния (90):
г t
х = ^- sin2ut ^f(/)cos2utdt-l-C1 —
О
Г t
—^—cos2ut (t)sin2utdt + Ct . (91)
0
Для t = 0 x = 0, откуда следует, что C2 = 0. Дифференци¬
руя выражение (91), получаем
t t
х = cos2ut J/(Z)cos2ut dt + sin 2«Z[/(Z)sin2utdt +
0 0
+ 4-sin!?uZ/(Z)cos2aZ — ■£- cos 2uZ/(Z) sin 2«Z + cos 2«Z C2. (92)
При 1 = 0, x = x0 = Eo= vOl (составляющая начальной ско¬
рости по оси х); следовательно, из равенства (92) получаем
Cj^ox-
Подставляя выражение (91) во второе и третье уравнения
(89), получим
7 = а(0, z=₽(0, (93)
где a(t) и p(Z)—известные функции времени.
Интегрируя уравнения (93), получим
У = $a(t)dt+y0, z= ^(t)dt + z0, (94)
и о
где _yo = zo = O.
Интегралы (91) и (94) можно получить численным интегри¬
рованием. Таким способом можно учесть влияние вращения Зем¬
ли в первом приближении. Так как на движение снаряда ока¬
зывают влияние много неопределенных факторов, вызывающих
отклонение его от начальной плоскости стрельбы, этот способ
расчета вполне пригоден для практических целей.
При желании получить бдлыпую точность можно повторить
эту процедуру, используя вместо функций к] и С функции х,
у, z, найденные из первого расчета. Кроме того, для большей
точности следует учитывать изменение g' с высотой.
34
Возвращаясь к выражениям (91) и (94), заметим, что они
могут быть представлены в более удобной для практики форме,
указанной Кранцем.
После подстановки f(t) в формулу (91) получаем интегралы
следующих типов:
t t
j cos 2utr\ <#=[(cos 2«Q ■»)]£+ 2u^qsin2utdt =cos 2и^ +
t
+ 2«j‘»] sin2u£d£;
о
t t
J sin 2a2 7] dt = sin 2utf\ — 2u J tj cos 2ut dt\
i> о
t „ . t.
£ cos 2h^ dt = [cos 2ut E]' 4- 2w p sin 2ut dt =
t
= [cos 2utt\о + 2u sin 2ufi — 4«2 p cos 2u£ dt-,
и
t .. . t .
f sin 2utt dt=sln 2utt— 2ujcos 2uft dt =
о о
(t \
2u cos2«# + 4u2JEsin 2utdt\.
Следовательно, будем иметь
t
x = у- sin 2ufJ(2u sin <p — 2u cos <?C + Ё) cos 2ut dt4-
0
t
+ — sin2a£E0— ^—cos2ut J(2usinifq—2«cos<pt+t)sih2«^4^ =
0
t t
= sin <p sin 2«?J■»] cos 2utdt—cos <p sin 2ut^ Ceos 2utdt+
o о
t t
4 sin 2 ut U cos 2ut dt—cos 2at sin <₽ | ti sin 2u dt 4-
2u J J
о и
t t
4- cos 2ut cos <₽ V C sin 2ut dt cos 2ut (? sin 2at dt 4-
J 2“ J
и о
t
4—5- sln2«^0 = 2w sin 2ut sin<p Ctj sin 2«£<#4-2acos 2u£sin<p X
2u J
и
3*
35
t t
X J7) cos 2ut dt— 2u cos ? sin 2ut J C sin 2ut dt—2u cos ? cos 2tit X
и о
X J C cos 2utdt+(cos22ut + sin2 2ut) 5 + sln 2ut<cos 2— —
0
— cos 2ut sin 2u.t $-| sin 2ut Ёо —
2u 2«
t t
— 2u sin 2utJE cos 2ut dt + 2u cos 2ut J E sin 2ut dt.
Или полагая х = Е+Дх, получим
t t
Дх = 2« sin 2ut sin ? Ct; sin 2u,tdt 4-2«cos 2«Zsin? j tj cos 2utdt—
б о
i t
— 2u cos ? sin2uZJC sin 2ut dt—2u cos ? cos2a/JC cos 2ut dt—
t t
— 2«sin2u.t f E cos 2и/ rfZ+ 2u cos 2ut fEsin 2utdt. (95)
о b
Полагая у = t]4-Ду, z=C4-Дз, получаем после интегриро¬
вания второго и третьего уравнений (89)
Ду = — 2и sin ? J х dt, (96)
о
t
Az = 2ucos?JxrfZ. (97)
о
В эти формулы вместо х следует подставить £Г4-1дх.
Формулы (95), (96) и (97) определяют для любого момента
времени t отклонение снаряда вследствие вращения Земли.
§ 16. Неоднородность поля силы тяжести и кривизна
поверхности Земли
При расчете траекторий снаряда поле силы тяжести считают
обычно однородным, т. е. имеющим всюду одинаковую величину
и одинаковое направление, а поверхность Земли считают пло¬
ской. Но при стрельбе на большие дистанции (артиллерия даль¬
него действия) следует учитывать непараллельность вертикаль¬
ных направлений (направлений силы тяжести) в различных
точках траектории, изменение силы тяжести с высотой и кривиз¬
ну поверхности Земли.
Траекторией снаряда в пустоте в однородном поле силы тя¬
жести (плоская Земля) является парабола. Но если учесть ша-
36
рообразность Земли, то нужно будет считать, что на снаряд
действует сила притяжения, направленная к центру Земли, в
котором сосредоточена вся масса Земли. В этом случае поле
силы тяжести является центральным полем и траекторией сна¬
ряда будет либо эллипс, либо гипербола, и только в промежу¬
точном случае траектория превращается в параболу. Это дви¬
жение мы рассмотрим более подробно ниже.
§17. Движение материальной точки в центральном поле сил
Рассмотрим материальную точку с массой т, притягиваемую
к неподвижному центру О с силой
гг ’
где г — расстояние от точки О до
частицы т, а у, — постоянная.
Будем определять положение точ¬
ки т в плоскости ее движения поляр¬
ными координатами г, 0 (фиг. 11).
Считая поверхность нулевого потенциала расположенной в
бесконечности, определим потенциальную энергию точки т в
центральном поле сил:
Llr =_!^.
Jr2 L г J» г
Скорость точки т равна
t, = j/> + r20r,
так что кинетическая энергия равняется
-ym^ + FO2).
Следовательно, полная энергия будет равна
+Л202)—1^.
Согласно закону сохранения энергии эта величина в про¬
цессе движения остается постоянной. Таким образом, если
при Z=0 r=rQ и ф = ф0, то можно написать
4 (r^e2)-—=4vo-~ ■ <98>
л Г £ гл
37
Фиг. 11.
Далее, момент количества движения точки т относитель¬
но центра О также должен оставаться постоянным.
Таким образом, если а—угол между г0 и v0, получаем
r2^- = vorosina. (99)
at
Уравнения (98) и (99) являются уравнениями движения
точки т\ г и 0 являются зависимыми переменными, а /—не¬
зависимым переменным.
Согласно формуле (99)
r_ dr_ / уого sin д X
d0 dt de \ г* ) ' ' 7
Из уравнения (98) получаем
r2 + r!02-^ = 'D2-^
г г0
или согласно (99) и (100)
/ dr \2 «о Г„ sin* a Vq/q sin* a 2(J.2 ’ 2(1*
— ——— 1—— = -п2 ,
\Л0 /г* г* г 0 г0
dr v0r0 sin а / 2(i* v2 Гр sin* a 2|i*
= I / Vz h -— >
d9 г* у 0 г0 г* г
так что
/ г>рго sin а X
— и I I
=— .f 7 • (101)
/ , 2ц* Vn /Лsin2 “ 2цг
1/ «о- 1
У Го гг г
Но
Н* VprpSina (1*
Г r VpTp sin а
Следовательно, равенство (101) можно переписать в виде
_ I УрГ0 Sin а _ (1* X
\ £ о sin а /
// 2 _ 2Н2 Н4 X _ / «pTpSin а (1* X»
\ 0 Гр Г2 Sin* a J \ Г VpFp Sin а )
или после интегрирования
VpFp Sin а (1*
0-0p = arccos—_ r fprosina^^ p02)
_ / 2 И4
У ”° Г. + 1>р Гр sin* а
38
где угол 0О определяется из начальных условий: г = г0, 0 = 0О.
Из равенства (102) получаем
Vorosina р.2
cos (0 - 0О) - —, r win‘
-1/ 2 2<.
I / V0 — “t* 2 2 • •
К rt Vq sin* a
Решая это выражение относительно г, находим
г г. ,
0ОГО SID8 a
r=—J . (103)
Wln« /, 2fi‘ |i4 Ln<s/ft
*+l 2 1/ V0 ~ + 2 2 ■ . }COS(t> “0‘
' (1 V ro «0 r0Sln “ )
Как известно, уравнение конического сечения в полярных
координатах имеет вид
г= Е -, (104)
1 + е cos (? — %)
где р, е и <р0 —постоянные; точка О является одним из фоку¬
сов, а е—эксцентриситет.
Если е<1, г остается конечным при всех значениях <р.
В этом случае коническое сечение является эллипсом. При
е = 0 эллипс переходит в окружность.
Если е=1, то при <р — <Po = 1t
Г = оо
и коническое сечение является параболой.
При е>1 г становится бесконечным, если
/ \ 1
COS(<p — <р0)= —-
или
<Р — <р0 = + аг cos I 1 .
В этом случае коническое сечение является гиперболой.
Сравнивая уравнения (103) и (104), замечаем, что уравне¬
ние (103) изображает коническое сечение, у которого
«П Гп sin2 а
— <105)
И
. _ V0r0 Sin a 2u2 .
1/ Vo~ T-+ —-2 - • (106)
г у Vq Pq sin8 a ' '
39
Из формулы (106) видно, что материальная точка описы¬
вает эллипс, параболу или гиперболу, в зависимости от того,
меньше, равна или больше начальная скорость, чем величина
т/V.
V г0 ■
Рассмотрим гравитационное поле Земли. На ее поверхности
будем иметь
= (107)
где R — радиус Земли, a g0— ускорение силы тяжести на ее по¬
верхности.
Следовательно,
?г = £оЯ2
и
¥=2^-
Следовательно, траектория снаряда, выпущенного с поверх¬
ности Земли, будет параболой, если начальная скорость его бу¬
дет равна
■цпар = V^g^R (параболическая скорость). (108)
Считая g0 = 9,81 м/сек2 и /? = 6 400000 м, получаем
«пар=Уг2-9,81-6400000» 11 км/сек.
Таким образом, если начальная скорость будет равна
11 км/сек, то снаряд уйдет в бесконечность, описывая параболи¬
ческую орбиту. Если начальная скорость будет больше этой ве¬
личины, то траектория перейдет в гиперболу.
В настоящее время начальная скорость снаряда 11 км/сек
значительно превосходит наши технические возможности, так что
в баллистике параболическое и гиперболическое движения пред¬
ставляют лишь теоретический интерес.
В дальнейшем мы будем рассматривать только эллиптиче¬
ское движение. Если через а обозначить большую полуось эллип¬
тической траектории, то в соответствии с формулой (104) будем
иметь
п ( 1 1 \ 2
2а = р( ) = р
1+е 1-е / 1 - е2'
откуда
а=-*-.
1-е2
40
Подставляя в эту формулу выражения (105) и (106), полу¬
чаем
«ц Гд sin2 а
|Х* l1'VOrO sir,t2
или
•=2/т- <109>
V ~v0
го
Если обозначить малую полуось через Ь, то будем иметь-
b = а /1 —е» ,
но из формулы (106) имеем
. 2 Vorosln*“ /%2
1 — 6 = fn L
И-4 \ го °/
так что
b = 1x3 v°r«sin ° I /2н* у2~
2р.2 , [X2 V Г0 0
, — vo
г0
или
b _ уо^РЛ. . 01 оу
V Го °
Перейдем теперь к определению положения точки в лю¬
бой момент времени t. При изменении полярного угла от
до О радиус-вектор г описывает площадь
е
— fr2dO.
2 J
е»
Секториальная скорость, т. е. площадь, описываемая ра¬
диусом в единицу времени, остается постоянной, равной
-у -пого sin а.
Следовательно, имеем
t-t0 = frtfO.
Vorsina J
41
Согласно формуле (104)
г= ,
1 +е cos <р
где
? = 0—0О,
так что
t—tp =—-—(77—^—Г- О11)
г>ого sin a J (l-j-ecos?)’
Для того чтобы взять интеграл (111), воспользуемся под¬
становкой
tg — =v.
6 2
Тогда
4—^
dv = — 2
cos* —
2
и, следовательно,
d<f = 2 cos* -3-dv = 7dv ■.
T 2 1+г>*
Далее
, <p . 2 <₽ 1 «*
COS <P = cos —— sin2 —= ,
T 2 2 l-H* 1+v2
так что
;2dt>
1+a* _
/ 1 — V*\ *
V + e 1 + 4
= 2 Г (1-M,*)^ = Г (l+^)dv = 2
J [l+t>‘+e(I - »«)]» J [l+e + (l-e)«*]* (1+e)*
P (l+^)dt> _ 2 Г (1+tg* 2~)dtgT
I /, 1—e V (l+e)! I / 1 -e , <p V '
1 (1 + f ( 1+” tg* — )
J \ 1+e ) J k 1+e K 2 J
Положим теперь
1 “ ч/I—*i Ф
tg— = 1/ tg—,
6 2 V 1 +e 6 2
42
тогда
~"+*J (,+1,f)'
// 1 +е и X и
( +1-е tg 2 Jdtg 2
Но
/1+в 1
(уТЙ)‘ (/Г/.)8 ’
так что
2 Г i-.+o+ow-f-
tfi&fJ (,+tg.-iy 2 “
/э и / и \
9 / >+te*V“e(1_,g8v)
J *<=
u / . и \
sin*y / sin T \
/ i+ e i
1 / C°S 2 \ C°S 2 / da
(vr=vy / —1 -=
/ / ’'"‘T'l coslr
/ *+
e/ \ cos8 — /
\ 2 /
/и и ( и и \
cos8—+sin8— —е cos8-—— sin8— )
2 2 k 2 2j_du =
( t U • a “ V
pos*— + sin2 — j
= (V (y .I..,. (»-««"«)■
Следовательно, согласно формуле (111)
t—t0 = —(u-esinu), (112)
voro sin a ( у 1 — e2)
43
причем
х « / 1 — е , <₽
tg = 1/ tg — .
6 2 V 14-е 6 2
Но
а = -£—
1 - £2
И
Ь = аУ 1 —е2,
так что
b = —^—V\^ = , р- ; аЬ = т-7£=—
1—6» r yi -е« (|/1 — е2)8
Следовательно,
р* 1 ab
voro sin а (у 1 — е2)8 voro sin а
Площадь эллипса равна nab, а секториальная скорость дви¬
жущейся точки равна 4-,norosina.
Следовательно, время полного оборота будет равно
Т= 2паЬ . (ИЗ)
Г0Г0 sin а
Уравнение (112) можно теперь записать в виде
n(Z—f0) = « —esinu, (114)
где
2л
Л = .
T
Уравнение (114) называется уравнением Кеплера.
. 2л
Формулу л = — можно также получить из следующих со¬
ображений.
При и = 0 имеем <р = 0 и согласно уравнению (114) n(t—Zo) = O;
следовательно, в момент t = t0 материальная точка находится
в перигелии, т. е. в точке, расстояние от которой до центра
притяжения кратчайшее. Это точка пересечения эллипса с
его большой осью, со стороны фокуса, являющегося центром
притяжения. Прии = 2к имеем ср = 2п и согласно формуле (114)
n(t—t0) = 2n.
Но при изменении <р от 0 до 2п точка совершает один оборот.
Следовательно, при <р = 2к, t—tQ равно периоду движения Т.
Таким образом получаем
2л
п =— .
т
44
Угол 0О соответствует перигелию. Если при t=0 0 = 0а,
то время /0 прохождения перигелия определяется из соотно¬
шения
-у (— ^о) = [« — е sin u]e=e„,
где
[“]«=*» = 2 arc Т77 tg ^5^) ■
Из формул (ИЗ), (109) и (НО) находим
Т 2тс р1 г>ого sin а 2п р.з
= w'"‘ (^) г
\ Го /
или
3
Т=-^. (115)
и
Следовательно,
«=Л- (не)
а2
По формуле (114) можно определить для любого момента
времени t соответствующее значение и, а следовательно, и
соответствующее значение ? = 0 —0О. Это можно сделать
следующим образом. Положим
n(t—t0) = M,
так что
М = и — e sin и.
Пусть для первого взятого значения и = иа будет
ЛГ1 = «1—е sin и,,
где Aft несколько отличается ст Л4. Величина М является
функцией и:
Полагая теперь
М=МХ + ДЛТх
и производя разложение в ряд Тейлора, получаем
М=М, + ДAfj =/(«!) +/' (uj) Д^ +...
Или, так как 7И1=/(н1),
(Uj) Дн1 + ...=’(1—ecosui) AUi + ...
45
Так как Дих мало, то высшими степенями Д«1 можно пре¬
небречь. Тогда получим
Дц1 = м~м' . (П7)
1 — е cos Uj
Вторым приближением, следовательно, будет
«a = “i + A«i-
Обозначая /(и,) через 7Иа, получим аналогичным образом
вторую поправку:
. М-М2
Дц, = — .
1 — 6 cos и2
Величина и8=и2+Ди2 будет третьим приближением для и.
Этот процесс можно повторять до тех пор, пока не будет до¬
стигнута необходимая степень точности.
Первое значение u=ut можно получить следующим образом
(фиг. 12).
Рассмотрим кривые
_y = sina (118)
и
y = -L(u-M). (119)
Исключая у из уравнений (118) и (119), получим
М=и—в sin и.
Следовательно, величина и, соответствующая заданному зна¬
чению М, является абсциссой точки Q пересечения кривых (118)
и (119). Кривая (118) является синусоидой, а кривая (119)—
прямой линией, составляющей с осью и угол
ф = arc tg —
и пересекающей ее в точке Р на расстоянии
ОР=М.
46
Фиг. 12.
Практически построить эту прямую можно следующим обра¬
зом. Выберем некоторый масштаб и проведем на расстоянии
100 единиц от оси и параллельную ей прямую. Прямая (119)
пересечет ее в точке S на расстоянии
TS-M-MOO в.
Прикладывая линейку к точкам Р и S, можно определить
точку Q. В случае когда М настолько велико, что точка S вы¬
ходит за пределы чертежа, линию, параллельную оси и, можно
провести на расстоянии 50 единиц длины. В этом случае
TS=M+50 в.
§ 18. Траектория снаряда в пустоте при различных значениях
начальной скорости
Рассмотрим траекторию снаряда, выпущенного с поверхности
Земли с большой начальной скоростью.
Если эта скорость сравнительно невелика (<17g7?, где R—
радиус Земли), то снаряд, выпущенный под углом ср к гори¬
зонту, будет описывать эллипс, бо¬
лее далекий фокус которого совпа¬
дает с центром Земли.
Рассмотрим случай, когда <р = 0.
С увеличением начальной скорости
эксцентриситет эллипса будет
уменьшаться и обратится в нуль
при о,= У gR. В этом случае сна¬
ряд будет описывать окружность,
центр которой совпадает с центром
Земли, двигаясь по ней с постоян¬
ной скоростью VgP '• При большей
скорости снаряда траектория вновь
становится (эллипсом, более близ¬
кий фокус которого находится в
центре Земли. Если скорость будет
равна y%gR, то траектория обра¬
тится в параболу и снаряд уйдет в
бесконечность. Последнее справедливо для всех значений угла
бросания ср.
Если начальная скорость снаряда превысит У‘2§Р, то экс¬
центриситет станет больше единицы и траектория превратится в
гиперболу.
Фиг. 13.
1 Если f + 0, a v0=j/g/?, то траектория становится эллипсом.
47
§ 19. Траектория снаряда, движущегося в пустоте
над поверхностью Земли без учета вращения Земли
Пусть снаряд выпускается из точки А и описывает над Зем¬
лей дугу эллипса АВ (фиг. 14). Угол бросания пусть будет ф.
Положим
£оЯ3 = Г,
где g0— ускорение силы тяжести на поверхности Земли;
А? — радиус Земли.
Тогда большая полуось эллипса будет равна:
a = (120)
2р.2 2
R V°
Угол х (см. фиг. 14) равен
х-4~♦
и, следовательно, по известному
свойству эллипса
s = те — 2х = тс—(тс — 2ф) = 2ф.
Далее
АМ'=—^- R = l,
2и* 2
R °
так что
ММ' = У R* + l2 — 2/?/cos2<p.
Следовательно
, /81п2Ф
Sin 71 = — т .
V R*+R -2RI cos 2ф
Обозначая длину дуги АВ (т. е. расстояние от точки А до
точки В, измеренное по поверхности земли) через АВ .будем
иметь
AB=2R-q. <121)
Малая полуось эллипса согласно формуле (ПО) будет равна
h = —j^cos^— (122)
1/2^ 2
У R v°
48
Фиг. 14.
Уравнение траектории снаряда в полярных координатах
имеет вид
г = — р . (123)
1+SCOS0 ' '
Полярная ось совпадает с большой осью эллипса и 0 =
= 7].
Согласно формулам (105) и (106) будем иметь
vlR* cos’ J/
Р=- - , (124)
к
и
_ Vo/? COS ф 2 2И* |Х4
И* V ° R + «oR’cos'ip • 025)
Секториальная скорость снаряда будет равна
4^ sin у = ф0 R cos ф.
Время полета снаряда от точки А до точки В согласно
формулам (114) и (116) будет равно
п+1)
t= I — = — [и — е sin и]»=’+’),
vaR cos ф j (1 +г cos 0)г |х J0 1
к-, (126)
где
"=2агс,9(1/ГТТ7^т)'
§ 20. Траектория снаряда, движущегося в пустоте,
с учетом вращения Земли
Используя результаты предыдущего параграфа, можно ре¬
шить задачу о движении снаряда в пустоте с учетом вращения
Земли.
На фиг. 15 изображена одна восьмая часть поверхности
земного шара. Предположим, что снаряд выпускается из точки
Р, лежащей в плоскости y'z', и пусть проекция его траектории
на невращающуюся поверхность Земли изображается дугой
большого круга PQ. Точка Q, следовательно, будет точкой паде¬
ния снаряда на поверхность Земли. Обозначим через р угол,
который плоскость траектории образует с направлением на юг.
Выберем теперь нулевой меридиан таким образом, чтобы дол¬
гота точки Р была равна— . Пусть широта точки Р будет а.
Определим сначала долготу 0 и широту <р точки Q, считая из-
4 Динамика ракет
49
вестными углы а, р, '{ (см. фиг. 15). Для этого выберем новую
систему координат xyz таким образом, чтобы оси х и х' совпа¬
дали, а координаты точки Р были равны: х=0, у=0, z=R
(фиг. 16).
Тогда координатами точки Q будут:
x=R sin у sin £; y=R sin у cos f; z=R cos y. (127)
Перейдем опять к системе x'y'z', для чего совершим поворот
вокруг оси х (совпадающей с осью х') на угол а против часовой
стрелки, если смотреть с положительной стороны оси х. Тогда
(фиг. 17)
■/=.vcos«+zsin«i
z’ = z cos a —у sin a. |
Из формул (127) и (128), получаем
х’ = /?sin у sin р,
у' = 7?(siny cos Pcos a + cosу sin a). (129)
z' = R(cos у cos a — sin у cos p sin a).
50
Фиг. 16.
Фиг. 15.
Фиг. 17.
С другой стороны,
х' = R cos ? cos 0,
y' = R cos ср sin 0, (130)
z' = /?sincp.
Из формул (129) и (130) имеем
cos ср cos 0 = sin 7 sin p,
cos ср sin 0 = sin 7 cos p cos a + cos 7 sin a, (131)
sin cp = cos 7 cos a — sin у cos p s in a.
Следовательно,
cp = arc sin (cos 7 cos a—sin 7 cos p sin a). (132)
Из двух первых уравнений (131) имеем
cos <р = У sin2 7 sin* р + (sin 7 cos р cos a + cos 7 sin a)2
и, следовательно,
eSlniSinB z,nn\
= arc cos r 1 r . (133)
у sin2 у sin2 + (sin 7 cos p cos a + cos 7 sin a)2
Как уже говорилось выше, дуга PQ представляет проекцию
траектории снаряда на невращающуюся поверхность Земли. На¬
чальная скорость снаряда и0 в этом движении является вектор¬
ной суммой относительной начальной скорости (относительно
поверхности Земли) и переносной начальной скорости, вызывае¬
мой вращением Земли. Рассматриваемая траектория является
траекторией снаряда в неподвижной системе координат с нача¬
лом в центре Земли. Но за время полета снаряда от точки Р
до точки Q Земля повернется на некоторый угол с запада на
восток. Если время полета равно t, а угловая скорость враще¬
ния Земли равна ш, то этот угол будет равен о>(. Следовательно,
на вращающейся Земле долгота точки падения снаряда будет
равна 0—<ot, а широта <р.
§ 21. Траектория снаряда с учетом шарообразности Земли,
сопротивления воздуха, изменения силы тяжести с высотой,
центробежной силы и вращения Земли
Если нужно учесть сопротивление воздуха, то удобно при¬
нять в качестве системы координат систему xyz, жестко связан¬
ную с вращающейся Землей, начало которой совпадает с цен¬
тром Земли, а ось z— с осью вращения Земли. Дифференци-
51
4*
альное уравнение движения снаряда запишется в этой системе
следующим образом:
mr = mi + ^ + FKop+?n, (134)
где т—масса снаряда;
г —радиус-вектор снаряда;
g—ускорение силы тяжести;
_R— сопротивление -воздуха;
/уор—сила Кориолиса и
Fn — центробежная сила.
Полагая g0/?2 = p2 (g0 — ускорение силы тяжести на поверх¬
ности Земли, a R— радиус Земли), имеем
mg= —р2т— , R= —уШсу" = —vcvn~l,
гз
где тА’>—единичный вектор в направлении и;
с и «—коэффициенты, зависящие от плотности воздуха р и
формы снаряда, причем п зависит, кроме того, от по¬
рядка величины скорости v.
Далее имеем
_ _ ijk
ЛоР = 2 /«(«> X «) = 2m ,
ООи
где и—вектор угловой скорости вращения Земли, направленный
по оси z (фиг. 18). Тогда составляющие действующих сил
будут равны
ц’/и х „ X
mgx = - —^т у-;
(xs о*+*2)2
52
Фиг. 18.
mgy = — У j-, mg, = — р?т у- ;
(x*+j!+*2)2 (Xt+jfl+g*)2
Д —1
Rx= — сфхфп~1 = —сфх(ф*л + ,n2+'i>2) 2 ;
Ry — — сфу(ф2 +v2 + »2z) 2 ;
я—1
Rz= — СФг(ф2+ф2+Ф2,) 2 •
Составляющие FKOp будут
FKopx = 2/nfJ,tt, FKopy = — 2тФхи, FKop, = 0.
Далее
I Fn | = mu2r cos cp = mu2 У x2 +y2
и составляющие Fn будут равны
F„x = mu2Ух2+у2 x = mu2x,
nx J V хг +y
Fnv = mu2y, Fnz = 0.
Проектируя уравнение (134) на оси и обозначая
— = k,
т
получаем
Л —1
Фх= — з +‘1>2+'О2) 2 + 2фуи + «»х;
(x'+yl + z‘) 2
л —1
фу= —у- — kVytv2 + Ф2у + ф2 ) 2 — 2-ох« + и?у\
(x!+y’+z!)2 (135)
■о2= —у—кФг(ф2х + ъ2+Ф2г) 2 ,
(x2+y'+z2)2
причем
Х = Фх, У=Фу, 2 = Фг.
Система (135) является системой шести совместных диф¬
ференциальных уравнений первого порядка, в которой х, у, z,
фх, Фу, ^—зависимые переменные, a t— независимое перемен¬
ное. Интегральными кривыми этой системы будут кривые в
семимерном пространстве х, у, z, фх, фу, ф2, t.
S3
Система (135) может быть проинтегрирована по методу
Рунге-Кутта.
Пусть
4r=/i(*, У> О,
%,=/г(*» У, z, vx, vy, vt),'
v2=f3(x, У> z, vx> V ®г).
Разыскивая интегральную кривую, проходящую через на¬
чальную точку х, у, z, vx, <uyt v2, t, проведем расчет по
схеме
t->h, х-+№, у->№, z-+№>,
Ч)х->№, Vv->k^,
л У *
Л(Э =_1_Л(0 + -L А(0 + 2_Л(0 +4 ь 2, 3, 4, 5, 6),
О О О о
/ k'p \ где для
= а = х/=1>у = 4>
/ №\ а=у i = 2, j = 5,
k^=(^ +aw)a a=; /=3> ;=6
Aii)=/;(x> У> 2,vx,vy,v2)h-,
/ *<’> №
l Л1 К | /Ci
=/. ( x H , у -| , z -| , vx 4 ,
2 22 2 x 2
t/n X /
k^=fi X4-— , J4-—, 2+ — , vx4—
3 /zy 2 > 1 2 2 x 2
й<5) /6> \
л Z f
^=fj(x + k^, у4-k$\ z + k§\ Vx+k^, vy+k^\ 'v.+k^fi,
где
i = 4, 7=1,
i = 5, / = 2,
i = 6, j = 3.
54
Координаты х, у, г связаны в любой момент времени t
с географическими широтой <р и долготой 0 соотношениями
x = rcos<pcos0, у = rcos <р sin 0, z=rsin<p,
ср = arc sin— , 0 = arctg—.
r X
Высота полета снаряда h равна:
h = Ух2 +^a + z2 — R = г— R.
Изменения k (в выражении для сопротивления воздуха) с
высотой и ~п с высотой и скоростью могут быть учтены в про¬
цессе приближенного интегрирования.
§ 22. Влияние ветра
До сих пор мы считали, что воздух находится в покое отно¬
сительно поверхности Земли. В действительности, однако, на
движение снаряда оказывает заметное влияние ветер, которым
нельзя пренебрегать. Но ветер в отличие от других факторов,
определяющих движение снаряда, не обладает закономерностью
и поэтому нельзя дать общей формулы для учета его влияния.
Он изменяется по величине и направлению не только при
изменении географических координат, но и при изменении вы¬
соты. Направление его может быть совершенно произвольным
(он может иметь также и вертикальную составляющую). Кроме
того, его нельзя считать постоянным в течение всего времени
полета снаряда и, таким образом, он является также и функ¬
цией времени.
В случае, когда пренебрегают кривизной Земли, влияние
ветра может быть учтено следующим образом.
Пусть цэ будет начальная скорость снаряда относительно
поверхности Земли, aw — скорость ветра. Движение снаряда
будем рассматривать в системе координат х'у'г', движущейся
с постоянной скоростью w относительно системы хуг, оставаясь
параллельной самой себе. Тогда относительно системы х'у'г'
воздух будет оставаться в покое, а начальная скорость снаряда
относительно этой системы будет равна:
■Потно = t*o — W
или в проекциях на оси
■Потно^ = 1*хо — Wx, 1*отн Qy = ФуО—Wy, ‘HothOj = (136)
55
Теперь можно рассчитать движение снаряда в системе x'y'z?
таким образом, как это делалось в предыдущих параграфах,
при учете сопротивления воздуха.
Тогда найдем
х'= %'(/), у'=/(/), z'= ?'(/).
Относительно неподвижной системы xyz координаты снаряда
в любой момент времени t будут
х = х’ у=у' + wyt, z = z' + w2t. (137)
Если скорость ветра изменяется с высотой, то траекторию
можно разбить на отдельные участки по высоте и применить
для каждого такого слоя описанный метод.
Проекции скорости в системе xyz в произвольный момент
времени t будут равны:
^Х = ^Х' + wx, vy = Vy +Wy, v2=vz- +W2. (138)
Проекции ускорения в системах xyz и x'y'z' одинаковы, так
как эти системы друг относительно друга не имеют ускорения.
§ 23. Сравнительная оценка силы Кориолиса и сил, связанных
с изменением гравитационного и центробежного полей с высотой
Ускорение силы тяжести на расстоянии г от центра Земли
равно
где g0 —УСК0Рение силы тяжести на поверхности Земли. Сле¬
довательно,
8go^=-2go-^^-2go^.
Например, для 8г =1000 м и /? = 6400 /си = 6 400 000 м
получаем
2g0—= 2 • 10 1000 => 0,003.
° ₽ 6400 000
Полагая теперь ‘t»=1000 м/сек, вычислим ускорение Корио¬
лиса:
12uv I = 2 —-— 1000 = 0,14.
1 1 3 600-24
56
Таким образом
£^Зж0)02.
2uv 0,14
Следовательно, при высоте 1000 м и скорости 1000 м/сек
ускорение Кориолиса велико по сравнению с изменением уско¬
рения силы тяжести с высотой.
Центробежное ускорение имеет величину порядка |и2г | и
при изменении высоты на 8г изменяется на иаог. Так что
ii/Ъг = иЪг = 2л 1000 = л Qqq qq4
2ио 2v 3600-24 2000 3600-24
Следовательно, для высоты 1000 м и скорости 1000 м/сек
ускорение Кориолиса велико также и по сравнению с измене¬
нием центробежного ускорения с высотой.
Таким образом можно, как это делалось в § 14, учитывать
силу Кориолиса, действующую на снаряд, вследствие вращения
Земли, и пренебрегать в первом приближении изменением гра¬
витационного и центробежно¬
го полей с высотой.
При наличии ветра откло¬
нения, вызванные ветром и
вращением Земли, можно вы¬
числять отдельно; сперва мож¬
но определить влияние ветра
по способу, изложенному в
§ 22, а затем ввести поправку
на вращение Земли, как это
делалось в § 15. Влияние кри¬
визны Земли можно оценить
следующим образом.
На фиг. 19 изображена траектория снаряда, выпускаемого
из точки А и падающего на землю в точке В. Дуга окружности
АВ является проекцией траектории снаряда на поверхность
Земли; прямая AD представляет касательную в точке А.
Тогда, очевидно, будем иметь
(AD)2 = DB(DB + 2R)
или приближенно
(4C)2=CDtgp 2R.
Следовательно,
АВ — (AC)^CD^ {АСУ .
2R tg?
57
Фиг. 19.
В большинстве практических случаев кривизна поверхности
Земли оказывает существенное влияние на дальность полета
снаряда, тогда как влиянием изменения g с высотой и влиянием
изменения направления g в процессе движения можно в первом
приближении пренебречь.
§ 24. Движение снаряда, с учетом кривизны земной поверхности,
вращения Земли, сопротивления воздуха и влияния ветра
Для точного расчета нужно с самого начала принять во вни¬
мание все факторы, влияющие на полет снаряда, и составить
дифференциальное уравнение, учитывающее неоднородность гра¬
витационного поля Земли, изменение плотности воздуха с высо¬
той, сопротивление воздуха, влияние ветра, вращение Земли
и кривизну ее поверхности.
Для того чтобы снаряд можно было считать материальной
точкой, будем предполагать, что его продольная ось совпадает
с направлением относительной скорости. Тогда сопротивление
воздуха будет направлено в сторону, противоположную относи¬
тельной скорости.
Выбирая систему координат xyz так же, как в § 21, полу¬
чаем в векторной форме следующее дифференциальное урав¬
нение:
mr = mg + R + FKop + F„,
в котором сопротивление воздуха R имеет составляющие:
/?,=—cvn г>0ТИд - _—ст»отн фп~*;
'X ОТН 0ТНа: ^отн i
VOTH
V
Ry=~ CVom -J "У • — ~ C<Vojh9 i
V
VOTH
где
^отн = ]/\х—wx)2 + (у—те^)2 +(z—ж,)2
и
Vothx = X — Wx, Ф„Ну =У — Му, —
a wx, wu, w,—составляющие скорости ветра в данной точке
пространства.
Векторы mg, FKop, Fn обозначают те же силы, что и в
уравнении (134), § 21.
58
Следовательно, получаем систему дифференциальных урав¬
нений 1
< = з— k&—wx) [(* - + О' - wy)2 +
(x2+y2+z2)2
+ (z — w2)2] 2 +2vyu + usx-
4 = ——2— k^~ K*—wx)2 +
(X2 + y2+Z2)2
n-i (139)
+ (y—wy)* + (z — w^)2] 2 — 2vxii + u2y;
v2= —3- - k(z- wg) X
(x2+y+z2)2
X[(x — wj2 + (y — w/ + (z—w2)2] 2 ;
x = ^x, y = vy, z = v2.
В этих уравнениях k = — и n являются функциями р,
т
а следовательно, функциями
Ух2+у2 + г2,
а л —также функцией
— wx)2 + (у — wy)2 + (z — w2)2.
Величины wx, wy, w2 можно считать известными функция¬
ми х, у, z.
Систему уравнений (139) можно проинтегрировать прибли¬
женным методом так же, как систему (135), § 21.
1 См. уравнения (135) § 21.
Глава II
ТЕОРИЯ ТЯЖЕЛОГО ГИРОСКОПА
§ 1. Общее решение задачи
Вращающийся снаряд ведет себя подобно тяжелому гиро¬
скопу, прецессирующему под действием своего веса.
Рассмотрим твердое тело, имеющее одну неподвижную точку,
так что оно может только вращаться вокруг осей, проходя¬
щих через эту точку. Трением в
точке опоры будем пренебре¬
гать и учитывать будем только
силу веса. Примером такого дви¬
жения может служить движение
тяжелого волчка с неподвижной
вершиной.
Для обозначения твердого те¬
ла, вращающегося вокруг оси,
проходящей через одну из его
точек, будем употреблять тер¬
мин «гироскоп». Пусть непод¬
вижная вершина гироскопа сов¬
падает с началом координат О
•системы xyz, ось z которой на¬
правлена вертикально вверх
(фиг. 20). Положение гироскопа определяется углом 0, обра¬
зуемым его осью с осью z, углом <р, образуемым плоскостью,
проходящей через ось z и ось гироскопа, с осью х, и углом ?,
на который гироскоп поворачивается вокруг своей оси, отсчиты¬
ваемым от некоторого начального положения. Ось гироскопа
мы будем называть также собственной осью вращения. Что ка¬
сается вращения вокруг собственной оси, то за начальное по¬
ложение (?=0) примем го, при котором определенная точка
гироскопа лежит в плоскости, проходящей через ось z и соб¬
ственную ось вращения. Таким образом, состояние движения
гироскопа определяется величинами 0, <р и ?.
60
Фиг. 20.
Предположим далее, что эллипсоид инерции гироскопа отно¬
сительно точки О является эллипсоидом вращения, геометри¬
ческая ось вращения которого совпадает с собственной осью
гироскопа. В этом случае любую пару взаимно перпендикуляр¬
ных осей, проходящих через точку О под прямым углом к оси
гироскопа, можно принять за две другие главные оси инерции.
Обозначая составляющие угловой скорости гироскопа по на¬
правлениям его собственной оси и двух других главных осей
инерции через ult и2 и и3 и выбирая одну из двух последних
осей инерции таким образом, чтобы она была перпендикулярна
оси z и собственной оси гироскопа, получаем
и1 = Ф + ?соз0, «2 = 0, «3 = ?sin0.
Кинетическая энергия гироскопа будет равна
или
т = у + ? cos 0)г + у/203 + 1-Z,?2 Sin2 0,
где Zv Z2 и Z3— моменты инерции относительно собственной
оси и двух других осей инерции.
В нашем случае Z2 = Z3, так что
I 1
Т = уМФ + <? cos 0)2+yZ2(02 + sin2 0). (1)
Уравнения Лагранжа запишутся в следующем виде:
АЖ_£1=Лв; _^т_^=л А/а_п _аг
dt \ де J дв dt\d<? ) dtp * dt \di/) дф
Будем считать, что центр тяжести гироскопа лежит на его
оси. Пусть радиус-вектор, идущий в центр тяжести, будет г9.
Тогда (фиг. 21)
. Gro80 sin 0 Х-, . о
Ле = —9 = Gr0 sin 0,
00
а
Av =0, Аф =0.
Далее
£L = Z20; —Z^=/a0;
де
^=— Zj(<p + ?cos 0)<psin0 +
00
+ Z2?2 sin 0 cos 0.
61
Следовательно, первое из трех уравнений (2) принимает
вид:
/20 + 4(ф + ср cos 9)<р sin 0 — /2ср2 sin 0 cos 0 = Gra sin 0. (3)
Далее
^4=/1(<P + <pcos0),
a
^=0,
<Эф
так что третье уравнение запишется в виде
? cos 0) = 0 (4)
at
ИЛИ
ф + <f COS 0 = о), (5)
где о> — постоянная. Но так как
Ф + cpcos 0 = «!,
то и1 = ш. Следовательно, составляющая угловой скорости по
направлению собственной оси остается постоянной. Далее
= /2(ф + ср cos 0) cos 0 + /2ср sin2 0 = Цы cos 0 + /2ср sin2 0,
d<f
—(-^гХ = Цы sin 00 + /2( ср sin2 0 + 2ср 0 sin 0 cos 0)
dt I d<f I
и
^ = 0.
d<p
Сокращая на sin 0, получаем второе уравнение (2) в виде
—/jUQ + /2(ср sin 0 + 2ср0 cos 0) = О. (6)
Полагая теперь в уравнении (3)
ф + ср COS 0 = 0),
получаем
/20 + /jo)? sin 0—/2<р2 sin 0 cos 0 = Gr0 sin 0. (?)
Уравнения (5), (6) и (7) определяют движение гироскопа.
Умножая уравнение (6) на sin 0, получаем
d / дГ\ п дТ .
— (—— 1=0, или —- = const,
dt \ д<? J df
62
т. е.
/jio cos 0 + /2<р sin2 0 = К.
Это соотношение можно получить также иначе. Так как
Л4 = —, где М—момент внешних сил относительно точки О,
_dt
а В—момент количества движения относительно этой же
точки, и так как 7Vfz = O, то Вг = К или
Bj cos 0 + В2 sin 0 = /2(ф + ср cos 0)cos 0 + /2ср sin2 0 = К,
что согласно равенству (5) эквивалентно полученному выше
соотношению.
Постоянная интеграции определяется из начальных усло¬
вий: при t = 0 0 = 0О H<p = f0. Следовательно,
Дш cos 0 + /2ср sin80 = /гшcos 0О + /2?О sin2 0О,
откуда
■ _ zi<a(cos е0 — cos e)+z2?o sin2 е0
Т /2sin’O ’ 1 ;
Далее, из уравнения (6) имеем
Дев = -4- («р sin 0 4- 2<р0 cos 0).
е
Подставляя это выражение в уравнение (7) и умножая на 0,
получаем
/2(sin20 <рср 4-2ср2 sin0 cos 00) + /2($0 — ср2 sin 0 cos 00) =
= Gr0 sin 00
или
/2(sin2 0 ср ср + cp2 sin 0 cos 00 4- 00) — Gr0 sin 00 = О
или после интегрирования
/2(cp8sina0 4-02)4-2Grocos0 = C2. (9)
Этот интеграл выражает закон сохранения энергии. В са¬
мом деле, если принять за плоскость нулевого потенциала
плоскость z = 0, то потенциальная энергия гироскопа в поле
силы тяжести будет равна Grocos0, а кинетическая энергия
4/1Ш2 + 472(ср281п20 + 02).
63
Так как сумма потенциальной и кинетической энергии остается
постоянной, и так как Д®2 тоже постоянно, то будет оста¬
ваться постоянной и левая часть уравнения (9).
С2 определяется из начального условия
/2(?о sin2 0О + ©о) + 2Gr0 cos 0О = С2. (Ю)
Далее, из уравнений (8) и (9) имеем
/202 = С2—/2?2 sin2 0 — 2Gr0 cos 0 =
п [Mcos 0О - cos 0) +/2?o sin* 0o]a nr._ _ o
— ь2 . . ZUr0COSU.
/2 sin8 0
Умножая обе части равенства на /2sin20, получаем
/2 2 = Сг/г sin10 — [ДЦсоз 0О — cos 0) +
+ /2<р0 sin2 0О]2 — 2Or0 cos 0 • /2 sin2 0 (11)
или, полагая cos0=x, cos0o = xo,
/1 (у)2 = С2/2(1 —х2) — [ЛЧх0-х) + /2?0( 1 —х2)]2 —
— 2Gr0/2x(l—х2),
следовательно,
t=I*( . г. (12)
J V c2f2( 1 - х*) - [/1О>(х0 - х) +4% (1 - X2)]' - 2GroM 1 - х*)
-*О
В правой части уравнения (12) стоит эллиптичёский интеграл,
который для любого значения верхнего предела х может быть
найден численно.
Таким образом t можно определить как функцию cos0,
а следовательно, и 0 как функцию /. Интегрируя затем ? и ф,
получим
? = + Ф = 1Ф^ + Фо. (13)
о о
где ? и ф определяются из уравнений (8) и (5) и начальных
данных ?0, ф0, 0О.
Исследуем теперь движение, для которого при/ = 0 0 =
= 0о = О.
Тогда равенство (10) примет вид
/2?0 sin2 0o + 2Gro cos 0О = С2. (14)
€4
Подставляя выражение (14) в (11), получаем
~ ^2®° Sin2 $° 2$г° C°S $0^2 s*n2 9 —
— [71w( cos 0О — cos 0) + 72<р2 sin2 0О]2 — 2Gr0 cos 0 sin2 0 =■
= (cos 0O —cos 0)[2Gro/j sin2 0 —2ш/]72ср0 sin2 0O +
+ /ico2(cos 0 —cos0o)]—72Tosin20o(sin20o — sin2 0) =
= (x0—x)[2Gr0/2(l —*2) —2“Л4?о(1 ~xo) + ^2(x~*o)] —
— /2 To(l —xo)(x2 —xo) =(x0—x)[2Gr0/2(l — x2) —
—2ш7172^>0(1 -x?) + 7?w2(x-x0) + /гфо(1 -x?)(x0 + x)], (15)
где cos 0 = x и cos 0O = x0.
Обозначим теперь
2Gr07a = а2; аЦ = b\ 72<p0 = c.
(Постоянные a, b и с имеют одинаковую размерность). Урав¬
нение (15) перепишется тогда в виде
л2(4У=(хо-х)1а2(1-х2)-2^(1-хо)+
+ Ьг(х—х0) + с=(1— х2Хх0 + х)]. (16)
Выражение в квадратных скобках представляет полином
второй степени относительно х и, следовательно, может быть
представлено в виде
— а\х—хДх — х2),
где Xj и х2 —корни квадратного уравнения:
а2(1 — х2) — 2bc( 1 — х2) + Ъ\х—х0) + с2(1 — х2Хх0 + х) = О
или, приводя это уравнение к обычной форме,
xt ft*+c'(l -х2) * — g'+2frc(l - xg) + bax0 - с*(1 - xg )х0 $
аг аг
Корни этого уравнения равны
j!+ce(1_x2)+/d-
** 2д* ’ Хг 2а* • ( )
где
D = [Ь2 + с2(1 —х2)]2 + 4а2[а2 — 2Ьс(1 — х2)—Ь2х0 + с2(1 — х2)х0] .
65
5 Динамика ракет
Дискриминант D всегда положителен. В самом деле,
D = [&’ + с2(1 -х2)]2 + 4а2[— Ь2 - с2(1 -х2) + а2 + А2(1 -х0)-
-2М1 -х2) + с2(1 -х2) + ^(1 - х2)х0] = [А2 + с2(1 -х2)]2 +
+ 4а2[—Ь2 - с2(1 -х2) + а2 + />2(1 - х0) - 2йс( 1 -х2) +
+ с2(1-х2Х1 +ХО)] = [Ь2 + с2(1 - х2)]2 + 4а2{ - Ь2 — с2(1 -
—х2) + а2 + (1—х0)[А2 —26с(1 + х0) + с\ 1 +х0)2]}
или
д = [/,2 + с2(1-Х2)_2а2]2 + 4а2(1-х0)[6-с(1+х0)]2. (19)
Так как xo = cos0o<l, то правая часть равенства (19)
положительна, т. е. D > 0.
Следовательно, корни хг и х2 действительны, a xt соглас¬
но равенству (18), кроме того, положителен. Далее
2а! - ft1 — с2(1 - х2) - V~D
1 — X, = ,
1 2а2
откуда следует согласно равенству (19), что 1—х2 отрицатель¬
но и, следовательно, хг больше единицы. Из уравнения (16)
имеем
4 4 = аУ (х _ хо)(х—Л1Хх~ хгТ (20)
at
Далее, так как x = cos0<l и хх>1, то х—хг отрица¬
тельно и, следовательно, величины (х—х0) и (х—х2) имеют
dx
противоположные знаки, так как — является действитель¬
ным числом. Отсюда следует, что х лежит между х0 и х,.
При х = х0 или х = ха из уравнения (20) следует,' что — = 0.
dt
Возводя уравнение (20) в квадрат и дифференцируя по t, полу-
dx
чаем после сокращения на —
2/2 S = —х1Хх—хг) + (*—х0)(х—ха) + (X - х0Хх—Xj)] .(21)
Предположим теперь, что х0 > х2, так что при t = Q, 0 име¬
ет минимум. Тогда при х = х0 из равенства (21) получаем
2/2^)х=х =а2(х0—XjXx0—х2).
Так как х0—хх отрицательно (Xj > 1), а х0—ха по предпо-
ложёнию положительно, то — ) < 0, т. е. начиная с мо¬
66
мента /=0 х будёт уменьшаться, а следовательно, 0 будет
увеличиваться.
Далее, из равенства (21) имеем
Но
ха—хй < 0 и х,—ха < О,
так что
f —А > о
и, следовательно, после того как х, уменьшаясь, достигнет
значения ха, он вновь начнет возрастать, а 0, следователь¬
но, начнет убывать.
Таким образом 0 колеблется в пределах от 0О до 0а, соот¬
ветствующих значениям х0 и х2.
Время, в течение которого х убывает от ха до ха, равно:
у, I, с dx
а У (х- х0)(х - Xj)(x - х2) ‘ (22)
Эллиптический интеграл, входящий в правую часть этого
равенства, может быть вычислен при помощи таблиц.
§ 2. Регулярная прецессия
Если х0—х2 = 0, т. е. 0 остается постоянным, то гироскоп
совершает движение, называемое регулярной прецессией.
В этом случае согласно уравнению (18) имеется следующее
соотношение:
2а2х0 = b* + с2( 1 —хо) - V~D
или, подставляя вместо D его полное выражение,
[2а2х0 —А2 —са(1 —Хо)]2= [Аа + с2(1 —Хо)]2 +
+ 4а2[а2 —2Ас(1—х2) —А2х0 + с2(1 — х2)х0]. (23)
Это условие можно упростить. Перепишем равенство
(23) в виде
{2аах0- [А2 + с2(1 - х2)]}1 = [А2 + с2(1 -х2)]2 + 4а2[... ];
тогда получим
4а4х2 —4а2х0[А2 + с2(1—х2)] =4а2[... ]
5*
67
или
а2х2—xQb2 — с2(1 —х2)х0 = а2 —2Ас(1 —х2) — А2х0 + с2(1 —х2)х0
или
х2(а2 — 2bc + 2с2х0) — а2 — 2Ьс + 2с2х0.
Следовательно, если исключить случай х2=1, т. е. 0о = О
или 0о = тс, т0 получим условие регулярной прецессии
а2 — 2Ас + 2с2х0 = 0. (24)
Подставляя вместо величин а, Ь, с и х0 их выражения, полу¬
чаем
2Gr04 — 2<d/1/2?0 + 2/г?о cos 0О = 0
или
Gr0 — соДсро + /2? о cos 0О = 0. (25)
Следовательно, в случае регулярной прецессии величины
w, ?0 и 0О должны удовлетворять условию (25).
•Это условие представляет уравнение второй степени отно¬
сительно ?0 и может быть записано в виде
•2 ш4 • . Gr0 л
фо — о + = 0-
/2 cos 0О A? cos $о
откуда
?0=-^±|/ . (26)
2Z2 cos 0o у 4l2 cos* 0o h cos ®o
Формула (26) для каждой пары значений ш и 0О дает зна¬
чения ?0, удовлетворяющие условию регулярной прецессии.
Как видно из формулы, при заданных значениях <о и 0О воз¬
можны две регулярные прецессии — быстрая и медленная.
В случае быстрой регулярной прецессии угловая скорость
?0 является величиной того же порядка, что и ш, а в случае
медленной прецессии <о значительно больше ?0 (предполагает¬
ся, что 4 и 4— величины одного порядка).
Условие (25) может быть непосредственно получено из
уравнения (7). Так как при регулярной прецессии 0 = 0о = О,
то 0 = 0. Следовательно, для / = 0 уравнение (7) дает (после
сокращения на'sin 0)
4w?o—4?о cos 0О = Gr0,
что совпадает с равенством (25).
68
Из формулы (26) видно, что при 0О > -у, т. е. в том слу¬
чае, когда центр тяжести гироскопа лежит ниже плоскости
ху, оба значения <р0 действительны. Если0о<-^-, то ДЛ5
возможности регулярной прецессии необходймо, чтобы
“*!/i Gro
4/gcos2O0 /2cosO
или
ш>— У /2Grocos0o . (27)
к
При меньших значениях ш регулярная прецессия невоз¬
можна.
§ 3. Псевдорегулярная прецессия
Движение, мало отличающееся от регулярной прецессии,
называется псевдорегулярной прецессией. В этом случае усло¬
вие (25) удовлетворяется лишь приблизительно, и величины
xo = cos0o и x2 = cos02 несколько отличаются друг от друга.
Мы предположили, что х0>х2; кроме того, xt > 1 и х1>х0.
Введем следующие обозначения:
хх — х2=р, х0—x2 = q, х—х2=у.
Тогда
х — х0 = (х—х2) — (х0—х2)=у — q,
х — х1 = (х—х2) — (х1—х2)=у—р,
так что
(X—Х0)(х —х2) (х—х2) = (у—q)(y —р)у =у3 —ру2—qy2+pqy.
В случае псевдорегулярной прецессии величины у и q ма¬
лы, так как х0 и х2 мало отличаются друг от друга; р, напро¬
тив, велико. Поэтому величинами у3 и qy2 можно пренебречь
(по сравнению с остальными членами), так что
(х — х0)(х — xj(x—x2)=pqy — py2=py(q—у).
Таким образом уравнение (20) принимает вид
/24 = ± aV ру^ч—у),
at
откуда находим
t = ± -4= fz - + С.
aV р JV ЧУ — У*
69
Но
Л /('-.В
■ / 2_у Л
= arc sin — — 1).
\ ч 1
Следовательно,
t= C + /a arc sin f 1 — —.
ay p \ q .)
Постоянная интеграции С и знак второго члена в правой
части равенства определяются из условия, что при t=Q y = q
и что с уменьшением у время t должно возрастать.
Полагая t = 0, получаем начальное условие:
О = С 4—I~= arc sin (— 1) — С ,
а/р V ’ в/ р 2
откуда
в|/р 2
Следовательно,
/ = 4-arcsin fl — —М. (28)
ay р\_2 \ q J ]
При х = х2 у обращается в нуль. Следовательно, интервал
времени, за который х изменяется от xt до х2, равняется
Т = -^—(— 4-arcsin • (29)
аур\2 J аур
Согласно формуле (18)
а*
так что
Г=’г-^Т‘ <3°)
Определим теперь у как функцию t. Из уравнений (28) и
(29) получаем
4- 7" Г л . /. 2 у X1 Т / 2_у
г = — — 4-arc sin(1 1 = -—ar cos — — 1 ,
я L 2 \ q J J я \ q J
70
откуда
—f=arcos f— — I')
Т \ч J
или
к , 2у ,
cos—1=— 1,
Т q
так что
J = y(l + cos-y/). (31)
Таким образом проекция какой-либо точки оси гироскопа
на вертикальную ось z совершает простое синусоидальное
колебание.
Так как у = х— x2 = cos0—х2 [х2 вычисляется по форму¬
ле (18)], то формула (31) позволяет определить cos О как
функцию t. Подставляя затем cos в в уравнения (8) и (5),
можно определить ? и ф как функции t и, интегрируя [фор¬
мула (13)], найти ? и ф как функции t.
Глава Ш
СНАРЯД КАК ТВЕРДОЕ ТЕЛО
§ 1. Введение
В предыдущих главах мы рассматривали снаряд как мате¬
риальную точку, а сопротивление воздуха принимали всегда
направленным в сторону, противоположную относительному дви¬
жению снаряда.
Такое упрощение допустимо в качестве первого приближе¬
ния. Однако в действительности снаряд не является материаль¬
ной точкой, а представляет собой твердое тело, вращающееся
с большой угловой скоростью. Кроме того, система сил, дей¬
ствующих на снаряд, значительно сложнее, чем предполагалось
выше, и под действием этих сил снаряд изменяет свое движе¬
ние, чем не всегда можно пренебрегать.
Некоторые из этих возмущений оказываются более суще¬
ственными, чем возмущение, вызываемое вращением Земли.
Ниже мы рассмотрим некоторые эффекты, вызываемые враще¬
нием снаряда, а именно: 1) эффект Пуассона, 2) эффект Маг¬
нуса и 3) гироскопический эффект.
§ 2. Эффект Пуассона
Предположим, что продольная ось снаряда образует с на¬
правлением движения угол а (фиг. 22), и что снаряд вращается
по часовой стрелке, если смотреть по направлению движения.
Впереди снаряда, как схематически показано на фиг. 22, про¬
исходит уплотнение воздуха. По¬
этому нижняя часть снаряда, со¬
прикасающаяся с образовавшейся
воздушной подушкой, испытывает
большее трение, чем верхняя часть;
вследствие этого снаряд, изобра¬
женный на фиг. 22, будет откло¬
няться вправо.
Фиг. 22.
72
§ 3. Эффект Магнуса
Если вращающийся цилиндр расположить в потоке воздуха
так, чтобы ось его была перпендикулярна направлению потока,
то на него будет действовать аэродинамическая сила, перпен¬
дикулярная оси цилиндра и направлению потока. Этот эффект,
впервые установленный Магнусом, объясняется разностью дав¬
лений в воздушном потоке снизу и сверху цилиндра, образую¬
щейся вследствие вращения цилиндра.
Если цилиндр вращается, как показано на фиг. 23 (ось ци¬
линдра перпендикулярна плоскости чертежа), то воздушный по¬
ток будет тормозиться в нижней части вследствие трения о
Фиг. 23.
Фиг. 24,
поверхность вращающегося цилиндра. По этой же причине в
верхней части поток будет ускоряться. Поэтому в области А
давление будет повышенным, а в области В — пониженным.
Следовательно, на цилиндр будет действовать аэродинамическая
сила, направленная от А к В.
Подобный эффект имеет место также в случае цилиндра, ось
вращения которого (являющаяся его продольной осью) обра¬
зует с направлением движения угол а.
Обратим движение и будем считать, что снаряд неподвижен,
а воздушный поток движется на него, образуя угол а с его
продольной осью. Разложим затем скорость потока v на две
составляющие: u cos а— вдоль продольной оси снаряда и
v sin а — перпендикулярно ей. Последняя составляющая и вы¬
зывает аэродинамическую силу; для снаряда, изображенного на
фиг. 24, она перпендикулярна плоскости чертежа и направлена
от нас, если снаряд имеет правое вращение. Эта сила вызывает
отклонение снаряда от начальной плоскости стрельбы влево
(при правом вращении).
§ 4. Гироскопический эффект
Будем опять считать снаряд неподвижным, а воздушный по¬
ток— движущимся на него (см. фиг. 25)). Пусть точка Z будет
центром тяжести снаряда, а точка Р — точкой приложения силы
73
сопротивления воздуха. Сопротивление воздуха R создает отно¬
сительно центра тяжести момент Rs sin а, перпендикулярный
плоскости чертежа и направленный на нас. Его можно записать
в векторной форме: 3R=sXR, где s=ZP.
Так как момент количества движения В, вызванный вра¬
щением снаряда, направлен по s и так как
= =
dt
то снаряд будет прецессировать вокруг касательной к траекто¬
рии центра тяжести. В случае движения снаряда, изображенного
на фиг. 25, головная часть его будет двигаться на нас. Это
движение подобно движению тяжелого ги¬
роскопа с неподвижной вершиной (фиг. 26).
В нашем случае сопротивление воздуха
соответствует весу тяжелого гироскопа G,
точка приложения сопротивления воздуха
Р соответствует центру тяжести тяжелого
гироскопа, а центр тяжести снаряда Z —
Фиг. 26.
Фиг. 25.
вершине О. Таким образом теорией тяжелого гироскопа можно
В1оспользоваться при изучении динамики полета снаряда.
Так как при движении снаряда, изображенного на фиг. 25,
головная часть его выходит из начальной плоскости движения,
то аэродинамическая сила, действующая на снаряд, приобре¬
тает боковую составляющую, вызывающую отклонение снаряда
вправо от начальной плоскости.
Отклонения снаряда вправо, наблюдаемые в большинстве
случаев (для не очень крутых траекторий), вызываются глав¬
ным образом гироскопическим эффектом; влияние сил Магнуса
незначительно. Только в случае очень крутых траекторий (зе¬
нитные орудия), когда встречаются большие углы атаки и со¬
ставляющая v sin а, перпендикулярная продольной оси снаряда,
становится значительной, начинает доминировать эффект Маг¬
нуса, вызывающий в случае правого вращения отклонение
влево.
74
Опыты, проведенные с шаровыми ядрами, которые подвер¬
жены влиянию лишь сил Магнуса и Пуассона, показали, что
большее значение имеет сила Магнуса.
Таким образом при изучении динамики снаряда в первую
очередь следует учитывать гироскопический эффект. Рассмотрим
это более подробно.
В момент вылета угол атаки снаряда а. равен нулю. Так
как продольная ось снаряда стремится сохранить свое перво¬
начальное направление, а траектория снаряда искривляется под
действием силы тяжести, то угол атаки а. возрастает и стано¬
вится положительным. Снаряд начинает прецессировать.
Продольная ось снаряда описывает во время полета круглый
конус прецессии около касательной к траектории, как при ре¬
гулярной прецессии тяжелого гироскопа (фиг. 26). Если эта
прецессия совершается настолько медленно, что головная часть
снаряда в течение всего полета остается справа от начальной
плоскости стрельбы, то суммарное отклонение снаряда будет
также направлено вправо. Это предположение о медленной пре¬
цессии высказывалось некоторыми ранними исследователями.
Позже, однако, от этого предположения пришлось отказаться.
Расчет периода прецессии, сделанный на основании известных
теперь данных о .величине момента силы сопротивления воздуха,
показывает, что в большинстве случаев этот период значительно
меньше времени полета снаряда, и, следовательно, согласно из¬
ложенному выше отклонения снаряда вправо или влево одина¬
ково возможны. Однако такое заключение было бы неправиль¬
ным. Между прецессией снаряда и регулярной прецессией тя¬
желого гироскопа нет в действительности полной аналогии. При
движении снаряда величина и направление силы сопротивления
воздуха, вызывающего прецессию, изменяются со временем; рас¬
стояние между точкой приложения силы сопротивления воздуха
и центром тяжести снаряда также изменяется в зависимости от
угла атаки. В противоположность этому у тяжелого гироскопа
расстояние между центром тяжести и точкой опоры, а также
сила веса G остаются постоянными. Таким образом движение
снаряда протекает более сложно.
В этом сложном движении головная часть снаряда совер¬
шает колебания, оставаясь в случае правого вращения справа
от вертикальной плоскости, проходящей через касательную к
траектории центра тяжести. Попеременно опускаясь и подни¬
маясь, она то приближается,.то вновь удаляется от касательной
к траектории.
Как показывает опыт, головная часть снаряда остается во
время полета справа от вертикальной плоскости, проходящей
через касательную к траектории, и снаряд получает в резуль¬
тате отклонение вправо. Через определенные промежутки вре¬
мени головная часть снаряда то отходит от траектории, то
75
Фиг. 27.
вновь приближается к ней, и снаряд, таким образом, получает
необходимую «послушность» и ударяется в цель головной
частью.
Качественно картину движения можно представить с по¬
мощью следующего графического построения, предложенного
впервые Кранцем в 1898 г. Это построение основано на упро¬
щающем предположении, что движение центра тяжести в тече¬
ние короткого промежутка времени можно считать не зави¬
сящим от прецессии снаряда. В течение этого промежутка вре¬
мени движение центра тяжести можно рассчитать ме¬
тодами, описанными в главе I.
Опишем вокруг центра тяжести снаряда сферу еди¬
ничного радиуса и продолжим его продольную ось до
пересечения с поверхностью этой сферы, а также про¬
должим до пересечения со сферой касательную к
траектории центра тяжести.
Построим точки, в которых касательная к траек¬
тории пересекается с поверхностью единичной сферы
О (при t=0), 7\ (при 7=Д/), Т2 (при /=2д£)ит.д.
(фиг. 27). Строго говоря, точки, изображенные на
этом чертеже, следовало бы строить на сферической
поверхности, но мы для простоты сделали построе¬
ние на плоскости.
Вблизи вершины траектории угловая скорость вра¬
щения касательной наибольшая и концентрация то¬
чек Т, следовательно, будет там наименьшей.
В момент Т=0 (момент вылета) продольная ось снаряда
совпадает с направлением движения, так что точка О является
также точкой пересечения продольной оси с единичной сферой,
описанной около точки Z.
Вследствие вращения снаряда его продольная ось стремится
сохранить свое первоначальное направление. Будем считать
приближенно, что в течение первого промежутка времени Д/
продольная ось остается параллельной самой себе, а прецессию,
в действительности непрерывную в течение всего интервала вре¬
мени, будем считать совершающейся мгновенно в конце ин¬
тервала.
Точку пересечения продольной оси снаряда, или касательной
к траектории, с поверхностью единичной сферы будем называть
для краткости апексом продольной оси или апексом касатель¬
ной.
Таким образом в момент t=&,t апекс продольной оси мы
будем считать находящимся в точке О, а апекс касательной —
в точке Тг.
Тогда продольная ось будет образовывать с направлением
скорости угол а. = Z.OZT,, вследствие чего на снаряд будет дей¬
ствовать момент М (относительно центра тяжести).
76
Под действием этого момента снаряд начнет прецессировать
согласно формуле
М — Ди sin a
1 dt
где 1г — момент инерции снаряда относительно продольной оси;
<и — угловая скорость собственного вращения (вокруг про¬
дольной оси);
— — угловая скорость прецессии продольной оси вокруг
dt
касательной к траектории (предполагается регулярная
прецессия).
Угол Д ф = L ОТХО^— угол поворота продольной оси снаряда
во время прецессии за первый интервал времени ДД Он равен
= ДД
/|Ш sin а
Таким образом окончательно получаем, что в момент t=M
апекс касательной к траектории находится в точке 7\> а апекс
продольной оси — в точке О2.
Точно таким же способом можно рассмотреть движение цен¬
тра тяжести и прецессионное движение снаряда во втором ин¬
тервале времени Д/ и т. д.
Таким путем мы получим в качестве траектории апекса ка¬
сательной на поверхности единичной сферы линию
олпг,... гмти,
а в качестве траектории апекса продольной оси — линию
O2O2Ofi<... Оп.
Построения, проделанные для конкретных снарядов, пока¬
зывают, что продольная ось остается все время справа от вер¬
тикальной плоскости, проходящей через мгновенную касатель¬
ную к траектории, причем продольная ось то приближается, то
удаляется от этой касательной. В течение значительного проме¬
жутка времени влияние прецессии на движение центра тяжести
снаряда становится заметным, и линия ОТ2Т2... Т10Т22 отклоняет¬
ся вправо.
Рассмотрим теперь условия, необходимые для того, чтобы
снаряд был достаточно послушным. Ясно, что для этого нужна
сравнительно быстрая прецессия, т. е. угловая скорость прецес-
сии —— не должна быть слишком мала по сравнению с угло-
dt
d8 .
вой скоростью касательной к траектории снаряда (И есть
dt
угол между направлением скорости и горизонтальной . плоско¬
стью) . Если прецессия будет очень медленной, то точки О2О2О2...
77
на фиг. 27 будут все более и более удаляться от соответствую¬
щих точек т. е. продольная ось снаряда будет все вре¬
мя удаляться от касательной к траектории.
В этом случае снаряд практически сохраняет свое первона¬
чальное направление во все время полета и падает на землю
хвостовой частью. Такой снаряд, следовательно, является не¬
достаточно послушным; он перестабилизирован вследствие слиш¬
ком большой угловой скорости ш вокруг своей продольной оси.
Отношение
.lib
' dt ’ dt
характеризует степень послушности снаряда.
Угловая скорость прецессии равна
_ м
dt /jwsina
а угловая скорость вращения касательной к траектории
g cos 8
dt v
(см. главу I). Угловая скорость принимает наибольшее зна¬
чение, когда & = 0 и скорость v мала (вершина траектории),
так что в отношении степени послушности f эта точка явля¬
ется критической. Следовательно, при определении / следует
брать именно эту точку. Тогда получим:
<78 _ g
dt vs
и
у (1>
l]U>g sin а
где v, — скорость снаряда в вершине траектории.
С другой стороны, должно быть выполнено условие, необхо¬
димое для того, чтобы снаряд мог прецессировать. В главе II,
§ 2 мы нашли для тяжелого гироскопа, что поевдорегулярная
прецессия возможна только в том случае, когда
ш2/2 Gs
4/д cos* a 72cosa
ИЛИ
а>2/2
! > 1.
4GsI2 cos а
В нашем случае момент, вызывающий прецессию снаряда,
равен
М = Gs sin а,
78
откуда
Gs = —^—.
Sia a
Следовательно, для снаряда условием возможности псевдо-
регулярной прецессии будет
шЧ2
а = ~й >Ь (2)
4 Z2 cos “
Sin а
где М—момент силы сопротивления воздуха относительно
центра тяжести снаряда;
/2 — экваториальный момент инерции снаряда (момент инер¬
ции относительно поперечной оси, проходящей через
его центр тяжести).
Отношение а будем называть коэффициентом устойчивости.
При я = 0, Л/ = 0 и отношение становится неопределен-
sin а
/ о \
ностью вида — ).
\ 0 /
Пользуясь аналогией между снарядом и тяжелым гироско-
м
пом, можно отношение — представить также в виде
sin а
М п
— = Rs,
sin а
где сопротивление воздуха R является аналогом веса тяжелого
гироскопа G, a s — расстояние между точкой приложения силы
сопротивления воздуха и центром тяжести снаряда.
Расстояние s изменяется с а; наименьшее значение оно
имеет при а=~ наибольшее — при а = 0. В начале траектории
продольная ось снаряда совпадает с направлением скорости,
s максимально, cosa=l и R также максимально, так как ско¬
рость в момент вылета имеет наибольшее значение. Следова¬
ли п
тельно, в этот момент =Rs максимально, а в — мини-
sin а
мально.
Таким образом сразу после вылета устойчивость снаряда
минимальна, затем она увеличивается. (Угловая скорость ш па¬
дает настолько незначительно, что этим можно пренебречь.)
Следовательно, если в начале траектории условие (2) удов¬
летворяется, то оно удовлетворяется и на всей траектории. Чем
больше с, тем менее вероятно возникновение нутации, иска¬
жающей прецессионное движение.
79-
При вычислении а в конкретных случаях мы встре¬
чаемся обычно с большими трудностями в определении
лг п
отношения . До сих пор не существует ника-
sin а
ких методов точного расчета этой величины, так что
приходится удовлетворяться грубыми приближениями.
Экспериментальным путем было доказано, что при дан-
м
ном значении а величина увеличивается с увели-
sin а
чением длины снаряда. Согласно Шарбонье в качестве
м
среднего значения величины —можно принять произведение
Ra, где R — сопротивление воздуха, а а — расстояние от сере¬
дины головной части снаряда до центра тяжести снаряда.
Из изложенного следует, что в будет иметь большее значе¬
ние, если Д и ф велики, а длина снаряда мала и если центр
тяжести снаряда расположен близко к головной части.
С другой стороны, из формулы (1) видно, что степень по¬
слушности снаряда / возрастает при уменьшении Zx и ш и при
увеличении расстояния от центра тяжести снаряда до головной
части.
Таким образом, для того чтобы получить достаточно по¬
слушный и устойчивый снаряд, нужно удовлетворить двум про¬
тивоположным требованиям, и поэтому приходится искать ком¬
промиссное решение, стараясь получить для s и f значения,
возможно большие по сравнению с единицей.
В случае пологой траектории, когда а мало, удовлетворить
указанным выше условиям и получить движение, подобное
изображенному на фиг. 27, легче, чем в случае крутой траекто¬
рии.
Рассмотрим движение снаряда на восходящей ветви крутой
траектории. Степень послушности снаряда равна
d<p . d8
J— dt dt ’
a
M
dip sin a
dt Iu>
Так как в начале траектории (а = 0) максимально, а — мало,
то степень послушности f на начальном участке траектории
будет велика. Но, по мере того как снаряд приближается к
d8 „ м г,
вершине траектории, — возрастает. Одновременно = Rs
dt sin а
убывает, так как вместе со скоростью v убывает R, as умень¬
шается с ростом а.
«о
Следовательно, вблизи вершины траектории точки Olt Оа... и
т. д. (фиг. 27) будут расположены более плотно, а начнет воз¬
растать более быстро и возникнет опасность, что вблизи вер¬
шины траектории и в начале ее нисходящей ветви послушность
снаряда окажется- недостаточной.
Если, однако, снаряд будет достаточно послушен, то он
пройдет вершину траектории с малым углом атаки, и на нисхо¬
дящей ветви траектории скорость его начнет возрастать и пре¬
цессия станет более быстрой.
Так как в дальнейшем траектория снаряда становится менее
искривленной, а скорость — более постоянной, то прецессия
снаряда будет приближаться по своему характеру к регулярной
прецессии тяжелого гироскопа и продольная ось снаряда будет
описывать почти правильный конус около касательной к траек¬
тории.
§ 5. Силы и моменты, действующие на снаряд
Рассмотрим теперь силы и моменты сил относительно- цен¬
тра тяжести, действующие на снаряд. Основными силами яв¬
ляются: 1) вес снаряда G и 2) результирующая аэродинами¬
ческая сила R. Последнюю силу можно разложить на две со¬
ставляющие: RT=RZT по касательной к траектории и RN=RZy
по перпендикуляру к касательной. Коэффициенты Z,r и Zn яв¬
ляются функциями угла атаки а, т. е. угла между продольной
осью снаряда и направлением скорости.
Основным моментом относительно центра_ тяжести Z
является момент силы сопротивления воздуха ЭЛ = где
R — сила сопротивления воздуха, а з —радиус-вектор, иду¬
щий из центра тяжести Z в точку приложения результирую¬
щей аэродинамической силы R.
Тогда _
13K| = 2M = /?sZffl,
где и Zm и з—функции а.
Силу R можно считать известной функцией скорости.
Функции ZT, Zu, sZm можно определить опытным путем.
В общем случае при расчете движения снаряда можно ог¬
раничиться только этими силами.
Кранц и Шмундт 1 учитывают также силу Магнуса. Скажем
о ней несколько подробнее.
Согласно Тайту сила Магнуса пропорциональна составляю¬
щей скорости v sin а, перпендикулярной продольной оси, и
окружной скорости вращающегося снаряда. Эту силу можно
представить в виде
К = цшо sin a J QdO,
6 Динамика ракет
81
1 Dr. С. С ran z, Der Ballistik, r. 1, § 58.
где dO — цилиндрический элемент поверхности снаряда;
[х — множитель, имеющий размерность
г , Г кг сек1
м-|—S-J-
Так как
dO - 2irS dh,
где 2 —радиус цилиндрического элемента поверхности сна¬
ряда, то
h=H
t» sin a-2ita> С Q2 dh,
₽ До
где Н — полная длина снаряда,
р»— плотность воздуха на высоте у, на которой находится
снаряд,
р — плотность воздуха у земли.
Сила К имеет направление вектора (<«Хо), где о»—вектор
угловой скорости снаряда, направленный по продольной оси,
av — скорость центра тяжести снаряда. Множитель у. опреде¬
ляется экспериментально. Согласно исследованиям Кранца сред¬
нее значение ц можно считать равным
р. = 0,014.
§ 6. Системы координат и формулы преобразования
Мы будем пользоваться следующими системами координат
(фиг. 28): _ _ _ _
1) неподвижной системой lu jlt klt где 4, /х, k2—единич¬
ные векторы по направлениям осей. Начало координат О этой
системы возьмем у среза канала ствола орудия; единичный век¬
тор 71 направим вдоль линии пересечения горизонтальной пло¬
82
Фиг. 28.
скости с вертикальной плоскостью, проходящей через начальную
скорость v0, а единичный вектор направим горизонтально
вправо, если смотреть по направлению стрельбы;
2) системой /2, k2 с началом в центре тяжести снаряда;
единичный вектор 12 направим вверх по главной нормали траек¬
тории, а единичный вектор k2 — по касательной к траектории
в направлении скорости;
3) системой Z8, /а, ka, жестко связанной со снарядом, с на¬
чалом координат в центре тяжести; единичный вектор ka напра¬
вим по продольной оси снаряда (от хвостовой части к голов¬
ной), а единичные векторы 1Я и /, направим вдоль двух других
главных осей инерции, произвольно взятых в плоскости, пер¬
пендикулярной к k2. _
Линию пересечения нормальной плоскости траектории 12, /2
с экваториальной плоскостью снаряда it, jt (проходящей черев
его центр тяжести S) будем называть линией узлов; вдоль этой
линии в направлении (&гХ&8) отложим единичный вектор е (из
точки S). _
Далее перпендикулярно е в плоскости l2, j2 отложим еди¬
ничный вектор q2 в направлении (£2Хе), а в плоскости Z,j8—
единичный вектор q3 в направлении (£8Хе). _
Таким образом системы kjzte, k2eq2 и k2eqa являются пра¬
выми системами. Все перечисленные векторы изображены на
фиг. 28.
Будем считать, что угол между соприкасающейся плоскостью
траектории ~i2k2 и начальной плоскостью 7ji остается в течение
всего времени полета малым, так что им и его первыми двумя
производными по времени можно пренебречь.
Положим
Z(£ К) = а> М = Z[£( “ ?г)] = Ф,
и
Z(^) = <p.
Углы а (угол нутации), ф (угол прецессии) и <р являются
тремя известными углами Эйлера.
Полагая далее
ZGiM=®»
получаем непосредственно из чертежа (см. также дополнение
на стр. 92)
Г2 = — i j sin 0 + cos 0; J 2 = Ai;й2 = i\ cos & + j\ sin О, (3)
e= ii sin 0 sin ф—/i cos Osin ф + fci cos ф, 1
q2 = i\ sin 0 cos ф — j i cos & cos ф — fcisln ф, J
6*
83
ia = — esinp — g3 cos я cos ф 4-A3 sin я cos Ф, 1
/2 = e cos<p —focosasin ф +A3sin asin ф, } (5)
A2 = +<73sina 4-A3cosa. J
Обозначая через <o —угловую скорость системы i3, J3, A3
относительно системы ilt j\, Ax, а через p, q, г—ее составляю¬
щие по осям е, qs, ka, будем иметь
ё = ёр +q3q+~k3r. (6)
Полную угловую скорость ш можно представить как
векторную сумму отдельных вращений, при каждом из ко¬
торых меняется один из углов &, я, ф и ср.
Следовательно,
- -г- d8 , —da -г dp -г d<f ....
at at at at
Подставляя выражения (5) в равенство (7), получаем
и =— (е cos ф — qa cos a sin ф 4- А3 sin автф) +
dt
+ — е + — (73sina 4-A, cos я)—A3 =
dt dt ™ * dt 3
— / dti . - da X — j dft . . dp , X ,
= e — cos<p + — + g3 cos a sin ф 4—— sin я 14-
\dt dt J dt T dt )
4-fc3f—slnocsintp 4-—cosa4-—V
\dl dt dt)
Сравнивая это выражение с выражением (6), находим
d8 . da
р =— cos ф 4 ,
г dt r dtf
db ... dp , /о.
q= cos a sin ф 4-— slna, (8)
dt dt
dto , 1 t I dp . dcp
r=—sin a sin Ф 4- —cos a 4-
dt dt dt
Рассмотрим теперь систему eqtk3. Система 4/э^з имеет
относительно нее угловую скорость A3^ .
СледовательноЛ угловая скорость системы eqtk3 относи¬
тельно системы ii /1 Ai будет равна
— dft т - . da — , dp -г — dv-г
<»4= —/2Ч е 4—-A2=<d i-k.
dtJ 3 dt dt 2 dt 3
84
или согласно равенству (6)
\=Р~е + ЧЧо + (г~ (9)
\ at J
§ 7. Уравнения движения центра тяжести
На движущийся снаряд действуют следующие силы:
сопротивление воздуха R, сила Магнуса К и сила веса О.
Их можно записать в виде
R = — RTka—Rxq2; К=—Ке-, G= — Oji
или согласно формулам (3) и (4)
R= —RT(wos 8 +/isin 8)—R/f(Ji sin 8 cos ф —
—ji cos 8 cos ф — ki sin Ф) =
= Zl( —COS 8 —COS ф Sin 8)-|-
+J1( — Sin & + /?лгСО8фсО8 8) +
_ _ +ki(RN sm Ф), (10)
K= ti( — К sin ф sin 8) + ji(K sin ф cos 8) -|-
+ ki(—К cos ф),
G=71(-O)-
Следовательно, дифференциальные уравнения движения
центра тяжести запишутся в следующем виде:
— тх = RT cos & + RN cos ф sin & + К sin ф sin 8,
— m_y =sin 8—/?лгсозфсоз8—/(зшфсозд + G, (И)
тг = /?лг sin ф — X cos ф.
§ 8. Вращение снаряда вокруг его центра тяжести
Мы будем учитывать только момент силы сопротивления
воздуха ЭЛ = Me относительно центра тяжести Z. Если че¬
рез В обозначить момент количества движения снаряда от¬
носительно его центра тяжести, то будем иметь
ЗЙ = —. (12)
dt
Уравнение Эйлера в системе eq3k3 запишется в виде
~ = +ЬХВ)=^, (13)
at \ at / .
\ /4
85
ee
/ dB\ — т
где 1—1 —производная В по времени в системе eqaka. Со-
\ dt /4
гласно формуле (9)
б q3 k3
®4ХВ= Р я (г-^) (14)
Ар Ад Сг,
где А и С—моменты инерции снаряда относительно осей е,
д8 и А3 (являющихся главными _осями инерции
снаряда; относительно осей е и q3 моменты инер¬
ции равны А).
Далее имеем
(—\.= eA^- + q aA—+k3C—. (15)
\ dt L dt ™ dt 3 dt ' ’
Подставляя выражения (14) и (15) в уравнение (13), по¬
лучаем
ЛА’[СГ-Л ('-«)]-"■)
л£+'[л('—*)~сг]=0’ <16)
С— =0.
dt >
Уравнения (16) и (8) образуют систему дифференциальных
уравнений, определяющих вращение снаряда вокруг его центра
тяжести.
§ 9. Различные случаи движения
Уравнения (11) вместе с уравнениями (8) и (16) опреде¬
ляют движение снаряда.
В уравнениях (11) /?г, Rn и К являются функциями о, а и
Р (см. § 5 этой главы); р в свою очередь является функцией у
(высоты полета снаряда).
В уравнения (8) и (11) можно подставить
ft = Z(ti v) = arc cos r x =■ .
Vx2+y! +i‘
Тогда в системах (11), (8) и (16) зависимыми переменными
будут: х, у, z, р, q, г, ?, ?, а и независимым переменным t.
Нужно найти решение этих систем, удовлетворяющее заданным
начальным условиям:
х = х0 у = у0 z = za,
при /=0 х = хо У=Уо z—’zo>
Р=Ро Я = Яо г=г0,
? = <Ро Ф = Фо “ =
Это можно сделать посредством приближенного интегрирова¬
ния. Но этот метод в большинстве случаев приводит к чересчур
громоздким выкладкам.
Рассмотрим некоторые случаи движения, для которых можно
принять упрощающие предположения и сделать численное ин¬
тегрирование практически возможным. Будем характеризовать
различные случаи движения снаряда значениями следующих
величий: 1) угла атаки а и 2) коэффициента устойчивости
С*г2
а = .
. . М (17)
4А COS а ' '
sin а
Здесь вместо Ц стоит С, вместо /2 — Ли вместо о» — г.
От первой из этих величин зависят силы RK, RT и К в урав¬
нениях (11). Следовательно, эта величина показывает, в какой
степени движение центра тяжести снаряда зависит от движе¬
ния его относительно центра тяжести. Вторая величина показы¬
вает, в какой степени вращение снаряда вокруг его центра тя¬
жести приближается. к псевдорегулярной прецессии.
Рассмотрим следующие случаи.
Случай I. а<5°, в>20. Этот случай встречается при по¬
лете снаряда по настильной траектории (при малом угле бро¬
сания), если исключить начальный участок траектории, непо¬
средственно после вылета снаряда из канала ствола. Движение
центра тяжести в этом случае лишь слегка возмущено вслед¬
ствие вращения снаряда вокруг центра тяжести; это вращение
можно считать регулярной прецессией. Мы получаем, таким об¬
разом, движение, качественно подобное изображенному на
фиг. 27.
Случай II. а<5°, 1<в<20. К этому случаю относится
движение снаряда на начальном участке траектории. (При а=0
величина ——— = Rs принимает наибольшее значение, так что
sin а
М * *
а мало. С увеличением а величина—;—быстро убывает и а
быстро возрастает.) В этом случае, как и в предыдущем, движе¬
ние снаряда по траектории лишь слегка возмущено вследствие
вращения его вокруг центра тяжести, но это вращение нельзя
уже считать псевдорегулярной прецессией, так как коэффициент
устойчивости мал и нутация может оказаться заметной.
Случай III. а>5°, о>20. К этому случаю относится полет
снаряда по навесной траектории, кроме ее восходящей ветви,
движение по которой относится к случаю I. Движение снаряда
относительно центра тяжести оказывает на этот раз заметное
влияние на движение снаряда по траектории, и производить рас¬
чет так, как это делалось в главе I, уже нельзя, даже если рас¬
сматривается движение снаряда за небольшой промежуток
87
времени. Нутация в этом случае незначительна и ею можно
пренебречь.
Случай IV. а>5°, 1<о<20. К этому случаю относится
движение снаряда на последнем участке навесной траектории.
Движение снаряда по траектории в большой степени зависит
от его движения относительно центра тяжести; кроме того, воз¬
можна значительная нутация.
В этом случае мы вынуждены проводить приближенное ин¬
тегрирование полной системы уравнений (8), (11) и (16).
§ 10. Интегрирование дифференциальных уравнений движения
а) Случай I. а<5°, а >20.
В этом случае можно считать ZT= \ и ZN=Q, а силой Магну¬
са / можно пренебречь.
Уравнения (11) движения центра тяжести тогда запишутся
в следующем виде:
— mx = R cos 0, — /ny = /?sin& + G. (IT)
Так как вращение вокруг центра тяжести можно считать
регулярной прецессией, то можно пренебречь составляющей
В, перпендикулярной А3, так что будем иметь
В= Crk3,
следовательно,
е Яз
ё.хв= Р Я =F(Cr<7) + ?3(-Cr/0+ А3(0)
0 0 Сг
и уравнения (16) принимают вид
Crq = M, — Сгр = 0, С-^ = 0.
Из последнего уравнения следует, что
Cr= const = N.
Подставляя это значение в первое уравнение, находим
м
q~ N
и второе уравнение системы (8) принимает вид
d8 , , dip . М
cos a sin Ф + —sin а = —
dt т dt N
ИЛИ dip М । sin ip d8
dt Ntina tg a dt
Так как Np = Q, то первое уравнение си- (’б)'
стемы (8) можно записать в виде
da d8 ,
—= cos Ф.
dt dt т
88
Численное интегрирование можно провести следующим об¬
разом. На первом участке траектории непосредственно после
вылета снаряда из канала ствола влиянием вращения можно
пренебречь и уравнения (11') можно проинтегрировать методом,
изложенным в главе I.
Распространим этот метод (не учитывающий вращения) и
на второй участок траектории. Таким путем найдем х, у и &
как функции t. Функцию = & (/), найденную для второго
участка траектории, подставим в уравнения (16') и полученную
систему проинтегрируем численным методом, например, методом
Рунге-Кутта. В качестве начальных условий будем иметь а=а0
и ф = фо=0, где а0 — значение а в конце первого участка
траектории, получаемое в предположении, что продольная ось
снаряда сохраняет свое направление неизменным в течение
всего первого участка. Таким образом мы получим на втором
участке траектории <р = ф(/) и а = а(0. Затем можно с помощью
основной системы (11) оценить влияние вращения снаряда на
движение его центра тяжести на втором участке, интегрируя
систему (11) методом Рунге-Кутта.
Распространяя второй участок на всю траекторию, найдем
приближенно результирующее отклонение снаряда вправо и из¬
менение горизонтальной дальности полета вследствие вращения
снаряда.
б) Случай II. а<5°, 1<о<20.
Этот случай наблюдается на начальном участке траектории
снаряда непосредственно после вылета его из канала ствола.
Уравнениями движения в этом случае являются уравнения
(11'), уравнениями вращения вокруг центра тяжести — уравне¬
ния (16) и (8). В первом приближении можно проинтегриро¬
вать систему (11') отдельно с помощью метода, изложенного
в главе I, и найти таким образом функцию & = Н (/).
Эту функцию можно затем подставить в уравнения (8) и
(16), зависимыми переменными в которых будут а, ср, ф, р, q,r.
Интегрируя эти системы, найдем приближенно функции a = a(t),
<Р = ?(0> Ф = ф(О- Эти функции вместе с ранее найденной
функцией 11 = &(0 можно подставить в систему (11). Интегри¬
руя затем численным методом эту систему, мы определим влия¬
ние вращения снаряда на движение его центра тяжести. Числен¬
ное интегрирование систем (8), (16), однако, весьма сложно.
Впрочем, в большинстве случаев движение снаряда почти
на всей восходящей ветви траектории относится к случаю I и
лишь небольшой участок траектории (вблизи дульного среза)
относится к случаю II. Поэтому влиянием вращения на этом
небольшом участке можно в общем случае пренебречь и про¬
изводить расчет, как указывалось в п. «а».
Расчет без учета влияния вращения продолжают до тех пор,
пока Д& не достигнет приблизительно 3°.
89
в) Случай III. 'а>5°, о>20.
К этому случаю относится движение снаряда по очень кру¬
той траектории на среднем ее участке. Начальный участок та-
. кой траектории относится к случаям I и II, а последний участок
нисходящей ветви — к случаю IV.
Уравнениями движения центра тяжести в рассматриваемом
случае будут уравнения (11), а уравнениями вращения—(16').
Но системы (II) и (16') нельзя теперь рассматривать отдельно
друг от друга, а нужно интегрировать совместно.
Положим
х = у=Фу, z = vz. (18)
Уравнения (11), (16') и (18) образуют систему восьми
совместных дифференциальных уравнений первого порядка, в
которых х, у, z, Vx, vv, vz, а. и ф являются зависимыми пере¬
менными. Угол 8 равен
8^=arccos . v* ~ , (. n\
V v2x+v2+v2z <19>
следовательно, 8 и 8 могут быть выражены через фх, vy, vz
и фх, Фу, ф2, а силы RT, Ry, Д'—через фх, vy, Фг, а, у.
RT = RT(V ф2+ф2 + ф2 , а, У),
Rn = Rn(V ‘v’+'t’J + t'l , а> У),
К= + + , а, J).
Высота у появляется в этих функциях потому, что плотность
воздуха зависит от у, р=р(у).
Систему из восьми совместных дифференциальных уравне¬
ний первого порядка можно проинтегрировать методом Рунге-
Кутта.
Этот способ имеет практическое значение только в том слу¬
чае, когда интервалы А/, в которых величины ф, а и v можно
рассматривать как постоянные, могут быть выбраны достаточно
большими. Для а>5°, о >20 это условие достаточно хорошо
удовлетворяется.
Первый участок крутой траектории можно рассчитать так,
как указывалось в пунктах «а» и «б».
г) Случай IV. а>5°, 1<а<20.
В этом случае уравнениями движения центра тяжести яв¬
ляются уравнения (11), а уравнениями вращения—(16) и (8).
Так как в рассматриваемом случае вращение снаряда оказы¬
вает значительное влияние на его траекторию, то системы (И),
(8), (16) следует интегрировать совместно. Уравнения (11),
(8), (16), (18), после подстановки выражения (19) в (8) и
(11), образуют систему из 12 совместных дифференциальных
£)0
уравнений первого порядка с зависимыми переменными х, у, г,
t'z, vv, vz, <p, ip, a, p, q, г и независимой переменной t. Числен¬
ное интегрирование этой системы, однако, практически неосу¬
ществимо, так как интервалы М нужно выбирать в этом случае
очень малыми.
К счастью, случай IV не имеет большого практического зна¬
чения, так как может встретиться только при движении снаряда
на последнем участке нисходящей ветви навесной траектории,
где а велико, а в становится очень малым, вследствие большой
м
скорости снаряда (так как sjn д =Rs увеличивается).
Но вращение снаряда вокруг центра тяжести мало отли¬
чается от регулярной прецессии тяжелого гироскопа. Поэтому
на самом последнем участке крутой траектории влиянием вра¬
щения снаряда вокруг центра тяжести можно пренебречь и
угол атаки а считать постоянным. Полагая а = ас=const, полу¬
чаем дифференциальные уравнения движения центра тяжести в
следующем виде [аналогичные уравнениям (11')]:
— mx = RT cos — ту = RT sin & + G, (11")
где
RT = RZT(ac).
Систему (11") можно проинтегрировать методом, изложен¬
ным в главе I.
§ 11. Момент силы Магнуса, момент трения
и демпфирующий момент
Силы RT, Rn, К и момент Л/, по крайней мере для скоро¬
стей ниже скорости звука, можно замерить при продувках
в аэродинамической трубе.
Момент L (относительно центра тяжести) силы Магнуса К,
которым в предыдущих рассуждениях мы пренебрегали, согласно
экспериментальным данным, действительно, во всех случаях
очень мал. В настоящее время неизвестны случаи, которые тре¬
бовали бы его учета.
Если считать, что точка приложения силы Магнуса распо¬
ложена между центром тяжести снаряда и его головной частью,
то момент L можно записать в виде
_ _ L^—q^L.
Момент 7Итр= — й3Мтр сил трения снаряда о воздух, про¬
тиводействующий его вращению вокруг продольной оси,
также незначителен.
Кроме того, при вращении продольной оси снаряда вокруг
касательной к траектории с угловой скоростью ш появляется
так называемый демпфирующий момент Н (относительно центра
91
тяжести). Английские исследователи Фаулер (Fowler), Галлон
(Gallop) и Ричмонд (Richmond) пробовали определить этот мо¬
мент экспериментальным путем. Согласно их исследованиям
Н=
где р —плотность воздуха;
v — скорость снаряда;
2R— калибр снаряда. Для скоростей от 300 до 700 м/сек
значение коэффициента Z* меняется в пределах от 30 до 90.
Из формул (8) получаем
w= е h q3 -J-sina,
dt dt
так что
Положим
Н= — еНх— q3H2,
где Hi — компонента, относящаяся к угловой скорости А;
Н, — компонента, относящаяся к угловой скорости -^sina.
Моменты L, Мтр и Н до настоящего времени не удава¬
лось измерить в аэродинамической трубе. С учетом этих
моментов уравнения (16) принимают вид
A — -)-q[ Cr—A(r——}1 = M—Hi,
dt 4 [ \ dt J
л^+<’[л(гА)-сг]=-£-"" <l6'>
=-^-
Движение снаряда будет тогда определяться системами
(11), (8), (16я).
ДОПОЛНЕНИЕ
ПОДРОБНЫЙ ВЫВОД ФОРМУЛ (3), (4), (5)
_ Будем считать приближенно, что единичные векторы k2 и
L лежат в одной вертикальной плоскости. Тогда
/2 =—A sin &+/i cos ft, (3)
так как составляющая /2 по направлению равняется — sin ft,
а по направлению cos ft.
92
Далее
k2 = 4i cos& + /1 sin &,
так как составляющая k2 по направлению К равняется cos 9, а по
направлению /\ — sin &.
Составляющая 4 по направлению i2 равняется — sin & и при
последующем_проектировании на е дает sin & sin ф. (Другая со¬
ставляющая zi вдоль k2 при проектировании на направление е
дает нуль, так как Следовательно, составляющая е по
направлению z'i равняется sin & sin <[>.
Составляющая j2 по направлению i2 равняется cos & и после
проектирования на направление е дает — cos & sin ф.
Другая составляющая j\ по направлению k2 не дает состав¬
ляющей по направлению е. Следовательно, составляющая е по
направлению j2 равняется — cos 6 sin ф.
Составляющая /2 по направлению е равняется cos ф, так что
составляющая е по направлению /2 также равняется cos ф.
Следовательно,
е = 4 sin 6 sin ф — yicos & sin ф + k\ cos ф. (4)
Составляющая 4 по направлению i2 равняется — sin 6 и после
проектирования на направление q2 дает sin & cos ф.
Другая составляющая 4 по направлению k2 перпендикуляр¬
на q2 (так как <?2±fe2) и не дает составляющей по направле¬
нию q2.
Следовательно, составляющая q2 по направлению 4 равняет¬
ся sin 0 cos ф.
Составляющая j2 по направлению i2 равняется cos & и после
проектирования на направление q2 дает—cos 6 cos ф. (Другая
93
Фиг. 28а.
Фиг. 286.
составляющая /х по направлению k2 не дает составляющей по
направлению q2, так как k2l_q2.)
Следовательно, проекция q2 на направление ]г равняется
— cos ft cos ф.
Составляющая k2=j2 по направлению q2 равняется — sin ф,
так что составляющая q2 по направлению k2 также равняется
— sin ф.
Следовательно, получаем
q2 = i sin ft cos ф — y'i cos ft cos ф — ki sin ф. (4a)
Составляющая Z2 по направлению e равняется—sin ф.
Проекция qa на направление q2 равняется cos я, и после про¬
ектирования на направление 12 получаем — cos я cos ф.
Другая составляющая qa (вдоль k2) перпендикулярна 12 и не
дает составляющей по направлению 12.
Таким образом составляющая 12 по направлению qa равняет¬
ся —cos а cos ф.
Составляющая ka по направлению q2 равняется — sin я и
после проектирования на направление 12 дает sin a cos ф. Другая
составляющая ka (вдоль Л2) не дает проекции на направление 12.
Следовательно, составляющая 1г по направлению ka равняет¬
ся sin я cos ф.
Таким образом получаем
12= — ез1пф — ^зсовасоэф + Ai sin а cos ф. (5)
Составляющая /2 по направлению е равняется cos ф.
Составляющая qa по направлению q2 равняется cos а и после
проектирования на направление /2 дает — cos я sin ф.
Другай составляющая qa (вдоль k2) не дает проекции на
направление /2. Следовательно, составляющая /2 по направле¬
нию qa равняется —cos я sin ф. _
Проекция ka на направление q2 равняется — sin я, и после
проектирования на направление /2 получаем sin я sin ф. Другая
составляющая ka (вдоль k2) не дает составляющей по направ¬
лению /2. _
Следовательно, проекция /2 на направление ka равняется
sin я sin ф.
Таким образом
J. = е cos ф—focos я sin ф + k3 sin а sin ф. (5а)
Наконец, очевидно, что
А2 =43sina + ^3cosa. (56)
Глава IV
ДИНАМИКА РАКЕТЫ, ДВИЖУЩЕЙСЯ ВБЛИЗИ ЗЕМЛИ
§ 1. Введение
Ракета представляет собой аппарат или снаряд, приводимый
в движение силой реакции отбрасываемых газов. Эти газы об¬
разуются при сгорании топлива в ракетной камере и выбрасы¬
ваются из сопла ракеты с большой скоростью.
Окислитель, необходимый для [сгорания гОрюч|епо, может
содержаться в самой ракете или браться из окружающей атмо¬
сферы *.
Скорость движения ракеты в сильной степени зависит от
скорости истечения газов, которая определяется физико-химиче¬
скими процессами, происходящими в камере ракеты.
Проблема достижения больших скоростей истечения связана,
с большими трудностями. Однако за годы второй мировой вой¬
ны в этой области получены значительные результаты, хотя до¬
стигнутая скорость истечения все еще недостаточна для осу¬
ществления межпланетных сообщений, которые следует считать
основным назначением ракеты. Скорость истечения, достаточную
для того, чтобы преодолеть силы земного тяготения и сделать
возможными межпланетные путешествия, мы сможем получить,
вероятно, в недалеком будущем, после того как овладеем атом¬
ной энергией.
В этой главе мы будем изучать движение ракеты вблизи
Земли. Мы будем предполагать, что в единицу времени из сопла
ракеты выбрасывается определенная масса газа с определенной
скоростью, и будем исследовать движение ракеты под дей¬
ствием реактивной силы и других сил, оказывающих влияние
на ее движение.
95-
1 В первом случае двигатель, приводящий в движение ракету, назы¬
вается ракетным двигателем (жидкостным или пороховым), во втором
случае-воздушно-реактивным двигателем. Прим. ред.
§ 2. Реактивная сила
Если на массу т в течение промежутка времени t2—t2 дей¬
ствует сила Р, то
^Pdt = Jm dt = m(v2 — ^1),
t, л
т. е. интеграл по времени от действующей силы равняется при¬
ращению количества движения.
Применяя эту формулу к массе газа т, протекающего в еди¬
ницу времени через сопло ракеты со скоростью с относительно
стенок сопла, получим, что интеграл по времени от силы Р,
действующей на массу т, будет равен приращению количества
движения газа за единицу времени.
Считая скорость газа во входном сечении сопла равной ну¬
лю, получим приращение количества движения за единицу вре¬
мени тс, YL так как в этом случае сила Р постоянна по величине
и направлению, получаем
Р=тс.
Следовательно, сила реакции газовой струи, действующая
на ракету, будет равна
Р'=—тс. (1)
§ 3. Движение ракеты в пустоте при отсутствии силы тяжести
В дальнейшем мы будем предполагать, что линия действия
реактивной силы проходит через центр тяжести ракеты (ракета
плюс топливо), так что она не будет вызывать вращения во¬
круг центра тяжести.
Рассмотрим сперва простейший случай прямолинейного дви¬
жения ракеты в пустоте без воздействия каких-либо внешних
сил *.
Если /п0 — начальная масса ракеты, ат — масса газа, отбра¬
сываемая в единицу времени со скоростью с относительно сте¬
нок сопла, то уравнение движения запишется в виде
(m0 — = тс>
1 Эта задача впервые была решена К. Э. Циолковским. Решение
опубликовано в журнале „Научное обозрение' в 1903 г. Статья полностью
перепечатана в книге К. Э. Циолковского „Труды по ракетной технике*,
Оборонгиз, 1947.
96
откуда
dv = mcdt =—с d(mo — mt)
m0—mt ma—mt
По истечении t единиц времени скорость ракеты будет
равна
ф = с In —, (2)
mg—mt
если начальная скорость Фй = 0. Из формулы (2) следует, что
в момент времени t = скорость становится бесконечной,
tn
так как масса ракеты в этот момент становится равной нулю.
Путь, пройденный за t единиц времени, будет равен
t t
s= С ф^ = с С In —— dt=ct In — c [Zil£
J J mg—mt mg—mt 1 J°’
о 0
где
/d m° У mamdt
* mg—mt _ I (mg—mt)1
mg I mg
mg—mt J mg—mt
C , mdt , • Л • Г tdt
= I t ■. (mn — mt) — m I ;— .
J (m0—mt)1 J m0—mt
Положим теперь
/п» — mt = и,
откуда
; Wp—U
m
и
dt= — J- du,
m
так что
л=- Л
I , 1CL[u т J и mJ и
= J- и—^Я-ln и= -т- (/я0— in{m0 — mt).
tn tn т tn
7 Динамика ракет
97
Следовательно,
s = c [ZIn— U(m0 — mt)+ —?-ln(/ra0 — mt)Y =
L m0—mt m m Jo
= ф In — In — (m0 - mt) + ^1
|_ m0 — mt m m0—mt m ml
ИЛИ
s = c[fz-^ In—+ z]. (3)
Lk mJ m0-mt J
При t=^- будем иметь
m
|7Z — ^'|ln _^01 =
L\ mJ тл—mt J . m0
(=-;—
m
mQ
= ™ = rff-^in -^1 -
\ mJ mQ L\ m / m J{=™о
—:—— t
fit
l m m
L_ “/—^2.
m
— \(t — In — Z4)! = r(-^ —z) In _
L\ mJ \ m J1 t—4h L\ m / \ m /1 f _ д<>
m m
Г<1 - I
г Til ~T~ <ln x) -i
fi In x dx л
L Jx-0 1 d ! \ \ [ J<=0
X Jx-o L dx ( x ) J_,.=o
Следовательно,
=0,
A m J m0—m t J (=т^
m
так что при Z = — пройденный йуть будет равен
т
s = c^.
т.
98
При />-^
т
In --w%- -
m8—mt
становится мнимым, что связано с тем, что при t— —А мае¬
те
са становится равной нулю.
§ 4. Равноускоренное движение ракеты в пустоте
без действия силы тяжести
В предыдущем случае закон истечения газа (как функция
времени) был задан. Рассмотрим теперь движение ракеты с по¬
стоянным ускорением. Тогда количество газа, отбрасываемое за
единицу времени, будет равно скорости убывания переменной
dm с
массы ракеты, т. е. . Если с — скорость газов относитель-
dt
но стенок сопла и а — заданное ускорение, то будем иметь
dm
— с — = ат,
dt
откуда
— = —— dt и т = тйе с . (4)
т с
Уравнение (4) показывает, как должна изменяться масса
ракеты со временем, для того чтобы получить движение с посто¬
янным ускорением.
§ 5. Равноускоренное движение ракеты в сопротивляющейся
среде
Рассмотрим движение ракеты в сопротивляющейся среде с
постоянным ускорением, когда на ракету, кроме реактивной силы
и силы сопротивления, больше никакие силы не действуют. Со¬
противление будем считать пропорциональным квадрату ско¬
рости. (Это имеет место, например, при горизонтальном равно¬
ускоренном полете дирижабля с ракетным двигателем.)
Если F — площадь поперечного сечения, р — плотность воз¬
духа и с — скорость истечения газов (которая всегда бе¬
рется относительно стенок сопла), то уравнение движения будет
иметь вид
dm . р о
— с— = ат + ргуст,
где v = at, а 7 —постоянный коэффициент
dm , а . pF-ra2/2 п /с,
или —+ —m + -Е-! = 0. (5)
dt с с
7*
99
Это—линейное дифференциальное уравнение первого порядка
относительно т*.
В общем случае, если
г Г ff(x)dx л
А+У ft*) = ?(А У=е L J е <f(x)dx + с] ■
ах
Следовательно, решением уравнения (5) будет
т = е [С—J е ~с г •
При /=0 /п = т0, так что
т=е с [ m0—?F^a f е с t2dt .
L с .)
о
Далее
J x2exdx=х2ех—2§exxdx = х2^ — 2[хех — ех] = [х2 — 2х + 2)ех,
так что
Л' t2dt=^{e Н =
с J a J \ с J \ с /
о о
= pF^r^_2_a_^ + 2TV' _2 АА
a L с1 с J а
Следовательно
m = + -2 11 (6)
1 a L \ с* с / J)
Здесь мы предположили, что начальная скорость «о=О.
Рассматривая более общий случай, когда v=v9+at, полу¬
чаем дифференциальное уравнение в виде
— с = ат + р/7! (г/2 + 2v0at + a2t2)
или
+ -&(2хг0/ + at2) + = 0. (7)
dt с с с
* Рассмотрение основного уравнения ракетодинамики как линейного
уравнения относительно массы т и подробное изучение обратных задач
выполнено впервые И. В. Мещерским. (И. В. Мещерский. .Работы по ме¬
ханике тел переменной Массы*, Гостехиздат, 1949). Прим. ред.
100
Решением его будет
— — < С — t
т = е с ■ т0—I е е ■p^1fg (2t>0Z+oF) +
о L
+ fFv,° lL
" J1
— р ~ ~ * \т 2v0pFfa . pF-ja3 . PF7»2 ,
** **^0 " * 1 *2 40 ,
С С С
где
Л= -4 ^7— t\d(—1\ =
а J \ с J \ с У
о
= £-e~t\—t-]. 1 + — ;
в1 I с J а1
t а <
1 С8 Г С [а .Ri j(a\,
4=—к (— г= (8)
a8 J \ с ) \ с / ' '
о
_rLrZlc_2-l/+2]e^'-2^;
а3 I с1 с J а»
А —« / х ( —I \
/3 = -Це‘ d(-t\=—\ec -\),
a J \ с ) а
о
В случае равномерного движения ракеты со скоростью и
дифференциальное уравнение будет иметь вид
dm г. л
— С— = ?Р-(Ф2,
откуда
т = т0—■ t. (9)
С
§ 6. Прямолинейное равноускоренное движение ракеты
в однородном поле силы тяжести
Теперь рассмотрим случай, когда ракета движется вверх по
наклонной прямой (фиг. 29) с постоянным ускорением а в
однородном поле силы тяжести (плоская Земля!). Исследуем,
по какому закону должна изменяться по времени масса ракеты
101
и каково должно быть направление реактивной силы для того,
чтобы удовлетворить этим условиям. _
Если с — относительная скорость отбрасываемых газов и А—
реактивная сила, то так как А и с имеют противоположные на-
Фиг. 29.
dm
правления, a отрицательно, имеем
dt
A=ld-^. (10)
Если g—ускорение силы тяжести, то вес ракеты может
быть выражен: _ _
G = mg.
Так как в этом случае А и mg являются единственными
силами, действующими на ракету, получаем
4-|-/ng=/na. (11)
Из уравнений (10) и (11) следует
С d-TTl — 1 4
— — +g = a. (12)
т dt
Обозначим через 0 угол, который реактивная сила А обра¬
зует с горизонтальным направлением. Считая скалярную вели¬
чину с положительной, получаем
— — cos 0 = a cos а, (13)
т dt
— — sin0—g=asina. (14)
т dt
Из уравнений (13) и (14) следует
а cos а g +asin а
cosf sin р
ИЛИ
tgB= g+asin^. (15)
a COS а
102
Но так как
cos р =■ у— 3 ,
/i + tg2₽
уравнение (13) можно переписать в виде
с dm ■*/■,, / rr+asina V
= a cos а 1/ 1 + (— ) .
т dt у \ a cos а /
Следовательно,
т
-с Г—=acosa ]/1+ /-g-+asina Vf
J m У \ a cos a J
ИЛИ
- ^-co.a -|/~l+(g+asinrp t
т = тйе c y V ecosa . (16)
Уравнение (16) показывает, как должна меняться масса
ракеты по времени для того, чтобы получить требуемое дви¬
жение, а уравнение (15) определяет положение ракеты.
Для угла a=f имеем
и -■ / , . fg+a sin а\1
lim acosal/ 1 -|- [- ) =g + a,
У \ a COS a j J
It
a=v
и уравнение (16) принимает вид
(17)
т = тпйе . '
Уравнение (15) для а = -^- дает р = -^-.
В этом случае дифференциальное уравнение движения
будет иметь вид
с dm . d т / . \ < <
— = g + a или с— = — (a + g)dt,
т dt т
откуда формула (17) получается интегрированием.
Для случая а = 0 (горизонтальное движение) из уравнения
(15) имеем
tg₽ = A (18)
а
а из уравнения (16)
(19)
т = тйе
103
Этот результат может быть также получен следующим
путем.
В данном случае дифференциальное уравнение движения
имеет вид
с dm а
cosp = a.
т dt г
А ~
т
а
уТ
Фиг. 30.
Из фиг. 30 видно, что tg 0 = —, так что
а
COS 0 = 1 = -J—- •
r /l + tg’0 , /
V ’+ «
у аг
Следовательно,
—£_^=а-|/1+-^ =y^+gF,
т dt V а1
откуда формула (19) получается интегрированием.
§ 7. Подъем реактивного самолета
Представим самолет, снабженный реактивным двигателем.
Линию действия реактивной силы будем предполагать прохо¬
дящей через центр тяжести самолета, так что она не будет со¬
здавать момента относительно этого центра.
Мы будем различать два основных вида подъема:
1) подъем с постоянным направлением реактивной силы;
2) подъем с постоянным углом атаки.
1. Подъем с ср = const
Пусть с? — угол между направлением реактивной силы и
горизонтальным направлением, у —угол между направлением
скорости v и горизонтальным направлением, а — угол атаки
(см. фиг. 31) и я+ 7—<р = /. Тогда дифференциальные уравнения
движения запишутся в виде
dv dm , , с- Vs
т-^ = —с~г cos (? — Т) — сх9^~—mgsint,
dt dt z
dt dm , , . , ci;1
=—c~^ sln — t) + 5>P—/ngcosy,
где с — скорость истечения газов.
104
В первое уравнение входят тангенциальные силы, во вто¬
рое— нормальные силы.
_ dv
Производная — представляет тангенциальное ускорение, а
dt
v1 v di
— = ‘V ~ = v —нормальное или центростремительное уско¬
рение ракеты, R — радиус кривизны траектории. Члены
Г. V* с V1
C^F у « cypF—
являются хорошо известными выражениями для лобового сопро¬
тивления, направленного в сторону, противоположную скорости,
и для подъемной силы, направленной под прямым углом к на¬
Фиг. 31.
правлению скорости, р — плотность воздуха, F — площадь
крыльев и с® и си — коэффициенты, зависящие от угла атаки а
и, для больших скоростей (порядка скорости звука), зависящие
также от и. Множитель £- введен для удобства. Переменную
массу т можно считать известной функцией времени, так что
можно написать
т=/(0 и ^=/'(/).
at
Тогда уравнения принимают вид
/(О = — с/'(0 cos (ср — 7) - cxpF —f(t)g sin 7,
di J <20>
/(0® sin(cp — 7) + cypF-—f(t)gcos7.
В этих уравнениях v и у являются зависимыми переменны¬
ми, t — независимой переменной, а ср — постоянной величиной.
105
Если через х обозначить горизонтальную координату, а через у—
вертикальную, то будем иметь
t t
х= j+cosyd/ и sin74ft. (21)
Уравнения (20) можно решить методом численного интегри¬
рования совместно с уравнениями (21). При этом следует учи¬
тывать изменение р с изменением у. По достижении самолетом
скорости звука аэродинамические силы уже нельзя считать про¬
порциональными о2, так как с® и cv являются функциями а и и.
Эти функции с®=с®(а, п) и cv=cv(a.,v) должны быть опре¬
делены экспериментально. Угол атаки а='?+х—7, где <р и/.—
постоянные.
2. Подъем с а=const
В этом случае мы имеем следующие дифференциальные урав¬
нения:
/(0 = — cf (0 cos (а — х) — CjcPF —f(t)g sin 7, )
Л. 2 !- (22)
vf(t) dt = — c/'(0sin(a—X) + cypF-^ /(0gcos7, J
где
m=f(t) и ^=/(0.
at
Координаты x и у определяются по формулам (21), а р являет¬
ся функцией у. Для небольших скоростей с® и cv постоянны
(так как а постоянно), а для (больших скоростей с® и q, явля¬
ются функциями V.
В| уравнениях (20), (21) и (22) изменение g с высотой не
принимается в расчет.
§ 8. Полет реактивного самолета вдоль экватора с постоянным
углом атаки а (с учетом вращения Земли и ее сферической формы)
Предположим, что реактивный самолет движется вдоль эква¬
тора Земли, оставаясь все время в его плоскости.
Вследствие вращения Земли на реактивный самолет будут
действовать следующие силы:
1) центробежная сила та>2г, направленная вверх (о> — угло¬
вая скорость вращения Земли, а г — расстояние самолета от
центра Земли);
2) сила Кориолиса +2то>п, направленная вверх, если само¬
лет летит на восток, и вниз, если самолет летит на запад.
Предположим, что угол атаки сохраняется постоянным.
Если х и 7 обозначают те же углы, что и ранее, а г0 обозначает
J06
радиус Земли, то дифференциальные уравнения движения запи¬
шутся в виде
ЛО = — cos (а — у) - cx?F —
г2
—sin T+/(Z)a>2rsin у,
ёп = ~ sln(a “ z)+cypF4 ~ (23)
r2
—/(Z)g cos 7 ±2/(Z)a)t> +
+ЛО®**" cos 7 + f(t) — cos 7,
где
m=f(t) и
at
И
t
r= r0 + J® sin 7^Z, (24)
О
e=p/pdt, (25)
о
0 есть угол поворота радиуса вектора, проведенного из центра
Земли к самолету.
В уравнениях (23) v, у и t — переменные, а г изменяется в
зависимости от v, у и t согласно формуле (24); р зависит от
высоты и, следовательно, является функцией г. При больших
скоростях сх и cv являются функциями v, которые должны быть
определены экспериментально.
Теперь мы можем уравнения (23) записать в виде
=7(0 [- cos (a _ х) ~ с/г’)р('’)/’4—
г2 з
—/(Z)S'4sin'T+/(0®,'’sinT J = Fi(-y,7,Z),
4/= -4[-^(0sin(a-X) + cy(^)p(r)pY— (26)
at vj(t) L '
r2
cos 7 2f(t)a>V + /(Z)(O2r COS 7 +
+/(0 7-C0S1 ] =
107
Эти уравнения можно численно проинтегрировать совме¬
стно с уравнением (24) методом Рунге-Кутта по следующей
схеме:
t-^-h, Ф-^-k, i = l,
k=— k\ + — k3 -J—— k3 4- — kit
О о о О
1= — Zi4- —Z24- --Z3 + — Ц,
6 з 2 з 3 6 4
Ai = Г1(ф,1^)А,
k2 = F, 4+ 4^+4«*+4)A>
ki = F\(v k3, i4-Z3, t-\-h)h,
Zi = F2(-t»,f,Z)A,
Z,_F,^+A,l + i
Z4 = F2 (n 4-A3, y4-Z3, t + h)h.
Угол 0 получаем затем интегрированием согласно форму¬
ле (25). Сначала траектория обращена выпуклостью к Земле;
на больших высотах, где аэродинамические силы значительно
уменьшаются, она становится вогнутой.
Если сообщить ракетному самолету достаточное количество
движения, то можно заставить его двигаться по круговой орбите
вокруг Земли на значительной высоте за пределами атмосферы.
Тогда можно было бы, не сжигая топлива, только под действием
сил земного притяжения достигнуть любой точки поверхности
Земли над экватором.
Рассматривая снаряд, движущийся на восток по окружности
радиуса г в экваториальной плоскости, мы получим в невращаю-
щейся системе координат следующее соотношение:
г2
/ng = т(ы')гг,
где
, I v
<0 = (D 4 ,
а ф — скорость относительно поверхности Земли.
108
Следовательно,
mg А- = /п(ш-|- А) г=/га(<о,г-|-2<и'п+ у-) .
Рассматривая это же движение в системе координат, вра¬
щающейся вместе с Землей, мы получим
г2 t
„ _ Г0 v1
то>2г + 2mwv — mg— = —т—.
гг г
центро- сила сила земно- массаХаентро-
бежная Кориолиса го притя- стремительное
сила жения ускорение
Если снаряд движется на запад, получим
, v
ш =<0 ,
г
так что в невращающейся системе координат будем иметь
mg—=mla> ) г=т ш2г—2<ov-l ),
r* \ r J \ r J
а во вращающейся системе координат
г2 *
mwi2r—2moiV — mg—= —m—.
Г* г
При круговом движении в пустоте (за пределами атмо¬
сферы), когда 7 = 0 и реактивная сила также равна нулю,
уравнения (23) принимают вид
— =0,
dt
„ г2 t <27>
di го , п , 9 , v
mv— =—mg 1- 2 m<ov + ma>r+m —
dt r* ~ r
и, следовательно,
= 0 или —=0.
dt dt
Нагрузка на крыло при этом движении будет равна нулю.
Кажущийся вес всех предметов в кабине и пассажиров также
обращается в нуль.
В случае установившегося движения вокруг Земли по круго¬
вой орбите на меньшей скорости и при наличии некоторого со¬
109
противления воздуха, уравновешивающего реактивную силу,
уравнения (23) принимают вид
0= — cos (а—X)—c^F— ;
_/(0±L=_c/Wsin(a_X) + Cj,pF2i_/(0g _1± <28>
±2/(0«>f+/(0®Ч
где сх и су являются функциями не только а, но и ф. Поло¬
жим теперь
ДО-у V) sin (а—X) + cypF^--
r2
± 2f(t)wu +f(t)Rr=y,
тогда для определенных значений t и г величина у будет
функцией а и ф.
Теперь, при определенных 1 и г зададимся определенным зна¬
чением а и найдем из первого уравнения (28) с помощью чи¬
слового расчета соответствующее значение v и подставим это
значение и взятое значение а в выражение для у. Проделывая
этот расчет для различных значений а, найдем функцию у=у (а).
Значение а, при котором у=0, определяет стационарное движе¬
ние по круговой орбите.
§ 9. Вертикальный подъем ракеты в пустоте без учета
вращения Земли
Исследуем вертикальный подъем ракеты, пренебрегая сопро¬
тивлением воздуха и вращением Земли. Предположим, что уско¬
рение, создаваемое реактивной силой (реактивная сила на еди¬
ницу массы), постоянно, так что в любой момент времени t
т = тйе
Если теперь через g0 обозначить ускорение силы тяжести
на поверхности Земли, уравнение движения запишется в виде
dv „ го
dt гг
НО
dv dv dr dv
= =Ф —,
dt dr dt dr
откуда
_2
dv ro
ф—=а—ёа—
dr r-
110
или
vdv = adr—
так что
-j-v2 = ar + g0r2y-+C.
При r=r0
■п = 0,
так что
O = aro + goro + C.
Следовательно,
2
1 9 , S'o7’О
— v2 = ar+ ar0—g0r0
или
■ / n , 2goro n о dr
® = I/ 2ar-\ 2ar0—2g0r0 = — .
yr dt
Высота ri—r0 достигается в момент времени Z = Zi, равный
_ р dr р dr
1 II/ 2g^ (29)
J J I/ 2ar+ —— —2ar0—2g0r0
ro ro
Масса ракеты будет в этот момент равна
- — t
тх = тйе с . (30)
Если теперь на высоте л прекращается действие реактив¬
ной силы, уравнение движения принимает вид
2
dv rQ
~dt~ ~Sa~T
ИЛИ
2
dv ro
v=^g
dr гг
откуда следует, что
2
2 г
Постоянная интегрирования определяется из условия, что
при V = Vi
Г=Г1,
так что
-L1)2=e2ll + _Lt,2— (31)
2 г 2 1 п '
111
Если за время действия реактивной силы от /=0 до t=t,
(активный участок траектории) ракета приобретает скорость,
как раз достаточную, чтобы покинуть Землю, то при г= оо ско¬
рость v должна обращаться в нуль. В этом случае согласно
уравнению (31) получаем
0 = —
2 1 z-f
откуда
®1 = |/ (32)
Г ri
С другой стороны, выше мы имели
1 9 . Еого
-ю2 = аГ1-] ar0—garQ
2 ri
или, учитывая равенство (32),
go'o , go'o
=ari -| —aro—goro,
ri 'г
откуда получаем
П = Го+—• (33)
а
Подставив г, из формулы (33) в качестве верхнего предела
в выражение (29), найдем с помощью формул (29) и (30) от¬
ношение масс, необходимое для того, чтобы получить при задан¬
ных значениях а и с скорость, достаточную для отрыва от Земли.
Время 0 [уравнение (29)] определяется квадратурой.
Гоман (W. Н. Hohmann) вычислил необходимое отношение
масс для различных значений а и с, заменив переменное ускоре¬
ние силы тяжести на интервале (г0, г,) постоянной средней ве¬
личиной 1
_ •_ 2go+gi
Sep 3
Результаты его расчетов представлены в таблице (см.
стр. 1113).
Из таблицы видно, что даже при очень большой скорости
истечения с=4000 м/сек и а = 15 м/сек2 это отношение равно 87,3,
так что для того, чтобы груз в 1 кг вылетел за пределы поля
земного тяготения, требуется 86,3 кг горючего, если пренебре-i
гать сопротивлением воздуха. С другой стороны, если в ракете
1 Dr. Ing. W. Н. Hohmann, Die Errelchbarkeit der HimmelkOrper.
На русском языке работа Гомана приведена в книге Рынина .Межпла¬
нетные сообщения*, выпуск 8, Ленинград, 1932.
112
находятся пассажиры, то ускорение выше 40 м/сек? недопустимо,
так как человеческий организм не выдерживает таких перегру¬
зок в течение сколько-нибудь значительного промежутка време¬
ни. Поэтому верхним пределом ускорения для ракет с пассажи¬
рами следует считать 30 м/сек?. Отсюда ясно, что возможность
межпланетных путешествий зависит главным образом от воз¬
можности получения больших скоростей истечения.
§ 10. Траектория ракетного снаряда в пустоте без учета
кривизны Земли
Предположим, что ракета вылетает с некоторой начальной
скоростью и0 под углом а к горизонту. Сопротивлением воздуха,
кривизной поверхности Земли и вращением ее будем прене¬
брегать. Предположим далее, что реактивная сила на единицу
массы постоянна, так что
- 7*
mi = тое
Так как снаряд движется в безвоздушной среде, продольная
ось ракеты сохраняет начальное направление, и ускорение а
также сохраняется постоянным по величине и направлению.
Таблица отношения масс —-
mi
Скорость
истечения с
м/сек
Ускорение а, м/cetfi
15
20
25
. зо
40
50
100
200
1000
58 700000
4 160 000
1545000
675000
346000
240000
120300
89 130
1500
149 000
25 000
12 000
7 750
4 950
3 840
2 400
2000
2 000
7 570
2010
1 160
825
587
495
347
299
2 500
1270
438
282
216
164
143
108
95,5
3 000
388
159
НО
88
70
62
49
44,7
4 000
87,3
44,8
34,1
28,7
24,2
22,2
18,7
17,2
5 000
35,7
20,9
16,7
14,6
12,8
11,9
10,4
9,8
10 000
6,0
4,6
4,1
3,8
3,6
3,5
3,2
3,1
8 Динамика ракет
ИЗ
Уравнениями движения тогда будут 1
х = а cos а, у = a sin а—g, (34)
откуда
x = (acosa)£ 4-х0, у = (a sin a—g)/+ y0> (35)
x = —(acosa)/2 + x0/ + x0, 1
, 2 > (36)
У= у (a sin a—g)/2+yo/+jo- J
Считая xo = O и _yo = O, определим время полета T из
уравнения
-у (a sin a—g)T2 +уаТ = 0.
Решая его, получим
Т = —(37)
g—a sin a
при этом предполагается, что gj>a sin a.
(Если g<;asina, то ракета вообще не вернется на Землю.)
Находим горизонтальную дальность
1 4i!Qsm* а 2«л sin a cos a
s = —a cos a 1 .
2 (g— a sin a)* g—a sin a
Если a = 0, имеем
2^slnacosa (38)
g
в соответствии с формулой горизонтальной дальности для
обычного артиллерийского снаряда, летящего в пустоте.
Момент достижения максимальной высоты траектории
определяется из уравнения
У = (a sin a—g)/i +у0 = 0.
Решая его, получаем
= (39)
g — a sin а
Максимальная высота траектории будет равна
, . vn sin a g—a sin a lysin'а
h = Va Sin «—5 -
g—a sin a 2 (g—a sin a)1
ИЛИ
k = (40)
2(g— a sin a)
114
Расстояние по горизонтали, пролетаемое ракетой к моменту
достижения максимальной высоты, равняется
sh = — a cos а—5 f- . (41)
2 (g—a sin a)* g—a sin a
Следовательно, мы можем написать
1 2l)g sin* a
s = 2s h H a cos a
A 2 (g-a sin a)*
ИЛИ
1 vosin
Sh = —S—a cos a . (42)
2 2(g—a sin a)*
Таким образом, проекция вершины на горизонталь находится
не посредине горизонтальной дальности, а несколько ближе к
началу траектории..
Если a sin a>g, то у все время увеличивается, и в этом слу¬
чае не имеет смысла говорить об определении времени полета,
максимальной высоты и горизонтальной дальности. Для частного
случая, когда a sin а—g=0, имеем
x = acos aZ + x0, у = у0‘,
x=-^acosat2+xat, y=yQt.
B| этом случае движение в направлении оси у равномерное,
а в направлении оси х равноускоренное. Следовательно, резуль¬
тирующее движение является параболическим, как движение
снаряда, выпущенного из точки х=0, у=0 с составляющими на¬
чальной скорости х0, у„ и находящегося под действием однород¬
ного гравитационного поля, направленного по положительной
оси х, с ускорением, равным a cos a.
Вообще, как видно из уравнений (36), траектория ракеты
будет параболой; движение можно рассматривать как происхо¬
дящее в однородном гравитационном поле с постоянным уско¬
рением g+a.
Если уо=О и g—asina=0, то движение будет горизонталь¬
ным и равноускоренным с ускорением a cos а.
§ 11. Траектория ракеты без учета сопротивления воздуха
и кривизны Земли в случае, когда реактивная сила
направлена по касательной к траектории1
В этом случае мы предполагаем, что продольная ось ракеты
и направление реактивной силы совпадают с касательной к тра-
1 Oberth, Wege zur Raumschiffahrt. На русском языке см. Г. Оберт.
Пути осуществления космических полетов, Оборонгиз, 1948.
8»
115
ктории. (Как это достигается в случае ракеты, не управляемой
геловеком, будет рассмотрено в § 17 этой главы.)
Следуя Оберту и предполагая, что ускорение а, создаваемое
>еактивной силой, постоянно, получаем уравнения движения в
шде
х = a cos а, у = asina—g. (44)
Деля второе уравнение на первое, получаем
-^- = tga—fs&ca, где /= —.
dx а
Теперь, если направление а совпадает с направлением дви¬
жения, то
tga-4.
X
гак что
< = /|/ 1 + (4-У- (45)
dx х у \ х J
Положим
у • ■ dv , • du
4-=и, у = хи и -4-= а 4-х—- ,
x dx dx
тогда выражение (45) примет вид
и + х = и
или
du у d 'x
/Гн?- х
Интегрируя, получаем
In (и + V1 ) 4- In х{ = In С
или
х,4-4-т/Г j 4- f-L'j l=C = xr(tga4-seca). (46)
х у \ х ) J
Постоянная интегрирования равна
С= x^tga04-seca0). (47)
Случай, когда начальная скорость равна нулю, не имеет
смысла, так как если нет движения, то нельзя говорить о его
направлении и, следовательно, о направлении реактивной силы.
С другой стороны, если по=0 и ракета выпускается под углом
116
к горизонту, то без наличия направляющей (пускового_станка)
невозможно, чтобы в начальный момент направление а совпа¬
дало с направлением движения, так как (фиг. 32)
dv = (a + g)dt.
Следовательно, в рассматриваемом в этом параграфе слу¬
чае мы должны предположить, что пуск ракеты происходит
с направляющей, которую ракета покидает уже с некоторой
начальной скоростью и ф0 |а. (Случай когда vol= 0, а
л0 = О, рассматривался уже в § 9.)
Из равенства (46) получаем
sina+1 = Сх ~г, и, следовательно, Vl — cos2a = Cx~fcos a—1
COS a
или
1 — cos” a = C2x~2f cos2 a — 2 Cx~fcos a + 1,
откуда
— cosa = C2x-2/,cosa—2Cx
Таким образом
2Cx~f 2
Сгх~2'+1 с х-Ц-С-'хГ v '
Согласно равенству (46) имеем
tg a. +]/l + tg2 a = Cx ~ f
или
1 +tg2a = (Cx-/ —tga)2= C2x-V—2C xVtg a + tg2a,
откуда
l = C2x~2/-2Cx-/tga
117
Фиг. 33.
Фиг. 32.
и, следовательно,
х_ C’i-V-l
tga= =—j—
Б 2С х~!
ИЛИ
tga=y(Cx-/— C-'xrY (49)
Далее
у = х А= xtga
X
и согласно равенству (49)
у=|(С?/-С->?).
Так как х = a cos а, то
dt=-^—
a COS а
или, принимая во внимание равенство (48)
dt = у-(С х~ 7 + C~lxf)dx.
Следовательно,
у— уй= Jy dt= Jy(Cx-/ — G-?xr)-^-(Cx —f -\-C~xxr)dx
или
у —уй jx(Ca х-2/- С- Wf)dx =
-*о
= — С (Сах*-2/ — С-2Х ’+204/х =
4a J
= Х2-2/ £Z1x2+2/> =_’_Г_СЦ;2-2/_^2-2/)_
4а[2-2/ 2+2/ J;o 4а [2-2/' '
Z~t“Z/ I
или, так как /=—, получаем
a
у -уа=4f—(х2-2/- х^-а/) - аа(Л2+2/_ x2+v)i (50)
о a—g a+g
118
Далее,
х—х0 = J xdt=4 J x(Cx~f + C~ 'xr)dx=
-*0 Xo
if c , C-‘ ,li
=— X2-7J x*+f Г
2я|_,2—/ 2+/ Ji0
ИЛИ
Далее получаем
t=(C'x-f-y C-1 xf)dx =
xo
=-L|_£_ x1-/+^L,x1+/lx
2а[ 1-/ i+/ JXq
или, так как /=—,
a
t= -J-Г—(x1-/- xj“z) + . (52)
2La-g a+g
Выражения (50), (51) и (52) определяют x, у и t как
функции переменного параметра х, так что х и у являются
известными функциями t.
Пусть теперь при x = xlt а = 0; тогда из равенства (49)
получаем
СхГ7—С-1Х1 = 0,
откуда х{=С.
Следовательно,
2+2/ 2.4.0
■ii+v=tfl '.=с'+.
Таким образом, если при х = х\ у=уъ то согласно ра¬
венству (50) получаем
2 ,
1 Г С1 [гП Ф2-2/Х
)-
с~2(г7+2 Х.2+2Л1--
a+g \ /J
/ 2 2 \
1 I CZ С* ;,2-2/ Cf , С-2 -2+2/)
= Хо 1 Хо /•
8 \ a-g a-g a+g . a+g }
119
Полагая tg а0 + sec а0 равным В, из равенства (47) получаем
С = В Xq,
так что
1 / 2g D-f '2 В* -2 , В-2 -2^
= zPT Хо Хо Н—;—Ло).
8 \а!—g' в—g a+g /
Если теперь при t = 0, ф = ф0 и я = а0, то
(2 \
В f — +^—) -Уосоь2а0, (53)
а1—g* a—g a+g'
откуда
Т) -9 Г ЗС^-.УоМа1-^1)
°-2 1/ ^7 С °’ (54)
Г 2gB/+(a— g)B~2— (a+g)B‘
Формула (54) определяет значение т0, необходимое, чтобы
выйти в горизонтальный полет на высоте Ji. Из формулы (54)
согласно Оберту находим для уч—_уо = 1ООк.и, а = 3,5 м/сек2 и
g=9,81 м/сек2-.
ао=6О 150 40 30 20 10 |градусы
«о=17О [ЗОО 600 1140 2340 57Оо| м[сек ’
Как и следовало ожидать, необходимое значение ф0 уве¬
личивается с уменьшением а0. Ясно, что при более пологих
траекториях (а0 мало), для того чтобы получить горизон¬
тальное движение на высоте 100 км, скорость должна быть
больше.
Если же т>0, а0 и Уа заданы, высота ji, на которой дви¬
жение становится горизонтальным, определяется форму¬
лой (53). Соответствующее значение х = х\ определяется по
формуле (51), в которой следует положить хг=х{=С.
Следовательно,
г—у 2._1 2+1 JL+1
•2-/ г/,/ „ Л2+/_ г -A f _ рГ
Xi Z=[X1] =С И Х1 — [X1J =с
так что
у V — 2_Г_£_ -2-/V fr7+1_-2+/^ _
° 2 t2a-g \ I 2a+g \ /1
1 / 4дС"^ C(v0 cosa0)2-7 q *(«0 cos ар)2+/ 1
2 \ 4a1—gl 2a—g 2a+g J
120
Но
С = В xq = B(v0 cos <x0)r
и, следовательно,
[2
- г4д , в 7 (^0 cos а0)а —
4а2—g*
В(у0 cos я0)2 В ~1 (у0 cos a0)2 1
2а—g 2a+g J
ИЛИ
/ _2. -1 \
Xi —x0 = — I —— В r — —I Vq cos2 a0. (55)
0 о 4fl*-£2 2a—g 2a+g) 0 °
Это уравнение определяет путь по горизонтали, пройденный
ракетой до точки, в которой движение \ становится горизон¬
тальным.
§ 12. Ускоренное круговое движение ракеты вокруг Земли,
переходящее в равномерное круговое движение
Исследуем теперь ускоренное круговое движение ракеты во¬
круг земного шара.
Обозначим расстояние до центра Земли через г, а скорость
через v. Предположим, что масса ракеты изменяется со време¬
нем по закону, выражаемому формулой (4) (§ 4), так что ве¬
личина реактивной силы на единицу мас¬
сы ракеты остается постоянной.
Оберт раскладывает а на радиальную
составляющую р (направленную от цент¬
ра Земли) и составляющую Ь, перпенди¬
кулярную радиальному направлению, и
получает в случае кругового движения
V1
g—p = ~- (56)
Из формулы (56) получаем
® = Vr^g-p) = ]/~r(g-p) 2. (57)
Направление этой скорости совпадает с направлением Ь.
Дифференцируя равенство (57), получаем
^=-12—^,
2 ]/g-p
кроме того,
</■0 = bdt = }/a2—p2dt, где a = |a| = const.
12f
Фиг. 34.
-Следовательно,
Va*^p* dt= - Y-L dP t
2 Vg—P
откуда
t = — Yl f dp ==, (58)
2 J V (g - P)(a2 - p2) v ’
Pa
причем p0 соответствует моменту времени Z=0.
Тогда
v<> = Vr(g-Po).
откуда видно, что при ®о = О pb = g.
Формулы (57) и (58) определяют v и t как функции пара¬
метра р, с помощью которых v может быть представлено как
функция t. Если v>vt>, то р<ра, так что р убывает во время
ускоренного кругового движения. В момент, когда достигается
скорость стационарного движения по кругу, р=0 и v = vc= У gr.
Во время ускоренного кругового движения угол
Р
е = arc sin —
а
убывает и обращается в нуль, когда движение становится
стационарным. Время Т, необходимое для достижения ско¬
рости стационарного движения, равно
о _Ро
т= - 1Z Г dp _ = VL f dP (59)
2 J У(g ~ Р)(а‘- Рг) 2 J V(g - рКаг - Р2) '
Ра О
Если при Z=0 начальная масса ракеты равна/п0, то в мо¬
мент достижения скорости стационарного движения масса
ракеты согласно формуле (4) (§ 4) будет равна
m (60>
m - - moe
Если в этот момент действие реактивной силы прекратится,
ракета будет совершать равномерное круговое движение
вокруг Земли.
Если по достижении стационарного кругового движения
скорость будет увеличиваться и дальше, то —>g, так что
при дальнейшем ускоренном движении будет
P=--g
и р будет направлено теперь к центру Земли.
122
Тогда
v = Vr(g+p) =V~rVg + p. (61)
Дифференцируя, получаем
. УГ dp
dv - х и ,
2 V g+p
но, с другой стороны,
dv = bdt=y а2—р2 dt,
откуда _
V a2-p2dt = 12 .
2 yg+p
Из этого равенства получаем промежуток времени, истек¬
ший с момента, когда была достигнута скорость стационар¬
ного движения:
t = V-L f . dp =- ■ (62)
2 J Vkg+pW—P*)
о
Формулы (61) и (62) определяют v и t как функции пере¬
менного параметра р\ из них можно получить v как функ¬
цию t.
При скорости, достаточной для преодоления поля земного
тяготения, Vp = y2gr (будем ее в дальнейшем называть па¬
раболической скоростью), имеем
Р=—~g=g-
г
Время, необходимое для ускорения от скорости стацио¬
нарного движения до параболической скорости, равно
Ti = 12 f dp - . (63)
о
В момент достижения параболиче¬
ской скорости (фиг. 35)
e = arctg-^-.
О
Если считать р положительным, когда оно направлено от
центра Земли, то время, необходимое, чтобы увеличить ско¬
рость от до vfi, вместо формулы (63) будет определяться
по формуле
-в
т — 12 f dp (бз')
1 - 2 J У(е-р)(а‘-р2)
о
Фиг. 35.
123
Полное время, необходимое для того, чтобы увеличить
скорость до Фр, равно
7* — Г =
2 J /(g-p)(a*-A
А
_ А
= ^- f —. . (64)
2 J Vig-pW-p*) '
-g
Если в случае, изображенном на фиг. 34, е считать по¬
ложительным, то этот угол будет изменяться от arctg —
ь
др arc tg .
О
Численным интегрированием уравнения (58) можно полу¬
чить
Z = <p(p)
или
р=Ф(О-
Длина пути, пройденного по траектории за промежуток
времени t, равняется
t
s= \ф(7)<а, (65>
о
а путь, пройденный по траектории к моменту достижения
параболической скорости фр
Тполн
«ПОЛИ= J V^dt. (66)
О
В момент времени t=0 величина р=рй.
§ 13. Равноускоренное движение ракеты по горизонтальной
направляющей
Рассмотрим теперь, какой расход горючего необходим для
того, чтобы ракете, движущейся с постоянным ускорением, со¬
общить параболическую скорость.
Ясно, что для того, чтобы по возможности уменьшить рас¬
ход топлива, нужно, чтобы во время ускорения ракеты не за¬
трачивалась работа на преодоление силы тяжести. Ракету для
этого следует заставить двигаться по горизонтальной направ¬
ляющей, идущей по большему кругу радиуса R вокруг земного
шара (R — радиус Земли).
Поэтому представим длинную трубу, идущую по большому
кругу на поверхности Земли, в которой без трения ускоренно
124
движется ракета. Пусть скорость истечения будет 3000 м/сек и
зададимся ускорением 30 м/сек2.
Решим такую задачу. Какова должна быть длина горизон¬
тальной направляющей и каково должно быть отношение масс
для того, чтобы получить параболическую скорость о₽?
Масса ракеты в момент t равняется
т - - тае ,
где а=30 м/сек2, а с=3000 м/сек. Параболическая скорость
i'p=11000 м/сек, откуда время, в течение которого ракета до-
, л ПОиО осс _
стигнет этой скорости, будет -- =366,7 сек.
Длина трубы тогда получится
366,7X5,5 =2016,85 км,
а необходимое отношение масс
зо 3fifi 7
^-=е с 1 =е3000 ’ = в3'667 ЗЭч-40.
т
Следовательно, такой способ старта ракеты значительно вы¬
годнее, чем вертикальный подъем, который при этих же усло¬
виях требует для преодоления земного притяжения отношение
масс, равное 88 (см. таблицу на стр. 113).
Для того, чтобы сообщить ракете круговую скорость vc=
8000
=8000 м/сек, требуется промежуток времени =266,7 сек.;
соответственно необходимая длина горизонтальной направляю¬
щей будет
266,7 X 4 = 1067 км,
а необходимое отношение масс
30 7
т±=ес ’ =e30tx> ’ =^.«67 = 14-15.
т
При круговой скорости ракета не будет оказывать никакого
давления на стенки трубы. При параболической же скорости
vf= ]/2g’o/? ракета будет иметь центростремительное ускорение
vp
— = 2g0, так что она будет оказывать на верхнюю стенку трубы
R
давление, равное ее весу.
§ 14. Вертикальный подъем ракеты с постоянным ускорением
с учетом сопротивления воздуха
Рассмотрим теперь вертикальный подъем ракеты, принимая
в расчет сопротивление воздуха и задаваясь некоторым постоян¬
ным ускорением. Изменением силы тяжести с высотой будем
пренебрегать.
125
В этом случае мы получим следующее дифференциальное
уравнение движения
+ О + (67)
at at
где с — скорость истечения;
R— сопротивление воздуха;
G —вес;
т — масса ракеты (с топливом).
Из уравнения (67) имеем
cdm + mdv + Gdt-\-Rdt = Q. (68)
Обозначим постоянное ускорение ракеты через Ь. Тогда
dv = bdt и уравнение (68) принимает вид
cdm + mbdt-\-Gdt-\-Rdt = G. (69)
Далее имеем
G = mg и R = F-tf>vt,
где у —баллистический коэффициент;
р — плотность воздуха;
F—наибольшее поперечное сечение ракеты.
Падение плотности воздуха с высотой можно считать
происходящим по закону, выражаемому приближенной фор¬
мулой, которой пользовался Оберт:
$
Р = Рое_ ", (70)
где з— высота в момент t, а /7=7,5 км.
Так как движение равноускоренное и ‘Ц0 = О, то
(71)
Далее
/ s X Ы*
R = = Fy(b2ts) \Рйе~ "J = F^FPae' .
Подставляя это выражение в уравнение (69), получаем
cdm + m,bdt-\-mgdt +Fp^b^Pe 1Н dt = O
или
_ ЬР
2" . (72)
dt с с 1
126
Мы получили линейное дифференциальное уравнение
первого порядка. Решением его будет
t
>+g t Г г , i>+g , ьр -]
я=е-—' LA— “ й . <73>
L с J
о
Следовательно, потеря массы, обусловленная сопротивле¬
нием воздуха, равна
t
ь+g , г ь+g, ьр
mR=e ‘ ^-Ht2e c ~2Hdt. <74>
c *
и
В общем случае 7 является функцией скорости v, кото¬
рая должна быть определена из опыта, для того чтобы вы¬
числить интеграл (74).
Если мы примем, как это делает Оберт, что сопротивление
воздуха пропорционально квадрату скорости, то у будет по¬
стоянной величиной и может быть вынесена за знак интеграла.
В этом случае нам нужно вычислить интеграл:
р ЬР
I=^Fe~‘'~~™dt. (75)
Введем новую независимую переменную
x=z1/A_A±^1/Z.
у 2Н с У 2Ь
Тогда
_Л2 = b+g_t_ьр_ _ / fe+g.
с 2Н \ с ) 2Ь
Следовательно,
ь+g t ьр /ь+gVH хЪ
с 2Н \ с ) 2Ь
Далее
и
Za = [x8+ 2^1/ "х +
L с у 2b \ с / 2b ] Ь
И
dt=]/ ^dx.
127
При этой подстановке интеграл (75) преобразовывается в
/ = A J х2е~х' dx 4- В j хе~х‘ dx + Cf e~x'dx.
Далее имеем
§xe~x'dx = -^e~x'd(x2) = —
и
§x2e~x'dx = ^хе~х’х dx= ^~^xd(e~x') =
= — —хе~х' 4- — {e~x'dx.
2 2 J
Теперь остается взять интеграл
X
Ii = \>e~x'dx.
Рассмотрим для этого сперва интеграл
ее
Ia = ^e-^dx.
Имеем
I2=jje-(X’+J',)dxdy.
Двойной интеграл I2 представляет г/< объема тела вра¬
щения, образованного вращением кривой z = e~x' вокруг оси
z в системе координат xyz.
Вводя полярные координаты г, <р, так что x = rcos<p,
у = г sin <р, получаем
те те
Т ~ ~2
^ = f ^e~r'rd<?dr=ljd<?^- J e~r’d(r2) =
0 0 U r>=0
те те
~2 Т
о о
откуда /^AyV.
128
Далее
J J...
и, следовательно,
\e~*'dx = —yV _ le~x'dx.
6 2 i
Ho
^e~x’dx= JA- e~x'2xdx = d(—e-x*) =
e~x' 1 f e~*' .
= dx,
2x 2 J x*
так что
ев ев
С e~1 C t>~x'
1 e~x'dx — 1 dx.
J 2x 2 J x*
Таким же способом находим в общем случае
f-~X'dx - — f—1— e~x'2xdx —
J X2" 2 J Л2л+1 2л2л+1
_±-j(-e-7)ir4»+4 = __^.+
■ 1 Г g_x, / (2w+l)dx \_ e~x' 2n + l f e~x‘dx
T2j х2л+2 )- 2^+1 2 J ^>>+2 ‘
Следовательно,
Г e~x'dx e~^ 2n+l f e~x'dx
J *2л 2x2n^ J
X X
Для n = 0, 1, 2, ...n эта рекурентная формула дает
ОО ев
(e~x'dx = —- [ e~X'dx— ;
J 2х 2 J л*
X X
Г e-^dx е~х* 3_ Г e~x'dx #
J х1 ~ 2х3 2 J х* ’
X X
9 Динамика ракет
129
Je X'dx e x' 5 C e X‘dx
2лб 2 J xe ’
Г e~^dx e~x' 2ra+l Г e~x‘dx
J xin jx2n+i 2 J л2я+2 ’
X X
откуда
Ге-жШ=^-Г1- — +-L±_±±i±
J 2x I 2x* (2x')e (2X1)»
X
+ 1-35-(2n-1) +/?],
“ (2x’)n J
где
П 1 • 3 • 5...(2/t+l) r e~x'dx
2^+1 J jc2n+2
X
Далее
f e~*‘dX < e-x* f ax _ e~X'
J x2n+2 J x2"+2 (2n + l)x2/’+1
X X
Следовательно,
D 1 -3-5...(2n+l) e-J1 = 1-3-5...(2п-1)с_и
2Я+1 (2л +1) x2n+1 2Л+1 ■*2л+1
или ,
n • 3 • 5...(2л—1) e~x
(2х!)л 2x
В выражении для R, полученном выше, мы не можем брать
большое п. В самом деле, если мы заменим в этом выраже¬
нии п на п+1, оно умножится на 2^+г1 ; этот коэффициент
является правильной дробью лишь при условии 2га + 1<2х2.
Интеграл Yt обозначают обычно через
^е~*\1х = -^]/ёф(х),
О
13Q
Для малых значений х полученным выше рядом пользовать¬
ся нельзя. В этом случае интеграл можно вычислить методом
численного интегрирования *.
§15. Движение ракеты с учетом сопротивления воздуха,
влияния ветра, вращения Земли, кривизны поверхности Земли,
и изменения g с высотой
Исследуем траекторию движения ракеты в атмосфере на
больших высотах и при большой дальности полета. Нам при¬
дется учитывать влияние сопротивления воздуха и ветра, кото¬
рые зависят от высоты, а ветер, кроме того, зависит от коорди¬
нат ракеты. Кроме того, мы будем учитывать вращение Земли,
изменение g с высотой и кривизну поверхности Земли.
Для упрощения мы будем предполагать, что ракета является
абсолютно послушной, т. е. будем считать, что продольная ось
ее все время направлена по относительной скорости (относи¬
тельно воздуха)-. Этого можно достигнуть с помощью стабили¬
заторов, как с автопилотом, так и без него. В качестве системы
координат выберем систему хуг, вращающуюся вместе с Зем¬
лей. Начало координат возьмем bi центре Земли, а оси х и у—
в экваториальной плоскости (фиг. 36).
Обозначая через г радиус-вектор, определяющий положение
ракеты, а через <р и 0 — географические долготу и широту
ракеты, получаем
x = rcos0cos<p, у = г cos 0 sin ф, z = rsin 0. (761“)
Из уравнений (76) получаем
х = — rsin 0 cos<р 0 — rcos 0sin +rcos 0 cos<р;
у — — rsin0sincp0 + rcos0cos<p<p + rcos0sincp; (77)
z= rcos 0$4-rsin 0. j
9*
131
Фиг. 36.
1 Функция Ф (x) называется функцией Крампа. Таблицы ее значений
имеются в математических Справочниках. (Прим, пёрев^.
X = — rsin© cos cp0 — r COS 0 COS <f 02 + r sin 0 Sin ср фё —
— r sin 0 cos<f0 —rcos 0 sin <p<p -|- r sin 0 sin <p0 cp —
— rcos 0 coscpcp2 — r COS 0 Sin cpcp + r COS 0 COS cp —
— rsin 0 coscp0 —rcos 0 sin cpcp.
_y = — rsin 0 sin<pd — rcos 0 sin cp02—rsin 0 cos <pcp0—
— rsin 0 sincp0-j-rcos 0coscpcp —rsin 0coscpOcp—
— r COS 0 sin cpcp2rcos 0 COS<pcp + rcos 0 Sin cp —
— r sin 0 sin <p0 + Г COS 0COS cpcp.
z = rcos 00— rsin 002 + rcos 00 +
H-rsin 0 +rcos 00.
В этих формулах x, у и z — составляющие скорости ракеты
относительно поверхности Земли. Если теперь о будет вектор
угловой скорости Земли (вокруг оси z), то на ракету будет
действовать сила Кориолиса:
_ _ ( 7 *
2М(ф'Х, ш) = 2/п х у z , (79)
О 0 со
где через М обозначена масса ракеты в некоторый момент
времени. Если через
u = iu,t+~juy +Л«г
обозначить скорость ветра в точке х, у, г, то скорость ра¬
кеты относительно окружающего воздуха будет ф—и, где ф
можно представить как
Ф = 1 X +Jy + kz.
Следовательно, для силы сопротивления воздуха будем
иметь _ _
R = kp(jv—u)2F, (80)
где F—площадь наибольшего поперечного сечения ракеты;
р—плотность воздуха;
k—коэффициент, являющийся функцией отношения
I V- й |
■ >
Ос
где фс—скорость звука в точке х, у, г. Следовательно,
k является функцией х, у, г, х, у, г, а р является функцией
высоты или в более общем случае функцией х, у и г.
132
Если через с обозначить скорость истечения, то реактив¬
ная сила будет равна
-С^=С/(0,
где /(0 можно рассматривать как известную функцию вре¬
мени. Направление реактивной силы совпадает с v—и.
Таким образом составляющая этой силы по оси х будет
с f(f) у . X~.Ul - .
V (х-их)г+(у-иу)г+(z-u,)*
Аналогичные выражения получаются для составляющих по
осям у и z. Составляющая силы сопротивления воздуха по
оси х будет равна
— kp(v — u)2F — -- x-uz — _
V (x-ux)t+(y-Uy)t+ (z—u,)*
= — k?F(x — их) У (X—Ux)2 +(у — uy)2 + (z—«г)а
и аналогичные выражения будем иметь для составляющих
по осям у и z.
Составляющие по осям х, у и z силы Кориолиса будут
равны
2 |т0—(/(0л|у®, —2 (/n0 — ^f(t}dt [х<о и О,
где т0— начальная масса ракеты. Далее получаем составляю¬
щую силы тяжести по оси х
— рп0- Г/(0 dt]g0 — (т — (/(0 dt 1 gorS — ,
I о J r r ( 6 J ra
где gQ —ускорение силы тяжести у поверхности Земли,
г=У x2+y2 + z*
и г0 —радиус Земли.
Центробежная сила, действующая на ракету, равняется
— т[шХ (ш Х0].
Но
_ _ zi & _ _ _
®Xr= 0 0 «о = г( — шу)+/+ ^(0),
х у z
а _ _ _
_ _ _ i j к _ _
®Х(®Х0 = О 0 <в =1 ( —шах)+/ ( — “’>)•
— шу wx О
133
Следовательно, составляющие центробежной силы, дей¬
ствующие на ракету, будут равны тиРх, тч>2у и 0.
Теперь мы можем написать дифференциальные уравнения
движения:
/ q..
т0 — \f(f)dt х =
и J
= — kpF(x — ux)V (х — иг)2 + (у—Uy)2 + (z — uz)2 —
— ma—\f(t)dt g0r2-±- + 2 m0—^f(t)dt у « +
+ cf(t) . x~Ux +
V (х—их)* + (у—иу)* + (г—иг}*
о
m0—p(t)dt у =
= — kpF(y - itjV (x - «x)a + CV - «у)2 + (z - мг)2 -
t 7 v Г < 1- (81)
— m0 — if(t)dt g0r2^- — 2 bn0 — \f(t)dt x <d +
o J r L 6 J
+ cf(t) ЛГ~.
V ^-u^ + iy-UyY+Cz-u^
+ ma—y(t)dt (Da_y,
£m0—ff(t)dt]z =
= — k?F(z—uz)V(x — ux)2 + (y — uy)2 + (z—uz)2 —
- ma-^f(t)dt gor^4+
+ cf(t) . .
V (x-ux)«+ (y-Uy?+ (z-Uzy
Скорость ветра можно разложить не по направлениям х,у, г,
а на составляющие «в, ич и иг (фиг. 37), считая положитель¬
ным для «в направление на север, для и^ —направление на
запад и для и,—направление, идущее вертикально вверх.
Тогда
«ш = ц<р sin <р—и© sin 0 cos <р + и, cos 0 COS ср,
иу= — uv cos ср — uq sin 0 sin cpmzcos 0 sin cp, (82)
uz = Ue cos 0 -]-u, sin 0.
134
Так как
= «<р (г, ср, 0), «е = Ue (г, ср, 0), нг= u/r, <р, 0),
то также и
uy = uy(r,<f,G), u2 = u^r,<f,e). (83)
Теперь можно выражения (76), (77), (78) и (83) подставить
в уравнения (81). Получим три уравнения, линейные относи¬
тельно г, ? и 0. Разрешая их относительно г, <р и 0, по¬
лучим систему
г = f\(r, <р, 0, г, <р, 0, t)\ 0 =/3(г, ср, 0, г, <р, 0, t).
(84)
Эта система эквивалентна следующей:
=/1(г, ф, 0, а,₽,ъ О; Р =ft{r, ?> в-«. Y.0; I =/з(г. Т» в>«. ₽. ъ *);'»
Г = а; Т = $ = !• )
(85)
Ее можно проинтегрировать приближенным методом Рунге-
Кутта. В этом случае мы имеем следующую схему расчета:
t^h^k
\r-+p <f->q 0—>з,
Л = — Ai + — А2 + — k3 +
0 0 0 0
1 .1 ,1 .1
т =— т. 4 т, 4 т. 4 т.,
6 1 з 2 з 3 6
1 , l । 1 ,1
^i+ — +
О О О О
1=— 4 + — 4+ —4+ —4.
6 з з 6 4
135
Фиг. 37.
Фиг. 38.
1 , 1 ,1 .1
P — ~гР1 + ~^~Pi "I—Г Рз + ~R~P*>
О О О О
1 .1 ,1 ,1
•s='^-si + ysa + ■^-5з+ ~^s<>
Ai = //г, <p, 0, a, p, y, t)A, p1 = aA,
*.=/.('+-^. т+f, e+f, «+^. f+y.
Y + —, Z+—V, pa = (^+—}b,
* 2 2 J \ 2 J
т+^, e+|. *+%, P+f,
t+^. <+-£•)*> р.= («+т)*.
A4 =/l(r + Ps> ? + 7з» $+S3» a + ^3» Р + 4» Y + OT3»
t+A)A, р4 = (а + Аа)А,
!i =A(r, <f, 0, a, p, y, t)A, ^ = pA,
k=f, (r+f. T+^-. e+f. .+ ^, Hf.
4+^. e+i «+i, p+-i
i+^> ^+4)A* ^=(p+-a)a’
^4 — /з(г+Рз> ? + ?з> в-|-$3, P + 4, 7 + ffis, t-]-A)A,
?4 = (? + 4)A,
nh=fa(r,<f,Q,a.,$,i,f)A, s^ih,
ot=f,(r+f. t + f, «+А, P+A,
т+f.
™.=/s(r+f. т+ f. e+f. •+-Ь, H-4-.
i+f. c+t)*. s.= (7+^)‘.
т4=/з(г+р», ? + 7з. $ + «3. a + ^3. ? + 4. Y + /«3» Z + A)A,
/>4 = (Y + ms)A.
136
Некоторые функции в уравнениях (81), как, например, k, иг.
ии и иг, не обязательно должны быть заданы в аналитической
форме, а могут быть представлены графиками.
Уменьшая наполовину число ступеней и повторяя расчет,
можно оценить точность обычным способом.
§ 16. Движение реактивного самолета с постоянным углом
атаки, с учетом вращения Земли, кривизны поверхности Земли,
изменения g с высотой и влияния ветра
Рассмотрим теперь движение реактивного самолета, учитывая
те же факторы, что и в предыдущем параграфе. В данном слу¬
чае усложнение состоит в том, что рассматривается ракета, снаб¬
женная крыльями. Вследствие этого результирующая аэродина¬
мическая сила направлена уже не противоположно относитель¬
ной скорости и может быть разложена на составляющие; одну,
направленную в сторону, противоположную относительной ско¬
рости, и другую, направленную перпендикулярно этой скорости.
Будем называть эти составляющие лобовым сопротивлением и
подъемной силой.
Относительно вращения реактивного самолета вокруг центра
тяжести будем считать, что угол атаки сохраняется постоянным,
а подъемная сила всегда лежит в плоскости, проходящей через
относительную скорость v—и (относительно воздуха) и равно¬
действующую Q силы тяжести, центробежной силы и силы Ко¬
риолиса.
Для (сопротивление воздуха) и Rn (подъемная сила) мы
можем записать
RT = cjF(v — и)2, (86)
R, = cy?F(v-u)2, (87)
где сх и су являются функциями
V — и
f
V'
a vc—скорость звука в той точке воздушной среды, где нахо¬
дится ракета. Таким образом, так как и (местная скорость вет¬
ра) является функцией x,y,z, то сх и су являются функциями
х,у, z, x,y,z, а р является функцией высоты, или, точнее, функ¬
цией х,у, z. Если ап — центростремительное ускорение, обус¬
ловленное вращением Земли, и аКор — ускорение Кориолиса
(также обусловленное вращением Земли), то мы получим ре¬
зультирующую силы тяжести, центробежной силы и силы Ко¬
риолиса на единицу массы в виде
Q — S ап аКор*
137
Тогда согласно нашему предположению подъемная сила
•будет иметь направление вектора:
(V — и)х { (V—u)XQ }.
Направляющие косинусы подъемной силы R„ равны ком¬
понентам единичного вектора1:
-р(1)_ (« - ujx{(« - u)XQ| _
N |(?-iT)x{(£ —«)xq}|
{г2 "11
(r — и) X -е0-ТГ-(йх(шХг)) — 2(шХг) f
= ; А. (88)
л. I — 'о - — — — —
(r-u)x (г-п)х -go~r — (<1)Х(шХг)) - (о>хг)
I L Гл JJ
Тогда подъемная сила принимает вид
RN=R^cypF^-h)2, (89)
а воздушное сопротивление
I» — «I
или
RT= — Cjj)F(v — u)\v—«|. (90)
Обозначая реактивную силу через Р, имеем
Р= —c — = cf(t).
dt '
Будем считать, что направление реактивной силы совпада¬
ет с продольной осью ракеты.
1 Та же система координат, что и в § 15.
138
Фиг. 39.
Векторы Р, V — и н R№ (проведенные из центра тяжести)
лежат в одной плоскости, так что если а (угол атаки) — угол,
образуемый вектором v — и и реактивной силой, то мы можем
написать
Р= { ■ cos а + A&’sin а (gn
I \v - u| ) ' '
Таким образом мы получаем векторное дифференциальное
уравнение движения
тг=сила тяжести+центробежная сила'Ч-сила Кориолиса+
Н-реактивная сил а+воздушное сопротивление-1- подъемная сила1 *
или
mr = —g0 4г-т[о>Х(<«Хг)]-2т(шХг) +
Г3
+ ( |2~-Г cos а + /?$v’s in а 1 cf(t) —
Ur — и | /
- c^F(r- ц)|г-«| + R$cyPF( г- «)*, (92)
где
t
т = т0— j
а вместо Rj* следует подставить выражение (88). Векторное
уравнение (92) эквивалентно системе трех скалярных уравне¬
ний второго порядка по осям х, у, г.
Теперь, как указывалось в предыдущем параграфе, мы мо¬
жем вместо х, у, z ввести переменные г, <р и 0 и получить си¬
стему трех дифференциальных уравнений второго порядка в
этих переменных.
Эту систему также можно проинтегрировать приближенным
способом, как указывалось в предыдущем параграфе.
139
Фиг. 40.
1 Горизонтальная черта указывает, что рассматриваемая величина
является вектором.
§ 17. Движение ракеты, управляемой гироскопическим
автопилотом
В этом параграфе мы рассмотрим ракету, управляемую гиро¬
скопическим автопилотом, подобную тем, какие применялись во
второй мировой войне.
Будем считать, что такой гироскопический автопилот состоит
из трех гироскопов.
Кроме того, будем предполагать, что ракета выпускается из
точки а в вертикальном направлении и описывает под действием
Фиг. 41.
реактивной силы дугу ab (фиг. 42). В точке b действие реак¬
тивной силы прекращается, и ракета далее движется как обыч¬
ный артиллерийский снаряд, выпущенный из точки b с соответ¬
ствующими начальной скоростью и углом бросания.
На фиг. 41 t-i]C представляет прямоугольную систему коор¬
динат, жестко связанную с ракетой. Ось g совпадает с попереч¬
ной осью снаряда, ось -») — с продольной осью ракеты и ось С
перпендикулярна им обеим. Ось С выбрана перпендикулярно
плоскости чертежа и направлена на нас. В момент пуска про¬
дольная ось направлена вертикально. Ось гироскопа А направ¬
лена параллельно оси -rj, ось гироскопа В — параллельно оси 5
и ось гироскопа С — параллельно оси С.
Предположим, что гироскопы Л и В совершенно свободны,
т. е. установлены таким образом, что их оси могут иметь любое
направление (гироскоп с тремя степенями свободы, установ¬
ленный в двух кардановых кольцах). Предположим далее, что
гироскоп С может поворачиваться только вокруг оси, параллель¬
ной оси 5, так что ось гироскопа остается все время в пло¬
скости т] С Специальная пружина стремится вернуть ось гиро¬
скопа С в положение, параллельное оси С.
Если пренебречь вращением Земли, то изображенная на
фиг. 42 траектория будет представлять плоскую кривую. Ста-
140
Фиг. 42.
билизирующие плоскости аир, показанные на фиг. 41 (пер¬
пендикулярные к плоскости чертежа), остаются во время дви¬
жения в вертикальной плоскости траектории, а стабилизирую¬
щие плоскости у и S образуют с этой плоскостью прямые углы.
Ось g остается во время движения ракеты перпендикулярной
к плоскости траектории. Гироскоп А управляет вращением ра¬
кеты вокруг оси Е, а гироскопы В и С препятствуют вращению
ракеты вокруг осей Си-»;. Каждому из трех гироскопов соот¬
ветствует промежуточный механизм, приводящий в движение
внешние воздушные и внутренние газовые рули. Газовые рули
находятся в газовом потоке и подвержены действию высоких
Фиг. 43.
Фиг. 44.
температур; поэтому они изготовляются из графита. С помощью
газовых рулей меняется направление газовой струи и таким
образом создается нуЖный мсймент. Таким способом можно
управлять ракетой, летящей в пустоте. Кроме того, посредством
этих газовых рулей можно стабилизировать ракету в начале
полета, когда воздушные рули недостаточно эффективны вслед¬
ствие малой скорости.
Когда во время движения ракета поворачивается вокруг
оси (•, ось гироскопа В остается параллельной самой себе и со¬
храняет свое положение относительно ракеты. Но когда вслед¬
ствие каких-либо возмущений возникает вращение вокруг оси С,
ось гироскопа В сохраняет неизменным свое положение в про¬
странстве и изменяет таким образом свое положение относи¬
тельно ракеты, благодаря чему приходит в движение промежу¬
точный механизм, который отклоняет соответствующий руль.
Принципиальная схема такого промежуточного механизма
изображена на фиг. 43 и 44. С помощью гироскопа приводится
в движение контакт А, скользящий по электрическому сопро¬
141
тивлению R (фиг. 43). Более подробно это показано на фиг. 44 *.
Полукруглый диск S укреплен на внутреннем кольце кардано-
вого подвеса гироскопа В, а деталь q с отверстиями р и р' уста¬
новлена на внешнем кольце карданового подвеса гироскопа В.
Весь гироскоп находится в коробке и приводится во вращение
сжатым воздухом. Отверстия р и р' связаны с двумя камерами
мембранного реле. Если теперь диск S вывести из его среднего
положения, то отверстия р и р' будут в неодинаковой степени
перекрыты диском, и мембранное реле переместит регулирую¬
щий золотник G, в результате чего масло будет входить с одной
стороны поршня сервоцилиндра Н и выходить с другой. Сколь¬
зящий контакт на фиг. 43 приводится в движение этим
поршнем.
Если изображенный на фиг. 43 контакт А окажется смещен¬
ным относительно середины сопротивления R, то две одинаковые
и противоположные обмотки мотора дадут результирующий маг¬
нитный поток, который создаст крутящий момент. Электрический
сервомотор отклонит руль и вызовет вращение ракеты вокруг
оси С. В то же время контакт будет скользить по сопротивле¬
нию Rv так что две одинаковые и противоположные обмотки
вспомогательного мотора дадут результирующий магнитный по¬
ток, благодаря чему этот вспомогательный мотор будет переме¬
щать сопротивление R таким образом, что контакт А возвра¬
тится в середину R. Для гироскопа А можно применить такую
же принципиальную схему. Только в этом случае деталь с от¬
верстиями р и р' должна поворачиваться по заранее заданному
закону во времени при помощи специального регулирующего
устройства, для того чтобы вызвать необходимое вращение ра¬
кеты вокруг поперечной оси £ в соответствии с расчетной тра¬
екторией движения.
Если вследствие каких-либо случайных причин ракета нач¬
нет вращаться вокруг продольной оси, то появится гироскопиче¬
ский момент, который, противодействуя упругим силам пружи¬
ны, повернет ось гироскопа С в плоскости т^, благодаря чему
придет в движение соответствующая сервосистема. В этом слу¬
чае для промежуточной сервосистемы может быть применена
та же принципиальная схема, что приводилась выше. Скользя¬
щий контакт А, изображенный на фиг. 43, можно заменить щет¬
кой, укрепленной на внутреннем кардановом кольце гироскопа С,
скользящей по коллектору, ламели которого электрически со¬
единены с последовательными точками сопротивления /?.
Щетка, приводимая в движение непосредственно гироскопом,
заменит скользящий контакт на фиг. 43. Наконец, заметим, что
если гиропилот должен работать в течение лишь короткого про¬
межутка времени, как, например, в ракете ФАУ-2, горение в ко-
142
1 Система, изображенная на фиг. 44, встречается в автопилотах
Сперри с той лишь разницей, что вместо нагнетания воздуха там исполь¬
зуется всасывание.
торой происходит в течение первых 70 сек. полета, то достаточно
применить три гироскопа лишь с двумя степенями свободы каж¬
дый (как гироскоп С) и возвращать корпус гироскопа в пер¬
воначальное положение при помощи пружины.
Тогда в нормальном положении три оси гироскопов буду!
взаимно перпендикулярны и каждая будет управлять враще¬
нием вокруг соответствующей оси ракеты. Функции гиропилотз
будут состоять в том, чтобы устранять вращения вокруг двух
осей и управлять вращением вокруг третьей оси (ось тангажа)
в соответствии с расчетной траекторией движения.
Для того чтобы вызвать необходимое вращение ракеты во¬
круг этой оси, ось соответствующего гироскопа должна пово¬
рачиваться определенным образом во времени при помощи элек¬
трического или какого-либо другого устройства, управляемого
или регулирующим механизмом, установленным в самой ракете,
или с Земли по радио.
Перейдем теперь к исследованию движения ракеты, управ-•
ляемой автопилотом.
Если пренебречь вращением Земли, ось £ будет перпендику¬
лярна плоскости траектории, рассматриваемой в системе коор¬
динат, вращающейся вместе с Землей. В действительности
вследствие вращения Земли траектория будет несколько откло¬
няться от плоскости бросания благодаря силам Кориолиса и бу¬
дет, следовательно, пространственной кривой. При автоматиче¬
ском управлении, описанном выше, продольная ось ракеты и,
следовательно, реактивная сила поворачивается в плоскости,
которая остается неизменной относительно неподвижных звезд
и определяется неизменяющимся направлением оси гироскопа А
и направлением оси гироскопа С в момент пуска раке¬
ты (f=0)*.
Изменять продольное направление ракеты, т. е. направление
реактивной силы, будет теперь автопилот, как описывалось вы-
ше, так что соответствующие направляющие косинусы можно
считать известными функциями времени.
Выберем систему координат xyz (фиг. 45), жестко связан¬
ную с Землей и вращающуюся вместе с ней; ось z пусть совпа¬
дает с осью вращения Земли, а начало координат — с центром
Земли. Пусть х', у', z' будут осями невращающейся системы ко¬
ординат, совпадающей в момент t=0 с системой xyz (фиг. 46).
На фиг. 46 z и zr образуют прямые углы с плоскостью чертежа
и направлены на нас.
Из фиг. 46 получаем
х=х' cos «Z+У sin ut,
у =y' cos ut—x' sin ut,
z = z'y
141
* Неизменное направление гироскопа В указывает направление нор¬
мали к этой плоскости.
где и —угловая скорость вращения Земли. Следовательно,
рассматривая единичный вектор, проведенный из начала коор¬
динат, с компонентами cosalt cospt и cos "П, относительно си¬
стемы x'y'z’ и с компонентами cosa^, cos pt и cos-ft относи¬
тельно системы xyz, получаем
cos <хх = cos cos ut+cos Pj sin ut,
cos Pi = cos Pi cos cosaisin«£, (93)
COS 71 = COS 71.
Если COS ap COsPp COS7j и cosan, COS pn, COS7n являются
направляющими косинусами единичных векторов a(1) и М1),
направленных по осям гироскопов А и С в системе x’y’z’,
при /=0, и ф—угол между единичным вектором с(1), направ¬
ленным по продольной оси ракеты (направление реактивной си¬
лы), и вектором а(1), то составляющие с<1) по а?* и Ь™ будут
равны созф и sin ф (фиг. 47). Обозначая направляющие косинусы
вектора с(1) относительно системы x'y’z’ через cos ab cos Pi и
cos 71, получаем
COS ai = COS Ф cos (Xj + sin ф COs an,
cos Pi = cos ф cos p! + sin ф cos pn, (94)
cos Yi = cos ф cos 7j 4- sin ф cos 7n.
В этих формулах cos 04, cos pit cos 7t и cos an, cos pn, cos 7n
следует считать постоянными. Обозначая направляющие ко¬
синусы вектора с10 относительно вращающейся системы ко¬
ординат xyz через cosai, cosPi и cos 71, из уравнений (93) и
(94) получаем
cos eq = [cos ф(0 cos aj 4- sin ф(0 cos aj cos ut 4-
4- [cos ф(0 cos Pi 4- sin ф(0 cos pn] sin ut,
cos Pi=[cos ф(0 cos pT 4- sin ф(0 cos pj cos ut — (95)
— [cos ф(0 cos aj 4- sin ф(0 cos an] sin ut,
cos 71 = cos ф(0 cos 7r 4- sin ф(0 cos 7n.
144
Фиг. 45.
Фиг. 46.
В этих формулах ф = ф (t) следует считать известной функ¬
цией времени, задаваемой регулирующим механизмом авто¬
пилота.
Относительно аэродинамических сил, действующих на раке¬
ту, можно заметить, что вследствие вращения Земли направле¬
ние движения не в точности совпадает с направлением продоль¬
ной оси ракеты, совпадающей с направлением реактивной силы.
Следовательно, полная аэродинамическая сила не идет точно в
отрицательном направлении движения и должна быть разложе¬
на на составляющую в отрицательном направлении движения
(лобовое сопротивление) и составляющую, перпендикулярную
этому направлению.
Будем называть эту последнюю составляющую, по анало¬
гии с терминологией, применяемой в аэродинамике самолета,
подъемной силой. Пусть R(n будет единичным вектором в
направлении подъемной силы Rn.
Вектор подъемной силы Ru и, следовательно, вектор R(n
лежит в плоскости, проходящей через вектор А (реактивная
сила) и скорость_г>. _
Обозначая / (Л, v) через Ф и раскладывая Rn по направле¬
ниям А и v, получаем составляющие (фиг. 48):
по A, cosec Ф,
по -у, ctg®.
Таким образом составляющие по осям х, у, z будут
R^x = cosec Ф cos ai — ctg Ф cos <х2, |
= cosec Ф cos Pi — ctg Ф cos p2, |
R$z = cosec Ф cos fi— ctgФ cosfa, I
10 Динамика ракет
145
Фиг. 48.
Фиг. 47.
где cosai, cos0i, cos 71 представляют направляющие косинусы
вектора A, a cosa2, cos02, cos 72 —направляющие косинусы
вектора v во вращающейся системе координат xyz.
Но
COS Ф = COS ai COS a2 + COS 0i COS 02 + COS 71 COS 72,
откуда
COSCC Ф—— . — - — •
V 1 — (cos aj COS ft+COS Pl cos P2 + COS ft COS ft)!
_ COS ft COS a2+COS Pt COS p2 + COS ft COS-(2
cts Ф =~ —— ■ ~ •
° У1 — (cos a] COS 02+COS Pl COS P2 + C0S 71 COS ft)1
Следовательно, направляющие косинусы вектора ^мож¬
но написать в виде
(1) _ cos ft — (cos ft cos 82+cos Pl cos P2+cos ft cos ft) cos a2 .
x У1 — (cos ft COSa2 + COS Pl COS P2 + COS 7! COS ft)' ’
^(1) _ COS Pl — (cos ft COS ft+cos p! COS p2+cos 71 COS 72) COS p2 .
* 1 — (COS ft COS ft+cos P! COS P2 + COS 71 COS 72)' ’
^(1) COS71 — (cosai COSaj + COsP] COsP24-COS7i COS 7?) COS 72
2 У1 — (cos a! COS a2 + cos Pl COS P2+COS 71 COS 72)' ’
где cosa2 = ~ , COS 02 = ~r=-y . . . ,
V x'+y'+z' у xt+yt+zt
cos72 = -f rZ . . = •
Следовательно,
X COS ai+j> COS Pi+z COS 71 .
COS aj — r- r- Г- x
p(n = x'+y'+z'
/J _ (x cosai+j COS Pl + ft COS ft)'
x'+y'+i'
или
n(l) (x'+j' + z') COS ft — (XCOS ft+j cosp!+z COSft)x
/—; ; ; : ♦ ; ; : : •
V (x'+y'+z')' — (x'+y'+z')(x cosaj+y cos Pi+z COS 71)'
(x'+y'+z') cos Pl — (xcosft+y cos Pl+z cos ft)y
У У (x'+y'+z')' — (x*+y*+z')(x COS aj-f-y COS Pi+z COS 71)' (96)
n(l) (x'+y'+z') cos7t — (x cosa^y cosPi+z’cosft)z
Kn, = , / . . . . =-. = ■
У (xt+yt + zt)t — (x'+y'+z')(x COS at+y COS Pl+z COS 71)'
Подъемная сила Rn и воздушное сопротивление RT являют¬
ся функциями v, угла Ф = ZiA.v) и высоты г=Ух2 + у2+ z2.
Следовательно, можно написать
Rn = Rn RT = RT(v,$,r).
146
Эти функции должны быть определены экспериментально.
Массу ракеты в момент времени t будем обозначать через
т(0 и считать известной функцией времени. Если теперь че¬
рез с обозначить скорость истечения (относительно стенок
сопла), то реактивную силу можно записать в виде
А = — cm'(t),
где
,/Л dm
m'(t) = — •
dt
Дифференциальными уравнениями движения ракеты, управ¬
ляемой гиропилотом, будут
— Кт(ф,Ф,г) - х = +2m(t)yu + m(t)u2x—cm'(t)cosai
V 1*+у+?
m(t)y = - m(t) - .tt + R^Rn&M ~
у . (97)
—Кт(ф,Ф,г) . -у-—2/n(Z)x« + m(t)u2y—cm'(t)cos pb
У Хг+уг + 2*
—т(Г) —J* + «ЙЛМ-
i _r )
— Ит(у,Ф,г) - Л. =. —cm\t) cos fl,
У х*+ф!+?
где
<P = Z(Ap)=arccos ^cos^+jcosgi+icosu
V i*+y+?
H2 = gZ?a, g—ускорение силы тяжести на поверхности Земли
и R — радиус Земли.
В правой части каждого из трех уравнений стоят компо¬
ненты силы тяжести, подъемной силы, лобового сопротивле¬
ния, силы Кориолиса, центробежной силы (вызванной враще¬
нием Земли) и реактивной силы.
Вместо Rty, , R$ в уравнениях (97) нужно подставить
выражения (96), а вместо созоц, cos pi и cosyi — выражения (95).
Выражения (95) должны быть подставлены также в выраже¬
ния (96), так что система (97) сильно усложняется. После
подстановки мы окончательно получим систему
X=fx(x,y,z,x,v,z,t), y=f2(x,y,z,x,y,z,t), z=fa(x,y,z,x,y,z,t},
10*
147
которая эквивалентна следующей системе:
\ =fz(x,y,z,vx,Vy,v2,ty,
x = vx-, 'y = ’Vy\
:oz=fi{x,y,z,vx,<Vy,v2,t)-,
Z = V2.
Если через h., k, Z, п, р, q, s обозначить малые прираще¬
ния переменных t, х, у, z, vx, vy, v2, то мы сможем проин¬
тегрировать эту систему приближенным способом по следую¬
щей схеме:
k = — ki -f- — k2 4 k3 4 ki ;
6 3 3 3 6 4
/ = — Zi 4 Z2 4 Z3 4 Z4;
6 з з 6
1 , 1 ,1 .1
6 3 2 3 3 6
1 , 1 ,1 ,1
P = —pl+ ~P2+—Pi+ —PF,
D О О О
1 ,1 ,1 ,1
Я = — ?14- ТЯг + V Яз +-T- Я.\
boob
1 .1 ,1 , 1
s s 14 s2 4 s3 4 s4;
6 3 8 3 3 6
Л1 = >vxh; Zi = Vyh; «1 = v2h;
А2=^®4-у)Л; /2 = ^4--у)й; п2 = ^г4-у)А;
Аз=(®г+ у) Л; Z3=^4- у-) Л; п3=^4-у)Л;
^ = (-»®+Рз)Л; Z4 = (^4-^3)A; и4 = (^4-«3)Л;
p\ = f\{x,y,z, vx,Vy,v2,t)h\
р2=/1(л+у, у+y- z+jT’ ^+у> +
^г +—, t+— }h;
2 2 ’ 2 J
A=/i(^+y. J'+y. *+y. ®,+^,
Pi =f\{x 4- k8, у 4- Za, z 4- n3, vx+p3, Vy 4- qa, v2 + s3,t + h)h
и аналогично для q и s.
148
Полная система уравнений (97) относится только к дуге ab;
на остальной части траектории мы должны положить реактив¬
ную силу равной нулю.
Если в точке Ь, кроме того, автопилот перестает быть эффек¬
тивным, то ракета дальше движется как обычный артиллерий¬
ский снаряд. Считая, что стабилизаторы делают ракету доста¬
точно послушной, мы можем в уравнениях (97) положить Ф=0.
Тогда уравнения упрощаются:
0 0 (x'+y'+z')'/. ’ у х'+?+?
+ 2т0уи + ягоц2х,
тоу = — тй , — RT(v,r) ,У ■ — (98)
(x'+y'+z1) '• у хг+уз+гг v ’
—2т0хи + тйи2у,
пУг = —тй ——j- RT(v,r\ . ■г ,
° ° (x?+y'+z')’b ’ У
где — масса ракеты на пассивном участке траектории.
Эта система дифференциальных уравнений также может быть
проинтегрирована только приближенно.
§ 18. Аналитический метод определения основных параметров
автопилота
В предыдущем параграфе мы предполагали, что автопилот
обеспечивает правильное положение ракеты в любой точке тра¬
ектории. Колебания ракеты относительно необходимого положе¬
ния должны быть настолько малы, чтобы они не оказывали за¬
метного влияния на траекторию движения.
Для этого различные параметры, определяющие работу авто¬
пилота, должны быть выбраны нужным образом. При выборе
их лучше всего исходить из дифференциальных уравнений дви¬
жения, описывающих колебания ракеты.
Предположим, что ракета, например, ФАУ-2, снабжена уста¬
новкой, состоящей из турбины, на одном конце вала которой
находится насос, нагнетающий спирт из баков в камеру сгора¬
ния, а на другом — насос, подающий жидкий кислород.
Эта установка расположена между баками с горючим и ка¬
мерой сгорания в задней части ракеты. С динамической точки
зрения колесо турбины и роторы насосов представляют одно
вращающееся тело. Ось вращения этого тела параллельна
оси Е, так что во время невозмущенного движения по траекто¬
рии эта ось остается параллельной самой себе и гироскопиче¬
ский момент равен нулю. Мы будем предполагать далее, что
J49
центр тяжести этого тела, а также центр тяжести всей ракеты,
лежит на продольной оси ракеты.
Выберем систему координат xyz так, чтобы начало О совпа¬
дало с центром тяжести ракеты, а оси х, у, z при правильном
положении снаряда на траектории шли в направлении осей ц
(продольная ось), £ (поперечная ось) и С (вертикальная ось).
(Следовательно, если пренебрегать влиянием вращения Зем¬
ли, в случае ракеты, управляемой автопилотом, как описывалось
выше, ось х будет совпадать с касательной к траектории, а оси
у и z — с бинормалью и нормалью к траектории.)
Величину отклонения от правильного положения будем опре¬
делять углами ч>, 0 и ty, и для правильного положения, следо¬
вательно, будем иметь ср=О, 0=0, =0. Углы <р, 0 и опре¬
деляют вращения соответственно вокруг осей С, £ и ц. Будем
обозначать в дальнейшем главную ось инерции снаряда, совпа¬
дающую с OS, цифрой (5) и две другие главные оси инерции,
проходящие через точку О, цифрами (/) и (2). Будем считать,
что при с’р =0 ось (/') лежит в плоскости ху и угол будем
считать положительным при правом вращении вокруг оси OS
(фиг. 49).
Линия ОА на фиг. 50 является пересечением плоскости ху
с плоскостью, проходящей через z и OS. Плоскость чертежа на
фиг. 50 совпадает с этой плоскостью ZOA.
На фиг. 50 <'р=0, так что главная ось инерции (/) перпен¬
дикулярна плоскости чертежа и направлена на нас. Пусть те
перь ракета поворачивается на угол <р. Будем считать, что век¬
торы угловых скоростей <р, и 0 начерчены так, чтобы соот¬
ветствующие вращения были правыми. Теперь, для того чтобы
выразить компоненты ии и2 и иг угловой скорости и по главным
150
Фиг. 50.
Фиг. 49.
ося»£ инерции через ф, 0, Ф и ф, 0, ф, нужно спроектировать
ф, 0 и ф на направления этих осей. Тогда мы получим:
проекция 0 на ось (1): 0соэф
. 0 „ (2):—0вшф
0 , (3): О
Ф » (1): О
Ф - (2): О
Ф . (3): ф
» ф » (1): —ф sin ф cos 0
. <р „ (2): —ф cos ф cos 0
„ Ф „ (3): фзт0
Что касается определения проекции ф на ось (/) или (2),
то можно заметить, что проекция единичного вектора по оси (/)
на ось z или единичного вектора по оси (2) на ось z равняется
проекции единичного вектора по оси z на ось (/) или ось (2).
Следовательно,
U1 = 0 cos ф — ф sin ф cos 0,
и2 = —0 sin ф —ф cos ф cos 0,
«3 = Ф sin 0 + ф.
Если через Iv 12 и 13 обозначить главные моменты инерции
ракеты (исключая ротор турбоустановки), то кинетическая энер¬
гия ракеты вследствие вращений ф, 0, ф будет равна:
71 = -^-/, (0 cos ф — ф sin ф cos 0)2 +-^- Z2(0 з1пф +
+ ф cos фcos0)2 Ч—/3(ф sin 0ф)2. (99)
Ротор турбоустановки является телом вращения, так что две
его главные оси инерции (проходящие через центр тяжести) в
плоскости, перпендикулярной оси вращения, можно взять в лю¬
бой момент времени так, чтобы они шли вдоль направлений (2)
и (<?) ракеты; ось вращения при этом будет направлена по
оси (/).
Тогда компоненты угловых скоростей о, 0 и Ф по этим трем
главным осям инерции ротора будут те же, что и соответствую¬
щие компоненты по главным осям инерции всей ракеты.
151
Скорость центра тяжести ротора вследствие вращений
<р, 0 и ф равняется
у/" г® cos2 0<р2 + гг02,
где г — расстояние от точки О (центра тяжести ракеты, вклю¬
чая турбоустановку) до центра тяжести ротора.
Полная кинетическая энергия твердого тела равна энергии
движения центра тяжести и энергии вращения вокруг центра тя¬
жести. Таким образом если ш будет угловой скоростью колеса
турбины относительно корпуса турбины, то кинетическая энер¬
гия ротора будет равна
T2=-^-Af(r2cos20<p2-|-r202)-|- -1- Л(о> -|-0созф — ф31пфСО3 0)2-|-
+ ~ /2[(0зшф + <р созфсоэ 0)2+ (срsin 0 + ф)2], (100)
где М — масса ротора;
1г — момент инерции относительно оси вращения;
/2 — момент инерции относительно одной из двух оставшихся
главных осей инерции.
Таким образом полная кинетическая энергия всей системы
равняется:
7=^ + 7,. (101)
Записывая уравнения Лагранжа, получаем дифференциаль¬
ные уравнения движения:
F d (дТ\ дГ
v dt \d<f / d<f ’
(102)
dt\de) de ’
dt \dfy J дф
Подставляя выражения (99) и (100) в (101), а затем под¬
ставляя (101) в (102), получаем обобщенные силы Ff, Fe и Fp
как функции ср, 0, ф и их первых и вторых производных по
времени. Считая ?, 0 и ф известными функциями времени, по¬
лучаем на основании уравнений (102) обобщенные силы Fv, F»
и также как известные функции времени.
Мы будем предполагать, что гироскопическая система авто¬
пилота состоит из трех гироскопов, каждый из которых имеет
две степени свободы, как гироскоп С на фиг. 41, и возвращается
в нормальное положение с помощью пружины. В нормальном
положении оси гироскопа взаимно перпендикулярны и каждый
152
из трех гироскопов управляет вращением вокруг одной из
осей Е, 1) и С
В качестве передающей системы возьмем электрическую си¬
стему, изображенную на фиг. 43. На практике скользящий кон¬
такт А осуществляется в виде щетки, укрепленной на корпусе
гироскопа и скользящей по коллектору. Ламели коллектора
электрически связаны с последовательными секциями электри¬
ческого сопротивления 7?. Обобщенная сила Fv соответствует
вращению вокруг оси ? (вертикальная ось), F&—вращению
вокруг оси (поперечная ось) и F — вращению вокруг оси т/
(продольная ось). Так как отклонения <р, 0 и $ малы, то три
обобщенные силы можно считать независимыми.
Если теперь 0 = 0(/) и, следовательно, 0 = 0(0. заданы,
то величина гироскопического момента, действующего на соот¬
ветствующий гироскоп,
— =0Bcosx
dt
также будет известной функцией времени. Через В обозначен:
момент количества движения гироскопа, а через 7.— отклоне¬
ние гироскопа от нормального положения. Если через аX обо¬
значить момент пружины, стремящийся возвратить гироскоп в
нормальное положение (а является коэффициентом пропорцио¬
нальности), то JX как функция времени определяется диффе¬
ренциальным уравнением
4opnX=^scosx —ax=/(tx)> <103)
где /(бу) можно считать известной функцией времени, а /К0Рп
означает момент инерции гироскопа относительно оси вращения
его корпуса.
Если 0 = 0(0 задано, мы можем найти X как функцию
времени, интегрируя уравнение (103) численным методом.
Если х изменяется достаточно медленно, то можно считать,
что гироскоп в каждый момент времени находится в равновесии,
определяемом мгновенным значением 0.
Тогда X как функцию времени приближенно можно опре¬
делить из уравнения
05 cos х = ах.
где
0 = 0(0-
Следовательно, если 0 = 0 (t) задано, то положение сколь¬
зящего контакта А на фиг. 43 является также известной функ¬
цией времени.
Выбирая электрические сопротивления R и и соединяя
их соответствующим образом с коллектором, мы можем силу
153
F» как 'функцию времени привести в. соответствие с функцией
F», найденной из уравнения (102), если функциями 9 = 9(0.
0=0(0 и ф = ф (0 задаться практически.
Так как направление скорости и направление продольной
оси не в точности совпадают в различных точках траектории
(см. § 16), то необходимо, вследствие возмущающего действия
аэродинамических сил прикладывать корректирующий момент,
для того чтобы заставить ракету в каждой точке траектории
принимать нужное положение. Эти корректирующие моменты
будут изменяться от одной точки траектории к другой и должны
рассматриваться как заданные функции времени.
Для того чтобы получить эти моменты, коллектор следует
поворачивать с помощью некоторого регулирующего механизма
согласно заданной функции времени в соответствии с расчетной
траекторией движения.
Аналогичным образом F<p и F$ как функции времени могут
быть приведены в соответствие с обобщенными силами, найден¬
ными из уравнений (102).
Определив таким способом основные динамические парамет¬
ры автопилота, можно затем, исходя из каких-либо начальных
условий, исследовать работу автопилота, интегрируя численным
методом систему (102).
Глава V
ДИНАМИКА РАКЕТЫ, ДВИЖУЩЕЙСЯ
В МЕЖПЛАНЕТНОМ ПРОСТРАНСТВЕ
§ 1. Введение
В этой главе мы исследуем полет ракеты в мировом про¬
странстве математическим методом.
В общем случае мы будем считать, что ракета управляется
человеком или в тех случаях, когда это возможно, соответствую¬
щим механизмом, управляющим направлением реактивной силы.
Кроме того, мы будем считать, что ракета удалена от Земли
на достаточно большое расстояние, так что движется в абсо¬
лютной пустоте.
Когда ракета находится вблизи Земли, мы можем считать,
что на нее действует только сила притяжения Земли и реактив¬
ная сила. Но когда ракета находится на большом расстоянии
от Земли, нужно принимать в расчет влияние Луны, а также и
Солнца. В случае полета вокруг Луны ракета будет пролетать
в непосредственной близости от нее, и ее влияние на этом уча¬
стке траектории будет доминирующим по сравнению с влиянием
Земли.
Если рассматривать движение ракеты относительно системы
координат xyz, начало которой находится в центре Земли и ко¬
торая, таким образом, движется вместе с Землей, но не уча¬
ствует в суточном вращении Земли, то вследствие ускорения
Земли при ее движении по орбите вокруг Солнца в системе
координат xyz будет существовать однородное поле сил инер¬
ции, равное и противоположное гравитационному полю Солнца
в центре Земли. В непосредственной близости от Земли это поле
сил инерции и гравитационное поле Солнца взаимно уничтожа¬
ются, и, следовательно, возмущающим действием Солнца на дви¬
жение ракеты можно пренебречь. На больших расстояниях от
центра Земли возмущающая сила Солнца равняется геометри¬
ческой разности между силой непосредственного притяжения
Солнца и силой притяжения Солнца в центре Земли.
155
Хотя сила непосредственного притяжения к Солнцу, дей¬
ствующая на ракету, когда она находится в непосредственной
близости от Луны, приблизительно в два \ раза больше силы
притяжения к Земле, упоминавшаяся выше геометрическая раз¬
ность, определяющая возмущение, составляет приблизительно
лишь Vgo силы земного притяжения. Следовательно, возмущающее
действие Солнца в этом случае мало; однако, если требуется
большая точность, его следует учитывать. Относительно влияния
других небесных тел (планет) можно заметить, что даже если
и требуется высокая точность расчетов, этим влиянием можно
смело пренебречь, так же как и очень малыми возмущениями
вследствие сплюснутости Земли у полюсов и слегка продолго¬
ватой формы Луны.
Исследование полета ракеты в мировом пространстве яв¬
ляется динамической задачей из области теоретической астро¬
номии.
Поэтому ясно, что к расчету движения ракеты в межпланет¬
ном пространстве можно применить тот же метод, который при¬
меняется при вычислении орбит комет, на движение которых
часто оказывают возмущающее действие планеты.
Движение ракеты в межпланетном пространстве усложняет¬
ся еще тем, что на нее, помимо сил притяжения различных не¬
бесных тел (Земли, Луны, Солнца), действует еще реактивная
сила. И, наконец, заметим, что так как масса ракеты весьма
мала по сравнению с массами различных небесных тел,
оказывающих на нее влияние, то мы можем пренебречь, так же
как и в случае движения комет, действием ракеты на небесные
тела.
§ 2. Движение ракеты в непосредственной близости от Земли
Мы будем рассматривать движение ракеты относительно си¬
стемы координат, начало которой совпадает с центром Земли, а
оси сохраняют постоянное направление относительно неподвиж¬
ных звезд. Предположим далее, что направление реактивной
силы совпадает с направлением движения, а ускорение, созда¬
ваемое реактивной силой, остается постоянным.
Если через с обозначить скорость истечения относительно
стенок сопла, то получим
dm
та = — с —,
dt
так что
- -t
т=тйе с ’ (1)
где тй — масса в момент Z = 0.
Пусть скорость ракеты в некоторый момент времени t бу¬
дет V.
156
В рассматриваемом случае на ракету действуют только две
силы, а именно: сила земного притяжения и реактивная сила.
Так как обе силы все время остаются в плоскости, прохо¬
дящей через центр Земли и вектор т, то ракета движется
по плоской траектории.
Пользуясь полярными координатами г и ф, запишем урав¬
нение Лагранжа
дТ_п, й /дТ\ дт
ТГ Т” I — Т" — '</•’ 37“ j' ) j —Ч? > \£)
dt \дг) dr dt \ду J о<р
где Т — кинетическая энергия ракеты,
Qr и Qv —обобщенные силы, соответствующие координатам
Г И ф.
Так как сила земного притяжения и реактивная сила про¬
порциональны мгновенной массе пг, то масса входит множите¬
лем во все члены уравнений движения и может быть опущена.
Следовательно, можно вычислять Т, Qr и Q, для единичной
массы. Таким образом о2=г21+/'2ф2, так что
Т=-^-(г2 + г2Ф2), (3)
дТ ■ d /дТ\ ■■ дТ я- //1Х
-==г; — — }=г, — =гаф, (4)
dr dt \дг J д'?
=2ггЧ + г2?« (5)
at \ ос? j
?-=ri2> (б)
or
(7)
ОСр
Величина реактивной силы, отнесенной к единичной массе,
равна а. Если теперь радиус Земли обозначить через /?0,
ускорение силы тяжести на поверхности Земли_через g и
угол между радиусом-вектором г и скоростью v через 8
(фиг. 51), то будем иметь
/
(8)
Q. = = a cos 8 — g—,
6г г*
Qv = csin8r8y =ros(nS (9)
Подставляя выражения (4), (6) и (8) в первое уравнение
(2), получаем
R2
г— гфа = асоз8—g-~. (10)
157
Подставляя выражения (5), (7) и (9) во второе уравнение
(2), получаем
2rrp + r2<p=ra sin 8
или
2r<p + rep = a sin 8, (10
но
cos 8 = -—£==- /12\
У гг + г‘ч* ' '
И
sinS=y'?Lv • <13>
так что уравнения движения (10) и (И) принимают вид
dr
d‘r dt Rq
(14)
~ (fa
<Р<? _ 1 dt 2 — — • i
d(2 Г Г / dr \2 /d«>\2 dt dt (1$)
W W+r! W j
Эти уравнения не могут быть проинтегрированы в конечном
виде, так что интегрирование приходится проводить приближен¬
ным методом.
На фиг. 52 показано семейство траекторий, получающихся
при одной и той же реактивной силе, но при различных углах
бросания.
1 При численном интегрировании уравнений (14) и (15) следует эада-
— _ — dr df
ваться каким-нибудь малым значением г0 + О. При Vj = 0 — = ——=0ипра-
dt dt
вые части (14) и (15) становятся неопределенными; численное интегриро--
вание в этом случае невозможно. {Прим., перев.).
158
Фиг. 51.
Если ракета выпускается строго вертикально, то траектория
1 представляет собой прямую. Если угол бросания будет мень¬
ше 90°, то под действием силы земного притяжения траектория
будет искривляться, как показано на фигуре для траекторий 2,
3, 4, 5. Если угол бросания мало отличается от 90° (траектории
2 и 3), то расстояние ракеты от Земли будет все время увели¬
чиваться. Но при меньших углах бросания (траектория 4) это
расстояние вначале увеличивается, затем уменьшается, а затем
снова увеличивается.
Если в некоторой точке действие реактивной силы прекра¬
щается, траектория становится эллиптической, так как на ра¬
кету действует только сила земного притяжения. Если это про¬
исходит в момент t', то
Г г- 1
s . dt
6f= arc sin — =а, (16)
( —) +r 2- =^0 (17)
\at J \at / J/'
и
rt’ = ro
и уравнение эллиптической орбиты будет
9 9 • •
Vq sin1 a
r=—r —j , (18).
i । varo sin a _ / , 2д! Ц.4 , ,
1 + 1 / v2 - —+ , a . cos (<f - %)
LI* V r0 V2a rasin' a J
где
И
p2
Vo sin a —
vorosina • .
<Po = - arc cos — 00 + (19).
, / 2 , , Hl
1 / ^0 + + 2 2 • t
У r0 Dy Tq SIH2 a
[см. главу I, формулы (103) и (102)].
Если в момент t' реактивная сила не равна нулю, то траек¬
торию движения можно считать эллиптической в течение бес¬
конечно малого промежутка времени. Эллиптическую орбиту-
(18) называют в этом случае оскулирующей эллиптической ор¬
битой, а соответствующее движение — о.скулиру)ощцм движе¬
нием Кеплера.
159.
Мгновенная скорость (в момент t') этого оскулирующего
движения совпадает по величине и направлению с мгновенной
скоростью действительного движения ракеты. Это соображение
дает возможность получить простой способ приближенного ис¬
следования траектории ракеты. Вместо предположения о непре¬
рывном действии реактивной силы мы можем предположить,
что от ракеты через равные короткие промежутки времени мгно¬
венно отбрасывается масса Ь.т, равная массе, отбрасываемой
за интервал времени h, в случае непрерывного истечения. Если
с — скорость истечения относительно стенок сопла, то при от¬
брасывании массы Дт скорость ракеты изменяется на
Дт»= — с, (20)
т
где т — масса ракеты в рассматриваемый момент времени.
Скорость о + До после отбрасывания массы Д/n имеет согласно
нашему предположению то же направление, что и скорость v
до отбрасывания. Следовательно, в момент t=t'+h мы будем
иметь
dtp -
, , Г dt
sina'= — - -. . (21)
_ / /dr\2 Zd®\2
1/ I ) +r* )
Lk \dt) \dt)
Скорость после отбрасывания массы Д/n будет равна
// dr \ 2 / do \ 2 Дт ,
( — +г (зГ + — c = vo- (22)
\dt ) \dt J Jf + h m
В этих формулах rt’+ л = r’o определяется из уравнения (18)
после подстановки
? = ?/'+*•
Далее
Г dtp 1 __ уйг0 sin а
L dt]t’+h Гд
и
/ dr \ Г dr d<p I typsin a f dr \
\dtjt-+h L d<f dt lt' + ii (rp)! \dcp7f+A*
a
\ d<p J t'+h
получается дифференцированием формулы (18) по <p с после¬
дующей подстановкой =
160
Величина фг+л, будучи значением ф в момент I' + А, опре¬
деляется из равенства
’■V+»
- С r2d<f = h (23)
«0Г0 sin a J
(ср. с главой I, § 17).
Следующая дуга эллипса будет определяться уравнением
«02r02Sin2tt'
'—г |‘‘ .
1 + l/ - /'+ “»<» - »«>
L у ro vo ro sin “
причем
' . . и*
«о sin а' — —
г>0 Го sin а
фп = — arc cos —- - . — + фг + Л.
, Г z2 2[Х* р-4
■ / V0 — ' "Ь '2 '2 • « f
У Г0 itftfsin’a'
Таким путем мы получаем приближенную траекторию как
последовательность дуг соответствующих эллипсов.
Этот метод можно применять и тогда, когда ракета во
время движения достигает параболической скорости или пре¬
восходит ее. В этом случае последовательные части траектории
являются дугами параболы или гиперболы.
Если скорость ракеты превышает параболическую, мы полу¬
чаем в выражении (23) интеграл вида
f r2dy =р2 С — = р2 С — ,
J J [1+s cos (f — Фо)]1 Зи+есовФ)1
где s> 1, а Ф = ф—ф0. В этом случае интегрирование может
быть выполнено следующим образом. Положим
1 Ч-есозФ = «;
тогда
du= —в sin Ф</Ф
и
<№=
е sin Ф
НО
_ и — 1
cos Ф = ,
е
sin Ф = р/" 1 — ~ 8 .
11 Диваиика ракет
161
Следовательно,
du du
(1Ф= г - -ту .
e-1/i /ц- 1 \2 Уе’ —(u —1)’
V \ е )
Обозначая
f dA> —I
J (14-e COS Ф)1 ’
юлучаем
г du г du
J и* _ (ц — 1)« J игУ&‘— u*+2u — I
_ f du
J u'Vie* -l)+2u-u*'
n 1 j dz
Полагая u =—, имеем du = , так что
_ r zd^z r zdz
J V(e‘-l)2l4-2z-l J V- 14-2z4-(e‘—l)z' ’
В общем случае
( . = - *- [--*
J v a+2bx+cx* c c j у a+2bx+cxl
И ДЛЯ С > 1
f r dx =г = -^-ln {ex + b + У~с У a + 2bx + ex2).
J У a+2bx+cx* У c
С помощью элементарных преобразований можно получить
dxn a+2bx+cxt=dxn~iН=
Xя dx xn~idx xn~2dx
-cn —— +b (2л - 1) +a (n - 1) ,
n ri ri
так что
Г xTdx 1 xn-\pj b(2n — 1) Г x"~ldx a(n - 1) Г xn~2dx
J H cn cn J H cn J H
162
Для л=1 получим
С xdx 1 b Р dx
J Н с с J Н
и для с>0
р dx Р dx
J “ J /r/f+2+x+«-“
1 Р dx 1 Г / Ь \ ■
’Z)/O)Z4)’’r'n^+‘)+;
/а b "I 1 , , г-
— +2 — х+х* +K=—y=ln [(cx+b)+VT Уа+2Ьх+сх* НК'.
с с J у с *
Следовательно, для е> 1 получаем
/=^37 /-l+2z + (e«^i^2_
ln[l+(e2-l)z + /^i/ — 1+2z + (s*—l)za],
где
i
z = .
1 +есовФ
Для частного случая, когда скорость равна параболиче¬
ской, е = 1 и
. Г zdz
J у 27^1 ■
Положим в этом случае У2г—l=w, т. е. 2z—l=w2,
так что z - - и dz - w aw.
2
Следовательно,
Pw’ + l
I wdw
1= =
d w
— -1— (" (щ)2 l)dw = —— (-^—W2 + =
2 J 2 \ 3 /
= ±[±(У2Г-^у> + У2ё=1] ,
где
1
z = .
l+ecos<I>
11*
163
§ 3. Метод вариации постоянных (элементов траектории)
Приближенный метод, изложенный в последнем параграфе,
дает тем большую точность, чем меньше взят интервал времени
h и, следовательно, чем меньше масса Am. В пределе, переходя
к непрерывному истечению, мы можем считать движение в каж¬
дый момент времени движением Кеплера, элементы траектории
которого изменяются непрерывно со временем под влиянием
реактивной силы.
Элементами эллиптической орбиты являются:
1. Большая полуось а орбиты.
2. Эксцентриситет е орбиты.
3. Азимутальный угол <?0 перигея, т. е. точки траектории,
ближайшей к центру Земли.
4. Момент времени t0 прохождения через перигей.
Теперь мы можем взять эти элементы траектории в качестве
новых зависимых переменных вместо г, ф, г и ср и интегриро¬
ванием определить эти элементы как функции времени. Этот
метод часто применяется в небесной механике и называется
методом вариации элементов орбиты (или методом вариации
постоянных).
Уравнением оскулирующей эллиптической орбиты будет
г= . (26)
1 +е cos (<р — фо)
Тогда
п ( 1 , 1 \ l-e+1+e 2
2а = ( \р = -- р = р
\1+е 1-еЛ 1-е* 1 - г’
и
р = (1-е«)а. (27)
Далее
(28)
|/ 1+е Б 2 Б 2 ' '
где и определяется из уравнения Кеплера
n(t—t0) = u — esinu, (29)
в котором
/—гравитационная постоянная;
М — масса Земли [см. главу I, формулы (114) и (116)].
Таким образом
u = u(t0,e,a,t). (29')
164
Из уравнения (28) получаем
? —<р0 = 2 arc tg (рЛtgJ0
и
? = 2 arc tg у) + ?o- (30)
Далее
cos(<p—?o)— c°sa $—~~ sin2 т ~ Уо,
2 2
HO
Ф — ®n 1 1
cos" “■ = r = = r
2 ■_ / e — cpn / 1+e u
1/ 1+,g!V- ]/ 1+TT7‘g’T
и
/1+е u
*~В 2_-.
2 i / , *+e . ,“
у 1+ТТ7'8'г
Следовательно,
1+e u
1 tg* —
, ч 1—e B 2
COS (<p — <p0) = — • (31)
a -I T
1+T^7'eT
Подставляя выражения (27) и (ЗЦ в уравнение (26), полу¬
чаем
/ 1+е и \
г= (1 —е’)д +
, 1+е . и . 1+е и / 1-|-е и \
1+Т^7,еТ+'0_ГТ718т)
+' 1+±ti_ lg.i_
1 -е 2
(1 +е и \ f 1+е и \
1+] ‘£‘т) (t~ eI)a(1+'i
1 — 8 2/ у 1 — 6 2/
(1+е и \ ( и \
7 rtg8T') (1+е)(1+ tg’ — )
1 8 2/ у 2 /
или
/ 1+е и \
Г= (32)
1+tglT
165
Дифференцируя <р по t и принимая во внимание (30) и (29')>
получаем
dy dy du dy du da dy0 , / dy . dy ди \ de dy ди dtt
dt ди dt ди да dt dt к de ди де) dt ди dt0 dt
Частные производные
Ё?. и А?
ди де
определяются непосредственным дифференцированием выра¬
жения (30) по и и е.
Частные производные
ди ди ди ди
—, , И —■
dt da de dta
определяются дифференцированием выражения (29) по t, а,
е и ta.
Дифференцирование выражения (29) по t дает
VfM ..du
EV=(1 —ecosa)—,
2
a
откуда
ди V fM
~дГ~~И • (34)
2 ,,
a (1 — e cos u)
Далее
du V'fM
1 • (35)
v 2
a (1 — e cos u)
Дифференцируя уравнение (29) по а, получаем
VfMa 2(t-t0) = — -ecosu—,
2 ' °' da da
откуда
3 ,
s- r • <36)
2
a (1—ecos u)
Дифференцируя уравнение (29) по e, находим
du . du п
sin и—ecos и— =0,
de de
166
откуда
aJL=!in«
ds 1— г cos и
Далее из выражения (32) и (29') имеем
dr dr du , / dr , dr du \ da / dr dr du \ de
dt du dt \da du da / dt \ de du de J dt
dr du dt0 . .
+ dTd^’ (38)
где
dr dr dr
—, — и —
du de da
находятся дифференцированием уравнения (32) по и, е и а.
Так как мгновенная скорость оскулирующего движения
Кеплера (для которого элементы орбиты а, е, t0 и <р0 посто¬
янны) по величине и направлению равняется скорости дейст¬
вительного движения ракеты, то получаем
dr dr du df d<p du
dt du dt ' dt du dt '
так что согласно формулам (33) и (38)
d<p du du . dy0 / dy . d<p du \ de dy du dt9 q
du da dt dt \ de du de j dt du dt0 dt ’
/ dr dr da \da dr dr du de dr du dt0 q (40)
\da du da J dt de du de ) dt du dtg dt
Далее
dr dr du dr У fM
dt du dt du A *’ (41)
a (1 — e cos u)
dy d<p du dip fM
di~du~dt ~du A — (42)
a (1 — e cos u)
откуда следует, что
= щ>1(а,е,и), w2 = wa(a,e,u),
a
u = u(a,e,t0,t).
167
Следовательно,
<Pr dwi dwi du , fdw-j .dw3 du \da
dt* dt du dt \ da du da J dt
./dwi .dwi du \ de dw3 du dt0 .
к de du de / dt du dt0 dt ’
d*<p dw2 dw2 du (dw2 . dw2 du_\ da
dt* dt du dt к да du да ) dt
, fdw2 dw2 du \ de dw2 du dt0 (ллх
\ de du de ) dt du dta dt
Частные производные
dwi dw3 dwi
du ’ da ’ de
и аналогичные производные для w2, входящие в уравнения
(43) и (44), находятся дифференцированием выражений (41)
и (42).
Величины
dw\ du dw2 du
du dt du dt ’
получающиеся, если элементы эллиптической орбиты оску-
лирующего движения Кеплера считать постоянными (при диф¬
ференцировании), представляют левые части уравнений (14) и
(15), если в правых частях этих уравнений опустить члены,
содержащие множитель а (ускорение реактивной силы), т. е.
&wi du Rq / dy \ * dw2 du 2 dr dy
du dt & r* \dt) ’ du dt r dt dt
Следовательно,
fdwi , du>i du \ da (dw3 dw3 du \de
\ da du da ) dt \ de du de J dt
dr
a —
+ - 7' - Д i <«>
du dt0 dt / , / dy \ a
У \dt ) +\dt J
i'dw2 , da>2 du \ da (dw2 , dw2 du \ de dw2 du dt0
\ da du da) dt \ de du de) dt du dt0 dt
d<f
= a dt , (46)
У \dt ) \dt )
где производные — и — следует взять из формул (41) и (42).
at dt
168
Уравнения (39), (40), (45) и (46) являются линейными относи¬
тельно
da dtfg de dtp
dt ’ dt * dt dt ’
так что они могут быть разрешены относительно этих вели¬
чин.
Тогда получим
^-= Л(а,е,«/в,0, =f2(a,e,U,t0,t),
at at
^r=f3(a,e,u,tg,t), d-^=fAa^,u,tp,t),
где согласно уравнению Кеплера u = n(a,e,Z0,Z). Эту систему
можно проинтегрировать приближенным методом.
Раскладывая в ряд Тейлора и обозначая малое прираще¬
ние времени t через А, а соответствующие приращения вели¬
чин а, ф0, е и tg—через A, I, q и $, получаем
h dh л* d*fi hn~l d"-lfi
U dt 2'. dt' ' ’’’ (n- 1)1 dtn~l
f d(o (48>
J (л-l)! \dtn Jt+h-v
<d—0
и аналогичные ряды для I, q и s.
Далее
dfi/dfi । dfaduXda । /d/j । dft du\de
dt \da du da ) dt \ de du de / dt
, /Э/i . dfa du \ dtp dfa dfadu
\d/0 du dtp) dt dt du dt ’
где опять
da ds r dtQ r
lt~dl' ht^*4
[согласно уравнениям (47)], а производные
du du du du
- JI
da ' de ’ dt dig
берутся из выражений (36), (37), (34) и (35).
Аналогично находим производные
dA #з dfa
dt ‘ dt ’ dt
и после дальнейшего дифференцирования —производные выс¬
шего порядка
d'fa d'fa d'fa
dt' ’ dt' * dt' ’ dt3
16^
Подставляя их в ряды (48), можно определить к, I, q и s
с любой степенью точности.
Рассмотрим теперь случай, когда скорость превышает па¬
раболическую. В этом случае (е > 1) имеем
г= , (49)
1 +е cos Ф
где Ф = т —?о или
Т = Ф + То- (50)
Величины р, е, 0 и То можно рассматривать как перемен¬
ные элементы траектории. Тогда
ф
—!— f =t—t8, (51)
vorosina J
0
где a=A‘I’o>ro)> так чт0 Vo sin а равняется удвоенной секто-
риальной скорости.
Выразим эту секториальную скорость, входящую в выра¬
жение (51), через элементы траектории. Если через Vp обоз¬
начить скорость, а через рпер—радиус кривизны орбиты в
перигее, то можно написать
Ак = -^-, (52)
Рпер 'mln
гДе rmin—расстояние в момент прохождения перигея.
Радиус кривизны имеет в полярных координатах следую¬
щее выражение:
3
Г / dr \ 2п 2
Р = L (53)*
. n/dr\^ (Рг '
гг+2 ( — ) — г —
Согласно выражению (49) имеем
dr esin®
— = Р (54)
d<b (1+е cos Ф)1 7
и
<Рг г есозФ . 2s1 sin1 Ф 1
= 1 Р- (55)
dQP L(l+ecos®)‘ (l+ecos®)8Jr
* Вывод этой формулы см. в дополнении, стр. 210.
170
Подставляя эти выражения в формулу (53), находим ра¬
диус кривизны в перигее ^в этом случае ^=0 и Ф = о)
р2
р = (1+£)> = — Р. _ = „ (56)
Рпер р _ ре 1+е_е Р'
1+е (1+е)1
Подставляя эту величину в уравнение (52), получаем
/1,4-. /"fM
^nep=(l+S) ]/ —■
Следовательно,
v0r0 sina = 2 X секториальная скорость =
=_^_(1+е)1/г
1 у р
и выражение (51) принимает вид
. f — = t—10. (57)
УpfM J (1+еcos®)1 ° v '
Следовательно,
Ф = Ф(р,е,6,0-
Дифференцируя частным образом выражение (57), находим
1 дФ _ VpfM
(1+е cos®)1 dt р* ’
откуда
^=^^-(1+ес°5Ф)». (58)
Аналогично
ЭФ==_ У77м_(1+есО5ф)2. (59)
d/0 Р2
Далее
-—!
(1+е cos Ф)* dp 2 J v °'
откуда
^ = -4-(l+ecos®)a/V//M(*-4)- <6°)
op z
171
* Этот же результат непосредственно следует из формулы (105) главы I,
если положить
172
И наконец
ф ф
д [* 4Ф . д_ Г d® ЭФ _q
de J (1+е cos Ф)2 дФ J (14-е cos Ф)г де
о о
ИЛИ
ф
2 Г cos ФдФ 1 дФ _д
3(1+есозФ)9 (14-е cos Ф)1 де *
о
откуда
дФ п/, , С совФдФ /С1ч
— = 2(1 4- е cos Ф)2 I . (61)
де ' 7 J (1+е cos Ф)3 '
о
(Интеграл I, от которого берутся частные производные, мо¬
жет быть взят так, как указано в конце § 2.)
Так как
г=г(Ф,е,р),
а
Ф = Ф(р,е,0,0 и <р = Ф4-т0,
то имеем
dr _ dr дФ / dr dr дФ \dp
dt dФ dt \dp дФ dp ) dt
/ (62)
V de dФ de J dt dФ dt0 dt ' '
д?__дФ, дФдр |_дФ_ de_ , дФ_Ло_ । д^_ ,
dt ~ dt + dp dt + de dt dt0 dt dt ‘ 7
Так как скорость в оскулирующем движении Кеплера
должна совпадать по величине и направлению со скоростью
действительного движения ракеты, то будем иметь
(64)
dt dФ dt v '
и
*L=d±t (65)
dt dt v 7
откуда в связи с равенствами (62) и (63) следует
Г dr . drdФ\dp /dr dr дФ\де dr dФ dt0 q ,ggx
\dp dФ dp J dt \ de d® de) dt dФ dt0 dt *
d® dp_ ^Ф <к_,дФ d/0 ' /67ч
dp dt de dt dt0 dt dt
Выражения (58), (59), (60) и (61) следует подставить в урав¬
нения (64), (65), (66) и (67).
Обозначим
dr dr дФ dr V pfM ,~о,
— = = (1 + е cos Ф)2 = W, (68)
dt Ю it дФ ? ' ' 1 ' '
и
—=—= J:-^^-(l+ есозФ)а = 'гг/г. (69)
dt dt р*
Так как
■w-i - и w2 = и/2(р,е,Ф),
где Ф = Ф(р,е,(0,(),
то
dw-i dw\ дФ , tdwi , dwi d$\dp
dt дФ dt \ dp дФ dp ) dt
fdw-i dwx dФ \ de . dw\ dФ dig
+ \de + ~дФ ~де) dt + ~дФ~ dt'g'dT’ ' '
dw2 dw2 dФ , fdw2 ,dw2 dФ \ dp ,
dt dФ dt \ dp dФ dp ) dt
fdw2 . dw2 dФ\de dw2 дФ dtg
\ ds dФ de J dt dФ dtg dt
Выражения
dw, dФ dw9 dФ
—- — и —
dФ dt dФ dt
получаются, если элементы траектории оскулирующего дви¬
жения Кеплера считать постоянными (при дифференцировании);
они равны левым частям уравнений (14) и (15), если члены,
содержащие множитель а в правой части этих уравнений,
опустить.
Следовательно, остальные слагаемые в правых частях урав¬
нений (70) и (71) должны равняться тем членам в правых
частях уравнений (14) и (15), которые содержат множитель
а, так что
(dwi , dwj dФ \dp fdw\ . dwi дФ \ de
dp dФ dp ) dt \ de dФ de J dt
dr
djOl_d^dJg= ° d/ .
дФ dtg dt Г / dr \3 /d<p\a ’
173
(dw2 , dw2 d® \ dp /dw2 , dw2 d® de
\ др d® dp J dt \ de d® de ) dt
df
dw2 d*_djp_= ° dt
d® dtpdt Г(dr\* fd^\*’
V W+r u)
где вместо — и — следует подставить выражения (68) и (69).
dt dt
Величины —■ и являются функциями р, е и Ф, а
согласно равенству (60) зависит, кроме того, от t и tp.
Уравнения (66), (67), (72) и (73) [в эти уравнения следует
подставить выражения (58), (59), (60) и (61)] являются линей¬
ными относительно производных
dp de d<to п dtp
dt ’ dt ’ dt dt
Разрешая их относительно этих производных, оконча¬
тельно получаем
=Л(Р,е,Ф//о) -£=/«(₽MtfA);
«г
^=А(р.».ф//о) ^=Л(рлФ/Л). 4)
dt dt
Уравнения (74) могут быть проинтегрированы приближен¬
ным методом.
Обозначая через k, I, q и s приращения величин р, <р0> е и
tp, соответствующие приращению Л независимой переменной
t, и раскладывая в ряд Тейлора, получаем
А . a <12л । /,я~1 ।
И Л ' 2! dt* ”Г‘" (л-1)! Л"-1 "Г
ш-Л
+ da> (75)
J (л — 1)1 \ dtn J t+h-w
<D = 0
и аналогичные выражения для I, q и s.
Далее
= d® , /^AidA d®\dp
dt dt ' d® dt \dp d® dp ) dt
,(^j.dh^\d^_,(dfx.dfkd^\djp_ ,7бч
"T \ de ’Г d® ds / dt \d/0 d® dtp) dt ’ V '
174
где вместо производных
дФ дФ дФ дФ
—, —> — И
dt dt0 dp de
следует подставить выражения (58), (59), (60) и (61), а
dp г de г dt3 х
dt ~du dt dt
Аналогично находим производные
0f2 dfa df±
dt ’ dt ’ dt
и после дифференцирования уравнений (76).,. и т. д, —произ¬
водные высшего порядка
д’Л
dP ’"
Далее поступаем так же, как в случае эллиптической оску-
лирующей траектории.
§ 4. Движение ракеты вблизи Земли в случае, когда
реактивная сила изменяется во времени
по величине и направлению
Рассмотрим движение ракеты относительно невращающейся
системы координат xyz с началом в центре земного шара.
Если через т обозначить переменную массу ракеты, то урав¬
нения движения будут иметь вид
fmMx ~ dm
тХ~ Г ~Cx~dT (77)
(x2+_y2+z2) 2
и аналогичные уравнения для у и z.
В уравнении (77) через f обозначена гравитационная посто¬
янная, через М — масса Земли и через сх—составляющая ско¬
рости истечения по оси х (относительно стенок сопла); —
есть скорость убывания массы ракеты (секундный расход мас¬
сы).
После деления уравнения (77) на т получим
• • fMx сх dm
Х~
(x‘+>2 + Z2)
Если сх и т — известные функции времени, то
-—^■=/1(0
т at
17S
также является известной функцией времени; аналогично для
у и z.
Уравнения движения можно тогда записать в виде
— f (fa ‘/R. v
dt~ A +/1W’ dt ”
(x'+y'+z')
±y__ fMy f dy__
dt A Л dt *' (78)
(x‘+yl+z*)
dvz_ fMz f(t} dz__
dt~ А + /з^’ dt ~V'-
(x'+y'+z') 2
Если f2(t), f3(t) заданы (например, в виде графиков),
то решение системы (78) может быть получено численным
методом Рунге-Кутта.
Записывая систему (78) в виде
= ^=F2(x,y,z/); ^ = F3(x,y,z/);
dt dt dt
dx dy dz
dt x dt y dt z
получаем следующую схему расчета:
t^-h, фх->Ь, фу~>1, ф2-^Р, х—>и, у->ф, z->w,
k = — А,-]- — Л2+ — А3+ — Л4;
6 1 з з 3 6 4
Ai = F/x, y,z,t)h-,
(x+Sl-ty + ^1Z+^-,l+ ЛЛй;
z 1 '2 '2 2 2 /
A3 = f/ x+^-,y+^,z + ^-,t+-^\h;
\ 22 22/
ki = F1(x + u3, У + ф3, z + w3, t + h)h
и аналогично для l и p.
Далее
1 .1 ,1 .1
4 = — tii + — u2 + — u3+ —u<-,
6 3 3 о
и^ф^-, u2= (^ФХ+^А-, и3=(^фх+^h-, u< = (?3 + k3yi
и аналогично для ф и w.
176
§ 5. Применение метода вариации постоянных к предыдущей
задаче
Полагая в уравнениях (78) члены Д(0, f2(t) и /8(0 равными
нулю, получаем дифференциальные уравнения центрального
движения, рассмотренные в главе I, § 17. В этом случае, как мы
видели, траектория является эллипсом, параболой или гипербо¬
лой, в зависимости от величины начальной скорости.
Если члены, содержащие t, не равны нулю, но малы (по
сравнению с членами, зависящими от координат), так что их
можно рассматривать как возмущения, наложенные на цен¬
тральное движение, то можно применить метод вариации эле¬
ментов траектории (вариации постоянных).
Выберем систему координат xyz с началом в центре Земли
и с осями х, у, лежащими в экваториальной плоскости. Ось г
будет совпадать с осью вращения Земли. Будем считать, что
направления х, у и z остаются постоянными, так что система
xyz будет невращающейся (как известно, направление оси вра¬
щения Земли является неизменным, если не считать незначи¬
тельной нутации и очень слабой прецессии, которыми в рас¬
сматриваемом случае можно пренебречь).
Уравнение траектории оскулирующего центрального движе¬
ния в полярных координатах в его плоскости будет
г= £ , (80)
1+е cos Ф
где
Ф = ? —?0, (81)
а <р — угол, образуемый радиусом-вектором г и линией пере¬
сечения плоскости траектории оскулирующего центрального дви¬
жения с плоскостью ху. (Эта линия
является линией узлов.) Угол <р0
есть значение <р, соответствующее
перигею. Угол между линией узлов
и положительным направлением оси
х обозначим через ф, а угол между
плоскостью траектории и плоскостью
ху (так называемый угол склоне¬
ния)— через I.
Тогда согласно равенству (57)
Ф = Ф (р, е, t0, t), где tQ—момент
прохождения перигея. В качестве
элементов траектории, определяю¬
щих центральное движение, выбе¬
рем шесть величин: р, е, 90, ф,/, t0,
и будем рассматривать координаты х, у, z центра тяжести ра¬
кеты как функции этих величин. Сперва нам нужно выразить
эти координаты через элементы траектории.
На фиг. 53 изображен △ ОРА, лежащий в плоскости траек-
12 Динамика ракет
177
Фиг. 53.
тории оскулирующего центрального движения. Точка Р изобра¬
жает ракету в некоторый момент времени t. Линия узлов ОА
лежит в плоскости ху.
Из фиг. 53 видно, что
х = r(cos <р cos ф— sin <р cost sin ф),
у = r(cos ср sin ф + sin <р cos i cos ф), (82)
z = г sin ср sin i,
где г определяется формулами (80) и (81). Из равенства (81)
находим
? = Ф + ?0 (83)
и из равенств (80), (82) и (83) получаем
p[cos (ФЧ-<ро) cos ф — sin (Ф+у0) cos i sin Ф1
1 +е cos Ф
_ p[cos (Ф+уо) sin ф+sin (Ф+у0) cost со5ф] zg^\
1+е cos Ф ’
_ р sin (Ф+уо) sin z
1+е cos Ф
Из. уравнений (84) видно, что
х = л(р,е,сро,ф,/,ф), у = у(р,е,ср0,ф,»,Ф), 2 = г(р,е,ср0,1,Ф),
где Ф = Ф(р,е/о,0.
Следовательно,
dx дФ /dx дх дФ \ dp /Эх , дх ЭФ \ de
ЭФ dt \dp dФ dp J dt \ de dФ de J dt
dx dyo . dx dф dx di , dx dФ dt0
dy0 dt d| dt di dt дФ dt0 dt ’
• dy дФ . fdy , dy dФ \dp /dy dy dф\de
dФ dt \d/> dФ dp) dt \ de dФ de J dt м-ч
dy dy0 . dy Эф dy di dy dФ dtn ' '
dy0 dt Эф dt di dt dФ dt0 dt ’
dz dФ , / dz , dz dФ\ dp , / dz . dz dФ\ de .
Z = 1- ( 1 —+ I 1 ) H
dФ dt \dp dФ dp ) dt \ de dФ de J dt
dz df0 dz di dz dФ dt0
df0 dt di dt dФ dt0 dt ’
Входящие в уравнение (85) частные производные
dФ dФ dФ дФ
— > , — И
dt dto dp de
следует взять из формул (58), (59), (60) и (61), а остальные
частные производные находим дифференцированием уравне¬
ний (84).
178
Так как составляющие скорости оскулирующего централь¬
ного движения равны соответствующим составляющим ско¬
рости действительного движения ракеты, то можно написать
dx d® dy ЭФ • dz ЭФ
d® dt * d® dt ЭФ dt v ’
Из уравнений (85) и (86) следует
/dx ,дх d® \ dp /dx dx d® \ ds
\d/> ЭФ dp J dt \ ds дФ de ) dt
dx d?() dx d^ . dxdi dx dФ dtp q
d<f0 dt dp dt didt dФ dtp dt ’
/dy dy dФ \dp /dy dy dФ\ de
\dp d® dp ) dt \ de dФ de / dt
dy dy0 , dy d !/ dydi dy dФ dtp _g '
dtp dt dp dt didt dФ dtp dt ’
/ dz , dz dФ \ dp / dz dz dФ \ de
\dp d® dp J dt \ de dФ de ) dt
dz dyp dz di dz d® dtp
dy0 dt di dt дф dtp dt
Положим
x = wn y = w2, z = w3. (88)
Из равенств (86), (84) и (58) видно, что
W1 = W1 (р,е,<Ро,<М,Ф); w2 = w2(p,e,<p0^,i^); w3 = и>а(р,е,?0,ф,г,Ф)
где Ф = Ф(р,е/0,/).
Следовательно,
dw3 d® . /dw\ , дин-дФ\<1р , /dw3 , дин дФ \ de .
W, = —1 (- —-H ’ 1 —+ I —“И — h
дФ dt \ dp дФ dp J dt \ de дФ de ) dt
dwx dfp dw3 dip dw^ di dw3 дФ dtp
dtp0 dt Эф dt di dt дФ dtp dt ’
dw2 dФ /dw2 dw2 дФ-ур /dw2 , dw2 d^_ \ de
2 dФ dt \ dp dФ dp ) dt \ de ЭФ de / dt
dw2 dfp dw2 dtp dw2 di dw2 dФ dtp .
+ d-fp dt Ф dp dt + di dt + dФ dtp dt ’ (89)
W dw3 ЭФ Jdw3 dwa dФ \dp . /dw3 . dw3 dФ \ de
3 dФ dt \ dp dФ dp / dt \ de dФ de / dt
dw3 d<fp dw3 di dw3 dФ dtp
d<fp dt di dt dФ dtp dt
,, dwi dФ dw2 дФ dw« дФ
dФ dt ЭФ dt dФ dt
12*
179
(90)
представляют ускорения ракеты, если элементы траектории
считать постоянными, т. е. являются ускорениями оскулирую-
щего центрального движения. Они равны, следовательно, пер¬
вым членам в правых частях трех первых уравнений (78) я
сокращаются с ними после подстановки выражений (89) в урав¬
нения (78). Следовательно, остальные члены в правых частях
равенств (89) равны возмущающим функциям f^t), f2(t), f3(t).
Таким образом
(dwj , ди>1 дФ \dp , /dwj . dwi дФ\de,
др дФ др / dt \ де дФ де / dt
,dwi d<pg , dwi dp _i_^wl di dw2 дФ dtg x
' ~d^~dt dt +~дГ 1Г + ~дФ dfa dt ~ ’
(dw2 ,дw2_dФ \dp ,/dw2 . dw2 ЭФ \ de ,
\ dp dФ dp) dt \ de dФ de) dt ,ggx
, dw2 dfg , dw2 di/ dw2 di dw2 dФ dfa x '
+ 'd^'dt+~d^ ’dt+~dT~dt+~d^ dfa'di'—J*' "
дФ^\^р_ /dtt^ dte/9 dФ \ de ,
\ dp dФ dp / dt \ de dФ de / dt
. dw8 d<?g dwg di dw3 dФ dfa
"T d<p0 dt oi dt dФ dfa dt J
Уравнения (87) и (90) являются линейными относительно
dp de d<?g dty ■ dl dfa
dt ’ dt * dt * dt ’ dt' dt ’
Разрешая их относительно этих производных, получаем
=Л(р,е,ф0,<р,(,Ф,4/); d± =^4(р,е,<р0,ф,/,Ф/0/);
at at
=^(/м,<рЛЛФ,М); = /76(р,е,<Ро,Ф,1,Ф/о,О; (91)
at at
= F3(p,e,<fgfy,i^,tg,ty, d£ =^(р,е,фо,ф,Г.Ф,Го,О,
at at
где согласно формуле (57) Ф=Ф(р,е/0,Г).
Система (91) может быть проинтегрирована приближенным
методом Рунге-Кутта.
Покажем теперь, как начальные значения элементов тра¬
ектории р, е, <р0, ф, i и tg могут быть определены по началь¬
ной скорости Фд{Фох, Фоу, Фо,) и начальному положению r(x0,yfa, z0).
180
то
Если a = Z(^o,ro),
то
ti0r0sina = |f0X г01= Г 1 7 Л 8 =
1/ 'Vo^Vo,
V хоУо zo
= У(voyZo—‘Votyo)a + (Фоахо—foxzo)2 + (Voxya—^о)2. (92)
Из формулы (18) следует, что
9 9..
Vq Zq sin2 a
p= 7* '
где |а2=/Л4
или
(V° “ Vo,^+(V’ “ %zo)'+(%>o - vo/“)f (93)
и1
Далее
H-* V r0 vjr^sln2 a
и из формулы (19)
[1*
Vo sin a —
VnTn Sin a
<P0 = ?a-arccos-7^-r-.^- - . (95)
У Л| Г0 + Vq fg Sin2 a
В формулах (94) и (95) вместо vosina следует подставить
выражение (92), а вместо tip sin a
угУ(voyzo—Фог Уо)2 +' (Votxo — -ад)2 + ("Vox у о—VoyXj. (96)
В формуле (95) <ра обозначает угол между г0 и линией уз¬
лов. Этот угол также должен быть определен.
Напишем теперь уравнение плоскости траектории
ах + by + z = 0. (97)
Эта плоскость содержит, кроме начала координат, точки
хй,У0, И хй + VOy, У0 + VOy, Zo + Vo2.
Следовательно, коэффициенты а и b можно определить из
уравнений
хйа +уйЬ =—гй и (х0 + vOx)a + (у0 + vOy)b = — (z0 +
181
Решая их, находим
>o(zo+%) - го(-Уо + %,)
хо(.Уо+%,) ~.Уо(хо+%.) (eg)
Zo(xo+voJ ~~ xo(zo+vo^ I
Хо(>о+%Л—Л(-*о+%) ’ I
Уравнением линии пересечения плоскости траектории с пло¬
скостью ху будет
ах + by = О
или
а
у=-~ёх-
Следовательно,
•кФ--у
или согласно формулам (98)
, -Уо(го+Гог) — ^оС-Уо+^оу) /п .
Ф = arc tg ‘. (99)
хо(*о + %) - *о( х0 +%)
Направляющие косинусы нормали к плоскости траектории
равны согласно уравнению (97)
а 0 Ь 1
cos 04 = -7=; cos 0t = -7= ; cos ь -
Уя* + 6г+1 у а* + Ьг + 1 у аг + Ь* + \
Так как i обозначает угол между плоскостью траектории
и плоскостью ху, то 7i = i, и, следовательно,
хо( Jo+®oy) - Уо(х+%)
i = arc cos —.. , —-
V [>о(^о+Ч) - *o(>o+%,)]'+[*o(xo+%) - xo(*o +VoJ]*+
y -Hxo(>o+%3~+o(xo+%)P~ • (100)
Направляющие косинусы линии узлов равны:
, 1 1 ь
cos аа = cos ф = Г = —г = г ;
V 1-Ы8*ф а*_ V а*+Ь*
V +Ь*
cos р2 = sin Ф = ■tg<p = - J—
У l+tg4 У а*+ь*
182
или согласно уравнениям (98)
_ *q(Xq+%) — *о(2о+%)
C0Sa2 ~yiy0(Z0 + V0>) - 2о(>о +Vl! + lZ°(X0 + %) “ Xo(Jo + %)F ’
^o(J'o+%) - Уо(Л>+%) О01)
C0S “ УБ^о+%) ~*о(Уо+%)1Жго(хо+%) -Xo(zO+%)P ’
cos 72 = 0.
Направляющие косинусы г0 равны:
cosa3= —, cosp3 = —, COS73 = -^-,
где Г° Г° '° (102)
У ^+Уо + 2о •
Далее
cos ф„ = cos as cos a3 + cos cos p3 + cos 73 cos y3. (103)
Таким образом из формул (101), (102) и (103) получаем
Фв =
*око(*й+%) - ■М*о+%)]+.Уо[го()'о+«>ои) - Уо(*о+%)]
= arc cos г ,
у (*о+Уо+ zo) {I Уо(-’о+^о2)-го( Уо+%,) 1г+[ *o(*o+%bxo(zo+%) ]г|
(Ю4)
так что ф0 определяется из формул (95) и (104).
Полагая в формуле (57) t = 0, находим t0.
Верхний предел интеграла при этом становится равным
Ф/-о=фа —Фо>
так что
Та-То
Г,' Г d<t> , , _
V~tfM J (l+ecos®)* ° (105)
о
(если фа<фо, t0 будет положительным).
Мы выразили таким образом начальные значения шести
элементов траектории /’,е,фо>(М/о через
Хд,Уд,2д И Фдх,Ф0у,Ф0г.
183
§ 6. Движение ракеты под действием сил тяготения
Земли, Солнца и Луны
Рассмотрим движение ракеты, находящейся на большом рас¬
стоянии от Земли, под действием сил тяготения Земли, Солнца
и Луны.
Выберем систему координат с началом в центре Земли и
: осями, сохраняющими постоянное направление в пространстве;
плоскость ху при этом пусть совпадает с плоскостью эклиптики
(плоскость орбиты Земли в ее движении вокруг Солнца).
Относительно этой системы координат нам нужно будет рас¬
смотреть движение трех тел, именно: Луны (масса т,), Солнца
(масса т2) и ракеты (мгновенная масса та). Обозначим коор¬
динаты Луны через xlt у2, z„ координаты Солнца через x2t у2, zt
и координаты ракеты через ха, уа, г3 (заметим, что всегда
г.=0).
Координаты Луны х2, у„ г, и Солнца х2, у2, z2 можно счи¬
тать известными функциями времени (масса ракеты по сравне¬
нию с массами Солнца и Луны ничтожно мала, и влиянием ее
на движение этих тел можно, разумеется, пренебречь). Предпо¬
ложим, далее, что ускорение ракеты, создаваемое реактивной
силой (реактивная сила, отнесенная к единице массы ракеты),
остается постоянным по величине, а направление этого ускоре¬
ния а совпадает в любой момент времени с направлением ско¬
рости V.
Тогда на ракету будут действовать следующие силы (все
действующие силы будем делить на массу ракеты):
1. Сила земного притяжения с составляющими по осям
х, у и г:
гз гз гз
где (Ю5)
гз = ]7хз+У1 + г1-
2. Сила притяжения Луны с составляющими
r’-' " (107)
где
гз,1 = И(х3 — -ч)2 + (у8 -yj + (z3 — zj2.
3. Сила притяжения Солнца с составляющими
Г'л’2 3,2 3,2 (108)
где
гз.2 = V (х3—ха)2 + (_у3 — j2)2 + (z3 — z2)2. J
184
4. Сила инерции, возникающая в системе xyz вследствие
того, что под дейстием лунного притяжения Земля движется
с ускорением в направлении Луны.
Составлющие этой силы равны:
-/"Ч 4 . . -/«1 4 >
г> ч Г1
где } (Ю9)
ri = ]/•«?+J'?+ z?- j
5. Аналогичная сила инерции, вызванная притяжением
Солнца.
Ее составляющие равны:
-fm2 4 , -fm2 , -fm2 ,
'2 *2
где (ПО)
Ъ = Уxl+yl + z22.
6. Реактивная сила с составляющими
а^, а№,
Vs ^3
где (Hl)
я3 = Уx23+y23+z% .
Ha основании формул (106), (107), (108), (109), (ПО) и (111)
получаем дифференциальные уравнения движения ракеты
г3 \ *3,1 Г1 / \ '3,2 r2 / v3
Уз+ЛИ4 = ->3гэ~- + Л1?) ->2 ("Зд—+4") +а ? ’ (112)
г3 У '3,1 '1 ] у '3,2 r2 ] v3
’.+/« ± --fm, \ _/m /£1=£=+^'1 + а i ,
Г3 \ Гз>* Г1 / \ Г3,2 Г2) V3
где xlt уи z2 и х2, у2, za —известные функции времени. По¬
лагая
х3 = 'их, y2 = vy, z3 = vz,
получаем шесть совместных дифференциальных уравнений пер¬
вого порядка относительно х3, ув, z3, vXj vv, vXt которые могут
185
быть проинтегрированы приближенно с помощью разложения
в ряд Тейлора или методом Рунге-Кутта. Если ракета находится
в непосредственной близости от Земли и, кроме того, реактив¬
ная сила а мала, то все члены в правых частях уравнения
(112) малы по сравнению с силой земного притяжения и пра¬
вые части уравнений (112) можно считать приближенно рав¬
ными нулю. В этом случае мы получим задачу о чисто цен¬
тральном движении, которая может быть решена элементарным
интегрированием (см. § 17, глава I).
Координаты ракеты х3, _у3, z3 и составляющие ее скорости
х3, .Уз» zs в этом случае будут определенными функциями
времени:
x3 = xs(t), y3=y3(t), zs = z3(0, |
x3 = x3(t), y3=y3(t), z3 = z3(0.1
Подставляя эти функции в уравнения (112), получим
*з = Л(0, ^3 = ^(0, г3 = Г3(0, (114)
и, следовательно, для не очень большого интервала времени
х3 = f ( J + vOx + хоз (115)
о \0 /
и аналогично для у3 и z3.
Для того чтобы получить следующее приближение, можно
(115) вновь подставить в (112) и т. д.
[Этот метод можно применить и в более общем случае,
когда функции (113) получены для определенного промежутка
времени с помощью метода Рунге-Кутта].
Если ракета приходит в непосредственную близость с Луной,
то Луна начинает играть доминирующую роль, а Земля — роль
возмущающего тела. Если при этом реактивная сила будет ма¬
ла по сравнению с силой притяжения Луны, то можно будет
применить указанный выше метод. Для этого нужно будет лишь
во всех предыдущих рассуждениях поменять местами слова
«Луна» и «Земля».
§ 7. Применение метода вариации элементов траектории
к предыдущей задаче
Если члены, стоящие в правых частях уравнений (112), ма¬
лы по сравнению с
'з
то движение ракеты можно рассматривать как центральное
движение с изменяющимися во времени элементами траектории.
Вообще такой способ теоретически всегда возможен, но нецеле¬
186
сообразен в тех случаях, когда силы, стоящие в правых частях
уравнений (112), имеют тот же порядок, что и силы тяжести.
Выберем в качестве элементов траектории величины
Р> S, Ср о, у, I, /0,
где ф — угол между положительным направлением оси х
и линией узлов, т. е. линией пересечения мгновенной плоскости
траектории (плоскость мгновенного центрального движения) и
плоскостью эклиптики (принятую за плоскость ху). Линию
узлов примем за полярную ось, так что <р будет обозначать
угол между радиусом-вектором ракеты и линией узлов.
Для х3, у3 и г3 мы получим такие же выражения, какие
мы имели для х, у и z в формулах (84). Таким образом
хэ = х3(р, 6, ?о. i, Ф); Уз=Уз(Р, е, ?о> Ф» ф);
гз = 2з(Р> е, ?о. 0 Ф)- (116)
Далее мы получим для х3, у3, z3 такие же уравнения, как
уравнения (87) для х, у, z, и если положим
дх3дФ • ду3дФ дгчдФ
дФ dt 1 дФ dt ’ 3 дФ dt 3
то опять получим уравнения (90), с той лишь разницей, что
теперь правыми частями полученных уравнений будут правые
части уравнений (112), в которых согласно (116) х3, у3, z3 явля¬
ются функциями р, е, <р0, ф, i и Ф, a xt,ylf zx и х2, у2, za —изве¬
стные функции времени.
Таким путем мы получим шесть уравнений, аналогичных
уравнениям (87) и (90), линейных относительно
dp de d<fo dfy di dta
dt ’ dt ’ dt' dt ' dt dt '
Разрешая эти уравнения относительно перечисленных про¬
изводных, получим систему, подобную (91)
^7 = Л(Р> е> ?о> Ф. i, ф. А» 0; ^7 = F4 (Р, е» Фо. Ф, i, Ф. 0. 0»
at at
^-=Ft(p, е, <р0, ф, i, Ф, 0, 0; A = F6(p, е, <р0, ф, i, Ф, 0, 0,
dt at
^г = Рз<Р, е» Фо» Ф» Ф» 0» 0; ^-=р6{р, Фо» ф. Ф» 0» 0-
dt dt
(117)
Эти уравнения могут быть проинтегрированы приближенно
путем разложения в ряд Тейлора или методом Рунге-Кутта.
В том случае, когда элементы траектории изменяются со
временем очень медленно, можно в течение короткого проме¬
187
жутка времени считать их постоянными, так что для достаточно
малого промежутка времени Д/ можно написать
p=p(t)= ^F^dt, (118)
где все входящие в F3 элементы траектории рассматриваются
как постоянные.
Интегрируя (118), получим для интервала Оч-Д£ вели¬
чину р как функцию времени.
Аналогично получим
Д/ у
e = e(0=f ЛН/>(0» е, <р0, ф, i, Ф, tg, /}Л + е/=0,
м
То = То(0 = е(0> То» Ф» к ф2, tg, Adt+’fgt^o,
ф=Ф(о= е(о. <Ро(о, ф, к ф2> ц, 4^+ф<=о,
i = = J F5{p(t), e(t), То (О, ф(0, i, Ф2» to, t]dt+ii=0,
it
= = j Fe{p(t), е(О,То(0,Ф(О, i(t), Ф2, tg, t}dt+t0M.
(119)
В первом из интегралов (119) е, <р0, ф, i, и t0 рассматрива¬
ются как постоянные и
Ф1 = Ф|р(0, е, tg, ф
Ф2 = Ф{/>(0» е(О,^о. t\
согласно равенству (57).
Во втором интеграле (119) постоянными считаются только
величины <р0, ф, i и tg и т. д.
Для того чтобы получить следующее приближение, можно
эту операцию в рассматриваемом интервале времени 0+-Д(,
повторить:
p = p(() = J Fjp(0, е(0, То (О» Ф(0> i(f), Ф«. ^о(О> 4^»
0 (120)
где
Ф3 = Ф3|р(0, s(0, tp(t), и т. д.
В том случае когда оскулирующее центральное движение
остается эллиптическим, можно в качестве элементов траек¬
тории выбрать также величины
а, е, То» Ф» i, Ц
188
то
то
и вместо Ф ввести, как это делалось в § 3 этой главы,
величину и, являющуюся согласно уравнению Кеплера
функцией а, е, 0 и t. В этом случае в уравнениях (82), напи¬
санных теперь для х3, уз и z3, нам нужно будет выразить cos<p
и sin <р через и и <р0. Это можно сделать следующим образом.
Так как
Ф = ?—'Ро + 'Ро»
то
cos <Р = cos [(<Р—ср0) + <р0] = cos (<Р—<р0) cos <Ро — Sin (<Р — ср0) sin <р0.
Так как, кроме того (сравните с § 3 этой главы),
/1+е и .
tg
•ш W—W - — чма —J— = 2 ,
1++Л,е,т
TO
1 4- e u _/14-e U
21/ i/,gV
cos’=—ГЙ—;rcos’°——n;——s|nT«. (I2i>
,+”«'T ,+ТГ7«’Т
(сравните с формулой (31) этой главы].
Аналогично
sin ср = sin [(ср—<р0) 4- <р0] = sin (?—<р0) cos <р0 4- cos (<р—<?0) sin <р0
и, следовательно,
/ 1+е и . 1+е . и
21/ tg — 1 — tg* —
, У 1-е В 2 , 1 —е 8 2
sin ср = COS ср0 4 sin <Ро- (122)
. 1 +* е . и ,1 +е и
1+1—rtg Т 14"i—7tg T
Подставляя выражения (121), (122) и (32) в формулы (82),
написанные для х3, у3, г3, получим
х3 = х3(а, е, ср0, ф, i, и); у3=у3(а, е, Тв, ф, i, и)\
za = z3(a, е, ср0, i, и). (123)
Дальше все делается так же, как это делалось выше, с той
разницей, что р повсюду заменяется на а, а Ф на и.
Предположение, которое мы сделали относительно реактив¬
ной силы, не имеет существенного значения при математическом
исследовании. Если бы реактивная сила изменялась по величине
и направлению и была, следовательно, заданной функцией вре¬
189
мени, то последние члены в правых частях уравнений (112)
нужно было бы заменить на известные функции f2(t) и
Все предыдущие математические рассуждения остаются
при этом в силе.
§ 8. Движение ракеты по заданной траектории
Выше мы рассматривали задачу о движении ракеты под
действием заданных сил. Можно также поставить обратную
задачу: как должна изменяться во времени реактивная сила
(по величине и направлению), чтобы обеспечить заданное дви¬
жение ракеты.
Зададим движение ракеты уравнениями
x = x(t), y=y{t), z = z(t), (124)
где х, у, z — координаты ракеты. Обозначим через g гравита¬
ционное ускорение, а через а — ускорение, создаваемое реак¬
тивной силой. Если через а- обозначить тангенциальное, а через
ап — нормальное ускорение в заданном движении (124) в ка¬
кой-либо момент времени t, то будем иметь
~g + a = a^ + an
или _ _ _ _
а = ах + ап—g. (125)
Тангенциальное ускорение равно
ах = _d ух2 у2 z2 = _xx+yy+zi_
dt dt ' Vx*+y*+i* ' '
Направляющие косинусы вектора ах будут
X а У
COS ах = — = , cos 0т = —7—,
У x*+y*+z* У х*+у*+'гг
‘Cos ft ,
У х*+у*+г*
так что
_ хх+уу+гг _ xx+yy+zz
'х х*+уг+'г* ’ V ■ х*+у*+г*. У'
= хх±У2±^г. (127)
х* + у*+г* ' '
Нормальное ускорение равно
I V X а I 1 ( /
fl"=—= Т 5-Х?
х yz
190
или
а =1/"Су* - *У)г+(*х - xz)‘+(xy -у х)* ,128)
п V x'+y'+z'
Уравнениями нормальной и соприкасающейся плоскостей
траектории в точке траектории х, у, z будут
x(x — x')+y(y—y') + z(z—z') = O
и
(yz — zy)(x—x') + (zx — xz) (у — у') + (ху — ух) (z—z') = О
или
хх' 4- у у' + zz' — (хх + у у + zz) = О,
(yz—zy) х' + (zx—xz)y' + (ху — yx)z* —
— [(у z — zy) X + (zx — xz)y + (xy —yx) z] = 0.
Обозначим
* = y = BR..z=.Ci; | (129)
yz — zy = A2; zx— xz=B2\ xy—yx = C2.)
Вектор нормального ускорения an параллелен линии пере¬
сечения плоскостей:
Ахх' -|- В,у' + Cyz' = 0 и А2х' + Вду' + C2z' = 0.
Разрешая эти уравнения относительно х* и у', получаем
, С2В, — С,В9 , ! , С9Ау — С,А2 , ,
X - _LJ L_- z' — mz’> у> = z =nz . )
ЯХВ2 — A2Bi В}А2 — В2Ау
Обозначая направляющие косинусы этой прямой через cos а,
cos р и cos 7, находим
т п п 1
COS а = —г — , COS В = г , COS 7 = г
ут'+пг+1 Г ]Лпг+л*-|-1 ’ 1 Ут»+л2+1
ИЛИ
В\С2 — B2Ci q -^26*1 — ^16*2 _ _ AiB9 •— Л251
cos а = 1 2 _ 1, cos 0 = , cos 7 = ~ 1,
Vr r - Vr Kr
где
R = (ВХС2 - B2Cy)2 + (AC2 - A2Cx)2 + (Ax B2 - Ада.
(130)
Таким образом •
anx = an cos а; аЛу = a„ cos P; a„2 = a„cos7. (131)
191
Поле гравитационных сил в общем случае изменяется со
временем вследствие движения небесных тел.
Следовательно,
gx = gxу, z, t) = gx [х (0, У (0, 2 (0, t] = gx (0.
gv = gy (x, у, z, t) = gy [x (0, y (0, z (0, t] = gy (0, (132)
gz = gz(*> У> z- t) = g2[x(0, y(t), z(t), t\ = gz (0.
Составляющие необходимого ускорения реактивной силы
будут таким образом равны:
= + a**+gx,y
ay = axy + any—gy, (133)
аг = аХг +ап, — gz
и
а = /о2+а;+< (134)
Из равенств (124), (127), (128), (129), (130), (131), (132), (133)
и (134) можно определить ах, ау, az и а как функции вре¬
мени.
Реактивная сила будет равна
7S — — d/n
Р=ат= —с — ,
<и
где с—скорость истечения относительно стенок сопла.
Пусть теперь
а —<р(0
будет известной функцией времени.
Тогда
/Л dm
<р(0/п=-с —,
откуда находим
t
m = nipe '» . (135)
Эта формула определяет закон изменения массы ракеты
со временем. Необходимый секундный расход горючего опре¬
деляется дифференцированием по времени формулы (135). Он
равен
t
f fWdt
— <p(i)e ‘° =—. (136)
с с
192
Направляющие косинусы вектора а равны
cos а = —,— < .. =-
]/ а2+а2+а2г
। аналогично для cos р и cos 7. Они определяют направление
)еактивной силы.
Если мы хотим, чтобы ракета, находящаяся на большом рас¬
стоянии от Земли, совершала чисто центральное движение, та-
\ое, какое она имела бы под действием одной только силы зем-
1ого притяжения, то нужно, чтобы составляющие ускорения
реактивной силы были согласно уравнениям (112) равны
ах =fmi /+>2 / Т *2- + (137)
\ 'Ь Л/ \ 'з3,2 'г/
I аналогично для ау и а3.
Так Xi и х2, а также центральное движение ракеты являют-
:я в этом случае известными функциями времени, то ах, ау
I а2 также являются известными функциями времени соглас-
ю равенству (137). Ускорение реактивной силы
a = V а2+а2+а2 = <р(0
также будет известной функцией времени.
Закон изменения массы ракеты и секундный расход опре¬
делятся из формул (135) и (136).
Если мы хотим, чтобы ракета совершала центральное дви¬
жение относительно Луны, то необходимые составляющие
ускорения реактивной силы должны быть равны
ах =fM +fm^ +fm2 /-3f-*2- + (138)
г3 ' 1 \ '3.2 '2 /
и аналогично для и аг.
Таким образом принципиально возможно исключить влияние
возмущений, вызываемых другими небесными телами.
§ 9. Управление ракетой в пустоте
Управление ракетой в пустоте можно осуществить с по¬
мощью газовых рулей (расположенных в газовой струе), изме¬
няющих направление реактивной силы.
Такой метод был применен в ракете ФАУ-2 для обеспечения
необходимой устойчивости непосредственно после пуска ракеты,
когда скорость ее мала. В этом параграфе мы рассмотрим дру-
13 Динамика ракет
193
гой способ управления, который также может быть применен
к ракете, движущейся в межпланетном пространстве.
Выберем систему координат x'y'z' с началом в центре тя¬
жести ракеты и с осями, сохраняющими постоянное направле¬
ние (относительно неподвижных звезд). Для того чтобы управ¬
лять движением ракеты, необходимо иметь возможность изме¬
нять направление газовой струи. Предположим, что ракета
имеет одно центральное сопло. В этом случае направление га-
зовой струи может быть изменено посредством поворота всей
ракеты вокруг ее центра тяжести. Это можно сделать с по¬
мощью электромотора, установленного в ракете так, чтобы он
имел три степени свободы и ось его могла, следовательно, уста¬
навливаться в любом направлении относительно системы xyz,
жестко связанной с ракетой.
Обозначим через w угловую скорость вращения ракеты во¬
круг ее центра тяжести, а через и — угловую скорость враще¬
ния ротора мотора относительно ракеты. Тогда кинетический
момент рассматриваемой системы будет равен
B = Bi + B2, (139)
где Bi — кинетический момент ракеты вместе с ротором отно¬
сительно системы координат x’y’z’ (ротор мотора при
_ этом считается неподвижным);
В2— кинетический момент ротора относительно системы
xyz.
Согласно уравнению Эйлера будем иметь
^-(Д1 + В2) + шХ (В1 + В2)=0, (140)
at
где производная — (Bi + В2) —скорость изменения вектора
dt
(Bi + В2) относительно системы xyz.
Уравнение (140) можно записать в виде
В1 + (юХВ1)= -К Ч“ХВ2). (141)
Следовательно, „вращающий момент" равен
— В2 —(шХВ2).
Если а> = 0, вращающий момент равен — В2.
Выбирая в качестве осей х, у, z главные оси инерции ра¬
кеты, получим
в>у = В>с =
194
где Ix, Iy, I2—глазные моменты инерции ракеты (с учетом
массы ротора). Если пренебречь небольшой скоростью конца
вектора и относительно системы хуг и обозначить через Q
момент инерции ротора относительно его оси, то будем иметь
^2x=uxQ, B2y=uyQ, B22=uzQ.
Таким образом _ _
_ _ i J k
а>ХВ1= <ох <оу шг
и
i j k
<оХВ2= Шх шу Ш2 •
uxQuyQu2Q i
Проектируя уравнение (141) на оси, получаем
4®ж+<в^в»г(4—4)= — 1«х+(")у«г—®а)Ь
^y + ^zYx — Iz) = — Q [«у + (шАг~ “x«z)L (142>
+ “х“у ((у — 4) = — Q \иг + — “у“х)1 •
Определяя положение подвижной системы xyz относитель¬
но неподвижной системы x'y'z' углами Эйлера <р, 0 и ф, по¬
лучаем согласно известным формулам механики
шх = ? — ф sin 0, 1
Шу = 0 cos <р+ ф cos 0 sin tp, } (143)
шг=—0 sin <p + ф cos 0 cos ср. ]
При определении эффекта, создаваемого вращением электро¬
мотора, следует переменные их, tty, и2 и их, и„, и2, входящие в
уравнения (142), считать известными функциями времени.
Уравнения (142) и (143) будут представлять тогда систему
шести совместных дифференциальных уравнений первого по¬
рядка, в которых Шу, шг, ср, © и ф являются зависимыми
переменными, a t — независимой переменной. Эта система мо¬
жет быть проинтегрирована приближенным методом.
Если, наоборот, углы ср, 0, ф, а следовательно, и их произ¬
водные ср, 0, ф являются заданными функциями времени, то
можно с помощью формул (143) определить <sv, а>2 и шт,
<dv, так же как функции времени. Уравнения (142) будут
представлять тогда систему трех совместных дифференциальных
уравнений первого порядка относительно их, и„, иг, которая
также может быть проинтегрирована приближенным способом.
Вместо одного мотора с тремя степенями свободы можно
взять три мотора, каждый с одной степенью свободы, оси кото¬
13*
195
рых направлены соответственно по осям х, у, г. Если угловые
скорости роторов этих моторов обозначить через их, uv, их, а
момент инерции каждого ротора через Q, то все предыдущие
формулы останутся в силе.
Заметим, что если в начальный момент времени ux=uv=
— иг=0, то в конечный момент времени, когда моторы остано¬
вятся, вновь будет их=иу=их=0 и <а = 0. Это непосредственно
следует из закона о сохранении момента количества движения.
Если же в начальный момент, когда моторы еще не работают,
ш #= 0, то можно привести моторы во вращение и сделать в>
равной нулю. Однако как только моторы остановятся, опять
будет о> =#0. Следовательно, для того чтобы уничтожить началь¬
ное вращение ракеты вокруг ее центра тяжести, необходимо
иметь вспомогательные сопла или газовые рули.
§ 10. Достижение Луны с помощью ракеты
Рассмотрим проблему полета ракеты на Луну.
Предположим, что ракета, вылетающая на Луну, поднимает¬
ся с Земли в вертикальном направлении, как, например, ФАУ-2,
и по прошествии короткого времени действия реактивной силы
приобретает скорость v0 и достигает точки г0 вблизи Земли. Точ¬
ку, однако, будем считать находящейся на таком расстоянии от
Земли, что последующее движение ракеты можно считать про¬
исходящим в абсолютной пустоте.
Будем считать, что на активном участке траектории ракета
управляется автопилотом, а начиная с точки га, она движется
как обычный артиллерийский снаряд.
В этом движении на нее будут действовать только силы при¬
тяжения Земли, Луны и Солнца.
Будем пользоваться теми же обозначениями, что в § 6 этой
главы. Выберем систему координат xyz с началом в центре
Земли и плоскостью ху, совпадающей с плоскостью эклиптики,
и обозначим координаты Луны через xlt ylt zlt координаты
Солнца через х2, у2, г2 и координаты ракеты через xa, уа, za.
Координаты точки г0 обозначим через х3 0, уа 0, za 0; компоненты
скорости и0 в конце активного участка, следовательно, будут
*’s о» Уз о» 2з о-
Пусть долгота L и широта В будут определять цель на по¬
верхности Луны. Пусть xyz будет система координат с началом
в центре Луны и осями, параллельными соответствующим осям
системы xyz, относительно которой рассматривается движение
ракеты.
Введем также систему x"y"'z', жестко связанную с Луной,
с началом в центре Луны и плоскостью х"у"', совпадающей с
лунной экваториальной плоскостью; x"z' пусть будет плоскость
нулевого меридиана. Ось z' будет осью вращения Луны.
196
(Как известно, Луна совершает полный оборот вокруг своей
оси за то же время, что и полный оборот вокруг Земли. Форма
Луны слегка отличается от сферической. Более точно она мо¬
жет быть представлена эллипсоидом с осями, немного отличаю¬
щимися друг от друга; эти оси можно принять за оси x"y"'z'.
Отклонением формы Луны от сферической мы будем в дальней¬
шем пренебрегать.)
От системы xyz можно перейти к системе х"у'"г' с помощью
последовательных поворотов:
При этом будем иметь
x = x'cosE — у'sin 5, |
у = х' sin Е +у' cos Е. )
у'=у'созт;— z'sinv], 1
z=y" sin т] + z'cos т]. J
x' = x" cosC — y"' sinCJ
у" = x" sin С +y'" cos C.|
Выражая x, y, z через x", y"’, z', получим
x=(x” cosC — y'" sinC)cos E —
— [(x" sinC+y"' cos C)cost]—z' sin tj] sin E;
у = (x’ cos С —уsin C) sin E +
+ f(x" sinC+y'" cos'C)cost; — z’ sin tj] cos E;
z = (x" sin C +y"' cos C) sin 7] + z' cos 7]
или
x = x" (cos C cos E —sin Ceos 7] sin E) +
+y"' ( — sin CcosE — cos Ccos 7) sin E) + z'(sin Tjsln E);
у = x" (cos C sin E + sin C cos tjcos E) + (144)
+y"'( —sin C sin E +cos Ceos tj cos E)4-z'(— sintjcos E); I
z = x" sin C s in t] +y'" cos C simg -f- z' cos tj. J
197
Фиг. 54.
Кроме того, имеем
х” = г cos В cos А, У" = г cos В sin £, z' = г sin В (фиг. 55)
и
где г — радиус Луны, а ш— угловая скорость ее вращения1 *.
Таким образом получаем окончательное выражение для
координат цели:
х (0 = х4(0 + rcosBcosL(cos w^cosE — sin <*>tcos t]sin0 —
— r cos Bsin£(s in<i>£cos£ + cosotfcos t; sin 0-J-rsin В sin tj sinE;
y(t)=y1 (0 + rcos В cosL (cosatfsin B-|- sin <&t cos ^cos 0 +
+ r cos В sin L (— sin cousin $ + cos <$t cost] cos 0—rsinB sintjcosE;
z(0 = zi (0 + rcosBcosZ, sin w£sin tq 4-
+ r cos В sin L cos <»t sin t] + r sin В cos tj.
(145)
Дифференциальные уравнения движения ракеты под дейст¬
вием притяжения Земли, Луны и Солнца имеют в обозначе¬
ниях § 6 этой главы следующий вид:
х, = —fM -fmi + (146)
ro I rO г*3 I I /
г3 \ '3,1 Ч / \ '3,2 '2 /
и аналогично для у, и za.
Координаты XiyiZi и x2y2z2, входящие в эти уравнения,
являются известными функциями времени. Таким образом
x3 = Fi(.xt, у3, z3, t,)y3 = F.{x3, у3, za, 0,
z3 = F3(x3, у3, z3, 0. (147)
Фиг. 55.
1 Вообще С=<1>/+£0, но специальным выбором системы х” у'" г' мы
можем сделать Со=О.
198
[В отношении хгу3гг (движение Луны вокруг Земли) следует
учитывать также возмущающее- действие Солнца. Эти коорди¬
наты выражаются через элементы оскулирующего эллиптиче¬
ского движения Кеплера, а эти элементы определяются как
функции времени при интегрировании дифференциальных урав¬
нений движения, возмущаемого притяжением Солнца.]
Посмотрим, какой должна быть в точке г0(х8 а,_ув с, z8 0) (в кон¬
це активного участка) «начальная» скорость a0(xsll, уво, z80)
для того, чтобы ракета попала в заданную на поверхности Луны
цель, движение которой описывается уравнениями (145).
Координаты ракеты х3, ув, zB являются функциями времени
и начальных скоростей:
X3o = vOx, y3o = v0y, Z30 = vQz, (148)
так что можно написать
х» = х3 (■»<)*, Voy, фОф 0;
Уз= Уз (%х> voy, vo,, t); (149)
z8 = 23(^03, vOy, Vo,, t).
Зададимся определенной величиной начальной скорости
(скорости в конце активного участка). Так как
^=/4+^+4 <15°)
и, следовательно,
^^Vvl-v^-vly ,
то можно считать Vo, определенной функцией vpx и voy и ра¬
венства (149) можно переписать в виде
xl = x3('PoI, Voy, t), y3=y3(vox, Voy, f), z3 = z3(v0x, Voy, t). (151)
Если в момент t=tL ракета поражает заданную на поверх¬
ности Луны цель, то vOx, vOy и 0 удовлетворяют трем урав¬
нениям:
Х8(^ох, Voy, t1)—x(t1) = O,
Уз (Vox, Voy, 0) — j(0) = O, (152)
z3(vOx, voy, 0) —Z(0) = O.
в которых x(0), r/(0), z(0)—правые части- формул (145)1
при / = 0.
Функции (151) при заданном значении и0 должны быть
определены численным интегрированием дифференциальных
уравнений (147) для всевозможных значений и V&.
199
Уравнения (152) можно решить следующим образом. Задав¬
шись определенным значением tlt определим из первых двух
уравнений фОх и ФОу и подставим найденные значения в третье
уравнение. Эту операцию будем проделывать для различных
значений (х до тех пор, пока не будет удовлетворено также
и третье уравнение. Уравнения (152) геометрически можно
интерпретировать как уравнения трех поверхностей, пересе¬
кающихся в точке фОх, ФОу, Ц.
Опрелить Фйх и у из первых двух уравнений (152) (при
заданном значении Ц) можно следующим образом.
Зададимся при взятом значении Ц определенным значе¬
нием ФОу и определим из первого уравнения фОх. Для этого
нужно задаваться различными значениями фОх и определять
для каждого фОх значение функции х3(г/Од., ФОу, Ц)—х(Ц) до
тех пор, пока она не обратится в нуль. Найденное значение
т>Ол. будет искомым.
Эту процедуру нужно будет проделать для различных зна¬
чений t/0>, но при одном и том же значении Ц. Таким путем
мы получим в плоскости ФОхФОу кривую, представляемую
уравнением
*ЛХрх, Фоу, t1)—x(t1) = 0
при постоянном заданном Ц.
Аналогично получим в той же плоскости кривую, опре¬
деляемую вторым уравнением (152), для того же значения Ц.
Точка пересечения этих кривых определит искомые значения
г'Ол. и Фру< соответствующие заданному значению
После того как будет найдено направление начальной ско¬
рости v0 (в точке г0, являющейся концом активного участка),
останется еще решить вопрос о том, канаследует пустить ракету,
чтобы она достигла заданной точки га с необходимой ско¬
ростью о0.
Эта задача может быть решена методом приближенного
интегрирования, проведенного в обратной последовательности
(отправляясь от точки г0 к предшествующим точкам, т. е. в по¬
рядке, обратном хронологическому).
Сделаем в связи с этим несколько общих замечаний.
Рассмотрим сперва движение материальной точки в стацио¬
нарном поле сил. В этом случае сила, действующая на мате¬
риальную точку, зависит только от ее координат.
Если мы теперь изменим направление скорости точки на
обратное, сохранив ее величину, то получим движение, совер¬
шающееся в обратном порядке, т. е. движение, при котором все
точки той же траектории проходятся с прежней скоростью, но
в обратной последовательности.
200
Тангенциальное ускорение тИ1) и нормальное ускорение
dv^
v останутся при этом, как легко показать, неизменны-
dt
ми. Следовательно, останется неизменным полное ускорение
точки г, а стало быть, и сила /(г) = т г, действующая на точку.
Таким образом можно сформулировать общее положение:
если конечное положение точки принять за начальное положе¬
ние нового движения и в качестве начальной скорости взять
конечную скорость первого движения, но противоположно на¬
правленную, то под действием того же поля сил точка опишет
ту же траекторию, проходя ее в обратном направлении с теми
же скоростями.
Эта теорема имеет место и в случае нестационарного поля
сил. Нужно только, чтобы поле сил изменялось при этом также
в «обратном порядке» [т. е. поле f(r, t) нужно заменить на
— t), где — конечный момент времени].
Это справедливо не только для точки, но и для любой си¬
стемы материальных точек, на которые действуют гравитацион¬
ные, электрические или электромагнитные силы или вообще лю¬
бые силы, зависящие от положения точек системы, но не зави¬
сящие от скоростей.
Но для движения в сопротивляющейся среде это утвержде¬
ние будет неверно, и мы не получим обращенного движения по
той же траектории, так как при изменении скорости на обрат¬
ную сопротивление также меняет свой знак и, следовательно,
требование, чтобы силы оставались теми же (в векторном смы¬
сле), не выполняется. Для того чтобы получить в этом случае
«обратную картину» движения, нужно оставить без изменения
силу сопротивления как по величине, так и по направлению.
Поэтому в «обратной картине» сила сопротивления была бы на¬
правлена в ту же сторону, что и скорость и представляла бы
«отрицательное сопротивление».
Что касается силы Кориолиса — 2m(uXv), то она при обра¬
щении движения остается постоянной по величине и направле¬
нию, так как и и и одновременно изменяются на противопо¬
ложные. Это же верно для цёнтробежной силы.
При обращении движения ракеты, производная — стано-
dt
вится положительной. Реактивную силу +с~ (где с — ско-
рость истечения относительно стенок сопла) нужно будет
— dm
при этом заменить на —с — ; тогда она сохранит свою ве¬
личину и направление и будет силой, противодействущей
движению.
201
Функция tn=m(t) в обращенном движении должна, конечно,
также быть обращена; масса т, уменьшавшаяся в прямом дви¬
жении, будет увеличиваться в обращенном.
В прямом движении масса ракеты изменялась по закону
--1
т = тое с , в обращенном движении эта зависимость должна
быть заменена на
Д/
т = тае с ,
где т0 — масса ракеты в «начале» обращенного движения.
Фиг. 56.
Из всего сказанного выше ясно, что силы, входящие в правые
части дифференциальных уравнений (97) (§ 17, глава IV),
остаются при обращении движения без изменения как по вели¬
чине, так и по направлению. Следовательно, мы можем провести
интегрирование этих уравнений в обратной последовательности,
отправляясь от «начального» положения r0, v0 и двигаясь до
встречи с поверхностью Земли.
Функцию ф = ф (0 (управляющая функция автопилота) мы
можем выбрать таким образом, чтобы ракета подошла к по¬
верхности Земли под прямым углом, что соответствует верти¬
кальному подъему ракеты в прямом движении.
Заметим, что при переходе от чисто гравитационного дви¬
жения к движению под действием реактивной силы (на актив¬
ном участке, в прямом движении) мы должны будем перейти
от невращающейся системы координат к системе координат,
жестко связанной с Землей (как делалось в § 17, глава IV),
к которой относятся упоминавшиеся выше уравнения (97). При
этом мы встретимся с преобразованием, аналогичным тому, ко¬
торое рассматривалось при выводе уравнений (145).
Определяя положение вращающейся системы координат
XYZ относительно неподвижной системы xyz аналогичными
углами g', т/, V, мы получим формулы преобразования:
Х=х (cos С' cos Е'— sin С cos т/ sin 0) +
+_у (cos C sin E' + sin C' cos tj' cos E') + z sin Csinvf;
K = x ( —sin C cos E' —cosC'cos t]'sin E') + (153)
( —sin C sin E' + cosC cos if cos E') 4-zcosC sinTf;
Z = x (sin 7]' sin E') +y ( — sin 7]' cos E7) + z cos tj',
где С' = ш7 + Со, а ш' — угловая скорость вращения Земли.
202
§ 11. Движение ракеты вокруг Луны
В этом параграфе мы кратко рассмотрим задачу о движении
ракеты вокруг Луны с возвращением на Землю. Такой полет,
кроме технического интереса, представляет также большой на¬
учный интерес, так как он дал бы возможность исследовать
фотографическим методом ту половину поверхности Луны, ко¬
торая недоступна для наблюдения с Земли.
Как известно, Луна, вращаясь с постоянной угловой ско¬
ростью вокруг своей оси, совершает полный оборот за один
звездный месяц. Но так как лунная орбита имеет некоторый
эксцентриситет и вследствие этого угловая скорость радиуса-
вектора, проведенного из центра Земли в центр Луны, не вполне
Фиг. 57.
постоянна и так как, кроме того, плоскость лунного экватора
не совпадает с плоскостью ее орбиты, образуя с ней угол при¬
близительно 61/г°, то Луна обращена к нам не строго одной
своей половиной.
Вследствие указанных причин (либрации Луны) обращенная
к Земле часть лунной поверхности непрерывно сменяется, так
что 41ю/о всей поверхности Луны навсегда скрыт от наблюда¬
теля, находящегося на Земле, а 18°/о этой поверхности попере¬
менно видимы или невидимы.
Исследуем вопрос о возможности такого движения ракеты,
при котором она, вылетая из начальной точки г0 близ Земли
с соответствующей начальной скоростью v0 (конец активного
участка) и двигаясь далее под действием одних только грави¬
тационных сил, достигает точки Р на линии, соединяющей цент¬
ры Земли и Луны, и возвращается затем на Землю.
Предположим сначала, что плоскость эклиптики и плоскость
лунной орбиты совпадают, и что на ракету действуют только
силы притяжения Земли, Луны и Солнца и, кроме того, будем
считать, что начальная скорость ракеты лежит в плоскости
эклиптики.
Пользуясь обозначениями, приведенными в § 6, запишем
уравнения движения ракеты под действием одних только гра¬
витационных сил в виде
Р3/1 + + (154)
г3 \ Г3,1 Г1 / \ Г3,2 r2 J
и аналогично для уа.
203
В этих уравнениях х1( и х3, уг являются известными
функциями времени, так что можно написать
х8 = Л(х8, у3, t), ys = F2(x3, у3, t).
_ Считая, что ракета вылетает из заданной начальной точки
гй (Лз0, _Уз„), мы можем считать ее последующее движение за¬
висящим лишь от составляющих начальной скорости
Хз. = Ъох и узо = ъ0!/,
так что можно написать
х8 = х8(г/0я, ®0у, t), Уз=Уз(ъОх, -поу, 0.
Координаты х, у точки Р и координаты х', у' заданной точки
возвращения (близ определенной точки на поверхности Земли)
x=x(t), y=y(t), x'=x'(t), y'=y'(t) можно считать известными
функциями времени.
Обозначим через момент прохождения ракеты через точку
Р, а через t2 — момент возвращения в точку х', у'. Величины
vox, v0V и 0, t2, очевидно, будут удовлетворять следующим
четырем уравнениям:
x3(^0l, voy, ti) — x(fj) = O; ХзСоо,, voy, t2) — x' (£2) = 0,) ' .
voy, tl)-y(t1) = O-, ya(vOx, vOy, t2) — /&) = (). j ' }
С геометрической точки зрения два уравнения (155), содер¬
жащие tlt определяют в четырехмерном пространстве vox, v0V,
t2 две цилиндрические поверхности с образующими, парал¬
лельными оси t2, а два других уравнения (155)—две цилинд¬
рические поверхности с образующими, параллельными оси t2.
Эти четыре цилиндрические поверхности, являющиеся трехмер¬
ными многообразиями в четырехмерном пространстве, пересе¬
каются в одной точке.
Систему (155) можно решить следующим образом. Из пер¬
вых двух уравнений (155) (содержащих 1 определим при
различных значениях величины vat и vay.
Таким путем найдем кривую
Voy) = Q (155)
в плоскости vOxvOy.
Аналогично определим v02 и v„„ для различных значений
из двух последних уравнений (155) (содержащих t2). Таким
образом, найдем кривую
Нг(ъОх, vOy) = Q (157)
в той же плоскости.
1 Сравните с решением уравнений (152).
204
Точка пересечения кривых (156) и (157) определит необхо¬
димое значение и0® и величины 0 и 0 найдутся из прове¬
денного расчета.
Проведенные исследования для случая двумерного движения
показывают, что полет вокруг Луны с возвращением на Землю
принципиально возможен.
Однако расчеты, проведенные для симметричных траекторий
(фиг. 58) без учета (с целью упрощения) притяжения Солнца,
показали, что для того, чтобы ракета, обойдя Луну, вернулась
на Землю, угол а (фиг. 58) не должен выходить из пределов
1“ — 9°. Соответствующая начальная скорость в точке А (точка
старта на поверхности Земли) варьирует при этом в пределах
от 0,99 v пар до 1,0001 цпар, где через и пар обозначена парабо¬
лическая скорость на поверхности Земли (v 11 км/сек).
(На фиг. 58 точка О обозна¬
чает центр Земли, а окруж¬
ность вокруг точки О—по¬
верхность Земли.) Расстояние I
от точки Р до поверхности Лу¬
ны при этом изменяется от 0
до оо *.
Как видим, заставить раке¬
ту описать требуемую траекто¬
рию вокруг Луны очень труд¬
но, так как допустимая ошибка
ляет всего только 1%.
Самое небольшое превышение требуемой начальной скорости
повлечет за собой невозвращение ракеты на Землю, в то время
как самое небольшое уменьшение этой скорости может вызвать
падение ракеты на Луну.
Кроме того, числовые расчеты показывают, что нельзя пре¬
небрегать возмущающим действием Солнца.
Учтем теперь то обстоятельство, что плоскость эклиптики не
совпадает с плоскостью лунной орбиты (угол между ними со¬
ставляет приблизительно 5°). Траектория движения ракеты
будет теперь пространственной кривой.
Мы должны будем исследовать вопрос о возможности такого
движения ракеты, при котором она, вылетая из заданной точки
А вблизи Земли, достигает заданной точки Р {xyz) на линии,
соединяющей центры Земли и Луны, на расстоянии s от центра
Луны, и возвращается в точку Q {x'y'z') близ поверхности
Земли.
Ясно, что эта задача, вообще говоря, не имеет решения.
В самом деле, требование, чтобы в момент /=0 три координаты
ракеты имели заданные значения (заданные точкой А), экви-
в начальной скорости состав-
: 1 R. Е s п a u 1 t-P е 1 ( е г i е, [/exploration par fusees de la tres haute
atmosphere et la possibilite des voyages interplanetaires. Bulletin de la Societe
astronomique de France, 1928.
205
Фиг. 58.
валентно трем математическим условиям. Требование, чтобы в
какой-нибудь (не заданный) момент времени ракета находилась
в заданной точке Р, т. е. чтобы координаты ракеты в этот мо¬
мент равнялись соответствующим координатам точки Р, экви¬
валентно еще двум условиям. Точно так же требование, чтобы
ракета возвратилась в точку x'y'z' (в какой-нибудь момент вре¬
мени), эквивалентно двум условиям.
Таким образом мы должны удовлетворить 3 + 2+2=7 усло¬
виям, в то время как общее решение системы (147) содержит
только шесть произвольных постоянных интеграции.
Следовательно, сохраняя заданными точку старта А и точку
возвращения Q (x'y'z'), мы можем только потребовать, чтобы
две из трех координат ракеты были равны двум соответствую¬
щим координатам точки Р (в какой-нибудь момент времени).
Так как возмущающее действие Солнца незначительно, то
третья координата ракеты окажется при этом мало отличаю¬
щейся от третьей координаты точки Р.
Поступая так, мы получим 3+1+2=6 условий, из которых
определятся шесть постоянных интеграции системы (147).
Рассматривая движение ракеты, вылетающей из точки А,
мы можем ее координаты x3yaz3 считать функциями составляю¬
щих начальной скорости и0
Хз, =Vox, К = vOy, z3,=vo2,
и времени t, так что можно написать
Х3 = Х,(‘»Ох, v0,, t), уя=у3(ъОх, vOy, Vox, t),
za = za(vOx, vOy, Vo2, t).
Обозначим момент прохождения ракетой точки Р через 0, а
момент возвращения в точку Q через 0. Величины тОг, v^y,
и 0, 0 будут определяться, очевидно, пятью уравнениями:
•M't'o,, voy, vo,, 0)—х'(0) = О; (1)1
Уз (fox, vOy, vo,, 0) —у’ (0) = 0; (2)
Z-Avox, vOy, Vo2, t2) — z(t2) =0; (3)1 (158)
^з(^» VQt, ^i)-x(ii) =0; (4) I
J8(^, vOy, vo,, 0)—y(0) =0. (5))
В этих уравнениях x, у, z и x', у', z' являются известными
функциями времени.
Определяя из системы (1) (2) (3) величины v0I, v0V, v„z
при различных значениях 0, получим кривую в пространстве
Oqx, Voy, Voz. [Вычисление v„x, vOv, v„z в заданный момент 0 может
быть выполнено так, как указывалось для уравнений (152)].
Решая систему (4) (5), мы получим поверхность в простран¬
стве v„x, v,v, Vf,2. (Эту поверхность можно получить, опреде¬
ляя vOx, и vOy для различных значений 0, при фиксированном
206
значении vOz и повторяя эту операцию для различных значе¬
ний Таким путем мы получим поверхность как последова¬
тельность кривых, лежащих в плоскостях const; эти кри¬
вые являются поперечными сечениями рассматриваемой поверх¬
ности.)
Точка пересечения полученной кривой и полученной поверх¬
ности определит необходимые значения -nnx, v„v, vu.. В про¬
цессе расчета определятся также значения 0 и 0.
Движение ракеты от точки Q (х', у', z') до поверхности
Земли, происходящее в земной атмосфере, можно рассчитать
так, как это делалось для гравитационного движения в § 17,
глава IV. При этом мы должны будем перейти от невращаю-
щейся системы координат xyz к системе XYZ, жестко связанной
с Землей, с началом в центре Земли и плоскостью XY, совпа¬
дающей с плоскостью земного экватора. Этот переход опреде¬
ляется уравнениями (153). Дифференциальными уравнениями
движения на этом участке могут служить уравнения (98) (§ 17,
глава IV).
§ 12. Метод неопределенных коэффициентов
Задачи, рассмотренные в двух последних параграфах, мож¬
но решать, представляя координаты ракеты х, у, z в виде сте¬
пенных рядов (или в более общем случае в виде функциональ¬
ных рядов) с конечным числом членов и определяя коэффи¬
циенты, входящие в эти ряды, таким образом, чтобы диффе¬
ренциальные уравнения движения удовлетворялись для опре¬
деленной серии значений независимого переменного t.
Напишем дифференциальные уравнения движения
x=f2(x, У, z, t), y=f2(x, у, z, 0, z=f3(x, у, z, 0
и рассмотрим задачу о поражении лунной цели с координа¬
тами
хл=хл(Г), ул=уя((), z„ = za(t).
Начальные значения Vp и x0, у0, zQ являются заданными.
Следовательно, полагая
X = Ср + Cft+ C2t2 + c3t* +... + cnt , 4
y = kp + k1t + k2t2 + k3F + ... + kntn, J. (159)
z = q3 + ?/ + q2t2 + q3t3 +... + Яп*п> j
207
получаем
Хй = Ср, (1)'
Уд — Ад, (2)
?д = Чд, (3)
ф2=с2+а2+?ь m (160)
Cg + c1tl + C2t21 + --.+‘V? = XJ1(fi), (5)
а0+ал+а24+--- + М=ь(Л). (6)
Чо + ЧА + Ч2^ + - ■■+ Уп^ = гл(Ц), (7)
где момент удара в лунную цель Ц является дополнительной
неизвестной.
Мы имеем Зп + З постоянных:
С0С1С2 • • • СЯ’
AgA2k2. . .Ая,
ЧдЧхЧз • ■ - Яп
и Ц в качестве дополнительной неизвестной; таким образом все¬
го Зл,+4 неизвестных. Нам недостает, следовательно, (Зп+4) —
—7=3п—3 уравнений.
Потребуем теперь, чтобы ряды (159) удовлетворяли трем
дифференциальным уравнениям движения для п—1 различных
значений t. Тогда мы получим недостающие Зп—3=3 (п—1)
уравнения, и неизвестные постоянные, а также Ц можно будет
определить из Зп+4 уравнений.
После определения постоянных можно проверить, достаточно
ли хорошо удовлетворяют выражения (159) дифференциальным
уравнениям движения при других значениях t.
Направляющие косинусы начальной скорости и0 будут
равны:
£1 Ц <71
У c2+kl+g2 V c2+k2+q2 ’ ]/ c2+k2+q2 ‘
Этот метод может быть применен также и к задаче о полете
ракеты вокруг Луны.
В этом случае мы будем иметь те же дифференциальные
уравнения, причем координаты х0, у0, z0 (начальная точка тра¬
ектории вблизи Земли) и координаты
Ха = Хо((), ya = ya(t), Za = Za(t),
(точка возвращения вблизи определенной точки поверхности
Земли) будут заданными, а координаты ракеты х и у должны
совпадать в какой-нибудь (незаданный) момент времени с ко¬
ординатами
хл = хл (t), ул=уя (f),
где хл, ул, гл — координаты той точки на линии Земля—Лу¬
на, через которую должна пройти траектория ракеты.
208
Обозначая через 0 момент, когда
•^ракета Хя, .У ракета Ул>
а через 0 —момент возвращения в точку ха, уа, za, получим
следующие уравнения:
х0 = с0, (О'
Уо = Ьо, (2)
2о = 7о. (3)
fo + C10+ с20+ •• - + 0/1 =Лл(0)» (4) ЛАП
kQ+kttt + k2ti+... + vr =yn (0), (5)
Co + 00+G0 + --- + c/] = Xo(0), (6)
Ао + М2 + М+--- + аЛ=^(0)> (7)
<?о + ?10 + <72^+---+^Л = га(0)- (8).
Мы имеем Зга+З постоянных с, k, q и две дополнительные
неизвестные t, и 0, так что нам нехватает еще (Зп+5)—8=
=3п—3 уравнений, которые могут быть получены так же, как
в предыдущем случае.
Точность полученного решения можно проверить путем под¬
становки степенных рядов (159) в дифференциальные уравне¬
ния при каких-либо других значениях t.
Начальная скорость найденного движения ракеты равняется:
<^ox==Cj, Vo у = klt Vo2 = q\.
Во всех этих рассуждениях мы считали, что х, у, z пред¬
ставляют степенные ряды по t. Очевидно, их можно также
записать в более общем виде:
X = Со + Cj&t (0 + с2&2 (0 +...
J = Ao + ^?i(0 + A!2<p2(0 + ...
2 = Яо + 71Ф1 (0 + 7гФг (0 + • • •
где <р, и ф,- — определенные функции. В частности, можно
попытаться представить х, у, z в виде тригонометрических
рядов.
Кроме того, для определения неизвестных коэффициентов В
рядах для х, у, z можно вместо метода подстановки применить
метод наименьших квадратов.
14 Динамика ракет
ДОПОЛНЕНИЕ
РАДИУС КРИВИЗНЫ В ПОЛЯРНЫХ КООРДИНАТАХ
Возьмем полярную систему координат с осью Ох и полюсом
О и рассмотрим в этой системе кривую АВ. Обозначим через р
радиус кривизны кривой АВ, в точке Р и через М — соответ¬
ствующий центр кривизны.
Фиг. 59.
Пусть Q будет точкой на кривой АВ, бесконечно близкой
к Р, так что PQ=ds. Тогда ds=pda, где а — угол между по¬
лярной осью и касательной в точке Р. Следовательно,
ds
Из фиг. 59 видно:
<х = <р + В, a tg8 = tgZPQO=^ = 4.
dr г'
где
d<f
Следовательно,
а = <Р + arc tg
и
. . , 1 г'dr — г dr'
аа. = а,9-\
/ г \а (г')!
\ г I
210
или
du=d4+r'dr-rdr- = dv Г1 + (r'}t-rrr 1 =
Y r‘+(r')‘ 4 /” + (+)* J
=^Г’+2(И’-ГП.
L r»+(r')1 J
Так как
PQ = ds = Vr2d<?a + dr2 - d<fVr2 + (F)2 ,
то получаем
2
ds__ [r» + (r')42
P da r'+2 (r')‘ - rr"
И91И
2
Hf)T
P “ I dr \2 d'r'
r*+2 —I —r—
\d? / df2
14*
Глава VI
САМОЛЕТ-СНАРЯД ФАУ-1
§ 1. Общие сведения
Летом 1944 г. были получены первые сведения о немецком
самолете-снаряде ФАУ-1, называвшемся официально FZG-76.
Сначала это оружие производили на заводе, предназначав¬
шемся для выпуска общедоступных легковых автомобилей
«Volkswagen» в Вольфсберге, но впоследствии из-за непрекра-
щавшихся воздушных налетов производство ФАУ-1 было пере¬
ведено в Шенебек.
ФАУ-1 представляет собой небольшой самолет без экипажа,
снабженный несложным реактивным двигателем, управляемый
автопилотом.
Общий вид ФАУ-1 показан на фиг. 60. Ниже приводятся его
основные данные.
Полная длина 7,75 м
Длина реактивного двигателя (вместе с соп¬
лом) 3,43 м
Длина фюзеляжа 6,60 м
Диаметр наибольшего поперечного сечения
фюзеляжа 0,825 м
Диаметр наибольшего поперечного сечения
двигателя 0,58 м
Размах крыла 5,40 м
Хорда крыла 1,04 м
Полный вес 2 150 кг
Вес взрывчатого вещества 1 000 кг
Средняя скорость 600 км/час
Емкость баков для горючего 600 л
Горючее Бензин
На носу самолета-снаряда установлена ветрянка, вращаю¬
щаяся от встречного потока воздуха, служащая для автомати¬
ческого определения пути, пройденного снарядом.
212
В носовой части снаряда в деревянном отсеке помещается
магнитный компас, связанный посредством промежуточного
пневматического устройства с автопилотом, установленным в
задней части фюзеляжа.
Дальше помещается боевая часть, содержащая 1000 кг
взрывчатого вещества. Затем идет бензиновый бак емкостью
около 600 л. За баком с горючим расположены два шаровых
бака со сжатым воздухом, усиленных стальными бандажами.
Сжатый воздух применяется для подачи горючего, вращения
гироскопов автопилота и для работы различных пневматических
устройств и сервомоторов, приводящих в движение рули высоты
и рули поворота.
Правая и левая половины руля высоты (7 и 8 на фиг. 60)
составляют одну жесткую систему, так что они движутся вверх
и вниз одновременно. Элеронов крыло не имеет и, следователь¬
но, самолет-снаряд неуправляем в отношении вращения вокруг
продольной оси. Видимо, конструкторы ФАУ-1 стремилисй сде¬
лать управление самолета-снаряда возможно более простым.
Крыло ФАУ-1 однолонжеронное. Лонжерон выполнен из
стальной трубы, нервюры — из штампованных полос стали, об¬
шивка — из фанеры.
Над фюзеляжем укреплен реактивный двигатель с соплом.
На фиг. 61 он показан в крупном масштабе.
§ 2. Реактивный двигатель
Реактивный двигатель состоит из камеры сгорания, девяти
форсунок, подающих бензин в распыленном виде в камеру сго¬
рания, и системы клапанов, открывающихся под действием
встречного потока воздуха. Клапаны представляют собой сталь¬
ные пластинки. Система форсунок и клапанов показана на
фиг. 61.
Работа реактивного двигателя протекает следующим обра¬
зом. Бензин под давлением сжатого воздуха подается к фор¬
сункам и затем в распыленном виде поступает в камеру сгора¬
ния. Прежде чем попасть в форсунки, бензин проходит через
фильтр и регулирующее устройство, связанное с трубкой Пито
и регулирующее подачу горючего в зависимости от скорости
полета.
Под действием встречного потока воздуха открываются кла¬
паны реактивного двигателя, воздух входит в камеру сгорания
и смешивается с бензином. Вследствие высокой температуры
стенок камеры сгорания (нагретых предыдущим взрывом) про¬
исходит воспламенение горючей смеси. Во время горения дав¬
ление в камере резко возрастает, и клапаны закрываются, пре¬
кращая дальнейший доступ воздуху. Продукты сгорания рас¬
ширяются и выбрасываются через сопло, представляющее собой
длинную трубу, создавая реактивную силу, движущую самолет-
снаряд. По окончании горения давление в камере сгорания па-
213
214
— 08ЕФ~
В „
>< jja I
J ЛИ" да*|
L ч /1\
11 1
§ и I
। Mg \^К|
!HU \I\OZS4’
*
—Л!» А .
ТйГ §
I 1 |?Ж^ Г
+г К—!—)1 ]
В *’ м /И
1 fenl " 8
“* f"7 ~'J ~006Ф
Я
\ I
"* pw
I
■ ГОР/Ф
I I Sb
/ K
/' огьФ
W J
215
/—бензиновый фильтр; 2— регулятор подачи
бензина; 3— трубка статического давления; 4—
трубка Пито; 5, б—сервомоторы руля поворота
и руля высоты; 7, <9—рули высоты; 9— баллоны
со сжатым воздухом; 10—редукционный клапан;
//—бензиновый бак; 12— заливная горловина;
13— компас; 14—камера сгорания; /5—контакт¬
ная коробка; 16—автопилот; /7—контролер.
Фиг. 60. Общий вид самолета-снаряда ФАУ-1.
дает, воздушные клапаны вновь открываются, и весь цикл по¬
вторяется. Таким образом, получается прерывистое горение в
виде последовательных взрывов, сопровождающееся шумом,
похожим на шум при работе неисправного двигателя внутрен¬
него сгорания. Частота взрывов составляет приблизительно 50
в секунду. Стенки камеры сгорания нагреваются во время ра¬
боты двигателя до темнокрасного каления.
При запуске двигателя зажигание производится от электри¬
ческой свечи.
§ 3. Старт ФАУ-1
Из сказанного ясно, что запуск двигателя ФАУ-1 не может
быть произведен сразу, так как для нормального всасывания
воздуха необходимо достаточное давление встречного потока.
Поэтому самолет-снаряд ФАУ-1 выпускался с катапульты, со¬
общавшей ему необходимую начальную скорость.
Пусковое устройство ФАУ-1 (фиг. 62) представляет длинную
трубу с продольной прорезью на верхней стороне. Самолет
снаряд скользит по укрепленным на трубе стальным направляю¬
щим полосам. В трубе помещен поршень, приводящийся в дви¬
жение сжатым воздухом или давлением газов, образующихся
при взрыве специального заряда. Поршень связан с самолетом
посредством детали, скользящей в прорези трубы, и, двигаясь
вверх по наклонной трубе, приводит в движение самолет. В кон¬
це направляющей скорость самолета-снаряда достигает
300 км/час. Утечка воздуха или газа через прорезь не имеет
существенного значения вследствие очень быстрого возрастания
давления в трубе. Видимо, существовал еще один способ
старта, при котором ФАУ-1 выпускался с летящего самолета,
специально сконструированного для этой цели.
216
Фиг. 62. Стартовое устройство ФАУ-1.
Фиг. 61. Схематический чертеж ФАУ-1.
/—конденсатор; 2—деревянный шаровой отсек; 3— компас;
4— бензиновый бак; 5—редукционный клапан; б—баллоны;
7—бандаж из стальной проволоки с воздухом; 8— вентиль;
9—форсунка; 10— пусковая форсунка; //—трубка Пито;
12—камера сгорания; /^--контролер; //—трубка статиче¬
ского давления; /5—штуцер для пускового бензина, /о
автопилот; /7-пневматическое сервоустроиство; /<У-уста¬
новочная рама.
Динамика ракет
§ 4. Компас
На фиг. 63 дан чертеж компаса, установленного в носовой
части самолета-снаряда. Этот компас предназначается для кор¬
рекции автопилота, расположенного в задней части фюзеляжа.
Фиг. 63. Компас.
Автопилот, как известно, состоит из гироскопа, укрепленного
в двух кардановых кольцах, так что ось его ротора может
устанавливаться в любом направлении. Ось вращающегося ги¬
217
роскопа сохраняет свое положение относительно неподвижных
звезд, и если самолет-снаряд вследствие какой-нибудь причины
изменит свой курс, то ось гироскопа займет другое положение
относительно самолета-снаряда. При этом будет оказано дей¬
ствие на промежуточные пневматические устройства, которые
приведут в движение рули, и самолет-снаряд вернется на преж¬
ний курс.
Таков принцип работы гироскопического автопилота. Однако
описанная система со свободным гироскопом имеет существен¬
ный недостаток, состоящий в отсутствии направляющего момен¬
та, который возвращал бы ось гироскопа в первоначальное по¬
ложение, если бы вследствие каких-либо возмущений она откло¬
нилась от него.
Для создания такого направляющего момента и служит ком¬
пас, стрелка которого сохраняет свое направление, находясь под
корректирующим действием магнитного поля Земли.
Если вследствие случайных возмущений ось гироскопа от¬
клоняется от первоначального направления, то самолет-снаряд
изменяет свой курс, вследствие чего изменяется положение маг¬
нитной системы компаса относительно самолета-снаряда и на
гироскоп производится такое воздействие, при котором откло¬
нение погашается и самолет-снаряд возвращается на прежний
курс.
Компас состоит из следующих деталей (см. фиг. 63). Де¬
таль 1, на которой укреплены два магнита, вращается в цап¬
фе 2 вокруг вертикальной оси. Диск 3 эксцентрично укреплен
на оси. Сжатый воздух входит через отверстие 4, проходит че¬
рез полость 5 во внутреннюю область 6, проходит через отвер¬
стия 7, обтекает эксцентричный диск 3, входит в каналы 8 и 9
и затем в кольцевые полости 10 и 11. В зависимости от поло¬
жения эксцентричного диска 3 давление будет выше в полости
10 или в 11, и мембрана 12 в коробке 13 замкнет контакт 14
или 15 и включит соленоид 16 или 17. Эти соленоиды (электро-
■магниты) действуют на гироскоп автопилота.
С помощью ручки 18 поворачивается ось 19 для регулиро¬
вания магнитной системы компаса. С этой осью связана система
компенсирующих магнитов (не показанных на фигуре). Ось 20
и связанная с ней коническая шестерня служат для регулиро¬
вания.
Сжатый воздух, пройдя эксцентричный диск 3, входит в ка¬
нал 21, проходит отверстия 22, 23 и 24 и выходит через отвер¬
стие 25. Давление в приборе можно регулировать пружинным
клапаном 26 с помощью винта 27.
§ 5. Автопилот
На фиг. 64 показана схема автопилота. Он состоит из трех
гироскопов А, Д и С, из которых А — только что рассмотренный
нами гироскоп.
218
219
Фиг. 64. Автопилот.
Как видно из фиг. 64, корпус гироскопа А может повора¬
чиваться вокруг оси, укрепленной в кольце 1, а само кольцо
может поворачиваться вокруг укрепленной в раме второй оси,
перпендикулярной первой.
Таким образом, гироскоп А имеет три степени свободы, и
ось его может принимать любое направление в пространстве.
Корпус гироскопа В, а также С может поворачиваться толь¬
ко вокруг одной оси, так что гироскопы В и С имеют лишь две
степени свободы. Оси, вокруг которых могут поворачиваться
корпусы гироскопов В и С, параллельны. В нормальном поло¬
жении ось гироскопа В вертикальна, а гироскопа С горизон¬
тальна.
В этих положениях они удерживаются при помощи пружин,
возвращающих оси гироскопов в нормальное положение всякий
раз, когда они от него отклонятся. Роторы гироскопов представ¬
ляют собой стальные цилиндры, на боковой поверхности кото¬
рых сделаны специальные углубления (см. фиг. 64). В эти
углубления ударяет струя сжатого воздуха, приводящая ротор
вс вращение. Скорость вращения роторов гироскопов составляет
приблизительно 20000 об/мин. Сжатый воздух подводится к ро¬
тору гироскопа через сопло, проходящее сквозь ось корпуса
гироскопа. Корпусы гироскопов установлены на шариковых
подшипниках.
Автопилот установлен таким образом, что ось корпуса гиро¬
скопа В параллельна продольной оси самолета-снаряда. В нор¬
мальном положении ось ротора гироскопа А также параллельна
продольной оси.
Рассмотрим работу автопилота в нормальном горизонталь¬
ном полете. Ось корпуса гироскопа В будет при этом направ¬
лена по полету; ось ротора гироскопа А, предварительно также
установленная по направлению полета, будет в дальнейшем со¬
хранять свое направление.
Предположим, что вследствие некоторого возмущения само¬
лет-снаряд начинает вращаться вокруг поперечной оси.
Пусть «j будет угловая скорость, а 13 — момент инерции ро¬
тора гироскопа В. Тогда B^uJ, будет момент количества дви¬
жения гироскопа В. При вращении самолета-снаряда на гиро¬
скоп В будет действовать момент сил инерции, равный
dBi
AL = —
1 dt
Величина этого момента равна
| AfJ = u^I,
где о»! — угловая скорость вращения самолета вокруг попереч¬
ной оси.
Он стремится повернуть верхний конец оси ротора гироско¬
па В направо или налево, в зависимости от направления вра-
220
щения самолета. Этот момент передается на корпус гироскопа,
и пружина, удерживающая корпус в нормальном положении,
будет под действием этого момента деформироваться. Пусть
9 — угол, на который при этом отклоняется корпус гироскопа.
Тогда из условия равновесия моментов получим
WjBi cos = UjWj/j cos 9 = a<f (фиг. 65), (1)
где а — коэффициент жесткости пружины (момент, создавае¬
мый пружиной, предполагается пропорциональным углу 9).
Для малых значений 9, cos 9 ~;1, так что можно написать
(2)
а
Из этой формулы видно, что при ма¬
лых отклонениях и при постоянной
скорости гироскопа угол 9 пропор¬
ционален угловой скорости <!>!•
Таким образом гироскоп В откло¬
няется от своего нормального поло¬
жения всякий раз, как самолет-сна¬
ряд получает вследствие каких-либо
возмущений угловую скорость отно¬
сительно поперечной оси. Это откло¬
нение приводит в действие промежу¬
точное пневматическое устройство,
которое отклоняет руль высоты в нужном направлении.
Это пневматическое устройство состоит из сопла 3 и двух
каналов, идущих от корпуса гироскопа к двум камерам мем¬
бранного реле. При отклонениях гироскопа мембранное реле
приводит в движение клапан, регулирующий поступление сжа¬
того воздуха в ту или другую полость сервомотора, отклоняю¬
щего руль высоты.
Ось гироскопа А сохраняет свое направление в пространстве.
Поэтому, когда самолет-снаряд повернется на некоторый угол
вокруг поперечной оси, кольцо 1 повернется относительно ра¬
мы 2, и сопло 4, связанное с кольцом 1 посредством эксцентрич¬
ного диска 5 и рычажной системы, также повернется, заставляя
работать то же реле, что связано с гироскопом В (см. фиг. 64).
Таким образом гироскоп А также управляет вращением са¬
молета-снаряда относительно его поперечной оси. Разница меж¬
ду гироскопами А и В состоит в том, что гироскоп А реагирует
на отклонение самолета (при его вращении вокруг поперечной
оси), а гироскоп В реагирует на угловую скорость этого откло¬
нения. Назначение гироскопа В состоит в том, чтобы демпфи¬
ровать возникающие при стабилизации колебания.
Упрощая задачу предположением о том, что действующий
на самолет момент слагается из двух моментов: момента, про¬
порционального углу отклонения (сигнал с гироскопа А), и мо-
221
Фиг. 65.
мента, пропорционального угловой скорости отклонения (сигнал
с гироскопа В), получим
/р= —р? — (3)
где / — момент инерции самолета-снаряда относительно его
поперечной оси;
р и q— коэффициенты пропорциональности;
ср — угол поворота относительно поперечной оси.
Разделив на I, получим
ф + -у-? + -у? = 0.
Подставляя ср = е“/ будем иметь
а2 + -?-а + -^- = 0,
I I ’
откуда
“4 = —^-+1/
«2 J 21- V \2l) I
Следовательно, в случае
\2/ / I
получаем
ср = Аеа‘< + Beait,
где a-L и а2 отрицательны, а постоянные А и В определяются
начальными значениями ср и ср.
В случае
\2// /
решение имеет следующий вид:
<Р = е~ % р sin - g-p + В cos j/^- - (^t =
=е~”‘ С sin _|/f-(тГ^+^
где
С = угА2 + В2 и >p = arctg —.
А
Демпфирующий член е появляется вследствие наличия
гироскопа В.
Предположим теперь, что под влиянием некоторого возму¬
щения самолет-снаряд изменяет свой курс, т. е. поворачивается
вокруг вертикальной оси. Вследствие появляющейся при этом
угловой скорости корпус гироскопа С получит отклонение. Свя-
222
занное с гироскопом сопло приведет в действие мембранное ре¬
ле, управляющее клапанами сервомотора. Сервомотор придет в
движение, и руль поворота отклонится в нужном направлении.
Все произойдет так же, как в случае вращения относительно
поперечной оси.
Одновременно корпус гироскопа А повернется относительно
кольца 1 (вследствие того, что гироскоп А сохраняет свое на¬
правление в пространстве). При этом отклонится от своего
нормального положения сопло 6, связанное с гироскопом А
посредством рычажного механизма. Отклонение сопла 6 при¬
ведет в действие мембранное реле, связанное с гироскопом С.
Таким образом при поворотах вокруг вертикальной оси ги¬
роскопы А и С играют ту же роль, что гироскопы А и В при
поворотах вокруг поперечной оси; гироскоп А при этом реаги¬
рует на отклонение самолета от курса, а гироскоп С — на угло¬
вую скорость отклонения.
До сих пор мы рассматривали работу автопилота в горизон¬
тальном полете. Для обычного самолета такой полет является
нормальным. Но летающий без экипажа самолет-снаряд должен
автоматически управляться не только в горизонтальном полете,
но и при наборе высоты после старта и при снижении перед
целью.
Для того чтобы управлять подъемом самолета-снаряда после
старта и обеспечить по достижении заданной высоты переход в
горизонтальный полет, нужно поворачивать определенным об¬
разом раму 2, несущую гироскоп А. Этот поворот осуществляет¬
ся при помощи сервомотора 7, работа которого находится в
зависимости от барометрического давления окружающей атмо¬
сферы, т. е. от высоты.
Так как ось гироскопа А сохраняет заданное ей первоначаль¬
но направление (горизонтальное), то плоскость кольца 1 остает¬
ся все время вертикальной, и так как положение сопла 4 зави¬
сит только от относительного расположения рамы 2 и кольца 1,
то можно, вращая должным образом раму 2, изменять положе¬
ние сопла 4 так, чтобы на определенной высоте рули высоты
были отклонены на определенный угол и чтобы угол подъема
был, следовательно, определенной, заданной функцией высоты.
Что касается гироскопа В, то так как он реагирует на угло¬
вую скорость вращения самолета-снаряда относительно попе¬
речной оси, то при подъеме с постоянным углом набора высоты
он не будет работать. Нужно только, чтобы его чувствительность
не была чересчур велика, для того чтобы он не препятствовал
переходу самолета-снаряда от режима набора высоты к режиму
горизонтального полета, происходящему с небольшой угловой
скоростью.
Рассмотрим устройство, поворачивающее раму 2 во время
подъема самолета-снаряда. Через трубку 8 в цилиндр 9 подает¬
ся сжатый воздух. В этом цилиндре перемещается золог-
223
ник 10, приводящийся в движение от рычага 11, жестко свя¬
занного с рычагом 12. Этот коленчатый рычаг может вращаться
вокруг оси 13. Рычаг 11 приводится в движение анероидной
коробкой 14, расположенной в корпусе 15. Трубка 16 соединяет
этот корпус с окружающей атмосферой. Рычаг 12 соединен по¬
средством пружины 17 с ползуном 18, жестко связанным со
штоком 19 поршня 20. Ползун 18 скользит по направляющему
стержню 21, укрепленному на крышке цилиндра сервомотора.
При наборе самолетом-снарядом высоты атмосферное давле¬
ние падает и анероид расширяется, передвигая золотник 10
вправо. При этом сжатый воздух через трубку 22 поступает в
сервомотор и поршень опускается. Пружина 17 давит на ры¬
чаг 12, рычаг 11 отходит влево, золотник 10 возвращается в
первоначальное положение, дальнейшее поступление сжатого
воздуха в цилиндр сервомотора прекращается и поршень оста¬
навливается в некотором среднем положении.
Таким образом положение поршня, а следовательно, и ра¬
мы 2 является функцией высоты. Начальная настройка анерои¬
дов, определяющая высоту полета, соответствующую определен¬
ному положению руля высоты, производится поворотом винта 23.
Для коррекции гироскопа А от компаса на раме 2 установ¬
лены два электромагнита с обмотками 16 и 17 (см. фиг. 63).
При случайном отклонении оси гироскопа А вследствие какого-
нибудь возмущения курс самолета-снаряда изменяется, компас
обнаруживает отклонение от курса и один из двух электромаг¬
нитов включается. Этот электромагнит действует на кольцо 1
и вызывает прецессию оси гироскопа А, заставляя ее вернуться
в первоначальное положение.
Для демпфирования колебаний корпусов гироскопов В и С
служат сделанные из животной ткани мембраны 24 и 25, свя¬
занные с корпусами гироскопов тонкими стержнями 26.
Для того чтобы можно было устанавливать ось гироскопа А
в нужном начальном положении, до того как ротор начал вра¬
щаться, предусмотрен рычаг 27, вращающийся вокруг оси 28.
Этот рычаг связан с пружиной 29, стремящейся установить его
в нужное положение. Ось гироскопа А фиксируется в нужном
положении при помощи укрепленного на рычаге 27 штыря 30.
Собачка 32, вращающаяся вокруг оси 33, препятствует при этом
возвращению рычага 27 в нормальное положение (изображен¬
ное на фигуре). Когда ротор гироскопа набирает нужное число
оборотов, срабатывает электромагнит 34, собачка 32 притяги¬
вается, и рычаг 27 освобождается, возвращаясь в положение,
указанное на фигуре.
Одновременно замыкается контакт и устанавливается элек¬
трическая связь между компасом и укрепленными на раме 2
корректирующими электромагнитами.
Глава VII
РАКЕТА ДАЛЬНЕГО ДЕЙСТВИЯ ФАУ-2
§ 1. От баллисты к ФАУ-2
От баллисты греков до ракеты дальнего действия ФАУ-2
артиллерия проделала большой путь.
Баллиста была предшественницей катапульты (подвижного
метательного орудия), применявшейся в средние века при оса¬
дах городов и крепостей. Катапульта использовалась для мета¬
ния боченков с горящей смолой, раскаленных ядер и тяжелых
камней, весящих до полутонны, на расстояние 200-5-300 ярдов.
Вслед за греками баллисту стали применять также и рим¬
ляне, которые усовершенствовали ее.
Пушки впервые появились между 1300 и 1350 гг.; например,
они участвовали в сражении при Кресси в 1346 г. Тяжелые мор¬
тиры большего калибра, чем калибр орудий, применявшихся
немцами при осаде Льежа в 1914 г. и известных под названием
«Большая Берта» (калибр 42 см), применялись турками еще при
осаде Константинополя в 1453 г. Эти пушки, так называемые
бомбарды, имели калибр около 80 см и стреляли снарядами
весом до 600 кг.
Баллистика как наука развивалась в те времена очень мед¬
ленно, и артиллерия, как правило, очень мало влияла на исход
сражения или войны. Большие возможности открылись перед
артиллерией с появлением нарезных стволов, которые позволили
вести огонь тяжелыми металлическими снарядами с большим
количеством взрывчатого вещества, на большие расстояния. В то
же время с увеличением начальной скорости повысилась про¬
бивная способность снаряда.
Сюрпризами первой мировой войны явились «Большая Бер¬
та», обстреливавшая форты Льежа, и «Paris canon» — дально¬
бойная пушка, из которой производился обстрел Парижа с
15 Динамика ракет
225
большого расстояния. Пушки, которые могли вести огонь через
Ла Мант, применялись во второй мировой войне обеими воюю¬
щими сторонами.
Ракеты были известны с древних времени. Их применя¬
ли еще китайцы и индусы; греки применяли зажигательные ра¬
кеты против вражеских кораблей.
В период между четырнадцатым и шестнадцатым веками ра¬
кеты вновь широко применялись при осаде городов и крепостей.
Примерно в 1800 г. английский офицер Конгрев, познако¬
мившись с индусскими ракетами, перенес их в Англию и усо¬
вершенствовал. Англичане применяли эти ракеты против вра¬
жеского флота 1.
Батареи реактивных снарядов применялись Наполеоном в
сражениях за Лейпциг и Ватерлоо. Последний раз они приме¬
нялись в битве за Севастополь в 1855 г., после чего в связи
с развитием нарезной артиллерии перестали применяться. Одна¬
ко в последней войне ракеты опять стали применяться, но в
более совершенной форме.
Самолёт-снаряд ФАУ-1 —это современная модернизирован¬
ная «баллиста», а ФАУ-2— «ракета модели 1944 г.».
§ 2. История развития ракетных снарядов и применение их
во второй мировой войне
Научное изучение ракетной техники началось в нашем веке.
В 1912 г. Эсно Пельтри в лекции, прочитанной во Французском
обществе физиков, поставил задачу исследования высших слоев
атмосферы с помощью ракет, а также остановился на вопросе
о возможности межпланетных путешествий.
В 1914 г. была опубликована работа Циолковского под на¬
званием «Исследование мировых пространств реактивными при¬
борами» 2 * * * * * В.
1 В 50-60-х годах прошлого столетия русский артиллерист генерал
К. И. Константинов разработал конструкцию и наладил производство бое¬
вых, спасательных и сигнальных ракет, которые по своим баллистическим
данным значительно превосходили ракеты, принятые в то время в ино¬
странных армиях.
Труды К. И. Константинова по теории, расчету, конструированию и
производству ракет были опубликованы в 50— 60-х годах на русском и
французском языках. {Прим ред.).
г Отметим, что часть I труда К. Э. Циолковского .Исследование ми¬
ровых пространств реактивными приборами** была опубликована значи¬
тельно раньше работ Эсно Пельтри, а именно в 1903 г.
В 1911 — 1912 гг. была опубликована в журнале .Вестник воздухопла¬
вания* часть И этого труда, а в 1914 г.- отдельная брошюра (на которую
ссылается автор), представляющая, как это указано на обложке, .до¬
полнение к I и II частям труда того же названия*. Там же дается точная
библиографическая справка о работах Циолковского 1903 и 1911 — 1912 гг.
Этот факт, конечно, должен был быть известен авторам. {Прим. ред.).
226
В 1919 г. профессор Годдар предложил использовать ракету
для достижения больших высот. Этот ученый проделал большую
экспериментальную работу и является одним из пионеров ракет¬
ной техники.
В 1923 г. профессор Оберт опубликовал свою работу «Ракета
в межпланетное пространство». В этой книге изложены основы
теории ракет'.
Серьезное развитие ракетной техники в Германии начинается
с 1928—1930 гг. с работ группы изобретателей; эта группа в
1933 г. связалась с Отделом вооружения армии. В 1937/38 гг,
был образован Научно-исследовательский Институт в Пеене-
мюнде, на создание которого было затрачено 300 миллионов
марок. С этого времени начинается быстрый прогресс. Был раз¬
работан и затем осуществлен ряд проектов. Ракеты, созданные
в этом институте, обозначались Al, А2 и т. д. до АЮ, из ко¬
торых только ракета А4, известная нам как ФАУ-2, нашла при¬
менение в последней мировой войне. Ракета ФАУ-2 была созда¬
на под руководством проф. Брауна.
Первые экспериментальные работы в Пеенемюнде с раке¬
той А1 велись еще в 1933 г. Эта ракета весила 150 кг. Усовер¬
шенствованная модификация ее — ракета А2 — была создана
в 1934 г.; она достигала высоты 2000 м. В 1938 г. были проведе¬
ны первые эксперименты с ракетой АЗ. Эта ракета, весившая
740 кг, имела длину 7,5 м и диаметр 0,75 м. Двигатель раке¬
ты АЗ работал в течение 45 сек. и развивал тягу 1480 кг.
Ракета достигала высоты около 13 000 м. При надлежащем
угле бросания горизонтальная дальность этой ракеты достига¬
ла 18 км.
В 1940 г. началась работа над ракетой А4. В июле 1942 г.
она была впервые испытана, а первые успешные результаты бы¬
ли получены в октябре того же года после пуска четвертой
ракеты этого типа. Горизонтальная дальность ракеты А4 равня¬
лась 270 км.
Bi конце 1942 г. был отдан приказ начать массовое произ¬
водство ракет этого типа, для чего был выделен ряд заводов.
Так, например, в Нордхаузене был построен гигантский подзем¬
ный завод, главный туннель,которого имел длину 2 км, а по бо¬
кам его шли дополнительные туннели. На заводе было занято
30 000 рабочих. Оборудование его состояло из 25 000 станков.
Производительность завода доходила до 30 ракет в день.
Каждая ракета ФАУ-2 состояла примерно из 30 000 различных
деталей, включая детали двигателя. Кроме того, этот завод про¬
изводил также самолёты-снаряды ФАУ-1 и газовые турбины для
реактивных истребителей.
15*
227
1 В первом издании книги Оберта результаты Циолковского были
даны без всяких ссылок на его оригинальные статьи. Позднее Оберт в
частных письмах признал приоритет Циолковского по теории движения
ракет. (Прим. ред.).
Впервые ракета ФАУ-2 была применена против Англии в
сентябре 1944 г. В четверг 7 сентября 1944 г. в Вассенар близ
Гааги (Голландия) прибыла немецкая «зондеркоманда». На¬
чальник этой зондеркоманды практически был автономен и по¬
лучал инструкции непосредственно из Главной ставки в Берли¬
не. Эта зондеркоманда немедленно по прибытии временно вы¬
селила жителей из домов в конце Konijnenlaan, Koekoekslaan и
Lijsterlaan (см. пункты 1 и 2 на карте I). Жителям было пред¬
ложено покинуть в течение двух часов свои жилища, забрав с
собой все вещи, и оставить открытыми окна и стеклянные две¬
ри. От пункта Rijksstraatweg через Rust en Vreugdlaan было
проложено несколько кабелей, питавшихся от нормальной сети
(напряжение 380 вольт, частота 50 периодов в секунду). На
следующий день в пятницу 8 сентября прибыла колонна из
шести автомашин. Примерно в 6 ч. 45 мин. вечера по средне¬
европейскому летнему времени одновременно с перекрестков до¬
рог, помеченных цифрами 1 и 2 на карте I, были выпущены две
ракеты ФАУ-2. Сразу после этого пусковые установки были
увезены.
На следующий день был отдан приказ о полной эвакуации
населения из Nieuw-Wassenaar, которая должна была закон¬
читься к 5 час. вечера в среду 13 сентября 1944 г. Тем временем
пусковые установки были перевезены в парк de Beukenhorst,
откуда в воскресенье вечером было выпущено пять первых ра¬
кет (пункт 3 на карте). По окончании эвакуации, в среду 13 сен¬
тября ракеты также были пущены с перекрестков дорог 4 и 5.
В воскресенье 17 сентября стартовые команды отбыли в Овер-
вин близ Гарлема. Неделей позже жителям Вассенара было
разрешено вернуться на свои места.
В течение всего этого периода стояла солнечная, сухая и
теплая погода. Следует отметить, что в течение этого времени
не было никаких аварий. Отъезд стартовой команды в воскре¬
сенье 17 сентября можно объяснить военными действиями на
востоке Голландии (воздушный десант вблизи Nijmegen и
Arnhem и в Veluwe).
В четверг 3 октября «зондеркоманда» возвратилась и в тот
же день был возобновлен обстрел ракетами ФАУ-2 из «Де-
Букенхорста» (пункт 3 на карте). Так продолжалось до
27 октября.
За этот период с 4 по 27 октября авария произошла только
с двумя ракетами; они взорвались на очень большой высоте.
В пятницу 27 октября в 2 часа дня произошла первая круп¬
ная катастрофа. При пуске ракеты с пункта 3 она поднялась
на высоту около 100 м, после чего упала, произведя разруше¬
ния и убив 12 человек стартовой команды. После катастрофы
этот пункт был оставлен и пуск ФАУ-2 был прекращен прибли¬
зительно на неделю. Во время катастрофы у соседних зданий
были снесены крыши. Повреждение окон наблюдалось в радиу-
228
Динамика ракет
се до 700 м от места взрыва. После катастрофы немецкое
командование заявило, что заряд ракеты не взорвался, а повреж¬
дение было вызвано взрывом кислорода и этилового спирта. Но
это было не так; заряд также взорвался. 4 ноября обстрел ра¬
кетами ФАУ-2 был возобновлен, но уже из имения Langenhorst,
помеченного на карге цифрой 7. Автопарк и ремонтный цех были
размещены в молочной ферме Rust en Vreugd (S). Зарядка ра¬
кеты взрывчатым веществом производилась в парке de Witten-
burg (9). Несколькими днями позже начался обстрел также из
Duindigt (пункт 10).
В Duindigt имелись две пусковые установки., которые рабо¬
тали попеременно, но иногда и вместе. Все автомашины, аппа¬
раты и прочее оборудование снабжались отметками Schuszstelle 1
и Schuszstelle 2 (пункты 1 и 2). Эти огневые позиции не меняли
своего местоположения в течение ноября и декабря 1944 г. и
января 1945 г.; они находились на расстоянии нескольких сот
метров северо-восточнее Duindigt-Hoeve. В течение этих меся¬
цев стояла плохая погода, все время было облачно, так что
английские бомбардировщики не появлялись. За этот период
произошло наибольшее число аварий, в среднем 2О°/о. Макси¬
мальное число аварий за одну ночь достигло пяти.
Чаще всего ракеты падали на землю, набрав всего 300—
500 м высоты. Поэтому большинство из них падало вблизи места
старта и взрывалось там. Наибольшее число аварий падает на
Waalsdorperweg. ।
Места падения ракет в городе Гааге отмечены на карте чер¬
ными кружочками.
Вышеупомянутое место Waalsdorperweg отмечено цифрой I.
Если отсчитывать от Duindigt (J0), то оно лежит точно на на¬
правлении на Лондон.
Кроме того, одна ракета, выпущенная с пункта 11, упала
на дом крестоносцев Св. Иона в Vredenburchrweg (см. II),
другая, выпущенная из пункта 13,— в Indigostraat (III), и
третья, выпущенная из пункта 10,— в Riouwstraat (IV).
Из пункта 11 ракеты выпускались только в течение корот¬
кого периода времени. Возможно, что это место сочли опасным,
так как по соседству располагались военные склады.
Однако более вероятно, что там оказался чересчур мягкий
грунт (польдер — низкая полоса земли, защищенная со стороны
моря плотиной). Из «Те Werve» (12) также предполагалось
производить обстрел ракетами ФАУ-2, но из-за мягкого грунта
ни одной ракеты выпущено не было.
В Duindigt твердый песчаный грунт и, очевидно, поэтому
Duindigt в течение пяти месяцев служил местом старта ФАУ-2.
В субботу 7 октября ФАУ-2 были впервые выпущены также
из Ockenburgh, помеченного на карте 13.
229
В конце февраля немцы использовали для пуска ФАУ-2
также и пункты в Statenkwartier (14) и в Zorgvliet (15). Но
с этих мест было выпущено всего лишь несколько ракет.
Три или четыре ракеты были выпущены еще из Haagsche
Bosch (16).
За все время в среднем выпускалось не более шести ракет
в сутки.
23 марта в 9 час. была выпущена ракета, которая описала
над Гаагой сложные круговые и спиральные кривые и упала в
Duinstraat, произведя большие разрушения.
Последние ракеты были выпущены 27 марта 1945 г. в 3 ч.
01 мин. и 4 ч. 02 мин. дня, и в 7 ч. 18 мин. вечера (по средне¬
европейскому времени). Количество ракет, выпущенных из Гааги
и ее окрестностей, указано в следующей таблице:
Количе¬
ство выпу”
щенных
ФАУ-2
Число
аварий
Сентябрь
Октябрь
Ноябрь
Декабрь
Январь
Февраль
Март
24
81
142
132
229
207
212
1 027
0
4
12
17
15
12
19
79
Около 600 из этих ракет упало на Лондон.
В четверг 29 марта 1945 г. команда, производившая пуск
ФАУ-2 (около 150 человек), отбыла из Wassenaar через
Leyden в восточном направлении вместе со всем парком авто¬
машин и 60 неиспользованными ракетами.
Отметки на карте Гааги и ее окрестностей.
Места старта ФАУ-2
1 — перекресток Konijnenlaan-Koekoekslaan.
2 —перекресток Schouwweg—Rust en Vreugdlaan.
3 — „de Beukenhorst".
230
КАРТА П
Динамика ракет
ГОЛЛАНДИЯ
Масштаб I 2 000 000
КАРТА III
район ГЕЛЛЕНДОРНА
Масштаб I-2OOOO
Нехе!
Динамика ракет
+e/yyse/_
4 —перекресток Schouwweg—Oud Wassenaarscheweg.
5 — перекресток Beukenlaan — Oud Wassenaarscheweg.
6 — перекресток Wittenburgerweg—Stoeplaan.
7 — „Langenhorst".
8 — „‘t Hofje van Hooge Linde" („Rust en Vreugd").
9 — „De Wittenburg*.
10 — .Duindigt”.
11 — „Overvoorde*.
72—„Те Werve“,
13 — „Ockenburgh".
14 — Willem de Zwljgerlaan („Statenkwartier").
15 — Zorgvliet".
16 — Haagsche Bosch.
17
— Kerkhoflaan.
18
19 — Rijswijksche Bosch.
Места падения ракет в городе
I—за Waalsdorperweg.
II— Vredenburgerweg (Дом крестоносцев Св. Иона).
Ill—Indigostraat.
IV — Riouwstraat.
V —Haagsche Bosch.
Радиостанции
А. Здание Bataafsche Import Maatschappij (Royal Dutch
Shell).
B. Block of flats Jozef Israelplein (переименованный немцами
в Thorn Prikkerplein).
На фиг. 66 показан план парка «Duindigt», помеченный на
карте I номером 10, близ Wassenaar, с отмеченными местами
старта ФАУ-2 и деревьями, служившими ориентирами при опре¬
делении направления на Лондон. Для этой цели выбирали три
дерева и стартовую установку располагали в треугольнике, об¬
разованном этими деревьями.
На фиг. 67 воспроизведена часть фиг. 66 в более крупном
масштабе. На ней показана триангуляционная сетка для точного
определения направления на Лондон.
Кроме Гааги и ее окрестностей, старт ФАУ-2 производился
также и из других мест Голландии. Но Лондон обстреливали
только из Гааги и ее окрестностей и из Hoek (карта II). Из
Gaasterland (самый северный пункт на карте II) производили
обстрел ракетами ФАУ-2 других мест Англии. Кроме того, об¬
стрел производили из Антверпена, Льежа и других пунктов
Бельгии. Все места старта выбирались на участках с твердым
песчаным грунтом.
231
232
Фиг. 67.
Фиг. 66.
На карте III показаны места старта ФАУ-2 вблизи НеПеп-
doorn в провинции Overijssel.
Самолеты-снаряды ФАУ-Г пускались из Nijverdal, а также
из других мест в Overijssel и в Gelderland.
§ 3. Общее описание конструкции ФАУ-2
На фиг. 68 и 69 дан общий вид ракеты ФАУ-2.
Как видно из фигуры, ракета представляет собой обтекае¬
мое тело, обшитое подобно фюзеляжу самолёта листовой
сталью, покрывающей каркас из круглых шпангоутов и про¬
дольных стрингеров. Диаметр ракеты приблизительно 1,8 м, дли¬
на 14 м.
Боевая часть, помещающаяся в носу ракеты, содержит 1 г
взрывчатого вещества и имеет два взрывателя. Непосредственно
за боевой частью находится отделение, заключающее механизмы
управления.
Средняя часть ракеты занята баками с горючим. Эти баки
представляют собой цилиндрические тела; первый бак (сосед¬
ний с отделением управления) содержит 75ю/о-ный водный
раствор этилового Спирта, второй бак — жидкий кислород. Баки
вмещают приблизительно 3500 кг спирта и 5000 кг жидкого
кислорода.
Из баков жидкости подаются насосами, приводимыми в дви¬
жение паровой турбиной, в камеру сгорания. После сгорания
газы с температурой около 1700° С расширяются в сопле и,
выходя наружу, создают тягу приблизительно от 27 000 до
30 000 кг.
Камера сгорания и сопло расположены в хвостовом отделе¬
нии ракеты. На этой конусной части ракеты расположены че¬
тыре неподвижных стабилизатора, на концах которых находятся
подвижные воздушные рули. Каждый из этих воздушных рулей
приводится в движение отдельным электромотором посредством
цепной передачи.
Кроме воздушных рулей, на выходе из сопла находятся че¬
тыре меньших графитовых руля, расположенных в газовом по¬
токе. Эти газовые рули могут быть использованы только во
время работы ракетного двигателя. Они приводятся в движение
гидравлическими сервомоторами, которые управляются с по¬
мощью электричества гиропилотом, расположенным в отсеке
управления позади боевой части. Электромоторы, приводящие
в движение воздушные рули, также управляются гиропилотом.
Два насоса, подающие горючее, вращаются с тем же числом
оборотов, что и турбина, и рассчитаны таким образом, что по¬
дают спирт и жидкий кислород в нужной пропорции.
Турбина приводится в движение паром. Этот пар образуется
при смешивании перекиси водорода и перманганата кальция.
Эти вещества смешиваются в газовом генераторе, из которого
233
Фиг. 68. Общий вид
ракеты ФАУ-2.
/—цепная передача к воз¬
душным рулям; 2—электро¬
мотор; 3—форкамеры; 4 —
трубопровод для подачи
спирта; 5—воздушные бал¬
лоны; б-задний шпангоут;
7—сервоклапан для спирта;
8— каркас ракеты; 9—ра¬
диоаппаратура; 10—трубо¬
провод от спиртового ба¬
ка к головной (боевой) ча¬
сти; 11—носовая часть с
взрывателем; /2—труба с
проводами; 13—централь¬
ная трубка взрывателя;
//—электровзрыватель;
15— фанерная рама; 16—
баллоны с азотом; 17— пе¬
редний шпангоут; 18— ги¬
роскопы тангажа и курса;
19— горловина для заливки
спирта; 20—двухстенная
трубка для подачи спирта
к насосу; 2/—горловина
для заливки жидкого ки¬
слорода; 22-гибкие трубо¬
проводы; 23—бак с пере¬
кисью водорода; 24—труб¬
чатая рама для крепления
турбонасосной установки;
25— бачок с перманганатом
(газовый генератор распо¬
ложен сзади); 26— распре¬
делитель кислорода; 27 —
спиртовые трубки для ох¬
лаждения; 28— входное от¬
верстие для спирта; 29—
электрогидравлическиесер-
вомоторы; 30—стабилиза¬
торы; 31—газовые рули;
32-воздушные рули; 53-
камера сгорания и сопло;
34—турбонасосный агре¬
гат; 35 -отсек управления;
36— спиртовой бак; 37—бак
с жидким кислородом.
234
Фиг. 69. Хвостовая часть ракеты ФАУ-2.
Позиции те же, что на фиг. 68.
235
образующийся при химической реакции перегретый пар подает¬
ся в турбину.
На фиг. 70 дана общая схема внутреннего устройства раке¬
ты. Баллоны с азотом в отсеке управления, показанные на фи¬
гуре, подают сжатый азот для приведения во вращение роторов
гиропилота и для других устройств управления.
Основные данные ФАУ-2
Вес взрывчатого вещества (аматол) 980 кг
Вес корпуса 1 750 ,
Вес турбонасосной установки 450 ,
Вес камеры сгорания 550 ,
Вес вспомогательных устройств 300 ,
Вес спирта и жидкого кислорода 8 750 ,
Вес перекиси водорода и перманганата . ... 200 г
Полный вес ракеты . . 12 980 кг
Полная тяга 27 200 кг
Турбина
Мощность при 5000 об/мин 675 л. с.
Число оборотов в минуту 5000
Рабочее давление 21 ата
Давление на выходе 1,1 ата
Расход пара (21 ата, 478 °Т) 9 кг на 1 л. с. час
Расход пара 1,68 кг/сек
Наибольшая продолжительность работы 100 сек.
Средняя продолжительность работы 70 сек.
Полный расход Н2О2 100%-ной 136 кг
Полное количество расходуемого тепла 112 224 кг кал
Полный объем пара при 21 ата, 419Р Т . . . . 16,62 м3
Секундный расход пара при 21 ата, 478° Т . . . 166,2 л/сек
Кислородный турбонасос
Производительность при 5 000 об/мин 75 кг/сек
Потребляемая мощность 320 л. с.
Рабочее давление 24 ата
Спиртовой турбонасос
Производительность при 5 000 об/мин 50 кг1се.к (75%)
Потребляемая мощность 355 л. с.
Рабочее давление 25 ата
§ 4. Ракетный двигатель
Ракетный двигатель (фиг. 71, I и II) состоит из камеры сго¬
рания и сопла. Он имеет форму тела вращения и представляет
собой цельносварную конструкцию, выполненную из листовой
стали толщиной приблизительно 6,5 мм.
236
Фиг. 70. Схематический чертеж ракеты ФАУ-2.
237
238
сч
>>
<
е
*0
0)
t"
s
Й
E(
u
s
e
Фиг. 71. //. Детали двигателя ФАУ-2.
239
Днище головки камеры сгорания (с противоположной сторо¬
ны сопла) имеет двойную стенку. В нем имеются форкамеры 1
(фиг. 71).
В каждой форкамере находится кислородный распылитель,
который представляет полое латунное тело с отверстиями, через
которые в камеру сгорания впрыскивается жидкий кислород в
виде тонких струй.
Со стороны нагнетающей магистрали в кислородном насосе
установлен распределитель (см. фиг. 69 и 72).
Этот распределитель имеет основной 1 и вспомогательный 2
клапаны. Основной клапан прижимается пружиной 3, а вспомо¬
гательный клапан управляется электромагнитом 4. Когда через
электромагнит проходит ток, вспомогательный клапан закры¬
вается, а когда ток прерывается, клапан открывается пружи¬
ной 5.
Перед стартом, когда ракета находится в вертикальном по¬
ложении на стартовой установке (см. § 11 этой главы), электро¬
магнит 4 получает ток от городской электросети. Перед пуском
ракеты ток в соленоиде 4 прерывается, вспомогательный кла¬
пан 2 открывается, и жидкий кислород самотеком поступает
через отверстия 6 в кольцеобразную полость 7, из которой вы¬
ходят шесть распределительных трубок a, b, с, d, е и f. Затем,
когда начинает работать турбина, под давлением поступающего
жидкого кислорода открывается основной клапан.
Каждая из шести распределительных трубок разветвляется
на три ветви, так что получается система из 18 распределитель¬
ных трубок, идущих к 18 кислородным распылителям в фор¬
камерах.
Спирт от бака к насосу течет по трубке с двойной стенкой,
проходя через бак с жидким кислородом (см. фиг. 68), где он
сильно охлаждается Из насоса спирт поступает в охладитель¬
ную рубашку сопла, которая сообщается с рубашкой камеры
сгорания. С этой целью сопло и камера сгорания имеют двой¬
ные стенки и в пространстве между ними циркулирует спирт.
Таким образом спирт, поступая в рубашку сопла через шесть
питающих трубок 2 (фиг. 71), течет далее через общую ру¬
башку сопла и камеры сгорания и попадает в пространство
между стенками днища головки камеры сгорания.
Одновременно спирт подается под давлением через латун¬
ные конические сопла 3 (деталь А, фиг. 11,11) и отверстия 4,
а также через латунные конические сопла 5 во внутренних ко¬
нических стенках форкамер 6, где смешивается с жидким ки¬
слородом, поступающим из латунных распылителей.
Пространство между стенками днища головки камеры сго¬
рания соединяется с трубками 7, которые связаны с кольцевыми
трубами 8, 9, 10 и 11, приваренными к внешним стенкам камеры
сгорания и сопла. Кольца 8, 9 и 10 (деталь В) соединены (при¬
варены) с кольцевыми каналами 12 в спиртовой рубашке, об-
240
16 Динамика ракет
241
Фиг. 72. Кислородный распределительный клапан.
разованной двойными стенками камеры сгорания. Каналы 12
имеют отверстия 13 для прохождения спирта через эту рубаш¬
ку в пространство между стенками днища головки камеры сго¬
рания. Оси этих отверстий параллельны оси камеры сгорания
и сопла.
В кольцевых каналах 12 просверлены также радиальные от¬
верстия 14 (не сообщающиеся с отверстиями 13), через которые
спирт может попадать из колец 8, 9 и 10 в камеру сгорания.
Кольцо 11 (деталь Е) соединено (приварено) с последним
кольцевым каналом рубашки камеры сгорания и сопла, имею¬
щим только небольшие радиальные отверстия, через которые
спирт может проходить из кольца 11 внутрь сопла. Четыре
трубы 7, соединенные с кольцами 8, 9, 10 и 11, соединяются
также с областью между стенками днища головки камеры сго¬
рания, так что небольшое количество спирта после прохожде¬
ния рубашки камеры угорания разбрызгивается на внутренние
стенки камеры сгорания и сопла, образуя газообразную за¬
щитную пленку, которая в известной степени защищает эти
стенки от действия высокой температуры горения. Компенсаци¬
онные витки 15, образуемые трубами 7, служат для предохра¬
нения труб при тепловом расширении. Компенсационные коль¬
ца 16, 17 и 18, приваренные к наружной стенке камеры сгора¬
ния, соединяют отдельные части камеры и служат для предо¬
хранения камеры при тепловом расширении (см. деталь С).
Таким образом обеспечивается достаточное охлаждение стенок
камеры во всех ее частях и температура ее выдерживается в
безопасных пределах.
Измерения показали, что температура на внутренней поверх¬
ности не превышает 1000° С, тогда как температура горения
равна приблизительно 1700° С. Возможные местные перегревы,
могущие вызвать увеличение напряжений, были исключены. Так
как охлаждающим веществом является спирт, то тепло, кото¬
рое в ином случае терялось бы, возвращается в данном случае
в двигатель. Таким образом эта система охлаждения является
регенеративной. Стенки охлаждаются и одновременно горючее
подогревается, что способствует более эффективному горению.
Центральная трубка 19 связана со всасывающей магистралью
спиртового насоса (см. деталь D). Если давление подачи спирта
становится слишком большим, то открывается клапан 20 в цен¬
тральной трубке 19, прижимаемый пружиной 21 к седлу 22,
и спирт частично течет обратно во всасывающую магистраль
спиртового насоса. При закрытом клапане спирт может также
частично вновь поступать в насос через отверстия 23 и 24. По
четыре таких отверстия 23 имеются в наружных стенках шести
форкамер внутреннего ряда (всего 24) и 12 отверстий 24 сдела¬
ны в стенках центральной трубки 19. Для усиления конструк¬
ции сделаны четыре ребра жесткости 25.
242
§ 5. Турбонасосная установка
На фиг. 73 дан общий вид турбонасосной установки. Она
состоит из паровой турбины, на концах вала которой сидят два
насоса. Турбина и насосы имеют одинаковое число оборотов.
Общая ось вращения установки параллельна поперечной оси
ракеты (оси тангажа), так что эта установка не создает гиро¬
скопических возмущений при повороте ракеты вокруг этой оси
(во время движения по траектории).
Турбина делает 5000 оборотов в минуту и развивает при этом
мощность 675 л. с. Рабочее колесо турбины имеет два ряда ло¬
паток. В первом ряду 1 пар отдает турбине только часть своей
кинетической энергии. Затем пар поступает на лопатки 2 на¬
правляющего аппарата в корпусе турбины, где происходит
далвнейшее расширение и энергия давления частично переходит
в кинетическую энергию. После этого пар поступает на лопатки
второго ряда 3, где происходит дальнейшее расширение, И кине¬
тическая энергия й энергия давления отдаются турбине.
На фиг. 74 детально показаны лопатки направляющего аппа¬
рата. Средний диаметр лопаток и сопел 470 мм, рабочее давле¬
ние 21 ата и давление на выходе 1,1 ата. Расход пара 1,68 кг/сек,
продолжительность работы при этом расходе равна 100 сек.
Насос с левой стороны турбины (фиг. 73) подает в камеру
сгорания спирт, другой насос подает жидкий кислород.
Как видно из чертежа, оба эти насоса обычного центробеж¬
ного типа. Благодаря работе насосов давление в баках с го¬
рючим доводится до 1,4 ата, что предохраняет их от прогиба.
Размеры крыльчатки и других частей насоса можно видеть на
фигуре. Мощность, затрачиваемая на вращение кислородного
насоса при 5000 об/мин, равняется 320 л. с., а на вращение
спиртового насоса при той же скорости — 355 л. с.
Производительность кислородного насоса при 5000 об/мин
равна 75 кг/сек, а рабочее давление 25 ата.
Производительность спиртового насоса при том же числе
оборотов равна 50 кг/сек, а рабочее давление 24 ата.
Общее количество топлива, подаваемого в камеру сгорания,
равно 125 кг!сек. В трубопроводы, соединяющие насосы с ба¬
ками, помещены гибкие соединения для компенсации расшире¬
ния, как показано на фиг. 73 (см. также фиг. 68 и 69).
Конструкция подшипников и других частей турбины и насо¬
сов весьма несложна, но обеспечивает надежную работу уста¬
новки, которая используется всего лишь в течение 70 сек.
§ 6. Описание некоторых клапанов
На фиг. 75 приведен чертеж редукционного клапана. Когда
давление подачи превышает определенную величину, клапан от¬
крывается и часть горючего поступает обратно в область низко-
16*
243
244
Фиг. 73. Общий вид турбонасосной установки.
245
246
Фиг. 74. Детали направляющего аппарата.
Фиг. 75. Редукционный клапан.
го давления. Отверстия 1, 2 и 3 служат для протекания горю¬
чего, когда клапан открыт.
На фиг. 76 изображен автоматический регулятор давления
масла в гидравлической сервосистеме. Масло под давлением
Фиг. 76. Регулятор давления масла.
входит через отверстие 1, проходит фильтр 2, поступает в об¬
ласть 3 и производит давление на мембрану 4. Масло подогре¬
вается электронагревателями 5. Когда давление на мембрану 4
247
превышает определенное значение, клапан открывается, масло
поступает в область 6 и оказывает давление на мембрану 7.
Область 6 соединяется с распределяющими трубками. Когда
давление масла в этой области превышает некоторую величину,
клапан опять закрывается, сжимая при этом пружину 8. Пру¬
жина 9 служит для точного регулирования величины давления
поворотом винта 10.
Клапан 11 является предохранительным. Он открывается,
когда давление становится слишком большим.
На фиг. 77 показан один из многих электрических клапанов,
установленных в ракете ФАУ-2. Сжатый воздух поступает через
трубку 1. Когда электромагнит не находится под током, связь
между трубкой 1 и областью 2 прерывается, и эта область через
отверстие 3 сообщается с окружающей атмосферой.
§ 7. Термодинамика ракетного двигателя
Ракетный двигатель состоит из двух основных частей: 1) ка¬
меры сгорания, 2) сопла.
В камере происходит сгорание топлива и химическая энергия
топлива переходит в тепловую энергию газов.
В сопле тепловая энергия переходит в кинетическую энер¬
гию выходящих газов; при этом создается тяга* движущая
ракету.
Процесс, происходящий в камере сгорания, непрерывен. Че¬
рез р0 и о0 обозначим давление и удельный объем газов в этой
камере. Насосы, питающие камеру спиртом и кислородом, долж¬
ны преодолевать давление р0. В этом смысле мы можем ска¬
зать, что давление р0 в камере сгорания определяется работой
насосов.
Если обозначить через Е удельную Химическую энергию
топлива (т. е. химическую энергию единицы веса горючей сме¬
си), то теоретическая скорость истечения будет
cTeop = V2iE. (1)
С другой стороны, эта теоретическая скорость должна рав¬
няться действительной скорости, если при адиабатическом рас¬
ширении в сопле давление будет падать от р0 до 0. Согласно
теории, изложенной ниже (стр. 254), эта скорость равняется
^т«=|/ 2gPoVo—j-, (2)
. СР
где k= —, а с_ и cv — удельные теплоемкости газов соот-
cv х
ветственно при постоянном давлении и постоянном объеме.
Так как
✓* — г
mix итеор»
248
249
Фиг. 77. Электроклапан.
то
2gpo®o^ZY = 2gF,
•откуда
П — 1 £ /пч
Ро = —г—— (3)
« t>o
или
4-1 Е
Vg = ———. (4)
я Ро
Таким образом если рй, определяемое работой насосов,
известно, то т0 можно найти из формулы (4).
Температура газов в камере сгорания может быть найде¬
на из соотношения
PgV0 = RTp или Тд=р-^, (5)
к
где R = cp — cv (см. стр. 252). Как видно из формулы (3), дав¬
ление рй зависит от природы газов, образующихся при горе¬
нии (от А), и пропорционально удельной химической энергии Е.
Если m будет заданное количество отбрасываемой в еди¬
ницу времени массы, а р0 — заданное давление в камере сго¬
рания, то производительность насосов также должна равняться
m при давлении р0. Если через Укаи обозначить объем камеры
сгорания, то вес заряда в камере сгорания будет равен
О = ^каи7о,
где т0 — удельный вес.
Но
у 1 Pok
10 v0 (k - 1) Е ’
так что
q Ррк'кам^ zg\
— (k - 1) Е ' k ’
В сопле газ расширяется и его энер¬
гия переходит в кинетическую энергию.
Это сопло имеет коническую форму, как
показано на фиг. 78, и круглое поперечное сечение. На фиг. 78
показан элемент газа толщиной dx с поперечным сечением F.
Если у будет удельный вес газа в этом сечении, то масса этого
элемента будет
F-(dx
g
250
Фиг. 78.
Если p + dp и р—давления на правой и левой гранях эле¬
мента газа, то на него действует сила—Fdp. Если с — ско¬
рость газа в поперечном сечении F, то имеем
Г g dt
Но dx = cdt и, следовательно,
— dp=— с de,
g
где т = —, а -о—удельный объем газа.
, v
Следовательно,
. с de
— vdp= —
g
или
Р Ро
f , f , с* - «0
— I v dp = I v dp = ,
d J 2g
Pc P
где c0 — скорость газа во входном сечении сопла, а с — ско¬
рость газа в выходном сечении. В большинстве случаев мож¬
но считать со = О.
Процесс расширения в сопле в первом приближении можно
считать адиабатическим, т. е. без теплообмена с внешней сре¬
дой. Поэтому рассмотрим сперва адиабатический процесс в об¬
щем виде.
Если dQ — -бесконечно малое количество тепла, сообщаемое
единице веса газа, то для идеального газа будет иметь место
соотношение
dQ = cvdT + р dv. (7)
Так как
pv = RT,
то
pdv + vdp = R dT,
откуда
pdv+vdp
~ R ‘
Таким образом, мы можем написать
= (8)
К
В случае расширения при постоянном давлений
pdv — RdT.
251
Следовательно, согласно формуле (7)
dQ = cvdT + RdT = (с, + R)dT = cpdT,
откуда следует, что
R = cp-cv. (9)
В случае адиабатического сжатия или расширения тепло¬
обмена с окружающей средой не происходит, так что в этом
случае
Л? = 0.] (10)
Следовательно, при адиабатическом процессе из формул
(8), (9) и (10) получаем
</„^+^+^ = 0,
Ср cv
cvpdv + cvvdp + (ср—cv) pdv = 0,
vdp= —kpdv,
где
k=^-.
Cp
Разделяя переменные, можно написать
dp fodv
p V
Интегрируя, получаем
1п^ = -Л1пХ
Pl 1>l Pl \ ”2 /
или
Р1^1=Р2^,
т. е.
рч? = const. (11)
Формула (11) устанавливает соотношение между р и v в
случае адиабатического сжатия или расширения и выражает
так называемый закон Пуассона. Соотношение между р и Т, и v
и Т для этого случая можно получить из формулы
pv = RT
или
= (12)
Запишем (11) в виде
—=f—У. (13)
Pi \V1J
252
или
^-=f—) к . (14)
v2 \ Р2 /
Из формул (12) и (13) получаем
(15)
\ v2 /
Далее из формул (12) и (14) имеем
(-)*=£-• (1б)
\ Р2/ ?2
' Вернемся теперь к расширению газов в сопле. Предполагая
расширение адиабатическим, мы можем написать
J £
pv^C или v = Ckp * .
Если р0, «о относится к начальному состоянию (в камере
сгорания), а р, v—к конечному состоянию (в выходном сечении
сопла), то согласно полученному выше имеем
Рб 1 Рб j
£- = {vdp = CF\p~*dp =
2g d d
p p
гГ 1 »’'*Г гГ k ЛТ С* к V
= c =c 7^Tp = СГТх
k dp dp
VL>4 „’+1
X Lpo — P J •
Ho
Cft =pkv = pov8,
следовательно,
c! k , . k ! c pv\
~pv^ = p«v° 1 “ •
2g k —' 1 я — 1 \ Povo /
Далее
prf=povk
или
_ 1_
P _ /ро V /Д-А к - v
Ро \ V / \ Pa) Vo’
253
254
откуда
i~L *-i
= / Р \ к = (JL\ к
Povo \Ро / \ Ро /
Следовательно
й-1 -
С* k . / р \ *
4 — 1 \ Ро /
ИЛИ
/~ Г к~х
‘ = 1/ ^Г^ТРо^ Ч?) * ‘ <17>
у 4— 1 'До/
Формула (17) определяет скорость газа в выходном сече¬
нии сопла, давление в котором р.
Если расширение продолжается до р = 0, то из (17) получим
максимальную скорость истечения
*тах = 1/ ZgPoVo-T-^-r [СМ. формулу (2)]
J К — 1
Если через сх обозначить скорость газа в некотором про¬
извольном сечении Fx сопла, то получим
/fe-i-
’ (18>
4-1 L \рй J J
Вес газа, проходящего через произвольное поперечное
сечение сопла, будет равен
О = ТА^=Т^ = ’
где ix и у —удельные веса газа в произвольном сечении Fx
и в выходном сечении F сопла.
Следовательно,
Г '
2g-^-^0 1-(4Г • <19>
4—1 \ Ро/
Далее
1
pvk=p0vo, р*ф=роФо
или
2_=±<A.V.
\ Р / Vg \ Р / v Vg\Po /
255
Следовательно,
/2_ fe+l~
(PAk-(P-Y ,
k — 1 Vq \ Po / \Pq / J
откуда
F = G
/L fe+t
2g к Po _ (Рё\ *
eA-l v0 L\Po/ \PoJ
Аналогично
F* = ° =. (20)
Г — t+1'
1/ 2g k P* (—V— (— V
f ёк - I v0 L\p0 J \p0 J
Формула (20) устанавливает соотношение между Fx и рх-
Если х — координата, определяющая положение Fx, а форма
сопла Fx=f(x) будет задана, то рх как функция х будет опре¬
деляться формулой (20).
Наоборот, если давление рх как функция х задано, то фор¬
мула (20) определит форму сопла.
Если эта функция изменяется от р0 до р по линейному за¬
кону, то сопло получает форму сопла Лаваля, которое имеет
минимальное (так называемое критическое) поперечное сечение,
после которого оно вновь начинает расширяться. Если Гкр —
площадь критического сечения, а ркр — давление газа в этом
сечении, то можно написать
F = G
J Кр /— ,
/ Г — fe+i ~
"1/ 2g к Po fP*vY (
f k-1 г?0 1Др0) \Ро) -
причем
2_ А+1 ~
d * =0.
\ Ро / \Ро J
Дифференцируя, получаем
г-»
2 /Ркр\ k -+ \ /Ркр\ =0
k \ро J к \р0 /
откуда
2-й 1
2 /Дкр\ А 4~ 1 /Ркр\* Q
* \ Ро / к \ Ро /
*_ _ 2~* й—1
2 fPw'f к = (Рх$\ к
к + 1 \ Ро / \ Ро /
я окончательно
k
п /2 \*-1
— = гтг • (21)
Ро \Ь + 1 /
По формуле (21) можно вычислить критическое давле¬
ние ркр.
Площадь критического сечения тогда определяется из
формулы
F = - - ° =
Ч> / г И ШТ
1/ 2g k Рй ( 2 У"1 ( 2 У"1
f *k-A v0 Цл + 1 / \й+1/
=G=
/" 2
1/ 2g k Pof 2 У~71 2)
f k - 1 гДл + 1 J \ й+l /
= G
/~ Z_
Л/ 2g k Po( 2 V-1*-!
f ° Л — 1 Vo \k + 1 / Й4-1
или
FMp = G . (22)
/ 2
1/ 2g—
У k + 1 Vo ( k + 1 /
Из формул (17) и (21) получаем скорость газа в критиче¬
ском сечении
р«о = 1/ 2g—— pav0 [ 1 —1 =
«р у вЛ- 1 Fo °[ * + 1 J
k k -1
или
сп^~\/ 2^ Ро^о • (23)
у А + 1
256
Как ясно из формулы (23), эта критическая скорость, а
также сх и с зависят только от начального состояния pav0
(в камере сгорания) и не зависят от давления окружающей
атмосферы.
Скорость и расход газа будут в действительности несколь¬
ко меньше вследствие трения газов о стенки сопла, а также
вследствие внутреннего трения. Это может быть учтено вве¬
дением коэффициента, близкого к единице, т. е. можно на¬
писать [см. формулу (17)]
С = <Р I/ 2g—t-povQ (24)
у л — I \Po /
На стр. 253 была получена формула
сг k !. pv \
2/~к-1Рой\1 Povo)
и так как
pv = RT и pQvQ = RT0,
а 2гЛ /, Т X
с 1-7" •
«— 1 \ 'о /
Таким образом с помощью формулы (24) получаем
k-\ -
„ 2gk , / р \ * 2gk /, Т \
« — 1 \Ро/ * — 1 \ *0 /
откуда следует, что
Г k—1
Т / я \~
1-Г = ?г 1_ м .
‘о \Ро /
Таким образом температура в выходном сечении сопла
равна
fe-i “I ]
T=Toil—<ра 1-f-^-V (- (25)
\ Ро / J J
Для турбин обычно принимают ?«0,98. Для сопла ФАУ-2
можно принять то же значение. Таким образом практически
его можно считать равным единице.
Вес газа, проходящего за единицу времени, можно вычис¬
лить по формуле
/Г L а+г
2g—£<l (-Р-У - , (26)
k — 1 f о L \ Ро / \ PoJ -I
где ф = 0,97.
17 Динамика ракет
257
В предыдущих расчетах мы считали, что газовая смесь под¬
чиняется закону для идеального газа pv=RT, где R — постоян¬
ная. Для условий в камере сгорания и сопле ракеты ФАУ-2 та¬
кое допущение можно считать в достаточной степени точным.
Нет никаких оснований для того, чтобы основной закон идеаль¬
ных газов заменить каким-либо более точным соотношением,
учитывающим взаимное притяжение молекул, например, зако¬
ном ван-дер-Ваальса.
С другой стороны, при очень высоких температурах, какие
наблюдаются в камере сгорания, возникает явление диссоциа¬
ции газообразных частиц, что можег заметно повлиять на рабо¬
чий процесс ракетного двигателя.
Процесс горения в ракетном двигателе ФАУ-2 происходит
в основном1 по следующему уравнению:
с3нбон+зо2=2со;+зн2о,
так что продукты сгорания состоят главным образом из угле¬
кислого газа и воды. При более высоких температурах эти про¬
дукты горения разлагаются (диссоциируют) дальше, в резуль¬
тате чего поглощается некоторое количество теплоты, которая,
таким образом, не переходит в кинетическую энергию вытекаю¬
щих из сопла газов. В общем случае при диссоциации газов
тепло поглощается, а при соединении газов — выделяется.
Вследствие высокой температуры в камере сгорания пар ча¬
стично разлагается на водород и кислород по уравнению
2Н2О=2Н2,+О2.
При этом разложении поглощается такое же количество
тепла на 1 кг пара (1 362 000 кгм), какое выделяется при оки¬
слении водорода.
При более высоких температурах (выше 2 500° С) наблю¬
дается также реакция Н2О=Й + ОН, а при температуре выше
4000”С происходит разложение на атомы
Н2=Н+Н, О2=О+О.
Аналогично
СО2=СО+О.
При температуре приблизительно 5000° С могут существовать
только свободные атомы. Таким образом газовая смесь будет
содержать следующие компоненты:
Н2О, СО2, Н2, 02, он, о, н, со.
При каждой определенной температуре и давлении между
этими компонентами устанавливается динамическое равновесие,
так что диссоциация и воссоединение уравновешивают друг дру¬
га, и при постоянных температуре и давлении смеси процент¬
ное содержание различных компонентов остается неизменным
258
и может рассматриваться как функция этой температуры и
давления.
Явление диссоциации может быть объяснено с помощью ки¬
нетической теории газов. Столкновения различных молекул мо¬
гут вызвать разрушение этих молекул, если кинетическая энер¬
гия сталкивающихся частиц достаточно велика. Эта кинетиче¬
ская энергия должна быть равна по меньшей мере тепловой
энергии, поглощаемой при диссоциации. Эта энергия называется
энергией диссоциации. Если кинетическая энергия мейьше этой
величины, то разрушения молекул невозможны, и соударение
молекул можно считать абсолютно упругим ударом. Если ки¬
нетическая энергия больше, то часть ее, равная энергии дис¬
социации, будет поглощаться.
Таким образом ясно, что при более высоких температурах,
т. е. при больших средних скоростях молекул диссоциация бу¬
дет большей. Далее ясно, что давление, которое устанавливается
в газовой смеси при определенной температуре, также оказы¬
вает влияние на диссоциацию. Так как диссоциированные газы
стремятся занять возможно больший объем (во всяком случае
если общее число частиц в результате диссоциации увеличивает¬
ся), то воссоединение будет происходить более интенсивно, когда
молекулы сжаты.
Диссоциация замерена при определенных температурах и да¬
влениях для различных газов. Эти результаты для углекислого
газа и пара приведены в табл. 1 *.
Таблица 1
Степень диссоциации в %
Темпера¬
тура
Н2О
СО2
р=10 кг/см*
р=\ кг/см1
р=10 кг[см*
д=1 кг/см*
1000
1,39 - 10“5
3,00 • 10-5
7,31 • 10-8
1,58 ■ 10~5
1 500
1,03 • 10~2
2,21 • 10~2
1,88 • 10~2
4,06 • 10“2
2 000
0,273
0,588
0,818
1,77
2 500
1,98
3,98
7,08
15,80
В камере сгорания ФАУ-2 температура не превышает 1700е С.
Из таблицы видно, что диссоциация в этом случае не имеет
большого значения, и элементарная термодинамическая теория,
изложенная выше, дает достаточно хорошее приближение.
Диссоциация может быть уменьшена снижением температу¬
ры газа. Этого можно достигнуть применением топлив с низкой
* Eugen Sanger, .Raketenflugtechnik*. На русском языке см. E. 3 e н-
rep. Техника ракетного полета, Оборонгиэ, 1947.
259
17*
температурой горения или путем добавления к горючей смеси
инертного газа (не участвующего в процессе горения). Умень¬
шить диссоциацию путем увеличения рабочего давления можно
только до определенного предела, так как при этом также под¬
нимается температура. По Зенгеру эффективного уменьшения
диссоциации можно достигнуть, придавая соплу соответствую¬
щую форму, так, чтобы значительное количество тепловой энер¬
гии возвращалось обратно. На очень больших высотах, где
р Г
—< —;, согласно соотношению
Р° 100 Г ¥11
Т = Т. !-(£)* I
L J»
температура в выходном сечении сопла становится настолько
низкой, что при достаточно большом выходном сечении опас¬
ность диссоциации практически исключается.
Для . того чтобы подробнее исследовать диссоциацию, нужно
изучить распределение концентраций различных продуктов дис¬
социации в газовой смеси при заданных давлении р и темпера;
туре Т. Для процессов, происходящих в сопле ФАУ-2, эта за¬
дача о^ень .сложна.
В газовой смеси, образующейся при горении этилового спир¬
та в чистом кислороде, происходят обратимые реакции;
(а) 2СО2^2СО + О2;
(?) 2Н2О^2Н2 + О2;
(Т) 2H2O^tHa + 2OH;
(3) со2 + н2^со + н2о,
так что образуется смесь из
СО2, Н2О, СО, ОН, Н2О2.
При брлее высоких температурах происходят также обрати¬
мые реакций
Н2^Н+Н, О2^О+О,
так чтр в наиболее общем случае мы получаем смесь из восьми
компонентой. Так как различные реакции влияют друг на дру¬
га, то практически невозможно точно определить каждый из
восьми Компонентов пр величине при заданных давлении р и
температуре Г. 'Рассмотрим спёрва три первые реакции (а),
X?) и 0) независимо от других реакций.
Если р й Т являкл'ся давлением и температурой газовой
смеси, то согласно уравнению
С2Н5ОН+ЗО2=2СОа+ЗНаО
2б0
парциальные давления С02 и Н20 в смеси в недиссоциирован-
ном состоянии равняются:
Рсо.= 4-р и рн,о=-|-р.
О о
Если теперь при реакции (а) (рассматриваемой независимо
2
от других реакций) при —р, Т и при реакциях (£) и (7) (тоже
5
3
независимо от других реакций) при — р, Т степень диссоциации
5
очень мала, то мы можем быть вполне уверены, что в газовой
смеси, в которой реакции влияют друг на друга, диссоциация
также будет незначительной.
Если теперь мы имеем пл молекул вещества А и пв моле¬
кул вещества В, участвующих в химической реакции
пАА + пв В^пл-А' + пЬ‘ В’,
в результате которой получаются пА- молекул вещества А'
и пв' молекул вещества В', то скорость реакции v зависит
от чисел килограммолекул на 1 м3 (так называемая молярнан
концентрация) и коэффициентов Сл и Св веществ А и В, и
может быть записана в виде
v = kCn.iCnaB.
A D
Аналогично мы можем написать скорость обратной реак¬
ции
v'= k’CnA4'CnJ.
В случае динамического равновесия обе скорости равны,
так что
v—v' = kC^C"B — k'CnA4'CnJ = О,
откуда получается так называемая .константа равновесия"
k САСУ
(27>
Для смеси газов с компонентами, входящими в химиче¬
скую реакцию, можно вместо молярных концентраций ввести
парциальные давления; константа равновесия будет тогда
равна
p^'ptf'
( ’
Кс и Кр связаны между собой зависимостью, которая мо¬
жет быть получена из соотношения
pV = RT, (29)
261
написанного для одной килограммолекулы компонента газа.
Если С обозначает молярную концентрацию, то так как
У = —, мы можем написать
С==£—, так что С,=^А- и т. д.
R-т art
В системе кг, м, сек. постоянная /? = 848 для всех газов.
Следовательно,
/Рл'уд'/Рв-ув-
к = \яг' \Rt)
' (Р+\пл(Рв_\ав
\rt) \rt)
или _
Ke = Kp(RT)in, (30)
где
2л = (лл + ил)— (пд' + пв-). (31)
Константу Кс можно считать функцией только температу¬
ры и можно записать в виде
А
Кс = КСте (32)
Постоянные величины Кс„, и А могут быть определены с по¬
мощью спектроскопических измерений, так что Кс, а также Кр
можно считать известными функциями температуры. Постоян¬
ная А — теплота диссоциации на килограммолекулу, т. е. ко¬
личество теплоты, которое поглощается при диссоциации одной
килограммолекулы газа и выделяется, когда происходит вос¬
соединение одной килограммолекулы.
Рассмотрим теперь реакцию
2СОа zl 2СО + Оа.
В этом случае
^ = Рсо£о,, (33)
Гео,
где рсо„, рсо и Ро,— парциальные давления компонентов СО2,
СО и О2. Если теперь известна как функция температуры, то
можно следующим образом' определить степень диссоциации для
определенных значений полного давления р и температуры Т.
Предположим, что мы имеем 2п молекул СО2. Обозначим
через х степень диссоциации. Тогда 2пх молекул СО2 будут дис¬
социированы и (1—х)2п — не диссоциированы. 2пх диссоции¬
рованных частиц СО2 образуют 2пх частиц СО и пх частиц О2.
262
Полное число частиц будет равно
(1—х)2п+2пх+пх= (2+х)п.
Тогда
Рсо, = 2nG -х)
р (2+х)п ’
откуда
2 —2х
Далее
_ 2х х
Рса~2+хР> Р0'~ТГхР-
Подставляя в формулу (33) вместо парциальных давлений
эти выражения, получаем
4х* хр
пг
к (2+х)» F (2+х) х» (2+х)'
р (2 - 2х)' t (2+х)» (1-х)*Р'
(2+х)' Р
Таким образом
К х3р
р (2+х) (1-х)*’
откуда можно найти х.
Если х«1, можно написать
Р 2 ’
откуда
■' = )/“• (34)
Степень диссоциации, выраженная в процентах, будет равна
s = ЮОх = 100j/^. (35)
Аналогично степень диссоциации может быть определена
при заданных значениях р и Т и для реакций
(?) 2Н2О^2Н2 + О2,
G) 2Н2О^Н2 + 2ОН,
если константы равновесия
1Z ^Н,Ро, Рн,^он
ЛР(1)— „2 ’ Л₽(2) — „2
Рн,о /’що
известны как функции Т.
В табл. 2 приводятся значения степени диссоциации для
различных значений р и Т в случае обратимых реакций (а),
(?) и (т).
263
Таблица 2
Константы равновесия и степень диссоциации
Степень диссоциации е при р ат.
100
со2^±со+-|оа
0,0027
0,068
0,355
3,05
13,1
(о) Н2О ^2. Н2 4- 2 О2
0,0042
0,0029
0,121
0,372
0,916
1,92
3,55
(fr) н2о^±4 н2+он
0,0038
0,030
0,147
0,502
1,33
2,99
5,83
1 Согласно формуле (42).
20
0,0047
0,116
0,571
5,21
20,3
0,0072
0,0049
0,206
0,634
1,56
3,28
6,05
0,0064
0,052
0,251
0,86
2,28
5,09
9,47
10
0,0059
0,146
0,721
6,58
24,4
0,0091
0,0062
0,260
0,800
1,97
4,14
7,64
0,0081
0,066
0,317
1,08
2,87
6,32
11,8
5
0,0074
0,184
0.908
8,28
29,7
0,0114
0,0078
0,327
1.01
2,48
5,21
9,62
0,0100
0,083
0,399
1,36
3,61
7.82
14,6
4
0,0088
0,198
0,977
8,91
31,25
0,0123
0,0084
0,352
1,08
2,67
5,61
10,35
0,0110
0,089
0,430
1.47
3,89
8,43
15,6
3
0,0088
0,218
1,08
9,82
33,6
0,0135
0,0092
0,388
1,19
2,94
6,18
11,4
0,0121
0,098
0,473
1,61
4,29
9,21
17,0
2
0,010
0,250
1,23
11.2
37,3
0,0155
0,105
0,445
1,37
3,37
7,08
13,1
0,0138
0,112
0,542
1,85
4,91
10,5
19,2
1,0
0,0127
0,315
1,55
14,16
44.1
(60.8) 1
0,0195
0,133
0,560
1.72
4,24
8,91
16,48
0,0174
0,141
0,682
2,33
6,18
13,0
23,5
0,8
0,0137
0,340
1,67
15,25
44,1
(65,50) 1
0,0210
0,143
0,603
1,85
4,57
9,59
17,75
0,0188
0,153
0,735
2,51
6,70
13,9
25,0
0,6
0,0151
0,374
1,84
16,79
49,3
(72,05) 1
0,0231
0,157
0,664
2,04
5,03
10,56
19,54
0,0207
0,169
0,809
2,77
7,38
15,4
27,1
0,4
0,0173
0,429
2,11
19,22
53,3
(82,48) 1
0,0265
0,180
0,760
2,33
5,76
12,09
22,37
0,0237
0,195
0,925
3,16
8,43
16,9
30,3
0,2
0,0218
0,540
2,65
24,21
56,8
0,0334
0,227
0,958
2,94
7,25
15,23
28,18
0,0299
0,244
1.17
3,99
10,1
21,6
36,2
0,1
0,0274
0.679
3,34
30,51
0,0420
0,286
1,207
3,70
9,14
19,19
35,51
0,0376
0,308
1.47
5,01
12,6
25,8
42,8
/>=0,05
0,0346
0,855
4,21
38,44
0,0530
0,361
1,521
4,67
11,52
24,17
44,74
0,0473
0,387
1,85
6,32
16,6
31,2
54,0
Т°
1400
1750
2 000
2500
3 000
1 500
1750
2000
2 250
2 500
2 750
3 000
1500
1750
2000
2 250
2 500
2750
3 000
264
Полагая рабочее давление в камере сгорания ФАУ-2 равным
15 ата, имеем
2 3
рсо = — р = 6 ата и рно = — р = 9 ата
* 5 я 5
Принимая температуру горения равной 1750°, находим
из таблицы, что есо, лежит между 0,184 и 0,146%,
ен3о(в) — между 0,0078 и 0,0062%
и
£н,о(4> —между 0,083 и 0,066%.
При меньших температурах во время расширения в сопле,
несмотря на низкое давление, диссоциация будет еще меньше.
Из этих цифр можно сделать заключение, что в процессе горе¬
ния в ракете ФАУ-2 диссоциация не имеет существенного зна¬
чения.
Комбинацию спирта и кислорода в качестве горючего сле¬
дует считать весьма удачной, так как, с одной стороны, тепло¬
творная способность этой смеси достаточно высока и, с другой
стороны, температура горения выдерживается в достаточно низ¬
ких пределах и таким образом удается избежать заметного
влияния диссоциации.
Из других комбинаций можно указать на следующие, обла¬
дающие более высокой теплотворной способностью:
октай+кислород
СВН18+250=8СО2+9Н2О
с теплотворной способностью 2500 кал на 1 кг смеси;
метан+кислород
CHJ+2О2=COJ+2HA
с теплотворной способностью 2650 кал на 1 кг смеси;
водород+кислород
HJ+O=H2O
с теплотворной способностью 3777 кал на 1 кг смеси.
Для комбинации
этиловый спирт+кислород
C2HSOH+ЗО2=2СО2+ЗН2О
имеем теплотворную способность 2340 кал на 1 кг смеси.
Теплотворная способность увеличивается с возрастанием со¬
держания водорода в горючем. Комбинация чистого водорода и
кислорода обладает значительной теплотворной способностью.
265
Оберт еще в 1923 г. предлагал в качестве топлива для ракет
средних размеров (как ФАУ-2) комбинацию спирта и кислоро¬
да, а для ракет дальнего действия — комбинацию водорода и
кислорода *. Другим видом топлива с очень высокой теплотвор¬
ной способностью является атомарный водород, который выде¬
ляет при образовании Н„ громадное количество тепла. Однако
в настоящее время мы еще не в состоянии использовать это
топливо на практике. То же самое можно сказать относительно
громадной энергии, освобождающейся при распаде атома.
Таким образом лучшим топливом для ракет, которым мы
располагаем в настоящее время, является комбинация водорода
и кислорода, но это топливо можно брать только в жидком со¬
стоянии. Большим неудобством является очень низкая критиче¬
ская температура жидкого водорода (—241° С), вследствие чего
части ракеты, соприкасающиеся с этой жидкостью, изменяют
свои механические свойства, становясь хрупкими. Кроме того,
стоимость жидкого водорода высока.
Тем не менее возможно, что в ближайшем будущем комби¬
нация водорода и кислорода найдет применение в качестве ра¬
кетного топлива. Поэтому рассмотрим это горючее более под¬
робно. Реакция горения может быть записана в виде следующе¬
го уравнения:
Н2 + ЛО2-^Н2О, (36)
где А — коэффициент, введенный для выражения различных от¬
ношений между горючим и кислородом.
При температуре, наблюдающейся в камере сгорания, про¬
дукт сгорания Н^О будет диссоциирован в довольно большой
степени, а молекулы Н3 и О2— в меньшей степени; эти процес¬
сы можно представить следующими уравнениями:
(I) 2Н2Ог±2Н2 + О2, (II) 2НаО^2ОН + Н„
(III) Н2^Н + Н, (IV) O2Z±O + O.
Таким образом в газовой смеси, образующейся при сгорании,
получается шесть компонентов:
Н3О, НО, Н2, О2, Н и О.
Эти компоненты будут участвовать в общем динамическом
равновесии, определяемом давлением р и температурой Т.
Обозначим молярные концентрации компонентов через
(НаО), (ОН), (Н2), (О2), (Н) и (О).
Нам нужно определить эти концентрации как функции давле¬
ния р и температуры Т смеси.
1 Вопрос о компонентах ракетного топлива был детально изучен
Циолковским гораздо раньше, чем Обертом. (К. Э. Циолковский .Работы
по ракетной технике', Оборонгиз, 1947). (Прим. ред.).
266
Обозначая константы равновесия реакций ,(I), (II), (III)
и (IV) через К» Кг, Кд, К4, можно написать
К1 = (н2)«(Ог) (37)
1 (Н2О)' ' 7
Кз= (0Н),(Нг)- ; (38)
2 (Н2О)« 4 ’
(39)
(нг)
= (40)
(О3) V
Эти константы равновесия могут быть найдены из экспери¬
мента, и их можно считать известными функциями р и Т.
Пятое уравнение может быть получено из того условия, что
отношение О2: Н2 до и после сгорания должно быть одинако¬
вым. Из уравнения горения следует, что
Н1= J_
О2 А '
Одна частица Н2О эквивалентна одной частице Н2, а ОН
или Н —£ Н2. Что же касается О2, то одна частица Н2О, ОН
или О соответствует -|- Оа. Таким образом мы получаем пятое
уравнение
(Ha)+(Ha0)+-<ML = 1 ((н^жоншо) +(Qa) I
X /1 I X I
или
М - т) +А +v <°) + (°н> -
\ X / <5 X
-у(Н). (41)
Шестое уравнение может быть получено следующим обра¬
зом. Для газообразной смеси согласно закону Дальтона полное
давление равняется сумме парциальных давлений компонентов
Рг+р2+ ... =р
или, обозначая молярные концентрации компонентов через си
с„ и т. д.,
Cj/?T+c2RT+ ... и т. д.=р.
Таким образом
(НаО) + (ОН) + (На) + (Оа) + (Н) + (О) = . (42)
ixl
267
Шесть молярных концентраций теперь могут быть определе¬
ны из уравнений (32), (38), (39), (40), (41) и (42).
Так как некоторые из этих уравнений являются нелинейны¬
ми, то при решении приходится пользоваться методом повтор¬
ных попыток. Процесс решения начинают с того, что задаются
значением наиболее важного компонента (Н2О). Затем задаются
значением какого-либо менее важного компонента [например
(Н2)]. Затем (О2) определяют из уравнения (37), потом (ОН)
из (38), (Н) из (39) и (О) из (40). Найденные таким образом
значения подставляют в уравнение (41). Эту процедуру повто¬
ряют при фиксированном значении (Н2О) и различных пробных
значениях (Н2) до тех пор, пока не будет удовлетворено урав¬
нение (41). Найденные значения, уже удовлетворяющие урав¬
нениям от (37) до (41), следует подставить в уравнение (42).
Всю изложенную выше процедуру следует повторять для раз¬
личных значений (Н2О) до тех пор, пока не будет удовлетворе¬
но также и уравнение (42).
Таким путем можно определить молярные концентрации и,
следовательно, веса различных компонентов смеси при диссо¬
циации для любых значений давления и температуры.
В дальнейшем мы будем предполагать, что это распределе¬
ние концентраций известно для любых значений р и Т.
Далее, если тполн есть полный объем газовой смеси, а пи nv
и т. д.— числа килограммолекул каждого из компонентов, то
можно написать
+ \rt=P
\ ^полн ^полн /
ИЛИ
Р^ПОЛН
4- /^2 +. • .
Если через ти ... и т. д. обозначить молекулярные веса
компонентов, а через и — объем, приходящийся на килограмм
газовой смеси, то
^полн = («1^1 + «2^2 + • ■ •) V.
Следовательно,
nimi+n2m2 + ... = -вТ
п1 + пг+ч •
Средний молекулярный вес смеси определяется из соот¬
ношения
(«1 + пг +...)т = Пупг^ + п2т2 +...
268
Таким образом равенство (а) можно записать в следующем
виде: _
= (43)
т
где
т = П1 w,+n2w2. (44)
л1+л2 4" • ••
В интересующем нас диапазоне температур удельные тепло¬
емкости при постоянном объеме с® газовых компонентов не яв¬
ляются постоянными. Можно приближенно считать
rv = a + pT + -fr + 8T8 + ..., (45)
где а, р, у, 8... — постоянные, зависящие от природы газа.
В большинстве случаев мы получаем достаточно хорошее при¬
ближение, ограничиваясь только несколькими членами в правой
части выражения (45). Для различных компонентов в газовой
смеси эти постоянные можно считать известными. Удельная
теплоемкость смеси (при постоянном объеме) может быть за¬
писана в виде
Gic +Gc +...
= /77'1 ’ (46)
О1 + О2 + ...
где Gu G2 и т. д. — веса компонентов на единицу объема.
Веса компонентов Glt G2 и т. д. зависят от температуры Г
л давления р смеси, так что, как видно из формулы (46), удель¬
ную теплоемкость с® смеси следует считать также функцией
р и Т.
По этой же причине, как видно из формулы (44), средний
молекулярный вес смеси следует тоже считать функцией р и Т.
Полагая
- =f(p, Т),
тп
получаем из равенства (43)
pv = Rf{p, Т). (47)
Если р или Т изменяется, то изменяются и концентрации,
так что происходит воссоединение или дальнейшая диссоциация,
и при этом выделяется или поглощается тепло.
Пусть р и Т изменяются на 8р и ST; тогда произойдет выде¬
ление некоторого количества тепла dQ', которое равно
др дТ
где dQ' отнесено к единице веса.
269
Пусть VI — количество тепла, выделяющееся при воссоеди¬
нении одной килограммолекулы рассматриваемого диссоцииро¬
ванного вещества, и 30, 30, 30 и 30 относятся к реакциям (I),
(II), (III) и (IV); эти величины могут быть измерены одновре¬
менно с величинами К2, К3 и /0 и их можно считать изве¬
стными функциями р и Т.
Перейдем теперь от значений р, Т к значениям р+8р, Т. Из
формулы (II) видно, что на одну частицу ОН приходится одна
частица Н2О.
Следовательно, количество тепла на единицу объема, выде¬
лившееся при реакции (II), равняется
—30-^-(ОН) 8р.
др
Согласно уравнению (47)
V = Rf(p.T) (47а)
Р
Таким образом количество тепла, приходящееся на едини¬
цу веса, при реакции (II) равняется
-20^-’-Г)- -1 (ОН) 8р.
Р °Р
Далее — (ОН)8р килограммолекул Н2О на единицу объе-
др д
ма теряется согласно реакции (II), а — (Н2О) 8р килограммо-
д/>
лекул Н2О образуется.
Таким образом образуется согласно реакции (I)
±(Н,О)8р + /-(ОН)8р
ор 0р
килограммолекул Н2О на единицу объема. Количество тепла,
выделившегося согласно реакции (I) на единицу веса, будет
равно _
30^(р’Т) Г/ (Н2О)8р + А(ОН)8р1.
р Ldp др J
Аналогично находится количество тепла на единицу веса,
выделившегося при реакциях (III) и (IV):
—L 21 /7^- г> _^_(н)8р
2 3 р дру ' г
и _
—L 20 &(р. т) д_
2 р др
270
Таким образом можно написать
= Т)[-(Н2О) + /-(ОН)-
др Р \ \-др др
-Я2(/Ь Tk-(OH)-^2l,(p, Т)/-(Н)-
ор 2 ор
-у^(А Л^-(О)|. (48)
Аналогично находим
j 2(i(p> т) г-2. (н20)+ (он)1 -
01 р \.оТ оТ J
-^(Р, Т)^(ОН)—U3(p, Т)^(Н)-
-у31*(Р, Т)^(О)|. (49)
Величины
4(Н2О), /-(ОН), ^-(Н), А (О),
ор ор ор ор
4(Н2О), /-(ОН), /;(Н), /(О)
01 01 01 01
опять можно считать известными функциями р и Т, так что
можно записать
^Г = *(Р. П (50)
°Р
(5D
Если во время расширения в сопле выделяется удельная
теплота dQ' и происходит повышение температуры на dT, то
dQ. + dQ' = cv dT +p dv, (52)
где dT следует рассматривать как независимую переменную, а
dQ обозначает количество тепла, поступившего извне (отри¬
цательное в случае охлаждения). Полагая tZQ = O, т. е. рас¬
сматривая только адиабатическое расширение, можно написать
(53)
<П а! а! \ р )
в соответствии с формулой (47). В уравнении (53)
= Т^ + ^Р' Т) (54)
оГ ор а! оТ аТ
согласно равенствам (50) и (51).
271
Далее
d / f(p, T) \ д / f(P, T) \ dp_ d_ / /(p, T) \ _
dT \ p / dp \ p /dT dT \ p /
= «(P, T)^ + ₽(AT). (55)
al
Из равенств (54,), (55) и (53) получаем
5(Р, + T) = cv(p, T)+pR[a(p,T)d/-+^p,T)],
аТ al
откуда __
dp = Cv (р, Г) - 7| (р, T)+pR Р (р, У) .
d7 Е(р, У)—р/?«(р, Т)
Таким образом
^=?(Р, Т). (56)
Это дифференциальное уравнение можно проинтегрировать
по схеме
Т_^А> p^k==±kl +±k2 +±-кг + ^к„
О О О О
^ = ^,7)4, Л2 = ?(р + -^, Т + у)л,
А3 = ?(р + у. т+~)^ kt = ^(p + k3, T + h3)h.
Таким образом найдем
Р = Л(Т). (57)
Подставляя (57) в (47а), получим
v = F3(T). (58)
Из равенств (57) и (58) найдем
■ц = ф(р). (59)
Если через р0 обозначить давление в камере сгорания, а
через р—давление в выходном сечении сопла, то скорость
истечения будет равна
с = 1/ ^gPY(p)dP • (60)
г р
272
Уравнение неразрывности записывается в виде
■\Fc = '(xFxcx
или
Fc Fxcx
9
V vx
откуда
F=F^- —.
V cx
Таким образом из равенств (59) и (60) получаем
ГРо
ф („ \ , / И (Р) dp
р <61)
Ф (Р) I/ Ро
У Шр) dp
Рх
Формула (61) устанавливает соотношение между площадью
поперечных сечений сопла Fx и давлением. Если закон измене¬
ния давления вдоль оси сопла задан (например, линейный за¬
кон от давления в камере сгорания до давления на выходе) и
выбрана длина сопла, то форма сопла определится из фор¬
мулы (61).
Далее, если мы зададимся давлением ра в камере сгорания
и обозначим тепловую энергию, выделяющуюся при сгорании
1 кг смеси через Е, то температура То газовой смеси в камере
сгорания может быть определена из уравнения
С cvdr\.
\ Т I
Суммирование производится по всем компонентам смеси:
G — вес какого-либо компонента в 1 кг смеси, R — соответ¬
ствующая газовая постоянная и 7\танл — стандартная темпе¬
ратура до начала горения, при которой образуется компонент.
(Веса G являются функциями р и Т.) Удельный объем смеси
определяется из уравнения
R „ RT0
Ж = То. ИЛИ *>()= — >
m mpQ
где ш определяется выражением (44).
Полный вес заряда в камере сгорания равняется
гу ^кам
'“'ПОЛИ >
с’о
где —объем камеры сгорания.
§ 8. Химия топлив для ракет дальнего действия
Как уже отмечалось в предыдущем параграфе, этиловый
спирт не является наивыгоднейшим горючим, т. е. тем горючим,
которое обладает максимальной теплотворной способностью на
273
18 Динамика ракет
килограмм ®(зятой смеси. Известно, например, что бензин в
этом отношении является более выгодным горючим, чем этило¬
вый спирт, хотя разница не так велика (около 7%). В табл. 3
приведены теплотворные способности различных веществ.
Таблица 3
Удельная и молекулярная теплотворная способность различных
органических соединений
Удельная тепло¬
творная способ¬
ность
кг кал/кг
Молекулярная
теплотворная
способность
кг кал/г мол
Водород Н2
33 925
68
1. Алифатические углеводороды
Метан СН4
13 245
212
Этан С2Нв
12 348
370
Пропан С3Н8
12 028
529
Бутан С4Н10
11 848
687
Пентан C3Hi2
11 619
840
Гексан СеН14
11490
991
Гептан С7Н13
11 374
1 139
Октан С8Н18
И 449
1309
2. Ароматические углеводороды
Бензол С6Нв
10 026
783
Нафталин СюН8
9614
232
Антрацен С14Ню
9510
1695
3. Алифатические спирты
Амиловый спирт CSH12O
8981
793
Бутиловый спирт С4Н10О
8 626
640
Пропиловый спирт С3Н8О
8 044
484
Этиловый спирт С2Н8О
7 110
328
Метиловый спирт СН4О
5 362
172
274
Для ракеты задала выбора горючего совершенно отлична
от аналогичной задачи для авиационных или других двигателей,
для которых необходимый для горения кислород может быть
взят из окружающего воздуха.
Для ракеты дальнего действия кислород, необходимый для
горения, должен содержаться в самой ракете. Таким образом
решающим критерием при выборе горючего будет теплотворная
способность килограмма топлива.
Необходимость брать с собой кислород возникает в основном
не от того, что ракета дальнего действия большую часть своей
траектории проходит в стратосфере (которая бедна кислородом,
см. табл. 4), так как горение практически заканчивается в тро¬
посфере. Но для того чтобы создать достаточный начальный
импульс, нужно расходовать в течение каждой секунды прибли¬
зительно 125 кг топлива, состоящего из 50 кг 75'%-ного этило¬
вого спирта и 75 кг кислорода.
Если брать кислород из окружающей атмосферы, то, чтобы
обеспечить это количество кислорода, компрессор должен был
бы нагнетать в секунду 337 кг сухого воздуха нормального со¬
става, т. е. 275 м* при 15° С и 760 мм рт. ст. Из этих 337 кг
воздуха 262 кг азота являлись бы лишним балластом. Эта тех¬
ническая задача не решена до настоящего времени.
При выборе горючего для своих ракет немцы не столько ру¬
ководствовались требованием получить оптимальный результат,
сколько требованием, чтобы горючее можно было производить
в больших количествах из легко доступных материалов.
Еще задолго до второй мировой войны в Германии этиловый
спирт вырабатывался в громадных количествах из картофеля
с полей Восточной Пруссии. Этот этиловый спирт использовался
вместе с бензином и бензолом в качестве горючего для автомо¬
бильных моторов.
Одновременно широко изучалась возможность использования
в качестве горючего различных органических соединений.
Исследовались также различные окислители; большое вни¬
мание было обращено на перекиси, в особенности в связи с за¬
дачей приведения во вращение паровой турбины ФАУ-2.
Окислители
Производство жидкого кислорода в достаточном количестве
требует больших и дорогостоящих установок для сжижения воз¬
духа и отделения более или менее чистого кислорода.
Немцы предполагали выпускать 1000 ракет в сутки. Если
количество жидкого кислорода, необходимого для пуска одной
ракеты ФАУ-2 из Голландии в Англию, принять равным при¬
близительно 5 т, то потребовалось бы 5 000 т жидкого кисло¬
рода, или 25 000 7 жидкого воздуха в сутки.
18»
275
Таблица 4
Высота
м
Температура
°C
Давление
мм рт. ст.
Удельный вес
KZjM3
1ропосфера
0
15
760
1,2255
500
12
716
1,1677
1 000
9
674
1,1100
1 500
5
634
1,0584
2 000
2
596
1,0068
3 000
5
526
0,9094
4 000
—11
462
0,8193
5 000
-18
405
0,7363
6000
-24
354
0,6598
7000
-30
308
0,5896
8 000
—37
267
0,5252
9000
—44
230
0,4664
10 000
-50
198
0,4127
И ООО
-55
169
0,3614
Стратосфера
12 000
-55
145
0,3090
13000
-55
124
0,2642
14 000
—55
106
0,2259
15 000
-55
91
0,1921
16 000
-55
77
0,1651
17 000
-55
66
0,1412
18 000
—55
57
0,1207
19000
-55
48
0,1032
20 000
—55
41
0,0883
276
Поэтому изучались другие окислители. Производились испы¬
тания концентрированной азотной кислоты (100% HNO3) с
удельным весом 1,5129, в которую для уменьшения ее корро¬
дирующего действия добавляли небольшое количество концен¬
трированной H2SO4.
Испытывалась также 85%-ная перекись водорода, которую
использовали для образования пара, необходимого для приве¬
дения во вращение турбины.
В связи с дефицитом платины и нержавеющей стали приме¬
няли следующий процесс.
2-этилантрахинон гидрировали и превращали в 2-этил ан-
трогидрохинон, который затем окислялся и образовывал началь¬
ный продукт и перекись водорода. Начальный продукт затем
повторял цикл.
СО СОН
I || II |Хн »| I || Р
СО сон
2-этилантрахинон 2-этил антрогидрохинон
О
II
СОН с
a//v>
I II II I +о2—| II II I + нао2
Х/Х/Х^ х/\/\^
сон с
II
о
Были проведены также испытания:
с перекисью диэтила
С2Н6 —О —О —С2Н6;
с перекисью дипропила
С3Н7— О — О — С3Н7;
с перекисью дибутила
С4Н9 —О-О —С4Н9.
Однако об этих соединениях пока мало что известно.
277
Горючее
В качестве горючего для ракеты дальнего действия испыты¬
вались следующие соединения:
Метанол СН8ОН
Этанол СаН5ОН
НС-СН
II II
Фурфуроловый спирт НС С —СН2ОН
О
Винил этиловый эфир СН2 = СН —О —С2Н6
Триэтил амин (C2HS)3N
Гидрат гидразина H2 = N — N= Н2-Н2О
СН3
4-амино 1. 3-диметилбензон или I метаксилидин
\/СН’
NH2
х\/-ч
8-гидрооксихинолин | || |
ОН N
Н2С —СН2
Тетрагидрофуран | |
Н2С СН2
Ж"
Анилин | |
Ж
Гидрированная фракция лигнитовой смолы, смешанная
с анилином, фурфуроловым спиртом и тетрагидрофураном, из¬
вестна под названием эрголевой смеси.
Только два первых указанных выше горючих нашли техни¬
ческое применение; при использовании остальных встретилось
слишком много практических трудностей.
278
Реакция между перекисью водорода и перманганатом
Реакция между перекисью водорода и перманганатом исполь¬
зовалась для образования перегретого пара для приведения во
вращение паровой турбины.
В этом случае перекись водорода является для перманганата
восстановителем. Разложение перекиси водорода происходит по
уравнению
н2о2ч-о-»н2о:+о2.
Согласно Томсену (I. Thomsen)
Н2+О2=Н2О2—45 320 кал.
Разложение на воду и кислород согласно Бертло (Berthelot)
происходит по уравнению
Н202=Н20 + 0 + 23 450 кал.
Это тепло может быть использовано для превращения обра¬
зующейся воды и воды, служившей в качестве растворителя
перманганата, в перегретый пар.
Как указывал Симановский, реакция между перекисью водо¬
рода и перманганатом является автокаталитической, т. е. во
время реакции образуется катализатор, ускоряющий реакцию.
Таким образом скорость реакции нарастает. Это обстоятель¬
ство является выгодным, так как оно делает пуск турбины плав¬
ным. Образующиеся марганцевые соединения являются катали¬
заторами.
Исходя из соображений легкости и компактности, что весьма
существенно для ФАУ-2, при выборе соли марганцовой кислоты
(НМпО4) остановились на кальциевой соли.
Насыщенный раствор Са(МпО4)2 при 20—25° С содержит
около 1500 г соли в литре, тогда как КМпО4 — только 60 г.
Оба раствора имеют густой фиолетовый цвет. Реакция мо¬
жет итти либо в щелочной среде:
2Са (МпО4)2 + 4Н2О2 -> 2Са (ОН)2 + 4MnO2 + 2Н2О + 5Оа (I)
либо в кислотной:
Са (МпО4)2 + Н2О2 + 3H2SO4 —> CaSO4 2MnSO4 -|-
+ 4Н2О + ЗО2. (II)
Если принять во внимание, что для полного восстановления
Н2О2 требуется в первой реакции половинное количество пер¬
манганата и что при этом нет опасности коррозии, то следует
предпочесть реакцию в щелочной среде. Яркое оранжево-крас¬
ное пламя длиной около 15 м, видимое за ФАУ-2 в течение
первых 70 секунд полета, можно объяснить присутствием каль¬
циевых солей.
279
Так как реакция между перманганатом и Н2О2 является
автокаталитической, то для начала реакции требуется очень
малое количество перманганата [Са(МпО41)2 или КМпО4].
В реакциях, указанных выше, используются слабые рас¬
творы Н2О2.
В случае почти 100% Н2О2 можно считать, что после начала
разложения реакция продолжается самопроизвольно. Самопро¬
извольное продолжение реакции обусловлено главным образом
высокой температурой, образующейся вследствие освобождения
тепловой энергии при разложении Н2О, на НоО-Н/гО^
99,91% Н2О2 (удельный вес 1,4633) разлагается уже при
90,35° С.
Для того чтобы обеспечить непрерывность процесса, жела¬
тельно непрерывно вводить в реактор небольшие количества
перманганата.
Произведем теперь приближенный расчет турбины. При
5000 об/мин мощность турбины равна 650—700 л. с., или в сред¬
нем 675 л. с. Рабочее давление равно приблизительно 21 ата,
а давление на выходе около 1,1 ага. Двигатель работает в те¬
чение 70 сек.; расчет турбины будем вести для продолжитель¬
ности работы 100 сек.
Расход пара может быть определен из формулы
С =5,45(1—— V с- час>
\ 740/\ nJ < 1-е0,21 ) '
где
е= —
Pi
и
рг—давление на выходе турбины;
pi—давление на входе;
t—рабочая температура;
Ns—мощность турбины.
В нашем случае имеем
р2 = 21 ата, р4 = 1,1 ата, Ns = &75 л. с.,
£ = 214°С (7= 487°).
Следовательно,
е=—=sO,O5 и 1—е0,21 = 0,4668.
21
Таким образом получаем
60 = 5,45-0,711-1,074-2,14 = 9,0 кг на л. с. час.
280
Таким образом для работы продолжительностью 100 сек.
при мощности 675 л. с. получаем необходимое количество
пара:
сполн== Jenn 675 = 168 кг паРа ПРИ 21 ата и Т = 487°.
ooUU
Количество тепла, необходимое для этого, равняется
168-668=112 224 кгкал.
Одна килограммолекула Н2О2 в жидком состоянии выделяет
при разложении на Н2О и 1/гО2 28 230 кгкал тепла [согласно
Люису и Рендалу (Lewis and Randall)]. Следовательно, необ¬
ходимо по крайней мере
——;«,4 килограммолекулы 100°/о-ной Н,О„
26 2oU л
ИЛИ
4-34 кг=136 кг.
Что касается теплопередачи, то мы не вводили здесь ника¬
кого коэффициента, так как теплопередача в рассматриваемом
случае является идеальной.
Потерями на излучение тепла мы тоже пренебрегаем. Из
136 кг Н2О2 получается только 4-18=72 кг Н2О, которые могут
быть превращены в пар. 4 килограмматома О или 2 килограм¬
молекулы О2, также сжатые до 21 ата и имеющие температуру
7'=487°, эквивалентны в отношении энергии приблизительно
3,8 м3 пара при тех же давлении и температуре. Вес 1 м3 пара
при 21 ата и 487° равен 10,106 кг.
Следовательно, 2 кг молекулы О2 эквивалентны приблизи¬
тельно 38,4 кг пара. Так как всего требуется 168 кг пара, то
нужно еще сообщить Н2О в количестве
168—(72+38) =58 кг.
Таким образом всего ракета должна дополнительно иметь
136+58+х кг Са(МпО4)2= (194+х) кг,
где х должен быть определен экспериментально. Можно счи¬
тать, что для того, чтобы началось и могло продолжаться раз¬
ложение перекиси водорода, достаточно всего несколько кило¬
граммов перманганата. Небольшое количество перманганата
может быть растворено в указанных выше 58 кг.
С помощью сжатого воздуха (>21 ата) обе жидкости могут
быть введены в реактор. Этот сжатый воздух содержится в не¬
больших сделанных из легкого металла цилиндрах (см. фиг. 69).
Другая возможность заключается во введении чистой
100%-ной Н2О2 в объем, занятый двуокисью марганца МпО2.
На фиг. 79 показан реактор, в котором происходит реакция
и образуется пар. Перекись водорода поступает сверху, через
281
Фиг. 79. Реактор.
Фиг. 80. Крышка бака.
282
пружинный клапан, а перманганат вводится сбоку. На фигуре
видны винтовые поверхности, сделанные для завихрения потока.
На фиг. 80 показана крышка бака с перекисью водорода.
Нужное количество энергии мог бы дать 7О°/о-ный раствор
НаО2. Но 70%-ная Н2О2 имеет тот недостаток, что она гораздо
в большей степени склонна к самопроизвольному разложению,
происходящему со взрывом, чем 1ОО°/о-ная Н2О2. Последнее
вещество можно безопасно перевозить в автоцистернах или по
железной дороге, чего нельзя делать с 70°/о-ной Н2О2. Добавляя
к 70%-ной Н2О2 соответствующий ингибитор, можно повысить
безопасность. Но, с другой стороны, ингибитор затрудняет на¬
чало реакции.
§ 9. Сервомоторы и рули
Каждый воздушный руль ФАУ-2 приводится в движение
электромотором через редуктор и цепную передачу. Мотор с
защитным медным кожухом изображен на фиг. 81 и 82, редук¬
тор — на фиг. 83, мотор вместе с редуктором — на фиг. 84 и
цепная передача — на фиг. 85.
На фиг. 69 также можно видеть электромотор с редуктором,
первую цепную передачу (с зубчатым сегментом на промежу¬
точной оси), промежуточную ось и вторую цепную передачу с
зубчатым сегментом, укрепленным на оси воздушного руля. Эта
ось перпендикулярна продольной оси ракеты и лежит в пло¬
скости стабилизатора.
Электромотор — обычного коллекторного типа с последова¬
тельным возбуждением. Параллельно с обмоткой якоря, а так¬
же с обмотками статора включены конденсаторы; третий кон¬
денсатор включен параллельно цепи, состоящей из обмотки
статора и обмотки якоря. На фиг. 81 показан также элемент
анодной батареи.
На фиг. 83 изображен редуктор. Ведущая шестерня на валу
мотора, имеющая 12 зубцов (не показанная на чертеже), вра¬
щает три зубчатых колеса (см. фиг. 83,А), каждое из которых
имеет 48 зубцов. Как можно видеть из фиг. 83,А и В, на валу
каждого из трех указанных выше зубчатых колес укреплена
шестерня, вращающая другое зубчатое колесо с 48 зубцами, на
оси которого находится другая шестерня с 12 зубцами. Эта
шестерня вращает в свою очередь три зубчатых колеса, имею¬
щих по 60 зубцов. На валу каждого из этих колес также укреп¬
лена шестерня с 12 зубцами, находящаяся в зацеплении с дру¬
гим колесом с 60 зубцами. На валу каждого из трех последних
колес посажена шестерня с 10 зубцами, находящаяся во внут¬
реннем зацеплении с колесом цепной передачи, имеющим
80 внутренних зубцов. Таким образом передаточное число всей
системы равняется
J !_ J 1 1 _ 1
4 4 5 5 8 “ 3200'
283
284
Фиг. 81. Мотор воздушного руля.
Колесо цепной передачи с 25 зубцами (фиг. 83,D) цепью
соединяется с промежуточным валом, расположенным перпен¬
дикулярно продольной оси ракеты и лежащим в плоскости ста¬
билизатора. Этот промежуточный вал с помощью второй цепной
передачи соединяется с осью воздушного руля, которая также
перпендикулярна продольной оси ракеты и лежит в плоскости
стабилизатора.
На фиг. 85 показана цепь передачи. Цепь натягивается с
помощью тандеров.
Фиг. 82. Мотор воздушного руля.
На фиг. 83,В показана шестерня 1 с 12 зубцами, находя¬
щаяся в зацеплении с пертинаксовым диском с 55 зубцами. На
оси этого диска установлены два других пертинаксовых диска
А и В специальной формы для управления электрическими кон¬
тактами в зависимости от положения воздушных рулей (см.
фиг. 86,Л и В и фиг. 87). В цепь этих контактов включены
электромагниты.
Возможно, что здесь мы имеем дело с электрическим предо¬
хранительным устройством, служащим для уменьшения скорости
мотора, когда руль подходит близко к упорам.
Газовые рули, расположенные в потоке газовой струи в вы¬
ходном сечении сопла и сделанные из графита, показаны на
фиг. 69 и на фиг. 88. Эти рули вращаются в шариковых под¬
шипниках вокруг оси, перпендикулярной продольной оси ра¬
кеты. Для того чтобы защитить подшипники от действия высо¬
кой температуры газов, установлены защитные диски.
285
Фиг. 83.
286
Редуктор.
287
Фиг. 85. Цепная передача.
288
Фиг. 84. Мотор
с редуктором.
Фиг. 86.
19 Динамика ракет
289
Фиг. 87.
Фиг. 88. Газовые рули.
Газовые рули приводятся в движение гидравлическими сер¬
вомоторами, такими, какие употребляются при автоматическом
управлении самолетами (см. § 17, глава IV). Рабочие цилиндры
этих сервомоторов расположены у внешней кромки выходного
сечения сопла (см. фиг. 69) и электрически управляются гиро¬
пилотом.
§ 10. Автоматическое управление
Как уже упоминалось, управление ракетой на активном уча¬
стке траектории производится посредством автопилота. Основ¬
ной частью автопилота является гироскоп с тремя степенями
свободы. В некоторых ракетах ФАУ-2 автопилот имел лишь два
таких гироскопа, приводимых во вращение электричеством. Ось
первого гироскопа параллельна поперечной оси ракеты, так что
вращение ракеты вокруг этой оси не может быть обнаружено
с помощью этого гироскопа. Он используется для управления
движением ракеты относительно продольной и вертикальной осей
ракеты. Управление осуществляется с помощью двух проволоч¬
ных потенциометров; один — для регистрации вращения вокруг
нормальной оси ракеты (отклонения от курса), другой — вокруг
продольной оси. Они расположены ©близи гироскопа, перпенди¬
кулярно друг к другу. Сигналы, снимаемые с потенциометров,
усиливаются электронными лампами и передаются на соответ¬
ствующие рули.
Фиг. 89. Схема расположения гироскопов автопилота.
Другой гироскоп служит для управления движением вокруг
поперечной оси. При вращении ракеты вокруг поперечной оси
его ось поворачивается в плоскости, параллельной нормальной
и продольной осям ракеты. Этот поворот воспринимается про¬
волочным потенциометром; сигнал после усиления передается
на соответствующие рули. С помощью специального вращения
оси гироскопа в указанной выше плоскости осуществляется по-
290
ворот ракеты вокруг поперечной оси при ее движении по траек¬
тории. Это вращение, происходящее по определенной программе
во времени, должно находиться в соответствии с расчетной
траекторией движения ракеты.
Сначала ракета поднимается вертикально вверх, а затем по¬
ворачивает в сторону цели. Радиус кривизны ее траектории по¬
степенно возрастает, так что упо¬
минавшийся поворот оси гироскопа
должен совершаться с уменьшаю¬
щейся скоростью.
Это достигается с помощью пя¬
ти сопротивлений, включенных в
цепь катушки, управляющей пово¬
ротом оси гироскопа вокруг попе¬
речной оси. Четыре из них снача¬
ла выключены и включаются по¬
степенно во время полета с по¬
мощью автоматического устройства,
состоящего из вращающегося ба¬
рабана, по поверхности которого
скользят контакты. Этот барабан,
по крайней мере в последних кон¬
струкциях ракеты, приводится в дви¬
жение от акселерометра.
Первые ракеты были оборудо¬
ваны радиопередатчиком и радио¬
приемником. Радиопередатчик ге¬
нерировал колебания, принимав¬
шиеся станцией, находившейся на
месте старта. Наблюдавшийся при
этом эффект Допплера использо¬
вался для определения скорости
ракеты. В нужный момент, когда
ракета достигала необходимой ско¬
рости, с земли посылался соответ¬
ствующий сигнал. Радиоприемник,
находившийся на борту ракеты,
принимал его, и подача горючего
прекращалась. Этот метод имел тот недостаток, что радиоприем¬
ник мог реагировать на ложные сигналы (искусственные по¬
мехи).
Позже были найдены средства борьбы с помехами. Однако
радиометод вскоре был оставлен и заменен методом интегриро¬
вания ускорения с помощью акселерометра, благодаря чему
полет ракеты перестал контролироваться с земли и управление
ракетой стало автономным.
Акселерометр (фиг. 90) представляет собой гироскопический
маятник, установленный в карданном кольце G. Ось CD являет¬
Фиг. 90. Акселерометр.
19*
291
Фиг. 91.
ся осью маятника. Кольцо G может вращаться вокруг оси EF,
параллельной продольной оси ракеты.
На гироскопе укреплен корректирующий выключатель. При
отклонении гироскопического маятника от среднего положения
выключатель включается, и асинхронный мотор М получает ток.
Этот мотор находится в зацеплении с осью карданного кольца G,
и при вращении последнего вокруг оси EF гироскопический
маятник начинает прецессировать, возвращаясь в среднее поло¬
жение. При этом выключатель вновь выключается, и мотор по¬
степенно останавливается. Затем все повторяется в том же по¬
рядке. Таким образом, выключатель попеременно включается и
выключается и гироскоп все
время прецессирует. Сред¬
няя скорость этой вынуж¬
денной прецессии зависит
от действующей на маятник
вдоль оси EF силы инерции,
т. е. от ускорения ракеты.
Когда ракета уменьшает
свою скорость, прецессия
совершается в противопо¬
ложном направлении.
Таким образом интегри¬
рующий акселерометр пово¬
рачивается на угол, про¬
порциональный интегралу от ускорения, т. е. пропорциональный
скорости. С этим акселерометром связан барабан, включающий
сопротивления в контур катушки, которая поворачивает гиро¬
скоп, управляющий вращением ракеты вокруг поперечной
оси.
Таким образом кривизна траектории изменяется в зависи¬
мости от скорости ракеты в соответствии с расчетным движе¬
нием.
Рассмотрим устройство, с помощью которого сигнал от ги¬
роскопа передается на соответствующий руль. Схема этого
устройства изображена на фиг. 91. Оно состоит из двух одина¬
ковых газонаполненных электронных ламп-тиратронов, которые
служат для усиления сигнала, поступающего с гироскопа, и двух
одинаковых электромагнитов, управляющих движением клапана
сервомотора.
Сопротивление сеток тиратронов, сопротивление анодных це¬
пей и емкости конденсаторов одинаковы. Электромагниты А1
и А2 включены в анодные цепи. Переменное напряжение Еа по¬
дается с умформера.
Электромагниты А1 и А2, действующие в противоположных
направлениях, связаны с мембраной В, играющей роль пружины.
Устройство А1ВА2 приводит в движение клапан, регулирующий
292
подачу масла в сервоцилиндр (сервомотор), управляющий дви¬
жением соответствующего руля.
Если гироскоп не отклонен, скользящий контакт а потенцио¬
метра находится в среднем положении, и средняя сила тока
в обеих анодных цепях одинакова. Силы, с которыми электро¬
магниты А1 и А2 действуют при этом на мембрану В, также
одинаковы и система А1ВА2 остается в среднем положении.
Но при смещении контакта а запаздывание по фазе потен¬
циала сетки в одном тиратроне увеличивается, в -другом .умень¬
шается, вследствие чего токи в анодных цепях становятся раз¬
личными. Электромагниты А1 и А2 начинают действовать с раз¬
личной силой, и система А1ВА2 сме¬
щается из своего среднего положения,
приводя в движение клапан сервоци¬
линдра.
Для того чтобы колебания ракеты
около положения равновесия были за¬
тухающими, может быть применено
устройство, посредством которого по¬
тенциометр перемещается навстречу
скользящему контакту а. таким обра¬
зом, что сигнал, снимаемый с потенцио-
.метра, Становится равным нулю рань¬
ше, чем гироскоп вернется в нормаль¬
ное положение. Это может быть осуществлено с помощью двух
противоположно действующих электромагнитов и мембраны
(или пружины), образующих систему, подобную А1ВА2.
Эти электромагниты включаются в цепь через потенциометр,
скользящий контакт которого перемещается при движении гид¬
равлического сервомотора, отклоняющего руль.
Описанная схема, усиливающая сигналы, подаваемые на
гидравлический сервомотор, может быть применена также в
том случае, когда руль приводится в движение посредством
электромотора. Электромагниты AJ и А2 (фиг. 91) должны быть
заменены в этом случае обмотками статора реверсивного мо¬
тора согласно принципиальной схеме, изображенной на фиг. 92.
§ 11. Пуск ракеты ФАУ-2
Пуск ракеты ФАУ-2 производили со специального пускового
стола. На огневую позицию ракету доставляли на длинном ла¬
фете, который буксировался тягачом (фиг. 93, 94, 95 и 96).
Мост лафета вместе с ракетой мог с помощью гидравличе¬
ских домкратов подниматься до вертикального положения.
В этом положении ракету устанавливали на пусковом столе, на
который она опиралась своими стабилизирующими поверхностя¬
ми. Для этой цели в нижней части стабилизирующих поверх¬
ностей были сделаны специальные утолщения (см. фиг. 69).
293.
Фиг. 94. Ракета, поднятая домкратом.
294
Фиг. 93. Лафет.
Фиг. 95. Ракета на лафете.
Фиг. 96. Подъем ракеты домкратом.
295
Ракета на пусковом столе показана на фиг. 97. Так как ракету
наполняли горючим и взрывчатым веществом после установки
на пусковом столе, то центр тяжести ракеты, находящейся на
лафете, был расположен в ее хвостовой
части, и момент, необходимый для
подъема моста, был невелик.
Подъем моста совершался с по¬
мощью гидравлического телескопиче¬
ского домкрата 2 (фиг. 93 и 94). При
этом использовался упор 1. После того
как ракета устанавливалась на пуско¬
вом столе, с нее снимали бандажи, ко¬
торыми она крепилась к лафету. Не¬
посредственно перед стартом лафет от¬
возили на безопасное расстояние и
опускали мост 3. Мост снабжен лест¬
ницей. Платформа представляла собой
ферму, сваренную из стальных труб; на
ней были смонтированы баллоны со
сжатым воздухом. Тележка платформы
имела восемь колес. Вдоль моста были
проложены трубопроводы 4 и 5, слу¬
жившие для наполнения ракеты спир¬
том, жидким кислородом и вспомога¬
тельным топливом.
Фиг. 98. Площадка под
пусковым столом.
Фиг. 97. Ракета на
пусковом столе.
Стабилизаторы ракеты, лежащей на лафете, были накло¬
нены к горизонту под углом 45°. При транспортировке их по¬
крывали брезентом.
Площадка под пусковым столом была устлана стальным»
ребристыми плитами (фиг. 98). Грунт под пусковым столом
296
должен был быть по возможности более плотным. Единствен¬
ными местами в Голландии с достаточно прочным грунтом ока¬
зались районы в восточной части страны и небольшие полосы
дюн вдоль морского побережья. Наилучшим вариантом является
пусковая площадка на месте с плотным песчаным грунтом,
устланная массивными бетонными плитами, поверх которых
укладываются стальные ребристые полосы. Так были оборудо¬
ваны те огневые позиции, с которых немцы производили обстрел
ракетами ФАУ-2 в течение продолжительного времени.
Фиг. 99 Установка ракеты
на стол.
Фиг. 100. Ракета, установленная
на пусковом столе.
На фиг. 101, 102 и 103 показан пусковой стол со всеми де¬
талями. Как видно из фиг. 101, пусковой стол состоит из двух
колец. Нижнее (опорное) кольцо устанавливается на четырех
стойках. На нем лежит верхнее кольцо, которое мо^сет пово¬
рачиваться с помощью двух храповых механизмов (см.
фиг. 102). Эти механизмы цепной передачей связаны с верхним
кольцом пускового стола. В нижнем кольце сделан жолоб, вы¬
ложенный шариками, по которым катится верхнее кольцо при
своем вращении (см. деталь А на фиг. 101). Верхнее кольцо
стопорится с помощью четырех зажимов.
Ракету устанавливают четырьмя стабилизирующими плоско¬
стями на верхнее кольцо таким образом, чтобы точки опоры
(утолщения на концах стабилизаторов) располагались между
направляющими трубками 9. Поворачивая верхнее кольцо, уста¬
навливают ракету нужным образом, т. е. так, чтобы плоскость
297
Фиг. 101. Пусковой стол.
/—верхнее кольцо; 2—нижнее кольцо с четырьмя стойками;
3— плита для отклонения пламени; 4—храповой механизм для
поворота верхнего кольца; 5 и 6—трубки; 7—стопорный зажим;
8— опора мачты; 9— упоры; 10—цепь.
298
Фиг. 102. Верхнее кольцо.
299
Фиг. 103. Плита.
стабилизаторов, играющих в полете роль «вертикального опере¬
ния», проходила через цель.
Внизу, под пусковым столом, расположена коническая плита
(фиг. 103), служащая для отклонения пламени в горизонталь¬
ном направлении. Заостренная вершина этого конуса, подвер¬
гающаяся действию высокой температуры, сделана из специаль¬
ного жаропрочного материала.
Фиг. 105. Мачта.
Трубки 5 и 6, укрепленные на верхнем кольце (см. фиг. 101),
служат для присоединения горелки, зажигающей смесь спирта
и жидкого кислорода, которая вытекает из сопла ракеты, когда
главные вентили открыты. Такая горелка показана на фиг. 104.
Деревянный штырь 1 (см. фиг. 104) входит в трубку 6 (см.
фиг. 101). Зажигается горелка с помощью электричества.
К пусковому столу крепится мачта (см. фиг. 97, 105), под¬
держивающая электрические провода, служащие для управле¬
ния во время старта различными электрическими устройствами
300
Фиг. 104. Горелка.
внутри ракеты. По этим проводам к ракете подается постоянный
ток для зарядки аккумуляторных батарей и трехфазный ток для
обогрева (для предохранения различных частей ракеты от
охлаждающего действия жидкого кислорода). Постоянный ток
получают с помощью умформера, состоящего из мотора трех¬
Фиг. 106. Поперечные сечения приме¬
няемых кабелей.
Фиг. 107. Упор мачты.
фазного тока мощностью 7,5 л. с., делающего 1500 оборотов в
минуту (питающегося от городской электросети), и динамома¬
шины мощностью 3kW, 1430 оборотов в минуту, вырабатываю¬
щей ток нужного напряжения и силы. Зарядка батарей продол¬
жается около часа, при токе 94/111 А и напряжении 27/32 V.
Умформер устанавливается на специальной автомашине.
На фиг. 106 показаны поперечные сечения различных при¬
меняемых кабелей.
Соединение электрических проводов с ракетой осуществляет¬
ся с помощью специального электромагнита.
301
Фиг. 108. Момент запуска двигателя.
Фиг. 109. Момент старта ракеты.
302
На фиг. 107 показана нижняя часть мачты, укрепленной на
пусковом столе. Верхний конец мачты изображен на фиг. 105.
В момент старта цепь электромагнита размыкается, и про¬
вода автоматически отсоединяются (см. фиг. 108 и 109).
На фиг. ПО показан прицеп для перевозки пускового стола
с конической плитой.
На огневую позицию ракета доставляется без топлива. На¬
полнение топливом производится непосредственно перед стар-
Фиг. НО. Тележка для перевозки пускового стола.
том, чтобы уменьшить потери жидкого кислорода вследствие
испарения и избежать ненужного переохлаждения двигателя
ракеты (фиг. 111).
Наполняют ракету в следующем порядке: 1) спирт, 2) жидкий
кислород, 3) перекись водорода, 4) перманганат кальция.
Вся операция наполнения ракеты занимает 12 мин.; потери
кислорода вследствие испарения составляют 2 кг в минуту.
После заправки автоцистерны с топливом отъезжают и подъ¬
езжает небольшая машина со специальной установкой для обо¬
грева турбины, насосов, двигателя и вспомогательного топлива.
Кроме того, как указывалось выше, применяется электрообогрев
переменным током от городской сети. Затем подъезжает броне¬
машина, с которой производится управление стартом. В ней на¬
ходятся два инженера и командующий стартом офицер. Эту
бронемашину можно видеть на фиг. 108 и 109. К ней при¬
соединяется кабель управления.
303
Вскоре машина с подогревателем отъезжает. Производится
зажигание горелки и открываются главные вентили горючего.
Спирт и кислород поступают в камеру сгорания (см. § 4 этой
главы). Начинается горение смеси. Через несколько секунд
начинается течение вспомогательных горючих, турбина приходит
во вращение и за три секунды набирает полные обороты. Тече-
Фиг. 111.
ние основных горючих усиливается, появляется тяга, которая
быстро возрастает. В момент, когда тяга становится равной
весу ракеты, последняя отрывается от земли. От момента зажи¬
гания горелки до отрыва ракеты от земли проходит 7—10 сек.
Выходящее из сопла ракеты пламя имеет длину около 15 м.
Запуск ракеты можно производить в любую погоду, за
исключением случая сильного ветра. Непосредственно после от¬
рыва ракеты от земли скорость ее невелика, и порыв сильного
ветра может опрокинуть ее.
304
§ 12. Ракета ФАУ-2 в полете
Как уже указывалось, ракета сначала движется в верти¬
кальном направлении. Затем автопилот начинает поворачивать
ракету, траектория ее наклоняется к горйзонту, и она движется,
описывая плоскую (приближенно) кривую. На высоте 20 км
продольная ось ракеты составляет с горизонтом угол около 40’.
С этого момента подача горючего прекращается, и ракета про¬
должает полет, как обычный артиллерийский снаряд.
В этот момент скорость ракеты равна 1700 м/сек, тяга —
30 т, масса — 4 т, ускорение — 8 g. Мощность ракетного двига¬
теля превышает в этот момент 600 000 л. с.
Фиг. 112.
С этого момента ракета движется по параболической траек¬
тории, достигая высоты 80 км. Время работы двигателя ракеты
составляет приблизительно 70 сек., а полное время полета —
5 мин.
На фиг. 112 изображена траектория полета ФАУ-2. Работа
двигателя прекращается в точке G. Эта точка удалена от места
старта на расстоянии 10 км по горизонтали.
Предварительные данные о движении ракеты можно полу¬
чить из следующего прикидочного расчета. Горизонтальная
дальность полета ракеты (от Голландского побережья до Лен-
дона) должна равняться 320 км. Считая, что выстрел произво¬
дится из воображаемого артиллерийского орудия под углом
45° и пренебрегая воздушным сопротивлением, кривизной по¬
верхности Земли и неоднородностью гравитационного поля, мы
найдем, что необходимая начальная скорость должна быть рав¬
на 1772 м/сек.
Максимальная высота траектории будет при этом 80 км, а
полное время полета — 225 сек. Место старта ракеты было вы¬
брано на расстоянии 10 км от этого гипотетического орудия
(см. фиг. 112). Траекторию, изображенную на фиг. 112, следует
305
20 Динамика раке г
рассматривать лишь как первое приближение. Однако отклоне¬
ние действительной траектории от изображенной параболы не¬
велико. Применяя методы, изложенные в § 17, глава IV, учи¬
тывающие кривизну поверхности Земли и неоднородность поля
силы тяжести, можно убедиться в том, что это отклонение не
превышает нескольких процентов.
Отклонение, происходящее вследствие вращения Земли, в
результате которого траектория становится пространственной
кривой, того же порядка.
Влияние сопротивления воздуха незначительно, так как
основная часть траектории проходит на очень больших высотах.
Его можно учесть, если иметь экспериментальные данные. Нем¬
цы накопили эти данные за время испытаний моделей в аэро¬
динамических трубах при сверхзвуковых скоростях.
Ограничимся грубой оценкой влияния сопротивления воздуха.
Определим его по формуле
R = к ( —— ikv2K (v —,
к 2 J Во < a J
где R—сопротивление воздуха;
d—калибр снаряда 85 см\
8—вес 1 м3 воздуха при средних температуре, давле¬
нии и влажности воздуха в условиях полета;
80—вес 1 л3 воздуха при 10°С, 760леи рт. ст. и 70% отно¬
сительной влажности;
i—коэффициент формы;
k—коэффициент, зависящий от калибра;
v—скорость снаряда;
К ( V— )—функция сопротивления, где
\ а /
а0 — скорость звука в воздухе при 10°С,
а—скорость звука при рассматриваемой температуре.
Согласно Эберхардту
1 47 7
— =1,1311—^ + 0,00031661».
i v
(Эта формула справедлива для снарядов с острым носом и
радиусом оживальной части около трех калибров.)
Согласно Критцингеру k тем меньше, чем больше калибр.
Для калибров от 6 до 35 см k изменяется в пределах от 1,04
до 0,45.
Попытаемся теперь оценить величину воздушного сопротив¬
ления ФАУ-2. В качестве средних значений примем скорость
с =1500 м/сек и высоту 50 км.
306
Рассмотрим теперь величины, входящие в формулу для R.
На фиг. 113 изображена кривая зависимости — от вы-
»о
соты h. Эта зависимость известна до высоты 20 км. Экстра¬
поляцией находим, что на вы¬
соте 50 км =0,01’.
Подставляя в формулу
Эберхардта 11=1500 м!сек, на¬
ходим / = 0,635. Это значение,
впрочем, нельзя считать до¬
стоверным.
Примем k = 0,45. На фиг. 114
дан график функции к(ъ
для температуры То = 10°С
(сплошная линия).
Так как в этом случае я =
=а0, то K=K(v). Для рас¬
сматриваемой температуры Ти
которую мы примем равной
—50°С(Т = 223сК),
нужно вместо v подставить
Ол ■■ / 7л -■ 283 « л л
=^1/ —=^1/ —= 1.12-0.
а У fa у 223
Фиг. 114.
Изображенный на фиг. 114 график построен по таблицам,
дающим K(v) до ^=1300 м!сек.
1 Эта цифра завышена. (Прим, перев.).
307
Фиг. 11&
20*
Будем считать, что при больших значениях скорости
функция К(ч>) остается постоянной, равной K(v) при v =
— 1300 м/сек. Следовательно,
также будет сохранять постоянное значение. Из графика
находим
10W = 3,240.
Подставляя в формулу для R найденные значения, полу¬
чаем
/? = тс-852-0,01-0,635-0,45-15002 ^ = 473 кг.
Запас топлива в ракете полностью сгорает задолго до
высоты 50 км, так что вес ракеты на этой высоте составляет
всего 4 г. Замедление ракеты, вызванное сопротивлением
воздуха, на высоте 50 км будет, следовательно, равно
/ = R— = — gc=0,lg=sl м/сек2.
' G 4000s 6
На больших высотах это замедление будет еще меньше.
Основная часть траектории ФАУ-2 (приблизительно 200 км)
проходит на-высоте, большей 50 км.
Примем в качестве среднего значения замедления вели¬
чину 0,6-=-0,7 М/сек2 и полное время полета будем считать
равным 250 сек. Тогда уменьшение горизонтальной дальности
вследствие сопротивления воздуха будет равно
ДХ=-^/?2=-у(0,6-г-0,7)2502=>20 км.
Заметим, что уменьшение горизонтальной дальности вслед¬
ствие сопротивления воздуха частично компенсируется из-за
кривизны поверхности Земли и вследствие уменьшения силы
тяжести с высотой.
Таким образом можно заключить, что воздушное сопротивле¬
ние не Оказывает существенного влияния на траекторию ракеты.
В полете ракета нагревается вследствие трения о воздух.
Температура ее при этом достигает 300° С. Англичане, видев¬
шие полет ФАУ-2, рассказывают, что она была раскалена до¬
красна. Это действительно могло иметь место вследствие зна¬
чительного уплотнения воздуха у носа ракеты. Произведем при¬
ближенный расчет. Уравнение движения бесконечно малого
элемента воздуха имеет вид
pSds —=—Sdp,
308
где S—поперечное сечение трубки тока;
ds—элемент длины трубки тока;
Р и v—плотность воздуха и скорость потока в рассматри¬
ваемой точке.
Так как
ds— = —dv = vdv,
dt dt
то
pvdv =—dp. (62)
Интегрируя это уравнение вдоль трубки тока, получаем
= COnSt’ (63)
Уравнение (63) является уравнением Бернулли. Предпо¬
лагая процесс сжатия воздуха адиабатическим, можем напи¬
сать
Ро \ Ро / \ Ро / Ро
Подставляя это выражение в уравнение (63), получаем
№-=k y-1rfp =
J Р Po J Р \ Ро J
Ро Рой-и pg*"1 pf
Но
Ро = Р_
Ро Р* ’
так что
£о_р*-1 = JL
Ро Р
Следовательно,
Cdp k р
J р k-\ р
и уравнение (63) принимает вид
V + ~~ — = const (64)
или, так как — =gRT,
р
^- + -r^-7-gT?r= const. (65)
309
Подставляя в уравнение (65)
k=^- и R = cp—cv,
cv
получаем
-у +gcpT = const.
Следовательно,
±+gcpT=^-+gcpT„, (65')
где vn и Т „—скорость потока и температура воздуха на
достаточно большом расстоянии от ракеты.
У носа ракеты i» = 0. Обозначая приращение температуры
у носа ракеты вследствие адиабатического сжатия через АТ,
найдем
.,2
дг=—. (66)
Подставляя в эту формулу 1^=1500 м/свк, g=10 м/сек2
и = 0,238 кг кал/кг градусы = 0,238 X 427 кгм/кгградусы =
= 102 м/градусы, получаем
1500* 2 250000 ..О,ог
А1 « = = 1125 С.
2• 10 • 100 2000
§ 13. Коэффициент полезного действия ракеты
Разные авторы дают для к. п. д. ракеты различные формулы.
Это происходит потому, что полезную работу при полете ракеты
можно определить по-разному.
Если считать, что с отбрасываемыми газами теряется кине¬
тическая энергия, которой они обладали до вылета (так как до
вылета они составляли часть ракеты и двигались с той же ско¬
ростью, что и она), то коэффициент полезного действия можно
представить следующей формулой:
. 1 .
mcv— —mv*
2 п v f v \*
7)= = 2 (— ) ,
1 • С \ С 1
— тс*
2
где т — масса газа, отбрасываемая в единицу времени;
mcv — работа, совершаемая в единицу времени действую¬
щей на ракету реактивной силой. (Если движение происходит
в пустоте, то эта работа равна приращению кинетической энер¬
гии ракеты.)
310
Полагая
— = R,
С
получим
ii = 2R-R'. (67)
При R = 0 т] = 0, что очевидно, так как в этом случае ра¬
кета находится в покое.
Если R=l, то т] = 1. В этом случае скорость ракеты равна
относительной скорости отбрасываемых газов, и после вылета
из ракеты они не обладают кинетической энергией в неподвиж¬
ной системе координат. Вся кинетическая энергия газов рас¬
ходуется на движение ракеты.
При дальнейшем увеличении R к. п. д. ракеты вновь начи¬
нает падать и обращается в нуль при R=2, т. е. когда скорость
ракеты становится равной удвоенной величине скорости истече¬
ния. В этом случае потеря кинетической энергии газов как части
ракеты, равна работе, затраченной на движение ракеты.
Если R>2, к. п. д. становится отрицательным, так как полез¬
ная работа становится меньше, чем потеря кинетической энер¬
гии газов.
Кроме этого «мгновенного» к. п. д., представляет интерес так¬
же средний к. п. д. ракеты на всем активном участке полета.
Этот к. п. д. равняется
в
Ъ₽=4 {(2R—Rt)dR=-j-(R2—~-Rs\ = R—-l-R*. (б8)
A J . А \ о / О
Он достигает своего максимального значения, когда
—(R -^Уоили 1 -R = 0,
dR{ з J з
т. е. при R= 1,5.
Таким образом
(1ер)п.«= 1.5-4 1.52 = 0,75 = 75%.
Итак, максимальное значение среднего к. п. д. равно 75% и
достигается в том случае, когда скорость ракеты в конце актив¬
ного участка в 1% раза больше скорости истечения.
Допустим, что ракета летит в пустоте и что можно пре¬
небречь влиянием поля силы тяжести. Тогда можно будет
яаписать следующее дифференциальное уравнение:
dm dv zcr,4
—с—=т—, (69)
at at
311
Фиг. 115.
где tn—масса ракеты (включая топливо). Разделяя, перемен¬
ные
dm dv
— ' »
т с
найдем после интегрирования
--у (70)
т = тое .
Подставляя в эту формулу = 1,5, найдем, что —- =4,48,
т. е. в случае, когда средний к. п. д. достигает своего максималь¬
ного значения 75%, запас топлива
составляет 78% от полного началь¬
ного веса ракеты.
Этот результат относится лишь
к механическому к. п. д. (в отли¬
чие от теплового к. п. д.) и спра¬
ведлив для любой ракеты, летящей
в пустоте, вне поля тяготения.
На фиг. 115 1 изображены кри¬
вые ЗаВИСИМОСТИ 7) И 7]ср от R.
При R=0 и 7?=3 т)ср=0; при
/?=1,5 т]ср имеет максимум. Обе
кривые являются параболами.
Рассмотренное движение ракеты
в пустоте, вне поля силы тяжести,
■представляет лишь академический
интерес. В реальных случаях, как,
например, в случае полета ФАУ-2,
реактивная сила совершает работу
против силы тяжести и силы сопротивления воздуха.
Рассмотрим сперва влияние силы тяжести при вертикальном
подъеме ракеты. Пренебрегая изменением силы тяжести с вы¬
сотой, получим следующее дифференциальное уравнение:
dm . dv
— с—=mg + m— (71)
dt dt v
или
—c — = gdt + dv.
m
Интегрируя, находим
m v+gt
^~e c . (72)
1 Aeronautics, январь 1945.
312
Фиг. 116.
Как указывалось выше, средний к. п. д. достигает макси¬
мального значения, когда в конце активного участка v= 1,5с.
_ / начальная масса \
Следовательно, отношение масс , соот-
\ конечная масса /
ветствующее этому максимуму, равно
l,5c+g7
с , (73)
т
где t — продолжительность активного участка движения.
т-г ^0
При заданном с оптимальное отношение масс —- является
т
функцией времени горения t.
Из формулы (73) видно, что для того, чтобы уменьшить — ,
т
т. е. для того, чтобы по возможности сократить запас топлива,
время горения t должно быть
как можно меньше ’. Этим объ¬
ясняется то, что конструкторы
ФАУ-2 стремились сделать вре¬
мя горения малым. Как указы¬
валось, это время составляет
всего 70 сек., тогда как полное
время полета равняется 5 мин.
На фиг. 1161 2 изображены
кривые зависимости оптимально-
/ТТп
го отношения ——, вычисленного
т
по формуле (73), от времени го¬
рения t для различных значений
скорости истечения с.
Принимая грубо для ракеты
ФАУ-2 скорость истечения
2000 м/сек, найдем для времени
горения 70 Рек. оптимальное отношение масс 64-7. Действи-
13
тельное отношение масс для ракеты ФАУ-2 равно —~3.
Следовательно, отношение масс в этой ракете не является
оптимальным.
Сопротивление воздуха уменьшает к. п. д. ракеты. Обозначая
воздушное сопротивление через R и вес ракеты с топливом че¬
1 Строгое решение для поля силы тяжести даст, что при оптимальном
режиме сгорание должно быть мгновенным. См. А. А. Космодемьян¬
ский, Механика тел переменной массы, изд. 1947.
2 Aeronautics, январь 1945.
31»
рез G, получим в случае вертикального подъема дифференци¬
альное уравнение
— с^ = П + С + т—.
\dt dt
Так как dt=—, это уравнение можно записать в виде
V
„ dm R+G , dv
—с —= — h т—. (74)
ds v ds ’
Если ракета движется вертикально вверх с небольшой ско¬
ростью, то сопротивление воздуха будет незначительным и ра¬
бота, затрачиваемая на его преодоление, также будет невелика.
Однако количество топлива, расходуемого на уравновешивание
силы тяжести, будет в этом случае велико, так как время подъе¬
ма будет значительным.
Если же ракета движется с большой скоростью, то на преодо¬
ление силы веса расходуется немного топлива, так как время
подъема невелико, но сопротивление воздуха (пропорциональ¬
ное по меньшей мере второй степени скорости) будет в этом
случае значительно и на его преодоление будет затрачиваться
большая работа.
Следовательно, существует оптимальная скорость, при кото¬
рой расход горючего—^—.необходимый для подъема ракеты на
ds
заданную высоту ds и приращения заданного количества дви-
du
жения т —, будет минимальным.
ds
Обозначая эту оптимальную скорость через vx, получим
д /dm\ q
dvx\ ds J
dv
и так как т— задано, то
ds
±[т*\=0.
дох\ ds /
Из этих равенств и уравнения (74) получаем
= (75)
dvx{ vx ) v
Соотношение (75) было получено Обертом и известно под
названием закона Оберта.
При средних значениях скорости сопротивление воздуха мож¬
но считать равным
^ = 4’pfF'°a’
-314
где р — плотность воздуха;
7 — коэффициент формы ракеты, не зависящий от и;
F — наибольшее поперечное сечение ракеты, перпендикуляр¬
ное направлению движения (т. е. перпендикулярное оси
ракеты).
В этом случае из соотношения '(75) найдем
1 _ G п
— PiF- = 0
9 г * 2
ИЛИ
G=T'PlF^' (76)
v
х V hf
Следовательно, при сопротивлении воздуха, пропорциональ¬
ном квадрату скорости, скорость будет оптимальной тогда, когда
сопротивление воздуха равняется весу ракеты.
При больших скоростях сопротивление воздуха можно счи¬
тать пропорциональным V3. В этом случае будем иметь
R = у- ptF-o*.
Подставляя это выражение в уравнение (75), получаем
д / 1 о о\ G л
— ( — = 0
dvx\ 2 “' л/ v2
или
P"(Fvx—— =0, p-fFi»3 = 2R = О и vx=i/^mg
vx V PlF ‘
Следовательно, при сопротивлении воздуха, пропорциональ¬
ном кубу скорости, скорость будет оптимальной тогда, когда вес
ракеты вдвое больше сопротивления воздуха *.
В наиболее общем случае сопротивление воздуха можно пред¬
ставить формулой
/?=у-Р7^п, (77)
где у и га являются функциями v, которые в неслишком боль¬
шом диапазоне скорости можно считать постоянными.
1 Формулы Оберта верны только при условии, что скорость движе¬
ния ракеты мала по сравнению со скоростью истечения.
315
Подставляя выражение (77) в уравнение (75), получаем
— -=0
dvx\ 2 И х ) v3
ИЛИ
_2z± Р1^п-2— — =0,
2
откуда
п 1 piFv* = О
или
(л-1)/? = О (78)
и
(79)
У (п— 1)р?£
Следовательно, отношение веса ракеты к силе сопротивления
воздуха при оптимальной скорости является постоянным для
каждого диапазона скоростей. Оно равно п—1, если сопротивле¬
ние воздуха в данном диапазоне пропорционально vn.
Считая величины пнув формуле (79) известными функ¬
циями v, а р и g — известными функциями s (где s — высота),
можно записать
= F(s,v),
где F(s,v)—правая часть формулы (79).
Из этого соотношения расчетным путем найдем
■п =/($). (80)
Заменяя я на А и интегрируя, найдем
,=Кч"й' 181 >
о
Исключая из уравнений (80) и (81) s, найдем
*> = Ш) (82)
и
S = J a(t). (83)
о
Мы предполагали в этом расчете, что при /=0 ракета имеет
оптимальную скорость, соответствующую высоте, на которой она
в этот момент находится.
316
Следовательно, нужно, чтобы ракета после старта как мож¬
но быстрее набрала оптимальную скорость, достигнув ее на воз¬
можно меньшей высоте.
Масса ракеты т как функция t может быть найдена из
дифференциального уравнения
dm , г> । dv
— с— = и + к + т— ,
dt dt ’
где согласно формулам (78) и (82)
Следовательно,
—с —— Q -|— р т— = —-— mg + /пф'(0
dt п-1 dt п-1 ®
или
(84)
т Ln — 1 J
Учитывая изменение g с высотой, имеем
где go— ускорение силы тяжести на поверхности Земли;
г—радиус Земли;
h — высота, на которой находится ракета в момент /=0 (мо¬
мент, когда ракета достигает оптимальной скорости).
В соответствии с равенством (83) можно написать
g-g(t).
Далее n = n{v), так что, учитывая равенство (82),
п = п(0.
Таким образом уравнение (84) можно записать в виде
—с— =$(f)dt,
т
где р—известная функция времени. Интегрируя, получаем
t
(85)
т - тое ° ,
.где та—масса ракеты с топливом в момент f = 0.
317
Реактивная сила как функция t равна
t
dm о/л о
~с~ = т№)е °
Найденное нами приближенно сопротивление воздуха для
ФАУ-2 на высоте 50 км равно 473 кг, а вес ее на этой высоте
4000 кг. Если мы даже примем п=5 (эта цифра, конечно, за¬
вышена), то получим для сопротивления воздуха, соответствую¬
щего оптимальным условиям, значение
^=1000 кг.
4
Следовательно, можно сделать заключение, что эта ракета
вообще не достигает оптимальной скорости. Это неудивительно,
так как ракета ФАУ-2 является снарядом, рассчитанным толь¬
ко на один полет (хотя стоимость ее почти такая же, как стои¬
мость истребителя Спитфайер). В условиях войны соображения
экономичности отодвигались на второй план. Однако в буду¬
щем при использовании ракеты для достижения больших вы¬
сот эти соображения следует учитывать.
Оберт в своей книге «Пути осуществления космических по¬
летов» описывает метод автоматического регулирования ско¬
рости ракеты с целью поддержания оптимального ее значения.
Сопротивление воздуха он принимает пропорциональным v2,
так что величина этого сопротивления должна равняться весу
ракеты.
Он предлагает установить в носовой части ракеты подвиж¬
ную пластину, которая под действием динамического давления
встречного потока воздуха будет перемещаться вдоль оси раке¬
ты и сжимать пружину. При этом будет изменяться электриче¬
ское сопротивление, включенное в цепь электромагнита, и ток
в этой цепи будет пропорционален величине сопротивления воз¬
духа.
Вес ракеты изменяется в зависимости от расхода топлива.
В системе, описанной Обертом, в баке с топливом помещается
поплавок, который по мере расходования топлива опускается
и изменяет при этом электрическое сопротивление таким обра¬
зом, что ток, проходящий через катушку второго электромагни¬
та, изменяется пропорционально весу ракеты. Электромагниты
действуют на рычаг, управляющий клапаном, который регули¬
рует подачу топлива. При оптимальной скорости ракеты силы,
с которыми действуют электромагниты, уравновешиваются и
рычаг находится в покое. Если скорость становится меньше
оптимальной, то действие второго электромагнита становится
сильнее действия первого, и подача горючего увеличивается.
318
Если же скорость ракеты превышает оптимальную, то домини¬
рует первый электромагнит, и подача горючего уменьшается.
Описанная система регулирования может быть применена
также и в том случае, когда сила сопротивления воздуха изме¬
няется по наиболее общему закону [формула (77)]. В этом слу¬
чае пружина, связанная с пластиной, воспринимающей воздуш¬
ный напор, должна быть отрегулирована таким образом, чтобы
при (л—1)R=G токи в катушках электромагнитов были оди¬
наковы и рычаг, следовательно, находился в равновесии.
Если п изменяется со скоростью,
то можно в описанную систему
ввести корректирующее автомати¬
ческое устройство. Можно, напри¬
мер, изменять силу пружины с по¬
мощью регулировочного винта, при¬
водимого во вращение от неболь¬
шого электромотора. При измене¬
нии скорости ракеты регулировоч¬
ный винт должен поворачиваться на угол, пропорциональный
величине этого изменения. Можно, например, связать этот мотор
с диском В, находящимся в электрическом контакте с диском А
(фиг. 117), который в свою очередь соединен с интеграционным
акселерометром. Когда линия aS лиска А совпадает с линией уЗ
диска В, подача тока к электромотору прекращается *.
§ 14. Влияние скорости истечения и отношения веса топлива
к весу ракеты на горизонтальную дальность ФАУ-2
Считая, что движение ракеты на активном участке траекто¬
рии происходит по вертикали, можно написать
d т , dv
—с— = G + R + m—.
dt dt
Заменяя в этом уравнении G на mg и пренебрегая сопро¬
тивлением воздуха R, получим после интегрирования
v+gt
т = тае с .
Пусть горение прекращается в момент и пусть масса ра¬
кеты в этот момент равна т,. Тогда
т.1 = тйе с
или
—с с
Ш!
Фиг. 117.
319
1 Предполагается, что при регулировании двигателя скорость истече¬
ния продуктов сгорания остается постоянной.
Следовательно,
mi
откуда скорость в конце активного участка
1»1 = с1п'"-5— gtv
т1
Пусть т—секундный расход топлива. Считая эту величину
на всем активном участке постоянной, будем иметь
£ СТр —7П1
1 т
и
= (87)
т\ т
Обозначим
тс с j
mg g
Величина I имеет важное значение для оценки реактивных
двигателей и обычно называется удельным импульсом или уделы
ной тягой.
Предположим, что реактивная сила Р задана. Тогда можно
написать
Р= mc = mgl,
откуда
Р
т = — .
Подставляя это выражение в формулу (87), получаем
Vi = gl In g2I. (88)
mi P
Следовательно, скорость в конце активного участка при
вертикальном подъеме пропорциональна величине /.
С того момента, как прекратится действие реактивной
силы, ракета пройдет по вертикали путь —, который, как
показывает формула (88), пропорционален /2.
Теоретическое значение величины / равно
[ стеор
*теор >
320
где
^eop=K2g^
Е—теплотворная способность топлива в кгм/кг.
Следовательно,
/2 = —,
g
откуда видно, что путь, пройденный ракетой от конца активного
участка до наивысшей точки, пропорционален Е.
Известен случай, когда вследствие неисправности приборов
управления ракета ФАУ-2 продолжала непрерывно поднимать¬
ся по вертикали. При этом она достигла высоты 162 км.
Если в качестве топлива и окислителя применить не спирт
и кислород, а водород и кислород, то теплотворная способность
• 3777
повысится с 2340 до 3777 кгкал, т. е. в 1а; 1,6 раза. В этом
2340 г
случае ФАУ-2 поднялась бы на высоту
1,6-162 « 260 км.
Если ракета движется на активном участке не по вертикали,
а по некоторой наклонной траектории, образующей в конце
активного участка угол а с
горизонтом (для ФАУ-2
а ~ 40°), то скорость ее в кон¬
це этого участка будет боль¬
ше, чем скорость, определяе¬
мая формулой (88). При за¬
данных значениях постоянной
реактивной силы Р, начальной
массы т0 и конечной массы т1 скорость в конце активного уча¬
стка v, будет возрастать с увеличением / быстрее, чем по закону
прямой пропорциональности.
Если скорость v, образует с горизонтом угол а, то горизон¬
тальное расстояние АВ (фиг. 118) равно
2г>] sin a COS а
g
и, следовательно, изменяется, при постоянном а, пропорциональ¬
но и/.
Поэтому горизонтальная дальность ракеты будет с увеличе¬
нием / возрастать быстрее, чем Р или Е, при постоянных Р,
та и Wj.
Фиг. 118.
21 Динамика ракет
321
Фиг. 119.
На фиг. 119 1 представлена зависимость — от I для раке¬
ты ФАУ-2. Через R обозначена фактическая горизонтальная
дальность ФАУ-2, равная 320 км при
/ = 217 кгсек
кг
(что соответствует топливу ФАУ-2 —
спирту и кислороду), а через R — гори¬
зонтальная дальность при различных зна¬
чениях /. Начальная масса, конечная
масса и реактивная сила взяты при этом
в соответствии с фактическими данными
ФАУ-2.
Величину / можно увеличить путем
повышения температуры и давления в
камере сгорания или применения топли¬
ва с более высокой теплотворной спо¬
собностью. Единственными подходящими
для этой цели топливом и окислителем
являются водород и кислород. Заменяя
спирт водородом, можно было бы увеличить горизонтальную
дальность ФАУ-2 до 500 км.
Другой величиной, в большой степени влияющей на горизон¬
тальную дальность ракеты, является отношение
вес топлива mi
начальный вес ракеты mQ
Выражая — через а,
т0
— =1—а
т0
и подставляя это выражение в формулу (88), получим
•Ц1 = £/1п—! m0^-g2L (88')
1 —а А
При приближении а к единице vv как показывает эта фор¬
мула, быстро возрастает и, следовательно, быстро возрастает
горизонтальная дальность.
Расчет показывает, что если 1000 кг взрывчатого вещества
заменить таким же количеством топлива, то горизонтальная
дальность ФАУ-2 почти удвоится.
§ 15. Проекты ракет дальнего действия
Гигантская скорость, достигнутая ракетой ФАУ-2, дает осно¬
вания считать, что в скором будущем ракетный двигатель най¬
дет применение на самолетах, движущихся со сверхзвуковой
iFlight, 8 ноября 1945.
322
скоростью. Расчеты показывают, что такие полеты возможны
уже в настоящее время.
В одном из рассматривавшихся проектов боевая часть раке¬
ты ФАУ-2 заменялась герметической кабиной и ракете прида¬
вались крылья с нагрузкой на крыло 175 кг/м2. На активном
участке эта крылатая ракета должна была управляться автома¬
тически, так же как ФАУ-2, а по окончании активного участка
на высоте около 35 км управление ракетой должно было пе¬
рейти к летчику.
Затем ракета должна была начать спуск с минимальным
углом планирования.
Если cv и сх — коэффициенты подъемной силы и лобового
сопротивления, то
Y = — Cvp/7!»2,
Q = T-c^oFi»2,
где Y — подъемная сила;
Q — лобовое сопротивление;
F — площадь крыльев;
Р — плотность воздуха.
Скорость установившегося планирования равна
v = \f — - ' . (89)
У Vc2y + c*
Угол атаки, соответствующий минимальному углу планирова-
ния, определяется из условия минимума отношения —
Су
Горизонтальная дальность описанной крылатой ракеты долж¬
на была равняться 550 км, а полное время полета 15 мин.
Рассматривались также проекты ракеты ФАУ-2 со специаль¬
ной стартовой камерой (ракета АЮ).
Два таких проекта были рассмотрены весьма подробно.
В каждом из них снабженная крыльями ракета ФАУ-2 подни¬
малась с помощью стартовой камеры на высоту 25 км. На этой
высоте стартовая камера отделялась, и ракета, достигшая к
этому моменту скорости 4800 км/час, продолжала дальнейший
полет самостоятельно.
По первому проекту после отделения стартовой .камеры
ФАУ-2 с полным запасом топлива должна была перейти в го¬
ризонтальный полет со скоростью 2500 км/час на высоте 25 км.
Горизонтальная дальность этой ракеты должна была равняться
2500 км, а полное время полета — 70 мин.
По второму проекту после отделения стартовой камеры
ФАУ-2 должна была продолжать подъем до тех пор, пока не
21*
323
будет израсходовано все топливо, что должно было произойти
на высоте около 130 км. Скорость ракеты к этому моменту
должна была достигнуть 12 000 км/час.
Дальнейший свободный полет ракеты должен был происхо¬
дить по параболической траектории *, так как подъемная сила и
сопротивление воздуха на больших высотах не оказывают на
полет существенного влияния.
Двигаясь по параболе, ракета должна была достигнуть вы¬
соты 300 км. Горизонтальная дальность свободного полета по
параболической части траектории должна была равняться
Фиг. 120.
1200 км. В конце параболической траектории на высоте около
50 км скорость ракеты должна была достигнуть 13 000 км/час.
С высоты 45 км ракета должна была перейти на планирование.
Горизонтальная дальность полета по этому проекту равнялась
4800 км, а время полета — 45 мин.
Biec стартовой камеры в описанных проектах составлял око¬
ло 100 т.
Рассмотренные траектории приведены на фиг. 120.
Первый из этих проектов следует считать вполне реальным.
Реализация второго проекта, однако, связана с серьезными труд¬
ностями вследствие очень большой скорости ракеты, намного
превышающей скорость, достигнутую ФАУ-2. При столь боль¬
шой скорости может значительно нагреться оболочка корпуса
ракеты.
Температуру торможения можно найти по формуле (66)
(см. § 12).
При ср =102 м/С° и v* = 13000 кл<а;3600 м/сек получим
Д 6500° С.
1 Точное решение показывает, что траектория центра тяжести ракеты
в пустоте в поле силы притяжения Землей будет иметь форму эллипса.
(Прим, перев.).
324
ОГЛАВЛЕНИЕ
Стр.
Предисловие редактора . ...................... 3
Глава I
Снаряд как материальная точка
§ 1. Введение . ................ 5
§ 2. Движение снаряда в пустоте в однородном поле силы тяжести 6
§ 3. Общий метод расчета траектории с учетом сопротивления воз¬
духа - 11
§ 4. Интегрирование основного уравнения в том случае, когда
^i/(c)=a+cv" 13
§ 5. Интегрирование основного уравнения в случае, когда kjf(v)=cvn 15
§ 6. Интегрирование основного уравнения в случае, когда сопроти¬
вление воздуха пропорционально v‘ 16
§ 7. Случай, когда сопротивление воздуха пропорционально v3 . . . 18
§ 8. Случай, когда сопротивление воздуха пропорционально v4 . . . 19
§ 9. Случай, когда сопротивление воздуха пропорционально v5 . . . 21
§ 10. Интегрирование уравнений движения снаряда методом Рунге-
Кутта 22
§ 11. „Послушность" снаряда 24
§ 12. Разбивка траектории на участки 26
§ 13. Ускорение Кориолиса 26
§ 14. Движение снаряда в пустоте с учетом вращения Земли .... 29
§ 15. Движение снаряда в сопротивляющейся среде с учетом вра¬
щения Земли 32
§ 16. Неоднородность поля силы тяжести и кривизна поверхности
Земли . 36
§ 17. Движение материальной точки в центральном поле сил .... 37
§ 18. Траектория снаряда в пустоте при различных значениях на¬
чальной скорости 47
§ 19. Траектория снаряда, движущегося в пустоте над поверхностью
Земли, без учета вращения Земли • 48
§ 20. Траектория снаряда, движущегося в пустоте, с учетом враще¬
ния Земли • - 49
§ 21. Траектория снаряда с учетом шарообразности Земли, сопроти¬
вления воздуха, изменения силы тяжести с высотой, центро¬
бежной силы и вращения Земли 51
§ 22. Влияние ветра 55
325
Стр.
§ 23. Сравнительная оценка силы Кориолиса и сил, связанных с из¬
менением гравитационного и центробежного полей с высотой 56
§ 24. Движение снаряда с учетом кривизны земной поверхности, вра¬
щения Земли, сопротивления воздуха и влияния ветра .... 58
Глава II
Теория тяжелого гироскопа
§ 1. Общее решение задачи . • . 60
§ 2. Регулярная прецессия .' • . . . 67
§ 3. Псевдорегулярная прецессия 69
Глава III
Снаряд как твердое тело
§ 1. Введение • • 72
§ 2. Эффект Пуассона • 72
§ 3. Эффект Магнуса ■ 73
§ 4. Гироскопический эффект . • • 73
§ 5. Силы и моменты, действующие на снаряд • 81
§ 6. Системы координат и формулы преобразования * . . 82
§ 7. Уравнения движения центра тяжести 85
§ 8. Вращение снаряда вокруг его центра тяжести • . . 85
§ 9. Различные случаи движения • 86
§ 10. Интегрирование дифференциальных уравнений движения ... 88
§ 11. Момент силы Магнуса, момент трения и демпфирующий момент 91
Дополнение 92
Глава IV
Динамика ракеты, движущейся вблизи Земли
§ 1. Введение 95
§ 2. Реактивная сила * 96
§ 3. Движение ракеты в пустоте при отсутствии силы тяжести . . 95
§ 4. Равноускоренное движение ракеты в пустоте без действия си¬
лы тяжести . . . • 99
§ 5. Равноускоренное движение ракеты в сопротивляющейся среде 99
§ 6. Прямолинейное равноускоренное движение ракеты в однород¬
ном поле силы тяжести 101
§ 7. Подъем реактивного самолета 104
§ 8. Полет реактивного самолета вдоль экватора с постоянным уг¬
лом атаки а (с учетом вращения Земли и ее сферической формы) 106
§ 9. Вертикальный подъем ракеты в пустоте без учета вращения
Земли • . 110
§ 10. Траектория ракетного снаряда в пустоте без учета кривизны
Земли • 113
§ 11. Траектория ракеты без учета сопротивления воздуха и кривиз¬
ны Земли в случае, когда реактивная сила направлена по ка¬
сательной к траектории 115
§ 12. Ускоренное круговое движение ракеты вокруг Земли, перехо¬
дящее в равномерное круговое движение . 121
.326
Стр.
§ 13. Равноускоренное движение ракеты по горизонтальной направ -
ляющей 124
§ 14. Вертикальный подъем ракеты с постоянным ускорением с уче¬
том сопротивления воздуха 125
§ 15. Движение ракеты с учетом сопротивления воздуха, влияния
ветра, вращения Земли, кривизны поверхности Земли и изме¬
нения g с высотой 131
§ 16. Движение реактивного самолета с постоянным углом атаки, с
учетом вращения Земли, кривизны поверхности Земли, изме не¬
ния g с высотой и влияния ветра 137
§ 17. Движение ракеты, управляемой гироскопическим автопилотом 140
§ 18. Аналитический метод определения основных параметров ав¬
топилота . . • • 149
Глава V
Динамика ракеты, движущейся в межпланетном пространстве
§ 1. Введение 155
§ 2. Движение ракеты в непосредственной близости от Земли . . . 156
§ 3. Метод вариации постоянных (элементов траектории) 164
§ 4. Движение ракеты вблизи Земли в случае, когда реактивная си¬
ла изменяется во времени по величине и направлению .... 175
§ 5. Применение метода вариации постоянных к предыдущей задаче 177
§ 6. Движение ракеты под действием сил тяготения Земли, Солнца
и Луны .... * 184
§ 7. Применение метода вариации элементов траектории к преды¬
дущей задаче 186
§ 8. Движение ракеты по заданной траектории 190
§ 9. Управление ракетой в пустоте • 193
§ 10. Достижение Луны с помощью ракеты 196
§ 11. Движение ракеты вокруг Луны 203
§ 12. Метод неопределенных коэффициентов 207
Дополнение • 210
Глава VI
Самолет-снаряд ФАУ-1
§ 1. Общие сведения • 212
§ 2. Реактивный двигатель 213
§ 3. Старт ФАУ-1 216
§ 4. Компас 217
§ 5. Автопилот ■ 218
Глава VII
Ракета дальнего действия ФАУ-2
§ 1. От баллисты к ФАУ-2 225
§ 2. История развития ракетных снарядов и применение их во вто¬
рой мировой войне 226
§ 3. Общее описание конструкции ФАУ-2 233
327
Стр.
§ 4. Ракетный двигатель • . . . . 236.
§ 5. Турбонасосная установка 243
§ 6. Описание некоторых клапанов • . 243
§ 7. Термодинамика ракетного двигателя 248
§ 8. Химия топлив для ракет дальнего действия . . • 273
§ 9, Сервомоторы и рули 283
§ 10. Автоматическое управление 290
§11. Пуск ракеты ФАУ-2 293
§ 12. Ракета ФАУ-2 в полете 305
§ 13. Коэффициент полезного действия ракеты 310
§ 14. Влияние скорости истечения и отношения веса топлива к весу
ракеты на горизонтальную дальность ФАУ-2 319
§ 15. Проекты ракет дальнего действия 322
Цена 18 руб.