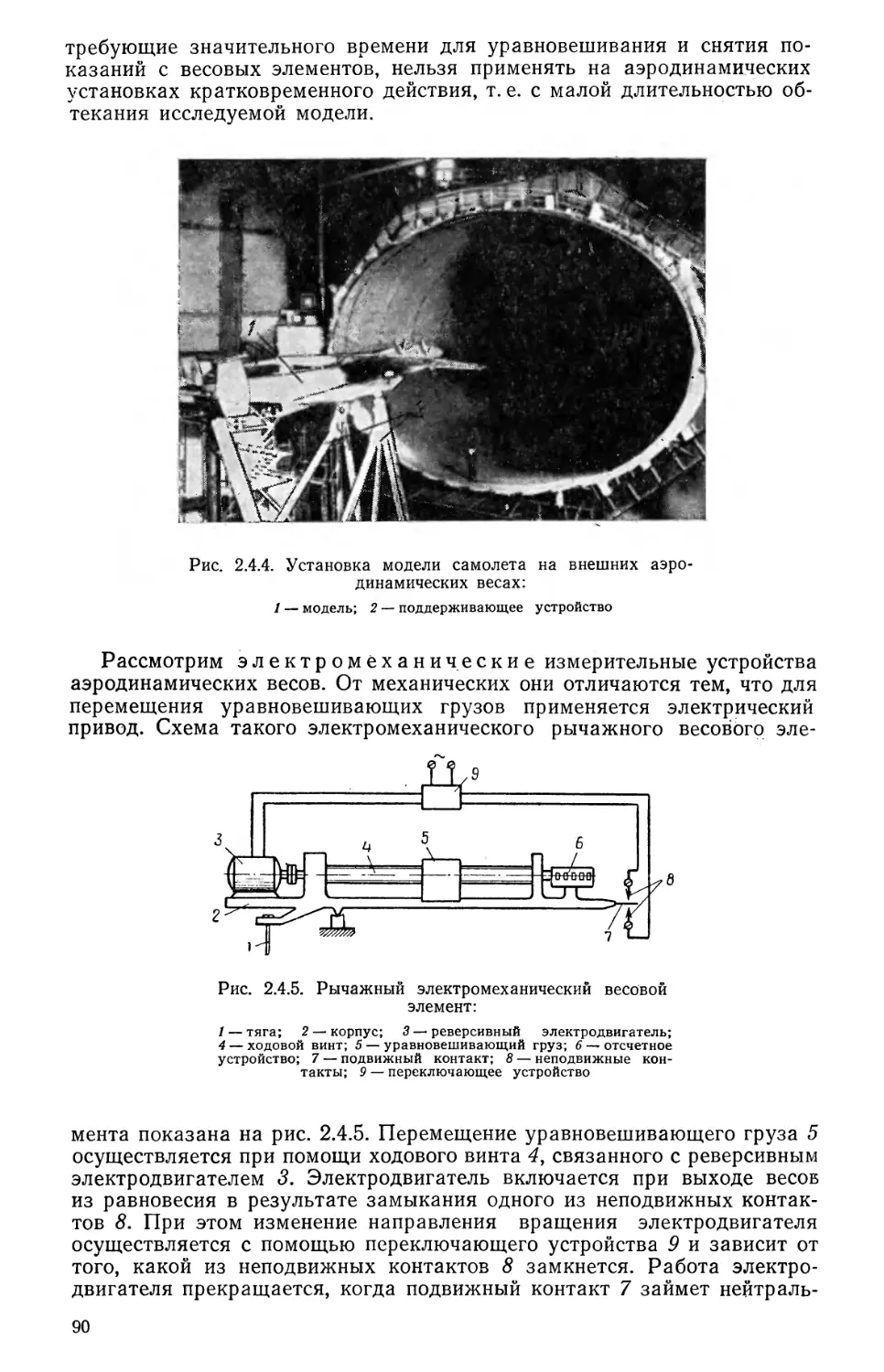
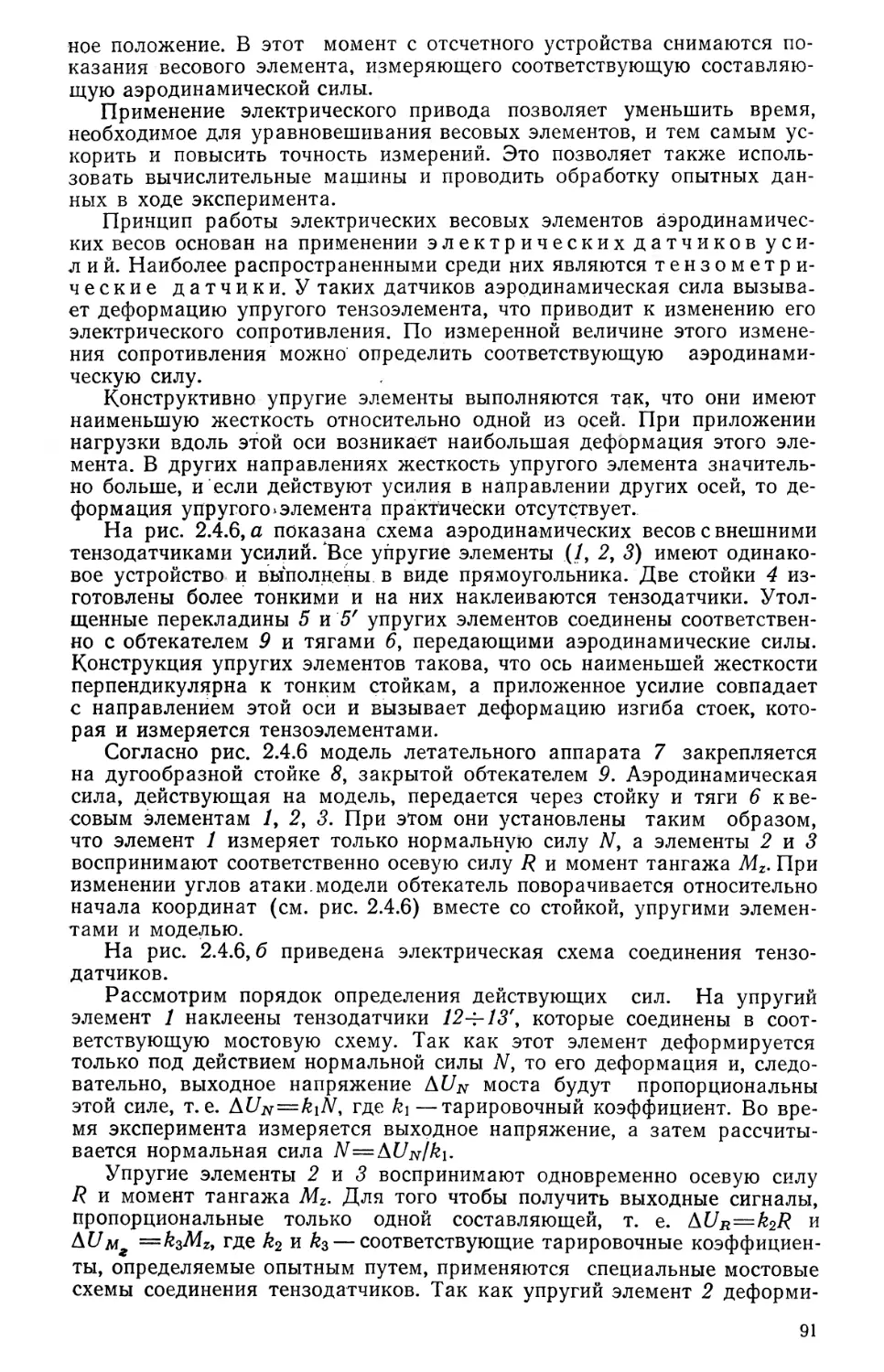
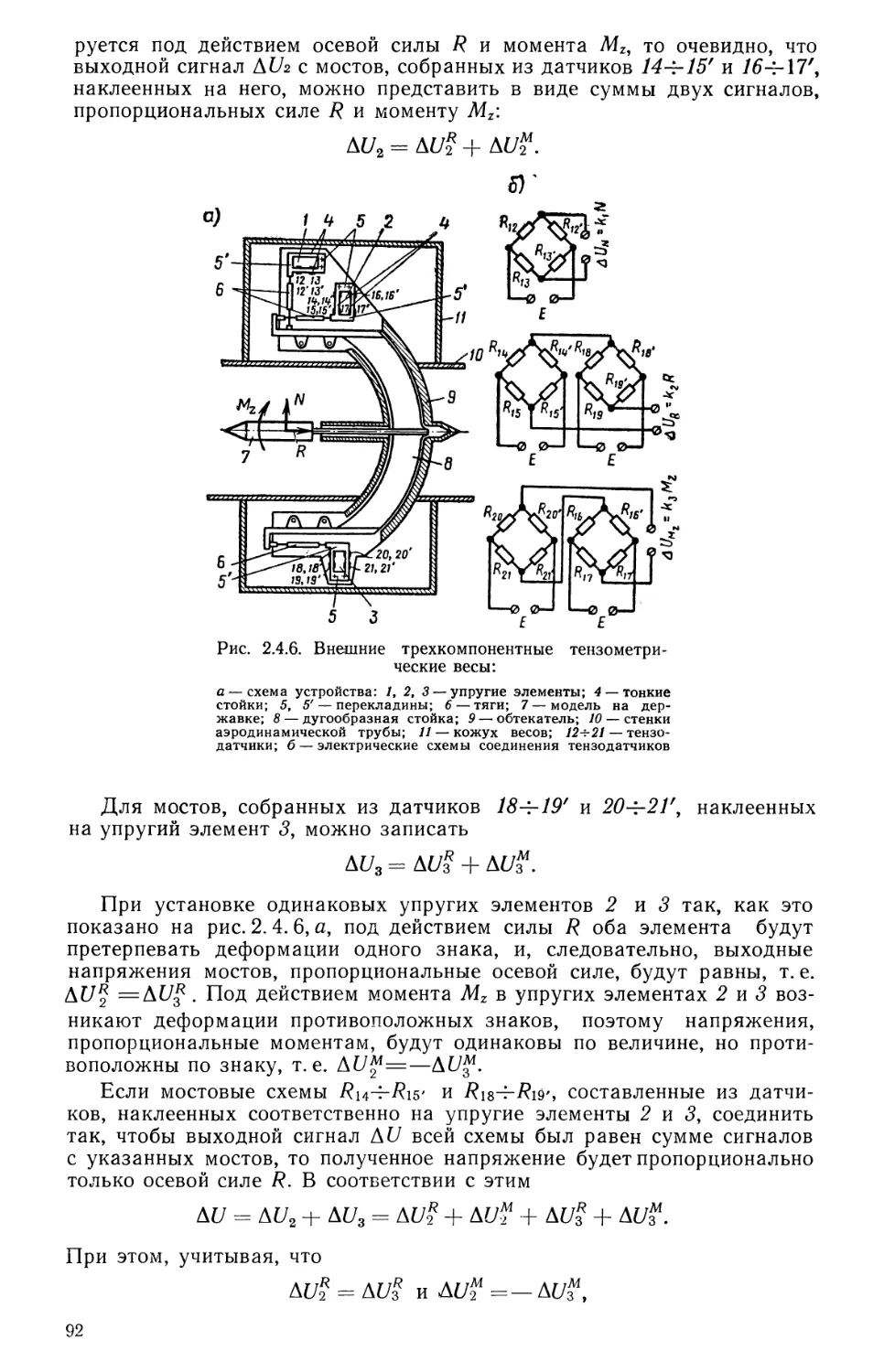
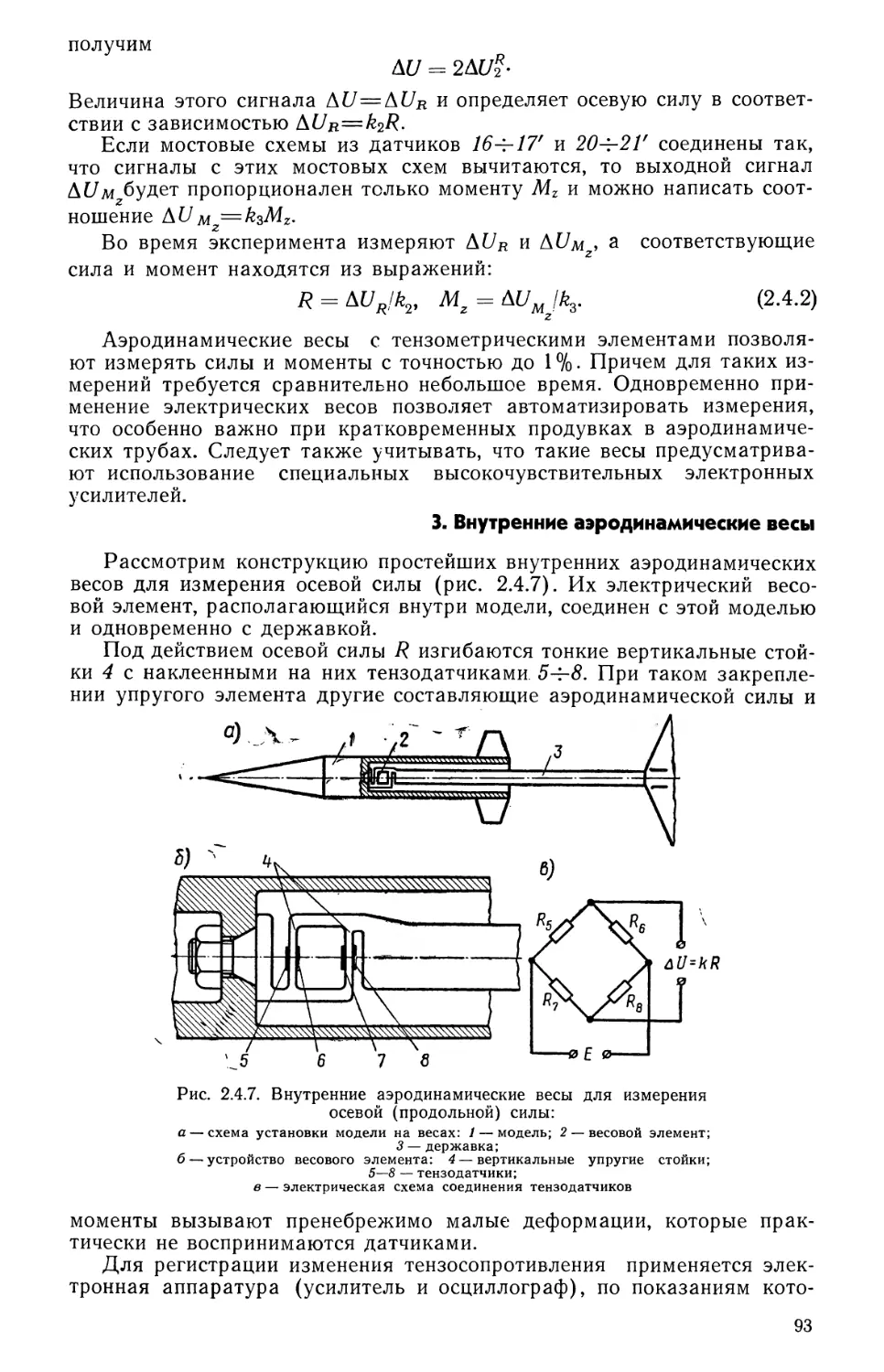
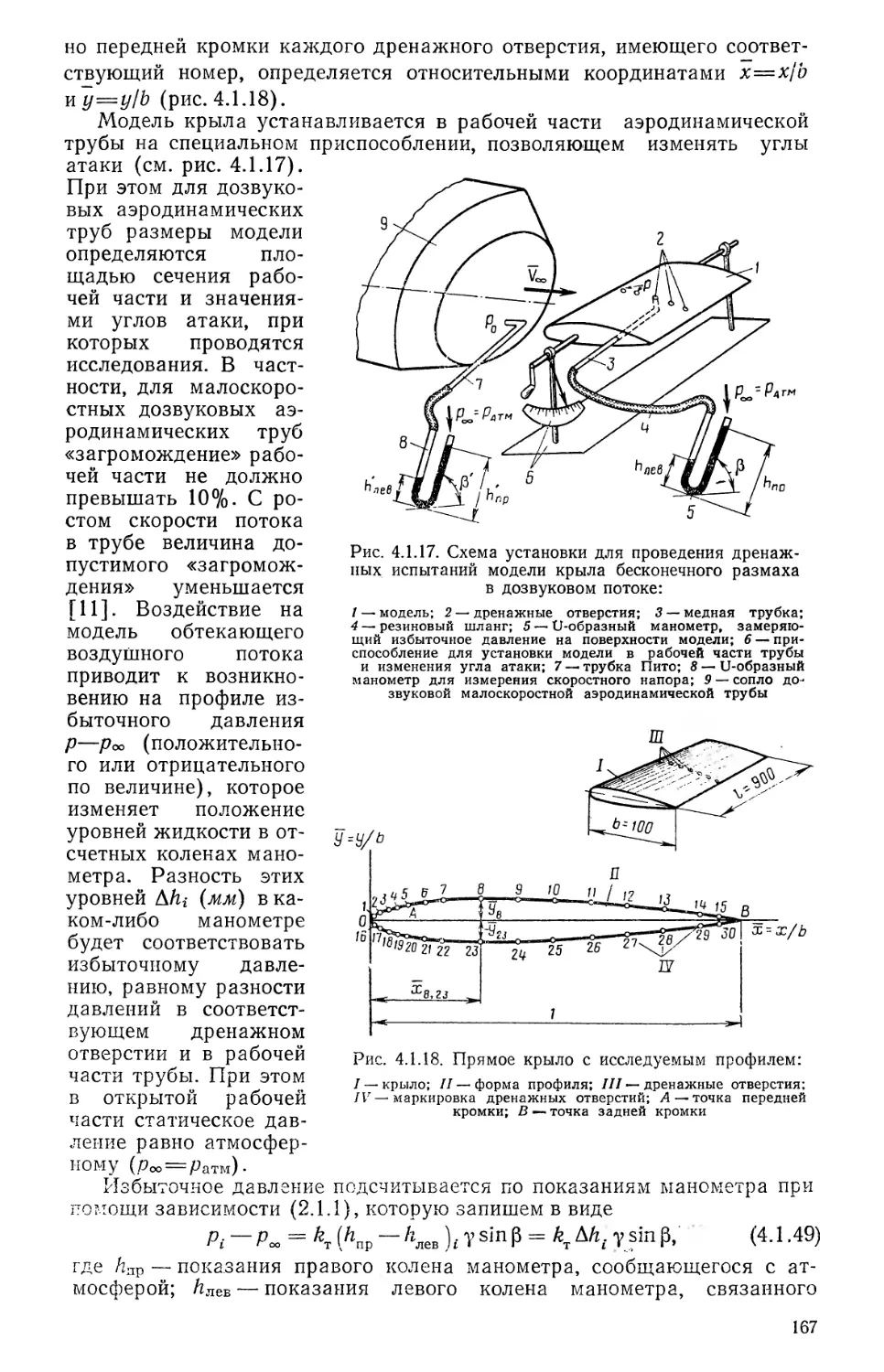
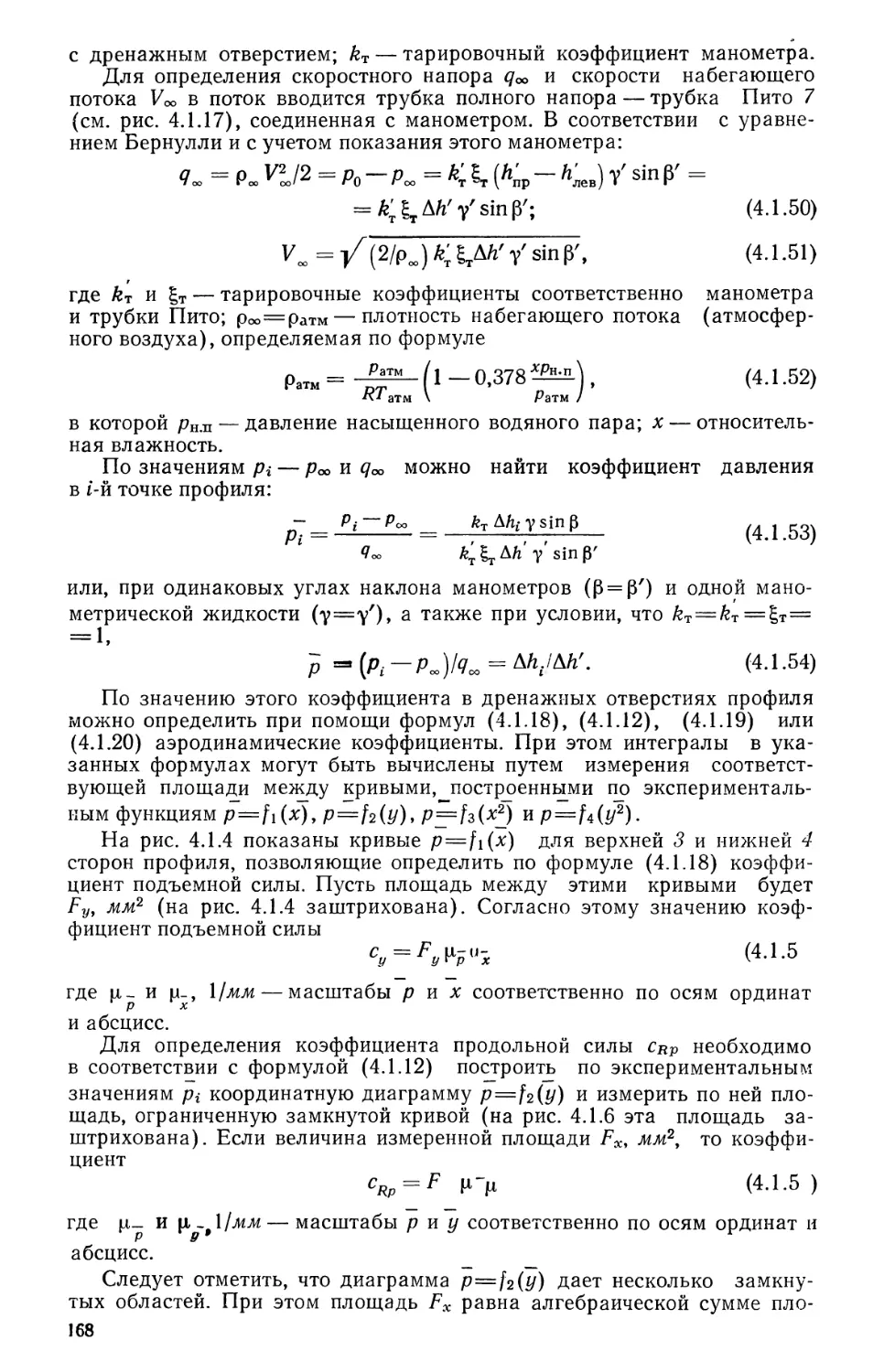
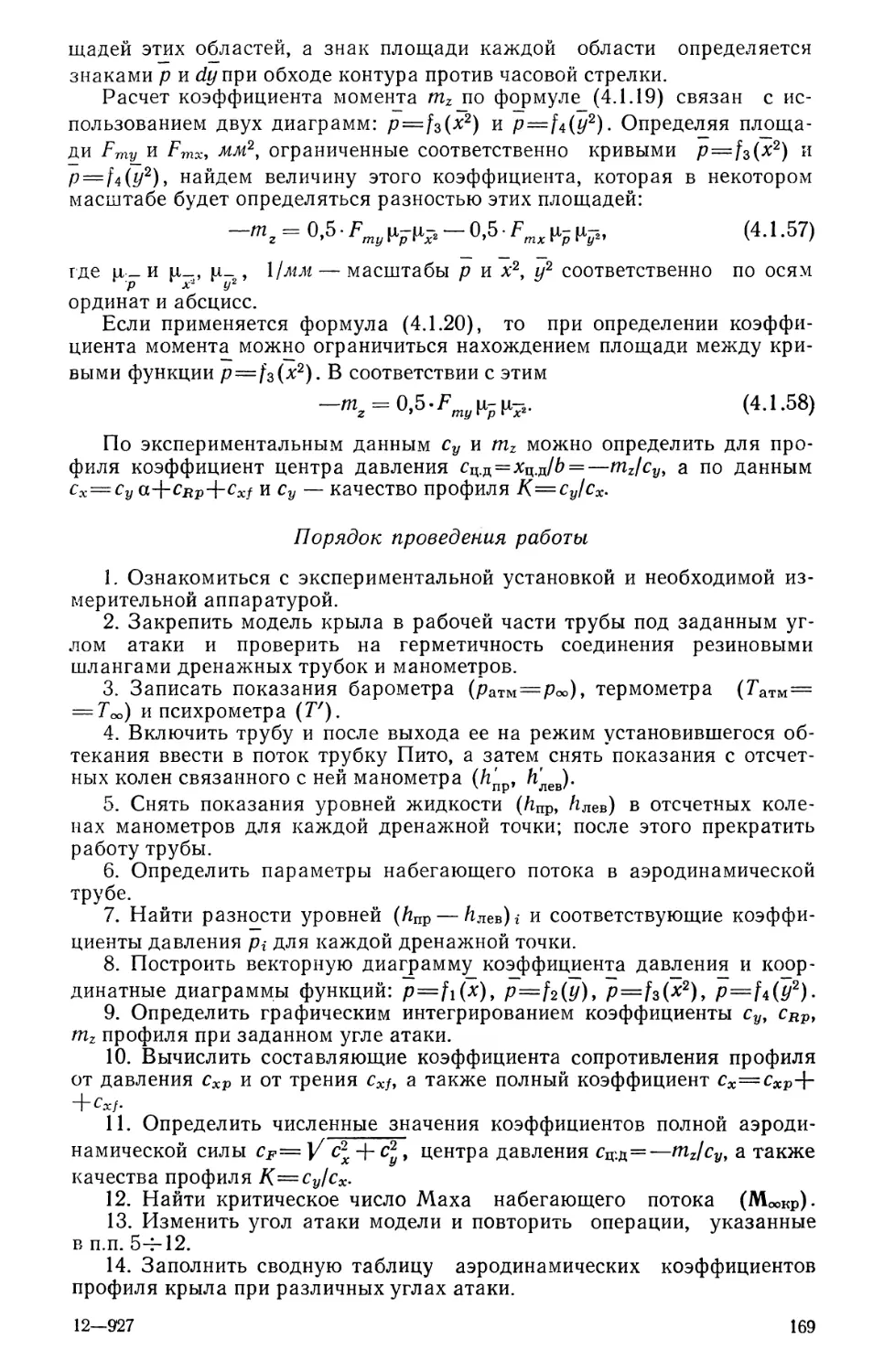
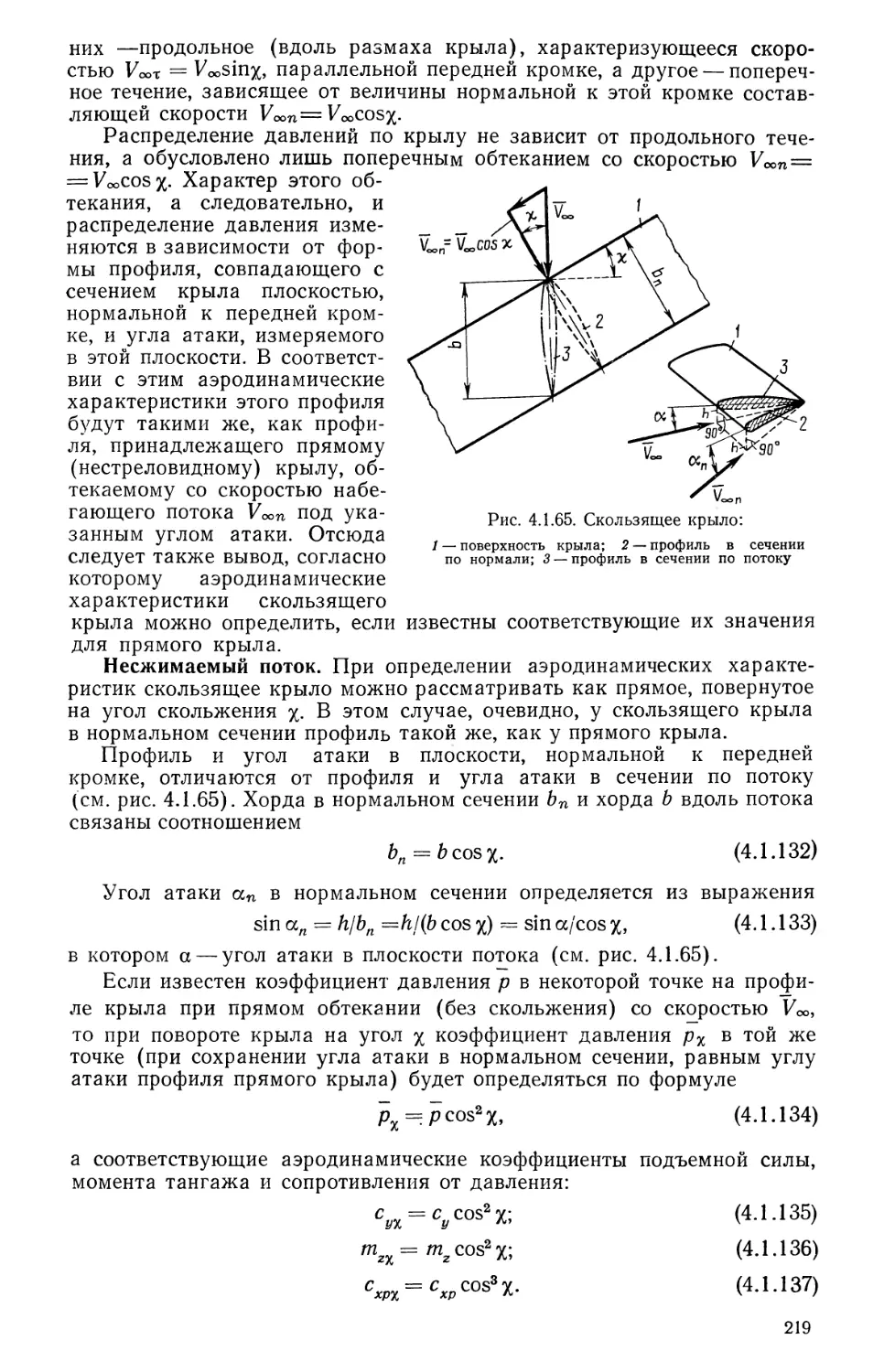
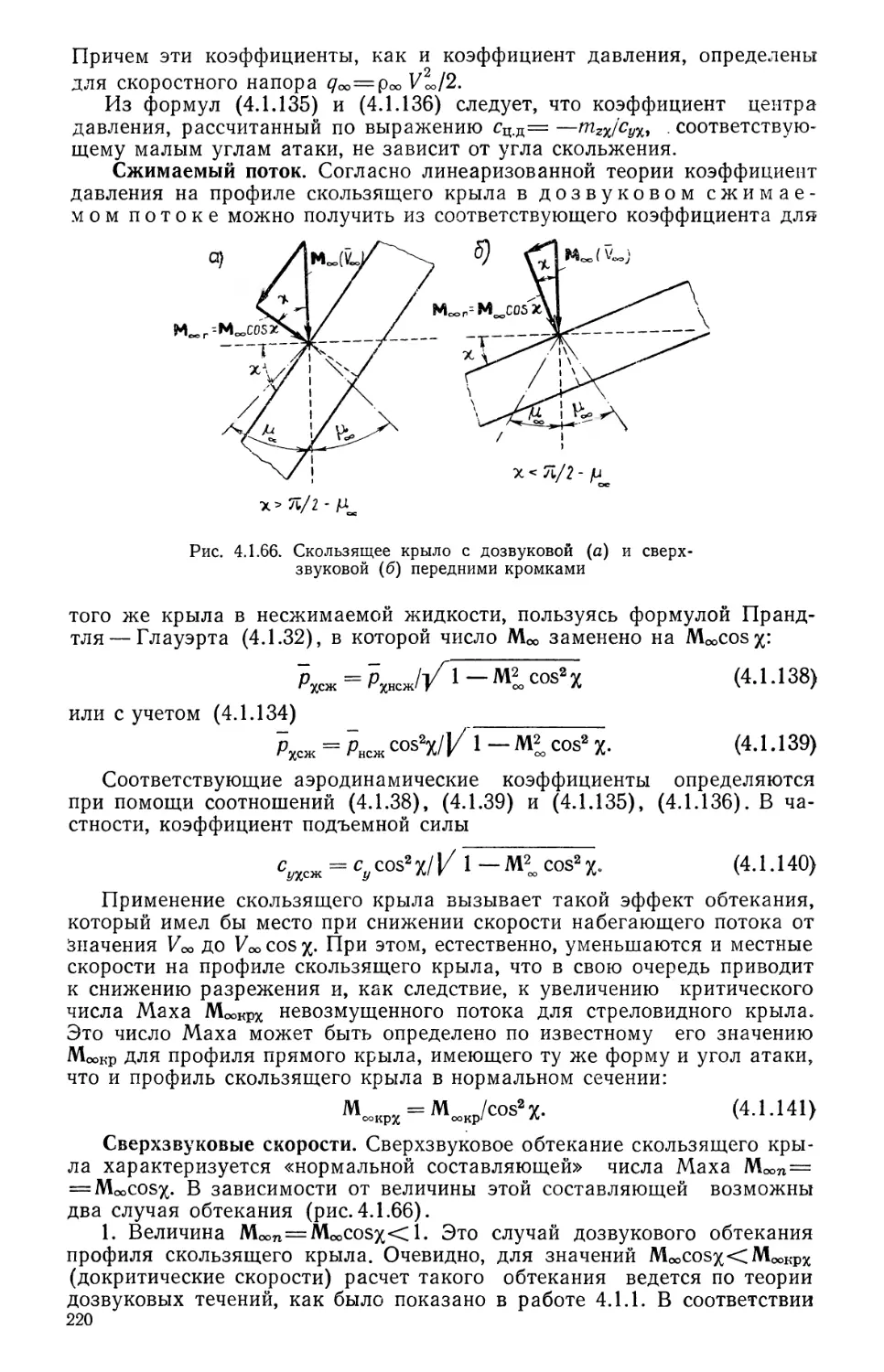
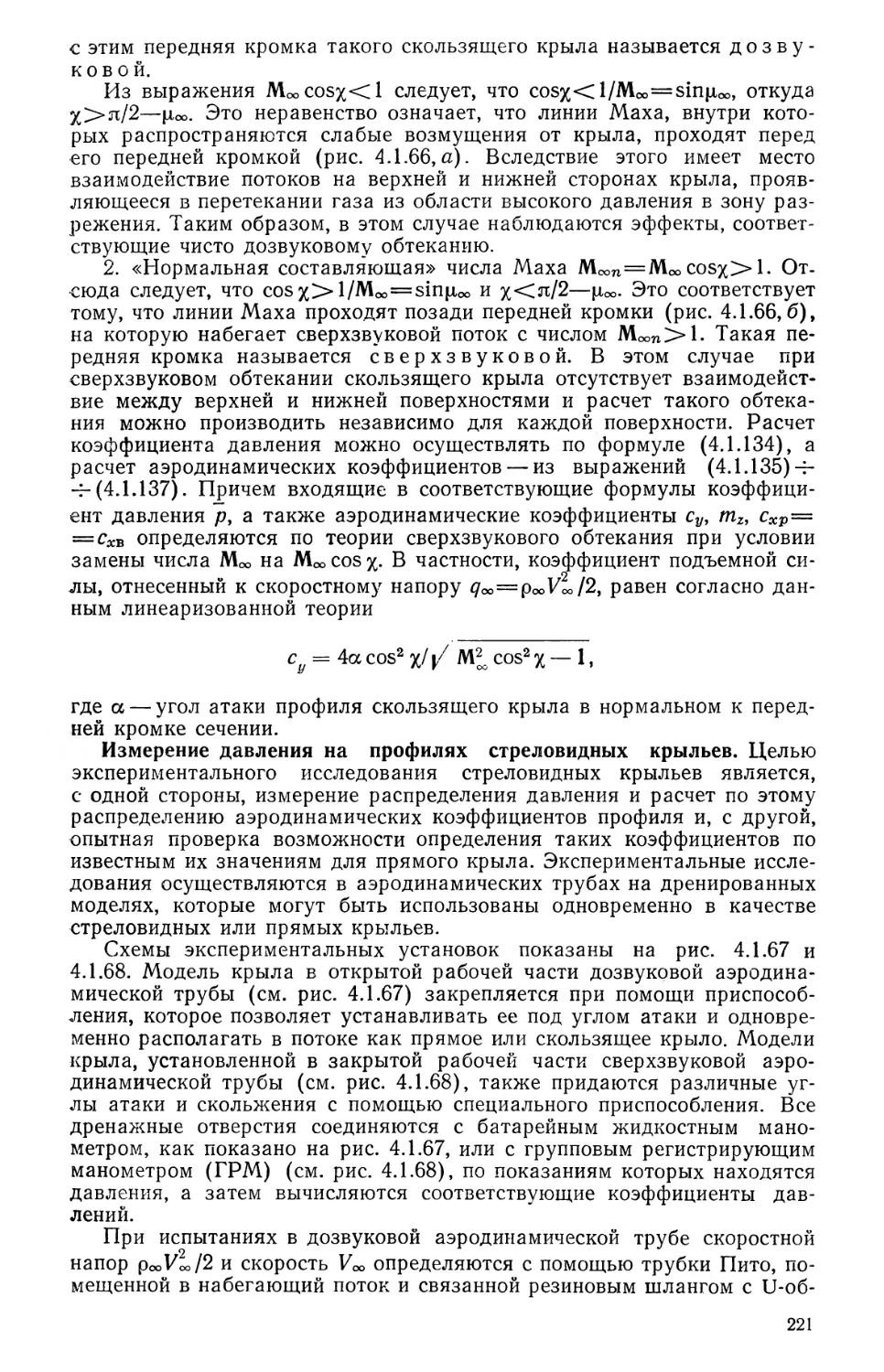
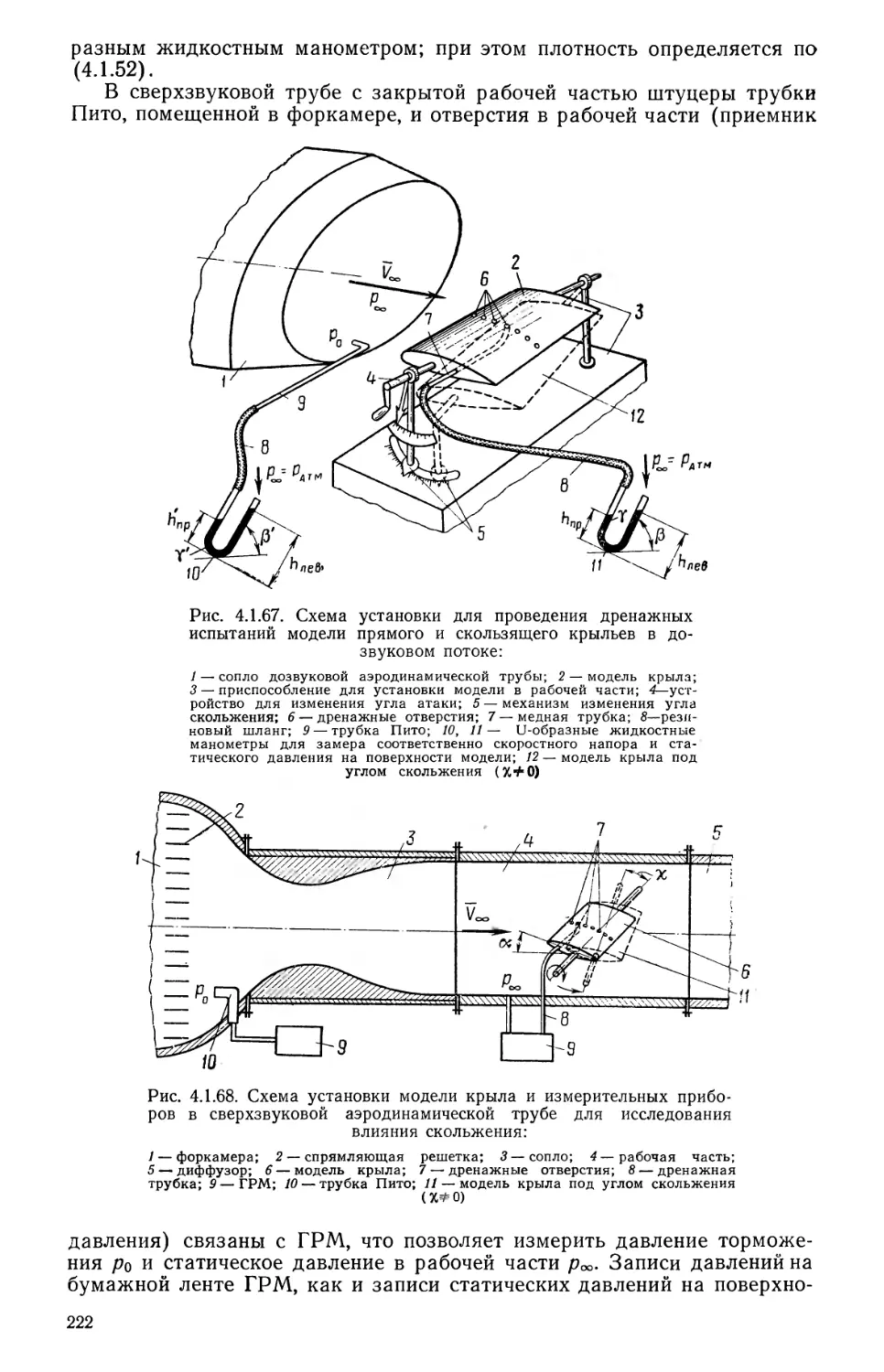
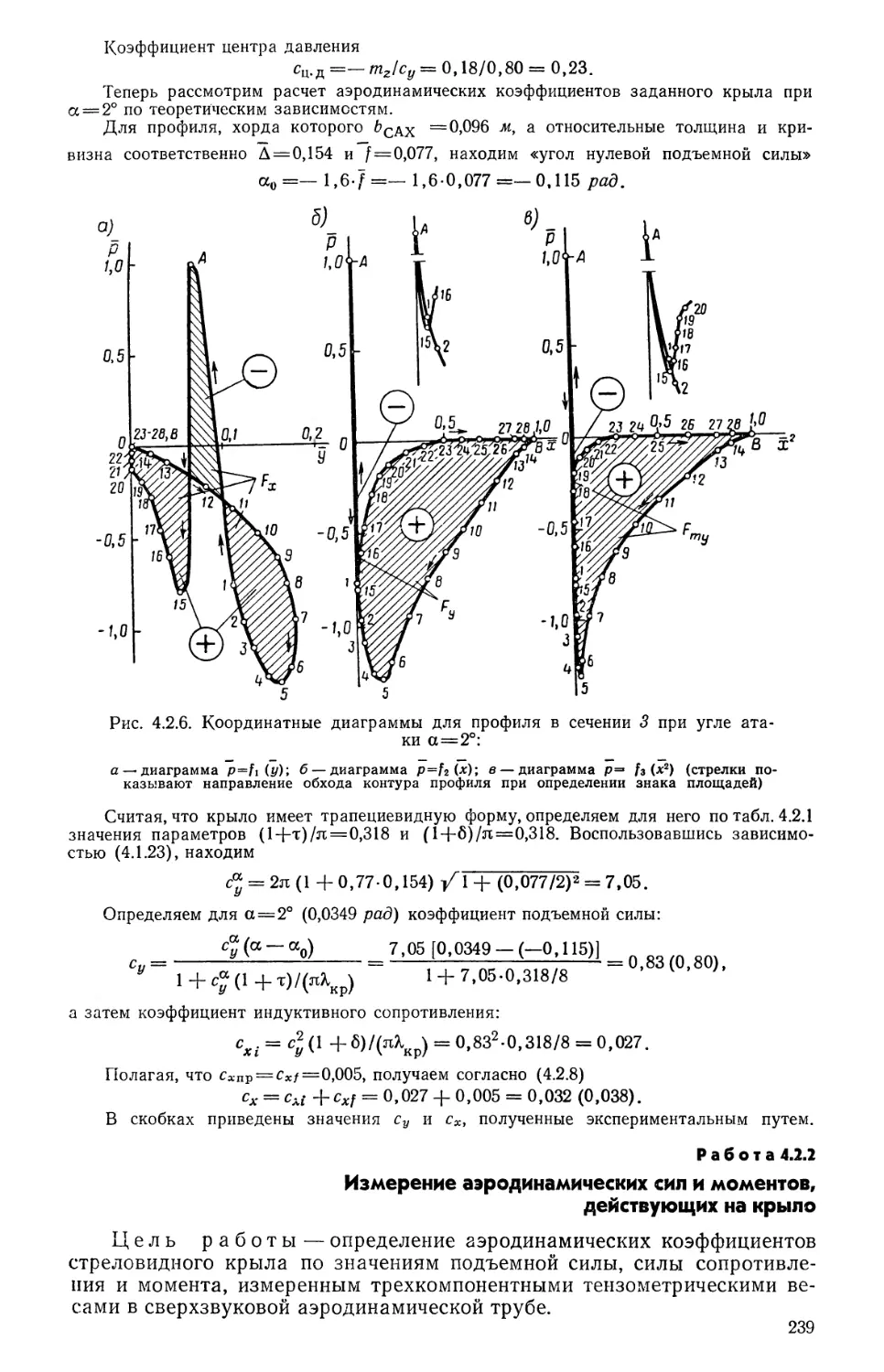
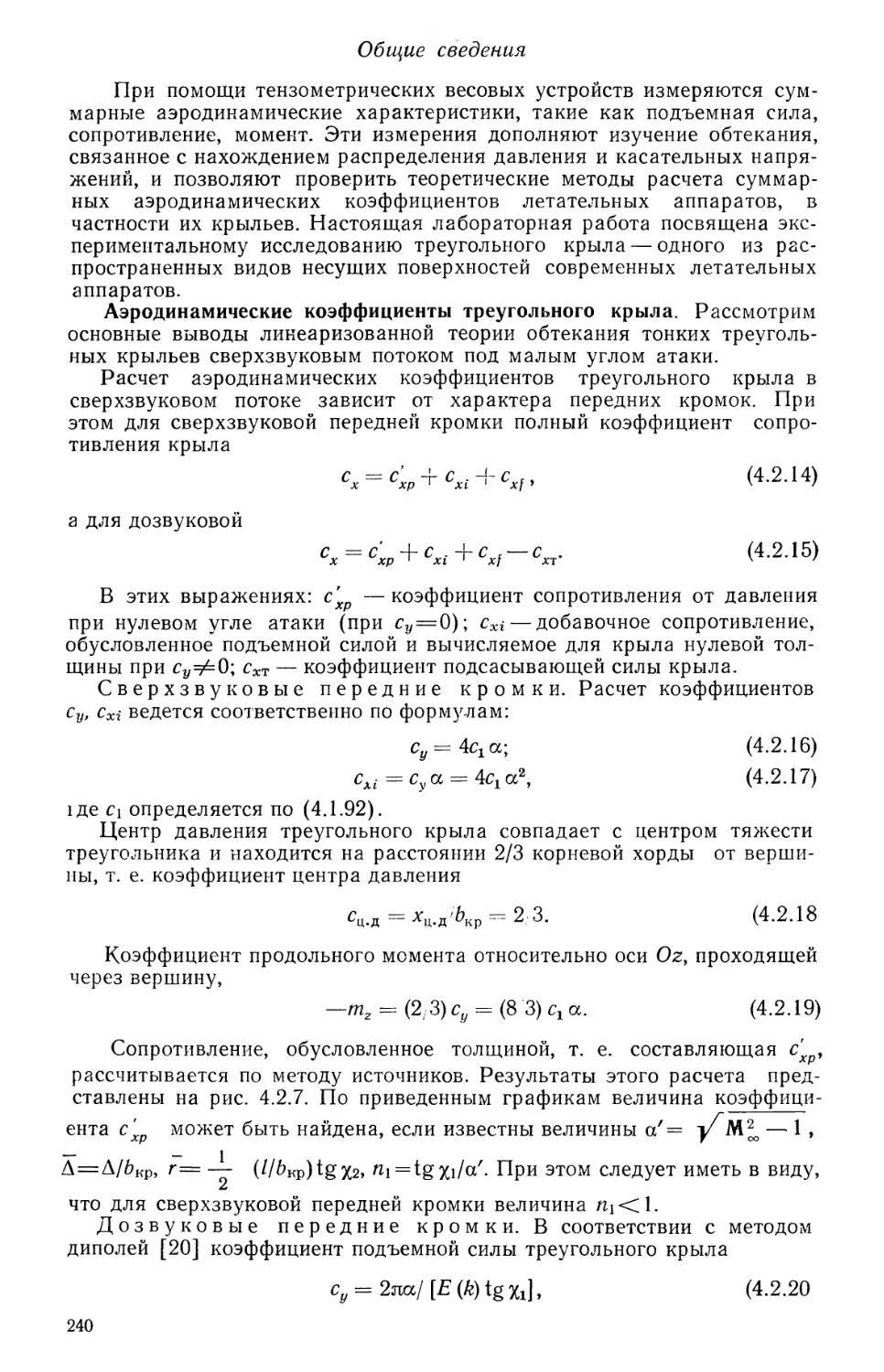
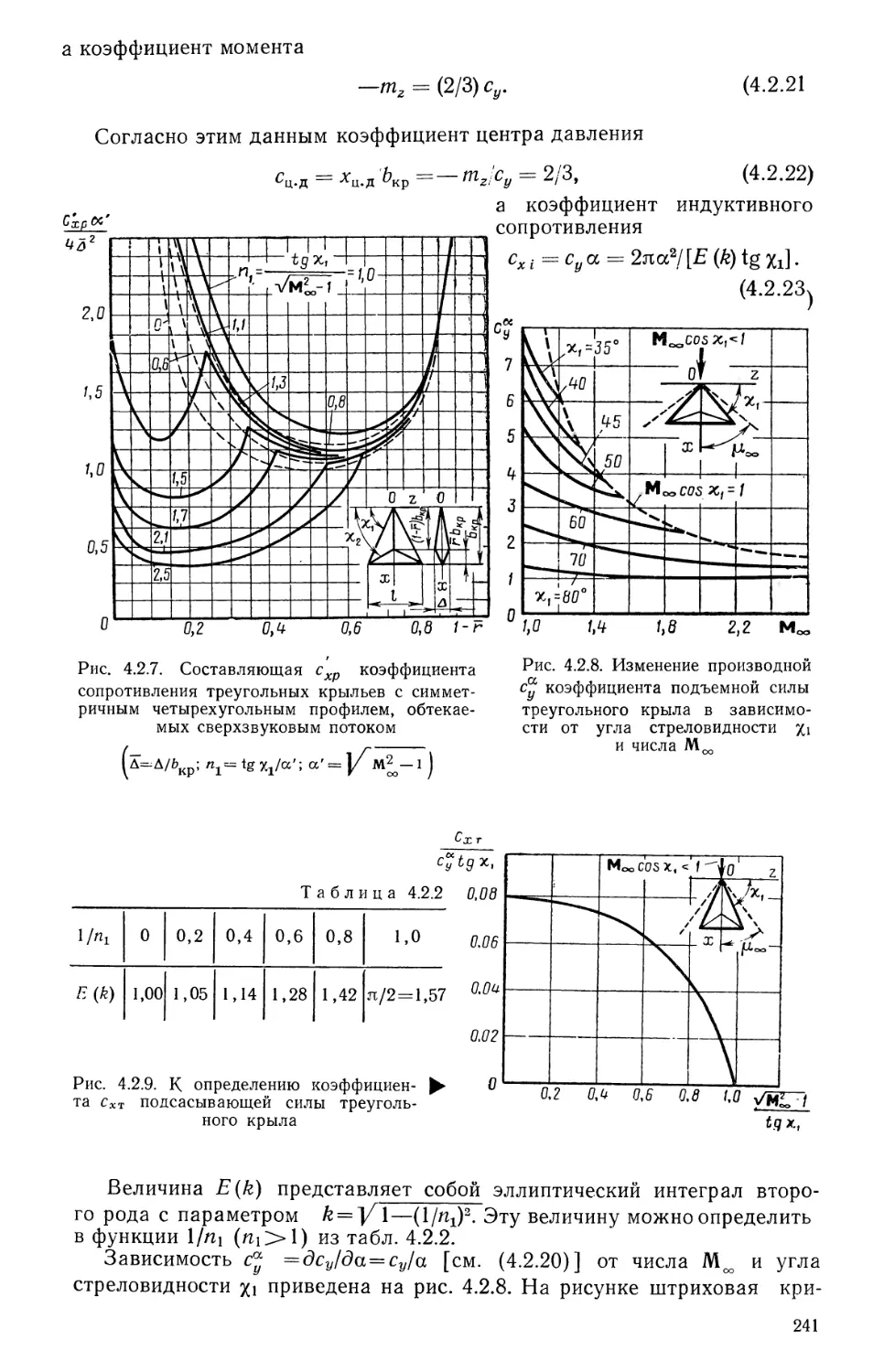
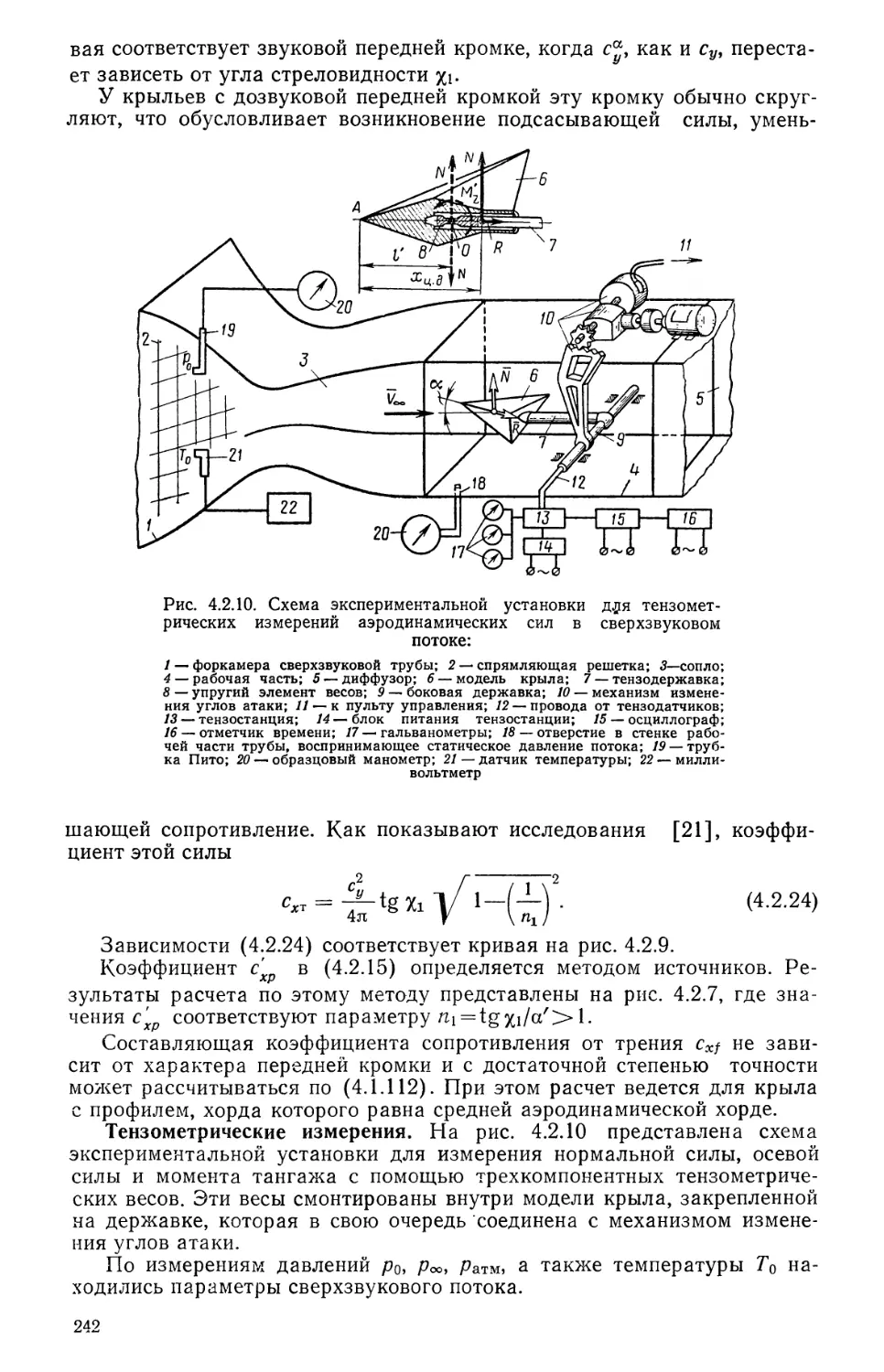
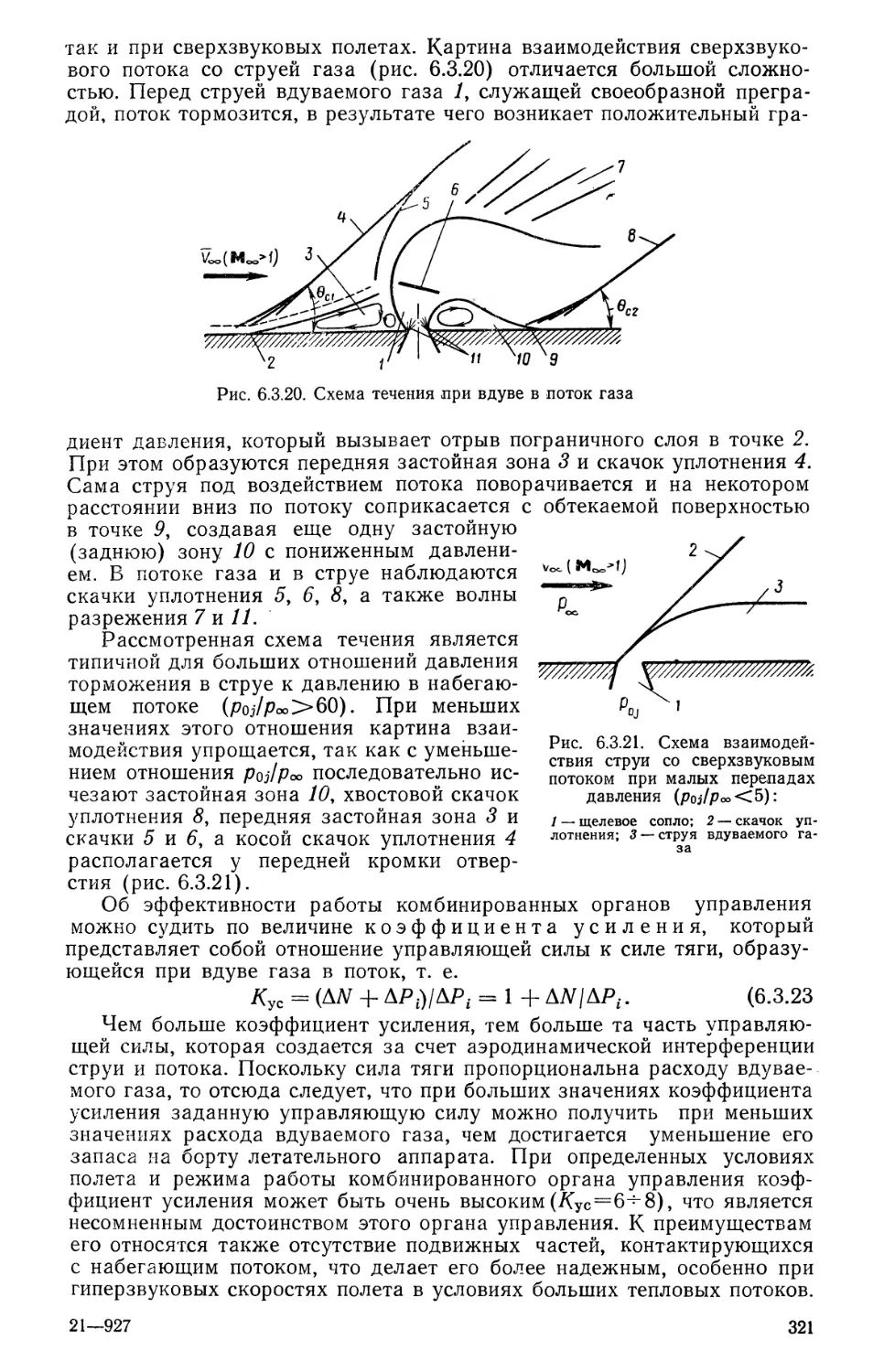
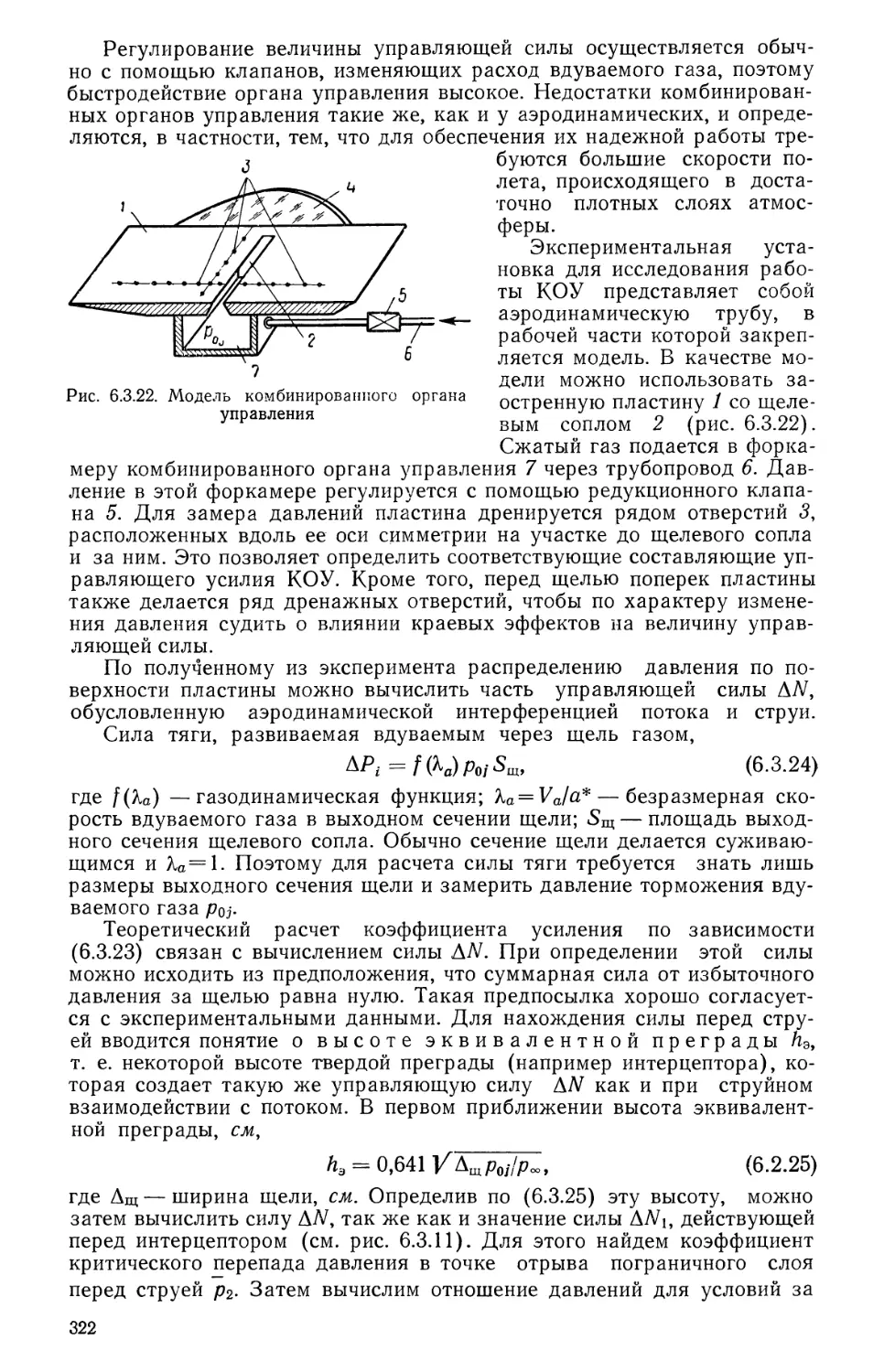
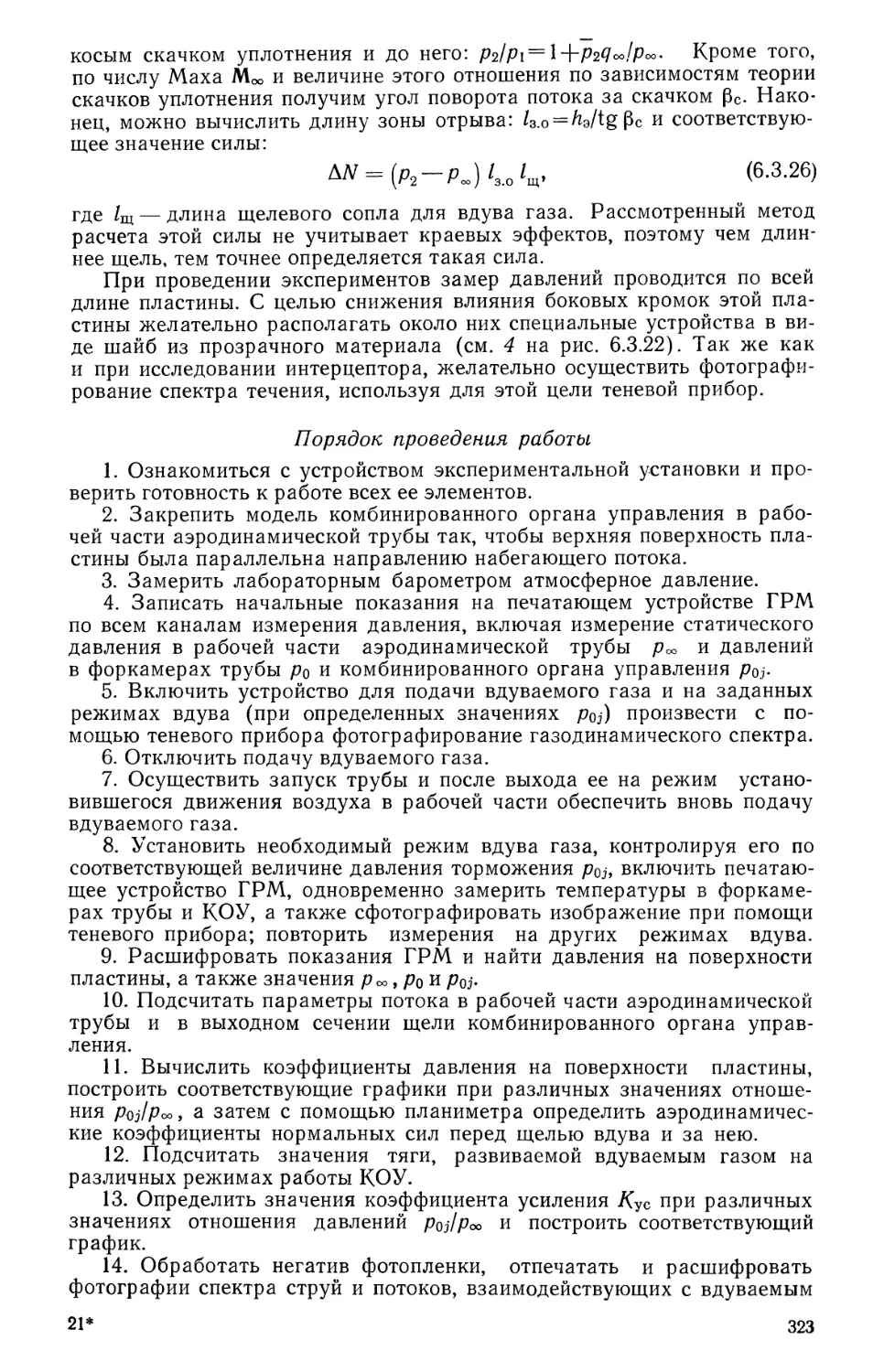
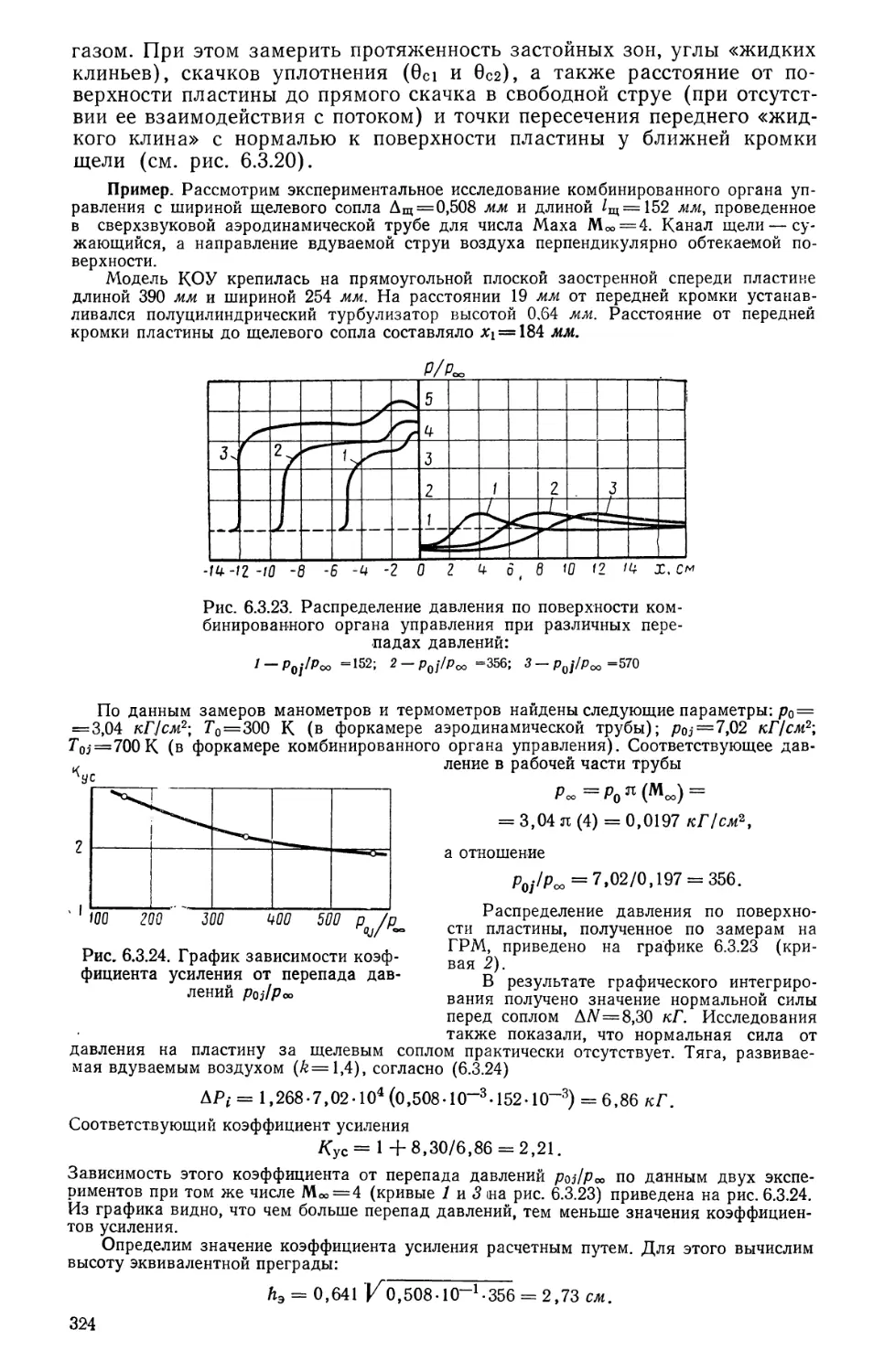
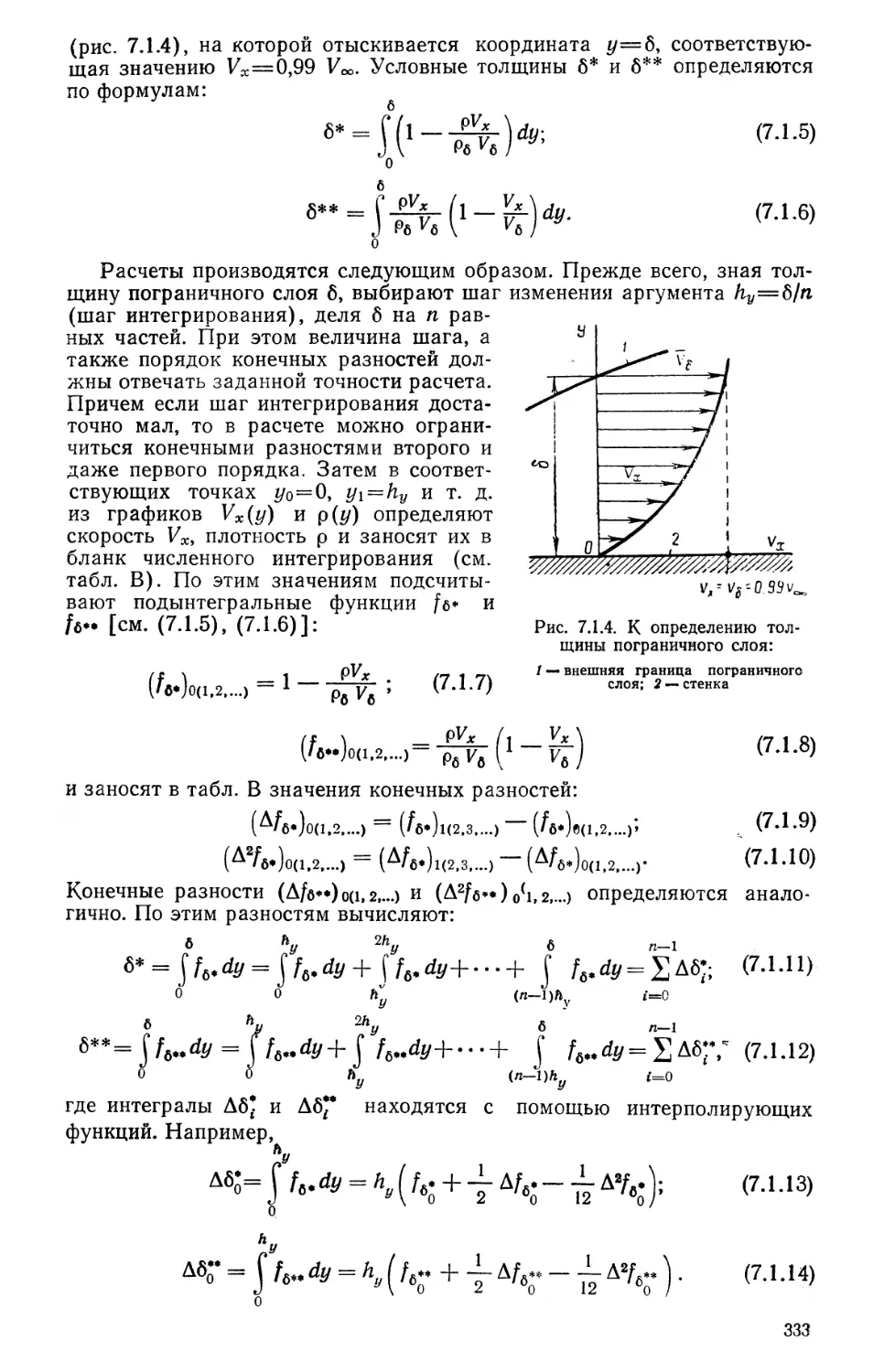
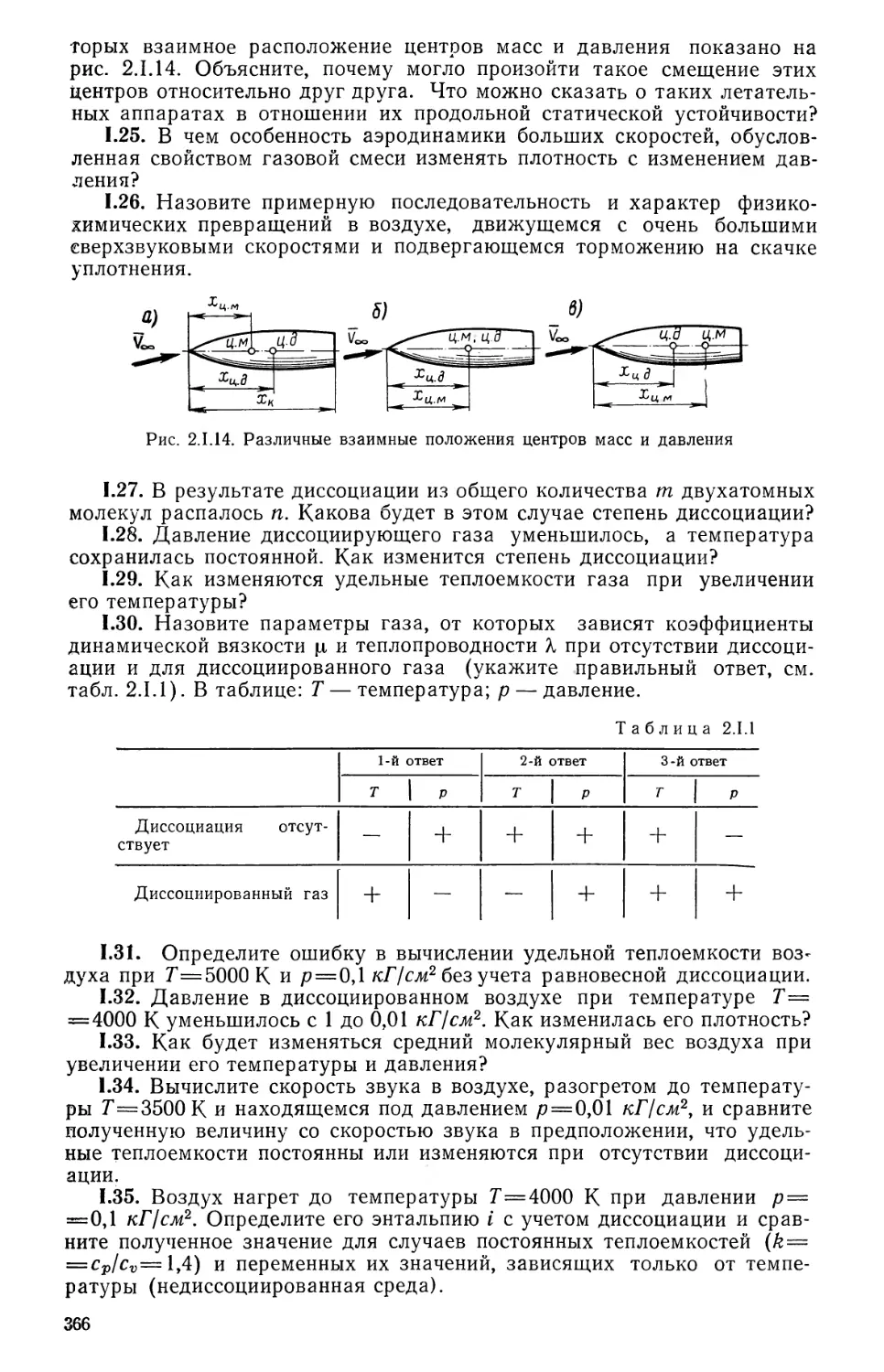
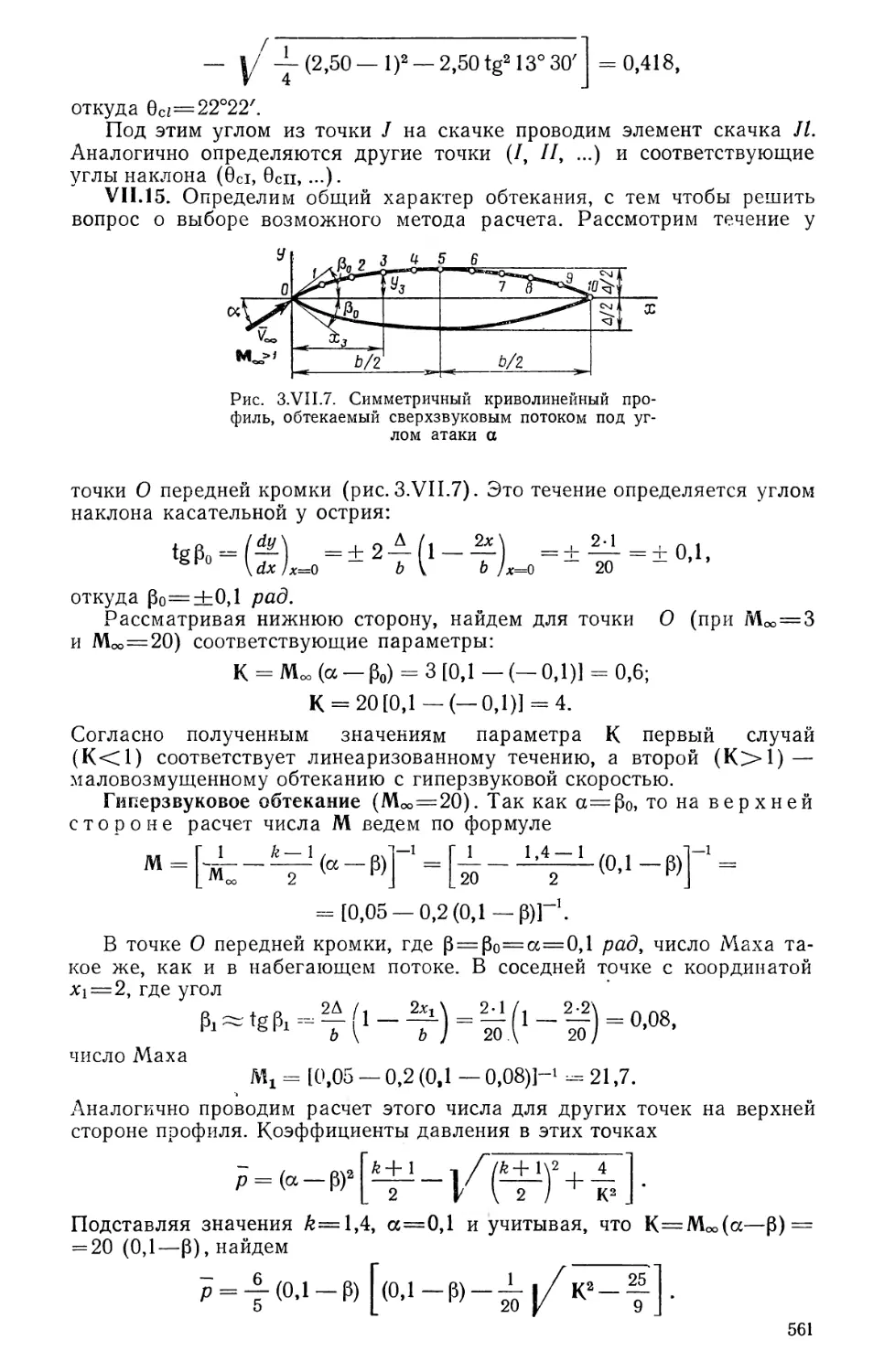
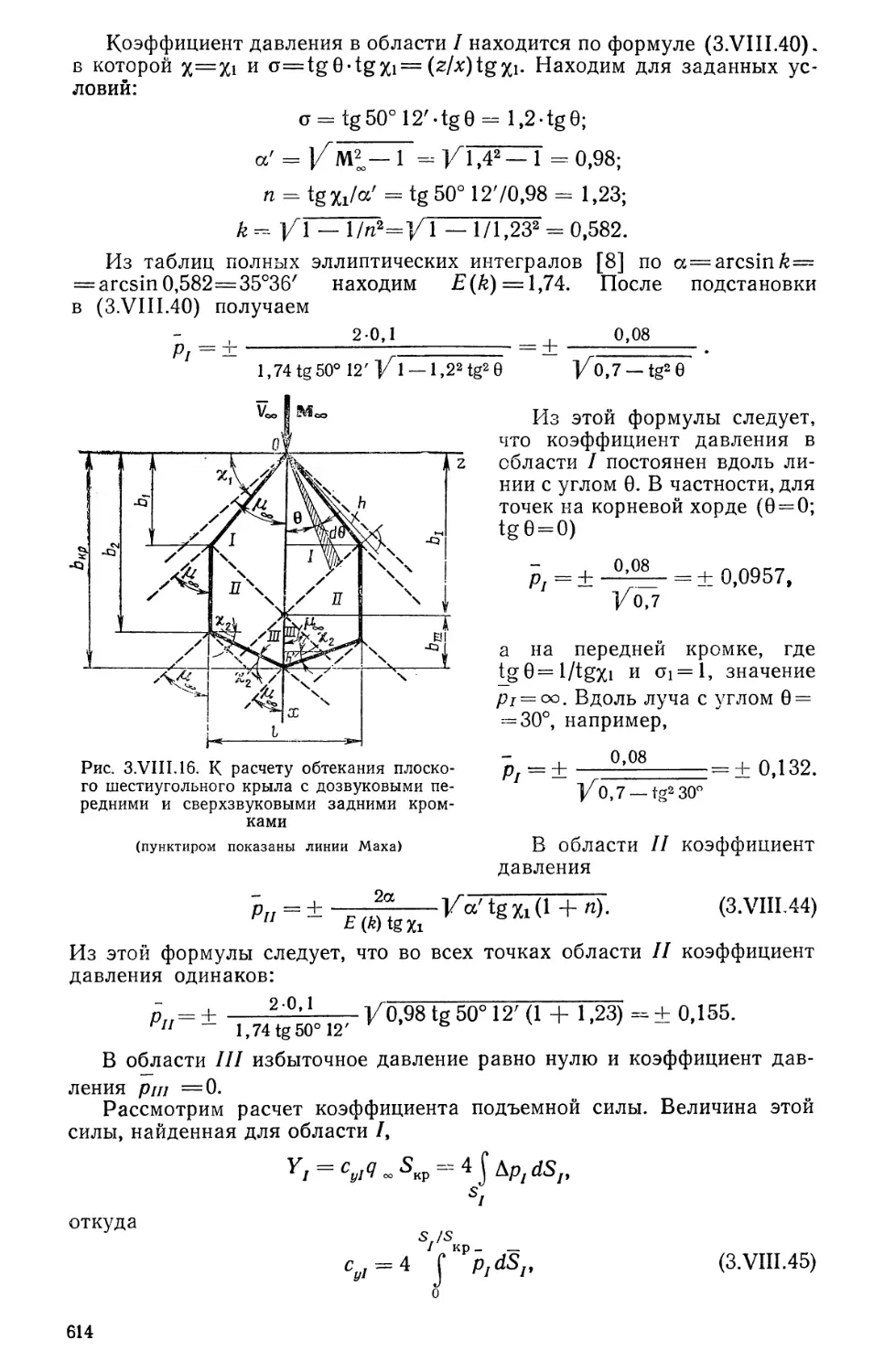
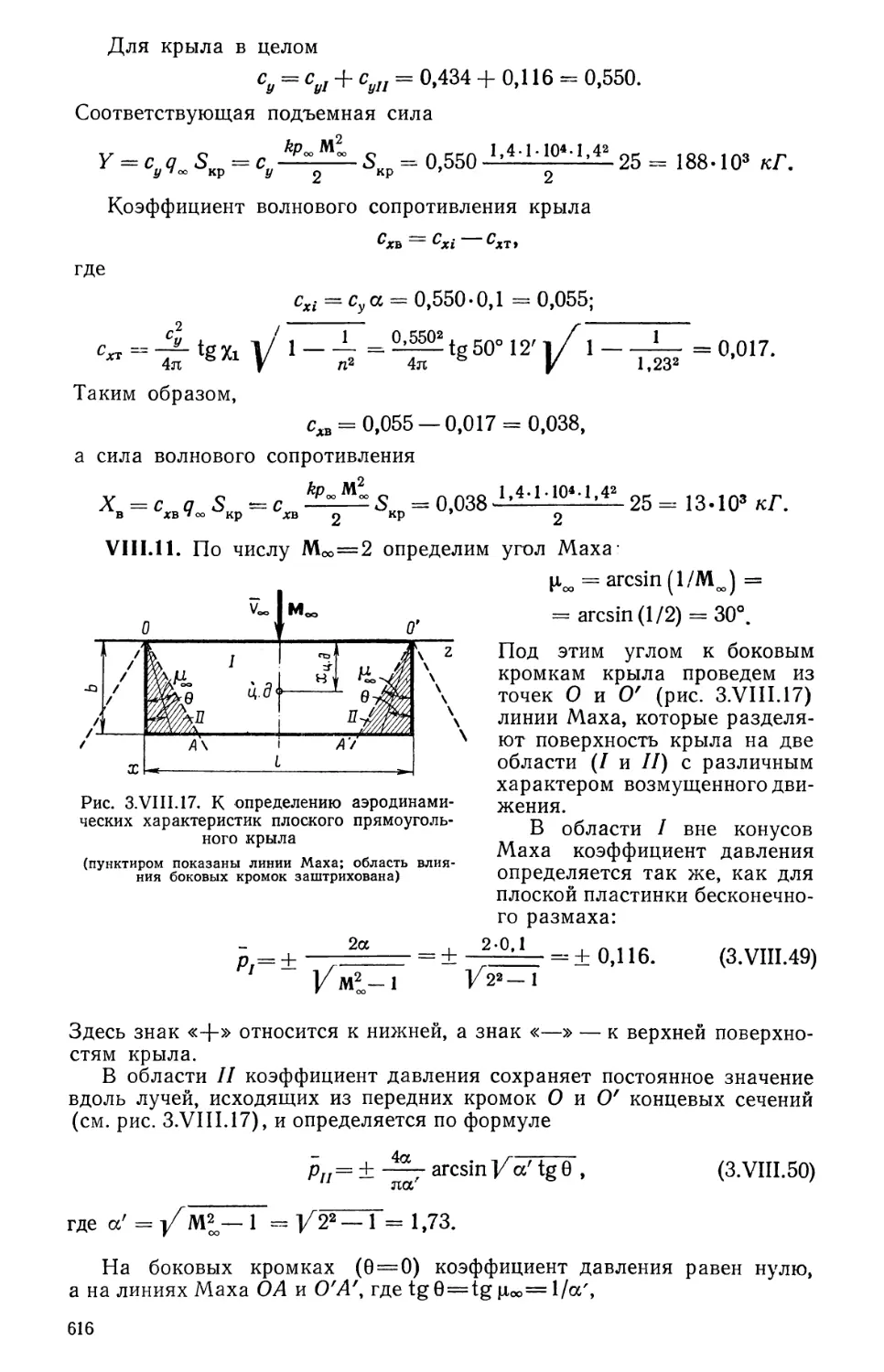
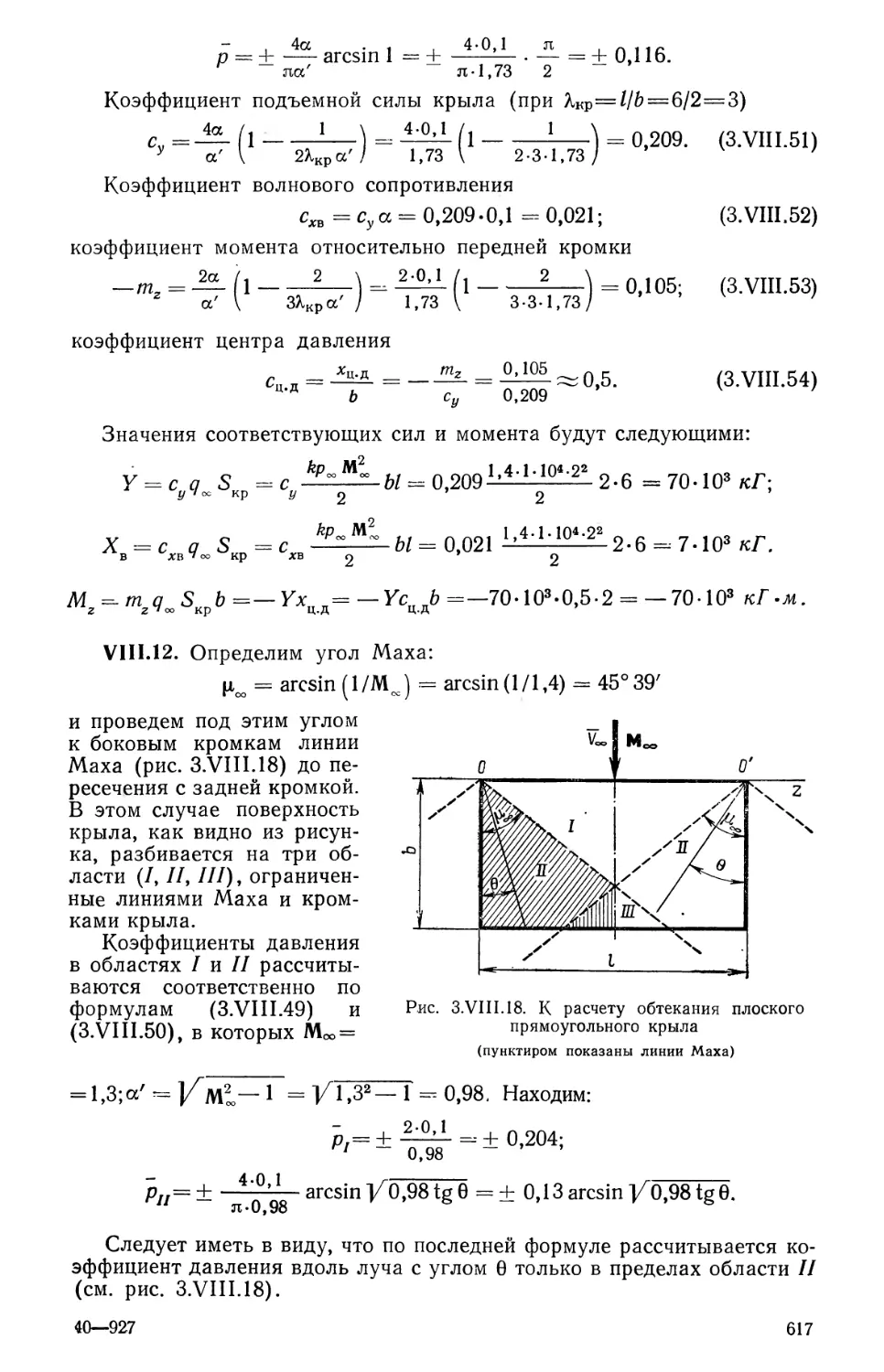
/





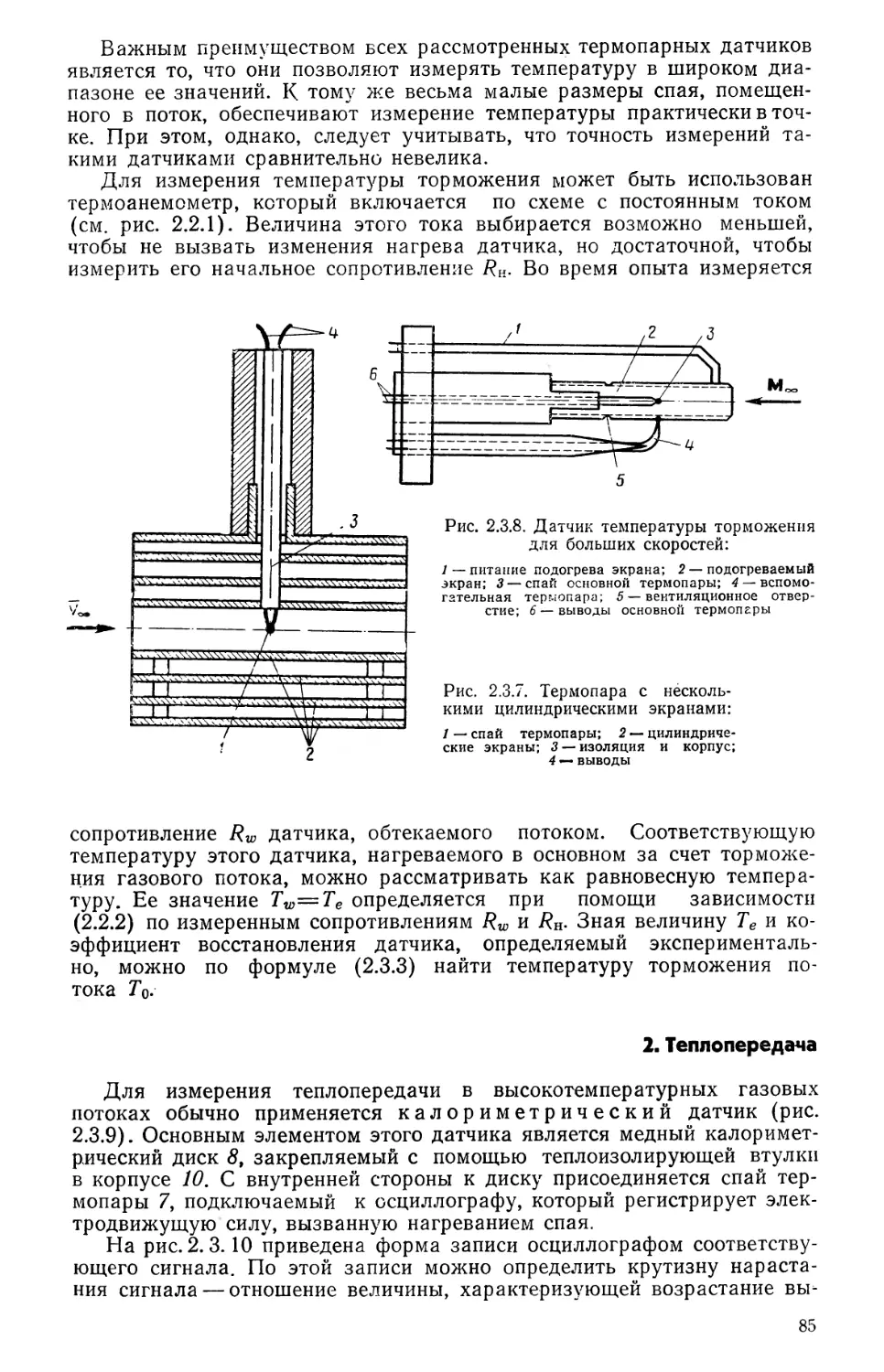
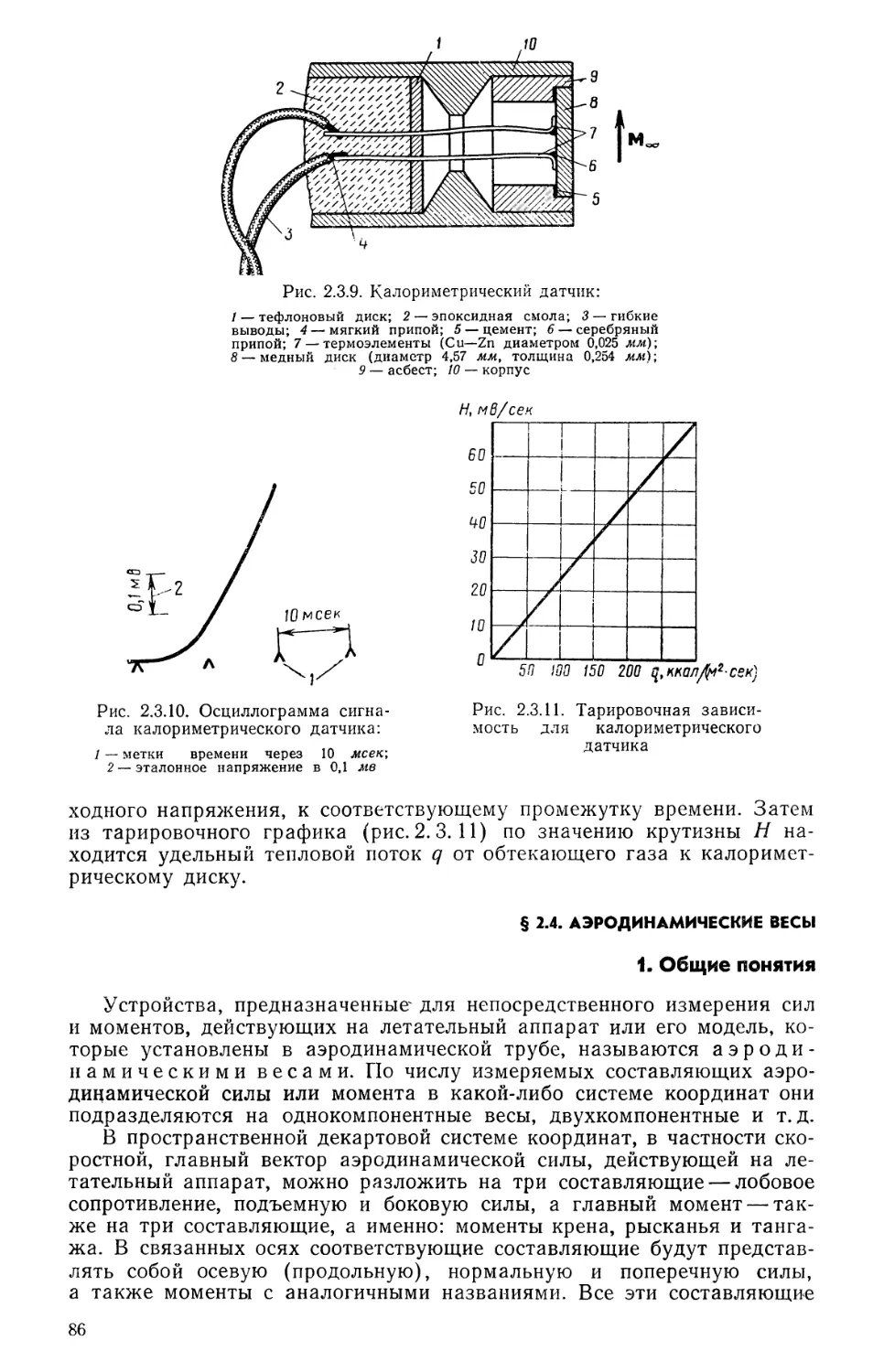

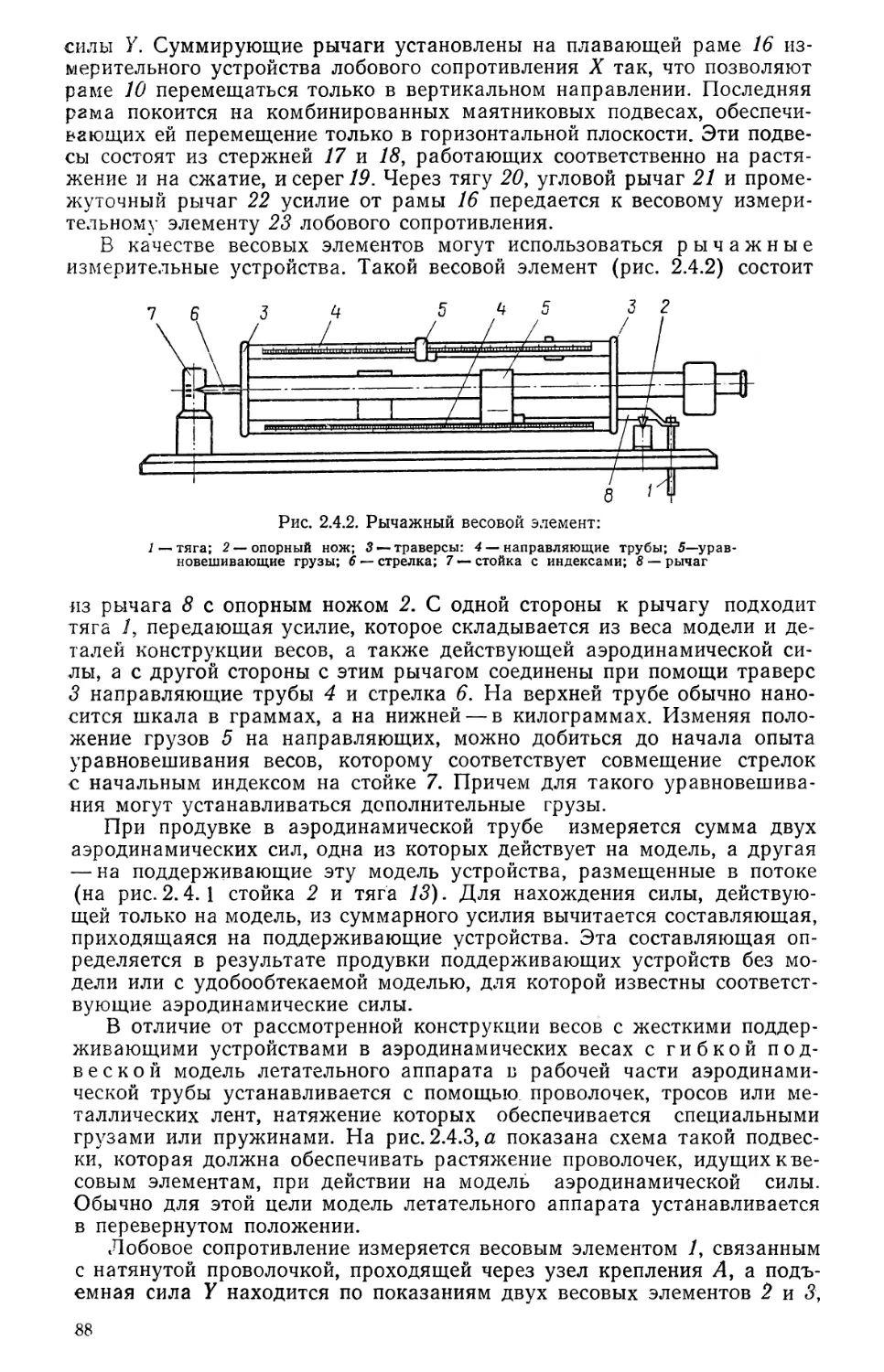
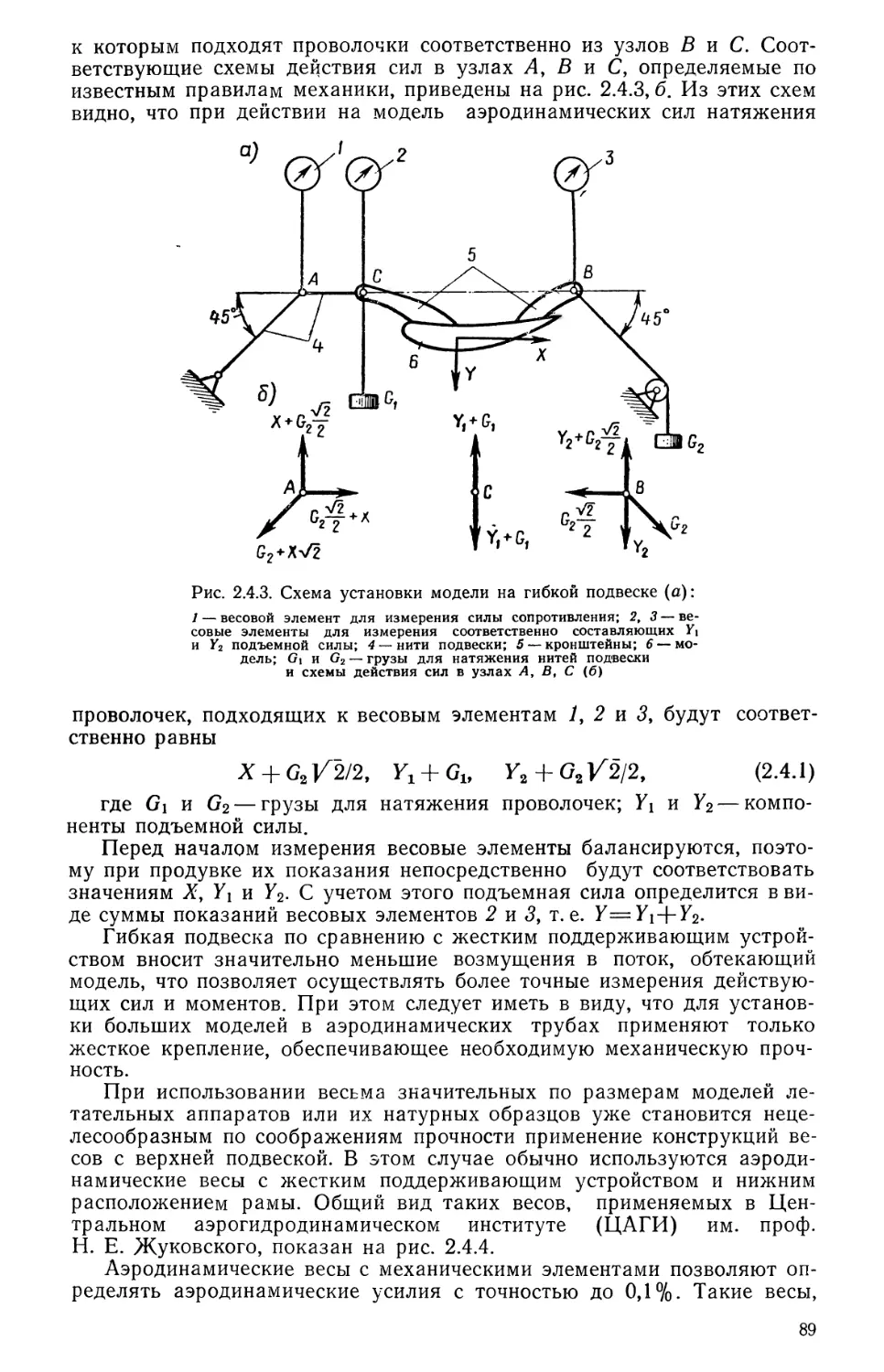
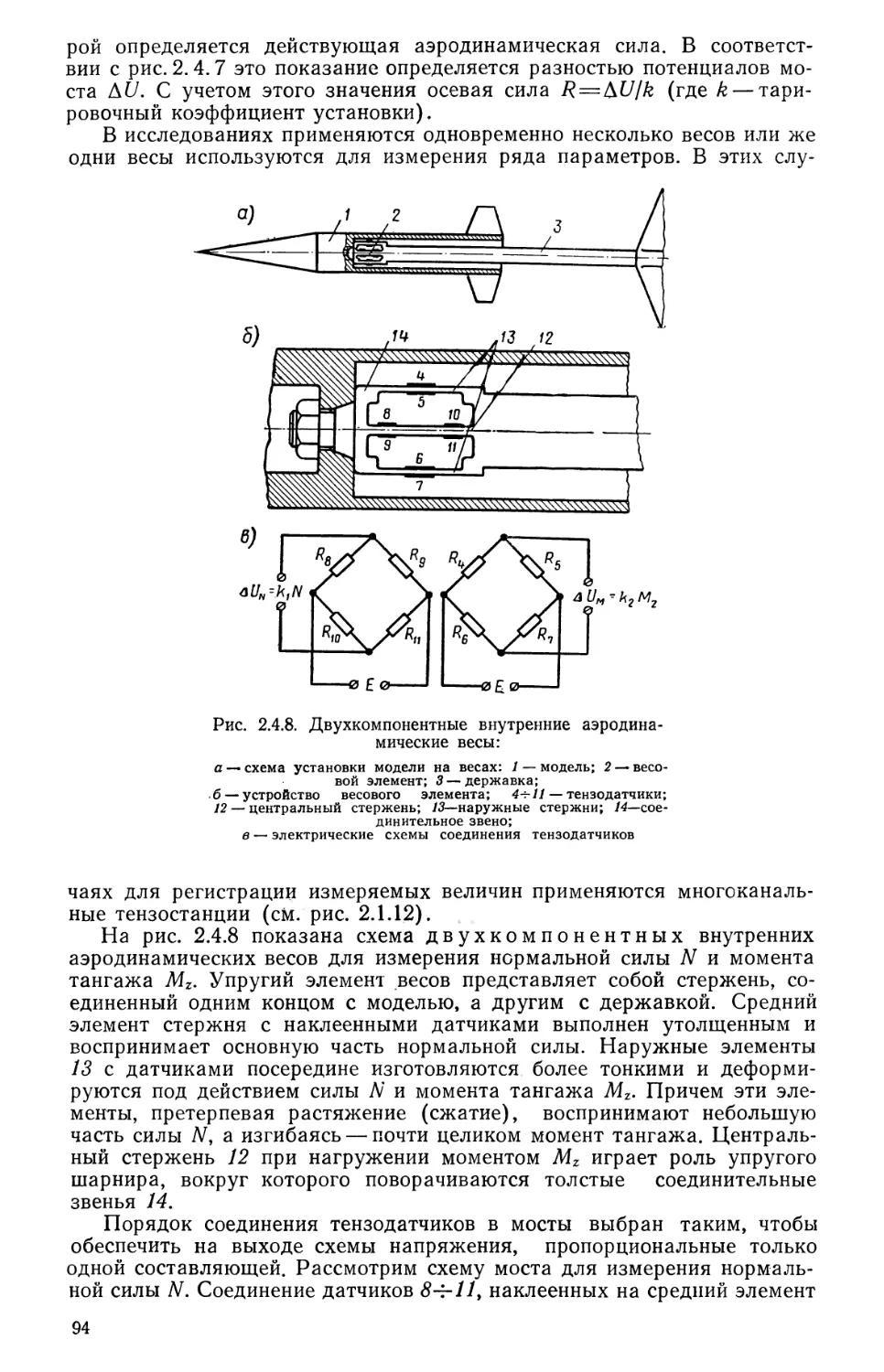
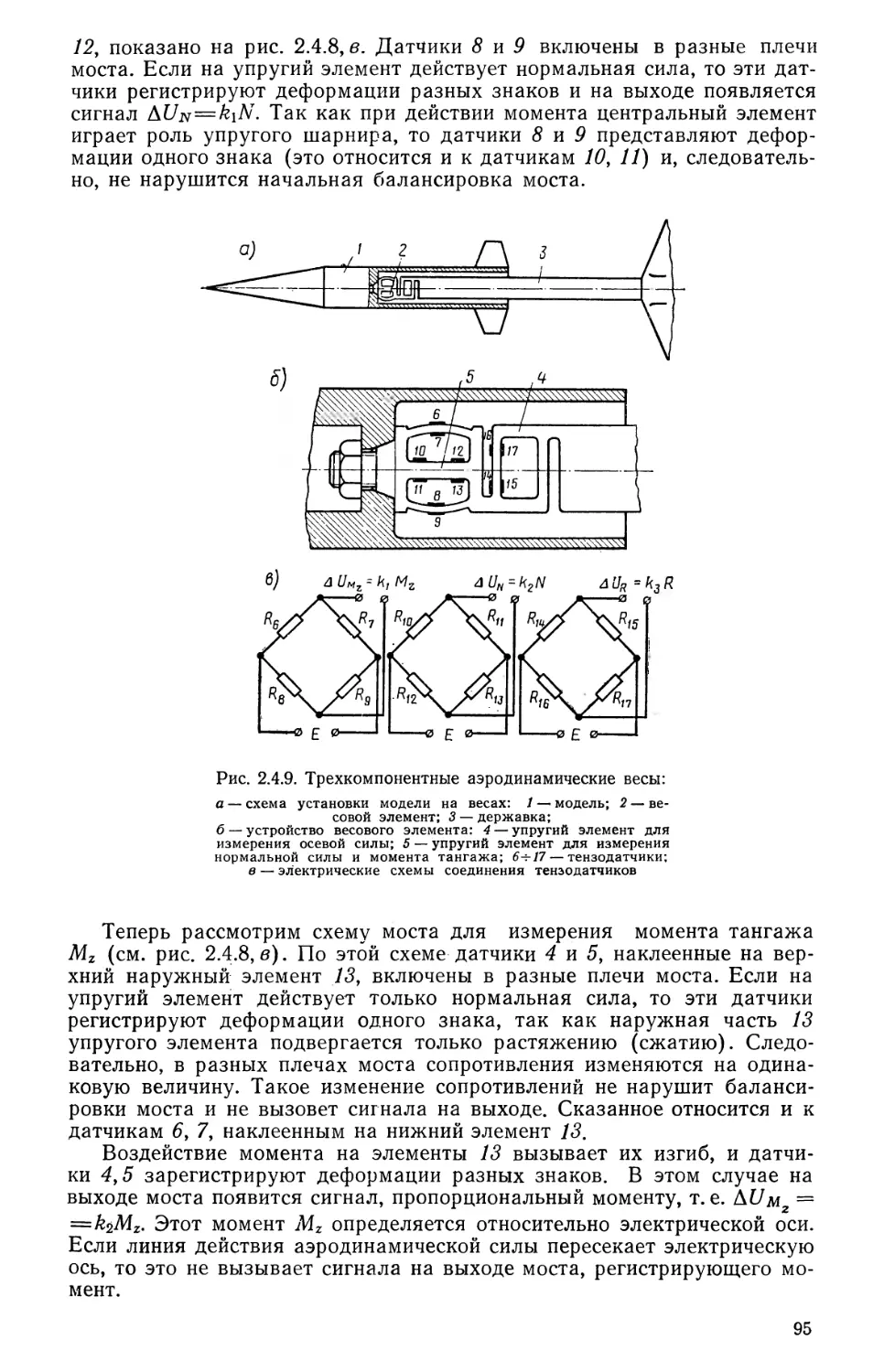
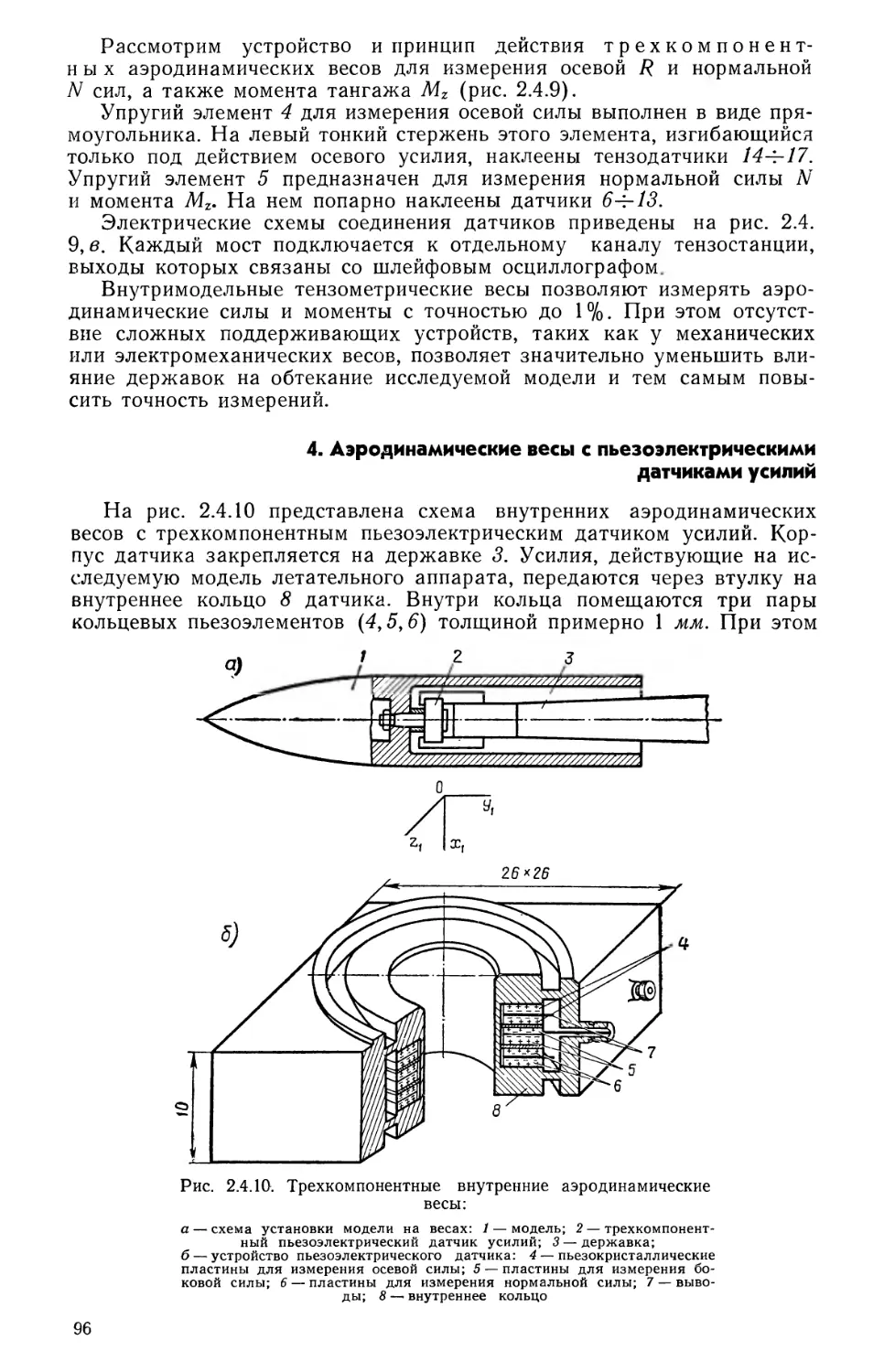




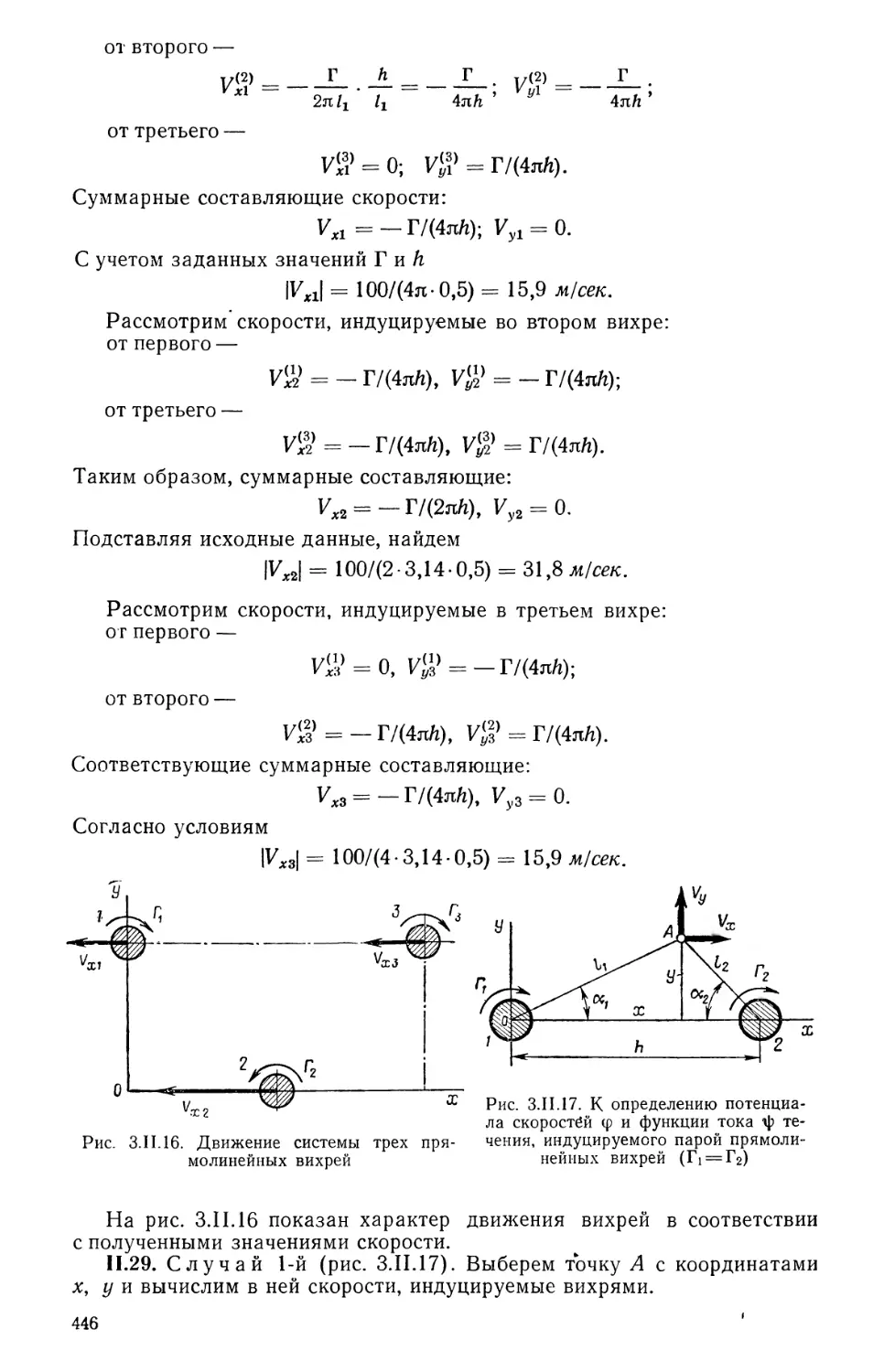



















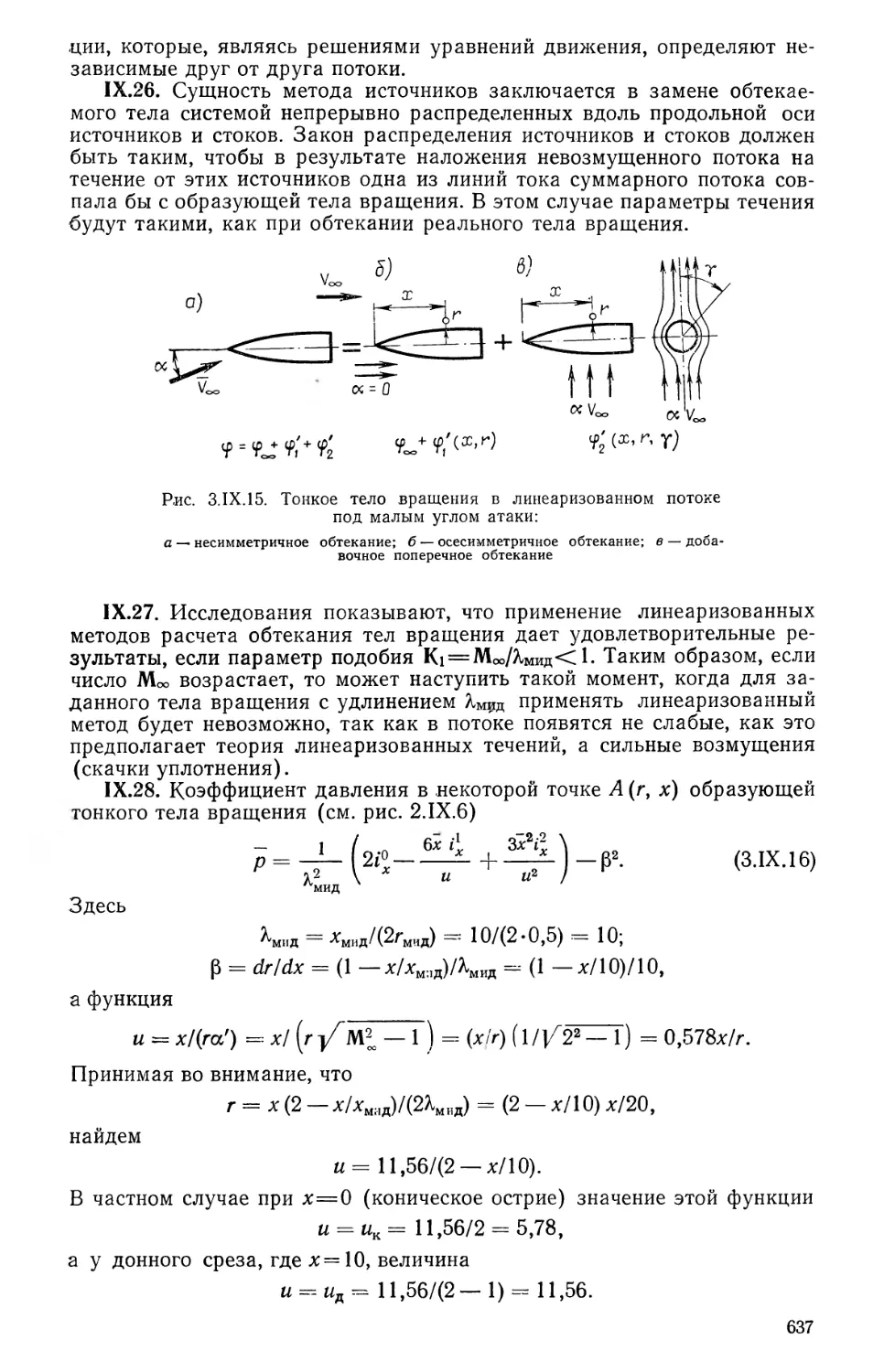
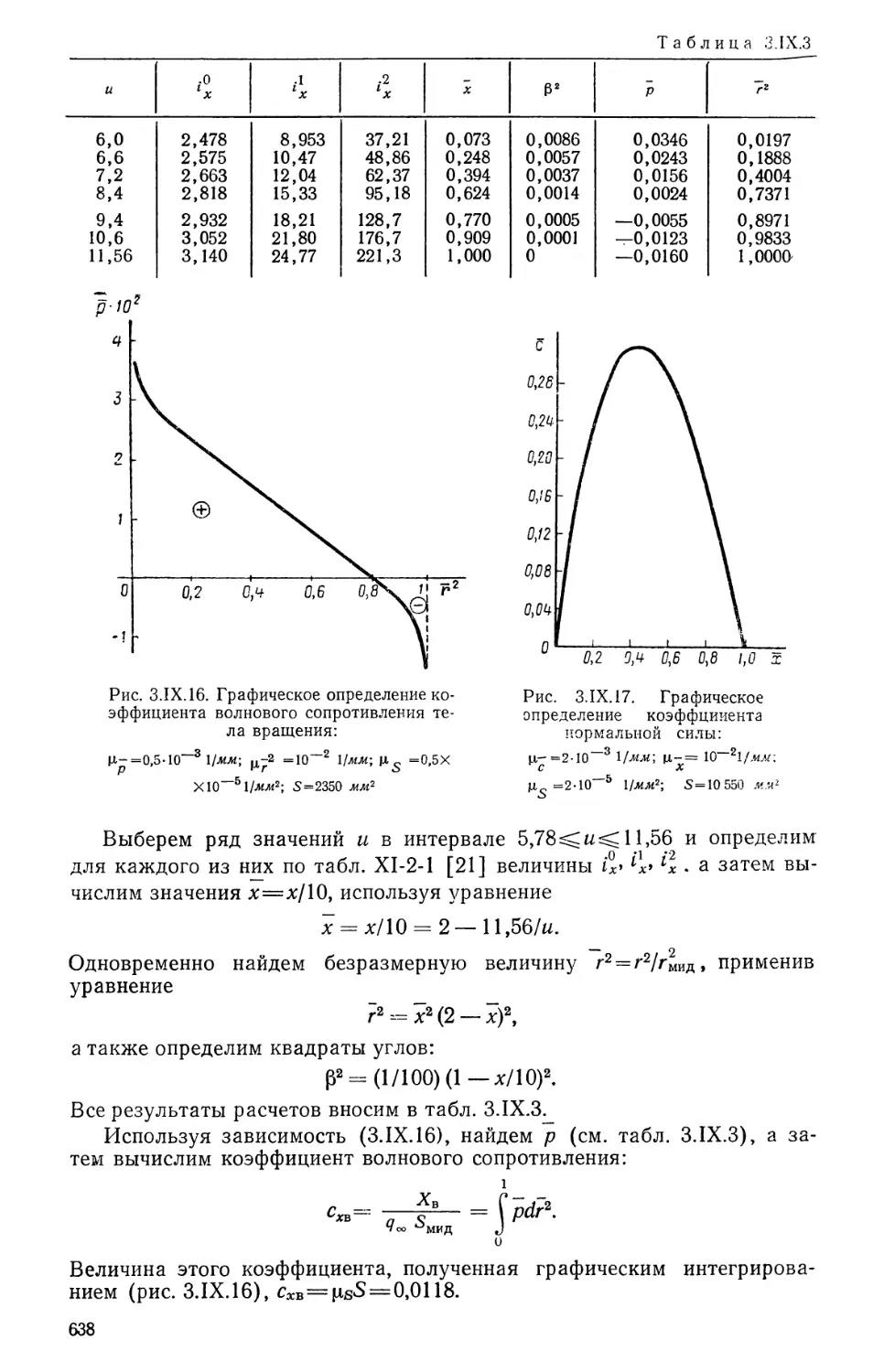
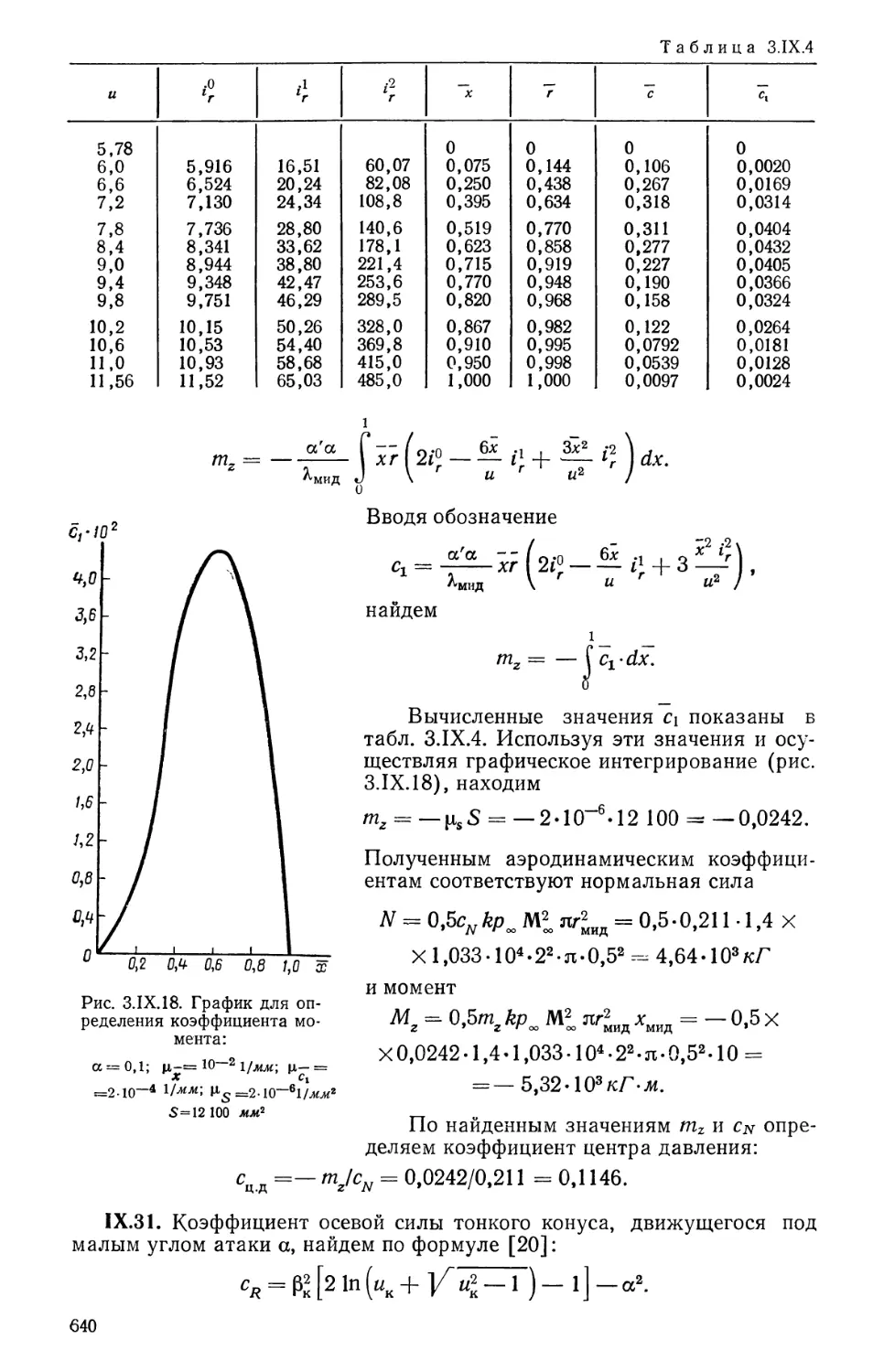











Text
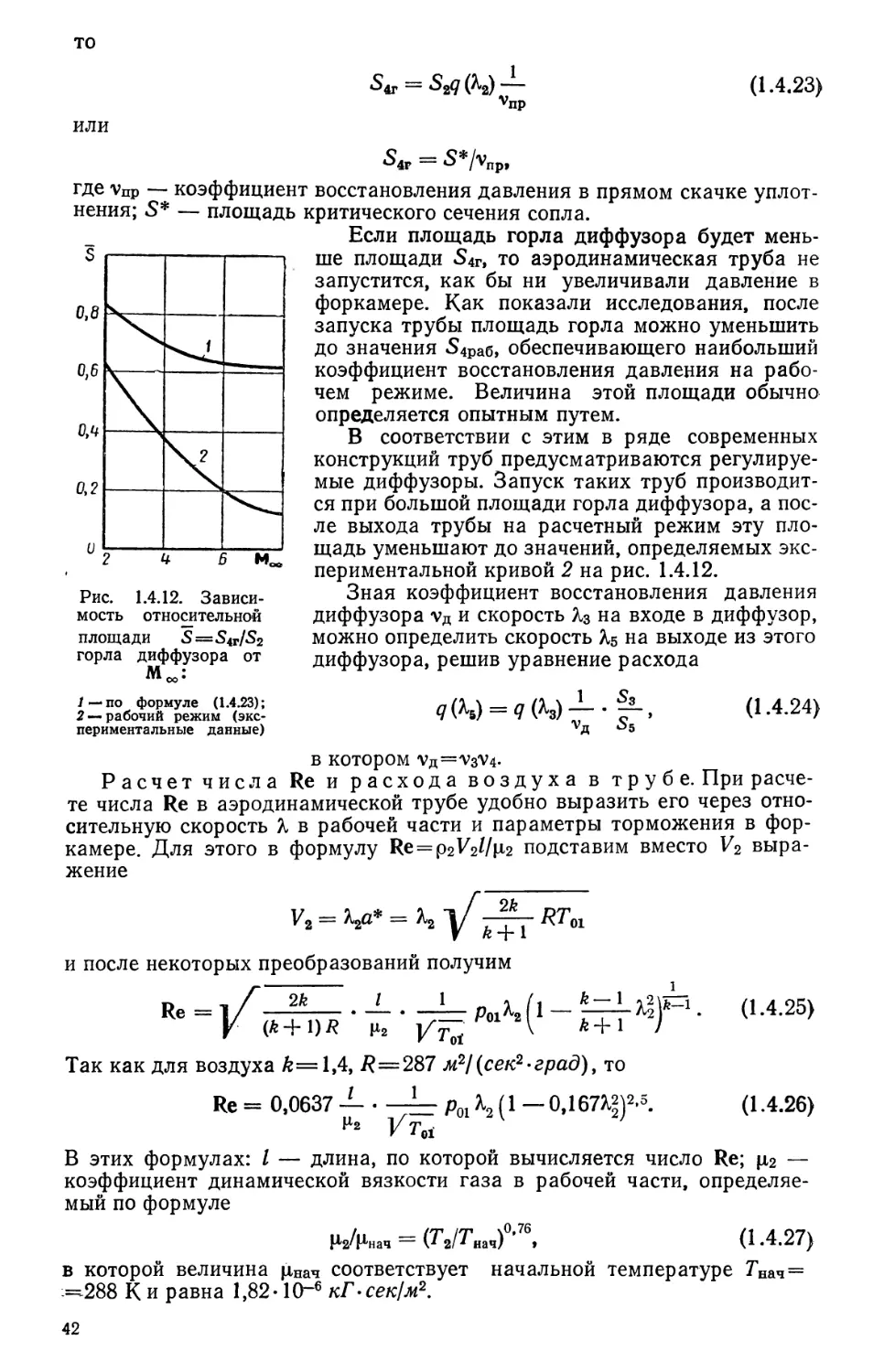
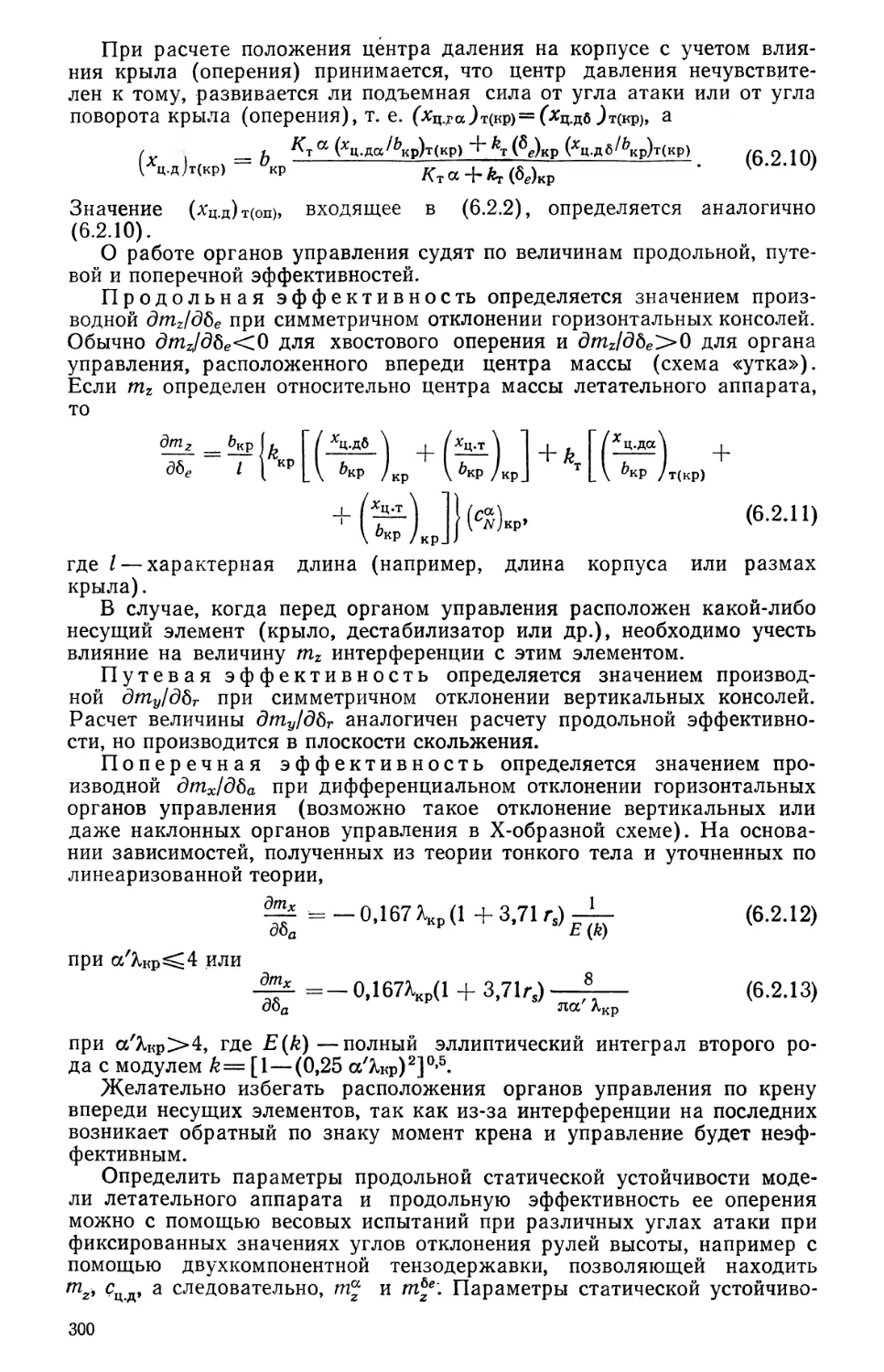
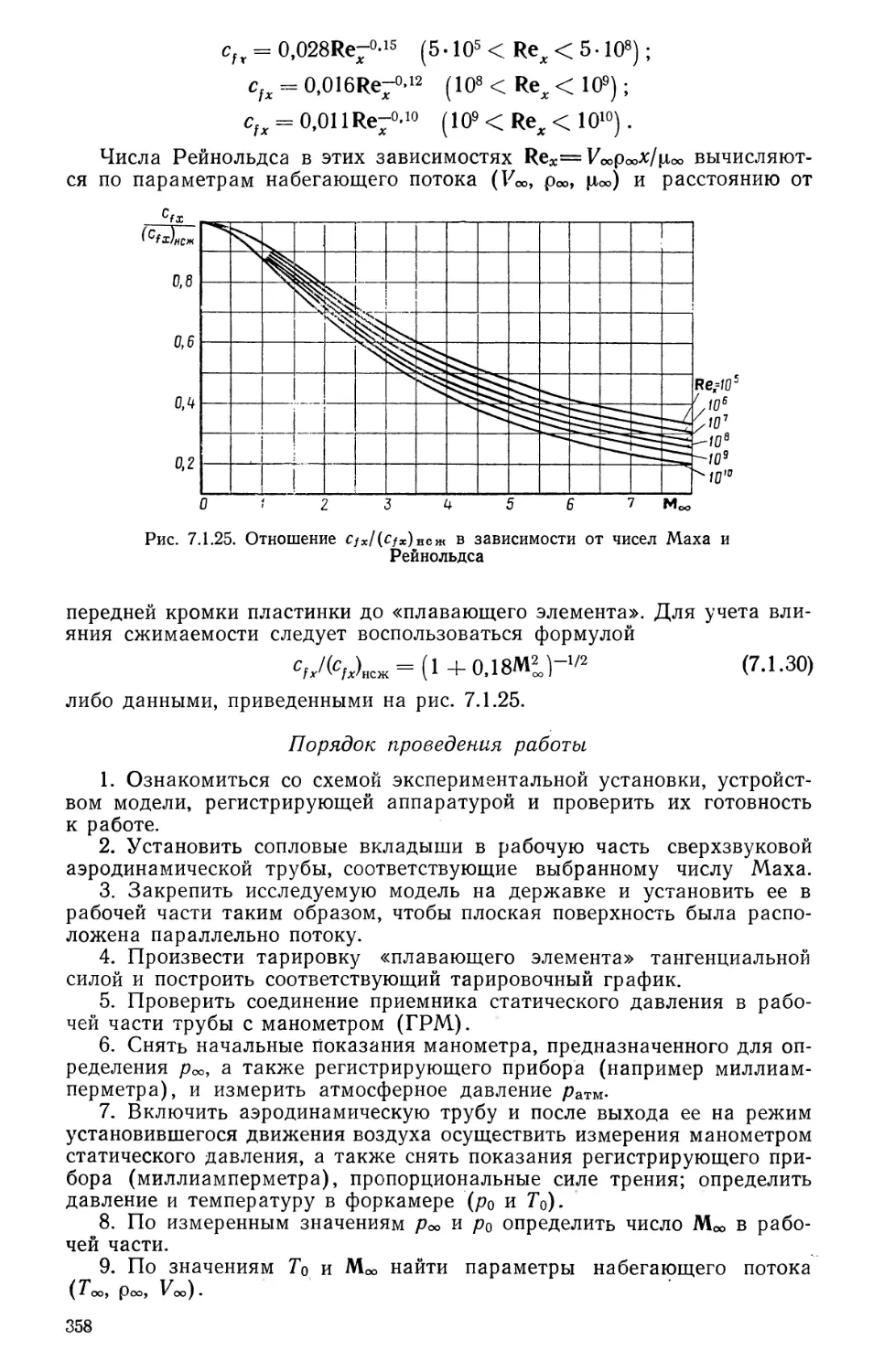
5% 1210155)
№
ИЧЗЧ
\
ПРИНПАДНАЯ
АЭРОДИ НАМИ!-[А
\
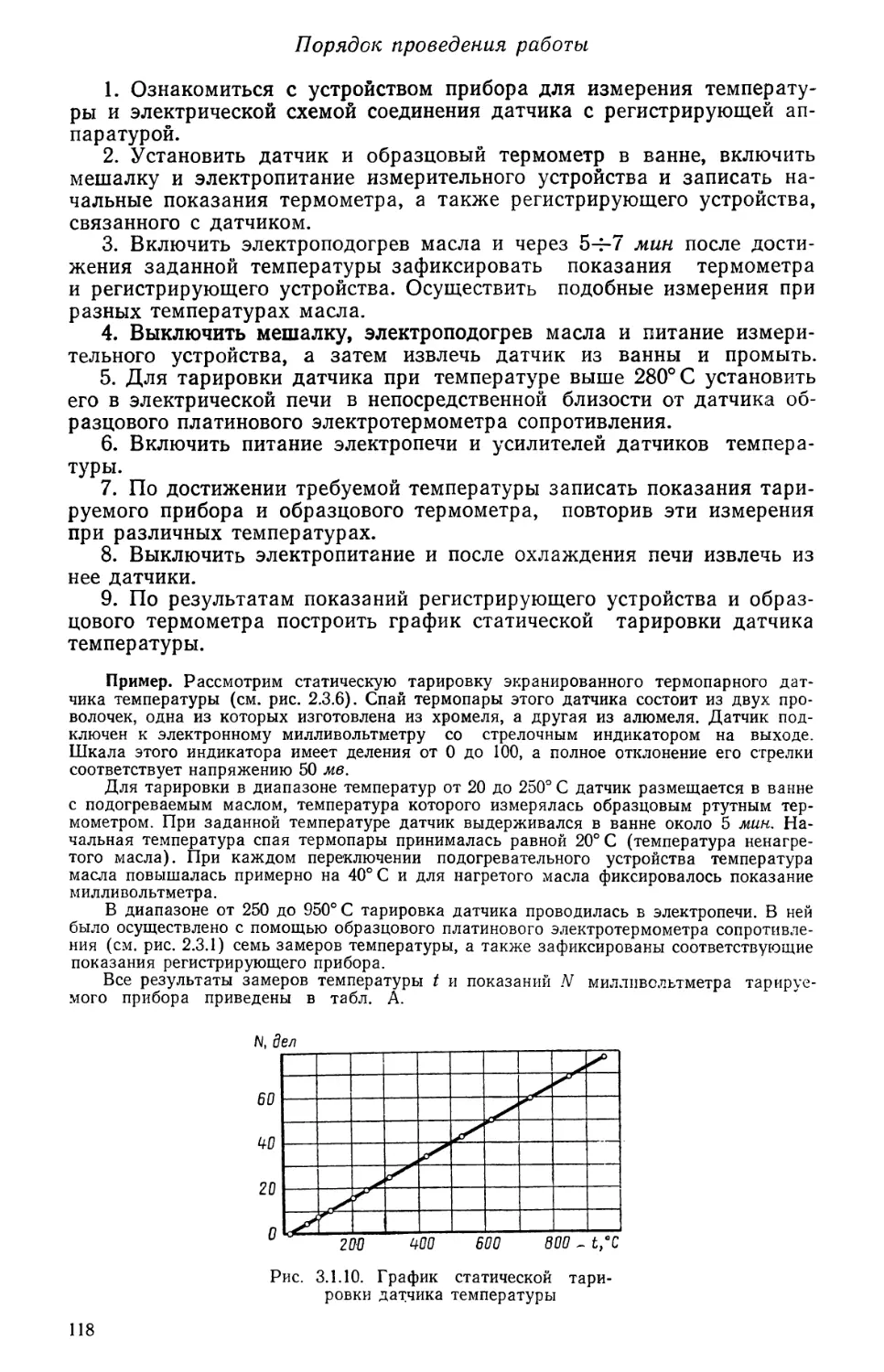
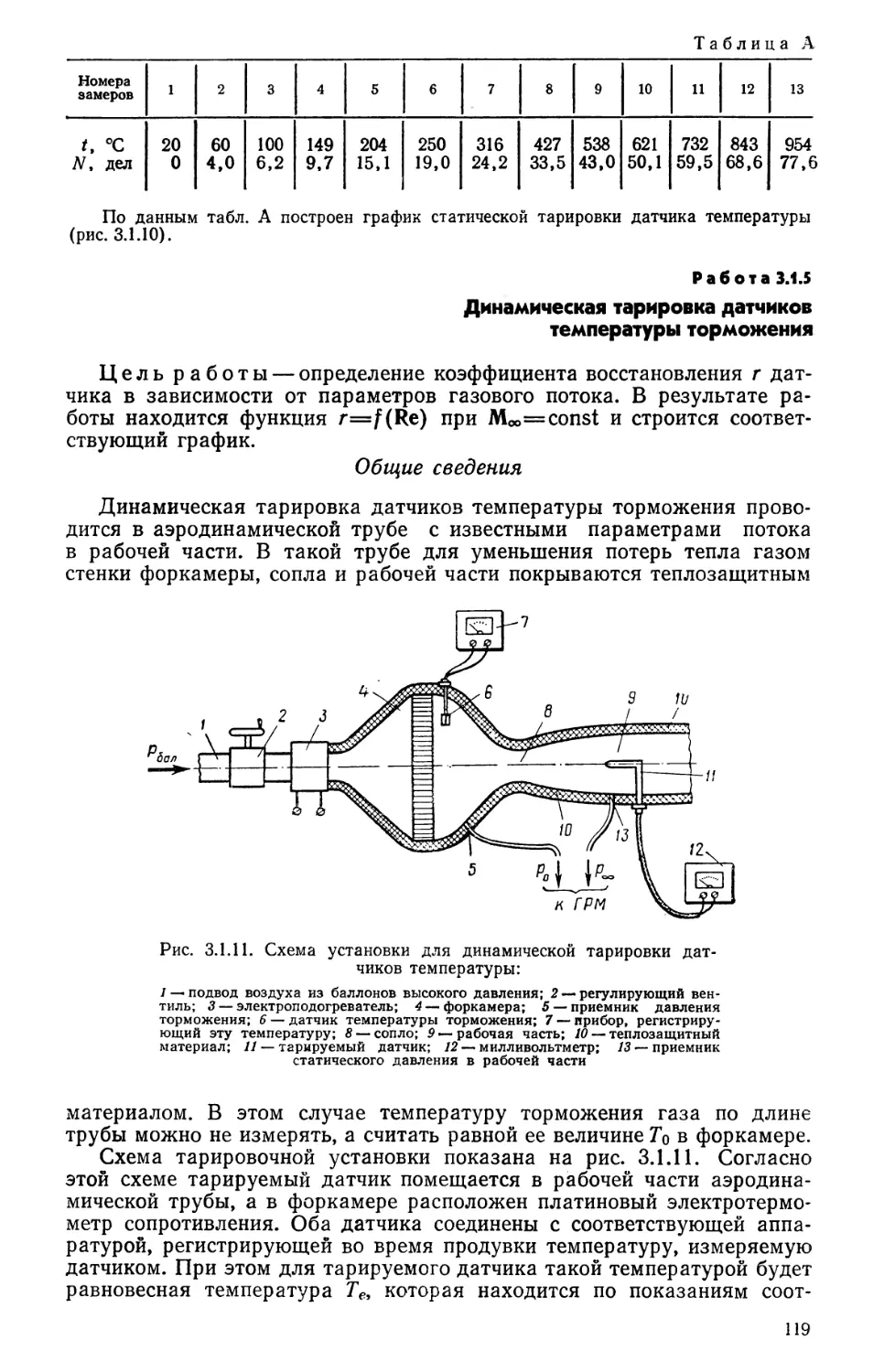
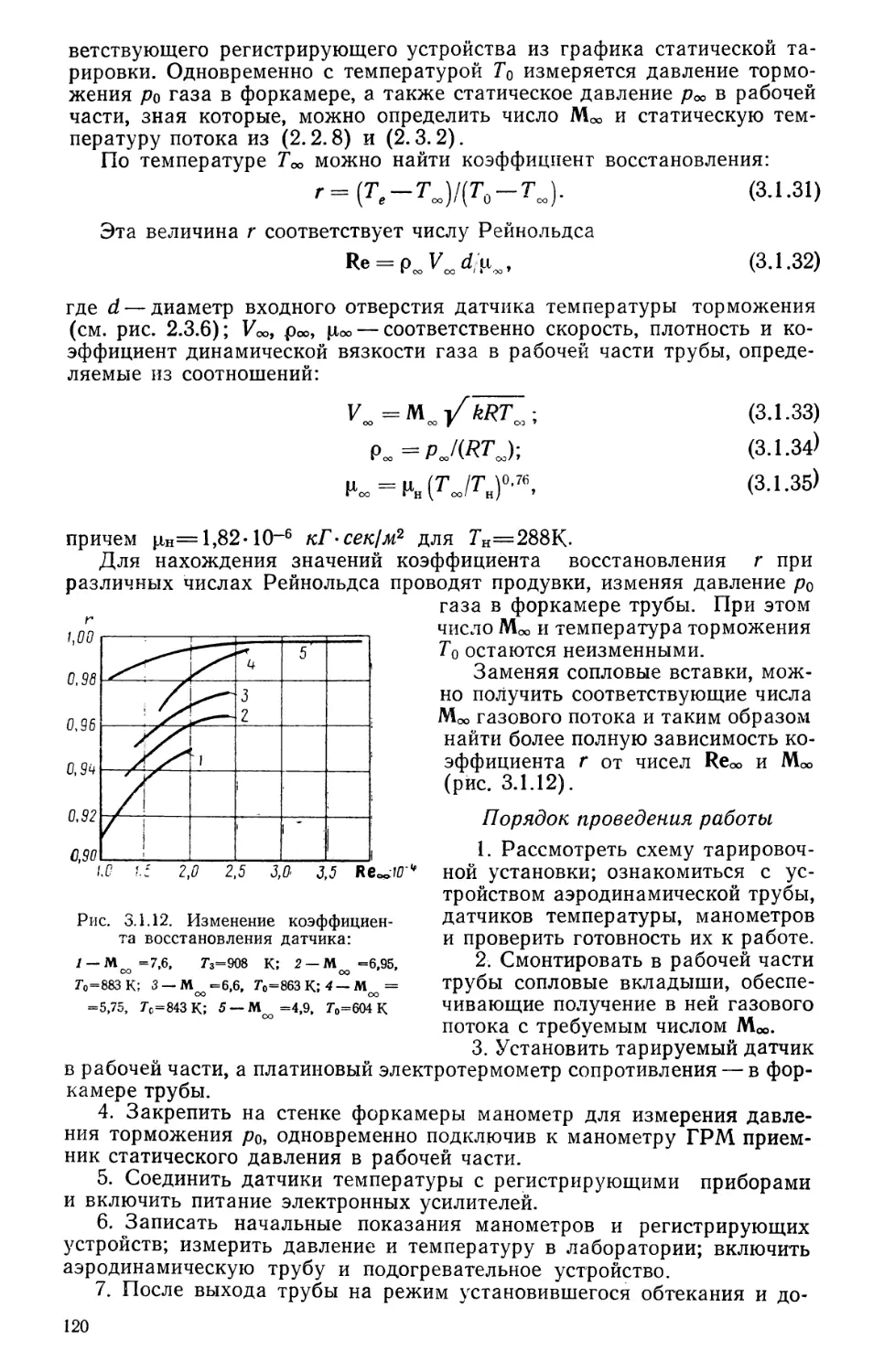
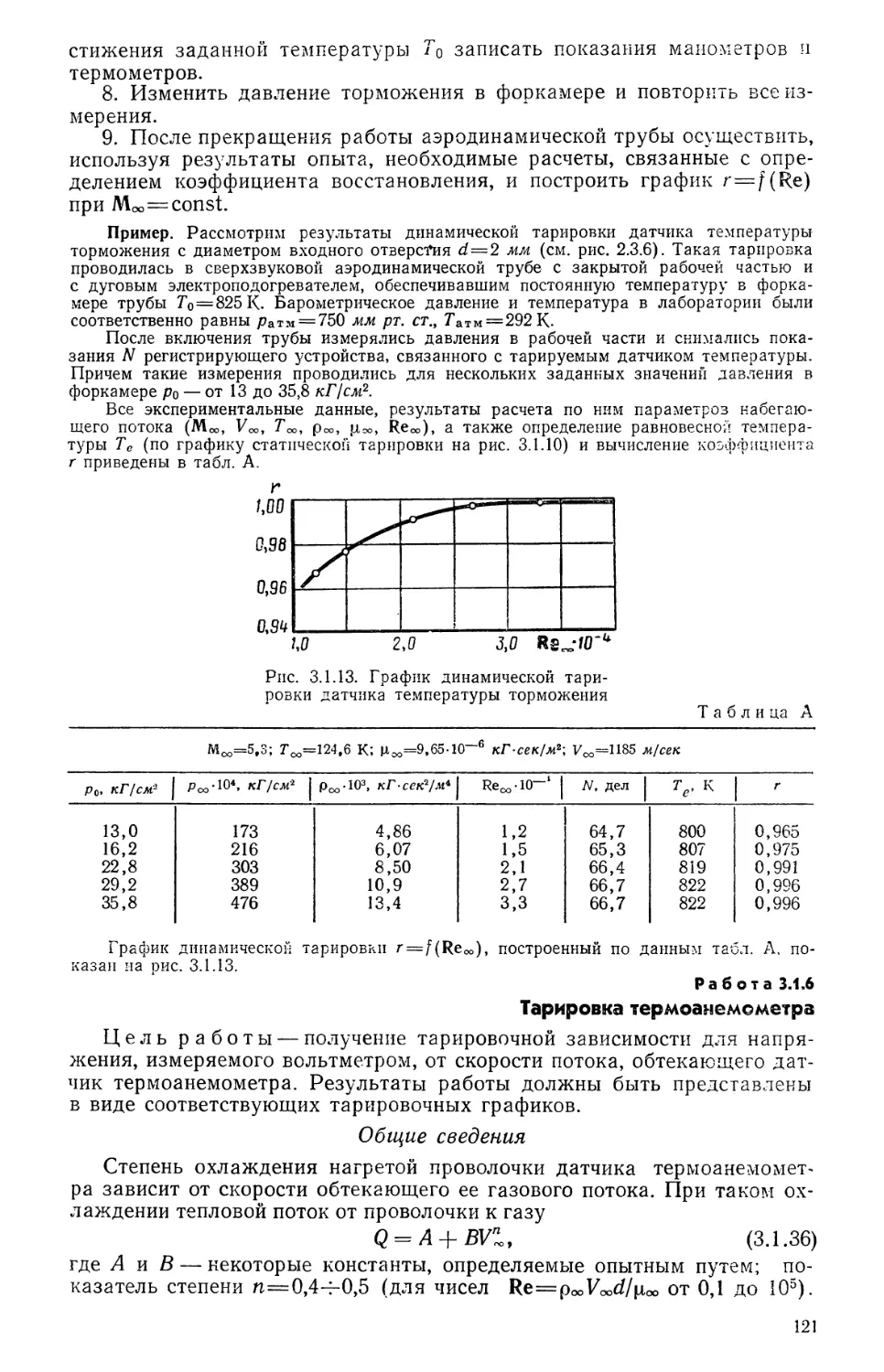
\ __.
ПРИ НПАДНАЯ
АЭ РОД И НАМ И НА
Под общей редакцией
профессора
Н. Ф.Краснова
допущено
Министерством высшего и среднего
специального образования СССР
в качестве учебного пособия
для студентов высших технических
учебных заведений
Москва
«Высшая школа»
1914
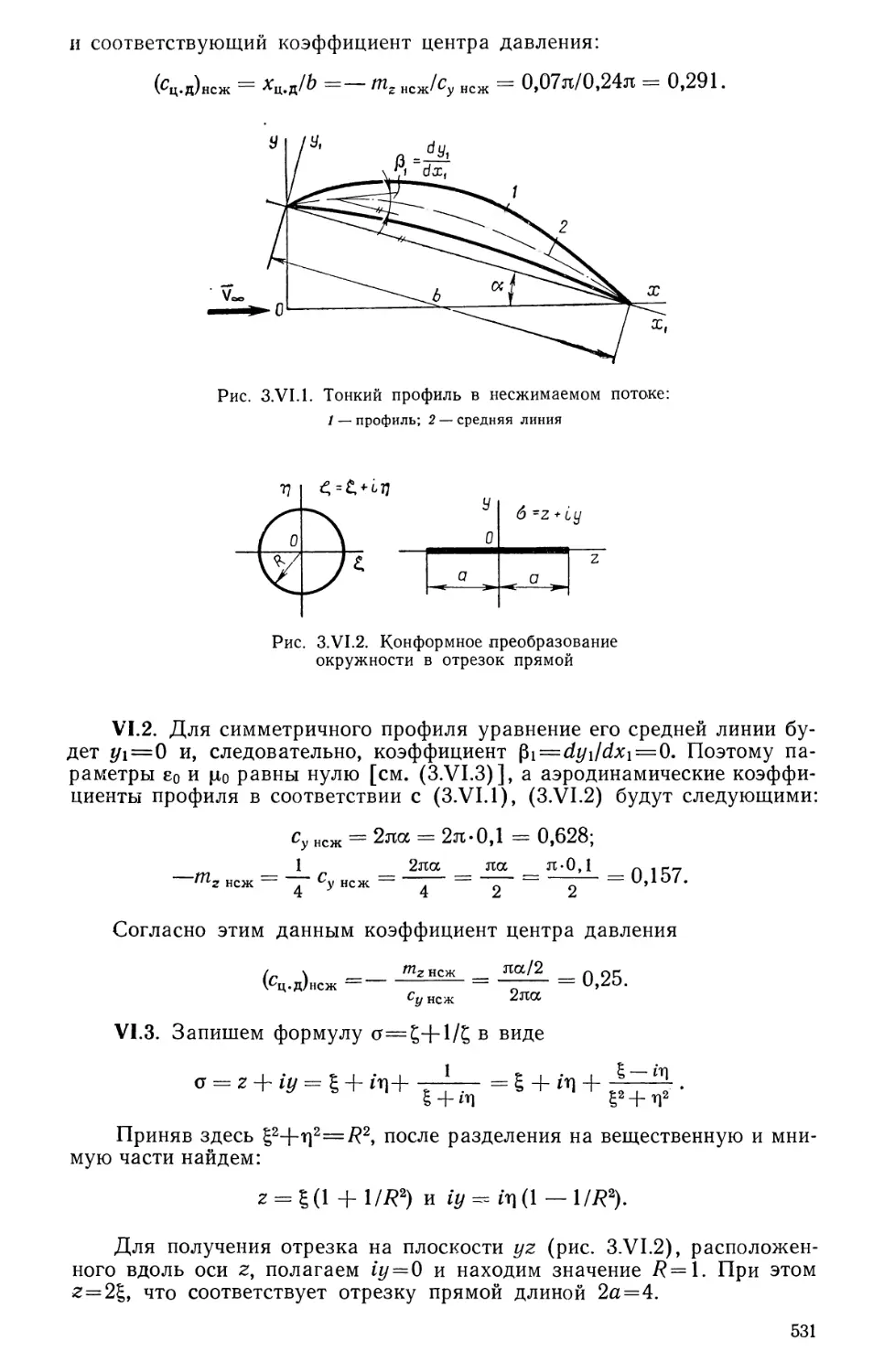
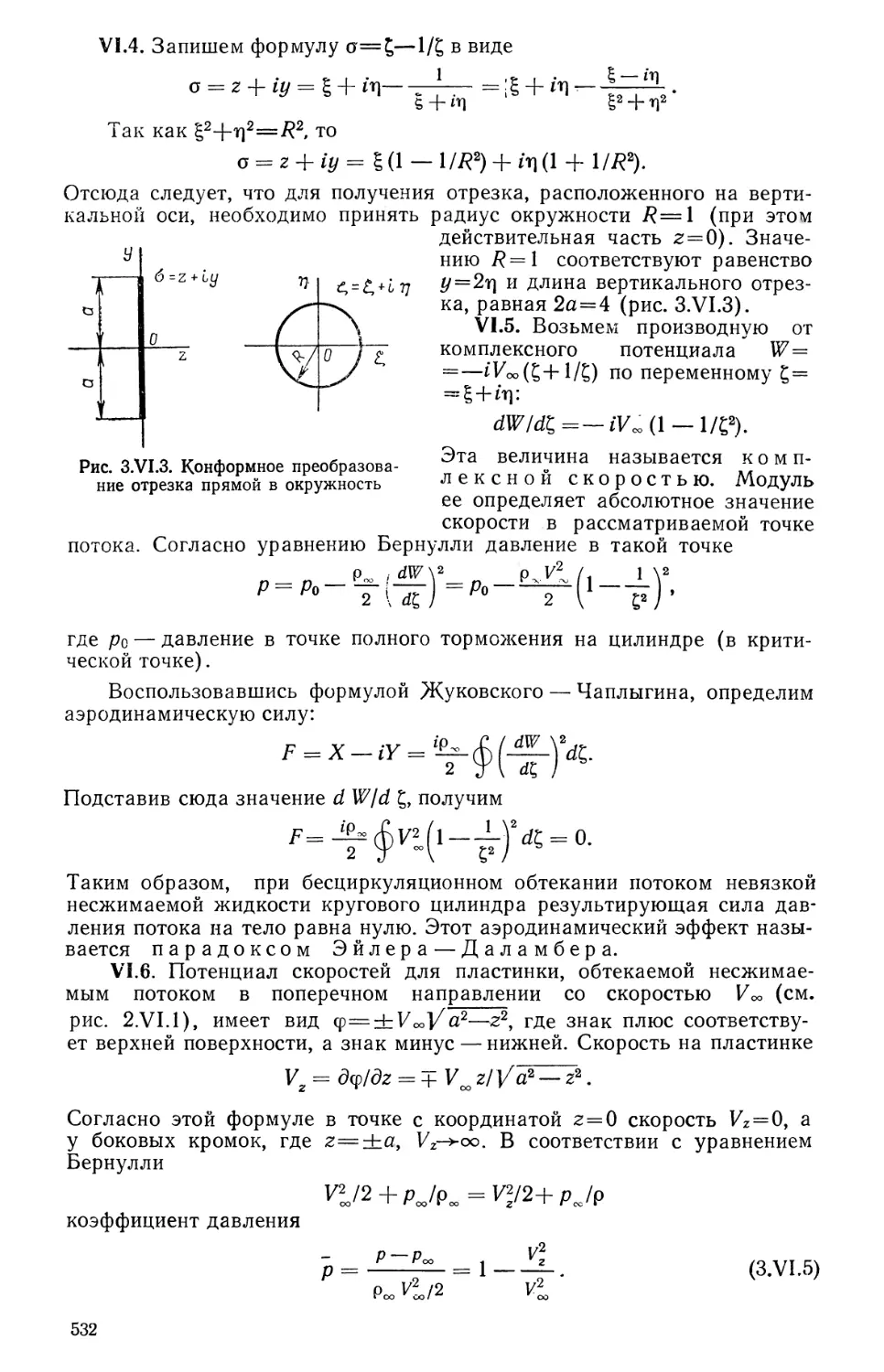
533
П75
удк 533.6(075)
П75
Н. Ф. Краснов, В. Н. Кошевой, А. Н. Данилов, В. Ф. Захарченко,
Е. З. Боровский, А. и. Хлупнов.
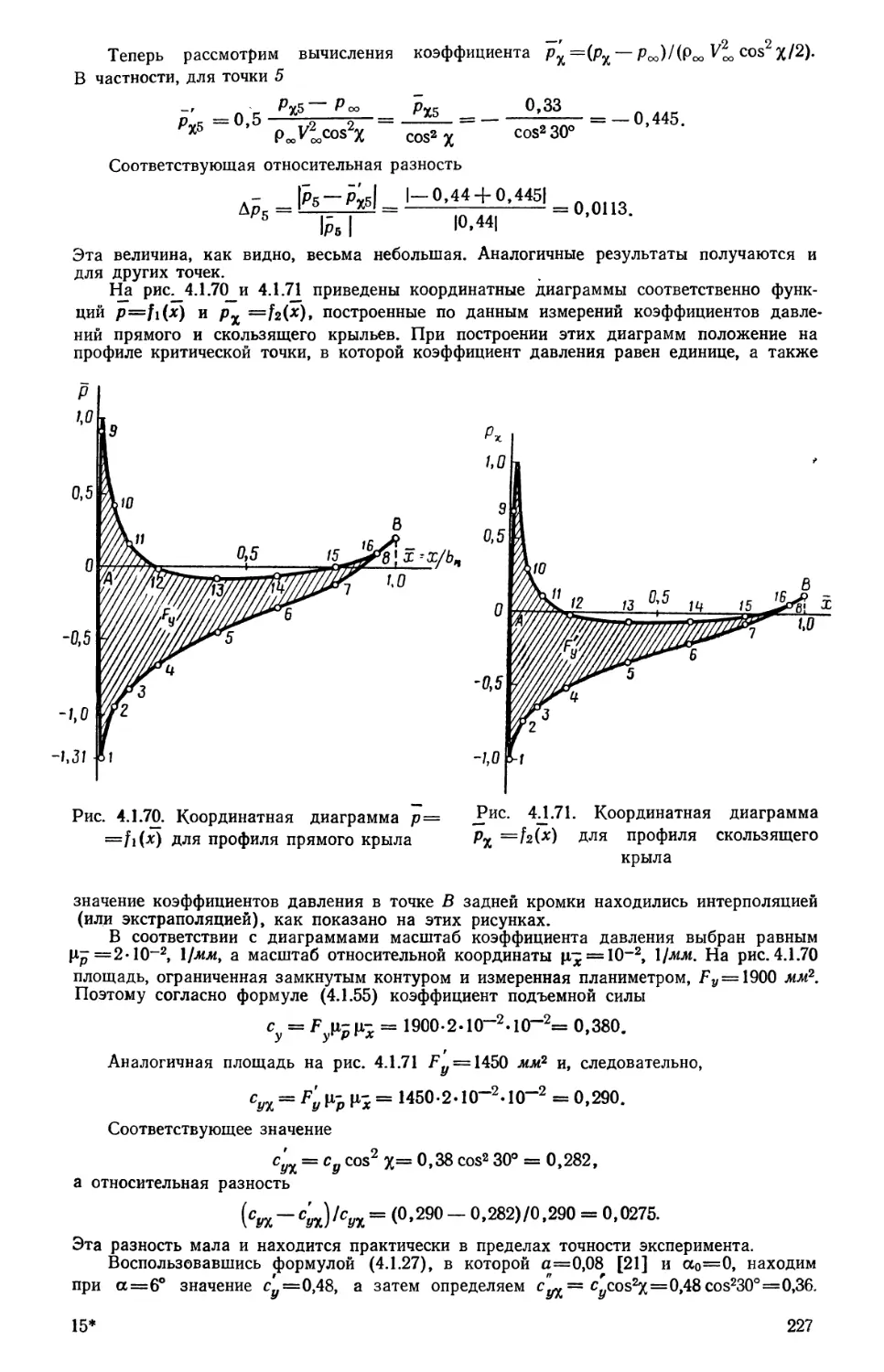
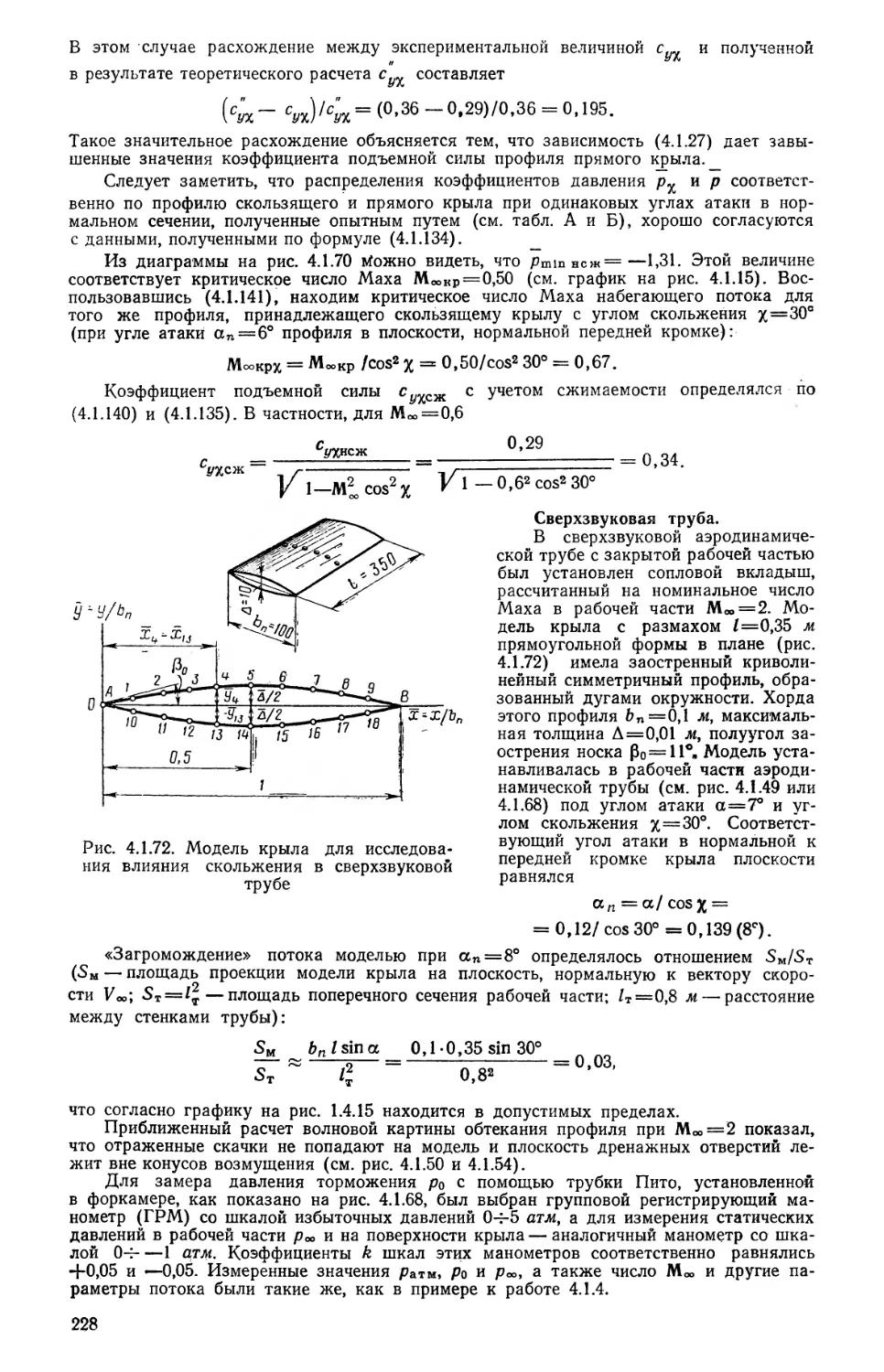
Прикладная аэродинамика
Под ред. Краснова Н. Ф. Учеб. пособие для втузов. М., «Высш.
школа», 1974.
732 с. с ил.
Перед загл. авт.: Н. Ф. Краснов, В. Н. Кошевой, А. Н. Данилов и др.
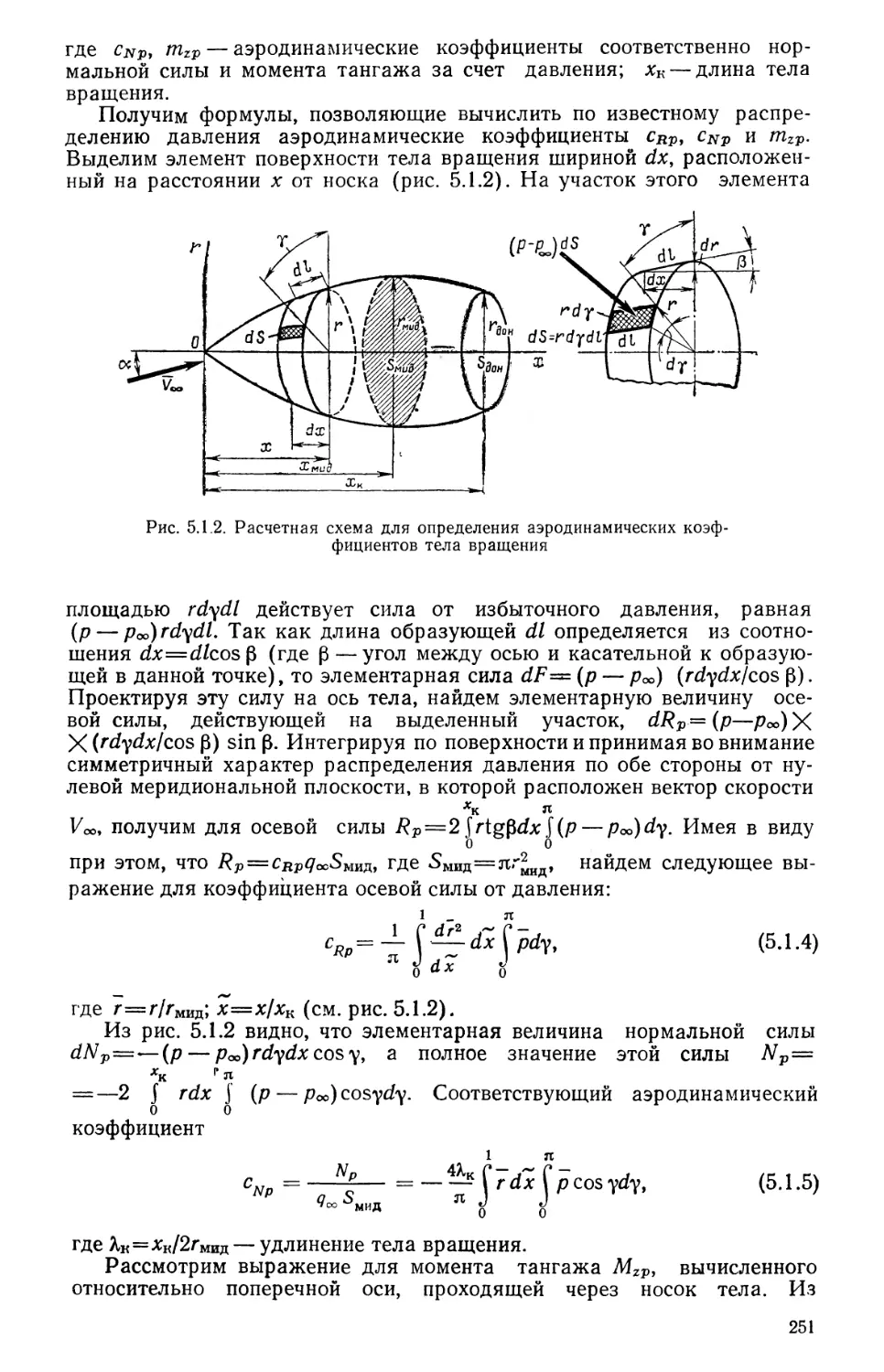
В книге излагаются основы прикладной аэродинамики—одного из важнейших разделов
современной аэродинамической науки. Подробно рассматриваются вопросы эксперименталь-
ной аэродинамики, включая описание и мет0ды расчета и проектирования аэродинамических
установок дозвуковых и сверхзвуковых скоростей, измерительных устройств, а также спосо-
бы определения на конкретных примерах различных аэродинамических характеристик.
Важное место уделено формулировке и решению задач по фундаментальным разделам
аэродинамики, таким как кинематика и динамика жицкости и газа, теория скачков уплотне-
ния, метод характеристик, аэродинамическая интерференция. В них последовательно раскры-
ваются мет0ды расчета параметров обтекания профиля и крыльев, тел вращения, а также в
целом летательных аппаратов, причем рассматриваются не только силовое воздействие (дав-
ление, трение), но также передача тепла от разогретого омывающего газа и вызванное этим
разрушение обтекаемой поверхности (абляция).
Книга предназначена для студентов технических вузов, а также будет полезна инжене-
рам и научным работникам.
20303—067___
001 (01 )—74
125—74 533
Рецензенты:
Кафедра аэромеханики Киевского института инженеров гражданской авиации.
Докт. физ.-матем. наук Г и н 3 б у р г И. П.
@ Издательство «Высшая школа», 1974 г.
ПРЕДИСЛОВИЕ
Изучение современной аэродинамики занимает большое место в
подготовке специалистов высшей квалификации по тем естественно-на-
учным и инженерно-техническим областям знаний, где в той или иной
мере приходится сталкиваться с явлениями Движения воздуха или вооб—
ще газовой среды. Несомненно, что аэродинамику следует рассматри-
вать в качестве одной из фундаментальных, базовых, дисциплин, на ко—
торую опирается последующая специальная подготовка будущего науч-
ного работника — механика или инженера по авиационно-ракетным, ар-
тиллерийским и другим смежным специальностям.
В настоящей книге, являющейся учебным пособием, излагаются ос-
новы прикладной аэродинамики—0дного из важнейших разделов сов—
ременной аэродинамической науки. Быстрое развитие ракетно-авиаци—
онной техники стало возможным благодаря успехам этой области аэро—
динамики, вобравшей в себя не только достижения современной аэроди-
намической теории, но и других наук, прежде всего вычислитель—
ной математики. Здесь прикладная аэродинамика рассматривается в бо—
лее широком плане как совокупность «классических» разделов, относя-
щихся к методам и практике экспериментальных исследований, а также
вопросов и задач по общему курсу аэродинамики. Такой подход к изло—
жению учебного материала более эффективен в целях усвоения научной
информации, развития умения и навыков в использовании этой инфор—
мации, правильной постановки эксперимента, оценки его точности и
обобщения полученных результатов. Именно такой единый процесс ис-
следования, основанный на глубоких теоретических знаниях и носящий
экспериментальный характер, свойствен практической деятельности сов-
ременного инженера-аэродинамика.
Быстродействующие электронно-цифровые машины все больше при—
меняются в лабораторной практике для обработки данных, получаемых
в результате продувок в аэродинамических трубах моделей летатель-
ных аппаратов, а также при решении многих задач, включая комплекс—
ные аэродинамические расчеты. Владея основами вычислительной мате—
матики, читатель сможет решить многие из задач, помещенных в книге,
а также рассмотреть некоторые аспекты, связанные с возможностью ав—
томатизации эксперимента с применением вычислительных машин. Поэ-
тому в книге основное внимание обращено на методику подготовки, про-
ведения и обработки результатов эксперимента, а также на правильный
выбор способов решения сформулированных задач с целью получения
отдельных конкретных результатов. Одновременно осуществляется ана—
лиз этих результатов, раскрывается их физический смысл, что облегчает
читателю в случае необходимости самостоятельную разработку алгорит-
ма при использовании электронно-вычислительной машины.
Развитие современной аэродинамики отражает подход к решению
инженерных проблем с двух позиций. Можно составить точные общие
!* 3
уравнения процесса обтекания И найти их решение с помощью вычисли-
тельных машин. Подобное решение может вызываться необходимостью
получения массовых результатов и имеет смысл для какой-то определен—
ной физической модели исследуемого процесса, обусловливающей мно-
говариантность начальных условий и большой объем вычислительных
операций. Вместе с тем исследование обтекания тел может быть осуще—
ствлено аналитически—путем постановки теоретических проблем, их
корректных физической и математической формулировок, создания но—
вых методов решения задач. Для инженера имеют исключительно важ—
ное значение такие аналитические решения при условии, что область их
применения известна. Именно этим решениям уделено большое
внимание в книге.
В первом разделе книги дана информация об основах эксперимен—
тальной аэродинамики, изложены цели и общие методы подготовки и
проведения лабораторных работ. Во втором и третьем раЗделах сформу—
лированы вопросы и задачи, приведены ответы на эти вопросы и рас-
смотрены решения задач.
Лабораторные работы‚ вопросы и задачи являются своеобразным
отображением в прикладном виде курса аэродинамики. Их выбор осу—
ществлялся с таким расчетом, чтобы помочь в усвоении основополага-
ющих, узловых разделов этого курса. При этом лабораторные работы‚
ответы на вопросы и решения задач хотя и завершаются числовой ил—
лЮстрацией, однако не являются частными, 21 имеют общий характер и
охватывают определенный комплекс учебной информации, способствуя
тем самым творческому подходу к усвоению аэродинамики.
Эффект от проведения лабораторных работ и глубина усвоения всей
аэрбдинамики возрастают, если такие работы носят исследовательский
характер и в известной мере отражают практическую деятельность экс—
периментатора. Это учитывалось при изложении содержания лабора—
торных работ, а также общих сведений, в которых нашла отражение не-
обХОДимая теоретическая информация и общая методика проведения ра—
боты. Правильной организации подготовки, проведения и обработки
данных эКсперимента помогут конкретные примеры, рассматриваемые
в конце каждой лабораторной работы. Согласно общей теме работы сту-
дент должен под руководством преподавателя выбрать аэродинамиче-
скую установку, измерительные приборы, необходимые моцели и мате-
риалы, наметить целесообразную форму бланков для записи эксперимен—
тальных данных, провести предварительные теоретические расчеты и, что
очень важно, предусмотреть рациональные и безопасные условия прове-
дения работы; лишь после этого можно приступать к ее осуществлению.
Основой экспериментальной аэродинамики являются понятия и оп—
ределения, относящиеся к созданию и эксплуатации аэродинамических
установок и измерительных устройств. Этому посвящены две первые гла-
вы, в которых последовательно рассматриваются принципы устройства
и конкретные конструкции дозвуковых и сверхзвуковых аэродинамиче—
ских труб, приборов и аппаратов для измерения скорости, давления, тре-
ния, суммарных аэродинамических сил и моментов, а также теплопере-
дачи при исследовании в этих трубах обтекания моделей летательных
аппаратов и их отдельных элементов (крыло, корпус, оперение).
В экспериментальной аэродинамике широко используют визуальные
методы исследования газовых течений. Поэтому в книге большое вни-
мание уделено рассмотрению конструкций и принципов действия опти-
ческих приборов, позволяющих наблюдать потоки около обтекаемых по—
верхностей, а также количественно оценивать параметры газа, характе-
риЗующие такие потоки. '
В настоящее Время все шире используются автоматизированные
системы управления подготовкой, проведением и обработкой получае-
4
мых данных на экспериментальных аэродинамических установках. Важ°
нейшим элементом таких систем являются электронные измерительные
устройства. Поэтому в книге большое внимание уделено рассмотрению
подобных устройств, использующихся для определения суммарных сил
и моментов, а также распределения напряжений
В третьей главе рассматриваются техника и методика измерения
параметров газовых течений. Важнейшим моментом таких измерений
является тарировка соответствующих приборов и устройств (маномет-
ры и насадки давлений, термоанемометры, аэродинамические весы“ и
др.). Сама техника измерений рассматривается применительно к опыт-
ному определению скорости и давления, турбулентности и скоса потока
в рабочей части аэродинамической трубы, а также параметров газаів
ударной трубе.
Известно, что результаты экспериментальных исследований исполь—
зуются для проверки теоретических выводов и гипотез. С учетом этого
описание лабораторных работ в книге сопровождается, там Где это вбз-
можно и целесообразно, элементами аэродинамического расчета иссле-
дуемого летательного аппарата и последующим сопоставлением данных
такого расчета с экспериментальными результатами.
При расчете какой—либо аэродинамической характеристики одни ее
составляющие могут находиться в результате решения соответствующих
уравнений или по готовым аналитическим зависимостям, а другие могут
быть определены по экспериментальным данным.
В связи с этим в книге для проведения полных аэродинамических
расчетов приведены в виде отдельных иллюстраций также данные, по-
лученные в лабораторных работах.
Настоящая книга написана на основе опыта преподавания курса
«Аэродинамика», в том числе его прикладных разделов, в Московском
высшем техническом училище им. Н. Э. Баумана в соответствии с учеб—
ной программой.
Лабораторные работы составлены в основном применительно к ус-
тановкам и измерительным устройствам, использующимся в аэродина—
мической лаборатории МВТУ. Однако большинство лабораторных работ
может быть выполнено в любом учебном заведении.
Последовательность вопросов и задач, содержание ответов и реше-
ния в основном соответствуют программе учебного курса. Однако от-
дельные вопросы и задачи носят комплексный характер; они как бы
«отклоняются» от такой последовательности‚ что должно способствовать
развитию навыков у читателя к обобщению научной информации, син—
тезированию ее при отыскании ответов на сложные вопросы и задачи.
В книге важное место при формулировке вопросов и задач занима-
ют такие разделы, как общие понятия и определения аэродинамики,
кинематика и динамика жидкости и газа, теория скачков уплотнения и
метод характеристик. Значительное место в книге занимают вопросы
и задачи, связанные с аэродинамическим расчетом.
При этом акцентируется внимание не только на рассмотрение число-
вых схем такого расчета, но и на раскрытие физической сущности тех
процессов, для которых находятся количественные характеристики.
Все задачи и вопросы сопровождаются достаточно подробными ре-
шениями и ответами, основная цель которых — изложить принципы этих
решений и ответов, а также указать некий ориентир, который поможет
читателю отыскать правильный путь, если он предпримет попытку само—
стоятельно и в ином порядке, чем в книге, решать сформулированную
задачу.
Важнейшим правилом, которым необходимо руководствоваться при
решении задач, является нахождение решений в безразмерной форме.
При соблюдении аэродинамического подобия такие решения могут быть
распространены с модельных на натурные явления, связанные с обтека-
нием летательных аппаратов И движением газа вообще. В связи со ска—
занным читателю следует более глубоко изучить теорию аэродинамиче-
ского подобия, а также общие методы подобия и размерности [3.7 ] .- Од—
нако безразмерные решения важны и вне связи с аэродинамическим
псдобием. Решая в безразмерной форме данную задачу, которая может
и не иметь аналога, находят искомые параметры, определяющие процесс,
отнесенные к характерным газодинамическим величинам, известным
для такого процесса. Например, вычисляют не абсолютные давления,
плотности или температуры, а их значения, отнесенные к соответствую-
щим параме'трам торможения. Это способствует нахождению правиль-
ных решений и более надежной оценке величин отыскиваемых газодина-
мических параметров. Вместе с тем для выработки реальных представ-
лений о действующих аэродинамических силах, моментах, тепловых по-
токах, а также других параметрах (давление, температура, плотность
и др.) в решениях задач предусматривается определение их абсолют-
ных значений, соответствующих летательному аппарат-у с известными
размерами и формой или каким-либо начальным данным, характеризу-
ющим исследуемый поток газа.
В основу изложения материала книги положены учебник «Аэроди-
намика» [20] и учебное пособие «Аэродинамика ракет» [21]. При изу-
чении основ аэродинамики и газодинамики целесообразно, а в отдель-
ных случаях и необходимо использовать другие учебники и учебные по-
собия, а также монографии, перечень которых приведен в конце книги.
В них, в частности, содержатся различные таблицы и графики газоди-
намических и термодинамических функций для воздуха и газов, кото-
рые используются при решении задач и в аэродинамических расчетах,
приведенных в книге.
Пользование данной книгой предполагает знакомство читателя
с теоретическими основами аэродинамики, которые могут изучаться как
в целом, так и по отдельным разделам в соответствии с порядком рас-
положения лабораторных работ, вопросов и задач.
Естественно, что одно учебное пособие не в состоянии охватить все
многообразие лабораторных работ, вопросов и задач, словом, всех тех
проблем, которые составляют содержание прикладной аэродинамики.
В данном пособии представлена информация, содержание и объем ко-
торой достаточны, при условии ее глубокого усвоения, чтобы самостоя-
тельно разобраться в других проблемах, связанных с организацией
и проведением аэродинамического эксперимента, формулировкой воп-
росов и решением аэродинамических задач.
В конце книги приведена специальная переводная таблица единиц
измерения физических величин, применяемых в аэродинамике, в новые,
соответствующие принятой Международной системе (СИ).
С рукописью книги внимательно ознакомились проф., докт. физ.-ма—
тем. наук И. П. Гинзбург, а также проф. А. М. Мхитарян и коллектив
руководимой им кафедры. Они высказали ряд критических замечаний,
внесли ценные предложения по улучшению рукописи. Всем этим това-
рищам авторы выражают свою благодарность.
Авторы отдают себе отчет в том, что книга не лишена недостатков
и будут признательны читателям, которые найдут возможным высказать
свои замечания, направив их по адресу: Москва, К-51, Неглинная ул.,
29/14, издательство «Высшая школа».
РАЗДЕЛ ПЕРВЫЙ
МЕТОДЫ ЭКСПЕРИМЕНТАЛЬНЫХ ИССЛЕДОВАНИЙ
И АЭРОДИНАМИЧЕСКОГО РАСЧЕТА
Г Л А В А |
АЭРОДИНАМИЧЕСКИЕ ТРУБЫ
& 1.1. ПРИНЦИПЫ УСТРОЙСТВА И РАБОТЫ
АЭРОДИНАМИЧЕСКИХ ТРУБ
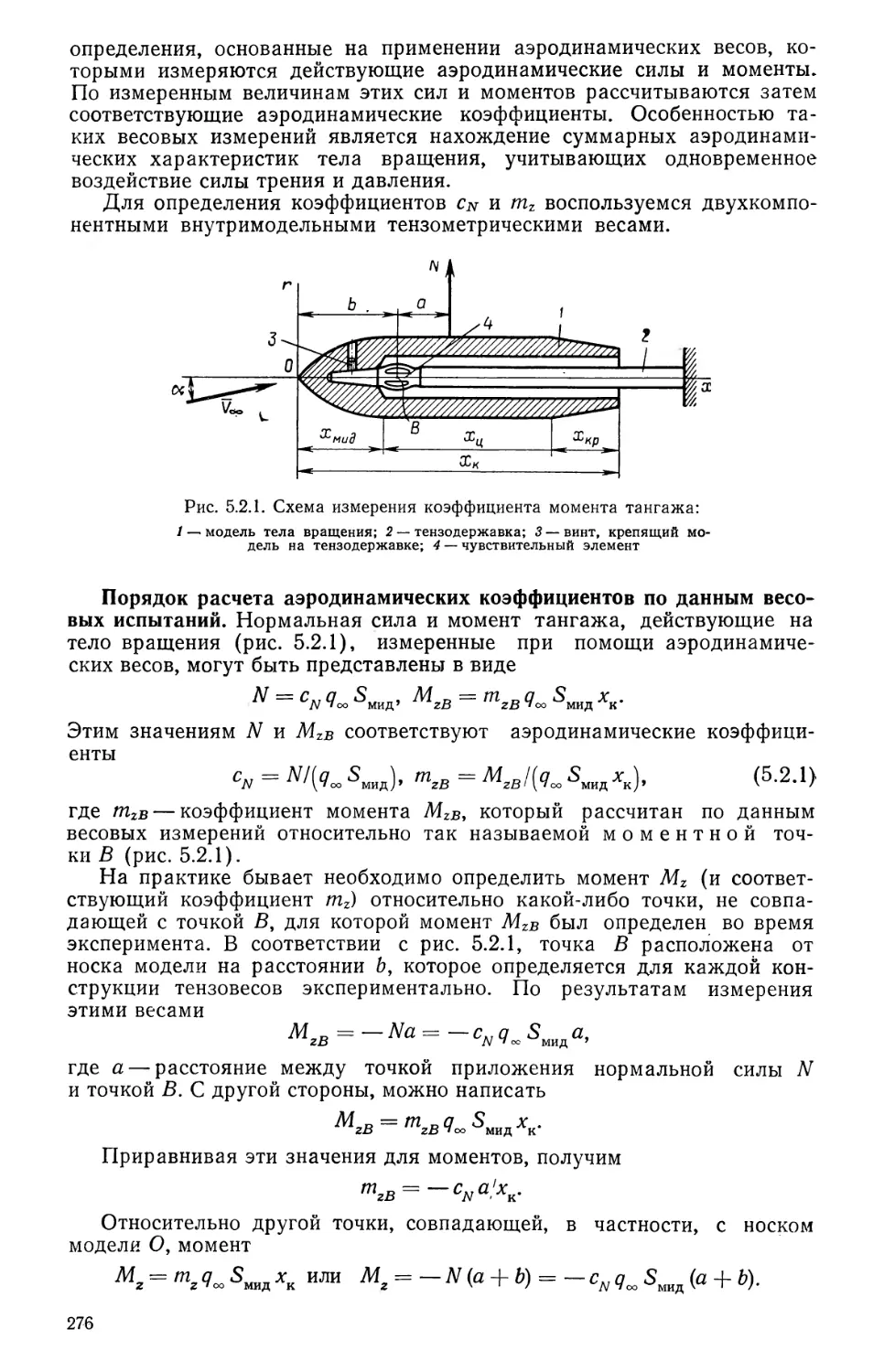
1. Основные понятия
Лабораторные установки, создающие газовый поток заданных па—
раметров для экспериментального изучения обтекания твердых тел,
называются аэродинамическими трубами. Помещая в этот
поток исследуемое тело (модель летательного аппарата, автомобиля,
поезда, жилого или производственного здания и т. п.), можно опреде-
лить действующие на него аэродинамические нагрузки.
Обеспечив предварительный нагрев потока, можно также изучать
тепловое воздействие омывающего газа на тело, законы изменения
формы этого тела под влиянием уноса массы с поверхности. С помощью
различных оптических устройств имеется возможность сделать видимой
картину обтекания, обеспечив наблюдение за участками возмущенного
потока (скачки уплотнения, местные зоны сжатия и_разрежения, погра-
ничный слой и др.).
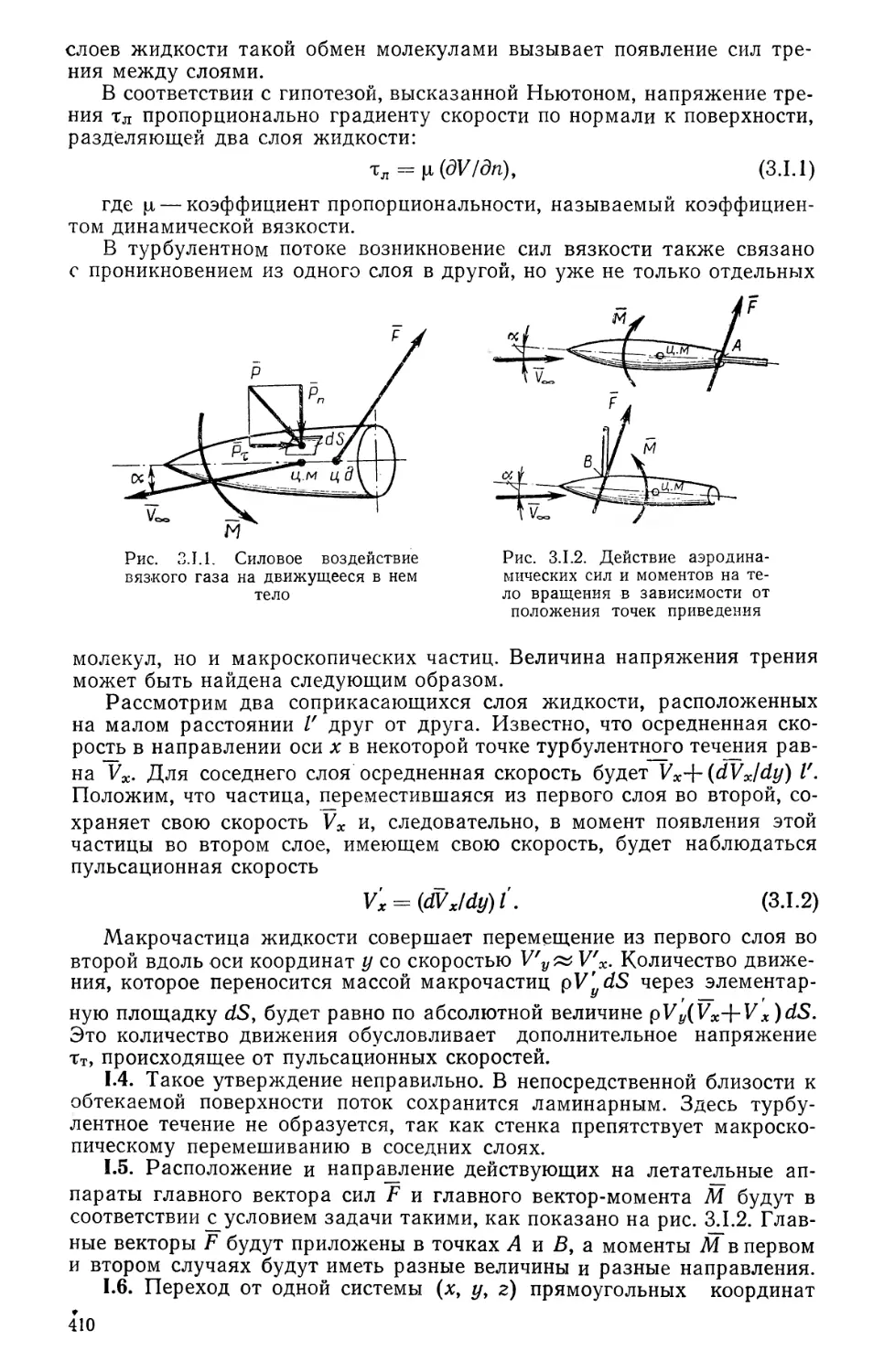
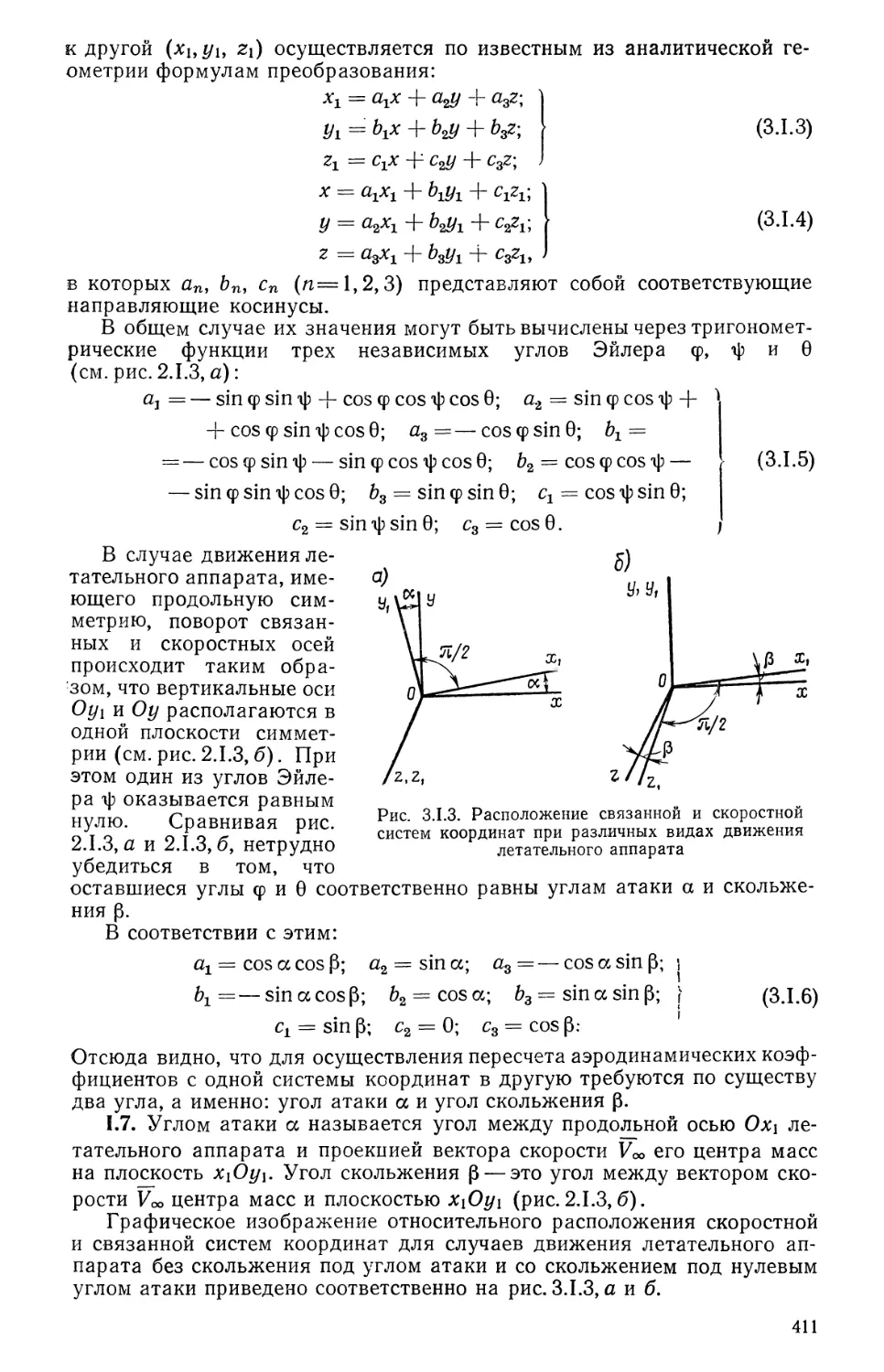
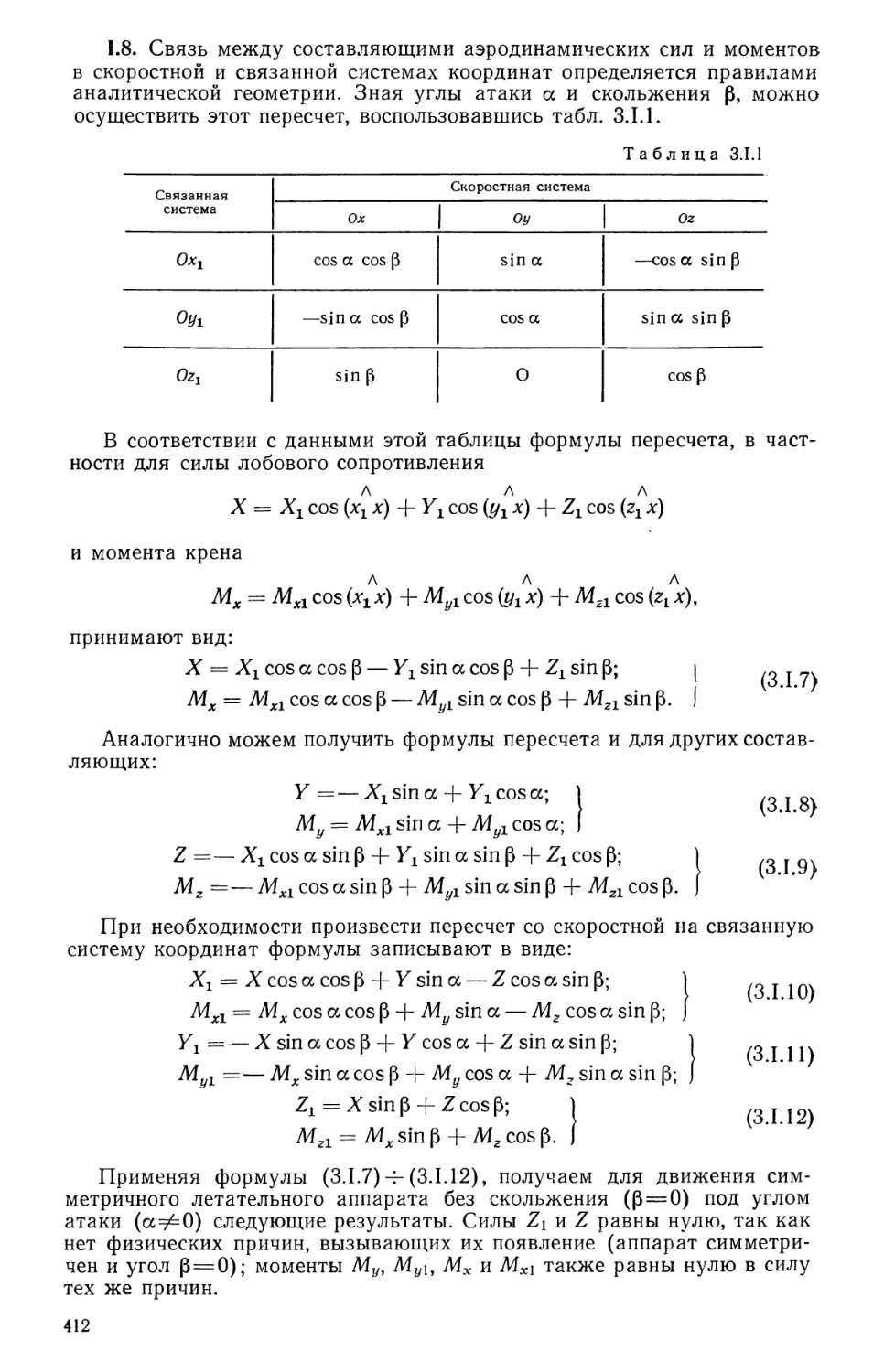
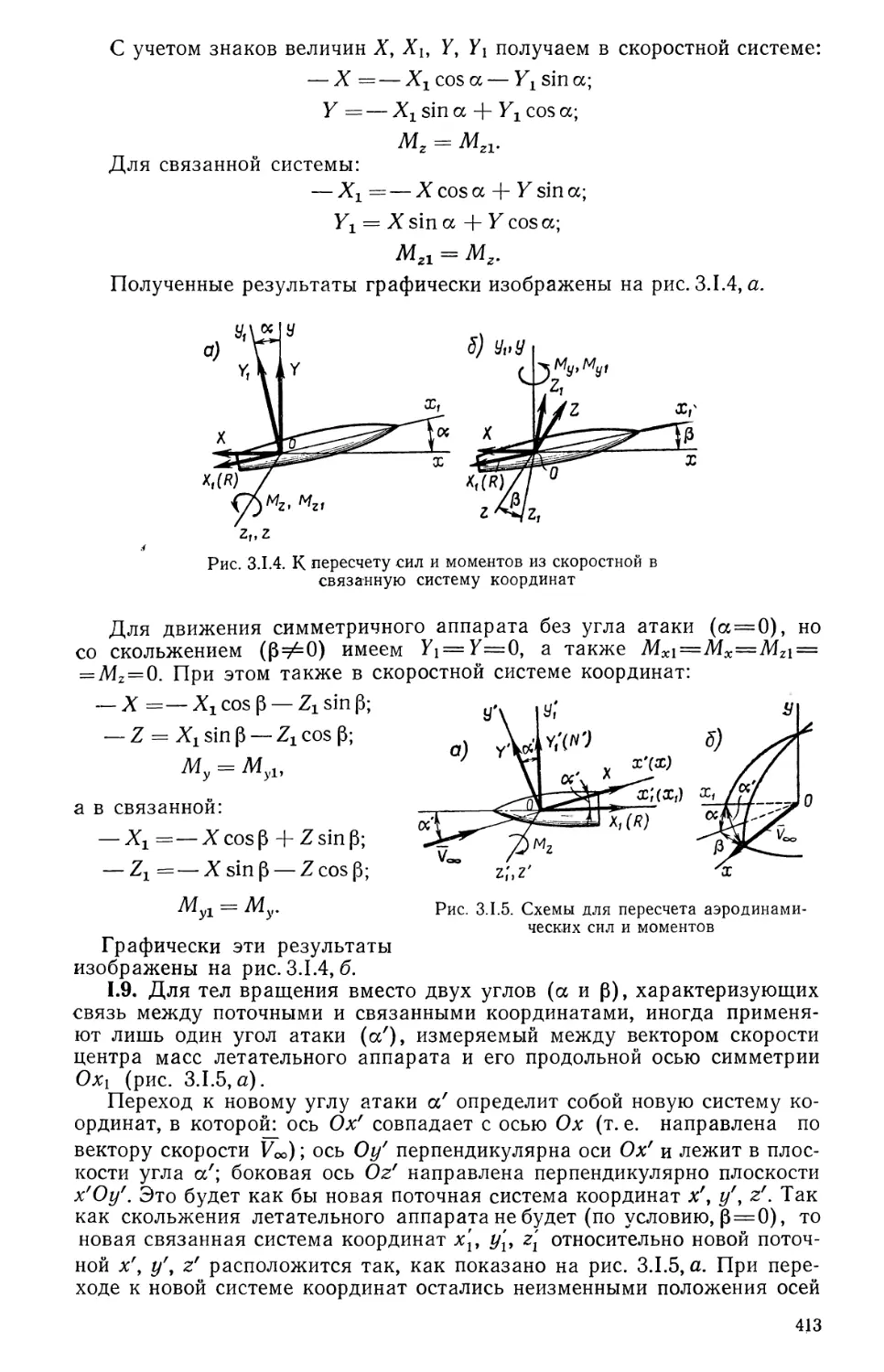
Исследование силового взаимодействия потока и летательного ап-
парата представляет собой одну из важнейших задач аэродинамики,
решаемых с помощью эксперимента в аэродинамических трубах. В
большинстве случаев при проведении таких исследований модель ле-
тательного аппарата закрепляется в трубе, а газовый поток набегает
на модель с заданной скоростью. Это приводит к тому, что силовое
взаимодействие потока и тела прОИСХОДИТ в условиях так называемого
обращенного движения (в противоположность такому движе-
нию полет тела в неподвижной газовой среде носит название прямо-
го движения).
Принцип обращения, как это следует из общего принципа от
носительности классической механики, применим в случае равно—
мерного прямолинейного поступательного движения тела. При соблюде—
нии этих условий силовое воздействие потока на тело будет одинако-
вым как в прямом, так и в обращенном движении. Эксперименталь-
ные установки, работающие с использованием принципа обращенного
7
движения, нашли широкое применение в практике аэродинамических
исследовании.
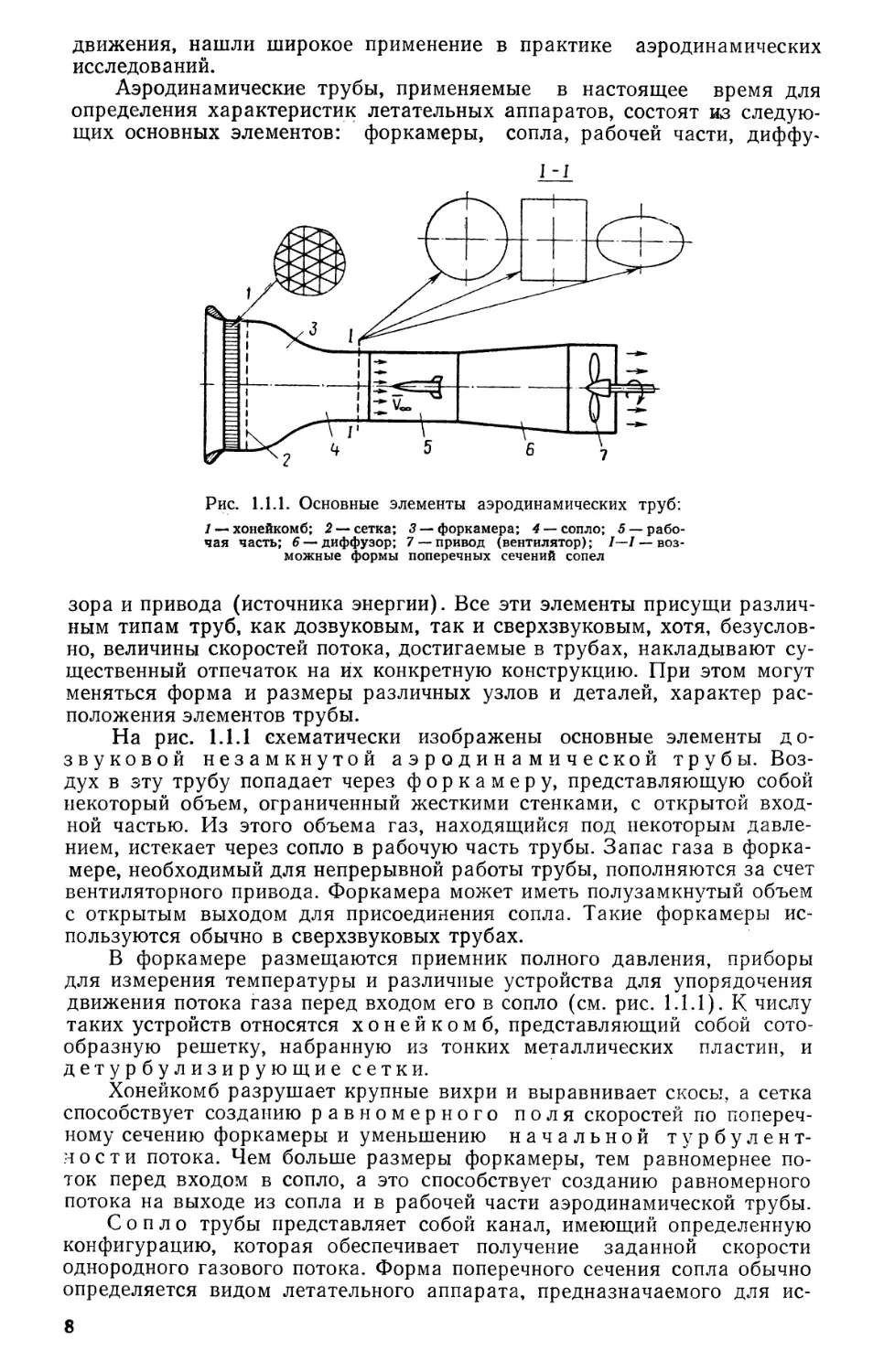
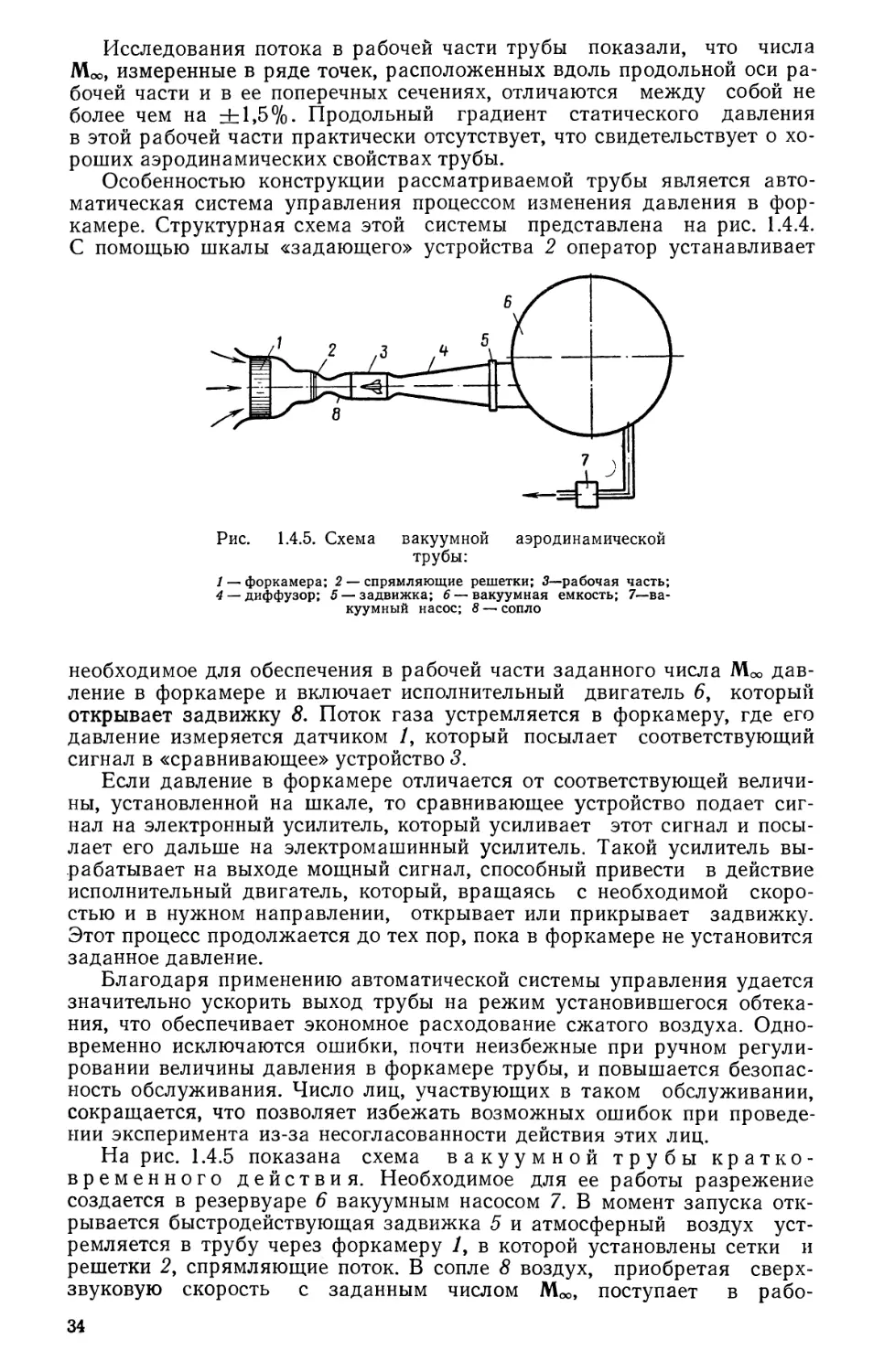
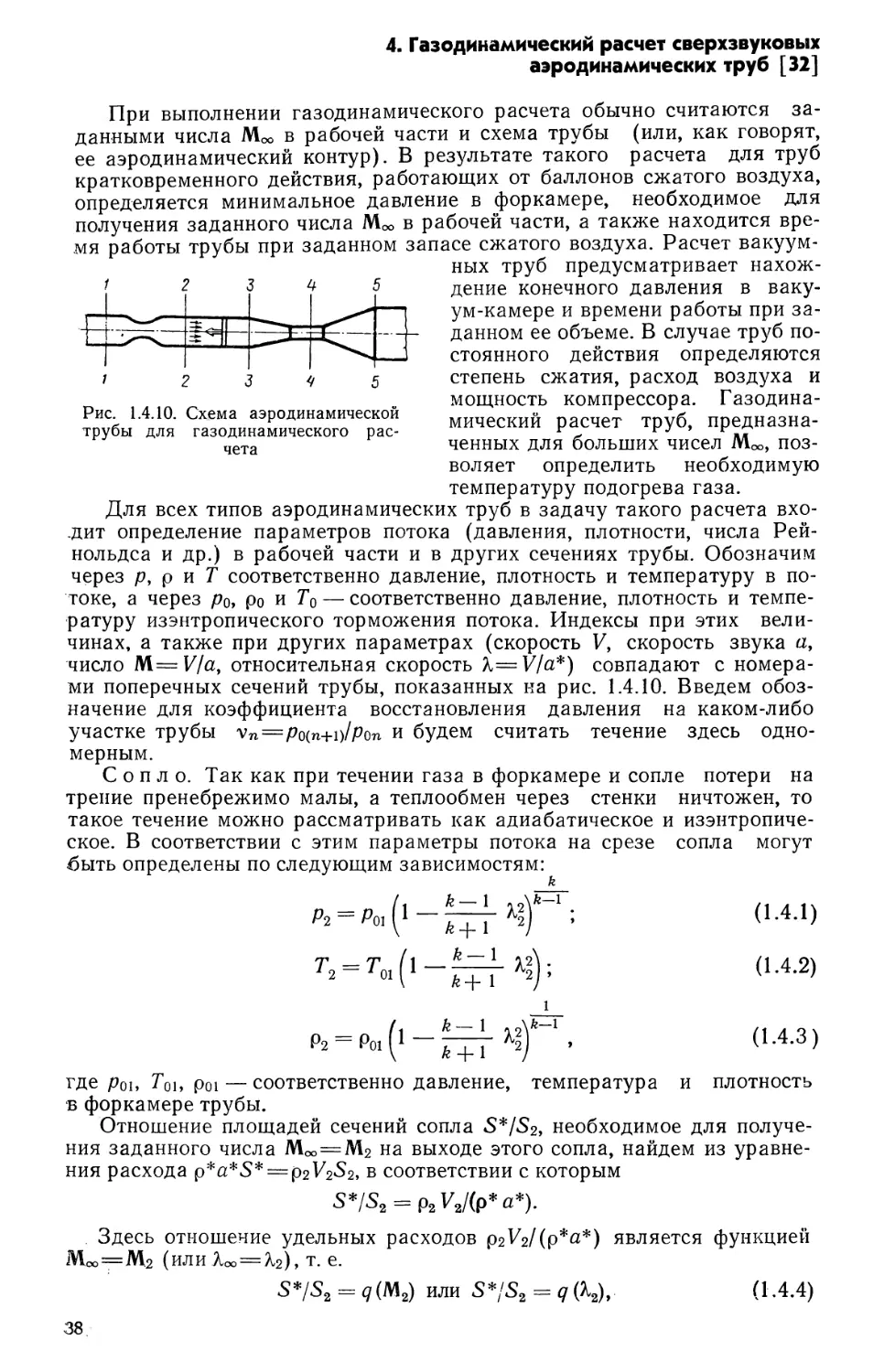
Аэродинамические трубы, применяемые в настоящее время для
определения характеристик летательных аппаратов, состоят из следую-
щих основных элементов: форкамеры, сопла, рабочей части, диффу—
Ё : _,
в — Аден—— —— —-—
Е + “со _)—
= "' \
Ё \ +
5 5 5 \7
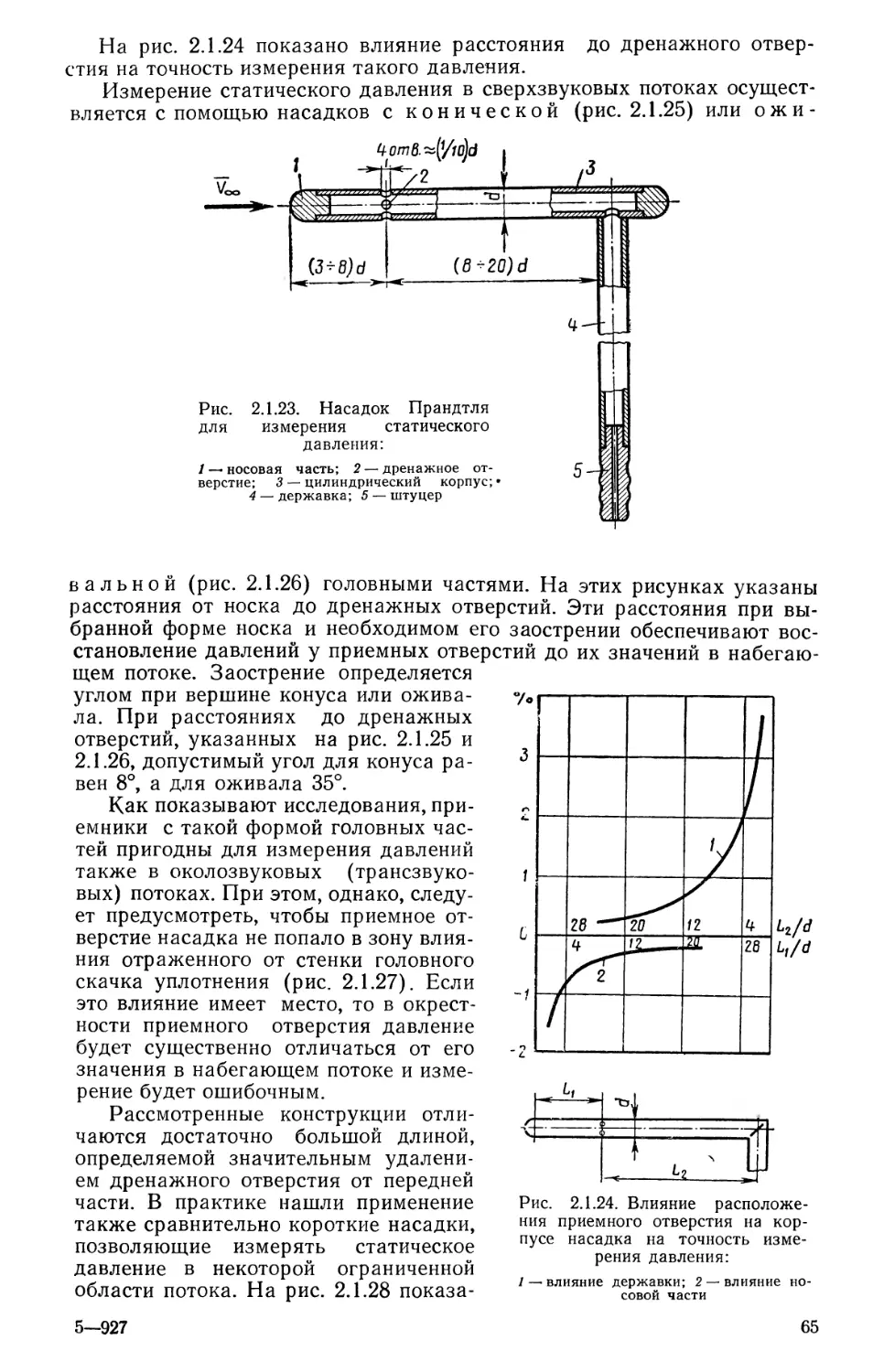
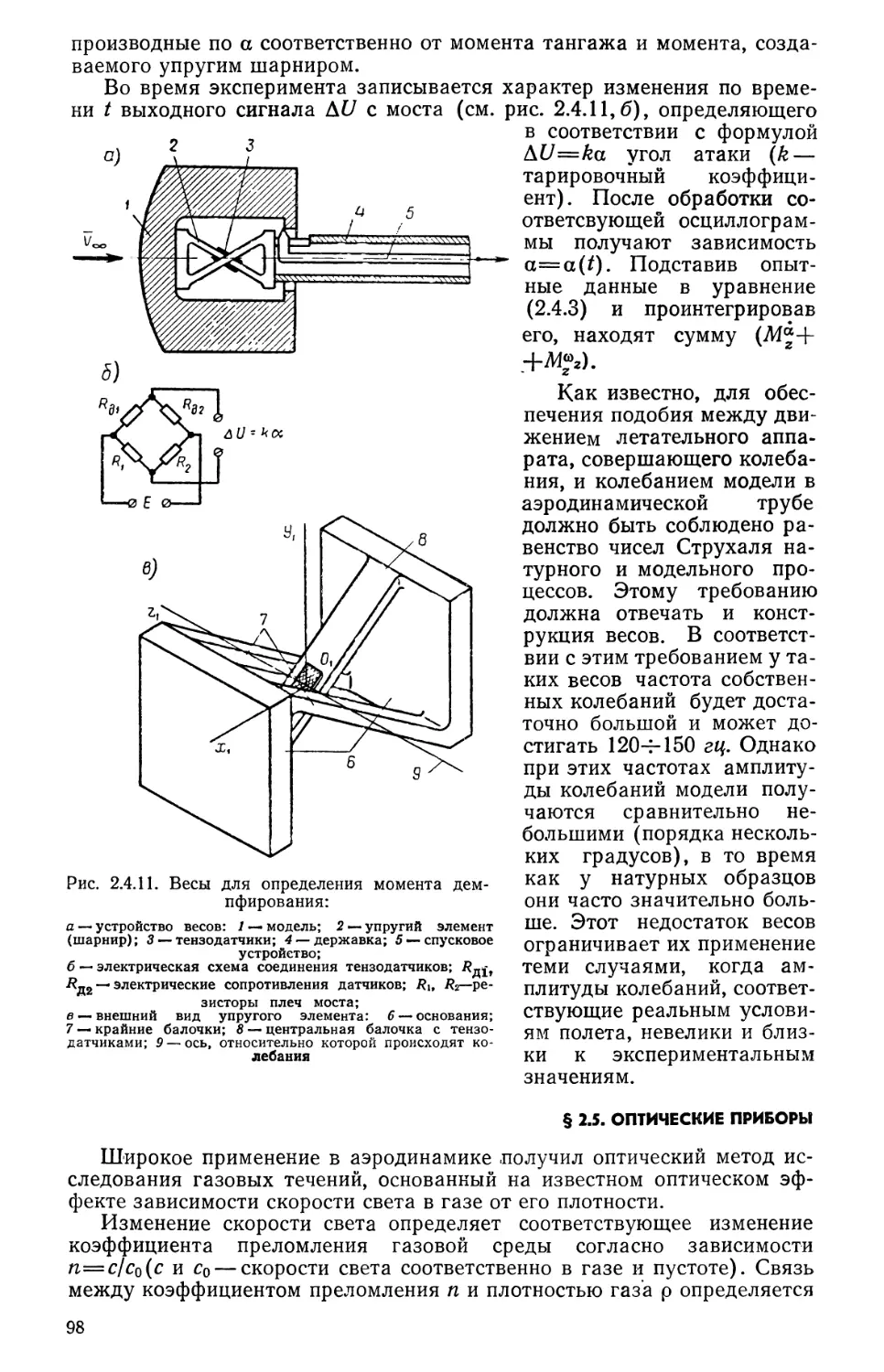
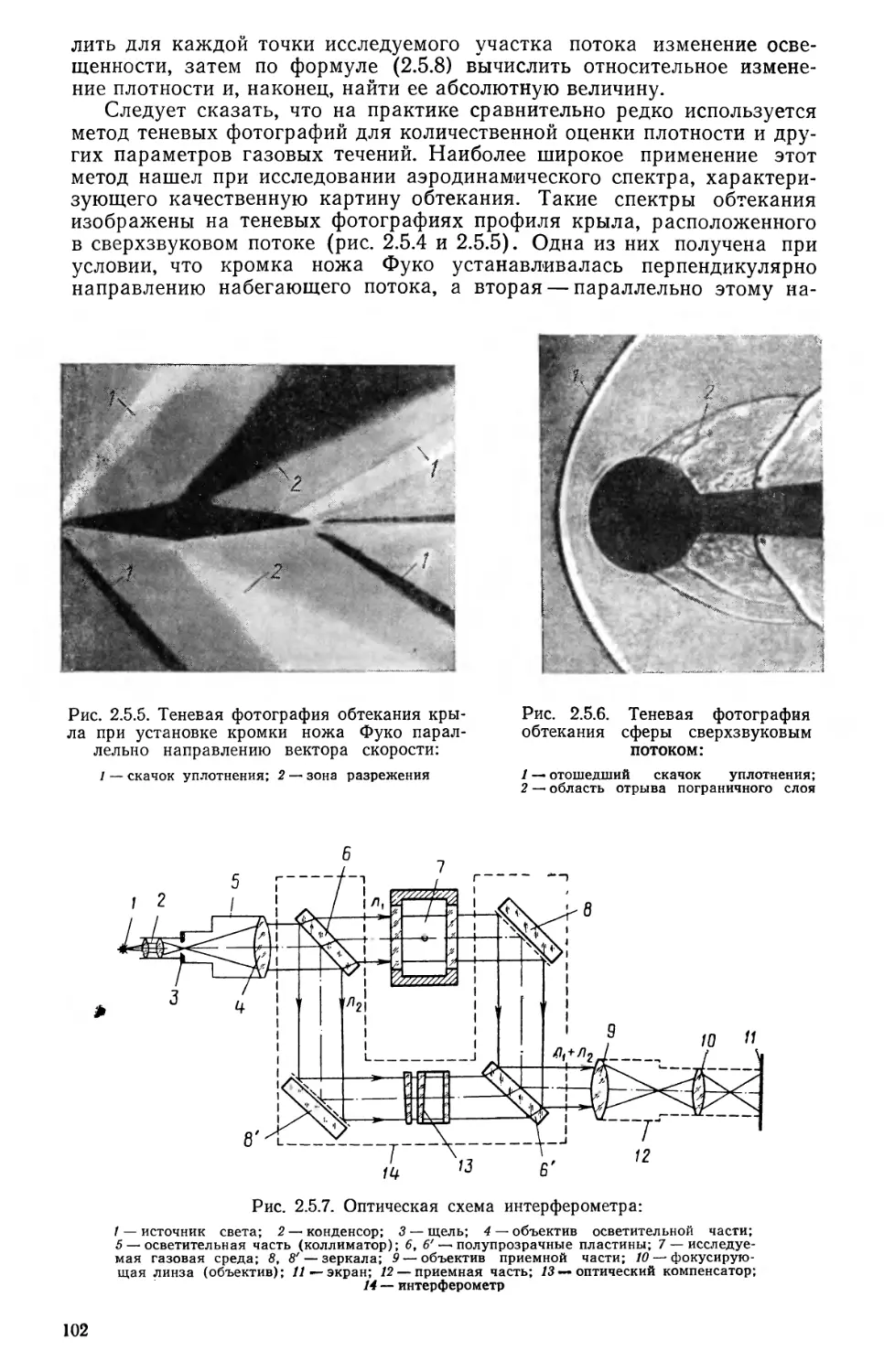
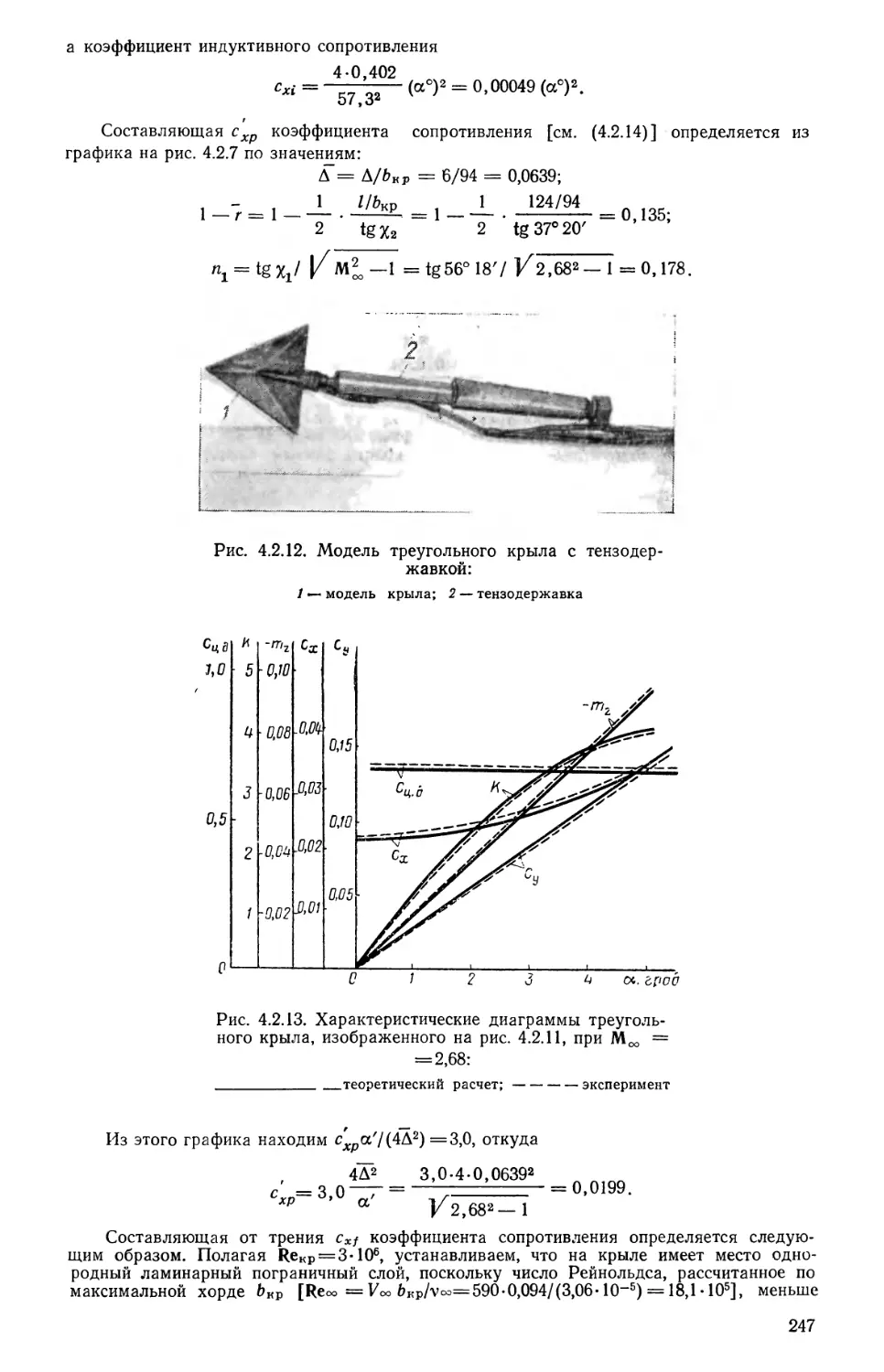
Рис. 1.1.1. Основные элементы аэродинамических труб:
] —- хонейкомб; 2 —- сетка; 3 —- форкамера; 4 — сопло; 5 — рабо—
чая часть; 6 —- диффузор; 7 — привод (вентилятор); 1—1 -— воз-
можные формы поперечных сечений сопел
зора и привода (источника энергии). Все эти элементы присущи различ—
ным типам труб, как дозвуковым, так и сверхзвуковым, хотя, безуслов-
но, величины скоростей потока, достигаемые в трубах, накладывают су-
щественный отпечаток на Их конкретную конструкцию. При этом могут
меняться форма и размеры различных узлов и деталей, характер рас-
положения элементов трубы.
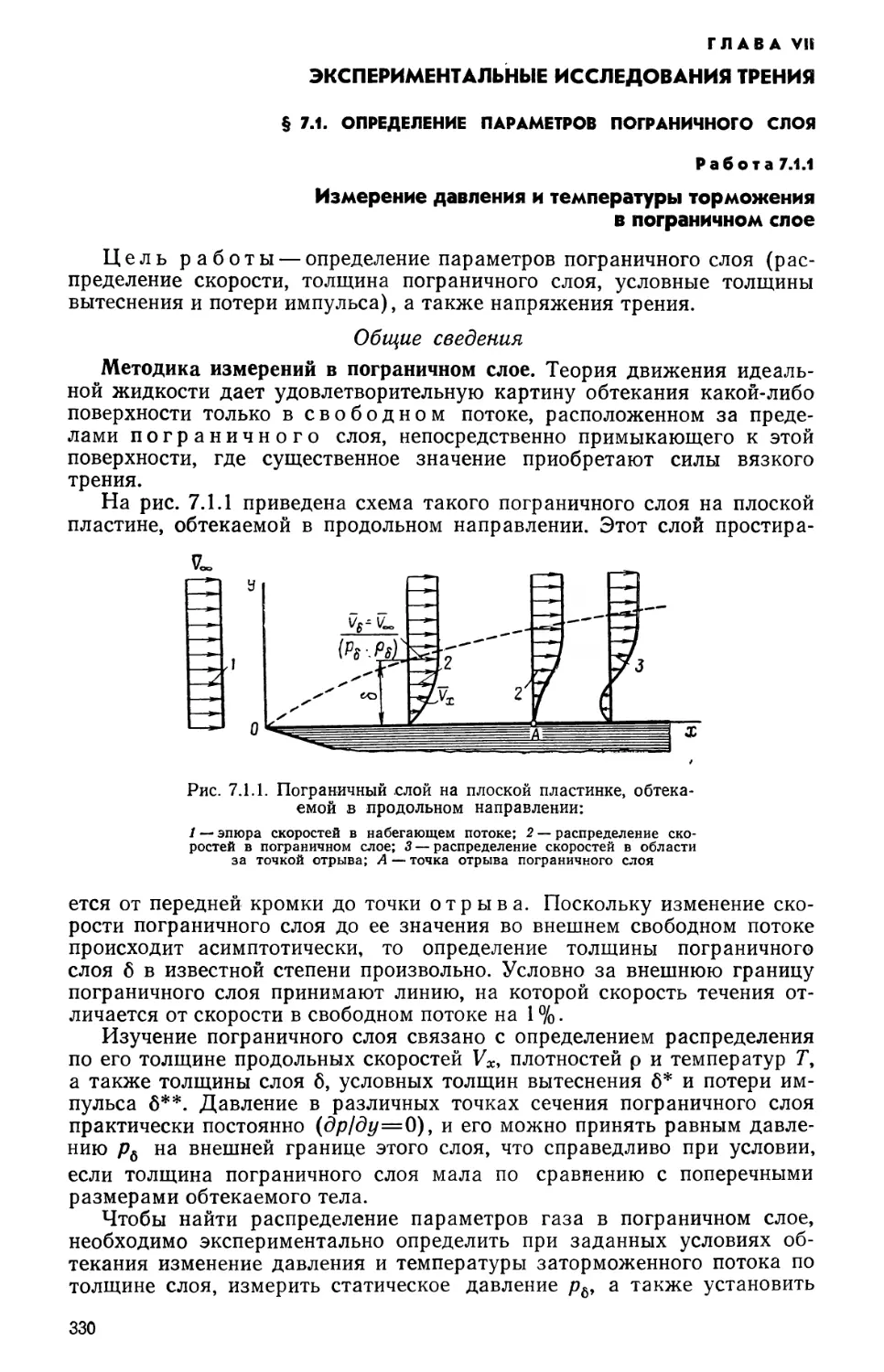
На рис. 1.1.1 схематически изображены основные элементы до—
звуковой незамкнутой аэродинамической трубы. Воз—
Дух в эту трубу попадает через фор к а мер у, представляющую собой
некоторый объем, ограниченный жесткими стенками, с открытой вход-
ной частью. Из этого объема газ, находящийся под некоторым давле-
нием, истекает через сопло в рабочую часть трубы. Запас газа в форка-
мере, необходимый для непрерывной работы трубы, пополняются за счет
вентиляторного привода. Форкамера может иметь полузамкнутый объем
с открытым выходом для присоединения сопла. Такие форкамеры ис—
пользуются обычно в сверхзвуковых трубах. '
В форкамере размещаются приемник полного давления, приборы
для измерения температуры и различные устройства для упорядочения
движения потока газа перед входом его в сопло (см. рис. 1.1.1). К числу
таких устройств относятся хонейком б, представляющий собой сото-
образную решетку, набранную из тонких металлических пластин, и
детурбулизирующие сетки.
Хонейкомб разрушает крупные вихри и выравнивает скосы, а сетка
способствует созданию р а в н о м е р н о г о п о л я скоростей по попереч-
ному сечению форкамеры и уменьшению н а ч а л ьн о й т у р 6 у л е н т-
ности потока. Чем больше размеры форкамеры, тем равномернее по-
ток перед входом в сопло, а это способствует созданию равномерного
потока на выходе из сопла и в рабочей части аэродинамической трубы.
Сопло трубы представляет собой канал, имеющий определенную
конфигурацию, которая обеспечивает получение заданной скорости
однородного газового потока. Форма поперечного сечения сопла обычно
определяется видом летательного аппарата, предназначаемого для ис-
8
следования в трубе (например, овальная форма наиболее подходит для
испытания моделей самолетов, круглая—ракет), а также возможностью
изготовления такого сопла.
В зависимости от величины скорости потока в трубе сопла подраз—
Деляются на до- и сверхзвуковые. Первые имеют вид сужающихся кана-
лов. Скорость потока, создаваемого ими, может регулироваться за счет
изменения перепада давления между форкамерой и выходным сечени-
ем сопла.
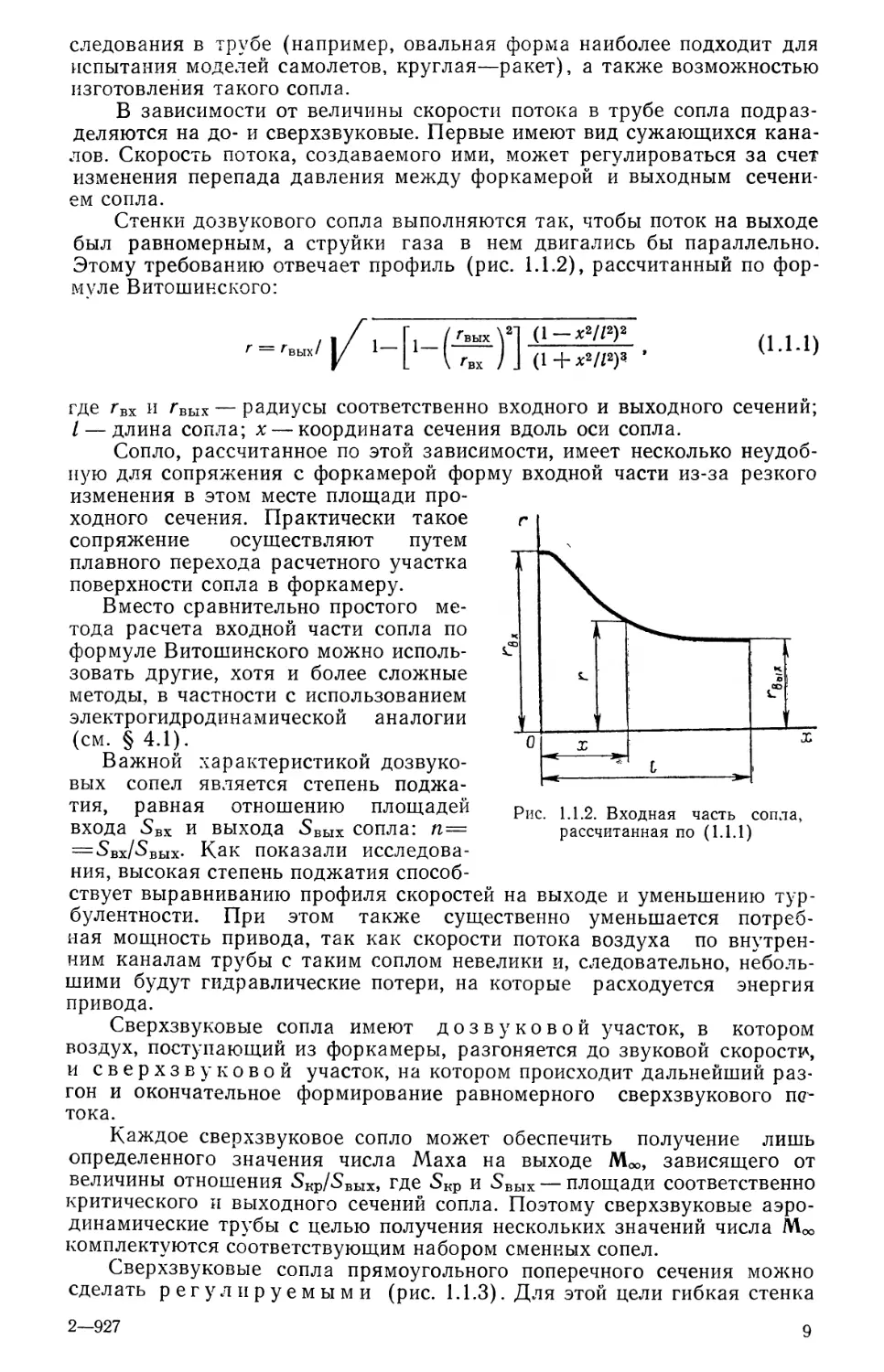
Стенки дозвукового сопла выполняются так, чтобы поток на выходе
был равномерным, а струйки газа в нем двигались бы параллельно.
Этому требованию отвечает профиль (рис. 1.1.2), рассчитанный по фор—
муле Витошинского:
’вых 2 (1—х2/12)2
г=гв…/ 1/1—[1—(——) ]————, (1.1.1)
’вх (1 '+' 752/12)з
где гвк и гв… — радиусы соответственно входного и выходного сечений;
[_ длина сопла; х—координата сечения вдоль оси сопла.
Сопло, рассчитанное по этой зависимости, имеет несколько неудоб—
ную для сопряжения с форкамерой форму входной части из—за резкого
изменения в этом месте площади про-
ходного сечения. Практически такое ‚—
сопряжение осуществляют путем .
плавного перехода расчетного участка 11
поверхности сопла в форкамеру.
Вместо сравнительно простого ме-
тода расчета входной части сопла по
формуле Витошинского можно исполь— С° \
зовать Другие, хотя и более сложные , &` _ Ё
методы, в частности с использованием . $ = '
электрогидродинамической аналогии \ ч ' \
(см. 5 4.1). о 3 . $
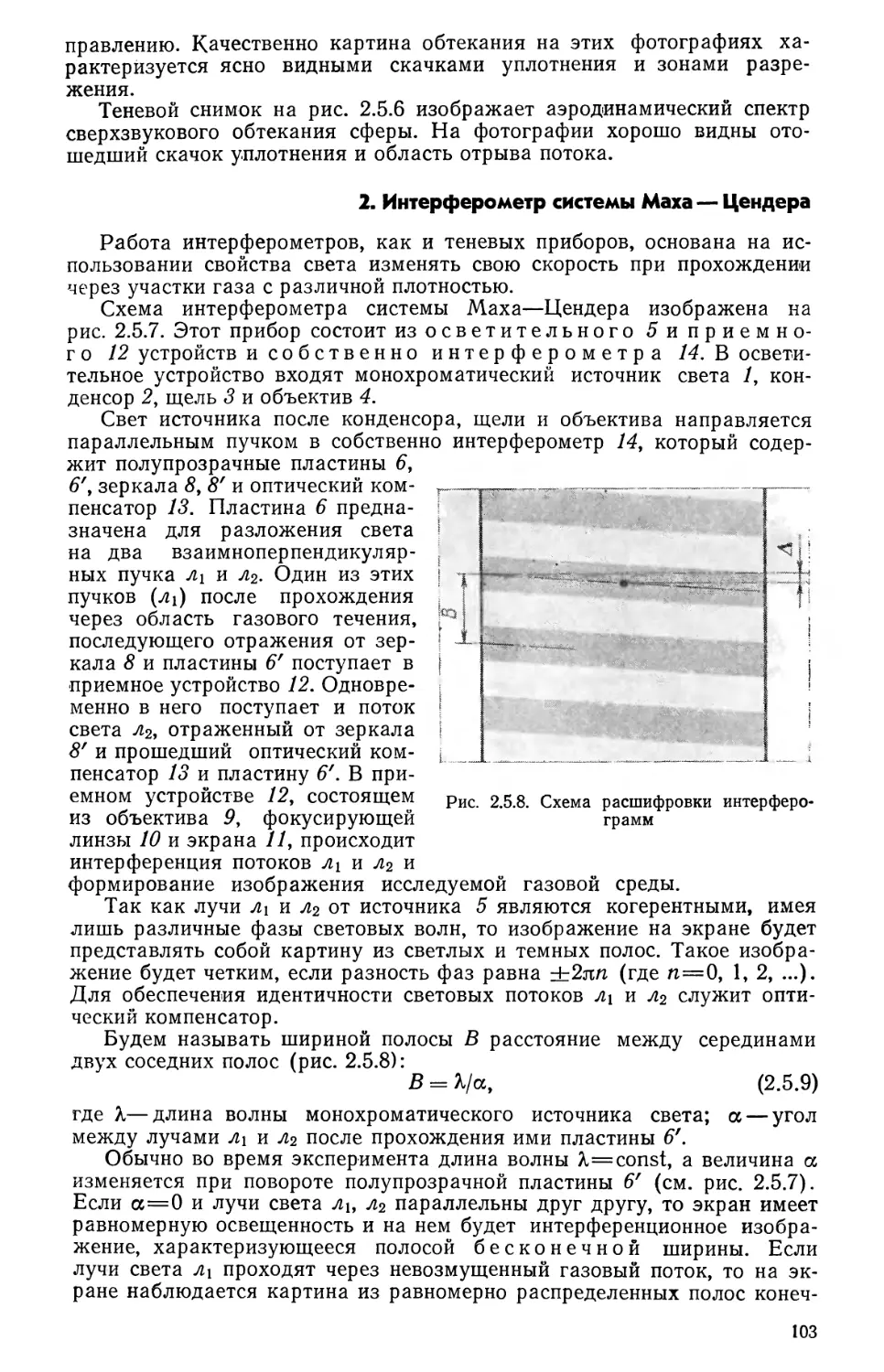
Важной характеристикой дозвуко- [, ‚
вых сопел является степень поджа- ’
ТИЯ› равная отношению площадей Рис. 1.1.2. Входная часть сопла,
входа Звх и выхода Звых сопла: п= рассчитанная по (1.1.1)
=83х/8Вых. Как показали исследова-
ния, высокая степень поджатия способ-
ствует выравниванию профиля скоростей на выходе и уменьшению тур-
булентности. При этом также существенно уменьшается потреб—
ная мощность привода, так как скорости потока воздуха по внутрен—
ним каналам трубы с таким соплом невелики и, следовательно, неболь—
шими будут гидравлические потери, на которые расходуется энергия
привода.
Сверхзвуковые сопла имеют дозвуковой участок, в котором
воздух, поступающий из форкамеры, разгоняется до звуковой скорости,
и св ер хзв уково й участок, на котором происходит дальнейший раз—
гон и окончательное формирование равномерного сверхзвукового па“-
тока.
Каждое сверхзвуковое сопло может обеспечить получение лишь
определенного значения числа Маха на выходе М…, зависящего от
величины отношения Бир/8%… где ЗКР и Звых— площади соответственно
критического и выходного сечений сопла. Поэтому сверхзвуковые аэро-
Динамические трубы с целью получения нескольких значений числа Мос
комплектуются соответствующим набором сменных сопел.
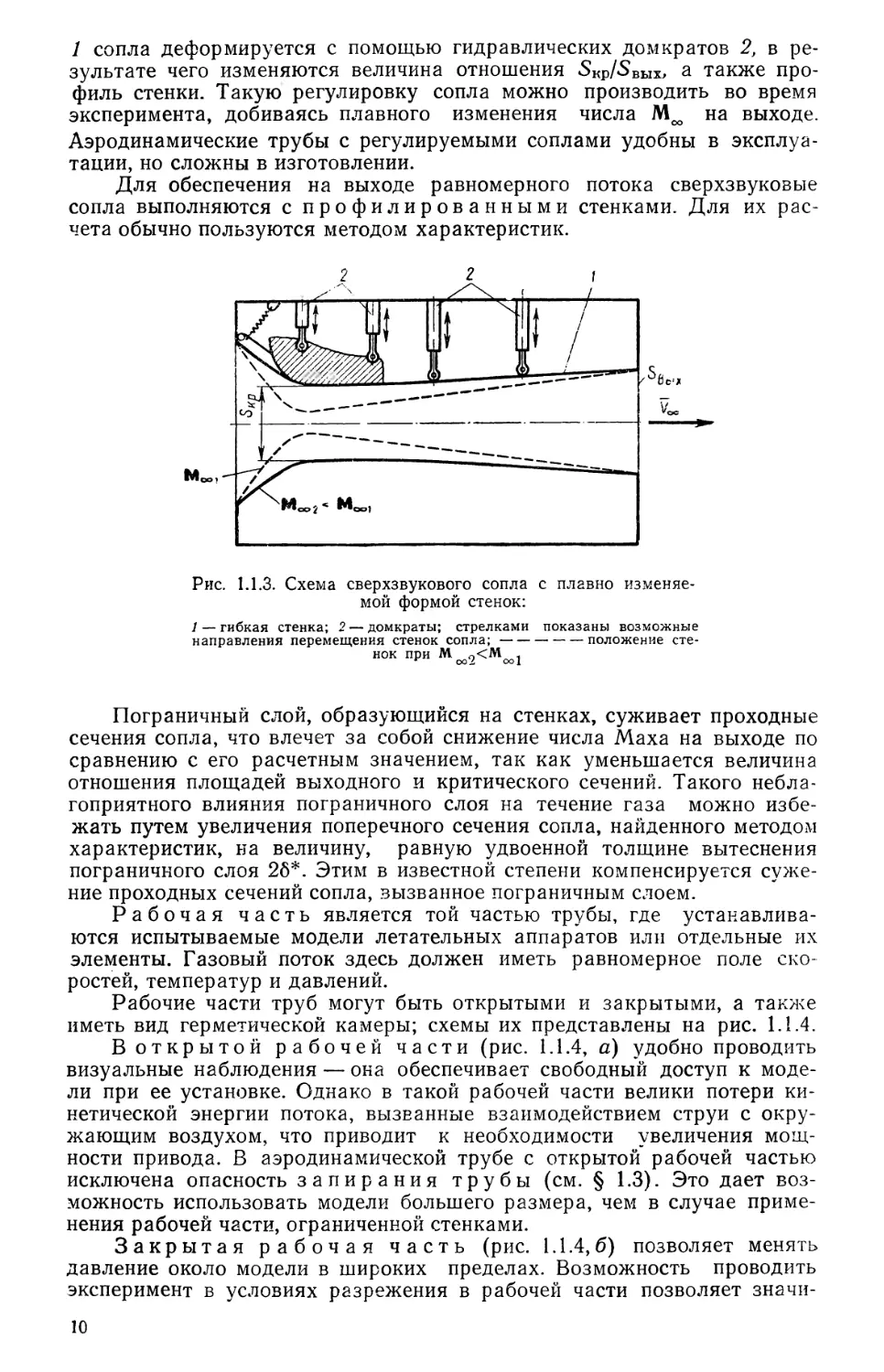
Сверхзвуковые сопла прямоугольного поперечного сечения можно
сделать р егул п руем ым и (рис. 1.1.3). Для этой цели гибкая стенка
2—927 9
] сопла деформируется с помощью гидравлических домкратов 2, в ре—
зультате чего изменяются величина отношения ЗКР/8%… а также про—
филь стенки. Такую регулировку сопла можно производить во время
эксперимента, добиваясь плавного изменения числа М… на выходе.
Аэродинамические трубы с регулируемыми соплами удобны в эксплуа-
тации, но сложны в изготовлении.
Для обеспечения на выходе равномерного потока сверхзвуковые
сопла выполняются с п р 0 ф и л и р о в а Н н ы М и стенками. Для их рас—
чета обычно пользуются методом характеристик.
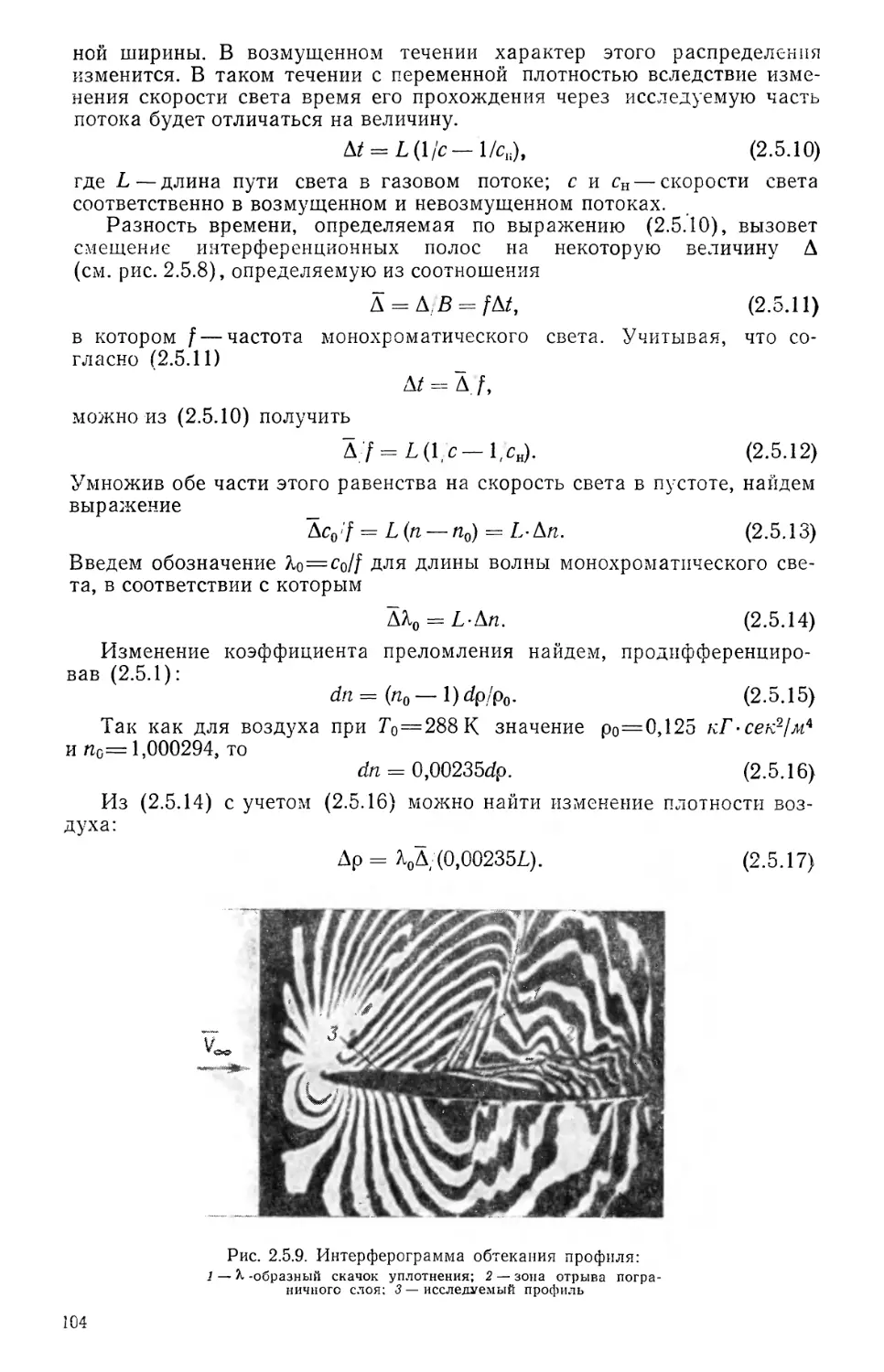
Рис. 1.1.3. Схема сверхзвукового сопла с плавно изменяе—
мой формой стенок:
1—гибкая стенка; 2—домкраты; стрелками показаны возможные
направления перемещения стенок сопла; ————— положение сте-
нок при МООО<М001
Пограничный слой, образующийся на стенках, суживает проходные
сечения сопла, что влечет за собой снижение числа Маха на выходе по
сравнению с его расчетным значением, так как уменьшается величина
отношения площадей выходного и критического сечений. Такого небла—
гоприятного влияния пограничного слоя на течение газа можно избе-
жать путем увеличения поперечного сечения сопла, найденного мет0дом
характеристик, на величину, равную удвоенной толщине вытеснения
пограничного слоя 2б*. Этим в известной степени компенсируется суже—
ние проходных сечений сопла, вызванное пограничным слоем.
Рабочая часть является той частью трубы, где устанавлива-
ются испытываемые модели летательных аппаратов или отдельные их
элементы. Газовый поток здесь должен иметь равномерное поле ско——
ростей, температур и давлений.
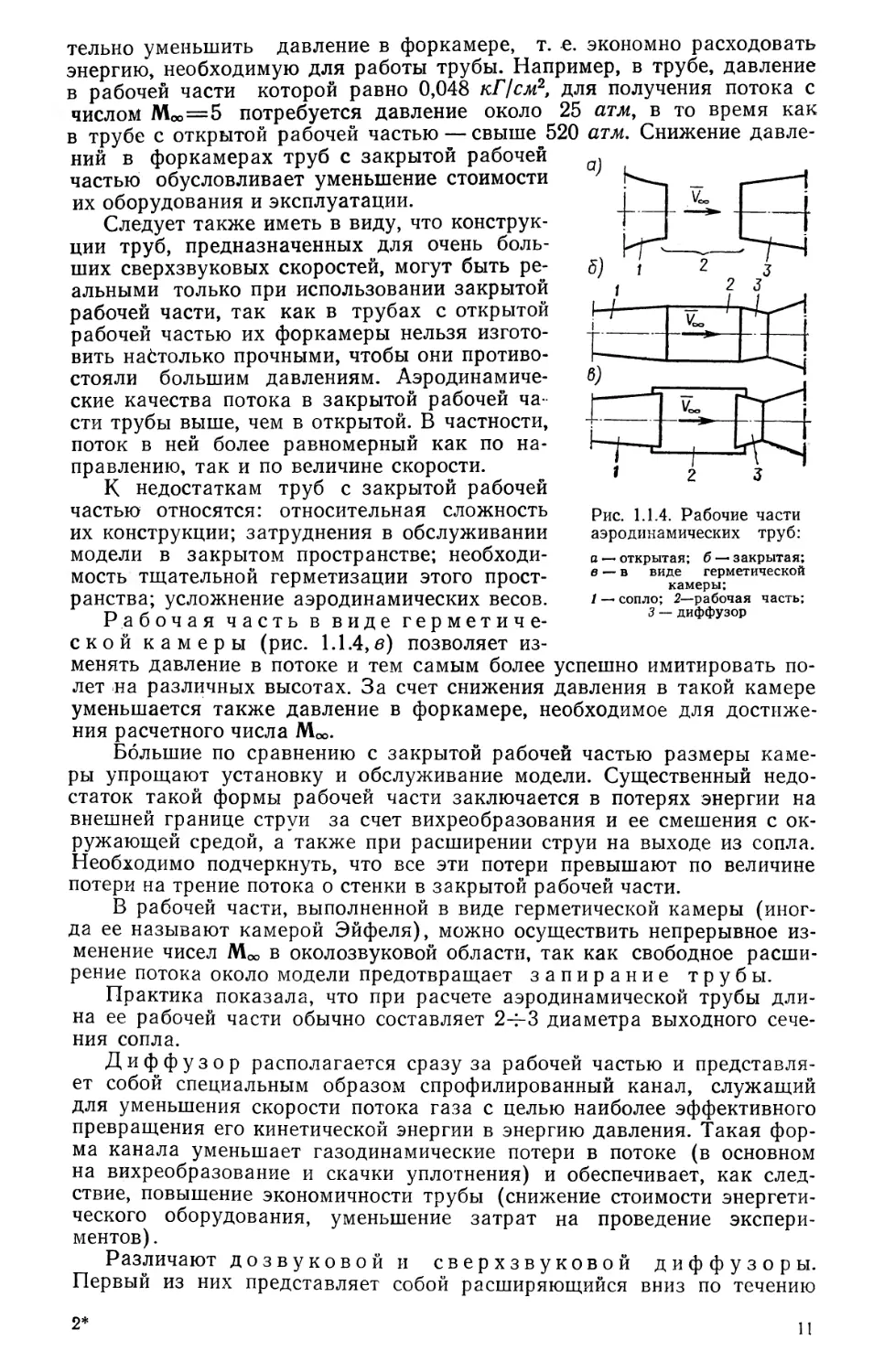
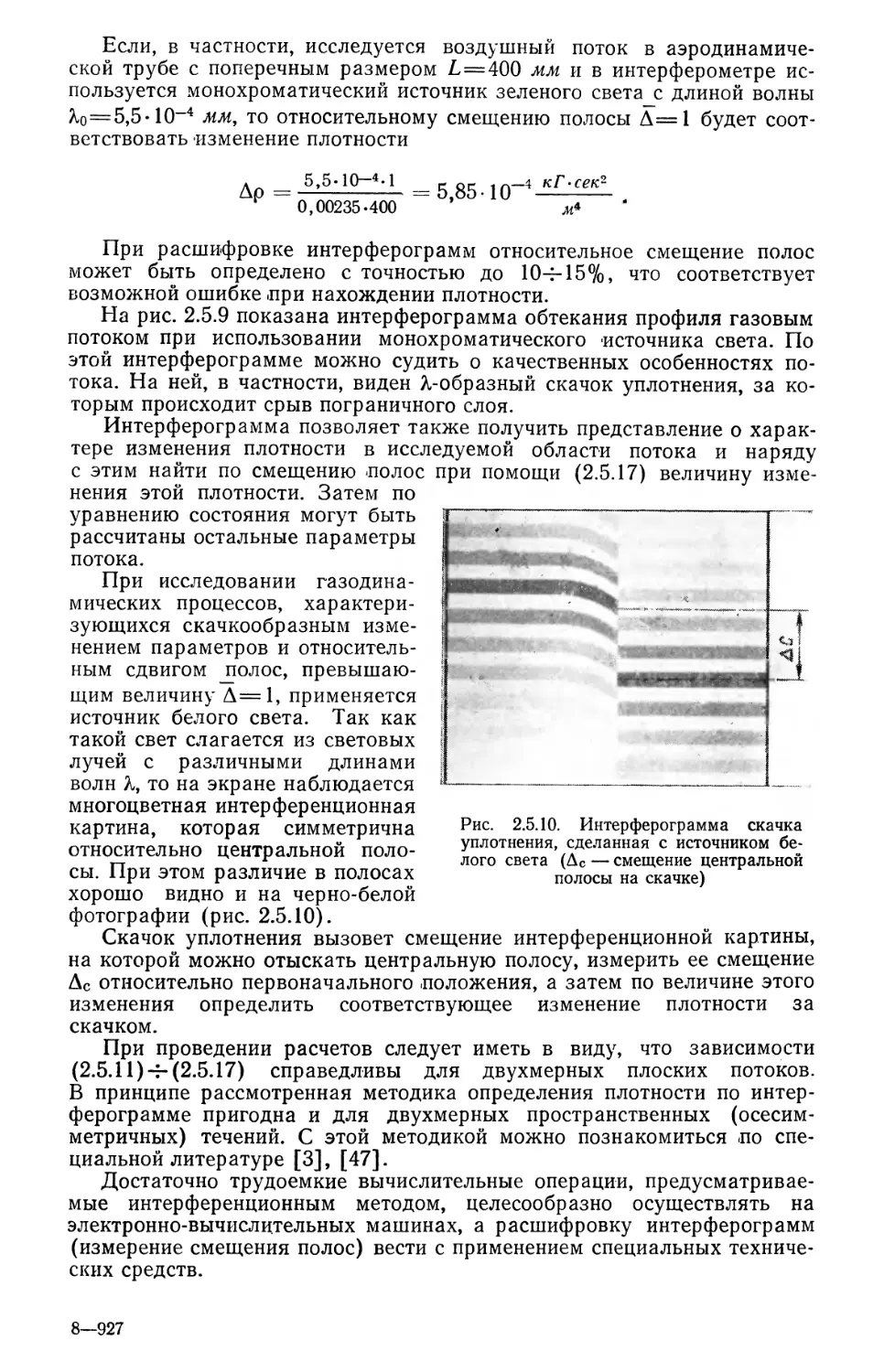
Рабочие части труб могут быть открытыми и закрытыми, а также
иметь вид герметической камеры; схемы их представлены на рис. 1.1.4.
В открытой рабочей части (рис. 1.1.4, а) удобно проводить
визуальные наблюдения _она обеспечивает свободный доступ к моде—
ли при ее установке. Однако в такой рабочей части велики потери ки—
нетической энергии потока, вызванные взаимодействием струи с окру—
жающим воздухом, что приводит к необходимости увеличения мош—
ности привода. В аэродинамической трубе с открытой рабочей частью
исключена опасность запирания трубы (см. @ 1.3). Это дает воз—
можность использовать модели большего размера, чем в случае приме—
нения рабочей части, ограниченной стенками.
3 акр ыта я р а 6 оч а я ч а ст Ь (рис. 1.1.4, 6) позволяет менять
давление около модели в широких пределах. Возможность проводить
эксперимент в условиях разрежения в рабочей части позволяет значи-
10
тельно уменьшить давление в форкамере, т. .е. экономно расходовать
энергию, необходимую для работы трубы. Например, в трубе, давление
в рабочей части которой равно 0,048 кГ/см2, для получения потока с
числом Мш=5 потребуется давление около 25 атм, в то время как
в трубе с открытой рабочей частью — свыше 520 атм. Снижение давле-
ний в форкамерах труб с закрытой рабочей и)
частью обусловливает уменьшение стоимости
их оборудования и эксплуатации.
Следует также иметь в виду, что конструк-
ции труб, предназначенных для очень боль-
ших сверхзвуковых скоростей, могут быть ре— 5)
альными только при использовании закрытой
рабочей части, так как в трубах с открытой 'т—
рабочей частью их форкамеры нельзя изгото-
вить наётолько прочными, чтобы они противо-
стояли большим давлениям. Аэродинамиче- б)
ские качества потока в закрытой рабочей ча--
сти трубы выше, чем в открытой. В частности,
поток в ней более равномерный как по на—
правлению, так и по величине скорости. 2 3
К недостаткам труб с закрытой рабочей
частью относятся: относительная сложность Рис. 1_1_4_ Рабочие час……
их конструкции; затруднения в обслуживании аэродинамических труб:
модели в закрытом пространстве; необходи- а—открытая; б—закрытая;
мость тщательной герметизации этого прост- 8-3 ВИЁМеБЁЁметическ°й
ранства; усложнение аэродинамических весов. 1—сопло; 2—рабочая часть:
Рабочаячастьввиде герметиче- 3"д“ффуз°р
с к о й к а ме р ы (рис. 1.1.4, 8) позволяет из-
менять давление в потоке и тем самым более успешно имитировать по-
лет :на различных высотах. За счет снижения давления в такой камере
уменьшается также давление в форкамере, необх0димое для достиже—
ния расчетного числа М….
Большие по сравнению с закрытой рабочей частью размеры каме-
ры упрощают установку и обслуживание модели. Существенный недо—
статок такой формы рабочей части заключается в потерях энергии на
внешней границе струи за счет вихреобразования и ее смешения с ок—
ружающей средой, а также при расширении струи на выходе из сопла.
Необходимо подчеркнуть, что все эти потери превышают по величине
потери на трение потока 0 стенки в закрытой рабочей части.
В рабочей части, выполненной в виде герметической камеры (иног-
да ее называют камерой Эйфеля), можно осуществить непрерывное из—
менение чисел м„ в околозвуковой области, так как свободное расши-
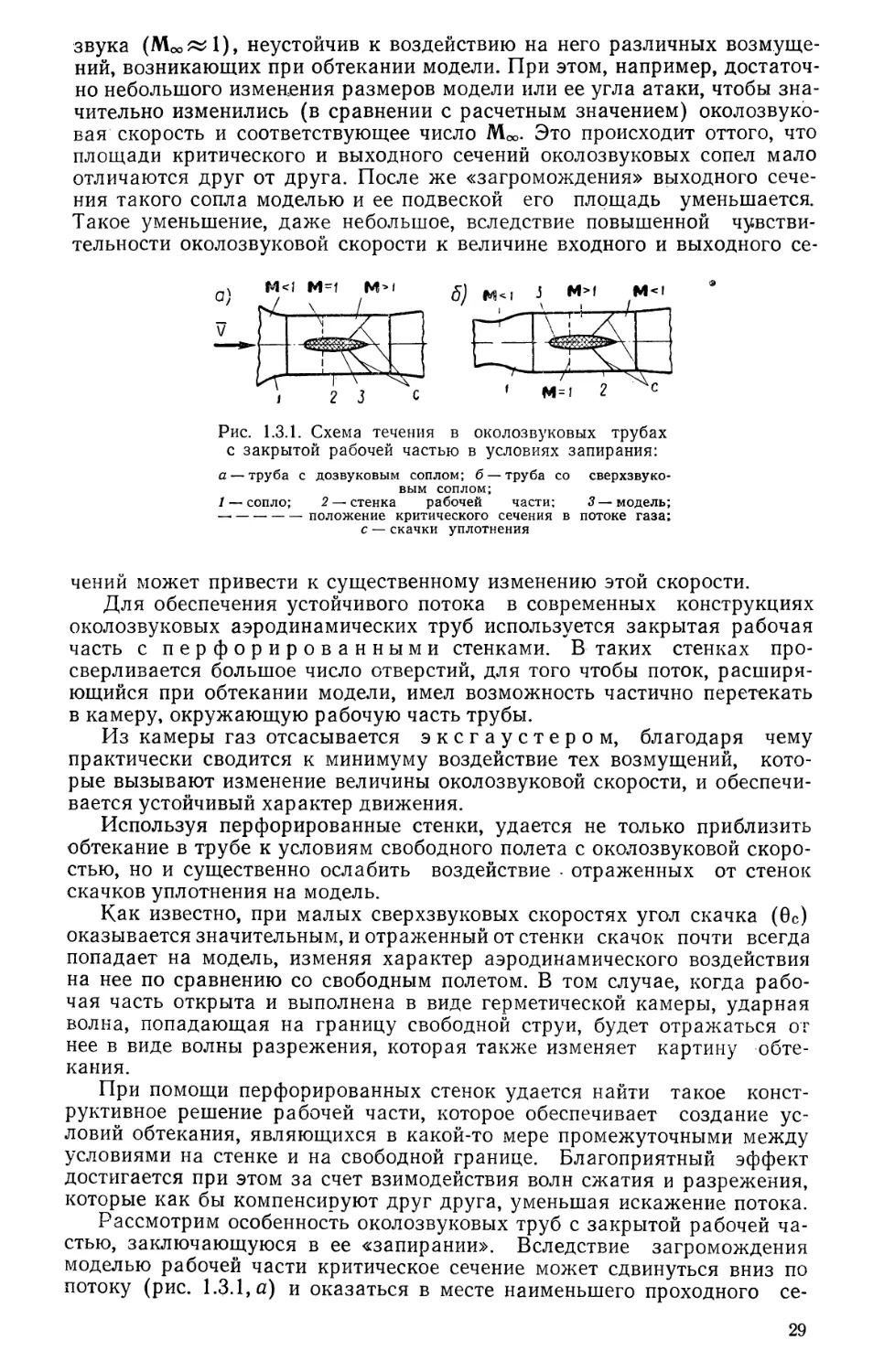
рение потока около модели предотвращает з а п и р а н и е т р у 6 ы.
Практика показала, что при расчете аэродинамической трубы дли—
на ее рабочей части обычно составляет 2—1—3 диаметра выходного сече-
ния сопла.
Диффузор располагается сразу за рабочей частью и представля—
ет собои специальным образом спрофилированный канал, служащий
для уменьшения скорости потока газа с целью наиболее эффективного
превращения его кинетической энергии в энергию давления. Такая фор-
ма канала уменьшает газодинамические потери в потоке (в основном
на вихреобразование и скачки уплотнения) и обеспечивает, как след-
ствие, повышение экономичности трубы (снижение стоимости энергети-
ческого оборудования, уменьшение затрат на проведение экспери-
ментов).
Различают дозвуковой и сверхзвуковой диффузоры.
Первыи из них представляет собой расширяющийся вниз по течению
2* 11
канал, в котором дозвуковой поток постепенно тормозится (см. рис.
1.1.4, а).
Исследования показали, что наименьшие потери энергии имеют мес-
то при углах расширения диффузора 6+8°.' При больших значениях
этого угла длина диффузора уменьшается, и, хотя при этом снижа-
ются потери на трение, создаются условия для отрыва пограничного
слоя и образования мощных вихрей. В результате суммарные потери
могут значительно возрасти. Если же угол расширения менее расчет-
ного, то длина диффузора станет больше, возрастут потери на трение,
а также увеличатся размеры трубы.
Сверхзвуковой диффузор состоит из начального сужающегося ка-
нала и следующего за ним расширяющегося участка трубы (см. рис.
і.1.4,б и в). В сужающем-ся канале сверхзвуковая скорость газа посте—
пенно снижается за счет образования скачков уплотнения. Возникаю—
щий при этом дозвуковой поток затем попадает в дозвуковую (расши-
ряющуюся) часть диффузора, где вследствие расширения скорость это—
го потока еще больше снижается.
Из теории скачков уплотнения известно, что торможение сверхзву-
кового потока, вызванное системой косых скачков, сопровождается
меньшими потерями полного давления, чем торможение за счет прямо-
го скачка. Поэтому сверхзвуковую часть канала диффузора профили-
руют так, чтобы торможение осуществлялось в системе косых скачков
уплотнения. При этом каждому значению скорости потока в рабочей
части соответствует своя оптимальная (обеспечивающая наименьшие
потери полного давления) система скачков и, следовательно, опреде—
ленная форма сверхзвукового диффузора.
Исследования показали, что изготовление регулируемых диффузо-
ров оптимальной формы, которая изменяется во время работы трубы,
существенного выигрыша в газодинамическом смысле не дает. Практи-
чески использование таких диффузоров значительно усложняет кон-
струкцию трубы и ее эксплуатацию. По этой причине регулируемые
диффузоры не нашли широкого применения.
Важное требование к конструкции диффузоров заключается в том,
чтобы обеспечить положительный продольный градиент давления до-
статочно малым по величине с целью избежать отрыва пограничного
слоя и интенсивного вихреобразования. В противном случае возникаю-
щие в связи с этим потери энергии, соизмеримые с потерями в скачках
уплотнения, могут значительно снизить эффективность диффузора.
Привод аэродинамической трубы представляет собой устройство,
сообщающее потоку газа необходимую энергию, при которой его ско—
рость в рабочей части достигает заданного значения. В качестве при-
вода в дозвуковых трубах часто применяются низконапорные осевые
вентиляторы, в сверхзвуковых трубах—многоступенчатые компрессо—
ры. Трубы кратковременного действия оснащаются поршневыми ком—
прессорами, накачивающими газ в баллоны под высоким давлением, из
которых он затем поступает в трубу.
Мощность привода в зависимости от размеров рабочей части и чис-
ла Моо в ней меняется в широких пределах. Наибольшая мощность, до—
стигнутая в современных крупных высокоскоростных трубах, составля-
ет около 200 тыс. квт.
Одно из требований, предъявляемых к приводу, состоит в необходи-
мости обеспечения регулирования числа оборотов вентилятора (ком-
прессора). Это позволяет изменять скорость потока в рабочей части,
т.е. проводить испытания при разных числах М00 и Кеш.
Помимо перечисленных основных элементов в конструкцию трубы
могут включаться другие устройства, необходимые для обеспечения
специальных условий эксперимента. К таким устройствам относятся
12
о сушители, служащие для удаления из воздуха излишней влаги, ис-
кажающей картину течения в рабочей части. В отдельных конструкциях
труб используются подогрев атели, необходимые при исследовании
аэродинамического нагрева или для предотвращения конденсации ком-
понентов газа. Такая конденсация может наступить вследствие глубо-
кого охлаждения газа при расширении его в сопле. В трубах непрерыв-
ного действия за счет трения потока 0 стенки и лопасти вентилятора
происходит нагрев газа. Поэтому в конструкцию таких труб включают
различного рода т е п л о о 6 м е н н и к и, охлаждающие газ.
2. Классификация труб и основные требования,
предъявляемые к ним
В основном все использующиеся в настоящее время аэродинамичес—
кие трубы можно разделить по конструктивным признакам на трубы
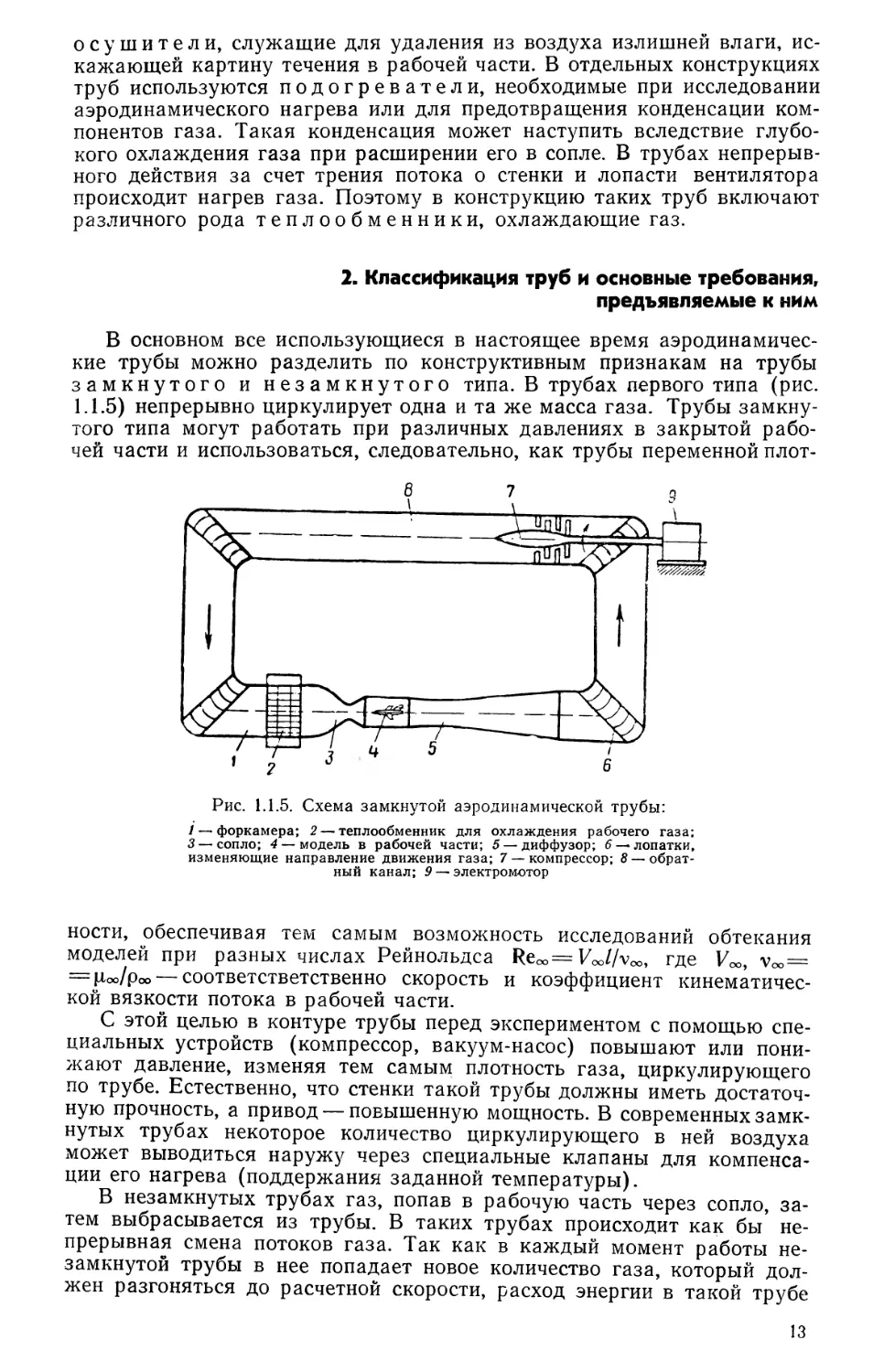
замкнутого и незамкнутого типа. В трубах первого типа (рис.
1.1.5) непрерывно циркулирует одна и та же масса газа. Трубы замкну—
того типа могут работать при различных давлениях в закрытой рабо-
чей части и использоваться, следовательно, как трубы переменной плот—
8 7 9
\
?—
+%. __
: —‹
! ’ !
‚Г 3 ч 5 1
2 6
Рис. 1.1.5. Схема замкнутой аэродинамической трубы:
! _ форкамера; 2 —— теплообменник для охлаждения рабочего газа;
3 _ сопло; 4 —— модель в рабочей части; 5 — диффузор; 6 —— лопатки,
изменяющие направление движения газа; 7— компрессор; 8— обрат—
ный канал; 9— электромотор
ности, обеспечивая тем самым возможность исследований обтекания
моделей при разных числах Рейнольдса Ке…=У…1/уоо‚ где У…, м…:
=моо/роо—соответстветственно скорость и коэффициент кинематичес-
кой вязкости потока в рабочей части.
С этой целью в контуре трубы перед экспериментом с помощью спе-
циальных устройств (компрессор, вакуум-насос) повышают или пони—
жают давление, изменяя тем самым плотность газа, циркулирующего
по трубе. Естественно, что стенки такой трубы должны иметь достаточ—
ную прочность, а привод— повышенную мощность. В современных замк-
нутых трубах некоторое количество циркулирующего в ней воздуха
может выводиться наружу через специальные клапаны для компенса—
ции его нагрева (поддержания заданной температуры).
В незамкнутых трубах газ, попав в рабочую часть через сопло, за-
тем выбрасывается из трубы. В таких трубах происходит как бы не-
прерывная смена потоков газа. Так как в каждый момент работы не—
замкнутой трубы в нее попадает новое количество газа, который дол-
жен разгоняться до расчетной скорости, расход энергии в такой трубе
13
выше, чем в замкнутой установке, где необходимо лишь поддерживать
движение циркулирующего газа.
Преимуществом трубы незамкнутого типа является относительно
меньшая ее стоимость. Что же касается аэродинамических свойств той
и другой трубы, то они зависят от вида применяемых сопел, рабочих
частей, диффузоров, обратных каналов, а также спрямляющих аппара-
тов, устанавливаемых в местах изгибов этих каналов.
В зависимости от скорости потока в рабочей части аэродинамичес-
кие трубы можно подразделить на дозвуковые (О<М°о<0,8), око-
лозвуковые (О,8<М°о<1,2), сверхзвуковые (1,2<М…<5)
и гиперзвуко вые (М…>5). Иногда эта классификация дополняет-
ся трубами малых (0<М…<0,5) и больших дозвуковых
(0‚5<_Моо<1) скоростей.
Первые три вида труб могут выполняться как по замкнутой, так и
незамкнутой схемам. Г иперзвуковые трубы строятся обычно незамкну-
тыми и с обязательным подогревом рабочего газа.
По виду рабочей части аэродинамические трубы разделяются на
трубы с открытой и закрытой рабочими частями, а так-
же с герметической камерой.
В зависимости от длительности работы трубы бывают кр атко-
временного и постояного Действия. Труба кратковременно-
го действия позволяет испытывать модели лишь в течение малого про—
межутка времени (несколько минут). Питание такой трубы осуществ-
ляется от батареи баллонов высокого давления, куда воздух предва—
рительно накачивается компрессорами. Емкость баллонной батареи
определяет продолжительность работы аэродинамической трубы.
Кроме труб, работающих от баллонов высокого давления, кратко-
временными являются вакуумные трубы, в которых перепад дав—
ления, необходимый для достижения заданного числа Моо в рабочей
части, создается путем образования разрежения на выходе из диффузо—
ра. Для этой цели применяют либо расположенную за диффузором ем-
кость, из которой перед экспериментом откачивают воздух, либо эж ек-
тор, приводимый в действие во время работы трубы. При этом эжек—
тируемый воздух, создающий поток в рабочей части, поступает в трубу
из баллонов или непосредственно из атмосферы. Сжатый воздух, необ-
ходимый для работы эжектора, предварительно накачивается в баллоны
высокого давления. Запас этого воздуха определяет продолжи—
тельность работы установки кратковременного действия с эжекто-
ром.
В трубах постоянного действия поток газа создается с помощью
осевого компрессора, встроенного в аэродинамическую трубу и обес-
печивающего необходимую степень сжатия газа для достижения задан-
ных чисел Моо. Время действия такой трубы практически неограничен-
но и определяется условиями эксперимента. Трубы постоянного дейст-
вия сложнее по конструкции, дороже в изготовлении, но обладают
определенными преимуществами: позволяют более точно воспроизво-
дить заданные параметры потока и сохранять их значения постоянны—
ми в рабочей части в течение длительного времени. Это дает возмож-
ность получать результаты эксперимента с большой степенью достовер-
ности.
Аэродинамические трубы должны удовлетворять ряду требований.
Одно из них связано с созданием равномерного поля ско-
ростей в рабочей части. Для обеспечения такого поля необходимо
выполнять аэродинамический контур трубы (включающий в себя фор—
камеру, сопло, рабочую часть, диффузор, обратный канал), устройст—
ва, расположенные в трубе (спрямляющие решетки, детурбулизирую-
щие сетки, датчики давлений и температуры), а также трубопроводы,
14
подводящие рабочий газ к форкамере (для баллонных труб), так, что-
бы они не создавали условий для возникновения в движущемся газе
возмущений (отрыва пограничного слоя и образования вихрей, скосов
потока и т.п.). Эти возмущения, возникнув в какой-либо части контура,
будут искажать поток, нарушая его равномерность далеко вниз по те-
чению, в том числе и в рабочей части. Поэтому внутренние поверхности
трубы должны иметь плавные переходы и повороты, а также тщатель—
но обрабатываться; в местах поворота потока устанавливаются на—
правляющие лопатки (см. рис. 1.1.5); принимаются меры, предупреж-
дающие отрыв пограничного слоя: не допускают больших углов рас—
ширения в диффузорах, отсасывают пограничный слой, образующийся
на стенках сопла и рабочей части, и др.
Равномерность скоростей в рабочей части характеризуется величи—
ной отношения АУ/Уср=(У—Уср)/Уср, где У и УОР—соответственно
местная и средняя скорости в рассматриваемой точке поперечного се-
чения рабочей части аэродинамической трубы. Эта величина в хорошо
отлаженных трубах должна удовлетворять неравенству
Атт/ср < 10,75% |.
Поток в рабочей части должен иметь по возможности малый скос
относительно оси трубы. Это обеспечивается установкой в трубе хоней-
комба, направляющих лопаток и других устройств, препятствующих
скашиванию потока. Для характеристики такого скоса обычно измеря-
ют угол Ао: между проекцией вектора скорости в рассматриваемой точ-
ке потока на горизонтальную плоскость симметрии рабочей части и ее
осью, а также угол АВ между проекцией этого вектора скорости на вер-
тикальную плоскость симметрии и той же осью. В современных кон—
струкциях труб эти углы должны находиться в пределах:
Асс < |о‚5°|‚ АБ < |0‚5°1.
Важное требование к современным конструкциям труб состоит в
обеспечении малого продольного градиента давления
сір/сіх в рабочей части. Возникновение такого градиента в рабочей части
объясняется ее загромождением моделью летательного аппарата, кон-
фигурацией стенок рабочей части и сопла, а также образованием на
стенках трубы пограничного слоя, суживающего проходные сечения.
Градиент давления создает эффект «выталкивающей силы», дей—
ствующей на модель в направлении убывания величины р. В ре—
зультате продольная сила, действующая на модель, определяется
с ошибкой, величина которой может быть приближенно рассчитана по
формуле
АО : [Ут (ар/(іх), (1.1.2)
где 1% — объем модели. При доводке трубы следует стремиться умень-
шать градиент давления до нуля.
Достоверность экспериментальных данных, полученных в аэродина—
мических трубах, зависит от ст е п е н и ту р 6 ул ентн о сти потока
в рабочей части, называемой также н а ч а л ь н о й т у р бу л ентн о -
с т ь ю и определяемой выражением [20]
е = 1/7', (173+Ё +17Ё№оы
Здесь Уф—осредненная скорость потока в рабочей части при турбу—
лентном Движении; УЦ, 1/5, УЁ—среднеквадратические значения тур-
булентных пульсаций компонент скорости в направлении осей коорди-
нат.
15
Так как в аэродинамических трубах обычно имеет место так
называемая изотропная турбулентность, когда У,;"`=У‚'‚°=У:, то е=
:Ъ/ЁЁ ‚71/00. Обычно степень турбулентности определяется в процентах:
‚‚ _ \
е= П/УЁ/Уоо) 100%. (1.1.3)
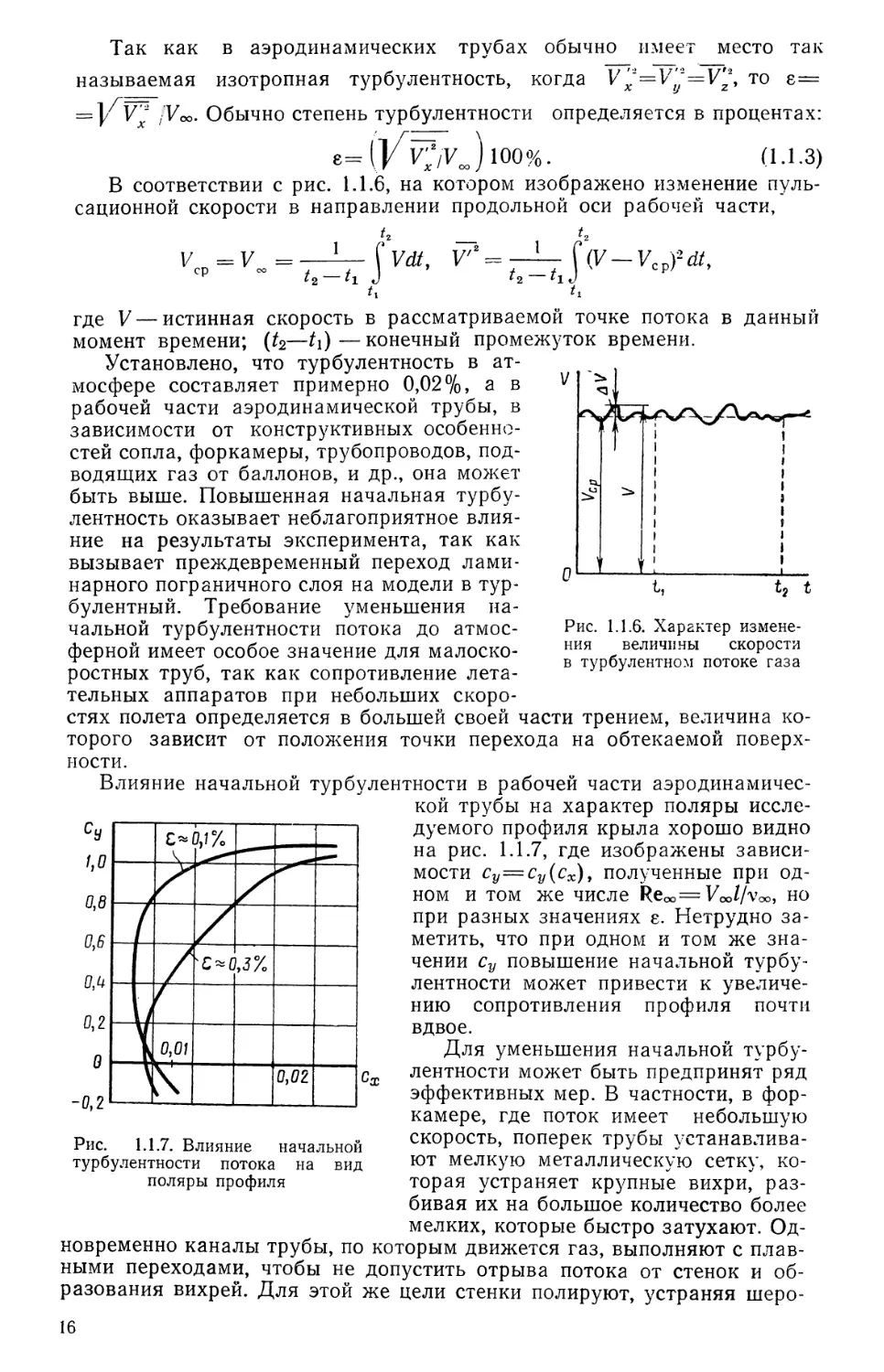
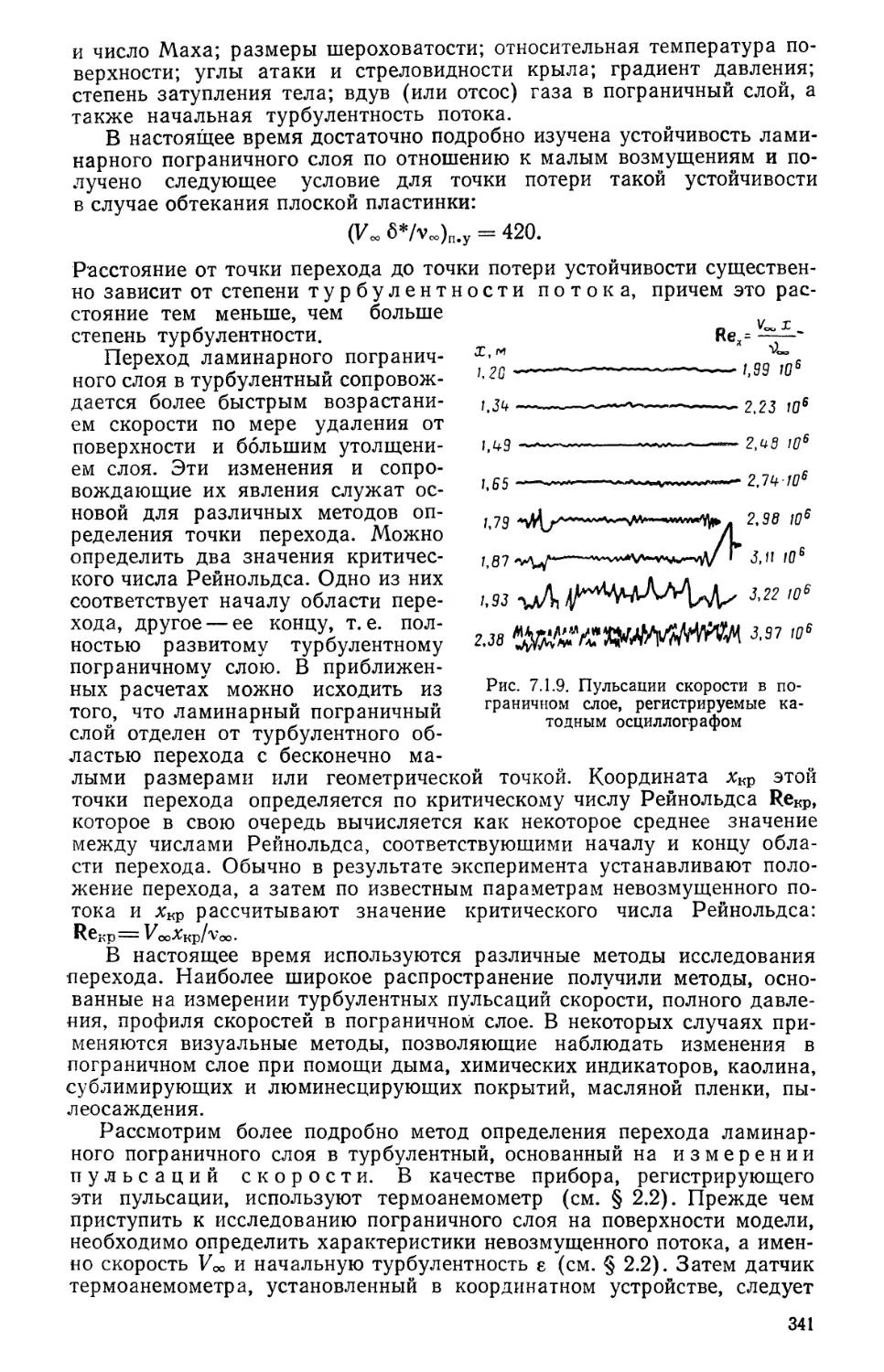
В соответствии с рис. 1.1.6, на котором изображено изменение пуль-
сационной скорости в направлении продольной оси рабочей части,
52 _ {2
Уф : Уш : 71—751/41, У”: _ [(У—Усуи,
2_ 1 2 19,
1 1
где У—истинная скорость в рассматриваемой точке потока в данный
момент времени; (152—151)—конечный промежуток времени.
Установлено, что турбулентность в ат- _
мосфере составляет примерно 0,02%, а в “ Ё
рабочей части аэродинамической трубы, в
зависимости от конструктивных особенно- @
стей сопла, форкамеры, трубопроводов, под—
водящих газ от баллонов, и др., она может
быть выше. Повышенная начальная турбу—
лентность оказывает неблагоприятное влия—
ние на результаты эксперимента, так как
вызывает преждевременный переход лами- 0 ;
нарного пограничного слоя на модели в тур—
булентный. Требование уменьшения на-
чальной турбулентности потока до атмос- Рис. 1-1-6. Характер Измене-
ферной имеет особое значение для малоско— НИЯ БеЛИЧН-ЧЫ СКОРОСТИ
в турбулентном потоке газа
ростных труб, так как сопротивление лета—
тельных аппаратов при небольших скоро-
стях полета определяется в большей своей части трением, величина ко-
торого зависит от положения точки перехода на обтекаемой поверх—
пости.
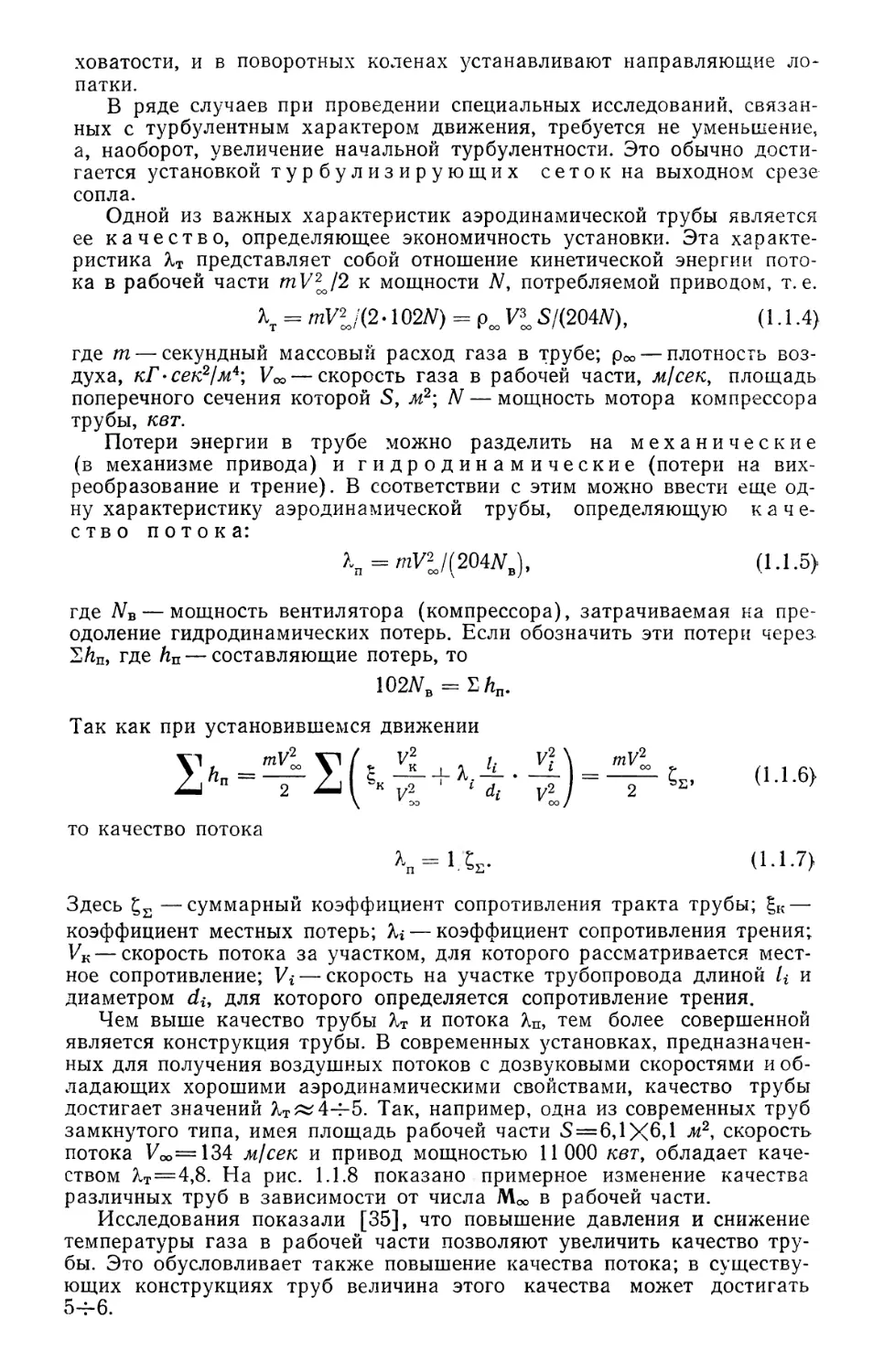
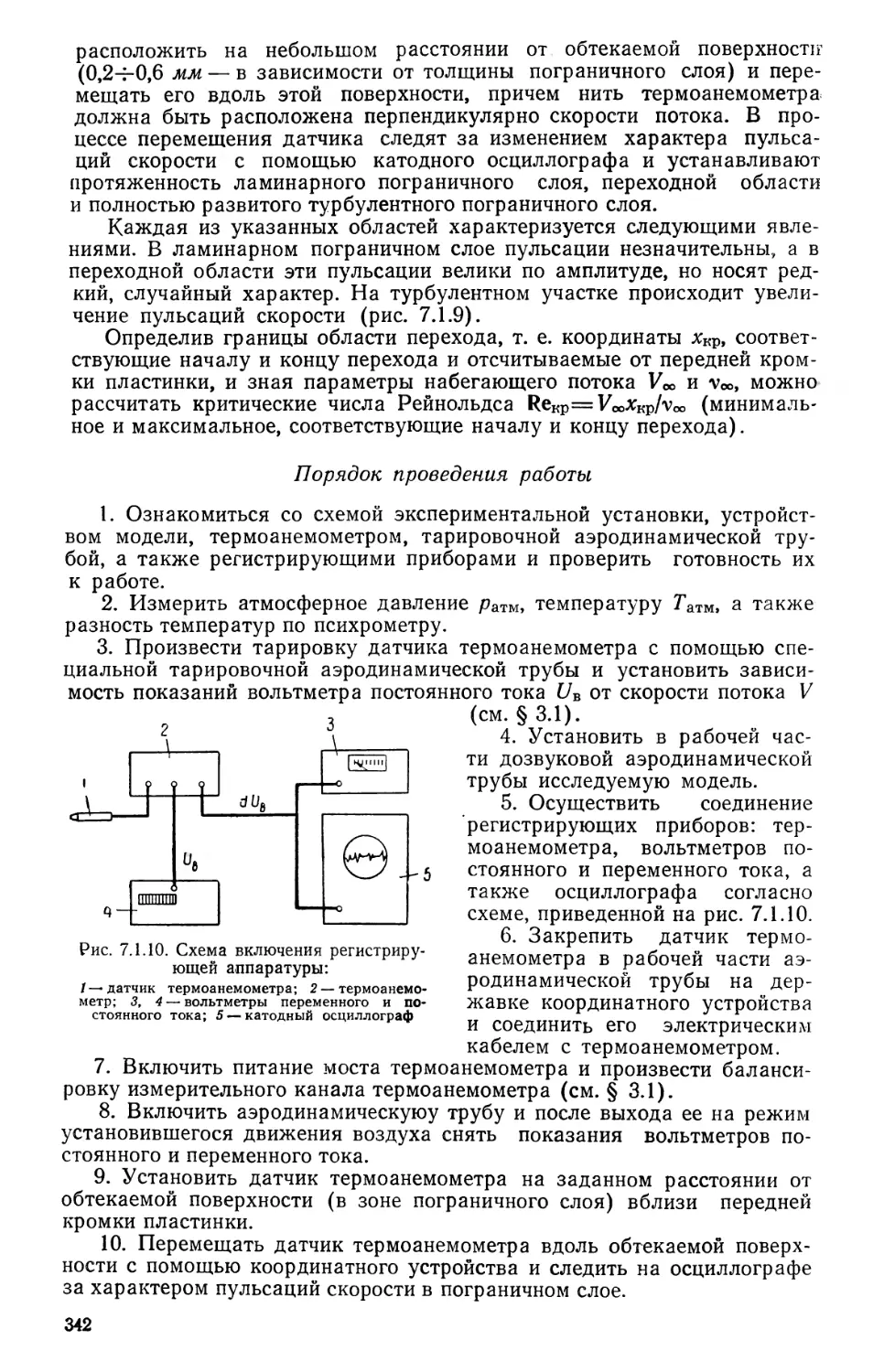
Влияние начальной турбулентности в рабочей части аэродинамичес-
кой трубы на характер поляры иссле-
дуемого профиля крыла хорошо видно
%
5
> >
___—_Ф—„—__—__
`
с* г———————-————-
(+
ю
съ
СН вхож, _
… на рис. 1.1.7, где изображены зависи—
’ мости су=су(сх)‚ полученные при од-
018 ном и том же числе Кеоо=Уооі/уоо‚ но
при разных значениях @. Нетрудно за—
п‚5 метить, что при одном и том же зна—
чении су повышение начальной турбу-
П‚Ц лентности может привести к увеличе-
нию сопротивления профиля почти
012 вдвое.
0 Для уменьшения начальной турбу-
0,02 Са: лентности может быть предпринят ряд
эффективных мер. В частности, в фор—
камере, где поток имеет небольшую
Рис. 1_1_7_ Влияние начальной скорость, поперек трубы устанавлива-
турбулентности потока на вил ЮТ мелкую металлическую сеТКУэ КО“
поляры профиля торая устраняет крупные вихри, раз—
бивая их на большое количество более
мелких, которые быстро затухают. ОД—
новременно каналы трубы, по которым движется газ, выполняют с плав-
ными переходами, чтобы не допустить отрыва потока от стенок и об—
разования вихрей. Для этой же цели стенки полируют, устраняя шеро-
—0‚2
16
ХОВЭТОСПЪ И В ПОВОРОТНЫХ КОЛЭНЗХ УСТЭНЗВЛИВЗКП`НЗПРЗВЛЯКЦЦИЕ ЛО—
патки.
В ряде случаев при проведении специальных исследований, связан-
ных с турбулентным характером движения, требуется не уменьшение,
а, наоборот, увеличение начальной турбулентности. Это обычно дости—
гается установкой тур булизирующих сеток на выходном срезе-
сопла.
Одной из важных характеристик аэродинамической трубы является
ее качество, определяющее экономичность установки. Эта характе-
ристика м представляет собой отношение кинетической энергии пото—
ка в рабочей части тУЁо/2 к мощности №, потребляемой приводом, т.е.
ит : тУЁо/(2— №№) : ро, и; $_/(204№)‚ (1.1.4).
где т—секундный массовый расход газа в трубе; рос—плотность воз-
духа, кГ—секг/м“; Ум,—скорость газа в рабочей части, м/сек, площадь
поперечного сечения которой 8, М?; М — мощность мотора компрессора
трубы, квт.
Потери энергии в трубе можно разделить на м е х а н и че с к и е
(в механизме привода) и г и д р о д и н а м и ч е с к и е (потери на вих—
реобразование и трение). В соответствии с этим можно ввести еще од-
ну характеристику аэродинамической трубы, определяющую к а ч е-
с т в о п о т о к а:
›„п : туго/(гощв), (1.15)
где Мв— мощность вентилятора (компрессора), затрачиваемая на пре—
одоление гидродинамических потерь. Если обозначить эти потери через.
БНП, где Ип— составляющие потерь, то
№№, = в п,.
Так как при установившемся движении
'] туго * 172 [. У? тУЁО .
2л„= 2 ; “ +ж.—Ъ.—‘ =—с2‚ (1.1.6)
ТО КЗЧЭСТВО ПОТОКЗ
ЖП: 1,2;2. (1.1.7)
Здесь {;2 ——суммарный коэффициент сопротивления тракта трубы; ён—
коэффициент местных потерь; Ъі—коэффициент сопротивления трения;
Уд.—скорость потока за участком, для которого рассматривается мест—
ное сопротивление; Уі—скорость на участке трубопровода длиной 1,- и
диаметром 02, для которого определяется сопротивление трения.
Чем выше качество трубы М— и потока ?…, тем более совершенной
является конструкция трубы. В современных установках, предназначен—
ных для получения воздушных потоков с дозвуковыми скоростями и об—
ладающих хорошими аэродинамическими свойствами, качество трубы
достигает значений Мяч—95. Так, например, одна из современных труб
замкнутого типа, имея площадь рабочей части $=6‚1><6‚1 м2, скорость.
потока Усо=134 м/сек и привод мощностью 11000 квт, обладает каче-
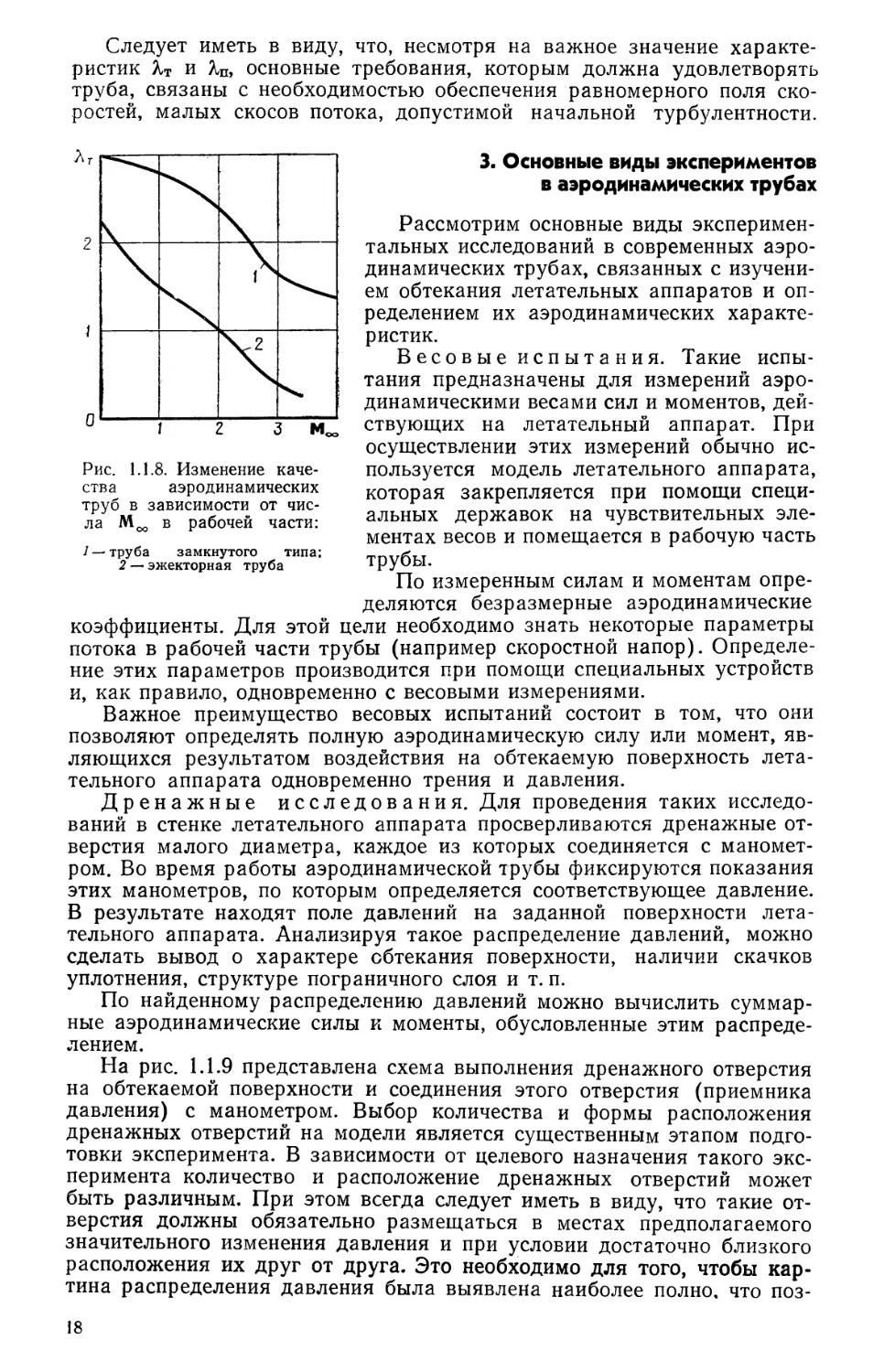
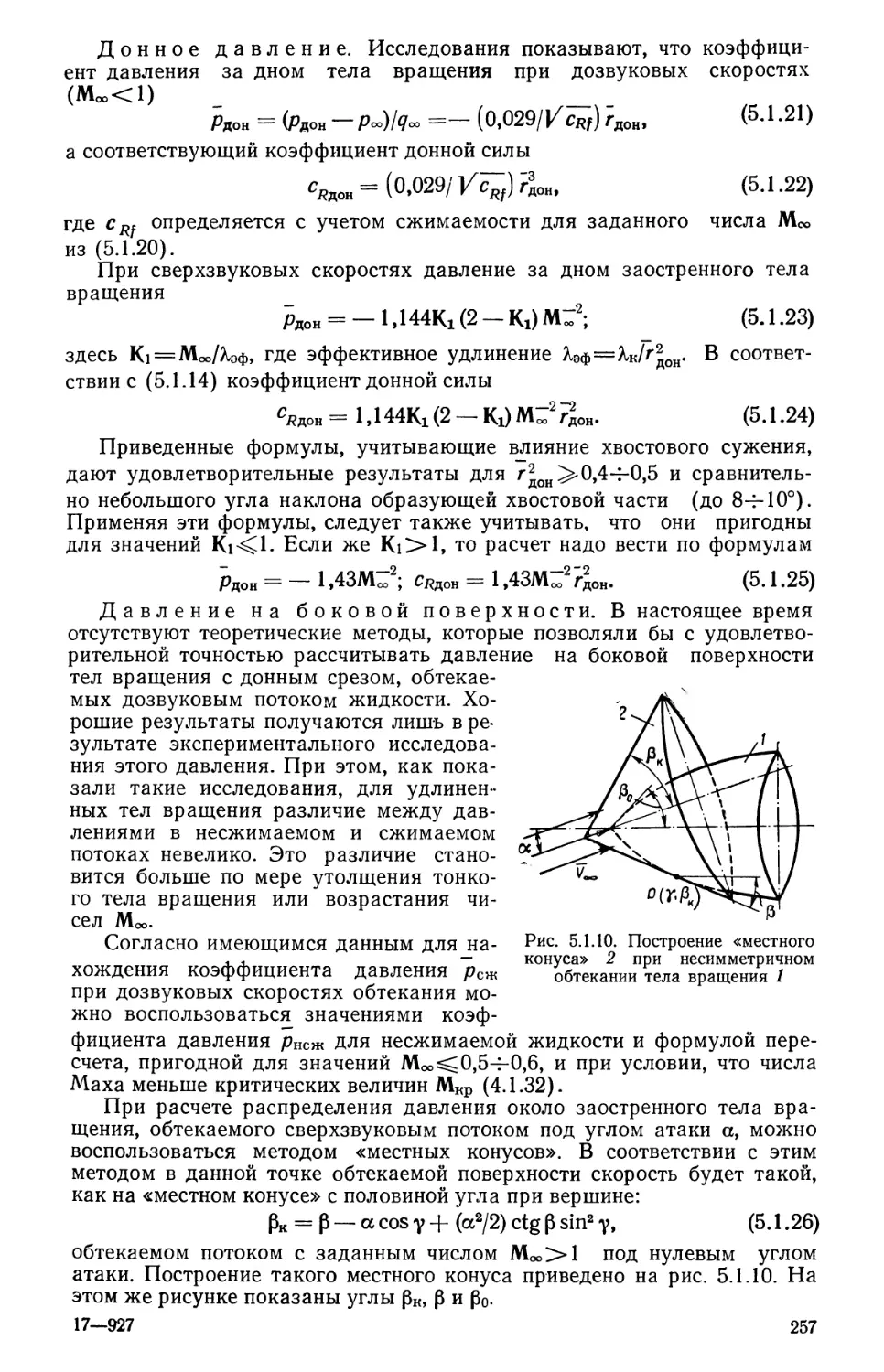
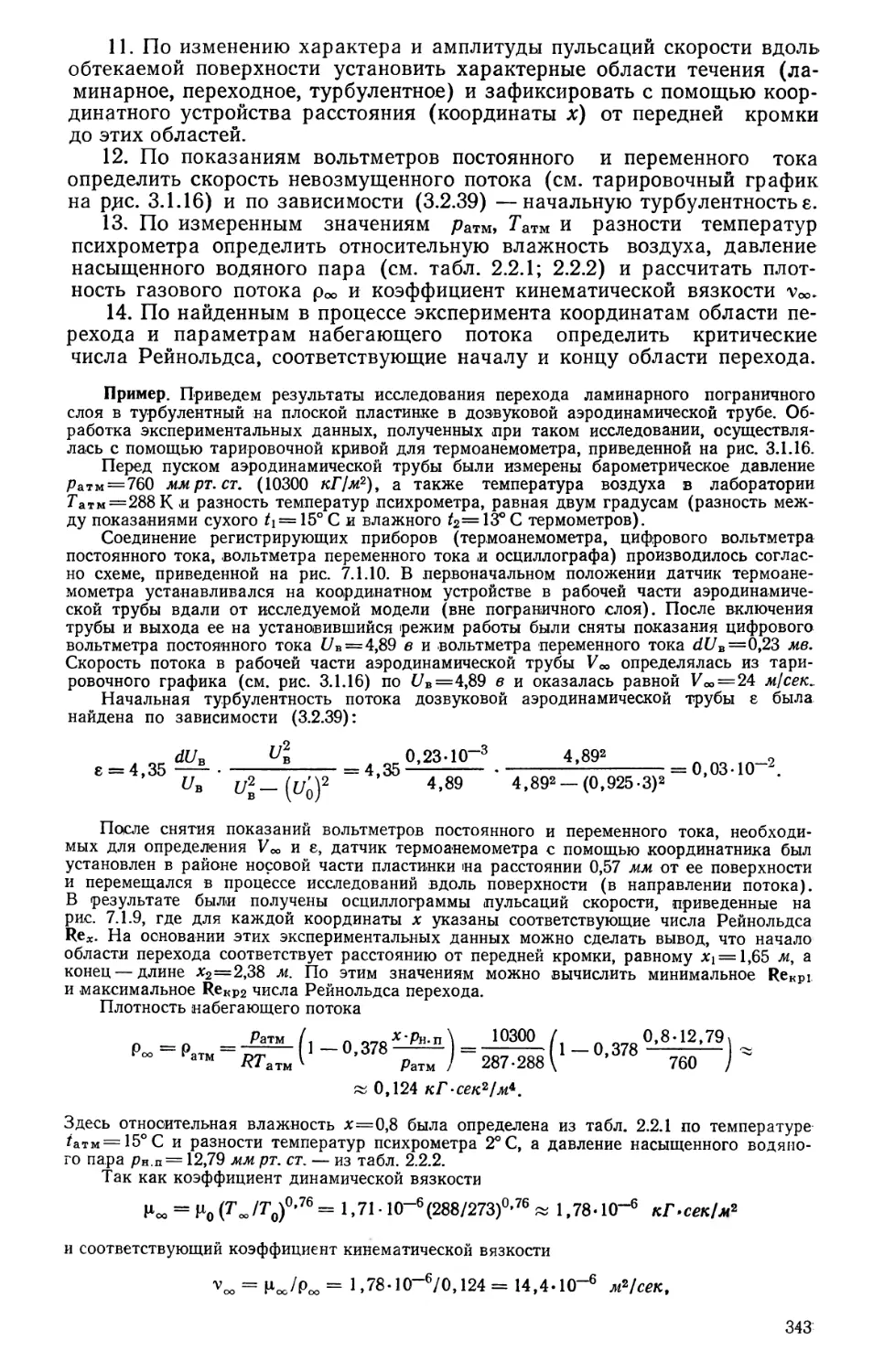
ством )„т=4,8. На рис. 1.1.8 показано примерное изменение качества
различных труб в зависимости от числа М… в рабочей части.
Исследования показали [35], что повышение давления и снижение
температуры газа в рабочей части позволяют увеличить качество тру-
бы. Это обусловливает также повышение качества потока; в существу—
ющих конструкциях труб величина этого качества может достигать
5—:-6
Следует иметь в виду, что, несмотря на важное значение характе-
ристик ?…— и ?…, основные требования, которым должна удовлетворять
труба, связаны с необходимостью обеспечения равномерного поля ско—
ростей, малых скосов потока, допустимой начальной турбулентности.
}\т ' ` - 3. Основные ВИДЫ экспериментов
\, в аэродинамических трубах
\ \ & Рассмотрим основные виды эксперимен-
2 тальных исследований в современных аэро-
\ >\ динамических трубах, связанных с изучени-
\ ем обтекания летательных аппаратов и оп-
ределением их аэродинамических характе-
1 2 ристик.
Весовые испытания. Такие испы—
тания предназначены для измерений аэро-
ъ \ динамическими весами сил и моментов, дей-
О 1 2 3 М… ствующих на летательный аппарат. При
осуществлении этих измерений обычно ис—
Рис. 1.1.8. Изменение каче— пользуется МОДеЛЬ летательного аппарата,
ства аэРОдинамических которая закрепляется при помощи специ-
труб в зависимости от чис-
Ча м В рабочей части альных державок на ЧУВСТВИТеЛЬНЫХ эле-
] б ментах весов и помещается в рабочую часть
_тру а замкнутого типа:
2—эжекторная труба Трубы-
По измеренным силам и моментам опре-
деляются безразмерные аэродинамические
коэффициенты. Для этой цели необходимо знать некоторые параметры
потока в рабочей части трубы (например скоростной напор). Определе-
ние этих параметров производится при помощи специальных устройств
и, как правило, одновременно с весовыми измерениями.
Важное преимущество весовых испытаний состоит в том, что они
позволяют определять полную аэродинамическую силу или момент, яв-
ляющихся результатом воздействия на обтекаемую поверхность лета-
тельного аппарата одновременно трения и давления.
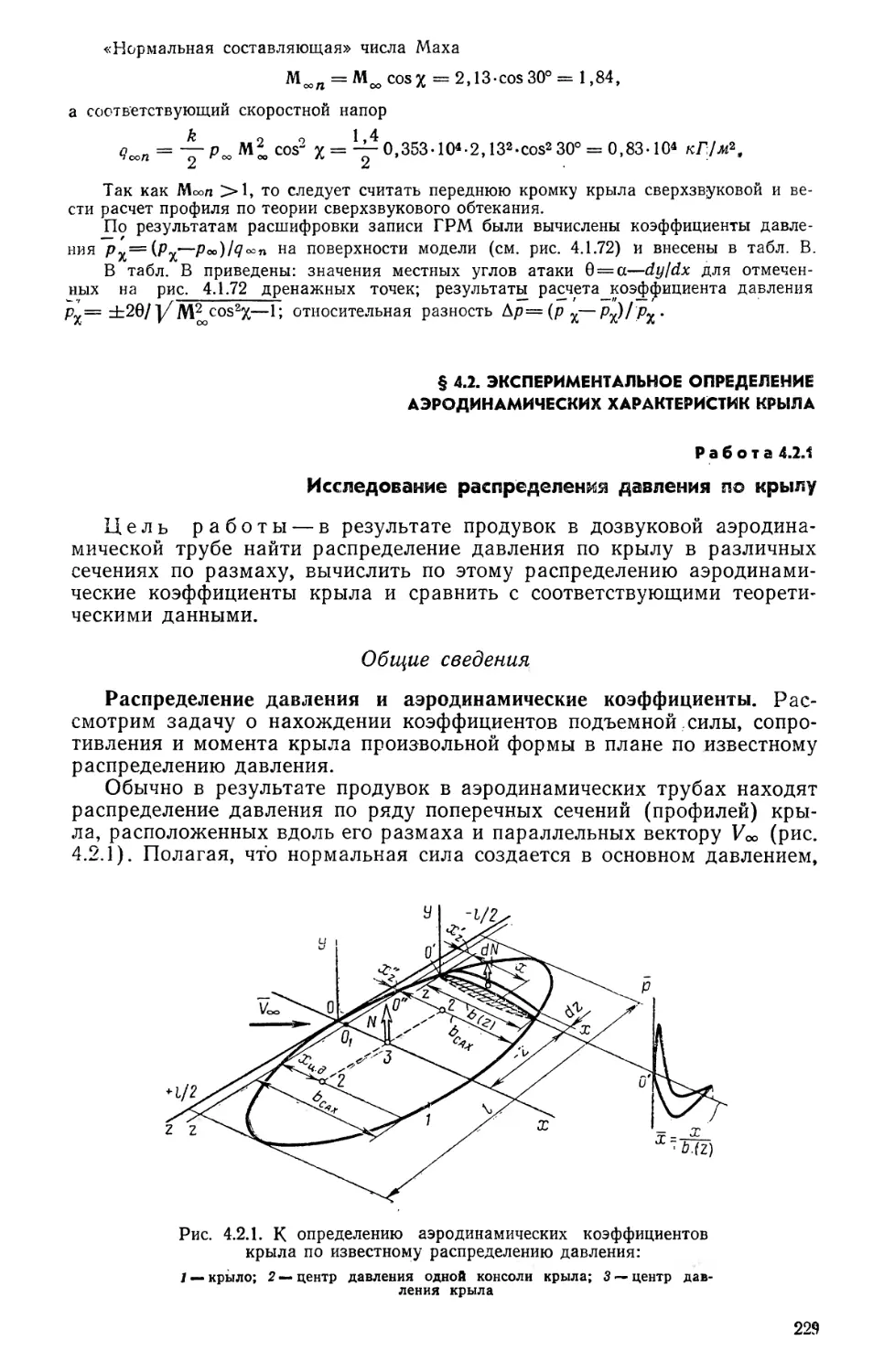
Дренажные исследования., Для проведения таких исследо-
ваний в стенке летательного аппарата просверливаются дренажные от-
верстия малого диаметра, каждое из которых соединяется с маномет-
ром. Во время работы аэродинамической трубы фиксируются показания
этих манометров, по которым определяется соответствующее давление.
В результате находят поле давлений на заданной поверхности лета-
тельного аппарата. Анализируя такое распределение давлений, можно
сделать вывод о характере обтекания поверхности, наличии скачков
уплотнения, структуре пограничного слоя и т.п.
По найденному распределению давлений можно вычислить суммар-
ные аэродинамические силы и моменты, обусловленные этим распреде-
лением.
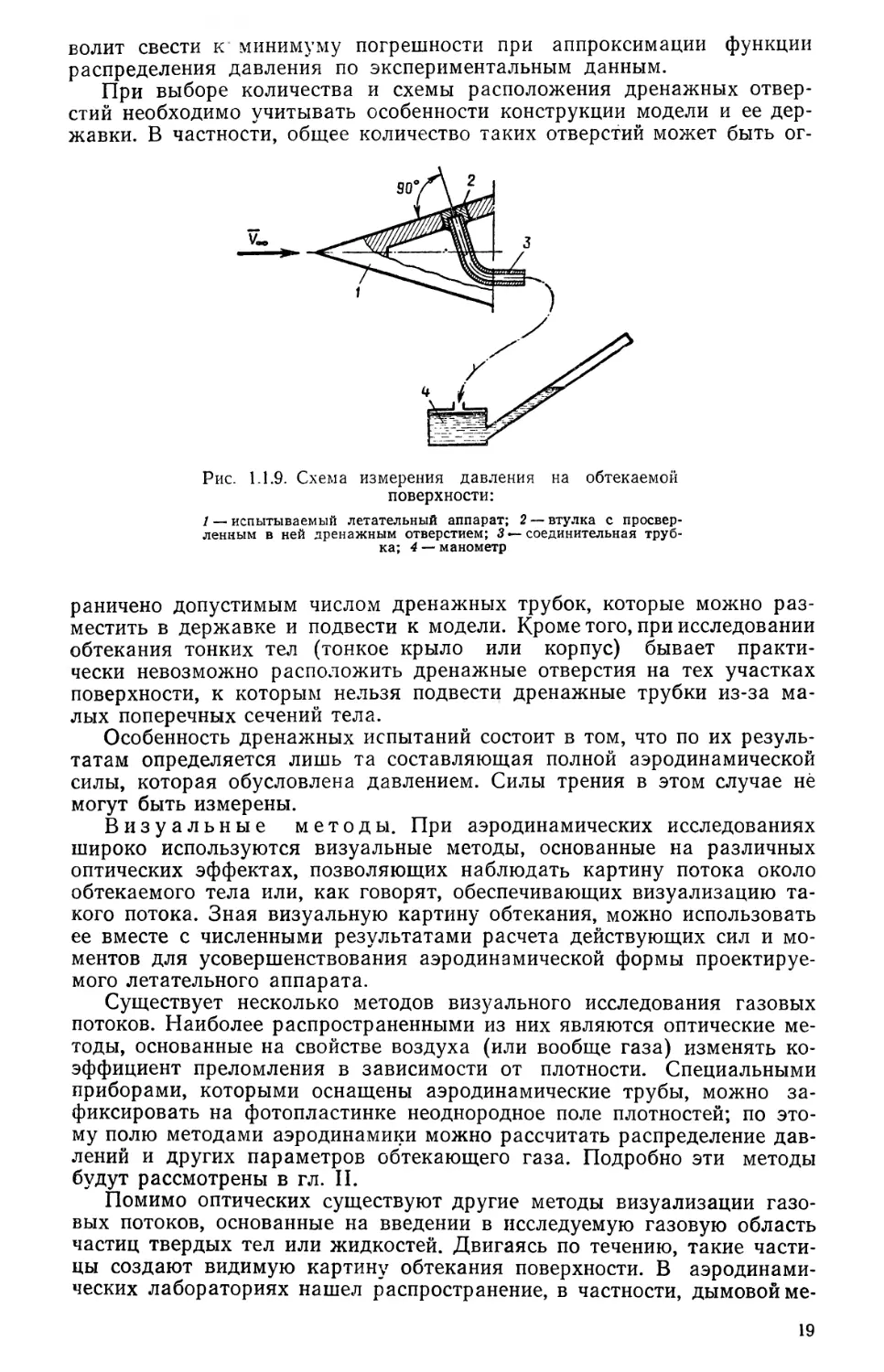
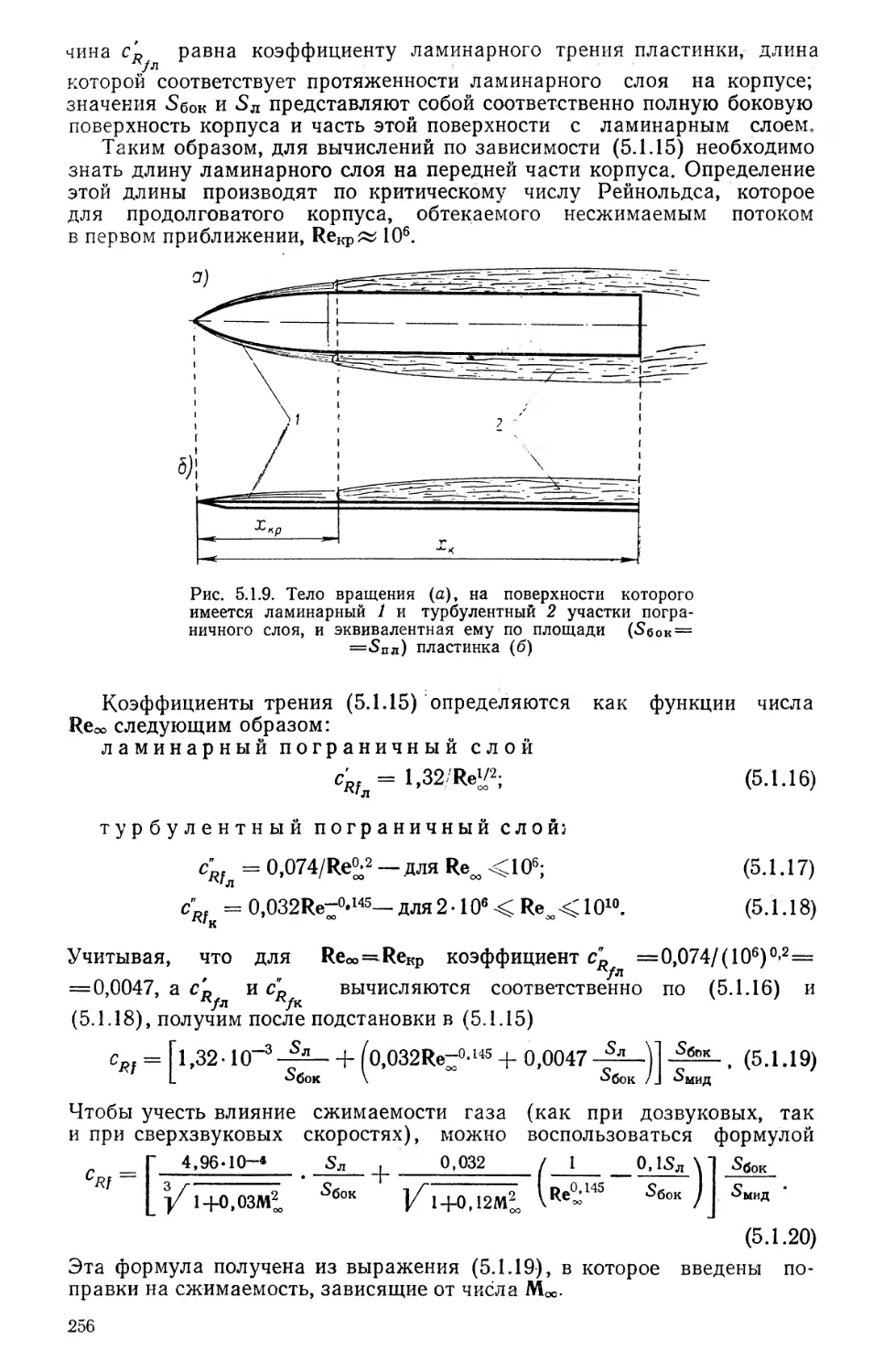
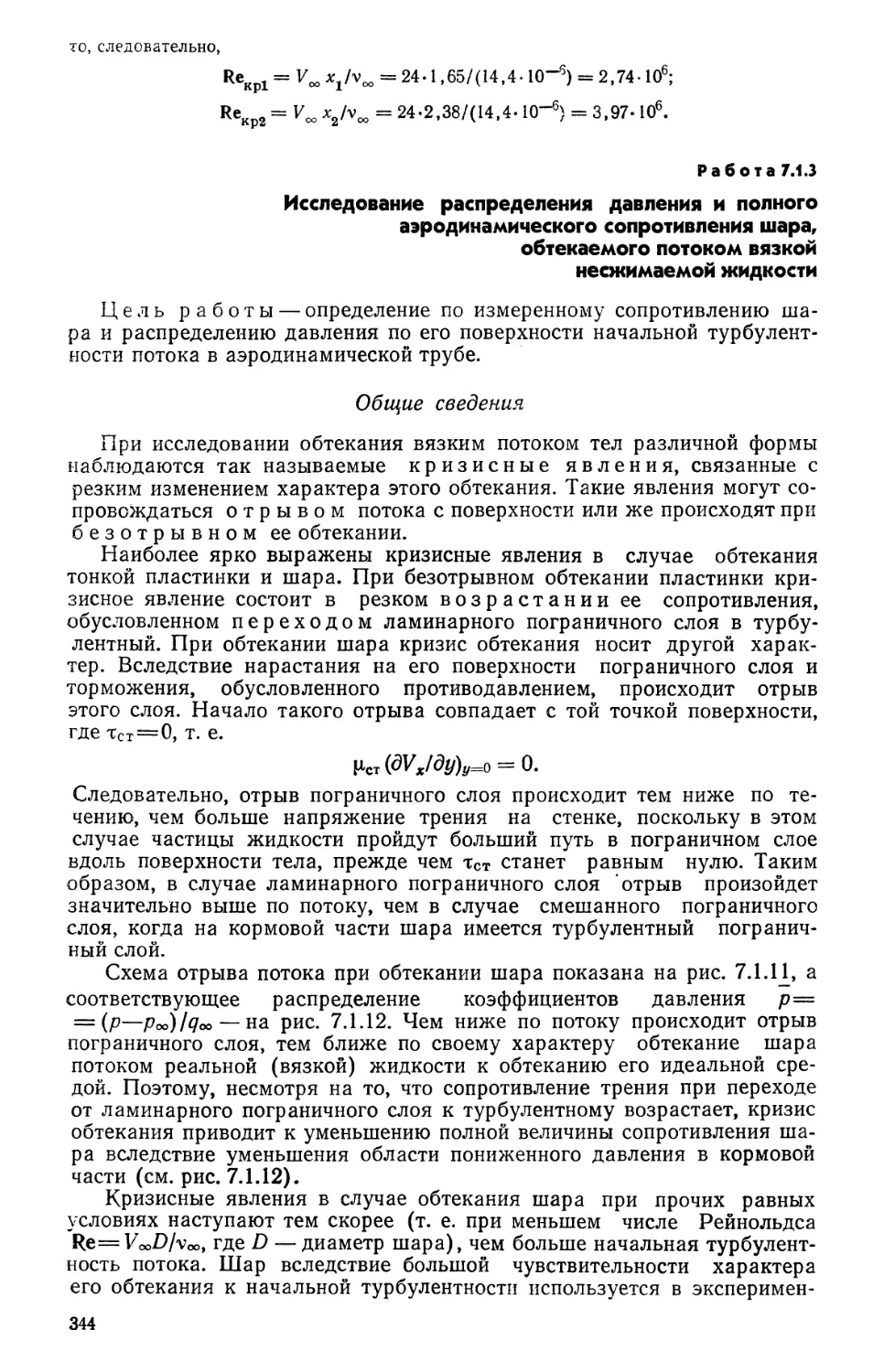
На рис. 1.1.9 представлена схема выполнения дренажного отверстия
на обтекаемой поверхности и соединения этого отверстия (приемника
давления) с маномептром. Выбор количества и формы расположения
дренажных отверстии на модели является существенным этапом подго-
товки эксперимента. В зависимости от целевого назначения такого экс-
перимента количество и расположение дренажных отверстий может
быть различным. При этом всегда следует иметь в ВИДу, что такие от-
верстия должны обязательно размещаться в местах предполагаемого
значительного изменения давления и при условии достаточно близкого
расположения их друг от друга. Это необходимо для того, чтобы кар-
тина распределения давления была выявлена наиболее полно. что поз—
18
волит свести к минимуму погрешности при аппроксимации функции
распределения давления по экспериментальным данным.
При выборе количества и схемы расположения дренажных отвер—
стий необходимо учитывать особенности конструкции модели и ее дер—
жавки. В частности, общее количество таких отверсТий может быть ог-
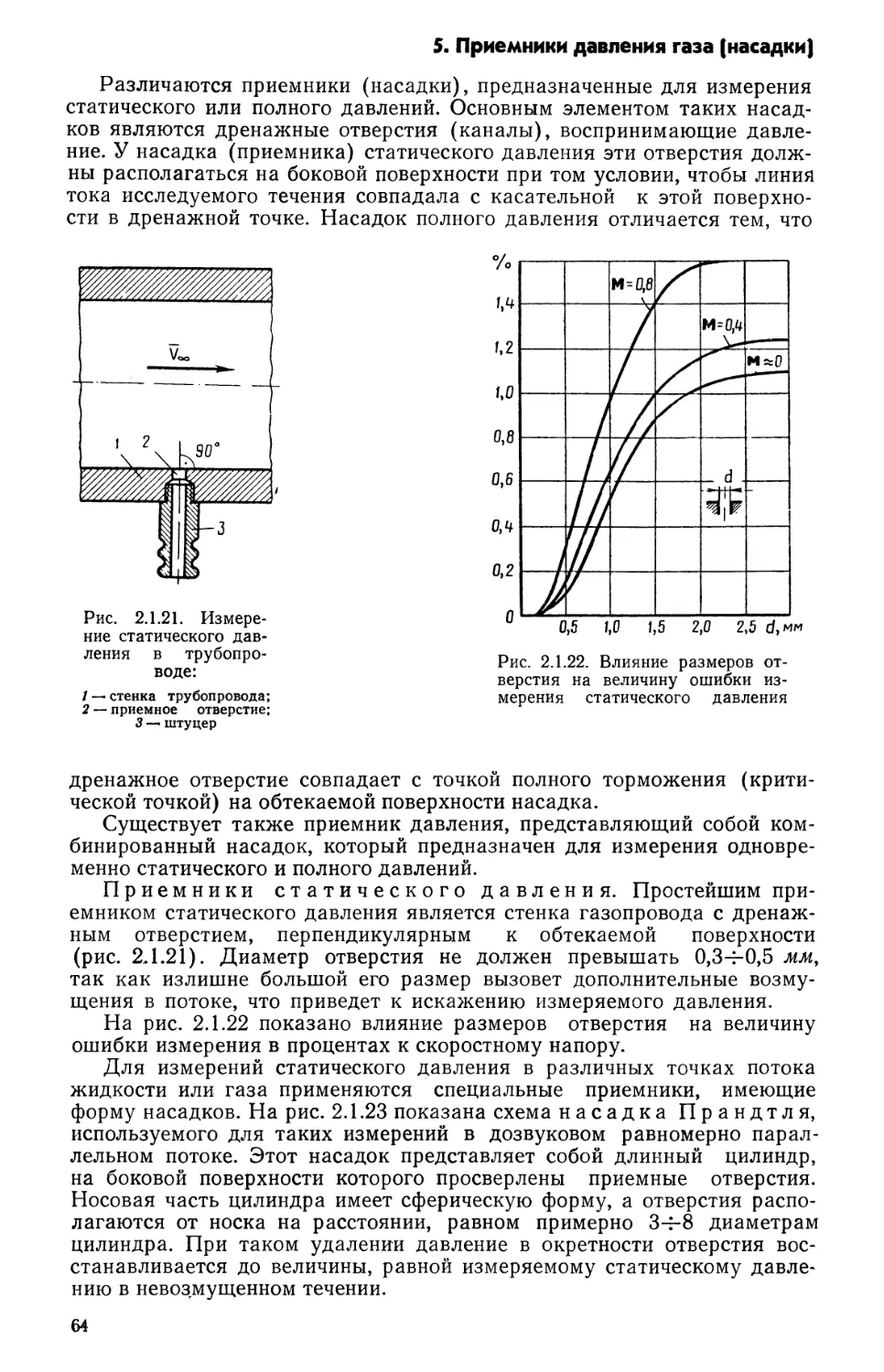
Рис. 1.1.9. Схема измерения давления на обтекаемой
поверхности:
1—испытываемый летательный аппарат; 2—втулка с просвер-
ленным в ней дренажным отверстием; 3—соединительная труб-
ка; 4—манометр
раничено допустимым числом дренажных трубок, которые можно раз-
местить в державке и подвести к модели. Кроме того, при исследовании
обтекания тонких тел (тонкое крыло или корпус) бывает практи—
чески невозможно расположить дренажные отверстия на тех участках
поверхности, и которым нельзя подвести дренажные трубки из-за ма—
лых поперечных сечений тела.
Особенность дренажных испытаний состоит в том, что по их резуль—
татам определяется лишь та составляющая полной аэродинамической
силы, которая обусловлена давлением. Силы трения в этом случае не
могут быть измерены.
Визуальные методы. При аэродинамических исследованиях
широко используются визуальные методы, основанные на различных
оптических эффектах, позволяющих наблюдать картину потока около
обтекаемого тела или, как говорят, обеспечивающих визуализацию та-
кого потока. Зная визуальную картину обтекания, можно использовать
ее вместе с численными результатами расчета действующих сил и мо-
ментов для усовершенствования аэродинамической формы проектируе-
мого летательного аппарата.
Существует несколько методов визуального исследования газовых
потоков. Наиболее распространенными из них являются оптические ме-
тоды, основанные на свойстве воздуха (или вообще газа) изменять ко—
эффициент преломления в зависимости от плотности. Специальными
приборами, которыми оснащены аэродинамические трубы, можно за-
фиксировать на фотопластинке неоднородное поле плотностей; по это-
му полю методами аэродинамики можно рассчитать распределение дав-
лений и других параметров обтекающего газа. Подробно эти методы
будут рассмотрены в гл. 11.
Помимо оптических существуют другие методы визуализации газо-
вых потоков, основанные на введении в исследуемую газовую область
частиц твердых тел или жидкостей. Двигаясь по течению, такие части—
цы создают видимую картину обтекания поверхности. В аэродинами-
ческих лабораториях нашел распространение, в частности, дымовой ме-
19
тод, используемый при относительно небольших скоростях движения
воздуха (примерно до 40 ‚)и/сек). Согласно этому методу в рабочую
часть незамкнутой аэродинамической трубы вводят через специальные
насадки дымовые струйки, благодаря которым можно наблюдать аэро—
динамический спектр обтекания заданной поверхности.
В соответствии с методом газовых струек в поток, обтекаю-
щий исследуемую модель, поступает химически активный газ, который,
взаимодействуя с веществом, нанесенным на поверхность этой модели,
оставляет ясно видимые следы, позволяющие делать заключение о ха-
рактере течения в пограничном слое.
В последние годы разработаны эффективные м ет од ы с у 6 л и м а—
ц и и, позволяющие исследовать течение в пограничном слое. Для этого
на поверхность тела наносятся твердые вещества, легко испаряющиеся
во время испытания такого тела в аэродинамической трубе. Так как ско—
рость испарения (сублимации) имеет разную величину в ламинарной
и турбулентной зонах пограничного слоя, то после выключения трубы
на исследуемой поверхности сохраняются следы, позволяющие судить
о протяженности эт'их зон.
Существуют и другие методы визуализации обтекания тел (наклеива-
ние легкоподвижных шелковинок, вдув дыма через отверстия на обте-
каемой поверхности и др.), позволяющие изучить те или иные аэроди-
намические явления. С этими методами можно ознакомт-іться по спе—
циальной литературе [5], 52].
Изучение аэродинамического нагрева и теплового
р азрушения летательных аппар атов, Экспериментальные
исследования аэродинамического нагрева основаны на обеспечении до-
статочно большой разности между температурой поверхности исследуе—
мого тела и температурой газа у этой поверхности, близкой к темпера-
туре торможения. Это может быть достигнуто либо путем предваритель-
ного охлаЖДения модели, либо подогревом обтекающего воздуха в фор-
камере. При этом температура поверхности модели в процессе экспери-
мента фиксируется с помощью тепловых датчиков
Если время вых0да трубы на заданный режим установившегося об-
текания подогретым воздухом велико, то испытываемое тело может на-
греться до высоких температур, что приведет к невозможности экспери-
мента из-за малой разности температур поверхности и омывающего
газа. Вот почему следует защищать модель от воздействия потока в пе--
риод установления режима обтекания. С этой целью для модели пре-
дусматривают специальные защитные колодки, которые во время про-
ведения эксперимента снимаются [44].
При исследовании теплового разрушения фотографируют модель,
фиксируя характер такого разрушения во времени, а также измеряют
температуру модели в разных точках с помощью термопар.
Особенности конструкции труб. Рассмотренные методы
исследования в аэр0динамических трубах предъявляют определенные
требования как к их конструкции, так и к измерительным устройствам,
которыми такие трубы оснащаются. Так, при весовых испытаниях в за-
висимости от конструкции применяемых весов следует предусмотреть
размещение в рабочей части державок и поцвесок, на которых крепит-
ся модель. Если такие весы используются в трубах с закрытой рабочей
частью, то это вызывает необходимость осуществить дополнительные
меры по обеспечению ее герметизации.
Визуальные методы исследования предусматривают использование
специальных устройств, таких, в частности, как теневой прибор или ин-
терферометр. При этом если рабочая часть закрытая, то в стенках тру-
бы предусматриваются герметические смотровые люки с вмонтирован—
ными в них оптическими стеклами.
20
Исследования аэродинамической теплопередачи ПРОВОДЯТСЯ, как
ПРЗВИЛО, С подогревом омывающего ВОЗДУХЗ. Одновременно может ПО-
требоваться охлаждение стенок ТРУбЫ С целью предохранения ИХ ОТ
прогара, а также ЗЗЩИТЗ оптического стекла ОТ повреждения ВЫСОКО-
температурным газом.
4. Влияние условий эксперимента в трубах
на величину аэродинамических коэффициентов
По результатам экспериментальных исследований рассчитываются
аэродинамические параметры летательных аппаратов. Но для получе-
ния истинных величин этих параметров должны быть учтены все осо-
бенности, характеризующие условия обтекания модели в рабочей части,
которые могут отличаться от условий в свободном полете. Это разли-
чие связано с неодинаковыми значениями начальной турбулентности,
наличием продольного градиента давлений, изменением скорости из-за
ограниченного размера поперечного сечения рабочей части, неблагопри-
ятным влиянием устройств, при помощи которых модель закрепляется
в трубе, и др.
Для получения достоверных экспериментальных данных обязатель-
ным является требование гео метр ического подоб и я испытыва-
емого тела и натурного летательного аппарата, а также обеспечение
необходимого аэродинамического подобия. В частности‚весь—
ма целесообразным является обеспечение такого подобия одновремен-
но по числам Маха М и Рейнольдса Ке, характеризующим силовое воз-
действие соответственно за счет сил давления, вызванных сжимаемо—
стью, и трения.
Данные эксперимента в сверхзвуковых трубах могут быть правдо-
подобны лишь в том случае, если на поверхность модели не попадают
возмущения, отраженные или исходящие от стенок рабочей части.
Все указанные выше особенности экспериментальных исследований
в трубах вызывают необходимость вводить поправки в полученные ре-
зультаты таких исследований, чтобы сделать эти результаты более до-
стоверными. Установлено [10], что для дозвуковых аэродиамических
труб, например, следует вводить поправки на: 1) загромождение пото-
ка моделью и спутной струей; 2) продольный градиент статического
давления; З) влияние подъемной силы крыла, испытываемого в трубе
(это влияние сказывается на изменении угла атаки и лобового сопро-
тивления); 4) скос потока в рабочей части «пустой» трубы (без моде-
ли); 5) блокинг—эффект; 6) интерференцию модели и устройств, за-
крепляющих модель в рабочей части.
Число поправок можно уменьшить путем тщательной проработки
отдельных элементов и всей конструкции аэролинамической трубы и
последующей отладки ее в процессе эксплуатации. Соответствующим
подбором очертаний стенок сопла и рабочей части можно значительно
снизить продольный градиент и тем свести к минимуму погрешность
эксперимента, сделав излишнеи поправку на его влияние; выполняя
модели возможно малыми, уменьшают загромождение потока; располо—
жив в форкамере детурбулизирующие сетки, можно уменьшить началь-
ную турбулентность в рабочей части, приблизив ее по величине к соот-
ветствующему значению в атмосфере, и т.д.
Рассмотрим порядок определения поправок к аэродинамическим ха-
рактеристикам, полученным в аэродинамических трубах.
Поправка на загромождение потока моделью и
спутной струей. Модель, помещенная в равномерный поток, дви-
жущийся в рабочей части трубы, изменяет площадь проходного сече-
ния этой части. Такое же действие производит спутная струя, образую-
щаяся за моделью. В результате в потоке, между стенками трубы (или
21
свободной поверхностью струи трубы с открытой рабочей частью) и мо—
делью (а также между стенками и спутной струей), устанавливается
течение, отличное от течения вокруг тела в свободном полете: скорости
около модели в трубе будут отличаться от скоростей в свободном по-
лете. Это приводит к изменению аэродинамических коэффициентов, ко—
торое может быть учтено выражением
сист : Сиам/(1 + 28м + 28стр)› (118)
где си…—истинный аэродинамический коэффициент; Сиам—аэродина-
мический коэффициент, измеренный в трубе; ем и ветр—коэффициенты,
учитывающие влияние загромождения рабочей части моделью иструей
соответственно; величины ем и е…… зависят от вида и формы рабочей
части и моделей (см. [10]).
Поправки на загромождение можно сделать малыми, если выпол—
нять модели малых размеров. Так, если отношение толщины 1‘ испыты-
ваемого профиля к высоте 11 рабочей части равно 0,05, то емшестр=
=О‚О1; для модели самолета объемом “7, испытываемой в трубе с пло—
щадью рабочей части 8 при 117/$=0‚05‚ значения ем=0‚025 и ветр:
=О‚О17.
Поправка, учитывающая продольный градиент
давления. Как уже отмечалось, изменение статического давления
в рабочей части вдоль оси трубы обусловливает действие на модель
дополнительной продольной силы (1.1.2). В результате величина лобо—
вого сопротивления (диет, найденная по измеренному значению этого
сопротивления в трубе, будет равна
6110
Оист : Оизм + _ т-
сіх
Соответствующий аэродинамический коэффициент
сір “7
Схист=схизм+ (іх ' 0х3 ‚ (11.9)
где ооо—скоростной напор; 3—характерная площадь исследуемой мо-
дели; сЗС изм—коэффициент лобового сопротивления, измеренный в
трубе.
Градиент давления в рабочей части обычно определяется как отно—
шение разности статических давлений в соседних точках на оси трубы
Ар к малому расстоянию Ах между этими точками. Используемое в рас-
четах значение градиента Ар/Ах выбирается средним по величине для
участка трубы некоторой длины. При этом в формуле (1.1.9) величина
градиента принимается положительной, если давление вниз по потоку
увеличивается.
Поправка на влияние подъемной силы. Размеры ра-
бочей части аэродинамической трубы ограничены, поэтому картина ли—
ний тока около испытываемой модели крыла будет отличаться от той,
которая имеет место при обтекании натурного крыла, движущегося в
атмосфере, причем, очевидно, отличие будет тем больше, чем больше
подъемная сила. Как показали исследования, это эквивалентно измене—
нию угла атаки модели крыла по сравнению со свободным полетом на
величину
Аосгр : д`)ос суЗ/Бтр, (1.1.10)
где су—коэффициент подъемной силы модели; Зтр—площадь попереч-
ного сечения рабочей части трубы; бы —-—некоторый коэффициент, опре—
деляемыи экспериментально.
Изменению угла атаки на величину Ассгр соответствует поправка
к измеренному коэффициенту лобового сопротивления
Асх=бсхсЁЗ/8 (1.1.11)
тр’
22
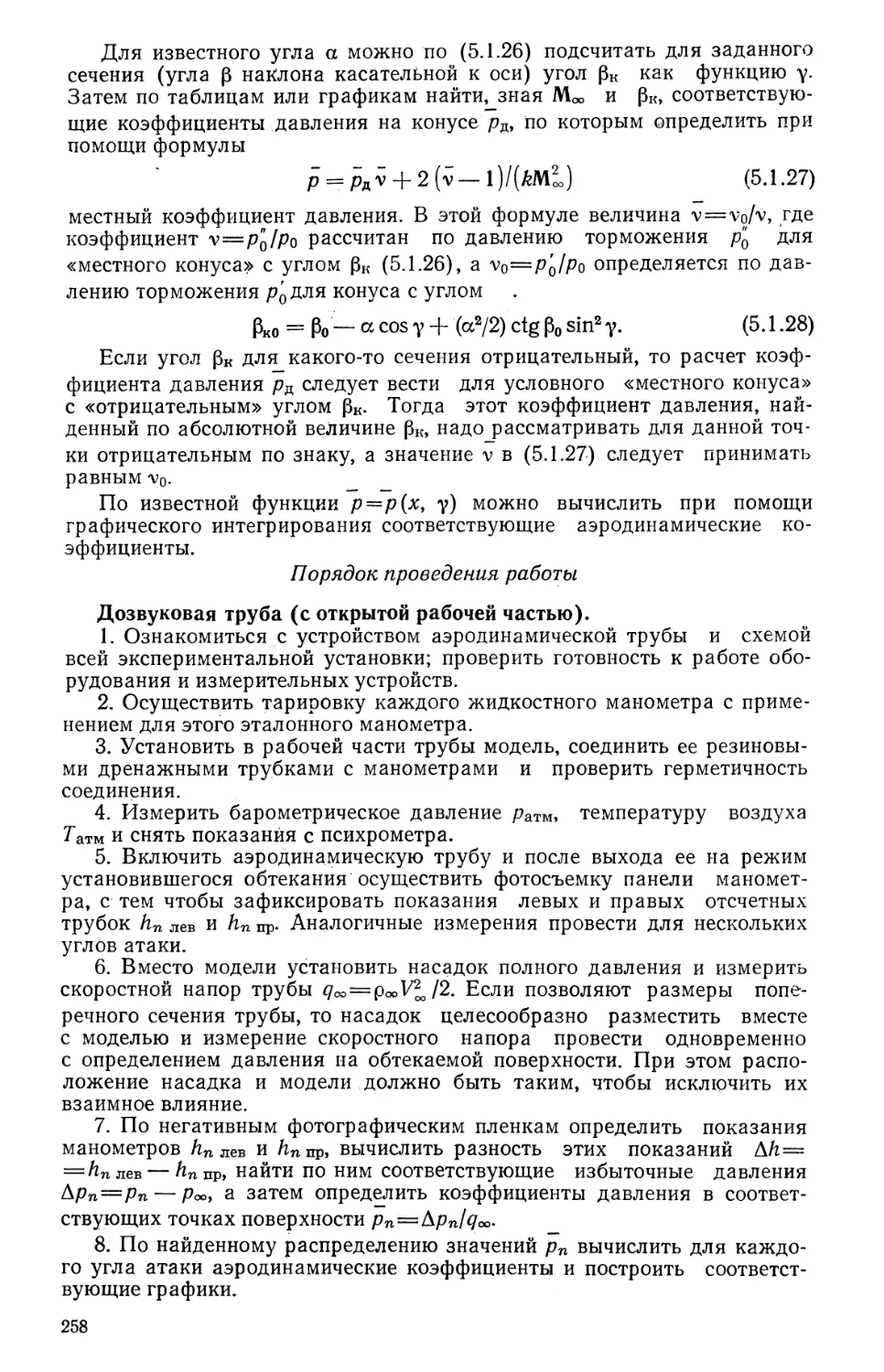
1,03 Ь
где бис—некоторый опытный коэффициент. При испытаниях изолиро—
ванных крыльев в дозвуковых аэродинамических трубах с закрытой ра-
бочей частью можно принять коэффициенты без и бах равными 0,125 для
круглых труб и 0,127 для труб с восьми-
гранным поперечным сечением рабочей
части [10]. /
Так как Аосгр (3.1.10) мало, то коэф- \ „02 _ /
фициент подъемнои силы изменяется не— —
значительно и можно считать его величи— \
ну су равной измеренному значению суизм. \ 1,0:
При введении поправки на влияние —2 1 о 1 2! оф
границ потока следует помнить, что в
трубах с закрытой рабочей частью Аагр— _
величина положительная, а в трубах с МЮ
открытой частью—отрицательная. Это
означает, например, что в трубе с откры-
ТОЙ рабочей частью УГОЛ атаки О‘ТЬ изме-- Рис. 1.1.10. График зависимости
ренный на шкале механизма установки Ь=і(с„$)
углов атаки, будет больше истинного свист
на величину А-осгр.
П о п р а в к а н а с к о с п о т о к а определяется экспериментально,
в частности, с помощью насадков, позволяющих находить направление-
вектора скорости газового потока в данной точке (см. гл. 11).
В результате систематических исследований потока в рабочей части
трубы определяются средние значения углов скосов в горизонтальной
Авер и вертикальной Аосср плоскостях, проходящих через продольную
ось трубы. Эти значения учитываются при определении истинных углов
атаки и скольжения:
“№ : % + А“… + №№; (1.1.12)-
Вист : Втр ’;" Абер-
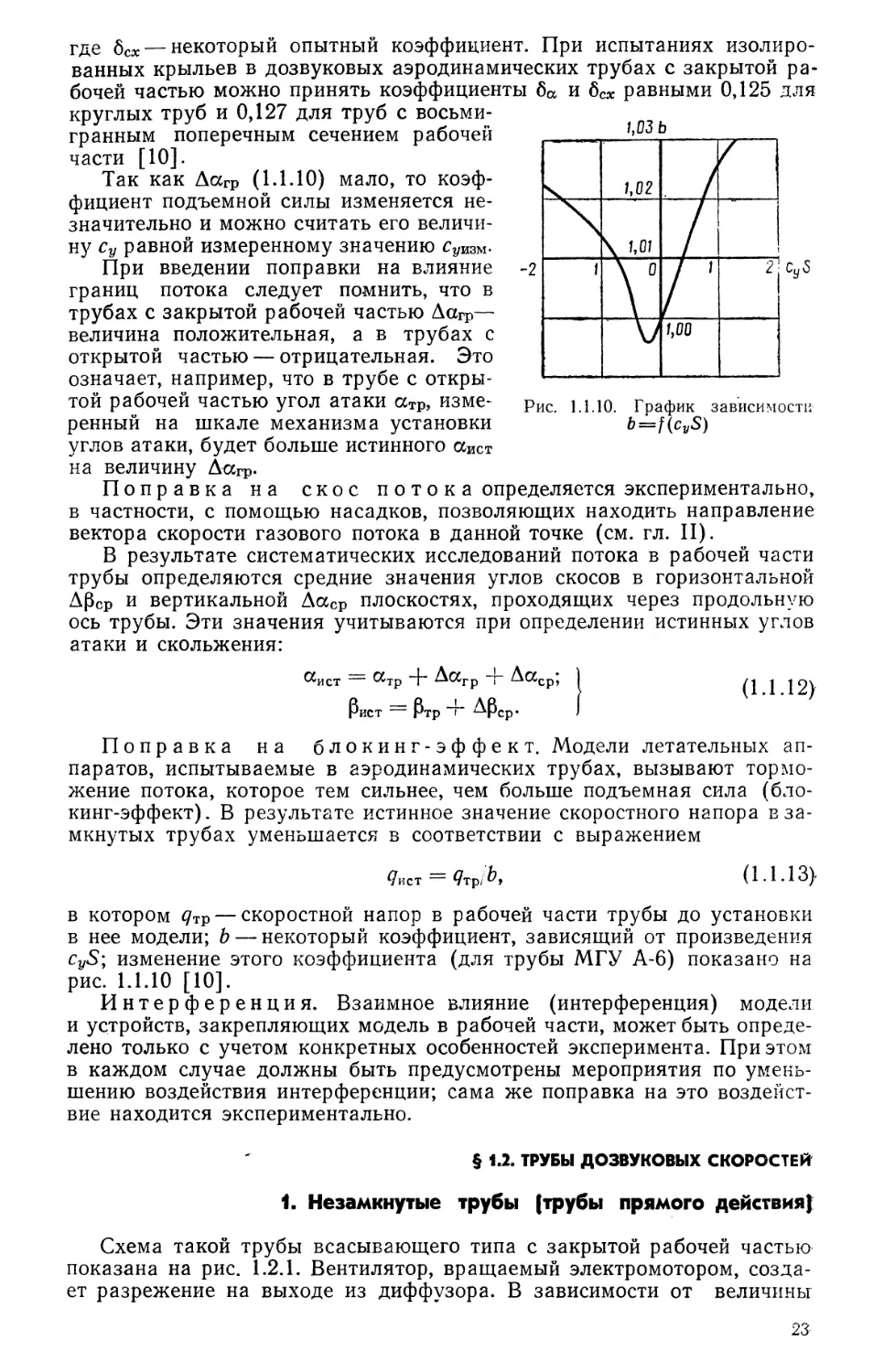
Поправка на блокинг—эффект. Модели летательных ап-
паратов, испытываемые в аэродинамических трубах, вызывают тормо-
жение потока, которое тем сильнее, чем больше подъемная сила ( бло-
кинг-эффект). В результате истинное значение скоростного напора в за-
мкнутых трубах уменьшается в соответствии с выражением
чист = су…-Ъ, (1.1.13)
в котором сир—скоростной напор в рабочей части трубы до установки
в нее модели; Ь—некоторый коэффициент, зависящий от произведения
суЗ; изменение этого коэффициента (для трубы МГУ А-б) показано на
рис. 1.1.10 [10].
И н т е р ф е р е н ц и я. Взаимное влияние (интерференция) модели.
и устройств, закрепляющих модель в рабочей части, может быть опреде-
лено только с учетом конкретных особенностей эксперимента. При этом
в каждом случае должны быть предусмотрены мероприятия по умень-
шению воздействия интерференции; сама же поправка на это воздейст-
вие находится экспериментально.
" 5 1.2. ТРУБЫ дОЗВУКОВЫХ СКОРОСТЕЙ‘
1. Незамкнутые трубы [трубы прямого действия}:
Схема такой трубы всасывающего типа с закрытой рабочей частью-
показана на рис. 1.2.1. Вентилятор, вращаемый электромотором, созда-
ет разрежение на выходе из диффузора. В зависимости от величины
23-
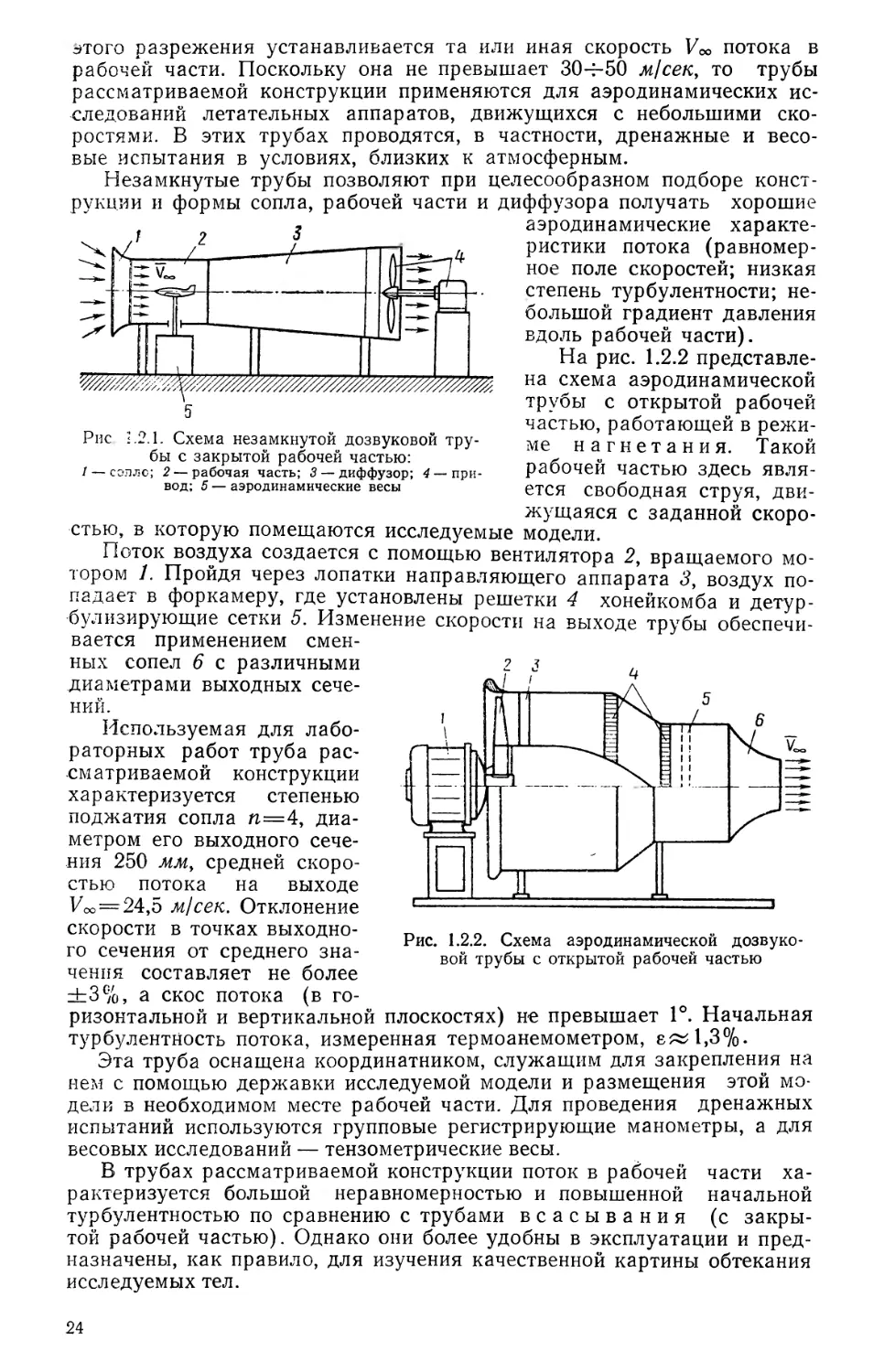
этого разрежения устанавливается та или иная скорость У… потока в
рабочей части. Поскольку она не превышает 30+50 м/сек, то трубы
рассматриваемой конструкции применяются для аэродинамических ис—
следований летательных аппаратов, движущихся с небольшими ско-
ростями. В этих трубах проводятся, в частности, дренажные и весо-
вые испытания в условиях, близких к атмосферным.
Незамкнутые трубы позволяют при целесообразном подборе конст-
рукции и формы сопла, рабочей части и диффузора получать хорошие
, 2 3 аэродинамические характе-
4 ристики потока (равномер—
ное поле скоростеи; низкая
степень турбулентности; не—
большой градиент давления
вдоль рабочей части).
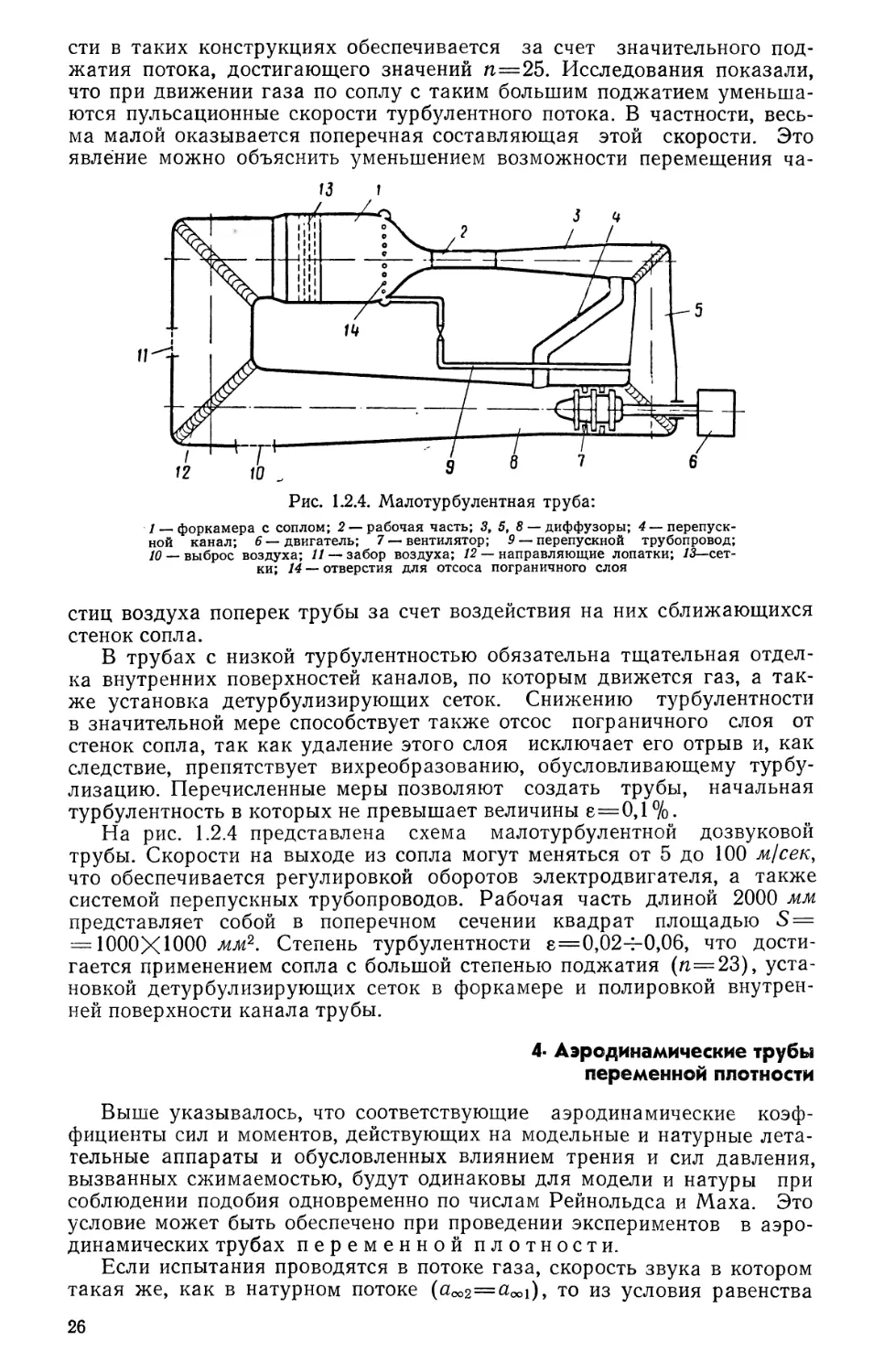
На рис. 1.2.2 представле-
на схема аэродинамической
трубы с открытой рабочей
\
\
::
/
Д;//’//”'/;/ , /
5 „
_ „ частью, работающеи в режи—
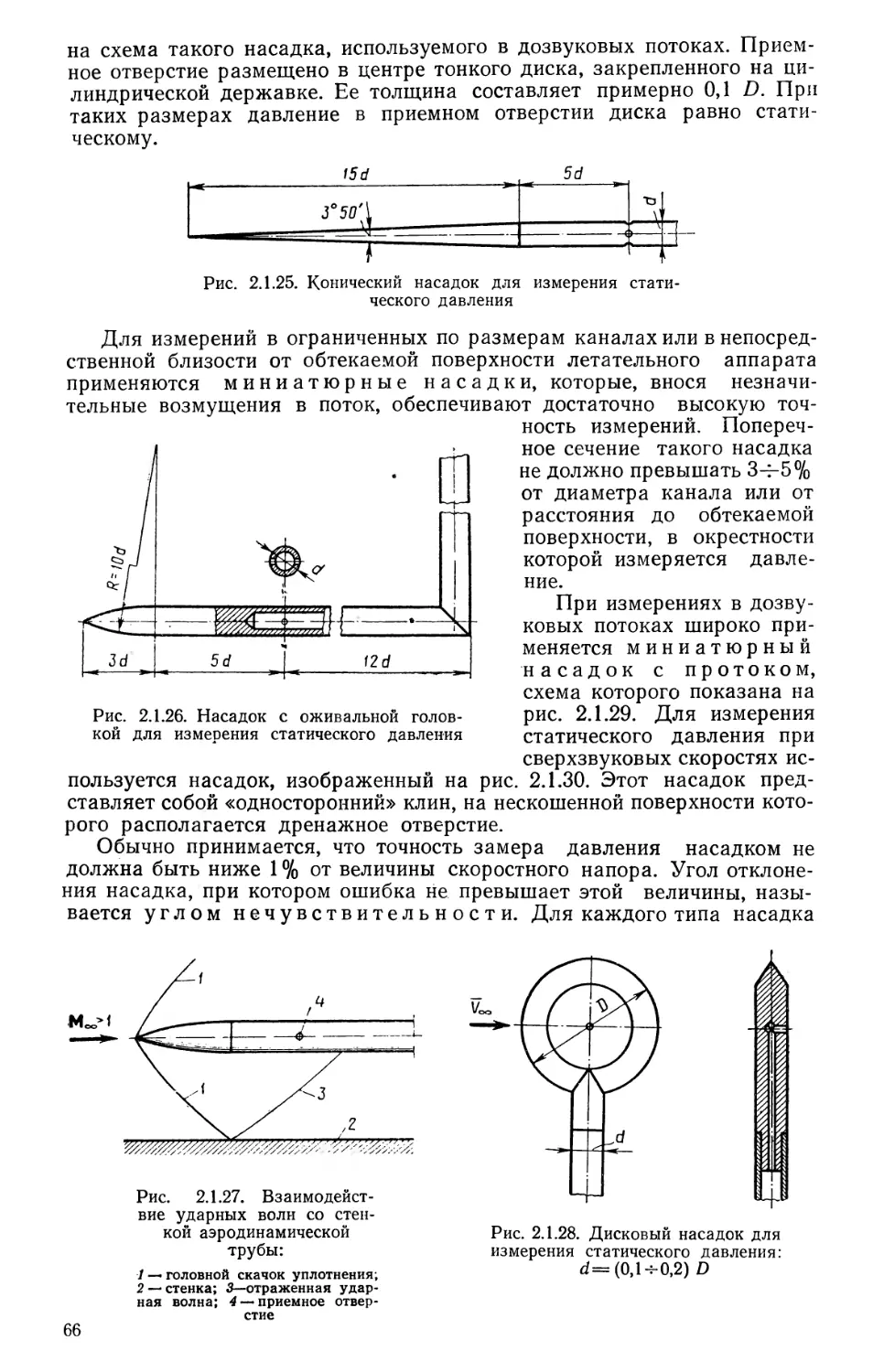
Рис 52.1. Схема незамкнутои дозвуковой тру- ‚ме Н & Г Н е т а Н И Я Такой
бы с закрытой рабочей частью: „ '
1—сс-пло; 2—рабочая часть; З—диффузор; 4—при- рабочеи частью ЗДЕСЬ ЯВЛЯ-
вод; 5—аэродинамические весы ется СВОбОДНЗЯ струя, дви-
жущаяся с заданной скоро—
стью, в которую помещаются исследуемые модели.
Поток воздуха создается с помощью вентилятора 2, вращаемого мо—
тором ]. Пройдя через лопатки направляющего аппарата 3, воздух по—
падает в форкамеру, где установлены решетки 4 хонейкомба и детур—
-булизирующие сетки 5. Изменение скорости на выходе трубы обеспечи-
вается применением смен-
ных сопел б с различными
диаметрами выходных сече- \
2
!
ний.
Используемая для лабо-
раторных работ труба рас—
\сматриваемой конструкции
характеризуется степенью
поджатия сопла п=4‚ диа- .
метром его выходного сече-
ния 250 мм, средней скоро—
стью потока на выходе Д
Уоо=24,5 м/сек. Отклонение
СКОРОСТИ В точках ВЫХОДНО‘ Рис. 1.2.2. Схема аэродинамической дозвуко-
ГО сечения ОТ Среднего зна- вой трубы с открытой рабочей частью
чения составляет не более
$392), а скос потока (в го-
ризонтальной и вертикальной плоскостях) не превышает 1°. Начальная
турбулентность потока, измеренная термоанемометром, 8%1,30/0.
Эта труба оснащена координатником, служащим для закрепления на
нем с помощью державки исследуемой модели и размещения этои мо-
дели в необходимом месте рабочей части. Для проведения дренажных
испытаний используются групповые регистрирующие манометры, а для
весовых исследований — тензометрические весы. __
В трубах рассматриваемой конструкции поток в рабочей части ха-
рактеризуется большой неравномерностью и повышенной начальной
турбулентностью по сравнению с трубами в с а с ы в а н и я (с закры-
той рабочей частью). Однако они более удобны в эксплуатации и пред—
назначены, как правило, для изучения качественной картины обтекания
исследуемых тел.
т
‹
| _.
..
.
Тег:—'
№№“
[___]
24
2. Замкнутые аэродинамические трубы
На рис. 1.2.3 представлена схема такой аэродинамической трубы
с открытой рабочей частью. По этой схеме изготовлена труба с рабочей
частью длиной 1100 мм. Канал трубы имеет восьмиугольное сечение;
расстояние между противоположными сторонами сопла составляет-
_ . ‘ ‚__`
"/
// +?
\ |Ъ№Ё7ЁО
/
` `
\`
*`
\
4.
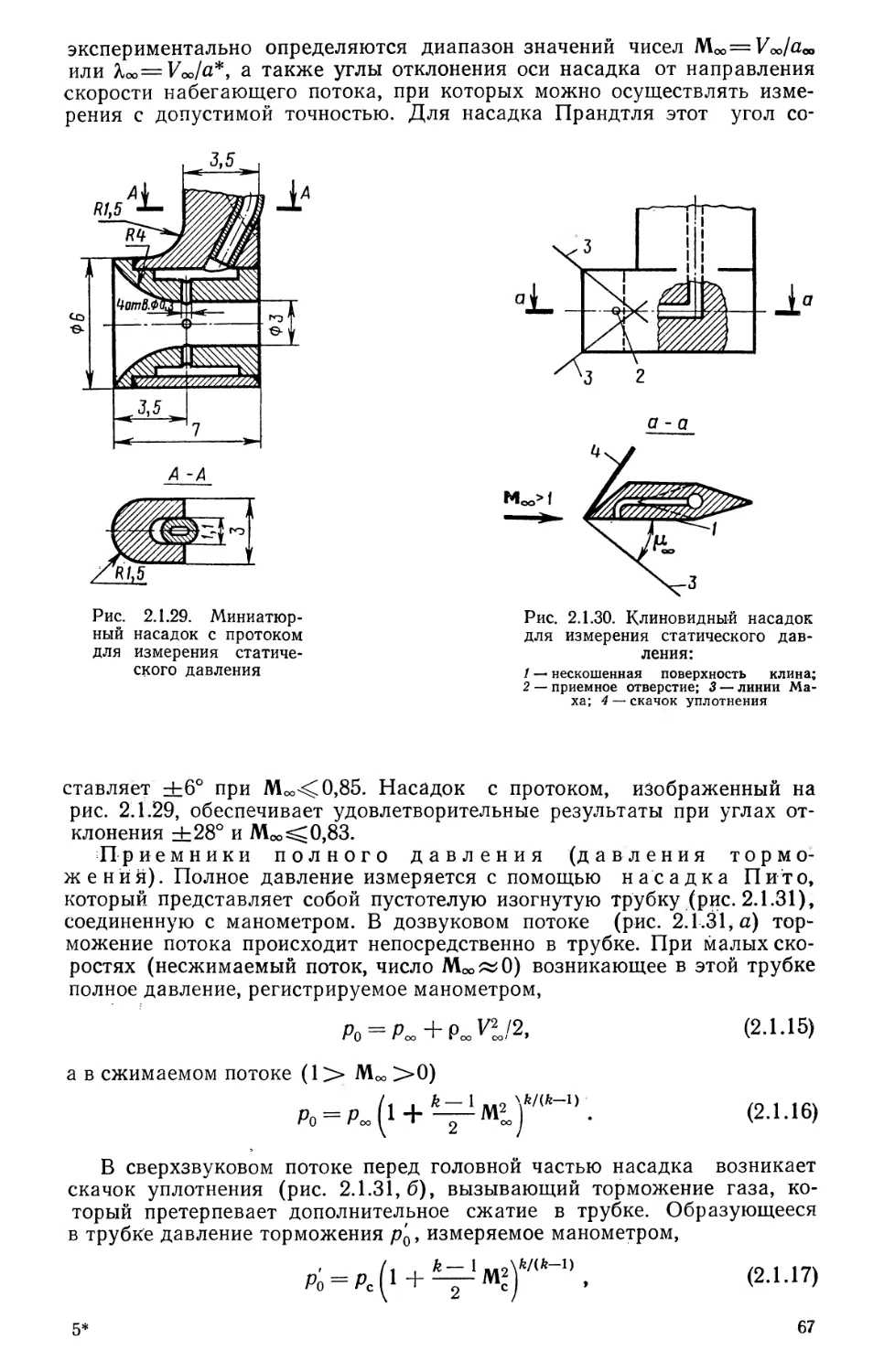
Рис. 1.2.3. Схема замкнутой аэродинамической трубы с открытой рабочей
частью:
1—сопло; 2—обратный канал; З—направляющий аппарат; 4— вентилятор (компрессор);
5—диффузор; б—направляющие лопатки; 7—механизм углов атаки с закрепленной
на нем моделью летательного аппарата
540 мм; степень поджатия сопла равна шести. Привод трубы пред—
ставляет собой восьмилопастный вентилятор диаметром 1780 мм, вра—
щаемый электромотором переменного тока мощностью 45 квт. Этот при—
вод обеспечивает скорость потока в рабочей части Уоо=59‚2 м/сек.
В трубе рассматриваемой конструкции число оборотов вентилятора не
регулируется, поэтому скорость потока постоянная.
Исследованиями установлено, что неравномерность скорости в ра-
бочей части определяется величиной і1,2%, а углы скоса потока (в го—
ризонтальной и вертикальной плоскостях) не превышают 0,45°. Про-
дольный градиент давления в потоке этой рабочей части аЁр/сіх=0‚003,
а начальная турбулентность 8% 1,33 %.
С целью уменьшения потерь энергии на завихрение в местах поворо—
та потока в канале трубы закрепленынаправляющиелопатки. Эта тру-
ба оснащена теми же приспособлениями для установки модели и изме-
рительными устройствами, что и рассмотренная незамкнутая труба
(см. рис. 1.2.2).
3. Трубы : низкой турбулентностью-
Для уменьшения разницы в величинах аэродинамических коэффи—
циентов, определенных во время летных и «трубных» испытаний (что
объясняется неодинаковыми значениями начальной турбулентности),
созданы специальные конструкции труб, обеспечивающие потоки с низ—
кой турбулентностью, близкой к атмосферной. Снижение турбулентно-
25
сти в таких конструкциях обеспечивается за счет значительного под—
жатия потока, достигающего значений п=25. Исследования показали,
что при Движении газа по соплу с таким большим поджатием уменьша-
ются пульсационные скорости турбулентного потока. В частности, весь-
ма малой оказывается поперечная составляющая этой скорости. Это
явление можно объяснить уменьшением возможности перемещения ча—
”@
/
12
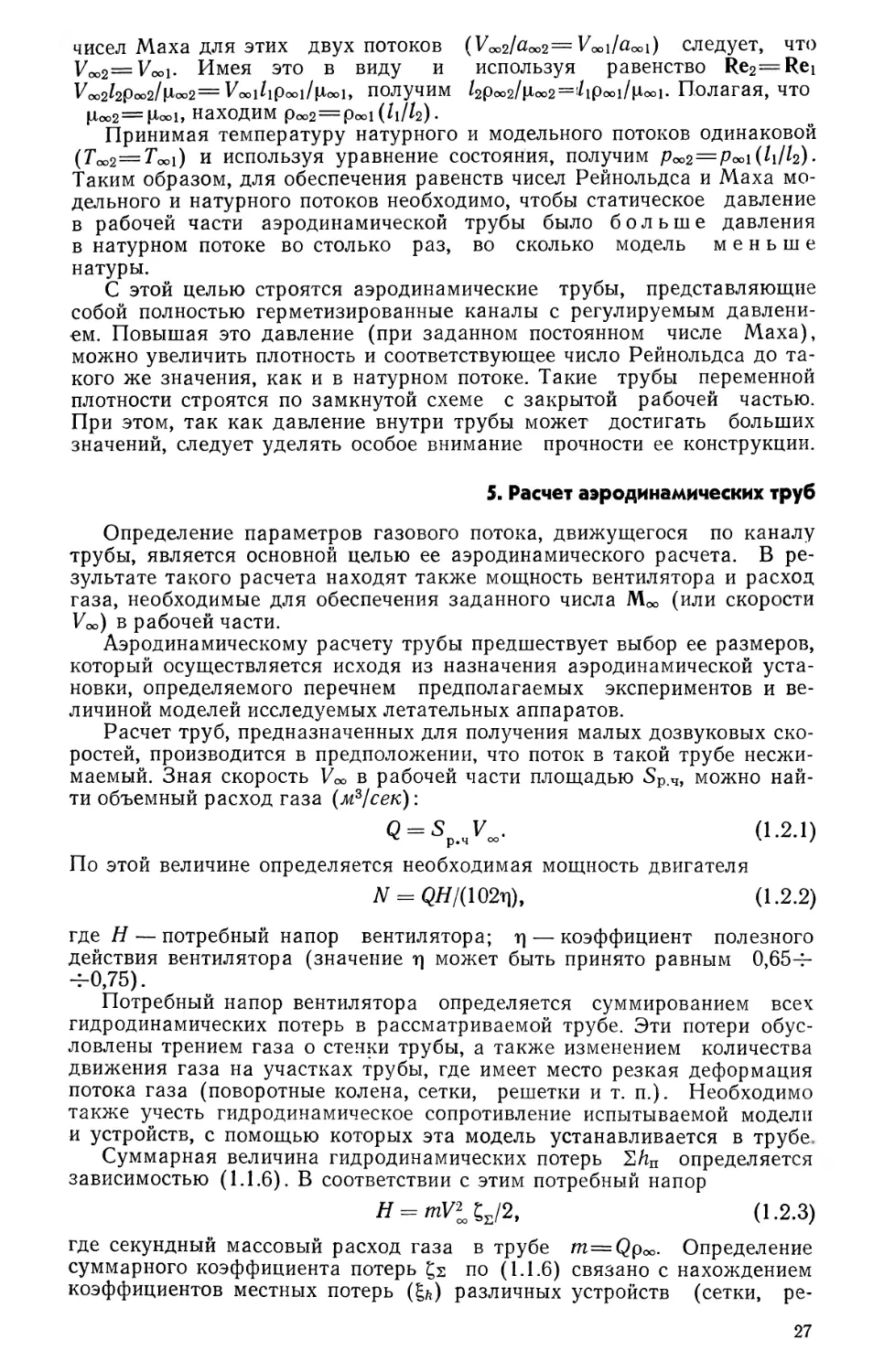
Рис. 1.2.4. Малотурбулентная труба:
‘! —— форкамера с соплом; 2— рабочая часть; 3, 5, 8 — диффузоры; 4— перепуск-
ной канал; 6 — двигатель; 7 —- вентилятор; 9 — перепускной трубопровод;
10 — выброс воздуха; 11 — забор воздуха; 12 — направляющие лопатки; 13—сет-
ки; 14—отверстия для отсоса пограничного слоя
стиц воздуха поперек трубы за счет воздействия на них сближающихся
стенок сопла.
В трубах с низкой турбулентностью обязательна тщательная отдел-
ка внутренних поверхностей каналов, по которым движется газ, а так—
же установка детурбулизирующих сеток. Снижению турбулентности
в значительной мере способствует также отсос пограничного слоя от
стенок сопла, так как удаление этого слоя исключает его отрыв и, как
следствие, препятствует вихреобразованию, обусловливающему турбу-
лизацию. Перечисленные меры позволяют создать трубы, начальная
турбулентность в которых не превышает величины е=0‚1 %.
На рис. 1.2.4 представлена схема малотурбулентной дозвуковой
трубы. Скорости на выходе из сопла могут меняться от 5 до 100 м/сек,
что обеспечивается регулировкой оборотов электродвигателя, а также
системой перепускных трубопроводов. Рабочая часть длиной 2000 мм
представляет собой в поперечном сечении квадрат площадью 8 =
=1000><1000 мм2. Степень турбулентности е=0,02—:—0‚06‚ что дости-
гается применением сопла с большой степенью поджатия (п=23)‚ уста-
новкой детурбулизирующих сеток в форкамере и полировкой внутрен-
ней поверхности канала трубы.
4- Аэродинамические трубы
переменной плотности
Выше указывалось, что соответствующие аэродинамические коэф-
фициенты сил и моментов, действующих на модельные и натурные лета-
тельные аппараты и обусловленных влиянием трения и сил давления,
вызванных сжимаемостью, будут одинаковы для модели и натуры при
соблюдении подобия одновременно по числам Рейнольпса и Маха. Это
условие может быть обеспечено при проведении экспериментов в аэро—
динамических трубах переменной плотности.
Если испытания проводятся в потоке газа, скорость звука в котором
такая же, как в натурном потоке (а…2=а…1)‚ то из условия равенства
26
чисел Маха для этих Двух потоков (Уоо2/аоо2=Уоо1/аоо1) следует, что
У®2=Уооъ Имея это в виду и используя равенство Ке2=Не1
Уоо212рш2/п…2=У…Црщ/мщ, получим !2роог/моо2=:11роо1/ыоо1. Полагая, что
мю2=мооь находим 9002=РОО1(11/ 2). _,
Принимая температуру натурного и модельного потоков одинаковои
(Т…2=Тоо1) и используя уравнение состояния, получим роо2:роо1([1/12).
Таким образом, для обеспечения равенств чисел Рейнольдса и Маха мо-
дельного и натурного потоков необходимо, чтобы статическое давление
в рабочей части аэродинамической трубы было больше давления
в натурном потоке во столько раз, во сколько модель м ен ь ш е
натуры.
С этой целью строятся аэродинамические трубы, представляющие
собой полностью герметизированные каналы с регулируемым давлени-
ем. Повышая это давление (при заданном постоянном числе Маха),
можно увеличить плотность и соответствующее число Рейнольдса до та-
кого же значения, как и в натурном потоке. Такие трубы переменной
плотности строятся по замкнутой схеме с закрытой рабочей частью.
При этом, так как давление внутри трубы может достигать больших
значений, следует уделять особое внимание прочности ее конструкции.
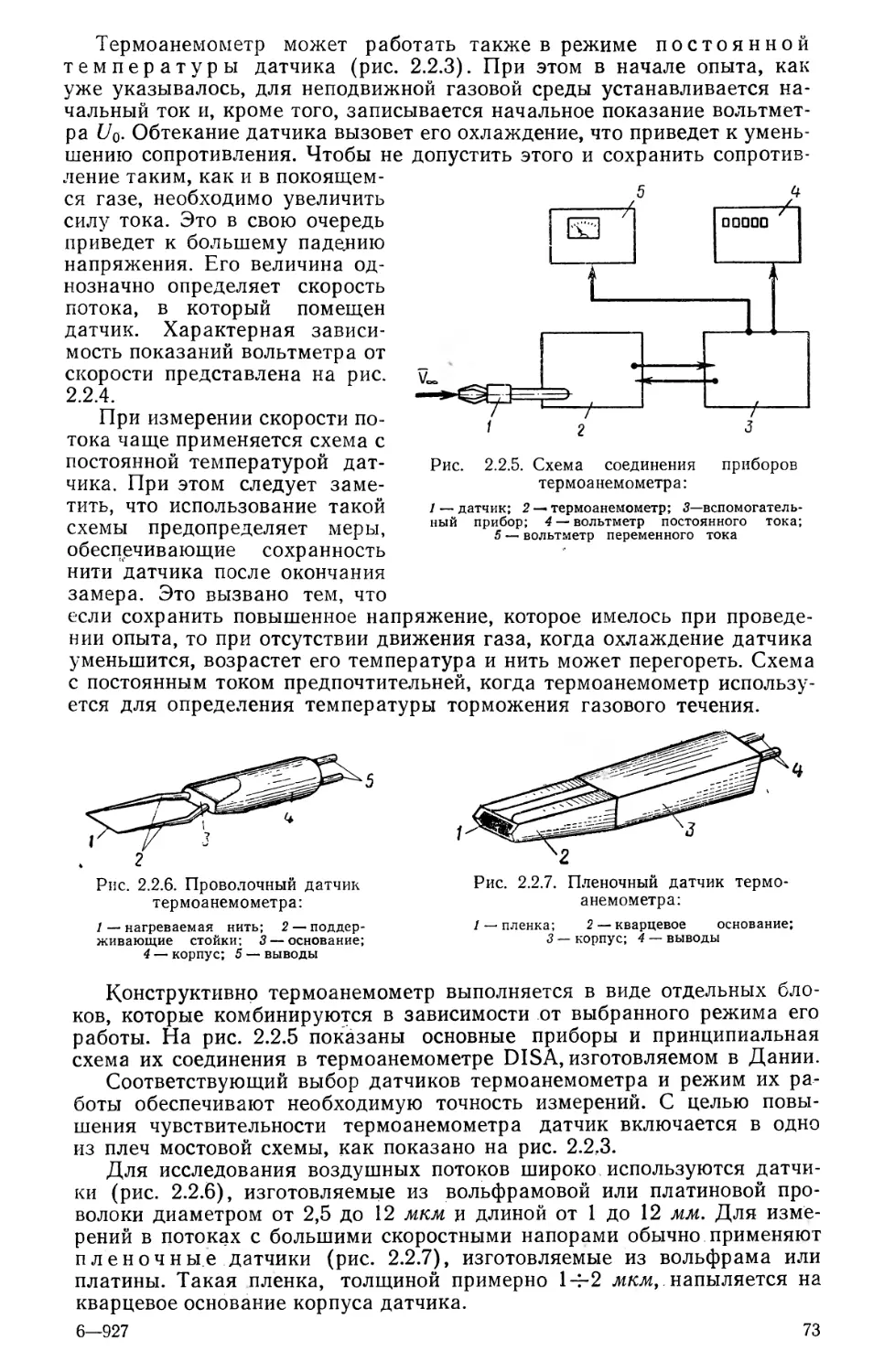
5. Расчет аэродинамических труб
Определение параметров газового потока, движущегося по каналу
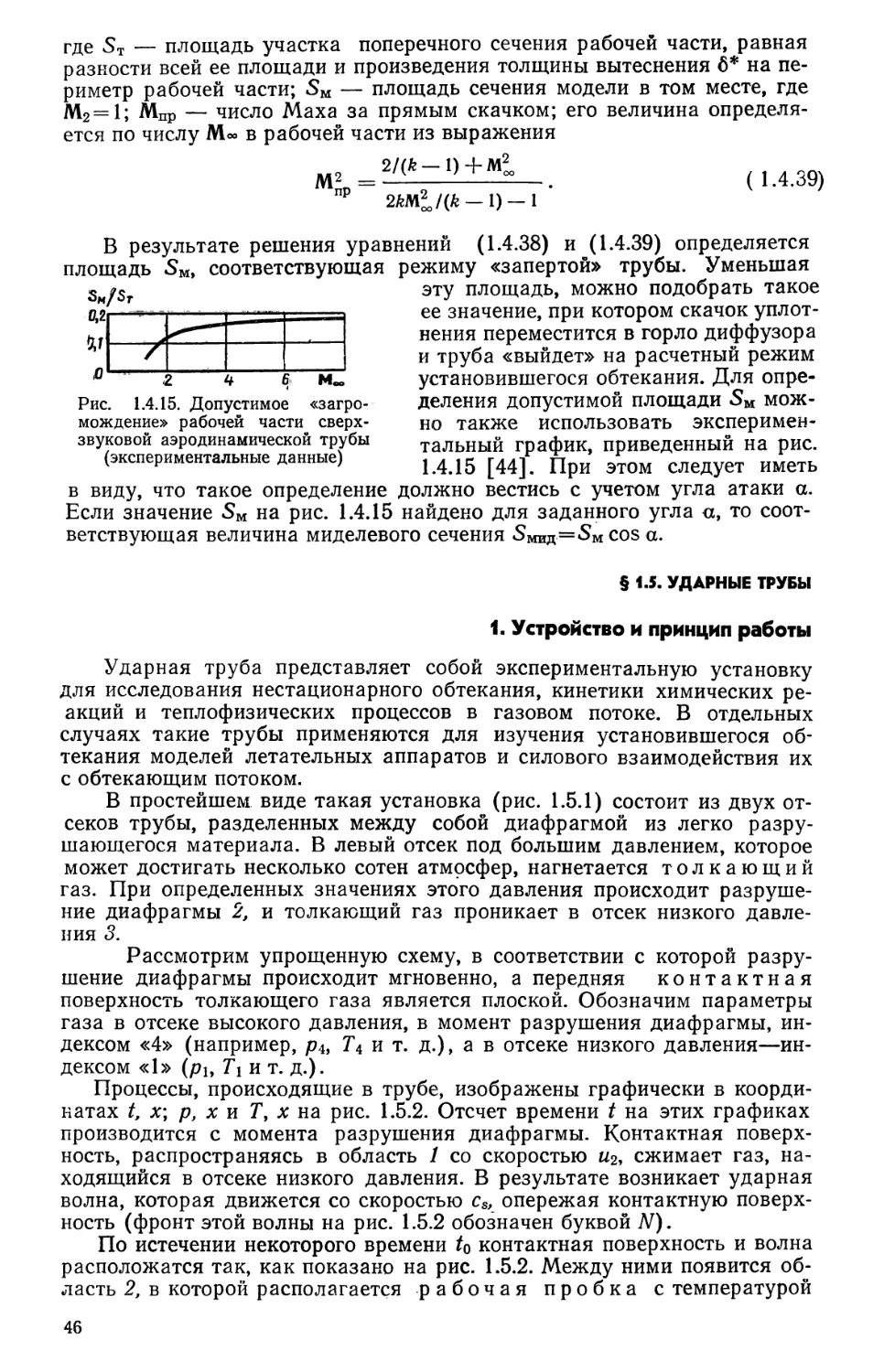
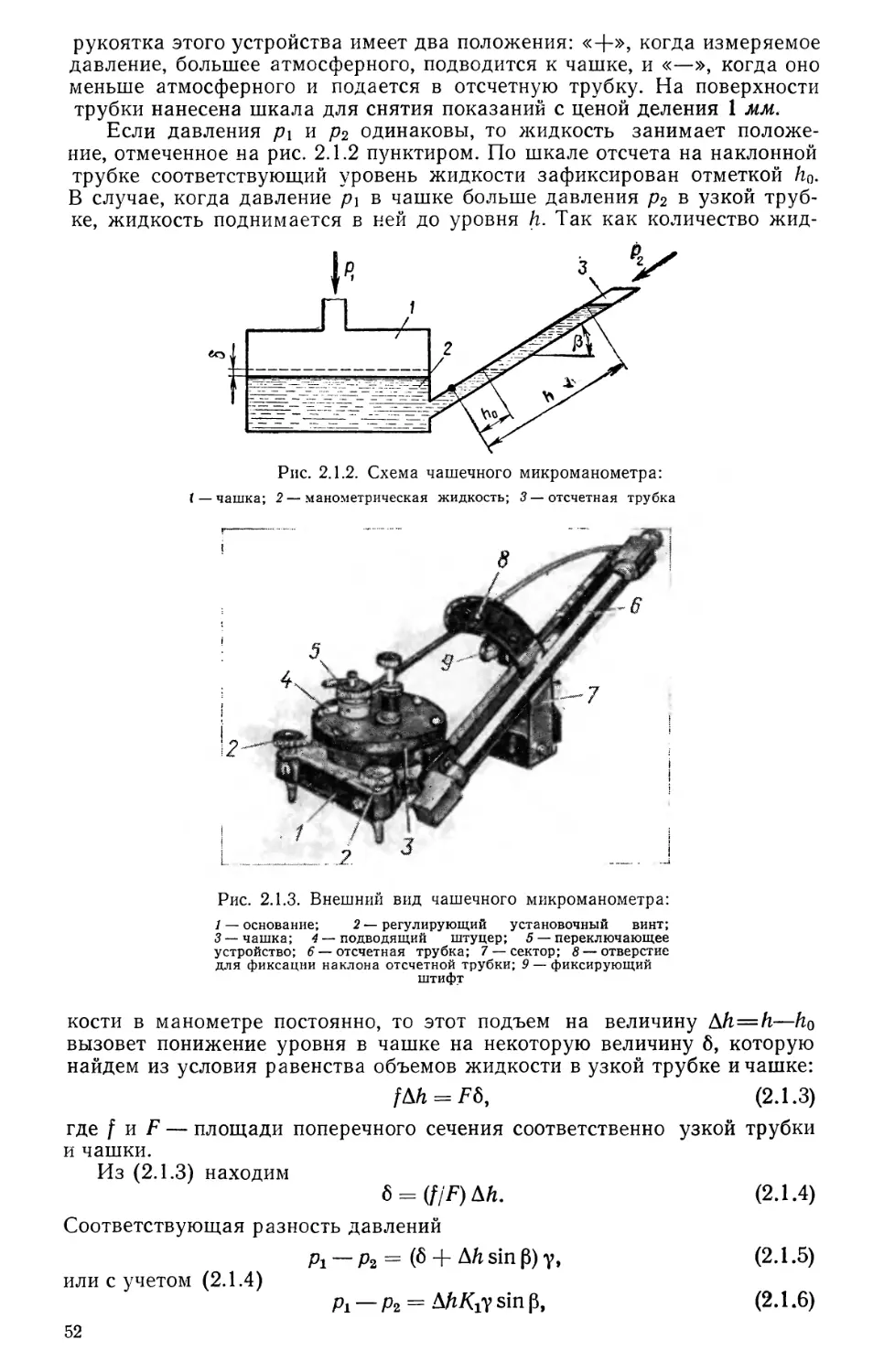
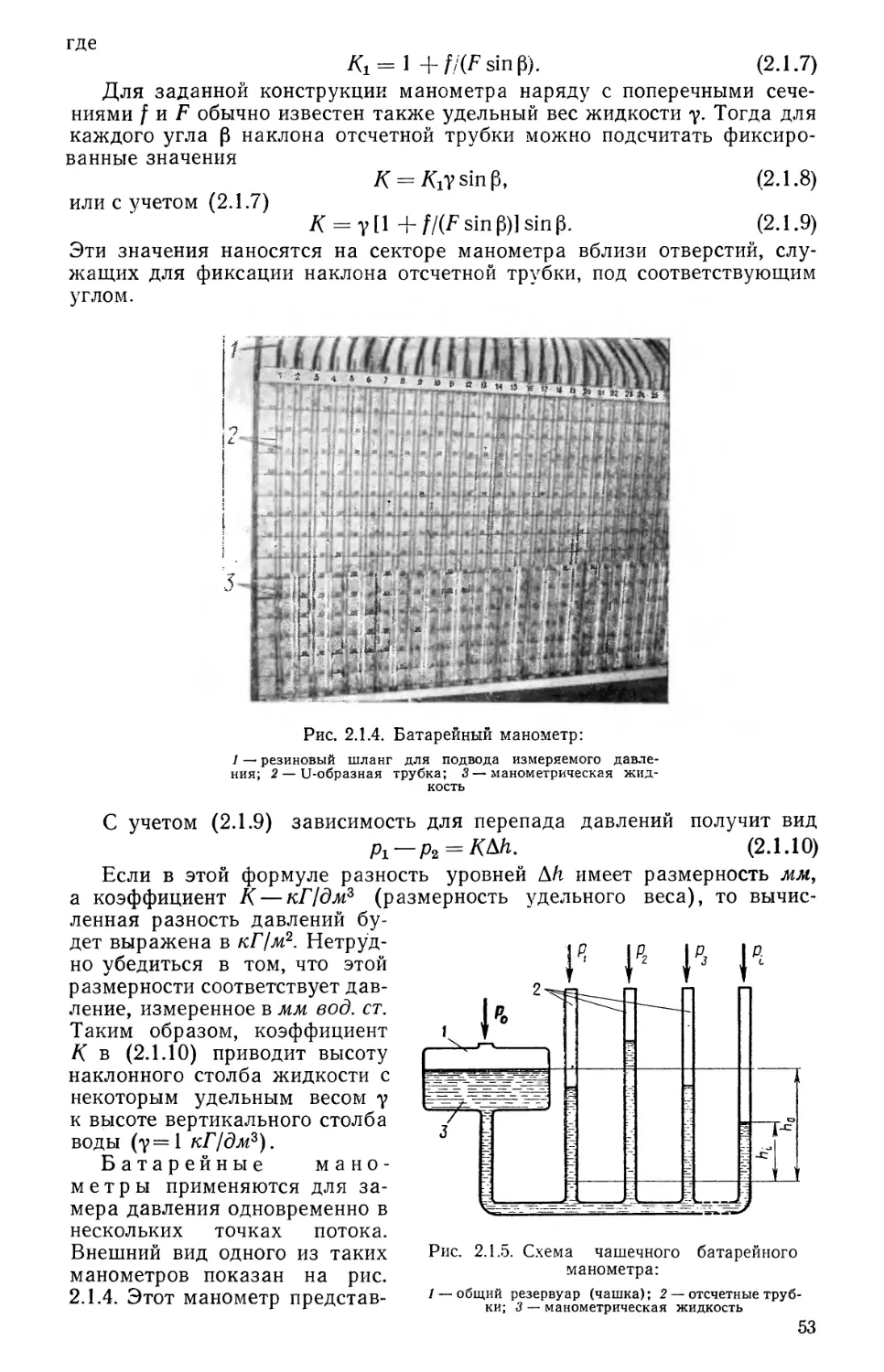
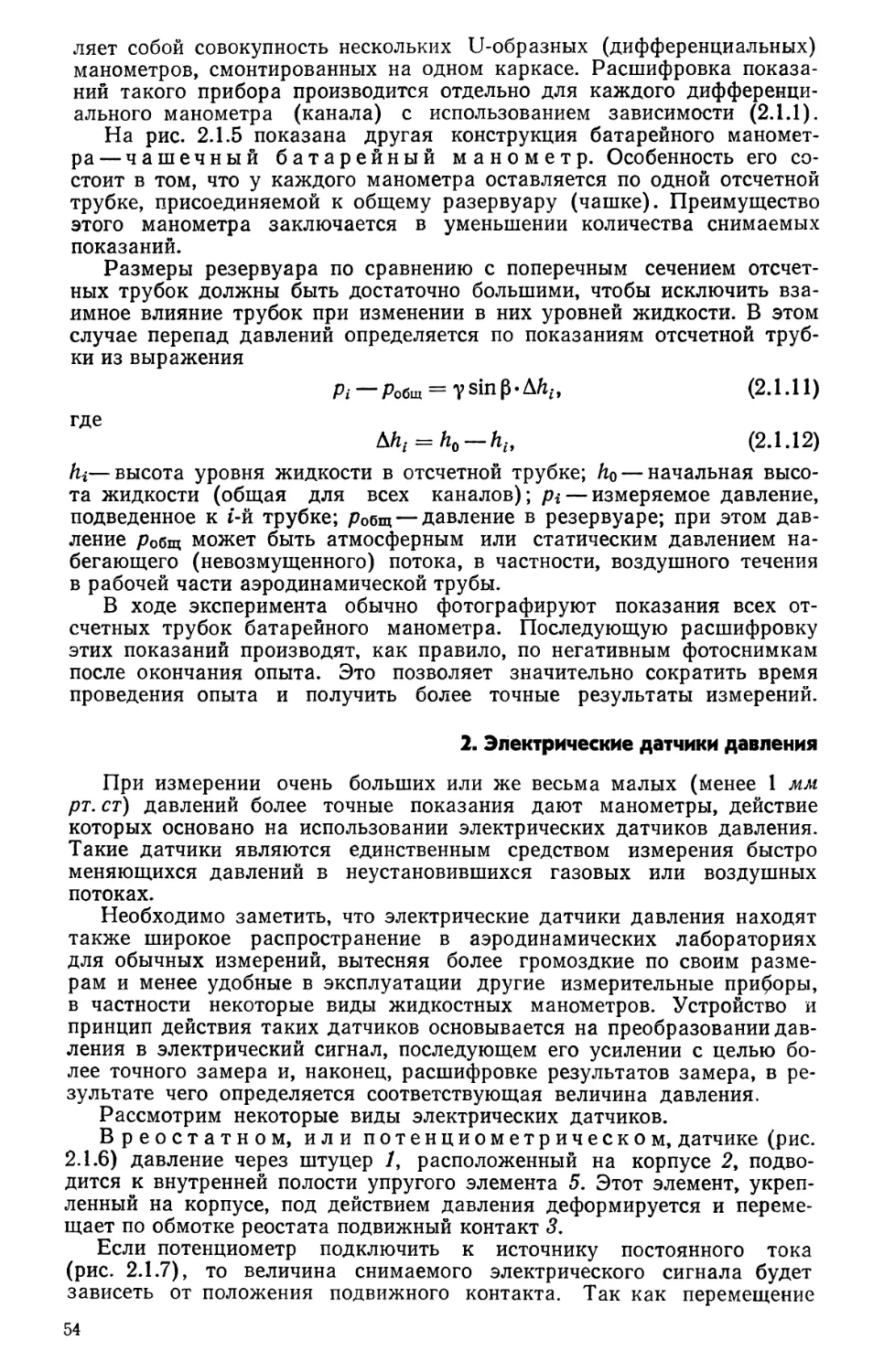
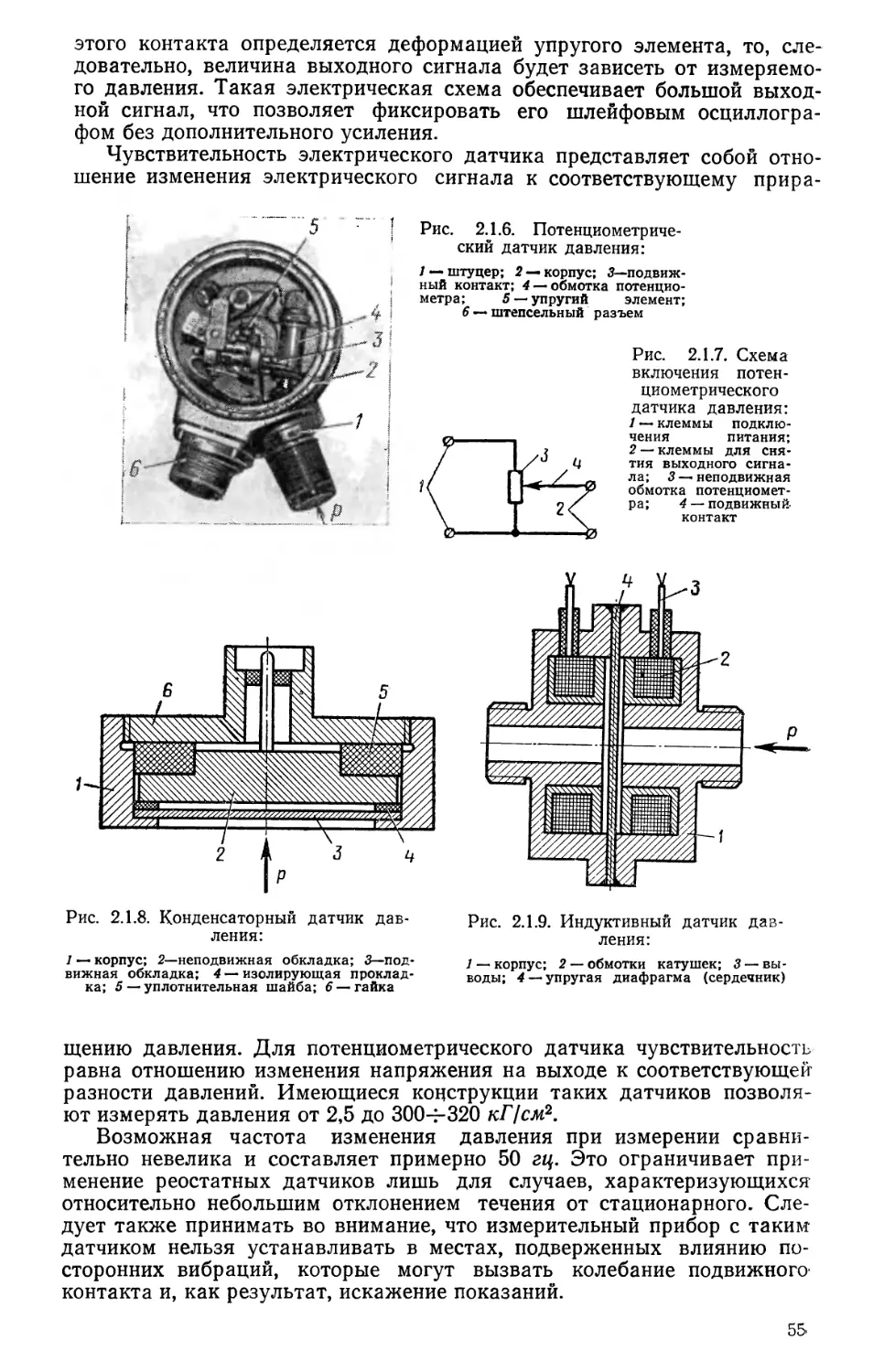
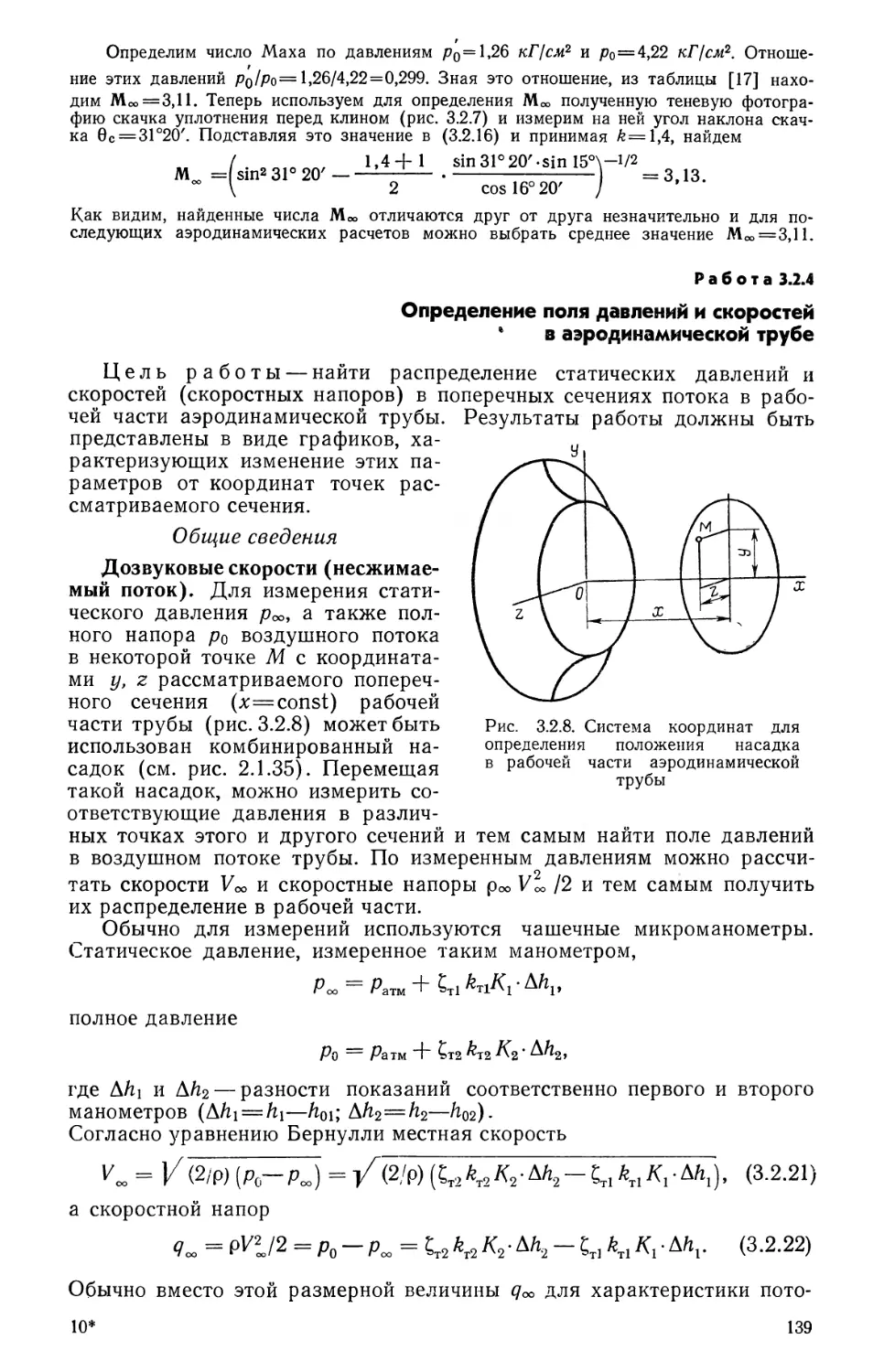
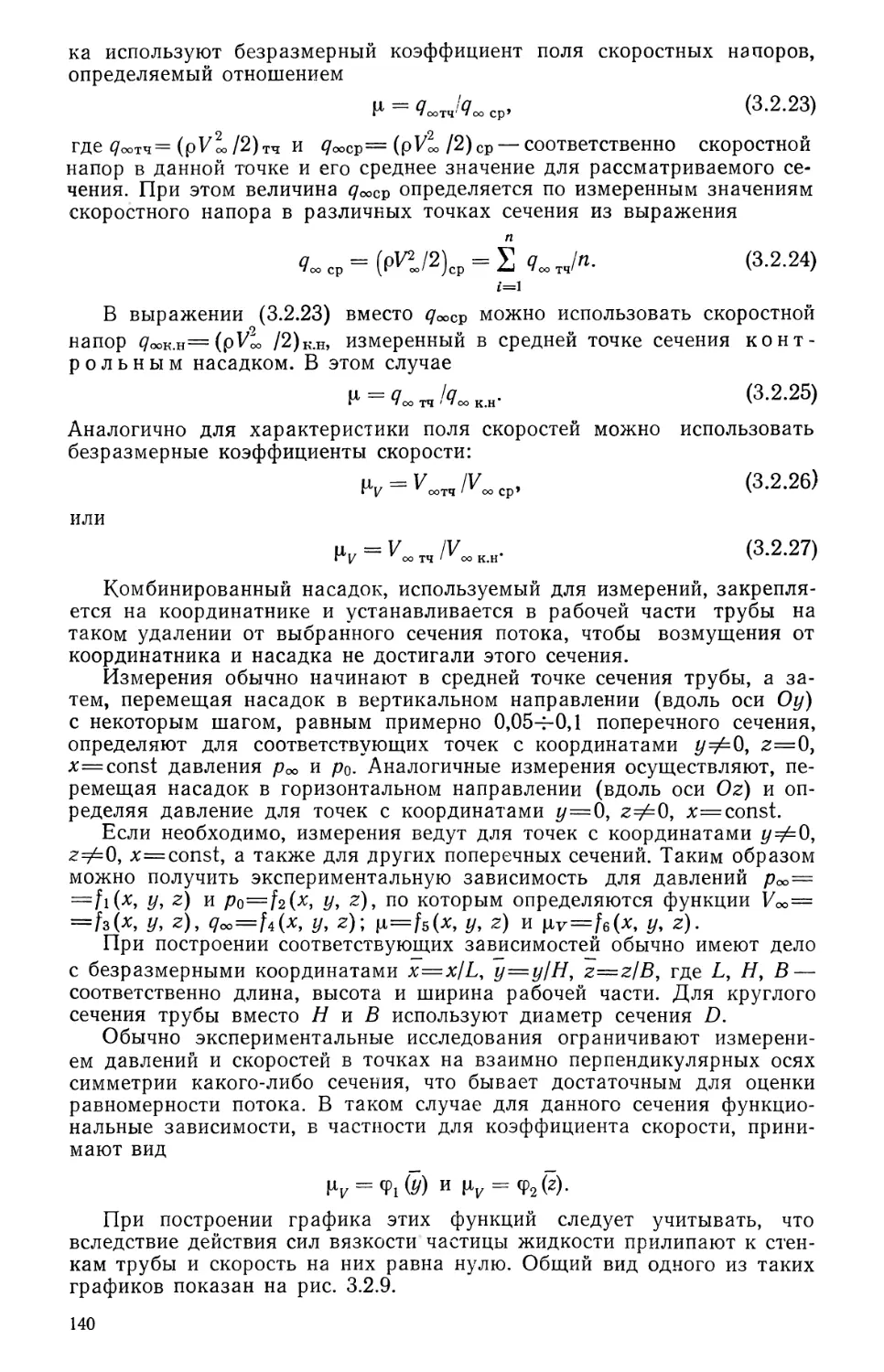
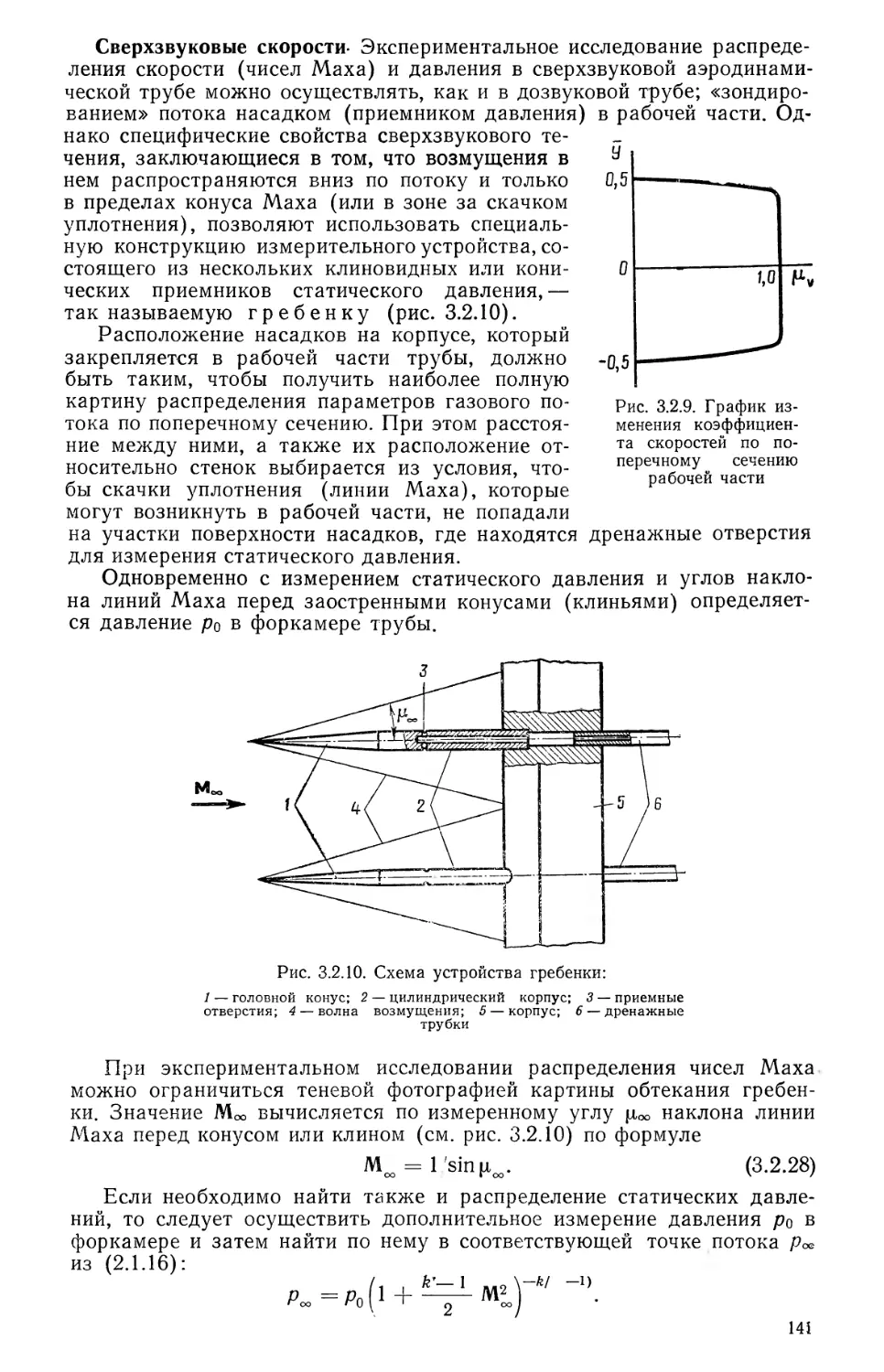
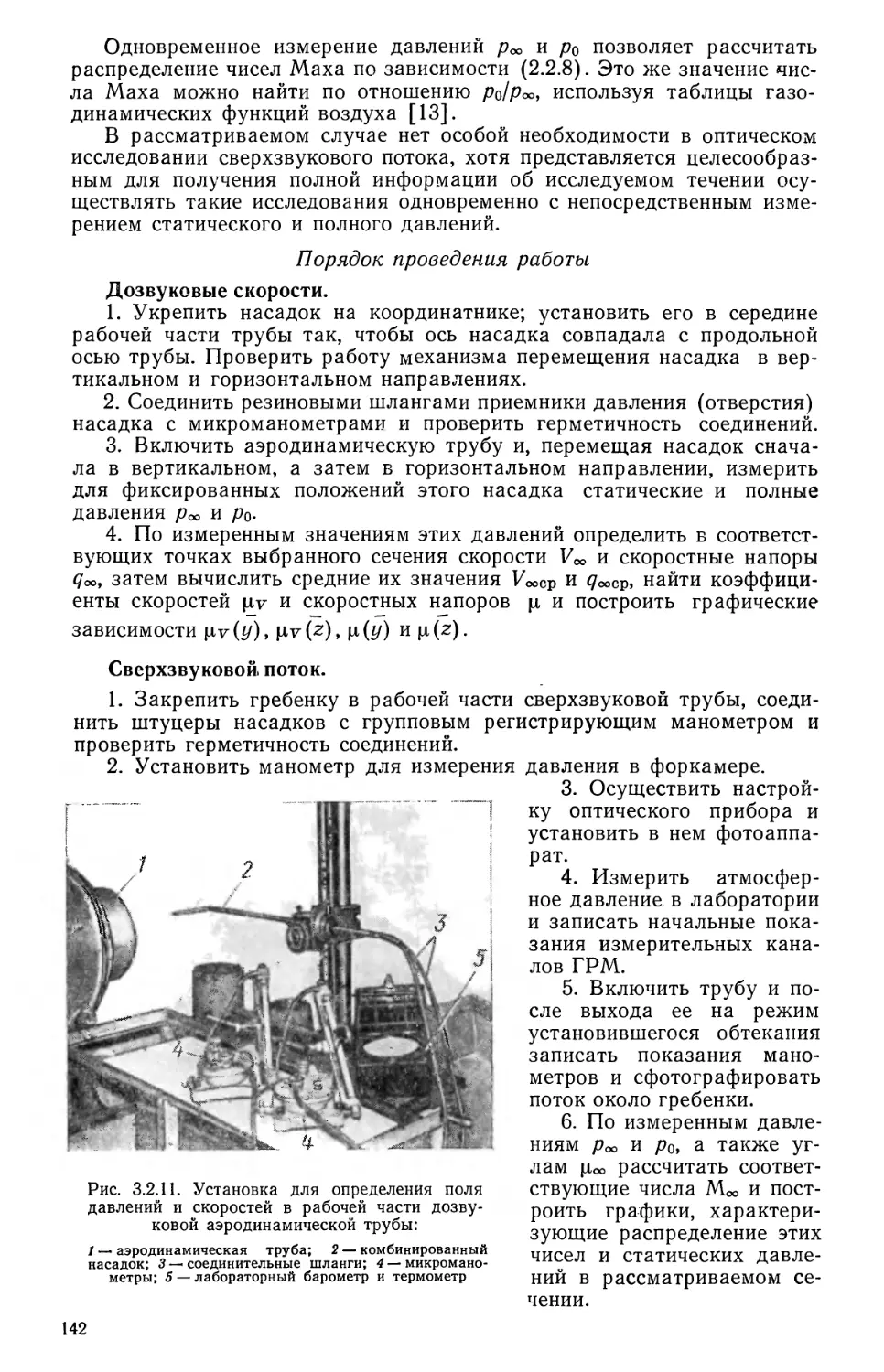
трубы, является основной целью ее аэродинамического расчета. В ре-
зультате такого расчета находят также мощность вентилятора и расход
газа, необходимые для обеспечения заданного числа Моо (или скорости
У…) в рабочей части.
Аэродинамическому расчету трубы предшествует выбор ее размеров,
который осуществляется исходя из назначения аэродинамической уста-
новки, определяемого перечнем предполагаемых экспериментов и ве-
личиной моделей исследуемых летательных аппаратов.
Расчет труб, предназначенных для получения малых дозвуковых ско—
ростей, производится в предположении, что поток в такой трубе несжи-
маемый. Зная скорость У… в рабочей части площадью $р_ч‚ можно най-
ти объемный расход газа (мЗ/сек):
О=$р_ч\/°о. (1.2.1)
По этой величине определяется необходимая мощность двигателя
№ : (ЗН/(10%), (1.2.2)
где Н _потребный напор вентилятора; п — коэффициент полезного
‚действия вентилятора (значение 11 может быть принято равным 0,65+
—:—0,75).
Потребный напор вентилятора определяется суммированием всех
гидродинамических потерь в рассматриваемой трубе. Эти потери обус-
ловлены трением газа 0 стенки трубы, а также изменением количества
движения газа на участках трубы, где имеет место резкая деформация
потока газа (поворотные колена, сетки, решетки и т. п.). Необходимо
также учесть гидродинамическое сопротивление испытываемой модели
и устройств, с помощью которых эта модель устанавливается в трубе
Суммарная величина гидродинамических потерь Шип определяется
зависимостью (1.1.6). В соответствии с этим потребный напор
Н : туз„ авт, (1.2.3)
где секундный массовый расход газа в трубе т=@р…. Определение
суммарного коэффициента потерь ;;; по (1.1.6) связано с нахождением
коэффициентов местных потерь (ёд) различных устройств (сетки, ре-
27
щетки, колена и т. п.), входящих в конструкцию трубы (см. [11; 16;
32; 52]). Одновременно должны быть вычислены коэффициенты сопро-
тивления трения № по соответствующим зависимостям, известным из кур-
са гидравлики.
Вычисление потерь в соответствии с (1.1.6) связано с нахождением
скоростей в различных сечениях контура трубы. Величина этой скоро—
сти определяется из условия сохранения расхода воздуха
У„ $,… : 1/00 3
… (1.2.4)
р.ч’
где Удщ—ОТЫСКИВаеМЗЯ скорость потока в сечении площадью ЗМ,-);
Удо—скорость в рабочей части площадью поперечного сечения $р_ч..
Зная скорости, нетрудно найти величины давлений рд… в тех же сече-
ниях, воспользовавшись формулой Бернулли:
У2 1/3 1/3,
р…,+ р ’;”) = ра+ 97 + 9,9 2 ‚ (1.2.5)-
где @@ — суммарный коэффициент сопротивления участка трубы, распо—
ложенного между расчетным сечением /г(і) и тем сечением а, где пара—
метры газа известны (ра, Уа).
При расчете аэродинамической трубы с открытой рабочей частью
это сечение совпадает со срезом сопла, в котором скорость определяется
величиной У…, а давление равно атмосферному ратм. В соответствии
с этим
1/2 . 30 1/20
Ра‹г›+Р_Ё2Ш-= Ра… +97 +ЁаР—2—- (13.6)
Проектируя трубу, следует учесть возможное неблагоприятное влия—
ние загромождения рабочей части моделью на результаты эксперимен—
тальных исследований. Это влияние можно свести к минимуму правиль—
ным выбором размер0в модели, соответствующих данной конструкции
трубы и ее рабочей части. Модель, загромождающая рабочую часть за-
крытого типа, вызывает значительное увеличение скорости потока, в то
время как в открытой рабочей части, где стенки отсутствуют, модель
будет обтекаться замедленным потоком. Этот эффект замедления обус—
ловлен тем, что давление на внешней части струи остается постоянным
на всем ее протяжении, а это приводит к повышению давления у модели
и соответствующему снижению скорости.
Уменьшить влияние загромождения на характер обтекания можно-
путем подбора достаточно малых размеров модели. Так, для неоткло-
ненных тел вращения (нулевой угол атаки) можно пренебречь влияни-
ем их загромождения, если площадь миделевого сечения модели будет
не более 4-3—50/0 от площади поперечного сечения рабочей части. Для
самолета это влияние будет пренебрежимо малым при условии, что от-
ношение размаха крыльев к ширине рабочей части равно или меньше
0,75 (для прямоугольных крыльев) и 0,6 (для стреловидных).
& 1.3. ТРУБЫ ОКОЛОЗВУКОВЫХ СКОРОСТЕЙ
Для испытаний моделей летательных аппаратов в диапазоне чисел М…,
близких к единице (0‚8<М…<1‚2), применяются аэродинамические
трубы окол оз вуковых скоростей. К их числу относятся и так
называемые т р а н с з в у к о в ые т р у 6 ы, в рабочей части которых
создается поток с числом Маха, равным или несколько большим едини-
цы (М…)Ц.
Исследования показали, что поток в рабочей части обычной конст-
рукции (с гладкими стенками), имеющий скорость, близкую к скорости
28
звука (М…/‚=; 1), неустойчив к воздействию на него различных возмуще-
ний, возникающих при обтекании модели. При этом, например, достаточ—
но небольшого изменения размеров модели или ее угла атаки, чтобы зна-
чительно изменились (в сравнении с расчетным значением) околозвуко-
вая скорость и соответствующее число Мос. Это происходит оттого, что
площади критического и выходного сечений околозвуковых сопел мало
отличаются друг от друга. После же «загромождения» выходного сече-
ния такого сопла моделью и ее подвеской его площадь уменьшается.
Такое уменьшение, даже небольшое, вследствие повышенной чувстви-
тельности околозвуковой скорости к величине входного и выходного се-
М<1 М=1 ]МЯ 6) №“ 5 М>! М<і °
\‘ ‚ \. ! ,
\і ' :
а\
7
_»
— д‘?
‚23 ‹: 'М='2°
Рис. 1.3.1. Схема течения в околозвуковых трубах
с закрытой рабочей частью в условиях запирания:
а—труба с дозвуковым соплом; б—труба со сверхзвуко-
вым соплом;
1 — сопло; 2 —- стенка рабочей части; 3 — модель;
————— положение критического сечения в потоке газа:
с—скачки уплотнения
чений может привести к существенному изменению этой скорости.
Для обеспечения устойчивого потока в современных конструкциях
околозвуковых аэродинамических труб используется закрытая рабочая
часть с п е р ф о р и р о в а н н ым и стенками. В таких стенках про-
сверливается большое число отверстий, для того чтобы поток, расширя—
ющийся при обтекании модели, имел возможность частично перетекать
в камеру, окружающую рабочую часть трубы.
Из камеры газ отсасывается э к с г а у с т е р о м, благодаря чему
практически сводится к минимуму воздействие тех возмущений, кото—
рые вызывают изменение величины околозвуковой скорости, и обеспечи-
вается устойчивый характер движения.
Используя перфорированные стенки, удается не только приблизить
обтекание в трубе к условиям свободного полета с околозвуковой скоро-
стью, но и существенно ослабить воздействие . отраженных от стенок
скачков уплотнения на модель.
Как известно, при малых сверхзвуковых скоростях угол скачка (Но)
оказывается значительным,иотраженный от стенки скачок почти всегда
попадает на модель, изменяя характер аэродинамического воздействия
на нее по сравнению со свобоцным полетом. В том случае, когда рабо-
чая часть открыта и выполнена в виде герметической камеры, ударная
волна, попадающая на границу свобОДной струи, будет отражаться от
нее в виде волны разрежения, которая также изменяет картину обте-
кания.
При помощи перфорированных стенок удается найти такое конст—
руктивное решение рабочей части, которое обеспечивает создание ус-
ловий обтекания, являющихся в какой-то мере промежуточными между
условиями на стенке и на свободной границе. Благоприятный эффект
достигается при этом за счет взимодействия волн сжатия и разрежения,
которые как бы компенсируют друг друга, уменьшая искажение потока.
Рассмотрим особенность околозвуковых труб с закрытой рабочей ча-
стью, заключающуюся в ее «запирания». Вследствие загромождения
моделью рабочей части критическое сечение может сдвинуться вниз по
потоку (рис. 1.3.1‚а) и оказаться в месте наименьшего проходного се-
29
чения, образованного стенками трубы и моделью, что в свою очередь
приведет к образованию за таким сечением некоторой зоны местных
сверхзвуковых скоростей, ограниченной “скачками уплотнения.
Эта картина течения сохраняется и при дальнеишем изменении давле—
ния в форкамере: скорость потока на участке до критического сечения
останется постоянной и, как правило, «нерасчетной», т. е. не равной той
величине, которую предполагали иметь во время эксперимента. Труба
«запирается», искажая картину обтекания.
В околозвуковой трубе, рассчитанной на получение в рабочей части
потока скорости, несколько большей звуковой (Моо>1)‚ явление запи—
БМ @ 5
0,2” /
0,1
‚
/‚
\
у
00,5 0,0 0,7 0,0 0,9 1,0 М… —>\—\—\г\\2\
Рис. 1.3.2. Зависимость вели-
чины заполнения площади по-
перечного сечения рабочей ча-
Рис. 1.3.3. Схема течения в околозвуко-
вых трубах со сверхзвуковым соплом:
сти моделью И ее подвеской а—стенки рабочей части без перфорации;
мя: б—перфорированные стенки; (Эс—угол скач-
от числа 00 ка уплотнения; с—скачки
рания носит аналогичный характер. Сверхзвуковое сопло такой трубы
имеет очень малую разницу в площадях критического и выходного сече-
ний (так как число М… близко к единице). Поэтому размещение модели
в рабочей части может привести к тому, что наименьшее проходное се-
чение будет не в критическом сечении сопла, а там, где расположена мо-
дель. Именно здесь произойдет переход потока через скорость звука
и появятся сверхзвуковая зона и замыкающие ее скачки (рис. 1.3.1‚б).
На модель будет набегать не сверхзвуковой поток из сопла, как ожида-
лось, а дозвуковой, и повысить его скорость уже не удастся. Произойдет
«запирание» околозвуковой трубы со сверхзвуковым соплом.
Число М’; ‚ соответствующее началу запирания трубы, зависит от
«загромождения», т. е. степени заполнения площади поперечного сече-
ния рабочей части 8 моделью и ее полвеской с площадью сечения Змид.
График, приведенный на рис. 1.3.2, дает возможность оценить величину
этого загромождения [32]. Например, значению М’; =О,85 (точка А на
рисунке) соответствует площадь поперечного сечения модели и подвес—
ки Змид=0‚02 8. Согласно этому значению экспериментальные исследо—
вания можно вести лишь при условии, что степень заполнения меньше
2%. Такой же результат получается при сверхзвуковой скорости (точ—
ка В на рисунке соответствует Змид=0‚02 $ и м; = 1,15).
Исследования показывают, что в околозвуковых трубах эксперимен-
тальные данные будут ошибочными, если число М… отличается от ве-
личины М* соответствующей запиранию, менее чем на 0,02. Согласно
оо ’
графику, приведенному на рис. 1.3.2, при МЁО=1 запиранию соответству—
ет величина $мид/$=О. Это означает, что при звуковой скорости экспе-
30
римент С моделью НЗВОЗМОЖСН, так как ПЛОЩЗДЬ ее поперечного сечения
должна быть равна нулю.
Однако, как показал опыт эксплуатации труб, практически возмож—
но устранение запирания в случае, если закрытая рабочая часть таких
труб имеет перфорированные стенки и заключена в герметическую ка-
меру (рис. 1.3.3). В такой рабочей части поток, полвергающийся сжа-
тию между твердыми стенками рабочей части и модели, может расши-
ряться, частично перетекая через перфорационные отверстия в герме-
тическую камеру. В силу этого поток около модели не будет характери-
зоваться наименьшим поперечным сечением, т. е. здесь не образуется
критическое сечение, так как оно по-прежнему остается в наиболее уз—
кой части сопла. На выходе из сопла сохраняется расчетный (сверхзву-
ковой) режим течения, и запирания трубы не происходит.
& 1.4. СВЕРХЗВУКОВЫЕ АЭРОДИНАМИЧЕСКИЕ ТРУБЫ
1. Труба кратковременного действия
На рис. 1.4.1 изображена сверхзвуковая труба для исследования мо—
делей летательных аппаратов в диапазоне чисел М… от 2 до 5. Эта тру-
ба относится к типу б а л л о н н ы х
аэродинамических установок
кратковременным режимом работы и закрытой рабочей частью.
Заполнение баллонов воздухом производится при помощи компрес—
соров высокого давления ]. В конструкции аэр0динамической установ—
ки предусмотрена батарея, состоящая из 60 баллонов объемом 0,4 мЗ
каждый. В компрессорной станции установлены три компрессора про—
изводительностью 3 мЗ/мин каждый, обеспечивающие в баллонах мак-
симальное давление 250 кГ/см2. Перед тем как попасть в баллоны, воз—
.\ Ё
. ‹!
| Е; …
!!
№№
!
“
|||
! %
//
до;
4“;
#!1
//
11] /
№
—_—-
Й’Ё’Ё % и ‘
№$5НН|П|||||| ||||||||ШПН
\"
‚\
] !
| Т—
Рис. 1.4.1. Схема сверхзвуковой баллонной трубы:
‚ ' , , _ __ .
Мрия/№№
'одд’.,
яма ..
! чп "
`"! " , А . .' ‚Ч., ‚”’, ,
›Ьіі/А///„///;/7/'/’///;//////’//////
‚\
Ки
&
1 — компрессор; 2 — осушитель; 3 — баллоны; 4 — дроссельная задвижка; 5—форкамера; б—хоней-
комб; 7— диск; 8 — сопловые вкладыши; 9— окно; 10—траверса (в положении для придания
молели углов атаки 06); 11—редуктор; !!!—электромотор механизма углов атаки; 13—сопло—
вая коробка; 14 —— выхлопная труба; 15 — глушитель; 16 — автоматический привод; 17 — трубка
полного напора
31
дух проходит через осушители, активнымвеществом в которых является
окись алюминия. После осушения воздух имеет точку росы —60° С, при
этом, как показывают наблюдения, не происходит конденсации влаги
в рабочей части трубы.
Незадолго до пуска трубы открываются запорные вентили, и воздух
по трубопроводу высокого давления поступает в форкамеру 5 через
дроссельную задвижку 4. Величина открытия задвижки (степень дрос-
селирования) регулируется автоматическим приводом 16. При необхо-
димости ручного управления автоматический привод может быть от-
ключен.
Форкамера, куда поступает дросселированный воздух, представляет
собой толстостенный стальной резервуар; к нему присоединяется сверх-
звуковое сопло. В форкамере помещается хонейкомб б, выполненный в
виде решетки из тонкой стальной полосы с размером ячеек 60><60 мм.
С целью выравнивания потока по поперечному сечению форкамеры пе-
ред отверстием, через которое поступает воздух, расположен стальной
диск 7. Измерение давления в форкамере осуществляется с помощью
трубки полного напора 17.
Из форкамеры воздух поступает в сопло, образованное двумя про—
филированными вставками 8, расположенными симметрично—сверху
и снизу— в сопловой коробке 13. В конструкции трубы предусмотрено
несколько пар таких сменных вставок, рассчитанных на получение пото-
ка с разными числами Мое. В боковых стенках сопловой коробки распо—
ложены два окна с плоскопараллельными оптическими стеклами, через
которые осуществляется наблюдение и фотографирование обтекания
модели, установленной в рабочей части трубы длиной 0,8 м и квадрат-
ным сечением площадью 0,16 м2.
Модели в рабочей части закрепляются с помощью державок, распо-
ложенных на траверсе 10, которая может поворачиваться относительно
своей продольной оси. Это позволяет, используя механизм углов атаки,
установить необходимый во время эксперимента угол. Общий вид и ки-
нематическая схема механизма углов атаки представлены соответствен-
но на рис. 1.4.2 и 1.4.3.
Механизм работает следующим образом. Оператор кнопкой на пуль—
те управления включает электромотор ], вращающий червячный редук-
тор 4, на валу которого закреплена траверса б с установленной на ней
моделью (см. рис. 1.4.3). Одновременно вращение передается на кон—
тактное устройство в счетчике 5 углов атаки и. По достижении моде-
лью заданной величины угла а счетчик разрывает электрическую цепь,
останавливая мотор ! и включая тормоз 2. Если после этого требуется
осуществить испытания на другом угле атаки, то оператор с помощью
дистанционного управления воздействует на контактное устройство,
смещая контакты на некоторую величину, пропорциональную новому
углу атаки, и вновь включает двигатель 1.
Установка углов скольжения [3 производится путем перестановки
траверсы из горизонтального положения (см. рис. 1.4.1) в вертикаль-
ное. В этом случае вращение передается на траверсу через зубчатый ре—
дуктор, а углы [5 отсчитываются также с помощью счетчика 5.
Труба оснащена оптическим прибором ТЕ-23, позволяющим фото—
графировать аэродинамический спектр. В конструкции этой трубы пре-
дусмотрена также промышленная телевизионная установка ПТУ-23-М,
передающая изображение картины обтекания на пункт наблюдения.
Групповые регистрирующие манометры, используемые при эксплуата-
ции установки, позволяют определять давления как в самой трубе, так
и на поверхности исследуемой модели. Для определения аэродинамиче—
ских сил и моментов применяются тензометрические аэродинамиче—
ские ве-сы.
32
гг№ ч— ‚ “и '
: .‹ „ ‘ і
\ к .
. хр- „ 1
*' :
,
1
" › > 1
"‹ "3" Ж ’ . " ”>? ': ,
_. .. _`_- ЕЁ : да:--
. ‚до . -.
3-й; ; „ _ .
. .`. : 43”, _ ‹.
._ ' с .
. „ ' -.
„;и ‹. __ _ ‹-
;. * $ & :?. _ Ф.;; .
_ - ._‚_
‚_, . .
` - :
+ . . . `,
-. ` . _ .
- ' ‚`: ‚ ` _ . . _ . ч ...... * $
+ - _. __. - .: .- _- "
:- ": -`› .
`; ‚, . ( . №:.
._ ‚ > - -: .
. ”и, _:- „ _. › - ‚5
* „ в №:; = ' . ‚… ‹
Е..: 5 '. . . %>" . ;. д'
_ . _.; ‚_ ‚_ .
- ' .- д' ' (" ’ 4- :»
._ .. ‚`. " .
"’-. ' Ъ — . : ’" - "'е
к - ' - _ Ч < "';-. =, . : : "
- З › .` % ,; '- - .. _ "
с ":.5 ЁЁ. ‘ {Ён - -- ' ..
\ 'З'д , _ `. _
) '3. ”мы . - :_ ' с
- . " %% Ё-с
. ‹ . ‚__. ‚,; . _,
.' ' ?"т
‚ . . _ - ‚, -. „ ._ ‚ - .
- "^ - › -. ‹ . .- . \ - * -. ‚1
' ‚"$ _, “_ = _ - '- ‹»> №№ %*
- . .- о. _ _^-:-: - т.,
$:: - .- < ' -:_ *'._›_" ` "
; „ _..- ` ‹
: ‚.'.2' " г
‚ __. ,
ж _а „ АФ
‚›. - _;‘.
ь _ .. &` - _‚ . $ {_
:… + _
Рис. 1.4.2. Общий вид механизма углов атаки
; |‚8 |
Щ .! [т
›‹ х' ][
][
5
Рис. 1.4.3. Кинематическая схема
механизма установки углов атаки
со и углов скольжения В:
1—электромотор; 2—тормоз; З—зуб-
чатая передача; 4—червячный редук-
тор; 5—счетчик углов 06 и В; б—рас-
положение траверсы при установке уг-
лов ОС; 7 —— расположение траверсы при
установке углов В: 8—зубчатый ре-
дУКТОР
1-|_› ‚
гг
СПФ—"|
«…
Рис. 1.4.4. Структурная схема системы управления
сверхзвуковой аэродинамической трубой:
! — датчик давления; 2 —— «задающее» устройство;
3—- «сравнивающее» устройство» 4—электронный уси-
литель; 5—электромашинный усилитель; б— исполни-
тельный двигатель; 7 ——устройство обратной связи; 8—ре-
гулирующий орган (задвижка)
3—927 83
Исследования потока в рабочей части трубы показали, что числа
М…, измеренные в ряде точек, расположенных вдоль продольной оси ра-
бочей части и в ее поперечных сечениях, отличаются между собой не
более чем на 11,5%. Пролольный градиент статического давления
в этой рабочей части практически отсутствует, что свидетельствует о хо-
роших аэродинамических свойствах трубы.
Особенностью конструкции рассматриваемой трубы является авто-
матическая система управления процессом изменения давления в фор-
камере. Структурная схема этой системы представлена на рис. 1.4.4.
С помощью шкалы «задающего» устройства 2 оператор устанавливает
Рис. 1.4.5. Схема вакуумной аэродинамической
трубы:
1 —- форкамера; 2 — спрямляющие решетки: 3—рабочая часть;
4 — диффузор; 5 — задвижка; б — вакуумная емкость; 7—ва—
куумный насос; 8 — сопло
необходимое для обеспечения в рабочей части заданного числа М… дав-
ление в форкамере и включает исполнительный двигатель 6, который
открывает задвижку 8. Поток газа устремляется в форкамеру, где его
давление измеряется датчиком 1, который посылает соответствующий
сигнал в «сравнивающее» устройство 3.
Если давление в форкамере отличается от соответствующей величи-
ны, установленной на шкале, то сравнивающее устройство подает сиг-
нал на электронный усилитель, который усиливает этот сигнал и посы-
лает его дальше на электромашинный усилитель. Такой усилитель вы-
.рабатывает на выходе мощный сигнал, способный привести в действие
исполнительный двигатель, который, вращаясь с необходимой скоро-
стью и в нужном направлении, открывает или прикрывает задвижку.
Этот процесс продолжается до тех пор, пока в форкамере не установится
заданное давление.
Благодаря применению автоматической системы управления удается
значительно ускорить выход трубы на режим установившегося обтека-
ния, что обеспечивает экономное расходование сжатого воздуха. Одно-
временно исключаются ошибки, почти неизбежные при ручном регули-
ровании величины давления в форкамере трубы, и повышается безопас-
ность обслуживания. Число лиц, участвующих в таком обслуживании,
сокращается, что позволяет избежать возможных ошибок при проведе-
нии эксперимента из—за несогласованности действия этих лиц.
На рис. 1.4.5 показана схема вакуумной трубы кратко—
временного действия. Необхоцимое для ее работы разрежение
создается в резервуаре б вакуумным насосом 7. В момент запуска отк-
рывается быстродействующая задвижка 5 и атмосферный воздух уст—
ремляется в трубу через форкамеру ], в которой установлены сетки и
решетки 2, спрямляющие поток. В сопле 8 воздух, приобретая сверх-
звуковую скорость с задан-ным числом М…, поступает в рабо—
34
чую часть 3, а затем через диффузор 4 попадает в вакуумный резер-
вуар.
Вакуумные трубы в отличие от баллонных более удобны для исследо-
вания движения разреженных газов, так как позволяют получить в ра-
бочей части воздушные потоки с малой плотностью. Таким потокам
свойственны весьма небольшие числа Рейнольдса, которых удается до-
стичь в этих трубах. Течения газа с большими числами Не…, которыми
характеризуется обтекание тел сплошной средой, целесообразнее иссле-
довать в баллонных трубах, позволяющих увеличивать давление...-
и плотность газа в рабочей части.
2. Гиперзвуковые аэр0динамические трубы
Конструкция аэродинамической трубы, предназначенной для полу-
чения очень больших (гиперзвуковых) скоростей (Моо>5)‚ обладает
рядом специфических особенностей. Для получения в такой трубе, на-
ч 5 5 7
: :| г“: {пишиш '
. . .===ф1|= "пищ….ЕЭЁ!‘
7; %Ж/Ж /////‚/// //‚/.///5/л’/;ійЙ//Х / /‚
/
////////‚ ‚7%
Рис. 1.4.6. Схема гиперзвуковой трубы:
1 — трубопровод высокого давления; 2 — подогреватель; 3 — камера сгора-
ния; 4 — задвижка; 5 — сопло; б — рабочая часть; 7 — сильфоны; 8 — за-
движка; 9 — трубопровол для откачки; 10 -— теплопоглотитель; !! — вакуум-
камера; 12 — патрубок к вакуум-насосу
пример, потока с числом Моо=8 необходимо обеспечить отношение дав—
лений в форкамере и рабочей части ро/роот 104, что обусловливает
большие абсолютные значения давления в форкамере, которая должна
обладать весьма большой прочностью. Обеспечить такую прочность не
всегда представляется возможным. Поэтому для поддержания заданно-
го отношения давлений ‚Оо/роо необх0димо обеспечить в рабочей части
большое разрежение, которое может быть достигнуто при помощи ваку-
ум-камеры.
Глубокий вакуум в рабочей части таких труб обусловливает низкие
температуры воздушного потока. В частности, отношению давлений
ро/роо=104 соответствует отношение температур ТО/Тоо=14. В этом слу—
чае при температуре в форкамере Т0=288 К (15° С) температура в ра-
бочей части Тоо=21 К, что приведет практически к конденсации всех
компонентов воздуха. Чтобы избежать этого, в конструкции гиперзву—
ковых труб предусматриваются подогревающие устройства.
На рис. 1.4.6 показана схема такой трубы. Воздух из баллонов вы-
сокого давления поступает в нее по трубопроводу ]. В теплообменни-
ке 2 он подогревается за счет сжигания газа в камере сгорания 3 и че—
рез открытую регулирующую задвижку 4 поступает в сопло 5, а затем
в рабочую часть 6.
З' 35
В вакуум-камере ]] разрежение создается насосами, откачивающи-
ми воздух через трубопровод 12. Для быстрого запуска трубы необхо-
димо обеспечить вакуум и в рабочей части путем предварительной от-
качки воздуха через трубопровод 9. В момент запуска открываются за-
движки 4 и 8, воздух поступает из баллонов высокого давления в ваку-
ум-камеру, и в рабочей части устанавливается поток с заданным числом
Маха. Так как воздух, поступающий в трубу, ПОДогревается до высокой
температуры (примерно 1400+1700° С), то для предохранения вакуум-
& ‚, ,
5 5 ‚
5% і/
__ .}: . ___
], /\/1і—›%*_›
' 2 $,}.
*
Рис. 1.4.7. Схема эжекторной сверхзвуковой трубы:
! — форкамера; 2 —— сопло; 3 — рабочая часть; 4 — камеры эжектора;
5 —- кольцевой зазор; б — камера смешения; 7 — диффузор (стрелками
показаны направления движения воздуха)
камеры от излишнего нагрева в нее помещают теплопоглощающий ма-
териал 10.
Большие перепады температур и давлений, свойственные трубам ги-
перзвуковых скоростей, обусловливают появление значительных нап—
ряжений в элементах конструкции. Для уменьшения таких напряжений
применяются сильфоны 7.
Рис. 1.4.8. Схема трехступенчатого эжектора
Разрежение на выходе из рабочей части трубы можно создавать, ис-
пользуя наряду с вакуумными резервуарами и 9 ж е к т о р ы. Принци-
пиальная схема аэродинамической установки с таким эжектором пока-
зана на рис. 1.4.7. Воздух высокого давления подается в эжектор 4 и по
кольцевому зазору 5 поступает в камеру б вместе с потоком воздуха из
рабочей части 3. В результате смешения этого потока воздуха с эжек-
тирующей струей, обладающей большой кинетической энергией, ско-
рость воздуха на выходе из диффузора возрастает, а давление снижа-
ется. При этом если разрежения, создаваемого одним эжектором, не-
достаточно для обеспечения нормальной работы трубы, то применяется
многоступенчатый эжектор. В качестве примера на
рис. 1.4.8 показана схема аэродинамической трубы с трехступен-
чатым эжектором.
Высокое разрежение в рабочей части гиперзвуковой трубы способст-
вует образованию «толстого» пограничного слоя на стенке сопла и по-
верхности обтекаемой модели. Поэтому следует внимательно отнестись
к определению допустимых размеров модели, с тем чтобы избежать не—
благоприятного взаимодействия пограничных слоев трубы и модели.
36
3. Аэродинамические установки
адиабатического сжатия
Испытания моделей летательных аппаратов, Движение которых со-
провождается интенсивным аэродинамическим нагревом, можно прово-
Дить на установках, где высокоскоростной поток, обтекающий модель,
имеет достаточно большую температуру. Один из метоцов получения
таких потоков состоит в сжатии газа поршнем, быстро движущимся
в канале трубы. При этом вследствие малой длительности процесс та-
кого сжатия можно считать адиабатическим. Эти аэродинамические ус—
\ 3
Рис. 1.4.9. Схема установки адиабатического сжатия:
! — отсек высокого давления; 2 — поршень; 3 — отсек низкого давления;
4 — сопло; 5 — рабочая часть; 6 —— вакуум-камера; 7 —— окно с оптиче-
ским стеклом; 8 — диафрагмы
тановки а Д и а б а т и ч е с к о г о е ж а ти я выполняются по схеме, по.—
казанной на рис. 1.4.9. Для приведения такой установки в действие в
отсеки высокого давления ] нагнетается толкающий газ. По достиже-
нии заданного Давления происходит разрыв диафрагмы 8 и поршень “2
начинает быстрое движение по отсеку низкого давления 3, сжимая на-
ходящийся в нем газ До Давлений‚ Достигаю-щих 2000 кГ/см2. За счет та-
кого сжатия происходит сильный нагрев газа, примерно ДО 3000+
—:—4ООО° С.
В трубе аДиабатического сжатия возможны Два режима работы.
Один из них связан с использованием т я ж ел о г о поршня. Скорость
движения такого поршня оказывается обычно меньше скорости звука в
толкаемом газе, и разогрев газа в отсеке 3 происходит без образования
ударной волны, т. е. изэнтропически.
Второй режим работы обусловлен применением л е г к о г о поршня.
В этом случае скорость поршня резко возрастает и может значительно
превысить скорость звука в газе, в котором по этой причине обязатель—
но возникнет ударная волна, располагающаяся перед движущимся
поршнем. Достигнув Диафрагмы, находящейся перед критическим сече—
нием сопла, эта волна отразится от нее и начнет обратное Движение по
направлению к поршню. В результате многократного отражения удар-
ной волны от Диафрагмы и поршня рабочий газ претерпевает неизэнтро-
пическое сжатие и сильно разогревается. По достижении заданного Дав—
ления происходят разрыв диафрагмы и истечение газа через сопло.
Исследования показывают, что температура этого газа оказывается зна-
чительно выше, чем при использовании тяжелого поршня. При этом при-
менение водорода или гелия в качестве толкающего газа позволяет зна-
чительно увеличить скорость Движения легкого поршня и за счет этого
повысить температуру газа перед соплом.
Достоинством установок адиабатического сжатия является возмож-
ность получения высокоскоростного и сильно разогретого потока газа
большой плотности, что позволяет моделировать полет с гиперзвуковы-
ми скоростями в плотных слоях атмосферы. При этом повышение плот—
ности газа, обтекающего модель в трубе, достигается за счет уменьше-
ния разрежения в отсеке низкого давления.
37
4. Газодинамический расчет сверхзвуковых
аэродинамических труб [32]
При выполнении газодинамического расчета обычно считаются за-
данными числа Моо в рабочей части и схема трубы (или, как говорят,
ее аэродинамический контур). В результате такого расчета для труб
кратковременного действия, работающих от баллонов сжатого воздуха,
определяется минимальное давление в форкамере, необходимое для
получения заданного числа Моо в рабочей части, а также находится вре-
мя работы трубы при заданном запасе сжатого воздуха. Расчет вакуум-
ных труб предусматривает нахож-
’ 2 3 4 5 дение конечного давления в ваку-
ум-камере и времени работы при за-
дн! Ё<З данном ее объеме. В случае труб по-
и
М
.. _ „
% СТОЯННОГО деиствия определяются
: 2 3 4 5 степень сжатия, расход воздуха и
_ „ мощность компрессора. Газодина-
Рис. 1.4.10. Схема аэродинамическои МИЧеСКИЙ расчет труб, предназна-
трубы для газодинамического рас-
чета ченных для больших чисел МОО, поз-
воляет определить необходимую
температуру подогрева газа.
Для всех типов аэродинамических труб в задачу такого расчета вхо-
-дит определение параметров потока (Давления, плотности, числа Рей-
нольдса и др.) в рабочей части и в других сечениях трубы. Обозначим
через р, р и Т соответственно давление, плотность и температуру в по-
токе, а через ро, ро и ТО—соответственно давление, плотность и темпе—
“ратуру изэнтропического торможения потока. Индексы при этих вели-
чинах, а также при других параметрах (скорость У, скорость звука а,
“число М=У/а‚ относительная скорость 7»= У/а*) совпадают с номера-
ми поперечных сечений трубы, показанных на рис. 1.4.10. Введем обоз—
начение для коэффициента восстановления давления на каком-либо
участке трубы уп=ро(п+1)/ро„ и будем считать течение здесь одно-
мерным.
С о п л 0. Так как при течении газа в форкамере и сопле потери на
трение пренебрежимо малы, а теплообмен через стенки ничтожен, то
такое течение можно рассматривать как адиабатическое и изэнтропиче-
ское. В соответствии с этим параметры потока на срезе сопла могут
быть определены по следующим зависимостям:
ь
іг—1 ‚іі—1
Р2 : $701(1 _" Ш 7%) ; (1-4-1)
‚ [2—1
72=Т01(1—Ё+1 и;); (1.4.2)
1
!г——1 П
р,: р01(1 _ т из) ‚ (1.4.3)
где 1001, Т…, р… —соответственно давление, температура и плотность
в форкамере трубы.
Отношение площадей сечений сопла $*/$2, необх0димое для получе-
ния заданного числа М…:Мг на выходе этого сопла, найдем из уравне-
ния расхода р*а*$*=р2 №82, в соответствии с которым
$*/$2 = 92 Уз/(Р* “*)-
_ Здесь отношение удельных расхолов р2У2/(р*а*) является функцией
М…;М2 (или .?ьоо=№)‚ т.е.
вуз, : (мм,) или вуз, : 4 (ж,), (1.4.4)
38.
где
д+1 в +1
)2‹іг—1› -М2 (1 + Ь;1 М.З.) 2(1г—1)
,
Ч‹М2)=(Ё_'2_1
1
(12 +1 12—1 , П
4 (№) = % — %) .
\ 2 2
Значения (;(М2) или (7002) могут быть найдены из таблиц газодинамиче-
ских функций соответственно по известным значениям м2 или №. Коэф-
фициент восстановления давления в форкамере и= .
Р а б 0 ч а я ч а с т ь. Определим параметры потока в конце рабочей
части (в сечении 3—3), если известны значения этих параметров на сре-
зе сопла. Рассмотрим закрытую рабочую часть и запишем уравнение
изменения количества движения потока в ней:
92 УЗ
”10/3 _ Уа) : (р2 _ РЗ) $2—
!
(Сх Змид + жтр $2 7) ›
где т— массовый расход газа в трубе; Сде—коэффициент сопротивле—
ния модели и подвески, отнесенный к площади миделевого сечения
Змид; Атт—коэффициент трения; „(і—отношение длины рабочей ча-
сти к ее диаметру (или высоте).
Произведя некоторые преобразования, получим
_ _ _Ё_ З…… і…
2(7»3)_2(7»2) ими 82 +2… (1), (1.4.5)
где
20%) = ?»3 —|—(1/7»3); 20‘2) : 7% + (1/ 2)-
Уравнение (1.4.5) позволяет определить относительную скорость №
в конце рабочей части с учетом сопротивления модели и ее подвески.
При этом для нахождения коэффициента трения мр можно воспользо—
ваться, например, формулами Никурадзе:
ЦИТ, = 2,0118Ще !/ Д,) — 0,84 (1.4.6)
И Л И
х„ -= 00032 + 0,221 тещи”. (1 .4.7)
Здесь число Не может быть определено по диаметру или высоте рабочей
части трубы. При этом формула (1.4.6) справедлива для чисел Не от
105 до 3-106‚ а (1.4.7) — от 105 до 108.
Коэффициент восстановления давления в рабочей части определя-
ется зависимостью
"2 : $25] (%)./[$35] (№)1- (1-4-8)
Для рабочей части с постоянным поперечным сечением (82:83)
”2 : („кг)/[5109]. (1.4.9)
Для получения одинаковой скорости в начале и конце рабочей части
(№=А3) необходимо брать отношение площадей $2/$3=\›2.
Рассмотрим расчет рабочей части со сво60дной струей (открытой
или в виде герметической камеры). В такой рабочей части давления в
начале и конце будут равны (р2=р3) и уравнение количества движения
примет вид
2
р У
та/З—У2) : _ 22,2 (Сх “Змид + Ес 82 %) '
39
Из этого уравнения можно получить выражение для числа ?» в конце
рабочей части 8
жз=іа(2—с„ мид—& _), (1.4.10)
2 82
где Ес — коэффициент сопротивления свободной струи (обычно ёс % 0,07).
Коэффициент восстановления давления в струе
із
іг—1 іг—1 —
=_= _ ‚…… № к—1. 1.4.1
”2 ро. (1 +12)_ (1_'4_+13) ( ”
Определив М и 172, можно найти все остальные параметры потока в
5 конце рабочей части:
іг
3 Ц : ‚г 2 іг—1.
_ __ - ? рэ розр— Ё+1ж3)_ ‚ (1.4.12)
!г__—_—_1
& ц 5 Т3=Т°з(1_Е_—+1 713), (1.4.13)
1
р . 1.4.11. с - _ _ "*__і :—
ИСкового диЁЁЗЁоЁЁЗВу Рз— Роз (1 іг+1?`%)й 1, (1.4.14)
где Роз=Ч2Р02д Т03=Т02; Роз=‘\72902—
Ди ффузор. Расчет диффузора заключается в определении коэф-
фициента восстановления давления мд=ро5/роз‚ а также площади по-
перечного сечения горла 4—4 и параметров потока в конце диффузора
(сечение 5—5). Рассмотрим вначале дозвуковой диффузор и вычислим
коэффициенты восстановления давления для участков 3—4 и 4—5
(рис. 1.4.11). При этом будем считать, что на входе в диффузор образу-
ется прямой скачок уплотнения. Тогда коэффициент восстановления
давления для участка 3—4 и число ?» в сечении 4—4 определяется по
формулам прямого скачка:
1
1— Ё— ›? 5:1
=р№ :?»? 12+! _
173 роз 3 1—Ё_1.—1_ ‚ (1.4.15)
іг+1 ;&
7»4 = 1/713. . (1.4.16)
Для определения коэффициента сопротивления расширяющейся ча-
сти диффузора можно пользоваться соотношениями, приведенными в
работе [16]. В частности, для конических диффузоров круглого сечения
с углами раствора у=0-:—40° этот коэффициент
& = йа,—2)- (1 — %) +з‚2 (13 %)1'25 (1 _— ‚];—){ (1.4.17)
Для квадратных и прямоугольных диффузоров с одинаковыми угла-
ми раствора у=0—:—25° (для обеих плоскостей)
АТР _; і 1,25 __1_ 2
ад: 23—5111…” (1 „+408 2) (1 п). (1.4.18)
Для плоских диффузоров с углами полураствора у=0+40° коэффи-
циент сопротивления
__?»тр а 1 1) 1__ _1 ]
__ —-———— 1—— _
ёд 4 [ь твт/2) ( п +2$іП(?/2) (1 122) +
+ 3,2 (18 _; )1'2'5 (1 — 7110511419)
40
В формулах (1.4.17+1.4.19): т‹;д—общий коэффициент сопротивления,
учитывающий трение и местные потери; п.=$5/$4—отношение площа—
дей ВЫХОДНОГО и входного сечений диффузора; а и 1) —стороны вх0дного
сечения плоского диффузора (!)—сторона, постоянная по всей длине);
мг,—коэффициент трения, который может быть рассчитан по полуэмпи-
рическим формулам (1.4.6) или (1.4.7), а также по соотношению
х„ : 0,3164/Ке0’25, (1.4.20)
пригодному для чисел Ке<105, причем эти числа Ке определяются по
параметрам на входе в расширяющуюся часть диффузора (сечение 4—4
на рис. 1.4.11).
Коэффициент восстановления давления диффузора (на участке
4—5)
1
‚г_ _
и = @ = 1 —ёд —"* и(1— —' хауз—1. (1.4.21)
Р04 Ё + 1 Ё + 1
Скорость в конце диффузора ?»5 может быть найдена по таблицам
газодинамических функций при помощи формулы
1 8
7» = ?» — - —4
(7( 5) Ч( 4) „4 $5 ›
в которой
1
іг 1 іг—1… _—
(№4): щ + ———, Азу—1;
2
1
12+! іг—1 2—
?» =?» ——?ь "’—1.
(?(5) 5( 2 2 5)
Общий коэффициент восстановления давления диффузора
мд : узи. (1.4.22)
При расчете сверхзвукового диффузор а примем, что на
его начальном участке образуется система косых скачков, завершаю-
щаяся прямым скачком, расположенным в горле диффузора (как изо-
бражено на рис. 1.4.14, 6). Пользуясь теорией скачков уплотнения, мож—
но рассчитать коэффициент восстановления давления для такой системы
скачков. Соответствующая площадь сечения горла диффузора, обеспечи-
вающая запуск аэродинамической трубы, будет найдена из уравнения
расхода газа, движущегося на участке (см. рис. 1.4.10) между срезом
сопла (сечение 2—2) и горлом (сечение 4—4). При этом примем, что
скачок, возникающий во время запуска трубы и перемещающийся в на-
правлении от сопла к диффузору, прямой, а в горле диффузора пло—
щадью $4г устанавливается скорость звука Ж4= 1. В соответствии с этим
уравнение расхода запишем в виде
92 7‘2 $2 : р; 8%,
откуда
84г : 92 №2 32/9:
ИЛИ ПОСЛС ПОДСТЗНОВКИ СООТВСТСТ'ВУЮЩИХ ЗаВИСИМОСТВЙ
1
1 '
84г=ж282(1—’“—1№ П(Ш)г_19_‹ш
‚3—1—1 2) 2 904.
Таккак
1 1
№=$- ?» 1_Ё—°_1;„2ь_—11г+1 5:1: 7.
904 \’пр’ 2( ]г—і—1 2) ( 2 \, (7( 2),
4—92? 41
Т0
1
$„ = 3,4 (х,) _ (1.4.23)
\’пр
ИЛИ
84? : ‚$$/„пр,
где упр —— коэффициент восстановления давления в прямом скачке уплот—
нения; $* — площадь критического сечения сопла.
_ Если площадь горла диффузора будет мень-
5 ше площади $4г, то аэродинамическая труба не
запустится, как бы ни увеличивали давление в
0 8 & форкамере. Как показали исследования, после
’ \ запуска трубы площадь горла можно уменьшить
\; до значения $4раб, обеспечивающего наибольший
0,6 # `— коэффициент восстановления давления на рабо-
чем режиме. Величина этой площади обычно.
определяется опытным путем.
0,ц ` В соответствии с этим в ряде современных
? конструкций труб предусматриваются регулируе-
0,2 мые диффузоры. Запуск таких труб производит-
ся при большой площади горла диффузора, а пос—
ле выхода трубы на расчетный режим эту пло-
и 2 ч 5 м щадь уменьшают до значений, определяемых экс-
°° периментальной кривой 2 на рис. 1.4.12.
р…; 1_4_12_ затеи- Зная коэффициент восстановления давления
мость относительной диффузора тд и скорость № на входе в диффузор,
площади $=$4‚/$2 можно определить скорость ?„5 на выходе из этого
горла дёіффузора ОТ Диффузора‚ решив уравнение расхода
„.
г:;гзбознмнаиэ-тёгё ‹] (м = а (из) # - “$$—‚ (1.4.24)
пернментальные данные) ”д 85
в котором мд=у3м4.
Расчет числа Ке и расхода воздуха в трубе. При расче—
те числа Ке в аэродинамической трубе удобно выразить его через отно—
сительную скорость ?» в рабочей части и параметры торможения в фор-
камере. Для этого в формулу Не=р2У21/ц2 подставим вместо У2 выра-
жение
2іг
У2 : 7»2а* : $12 "/_Ё + 1 КТ01
И после некоторых преобразований получим
_— 1
% ! 1 іг—1 2 _—
: ___. и(1_ ?» Н. (1.4.25
№ Маг—нне № угл.-”“‘ 2 іе+1 2) >
Так как для воздуха &= 1,4, К=287 м2] (век?-град), то
не = 0,0687 # . __12 р01?»2(1 _ шатун. (1.4.26)
2
То1`
В этих формулах: ! — длина, по которой вычисляется число Ке; № —
коэффициент динамической вязкости газа в рабочей части, определяе-
мый по формуле
”2/Р‘нач : (Т2/Тнач)0'7бэ (1 .4. 27)
в которой величина рнач соответствует начальной температуре Тнач=
:=_288 К и равна 1,82- 10'6 кГ-сек/м2.
42
Расх0д газа определяется зависимостью т=р2$2№а*‚ которую можно
ПРИВЭСТИ К ВИДУ
1 __
___ (_2__)Г-1 МД . _1_ __$*‚ (1.4.28)
іг + 1 іг + 1 _К— МТ.—01
т : 0,0405(р„1/1/Т„;)8* (1.4.29)
для воздуха
ИЛИ
т = 0,063752 ( 1/1/ Т.,—1) р…?»з (1 _— О,1677»Ё)2'5. (1 ‚4.30)
Давление в форкамере и время работы трубы. Опре-
деление величины минимального Давления (Ро1ш1п) в форкамере трубы
баллонного типа связано с нахождением суммарного коэффициента вос-
становления давления. Величина этого коэффициента \: равна произве-
дению коэффициентов восстановления на каждом участке трубы:
"; : ”1‘У2‘Уз‘У4.
Очевидно, этот коэффициент можно определить как отношение давления
торможения на выходе к давлению в форкамере, т. е. у=ро/р01ш…‚ где
іе
Ро=Ра (1—2; ЖЁ) “:
здесь ра — атмосферное давление.
В соответствии с этим
ь
р011піп = Ра/[”1”2”з”4(1 _ ‚а 1 ЖЁ)д-1]. (1-4-31)
іг + 1
Время работы трубы определяется по формуле т=№/т‚ в которой
№ — масса газа, потребная для экспериментов: №=№наЧ—№Нон. Началь—
ная масса газа в баллонах Мнач зависит от объема этих баллонов 1%,
а также от начального давления рбдач и начальной температуры в них
Тбдач. Конечная масса №…… определяется тем же объемом и конечными
значениями давления рбдон и температуры Тбдон. В соответствии с этим
№ : Рб.нач т № : Рб.кон {„
нач КТбщач бя кон "К' Т" б.кон бя
и время работы трубы
‹.,- = Ёб. (№. _№) _ (1432)
Кт Тб-нач Тб-кон
В выражении (1.4.32) расхоц газа т можно определить из (1.4.28) или
(1.4.30). Принимая процесс опорожнения баллонов изотермическим, т. е.
полагая Та_нач=Тб_кон=Тб‚ преобразуем (1.4.32) к вицу
([:—° _ КтТб (рб.нач_ _рб.к0н); (1…433)
ЗДеСЬ конечное Давление В баллонах
рбжон = ра/[ттр \’1’\’2'\73'\’4 (1 — Ё д.:-|_- ; ?»?)Ё: #1] , (1.4.34)
где ттр— коэффициент восстановления давления в трубопроводе, сое—
диняющем баллоны с форкамерой, при полностью открытой регулирую—
щей задвижке.
Время работы вакуумной трубы
—Рв.нач)‚ (1.4.35)
:КтТв
4* 43
Где ржач, рвдон — соответственно начальное И конечное Давления газа в
вакуум-камере, а “УВ — ее объем; ТВ=ТВ.НаЧ=.ТВ_н0н. Конечное Давление
в вакуум-камере
ь
рис… : у1у2у3у4 (1 —— Ё _ 1 жёг—“1 ра. (1.4.36)
іг + 1
К о н д е н с а ц и я в о 3 д у х а. Определим потребную температуру
подогрева воздуха для предотвращения конденсации. Рассматривая воз-
дух как объемную смесь, состоящую из 79% азота и 21% кислорода,
получим из условия конденсации кислорода
366,523 (1 +о‚2м3)
“1 _ 4,063— 13(0‚21р2)
К о н д е н с а ц и я в о 3 д у х а. Определим потребную температуру
пература подогрева воздуха, поступающего в трубу, должна рассчиты-
ваться именно из условия этой конденсации.
(1.4.37)
5. Определение допустимых
размеров моделей
Основное требование, которое предъявляется к модели летательного
аппарата, состоит в том, чтобы она полностью находилась в зоне невоз—
мущенного равномерного течения в рабочей части аэродинамической
трубы. С учетом этого должны быть выбраны соответствующие разме—
ры модели. Эти размеры оказывают влияние на условия работы самой
трубы И должны обеспечивать при запуске вых0д ее на расчетный режим
обтекания.
Рассмотрим методы определения максимально допустимых размеров
модели. В сверхзвуковой трубе такое определение ведется исходя из тре—
бования, чтобы возмущения, вносимые м0делью в сверхзвуковой поток,
в частности в виде скачков уплотнения или слабых волн сжатия, и отра-
женные от стенок, не достигали модели.
На рис. 1.4.13 показана схема отражения головного скачка уплотне-
ния, возникающего перед моделью при различных углах атаки. На ха-
рактере этого отражения сказывается влияние пограничного слоя. Ус-
ловно считают, что поверхность отражения удалена от твердой стенки
рабочей части на толщину вытеснения.
Перед изготовлением модели следует построить и проанализировать
схему скачков уплотнения, образующихся в рабочей части, с тем чтобы
длина м0дели не превышала некоторого значения, по достижении кот-о-
рого отраженные скачки попадут на поверхность МОДели. С ростом угла
атаки ов допустимая длина модели будет уменьшаться (см. рис. 1.4.13).
Следует также иметь в ВИДу, что размеры модели должны удовлетворять
условию, согласно которому во время эксперимента она должна распо—
лагаться (в рабочей части прямоугольного сечения) внутри клиновидно-
го участка, образованного линиями Маха, как это показано на
рис. 1.4.13. На этом участке течение равномерное, а число Мао равно
тому значению, которое имеет место во всей рабочей части трубы.
При выборе размеров модели следует проанализировать картину рас-
положения скачков и слабых волн возмущения не только в вертикальной
плоскости, как это изображено на рис. 1.4.13, но также и в горизонталь-
ной. Это позволит правильно выбрать размеры модели и избежать не-
благоприятного воздействия на нее возмущений, отраженных от боко—
вых стенок рабочей части.
При исследовании картины взаим0действия скачков уплотнения со
стенкой углы головного 60 и отраженного ср скачков определяются с по-
мощью обычных методов газовой динамики по известным значениям чи-
44
сла Мое и угла заострения головной части модели. Толщина вытеснения
6* может быть с достаточной точностью вычислена по формулам, при—
веденным в работе [20]. .,
Площадь поперечного сечения модели вместе с устроиствами, при
помощи которых она крепится в рабочей части трубы, нахоцится из ус-
ловия допустимого загрОМОЖДения этой рабочей части, определяемой
в свою очередь возможностью запуска трубы и выхода ее на заданный
режим работы. Для этой цели рассмотрим схему течения около модели,
помещенной в сверхзвуковую трубу (рис. 1.4.14). Схема течения в рабо—
5 и
’ _!
——_’—__`і_'7']
Рис. 1.4.13. К определению степени «загромождения»
рабочей части трубы:
1 —линии слабых возмущений; 2—головные скачки уплотнения;
3 —— отраженные скачки уплотнения; 4 — траверса; 5 —— державка
тензовесов; б—модель тела вращения; 7—пограничный слой
Мп " М::
а) ‚\ /р /
——›-\/ '
\_/М_‚>1\К_—_: (58,4
.А.
\/_'"" $М
& ' › ,
—›3 _
Рис. 1.4.14. К расчету допустимого заполнения
поперечного сечения трубы моделью:
а—труба заперта; б—труба в режиме установившегося обте-
кания;
[_прямой скачок; 2— «звуковая» линия; З—первый косой ска-
чок уплотнения; 4—второй косой скачок уплотнения
чей части трубы, когда она «заперта» прямым скачком, появившимся
перед моделью в момент запуска, изображена на рис. 1.4.14, а. Приняв
в наиболее узком сечении трубы (там, где диаметр модели наибольший)
скорость течения равной скорости звука (М2=1)‚ можно написать в со—
ответствии с теорией изэнтропического Движения газа
іг 1 ——""+1
1 _ м2 2(іг—-—1)
зт—зм ___ мир + 2 2 =
1 —|——2—' мпр
13+]
Ш 2(іг‚—1)
2 ,
: мпр (1.4.38;
іг—1 ,
1+ 2 м,пр
где ЗТ — площадь участка поперечного сечения рабочей части, равная
разности всей ее площади и произведения толщины вытеснения б* на не-
риметр рабочей части; ЗМ — площадь сечения модели в том месте, где
М2=1; Мпр — число Маха за прямым скачком; его величина определя-
ется по числу М.» в рабочей части из выражения
, 2/(іг—1›+мі‚
_ . ( 1.4.39)
“" темі,/(із _ 1) _ 1
В результате решения уравнений (1.4.38) и (1.4.39) определяется
площадь ЗМ, соответствующая режиму «запертой» трубы. Уменьшая
эту площадь, можно подобрать такое
ЁЁ/$Ё-т-—- -- * -- -- * ее значение, при котором скачок уплот-
ц, . } ` . ‚ нения переместится в горло диффузора
/ и труба «выйдет» на расчетныи режим
" ‚:г ' ч 45 м.., установившегося обтекания. Для опре-
Рис. 1.4.15. Допустимое «загро— деЛЗНИЯ ДОПУСТИМОЙ ПЛОЩадИ Зм МОЖ-
МОЖдение» Рабочей ЧЭСТИ сверх- но также использовать эксперимен-
звуковой аэр°динамиче°к°й Трубы тальный график, приведенный на рис.
(экспериментальные данные) 1.4.15 [44]. При этом следует иметь
в виду, что такое определение должно вестись с учетом угла атаки (1.
Если значение ЗМ на рис. 1.4.15 найдено для заданного угла и, то соот-
ветствующая величина миделевого сечения Змид=$м соз &.
5 1.5. УДАРНЫЕ ТРУБЫ
1. Устройство и принцип работы
Ударная труба представляет собой экспериментальную установку
для исследования нестационарного обтекания, кинетики химических ре—
акций и теплофизических процессов в газовом потоке. В отдельных
случаях такие трубы применяются для изучения установившегося об-
текания моделеи летательных аппаратов и силового взаимодействия их
с обтекающим потоком.
В простейшем. виде такая установка (рис. 1.5.1) состоит из двух от-
секов трубы, разделенных между собой диафрагмой из легко разру—
шающегося материала. В левый отсек под большим давлением, которое
может достигать несколько сотен атмосфер, нагнетается тол к а ю щ и й
газ. При определенных значениях этого давления происходит разруше-
ние диафрагмы 2, и толкающий газ проникает в отсек низкого давле-
ния 3.
Рассмотрим упрощенную схему, в соответствии с которой разру-
шение диафрагмы происходит мгновенно, а передняя контактная
поверхность толкающего газа является плоской. Обозначим параметры
газа в отсеке высокого давления, в момент разрушения диафрагмы, ин-
дексом «4» (например, р4‚ Т.„ и т. д.), а в отсеке низкого давления—ин-
дексом «1» (рд, Т1 и т.д.).
Процессы, происходящие в трубе, изображены графически в коорди-
натах 15, х; р, х и Т, х на рис. 1.5.2. Отсчет времени 1? на этих графиках
производится с момента разрушения диафрагмы. Контактная поверх-
ность, распространяясь в область 1 со скоростью нг, сжимает газ, на-
ходящийся в отсеке низкого давления. В результате возникает ударная
волна, которая движется со скоростью сз, опережая контактную поверх-
ность (фронт этой волны на рис. 1.5.2 обозначен буквой №).
По истечении некоторого времени 150 контактная поверхность и волна
расположатся так, как показано на рис. 1.5.2. Межцу ними появится 06-
ласть 2, в которой располагается .р а 6 оч а я п р о б и а с температурой
46
газа Т2 и давлением рг. Значения этих параметров будут, очевицно, вы-
ше, чем в невозмущенном пространстве отсека низкого давления. В со-
ответствии с рис. 1.5.2 длина рабочей пробки
Ь : (0$ —Ц2) !"
В координатах [, х положения контактной поверхности и ударной
волны в каждый момент времени изображаются прямыми ОК и ОМ.
Одновременно с движением контактной поверхности в противоположном
направлении распространяется с соответствующей скоростью звука в от-
секе высокого давления серия волн разрежения В. Как показано на ри-
! 2 3 # 5
””””Щ”„”‹Л””Л””„„ЛТ„Л’””М7107/11/11]! 71/11/111/1/1 \
' - . '
]
Рис. 1.5.1. Схема ударной трубы:
1 — отсек высокого давления; 2 -- диафрагма; 3— отсек низ—
кого давления; 4 -— модель; 5 — окно
сунке, у передней волны скорость
будет вы, а у замыкающей аз, при- д
чем а3<а4‚ так как температура : =0 [;© ® ' ,
в зоне разрежения падает (Т3<
<Т4). Следует иметь в виду, что
волна, движущаяся со скоро- и“ ” С: А!
стью а4, распространяется в не- то, @ к ад%@из и2@°г с @@
подвижном газе, а волна, ско- {: *д—
рость которои а3‚—вдвижущеися „, (
сРеДе. Поэтому скорость волны \\\ ° А’ “Рад
относительно трубы сз=а3—и3 @ 9' @
(где из,—скорость толкающего @ к
газа, направленная в сторону от-
сека низкого давления). Таким
образом, возникает область тече-
ния 3, расположенная между ра- р,+
бочей пробкой 2 и волнами раз- р р
режения. *’ 2
Так как контактная поверх-
ность не является поверхностью а
разрыва, то давления и скорости Т
справа и слева от этой поверхно- Те \
сти олинаковы, т. е. р2=р3 и @=
=и2. При этом, однако, соответ- ___—\ т
ствующие температуры не будут
равны, ибо по обе стороны от этой д :в
поверхности находятся разные га-
зы и к тому же один из них рас—
ширяется, а “другой испытывает
сжатие. „
Для исследования обтекания тел высокотемпературным потоком ис-
пользуется течение в рабочей пробке. Чем дальше вправо от диафрагмы
Д располагается модель, тем больше продолжительность времени {раб
работы трубы, так как по мере этого удаления (до известного предела)
растет длина пробки.
ЗВ
Рис. 1.5.2. Изменение параметров в од-
нодиафрагменной ударной трубе
47
2. Аэродинамические ударные трубы
В ударных трубах газ разогревается до высоких температур, что
позволяет проводить исследование процессов аэродинамического нагре-
ва, однако числа м2 в рабочей пробке невелики (не более 5—1—6).
33 ударных трубах можно увеличить скорость движения газа в ра-
бочеи пробке, если на выходе из отсека низкого давления установить
расширяющееся сопло. В этих условиях модель обтекается газом, исте-
кающим из сопла, в условиях высоких скоростей И температур. Схема
такои аэродинамической ударной трубы показана на
рис. 1.5.3.
Толкающий газ из баллонов высокого давления ] поступает в отсек
высокого давления 3, отделяемый от отсека низкого Давления 5 диаф-
рагмой 4 Низкое Давление создается в отсеке 5, а также в вакуум-каме-
8
!
\]
Рис. 1.5.3. Схема аэродинамической ударной трубы:
1 — баллоны с толкающим газом; 2 — вентиль; 3 — отсек высокого дав—
ления; 4 — диафрагма; 5 — отсек низкого давления; 6 — диафрагма;
7 — сопло; 8 — модель; 9 — окно; 10 — вакуум-камера; !1—вакуум-насосы
ре 10 специальными вакуумными насосами 11. Модель летательного
аппарата 8 устанавливается на выходе из сверхзвукового сопла 7 так,
чтобы за ней можно было наблюдать с помощью оптических приборов
через оконный проем 9. Диафрагма б разделяет между собой отсек низ-
кого давления 5 и вакуум—камеру 10. По достижении необходимого дав-
ления в отсеке 3 разрывается диафрагма 4 и газ устремляется в отсек 5.
Возникшая при этом ударная волна, достигнув диафрагмы 6, разрывает
и ее, и разогретый газ под большим Давлением устремляется через
сопло в вакуум-камеру 10. Одновременно ударная волна, отразив—
шись от диафрагмы 6, начинает движение в сторону отсека высоко-
го давления 3, вновь сжимая и разогревая газ в рабочей пробке.
Через некоторое время она встретится с контактной поверхностью и
снова, отразившись от нее, возвратится к соплу. В этот момент прек-
ращается установившееся движение газа в сопле и начинается режим
нестационарного течения, сопровождающийся колебательным характе-
ром изменения параметров газа.
В ударных аэродинамических трубах, подобных рассмотренной,
давления торможения достигают 2000 атм, температура—около 7000 К,
число М потока — примерно 20+25, а потока в рабочей пробке—до 5+6;
время установившегося движения газа в этой пробке составляет при-
мерно 5+7 мсек.
. 3. Газодинамический расчет ударных труб
Определим параметры потока в рабочей пробке (ща, М2=и2/а2‚ р2‚
Т2‚ р2)‚ рассматривая толкающий и толкаемый газы совершенными с по-
стоянными теплоемкостями, а также пренебрегая вязкостью и влиянием
перемешивания ГЗЗОВ Через КОНТЗКТНУЮ поверхность.
Ударная ВОЛНЗ ДВИЖВТСЯ СО СКОРОСТЬЮ СЗ, ПОЭТОМУ СООТВЕТСТВУЮЩ68
48
число Маха М1=сз/а1. Это число м1 определяет для ударной волны от—
ношение давлений
172 _ 2 1_]г1`_'1 1
р1__2іг11М1Ё +1 Ё1+1 (1.5. )
и плотностей Ё ‘ 1 ‚в +1
&=_ц_.& 1)(1__ +р_2_) . 1.5.2
91“ (‚Ч—1 Р1 + 131—1 ( )
Согласно уравнению состояния отношение температур для условий
после и до ударной волны определяется зависимостью
&:&.Е_ 053)
Ті рт Ра
Скорость потока за такой ударной волной (в рабочей пробке)
2іг1 1/2
о ‚д` 1
„2___„3=.а_1(р_-_1) , 1+ ‚ (1.5.4)
1% рт & ‚гг—1
‚&&-+1
а соответствующие числа Маха М2= и2/а2 (где @= 1/1г1К—т—Т2; “Кт —га—
зовая постоянная для условий в рабочей пробке).
Число М1 является неизвестной величиной. Для его определения не-
обходимо знать отношение давлений р2/р1‚ которое находится по задан-
ным параметрам (рь ш, ш, ад, #1, #4) из уравнения
где;
&=&; 1_ ‹*43—1>( і)(іі—1) „_…
рт Р1` _ *
1/2/г1- 1/21г1+‹1г1+1› (& —1)
Р1‘ -
Температуры Т2 и Т4 связаны между собой приближенным соотно-
шением
7_`_2%Ё4(Ё1`_1)(Ё1`+1)2Щ (156)
т; щ— Ь4—1 м’ "
в котором … и п4— молекулярные веса соответственно рабочего и тол-
кающего газов.
Нетрудно заметить, что, применяя более легкий толкающий газ,
можно увеличить температуру Т2 в рабочей пробке, а это повышает
эффективность исследований аэродинамической теплопередачи. Изме-
няя отношение …]щ, можно подобрать нужные температуры и числа
Маха в рабочей пробке.
Влияние различных газов на предельные значения числа М1=а8/а1
ударной волны показано в табл. 1.5.1, в которой также приведены соот-
ветствующие отношения скоростей звука, рассчитанные по формуле
12
а4/а1=(Т4/Т1) ] - Т 6 151
& лица . .
Толкающий газ/рабочий газ …]… 04/01 Мк
Воздух/воздух . . . . . . 29/29 1 ‚0 6. 1
Г елий/воздух . . . . . . . 4/29 2 ‚ 9 Ю › 7
Гелий/кислород . . . . . . . . 4 / 32 3 ‚ 1 11 . 2
Гелий/углекислый газ . . . . 4/44 3,8 13.0
Водород/воздух . . . 2 , 02/29 3,8 21, 4
Водород/кислород . . . . . . 2,02/32 4,0 23,6
Водород/УГЛекислый газ . . . . . . . 2,02/44 4,9 27.5
Водород/ксенон . . . . . . . . . . . . . 2 ‚02/ 131 7 ‚4 48 ‚6
ГЛАВА ||
ИЗМЕРИТЕЛЬНЫЕ ПРИБОРЫ И УСТРОЙСТВА
Современный аэродинамический эксперимент предусматривает
большой комплекс измерений параметров газового, потока, обтекающего
МОДель летательного аппарата. Одна часть этих измерений связана с ис-
следованием свойств набегающего (невозмущенного) течения, другая—
с определением параметров газа в' возмущенном потоке: непосредствен-
но на поверхности обтекаемого тела или вблизи него.
Экспериментальное изучение газовых течений основано на исполь-
зовании различных по конструкции и назначению измерительных прибо-
ров и устройств.
5 2.1. МАНОМЕТРЫ И ПРИЕМНИКИ дАВЛЕНИЯ
ГАЗА [НАСАДКИ]
Для измерения давлений в газовом или воздушном потоке применя—
ются разнообразные манометры. Причем выбор конкретной конструкции
манометра, соответствующей заданным условиям эксперимента, опреде—
ляется предполагаемой величиной исследуемого давления, характером
движения газа (установившийся или нестационарный поток, быстрое
или медленное изменение давления), а также требуемой точностью за-
мера. С учетом этих требований рассмотрим некоторые типы маномет-
ров, их устройство, принцип действия и области применения.
1. Жидкостные манометры
Дифференциальные манометры применяются для изме-
рения относительно небольших перепадов давлений в газовых средах.
Конструктивно они выполняются в виде Н-образной трубки, изготовлен-
ной из прозрачного материала (стек-
ло, пластмасса) и установленной обыч—
но с наклоном к горизонтальной плос—
кости (рис. 2.1.1). «Чувствительным
элементом» прибора является жид-
кость, налитая в трубку. Если к лево-
му колену трубки манометра подвести
давление рд, а к правому р2, причем
р1>р2, то это вызовет подъем уровня
жидкости в правом и соответствующее
снижение его в левом колене. Перепад
давлений р1—р2 будет уравновеши—
ваться давлением жидкости в трубке с
высотой, равной вертикальной проек-
Рис. 2.1.1. Схема жидкостного диф— ЦИИ СТОЛба’ длина котор 01.20 опредеітж
ференциального манометра ется разностью показании уровнеи в
обоих коленах манометра:
р1—р2=УАЙ$іПВ‚ (2.1.1)
где у—удельный вес жидкости; [З—угол наклона манометра; Ай=
=112—11ь причем 111, 112—показания уровней жидкости соответственно
в левом и правом коленах отсчетной трубки манометра.
Обычно в используемых конструкциях длина отсчетных трубок огра-
ничивается высотой помещения аэродинамической лаборатории. В соот-
ветствии -с этим, например, дифференциальным ртутным манометром с
вертикальными трубками (В=90°)‚ расположенными в помещении высо-
50
той 4 м, можно измерить перепады давлений до 5,5 кГ/см2; для мано—
метра, заполненного спиртом (т=0,8 кГ/дм3)‚ предельная величина из-
меряемого перепада давлений составит лишь 0,32 кГ/см2. Пределы из—
меряемых перепадов давлений будут еще меньше, если эти трубки уста-
новить наклонно.
Рассмотренные жидкостные манометры используются для измере—
ния давления только в установившихся потоках, что обусловлено инер-
ционностью столба жидкости, вызывающей существенное запаздывание
показаний истинной величины давления.
Качество манометра, как и любого измерительного прибора, харак—
теризуется его чувствительностью. Чувствительность манометра
определяется отношением величины разности уровней жидкости _в от-
счетных коленах к соответствующему значению перепада давлении:
№№ —р2› = (? зіп га)—1. (2.1.2)
Из этой зависимости следует, что чувствительность возрастает по мере
уменьшения наклона трубок и снижения удельного веса манометричес-
кой жидкости. При этом следует иметь ввиду, что угол не должен быть
настолько малым, чтобы затруднялся отсчет показаний уровня жидко-
сти в трубке из-за размытия мениска. В практических случаях этот угол
выбирается обычно не менее 0,1 рад. Чувствительность значительно по-
вышается, если вместо тяжелой «жилкости», какой является ртуть, ис-
пользовать обычную жидкость, например воду или спирт. Однако в этом
случае возможности регулирования чувствительности ограничены, так
как плотности таких жидкостей мало отличаются. Чаще в манометрах
используется спирт, который позволяет несколько повысить чувствитель—
ность, так как он легче воды; к тому же спиртовый столб имеет менее
размытый мениск, что дает возможность осуществить более точный от—
счет показаний уровня. С этой же целью жидкость в манометре подкра—
шивают.
Отсчет показаний уровня жидкости произвошлтся по шкале, нане-
сенной непосредственно на поверхность трубки или на экран. Цена деле-
ния шкалы составляет обычно 1 мм, а систематическая ошибка отсче-
та — примерно 11 мм.
Внутренний диаметр трубок жидкостных манометров равен 8—2—
—:—12 мм. Применение чрезмерно широкой трубки приводит к излишнему
увеличению количества жидкости и значительному размыванию менис-
ка. В трубке с очень малым диаметром действуют большие капиллярные
силы, затрудняющие измерения. По этой причине следует использовать
в манометре жидкости с малым поверхностным натяжением. Необхоци-
мо следить за чистотой стенок трубок. Грязь на них затрудняет снятие
показаний из-за нарушения формы мениска жидкости.
При работе с манометрами, заполненными ртутью, следует обра-
щать особое внимание на технику безопасности и предупреждать воз-
можные утечки ртути, так как ее пары являются токсичными.
М и к р о м а н о м е т р ы — приборы, предназначенные для измере—
ния малыхперепадов давлений (порядка 0,02 кГ/см2). Разновидностью
таких приборов является чашечный микроманометр, одно
колено которого выполнено вместо тонкой трубки в виде чашки—сосуда
большого диаметра (рис. 2.1.2 и 2.1.3).
На основании ] (см. рис. 2.1.3), которое при помощи закрепленного
на нем уровня устанавливается регулировочными винтами 2 горизон-
тально, находится чашка 3, соединенная с отсчетной трубкой 6. На сек-
торе 7 имеются отверстия 8 для фиксации угла наклона отсчетной труб—
ки с помощью штифта 9.
Давление в микроманометр подводится через штуцер 4 переключа—
ющего устройства 5, находящегося на крышке чашки. Переключающая
51
рукоятка этого устройства имеет два положения: «+», когда измеряемое
давление, большее атмосферного, подводится к чашке, и «—>›‚ когда оно
меньше атмосферного и подается в отсчетную трубку. На поверхности
трубки нанесена шкала для снятия показаний с ценой деления 1 мм..
Если давления р1 и № одинаковы, то жидкость занимает положе-
ние, отмеченное на рис. 2.1.2 пунктиром. По шкале отсчета на наклонной
трубке соответствующий уровень жидкости зафиксирован отметкой по.
В случае, когда давление ‚01 в чашке больше давления № в узкой труб—
ке, жидкость поднимается в ней ДО уровня _в. Так как количество жид-
@” 3 7
Рис. 2.1.2. Схема чашечного микроманометра:
і—чашка; 2—манометрическая жидкость; 3—отсчетная трубка
{в - __ ;
_,
. 5% ЗМ !
{\ $“- _______ № :?
| _ {`,-; ;” ‚ $. ...... 21$; :
ЁЁ » ;
; _ г ,; 3
&. ‚……‚„…„„_„„…‚ _, _ 3 ' ____ __ _;
Рис. 2.1.3. Внешний вид чашечного микроманометра:
] — основание; 2 — регулирующий установочный винт;
3 — чашка; 4 — подводящий штуцер; 5 — переключающее
устройство; 6 — отсчетная трубка; 7 — сектор; 8 —— отверстие
для фиксации наклона отсчетноЁ) трубки; 9 — фиксирующий
шти т
кости в манометре постоянно, то этот подъем на величину Аі1=іт—іго
вызовет понижение уровня в чашке на некоторую величину 6, которую
найдем из условия равенства объемов жидкости в узкой трубке и чашке:
МН : Рб, (2.1.3)
где і и Р —— площади поперечного сечения соответственно узкой трубки
и чашки.
Из (2.1.3) находим
6 = (ПР) Ай. (2.1.4)
Соответствующая разность давлений
р1 — р2 : (6 + Мг зіп 6) у, (2.1.5)
или с учетом (2.1.4)
Р1 _ Рв : Айк“ 5… В: (2—1-6)
52
где
К1 : 1 + і/(Р зіп 6). (2.1.7)
Для заданной конструкции манометра наряду с поперечными сече—
ниями і И Р обычно известен также удельный вес жидкости у. Тогда для
каждого угла В наклона отсчетной трубки можно подсчитать фиксиро—
ванные ЗНЗЧЕНИЯ
к : кд зіп @, (2.1.8)
К : у [1 + і/(Рзіп р)] зіпБ. (2.1.9)
Эти значения наносятся на секторе манометра вблизи отверстий, слу-
жащих для фиксации наклона отсчетной трубки, под соответствующим
углом.
или с учетом (2.1.7)
{*.„3
"у. _;
Рис. 2.1.4. Батарейный манометр:
1—резиновый шланг для педвода измеряемого давле-
ния; 2—Н-образная трубка; 3—манометрическая жид-
кость
С учетом (2.1.9) зависимость для перепада давлений получит вид
р1—р2=КАп. (2.1.10)
Если в этой формуле разность уровней Ан имеет размерность мм,
а коэффициент К —кГ ]дмз (размерность удельного веса), то вычис-
ленная разность давлений бу-
дет выражена в кГ/м2. Нетруд-
но убедиться в том, что этой
размерности соответствует дав-
ление, измеренное в мм вод. ст.
Таким образом, коэффициент
К в (2.1.10) приводит высоту
наклонного столба жидкости с
некоторым удельным весом );
к высоте вертикального столба
воды (у=1 кГ/дмз).
Батарейные мано-
метры применяются для за-
мера давления одновременно в
нескольких точках потока.
Внешний вид одного ИЗ ТЗКИХ Рис. 2.1.5. Схема чашечного батарейного
манометров показан на рис. манометра:
_ _ 1 — общий резервуар (чашка); 2 —— отсчетные труб-
2"14 ЭТОТ манометр представ ки; 3—манометрическая жидкость
53
ляет собой совокупность нескольких П-образных (дифференциальных)
манометров, смонтированных на одном каркасе. Расшифровка показа-
ний такого прибора производится отдельно для каждого дифференци-
ального манометра (канала) с использованием зависимости (2.1.1).
На рис. 2.1.5 показана другая конструкция батарейного маномет-
ра—чашечный батарейный манометр. Особенность его со-
стоит в том, что у каждого манометра оставляется по одной отсчетной
трубке, присоединяемой к общему разервуару (чашке). Преимущество
этого манометра заключается в уменьшении количества снимаемых
показаний.
Размеры резервуара по сравнению с поперечным сечением отсчет-
ных трубок должны быть достаточно большими, чтобы исключить вза-
имное влияние трубок при изменении в них уровней жидкости. В этом
случае перепад давлений определяется по показаниям отсчетной труб-
ки из выражения
рі—робщ= „тв-Ан„ (2.1.11)
где
№.- = до —/т.-‚ (2.1.12)
Щ— высота уровня жидкости в отсчетной трубке; по—начальная высо-
та жидкости (общая для всех каналов); р.;—измеряемое давление,
подведенное к і-й трубке; рощ—давление в резервуаре; при этом дав—
ление робщ может быть атмосферным или статическим давлением на-
бегающего (невозмущенного) потока, в частности, воздушного течения
в рабочей части аэродинамической трубы.
В ходе эксперимента обычно фотографируют показания всех от-
счетных трубок батарейного манометра. Последующую расшифровку
этих показаний производят, как правило, по негативным фотоснимкам
после окончания опыта. Это позволяет значительно сократить время
проведения опыта и получить более точные результаты измерений.
2. электрические датчики давления
При измерении очень больших или же весьма малых (менее 1 мм
рт.ст) давлений более точные показания дают Манометры, действие
которых основано на использовании электрических датчиков давления.
Такие датчики являются единственным средством измерения быстро
меняющихся давлений в неустановившихся газовых или воздушных
потоках.
Необходимо заметить, что электрические датчики давления находят
также широкое распространение в аэр0динамических лабораториях
для обычных измерений, вытесняя более громоздкие по своим разме-
рам и менее удобные в эксплуатации другие измерительные приборы,
в частности некоторые виды жидкостных манометров. Устройство и
принцип действия таких датчиков основывается на преобразовании дав-
ления в электрический сигнал, последующем его усилении с целью бо—
лее точного замера и, наконец, расшифровке результатов замера, в ре-
зультате чего определяется соответствующая величина давления.
Рассмотрим некоторые виды электрических датчиков.
Вреостатном, или потенциометрическом,датчике (рис.
2.1.6) давление через штуцер ], расположенный на корпусе 2, подво-
дится к внутренней полости упругого элемента 5. Этот элемент, укреп-
ленный на корпусе, под действием давления деформируется и переме—
щает по обмотке реостата подвижный контакт 3.
Если потенциометр подключить к источнику постоянного тока
(рис. 2.1.7), то величина снимаемого электрического сигнала будет
зависеть от положения подвижного контакта. Так как перемещение
54
этого контакта определяется деформацией упругого элемента, то, сле--
довательно, величина выходного сигнала будет зависеть от измеряемо-
го давления. Такая электрическая схема обеспечивает большой выход-
ной сигнал, что позволяет фиксировать его шлейфовым осциллогра-
фом без дополнительного усиления.
Чувствительность электрического датчика представляет собой отно—
шение изменения электрического сигнала к соответствующему прира-
‚........... .- _ . .. ___ _ .,
з 5 ' Рис. 2.1.6. Потенциометриче-
' СКИН датчик Давления:
! -- штуцер; 2 — корпус: 3—подвиж-
"$ __ _ _ ; ный контакт; 4—обмотка потенцио-
7 1 метра; 5 -— упругий элемент;
1
1
6 —- штепсельный ` разъем
&`
Ы
№
\ _' -_ ?:; Ё.,“ Рис. 2.1.7. Схема
: - . ' 3,7 ‚Ё - включения потен-
ЦИОМЗТРИЧеСКОГО
датчика давления:
? ] —-- клеммы подклю—
чения питания;
2 -- клеммы для сня-
тия выходного сигна-
ла; 3 -- неподвижная
обмотка потенциомет-
ра; 4 —— недвижный-
контакт
„_.
- . ”ён ‹.;
„ ..“„ ‚ „т...—___,. гм
гут-_‚оу-чигиипт’г’ тие—н
{Ча
%
Ё”
!
Е
и
%
1__
Рис. 2.1.8. Конденсаторный датчик дав- Рис. 2_1_9_ Индуктивный датчик дав-
ления: ления:
1—корпус; 2—неподвижная обкладка; 3—под- 1—корпус; 2—обмотки катушек; 3_вы_
ВИЖНЗЯ обкладка; 4—изолирующая проклад' ВОДЫ; 4_упругая диафрагма (сердечник)
ка; 5 — уплотнительная шайба; 6 — гайка
щению давления. Для потенциометрического датчика чувствительность
равна отношению изменения напряжения на выходе к соответствующей
разности давлений. Имеющиеся конструкции таких датчиков позволя—
ют измерять давления от 2,5 до ЗОО—і-З2О кГ/см2.
Возможная частота изменения давления при измерении сравни—
тельно невелика и составляет примерно 50 гц. Это ограничивает при-
менение реостатных датчиков лишь для случаев, характеризующихся
относительно небольшим отклонением течения от стационарного. Сле-
дует также принимать во внимание, что измерительный прибор с таким
датчиком нельзя устанавливать в местах, подверженных влиянию по-
сторонних вибраций, которые могут вызвать колебание подвижного-
контакта и, как результат, искажение показаний.
55
Основнымэлементом емкостного (конденсатор ного) дат-
ч и к а является плоский конденсатор, одна обкладка которого представ-
ляет собой тонкую упругую пластину (на рис. 2.1.8 ПОДвижная обкладка
3). Деформируясь ПОД воздействием давления, она смещается относи-
тельно неподвижной обкладки и вызывает изменение емкости конден-
сатора, измерив которое, можно найти соответствующее изменение дав—
ления. Изменение емкости регистрируется специальным электронным
прибором, соединенным с выводами конденсатора, один из которых
выполнен заодно с неподвижной обкладкой, а другой связан с корпу-
сом.
Чувствительность емкостного датчика определяют как отношение
изменения емкости конденсатора к соответствующему изменению дав-
ления. Выбором жесткости упругой обкладки можно обеспечить необхо—
димую чувствительность датчика. Этим датчиком можно измерять пере-
менные давления с частотой до 30 кгц.
К недостаткам емкостных датчиков следует отнести возможное ис-
кажение показаний, вызванное проникновением газа в пространство
между обкладками конденсатора. Следует также отметить, что удале-
ние датчика от усилительной и регистрирующей аппаратуры ограничено
сравнительно небольшими расстояниями во избежание значительных
наводок, которые могут возникнуть в длинных соединительных кабе-
лях. Исследования показывают, что при использовании электрическо-
го тока частотой до 100 кгц допустимое удаление не должно превы-
шать 0,3+О,5 м.
В индуктивном датчике используется свойство катушек из-
менять индуктивность при перемещении внутри них металлического
сердечника. В корпусе ] такого датчика (рис. 2.1.9) закрепляются об-
мотки катушек 2, межцу которыми посередине корпуса размещается
упругая диафрагма 4 из магнитного материала, играющая роль метал-
лического сердечника. Измеряемое давление подведится к диафрагме
через отверстие в корпусе датчика. Для питания датчика обычно ис—
пользуется переменный ток частотой до 50 кгц. В электрической схеме
датчика предусматриваются специальные электронные усилители.
Чувствительность индуктивного датчика определяется как отноше—
ние приращения индуктивности к соответствующему изменению изме—
ряемого давления. Требуемая чувствительность достигается за счет со-
ответствующего подбора толщины мембраны. Современные конструк-
ции датчика позволяют измерять давления, изменение которых проис-
ходит в широком диапазоне частот, достигающих примерно 5 кгц.
Этот датчик позволяет регистрировать также стационарное давление,
обеспечивая устойчивые показания (о таком приборе говорят, что он
имеет стабильную статическую характеристику). Малые размеры ин-
дуктивных датчиков позволяют использовать их для измерения давле-
ний в ограниченных по размеру областях течения газа.
В тензометрическом датчике упругий элемент, восприни-
мающий давление, несет на себе тензосопротивления (тензоцатчики).
Изменение давления вызывает деформацию упругого элемента и, как
следствие, изменение электрического сопротивления наклеенных тензо-
датчиков, регистрируемого специальными измерительными приборами.
Упругие элементы изготовляются в виде плоской мембраны, тонко-
стенного стакана или трубки-кольца. Тензодатчики располагаются в
месте наибольших деформаций упругого элемента. На рис. 2.1.10 по-
казана схема такого упругого элемента в виде тонкостенного стакана,
на боковых стенках которого расположены датчики. Используемые в
современных конструкциях датчики, изготовляемые из тонкой металли-
ческой проволоки, фольги или пленки, называются тензисторамн.
Изменение величины сопротивления и, следОвательно, вых0дной
электрический сигнал тензодатчика малы, поэтому их трудно измерить.
Для увеличения величины этого сигнала тенз0датчик с сопротивлением
Нд включается в одно из плеч моста Уитстона (рис.о2.1.11). К однои
диагонали моста подводится напряжение Е, а с другои диагонали сни-
мается напряжение Пвых, пропорциональное изменению сопротивления
Нд датчика и, следовательно, зависящее от величины измеряемого дав-
ления. Если есть возможность установить второй датчик Кн, измеряю-
щий деформации противоположного знака, то его включают в противо-
положное плечо моста (см. рис. 2.1.11). Такое включение датчиков по—
зволяет получить на вых0де моста
сигнал, в два раза больший, чем при
использовании только одного дат-
чика.
Нагревание (или охлаждение)
тензодатчиков во время опыта вы-
2 зывает дополнительное изменение
его сопротивления, что приводит к
нарушению начальной балансиров-
////‚…
и
/№
”дых
@
Рис. 2.1.10. Упругий эле-
мент тензометрического дат-
чика давления:
З 9—
] —— тензодатчик; 2 —- тонкостен- Е
ный стакан; З—фланец для
крепления стакана ‚, корпусе Рис. 2.1.11. Мостовая схема
датчика включения тензодатчиков
ки моста и появлению на выходе неучитываемого сигнала. Для устране—
ния этого явления применяют температурную компенса цию,
которая заключается в том, что в разные плечи моста включаются два
датчика (Нд и КК) с одинаковым изменением сопротивления при нагрева—
нии или охлаждении. Такое включение приводит к сохранению баланси-
ровки моста при температурных изменениях. Таким образом, в рассмат-
риваемом случае второй датчик с сопротивлением Кн играет роль темпе-
ратурного компенсатора. Обычно такой датчик работает в том же темпе-
ратурном режиме, что и датчик с сопротивлением Нд. Если не удается
использовать датчик для измерения деформаций противоположного зна-
ка, то в качестве температурного компенсатора применяется термоком-
пенсирующий элемент Нк, наклеиваемый в месте нулевых деформаций,
где его температура будет такой же, как и основного тензодатчика.
Из рис. 2.1.11 видно, что в схеме моста предусматриваются также
р езистор ы К1 и 132. При использовании этой схемы для тензоизмере-
ний обычно в качестве таких резисторов применяются другие датчики,
нанесенные на упругий элемент.
Рассмотренная мостовая схема подключается к т е н 3 о м е т р и ч е—
ской станции, служащей для регистрации и измерения вых0дного
сигнала. На рис. 2.1.12 показан внешний вид одного из промышленных
образцов такой станции (типа 8АНЧ-7М) со шлейфовым осциллогра-
фом для записи показаний. Эта станция имеет восемь одинаковых
усилительных каналов, расположенных в общем корпусе. К каждому
57
из них может быть подключен один датчик. Таким образом, тензостан-
ция позволяет измерять Давления одновременно в восьми точках пото—
ка. Органы управления и настройки каждого канала вынесены на ли-
цевую панель, на которой также размещается пульт управления всей
станцией и общим источником питания.
’! “г““: `
`*`/' `"дж-`." ' :: .
* №№ ..” 9"
" 1!“- . '-
' . . _ К..: ‹
‹. ":: \=! . _.
+ ' '
.; "'?
№ . ......... ::::'__.-_
И
» :
5 :>
.а...
Рис. 2.1.12. Внешний вид тензометрической станции со шлей—
фовым осциллографом:
1—тензометрическая станция; 2—пульт управления; З—лицевая па-
нель измерительного канала; 4—шлейфовый осциллограф
Функциональная структурная схема ОДНОГО канала представлена
на рис. 2.1.13. Одна диагональ схемы 1 с тензодатчиками Нд и КК под-
ключается к генератору несущей частоты 6. Под воздействием измеря-
1
НГ 2 3 ч 5,
& {__
6
1
7
Рис. 2.1.13. Функциональная структурная схема одного
канала тензостанции:
] — мостовая схема; 2 — усилитель; 3 — фазочувствительное уст-
ройство; 4 — фильтр; 5 — индикатор; б — генератор несущий ча-
стоты; 7 — блок питания; 8 — балансное устройство; 9 — осцилло-
граф; Ед— рабочий тензодатчик; КК —компенсирующий тензо-
датчик; Е; и Кя—резисторы моста
емого давления вместе с упругим элементом датчика деформируются
наклеенные на него тензоэлементы и изменяется их сопротивление. По
этой причине нарушается первоначальная балансировка .моста (эта ба-
лансировка осуществляется специальным балансным устройством) и
58
появляется сигнал во второй диагонали моста, которая подсоединена
к усилителю 2. После усиления сигнал поступает на фазочувствитель—
ное устройство 3, которое определяет знак деформации и выделяет оги-
бающую амплитудно-медулированного сигнала, обусловленного пере-
менным характером измеряемого давления. Пройдя фильтр 4, который
задерживает высокочастотные колебания с частотой генератора, сиг-
нал регистрируется индикатором 5. У прибора 8АНЧ-7М, показанного
на рис. 2.1.12, в качестве индикатора, общего для всех каналов, исполь-
зуется миллиамперметр, установленный на пульте управления тензо`
/ 5
0 3 С
‚ газа:-‘
% 5252$"
/// /
/.=:=:=:=3 ;
о'о'о'о'сі / / ?
о'о'о'о'с' %
% ::::фй | ]] /Й _}
/ 9999‹ ‘
, КЗ /9°.2°:92д.‹ \ Ч \ »Й/‚_Ч_
//‚/ Р" ;33/
ТФ +Ц| '- _
|' Рис. 2.1.15. Пьезокристалличе-
ский датчик давления:
Рис. 2.1.14. Электрическая схе- ‚_корпус; 2_пьезоэлемент;
МЭ ВКЛЮЧЗНИЯ Г едисторов 3—электрод; 4—фторопластовая
мембрана; 5 —- вывод; б — изолиру-
ющая втулка
станцией. Вместе с индикатором для записи показаний может быть ис—
пользован шлейфовый или катодный осциллограф.
В современной тензометрической практике широкое распростране-
ние наряду с датчиками из проволоки, фольги или пленки находят ге-
дисторы—полупроводниковые тензодатчики из германиевой денд-
ридной ленты. Электрическая схема включения гедисторов показана на
рис. 2.1.14. Благодаря повышенной чувствительности такие датчики не
требуют для работы с ними специальных электронных усилительных
устройств. Возникающий под воздействием давления выходной сигнал
с датчика измеряется миллиамперметром и регистрируется при помо—
щи шлейфового осциллографа. Применение такого датчика ограничено
случаями, при которых его температура не превышает 45—2-50° С. При
значительном разогреве точность измерений существенно снижается.
Тензометрические датчики широко применяются для измерения как по—
стоянных, так и переменных давлений. При этом современные конст-
рукции датчиков допускают регистрацию давлений, частота изменения
которых не превышает 2 кгц.
В пьезокристаллических и пьезокерамических дат-
чиках используется физический эффект, заключающийся в появлении
на гранях пьезокристалла электрического заряда, если к этому кри-
сталлу приложено усилие, совпадающее по направлению с кристал-
лографическо й осью (осью чувствительности). В использу-
емых конструкциях датчиков, схема одного из которых показана на
рис. 2.1.15, величина заряда пропорциональна действующему усилию.
Между корпусом ] датчика и электр0дом 3 расположен пьезоэлемент
2. Через фторопластовую мембрану 4, играющую роль изолятора и пре-
дохраняющую пьезоэлемент от повреждения, на него передается уси—
лие, вызванное измеряемым давлением. Возникающий вследствие это-
го электрический заряд (напряжение) снимается при помощи выводов
59
датчика, которыми являются корпус и вывод 5, и измеряется с по—
мощью электронного усилителя постоянного тока или усилителя с об-
ратной емкостной связью.
Чувствительность датчика определяется отношением величины воз—
никающего электрического заряда ‹] к соответствующему давлению.
Для пьезокристаллических элементов, работающих на сжатие под
действием некоторого усилия Р, пьезоэлектрический модуль @=
=с1/Р=20—:—2З ГИС/КГ (1 т.с=10—12 к). Так как на элемент датчика
Действует усилие Р=р8 (где р—измеряемое давление; 8—площадь
кварцевой пластины), то чувствительность датчика
В : а/р = (18 = (20 + 23) $ тс-см2/к1`. (2.1.13)
Конструкции приборов с датчиками из пьезокерамических кристал-
лов обеспечивают чувствительность, большую в 2—3 раза, чем из
кварца. Однако пьезокерамические Датчики позволяют измерять пере-
менные давления с частотой от 3 гц до 2 кгц, в то время как пьезокрис-
таллическими датчиками измеряются значительно большие частоты, до-
стигающие 50 кгц. Одно из преимуществ рассматриваемых датчиков
заключается в их высокой механической прочности, _а также возможно-
сти измерений давления в разогретых или, наоборот, переохлажденных
потоках. Пьезокристаллические датчики надежно работают при темпе-
ратуроах от —240 до +260 °С, а пьезокерамические—лишь от —55 до
+100 С.
3. Измерение разрежений
Манометры, предназначенные для измерения весьма малых дав-
лений (разрежений) называются вакуумметрами. В качестве ва-
куумметров могут использоваться обычные жидкост—
ные или механические манометры, позволяющие за-
, мерять малые давления порядка нескольких милли—
5 ] метров ртутного столба. Значительно меньшие давле-
Г ния могут: измеряться специальными вакуумметра—
ми, устроиство и принцип Деиствия которых зависят от
глубины вакуума исследуемой среды.
Рассмотрим т е п л о в о й вакуумметр, широко ис—
пользуемый для измерения малых давлений от 1 до
!
\'ЦЁЁ' пературный датчик (рис. 2.1.16). В стеклянном корпу-
Я} 10—3 мм рт. ст. Основным элементом его является тем-
Г се 1 этого датчика находится нить подогревателя 2 с
№2 укрепленным на ней спаем термопары 3. Выводы 4
' ___ 3 р. мм рт ст
! …
\ : ‘ л,] } 098
.” ', ”: і
Ё! ‚ і |‚Ё 0,5
:г___ | … .:
% Е. Т_Ц
0,“
Рис. 2.1.16. Схема
датчика теплового 0, 2
вакуумметра: 20 #0 60 80
1 _- стеклянный кор- ДЕЛЕНЦЯ шкалы придали
пус: 2 — нагреваемая
нить; 3 -— термопара;
4—электрические вы- Рис. 2.1.17. Градуировочная кри-
в°ды: 5—0тламывае' вая датчика теплового вакуум-
мая часть стеклянно-
го корпуса Метра
60
служат для подключения к датчику электрического кабеля, соединяю-
щего этот датчик с источником питания нити пологревателя и милли—
вольтметром для регистрации температуры спая термопары. На темпе-
ратуру нити, разогреваемой постоянным электрическим током, оказыва-
ет влияние теплопроводность газа, в котором эта нить нах0дится. В свою
очередь теплопроводность, как известно, зависит от плотности газового
потока и, следовательно, от давления. Измеряя при помощи термопары
температуру нити, можно таким образом найти соответствующее дав-
ление.
Для этой цели используются тарировочные графики, которые обыч-
но выполняются заводами, производящими вакуумметры. Для иллюст-
рации такой график показан на рис. 2.1.17. По горизонтальной оси гра—
фика откладываются деления шкалы прибора, регистрирующего тем-
пературу спая, а по вертикальной оси—измеряемое давление.
При использовании датчика часть его стеклянного корпуса отламы-
вается (см. рис. 2.1.16) и открытая нить помещается в среду, где тре-
буется измерить вакуум. Затем в соответствии с инструкцией, разра-
ботанной заводом-изготовителем, устанавливается начальный ток че-
рез нить подогревателя и фиксируется температура спая. Точность
измерения вакуумметрами составляет примерно 10—2—15 %.
4. Групповой регистрирующий
манометр
Рассмотрим конструкцию и принцип действия групповых регистри-
рующих манометров, позволяющих измерять давления одновременно
в нескольких точках потока. В аэродинамических лабораториях широ-
кое применение нашел регистрирующий электромеханический мано-
метр ГРМ, изготовляемый Московским зав0дом «Контрольприбор».
Внешний вид такого манометра
изображен на рис. 2.1.18. В кор— _ 5; 5
пусе прибора размещены двад- _ „
Цать Рычажных весовых элемен- ` ‘
тов (рис. 2.1.19), связанных меж—
ду собой общим электрическим
приводом и механизмом печати
(для воспроизведения показаний
на бумажной ленте). В верхней
части прибора Расположена шка-
ла визуального отсчетаэтих по—
казаний. „ ._ __ _____
Величина измеряемого давле- “__`_" ‚. __ '_ '
ния считывается с вертикальной __ › “……» " »»
шкалы 1 (см. рис. 2.1.18) напро- _ …… ' ' &’
тив указателя 2. Такие шкалы Ё " _-
выполнены для каждого измери- “ _' _а
‚› „№№ сии—“ммм
"»
‚.: , ". -‚.-
„ -
: “' `
‹ .
' ‘_ ‹ . о“
'. „- ._-
:‚:9 . '
. `, " ,
'№№№° "° '
_, " '“ №,:‚щжд „… мачт-м п'чг—м ри
, .
№
«›
Рис. 2.1.18. Групповой регистрирующий 'к' '
1—шкала визуального отсчета; 2—подвиж-
ный указатель; 3—указатель номера замера; -.__- . ,. --
кг!—механизм печати; 5—бумажная лента; __
6 —кнопка включения механизма печати; _ ' 3%
7— выключатель питания; 8— кнопка передви- - 1: ”\ .-
жения указателя номера замера " ` "
.61
тельного канала отдельно (всего две группы таких каналов по 10 в каж-
дой). В крайнем левом столбце каждой половины шкалы располагается
указатель 3 номера замера. В средней части прибора находится меха-
низм печати 4, а внизу, с правой стороны, расположен пульт включения
источника питания, механизма печати и устройства для передвижения
указателя номера замера.
\=
ТЗ
&&
4
!
20
Рис. 2.1.19. Схема рычажного весового элемента прибора ГРМ:
] — штуцер; 2 — основание; 3 — сильфон; 4 — упругий шарнир подвески;
5 — рычаг; б — подвижный контакт; 7 — неподвижные контакты; 8 — вин-
товая измерительная пружина; 9 — гайка измерительной пружины;
10 — винт; ]! — бумажная лента; 12 — механизм печати; 13 — механизм
регистрации; 14 — визуальный винт; 15 — шкала; ]б — указатель;
17 — электромагниты; 18 — ролик; 19 — групповой вал; 20 — электродви-
гатель привода; 2] —— диски привода
Измерение давления воздушного потока осуществляется следующим
образом. При помощи специальных приемников (насадков), располо-
женных в потоке, давление по резиновому шлангу подводится к штуце-
ру ], расположенному на задней стенке ГРМ (см. рис. 2.1.19), И по
дренажной трубке— к сильфону 3, установленному на рычаге 5. Воз-
никающее от давления в сильфоне усилие передается на этот рычаг, и
вследствие нарушения его равновесия происходит замыкание одного из
контактов 7. При этом включается соответствующий электромагнит 17,
который притягивает пластинку с роликом 18. Через этот ролик враща-
62
тельное движение передается на винты 10 и 14, которые приводят в дей-
ствие механизм регистрации показаний прибора 13. Одновременно вра-
щение винтов вызывает переМещение гайки 9 на измерительной пружи-
не 8 до тех пор, пока рычаг не окажется в равновесии. ТОГДа контакты
6—7 разомкнутся и цепь питания электромагнитов 17 разорвется. В этот
момент показание прибора будет соответствовать измеряемому дав-
лению.
Запись показаний в условных единицах производится на двух бу-
мажных лентах, перемещение которых осуществляется при помощи
12
//90\90101 01 во 90|
::Г42-: . /
9
0/5 10 81012
.3
. —|—|—|—'—1— —|—|—]—|—'—|— !— — -'—|—'—1_ . — — _т— _
г
Ш 12 В то 12 8 ш 12 8 1012 В 10 12
99,7 \ 100,3 100,3 994+ 99,7
Ч %
99,6
Рис. 2.1.20. Пример отпечатка показаний прибора ГРМ:
1 -— индекс прибора; 2 — номер декады; 3 — номер замера; 4 — указатель шка-
лы; 5 -— шкала десятков; б -— шкала единиц
специального электродвигателя. На каждой ленте фиксируются данные
о давлении, соответствующие декаде—группе из десяти измеритель—
ных каналов (рис. 2.1.20). Лента имеет одиннадцать колонок отпечат-
ков. Крайняя левая из этих колонок содержит индекс манометра 1 и но-
мер декады 2 (верхний ряд). В нижнем рЯДу, против неподвижного ин-
декса, располагается считываемый номер замера.
В других колонках, каждая из которых соответствует определенно-
му каналу, сверху и снизу расположены две шкалы. Причем верхняя
шкала, цена делений которой составляет 0,2, является по отношению к
нижней нониусом. Это означает, что показание нижней шкалы всегда
представляет собой целое число ее делений. В тех случаях, когда такое
показание близко к целому числуине ясно, больше оно или меньше это-
го числа, необходимо обратиться кверхней шкале. Если нуль на ней рас—
положен справа от указателя 4, то показание нижней шкалы будет
меньше целого числа, если слева, то больше. Примеры расшифровки по-
казаний замеров шести каналов по верхней и нижней шкалам приведе-
ны на рис. 2.1.20.
Расчет давления (в кГ/см2) по показаниям манометра осуществля-
ется по формуле
р—раш= і (Мо—МПа, (2.1.14)
где №0 и А! — показания прибора в условных единицах, соответствующие
атмосферному ратм и измеряемому р давлениям; іг — коэффициент
прибора.
Значение №0 определяется как среднее из показаний, соответствую-
щих атмосферному давлению до и после измерений в потоке. Коэффи-
циент Аа определяется в результате т_арирования манометра, осуществ-
ляемого обычно на заводе-изготовителе. Знак перед скобкой в формуле
(2.1.14) зависит от типа прибора: для манометров с пределами измере-
ния разности давлений (р—ратм) от —1 до 0,2 кГ/см2 и от —1 до
1 кГ/см2 следует выбрать знак «+», а для всех остальных — знак <<—>>.
Регистрация результатов измерений манометром может производить-
ся либо путем считывания отпечатанных на ленте показаний, либо по
указателю. Современные конструкции манометров типа ГРМ обеспе-
чивают точность измерения давления в случае снятия отпечатанных
показаний в пределах іО,5%\ от максимальной величины измеряемого
избыточного давления, а при визуальном отсчете _-і_—1‚5%ь
63
5. Приемники давления газа [насадки]
Различаются приемники (насадки), предназначенные для измерения
статического или полного давлений. Основным элементом таких насад-
ков являются дренажные отверстия (каналы), воспринимающие давле-
ние. У насадка (приемника) статического давления эти отверстия долж-
ны располагаться на боковой поверхности при том условии, чтобы линия
тока исследуемого течения совпадала с касательной к этой поверхно-
сти в дренажной точке. Насадок полного давления отличается тем, что
////////////////// 0:1 №
Т°—Ё-— :; 17/4252
, $ „„ / 1
‚\ /\ №00, 0,6 //1 д
. ’ /// ЧГ;
' 1//
Рис. 2.1.21. Измере- О %
ние статического дав- “›5 "О 1,5 2,0 2,5 с!,мм
ЛЗНИЯ В трубопро— Рис. 2.1.22. Влияние размеров от-
воде. верстия на величину ОШИбКИ ИЗ-
1—стенка трубопровода: мерения статического давления
2—приемное отверстие;
З—штуцер
дренажное отверстие совпадает с точкой полного торможения (крити-
ческой точкой) на обтекаемой поверхности насадка.
Существует также приемник давления, представляющий собой ком-
бинированный насадок, который предназначен для измерения одновре—
менно статического и полного давлений.
Приемники статического давления. Простейшим при—
емником статического давления является стенка газопровода с дренаж—
ным отверстием, перпендикулярным к обтекаемой поверхности
(рис. 2.1.21). Диаметр отверстия не должен превышать 0,3+0‚5 мм,
так как излишне большой его размер вызовет дополнительные возму—
щения в потоке, что приведет к искажению измеряемого давления.
На рис. 2.1.22 показано влияние размеров отверстия на величину
ошибки измерения в процентах к скоростному напору.
Для измерений статического давления в различных точках потока
жидкости или газа применяются специальные приемники, имеющие
форму насадков. На рис. 2.1.23 показана схема и а с адк а П р а ндтл я,
используемого для таких измерений в дозвуковом равномерно парал—
лельном потоке. Этот насадок представляет собой длинный цилиндр,
на боковой поверхности которого просверлены приемные отверстия.
Носовая часть цилиндра имеет сферическую форму, а отверстия распо-
лагаются от носка на расстоянии, равном примерно 3—2—8 Диаметрам
цилиндра. При таком удалении давление в окретности отверстия вос-
станавливается до величины, равной измеряемому статическому давле—
нию в невозмущенном течении.
64
На рис. 2.1.24 показано влияние расстояния до дренажного отвер-
стия на точность измерения такого давления.
Измерение статического давления в сверхзвуковых потоках осущест—
вляется с помощью насадков с конической (рис. 2.1.25) или ожи -
[дата:-‚(Иар
1
“1/2
' \ч
71111111111; '. 7////‚`_.\ :
` ‘
^
С»
1
Ш
\.и
О.
‚"
а
. | .
М
©
`;
‚”’/”111’11’
:
верстие; 3 — цилиндрический корпус; -
4 — державна; 5 — штуцер
“\ \
Рис. 2.1.23. Насадок П андтля Ё Ё
для измерения статического Ё? ЁЁ
давления: ; ;.
%
1—носовая часть; 2—дренажное от- 5 ;
г
@
\\\\&\\\\\\\`
в альной (рис. 2.1.26) головными частями. На этих рисунках указаны
расстояния от носка до дренажных отверстий. Эти расстояния при вы—
бранной форме носка и необходимом его заострении обеспечивают вос—
становление давлений у приемных отверстий до их значений в набегаю-
щем потоке. Заострение определяется
углом при вершине конуса или ожива- 0/0
ла. При расстояниях до дренажных
отверстий, указанных на рис. 2.1.25 и ]
2.1.26, допустимый угол для конуса ра- 5
вен 8°, а для оживала 35°.
Как показывают исследования, при-
емники с такой формой головных час—
тей пригодны для измерения давлений ’
также в околозвуковых (трансзвуко- 1
вых) потоках. При этом, однако, следу- ]
ет предусмотреть, чтобы приемное от- _ 28 ...- ‚2 ч 1. „
верстие насадка не попало в зону влия- 0 4 ,; д 28 1112/67
ния отраженного от стенки головного /
скачка уплотнения (рис. 2127). Если 2
это влияние имеет место, то в окрест— ' /
ности приемного отверстия давление
будет существенно отличаться от его -2
значения в набегающем потоке и изме-
рение будет ошибочным.
Рассмотренные конструкции отли-
чаются достаточно большой длиной,
определяемой значительным удалени-
ем дренажного отверстия от передней
Г-Э
!..
части. В практике нашли применение Рис. 2.1.24. Влияние расположе-
также сравнительно короткие насадки, НИЯ ПРИЗМНОГО отверстия на КОР-
позволяющие измерять статическое ”усе ”ЗСЗЁЁЁЯ “213323229“ изме“
Давление в некоторой ограниченной р д '
1 —- влияние державки; 2 — влияние но-
области потока. На рис. 2.1.28 показа— совой части
5—927 65
на схема такого насадка, используемого в дозвуковых потоках. Прием-
ное отверстие размещено в центре тонкого диска, закрепленного на ци-
линдрической державке. Ее толщина составляет примерно 0,1 0. При
таких размерах Давление в приемном отверстии диска равно стати—
ческому.
150’ бд
___%—1570 501$ - ^ ` +—
5
Рис. 2.1.25. Конический насадок для измерения стати-
ческого давления
Для измерений в ограниченных по размерам каналах или в непосред-
ственной близости от обтекаемой поверхности летательного аппарата
применяются миниатюрные насадки, которые, внося незначи—
тельные возмущения в поток, обеспечивают достаточно высокую точ-
ность измерений. Попереч-
„т ное сечение такого насадка
. не должно превышать 3—2—50/0
от диаметра канала или от
расстояния до обтекаемой
ъ поверхности, в окрестности
э %(), которои измеряется давле-
НИЗ.
М
31
% Ь.
‚ „„„„„‚„ П и и е ниях в озв '-
{ ужин:" — - _ р ЗМ ре д 3
. й _ . „!$/‚1111171111114. ‘ КОВЬЁХ потоках широко при—
" меняется миниатю ный
' за БЫ ! 12с! . р
:: ‘ гт— тг— НЗСЭДОК С ПРОТОКОМ,
схема КОТОРОГО ПОКЗЗЭНЭ НЭ
Рис. 2.1.26. Насадок с оживальной голов- рис. 2.1.29. Для измерения
кой ДЛЯ измерения статического давления статического давления при
сверхзвуковых скоростях ис-
пользуется насадок, изображенный на рис. 2.1.30. Этот насадок пред-
ставляет собой ‹<односторонний» клин, на нескошенной поверхности кото-
рого располагается дренажное отверстие.
Обычно принимается, что точность замера давления насадком не
должна быть ниже 1% от величины скоростного напора. Угол отклоне-
ния насадка, при котором ошибка Не. превышает этой величины, назы-
вается углом нечувствительности. Для каждого типа насадка
\\\\\`
№п№
',”‚1111111111/
\\\\\\\\\\\
7
/‚ [1/ 777," "! ‚71,7717/1’ : "
%7/22}, ‚///// /‚/'2//‚//‚>Му 7/7 ‚ / / ”?,/77:1;4/2
\\\\\\\\
.\\\\\\
"”"11’1’‚”"’.
Рис. 2.1.27. Взаимодейст-
вие ударных волн со стен-
кой аэродинамической Рис. 2.1.28. Дисковый насадок для
трубы: измерения статического давления:
-1 —- головной скачок уплотнения; (!= (0‚1+0‚2) В
.? — стенка; 3—отраженная удар—
ная волна: 4—приемное отвер-
стие
66
экспериментально определяются диапазон значений чисел Моо=Уо°/а…
или ЖЮ=У°°/а*‚ а также углы отклонения оси насадка от направления
скорости набегающего потока, при которых можно осуществлять изме-
рения с Допустимой точностью. Для насадка Прандтля этот угол со-
3,5
А 1/1
щді _
34
!
#атбфа \
со _гчъ
'е- __… 9
$
\
3,5
7 а ' а
’ Ц
- .4’17/0
м ›! ////.__ !
_°°_,‚_ ‚ А'Гі/‘ЛЙЖЁ/Й
!
3
Рис. 2.1.29. Миниатюр- Рис. 2.1.30. Клиновилный насадок
ныи насадок с протоком для измерения статического дав-
для измерения статиче- ления:
СКОГО давления і—нескошенная поверхность клина;
2 — приемное отверстие; 3 — линии Ма-
ха; 4 —— скачок уплотнения
ставляет 16° при М…<0,85. Насадок с протоком, ивображенный на
рис. 2.1.29, обеспечивает удовлетворительные результаты при углах от-
клонения і28° и М…<О‚83.
гП-ри-емники полного давл ения (давления тормо—
ж е н и я). Полное давление измеряется с помощью и а'с а д к а П и-‘т о,
который представляет собой пустотелую изогнутую тр'убку_(рис. 2.1.81),
соединенную с манометром. В дозвуковом потоке (р-ис. 2.1-.З1,а) тор—
можение потока происходит непосредственно в трубке. При Малых ско-
ростях (несжимаемый поток, число М…тО) возникающее в этой трубке
полное давление, регистрируемое манометром,
ро = р.,. + р.. УЁ.‚/2‚ (2.1.15)
а в сжимаемом потоке (1> Мсо >О)
іг—1 „№№—1)
р0=р°° (1 + Тмдо) . (2.1.16)
В сверхзвуковом потоке перед головной частью насадка возникает
скачок уплотнения (рис. 2.1.31,б)‚ вызывающий торможение газа, ко-
торый претерпевает дополнительное сжатие в трубке. Образующееся
в трубке давление торможения Ро› измеряемое манометром,
іг— [ )Ё/(Ё—П
рЬ=рс(1+—М2
2.1.17
2 ‚ ‹ ›
5* 67
где рс, Мс —соответственно Давление и число Маха непосредственно за
«прямой» частью криволинейного скачка уплотнения:
212 ь_1
Рс=Роо (@ МЕ,—дп); (2.1.18)
_ 2 да 1 М2
М:: +‹ +) °° . (2.1.19)
гьм‘іо—(ь_1)
ос при:
% м„=0,26 м…:ж, 62
3:
”\“/52 ’ !?: -———-———-— с: %:…25 гп° Ыі°
“
\\\\\`\\`
%
\
"О
?
37/2
"
и:
Ё
к\`
7////////
‘
ЁЁ…
/
› № ,
‚ 6) № [
м„>‚‚р ‘_ д=Фз,2
_"› „, 1,0 :21° 229°
““““““““““‘“ ‚5 5: 0,55 : 13 ° ., : п:
дыме … ’ 0,391105 нц
_.
Рис. 2.1.31. Насадок Пито для Рис. 2.1.32. Величина углов нечувствительности и
измерения ПОЛНОГО давления: для различных форм головной части насадков
а—схема обтекания насадка до- ПОЛНОГО давления
звуковым потоком (і—изогнутая
приемная трубка; 2—штуцер; 3—гай-
ка; 4—стенка); б—-'схема обтека—
ния приемного отверстия сверхзву-
ковым потоком
Углы нечувствительности для заданной формы насадка определя-
ются в зависимости от числа Мсо газового потока, в котором проводятся
измерения. На рис. 2.1.32 показаны схемы насадков с различной фор-
мой входной части трубки и соответствующие им углы нечувствитель-
ности для двух чисел М…: 0,26 и 1,62. Как видно, соответствующим вы—
бором формы насадка можно значительно увеличить углы нечувстви—
тельности. Это позволяет, не предъявляя жестких требований к распо-
ложению насадка в потоке, получать достаточно точные результаты
измерений давления.
Такой же эффект имеет место при использовании экр анирован-
ного насадка (рис. 2.1.33), углы нечувствительности которого могут
достигать і(60—:—65)°.
Если насадок полного напора находится в потоке, характеризую-
щемся неравномерным распределением скорости по некоторому сечению
68
в ограниченной области потока, то измеряемое им давление будет соот—
ветствовать скорости в точке сечения, которая расположена на «э ф ф е к-
тивной» оси. Эта ось смещена относительно геометрическои оси
1
Рис. 2.1.33. Экранированный насадок для измерения пол-
ного давления:
1—корпус (экран); 2—трубка с приемным отверстим; д—диаметр
вх0дного отверстия экрана; 1—длина входного конического участ-
ка; 11=0‚5 В; ‹і=-0‚5 В; углы нечувствительности: і47° при !=!)
и іб4° при 1=0‚150
входного отверстия, как это показано на рис. 2.1.34, на некоторое
расстояние 6, которое с известным приближением определяется из вы—
ражения
д/р = 0,131 + орава/в, (2.1.20)
где В и а — диаметры соответственно наружной трубки и входного от-
верстия насадка.
&‘
Рис. 2.1.34. Смещение рав-
нодействующей сил давле-
ния в неравномерном по-
токе относительно оси на—
садка:
1—Г60МВТРИЧСК8Я ОСЬ насадка:
2 —- положение «эффективной»
оси
Зависимость (2.1.20) справедлива при условии
(Б‚’(])—(сіа‚"сіу) : 0,1 + 0,2 (а : рУ2/2). (2.1.21)
Указанный эффект смещения необходимо учитывать, в частности, при
измерениях в пограничном слое. В соответствии с этим эффектом ско—
рость, вычисленная по измеренному полному давлению, будет равна ее
значению в той точке сечения пограничного слоя, которая расположена
на «эффективной» оси.
Комбинированные насадки. Для измерения давлений в до-
звуковых потоках широко используется к 0 М 6 и н и р о в а н н ы й н а -
с а д о к П И т о — П р а н д т л я, показанный на рис. 2.1.35. Продоль-
ное отверстие 2 насадка воспринимает полное давление, а отверстие 4
на боковой поверхности цилиндрического корпуса 3—статическое Дав-
ление. Таким насадком можно измерять давления в воздушных потоках
с числами Моо<0‚85. Угол нечувствительности насадка составляет для
указанных чисел Маха примерно і5°.
69
"Для Измерения давлений в около- и сверхзвуковых Потоках приме-
няется насадок, схема которого показана на рис. 2.1.36. Этот насадок
представляет собой комбинацию обычной трубки Пито и насадка ста-
‚234+
\\“- "
//\
_
Рис. 2.1.35. Комбинированный насадок Пито—Прандтля
\\5
Ч—
@=
=0‚3 В; 1=3 В.
! —- головка насадка, 2 —-— продольное отверстие;
3 — цилиндрический корпус,
4—приемные отверстия статического давления; 5—трубка вывода для изме-
рения полного напора; б—державка и штуцер статического давления
Рис. 2.1.36. Комбинированный насадок:
і—приемник статического давления; 2—трубка полного напора; 3—- скачок
уплотнения; 4— линии Маха
тического давления (см. рис. 2.1.25). В этой комбинации трубка Пито
располагается так, чтобы скачок уплотнения, возникающий перед нею,
находился бы за приемным отверстием насадка статического давления.
" _""""""""" "
..
&“““_іі"""""""`р`т
\\\\\\`\\\\\\\\\\\\\\"\`
.
\\\\\\\\\\\\\\\\\\\\\\\_\\\`
\
“
"‘іііііііііііі. „и ‚"’/‚111 \ , …
„,/‚’лдіііііііііііі. г",/„”’‚1111111111111Ш1/1.
/
/
Рис. 2.1.37. Миниатюрный комбинированный
насадок с протоком:
1—приемное отверстие статического давления;
2—трубка полного напора
70
Конический носок этого насад—
ка должен быть достаточно
тонким, чтобы образующийся
скачок уплотнения был весьма
малой интенсивности, т. е. по
существу представлял бы со-
бой волну возмущения (конус
Маха). Влияние этой волны на
показания трубки Пито будет
пренебрежимо малым.
Миниатюрный ком-
бинированный насадок
для одновременного измерения
статического и полного Давле-
ний (рис. 2.1.37) можно _полу-
чить соединением в одной кон—
струкции насадка статического
давления с протоком и экраннроват—тного насадка (см. рис. 2.1.29
и 2.1.33). _
Другая конструкция такого миниатюрного насадка показана на рис.
2.1.38. Этот насадок изготовляется из Двух трубок, одна из которых яв-
ляется приемником полного давления, а другая — статического давления.
дид ! !”
ь №_№ |
А—А %
“Ф,
"Ф
6- :!-
°° \
… Т А “11
ц Р— %
<—›| ::
17 @
Рис. 2.1.38. Миниатюрный комбинированный насадок:
1—трубка полного напора: 2—приемное отверстие статического давления
Измерения полного давления в пограничном слое проводятся специ-
альными микротрубками (рис. 2.1.39) с диаметром приемных отверстий
О,15—:—О,2 мм. Такие трубки могут быть выполнены из металла или
Рис. 2.1.39. Микротрубки полного напора:
а — металлическая; б — кварцевая
кварцевого стекла. В измерительных целях могут быть использованы
металлические иглы для медицинских шприцев. У таких насадков при-
емное отверстие имеет форму сильно вытянутого овала, что позволяет
уменьшить смещение «эффективной» оси и тем повысить точность из-
мерений. Поперечные размеры насадка должны быть значительно
меньше толщины пограничного слоя (менее 0,1 6), что обеспечит воз-
можность измерения давления практически в выбранной точке этого
слоя.
5 2.2. приворы для измерения скорости ПОТОКА
1. Термоанемометры
Принцип действия и устройство термоанемометра основаны на из-
вестном физическом эффекте изменения температуры нагретого про-
водника, помещенного в поток, при изменении скорости его обтекания.
Основным элементом этого прибора является проволочный (или пле-
ночный) датчик.
Измерения в установившемся потоке. Теплоотдача про-
волоки будет равна такому количеству тепла, которое получает датчик
71
при нагревании электрическим током. Соответствующее количество
электроэнергии, идущей на нагревание, определяется по закону Джоу-
ля—Ленца:
(2 : РК,… (2.2.1)
где В… —сопротивление датчика; і— сила тока.
Во время опыта поддерживается постоянной сила тока и по изме-
нению сопротивления можно судить о скорости обтекающего газа. Та-
ким образом, по этой схеме термоанемометр работает в режиме по-
стоянного тока (рис. 2.2.1). Начальный ток, соответствующий по-
7 , и, 6
—°°—› %# і і 2 \\
4 Г ' \\`
я, {*_— О
2 20 #0 У…,м/сек
Рис. 2.2.1. Термоанемометр, выполнен— Рис. 2.2.2. Зависимость показаний
ный по схеме постоянного тока: термоанемометра от скорости потока
‚__датчик. 2—6алластный резистор при включении по схеме постоянного
тока
ложению датчика в покоящемся газе, устанавливается с помощью
балластного переменного резистора, а во время опыта регистрируются
показания вольтметра, соответствующие различным скоростям потока.
Характер зависимости этих показаний от величины дозвуковой ско-
рости виден из рис. 2.2.2. Такая зависимость определяется физическим
эффектом, в соответствии с которым при увеличении скорости обтека-
ния проволочка охлаждается сильнее. При этом чем ниже ее темпера—
тура, тем Меньше сопротивление, определяемое в соответствии с фор—
мулои
1% : Кн [1 + осн (Таи — ТНП, (2-22)
в которой Ти,—температура датчика; К… и Кн— сопротивления датчи-
ка соответственно при температуре Т… и начальном значении ТН:
=293 К; осн—температурный коэффициент сопротивления материала
проволочки при Тн=293 К.
При постоянном токе уменьшение сопротивления датчика вызывает
снижение падения напряжения на нем, что видно на рис. 2.2.2.
г\ “т В
\ /
5 /
„ /
3 (
п 20 ци 60 И…М/сеи
Рис. 2.2.4. Зависимость показаний
Рис. 2.2.3. Схема термоанемометра с по- вольтметра термоанемометра от ско—
стояннои температурои датчика: рости потока при включении по схе-
сторы моста ЧИКЗ
72
Термоанемометр может работать также в режиме постоянной
температуры датчика (рис. 2.2.3). При этом в начале опыта, как
уже указывалось, для неподвижной газовой среды устанавливается на—
чальный ток и, кроме того, записывается начальное показание вольтмет-
ра По. Обтекание датчика вызовет его охлаждение, что приведет к умень-
шению сопротивления. Чтобы не допустить этого и сохранить сопротив-
ление таким, как и в покоящем-
ся газе, необходимо увеличить 45 “
силу тока. Это в свою очередь / попов
приведет к большему падению
напряжения. Его величина од—
нозначно определяет скорость
потока, в который помещен 1
датчик. Характерная зависи-
мость показаний вольтметра от
скорости представлена на рис. " '
у... - :
2.2.4. % ‚
При измерении скорости по- ’
ТОКЗ чаще применяется схема С
постоянной температурой дат- Рис. 2.2.5. Схема соединения приборов
ЧИКЗ. При ЭТОМ следует заме- термоанемометра:
ТИТЬ, ЧТО использование ТЭКОЙ 1—датчик; 2—термоанемометр; З—вспомогатель-
схемы предопределяет меры, ный прибор; 4—вольтметр постоянного тока;
5— вольтметр переменного тока
обеспечивающие сохранность \-
нити датчика после окончания
замера. Это вызвано тем, что
если сохранить повышенное напряжение, которое имелось при проведе—
нии опыта, то при отсутствии движения газа, когда охлаждение датчика
уменьшится, возрастет его температура и нить может перегореть. Схема
с постоянным током предпочтительней, когда термоанемометр использу-
ется для определения температуры торможения газового течения.
Рис. 2.2.6. Проволочный датчик Рис. 2.2.7. Пленочный датчик термо-
термоанемометра: анемометра:
! -— нагреваемая нить; 2 — поддер— ! -— пленка; 2 — кварцевое основание:
живающие стойки: 3 — основание; 3 — корпус; 4 —— выведы
4 — корпус; 5 — выводы
Конструктивно термоанемометр выполняется в виде отдельных бло-
ков, которые комбинируются в зависимости .от выбранного режима его
работы. На рис. 2.2.5 показаны основные приборы и принципиальная
схема их соединения в термоанемометре В15А,изготовляемом в Дании.
Соответствующий выбор датчиков термоанемометра и режим их ра.-
боты обеспечивают необходимую точность измерений. С целью повы—
шения чувствительности термоанемометра датчик включается в одно
из плеч мостовой схемы, как показано на рис. 2.2.3.
Для исследования воздушных потоков широко.. используются датчи-
ки (рис. 2.2.6), изготовляемые из вольфрамовой или платиновой про—
волоки диаметром от 2,5 до 12 мкм и длиной от 1 до 12 мм. Для изм'е-
рений в потоках с большими скоростными напорами обычноприменяют
пленочныедатчики (рис. 2.2.7), изготовляемые из вольфрама или
платины. Такая пленка, толщиной примерно 1+2 мкм,.напыляется на
кварцевое оснОвание корпуса датчика.
6—927 73
Датчик устанавливается в потоке так, чтобы нить проволочки или
поверхность пленки были перпендикулярны направлению набегающего
потока. С измерительными приборами датчик соединяется специаль—
ным экранированным кабелем.
Преимущество термоанемометра как прибора для исследования воз-
душных течений определяется малыми размерами датчика, позволяю-
Рис. 2.2.8. Расположение проволочного датчика тер—
моанемометра и составляющие скорости потока:
1 — нагреваемая нить; 2 —- стойки; 3 --— основание
щими при измерении с‘корости вносить весьма малые возмущения в
поток. Одновременно это делает возможным применение термоанемомет-
ров для измерения скорости в потоках, ограниченных малыми размера—
ми, в частности в пограничном слое и в свободном потоке вблизи обте-
каемой поверхности. Термоанемометры отличаются также высокой
чувствительностью, позволяющей измерять небольшие скорости поряд-
ка 0,5-2—1 м/сек.
Измерение турбулентности. При обтекании датчикатурбу—
лентным потоком, вектор скорости которого содержит переменную
пульсационную составляющую, сигнал на выходе усилителя термоане—
мометра будет зависеть иот этой составляющей. В таком сигнале мож—
но выделить его постоянную и переменную составляющие: первую из
них измеряют вольтметром постоянного тока, а вторую—вольтметром
переменного тока.
Если датчик установлен относительно вектора скорости набегающе-
го потока так, как показано на рис. 2.2.8, то переменная составляющая
напряжения на выходе усилителя будет зависеть только от продольной
пульсационной составляющей скорости. Это напряжение, измеряемое
вольтметром переменного тока, будет пропорционально указанной со—
ставляющей.
Для измерения других пульсационных составляющих в конструкции
термоанемометра применяется Х-образньтй датчик, состоящий из двух
взаимноперпендикулярных перекрещивающихся проволочных нитей,
закрепленных на отдельных стойках датчика под углом 45° к его ос—
нованию (рис. 2.2.9). Каждая проволочка соединяется с отдельным
усилителем, на выходе которого измеряется соответствующий сигнал,
возникающий при обтекании датчика. Величина этого сигнала зависит
при заданной величине скорости потока от ее направления относитель-
но проволочки. В соответствии со схемой на рис. 2.2.9 только верти—
кальная составляющая су пульсационной скорости имеет различные уг-
лы с проволочными нитями. Следовательно, возникает разность выход-
ных сигналов с усилителей, по величине которой можно определить-
значение оу. Необходимая точность измерений достигается при усло—
вии, если частота изменения пульсационной составляющей скорости в.
74
турбулентном потоке меньше собственной частоты колебаний регист-
рирующей аппаратуры. „
Прежде чем приступить к проведению измерении, необходимо срав:
нить ожидаемую частоту пульсационной составляющеи_с наименьшеи
частотой собственных колебаний, которую имеет какои-либо элемент
“В
1 _,:1
З 15, сек
.: 6,
СЧ,…
‚_.
_ :.
Рис. 2.2.9. Схема Датчика термоане— Рис. 2.2.10. Осциллограмма
мометра для измерения поперечной реакции датчика на прямо-
составляющеи скорости: угольный импульс электри-
і—нагреваемые нити; 2—стойки; 3—осно— ческого тока
вание
термоанемометра. Исследования показывают, что такой частотой обла-—
дает датчик; ее величину можно оценить по формуле
1“ = 1/17, (2.2.3)
где т—постоянная времени датчика. Значение этой постоянной, зави—
сящее от материала и размеров датчика, обычно определяется опыт-
ным путем. Это определение ведется по осциллограмме выходного сиг-
нала с датчика при условии, что на его входе импульс тока имеет пря—
моугольную форму.
На рис. 2.2.10 в качестве иллюстрации показана такая осцилло—
грамма. Принимается, что постоянная т равна времени уменьшения ам-
плитуды сигнала на 0,63 Н (Н—первоначальная амплитуда). Согласно
этим экспериментам, в частности для датчика с проволочкой диамет-
ром 2‚5 мкм, постоянная времени из 10—3 сек и, следовательно, частота
собственных колебаний равна 1 кгц. В соответствии с этим возможная
частота изменения измеряемой пульсационной скорости должна быть
меньше 1 кгц.
Определение направления потока. Датчики и электриче-
ская схема термоанемометра, применяющегося для определения на-
правления скорости, показаны на рис. 2.2.11. К трем стойкам, располо-
женным на жестком основании датчика, прикреплены две одинаковые
АБББ
Рис. 2.2.11. Схема датчика термоанемометра для изме—
рения направления скорости:
1—стойки; '.’—основание.
_6, 75
проволочки АБ и БВ, образующие между собой угол 10°. Эти прово-
лочки, имеющие обычно длину от 1 до 5 мм, включаются, как показано
на рис. 2.2.11, в разные плечи моста Уитстона.
В Другом случае кажлую из проволочек можно соединить с отдель-
ным усилителем. При этом сопротивления проволочек (или сигналы
на выходе усилителей) будут одинаковыми, если датчик расположен в
потоке газа так, что углы, образуемые проВолочками и вектором ско-
рости, также одинаковы. В этом случае направление скорости совпада-
ет с биссектрисой угла меЖДу проволочками. Таким образом, направ—
ление скорости в рассматриваемой точке потока фиксируется при
достижении равновесия моста Уитстона (или равенстве сигналов на вы-
ходе усилителей).
2. другие приборы
для измерения скорости
Наряду с термоанемометром для исследования газовых течений мо—
гут использоваться другие приборы, различные по конструкции и наз-
начению. Обычно каждая такая конструкция предназначена для реше—
ния какой—либо конкретной задачи, связанной с определением либо
величины, либо направления скорости потока.
Для определения скорости дозвукового потока можно использовать
комбинированный насадок, изображенный на рис. 2.1.35. Из-
мерения в сверхзвуковых потоках целесообразно вести с помощью на—
садка, показанного на рис. 2.1.36. Заметим, что этими насадками ско-
рость не может быть измерена непосредственно; ее величина определя-
ется при помощи соответствующих теоретических зависимостей по
известному давлению воздушного потока, измеряемому насадком. Для
несжимаемого потока эта скорость подсчитывается по формуле
У… = 1/2АРо/Р‚ (2-2—4)
где Аро=ро—роо —разность давлений в насадке, регистрируемая диф—
ференциальным манометром; р —плотность жидкости.
Принимая для воздуха плотность р=0,125 кГ-сек2/м4, получим рас-
четную зависимость для этой скорости в следующем виде:
11… = 4 1/ Щ,. (2.2.5)
Для более точного определения скорости необходимо учитывать из—
менение плотности воздуха в зависимости от барометрического давле-
ния, температуры и влажности, используя выражение
: Ратм _ Ш)
р 2—1‚1‹27з+:)(1 О,37_8х ра…, , (2.2.6)
где рим—атмосферное давление, мм рт.ст.; х—относительная влаж-
ность; і—температура воздуха, °С; рыл—давление насыщенных водя—
ных паров, мм рт. ст.
Относительная влажность воздуха х находится из табл. 2.2.1 по раз—
ности показаний сухого и влажного термометров аспирационного пси-
хрометра.
Давление насыщенного водяного пара рнд зависит от температуры
воздуха и определяется из табл. 2.2.2.
После подстановки значения плотности из (2.2.6) в (2.2.4) получим
У„ = 1/ 42,2Ёіі (1 — 0,378х шт)—1 др,. (2.2.7)
Ратм Р атм
В результате экспериментальных исследований сжимаемых газо-
вых течении п'о измеренным давлениям в некоторой области потока на-
ходят соответствующее распределение чисел Моо :
76
Т абл и ца 2.2.1
Показания Разность показаний термометров, °С
с _
„%ЁЁЁЪаЁеВС О ' 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 ' 10
О 100 81 63 45 28 11 — — — __ _
2 100 84 68 51 35 20 — — — _— _
4 100 85 70 56 42 28 14 — — _ —
6 100 86 73 60 47 35 23 10 — — _
8 100 87 75 63 51 40 28 18 7 — —
10 100 88 76 65 54 44 34 24 14 4 —
12 100 89 78 68 57 48 38 29 20 1.1 —
14 100 90 79 70 60 5 1 42 33 25 1 7 9
16 100 90 81 71 62 54 45 37 30 22 15
18 100 91 82 73 64 56 48 41 ' 34 26 20
20 100 91 83 74 66 59 51 44 ' 37 30 24
22 100 92 83 76 68 61 54 47 40 34 28
24 100 92 84 77 69 62 56 49 43 37 31
26 100 92 85 78 71 64 58 50 45 40 34
28 100 93 85 78 72 65 59 53 48 42 37
30 100 93 86 79 73 67 61 55 50 44 39
Таблица 2.2.2
ес ' _10 | о | 10 15 | 30 '50
\
Ри—пя мм РТ- СТ- 2.159 4,579
9,210 12,79 | 31:80. ‘ 62,50…
_ 2 _Ро_“*—1>/*
мое- Миг—№№…) _ 1]. (2.2.8)
В сверхзвуковом потоке манометр измеряет давление торможения
ро за прямым скачком уплотнения, образующимся перед насадком.
Число Маха определяется по величине этого давления, а также по ста-
тическому давлению роо из уравнения
‚ із
р_0=( 24 мас—*__*) _“? ___2‹д_1›__1_ тег-тд (2.2.9)
рш ь+1 іг+1 ‹Ь+1›2 (№№ м3,
По найденным числам Маха дозвуковых или сверхзвуковых потос
ков можно вычислить соответствующие скорости
УФО = Ъ/ігКТо (1 + ’іЁ—‘мзоГ, (2.2.10)
где То— температура торможения газового потока, которая может
быть измерена в форкамере аэродинамической трубы.
3. Приборы для измерения направления
скорости потока
Простейшим прибором для определения направления потока явля—
ется флюгарка—флажковый угломер (рис. 2.2.12). Этот при-
бор состоит из флажка, который поворачивается под давлением воз-
душного потока На корпусе флюгарки нанесена шкала углов, по _кото—
рой определяют угол поворота флажка и тем самым находят направ-
ление потока в рассматриваемой области. Точность этого определения
невелика и составляет примерно 1-:—-1,5°.
77
Наиболее широкое распространение в экспериментальных исследо-
ваниях, связанных с определением направления потока, получили
пневмометрические насадки. У этих насадков приемная часть
с отверстиями выполнена так,что малое отклонение насадка от направ-
ления набегающего потока вызывает большие изменения показаний
манометров. Иными словами,
пневмометрические насадки об—
ладают повышенной чувствитель-
ностью к изменению угла их ус-
тановки в потоке.
На рис. 2.2.13 и 2.2.14 показа—
ны схемы насадков Для определе-
ния направления скорости двух-
мерного пл оско го потока. Кон-
струкция этих насадков характер-
на тем, что два приемных отвер—
стия располагаются в плоскости,
Рис. 2.2.12. Приемная часть флюгарок: совпадающей С той ПЛОСКОСТЬЮ, В
‚_ОСЬ; 2__флажок которои проводится измерение
направления скорости потока.
Для измерений газовых течений
в ограниченных областях, в частности пограничном слое, должны ис-
пользоваться насадки малых размеров. Такими малыми размерами от-
личается (0-0 6 р а з н ый н а с а д о к, показанный на рис. 2.2.14.
Щи,-р)
Р… и:
—\"\"`\""""`\`
'“ "’/111111111111111.
Рис. 2.2.13. Насадок для измерения направления пото-
ка и его тарировочные графики:
! и 2—- приемные отверстия для измерения направления потока;
З—приемное отверстие для измерения полного давления (тари-
ровочные графики построены для насадка с 0=1‚5 мм и 2 Ф=
=70° при 1100 =33 м/сек)
В трехмерных пространственных дозвуковых потоках определе-
ние направления скорости осуществляется насадком, показанным на
рис. 2.2.15. Конструкция этого насадка предусматривает расположение
приемных отверстий на поверхности сферического носка в двух взаим-
но перпендикулярных плоскостях. *
78
Измерения в с в е р х 3 в у к о в Ы х плоских потоках осуществляются
с помощью к о н и ч е с к И х или к л и н о в и д н ых насадков (рис. 2.2.16).
Приемные отверстия располагаются по обе стороны клиновидной по-
верхности или на противоположных образующих конуса в плоскости
изменения скорости.
1 _Фддхфцэ
5:
Рис. 2.2.14. Трехточечный насадок и его тарировоч-
ный график:
!, З—приемные отверстия для измерения направления по-
тока; 2—насадок полного напора
5 Ф5
‹ 7.1.01”, ‚ііііііііі’л
\\\\ ‚‹,‚е“”’"”,`"‘„’п
\\ Ё№\\`
_
игл,/11111114 " ‚и, ‚7 ‚го
' тием
‘
учите
' . _, , ' _1 !, 4 ," 'О .
Ф _‚АР’рііііііі!!/.‚Ёо“д'/ ”!Ж’г‘д/Аъ’аг'а ‚(”‘/'}
"'-"': чип-пп
№_&№\\\\\.
?’- ')”‘1’,””„’„,”
№1-
, ‚("’/1111/‚1/1/1/1/14
. ' `
_`\\\ &`“
Ш
Рис. 2.2.15. Пятиточечный насадок:
!, 3, 4, 5—приемные отверстия для определения направления потока; 2—прием—
ное отверстие полного напора; б—сферический корпус; 7—дренажные выведные
трубки; 8—державка с обтекателем
Для всех пневмометрических насадков характерно симметричное
расположение приемных отверстий относительно продольной оси насад—
ка. Если эта ось совпадает с направлением потока, то давления в сим-
метричных отверстиях будут равными. Ее отклонение вызовет различие
в показаниях манометров, соединенных с приемными отверстиями. На
измерении этой разницы и основано определение направления газового
потока. Точность измерения пневмометрическими насадками составля—
ет примерно 0‚5—:—1°. Существует два метода таких измерений.
Первый из этих методов основан на выравнивании давлений в
симметричных отверстиях и непосредственном определении направле-
ния скорости. Для этой цели используется державка-координатник, по—
79
зволяющий изменять ориентировку насадка в потоке. При этом доби-
ваются такого положения насадка, при котором показания манометров
выравниваются. Тогда ось насадка будет совпадать с направлением
скорости набегающего потока. По шкале отсчета на лимбе координат—
ника может быть измерен соответствующий угол поворота насадка, оп-
ределяющий отклонение потока от какого-либо заданного направления.
5)
о) _ .
М.., готб (00,3 р, р?
_ д % &‘ @.
ОС 6 у
15 _
М
р, —р2‚ мм бод ст ",С
300 ,
200 / !
100 ‚. р-р,мм додс/п
/ 1 2
0 ! 500
г 2“- 3 и 5 ос. град /
' 250 ,
р, —р2‚ мм 6067 от
“335 [Зи -.3 ›2 4 0 х 2 3
100 ,/ /
О / '500
1 2 3 4 5 13. град
Рис. 2.2.16. Насадки для измерения направления потока при сверхзвуковых
скоростях и их тарировочные графики:
а—конический; б—клинОВИДный (для конуса характеристика получена при МОО —2‚
а для клина при Моо =1,4)
В аэродинамических исследованиях такое отклонение может быть най-
дено относительно продольной оси рабочей части аэродинамической
трубы.
Второй метод состоит в косвенном определении направления по-
тока. По этому методу насадок устанавливаетсявпотоке так, чтобы ось
совпадала, например, с продольной осью аэродинамической трубы. За—
тем во время работы трубы записываются показания манометров, ис-
пользуя которые, при помощи тарировочных графиков определяют
соответствующий угол отклонения потока в рассматриваемой области.
В качестве иллюстраций на рис. 2.2.13, 2.2.14 и 2.2.16 приведены тари-
ровочные графики, полученые для насадков, изображенных на этих ри-
сунках.
Как видно, первый метод позволяет непосредственно определять на-
правление потока, в то время как второй предполагает осуществление.
дополнительных вычислений. При этом, однако, следует принимать во
внимание, что реализация первого метода требует большего времени
работы аэродинамической установки. Если это время невелико (как,
например, при работе аэродинамической трубы кратковременного дей-
ствия), то предпочтительнее второй метод, дающий возможность опре-
деления отклонения потока по тарировочным кривым без затраты вре-
мени на поворот насадка, предусмотренный в первом методе.
80
5 2.3. ПРИБОРЫ дЛЯ ТЕПЛОВЫХ ИЗМЕРЕНИЙ
1. Температура
Коэффициент восстановления. Для измерения темпера—
туры газового потока применяются разнообразные по устройству при-
боры, Действие которых основано на различных физических эффектах.
Если чувствительный элемент такого прибора помещен в покоящуюся
среду, то через некоторое время он принимает температуру этой среды,
которая и регистрируется соответствующим измерительным устрой-
ством.
В потоке газа характер его теплового воздействия на температур-
ный датчик будет иным. Обтекание неподвижного чувствительного эле-
мента вызовет его нагревание до некоторой температуры Те. В общем
случае эта равновесная температура отличается от температуры
торможения газового потока То вследствие относительно слабого кон—
вективного теплообмена между датчиком и движущимся газом, излуче-
ния и теплопроводности датчика. Величина этой равновесной темпера-
туры несколько меньше температуры торможения газового потока То.
Для заданных условий обтекания имеется однозначная зависимость
между Т8 и То, устанавливаемая в результате тарировки измерительно-
го прибора. По соответствующему тарировочному графику и измерен—
ной температуре Тв можно. определить температуру торможения То.
Конструкцию датчика температуры можно охараКтеризовать к 03 ф -
фициентом восстановленияг:
г = (Те—ТОО) ЦТО—Тео), (2.3.1)
где Тео—статическая температура ГЗЗОВОГО потока, определяемая как
фУНКЦИЯ соответствующего ЧИСЛЕ! Маха ИЗ соотношения
‚із—1 2 —1
ТОО = ТО(1 + 2 м…) . (2.3.2)
Коэффициент восстановления, определяемый обычно путем тариров-
ки измерительного прибора, зависит для данной конструкции датчика
от чисел Моо и Не…, характеризующих его Обтекание вязким потоком
сжимаемого газа. Если известно значение этого коэффициента, соответ-
ствующее заданным условиям обтекания, то температуру торможения
можно рассчитать по измеренной р авнов есной температуре Т В со—
ответствии с (2.3.1) этот расчет ведется по формуле
Те
ТО: г+(1—г)(Т„/Т0) * (233)
или с учетом (2.3.2) по выражению
То : Те _ (2.3.3’)
__ \_1
г+‹1—г›(1+Ё 211%)
Для различных конструкций датчиков коэффициент г изменяется от
0,6 до значения, близкого к единице. Для гт1 температура Те, как сле-
дует из (2.3.3), равнаТо. Если же г;:Ы, то, чтобы рассчитать величину
То на основе результатов опыта, необходимо дополнительно определить
такие параметры обтекающего потока, как числа М… и Кеш, что позво-
лит правильно выбрать коэффициент восстановления.
Так как значительно проще использовать опытные данные для оп-
ределения температуры в случае, если коэффициент восстановления
гц 1, то при конструировании датчиков температуры торможения стре-
мятся достигнуть величины г, практически равной единице. Если этого
81
не удается достичь, то принимают меры, обеспечивающие такой коэф-
фициент г, который хотя и отличался бы от единицы, но сохранялся по-
стоянным при различных условиях эксперимента. Это также способст-
вует повышению точности измерения.
Рассмотрим некоторые образцы электронных термометров, наибо-
лее широко применяемых в аэродинамических исследованиях.
'
'.
' ‘ . "
9.2930!
.
0:
то920209203033010303051а
'О .
8.9.315
‚952629.
`? .’26‘
..1.'.:..; .
$20:
"..
.`
.. 0.6.
. 9320.
. .'д
\"
_ _ ` 0'0'
33089696933
‚одод'
'
г.?"
'О'О,
.
д'.
` \\ \\\ \\ \
Ф \…) $“
М
Рис. 2.3.2. Датчик темпе-
Рис. 2.3.1. Схема датчика тер- ратуры с термистором:
мометра СОПРОТИВЛЗНИЯ: ] _ термистор; 2 — платино-
вые выводы; 3 — манганино-
вые провода с изоляцией;
4 — стеклянная трубка;
5 — текстолитовая втулка;
б —— металлический корпус
[_рамка из изоляционного мате-
риала; 2—спираль из платиновой
проволоки; З—выводы
Основным элементом термометра сопротивления является
проволочный датчик, соединенный с электронным усилителем. Этот уси-
литель регистрирует изменение сопротивления датчика в зависимости
от его температуры, значение которой находится по шкале измеритель-
ного прибора, подключенного к выходу усилителя.
Конструктивно датчик (рис. 2.3.1) представляет собой рамку из
изоляционного материала 1 с намотанной тонкой проволокой 2, В ка-
честве изоляционного материала обычно используется фарфор, а прово—
лока диаметром от 0,05 до 0,3 мм чаще всего изготовляется из плати-
ны. Такие платиновые датчики сопротивления обеспечивают высокую
стабильность измерений и надежную работу термометра. К их недо-
статкам можно отнести сравнительно большую инерционность, что не
позволяет с необходимой точностью вести измерения быстро меняющей-
ся температуры. Кроме того, такие датчики обычно имеют значитель—
ные размеры, что позволяет определять ими только среднюю темпера-
туру в некоторой области потока.
Эти свойства датчиков определяют их применение в качестве эта—
лонных при измерении температуры неподвижной среды. Их также ис-
пользуют для измерения температуры газа в форкамере аэродинамиче-
ской трубы, где скорости движения газа пренебрежимо малы. Для та-
ких условий коэффициент восстановления датчика принимаем равным
единице; в соответствии с этим температура Те, показанная датчиком,
будет равна температуре То в форкамере.
Одной из наиболее совершенных конструкций датчиков температу-
ры является термистор, устройство которого основано на использо-
.82 '
вании полупроводников (рис. 2.3.2). В этом приборе использован изве-
стный физический эффект изменения сопротивления полупроводника
при изменении его температуры. Это изменение сопротивления реги—
стрируется при помощи усилителя, к выходу которого присоединяется
прибор со шкалой для снятия показаний температуры.
Чувствительность термометра определяется как отношение измене-
ния сопротивления датчика к соответствующему изменению темпера-
туры. Эта чувствительность значительно выше у термистора, что дела-
ет его пригодным для измерения весьма малых перепадов температур.
К тому же термистор имеет небольшие разме-
ры, а высокая чувствительность позволяет под-
ключать его к измерителы—юму прибору без
усилителя. При измерении термистором темпе-
ратуры торможения газового потока с числа-
ми Моо=0,35—:—О‚75 коэффициент восстановле-
ния можно принять равным г=0,75.
Термистор обладает еще одним преиму-
ществом, обусловленным
большим начальным элект-
рическим сопротивлением.
При таком сопротивлении
потребляемая сила тока бу-
дет мала, что делает воз—
“ .
““`“ ' \\Ш
\Ы
"и
4:
Ф15
… \\
\\“ж‘п\\\\
' ‚.д.;
.
' 3969652030202
№
.
“дожди
.
..
\\“Ж/
;: о..
"6330. '.:
"ардодоэджоэхо:
О'Ч'Ё ‚о,
о...
$928.20.
-.-.‹...
.
.
96.11.9293»;
":
1.
'.‘Е‘Ъ'Ч'ь’б ` '.
_' . "3493.39.
\
...ОХ
'
\\\“\\\ч\\\\\“\\в .\\\\\\.\`\'ь\\
3:52
" 'вёз;ог;о;огозэгёъ'едезе'гггдггга‚_
ээхгаъъэхогозхо: ‘: _., дек
‚‘;?{91030302020202'Ж‘Ё
\
Рис. 2.3.4.
р 2 33 С " ТЁРМОПЭР' Рис. 2.3.5. Термопар-
ИС. . . . ХЗМЗ ИЗМЗР61'П.Я НЫИ ДЗТЧИК ный ДЗТЧИК с Экрани-
ВЗЛИЧЧНЫ ТЗРМОЭЛ‘ЗКТРОДВН: С ОТКРЬГГЫМ рованным спаем:
жущеи силы, развиваемои спаем: „
спаем термопары: „ ’ _ спа" термопары;
1—спаи тер- 2—вентиляционное от-
! — спай; 2 — проводочки спая МОПЭРЫ: верстие: 3 — ВЫВОДЫ:
2 — изоляция; 4 — изоляция; 5— вход-
3 — корпус; ное отверстие; б—корпус
4 —— выводы (экран)
можным использование автономного источника питания небольших раз-
меров и применение соответствующей портативной переносной аппара-
туры. Кроме того, малая сила тока обусловливает значительное время
работы всей измерительной установки. К недостаткам термистора следу-
ет отнести его не вполне надежную работу при сравнительно больших
температурах. Допустимая температура, при которой датчик дает удов-
летворительные показания, равна примерно 70-2—75° С.
Рассмотрим термометр, основным элементом которого является дат-
чик температуры в виде тер м о п а р ы, представляющей собой спай
разнородных проводников. Такой спай при изменении температуры соз-
дает термоэлектродвижущую силу, измерив которую, можно определить
это изменение температуры. Соответствующая схема измерения пока—
зана на рис. 2.3.3. В этой схеме регистрация термоэлектродвижущей
силы производится милливольтметром. Если же напряжение, развивае-
83
мое спаем, мало, то необходимо использовать электронный усилитель,
к выходу которого присоединяется измерительный прибор со шкалой,
градуированной в °С или К.
При измерении температуры торможения таким датчиком следует
иметь в виду, что коэффициент восстановления г зависит от его кон—
струкции. Для датчиков, выполненных с открытым спаем термопары
и установленных так, как это показано ‚_на рис. 2. 3. 4, коэффициент
г=0‚68_—|_—0‚07. Такая сравнительно небольшая величина объясняется
значительными потерями тепла спаем датчика вследствие излучения
и теплопроводности.
С целью увеличения коэффициента восстановления спай термопары
экр анируют (рис. 2.3.5). На рисунке экран представляет собой ме-
таллическую стенку корпуса 6, внутри которого размещается спай. Га—
зовый поток, попадая внутрь корпуса через приемное отверстие 5, пре—
2 д
1
__ . "В *—
//////1/////// „%,/[Ж #
7 б 5
Рис. 2.3.6. Насадок для измерения температуры тор-
можения:
! — корпус насадка; 2 — уплотнение; 3 — державка; 4_— экран-
(насадок); 5 -— термопара; 6 — вентиляционное отверстие; 7 — вы-
воды
терпевает торможение. Истечение газа происходит через вентиляцион—
ное отверстие 2, которое выбирается так, чтобы обеспечить в нем зву—
ковую скорость. Это позволяет резко уменьшить скорость обтекания
спая термопары, снизить за счет этого потери тепла и тем самым уве—
личить коэффициент восстановления. Для датчика, показанного на
рис. 2.3.5, коэффициент г может достигать величины 0,98.
На рис. 2.3.6 показана другая конструкция экранированного
датчик а. В этой конструкции экран представляет собой насадок 4,
выполненный из двуокиси кремния, являющейся термоизоляционным
материалом, и позволяющий поэтому значительно уменьшить потери
тепла. У такого датчика коэффициент восстановления достигает значе—
ний г=0,94—:—0‚998. Это наибольшие значения из тех, которые имеют
современные температурные датчики.
При больших сверхзвуковых скоростях разница между температу-
рами спая и экрана может быть значительной, поэтому будут велики по-
тери тепла и малы значения г. Чтобы избежать этого, применяют дат-
чики с экранами, образуемыми несколькими цилиндрами (рис.2. 3.7).
Для этой цели используется также датчик с подогреваемым экраном
(рис. 2.3.8). Электрический подогрев такого экрана продолжается во
время эксперимента до тех пор, пока температура установленной на нем
вспомогательной термопары 4 не окажется равной температуре основ—
ной термопары 3 внутри экрана 2. Ее значение и регистрируется изме-
рительной аппаратурой. Такая конструкция датчика позволяет достичь
значения коэффициента восстановления, почти равного единице. Из—
меренная им температура будет соответствовать условиям полного тор—
можения.
84
Важным преимуществом всех рассмотренных термопарных датчиков
является то, что они позволяют измерять температуру в широком диа—
пазоне ее значений. К тому же весьма малые размеры спая, помещен-
ного в поток, обеспечивают измерение температуры практическивточ—
ке. При этом, однако, следует учитывать, что точность измерений та—
кими датчиками сравнительно невелика.
Для измерения температуры торможения может быть использован
термоанемометр, который включается по схеме с постоянным током
(см. рис. 2.2.1). Величина этого тока выбирается возможно меньшей,
чтобы не вызвать изменения нагрева датчика, но достаточной, чтобы
измерить его начальное сопротивление Ен. Во время опыта измеряется
Рис. 2.3.8. Датчик температуры торможения
для больших скоростей:
! —-питаиие подогрева экрана; 2—подогреваемый
экран; 3—спай основной термопары; 4—вспомо—
гательная термопара; 5— вентиляционное отвер-
стие; б—вывоцы основной термопары
Рис. 2.3.7. Термопара с несколь—
кими цилиндрическими экранами:
1 —- спай термопары; 2 —- цилиндриче-
ские экраиы; 3 — изоляция и корпус;
4 -— выводы
сопротивление К… датчика, обтекаемого потоком. Соответствующую
температуру этого датчика, нагреваемого в основном за счет торможе-
ния газового потока, можно рассматривать как равновесную темпера—
туру. Ее значение Т„‚=Те определяется при помощи зависимости
(2.2.2) по измеренным сопротивлениям К… и Кн. Зная величину Те и ко-
эффициент восстановления датчика, определяемый эксперименталь-
но, можно по формуле (2.3.3) найти температуру торможения по—
тока То.-
2. Теппопередача
Для измерения теплопередачи в высокотемпературных газовых
потоках обычно применяется калориметрический датчик (рис.
2.3.9). Основным элементом этого датчика является медный калоримет-
рический диск 8, закрепляемый с помощью теплоизолируюшей втулки
в корпусе 10. С внутренней стороны к диску присоединяется спай тер-
мопары 7, подключаемый к осциллографу, который регистрирует элек-
тродвижущую силу, вызванную нагреванием спая.
На рис.2.3. 10 приведена форма записи осциллографом соответству-
ющего сигнала. По этой записи можно определить крутизну нараста-
ния сигнала—отношеиие величины, характеризующей возрастание вы-
85
т……
штчаш
Рис. 2.3.9. Калориметрический датчик:
1—тефлоновый диск; 2—эпоксидная смола; 3—гибкие
выводы; 4—мягкий припой; 5—цемент; б—серебряный
припой; 7—термоэлементы (Си—Хи диаметром 0,025 мм);
8—медный диск (диаметр 4,57 мм, толщина 0,254 мм);
9 — асбест; 10 — корпус
Н, мВ/сек
60
50
ЦБ
30
20
Ю мсек …
\1/ П 55 №8 150 200 ‹;‚ккал/М-сек}
Рис. 2.3.10. Осциллограмма сигна- Рис. 2.3.11. Тарировочная зависи—
ла калориметрического датчика: мость для калориметрического
1—метки времени через 10 мсек; датчика
2—эталонное напряжение в 0,1 мв
ходного напряжения, к соответствующему промежутку времени. Затем
из тарировочного графика (рис. 2. 3. 11) по значению крутизны Н на-
ходится удельный тепловой поток с; от обтекающего газа к калоримет-
рическому диску.
& 2.4. АЭРОДИНАМИЧЕСКИЕ ВЕСЫ
1. Общие понятия
Устройства, предназначенные для непосредственного измерения сил
и моментов, действующих на летательный аппарат или его модель, ко-
торые установлены в аэродинамической трубе, называются аэроди—
нами ческими весами. По числу измеряемых составляющих аэро-
Динамической силы или момента в какой-либо системе координат они
подразделяются на однокомпонентные весы, двухкомпонентные и Т.Д.
В пространственной декартовой системе координат, в частности ско-
ростной, главный вектор аэродинамической силы, действующей на ле—
тательный аппарат, можно разложить на три составляющие—лобовое
сопротивление, подъемную и боковую силы, а главный момент—так-
же на три составляющие, а именно: моменты крена, рысканья и танга-
жа. В связанных осях соответствующие составляющие будут представ-
лять собой осевую (продольную), нормальную и поперечную силы,
а также моменты с аналогичными названиями. Все эти составляющие
86
могут быть одновременно измерены шестикомпонентными веса-
ми. Для измерения меньшего числа составляющих применяются весы
с соответствующим числом измерительных каналов. Особо следует под-
черкнуть, что важнейшим условием правильного конструирования мно-
гокомпонентных аэродинамических весов является н ез а в и_си м о сть
измерений по различным каналам, т.е. чтобы каждый весовой элемент
измерял только соответствующую силу или момент и не реагировал бы
на действие других составляющих.
В зависимости от условий эксперимента могут применяться внеш-
ние весы с измерительными элементами вне МОДели летательного ап-
парата и внутр енние весы с расположением этих элементов внутри
исследуемой модели летательного аппарата или же внутри какого-либо
устройства, поддерживающего эту модель в рабочей части аэродинами—
ческой трубы. Рассмотрим конструкцию и принцип действия весов, наи—
более широко используемых для измерения аэродинамических сил и
моментов.
2. Внешние аэродинамические весы
На рис. 2.4.1 показана схема часто применяемых в аэродинамичес-
ких исследованиях т р е х к о м п о н е н т н ых внешних весов. Модель 1
летательного аппарата с помошью опорной стойки 2 устанавливается
на поворотном круге б, перемещая который относительно плавающей ра
17
._.__ _ 18
" /////// //// ‚' / / /////л//7'/////'/7/’/;/7//?%27/ //////// /‚
Рис. 2.4.1. Схема трехкомпонентных внешних аэродинамиче-
ских весов:
1 — модель; 2 — опорная стойка; 3 — тяга; 4 — рычаг продольного мо-
мента; 5 —- промежуточный рычаг; 6 —— поворотный круг; 7 — тяга;
8 —- промежуточный рычаг; 9 — весовой элемент продольного момента
А 2 ; 10 — плавающая рама; „11, 12— суммирующие рычаги; 13— тяга;
14 —— промежуточный рычаг; 15 — весовой элемент подъемной силы У;
16 —— плавающая рама; 17, 18 — стержни; 19 — серьга; 20 — тяга; 21—уг-
ловой рычаг; 22 — промежуточный рычаг; 23 — весовой элемент силы
сопротивления Х
мы 10, задают углы скольжения Б. Одновременно через тягу 3, рычаг
4 и промежуточные рычаги '5 и 8 хвостовая часть модели соединяется
‹: весовым элементом 9, изменяющим момент тангажа М2 в вертикаль-
ной плоскости. Угол атаки модели изменяется при повороте рычага 4
продольного момента вокруг его оси вращения. Плавающая рама 10 по—
коится на суммирующих рычагах 11, 12, связанных через тягу 13 иры-
чаг 14 с весовым элементом 15, регистрирующим величину подъемной
87
силы У. Суммирующие рычаги установлены на плавающей раме 16 из-
мерительного устройства лобового сопротивления Х так, что позволяют
раме 10 перемещаться только в вертикальном направлении. Последняя
рама покоится на комбинированных маятниковых подвесах, обеспечи—
вающих ей перемещение только в горизонтальной плоскости. Эти подве-
сы состоят из стержней 17 и 18, работающих соответственно на растя-
жение и на сжатие, и серег 19. Через тягу 20, угловой рычаг 21 и проме-
жуточный рычаг 22 усилие от рамы 16 передается к весовому измери-
тельному элементу 23 лобового сопротивления.
В качестве весовых элементов могут использоваться рычажные
измерительные устройства. Такой весовой элемент (рис. 2.4.2) состоит
3 2
'? 3 Ч 5 4; 5
___—___-
б 1
Рис. 2.4.2. Рычажный весовой элемент:
1 —- тяга; 2 — опорный нож; 3 —— траверсы: 4 — направляющие трубы; 5—урав-
новешивающие грузы; б —— стрелка; 7-— стойка с индексами; 8 — рычаг
из рычага 8 с опорным ножом 2. С одной стороны к рычагу подходит
тяга ], передающая усилие, которое складывается из веса модели и де—
талей конструкции весов, а также действующей аэродинамической си—
лы, а с другой стороны с этим рычагом соединены при помощи траверс
3 направляющие трубы 4 и стрелка 6. На верхней трубе обычно нано—
сится шкала в граммах, а на нижней—в килограммах. Изменяя поло-
жение грузов 5 на направляющих, можно добиться до начала опыта
уравновешивания весов, которому соответствует совмещение стрелок
‚с начальным индексом на стойке 7. Причем для такого уравновешива-
ния могут устанавливаться дополнительные грузы.
При продувке в аэродинамической трубе измеряется сумма двух
аэродинамических сил, одна из которых действует на модель, а другая
—на поддерживающие эту модель устройства, размещенные в потоке
(на рис. 2. 4.1 стойка 2 и тяг'а 13). Для нахождения силы, действую-
щей только на модель, из суммарного усилия вычитается составляющая,
приходящаяся на поддерживающие устройства. Эта составляющая оп-
ределяется в результате продувки поддерживающих устройств без мо—
дели или с удобообтекаемой моделью, для которой известны соответст-
вующие аэродинамические силы.
В отличие от рассмотренной конструкции весов с жесткими поддер-
живающими устройствами в аэродинамических весах с гибкой под-
веской модель летательного аппарата в рабочей части аэродинами-
ческой трубы устанавливается с помощью проволочек, тросов или ме-
таллических лент, натяжение которых обеспечивается специальными
грузами или пружинами. На рис. 2.4.З,а показана схема такой подвес—
ки, которая должна обеспечивать растяжение проволочек, идущих кве-
совым элементам, при действии на модель аэродинамической силы.
Обычно для этой цели модель летательного аппарата устанавливается
в перевернутом положении.
Лобовое сопротивление измеряется весовым элементом ], связанным
с натянутой проволочкой, проходящей через узел крепления А, а подъ-
емная сила У находится по показаниям двух весовых элементов 2 и 3,
88
к которым подходят проволочки соответственно из узлов В И С. Соот—
ветствующие схемы Действия сил в узлах А, В И С, определяемые по
известным правилам механики, приведены на рис. 2.4.3, 6. Из этих схем
видно, что прИ действии на модель аэродинамических сил натяжения
62%? +›‹
еть/ё
Рис. 2.4.3. Схема установки модели на гибкой подвеске (а):
1—весовой элемент для измерения силы сопротивления; 2, З—ве-
совые элементы для измерения соответственно составляющих У.
и № подъемной силы; 4—нити подвески; б—кронштейны; б—мо-
дель; О; и од,—грузы для натяжения нитей подвески
и схемы действия сил в узлах А, В, С 6)
проволочек, подходящих к весовым элементам ], 2 и 3, будут соответ-
ственно равны
х + 62 1/ 9/2, У, + с„ и, + 021/52/2, (2.4.1)
где 61 И 02—грузы для натяжения проволочек; У1 И У2—компо-
ненты подъемной силы.
Перед началом измерения весовые элементы балансируются, поэто-
му при продувке их показания непосредственно будут соответствовать
значениям Х, Уд и У2. С учетом этого подъемная сила определится вви-
де суммы показаний весовых элементов 2 И 3, т. е. У=У1+У2.
Гибкая подвеска по сравнению с жестким поддерживающим устрой-
ством вносит значительно меньшие возмущения в поток, обтекающий
модель, что позволяет осуществлять более точные измерения действую-
щих сил И моментов. При этом следует иметь в виду, что для установ-
ки больших моделей в аэродинамических трубах применяют только
жесткое крепление, обеспечивающее необходимую механическую проч-
ность.
При использовании весьма значительных по размерам моделей ле-
тательных аппаратов или их натурных образцов уже становится неце-
лесообразным по соображениям прочности применение конструкций ве-
сов с верхней подвеской. В этом случае обычно используются аэроди-
намические весы с жестким поддерживающим устройством И нижним
расположением рамы. Общий вид таких весов, применяемых в Цен-
тральном аэрогидродинамическом институте (ЦАГИ) им. проф.
Н. Е. Жуковского, показан на рис. 2.4.4.
Аэродинамические весы с механическими элементами позволяют оп—
ределять аэродинамические усилия с точностью ДО 0,1%. Такие весы,
89
требующие значительного времени для уравновешивания и снятия по-
казаний с весовых элементов, нельзя применять на аэр0динамических
установках кратковременного действия, т. е. с малой длительностью об-
текания исследуемой модели.
Рис. 2.4.4. Установка модели самолета на внешних аэро-
динамических весах:
! — моцель; 2 — поддерживающее устройство
Рассмотрим 3 л е к т р 0 М е х а н и че с к и е измерительные устройства
аэродинамических весов. От механических они отличаются тем, что для
перемещения уравновешивающих грузов применяется электрический
привод. Схема такого электромеханического рычажного весов`0го эле-
":
Рис. 2.4.5. Рычажный электромеханический весовой
элемент:
1 — тяга; 2 —— корпус; 3 —- реверсивный электродвигатель;
4 — х0довой винт; 5 — уравновешивающий груз; б —— отсчетное
устройство; 7 — подвижный контакт; 8 — неподвижные кон-
такты; 9 — переключающее устройство
мента показана на рис. 2.4.5. Перемещение уравновешивающего груза 5
осуществляется при помощи ходового винта 4, связанного с реверсивным
электродвигателем 3. Электродвигатель включается при выходе весов
из равновесия в результате замыкания одного из неподвижных контак—
тов 8. При этом изменение направления вращения электродвигателя
осуществляется с помощью переключающего устройства 9 и зависит от
того, какой из неподвижных контактов 8 замкнется. Работа электро-
двигателя прекращается, когда подвижный контакт 7 займет нейтраль-
90
ное положение. В этот момент с отсчетного устройства снимаются по-
казания весового элемента, измеряющего соответствующую составляю-
щую аэродинамической силы.
Применение электрического привода позволяет уменьшить время,
необходимое для уравновешивания весовых элементов, и тем самым ус-
корить и повысить точность измерений. Это позволяет также исполь-
зовать вычислительные машины и проводить обработку опытных дан-
ных в ходе эксперимента.
Принцип работы электрических весовых элементов аэродинамичес—
ких весов основан на применении электрических датчиков уси—
л и й. Наиболее распространенными среди них являются т ен з 0 м ет р и-
ческие датчики. У таких датчиков аэродинамическая сила вызыва-
ет деформацию упругого тензоэлемента, что приводит к изменению его
электрического сопротивления. По измеренной величине этого измене-
ния сопротивления' можно“ определить соответствующую аэродинами-
ческую силу. ,
Конструктивно упругие элементы выполняются так, что они имеют
наименьшую жесткость относительно одной из осей. При приложении
нагрузки вдоль этой оси возникает наибольшая деформация этого эле—
мента. В других направлениях жесткость упругого элемента значитель-
но больше, и'если действуют усилия в направлении других осей, то де-
формация упруго-гоьэлемента пргікТ'ичеСки отсутствует..
На рис. 2.4.6‚а показана схема аэродинамических весовсвнешними
тензодатчиками усилий. *Все упругие элементы _(__1‚ 2, 3) имеют одинако—
вое устройство и вьіполнеНЬт. в виде прямоугольника. Две стойки 4 из—
готовлены более тонкими и на них наклеиваются тензодатчики. Утол-
щенные перекладины 5 и '5’ упругих элементов соединены соответствен-
но с обтекателем 9 и тягами б, передающими аэродинамические силы.
Конструкция упругих элементов такова, что ось наименьшей жесткости
перпендикулярна к тонким стойкам, а приложенное усилие совпадает
с направлением этой оси и Вызывает деформацию изгиба стоек, кото-
рая и измеряется тензоэлементами.
Согласно рис. 2.4.6 модель летательного аппарата 7 закрепляется
на дугообразной стойке 8, закрытой обтекателем 9. Аэродинамическая
сила, действующая на модель, передается через стойку и тяги б кве-
совым элементам ], 2, 3. При этом они установлены таким образом,
что элемент ] измеряет только нормальную силу М, а элементы 2 и 3
воспринимают соответственно осевую силу К и момент тангажа М,. При
изменении углов атакимодели обтекатель поворачивается относительно
начала координат (см. рис. 2.4.6) вместе со стойкой, упругими элемен-
тами и моделью.
На рис. 2.4.6,б приведена электрическая схема соединения тензо—
датчиков.
Рассмотрим порядок определения действующих сил. На упругий
элемент ] наклеены тензодатчики 12—2—13’, которые соединены в соот-
ветствующую мостовую схему. Так как этот элемент деформируется
только под действием нормальной силы №, то его деформация и, следо-
вательно, выходное напряжение АПы моста будут пропорциональны
этой силе, т.е. АП№=1г11\/‚ где іе1—тарировочный коэффициент. Во вре-
мя эксперимента измеряется выходное напряжение, а затем рассчиты-
вается нормальная сила №=АП№/іг1.
Упругие элементы 2 и 3 воспринимают одновременно осевую силу
1? и момент тангажа М,. Для того чтобы получить выходные сигналы,
пропорциональные только одной составляющей, т. е. АПН:/еж и
АПмг =Ё3М2, где 1:52 и ігз— соответствующие тарировочные коэффициен—
ты, определяемые опытным путем, применяются специальные мостовые
схемы соединения тензода-тчиков. Так как упругий элемент 2 деформи-
91
руется под действием осевой силы 1? и момента М:, то очевидно, что
выходной сигнал АШ с мостов, собранных из датчиков 14—2—15’ и ]б—і—17’,
наклеенных на него, можно представить в виде суммы двух сигналов,
пропорциональных силе К и моменту М::
АЩ : Аиё + №34.
\
""іііі” ‚"‘. "1101,11”,
"’. ’,”1””"”
”‘.
"""""""""" \\\\\\ \\"\"`\`\"""
Рис. 2.4.6. Внешние трехкомпонентные тензометри-
ческие весы:
а— схема устройства: 1, 2, З—упругие элементы; 4—тонкие
стойки; 5, 5’ — перекладины; б—тягн; 7— модель на дер-
жавке; 8 — дугообразная стойка; 9 —— обтекатель; 10 — стенки
аэр0динамической трубы; 11—кожух весов; 12+21—тензо—
датчики; б—электрические схемы соединения тен30датчиков
Для мостов, собранных из датчиков 18—3—19’ и 20+21’, наклеенных
на упругий элемент 3, можно записать
Аи, : Ша" + АПЗ”.
При установке одинаковых упругих элементов 2 и 3 так, как это
показано на рис. 2. 4. 6, а, под действием силы К оба элемента будут
претерпевать деформации одного знака, и, следовательно, выходные
напряжения мостов, пропорциональные осевой силе, будут равны, т.е.
АПЗ =АП5. Под действием момента М2 в упругих элементах 2 и 3 воз-
никают деформации противоположных знаков, поэтому напряжения,
пропорциональные моментам, будут одинаковы по величине, но проти-
воположны по знаку, т. е. АП_’‚2‘4=—АПЁ4.
Если мостовые схемы К14+К1э и К18+К19’‚ составленные из датчи-
ков, наклеенных соответственно на упругие элементы 2 и 3, соединить
так, чтобы выходной сигнал АП всей схемы был равен сумме сигналов
с указанных мостов, то полученное напряжение будет пропорционально
только осевой силе К. В соответствии с этим
АП : АШ + АПЗ : ШЗ? + №34 + №5 + 130%“.
При ЭТОМ, учитывая, ЧТО
№5 : №53 и №34 :_ №94,
получим
АП : зашё—
Величина этого сигнала АП=АПВ И определяет осевую силу в соответ-
ствии с зависимостью АЦн=іг2К
Если мостовые схемы из датчиков 16—1—17’ и 20+21’ соединены так,
что сигналы с этих мостовых схем вычитаются, то выходной сигнал
Аимгбудет пропорционален только моменту М2 и можно написать соот-
ношение АПМ2=Ь3М2.
Во время эксперимента измеряют АПВ и АПМ2‚ а соответствующие
сила и момент находятся из выражений:
Н : АПК/1%, Мг : АПМЗ/ігз. (2.4.2)
Аэродинамические весы с тензометрическими элементами позволя-
ют измерять силы и моменты с точностью до 1%. Причем для таких из-
мерений требуется сравнительно небольшое время. Одновременно при-
менение электрических весов позволяет автоматизировать измерения,
что особенно важно при кратковременных продувках в аэродинамиче-
ских трубах. Следует также учитывать, что такие весы предусматрива-
ют использование специальных высокочувствительных электронных
усилителей.
3. Внутренние аэродинамические весы
Рассмотрим конструкцию простейших внутренних аэродинамических
весов для измерения осевой силы (рис. 2.4.7). Их электрический весо-
вои элемент, располагающиися внутри модели, соединен с этой моделью
и одновременно с державкой.
Под действием осевой силы К изгибаются тонкие вертикальные стой—
ки 4 с наклеенными на них тензодатчиками. 5+8. При таком закрепле-
нии упругого элемента другие составляющие аэродинамической силы и
а) \ ‚.
\
"5 6 7 8
Рис. 2.4.7. Внутренние аэродинамические весы для измерения
осевой (продольной) силы:
а— схема установки медели на весах: ] — МОДель; 2 — весовой элемент;
3 — державка;
б —- устройство весового элемента: 4 — вертикальные упругие стойки;
5—8 —— тензодатчики;
в— электрическая схема соединения тен30датчиков
моменты вызывают пренебрежимо малые деформации, которые прак-
тически не воспринимаются датчиками.
Для регистрации изменения тензосопротивления применяется элек-
тронная аппаратура (усилитель и осциллограф), по показаниям кото-
93
рой определяется действующая аэродинамическая сила. В соответст-
вии с рис. 2.4.7 это показание определяется разностью потенциалов мо—
ста АП. С учетом этого значения осевая сила К=АЩіг (где !г—тари-
ровочный коэффициент установки).
В исследованиях применяются одновременно несколько весов или же
одни весы используются для измерения ряда параметров. В этих слу-
Рис. 2.4.8. Двухкомпонентные внутренние аэродина—
мические весы:
а—схем-а установки медели на весах: 1—модель; 2—весо-
вой элемент; З—державка;
.6— устройство весового элемента; 4:11 —тензодатчики;
!2—центральный стержень; 13—наружные стержни; 14—сое—
динительное звено;
в—электрические схемы соединения тензодатчиков
чаях для регистрации измеряемых величин применяются многоканаль-
ные тензостанции (см. рис. 2.1.12).
На рис. 2.4.8 показана схема двухкомпонентных внутренних
аэродинамических весов для измерения нормальной силы М и момента
тангажа Мг. Упругий элемент _весов представляет собой стержень, со-
единенный одним концом с моделью, а другим с державкой. Средний
элемент стержня с наклеенными датчиками выполнен утолщенным и
воспринимает основную часть нормальной силы. Наружные элементы
13 с датчиками посередине изготовляются более тонкими и деформи-
руются под действием силы № и момента тангажа М2. Причем эти эле-
менты, претерпевая растяжение (сжатие), воспринимают небольшую
часть силы М, а изгибаясь—почти целиком момент тангажа. Централь-
ный стержень 12 при нагружении моментом М2 играет роль упругого
шарнира, вокруг которого поворачиваются толстые соединительные
звенья 14.
Порядок соединения тензодатчиков в мосты выбран таким, чтобы
обеспечить на выходе схемы напряжения, пропорциональные только
одной составляющей. Рассмотрим схему моста для измерения нормаль-
ной силы №. Соединение датчиков 8+11‚ наклеенных на средний элемент
94
12, показано на рис. 2.4.8, в. Датчики 8 и 9 включены в разные плечи
моста. Если на упругий элемент Действует нормальная сила, то эти дат—
чики регистрируют Деформации разных знаков и на выходе появляется
сигнал АП№=Ё1М Так как при действии момента центральный элемент
играет роль упругого шарнира, то Датчики 8 и 9 представляют дефор-
мации одного знака (это относится и к датчикам 10, 11) и, следователь-
но, не нарушится начальная балансировка моста.
а)
Рис. 2.4.9. Трехкомпонентные аэродинамические весы:
а—схема установки модели на весах: 1—модель; 2—ве-
совой элемент; 3 — державна;
б—устройство весового элемента: 4—упругнй элемент для
измерения осевой силы; 5—упругий элемент для измерения
нормальной силы и момента тангажа; б+17—тензодатчики;
в—эЛектрические схемы соединения тензодатчиков
Теперь рассмотрим схему моста для измерения момента тангажа
М2 (см. рис. 2.4.8‚в). По этой схеме датчики 4 и 5, наклеенные на вер-
хний наружный элемент _13, включены в разные плечи моста. Если на
упругий элемеНт действует только нормальная сила, то эти датчики
регистрируют деформации одного знака, так как наружная часть 13
упругого элемента подвергается только растяжению (сжатию). Следо-
вательно, в разных плечах моста сопротивления изменяются на одина—
ковую величину. Такое изменение сопротивлений не нарушит баланси-
ровки моста и не вызовет сигнала на выходе. Сказанное относится и к
датчикам б, 7, наклеенным на нижний элемент 13,
Воздействие момента на элементы 13 вызывает их изгиб, и датчи-
ки 4,5 зарегистрируют деформации разных знаков. В этом случае на
выходе моста появится сигнал, пропорциональный моменту, т.е. АПМ2 =
=Ё2М2. Этот момент М, определяется относительно электрической оси.
Если линия действия аэродинамической силы пересекает электрическую
ось, то это не вызывает сигнала на выходе моста, регистрирующего мо-
мент.
95
Рассмотрим устройство и принцип действия трехкомпонент—
ных аэродинамических весов для измерения осевой К и нормальной
А/ сил, а также момента тангажа М2 (рис. 2.4.9).
Упругий элемент 4 для измерения осевой силы выполнен в виде пря—
моугольника. На левый тонкий стержень этого элемента, изгибающийся
только под действием осевого усилия, наклеены тензодатчики 14+17.
Упругий элемент 5 предназначен для измерения нормальной силы М
и момента Ми. На нем попарно наклеены датчики б+13.
Электрические схемы соединения датчиков приведены на рис. 2.4.
9,8. Каждый мост подключается к отдельному каналу тензостанции,
выходы которых связаны со шлейфовым осциллографом
Внутримодельные тензометрические весы позволяют измерять аэро—
динамические силы и моменты с точностью до 1%. При этом отсутст-
вие сложных поддерживающих устройств, таких как у механических
или электромеханических весов, позволяет значительно уменьшить вли-
яние державок на обтекание исследуемой модели и тем самым повы-
сить точность измерений.
4. Аэродинамические весы с пьезоэлектрическими
датчиками усилий
На рис. 2.4.10 представлена схема внутренних аэродинамических
весов с трехкомпонентным пьезоэлектрическим датчиком усилий. Кор-
пус датчика закрепляется на державке 3. Усилия, действующие на ис-
следуемую модель летательного аппарата, передаются через втулку на
внутреннее кольцо 8 датчика. Внутри кольца помещаются три пары
кольцевых пьезоэлементов (4, 5, б) толщиной примерно 1 мм. При этом
а) ! 2 3
` 7/ ‚[[/”,[1/1///,///„//’/////////Ш
‚ , , .
_, ‚ Н 1 | ’
11 [
|*___'__.1
Рис. 2.4.101. Трехкомпонентные внутренние аэроцинамические
весы:
а—схема установки медели на весах: 1—МОДель; 2—трехкомпонент-
ный пьезоэлектрический датчик усилий; 3—державка;
б—устройство пьезоэлектрического датчика: 4—пьезокристаллические
пластины для измерения осевой силы; 5—пластины для измерения бо-
ковой силы; б—пластины для измерения нормальной силы; 7—выво-
ды; 8—внутреннее кольцо
96
расположение пьезоэлементов таково, что они имеют взаимно перпенди-
кулярные оси чувствительности, а предельно допустимое давление на
кольцо составляет около 15 кГ/мм'2. В соответствии с этим возможное
усилие, измеряемое датчиком, не превышает`500 кГ.
Первая пара пьезоэлементов 4 (см. рис. 2.4.10) работает на сжатие
и измеряет усилие К, направленное вдоль оси ;и. Две другие пары (5, 6),
измеряюшие соответственно усилия А! и 2 вдоль осей Ш и 21, работают
на сдвиг. Следует отметить, что чувствительность пьезоэлементов, рабо-
тающих на сдвиг, вдвое выше работающих на сжатие и достигает
45+46 пк/кГ .
Во время эксперимента измеряется заряд с;, образовавшийся на гра-
нях кристалла. Соответствующее усилие, вызвавшее этот заряд, Рав-
но Р=с]/іг (где [т,—тарировочный коэффициент весов). Например, ес-
ли усилитель позволяет измерить заряд в 0,03 тс, а тарировочный коэф—
фициент Аг=22 ГИС/КГ, то минимальное определяемое усилие равно
0,0015 кГ .
Применение таких датчиков вызывает необходимость весьма тща—
тельной их установки относительно модели, с тем чтобы уменьшить вза-
имное влияние измерительных каналов и тем самым устранить возмож-
ные ошибки измерений, которые могут быть у пьезоэлектрических ве-
сов значительными. Например, ошибка при измерении усилий в попереч-
ном направлеиии, обусловленная влиянием других измерительных
каналов, может достигать і—:-2% и более. Для снижения этого эффек-
та наряду с точной установкой весов применяют специальные электрон-
ные схемы, ограничивающие воздействие других каналов и позволяющие
получать на выходе каждого из них сигнал, практически зависящий
только от одной соответствующей составляющей аэродинамического
усилия.
5. Аэродинамические весы для измерения сил
и мементев летательных аппаратов,
совершающих колебательные движения
Рассмотрим весы, предназначенные для измерения момента демпфи-
рования, возникающего при колебаниях летательного аппарата. На
рис. 2.4.11 показаны такие весы, получившие название уп ругого
ша рнир а. Упругий элемент, расположенный на державке 4 и соеди-
ненный с моделью ], представляет собой три перекрещивающиеся балоч-
кн (7, 7, 8), причем на средней 8 наклеены тензодатчики 3. Такая кон-
струкция упругого элемента допускает угловые перемещения модели,
т. е. этот элемент играет роль шарнира.
Спусковое устройство отклоняет модель от нейтрального положения
и удерживает ее в этом состоянии, жестко связывая между собой модель,
упругий элемент и державку. При помощи этого устройства можно
устранить такую жесткую связь и тем вызвать колебательное движение
модели. Ось 9, относительно которой совершаются колебания, проходит
через середины балочек. При этом отклонение модели вызывает дефор-
мацию балочки 8 с наклеенными тензодатчиками.
В потоке трубы характер колебаний определяется наряду с упру-
гими силами, возникающими в балочках, также демпфирующим момен-
том :и моментом тангажа и описывается следующим дифференциальным
уравнением:
12 420:
4:2
где „ТЗ—момент инерции колеблющейся массы; ос—угол отклонения
модели (угол атаки); со; —угловая скорость; МЗ, МЗ:—производные от
момента демпфирования соответственно по ос=сіос/аіъ‘ и по (92; М? , М&—
—(М2°°+м;°г) $$$—( З+мг°ц)оа=о‚ (2.4.3)
7—927 97
произвщные по а соответственно от момента тангажа и момента, созда-
ваемого упругим шарниром.
Во время эксперимента записывается характер изменения по време—
ни ! выходного сигнала М] с моста (см. рис. 2.4.11‚б)‚ определяющего
в соответствии с формулой
АН=Ёа угол атаки (Аг—
тарировочный коэффици-
ент). После обработки со-
ответсвующей осциллограм-
= Щ мы получают зависимость
`_"“ "“’—"' а=а(1‘). Подставив опыт-
`№ ные данные в уравнение
(2.4.8) и проинтегрировав
его, находят сумму (МЗ—і—
_+М;°2).
Как известно, для обес-
печения подобия между дви—
жением летательного аппа-
рата, совершающего колеба-
ния, и колебанием модели в
аэродинамической трубе
. должно быть соблюдено ра-
` 8 венство чисел Струхаля на-
` турного и модельного про—
цессов. Этому требованию
должна отвечать и конст-
‚ рукция весов. В соответст-
\? ‚ 0. вии с этим требованием у та-
` ‚"47 . ких весов частота собствен-
`°`°` ных колебаний будет доста—
' " \ точно большой и может до-
а:. _ ' стигать 120—3—150 гц. Однако
5 9 при этих частотах амплиту—
ды колебаний модели полу-
чаются сравнительно не-
большими (порядка несколь-
И ких градусов), в то время
Рис. 2.4.11. Весы для определения момента дем- как У натурных Образцов
пфирования: они часто значительно боль-
а—устройство весов: 1—модель; 2—упругий элемент ше. ЭТОТ недостаток весов
(ШЗРНИР); 3'—теНЗОДаТЗЁЁЁёйЁт-ЁОЁЪеРЖЗВКЗ; 5—СПУСКОВОВ ограничивает их применение
б—электрическая схема соединения тензодатчиков; Кдъ теми СЛУЧЗЯМИ, когда ам-
Кд2 _ электрические сопротивления датчиков; К], Кгре° пл ИТУДЬ1 кол ебаний, соотв ет_
зисторы плеч моста;
в—внешний вид упругого элемента: б—основания; СТВУЮЩИе реаЛЬНЫМ УСЛОВИ'
7—крайние балочки; 8—центральная балочка с тензо— _
датчиками; 9—ось, относительно которой происходят ко- ЯМ полета’ НЭВЭЛИКИ И бЛИЗ
лебания КИ К ЭКСПЭРИМЗНТЗЛЬНЫМ
3Н8Ч6НИЯМ.
& 2.5. ОПТИЧЕСКИЕ ПРИБОРЫ
Широкое применение в аэродинамике получил оптический метод ис-
следования газовых течений, основанный на известном оптическом эф—
фекте зависимости скорости света в газе от его плотности.
Изменение скорости света определяет соответствующее изменение
коэффициента преломления газовой среды согласно зависимости
п=с/со(с и со—скорости света соответственно в газе н пустоте). Связь
между коэффициентом преломления п и плотностью газа р определяется
98
формулой
п = 1 + (по— 1›р/р… (2.5.1)
в которой по И ро —соответственно начальные значения коэффициента
преломления и плотности газа.
Эффект изменения скорости света и коэффициента преломления
в оптически неоднородном потоке газа, которым является возмущенное
течение, используется при конструировании оптических приборов Для
визуализации обтекания моделей летательных аппаратов.
1. Зеркально-менисковый прибор
конструкции д. д. Максутова
Зеркально-менисковый прибор, широко используемый в аэродинами—
ческих исследованиях, относится к типу теневых оптических прибо-
ров. Схема такого прибора (модель МАБ-451) показана на рис. 2.5.1.
Рис. 2.5.1. Оптическая схема прибора МАБ-451:
] —— источник света; 2 —— конденсор; 3 —- щель; 4 — диагональное
зеркало осветительной части; 5—объектив осветительной части;
б—объектив приемной части; 7—диагональное зеркало прием-
ной части; 8— нож Фуко; 9—фокусирующий объектив; 10— эк-
ран; !1—исследуемая газовая среда
Его осветительная часть включает источник света ], конденсор 2, вход-
ную щель 3, диагональное зеркало 4 и объектив 5. В приемную часть
прибора входят объектив б, диагональное зеркало 7, непрозрачная
пластина (нож Фуко) 8, фокусирующий объектив 9 и экран 10. При
этом объективы 5, 6 «и диагональные зеркала 4, 7 выбраны одинаковы-
ми. С помощью фокусирующего объектива 9 добиваются четкого изо-
бражения газового пот-ока на экране 10. Непрозрачная пластина уста-
новлена в фокусе объектива приемной части так, что ее кромка парал-
лельна длинной стороне входной щели 3.
Теневой прибор работает следующим образом. Изображение светя-
щейся нити источника ] проецируется с помощью конденсора 2 на
входную щель. Отраженный от диагонального зеркала свет, пройдя
через объектив вдоль оптической оси осветительной части, выходит рав—
номерным параллельным пучком к участку исследуемого газового по—
7* 99
тока. Лучи света затем попадают в приемную часть и собираются
в фокусе объектива 6. В результате получается четкое изображение уча-
стка газового потока на экране 10. .,
Перед началом эксперимента лезвие ножа Фуко в фокальнои пло-
скости объектива 6 устанавливается так, чтобы перекрыть часть изобра-
жения щели 3 (см. рис. 2.5.1). В та—
: 1 2 ком положении (рис. 2.5.2) нож Фу—
“%%—т ““““““ ?( ”””” “]"—"‘“ 3 ко отсекает часть лучей и вызывает
равномерное затемнение изображе-
|
1 1
, ”)”/757 @ЖЙЁ‘ЙЁЁЁНЁЙ 17%” ния, наблюдаемого на экране.
№№ При прохождении лучей света
через возмущенную газовую среду
Рис. 2.5.2. Кромка ножа Фуко в тене- с переменной плотностью изменяет-
ВОМ ПрИборе3 СЯ ИХ ПЗРВОНЗЧЭЛЬНОЗ НЗПРЗВЛБНИЭ
1—начальное изображение щели; 2—сме- Нд УГОЛ отклонения в., ЧТО вызывает
щенное изображеЩЁе затон, З—кромка но- смещение ИЗОбРЭРКЭНИЯ ЩЗЛИ В ф0_
кальной плоскости на величину Ша.
Если смещение увеличивает высоту
части щели над кромкой ножа, то освещенность изображения возраста—
ет. И, наоборот, при смещен-ии изображения к кромке ножа Фуко осве-
щенность уменьшается. _
В исследуемом газовом потоке с неравномерным распределением
плотностей углы отклонения в будут не одинаковы для различных уча-
стков этого потока. Поэтому будут отличаться соответствующие смеще-
ния Ай, а следовательно, неоднородной будет и освещенность изображе—
ния. На экране возникает теневая картина этого изображения—отсюда
и название измерительного устройства конструкции Д. Д. Максутова —
теневой оптический прибор.
Относительное изменение освещенности, или ст е п е н ь ко н тр а ст—
но сти изображения характеризуется отношением изменения количе-
ства падающего света к полному световому потоку и определяется зави-
симостью
е=АШщ‚ шли
где Шт—смещение изображения щели; Щ —начальная высота открытой
части щели (см. рис. 2.5.2), так как световой поток прямо пропорцио-
нально зависит от величины открытои части щели.
&! Смещение, вызываемое отклонением лу—
ча на угол е,
[д Ан=ды (25$
‚\ 5 где Ь—фокусное расстояние объектива
2\0 №45 приемной части.
\ 2 С учетом (2.5.2) и (2.5.3) степень конт-
ц растности
е=№щ. шви
Угол отклонения, зависящий от измене—
ния коэффициента преломления,
4
'5 "]
_ . '!
Рис. 2.5.3. Схема преломле— [18 _ [Ёгадп 6131.1”, (255)
НИЯ СВС'ГОВОГО луча, ПРОХО- . ___ т ч
аэродинамической трубы: векторов:
1—смотровое окно; 2—входя- . дп . . дп дп
щий луч; З—выходящий луч; Егаё п = ;… _. _,— ] __ + ___
4—первоначальное направление дх ду д.
луча
и а'з : іаЁх —}— ]сіу + 13612.
100
Вектор вёз определяет элементарную величину и направление пути рас-
пространения света в возмущенном потоке газа.
Из решения уравнения (2.5.5) можно определить суммарный угол
отклонения при прохождении лучом пути длиной 5:1, вдоль оси 2
(рис. 2.5.3):
[.
(.; . Ё.) аг. (2.5.6)
п ду /
8), :
. \
Эту зависимость можно использовать для нахождения угла в в двух—
мерном (плоском) потоке, для которого (Эр/(32:0 и, следовательно,
ддт/(32:0. В соответствии с этим И с учетом (2.5.1) находим
е = ”Г 1. Ь (ЁЁ). (2.5.7)
”о 90 ду
Используя это выражение, определим в соответствии с (2.5.4) степень
контрастности:
(, : Ь_№_—_1__Ь_{Ё)_ (2.5.8)
111 по ро \ ду
Формула (2.5.8) характеризует влияние на степень контрастности
изменения плотности в направлении, перпендикулярном кромке ножа
Фуко. При этом освещенность экрана сохранится одинаковой, если
(‚$
то -\- _‘‚
1:
Рис. 2.5.4. Теневая фотография обтекания крыла
при установке кромки ножа Фуко перпенцикулярно
направлению вектора скорости:
1 — скачок уплотнения; 2 -——- зона разрежения
плотность газа будет изменяться вдоль оси, параллельной кромке ножа.
Тогда отклонение света вызовет смещение изображения щели парал—
лельно кромке ножа Фуко.
Сравнением фотографии обтекания МОДели летательного аппарата
и ее начального изображения («нулевой» фотографии) можно опреде—
101
лить ДЛЯ каждой точки исследуемого участка потока изменение осве-
щенности, затем по формуле (2.5.8) вычислить относительное измене-
ние плотности и, наконец, найти ее абсолютную величину.
Следует сказать, что на практике сравнительно редко используется
метод теневых фотографий для количественной оценки плотности и дру-
гих параметров газовых течений. Наиболее широкое применение этот
метод нашел при исследовании аэродинамического спектра, характери-
зующего качественную картину обтекания. Такие спектры обтекания
изображены на теневых фотографиях профиля крыла, расположенного
в сверхзвуковом потоке (рис. 2.5.4 и 2.5.5). Одна из них получена при
условии, что кромка ножа Фуко устанавливалась перпендикулярно
направлению набегающего потока, а вторая—параллельно этому на-
,:‘Ё .‘ач № “№ ‚“"“-' «з % ”%
я}? '1 ‘ _. ` & «9 °“ _ ‘
и « -- `!
„% .-
‘.‚к _ “_ _" ёё
@ ‚_ \ , ’ ‘“ ‹.›—‹:':-=і-’`
і " & `,…
№ . . ` ,? ‘ " '
Рис. 2.5.5. Теневая фотография обтекания кры- Рис. 2.5.6. Теневая фотография
ла при установке кромки ножа Фуко парал- обтекания сферы сверхзвуковым
ЛВЛЬНО направлению вектора СКОРОСТИ: ПОТОКОМ:
! —скачок уплотнения; 2—зона разрежения 1—отошедший скачок уплотнения;
2—область отрыва пограничного слоя
6
5 г---— —1
' |
1 2 / ' …, ;:
|' ' %
и
| и
' Ё
:
Э 3 '
|
|
|
\. ________ .!
ь ________ Т—
Ш
Рис. 2.5.7. Оптическая схема интерферометра:
! — источник света; 2 — конденсор; 3 — щель; 4 — объектив осветительной части;
5 —— осветительная часть (коллиматор); б, 6’ —- полупрозрачные пластины; 7 — исследуе-
мая газовая среда; 8, 8’ — зеркала; 9 —— объектив приемной части; 10 —— фокусирую-
щая линза (объектив); !! --экран; 12—приемная часть; 13— оптический компенсатор;
' 14 — интерферометр
102
правлению. Качественно картина обтекания на этих фотографиях ха-
рактерИзуется ясно видными скачками уплотнения и зонами разре-
жения.
Теневой сним-ок на рис. 2.5.6 изображает аэродинамический спектр
сверхзвукового обтекания сферы. На фотографии хорошо видны ото-
шедший скачок уплотнения и область отрыва потока.
2. Интерферометр системы Маха — Цендера
Работа интерферометров, как и теневых приборов, основана на ис-
пользовании свойства света изменять свою скорость при прохождении
через участки газа с различной плотностью.
Схема интерферометра системы Маха—Цендера изображена на
рис. 2.5.7. Этот прибор состоит из осветительного 5 и пр ием но-
го 12 устройств и собственно интерферометра 14. В освети-
тельное устройство входят монохроматический источник света ], кон-
денсор 2, щель 3 и объектив 4.
Свет источника после конденсора‚ Шели и объектива направляется
параллельным пучком в собственно интерферометр 14, который содер—
жит полупрозрачные пластины 6,
б’, зеркала 8, 8’ и оптический ком- , _, ..
пенсатор 13. Пластина 6 предна-
значена для разложения света " =
на два взаимноперпендикуляр- ;
ных пучка 111 и 112. Один из этих Ё
пучков (121) после прохождения
через область газового течения, “3
последующего отражения от зер- - _
кала 8 и пластины 6’ поступает в … .. '
приемное устройство 12. Одновре- ' ` ` !
менно в него поступает и поток " № .'скд:.;._;<_._ %
света 112, отраженный от зеркала … „ - *
8’ и прошедший оптический ком- %. ' ` '
пенсатор 13 и пластину 6’. В при-
еМНОМ УСТРОйстве 12, состоящем Рис. 2.5.8. Схема расшифровки интерферо-
из объектива 9, фокусирующей грамм
линзы 10 и экрана 11, происходит
интерференция потоков 111 и 112 и
формирование изображения исследуемой газовой среды.
Так как лучи 111 и 112 от источника 5 являются когерентными, имея
лишь различные фазы световых волн, то изображение на экране будет
представлять собой картину из светлых и темных полос. Такое изобра-
жение будет четким, если разность фаз равна _—|_—2лп (где п=0‚ 1, 2, …).
Для обеспечения идентичности световых потоков лд и 122 служит опти-
ческий компенсатор.
Будем называть шириной полосы В расстояние между серединами
Двух соседних полос (рис. 2.5.8):
В = 7»/Ш‚ (2.5.9)
где Ж— длина волны монохроматического источника света; ос—угол
между лучами 111 и 112 после прохождения ими пластины 6’.
Обычно во время эксперимента длина волны &=соп5’ц а величина ос
изменяется при повороте полупрозрачной пластины 6’ (см. рис. 2.5.7).
Если ос=0 и лучи света л], 112 параллельны друг другу, то экран имеет
равномерную освещенность и на нем будет интерференционное изобра-
жение, характеризующееся полосой бесконечной ширины. Если
лучи света 111 проходят через невозмущенный газовый поток, то на эк—
ране наблюдается картина из равномерно распределенных полос конеч-
103
ной ширины. В возмущенном течении характер этого распределения
изменится. В таком течении с переменной плотностью вследствие изме-
нения скорости света время его прохождения через исследуемую часть
потока будет отличаться на величину.
Аг = Ь ‹1/с— ш…). (2.5.10)
где Ь—длина пути света в газовом потоке; с и сН—скорости света
соответственно в возмущенном и невозмущенном потоках. _
Разность времени, определяемая по выражению (2.5.10), вызовет
смещение интерференционных полос на некоторую величину А
(см. рис. 2.5.8), определяемую из соотношения
Е : А.В : ты, (25.11)
в котором і—частота монохроматического света. Учитывая, что со—
гласно (2.5.11)
А: :: Ъ, ;,
можно из (2.5.10) получить
73,71: [„(1с— 1‚сн). (2.5.12)
Умножив обе части этого равенства на скорость света в пустоте, найдем
выражение __
АСО/і : [. (11 _по) :: Ь-Ап. (2.5.13)
Введем обозначение ?ьо—со/і для длины волны монохроматпческого све—
та, в соответствии с которым
МО : д.»…. (2.5.14)
Изменение коэффициента преломления найдем, продифференциро—
вав (2.5.1):
6112 : (по _ 1) др,/Ро. (2.5.15)
Так как для воздуха при Т0=288К значение р0=0‚125 нГ-секЁ/м4
и по=1‚000294‚ то
0111 : 0,00235сір. (2.5.16)
Из (2.5.14) с учетом (2.5.16) можно найти изменение плотности воз-
духа:
Ар : лож,-(0,00235ц. (2.5.17)
Рис. 2.5.9. Интерферограмма обтекания профиля:
1—Ж-образный скачок уплотнения; 2—зона отрыва погра-
ничного слоя: 3— исследуемый профиль
‚__;
С:)
›Р—
Если, в частности, исследуется воздушный поток в аэродинамиче-
ской трубе с поперечным размером Ь=4ОО мм и в интерферометре ис-
пользуется монохроматический источник зеленого света с длиной волны
Жо=5‚5- 10—4 мм, то относительному смещению полосы А=1 будет соот-
ветствовать «изменение плотности
5,5-10—4-1 _ . 2
: 25,8510 4 кГ сек .
0 , 00235 -400 м4
При расшифровке интерферограмм относительное смещение полос
может быть определено с точностью до 10—2—15%‚ что соответствует
возможной ошибке .при нахождении плотности.
На рис. 2.5.9 показана интерферограмма обтекания профиля газовым
потоком при использовании монохроматического источника света. По
этой интерферограмме можно судить о качественных особенностях по—
тока. На ней, в частности, виден Ъ—образный скачок уплотнения, за ко-
торым происходит срыв пограничного слоя.
Интерферограмма позволяет также получить представление о харак-
тере изменения плотности в исследуемой област-и потока и наряду
с этим найти по смещению .полос при помощи (2.5.17) величину изме—
нения этой плотности. Затем по
уравнению состояния могут быть 3 *-
рассчитаны остальные параметры °- " '
потока. __ *$ ' ‚Ё
При исследовании газодина- ..-_…:
мических процессов, характери- : . …” ……№Ё…№…„№
зующихся скачкообразным изме- __ .
нением параметров и относитель- ` . „; ' - ‹-
ным сдвигом полос, превышаю-
щим величину А= 1, применяется
источник белого света. Так как
такой свет слагается из световых &… -
лучей с различными длинами
волн 7», то на экране наблюдается
многоцветная интерференционная
№№ № № 5 ф
относительно Центральнои ПОЛО' його света‚(Ас—смещение центральной
сы. При этом различие в полосах полосы на скачке)
хорошо видно и на черно-белой
фотографии (рис. 2.5.10).
Скачок уплотнения вызовет смещение интерференционной картины,
на которой можно отыскать центральную полосу, измерить ее смещение
Ас относительно первоначального положения, а затем по величине этого
изменения определить соответствующее изменение плотности за
скачком.
При проведении расчетов следует иметь в виду, что зависимости
(2.5.11)-:—(2.5.17) справедливы для двухмерных плоских потоков.
В принципе рассмотренная методика определения плотности по интер-
ферограмме пригодна и для двухмерных пространственных (осесим-
метричных) течений. С этой методикой можно познакомиться «по спе-
циальной литературе [3], [47].
Достаточно трудоемкие вычислительные операции, предусматривае—
мые интерференционным методом, целесообразно осуществлять на
электронно-вычислительных машинах, а расшифровку интерферограмм
(измерение смещения полос) вести с применением специальных техниче—
ских средств.
!
№
№53
8—927
ГЛАВА |"
ТЕХНИКА И МЕТОДИКА ИЗМЕРЕНИЯ ПАРАМЕТРОВ
ГАЗОВЫХ ТЕЧЕНИЙ
В основе экспериментальных исследований в аэродинамике лежит
использование воздушного (газового) потока аэродинамических труб
для целей измерения параметров обтекания моделей летательных аппа-
ратов. В связи с этим особое значение имеют подбор наиболее совер-
шенных измерительных приборов и устройств, .правильная их эксплуа-
тация, разработка и реализация правил проведения эксперимента, т. е.
все то, что объединяют под общим понятием техники и методики изме-
рений.
К числу мероприятий, связанных с проведением аэродинамического
эксперимента, относится подготовка необходимой измерительной аппа-
ратуры: проверка ее технической готовности, наладка и тарировка.
Одновременно разрабатывается последовательность операций при ра—
боте с этой аппаратурой, которая должна быть реализована при осуще-
ствлении измерений. Важным элементом подготовки к такому
эксперименту является измерение параметров потока в рабочей части
аэродинамической трубы, который рассматривается как набегающий
(невозмущенный) при исследовании обтекания моделей. На основании
данных такого «измерения могут осуществляться меры по улучшению
свойств потока, а именно обеспечению параллельности и равномерности
течения, снижения степени турбулентности, достижения заданных вели—
чин чисел Маха и Рейнольдса и др.
5 3.1. ТАРИРОВКА ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ
И УСТРОЙСТВ
Тарировка измерительного .прибора позволяет установить степень
соответствия его показаний действительным значениям измеряемых фи-
зических величин, причем такие значения могут определяться различны-
ми способами, в частности, измерениями при помощи эталонных при-
боров.
При тарировке измерительного прибора одновременно определяет-
ся его чувствительность, которая также может сравниваться с анало-
гичной характеристикой эталонного прибора.
Работазлл
Тарировка ЖИДКОСТНОГО микроманометра
Цель работы—установить зависимость показаний микромано-
метра от величины измеряемого давления и осуществить его тарировку.
По результатам работы составляются таблицы опытных данных, стро-
ится тарировочный график и определяется тарировочный коэффициент.
Общие сведения
Наиболее распространенной в практике применения манометров
является их тарировка способом д о л и в а н и я ж и д и о с т и или по
методу с р а в н е н и я п о к а з а н и й этих манометров с эталонным.
По первому способу в чашку микроманометра (см. рис. 2.1.2) доли-
вают некоторое количество жидкости. Если площадь чашки Р, то уро-
вень в неи изменится на величину
А! = [’У/(713), (3.1.1)
где 117— объем долитой жидкости; у — ее удельный вес.
Повышение уровня жидкости эквивалентно увеличению Давления
в узкой трубке, равному
Ар : Шу, (3.1.2)
106
но сучетом (2.1.10)
Ар : Кэ Ала,
где индексом «э» обозначены рассчитываемые показания отсчетной
трубки микроманометра, которые рассматриваются как эталонные.
Тогда в соответствии с (3.1.1) и (3.1.2)
Ап. = Алу/к. = шикэ Р). (3.1.3)
ритм
\
Рис. 3.1.1. Схема тарировки микроманометра:
! —- насадок полного напора; 2—эталонный микрома-
нометр; 3—тарируемый мнкроманометр
Во время тарировки после доливания фиксированных объемов жид-
кости в чашку микроманометра записывают соответствующие экспери-
ментальные показания пт и затем по начальному показанию по вычис—
ляют разность Апт=пт—/10. Эту разность сравнивают с расчетными зна-
чениями Аид, определяемыми из выражения (3.1.3).
Отношение эталонной величины м. к значению АИТ определяет та-
рировочный коэффициент микроманометра.
и. = Ап./Ал... (3.1.4)
Более широкое .применение в практике получила тар-ировка по мето—
ду сравнения показаний исследуемого микроманометра с эталонным
при измерении ими одного и того же давления. На рис. 3.1.1 приведена
схема соединения приборов для проведения такой тарировки. Согласно
этой схеме перепад давлений, измеряемый эталонным манометром
и равный
Ро _ Ратм : Кэ ' Ана: (3-1-5)
сравнивается с показаниями тарируемого манометра
Ро _ ратм = Ёт Кт' Ант, (3°16))
где коэффициенты Кэ и Кт соответственно для эталонного и тарируемо-
го манометров определяются по (2.1.9). В результате этого сравнения
находим
КЭ. Аид : Ёт Кт ' Ант, (3.1.7)
откуда тарировочный коэффициент
А:„ = КЭ— Айа/(Кт—АИТ). (3.1.8)
Вводя обозначение
’ге Ф = Ма,/(№№ (3.1.9)
получим
ігт = (Кэ/Кт) 13 (р. (3.1.10)
Во время эксперимента снимают показания микроманометров при
различных давлениях и определяют зависимость Анри/№), по кото-
рой строят тарировочный граф ик.
8* 107
Выражение (3.1.10), определяющее постоянное значение коэффици-
ента !% для всего диапазона измеряемых давлений, будет соответство—
вать тарировочному графику в виде прямой линии, наклоненной под. уг—
лом (р к оси, на которой откладывается Алт. Тарировочный коэффициент
ігт может быть вычислен по экспериментальным данным при помощи
выражения
п
БКЗ-№3.-
ігт= „ '=1 _ (3.1.11)
2 КэКт'АЬэі'АЬті
і=1
Все тарировочные данные необходимо дополнить поправками, учи-
тывающими изменение удельного веса жидкости за счет температуры,
по формуле
1 = тн./[1 + 1305—1101, (3.1.12)
где мы и у—удельные веса жидкости соответственно .при некоторой на-
чальной температуре Ён и температуре эксперимента !; [3 — коэффициент
объемного расширения жИДкости.
Если измерение производится при температуре 15, то в соответствии
с показаниями манометра
рО—ратм : [ет К'Ё‘Аптэ (3.1.13)
где величина К,; находится из (2.1.9) по удельному весу у, определяемо-
му согласно (3.1.12). Эту величину можно представить в виде
Кё = кт 12/1… (3.1.14)
где Кт—коэффициент (2.1.9), вычисляемый для температуры Ён, при
которой осуществлялась тарировка. Введя обозначение
? 1
[г, = _ = „‚
Ун 1 '+' В (1 _ін)
ПОЛУЧИМ ЗЗВИСИМОСТЬ ДЛЯ расчета перепада ДЗВЛёНИй В виде
ро — ратм = !гКт-Айт, (3.1.16)
где ‚поправочный коэффициент
(3.1.15)
іг=ігтіг‚. (3.1.17)
Порядок проведения работы
Тарировка по способу доливания.
1. Ознакомиться с устройством микроманометра и проверить его го-
товность к работе.
2. Снять крышку чашки микроманометра и штангенциркулем изме—
рить ее размеры.
З. Измерить температуру в лаборатории ін. Зафиксировать началь-
ный уровень в отсчетном колене микроманометра 110.
4. Доливая в чашку фиксированные объемы жидкости, записать
соответствующие показания микроманометра пт.
5. Определить перепады уровней Апт=пт—/10 и вычислить Айа из
(3.1.3); по этим данным построить график Айэ=і(Аі1т) и рассчитать та—
рировочный коэффициент.
Тарировка по методу сравнения с эталонным манометром.
1. Ознакомиться с устройством аэродинамической трубы, насадка
полного давления и манометров; проверить их готовность к работе.
2. Закрепить насадок полного давления в рабочей части аэродинами-
ческой трубы.
108
-3. Установить эталонный и тар—ируемый микроманометры; подсоеди-
нить их при помощи резиновых шлангов к насадку и проверить герме—
тичность соединений.
4. Измерить температуру в лаборатории Ён; зафиксировать началь-
ные уровни в отсчетных коленах манометров (но, и и…) и включить
аэродинамическую трубу.
5. После выхода трубы на режим установившегося течения в рабо—
чей части записать соответствующие показания микроманометров (113
11 Ш) , а затем выключить трубу.
6. Изменить условия работы аэродинамической трубы, при которых
возросло бы (или, наоборот, уменьшилось) измеряемое давление,
и осуществить аналогичные замеры обоими манометрами.
7. По экспериментальным данным Анд и АИТ построить график
Анз=і(А/1т) и рассчитать тарировоч-
ный коэффициент.
Пример. Рассмотрим тарировку по Номера
способу доливания чашечного микромано- замеров 1 2 3 4
метра, показанного на рис. 2.1.3. Тарировка
проводилась в помещении с температурой
Таблица А
15:19° С. Вкачестве манометрической жил- дт _ _ _ _ 3 3 3 › 3
кости использовался спирт с у: ;, _ _ _ _ _ 26 —4 1 106
_—_О‚8095 кГ/дмз, который доливался в чаш- А?!-Г, мм _ _ 23 & $8 103
ку из мензурки с ценой деле/НИЯ 1 см3_ 11’/‚см3. . . 18 40 61 80
Внутренний диаметр чашки микроманомет- Ада,/им _ _ 22,9 51,0 77,7 102
ра равен 100 мм, а ее площадь 78,5 см2.
Результаты измерений уровней Ит и расчетов
Шиа, Ант для значения Кт=Кэ=0,1 приве—
дены в табл. А.
Используя данные табл. А, по формуле (3.1.11) определяем тарировочный коэффи-
ВИЗИТ:
4
241113
Ё 1 22,92+512+77,72 + 1022 _0 996
"`_ 4 _23-22‚9+51-51+77,7-78+102-103 _ ’ '
Блит—Ап,
1
Проведем тарировку того же чашечного микроманометра (см. рис. 2.1.3) по метолу
сравнения с эталонным прибором для измерения давления. Причем в качестве такого
прибора выберем аналогичный чашечный микроманометр, показания которого рассмат—
риваются как точные.
Тарировка осуществлялась в вентиляторной малоскоростиой аэродинамической
трубе с открытой рабочей частью. Изменение скорости потока в этой трубе осуществ-
лялось путем регулирования числа оборотов электродвигателя вентилятора с помощью
реостата. В качестве приемника давления Использовался насадок полного напора (см
рис. 2.1.31). Общее число проведенных замеров давления манометрами составило пять
При этом каждому последующему замеру соответствовало включение двигателя вен—
тилятора на большее число оборотов, при которых увеличивался перепад уровней в
отсчетных трубках. Максимальное число оборотов выбиралось таким, чтобы возникаю—
щий полный напор потока не вызывал подъема уровня жидкости в этих трубках за
пределы отсчетной шкалы.
Данные отсчета показаний уровней эталонного На и Ада-‚ММ
тарируемого Ит манометров, их начальных значений и…, 11
Лот, а также результаты вычисления соответствующей раз-
пости уровней Айа и АИТ приведены в табл. Б. 200
ТаблицаБ 150 /
.Номера замеров ] 2 3 4 5 100 1
“Р
до,. . . . . . . 10 10 10 10 10 -50
23 - - . . . - - 20 30 61 111 195
і1 , мм . . . 10 20 51 101 185
дата. _ _ 11 11 11 11 … П 50 ШП 150 Штип
Ьт _ _ 19 26 49 86 148 Рис. 3.1.2. Тарировочный
мт, мм . . . . . . 8 15 38 75 137 график чашечного мик-
романометра
109
По результатам табл. В на рис. 3.1.2 построен тарировочный график, из которого
находим 18ф=1‚35. По этой величине, а также значениям Кэ=0‚3 и Кт=0,4, которые
известны для манометров и соответствуют выбранным углам наклона их отсчетных
трубок, определяем по (3.1.10) тарировочный коэффициент:
1% = (к.,/к,.) в; ср = (од/0,4) 1,35 = 1,01.
Это значение [ет соответствует температуре ін=15° С, при которой проводилось тариро-
вание. Для этой же температуры были вычислены коэффициенты К„ и К,.
По данным измерений м., и №., тарировочный коэффициент может быть опреде-
лен также при помощи формулы (3.1.11). Внося в нее соответствующие данные, по-
лучим
5
Кэ 2 №3
1 о,з‹10=+202+512 +1012+1852)
5 =0,4(10—8+20-15+51-38+101-75+185-137)
КТ 2 АНЭ 'Алт
1
= 1,012.
Кт:
Как видим, с точностью до второго десятичного знака получен такой же результат, что
и по тарировочному графику.
Предположим, что измерения тарируемым манометром осуществлены в лаборатории
при температуре !=2Б° С. В этом случае отношения удельных весов жидкости (этило—
вого спирта)
у _ 1 _ 1 _
у„ —1+13(г—гн) _1+о,0011(25°— 15°)—
Тогда, согласно (3.1.17), тарировочный коэффициент с учетом температурной поправки
будет
0,99.
&= лтд, = 1,01.о,99= 1,0.
Р а 6 о т а 3.1.2
Тарнровка насадков
Цель р а боты—установить соответствие показаний тарируемого
и эталонного насадков и найти степень влияния отклонения оси насадка
от направления скорости набегающего потока на показания манометра,
соединенного с этим насадком. Результаты работы должны быть ‹.пред-
ставлены в виде соответствующих таблиц экспериментальных данных,
а также тарировочных графиков.
Общие сведения
Тарнровка насадка заключается в сравнении давления, измеренного
при помощи этого насадка, с соответствующим значением, показанным
манометром, подсоединенным к
эталонному насадку. Во время
тарировки оба насадка (при—
емника давления) устанавли-
ваются в рабочей части аэро-
динамической трубы строго на-
раллельно друг другу. Схема
расположения этих насадков
и соединения их с манометра—
ми показана на рис. 3.1.3.
Если Арз=рэ—ратм—дей-
ствительное избыточное давле-
ние, измеренное манометром,
Рис. 3.1.3. Схема расположения насадков соединенным с ЭтаЛОННЫМ на-
ПРИ тарировкеі садком, а разность Арт-=рт—
і—аэродинамическая труба; 2—эталонный наса- —Ратм СООТВСТСТВУЗТ ПОКЗЗЭНИ—
док; 3—тарируемый насадок; 4—микроманомег-
ры ЯМ М&НОМЗТ'РЭ, СОЗДИНёННОГО С
110
тарируемым насадком, то тарировочный коэффициент этого насадка
определяется в виде отношения
с. = Ара/Арт. (3.1.18)
Используемые манометры, соединенные с соответствующими эталон-
ным и тарируемым насадками, должны быть предварительно .протири-
рованы, т. е. для них должны быть известны тарировочные коэффициенты
із; и ‚г;. Кроме того, в частности для чашечных микроманометров, долж-
ны быть известны также значения коэффициентов Кэ и Кт, найденные
по формуле (2.1.9). С учетом этого избыточные давления, измеренные
обоими манометрами, будут определяться по выражениям:
рэ —ратм = 123 КЗ,-Айа; (3.1.19)
рт —ратм = &; Кт— МТ. (3.1.20)
С учетом этих выражений тарировочный коэффициент (3.1.18)
*? Кэ
(&=—течи (3.1.21)
же; к„
где
Ёе ср = Ан,/Ай,…
Обычно тарировка осуществляется по результатам нескольких заме—
ров уровней в отсчетных коленах манометров. По этим результатам
можно определить соответствующий тарировочный коэффициент насад—
ка при помощи зависимости, аналогичной (3.1.11),
% (закат/13.-
& = "=1 — (3.1.22)
п
2 Ёзёёкэкт'Анэі'Апті
і=1
Угловую характеристику насадка, которая определяет зависимость из-
меряемого им давления от его отклонения относительно направления
скорости набегающего потока, можно представить в виде некоторой
функции от угла оа этого отклонения:
:* (06) = (Арс. — Модо/Арн:… (3.1.23)
где Ара=0=ра=О—ратм -и Ара=ра— Ратм — избыточные давления, изме—
ряемые насадками соответственно при а=0 и (1750.
При экспериментальном определении угловой характеристики наса—
док (приемник давления) закрепляется на координатнике—специаль-
ном устройстве, позволяющем изменять наклон этого насадка в рабочей
части аэродинамической трубы. Если при некотором угле ос этого накло-
на избыточное давление, измеренное микроманометром,
Ара. : рос _ратм : Ё; Кт°Айои
а при ос=0
Арос=О—_'—_ рсд=0_ ратм : Ё; Кт. Апа=т
то выражение (3.1.23) примет вид
;(“) = (Анод— Анос=0)/Айо‹.=0’ (3-1—24)
Где дни:—игле; Ана=о=іъа=о —/10.
По данным измерений строится график функции [(а), представляю—
щий собой угловую характеристику. При помощи этого графика можно
определить экспериментальную «зону нечувствительности», т. е. интер—
111
вал углов ос, в котором ошибка измерений не превышает заданной велн-
чины (ее величина равна примерно і1+1,5%).
Обычно определение такой угловой характеристик-и, как и тарировка
насадка, осуществляются для различных чисел Маха потока в рабочей
части аэродинамической трубы.
„Порядок проведения работы
1. Ознакомиться со схемой тарировочной установки, устройством
микроманометров и насадков и проверить их готовность к работе.
2. Закрепить на координатн-иках оба насадка и установить их в се-
редине рабочей части аэродинамической трубы параллельно друг
дРУГУ—
' д 3. Соединить с помощью резино—
_ _ , _ вых шлангов насадки и микромано-
“т __ метры и проверить герметичность
.. {і ' - ' этого соединения; снять начальные
' '*‘ показания микроманометров йод
Ё И дет.
; _ 4. Включить аэродинамическую
__ іі ` - трубу и произвести замеры показа—
* Ё ний обоих манометров На и Ит при
.; различных скоростях воздушного
; № потока в рабочей части; выключить
‘*‘” 71 : . ТРУбУ-
; у ._ ;- > 5. Оставив в рабочей части толь-
” : ко один Насадок, включить трубу и
осуществить замеры показаний ма-
нометра Ио; при одной и той же ско—
рости, но для нескольких значений
углов наклона насадка (углов ата-
ки и), устанавливаемых с помощью
координатника. Аналогичные изме—
рения провести при других скоро-
Ъ: »; "( ц…. …. ",-';‚ъ'іі „Ё: „.;-‚ ". ті
Рис. 3.1.4. Координатник: СТЯХ ВОЗДУШНОГО потока
] — рукоятка горизонтального переме- _
щения; 2—горизонтальный ходовой 6 ПО РЕЗУЛЬТЭТЭМ ЗЭМЭРОВ ВЫ
винт;; З—каретка; 3—основание;8 5—стой— ЧИСЛИТЬ РЭЗНОСТИ АИ3=ИЭ—Йоэ И
ка; ———маховик; —корпус; —наса- _ _
док; 9—маховик задания углов атаки; Айт—йТ—ЁОЪИПОСТРОИТЬ ГрафиК 38-
10—вертикальный холовой винт; ‘ :
]1—рукоятка вертикального перемеще- ВИСИМОСТИ А Э і (АЬТЪ ОПР6,Е[6ЛИТЬ
ния УГОЛ (р НЭКЛОНЭ тарировочнои ПРЯ-
Мой и по формуле (3.1.21) найти со-
ответствующий тарировочный коэффициент насадка. Этот же коэффи-
циент рассчитать по выражению (3.1.22).
7. По опытным данным определить разности уровней Анод) :
=да=0—іхо‚ Айа=И“—Но (где Ио—начальный уровень манометра, рав-
ный ітот) и вычислить значения функции Нос) (3.1.24).
8. Для каждой скорости построить по этим значениям На) угловые
характеристики НЭСЭДКЭ.
Пример. Рассмотрим тарировку насадка (см. рис. 2.1.33) в малоскоростной аэро-
динамической трубе с открытой рабочей частью. В качестве эталонного был взят ана-
логичный насадок, подключенный к чашечному микроманометру с тарировочным ко-
эффициентом @= 1,0 и величиной Кэ (2.1.9), равной 0,8. Соответствующие значения для
Т
манометра, соединенного с тарируемым насадком, равны ігт=1‚0 и Кт=_0‚8_
Эталонный и тарируемый насадки устанавливались в рабочей части трубы при по-
мощи двух координатников. Одна из возможных конструкций координатника показана
на рис. 3.1..4. Основание 4 этого координатника закреплялось на горизонтальном столе,
расположенном под рабочей частью. Вращением рукоятки 1 приводился в действие го-
ризонтальный ходовой винт 2, который перемещал каретку 3 и связанный с ней насадок
112
8 в горизонтальном направлении в поперечной плоскости потока. Насадок закреплялся
в корпусе 7, который двигался в вертикальном направлении по стойке 5, как по на--
правляющей, при вращении рукояткой 11 ходового винта 10.
Наклон насадка в вертикальной плоскости потока (на угол атаки и) изменялся
при помощи поворотного устройства, смонтированного в корпусе. Вращением маховика
9 приВОДилась в движение червячная пара, которая поворачивала на нужный угол свя—
занный с ней насадок. Отсчет углов производился по шкале на втулке червячного коле-
са при помощи неподвижного указателя, закрепленного на корпусе. Поворотом махо-
вика б осуществлялся поворот насадка в горизонтальной плоскости потока (на угол
скольжения |З).
Схема установки насадков в рабочей части трубы и соединения их с манометрами,
показанная на рис. 3.1.3, сохранялась при проведении замеров обоими манометрами,
изменялось лишь число оборотов вентилятора трубы, что позволяло регулировать ско-
рость потока. Данные замеров, т. е. показания отсчетных трубок тарируемого пт и эта—
лонного ИЭ манометров, их начальные уровни пот и поз, а также результаты расчета
разностей АНТ и Айа приведены в табл. А.
Д'ЬЗ‚ММ'
Таблица А
150
Номера замеров 1 2 3 4
100
1103 . . . . 11 11 11 11
на . _ _ . . . . . . 33 75 134 183 50, „‚
Ан„ мм . . . . . . 22 64 123 172 - \
н…… . . . . . 12 12 12 12 „
дт . . . . . . . . . . . 34 76 135 184 50 100 150 Мммм.-
АИТ' мм ' 22 64 123 172 Рис. 3.1.5. Тарировочный
график насадка
По данным табл. А прстроен тарировочный график (рис. 3.1.5). Угол наклона та-
рирёэзвотЁсзи прямои ср=4о ‚ следователы-ю, тарировочный коэффициент насадка соглас-
но . .
1,0-0‚8
°Т— 1,0-0‚8
1,945о = 1,0.
Соответствующая величина тарировочного коэффициента, рассчитанная непосред-
ственно по измеренным значениям Айа и АИТ при помощи (3.1.22), также равна едини-
це, так как измеренные значения Айа и АНТ оказались одинаковыми.
Для нахождения угловой характеристики эксперимент осуществлялся с одним
насадком, установленным на координатнике (см. рис. 3.1.4). Отсчет показаний мано-
метра производился при одной 1-1 той же скорости потока и при различных углах @
наклона насадка: эти углы менялись от О до —!_—4О°. Соответствующие значения уровней
по,:о и 1206 ‚ начальная величина уровня Ио, а также результаты вычисления разностей
№0, =Р10С —/10 , Апа=0 =Иа=0 —і10 и функции На) (3.1.24) приведены в табл. 5.
На основе данных табл. Б построена угловая характеристика насадка (рнс. 3.1.6).
0$. град
Рис. 3.1.6. Угловая характеристика насадка пол—
ного давления
113
Таблица Б
(1 град —40 _30 —20 —10 о 10 20 30 40
по ........ 12 12 12 12 12 12 12 12 12
11“ . ‚. . . . 180 184 184 184 184 184 184 184 181
АН“ :!:“ _в… мм 168 172 172 172 172 172 172 172 169
Анаа, ‚ мм . 172 172 172 172 172 172 172 172 172
№06 ——А/106___0‚ мм —4 0 О О О 0 О 0 —3
Анод—Аноды, _
і(ос)= ? —0‚02З 0 0 0 О О 0 О —0‚017
ос=0
Работазлз
Тарировка пятиточечного насадка.
предназначенного для определения направления
скорости потока
Цель работы—получить тарировочный график, определяющий
зависимость измеряемой разности давлений в симметричных приемных
отверстиях насадка от угла отклонения его оси относительно направле-
ния скорости набегающего потока.
Общие сведения
Тарировка насадков, предназначенных для определения направле-
ния скорости набегающего потока, заключается, во-первых, в определе-
нии у г л о в о й х а р а кт е р и с т и к и приемника полного давления и,
во-вторых, нахождении зависимости давлений в симметричных точках
[ и 3 от угла атаки ос, а в точках 4 и 5— от угла скольжения [3
(см. рис. 2.2.15).
Если обозначить через Рзо давление в приемном отверстии 2 в случае,
когда ось насадка совпадает с направлением скорости (оз=[3=0)‚ а че-
рез рш и р26 —давления‚ соответстізующие углам “#0, В=О и 133150,
-ос=0‚ то функции {;(ос) и (13103) для угловых характеристик можно пред-
ставить в следующем общем виде:
12 (06) = (ри —— то)/ра); (3.1 .25)
Ф1 (В) = (р2в _ р20)/р2о— (3-1-26)
Обозначив давления в других приемных отверстиях через р„ (п=1‚
53, 4, 5), напишем общие выражения, характеризующие измерение ука—
занных разностей давления от со и |З, в виде функций і2(ос) и ср2([3):
Га (05) : (Р1 _ да)/(Ш + Ра); (3—1—27)
Фа (В) = (Р4 "'“ Рад/(174 + Р5)- (3-1-28)
Если во время эксперимента используются чашечные микромано-
метры, то измеряемые ими разности давлений
рти—рати : ЁТпКд°Анд (п = 1929 39 495),
где АЬ„=/1„—/10„ (нод—начальный уровень манометра).
Примем для удобства, что тарировочные коэффициенты Ё.… микро—
манометров равны и, кроме того, одинаковы соответствующие значения
(3.1.29)
114
Кп (2.1.9). Тогда равенства (З.1.25)—:—(3.1.28) можно записать в таком
виде:
!% (ос) : (№20, — Айш=0)/АИЩ=0; (з. 1 _ 25!)
(91 (в) : (№25 _ Ад26=0у№25=ф (3.1.26’)
;, (ов) = (№10, _ дам)/(№№ + №3“), (3.1 .27’)
чз2 (В) = (№45 — Мэд/(№45 + №56), (3.1.28’)
:'где Адш=п2“—до2; АЙ2В=И23 _]102.
Графики функций (3.1.25), (3.1.26) позволяют определить «зону
нечувствительности» для уг- 3
лов а и 6, т. е. такие их зна-
чения, при которых ошибка
измерения полного давления
не превышает некоторой за-
даНной величины. Кривые,
соответствующие зависимо—
стям (3.1.27), (3.1.28), ис-
2 21/40:
пользуются в эксперимен- ц
тальных исследованиях при Рис. 3.1.7. Схема определения углов отклоне-
--определении по измеренным …… насадка:
ДЛЯ“ симметричных отвер- !, 2, 3, 4—приемные отверстия; 5—геометрическая
стии значениям Ат… и Шип ось насадка
углов а и В, характеризую-
щих наклон насадка, или, что то же самое, направление скорости потока
относительно оси насадка (рис. 3.1.7).
В случае исследования с`жимаемых газовых течений все зависимости
(3.1.25)+(3.1.28), характеризующие насадок, определяются для раз-
личных чисел Мос набегающего потока.
Порядок проведения работы
1. Ознакомиться с устройством аэродинамической трубы, насадка
и микроманометров и проверить готовность их к работе.
2. Закрепить на координатнике насадок и установить его в рабочей
«части трубы.
Рис. 3.1.8. Схема установки для тарировки пятиточечного насадка:
! —Ёіасадок; 2— соединительные шланги; 3— микроманометры
3. При помощ-и резиновых шлангов соединить выводы приемных
‚отверстии насадка с микроманометрами, проверить герметичность сое-
.динении и записать начальные уровни т… жидкости в отсчетных ко—
.ленах.
115
4. Включить трубу и выверить положение насадка в рабочей части
трубы, ориентировав его ось по направлению скорости набегающего
потока (при этом разности уровней в манометрах, соединенных с че-
тырьмя периферийными приемными отверстиями, должны быть одина—
ковы).
5. Для этого положения насад-
ка, соответствующего значениям
углов а=[3=0‚ записать показа—
ния микроманометров Ра„ { ос=0.
131“)
6. Изменив углы атаки а, за-
писать для соответствующих их
значений новые показания мик—
романометров Ипа (п= 1, 2, 3).
7. Возвратить насадок в пер-
воначальное положение, осущест-
вить поворот на угол ‹[3 в горизон-
тальной плоскости и записать по—
казания микроманометров 11,16
ос. град (п=2, 4, 5), соответствующие не—
скольким фиксированным значе-
ниям этого угла, после чего вы—
ключить трубу. Аналогичные из-
мерения провести для ряда зна—
чений чисел Моо потока.
8. По результатам этих изме-
рений вычислить соответствующие
разности уровней и построить
графики функций і1(а), ср1([3)‚
Ма), ФМЗ)-
ад ([5)
[З, град
Рис. 3.19. Тарировочные графики пяти-
точечного насадка
Пример. Рассмотрим результаты тарировки пятиточечного насадка (см. рис. 2.2.15)
в малоскоростной аэродинамической трубе с открытой рабочей частью.
Насадок закрепляется на координатнике (см. рис. 3.1.4), с помощью которого из—
менялись углы а и 6. Давления измерялись чашечными микроманометрами (см.
рис. 2.1.3), для которых были приняты значения К=0‚6 (2.1.9), а тарировочные коэф—
фициенты равнялись ігт= 1,0.
Схема экспериментальной установки показана на рис. 3.1.8. Измерения на ней про-
воцились в пределах углов и и 6, равных і6°‚ с интервалом $29 Все данные измере-
ний, начальные уровни, а также результаты расчетов функций (3.1.25’)—:—(3.1.28’) при-
ведены в табл. А.
По данным табл. А построены графики, показанные на рис. 3.1.9.
Т а б л и и а А
Номера отверстий
ос, град 1 3 2 {$$$}? {23,(1765711?
по, 111 Ап; (мм) по, 113 Ап, (мм) 1102 712 Мы (мм)
6 11 47 36 12 81 69 10 135 125 О —0‚314
4 11 52 41 12 75 63 10 135 125 О —-0‚212
2 11 58 47 12 70 58 10 135 125 О —0‚ 105
0 1 1 63 52 12 64 52 10 135 125 0 0
—2 11 68 57 12 61 49 10 135 125 0 0,09
—4 11 73 62 12 54 42 10 135 125 0 0 , 192
—6 11 79 68 12 49 37 10 135 125 О О , 295
Продолжение табл. А
Номера отверстий
& град 4 5 2 Ф? 31103631 )0 ФЁЭЁЁ 122131};
"404 ‚14 А”: (мм) ‚105 ‚15 АНБ (мм) ‚102 ‚12 Ади (мм)
6 13 48 35 15 82 67 10 135 125 0 —0,314
4- 13 53 40 15 76 61 10 135 125 0 —0,208
2 13 58 45 15 70 55 10 135 125 0 ———0, 105
0 13 62 49 15 64 49 10 135 125 0 0
—2 13 68 55 15 60 45 10 135 125 О 0, 1
—4 13 73 60 15 54 39 10 135 125 0 0,212
—6 13 78 65 15 49 34 10 135 125 0 0,314
Работазлл
Статическая тарировка приборов
для измерения температуры
Цель работы—получить зависимость показаний регистрирую-
щего устройства от температуры жидкой или газообразной среды, в ко-
торой расположен датчик. Результаты работы должны быть представ-
лены в виде тарировочного графика.
Общие сведения
Датчик прибора для измерения температуры, помещенный в непод-
вижную жилкую или газообразную среду, через некоторое время прини-
мает температуру этой среды. При статической тарировке датчика та—
кая темпера-тура поддерживается постоянной и измеряется образцовыми
термометрами. В результате тарировки устанавливается соответствие
между этой температурой и показаниями регистрирующей аппаратуры,
связанной с датчиком.
В случае тарировки в диапазоне температур от 0 до —30+—35°
датчики помещают в ванну со смесью этилового спирта и твердой угле-
кислоты. Тарировку, соответствующую температуре 0° С, можно осуше—
ствить в ванне с тающим льдом.
При температурах до 280°С тарировка ведется в подогреваемом
масляном резервуаре, в котором благодаря перемешиванию устанавли-
вается равномерная температура, измеряемая образцовым ртутным
термометром. Показания такого термометра вблизи отметки 100°С до-
полнительно контролируются при измерении им температуры кипящей
воды, которая зависит от барометрического давления ратм и определяет-
ся по формуле
1… : 100° + 3,67- 10—2 (р,… — 760) _ 2,3. 10—5 (р,… _— 760)? (3.1.30)
Эта формула справедлива для давлений ратм от 680 до 780 мм рт. ст.
Ошибка измерения ртутным термометром невелика и составляет при-
мерно іО,1, 10,2 и іО,З°С соответственно Для диапазонов температур
0+56‚ 50—2—100 и 250—2—350° С.
Тарировка датчиков при температуре выше 280°С проводится обыч-
но в электрических печах в атмосфере разогретого газа, причем дейст-
вительная (эталонная) температура измеряется образцовыми платино-
выми электротермометрами сопротивления.
В результате тарировки определяется зависимость показаний № при-
бора от температуры среды 1‘, в которой находится датчик. По этим
показаниям строится график №=і (і) статической тарировки датчика
температуры.
117
Порядок проведения работы
1. Ознакомиться с устройством прибора для измерения температу-
ры и электрической схемой соединения датчика с регистрирующей ап-
паратурой.
2. Установить датчик и образцовый термометр в ванне, включить
мешалку и электропитание измерительного устройства и записать на-
чальные показания термометра, а также регистрирующего устройства,
связанного с датчиком.
З. Включить электроподогрев масла и через 5—:—7 мин после дости-
жения заданной температуры зафиксировать показания термометра
и регистрирующего устройства. Осуществить подобные измерения при
разных температурах масла.
4. Выключить мешалку, электроподогрев масла и питание измери-
тельного устройства, а затем извлечь датчик из ванны и промыть.
5. Для тарировки датчика при температуре выше 280°С установить
его в электрической печи в непосредственной близости от датчика об-
разцового платинового электротермометра сопротивления.
6. Включить питание электропечи и усилителей датчиков темпера—
туры.
7. По достижении требуемой температуры записать показания тари-
руемого прибора и образцового термометра, повторив эти измерения
при различных температурах.
8. Выключить электропитание и после охлаждения печи извлечь из
нее датчики.
9. По результатам показаний регистрирующего устройства и образ-
цового термометра построить график статической тарировки датчика
температуры.
Пример. Рассмотрим статическую тарировку экранированного термопарного дат-
чика температуры (см. рис. 2.3.6). Спай термопары этого датчика состоит из двух про—
волочек, одна из которых изготовлена из хромеля, а другая из алюмеля. Датчик под-
ключен к электронному милливольтметру со стрелочным индикатором на выходе.
Шкала этого индикатора имеет деления от О до 100, а полное отклонение его стрелки
соответствует напряжению 50 мв.
Для тарировки в диапазоне температур от 20 до 250° С датчик размещается в ванне
с подогреваемым маслом, температура которого измерялась образцовым ртутным тер-
мометром. При заданной температуре датчик выдерживался в ванне около 5 мин. На—
чальная температура спая термопары принималась равной 20°С (температура ненагре—
того масла). При каждом переключении подогревательного устройства температура
масла повышалась примерно на 40°С и для нагретого масла фиксировалось показание
милливольтметра.
В диапазоне от 250 до 950°С тарировка датчика проводилась в электропечи. В ней
было осуществлено с помощью образцового платинового электротермометра сопротивле—
ния (см. рис. 2.3.1) семь замеров температуры, а также зафиксированы соответствующие
показания регистрирующего прибора.
Все результаты замеров температуры 1! и показаний № милливольтметра тарируе-
мого прибора приведены в табл. А.
М, дел
60
#0
20
0 200 400 600 800 - С,°С
Рис. 3.1.10. График статической тари-
ровки датчика температуры
118
Таблица А.
н
„$$$ 1 2 з 4 5 в 7 8 9 10 11 12 13
!, °С 20 60 100 149 204 250 316 427 538 621 732 843 954
№, дел 0 4,0 6,2 9,7 15,1 19,0 24,2 33,5 43,0 50,1 59,5 68,6 77,6
По данным табл. А построен график статической тарировки датчика температуры
(рис. 3.1.10).
Работазлд
динамическая тарировка датчиков
температуры торможения
Цель р а боты—определение коэффициента восстановления г дат-
чика в зависимости от параметров газового потока. В результате ра—
боты находится функция г=1с (Ке) при М°°=сопз’с и строится соответ—
ствующий график.
Общие сведения
Динамическая тарировка датчиков температуры торможения прово-
дится в аэродинамической трубе с известными параметрами потока
в рабочей части. В такой трубе для уменьшения потерь тепла газом
стенки форкамеры, сопла и рабочей части покрываются теплозащитным
Еда/7
рбал
_»
Рис. 3.1.11. Схема установки для динамической тарировки дат-
чиков температуры:
1 —- подвод воздуха из баллонов высокого давления; 2—регулирующий вен—
тиль; 3—электроподогреватель; 4—форкамера; 5—приемник давления
торможения; б —датчик температуры торможения; 7—прибор, регистриру-
ющий эту температуру; 8—сопло; 9—рабочая часть; 10—теплозащитный
материал; 11 — тарируемый датчик; 12 — мнлливольтметр; 13 —- приемник
статического давления в рабочей части
материалом. В этом случае температуру торможения газа по длине
трубы можно не измерять, а считать равной ее величине То в форкамере.
Схема тарировочной установки показана на рис. 3.1.11. Согласно
этой схеме тарируемый датчик помещается в рабочей части аэродина-
мической трубы, а в форкамере расположен платиновый электротермо-
метр сопротивления. Оба датчика соединены с соответствующей аппа—
ратурой, регистрирующей во время продувки температуру, измеряемую
датчиком. При этом для тарируемого датчика такой температурой будет
равновесная температура Те, которая находится по показаниям соот—
119
ветствующего регистрирующего устройства из графика статической та-
рировки. Одновременно с температурой То измеряется давление тормо-
жения ро газа в форкамере, а также статическое давление род в рабочей
части, зная которые, можно определить число М… и статическую тем-
пературу потока из (2.2.8) и (2.3.2).
По температуре Т… можно найти коэффициент восстановления:
г= (Те—ТОО)‚/(ТО—Тоо). (3.1.31)
Эта величина г соответствует числу Рейнольдса
Ке = рю УФО Щит, (3.1.32)
где сі—диаметр входного отверстия датчика температуры торможения
(см. рис. 2.3.6); У…, ‚Рао, мос—соответственно скорость, плотность и ко-
эффициент динамической вязкости газа в рабочей части трубы, опреде-
ляемые из соотношений:
Уш = мы ,тем"… (3.1.33)
9… = р…,/(Кто,); (3.1.34)
но, = и„ (То,/Т,)О'т, (3.1.35)
причем [щн=1,82—10—6 кГ-сек/м2 для Тн=288К.
Для нахождения значений коэффициента восстановления г при
различных Числах Рейнольдса проводят продувки, изменяя давление ро
газа в форкамере трубы. При этом
‚11
число Моо и температура торможения
1,03 . ‚
‚‹ 5 То остаются неизменными.
0,98 // Ц ‘ Заменяя сопловые вставки, мож—
// 3 но подучить соответствующие числа
0 96 / , Моо газового потока и таким образом
/ _ найти более полную зависимость ко-
ду„ ‚ . /" ° эффициента г от чисел Ке… и Мос
' ; . ` : (рис. 3.1.12).
(132 / : . | — __ Порядок проведения работы
0,90 ? | , 1. Рассмотреть схему тарировоч-
‚дд 1.5 2,0 2,5 5,0, 3,5 квант“ ной установки; ознакомиться с ус-
тройством аэродинамической трубы,
Рис. 3.1.12. Изменение коэффициен- датчиков температуры, манометров
та восстановления датчика: И проверить ГОТОВНОСТЬ ИХ к работе.
1—м“, =7‚в‚ Т3=908 к: 2—1“… =в‚95‚ 2. Смонтировать в рабочей части
т0=883 к; 3—Моо=6‚6‚ То=863 к;4—м°о= трубы сопловые вкладыши, обеспе-
=5‚75‚ то=з4з к; 5—моо =4‚9, Т°=604К чивающие получение в ней газового
потока с требуемым числом Мао.
3. Установить тарируемый датчик
в рабочей части, а платиновый электротермометр сопротивления —— в фор-
камере трубы.
4. Закрепить на стенке форкамеры манометр для измерения давле-
ния торможения ро, одновременно поцключив к манометру ГРМ прием-
ник статического давления в рабочей части.
5. Соединить датчики температуры с регистрирующими приборами
и включить питание электронных усилителей.
6. Записать начальные показания манометров и регистрирующих
устройств; измерить давление и температуру в лаборатории; включить
аэродинамическую трубу и подогревательное устройство.
7. После выхода трубы на режим установившегося обтекания и до-
120
СТИЖСНИЯ заданной ТЭМПВРЭТУРЫ То записать ПОКЗЗЗНИЯ МЗНОМЭТРОВ .51
термометров.
8. Изменить Давление торможения в форкамере и повторить все из-
мерения.
9. После прекращения работы аэродинамической трубы осуществить,
используя результаты опыта, необходимые расчеты, связанные с опре-
делением коэффициента восстановления, и построить график г'=і(Ёе)
при М…=сопз’с.
Пример. Рассмотрим результаты динамической тарировки датчика температуры-
торможения с диаметром входного отверстия сі=2 мм (см. рис. 2.36). Такая тарировка
проводилась в сверхзвуковой аэродинамической трубе с закрытой рабочей частькз и
с дуговым электроподогревателем, обеспечивавшим постоянную температуру в форка-
мере трубы:7Ъ==8251<.15арометрическое давление и температура в лаборатории были
соответственно равны ратм=750 мм рт. ст., Татм=292 К.
іТосле вклющения трубы:измерялись давления в рабочей части и снимались пока—
зания № регистрирующего устройства, связанного с тарируемым датчиком температуры.
іТричем такие измерения провоцились для нескольких заданных значений давления в
форкамере ро — от 13 до 35,8 кГ/см2.
Все экспериментальные даннькъ результаты расчета по ним параметров набегакъ
щего потока (М…, У…, Т…, ров, р….оо, Не…), а также определение равновесной емпера-
туры Те (по графику статической тарировки на рис. 3.1.10) и вычисление коэффициента
г приведены в табл. А-
‚‘
1,00 *
0,98 /
/Г
0,96
0,911
2,0 2,0 3,0 ве…-10°“
Рис. 3.1.13. График Динамической тари-
ровки датчика температуры торможения
Т а б ли на А
Моо=5‚3; Тоо=124‚6 к; и°°=9‚65-1О—6 кГ-сек/м2; оо=1185 м/сек
Ро, кГ/см'д , роо.104‚ кГ/см'2 000.108, кГ-сск2/м4 Несю—10—і | А], дел Те’ К | г
| 1
13,0 173 4,86 1,2 64,7 800 0,965
16,2 216 6,07 1,5 65,3 807 0,975
22,8 303 8,50 2,1 66,4 819 0,991
29,2 389 10,9 2,7 66,7 822 0,996
35,8 476 13,4 3,3 66,7 822 0,996
График динамической тарировин г=1°(Ке,—_‚о), построенный по данным табл. А, по-
казан на рис. 3.1.13.
Р а б о т а 3.1.6
Тарировка термоанемометра
Ц е л ь р а б о т ы — получение тарировочной зависимости для напря-
жения, измеряемого вольтметром, от скорости потока, обтекающего дат—
чик термоанемометра. Результаты работы должны быть представлены
в виле соответствующих тарировочных графиков.
Общие сведения
Степень охлажления нагретой проволочки датчика термоанемомет—
ра зависит от скорости обтекающего ее газового потока. При таком ох-
лаждении тепловой поток от проволочки к газу
@= А+ ВУЗ… (3.1.36)
где А и В—некоторые константы, определяемые опытным путем; по-
казатель степени п=0,4+0,5 (для чисел Ке=рооУо°аТ/р‚со от 0,1 до 105).
121
При установившемся обтекании тепловой поток к газу от проволоч-
ки равен соответствующему количеству тепла, выделяющемуся при
прохождении через проволочку электрического тока. Это количество
тепла определяется по закону Джоуля — Ленца:
с = (!%/12... (3.1 .37›
где Кш— сопротивление датчика; Нв — соответствующее напряжение
на датчике, измеряемое вольтметром.
В соответствии с (3.1.36) и (3.1.37)
(!%/в… = А + ВУЗ.. (3.1.38)
Из этого соотношения следует, что если применяется схема включения
термоанемометра с постоянным сопротивлением датчика (Ки,:сопзі),
то экспериментально можно получить однозначную зависимость
ив : щую). (3.1 .39)
Для этого следует поступить следующим образом: включить электро—
питание измерительного прибора, замкнуть перемычкой вход термоане—
мометра и осуществить балансировку измерительного моста так, чтобы
показание вольтметра постоянного тока на выходе моста равнялось ну-
лю. Затем следует снять перемычку и подключить к этому мосту датчик
с кабелем, который применяется во время эксперимента; сопротивление
датчика, соответствующее температуре Т…, измерить с помощью потен—
циометрического моста и включить нагрев проволочки. При этом тем-
пература Т… проволочки выбирается по известной величине Тсо из усло-
вия, чтобы степень нагрева
(1 : (ТФ _ то, ути (3.1 .40)
не превышала значения а=0‚7—:—0‚8. Далее надо вновь измерить сопро-
тивление датчика Ки, и Одновременно записать начальное показание
вольтметра По.
Затем датчик помещают в аэродинамическую трубу, включают ее и
при различных скоростях У… газового потока в рабочей части фиксиру-
ют показания вольтметра Нв. Таким образом в результате измерений
будет известна зависимость ПВ =і(Уоо)‚ по которой строится соответ-
ствующий тарировочный график.
Порядок проведения работы
1. Ознакомиться с устройством и работой термоанемометра и аэро-
динамической трубы, а также с электрической схемой измерительной
установки.
2. Включить трубу; осуществить измерения скорости потока в рабо—
чей части, соответствующие различным фиксированным числам оборо—
тов вентилятора.
3. Установить датчик термоанемометра в рабочей части трубы.
4. Провести балансировку моста термоанемометра, нагреть прово-
лочку датчика до температуры Т… в соответствии с выбранной степенью
перегрева (3.1.40), а затем переключить термоанемометр на режим ре-
гистрации.
5. Зафиксировать по шкале вольтметра постоянного тока начальное
напряжение По и включить аэродинамическую трубу.
6. При различных скоростях газового потока в рабочей части трубы
(см. п. 2) записать показания вольтметра и выключить аэродинамиче—
скую трубу.
7. Используя результаты опыта, провести необходимые расчеты и по—
строить тарировочный график Нв ="Т(У…).
122
Пример. Рассмотрим тарировку проволочного датчика термоанемометра (см.
рис. 2.2.6). Эта тарировка осуществлялась в малоскоростной аэродинамической трубе
с закрытои рабочеи частью для условий в лаборатории, которые характеризуются ба—
рометрическим давлением ратм=750 мм рт. ст. и температурой Татм=292 К.
р
“о /‚
6 ідЁ
Д „
!>
1
4“ ‚!=? 2 2
‚”’!!ііт-т'типі/м}. 3 Ц
,
— |
|
]
|
\\".
, №111: 33: ‘
‚ . "' !-
_
„”’М’Л”’‚---- _ . ‘ 7 ,
1|і||||і| _ ' '\`\<'\°'1\\\\\\\\\\\\ ..
' т.т/И,” " ,
/ ‚„ ‚іііііііііід/ |
‚/ 1 : П 1 5
х\\
\\
Рис. 3.1.14. Схема установки датчиков термоанемометра при тарировке:
! “аэродинамическая труба; 2—приемные отверстия для замера перепада давлений; 3—тари-
руемый датчик: 4 — съемный корпус: 5 — державка; б — микроманометр
};..г. _‘ ч..,- ' . _ в - _ _
'..""- . ..- :__.' '
5} >» _.; - - .! -:
Рис.` 3.1.15. Установка с измерительными прибо-
рами для тарировки датчика термоанемометра:
1 — аэродинамическая труба; 2 — тарируемый датчик;
3 — термоанемометр; 4 .‚_ вольтметр постоянного тока:
5 — соединительные кабели; б — микроманометр; 7 —- регу-
лировочный реостат
\ -‚""' . . ‚„.- __“.
Щ _....- ...и.“ №-
Общая схема измерительной установки показана на рис. 3.1.14, а фотография этой
установки вместе с измерительными приборами — на рис. 3.1.15.
Для определения скорости воздуха в рабочей части измерялась разность статиче-
ских давлений в сечениях 1—1 и 11—11. При этом использовался чашечный микромано-
метр с ігт=1‚0 и К=0‚8. Измеренная разность статических давлений
АР=Р1 _р11= Ёт К-АИ,
где АИ=і1—і10 (см. рис. 3.1.14).
Эти разности показаний микроманометра соответствуют различным скоростям воз-
душного потока в трубе, которые достигались изменением числа оборотов электродви-
гателя с помощью реостата.
При помощи психрометра определена относительная влажность х=66%‚ а также
давление насыщенных паров Ри.п=17‚9 мм рт. ст. В соответствии с этими данными
скорость У… определялась по зависимости (2.2.7) при ратм=750 мм рт. ст. и і=19° С.
Нагрев тарируемого датчика производился с учетом степени перегрева а=0,8.
Если принять при этом, что температура потока Тоо=292 К, то температура проволочки
тш=(1+а)т°° =(1 +о,8)292=5271<.
123
Соответствующее сопрошвленне датчика (при начальном сопротивлении Ко=
=3‚22 ом)
КШ :КО (1 +а) =3‚22о1,8 =5‚79 ом.
При этом сопротивлении показание вольтметра постоянного тока По=3,0 в. Во
время работы трубы при разных скоростях потока в ней вольтметр измеряет соответст-
вующие напряжения (13. Результаты замеров и расчетов приведены в табл. А.
Таблица А “в,(5 __
/ |
Номера замеров О 1 2 З 5 /
Ч /4
110 . 13 13 13 13
п. . . 13 43 130 279 3
“„О 20 ЦП 63 60 Умм/сек
А1], мм . . О 30 117 266
УФО, м/сек 0 20,1 39,8 60,1 Рис. 3.1.16. Тарировочный график дат-
ЦБ в 3 4 7 5 3 5 8 чпка термоанемометра
По данным табл. А на рис. 3.1.16 построен тарнровощ—щй график ПВ=1°(У…).
‘ Работа3.1.7
Тарировка трехкомпонентных
тензометрических весов
Ц е л ь р а б о т ы — определение зависимости величины вых0дного
сигнала с тензостанции от приложенной к тензометрическим весам на-
грузки.
В результате работы строятся соответствующие тарировочные гра-
фики.
Общие сведения
Тарировку тензометрических весов обычно осуществляют, устанав—
ливая их в рабочей части аэродинамической трубы. Если это не пред-
ставляется возможным, то тарировка ведется при помощи специального
тарировочного приспособления. Так как выходной сигнал, поступающий
на усилитель тензостанции с тензоэлементов, мал, то для устранения не—
благоприятного влияния соединительных кабелей на показания измери—
тельных устройств во время эксперимента тарировку необхоцимо про—
водить, используя те же кабели и усилители. Количество тарируемых
каналов усилителя выбирается по числу компонентов аэроцинамиче—
ской нагрузки, измеряемых весами.
При тарировке место приложения и направление действия нагрузки
соответствуют тарируемому каналу. Например, если тарируется канал,
измеряющий осевую силу К, то известная по величине нагрузка должна
быть приложена вдоль продольной оси 0х1 модели, внутри которой рас-
положены весы.
Для уменьшения затрат времени на эксперимент выходной сигнал
с усилителя тензостанции регистрируется шлейфовым осциллографом
и записывается на фотобумаге. Величина такого сигнала характеризу—
ется отклонением луча шлейфа (в мм) от начального положения. После
опыта фотобумага проявляется, а запись соответствующим образом
расшифровывается. В результате находится зависимость
и, =1°(Р)‚ (3.1.41)
124
в которой Рър ——отклонение луча шлейфа; Р —— приложенная нагрузка
(вес тарировочного груза).
При тарировке каналов нормальной силы и момента внутримодельо—
ные весы размещаются в специальном цилиндре с шинами на внешнеи
поверхности. Средний ряд этих шипов расположен в поперечной плоско-
сти, совпадающей с электрической осью аэродинамических весов. При
подвешивании груза на такие шипы выходной сигнал будет возникать
только в канале для измерения силы №. Если грузы подвешиваются на
шины в других рядах, то выходной сигнал появится одновременно
в двух каналах для измерения силы и момента тангажа Ми.
Отклонение луча Рам шлейфового осциллографа для канала М2 про—
порционально моменту М2=Р1, где [_расстояние между электриче-
ской осью весов (средний ряд шипов) и шипом, на который подвешива-
ется этот груз. По результатам измерения величины НМ, соответствую-
щей заданному моменту М„ определяется тарировочная зависимость
дм = НМЗ). (3.1.42)
Так как обычно время эксперимента ограничено, то начальное поло—
жение лучей шлейфового осциллографа записывается только один
раз —при каком-либо угле атаки МОДели (чаще всего при оъ=0). При
этом поскольку на весы действует вес модели, то могут появиться сигна—
лы на выходе усилителей, вызывающие дополнительные отклонения лу-
чей осциллографа. В целях компенсации воздействия веса до начала
эксперимента записывают показания всех каналов 113, соответствующие
экспериментальным углам атаки. Эти показания учитываются затем при
продувкахкак поправки на вес.
Отклонение луча осциллографа, зависящее только от аэр0динамиче-
ской силы, будет
и = ив _и‚ (3.1 .43)
где И}: и Нв— отклонение лучей соответственно во время продувки и
при воздействии только веса (поправка на вес) при заданном угле
атаки. ›
Если начальное положение луча записывается для каждого угла ата-
ки отдельно, то поправка на вес уже не вводится, и при помощи осцил-
лографа непосредственно находится отклонение И.
При применении внутренних аэродинамических весов с Донной дер-
жавкой необходимо учитывать влияние поддерживающего устройства на
правильность определения лобового сопротивления модели летательно-
го аппарата. С этой целью проводят серию т-хетоцических пр0дувок од—
ной и той же модели с донными державками различных диаметров. По
опытным данным строится график функции св=і(сідер)‚ где відер=
=сідер/сімид—относительный диаметр донной державки (рис. 3.1.17).
Путем экстраполяции полученной кривой находят значение, соответст-
вующее величине адер=о‚ которое принимается за истинный коэффици-
ент продольнои силы с…т для заданной формы модели тела вращения.
Порядок проведения работы
{. Ознакомиться с устройством тензометрических весов и электриче—
скои схемои измерительного устройства.
2. Установить аэродинамические весы в приспособлении для тари—
ровки и закрепить на них цилиндр с шипами так, чтобы плоскость сред-
них шипов совпадала с электрической осью весов.
125
З. Подключить тензодатчики к входам усилителей тензостанций, а их
выходы соединить со шлейфовым осциллографом.
СЯ
0,20 5511.62
0715 °і"?\
Рис. 3.1.17. Тарировочный график для определе-
ния поправки на влияние донной державки при
измерении продольной силы
4. Провести балансировку каналов тензостанции и записать показа—
ния, характеризующие начальное положение лучей шлейфового осцил-
лографа.
5. Подвешивая последовательно различные грузы на шипы в сред-
нем ряду, зафиксировать отклонение луча канала регистрации нормаль-
ной силы, затем снять нагрузку и снова зафиксировать соответствующее
отклонение луча.
6. Осуществить подвешивание различных грузов на шипах, располо-
женных в других рядах, и записать соответствующие показания осцил-
лографа для каналов регистрации нормальной силы и момента.
7. Закрепить аэр0динамические весы вертикально и, сначала нагру-
жая их, а затем снимая нагрузку, записать соответствующие показания
осциллографа для канала осевой силы.
8. Закрепить аэродинамические весы в дозаторе углов атаки.
9. Провести балансировку усилителей, а затем, установив модель
под углами атаки, при которых предполагается продувка в аэродина-
мической трубе, записать отклонение лучей осциллографа для всех ка—
налов (К, М, М:) , которые будут определять поправку на вес.
10. Проявить фотобумагу с записью измерений на осциллографе,
расшифровать их и по полученным результатам построить тарировоч—
ные зависимости Ир=1°1(Р), 11м=і2 (М,), а также кривую, характеризую—
щую поправку на вес.
Пример. Рассмотрим тарировку трехкомпонентных аэродинамических весов,
схема которых показана на рис. 2.4.9. Для тарировки использовалось приспособ—
ление, позволяющее устанавливать их горизонтально. Вместо модели во время тариров-
ки на весах закреплялся цилиндр с пятью рядами шипов, расстояние между которыми
равнялось 50 мм.
Для работы использовались тензометрическая станция (типа 8АНЧ—7М), а также
шлейфовый осциллограф Н-700. Приборы и приспособления для тарировки аэродинами-
ческих весов показаны на рис. 3.1.18.
При закреплении на весах цилиндра было выполнено условие, чтобы электрическая
ось совпадала с поперечной плоскостью, в которой расположены шипы среднего ряда.
При этом подвешивание груза на эти шипы не вызывало отклонения луча осциллографа,
связанного с измерительным каналом момента М,. При тарировке подвешивание грузов
производилось начиная с первого ряда шипов, расположенного ближе к зажимному уст—
ройству (см. рис. 3.1.18).
Для определения отклонения луча вместо кассеты с фотобумагой использовался
экран из матового стекла со шкалой. При этом начальное положение «зайчика» фикси-
ровалось с помощью луча свобоцного канала, направленного на экран до нагружения.
При нагружении весов на этом экране измерялось расстояние между начальным и от-
клоненным «зайчиками» (рис. 3.1.19).
Для подвешивания выбирались грузы весом 2,4 и 6 КГ . Соответствующие результа-
ты измерений отклонения лучей осциллографа (іты, пм), значения момента М2=Р1
для первого ряда шипов (1:10 см) показаны в табл_ А_
Затем измерения повторялись с весами, повернутыми относительно продольной оси
на 180°. Результаты измерений, полученные для этого положения весов, соответствуют
126
Рис. 3.1.18. Приборы и приспособления для тариров-
ки тензовесов:
], 2, 3, 4, 5—номера рядов шипов; б—тарировочный ци-
линдр с шипами; 7—подвешиваемый груз; 8—державка
с тензометрическими весами; 9—зажимное приспособление;
10 —- тензостанция; !! — шлейфовый осциллограф
Т а б л и ц а А
' кГ.см м " "33: ,
0 О О О
2 20 19 22
4 40 38 44
6 60 57 66
Таблица Б
Рис. 3.1.19. Внешний вид экрана
к, „ Г 0 О, 5 1,0 1,5 шлейфового осциллографа при та—
рировке:
і—корпус; 2—сменная рамка с экра-
ном; 3—матовое стекло; 4—начальное
”К’ мм 0 15 30 45 положение зайчика; 5—отклоненное
положение зайчика; б—смещение луча
отрицательному по знаку нагружению. Полученные при этом отклонения лучей осцил—
лографа оказались такими, как и для первоначального положения весов.
На рис. 3.1.20 и 3.1.21 показаны тарировочные графики Ь№=і1(1\/') и пм=г2(м‚)‚
построенные по данным измерений отклонения луча шлейфового осциллографа.
При тарировке канала осевой силы К аэродинамические весы закреплялись в за-
жимном приспособлении вертикально, а грузы размещались на торце цилиндра. Вес
этих грузов принимался равным 0,5; 1 и 1,5 кГ . Измеренные отклонения луча пн осцил-
лографа приведены в табл. Б.
Тарировочный график Ьв=із(К), построенный по данным этой таблицы, показан
на рис. 3.1.22.
Для определения поправки на вес вместо цилиндра использовалась модель лета-
тельного аппарата, внутри которой размещались весы на державке, закрепленной при-.
127
помощи механизма изменения углов атаки (рис. 3.1.23). После балансировки измери-
тельных каналов на матовом экране шлейфе-вого осциллографа были определены на-
п…, ММ ЬМ’ ММ
: 50 60 /
а
!
; #0 40
20 20
і ! 0
_ !
6 И 'Ё/Ё 2 ’в; миг -50 №0 —20 /' 20 #0 50 М2.кГсм
| |
: ;( —20 | / -20
/ щи Л до
!
; х
—50 <( _і _; 450
Рис. 3.1.20. График тарировки ка- Рнс. 3.1.21. График тарировки кана—
нала нормальной силы ла момента тангажа
чалы—тые положения луча при нулевом угле атаки; причем с каждым таким начальным
положением совмещались световые «зайчики» свободных каналов.
Для заданных углов атаки ос=4‚ 8 и 2° определялись расстояния 11%, 1133… 1131 ме-
жду начальным и отклоненным лучами, обусловленные воздействием веса и соответ-
ствующие каналам для измерения осевой и нормальной оси, а также момента (табл. В).
ь… мм
БП
›
дп /
/
20 И
ОСГ
{3,5 ДП К,:(Г
Рис. 3.1.22. График тарировки ка-
нала осевой (продольной) силы
.. \" —. ".: '
›: 1 .- „: … _в_. _ . - , .гЖ- _… „нд-„. —- ›
№.иі-
Рис. 3.1.23. Схема тарировки при определении поправки
на вес:
1—МОДель; 2—державка с тензометрическими есами; З—уст—
ройство для установки углов атаки
128
В соответствии с данными табл. В поправку на вес следует вводить только в ре-
зультаты измерения осевой силы. Это обусловлено следующим. Из рис. 3.1.24 видно, что
вдоль оси 0х1 на весы действует усилие от веса модели Ом
КВ : Ом ЗіП (1,
Т а б л и ц а В
ос. град 11%. мм и?… мм “?)/!* мм
0 0 0 0
4 1 0 0
8 2 0 0
12 З 0 0 Рис. 3.1.24. Силовое воздействие модели на
упругие элементы аэродинамических весов
а дополнительная нагрузка на упругие элементы каналов М и М: будет соответственно
равна
№В=6м(1—соэос)‚ МЁ=0М (1 —созос)х
Ц.М’
где хц‚м — расстояние от центра массы модели до электрической оси весов.
Для модели весом 0,6 кГ, у которой хд_м=2,0 см, в случае а=12° значения Кв=
=0‚125 КГ, №в=0,013 КГ, М2=0,026 кГ—см. Если чувствительность весов характеризу-
ется графиками на рис. 3.1.20—2—3.1.22, то под действием полученных нагрузок отклонения
соответствующих лучей возможны лишь для канала измерения К, а для каналов № и
М: эти отклонения пренебрежимо малы и не могут быть зарегистрированы.
& 3.2. ИЗМЕРЕНИЕ ПАРАМЕТРОВ ГАЗОВОГО ПОТОКА
Эксплуатация аэродинамических труб непосредственно связана с не-
обходимостью измерения параметров газового потока в рабочей части.
Данные этих измерений используются Для улучшения конструкции от—
дельных элементов аэродинамической трубы (форкамера, сопло, диф-
фузор и др.) с целью получения расчетных (заданных) параметров по—
тока. Одновременно такие измерения составляют неотъемлемую часть
исследований обтекания моделей летательных аппаратов, связанных
с изучением параметров набегающего (невозмущенного) потока.
В настоящем параграфе рассматриваются основные лабораторные
работы, знакомящие с методами измерения и расчета параметров газо—
вого потока в рабочей части аэродинамической трубы.
Работаздл
Измерение скорости потока при помощи насадка
Ц е л Ь р а б о т ы — определить скорость газового потока по резуль—
татам измерения давлений комбинированным насадком.
Общие сведения
Комбинированный насадок (см. рис. 2.1.35), помещенный в воздуш-
ный поток с малой скоростью (несжимаемое течение), позволяет изме—
рить разность полного и статического давлений [см. (З.1.19)]. По этой
разности давлений, используя (2.2.4), можно определить соответствую-
щую скорость набегающего потока. Для воздуха получим расчетную за-
висимость для этои скорости в следующем виде:
У.. =41/атігткшъ, (3.2.1)
где ігт и К — соответственно тарировочный коэффициент и коэффициент
шкалы чащечного микромано-метра; ёт _ тарировочный коэффициент
9—927 129
насадка; АН — перепад уровней в отсчетной трубке микроманометра,
мм.
Для более точного определения скорости необходимо учитывать из-
менение плотности воздуха в зависимости от барометрического давления,
температуры и влажности. В этом случае вместо (3.2.1) следует вос-
пользоваться формулой (2.2.7):
У.._ \/42‚22——73 '“ (1—о‚———з78х “… _) цикл/1, (3.2.2)
Ратм \ Ратм
Для определения скорости (числа Маха) сверхзвукового потока мо—
жно применить комбинированный насадок, схема которого изображена
на рис. 21.36. При измерении давлений с помощью этого насадка целе—
сообразно использовать групповой регистрирующий манометр ГРМ. По
результатам измерения из соотношения „(2..29) определяется число Мю
потока в рабочей части аэродинамической трубы. Одно из таких измере—
ний связано с определением разности давления торможения р„ за пря—
МЫМ СКЭЧКОМ И аТМОСфЭРНЫМ ДЗВЛЗНИЗМ.
рО —— ратм : АМО 12, (3.2.3)
где 12 — коэффициент группового регистрирующего манометра; АМ) =
=1\/’—1\/(') — разность конечного и начального показаний манометра по
шкале отпечатков.
Аналогичное выражение запишем для определения разности стати-
ческого и атмосферного давлений:
рт _ ратм : АА/„О Аг, (3.2.4)
где А№ю=№оо—№ооо — разность показаний по шкале ГРМ.
По опытным данным находим величину М…, используя соотношение
2/е 2 2—1
АМ’Ь ...—
0 +“… = “1 ‘”“ . (3.2.5)
АМФ іг + ратм 412 2 (в _ 1) 1 миг—ц
[(№№ _‹/г+1›2`м3°]
Для определения скорости потока по известному из опыта числу Мс,о
необх0димо в соответствии с (2.2.10) знать температуру То в форкамере
(температуру торможения). Для ее измерения можно использовать пла-
тиновый электротермометр сопротивления (см. рис. 2.3.1). По показанию
А! на шкале регистрирующей части этого прибора, датчик которого по—
мещен в форкамеру, из тарировочного графика находится соответствую-
щая температура Т0=1°(1\/). Используя теперь формулу (2.2.10), в кото-
рой принимаем ЁК=4О1‚9 м2/сек2-град, напишем
У.. : м.. (1 + 0,2м‘і)—“2—2о‚1 1/ Т_„. (3.2.6)
Порядок проведения работы
Измерения в дозвуковой аэродинамической трубе малых скоростей..
1 Ознакомиться с устройством аэродинамической трубы, насадка,
микроманометров и проверить готовность их к работе.
2. Установить на координатнике насадок и выверить его положение
относительно направления вектора скорости.
3. Соединить резиновыми шлангами штуцеры насадка с микромано—
метром и проверить герметичность соединений.
4. Определить барометрическое давление, температуру и влажность
воздуха.
5. Включить аэродинамическую трубу и после выхода ее на режим
130
УСТЗНОВИВШЭГОСЯ ДВИЖЗНИЯ ВОЗДУХЭ зафиксировать соответствующие ПО“
казания микроманометра.
6. По полученным результатам измерений рассчитать скорость по—
тока.
Измерения в сверхзвуковой трубе.
1. Ознакомиться с устройством аэродинамической трубы, насадка,
координатника, манометра (ГРМ), электротермометра и проверить их
готовность к работе.
2. Установить комбинированный насадок в рабочей части трубы и
соединить приемники давления (дренажные отверстия) с ГРМ.
З. Измерить атмосферное давление и температуру в лаборатории и
записать начальные показания ГРМ.
4. Установить в форкамере платиновый датчик температуры и про-
верить электрическую схему электротермометра.
5. Включить аэродинамическую трубу и после выхода ее на режим
установившегося движения воздуха записать показания манометров и
регистрирующего прибора термометра сопротивления.
6. По показаниям манометра определить давления рос, рд, а также
найти температуру торможения То.'По этим значениям рассчитать число
Мс,о и скорость газового потока Усе.
Пример. Приведем результаты
измерения скорости воздушного по- №№ …… „:::-:т-«г-ттъ-г. ……‚……
тока с помощью комбинированного
насадка Пито—Прандтля. Измере-
ния осуществлялись в открытой ра-
бочей части малоскоростной аэроди-
намической трубы. Общий вид изме- _
рительной установки приведен на 7;
рис. 3.2.1. %:
Давление регистрировалось ча- Ё ? __ _
шечным микроманометром с коэффи- , __
циентами к=0‚4 и Ьт=1‚0; тариро- __ = ' - ‘ \
вочный коэффициент насадка ёт=
=1‚0. Начальный уровень жидкости
вмикроманометре Ьо=12 мм. В ре-
зультате продувки произошел подъ-
ем жидкости в отсчетном колене до
отметки н=132 мм. Соответствую-
щий перепад уровней составил АН=
=11—Ь0=120 мм.
По измерениям в атмосферном
воздухе і=22°С (Т=295 К) и ратм=
Рис. 3.2.1. Установка Для определения скоро-
сти дозвукового потока с помощью комбини-
рованного насадка:
=740 мм рТ. СТ., а по данным ПСИ- 1—аэрод13намическая труба];— 2—комбннированный
_ _ „ насадок; —координатник; микроманометр; 5—ла-
хрометра разность показании сухого бераторный барометр „ термометр
ивлажного термометров была равна
4° С._ _По этой разности температур
из табл. 2.2.1 при і=22°С найдена относительная влажность х=68%, а по величине
і=22°С из табл. 2.2.2 определено давление насыщенных водяных паров р,… =
=21;6 мм рт. ст.
Подставляя все эти данные в (3.2.2), получаем
7 2 21,6 —1
У =1/42,2—5Ё—Ё—_Ц 1—0,378-0,68—) 1,0-1‚0-0,4-12О=28,4м/сек.
°° 740 740
Теперь рассмотрим результаты проведения лабораторной работы по определению
скорости сверхзвукового потока. Для этой цели использовался комбинированный наса—
док (см. рис. 2.1.36). Измерения проводились в сверхзвуковой аэродинамической трубе
с закрытой рабочей частью. Общий вил трубы с установленным в ней насадком пока-
зан на рис. 3.2.2.
Температура в форкамере трубы, найденная при помощи платинового термометра
сопротивления, равнялась Т0=275 К. Барометрическое давление и температура в лабо-
ратории были равны соответственно Ратм=738 мм рт. ст. и Т=298 К.
Сменный сопловый вкладыш трубы был рассчитан на получение в рабочей части
М°о=3,0. Это число и уточнялось в результате проведения измерений. Во время экспе-
9>і< 131
римента использовался групповой регистрирующий манометр типа ГРМ- 2, коэффициент
шкалы которого &= —О ‚05 атм/дел.
Начальные показания, соответствующие каналам для измерения статического дав—
ления и давления торможения: №000=2О‚1; №0=19‚8. Во время продувки на шкале ма—
нометра зафиксированы показания: №®=2‚0; №’=25,О.
В соответствии с этими показаниями
+ігАА/оо =1‚003—0,05-18‚1=
= 0,098 кГ/см2;
рЬ=ратм+ігА№д = 1‚ооз+0‚05.5‚2 :
= 1,263 кГ/см2.
р°°= ратм
@@
Рис. 3.2.2. Общий ВИД рабочей части
аэродинамической трубы с комбиниро-
ванным насадком:
[_рабочая часть аэродинамической трубы;
2 —— комбинированный насадок; 3 — соедини-
тельные шланги; 4—групповой регистрирую—
щий манометр
Из таблиц газодинамических функций воздуха [13] по отношению рос/р0=
=О‚О98/1,263=О‚О775 для іг=1‚4 находим число Маха в рабочей части трубы Мос:
=3,11. По формуле (3.2.6), зная Т0=275 К и .Моо=3‚11, находим соответствующую ско—
рость потока:
1/00 = 3,112… ь/2—75 (1 + 0,2.з‚112)—1/2 = 614 м/сек.
Работаззд
Определение скорости воздушного потока
по методу измерения перепада давлений
Цел ь р а б оты —— определить скорость потока по измеренным ста-
тическим давлениям в двух поперечных сечениях аэр0динамической
трубы.
Общие сведения
Рассмотрим воздушный поток в диффузоре сверхзвуковой аэродина-
мической трубы (см. рис. 1.4.1). Скорости такого потока будут дозву-
ковыми. При этом то обстоятельство, что движение воздуха происходит
в канале с небольшим расширением и, следовательно, параметры пото-
ка в-различных точках какого—либо поперечного сечения можно принять
с достаточным приближением оди-
? наковыми, позволяет определить
скорость этого движения по изме—
ренной разности статических дав-
лений для двух таких сечений. Ес-
ли для одного сечения параметры
"о“
газа обозначить индексом <<1», адля
` другого—индексом «2» (рис. 3.2.3),
[ то уравнение Бернулли для этих се-
р + чений будет иметь вид
‹ 02ъ2
2 2
___Ё__Ё_ '__‘_/_1_= іг & ! &
Рис. 3.2.3. Схема измерения давле— Ё__1 91 _] 2 Ё_1 92 Т 2 '
ний в трубопроводе для определения
скорости потока (3.2.7)
332
Полагая в этом выражении скорость У1 равной в соответствии с урав-
нением расхода р1У1$1=р2У2$2 (81 и 82 — соответственно площади по—
перечных сечений 1—1 и 2—2) величине
У1 : У2 92 82,” (9181)›
найдем следующую зависимость для скорости в сечении 2—2:
112 : {і . р_1[1_.(_р2_91_)[1_(32_52_)2]_1}1/21_
3—1 01 19192 \9181
Так как отношение плотностей можно заменить по уравнению адиабаты
102/91= (Р2/Р1)№› ТО
——1__2Ё_.& Г __ 'В2_"(’“_1)/’*]Г __ [ЁЁ/"ЁЁ —1‘1/2
У2 „ч\Ё—1 9111 '\Р1) _[1 (171, 3% .
Имея в виду, что 13р1/р1 :аЁ, и переходя к разности давлений Ар=р1—р2,
получим
2 2 _ , 82 _1 1/2
1/ = “1 [1—( -— 3)“ №] 1—(1——Аі)№—2 (3.2.8)
3—1 р1 и 52
1
Здесь в свою очередь квадрат скорости звука
а2=ігКТ : ЬКТ „Ш УЗ 8% (1— ЗЕТ/Ё . (3.2.9)
1 1 0 2 8% р1
Полагая, что параметры в сечении 1—1, а также температура То извест-
ны, можно из уравнений (3.2.8) и (3.2.9) определить по измеренной раз-
ности статических давлений Ар скорость во втором сечении.
Рассмотрим случай, когда сечение 1—1 прох0дит через форкамеру
и его площадь значительно превышает величину 82. Тогда можно при-
нять Т1жТ0, р1нро и, учитывая, что $2<<$1, написать вместо (3.2.8)
соотношение
213 КТ ’ А (іг—1)//г 1/2
,: {———°[1—(1——і) ]} ‚ (3.2.10)
Ё _ 1 Ро /
в котором Ар=ро—р2.
Наиболее точными значения скорости, получаемые по методу изме-
рения перепада статических давлений, будут, если этот перепад неве-
лик и относительная величина Ар/ро не превышает 0,15+0,2. В частно-
сти, если р0=1 кГ/см2 (104 мм вод. ст.), то при выполнении этого усло—
вия Ар<2000 мм вод. ст. Для Ар/ро<0‚15—:—О‚2 формулу (3.2.10) можно
упростить, представив в виде
Ар 1 Ар 1/2 .
У,: 2 Т (1 —.—] . 3.2.11
… [ Н О Ро + 213 Ро) ( )
Для еще меньших перепадов давлений (Ар/ро<О,О2—:—О,03) в круглых
скобках (3.2.11) можно ограничиться одним членом в разложении и,
приняв КТ0=р0/ро, написать
11... =`1/2—А;Тр. (3.2.12)
Эта формула совпадает с соответствующим выражением (2.2.4) для
несжимаемого потока.
В рассматриваемом случае движения воздуха с малой скоростью
определение ее величины по измеренному перепаду статических давле-
ний возможно также, если первое сечение не проходит через форкаме-
ру и, следовательно, параметры воздуха в нем отличаются от их значе-
ний для условий торможения (см. рис. 3.2.3).
133
Чтобы получить для этого случая расчетную зависимость, напишем
уравнение Бернулли для несжимаемой жидкости (р=сопз’с):
р1’р + кг,/2 : ‚з,/р + 7.32. (3.2.13).
Из условия постоянства расхода У1$1=72$2 можно найти скорость
У1=У2($2/$1). Внося это значение в (3.2.13) и определяя скорость %,
получим
У,: )/%Ар —-ЁЁ- _1. (3.2.14)
Подставляя сюда вместо Ар=р1—р2 значение, полученное в результа-
те измерения давления чашечным микроманометром,иопределяя плот-
ность р с учетом барометрического давления, температуры и влажнос—
ти, найдем расчетную зависимость в следующем виде:
- _ $3 -—1
%: |/42‚2№(1—0‚378х№> 1ьтсткАн 1— ; _(з.2.15>
$-
Ратм Ратм 1
Порядок проведения работы
Измерения в аэродинамической трубе малых скоростей (см.
рис. 3.1.14).
1. Ознакомиться с устройством аэродинамической трубы, маномет-
ров и термометров; проверить их готовность к работе.
2. Соединить приемник статического давления (дренажное отверстие
в стенке трубки) резиновыми шлангами с чашечным микроманометром
и проверить герметичность соединения.
3. Измерить барометрическое давление и температуру в лаборато—
рии.
4. Включить аэродинамическую трубу и после выхода ее на режим
установившегося потока в рабочей части записать показания микрома-
нометра.
5. По измеренной разности уровней жидкости в манометре вычис-
лить соответствующий перепад давлений, а затем, используя формулу
(3.2.15), рассчитать скорость газа в рассматриваемом сечении аэроди-
намической трубы.
Измерения в диффузоре сверхзвуковой аэродинамической трубы.
1. Ознакомиться с устройством сверхзвуковой аэролинамической
трубы, насадками, манометрами, электротермометром, а также схемой
измерительной установки.
2. Установить в форкамере платиновый датчик температуры и про-
верить электрическую схему термометра.
3. Резиновыми шлангами соединить штуцеры приемников статичес—
кого давления в сечениях 1—1 и 2—2 диффузора с групповым регист-
рирующим манометром.
4. Измерить барометрическое давление и температуру атмосферно-
го воздуха.
5. Определить площади $1и$2 поперечных сечений 1—1 и 2—2 Диф-
фузора.
6. Включить аэродинамическую трубу и измерить при помощи
ГРМ разности давлений Ар1=р1—ратм и Ар2=р2—ратм.
7. По этим значениям найти разность статических давлений Ар:
=р1—р2, определить в сечении 1—1 давление р1=Ар1+ратм, а затем,
зная То, вычислить, используя (3.2.8) и (3.2.9), скорость в сечении
2—2 диффузора.
434
Пример. Определим скорость воздушного потока в рабочем сечении малоскорост—
ной аэродинамической трубы (см. рис. 31.14). В выбранном сечении 11—11 в стенке
трубы просверлено дренажное отверстие, которое через штуцер соединено резиновым
шлангом с отсчетной трубкой чашечного микроманометра (ігт=1‚0‚ К =0,8). Начальный
уровень жидкости в ‚его отсчетном колене 110= 10 мм.
Так как воздух поступает в трубу из атмосферы и его скорость в форкамере пре-
небрежимо мала, то принимаем для сечения 1—1, проходящего через форкамеру,
Ино. Давление здесь будет атмосферным и равным, согласно показанию барометра,
ро=ратм=750 мм рт. ст. Соответствующая температура Т0=Татм=295 К. Относитель-
ная влажность х=68%. Давление насыщенных паров рн:п=21,6 мм рт, ст.
Статическое давление в сечении 1—1 равно атмосферному, следовательно, резерву—
ар чашечногомикроманометра сообщался с атмосферой. После включения трубы уровень
жидкости в отсчетной трубке этого манометра переместился до отметки 11=142 мм.
В соответствии с этим разность уровней
А11=11—110= 142— 10: 132 мм,
а перепад давлений
Ар = р1 —р2 = Ёт К-Ап = 1,0—О‚8- 132 = 106 мм вод. ст.
По этому значению перепада давлений определяем из (3.2.15) скорость
/
г' 1 _]
У2 : Ъ/42,22Ё)(1—0,378-0‚682—Ё) 106= 41,8 м/сек_
750 750
Рассмотрим теперь результаты измерения скорости в диффузоре сверхзвуковой
трубы. В сечениях 1—1 и 2—2 (см. рис. 3.2.3) в стенке диффузора просверлены дре-
нажные отверстия, которые через штуцера соединены резиновыми шлангами с ГРМ.
Измеренное барометрическое давление и температура в лаборатории были равны соот-
ветственно ратм=738 мм рт. ст., Татм=298 К. Температура в форкамере, найденная с
помошью платинового электротермометра сопротивления, равнялась Т0=275 К.
Во время работы трубы измеренные при помощи группового регистрирующего ма-
нометра (ГРМ—2 с коэффициентом 12:0,01) перепады давлений были следующими:
АР1=р1_ратм___—‚"'(МГ—‘А/Щ) =0101'12 КТГ/02142;
Ар2 = р2—ратм = іг(№2—№02) = 0,01 -22 {СГ/6142,
где Момот, №№) — соответственно начальные и конечные показания по шкале ГРМ.
С учетом полученного перепада давлений статическое давление в сечении 1—1
р, = Ар1 +ратм= 0,12 + 1,00 = 1,12 кГ/см2.
Площади поперечных сечений 1—1 и 2—2 соответственно равны: $1=0,282 м2 и
82:0,406 м2, отношение этих площадей $2/$1=0,406/О,282=1,44. Имея в виду, что
ігд=1‚4—287=401,9 м2/сек2-град, Т0=275 К и Ар=Ар1—Ар2=—О,1 ‚СГ/см?, после под-
становки соответствующих данных в (3.2.8) и (3.2.9) найдем:
У _{ 211? 1 *] _од __(1‚4_1)/1‚41 1 1 __о‚1 2/1‚41 42 --11/2
Г' 1,4—1[_(— 1,12) ][ _( _ 1,12) ’4 ] ’
1,4—1 / —0‚1 2/1.4
а?=4О1‚9-275———[УЗ-1,442К1———) .
2 1,12
Решая эти уравнения относительно скорости Уг, найдем ее величину У2=33‚1 м/сек.
Работаззз
Определение числа Маха невозмущенного
сверхзвукового потока
Ц е л ь р а б о т ы — определение числа Маха потока в рабочей части
сверхзвуковой трубы по теневой фотографии обтекания поверхности
и по методу измерения давлений.
Общие сведения
Оптический метод. Рассмотрим Обтекание равномерным и парал-
лельным сверхзвуковым потоком плоской клиновидной поверхности
с половиной угла при вершине Вкл (рис. 3.2.4). Если этот угол не пре-
вышает некоторого предельного (критического) значения [3*‚ то обте—
кание характеризуется возникновением перед клином прямолинейного
“. 135
ПРИСОЗДИНЗННОГО СКЗЧКЗ УПЛОТНВНИЯ‚ НЭКЛОНВННОГО ПОД УГЛОМ ее И ВВК-
тору скорости У…. Если угол клина Вкл и число Мао заданы, то можно
определить величину Вс. Может быть решена и обратная задача, связан-
ная с отысканием
числа Маха набега—
ющего сверхзвуко—
вого потока по из—
вестным значениям
А ргг 60 И Вкл-
Вкл % д…»
//
/ _
‚99% ///////‚т////////////4 , При помощи оп-
Мщр, _ - ‚ _Лт///Ж№////Щ р, тических методов ис-
›»
следования сверх-
звукового обтекания
в аэродинамической
Рис. 3.2.4. Схема измерения давлений на клиновид- трубе МОЖНО сфото-
.ном насадке для определения числа Моо потока Графировать ПОТОК
около клина и полу-
чить теневой
снимок, на котором будет изображена линия скачка уплотнения.
Зная направление набегающего потока, можно измерить угол 60 меж-
ду скачком и вектором У…, а затем вычислить соответствующее число
Маха, пользуясь следующей формулой из теории косого скачка уплот-
нения:
іг—і— 1 _ зіп Эс-зіп В,… ]—1/2. (3.2.16)
2 соз (Эс—Вкл)
Измерение давлений на кЛиновидной поверхности. Наряду с опти—
ческим методом определение числа Мос можно вести также путем из-
мерения давления р2 на обтекаемой поверхности клина, а также стати-
ческого Давления р1 набегающего потока. По этим значениям р2 и т,
а также заданному углу клина Вкл число Маха находится из решений
уравнений (3.2.16) и
1 /г 1 іе—1 1/2
.. = . ———+ (”—2 +—)] . (3.2.17)
$1п 6С 2%. И іг+ 1
Измерение давлений ведется на модели клина (см. рис. 3.2.4), уста-
новленной в рабочей части сверхзвуковой трубы так, чтобы одна сторо-
на (нижняя) была параллельна вектору У… (Мос), а другая (верхняя)
образовывала с ним некоторый угол Вкл (угол клина), меньший крити—
ческой величины в*.
Дренажное отверстие на нижней поверхности будет воспринимать
статическое давление потока …, а на верхней—давление ря за косым
скачком уплотнения, или, что то же самое, давление на клине. Эти дре—
нажные отверстия (приемники давления) соединяются специальными
металлическими трубками и резиновыми шлангами с манометрами.
Если используется групповой регистрирующий манометр (ГРМ), то из--
мереННЬ1е Давления:
[31 : ратм + Ёп Ё АМВ
р2 :“ ратм + ёт2 Ё АМЪ
где Яка—коэффициент шкалы прибора ГРМ; ётг И Ёт1—тарировочные
коэффициенты соответствующих приемников давления на клине; АМ),
ААП—разность конечных и начальных показаний на шкалах мано-
мш = [вине, _—
метра.
Внося значения … и № в уравнение (3.2.17), получим
: 1 %+] Ратм+ігётгА№9 ‚?"—1 1/2
00 Зіп 6с [ 2,3 (Ратм+Ё;т1'А№1—|_ Ё+1‚)] . (3218)
136
Решая это уравнение совместно с уравнением (3.2.16), найдем соответ—
ствующее число М.….
Измерение давлений торможения. При экспериментальном определе-
нии числа Моо в рабочей части сверхзвуковой трубы часто используют
насадок Пито (см. рис. 2.1.31).
При помощи такого насадка, соединенного с ГРМ, измеряется дав-
ление торможения рО за прямым скачком уплотнения
рд : ратм + ватин, (3.2.19)
где Ё, ёт—соответственно коэффициент шкалы ГРМ и тарировочный
коэффициент насадка; А№=№——1\/о—разность конечного и начального
показаний ГРМ.
Одновременно измеряется давление ро в форкамере трубы. По этим
значениям давлений торможения можно определить число М…, пользу-
ясь выражением
12
_ _.; 2 іг—1 м2 _
Ратм+ігёт АМ =[Ё-М2 [е_—!.] іе—1 . +( ) °° да:—1 . (3220)
Ро іг+1 °°—1г+1 (ё+1)МЁ.
Для Ё=1,4 это число Мос, можно найти по вычисленному отношению
рд /ро из таблицы, приведенной в книге [17].
Порядок проведения работы
1. Ознакомиться с устройством аэродинамической трубы, оптическо-
го прибора, насадков и манометров и проверить готовность их к ра—
боте.
2. Установить клиновидный насадок и трубку Пито в рабочей части
сверхзвуковой аэродинамической трубы и соединить приемники давле—
ния (дренажные отверстия) с групповым регистрирующим манометром.
3. Закрепить манометр в форкамере трубы.
4. Настроить теневой прибор и установить фотоаппарат.
5. Измерить атмосферное давление и температуру в лаборатории и
записать начальные показания ГРМ.
6. Включить аэродинамическую трубу и после выхода ее на режим
установившегося движения воздуха записать показания манометров и
сфотографировать возмущенный поток около клиновидного насадка.
7. По показаниям манометров определить давления р2, р1, ро, рд, а
на фотографии измерить угол скачка. Используя значения р2 И ‚01, дав—
лений торможения ро и рО и угла 6С, вычислить соответствующие чис-
ла М… и сравнить их между собой.
Пример. Определим число №00 в рабочей части сверхзвуковой аэродинамической
трубы, осуществив одновременное измерение угла наклона скачка уплотнения перед
клиновидным насадком, давлений р2 и р1 на нем, а также давлений торможения до за
прямым скачком и ро в форкамере. Схема измерительной установки показана на
рис. 3.2.5, а ее внешний вид — на рис. 3.2.6.
Экспериментальная модель представляет собой «односторонний» клин (см.
рис. 3.2.4) с углом при вершине |3кл= 15°. На его верхней и нижней сторонах просверле—
ны дренажные отверстия диаметром 0,3 мм, к которым припаяны тонкие медные дре—
нажные трубки.
Для измерения давления ро торможения за прямым скачком уплотнения использо-
валась трубка Пито, закрепленная на одной державке вместе с клином (см. рис. 3.2.5).
При этом трубка Пито размещалась так, чтобы возникающий скачок располагался за
дренажным отверстием на нижней стороне клина.
Для измерения давлений р2, рд и ро использовался групповой регистрирующий
манометр типа ГРМ—2 с коэффициентом шкалы Ь=О,05. Барометрическое давление в
лаборатории во время опыта ратм=750 мм рт. ст.=1,022 кГ/см2‚ а давление в форка-
мере, измеренное во время работы трубы, ро=4,22 кГ/см2.
Конечные М и начальные №0 показания ГРМ при измерении давлений р2‚ рі и ро
а также результаты вычисления представлены в табл. А.
10—927 137
Давления в этой таблице вычислены при условии, что тарировочные коэффициенты
Дт приемников давления равны единице. Найденные значения р2=0,282 кПа-и?, р1=
=О‚097 кГ/см2 вносим в (3.2.18):
®
1'[1‚4+1 (0,282 “1,4—1Л1/2
№0С „21,4 0,097 1‚4+1 '
ГИ“////////////1%/////‚7/4%7//2„’іэ”7//&7/ /7////
8 6
5 7 ”2 \ с
‘‚'3
‹ м.„ —
5
Я . 2 9
1% и 3 р,;
/ ///////////_///_//////////////////'//////////////////И ‚2 р
1 10 ‚92 + а
”' 1
%+ в
Рис. 3.2.5. Схема установки для определения числа МОО:
] —— аэродинамическая труба; 2 — насадок Пито; 3— скачок уплотнения; 4 — волна
возмущения (линия Маха); 5, 8—приемники давления; б—косой скачок уплот-
нения; 7 — односторонний клин; 9 — державна; 10 — дренажные трубки; ]] — груп-
повой регистрирующий манометр; 12—дренажная трубка для давления торможения
Таблица А
"" | !
| р2 131 ро
/2 |
№0 . . 19,8 20,2 19,6
№ . - . . - 5,0 1,7 24,4
А1\/=1\/—1\/0 . —14,8 —18,5 4,8
ЬАА/ . . . . . . —0,74 —0,925 0,24
р=Ратм+ідёт ' АМ,
“ КГ/См2 - - 0,282 0,097 1,26
‚' 7$
т\-
/ .
Рис. 3.2.6. Установка для определе—
ния числа МОО:
/4
1 —— аэродинамическая труба; 2 — клино-
видный насадок с трубкой Пито; З—дре-
жные т бки; 4—г пповой егист и- ‚
на рурующий махометр р р Рис. 3.2.7. Теневая фотография обте—
КЗНИЯ ОДНОСТОРОННЗГО КЛИНЭ
Решая это уравнение совместно с зависимостью (3.2.16)
1,4 1 зіпЭ зіп 15° —-1/‘2
м -_— зіп26с— ———_Ё— . ———°———] ‚
°° 2 соз (Вс— 15 )
находим Мш=3‚10.
138
Определим число Маха по давлениям р6=1‚26 кГ/см2 и ро=4‚22 кГ/см2. Отноше-
ние этих давлений рЬ/ро=1‚26/4,22=О‚299. Зная это отношение, из таблицы [17] нахо-
дим М°о=3‚11. Теперь используем для определения Мсо полученную теневую фотогра-
фию скачка уплотнения перед клином (рис. 3.2.7) и измерим на ней угол наклона скач-
ка 6с=31°20’. Подставляя это значение в (3.2.16) и принимая Ь=1,4‚ найдем
1‚4+1 зіп31°20’—5іп15° —1/2 13
2 ' со516°20’ ) _'
Как видим, найденные числа М… отличаются друг от друга незначительно и для по—
следующих аэродинамических расчетов можно выбрать среднее значение М…=3,11.
мы =(зіп2 31° 20’ _
Работаззл
Определение поля давлений и скоростей
“ в аэродинамической трубе
Цель р аботы—найти распределение статических давлений и
скоростей (скоростных напоров) в поперечных сечениях потока в рабо-
чей части аэродинамической трубы. Результаты работы должны быть
представлены в виде графиков, ха- Н
рактеризующих изменение этих па-
раметров от координат точек рас-
сматриваемого сечения.
Общие сведения
Дозвуковые скорости (несжимае-
мый поток). Для измерения стати- о
ческого давления р…, а также пол- 7. _
ного напора ро воздушного потока
в некоторой точке М с координата-
ми у, 2 рассматриваемого попереч-
ного сечения (х=сопз1:) рабочей
части трубы (рис. 3.2.8) может бЫТЬ Рис. 3.2.8. Система координат для
использован комбинированный на- определечия положения насадка
садок (СМ. рис. 2_1_35)_ Перемещая в рабочеи части баэр0динамическои
такой насадок, можно измерить со- тру Ы
ответствующие давления в различ-
ных точках этого и другого сечений и тем самым найти поле давлений
в воздушном потоке трубы. По измеренным давлениям можно рассчи-
тать скорости Уоо и скоростные напоры ооо УЗО /2 и тем самым получить
их распределение в рабочей части.
Обычно для измерений используются чашечные микроманометры.
Статическое давление, измеренное таким манометром,
роо : ратм + ё'г1 ЁТ1К1. Апр
полное Давление
ро : ратм + ётг. ‚СШ К2 ' АИЪ
где Ат и АЩ—разности показаний соответственно первого и второго
манометров (АН1=И1—/101; АН2=Н2—/102).
Согласно уравнению Бернулли местная скорость
У.. = 1/‹2/р› (р.‚— р..) = 1/ (г,/р) (а... и. [‹.—№2— с… !г„ К.М.), (3.2.21)
а скоростной напор
а... = риа/2 = ро —р.. = ё„ дети,-Аи, _Ст11гт1К1—Ап1. (3.2.22)
Обычно вместо этой размерной величины С]… для характеристики пото-
10* 139
ка используют безразмерный коэффициент поля скоростных напоров,
определяемый отношением
„, : ЧМП/ЧШ Ср, (3.2.23)
где соо…: (91/30/52)ТЧ и аюср= (рУЁо /2)ср—соответственно скоростной
напор в данной точке и его среднее значение для рассматриваемого се-
чения. При этом величина Чосер определяется по измеренным значениям
скоростного напора в различных точках сечения из выражения
Ч.. ср = (№,/2)ср = 2 а.. т.,/п- (3.2.24)
і=1
В выражении (3.2.23) вместо афер можно использовать скоростной
‘2 „ \!
напор Чоон_н= (рУоо /2)н_н‚ измеренныи в среднеи точке сечения конт-
рольным насадком. В этом случае
и = а.. … М.. (3.2.25)
Аналогично для характеристики поля скоростей можно использовать
безразмерные коэффициенты скорости:
„,:у /1/
ООТЧ
(3.2.26)
00 ср’
ИЛИ
рУ=У /У
ООТЧ
(3.2.27)
оо к.н'
Комбинированный насадок, используемый для измерений, закрепля-
ется на координатнике и устанавливается в рабочей части трубы на
таком удалении от выбранного сечения потока, чтобы возмущения от
координатника и насадка не достигали этого сечения.
Измерения обычно начинают в средней точке сечения трубы, а за-
тем, перемещая насадок в вертикальном направлении (вдоль оси Оу)
с некоторым шагом, равным примерно 0,05—2—0,1 поперечного сечения,
определяют для соответствующих точек с координатами уЗЬО, 2:0,
х=сопзі давления рос, и ро. Аналогичные измерения осуществляют, пе-
ремещая насадок в горизонтальном направлении (вдоль оси Ог) и оп-
ределяя давление для точек с координатами у=0, гфО, х=сопз’с.
Если необходимо, измерения ведут для точек с координатами уфО,
25720, х=сопз’с‚ а также для других поперечных сечений. Таким образом
можно получить экспериментальную зависимость для давлений роо=
=1°1(х‚ у, г) и ро=і2 (х, у, 2), по которым определяются функции Уоо=
=і°з(х‚ у, 2), аоо=і°4(х‚ 11,2): м=із(х‚ % 2) И №=1°в(х‚ у, г)-
При построении соответствующих зависимостей обычно имеют дело
с безразмерными координатами х=х/Ь, у=у/Н‚ 2=2/В, где Ь, Н, В—
соответственно длина, высота и ширина рабочей части. Для круглого
сечения трубы вместо Н и В используют диаметр сечения О.
Обычно экспериментальные исследования ограничивают измерени—
ем давлений и скоростей в точках на взаимно перпендикулярных осях
симметрии какого-либо сечения, что бывает достаточным для оценки
равномерности потока. В таком случае для данного сечения функцио-
нальные зависимости, в частности для коэффициента скорости, прини-
мают вид
„у : Ф1(_у_)и ”у : (%(—%>
При построении графика этих функций следует учитывать, что
вследствие действия сил вязкости частицы жидкости прилипают к стен-
кам трубы и скорость на них равна нулю. Общий вид одного из таких
графиков показан на рис. 3.2.9.
140
Сверхзвуковые скорости- Экспериментальное исследование распреде-
ления скорости (чисел Маха) и Давления в сверхзвуковой аэродинами-
ческой трубе можно осуществлять, как и в дозвуковой трубе; «зондиро-
ванием» потока насадком (приемником давления) в рабочей части. Од-
нако специфические свойства сверхзвукового те- _
чения, заключающиеся в том, что возмущения в
нем распространяются вниз по потоку и только 0,5‘
в пределах конуса Маха (или в зоне за скачком _`т
уплотнения), позволяют использовать специаль-
1,0
ную конструкцию измерительного устройства, со-
стоящего из нескольких клИНОВИДных или кони- 0
ческих приемников статического давления,— ”"
так называемую гребенку (рис. 3.2.10).
Расположение насадков на корпусе, который
закрепляется в рабочей части трубы, должно -015
быть таким, чтобы получить наиболее полную
картину распределения параметров газового по- Рис. 3_2_9_ график из-
тока ПО поперечному сечеНИЮ. При ЭТОМ расстоя- менения коэффициен—
ние между ними, а также их расположение от- та скоростей ПО ПО-
перечному сечению
НОСИТеЛЬНО стенок выбирается ИЗ УСЛОВИЯ, ЧТО- рабочей части
бы скачки уплотнения (линии Маха), которые
могут возникнуть в рабочей части, не попадали
на участки поверхности насадков, где находятся дренажные отверстия
для измерения статического давления.
Одновременно с измерением статического давления и углов накло-
на линий Маха перед заостренными конусами (клиньями) определяет-
ся давление ро в форкамере трубы.
Рис. 3.2.10. Схема устройства гребенки:
] — головной конус; 2 — цилиндрический корпус; 3 — приемные
отверстия; 4 — волна возмущения; 5 — корпус; 6 -— дренажные
трубки
При экспериментальном исследовании распределения чисел Маха
можно ограничиться теневой фотографией картины обтекания гребен-
ки, Значение Мос, вычисляется по измеренному углу „… наклона линии
Маха перед конусом или клином (см. рис. 3.2.10) по формуле
МОО : 1'з1прьоо. (3.2.28)
Если необходимо найти также и распределение статических давле-
ний, то следует осуществить дополнительное измерение давления ро в
форкамере и затем найти по нему в соответствующей точке потока рее
из (2.1.16):
Ь*—1 —/г/ —1›
‚000 : р0(1 + 2 м;) .
141
Одновременное измерение давлений рао и ро позволяет рассчитать
распределение чисел Маха по зависимости (2.2.8). Это же значение чис-
ла Маха можно найти по отношению ро/роо‚ используя таблицы газо—
динамических функций воздуха [13].
В рассматриваемом случае нет особой необходимости в оптическом
исследовании сверхзвукового потока, хотя представляется целесообраз—
ным для получения полной информации об исследуемом течении осу-
ществлять такие исследования одновременно с непосредственным изме-
рением статического и полного давлений.
Порядок проведения работы
Дозвуковые скорости.
1. Укрепить насадок на координатнике; установить его в середине
рабочей части трубы так, чтобы ось насадка совпадала с продольной
осью трубы. Проверить работу механизма перемещения насадка в вер-
тикальном и горизонтальном направлениях.
2. Соединить резиновыми шлангами приемники давления (отверстия)
насадка с микроманометрами и проверить герметичность соединений.
3. Включить аэродинамическую трубу и, перемещая насадок снача-
ла в вертикальном, а затем в горизонтальном направлении, измерить
для фиксированных положений этого насадка статические и полные
давления рсю и ро.
4. По измеренным значениям этих давлений определить в соответст-
вующих точках выбранного сечения скорости Ус,о и скоростные напоры
Чао, затем вычислить средние их значения Уооср И афер, найти коэффици-
енты скоростей …; и скоростных напоров р, и построить графические
зависимости МИД» мг%—2), МД) И МЕ)-
Сверхзвуковой. поток.
1. Закрепить гребенку в рабочей части сверхзвуковой трубы, соеди-
нить штуцеры насадков с групповым регистрирующим манометром и
проверить герметичность соединений.
2. Установить манометр для измерения давления в форкамере.
3. Осуществить настрой-
…………………_. '*'—”"""! ку оптического прибора и
% установить в нем фотоаппа-
рат.
4. Измерить атмосфер-
; ное давление. в лаборатории
; № 5 и записать начальные пока-
' д” зания измерительных кана-
„__ __ . .. . _ 5 лов грм.
ЁЁ.- _ %; _, __ 5. Включить трубу и по-
__ „,… ‘_ “ … „,? сле выхода ее на режим
% 1 \ “_ установившегося обтекания
' °' ' _‘і Ё ф записать показания мано—
Ёжъ—___— %; . ` метров и сфотографировать
` „— : их? *’ . -- поток около гребенки.
> . _ ;;"? 6. По измеренным давле—
{…с &… ч ' ; "„а: ниям рао И Ро, а также Уг—
лам и… рассчитать соответ-
Рис. 3.2.11. Установка для определения поля СТВУЮЩИе числа М… И ПОСТ-
давлений и скоростей в рабочей части дозву- роить гра-фики, характери_
КОВО'И ЗЭРОДИНЗМИЧВСКОИ ТРУбЫ: ЗУЮЩИе распределение ЭТИХ
Ь;ЕЁЁЗЁДЁЁЁЁЁЁЁНЪЁеліёё'іа‘ШЛЁБИ‘ЁЁЁ‘ЪИИРЁЁОЗЁЁЁЁЁ ЧИЁеЛ И статических давле-
метры; 5—лабораторный барометр и термометр НИИ В рассматриваемом се..
чении.
‚_ „_.—„... . ‚.... "'У-'
. ‚ птн—питии",
‚&&
142
Пример. В качестве примера определим поле скоростей и скоростных напоров в вы-
ХОДНОМ сечении диаметром В=300 мм малоскоростной аэродинамической трубы с от-
крытой рабочей частью. Общий вид измерительной установ-ки показан на рис. 32.11.
Для измерений использовался комбинированный насадок Пито — Прандтля, кото-
рый устанавливался с помощью координатника на расстоянии 200 мм от выходного
сечения. На таком расстоянии (превышающем 10 диаметров насадка) возмущения от
него в вице повышенного давления не достигали этого сечения.
Шаг перемещения насадка при помощи координатника был выбран равным Ан:
=0‚1 В=30 мм. Измерение давлений осуществлялось двумя чашечными микромано-
метрами с тарировочными коэффициентами ігт1=ігт2=1,0 и коэффициентами шкал
К1ЁК2=0‚4. Тарировочные коэффициенты насадка были приняты равными ё“:-
= т2=1‚0.
Во время эксперимента атмосферное давление ратм=744 мм рт. ст, а температура
Татм=288 К. Так как для этих условий плотность воздуха р=0,125 кГ-сек2/м4‚ то, при-
нимая во внимание приведенные значения тарировочных коэффициентов и коэффициен-
тов шкал, а также равенство рю=ратм‚ расчетная формула для скорости примет вид
Ум„ = 2,53 Мм„
а для скоростного напора
Чт„ = 01/2 /2 = 0,4-Ап2.
°°ТЧ
Значения Ай2=й2—И02 для точек на оси у, а также вычисленные по ним скорости
У…… и скоростные напоры а…“ приведены в табл. А.
Таблица А
_7; 0,5 0,4 0,3 0,9. 0,1 0 _0,1 _0,2 _0‚3 _0‚4 _0,5
‚102, мм ‹ 10 >
712, мм 0 129 129 130 131 132 132 130 130 129 0
№12, мм 0 119 119 120 121 122 122 120 120 119 0
Уф,”, , м/сек 0 27,6 27,6 27,8 27,8 27,9 27,9 27,8 27,8 27,6 0
Утер ‚ м/сек ‹ 27,76 >
…, 0 0,995 0,995 1,001 1,002 1,003 1,003 1,001 1,001 0,995 0
ашттммводюц 0 47,6 47,6 48 48,4 48,8 48,8 48 48 47,6 0
(утер, мм вод. ст ‹— 48,1 %
р 0 0,99 0,99 0,998 1,004 1,018 1,018 0,998 0,998 0,99 0
В табл. А скорости на стенке, как и скоростные напоры (для точек с относитель-
ными координатами у=іО,5), приняты (согласно предположению о прилипании частиц
жидкости к стенке) равными нулю. Среднее значение а…ср определялось по формуле
9
0,4
0,2
Рис. 3.2.12. Распределение коэффициентов скорости и ско-
ростного напора по поперечному сечению рабочей части
аэродинамической трубы
143
(3.2.24) с учетом скоростных напоров в точках с координатами —— 0‚4<у<0,4. Соот-
ветствующая средняя скорость вычислялась из выражения Ушер=1/ (2/р)(7°оср.
По найденным значениям функции мг(у)=У°отч/Уо…р и м(у)=а°отч/ао°ср‚ при-
веденным в таблице, построены соответствующие графики (рис. 3.2.12). По данным
графикам можно установить зону относительно небольших изменений скорости —ядро
потока. Из рис. 3.2.12 вицно, что пло-
щадь ядра Зят'л (0,8 В)2/4 составляет
64% от площади выходного сечения
трубы. С учетом этого максимальная
площадь поперечного сечения опытной
модели, если принять допустимое загро-
мождение равным 5%, будет составлять
0,05Х0,64Х100=3,2°/о площади выход—
ного сечения трубы.
Рассмотрим результаты измерения
скоростей и давлений в сверхзвуковой
аэродинамической трубе. Схема измери-
тельной установки показана на рис.
3.2.13.
В рабочей части этой трубы сечени-
ем 400Х400 мм закрепляется с помощью
двух фланцев гребенка (рис. 3.2.14), со-
стоящая из 21 насадка, каждый из ко-
торых представляет собой цилиндр с
Рис. 3.2.13. Схема установки для опре- тонким коническим носком с половиной
деления чисел №00 в сверхзвуковой аэ- угла при вершине 4°.
родинамической трубе: Эти насадки с дренажными отвер-
!_ абочая Часть трубы 2_гребенка с на_ стиями‚ выполненными на цилиндриче-
садкрами статического давления; 3_дренаж_ скои поверхности, закреплены на оощем
ные трубки; 4_грм каркасе крестообразнои формы. На рис.
3.2.15 показана схема расположения та-
ких отверстий и расстояние между ними.
Атмосферное давление во время
продувки было равно Ратъ1=750 мм рт. ст.=1‚022 кГ/см2- Измерение статических дав-
лений осуществлялось приборами ГРМ-2, рассчитанными для регистрации значений р—
—ратм в пределах от ——1 до 9 кГ/см2 с коэффициентом шкалы іг=0‚05. Давление тор-
можения, измеренное в форкамере, р0=4‚22 кГ/см2.
Рис. 3.2.14. Гребенка с насадками статического дав-
ления:
! — насадок статического давления; 2 — каркас; 3 — фланец;
4 — дренажные трубки
На бумажной ленте ГРМ регистрировались начальные №0 и конечные А1 показания
манометра, по которым определялись разности давлений:
Арао =роо _раТМ : [е(№00 __ №000) : Ё°А№°о‚
а затем подсчитывались значения:
роо =(0,05А1\/ + 1,022) кГ/см2_
144
Таблица Б
Показания ГРМ
Номера насадков Арес. р _ кГ/см2 М
(по схеме рис. 3.2.15) №0 | № | АМ кГ/см” оо со
1 20,1 1,8 ——18,3 —0,915 0,107 3,01
2 20,2 1,7 —18,5 —0,925 0,097 3,11
3 20,0 1,5 ——18‚5 —0,925 0,097 3,11
4 20,4 1,9 —18‚5 ——-0‚925 0,097 3,11
5 20,2 1,7 ——18,5 —0‚925 0,097 3,11
6 20,3 1,8 ——18,5 —0‚925 0,097 3,11
7 19,8 1,3 —18‚5 —0,925 0,097 3,11
8 20,1 1,6 —18,5 —0‚925 0,097 3,11
9 20,1 1,7 ——18,4 —0‚920 0,102 3,05
10 19,9 1,6 —18,3 —0‚915 0,107 3,01
11 20,3 1,8 —18,5 —0,925 0,097 3,11
12 20,2 1,7 —18‚5 0,925 0,097 3,11
13 20,4 1,9 —18‚5 —0,925 0,097 3,11
14 20,5 2,0 —18,5 —0‚925 0,097 3,11
15 20,0 1,5 —18,5 —0,925 0,097 3,11
16 20,1 1,6 —18‚5 —0,925 0,097 3,11
17 19,9 1,4 —18,5 —0,925 0,097 3,11
18 20,0 1,6 —18,4 —0,920 0,102 3,05
19 20,1 1,8 —18,3 —0,915 0,107 3,01
20 20,4 1,9 —18‚5 0,925 0,097 3,11
2! 19,9 1,7 —18,2 0,910 0,110 3,00
По этим значениям рсо и давлению ро=4,22 кГ/см2 из таблиц [13] нахоцились соот-
ветствующие числа Маха.
Показания манометра для каждого насадка, а также вычисленные по ним стати-
ческие давления р„о и соответствующие числа Маха приведены в табл. Б
р а б о т а 3.2.5 9
Исследование турбулентности “ „ ® „@
воздушного потока @
0 0
Цель работы—измерение @
термоанемометром начальной "@ "@
турбулентности воздушного пото- © @ ‹» ц
ка в рабочей части дозвуковой % _ 9— ® @
аэродинамической трубы. & ' " к
@ @ „@ „@дд @
Общие сведения „. @@ ,
Экспериментальное исследо- „@ „.
вание турбулет-ттности воздушно- „@ „@)
го потока является важной со- ,
ставной частью методических ис- О о" „„ 2
пытаний аэродинамических труб. ` №7 _<80}…„5__‘_4_ід‚__
В результате этих исследований
определяется начальная тур бу- РИС. 3..215. гребенка ДЛЯ измерения
распределения давления (указаны по-
., 9 _
лентность (см. рис. 2…8), кото рядковые номера насадков)
рую можно рассматривать в ка-
честве критерия пригодности тру-
бы для получения достоверных экспериментальиых данных, в частности
о пограничном слое и теплопередаче.
Для измерения начальной турбулентности наиболее широко приме-
няется термоанемометр, датчик которого размещается в рабочей части
аэродинамической трубы. Электрическая схема измерительной установ-
ки пбказана на рис: 2.2.5.
145
При исследовании турбулентности потока можно производить изме—
рения пульсационных составляющих скорости в одном каком-либо на-
правлении, в частности в направлении осредненной скорости У… набе-
(Ь!/(1724 гающего потока. `Приняв, что тече—
в 0 ние обладает своиством изотропно-
сти, пульсационные составляющие
по другим направлениям можно
/ принять такими же, как измере__н-
… / ное в направлении вектора У…
› / Вольтметр переменного тока, пре-
дусмотренный в схеме измеритель-
0,2 ной установки, при включении тру-
… бы покажет напряжение, пропор—
' циональное пульсационной состав-
ляющей. При этом вольтметр посто-
Рис. 3.2.16. Тарировочная кривая янного тока изменит свое показа-
проволочного датчика термоанемо- НИС Нд ВЗЛИЧИНУ „Б"—ПО (Где По И
метра (із—показания этого вольтметра
соответственно при У…=0 и У… ;&
#0), причем показание ПВ однозначно определяет осредненную ско-
рость У…
Покажем, как можно по измеренным значениям По, Пв 'и а?!/в най-
ти начальную турбулентность:
& : 41/00 /У.. :УЁё/Уш. (3.2.29)
В этой формуле осредненная скорость потока У…, набегающего на дат-
чик термоанемометра, находится из тарировочного графика функции
У…=і1(Пв ). Эту функцию удобнее заменить зависимостью (рис. 3.2.16)
2 = ;, (1100), (3.2.30)
10” 10° 10’ и...„ м/свк
в которой ‚
2 = (ПВ/ПО)2 — 1, (3.2.31)
а величина По =0‚925 По. Как показывают исследования, если кривую
на рис. 3.1.16 перестроить в логарифмических координатах:
=192; х = 19 7… (3.2.32)
то тарировочный график будет представлять собой прямую, уравнение
которой
у = а —|— пх, (3.2.33)
где а, п—некоторые постоянные коэффициенты, определяемые опыт—
ным путем.
Из (3.2.33) следует, что сіу/сіх=п=сопз’с. Покажем, что от этой ве-
личины зависит начальная турбулентность в=сіУ…/У…. Действительно,
продифференцировав (3.2.32) соответственно по (1 и У…, получим
_а”! __41. "2 1 ‘“ (3.2.34)
див _ аг див " г1п10 ` див
4—х = —‘—— . (3.2.35)
аши 110011110
Из этих выражений находим
в— ду… _ див (іх ив (12
У иВ ау 2 аив°
ОО
(3.2.36)
146
Вычисляя здесь производную (12/0303 в соответствии с (3.2.34), найдем
е_ №…Е’і Ш
(3.2.37)
ПВ ау 2
Внося сюда вместо 2 значение (3.2.31) и учитывая, что сіу/сіх=п‚ по-
лучим
‘ШВ._Ё___Ё_ (3238)
[}в ” и‘ЁЗ—(ис'д2
8:
По экспериментальным данным при скоростях потока Уоо<80 м/сек
величину п можно принять равной 0,46. В соответствии с этим значе-
нием
на и2
в = 4,35 В . В ‚ . (3.2.39)
ПВ (Рв—(ио?
Порядок проведения работы
1. Ознакомиться с устройством аэродинамической трубы и термо-
анемометра; проверить готовность их к работе.
2. При помощи координатника установить датчик термоанемометра
в рабочей части трубы и соединить его электрическим кабелем с изме-
рительной аппаратурой.
3. Провести балансировку измерительных мостов термоанемометра
и записать начальное показание По вольтметра постоянного тока.
4. Включить аэродинамическую трубу и после выхода ее на режим
установившегося движения воздуха записать показания вольтметров
постоянного тока ПВ и переменного тока сіПв.
5. По измеренным значениям По, ЦБ и сЦ/в при помощи формулы
(3.2.39) вычислить соответствующую начальную турбулентность.
Пример. Рассмотрим ре-
зультаты измерения термо— е .‘ “3? ””'”
анемометром начальнои тур-
булентности воздушного по-
тока в рабочей части до.
звуковой аэродинамической
трубы с открытой рабочей - _ - - --
частью (рис. 3.2.17). ' _ _ ›_ ‚ - .‘.
Проволочный датчик *; ‚» _» -. _ '
термоанемометра закреплял- ЁЁ же; ; :} Ё№Ё*”(№Ё -
ся на координатнике и уста— " %*“ _‘3;
навливался в рабочей части ;- '” $1.53 " _‘ъ `
тт- - "Щ,-мгтппг-тр „..
' '.` " ' >.
‚ .
Ъ
7.
.\
так, что продольная ось ч..-:“" __ > ЁЁ. ".“
датчика совпадала с осью _ „т…: _ №“
трубы. После включения _ __ 5754$ (><': " %.,
электрической схемы термо- _,} __
анемометра и балансировки ;- .::.
ИЗМЗРИТЗЛЬНОГО канала "
ВОЛЬТМЭТРОМ ПОСТОЯННОГО
тока было измерено началь—
ное напряжение [10:3 8. 1 б ' 2 чик е моаненомет а°
ВО ВРеМ„Я Работы аэродинд' а_ЁЁЁЁЁЁЁЁЁЁЁЁЁКЁЁ ЁЕЁдЁаительЁьЁё кабедтш‘? “5—т‘ермоа‘ёеі
мическои Трубы ЭТИМ ВОЛЬТ“ мометр; б—вольтметр постоянного тока; 7—вольтметр пере-
метром было измерено на- менного тока
пряжение Пв=5,5 в, а по
шкале вольтметра переменного тока зафиксирована величина сіПв=0,02 в. В соответ-
ствии с этими данными и с учетом значения ПО=0‚925 По=0‚925-3=2‚78 в начальная
турбулентность согласно (3.2.39)
0 , 02 5 , 52
= ——.-————=о‚021.
8 4’35 5,5 5,52—2,782
Рис. 3.2.17. Установка для определения начальной
турбулентности воздушного потока:
147
Работаздд
Определение угла скоса потока
Цель работы—определить угол между направлением скорости
потока в рабочей части аэродинамической трубы и ее продольной осью.
Общие сведения
Аэродинамические силы и моменты, действующие на модель лета—
тельного аппарата во время ее продувки в аэродинамической трубе, за—
висят от угла между вектором скорости набегающего потока Уоо ипро—
дольной осью модели, определяемого соответствующими у с т а н о в 0 ч -
н ым и углами атаки ауст и скольжения [Бут, гюд которыми закрепляется
Ю.
Рис. 3.2.18. Схема определения истинных углов атаки и скольжения
моцели летательного аппарата
модель в рабочей части. Эти углы обычно отсчитываются дозатором
относительно продольной оси трубы. В случае скоса потока в трубе
и сти н ный угол атаки свист будет больше (или меньше) установочного
на величину угла этого скоса Асс. Соответствующим образом должен
определяться и истинный угол скольжения Вист (рис. 3.2.18). На этом
же рисунке показаны знаки углов Асс и А6.
В общем случае для измерения углов скоса Асс и А|3 может быть ис-
пользован при малых скоростях потока насадок, предназначенный для
определения направления потока в трехмерном пространстве (см. рис.
2.2.15). Этот насадок закрепляется на координатнике и устанавливается
в рабочей части так, чтобы его ось совпадала с продольной осью аэро—
динамической трубы. Каждый приемник давления (дренажное отвер-
стие насадка) соединяется с соответствующим манометром. Во время
продувки записываются показания всех микроманометров.
Для определения угла скоса в вертикальной плоскости Асс исполь—
зуются результаты измерения при помощи верхнего и нижнего прием-
ников давлений (соответственно 1 и 3 на рис. 2.2.15). Если избыточное
давление в приемнике ] Ар1=р1—ратм‚ а в приемнике 3 это давление
Ар3=р3—ратм‚ то их разность бр1з=Ар1—Арз. Величина этой разности
зависит от угла скоса Аос, который определяется из тарировочного гра-
фика функции ]“2(а) (3.1.27’).
Нахождение угла скоса АБ в горизонтальной плоскости связано соп-
ределением избыточных давлений Ар4=р4—ратм и Ар5=р5—рдтм. Зная
разность бр45=Ар4—Ар5 и сумму Ар4+Ар5, можно при помощи тариро-
вочной кривой функции (№№) (3.1.28’) найти соответствующий угол
скоса А5.
При определении знаков углов Асс и А|3 следует учитывать величи-
ны давлений в дренажных отверстиях и показания соответствующих
манометров. Если согласно схеме на рис. 2.2.15 давление в нижнем от-
верстии 3 больше, чем в верхнем ], а давление в боковом отверстии 5
больше, чем в отверстии 4, то углы скоса Аос и А|3 рассматривают поло`
жительными.
№8
Экспериментальное определение направления скорости в трубе обыч-
но ведется для некоторого участка потока в его поперечной плоскости
(Ядра сечения) и осуществляется путем измерения давлений в соответ-
ствующих дренажных отверстиях насадка, размещаемого в различных
точках выбранного сечения рабочей части. Обычно насадок перемеща-
ют в двух взаимно перпендикулярных направлениях вдоль осей симмет-
рии сечения с шагом, равным 0,05—2—0,1 поперечного размера (диаметра)
этого сечения. Полученная информация об углах Аос и № оказывается
достаточной для оценки скоса потока в ядре сечения.
Порядок проведения работы
1. Ознакомиться с устройством аэродинамической трубы, насадка,
координатника и микроманометра, а также общей схемой измеритель-
ной установки.
2. Установить координатник и закрепить на нем насадок.
3. Расположить насадок в рабочей части так, чтобы его ось совпа-
дала с продольной осью аэродинамической трубы.
4. При помощи резиновых шлангов соединить микроманометры со
штуцерами насадка и проверить герметичность соединений.
5. Установить под некоторым углом наклона отсчетные трубки мик-
романометров, зафиксировать соответствующие коэффициенты шкал
Кп и начальные показания уровней и…,.
6. Включить аэродинамическую трубу и после выхода ее на режим
установившегося обтекания записать показания соответствующих мик-
романометров пп.
7. Определить разности уровней АИ, и №3, АШ и А/15, а затем вы-
числить значения функций і2(а) (3.1.27’) и (13203) (3.1.28’), по которым
из тарировочных графиков найти углы скоса Аос И АБ.
Пример. Определим углы
скоса потока в рабочей части __ ` ., {ёё :;
МЗЛОСКОРОСТНОИ ЗЭРОДИНЗМИЧВ- \__д—9'№"="г-<ч-‘='3'"` о.,
ской трубы с открытой рабо- “
чей частью, используя пятито-
чечный насадок (см. рис.
НЭСЗДОК ЗЗКРЕПЛЯЛСЯ Нд
"‘
2.2.15). Схема и общий ВИД ; `
о ›?
экспершлентальнои установки , Ё &? ;
показаны на ис. 3.2.19. :" 2
р „ $ 3 / 9
. _.}? - '
координатнике, а горизонталь-
ное расположение этого насад-
ка, как и всей трубы, выверя- «,
лось при помощи жидкостного __ .
.' "'-;. '-
‘ "","-...
„мда...... , …
уровня. Давления измерялись __, 723
четырьмя чашечными микрома- _.-,_ Х ___„ г …. ._
нометрами, тарировочные ко- __ * №№№* ]
эффициенты которых были ;. , ? '
приняты одинаковыми и рав- " Т:}; 5…… „Е…-__ _- «.=
ными Агтп=1‚0 (п=1, 3, 4, 5).
Для удобства расчетов были ,
установлены Одинаковые зна— Рис. 3.2.19. Устанрвка для измерения углов скоса
чения коэффициентов шкал потока в рабочеи части аэродинамическои трубы.
п=0‚4. 1—аэродинамическая труба; 2—пятиточечный насадок;
Перед включением трубы З—координатник; 4—соединительные шланги; 5+8—микро—
бЫЛИ зафиксированы началь_ манометры, 9—лабораторные барометр и термометр
ные уровни Нод всех микрома-
нометров, а во время ее рабо-
ты—соответствующие показания пп. Эти Данные измерений, а также результаты рас-
чета соответствующих разностей показаний (в мм) внесены в табл. А.
По значениям разности уровней можно подсчитать перепады давлений Ар… их раз-
ности бр13‚ бр45‚ суммы Ард—Арз, Ар4+Ар5 и отношения бр13/(Ар1—|—Ар3)‚ бр45/(Ар4—|—Ар5)_
При этом, учитывая, что у всех манометров одинаковые тарировочные коэффициенты
149
Таблица А
Номера отверстий | 1 | 3 | 4 5
//‚‚#Г_ "` ‚101 ‚11 А’И ИОЗ ‚13 Ада Н04 ‚14 [3/14 ‚105 ‚15 АЬБ
и…}…в
\ 5 ч,!
\ .
\`ЁЁЁ‘°/ 11 78 67 12 74 62 10 73 63 15 72 57
!
и коэффициенты шкал, можно при вычислении указанных отношений ограничиться зна-
чениями разностей уровней. В соответствии с этим
із (а) = 5/(67 + 62) = 0,039;
% (В) = 6/(63 + 57) = 0,05.
функций Г2(а) и ср2(Б) из тарировочных
А
° и в=—1°.
По вычисленным значениям графиков на
рис. 3.1.9 находим углы скоса Аос=—0,7
Работа 3.2.1
Исследование параметров газового потока
в ударной трубе
Цель ра б оты—определить скорость распространения ударной
волны и параметры газа в рабочей пробке ударной трубы.
Общие сведения
Для определения скорости движения ударной волны на некотором
участке трубы длиной Ь в ее стенке устанавливаются два ионизацион-
ных (или пьезоэлектрических)
5 датчика (рис. 3.2.20). При про-
хождении ударной волны на
выходе первого датчика появ-
ляется электрический сигнал,
д который поступает на цифро-
‚р. “__—"? 41/4 ‚__. вой частотомер и включает
Т!. __ устроиство отсчета времени.
& %. \ С @ \ Движение этои волны мимо-
” 1 2 10 3 второго датчика вызовет по—
_\_ явление другого электрическо-
> ШШШ го сигнала, который остановит
работу частотомера. По его
Рис. 3.2.20. Схема измерения параметров
газа в ударной трубе:
1—уларная труба; 2—датчики, регистрирующие
прохождение ударной волны (с формирующей
приставкой); 3—- цифровой частотомер; 4—пьезо-
датчик давления; 5—усилитель; б—электронный
осциллограф с фотоприставкой; 7—тензодатчик
давления; 8—тензостанция; 9—шлейфовый осцил-
лограф; 10— манометр в отсеке низкого давления;
11—термометр в отсеке высокого давления
шкале отсчета можно опреде-
лить время 15 прохождения уча-
стка пути между обоими дат-
чиками. В соответствии с этим
средняя скорость распростра-
нения ударной волны на этом
участке трубы
с. = и. (3.2.40)
Соответствующее число Маха ударной волны
М1 = 08/31»
150
(3.2.41)
где скорость звука
“1 : Мій К1 Т1
определяется по известным параметрам газа 1:51, Къ Т1 в отсеке низкого
давления трубы (до момента разрыва диафрагмы) Полагая, что по-
ток в рабочей пробке не диссоциирован (при М1<6-:—7), можно по най-
денному числу М1 определить давление И температуру газа в этой проб-
ке, используя формулы теории скачков уплотнения при постоянных теп-
лоемкостях:
_ _РА 5.11_&_1 3243
Т2==Т1(1_1—131—1——1—_11 Р1)(1—+Ё1+1 Рв) . ( )
По этим значениям р2 и Т2 из уравнения состояния находится плотность
92_ _ Р2/(К2 Т-а)
Число Маха на участке потока за ударной волной (в рабочей проб-
ке) определяется из соотношения
м : &=; (154) [За (%+-1 + ’г1—1.22_)Г“2‚ 3.2.44
2 Р1 Р1 2Ё1 2іг1 Р1 ( )
в котором (12 —скорость звука в пробке:
[_
“2 : Ъ [32 На Тв
И Ц2—СКОРОСТЬ движения КОНТЗКТНОЙ ПОВЗРХНОСТИ:
Ре / 2/Ё1
и =а —— . 3.2.45
2 1(р1 ) \] (ё1+1)р2/р1+(1г1—1) ( )
Так как диссоциация отсутствует, то газовая постоянная № для га-
за за ударной волной может быть принята равной соответствующему
значению & в отсеке низкого давления.
При очень больших скоростях ударной волны (М1>6+7) парамет-
ры газа в рабочей пробке необходимо рассчитывать с учетом диссоциа-
ции и ионизации по заданным величинам м1, ‚01 и Т1 (см. [47]).
Все результаты теоретических расчетов можно сопоставить с экс-
периментальными данными измерения соответствующих параметров в
рабочей пробке, в частности давления ‚02. Измерение этого давления
осуществляется пьезоэлектрическим датчиком, выходной сигнал с кото-
рого поступает на усилитель, а затем на электронный осциллограф (см.
рис. 3.2.20). Применение осциллографической трубки с длительным
послесвечением позволяет фотографировать запись сигнала датчика с
экрана осциллографа.
Высокое давление ш в соответствующем отсеке ударной трубы из-
меряется обычными механическими или ртутными манометрами. Ма-
лое давление (вакуум) в отсеке низкого давления измеряется вакуум-
метрами со специальными электрическими датчиками (см. 5 2.1).
Температуры Т4 и Т1 в отсеках высокого и низкого давлений опре-
деляются до момента разрыва диафрагмы обычным образцовым ртут-
ным термометром или специальным измерительным устройством с тер-
мопарой (см. рис. 2.3.5).
По измеренным параметрам в обоих отсеках можно рассчитать от-
ношение Давле-ний в рабочей пробке и в отсеке низкого давления р2/р1‚
пользуясь уравнением (1.5.5).
Найденное значение р2/р1 из (1.5.5), которое решается методом по-
следовательных приближений, можно сравнить с соответствующей ве—
личиной, измеренной во время эксперимента.
151
Порядок проведения работы
1. Ознакомиться со схемой экспериментальной установки И проверить
готовность к работе всех элементов ее конструкции и измерительных
приборов.
2. Установить в стенке трубы ионизационные датчики и пьезодатчи-
ки давления.
3. Включить электропитание, прогреть электронные приборы иосу-
ществить их балансировку.
4. Смонтировать диафрагму, проверить надежность соединения от-
сека высокого давления с мультипликатором и баллонами со сжатым
газом; установить вакуумный насос и соединить его с отсеком низкого
давления.
5. Включить вакуумный насос и после достижения заданного давле—
ния р1 выключить.
6. С помощью мультипликатора заполнить газом отсек высокого
давления и повысить это давление до величины ‚04, при которой проис—
ходит разрыв диафрагмы. Установленным на мультипликаторе Мано-
метром зафиксировать величину ‚04 в этом отсеке.
7. Выключить мультипликатор и записать показания цифрового ча-
стотомера.
8. По результатам измерений рассчитать число М1, а также пара-
метры газа в рабочей пробке.
Пример. Определим параметры газа в Однодиафрагменной ударной трубе с диа-
метром разгонного канала 50 мм (рис. 3.2.21). В качестве толкающего газа был выбран
воздух; отсек низкого давления также заполнялся воздухом
. : - :.:-_ `— ‚___ .
:" . - .… ., ›.‚3
._:_; _. '-"Ё'. " \; ` _ _ .
. `": . " _ ‹.. " .- › : ,: . _ … __} . . ё ; Ё
‚ _ д.;: . .“ . {+. . . Ч : , ‚ц. . . {
‚.,-';!- . —_ _ '_
„‚:„9 -_ . м:: -
. к '
›; ‚ы.;-
. '- ‚“'—
" а _ ., …..
‚1 ; ч.: :.
М › :
пн.—‚ ' .. ' .
- .` %
Ё ‚139: _,.
‚. - .
. '1 “ :* 1;
` ’ - - ‚ .
' :" “Ё- ‹. _
* - :" ; %. `
> ›.'-_' '
' ‚М“ ""с- "
.- ' - 55:1: “' _ .
< . ›
_м
_
Рис. 3.2.21. Установка для измерения скорости ударной
волны:
1—ударная труба; 2—ионизационные датчики с формирующими
приставками
С помощью диффузионного масляного вакуумного насоса низкое давление в отсеке
трубы достигало величины р1=50 мм рт. ст. (0,068 кГ/смЁ). Температура газа в этом
отсеке принималась Татм =292 К.
В качестве диафрагмы использовался алюминиевый диск диаметром 80 мм и тол—
щиной 0,8 мм. Крестообразные риски глубиной 0,2 мм на этом диске обеспечивали
полное раскрытие диафрагмы и необходимую форму ее лепестков.
Ионизационные датчики устанавливались в двух отверстиях диаметром 40 мм, про—
сверленных в корпусе разгонного канала на расстоянии друг от друга Ь=1500 мм.
Внешний вид ионизационного датчика с формирующей приставкой показан на рис. 3.2.22.
Торцовая поверхность его цилиндрического корпуса выполнена по профилю канала
трубы. Диаметр электрода ионизационного датчика равнялся 5 мм, а промежуток меж-
ду ним и корпусом датчика составлял 0,5 мм.
Формирующая приставка позволяет получить с ионизационного датчика выходной
сигнал, который требуется для запуска (или остановки) отсчетного устройства цифро-
152
вого частотомера, работающего в режиме измерения промежутков времени между оди-
ночными импульсами. Минимальная величина этого промежутка времени, измеряемого
частотомером, равна 10 6 сек.
Воздух в мультипликатор подавался из воздушных баллонов с начальным давлени-
ем 150 атм. В момент разрыва диафрагмы термопарный термометр, установленный в
отсеке высокого давления, показывал температу-
ру Т4=298 К, а давление, зафиксированное ма- _ __,
нометром, было 154 кГ/см2. Атмосферное давле- :}; №5 :
ние во время опыта ратм=758 мм рт. ст. ' '
Время прохождения ударной волной рассто- Ё ?Ж . \‚_ =,
яния между датчиками, зафиксированное цифро- 12№` 1 ,
вым частотомером, 2‘=1,068- 10—3 сек. Так как Ё ‚ЗМ ‚ к _
датчики установлены на расстоянии Ь=1500 мм, 1 “к @ — ;
то средняя скорость ударной волны {5 .
сз = 1,5/(1‚068-10—3) = 1400 м/сек.
Так как СКОРОСТЬ звука В отсеке НИЗКОГО ДЗВ- РИС. 3…222 ИОНИЗЭЦИОННЫЙ
ления датчик:
_ 1—корпус; 2—центральный электрод;
01 =1/ [›4'287'292 _ 343 м/Секэ З—воздушный зазор; 4—фланец для
крепления; 5—штепсельный разъем;
то соответствующее число Маха д__ формирующая приставка
м1 = 1400/343 = 4,1.
По числу М1=4‚1 и значению Ё1=1,4 находим параметры газа в рабочей пробке:
&=_Щ4‚12_1›_4—_1=19‚45;
р1- 1‚4+1 1‚4+1
р2 =(р2/р1)р1 = 19,45-0,068 = 1,32 кГ/смг;
1+Щ19 45
Т„ : 1,4+1 ’ =з‚77;
Т1 1+ 1,4—1 1
1,4 + 1 ' 19,45
Т2 = (Т2/Т1)Т1 = 3,77-292 = 1100 К;
02 = 1,32-104/(287-1100) = 0,0419 кГ-сек2/м4.
Число Маха в рабочей пробке
1,4 —|- 1
2-1‚4
Рассчитаем отношение р2/р1 по измеренному начальному перепаду р4/р1=2280. Сог-
ласно (1.5.5), полагая &=&, и &=&, получим:
а1/а4 = 1/т1/т4 = 1/292/298 = 0,99;
1,4—1 о, 9 _1 —2-1.4/‹1‚4—1›
2280=&11_ ( ) 9 (172/131 ) } _
И] 1/2-1‚41/2-1‚4+‹1‚4+опыт—1)
Решая это уравнение, найдем отношение р2/р1=19,6, которое менее чем на 1% отлича-
ется от соответствующего значения, вычисленного по экспериментальным данным
м —$‹19 45 1)[19 45( + 1’4—1 19 45 )Гш 157
2—1‚4 ’ , 2.1‚4 , ` "— ’ .
ГЛАВА |У
АЭРОДИНАМИЧЕСКИЕ ИССЛЕДОВАНИЯ
НА МОДЕЛЯХ КРЫЛЬЕВ
Важнейшим элементом летательного аппарата является крыло, ко-
торое в основном определяет его аэродинамические характеристики.
Исследование этих характеристик непосредственно связано с изучением
аэродинамики изолированных крыльев. При этом найденные для этих
крыльев аэродинамические силы и моменты, вообще говоря, не совпа-
дают с теми значениями, которые будут у них в случае комбинации
с другими элементами летательного аппарата —корпусом (фюзеля-
жем), стабилизирующими или управляющими элементами летательного
аппарата. '
Причина такого явления заключается в интерференции—взаимо—
действии с крылом всех этих элементов, изменяющем аэродинамические
свойства изолированного крыла. Истинные аэродинамические харак-
теристики летательного аппарата, состоящего, в частности, из комбина—
ции корпуса и крыла, могут быть получены сложением соответствую-
щих значений этих характеристик для изолированных корпуса и
крыла и некоторой добавочной величины—интерференционной по—
правки.
Аэродинамические свойства крыла при заданных условиях движения
(скорость, углы атаки и скольжения, высота полета) зависят от его
формы в плане и вида профиля. Исследования обтекания
крыла сводятся в основном к определению количественной зависимости
между его аэродинамическими силами и моментами и геометрическими
параметрами, характеризующими форму крыла в плане и вид про-
филя.
Для заданной формы в плане аэродинамические характеристики мо—
гут быть определены, если найдены соответствующие их значения для
ряда профилей, выбранных вдоль размаха крыла (точнее, для элемен-
тарных прямоугольных крыльев с такими профилями). При этом у пря-
моугольного крыла бесконечного размаха такие его характеристики,
как коэффициенты подъемной силы, момента тангажа, будут теми
же, что и у профиля. У крыла же конечного размаха с произвольной
формой в плане аэродинамические параметры могут оказаться довольно
близкими к соответствующим их значениям для профиля.
Отсюда понятна большая важность исследований обтекания профи—
лей, занимающих особое место в экспериментальной аэродина-
мике
Определение аэроцинамических коэффициентов крыла (или его
профиля) при продувках МОДелей в аэр0динамических трубах может
производиться либо с помощью аэродинамических весов, либо путем
измерения давления на обтекаемой поверхности. Такое измерение дав-
ления и нахождение его распределения является одним из наиболее
распространенных экспериментов, позволяющим не только определить
соответствующие аэродинамические коэффициенты, но и изучить физи-
ческую картину обтекания. Без этого изучения нельзя успешно решать
задачи управления процессами взаимодействия между газом и движу-
щимся в нем летательным аппаратом, в частности задачи о наивыгод-
нейшей форме крыльев и профилей с заданными аэродинамическими
свойствами.
5 4.1. ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ
АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ПРОФИЛЯ
Работадлл
Определение аэродинамических коэффициентов
профиля крыла в дозвуковом потоке
по измеренным давлениям на его поверхности
Цель р & боты—найти распределение давления по профилю кры-
ла; вычислить коэффициенты подъемной силы, лобового сопротивления
и продольного момента (момента тангажа), а также критические числа
Маха и некоторые другие аэродинамические характеристики профиля
в дозвуковом потоке.
Общие сведения
Азроцинамические коэффициенты. Воздействие воздушной среды на
Движущееся в ней крыло приводит к появлению на его поверхности не—
прерывно распределенных сил от давления и касательного напряжения.
С учетом этого любую аэродинамическую силу и момент можно пред-
ставить в виде суммы двух составляющих, одна из которых зависит от
распределения давления, а другая — от касательного напряжения.
Соответствующим образом можно выразить аэродинамические коэф—
фициенты сил и момента:
сх : схр + ох,; (4.1.1)
с}, = сур + с“; (4.1.2)
т_2 : тд, —|— тв„ (4.1.3)
где схр, сур, тгр —соответственно коэффициенты лобового сопротивле—
ния, подъемной силы и продольного момента от давления; еще, су„
тг, — аналогичные коэффициенты сил и момента, вызванных трением.
Исследования показывают, что составляющие аэродинамических
коэффициентов сил и моментов, вызванных давлением, обычно бывают
наибольшими по величине и именно эти составляющие в основном опре-
деляют аэродинамические свойства профиля.
Распределение давления по профилю опытным путем получают ча-
ще всего в результате продувок дренированных моделей крыльев в аэро-
динамических трубах. Это распределение давления графически пред-
ставляют с помощью векторной и координатной диаграм м,
причем в качестве величины, характеризующей давление, используется
безразмерный параметр р, равный избыточному давлению р—роо, отне—
сенному к скоростному напору рожа/2 набегающего (невозмущенного)
потока:
р = 2 ‹р_р…>/(р…иі.). (4.1.4)
Этот безразмерный параметр называется к 0 ф ф и ц и е н т о м д а в-
ления. На векторной диаграмме коэффициенты давления изобража-
ются в виде векторов, нормальных к контуру профиля и направленных
внутрь или наружу, если значения р соответственно положительные
или отрицательные. В качестве иллюстрации на рис. 4.1.1 показана
такая векторная диаграмма для симметричного профиля, принадле—
жащего тонкому крылу, обтекаемому под нулевым углом атаки.
На диаграмме передняя точка А является т 0 ч к о й п о л н о г о т о р-
можения (критической то чкой), для которой коэффициент дав-
ления несжимаемой жидкости в соответствии с уравнением Бернулли
УЗО/2 + р../Р.. = ре./Р.. (4.1-5)
равен 790 = 2 (ро —р…)/(р..\/Ё.) = 1-
155
Уравнение (4.1.5), записанное для двух сечений струйки (Одно из
них выбрано в набегающем потоке, а другое—в возмущенном течении
около профиля), позволяет получить формулу, связывающую местную
скорость У с коэффициентом Давления:
У : У... 71—15. (4.1.6)
Рис. 4.1.1. Векторная диаграмма распределения коэффици—
ента давления при обтекании симметричного профиля не-
сжимаемым потоком под нулевым углом атаки:
!, !У— области течения, где местная скорость меньше скорости на—
бегающего потока (У<Уоо ); П, !!!—области, в которых У>У°о
В соответствии с этой формулой течение в областях 1 и П/ (см.
рис. 4.1.1) характеризуется скоростями, меньшими, чем в невозмущен-
ном потоке, поскольку, как видно из диаграммы, коэффициенты р здесь
5 положительные (например, вточ-
ке задней кромки В), а в обла-
‘ ’ стях ]! и 111— скоростями, боль-
х_цими, чем в этом потоке, так как
3: р отрицательные. Причем в точ-
33 как 0, где эти коэффициенты ми—
Ь нимальные, скорость будет наи-
И большей; В точках С и Е на диа-
,. га:/Ь грамме р=0‚ и соответствующая
местная скорость равна скоро-
сти набегающего потока.
‘ Координатная диаграмма рас-
пределения давления строится
Бис. _4.1.2. Координатная диаграмма таким образом, ЧТО ПО ОСИ абс-
Р=1° (Х) ПРИ НулеВОМ угле атаки симмет- цисс откладываются отношения
РИЧНОГО Профиля координат точек профиля х к его
хорде 19, а по оси ординат—ко-
эффициенты давления р, На рис. 4.1.2 показана координатная диаграм—
ма, которая характеризует распределение коэффициента давления
около профиля — такое же, как на рис. 4.1.1.
При движении под углом атаки распределение давления по профилю
будет различным на его верхней и нижней сторонах. Соответствующие
векторная и координатная диаграммы приведены на рис. 4.1.3 и 4.1.4.
Они характеризуют распределение давления при условии, что на про-
филе всюду скорости дозвуковые. Как видно, на значительном участке
разрежение на верхней стороне профиля при а>0 больше, чем на ниж-
ней. Это различие в разрежении является определяющим фактором
<!
8
асс:
52
||
ФП
156
в возникновении подъемной силы при дозвуковых скоростях обтекания.
Так же, как при нулевом угле атаки, и при произвольном его значе—
нии можно указать для профиля точку полного торможения, в которой
скорость равна нулю, а коэффициент Давления имеет предельное значе-
Рис. 4.1.3. Векторная диаграмма профиля при ОНЕО
ние (для несжимаемой жидкости, как указывалось, это значение равно
единице). Это точка при положительных углах атаки лежит на нижней
стороне профиля (см. рис. 4.1.3), а при отрицательных—на верхней
стороне.
Как правило, точку полного торможения найти непосредственно
опытным путем не удается, однако по характеру распределения давле-
ния можно установить, в каком
месте на профиле она располо- "д
жена. С этой целью используют- ,
ся векторная и координатная
диаграммы, при построении кото-
рых путем интерполяции и нахо-
дится такая критическая точка.
Рассмотрим формулы, позво-
ляющие определить для профиля
составляющие коэффициентов
подъемной силы, лобового сопро-
тивления и продольного момента
от давления. На рис. 4.1.5 пока-
зан профиль, принадлежащий
участку прямоугольного крыла с
единичным размахом.
Выделим на этом участке эле-
ментарную поверхность сі$=сЦ><
><1. По нормали к ней действует
элементарная сила от избыточно-
Рис. 3.1.4. _Координатная диаграмма
р=і(х) профиля при осэЬО:
1—профиль; 2—положительное направление
ГО давления (р_рт) СЦ- ПроеКЦИЯ обхода; з—верхняя сторона профиля; 4—ниж—
этой силы на нормаль к хорде, НЯЯ трона ПРОФИЛЯ
совпадающей со связанной осью
координат Ох, представим в виде (Е—р…)аісозв или, учитывая, что
а?! соз [3=а?х и р—роо=рсіоо‚ запишем ра…сіх. Интегрируя это выражение
по х, получим составляющую нормальной силы от давления
АТР : (100 фрай. (4.1.7)
Криволинейный интеграл в (4.1.7) вычисляется при условии, что
положительным является направление обхода профиля против часовои
стрелки.
157
Нормальная сила может быть выражена также формулой
Пр : №6100 17, (4.1.8)
где сыр — коэффициент нормальной силы от давления. С учетом (4.1.7)
и (4.1.8)
от, : фра}, (4.1.9)
где х=х/Ь. Как видно из формулы (4._1.9), коэффициент СЫр определяет-
ся на координатной диаграмме р=;°(х) (см. рис. 4.1.4) площадью меж-
ду кривыми распределения
давления на верхней и ниж-
ней сторонах профиля.
Таким же путем можно
найти составляющую про-
дольной (осевой) силы про--
филя Кр (или ее коэффици—
ент свр), зависящую от
распределения давления.
Проекция элементарной си-
лы от избыточного давления
на направление хорды про-
филя крыла равна (р—
——роо)сі! зіп [3 или, учитывая,
что сіізіп В=сіу и р—роо=
=рсіоо‚ — величине ра…ау-
о _ Ве ТИКЗЛЬНЗЯ КОО И-
РИС- 4-1-5- К Определению сил и момента, ден- (у - р рд
ствующих на профиль, по известному распре- ната’ связанная С Профи—
делению давления: леМ)— ИнтеГРИРУЯ ПО % ПО“
лучим продольную силу
1%, = 4,95 Блу. (4.1 .10).
] —— крыло; 2 — профиль; 3 — средняя линия; 4 — хор-
да профиля
Так как эта сила
Кр=0кр4„д› (4.1.11)
то с учетом (4.1.10) можно получить для коэффициента продольной
силы от давления зависимость
вкр = 995417, (4.1.12).
где у=у/Ь. Интеграл в (4.1.12) может быть вычислен графически пу—
тем определения площади между кривыми, характеризующими измене-
ние коэффициента давления на верхней и нижней сторонах профиля
в зависимости от координат точек у (рис. 4.1.6).
По найденным аэродинамическим коэффициентам в связанных осях
определим соответствующие коэффициенты в поточных координатах
(рис. 4.1.7):
сур : см, соз ос —с№ вт 04;
схр : с№ 51пос + от, соз ос.
(4.1.13)
Для летных углов атаки, не превышающих значений о=10+12°`,
можно написать:
Сур/УСМ,),
с : сур (ос°/57‚3°) —|— окр.
хр
(4.1.14)
158
В соответствии с (4.1.14) и (4.1.9) коэффициент подъемной силы
су„ : 56545. (4.1.15)
Получим теперь зависимость для расчета составляющей коэффици—
ента продольного момента тир от давления, определяя этот момент от—
носительно точки А, лежащей на пересечении хорды с профилем (см.
рис. 4.1.5). Будем считать момент
положительным, если он увеличива-
ет угол атаки.
Величина момента от силы, дей—
ствующей на элементарную пло—
щадку (1$, равна
—— [(р—р…) ФС] х + [(р—рю) ау] %
_ !
р…… +…—
_Рис. 4.1.6. _Коорд_инатная диаграм- Рис. 4.1.7. Схема действующих на
ма р:”… профиля: крыло аэродинамических сил в по-
і—профиль; 2—положительное направ_ ТОЧНОИ И СВЯЗЗННОИ СИСТЗМЭХ ОСЗИ
ление 06х0да; З—замкнутая область, координат:
имеющая положительную площадь;
4—замкнутая область с отрицательной 1—профиль крыла; 2 —центр давления
площадью
а результирующий момент
МЦ, = 55 (р — р…) (— хсіх + учу).
Производя здесь замену ‚к)—роо=,5(]оо и М2р=т2ра°одд‚ получим .за-
висимость для коэффициента момента
_ те„ = 0,5. 56,34)? _ 0,5 ф Бад-**. (4.1.16)
Для тонкого малоизогнутого профиля можно пренебречь величиной
усіу по сравнению с величиной хсіх, и тогда
_тгр : 0,5. 45,3452. (4.1.17)
Составляющие от трения полных коэффициентов подъемной силы и
продольного момента очень малы, поэтому с достаточной степенью точ-
ности можно принять для соответствующих их значений:
су=ф5сьё (4.1.18)
——т2 : 0,5. ЭББаЕ2—0‚5фдад2. (4.1.19)
Для тонких малоизогнутых профилей
__ тг : 0,5. фы)? (4.1.20)
159
Удельный вес составляющей от трения в суммарном сопротивлении
может быть различен. Для тонких профилей большую часть полного
сопротивления составляет сила трения; с увеличением их толщины воз-
растает доля сопротивления от давления.
Сопротивление трения профиля можно найти, если известно распре-
деление на нем касательных напряжений, аналогично тому, как это
было сделано при определении сопротивления от давления. Следует,
однако, отметить, что экспериментальное нахождение распределения
касательных напряжений по обтекаемой поверхности представляет по
сравнению с измерением давления более сложную задачу. Обычно при
определении силового воздействия используют метод измерения сум—
марных сил трения или же соответствующие приближенные расчетные
зависимости.
Расчет аэродинамических коэффициентов профиля в несжимаемом
потоке. Как показывают исследования, при безотрывном обтекании про-
филя несжимаемым потоком его коэффициенты подъемной силы и про-
ДОЛЬНОГО МОМЭНТЗ В ДИЗПЗЗОНЭ ЛЭТНЫХ УГЛОВ атаки (1 определяются СО-
ОТВЕЪТСТВЕННО ЗЗВИСИМОСТЯМИЕ
су=сЁ(ос—ос0); (4.1.21)
тз : т20 —|— тгсу су, (4.1.22)
в которых с; =дсу /доъ‚ тЁу =дт2/дсу — производные от коэффициентов
подъемной силы и момента соответственно по а и (:у (эти производные
принимаются постоянными для данного профиля); тд,—коэффициент
момента при нулевой подъемной силе (су=0); осо—«угол нулевой
подъемной силы».
Производная с; в (4.1.21) может быть определена по следующей
приближенной зависимости:
с? : 2л (1 + 0,77 5) 1/ 1 + (7/2)2 , (4.1 .23)
где 7=і/Ь; Д=А/Ь —соответственно относительная кривизна и толщи—
на профиля (см. рис. 4.1.5).
Для симметричных профилей величина і=0, а для несимметричных
профилей, обычно используемых в летной практике, эта величина хотя
и отлична от нуля, но оказывается весьма малой, так что значением
(772)? по сравнению с единицей можно пренебречь. В соответствии
с этим
с; : 2л(1 + 0,773». (4.1 .24)
_ Для очень тонких профилей (Д<<1), как и для плоской пластины
(А=О)‚ можно принять
в? : 2л. (4.1.25)
«Угол нулевой подъемной силы» связан с относительной кривизной
профиля зависимостью [28]
а, = _- 27, рад. (4.1.26)
Коэффициент подъемной силы иногда определяют по приближенной
формуле
0), = (Дос—осо), (4.1.27)
в которой од:—1,6і, род:—Эт, град [28]. Коэффициент а в (4.1.27)
определяется опытным путем для каждого профиля и зависит от угла
заострения его задней кромки, числа Ке°о=У°сЬ/ук_‚ положения на про-
160
филе точки перехода ламинарного пограничного слоя в турбулентный
[21]. Это значение а оказывается несколько меньшим теоретической
величины а=с3° в (4.1.21).
Зависимость т2=і(су) [см. (4.1.22)]‚ линейная в диапазоне летных
углов атаки, может определяться по теоретическим значениям т…:
=—лі и тіу =—О,25. При этом, как показывают экспериментальные
исследования, коэффициенты тю и т?… полученные из опыта и завися—
щие от тех же факторов, что и а, оказываются, подобно этой величине,
С
несколько меньшими теоретических. В частности, значение тгу для
большинства профилей в несжимаемом потоке составляет —(0‚22+
0,25).
Рассмотрим расчет сопротивления. Известно, что составляющая
этого сопротивления от Давления при безотрывном дозвуковом обтека—
нии идеальной (невязкой) жидкостью равна нулю (парадокс Эйлера —
Даламбера). В реальных
условиях обтекания вяз- 2'103(с${)м _в
кон средои и при сохра- "“
нении условия безотрыв- :
ности произойдет пере—
распределение давления
и появится в дополнение
к трению составляющая
силы от давления. При
этом для тонких вытяну-
тых профилей с малыми
углами атаки эта состав—
ляющая будет малой
и сопротивление в основ-
ном будет обусловлено
действием сил вязкости. !
Мыдщтчт
Соответствующий ко- 0
эффициент сопротивле- ! ? Ш- Не„
ния трения схт=
=Хдс/(С]оо$пр) (где $пр— Рис. 4.1.8. График зависимости (сх;)м°°=0=
Плошадь поверхности пря- =?(Кеоо, 3215) для плоской пластинки в несжи—
МОУГОЛЬНОГО крыла еди— маемом потоке
ничного размаха с задан-
ным профилем) может
определяться по следующей эмпирической формуле [28‚ 30]:
схі=2(схі)мш____0пд‚ (4.1.28
где 2(сх,‹)мо°=о—удвоенный коэффициент трения плоской пластины
единичного размаха с шириной, равной хорде профиля, и с таким же,
как у профиля, положением точки перехода ламинарного пограничного
слоя в турбулентный; 11.13 — некоторый поправочный коэффициент.
Значение 2(Схі)моо=о можно найти для малых дозвуковых скоро-
стей по графику на рис. 4.1.8 в зависимости от числа Рейнольдса Неоо=
= У…Ь/уоо и относительной координаты точки перехода х‚=х‚/Ь = Кеша/Ке…
(Нед,—критическое число Рейнольдса, которое принимается равным
5-105).
Для приближенного определения коэффициента (сх,)м„=0 гладких
профилей (при отсутствии шероховатости) можно воспользоваться для
ламинарного пограничного слоя формулой
(Схі)м°о=о : 1,29/1/К—еоо, (4.1.29)
11—927 161
а для турбулентного пограничного слоя — формулой
(симка) = 0,075/Ё/ЁЁ0— (4.1 .30)
Коэффициент ПЖ (4.1.28) учитывает влияние на сопротивление отно-
сительной толщины профиля А и положения точки перехода. Значения
!,!
10
0 0,02 0,04 0,06 0,08 0,10 А
7
Рис. 4.1.9. График для определения коэф-
фициента 7] А = {(А, х,)
—П‚7
—0.6
0
0,1 0,2 0,3 0,4 0,5 0,6 Мао
Рис. 4.1.10. Сравнение различных способов оп-
ределения коэффициента давления в сжимае-
мой ЖИДкости:
] —-— эксперимент; .? —- по Карману -— Тзяну; 3 —— по
Прандтлю —— Глауэрту
этого коэффициента приведены
на рис. 4.1.9 [28, 30]. Для тон—
ких профилей (А=0,02—:—0‚12)
с ламинарным пограничным
слоем можно принять 1173 =].
При полностью турбулентном
пограничном слое зависимость
1113 от А оказывается близкой
к линейной и хорошо аппрок-
симируется формулой
пд =1+ 2,77 21. (4.131)
Влияние сжимаемости на
распределение давления._ Для
тонкого профиля при неболь—
ших углах атаки влияние сжи-
маемости на давление может
быть учтено при помощи ф о р -
мульт Прандтля—Гла-
у 3 р т а:
Реж : Бнсжп/ 1 _ Мс2>о ‚ (4.1.32)
в которой рнСЖ и реж—коэф-
фициенты давления для рас-
сматриваемой точки профиля
соответственно в несжимае-
мом и сжимаемом потоках.
Зависимость (4.1.32) мож—
но рассматривать в качестве
первого приближения при рас—
чете коэффициента давления
в сжимаемом потоке по _с_оот-
ветствующему значению рнсж.
Более точные результаты, от—
носящиеся к утолщенным про-
филям и увеличенным углам
атаки, получаются по формуле Кармана—Тзян а:
Бон.—_— р.…. 2 _ (4.1.33)
. Мос р….ж
1/1— м5. + _- 2
1+ 1/1—11/13о
Сравнение экспериментальных результатов и данных расчета по
формулам (4.1.32), (4.1.33) показано на рис. 4.1.10.
Применение этих формул приводит к весьма большой погрешности
162
при определении коэффициента давления в точке полного торможения
[так, например, при Моо=0,8 формула (4.1.32) дает значение этого ко—
эффициента 1,67, а формула (4.1.33) —значение 1,26 вместо 1,17].
В этой точке для Моо<1 коэффициент давления можно рассчитывать
по формулам:
_ _ . С
рОСЖ _ 1 + Бр, о /
МЁО 2 _ ,а м4 ? //
Р’Р/`“ 4 + 24 °°' 1.1
1.3
(4-1-34) 0 0.2 0,4 0,6 0,3 м.„
ДЛЯ 12:1,4 значения Рис. 4.1.11. Поправка, учитывающая влияние
вр приведены на рис. сжимаемости на давление [ер=;°(М°° )]
4.1.11
Более совершенный
метод расчета коэффи-
циента давления с уче-
том сжимаемости при до—
критических скоростях об—
текания (М…<М°°Кр) раз-
работан акад. С. А. Хри-
стиановичем. Этот расчет
ведется следующим об-
разом. По известному
числу Моо сжимаемого по—
тока из таблиц газодина-
мических функций [13]
или по формуле
(14+ 1) Ма,/2
АОС: 2
1+(1е— 1) МОО/2
Рис. 4.1.12. Распределение коэффициента давле-
(4.1.35) ния по профилю в несжимаемом потоке и пере—
счет этого распределения с учетом сжимаемости
вычисляем относитель- по методу акад. С. А. Христиановича:
НУЮ скорость Ж®=У°°/а*_ 1—профиль ЦАГИ; 2—несжимаемый поток; З—сжимае-
й п 0
По этому значению ?… из МЫ от к
табл. 4.1.1 определяем
число Аоо (относительную скорость некоторого фиктивного несжимае-
мого потока), а затем находим соответствующее местное число
[
А = А... 1 1 — р…,ж (4.1.36)
в той точке, где известно значение рнсж. Далее из табл. 4.1.1 по найден—
ному значению А находим ?…— местную относительную скорость, а по
формуле
(4.1.37;
___ 1—(4—1)›.2/(4+1) шие—1) : по.)
р р°° [ 1_(ь—1)7.30/(ь+1)} р°°“(^оо)
вычисляем абсолютное давление{ функции ЛЭП») и 1130100) находятся из
таблиц га30динамических функций [13] }. Наконец, воспользовавшись
выражением
2 (р —р…) : 200/10… — 1)
р.. 73. №3. '
5 : (4.1.33;
11* 163
подсчитываем коэффициенты давления реж в данной точке профиля,
расположенного в сжимаемом потоке с числом МОО.
На рис. 4.1.12 показана для профиля (типа ЦАГИ Д2 11% с относи-
тельной толщиной А=0,11) векторная Диаграмма коэффициентов дав—
ления в несжимаемом потоке при а=7,5°, а также соответствующих
значений этих коэффициентов, полученных в результате пересчета на
Мю=0,43 по методу акад. С. А. Христиановича.
Таблица4іі
А. М (А.) А А. М (А.) А
0 [ 0 0 0,675 0,6410 0,6080
0,05 0,0457 0,0500 0,700 0,6668 0,6251
0,10 0,0913 0,0998 0,725 0,6929 0,6413
0,15 0,1372 0,1493 0,750 0,7192 0,6568
0,20 0,1832 0,1983 0,775 0,7458 0,6717
0,25 0,2294 0,2467 0,800 0,7727 0,6857
0,30 0,2759 0,2943 0,825 0,7998 0,6988
0,35 0,3228 0,3410 0,850 0,8274 0,7110
0,40 0,3701 0,3862 0,875 0,8552 0,7223
0,45 0,4179 0,4307 0,900 0,8834 0,7324
0,50 0,4663 0,4734 0,925 0,9119 0,7413
0,55 0,5152 0,5144 0,950 0,9409 0,7483
0,60 0,5649 0,5535 0,975 0,9702 0,7546
0,625 0,5901 0,5722 1,000 1,0000 0,7577
0,650 0,6154 0,5904 —— —— ——
Аэродинамические коэффициенты профиля в дозвуковом сжимаемом
потоке. Для определения аэродинамических коэффициентов профиля
в дозвуковом сжимаемом потоке можно использовать данные об обте-
кании того же профиля несжимаемой средой. При этом для тонких про-
филей и небольших углов атаки расчет коэффициентов подъемной силы
и продольного момента можно вести на основе формулы Прандтля —
Глауэрта, аналогичной зависимости (4.1.32) для коэффициента дав—
ления:
в)„ж : су„сжЛ/1 _МЗ. ; (4.1 .39)
тгсж : тгисжп/1 _МЁО — (4.1.40)
Исследования акад. С. А. Христиановича позволили получить более
точные зависимости:
сусж : су…,ж Ці/ 1 _— мё; (4.1 .41)
т… = т..…. и!” 1—МЁоз (4.1.42)
в которых
1. = 1 + шота/мікр- (4.1.43)
Влияние сжимаемости на коэффициент лобового сопротивления про-
_
филей можно оценить по графику функции схож/с,…сж=—і(Мсо, А), пред-
ставленному на рис. 4.1.13, либо по формуле К. К. Федяевского
ох.../с...... = 1/1/1 + 0,2м‘і. . (4.1.44)
Сжимаемость изменяет положение центра давления профиля (коор-
дината этого центра хц_д отсчитывается от передней кромки вдоль хор-
164
ды, см. рис. 4.1.7). Из (4.1.41) и (4.1.42) следует, что в сжимаемом по—
токе относительная координата центра давления хц_д=хц_д/Ь, называе-
мая также коэффициентом центра давления и обозначаемая сц_д, опре—
ДЕЛЯЕТСЯ СООТНОШЕНИЕМ
(СЦ-д)сж : (сц.д)нс›к [" (4…145)
Где (сц.д)сж : '— ’пгсж/сусж И (СЦ-д)нсж : _тгнсж/сунсж-
Из (4.1.45) следует, что центр давления в сжимаемом потоке по
сравнению с несжимаемой средой смещается к задней кромке.
Аналогично изменяется положение фокуса профиля, безразмерная
координата которого хр=хр/Ь для тонких малоизогнутых профилей оп-
ределяется производной дт1/дсу.
Определение критического числа Маха М…кр. Приведенные формулы,
по которым рассчитываются аэродинамические коэффициенты в дозву-
сц: сж
С:с „… 41:0‘15 ИЦ?
Ъ!
,…\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\
\ \\;
„в Х_- “8 0 ‘\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\.\д ‚ “і
‚ О Бтьп нсж """"
0.9 _
О 9-2 0,4 3.6 м..., ртспкр —————————
РИС. 4…113 влияние сжимаемости на РИС. 4…114 Координатные Диаграммы Ъ:
кг;}:фЁЁЁЗЁЁейЛЁЁЁЁЁЪЁойСОЁЁЁЁЁЁЁ =і'(х) для симметричного профиля, обте-
каемого под нулевым углом атаки несжи-
маемым (кривая 1) и сжимаемым потоком
=Мшкр; кривая 2)
00
ковом сжимаемом потоке, справедливы при условии, что число Маха
набегающего потока Моо меньше критического значения это—
го числа Моокр. Критическому числу Маха соответствует такая ско-
рость набегающего дозвукового потока, при которой на профиле в не-
которой точке местная скорость становится равной скорости звука
в потоке. При докритическом обтекании (М…<Моонр) местная ско-
рость всюду около профиля меньше скорости звука, т. е. такое обтека—
ние будет чисто дозвуковым.
Величина М…нр зависит от относительной толщины профиля, рас-
стояния от передней кромки до места его максимальной толщины, фор-
мы профиля, угла атаки. В соответствии с исследованиями акад.
С. А. Христиановича местная звуковая скорость на профиле возникает
в той его точке, где при Моо=0 достигается минимальное давление, ко—
торому соответствует коэффициент Ршіп нож (рис. 4.1.14). Зная этот ко-
эффициент, который определяется, например, в результате продувок
профиля в малоскоростной аэродинамической трубе, можно найти чис—
ло М…кр, являющееся для любого профиля функцией только величины
рШіПНСЖ-
Соответствующий расчет ведется следующим образом. По значению
??…… нож при помощи формулы
Б…,ж : 1 _ А2/АЁО, (4.1.36’)
165
в которой, согласно Данным табл. 4.1.1, величина А=0,7577 (эта вели-
чина соответствует значению ?ь=1), находим относительную скорость
фиктивного набегающего потока:
А... = 0,7577// 1 —5`…… …. (4.1.46)
Далее из табл. 4.1.1 по найденной величине А… находим относитель-
ную критическую скорость ?Ъоокр И вычисляем соответствующее критиче—
ское число Маха:
2х2 іг 1
м : “”*"/< +) . (4.1.47)
оокр 1—(іг— 1) АЗОКР/(іг—і— 1) °
4. М.„ „, { д
1 г
(0,9 :
- ‚1 .“ г
50,8
?
07 :;
’ \
0,6. \\
. г\
0,5 . \\
@, ` _=-— Рис. 4.1.16. Координатная диаграмма Ъ=і (1?) для
0 -0‚5 —1,0 —1,5 ртвпнсж профиля при закритических числах Маха (Моо >
>М :
Рис. 4.1.15. Зависимость Моокр °°кр)
— і—профиль; 2—верхняя и 3—нижняя поверхности про—
от р…… нсж филя; 4—место скачка
Это же значение числа Маха можно найти из табл. 4.1.1. Расчет зна-
чительно упрощается, если для определения Моонр по значению коэффи-
циента ршш нож воспользоваться графиком Христиановича (рис. 4.1.15).
Для чисел МОО, изменяющихся в интервале МЮКР<МЮ< 1, обтекание
профиля характеризуется тем, что в его окрестности возникает зона
сверхзвуковых скоростей и, как следствие, образуется местный скачок
уплотнения (рис. 4.1.16). Это приводит к перераспределению давления
в хвостовой части профиля и появлению дополнительного сопротивле-
ния, которое называется в о л н о в ы м. По данным Я. М. Серебрийско—
то и С. А. Христиановича, коэффициент этого сопротивления при
МЮ<М°°нр+ОДБ
сх = А (мо, — М…кр)3› (4.1.48)
где А ——коэффициент, зависящий от вида профиля И характера его об—
текания (согласно эксперименталы-гым данным А=11).
Измерение давления на. профиле и вычисление соответствующих аэро-
динамических характеристик. Для исследования распределения давления
по профилю используется дренированная МОДель крыла, имеющая пря-
моугольную форму в плане и удлинение 7»=[/д/>‚5. При таком удлине—
нии крыла его профиль, расположенный в середине, не испытывает
влияния боковых кромок и рассматривается как профиль, принадлежа-
щий крылу бесконечного размаха. На поверхности модели в централь-
ном сечении, совпадающем с профилем, расположены дренажные отвер-
стия с малым диаметром порядка 0,5 мм, воспринимающие давления,
которые измеряются манометрами (рис. 4.1.17). Положение относитель-
166
но передней кромки каждого дренажного отверстия, имеющего соответ—
ствующий номер, определяется относительными координатами х=х/Ь
и у=у/Ь (рис. 4.1.18).
Модель крыла устанавливается в рабочей части аэродинамической
трубы на специальном приспособлении, позволяющем изменять углы
атаки (см. рис. 4.1.17).
При этом для дозвуко—
вых аэродинамических
труб размеры модели
определяются пло-
щадью сечения рабо-
чей части и значения-
ми углов атаки, при
которых проводятся
исследования. В част-
ности, для малоскоро—
стных дозвуковых аэ—
родинамических труб
«загромождение» рабо-
чей части не должно
превышать 10%. С ро—
стом скорости потока
в трубе величина до-
пустимого «загромож-
Рис. 4.1.17. Схема установки для проведения дренаж-
пых испытаний модели крыла бесконечного размаха
ДеНИЯ» уменьшается В Дозвуковом потоке:
[111.В03Д6ЙСТВИ6 на і—ьтодель; 2—дренажныеиотверсти3; 3—медная трубка;
4—резиновый шланг; 5— -образны манометр, замеряю—
МОДЕЛЬ обтекающего щий избыточное давление на поверхности моцели; б—при-
ВОЗДУШНОГО потока способление для установки медели в рабочей части трубы
и изменения угла атаки; 7—трубка Пито; 8—Ц—образный
ПРИВОДИТ К ВОЗНИКНО' манометр для измерения скоростного напора; 9—сопло до-‹
вению на профиле ИЗ- звуковой малоскоростной аэродинамической трубы
быточного давления
р—роо (положительно-
го или отрицательного
по величине), которое
изменяет положение
уровней жидкости в от— дру/д
счетных коленах мано-
метра. Разность этих ‚П
уровней Ай,- (мм) вка— „#5 д 7 89 9 ’О ” / 12 13 … ‚5
ком-либо манометре А ‘ 8 , „ Ваш/д
будет соответствовать ”181920 2, 22 23 гц 25 25 т\гу 29 °П-
избыточному давле— Ш
нию, равному разности 558,2,
давлений в соответст- ; 1 _]
вующем дренажном
отверстии и в рабочей
ЧЗСТИ Трубы“ ПРИ ЭТОМ 1—крыло; [і—форма профиля; !!!—дренажные отверстия:
В открытой рабочей „"'—маркировка дренажных отверстий; А—точка передней
кромки; В—точка задней кромки
части статическое дав-
ление равно атмосфер—
ному (р…:ратм).
Избыточное давление педсчитывается по показаниям манометра при
помощи зависимости (2.1.1‘, которую запишем в виде
рд. — Р… : ігт (НПР —— іълев ), т зяпБ : ігт АИ, 751115, (4.1.49)
гд› идр —— показания правого колена манометра, сообщающегося с ат—
мосферой; Идев — показания левого колена манометра, связанного
_—
В] о _
'—
СЕ.|
№3
1".
Рис. 4.1.18. Прямое крыло с исследуемым профилем:
167
с дренажным отверстием; ігт—тарировочный коэффициент манометра.
Для определения скоростного напора с]… и скорости набегающего
потока Уоо в поток вводится трубка полного напора —трубка Пито 7
(см. рис. 4.1.17), соединенная с манометром. В соответствии с уравне-
нием Бернулли и с учетом показания этого манометра:
Ч... : Р… УЗО/2 : Ро _роо = Ё;Ёт(/1,',р— 11,1%)1/ зіп [3’ =
= *; %, М’ У’ зіп 13’; (4.1.50)
Уш : {(г/рю) 444,415 (‚’ зіп (у, (4.1.51)
где Хет и ёт—тарировочные коэффициенты соответственно манометра
и трубки Пито; рш=рдтм— плотность набегающего потока (атмосфер-
ного воздуха), определяемая по формуле
р…, = №(1—0378Щ), (4.1.52)
КТатм Ратм
в которой рнд _ давление насыщенного водяного пара; х— относитель-
ная влажность.
По значениям р,; — рсо и с]… можно найти коэффициент давления
в і-й точке профиля:
_ до,—р...: ЁтАдіУЗіпВ (4153)
Ч… із; ЕТ Ап, ?, зіп Б’
или, при одинаковых углах наклона манометров ([З=[3’) и одной мано-
метрической жидкости (?=у’), а также при условии, что ігт=ігт=ёт=
‚
В = (17. —р..)/с/.. : Ан,/Ана (4.1.54)
По значению этого коэффициента в дренажных отверстиях профиля
можно определить при помощи формул (4.1.18), (4.1.12), (4.1.19) или
(4.1.20) аэродинамические коэффициенты. При этом интегралы в ука—
занных формулах могут быть вычислены путем измерения соответст—
вующей площади между кривыми, построенными по эксперименталь-
НЫМ функциям р=1°1(Х)‚ р=1°2(у)‚ р_=1°з(хЁ) И р=і4(у2).
На рис. 4.1.4 показаны кривые р=і'1(х) для верхней 3 и нижней 4
сторон профиля, позволяющие определить по формуле (4.1.18) коэффи—
циент подъемной силы. Пусть площадь между этими кривыми будет
Ру, мм2 (на рис. 4.1.4 заштрихована). Согласно этому значению коэф—
фициент подъемной силы
су:]:урди} (4.1.5
где и; и и}, „мм—масштабы р и х соответственно по осям ординат
и абсцисс.
Для определения коэффициента продольной силы СВр необходимо
в соответствии с формулой (4.1.12) построить по экспериментальным
значениям рі координатную диаграмму р=1°2 (у) и измерить по ней пло—
щадь, ограниченную замкнутой кривой (на рис. 4.1.6 эта площадь за—
штрихована). Если величина измеренной площади Рас, №142, то коэффи-
циент
СКр : Р Н”” (4..15 )
где 11; и під/мм — масштабы р и у соответственно по осям ординат и
абсцисс.
Следует отметить, что диаграмма р=і'2(у) дает несколько замкну—
тых областей. При этом площадь Р,С равна алгебраической сумме пло-
168
щадей этих областей, а знак площади каждой области определяется
знаками р И ау при обходе контура против часовой стрелки.
Расчет коэффициента момента т, по формуле (4.1.19) связан с ис-
пользованием двух Диаграмм: р= _.і3(х2) и р: і4(у2 ). Определяя площа-
ди Р…, и Р…, мм2 ‚ограниченные соответственно кривыми р=1°3(х2)и
р=і4(у2), найдем величину этого коэффициента, которая в некотором
масштабе будет определяться разностью этих площадей:
—т2 _ —‚О 5- Р` —О‚5-РтхрБр-у—2‚ (4.1.57)
ту рр” х—2
где ”35 и ”)?-" „52, 1/мм —— масштабы р и х2‚ И соответственно по осям
ординат и абсцисс.
Если применяется формула (4.1.20), то при определении коэффи-
циента момента можно ограничиться нахождением площади между кри-
выми функции р=ізбс2). В соответствии с этим
_тг : 0,5.Рту НБ РСС-2. (4.1.58)
По экспериментальным данным су и т2 можно определить для про-
филя коэффициент центра давления сц_д=хц_д/Ь=—т‚/су, а по данным
сх=су а—і—сВр—Ъ—сх; и су — качество профиля К=су/сх.
Порядок проведения работы
1. Ознакомиться с экспериментальной установкой и необходимой из—
мерительной аппаратурой.
2. Закрепить модель крыла в рабочей части трубы п0д заданным уг—
лом атаки и проверить на герметичность соединения резиновыми
шлангами дренажных трубок и манометров.
З. Записать показания барометра (ратм=р°о)‚ термометра (Та…=
=Тоо) и психрометра (Т’).
4. Включить трубу и после выхода ее на режим установившегося об—
текания ввести в поток трубку Пито, а затем снять показания с отсчет—
ных колен связанного с ней манометра (Нир, плен).
&. Снять показания уровней жидкости (пир, И……) в отсчетных коле—
нах манометров для каждой Дренажной точки; после этого прекратить
работу трубы.
6. Определить параметры набегающего потока в аэр0динамической
трубе.
7. Найти разности уровней (Ипр— д……)і и соответствующие коэффи—
циенты давления р…; для каждой дренажной точки.
8. Построить векторную диаг_рамму коэффициента давления и коор
динатные диаграммы функций р= —і1(Х) р=1°2(у) р= із(х2) р=1°4(у )
9. Определить графическим интегрированием коэффициенты су, евр,
т2 профиля при заданном угле атаки.
10. Вычислить составляющие коэффициента сопротивления профиля
от давления стО и от трения 0х1, а также полный коэффициент сх=схр+
+схі-
11. Определить численные значения коэффициентов полной аэроди-
намической силы Ср: 1/ с— +в2 у , центра давления Сц1д=—т2/Су‚ а также
качества профиля К=су/сх.
12. Найти критическое число Маха набегающего потока (М…кр).
13. Изменить угол атаки модели и повторить операции, указанные
в п.п. 5+12.
14. Заполнить сводную таблицу аэродинамических коэффициентов
профиля крыла при различных углах атаки.
12—927 169
15. По данным этой таблицы построить кривые изменения аэроди-
намических КОЭффИЦИЕНТОВ В зависимости ОТ УГЛЗ атаки, а также ПО-
ЛЯРУ су=і(сх)-
Примечание. В необходимых случаях для сокращения времени продувки мо-
дели регистрацию соответствующих показаний манометров, связанных с дренажными
отверстиями, осуществляют путем фотографирования панели, на которой установлены
отсчетные трубки. Расшифровка этих показаний (и…„ И……) ведется по полученному
негативному изображению на фотопленке с помощью оптического прибора «Микрофот».
Пример. Рассмотрим результаты исследования распределения давления по сим-
метричному профилю в центральном сечении модели прямоугольного крыла, размах
которого !=0,9 м, хорда Ь=0‚1 м (удлинение ?»=1/Ь=9) и максимальная толщина
Рис. 4.1.19. Установка для исследования распределения дав-
лений по профилю крыла в дозвуковой малоскоростно-й
трубе:
! — аэродинамическая труба; 2— модель крыла; 3— насадок полно-
го напора; 4—приспособление для крепления модели в рабочей ча-
сти трубы под заданным углом атаки; 5 — резиновые шланги; б—ба-
тарея Н—образных жидкостных манометров
А=0,012 м. Эти продувки производились в аэроцинамической трубе малых скоростей
с открытой рабочей частью диаметром 0:0,8 м. «Загромождение» потока молелью вы-
биралось из следующих соображений. Поскольку размах модели крыла превышает
диаметр рабочей части, примем при расчете величину этого размаха !=В=0‚8 м. При
наибольшем угле атаки, на котором проводилась продувка (ос=15°), площадь проекции
модели крыла на плоскость, нормальную вектору скорости набегающего потока, $м=
=ЬВ зіпоа=0‚1-0,8-$іп 15°=0,0207 м2. Поскольку площадь сечения рабочей части т убы
$т=лВ2/4=3,14-0‚82/4=0,503 м2, то величина загромождения составит $м/ т=
=0,0207/0,503=0,О412, что меньше предельно допустимой. При углах ос<15° «загро—
мождение», очевидно, будет еще меньше.
Форма выбранного профиля с относительной толщиной А=О,12 показана на
рис. 4.1.18. На этом же рисунке номерами отмечены дренажные отверстия; относитель-
ные координаты некоторых из них приведены в табл. В. На рис. 4.1.19 показан общий
вид измерительной установки, включающей рабочую часть аэродинамической трубы,
модель крыла, приспособление, на котором она закрепляется под заданным углом
атаки, дренажные трубки и резиновые шланги, насадок полного напора, а также мано—
метры.
В хоце эксперимента были определены параметры набегающего потока, при этом
некоторые из параметров, такие как скоростной напор или скорость, нах0дились путем
измерений в потоке, плотность, коэффициент динамической вязкости и другие вычис-
лялись по соответствующим теоретическим или эмпирическим зависимостям. Например,
плотность набегающего потока определялась по формуле (4.1.52), в которой величины
ратм=760 мм рт. ст. и Татм=288К нах0дились с помощью соответственно барометра
и термометра, а величины х=0,9 и рн,п= 12,79 мм рт. ст. — из табл. 2.2.1 и 2.2.2 по соот—
ветствующим значениям Татм=288К и Та…—Т’=1° (Т’=287К — температура, по—
казанная влажным термометром в психрометре). Результаты определения параметров
потока в рабочей части трубы приведены в табл. А.
В табл. А приведено число М…=0,09. Практически при такой малой его величине
поток в аэродинамической трубе может рассматриваться несжимаемым. Некоторые дан-
170
Исходные данные:
Таблица А
Тоо = 288 К; роо =760 мм. рт. от.; Н = 287 дж/кг-град; А! = ср/со =1,4;
:== ' __ ' == _ . ' == 3 . . : == .
Ап пир “лев 300 мм, ? 0,805 кГ/дм (спирт), 51:18 0,246,
#; = ЕТ = 1,0
Параметры набегающего Обозначение и размер- Р
потока ность асчетная формула Величина
Плотность род, кГ—сек2/м4 (4.1.52) 0,125
Коэффициент динами- рос, кГ -сек/м2 (3.1.35) 1,82-10—6
ческой вязкости
Коэффициент кинема- тоо, м‘З/сек тоо =роо/р‹>О 1,46-10—5’
тической вязкости
Скоростной напор 40°, кГ/м2 (4.1.50) 59,5
1
Скорость УФО, м/сек (4.1.51) 30,8
Число Рейнольдса Кеш Ёеоо = шой/\?со 2,07-105
Скорость звука атм/сек 000 = ігКТоо 341
Число Маха М00 М00 = Уфо/аоо 0,09
ные измерений параметров обтекания таким потоком профиля при а=6°, а также ре—
зультаты расчета соответствующих значений
коэффициента давления
приведены
в табл. 15.
Т а б л и и а В
_Нпшзря А“ "
Поверх- дре- — — — -.3 п , п . = пр _ — м
ности 133$“ х у х' у % “Ё _ ”лев' мм р а—А—Ьг
точек
! 0,01 0,01 0,0001 0,0001 53 447 —394 —1 ‚31
2 0,025 0,0214 0,0006 0,0005 84 416 —332 —1 , 11
3 0,05 0,0306 0,0025 0,0009 106 394 —288 —0,96
5 0,1 0,0423 0,01 0,0018 124 376 —252 —0,84
Ве хняя 7 0,2 0,0549 0,04 0,0030 150 350 —200 —0,67
Р 9 0,4 0,0592 0,16 0,0035 184 316 __132 _о,44
!] 0 ,6 О, 0492 0 , 36 0 , 0023 209 291 —82 —0 ‚27
13 0,8 0,0284 0,64 0,0008 238 262 —24 —0,08
14 0,9 0,0157 0,81 0,0002 255 245 10 0,03
!5 0,95 0,01 0,90 0,0001 265 235 30 0,10
16 0,01 —0,01 0,0001 0,0001 385 115 270 0,90
17 0,025 —0,0214 0,0006 0,0005 347 153 194 0,65
18 0,05 —0,0306 0,0025 0,0009 309 191 118 0,39
' 20 0,1 —0,0423 0,01 0,0018 271 229 42 0,14
НИЖНЯЯ ".22 0,2 —0,0549 0,04 0,0030 245 255 —10 —0‚03
24 О , 4 —0 , 0592 0 , 16 О , 0035 236 264 —28 —0 , 09
26 0 , 6 —О , 0492 0 , 36 0 , 0023 240 260 —20 —0 , 06
28 0,8 ——0,0284 0,64 0,0008 250 250 0 0,00
29 0,9 —0,0157 0,81 0,0002 256 244 12 0,04
30 0,95 —0,01 0,90 0,0001 265 235 30 0.10
] .
12”
171
. Все расчеты проводились для угла наклона отсчетных трубок манометров (замеря—
ющих избыточное давление на модели) Б=[3’= 14°15’ и удельного веса жидкости в этих
манометрах у=у’=0,805 кГ/дмз (спирт).
На рис. 4.1.20 приведена построенная по данным табл. Б векторная диаграмма
коэффициента давления, а на рис. 4.1.21+4.1.24 — графики функций р=і1(х); р=і2(у)‚
р=і3(х2), р=і4(у2). При построении этих диаграмм и графиков с помощью интерполя—
ции _б_ыли найдены положения критической точки С, где рс=ро=1, и точек, для кото-
рых р=0 (одна из таких точек совпала с точкой А передней кромки), а также значе-
ние коэффициента давления рв в точке В задней кромки (см. рис. 4.1.20+4.1.24).
Рис. 4.1.20. Векторная диаграмма для профиля крыла, обте-
каемого несжимаемым потоком под углом атаки ос=6°:
А и В—точки передней и задней кромок: С—критическая _точка;
знак «+» соответствует области, где р>0‚ а знак «_», где р<0
В соответствии с графиками на рис. 4.1.21—2—4.1.24 масштаб коэффициента давления
был выбран равным р5=2—10—2, 1/мм, а величин х, у, х2, у2‚ отложенных по осям
__ —2 __ —3 —— _ --2 — _ —5
абсцисс, — соответственно их:—10 ‚ р.у—10 ‚ мхи—10 , дуг —5-10 , 1/мм.
Согласно рис. 4..1 ‚21 измеренная планиметром площадь Ру: 1900 №142. В соответствии
с этим '
_? —‘2
Су=РуНБМЗ=19ОО'2'Ю -10 =0,З8_
Измеренная планиметром на рис. 4.1.22 результирующая площадь (с учетом знака)
&= 1360 №142. Следовательно,
_. — —— . . —2. _..3 '—
сКр_Рх мр р.у— 1360 2 10 10 __0‚027.
На_конец, из диаграмм на рис. 4.1.23 и 4.1.24, планиметрируя кривые р—=і3(х_2) и
Ъ=і4(у2), находим площади Рту=916 мм2 и Ртх=3160 мм2. Соответствующий коэф-
фициент продольного момента
—т2=0,5-916—2-10—2-10_2—0,5-3160-2-10_2—5-10_5=0,090,
Коэффициент сопротивления Схр определяется по формуле (4.1.14), в которой
Сур=Су:
04° 6
Схр = су №+сдр = 0,38 553 + 0,027 = 0,067.
Определим составляющую сх; коэффициента лобового сопротивления от трения.
Поскольку число Кеш=Уоо/Ь/\гоо=2‚07-105 меньше критического (Кекр=5- 105), то по-
граничный слой на крыле ламинарный (координата точки перехода х3=1‚0). Поэтому
для определения коэффициента сх; воспользуемся формулами (4.1.28) и (4.1.29), приняв
“х =. ‘-
2 ' 1 ‚29 2. 1 ‚29
С =2(С )м =() ‚г]—= __ “’ _
” ” °° ^ УШЗ... 72,0740—5
: 0,00585.
172
\`——'д' "
\\ЧЪ‘Ч
' :
@
Рис. 4.1.21. Координатная диаграмма р=
=7°1(х) для профиля крыла,
несжимаемым потоком
ос=6°
(стрелки на диаграмме указывают направление
обхода кривой при определении знака площади
)
у
обтекаемого
под углом атаки
Рис. _4.1.2З. Координатная диаграмма ?=
=і3(х2) для профиля крыла, обтекаемого не—
сжимаемым потоком под углом атаки ос=6°
(обход кривой при определении знака площади рту
показан стрелками)
Ртьп НСЖ
Рис. 4.1.22. Координатная диаграмма ?:)—=
=1°2(у) для профиля крыла в несжимаемом
потоке под углом атаки ос=6°
(стрелки на диаграмме указывают направление
обхода кривой при определении знака замкнутых
областей Р и Р)
›: х
р
1,0,— с
и
„5
’ %% *-
'\
Рис.
4.1.24. Координатная диаграмма
р=1°4(у2) для профиля крыла в несжи-
маемом потоке под углом атаки ос=6°
(стрелки на диаграмме показывают направ—
ление обхода кривой при определении знака
площади Ртх)
Полный коэффициент лобового сопротивления в соответствии с (4.1.1)
сх = сд, + сх): = 0,067 + 0,00585 = 0,073.
По полученным значениям сх, С1, и т: можно найти коэффициент суммарной аэро—
динамической силы
сі—я—с; = 1/0‚0732+ 0,382 = 0,39,
СР =
качество профиля
К = су/сх = 0,38/0,07З = 5,22
С
и __ ‚ :;
Сшд тг сх СЗ, Ита: „О _
| " ! ‘ сути.]: ,
: » д " _ ъ ›- —————————————————
0...’ 5 ГЦБ 0,51'Ь0: су тах : “ир
________ *_____"' _ С _ 0,8 '
' '. 9
от а ь0,ц—0‚цъ0.д‘› : . '-
Е ! 0,6%
0.31- диализ—0,51 ; : ос……”
0,1“
0.2 — 2 Ь0,2—0‚2—0‚Ц- на: 0
: 0,2 -
‚ ' ?
0.1— ЦДП Отд.? -- : ”70$
' 1 ос„ , Ш
0 б Ц Б 12 06, град С:: гпі‚п_ \
Рис. 4.1.25. Характеристические диаграммы Рис. 4.1.26. Поляра профиля кры-
для профиля крыла в несжимаемом потоке
и коэффициент центра давления
Сц_д = хдд/Ь = _ ‚пз/Су = 0, 090/0,38 = 0,24.
Аналогичные расчеты были проведены для ряда других углов атаки; результаты
расчетов приведены в табл. В.
По данным табл. В построены характеристические диаграммы
`су=Ф1(0‘)› сх=Ф2(0‘)› т2=Фз(0‘)› К=Ф4(О'и)‚ сц.д=Ф5(а)
Таблица В
ла Су=ПС=>
(рис. 4.1.25), а также поляра про—
филя (ри—с. 4.1.26). По кривым на
рис. 4.1.25 и 4.1.26 можно устано-
щ град с с _… К с вить характерные углы атаки про-
У х 2 ц'д филя и соответствующие аэродина—
мические коэффициенты. «Угол ну-
0 0 0,060 0 0 0 левой подъемной силы» равен ну-
3 0,20 0,067 0,045 2,99 023 лю (ао=0)‚ и этому значению со—
6 0,38 0,073 0,090 5,22 0,24 ответствует минимальный коэффи-
8 0 50 0 092 0 12 5 45 0 24 циент сопротивления с: ш…=0‚060.
’ ’ ’ ’ ’ Критический угол атаки акр=15°,
10 0.60 0,11 0,15 5,30 0,24 а соответствующий максимальный
12,5 0,78 0,16 0,19 5,03 0,25 коэффициент «подъемной силы
15 0,91 0,21 0,23 4,33 0,25 су шах=0‚91. Наивыгоднейший
16 0,89 0,22 0,22 3,95 0,25 угол атаки адддв=8°, при этом
имеем максимальное качество
Кшах=5‚45; на поляре (рис. 4.1.26)
этому значению пропорциональ-
на величина 18 Фшах.
На рис. 4.1.27 и 4.1.28 сравниваются результаты экспериментального и теоретиче-
ского определения коэффициентов подъемной силы с‚‚=]°(а) н момента т‚=і(с„). Ве-
личина су была рассчитана по формулам (4.1.21) и (4.1.24):
су=2л(1+о‚7773)оь = 23,14 (1 + 0,77-0‚12)ос = 6,86“: 0,12ос°‚
а также по формуле (4.1.27), в которой величина ‹; находилась по [21] :_ .
су= 0,08 ос°_
174
Для коэффициента момента согласно (4.1.22) имеет место зависимость
тг = _ 0,25 Су.
Как видно из рис. 4.1.27, наибольшее расхождение между экспериментом и теорией
возникает при использовании зависимостей (4.1-21), (4.1.24). Данные расчета по зави—
симостям (4.1.27), (4.1.22) отличаются от экспериментальных результатов примерно на
10+15% (см. рис. 4.1.28).
Рассмотрим, как изменяются аэродинамические характеристики профиля при обте—
кании его сжимаемым дозвуковым потоком.
Прежде всего определим критическое число Маха. Из график_а на рис, 4_1.21 нахо-
дим минимальный коэффициент давления в несжимаемом потоке ртіп нсж=—1.31 и по
этой величине определяем при помощи форму-
лы (4.1.46): сз
Аш=0,7577/1/1—(——1,31)=0,50‚ „06
9
2 1
Св
‚10 Ь 2 " ДЦ
3
_ 1
0,5 „д’?
| | а
1 | 1 .
д 5 10 06, град “0,2 10,1 т2
Рис. 4.1.27. Теоретические и экс- Рис. 4.1.28. Теоретиче—
периментальная кривые Су: ская и эксперименталь—
=1°(ос) для симметричного ная кривые т2=і(су)
профиля в несжимаемом по- для симметричного про—
токе: филя в несжимаемом по-
1 — эксперимент; 2 — с =0,12-ов°_ токе:
расчет по формулам (4.1.21) и 1 _ эксперимент; 2 _ т2='
(4.1.24); 3—0 =О,08-ОЬ°—расчет по =—0‚25 с _расчет по фор-
формуле (4.1.27) муле (4.1.22)
Затем из табл. 4.1.1 находим ?……р=0,53 и, наконец, по выражению (4.1.47) вы-
числяем соответствующее число Мюкр=0,50
В качестве примера найдем изменение коэффициентов давления на профиле при
обтекании его сжимаемым потоком с числом Моо=0,45 (А…тОАЗ). В точке полного
торможения (на рис. 4.1.20 точка С) при этом значении числа Маха коэффициент дав-
ления согласно (4.1.34)
.. 0,452 2—— 1,4
=1 0,454=1‚05.
Росж + 4 + 24
По сравнению с несжимаемым потоком коэффициент давления увеличился пример-
но на 5%.
Для определения соответствующих коэффициентов давления Реж в других точках
на профиле при Моо=0,45 можно воспользоваться методом акад. С. А. Христиановича,
формулой Кармапа—Тзяна (4.1.33) или формулой Прандтля — Глауэрта (4.1.32).
Рассмотрим результаты расчета по методу акад. С. А. Христиановича, как наиболее
точному. В качестве примера выберем точки 1, б, 10 на верхней и 17, 18 на нижней сто-
ронах профиля. В этих точках коэффициенты давления для несжимаемого потока были
найдены из рис. 4.1.20 и по ним подсчитаны при помощи формулы (4.1.36) соответству—
ющие значения А. При этом входящая в формулу (4.1.36) относительная скорость рав-
нялась, по данным табл. 4.1.1, для ?…=0,48 величине А°о=0.45. Далее из той же
табл. 4.1.1 по найденным значениям А определялись соответствующие относительные ско-
рости ?», затем по формуле (4.1.37) —— отношения давлений р/рсо и, наконец, по выра-
жению (4.1.38) для М…=0,45 —коэффициенты давления. Результаты этих расчетов при-
ведены в табл. Г.
Для сравнения в табл. Г приведены также коэффициенты давления, подсчитанные
по формулам Кармана — Тзяна (4.1.33) и Прандтля — Глауэрта (4.1.32). Последняя
формула дает, как видно, наименее точный результат, поскольку не учитывает имею—
щую место в действительности нелинейную зависимость между реж и рнсж.
175
Таблица Г
Номе р _рсж
ра Б А ›“ ._
дрЁГЁЁЁЁЫХ нсж рос) {;и 511325; по‹ф‹1>рзьзтуле по(ф‹ірзьё3)іле
ВНЧЭ
1 —1,31 0,69 0,80 0,78 —1,57 —1,60 —1,47
6 —0,67 0,59 0,65 0,89 —0,78 —0,79 —0,75
10 —0,35 0,53 0,57 0,96 —0‚39 —0‚4О —0,39
17 0,65 0,27 0,27 1,11 0,78 0,71 0,73
18 0,39 0,35 0,36 1,07 0,50 0,43 0,43
Воспользовавшись формулами (4.1.41)—:-(4.1.43), можно найти коэффициенты подъ—
емной силы и продольного момента рассматриваемого профиля в сжимаемом потоке.
В частности для ос=6° И Моо=0,45:
Ь = 1 + 0,05-0,452/0‚5'2 = 1,041;
с…„ = 0,38-1,041/1/1 _— 0,452 = 0,44;
т2 …, = (_ 0,090)-1‚0412/1/1 _ 0,45° : _ 0,11.
Для сравнения приведем результаты, полученные по формулам Прандтля — Глау-
эрта (4.1.39), (4.1.40):
су СЖ = 0,38/1/1—О,452 : 0,42;
тгсж= —0,090/1/1—0,452 : _0,10_
Для определения влияния сжимаемости на коэффициент сопротивления находим из
рис. 4.1.13 отношение схож/схнс…= 1,01, по которому вычисляем
сх СЖ = 1,01 -сх „СЖ = 1 ‚01 -0,073 = 0,074.
В заключение определим новое положение центра давления. Согласно (4.1.45)
(Сц.д)сж = 0,24-1,041 = 0,25.
Центр ДЭВЛЗНИЯ В сжимаемом ЫОТОКЭ СДВИГЭеТСЯ К задней кромке, однако ЭТОТ
СДВИГ незначителен.
Работа 4.1.2
Определение лобового сопротивления профиля
в дозвуковом потоке методом импульсов
Цель р а боты—исследовать поле скоростей (давлений) в сле—
де за крылом и определить коэффициент лобового сопротивления про—
филя.
Общие сведения
Определение метода импульсов. При обтекании крыла реальным
(вязким) потоком за ним возникает след (спутн ая струя), со-
стоящий из заторможенных частиц жидкости. Скорости в этом следе
сильно отличаются от скорости набегающего (невозмущенного) тече-
ния. При этом наибольшее торможение испытывают частицы, располо-
женные вдоль оси следа. В- направлении внешней нормали к этой осп
наблюдается увеличение скоростей и постепенное выравнивание их про-
филя. Значения скоростей приближаются к соответствующей ве-
личине для набегающего потока.
Зная распределение скоростей в следе, можно определить лобовое
сопротивление профиля, если воспользоваться м е т о д о м и м п у л ь—
сов. Этот мет0д основан на теореме, согласно которой изменение
количества движения жидкости в данном объеме равно
импульсу сил, действующих на жидкость. В соответствии с методом им—
пульсов поток и наХОДящееся в нем тело представляют собой единую
176
механическую систему, а лобовое сопротивление рассматривается как
реакция тела на силовое воздействие движущейся жидкости.
Для определения этого сопротивления следует рассмотреть двух-
мерное плоское обтекание крыла бесконечного размаха. Выберем на об-
текаемой поверхности элемент прямоугольного крыла единичного раз-
маха и расположим его внутри замкнутого контура 1—1—2—2 (рис.
4.1.29). Форма контура может быть произвольной, однако для простоты
примем ее прямоугольной —такой, чтобы линии 1—1 и 2—2 были па-
раллельны оси у, а линии 1—2—оси х, с которой совпадает вектор ско-
рости набегающего потока. Линия 1—1 проходит в зоне невозмущенно—
го потока, характеризующегося скоростью У…, статическим давлением.
@
7 2
] 2
Рис. 4.1.29. К расчету силы лобового сопротивления про-
филя крыла методом импульсов:
! — модель крыла: 11—пограничный слой; !!!—след: [Р'—элемен-
тарная струйка жидкости
р… и давлением торможения ро. Линия 2—2 пересекает след крыла, где
скорость Ух и давление р переменные и отличаются от соответствующих
величин для невозмущенного течения.
Примерная картина изменения скорости в следе на линии 2—2 по-
казана на рис. 4.1.29. Как видно, для следа характерна «впадина» в
эпюре скоростей (Ух<У°о). При этом в соответствии с законом сохра-
нения массы вне этой «впадины» скорости оказываются несколько
большими У…. Далее, по мере удаления от оси следа скорость асимпто-
тически приближается к ее значению в набегающем потоке.
На линиях 1—2 в передней части потока, где струйки как бы раздви—
гаются благодаря влиянию обтекаемой поверхности, скорости направ-
лены наружу контура, а на заднем участке, где струйки смыкаются, те—
чение направлено внутрь. При бесконечном удалении этих линий кон-
тура количество движения протекающей сквозь них ЖИДКОСТИ равно
нулю, а статическое давление будет таким же, как в невозмущенном
потоке. Если выбрать именно такое расположение линий 1—2, то можно
вместо контура рассматривать два сечения 1—1 и 2—2.
Изменение количества движения ЖИДКОСТИ в проекции на ось х в еди—
ницу времени может быть определено как разность произведений се—
кундного массового расхода через контрольные сечения 2—2 и 1—1 на
соответствующую скорость, т. е.
5 р„ 73, ауд, _ 5 рУісіу, (4.1.59)
(14) (2—2)
где р и Ух=Ух(у) —соответственно плотность и скорость в некоторой
точке сечения 2—2; душ и а'у — толщины элементарных струек соответст-
венно в сечениях 1—1 и 2—2.
177
Выражение (4.1.59) можно упростить, перейдя к интегралу только
вдоль сечения 2—2. Для этого воспользуемся уравнением расхода для
элементарной струйки при установившемся движении
9... У.. ау... = (>!/„еду, (4.1.60)
из которого найдем
С учетом этого равенства выражение (4.1.59) запишем в виде
9... Уі— р: „ ‹іу—У 97361.11,
(!?—2) (2—2)
ИЛИ
рк, (1/0, — У,) @. (4.1.61)
(!?—2)
Силы, действующие вдоль оси х между контрольными сечениями
1—1 и 2—2, сводятся: 1) к проекции на эту ось реакции крыла, являю-
щейся аэродинамической силой лобового сопротивления Х; 2) к ре-
зультирующей силе от распределенных по сечениям 1—1 и 2—2 давле—
ний, равной2 [?(р—рооуіу; 3) к силе от касательных напряжений, рас-
— )
пределенных вдоль сечения 2—2, равной [та у [в приведенных выраже—
(2—2)
ниях величины р=р (у) и т=т (у) представляют собой соответственно
давление и напряжение трения в сечении 2—2].
Исследования показывают, что напряжения трения невелики и со-
ответствующей составляющей сопротивления можно пренебречь. С уче—
том этого теорему об изменении количества движения, записанном в ви—
де (4.1.61), можно выразить уравнением
у рУ„(У„—Ух)сіу=Х+ 5 (р—р..)сіу‚
(2—2) (2—2)
откуда сила лобового сопротивления
)( = 5 (311), (У„ —1/_,) сіу+ 5 (р„ _р) @. (4.1.62)
(2—2) (2—2)
Эта формула позволяет определить сопротивление, если известно рас—
пределение скоростей и давлений в некотором сечении, пересекающем
поток за обтекаемой поверхностью. При этом область интегрирования
может быть ограничена следом, поскольку вне его изменение скоростей
и давлений пренебрежимо мало.
Контрольное сечение 2—2 обычно располагают на небольшом рас—
стоянии от задней кромки крыла, равном примерно половине хорды про—
филя. Как показывают измерения, статическое давление в следе прак—
тически не меняется по его высоте уже в сечениях, расположенных на
расстоянии, большем 0,3 хорды, и равно давлению в невозмущенном
потоке. При таком расположении контрольного сечения 2—2 можно пре-
небречь вторым слагаемым в правой части (4.1.62) и получить более
простое соотношение для силы сопротивления
х : фр У, (Уш _ Ух) @. (4.1.63)
(2—2)
Эту же силу можно представить через коэффициент сопротивления
профиля С„ в виде
х = с, (р„ И../?)!)
178
В соответствии с этим
Р…
(2—2)
У,. Ух '—
с,=2уі.к(1—Ё)ау‚ (4.1.64)
где у=у/Ь. При малых скоростях эффект сжимаемости можно не учиты-
вать (р=роо), поэтому
Ух _Уі —
с,_2 ?(1 У )сіу. (4.1.65)
00 00
(2—2)
Как видно из выражения (4.1.65), для определения коэффициента
сопротивления необходимо знать распределение скорости У„ в следе,
которое может быть найдено по измеренному в нем полному давлению.
С этой целью воспользуемся уравнением Бернулли для элементарной
струйки несжимаемой жидкости, пересекающей сечение 1—1 [см.
(2.1.15)]‚ из которого скорость невозмущенного потока
Уш : 1/2 (ро—ресуров . (4.1.66)
Для струйки, пересекающей сечение 2—2,
1)... Уі/2 + р.. = рд,
откуда скорость в следе
У, : 1/ 2 (рд—ресурс, . (4.1.67)
В формулах (4.1.66) и (4.1.67) значения ро и р’о определяют давле-
ния торможения соответственно для набегающего потока и течения в
следе. При этом давление 106 меньше полного давления ро вследствие
потерь кинетической энергии частиц жидкости, вызванных трением при
обтекании крыла.
После подстановки (4.1.66) и (4.1.67) в (4.1.65) получаем
0,225- Щ(1_1/Ш „, (4,58)
РО—РОО р0_р°о
(2—2)
Таким образом, для определения с,с необходимо знать распределе-
ние полного давления рО по высоте следа.
Найденное при этом сопротивление обусловлено воздействием на
крыло одновременно давления и трения. Отсюда следует важное преи—
му‘щество метода импульсов, которое заключается в этой возможности
нахождения суммарной силы вместо определения отдельных ее состав-
ляющих, как предусматривается в других методах. При этом точность
метода импульсов составляет, как показывают исследования, примерно
15%-
Определение коэффициента сопротивления профиля по измерениям
в малоскоростной аэродинамической трубе. Схема экспериментальной
установки для измерения полных давлений ро и рд в потоке аэродинами-
ческой трубы, необходимых для расчета коэффициента сопротивления
профиля по формуле (4.1.68), показана на рис. 4.1.30. В сечении 1—1
перед моделью помещен насадок полного давления (трубка Пито), при
помощи которого определяется величина ро—роо ‚ входящая в (4.1.68).
Эта же величина равна скоростному напору в соответствии с выражени-
ем Чао =роо УЗО/2=ро—роо .
Избыточное давление рО—роо находится по показаниям Дифферен-
циального манометра по формуле (4.1.50), в которой заменим Ан’ на
м…:
179
Распределение ДЗВЛЗНИЯ рОВ СЛ6Д6 НЭХОДИТСЯ ПРИ ПОМОЩИ НЭСЭДКЭ
полного напора, перемещающегося вертикально вдоль сечения 2—2. Из—
быточное давление 176—1700 в некоторой точке этого сечения регистри—
руется дифференциальным манометром. Если Ап2_2=п„р—нлев — раз—
ность уровней в отсчетных трубках, у и В —— соответственно удельный вес
манометрической жидкости и угол наклона трубок, а (г.. и ЕТ _тариро—
вочные коэффициенты соответственно для манометра и насадка полного
напора‚то
рд — роо : ігт ёт АН2_2 ? зіп |З. (4.1.69)
Ьлеб
’
Ь„р
Рис. 4.1.30. Схема измерений при определении силы лобо-
вого сопротивле1-1ия профиля крыла в несжимаемом пото-
ке методом импульсов:
! — сопло дозвуковой малоскоростной аэродинамической трубы;
!1—трубка Пито; !!!—МОДель крыла; 1У—насадок полного на-
пора координатника; У—Ы—образные манометры
С учетом (4.1.50) и (4.1.69) и при условии, что &=&; ‚ расчетная за-
висимость (4.1.68) для коэффициента сопротивления примет вид
'_—.——\
с _—_2 1/___ №2— 217811113 (1 _ ‘/ _Ш)ау. (4.1.70)
Ан]_1у’зіп[3 АЬ1_]у’$іп[3’/
(2—2)
При одинаковых удельных весах жидкости в манометрах (у=у’)
и равных углах наклона трубок ([З=Б’) формула (4.1.70) будет более
простой:
сх=2 “№№—МШ @. (4.1.71)
Ап \ [11114]
1—1
(2—2)
Вводя обозначение
1='/^”2—2 1—|/№—_2\‚ (4.1.72)
Ан мы]
1—1
получим
=2 ( мд. (4.1.73)
(2—2 )
180
И'змерениямн в потоке аэродинамической трубы можно определить
величину АН1_1‚ а также значения №124 в различных точках сечения
2—2. По этим данным затем вычисляется
график „!=/%;) (рис. 4.1.31). Площадь 8,
фике определяет интеграл:
` .]Сіу : 8.118,
42`—2›
(4.1 .74)
где из, 1/мм2— масштаб площади; из:
=ш НЭ (ш и рд, 1/мм —масштабы соот-
ветственно величины ! и безразмерной
координаты у=у/Ь).
Коэффициент лобового сопротивления
профиля с учетом (4.1.73)
сх : 28р5. (4.1.75)
Порядок проведения работы
1. Ознакомиться со схемой аэродина-
мической установки и необходимой изме-
рительной аппаратурой, предназначенной
для проведения лабораторной работы.
функция 1 (4.1.72) и строится
мм2‚ под кривой на этом гра—
;
%
%
]
'
%
А
_.],
—0,1 0
Рис. 4.1.31. График функции !=
=1°(у)
—0,2
2. Закрепить модель крыла в рабочей части трубы под заданным
углом атаки.
3. Установить перед моделью (в сечении 1—1) насадок полного на—
пора, включить трубу и записать показания манометра (11' &'
„гг
..,
Рис. 4.1.32. Установка для определения сопро-
тивления профиля крыла в несжимаемом по—
токе методом импульсов:
1—сопло аэродинамической трубы; 2—рабочая часть
трубы; 3—модель крыла; 4—насадок полного на-
пора координатника; 5—координатник; б—приспо-
собление для установки модели в рабочей части тру-
бы под заданным углом атаки; 7—резиновые шлан-
ги (к манометру)
пр’ лев )
4. Измерить температуру
в лаборатории (ТатМ=Тоо) и
атмосферНОе Давление (ратм=
=Роо), а также записать по—
казания Т’ влажного термо-
метра в психрометре.
5. По значениям Т…, Т’, рос
и измеренному полному давле-
нию ро определить параметры
набегающего потока.
6. Расположить насадок
полного напора, установлен-
ный на координатнике, в сече-
нии 2—2 и вращением микро-
винта перемещать его в верти—
кальном направлении с задан-
ным Шагом. Для каждого фик—
сированного положения насад-
ка снять соответствующие по-
казания с отсчетных трубок
манометра (Нир, Нлев). При
этом координата у, определя-
ющая положение насадка
в следе, отсчитывается от оси
трубы, относительно которой
измеряется также установоч-
ный угол атаки крыла.
181
7. Рассчитать по формуле $41.72) значення функции 1 и построить
соответствующий график 1=і (у).
8. Подсчитать площадь под кривой 1=і(57) и по зависимости
(4.1.75) определить коэффициент сопротивления сх.
Пример. Рассмотрим результаты лабораторной работы по определению сопротив—
ления профиля, изображенного на рис. 4.1.18. Эта работа проводилась на установке,
общий вид которой изображен на рис. 4.1.32.
Измерения осуществлялись в аэродинамической трубе, поток в которой определял—
ся параметрами, приведенными в табл. А работы 4.1.1. В табл. А величина Ап’=300 мм
соответствует принятому здесь обозначению Ап,_,.
М0дель крыла прямоугольной формы имела те же размеры, что и в примере к ра—
боте 4.1.1: Ь=0,1 м; 1=0,9 м; А=0,О12 м. Как было отмечено, при таких размерах мо.
дели загромождение рабочей части для угла атаки ос=15° составляет примерно 4%.
В этом случае влияние границ потока на профиль в центральном сечении практически
исключено. Таким образом, в пределах границ воздушного потока трубы с открытой
рабочей частью выполняется условие, позволяющее при применении метода импульсов
перейти от замкнутого контура к двум контрольным сечениям.
Результаты измерений при угле атаки ос=6° представлены в табл. А
Т а б л и и а А
П ПОЁЁЗЗНИЯ отсчетных
оложение Б тру к мавометра, мм _,
(КЪЗЁЗДЁЁЗ° ЁЁЁЁЁЁЁЁЁЯ 1/‘3’12—2 1_ Ш [формула
та д.дмм) !! = у/Ь [1 ]; Ада—2 == А111_1 АЬ]_, (4.1.72”
пр лев : “пр _ лев
300 0,300 550 250 300 1 0 0
200 0, 200 547 253 294 0 , 990 0, 010 0, 010
150 0 , 150 532 268 264 0 , 936 0 , 064 0 ‚ 060
100 0,100 493 307 186 0,780 0,220 0, 170
50 0, 050 438 362 76 0 ‚ 500 0 , 500 0 , 250
0 0 468 332 136 0 , 670 0 ‚ 330 0 , 220
—50 —0,050 519 281 238 0,890 0,110 0,100
—100 —0‚ 100 545 255 290 0,985 0,015 0,015
— 150 —0 ‚ 150 549 251 298 % % :=:
По данным табл. А на рис. 4.1.31 построен график зависимости ]=Г@). Согласно
этому графику маштаб функции ! выбран равным ш=2,5—10-3, 1/мм, а безразмерной
координаты _у—п 3=5—10—3, 1/мм. Соответствующий масштаб площади ц5=шц3=
с::
0,03 Рис. 4.1.33. График за—
висимости сх=і(ос) для
профиля крыла в несжи-
маемом ПОТОКЗ!
0,02
А _результат измерения по
методу импульсов; О—дан—
ные по опытному распреде-
лению давления и теоретиче-
скому расчету трения
0,0!
01148
12 ос, град
=12‚5-10—6‚ 1/мм2. Так как измеренная площадь между кривой ] =,‘( у) и осью оу равна
5:3,36—10З ммг, то коэффициент сопротивления профиля при угле атаки ос=6
сх = 2311.3 = 2-3,36-103- 12,5.10—6 = 0,084.
Аналогично могут быть определены значения с„ для других углов атаки (а=0, 6,
8, 12°). Полученные результаты графически изображены на рис. 4.1.33. Здесь же для
сравнения представлены коэффициенты сопротивления экспериментального профиля,
найденные путем измерения распределения давления и приближенного расчета трения
(см. работу 4.1.1).
182
Работадлз
Определение коэффициента псдъемной силы
профиля мет0дом эпектроанапогии
Цель р аботы—ознакомление с методом электроаналогии на
примере исследования подъемной силы профиля в невязком несжимае-
мом потоке. В результате работы определяется спектр обтекания моде-
ли профиля и находится коэффициент его подъемной силы.
Общие сведения
Метод электроаналогии. Движение электрического тока в проводя—
щей среде и течение невязкой жидкости описываются одинаковыми по
форме дифференциальными уравнениями в частных производных эл-
липтического типа. Такая аналогия между двумя физическими явлени-
ями, проявляющаяся в одной и той же форме их математического опи-
сания, используется как метод исследования потока жидкости на основе
известных (заданных) свойств электрической проводимости. В дан—
ном случае электрический ток в проводящей среде является своеобраз—
ной моделью картины потока. Этот метод изучения движения несжи—
маемой жидкости называется м етодом электрогидроди н а м и-
ческой ан алогии (Э ГДА). В данной работе используется одна
из разновидностей метода, основанная на моделировании при помощи
электропроводящей бумаги. Прибор, при помощи которого осуществля-
ется такое моделирование, называется и н те г р а т о р о м.
Рассмотрим подробнее дифференциальные уравнения движения
жидкости и электрического тока. Плоский несжимаемый поток иссле—
дуется при помощи уравнения неразрывности
ду,/дх + ду,/ду = 0. (4.1.76)
Для потенциального течения составляющие скорости можно выра-
зить через гидродинамический потенциал скоростей сргд в виде
У„ = дсргд/дх; У), = дсргд/ду. (4.1.77)
Тогда (4.1.76) примет форму уравнения для потенциала скорости
д2 ‹ргд/дхг + д2 сид/дт = 0. (4.1.78)
Это уравнение является основным в гидродинамике двухмерных плос—
ких установившихся течений.
Изучение стационарного электрического тока в проводнике основа-
но на использовании уравнения
д.!Е/дТс + джд/д'у' = 0, (4.1 .79)
в котором ];, .!"— компоненты вектора плотности электрического тока
7: —1;і+1уі в данной точке электрического поля (і, і—единичные век-
торы соответственно по осям х и у). Эти компоненты могут быть выра-
жены через коэффициент электропроводности о и электрический потен—
циал ср:
1;=—0Ё'_Ё-‚1д=—а-‘3°:°. (4.1.80):
дх ду
В соответствии с этим уравнение (4.1.79) преобразуется к виду
і—[ОЁСЁ]+З:[ОЁСЁ] =о. (4.1.81)
дх дх ду ду
183
В частном случае движения электрического тока в однородной сре-
де коэффициент о=сопз1 и (4.1.81) преобразуется в уравнение Лап—
ласа _ _
д2ф/д ›‹2 —[— дгф/д у2=0. (4.1.82)
На основе уравнений (4.1.78) и (4.1.82) рассмотрим электрическую
модель, которая в некотором геометрическом масштабе отражает ис-
следуемую область течения жидкости. Если обозначить этот масштаб
через т, то координаты точек электрического поля (х, у) и потока
жидкости (х, у) будут связаны соотношениями
?( : тх, @ : ту, (4.1.83)
причем значения х, у могут быть координатами точек профиля на
электропроводной бумаге, а х, у—в обтекающем потоке.
Примем, что электрический потенциал (р связан с гидродинамичес-
ким потенциалом (ргд зависимостью
Ф = аф… + Ь. (4.1.84)
в которой а и Ь—некоторые постоянные параметры. Будем считать,
что коэффициент электропроводности 0 является величиной постоян—
ной. Внося (4.1.83) и (4.1.84) в уравнение (4.1.82), получим
162% + дт…) : 0. (4.1.85)
т дх2 ду2
Поскольку (1750 и т<00‚ полученное уравнение тождественно
(4.1.78) и, следовательно, всякому его решению соответствует некото—
рое решение уравнения (4.1.78).
Из зависимости (4.1.84) для ср и ‹ргд вытекают условия, в соответст-
вии с которыми при -ср=соп5’[ будет также иметь место равенство сргд=
=сопз’с‚ а при дф/дп=О——равенство дфгд/дп=0. Согласно этому ли—
ниям равного потенциала на электропроводяшей бумаге (т. е. на элек—
трической модели) соответствуют эквипотенциальные линии в потоке,
& силовым линиям—ли-
? > ‚дфгд/д’пд ? _ нии тока.
, В процессе проведе-
__‚‚_ _ ния работы производится
(„:свпзъ „ огд=сдпдд измерение электрическо-
Ь——‚— %дфгд/дпщ _)— _го потенциала. При этом
если потенциал измеря-
т; ‘——>- ‘—->— ется в абсолютных еди—
‹» ницах (вольтах), то это
`_"' """ требует практически пол-
_ _ ной стабилизации напря-
1 # Эред/дтп 2 ’ жения питающего тока,
что связано с определен-
Рис. 4.1.34. Граничные условия при обтекании НЫМИ ТРУДНОСТЯМИ- ПО“
профиля потенциальным потоком невязкой не- этому целесообразно пе-
СЖИМЭеМОИ ЖИДКОСТИ рейТИ к определению без-
размерных (приведен-
ных) значений электрического потенциала, определяемых как отношение
измеренного потенциала к разности потенциалов источника тока, питаю—
щего интегратор. Эти безразмерные значения, измеряемые в долях еди-
ницы или в процентах, не будут зависеть от изменения выходного напря-
жения питающего устройства, что повышает точность моделирования
движения жидкости при помощи электроаналогии.
Максимальное и минимальное значения рабочего напряжения на
выходе питающего устроиства интегратора приняты равными соответ-
ственно ср= 1 (100%) и (р=0.
184
Граничные условия. При исследовании обтекания профиля потоком
невязкой несжимаемой жидкости используется уравнение (4.1.78), ре—
шение которого должно удовлетворять граничным условиям:
дфГд/‘дп : О и сргд : сопз’с.
Первое условие выполняется в области невозмущенного потока
вдоль границ 1—2 (рис. 4.1.34). Одновременно это условие соответст-
вует безотрывному характеру обтекания профиля, при котором нор—
мальная к контуру составляющая скорости равна нулю. Второе усло—
вие выполняется в области невозмущеннбго потока вдоль границ 1—1 и
2—2. При моделировании об-
текания профиля этим двум
граничным условиям соответ-
ствуют согласно (4.1.84) ус-
ловия
дф/дп : О и (р = сопз‘с.
Для реализации первого ус-
ловия необходимо вдоль рас-
сматриваемых линий обрезать
электропроводную бумагу, т. е.
изолировать ее. Если такими
линиями являются границы
внутри области, то для на-
дежности изоляции в разрез
вставляется полоска кальки,
согнутая под прямым углом
(рис. 4.1.35).
Вырезав профиль заданной
Рис. 4.1.35. Реализация граничных условий
дф/дп=0 и ср=сопзі при моделировании
формы В прямоугольном листе обтекания профиля:
ЭдеКТрОПРОВОДНОЙ бумаГИ‚ ПО' 1—электропроводная бумага; 2—контур профи—
_ ля; З—полоска кальки; 4—шины-зажимы; 5—гнез—
ЛУЧИМ тем СЗМЫМ ОбЛЗСТЬ ДВИ да для штепселя; б—штепсели коммутационного
жения электрического тока, шнура; 7—источник питания (штриховкой пока—
6
геометрически подобную участ- заны изолированные о ласти)
ку течения жидкости, обтека-
ющей заданный профиль. Поскольку ток может течь только вдоль
изолированной границы, на ней выполняется требуемое условие
(Эф/дп,:О.
Чтобы обеспечить выполнение второго условия ср=сопзі‚ на прямо-
линейных границах устанавливаются шины-зажимы, на которые пода-
ется требуемый потенциал (см. рис. 4.1.35).
При исследовании двухмерных плоских течений несжимаемой жид-
кости можно вместо потенциальной функции сргд использовать функцию
тока тр…, связь между которыми устанавливается соотношениями:
дфгд/дх : дсргд/ду; дфгд/ду : — дсрГд/дх.
Аналогично при изучении плоских электрических полей можно вме-
сто электрического потенциала ср рассмотреть силовую функцию то-
ка тр. Известно, что эквипотенциальные линии (ср=сопз‘[) и линии тока
(ф=сопз’с) пересекаются под прямым углом, образуя ортогональную
сетку. В соответствии с этим линии тока будут перпендикулярны грани-
це области, на которой ср=сопзі‚ следовательно, функция тока тр будет
сохранять в направлении, нормальном к эквипотенциальным линиям,
постоянное значение, т.е. дф/дп=0. Таким образом, граничное условие
ср=сопзі заменяется эквивалентным условием дф/дп=0. Аналогично
вместо ф=соп$т можно воспользоваться условием дср/дп=0.
185
При электр-омоделировании можно найти только поле потенциаль-
ной функции. Однако для любой задачи легко отыскивается новая “мо—
дель, в которой эквипотенциальные линии и линии тока меняются мес-
тами.
Рассмотрим следующий пример. На рис. 4.1.36‚а эквипотенциаль-
ными являются дуги концентрических окружностей. Причем на край-
них дугах приведены значения разности потенциалов (р=1 и (р=0.
Если теперь вдоль заданных граничных прямых, на которых выполня-
ется условие дср/дп=0‚ установить электрические шины с относитель-
ной разностью потенциалов, которой соответствуют приведенные зна—
чения силовой функции тока ф=1 и ф=0‚ и предусмотреть изоляцию
(для этого необходимо обрезать бумагу вдоль прежних эквипотенци-
Рис. 4.1.36. К примеру обращения задачи:
а —— прямая задача; б — обращенная задача; ! — электропровод-
ная бумага; 2 — линии тока; 3 —— эквипотенциальные линии;
4 —- электрические шины; 5 — изолированные границы — линии
обреза
альных линий ср=1 и (р=0; см. рис. 4.1.36, 6), то в полученной обра-
щенной кзртйне эквипотенциальные линии совпадают с первоначаль—
ными линиями тока.
В пределе, при стягивании внутреннего контура в точку и переходе
к полным окружностям, получим картину, состоящую из семейства
концентрических окружностей и радиальных линий. В прямой задаче
такие окружности и линии являются соответственно эквипотенЦиальны—
ми кривыми и линиями тока в поле точечного источника (стока), а в
обращенной задаче, наоборот,—линиями тока и линиями равного по-
тенциала в поле потока от точечного вихря.
Деление моделирующих задач на прямую и обращенную является
отражением характерной особенности двухмерных плоских полей, ко-
торая состоит в их дуальности, т.е.“ возможности осуществления
двух сопряженных полей с ортогональными сетками из эквипотенЦн-
альных линий и линий тока. Для таких полей можно построить соот-
ветствующие электрические модели, которые получаются путем взаим-
ного обращения граничных условий. Случаи прямой и обращенной
задач условно называют соответственно аналогией «А» и анало-
ГИ е Й «В».
Бесциркуляцнонное обтекание профиля. Рассмотрим задачу об об-
текании профиля (с контуром в виде окружности) потоком невязкой
несжимаемой жилкости. Подъемная сила симметричного профиля рав-
на нулю. Отсюда в соответствии с формулой Жуковского (У=рооУооГ)
при У=0 равна нулю и циркуляция скорости около профиля (Г=О).
Поэтому рассматриваемое обтекание называют бесциркуляцион-
ны М, а возникающий возмущенный поток—поступательн ым.
186
Таким же будет обтекание симметричного профиля, отличающегося по
форме от окружности, при установке его в поток под нулевым углом
атаки (рис. 4.1.37).
Как показали исследования, при обтекании профилей на расстоя-
нии от них, равном примерно 2+3 хордам, можно считать сверху и
снизу поток практически невозмущенным. В качестве границ такого
’ ?
_› ‘
'*`“ .’о
__ ‚|:;
—› ..|.
…
__). \;
7.» ——› ////
—› %, '
___›_ ‚"-’, //'-/’ А
—›- ‚и?
___). 4 о _ ё,
___- !
’" 3
( # + 5) Ь 4 ( ц _— 5) Ь
Рис. 4.1.37. Обтекание симметричного профиля безграничным потоком не-
вязкой несжимаемой жидкости
`(ц+5)ь’ " (ц+5)ь’
,!
/
(Эф/(МЧ? `л\
} :?
д` "* :;
дф/дп=0 3 \
` А
‚ _В
"7, @
(’О-' 50:01“,
‚дво/дтд Ю— \
Ц' _ д’
1 2
!д___
і !
Рис. 4.1.38. Моделирование обтекания профиля бесцир—
куляционным потоком (аналогия «А»):
1—электропроводная бумага; 2—изолированные границы; З—вы-
резанный контур профиля; 4—шины-зажимы
потока можно выбрать прямые, параллельные хордам, удаленные от
профиля на указанное расстояние.
Аналогичными исследованиями установлено, что вверх и вниз по
потоку прямые линии, ограничивающие участки невозмущенного тече-
ния, располагаются от профиля на расстоянии, равном примерно 4—2—5
хордам. Таким образом, область возмущенного потока около модели
может быть представлена в виде прямоугольника ] 2 3 4 (см. рис.
4.1.37). При этом стороны 1 2 и 3 4 можно рассматривать как линии
тока, а 1 4 и 2 3—как линии равного потенциала. Граничными услови-
ями при решении задачи об обтекании профиля будут постоянные зна-
187
чения потенциала скоростей на линиях 1 4 и 2 3 (сргд=сопз’[) и равенст-
во дсргд/дп=0 на линиях ] 2 и 3 4.
Перейдем к моделированию рассматриваемой задачи. Если выре-
зать профиль заданной формы в листе электропроводной бумаги пря-
9 „М #
‚’ / 2!
2 А
2 7-е
17?
_.: 5»,
: 3
, \
. 1
1 д' `—°
" “ Ё?
\
Ц, \ \ 3!
\ \
@ Ф=1 #
(ц+5)ь’ (Цт5)Ь'
Рис. 4.1.39. Моделирование обтекания профиля безциркуля-
ционным потоком (аналогия «В»):
! -— электропроводная бумага; 2— изолированные границы; 3— про-
филь из медной фольги; 4—шины-зажнмы
моугольной формы с такими же относительными размерами, как на
рис. 4.1.37, то получим область 1’ 2’ 3’ 4’ движения электрического тока
А,
\
Рис. 4.1.40. К задаче
о циркуляционном обте-
КЗНИИ КРУГОВОГО ЦИ-
линдра несжимаемым
потоком (аналогия «А»):
1 —‹ электропроводная бума—
га; 2—изолированный вы-
рез; З—линии равного по-
тенциала ( =сопз’с); 4—ли-
нии тока (’Ф=сопзі); !,
!1 — шины-зажимы
(рис. 4.1.38), геометрически подобную участку
обтекания профиля 1 2 3 4. Соответствующи-
ми граничными условиями при решении задач
о таком движении электрического тока будут
постоянство электрического потенциала вдоль
прямых 1’ 4’ и 2’ 3’ (ср=сопз‘[) и равенство
дф/дп=0 вдоль линий 1’ 2’ и 3’ 4’, а также на
контуре профиля. Укрепив шины—зажимы
вдоль сторон [’ 4’ и 2’ 3’ и подведя к ним
электрический ток некоторого напряжения,
определяем на бумаге распределение эквипо-
тенциальных линий, решая таким образом
прямую задачу (аналогия «А»).
Рассмотрим обращенную задачу (аналогия
«В»). При ее моделировании профиль изго-
товляется из медной фольги и приклеивается
электропроводным клеем к листу электропро—
водной бумаги (рис. 4.1.39). В этом случае
шины—зажимы закрепляются вдоль сторон
[’ 2’ и 3’ 4’. Подав на шины электрический
ток, определяем на бумаге семейство линий
тока аналогично тому, как это было сделано
при нахождении эквипотенциальных линий.
При этом на контур профиля никакого напря-
жения не подается; но поскольку контур про-
филя выполнен из проводника, то вдоль него пойдет электрический ток
от шин на линиях ]! 2’ и 3’ 4’, т. е. контур “станет линией тока, как
и должно быть по условию задачи.
188
В результате моделирования прямой и обращенной задач строится
ортогональная сетка кривых ср=сопзі и ф=сопзі‚ что позволяет вы—
полнить численный расчет бесциркуляционного обтекания профиля.
Циркуляционное Обтекание. Рассмотрим задачу о чисто цирку-
ляционном обтекании кругового цилиндра несжимаемым потоком
(рис. 4.1.40). Это обтекание характеризуется циркуляцией скорости
около цилиндра, которая определяется в виде разности потенциалов в
совмещенных точках произвольного кругового контура А—А’ (см.
рис. 4.1.40), а именно
Г=ф1741Т9 : ((РГд)А' _ (ФГД)А°
При этом совмещенные точки могут быть выбраны на замкнутом кон—
туре, совпадающем с сечением заданного цилиндра.
Моделирование рассматриваемой задачи осуществляется следую-
щим образом. Выбрав круглый лист электропроводной бумаги, его раз-
резают, как показано на рис. 4.1.40, и вдоль радиального участка раз-
реза устанавливают шины-зажимы [ и 11, на которые подается элект-
рический ток с некоторой разностью потенциалов Аср1_„. Возникающее
при этом электрическое поле характеризуется семейством эквипотенци-
альных линий ср=сопз‘[, которые определяются непосредственно и
представляют собой радиальные лучи, а также семейством линий тока
ф=сопзі в виде концентрических окружностей.
По этой разности электрических потенциалов Аср1_„ можно найти
циркуляцию скорости Г в моделируемом потоке, используя зависи—
мость
Г : ((рН — (рд/а : Аф1__„‚/а, (4.1.86)
в которой а—некоторый постоянный параметр, определяемый в соот-
ветствии с (4.1.84).
В обращенной задаче используются изогнутые полосовые шины-за-
жимы, которые устанавливаются вдоль контура цилиндра и по окруж-
ности достаточно большого радиуса. К ним подводится электрический
ток с некоторой разностью потенциалов. В образующемся электричес-
ком поле путем непосредственных измерений можно определить экви-
потенциальные линии в виде концентрических окружностей, с которы-
ми в прямой задаче совпадают линии тока, а также линии тока в виде
радиальных лучей.
Рассмотренное решение Для круглого цилиндра можно распростра-
нить также на случай циркуляционного обтекания симметричного про-
филя произвольной формы при нулевом угле атаки.
Циркуляционно-поступательный поток. Такой—более сложный——
поток получается в результате наложения друг на друга циркуляцион-
ного и поступательного течений несжимаемой жидкости. Потенциал
скорости и функция тока циркуляционно-поступательного
потока определяются соответственно выражениями фгд=ф1гд+ф2гд и
Фгд=1р1гд+т|92гд‚ в которых индекс «1» относится к Циркуляционному‚ а
индекс «2» — к поступательному течению.
ОЧевидно, функции фгд и тр…, так же как (р1(2)гд и Ф1(2)гд‚ удовлетво-
ряют уравнению Лапласа (4.1.78). Этому же уравнению будут удов—
летворять соответствующие суммарные значения электрического потен-
циала ф=ср1+ср2 и функции тока ф=ф1+ф2. На этом основывается
электрическое моделирование задач об обтекании тел циркуляционно—
поступательным потоком.
На рис.4. 1.41 показана принципиальная схема установки для мо-
Делирования линий тока (аналогия «В»). На листе электропроводной
бумаги наклеивается под некоторым углом атаки изготовленная из
189
медной фольги модель профиля. Электрический ток некоторого напря-
жения подводится к этому листу и контуру профиля шинами-зажимами,
Известно, что если на контур не подаватьдополнительного напряже-
ния, то будет моделироваться бесциркуляционное Обтекание профиля.
Подведя же к нему электрический ток, можно получить распределения
силовых функций тока, которые соответствуют различным случаям об-
Рис. 4.1.41. Принципиальная схема установки для моде-
лирования линий тока около профиля, обтекаемого
с циркуляцией (аналогия «В»):
1—электропроводная бумага; 2—модель профиля из медной
фольги; З—изолированные границы; 4—шины-зажимы; б—ис-
точник тока; б—сопротивление (делитель напряжения); 7—гнез-
да для штепселя; 8—штепсели; 9—отвод со штепсельной вил-
кой; 10—линии тока Ф=соп5г; аЬссі—линия тока, на которой
=1р,\.; Ь—точка полного торможения на профиле
текания заданного профиля циркуляционно-поступательным потоком.
При этом следует выбрать поле с распределением электрических пара-
метров, соответствующим такому обтеканию профиля, при котором его
задняя кромка является точкой плавного схода струй (постулат Жу-
ковского—Чаплыгина). С этой целью в процессе моделирования под-
бирают такое напряжение на контуре фк, чтобы одна из линий тока ф=
=\рк совпадала с контуром заданного профиля и сходила с него в зад-
ней критической точке профиля.
%” г - ё’
‹ , .
, __ №{ „&‘—:
„‹ 31“ „№ - №№ °?“ ‘ * $" > ' „ в.»” ‚ . ..
` _ "` .“! , Г'щйгш ‹- - ; » > __ "`-› а ‹.; №№ . "№"Ч:‹"" от № ^<
`.` -_ _ . " ": - .’- ,.-`.."-ь '
№ «Уз-із: *; ш , гг“.- ,
. :__ . __. ‹ * ч . :'__. _.ч .- -
„‚. 4.“ .- “534“ 'с?" . :і & .; ‘ “г;-'я, ' а" *' № *' —_:.'" '
_; ^ *- \ . _.. _. __ — = 1 (*$-(‚ {, ‚;.; Ё : ' "’-$ $: _. __.Ё ‚_ . (`.
` ("’д' ' _ {" ’ &'“Хё @: ; ; " . \ таё' _ ` ' .;
' о _. " да». -' ^ \. чё _“ ‚:.-, __ __ „ а. \ {‹.-
{' Ё ‚ . 43 .им " . _ __‚` :. &? „(г. “ *;
‘*‘-№ - и № - и _ ‹, ...... - — и: ‚. а :.
. ‹- “ :.Е‘ "‹ } ' ' {‘ ‚ _ . . & .д- ` . " "
' * ? ___ `.` › . . __ ‚__ .
__ \ ' .:, _ \ "и“ - ч:: к — . а. '
№ “‹. „от $3 \ ‚ " № › А“.) .. % ёё! ' . ‘ ‘.' д.,“-
* ; — аг"; » . ъ -
‚ , 5%; з.; {$ ‚. -
3 “°? . - <. -' ^ „'*` ::- :“… № ‹ т`-'-*‹.::-\" :‘3’6 .. ‘ ь '*’… "
№0092."- "" ' ' ' — ' -.‚-_._… „ … а;, " __“ ‹ до: . .
ь $“; .. Ё ‚ ь 352 _ 3—19.“ г
; '-: . Кё,?! гЁ—ЁР'Ё- ";? *$ } \ ‘? ;, `
" -' ' ' ' ; Ё.— ' \ »; _.ъ о
’ ‹ ‚к. « А 3,“ `;
Рис. 4.1.42. Стенд и блоки интегратора ЭГДА:
1—блок питающего устройства и управления; 2—блоки потенциометрических
делителей напряжения; З—нзмерительное устройство; 4—стенд интегратора;
б—шины-зажимы; б—зажимные ключи; 7—одинарная измерительная игла;
8—двойная измерительная игла; 9—электропроводная бумага; 10—ящик для
инструмента и приспособлений; 11—коммутационные и соединительные шнуры
190
Методика измерений. Комплекс приборов и устройств, используемых
для измерения электрических параметров при моделировании процес-
сов обтекания на основе электрогидродинамической аналогии, называ-
ется интегратором. В аэродинамических лабораториях широко
применяется универсальный интегратор типа ЭГДА-9/60
(рис. 4.1.42).
Рассмотрим методику измерений электрического поля при помощи
этого интегратора, а также расчет по результатам этих измерений рас—
пределения параметров обтекания профиля и коэффициента его подъ-
емной силы. Заданными условиями в этой задаче являются форма про-
филя, угол атаки со и скорость набегающего потока У…. В результате
ее решения должна быть определена геометрическая картина обтекания
в ВИДе семейства линий тока и эквипотенциальных кривых, найдено
распределение скоростей (давлений) в возмущенной области течения,
включая контур профиля, а также вычислен коэффициент подъемной
силы.
Как уже указывалось, при электрическом моделировании такого об-
текания выбирается лист электропроводной бумаги, в середине которо-
го наклеивается модель профиля из медной фольги, наклоненная к про-
дольной оси под углом ос. При этом к модели припаивается отвод со
штепсельной вилкой Такой лист бумаги размещается на панели стенда
интегратора и закрепляется шинами-зажимами, как показано на
рис.:4.1.41. На эти шины от блока питающего устройства подают нап-
ряжения ф=1 и ф=0 и, соединив штепсельную вилку с делителем нап-
ряжения, подводят к контуру напряжение трк.
С помощью одинарной измерительной иглы, соединенной с измери-
тельным устройством, находят в окрестности задней кромки профиля
точку с таким же потенциалом трк. Затем, перемещая иглу по направ—
лению к профилю, фиксируют точки, в которых потенциал равен трк. Пу-
тем подбора фк строится такая линия 003 с потенциалом фк, которая схо-
Дит с профиля в задней критической точке (см. рис. 4.1.41). После постро-
ения линии са! находится другая ветвь а!) той же линии тока. В окрест-
ности предполагаемой точки полного торможения !) находится точка
с потенциалом фк, после чего, перемещая иглу по направлению к профи-
лю (и в обратную сторону), строят по точкам линию а!), вдоль которой
потенциал является постоянным и равным его значению трк на профиле.
Задавшись шагом Аф=і(1-:—1О%), по обе стороны от линии тока
(117003 с помощью той же измерительной иглы строят линии тока ф=
=сопз’с. На этом моделирование заканчивается.
Затем переходят к моделированию по аналогии «А», которое долж-
но завершиться построением эквипотенциальных линий. Для этой цели
необходимо вырезать модель из листа электропроводной бумаги, уста-
новить шины-зажимы так, как показано на рис. 4.1.38, и подключить
их к блоку питающего устройства, подав напряжения ср=1 и ср=0. В
таком виде моделирующая установка подготовлена к соответствующим
измерениям, в результате которых находятся линии равного потенци-
ала.
При осуществлении измерений следует иметь в виду, что в задачах
обтекания с циркуляцией потенциал скорости не является однозначной
функцией, т.е. при каждом новом обходе контура значения потенциала
будут отличаться на величину циркуляции. Поэтому при моделирова-
нии в случае аналогии «А» помимо обычного обращения задачи необ-
ходимо перевести двухсвязную область (контур электропроводного ли—
ста и контур профиля) в односвязную область.
С этой целью, используя найденные линии тока, строят ортогональ-
ную кривую, начинающуюся на контуре и являющуюся эквипотенци—
альной линией. Затем вдоль нее производят разрез, по «берегам» кото-
191
рого устанавливают шины-зажимы или полосовые шины (см. рис. 4.1.43),
соединенные друг с другом посредством реостата. В полученной области
потенциал скорости является однозначной функцией.
Следует отметить, что реостат К не включается в систему питания
интегратора, а лишь замыкает шины, установленные по «берегам» раз—
реза. Однако под действием электрического поля, созданного шинами,
к которым подведены потенциалы ср=1 и ср=0, между «берегами» ус-
танавливается некоторая разность потенциалов (дл—п, что и требовалось
при воспроизведении циркуляционного движения. При этом изменением
потенцалов (р; и (рц по «берегам» разреза 1—11, достигаемым с помо—
щью ползуна реостата, до-
биваются в соответствии
с постулатом Жуковского —-
Чаплыгина совпадения точ-
(„0 кн 0 разветвления эквипо-
. _ тенциальнои линии тсп
“ "35*-..._›_і __ _ с задней кромкой профиля
"_ " і _ (см. рис. 4.1.43).
-- __". " 'го_ ‚ — "'ччг'О'ЮООО'ОО‘ЭЮОООО'ОО
& '.:очо'оэчэ'оэио - .
' ° . При некотором положе-
№ нии ползуна реостата и со-
' ответствуюшем сопротивле-
нии К с помощью одинар—
С ‚|___'| ной иглы (см. рис. 4.1.42)
! замеряют потенциал в ка-
р 4143 П кой-либо точке в окрестно-
ис. .. . ринципиальная схема установки „ _
для построения эквипотенциальных линий при СТИ заднеи кромки И, пере
обтекании профиля (аналогия «А»): МеЩЭЯ ЭТУ НГЛУ, определя-
1, 11—шины-зажимы; !!!—вырезанный :контур про— ЮТ положение ЛИНИИ С ТЭ-
филя: [іі—изолированный разрез ким потенциалом. Может
случиться, что эта линия не
попадет на профиль в точке с; тогда по аналогии с предыдущим берут
в качестве исходной новую точку в окрестности задней кромки с дру-
гим потенциалом. Если отыскать такую линию не удается, то с по-
мощью реостата изменяют электрическое поле и повторяют указанные
операции. В результате соответствующим подбором сопротивления К
находят эквипотенциальную линию тс, подходящую к профилю в точ-
ке схода. После этого с помощью той же одинарной иглы и измеритель-
ного устройства определяют положение другой ветви сп этой линии
(см. рис. 4.1.43), а затем, задавшись шагом А=ф=і(1+10%), обыч—
ным образом строят остальные линии равного потенциала.
Соответствующая разность потенциалов Аср1_п=(р1 1—(р1 измеряет-ся
двойной измерительной иглой (см. рис. 4. 1.42), связанной с гальвано-
метром измерительного устройства. По этой величине можно опреде—
лить разность гидродинамических потенциалов Афгд=Аср1_п/а, а затем
вычислить коэффициент подъемной силы. Соответствующая расчетная
зависимость находится из уравнения связи между соотношением
су=У/(О,5рооУ2°…Ь) и формулой Жуковского У=рооУооГ, согласно кото-
РОМУ
о:;й
су = 2Г/(Уш Ь). (4.1.87)
Так как циркуляция Г=Асргд=АФ1—п/а‚ ТО
су : 2Аср1_„/(У°° ад).
В этой формуле Уоо можно выразить через потенциал скоростей на-
бегающего потока:
Уоо : дфгдю/дх
192
или В конечных разностях:
У,ю : Афгдю/(АХ).
Так как Ах=тАх, Ь=тд’ (д’—хорда модели) и Афгдоо=Афоо/а‚ где
Афоо—разность электрических потенциалов вдоль отрезка Ах силовой
линии, моделирующей линию тока набегающего потока, то коэффи-
циент
№ А“
1—11 х
Су=2_ ° —‚—
Аср Ь
(ХЭ
(4.1.88)
Величина Асрщ как и Аст—п, замеряется двойной иглой в области
линии 1’4’ (см. рис. 4.1.38), моделирующей набегающий невозмущен-
=Р, %
10
20
30
00
50
60
70
а
80 ” ; ' ' """ ""*"—1
90 . . , _ ————— - ‚_
1 !
00100 95 90 80 \2' 70 (т\з/ 20 10 5 О
% %
. т
`
_
"_
Рис. 4.1.44. Сетка линий тока и эквипотенциальных
линий:
1—профиль; 2—линии тока; З—линии равного потенциала
ный поток, вдоль направления невозмущенного потока и регистриру-
ется гальванометром. Длина отрезка Ах силовой линии тока, на кото-
ром измеряется разность потенциалов Асрщ регулируется изменением
расстояния между иглами.
Если известно распределение линий тока и эквипотенциальных ли-
ний около профиля (рис. 4.1.44), то нетрудно определить скорость
в любой точке потока. В частности, местная скорость на профиле
А А”
У. = —_Ф- - —" У.,. (4.1.89)
А3 АФ…
где Афоо— ШЗГ, определяющий расстояние между ЭКВ'ИПОТёНЦИЭЛЬНЫМИ
линиями <<на бесконечности» (около боковых кромок листа); Ах—от-
резок линии тока, заключенный между двумя такими линиями; Аср—
шаг, определяющий расстояние между эквипотенциальными линиями
вблизи профиля; Аз—отрезок линии тока (контура профиля), заклю-
ченный между этими линиями.
Определяемая по (4.1.89) скорость У8 относится к середине участ-
ка А3. Например, если замеренная на отрезке Ах—=1О мм (см.
рис. 4.1.44) величина Асроо=0‚05 (5%), то в точке А, где на отрезке [ХЕ—=-
: 10 мм величина Аф=0‚10 (10%), скорость
__А_(р АЗЕУ _ 0,10 10мм
АТ.—' АФ...
‚, = 21/00.
00
_10мм 0,05 °°
13—927 '193
Воспользовавшись формулой (4.1.6), можно определить коэффици-
ент давления в точке А:
_ 1/31 _ (21/00)?
рА: —7= —гУ2 _
И СООТВ6ТСТВУЮЩ66 абсолютное давление:
р„ =БАС/…+р…‚ =—3‹1… +10…
Порядок проведения работы
1. Ознакомиться с устройством и принципом действия, а также про-
верить готовность к работе всех блоков и приборов интегратора в со-
ответствии с инструкцией по его эксплуатации.
2. Изготовить из медной фольги модель исследуемого профиля.
3. Вырезать прямоугольный лист электропроводной бумаги, разме-
ры которого определяются в соответствии с величиной модели профиля
(см. рис. 4.1.38).
4. Приклеить модель профиля электропроводным клеем в середине
вырезанного листа так, чтобы она оказалась наклоненной к .продоль-
ной оси на заданный угол атаки.
5. Припаять к модели отвод со штепсельной вилкой, по которому на
контур профиля подается потенциал.
6. Разместить лист электропроводной бумаги с наклеенной мо-
делью из фольги на панель интегратора, установить шины-зажимы
и соединить их с источником питания.
7. Осуществить на листе электропроводной бумаги построение си-
ловой линии тока, сходящей с задней кромки модели профиля. Для
этого необходимо выполнить следующие операции:
а) определить при помощи одинарной измерительной иглы и изме—
рительного устройства электрический потенциал ‘Рк на контуре профи-
ля в случае, когда напряжение на лист электропроводной бумаги пода-
ется только через шины-зажимы;
б) используя ту же измерительную иглу, найти точку в окрестности
задней кромки профиля с таким же потенциалом «4312, а затем постепен-
но перемещать иглу по направлению к контуру, фиксируя точки с по-
тенциалом тр=—1|эк. В результате получим силовую линию тока ф= фк;
в) если эта линия тока не совпадает с контуром в точке задней
кромки, то следует подключить отвод со штепсельной вилкой к блоку
потенциометрических делителей напряжения и подать на профиль до-
полнительное напряжение, затем измерить новый потенциал на конту—
ре фк и построить другую линию ф= трк. Аналогичные построения про—
изводят до тех пор, .пока одна из линий тока тр=1рк не совпадает с кри-
вой саЁ (см. рис. 4.1.41), сходящей с задней кромки. Затем при помощи
измерительной иглы по значению электрического потенциала тр=фп
построить другую ветвь аЬ найденной линии тока (см. рис. 4.1.;41)
г) выбрав произвольное значение электрического потенциала, отли-
чающееся от тр= 1133 на величину шага, производят аналогичное постро—
ение соседней с контуром линии тока и т. д. При этом величина шага
в малой окрестности профиля составляет не более 1% выбранного по-
тенциала, а на удалении от него — примерно до 10%.
На черной электропроводной бумаге точки, зафиксированные изме-
рительной иглой, и соединяющие их линии тока наносятся цветным
стеклографом.
8. Отключив шины-зажимы от источника питания, а отвод на мо—
дели от делителя напряжения и сняв затем эти шины с листа электро-
194
проводной бумаги, провести под профилем (см. рис. 4.1.43) на неболь-
шом расстоянии Друг от Друга две лин-ии 1 и 11, перпендикулярные ли-
ниям тока. После этого вырезать часть бумаги между этими линиями
и одновременно сделать вырез по контуру профиля.
9. Установить шины—зажимы (или полосовые шины) вдоль линий
1 и 11 и, кроме того, закрепить аналогичные шины на боковых кромках
листа электропроводной бумаги (см. рис. 4.1.43).
10. Присоединив шины-зажимы к источнику питания, а шины, уста-
новленные вдоль линий 1—11,—к реостату, осуществить, используя
\ к 1 я ! ___1_`
/ №5070
Рис. 4.1.45. Сетка линий тока и эквипотенциальных линий при
обтекании профиля несжимаемым невязким потоком, построен—
ная по методу электроаналогии
одинарную иглу и измерительное устройство, построение эквипотенци-
альной кривой тсп (см. рис. 4.1.43), прох0дяшей через заднюю кромку
профиля. Такое построение достигается путем соответствующего изме-
нения сопротивления реостата. Этот процесс нахождения эквипотенци-
альной кривой тсп аналогичен построению линии тока аЬссі. После
нахождения этой кривой строятся по заданному шагу Аср= і(1-:—1О%)
другие эквипотенциальные линии.
11. При помощи Двойной измерительной иглы и измерительного
устройства определить на шинах разность потенциалов Аср1_п.
12. Используя двойную иглу, определить разность потенциалов Асроо
вдоль нескольких силовых линий тока вблизи боковых кромок листа
(при одинаковом расстоянии Ах между иглами) и вычислить соответ-
ствующее среднее значение этой разности.
13. По формуле (4.1.88) подсчитать коэффициент подъемной силы
профиля при заданном угле атаки.
14. По распределению эквипотенциальных кривых на контуре про—
филя рассчитать распределение скорости [см. (4.1.89)].
Пример. Рассмотрим применение интегратора ЭГДА-9/6О Для исследования обте—
кания профиля серии ЦАГИ В, форма которого показана на рис. 4.1.45. Исследование
обтекания профиля несжимаемым потоком проводилось для угла атаки ос=35°.
Длина хорды модели профиля, выполненной из медной фольги, равнялась Ь’=
=100 мм, а толщина профиля А’=20 мм (относительная толщина А’=А’/Ь’=0‚2). В со—
ответствии с размерами модели прямоугольный лист электропроводной бумаги имел
размеры 250Х450 мм. Модель была наклеена электропроводным клеем в середине этого
13* 195
листа под углом а=35° к пр0дольной оси. Шины-зажимы, установленные вдоль про-
дольных сторон листа, соединялись с блоком питания интегратора, на выходе которого
постоянное напряжение равнялось 28 в. Это напряжение в соответствии с безразмерной
градуировкой шкал интегратора и принималось за ‚100%. Таким образом, на каждой из
двух шин потенциалы равнялись соответственно 100% и 0. Изменяя напряжение фк, по-
даваемое на контур профиля, подбирали значение фк=70,1%‚ при котором линия то-
ка ссі сходила с точки задней кромки. При этом точки линии тока с потенциалом ф=
=фк нах0дились с помощью измерительной иглы и гальванометра. Для фиксации этих
точек и построения линий тока использовался стеклограф, заполненный жидкой аква-
рельной краской желтого цвета. Аналогично строилась другая ветвь аЬ линии тока
С Ф=фк=70,10/0.
Затем для принятого значения Аф=—1% были построены линии тока с электри-
ческими потенциалами, значения которых изменялись от 69 до 60%. При этом, приме-
няя одинарную иглу, на бумаге отыскивали точки с соответствующим потенциалом,
величина которого регистрировалась по гальванометру. Построение каждой линии на-
чиналось от одной из боковых кромок_ Таким же образом были определены линии тока
ДЛЯ выбранных 11) от 50 до 10% (с интервалом в 10%).
В области под профилем был выбран шаг Аф=2% и линии тока построены с по-
тенциалами 0; от 72 до 80%. Затем построения были продолжены с большим шагом
(Аф=5%) для значений ф=85; 90 и 95%_
Ввиду большой густоты линий тока в области над профилем часть этих линий на
рис. 4.1.45 Оборвана. Линии ! и 11 под профилем, перпендикулярные построенным ли—
ниям тока, проводились на расстоянии 8 мм друг от друга. После того как была раз-
резана бумага между этими линиями и вырезан контур профиля, и установленным на
боковых кромках листа шинам-зажимам были проведены напряжения ср=100% и 0.
Изменением сопротивления реостата было подобрано напряжение ф=33,9%, при кото-
ром точка разветвления эквипотенциальной линии совпала с точкой с задней кромки.
Аналогично были построены эквипотенциальные линии с шагом Аср=і2% для зна-
чений (р от 30 до 70%, а затем с шагом Аср=10% для ф=10+90%. Полученная в ре-
зультате этих построений сетка линий тока и линий равного потенциала около профиля
показана на рис. 4.1.45.
Используя двойную измерительную иглу, подключенную к гальванометру, измеряли
разность потенциалов АФ1_11=17,40/0 на линиях 1—11. При помощи этого же измери-
тельного устройства, в котором расстояние между иглами установлено Ах=10 мм,
вблизи боковых кромок листа была измерена разность потенциалов вдоль нескольких
силовых линий и вычислено среднее значение этой разности, оказавшееся равным
Аф…=6%. По этим данным при помощи (4.1.88) определен коэффициент п0дъемной
силы профиля:
№14; Ах 0,174 10
Аср д’ _ 0,06 Ж):
00
су— 0,58,
По полученной сетке линий тока и линий равного потенциала определялись ско—
рость и давление Рассмотрим для примера точку А на профиле (см. рис. 4.1.45). Из—
мерив в ее окрестности расстояние между двумя эквипотенциальными кривыми А3:
=3 мм и установив по сетке разность потенциалов Аф=2% (0,02), можно найти по
формуле (4.1.89) скорость
Соответствующий коэффициент давления
БА =1—1/`;°;,/У?,° = 1 —(1‚11)2= —0,2з.
Работа 4.1.4
Профиль крыла в сверхзвуковом потоке
Цель р аботы—найти распределение давления по профилю
крыла при различных углах атаки и вычислить соответствующие аэро-
динамические коэффициенты профиля.
Общие сведения
Основные расчетные формулы. Сверхзвуковое обтекание заострен-
ного профиля характеризуется возникновением перед ним присоеди—
ненного криволинейного скачка уплотнения (рис. 4.1.46). Непосредст-
196
венно за таким скачком происходит резкое изменение направления
струек, скачкообразное увеличение Давления и соответствующее умень-
шение скорости. При этом Для углов заострения профиля, меньших
критических, эта скорость остается сверхзвуковой. Вниз по потоку
вдоль криволинейной поверхности сверхзвуковая скорость постепенно
увеличивается, а давление соответственно уменьшается. Сверхзвуковое
течение за профилем поворачивается и принимает направлен-ие, близ-
кое к направлению набегающего потока. Такой поворот сопровожда-
ется образованием хвостового скачка уплотнения, течение за которым
уже не оказывает влияния на обтекание профиля.
а)
М°°<1
Рис. 4.1.46. Профиль в потоке газа:
а —- Дозвуковое обтекание; б — сверхзвуковое обтекание; ! — про-
филь; 2 — Идеальная жидкость; 3 — вязкая ЖИДКОСТЬ; 4 — скачки
уплотнения; 5 — вихревой след
Сверхзвуковое обтекание профиля по своему характеру принципи-
ально отличается от обтекания его потоками с Дозвуковыми скоростя-
ми. На это указывает, в частности, различие в распределении давления
(см. рис. 4.1.46). Для дозвукового обтекания идеальной (невязкой)
жидкостью характерно полное восстановление давления До его величи-
ны в набегающем потоке, тогда как в сверхзвуковом потоке такое явле-
ние не имеет места. Анализ распределения давления на рис. 4.1.46
показывает, что при обтекании профиля Дозвуковым невязким потоком
аэродинамическое сопротивление отсутствует (парадокс Эйлера—Да-
ламбера). В случае же сверхзвуковых скоростей такое сопротивление,
обусловленное перераспределением давления, обязательно возникает,
Даже если поток невязкий. Это сопротивление называется волновым.
В реальных условиях обтекание вязким газом вызывает некоторое
перераспределение давления и соответствующее изменение волнового
сопротивления. Одновременно возникает Дополнительное сопротивле—
ние, обусловленное трением. Полное сопротивление профиля будет
равно сумме сопротивлений от Давления и трения. Соответствующая
величина суммарного коэффициента сопротивления
сх : схр + Сх] : Схв + Сх], (4…190)
где сЮВ и стс—соответственно коэффициенты волнового сопротивления
и сопротивления трения.
1'97'
Как и при дозвуковых скоростях, влияние вязкости на подъемную
силу и аэродинамический момент профиля в сверхзвуковом потоке зна-
чительно меньше, чем на сопротивление. Практически этим влиянием
можно пренебречь и считать, что подъемная сила и момент создаются
только за счет соответствующего распределения давления. Таким обра-
зом, аэродинамические коэффициенты этой силы и момента будут су=
=сшО и т2=т2р. _
Расчет коэффициента давления р= (р—рс‚с‚)/С/оо на тонком профиле,
обтекаемом сверхзвуковым .потоком под малым углом атаки, можно
пм
0,9
0,8
0,7
0,6
0,5
Рис. 4.1.47. Профиль в сверхзвуко- дд,
вом потоке: ’ О 1 2
і—профиль; 2—центр давления; З—верх-
ний контур профиля с уравнением ув=
=і‚(х); 4 — нижний контур — ун=1°2(х);
5 — скачок уплотнения
Рис. 4.1.48. График для опреде_ления коэффи-
циента пм=і(М°о, х,)
осуществлять по следующей формуле, полученной в аэродинамической
теории второго приближения,
Ъ: іс1е—і—с262, (4.1.91)
где @, рад—угол между касательной к профилю в данной точке и на-
правлением невозмущенного потока;
(‚3:2 (МЗ. _ 1)—“2- (4.1.92)
’
02 = 0,5. (м3. — 1)“2 [(м3. _ 2)2 + [ема]. (4.1.93)
В соответствии с рис. 4.1.47, на котором показан положительный
угол атаки, знак «+» в (4.1.91) относится к нижней, а «—>›—к верх-
ней стороне профиля. Угол @ в (4.1.91) зависит от формы профиля,
определяемой уравнением у=]°(х) его контура, а также от угла атаки
а в соответствии с выражением
@ : ос — ду,-"ах. (4.1.94)
Здесь производная аЁу/сіх определяется по уравнению контура у=1°(х)
с учетом знака для верхней и нижней сторон профиля. Величину
(4.1.94) можно рассматривать в качестве местного угла атаки,
под которым обтекается потоком с числом Моо тонкая пластинка (по-
лигон) в виде элементарного участка контура, совпадающего с каса-
тельной в рассматриваемой точке.
Внося (4.1.91) в (4.1.9), нетрудно получить формулу для коэффи-
циента нормальной силы сыр, который в соответствии с (4.1.14) и ра-
венством су=сур можно принять с достаточным приближением рав-
Ным полному коэффициенту подъемной силы:
‘ с =сЁос=2с1ос+с2К2, (4.1.95)
0
198
где
1 _ 2 _ 2 _
к2 : ) [(%) _ (Щ?) ]сіх. (4.1.96)
0 (іх (іх
После подстановки (4.1.91) в (4.1.12) получим соотношение для
коэффициента СВр осевой силы от давления, которое вместе с (4.1.14)
и (4.1.95) дает следующую формулу для коэффициента волнового со-
противления:
схв = схр : 201 012 + 01 К1 52 —|— 302 К2 01, (4.1 .97)
где Ё=А/Ь— относительная толщина профиля;
1 — 2 _ 2 _
К1 : %— [(%) +(‘1і_) ]сіх. (4.1.98)
А2 0 (іх \ (іх
В выражениях (4.1.96), (4.1.98) дн=уН/Ь и дв=ув/Ь—относитель-
ные координаты точек контура соответственно для нижней и верхней
сторон пр_офиля._В частном случае симметричного профиля (дэн/д)?)2:
= (Сіув/Ц'Х)2= (ду/СЫР и, следовательно, К2=0;
1
_ 2 _
к1 : _і ( (ату) сіх; (4.1.99)
А2 0 (1х
су : 20101; (4.1.100)
схв=2с1оь2+с1к132. (4.1.101)
С учетом (4.1.90) и (4.1.97) коэффициент полного сопротивления
профиля
сх :: 201012 —|— 01 К1 $2 —|— 302 К2 ос—|—сх].. (4.1.102)
Для симметричного .профиля согласно (4.1.101)
сх=2с1ос2+с1К1Ё2+сц (4.1.103)
или с учетом (4.1.100) и (4.1.92)
м2 —1 _
сх=іЁ——сЁ—|—С1К1 А2+Схі° (4.1.104)
Уравнение (4.1.104) определяет зависимость между коэффициента-
ми сопротивления и подъемной силы—так называемую поляру
профиля.
Коэффициент процольного момента относительно передней кромки
найдем в результате подстановки (4.1.91) в (4.1.20):
тг =с1‚41Ж—2с21з2 + (2с2 212—01) 01, (4.1.105)
где
1 _ _
А1 :;Ц‘Ч +4у3)32с1}; (4.1.106)
А 0 (іх (1х
1 _ _.
А2: На _“ —"—уЕ-)›?с17с; (4.1.107)
0 (іх (іх
1 _ 2 _ 2 _ _
‚3.2 : Х [<“? ) _— (Зу—_В) ]хсіх. (4.1.108)
0 „_ (іх (іх
199
Для симметричного профиля адН/аЕ=—адВ/аі‚ поэтому А1=0‚
В2=0И
А2=—2 {‘*‘/5 324}. (4.1.109)
?) (1):
В соответствии с этим
т,. =(202А2—01)ОЬ. (4.1.110)
Коэффициент центра Давления профиля определяется с учетом
формулы сц_д= _тг/су и зависимостей (4.1.105) и (4.1.95). Для симмет-
ричного профиля, воспользовавшись (4.1.110) и (4.1.100), найдем
с…„ : х„_д/Ь : 0,5 (1 _ 2 “`—Ч,) . (4.1.111)
_. 01
Коэффициент сопротивления трения сх; в формуле (4.1.102) или
(4.1.103) может быть определен по выражению
сх]. : (2схі)моо=0’_пд пм, ' (4.1.112)
в котором (2сх,‹)м°°=о, пд, ПМ определяются из графиков соответст-
венно на рис. 4.1.8, 4.1.9, 4.1.48. При этом для нахождения величины
(2 Схт)м°о=0 необходимо знать относительную координату точки пере-
хода хі=12ещд№еоо и число Рейнольдса Кеоо=УооЬ/уоо, для определе-
ния коэффициента 1175 —относительные толщину профиля А и коорди-
нату точки перехода х), а для определения коэффициента пм—ту же
координату х, и число Мос.
Измерение давления. Исследования сверхзвукового обтекания про-
филя с целью измерения на нем давления осуществляются в сверхзву-
ковых аэродинамических трубах. Эксперименты в таких трубах прово-
дятся с Дренированными моделями крыльев, сечения которых совпада-
ют по форме с заданным профилем (см. работу 4.1.1). При этом
следует подчеркнуть, что при разработке их конструкции должно быть
обращено особое внимание на обеспечение прочности моделей, а также
устройств для их крепления в рабочей части трубы, имея в виду, что
вследствие больших скоростей обтекания могут возникнуть значитель—
ные аэродинамические силы и моменты.
На рис. 4.1.49 показана схема экспериментальной установки, вклю—
чающей сверхзвуковую аэродинамическую трубу с закрытой рабочей
частью, модель крыла с заостренным проф-илем произвольной формы,
устройство для ее крепления и установки под заданным углом атаки,
а также измерительные приборы (манометры).
Размеры моделей, которые используются для испытаний в сверх—
звуковых аэродинамических трубах, с учетом степени допустимого
«загромождения» площади сечения трубы определяются по экспери-
ментальному графику на рис. 1.4.15.
Форма и размеры профиля, а также угол атаки, под которым мо—
дель располагается в рабочей части трубы, должны быть такими, что—
бы отраженные волны пересекались за пределами модели (рис. 4.1.50).
Размах модели выбирается из условия, чтобы влияние концов кры-
ла не сказывалось на характере течения в той части модели, где рас-
положены дренажные отверстия. Другими словами, полоска крыла,
в которой располагаются дренажные отверстия, должна быть вне об-
ластей, ограниченных конусами Маха, проведенными через передние
кромки концевых сечений (рис. 4.1.51).
Для определения параметров сверхзвукового потока, необходимых
в дальнейшем для расчета аэродинамических коэффициентов профиля,
200
замеряются полное давление и температура изэнтропического тормо—
жения (ро и То), а также статическое Давление ;)ОС) в рабочей части тру-
бы. По этим данным определяются Другие параметры воздуха в рабо-
чей части, а именно: число Мое, скорость потока У…, скорость звука
а…, плотность р…, коэффициент динамической вязкости поо.
\—
‚ 297
‘ \„
4—й.
,
\\\\\\\\\\\“
Щ
у.}
‚"`
Рис. 4.1.49. Схема установки модели крыла и измерительных
приборов в сверхзвуковой аэродинамической трубе:
1—форкамера; 2—спрямляющая решетка; З—сопло (сопловой вкла—
дыш); 4—рабочая часть; 5—диффузор; б—модель крыла; 7—дре-
нажные отверстия; 8—дренажная трубка; 9—групповой регистрирую-
щий манометр (ГРМ); 10—датчик температуры; 11—милливольтметр;
12—кожух; [д'—термопара; 14—изоляция; 15—трубка Пито; !б—от-
верстие в стенке трубы для замера статического давления; 17—меха-
пизм изменения углов атаки; 18—пульт управления
2
/ .д…. __”// .
3 ”›
1 ‚ ` 2
м ›т
СА
ЖЖЖ/№№ %
2
Рис. 4.1.50. Отражение удар—
ных волн от стенок аэродина-
мической трубы;
Рис. 4.1.51. Области влияния концов крыла на
его Обтекание сверхзвуковым потоком:
! — крыло; 2 — конусы возмущений; 3 — линии Маха:
] —— модель; 2 — стенки трубы; 4 —- область расположения дренажных отверстий;
З—скачки уплотнения; 4—отражен- 5—дренажные отверстия; 6—области влияния
ные ударные волны
Замер избыточных давлений на поверхности дренированной модели
производится с помощью дренажных отверстий, соединенных медными
трубками и резиновыми шлангами с манометрами. В качестве такого
манометра может использоваться ГРМ, регистрирующий избыточную
величину давления р—ратм. Эта величина находится в результате рас—
шифровки записи ГРМ .по формуле (2.1.14). Аналогичным образом
можно измерить избыточное полное давление ро—ратм в форкамере,
если в ней разместить трубку Пито и соединить ее с ГРМ, а также из-
быточное статическое давление Рос—ратм в рабочей части.
14—927 201
Зная атмосферное Давление ратм по показанию лабораторного ма—
нометра, можно определить абсолютное значение давлений ро, рос и р
('на поверхности модели). Соответствующие коэффициенты давления
на профиле определяются по формуле р= 2(р—роо)/(рооУЁо ). Получив
распределение этих коэффициентов по профилю в сверхзвуковом пото-
ке, можно вычислить по формулам (4.1.9), (4.1.12) и (4.1.16) соответ—
ствующие коэффициенты сыр, евр и тир. При этом для тонких мало—
изогнутых профилей вместо (4.1.9) и (4.1.16) можно воспользоваться
сответственно (4.1.18) и (4.1.20).
Рис. 4.1.52. Координатные диаграммы Б=і1(х) и р=і2(у)
для профиля, расположенного в сверхзвуковом потоке под
углом атаки
Чтобы определить аэродинамические коэффициенты, следует по—
строить диаграммы р=1°1(х)‚ р=і2(у), р=1°3(х2) и вычислить площади
под соответствующими кривыми. Характер координатных диаграмм
р=1°2(у) и р=і1(х) для заостренного профиля, расположенного под
небольшим углом атаки в сверхзвуковом потоке, показан на
рис. 4.1.52.
Коэффициент Схв=схр определяется по формуле (4.1.14), затем под-
считываются коэффициенты сх; и сх соответственно по формулам
(4.1.112) и (4.1.90), аэродинамическое качество К=су/с‚С и коэффици—
ент центра давления Сц_д.
Порядок проведения работы
1. Ознакомиться с устройством экспериментальной установки
и проверить готовность к работе всех ее элементов. Особое внимание
обратить на герметичность соединения медных дренажных трубок
и резиновых шлангов со штуцерами ГРМ.
2. Закрепить модель в рабочей части аэродинамической трубы под
заданным углом атаки.
3. Замерить лабораторным барометром атмосферное давление
Ратм-
4. Записать начальные показания на печатающем устройстве ГРМ,
соответствующие каждому измерительному каналу, включая каналы
для измерения статического давления р… в рабочей части трубы и пол-
ного давления ро в форкамере.
5. Осуществить запуск трубы, и после выхода ее на режим устано—
вившегося движения воздуха в рабочей части включить печатающие
устройства ГРМ; одновременно замерить температуру в форкамере.
После осуществления этих операций прекратить работу трубы.
6. Расшифровать показания ГРМ, соответствующие измерениям ро
и р…, затем определить эти параметры и вычислить соответствующие
газодинамические величины для воздуха в рабочей части.
202
7. Расшифровать показание ГРМ, регистрирующего избыточные
давления р—ратм на поверхности модели, и вычислить по этим показа-
ниям коэффициенты давления в соответствующих дренажных точках.
8. По найденным значениям построить соответствующие диаграм-
мы, а затем определить аэродинамические коэффициенты профиля
при заданном угле атаки.
9. Повторить измерения и соответствующие расчеты, задавшись
несколькими углами атаки.
10. Используя полученные результаты, построить графики аэроди—
намических коэффициентов профиля [су=су(ос), сх=сх(а)‚ т2=т2(ос)‚
К=К(а), сц_д=сц_д(а)]‚ соответствующие данному числу М;„.
11. Изменив условия течения в рабочей части трубы путем смены
соплового вкладыша, что обеспечит поток с другим числом М…, осу-
ществить измерения и расчеты давления и аэродинамических коэффи-
циентов, соответствующие этому числу М…. В результате получить
аэродинамические коэффициенты как функции не только _углов атаки,
но и чисел Маха.
Пример. Рассмотрим результаты измерений и расчета аэродинамических коэффи—
ЦИ6НТОВ на примере ПРОДУВКИ В СВЗРХЗВУКОВОЙ трубе ПРОфИЛЯ, фОРМа И ОТНОСИТЗЛЬНЫВ
размеры которого показаны на рис. 4.1.53. На этом же рисунке показаны модель пря-
моугольного в плане крыла с заданным профилем (с размахом !=0,35 м), а также рас-
пооложение дренажных отверстий. Выбранный заостренный профиль является криволи-
неиным И образован двумя симметричными
дугами окружностей. Его хорда Ь=0,1 м, а) 7 2
максимальная толщина А=0,О1 м, угол зао- % №И№ / ’;47
стрения [30%11°, угол атаки модели принят `
ос=8 .
!
1 1 2
2 '3 Щ 15 на дп т\із 20 2:
| В
" 0,5 і
М°°=2 “"
, 7///////////////////////////////////ё/’7////// А
Рис. 4.1.53. Крыло с криволинейным симмет- Рис. 4.1.54. Модель прямоугольного
ричным профилем (угол [30%11°): крыла в рабочей части сверхзвуковой
1—КР'ЫЛ0: 11—профиль; !!!—дренажные отверстия; трубы:
[11 — маркировка дренажных отверстий а: — вид сбоку; 6 — вид сверху; ! — рабочая
часть трубы; 2 — стенки трубы; 3 — модель;
4—линии Маха; б—ударные волны; б—от-
раженные ударные волны
Продувка производилась в сверхзвуковой аэродинамической трубе кратковремен-
ного действия (с баллонами для сжатого воздуха) с закрытой рабочей частью. Сопло-
вый вкладыш был рассчитан на число М°о=2 (это число уточнялось по измерениям
в рабочей части трубы). Размер сечения рабочей части 400Х400, а ее длина—800 мм.
Для проверки правильности выбора размеров крыла и угла атаки (с точки зрения
допустимого «загромождения») из рис. 1.4.15 по Мю=2 было определено отношение
$м/$т=0,25. Площадь проекции модели крыла на плоскость, нормальную вектору ско—
рости набегающего потока (при оъ=8°), $м=Ь(зіп ос) 1=0,1—0,139-0‚35=0‚005 М?, а пло-
щадь квад атного сечения рабочей части трубы $т=0‚42=0‚16 м2. В соответствии
с этим &… $т=0‚005/0,16=0‚03. Таким образом, при угле атаки ос=8° величина «за-
громождения» оказывается в допустимых пределах.
14* 203`
Приближенный расчет волновой картины обтекания профиля заданных размеров
при .М…=2 и ос=8° показал, что отраженные скачки не попадают на моцель, а плос-
кость расположения дренажных отверстий лежит вне конусов возмущения (рис. 4.1.54).
Как уже отмечалось, давления ро И рао, а также СТЭТИЧЭСКИВ ДЗВЛВНИЯ р на ПОВЕРХ-
а)
Ё'ЬЦЁШЁЗШЁЁШЁщёш
"в таг-{гпъ—ГБТЬ
дни?…ні?-ндЁъЩЩцЁЩЁ
Р"?"Ч—“г—т—Т—Р—г _:Т:[:1Т_
0Г2гц б 81—1312 шт
Рис. 4.1.55. Запись на бу-
мажной ленте ГРМ из-
быточного давления
(ро—ратм)3
а ——- начальное показание №0
прибора; б —- величина №
ности модели замеряются с помощью ГРМ, которые вы-
бираются по ожидаемому диапазону измеряемых давле-
ний. Так, например, для замера давления ро был выб-
ран ГРМ со шкалой избыточных давлений +5 атм, а
для замера давлений рос и р —со шкалой — 1 атм. Выб-
ранные ГРМ имели коэффициенты іг=+0,05 в первом
случае и іг=—0,05 во втором.
На рис. 4.1.55 показана запись на бумажной ленте
ГРМ, один из каналов которого подключен к трубке Пи—
то, помещенной в форкамере трубы. По данным этой за-
писи, №0=19,4 и №=65,5. Воспользовавшись формулой
(2.1.14), находим
рО _рдтм =(1\/ — 11/0)1г = (65,5 —19,4)><
><0,05 := 2,305 кГ/см2.
По величине этой разности давлений и атмосферно-
му давлению, измеренному лабораторным барометром,
ратм=738 мм рт. ст. (1,003 кГ/см2) вычисляем
Ро : (Ро —Ратм) + Ратм : 2305 +1›003 = 3,31КГ/0м2-
Аналогично расшифровываются записи статического давления роо в рабочей части
и статических давлений р на поверхности модели. При этом измерения показали, что
роо=0‚353 кГ/см2.
При расшифровке записи давлений с помощью ГРМ была составлена табл. А
Т а б л и ц а А
Определение ро (іг = 0,05) Определение рооиг = — 0,05)
р°_ратм’ РОО—р .
№., № 1\/—№„ кГ/Смгд р… , №., № м—м, кГ/Ё‘иТ-ЁЁ4 роо'
формула кГ/см- формула кГ/см‘-’
(2.1.14) (2.1.14)
19,4 65,5 46,1 2,305 3,31 15,0 28,0 13,0 —0,650 0,353
По отношению рш/ро=л(М°о) определяем число Маха Моо в рабочей части тру-
бы, воспользовавшись таблицами газодинамических функций воздуха [13]. Подставляя
данные, находим
и(Моо)=р°о/р0=0,107 и Мю =2‚13.
По шкале милливольтметра, связанного с помещенной в форкамере термопарой,
в ходе эксперимента была зафиксирована температура в форкамере Т0=288 К.
Соответствующими расчетами были найдены также другие параметры воздушного
потока в рабочей части трубы (для іг=ср/с„=1,4; К=287 дж/кг-град). Все результа-
ты этих расчетов были сведены в табл. Б.
Т а б л и ц а В
П Обозначение и размер-
араметры потока ность Расчетная формула Величина
Полное давление ро, кГ/см2 — 3,31 (изме—
рена)
Статическое давление Рос? кГ/см2 — 0,353
(измерена)
Температура торможе- ТО, К —— 288 (изме-
ния рена)
Число Маха Моо по функции 2’13
204
Продолжение табл. Б
Обозначение и размер-
Параметры потока ность Расчетная формула Величина
Температура ТОО, К Тоо = Тот (МОО) [13] 151
Роо
Плотность 900’ КГ -сек2/м4 р()() = 0,081?
КТОО
Скорость звука а…» м/сек а :УЬКТ 246
Скорость УФО, м /сек 1/00 = Мооаоо 525
1/2 іг
Скоростной напор (10°, гГ/м2 40°: р°°2 °°_—__2_ роо м3) 1,12404
КОЭф‘Рнциент динами' „..., кГ-сек/м2 (3.1.35) 1,05—10—0
ческои вязкости
Коэффициент кинема- „00, м2 ] сек „00 : Нео/Р… 1,3—10—5
тическои вязкости
Число Рейнольдса Пет Кеоо = Уфо/№00 4,0— 10°
Рис. 4.1.56. Векторная Диаграмма для профиля, обте-
каемого потоком с МОО =2,13 под углом атаки ос=8°:
А и В—точки соответственно передней и задней кромок; рЁр
_В
”в
-—коэффициенты давления в точках А и В на верхней сторо-
не профиля; р} 10% —-то же, на нижней стороне; знак «+»
соответствует области, где р>0‚ знак «——» -—области‚ где р<0
В результате расшифровки записи ГРМ и определения коэффициентов давления
в д енажных точках п о или см. ис. 4.1.53 пол чены' данные, кото ые помещены
Р
в табл. В.
По этим данн_ым построены _в_екторная диаграмма (рис. 4.1_.56) и координатные
диаграммы р=1°1(х) (рис. 4.1.57), р=]°2(у) (рис. 4.1.58) и р=і3(х2) (рис. 4.1.59). При
построении указанных диаграмм значения коэффициентов давления в точках
(см. также рис. 4.1.53) определялись по формулам (4.1.91) и (4.1.94).
иВ
205
Номера Верхняя поверхность
дренажных
точек 1|2|з|4|5|6|7| 8|9|1о|11
:? 0,05 0,1 0,2 0,3 0,4 } 0,5 0,6 0,7 0,8 0,9 0,95
17 0,010 0,020 0,035 0,040 0,048 0,050 0,048 0,040 0,035 0,020 0,010
7:9 0,0025 0,01 0,04 0,09 0,16 0,25 0,36 0,49 0,64 0,81 0.9025
_. Ё №0 20 20 20 20 20 20 20 20 20 20 20
г..
5
Ё № 32,0 33,0 34,0 34,6 35,4 35,8 36,4 35,8 35,4 35,2 35,2
(0
С“
%% .
8 [\!—№0 12,0 13,0 14,0 14,6 15,4 15,8 16,4 15,8 15,4 15,2 15,2
Ё“ .
Ё р—ратм. —-0,60 —-0,65 —0‚70 —0,73 —0,77 —0.79 —0,82 —0,79 —0‚77 —0‚76 —О‚76
'кГ/см2 .
р, кГ/см2 ; 0,40 0,35 0,30 0,27 0,23 0,21 0,18 0,21 0,23 0,24 0,24
р—роо. 0,05 0 —0,05 —0‚08 —0,12 —0‚14 —0‚17 —0‚14 —0‚12 —0,11_—0.11
кГ/см‘і
Б=(р—роо)/а 0,045 0 —0,045 —0,07 —0,11 —0,13 —0‚15 —0,13 —0,11 —0,10 —0,10
00
В точке А для верхней стороны профиля (сіу/сіх)?4=у_1/;с-1=+О‚2‚ а
(ау/дхуд =—0‚2. Находим соответственно значения:
31 = 06 — (ду/дх)‚‘2= 0,14—0‚2 = —0‚06;
@; = ос _ (ау/авг:1 = 0,14— (_ 0,2) = 0,34.
для нижней
Ё
дн
"".12
О) 0,3
‚14
` .15
‘ 16
17
Р .'В
‚ у - 19
АЧ 20 1,0
0 „ `. * —
2 .. а:
3 __ 0’51ЙЩ'НВ
5 " . ' 9 10"
6 .
6
Рис. 4.1.57. Координатная диаграмма _Рис. $1.58. Координатная диаграмма
р=і1(х) для профиля (МОО =2,1З; р=і2(у) для профиля (Моо =2‚13;
ос=8°) ос=8°)'
206
Таблица В
Нижняя поверхность
12 13 14 15 16 | 17 | 18 19 20 21 22
0,05 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 0,95
0,010 0,020 0,035 0,040 0,048 0,050 0,048 0,040 0,035 0,020 0,010
0.0025 0,01 0,04 0,09 0,16 0,25 0,36 0,49 0,64 0,81 0.9025
20 20 20 20 20 20 20 20 20 20 20
21,8 23,0 24,8 26,0 27,6 29,0 30,2 3132 32,4 33,6 84,0
1,8 3,0 4,8 6,0 7,6 9,0 10,2 11,2 12,4 13,6 14,0
_0,09 -—0,15 _0,24 _0,30 —О,38' _0,45 ' _0‚51 _0,56 3 —0‚62 —0‚68 _0‚70
0,91 0,85 0,76 0,70 0,62 _ 0,55 0,49 0,44 0,38 0,32 0,30
0,56 0,50 0,41 0,35 0,27 0,20 ‚ 0,14 0,09 0,03 _0,03 _0,05
0,50 0,45 0,37 0,31 0,24 0,18 0,13 0,08 0,027 _0,027 —0‚045
По формуле (4.1.91) получаем:
ЁЁ=—с193—|—02 (03)2=— 1,07><
><(— 0,06) + 1,43 (— 0,06)2= 0,0693;
БЁ=С1ОЁ+С2(ЭЁ)2=1,07—0,34+
+1,43-0,342=0‚529.
В этих выражениях значения коэф—
фициентов с,=1,07 и с2=1‚43 находят-
ся по числу Моо=2‚13 из формул
(4.1.92), (4.1.93).
Аналогично определялись значения
коэффициентов Давления в точке В (см.
рис. 4.1.53). По формуле (4.1.94)
0; = ос _ (ау/ах); = 0,14 _
Вис. $1.59. Координатная диаграмма
—(— 02) = 034; р=1°3 (х?) для профиля (Моо =2,13;
9Ъ=ос—(сіу/сіх)Ъ =0,14— а=8°)
—0‚2 = _0,06,
По (4.1.91)
__
рЁ = _ 7:10; +02 (0%)2 = _ 1,07 (0,34) + 1,43 (0,34)2 = _ 0,198;
5; = 1:19; +% (0%)2 = 1,07 (_0,06) + 1,43 (_0,06)2 = _0,0590.
При построении Диаграмм были выбраны следующие масштабы: масШтаб коэффи-
циента давления дБ:-=…“ 1/мм, а масштабы величин, отложенных по осям абсцисс,
составляли 15:10“, 1.15 =10—3, и? =10—2 1/мм.
207
Согласно рис. 4.1.57 площадь, ограниченная замкнутым контуром и измеренная
с помощью планиметра, равна Ру=2900 мм? В соответствии с (4.1.55) находим
"— —— о —2- _2= _
су—Рурдн;_2900 10 10 0,29.
Измерение площади на рис. 4.1.58 дает значение Рх=3080 мм2‚ следовательно
[см. (4.1.56)],
_ _ _ —2_ __з _
сКр““Рх р.,.) р.;/. -—3080 10 10 _0,0308.
Наконец, из диаграммы на рис. 4.1.59, планиметрируя кривую, находим Рту=
=2420 мм2 и по формуле (4.1.58) подсчитываем соответствующий коэффициент про-
дольного момента:
—- . = с . __2. _? :
_тг _ 0,5 рту и; 1132 0,5 2420 10 10 0,121,
Коэффициент волнового сопротивления схв=схр определяется по формуле (4.1.14),
в которои сур=су:
04° 3
__ =0,29—м 0,0308=0‚0713.
су 57,3° +%” 57‚3+
Воспользовавшись формулой (4.1.112), определим значение коэффициента с“. Приняв
Кенр=3-106, находим
схв :
‚'с, = кеш,/ке„ = 3-106/4—106 = 0,75.
По этой величине 33:0'75 и значению 73=0‚1 из графика на рис. 4.1.9 находим
113 =1,05. По величине хі=0,75 и значению М…=2,13 из графика н_а_ рис. 4.1.48 уста-
навливаем значение коэффициента пм=0,85. Наконец по величинам х,=0‚75 и Пе…—=-
=4-106 из графика на рис. 4.1.8 нахоцим 2(с‚„‹)м°°=о =0,003. Таким образом,
сх] = 2 (сх])мо°___0 пд пм = 0,003—1,05-0,85 = 0,0027.
Полный коэффициент сопротивления согласно (4.1.90)
сх = схр + сх]: = 0,0713 + 0,0027 = 0,074,
По полученным значениям сх, су и т2 находим качество профиля:
К = су/сх = 0,29/0,074 = 3,93
и коэффициент центра давления:
сд,д = хдд/Ь = — тг/су = 0,121/0,29 = 0,418.
Результаты определения аэродинамических характеристик заданного профиля при
М°°=2,13 и других углах атаки приведены в табл. Г.
Таблица Г
к=Сн/Сш суэсшв Сцд, -т2
5 _ 1 П _ гЁсЁд СУ сх _тг К сц—д
4— 08—
0 0 0,030 0 0 0
3— 0,5— 2 0,07 0,032 0,030 2,18 0,430
2_ 04— 4 0,14 0,040 0,060 3,50 0,430
› с\ё 6 0,22 0,053 0,091 4,15 0,413
, „__ Ч- ________ ‚ ‚ 8 0,29 0,074 0,121 3,93 0,418
5 | , сд; _ 10 0,37 0,097 0,153 3,82 0,414
0 0 Ц д ‚2 15 06, град 15 0,56 0,175 0,225 3,20 0,403
20 0,74 0,285 0,302 2,55 0,409
Рис. 4.1.60. Характеристические диаграммы для
профиля при Моо =2,13:
рассчитанные ПО теории ВТОРОГО ПРИбЛН-
жения; _— — _ экспериментальные
По данным табл. Г построены характеристические диаграммы су=ср1(ос), сх=
=ср2(ос)‚ т2=ср3(04), К=ф4(а), сц_д=ср5(01) профиля крыла в сверхзвуковом потоке
с Моо=2,13, показанные на рис. 4.1.60 штриховыми линиями.
Проведем аэродинамический расчет профиля, воспользовавшись теорией второго
приближения, и сравним результаты этого расчета с полученными экспериментальными
данными. Расчет распределения давления по профилю ведется по формулам (4.1.91),
208
(4.1.94). Так, в частности, были определены значения коэффициентов давления в точках
А и В, о чем говорилось ранее. Аналогично находятся коэффициенты давления в лю-
бой точке профиля. Например, в точках б и 17 (см. рис. 4.1.53), где (сіу/сіх)6;17=0 и 06=
=017=ос—(сіу/сіх)6‚17=оь, при угле атаки оъ=8° (0,14 рад) коэффициенты давления:
56 : _с1 96 + с, её=‚_1‚07.о‚14+1,4з.о,142 = _о‚122(—0‚13);
‚317 = 01 91, +02 937 = 1,07-о‚14+1‚4з.о‚142 = 0,178 (0,18).
Здесь в скобках приведены экспериментальные значения соответствующих коэффициен-
тов давления при том же угле атаки, взятые из табл. В.
Коэффициент подъемной силы определен по формуле (4.1.100)
су=2-1,07оъ=2.14ос
или
су = 0,0374ос°_ (4.1.113)
Коэффициент сопротивления [см. (4.1.103)]
сх = 2- 1 ‚07 062 + 1 ‚07(8/3) 0,12 + 0,0027 = 0,0311+ 2,14ос2
или
сх=0,0311+0‚00065(ос°)2. (4.1.114)
В (4.1.103) величина К1=8/3 определялась по (4.1.99).
Коэффициент момента согласно (4.1.110)
тг = [21,43 (2/3) 0,1 _ 1,07] а. = —0‚879ос
ИЛИ
т2=—0‚01530с°; (4,1.115)
величина А2= (2/3)А_ определялась по (4.1.109).
Воспользовавшись формулами (4.1.113) и (4.1.114), находим аэродинамическое ка—
чество:
су 0,0374 01°
сх _ 0,01… + 0,00065 (ос°)2 '
При определении коэффициента центра давления вследствие симметричности про-
филя используем формулу (4.1.111):
К= (4.1.116)
1,43 2
сц_д=0‚5(1—2-——-—0,1)=0,411. (4.1.117)
Приведенные зависимости (4.1.113)—:—(4.1.117), соответствующие теории второго
приближения, нанесены на график на рис. 4.1.60 сплошными линиями. Как видно из ри-
сунка, расчетные и экспериментальные результаты достаточно близки.
Работадлд
Исследование сверхзвукового обтекания
профиля оптическим методом
Ц е л ь р а б о т ы — по фотограф-ии скачков уплотнения и линий
слабых возмущений найти распределение скоростей и давлений
в сверхзвуковом потоке, обтекающем профиль.
Общие сведения
Расчет параметров обтекания. Характерной особенностью сверх-
звуковых газовых течений является возникновение в них скачков уп-
лотнения и линий слабых возмущений (линий Маха). От этого зави-
сят величина и распределение параметров сверхзвукового обтекания,
таких как скорость, давление, температура и др. Если эксперимен-
тальным путем найдена система скачков и линий Маха, то можно оп-
ределить указанные параметры, характеризующие Обтекание заданной
поверхности, в частности профиля крыла. Рассмотрим некоторые мето—
ды этого определения.
На рис. 4.1.61 приведена схема обтекания сверхзвуковым потоком
заостренного профиля в виде симметричного ромба. На его нижней
209
стороне показан прямолинейный скачок уплотнения, сходящий с точки
передней кромки профиля. На этой же стороне у излома контура и в
точке задней кромки профиля показаны линии Маха. На верхней сто-
роне показаны лин-ии Маха, выходящие из точки О передней кромки
Рис. 4.1.61. Симметричный ромбовидный профиль под
углом атаки в сверхзвуковом потоке:
! — профиль; 2 — скачки уплотнения; 3 — линии Маха
и точки А излома контура, а также скачок уплотнения у задней кром-
ки. Систему таких скачков уплотнения и линий Маха можно наблю-
дать при продувках °моделей крыльев в сверхзвуковых аэродинамиче-
ских трубах, используя для этих целей специальные оптические при-
боры, например теневые приборы ИАБ-451 системы Д. Д. Максутова
нлп ТЕ-23.
При помощи фотокамеры, присоединенной к прибору, можно полу-
чить снимки потока, на которых четко видны скачки и линии Маха.
На снимках можно измерить углы наклона этих скачков и линий Маха
к обтекаемому контуру, а затем, используя значения этих углов, вы—
числить соответствующие значения давлений и других параметров
газа.
Рассмотрим верхний контур профиля. Из точки О передней кромки
этого контура выходит одна линия Маха 00’ с углом наклона дюз
=агсзіп (1 /М…). Это указывает на__то, что участок контура (грань ОА)
расположен параллельно вектору У…. Поэтому давление на нем р0А=
=роо, а коэффициент давления рОАг—О.
За точкой А этого участка наблюдается течение Прандтля—Майе-
ра, характеризующееся тем, что между линиями Маха АА’ („ОА=№О)
и АА” частицы газа претерпевают поворот и за линией АА” пере—
мещаются параллельно грани АВ. По измеренному углу
МАБ наклона линии АА” из формулы зіп дАв=1/МАВ можно найти на
грани АВ число Маха МАв=1/зіп ”Ав, определить соответствующее
давление
1+(1е_1)м?„/2 “(**—1)
рАВ =р°° 2 (4.1.118)
1+(іе—1)МАВ/2
и коэффициент этого давления
_ 2 1+(іг—-1)М2°°/2 “(*—1)
рАВ= 2 2 —1 . (4.1.119)
км„ 1 + (іе— 1) МАБ/2
210
На нижней грани ОС давление будет таким, как за косым скачком
уплотнения 00”. По углу Ос его наклона к вектору У… (этот угол так-
же замеряется “по фотографии обтекания) нах0дим по теории скачка
уплотнения давление на этой грани:
_ 3 2 - 2 _Ш
рос _роо (‚…ЧМЮ $1п 19‹: 11+ 1) (4.1.120)
и соответствующий коэффициент давления:
— 4 . .
: _— М2 $1п26'к—1 . (4.1.121)
Рос (іе+1)м2,( °° ° )
Число Маха на грани ОС Определяется по углу рос наклона линии
Маха СС’ : Мос=1/$іп рос.
Поток около грани СВ будет аналогичен течению Прандтля—Майе-
ра по верхней стороне. Коэффициент давления на этой грани можно
найти, определив угол „дв наклона линии Маха СС”:
- 2 Рсв рос
рСВ : Ёмёо (РОС ' рао —1)!
где Рос/Рао определяется по (4.1.120), & рав/рос—по формуле
Рсв 1_|_ (й—1)‚(8іпнос)_2/2 МНе—1)
рос _ 1+(/с—1)($іп „СВ)—%
С этими результатами, полученными по измеренным эксперимен-
тально углам наклона скачков и линий Маха, сравниваются соответст-
вующие данные, полученные методами теоретических исследований.
Одним из них является метод, основанный на сочетании теорий
скачков уплотнения и течения Прандтля—М‘айера. Применение этого
метода рассмотрим на примере расчета обтекания профиля
(рис. 4.1.62) более общего вида, чем ромбовидный. Такой расчет пре-
дусматривает следующие три случая обтекания.
1. Угол атаки ’01 меньше верхнего угла заострения профиля [ЗВ
(ос<Бв) (рис. 4.1.62, а).
В этом случае на верхней и на нижней сторонах профиля возникают
скачки уплотнения, интенсивность которых, вообще говоря, может
быть различной (углы наклона скачков ВОВ и ВСН не равны). Эти скачки
будут одинаковыми (60в=60н), если выполняется условие Бв—БН=2ос,
как это видно из рисунка, или в случае, когда профиль симметричный
и ос=0.
2. Угол атаки ос равен верхнему углу заострения профиля
[ЗВ (-01= БВ) (рис. 4.1.62, 6).
При этом скачок уплотнения возникает перед передней кромкой
только на нижней поверхности, а на верхней появляется линия Маха,
проходящая через точку О этой кромки, которую можно рассматри-
вать как источник малых возмущений. Угол наклона этой линии к гра-
ни ОА будет п0А=11°о=агсзіп (1/Моо).
3. Угол атаки а. больше* угла заострения профиля Вв(ос>Вв)
(рис. 4.1.62, 6).
В этом случае на нижней поверхности перед передней кромкой по-
прежнему возникает скачок уплотнения, а на верхней появляются две
линии Маха, проходящие через точку О: одна из них с углом наклона
м…=агезіп(1/Моо) к вектору У…, а другая с углом наклона МОА:
=агс$іп (1/МОА) к грани ОА (МОА—число Маха на грани ОА).
В каждом из приведенных случаев поток за скачками уплотнения
рассматривается как течение со сжатием. Обтекание верхней
поверхности профиля (см. рис. 4.1.62,б,в) характеризуется как тече-
(4.1.122)
. (4.1.123)
211
ние р азр ежения (течение Прандтля—Майера). При этом течение
со сжатием можно рассматривать как сочетание потока непосредствен-
но за скачком уплотнения и движения газа с расширением вдоль участ—
ков контура АВС и ВЕС (см. рис. 4. 1 .,62)) т. е. течения Прандтля—
д А”
О) до 5
‚. #148 ‚‚
‚1/‚1 #„ ’ЦдВ /3 в
ОС ! ”,—ЧГ
_ . О ‚ 8654 Тдд { ВС _ `__
‘ _ в
\УФ " вен ‚в,; ‚в; ?> С >?
%
Рис. 4.1.62. Схемы обтекания линейного профиля сверх-
звуковым потоком при а>0:
! — профиль; 2 — скачки уплотнения; 3 —— линии Маха
Майера. Такое комбинированное течение, как и поток с расіпирением,
возможны при условии, что углы ВБ и рн меньше некоторой величины,
так называемого критического угла клина Вкр, определяемого для за-
данных числа М… и отношения Ё=ср/с„. Если это условие не выполня—
ется, то происходит отсоединение скачка уплотнения и возникающий
далее за ним поток не совпадает с течением Прандтля—Майера.
Рассмотрим конкретные зависимости, при помощи которых осуще-
ствляется расчет обтекания профиля с заданными числами М… и углом
атаки ос. Прежде всего по значению М… из графика на рис. 111-1 книги
[17] определим предельный (критический) угол клина [ЗКР (для &=
= 1,4), а затем из условий
БЬ=|33—04<13Кр›13;=і3н+°4<[3кр
уточним допустимые величины угла атаки ос (или при заданном ос—
допустимые значения [ЗВ и Вы). При этих условиях давление на верхней
212
стороне профиля (см. рис. 4.1.62, а) определяется следующим образом.
На грани ОА давление
211% . іг— 1
= — М2 51112 6 — _) ,
где угол скачка ОСВ находится из решения уравнений:
РС МЭО 5іП2 ВСВ
: ‚ (4.1.124)
9… 2/(.’г—|— 1)+ (іг— 1) міозіп2осв/(1г4— 1)
18 ОСВ : с186;[%(—ЁЁ —— 1>— 1/%(1:%—1)2_5%і82р; ], (4.1.125)
в которых @во и рс—плотность соответственно в набегающем потоке
и на скачке уплотнения.
Соответствующий коэффициент давления
Ъ… = —4—— (мі. 51112 ее„ _ 1).
(4 + 1) МЗ.
Число Маха на рассматриваемой грани
МА: 1 ‚ ]/— ШМ“) ‚ (4.1.126)
зіп ( есв _рв) род/рео— (1; _ 1)/‹1›‚+ 1)
где рОА/роо определяется по формуле (4.1.124), в которой рс=рОА.
Эти расчеты давления и числа Маха за скачком уплотнения можно
производить при помощи таблиц или графиков.
Для определения скорости и давления на гранях АВ и ВС восполь—
зуемся методом характеристик. В соответствии со схемой течения на
рис. 4.1.62, (1 поток, параллельный плоскости ОА, при обтекании точки
излома контура А постепенно поворачивается, принимая направление,
параллельное плоскости АВ. Возмущенный участок течения с расшире—
нием ограничен с левой стороны линией Маха АА’, наклоненной кпло-
скости ОА под углом _110А=агсзіп (1/МОА).
Процесс расширения заканчивается на линии Маха АА”, наклонен-
ной под углом цАВ=агсзіп (1/МАВ) к плоскости АВ. Между этими ли-
ниями происходит непрерывное измененне параметров потока. Число
Маха на плоскости АВ определяется по углу ШАБ=ШОА+Бвэ где ш0А=
:о) находится из уравнения
(в: ушагс’сд 1/Ё_1(М2——1)—агс1$1/М2—1 (4.1.127)
іг—1 іг+1
по числу М=М0А. Из этого же уравнения по ш=шАв находится соот-
ветствующее число МАБ. При проведении подобных расчетов обычно
пользуются таблицами функций ш=1°(М). Такие таблицы, составлен—
ные, в частности, для значения іг=ср/су=1,4‚ приведены в [13‚ 17].
Найденное из (4.1.127) или по таблицам число Маха МАБ позволя-
ет определить давление на грани АВ
1+(!г—1)М20А/2 “(*—1)
р : р 4.1.128
АВ 0А[1+(Ё_1)мЁв/2] ( )
и коэффициент давления
_ р
рАВ : 22 АВ . РОА — 1 . (4.1.129)
Ёмоо РОА Рос
За точкой В излома контура также набЛЮДается течение Прандтля—
Маиера, характеризующееся тем, что на участке между линиями Ма-
213
ха ВВ’ [угол наклона этой линии пАв=агсзіп (1/МАВ)] и ВВ” [рвс=
=агсзіп (1/МВС)] частицы газа поворачиваются и за линией ВВ” пере-
мещаются параллельно грани ВС. По соответствующему этой грани углу
ШВС=03АВ+ВЕ (см. рис. 4.1.62, (1) вычисляется из (4.1.127) число МВС,
а затем давление
1+ іг—і м2 /2 “(*—1)
‚ЭВС: АВ! ( ) АВ (4.1.130).
! 1+(/г— 1) м2ВС/2
и коэффициент давления
ББС: 22 РВС .рАВ . № -—1 ‚ (4.1.131)
дм… РАВ рОА роо
причем отношения давлений рАВ/рОА и рОА/роо были определены ранее.
Аналогично рассчитываются параметры обтекания нижней поверх-
ности для всех расчетных схем, т.е. для всех тех случаев, когда возни-
кает скачок уплотнения.
Теперь рассмотрим течение разрежения на верхней поверхности
(см. рис. 4.1.62,б, в). На рис. 4162,6 грань ОА параллельна вектору
1/00, поэтому на ней р0А=роо, род=0 и М0А=Моо. По величине ш…, най-
денной по числу Моо из табл. 5.3.1 [20], можно определить для граней
АВ и ВС углы
_ . __ _ с
(ПАВ—(Ооо—ГБВ И ФБС—ШАВ +Бвэ
а по ним из той же таблицы или из табл. 10 [13] —соответствующие
числа МАБ и МВС. Расчет давления №113 и коэффициента давления рАВ
ведется по формулам (4.1.118) и (4.1.119) соответственно. Давление рве
и коэффициент давления рвс определяются соотношениями
1 + (іг— 1) МЁв/2 “(*—1)
1+ (е_ 1) мёд/2
рвс : рАВ [
Б _ 2 Рвс _ РАВ 1)
вс _ ’
ЁМЁО РАВ Роо
где ‚див/рсо находится по (4.1.118).
Аналогично вычисляем числа Маха на верхней стороне профиля,
обтекаемого по схеме на рис. 4.1.62, 8. Здесь течение Прандтля—Май-
ера начинается непосредственно у передней точки грани ОА. Для этой
грани
_ "13. 1 _
ЮОА _ 0300 —‚— (ос БВ),
а для двух других—
_ "гв _ _ _ с
(ОАЕ—ШОА Изв И Одве—"динз—і [Зв'
По этим значениям 0) из табл. 10 [13] находим соответствующие
числа Маха, а по ним давления. В частности, давление на грани ОА
1+‹1›‚— 1) Ма,/2 “(*—1)
рОА : роо ’
1+<1г— ома/2
а коэффициент давления
_ 2 рОА
р = — 1) .
ОА №2... ( р…
/
214
Для грани АВ расчет давления И коэффициента давления ведется
по формулам (4.1.128) и (4.1.129), а для грани ВС—по (4.1.130) и
(4.1.131).
Течение за хвостовыми скачками и линиями Маха не исследуется,
так как оно не оказывает влияния на обтекание профиля.
Оптические исследования в аэродинамических трубах. Целью этих
исследований является фотографирование модели крыла с заданным
профилем, расположенной в рабочей части сверхзвуковой аэродинами—
ческой трубы, и последующее измерение углов наклона скачков и линий
Маха. Для проведения таких экспериментов необходимо иметь кроме
аэр0динамической трубы модели крыла, устройства для ее крепления
и установки угла атаки, а также соответствующие оптические приборы
и фотографические устройства.
Оптические исследования обычно проводятся в сверхзвуковых тру-
бах с закрытой рабочей частью, причем такие исследования можно
осуществлять одновременно с дренажными испытаниями. Особенность
закрытой рабочей части трубы, предназначенной для оптических иссле-
дований, состоит в том, что в ее боковых стенках должны быть «окна»
из оптического стекла, через которые просвечивается и фотографирует-
ся возмущенная область потока около модели.
Порядок проведения работы
1. Ознакомиться со схемой экспериментальной установки и прове—
рить готовность к работе всех ее элементов, включая оптический
прибор.
2. Подсоединить манометр к штуцеру насадка полного напора
(трубки Пито), установленного в форкамере, а вакуумметр—к штуце-
ру отверстия (приемника статического давления) в рабочей части
трубы.
3. Закрепить при помощи специального приспособления модель кры-
ла в рабочей части трубы и установить ее под заданным углом атаки.
4. Включить источник света оптического прибора и произвести фо-
кусировку изображения модели по матовому стеклу. Затем отключить
источник света, присоединить к прибору на место матового стекла фото—
приставку, заряженную фотопленкой, установить экспозицию и подклю—
чить фотоприставку к блоку питания. После этого закрыть кожухом
узел фотоаппаратуры. Дальнейшее управление работой оптического
прибора осуществляется автоматически с пульта управления.
5. Записать по показанию лабораторного барометра величину ат-
мосферного давления ратм.
6. Включить аэродинамическую трубу и после выхода ее на режим
установившегося обтекания осуществить фотографирование модели, а
также измерить давление ро в форкамере и статическое давление в ра-
бочей части рос.
7. По измеренным давлениям ро и р… определить число Маха в ра-
бочей части трубы.
8. Проявить фотопленку, снятую с фотоприставки к оптическому
прибору, и сделать несколько фотоотпечатков.
9. Измерить на полученной фотографии углы наклона скачков уп-
лотнения и линий Маха, осуществить по ним необходимые расчеты па-
раметров потока около модели и сравнить с теоретическими Данными.
Пример. Рассмотрим результаты оптических исследований в сверхзвуковой аэро-
динамической трубе, которые получены на модели прямоугольного крыла с симметрич—
ным ромбовидным профилем (рис. 4.1.63), установленной в потоке под углом атаки ос=
=8°. Хорда профиля равнялась Ь=0,1 м, максимальная толщина А=0‚01 м, а угол
заострения Бшбй Модель крыла с таким профилем располагалась вплотную к боко-
вым стенкам трубы, расстояние меЖДу которыми 1=О‚4 м. Труба имела закрытую ра-
215
бочую часть прямоугольного сечения и сопловой вкладыш, рассчитанный на число
М°о=2. «Загромождение» рабочей части трубы
ЗМ Ьзіпос! Ьзіпос 0,1-0,139 О 035
$? 12 ! 0,4 ’
находилось согласно графику на рис. 1.4.15 в допустимых пределах.
Давление ро в форкамере измерялось образцовым манометром, а разрежение в ра—
бочей части—вакуумметром, рассчитанными Соответственно на давление до 5 атм
и 760 мм рт. ст.
Число Маха Моо в рабо-
чей части трубы уточнялось по
измеренному отношению давле-
ний роо/ро=л(М°о) из таблиц
газодинамических функций
<, [13]. Измеренные значения
5/2 В \] Ратм, Ро и р…, а также число
0 _ Маха были такими же, как в
‚д/2 СЁ=СС/Ь примере к работе 4.1.4.
с На рис. 4.1.64 показана фо—
0,5 _ тография спектра обтекания
‚ профиля, на которой ВИДна си—
= стема скачков уплотнения и ли—
ний Маха. По этой фотогра-
Рис. 4.1.63. Модель прямоугольного крыла с сим- фИИ были измереныо УГОЛ нак-
метричным ромбовидным профилем ЛОНЗ скачка 9с=42 ‚„а также
углы наклона линии Маха:
ноо=28°; моА=27°; нАв=
=22о; Мос=39°; Мсв=30°.
По этим углам рассчитаны соответствующие параметры обтекания. Значение ноо=
=28° определяет число Маха набегающего потока
МОО = 1/зіп ров = 1/5іп 28° = 2,13.
На грани ОА верхней стороны число Маха
МОА = 1/5іп 27° = 2,20.
Рис. 4.1.64. Спектр обтекания профиля сверхзвуковым потоком
с МОО =2‚13:
] — профиль; 2 — скачки уплотнения; 3 — линии Маха; 4 — след
Аналогично найдены числа Маха на гранях АВ верхней и СБ нижней поверх-
ностей:
а также число Маха на грани ОС (после косого скачка уплотнения)
МОС = 1/5іп 39° = 1,59.
По найденным числам Маха определялись давления. В частности, на грани ОА
216
р р ' да —1 \—ь/‹к—1› 3,31 1,4_ 1 _1‚4/‹1.4—1›
—О—А=—9—(1+ 2 Мёд) = —— (1+—2—2,202) =0,895.
р.. р..
Соответствующий коэффициент давления
' 2 рОА—1——і—(0895—1)——оозз1
РОА: ЬМЁ, ро, _1,4.2,132’ _ ’ '
Аналогично для грани АВ той же верхней стороны
рАВ 4—1 м2 —іг/(іг—1›_ 3,31 2 —1‚4/‹1.4—1›
— 1 —— 1 12, 67 = 0,430
р.., =Р…( + 2МАВ) =0 353( +— >
_ 2 рАВ 2
=——_ ———1 =————— 0,430—1 =—0,180.
РАВ ЁМЁО (РОО ) 1,4.2_132( )
На нижней грани ОС давление определяется по формуле (4.1.120):
Р 2 1, 4 1,4—1
—06 = ——2, 132 зіп2 42° _-
роо 1 ‚4 + 1 1,4 -|— 1
а коэффициент давления — по формуле (4.1.121):
= 2,20,
Бос —(1 4+1)2 132 (2э1328і1’12 420—1)=0‚378.
На грани СВ коэффициент давления находится следующим образом. Используя
(4.1.123), получим
р _ - о —2 1,4/(1,4—1)
_сё __ [1+(1,4 1) ($… 39) т] _ о 535
1 + (1,4_ 1) (зіп 30°)—2/2
Далее по (4.1.122) находим соответствующий коэффициент давления:
рос
рсв = (0,535.2,20_1) =0,0558.
__2___
1,4-2,132
Теперь проведем расчет обтекания профиля при Моо=2,13 и ос=8° по методу,
сочетающему теорию косых скачков уплотнения и течений разрежения. При угле ос=
=8° реализуется третья расчетная схема, когда перед нижней гранью ОС возникает
косои скачок уплотнения, а на всех остальных—течение разрежения Прандтля—
Здайера.
По числу Моо=2, 13 из табл 5.3.1 [20] находим (0…=30°. Затем для граней ОА
и АВ определяем значения:
030.4— _ (000 + (05—13) = 30 + (8—6) = 32°;
(ОАЕ : (оОА—і—26=З2-|—2—6=44°
и из табл. 10 [13] отыскиваем соответствующие числа Маха: М0А=2‚21; М А В=2,72.
По этим числам находим:
_рЁ __ Г 4 (13 _ им;/2 Г“… _ [1 + (1 ‚4 _ 1)2‚132/2]1.4/‹1‚4—1›
=0,880;
р.. 1—:— (14 —1)№ЁА/2 1+ (1,4— 02,21“?
_ 2 рОА ) 2
__ =_=—= —_1 = —— 0,880—1 =—0,0379;
[90.4 ‚ЁЁ/150 (роо , 1,4-2,132 ( )
рдВ— 1 —|—(/г—1)М2ос/2 ' “"“—” [1+(1,4_1)2,1з2/2 .1.4/‹1‚4—1› (› 399
рю 1+(Ё—1)МЁв/2 [1+‹1,4—1)2‚722/2 _ ’ ’
— 2 РАВ \, 2
= =_— ——__1 =———— 0,399— =—0‚18 .
рдв №30 (рт 1,4.2,132( [) 9
/
217
Обтекание нижней поверхности определяется углом наклона косого скачка 00.
Его величина была найдена по Моо=2,13 и углу отклонения потока Б’=[3+ос=6°—|—
+8°=14° из графика на рис. 111-1 [17] и равнялась 00=41‚5°. Там же находилось
число Маха за косым скачком Мос=1,55. Соответствующее отношение давлений опре-
делялось по формуле (4.1.120):
рос
' 94 1,4—1
———_-_—. (32—1—— 2,132 зіп2 41‚5°———) =2,17_
Род ‚4+1 1‚4+1
Коэффициент давления за скачком (на грани ОС)
_ 2 рОС
=— —_ =——— 2,17—1=0,369.
Рос ЁМЁО (роо ) 1,4—2‚132( )
Расчет числа Маха и давления на грани СВ проводился следующим образом.
По числу Мсв=1,55 из табл. 5.3.1 [20] определен угол фос=13‚5‚ а по величине
фсв=соос+2|3=13,5°+2-6°=25,5° из табл. 10 [13] ——число Маха Мсв=1,97. Этим
числам соответствуют отношение давлений
рев 1 + (іг — 1)МЁС/2` "”"“”_ [1 + (1 ‚4 —1)1‚552/2]1‚4/‹1.4—1›
__ _ =0‚530
1+(1‚4—1)1,972/2
… _
Рос 1 -|—(іг—1)М2СВ/2
и коэффициент давления
_ _ _2_ ШЗ @ [ __ __
Рсв _ дм?” Рос роо 1,4-2‚132
Результаты определения чисел Маха и коэффициентов давления на гранях про-
филя по измеренным углам скачка уплотнения и линий Маха, а также расчета по ме-
тоду сочетания теории скачков уплотнения и течения разрежения приведены в табл. А.
(0,53-2,17—1)=о‚047з.
Таблица А
| Мос рос мсв рсв
Эксперименталь- 2,20 —0‚0331 2,67 —0,180 1,59 0,378 2,00 0,0558
ные данные
Теоретический 2,21 —0‚0379 2,72 —0,189 1,55 0,369 1,97 0,0473
расчет
М
Параметры МОА РОА АВ рАВ
Работадлд
Исследование влияния скольжения крыла
на обтекание профиля
Цель работы—найти распределение давления по профилю пря-
мого и скользящего крыльев бесконечного размаха и определить по ним
соответствующие аэродинамические коэффициенты; путем сравнения
полученных результатов оценить влияние скольжения на обтекание про-
филя; экспериментально проверить возможность расчета аэродинамиче-
ских коэффициентов профиля скользящего крыла по известным их зна-
чениям для такого же профиля, принадлежащего прямому крылу.
Общие сведения
ПРЯМОУГОЛЬНОЗ КРЫЛО беСКОНСЧНОГО размаха, передняя КРОМКЭ КОТО-
РОГО не перпендикулярна НЭПРЭВЛЗНИЮ СКОРОСТИ набегающего ПОТОКЗ,
НЭЗЫВЭЗТСЯ С К О Л Ь 3 Я Ш И М К р Ы Л О М, а УГОЛ МЗЖДУ ВСКТОРОМ СКОРО-
сти У… и его нормальной к передней кромке составляющей—углом
с к о л ь ж е н и я Х (рис. 4.1.65). Такая передняя кромка называется так—
же скользящей, или стр елов идной.
Рассмотрим некоторые особенности обтекания скользящих крыльев.
Поток около таких крыльев можно разделить на два течения: одно из
218
них —продольное (вдоль размаха крыла), характеризующееся скоро-
стью У… : У…зіпх‚ параллельной передней кромке, а другое—попереч-
ное течение, зависящее от величины нормальной к этой кромке состав-
ляющей скорости Уст: У…созх.
Распределение давлений по крылу не зависит от продольного тече—
ния, а обусловлено лишь поперечным обтеканием со скоростью Уст:
:Уюсоз Х- Характер этого об-
текания, а следовательно, и
распределение давления изме-
няются в зависимости от фор-
мы профиля, совпадающего с
сечением крыла плоскостью,
нормальной к передней кром—
ке, и угла атаки, измеряемого
в этой плоскости. В соответст—
вии с этим аэродинамические
характеристики этого профиля
будут такими же, как профи-
ля, принадлежащего прямому
(нестреловидному) крылу, об- ,
текаемому со скоростью набе- \,…
гающего потока Усс… под ука-
занным углом атаки. Отсюда ] _
_поверхность крыла, 2—профиль в сечении
следует также ВЫВОД, СОГЛЭСНО по нормали; 3—профиль в сечении по потоку
которому аэродинамические
характеристики скользящего
крыла можно определить, если известны соответствующие их значения
для прямого крыла.
Несжимаемый поток. При определении аэродинамических характе-
ристик скользящее крыло можно рассматривать как прямое, повернутое
на угол скольжения Х- В этом случае, очевидно, у скользящего крыла
в нормальном сечении профиль такой же, как у прямого крыла.
Профиль и угол атаки в плоскости, нормальной к передней
кромке, отличаются от профиля и угла атаки в сечении по потоку
(см. рис. 4.1.65). Хорда в нормальном сечении Ьп и хорда Ь вдоль потока
связаны соотношением
`
мг;/14”, -'-:-_:
‚„/' /
11,4”
‚. „
2
Рис. 4.1.65. Скользящее крыло:
Ь„ = Ьсозх. (4.1.132)
Угол атаки О… в нормальном сечении определяется из выражения
зіп ос„ : И/Ьп =Рь/(Ь соз %) : зіп ос/соз х, (4.1.133)
в котором оъ—угол атаки в плоскости потока (см. рис. 4.1.65).
Если известен коэффициент давления Ъ в некоторой точке на профи—
ле крыла при прямом обтекании (без скольжения) со скоростью ТД,…
то при повороте крыла на угол Х коэффициент давления ;),с в той же
точке (при сохранении угла атаки в нормальном сечении, равным углу
атаки профиля прямого крыла) будет определяться по формуле
БХ =_ Бсоз2х, (4.1.134)
а соответствующие аэродинамические коэффициенты подъемной силы,
момента тангажа и сопротивления от давления:
сух : су соз2 х; (4.1.135)
тц : т2 соз2 х; (4.1.136)
сат)с : схр созЗ х. (4.1.137)
219
Причем эти коэффициенты, как и коэффициент давления, определены
для скоростного напора 6/с‚<‚=рсо УЗО/2.
Из формул (4.1.135) и (4.1.136) следует, что коэффициент центра
давления, рассчитанный по выражению Сц_д= _тгх/сшс, соответствуюс
щему малым углам атаки, не зависит от угла скольжения.
Сжимаемый поток. Согласно линеаризованной теории коэффициент
давления на профиле скользящего крыла в доз в у ков о м сж и м а е -
м о м пото к е можно получить из соответствующего коэффициента для
х<Л/2—р_
апп/241“
Рис. 4.1.66. Скользящее крыло с дозвуковой (а) и сверх—
звуковой (б) передними кромками
того же крыла в несжимаемой жидкости, пользуясь формулой Пранд-
тля—Глауэрта (4.1.32), в которой число Мсо заменено на М…соз х:
БЖЖ ___ БЖЖ/М 1 _ м3, со52х (4.1.138)
или с учетом (4.1.134) _
БЖЖ = рНСЖ соз2х/ ]/ 1 — МЗО соз2 х. (4.1.139)
Соответствующие аэродинамические коэффициенты определяются
при помощи соотношений (4.1.38), (4.1.39) и (4.1.135), (4.1.136). В ча—
стности, коэффициент подъемной силы
с = сусоз2х/|/ 1 _— мгт сов2 х. (4.1.140)
уХСЖ
Применение скользящего крыла вызывает такой эффект обтекания,
который имел бы место при снижении скорости набегающего потока от
“значения Уоо до У… соз х. При этом, естественно, уменьшаются и местные
скорости на профиле скользящего крыла, что в свою очередь приводит
к снижению разрежения и, как следствие, к увеличению критического
числа Маха Мо……с невозмущенного потока для стреловидного крыла.
Это число Маха может быть определено по известному его значению
М.,окр для профиля прямого крыла, имеющего ту же форму и угол атаки,
что и профиль скользящего крыла в нормальном сечении:
Моск” = Мшкр/соз2 х. (4.1.141)
Сверхзвуковые скорости. Сверхзвуковое Обтекание скользящего кры-
ла характеризуется «нормальной составляющей» числа Маха Мо…:
=Мтс05х. В зависимости от величины этой составляющей возможны
два случая обтекания (рис. 4.1.66).
1. Величина Мооп=М°осо5х<1. Это случай дозвукового обтекания
профиля скользящего крыла. Очевидно, для значений М…созх<М„крх
(докритические скорости) расчет такого обтекания ведется по теории
дозвуковых течений, как было показано в работе 4.1.1. В соответствии
220
с этим передняя кромка такого скользящего крыла называется дозву-
ковой
Из выражения М… со5х<1 следует, что созх<1/М„=зіпн°о, откуда
%>Л/2—‘Ноо. Это неравенство означает, что линии Маха, внутри кото-
рых распространяются слабые возмущения от крыла, проходят перед
его передней кромкой (рис. 4.1.66, а). Вследствие этого имеет место
взаимодействие потоков на верхней и нижней сторонах крыла, прояв-
ляющееся в перетекании газа из области высокого давления в зону раз-
режения. Таким образом, в этом случае наблюдаются эффекты, соответ-
ствующие чисто дозвуковому обтеканию.
2. «Нормальная составляющая» числа Маха Мооп=М°о созх>1. От-
сюда следует, что созх>1/М°о=зіпр…о и х<л/2—р°о. Это соответствует
тому, что линии Маха проходят позади передней кромки (рис. 4.1.66, 6),
на которую набегает сверхзвуковой поток с числом М…„>1. Такая пе—
редняя кромка называется сверхзвуковой. В этом случае при
сверхзвуковом обтекании скользящего крыла отсутствует взаимодейст—
вие между верхней и нижней поверхностями и расчет такого обтека—
ния можно производить независимо для каждой поверхности. Расчет
коэффициента давления можно осуществлять по формуле (4.1.134), а
расчет аэродинамических коэффициентов—из выражений (4.1.135)+
—:—(4.1.137). Причем входящие в соответствующие формулы коэффици-
ент давления р, а также аэродинамические коэффициенты су, т;, схр=
=сш3 определяются по теории сверхзвукового обтекания при условии
замены числа М… на М… соз Х- В частности, коэффициент подъемной си—
лы, отнесенный к скоростному напору асо=рооУЁо /2, равен согласно дан-
ным линеаризованной теории
су : 404 соз2 х/у/ЦМЁЮ соз2х — 1,
где оа—угол атаки профиля скользящего крыла в нормальном к перед-
ней кромке сечении.
Измерение давления на профилях стреловидных крыльев. Целью
экспериментального исследования стреловидных крыльев является,
с одной стороны, измерение распределения Давления и расчет по этому
распределению аэродинамических коэффициентов профиля и, с другой,
опытная проверка возможности определения таких коэффициентов по
известным их значениям для прямого крыла. Экспериментальные иссле-
дования осуществляются в аэродинамических трубах на дренированных
меделях, которые могут быть использованы одновременно в качестве
стреЛОВИДных или прямых крыльев.
Схемы экспериментальных установок показаны на рис. 4.1.67 и
4.1.68. Модель крыла в открытой рабочей части дозвуковой аэр0дина-
мической трубы (см. рис. 4.1.67) закрепляется при помощи приспособ-
ления, которое позволяет устанавливать ее под углом атаки и одновре-
менно располагать в потоке как прямое или скользящее крыло. Модели
крыла, установленной в закрытой рабочей части сверхзвуковой аэро—
динамической трубы (см. рис. 4.1.68), также придаются различные уг-
лы атаки и скольжения с помощью специального приспособления. Все
дренажные отверстия соединяются с батарейным жидкостным мано-
метром, как показано на рис. 4.1.67, или с групповым регистрирующим
манометром (ГРМ) (см. рис. 4.1.68), по показаниям которых находятся
давления, а затем вычисляются соответствующие коэффициенты дав-
лений.
При испытаниях в дозвуковой аэродинамической трубе скоростной
2
напор р…Уоо /2 и скорость У… определяются с помощью трубки Пито, по-
мещенной в набегающий поток и связанной резиновым шлангом с Ы—об-
221
РЭЗНЫМ ЖИДКОСТНЫМ МЭНОМеТРОМ; ПРИ ЭТОМ ПЛОТНОСТЬ определяется ПО
(4.1.52).
В сверхзвуковой трубе с закрытой рабочей частью штуцеры трубки
Пито, помещенной в форкамере, и отверстия в рабочей части (приемник
Рис. 4.1.67. Схема установки для проведения дренажных
испытаний модели прямого и скользящего крыльев в до-
звуковом потоке:
1—сопло дозвуковой аэродинамической трубы; 2—модель крыла;
3—приспособление для установки модели в рабочей части; 4—ус'г-
ройство для изменения угла атаки; 5—механизм изменения угла
скольжения; б—дренажные отверстия; 7—медная трубка; 8—резп-
новый шланг; 9—трубка Пито; 10, 11— И-образные ЖИДкостные
манометры для замера соответственно скоростного напора и ста-
тического давления на поверхности медели; 12— модель крыла под
углом скольжения (Х,-#0)
. .
`“,“ “\ ›
_", “ \\“…““\“'5…“`№| \
/ / т.д,“.
___—^___._‚‘-`—1`‚-
| ! |
| |
<
Рис. 4.1.68. Схема установки модели крыла и измерительных прибо-
ров в сверхзвуковой аэродинамической трубе для исследования
влияния скольжения:
] — форкамера; 2 — спрямляющая решетка; 3 — сопло; 4 — рабочая часть;
5 -— диффузор; 6 — модель крыла; 7 —- дренажные отверстия; 8 — дренажная
трубка; 9— ГРМ; 10—трубка Пито; ]! —— модель крыла псд углом скольжения
( '“ )
:,:—
давления) связаны с ГРМ, что позволяет измерить давление торможе-
ния ро и статическое давление в рабочей части р…. Записи давлений на
бумажной ленте ГРМ, как и записи статических давлений на поверхно-
222
сти дренированной модели, расшифровываются по формуле (2.1.14). По
значениям величин ро и р… рассчитываются число М… в рабочей части
трубы (см. работу 4.1.4), а также скоростной напор асо=0‚5 !грооМЁо.
При проведении исследований в дозвуковой аэродинамической тру—
бе с открытой рабочей частью вначале измеряется давление на профи-
ле крыла, которое устанавливается в потоке как прямое под заданным
углом атаки осп. Затем эта же модель поворачивается на угол сколь—
жения Х и закрепляется под углом атаки ос=осп созх (при этом, очевид-
но, в нормальной к передней кромке плоскости угол атаки остается
равным осп, как и при прямом обтекании профиля).
Измерив и сравнив давления р и р,( в соответственных точках про-
филя при прямой и косой его обдувке, можно проверить достоверность
предпосылки, в соответствии с которой распределение давления зависит
только от нормальной составляющей скорости Усоп=Уоо соз х. Коэффи-
циенты давления в этих точках, рассчитанные по нормальным к перед-
ней кромке скоростям, т.е. по У… и У… созх соответственно, должны
быть равны, так как они зависят от формы профиля, положения точки
на нем и угла атаки (что в обоих случаях одинаково), но не зависят от
скорости. Таким образом,
__ р—роо _? _
ро, УЗО/2 "
ЕН
роо УЗО соз2 х/2
откуда
(рх—р…) = (!?—р…) 005%
ЕСЛИ далее определить ПО реЗУЛЬТЭТЗМ измерения Давления ИХ КО-
эффициенты ;) и Ри на профиле соответственно при прямом его обтека-
нии и со скольжением, а затем сопоставить их, то тем самым будет про-
контролировано правило, согласно которому обтекание скользящего
крыла может быть рассчитано по известным параметрам прямого кры-
ла бесконечного размаха того же профиля, в частности, например, по
формуле (4.1.134).
Подтвердить предположение о зависимости распределения давления
при прочих равных условиях только от нормальной составляющей ско-
рости можно также путем смены выходного насадка на сопле дозвуко-
вой аэродинамической трубы, подобрав его таким образом, чтобы тру—
ба давала скорость набегающего потока, равную У… созх. Очевидно,
при правильности рассматриваемого предположения результаты про-
дувки прямого крыла в этом случае должны совпадать с результатами
косой обдувки под углом Х того же крыла при скорости невозмущенно-
го потока, даваемого трубой, равной У…. Расчет аэродинамических ха-
рактеристик профиля при прямой или косой его обдувке по известному
распределению коэффициентов давления производится соответственно
по формулам (4.1.12), (4.1.18) и (4.1.20).
Исследования в сверхзвуковой трубе будут аналогичными. При этом
приспособление, на котором модель закрепляется в рабочей части тру-
бы, должно позволять в ходе эксперимента устанавливать модель под
различными углами атаки и скольжения.
Методика экспериментального исследования может быть иной. Пос-
ле продувки модели, расположенной как прямое крыло под некоторым
углом атаки ос, потоком с числом Моо останавливают трубу и повора-
чивают модель на угол скольжения, наклоняя ее одновременно на угол
атаки ос=осп созх (где осп—угол атаки в плоскости потока при прямой
обдувке крыла). При этом также производят смену соплового вклады-
ша с целью получения числа Маха в рабочей части трубы, равного
Мю/созх. Результаты продувки в этом случае должны, очевидно, совпа-
223
дать с соответствующими результатами для того же крыла без сколь—
жения в потоке с числом М…. Расчет аэродинамических характеристик
профиля по известному распределению давления ведется при помощи
графического интегрирования с использованием формул (4.1.12),
(4.1.18) и (4.1.20).
При испытаниях моделей со скольжением проверяются также допу-
стимые величины «загромождения» рабочей части моделью, а при
сверхзвуковых скоростях еще и расположение дренажных отверстий вне
конусов возмущений, проходящих через передние кромки концевых се-
чений (см. рис. 4.1.51). Кроме того, отраженные от стенок трубы удар—
ные волны должны пересекаться за моделью (см. рис. 4.1.50).
Порядок проведения работы
Ознакомиться с устройством и проверить готовность к работе экс-
периментальных установок на базе дозвуковой или сверхзвуковой
трубы.
Дозвуковая труба.
1. Закрепить в рабочей части трубы при помощи приспособления
дренированную модель как прямое крыло под заданным углом атаки ос.
2. Записать показания лабораторных барометра (ратм=р°о)‚ тер-
мометра (Татм=Т°о) и психрометра (Т’).
3. Произвести запуск трубы и после выхода ее на режим установив-
шегося обтекания ввести трубку Пито и снять показания с колен свя-
занного с ней манометра (Ипр, плев; Альп,… —!1лев).
4. Зафиксировать показания отсчетных колен манометров, связан-
ных с дренажными отверстиями на модели (апр; Идев), путем непосред—
ственного наблюдения или фотографирования.
5. Прекратить работу трубы и установить модель под углом атаки
ос созх, повернув ее на угол скольжения Х (в этом случае, очевидно, угол
атаки ся… в нормальном сечении будет равен углу атаки & прямого кры-
ла); включить трубу и зафиксировать показания батарейного мано—
метра.
6. По показаниям манометра, предназначенного для измерения ско-
2
ростного напора, вычислить величину асо=рооУ°о/2‚ а затем определить
скорость Уоо
7. После фотографирования панели батарейного манометра проя-
вить фотопленку и с помощью прибора «Микрофот» расшифровать его
показания (Нир; плен).
8. По этим показаниям определить разности уровней АИ: —Нпр— плен
и вычислить по ним коэффициенты давлений р=(р—рс‚‹‚)/(рс‚‹‚УЁо /2) и
Рх= (рх—рао)/(рс›оУ 00/2)
9. По_ результатам измерений для ряда дренажных точек найти ве—
личину Рх= (рх ---р,‚…о_)/(рс‚с‚УЁо соз2х/2) = рх/созх и вычислить относитель—
ную разность Ар= |р— —%р | /р.
10. Построить диаграммы р=1°1()Ё) и р_‚( =]°2(_х) и графическим ин-
тегрированием определить соответственно коэффициенты подъемной си—
лы прямого (су) и скользящего (дух) крыльев.
11. Сравнить значения сух и с' : су соз2х и определить относитель—
ную разницу; найти для прямого крылау по формуле (4.1.21) теоретичес-
кий коэффициент су подъемной силы, вычислить значение с“:
— —ус со52х и сравнитьу его с экспериментальной величиной.
Сверхзвуковая труба.
1. Закрепить модель в закрытой рабочей части трубы на державке
и с помощью координатника придать ей некоторые углы атаки ос и
224
скольжения Х- При. этом со и Х должны быть такими, чтобы поток око-
ло профиля в нормальном сечении был сверхзвуковым (Мсо со5х>1)
и маловозмущенным (линеаризованным).
2. Записать показания лабораторного барометра (ратм).
З. Записать начальные показания на печатающем устройстве груп—
повых регистрирующих манометров по каждому измерительному ка-
налу. '
4. Включить трубу и после вых0да ее 'на режИм установившегося
обтекания записать показания ГРМ, а затем остановить трубу.
5. Расшифровать показания на бумажной ленте ГРМ, регистрирую-
щей давление торможения ро в форкамере' и статическое давление р„°
в рабочей части; определить число М… в рабочей части трубы.
6. Расшифровать показания ГРМ, соответствующие измеряемому
статическому давлению Рх на поверхности-модели, и Вычислить коэф-
фициенты давления рж=(р‚С —р<‚,‚)/(О‚5-Лишай/1%о соз2х) на профиле в
плоскости, нормальной к передней кромке крыла.
7. Определить коэффициенты давления в тех же точках профиля
по формуле р; = 4_г 26 1/ МЁО соз2х—1 и сравнить их с соответствующими
значениями р;; вычислить относительную разность Ар=|р‚'С—р;|/р;‘.
Пример. Рассмотрим результаты лабораторной работы по исследованию обтека—
ния стреловидных крыльев прямоугольной формы в плане в дозвуковой и сверхзву—
ковой аэродинамических трубах.
ДозвУковая труба.
Для исследований в дозвуковой
трубе была использована та же мо-
дель, что и в работе 4.1.1. В нормаль—
ном сечении это крыло имело про— _
филь с хордой Ь‚‚,=0,1 м, изображен- 9 =Н/Ьп
ной на рис. 4.1.69, где цифрами отме—
чены дренажные отверстия. 3 ц
Модель располагалась в откры- 12
той рабочей части малоскоростной аэ- 0,
родинамической трубы как прямое А 910 „ ‚2
крыло под углом атаки оъ=6° (см. __ |_ .
РИС. 4…167). $5:3:13 [
Величйиа «загромождения» пото- ' Е "' 1
ка при оъ=6° определялась отноше— ` „.
нием '
$м диз… 050 Рис. 4.1.69. Скользящее крыло:
&- твт/4 Зени‘Ь‘Ёы’й’!3.3др&‘;ЧЁ‘ЁЫЕРЁЁЁЁСЁИЁР?‘Э’Ёндё‘рё-
ровна-дренажных отверстий; А—точка передней
кромки; В—точка задней кромки профиля
0,1 зіп 6°—0‚8
л-О‚82/4
Расчет этого отношения проводился по диаметру выходного сечения сопла, равному
В=0‚8 м. '
Измерения давлений и скоростного напора осуществлялись с помощью П-образных
жидкостных манометров, как показано на рис. 4.1.67, причем зіп Б=5іп [3’=0‚246 и у=
=у’=0,805 кГ/дмз. Перепад Уровней Альпы,—п ев оказался равным 300 мм. Ре—
=0,0167,
Л
зультаты определения параметров потока приведены в табл. А к работе 4.1.1. По по—
казаниям манометров было найдено распределение по контуру профиля коэффициен—
тов давления, помещенных в табл. А. В этой табл. А указаны также значения безраз-
мерной координаты х=х/Ь„ дренажных точек.
Дальнейшоая продувка осуществлялась под углом атаки модели, равном оссозх'=
=0,105 соз 30 =0,0906 (5°12’), при повороте ее на угол скольжения х=30°. При этом
угол атаки профиля в нормальном к передней кромке сечении оставался равным 6°
(как и при прямой обдувке). Полученное распределение коэффициентов давления рх
представлено в табл. Б.
В табл. Б коэффициент давления рассчитывался по формуле
5 _ Рх-ЦРсо _ АйузіпВ _ АР;
х _ рос УЗО [2 _Ад’у’зіпВ’_Ап’ '
15—927 225
« . . _ !*
шоб за! тоа! „О.о! 85! :.о оша %.о 8.0 85| а_оі „юа! …… е.. % о... …к о! 8 _1 Ёзціщ
„& Т. ФТ. от! @! „…… от „…о… «… …:! $1 02| ЗТ. ЗТ. от…! сою... Ё _…ЁТЁНЁ
ю…… %… ю…… З…… Ю…… „мы …от Э…… ю…… %… за ос…… З…… З…… З… оз Ё а…;
$… $… „а 3… :…… $… …% $… %… _а ……а 8… Ё „Ё Ё оо… Ё ‚Ё…
83 $5190 Эхо 8.0 ото …за г.в 85 $5 $5 Эхо о….о за 85 за „Ёп…
‚Е ‚2 Е Ё @ : Ё …… ю .… ‚о …. ъ …. и ` чатов из…—„каштаны
Загон.—
дьоошхдошоп ЁЁЁЩ дноошицФщоп щщшицош
…… шпыцюю ‚н
26 о 85! 861 8.0... 3.0 а.….о 8.0 ото „об! „3.1 3.0... $51 $51. 85| :….Т ъЁЁищ
о… о О…! Ю…! 2! а… …: Е… от а! а…! „21 З…! З…! З…! а…! Ёаёідёпё
…ты от… 8… $… ю…… аты :: …: …ты то… а… …:… о…… Ё а… % Ё ёё
$… от… 3… Ф…… Э… :… то… …% то… ю…… %… %… %… Ё ФЭ …… Ё.. „Ё
ю….о 85 85 ото 85 25 8.0 5.0 85 $5 85 33 85 за 86 5.0 ЁЁ…
%
…: Е Е 2 мы : Э …… …… ы …… …. …… ‚…. и ` копов наш…—„штаны
аводот
дьоошицшшоп 53225 #8538: 5533
< пинцет Н
226
Теперь рассмотрим вычисления коэффициента БХ, =(рх — Род/(Роэ 11200 сов? 96/2)—
В частности, для точки 5
% —р… ' 0,33
рх5=0›5—'2__2——= риз =__—о_=_0›445-
Рос 1705208236 со$2 х СО$2 30
Соответствующая относительная разность
_ ' _" _0,44 0,445
Ар5=Ш=| + |=0‚011з.
05 | №
Эта величина, как видно, весьма небольшая. Аналогичные результаты получаются и
для других точек.
На рис.__4.17.0 и 4.1.71 приведены координатные диаграммы соответственно функ-
ций р=і1(х) и рас =і2(х)‚ построенные по данным измерений коэффициентов давле-
ний прямого и скользящего крыльев. При построении этих диаграмм положение на
профиле критической точки, в которой коэффициент давления равен единице, а также
- `
""$_..`__ .
\\\\\`
Рис 4…170 Координатная диаграмма р: Рис. 4..171. Координатная диаграмма
=і1(х) для профиля прямого крыла РХ =1°2(_х) дЛЯ профиля скользящего
крыла
значение коэффициентов давления в точке В задней кромки нахоцились интерполяцией
(или экстраполяцией), как показано на этих рисунках.
В соответствии с диаграммами масштаб коэффициента давления выбран равным
рр =2 104, 1/мм‚ а масштаб относительной координаты рг=10°2, “мм. На рис. 4.17.()
площадь, ограниченная замкнутым контуром и измеренная планиметром, Ру=1900 мм2.
Поэтому согласно формуле (4.1.55) коэффициент подъемной силы
_ _. _ _ —2 —2_
с)) — Рурр рх __1900-2-10 -10 _ 0,380.
Аналогичная площадь на рис. 4.1.71 Р;=1450 мм2 и, следовательно,
__ ' - _ _ —2 —2 _
дух __ Ру рр рх — 1450-2-10 -10 _ 0,290.
Соответствующее значение
С;), = 09 соз2 х= 0,38 соз2 30° = 0,282,
а относительная разность
(сш _ ещ) мух = (0,290 _ 0,282) 10 ‚290 = 0, 0275.
Эта разность мала и находится практически в пределах точности эксперимента.
Воспользовавшись формулой (4.1.27), в которой а= 0,08 [21] и осо= 0, находим
при ос= —6° значение су =0, 48, а затем определяем с;х=у с соз х—О 48 со5230°—-0 36
15* 227
В этом 'случае расхождение между экспериментальной величиной с
”
"е'т "
ух и получ нюи
в результате теоретического расчета с составляет
ух
(сш _ Сид/Сук = (0,36 —0.29)/0,36 = 0,195.
Такое значительное расхождение объясняется тем, что зависимость (4.1.27) дает завы-
шенные значения коэффициента подъемной силы профиля прямого крыла.
Следует заметить, что распределения коэффициентов давления р.!`с и р соответст-
венно по профилю скользящего и прямого крыла при одинаковых углах атаки в нор—
мальном сечении, полученные опытным путем (см. табл. А и 5), хорошо согласуются
с данными, полученными по формуле (4.1.134).
Из диаграммы на рис. 4.1.70 Можно видеть, что Ршіп нсж= —1,31. Этой величине
соответствует критическое число Маха Моокр=0,50 (см. график на рис. 4.1.15). Вос—
пользовавшись (4.1.141), находим критическое число Маха набегающего потока для
того же профиля, принадлежащего сколЬзящему крылу с углом скольжейия х=30°
(при угле атаки ап=6° профиля в плоскости, нормальной передней кромке):-
мо……с = м...,кр /соз2 ›‹ = 0,50/соз2 30° = 0,67.
Коэффициент подъемной силы сухсж с учетом сжимаемости определялся по
(4.1.140) и (4.1.135). В частности, для М…=0,6
сухнсж О ’ 29
1/1—мі, СОЗ? )( 1/1— 0,62 ‹:оз2 30°
Сверхзвуковая труба.
В сверхзвуковой аэродинамиче-
ской трубе с закрытой рабочей частью
был установлен сопловой вкладыш,
рассчитанный на номинальное число
Маха в рабочей части Мш=2. Мо—
дель крыла с размахом !=0‚35 м
прямоугольной формы в плане (рис.
4.1.72) имела заостренный криволи-
нейный симметричный профиль, обра-
зованный дугами окружности. Хорда
этого профиля Ь„=0,1 м, максималь-
ная толщина А=0,О1 м, полуугол за-
острения носка Бо=11°. Модель уста-
навливалась в рабочей части аэроди-
намической трубы (см. рис. 4.1.49 или
4.1.68) под углом атаки а=7° и уг-
лом скольжения х=80°. Соответст-
вующий угол атаки в нормаЛьной к
передней кромке крыла плоскости
равнялся
= 0,34,
сухсж =
Рис. 4.1.72. Модель крыла для исследова—
ния влияния скольжения в сверхзвуковой
трубе
осп = ос/ сов х =
= 0,12] сов 30° = 0,139 (8°).
«Загромождение» потока моделью при осп=8° определялось отношением ЗМ,/$т
(ЗМ—площадь проекции модели крыла на плоскость, нормальную к вектору скоро-
сти Уоо; $т=1З—площадь поперечного сечения рабочей части; 1т=0,8 м—расстояние
между стенками трубы):
ЗМ дп [зіпос 0,1 —0,35 зіп 30°
в, “‘ 13 0,82
=0‚03‚
что согласно графику на рис. 1.4.15 находится в допустимых пределах.
Приближенный расчет волновой картины обтекания профиля при М°°=2 показал,
что отраженные скачки не попадают на модель и плоскость дренажных отверстий ле-
жит вне конусов возмущения (см. рис. 4.1.50 и 4.1.54).
Для замера давления торможения ро с помощью трубки Пито, установленной
в форкамере, как показано на рис. 4.1.68, был выбран групповой регистрирующий ма-
нометр (ГРМ) со шкалой избыточных давлений 0-:—5 атм, а для измерения статических
давлений в рабочей части р… и на поверхности крыла— аналогичный манометр со шка-
лой 0—:— —1 атм. Коэффициенты Ь шкал этих манометров соответственно равнялись
+0,05 и —О,05. Измеренные значения рати, Ро и р…, а также число мы и другие па-
раметры потока были такие же, как в примере к работе 4.1.4.
228
«Нормальная составляющая» числа Маха
Мо… = Моо созх = 2,13-со5 30° = 1,84,
а соответствующий скоростной напор
із
1,4
(‚700,2 = Ёрю м3, соз9‘ ›‹ = —2— 0,353-104-2‚132-со52 30° = о‚зз.104 к‚Г;/м2,
Так как Мооп >1, то следует считать переднюю кромку крыла сверхзвуковой и ве-
сти расчет профиля по теории сверхзвукового обтекания.
По результатам расшифровки записи ГРМ были вычислены коэффициенты давле-
ния рх=(рх—р.„)/с]ш„ на поверхности модели (см. рис. 4.1.72) и внесены в табл. В.
В табл В приведены: значения местных углов атаки 6=а—сіу/сіх для отмечен-
ных на рис 4.1.72 дренажных точек; результаты расчета __коэффициента Давления
рх— — :]:2611/М2 соз 2х——1; относительная разность Ар= (р х— Рэд/РХ
& 4.2. ЭКСПЕРИМЕНТАЛЪНОЕ ОПРЕДЕЛЕНИЕ
АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК КРЫЛА
Реботаддл
Исследование распределения давления по крылу
Цель работы—в результате продувок в дозвуковой аэродина-
мической трубе найти распределение давления по крылу в различных
сечениях по размаху, вычислить по этому распределению аэродинами-
ческие коэффициенты крыла и сравнить с соответствующими теорети—
ческими данными.
Общие сведения
Распределение давления и аэродинамические коэффициенты. Рас-
смотрим задачу о нахождении коэффициентов подъемной ‚силы, сопро—
тивления и момента крыла произ-вольной формы в плане по известному
распределению давления.
Обычно в результате продувок в аэродинамических трубах находят
распределение давления по ряду поперечных сечений (профилей) кры—
ла, расположенных вдоль его размаха и параллельных вектору Уоо (рис.
4.2.1). Полагая, чт'о нормальная сила создается в основном давлением,
в —ъ/2
„„ .
О' /"/
СС
Рис. 4.2.1. К определению аэродинамических коэффициентов
крыла по известному распределению давления:
1—крыло; 2 -центр давления одной консоли крыла; 3—центр дав-
ления крыла
229
__і
Верхняя поверхность
Номера
№3321“…1|2|з|4|5|6|7|8|9
рх _ратм‚ —0‚650 ——0‚665 —0,710 —0‚750 —0,770 —0,795 —0,835 —0,830 —0,825
кГ/см2
р)с ‚ кГ/см2 0,353 0,338 0,293 0,253 0,233 0,208 0,168 0,173\ 0,178
рх —р„, 0 ——0‚015 ——0,060 —0‚100 —0‚120 ——0‚145 -—0,185 —0,180 —0‚175
кГ/см2
Ъх 0 —0‚019 ——0,074 ‚—0‚123 —0,148 —0‚179 —0,228 —0‚222,—0‚216
0, рад 0 0,02 0,07 0,11 0,14 0,17 0,21 0,26 0,28
5, ‘ 0 —0‚022 )—0‚076 —0,120 —0,152; ——0‚181 —0,228 —0,283 —0,304
АБ | 0 0,158 0,027 0,025 0,027 0,011 0 0,274 0,407
напишем выражение для элементарной нормальной силы
ним из таких профилей и с размахом (12:
аш : 4... д (2) да 99 да?.
крыла с од-
Интегрируя это выражение по всей поверхности, т.е. вдоль размаха,
найдем полную нормальную силу крыла:
+Е/2
№: а... ( (›‹гмгфда},
—1/2
(4.2.1)
где ! и г—соответственно размах и координата сечения, отсчитывае-
мая от середины крыла (корневой хорды); Ь(г) —хорда сечения; х=
=х/Ь (г).
Записывая нормальную силу в виде
№ = с” Ч… $кр‚
где 8…) — площадь крыла в плане, и учитывая (4.2.1), получим
С
1
№
КР
+1/2
5 !) (2) (12 @ да?,
—1/2
откуда, принимая во внимание (4.1.9) и
31;
+1/2
1
—!/2
вводя обозначение с),
=(; рсіх для коэффициента нормальной силы профиля, находим
) с); !) (г) (12.
(4.2.2)
При небольших углах атаки можно принять с№=су и с„=су[формула
(4.1.18)].
230
Габлица В
Нижняя поверхность
10 | 11 12 13 14 15 16 | 17 ' 18
——0,400 ——0,415 ——0,465 ——0‚495 ——0,520 ——0,555 ——0,585 ——0,630 -—4Ъ650
0,603 0,588 0,538 0,508 0,483 0,448 0,418 0,373 (№353
0,250 0,235 0,185 0,155 0,130 0,095 0,065 0,020
——0,308 0,290 0,228 0,191 0,160 0,117 0,080 0,025 0
0,28 0,26 0,21 0,17 0,14 0,11 0,07 . 0,02 0
0,304 0,283 0,228 0,181 0,152 0,120 0,076 0,022 0
0,013 0,024 0 0,052 0,050 0,025 0,050 0,120 0
Для того же крыла продольная составляющая аэродинамической
силы от давления
+1/2 _ _
Кр : Ч… 5 Ь(г) сігфрсіу,
—1/2
а коэффициент этой силы
] +1/2 _
сдр :: 8 ; Ь(2)сігфрсіу,
К
р —:/2
тде относительная координата —у=у/Ь(2). Учитывая (4.1.12_) Ё обозначая
коэффициент продольной силы профиля через сЬр=ф рсіу, напишем
] +1/2
СКР : —— Я с;,рЩг) 612. (4.2.3)
.5
кр —1/2
элементарная величина продольного момента, С ДОСТаТОЧНОЙ ТОЧНО-
СТЬЮ определяемого ТОЛЬКО распределением давления ПО крылу, для
профиля относительно оси О’г, проходящей через переднюю кромку,
равна
ам; =— („, Ь2(г)61286;_і}сі; + (‚О, 132 (г) сіг ф ‚Бу—ад,
а соответствующее значение для элементарного момента относительно
некоторой произвольной оси 012 будет (см. рис. 4.2.1)
дмг : х;сі1\/ + ам; : ч.. Ь(2) х;‹іг 99 Ба} — а.. 1)? (2) 425655542 +
+ а.. Ь” (г) & ф 55427.
231
Интегрируя по размаху, найдем полный момент:
+1/2 _ _ +1/2 __ _
‚ _ 9 ‘
мг=4°с {хгщажігфрсіх—аю 5 !) (2)с1236рхсіх -‚—
-'—`:_/2 ——1/2
+1/2 __ _
+ а... ) 192 (г) сігфрусіу.
—!/°2
Известно, что средней аэродинамической хордой ЬСАХ
крыльев произвольной формы в плане называют хорду равновеликих
прямоугольных крыльев, имеющих те же моментные характеристики.
Тогда можно найти такую точку О” на передней кромке с координатой
х; относительно оси 02, что первый член в последнем выражении для
момента М2 окажется равным нулю. Эта координата определяет точку
передней кромки профиля со средней аэродинамической хордой, а ось
О”2 совпадает с передней кромкой аэродинамически эквивалентного
прямоугольного крыла.
Таким образом, момент относительно оси, проходящей через точ-
КУ 0”,
-—'-1/2 4.1/2
_ 2 2
М2——Ч‚„ 811 (дёгфрхсіх—і—оос `!) (г)а!2;русіу,
_1/2 —[/2
а соответствующий коэффициент, рассчитанный по средней аэродина-
мической хорде ЬСАХ и площади крыла в плане,
+1/2 +і/2
1 1
т., : _ № \ Ь2(г)агф рсіх2—і— % ( Ь2(2)сіг фрау. (4.2.4)
_1/2 _]
Для тонких малоизогнутых профилей, обычно применяющихся в аэ-
родинамике, второй член в правой части (4.2.4) невелик, поэтому им
можно пренебречь; тогда
+1/2
1 а ’? __ _
2 = __ 192 а! 41 2.
т 23крдсхх 5 (2) гфр х
—і/2
Вводя здесь с учетом (4.1.20) обозначение для коэффициента мо—
мента профиля т;=—(1/2) З) рсіх2, получим
1 +1/2
тг : ТТ)— ) п1;Ь2(2)сіг. (4.2.5)
кр САХ
ОчеВИДно, для прямоугольного крыла в написанных формулах сле-
дует принять: $кр=Ы; Ь(2)= —Ь=сопзі; ЬСАХ=Ь.
. Коэффициенты сопротивления от давления с:.ср и подъемной силы
су=сур определяются по найденным значениям сыр и сы=с№р при по-
мощи выражений (4.1.13). При малых углах атаки можно принять, как
указывалось, су=с№, а коэффициент схр найти по (4.1.14). Коэффициент
центра давления, координата хдд которого отсчитывается от начала
хорды ЬСАХ (см. рис. 4.2.1), будет равен сц_д=хд_д/ЬСАХ= —т2/_сы или
при малых углах атаки сд_д= _тг/су.
Для вычислен—ия ЬСАХ можно пользоваться формулои
1 -ъ1/2
_ 2
а… _ Ё ( :; (г)сіг. (4.2.6)
—і"/2
232
Расчет коэффициентов подъемной силы, момента и сопротивления
по известному распределению давления с использованием формул
(4.2.2)—:—(4.2.5) осуществляется обычно путем графического определе—
ния соответствующих двойных интег- Таблица 421
ралов. Все эти формулы применимы
как для сверхзвуковых, так и для до- 5 5
звуковых скоростей обтекания. При Форма крыла в плане $ до?
этом распределение давления по кры— : :;
лу, т. е. по ряду его сечений вдоль раз— %
маха, может быть получено либо тео- Эллиптическая 0,318 0,318
ретическим расчетом, либо в результа- ЁРЁЁЁИЁЁЁННЁЯЯ 8,3% 83$
те ПРОДУВОК СООЁвеТСТВУЮЩИХ дрени' ПЁямоёгольная со 0,365 0318
рованных моделеи в аэродинамических скругленными конца_
трубах. МИ
Расчет аэродинамических коэффи-
циентов крыла в несжимаемом по-
токе. Рассмотрим приближенный расчет обтекания нестреловидных
крыльев произвольной формы в плане малоскоростным потоком воз-
духа.
Коэффициент подъемной силы крыла, набранного из профилей од-
ного семейства,
а (Х.—(1,
су : ( ‚ °) ‚ (4.2.7)
1+а (1 тт)/(лжкр)
где а=сЁ—коэффициент‚ определяемый для профиля по формулам
(4.1.23)—:-(4.1.25) или опытным путем [21]; ово—«угол нулевой подъем-
ной силы», определяемый формой профиля [см., например, (4.1.26)];
жкр=12/$кр — удлинение крыла.
Значения параметра (1—|—-1:)/:п: для крыльев различной формы в пла-
не приведены в табл. 4.2.1.
Следует отметить, что при определении величин осо и су“ в (4.2.7) вы-
бирается профиль, хорда которого равна средней аэродинамической
хорде ЬС АХ .
Полный коэффициент сопротивления
сх : с,…р + с,… (4.2.8)
где схпр и схі—соответственно коэффициенты профильного и индуктив-
ного сопротивлений.
Имея в виду, что профильное сопротивление состоит из сопротив-
ления от давления при су=0 (ос=осо) и сопротивления от трения, мож-
но написать для коэффициента этого сопротивления
схпр : с;“) + сх]… (4.2.9)
Обычно величина с;… значительно меньше стс. Поэтому, пренебре-
гая этой величиной, можно принять коэффициент схпр=сщс и опреде-
лять его по формулам (4.1.28)-:—(4.1.31) для профиля с хордой, равной
САХ -
Коэффициент индуктивного сопротивления крыла в несжимаемом
потоке
2
„- : ‹1 + 6), (4.2.10)
ПКР
О
Н
где параметр (1+б)/:п: находится по табл. 4.2.1 в зависимости от фор-
мы крыла в плане.
16—927 233
Коэффициент продольного момента определяется по формуле
(4.1.22), в которой тт:—л:;с и т;у=—(О‚22—:—О,25), причем кривизна
_—
і берется для профиля с хордои, равной ЬСАХ .
Для крыльев, обычно используемых при малых дозвуковых скоро-
стях (эллиптические, прямоугольные, трапециевидные), коэффициент
центра давления, как правило, является постоянной величиной, равной
О,22—:—О.25. При этом считается, что центр давления крыла расположен
на корневой хорде на расстоянии от начала САХ, равном хц_д=сц_д><
ХЬСАХ (СМ. РИС. 41...21)
Измерение давления на поверхности крыла и вычисление соответст-
вующих аэроцинамических коэффициентов. Для нахождения распреде-
ления давления по крылу при помощи продувок в малоскоростных аэро-
динамических трубах используются дренированные модели с отверстия—
ми, располагающимися на контурах нескольких сечений вдоль размаха.
При этом ВВИДУ продольной симметрии крыла измерение давления на
нем осуществляется для одной (правой или левой) консоли. Модель
этой консоли устанавливается в рабочей части аэродинамической тру—
бы на боковой державке, закрепляемой в специальном устройстве, при
помощи которого производится изменение ее углов атаки (рис. 4.2.2).
Рис. 4.2.2. Схема установки для исследования распределения
давлений по крылу в дозвуковом потоке:
1—сопло аэродинамической трубы; 2—открытая рабочая часть; 3—мо-
дель консоли крыла; 4—сечения крыла; 5—дренажные отверстия;
б—медные трубки; 7—соединительные резиновые шланги; 8—11-06-
разные жидкостные манометры; 9—боковая державка; 10—механизм
изменения углов атаки; 11—трубка Пито; 12—обтекатель
Каждое дренажное отверстие на модели связано со своим жидкостным
маноМетром, регистрирующим избыточное давление в соответствующей
точке сечения. Эти манометры, размещенные на одной подставке, обра-
зуют так называемый батарейный манометр. По показаниям отсчетных
колен маномеров, используя формулы (4.1.49), (4.1.53), (4.1.54), нахо-
дятся в дренажных отверстиях коэффициенты давления, по которым рас-
считываются, соответствующие аэродинамические коэффициенты профи-
ля с1"‚‚ снт тг.
234
Метод этого расчета, основанный на графическом интегрировании,
изложен в $ 4.1. По найденным значениям этих коэффициентов, как
функций расстояния 2 вдоль размаха, можно определить по формулам
(4.2.2), (4.2.3) и (4.2.5), используя ру
тот же метод графического интегри-
рования, величины сы‚ СВр и т2 для а)
крыла.
На рис. 4.2.3 показан общий 59
вид кривых, соответствующих по- | | "
дынтегральным функциям Р; = :
=с1"‚ Ь(2), Р; =с;др Ь @) и ”;.у :
=тгЬ2(г) формул (4.2.2), (4.2.3) и
(4.2.5). 5)
Обозначим площадь между кри-
вой и осью абсцисс на рис. 423,41 5:1; '
через Зу, им?, а масштабы Р`; и г— _Ь ? ь 0 . !. ‚
соответственно через р. ‚„ м/мм, и / „
у
1/2 " 0 ' +ъ/2
р.;, м/мм. Тогда, очевидно, коэффи-
циент нормальной силы крыла д)
с„ = Будды,/8… (4 .2.1 1)
|
в… | \ '
Площадь 8х, мм2, между кри- ‘ . ! 4
вой и осью абсцисс на рис. 4.2.3‚б 1/2 0 +5/2
представляет собой в некотором
масштабе коэффициент продольной Рис. 4.2.3. Кривые изменения аэро-
силы крыла. Этот масштаб равен динамических характеристик Вдоль
. 2 2 размаха крыла:
произ-ведению д.р, №, м /мм ‚ мас- , , , ,
х , а) Ру= суд (2); б) Рх=сКр 17 (г);
штабов соответственно Рх и г. Та- В) ,; :т' 1,2…
т 2
ким образом, коэффициент продоль- у
ной силы
вкр = 8х рр); мг,/Бир. (4.2.12)
Вычисляя по рис. 4.2.3, в площадь З…, мм2, между кривой и осью абсцисс
и определяя масштабы д.р, , м2/мм, и „„ м/мм, соответственно величин
ту
[’,'пуи._г, находим коэффициент продольного момента крыла;
_тг : вт „% №! (зщ, д…). (4.2.13
Порядок проведения работы
1. Ознакомиться с экспериментальной установкой и измерительной
аппаратурой и проверить готовность их к работе.
2. Закрепить модель консоли крыла в открытой рабочей части до-
звуковой аэродинамической трубы на боковой державке и с помощью
специального механизма повернуть ее на необходимый угол атаки.
3. Соединить с помощью резиновых шлангов дренажные трубки мо-
Дели с левыми коленами П-образных трубок батарейного манометра, а
также насадок полного напора (трубку Пито) с Ш-образным жидкост-
ным манометром.
4. Записать показания лабораторных барометра (ратм=р…), тер-
мометра (Татм=Т°о) и психрометра (Т’).
5. Включить трубу и после выхода ее на режим установившегося
16* 235
обтекания ввести в поток трубку Пито и снять показания с колен свя-
занного с ней П-образного манометра (А Н’=/1пр—И ).
лев
6. Записать (или сфотографировать) показания уровней жидкости
(Нир, Ндев) в коленах П-образных манометров для каждой дренажной
точки выбранных сечений (после фотографирования расшифровка пока-
заний осуществляется по негативу на аппаратах «Микрофот»).
7. Определить параметры набегающего потока в аэродинамической
трубе.
8. По показаниям манометров определить величины Ап=ппр_плев
и соответствующие значения коэффициентов давления для каждой дре-
нажной точки.
9. Для каждого из выбранных сечений построить координатные ди-
аграммы р=1°1 (х), р=і2(у) и р=1°3(х2) и графическим интегрирова-
нием найти коэффициенты с; :о}… с;“), т2 соответствующих профилей
сечении.
10. Определить функции 1%: с;!)(г), Р; :сЬрЬ (г), Р:,пу =!‘т;Ь2(2)
для каждого сечения и построить соответствующие графики Р; : (…(2),
Р; =Ф2(г)‚ Р‚'‚‚у=Фз(г)-
11. Определив по этим графикам площади Зу, 8х, $… и масштабы
№4, №3 „Р' ‚ рг, вычислить по формулам (4.2.11)—:—(4.2.13) коэффици-
у х ту
енты су, свр и т2 крыла.
12. По формуле (4.1.14) найти для заданного угла атаки коэффи-
циент стр, из выражений (4.1.28)-:—(4.1.31) — величину еще, а затем под—
считать коэффициенты сх=схр+сх,‹‚ сц_д=—т‚/су и К=су/сх.
13. Рассчитать аэродинамические коэффициенты крыла по теорети—
ческим зависимостям и сравнить их с полученными экспериментальными
данными.
14. Аналогичные измерения и вычисления осуществить для различ—
ных углов атаки модели крыла в аэродинамической трубе и получить
зависимости сую), сх(а) и т‚(а).
Пример. Рассмотрим дренажные испытания в малоскоростной дозвуковой аэр0ди-
намической трубе при угле атаки ос=2° модели полукрыла, изображенной на рис. 4.2.4.
Основные геометрические характеристики крыла: размах 1/2=0,36 м; корневая и кон-
цевая хорды соответственно Ькр=0‚13 м и Ьнц=0‚05 м; сужение п=Ьнр/Ькц=2,6;
средние геометрическая и аэродинамическая хорды соответственно Ьср=0‚089 м,
ЬСАХ =0‚096 м; площадь в плане вкр/2:0,0324 м2; удлинение ?…р=12/8кр= .
Для того чтобы характер обтекания полукрыла в области корневого сечения был
такой же, как при обтекании целого изолированного крыла, выбранная модель пред—
ставляла собой соединение этого полукрыла и части другой консоли с размахом 0,07 м
(примерно 10% от всего размаха; см. рис. 4.2.2).
Величина «загромождения» потока моделью при диаметре выходного сечения соп-
ла трубы В=0,6 м равнялась
&& (Бир/2 + ЗКР/10)_(0‚0324 + 0,0065) _ 0 005
ЗТ … 31:02/4 _ :пэ-0,62/4 — ' °
Определение давления производилось по измерениям в дренажных отверстиях для
пяти сечений консоли, как показано на рис. 4.2.4, где приведены также значения хорд
!)(г) и координаты 2 этих сечений. Для иллюстрации на рис. 4.2.5 показана форма про-
филя в сечении 3 (см. рис. 4.2.4), а также маркировка дренажных отверстий на этом
профиле.
По измеренным с помощью лабораторных барометра, термометра и психрометра
соответственно величинам ратм=роо=760 мм рт. ст. (1,03 кГ/см2)‚ Татм=Тоо=288К
и Т’=286 К находились по табл. 2.2.1 и 2.2.2. величины относительной влажности и дав-
ления насыщенного пара: х=0‚80 и рн:п=12‚79 мм рт. ст. (250,0174 [СГ/см?), а также
плотность воздуха ратм=роо с учетом влажности [по (4.1.52)]. Показания П-образного
жидкостного манометра (у’=0‚805 кГ/дмз; зіп В’=О‚246; &=&; = 1,0), соединенного
с трубкой“ Пито, Ап’=п‚'тр —іъ;1ев=800 мм.
236
Таблица А
Номера Верх ! 2 3 | 4 | 5 | 6 | 7
дренажных А
точек Низ 1.5 | 16 17 18 | 19 | 20 21
Верх —0‚78 —0‚96 —1,09 —1,26 —1‚30 —1,20 ——0‚96
{› 1,00
Низ ——0,80 ——0,60 _0‚46 —0,28 —0,19 —0,12 —0‚06
Ё=х/Ь3 0 0,02 0,04 0,06 0,10 0,15 0,20 0,30
Верх 0,070 0,100 0,120 0,130 0,150 0,160 0,172 0,174
17:9/173
Низ 0,07 0,05 0,04 0,03 0,01 0 0 0
Продолжение табл. А
Номера Верх ' 8 , 9 ] 10 | 11 | 12 | 13 | 14
дренажных А . В
точек низ і 22 | 23 24 | 25 | 263 | 27 | 28
Верх [—0,76—0,61—0,48 —0‚34 —0,22 —0‚08 —0,04
Ь —— 1,00 0
Низ —0,02 0 0 0 0 0 0
Ёс=х/Ь3 0 0,40 0,50 0,60 0,70 0,80 0,90 0,95 1,00
Верх 0,070 0,168 0,156 0,134 0,107 0,075 0,040 0,020 0
@=у/Ьз
Низ 0,07 0 0 0 0 0 0 0 0
Указанные измерения позволили определить параметры набегающего потока в ра-
бочей части трубы: рю=0,125 кГ-сек2/м4; м…: 1,82- 10—6 кГ-сек/м2; же: 1,46- 10—51112/се1с;
(‚іоо= 160 кГ/м2; У…=50,4 м/сек.
По результатам измерений уровней жидкости в коленах манометров (п…„ 11…38),-
определялась для каждого дренажного отверстия разность АН,:(Нпр—Нлевм и вы-
числялся коэффициент давления р,- по формуле (4.1.53).
Для примера в табл. А приведены значения этого коэффициента для сечения 3
(см. рис. 4.2.4 и 4.2.5).
В табл. А приведены также относительные координаты х=х/Ьз и у=у/Ьз дренаж-
ных отверстий, а также точек А и В передней и задней кромок.
По полученному распределению коэффициента давления для каждого сечения (про—
филя) консоли крыла были построены координатные диаграммы р:}.(у), р=і2(х),
__} _2
Р—із (х )-
В частности, для сечения 3 такие диаграммы показаны на рис. 4.2.6. При построении
этих диаграмм были выбраны масштабы (в 1/мм): 15:2—10—2, и; =2-10—2‚ нд:
=4-10—з и 11.32 =2-10—2. Измерения с помощью планиметра площадей фигур на
рис. 4.2.6. дали следующие значения: Рх=100‚ Ру=2300 и Рту=1150 мм?
Воспользовавшись формулами (4.1.55), (4.1.56), (4.1.58), находим для этого се-
чения:
, —‹ —|—— . . _2. . —2— '
су=Гурр г1‚С_2300 2 10 2 10 _0‚92,
с;“): РХ …, „„ : 10021044104: 0,0080;
—т$=°›5'1°…НБРЭ-= 0,5-1150.2.10—2—2.10—2=0,2з_
237
Аналогичные результаты были получены для других сечений, что позволило для
каж ого сечения оп ить " , = , ‚= , ' —
д редел значения функции Ру, су !)(г), РХ СКР !)(г) и [дт/_
— 2 _ ‚_ :
_тгд (г) и построить соответствующие графики Ру—ф1(г)‚ Рх—ф2(2)‚ Рту=фз(г)‚
аналогичные приведенным на рис. 4.2.3. При построении этих графиков были взяты сле-
дующие масштабы:
др, =2.10_3‚ рр, =2-10“5 и ”: =2-10_2‚ ‚ла/мм; рр, =2-10_4‚ ‚и?/мм.
у х ту
Измерения площадей на этих 7.30
графиках Дали значения: $у=
= 1300 №№, х=810 мм2 и З…:
=280 мм2. Воспользовавшись форму—
лами (4.2.11)-:—(4.2.13)‚ нах0дим аэ-
родинамические коэффициенты кры-
ла:
Сечение 5
СЕЧВНЦЕ Ц
Сечение 3
Сечение ?
СЕчениеі
О
Бу МБ;] ”2 _
Су " 2 (вкр/2) _
ькр=130
1300-2-10—3.2-1о—2
: =0,80;
2-0,0324
8х ”р' р‘г
с =___х__=
КР изд,/2)
_5 —2 *
=8Ю'2'10 °2°10 ___0‚оо5о; Рис. 4.2.4. Модель консоли (полукрыла)
2-0‚0324
.З и ‚ дл_
т.с.Рту * _280-2.1о—4.2-1о—2 о 18
_т2_ 2(8кр/2)ЬСАХ _ 2.0‚0324-0‚096 _ ’ '
По значениям СВр и С1, определяем при помощи (4.1.14) коэффициент сопротивле-
ния от давления
“О
2‚.…—__
__ _— : ————' 0,0050=0,0 .
схр су 57,30 -|—сд‚р 0,80 57 3 + 33
Теперь определим составляю-
Н 1: щую сопротивления от трения. Чи-
_ 8,22 ‘ сло Рейнольдса, подсчитанное по
средней аэродинамической хорде,
Нео} = УФО ЬСАХ №00 =
=50,4_0‚096/(1‚46-10—:'>)=
__ В = 3,3-10ё.
Если принять критическое чис-
ло Рейнольдса Кекр=5- 105, то
можно сделать вывод, что на крыле
всюду будет ламинарный пограни-
чный слой (Кеф<Кенр). Поэтому
воспользуемся формулами (4.1.28)
и (4.1.29), полагая п5=1‚ и най—
дем
23 25
53:100
.‘
Рис. 4.2.5. Форма профиля консоли крыла в се-
чении 3 и маркировка дренажных точек (от-
носительная максимальная толщина профиля
Е=у7/Ь3=0,174;_ относительная координата с Г = 2-1‚29/і/Ё:° =
хс=Х7/Ь3=О’З) х
=2.1‚29/;/з,з!1огз = 0,005.
В соответствии с этим полный коэффициент сопротивления крыла
с,; = схр + сх, = 0,033 + 0,00 5 = 0,038.
238
Коэффициент центра Давления
Сц‚д ='—' тг/Су = 0,18/0,80 = 0,23.
Теперь рассмотрим расчет аэродинамических коэффициентов заданного крыла при
ос=2° по теоретическим зависимостям.
Для профиля, хорда которого Ьсдх =0,096 м, а относительные толщина и кри-
визна соответственно 3:0‚154 и—і=0,077, находим «угол нулевой подъемной силы»
а„=— 1,6-?=— 1,6-0‚077 =_ 0,115 рад.
О
`." \,
© Ен
0,5
4,0
Рис. 4.2.6. Координатные диаграммы для профиля в сечении 3 при угле ата-
ки а=2°:
а—диаграмма Ъ=і1(Э); б—диаграмма Б=і2 бс); в—диаграмма р= {м:-съ) (стрелки по-
казывают направление обхода контура профиля при определении знака площадей)
Считая, что крыло имеет трапециевидную форму, определяем для него по табл. 4.2.1
значения параметров (1—|—т)/л=0‚318 и (1+б)/л=0,318. Воспользовавшись зависимо-
стью (4.1.23), находим
с? = 2л (1 + 0,77.0‚154)1/Т(0‚0Т/2)'3 = 7,05.
Определяем для а=2° (0,0349 рад) коэффициент подъемной силы:
_ стос—040) _ 7,05 [0,0349—‹—о,115)]
1+с;°(1+т)/(л›„кр) 1+7‚05-0.318/8
Су =0,83 (0,80),
а затем коэффициент индуктивного сопротивления:
_ 2 _ 2, _
ст. _ су (1 _|— б)/(л?\кр) _ 0,83 0,318/8 — 0,027.
Полагая, что Схпр=Схі=0,ОО-5‚ получаем согласно (4.2.8)
сх = См' +сх; = 0,027 _|— 0,005 = 0,032 (0,038).
В скобках приведены значения Си и сх, полученные экспериментальным путем.
Работаддз
Измерение аэродинамических сил и моментов,
действующих на крыло
Ц е л ь р а б о т ы — определение аэродинамических коэффициентов
стреловидного крыла по значениям подъемной силы, силы сопротивле—
ния и момента, измеренным трехкомпонентными тензометрическими ве-
сами в сверхзвуковой аэродинамической трубе.
239
Общие сведения
При помощи тензометрических весовых устройств измеряются сум—
марные аэродинамические характеристики, такие как подъемная сила,
сопротивление, момент. Эти измерения дополняют изучение обтекания,
связанное с нахождением распределения давления и касательных напря-
жений, и позволяют проверить теоретические методы расчета суммар-
ных аэродинамических коэффициентов летательных аппаратов, в
частности их крыльев. Настоящая лабораторная работа посвящена экс-
периментальному исследованию треугольного крыла—Одного из рас-
пространенных видов несущих поверхностеи современных летательных
аппаратов.
Аэродинамические коэффициенты треугольного крыла. Рассмотрим
основные выводы линеаризованной теории обтекания тонких треуголь—
ных крыльев сверхзвуковым потоком под малым углом атаки.
Расчет аэродинамических коэффициентов треугольного крыла в
сверхзвуковом потоке зависит от характера передних кромок. При
этом для сверхзвуковой передней кромки полный коэффициент сопро—
тивления крыла
с : с),р + см. + сх}, (4.2.14)
х
8 для дозвуковой
сх : схр + см. —}—— сх, —— сп. (4.2.15)
В этих выражениях: с;“) — коэффициент сопротивления от давления
при нулевом угле атаки (при су=0); сж- —-добавочное сопротивление,
обусловленное подъемной силой и вычисляемое для крыла нулевой тол—
щины при суЗЬО; с‚ст —— коэффициент подсасывающей силы крыла.
Сверхзвуковые передн ие кр о м ки. Расчет коэффициентов
су, сх, ведется соответственно по формулам:
су : 4С1 ос; (4.2.16)
см- : суос : 4с1 ос2, (4.2.17)
1де с1 определяется по (4.1.92).
Центр давления треугольного крыла совпадает с центром тяжести
треугольника и находится на расстоянии 2/3 корневой хорды от верши—
ны, т. е. коэффициент центра давления
сшд : хдд/ЬКР : 223. (4.2.18
Коэффициент продольного момента относительно оси Ог, проходящей
через вершину,
—т2 : (2,3) су : (8 З) 01 ос. (4.2.19)
’
Сопротивление, обусловленное толщиной, т. е. составляющая сш),
рассчитывается по методу источников. Результаты этого расчета пред-
ставлены на рис. 4.2.7. По приведенным графикам величина коэффици—
ента с;“) может быть найдена, если известны величины а’= Ъ/МЁО — 1 ‚
—- — 1
А=А/Ьнр‚ г= _; (1/Ьнр)19№, щ=19Х1/оъ’. При этом следует иметь в виду,
что для сверхзвуковой передней кромки величина п1<1.
Дозвуковые передние кром кн. В соответствии с методом
диполей [20] коэффициент ПОДъемной силы треугольного крыла
су : 2лос/ [Е (Ё) 18 №], (4.2.20
240
а коэффициент момента
_тг = (2/3) су. (4.2.21
Согласно этим данным коэффициент центра давления
Сц_д :: хц_д !Ькр :— тв,/‚Су : 2/3, (4.2.22)
а коэффициент индуктивного
сопротивления
сх,— : суос : 2лос2/[Е (11%) ’[8 №].
(4.2.23)
006
9 Мшсоз х,‹!
7
б
5
0
мооС081х1—д,
3
60 `
2
70
1
х,=80°
_ О
0 0 0,5 0,0 ‚_,„ 1,0 1,0 1,0 2,2 м…,
Рис. 4.2.7. Составляющая Схр коэффициента Ёис. 4.2.8. Изменение производной
сопротивления треугольных крыльев с симмет- Су коэффициента подъемнои СИЛЫ
ричным четырехугольным профилем, обтекае- треугольного крыла в зависимо-
мых сверхзвуковым потоком сти от угла стреловидности )…
и числа Моо
_. . __ !. г ‚_ 2
(А—А/дкр, 111—18 911/04 ‚ ос _ 1/м 1 )
6.131-
(35159 за,
Таблица 4.2.2 0.08
1›0 0.00
1/111 0 ’ 0,2 0,4 | 0,6 | 0,8
1,28 1,42
л/2=1,57 010“
Е(іг) 1,00’1‚05 1,14
0.02 -—
Рис. 4.2.9. К определению коэффициен- › 0
та с… подсасывающей силы треуголь- 0'2 [№ 0'6 0'8 1.0 ...—__" Мы,-!
ного крыла
159 х.,
Величина Е(Ё) представляет собой эллиптический интеграл второ-
го рода с параметром Ё=1/1—(1/п1)2. Эту величину можно определить
в функции 1/п1 (п1>1) из табл. 4.2.2.
Зависимость с; =дсу/д01=су/01 [см. (4.2.20)] от числа М00 и угла
стреловидности Х1 приведена на рис. 4.2.8. На рисунке штриховая кри-
241
вая соответствует звуковой передней кромке, когда с;, как и су, переста-
ет зависеть от угла стреловидности 361-
У крыльев с дозвуковой передней кромкой эту кромку обычно скруг-
ляют, что обусловливает возникновение подсасывающей силы, умень-
Рис. 4.2.10. Схема экспериментальной установки для тензомет-
рических измерений аэродинамических сил в сверхзвуковом
потоке:
1—форкамера сверхзвуковой трубы; 2—спрямляющая решетка; 3—сопло;
4 — рабочая часть; 5 —— диффузор; б — модель крыла; 7 — тензодержавка;
8—упругий элемент весов; 9—боковая державна; 10—механизм измене-
ния углов атаки; !! —— к пульту управления; 12— провода от тензодатчиков;
13 — тензостанция; 14 — блок питания тензостанции; 15 — осциллограф;
16 — отметчик времени; 17 -— гальванометры; 18 —отверстие в стенке рабо-
чей части трубы, воспринимающее статическое давление потока; 19—труб-
ка Пито; 20—образцовый манометр; 21 —датчик температуры; 22— милли-
вольтметр
шающей сопротивление. Как показывают исследования [21], коэффи-
циент этой силы
2 __2
с : він; м \/1—(—‘—) . (4.2.24)
П 4:11 111
Зависимости (4.2.24) соответствует кривая на рис. 4.2.9.
Коэффициент схр в (4.2.15) определяется методом источников. Ре-
зультаты расчета по этому методу представлены на рис. 4.2.7, где зна—
чения схр соответствуют параметру п1=і8х1/а’> 1.
Составляющая коэффициента сопротивления от трения сх; не зави—
сит от характера передней кромки и с достаточной степенью точности
может рассчитываться по (4.1.112). При этом расчет ведется для крыла
с профилем, хорда которого равна средней аэродинамической хорде.
Тензометрические измерения. На рис. 4.2.10 представлена схема
экспериментальной установки для измерения нормальной силы, осевой
силы и момента тангажа с помощью трехкомпонентных тензометриче-
ских весов. Эти весы смонтированы внутри модели крыла, закрепленной
на державке, которая в свою очередь “соединена с механизмом измене-
ния углов атаки.
По измерениям давлений ро, р…, рим, а также температуры То на—
ходились параметры сверхзвукового потока.
242
Для определения по величине электрического сигнала соответствую-
щей аэродинамической силы или момента используют результаты тари—
ровки тензометрических весов (см. @ 2.4). При осуществлении изме-
рений этими весами продольный момент М; определяется относительно
поперечной оси, проходящей через середину шейки упругого элемента
весов (точку О на рис. 4.2.10).
Величина этого момента
_м; = № (›‹…д —1’)‚ (4.2.25)
где 1’—расстояние между точками А и 0. Из выражения (4.2.25)
МОНіНО ОПРСДеЛИТЬ КООРДИНЭТУ центра ДЭВЛЭНИЯ, ОТСЧИТЫВЭЭМУЮ ОТ
ВЭРШИНЫ крыла,
„
..ц_д : 1’ _ М.З./^^ (4.2.26)
Соответствующий коэффициент центра давления
’ т
сц_д= ”**-д = -’— _— г ‚ (4.2.27)
Ькр Ькр СП
где аэродинамические коэффициенты:
№ 12 71
С“ = _— : Ц; (4.2.28)
‚ М, іг п
т2=: г = ’“ М . (4.2.29)
‘7°° $кр Ькр а... $кр дкр
Соответствующий коэффициент осевой силы
іг п
сд: “ = в К . (4.2.30)
000 вкр 000 вкр
В формулах (4.2.28)—:—(4.2.30)п№, из и пм представляют собой элек-
трические сигналы, регистрируемые измерительными приборами, от
воздействий на крыло соответственно нормальной и продольной сил
(М, К) и момента (м;), а Азы, ігв и Ём—тарировочные коэффициенты.
При этом при тарировке тензовесов момент, имеющий такое же направ-
ление, как на рис. 4.2.10, вызывает отклонение стрелки измерительного
прибора вправо. В соответствии с принятым знаком продольного мо-
мента величина электрического сигнала пм в этом случае принимается
отрицательной.
Поскольку углы атаки, при которых проводится эксперимент, не-
большие, коэффициент подъемной силы су будет таким же, как величи-
на см. Для определения коэффициента сопротивления (в поточных ко-
ординатах) необходимо воспользоваться формулой, аналогичной
(4.1.14), но записанной для полных коэффициентов.
Момент относительно поперечной оси, проходящей через вершину
крыла (точка А на рис. 4.2.10),
_Мг : Мхшд, (4.2.30’)
а коэффициент момента
х] . /
_тг : См [3$— = с” сид. (4.2.30)
Производя измерения и соответствующие расчеты для различных чи-
сел Маха и углов атаки, получают аэродинамические коэффициенты
в функции Мс,о и а. Одновременно можно при необхоцимости осущест-
вить исследования при условии изменения чисел Рейнольдса потока в
рабочей части. Тогда найденные коэффициенты будут отражать более
сложную их зависимость от М…, 04 и Не. При проведении замеров аэро—
243
динамическими весами следует предусмотреть дополнительные исследо—
вания, связанные с выявлением и устранением влияния конструкции
державки на результаты измерения сил и моментов. Вообще говоря,
это влияние для одной и той же конструкции будет неодинаковым при
различных М…, и о. Поэтому нахождение необХОДимых поправок к из—
меряемым величинам должно было быть предметом соответствующих
методических исследований для каждого значения МООИ от и их сочета-
ния. Однако для простоты исследований, имея также в виду их при-
ближенный характер, можно ограничиться нахождением поправок к ве-
совым данным за счет влияния державки при каком-нибудь значении
М00 и и. При проведении таких методических исследований можно исхо-
дить из рекомендаций, изложенных в 5 3.1.
Весовые испытания крыла с ромбовидным профилем, имеющего
«нулевые» толщины кромок, приводят к некоторым искажениям резуль-
татов ввиду необходимости некоторого изменения формы крыла в зад-
ней части центрального сечения для размещения донной тензодержавки
(см. рис. 4.2.10). Наличие этого цилиндрического «наплыва» практиче-
ски не изменяет подъемной силы и пр0дольного момента крыла и ска-
зывается в основном на сопротивлении. Проведя дренажные исследова-
ния двух моделей крыла, одна из которых имеет указанный «наплыв»
и устанавливается на той же державке, на которой проводятся весовые
исследования, можно найти поправки к измеренному сопротивлению
и тем самым определить его действительную величину. Дренаж осуще-
ствляется в обоих случаях по верхней поверхности крыла, а для получе-
ния результатов по нижней поверхности модели придается равный по
величине, но отрицательный по знаку угол атаки. Дренажные трубки
выводятся из модели через нижнюю поверхность. С нижней же стороны
осуществляется также крепление «идеальной» модели (без «наплыва»
и донной державки).
Порядок проведения работы
1. Ознакомиться со схемой экспериментальной установки, конст-
рукцией трехкомпонентных тензовесов, моделью, измерительными при-
борами.
2. Провести тарировку тензовесов (определить тарировочные коэф-
фициенты дав, Азы, дам).
3. Установить тензодержавку с моделью в рабочей части трубы на
боковой державке под заданным углом атаки.
4. Включить тензостанцию (а при необходимости и осциллограф) и
настроить ее, произведя балансировку мостов.
5. Соединить образцовые манометр и вакуумметр соответственно со
щтуцерами насадка полного напора, установленного в форкамере, и
отверстия приемника статического давления в рабочей части трубы.
6. Замерить лабораторным барометром атмосферное давление ратм.
7. Включить трубу и после выхода ее на режим установившегося
обтекания снять показания пн, пы, пм с гальванометров или записать
их на осциллограмме. Одновременно зафиксировать показания датчика
температуры То, замерить давление в форкамере ро и статическое дав—
ление в рабочей части рос,. После выполнения этих операций прекратить
работу трубы и отключить измерительную аппаратуру.
8. По результатам измерения ро, рос„ То определить параметры
сверзвукового потока в рабочей части аэродинамической трубы.
9. Вычислить по формулам (4.2.27)—:—(4.2.30), (4.2.30”) аэроди-
намические коэффициенты сц_д‚ сы, сн, ‚т; крыла при заданном угле ата-
ки, по формуле (4.2.14) —коэффициент сх, а также качество крыла
К=су/сх.
10. Повторить измерения и соответствующие расчеты для несколь-
244
КИХ УГЛОВ атаки И ПО ПОЛУЧЕННЫМ данным ПОСТРОИТЬ ХЭРЭКТСРИСТИЧЭ-
ские диаграммы су(а)‚ сх(ос)‚ ‘т‚(оь)‚ Сц_д(а‚)‚ К(оь) изолированного тре-
УГОЛЬНОГО крыла ПРИ заданном ЧИСЛВ МЗХЗ набегающего ПОТОКЭ.
Пример. Рассмотрим результаты лабораторной работы по измерению трехкомпо—
нентными тензометрическими весами аэродинамических характеристик треугольного
крыла в сверхзвуковой трубе с закрытой рабочей частью и сопловым вкладышем, рас-
считанным на номинальное число М°о=2.7. На рис. 4.2.11 показано треугольное кры-
2 9 0
д;
\
ЬСАМ
дэ
\ СС
Рис. 4.2.11. Треугольное крыло с симметричным ромбовидным
профилем:
1—форма в плане; 2—профиль в корневом сечении; 3—линин Маха;
4—центр давления консоли крыла; 5—центр давления крыла
ло с симметричным ромбовидным профилем. Основные размеры крыла (в мм): !=
=124, [кр=94, Ькц=0, Ь1=47, Ь2=47‚ Ьср=47‚ ЬСАХ=63’ А=6‚ Х1=56°18‚‚ х2=
=37°20’. Площадь модели крыла в плане вкр=5,83'103 ммг; ее удлинение Ж=12/8кр=
=2‚64; сужение п=Ькр/Ькц=оо; относительная толщина профиля в корневом сечении
А=А/Ькр=0‚0639.
Общий вид модели с весовой державкой показан на рис. 4.2.12. Расстояние от'вер-
шины крыла до середины шейки упругого элемента весов [’=24 мм.
Угол атаки, при котором проводилась продувка, был равен 5°. В этом случае «за-
громождение» моделью рабочей части составило
3 3 'п 5,83-10—3.о‚0872
__м_ : Ш : = 0,003”,
вт вт 0,16
что при Мос =2,7 согласно рис. 1.4.15 вполне допустимо.
Расчет волновой картины обтекания крыла при этом же числе Маха показал,
что отраженные от стенок трубы скачки уплотнения не попадают на модель. Прак-
тически такая же картина сохранилась в рабочей части в реальном случае, которому
соответствовало измеренное число Мос =2‚68.
В измерительный комплекс тензовесов входили универсальная тензометрическая
станция, каналы которой использовались для измерения величин №, К и М„ а также
три гальванометра, каждый из которых был подключен к соответствующему каналу
тензостанции (см. рис. 4.2.10). По шкалам этих гальванометров производилась реги-
страция величин электрического разбаланса мостов, пропорциональных №, К и М,.
По результатам тарировки весов найдены следующие значения тарировочных ко-
эффициентов: ігы=1О—1 кГ/мв; ёв=1О—‘ кГ/мв; ігм=10—2 кГ-м/мв.
После установки модели под углом атаки а=5° была проведена балансировка
всех трех мостов тензостанции` при этом стрелки регистрирующих приборов гальва-
нометров были установлены на нуле (на середине шкалы). Давление в форкамере ро из-
мерялось образцовым манометром, рассчитанным на 5 атм, а статическое давление
в рабочей части роо ——образцовым вакуумметром, предназначенным для регистрации
давлений до 760 мм рТ. ст. Измерения показали, что ро—ратм=1‚47 ‚СГ/см?, а ратм—
_роо=0,919 кГ/смг. Замеренное барометром давление в лаборатории Ратм= 1,03 кГ/см2.
Таким образом, ро=2,50 кГ/см2 и рос =0,111 кГ/смг. Термопара в кожухе, установлен—
ная в форкамере, показала температуру То=293 К.
245
По этим параметрам для значений Ь=ср/с„=1,4; К=287 дж/(кг-град) был про—
веден расчет параметров воздушного потока в рабочей части. В частности, были опре-
делены числа Моо=2,68 и Ке „„ = 7… дсАх/“Ъо = 12,1 - 105.
После включения трубы и выхода ее на режим установившегося обтекания были
зарегистрированы следующие показания гальванометров:
пд=7,50 мв, ”№ =45,7 мв, пм =— 18,7 мв,
СОГЛЭСНО ЭТИМ ДаННЫМ осевая сила
13 = ьн пд = 10-1750 = 0,750 кг,
Т а б л и ц а А а коэффициент этой силы
с т с с Ёкпк
с — =———=
05, град у х 3 К ц.д ;; 40° вкр
—1
. 0
0 0 0,023 0 о 0 = 10 7'5 =0,023.
1 0,028 0,024 0,019 1,17 0,68 0,56-104-5,83-10"3
2 0,056 0,025 0,038 2,24 0,68
3 0,084 0,027 0,056 3,10 0,67 Нормальная сила
4 0,110 0,030 0,075 3,67 0,68 ___ =10—1><
5 0,140 0,035 0,094 3,97 0,68 ” /е„п„
><45,7=4‚57 кг,
а ее коэффициент
Ёп ”№ _ 10—1.45,7
с = — =0,14_
“ а… $„р 0,56-104-5,83—10"3
И, наконец, момент тангажа
м; =ігм пм =10_2(—18,7) =_0, 187 кГ-м
и соответствующий коэффициент
‚ ігм пм 10—2. ——18,7
тг : = ( ) =_ 0,061 .
а…8кр Ь,… 0,56.104.5,83-10—_3-0‚094
По значениям су=сы=0,14 и сн=0,023 был найден коэффициент сопротивления;
@
сх=су'5—7—3;+СК=О›14
0,02 = ‚0 _
57,3 + 3 О 35
СООТВЭТСТВУЮЩЗЯ величина ЭЭРОДИНЗМИЧЗСКОГО качества
к = су/сх = 0,14/0,035 = 3,97,
По значениям т;=—0,061 и с№=0,14 определен коэффициент центра давления
[см. формулу (4.2.27)]
В соответствии с (4.2.30”)
—т2 = 0,14-О,68 = 0,094,
Аналогично были получены аэродинамические характеристики крыла для углов
атаки 0+4° (с интервалом через 1°). Результаты соответствующих измерений и рас-
четов представлены в табл. А.
Теперь сравним полученные экспериментальные результаты с данными расчетов
по линеаризованной теории сверхзвукового обтекания тонкого треугольного крыла.
Так как число Моо =2,68, то соответствующий угол наклона линий возмущения 1100 =
=агсзіп (ЦМ…) = агсзіп (1/2,68)=22°. Проведя под этим углом линии Маха
(см. рис. 4.2.11), можно убедиться в том, что эти линии проходят за передней и сред-
ней-кромками, которые, таким образом, являются сверхзвуковыми. Для расчета аэро-
динамических коэффициентов необходимо воспользоваться соответствующими этому
вилу кромок зависимостями (4.2.14), (4.2.16)—:—(4.2.19). Входящий в эти зависимости
коэффициент с1=1/1/2,682—1=0,402. В соответствии с этим значением коэффициент
подъемной силы
_ 4-0,4О2
Су—Ёа°=0‚0281-0&°‚ (4.2.31)
246
а коэффициент инпуктивного сопротивления
4—0‚402 о 2 о 2
ед _ __57,32 (а. ) = 0,00049 (ос ) .
Составляющая С„Ср КОЭффИциента сопротивления [см. (4.2.14)] определяется из
графика на рис. 4.2.7 по значениям:
А = А/Ьнр = 6/94 = 0,0639;
_ 1 1 1 124 94
1—г=1_—.№=1_—.——/—=о‚135;
2 №№ 2 $337°2о’
111 = я; х1/1/м30 —1=1856°18'/1/2‚682—1= 0,178.
… „рп-„‚_. ‚„...
‚__—„›ЮтРУ'Щ“
\ ‹. ‘-. .и. . .-.
Рис. 4.2.12. Модель треугольного крыла с тензодер-
жавкой:
1 -— модель крыла; 2 — тензодержавка
Сцд И ЧП: С:: С#
1,0- Радд»
01
и г 0,08ШЛ4
3 под №5
2 ‚0,014 1102
"
‘
__ш
©
\)
„Б
©
"
‚\ |
ц ос. град
СЭ
`.
№
Сч -
Рис. 4.2.13. Характеристические диаграммы треуголь-
ного крыла, изображенного на рис. 4.2.11, при Моо =
= 2,68:
_теоретический расчет; — — _ _ эксперимент
Из этого графика находим с;:рои/ (4_А2) =3,0, откуда
Шг 3,0.4.о,06392
3,0 ‚ = __ = 0,0199‚
“ 1/2,682— 1
Составляющая от трения сх, коэффициента сопротивления определяется следую-
щим образом. Полагая Кекр=З-106‚ устанавливаем, что на крыле имеет место ОДНО-
родный ламинарный пограничный слой, поскольку число Рейнольдса, рассчитанное по
максимальной хорде Ьнр [Цеоо =Уоо Ьнр/юоэ=590-О,094/(3‚06-10—5)=18‚1-105]‚ меньше
247
Схр=
КРИТИЧЕЪСКОГО ЧИСЛЕ Кекр. В ЭТОМ случае ОТНОСИТЭЛЬНУЮ КООРДИНЗТУ ТОЧКИ перехода
принимаем равной единице (Б=1). Из графика на рис. 4.1.48 по Мос =2‚68 и х‚=1
находим коэффициент пм=0,95.
Приняв коэффициент пд =] и используя формулы (4.1.112), (4.1.29), вычисляем
1,29 1,29
———__— пм =2 —'____0‚95 = 0,0025‚
УНЧ… 1/ 9,65-105.
причем в этом выражении число Рейнольдса Несе = Реадер/узо.
Таким образом, в соответствии с формулой (4.2.14) коэффициент сопротивления
крыла
Схі=2
сх = 0,0199 —|— 0,00049 (04°)2 _|— 0‚0025 : 0,022 + 0,00049 (ос°)2_ (4.2.32)
Коэффициент момента в соответствии с формулой (4.2.19)
—т2=0,0187-ос°. (4.2.33)
Используя формулы (4.2.31) и (4.2.32), определим качество крыла:
К— су 0,0281-ос°
: 4.2.34)
сх 0,022 +(Р,00049 (ос°)2 (
Коэффициент центра давления треугольного крыла равен сддд=2/3.
Результаты этих расчетов показаны в графическом виде на рис. 4.2.13. Там же
приведены кривые, построенные по экспериментальным данным. Сравнение теоретиче—
ских и экспериментальных данных указывает на их хорошее согласование.
ГЛАВА \!
ЭКСПЕРИМЕНТАЛЬНАЯ АЭРОДИНАМИКА
ТЕЛ ВРАЩЕНИЯ
Корпус (фюзеляж) в виде тела вращения или близкий по форме к
нему представляет собой наряду с крыльями, управляющими и стаби—
лизирующими элементами важнеишую часть многих летательных аппа-
ратов. Вместе с тем отдельные типы ракетных систем имеют корпус
как единственный элемент аэродинамической схемы. Вот почему в аэро-
динамических исследованиях большое место занимает изучение обтека`
ния тел вращения.
Результаты этого изучения могут непосредственно использоваться
для оценки аэродинамических свойств летательного аппарата, если он
представляет собой по форме тело вращения, или же применяются
вместе с соответствующими данными для несущих поверхностей
(крылья, рули, стабилизаторы) и интерференционными поправками
как отдельные составляющие при аэродинамическом расчете комбина—
ции «корпус+крыло+оперение>>.
Современная аэродинамика тел вращения благодаря развнтш мате-
матики и вычислительной техники достигла больших успехов. Вместе
с тем возросла роль и экспериментальных исследований обтекания кор-
пусов, что вызвано значительным усложнением аэроцинамических за-
дач и повышением требований к проверке правильности их решения
опытным путем. К тому же многие проблемы аэроцинамики тел враще—
ния могут быть пока достаточно надежно разрешены лишь в экспери-
ментальных условиях.
Экспериментальное изучение обтекания тел вращения связано в ос-
новном с исследованием потока около их моделей, так как использова—
ние натурных образцов не всегда возможно из-за ограниченных разме-
ров аэродинамических труб и неоправданно больших затрат на прове-
дение исследований с такими образцами. При этом опытное определение
аэродинамических характеристик на моделях дает' достаточно хорошие
результаты, которые могут быть перенесены на натурное изделие, если
при проведении экспериментов выполнены условия аэродинамического
подобия модельного и натурного потоков.
Как и для крыльев (профилей), экспериментальное исследование
аэродинамических свойств тел вращения можно проводить либо путем
измерения распределения давления и касательных напряжений с по-
следующим расчетом необходийых аэродинамических параметров, либо
при помощи весовых испытаний, позволяющих нахоцить суммарные
аэроцинамические силы и моменты.
На практике широко используются комбинированные методы аэро—
динамических исследований, согласно которым одни составляющие си-
лового воздействия на обтекаемое тело вращения определяются экспе-
риментально (в частности, силы от давления), а другие (силы тре-
ния) —— расчетом.
Рассматриваемые в этой главе лабораторные работы позволяют
ознакомиться с современными методами, приборами и аппаратурой,
которые используются в экспериментальной аэроцинамике тел враще-
ния.
Одновременно для них приводятся теоретические зависимости, при
помощи которых ведется расчет отдельных аэродинамических коэффи-
циентов.
249
5 5.1. ОПРЕДЕЛЕНИЕ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
ТЕЛ ВРАЩЕНИЯ ПО ИЗМЕРЕНИЯМ дАВЛЕНИЙ
Работа 5.1.1
Исследование распределения давления
по обтекаемой поверхности тела вращения
Ц е л ь р а б о т ы —— найти путем измерений распределение давления
по поверхности тела вращения, обтекаемого воздушным потоком в аэро—
динамической трубе под некоторым углом атаки, и определить по этому
распределению соответ—
..... ствующие аэродинамиче-
“
‚‘
‘
‚.= “ ские коэффициенты.
\
\ Общие сведения
: \\ Аэроцинамические ко-
0 0‘ Х эффициенты тел враще-
М _ Ц.Д & а: ния. На тело вращения,
и… Ма расположенное в потоке
азцд ПОД углом атаки (1 (рис.
<———'—— 5.1.1), деиствует а_эроди-
намическая сила Р=Кі+
Рис. 5.1.1; Схема аэродинамических сил и мо- +1“, Где К, М—соответ-
мента, действующих на тело вращения (двухмер-
ное Обтекание) ственно осеваяи нормаль-
ная силы; :, 1—единич-
ные векторы по осям свя-
занной системы координат. Одновременно на это тело действует момент
тангажа М2.
Рассмотрим отдельно каждую составляющую К и М, а также момент
Ми. В соответствии с физической природой аэродинамической силы со—
ставляющая К может быть представлена в виде суммы:
К=Кр+Кдон+Кіэ (5-1-1)
где 1%, Кдош Кт—составляющие осевой силы соответственно от рас—
пределения давления по боковой поверхности, донного давления и
трения.
Аэродинамический коэффициент осевой силы св=1?/(с7…$мид) может
быть представлен в виде суммы коэффициентов соответствующих со-
ставляющих:
ск = Сар + аддон + от, (5.1.2)
где Змид—миделевое сечение тела вращения; асо=рооУЁо /2—СК0Р°СТ'
ной напор.
По аналогии с (5.1.1) нормальную силу, как и момент тангажа,
можно представить в виде соответствующих сумм составляющих от дав—
ления (по боковой поверхности и донному срезу) и трения. Однако, как
показывают исследования, для сравнительно недлинных тел вращения,
которые обычно применяются на практике, составляющие нормальной
силы и момента, обусловленные трением, невелики. Также малы и те
составляю-щие, которые возникают за счет донного давления. Это обу-
словлено тем, что распределение давления за дном обычно незначитель-
но отличается от равномерного и поэтому почти не дает составляющих
суммарной силы А1 и момента М:. В соответствии с этим полагаем, что
сила и момент вызваны воздействием только давления на боковую по-
верхность и равны: _
№р=с№а® ЗМ“, Мр=т2ра®8 (5.1.3)
: мид Хк,
250
где сыр, тд)—аэродинамические коэффициенты соответственно нор—
мальной силы и момента тангажа за счет давления; хк—длина тела
вращения.
Получим формулы, позволяющие вычислить по известному распре-
делению давления аэродинамические коэффициенты СВр, сыр и тир.
Выделим элемент поверхности тела вращения шириной сіх, расположен-
ный на расстоянии х от носка (рис. 5.1.2). На участок этого элемента
Рис. 5.1.2. Расчетная схема для определения аэродинамических коэф-
фициентов тела вращения
площадью ища! действует сила от избыточного Давления, равная
(р— р…)гаіусіі. Так как длина образующей а! определяется из соотно-
шения сіх=сіісоз [3 (где В— угол между осью и касательной к образую-
щей в данной точке), то элементарная сила аг = (р —— р…) (гатсіх/соз В).
Проектируя эту силу на ось тела, найдем элементарную величину осе—
вой силы, действующей на выделенный участок, акр: (р—роо)><
)( (гсіусіх/соз В) зіп @. Интегрируя по поверхности и принимая во внимание
симметричный характер распределения давления по обе стороны от ну-
левой мерИДиональной плоскости, в которой расположен вектор скорости
х
Л
У…, получим для осевой силы Кр=2ёкгщвахё(р—роо)сіу. Имея в виду
при этом, что Кр=свраоо$мид, где $мид=лгінш найдем следующее вы—
ражение для коэффициента осевой силы от давления:
1 _ :п:
1 (1,2 м _
акр—:?; _ сіхЯрсі , (5.1.4)
0 дх '6
где г=г/гмид; х=х/хк (см. рис. 5.1.2).
Из рис. 5.1.2 видно, что элементарная величина нормальной силы
сі№р=——(р—р…)га?усіх соз у, а полное значение этой силы №р=
Хк РЛ}
=—2 [ гсіх ] (р— р…)созусіу. Соответствующий аэродинамический
О 0
коэффициент
М„ и„
с __ _
№9
4… З…… Л
1 21:
га} 5 ;? (305 №, (5.1 .5)
О 0
где &=&/Шмид — удлинение тела вращения.
Рассмотрим выражение для момента тангажа МЦ), вычисленного
относительно поперечной оси, проходящей через носок тела. Из
251
рис. 5.1.2 видно, что элементарная величина этого момента, действую-
щего на площадку 05$, расположенную на расстоянии х от носка,
__ _ 2 _ _
сіМгр _ х (р Р…) гёусіх соз у + г (р рю) щих созу’се Б.
Учитывая симметричность распределения давления, после интегрирова-
ния найдем полный момент:
ХК “ хк Л
_ . 1 `_ ' п 2 {.
Мгр _— 2 ) хг (1х5 (‚0 —роэ) соз мтз) г {366136
0 о
О
) (р — р..) СОЗ тат,
0
откуда коэффициент момента
1 ::
1 И
т.д, : №5” №13? \ Бсоз № + _:Ё— 5 72 1% {за} ; Бсоз усіу. (5.1.6)
л „,
О ‹) 0 0
Если тело вращения тонкое (г<<хн)‚ то вторым членом в правой части
(5.1.6) можно пренебречь.
По известным значениям тд, и сыр можно определить коэффициент
центра давления (см. рис. 5.1.1):
__ "Ц-д ___ _Ёгд _ (5.1.7)
хк СПР
Зависимости (5.1.4), (5.1.5), (5.1.6) определяют аэр0динамические
коэффициенты тела вращения в связанной системе координат. В поточ-
ных координатах (см. рис. 5.1.1) соответствующие коэффициенты могут
быть вычислены при помощи фор-
мул (3.1.8)+(3.1.12). '
Порядок расчета аэроцинами-
ческих коэффициентов. Рассмот—
рим методику вычисления аэро-
динамических коэффициентов по
“"] приведенным выше зависимостям
| при условии, что распределение
1
0,5-
Давления по поверхности тела
вращения заданной формы изве-
Т стно. Такое распределение может
’ быть найдено либо теоретически—
-д_5 _ ми расчетами, либо путем экспе-
риментальных исследований.
Рис. 5.1.3. К вычислению интеграла О: В результате ЭТИХ Расчетов ” ИС"
1 следований находится функция
р=р(у‚ х), характеризующая за—
кон изменения коэффициента дав-
ления в зависимости от меридионального угла \) и осевой координаты х
тела вращения. Такая функция определяет коэффициент осевой силы
от давления в соответствии с выражением (5.1.4), которое можно пред-
ставить в виде
'. ' : : % ‚27 : т'
_ 52 9 0.4 0.5 0,5 а 0,8 0.9
= _; М
0
с = Хост, (5.1.8)
Где
о=5ра‚ (5.1.9)
а значения гдон=гдОН/гмид; у=у/л. Нетрудно видеть, что функция 0 за—
ВИСИТ ТОЛЬКО ОТ ОДНОЙ переменной, а именно КООРДИНЗТЫ х ИЛИ, УЧИТЫ-
252
вая известный вид уравнения образующей г=г(х), от соответствующе-
го радиуса поперечного сечения г. Если распределение коэффициента
давления найдено, то функция 0 вычисляется при помощи однократно-
го интегрирования для каждого из выбранных сечений тела вращения,
а затем согласно (5.1.8) произволится повторное интегрирование.
На рис. 5.1.3 показан характер распределения коэффициента давле-
ния по одному из поперечных сечений тела вращения. Измерив площа-
ди 81и $2 между кривой и горизонтальной осью, с учетом их знака
можно определить в соответствии с (5.1.9) величину
В : (81+32)д$в '
где ”ЭП:“,БРЪ —— масштаб площади, равный произведению соответст-
вующих масштабов значений р и у. Кривые р=р(1›), аналогичные гра—
фику на рис. 5.1.3, долж-
ны быть построены для Р`
ряда сечений, в точках ко- ’
торых известны давления,
с тем чтобы осуществить
повторное интегрирова- 0,5
ние в соответствии с
(5.1.8). Количество этих
сечений должно быть та- [,
ким, чтобы можно было
осуществить интегриро-
вание и обеспечить при
этом необходимую точ- “05 '
ность.
В соответствии с рис.
5.1.4, на котором изобра-
жен график функции
0:0 (т?), коэффициент осевой силы от давления
СНр : (81+ 82) Р‘БС’
где 81 и 82 — площади между кривой и осью г2 с учетом знака; р5с=
=Ш>М72 — масштаб площади, равный произведению соответствующих
масштабов величин В и Р.
Для расчета коэффициента нормальной силы воспользуемся форму-
лой (5.1.5), которую перепишем в виде
1 1
с : —4?»к57(1;55соз(ёл)сі$.
№10
0 о
— гмид(?мид=,)
\
Рис. 5.1.4. Графическое вычисление СВр тела вра-
щения
Вводя обозначение
1
П=55соз(_ул)д›, (5.1.10)
0
получим
1
с„р=—4жк(пгах. (5.1.11)
0
В соответствии с этой формулой коэффициент нормальной силы опреде-
ляется путем двукратного интегрирования. При этом сначала находятся
графическим интегрированием значения П, соответствующие несколь-
ким сечениям тела вращения. В качестве иллюстрации такое интегри-
253
рование для Одного сечения показано на рис. 5.1.5. В соответствии
с этим рисунком для рассматриваемого сечения функция
” = ”817 (81 + 82)›
где 81 и 82— площади под кривой (с учетом знака); из” = „№085 Щ —
масштаб площади, равный произведению соответствующих масштабов
величин р соз ? и 1).
Затем по найденным значениям П подсчитывают для выбранных се-
чений функции П1=47…7П и строят график П1=П1(;) (рис. 5.1.6).
‚0005 Т_ Пу=дЛкРП
&5г
0,5 г
@ 5,
0 . : : - г ' : /"'[Ъ:
0,1 0,2 0,5 0,4 0,5 0,5 0,7 дд 0,9 , Т” 0 0,1: 0,32 П:,З ЧД 0,5 : ;&?52 а: :::/‚д
5, 0,6 0,7 0,8 0,9 1
@
'П‚5 -
„Ы
Рис. 5.1.5. Вспомогательный график для Рис. 5.1.6. График для вычисления сы р
вычисления коэффициента нормальной тела вращения
силы от давления
о) 5)
п2 п‚
а,; — 0.1 +
5;
и №2 № а‚5№3=ш/ш„ „ @ ”'? т № д'Э/@пчг/тиж
' ' 0.5 и.т.д 0.9 1 0,6 0,7 ‚9 1
№ @ 5‘ ‚2530$?
111 — “0.7"
Рис. 5.1.7. К определению коэффициента тт
Площади 81 и 82 ПОД кривой с учетом знака определяют коэффициент
нормальной силы:
сир : __Р‘зм (31 + 82Ъ
где из” = Р; ”171 —— масштаб площади, равный произведению соответст-
вующих. масштабов значений х и П1.
Вычисление коэффициента момента ведется на основе формулы
(5.1.6), которую представим в следующем виде:
-з
1 гдон
тд, : ] ща 32 + 5173473, (5.1.12)
0 0
где
172 : идёт, 173 : жил,/з. (5.1.13)
Эти функции П2 и ПЗ определяются по значениям П, известным из рас—
четов коэффициента нормальной силы, а затем строятся графики П2=
=П2(ЁЁ) и П3=П3(_гз) (рис. 5.1.7). Если площади псд кривой функции
254
П2(х) будут 81 и 82 (с учетом знака, рис. 5.1.‚7 а), а под кривой П3(г3)
будут 8' и 82 И 33 (рис. 5.1.7, 6), то коэффициент момента
: (81+82\Р'$1 (81+82+83) ”3?
где ”в: ртрх; р:: ризы—‚з— масштабы площадей на рис. 5.1.7‚а и
5.1.7,б, равные соответственно произведению масштабов значений Пг, х
И 173, ГЗ.
Осевая сила, обусловленная давлением на дно (рис. 5.1.8), определя-
ется в общем виде из выражения
‚дон “ :”
Нд… : _ 2400 5 5 ( рдон __ ров)“ щиту, „, , : 0
О 0
а соответствующий коэффициент этой
(‚Пда/1 73°)!“ кагда Т
СИЛЫ ‚. .
в до" 1 а }
_ _ _ _ "
Скдон : (‚со ——Ё-———он =—— 2 { Таг 65 рдонп СЦ), ' .
мид
Н
и
О
где рдонп=рдон„(г, у) —функция, харак- '
теризующая распределение коэффициен-
та давления на донной поверхности,
В экспериментальных условиях эта функ- Рис 518. К вычислению донного,
ция находится по измерению давления сопротивления
в дренажных отверстиях, просверленных
на донном срезе тела вращения.
Исследования показывают, что достаточно удовлетворительные ре-
зультаты при определении донной силы получаются, если давление за
дном измерить в нескольких точках и последующий расчет такой силы
вести по средней величине этого давления рдон и соответствующему
среднему коэффициенту донного давления рдон. В этом случае
_ "?
сКдон =— РДон Г дон. (5.1 .14)
ЕСЛИ ДОНН0е сечение такое же, как миделевое (гд0н=гьіид)‚ ТО
тт
СКдон __ ддон-
Приближенный аэроцинамический расчет.
С о п р о т и в л е н и е т р е н и я. При упрощенных расчетах сопро—
тивления трения корпусов могут быть использованы зависимости для
плоской пластинки. Если сх; представляет собой коэффициент сопротив-
ления пластинки с длиной, равной длине корпуса, то сила сопротивле—
ления трения Х;=сх; 6100850… где 86… — боковая поверхность
корпуса.
Пограничный слой около корпуса в реальных условиях, как правило,
оказываетсй смешанным: на передней части он ламинарный, на осталь-
ной турбулентный (рис. 5.1.9). В соответствии с этим средний коэффи-
циент сопротивления трения корпуса, отнесенный к миделевому сече—
нию (в связанной системе координат),
” вбок “ Вл ' _ 3:1
с = —— —с
Ні КГК Змид к,” Змид Від змид
где сд!к и окт—коэффициенты турбулентного трения пластинки
(первый из них находится по числу Рейнольдса Кею= °эхи/уса, подсчи-
танному по длине корпуса, второй — по значению критического числа
Рейнольдса Кекр, вычисленному по длине ламинарного участка); вели-
, (5.1.15).
255
чина сд” равна коэффициенту ламинарного трения пластинки, длина
которой соответствует протяженности ламинарного слоя на корпусе;
значения 85… и &; представляют собой соответственно полную боковую
поверхность корпуса и часть этой поверхности с ламинарным слоем
Таким образом, для вычислений по зависимости (5.1.15) необходимо
знать длину ламинарного слоя на передней части корпуса. Определение
этой длины производят по критическому числу Рейнольдса, которое
для продолговатого корпуса, обтекаемого несжимаемым потоком
в первом приближении, Кенрщ 106.
Рис. 5.1.9. Тело вращения (а), на поверхности которого
имеется ламинарный 1 и турбулентный 2 участки погра-
ничного слоя, и эквивалентная ему по площади ($60к=
=$пд) пластинка (б)
Коэффициенты трения (5.1.15) 'опредеЛяются как функции числа
Не.-„ следующим образом:
ламинарный пограничный слой
с;,‚л = 1,32_:’Ке}„{2; (5.1.16)
тур булентный пограничный слой;
с;,іл = 0,074/“8232 —для Кесо {106; (5.1.17)
с;,“ = 0,032Ке;°°145— для 2— 106 < Кеш< 1010. (5.1.18)
Учитывая, что для Кею=Кекр коэффициент с)”, =0‚074/(106)°‚2=
Л
=0‚0047‚ а с;‹ и с}, вычисляются соответственно по (5.1.16) и
.И к
(5.1.18), получим после подстановки в (5.1.15)
от:[1,32.1О_3?8“—+(0,032Ке30-145—1—0,0047 85" )] 56“ ‚(5.1.19)
бок бок мид
Чтобы учесть влияние сжимаемости газа (как при дозвуковых, так
и при сверхзвуковых скоростях), можно воспользоваться формулой
С _ 4,96'10_°4 Бл 0,032 1 0, 18.71 збок
}? _— ° — _
_ з $ _:
1/1+о,03м2„ б°" 1/1+о‚12м;о
Змид .
(5.1.20)
Эта формула получена из выражения (5.1.19), в которое введены по—
правки на сжимаемость, зависящие от числа М….
256
Д о н н о е д а в л е н и е. Исследования показывают, что коэффици—
ент давления за дном тела вращения при дозвуковых скоростях
(Моо< 1) _ _ _
р… = (рдон —р…)/‹;… =— (0‚029/1/0кг) где… (51—21)
а соответствующий коэффициент донной силы
аддон : (0,029/1/с—т) ??…… (5.1 .22)
где ст определяется с учетом сжимаемости для заданного числа Мао
из (5.1.20).
При сверхзвуковых скоростях давление за дном заостренного тела
вращения
Эдо„ = — 1,144к1‹2 — кд м?; (5.1.23)
здесь К1=Моо/?»эф‚ где эффективное удлинение жэф=›…/`гіон. В соответ-
ствии с (5.1.14) коэффициент донной силы
сКдон : 1 ‚144к1 (2 '— К1) М;2 ;Ёон. (5.1.24)
Приведенные формулы, учитывающие влияние хвостового сужения,
дают удовлетворительные результаты для гіон>0,4+0‚5 и сравнитель-
но небольшого угла наклона образующей хвостовой части (до 8—2—1О°).
Применяя эти формулы, следует также учитывать, что они пригодны
для значений К1<1. Если же К1>1, то расчет надо вести по формулам
Ъдон = —— 1,43м;2; аддон : 1,4зм;2}іон. (5.1.25)
Давление на боковой поверхности. В настоящее время
отсутствуют теоретические меТОДы, которые позволяли бы с удовлетво—
рительной точностью рассчитывать давление на боковой поверхности
тел вращения с донным срезом, обтекае—
мых дозвуковым потоком жидкости. Хо—
рошие результаты получаются лишь в ре-
зультате экспериментального исследова-
ния этого давления. При этом, как пока-
зали такие исследования, для удлинен-
ных тел вращения различие между дав-
лениями в несжимаемом и сжимаемом
потоках невелико. Это различие стано-
вится больше по мере утолщения тонко-
го тела вращения или возрастания чи-
сел Мао.
Согласно имеющимся данным для на- Рис. 5.1.10. Построение «местного
конуса» 2 при несимметричном
хождения коэффициента давления реж обтекании тела вращения 1
при дозвуковых скоростях обтекания мо—
жно воспользоваться значениями коэф-
фициента давления рнСЖ для несжимаемой жидкости и формулой пере-
счета, пригодной для значений М…<О‚5+О‚6‚ и при условии, что числа
Маха меньше критических величин Мкр (4.1.32).
При расчете распределения давления около заостренного тела вра-
щения, обтекаемого сверхзвуковым потоком п0д углом атаки а, можно
воспользоваться метоцом «местных конусов». В соответствии с этим
Методом в данной точке обтекаемой поверхности скорость будет такой,
как на «местном конусе» с половиной угла при вершине:
Бк = В — од соз ? + (иЗ/2) с’се Б зіп2 у, (5.1.26)
обтекаемом потоком с заданным числом Моо>1 ПОД нулевым углом
атаки. Построение такого местного конуса приведено на рис. 5.1.10. На
этом же рисунке показаны углы Бк, В и 50-
17—927 257
Для известного угла а можно по (5.1.26) подсчитать для заданного
сечения (угла [3 наклона касательной к оси) угол Бк как функцию у
Затем по таблицам или графикам найти, зная М00 и [ЗК, соответствую-
щие коэффициенты давления на конусе. рд, по которым определить при
помощи формулы
5=дд6+2(6—1)/(1гм30) (5.1.27)
местный коэффициент давления. В этой формуле величина у: уо/щ где
коэффициент у=р0/ро рассчитан по давлению торможения ро для
«местного конуса» с углом Вы (5.1.26), а у0=рО/ро определяется по дав-
лению торможения рс') для конуса с углом
Ёко = [55% 06 соз ? + (ой/2) ста [30 зіп2 7. (5.1.28)
Если угол [ЗК для_ какого-то сечения отрицательный, то расчет коэф-
фициента давления рд следует вести для условного «местного конуса»
с «отрицательным» углом Бк. Тогда этот коэффициент давления, най—
денный по абсолютной величине Вю надо рассматривать для данной точ-
ки отрицательным по знаку, а значение \) в (5.1.2?) следует принимать
равным «70.
По известной функции р=р(х‚ у) можно вычислить при помощи
графического интегрирования соответствующие аэр0динамические ко-
эффициенты.
Порядок проведения работы
Дозвуковая труба (с открытой рабочей частью).
1. Ознакомиться с устройством аэродинамической трубы и схемой
всей экспериментальной установки; проверить готовность к работе обо—
рудования и измерительных устройств.
2. Осуществить тарировку каждого жидкостного манометра с приме-
нением для этоГо эталонного манометра.
3. Установить в рабочей части трубы модель, соединить ее резиновы—
ми дренажными трубками с манометрами и проверить герметичность
соединения.
4. Измерить барометрическое давление ратм, температуру воздуха
Татм и снять показанйя с психрометра.
5. Включить аэродинамическую трубу и после выхода ее на режим
установившегося обтеканияосуществить фотосъемку панели маномет-
ра, с- тем чтобы зафиксировать показания левых и правых отсчетных
трубок и„ лев и и„ пр. Аналогичные измерения провести для нескольких
углов атаки.
6. Вместо модели установить насадок полного давления и измерить
скоростной напор трубы аоо=рооУЁ° /2. Если позволяют размеры попе-
речного сечения трубы, то насадок целесообразно разместить вместе
с моделью и измерение скоростного напора провести одновременно
с определением давления на обтекаемой поверхности. При этом распо-
ложение насадка и модели должно быть таким, чтобы исключить их
взаимное влияние.
7. По негативным фотографическим пленкам определить показания
манометров й„ лев и и„ пр, вычислить разность этих показаний Ап:
=і1плев — и„ пр, найти по ним соответствующие избыточные давления
Арп=рп——роо, а затем определить коэффициенты давления в соответ-
ствующих точках поверхности рп=Арп/С]оо.
8. По найденному распределению значений рп вычислить для каждо—
го угла атаки аэродинамические коэффициенты и построить соответст-
вующие графики.
258
Сверхзвуковая труба (с закрытой рабочей частью).
1. Ознакомиться с общей схемой экспериментальной установки, уст-
ройством трубы и измерительных приборов, проверить их готовность
к работе.
2. Установить сменные сопловые вкладыши, рассчитанные на полу-
чение заданного (номинального) числа Моо>1. _
3. Закрепить на державке модель тела вращения и установить ее в
рабочей части под необх0димым углом атаки. .
4. Соединить резиновыми трубками дренажные отверстия модели
с групповым регистрирующим манометром ГРМ. С этим же маномет—
ром соединить приемник давления в стенке трубы, воспринимающин
статическое давление р… в рабочей части, и проверить герметичностт
соединений. ,
5. Установить манометр и термопару для измерения давления Ра
и температуры То в форкамере трубы.
6. Измерить барометрическое давление ра….
7. Снять все начальные показания группового регистрирующего ма—
нометра №0.
8. Включить трубу и после выхода ее на режим установившегося об-
текания осуществить измерение давлений, зафиксировав на печатаю-
щем устройстве ГРМ соответствующие показания №. Одновременно за-
мерить давление ро и температуру То в—форкамере трубы. Аналогичные
измерения провести для нескольких углов атаки.
9. По разности показаний АМ… =А/—— №0 вычислить статическое дав—
ление роо=раТМ+А№оо 18 (где іг— коэффициент шкалы ГРМ), а по отно-
шению рос,/ро найти, используя [17], соответствующее число М…“
10. Определить по значениям А№п=№п —1\70 давления в дренажных
точках М0дели рп=ратм+А№піе‚ вычислить избыточные давления
Арп=рп—р°о и, зная скоростной напор суф=йро°МЁо /2, найти коэффи-
циенты давления рп =Арп/с]оо в этих точках.
11. По найденному распределению рп для каЖДого из гуглов атаки
определить соответствующие аэродинамические коэффициенты
Пример. Рассмотрим результаты проведения лабораторной работы в дозвуко-
вой трубе. В такой трубе, имеющей небольшую скорость движенйя воздуха в ра—
бочей части (несжимаемый поток), измерялось распределение давления на модели те-
ла вращения, общий вид которой показан на рис 5.1.11. Размеры модели, мм: гмид=45;г
хг=92; хд=46; хк=182; гдон=34. На этом же рисунке показано разМещение дренаж-
НЫХ отверстий В семи поперечных сечениях модели. ОТНОСИТ6ЛЬНЫЗ, КООРДИНЗТЫ х=
=х/хк этих сечений, а также координаты дренажных отверстий Ёг=г/1“д„…д, у=у/:п: при—
ведены в табл. А.
В соответствии с размерами модели отношения боковой поверхности З…… и пло-
щади донного _среза _8д0н_ к миделеву—1 сечению З…… соответственно, равны: 860к=
Т а б л и ц а А
5 Номера дренажных отверстий
# о _— 1 2 3 4 5 б 7 _
1/3 — 8 9 111 11 12 13 14 _
2/3 — 15 16 17 - 18 19 20 . 21 —
1 _ 22 23 24 25 26 27 28 _
17* 259
Продолжение табл. А
Номера сечений
Раз—
меры и | ш | 111 | и | и | и: | ии ] 1х
? 0,311 | 0,601 ' 0,800 '0‚95в| 1,00 | 1,00 О,922|0,756
3? 0,088 | 0,187 0,296 0,401 0,505 0,758 0,885 1,00
Измерение давлений в дренажных отверстиях, а также полного давления (ско-
ростного напора) производилось при помощи батарейного манометра, состоящего из
двадцати восьми П—образных стеклянных трубок, заполненных спиртом с удельным
весом 'у=0‚82 кГ/дмз. Угол наклона панели манометра Б=90°‚ а тарировочные коэф-
фициенты каждой П-образной трубки принимались равными единице. Скоростной напор
[ПШШУШ ШШШ
измерялся комбинированным на-
садком Пито _ПраНДтля с тари-
ровочным коэффициентом &, = 1,01.
Б | _ Углы атаки модели устанавлива-
=Г_' 7 №775 лись при помощи координатннка,
2 \ _ на котором эта моцель закрепля-
__ _ Ё лась. .,
(„` |_Е\2Л/3 Схема и общии вид измери-
|.) тельнои установки показаны на
‘27‘28 |__ рис“. 5.1.12 и 5.1.13. Перед пуском
ддц . Т"" этои установки в лаборатории
‚ были измерены атмосферное дав-
_____›-. ление и температура (ратм=
=760 мм рт. ст., Татм=293 К).
Рис. 5.1.11. Схема испытываемой модели тела Одновременно была определена
вращения разность показаний термометров
психрометра, оказавшаяся равной
4° С, а по табл. 2.2.1 и 2.2.2 най-
дены соответственно относительная влажность (х=0‚6) и давление насыщенных па-
ров (рн:п=30 мм рт. ст.).
После включения трубы был зафиксирован перепад уровней жидкости АЬ=267 мм
в манометре, связанном с насадком полного напора. В результате получен скоростной
260
Ш
3
Рис. 5.1.12. Схема установки для испытания дренаж-
ной МОДеЛИ тела вращения:
! —-дозвуковая аэродинамическая труба; 2—дренированная
модель; З—жидкостные манометры; 4—трубка полного на-
пора; 5 — механизм углов атаки; б — державна модели;
7 —— соединительные трубки
напор Ч°о=р°оУЁо/2=Ануётёт=267-0‚82-1,01-1=220 кГ/мг. По этой величине скорост-
ного напора при помощи (3.2.2) определялась скорость
293 1
ию= 42,2 .е
760 1 0 378 0 6—-1-8——
_ ’ ' ’ 0,6—760
Результаты измерения уровней дп,—„дв и И…… в отчетных коленах манометров,
расчета разностей этих уровней №п=пп лев—Ип пр, избыточных давлений Ар„=р„——
220— 1,01—1 = 59 м/сек.
. - . _ '› „ - ‚ ‚ _ "'.' №:"; ".- _ "- {,.-;д : “%;;
___%-№3 " _ — : . . ., ___ {_ ` _ ^ - _ __ ‚ ._" ‹- . -.-_\\'.к .
-'—--`:'
Рис. 5.1.13. Установка модели летательного аппарата в
открытой рабочей части аэролинамической трубы
—р…=Ап„уігт=Ап„-О‚82-1=0‚82Ап„, а также коэффициентов давлений в дренажных
точках при осесимметричном обтекании модели (угол атаки (1:0) приведены в табл. Б.
Таблица Б
Н°МЁРЁеЁЁЁЪСТИЙ (1) 1 (11) 2 (111) 3 (Ш) 4 (и 5 (И) 60/1!) душ) (!Х)
И,…ев, мм — 47 —4 —7 —7 —7 0 2 —
и,…… мм _ —46 4 6 7 7 0 —1 _
Ал… мм _ 93 —8 —13 ——14 —14 0 з —
Ард, кГ/м2 —- 77 —6,6 ' ——-10 —11 —11 0 2,2 —
40°, кГ/м2 220
Б„ 1 | 0,35 _0,03 —0,04 —0‚05 —0‚05 0 0,01 _—
"2 0 0,097 0,360 0,640 0,913 1,000 1,000 0,850 0,572
принимая ВО внимание симметричный характер обтекания тела вращения, давле—
ния, приведенные В табл. Б, измерялись ТОЛЬКО В дренажных отверстиях, расположен—
ных на верхней образующей (см. рис. 5.1.11). В сечениях 1 (острие) и [Х (донный срез)
26!
давления:.ане.,измер.ялись‚ а определялись приближенно путем-графической экстраполя-
ции. В табл. Б приведены для соответствующих сечений значения г2=(г/гдон)2, кото-
рые будут использованы в дальнейших расчетах.
Измерения давлений осуществлялись также при углах атаки а=_4‚ 6, 8°. В част-
ности, для ос=4Ч° и а-…=220 кГ/м2 результаты этих измерений приведены в табл. В.
'.
Ё'Габлица В
Номера сечений - 11 111 111 У У! УП УП!
‚5:0
Номера отверстий ] 2 3 4 5 б 7
пплев‚ мм 30,6 __5 —9‚5 _].2 —12‚2 '—4‚1 _].‚7
„пр, мм _31 4,8 10 12,2 12 4 1
Ап… мм 61,6 —9‚8 —19‚5 ——2-4‚2 —`24‚2 —8,1 —2‚7
А_р„, ›‹сГ/м2 50,6 —8 —-16 —19‚8 —19,8 —6,6 —2‚2
р„ 0,23 —0‚04 —0‚08 ——0,09 —0‚09 —0‚03 —0,01
8:1,3
Номера отверстий 8 9 10 1! !2 13 14
№…… мм 37 —1‚7 —9 —11 —11 —5,4 0
„пр, мм —38 1 10 11 11 3 0
Ап… мм 2 75 —2,7 —19 —22 —22 —5‚4 0
Ар… кГ/м2 61,6 —2‚2 —15‚4 —17‚6 —17‚6 —4,4 0
Ь„ 0,28 —0,01 —0,07 —0‚08 —О‚08 —0‚02 0
$=2/3
Номера отверстий 15 [б !7 !8 19 20 21
п,…ев, мм 42 1,7 —2,4 —3 _в —1,7 0
н„„р, мм —43 —1 3 2,4 2,4 1 0
Ап… мм 85 2,7 —5,4 —5‚4 -——5,4 —2‚7 0
А_р„, кГ/м2 70 2,2 —4‚4 ——4‚4 —4‚4 —2‚2 0
р„ 0,318 0,01 ——0,02 —0‚02 —0,02 —0,01 0
Э=1
Номера отверстий 22 23 24 25 26 27 28
п…… мм 47 —5,4 —1‚7 —1,4 —1 0 1,7
пир, мм —48 5 1 1 1,4 0 _1
№… мм 95 10,8 —2,7 —2,4 —-2,4 0 2,7
Ар… ‚‹:Г/м2 78 8,8 ——2,2 —2 —2 0 2,2
Б„ 0,35 0,04 -—0,1 —0‚091 —0‚091 0 0,
Рассмотрим результаты вычисления по полученным экспериментальным данным
аэродинамических коэффициентов. При осесимметричном обтекании (01:0) коэффици-
ент осевой силы от давления
,
дон_ _
СНРЁСир =: 5 рат,
_ о
262
где функция р=р(г2) определяется по__ табл. Б. График этой функции построен на
рис. 5114, где масштабы значений р и ‚2 составляют соответственно и =10'2
и №2 =10 2 1/мм. Измеренная площадь ПОД кривой р(г2) равна $=150 1141142. В соот-
ветствии с этим коэффициент осевой силы
вкр = 305 „;., = 150.10—2-10—2 = 0,015.
Р’ ‚5 [
’ _ 0,41
0,8 0,2
1
0,5 ’; 0 ‚ , ?=т л
1/3 2/3 :
1_ _
071+ / Рис. 5.1.15. Вычисление интеграла В=5рсіт
0
4
‚ !
0,2
0 ////Ё 0,4 0,5 0,0 ‚,„ЁЗ__
2.-‚‚!////////_ Л ‚7,2: ”'/”'ад
„9,2 _ Рис. 5.1.14. Графическое определение СВр
при а=0
Используя такое же графическое интегрирование, найдем по результатам измере-
ния давлений соответствующие аэродинамические коэффициенть_1 при угле атаки а= 4°.
По данным табл. В для сечения !] строим график функции р= —р(у) (рис. 5..1 15) с мас-_
штабами р5=10 2 и „?=10 2 1/ми. Площадь под кривой $= ——2960 №142, поэтому вели-
чина 0 [см. (5.1.9)] будет
в = 305 щ, = 2960-10"2—10"2 = 0,296.
проведя аналогичные расчеты ДЛЯ ДРУГИХ сечений, поместим полученные данные
втабл. Г.
Таблица Г
2313353 1 11 Ш п! ‘ и и У!! ' ил 1х
В | —— |0‚296 0,010 '—0‚115|—0‚178 —0,130 —0‚082[ —0,03 | —-
По данным табл. Г на рис. 5.1.16 построена кривая для функции В=В(г2) с мас-
штабами по осям координат рр=10—2‚ дм,—2 =10—2 1/мм.
В соответствии с (5.1.9) .площадь под этой кривой $=200 мм2 определяет коэффи-
циент осевой силы от давления при а=4°:
вкр: в…) др, = 200. 10—210—2 = 0,02,
Для определения коэффициента нормальной силы воспользуемся данными табл. В.
По этим данным в качестве иллюстрации для сечения 11 построен _график функции
рсоз(у:гш)=і(чг)2 (рис. 5.1.17) при условии, что масштабы значений Ну) и у соответст-
венно ш=102 , р* =10 2 1/мм. Измеренные площади под кривой оказ1ались равными
$1=831, &= —1053 мм2‚ а соответствующая величина интеграла П= ( Думу
и = (31 + 82) „„ „5 = [831 + (—-1053)1 10—2-10—2 =— 222.10—4
Аналогично были найдены значения П для других сечений (см. табл._ Д).
263
Таблица Д
2223353 1 11 Ш 11! 2335,53 11 и У!! шп 1х
П - 104 —— —222 ———208 —225 П - 104 —160 —125 —93 0 —
171-104 О —574 ——1010 —1451 171—104 —1236 —1010—749 0 —
_ В табл. Д внесены также значения П1=4?…П7‚
а г взято из табл. Б.
По данным табл. Д на рис. 5.1.18 построен график функции П1=П1(;), на котором
масштабы П, и х соответственно рьп=5- 10—3 и рн=1О—2 1/мм, а площади под кривой
&= —.1475 мм2 и &=
где ?… =хн/(2гмид) = 182/90=2‚02,
115 мм? В соответствии с (5.1.11) коэффициент нормальной силы
с =— 8 +8 и „„=_(_1475_!_ _
Пр ( 1 2) П1 х ЕСОбб'ТЪ')
+115)5-10—3-10_2=0‚068, „
О,?
В + /
, г //51
0 // ‚ _
1/3 Т
0,8 .
>0.2'
0,6 ‚
; Рис. 5.1.17. Вспомогательный график для
; вычисления СЫр тела вращения
00
‘ /
/ П:
0 2 / о,: ,
+ ?,’„„= 0.572 '
0 / 0._ц \35 040 ; 0 _
'- 1
'0.2 Г 0,
Рис. 5.1.16. График для определения СВр Рис. 5.1.18. График для вычисления Смр
тела вращения
Для вычисления коэффициента момента воспользуемся полученными выше значе-
ниями П и для каждого сечения найдем
„_ „ 1
П2 = 4%… хгП=хП1 и На: 37» П: 0,165П (см, табл, Е),
К
Т а б л и Ц а В
232333 1 11 ш 111 и И ип шп {Х
172 - 104 0 ——51 ‚7 —189 —430 ——496 —510 ——567 0 800
П3—104 —36‚6 —34‚3 ——37,2 —26‚4 —2О‚6 —15‚4 О —
’З'с 0,088 0,187 0,296 0,401 0,505 0,758 0,885 1
;? 0,0271 0,218 0,513 0,875 1 1 0,788 0,435
264
В табл. Е значение П2=800-10—4 для сечения [Х взято по графику на рис. 5.1.18.
В табл. Е помещены наряду с величинами х также значения г3, вычисленные по дан-
ным табл. 5.
Построенные графики функций П2=П2(^х‘) и П3=П3(Ё*) показаны на рис. 5.1.19а
и 6. При этом на рис. 5.1.19,а масштабы П2 и хнсоответственно ”П2=2’5°Ю—з и и;:
=10—2 1/мм, площади под кривой &: —1250 и 82:150 ммг, а на рис. 5.1.19,б ”Па =
=2‚5.10—4 и „73:10—2 1/мм, $; = —1130 и 3; =—7о ‚им?.
В соответствии с этими данными и согласно формуле (5.1.12) коэффициент мо—
мента
\ ‚_, ’ ’ _ ——3 —2
т„‚=($1 +82)р„2рх—|— (814—82)…73 ‚ц,-_‚=(—1250+150)2,5.1о -10 +
+ (—1130 _70) 2,5. 10—4.1о—2 =_ 0,03.
Аналогично был осуществлен расчет аэродинамических коэффициентов в связан-
ных координатах для других углов атаки (см. табл. Ж).
Таблица Ж О)
«; А
(1, град О 4 6 8 0172334. ? $2
9% 0,015 0,020 0,031 0,039 0 [];/2 0,41 0,6 /З‚8 %%; і
сд,р 0 0,068 0,093 0,125 / /
—т2р 0 0,030 0,047 0,061 _ 5,
“0,05 _.
5) пд
0,005—
_3 ,
02 0%": 82 05 08 1
’ ' , ‚„ __ '
0 ' /' // ]] _в: `,-
// '“ (”/тив)
Рис. 5.1.19. Графики для вычисления (* Ф И
слагаемых в формуле для коэффици— “8,
ента момента -0‚005Г :
Суммарные коэффициенты нормальной силы и момента принимаются такими, как
соответствующие их значения, зависящие от давления, т. е. С№=С№р‚ т,=т‚р. Для
определения полной величины коэффициента осевой силы к значению СВр надо доба-
вить значения коэффициентов сил трения с… и донной силы СВдон.
С целью выбора расчетной формулы для с… найдем число Рейнольдса Цеш=
=Уфрфхн/роо, где величина У…р…=2а…/У°о=7,46 кГ-сек/мз, а коэффициент динами-
ческой вязкости мш=рн(Т…_/Тн)°:76. Так как „13:1,82-10—6 кГ-сек/м2 при Тн=288 К,
а в нашем случае Тоо=293 К, то
и… = 1,82-10“6 (293/288)0'76 = 1,84-10"6 кГ-сек/м2,
Следовательно,
нео, = ро, УФО ‚тк/„„ : 7,46-0, 182/(1,84—10_6) = 7,38-105,
Это значение меньше критического числа Кекр=106‚ поэтому коэффициент трения
1,32 $ ‚ 1,32
от: - 6“ =—————6,62=0,0102_
1! №00 змид 1/ 7,38-105.
По этому значению с… можно найти коэффициент донной силы:
0,02 сі 0,029 68 \3
_ /_Е_)_ . дон : [_ (—0) =о‚124_
1 Ст дмид 1/ 0,0102 ‘ 9
Таким образом, суммарные коэффициенты осевой силы:
сд = СКр+ ст + сд дон = 0,015 —|— 0,0102 + 0,124 = 0,149 (при ос = 0°);
СК: 0,02 +0,0102 + 0-, 124 = 0,154 (при ос ='4°).
18—927 265
СК дон =
Коэффициенты лобового сопротивления и подъемной силы (в поточных коорди—
натах) вычислялись соответственно по формулам (при а=4°):
сх = сд соз ос+ с” зіпос = 0,154-0,998 + 0,068-О‚07 = 0,159;
су = с” созос—сдзіпос = 0,068-0,998—0,154-О,07=О,057._.
Центр давления определялся по формуле (5.1.7), согласно которой для оа=4°
вид =— тг/см = 0,03/0,068 = 0,44,
Рассмотрим результаты измерения давления в с в е р х 3 в у к о в о й т р у 6 е.
Экспериментальное исследование давления проводилось в сверхзвуковой трубе с за—
крытой рабочей частью и соп-
ЛОВЫМИ ВКЛЗДЬППЭМИ, рассчи-
'У
і танными на номинальное число
*’ А?,— " 1 М…=2,68. Это исследование
"" 2 осуществлялось на моделитела
‘Ъ
В
130 [ Ё % ‚\ вращения с параболической об-
] _
| “: !
___ разующей при а=0 .и 5° в пя-
- ]3 ти дренажных отверстиях, рас-
дь)\ положенных в сечении, удален-
М "' Ь ном от острия на расстояние
336 5 ' ‘ _
{ьтид ::Ъи хС=О,5'хМид (хс=0,5). О_ТНО'
сительный радиус сечения гс=
=х(2—х) =О‚5(2—О‚5) =О‚75,
а меридиональный угол, соот-
ветствующий углу между дву-
;=х/хмид мя соседними отверстиями, п_ри-
нимался равным у=45° (у:
=у/:п:=0,25). Форма модели и
расположение дренажных от-
верстий показаны на рис. 5.1.20. Размеры модели: хмид=200 мм; гмид=40 мм; 60:
=24°48’; хо = 100 мм.
Давление на модели, а также в рабочей части трубы измерялось групповым ре—
гистрирующим манометром ГРМ, коэффициент шкалы которого К=0‚05.
Общая схема экспериментальной установки показана на рис. 5.1.21.
Рис. 5.1.20. Дренированная модель тела враще-
ния с параболической образующей:
?=} (2—2); г;г/гмид;
`\
\\
"\
\Гііійігііг '
\\
".."
д 3 “№\№
7 А‘
\
Рис. 5.1.21. Схема установки для иследования дренированной
модели тела вращения:
1——сверхзвуковая аэродинамическая труба;.2——дренированная молель;
3-—-механизм утлов атаки; 4——трубка полного напора; 5-—термопара
с гальванометром; б——ГТЧИ; 7——соединнтельные трубки; 8——приемник
давления
До начала продувки было измерено барометрическое давление ратм=755 мм рт. ст.
(1,025 кГ/см2). Одновременно на бумажной ленте группового регистрирующего мано-
метра фиксировались начальные показания №о=101,6 (для приемника статического дав-
266
ления) и М… (для дренажных отверстий), а после включения трубы записывались со-
ответствующие показания манометра (1\’=84‚2)‚ а также Мп (последовательно для
а=0 и ос=5°). Так как для приемника статического давления разность А1\/=1\/—№о=
=84,2——1О1,6= —17,4, а К =О,05‚ то статическое давление в рабочей части р…:ратм—і-
+КА№ =1,О25——О‚05-17,4=О,155 кГ/см2. Давление в форкамере, измеренное пружинным
манометром, было равно р0=2‚48 кГ/см2. По отношению Рт/р0=0,155‚3‚48=0‚0445 из
таблиц газодинамических функций [17] найдено число Моо=2,68. Следовательно, ско-
ростной напор трубы
а... = ‚грома,/2 = 1,4-0,155-2,682/2 = 0,78 кГ/см2.
Температура То, измеренная в форкамере, оказалась равной 293 К. Этой величине
соответствует найденная по М…=2,68 при помощи таблиц [17] температура Тоо=
= 120 К.
При нулевом угле атаки (01=О) измерение давления проводилось только в дренаж-
ном отверстии 1 (см. рис. 5.1.20), для которого начальное показание М…=115‚8, а ко—
нечное (при включенной трубе) №п=100. Величина этого давления р=ратм+КА1\/„=
=1,О25—О,05-15‚8=О‚2ЗЁ, а разность р—роо=0,235—0,155=0,080. Соответствующий
коэффициент давления р=(р—роо)/аоо=(0,235—О,155)/0‚78=О,1О2.
Для угла атаки ос=5° начальные и конечные показания ГРМ, а также результаты
вычисления коэффициентов давления в дренажных отверстиях приведены в табл. 3.
Таблица 3
Номера отверстий ! 2 3 4 5
№0 111,9 117,7 119,4 114,4 117,2
№ 95 101 103 99 102
АА! —16,9 —16,7 —16,4 =15,4 =15‚2
р, кГ/см2 0,178 0,190 0,205 0,245 0,264
р—роо, кГ/см2 0,023 0,0351 0,0506 0,090 0,109
р=(р—р°о)/а°о 0,03 0,045 0,065 0,115 0,140
Произведем приближенный расчет распределения давления по теоретическим за-
висимостям, и полученные данные сравним с экспериментальными результатами.
При ос=0 величину коэффициента давления в точке ! определяем по методу «ме-
стных конусов» при помощи формулы
Бд= (0,0016+0‚002м;2) }»7.
В этой формуле коэффициент Эд определяется по числу Моо=2,68 и углу конуса
131 = агсщ (аг/ах) = агсі3[(1/7»мид) (1—Есп = агсі9[(1/2,5) (1— 0,5)] = 11° 18’.
Таким образом,
Эд = (0,0016+ 0,002—2,68_2) (11° 13')1-7 = 0,117.
По углу |З;=11°18’ к числу М°о=2,68 определим из [22] величину у=0‚99‚ а по углу
Ёо=агсі3(1/2,б) =21°50’ и числу М…=2‚68 находим мо=0,92. В соответствии с этим
у=уо/\7=О,92/О,99=0‚93. Таким образом, согласно (5.1.27)
5 = 0,117—0,93 + 2 (0,93 _ 1)/(1,4-2,682) = 0,108.
Эта величина, как видим, незначительно отличается от экспериментального значения.
Для расчета коэффициентов давления в дренажных точках при ос=5° воспользуем-
ся тем же методом «местных конусов», основанным на гипотезе одинаковых скоростей,
и соответствующей формулой (5.1.26). По этой формуле местный угол конуса, напри-
мер в точке 2 (у=п/4)‚
ВК [31- 04 :п: 1 ( 2 _ л 11‚3°
= __ — _— ъ — „е_—_- _
57,3 57,3 57,3 № 4 + 2 57,3) №5151 4 57,3
0 1 50 2
_ 0,707 —( 5,00 .0,7072=0,149 д 8°34’ .
57,3 + 2 ,57,3) 5 Р“ ( )
АНЗЛОГИЧНО ВЫЧИСЛЯЮТСЯ местные УГЛЫ КОНУСЗ Бк ДЛЯ ОСТЗЛЬНЫХ дренажных ТОЕСК, ПО
которым из (5.1.27) определяются соответствующие коэффициенты давления рд (см.
табл. И).
18* 267
По значениям углов 01, у и Во определяются соответствующие углы |З…) «мест—
ных конусов» у острия. Например, для 01=5°, у=л14 и [30=21‚83°
в…, 21 ‚83° 5° 1 ( 5° )2
= _ 0,707 —— 2,496-0,7072 = 0,325 18° 38’ .
57,3 57,3 57,3 + 2 57,3 ра“ )
Та б л и ц а И
ОЁЁЁЁЗЁЙ ! 2 3 4 5
у 0 л/4 пт:/2 (3/4)л :п:
_Вк 5°44’ 8°34’ 12°24’ 15°37’ 16°18’
рд 0,037 0,074 0,138 0,204 0,218
Аналогично находятся остальные углы в…,. По найденным значениям Б„ и В…), а так-
же числу М°°=2,68 определяем из [22] соответственно \? и то и вычисляем коэффи—
циенты давления (см. табл. К).
Т а б л и Ц а К
Номера отверстий ! 2 3 4 5
в…, 16°50’ 18°38’ 22°24’ 25°42' 26°50’
=рБ/р0 0,997 0,995 0,986 0,97 0,965
уо=рЬ/р0 0,96 0,95 0,915 0,88 0.865
&=…» 0,961 0,955 0,927 0,91 0,896
”р 0,028 0,062 0,113 0,168 0,174 .
Сравнивая полученные расчетные значения коэффициента давления с соответст-
вующими экспериментальными данными, можно видеть известное различие между ни-
ми, обусловленное приближенным характером расчетов и также в какой-то мере по-
грешностями эксперимента. Это различие сравнительно невелико для дренажных то-
чек, расположенных на верхНей части поверхности, и возрастает для точек, располо-
женных на нижней поверхности.
Работа5л1
исследование влияния инжекции газа
на Обтекание затупленного тела вращения
Цель р а боты—исследовать аэродинамический спектр при сверх-
звуковом обтекании тела вращения со сферическим затуплением в- слу—
чае вдува (инжекции) газа через отверстие в точке полного торможе-
ния. Найти также путем измерений распределение давления по сфери-
ческой поверхности и сравнить это распределение с тем, которое _имеет
место без инжекции. Определить изменение коэффициента волноВого
сопротивления за счет влияния инжекции.
Общие сведения.
Влияние инжекции на течение газа около затупленных тел. Лета-
тельные аппараты с затупленными головными частями нашли широкое
применение в случае очень больших сверхзвуковых скоростей их дви-
жения, когда необходимо обеспечить условия, при которых такие ап-
параты успешно противостоят действию высок-их температур обтекаю-
268
щего газа. Вместе с тем при небольших скоростях в силу“ различных
конструктивных требований летательные аппараты могут иметь затуп-
ленную головную часть.
Некоторые возможные формы затуплений представлены на
рис. 5.1.22. Сферический касательный носок 2 и плоский торец ], пока-
занные на этом рисунке, являются двумя наиболее характерными
формами затуплений, которые можно рассматривать как границы свое-
образного интервала, содержа-
щего другие возможные фор-
мы, Этим двум формам затуп-
лений соответствуют кривые
волнового сопротивления, изо-
браженные на рис. 5.1.23. Из
рисунка видно, что за счет из-
менения формы носка схв воз-
растает в среднем почти в два
раза. Такая разница в величи-
не сопротивления объясняется
изменением характера обтека-
НИЯ затупления газом. Рис. 5.1.22. Формы затуплений конической
На рис. 5.1.24 приведены головнои части:
Две фОТОГРдфИИ, полученные [_В виде плоского торца; 2—сферическое каса-
" тель ое; 3—с е ическое се ее
в сверхзвуковои трубе. Тела “ ф ? КУЩ
вращения одинаковой формы
имеют в одном случае очень малое затупление (рис. 5.1.24, (1), а в дру—
гом—затупление в виде плоского 'торца (рис. 5.1.24, 6). Изменение-ви-
да затупления привело к резкому изменению характера расположения,
интенсивности и количества скачков.- Это в свою очередь обусловило
изменение распределения давления газа не только в окрестности затуп-
ления, но И на большей части тела (рис. 5.1.25).
саб
1,7
1,5
1,5
1‚Ц
1.3
1,2
1.1
1,0
0,9 " а
_›
0,8
0 2 Ц Е @ юшшпэтв 20222425м°°
Рис. 5.1.23. Кривые изменения волнового сопротивления
двух тел вращения, имеющих сферическое (а) и пло—
ское (б) затупления:
! — скачки уплотнения
Исследования показали, что характер обтекания тела, распределе—
ние давления, скорости, температуры по поверхности, величина аэро-
дина'МИческих коэффициентов изменяются также и при осуществлении
вдува газа через переднюю точку в направлении против потока, обте-
269
кающего тело. Картина такого течения газа около тела вращения в ви—
де цилиндра со сферическим затуплением изображена на рис. 5.1.26.
Вдуваемая струя газа А приобретает сверхзвуковую скорость после
того, как покинет канал, по которому она подводится к передней кри-
тической точке тела. При
@“ ""' - ,в; ‚.. _. №1; установившемся течении
" " " ' ; внешнии поток и струя
3 затормаживаются на оси
_ 3 в точке Р. Здесь давле-
‘--' " : ;. = ние равно величине ро,
„ т.е. давлению торможе-
.. __Ё` ' № __ . ния за прямым скачком
„» :… % уплотнения_ Газ БД)/вав-
" ` " ` ' - мой струи растекается по
поверхности сферического
затупления в области,
Рис. 5.1.24. Характер обтекания сверхзвуковым по- ограниченной линией ТО-
током (мос =2‚5) тел вращения с очень малым за- ка В исходящей ИЗ ТОЧ-
,
туплением носка (а) и плоским затуплением (б) КИ Р образуя при ЭТОМ
,
застойную зону с воз-
вратным течением С. В области В (на рисунке она заштрихована) газ
движется по направлению к поверхности тела вращения. При этом в
точках Е на этой поверхности создаются условия, способствующие воз—
никновению косого скачка @, который пересекается с головной ударной
волной Н. _
Исследования показали, Р
_что образование застойной 0,12
зоны снижает давление на
затупленной поверхности по 0,1
сравнению с течением без
9
‹.
№
%.
ВДУВЭ, В РЕЗУЛЬТЗТе чего 0'08
волновое СОПРОТИВЛЕНИЗ те—
ла уменьшается. 0'06
Коэффициент волнового 001+
сопротивления. Для расчета ’ о 5 10 ;5 „"/дт
коэффициента волнового
сопротивления затупленного Рис. 5.1.25. Распределение давления при М00 =
тела ВОСПОЛЬЗУСМСЯ ВЫРЭЖЭ- =6 ПО КОНУСЗМЗ
НИЕМ (5…14), написав его В острому (1), со сферическим носком (3) и плоским
виде затуплением (2)
1 _ _
С,… = евр : “( ра! #, (5.1.29)
0
где г=г/1?т (рис. 5.1.27). Наличие инжекции существа расчета не из-
меняет, так как надо знать лишь распределение давления по затуплен-
нон поверхности.
Коэффициент со… вычисляется при помощи графического интегриро-
вания, как показано на рис. 5.1.27, по формуле
схв : вдв, (5.1.30)
где № = и; р—‚г— масштаб площади.
В выражении (5.1.30) для нахождения е_…В следует в соответствии
с рис. 5.1.27 брать площадь 81 (заштрихована вертикально), если вы-
числяется коэффициент волнового сопротивления без вдува газа через
критическую точку затупления, и 82, если определяется этот коэффи-
270
циент с учетом вдува. Масштабы пр“, „72 , из и в том И в другом случае
одни и те же.
Расчет давления на затупленной поверхности и расстояния от нее
до ударной волны (без инжекции). Для расчета давления в некоторой
точке на поверхности затупления может быть использована модифици—
рованная формула Ньютона
Б : БО соз2 п, (5.1.31)
в которой 11 —угол между вектором скорости Уоо И нормалью к поверх-
ности в рассматриваемой точке; ро—коэффициент давления в точке
полного торможения (см. рис. 5.1.27); этот коэффициент при очень
„ ‹ 5 “а…
'.5 5 7…
Ж %
! +
/Ё"дд‹&2
; 7
0.5 52
В . }\
д 1 :'1
‹ ?? = (г/г')’
@ ‹ Вязиий Слай
Рис. 5.1.27. Графическое 1опреде-
Рис. 5.1.26. Схема потока око-
ЛО затупленного ПО Сфере ЦИ- 1 кривая Еды—Ё) соответствУет обте
Л…{дра при вдуве В ЭТОТ ПО- канию без вдува; 2—то же. но со
ТОК воздуха вдувом; З—скачок уплотнения
ление величины схв= 5рсіг2:
()
больших скоростях обтекания определяется с учетом диссоциации воз-
духа.
Обтекание затупленного тела сопровождается образованием перед
ним отсоединенной головной ударной волны. Ее форма и расположение
относительно тела вращения могут быть определены по фотографиям,
полученным .при помощи различных оптических методов (см. @ 2.5).
Это же можно сделать, используя соответствующие приближенные за-
висимости, найденные в результате теоретических исследований или
экспериментальным путем. В частности, расстояние 50 от волны сфери-
ческого 3атупления, отнесенное к радиусу Кт этого затупления (см.
рис. 5.1.27), определяется по формуле [20]
50 = 0,52 [?>/(1 —Ъ›1°'86‚ (5.1.32)
где р=роо/рс (ре—плотность газа за «прямой» частью скачка уплот-
нения).
Радиус кривизны Нео волны на оси, отнесенный к радиусу сферы
Кт, находят из выражения
Ёсо : Ксо,/Кт : 1/(1_";0)2’5‚ (5…133)
в котором
&=[Ы‹1—6›2н1—‹2`р—"р2>“21. (5.1.34)
271
Как .показали расчеты и экспериментальные исследования сверх-
звукового обтекания сферической поверхности, образующую ударнон
волны можно приближенно представить в виде гиперболы
(х + а 2/а2 — №7172 : 1, (5.1.35)
где
а=нс0(м30—1)‚ Ь=Кс01/М2°о—1. (5.1.36)
Порядок проведения работы
1. Ознакомиться с устройством аэродинамической трубы, приспо-
соблением для вдува воздуха и схемой экспериментальной установки
в целом; проверить готовность к работе оборудования и измерительных
устройств.
2. Закрепить модель на державке в рабочей части аэродинамиче—
ской трубы и соединить дренажные отверстия, а также приемник ста—
тического давления в рабочей части дренажными трубками с маномет-
рами. Проверить герметичность соединений.
З. Измерить барометрическое давление ра….
4. Зафиксировать начальные показания №0 группового регистрирус
ющего манометра.
5. С помощью редуктора установить необходимое давление вдувае—
мого воздуха.
6. ВключИть аэродинамическую трубу и после выхода ее на режим
установившегося обтекания осуществить измерение давлений, зафик-
сировав на печатающем устройстве ГРМ соответствующие показания
Мп. Одновременно измерить давление ро в форкамере трубы и сфотогра—
фировать картину обтекания тела вращения.
7. Выключить редуктор, прекратив тем самым подачу вдуваемого
воздуха, и произвести снова запись показаний всех манометров ГРМ.
8. По разности показаний А№…=№—№о вычислить статическое дав—
ление роо=ратм+А№ооіг и по отношению рао/ро найти соответствующее
число М…. _
9. Определить по показаниям манометра А№п=№„—1\/о для каждой
дренажной точки давления рп=ратм+А№піг, вычислить затем избыточ-
ные давления Арп=р„——роо и, зная скоростной напор аш=ігроо мг,/2,
найти соответствующие коэффициенты давления рп=Ар„/с]°о. При
этом коэффициенты рп находятся дважды —при вдуве и без него.
10. По найденному распределению коэффициента давления опреде-
лить с;,св в каждом из этих случаев.
11. Проявить фотопленку и отпечатать снимки форматом, удобным
для обработки; найти по этим снимкам отход во и кривизну волны Као.
Пример. Рассмотрим результаты исследования обтекания затупленного тела вра—
щения, которое проводилось в сверхзвуковой трубе с закрытой рабочей частью. Сопло-
вые вкладыши этой трубы были рассчитаны на номинальное число М…= .
Общая схема экспериментальной установки, включая приспособление для вдува
воздуха, показана на рис. 5.1.28. Модель тела вращения (рис. 5.1.29) помещалась в ра-
бочей части трубы на державке под углом атаки а=0. Во время испытаний“ измеря-
лось распределение давления по сферическому носку этой модели, статическое давле-
ние в рабочей части трубы, давление вдуваемого воздуха, а также производилось фо-
тографирование картины обтекания с помощью теневого оптического прибора ИАБ-451.
Для обеспечения вдува воздуха (инжекции) использовалось специальное приспо-
собление (см. рис. 5.1.28). Сжатый воздух из баллонов поступал через вентиль 9 к ре-
дуктору 10. Вращением регулировочного винта этого редуктора устанавливалось необ—
ходимое давление, которое контролировалось манометром 11, расположенным на тру—
бопроводе сразу за редуктором. Воздух, необходимый для формирования струи, по
трубчатой державке 3, попадая во внутреннюю полость модели, через отверстие в точ—
272
ке полного торможения истекает в окружающее пространство. Трубка полного напора 4
позволяет измерить полное давление вдуваемого воздуха, которое регистрируется ма-
нометром 6 (см. рис. 5.1.28). Закрытием вентиля 9 создавались условия, необходимые
для обеспечения обтекания модели без вдува.
До начала эксперимента было зафиксировано барометрическое давление ратм=
=735 мм рт. ст. Одновременно на бумажной ленте ГРМ были отмечены начальные
1 2 3 ч
/ 1 1 / \
и -'
__
__ _ __ __
__ ___— _ ___. _ _
—-›
®„
Рис. 5.1.28. Схема установки для исследования обтекания
тела вращения СВЗрХЗВУКОВЫМ ПОТОКОМ ПРИ ВДУВВ В него
воздуха:
1—аэродинамическая труба; 2—модель тела вращения; З—полая
державка; 4—трубка Пито; 5—ГРМ; б—манометр; 7—приемник
статического давления; 8—воздух из баллонов; 9—вентиль; !О—ре-
дуктор; !1-—-манометр редуцированного воздуха
10
Мс::з
бс,
дмид
Рис. 5.1.29. Модель тела вращения для исследования
течения со вдувом воздуха в набегающий поток
показания №о=100‚1 (для приемника статического давления на стенке трубы) и №…,
(для дренажных отверстий). После включения трубы регистрировались соответствую-
щие показания манометра № =83,2 и А/„. Таким образом, статическое давление в ра—
бочей части аэр0динамической трубы
рос =ратм +к (А!—№0) = 1 +0,05 (83,2 _- 100,1) = 0,155 кГ/см2‚
а давление в выбранной дренажной точке рп=ратм+к(1\/„—1\/о„).
Так как давление в форкамере было ро=4‚7 кГ/смг, то число Маха в рабочей части
аэродинамической трубы
12—1 ' 1/2 1,4—1 ' 1/2
2 к 2 5,7 ' 1.4
м = _— р—0 __1 = (_) _1 ::
°° іг—1 49… 1,4—1 0,155
Соответствующий скоростной напор
№00 №30 1,4-0‚155-з2
= 0,975 кГ/см2,
2 2
(700:
Давление вдуваемого воздуха, зафиксированное манометром 6 (см. рис. 5.1.28),
было равно 50 кГ/см2.
273
ПО измеренным ДЗВЛЭНИЯМ В дренажных ТОЧКЭХ СфВРИЧВСКОГО НОСКЭ тела враще-
ния были подсчитаны коэффициенты давления р” и р’ (соответственно со вдувом и без
вдува), приведенные в табл. А.
Т а б л и д а А
Номера дренажных отверстий 2 ‹ 3 4 5 б 7
Ь”=(р”_р„)/4® 0,376 0,384 0,396 0,435 0,620 0,772
Ь’=(р’—Роо)/(7°° 1,742 1,632 1,525 1,400 1,292 1,175
72 0,030 0,067 0,117 0,179 0,250 0,329
Продолжение табл. А
Номера дренажных отверстий 8 9 [0 11 12 13 14
Ь”=(р”—др°о)/а°о 0,832 0,788 0,725 0,632 0,395 0,138 0,039
Б’=(р’_р°°)/аоо 1,040 0 ‚912 0,775 0,652 0,400 0,139 0,039
72 0,414 0,501 0,575 0,672 0,822 0,935 1,000
0
1,8
1,5 .ё'
ДЦ
„ 2 """" $9:
1
0, 8
0.4
0,2
0 __ .:.—":::; а… …
0,2 0,4 0,6 0,8 1 Р
Рис. 5.1.30. Графики для вы-
числения дтп затупленного Рис. 5.1.31. Фотографии обтекания
по сфере тела вращения:
1—распределение давления по
затуплеиию без инжекции;
2 _— то же, с инжекцией;
————— по формуле р=
=ро соз2 1]
затупленного тела вращения сверх—
звуковым потоком воздуха (МОО =
=З):
а—с инжекцией воздуха через отверстие
в передней критической точке; 6— без ин—
жекции
„
По данным табл. А были вычислены коэффициенты волнового сопротивления схВ
(со вдувом) и с№ (без вдува). При этом использовалась формула (5.1.29), в которой
функция р=р(г2) определялась по табличным данным. График этой функции постро-
274
ен на рис. 5.1.30, где масштабы значений _р и _г2 равны соответственно и.; =0,5-10—2
и р72=0‚5°10_2 1/мм; “$:”; 4172 =0‚25-10‘4 1/мм2. На этом рисунке площадь под
кривой ] $’=31300, а площадь под кривой ? $”=18620 мм? По этим значениям опре-
делялись коэффициенты волнового сопротивления полусферы:
1
0363 = ; 5” д;? = 5” „$ = 18620-0,25-10"4 = 0,466;
1
' _! _ ! —4
схв=61р сіг2=8 дз=з1зоо.о,25-1о =0,783.
Во время продувки модели тела вращения в аэродинамической трубе были сдела-
ны две фотографии обтекания (рис. 5.1.31). На одной из этих фотографий (рис. 5.1.31,а)
показана форма головной ударной волны при обтекании со вдувом, а на другой
(рис. 5.1.31,б) —при обычном обтекании (без вдува). Как видно, вдув воздуха в омы-
вающий поток значительно отоцвинул ударную волну от поверхности тела вращения.
По измерениям на фотографии рис. 5.1.31,б (без вдува) расстояние до ударной
волны от носка $0=4,65 мм. Учитывая, что радиус сферы Кт=0,023 м, величина от-
носительного отхода $о=$о/Кт=4,65/23=0,202. Рассчитаем эту величину по теорети-
ческой зависимости. Зная число МОО =3, определим сначала относительную плотность
за «прямой» частью скачка:
& 1 —1 1,4 1 —1
р ім?“ % 32
6: 00 = 2 = =0,259;
іг—і 1,4—1
9“ 1+ТМ3° 14—732
с учетом этого значения по (5.1.32) нахолим
_ 30 0,259 0.86
$0 = —— = 0,52 _) = 0,21.
Кт 1 — 0,259
По формулам (5.1.34), (5.1.33) были рассчитаны величины относительного отхода
&=&/ЕСО и радиуса кривизны скачка на оси Ёсо=КсоКт:
„ 0,259
30 = _—
(1 — 0,259)2
13… =1/(1— 0,154)?5 = 1,5.
По измерениям на фотографии рис. 5.1.31, 6 величина Ксо=36 мм, следовательно,
Ксо=Ксо/Кт=36/23=1,56. Как видно, разница межцу экспериментальным и теорети-
ческим значениями относительного отхода и радиуса кривизны волны оказалась не-
значительной.
По формуле Ньютона (5.1.31) было найдено распределение коэффициента давле-
ния по сферическому затуплению. В этой формуле значение ро принималось равным
1,82 в соответствии с графиком на рис. 5.1.30. Полученные результаты, показанные
пунктирной линией на рис. 5.1.30, хорошо совпадают с экспериментальными данными.
[1 _ (2.0‚259 _ 0,2592)1/2] = 0,154;
5 5.2. ИССЛЕДОВАНИЕ АЭРОдИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
ТЕЛ ВРАЩЕНИЯ ПРИ ПОМОЩИ АЭРОдИНАМИЧЕСКИХ ВЕСОВ
Работа 5.2.1
применение тензометрических весов для измерения
аэродинамических СИП и моментов
Цель работы—определение коэффициентов нормальной силы
и момента тангажа, действующих на тело вращения, движущееся со
сверхзвуковой скоростью.
Общие сведения
Наряду с определением аэродинамических коэффициентов по ре-
зультатам дренажных испытаний моделей тел вращения в эксперимен-
тальнои практике широко применяются также весовые методы этого
275
определения, основанные на применении аэродинамических весов, ко—
торыми измеряются действующие аэродинамические силы и моменты.
По измеренным величинам этих сил и моментов рассчитываются затем
соответствующие аэроцинамические коэффициенты. Особенностью та-
ких весовых измерений является нахождение суммарных аэродинами—
ческих характеристик тела вращения, учитывающих одновременное
воздействие силы трения и давления.
Для определения коэффициентов см и т„ воспользуемся двухкомпо—
нентными внутримодельными тензометрическими весами.
№
СС
Рис. 5.2.1. Схема измерения коэффициента момента тангажа:
1—модель тела вращения; 2—тензодержавка; 3—винт, крепящий мо-
дель на тензодержавке; 4—чувствнтельный элемент
Порядок расчета аэродинамических коэффициентов по данным весо—
вых испытаний. Нормальная сила и момент тангажа, действующие на
тело вращения (рис. 5.2.1), измеренные при помощи аэродинамиче-
ских весов, могут быть представлены в ВИДе
№=с№а°°$ М2 В=тгвс700 8
мнд ’ мид хк'
Этим значениям М и М,… соответствуют аэропинамические коэффици-
енты
с„=№/(а°°$мид)‚т В=М2 В/(аоо Змид кх), (5.2.1)
где тив—коэффициент момента Мгв, который рассчитан по данным
весовых измерений относительно так называемой мо м ентной точ-
кн В (рис. 5.2.1).
На практике бывает необходимо определить момент М„ (и соответ-
ствующий коэффициент т;) относительно какой- либо точки, не совпа—
дающей с точкой В, для которой момент МШ был определен во время
эксперимента. В соответствии с рис. 5..,21 точка В расположена от
носка модели на расстоянии Ь, которое определяется для каждой кон—
струкции тензовесов экспериментально. По результатам измерения
этими весами
МгВ
где а—расстояние между точкой приложения нормальной силы М
и точкой В. С другой стороны, можно написать
М2 В=тгва°о $
Приравнивая эти значения для моментов, получим
=—1\/а=— „Ч… Змида ‚
МИД ХК
_ _ /
тгВ _ смак“.
Относительно другой точки, совпадающей, в частности, с носком
модели О, момент
М2=тгаоо$ х или М =—1\/(а—|—Ь)=— „ЦФОЗМИдш—і—Ь).
мид к
276
Следовательно, коэффициент момента
_ _ /
т2 _ тгВ см Ь,хк. (5.2.2)
Приближенный аэроцинамический расчет тела вращения. Исследо-
вания показывают, что коэффициенты нормальной силы и момента
тангажа тонких тел при малых углах атаки почти не зависят от числа
М.,.) и определяются в соответствии с линейной теорией выражениями:
дон; (5.2.3)
т„ = _— 2од<5дон _ ти./и), (5.2.4)
где “Ир—объем тела вращения; №д=хн$мид—объем цилиндра, осно-
вание которого равно площади миделевого сечения, а высота —дли-
не тела.
При сверхзвуковых скоростях .полета эти формулы хорошо подтвер—
ждаются экспериментальными данными при небольшом хвостовом су-
жении $донн1 и сравнительно малой длине. В случае значительной
длины корпуса формулы (5.2.3) и (5.2.4) могут давать существенную
погрешность, так как они не учитывают возрастающего влияния на
аэродинамические коэффициенты отрыва потока на подветренной сто-
роне тела при обтекании под углом атаки.
Согласно исследованиям такого обтекания тел вращения с большим
удлинением их коэффициенты нормальной силы и момента тангажа
(относительно носка) могут быть определены по следующим фор-
мулам:
см = 2ос3`
с“ = 2 осЁдон + (4/л) сос2 (?»ц + Жир); (5.2.5)
тер : _ 20‘ (Ёдон _ “ут/шц) _ (2/50 0062 (жк _ ЖЁИд/и‘къ (5126)
Где Жк=хк/дмид; ЖМИд=хМИд/(1МИД; Жц=хц/дМИД; Жкр=охкр/Сімиц—С00ТВЁТ°'
ственно удлинения всего тела, а также головнои, цилиндрическом
и хвостовой частей (см. рис. 5.2.1). Коэффициент с в формулах
(5.2.5) и (5.2.6) зависит, как показали экспериментальные исследова—
ния, _от вида пограничного слоя на поверхности тела вращения. При
этом если пограничный слой ламинарный (в этом случае принимается
Не…: оо зіп а-(імид рш/роо<3- 105), то 0% 1,2, если же течение турбулент-
ное, то ся,/0,3.
Порядок проведения работы
1. Ознакомиться с устройством аэродинамической трубы и схемой
экспериментальной установки; проверить готовность к работе обору-
Дования и измерительных устройств.
2. Установить в труб-е сменные сопловые вкладыши, обеспечиваю-
щие получение заданного (номинального )числа Мэо в рабочей части.
3. Тензометрические весы вместе с закрепленной на них моделью
тела вращения поместить в рабочей части трубы на траверсе механиз-
ма углов атаки.
4. Произвести сборку схемы измерительных устройств, соединив
между собой в соответствии с электрической схемой датчики тензове—
сов, тензостанцию и гальванометры.
5. Осуществить тарировку тензовесов и найти их рабочую фор-
мулу.
6. Установить в форкамере манометр и термопару (термометр со-
противления) для измерения давления ро и температуры Т0.
7. Соединить приемник статического давления рэо на стенке рабо-
чей части трубы с П-образным манометром. Проверить герметичность
этого соединения. .
277
8. Зафиксировать начальные показания гальванометров, регистри-
рующих сигналы тензодатчиков для каналов нормальной силы Ном и
момента НОМ.
9. Измерить барометрическое давление ра….
10. Включить трубу и после выхода ее на режим установившегося
обтекания осуществить запись показаний гальванометров Нм и НМ.
Одновременно измерить давление ‚00 и температуру То в форкамере
трубы, а также зафиксировать показания Нир и плен в отсчетных коле-
нах П-образного ртутного манометра, измеряющего давление в рабо-
чеи части.
11. Вычислить статическое давление в рабочей части рш=ратм+
+(11пр—Нлев)урт и по отношению рао/ро найти соответствующее число
Мсо и скоростной напор с]…
12. Определить при помощи «рабочей формулы» тензовесов по из-
мере‘нным значениям разностей Рич—НОП и ИМ—ИОМ нормальную силу
А! и момент Мгв, рассчитать соответствующие аэр0динамические коэф-
фициенты см и тив и, наконец, найти по (5.2.2) коэффициент т;.
13. Построить графики сы=сы(ос) и т2=т2(а).
Пример. Определим коэффициенты нормальной силы и момента тангажа тела вра—
щения в сверхзвуковой аэродинамической трубе с закрытой рабочей частью квадрат-
ного сечения размером 400Х400 мм. Сменные вкладыши, образующие сопло трубы,.
рассчитаны на номинальное число МОО =2,7.
Общий вид установки показан на рис. 5.2.2. На этой установке испытывалась мо-
дель тела вращения (рис. 5.2.3) со следующими размерами: полная длина хн=360 мм;
длина параболической головной части хмид=120 мм; диаметр миделевого сечения
дмид=40 мм; Ь=19О мм. Модель закреплялась на тензометрических весах путем по-
садки ее на коническую поверхность чувствительного элемента и фиксировалась гай-
кой. Размеры модели и углы атаки ос ее во время эксперимента были выбраны в со-
ответствии с допустимым «загромождением» рабочей части, а также с учетом распо-
ложения в ней. скачков уплотнения.
В соответствии со сказанным модель должна нахолиться внутри «рабочего ром-
ба», ограниченного линиями слабых возмущений, образующих с направлением вектора
скорости набегающего потока угол И… =агсзіп (1/М°°)=агсзіп (1/2‚7)=21,7°. Кроме
того, на нее не должны падать скачки уплотнения, отраженные от стенок трубы. Мо-
дель также не должна взаимолействовать с пограничным слоем, образовавшимся на
стенках сопла и рабочей части (толщина его, как показали исследования, равна при—
мерно 8 мм).
После произведенных построений скачков уплотнения (см. рис. 1.4.13) было опре-
делено, что угол атаки ос не должен превышать 15° при выбранных размерах модели.
При этом степень «загрОМОЖДения» для нулевого угла атаки (оа=0)
л402-100‘У
(Змид/зрабласти) 100% = тд)-{‘В = 0,8%,
а для ос=15°
(Змид/Зраб.части) 100% = 3300-100%/4002 = 2%;
в последней формуле Змид—площадь проекции модели на поперечное сечение рабо-
чей части трубы.
Для измерений М и М2 были выбраны двухкомпонентные внутримодельные тензо-
метрические весы (см. рис. 5.2.3). Рассмотрим тарировку этих весов, в результате ко-
торой получена их «рабочая формула» (см. гл. 11). .
Общий вид тарировочной установки показан на рис. 3.1.18. Эта установка состоит
из тензовесов с закрепленной на них тарировочной втулкой, вдоль которой перемеща-
ется подвеска с гирями.
Электрическая часть тензовесов состояла из тензостанции УТС-1ВТ-12 и гальва-
нометров. Во время эксперимента использовались два канала этой станции—один для
измерения нормальной силы, другой для измерения момента.
При тарировке сначала было найдено положение «моментной точки» В
(рис. 5.2.4, а), характерной тем, что приложенная в ней сила не вызывает деформации
балочки весов, фиксирующей момент тангажа. При нагружении в точке В силой @=
=—4 КГ стрелка гальванометра, работающего в канале момента тангажа, не откло-
нилась (так как М,в=0)‚ а стрелка другого гальванометра переместилась с отметки
ітоы=0 на 1…=7‚4. Таким образом, разность показаний Иы—ітоы=7‚4—-0=7,4. Соот-
ветствующие точки 1’ (с координатами №=—4‚ п,т—и…=7‚4) и 1 (с координатами
М,=0, пм—иом=0) показаны соответственно на рис. 524,6 и 5.2.4, 6. Затем та же
278
,
/
/ ЁЁЁ‘7/А’7/////7//„
’/
1
‚, /
/ 1/
/ ] 1// 4 14 / 4/1 1/1]
’/
0/13; 177,147 ’З7ЁЁЁ/7////”//ЙС Д
/,‚/,1Г”//
///'4 '/
{Ц
Е.; ЙП/// ‚(С/
%).////, ’./""//
““Ж““ " .' ТЦ,
@ ‚3$. .
//
Рис. 5.2.2. Схема установки для определения аэродинамиче-
ских коэффициентов тел вращения с помощью внутримо-
дельных тензометрических весов:
1 —— сверхзвуковая труба; 2 — модель; 3— механизм углов атаки;
4 — манометр; 5 — трубка полного напора; б — термопара; 7 — галь-
ванометр; 8 — жидкостной манометр; 9 — тензостанция; 10 — галь-
ванометры; !! — соединительная трубка; 12 — провода, идущие от
тензовесов к тензостанции; 13 — державка
к "т ть" %
ы’
. ' 1
.с
жд
33 к
///////////////7//////////////////////А
‚
:* с{мид
\“
\ \\\\\\_\\\\
//////////// ЁЁ/А ! !37А////////////'////////////////
Рис. 5.2.3. Схема за-
крепления модели на
тензовесах:
! —- съемная головная
часть модели; 2 — тензо-
\\ > Ч' весы; 3 — стенки аэроди-
`\` \ “‘,! \ намической трубы;
` д Ч \! \ЁЁ' 4 — траверса; 5— модель;
, $}… 55,51 \ б —- державна; 7 — про-
д;];‘іді'х 71 % вода, идущие от тензо—
°‚‚5,-"”! 4 & датчиков к тензостанции;
’-’<//’. Й & 8 —‹ приемник статичес-
- ’\——`—`___
КОГО давления
сила О=—4 кГ была приложена в точке, расположенной на расстоянии і=50 мм
справа от первоначально выбранной. При этом по—прежнему величина №=—4 кГ ,
а момент возрос от нуля ДО значения Мдв=4 0,05= 0,2 КГ м. На шкалах гальвано-
метров стрелки зафиксировали показания н„=7 (пы—по„=7—0= 7) и нм=8,6
(пм—п…= 8,6=—0 8,.6) По этим Данным нанесены точки 2 и 2, затем построены
прямые 1—2, 0—1’ и 0—2’ (см. рис. 5...24) Прямая 0—1’ представляет собой тарировоч-
ный график для силы № при М2в=0‚ а прямая 0—2’ —для той же силы №, но с учетом
воздействия момента М‚в=0,2 кГ-м.
Для каждого нового значения момента (например, М2в=А) будет своя прямая
на рис. 524,6. Таким образом, наличие момента, равного 0,2 кГ м, вызвало смещение
тарировочной прямой на величину Атар=0,о27 при разности показаний [ты—Иоы=7.
Этому смещению соответствует разность (пм—и…)тар=г=8‚6
0)
{ г г г
6)
б)-А/=0‚кГ Мдд=А МШД”
1
0,8
0.2
0.6
=(]
0‚ц
0,2
0 -
123и567дь„—ь„„ # Нам
Р
Рис. 5.2. 4. Схема тарировки внутримодельных тензовесов (а)
и тарировочные графики для каналов нормальной силы (6)
и момента (в):
! _тарировочная втулка; 2—тензодержавка; В—точка, относи-
тельно которой момент силы 0 равен нулю; і—фиксированное рас-
стояние между точками приложения силы (2 при тарировке
Если во время эксперимента на гальванометре в канале момента получена раз-
ность и,…—пом, то ей на координатной сетке будет соответствовать смещение
А 0 __,0__827
_тар (ЬМ_ пом): _(пм _— ЬОМ)— __ О ‚0031 (нм _ пом)-
Из сказанного следует, что «рЁбочая формула» для силы №, представляющая со-
бой уравнение тарировочной прямой на плоскости №, ддт—п…, будет (с учетом знака
силы №)
№=о‚542(н„ —п0„)—о‚оз1 (пм—пом), (5.2.7)
где величина 0,542 равна тангенсу угла наклона прямой, соответствующей М‚в=0
(щ Фы=4/7,4= 0,542).
Из рис. 5..,24 6 следует, что Мгв=і3фм(/1м_—пом). При этом так как ’[3 фм=
=0,2/8‚6= 0,023 то
Уравнение (5.2.8) представляет собой «рабочую формулу» для момента тангажа.
Во время испытаний были измерены атмосферное давление ратм=1 кГ/см2 и тем-
пература воздуха Татм=293 К. После “включения аэродинамической трубы и выхода
ее на режим установившегося обтекания манометром было измерено давление в фор-
камере ро=3,5 кГ/см2. Одновременно в отсчетных коленах Н-образного манометра,
соединенного с приемником статического давления в рабочей части трубы, был зафик-
сирован перепад уровней ртути Ан=ітпр—пдев=(—З10) — (312)=—622'. Таким обра—
зом,_ давление в рабочей части
Р… = ратм + Ануш = 1- 104 —— 0,622- 13600 = 1550 кГ/м2.
280
По отношению рос /ро=0,155/3,5=0,0443 из табл. 1 [17] определено число Маха в ра-
бочей части Моо =2‚7. Соответствующий скоростной напор
‚гр… №30 1 401552 72
400 = = ’ , , =0‚78 кГ/см2.
2 2
Температура в форкамере, найденная установленной в ней термопарой, Т0=293 К.
Этой температуре соответствует при числе МОО =2‚7 величина ТОО =293-0‚4104=120К
(см. табл. [17]).
Данные, полученные в результате испытания модели тела вращения при ос=8°,
приведены в табл. А.
Т а б л и ц а А
дом ”№ "А!—дом "ом дм ”Аг-дом
0 8 , 5 8 ‚5 | 0 15 | 15
Соответствующие этим данным сила 1\/ и момент МШ определяются по формулам
(5.2.7) и (5.2.8):
№=0,542.8,5+0‚0031.15=4,65 кг,
м В = 0,023.15 = 0,345 кГ-м.
Коэффициенты силы 1\/ и момента Мгв соответственно равны:
1\/ 4,65
С = =
“ ‹; $ 0,78-104—125-10—ё
°° мид
МгВ 0,345
тгВ= = _ =0‚098.
а… змид хк 0,78-104-125-10 50,36
2
= 0,476;
Согласно (5.2.2) коэффициент момента относительно вершины головной части
т2 = 0,098 — 0,476 (190/360) =— 0,155.
Найденным значениям т2 и см соответствует коэффициент центра давления
сц_д =—т2/с№ = 0,155/0‚476 = 0,326.
В табл. Б приведены аэродинамические коэффициенты для других углов атаки, най-
денные аналогичным образом.
Таблица Б
0 2 4 6 8
Коэффициенты }
см 0 0,120 0,240 0,370 0,476
тг 0 —0,040 —0,080 _0,125 —0,155
сц_д — 0,332 0,333 0,337 0,326
По данным табл. Б построены графики на рис. 5.2.5.
Сравним полученные экспериментальные величины с результатами расчета по фор-
мулам (5.2.5) и (5.2.6). Вх0дящие в эти формулы геометрические параметры тела вра-
щения имеют следующие значения: ?…ид=120/40=3; \У/т/ЪУ/ц=0,81. Для выбора коэф-
фициента с в формулах (5.2.5), (5.2.6) необходимо определить характер пограничного
слоя на корпусе. С этой целью вычислим число Ке°о=У°о зіпосроо ‹імнд/роо. Здесь
скорость УФО находится для условий в рабочей части трубы:
Уш : мт аш = мю 10413700 = 2,7 1/1 ,4-287- 120 = 590 м/сек.
Соответствующая плотность воздуха
_р_°° 1550 о 045 Г 2/ 4
р°° _ КТ„ _ 287-120 _ ’ к “к м’
281
коэффициент динамической вязкости
#… = рн (Т…/Тн)0'76 = 1,82.1о—6 (120/288)0"76 = 0544.10“6 кГ-сек/м2.
С учетом этих Данных число Рейнольдса
590-0‚139-0‚045-0,04
°° " 0544.10—6
е =2,71-105.
см,/772; ещё
4;
0,5
ос, град
Рис. 5.2.5. Аэродинамические коэффициенты тела
вращения при Моо=2‚7
Так как это число Кесо <3-105‚ то поперечное обтекание характеризуется лами-
нарным пограничным слоем и для такого обтекания можно принять коэффициент с=
=1‚2. С учетом этого по формулам (5.2.5) и (5.2.6) имеем:
4
с“ = 2-0‚139-1 + 1,2-0‚1392 ? (6+ 0) = 0,42 [0,476];
2 2 32
тгр=—2-0‚139(1—0‚81)—Ё 1,2-0‚139 9——9—) =—0‚168 [—0‚155].
В квадратных скобках рядом с полученными расчетными результатами для сравне-
ния показаны экспериментальные коэффициенты.
ГЛАВА У|
ИССЛЕДОВАНИЕ АЭРОДИНАМИЧЕСКИХ ПАРАМЕТРОВ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
В данной главе рассматривается исследование аэродинамических
параметров летательных апп ар атов в целом, а также ти—
пичных о р г а н о в у п р а в л е н и я их полетом. При этом для выявле—
ния эффектов взаимного влияния корпуса, крыла и оперения летатель-
ного аппарата на его аэродинамические характеристики приходится
проводить как весовые, так и дренажные испытания моделей аппаратов
в аэродинамических трубах, сопоставлять картины распределения дав—
ления по изолированным (отдельно взятым) элементам планера лета-
тельного аппарата и по этим же элементам, собранным в единую мо-
дель, подсчитывать коэффициенты интер ференции, позво-
ляющие по аэродинамическим параметрам ОТДеЛЬНЫХ элементов
находить суммарные характеристики для их комбинаций. С вопросами
интерференции тесно связано и исследование эффективности
х в о с т о в о г о о п е р е н и я летательного аппарата, обусловленного,
в частности, скосом и торможением потока за расположенным перед
оперением крылом.
Важнейшее значение в практике авиа- и ракетостроения имеет иссле-
дование устойчивости аппаратов, проводимое не только в ста-
тических, но и в динамических условиях, имитирующих полет.
Успех выполнения поставленных перед тем или иным летательным
аппаратом задач во многом зависит от правильного функционирования
органов управления. Поэтому применяемые в настоящее время виды ис-
следования работы аэр0динамических, газодинамических и комбиниро-
ванных органов управления достаточно разносторонни и проводятся как
в аэродинамических трубах, так и на специальных стендах.
Далее приводится описание некоторых типичных экспериментальных
работ, отражающее упомянуты-е исследования.
5 6.1. АЭРОДИНАМИЧЕСКАЯ ИНТЕРФЕРЕНЦИЯ
Работа 6.1.1
Экспериментальное исследование влияния
интерференции на обтекание
летательного аппарата
Ц е л ь р а б о т ы — найти распределение давления по корпусу и кры-
лу летательного аппарата при сверхзвуковых скоростях, сравнить его
с соответствующим распределением по изолированным элементам этого
аппарата и оценить „точность расчета давления с учетом интерференции
по аэродинамическои теории тонкого тела.
Общие сведения
При обтекании потоком воздуха летательного аппарата в результате
аэродинамической интерференции (взаимного влияния между корпусом
и крылом) происходит перераспределение давления по сравнению со
случаем обтекания изолированных друг от друга тех же крыльев и кор—
пуса. При этом оказывается, что аэродинамические характеристики ле-
тательного аппарата не равны сумме соответствующих характеристик
изолированного крыла и корпуса. Аэродинамическая интерференция
"283
происходит также между корпусом и оперением, крылом и оперением
и др.
Распределение коэффициента давления по наветренной (нижней)
цилиндрической части заостренного корпуса с учетом влияния треуголь-
ного плоского крыла по теории тонкого тела [21] находится из формулы
_н 2 1: 1 _ ‚3 2 1 4ГЁ $іП2 26 (6 1 1)
р = а С а _ , . .
т(кр) 89%“ + ’Ё)2—4’Ё созО ]1/2 (1+ ’Ё)2—4’Ё созО
где а—угол атаки в радианах; х—угол стреловидности передней кром-
ки крыла; г$=г/$——безразмерный параметр, представляющий собой от-
ношение радиуса цилиндрической части корпуса г к полуразмаху крыла
в рассматриваемом сечении $; 6 —угловая координата точки на поверх-
ности корпуса.
Зависимость (6.1.1) справедлива для полета без скольжения и для
случая расположения крыла целиком на цилиндрической части корпуса.
Коэффициент давления на подветренной (верхней) части корпуса
4
$
. (6.1.2)
[(1—1— гэг—4% соз2 ОГД
_ _ 1 — г
рз(кр) : РЗ…” _ 40° “8 Х
Распределение коэффициентов давления по нижней и верхней по-
верхностям консолей крыла с учетом влияния корпуса соответственно
следующее:
2 2 2 2 2 2
(25+’з/25) (1—г5/25)
2 ,
52}… : 2ос сщх (1 —г;*)
* 2 2_ 2 2 1/2 +*ОС2 1 . 2 2_ 2 (6'1'3)
[(1—і— ’в) (28 + гз/гз) ] (1—гг5) (23+ ’5/25)
4
2 2_ 2 $_ 2 1/2’ (6'1°4)
[(Вт) (в %)]
где 23=2/$… (2— поперечная координата точки на поверхности консоли;
зт— полуразмах крыла).
Зависимости (6.1.3) и (6.1.4) соответствуют условиям обтекания, при
которых расстояние от начала цилиндрической части корпуса до борто-
вой хорды крыла превышает два диаметра корпуса, и такое крыло прак-
тически оказывается расположенным в зоне невозмущенного потока.
Исследование влияния интерференции на распределение давления по
корпусу и крылу можно провести путем продувки дренированной моде—
ли летательного аппарата в аэр0динамической трубе с последующим
сравнением этого распределения давления по поверхности изолирован-
ных элементов модели (крыла и корпуса), полученных также из опыта
в этой аэродинамической трубе при тех же режимах обтекания, т. е. при
одинаковых числах Мс,о и углах атаки а.
_ 1 — г
рЁщт) : рЁрп) _ 40° “9 Х
Порядок проведения работы
1. Ознакомиться с описанием лабораторной работы и сверхзвуковой
аэродинамической установкой, измерительной аппаратурой и прибора—
ми и проверить их готовность к работе.
2. Установить крылатую модель летательного аппарата на донной
державке в рабочей части трубы ПОД заданным углом атаки.
3. Замерить лабораторным барометром атмосферное давление ратм.
4. Подвести дренажные трубки и шланги к прибору ГРМ и прове—
рить герметичность их соединения.
5. Записать начальные показания на печатающем устройстве ГРМ,
соответствующие всем каналам измерения давления, включая измере-
284
ние статического давления в рабочей части р… и давления в форкаме-
Ре ‚00-
6. Осуществить запуск трубы и после выхода ее на режим устано-
вившегося движения воздуха в рабочей части включить печатающее
устройство ГРМ, одновременно замерив температуру воздуха в фор-
камере.
7. Повторить испытания при заданных углах атаки.
8. Снять с модели летательного аппарата крыло, разместить заглуш—
ки, обеспечивающие гладкую поверхность изолированного корпуса,
и провести продувки при тех же значениях углов атаки.
9. Провести аналогичное испытание на модели изолированного крыла,
составленного из двух консолей.
10. Расшифровать показания ГРМ, найти значения коэффициентов
давления по поверхности модели и построить соответствующие графики.
11. С помощью зависимостей (6.1.1)—:-(6.1.4) рассчитать коэффици-
енты давления для корпуса и крыла в тех точках, где расположены дре—
нажные отверстия.
12. По этим данным построить для характерных точек зависимости
коэффициентов давления от угла атаки и сравнить с ними эксперимен-
тальные результаты.
Пример Рассмотрим результаты испытаний модели летательного аппарата, пока-
ванной на рис. 6..1.1 ЭТИ испытания проводились на сверхзвуковой аэродинамической
уртаноігвке с сопловыми вставками, обеспечивающими в рабочей части трубы число
Модель представляет собой плоскую комбинацию, СОСТОЯЩУЮ ИЗ цилиндрического
корпуса и треугольного крыла. ЕСЛИ вместо консолей ЭТОГО крыла установить специаль—
ные заглушки, то получится модель изолирован—
НОГО корпуса. В вертикальной плоскости симмет—
рии на этом корпусе размещены между консоля—
Л о
“а ' ми крыла 12 дренажных отверстии (по шесть
“” с каждой стороны). Такое расположение отвер-
‚___,—+...—
70,7
2Г Ё ; ‘х = 5630 / -
… - .‚7\ "
„ ` ; {ЧЗ/]
4,65 8 т\\'/
со , -
&` 1 Ші % `
91+
2
ц,7
.\
„:
]
8,2 82 П _
Рис. 6.1.1. Модель лета- Рис. 6.1.2. Схема располо-
тельного аппарата (все жения дренажных отвер-
разме-ры даны в долях стий на крыле и корпусе:
радиуса корпуса ’) 1 — консоль крыла; !! —- корпус;
П! —— дренажные отверстия,
”1 — линии Маха
стий позволяет определять распределение давления в трех сечениях консоли вдоль хорд
(рис. 6.1.2).
Первоначально модели устанавливались в рабочей части трубы на донной дер-
жавке под углом атаки ос=0. Во время эксперимента угол атаки менялся автомати-
чески в соответствии с выбранной программой в пределах от О до 12°. Для этой цели
использовался дозатор углов атаки (см. 5 1.4), управление которым осуществлялось
дистанционно с общего пульта аэродинамической установки.
Площадь модели в плане $м=19,0°10—3 м2. Загромождение потока этой моделью
на максимальном угле атаки осшах=12°.
&‘ = $„ зіп атак/з.„
285
где $т=(а`—б*)2-—площадь сечения рабочей части трубы с учетом участка ПЛОЩЁДИ’
занятой пограничным слоем; а=0‚400 м—сторона квадрата рабочеи части трубы; 6 =
=0,016 м—толщина вытеснения турбулентного пограничного слоя в рабочеи части
трубы (эта величина рассчитана по расстоянию от критического сечения трубы до оси
вращения механизма установки углов атаки).
' После подстановки данных величина загроможтния
_ 19,0-10—З зіп 12°
_ (0,400—0,016)2
т. е. согласно графику на рис. 1.4.15 вполне допустимая.
Была проведена проверка нахождения модели внутри «ромба невозмущенного по-
О
тока». Из построения на рис. 6.1.3 видно, что при угле атаки сашах=12 вне ромба
находится лишь незначительная часть консоли крыла, что, по-видимому, можно допу—
=0,027‚
Рис. 6.1.3. Схема размещения модели внут-ри трубы:
1 — сопловой вкладыш; 2— ромб равномерной части потока:
3— положение модели при угле атаки 06=12°; 4— смотровое окно
стить. На этом же рисунке построена система скачков уплотнения, возникающих перед
носовой частью модели и крылом и отраженных от стенок рабочей части. Можно кон—
статировать, что отраженные скачки на поверхность модели не попадают. Кроме того,
выбранное расположение модели позволяет наблюдать через смотровые отверстия об—
текание носовой части моцели и крыла, что представляет интерес при проведении ис-
следований аэродинамического спектра. По измеренным давлениям (ро=3,52 кГ/см2,
р“, =О,155 кГ/см2) и температуре (Т0=293 К) были рассчитаны параметры в рабочей
части трубы: Мс,° =2,68; Тсо =120 К; рсо =0,0450 кГ-сек2/м4; аоо =220 м/сек; У… =
=590 м/сек; (70° =0,778-104 кГ/м2.
Давления фиксировались на бумажной ленте прибора ГРМ. После расшифровки
показаний этого- прибора были вычислены коэффициенты давления на изолированных
корпусе и крыле, а также на модели всей комбинации. В табл. А приведены значения
коэффициентов давления для корпуса, а в табл. Б—для крыла, соответствующие углу
атаки ос=5°.
Таблица А
’8 0,565 0,442 0,362 0,306 0,266 0,234
Изолированный 0,042 0,038 0,036 0,033 0,032 0,032
_„ корпус
рпкр)
С учетом интер- 0,040 0,039 0,037 0,045 0,050 0,049
ференции
Изолированный _0,048 _0,041 _0,031 _0,025 _0,021 —0‚012
корпус
-в
рТ(КР) С
учетом интер- _0,050 __0‚045 _0,040 _0,036 —0,040 —0,038
ференции
286
Если" сопоСтавить полученнОе из опыта
распределение давления по корпусу и кры-
лу в Их комбинации с соответствующим
распределением для изолированных элемен-
тов (крыло и корпус). то можно сделать
вывод о существенном влиянии интерферен-
ции. В-на—стноети, давления в зонах взаим-
ного влияния корпуса и крыла (эти зоны
ограничены. ‚пунктирными' ‚линиями .на
рис. 6.1.2) значительно выше, чем на изоли-
рованных элементах. Поэтому эффект ин-
терференции обязательно должен прини-
маться во внимание при осуществлении
аэродинамического расчета летательных ап-
паратов. `
Для сравнения с опытными данными
рассмотрим некоторые результаты теорети-
ческого расчета интерференции для угла
атаки а=5°. Коэффициент давления на
нижней половине корпуса в точке, для ко-
торой г3=0‚266 и 0=90°‚ согласно (6.1.1)
` 5 о :
р&к… = 2 57? сіз 56 ‘30 Х
>< 1—О‚2664
* [(1+0,2662)2—4.о‚2662соз90°1
52
1—
+ 57,32 [
40,2662 зіп2 2-90°
(1 + 0.2662)2—4-о‚2662 соз 90°
Соответствующее значение коэффици—
ента на верхней стороне корпуса в точке
с теми же данными по (6.1.2)
1/2 +
]=0‚112.
_ 5
В _ _ о :
рт…р) _ 0,112—457 Зсіебб 30 ><
,
Х 1—0‚2664 _
[(1 + 0,266?)2 __ 40,2662 соз2 90011/2 _
=—-—0‚101.
Используя формулы (6.1.3) и (6.1.4),
получим следующие коэффициенты давления
для крыла (в точке г3=0,284 и 28=0‚5):
_Н
5 ркр(Т) =
2 $3 сш 56° 30’ (1 _ 0,2844)
: [(1 + 0,2842)2— (0,5 + 0,2842/о‚5)2]1/2 +
5 \2
.____ 1 __
+ (57.3 [
_
(0.5 + 0,2842/0‚5)2(1 _ 0'2842/0’52)2] _
(1 + 0,2842)2 _— (0,5 + 0,2842/0‚5)2
= 0,144;
_ 5
В о !
1—0‚2844 _
[(1 + 0,2842)2 — (0,5 _ 0,2842/0,5)11/2 _
=—о, 103.
Сопоставляя найденные результаты с
полученными экспериментальными данными,
Таблица 5.
… %
оо сч
© [\ съ ——‹ о
"* СЧ“ СЭ. _: о
о о с
© 58
‹г ю
ш съ —— с
° °] ° "` С;
о о о
… [\ 88
со
съ съ … о
% °] @ _— с;
о с Ф
ю %
[\ ю
[\ @ съ -‹ Ф
со о __ о“
о о Ф
+ 8
а &‘ сч @
ю С° "' _— с;
о о ©
о %
© % _. со с
со —- —' *
о. о. & о
о о о
[\ %
со
[\ .‘1'3 со 0
" °° "' '“ 6
О о Ф
съ
[\ оо ‹: 00
© о 00 о
о ‹5 о |
ю г—Ч
со о 05
і—Ч _ .
Б _ - о
о о о '
сч 1.0 © 8%
__ СЭ '— Ч‘ О
Ю ---4 '—-і ‚_
о. " В о
о о о
с =: с
5 в. 6-
‚д 0) 5
@ *Э- с…
=< % к
а) с
0 Е о
:: ш
з *‘ Ш
«:
ш 2 ш
ш 0 О О
& СЬ Р сд
: И 5 Ф :
0 " !; °“ !;
["' о > с
00 со
5 О 5
! 0,111‘ 0,108' 0,107| 0,101| —0,105
0,099
0,110
|
0,115
С учетом интерферен-
ЦИИ
ЦИИ
кр(т)
кр(т)
н
В
Б
Б
]
Ю
СЮ
`
можно отметить значительное различие. Это указывает на то, что аэродинамическая
теория тонких тел, воспроизводя правильную качественную картину обтекания лета—
тельных аппаратов, дает возможность лишь весьма ориентировочно определить коли-
чественные характеристики такого обтекания и поэтому может использоваться только
для грубой оценки этих характеристик.
Работа 6.1.2
Исследование аэродинамической интерференции
летательного аппарата при помощи
весовых испытаний
Цель работы—определить коэффициенты интерференции лета-
тельного аппарата в виде комбинации корпус—крыло и сравнить их
с результатами расчета по аэродинамической теории тонкого тела.
Общие сведения
Подъемную силу летательного аппарата У…“, можно определить как
сумму подъемных сил изолированных корпуса и крыла, а также интер-
ференционных поправок, обусловленных взаимным влиянием корпуса
и крыла, т. е.
УМР : Ут + Укр + Аут“… + Мкр… , (6.1.5)
где Ут и Укр—подъемные силы соответственно изолированного корпуса
и изолированного крыла; АУтШщ—дополнительная подъемная сила
корпуса, обусловленная влиянием крыла; АУкр(т)—дополнительная
подъемная сила крыла, обусловленная влиянием корпуса.
Переходя к коэффициентам подъемных сил и вводя понятия о коэф—
фициентах интерференции, вместо (6.1.5) можно написать
сут.кр : уткр №400 Зкр) :. (Ктм + Кт + Кир) Сукр’ (6'1'6)
где ЗКР—площадь изолированных консолей крыла, а величина
Къи : Ут/ кр (6.1.7)
представляет собой безразмерный параметр, связывающий подъемные
силы (или соответствующие коэффициенты) изолированных корпуса
и крыла; другие две величины
Кт = [Лінки/Ук °
р, (6.1.8)
р : (Укр + АУкр(т))/1’кр (6.1.9)
являются коэффициента ми ин тер ф ер енции. Для летатель-
ного аппарата с треугольным крылом на цилиндрическом корпусе аэро-
динамическая теория тонкого тела дает следующие формулы для опре-
деления этих коэффициентов:
К
К
"?
.?
2 вт _]. Л — 1 Зт + 1 _
Кт: _ _ _|_— 831+ _— _ аГСЁ Зт ; 6.1.10
л: (зт— 1)2 вт 2 $3, 75%, 8 ( )
Кир : + 'З- (Зт ) _$т_ + (5т__)_ агсзіп Зт ‚ (6..111)
л($т __1)2 4 3,3, в… 2 3,3, ЕЁЮЧ
где Ёт=$т/г—отношение полуразмаха крыла к радиусу цилиндриче-
ской части корпуса. Складывая (6.1.10) и (6.1.11), получим соотношение
кт + ккр = (Ет+1)2/'в'‚3„ (6.1.12)
которое дает возможность определить один из коэффициентов, если най-
дено значение другого.
288
Зависимости (6.1.6), (6.1.7) и (6.1.12) позволяют по известным ко—
эффициентам подъемных сил изолированных корпуса и крыла найти
коэффициент подъемной силы комбинации крыло—корпус. Причем, как
показывают исследования, такой расчет возможен для любой формы
крыла в плане. Эти же зависимости пригодны и для «нетонких» комби—
наций.
Координата центра давления подъемной силы, индуцированной кор—
пусом на крыле, отсчитываемая от носка бортового сечения консоли,
определяется из условия
(хц.д)оскр('г) : _— АМгкр(т›/Аукр(Т) ’ (6'1'13)
в котором АМ…)(ту—момент тангажа (относительно носка бортового се-
чения консоли) от сил давления, обусловленных влиянием корпуса на
крыло. Другая координата центра давления подъемной силы, индуциро-
ванной крылом на корпусе,
АУ
!
гт(кр)-’/ т(кр)’
(хц.д)оьт(кр) : _ АМ (6.1.14)
где А1И2т(кр)—момент тангажа (относительно того же носка бортового
сечения консоли) от сил давления, обусловленных влиянием крыла на
корпус.
Силы и моменты, входящие в (6.1.13) и (6.1.14), находятся по рас-
пределению давления, полученному с помощью (6.1.1)+(6.1.4).
Переходя к безразмерным параметрам (коэффициентам) центров
Давления, напишем:
(СЦ-д)оскр(т) : (хп-д)акр(Т)/Ькр; (6°1°15)
(СЦ-д)осТ(кр) _ (ХЦ-д)осТ(кр)/Ь (6'1'16)
кр’
где дыр—бортовая хорда консоли крыла. Значения этих коэффициентов
приводятся в табл. Х\/-1-1 [21].
Мет0д определения коэффициентов аэродинамической интерференции
комбинации корпус—крыло путем весовых испытаний заключается
в следующем. Модель летательного аппарата устанавливается на весо-
вом элементе и подвергается продувке в аэродинамической трубе, в ре—
зультате которой наХОДятся ее аэродинамические коэффициенты подъ-
емной силы и центра давления (су и сд_д). Таким же образом находятся
значения соответствующих аэродинамических коэффициентов сут, (спд)Т
и сукр, (сц_д)кр для изолированного корпуса этой модели и изолированно—
го крыла, составленного из двух консолей. Это дает, в частности, воз—
можность определять по значениям (6.1.6) и (6.1.7) сумму этих коэф-
фициентов интерференции (Кт+Ккр) и сравнивать ее с соответствующим
расчетным значением. Для опытного определения каждого из коэффи-
циентов, Кт или Ккр, необходимо провести замер сил, приложенных толь-
ко к корпусу или только к крылу модели комбинации, что вызывает боль-
шие технические трудности.
Опытное значение коэффициента центра давления всей комбинации
можно сравнить с расчетным значением
:(сЦ-д)аКР(Т) Ккр Сукр + (СЦ-д)06’1‘ТКР) Кт сукр + (СЦ-д)Т сут
Кир Сукр + Кт Сукр + сут
Входящие сюда коэффициенты Кт и Кир, а также (сЦ_д)о…р(т) и (вид)….(кр)
вычисляются по приведенным зависимостям (6.1.10), (6.1.11), (6.1.15),
(6.1.16) или находятся по соответствующим таблицам.
Сц-д
(6.1.17)
Порядок проведения работы
1. Ознакомиться с устройством экспериментальной установки, изме-
рительной аппаратурой и приборами.
2. Провести тарировку тензовесов.
19—927 289
3. Установить тензовесы с моделью в рабочей части трубы на донной
державке под углом атаки а=0.
4. Включить тензостанцию (а при необходимости и осциллограф)
и настроить ее, произведя балансировку мостов.
5. Соединить образцовые манометр и вакуумметр соответственно со
штуцерами насадка полного напора, установленного в форкамере,
и приемника статического давления в рабочей части трубы.
6. Замерить лабораторным барометром атмосферное давле-
ние ра….
7. Включить трубу и после выхода ее на режим установившегося
обтекания снять показания с гальванометров или записать их на ос—
циллограмме. Одновременно зафиксировать показания датчиков тем-
пературы То и давления в форкамере Ро‚ а также статического давле—
ния в рабочей части аэродинамической трубы р….
8. Повторить испытания для заданных углов атаки, после чего пре--
кратить работу трубы и отключить измерительную аппаратуру.
9. Снять с модели крыло, разместить на корпусе заглушки, обеспе-
чивающие гладкую поверхность корпуса, и повторить эксперимент при
тех же значениях углов атаки.
10. Установить в рабочей части вместо корпуса модель крыла и
вновь провести продувки под прежними углами атаки.
11. По результатам измерений ро, рос, и То определить параметры
сверхзвукового потока в рабочей части аэродинамической трубы.
12. Вычислить по результатам весовых испытаний коэффициенты
подъемной силы, момента тангажа и центра давления (су, №2 и сц_д)
крылатой модели, а также изолированных корпуса и крыла и соответ-
ствующие коэффициенты интерференции.
13. Сравнить величину суммы этих коэффициентов Кт+Ккр с теоре-
тическим значением, найденным по зависимости (6.1.12).
14. Вычислить по формуле (6.1.17) коэффициент Сц_д и сравнить его
с экспериментальным значением.
Пример. Рассмотрим результаты лабораторной работы по определению коэффи-
циентов интерференции плоской крылатой модели, форма и размеры которой изобра-
жены на рис. 6.1.1. Продувка модели осуществлялась в сверхзвуковой аэродинамической
трубе при мш=2‚68 п0д углом атаки а=6°.
По аналогии с лабораторной работой 6.1.1 была осуществлена проверка допусти-
МОГО «загромождения» потока моделью, правильности расположения В «ромбе равно-
мерной скорости», характера отраженных от стенок трубы скачков уплотнения и воз-
можности вести наблюдения через смотровые окна.
Для замера сил, действующих
на модель, применялись двухком-
Т а б л И Ц а А понентные тензовесы, универсаль-
Изолиро- Изолиро— ная восьмиканальная тензостан;
Крылатая ванный ванное ция типа 8АНЧ-7М и шлеифовыи
МОДель корпус крыло осциллограф Н—700. Модель с тен-
“ “Р) (Т) (КР) зовесами устанавливалась на дон-
ной державке в рабочей части
т бы. В ее льтате та и овки
”№, мв 104 16 58 тёнзовесов ёылЪ}; найдены 1сэосг›)твет-
ствующие тарировочные коэффи-
циенты для каналов нормальной
36,3 (подъемной) силы и предельного
момента: ігы=1О-1 кГ/мв и !гм=
=1О—2 кдм/мв.
№=п№ ];“, КГ 10,4 1,6 5,8 с Показания пы и пм, снятые
ленты осциллографа (в милли-
вольтах), и рассчитанные по ним
нормальная сила, продольный мо—
мент и координата центра давле-
ния приведены в табл. А.
_ По измеренным значениям
Хц.д=—Мг/№‚ м 0,263 0,0515 0,0625 давления и температуры в форка-
мере (ро=2‚50 кГ/см2, Т0;293 К),
СО
10
п М, м8 273
› 2,373 0,092] 0,363
а также статического Давления в рабочей части (Роо=0‚111 кГ/смд) были рассчитаны
параметры набегающего потока:
М…=2,68; Тоо = 120 К; роо = 0,0323 кГ-сек2/м4; (100 = 220 м/сек;
Уш = 590 м/сек; 400 = 0,560—104 кГ/м2.
Полагая, что ввиду малости угла атаки нормальные и подъемные силы будут от-
личаться несущественно, по (6.1.7) был найден безразмерный параметр
Ктм = мт/мкр =1‚6/5‚8 = 0,28,
а с помощью зависимости (6.1.6) определена сумма коэффициентов интерференции
Кт + Кир = М.,-_кр/Мкр — К…, = 10,4/5‚8 — 0,28 = 1,5.
В соответствии с экспериментальной величиной хд‚д=0,263 ‚и коэффициент центра
давления
Сц_д = хц_д/Ькр = 0,263/0‚094 : 2,80.
Сравним полученные данные с результатами расчета. По формуле (6.1.12)
Кт + Кир = (82/20 + 1)2/(82/20)2 = 1,53;
как видим, разница оказалась незначительной.
Прежде чем рассчитать значения коэффициента центра давления по соответствую-
щей зависимости (6.1.17), отыщем входящие в эту зависимость вспомогательные ве—
личины. В частности, вычислим коэффициенты интерференции по (6.1.10) и (6.1.11).
Учитывая при этом, что $т=$т/г=82/20=4‚1, находим:
2 4,12—1 л 1 4,12+1
= — 4,12 )———— 1 4,1 =о‚зз9;
КТ л(4,1—1)2[ 4,1 + 2 ( + 4,12, 4,12 №8 1
2 . 4,12—1 2 4,12—1 4,12 12 4,12—1
Ккр=——[—ч—-(—————)-— ( + ) агсзіп ———]= 1,19.
л(4,1—1)2 4 4,12 4,1 24,12 4,12—1-1
Аэродинамические характеристики для рассматриваемой модели берем из реше—
ния задачи Х1.30: Сут=0‚045; Сукр=0,168; (хд;д)0…р(т)=13‚8; (хц_д)ш(кр)=15,6;
(хц:д)т=2‚78. По координатам центров давления определяем соответствующие без-
размерные коэффициенты: (сц_д)ожр(т) =1З,8/4,7=2‚93; (сд_д)т=2,78/4‚7=0.591;
‹Сц‚д)ат(кр) =15‚6/4‚7=3,32.
В соответствии с этими данными из (6.1.17) находим
2,93-1,19-0,168 + 3,32—0‚339-0, 168 + 0,591 -0,045
С ‚ = =
” 1,19-0‚168—]-0,339-0,168+0,045
Сравнение показывает, что разница. между теоретическим и экспериментальным значе—
ниями коэффициента центра давления составляет около 4%.
2,7.
Работа 6.1.3
Аэр0динамические исследования оперения
Ц е л ь р а б о т ы — найти угол скоса потока, коэффициент торможе-
ния скорости у оперения, а также коэффициент эффективности оперения
модели летательного аппарата.
Общие сведения
Скос и торможение потока у оперения вызываются влиянием кры—
ла, расположенного на корпусе летательного аппарата перед таким
оперением. Оба эти эффекта обусловлены действием закона сохранения
количества движения воздуха, обтекающего летательный аппарат. Воз-
никающие при таком обтекании подъемная сила и лобовое сопротивле-
ние вызывают отклонение потока в вертикальном направлении и его
торможение за крылом.
Знать угол этого отклонения (угол скоса) и коэффициент торможе—
ния скорости необходимо для правильного определения аэродинамиче-
ских характеристик оперения и других органов управления полетом,
расположенных за крылом.
19* 291
Непосредственное определение величины и направления скорости
потока за крылом затруднительно. Кроме того, строго говоря, поле ско-
ростей за крылом неравномерное. Поэтому угол скоса и коэффициент
торможения скорости определяются косвенным путем и рассматрива-
ются как некоторые средние величины в некоторой области потока у
оперения.
Наиболее полно и достоверно скос потока и торможение скорости у
оперения могут быть определены в результате систематических иссле-
дований интерференции, позволяющих опытным путем находить аэро-
динамические характеристики (в частности, коэффициенты продольно-
го момента) летательного аппарата в виде плоской комбинации из кор-
пуса, крыла и оперения, а также отдельных элементов, из которых эта
комбинация состоит. Такая полная комбинация и ее элементы пред-
ставлены в табл. А.
Таблица А
Название комбина-
ции летательного
аппарата
Форма комби-
Обозначение мо- \
КОРЁЁЁБЁЁБЁЛО_ КОРПУС—Крыло КОРПУС—Оперение Корпус
мента тангажа тгт.кр.оп тгт—кр тгтюп тгт
Аэродинамические коэффициенты моментов тангажа для комбина-
ций летательных аппаратов, приведенных в табл. А, определяются сле-
дующим образом:
_ _Ь .
тгт.кр.оп _ тат + тгт(кр) ‘ тетю… + тгкр(т) + тгощт) + тг(т.оп)вг (6.1.18)
таъкр : тгт + тгт(кр) + так…-г); (6…119)
тгтюп : тгт + тгт(оп› + тгоп(т) ' (6120)
В этих формулах для соответствующих моментов введены те же
индексы, что и для компонентов подъемной силы в работе 6.1.2 (напри-
мер, т2т(кр)—коэффициент момента тангажа, возникающего на корпу—
се за счет интерференции с крылом, а т1(т:0п)в—КОЭффИЦИ6НТ момен-
та тангажа, вызванный интерференцией крыла с оперением, установ-
ленным позади его на корпусе и обусловленный взаимодействием
вихревой пелены, сбегающей с крыла, как с оперением, так и с корпу-
сом).
Из соотношений (6.1.18)+(6.1.20) можно найти по эксперименталь-
ным значениям (тдтдрдп, т2т_кр‚ тиши, тт) лишь три величины:
тдтдщв, [тшр(т,+т2т(кр)] и [тюп(т)+т2т(оп)]. Определить же отдельные
слагаемые в двух последних величинах не представляется возможным.
Однако с помощью аэродинамической теории тонкого тела можно про—
вести такое приближе`нное определение.
Последовательность расчета коэффициентов т10п(т_кр) и тд…… не-
обходимых для нахождения угла скоса и коэффициента торможения
потока, следующая. Из уравнений (6.1.18)—:—(6.1.2О) находим коэффи—
циент
__ __ | _
т2(Т-0П)В _ тгт.кр.оп тгтмр + тат тгт.оп' (6121)
Далее подсчитываем значения
т; т.оп — тгт
т : 3 (6.1.22)
)
гоП(Т Кт (хдд од/Ькр)т(кр)
Ккр (хц.дОЬ/Ькр)КР(т)
292
тгоп(т. кр) : тгоп(т) + тг(т. оп)в° (6…123)
Для определения угла скоса потока в и коэффициента торможения
скорости Агоп используется следующая зависимость:
ао
тгоп(т.кр) : оптгощт) (а+бш— 8)? (6'124)
в которой производная от коэффициента момента дтгощП/Одос п = ”158$…
равняется (в линейном диапазоне изменения тющт) от а…) отношению
іп2оп(т)/(10п и определяется
при том же значении угла
установки оперения бои, что
и коэффициент тющтдр).
Угол скоса потока в на-
ходится из условия равенст-
ва нулю коэффициента
т…щтдр). Как следует из за-
т20п‹т.кр)
0,05
висимости (6.1.24), в этом 0,0!
случае угол атаки оперения …
аоп=аібоп—8=О‚ Т. е. '0 01 град
в = ос $ 60… (6.1.25) -0‚02
а поток, скошенный крылом,
Идет параллельно поверхно_ Рис. 6.1.4. График зависимости коэффициента
т10п(т:кр) при различных УГЛЭХ поворота ОПС-
сти оперения.
Чтобы подсчитать в из
выражения (6.1.25), с помо—
щью графического построения находится такая пара значений углов и
и бон, при которых кривая зависимости коэффициента тюп(т_кр)=і(о‚
бод) от этих углов пересекает ось абсцисс, где т20п(т_кр)=0 (рис. 6.1.4).
Построение серии графиков тющт кр)=і(о‚ бод) позволяет получить зави-
симость угла скоса потока в от угла атаки (1.
После определения в возможно из (6.1.24) найти коэффициент тор-
можения потока:
рения оп
т
в… = ““”-“Р> . (6.1.26)
тгоп(Т) (“+ _ 8)
При этом в формулу (6.1.26) следует подставлять значения коэф-
фициентов тёощткти т2‘00п(т),взятые для такого угла поворота оперения
бод, который будет подставляться в знаменатель формулы
(6.1.26). Отметим, что коэффициент торможения потока для рассмат—
риваемого летательного аппарата является функцией угла атаки со и
не зависит от угла поворота оперения бод.
Степень интерференции крыла с оперением характеризуется коэф—
фициентом эффективности оперения
п : (МТ-краш _ №т.кр)‚/(№т.оп '— Мт)‚ (6.1 .27)
который равен отношению приращения нормальной силы при уста-
новке хвостового оперения на комбинацию корпус—крыло к прираще-
нию нормальной силы при установке хвостового оперения на изолиро-
ванный корпус. Коэффициент эффективности оперения показывает, на
сколько уменьшается несущая способность оперения в результате ин-
терференции с крыльями.
Порядок проведения работы
1. Ознакомиться с устройством экспериментальной установки и про-
верить готовность ее к работе.
2. Провести тарировку тензовесов.
293
3. Установить тензодержавку и модель летательного аппарата
(с крыльями и оперением) в рабочей части трубы под углом атаки ос=
=О; при этом угол установки оперения должен быть равен нулю
(боп=0).
4. Включить тензостанцию (а при необх0димости и осциллограф)
и настроить ее, произведя балансировку мостов.
5. Соединить образцовые манометр и вакуумметр соответственно
со штуцерами насадка полного напора, установленного в форкамере,
и приемника статического давления в рабочей части трубы.
6. Замерить лабораторным барометром атмосферное давление.
7. Включить трубу и после выхода ее на режим установившегося
обтекания снять показания с гальванометров или записать эти показа-
ния на осциллограмме, включив предварительно протяжку ленты ос—
циллографа. Одновременно зафиксировать показания датчиков темпе—
ратуры То и давления ро в форкамере, а также замерить давление в ра-
бочей части трубы р…. При наличии соответствующих датчиков их по-
казания можно также записывать на осциллограмме.
8. Провести указанные в п. 7 замеры при требуемых углах атаки,
устанавливая их последовательно с помощью соответствующего при-
способления.
9. Прекратить работу трубы и отключить измерительную аппара-
ТУРУ-
10. Снять тензодержавку с моделью. Изменяя угол установки опе-
рения согласно программе эксперимента, повторить исследования (см.
п. п. 2+4‚ 6—2—9) при тех же углах атаки.
11. Провести аналогичные эксперименты по продувке модели лета—
тельного аппарата, имеющего только оперение. При этом в местах уста-
новки крыла должны быть размещены заглушки, обеспечивающие глад-
кость поверхности корпуса. Диапазон изменения углов поворота опе-
рения (боп) и углов атаки (ос) тот же, что и при исследовании модели
с крылом.
12. Снять с модели оперение, разместить на корпусе соответствую-
щие заглушки и повторить исследование обтекания изолированного
корпуса для прежнего диапазона углов атаки.
13. Снять с модели заглушки в местах посадки крыла, вновь уста-
новить крыло и осуществить весовые испытания неоперенной модели с
крылом.
14. По результатам измерения То, ро, рао определить параметры
сверхзвукового потока в рабочей части аэродинамической трубы.
15. Расшифровать показания осциллографа (или гальванометров)
и с помощью тарировочных зависимостей найти значения соответству-
ющих коэффициентов нормальной силы см и момента тангажа т;. По
результатам этих расчетов построить графики функции: т2т_кр_оц><
><(О'л бои); тгтжр (а): тгтюп (ап бон); тат) (06 '
16. Вычислить коэффициенты эффективности оперения, а также зна-
чения угла скоса потока в и коэффициента торможения скорости у.опе-
рения йод для различных углов атаки.
Пример. Рассмотрим результаты лабораторной работы по определению угла скоса
потока, а также коэффициентов эффективности оперения и торможения скорости при
сверхзвуковом обтекании модели летательного аппарата, изображенной на рис. 6.1.5.
Площадь в плане этой модели $м=22-10—З м2. Угол атаки, при котором велась про-
дувка, а=6°. Соответствующее «загромождение» рабочей части трубы моделью опре-
делялось отношением $=$м/$т (где $т=0,16 ли?—площадь поперечного сечения ра-
бочеи части):
Полученная величина, определяющая загромоЖдение потока, допустима для условий
продувки в трубе с закрытой рабочей частью.
Для измерения нормальной силы и момента тангажа использовалась двухкомпо-
нентная весовая тензометрическая державка До начала эксперимента была произведе-
на ее тарировка и определены тарировочные коэффици-
енты ігы=10 1 кГ/мв и Ём=10— —2 кГ- м/мв. После на- [
хождения тарировочных коэффициентов производилась _ ‘ ‘ ]
балансировка электрических мостов на универсальной
восьмиканальной тензостанции типа 8АНЧ- 7М, а регист-
рация электрических сигналов с тензодатчиков—на ос-
ци ллографе типа Н- 700. После включения трубы произ-
водилась запись показаний тензостанции на ленте осцил- (
лографа.
По результатам измерений давления и температуры -
торможения (Ро=2, 65 нГ/см2, Т0=289 К), а также дав- ……
ления в рабочей части (р°°=0, 115 кГ/см2) определялись /'
параметры сверхзвукового потока: '
1“… =2‚71; Т_со = 117 К; рсо = 0,0343 КГ-секЗ/м4;
“… =218 м/сек; "… = 590 м/сек; 1
(700 = 0,596—104 кГ/м2_
110
210 `
#20
ЭЦ
Данные, полученные из эксперимента для угла ата- \
ки а=6° и углов отклонения оперения боп=0; —9‚4°, а
также расчет координаты хшд .и коэффициентов см и
т: представлены в табл. Б |
Используя (6.1.27) и экспериментальные значения ‚Э 1
нормальных сил для соответствующих комбинаций, вы- ”ЭФ
числяем коэффициенты эффективности оперения: '
Т
0
60
9 6 — 10 3
=-—’———’-=1‚49 б=—9‚4°;
“°“ 1,10 —1‚57 ( ) = 18614
10,9 — 10,3 4 =
Чоп = 5 1 57" = 0,555 (0 = О).
2’6 _ ’ Рис. 6.1.5. Модель крыла-
Значения аэродинамических коэффициентов вычис— той оперениой ракеты
ляются по (6.1.21), (6.1.22) и (6.1.23).
Для б=0 (01=6°):
=—0 ‚886+0, 847—0 ‚‚089—РО 155=О‚ 027;
тг(т .оп)в
— 0,155 + 0,089
тг оп(т) : 0,8 0,598 =— 0’044’
1,45 ' 0,647
тЁ‘опщ =—0 ,044/6° =— 0, 0074 1/град;
тг …… кр) =_0, 044 + 0, 027— == 0, 017
Для б= —9‚4° (а=6°):
тг („…В =— 0,768 + 0,847 + 0,031 _ 0,089 = 0,021;
_0, 081 + 0 ‚089
тг °“… = 0 ,8 0 ,5_98 : 0’038;
1 ‚45 0, 647
”130…” = 0,038/6° =— 0,0063 1/град;
тг от…” = 0,038 + 0,021 = 0,059.
Строится зависимость т20п(т_кр) (06, б), показанная на рис. 6.1.4. Из условия ра-
венства т‚оп(т_нр)=0 определяется угол скоса потока 6=З‚5°. По (6.1.26) находится
коэффициент торможения потока:
Хе _0,017 092
°"— —0,0074(6——0—3‚5) _ ’ '
295
Фюоб
935 …За! ш…: 6! „это! ЕЁ! $2! %……51 „в
5.0 $5 $2… $3 шт; шт.… ю…; @; Ё
Ёб „25 $85 $3… $3 $3 $2 ю……чо „‹ Ё;
@.. „..… ‚‚
в; 3; З.… З.… „..… „0:2 3: $4… 3: ‚3 <<
т…… т…… о.: ….юы то… „2 Ф…… %… 3…
тчо! ……Ё! Ё…оді 53| $. …! ФЧ …! …ты! Юты! ЁЁ ‚%
…… ю…… …; З:… З… 8… а…… Ё .Ё
„на! о …на! о 3…1 о „на! о %% ‚@
ю @ %% .в
„д : Е.:—ЗФ
9:53… шшшшцш=о|о›=цож оБЁхіоЁцож шхшшцшпоіоч_дцхіо›ццож
:шимшцюгош
Щ …… : = =. ю а ‚Н
296
5 6.2. ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ ЛЕТАТЕПЬНЫХ АППАРАТОВ
Работабдл
Измерение параметров статической устойчивости
Ц е л в р а б о т ы — по испытаниям в сверхзвуковой трубе определить
параметры продольной статической устойчивости модели летательного
аппарата, а также эффективность оперения при различных углах от-
клонения аэродинамических рулей.
Общие сведения
При движении летательного аппарата случайные возмущения (на—
чальный толчок при сходе со стартового устройства, порыв ветра, от-
клонения от заданного режима работы двигательной установки и др.)
могут привести к изменению углов атаки ос, скольжения В и крена у.
Возникающие вследствие этого моменты после прекращения действия
возмущений приводят к дальнейшему изменению этих углов. Если при
этом изменении углы ос, [3 и ? стремятся к первоначальным значениям,
то полет будет статически устойчивым, если же отклонения уг-
лов продолжают возрастать, то такой полет будет статически не-
устойчивым. При неизменности углов имеем случай статичес—
кой нейтральности
В соответствии с отклонениями значений углов ос, [3 и у статическая
устойчивость подразделяется на пр одол ьную, попер ечную и ста-
тическую устойчивость пути. Иногда, учитывая взаимозависимость
движения рыскания и крена, вместо путевой и поперечной устойчиво-
стей рассматривают б о к о в у ю статическую устойчивость.
При наличии продольной статической устойчивости возникающий
продольный момент будет восстанавливающим, т.е. будет стре—
миться вернуть угол атаки к прежнему значению. В этом случае на-
правление момента тангажа М2 (величине этого момента соответствует
аэродинамический коэффициент т;) будет противоположно направле-
нию изменения угла ос. Следовательно, условием предельной статической
устойчивости будет неравенство дМЗ/да<0 (или дт з/дос =т3< О).
В случае продольной статической неустойчивости возникает опро-
к идывающий момент, который стремится еще больше изменить
угол атаки. Поэтому условие продольной статической неустойчивости
имеет вид дМг/да>0 (или дтг/дос=т2° >О).
Статические устойчивость и неустойчивость пути, очевидно, будут
характеризоваться соответственно неравенствами дМу/дВ<О (или
дту/дБ<О) и дМу/дв>0 (или дту/д-[3>О). В первом случае направле-
ния изменений момента рыскания и угла скольжения различны, во-вто-
ром—одинаковы, а соответствующие моменты будут восстанавлива-
ющими и опрокидывающими.
Мерой поперечной статической устойчивости (статической устойчи-
вости крена) является производная дМх/др (или дтх/д5=т5), так как
у летательных аппаратов обычно момент крена появляется в полете с
углом атаки лишь при возникновении угла скольжения. Если производ-
ная тг <О, то летательный аппарат обладает поперечной устойчи—
востью, а при тЁс>0 имеет место поперечная неустойчивость.
„Летательный аппарат может быть нейтрален в отношении продоль-
нои статической устойчивости, устойчивости пути или поперечной ста—
тической устойчивости, если справедливы равенства т3=0, т3=0 и
тЁ=О.
20—927 297
В качестве характеристики _продольнрй статической устойчивости
можно принять разность спд—хим (где сц0_д=хц:_д/1, хц_м=хц_М/1; хц_д и
хд_м—соответственно расстояния от однои и тои же точки, например
носка головной части, до центра давления и центра массы; 1—харак-
терный линейный размер летательного аппарата). Если разность хдд——
—хд_м, определяющая запас статической устойчивости, по-
ложительна, т. е. центр давления расположен за центром массы, то по-
лет будет статически устойчивым; при переднем расположении центра
массы [(Ёд‚д—хд_м)<0] полет статически неустойчив.
В случае, когда продольный момент вычисляется относительно _цент-
ра массы, то запасом статической устойчивости будет параметр сд_д=
=дтд/дсм называемый коэффициентом продольной устой-
чивости. При дтд/дсы<0 полет будет статически устойчивым, а при
дт2/дс№>0 — статически неустойчивым.
Для несимметричных конструкций (или для летательных аппаратов
симметричной формы, но с отклоненными рулями) в качестве критерия
статической устойчивости применяют безразмерное фокусное расстоя—
ние хр=хр/і=—дт2/дс№. При заднем относительно центра массы рас-
положении фокуса полет будет статически устойчивым, при переднем —
статически неустойчивым.
Аналогично рассматриваются понятия запаса и коэффициента ста-
тической устойчивости пути, но при этом положение центра давления
определяется не в плоскости угла атаки, а в плоскости угла скольже-
ния и, например, коэффициент устойчивости пути будет находиться по
формуле сд_д= —дту/дс2.
При рассмотрении поперечной статической устойчивости ограничи-
ваются определением величин т?, при различных фиксированных зна-
чениях углов атаки и углов отклонения рулей 6. Для обеспечения ста—
тически устойчивого прямолинейного полета в продольной плоскости с
требуемым углом атаки необходимо выполнять условие балансировки,
позволяющее найти соответствующее отклонение рулей высоты:
т3а+т26+тго=0.
Из этого уравнения находят балансировочную хар акте р ис-
т и к у, представляющую собой отношение угла атаки со и углу откло-
нения рулевого органа 6. Для симметричной конструкции такая харак-
теристика определяется формулой
ос/б = — тЗ/тг .
С целью обеспечения требуемой статической устойчивости крыло
располагают в определенном месте корпуса, а в случае необходимости
прибегают либо к установке хвостового оперения, играющего роль ста-
билизатора, либо небольших крыльев в носовой части для создания
дестабилизирующего эффекта. Характеристики статической устойчиво-
сти летательных аппаратов могут быть рассчитаны различными мето-
дами. Рассмотрим один из таких методов, относящихся к плоской кон—
фигурации (см. рис. 6.1.5). Согласно этому методу находятся аэр0ди—
намические характеристики изолированных корпуса, крыла и оперения,
а затем вычисляются соответствующие интерференционные поправки.
При этом для определения аэродинамических характеристик оперения
необходимо либо найти угол скоса потока за крылом в и по эффектив-
ному значению угла атаки
осэ=ос+боп—в
рассчитать эти характеристики с учетом интерференции для заданного
угла установки оперения (бод), либо воспользоваться соответствующи-
298
ни расчетными зависимостями из аэродинамической теории тонкого
тела.
Координата центра давления оперения изменяется под влиянием
вихрей крыла, но с достаточным приближением можно считать, что
точка приложения нормальной силы, обусловленной вихрями крыла,
совпадает с центром давления оперения для комбинации корпус—опе-
рение, т.е. №
(хи-дос)оп(в) : (хц.да)ОП(Т)° (621)
В случае отклонения поворотного крыла (оперения) от нейтраль—
ного положения на некоторый угол характеристики статической устой—
чивости изменяются. Это происходит как за счет появления нормаль—
ной силы на самом руле (крыле или оперении), так и от изменившихся
условий интерференции.
Координата центра давления для полной комбинации корпус—кры—
ло — оперение
‹С№)т(хц. д)т+(с№)кр(т)(хц .д)кр(1')+(с№)'г(кр)(хцо д)’г(кр) + (с№)Т(0П)(хц- д)Т(0П)+
(сл/)т + (0№)кр‹т› "' (сл/Мит + (с№)т‹оп› "'
_) + (с№)оп(т) (хц.д)оп(т) + (ей/)опш) (хц.д)оп(в) , (6.2.2)
+ (с№)оп(т) + (с))/)ощв)
где (смт—коэффициент подъемной силы носовой части корпуса;
(сидит—коэффициент подъемной силы крыла с учетом влияния кор-
пуса и т.д.; (хд_д)т—координата центра давления носовой части кор-
пуса; (хд_д)кр(т)—координата центра давления крыла с учетом влияния
корпуса и т.д.; индекс «оп» относит все величины к оперению.
Входящие в формулу (6.2.2) величины определяются с помощью
следующих зависимостей:
*ц—=д
(0№)кр(т) = [Кира №( Е.,) 1,] (с“ ),…‚; (6.2.3)
(Смм… = [К <% + * :д( „) ] (0% )… ‹6.2.4›
(с№)оп(т) : [коп “ +* оп ( 6е)оп] ( с№)оп (воп/ вкр); (625)
(с№)т(оп) : [(Кт)оп 06 + (’г'г)оп (бе)оп] (С?/)т: (Зои/$1413); (6…26)
(с№)оп(в) : іоп (СП )кр (СА/)т [Кира + ‚акр (бе)кр] (3… _ ’)оп ‚ (6.2.7)
2“жоп (% "' ’)кр
где кроме ранее встречавшихся обозначений ‚вкр, Код, 1%, (іет)од—— коэф-
фициенты интерференции, обусловленные отклонением рулей на угол
(бе)кр (поворотного крыла) или (бе)… (поворотного оперения) и опре-
деляемые в первом приближении из табл. ХУ-З-1 книги [21] по вели-
чине г/зт:
__ КБР “ (хД-дОЬ/Ь кр)КР(Т) + ‚акр (6 е)кр (хи д 6/0 кр)кр(т)
(‚силой…-‚‚ — хкр + к…, и + % (би,… Ь,… (6.2.8)
где хм,—расстояние от носка летательного аппарата до передней точ-
ки корневой хорды консоли крыла; (хд_…/Ьнр)кр‹т)—относительная ко-
ордината центра давления крыла в присутствии корпуса при
наличии угла атаки ос (определяется по табл. Х\7-1-1 книги [21]);
(хд_да/Ьнр)нр(т)—то же, но при наличии угла (бе)кр отклонения крыла (оп-
ределяется по табл. Х\/-31 книги [21] или с помощью равенства
(хи дб) КИТ): (хц дб) Кр)
Величина (хд_дд)ощт) определяется из выражения, аналогичного
(6.2.8). Для определения (хд_да)т(кр) служит формула
х /Ь Ь . (6.2.9)
(хц.дос)т(кр)= КРТ +(х х-цдос кр)'г(кр) кр
20°'` 299
При расчете положения центра даления на корпусе с учетом влия-
ния крыла (оперения) принимается, что центр давления нечувствите—
лен к тому, развивается ли подъемная сила от угла атаки или от угла
поворота крыла (оперения), т. е. (хд_Ш)т(кр)=(хд_дд )т(кр)‚ а
__ КТ а' (хЦодОЬ /Ькр')Т(КР) + ‚ет (бе)кр (хц.дб/Ькр)т(кр)
(хц.д)т‹кр› —— кр кт ‹» + в «*$.»кр . (6.2.10)
Значение (хц_д)т(оп)‚ вхолящее в (6.2.2), определяется аналогично
(6.2.10).
О работе органов управления судят по величинам продольной, путе-
вой и поперечной эффективностей.
Пр0дольн ая эффективность определяется значением произ-
водной дтя/дбе при симметричном отклонении горизонтальных консолей.
Обычно дтд/дбе<0 для хвостового оперения и дтг/дбе>0 для органа
управления, расположенного впереди центра массы (схема «утка»).
Если т2 определен относительно центра массы летательного аппарата,
то
дт Ькр хц.дб х .т х ц.дос
—2 =—— Ё _— + ц— + — +
: № ).. Ш...] … >…
+ Ш ос 6.2.11
(дкр )кр]} (СА/)и), ( )
где 1—характерная длина (например, длина корпуса или размах
крыла).
В случае, когда перед органом управления расположен какой—либо
несущий элемент (крыло, дестабилизатор или др.), необходимо учесть
влияние на величину т2 интерференции с этим элементом.
Путевая эффективность определяется значением производ-
ной дту/дбт при симметричном отклонении вертикальных консолей.
Расчет величины (Эту/дб? аналогичен расчету пр0дольной эффективно-
сти, но производится в плоскости скольжения.
Поперечная эффективность определяется значением про-
изводной дтх/дба при дифференциальном отклонении горизонтальных
органов управления (возможно такое отклонение вертикальных или
даже наклонных органов управления в Х-образной схеме). На основа-
нии зависимостей, полученных из теории тонкого тела и уточненных по
линеаризованной теории,
дт 1
" -___ ?» 4_ _ _ _
аб.. 0,167 кр(1 , 3,71 ’дщв (6212)
при оа’жнр<4 или
№ =— 0,167жкра + 3,71г,) 8
—— (6.2.13)
дбд лос’Жкр
при ос’жкр>4‚ где Е(Ё) —полный эллиптический интеграл второго ро—
да с модулем &= [1—(О,25 ос’мр)2]°›5.
Желательно избегать расположения органов управления по крену
впереди несущих элементов, так как из-за интерференции на последних
возникает обратный по знаку момент крена и управление будет неэф-
фективным.
Определить параметры продольной статической устойчивости моде-
ли летательного аппарата и продольную эффективность ее оперения
можно с помощью весовых испытаний при различных углах атаки при
фиксированных значениях углов отклонения рулей высоты, например с
помощью двухкомпонентной тензодержавки, позволяющей находить
тг, сц_д‚ а следовательно, т? и т;”: Параметры статической устойчиво—
ЗОО
сти пути и путевая эффективность могут определяться аналогичным
образом, но на модели, повернутой вокруг своеи продольнои оси на
угол 90°. ..
Для экспериментального определения параметров поперечнои ста-
тической устойчивости и поперечной эффективности необходимо произ—
водить замер момента крена с помощью специального чувствительного
тензодатчика, помещаемого на державке и фиксирующего деформации,
связанные со стремлением модели повернуться вокруг своей продоль—
нои оси.
Порядок проведения работы
1. Ознакомиться с устройством экспериментальной установки и про-
верить готовность ее к работе.
2. Провести тарировку тензовесов.
3. Установить тензодержавку с крылатой и оперенной моделью ле-
тательного аппарата в рабочей части трубы под углом атаки ос=0 и
при угле установки оперения боп=0.
4. Включить тензостанцию и другую измерительную аппаратуру.
Произвести балансировку мостов тензостанции.
5. Соединить образцовые манометры и вакуумметр со штуцерами
соответственно насадка полного напора, установленного в форкамере,
и приемника статического давления в рабочей части трубы.
6. Замерить лабораторным манометром атмосферное давление.
7. Включить трубу и после выхода ее на режим установившегося об-
текания снять показания гальванометров или записать их на осцилло—
грамме, включив предварительно (одновременно с пуском трубы) про-
тяжку ленты осциллографа. В то же время зафиксировать показания
датчиков температуры То и давления ро в форкамере и замерить дав-
ление в рабочей части трубы Рос. Показания датчиков, измеряющих
То, ро и р…, желательно преобразовать в электрические величины и за-
писывать на той же осциллограмме, что и показания Каналов тензо-
станции.
8. Изменить угол атаки и провести замеры, указанные в п. 7.
9. То же самое выполнить для углов атаки, предусмотренных про-
граммой исследования.
10. Прекратить работу трубы и выключить измерительную аппара—
ТУРУ-
11. Снять тензодержавку с моделью. Установить оперение на требу-
емый угол боц и повторить эксперимент (см. п.п. 2—2—4, 6—2—10).
12. По резУльтатам измерения Ре, То, роо определить параметры
сверхзвукового потока в рабочей части аэродинамической трубы.
13. Расшифровать показания гальванометров (или осциллограммы)
и с помощью тарировочных коэффициентов подсчитать значения коэф-
фициентов нормальной силы см и продольного момента т2 при всех уг-
лах атаки, а также углах установки оперения.
14. Построить график зависимости т„(ос) при различных значениях
боп=беи найти соответствующие значения производной т?.
15. Построить график зависимости т„(бе) при различных значениях
угла атаки и определить продольную эффективность ата/дб,.
Пример. Рассмотрим результаты эксперимента, проведенного с крылатой и оперен-
ной моделью летательного аппарата (см. рис. 6.1.5) на сверхзвуковой аэродинамической
трубе. Площадь в плане этой модели $м=22-10—з м2. Углы атаки, при которых велись
продувки, не превышали 10°. Соответствующее «загромождение» рабочей части трубы
моделью определялось отношением
— ЗМ зіп ос…ж 22-1О--з зіп 10°
8 = = = 0.0238,
ЗТ 0,16 `
301
что вполне допустимо для сверхзвуковых труб с закрытой рабочей частью. Угол уста-
новки крыла модели относительно продольной оси был равен нулю (бе)нр=0‚ а_ угол
установки оперения принимал три значения: (бе)оп=0; 10; 15°. Углы атаки, на кото-
рых велись испытания, были равны о,=6 и 8°.
Модель монтировалась вместе с двухкомпонентными тензовесами в рабочей части
аэродинамической трубы. В измерительную аппаратуру входили универсальная тен-
зостанция типа 8АНЧ—7М и шлейфовый осцилло-
5 ‚.0 ‚д граф Н-700.
(д Тарирование тензовесов осуществлялось после
8
Ж ОС :60
\
|
8,006 их установки вместе с моделью в рабочей части
трубы. Тарировочные коэффициенты оказались
равными соответственно по каналам измерения
нормальной силы ігм=10—1 кГ/мв, продольного
момента ём=10°°2 кГ-м/мв.
Давления в форкамере и в рабочей части тру-
Ж ос : до бы замерялись с помощью датчиков типа ЭДД-3,
\Ч\ показания которых записывались на фотобумаж-
“’‚Ч \ ной ленте осциллографа Н-700: ро=2,65 1470112;
рю=0,115 кГ/см2. Температура в форкамере реги—
тг гида” стрировалась также на осциллографе (Т0=269 К).
' Датчиком служила термопара.
Данные расчета параметров потока в рабочей
РИС- 62-1- зависимость коэффи- части трубы следующие: Моо=2,71; Тоо=117 К:
циента момента тангажа лета- р…=0,0343 кГ-‘сек2/м4; аш=218 м/сек; уф =
тельного аппарата ОТ угла ПО- =590 м/сек; 4°°=0‚596_104 кГ/м2.
ворота горизонтального опере- Расчеты аэродинамических коэффициентов
НИЯ модели по данным эксперимента приведены в
табл. А, где т, вычислено относительно центра
вращения модели (центра массы) с координа-
той хвр.
По данным табл. А построен график зависимости коэффициента момента тангажа
от углов атаки и поворота оперения (рис. 6.2.1). Из графика видно, что зависимость
коэффициента момента тангажа модели летательного аппарата (тп-.крюп) от угла от-
ПЛ ’
/
Т а б л и п а А
х _ ›:
гЁод гЁЭд “М “№ М, кГ-м ”! к!“ хЦ-д' и } САТ тг : с” вр ::к ц д
0 278 109 —2,78 10,9 0,255 1,45 —0,156
6 10 332 123 —3,32 12,3 0,270 1,65 —0,237
15 352 127 ——3,52 12,7 0,277 1,69 —0,270
0 363 145 —3,63 14,5 0,250 1,93 —0,183
8 10 427 159 —4,27 15,9 0,267 2,12 —0,286
15 447 162 —4‚47 16,2 0,274 2,16 —0,329
клонения оперения (бе)ои близка и линейной. Значения продольной эффективности для
углов атаки а=6 и 8° соответственно будут равны по абсолютной величине:
дт2 … Ат, _[—0,270—(—0,156)]
дб„ “‘ Ад„ '“ 15/57‚з = '- 0’435;
ЁЁ; % ЁЁ: : [—0,329575-;‚—30‚183)] : _ 0,558_
Значение т? соответственно равно:
_ %%- -_-_ 0,026 (при 6 = с); — О—ЁЁ =— 0.039 (при 6 = 10°):
__ $?) =— 0,045 (при 6 = 15°).
В задаче Х1.30 по формулам, приведенным в этой работе, показан расчет соот—
ветствующих аэродинамических характеристик, с которыми хорошо совпадают получен-
ные экспериментальные результаты.
302
Работабдд
Исследование динамической устойчивости
летательных аппаратов
Ц е л ь р а б о т ы —— определить коэффициент аэр0динамического
демпфирующего момента модели летательного аппарата при сверхзву-
ковой скорости.
Общие сведения
Характеристики статической устойчивости не могут полностью оце—
нить летных качеств движущегося тела. Они не позволяют, в частности,
ответить на вопросы, какова будет амплитуда колебаний угла атаки при
тех или иных начальных возмущениях и каким образом произойдет ее
изменение по времени.
На эти и другие вопросы отвечает т е о р и я ди н а м и ч е с ко й
ус т о й ч и в о с т и, которая опирается на результаты аэродинамических
исследований при неустановившемся обтекании. При этом на тело в от—
-\/… скуд/Их,
/
_і `
№ Ц т ЦМ, / і
. ‚у, 80”
;. осо” ц.:іал , _
щШг
$ц.д.кр_ шцд. ОП __
"`
Рис. 6.2.2. Схема к определению демпфирующего момента
личие от испытаний в статических условиях будут действовать дополни—
тельные аэродинамические нагрузки, эффект которых зависит от вре-
мени.
Одной из таких нагрузок является д е М п ф и р у ю щ и й м о м е н т,
возникающий в тех случаях, когда на траектории тело совершает вра-
щательное движение относительно центра массы. Этот момент по своей
природе является тормозящим, так как всегда направлен в сторону, 06-
ратную вращению.
Рассмотрим движение летательного аппарата в продольной плоско-
сти без крена и скольжения с постоянной скоростью 0= ——Уоо=сопзі
и сугловой скоростью вращения в этой плоскости 92=сопзі (рис. 6.2.2).
Для нахождения характеристик демпфирования, обусловленного уг-
ловой скоростью 92, примем, что движение осуществляется с постоян-
ным углом атаки а=соп5і (а=0)‚ например по круговой траектории.
Вследствие вращения аппарата оперение будет находиться под дополни—
тельным углом атаки Аа=91хц_д_оп/У… (где хц,д_оп— расстояние от цент-
ра массы аппарата до центра давления оперения). Изменение угла ата—
ки вызовет приращение нормальной силы оперения, коэффициент ко-
торои
_ дс” Ч 9хц.д.оп
“№“ “( аа )… 4… Т— (62-14)
303
где произВОДная (асы/0100011 определяется по параметрам потока перед
оперением; ‹; — скоростной напор этого потока.
В соответствии с (6.2.14) вращательные производные для коэффи-
циентов нормальной силы и продольного момента будут соответственно
равны: _
(сна…: 2(д°`№) 6„„№; (6.2.15)
СС оп
(171252)… = — 2 ( д.;, )„6 (—,—) (6.2.16)
где 60п=а/ао°— коэффициент торможения потока у оперения; ш2=
=921/(2Уоо) — безразмерная угловая скорость вращения; 1—характер-
ный размер аппарата; вращательная производная т:,”г называется ко-
эффициентом демпфирующего момента оперения.
Аналогично определяются коэффициенты демпфируюших моментов
крыла и корпуса:
(тЁЗ)кр : — 2 (%?—)и!) (х—Ц'Ё'КРГ; (6.2.17)
(т;-"г)т : _- 2 ( д;: МЭГ—.У (6.2.18)
Формулы (6.2.17) и (6.2.18) используются для условий, при которых
соответствующие коэффициенты торможения потока равны единице.
Коэффициент демпфирующего момента всего летательного аппарата
тЁг : (тЁг)0п—!— (тЁг)Кр—{— (тЁг)т, (6.2.19)
а момент демпфирования _ _ _ _
Мгд : М?;сог : ”1320... Змид 1032. (6.2.20)
Демп-фирование вызывается также изменением по времени угла ата—
ки, характеризующимся производной 06. Для определения момента этого
демпфирования предположим, что движение аппарата не сопровождает-
ся вращением (9‚=О), но имеет место изменение угла атаки, так что
о$0 (см. треугольник скоростей на рис. 6.2.2, полученный при горизон-
тальном полете с постоянной скоростью —У°°). Если при этом Аакр_
изменение угла атаки крыла, то вследствие скоса потока за ним угол
атаки изменяется на величину Ааоп=—(д6/да)опАакр. Исследования
показывают, что изменение скоса у оперения происходит с некоторым
запаздыванием относительно изменения угла скоса у крыла. Это запаз-
дывание определяется временем, затрачиваемым следом потока на про-
хождение расстояния от крыла до оперения и равным !=(хц_д_кр—|—
+хц_д_0ц)/У°о=хд/\{°о. Подставляя это время в выражение Аакр=—аі,
получим Аанр=—ахц/Уоо и тогда
Асс… = (сохи/У…) (дети)…. (6.2.21)
Изменение угла атаки оперения на величину Аооп приводит к возникно-
вению добавочной нормальной силы, коэффициент которой
дс” Ч бы да
А = — ._Ц _ . .
( см).… ( до, )оп % У.. ( до, ). (6 2 22)
Зная величину (Асы)…т, можно найти производные устойчивости:
; /д д
(0%)011 : 2 (%)ОПЁОП (ЁЁ—)(… %“ ‚ (6.2.23)
& дс” ( д8_ (_хЦ—`2
(тг )ОП : —2 (‚Ж)ОПЁОП ‘ да )ОП [ ) › (6.2.24)
\
304
для которых принято о=а!/(2У…).
Характеристики демпфирования рыскания определяются аналогично-‚
но в плоскости угла скольжения Б.
Суммарный момент демпфирования, обусловленный угловой ско-
ростью 97, и производной ос, _
м„ = [т?—СБ,. + ті} &] а... з…… 1; (6.2.25)
величина Мяд учитывает не только значения параметров движения ле-
тательного аппарата в д а н н ы й' м о м е н т в р е м е н и, но и преды-
сторию этого движения, которая проявляется в запаздывании скоса по-
тока. Приближенный расчет Мяд ведется по формулам (6.2.16)—:— (6.2.19),
(6.2.24), причем аэродинамические характеристики (дем/дос), хдд, [гоп,
(де/дос)…1 для корпуса, крыла и оперения, входящие в эти формулы,
должны находиться с учетом интерференции.
Для гиперзвуковых скоростей характеристики демпфирования мож-
но определять с помощью ньютоновской теории. Например, для конуса
имеется следующая формула ([49], 1968, № 1):
"' 2
т? =—і 19“? [ЗК [1 —і— 182 ВК ——8— (ХМ ) —}—— 2соз2 [%( х…… ) ], (6.2.26)
4 3 ::к х"
в которой [ЗК— половина угла конуса при вершине; мдм—расстояние от
этой вершины до центра массы; хн —— высота конуса.
Один из способов экспериментального определения демпфирующего
момента связан с исследованием поведения модели летательного аппа-
рата в аэродинамической трубе на установке свободных колебаний, на-
пример на динамической установке с упругим шарниром (см.
рис. 2.4.11). Модель закреплена на этой установке так, что может совер-
шать свободные колебания вокруг оси г. Уравнение таких колебаний
(2.4.3) имеет следующее решение:
(‚с = а, е_“ зіп (ті + ф), (6.2.27)
где ово—начальное значение угла атаки; ф—начальная фаза колеба-
ний; т=2л/Т—угловая частота; Т—перИОД колебаний.
Параметр п в (6.2.27) определяется по выражению
(Ъ .:
‚и г +м°°
„ : _г___г ._1 (62,28)
4012 УФО
и называется к 0 Э ф ф и ц и е н т о м 3 а т у х а н и я. Этот коэффициент
можно определить по формуле
п = — [18 (осі+Т‚’осі)]/(О,4З4Т), (6.2.29)
где индусы—отношение амплитуд колебаний (углов атаки), замерен-
ных через один период колебаний Т (рис. 6.2.3). Обычно для наХОЖДе-
ния величины этого отношения строят график осі+т=]°(осі) (рис. 6.2.4)
по ряду колебаний модели, записанных на осциллограмме. Этот график
аппроксимируется прямой, так что осі+Т/ос‚;=’[96 (где 6 —угол наклона
этой прямой).
Ввиду того, что в условиях эксперимента в аэродинамической трубе
производная тЁг фт? , окончательный ВИД расчетной зависимости для
производных коэффициентов демпфирования будет следующий:
тЁг + т? = 41,18 (1% б),/(0,4з4—Тр... У... 312). (6.2.30)-
Входящий в формулу (6.2.30) перИОД колебаний Т находится по числу
меток времени, приходящихся на одно колебание. А для определения
момента инерции модели 12 записывают ее свободные колебания при
305
отсутствии потока воздуха в аэродинамической трубе. Делается это
дважды, причем ОДИН раз на модель крепится дополнительный груз
с известным моментом инерции Аіг. Тогда, найдя периоды свободных
колебаний модели без груза Т, и с грузом В, можно подсчитать величи-
ну момента инерции модели:
.]: : Атт/(ТЗ —Т`%Т›. (6.2.31)
0.00! се,
'*‘РГЬ
“(, + ,! ММ
" | 30
"
Осьд
‹'1 \ / \} \ф/С :о
1 `,! №“ 5 “43,50
: а '
` Т 0,0108Л 10 20 “с. ММ
Рис. 6.2.3. Осциллограмма с записью ко- Рис. 6.2.4. График для опре-
пебаний модели во время эксперимента деления коэффициента зату-
хания колебаний
Порядок проведения работы
1. Ознакомиться с экспериментальной установкой и проверить го—
товность к работе всех ее элементов.
_2. Закрепить динамическую установку с упругим шарниром
(см. рис. 2.4.11) и модель в рабочей части трубы под заданным углом
атаки.
3. Соединить образцовые манометр и вакуумметр соответственно со
штуцерами насадка полного напора, установленного в форкамере,
и приемника статического давления в рабочей части трубы.
4. Включить питание приборов и осуществить их подстройку на соот-
ветствующий режим работы (необходимая скорость протяжки ленты
для записи колебаний; частота меток времени; коэффициент усиления
канала датчика угла атаки модели).
5. Включить протяжку ленты осциллографа и записать свободные
колебания установки с моделью.
6. Добавить груз с известным значением момента инерции АЬ, вновь
записать св060дные колебания всей системы, а затем снять дополни-
тельНый груз.
7. Замерить лабораторным барометром атмосферное давление.
8. Включить трубу и лентопротяжное устройство осциллографа и за-
писать колебания модели в потоке воздуха. Одновременно зафиксиро-
вать показания датчика температуры То и давления ро в форкамере,
а также измерить статическое давление в рабочей части р….
9. По результатам замера То, ро и р… определить параметры сверх-
звукового потока в рабочей части аэроцинамической трубы.
10. Расшифровать запись на ленте осциллографа и построить график
зависимости аі+т=і (щ) .
11. Подсчитать значения коэффициента затухания п и величину т?.
Пример. Рассмотрим результаты лабораторной работы по определению коэффици-
ента момента демпфирования конуса- со следующими характеристиками: диаметр ос—
зования В=0‚08 м; угол конусностн Вк=15°; безразмерная координата центра массы
хцм = хдд/хи = 0,63-
306
Испытания проводились в сверхзвуковой аэродинамической трубе при скорости
потока, соответствующей числу Маха М…=4. Вычисленные по измеренным давлениям
ро, роо и температуре То плотность и скорость потока в рабочей части трубы были рав-
ны соответственно р…=0,553 кг/м3 и Усо=645 м/сек.
На рис. 6.2.3 приведена часть осциллограммы колебаний конуса на упругом шарни-
ре, метки времени на которой наносились через 0,001 сек. В соответствии с этой осцил—
лограммой период колебаний Т=0,01 сек, а следовательно, частота 1/Т=1/0,01 = 100 гц.
График зависимости щ+т=і(осі)‚ построенный по замерам последовательных ам-
плитуд угла атаки на осциллограмме, приведен на рис. 6.2.4. Значение угла б на нем
равно 43,5°. Периоды свободных колебаний модели с грузом и без него соответственно
оказались равными Т2=0,0136 сек и Т1=0,01 сек. Момент инерции груза на модели
А],=0,00065 ‚се-м?. Поэтому согласно (6.2.31) момент инерции этой модели
12 = 0,00065-0,012/(0,01362 —— 0,012) = 7,65-10—4 кг.м2.
За характерную площадь была принята площадь миделевого сечения
$ = Змид = лБ2/4 = п0,082/4 = 5,03-10—з м2,
а за характерный размер — высота конуса
д = х„ = (в ста ВК)/2 = (0,08 сі815°)/2 = 0,149 м.
В соответствии с этими данными по (6.2.30) была найдена вращательная производная
4.7‚65- 10—4 18 (158 43,5°)
52 Ё = =— 0 45 .
тг +т2 0,434-0,01—0,553-645-5‚03-10—3-0, 1492 ’
Коэффициент затухания согласно (6.2.29)
71 = ——18(’с3 43‚5°)/(0,01-0,434) = 32,4 .
Расчет по зависимости (6.2.26) для конуса показал, что
' —' 1 1 8
ФЗ а, =__ __ _ __ 1 102150 __ 0 63 2 со5215°—0‚6З2]=— 0,484-
т2 —}—т: 4 ($2150) [ + Ь Э ‚ +
Совпадение результатов расчета и опыта можно считать удовлетворительным.
& 6.3. ОПРЕДЕЛЕНИЕ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
ОРГАНОВ УПРАВЛЕНИЯ
Работа 6.3.1
Аэродинамические исследования руля в виде
поворотной консоли
Цель р аботы—путем дренажных испытаний в малоскоростной
аэродинамической трубе найти характеристики рулевой консоли в зави-
симости от угла ее поворота и ширины щели между консолью и корпу—
сом летательного аппарата.
Общие сведения
Поворотная консоль широко применяется в различных конструкциях
летательных аппаратов в качестве аэродинамического органа управле-
ния (поворотное крыло или оперение), а также газового руля, разме—
щаемого в выходном сечении сопла ракетной двигательной установки.
Аэродинамические характеристики поворотной консоли позволяют
найти значения управляющих усилий и величину силы, на которую воз-
растает лобовое сопротивление (или соответветственно уменьшается
тяга двигателя в случае газового руля). Кроме того, эти характеристики
используются при определении сил, создаваемых неподвижными консо-
лями крыла или оперения.
На аэродинамические свойства поворотной консоли существенное
влияние оказывает интерференция ее с той частью поверхности корпу—
са, к которой она примыкает. При этом взаимодействие консоли и кор-
пуса носит более сложный характер в случае, когда между ними обра-
зуется щель. Поэтому экспериментальными исследованиями преду—
сматривается определение аэродинамических характеристик консоли,
307
расположенной на корпусе, в зависимости от угла ее поворота бр, а так—
же при различных значениях ширины щели ЛЩ (рис. 6.3.1).
В лабораторной практике широкое распространение получил метод
определения таких характеристик, основанный на дренажных испыта-
ниях модели руля, в результате которых находится распределение дав-
Рис. 6.3.1. Схема установки для исследования работы руля
в виде поворотной консоли:
1 — аэродинамическая труба; 2 — поворотная консоль; 3 — дренаж-
ные отверстия; 4—ось вращения консоли; 5— модель корпуса;
б—сектор для установки углов атаки (поворота консоли); 7—упру-
гий элемент с тензодатчиками; 8— Н-образный манометр; 9—галь-
ваномер; 10 — тензостанция
ления по обтекаемой поверхности рулевой консоли. Затем по этому рас—
пределению давления могут быть вычислены аэродинамические коэф—
фициенты консоли в связанных координатах (рис. 6.3.2):
1
_ 2пк — - -_
вкр _ 1—1к—і-1 { (12 фрау, (6.3.1)
0
2 1
_ пк ‘ " _ '_
см, _1—]к+10`8с12 фреш, (6.3.2)
1
_3 2 _ _ _?
тгр : _О_Ё<__ 42 @ рсіх“, (6.3.3)
"ЪЁ +“,; +1
0
п,. = дид/ькр; %: тк; } : х/ькр; @ = у/ькр.
При расчете коэффициентов сопротивления и подъемной силы ( в по—
точных координатах) целесообразно такой расчет осуществить с учетом
дополнительной продольной силы, обусловленной трением (ст):
308
Г де
с = (СКр + ст) созос + см, зіпсс; (6.3.4)
0
Х
_ _|_ ` '
у „рсозоа ‚(вкр , ск,)зтос. (6.3.5)
Здесь величина сд;- рассчитывается в зависимости от характера погра-
ничното слоя (ламинарного или турбулентног0) соответственно по фор-
мулам (4.1.28), (4.1.29) или (4.1.30); аэродинамические коэффициенты
С
___,.
Ькцв 90
„"
;
ЗМ„
8 , Бк=№
Ч
Рис. 6.3.2. Поворотная консоль
сил отнесены к площади консоли ЗК, а момента—к произведению
Бк ЬСАХФ (где дсахь — средняя аэродинамическая хорда консоли).
Схема дренажных испытаний консоли крыла или оперения представ—
лена на рис. 6.3.1. Модель такой консоли 2 с дренажными отверстиями 3
размещается в потоке воздуха рабочей части аэр0динамической тру—
бы 1 под некоторым углом атаки а, равным углу поворота консоли бр.
Для воспроизведения реальных условий обтекания модели она крепится
на цилиндрическом корпусе, длина которого может меняться с целью
подбора различных параметров пограничного слоя перед моделью. При
этом предоставляется возможность изменения ширины щели иш между
корпусом и консолью, а также угла ее установки бр. При изготовлении
модели консоли необхоцимо предусмотреть такое количество дренаж-
ных отверстий, которое позволило бы получить достоверное представле-
ние 0_ поле давлений и осуществить по нему расчет действующих аэро—
динамических сил. Однако следует учитывать, что из-за малой толщины
модели, ограничивающей число размещаемых в ней медных дренажных
трубок, может оказаться недостаточным количество дренажных отвер—
стий на одной стороне консоли. В этих случаях при-использовании кон-
соли с симметричным профилем для более точного замера распределения
давления дренажные отверстия располагают только с одной сторо-
ны консоли. А для того чтобы найти распределение давления на проти-
воположной стороне, угол поворота бр меняют на обратный и повторяют
измерения.
Рассчитать аэродинамические характеристики поворотной консоли
можно по следующей приближенной методике. Рассматривая консоль
как крыло малого удлинения, а воздух, обтекающий ее в рабочей части
малоскоростной аэродинамической трубы,— как несжимаемую ЖИД-
кость, для определения статической произвоцной коэффициента нор-
мальной силы изолированной консоли используем зависимость с? =
=(05’°`‚)И_1к от сужения, удлинения крыла и угла стреловидности его пе-
редней кромки, приведенную на рис. 12.12 в книге [5].
309
С учетом интерференции консоли с корпусом, влияния щели, а так-
же расположения оси поворота консоли относительно продольной оси
корпуса коэффициент нормальной силы консоли
0 іг пщ соз Х„ (оз/57,3), (6.3.6)
№ : (%);… кр
где Ёкр — коэффициент интерференции поворотной консоли; пщ — коэф-
фициент, учитывающий влияние щели (для малых скоростей в среднем
пщ=0‚80); хр—угол стреловидности оси вращения консоли.
Коэффициент профильного сопротивления консоли
в…„ = с… (0,93 + изд) (1 + 5 Дмё), (6.3.7)
где А — относительная толщина профиля консоли.
Коэффициент индуктивного сопротивления
2 и
сх,— : су (1 + б)/(л7…кр), (0.3.8)
где жкр=4!3/$нр—удлинение крыла, составленного из двух консолей;
б— поправочный коэффициент, учитывающий форму крыла в плане.
Таким образом, коэффициент продольной силы консоли
с],, : схпр + ст.. (6.3.9)
Порядок проведения работы
1. Ознакомиться с экспериментальной установкой, необходимой изме-
рительной аппаратурой и проверить их готовность к работе.
2. Закрепить модель консоли оперения в рабочей части трубы под
заданным углом атаки, установить необходимую ширину щели между
консолью и корпусом, а также проверить герметичность соединения ре—
зиновыми шлангами дренажных трубок и манометров.
3. Записать показания барометра рати, термометра Татм и психро—
метра.
4. Включить трубу и после вых0да ее на режим установившегося
обтекания ввести в поток трубку Пито, а затем снять показания с от—
счетных колен связанного с ней манометра.
5. Зафиксировать положение уровней жидкости в отсчетных коле—
нах манометров для кажлой дренажной точки (для этой цели панель
манометра может быть сфотографирбвана).
6. Определить параметры потока в рабочей части трубы.
7. Найти коэффициенты давления для каждой дренажной точки, ис—
пользуя для замера перепада уровней жидкости в манометрах прибор
«Микрофот» и построить кривые распределения этого коэффициента по
обтекаемой поверхности.
8. Определить графическим интегрированием коэффициенты ст„
СЫр И тдр.
9. Вычислить коэффициенты лобового сопротивления и подъемной
силы с учетом трения.
10. Провести аналогичные испытания консоли при различных углах
атаки, ширине щели и осуществить необходимые расчеты аэродинами—
ческих коэффициентов.
° Пример. Рассмотрим результаты исследования модели поворотной консоли, имею-
щеи симметричный притупленный ромбовидный профиль и трапециевидную форму
в плане, в аэродинамической трубе малых скоростей. ' '
Внешний вид этой модели, установленной на цилиндрическом корпусе в_ открытой
рабочеи части трубы, приведен на рис. 6.3.3, а основные размеры и расположение дре-
нажных отверстий показаны на рис. 6.3.2. Площадь консоли 8к=208 см?, а средняя
геометрическая хорда Ь=$н/1н=208/15‚5=13,4 см.
Ввиду симметричности профиля консоли дренажныехотверстия размещены лишь
с одной стороны поверхности. Цилиндрический корпус устанавливался в рабочей ча—
сти так, чтобы его поверхность омывалась невозмущенным потоком, но вызывала. мини-
310
мальное «загромождение» потока. Наибольшая величина этого «загромождения» оп—
ределялась в соответствии с рис. 6.3.4 при максимальном угле поворота консоли бр=9°:
8 ’
„ =3к0р+5к=117+зз =о‚овз.
вт $., 2400
При этом величина $к=33 см2 определялась как площадь проекции консоли при бр=9°
на плоскость поперечного сечения рабочей части трубы. Найденная величин.-і <:загро—›
мождения» является допустимой при проведении подобных экспериментов.
Рис. 6.3.3. Общий вид установки для испытания поворотной
консоли:
1—рабочая часть трубы; 2—корпус; 3—модель консоли; 4—уст-
ройство для крепления установки в рабочей части
Исходными данными для определения параметров потока в рабочей части трубы
были: Тоо=291 К; рю=764 мм рт. ст.; К=287 дж/кг-град; Ё=ср/с„=1,4;у’=
=0‚805 кГ/дмз; ёт=1,02; Ё.; =0‚998; зіп Б’=О‚246; х=0‚7; АЬ’=275 мм; рад:
=7‚1 мм рт. ст.; Т=288 К.
р
0,8
0,6
[№
0,2
0
-0,2
Рис. 6.3.4. Поперечное се— “дд
чение рабочей части аэро- _д 6
динамической трубы: ’
1—п°в°р°тная консоль; Рис. 6.3.5. График функции Б=Р;(Ё)
2—стенка модели корпуса;
3—ось вращения консоли
В результате расчета найдены значения: р…=0‚124 кГ-сек2/м4; „=1‚83- ЕС)—5 кГХ
Хсек/м2; ую= 1,45-10—5 м2/сек; аю=220 кГ/м2; Усо=60 м/сек; Ке…=5‚54-Ш’5; аф—
=З40 м/сек; Моо=0‚176.
По найденной величине скоростного напора и измеренным батарейным манометром
давлениям в дренажных отверстиях были рассчитаны коэффициенты давления р. В ча—
стности, для сечения консоли АВ (см. рис. 6.3.2; 2=сопз’с) эти коэффициенты при-
ведены в табл. А.
311
Таблица А
|
„Ъ„ 1 2 3 4 5 б 7 8 | 9 10 и 12
ЁЁ 0,03 0,05 |0,07 0,1 0,2 0,3 0,4 0,5 |0,6 |0,7 0,8 0,9
3—62 0,0009 0,0025 0,0049 0,01 0,04 0,09 0,16 0,25 0,36 0,49 0,64 0,81
Нижняя плоскосте крыла
_; —0,001\—0,002|—0,004|—0‚006 —0,012 —о‚022 —о‚025 —0‚027і—о‚024 —0,021|—0,018|—0,005
[› 0,4 0,9 0,8 0,5 0,18 —о,05 —0,12 —0‚19 —0,17 —0,11 —0,06 0,1
Верхняя плоскость крыла
_ 1
у 0,001 0,002 0,004 0,006 0,012 0,022 0,025 0,027 0,024 0,021|0‚018 0,005
[6 0 _о,1 —0‚1з —0,20 —0‚35 ——0,40 _0,42 —0,40 —0‚з2 —0,25 —0,12 0,08
Соответствующие данным табл. А графики зависимостей Б.=і1(—:Ё)‚ Ъ:;ЪФ), Ё:
=ізбё2) помещены на рис. 6.3.5, 6.3.6 и 6.3.7, а кривые ДЛЯ функций ф1(г)= рсіх,
‹р2(—ё)= 4556117, .ф3(г_)= ф—рсіЁ, полученные графическим интегрированием с помощью
планиметра, изображены на рис. 6.3.8, 6.3.9, 6.3.10 (пунктиром показаны экстраполяци—
РИС- 6-3-6-_ Гра_фик Рис. 6.3.7. График функции ‚5:
функции р=і2(у) =Гз(х2)
35,55!—
0,05
0,04
0,02
\
'0,02
‘ 0
\ О.! С.? 0.5 д.ц 0.5 0.6 0.7 0,5 ? _.
Рис. 6.3.8. График_ функции фиг—)“: Рис. 6.3.9. График_функции ф2(5)=
:фр‘і" =<? Рау
312
онные кривые). На рис. 6.3.8, 6.3.9, 6.3.10 были определены площади под кривыми, а за—
тем были найдены в соответствии с формулами (6.3.1), (6.3.2) и (6.3.3) и задани-
ными размерами консоли аэродинамические коэффициенты: С№р=0,33; свр=0,0327
И тир—20,29.
Вычислим теперь коэффициент продоль- 55/3052
ной силы, обусловленной трением. Примем, 0,3
что критическое число Рейнольдса Кекр=
=105. Поскольку Ке…=5‚54-105>Кенр, то 0’2
на поверхности консоли будет турбулент- … ’
ный пограничный слой. Поэтому в соответ- ’
%ЁВЁ1С формулами (4.1.28) и (4.1.29) при 0 0.1 0,2 0,3 № 0,5 дд. ,“ 0.8 № Ё
5 ___- _
СКГ=2°О’О74„/5’54°105 : 0,012. Рис. 6.3.10. Г-рафик_функции ф3(2)=
=Ф раз??
С учетом этой величины определим аэро—
динамические коэффициенты в поточных
координатах [см. (6.3.4) и (6.3.5)]:
с„ = (0,0327 + 0,012) соз 9° + 0,33-5іп 90 = 0,096;
С„ = 0,33-со5 9° _ (0,032? + 0,012) зіп 9° = 0,32.
Рассчитаем теперь значения этих коэффициентов по приближенной методике Ъ’Д-тине-
ние крыла мр=413/$кр=4 15 52/416 2,30 а его сужение пк=Ькр/Ькд=180/9О=2.
По графику рис. 12.12 [5] этим значениям Жкр=2„3 пк=2, а также угта х=21°10’
соответствует коэффициент (ей, ) …,- = с? = 2,7.
Отношение радиуса корпуса к полуразмаху консоли г/$т=15,5/31=0,5. По этой-
величине из табл. ХУ-3-1 [21] коэффициент интерференции консоли іекр=0,94. Приняв
значение пщ=0,8 и учитывая, что хр=90°‚ получим из (6.3.6) для угла атаки ос=9°
с“ = 2,7.0,94-0,80-со5 90° (9°/57,3) = 0,32.
Относительная толщина профиля крыла
3 = А/Ь = 10/180 = 0,056.
Отсюда коэффициент профильного сопротивления консоли согласно (6.3.7)
сх „р = 0,012 (0,93 + 2,8-0,056)(1+ 5-0,056-0‚1764) = 0,0131 .
По (6.3.8) полсчитываем коэффициент индуктивного сопротивления
сх,- = 0,322 (1 + 0,08)/(3,14-1,15) = 0,0304,
где 1,15—значение Жир для одной консоли. Здесь поправочный коэффициент б= ——,008
соответствует случаю трапециевидных крыльев малого удлинения Согласно (6…39) ко-
эффициент продольной силы
сд: 0,0131+0‚0304 = 0,0435.
В соответствии с этими значениями
сх = сдсоз ос + с“ зіп ос = 0,0435-соз 9° + 0,32-5іп 9° = 0,093;
= смсоз ос — сдзіп ос = 0,32-со5 9° — 0,0435 -$іп 9° = 0,323.
Сравнение показывает, что расчетные и опытные данные хорошо согласуются меж-
ду собой.
Работаозд
Исследование рулевого устройства
в ВИДе интерцептора
Ц е л ь р а б о т ы — рассмотреть физическую картину обтекания ин—
терцептора сверхзвуковым потоком и путем дренажных испытаний оп—
ределить создаваемые им управляющие силы.
313
Общие сведения
Иптерцептор (рис. 6.3.11) представляет собой тонкую пластину !,
которая выдвигается в поток в направлении, перпендикулярном обте-
каемой поверхности летательного аппарата. При воздеиствии на эту
пластину сверхзвукового потока возникает следующая картина тече—
ния. Ввиду того что перед
такой пластиной поток
читы,) $5 затормаживается, а дав-
——› ление увеличивается.
3 дм ‘ происходит отрыв погра-
2 ‘ ' ; . дк "… Б ничного слоя от обтекае-
ЁЙ/А' мой поверхности, кото—
, ‘Ёдйщад рыи сопровождается по-
_" %, 7, м воротом этого потока и
4 7 появлением косого скач-
! ка уплотнения 2. При
Рис. 6.3.11. Схема обтекания интерцептора сверхзву— этом образуется зас—
КОВЫМ “шоком тойная зона повышен-
ного давления 3, а непос-
редственно перед верхней частью интерцептора возникает криволиней-
ный скачок уплотнения 4. За ним поток повернется в сторону, обратную
направлению омывающего течения, а при переходе через волны разре-
жения 5 произойдет увеличение скорости этого потока и восстановление
безотрывного характера обтекания поверхности. Поскольку это приве-
дет к новому повороту потока, то появится еще один (хвостовой) скачок
уплотнения 6. За интерцептором также образуется застойная зона 7, но
давление в ней будет пониженным, подобно тому как это происходит за
дном летательного аппарата в виде тела вращения.
В результате такого взаимоцействия интерцептора возникает нор—
мальная сила АМ, состоящая из двух составляющих АМ и АМ2, обу-
словленных соответственно избыточным давлением в зоне 3 и разреже-
нием в зоне 7 (см. рис. 6.3.11). Ввиду того что эти силы имеют различ-
ное направление, возникает момент. Продольное сопротивление А1?
также складывается из силы АК1 от воздействия повышенного давления
на переднюю плоскость и силы «донного» сопротивления АК2 от воз-
действия пониженного давления на заднюю плоскость интерцептора.
Опыты показывают, что [АМ 1| > |А№2| , поэтому суммарное управляющее
усилие А№=А№1 —А1\/2 будет направлено вниз. Его величину можно
существенно увеличить, если расположить интерцептор у задней кром-
ки крыла или у донного среза корпуса летательного аппарата.
Как правило, управление с помощью интерцептора осуществляется
путем приведения его в колебательный режим движения с постоянными
амплитудой и частотой. Величина управляющего усилия регулируется
перемещением центра колебания интерцептора. Чем ближе этот центр
к потоку, тем на большую высоту выдвигается интерцептор, тем боль-
шее время он находится в потоке и, следовательно, больше будет управ-
ляющее усилие.
Преимуществом интерцепторов перед другими аэроцинамическими
органами управления является их меньший вес, а недостатками ——зна-
чительное увеличение лобового сопротивления и ограниченность макси-
мальных значений управляющих сил. Этим и объясняется их примене-
ние на сравнительно маломаневренных и легких летательных аппа-
ратах.
Определить управляющие силы, создаваемые интерцептором, мож-
но путем испытаний модели в аэр0динамической трубе. В частности, мо-
дель, имитирующая часть несущей поверхности с интерцептором, может
314
быть выполнена в виде заостренной пластины (рис. 6.3.12). При этом
следует предусмотреть возможность выдвижения интерцептора на раз-
личную высоту. “
Как показывают исследования с помощью скоростнои киносъемки,
перестройка картины течения около интерцептора происходит за про—
межутки времени, не превышающие 2-10—4 сек. Поэтому испытания ко-
леблющихся интерцепторов можно
практически осуществлять в «стати-
ческом» режиме при различных вы- / и ”, „„ ‚
сотах выдвижения.
Модель должна иметь дренаж-
ные отверстия, расположенные
вдоль оси симметрии пластины (до
и за интерцептором), позволяющие \/\
измерить давление и наити соответ-
ствующую управляющую силу, а
также перед интерцептором в попе—
\\
\\
\
1
Я
\\Ъ
%
Рис. 6.3.12. Схема модели с интерцеп-
речном направлении, для того чтобы тором;
ПО характеру изменения давления ! —заостренная пластина; 2—выдвижной
судить о влиянии краевых эффектов интерцептор; З—боковые шайбы из про-
…. зрачного материала; 4—дренажные от—
на величину управляющеи силы. С верстия
целью исключения влияния краевых
эффектов на распределение давле-
ния по бокам интерцептора на пластине устанавливаются две заострен-
ные пластинки (боковые шайбы, см. рис. 6.3.12), имеющие про-
зрачные окна, которые позволяют фотографировать спектр потока. Та—
кое фотографирование проводится для исследования качественной кар—
тины обтекания интерцептора и осуществляется с помощью теневого
прибора. По фотографии можно определить форму и размеры застой—
ных зон, скачков уплотнения и воли разрежения. С этой целью удобно
использовать оптическое устройство, называемое к о м п а р а т о р о м,
которое помогает быстро и точно находить координаты характерных
точек.
Найденное из эксперимента распределение давления до и после ин-
терцептора позволяет вычислить соответствующие значения коэффици-
ентов нормальной и продольной сил. Такое вычисление аналогично рас-
чету аэродинамических коэффициентов профиля крыла. Вместе с тем
определение искомых аэродинамических коэффициентов можно осуще—
ствить, используя приближенные теоретические методы.
Рассмотрим один из таких методов. Вначале поцсчитывается число
Рейнольдса перед интерцептором Кех1=У1х1/у (где 1/1— скорость пото-
ка в точке отрыва; х1 _расстояние от передней кромки пластины до
этой точки перед интерцептором; у —коэффициент кинематической
вязкости). Затем определяется коэффициент критического
п е р е п а д а д а в л е н и я в точке отрыва 772=(р2—-р1)/41 (где рд, рд —
давления соответственно перед точкой отрыва и за нею; ад=ігр1МЁ /2 —
скоростной напор перед этой точкой). При этом используются следую—
щие эмпирические зависимости:
для ламинарного пограничного слоя
‚3, = 1,69/[ке2125 (м? — 1)°'25]; (6.3.10)
для турбулентного
р2 = 2,04/ [Не2'11(М%—1)0’25]- (6.3.11)
Одновременно находится отношение давлений для условий после
и до скачка, возникающего в точке отрыва:
Ра,/Й : 1 + 5241/101- (6-3—12)
315
По числу Маха перед точкой отрыва (м,) и отношению давлений
р2/р1‚ используя зависимости теории скачков уплотнения, можно опре-
делить угол Вс поворота потока за скачком (угол «жидкого клина»,
рис. 6.3.13).
Полагая, что граница
застойной зоны прямоли-
нейна и проходит через
вершину интерцептора,
подсчитывается коэффи-
циент нормальной силы
перед интерцептором:
сш : №1‚"((]1Ыи) : 52/1323 Бс’
(6.3.13)
Рис. 6.3.13. Схема к расчету интерцептора
где и и [и — соответственно высота и длина интерцептора.
По графику на рис. Х‘Л—1-4 [21] для известных значений числа м1
и высоты интерцептора находится коэффициент давления за ним рдон.
В соответствии с этим коэффициент продольной силы интерцептора
сд : те,/(ами) : 52 + №№ |. (6.3.14)
Для определения давления за интерцептором можно воспользовать-
ся также следующей методикой. Вначале подсчитывается угол косого
скачка перед интерцептором:
ес : агсзіп {[р./р1 _;— (Аг _ 1)/(іг + 1)]/[2!гМЁ/(іг + 1)]‚ (6.3.15)
а из формулы
__ із — 1 & _ Ё — 1 —1
18 (@ __рс) (ЬТ1 Щ + 1) (‚Ид—1 +— %) тд 9. (6.3.16)
определяется угол Вс. Затем нахоцится соответствующее число Маха
за косым скачком:
2 + (12 __ 1) м? [ мёсоз2 ес
Т .
изм? зіп2 ес _ (Ь— 1) 1+(/г —1)/(2/г)
м2 = (6.3.17)
При допущении, что сечение АВ (см. рис. 6.3.13) является критиче-
ским (число М=1), а направление течения в нем составляет с перво-
начальным направлением угол 60/2 определяется давление торможения
перед сечением АВ:
1 212 12
003=р2( % мё—Ш) ‚… м5—1(і) Н. (6.3.18)
Ь + 1 іг + 1 @ + 1
Если, далее, задаться некоторым давлением рдон‚ то методом после-
довательных приближений можно найти из выражения :п:(М4)=рдон/Роз
число м., а также число Маха Мр_л_т на разделяющей линии тока
по графику на рис. 6.3.14 для числа м.. Одновременно вычисляется
давление торможения на этой линии:
(р0)р.л.т : Рдон/[Л (Мр.л.т)]- (6…319)
Тогда по числу м4 из табл. 1\/—1-1 [21] получим значение функции
со(М4) и подсчитаем угол В4=ю(М4)—60/2. Затем из теории скачков
уплотнения, зная 64 и м., находим 605 и отношение давлений:
Рь іг_—1
_=—м5 …о
рд… Ь+145Г126°°-1г—+1 (632)
316
Соответствующее давление в зоне восстановления безотрывного
обтекания (см. рис. 6.3.14)
Рп : Ки (‚05 _" рдон) + РДС… (63-21)
где Кп— некоторый коэффициент, определяемый по графику рис. 6.3.15
в зависимости от числа Маха на верхней кромке интерцептора.
м Сравнивая полученное зна-
-Л
20” ’ чение рп с давлением (р0)р_д_т,
" 8 методом последовательных
' приближений отыскиваем
1,6
“а
!,Ц ? [
"2 \і
!
1 1 '
а_7_ ————— .
0,8 \
0'6 2 ? 0 ! \
\; Ц 5 6 "Ч 1 2 3 М“
Рис. 6.3.14. График зависимости чисел Ма- Рис. 6.3.15. График зависимости
ха на разделяющей линии тока в зоне сме- коэффициента Кц от числа
шения в изэнтропическом потоке Маха
окончательно такую величину рдон, при которой рп= (р0)р_л_т. После это-
го оказывается возможным определить длину зоны отрыва 13_02=/1с’с9 64
(см. рис. 6.3.13) и коэффициенты сил с№=рдон сте 64, сн2=рдон. В соот-
ветствии с этим полный коэффициент продольной силы
с,, = 5, + |Бд0н1. (6.3.22)
Порядок проведения работы
1. Ознакомиться с устройством экспериментальной установки и про—
верить готовность к работе всех ее элементов.
2. Закрепить пластину с интерцептором, выдвинутым на высоту и,
в рабочей части аэродинамической трубы так, чтобы верхняя поверх—
ность пластины была строго параллельна направлению потока.
3. Замерить лабораторным барометром атмосферное давление.
4. Записать начальные показания на печатающем устройстве ГРМ
по всем каналам измерения давления, включая статическое давле—
ние в рабочей части трубы Роо и давление в форкамере ро.
5. Осуществить запуск трубы и после выхода ее на режим устано-
вившегося движения воздуха в рабочей части включить печатающее
устройство ГРМ. Одновременно замерить температуру в форкамере
и сфотографировать спектр потока при помощи теневого прибора.
6. Расшифровать показания ГРМ и найти давления на поверхности
пластины, а также роо и ро.
7. Подсчитать параметры потока в рабочей части аэроцинамической
трубы.
8. Вычислить коэффициенты давления на поверхности пластины,
а затем определить аэродинамические коэффициенты с…, см, а так—
же Св.
9. Повторить измерения и соответствующие расчеты для различных
высот выдвижения интерцептора.
10. Обработать негатив фотопленки, отпечатать и расшифровать
фотографии спектра потока, обтекающего интерцептор, замерив протя-
женность застойных зон, углы «жидких клиньев», а также скачков уп-
лотнения (В… и 902).
317
11. Построить график зависимости коэффициентов с…, с№ и св от
высоты выдвижения интерцептора 11.
Пример. Рассмотрим экспериментальное исследование интерцептора длиной 1и=
=100 мм и высотой п=8 мм, расположенного на поверхности заостренной пластины
на расстоянии х1=140 мм от ее передней кромки, проведенное в сверхзвуковой аэро-
динамической трубе с открытой рабочей ча-
д стью при М…=1‚83.
} Расшифровка показаний лабораторного
ОД барометра, ГРМ, датчика температуры поз-
/"\_1 ‘ волила определить: атмосферное давление
0,3 ратм=104 ‚СГ/м?; давление в рабочей части
! р°о=104 кГ 1.442; давление и температуру
в форкамере ро=5‚89—104 кГ/м2, Т0=479 К.
Этим значениям и числу М…=1‚83 соот-
ветствуют плотность и температура в рабо-
!“ 0,2
0,1 чей части: р…=0,125 кГ-сек2/м4, Тоо=
] 2,5 5 7,5 т =25Ё К— _6 .,
- алее ы. оп е. елен ск ост ‚ —
4,5 _5 _2,5 аз/Ь пор т р ‚1 ор нои на
ё -о.г /
ё ] 6/00 = *Р… Мёд/2 =
—0.2 ‘ 4 2 4 2
= 1,4-10 -1‚83 /2=2,34‹10 кГ/м .
—0.5
По величине этого напора, а также да-
Рис. 6.3.16. График распределения ко-
эффициента давления при обтекании
интерце—птора
влению, найденному в результате расшиф-
ровки показаний ГРМ, вычислены и постро-
ены графики распределения коэффициента
давления по длине пластины (рис. 6.3.16).
Затем с помощью планиметра найдены пло—
щади под кривой функции Е(Ё) распределения коэффициента давления перед интер-
цептором $1=24‚9 см2 и за ним &= 16,0 см?. Учитывая масштабы р и х („5 =О,05 1/см
и р; =1,25 1/см), получаем значения коэффициентов нормальных сил:
сд,1 = 81 и; р,; = 24,9-0,05- 1,25 = 1,56;
с№ = 82 ”В и; = 16,0-0‚05-1,25 = 1,00.
Соответствующий коэффициент продольной силы
сд =}52 —|— |Бдон | = 0,36 + 0,31: 0,67.
Измерения на компараторе фотографии изображения потока, полученной при по-
мощи теневого прибора МАБ-451 (рис. 6.3.17), позволили найти: длины передней и зад-
Рис. 6.3.17. Фотография спектра обтекания интерцеп—
тора сверхзвуковым потоком (М…=1,83; 11:0,8 см)
318
ней застойных зон 13:01=36 и 13:02:23 мм, углы «жидких клиньев» Вс1=12 кВ.—‚2% 19°,
углы скачков 601=44 и 002%42°. _
На рис. 6.3.18 построен график зависимости нормальнои силы перед интерцептором
АМ от высоты его вылвижения И, полученный по экспериментальным данным в ана-
логичных условиях (Мао: 1,83).
Рассмотрим расчет интерцептора заданных размеров и сравним полученные дан—
ные с экспериментом. Сначала подсчитаем значения коэффициентов динамической и ки-
нематической вязкости воздуха в рабочей части трубы:
но, = „ (То,/Т)0'76 = 1,83‹10_5(287/288)0'76 = 1132-10--6 кГ—сек/м2;
„„ = „„,/рю = 1,82-10—6/0, 125 = 1,46—10‘5м2/сек.
Определяем скорость перед зоной отрыва: д „„ „
У1 = Моо аоо = 1,83-340 = 622 м/сек,
50
а также число Рейнольдса:
Ке = 111 х1/уоо= 622-0,140/(1,46-10—_5)= 6,00-106_ 20
Считая пограничный слой турбулентным
(Кекр<6-106), найдем:
коэффициент давления 10
2,04
(6,00-106)°’1 (1,832 _1)0‚-3.-3
‚_В—2 : = 0,346,
2 41 5 # см
соответствующее отношение давлений Р 6318 Г ф
ис. .. . ра ик зависимо-
__ _ 2. = 0
Рэд/171 — 1 + 1140 1›83 0›346/2 1›81 сти нормальном силы перед ин-
терцептором от высоты его вы—
движения при числе Мы= 1,83:
1—теоретическая кривая; 2—опыт-
ная кривая
И абсолютную ВВЛИЧИНУ ЭТОГО ДЗВЛЗНИЯ
р, = (р2/р1)р1 = 1,81-1 = 1,81 кГ/см2.
Далее определим УГОЛ КОСОГО СКЗЧКЭ УПЛОТНВ-
НИЯ:
ес = агсэіп У/[рЗ/р1—4—(іг _ 1)/(іг +1)1/[2/ем% № + … =
= агсзіп 1/[1,81 + (1 ‚4 _- 1)/(1 ‚4 +1)]/[2-1,4-1‚832/(1‚4 + … = 45‚5°.
С учетом этого
іе(9с—13с) = [(1›4— 1)/(1‚4+ 1) 1,81-1- 1П(1›4-— 1)/(1‚4+ 1) +
+ 1,811—1 1$ 45 ,5°= 0,669,
откуда
19 [5С = 0,206 (БС = 11‚6°).
Теперь найдем число Маха за косым скачком:
2 ' 1,4—1 1,832 1,83% 245,50
М2= / “. ) + 05 =1‚4з‚
2-1,4-1‚83251п345,5°——(1,4—1) 1+(1‚4—1)/‹2.1‚4)
& также Давление торможения 38 ЭТИМ скачком:
1 '2-1,4 1,4
181 2°1’4 14 1’4__1"_1'4—114з1'4—1 2 1,4—1 5 Г/
= , › З2__ , = "92 _ 2..
р“ (1,4+1 1,4+1 (1,4+1) ' " ”‘
Зададимся давлением в застойной зоне за интерцептором рдон=0‚287 кГ/см2. Тогда
газодинамическая функция л:(М.,)=0,287/5,72=0‚0502. Этому значению в табл. 9 [13]
для іг= 1,4 соответствует число Маха М4=2‚62.
По графику рис. 6.3.14 для М4=2‚62 получим число Маха на разделяющей линии
тока Мр_л_т=1,23‚ которое по табл. 9 [13] позволяет найти функцию Л(М'р_л_т) =0,396
и давление торможения на разделяющей линии тока:
(род…т = ‚од…/л (м……) = 0,287/О‚396 = 0,723 кГ/см2.
Из табл. 1\/-1-1 [21] по числу М4=2,62 определяем угол поворота потока (‚›(М4) =
=41‚8°. Соответствующий угол '
4 : (\)(мё') _ 82/2 = 41,8— 45,5/2=190-
319`
Используя формулу из теории скачков уплотнения
2 - 2
189% ([а—!— 1) М4 зт 0с5
= . ‹) '
із (есз — 64) 2 + (Аг—1) м? $1п“ есз
получаем методом последовательных приближений значение угла скачка 0с5=40,1°.
Соответствующее отношение давлений на скачке
р5 2-1 ‚4 1 ‚4 _ 1
: —2‚622 3.112 40,10 ___— = 3,179
рдон 1,4—|—1 ‘ 1‚4+1
откуда
Р5 : (РБ/Рдон) РДОН = 3,17-0‚287 : 0,910 КГ/См2.
Получив из графика (см. рис. 6.3.15) по значению М4=1 величину коэффициента
Кп=0‚70‚ подсчитываем давление за хвостовым скачком уплотнения
рп = 0,70 (0,910— 0,287) + 0,287 = 0,725 {СГ/см?.
Поскольку (ро)р_л‚т=0,723 и рп=0‚725 кГ/см2 достаточно близки, дальнейших прибли-
жений не делаем и полагаем, что давление рдон=0,287 кГ/см2 найдено достаточно
точно.
Коэффициент давления
БД,… = (0,287 —1)/2‚42 = — 0,295.
Коэффициенты нормальных сил №1 и №2 соответственно равны:
с… = {№1950 = 0,346/0,206 = 1,67;
с„, = Ъдон ст; [34 = —о‚295-съе 19° = ——0‚855‚
а коэффициент осевой силы
сд = 5, + | Ьдон\ = 0,346 + 0,295 = 0,641.
Сравнение показывает, что результаты расчета отличаются от экспериментальных
коэффициентов сн и с… примерно на 5%, а от коэффициента Сью—НЗ 15%.
Работа 6.3.3
Исследование комбинированного органа
управления [КОУ]
Ц е л ь р а б о т ы — изучение картины взаимодействия сверхзвукового
потока воздуха со струей газа, вдуваемого через щель в пластине,
и управляющей силы комбинированного органа управления.
Общие сведения
Комбинированный орган управления (КОУ) представляет собой
щелевое сопло или систему отверстий, расположенных обычно либо на
задней кромке несущей поверхности (крыло, оперение), либо на внеш-
ней поверхности кормовой части корпуса летательного аппарата. Уп-
равляющая сила, создаваемая им, включает в себя как силу тяги АР,-
от истечения вдуваемого в поток газа, так и аэроцинамическую силу
АМ, возникающую от перераспре-
Ц деления давления по омываемой
потоком поверхности при интер-
ференции этого потока со струей
вдуваемого газа (рис. 6.3.19).
В качестве рабочего тела КОУ
7…(М°о>?)
_›
применяется сжатый газ, пр0дук-
ты сгорания топлива двигатель-
Рис. 6.3.19. Схема комбинированного ор- ной установки И т_ п_
гана управления на заднеи кромке КОУ используется как при д0_
к ыла:
] 2 р 3 ЗВУКОВЫХ СКОРОСТЯХ В качестве
— крыло; — щелевое СОПЛ0; _- СТРУЯ ВДУ-
ВЗЕМОГО газа; 4 —- система СКЗЧКОВ уплотнения р е а к Т И В Н Ь1Х 3 а К р Ы Л к 0 В,
\д`
320
так и при сверхзвуковых полетах. Картина взаимодействия сверхзвуко—
вого потока со струей газа (рис. 6.3.20) отличается большой сложно-
стью. Перед струей вдуваемого газа ], служащей своеобразной прегра-
дой, поток тормозится, в результате чего возникает положительный гра-
/
.! .А "С?
‚^. гг./{{ "'1/ "1/ /‚
И 10 9
Рис. 6.3.20. Схема течения при вдуве в поток газа
диент давления, который вызывает отрыв пограничного слоя в точке 2.
При этом образуются передняя застойная зона 3 и скачок уплотнения 4.
Сама струя под воздействием потока поворачивается и на некотором
расстоянии вниз по потоку соприкасается с обтекаемой поверхностью
в точке 9, создавая еще одну застойную
(заднюю) зону 10 с пониженным давлени-
ем. В потоке газа и в струе наблюдаются
скачки уплотнения 5, б, 8, а также волны
разрежения 7 и 11. ’
Рассмотренная схема течения является
типичной для больших отношений давления
торможения в струе к давлению в набегаю-
щем потоке (род/р…>60). При меньших р… !
значениях этого отношения картина взаи-
модеиствия упрощается, так как с уменьше- ствия струи со сверхзвуковым
нием отношения род/р… последовательно ис- потоком при малых перепадах
чезают застойная зона 10, хвостовой скачок давления (Род/Рео<5):
уплотнения 8, передняя застойная зона 3 и ‚_Щелевое сопло; 2_скачок ‚….
скачки 5 и б, а косой скачок уплотнения 4 лотненияд 3_°Т1;3;Я ВдУВде-ММО ”"
располагается у передней кромки отвер-
стия (рис. 6.3.21).
Об эффективности работы комбинированных органов управления
можно судить по величине к 0 Э ф ф и ц и е н т а у с и л е н и я, который
представляет собой отношение управляющей силы к силе тяги, образу-
ющейся при вдуве газа в поток, т. е.
Кус = (АМ —|— АРд/АР, = 1 + [ХМ/АР,… (6.3.23
Чем больше коэффициент усиления, тем больше та часть управляю-
щей силы, которая создается за счет аэродинамической интерференции
струи и потока. Поскольку сила тяги пропорциональна расходу вдувае-.
мого газа, то отсюда следует, что при больших значениях коэффициента
усиления заданную управляющую силу можно получить при меньших
значениях расхода вдуваемого газа, чем достигается уменьшение его
запаса на борту летательного аппарата. При определенных условиях
полета и режима работы комбинированного органа управления коэф—
фициент усиления может быть очень высоким (Кус=6+ 8), что является
несомненным достоинством этого органа управления. К преимуществам
его относятся также отсутствие подвижных частей, контактирующихся
с набегающим потоком, что делает его более надежным, особенно при
гиперзвуковых скоростях полета в условиях больших тепловых потоков.
Рис. 6.3.21. Схема взаимодей-
21—927 321
Регулирование величины управляющей силы осуществляется обыч-
но с помощью клапанов, изменяющих расход вдуваемого газа, поэтому
быстродействие органа управления высокое. Недостатки комбинирован-
ных органов управления такие же, как и у аэродинамических, и опреде-
ляются, в частности, тем, что для обеспечения их надежной работы тре-
буются большие скорости по—
лета, происходящего в доста-
точно плотных слоях атмос—
феры.
Экспериментальная уста-
новка для исследования рабо-
ты КОУ представляет собой
аэродинамическую трубу, в
рабочей части которой закреп-
ляется модель. В качестве мо-
дели можно использовать за-
остренную пластину ] со щеле-
вым соплом 2 (рис. 6.3.22).
Сжатый газ подается в форка-
меру комбинированного органа управления 7 через трубопровод б. Дав-
ление в этой форкамере регулируется с помощью редукционного клапа-
на 5. Для замера давлений пластина дренируется рЯДом отверстий 3,
расположенных вдоль ее' оси симметрии на участке до щелевого сопла
и за ним. Это позволяет определить соответствующие составляющие уп-
равляющего усилия КОУ. Кроме того, перед щелью поперек пластины
также делается рЯД дренажных отверстий, чтобы по характеру измене-
ния давления судить о влиянии краевых эффектов на величину управ-
ляющей силы.
По полученному из эксперимента распределению давления по по—
верхности пластины можно вычислить часть управляющей силы АМ,
обусловленную аэродинамической интерференцией потока и струи.
Сила тяги, развиваемая вдуваемым через щель газом,
АРі : П%) р…- 8щ‚ (6.3.24)
где Н)…) — газодинамическая функция; ?…=Уа/а* — безразмерная ско-
рость вдуваемого газа в выходном сечении щели; БЩ— площадь выход—
ного сечения щелевого сопла. Обычно сечение щели делается суживаю—
щимся и м=1. Поэтому для расчета силы тяги требуется знать лишь
размеры выходного сечения щели и замерить давление торможения вду-
ваемого газа род-.
Теоретический расчет коэффициента усиления по зависимости
(6.3.23) связан с вычислением силы АМ. При определении этой силы
можно исходить из предположения, что суммарная сила от избыточного
давления за щелью равна нулю. Такая предпосылка хорошо согласует-
ся с экспериментальными данными. Для нахождения силы перед стру-
ей вводится понятие о высоте эквивалентной преграды 113,
т. е. некоторой высоте твердой преграды (например интерцептора), ко-
торая создает такую же управляющую силу АМ как и при струйном
взаимодействии с потоком. В первом приближении высота эквивалент-
ной преграды, см,
Рис. 6.3.22. Модель комбинированного органа
управления
и, = 0,641 1/АЩ р…,/р.., (6.2.25)
где Ащ— ширина щели, см. Определив по (6.3.25) эту высоту, можно
затем вычислить силу АМ, так же как и значение силы АМ 1, действующей
перед интерцептором (см. рис. 6.3.11). Для этого найдем коэффициент
критического перепада давления в точке отрыва пограничного слоя
перед струей р2. Затем вычислим отношение давлений для условий за
322
косым скачком уплотнения и до него: р2/р1=1—|—р2а°о/р°о. Кроме того,
по числу Маха Моо И величине этого отношения по зависимостям теории
скачков уплотнения получим угол поворота потока за скачком Вс. Нако-
нец, можно вычислить длину зоны отрыва: 13_0=Нз/’[9 [3С и соответствую-
щее значение силы:
АМ : (р?—рю) 13_01щ‚ (6.3.26)
где [дц—длина щелевого сопла для вдува газа. Рассмотренный метод
расчета этой силы не учитывает краевых эффектов, поэтому чем длин-
нее щель, тем точнее определяется такая сила.
При проведении экспериментов замер давлений проводится по всей
длине пластины. С целью снижения влияния боковых кромок этой пла-
стины желательно располагать около них специальные устройства в ви-
де шайб из прозрачного материала (см. 4 на рис. 6.3.22). Так же как
и при исследовании интерцептора, желательно осуществить фотографи-
рование спектра течения, используя для этой цели теневой прибор.
Порядок проведения работы
1. Ознакомиться с устройством экспериментальной установки и про—
верить готовность к работе всех ее элементов.
2. Закрепить модель комбинированного органа управления в рабо-
чей части аэродинамической трубы так, чтобы верхняя поверхность пла-
стины была параллельна направлению набегающего потока.
3. Замерить лабораторным барометром атмосферное давление.
4. Записать начальные показания на печатающем устройстве ГРМ
по всем каналам измерения давления, включая измерение статического
давления в рабочей части аэродинамической трубы роо и давлений
в форкамерах трубы ро и комбинированного органа управления род-.
5. Включить устройство для подачи вдуваемого газа и на заданных
режимах вдува (при определенных значениях род-) произвести с по-
мощью теневого прибора фотографирование газодинамического спектра.
6. Отключить подачу вдуваемого газа.
7. Осуществить запуск трубы и после выхода ее на режим устано—
вившегося движения воздуха в рабочей части обеспечить вновь подачу
вдуваемого газа.
8. Установить необходимый режим вдува газа, контролируя его по
соответствующей величине давления торможения род-‚ включить печатаю-
щее устройство ГРМ, одновременно замерить температуры в форкаме-
рах трубы и КОУ, а также сфотографировать изображение при помощи
теневого прибора; повторить измерения на других режимах вдува.
9. Расшифровать показания ГРМ и найти давления на поверхности
пластины, а также значения роо , ро и род-.
10. Подсчитать параметры потока в рабочей части аэродинамической
трубы и в выходном сечении щели комбинированного органа управ-
ления.
11. Вычислить коэффициенты давления на поверхности пластины,
построить соответствующие графики при различных значениях отноше—
ния род/роо, а затем с помощью планиметра определить аэродинамичес-
кие коэффициенты нормальных сил перед щелью вдува и за нею.
12. Подсчитать значения тяги, развиваемой вдуваемым газом на
различных режимах работы КОУ.
13. Определить значения коэффициента усиления Кус при различных
значениях отношения давлений род/р… и построить соответствующий
график.
14. Обработать негатив фотопленки, отпечатать и расшифровать
фотографии спектра струй и потоков, взаимодействующих с вдуваемым
21* 323
газом. При этом замерить протяженность застойных зон, углы «жидких
клиньев), скачков уплотнения (901 и 602), а также расстояние от по—
верхности пластины до прямого скачка в свободной струе (при отсутст-
вии ее взаИМОДействия с потоком) и точки пересечения переднего «жид-
кого клина» с нормалью к поверхности пластины у ближней кромки
щели (см. рис. 6.3.20).
Пример. Рассмотрим экспериментальное исследование комбинированного органа уп-
равления с шириной щелевого сопла Ащ=0‚508 мм и длиной 1щ=152 мм, проведенное
в сверхзвуковой аэродинамической трубе для числа Маха Моо=4. Канал щели— су-
жающийся, а направление вдуваемой струи воздуха перпендикулярно обтекаемой по-
верхности.
Модель КОУ крепилась на прямоугольной плоской заостренной спереди пластине
длиной 390 мм и шириной 254 мм. На расстоянии 19 мм от передней кромки устанав-
ливался полуцилиндрический турбулизатор высотой 0.64 мм. Расстояние от передней
кромки пластины до щелевого сопла составляло х1=184 мм.
р
5
ц
3
-щ-!2—:0 -8 -6 -ц —2 а 2 ц 6_ в та ‹2 № х.зм
Рис. 6.3.23. Распределение давления по поверхности ком-
бинированного органа управления при различных пере-
падах давлений:
По данным замеров манометров и термометров найдены следующие параметры: ро=
=3,04 кГ./см?; Т0=300 К (в форкамере аэродинамической трубы); р05=7,02 ‚СГ/см?;
Т05=700К (в форкамере комбинированного органа управления). Соответствующее дав-
% ление в рабочей части трубы
ус
1 р 00 : ро л (МОО) :
= 3,04 л (4) = 0,019? кГ/см2,
2 \\
"— а отношение
рт./роо = 7,02/0, 197 = 356.
\! ‘ Распределение давления по поверхно—
„… 200 300 #00 500 род/реа сти пластины, полученное по замерам на
ГРМ, приведено на графике 6.3.23 (кри-
вая 2).
В результате графического интегриро-
вания получено значение нормальной силы
перед соплом А№=8,30 КГ . Исследования
- также показали, что нормальная сила от
давления на пластину за щелевым соплом практически отсутствует. Тяга, развивае—
мая вдуваемым воздухом (&= 1,4), согласно (6.3.24)
АР,- = 1,268-7,02-104 (0,508.1о—3.152.10—3) = 6,86 кГ.
Соответствующий коэффициент усиления
Кус = 1 + 8,30/6,86 = 2,21.
Зависимость этого коэффициента от перепада давлений род/‚Ооо По данным Двух экспе—
риментов при том же числе Моо=4 (кривые 1 и 3 на рис. 6.3.23) приведена на рис. 6.3.24.
Из графика видно, что чем больше перепад давлений, тем меньше значения коэффициен-
тов усиления.
Определим значение коэффициента усиления расчетным путем. Для этого вычислим
высоту эквивалентной преграды:
п, = 0,641 1/0,508.1о—1-356 = 2,73 см.
Рис. 6.3.24. График зависимости коэф-
фициента усиления от перепада дав-
лений Род/Рао
324
Температуре воздуха в рабочей части трубы Тоо=Тот(Моо)=300—т(4)_:=71‚21( соответ-
ствует согласно графику на рис. 1—12 [17] коэффициент динамическои вязкости рю=
=О.65-10—6 кГ —сек/м2. Плотность воздуха в этой рабочей части
9… = р.,/(КТ…) = 0,0197/(287-71‚2) = 0,00965 кГ-сек2/м4.
Скорость звука
а„ = 1/1,4-287.71‚2 = 168 м/сек,
а скорость потока
Усо = Моо аф = 4-168 = 672 м/сек.
Соответствующее число Рейнольдса потока перед щелевым соплом
У.. 0... х1 _ 674-0‚00965-0‚184
н.. — 0,65 . 10—6
а коэффициент давления в передней застойной зоне
}52 = 2,04/[(1‚82-106)0'1(42—1)°'25] = 0,244_
По этой величине находим отношение давлений:
рв/р1 = 1 + 1,442 (0,244/2) = 3,73.
Угол наклона скачка уплотнения по (6.3.15)
0‹: = агсзіп 1/[З‚73 —|— (1,4 —— 1)/(1 ‚4 —|— 1)]/[2-1‚4-42/(1‚4—|— … = 26°50’,
По этой величине определяем из (6.3.16)
’1‚4—1 1,4—1
ЁЕ(ес'_'3с)=(1‚4__'_13,734"1)(1‚4_'_1
откуда угол Вс=15°. Этому значению угла соответствует длина зоны отрыва
[3.0 = Раз/19 [3С = 2,73/1815° = 10,2 см.
Теперь можно найти управляющее усилие:
АА] = (р2/рдо — 1)роо 13_01 = (3,78— 1) 0,0197-10,2-15,2 = 8,35 кГ.
Ш
Нех= = 1,82.106‚
_]
—|— 3,73; 18 26°50’ = 0,203,
Как ВИДИМ, результаты расчета И данные ОПЫТЗ СОГЛЭСУЮТСЯ ДОСТЗТОЧНО ХОРОШО.
Работабзл
Определение шарнирного момента руля
Цель работы—определить шарнирный момент аэродинамиче—
ского руля и исследовать зависимость его величины от угла поворота
и ширины щели между консолью руля и корпусом.
Общие сведения
Шарнирный момент аэродинамического руля МШ обусловлен дейст-
вием на него поверхностных сил и вычисляется относительно оси поворо-
та руля. Этот момент является одной из важнейших характеристик ор-
гана управления и входит в уравнение, характеризующее вращатель-
ное движение руля. При маневре рулевой привод преодолевает воздей-
ствие шарнирного момента. Поэтому чем больше величина МШ, тем
мощнее должен быть этот привод. В противном случае вращение руля
будет происходить медленнее и летательный аппарат может не выпол-
нить требуемый маневр.
Шарнирный момент аэродинамического руля в виде поворотной кон—
соли (рис. 6.3.25) определяется выражением
м… : ——1\/р и, (6.3.27)
в котором А/р — нормальная сила, приложенная в центре давления руля;
И — расстояние от этого центра до оси вращения.
В соответствии с выражением (6.3.27) момент рассматривается от-
рицательным при условии, если №р>0‚ 11>0.
325
Заменяя в (6.3.27) нормальную силу ее выражением через аэродина—
мический коэффициент с№=А//($рс] 00) (где Зр—площадь рулевой кон-
соли; цов—скоростной напор) и вводя коэффициент шарнирного мо—
Мента т…:Мш/(Зрс;оо ЬсАх.р), получим для этого коэффициента
тШ : — См ід/ЬСАХр , (6.3.28)
где ЬсАх_р —-—— средняя аэродинамическая хорда руля.
Из формулы (6.3.28) видно, что для определения коэффициента шар—
нирного момента надо знать значения см и И, т. е. величину и точку при-
ложения нормальной силы руля. Поскольку обычно стремятся иметь
минимальную мощность руле—
! ь «` ”р 060 летатеддндгд вого привода, что соответству-
’ аппарата ет наименьшему значению
—.____{Ч№ _ Мш, то принимают необходи—
:) _ _ _др мые меры, способствующие
„\ уменьшению величины и. Это,
адц-д однако, может привести к сни-
‚ Шер , жению точности определения
тш по (6.3.28), так как при не—
Рис. 6.3.25. Схема к определению шарнирно- бОЛЬШИХ значениях координа_
ГО момента
ТЫ центра давления ОТНОСИ-
тельная погрешность при рас-
чете Н возрастает. Поэтому обычно расчетные значения коэффициента
шарнирного момента уточняют и проверяют при помощи соответствую—
щих экспериментов.
Для замера величины шарнирного момента можно использовать тен-
зометрическое устройство (см. рис. 6.3.1). Шарнирный момент, дейст-
вующий на поворотную консоль 2, передается через ось вращения 4 на
сектор установки углов атаки 6, который стремится изогнуть упругий
элемент 7. На шейке упругого элемента наклеен проволочный тензодат-
чик. Усиленные сигналы от этого тензодатчика поступают на тензостан-
цию 10 и гальванометр 9.
Для определения влияния ширины щели ИШ между консолью опере-
ния и корпусом опыты проводятся при различных значениях этой шири-
ны. Результаты эксперимента представляются в виде графиков зависи—
мости коэффициента шарнирного момента от угла поворота консоли бр
и ширины щели. Рассмотрим один из моментов расчета коэффициента
шарнирного момента, вызванного поворотом руля на угол бр. Прежде
всего по формуле (6.3.6) следует определить коэффициент нормальной
силы руля сы. Далее находят координату центра давления тонкой изо-
лированной консоли (хц_д)и_н и вносят поправки на его толщину Ахцд
и интерференцию с корпусом при повороте Ахцдд. В соответствии с этим
координата центра давления руля
Н : (хдд)…к — Ад… — Ахцдб — хз„ (6.3.29)
\
где хвр— расстояние от передней точки бортовой хорды консоли до оси
вращения руля.
Слагаемые, входящие в (6.3.29), определяются следующим образом.
Сначала находятся сужение консоли
“к : кр/Ькш (6…330)
средняя аэродинамическая хорда руля
_ 4 ‚3—х ___—“К 6 3
ЬСАХр— 3 [к [1 04—7182] ( .3. 1)
326
и ее координата
[к к + 2
хСАХ = ; ° 2— + 1 га хп. (6.3.32)
Затем по графику фиг. 5.4 [25] определяется коэффициент хм и под-
считывается координата центра давления изолированной консоли:
(хц.д)и.к : хслх + ЬСАХ.р хаА- (63-33)
Поправка на толщину, как показывают исследования, невелика, и в на-
шем случае примем Ахц_д=0. Что касается поправки на интерферен-
цию при повороте руля, то она находится из формулы [21]:
Ах _ 6 х . 6 х . 6
Щ: (Ц _ щ ‚ (6_3_34)
Ькр Ькр кр Ькр “Р”)
в которой слагаемые правой части берутся из табл. ХУ-3-1 [21] по со-
ответствующим величинам г8=г/$….
Вычислив координату 11 по (6.3.29) и подставив ее значение, а также
ранее найденные величины см и ЬсАх_р в (6.3.28), получим искомое
значение коэффициента шарнирного момента т….
Порядок проведения работы
1. Ознакомиться с экспериментальной установкой и необходимой
измерительнои аппаратурой.
2. Закрепить модель консоли оперения в рабочей части трубы под
заданным углом атаки и установить требуемую ширину щели между
консолью и корпусом.
3. Провести тарирование тензометрического устройства для измере-
ния шарнирного момента в требуемом диапазоне углов атаки и по—
строить соответствующий тарировочный график.
4. Записать показания лабораторных барометра и термометра, а так-
же психрометра.
5. Включить трубу и после выхода ее на режим установившегося об-
текания ввести в поток трубку Пито, а затем снять показания с отсчет-
ных колен связанного с ней манометра.
6. Зафиксировать показания гальванометра, после чего прекратить
работу трубы.
7. Определить параметры набегающего потока в аэродинамической
трубе.
8. С помощью тарировочного графика найти по показанию гальва-
нометра величину шарнирного момента.
9. Подсчитать значение коэффициента шарнирного момента.
10. Изменить угол атаки и ширину щели в соответствии с програм-
мой эксперимента и повторить операции, указанные в п.п. 5—2—9.
11. Занести полученные данные в сводную таблицу коэффициентов
шарнирного момента при различных углах атаки и величинах ширины
щели.
12. Построить графики зависимости величины коэффициента шар-
нирного момента от угла атаки консоли оперения при фиксированных
ЗНЗЧЗНИЯХ ШИРИНЫ ЩСЛИ, а также ОТ ШИРИНЫ ЩВЛИ ПРИ различных УГ-
лах атаки.
Пример. Рассмотрим результаты экспериментального исследования шарнирного мо-
мента руля в виде поворотной консоли, проведенного в дозвуковой аэродинамической
трубе малых скоростей с открытой рабочей частью. Для такого исследования исполь-
зовалась та же м0дель кон`соли и приспособление для ее крепления в рабочей части,
что и в работе 6.3.1 (см. рис. 6.3.1 и 6.3.2). Аналогично этой работе определялись и па-
раметры потока в рабочей части трубы. Скоростной напор в ней аоо=220 кГ/м2.
Тарирование тензометрического устройства проводилось непосредственно в рабочей
части трубы после установки медели (рис. 6.3.26). На плече в 91 мм от оси вращения
327
к консоли прикреплялась чашка весов. Нагружение осуществлялось с помощью разно-
весов. В качестве измерительной аппаратуры использовались тензостанция типа
УТС1- 12/35 и гальванометр МВ- 150. Данные тарирования представлены графиком на
рис. 6.3.27 в виде зависимости момента, приложенного к поворотной консоли, от числа
делений отклонения стрелки гальвано-
метра.
Эксперимент проводился при уста-
новке руля бр=9° и различных значени—
ях ширины щели (пщ=1; 2; 3; 4; 5 и
8 мм). Результаты отклонения стрелки
гальванометра — число делений п, зна-
чения шарнирного момента МШ, найден-
ные по тарировочному графику (см. рис.
Мш,КГ'М
0.080
0,070
0,050
_ 0,050
: 0,000
;;; “`}. №.:]. 33:2 _
. "":-%*: “&&& *‘_,›"( Задай-А'; ‚}\:‘Ёё „Рэціьм' .) " : $ 07030
0020
Рис. 6.3.26. Устройство для крепления 0.010
модели поворотной консоли .и корпуса: 9
1—корпус; 2—ось вращения консоли; 3—сек- 2 # „
тор для установки углов поворота консоли; .,
4—упругий элемент с тензодатчиком; 5 — дре- РИС' 63-21 тарировочныи График
нажные трубки УПРУГОГО элемента С ТВНЗОДЗТЧИКОМ
Таблица А т
иш, мм п #1}; тШ тЁЦ на р .1/град 0»…
0,12
1 10 0,090 0,140 0,016
2 7 0,063 0,098 0,011 0:10
3 6 0,055 0,086 0,00%
4 5 0 ‚ 045 0 , 070 0 , 0078 0, 08
5 5 0,045 0,070 0,0078
8 5 0 ‚ 045 0, 070 0 , 0078 0.06
0 1 2 3 Ч 5 В… мм
Рис. 6.3.28. Зависимость коэф-
фициента шарнирного момента
от ширины щели при угле ата-
ки а=9°
6.3.27) и соответствующие коэффициенты этого момента приведены в табл. А.
В табл. А приведены также значения производной т°ш‚ 1/град. График зависимости
тш от йщ, построенный по данным табл. А, изображен на рис. 6.3.28. Из этого графика
видно, что при увеличении ширины щели коэффициент шарнирного момента уменьша-
ется; это, очеВИДно‚ связано с более интенсивным перетеканием воздуха .из области .по-
вышенного давления под консолью в область пониженного давления над ней, следстви-
ем которого явилось уменьшение перепада давлений, подъемной силы и шарнирного
момента.
Для сравнения оценим величину коэффициента шарнирного момента расчетным
путем. Согласно (6.3.30) сужение консоли
пк = 180/90 = 2;
средняя аэродинамическая хорда (6.3.31)
0 _—4- 30—8-[1 —2—]—14о‚‚—м
САХ-Р_з 15,5_ (1+2)2 _ ’ ’
328
а ее координата (6.3.32)
15,5 2 + 2
= —— _ 21°10' =2,66 .
По графику фиг. 5.4 [25] для А1/1—МЗО =2-1‚151/1—0‚172=2‚29 И пк=2 на-
ходим коэффициент х,; А =0‚25.
С учетом этого коорщтната изолированной консоли (6.3.33)
(”дадим = 2,66 +14°0‚25 = 6,16 см.
По табл. ХУ-З—і [21] для г,=0 значение (хц.д6 /Ькр)кр=0‚667‚ а для г.=0,5 значение
(хц.д6 /днр)кр‹т)=0,664. Поэтому в соответствии с (6.3.34) поправка
Ахц_д 6 = 18 (0,667 — 0,664) = 0,054.
Подставляя соответствующие величины в (6.3.29), получим
хц.д = 6,16 _ 0,054 _ 9,00 = _ 2,90 СМ,
т. е. центр давления находится перед центром вращения консоли.
Используя найденное в работе 6.3.1 для рассматриваемой поворотной консоли рас-
четное значение коэффициента нормальной силы см=0‚32‚ определим по (6.3.28) коэф-
фициент шарнирного момента:
т… = —о‚32 (_ 2,90/14) = 0,066,
Соответствующая величина ЭТОГО момента
мШ = ты а... 3к (‚САХФ = 0,066-221-208-1О_4.14-10—`2 = 43-10—3 кг….
Сравнивая полученную величину коэффициента шарнирного момента с соответствующим
экспериментальным значением, можно сделать вывод об их достаточно удовлетворитель-
ном согласовании между собой для ширины щели, равной примерно 4 мм.
22—927
Г П А В А \’П
ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ ТРЕНИЯ
& 7.1. ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ ПОГРАНИЧНОГО СЛОЯ
Работа7лл
Измерение давления и температуры торможения
в пограничном слое
Ц е л Ь р а б о т ы — определение параметров пограничного слоя (рас-
пределение скорости, толщина пограничного слоя, условные толщины
вытеснения и потери импульса), а также напряжения трения.
Общие сведения
Методика измерений в пограничном слое. Теория движения идеаль-
ной жидкости дает удовлетворительную картину обтекания какой—либо
поверхности только в свободном потоке, расположенном за преде-
лами пограничного слоя, непосредственно примыкающего к этой
поверхности, где существенное значение приобретают силы вязкого
трения.
На рис. 7.1.1 приведена схема такого пограничного слоя на плоской
пластине, обтекаемой в продольном направлении. Этот слой простира-
Рис.7СЪ1.1Тограничньиіслой на плоской пластинке,обтека-
емой в продольном направлении:
1—эпюра скоростей в набегающем потоке; 2—распределение ско-
ростей в пограничном слое; 3—распределение скоростей в области
за точкой отрыва; А—точка отрыва пограничного слоя
ется от передней кромки до точки отр ы в а. Поскольку изменение ско-
рости пограничного слоя до ее значения во внешнем свободном потоке
происходит асимптотически, то определение толщины пограничного
слоя 6 в известной степени произвольно. Условно за внешнюю границу
пограничного слоя принимают линию, на которой скорость течения от-
личается от скорости в свободном потоке на 1%.
Изучение пограничного слоя связано с определением распределения
по его толщине продольных скоростей Ух, плотностей р и температур Т,
а также толщины слоя 6, условных толщин вытеснения б* и потери им-
пульса б**. Давление в различных точках сечения пограничного слоя
практически постоянно (др/ду=0), и его можно принять равным давле-
нию р& на внешней границе этого слоя, что справедливо при условии,
если толщина пограничного слоя мала по сравнению с поперечными
размерами обтекаемого тела.
Чтобы найти распределение параметров газа в пограничном слое,
необходимо экспериментально определить при заданных условиях об-
текания изменение давления и температуры заторможенного потока по
толщине слоя, измерить статическое давление рд, а также установить
330
зависимость коэффициента восстановления датчика температуры от па-
раметров потока. В связи с малой толщиной пограничного слоя и боль-
шими градиентами скоростей для измерений в нем требуются мини-
атюрные датчики давлений и температур с высокой чувствительностью.
Статическое давление в пограничном слое рд, равное его значению
в свободном потоке, может быть измерено при помощи дренажного от-
верстия, просверленного в стенке и соединенного с манометром. При
большой толщине пограничного слоя, когда условие др/ду=0 не со—
блюдается, т. е. статическое давление по толщине слоя изменяется и не
равно рб _(это также имеет место при больших сверхзвуковых скоро-
стях), измерение этого давления необходимо проводить с помощью спе-
циального зонда в ряде точек пограни-
чного слоя. В качестве такого зонда ТД„ 2
используются насадки с конической ""-'")“ ' ,
или оживальной головкой (см. рис. _
2.1.25 и 2.1.26). При эксперименталь- №
ных исследованиях пограничного слоя ‘
микронасадок полного. напора закреп—
ляют на координатнике, снабженном
микрометрическим винтом, позволяю-
щим измерять расстояния с точностью
до 0,02 мм. Момент соприкосновения
насадка с обтекаемой поверхностью
регистрируют с помощью электричес-
Рис. 7.1.2. Электрическая схема
для регистрации момента сопри—
КОГО контакта (РИС- 7-12). косновения микхронасадка с обте-
Микронасадок, изолированный от каемой поверхностью:
остальной конструкции, соединяется с ‚_.обтекаемая поверхность; 2_Чув-
одним из полюсов источника напряже- ЁТЁНЁЁЁЁЁЁЁ ЭЁЁЁ—ЁЁя;(мЁк-Ё°ЁЁЁЁЁЁЁЁЁ
НИИ, & ИССЛВДуеМЗЯ ПОВВРХНОСТЬ -— С метр; 5—х регистрирующему прибо—
дРУГИМ‚ Причем в Цепь последователь- РУ—ман°м°ТРУ
но включены потенциометр и милли-
амперметр. В момент соприкосновения насадка с обтекаемой поверхно—
стью цепь замыкается, и этот момент фиксируют по показанию милли-
амперметра. Минимальное расстояние от этой поверхности до точки за-
мера составляет половину поперечного размера приемного отверстия
трубки Пито. '
Схемы координатников приведены на рис. 7.1.3. Координатники со-
держат микрометрический винт, соединенный с ползуном, для отсчета
положения ползуна относительно некоторого начального положения
и направляющие. На ползуне закрепляют чувствительные элементы
(зонд статического давления, трубка Пито, термоприемник и т. п.), слу-
жащие для исследования течения жидкости, например в пограничном
слое.
Рис. 7.1.3. Координагники для исследования поля скоростей и тем-
ператур в пограничном слое:
] ›— чувствительные элементы; 2 — микрометрический винт; 3 — к приводу;
4 —— регулировочный тендер; 5 — резиновые шланги; б — державка; 7 — направ—
ляющие; 8—ползун; 9— червячный редуктор
При измерении в пограничном слое трубку полного напора переме-
щают при помощи координатника до тех пор, пока она не окажется
в свободном потоке, т. е. за пределами пограничного слоя, 0 чем судят
по прекращению изменения показаний манометров, измеряющих дав-
ление рь .
Как показывают исследования, при сверхзвуковом обтекании на
большей части пограничного слоя скорость будет также сверхзвуковой
и лишь в очень малой пристеночной области—дозвуковой
(см. рис. 7. 1.7.) Измерив давление торможения Ро на участке сверхзву-
КОВОГО ТВЧВНИЯ, а также определив СТЗТИЧССКОС Давление рд _(ДЗВЛСНИВ
на стенке), можно найти при помощи формулы (2.2.9) число Маха в со-
ответствующей точке пограничного слоя, расположенной на «эффектив-
ной оси>> насадка (см. рис. 2.1.34).
Эпюра скоростей и параметры пограничного слоя. Для нахождения
соответствующей скорости в пограничном слое необходимо определить
местную температуру Т или плотность р. Чаще всего в условиях экспе-
римента находят температуру торможения То, по которой затем вычис-
ляют статическую температуру Т, а плотность определяют из уравнения
состояния и условия постоянства статического давления поперек погра-
ничного слоя.
Обычно температуру торможения в пограничном слое измеряют с по—
мощью термоприемника, конструкция которого определяется условия-
ми эксперимента, величинами измеряемой температуры, скорости и дав-
ления, а также допустимой погрешностью измерений. Температура
обтекаемой поверхности тела может быть измерена термопарой, вмон-
тированной в стенку этого тела (см. @ 2.3).
Как правило, давление р() и температура То торможения замеряют-
ся в точках сечения, расположенных на таком расстоянии друг от друга,
чтобы по найденным значениям можно было осуществить достаточ—
но надежную интерполяцию для определения соответствующих проме-
жуточных величин. При этом находятся значения рО и То, соответству-
ющие одной и той же точке пограничного слоя. По измеренной темпе-
ратуре торможения То и найденному числу М в этой точке можно найти
температуру, плотность и скорость:
1
Т=То№1+——Ё—2\;М2) (7.1.1)
р = рё (КТ) или р = рд (Тб/Т); (7.1.2)
=м і/ькт„№1 ' ШМ). (7.1.3)
Предполагая, что теплообмен между потоком и стенкой отсутствует
или пренебрежимо мал, а температура торможения в пограничном слое
мало отличается от соответствующего значения для свободного потока,
скорость в слое можно определить по следующей зависимости:
=м х/Ыетот/ 1 +’г—1ММ2), (7.114?
где ТОоо : Т6 (‚1 + Шмд).
В этом случае измерение температуры производят лишь в одной точ-
ке пограничного слоя или в свободном потоке. На основании экспери—
ментальных зависимостей Ух(у) и р(у) можно определить толщину по—
граничного слоя 6, условные толщины вытеснения б* и потери импуль-
са б**. При этом толщина 6 наХОДится по эпюре скоростей Иду)
332
(рис. 7.1.4), на которой отыскивается координата у=б‚ соответствую-
щая значению Ух=0‚99 У…. Условные толщины б* и б** определяются
по формулам:
б
*_ . _ рУх .
6 __5(1 (‚будет, (7.1.5)
0
6 У У
“е_ а р х __х
а _; %% (1 „Лещ. (7.1.6)
Расчеты производятся следующим образом. Прежде всего, зная тол—
щину пограничного слоя 6, выбирают шаг изменения аргумента пу=бт
(шаг интегрирования), Деля б на п рав-
ных частей. При этом величина шага, а 5
также порядок конечных разностей дол-
жны отвечать заданной точности расчета.
Причем если шаг интегрирования доста—
точно мал, то в расчете можно ограни—
читься конечными разностями второго и
даже первого порядка. Затем в соответ-
ствующих точках уо=0‚ у1=пу и т. д.
из графиков Ух(у) и р(у) определяют
скорость Ух, плотность р и заносят их в
\"д—
1
1
1
1
|
|
|
1
1
!
\/
бланк численного интегрирования (см. // „
табл. В). По этим значениям подсчиты- „ …дсд_с}9„_
вают подынтегральные функции др и ’ ' ’
іб“ [СМ. (7.1.5), (7.1.6)]: Рис. 7.1.4. К определению тол-
ЩИНЫ ПОГРЭНИЧНОГО СЛОЯ!
(іь—)0„‚2‚...‚ = 1— _рЁУУ’Ъ : (7.1.7) ’"в“°ш“ё‘л’т‘о›ё"$“іцётеё‘ёё№“““°‘°
_ 911 У
(іб°')011‚2‚...)_ Ъб—Ё/о (1 _ 17$) (7.1-8)
и заносят в табл. В значения конечных разностей:
(Аіб*)0(1.2‚...) : (іб')1(2‚3‚...) _ (іб°)о‹1,2....)3 (7—1-9)
(^2іь-)о‹1‚2‚...‚ = (Аіб*)1‹2,з‚…› — (Аі6*)о‹1‚2‚...)° (7-1-10)
Конечные разности (Аівп) 0(1‚2,...) и (А2ідм)о‘1‚2‚_„) определяются анало-
гично. По этим разностям вычисляют:
6 ”у Ёіду б п—1
б*=Я1°д.біу=Х/°д.біу+\Гдэбіу+°°°+ ; ;б_ду=2№;д (7.1.11)
0 о “
у
& (п—1)п\‚ і=0
‘)
„п „
б ” у 6 —1
б**=Хід..4у =гібпау+5` ібовау+°'°+ 5 ібиау=2Абгі (7.1012)
0 0 “у =0
(п—1)/1у {
где интегралы А6; и А6? находятся с помощью интерполирующих
функций. Например,
я
у
Аб'= ‚(і =і;( . _1_ ‚___; 2 ‚>.
0 05% у у 130+ 2 Аідо 12^ %* (7.1.13)
пу
** 1 1
Або = 51 д…,ф =11у(ідз* + Ъ—Аідзж— 331321353)— (7.1.14)
0
333
Таким образом, при вычислении Аб;= и А6? следует пользоваться фор—
мулами горизонтальной строки последовательных элементов и лишь
один раз, при вычислении последнего значения Аб‚'1'_1 или Абдір—фор-
мулами ломаной строки. Например,
6
___ * $ * __1__ 2 *
ідщу пу(гдп_1 + 2 Аідп_1 12 А 16,24). (7.1.15)
(п—1)пу
Аб'
п—1 :
Как уже говорилось, введение трубки полного напора в пограничный
слой приводит к нарушению структуры пограничного слоя и ошибкам
измерения его параметров. Для устранения этих ошибок можно вос-
пользоваться экспериментально установленными зависимостями для ус-
ловных толщин вытеснения и потери импульса, учитывающими иска-
жения измерений трубкой Пито вблизи внешней границы слоя:
8“ : д;..сча —‹і/б)°'18; (7.1.16)
в“ = 632… (1 — а/д)°"8, (7.1.17)
где 6* б” —величины, рассчитанные по экспериментальным дан-
расч' расч
ным; (1 — наружный диаметр трубки Пито.
Напряжение трения. По эпюре скоростей и распределению других
параметров газа в пограничном слое можно рассчитать для рассматри-
ваемого сечения напряжение трения на стенке тот и соответствующий
местный коэффициент трения стх=2тст/(РдУЁ). Для этой цели но графи-
ку, изображающему такую эпюру (см. рис. 7.1.4), следует найти вели-
чину (дУх/ду) у:… а затем, пользуясь формулой Ньютона, вычислить на-
пряжение трения на стенке:
тет = ист (дУх/ду)у=0. (7.1.18)
Коэффициент динамической вязкости определяется по приближенной
формуле
„ = „., (7779036, (7.1.19)
где ‚ло—коэффициент вязкости при нексторой начальной темпера—
туре То. '
Кроме указанного графического способа для определения производ-
ной (дУх/ду)у=о может быть использован метод численного дифферен-
цирования. Для этого необходимо составить таблицу измеренных зна-
чений Ух=і(у) с постоянным шагом и вычислить конечные разности
ма…, [3211,50 и АЗУхо. По значениям этих разностей (дУх/ду)у=о может
быть определена по следующей формуле численного дифференцирова-
ния (для последовательных элементов горизонтальной строки):
(%%)уа = %] (АУ… — % Азъ/„ + _;— Азщ), (7.1 .20)
где
Аухо : Ул _ Ухо = Уд; А2Ух0 : Аул _ Аут;
Азъ/„ = Азъ/„ — ‚3211,0.
При использовании указанных методов следует учитывать, что вви-
ду конечных размеров трубки полного напора не удается измерить ско-
рости в пристеночной области, поэтому при построении эпюры скоростей
приходится пользоваться экстраполяцией, что, естественно, снижает
точность определения произвоцной дУх/ду на стенке. При необходимости
для повышения этой точности можно осуществить расчеты тот по экспе-
334
РИМеНТЗЛЬНЫМ данным НЗ ОСНОВВ решения ИНТВГраЛЬНОГО СООТ-
НОШСНИЯ ИМПУЛЬСОВС
(163% *
х+—. —Ух°—(26** +б*)_ — (7.1.21)
96 Тв
Среднее значение тет на некотором малом участке обтекаемой по—
верхности Ах=х2—х1 определяют следующим образом. Сначала произ—
водят измерение всех необходимых величин (Уд , Ух, р) на границах
этого участка, а затем рассчитывают соответствующие значения 6*
и б**‚ по которым, используя уравнение (7.1.21), определяют тот. При
обтекании плоской пластинки задача упрощается, так как вдоль пла-
стинки Уб=сопз1 и уравнение (7.1.21) принимает вид
ад“/ах = тет/(рд Уд). (7.1.22)
Соответствующая зависимость для определения коэффициента трения
будет
с „ = 2 (сіб**/сіх). (7.1 .23)
Как видно, в данном случае можно ограничиться нахождением для пла-
стинки только условной толщины потери импульса, что существенно
облегчает исследование трения.
Приближенные методы расчета пограничного слоя на пластинке.
Исследования показывают, что пограничный слой на пластинке либо
полностью ламинарный, либо смешанный—на передней части ее по-
верхности ламинарный, а на остальной турбулентный. В случае без-
градиентного течения несжимаемой жидкости можно использовать за-
висимости для расчета параметров пограничного слоя [20]:
ламинарный пограничный слой—
бнсж 4,64 ( ) 0, 646 (С ) 1,292
: _; іхнсж= ; хінсж=_:';
х уксус _ укех упс!!
б* _ 1,74 _ 933_ 0,646 _
" Упс,. , " УЕ
турбулентный пограничный слой—
бнсж = 0,37 . 6$ _ __1__ . б** : _7—
х _і/ЁТ , бнсж 8 , бнсж 72 ,
::
0,0598 0,075
(сіх)нсж = 5——___; (Схі)нсж= : .
]/ нех Ъ/КеЬ
При учете влияния сжимаемости и теплопередачи на параметры по-
граничного слоя в случае больших скоростей можно исходить из мето-
да определяющей энтальпии 1'*. В соответствии с этим методом отноше—
ния соответствующих толщин и коэффициентов трения определяются
следующим образом:
ДЛЯ ЛЗМИНЗРНОГО ПОГРЗНИЧНОГО СЛОЯ—
"' 1'2 " 12.
бсж/бнсж=:(Т /Т6)(п+)/ (Норд/НСР)/ ’
* 1/2
(схі)сж : (Сідсж : (Тст)сж =(Т*)(“—1)/2(РСР ) .
(схі)н сж (сіх)нсж (Тст)нсж Тб Р'срб
335
для турбулентного пограничного слоя—
6 @ = (ищут”/5(вердикта
сж нсж
* 4 5
(схпсж : (сіх)сж ___ (Тст)сж = ( Т,“ )(п—4)/5 ( ”СР ) /
(схі)нсж (Сиднея: (Тст)нсж Тд Рсрв
В этих соотношениях индексом «*» отмечены определяющие параметры;
мер—средний молекулярный вес газа; п—показатель степени, опреде-
ляющий зависимость коэффициента динамической вязкости от темпе-
ратуры.
Порядок проведения работы
1. Ознакомиться со схемой экспериментальной установки, устройст—
вом модели, датчиков давления и температуры, а также регистрирую-
щими устройствами; проверить готовность их к работе.
2. Установить в рабочую часть сверхзвуковой трубы сопловые вкла-
дыши, соответствующие выбранному расчетному числу Маха.
3. Закрепить исследуемую модель на державке и установить ее в ра-
бочей части так, чтобы плоская поверхность была расположена парал-
лельно потоку.
4. Установить на модели при помощи микрокоординатника трубку
Пито и соединить ее дренажной трубкой с ГРМ.
5. Проверить соединение приемника статического давления в рабо-
чей части трубы с манометром (ГРМ).
6. В соответствии с электрической схемой (см. рис. 7.1.2) соединить
модель и трубку Пито с устройством для регистрации момента их со-
прикосновения.
7. Снять начальные показания манометра, предназначенного для оп-
ределения р…, и измерить атмосферное давление ратм.
8. Установить трубку полного напора в крайнее нижнее положение
(до соприкосновения с обтекаемой поверхностью), сделать нулевой от-
счет на счетчике положения микрокоордийатника и снять начальные
показания манометра, соединенного с трубкой Пито.
9. Включить аэродинамическую трубу и после выхода ее на режим
установившегося движения воздуха снять показания манометров, изме—
ряющих давления торможения рд и статическое давление Р…» а также
измерить температуру То ф в форкамере.
10. Перемещая трубку полного напора с помощью микрокоординат-
ника на заданное расстояние у от стенки, произвести аналогичные из—
мерения давления рд в пограничном слое.
11. Выключить трубу и вместо трубки полного напора установить на
модели при помощи микрокоординатника датчик температуры. Соеди-
нить его с регистрирующей аппаратурой и проверить надежность ее ра-
боты; включить трубу и, перемещая датчик, снять показания электри-
ческого прибора, соответствующие определенному значению темпера—
туры торможения То.
12. По измеренным значениям статического давления и давления рд
за скачком уплотнения найти распределение чисел М по толщине погра-
ничного слоя. ’
13. Зная температуру торможения То и числа М, вычислить в соот-
ветствующих точках сечения пограничного слоя статическую темпера-
туру Т, скорость Ух и плотность р.
14. Осуществить расчет толщины пограничного слоя 6, условных
толщин б* и б**‚ а также напряжения трения тот и коэффициента
сіх = 2тст/(рё УЁ) '
336
Пример. Рассмотрим результаты экспериментального исследования сверхзвукового
пограничного слоя на стенке рабочей части аэродинамической установки сверхзвуко-
вых скоростей.
Коэффициент тарировки трубки Пито &, и коэффициент восстановления датчика
температуры г принимались равными единице. Для измерения давления в рабочей части
трубы рее, которое принималось равным давлению рд в пограничном слое на стенке, а
’
также Давления торможения ро в этом слое использовался ГРМ с коэффициентом шка-
лы К =0‚005. Давление ро в фор-
камере определялось обычным ме—
ханическим манометром, а темпе-
ратура Тоф в ней измерялась с по-
мощью платинового электротермо-
метра сопротивления.
Общий вид этой трубы и схе-
ма всей экспериментальной уста-
новки показаны на рис. 7.1.5. Пе-
ред пуском аэродинамической тру-
бы было измерено барометричес-
кое давление Ратм=740‚1 мм рт. ст.
Сч
и…
\ -
#
(10065‚5 кГім2). Одновременно бы-
ли сняты начальные показания
ГРМ для каналов измерения ста-
тического давления (Рао) №о=0,3
и давления торможения (ро) - '
1Ч0=1,2. -
После включения трубы и вы-
хода ее на установившийся ре-
жим с манометра для измерения : - =
статического давления было сня— _- "‘ ° \
то показание №=199. В соответ- "`/”_”,“
ствии с этим статическое дав-
ление Рис. 7.1.5. Схема экспериментальной установки:
рш=р ати _Ет К(М— №0)= 1—рабочая часть: 2—термоприемник; З—трубка
полного напора; 4—ГРМ
= 10065‚5 —1-0,005 Х
Х(199—0‚3) 104= 130,5 кГ/м2.
Так как измеренное давление в форкамере ро=45 кГ/см2‚ то число Маха потока
в рабочей части аэр0динамической трубы
2 ро (‚г-"1“,2 1/2 2 45-104 (1.4—1)/1‚4 1/2
М : _— _ _ = _1 = ‚80.
°° {іг— 1 [( р…) ‘В {1,4—1[(1зо‚5) ]} 6-
Число Маха мд на внешней границе пограничного слоя будет таким, как это значе-
ние Мос. Соответствующая ему скорость У…, равная скорости Уд на этой границе, бу-
дет Уд =У°°=Мд ад . Так как скорость звука в свободном потоке ад =1/1гКТд
!г—1 -1 '
а температура этого потока Т6=Тоф(1 +ТМЁ) , то, учитывая, что измеренное
в форкамере значение Тоф=800 К и газовая постоянная для воздуха [?= 287 ‚112/(сек2
-град) [287 дж/(кг- -‚град)] получим:
1‚4_1 —1
т,5 =800(1+—-2——6,82) =78,06 к;
Уд = 6,80 1/1,4.287.78‚06 = 1204 м/сек;
рд = ре,/(КЦ) = 130,5/(287-78,06) = 0,00583 кГ-сек2/м4;
При измерении давления Ро и температуры торможения То в пограничном слое со-
ответствующие насадки перемещались в нем на малые расстояния, рав-ные 0,25 и 0,5 мм
вблизи стенки и 1 мм на большей части слоя, причем точность отсчета этих расстояний
на микрокоординатнике составляла 10,025 мм. Расположению трубки Пито на обте-
каемой поверхности соответствовало расстояние у1=0.25 мм от ее оси до стенки. При
этом показание ГРМ было № = 197,4. Таким образом, давление торможения
рд = р…, — а,. к (А! —— №0) = 10065,5 —1-о‚005(197‚4—1,2) 104 = 256 кГ/м2.
Так как рд =130,5 кГ/м2‚ то число Маха, определенное из уравнения (2.2.9):
337
2-1‚4 1,4—1 1/(1.4—-1)
‹ ›
130,5 __ 1,4+1 1,4—1—1.
256 (1,4-1— 1 МЗ)1.4/(1.4—1)
2
будет равно 1,03.
По показанию милливольтметра 1\/=8‚5 из тарировочного графика (см. рис. 3.1.10)
находим температуру торможения Т0=400 К. По этому значению определяем статиче-
скую температуру:
іе—1
2
1,4—1
—1 —1
мг) =400<1+ 1,032) =329,6 к;
ВЫЧИСЛЯЗМ СКОРОСТЬ!
м Т № 1,03 329,6 1/2
Ух “ 76 (мб) (тб) 6,80 (78,06) 75 "‘/сек
И ПЛОТНОСТЬ:
р = рд (тд/Т) = 0,00583 (78,06/329,6) = 0,00139 кГ-сек2/м4.
Аналогично производятся измерения и осуществляются расчеты параметров для дру-
гих положений датчиков давления и температуры в пограничном слое; полученные ре-
зультаты вносятся в табл. А.
Т а б л и ц а А
Расстояние Р’, / ' У 0,
0 от ;;енки. кгс/>и, Тм К р Ро М Т, К „,/"с;“: кГ-сек2/м4
0,25 256 400,0 0,5100 1,03 329,6 375 0,00139
0,50 315 450,4 0,4154 1,20 349,7 449,7 0,00130
1,00 822 528,8 0,1594 2,12 278,5 708,6 0,00164
1,50 1095 577,6 0,1191 2,48 259,0 799,7 0,00176
2,00 1220 592,0 0,1074 2,62 249,5 829,2 0,00182
2,50 1341 603,2 0,0979 2,75 240,1 853,7 0,00190
3,00 1475 612,0 0,0885 2,90 228,2 877,5 0,00200
4,00 1730 629,0 0,0755 3,15 210,1 914,7 0,00217
5,00 2000 648,0 0,0651 3,40 195,6 953,2 0,00233
15,0 5750 768,8 0,0227 5,82 98,86 1159,3 0,00461
16,0 6275 775,4 0,0208 6,08 92,35 1170,9 0,00493
21,0 7810 798,0 0,0167 6,80 78,06 1200,0 0,00583
22,0 7810 800 0,016? 6,80 78,06 1204,0 0,00583
9 им , т у.“…
20 ‘ ________ }
15 }
10 ' / '
(е_ / [
1
5 )
. ‚ / ‹
0 " 0
200 000 600 000 1000 из, М/сеи ! 4 5 Б и
Рис. 7.1.6. Распределение скоростей в погранич- Рис. 7.1.7. Распределение чи-
ном слое на стенке рабочей части аэроцинами— сел М по толщине погранич—
ческой трубы ного слоя
338
В табл. А для сок-рашения ее размеров приведена часть полученных результатов,
‚относящихся к пристеночной области и к участку пограничного слоя, примыкающему
к внешней границе. Причем, как видно из таблицы, измерения заканчивались, Кетда
координата у насадка была равна 22 мм и он показывал то же давление ро, что и для
предыдущей координаты у=21 мм.
По данным табл. А на рис. 7.1.6 построен график функции Ух=і(у)‚ из которого
найдена при условии, что Уд=0,99-Уоо=1192 м/сек, толщина пограничного слоя б=
=19 мм. На рис. 7.1.7 и 7.1.8 показаны соответствующие зависимости М, То и Т.
Т а б л и ц а В 19' мм
АУ . А’У . АЗУ . [
у, мя Ух, м/сек м/с'с’гск диоде м/сёТс 20
т
0 0 449,7 —190,8 +23,0 ‚5 ‚
0,5 449,7 258,9 —167,8 ——
1,0 708,6 91,1 __ _ ТЧ
1,5 799,7 —— _ _
ю \
5 \ /
Рис. 7.1.8. )Распределение темпера- … о 200 жрёт? ‚800 Т “
тур (Т 0, Т по толщине погранич- „.
ного слоя $00 200 300 цоп т_ и
Для нахождения напряжения трения на стенке тет составим по известному рас-
пределению скорости таблицу разностей (см. табл. Б).
В соответствии с данными табл. Б
_ =_44›7——°—1‚ —-‚-_-‚ .в _
(ду )у=0 0.5.10—3 [ 9 2 ( 90 8)+ 3 23 о] 1 10610 1/сек
Коэффициент динамической вязкости
нет = и, (Ты./тдс"76 = 1,71 .10—6 (310/273)°'76 = 1,89-10—6 кГ-сек/м2,
Температура стенки здесь Тот, равна 310 К, определялась экстраполированием по
графику на рис. 7.1.8. В соответствии с полученными результатами
тет = „с, (дух/думы = 1,89-10"6-1,106-10° = 2,09 кГ/м2,
По этой величине находим местный коэффициент трения:
Тст _ 2Тст 2-2,09
с =—_ = =0‚49-10—3_
”‘ % №3105 1,4-6‚802.1зо
Для определения условных толщин вытеснения б* и потери импульса 6** восполь-
зуемся формулами численного интегрирования (7.1.11)—:-(7.1.14). В соответствии с эти-
ми формулами и с учетом данных измерений 7: и 0 (см. табл. А) были подсчитаны от-
ношения У.е/%* 9/95 ‚ рУх/(рд Уд), найдены функции Гб., іди, а также соответствую-
щие конечные разности, и определены величины Аб*, Аб** (см. табл. В).
По данным табл. В, где в целях иллюстрации представлена лишь часть результа-
тов, при помощи (7.1.11) и (7.1.12) были определены следующие значения 6* .и б“:
18
($# = 2 А6; = 0,9148 + 0,7992 +- - —+ 0,0480 + 0,0108 % 8,65 мм;
0
18
6** = 2 А6? = 0,04129 + 0,06969 +. „+ 0,00545 + 0,00077 :=: 0,85 мм.
0
‚С учетом поправочных формул (7.1.16) и (7.1.17):
6* = 8,65 (1 _ 05119)".18 м 8,60 мм;
в“ = 0,85 (1 _ 0,5119)“18 % 0,85 мм,
Таблица В
ЗЮ
% 03030001 сыпь
% шюыч ють
_ФФФ ишо
; тююю -—оо|
% оооо ооо
‹ оооо ооо
@ ю ть
оююё —Ф
* ы—ощ _т
Ь ьооз ‚оо]|
? 900 оо
“ ?°?? ??
ююою Ф—Ч
. ючщ— юою
* о—оо шыш
@ ьооо _ООО'
Ё оооо ооо
°??? ???
ФОФ «ют
тнт шюю
: ОФФ тат
© оъюю .нооо
\ ооо ооо
ооо ооо
; юы—о тою
ФФЮО ююо
_ _Фют сан!
% Фььь _оо
< оооо ооо
@ юо—о от
% нооо оо
ооо? оо
„тью ююю
—юют ФЮЮ
. ьююю шта
& _ооо ООО]
° ???? ???
Фот Фтю
* как вав
3 "юьь _ооо
ооо ооо
ч.: “Ъ
ось нют
° чьи Фют
;>> сваю Фшь_
@ @ _ЧЫ @@@
° ооо ооо
ьъю ФФЬ
нюю —юю
° ФЫЮ ЮФ“…
ттт шта
ооо ооо
ююы ФФФ
что ить
>>> ююъ ФФФ
ооо ооо‘
%
…} что ююьо
02 ююо ФЫФФ
тз ттч- -чччч
0; ооо оооо
&
2
& юшю Ф
Е офаь .ооаы
_ отъ ьююф
›. [\Юф п—о—чч—я—ч
>` ___—4
$
_ о—шю шьют
=) ___—1—
Работа1л3
Исследование пульсаций
скорости в пограничном
спое на плоской пластинке
Ц е л ь р а б о т ы — эксперименталь-
ное определение точки перехода лами-
нарного пограничного слоя в турбу-
лентный.
Общие сведения
Распределение параметров жидко-
сти в пограничном слое, а также тре—
ние и теплопередача к обтекаемой по-
верхности существенно зависят от ре-
жима течения, поэтому важной прак-
тической задачей является определе—
ние положения точки перехода лами-
нарного пограничного слоя в турбу-
лентный.
Ламинарное течение жидкости ус-
тойчиво при некоторых условиях, оп-
ределяемых критическим чис-
лом Рейнольдса. При значениях
этого числа, больших критического,
ламинарное течение становится неус-
тойчивым и переходит в турбулентное.
Такой переход связан с возникновени—
ем в потоке незатухающих возмуще-
ний.
Если образующиеся вследствие ка—
ких-либо внешних причин возмущения
скорости и давления с течением вре-
мени затухают, то течение устойчиво,
если они возрастают, то течение неус-
тойчиво и возможен переход ламинар-
ного режима в турбулентный. Однако
этот переход не происходит мгновенно.
Непосредственно за точкой потери ус-
тойчивости ламинарного пограничного
слоя по отношению к малым случай-
ным возмущениям, попадающим в этот
слой, течение носит перемежающийся
характер: происходит смена ламинар—
ных и турбулентных состояний через
неравномерные промежутки времени.
Физический характер такого переме—
жающегося течения характеризуют
посредство м коэффициента
перемежаемости, указывающе-
го, какую долю некоторого промежут-
*ка времени в определенном сечении
потока существует турбулентное тече-
ние.
На переход ламинарного погранич—
ного слоя в турбулентный влияет Це-
лый ряд факторов: число Рейнольдса
и число Маха; размеры шероховатости; относительная температура по-
верхности; углы атаки и стреловицности крыла; градиент давления;
степень затупления тела; вдув (или отсос) газа в пограничныи слои, а
также начальная турбулентность потока.
В настояшее время достаточно подробно изучена устойчивость лами-
нарного пограничного слоя по отношению к малым возмущениям и по-
лучено следующее условие для точки потери такои устоичивости
в случае обтекания плоской пластинки:
(и… от…… = 420.
Расстояние от точки перехода до точки потери устойчивости существен—
но зависит от степени турбулентности потока, причем это рас-
стояние тем меньше, чем больше
степень турбулентности. Ке,
Переход ламинарного погранич- 33,” "“
_УЙЩЧ
__
ного слоя в турбулентный сопровож-
дается более быстрым возрастани-
ем скорости по мере удаления от
поверхности и большим утолщени-
ем слоя. Эти изменения и сопро-
вождающие их явления служат ос-
‚_314, №№… 223 …В
… ___ - ———- 2,74-105
1.55 №7
НОВОЙ ДЛЯ различных методов ОП- 2,98106
ределения ТОЧКИ перехода. МОЖНО
1,79 №№
определить Два ЗНЗЧЗНИЯ КРИТИЧЭС' 1,8 № 3,11Шв
кого числа Рейнольдса. Одно из них
7
5
соответствует началу области пере- 1,93 «№ № 5,22 !0
хода, другое—ее концу, т.е. пол— „ … и " 3 7; 6
ностью развитому турбулентному 2,58 имт/№0 д— ЖЁАММММ '9 0
Рис. 7.1.9. Пульсации скорости в по-
пограничному слою. В приближен—
НЬ1Х расчетах МОЖНО" ИСХОДИТЬ И? граничном слое регистрируемые ка—
того, что ламинарныи пограничныи ‚годным дециллографом
слои отделен от турбулентного об—
ластью перехода с бесконечно ма-
лыми размерами или геометрической точкой. Координата хнр этой
точки перехода определяется по критическому числу Рейнольдса Кеш),
которое в свою очередь вычисляется как некоторое среднее значение
между числами Рейнольдса, соответствующими началу и концу обла-
сти перехода. Обычно в результате эксперимента устанавливают поло-
жение перехода, а затем по известным параметрам невозмушенного по-
тока и хнр рассчитывают значение критического числа Рейнольдса:
Нед,-р: У…хкр/тт.
В настоящее время используются различные методы исследования
перехода. Наиболее широкое распространение получили методы, осно-
ванные на измерении турбулентных пульсаций скорости, полного давле-
ния, профиля скоростей в пограничном слое. В некоторых случаях при-
меняются визуальные методы, позволяющие наблюдать изменения в
пограничном слое при помощи дыма, химических инцикаторов, каолина,
сублимирующих и люминесцируюших покрытий, масляной пленки, пы—
леосаждения.
Рассмотрим более подробно метод определения перехода ламинар-
ного пограничного слоя в турбулентный, основанный на измерении
п у л ь с а ц и й с к о р о с т и. В качестве прибора, регистрирующего
эти пульсации, используют термоанемометр (см. 9 2.2). Прежде чем
приступить к исследованию пограничного слоя на поверхности модели,
необходимо определить характеристики невозмушенного потока, а имен-
но скорость У… и начальную турбулентность в (см. @ 2.2). Затем датчик
термоанемометра, установленный в координатном устройстве, следует
341
расположить на небольшом расстоянии от обтекаемой поверхности
(О‚2+О,6 мм— в зависимости от толщины пограничного слоя) и пере-
мещать его вдоль этой поверхности, причем нить термоанемометра:
должна быть расположена перпендикулярно скорости потока. В про-
цессе перемещения датчика следят за изменением характера пульса-
ций скорости с помощью катодного осциллографа и устанавливают
протяженность ламинарного пограничного слоя, переходной области
и полностью развитого турбулентного пограничного слоя.
Каждая из указанных областей характеризуется следующими явле—
ниями. В ламинарном пограничном слое пульсации незначительны., а в
переходной области эти пульсации велики по амплитуде, но носят ред-
кий, случайный характер. На турбулентном участке происходит увели-
чение пульсаций скорости (рис. 7.1.9).
Определив границы области перехода, т. е. координаты хкр, соответ—
ствующие началу и концу перехода и отсчитываемые от передней кром-
ки пластинки, и зная параметры набегающего потока У… и у…, можно
рассчитать критические числа Рейнольдса Кекр=У°охкр/у°о (минималь—
ное и максимальное, соответствующие началу и концу перехода).
Порядок проведения работы
1. Ознакомиться со схемой экспериментальной установки, устройст—
вом модели, термоанемометром, тарировочной аэродинамической тру—
бой, а также регистрирующими приборами и проверить готовность их
к работе.
2. Измерить атмосферное Давление ратм, температуру Татм, а также
разность температур по психрометру.
3. Произвести тарировку датчика термоанемометра с помощью спе—
циальной тарировочной аэродинамической трубы и установить зависи-
мость показаний вольтметра постоянного тока ПВ от скорости потока У
3 (см. 9 3.1).
2\ \ 4. Установить в рабочей час—
‘ ти дозвуковой аэродинамической
| - трубы исследуемую модель.
?
ЦЬ__] | | див 5. Осуществить соединение
б
›-о
регистрирующих приборов: тер—
@ моанемометра, вольтметров по—
,рд стоянного и переменного тока, а
также осциллографа согласно
еть ** схеме, приведенной на рис. 7.1.10.
Рис 7110 Схема включения егист и 6. закрепить датчик термо—
- — ° °ющей аппаратурыр Р ру анемометра в рабочеи части аэ—
!-—-датчик термоанемометра; 2—термоанемо- РОДИНЭМИЧБСКОИ Трубы Нд Дер—
метр; 3, 4—вольтметры переменного и по- ЖЗВКЭ КООРДИНЗТНОГО УСТРОЙСТВИ
стоянного тока, 5—катодный осциллограф _
и соединить его электрическим.
кабелем с термоанемометром.
7. Включить питание моста термоанемометра и произвести баланси—
ровку измерительного канала термоанемометра (см. @ 3.1).
8. Включить аэродинамическуюу трубу и после вых0да ее на режим
установившегося движения воздуха снять показания вольтметров по-
стоянного и переменного тока.
9. Установить датчик термоанемометра на заданном расстоянии от
обтекаемой поверхности (в зоне пограничного слоя) вблизи передней
кромки пластинки.
10. Перемещать датчик термоанемометра вдоль обтекаемой поверх-
ности с помощью координатного устройства и следить на осциллографе
за характером пульсаций скорости в пограничном слое.
342
11. По изменению характера и амплитуды пульсаций скорости вдоль
обтекаемой поверхности установить характерные области течения (ла-
минарное, переходное, турбулентное) и зафиксировать с помощью коор—
динатного устройства расстояния (координаты х) от передней кромки
до этих областей.
12. По показаниям вольтметров постоянного и переменного тока
определить скорость невозмущенного потока (см. тарировочный график
на рис. 3.1.16) и по зависимости (3.2.39) — начальную турбулентность в.
13. По измеренным значениям ратм, Татм и разности температур
психрометра определить относительную влажность воздуха, давление
насыщенного водяного пара (см. табл. 2.2.1; 2.2.2) и рассчитать плот-
ность газового потока роо и- коэффициент кинематической вязкости мы.
14. По найденным в процессе эксперимента координатам области пе-
рехода и параметрам набегающего потока определить критические
числа Рейнольдса, соответствующие началу и концу области перехода.
Пример. Приведем результаты исследования перех0да ламинарного пограничного
слоя в турбулентный на плоской пластинке в дозвуковой аэродинамической трубе. Об-
работка экспериментальных данных, полученных при таком исследовании, осуществля-
лась с помощью тарировочной кривой для термоанемометра, приведенной на рис. 3.1.16.
Перед пуском аэродинамической трубы были измерены барометрическое давление
Ратм=760 мм рт. ст. (10300 кГ/м2)‚ а также температура воздуха в лаборатории
Татм=288 К н раз-ность температур психрометра, равная двум градусам (разность меж-
ду показаниями сухого 11= 15° С и влажного &= 13° С термометров).
Соединение регистрирующих приборов (термоанемометра, цифрового вольтметра.
постоянного тока, вольтметра переменного тока .и осциллографа) производилось соглас-
но схеме, приведенной на рис. 7.1.10. В первоначальном положении датчик термоане-
мометра устанавливался на координатном устройстве в рабочей части аэродинамиче—
ской трубы вдали от исследуемой модели (вне пограничного слоя). После включения
трубы и выхода ее на установившийся режим работы были сняты показания цифрового.
вольтметра постоянного тока Пв=4‚89 в и вольтметра переменного тока сіПв=0‚2З мв.
Скорость потока в рабочей части аэродинамической трубы Уа° определялась из тари-
ровочного графика (см. рис. 3.1.16) по Пв=4‚89 в и оказалась равной Уоо=24 м/сек..
Начальная турбулентность потока дозвуковой аэродинамической трубы в была.
найдена по зависимости (3.2.39):
112 о . о—3 892
8:4‚35 % ‚ __в__,___ =4’35 ‚23 1 . 2 4, 2:0,03'10—2.
ПВ уё_ (00)2 4,89 4,89 —(0‚925-3)
После снятия показаний вольтметров постоянного и переменного тока, необх0ди-
мых для определения Усо и е, датчик термоанемометра с помощью координатника был
установлен в районе носовой части пластинки на расстоянии 0,57 мм от ее поверхности
и перемещался в процессе исследований вдоль поверхности (в направлении потока).
В результате были получены осциллограммы пульсаций скорости, приведенные на
рис. 7.1.9, где для каждой координаты х указаны соответствующие числа Рейнольдса
Кех. На основа-нии этих экспериментальных данных можно сделать вывоц, что начало
области перехода соответствует расстоянию от передней кромки, равному х1=1‚65 м, а
конец—длине х2=2‚38 м. По этим значения-м можно вычислить минимальное Кекрх.
и максимальное Кекр2 числа Рейнольлса перехода.
Плотность набегающего потока
Ратм ( Х'рн_п 10300 ( 0,8'12‚79
„= =—1——0,з78— =-——1—0,378—— ::
Р Р.… КТ.… ра…) 287-288 760 )
: 0,124 кГ-секв/м4.
Здесь относительная влажность х=0‚8 была определена из табл. 2.2.1 по температуре-
' О
[атм=15 С и разности температур психрометра 2°С, а давление насыщенного водяно-
го пара рн_ц= 12,79 мм рт. ст. — из табл. 2.2.2.
Так как коэффициент динамической вязкости
и... = „„ (ТФ,/ТО)°'76 = 1,71 . 10_6(288/273)0'76 % 1.78.10—6 кГ-сек/м2
и соответствующий коэффициент кинематической вязкости
ую = рос/рее = 1,78.1о—6/о‚124 = 14,4-10—6 м2/сек‚
343?
то,следовательно‚
_ _ - —6 _ 6.
вскр, _ 1/00 хит„ _ 24-1‚6:›/(14‚4— 10 ) _ 2,74-10 ,
ке р, = 1100 ‚это, = 24-2,38/(14,4-1О"6} = 3,97-106.
К
РаботаТАз
Исследование распределения давления и полного
аэродинамического сопротивления шара,
обтекаемого потоком вязкой
несжимаемой жишюсти
Ц @ л Ь р а б о т ы — определение по измеренному сопротивлению ша-
ра и распределению давления по его поверхности начальной турбулент-
ности потока в аэродинамической трубе.
Общие сведения
При исследовании обтекания вязким потоком тел различной формы
наблюдаются так называемые кризисные явления, связанные с
резким изменением характера этого обтекания. Такие явления могут со-
провождаться о т р ы в о м потока с поверхности или же происходят при
безотрывном ее обтекании.
Наиболее ярко выражены кризисные явления в случае обтекания
тонкой пластинки и шара. При безотрывном обтекании пластинки кри—
зисное явление состоит в резком возрастании ее сопротивления,
обусловленном переходом ламинарного пограничного слоя в турбу-
лентный. При обтекании шара кризис обтекания носит другой харак—
тер. Вследствие нарастания на его поверхности пограничного слоя и
торможения, обусловленного противодавлением, происходит отрыв
этого слоя. Начало такого отрыва совпадает с той точкой поверхности,
где тст=0‚ т. е.
“от (дух/ду)у=0 : 0-
Следовательно, отрыв пограничного слоя происходит тем ниже по те-
чению, чем больше напряжение трения на стенке, поскольку в этом
случае частицы жидкости пройдут больший путь в пограничном слое
вдоль поверхности тела, прежде чем тот станет равным нулю. Таким
образом, в случае ламинарного пограничного слоя `отрыв произойдет
значительно выше по потоку, чем в случае смешанного пограничного
слоя, когда на кормовой части шара имеется турбулентный погранич—
ный слой.
Схема отрыва потока при обтекании шара показана на рис. 7.1.11, а
соответствующее распределение коэффициентов давления р=
=(р—р…)/с]°° —на рис. 7.1.12. Чем ниже по потоку происх0дит отрыв
пограничного слоя, тем ближе по своему характеру Обтекание шара
потоком реальной (вязкой) жидкости к обтеканию его идеальной сре-
дой. Поэтому, несмотря на то, что сопротивление трения при переходе
от ламинарного пограничного слоя к турбулентному возрастает, кризис
обтекания приводит к уменьшению полной величины сопротивления ша-
ра вследствие уменьшения области пониженного давления в кормовой
части (см. рис. 7.1.12).
Кризисные явления в случае обтекания шара при прочих равных
условиях наступают тем скорее (т. е. при меньшем числе Рейнольдса
Ке= Уезд/тоо, где В — диаметр шара), чем больше начальная турбулент-
ность потока. Шар вследствие большой чувствительности характера
его обтекания к начальной турбулентности используется в эксперимен—
344
тальной аэродинамике как эталонный образец обтекаемой поверхности
при определении величины этой турбулентности.
Разработаны и применяются два способа этого определения. Пер-
вый из них связан с измерением лобового сопроти вления шара,
а второй основан на измерении п е р е п а д а д а в л е н и я на его по—
верхности.
Рис. 7.1.11. Схема отрыва потока при обтекании шара:
а—полностью ламинарное течение (докритическое Обтекание); б— сме—
шанное течение (закритическое Обтекание); 1—линии тока; 2—эпюра
скоростей в пограничном слое; 3—точка перехода ламинарного погра-
ничного слоя в турбулентный; 4—точка отрыва пограничного слоя;
5 —- эпюра скоростей в точке отрыва; 6 —вихревой след за телом
1,0
Рис. 7.1.12. Распределение коэффициентов давления по
поверхности шара:
1—безвихревое Обтекание идеальным потоком; 2—докритиче-
ское Обтекание; З—сверхкритическое Обтекание
Определение начальной турбулентности потока в аэродинамической
трубе по измерению лобового сопротивления шара. Если, увеличивая
скорость потока в аэродинамической трубе, измерить при помощи аэро-
динамических весов лобовое сопротивление шара и подсчитать соответ-
ствующий коэффициент сопротивления сх, то можно построить график
зависимости этого коэффициента от числа Рейнольдса, как это показа-
но на рис. 7.1.13.
Из рисунка видно, что величина сх изменяется в широких пределах:
при малых числах Рейнольдса, когда происходит отрыв ламинарного
потока сх%0,48‚ а при больших значениях этого числа (в случае «тур-
булентного отрыва») схтод. В сравнительно малом диапазоне чисел
Рейнольдса (на рис. 7.1.13 Ке1 и Ке2) происходит резкое снижение коэф-
фициента сопротивления, обусловленное переходом ламинарного по-
граничного слоя в турбулентный и сдвигом по этой причине его точки
отрыва вниз по потоку. Приближенно считают, что такое снижение про—
исходит при критическом числе Рейнольдса Ке*, за которое прини-
мают его значение Ке=У°оВ/моо, соответствующее коэффициенту лобо-
вого сопротивления шара сх=0‚3 (см. рис. 7.1.13).
345
Если провести измерения лобового сопротивления одного и того же
шара в различных аэродинамических трубах и построить графики сх=
=1°(Ке), то может оказаться, что полученные кривые не совпадут
(рис. 7.1.14) и соответствующие числа Ке* будут также различными.
Это объясняется разной величиной начальной турбулентности потока в.
На основании испытаний по определению лобового сопротивления
одного и того же шара в различных аэродинамических трубах, началь-
Г‘
. ‘ $
33
()
„'‚Ч
0,3
0,2
0,1 | :
'Не не:- ‹- НеТі | : :ре:
1 2 0
9.3 „@
Ы ‚(:
_Сз
г\)
0 " и _
1,0 2,0 3.0 4,0 пе-Ш'5 1,0 2,0 982893 14,0 ве-зэ 5
Рис. 7.1.13. Зависимость коэффициента Рис. 7.1.14. Зависимости сх=Г(Ке) дЛЯ
лобового сопротивления шара от числа шара, полученные в различных аэродина-
Реинольцса мических трубах
ная турбулентность в которых заранее определена с помощью, напри-
мер, термоанемометра, можно построить серию кривых сх=і(ке)-—
таких, как на рис. 7.1.14. По этим кривым можно найти критические
числа Ке*‚ а затем графически воспроизвести зависимость 8=Г(Не*).
Такая зависимость, которой можно пользоваться для определения в
экспериментальных условиях начальной тур-
_ ‚‹.-‚* _5
ак.. Ш булентности в, %, приведена на рис. 7.1.15.
3,6 А Исследования показывают, что найденные
при помощи этого графика значения началь-
ной турбулентности потока близки к действи-
тельным, если используемая в экспериментах
модель шара имеет диаметр 0%12—2—15 см.
Определение начальной турбулентности
потока по измерению перепада давлений на
поверхности шара. Из рис. 7.1.12 видно, что
изменение числа Рейнольдса наиболее сильно
сказывается на распределении давления в
1 2 3 4 58,70 кормовой части шара. Если до наступления
«кризиса» за шаром преобладает разрежение,
Рис. 7.1.15. Связь между то при «закризисном» обтекании в этой зоне
1,2
0,80
начальной ТурбулеНТНО- наблюдается более высокое давление. Об-
СТЬЮ ПОТОКЗ И КРИТИЧЗ- „ _
ским ЧИСЛОМ Рейнольдса ласть, которая в наибольшей степени реагиру
шара (‚4__свободный ет на изменение числа Рейнольдса, определя;
полет) ется полярными координатами 9:150 +210
(см. рис. 7.1.12). Эта особенность обтекания
шара используется в целях определения кри-
тического числа Рейнольдса по перепаду давлений в головной и кормо-
вои частях шара.
В стенке шара, предназначенного для подобных исследований, про-
сверливают два дренажных отверстия, причем одно из них располага-
ют в точке полного торможения (критической точке), а другое —в кор—
мовой части, в точке с полярной координатой 6=157°30’. В целях по—
вышения точности измерений давления в кормовой части шара просвер-
ливают не одно, а четыре симметрично расположенных дренажных от-
верстия (рис. 7.1.16), измеряемые давления в которых осредняются с
346
помощью коллек-гора (величину этого осредненного давления обозна-
чим через рк). Изменение условий обтекания (числа Ке) существенно
влияет на перепад давления Ар=ро‚——рк в этих точках и в точке полно"-
го торможения. Если при разных скоростях потока в аэродинамическои
, 7°30'
е "5
Ё
Рис. 7.1.16. Модель шара для определения начальной турбулентности
потока по измерению перепада давления на его поверхности:
! ——шар давления; 2—донная державна; 3— жидкостной манометр; 4, 5—тру-
бопроводы, соединяющие дренажные точки с манометром; б—дренажные от-
верстия для измерения давления; 7—коллектор
трубе измерить этот перепад давлений, то можно построить зависимости
(рис. 7.1.17)
— 2 — „ %
Ар: (до 210) : р2 ___]с(№)_
Исследования показывают, что значение Ар=1,22 соответствует ко-
эффициенту лобового сопро- _
тивления сх=0,3‚ при кото- дд
ром определяется критичеС- ‚›Ч
кое число Ке*. Таким обра-
зом, для нахождения этого 1,3
числа Рейнольдса можно ис-
пользовать график Ар: ‚2
=і(1{е)‚ на котором значе-
ние Ке* отыскивается по ве-
личине Ар=1‚22. Зная Ке*,
по кривой на рис. 7.1.15 мо-
жно определить соответст- 1,0
вующую величину началь-
ной турбулентности 8. №
1,1
Порядок проведения работы
0,8 2,0 # 2,8 2 не40'5
Метод измерения полно-
го сопротивления. д'ечъ
1. Ознакомиться со схе- _
МОЙ экспериментальной ус_ Рис. 7.1.17. Зависимости Ар от числа Рейнольд-
.‚ са для шара, полученные в аэродинамических
ТЗНОВКЩ УСТРОИСТВОМ МО“ трубах с различной начальной турбулентностью
дели, однокомпонентными потока (1, 2, 3)
347
тензометрическими весами, тарировочным приспособлением, а также
регистрирующими приборами и проверить готовность их к работе.
2. Произвести тарировку аэродинамических весов и построить тари—
ровочный график зависимости Х=1°(1\/) (Где Х—осевая сила; М—по-
казания регистрирующего прибора —милливольтметра).
З. Закрепить исследуемую модель шара на тензометрических весах
с помощью донной державки и установить ее в рабочей части аэроди-
намической трубы.
4. Установить в этой рабочей части насадок полного напора и соеди-
нить его с микроманометром с помощью резинового шланга.
5. Измерить атмосферное давление ратм и температуру Татм, снять
начальные показания микроманометра‚ регистрирующего прибора весов,
а также психрометра.
6. Включить аэродинамическую трубу и после ВЫХОДа ее на режим
установившегося движения воздуха зафиксировать показания мано-
метра, измеряющего полное давление, а также показания регистри-
рующего прибора аэродинамических весов.
7. Изменить режим работы двигателя аэродинамической трубы и про—
вести новые испытания по определению лобового сопротивления шара,
записывая кажцый раз показания трубки полного напора и регистри-
рующего прибора весов.
8. По измеренным атмосферному давлению (ратм) и температуре
(Татм), а также разности температур влажного и сухого термометров
психрометра определить плотность воздуха р….
9. По измеренным атмосферному Давлению и давлению торможе-
ния ро, а также найденной ранее плотности роо определить скорость по-
тока в рабочей части аэродинамической трубы, а затем подсчитать
коэффициент кинематической вязкости мы, скоростной напор а…:
=р°оУЁ°/2 и число Рейнольдса Ве=УооВ/\›<„ для различных режимов ра-
боты аэродинамической трубы.
10. Используя тарировочный график, по найденным в эксперименте
показаниям регистрирующего прибора весов № определить лобовое со-
противление шара Х.
11. По значению Х найти соответствующий коэффициент лобового
сопротивления с:,‹: для каждого режима работы аэродинамической трубы.
12. Построить графическую зависимость коэффициента с,С от вели-
чины Не=У…В/у°о и определить критическое число Рейнольдса Не*‚ со-
ответствующее значению сх=0‚3.
13. Опредедить по Не* начальную турбулентность аэродинамической
трубы, используя график на рис. 7.1.15.
МеТОД измерения перепада давлений.
1. Ознакомиться со схемой экспериментальной установки, устройст-
вом модели, а также регистрирующими приборами и проверить их го-
товность к работе.
2. Установить в рабочей части аэродинамической трубы дренирован-
ную модель шара (шар давления) на донной державке.
3. Соединить резиновыми трубками дренажное отверстие, располо-
женное на лобовой поверхности шара, с резервуаром чашечного микро—
манометра, а отверстия в кормовой части—с измерительной трубкой
микроманометра.
4. Установить в рабочей части аэродинамической трубы насадок
полного напора (для измерения скорости У…)“ и соединить его с мик—
романометром (это измерение можно также осуществить по величине
полного давления, измеренного в критической точке шара, которое под-
водится к манометру через соединительный тройник).
5. Снять начальные показания микроманометров, предназначенных
для определения скорости потока и перепада давлений в лобовой и кор-
348
мовой областях шара, а также измерить атосферное давление ратм,
температуру Татм и разность температур по психрометру.
6. Включить аэродинамическую трубу и после выхода ее на режим
установившегося движения воздуха снять показания микроманометров.
7. Изменить режим работы Двигателя аэродинамической трубы
и вновь провести испытания по измерению перепада давлений на по-
верхности шара.
8. По измеренным ратм, Тати, а также разности температур влажно-
го и сухого термометров психрометра определить плотность воздуха р….
9. По измеренным атмосферному давлению ратм, давлению тормо-
жения ро и найденной плотности роо определить скорость потока в от-
крытой рабочей части аэродинамической трубы, а затем коэффициент
кинематической вязкости у…, скоростной напор аю=рюУЁю/2 и число
Рейнольдса для различных режимов работы аэродинамической трубы.
10. Определить перепад давлений Ар’=ро—рк при разных скоростях
набегающего потока.
11. Вычислить значения Ар=Ар/с]<„‚ построить график Ар=1°(ке)
и определить по нему критическое число Рейнольдса, соответствующее
значению Ар=1‚22.
12. Определить по этому числу Рейнольдса, используя графическую
зависимость з=]°(Ке*) на рис. 7.1.15, начальную турбулентность.
Пример. Измерение лобового сопротивления. Рассмотрим результа-
ты экспериментального определения начальной турбулентности потока дозвуковой аэро-
динамической трубы переменных скоростей
по измерению в ней лобового сопротивле— Х,!—
ния медели шара. 200
Для исследования применялась моцель
диаметром 13:12 см (площадь миделевого 150
сечения Змид=0,0113 м2), установленная на
однокомпонентных тензометрических весах
с помощью донной державки. Предвари-
тельно была осуществлена тарировка этих
весов, по результатам которой построен 50
трафик на рис. 7.1.18.
Перед пуском аэродинамической трубы 0
измерялись барометрическое давление 1 0 №,дел
‚ра-…=760 мм рт. ст., температура в лабо-
ратории Татм=288 К, а также разность Рис. 7.1.18. Тарировочный график од—
температур по психрометру, равная двум ,нокомпонентныхтензометрических весов
градусам (показание влажного термометра
286 К). Одновременно были сняты началь—
ные показания микроманометра (Но=6 мм) и регистрирующего прибора весов (№0:
=12 дел).
Плотность воздуха
. 10300 0,8-12,79
— № (1 _ 0,378 №) = —— (1 _ отв—) =
100
р°° = рат _ ата… ра… 287-288 760
% 0,124 кГ-сек2/м4,
Здесь относительная влажность х=0‚8 определена из табл. 2.2.1 .по атмосферной темпе—
ратуре и разности температур психрометра, а давление рн‚п=12,79 мм рт. ст.—из
табл. 2.2.2 по температуре Татм=288 К (15° С).
Коэффициент динамической вязкости
и… = По (Тео/То)°°76 = 1,71 . 10—6 (288/273)О'76 = 1,78-10—6 кГ-сек/м2,
а коэффициент кинематической вязкости
тоо = рее/ров = 1,78-1О_6/О, 124 = 14,4-10—6 м2/сек.
После пуска трубы и выхода ее .на установившийся режим с микроманометра, сое-
диненного с трубкой полного напора, было снято показание Н=41 мм, а с регистрирую—
щего прибора весов №=68. В соответствии с этими данными скорость потока в рабо-
чей части аэродинамической трубы
349
Усо= \/ р—Ёо-ш—пдзіпв-мт = 1/
= 15,1 м/сек,
(41 ——6) 10—3.0,5-800.1 =
Здесь: у=0,8 кГ/дмЗ—удельный вес жидкости в микроманометре; В=30°—угол нак-
лона плоскости измерительного колена микроманометра; Ет—коэффициент тарировки
насадка полного напора (его величина принимается равной единице).
Сила лобового сопротивления Х =0,075 кГ определена из тарировочного графика
(см. рис. 7.1.18) по величине
Скоростной напор набегающего потока
47… = 0,0 УЗО/2 = 0,124.15,12/2 = 14,0 кГ/м2.
Наконец, коэффициент лобового сопротивления шара
Сх: Х/(аоо Змид) = 0,075/(14-0,011З)= 0,474
и число Рейнольдса
Не = УО, от… = 15,1.0,12/(14‚4.10—б) = 1,25-105_
Т а 6 Л И Ц а А Аналогично осущест-
вленные измерения и расче-
Уоо’ 01—010, 2 _в ты для других режимов
м‚‚‘сек дел Х’ “Г аш'кг/м сх Не'ю работы двигателя аэроди-
намической трубы иосоответ-
15,1 56 0,075 14,0 0,474 1,25 ствующих скоростеи потока
20,0 98 0,130 24,8 0,464 1,67 Ё ЁЁЁЁЧЖ части приведены
25,0 127 0,170 38,7 0,389 2,08 ` ' ' 6 А
30,0 77 0,103 55,75 0,164 2,50 рис ЁО1ЁЁНЁЁЁЁГРЁЁНЁ 38131}:
35,0 71 0,095 76,0 0,111 2,92 симость Сх=)°(ке), на осно-
40›0 88 0› 117 99»1 0›105 3›33 вании которой определено-
критическое число Рейнольд—
са Ке*=2,2-105, соответ-
ствующее значению сх=0,3. По значению Ке*=2,2- 105 из графика 6=)°(Ке*) на
рис. 7.1.15 была определена начальная турбулентность потока е=0,9°о.
И 3 м е -р е н и е п е р е п а д а д а в л е н и й. Приведем результаты эксперименталь-
Сэ:
8,5
0,3 _ —
0,2 …— _ \—
0,і „ —° |
1,0 2,0 не 3,0 не—10'5
Рис. 7.1.19. Экспериментальная зависимость
сх=)°(Ке) для определения критического числа
Рейнольдса Ке*
ние манометра (Но=6 мм), а затем показание п
установившиися режим (17:39 мм). В соответстви
ного определения начальной тур-
булентности по измерению перепа—
Да давлений на поверхности шара
в той же дозвуковой аэродинами—
ческой трубе, что и в предыду-
щем примере. .
Схема эксперименталы-юй
установки (шара давления) при-
ведена на рис. 7.1.16. Полый дре-
нированный шар диаметром 0:
=12 см (площадь миделевого се-
чения $мид=0‚0113 м2) устанав—
ливался на донной державке в ра-
бочей части трубы. Скорость на-
бегающего потока Уоо в ней оп-
ределялась как с помощью трубки
полного напора, так и по давле-
нию торможения, измеренному в
передней критической точке шара.
Перепад давлений на поверх-
ности щара в заданных точках оп-
ределялся с помощью микромано—
метра. Для этого перед пуском
трубы было снято нулевое показа—
ри продувке после выхода трубы на
и с этим
Ар = ро —р„ = (и _ по) зіп 6.7.15… =(39 _— 6) 10—3.0‚75.800. 1 ‚0 = 19,8 кГ/м2,
а соответствующая безразмерная величина
АБ = Ар/Чоо = 19,8/14 = 1,42.
350
Аналогично производились измерения и осуществлялись расчеты для других режи-
мов работы аэродинамической трубы (см. табл. Б).
Таблица Б
Уоо' м/сек ао… ““Т/м" пело—5 н, мм - %„ Ар, кГ/м“ АЪ
15,1 14,0 1,25 39 33 19,8 1,42
20,0 24,8 1,67 63 57 34,2 1,38
25,0 38,7 ‚08 89 83 49,8 1,29
30, 0 55 ‚75 ,50 94 88 52 ,8 0, 948
2
2
35,0 76,0 2,92 110 104 62,4 0,821
40,0 99,1 3,33 139 133 79,8 0,808
По данным табл. В на рис. 7.1.20 построен график зависимости Ар=]°(Ке)‚ на ос-
новании которого было определено критическое число Рейнольдса Ке*=2‚14—1О5‚ соот—
ветствующее Ар= 1,22.
А Б
1, Ч
!, 3
1, 2
1,1
1,0
0,9
0.8
"“ 2:0 Ве 5,0 неча—5
Рис. 7.1.20. Определение критического числа
Рейнольдса Ке* по найденной в результате экс-
перимента зависимости АБ=Г(Ёе)
По значению Ке*=2,14-1О5, используя зависимость е=і(Ке*) (см. рис. 7.1.15),
найдена начальная турбулентность потока 825 1,0 %.
Работа 1.1.4
Исследование влияния шероховатости
на обтекание поверхности
Ц е л ь р а б о т ы — определение зависимости между шероховатостью
и переходом ламинарного пограничного слоя в турбулентный.
Общие сведения
Шероховатость обтекаемой поверхности оказывает существенное
влияние на распределение параметров потока, положение и размеры об-
ласти перехода, величину поверхностного трения, поэтому исследование
влияния шероховатости на пограничный слой представляет большой
практический интерес.
Область возмущений, вносимых в поток шероховатостью, зависит
от отношения высоты элементов шероховатости (например бугорков
шероховатости) к толщине пограничного слоя. Для практики необходи-
мо знать, до каких значении этой высоты шероховатость не оказывает
влияния на переход ламинарного пограничного слоя в турбулентный
и как изменяется характер этого перехода при произвольной шерохова-
тости. Представляет также интерес величина допустимой шероховато-
сти для турбулентного пограничного слоя, при которой не происходит
увеличения сопротивления по сравнению с гладкой стенкой.
351
Оценка влияния сжимаемости на эффективность шероховатости по-
казывает, что с увеличением Моо критические высоты шероховатости
возрастают. Это явление ЦОДтверЖДается экспериментами (рис. 7.1.21).
Таким образом, пограничный слой в сжимаемой жидкости менее чув—
ствителен к шероховатости, чем в несжимаемом потоке. После того как
отношение Ыб; (Ё — высота элемента шероховатости; б; _толщина вы-
теснения в сечении пограничного слоя, где расположен турбулизирую-
щий элемент) достигнет критического значения, дальнейшее его возра-
стание даже на небольшую величину приводиткбыстрому перемещению
некр
какэі
1.0 Й
0,8
\ ( Кё.…- Нем) т“
\ г\ /
' ‚\ \ . ‚ . ‚/
\
0,2 \‘
0 1 2 3 к/гг: О 2 4 м,
Рис. 7.1.21. Влияние цилинд-
рического элемента шерохо-
ватости на критическое чис-
ло Рейнольдса:
Рис. 7.1.22. Расстояние меж-
ду точкой перехода и турбу-
лизатором в зависимости от
числа Маха (конус и пла-
стинка)
*
($#—толщина вытеснения по-
граничного СЛОЯ В месте распо-
ложения элемента шероховато-
сти; 1—зависимость для ма- ТОЧКИ перехода вперед ДО тех пор, ПО-
ЁЁЁкосЁЁЁЁОСЁЁЁ ЧИЁЁЁШЁМОЁЁЁ’Ё ка она не достигнет минимального
Кекр_Г—‹ критическое число Рей- раССТОЯНИЯ ОТ элемента ЦЗЗРОХОВЭТО-
нольдса для Гёттаёкой поверхно- сти, при котором последнии считается
эффективным,
Это минимальное расстояние между точкой перехода и положением
турбулизирующего элемента зависит от числа Мьди увеличивается срос-
том этого числа. На рис. 7.1.22 приведена зависимость для разности
Кекр—Кехд (где Кекр-=Удхкр/уд; Кехд=Уд Хд/уд) от числа Маха, полу-
ченная при обтекании плоских пластин и конусов со сферическими эле-
ментами шероховатости.
В турбулентном пограничном слое шероховатость не приводит к
увеличению сопротивления в случае, если высота элементов шерохова-
тости меньше толщины л а м и н а р н о г о п о д с л о я. Приближенно ве-
личина допустимой шероховатости 12 для пластинки может быть опре-
делена из соотношения
Ут іг/уоо = 100. (7.1.24)
Расчеты и экспериментальные данные показывают, что критическая вы-
сота шероховатости, вызывающая переход ламинарного течения в тур—
булентное, значительно больше (примерно в 10 раз при малых скоро-
стях), чем допустимая высота шероховатости при турбулентном погра-
ничном слое.
Остановимся на исследовании влияния элементов шероховатости на
переход течения в пограничном слое. Обычно при таких исследованиях
эти элементы той или иной формы (сферические, цилиндрические и т.п.)
равномерно располагают на кольцевых (для тел вращения) или плос-
352
ких полосках и укрепляют на поверхности тела в заданном сечении
с помощью, например, эпоксидного клея. При этом толщина указанных
полос должна быть такой, чтобы они не оказывали влияния на переход
пограничного слоя. Например, при числе Мб =2‚7 Допустимая толщина
такой полосы примерно равна 0,05 мм [49], причем с увеличением Мд
она несколько возрастает.
Высота элементов шероховатости определяется микрометром. Сле-
дует обратить внимание на тщательность обработки обтекаемой поверх-
ности особенно в носовой части, где пограничный слой наиболее топок.
Затем препарированная модель устанавливается в рабочей части аэ-
родинамической трубы и каким-либо способом определяется положение
точки перехода ламинарного пограничного слоя в турбулентный. В ча-
стности, при сверхзвуковых скоростях целесообразно такое определение
вести либо путем измерения теплового потока (для этой цели на поверх-
ности модели размещают термопары), либо используя оптические при-
боры, позволяющие фотографировать пограничный слой и различные
его участки.
Изменяя размеры и форму элементов шероховатости, а также их ра-
сположение на обтекаемой поверхности и определяя каждый раз кри-
тическое число Рейнольдса, можно путем сравнения этого числа с со-
ответствующим значением для гладкой поверхности установить степень
влияния шероховатости и оценить эффективность турбулизатора.
При малых скоростях (несжимаемая ЖИДКОСТЬ) высота изолирован-
ного элемента шероховатости цилиндрической формы, при которой еще
не сказывается влияние этой шероховатости на переход, может быть
определена из соотношения
У„Аз/уд =7, (7.1.25)
где із — высота элемента шероховатости; У„ : і/тстд/р — Ц И н а м и ч е-
с к а я с к о р о с т ь, определяемая по величине касательного напряже-
ния на стенке (тстд) в месте расположения этого элемента.
Высота элемента шероховатости, при которой переход ламинарного
пограничного слоя в турбулентный происходит непосредственно около
этого элемента, определяется из соотношения
шт, : 15 + 20. (7.1.26)
При сверхзвуковых скоростях число Кед=Уд іг/уд является функци-
ей Мд, &, Кехд=Удхд/мд и соответствует минимальному критическому
числу Рейнольдса на адиабатической стенке:
для конусов
не, : 32,8 (1 + % м3) хеш; (7.1.27)
ДЛЯ ПЛОСКИХ ПЛЭСТИНОК
не, : 43,2 (1 + "’—5.1 мд) №355. (7.1.28)
В соответствии с зависимостью (7.1.27) можно также записать
Невё„4
: ; 1 . (7.1.29)
32,8 (1 + % мё)
згіё?
Соотношения (7.1.27)+(7.1.29) устанавливают эффективные разме-
ры шероховатости, при которой число Рейнольдса перехода (критичес—
кое число) оказывается минимальным.
Можно рекомендовать следующую методику определения размеров
элементов шероховатости и их положения на обтекаемой поверхности
23—927 353
для обеспечения перехода пограничного слоя в заданной точке поверх—
ности. Выбирают в зависимости от поставленной задачи положение точ-
ки перехода Хнр и соответствующее число Кекр= Уд хнр/уд (при этом па-
раметры невязкого потока Уд, рб предполагаются известными). Затем
по графику (см. рис. 7.1.22) наХОДят величину разности Кекр—Кехд как
функцию числа Мб и вычисляют Нехд, а используя зависимости (7.1.27),
(7.1.28), определяют Нед. По найденным значениям чисел Кехд и Нед
вычисляют соответствующую координату турбулизатора и размер эле-
мента шероховатости.
Порядок проведения работы
1. Изготовить турбулизатор, для чего отшлифовать отдельные эле-
менты шероховатости (например стальные шарики) до получения за-
данных номинальных размеров; равномерно расположить их на сталь-
ной ленте (плоской или кольцевой) и залить эпоксидным клеем, после
чего вновь отшлифовать. Толщина стальной ленты при этом должна
быть достаточно малой, чтобы не оказывать влияния на переход погра—
ничного слоя. _
2. С помощью микрометра измерить высоту ОТДельных элементов
шероховатости.
3. Ознакомиться с аэродинамической установкой, регистрирующей
аппаратурой и проверить их готовность к работе.
4. Проверить соединение приемника статического давления в рабо—
чей части трубы с манометром (ГРМ).
5. Снять начальные показания манометра, предназначенного для
определения р…, а также измерить атмосферное давление.
6. Установить в рабочей части аэродинамической трубы на донной
державке исследуемую модель с тщательно обработанной поверхно-
стью.
7. Осуществить пуск аэродинамической трубы и после выхода ее на
установившийся режим движения воздуха снять показания манометров,
измеряющих статическое давление р… и давление торможения в фор-
камере ро, измерить температуру в форкамере То, а также произвести
фотографирование картины обтекания модели теневым прибором.
8. Выключить аэродинамическую трубу, укрепить изготовленный
турбулизатор на исследуемой поверхности в сечении с координатой хд,
отсчитываемой от передней кромки тела.
9. Вновь осуществить пуск аэродинамической трубы и после выхода
ее на установившийся режим работы произвести фотографирование об-
текания модели.
10. По измеренным значениям давления торможения в форкамере
ро и статического давления рсю найти число Мсо в рабочей части аэроди-
намической трубы, а затем, используя найденную при помощи датчика
температуру торможения То, рассчитать все остальные параметры по-
тока.
11. По полученным теневым снимкам определить положение точки
перехода пограничного слоя для гладкой стенки и поверхности с турбу-
лизатором.
12. По известным параметрам свободного потока (на внешней гра-
нице пограничного слоя) и координате хнр перех0да Ламинарного погра-
ничного слоя в турбулентный подсчитать критические числа Рейнольд-
са для гладкой и шероховатой поверхностей (соответственно Нек… и
Кенр) .
Пример. Рассмотрим результаты экспериментального исследования влияния сфери-
ческих элементов шероховатости на Обтекание теплоизолированной поверхности конуса
сверхзвуковым потоком. Исследуемая модель была изготовлена .в виде заостренного ко-
854
нического тела с полууглом при верши- } …… . _, _ - ‘
не Бд=5° и длиной образующей 500 мм. Ё, 3
$ ‹ в“
&
Чистота поверхности конуса (после по—
лировки) соответствовала среднеквад-
ратичному отклонению микронеровностеи
менее 0,25 мкм. Турбулизатор представ-
лял собой стальную ленту толщиной при-
мерно 0,05 мм, на поверхности которой _
с помощью эпоксидного клея были ук- … \ ,
реплены стальные шарики на расстоянии _ _ ; 1 №
друг от друга примерно 1,5 мм. При 247 ЗЫ? % —’%Ё3Ё:’Ё№Ч
этом средняя высота элементов шерохо-
ватости, измеренная микрометром, іг=
=0,198 мм. ' __ . _, .
Перед пуском аэродинамической {ЁЁ} ` "
трубы было измерено барометрическое
давление ратм=740 мм рт. ст. ;
(10060 кГ/м2). Одновременно были сня- ;} " %
ты начальные показания в канале ГРМ
№0=1,4 для измерения статического дав-
ления роо. После установки гладкой мо-
дели конуса в рабочей части, включения
трубы и выхода ее на установившийся
режим работы были сняты показания _` ‚‚ , =
манометра № =191‚4 статического давле- 7,3“ А?!? Ёж“ '
ния, измерено давление в форкамере "“ """""" !
ро=1‚53 кГ/см2‚ а также температура
Т0=300 К. Одновременно была сфото- Рис. 7.1.23. Теневые фотографии обтекания
графирована картина обтекания модели модели:
теневым прибором. а—гладкая поверхность; б—шероховатая по—
В соответствии с полученными дан- верхность
ными и с учетом того, что коэффициент
трубки ёт=1‚0‚ а коэффициент шкалы
ГРМ К=0,005‚ были определены параметры потока в рабочей части:
роо = ратм_ Еткш— №0) = 10060— 1.0‚005 (191,4 _ 1,4) 104 = 564 кГ/м2;
1 1 $
“1100.
1 1
44—1 1 1.4 _
—1]}2 = 2,8;
”@={ЁЧ1<'5—1>7—11Р=1…_11<‘*іі1‘°‘> &
іг—1 —1 1,4—1 —1
\
аш : умело = 1/1‚4—287- 117 % 218 м/сек;‚
Уоо = Моо аоо = 2,8-218 : 610 м/сек;
р.., = р../(КТ…) = 564/(287-117) = 1,68-10"2 кГ-сек2/м4.
Параметры на внешней границе пограничного слоя определялись по найденным па-
раметрам не-возмущенного потока с помощью таблиц и графиков [17]:
МЁ=мб=2’7; рд=рб=1,86…10_2к1`сек2/м4;
Уд: = Уд = 602 м/сек; а : ад = 223 м/сек.
Коэффициент динамической вязкости подсіитывался по формуле (7.1.19):
рд = „О (Тб/Т0)°'76 = 1,83—10"6 (123/293)°-76 = 0,95410—6 кГьсек/м2_
Соответствующий коэффициент кинематической вязкости
мд = „6 /р6 = 0,954-10_6/(1‚86-10_2) = 0,513-10—4 м2/сек.
По полученным теневым фотографиям обтекания гладкой поверхности (рис. 7.1.23, а)
была определена координата точки перехода хкр=305 мм. Следовательно, критическое
число Рейнольдса для такой поверхности конуса
не“… = Уд хкр/уд = 602-0‚305/(0‚513-10_4) =3,58-106_
Исследования влияния шероховатости проводились на модели конуса с установлен-
ным на расстоянии хд=73 мм от носка турбулизатором. Из полученных теневых сним-
23’" 355
ков (см. рис, 7.1.23, 6) была определена координата точки перехода Хкр= 102 мм. В соот-
ветствии с этим значением критическое число Рейнольдса для шероховатой поверхности
кекр = 602—0‚102/ (0,513—10—4) = 130.106.
Отношение найденных критических чисел Рейнольдса для гладкой и шероховатой
поверхностей Кекр_г/Кекр%3. Таким образом, используемая в эксперименте шерохова-
тость вызывает перех0д пограничного слоя на расстоянии от носка, втрое меньшем, чем
на гладкой стенке.
Сравним полученные опытные результаты с некоторыми данными, известными из
литературных источников. Число Рейнольдса, подсчитанное по параметрам на внешней
границе ПОГРЭНИЧНОГО СЛОЯ И ПО координате Хм
_ —4 _ 6
нех„ = Уд хЁ/уб _ 602-О,073/(0,513-10 ) _ 0,86-10 .
Следовательно, разность
Кекр —— Кехд = 1 ,20-106 — 0,86-106 % 0,34-106_
Эта величина удовлетворительно согласуется с результатами, приведенными на
рис. 7.1.22, и одновременно служит подтверждением того, что выбранная высота элемен-
тов шероховатости близка к 3 ф ф е к т и в н о й.
Найдем значение этой эффективной высоты. Для этого вычислим число Рейнольдса
по значению Ь=0‚198 мм:
Кей = Уб іг/уд = 602-0,198—10—3/(0,513-10—4) = 2330,
Согласно (7.1.27) число Кен, соответствующее эффективной шероховатости,
4
1, —1
Ке», = 32,8(1+ ——2——— 2,72) (0,86-106)1/4 = 2460.
Таким образом, эффективная высота шероховатости
[г = не,е % щ, = 2460-0,513-10_4/602 = 0,208-10—3м.
РаботаТАд
Весовые измерения силы трения
Цель р а боты — непосредственное измерение аэродинамического
сопротивления, обусловленного трением, и определение местного коэф-
фициента трения для турбулентного пограничного слоя.
Общие сведения
При исследовании обтекания тел вязким потоком газа большое
практическое значение приобрели методы непосредственного измерения
силы сопротивления трения. К числу их относится метод обр ащен-
н 0 го дв иже н и я [18], согласно которому небольшой участок поверх-
ности тела («плавающий элемент») закрепляется на весовом устройст—
ве и в результате продувки в аэродинамической трубе определяется
соответствующая сила трения.
На рис. 7.1.24 показан общий вид экспериментальной модели с «пла-
вающим элементом», предназначенной для измерения трения при обте—
кании непроницаемой поверхности плоской пластинки. «Плавающий
элемент» 4 размещается в прямоугольном пазу такой пластинки 1. При
этом зазор между ними должен быть достаточно малым в целях устра-
нения градиента давления на его острых кромках. Согласно экспери-
ментальным данным величина этого зазора не должна превышать
0,03+О,08 мм. Кроме того, верхние поверхности пластинки и «плаваю-
щего элемента» должны притираться совместно в собранном виде. с
тем, чтобы устранить возможный сдвиг этих поверхностей в вертикаль-
ном направлении. Такой сдвиг оказывает неблагоприятное влияние на
результаты экспериментальных исследований. Например, установлено,
что коэффициент сопротивления трения уменьшается примернона 20%
зв.—.в.
в случае, если поверхность «плавающего элемента» расположена ниже
на 0,05 мм относительно пластинки, и возрастает на ту же величину, ес-
ли этот элемент поднят примерно на 0,03 мм. В первом случае возни-
кает отрицательный градиент давления, способствующий снижению тре-
ния, во втором к собственно поверхностному трению добавляются сила
от давления и донное сопротивление. Таким образом, максимальные
выступы сопрягаемых деталей не должны превышать долей микрона.
Подвижная система помимо «плавающего элемента» включает в се-
бя стойку 5, ось 7, два упругих элемента 3, 6, поддерживающих ось 7,
керамический электрод 2 и катушку 8 с выводами. Основной упругий
1 . Ц 5 Б 7 8 9
_]
7, _
„ „: __ ‚$:. ..7 /////////
”\\/{"‘ЩЁ №“; ' ”%%” %%“ .х‘
';
#
Ё № А, \? &ЁЁ“ „.
'- !“,/7,7/4'і
:.? №!ИЛ//
":, . . .-_.-.-.-.-.-.
.1
‚/ _. .. __ тии/‚„„ .
!Ж/АЁА\\\\\\\\ `\\\\\\(<{і_з,/////// ' .
ит„ ‚
{.Р
. _
И/ ........
90.14%
> №
\
Рис. 7.1.24. Конструктивная схема «плавающего элемента», предназначенного для не-
посредственного измерения силы трения
элемент 3 выполнен в виде консольной балки, к свободному концу кото—
рой прикладывается измеряемое усилие; второй упругий элемент явля-
ется поддерживающим и должен обладать большой «податливостью»
в осевом направлении. Тарировку «плавающего элемента» тангенци-
альной силой производят до установки исследуемой модели в рабочей
части аэродинамической трубы. При этом при перемещении электрода,
соединенного с «плавающим элементом» посредством упругой консоль—
ной балки, изменяется межэлектродное пространство и емкость систе-
мы, что регистрируется соответствующим прибором. Кроме того, в кон—
струкции устройства предусмотрены подвижная катушка 8 и узел под—
магничивания 9, позволяющие заменить внешнюю тангенциальную силу
электромагнитной и производить в случае необходимости тарировку
«плавающего элемента» модели, установленной в аэродинамической
трубе.
В процессе эксперимента регистрируют показания, например мил-
лиамперметра, пропорциональные перемещению упругого элемента
(т.е. тангенциальной силе поверхностного трения), и, используя тари-
ровочный график, определяют силу трения Хі. Соответствующая этой
силе средняя на рассматриваемом участке поверхности величина напря—
жения трения тст=Х‚‹/8, а местный коэффициент трения
Хі _ Хг
6100$ (мире„ маз,
Сіх :
где аоо=рооУ3° /2—скоростной напор набегающего потока; 8—площадъ
поверхности «плавающего элемента».
В соответствии с теоретическими и экспериментальными исследова—
ниями определение коэффициента турбулентного трения плоской пла-
стинки, обтекаемой несжимаемым потоком, можно вести по следующим
зависимостям, каждая из которых применяется для соответствующего
диапазона чисел Рейнольдса:
357
с” = 0,02812ех—0'15 (5-105 < Нех < 5-108) ;
с” = 0,016Не;°›12 (108 < Нех < 109) ;
с” = 0,011Нех—0’10 (109 < Цех < 1010) .
Числа Рейнольдса в этих зависимостях Кех= Утроох/моо вычисляют-
ся по параметрам набегающего потока (Усе, ‚Рао, ”со) и расстоянию от
ст:
(Сіднсж
0,8
0,6
Од 105
107
108
109
0,2 ……
0 1 2 3 Ц 5 б 7 Мое
Рис. 7.1.25. Отношение с,‹х/(с,‹х)нсж в зависимости от чисел Маха и
Рейнольдса
передней кромки пластинки до «плавающего элемента». Для учета вли-
яния сжимаемости следует воспользоваться формулой
Сіх/(Сіх)нсж : (1 + 0,18МЁОГ1/2 (7.1.30)
либо данными, приведенными на рис. 7.1.25.
Порядок проведения работы
1. Ознакомиться со схемой экспериментальной установки, устройст-
вом модели, регистрирующей аппаратурой и проверить их готовность
к работе.
2. Установить сопловые вкладыши в рабочую часть сверхзвуковой
аэродинамической трубы, соответствующие выбранному числу Маха.
3. Закрепить исследуемую модель на державке и установить ее в
рабочей части таким образом, чтобы плоская поверхность была распо-
ложена параллельно потоку.
4. Произвести тарировку «плавающего элемента» тангенциальной
силой и построить соответствующий тарировочный график.
5. Проверить соединение приемника статического давления в рабо-
чей части трубы с манометром (ГРМ).
6. Снять начальные Показания манометра, предназначенного для оп-
ределения рос, а также регистрирующего прибора (например миллиам-
перметра), и измерить атмосферное давление ратм.
7. Включить аэродинамическую трубу и после выхода ее на режим
установившегося движения воздуха осуществить измерения манометром
статического давления, а также снять показания регистрирующего при-
бора (миллиамперметра), пропорциональные силе трения; определить
давление и температуру в форкамере (‚по и То).
8. По измеренным значениям роо и ро определить число Мво в рабо-
чеи части.
9. По значениям То и Мс,° найти параметры набегающего потока
(Т°°› Р°°9 УФ)
358
10. Используя тарировочный график, определить по показанию мил-
лиамперметра силу трения Х
11. Найти по величине этой силы и параметрам набегающего пото-
ка, а также известной площади стенки «плавающего элемента» коэф-
фициент трения сж.
Пример. Рассмотрим данные
исследований трения на плоской
непроницаемой пластинке с помо—
шью экспериментальной установки,
схема которой приведена на рис.
7.1.26. «Плавающий элемент»,
имеющий форму прямоугольника
с размерами 12х35 мм, располо-
жен на расстоянии 450 мм от пе-
редней кромки пластинки. Стен-
ки элемента и пластинки тепло-
изолированы от остальной конст-
рукции. Давление в форкамере
сверхзвуковой трубы определялось
с помощью обычного механическо-
го манометра (ро=6 кГ/см2)‚ а
температура была измерена элект-
ротермометром сопротивления
(Т0=288 К). Для измерения ста-
тического давления на стенке ра-
бочей части трубы использовался
групповой регистрирующий мано-
метр с коэффициентом шкалы К=
=0,005.
Перед пуском этой трубы из-
мерялось барометрическое давле-
ние (Ратм=740 мм рт.ст.), а так-
же осуществлялась тарировка
«плавающего элемента» (рис.
7.1.27). Начальные показания
ГРМ (в канале статического дав-
ления), а также показание мил-
лиамперметра соответственно бы—
ли равны №о=1‚7 и по=10. Пос-
ле включения трубы и выхода ее
на установившийся режим с ма-
нометра статического давления
было снято показание №=140.
В соответствии с этим
роо=Ратм—ётК(№—№о) :
= 10060—1 -0,005(140——1‚7) 104 =
= 3150 ‚СГ/м?.
Так как давление в форкаме-
ре ро=6- 104 кГ/м2‚ то число Маха
в рабочей части трубы
Сч
* „,…/3
Рис. 7.1.26. Общий вид экспериментальной уста-
ковки:
! -— рабочая часть; 2 — плавающий элемент; 3 — плос-
кая пластинка: 4— ГРМ
К„ Г
20 //
//
10
0 / .
511 ШП 150 п—пд
Рис. 7.1.27. Тарировочный график плава-
ющего элемента
ь—1 1/2 1,4—1 1/2 ‚
2 _- 2 -104 _,
М®={__[(Е°_ із __1 } ={ (6 ) 1,1 _1]} =2‚57_
іг—і РСО 1,4—1 3150
Остальные параметры потока были следующими:
1
1,4 1
;д_ 2 —1 __ —1
Т°о=Т0 (1+—2—М°о) =288 (14—7—2572) =124 К;
УФО = Моо от = 2,57 1/1 ‚4-287-124 = 575 м/сек;
Р… = рос/(КТСО) = 3150/(287- 124) = 0,0882 кГ-секЗ/м4_
Соответствующий коэффициент динамической вязкости
и…, = …, (То,/ТО)“76 = 1,82-10"6 (124/288)°'76 = 0,97.10—5 кГ-сек/м2.
359
По показанию миллиамперметра п=52 из тарировочного графика (см. рис. 7.1.27)
по величине п—по=42 находим силу трения Х‚‹=8,75 Г. Зная поверхность «плавающе—
го элемента» $=4‚2-10—4 м2, определяем соответствующее этой силе напряжение
трения
— — —3/( о—4 — о 2
тст __ Х‚/$ _ 8,75—10 4,2-1 ) _ 2 ‚8 кГ/м
и аэродинамический коэффициент
х, х, 8,75—10—3
С х = = = __
" 400$ (іе/2)р°о маз (1,4/2)з150—2‚572.4‚2.10 4
Сравним полученные результаты с данными, которые получаются по соответствую-
щим методам аэродинамического расчета. Для этого установим характер пограничного
слоя на пластинке. Приняв критическое число Рейнольдса Кекр=2-106‚ найдем коорди—
нату точки перехода ламинарного пограничного слоя в турбулентный:
Карна _2.106.о‚97-1о—6
Уд рд 575-0‚0882
Так как эта длина очень мала, то практически можно считать, что в рассматриваемом
случае на исследуемой пластинке имеется только турбулентный пограничный слой, на-
чинающийся с ее передней кромки.
Ввиду того что расстояние от передней кромки до «плавающего элемента» 0,45 ‚и,
соответствующее число Рейнольдса
% % 575-0‚45-0‚0882
рд 0,97.1о—6
=1‚4з.10—з
хкр= % 0,038м.
Нех = =2‚36—107‚
а местный коэффициент трения в несжимаемом потоке
(%)нсж = (№28 “(50.15 = 0,028 (2,36-107)_0’15 = 2,19.10—3.
Влияние сжимаемости на коэффициент трения можно учесть, используя зависимость
] 1
_? __
Сіх/(сіх)нс;к = (1 + 0,18МЁО) = (1 + оле-2,572) 2 = 0,675.
Следовательно, сіх=0,675 (сіх)нсж=0‚675-2‚19-10—3=1‚48-10—3‚ что удовлетвори—
тельно согласуется с полученными экспериментальными результатами и имеющимися
данными для теплоизолированной пластинки при М…=2‚57 (см. рис. 7.1.25).
РАЗДЕЛ ВТОРОЙ
ВОПРОСЫ И ЗАДАЧИ ПО АЭРОДИНАМИКЕ
!. ОСНОВНЫЕ СВЕДЕНИЯ ИЗ АЭРОДИНАМИКИ
1.1. Каков характер силового воздействия газообразной среды на
движущийся в ней летательный аппарат?
1.2. В чем заключаются характерные особенности ламинарного
и турбулентного движений жидкости?
1.3. В чем различие происхождения сил трения в ламинарном и тур-
булентном потоках?
1.4. Измерения показали, что в рассматриваемом сечении поток
около обтекаемой поверхности на некотором удалении от нее турбулент-
ный. Правильно ли утверждение, что таким же будет течение на всем
участке этого сечения, включая пристеночную область.
1.5, На рис. 2.1.1 показаны главный вектор Р и главный вектор мо—
мента М системы элементарных аэродинамических сил, распределенных
на обтекаемой поверхности (центр масс О на рисунке—точка приведе-
ния, относительно которой вычислен момент).
Покажите схемы расположения аналогичных векторов Р и М для
двух моделей летательных аппаратов, закрепленных в аэродинамиче—
ских трубах так, как показано на рис. 2.1.2. Места крепления этих мо—
делей совпадают с точками приведения А и В, относительно которых
определяется момент.
1.6. На рис. 2.1.3 показан общий случай поворота осей ортогональной
системы координат, а также взаимное расположение скоростной и свя—
занной систем координат, применяющихся в аэродинамике.
Для перехода от системы координат х, у, 2 к системе Щ, Ш, 21 необхо—
димо знать три угла Эйлера ср, тр, 9 (см. рис. 2.1.3, 0). В то же время для
пересчета аэродинамических сил и моментов, полученных в скоростной
системе координат, на соответствующие их значения в связанных осях
достаточно иметь известными два угла и и [3 (угол атаки и угол сколь—
жения; см.рис.2.1.3,б). Обьясните, почему возможен такой пересчет.
].7. Дайте определения углов атаки и И скольжения [З. В соответст-
вии с этими определениями покажите графически относительное распо-
ложение скоростной и связанной систем координат, а также углов а и [3
в следующих случаях движения летательного аппарата: 1). без сколь-
жения под углом атаки; 2) со скольжением под нулевым углом атаки.
1.8. На рис. 2.1.4 показана наиболее общая схема действующих на
летательный аппарат аэродинамических сил и моментов в скоростной
(х, у, 2) и связанной (щ, и, 21) системах координат. В соответствии
сэтой схемой при наличии углов атакиа и скольжения [3 такими силами
24—927 361
являются лобовое сопротивление Х, подъемная сила У, боковая сила 2
(проекции вектора Р на оси скоростной системы), а моментами—Мк,
Му, М2 (соответственно моменты крена, рыскания и тангажа, являющи-
еся. проекциями момента М на те же оси х, у, 2).
Ш
7…
Рис. 2.1.1. Главный вектор Рис. 2.1.2. Различное закрепление
и главный момент аэродина- тел вращения 1 на державках 2
мьических сил, действующих
на тело, движущееся со ско-
ростью Уоо
Рис. 2.1.3. Расположение двух ортогональных си—
стем координат:
а—общнй случай; б—связанная и поточная системы
Если рассмотреть связанные с летательным аппаратом оси, то дей-
ствующими силами будут Х1(К), У1(1\/)‚ 21—осевая (продольная), нор-
мальная и поперечная силы (проекции вектора Р соответственно на оси
161, уд, 21), а моментами—М…, М…, М„ (моменты крена, рыскания
итангажа), являющиеся проекциями векторам соответственно на те же
оси х], уд, 21. Получите формулы пересчета сил и моментов из связанной
системы координат в скоростную и наоборот.
Как будет выглядеть соответствующая схема в случаях движения
летательного аппарата, указанных в вопросе 1.7, при условии, что кон-
струкция такого аппарата симметрична относительно горизонтальной
и вертикальной плоскостей, проходящих через его продольную ось?
1.9. На рис. 2.1.5 изображена схема действующих на тело вращения
сил и моментов в связанных (хд, уд, 21) и поточных (х, у, 2) координатах.
На этом же рисунке указаны углы атаки а и скольжения [З. Приведите
эквивалентную схему силового воздействия, обусловленную обтеканием
того же тела вращения под углом атаки а’([3=0), и найдите величину
этого угла.
362
1.10. На рис. 2.1.6 показаны два одинаковых оперенных тела враще—
ния и действующие на них осевые силы В] и &, возникающие при обте—
кании этих тел под некоторыми углами атаки. Существование силы В;
(рис. 2.1.6, а) вполне объяснимо; что касается силы 1% (рис. 2.1.6, 6), то
ее возникновение кажется неправдоподобным, так как она будто бы
Рис. 2.1.6. Силы, действу-
ющие на оперепные тела
Рис. 2.1.4. Силы и моменты, действующие
на летательный аппарат
Рис. 2.1.7. Взаимное расположение
сил в скоростной и связанной си-
СТСМЭХ КООРДИНЗТ
в М.„& 9: 0 бит?
06 “Муг
У
* №21…)
21 Х $
“,
ос 0 ; &
ч„ №)
Мг; Мг
2: 2
Рис. 2.1.5. Схема для расчета сил и мо- Рис. 2.1.8. Схема летательного
ментов, действующих на тело вращения аппарата
представляет собой некую подталкивающую силу. В действительности
на обтекаемое тело действует сила лобового сопротивления Х2 (или Х,
в первом случае).
Объясните, в чем разница между осевой силой и лобовым сопротив-
лением, покажите схему силового воздействия при обтекании каждого
обтекаемого тела в поточной и связанной системах координат.
|.“. В соответствии со схемой силового воздействия на летательный
аппарат (рис. 2.1.7) напишите выражения для подъемной силы У в за-
висимости от осевой и нормальной сил (В и М), а для нормальной силы
24* 363
М—в зависимости от сопротивления и подъемной силы (Х и У). Найди—
те соотношения, определяющие 1’ и М как линейные и квадратичные
функции угла атаки и.
1.12. Теоретически или экспериментальным путем найдены составля-
ющие главного вектора момента М в связанных координатах (М…,Муь
МЦ). Определите по этим составляющим проекции того же вектора
в поточной и скоростной системах координат. Рассмотрите при этом
частные случаи, характеризующие движение без скольжения, а также
движение со скольжением под нулевым углом атаки.
1.13. Один из аэродинамических коэффициентов (с…) силы лобового
сопротивления Х рассчитан по площади наибольшего поперечного. сече—
ния ЗМид корпуса, а другой (03,2) —по площади крыла в плане Бкр. Най-
дите зависимость между этими коэффициентами.
1.14. В соответствии со схемой на рис. 2.1.8 напишите выражения для
коэффициента подъемной силы су летательного аппарата в скоростных
координатах в функции коэффициентов нормальной сд— и осевой сн сил
в связанных осях координат. При этом учесть, что коэффициенты см,
сн рассчитаны соответственно по площадям Экр, Змид (см. рис. 2.1.8),
а коэффициент су должен быть вычислен по значению Бир.
1.15. В результате исследований в аэродинамической трубе был из-
мерен момент тангажа МШ относительно поперечной оси, проходящей
через точку А в хвостовой части модели (см. рис. 2.1.8). По этой величи—
не момента вычислен аэродинамический коэффициент тт, рассчитан-
ный по площади Змид и длине модели хи. Зная тж, требуется найти соот-
ветствующую величину коэффициента момента тангажа относительно
оси, проходящей через другую точку 0, при условии, что этот коэффи-
циент рассчитан по хорде крыла Ькр и его площади в плане 8141).
1.16. В соответствии со схемой на рис. 2.1.8 напишите выражения для
коэффициента момента крена т,с в скоростных координатах через коэф—
фициенты моментов тангажа тд, рыскания т… и крена т… в связанных
координатах при условии, что т,.с относится к площади крыльев в плане
$…) и их размаху [, а коэффициенты в связанных осях—к геометриче-
ским размерам Бир, хиппи), Бкр, [(ты) и Бкр, [(тх1).
1.17. Назовите характерные геометрические параметры, которые
обычно выбирают при расчете аэродинамических коэффициентов лета-
тельных аппаратов самолетных схем.
1.18. Известен аэродинамический коэффициент силы (или момента),
а также высота и скорость движения летательного аппарата. Можно ли
определить по этим данным соответствующую силу или момент?
1.19. Известны следующие составляющие коэффициента сопротивле-
ния летательного аппарата в виде тела вращения (рис. 2.1.9): схр=0,2
(коэффициент сопротивления от давления, рассчитанный по милелево-
му сечению тела Змид); сщс=0‚01 (коэффициент сопротивления трения,
найденный по боковой поверхности Зи); схдон=0,3 (коэффициент донно-
го сопротивления, вычисленный по площади сечения дна $дон).
Определите полный коэффициент сопротивления тела вращения при
условии, что Змид/Зп=0,1‚ Змид/Здон= 1,2.
1.20. На рис. 2.1.10, (1, 6 показаны схемы трех изолированных крыльев
прямоугольной ], трапециевидной 2 и треугольной 3 форм. В соответст-
вии с размерами этих крыльев на рисунке определите их удлинение ?»
и сужение 1].
1.21. В соответствии с обозначениями и конкретными размерами
шестиугольного крыла на рис. 2.1.11 (Ькр=1; Ькц=0,2; !=5; Ь’=0,1)
найдите соответствующие общие соотношения и численные значения для
средней геометрической Ь и средней аэродинамической дсдх хорд этого
крыла.
1.22. Для несимметричного профиля экспериментальным путем най—
364
дена зависимость между коэффициентами подъемной силы су и момента
тангажа т2 относительно точки 0 передней кромки (рис. 2.1.12).
Определите коэффициент центра давления сц_д=хд_д/Ь и безразмер°
ную координату фокуса хр=хр/Ь.
О
2
Ш
5
$,…
43
3
6 .в __ _
2 ПЗ
] х _
-- Здан (% дан) [4 '- #1
Рис. 2.1.9. Характерные площади тела вра- Рис. 2.1.11. Крыло шестиуголь-
щения ной формы в плане
0) - 1
]!
5)
Ь,…
Ъ
‚Ь,…
Рис. 2.1.10. Возможные схемы крыльев Рис. 2.1.12. Несимметричный профиль крыла
1.23. На рис. 2.1.13 изображены а) 5)
п о л я р ы двух профилей. Покажите, СЗ сд
какой будет соответствующая форма 1,1 1,1
этих профилей, и определите для них … 1,0
непосредственно по рисунку м а кси -
мальное качество (су/сх)…ах,на— 0-9 “›9
ивыгоднейший угол атаки „_в ад
сэнди… максимальное значение коэффи-
циента подъемной силы сушах и кр и- 0›7 ”›7
тические углы атаки секр. …; дд
1.24. В результате эксперименталь- 05 05
ных исследований тела вращения в аэ- ’ ’
родинамической трубе определена ве- ад 0,1;
личина коэффициента центра давле- 03 03
ния сц_д=хц_д/хн. Это тело использова- ' ’
лось в качестве летательного аппара- 0,2 0,2
та в трех случаях, для каждого из ко- … 0,1
0 0
Рис. 2.1.13. Поляры профилей крыла ——› 0,1 0,2 0,3 сд; 0” от
365
торых взаимное расположение центров масс и давления показано на
рис. 2.1.14. Обьясните, почему могло произойти такое смещение этих
центров относительно Друг друга. Что можно сказать о таких летатель-
ных аппаратах в отношении их продольной статической устойчивости?
1.25. В чем особенность аэродинамики больших скоростей, обуслов—
ленная свойством газовой смеси изменять плотность с изменением дав-
ления?
1.26. Назовите примерную последовательность и характер физико-
химических превращений в воздухе, движущемся с очень большими
сверхзвуковыми скоростями и подвергающемся торможению на скачке
уплотнения.
—‹
а)
и…
,
.Ец д |
Рис. 2.1.14. Различные взаимные положения центров масс и давления
1.27. В результате диссоциации из общего количества т двухатомных
молекул распалось п. Какова будет в этом случае степень диссоциации?
1.28. Давление диссоциирующего газа уменьшилось, а температура
сохранилась постоянной. Как изменится степень диссоциации?
1.29. Как изменяются удельные теплоемкости газа при увеличении
его температуры?
1.30. Назовите параметры газа, от которых зависят коэффициенты
динамической вязкости М и теплопроводности ?» при отсутствии диссоци-
ации и для диссоциированного газа (укажите правильный ответ, см.
табл. 2.1.1). В таблице: Т — температура; р — давление.
Таблица 2.1.1
1-й ответ 2-й ответ 3-й ответ
т | т | ‚‚ г | ‚‚
Диссоциация отсут- _
ствует + + + +
Диссоциированный газ + | — —— | —-|— + | +
1.31. Определите ошибку в вычислении удельной теплоемкости ВОЗ‹
духа при Т=5000 К и р=0‚1кГ/см2 без учета равновесной диссоциации.
1.32. Давление в диссоциированном воздухе при температуре Т=
=4000 К уменьшилось с 1 до 0,01 кГ/см2. Как изменилась его плотность?
1.33. Как будет изменяться средний молекулярный вес воздуха при
увеличении его температуры и давления?
1.34. Вычислите скорость звука в воздухе, разогретом до температу-
ры Т=3500 К и находящемся под давлением р=0,01 кГ/см2, и сравните
полученную величину со скоростью звука в предположении, что удель—
ные теплоемкости постоянны или изменяются при отсутствии диссоци-
ации,
1.35. Воздух нагрет до температуры Т=4000 К при давлении р=
==0,1 кГ/см2. Определите его энтальпию і с учетом диссоциации и срав-
ните полученное значение для случаев постоянных теплоемкостей (&=
=ср/с„=1,4) и переменных их значений, зависящих только от темпе-
ратуры (недиссоциированная среда).
366
!.36. В аэродинамике больших скоростей для упрощения исследова—
ний обтекания тел вместо воздуха, представляющего собой сложную
химически реагирующую газовую среду, используют его двухатомную
модель. Объясните, что представляет собой такая модель воздуха.
1.37. Для заданных давления р=0‚01 ісГ/см2 и температуры Т=
=3000 К определите степень равновесной диссоциации кислорода, рас-
сматривая его как условный двухатомный диссоциирующий газ.
1.38. Определите средний молекулярный вес двухатомной модели
азота при давлении р=0,01 кГ/см2 и температуре Т=5000 К.
1.39. При давлении р=0‚01 кГ/см2 степень диссоциации азота ос=
=О,5. Рассматривая его как двухатомную модель диссоциирующего га-
за, определите плотность, температуру, энтальпию и внутреннюю
энергию.
1.40. Для воздуха, рассматриваемого в виде смеси диссоциирующих
чистых двухатомных газов №2 и 02, известны давление р=0‚01 кГ/см2
и температура Т=4500 К. Определите степень диссоциации и термоди-
намические параметры разогретого воздуха.
5.41. Для условий предыдущей задачи (степени диссоциации кисло-
рода и азота в воздушной смеси, энтальпии ее равновесной диссоциа-
ции) определите средний молекулярный вес и коэффициент динамиче-
ской вязкости воздуха.
||. КИНЕМАТИКА ЖИДКОЙ СРЕДЫ
Н.]. В аэродинамике существуют два метода кинематического иссле-
дования жидкой среды, один из которых называют методом Лагранжа,
а другой—методом Эйлера. Каково основное содержание этих мето-
Дов и в чем их различие?
Рассмотрите также следующую задачу. Пусть движение жидкости
задано проекциями скоростей в переменных Эйлера (х, у, 1): Ух=тх+
+т‘‚ Уу=—ігу—|—11‘‚ У2=О‚ где т, п, !, !г—некоторые постоянные вели—
чины.
Перейдите от переменных Эйлера к переменным Лагранжа и опре-
делите в этих новых переменных уравнение траектории.
11.2. Найдите уравнения линий тока и траекторий для трех видов
движения жидкости, заданных следующими проекциями скоростей:
1) Ух : —ау‚ Уу :: ах, У2 : О;
2) Ух=х+!, У),: —у—|—і‚ У2=О;
3) У„ = ах/Кз, Уу :: сту/КЗ, У2 : ага/КЗ;
здесь а—некоторая постоянная величина; К=1/ х2+у2+22.
П.З. Укажите основное отличие характера движения жидкой части—
цы от движения твердого тела, а также элементы, из которых складыва-
ется деформационное движение жидкой частицы. Выделите элементы,
характеризующие поступательное, вращательное и деформационное
движения жидкой частицы в виде параллелепипеда, скорость точки С
которой определяется в виде
Ух„ =: У„ —|— О„ сіх + ву (із —|— в; ау + соу (12 —— со, ау,
1 У У 1
где 9х=%-;8у=—(дх д_2);82:_(дУу +дУх);
дх 2 дг дх 2 дх ду _
:;(Ш_№ .(‚0 ___-_1—‘дУу __дУХ \
11.4. Определите величину скорости относительного ку—
бического расширения в потоке газа, проекции скорости кото-
РОГО ЗЭДЗНЬЛ уравнениями:
__ сх _ су
Ух _ 2 2 ’ Уу _ 2 2 ’
9 (х +у) @ (х + у)
Где р— ПЛОТНОСТЬ Газа; С _ некоторая КОНСТЗНТЗ.
П.Б. В двухмерном плоском потоке жидкости расположена беско-
нечно малая частица в форме круга с уравнением
2 2__ 2
х1—і—у1—г.
?, ,
Определите форму этой частицы и изменение ее площади после де-
формации при условии, что эта деформация ли не йн а я и происходит
вдоль осей 0х1 и Оу1, являющихся главными осями деформации
(рис. 211.1).
' 11.6. Определите, каким будет по характеру —— в и х р е в ым или п о-
т е н ц и а л ь н ы м — поток жидкости в трубе, в которой распределение
скорости по сечению подчиняется степенному закону:
Ух : Утах (ИП))”.
Где У…ах— наибольшая скорость в центре трубы;
го— радиус трубы; величина у=г0—г (рис. 2.112).
Найдите для этого случая величину р о т о р а с к о р о с т и гоі 17.
368
||.7. На рис. 2.11.53 показано двухмерное плоское течение—так на-
зываемый плоский вихрь. В этом течении линиями тока служат
концентрические окружности, причем скорость У зависит только от ра-
диуса г в соответствии с формулой
У= сопз’с/г.
Докажите, ЧТО такое течение ЯВЛЯЗТСЯ бВЗВИХРВВЫ М, И НЗПИШИ-
те В общем виде условие СУШЕСТВОВЭНИЯ бЗЗВИХРЗВЫХ ДВИЖЗНИИ ЖИД-
КОСТИ.
у 9
, ..
- Ц " "у
Уд, ` -
" _ ‹ у
о в 7 °
!
№ .'1: 3
Рис. 211.1. К опреде- Рис. 2.112. Распределение Рис. 2.113. Циркуляционный
лению деформации скоростей по сечению поток (плоский вихрь)
жидкой частицы в круглой цилиндрической
форме круга радиуса г трубы
11.8. Напишите равенства, выражающие необходимые и достаточные
условия, для того чтобы составляющие скорости Ух, Уу, У, являлись
частными производными по координатам от некоторой функции ср, назы-
ваемой п о т е н ц и а л о м с к о р о с т е й. Покажите, что вектор скоростей
равен г р а д и е н т у этой функции, т.е.
17 : егасі (р.
11.9. Определите составляющие угловой скорости частиц жидкости
в потоке, для которого проекции скорости на оси координат равны
У„ = аху, Уу : ауг, 1/2 : ах2‚
где (1 —некоторая константа.
П.]О. Рассмотрите вывод уравнения неразрывности на основе мето-
да Лагранжа.
11.11. При выводе уравнения неразрывности можно исходить из ме-
тода Эйлера. Каким будет по физическому смыслу условие этого вы-
вода?
||.12. Используя метод Эйлера, выведите уравнение неразрывности
для случая неустановившегося движения газа за цилиндрической удар-
ной волной, возникающей перед так называемым р а сш и р я ю щ и м ся
цилиндрическим поршнем (рис.2.11.4).
11.13. Используя метод Эйлера, получите уравнение неразрывности
в цилиндрических и сферических координатах.
11.14. Покажите, что уравнение
др/д! + д (рУ)/дг + арУ/г = 0
представляет собой уравнение неразрывности для течения с плоскими,
цилиндрическими и сферическими волнами (величйна а равна соответ-
ственно 0, 1 и 2).
11.15. Получите уравнения неразрывности для следующих видов
движения газа:
1) каждая частица описывает окружность, перпендикулярную посто-
янной оси и с центром на ней;
369
2) скорости частиц, располагающихся в пространстве симметрично
по отношению к неподвижному центру, направлены либо от центра, ли-
бо к нему и зависят только от расстояния до этого центра;
3) частицы газа движутся в плоскости, проходящей через ось х.
11.16. Движение газа характеризуется тем, что траектории частиц
располагаются в одном случае на поверхностях коаксиальных цилинд-
ров, а в другом — на поверхности конусов, коаксиальных с осью х и име-
ющих общую вершину. Напишите уравнение неразрывности для каж-
дого из этих случаев.
Рис. 211.4. Движение газа за Рис. 2.115. Профиль и крыло
цилиндрической ударной конечного размаха в потоке
волной жидкости
11.17. Какой вид имеют уравнения неразрывности в декартовых ко-
ординатах, используемые для исследования установившегося обтекания
сжимаемой жидкостью профиля крыла, а также крыла конечного раз-
маха (рис. 211.5)?
11.18. Преобразуйте уравнение неразрывности
др/ді + аш (5317) = 0
к виду
др/дъ‘ +179гасі р + р (ііу 17 = 0.
11.19. Потенциальная функция (р полностью определяет характер
движения жидкости, так как по ее величине можно определить ско-
рость в любой точке течения. Можно указать также на существование
другой функции, определяющей движение, а именно функции тока тр.
Дайте определение этой функции, укажите виды потоков, для кото-
рых она существует, и напишите соотношения, связывающие между со-
бой функции ф и 113.
11.20. Определите функцию тока ф, если известен потенциал скоро-
стей несжимаемого течения
Ф=а(Х2—у2)‚
где а—некоторая константа (а>0).
!!.21. Докажите, используя понятия векторного анализа, свойство
ортогональности линий тока и эквипотенциальных
ли ний (на плоскости) или эквипотенциальных поверхно—
с т е й (в пространственном осесимметричном потоке).
11.22. Определите расход жидкости через произвольную кривую АВ
для случая двухмерного (плоского или пространственно'го осесиммет-
ричного) течения, если известны значения функций тока в точках А и В.
[1.23. Определите расход жидкости через отрезок прямой линии, со-
370
единяющей точки А (х1=0; у1=0) И В (х2=1, у2=1), в случае движе-
ния, определяемого потенциалом скоростеи
ср : х (х2 — 3у2).
11.24. Докажите теорему Гельмгольца о постоянстве вдоль вихревой
трубки ее интенсивности. Какое важное свойство вихревых трубок сле-
дует из теоремы Гельмгольца?
!!.25. Движение задано проекциями скорости
Ух = -— жу, Уу = дх, Уа = УФ @ — %“ (162 + 92),
где іг— постоянная величина; (р(2) — некоторая функция 2.
н 5
1 3А% ’ 3%“
.с . _:
2
0 @ ::
н :11: п
Рис. 211.6. К исследованию движения системы трех прямо-
линейных вихрей
Определите ротор скорости 9=гогУ и укажите его направление.
!!.26. Вычислите цир куля ци ю скорости по контуру, соединяюще-
му точки с координатами А (х, 0) и В (О,у) в потоке жидкости, кото-
рый задан проекциями скорости
У„=——і"—‚ У =——“—-‘/—‚ 72:0,
х2-|—у2 у х2+у2
где а — некоторая константа.
П.27. Определите скорость, индуцированную вихревым кольцом (ви—
хревой линией, имеющей форму окружности), в точке, расположенной
в центре кольца. Радиус кольца
г=1 м; циркуляция (интенсивность у ‚. Г
вихревой линии) Г=1ОО ли?/сек. ' ^?
11.28". На рис. 211.6 дана систе- 2 а:
ма, состоящая из трех прямолиней- _ ’?
ных вихрей, расстояние между ко- 9 ^
торыми в продольном и поперечном
направлениях Н=50 см. Найдите . ' %
скорости, сообщаемые вихрями друг _ “ … 2
другу, и определите характер дви- ‚
женяя ннхненея 555$]%ЬЬКД-олёнждгвэггвнж;
В ДВУХ случаях: „ интенсивности
1) интенсивности всех вихреи
одинаковы по абсолютной величине
и знаку (Г1=Г2=Г3=Г);
2) интенсивность нижнего вихря одинакова по величине, но проти-
воположна по знаку двум верхним вихревым жгутам; абсолютная вели-
чина циркуляции равна 100 м2/сек.
11.29. Определите потенциал скоростей и функцию тока течения, ин-
дуцируемого парой прямолинейных вихрей для двух случаев (рис. 211.7):
1) циркуляции скорости вокруг каждого из вихрей одинаковы по
величине и знаку (Г1=Г2=Г);
,]
Г. Г:;
371
2) указанные циркуляции скорости одинаковы по величине, но про-
тивоположны по знаку (Г1= —Г2).
П.ЗО. Найдите траекторию прямолинейного вихря, находящегося
внутри двугранного угла, который образован двумя взаимно перпенди-
кулярными стенками.
11.31. В точках с координатами у=_—і-_/1 в жидкости расположена
пара вихрей, интенсивности которых равны по величине, но противопо-
ложны по знаку (Г1=—Г2). При этом набегающий поток (на беско-
нечности) имеет такую скорость, что вихри остаются неподвижными…
Найдите соответствующие линии тока.
11.32. Покажите, что необходимыми и достаточными условиями су-
ществования комплексного потенциала“ №(г) для двухмерного
плоского несжимаемого потока являются зависимости
дф/дх = дф/ду, дср/ду = ——д1р/дх.
11.33. Получите выражение для комплексного потенциала течения
несжимаемой жидкости, создаваемого п л о с к и М т 0 ч е ч н ым д и п о -
л е м.
11.34. Определите комплексный потенциал потока, образующегося
в результате наложения поступательного плоскопа р аллел ь-
н о г о п о т о к а со скоростью У на течение от д и п о л я с моментом М.
Найдите уравнение семейства линий тока полученного сложного тече-
ния.
11.35. Рассмотрите геометрическую картину течения, комплексный
потенциал которого задан в виде уравнения
177 : 1/(2 —|— гЁ/г).
П.Зб. Движение определяется комплексным потенциалом
177 = (1 —|— і)1п(22— 1) + (2 -— Зі)1п(г2—4) + 1/2. (211.1)
Найдите расход жидкости через окружность х2+у2=9 и циркуля—
цию скорости Г по этой окружности.
11.37. Комплексный потенциал задан функцией
‚2
ша) : У (2 + 70) _; 1пг. (211.2).
Эта функция, характеризующая сложный поток, получена путем сложе-
ния комплексных потенциалов трех более простых течений.
Выделите из (211.2) каждый такой комплексный потенциал и рас-
смотрите соответствующую картину течения.
!!.38. По заданному комплексному потенциалу (2.112) определите
потенциал скоростей и функцию тока результирующего потока, выведи-
те уравнение обтекаемого контура и найдите распределение скорости в
потоке и на этом контуре.
11.39. Как изменяются скорость и давление в потоке от плоского
точечного источника (или стока) при удалении от него?
|||. ОСНОВЫ дИНАМИКИ ЖИДКОСТИ И ГАЗА
"1.1. Уравнения движения вязкого газа (уравнения Навье—Сток-
са) при условии м=сопз1 записываются в следующем виде;
сіУх 1 др «› д . — 1
а: р дх+ Х+ 3 дх ,
Ш=у_і.Ёі+тА1/у+_”_._д-ам7; [
а: р ду 3 ду
№=2_і .Ё +мдуг+і._д_а1у1`/.
а: 9 да 3 дг ;
Какой вид примут эти уравнения для одномерного неустановившегося
(нестационарного) течения невесомого сжимаемого газа и для плоского
установившегося движения невесомой несжимаемой жидкости?
!!!.2. Преобразуйте уравнения движения невесомого невязкого неио-
низированного газа в декартовых координатах
дУх___1_Ё дУу___1_ 28 а_Уг—___‘.ЁР_ (21111)
„ . .
__ . , _—
а: р дх ’ а: р ду
к цилиндрическим координатам.
"1.3. Выведите уравнение диффузии для плоского течения относи-
тельно декартовой системы осей координат.
"1.4. Уравнение энергии для двухмерного (плоского) движения вяз-
кого теплопроводного газа (при отсутствии диффузионной теплопере-
дачи и излучения) имеет следующий вид:
3 — 23” + {( д—іі) +(і;5>2—-3—‹№›2+
—1—2(д—д—Уу+д—Уу’“П+аіу(ждга‹1Т). (2.1112)
Выделите в этом уравнении д и с с и п а т и в н ые члены, а также запиши-
те уравнение энергии при условии, что движение газа происходит с ма-
лыми скоростями.
"1.5. Крыло бесконечного размаха обтекается без скольжения по—
током невесомого сжимаемого невязкого и неизлучающего газа. Пара-
метры набегающего потока известны. Назовите параметры установив—
шегося возмущенного потока, которые необходимо определить (при ус-
ловии постоянства удельных теплоемкостей), и составьте соответству—
ющую систему уравнений.
”1.6. Для всякой баротропной газовой среды, характеризующейся
однозначной зависимостью между давлением и плотностью, отношение
сір/р представляет собой дифференциал некоторой функции Р. Найди-
те значение этой функции для случая адиабатического течения газа.
ЦП. 7. Один из частных интегралов уравнения движения невязкого
газа имеет вид
дф/дг + 1/2/2 + уар/р + и = с (1). (2.1113)
Как называется этот интеграл и каков его физический смысл? Объясни—
те также физический смысл величины дср/дъ‘.
"1.8. Сформулируйте физическое условие, соответствующее урав-
нению Лагранжа
нчньинё№№=<+>2—<+>‚
ЗЗПИСЗННОМУ ДЛЯ ДВУХ ПРОИЗВОЛЬНЫХ точек В ПОТОКЗ, ВЗЯТЫХ В ОДИН И
ТОТ же момент времени.
373
Каким свойством обладает поток газа, для которого действительно
уравнение Лагранжа вида
дф/ді + У2/2 + і : с (1)? (2111.5)
"1.9. Напишите частный интеграл уравнения движения невязкого
сжимаемого газа, являющийся интегралом Эйлера. Каков физический
смысл этого интеграла и в чем его отличие от интеграла Лагранжа?
"1.10. Уравнение вихревого (непотенциального) установившегося
движения сжимаемой жидкости имеет в векторной форме вид
3гас1(У2/2) + го’с 17 >< 17 : б — (1 /р) дгаа р. (2111.6)-
Укажите возможные частные интегралы этого уравнения.
[П.П. Какой закон физики лежит в основе уравнения (интеграла)
Бернулли
У2/2 + 89 + р/р + (1 : сопз’с? (2111.7)
Рассмотрите физический смысл членов этого интеграла.
"1.12. В гидроканале путем протаски изучается модель корабля,
имеющего длину в натуре ЬН=160 м и скорость Ун=14 м/сек. Опреде—
лите, с какой скоростью необходимо перемещать в этом гидроканале
модель, длина которой Ьм-=3 м.
"1.13. Летательный аппарат рассчитан на движение при нормальн
ных атмосферных условиях со скоростями Ун=300+600 гсм/ч. Для ис-
пытаний в аэродинамической трубе переменной плотности используется
модель этого аппарата., выполненная в масштабе 1:10. Продувка бу—
дет проводиться при давлении в рабочей части аэродинамической тру—
бы р=20 атм и температуре і=25° С. Определите, при каких скоростях
необходимо испытывать модель, чтобы обеспечить аэродинамическое
подобие по числу Рейнольдса.
!!!.14. В аэродинамической трубе переменной плотности испытыва-
ется модель крыла с хордой ЬМ=150 мм. Скорость воздушного потока
в трубе Ум=25 м/сек, а температура воздуха ім=30° С. Определите,
при каком давлении необходимо проводить испытания, чтобы обеспечи-
валось аэродинамическое подобие по числу Рейнольдса. Натурное кры-
ло имеет хорду дн: 1,2 м, а скорость его движения Ун=330 гсм/ч.
"1.15. В сверхзвуковой аэродинамической трубе истечение воздуха
из сопла происходит со скоростью У=450 м/сек при температуре !=
=—50° С. Каким будет соответствующее число Маха и как изменится
это число, если путем подогрева увеличить температуру воздуха в ра-
бочей части трубы до 1‘=15° С?
"1.16. Как изменится максимальная скорость истечения газа из ре-
зервуара при изотермическом повышении в нем давления?
"1.17. Найдите максимальную скорость при расширении воздуха,
имеющего начальную температуру 27° С.
!!!.18. Определите М=У/а и ?»=У/а*, а также максимальную ско—
рость и скорость звука для струи воздуха, истекающей из сопла со ско—
ростью, равной половине максимальной скорости. Температура возду-
ха в сосуде равна 15° С.
"1.19. Найдите местное число Маха, соответствующее относитель-
ной скорости ?»=У/а*=2‚2 (&=ср/с„=1‚4).
"1.20. Определите, какую ошибку допускают в аэродинамике не-
сжимаемой среды, полагая плотность воздуха, имеющего скорость
Уоо=100 м/сек при температуре 15°С (аоо=341 м/Сек), величиной по—
стояннои.
"1.21. Вычислите при Моо=О,8 коэффициент давления в точке пол—
ного торможения.
374
"1.22. Сверхзвуковой воздушный поток с числом Маха Моо=1‚5 и
отношением удельных теплоемкостей Ь=ср/с„=1‚4 имеет статическую
температуру і…=—50°С. Определите критическую скорость звука для
этого потока.
"1.23. Какую наибольшую скорость воздуха можно получить в
сверхзвуковой трубе без подогрева, если воздух сжижается при темпе-
ратуре 78 К [13]?
"1.24. Напишите зависимости, устанавливающие связь между ста-
тическими параметрами, параметрами торможения и относительной ско-
ростью ?» движения газа, воспользовавшись известными газодинамиче-
скими функциями вида р/ро= [1+(1г—1)М2/2]—Ё/(Ё—1)и соответствующей
зависимостью М=1°(?ь). р—
!П.25. Какая связь между отно- ‚
сительными скоростями ?» и соответ—
ствуюшими значениями статических '
давлений, плотностей и температур 0,5
двух потоков, имеющих одинаковые
параметры торможения?
"'-26° В°ЗДУХ (д…,/%:… ////////////////////////////////
движется в трубе переменного се- / „„„
" " , //
чения, при этом число Маха в од- ”////////////‚///////////////////
ном из сечений М1=1‚ а в другом
М2=2_ Найдите соотношение меж- -0‚5Г—-.-————
ду скоростями воздуха в этих сече-
ниях, а также определите, что про- Рис. 2.111._1_. Распределение коэффициента
изойдет с кинетической энергией давленияр ПО СИмМЗТРИЧНОМУ Пр0филю‚
единицы объема воздуха при дви- Ра'сположенноьилімпёттёеи под НУЛЗВЫМ
жении от первого сечения ко второ-
Му [13].
"1.27. Давление и температура заторможенного воздушного потока
равны соответственно ро=1 кГ/см2 и Т0=1000 К. Определите критиче-
ские значения давления, плотности и температуры, принимая, что те-
чение изэнтропическое и показатель адиабаты постоянен и равен &=
=СЮ/С„=1‚4.
"1.28. На рис. 2111.1 показано распределение коэффициента давле-
ния р= (р—р…)/(рУЁо/2)‚ полученное по результатам продувок профиля
в малоскоростной аэродинамической трубе, дающей скорость потока в
рабочей части Уоо=100 м/сек. По данным этого распределения построй-
те кривые изменения скорости вдоль профиля и площади поперечного
сечения воображаемой струйки, обтекающей этот профиль.
"1.29. По испытаниям в аэр0динамической трубе найдено распреде-
ление давления около поверхности, обтекаемой чисто дозвуковым воз-
душным потоком. Зная в заданной точке поверхности коэффициент да-
вления р=(р—роо)/(рооУЁо/2) =—0,З, а также параметры в рабочей
части трубы (р…:1кГ/см2‚ Тоо=288 К, УЮ=2ОО м/сек), определите
в этой точке абсолютное давление, скорость, число Маха, плотность,
температуру, скорость звука и энтальпию.
"1.30. Подберите площадь критического сечения сверхзвукового соп-
ла, обеспечивающего весовой секундный расход воздуха 0:1 кГ/сек,
если истечение расчетное и происходит из резервуара, где давление
ро=6 кГ/см2 и температура іо=1б° С.
"1.31. Воздух вытекает из резервуара (р0=30 кГ/сл42‚ ЁО=1Б°С)
в атмосферу через сопло Лаваля. Определите скорость, температуру и
плотность воздуха на выходе из этого сопла, считая течение адиабати-
ческим и без потерь, а режим истечения расчетным.
"1.32. Воздух истекает из резервуара в атмосферу через сопло Ла-
375
С
валя со скоростью Уа=800 м/сек, имея температуру {‚_-„= ——70° С. При
условиях адиабатического И без потерь течения, а также расчетного ре-
жима работы сопла определите Давление, температуру и плотность воз-
духа в резервуаре.
111.33. В форкамере аэродинамической трубы находится воздух
[іе=ср/с„=1,4; К=287 дж/(кг-град)] при температуре Т0=293К. Оп-
ределите давление ро и плотность ро в форкамере, скорость Уа, числа
М„ и ?…, плотность ра и температуру Та в выхщном сечении сопла, а
также весовой расход газа при условии, что давление на срезе сопла
ра=1кГ/см2, отношение площади 8* критического сечения сопла к пло-
щади За выходного сечения $*/$а=0‚2 и величина 80:0‚16 м2.
111.34. Рассчитайте параметры газа [1г=ср/с„=1,2; К=333 дж/(кг-
-град)], истекающего из резервуара (ро=41 кГ/см2, Т0=3000 К) через
сверхзвуковое сопло, и постройте графики изменения давления, тем—
пературы, плотности, скорости звука, скорости течения и числа Маха
по длине сопла, а также определите секундный весовой расход газа
и режим работы сопла. Движение газа изэнтропическое и происходит
в среде с давлением рн=4,1-10—2 кГ/см2. Размеры сопла приведены
в табл. 2111.1.
Т а б л и п а 2111.1
№ сечения ] 2 3 ; 4 5 б 7 8 9 10
х, мм 0 22 35 50 65 80 110 140 170 200
61, мм 100 79 35,6 20 26 32 44 55,4 68,8 80
П р и м е ч а н и я: х — расстояние от входного сечения сопла 1; а — диаметр рас-
сматриваемого сечения; сечение 4 является критическим.
111.35. В выходном сечении сверхзвукового сопла известны скорость
Уа=8000 м/сек, число Ма=5 и давление ра=0‚01 [СГ/см?. Определите
необходимые для обеспечения этих параметров давление ро и температу-
ру То воздуха в форкамере аэродинамической трубы.
111.36. Давление и температура в форкамере аэродинамической тру—
бы ро=100 кГ/см2, Т0=12000 К. Определите изменение плотности, дав-
ления, температуры, скорости и числа Маха при изэнтропическом исте-
чении диссоциированного воздуха из сверхзвукового сопла, в выходном
сечении которого площадью $а=0,16м2задана скорость Уа=8000 м/сек.
@
|У. ТЕОРИЯ СКАЧКОВ УППОТНЕНИЯ
“1.1. На рис. 2.1\/.1 показаны три вида распространения малых
(звуковых) возмущений в газовом потоке. Укажите, какой скорости
движения газа—дозвуковой (У<а), сверхзвуковой (У>а) или зву-
ковой (У=а)——соответствует каЖДая картина распространения воз-
мущений.
Рис. 2.1\/.1. Схема распространения слабых возмущений в
потоке
ГЪ=0Ё2
г,:аЁ1
‚“>а
и,
“72 \ Т
Рис. 2.1\/'.2. Схема распространения слабых возмуще-
ний в сверхзвуковом потоке
“’2. Докажите, что касательная к круговым волнам звуковых воз-
мущений в сверхзвуковом потоке (рис. 2.1\/.2) является прямой (такая
прямая называется линией или волной Маха).
“1.3. На рис. 2.1\/.3 показана криволинейная волна Маха, возникшая
в потоке газа с постоянными теплоемкостями. Покажите, как изменяется
местное число М вдоль та-
кой волны в направлении от
точки А к точке В.
“1.4. Изменится ли угол
наклона линии Маха „=
=агс5іп (1/М), если впото-
ке газа с постоянНыми теп- _ \Р-А
лоемкостями и одной и той “д……
же скоростью увеличится д
давление?
“‚_5_ ЧТО произойдет С Рис. 2.1\/`.3. Криволинейная волна слабых воз-
м ений волна Маха
углом наклона линии Маха УЩ ( )
в потоке газа с постоянны-
ми теплоемкостями при неизменной скорости и уменьшении темпера-
туры? '
|\/.6. Как изменится наклон линии Маха, вычисленный в некото—
рой точке потока газа, если учесть влияние диссоциации?
“1.7. Как изменится угол наклона линии Маха в диссоциирующем
газе при уменьшении давления?
377
“!.8. Что является причиной образования скачков уплотнения?
“1.9. Как известно, давление, плотность и температура за скачком
уплотнения резко возрастают. В чем существенное отличие такого скач-
кообразного изменения параметров от плавного их возрастания в слу-
чае отсутствия скачков?
“!.10. Чем объяснить, что с ростом температуры газа за скачком
уплотнения уменьшается скорость потока?
!\/.11. Для определения неизвестных величин—отношений парамет-
ров газа за прямым скачком уплотнения и перед ним в случае постоян-
ных теплоемкостей—должны быть известны число М1 набегающего
потока и показатель адиабаты іг1=ср/с„. Какие дополнительные дан-
ные должны быть известны, если решается задача о скачке уплотнения,
поток за которым диссоциирован?
" ` !
">! ’8' гбг
/ "/
/ ,
Рис. 2.1\/.4. Схема течения газа через Рис. 2.1\/.5. Система скачков
криволинейный скачок уплотнения в одномерном потоке:
1—косые скачки; 2—прямой скачок
“1.12. Параметры газа за косым скачком уплотнения можно рас—
сматривать такими же, как их соответствующие значения за прямым
скачком. При каком условии это возможно? .
“!.13. Определите угол наклона присоединенного скачка уплотне-
ния 60 в плоском сверхзвуковом потоке, если заданы отношение плот-
ностей р2/р1=10 и угол наклона преграды БС=ЗО°.
“’.14. Найдите отношение скоростей 1/2/ И после и до косого скачка
уплотнения, присоединенного к заостренному клину с углом Бс=30°.
Отношение плотностей для условий непосредственно за скачком и перед
ним задано и равно .р2/рд= 10.
“1.15. Разность давлений и отношение плотностей для условий дис—
социированного газа р2—р1-=ЗО кГ/см2, р2/р1=10‚ а плотность р1=
=О,125 кГ так?/1144. Определите разность энтальпий і2—і1 для условий
после скачка и перед ним.
“1.16. В точках А и В, расположенных за криволинейным скачком
уплотнения на различных линиях тока (рис. 2.1\7.4)‚ одинаковы скоро-
сти (УА=УВ=У). Сравните между собой соответствующие давления
(рА‚рВ)‚ плотности (рА,рВ) и температуры (ТА‚ТВ).
!\/.17. Получите уравнение расхода для одномерного установивше-
гося движения газа с постоянными теплоемкостями в струике, проходя-
щей через систему скачков уплотнения (рис.2.1\7.5), в следующем виде:
52; = _1_ _№
81- „ а‹м2› ’
где у=р6 /ро_—— коэффициент восстановления давления в системе скач-
ков уплотнения (ро и рЬ—соответственно давление изэнтропического
торможения и давление торможения за последним скачком уплотнения);
$1, $2 — соответствующие площади поперечного сечения струйки;
(;(М) —— газодинамическая функция числа Маха, представляющая собой
378
отношение рУ/р*а* (здесь рУ— удельный расход в сечении с заданным
числом Маха; р*а*—значение удельного расхода в критическом сече-
нии струйки).
“1.18. Как изменяются температура и скорость в потоке газа за
скачком уплотнения по сравнению с изэнтропическим течением при оди-
наковом изменении давления?
|\/.19. Найти параметры газа за присоединенным косым скачком уп-
лотнения (р2/р1; р2/р1; а2/а1; Т2/Т1; Мг; У2/У1), а также угол его накло-
на 60, если заданы угол клина Бс=30°‚ число Маха М1=5 и показатель
адиабаты Аг=1‚2.
“1.20. В рабочей части сверхзвуковой аэродинамической трубы рас-
положено клиновидное тело А0К(рис.2.1\/.6). Обтекание этого тела соп-
...“/‚(Ч , 1 / //1_. А ‚, \}3‘мз)
П Д _
Рис. 2.1\/'.6. Схема отражения косого Рис. 2.1\7.7. Схема обтекания
скачка уплотнения от твердой стенки сверхзвуковым потоком тела:
А _точка за скачком уплотнения:
В—точка в изэнтропическом течении
ровождается возникновением у его вершины Ао скачка уплотнения, ко-
торый встречает стенку ВА в точке А. Скорость за ним не параллель—
на стенке, поэтому она взаимодействует с потоком, вызывая появление
отраженного скачка АВ, за которым поток становится параллельным
стенке. Определите угол отражения скачка при условии, что перед скач—
ком АСА число М1=5, а угол клина Вкл: 15°.
“1.21. Определите коэффициент давления р2 за скачком уплотнения
при условии, что угол его наклона 60:300, а число Маха перед скачком
М1=5. Сравните при этом два значения коэффициента давления, одно
из которых вычислено для іг=1‚2, а другое для Ё=1‚4. Найдите для
іг=1,2 и 1,4 предельные значения р2, соответствующие М1—›оо.
“422. На рис. 2.1\/'.7 показана картина обтекания некоторой поверх-
ности сверхзвуковым потоком с числом М1=5 (статическое давление
р1=1 кГ/см2‚ показатель адиабаты іг=1,2). Одна из линий тока прохо-
дит через скачок уплотнения, а другая расположена вне скачка на ниж-
ней стороне обтекаемой поверхности. Определите давления в точках А
и В на этих линиях тока при условии, что скорости в этих точках оди-
наковы и равны У2=1‚1 У].
“1.23. В сверхзвуковой трубе с закрытой рабочей частью прямоу-
гольного сечения (рис. 2.1\/.8‚ а) на входе в диффузор образуется систе-
ма из двух пар наклонных к оси трубы скачков уплотнения
(рис. 2.1\/.8‚ 6). При этом скачки АВ,А"В’ по отношению к потокувра-
бочей части являются косыми, а скачки С‚ђ’—прямыми (по отно-
шению к течению за скачками АВ и А’В’). Определите давление тормо-
жения ро в форкамере, необходимое при такой системе скачков для по-
лучения потока с числом М00 в рабочей части и преодоления на выходе
диффузора атмосферного противодавления (рВ=1 кГ/см2) при скоро-
сти потока, соответствующей МВ=О‚З.
“1.24. Оптические исследования показали, что при сверхзвуковом
истечении газа на выходе сопла (рис. 2.1\/.9) в одном случае образуют-
379
ся волны разрежения (волны Маха), а в другом -——скачки уплотнения.
При каких условиях и почему возникает такая картина движения газа?
“1.25. Подберите угол клина Вкл, при котором число Маха за возни-
кающим перед таким клиномг скачком уплотнения равно единице
(М2=1). Число Маха набе-
0) \7 ‚(и гающего потока М1=4; по-
. м вк в)
р Ы …) казатель адиабаты й=1‚4.
о __ __ „:*: __ „___-_ —--‹——— °
„+ _|_ “1.26. Наидите такое
рб значение угла скачка Вет,
при котором будет происхо—
дить поворот потока за ним
на наибольший угол Вс…
Определите величину этого
угла в зависимости от чис-
ла М1 и показателя адиаба-
ты газа да.
“!.27. Коэффициент
давления непосредственно
после косого скачка уплот-
нения, за которым поток от-
Рис. 2.1\/.8. Схема к расчету потребного давле— клоняется на УГОЛ ВФ В Об_
ния в форкамере:
щем случае может быть он-
а —— схема сверхзвуковой аэродинамической трубы; .,
6 —система СКЭЧКОВ уплотнения на входе В диффузор ределен ИЗ зависимостеи
5:2(Р2—Р1)= 4 (вынес—#) (г.в/.в
дит? Ё+1 2
1
и (3.1\/.18)‚ в которой ВКЛ=ВС. Покажите, что при малых углах Вс
этот коэффициент можно представить с точностью до малых второго
порядка в виде
2 И ‹ь+1)м;*—4(м%—1)
мг%… им?—1)?
“1.28. Как изменится
критический угол поворо—
та потока за скачком при
увеличении давления?
“1.29. Что произойдет
с критическим углом по-
ворота потока при увели-
чении числа м,?
“1.30. На рис. 2.1\/.10
показана схема отсоеди- Рис. 2.1\/`.9. Схемы истечения сверхзвуковой струи
ненного криволинейного В атмосферу:
_ а—поток с образованием волн разрежения; б—течение со
скачка УПЛОТНЕНИЯ_ Ка скачками уплотнения; 1—сопло; 2—линии разрежения
КИМ будет характер изме— (волны Маха); З—скачки уплотнения
нения угла наклона век-
тора скорости [30 вдоль скачка в направлении от точки А (прямой ска—
чок) до точки В (волна Маха)?
|\/.31. Из формулы (3.1\/.1) следует, что заданному углу [ЗС соответ-
ствуют два значения угла Ос: одно из них— большее (знак плюс), дру-
гое — меньшее (знак минус). Каким свойством характеризуются тече—
ния за скачками уплотнения, наклоненными под этими углами 6С?
П’.32. Как изменяется угол наклона присоединенного скачка уплот-
нения Ос при увеличении угла клина во?
5:
%…„= П
Ч
Ё
% _
%
380
“1.33. Что произойдет с углом Ос, если увеличить число М1 набегаю-
щего потока?
“1.34. В Двух сверхзвуковых потоках с различными числами Маха
М…, М 002 и показателями адиабаты 1:31, 1:52 расположены клиновидные по-
верхности с одинаковыми углами заострения (Вкл1=6кл2=[3кл). Скачок
уплотнения перед однои из этих поверхностеи оказался присоединенным
прямолинейным, а перед Другой — отошедшим криволинейным (рис.
2.1\/.11). Сравните меЖДу собой возможные значения чисел Маха и по-
72042)
_.рг-О
Рис. 2.1У.10. Схема отсоединенного кри- Рис. 2.1\/.12. Характерные точки на скачке
ВОЛИНЗЙНОГО СКЗЧКЗ УПЛОТНВНИЯ: УПЛОТНВНИЯЁ
А —точка на участке прямого скачка; В— точ— К—ТОЧКЗ на участке ПРЯМОГО скачка; Ь'—Т°ЧКЗ
на на волне Маха максимального угла поворота; М—точка на вол-
не Маха
казателей адиабаты, кото-
рым соответствуют указан—
ные скачки уплотнения.
“1.35. Покажите на рис.
3.1\/.4 области применения
ударной поляры для расче—
та сверхзвукового обтека—
ния заостренного кли-на.
“1.36. На рис. 2.1\/.12
показана схема отсоединен_ Рис. 2.1\/.11. Схемы скачков уплотнения перед
ного скачка уплотнения. По- КЛИНОМ'
кажите НЗ ударной поляре а—присоединенный КРПИЁЁЁЁЁЁЁЁЁЁЙЫЙ; б—отошедший
(см. рис. 3.1\/.4) точки, со-
ответствующие точкам скачка, отмеченным на рис. 2.1\/.12.
“1.37. Напишите уравнения годографа скорости за скачком уплот—
нения для случая невозмущенного потока газа с максимальной ско-
ростью. Каков будет вид этого годографа?
“1.38. Определите изменение давления, температуры и скорости,
а также число Маха за прямым скачком уплотнения, если известно, что
отношение плотностей за этим скачком и перед ним р2/р1=5‚ а показа-
тель адиабаты &= 1,2.
“1.39. В чем отличие прямого скачка уплотнения от косого с точки
зрения характера изменения скорости за ним?
“1.40. Определите коэффициенты давления в точке полного тормо-
жения за прямым скачком уплотнения при М1= 10 для &= 1,2 и 1,4. Срав-
ните найденные значения этих коэффициентов между собой и с их пре-
дельными величинами, полученными для условия М1—›оо.
“1.41. Найдите для прямого скачка уплотнения при постоянных теп-
лоемкостях по известным значениям Ж1=1,90 и іг=1‚4_0 относительную
„баг?/зип!
381
скорость после скачка №, а также отношения р2/р1, Т2/Т1, р2/р1 и ро/р0.‚
“1.42. Определите максимальное «загромождение» моделью (или
устройством Для ее крепления) потока в рабочей части сверхзвуковой
аэродинамической трубы с числом М…=2‚68, при котором не будет про—
исходить «запирания» трубы [такое запирание сопровождается прохож-
дением через незагроможденную часть трубы (между стенкой трубы
и моделью) «пускового» скачка уплотнения, течение за которым дозву-
ковое].
“1.43. Найдите для скачка уплотнения, за которым угол поворота
потока Вс=30°, отношение плотностей р2/р1, коэффициенты статического
давления рг и давления торможения ро, а также числа М2 в предельном
случае сверхзвукового течения газа при М15іп (Эс—›оо и значениях &=
= 1,2 и 1,4.
“1.44. Сверхзвуковое течение перед скачком уплотнения характери—
зуется числом М1=15 и значением Ь=1‚4, а непосредственно за скач“—
ком—поворотом на угол [ЗС-=5‚73°. Рассматривая другие сверхзвуковые-
потоки с очень большими числами Маха, подобными заданному, опреде-
лите параметры газа за скачками уплотнения для М1.=.10‚ М1=2О` при
том же значении &= 1,4.
“1.45. Какой будет температура за скачком уплотнения в диссоции-
рованном газе по сравнению с ее значением при постоянных теплоем-
костях?
П/Аб. Сверхзвуковой газовый поток обтекает ‚поверхность клина
с некоторым углом Вс. Каким будет угол наклона скачка 60 при диссо-
циации по сравнению со случаем постоЯнных теплоемкостей?
“1.47. Как изменится давление за скачком уплотнения, если учесть-
влияние диссоциации газа?
“1.48. Сравните плотность за скачком уплотнения при постоянных
теплоемкостях и в случае диссоциации. _
“1.49. Что произойдет с критическим углом поворота потока за скач--
ком уплотнения (критическим углом клина), если заменить поток с по—
стоянными теплоемкостями течением диссоциирующего газа?
“1.50. Определите параметры газа непосредственно за прямым скач-
ком уплотнения, а также значения соответствующих параметров в точке
полного торможения за этим скачком при скорости У1=8‚1 км/сек, дав-
лении р1=0‚01 кГ/см2, среднем молекулярном весе (пор)1=29,0, темпе-
ратуре Т1=236 К и скорости звука а1=310 м/сек.
“1.51. Рассчитайте параметры воздуха за косым скачком уплотне-
ния для следующих условий: число М1=11, угол поворота потока за
скачком Бс=45°, высота полета Н=5 км.
“1.52. Определите параметры газа в точке полного торможения за
прямым скачком уплотнения, рассматривая движение за ним как поток
несжимаемой среды. Скорость воздуха перед скачком У1=8100 м/сек.
Сравните полученные значения давления, плотности и температуры с их
значениями, найденными обычным расчетом с учетом диссоциации и сжи-'
маемости газа за скачком. При определении параметров газа непосред-
ственно за скачком уплотнения используйте исходные данные и решение
задачи “1.50.
“1.53. Известны угол наклона косого скачка уплотнения 6с=55°,
угол поворота потока за этим скачком Вс=45°, а также высота полета
Н =10 км. Определите число М1 перед скачком, а также соответствую-
щие параметры непосредственно за ним.
“1.54. Измерениями в точке полного торможения на летательном ап-
парате, совершающем полет на высоте Н =5 км, найдены давление ;)0 =
= 10 кГ/см2 и температура ТЬ =7500 К. Определите скорость летательно-
го аппарата и параметры газа за скачком уплотнения.
382
“1.55. Обработка интерферограмм показала, что за косым скачком
уплотнения перед плоской преградой с углом Бс=30° плот-ность воздуха
увеличилась при одном режиме работы аэродинамической трубы
в 3,41 раза, а при другом ——в 10 раз. Достаточно ли этих данных для
определения отношений соответствующих значений скоростей и темпе-
ратур после и до скачка? Задайтесь в случае необходимости недостаю—
щими параметрами и найдите искомые отношения.
“1.56. Определите параметры за скачком уплотнения в воздухе, рас-
сматриваемом как смесь чистых диссоциирующих азота и кислорода,
полагая, что нормальная составляющая скорости перед скачком У…=
=1,5Уд‚ а полет совершается на некоторой высоте, где р1=1,5-1О—7 рд
(И; и рд — соответственно характеристические скорость и плотность дис-
социации).
“1.57. По данным задачи [\].51 определите степень диссоциации воз-
духа за скачком уплотнения, рассматривая его как двухатомную модель
смеси кислорода и азота.
“1.58. Средний молекулярный вес воздуха за скачком уплотнения
(мер)2=23,2. Определите соответствующую степень диссоциации ‹12, по-
лагая воздух перед скачком недиссоциированным (а1=0).
“1.59. Как изменится степень диссоциации за скачком уплотнения на
участке длины пути релаксации?
“1.60. Определите параметры газа за прямым скачком уплотнения
с учетом влияния неравновесности при условии, что до скачка М1=25;
р1=0,01 кГ/см2; Т1=250 К; іг1=1‚4. Сравните эти параметры с соответ-
ствующими значениями при равновесной диссоциации, вычислите время
и длину пути релаксации за скачком.
У. МЕТОД ХАРАКТЕРИСТИК
У.]. Уравнение неразрывности, преобразованное с помощью уравне—
ния Движения, написано в форме
/ 2
(у;—аг) дЬм/„Уу (ЧУ—16+?!) + (УЗ—(12) @Ка—еШ: о. (з\п)
дх ду дх ду у
Какие виды Движения газа могут исследоваться при помощи этого урав—
нения?
\’2. Покажите, что при изменении энтропии или энтальпии тормо—
жения в потоке газа при переходе от одной линии тока кдругой поток
будет вихревым.
\!.З. Выразите Математически тот факт, что энтропия частицы газа,
движение которой мы наблюцаем, остается при этом движении постоян-
иой, если не учитывать внутреннее трение и перенос тепла вследствие
теплопроводности, т. е. если термически процесс является и з э н т р о п и-
ческим.
УА. Вдоль линии тока величина энтальпии торможения іо=і+У2/2‚
определяющая полную энергию единицы массы газа, не меняется. По-
кажите, что при этом выполняется также условие постоянства энтро—
пии 8.
№5. Содержание задачи Коши заключается в отыскании в окрестно—
сти начальной кривой решения дифференциального уравнения для по-
тенциала ср
2 2 2
(уз,—ав) @ + 211,7, Ш + (1/2 —а2) д—Ф : о, (гл/‚г)
дх2 дх ду у ду2
удовлетворяющего заданным на этой кривой некоторым дополнитель-
ным условиям. Назовите эти условия.
№6. При решении задачи Коши об отыскании искомого потенциала ср
можно ограничиться определением вторых производных (и=ср…, $=срху,
і=-сруу) на заданной кривой, уравнение которой в общем виде Р(х‚ у,
2) =0. Для этой цели необходимо решить следующую систему из трех
уравнений:
Аи+2Вз+Сі+Н=0;
сіх-и+сіу-$+02‘—сіср„=0; (2.\/.3)
Он + (іх-$ + сіу—і—сісру : 0.
При каком условии неизвестные производные и, 5, 1‘ определяются одно-
значно?
\1.7. Известно, что если главный определитель А. системы уравнений
(2.\/.3) равен нулю, то эта система будет иметь к о н е ч н ы е, хотя
и н е о д н о 3 н а ч и ые, решения только тогда, когда остальные три
частных определителя Аи, А5, А1 будут равны нулю. Покажите это на
примере решения алгебраической системы уравнений:
0х + Оу + 02 = О;
2х + 2у + 02 = 2; (2.\/.4)
— х + Бу + 2 = 3.
\!.8. Из задачи Коши известно, что конечные, хотя и неоднозначные,
решения искомой функции ср в окрестности некоторой начальной кри-
вои существуют, если главный определитель А системы (2.\/.3) равен
нулю. Геометрически это означает, что начальная кривая совпадает
с особои кривой — характеристикой, представляемой уравнением
А(Ё)2_2Вд_у+6=0(я=у5_аг‚ В=У У С=У;—аг)‚ (2.\/.5)
4х ах "’ у,
384
называемым х а р а к т е р и с т и ч е с к и м. На основе анализа систе—
мы уравнений (2.\/.3) укажите наряду с (2.\7.5) Дополнительное условие,
которое должно быть выполнено, Чтобы существовали указанные ре-
шения.
\].9. Решение квадратного характеристического уравнения (2.\/.5) от-
носительно производной сіу/сіх имеет ВИД
Ёё_'._і "г:—.—
ришы_%,_А(віъчз Асу (ямы
В чем геометрический смысл этого решения?
\!.10. Что понимают в методе характеристик под у с л о в и я м и
с о в м е с т н о с ти и каков геометрический смысл этих условий?
\!.11. В чем отличительная особенность
9 характеристик от других кривых, прове-
д _ денных в потоке?
18° [3 "’ \!.12. В заданной точке потока вектор
0 " ’ 7 скорости наклонен к оси Ох под углом
42° 1 д 3 В=40°. Определите направление характе—
ристик, проходящих через эту точку, если
число Маха в ней равно двум.
\!.13. Покажите, что характеристиче-
ское уравнение в физической плоскости
по внешней форме одиднаково для
двухмерных плоского и пространственного осесимметричного течений
газа.
\!.14. В некоторой точке потока найдены при помощи теневой фото—
графии углы наклона волн возмущения (линий Маха), равные 18°
и —12° (рис. 2.\/.1.). Определите на-
правление вектора скорости и число
Маха в этой точке.
\!.15. В двух точках сверхзвуко-
вых потоков — «холодном» и «горя-
чем» (показатели адиабаты газа в ‚
этих потоках соответственно Ё1>
>іг2) — относительные скорости &=
=У/а* одинаковы. Сравните углы 0
‹‚ж/ /
наклона характеристик в этих точ- ` / //// И 1:
Рис. 2.\7.1. Линии Маха в газовом
потоке
ках ( … и №).
\!.16. Определите углы наклона
характеристик в заданной точке по- РИС- ”"—2— %ЁЁЁЗПОЁЁКЛЗЯЧИЯ заострен-
ТОКЗ, если СОСТЗВЛЯЮЩИе СКОРОСТИ р .
„ _ _ 1—головной скачок уплотнения; 2—пада—
В ЭТОИ точке Уэс—320 М/СЗК, У — ющая волна разрежения (характеристика
=150 .М/СЗК & СКОРОСТЬ звука а: первого семейства); 3—отраженная волна
’ разрежения (характеристика второго семей-
=280 .М/СВК. ства); 4—криволинейный скачок уплот-
У.17. В физической плоскости нения
характеристики первого и второго
семейств наклонены соответственно под углом 45° и 13°. Определите на-
правление с о п р я ж е н н ых характеристик в плоскости годографа.
\!.18. Как будет изменяться давление торможения рд с увеличением
энтропии газа (ёЗ/Ып>0) при переходе от одной линии тока к другой?
\!.19. Укажите область сверхзвукового течения около заостренного
клина с криволинейной стенкой, которая должна рассчитываться мето-
Дом характеристик с учетом в и х р е в о г о в л и я н и я (рис. 2.\7.2).
\!.20. Уравнение для характеристик в плоскости Юдографа для плос-
кого сверхзвукового потока имеет вид
Б=ію+йт амп
25—927 385
где УГОЛ (1) определяется ПО выражению
= ———Ё+' ——’°—' 2… _ ит
1/„1 ата 1/ д _… (М 1) агсіді м 1 (№3)
ИЛИ
__ /Ъ+1 ]/ ›„2—1 іг—|—1 ›„2—1
(‚0— \,1 !?!—1 аГСЁЁ П2—8ГСЁЁ Ь_1.ж%пах_ж2 _ (2`,_9)
тах _
Каков физический смысл этого угла?
\!.21. В заданном сечении сверхзвуковой струи газа число М1=5
(точка А на рис. 2.\/.3). Определите угол отклонения АБ струи от
этого сечения при ее расширении до состояния, характеризующегося
А(М.)
ЩМг)
а! \/ 01 \!
Рис. 2.\7.3. К определению угла Рис. 2.\/`.4. Схема расчета чис-
отклоненйя потока ла М по углу отклонения газо-
ВОГО 'ПОТОКЗ
числом М2=10 (в точке В). Течение—изэнтропическое‚ показатель
адиабаты газа іг=ср/с„= 1,4.
\!.22. Отклонение сверхзвукового потока от начального состояния
в точке С (рис. 2.\/.4)‚ характеризуемого числом М1=3‚ определяется
углом АВ=1О°. Найдите число Маха м2 в точке В отклонившегося по-
тока для іг=ср/с„=1,4 и определите, происходит ли указанное откло-
нение потока со сжатием или с расширением.
\!.23. Сверхзвуковой поток в некотором сечении струи газа (Ё=1‚4)
характеризуется числом М2=10. На сколько отличается от п редель—
ного значения (Юшах) Угол отклонения этого потока, отсчитываемый
от начального состояния течения с числом м]: 1,0?
№24. Найти предельное отклонение потока, необходимое для полу-
чения максимальной скорости, если угол этого отклонения от-
считывается от направления потока,вкотором число М=5 (іг=ср/с„=
=1,4).
\!.25. Поток газа в некотором сечении струи характеризуется сле-
дующими параметрами: М1=3,2; р1=0‚12 кГ/см2; р1=0‚02 кГ-секЁ/‚и“;
Т1=209 К. Определите соответствующие значения этих параметров, а
также скорость 1/2 при изэнтропическом движении газа с постоянными
теплоемкостями (іг=1‚4) и отклонении струи на угол МЗ:—13°.
\!.26. Газовая струя с числом Мд=2,3 и давлением рд=0,56 кГ/см2
на срезе сверхзвукового сопла истекает в неподвижную среду с давле—
нием рн=0‚11 кГ/см2. Определите угол поворота струи (&=ср/с„=
=1‚4).
\!.27. Покажите, что если в плоском потенциальном (сверхзвуко—
вом) потоке одна из характеристик какого-либо семейства прямая, то
и все другие характеристики этого семейства также будут пр ямы м и.
\!.28. На рис. 2.\/.5 показано расположение сопряженных характе—
ристик в физической плоскости х, у (рис. 2.\/.5,а) и в плоскости годо-
графа их, ›… (рис. 2-\7.5, 6,6). Рассмотрите виды сверхзвуковых течений,
для которых имеет место такое расположение характеристик.
\].29. На рис. 2.\/.6 показаны схемы обтекания плоским сверхзвуко-
386
вым потоком двух одинаковых поверхностей. На одной из этих схем
характеристики имеют вид прямых линий, а на другой они—криво-
л и н е й н ые. Чем можно объяснить это различие?
\!.30. В двух точках А и В с координатами хА=10 и уА=1О, хв=
=12 и уВ=8 известны скорости плоского (или пространственного осе-
б) Ан
а б
) )из
в
в _ _
д На)
А и
о ,? а: 0'
Рис. 2.\/.5. Схема расположения сопряженных характеристик:
а —— в физической плоскости: б, в—— в плоскости годографа вектора скорости
а) 'б)
9
Н
Рис. 231.6. Обтекание профиля сверхзвуковым потоком:
а—характеристики в виде пряіиых линий; б—криволинейные харак-
теристики
симметричного) сверхзвукового газо-
вого потока УА=800 м/сек, Ув=
=820 м/сек и их направления, опре-
деляемые соответственно углами [ЗА=
=30°‚ Бв=32° (рис. 2.\/.7). Найти ско-
рость и угол отклонения потока в точ-
ке С на пересечении характеристик
разных семейств, выходящих из точек
А и В, при условии, что'течение изэнт-
ропическое, скорость невозмущенного
потока Уоо=750 м/сек, температура
Тоо=228 К, іг=ср/с„= 1,4.
№31. По условиям задачи №30 рас-
считайте скорость в точке С на пере-
сечении характеристик разных се-
мейств, проведенных из точек А и В,
34
96
Н
0 $„
‚'
3:8
_
Рис. 2.\7.7._Схема расчета скорости в
точке С пересечения двух характерис-
тик различных семейств
при условии, что течение неизэнтропическое. Изменение энтропии в
точках А и В задано через изменение давления торможения (род ==
=0‚8 ро в точке А; рЬВ=О‚77 ро в точке В; ро—давление торможения
при изэнтропическом сжатии).
\!.32. Определить скорость на поверхности тела вращения в месте
пересечения характеристики второго семейства, проведенной из близко
25*
387
расположенной точки В (рис. 2.\/.8). Условия задачи следующие: ско-
рость набегающего потока Уш=750 м/сек; температура Тоо=288 К;
іг=ср/су=1‚4; давление торможения на поверхности р6=0‚77 ро. Для
точки 0 это давление р6д=0,8 ро, а скорость в ней Ур=800 м/сек.
Уравнение образующей в окрестности точки В
у = у… (х/хт) (2 —х/х…)‚ (2.\/.10)
&! В
‚\
0 ‚Н” Н’"
3:1, _ а:
1 агт _
1 и ЧП
/‚
у —— в
0 __
` $17 ` а:
` ‚133 :
Рис. 2.\/.8. Схема расчета скорости в точке пересечения
характеристики со стенкой
где у…=1; х…=10. Координаты этой точки хр=5‚ ур=0‚8‚ & угол на-
клона вектора скорости в ней Вр=5°.
Сравните найденную скорость в точке В с соответствующим ее зна-
чением, полученным без учета влияния вихревого характера течения.
\!.33. На прямолинейный скачок
уплотнения с углом е=30° падают в
точках $ и Н близко расположенные
волны разрежения [характеристики 1
7; семейства (рис. 2.\/.9)]. Вычислить
скорость за скачком на участке ЗН и
определить соответствующее измене-
В, ние угла наклона скачка. В точке Р
с координатой ур= 10, находящейся на
пересечении характеристики второго
семейства ЗР и характеристики пер-
вого семейства РН(хН—хг=0‚5)‚ ско—
рость Ур=950 м/сек, угол отклонения
рис, 2_у_9_ к определению скоре- потока Вр=11°‚ скорость набегающего
сти в точке пересечения характе- потока Удо: 1020 м/сек, температура
ристики со скачком уплотнения: Тоо=288 К, Ё=ср/с„=1‚4_
ЁіЁЁЁЁЁЁЁЁЁришика первого семейства; \!.34. Найти параметры воздуха
РИСТИКЗ ВТОРОГО семейства
(давление ро и плотность ро) в фор—
“ камере сверхзвуковой аэродинамиче-
скои трубы с открытой рабочей частью, определить площадь крити-
ческого сечения и выбрать форму криволинейного кон—
тура сопла, обеспечивающего получение на выходе параллельного
сверхзвукового потока с числом Моо=3 и давлением роо=1 кГ/см2. Квад-
ратное сечение сопла на выходе имеет площадь $=0‚16 м2, температура
воздуха в форкамере Т0=290 К.
0 - ‘За“
У|. ПРОФИЛЬ И КРЫЛО КОНЕЧНОГО РАЗМАХА
В ПОТОКЕ НЕСЖИМАЕМОЙ ЖИДКОСТИ
УЦ.]. Определите аэродинамические коэффициенты тонкого профи—
ля, обтекаемого потоком несжимаемой жидкости под углом атаки ос=
=0‚1 рад. Контуры профиля, имеющего хорду Ь=1 м, заданы в свя-
занной системе осей координат уравнениями:
у… : 0,2 х1 (1 —х1/Ь) (верхняя сторона);
у1н = — 0,12х1 (1 —х1/Ь) (нижняя сторона).
\!].2. Определите при ос=0‚1 рад аэродинамические коэффициенты
тонкого симметричного относительно хорды профиля, расположенного
в несжимаемом потоке.
\!].3. Конформная формула &;
6=С+1/‹Ё
производит преобразование круга на плоскости
ё=ё+іп в отрезок на плоскости о=2—|—іу. Найди-
те радиус круга и длину отрезка, а также опре-
делите, вдоль какой оси этот отрезок расположен.
ИА. Конформная функция
о=С—1/С
преобразует отрезок на плоскости о=г+іу в ок-
ружность на плоскости ё=ё+іп. Найдите радиус
окружности и длину отрезка, а также определи-
те характер расположения этого отрезка на плос-
кости о.
\’1.5. Комплексный потенциал несжимаемого
потока около кругового цилиндра единичного ра— РИС- 2.\/1.1. Попереч'
диуса в плоскости ё=ё+іп имеет вид ное Обтекание пла'
стинки
“7 = — Л’… (С+ 1/0,
где У… — скорость невозмущенного потока. Най-
дите распределение давления и определите аэро-
динамическую силу, действующую на цилиндр.
\’1.6. Найдите распределение коэффициента
давления по поверхности пластинки, обтекаемой
несжимаемым потоком в поперечном направле-
нии (рис. 2.\/1.1).
\П.7. Комплексный потенциал при обтекании
кругового цилиндра единичного радиуса несжи- рис 2…2 чЦилиндр
маемым циркуляционно-поступательным потоком в циркуляцнОнн0-по-
в плоскости о=х+іу (рис. 2.\/1.2) имеет вид ступательном потоке
“7 : Уш (0 + 1/0) + і(Г/2л) 1по.
Найдите распределение скоростей (давлений) по поверхности цилинд-
ра, определите подъемную силу У и лобовое сопротивление Х, а также
положение критических точек (точек полного торможения) на цилинд-
ре при скорости У =50 м/сек‚ циркуляции Г=314 ли?/сек и плотности
воздушного потока роо=0‚125 кГ-сек2/м4.
И.З. Пластинка, имеющая хорду 2а=2 м и размах 1=1 м, обтека-
ется несжимаемым воздушным потоком со скоростью Уоо=100 м/сек
под малым углом атаки ос=0,1 рад. Найдите распределение скоростей
389
И давлений, определите подъемную силу и циркуляцию скорости около
пластинки.
\П.9. Крыло прямоугольной формы в плане с размахом !=8 м соз-
дает подъемную силу У=5000 КГ при движении в атмосфере (плот-
ность воздуха роо=0‚125 кГ-сек2/м4) со скоростью 360 км/ч. Определи-
те угол скоса потока за крылом.
\’ЫО. Измерения показали, что угол & скоса потока за крылом эл-
липтической формы в плане равен 2°. Определите подъемную силу это-
го крыла при условии, что его площадь в плане Экр=10 М?, а размах
[=8 м. Скорость воздушного потока Усо=100 м/сек, а плотность роо=
=0,125 кГ-сек2/м4.
\П.11. Объясните, к чему приводит возникновение угла скоса потока
за крылом конечного размаха.
У!.12. По условию задачи \/1.10 определите коэффициент и силу ин-
Дуктивного сопротивления эллиптического крыла.
\11.13. Как изменится угол скоса потока при переходе к крылу ко-
печного размаха с меньшим удлинением?
\/|.14. Что произойдет с истинным углом атаки крыла конечного
размаха, если его удлинение возрастет?
\’МБ. Сравните коэффициент индуктивного сопротивления крыла
конечного размаха с соответствующим коэффициентом крыла такой же
формы, но с большим удлинением.
УП. ПРОФИЛЬ В ПОТОКЕ СЖИМАЕМОГО ГАЗА
ЧП.]. Предположим, что линеаризованному потоку газа, обтекаю-
щему тонкий профиль, соответствует поток несжимаемой жидкости,
имеющий тот же потенциал скоростей, что и для сжимаемого газа. Ка-
ким образом в данном случае будет деформироваться профиль и изме-
нится ли угол атаки при переходе от сжимаемого поток—а к несжимае—
мому?
“1.2. Какова зависимость между коэффициентами подъемной силы
и продольного момента профиля при обтекании его линеаризованным
дозвуковым сжимаемым потоком газа (Моо<Моо1-ср) и потоком несжи-
маемой жидкости при одинаковых углах атаки?
УЦЗ. Коэффициент подъемной силы суНСЖ тонкого профиля с хор-
дой Ь=2 м, обтекаемого несжимаемым потоком под углом атаки ос=
=0‚1 рад, равен 0,3. Определите значение сути, а также циркуляцию ско-
рости ГСЖ для этого профиля, обтекаемого маловозмущенным (лине—
аризованным) потоком под тем же углом атаки при Моо=0‚5 и темпе-
ратуре воздуха Тоо=288 К (а…=340 м/сек).
ИПА. Пусть для некоторого профиля известно критическое число
Маха набегающего дозвукового потока (Моокр). Как изменится это чис-
ло, если профиль будет утолщен? Изменится ли критическое число Ма-
ха набегающего потока при увеличении угла атаки профиля?
17
…В Р
1,0
9
О
".’.“
__ _ —1‚0
ртьпнсж__”25
Рис. 2.\/'П.1. Распределение коэффициента давле- Рис. 2.\/'Н.2. Распределение коэффи-
ния по профилю, обтекаемому п0д углом атаки циента давления по профилю, обте-
несжимаемым потоком каемому под углом атаки потоком с
числом М°о=0‚5
'УПБ. На рис. 2.\/`П.1 показано распределение коэффициента давле—
ния около профиля, полученное путем продувки в малоскоростной аэ-
родинамической трубе (при М…шО). Определите для этого профиля
критическое число Маха (М…кр).
\/П.6. На рис. 2.\/`П.2 показано распределение коэффициентов дав-
ления около профиля, полученное при Моо=0,5. Найдите соответству-
ющее этому распределению критическое число Маха набегающего воз-
душного потока (Моокр).
\!П.7. Пересчитайте кривую распределения коэффициента давления
для профиля (рис. 2.\/П.3), обтекаемого несжимаемым потоком возду-
ха, на число Моо=0,5.
391
\П!.8. Дана кривая распределения коэффициента давления на про—
филе (рис. 2.\/П.4)‚ полученная при обтекании его потоком воздуха с
числом Моо1=0,4. Пересчитайте эту кривую на число Моо2==0‚6.
УПА). Определите коэффициент волнового сопротивления профиля
для ряда значений М…(Моокр<Моо<1) при условии, что известно рас-
пределение коэффициента давления около этого профиля, полученное
при малых скоростях набегающего воздушного потока (см. задачу
\/П.5). Для одного из чисел Моо определите силу волнового сопротив—
ления участка крыла размахом 1=1 м (хорда профиля Ь=2 м) при
полете в атмосфере вблизи поверхности Земли.
и б
„0 “
0 _Ь „№№/„„„, '__
0 ”"4-№//////‚//////////””” га:
!
. „„ 2 '
__ 3 [ Ь ‚„
"›0 “ 4,0 —
Вис. 2_.\/П.З. Координатная диаграмма Еис. 2.\/11.4. Коорди-натная диаграмма
р=і(х) для симметричного профиля р=і(х) для симметричного профиля,
в несжимаемом потоке при а=‚ЬО обтекаемого при нулевом угле атаки
потоком с числом М…=0,4
ИНО. Обтекаемая плоская поверхность отклонена от направления
скорости Удо набегающего потока воздуха на угол Б=ЗО°. Определите
угол центрированной волны (веера разрежения), характер течения в
этой волне, а также параметры газа на отклоненной поверхности при
условии, что число Моо=2 и іг=ср/с„= 1,4.
\/П.11. Определите параметры возмущенного течения на верхней
стороне пластинки, обтекаемой гиперзвуковым воздушным потоком с
числом Моо=10 и іг=ср/с„=1‚4 при ос=0‚1 рад. Полагая, что течение
около другой пластинки, расположенной под углом атаки ос=0,05 рад,
будет аэродинамически подобным, вычислите параметры ее обтекания.
\1П.12. Два крыла в виде тонких пластинок расположены в сверх-
звуковых потоках воздуха (&=ср/с„=1‚4)‚ имеющих числа Моо=5 и
20, под одинаковым углом атаки ос=0‚1 рад. Определите аэродинами-
ческие характеристики этих крыльев.
\]!ЫЗ. Определите параметры обтекания профиля сверхзвуковым
воздушным потоком (Мод=5; Ь=ср/с„=1‚4) под углом атаки сс=20°.
Контур профиля (рис. 2.\/П.5) задан уравнением
у : і 2А(х/Ь) (1 —х/Ь)‚
где А=2; @= 12.
\/П.14. Определите параметры сверхзвукового обтекания профиля
(рис. 2.\/Н.6)‚ контур которого на переднем участке представляет со-
бой клин с половиной угла при вершине Во=15°‚ а на остальной час-
ти — параболическую кривую с уравнением
у : 2А (х/Ь) (1 —х/Ь)‚
где А=2; 1): 10.
392
Число Маха набегающего потока Моо=5‚ угол атаки сс=0°‚ отноше-
ние удельных теплоемкостей для воздуха іг=ср/с„=1‚4.
\’ПДБ. Определите параметры изэнтропического обтекания двух
одинаковых профилей под углом атаки ос=0‚1 рад сверхзвуковыми
воздушными потоками с числами Мы:?) и Моо=20 (!г=ср/с„=1‚4).
Контур профилей (см. рис. 2.\/П.5) задан уравнением
у = і 2А (х/Ь) (1 —х/Ь)‚
где А=1; 19:20.
9—
709 2/30 % 6/2
1 5 д к,"
М…, 1 0 \ ‚4/2
‹ Ь/2 ;, 17/2 _
Рис. 2.\711.5. Симметричный сверхзвуко- Рис. 2.\/П.6. Симметричный профиль с кли-
вой профиль НОВИДНЫМ носком
&! „ … 1383
_ [35 113/2
“ О В: “‹1/2
у… В,?
м… ь/2 _7` г Ь/2 __
Рис. 2.\/'11.7. Симметричный ромбовидный Рис. 2.\/'П.8. Несимметричный ромбовид-
профиль ный профиль
\’П.16. Определите коэффициенты аэродинамических сил, момента
тангажа, центра давления, а также аэродинамическое качество про-
филя (см. рис. ЕВА/11.5) с уравнением контура
у : і 2А(х/Ь)(1—х/Ь),
где А=1; 17:20.
Профиль расположен под углом атаки сс=0‚1 рад в сверхзвуковом
потоке в одном случае с числом Моо=3‚ а в другом с числом Моо=20.
Отношение удельных теплоемкостей Для воздуха іг=ср/с„=1‚4.
\’П.17. Определите аэродинамические характеристики ромбовидного
профиля (13:2; 19:20; рис. 2.\/П.7)‚ обтекаемого под углом атаки ос—
=0‚05 рад сверхзвуковым потоком с числами Моо=3 и 20. Отношение
удельных теплоемкостей для воздуха й=ср/с„= 1,4.
\!П.18. Определите аэродинамические характеристики несимметрич-
ного ромбовидного профиля (!)/2:4; у; =2; |у31|=1; рис. 2.\/П.8)‚
обтекаемого сверхзвуковым потоком с числом Моо=5 и отношением
удельных теплоемкостей ё=ср/с„=1‚4 под нулевым углом атаки.
\]!ЫЭ. Определите аэродинамические коэффициенты и соответст-
вующие силы и момент для участка длиной А2=1 м тонкого крыла
(рис. 2.\/П.9) с углом скольжения х=60°, обтекаемого воздушным пото—
ком со скоростью Усо=100 м/сек под углом атаки ос=0‚1 рад. Контур
профиля с хордой Ьп=1 м задан уравнениями:
у1в : 0,2 х1(1 _ Шёл), у… =_ _ Од? х1(1 _ Хиди):
Плотность воздушного потока роо=0,125 кГ '- `сие?/1144,
26—927 393
\П].2О. Скользящее крыло (см. задачу \/11.19 и рис. 2.\/11.9) движет-
ся со скоростью, соответствующей числу Моо=0‚5‚ под углом атаки
ос=0‚1 рад. Определите аэродинамические коэффициенты этого крыла,
рассчитанные по скоростному напору асо=0‚5 род/020 .
8<1
У.,…
2 ЦП 918
“Г/ 0
к \ `
“„У 14
Ъ“ рф” :Е’ ;— у,”
› дп _
>/ :с.
1
112
`
Рис. 2.\/Н.9. Скользящее крыло
“1.21. Определите аэро-
динамические характеристи-
ки скользящего крыла (см.
задачу \’11.19 и рис. 2.\/П.9) ‚
движущегося в атмосфере
вблизи поверхности Земли с
Моо=1,2 под углом атаки
оъ=0‚1 рад.
\’П.22. Рассчитайте обте—
кание участка крыла длиной
Рис. 2.\711.10. Пластинка под углом атаки в сверх- А2=1 м, движущегося СО
ЗВУКОВОМ потоке скольжением под углом Х:
=60° с М…:З в воздушной
т среде (іг=ср/с„=1‚4) с дав-
—* *‘ лением роо=1 кГ/см2. Кон-
до А тур симметричного профиля
в осях координат х1Оу1 (см.
__ рис. 2.\/П.9) задан уравне—
нием
130
_ у1 : і 2А(х1/17„) (1 —х1/!7„)‚
И» 17/2 Ь/2
, ` ; где А=О‚05 м — максималь—
ная толщина; 17п=1 м—хор-
Да профиля.
“1.23. Определите пара-
метры обтекания диссоции-
рующим газовым потоком заостренного профиля (см. рис. 2.\/Н.5), кон-
тур которого задан уравнением
у : $ 213 (х/Ь) (1 — х/Ь)‚
Ц.
Рис. 2.\/П.11. Симметричный криволинейный
профиль
в котором А=2; Ь=4.
Движение профиля происходит в воздушной атмосфере на высоте
Н =2О км со скоростью Усо=5000 м/сек под углом атаки ос=5°.
\!П.24. Определите аэродинамические коэффициенты профиля кры-
ла в виде плоской пластинки с хордой Ь=2 м и длиной 1=5 м (рис.
2.\/П.10)‚ обтекаемой сверхзвуковым диссоциирующим потоком возду-
ха под углом атаки ос=20°, а также найдите соответствующие подъем-
394
ную силу, сопротивление и момент относительно передней кромки. Па-
раметры набегающего потока: Усо=5000 м/сек; роо=0‚01 кГ/см2_; Тоо=
=4000 К.
“1.25. Определите параметры газа на верхней стороне профиля в
точке А с координатой хА=6 при условии, что профиль обтекается
диссоциирующим воздушным потоком под углом атаки ос=0,3 рад со
скоростью Уоо=4000 м/сек. Давление и температура набегающего по-
тока соответственно роо=0‚01 кГ/см2‚ Тоо=4000 К.
Уравнение контура профиля (рис. 2.\7П.11)
;; : і 2А(х/Ь) (1 —х/Ь)‚
где А=1; 19:10.
\!]!26. На верхней стороне пластинки (рис. 2.\/11.10)‚ обтекаемой
под углом атаки ос=20° диссоциирующим потоком воздуха, известны
давление рв=0‚01 кГ/см2, температура ТВ=3500 К и скорость УВ=
=4ООО м/сек. Определите параметры набегающего потока.
\!".27. Профиль с уравнением контура (см. рис. 2.\/П.11)
у = 1” 2А (х/Ь) (1 —х/Ь)‚
где А=1‚ 19:10, обтекается диссоциирующим потоком под углом ата-
ки сс=0‚3 рад со скоростью Усо=4000 м/сек. Давление и температура
воздуха в этом потоке соответственно роо=0‚01 кГ/см2‚ Т…:БООО К.
Найдите координаты уА‚ хА точки А, в которой значение числа Маха
МА=МОО+О‚5.
У|". КРЫЛО В СВЕРХЗВУКОВОМ ПОТОКЕ
\’ПЫ. Консоль крыла треугольной формы с тонким симметричным
профилем (рис. 2.\7П1.1) расположена в сверхзвуковом потоке (Моо=
=1,5; роо=1 [СГ/см?; іг=ср/с„=1‚4) под нулевым углом атаки. Опреде-
лите распределение давления на поверхности и вне крыла в окрестнос—
ти корневой хорды и передней кромки, а также найдите волновое соп-
ротивление консоли, имеющей размеры: Ькр=5 м; .1/2=4 м; ?„=О,1 рад.
\ПП.2. Вычислите распределение давления на крылеив окрестности
его передних кромок, а также найдите волновое сопротивление этого
Рис. 2.\/'П1.1. Треугольная консоль
крыла метричное относительно оси Ох
крыла, обтекаемого сверхзвуковым потоком под нулевым углом атаки.
Крыло (рис. 2.\/П1.2) имеет следующие размеры: Ькр=5 м; 1/2=4 м;
?»=О‚1 рад. Параметры набегающего потока: Моо=1,5; роо=1 кГ/см2,
Ё=Ср/Ср=1‚4.
УППВ. Бесконечное полукрыло, форма и размеры которого приве-
дены в задаче \/111.1 (см. рис. 2.\/111.1)‚ обтекается сверхзвуковым пото-
ком с числом Моо=2‚5 под нулевым углом атаки. Найдите распределе-
ние давления на поверхности крыла и в окрестности боковой кромки за
его пределами, а также определите волновое сопротивление. Давление
набегающего воздушного потока роо=1 кГ/см2, показатель адиабаты
Ь=ср/с„= 1,4.
\’ППА. Крыло треугольной формы в плане, размеры которого даны
в задаче \/111.2 (см. рис. 2.\/1П.2), расположено под нулевым углом
атаки в сверхзвуковом потоке (М…=2,5; роо=1кГ/см2; Ь=ср/с„=1,4).
Определите распределение давления на крыле и его волновое сопро—
тивление.
ИПБ. Найдите распределение давления, силу сопротивления и ко-
эффициент этой силы для тонкого треугольного крыла с симметричным
профилем при обтекании сверхзвуковым потоком (М…=1,З; рос):
:] кГ/см2; Ь=ср/с„=1,4) под нулевым углом атаки. Основные разме-
ры этого крыла (рис. 2.\/111.З) следующие: 1=6 м; Ьнр=5 м; Ь’=2 м;
А=О‚2 м.
\!НН.6. Тонкое треугольное крыло с симметричным профилем (см.
рис. 2.\/'П1.3) имеет следующие размеры: ‚[=8 м; ЬКр=5 м; Ь’=З м; А:
=0,6 м. Найдите распределение давления, силу сопротивления и коэф-
фициент этой силы при условии, что крыло обтекается под нулевым уг—
лом атаки сверхзвуковым потоком с параметрами: Моо=1,3; рос:
=1 ‚СГ/см?; Ё=ср/с„=1,4.
\/П!.7. Сверхзвуковой поток (Мод=2; рю=1 кГ/см2, іг=ср/с„=1,4)
обтекает тонкое треугольное крыло с симметричным профилем (см. рис.
2.\/1П.3), расположенное под нулевым углом атаки и имеющее размеры:
Ькр=4 м; Ь’=2 м; 1=8 м, А=О,4 м. Вычислите распределение давления
519% крылу, его сопротивление и соответствующий коэффициент.
\ПП.8. Найдите распределение Давления, подъемную силу, сопротив-
ление и момент, а также соответствующие аэродинамические коэффици—
енты для треугольного крыла
А 790 № в виде тонкой пластинки (рис.
4 ' 0 2.\/1П.4), обтекаемой сверхзву-
А ` ! 2 Й…‘Мю
№ в
'! у \ х) &
Ь,…
Ь…
№ ,
. \ /
в
__ Ь $ :, СЕ ]
Рис. 2.\7111.3. Треугольное крыло с симмет- Рис. 2_\/111_4_ Плоское треуголь-
-ричным `ромбовидным профилем ное крыло
КОВЫМ ПОТОКОМ ПОД М&ЛЫМ УГ- —
УФО мы
лом атаки оъ=0‚1 рад. Размах
и корневая хорда крыла соот- @
ветственно равны 1=8 м; л 2
ЬКр=5 м. Параметры набегаю-
щего потока: Моо=1,4; роо=
:] КГ,/62142; іг=ср/с„= 1,4.
УПЦ). Тонкое крыло тре—
угольной формы в плане (см..
рис. 2.\/П1.4) расположено в
сверхзвуковом потоке под ма-
лым углом атаки оъ=0‚1 рад.
Найдите распределение давле-
ния, подъемную силу, сопро-
тивление и момент, а также со- \
ответствующие аэродинамиче- С 33
ские коэффициенты для сле-
дующих параметров набегаю-
щего потока: Моо=2; роо=
=1 кГ/см2; Ё=ср/с„=1,4. Раз-
мах и корневая хорда соответственно равны 1=5 м; Ькр=8 м.
\!ПЫО. Тонкое шестиугольное крыло (рис. 2.\/1П.5)‚ имеющее раз-
меры Ьнр=7 м, Ь1=З м, Ь2=6 м, 1=5 м, обтекается сверхзвуковым
потоком под малым углом атаки ос=0‚1 рад. Определите распределе-
ние давления, подъемную силу и сопротивление, а также соответству-
ющие аэродинамические коэффициенты. Параметры набегающего пото—
ка: Моо=1‚4; рт=1 кГ/см2; іг=ср‚/с„=1‚4.
ЧПЬН. Найдите подъемную силу, лобовое сопротивление и момент,
а также соответствующие аэродинамические коэффициенты для тонко-
го прямоугольного крыла, движущегося в воздушной атмосфере (р…=
=1 кГ/см2, 1г=ср/с„= 1,4) со сверхзвуковой скоростью (Мод=2) под ма-
лым углом атаки ос=0‚1 рад. Хорда крыла Ь=2 м, размах 1=6 м.
\ПП.12. Рассчитайте параметры обтекания тонкого прямоугольного
крыла, расположенного в сверхзвуковом потоке с числом Моо=1‚4-
(роо=1 кГ/см2‚ іг=ср/с„=1‚4) под малым углом атаки ос=0,1 рад. Хор—
да крыла Ь=4 м, размах 1=6 м.
01
да
С),…
Рис. 2.\/1П.5. Плоское шестиугольное крыло
3.9.7
|Х. АЭРОДИНАМИКА ТЕЛ ВРАЩЕНИЯ
[Х.]. Какие сверхзвуковые течения 'по своему характеру являются
коническими?
[Х.2. На рис. 2.1Х.1 изображена «яблоковидная» кривая—геомет-
рическое место концов векторов скорости Ун конического течения не—
посредственно на обтекаемом конусе. Здесь же показаны годографы
скорости, т.е. геометрические места концов векторов скорости в воз-
мущенной области течения между обтекаемой поверхностью и скачка-
ми уплотнения для трех конусов с углами при вершине В…, [ЗН-2, Виз.
Проанализировав рис. 2.1Х.1, укажите характерные особенности этих
трех течений.
!Х.3. Что такое «критический» угол конуса?
ПХ.4. Какой из критических углов больше: для конуса или для
клина?
ПХ.5. Определите угол полураствора конуса [ЗК и параметры обтека-
ющего конус воздуха, если известно, что скачок уплотнения наклонен
к вектору скорости набегающего потока под углом 60=ЗО°. Величина
скорости набегающего потока Усо=1700 м/сек (Мод=5).
[Х.б. На рис. 2.1Х.2 показана головная ударная волна ОА перед ко-
нусом ОВС. Как видно, на переднем участке эта волна прямолинейная,
а начиная с точки А она искривляется. Объясните, чем обусловлена та-
кая форма ударной волны.
|Х.7. Как изменяется угол 90 наклона скачка уплотнения перед
острым конусом с ростом числа Моо полета?
!Х.8. Как изменяются степень диссоциации, давление и температура
газа на поверхности конуса с увеличением его угла Бк?
А
\А!
‚‚, /
о _
\\ё‘ 1 “по О
2 ’
%*} \\ЪЪ ,} мы?!
; 13“ Вид
\ Ви!
, _
о П А
Рис. 2.1Х.1. Годограф скоростей конических Рис. 2.1Х.2. Схема обтекания
течений конуса сверхзвуковым потоком
газа
ПХ.9. Рассчитайте обтекание острого конуса, а также найдите соот-
ветствующий угол [ЗК при условии, что Моо=20, угол скачка перед ко-
нусом 60=50°‚ а параметры набегающего потока соответствуют высоте
полета Н=5 км.
[Х.1О. Что произойдет с углом наклона скачка уплотнения, возника-
ющего перед острым конусом, который совершает полет, удаляясь от
Земли с гиперзвуковой скоростью при постоянном значении числа Мое?
[Х.И. Как изменяется коэффициент волнового сопротивления схв ост-
рого конуса в зависимости от числа М… полета, если угол атаки ос=0?
[Х.12. Определите положение центра давления острого конуса, вы-
сота которого хн, если он движется со сверхзвуковой скоростью под ма-
лым углом атаки.
ПХ.13. Чем вызвано применение в современной аэродинамике лета-
тельных аппаратов с затупленными головными частями?
398
|Х.14. На затупленном и заостренпом конусах с одинаковым углом
[31,- наклона образующей определены каким-либо путем равные по вели-
чине давления рк1=рк2=рк. Найдите зависимости для соответствую-
щих скоростей У… и УН2 и сравните их значения при условии, что сверх-
звуковое обтекание заостренного конуса будет докритическим (т.е.
скачок имеет конический вид).
[Х.ЪБ. Покажите, как будет изменяться с подъемом на высоту при
М…:сопз’с коэффициент волнового сопротивления схВ полусферы в
предположении постоянных теплоемкостей, а также в реальных усло-
виях.
ПХ.16. Сфера радиуса Кт=2 м движется со сверхзвуковой скоро-
стью, соответствующей числу Моо=15‚ в атмосфере Земли на высоте
р ' дю
Фк ‘
? сл А
Д.). чр дт [3 20 Ё
(7’> , &,
9 д’ 50, 7 ‚
[12 ТО, ; ‚„/і ‚1.7/1 /”//////////1////;////‚//1„„‚‚ {___
Т2 0, 0 ‚!!!/[%! №Л1/1/Л” {В
Р Р“
2 1 1, = 5 м
а:
Рис. 2.1Х.3. Конус со сферическим затупле- Рис. 2.1Х.4. Распределение давления
.н-ием: по поверхности тела вращения
і—скачок уплотнения; Кт=2 м; Вк=20°
Н=15 км. Определите ОТХОД и форму ударной волны перед обтекаемой
поверхностью.
[Х.17. Найдите градиент скорости в окрестности точки полного тор—
можения, а также распределение скорости по сферической поверхности
носовой части летательного аппарата‚движущегосяввоздухе на высоте
Н =ЗО км со скоростью Уоо=4000 м/сек. Радиус сферической поверх-
ности Кт=2 м.
|Х.18. Определите коэффициент волнового сопротивления схв, гра-
диент скорости и скорость на поверхности затупленного по сфере кону-
са, движущегося в атмосфере Земли на высоте Н =1О км со скоростью
Уоо=5000 м/сек. Форма и размеры конуса показаны на рис. 2.1Х.З.
ПХ.19. При равновесном обтекании затупленной поверхности возро-
сло давление набегающего потока. Как изменится отход ударной вол-
ны в газе с постоянными теплоемкостями, а также при учете диссоциа—
ции?
[Х.2О. В точке полного торможения на затупленной поверхности го-
ловной части летательного аппарата установилась равновесная темпе—
ратура. За этой точкой течение будет неравновесным. Объясните ха-
рактер изменения температуры в таком течении и сравните ее с соот-
ветствующим значением в случае равновесной диссоциации.
НХ.21. Как изменится отход ударной волны от обтекаемой поверх-
ности сферы, если учесть излучение тепла газом, находящимся между
скачком и поверхностью тела в окрестности точки полного торможе-
ния?
]Х.22. На рис. 2.1Х.4 показано распределение избыточного давления
по поверхности тела вращения (кривые 1 и 2). Укажите основные осо-
бенности обтекающего потока, обусловившие различие в этом распре-
" 399
ДВЛСНИИ, И Дайте физическое ИСТОЛКОВЭНИС изменения ДЗВЛЗНИЯ В каж—
дом случае.
[Х.23. Методом характеристик были рассчитаны распределения дав-
ления по телу вращения, обтекаемого идеальным (невязким) газом
(кривые 1 и 2 на рис. 2.1Х..5). Объясните различие в этих распределе-
ниях и укажите скорости сверхзвукового потока, при которых это раз-
личие будет существенным. .,
ПХ.24. Расскажите, в чем заключается линеаризация уравнении дви-
ЖВНИЯ газа ОКОЛО ТОНКИХ ТЕЛ вращения.
# ’“ д
р/росГ ' М№ 130 , і” 13 "‘“
\\ Щ
\ 2
1 \,`
" ‘ЮМЦЁ _
" Рис. 2.1Х.6. Заост-ренное тело вращения с парабо-
0 \, \ "___ 513" лической образующей
\Ёт—
Рис. 2.1Х.5. Распределе-
ние давления по поверх-
ности тела вращения,
рассчитанное метоцом ха-
Рис. 2.1Х.7. Тонкий конус:
рактеристик гмид=0‚5; хк=10
[Х.25. Напишите в общем виде выражение для потенциала скоро-
стей линеаризованного потока, обтекающего тонкое тело вращения
под малым углом атаки.
ПХ.26. В чем сущность метода источников, применяемого для реше-
ния задачи обтекания тонких тел вращения сверхзвуковым потоком?
[Х.27. Полет тонкого тела происходит с возрастающей сверхзвуко-
вой скоростью. Можно ли использовать для всех скоростей линеаризо-
ванные методы расчета?
[Х.28. Найдите распределение коэффициента давления и соответст-
вующую величину волнового сопротивления тонкого заостренного тела
вращения, обтекаемого линеаризованным сверхзвуковым потоком с чи-
слом Моо=2 под нулевым углом атаки. Форма тела вращения пред-
ставлена на рис. 2.1Х.6. Уравнение образующей: г= (гмид/хмид)х><
>< (2—Х/хМид); Гмид=0,5; Хмид= 10.
[Х.29. Определите коэффициент и силу волнового сопротивления,
действующую на тонкий конус при его движении со сверхзвуковой ско-
ростью (Моо=2) вблизи поверхности Земли. Размеры конуса показаны
на рис. 2.1Х.7.
[Х.ЗО. Требуется найти нормальную силу и момент, а также соот-
ветствующие аэродинамические коэффициенты для тонкого тела вра-
щения, изображенного на рис. 2.1Х.6. Движение происходит вблизи по-
верхности Земли под малым углом атаки ос=0‚1 со сверхзвуковой ско-
ростью (Мод=2).
[Х.31. Для тонкого конуса, изображенного на рис. 2.1Х.7, определи-
те аэродинамические силы и момент тангажа относительно оси, про-
ходящей через носок, а также соответствующие коэффициенты при ус-
ловии, что угол атаки ос=0,1‚ число Моо=2, а движение конуса проис—
ходит вблизи поверхности Земли.
' 400
Х. ТРЕНИЕ И ТЕПЛОПЕРЕДАЧА
Х.]. Плоская пластинка с теплоизолированной поверхностью дви-
жется со скоростью Усо=Уд=7ОО м/сек в воздушной атмосфере на вы-
соте Н = 10 км.
Определите местные параметры трения на ламинарном участке об-
текаемой поверхности (напряжение и коэффициенты трения, толщину
пограничного слоя) при условии, что критическое число Рейнольдса
Некр=105. Найдите также средний коэффициент и сопротивление тре-
ния для этого участка пластинки. Размеры пластинки показаны на
рис. 2.Х.1.
Х.2. Найдите параметры пограничного слоя (местный коэффициент
трения; толщину слоя) на участке турбулентного обтекания плоской
пластинки (см. рис. 2.Х.1),
а также средний коэффици-
ент и силу трения. Условия
обтекания потоком со ско-
ростью Уоо=Уд=700 м/сек __;Ё ` „"/1
соответствуют высоте атмос— “Г- _!
феры Н=10 км. Критиче— [7:5 /
ское число Рейнольдса " '"— `
кекр=105.
Рис. 2.Х.1. К расчету параметров пограничного
Х.З. Пластинка С тепло' слоя на плоской пластинке
изолированной поверхно-
стью шириной (хордой) 1):
=5 м и размахом !=1 м обтекается сверхзвуковым потоком со скоро-
стью Уоо=Уд=4000 м/сек. Условия обтекания соответствуют полету на
высоте воздушной атмосферы Н =20 км. Найдите местные и средний
коэффициенты трения, распределение толщин ламинарного погранич-
ного слоя, а также силу трения пластинки.
Х.4. Для условий задачи Х..3 найдите местные и средний коэффици-
енты трения, распределение толщин турбулентного пограничного слоя,
а также силу трения пластинки.
Х.5. Определите параметры пограничного слоя (местный и средний
коэффициенты трения, распределение толщин слоя), а также сопротив-
ление трения для теплоизолированной поверхности конуса, движущего-
ся со скоростью Уоо=5000 м/сек на высоте Н=10 км. Длина образую-
щей конуса хк=5 м, половина угла при его вершине Вк=40°.
Х.6. Профиль крыла, форма и размеры которого показаны на рис.
2.Х.2, движется под нулевым углом атаки со сверхзвуковой скоростью,
соответствующей числу Моо=2. Определите параметры ламинарного
пограничного слоя на этом профиле для условий полета на высоте Н =
=20 км.
Х.7. Определите тепловые потоки на ламинарном и турбулентном
участках обтекания пластинки, расположенной в воздушном потоке,
скорость которого Уш=Ув=4ООО м/сек. Критическое число Рейнольд-
са Кекр=106. Условия обтекания пластинки шириной Ь=5 м и разма-
хом 1=1 м соответствуют высоте атмосферы Н =10 км. Температура
стенки поддерживается постоянной и равной Тст=300 К.
Х.З. Летательный аппарат в виде конуса движется со скоростью
Уоо=3500 м/сек на высоте Н =10 км. Определите тепловой поток к его
поверхности при условии, что температура поверхности поддерживает-
ся постоянной и равной Тст=600 К. Высота конуса И=5 м, угол полу-
раствора к=40°.
Х.9. Требуется рассчитать ламинарную теплопередачу на затуплеи—
ном по сфере конусе, движущемся со скоростью Уоо=4000 м/сек на вы—
соте Н =20 км. Условия обтекания этого конуса соответствуют равен-
401
ству числа Льюиса—Семенова единице (Ье=1). Температура стенки
поддерживается постоянной и равной Тст=500 К. Форма и размеры
затупленного конуса показаны на рис. 2.Х.3.
Х.1О. Летательный аппарат, имеющий форму конуса со сферической
носовой частью, движется со скоростью Усо=4000 м/сек на высоте Н =
=20 км. Определите дополнительный тепловой поток к обтекаемой по-
верхности, обусловленный диффузией в пограничном слое. Температу—
ра поверхности поддерживается постоянной и равной Тст=500 К. Фор-
ма и размеры конуса показаны на рис. 2.Х.З.
Х.11. Найдите равновесную радиаци-
онную температуру стенки в окрестности
точки полного торможения конического
летательного аппарата, движущегося со
скоростью Уоо=4000 м/сек на высоте Н=
=20 км при условии, что теплопередача
рассчитывается с учетом влияния диф-
"%
91 \ вс 2
: :п
1 13° \
О
«13,
_ шумид
дк : 2$1мид
Рис. 2.Х.2. Профиль крыла в сверхзвуко- Рис. 2.Х.3. К расчету теплопе-
вом потоке. Уравнение профиля и раз- редачи на затупленном по сфе-
меры: ре конусе:
у1=(у1Мид/х1мид) (2—х1/х1Мид)х : х1мид=1 м; КТ=1’5 м; [К:—5 м; ВК =40°
фузии в пограничном слое. Материал стенки—стекловидное вещество
(константа скорости каталитической реакции для этого вещества даст:
=10 см/сек). Степень черноты поверхности принимается равной &=
=0‚7. Форма и размеры летательного аппарата показаны на рис. 2.Х.З.
Х.12. Летательный аппарат в виде затупленного по сфере тела вра-
щения (см. рис. 2.Х.З) движется со скоростью Уоо=4000 м/сек на высо-
те Н =20 км. Требуется определить унос массы и снижение теплопере—
дачи в окрестности точки полного торможения, обусловленные абляци—
ей материала покрытия. Принять константу скорости каталитической
реакции ігст=0, а число Льюиса — Семенова Ье= 1.
Расчет провести для тефлона (С2Р4)п (с учетом частичного сгорания
его паров в пограничном слое) и стекловидного вещества.
Х.1З. Выбрать материал теплозащитного покрытия и определить
его толщину для летательного аппарата в виде сферы диаметром
2Кт=2 м, весом 1250 КГ, совершающего вход в плотные слои атмосфе-
ры На высоте Н=20 км со второй космической скоростью под углом 30°.
Хі. АЭРОДИНАМИЧЕСКАЯ ИНТЕРФЕРЕНЦИЯ
ХЦ. Что такое аэродинамическая интерференция?
Х!.2. Как изменится подъемная сила изолированного крыла (или
оперения), если его присоединить к корпусу?
Х1.3. В каком случае подъемная сила корпуса больше: когда он изо-
лирован или когда к нему присоединено крыло?
Х!.4. Чем определяются размеры зон взаимного влияния крыла и
корпуса в линеаризованном сверхзвуковом потоке?
Х|.5. Найдите коэффициент подъемной силы крыла, расположенно-
го на корпусе в виде тонкого тела вращения, если известны величина
этого коэффициента для
всей модели летательного
аппарата Сукр_т=1‚9‚ а А
также значения Кт.и= ‚ в
=Сут/Сукр=0‚5‚ Кир: &' ‚ 5 03
=Асукр(т)/сукр= 1,45 И Кт= &
=Асут(нр)/сукр=0‚8. Здесь —:і-'*—'—'=-—--` ——“—' =-"--——іі:.
сунр, суТ —— коэффициенты . , $
подъемной силы соответ-
ственно крыла и корпуса; д «’На
Адукштъ АСут(кр)_аНа-ПО' Р`Р—__… у 4 `
гичные коэффициенты Р 9
для крыла в присутствии Га \
корпуса и корпуса в при— \‘Гг , 2
сутствии крыла; Кир, *$… : `
Кт — соответствующие ко- ;
эффициенты интеРфереН' Рис. 2.Х1.1. Схема и разме-ры летательного аппа-
ЦИИ— рата с плоским оперением:
Х1.6. Определите ко-
эффициент подъемной си-
лы изолированного кор-
пуса крылатого летательного аппарата, если радиус этого корпуса
г=1 м, полуразмах крыла $т=2 м, коэффициент подъемной силы все-
го аппарата Сут.кр= 1,72, а изолированного крыла сукр=0,637.
Х|.7. Каково влияние интерференции на положение центров давле-
ния консолей крыла и корпуса?
Хі.8. Тонкое тело вращения с оперением (крыльями) в виде плос-
ких треугольных пластин расположено в сверхзвуковом потоке воздуха
(Аа=1,4) с числом маха Моо=1‚5 и давлением рео=1 кГ/см2 под малым
углом атаки ос=0‚1 рад. Найдите распределение давления на оперении,
а также аэродинамические силы, приложенные к летательному аппара-
ту. Форма и размеры аппарата показаны на рис. 2.Х1.1.
Х1.9. Объясните физический смысл интерференции между корпусом
и установленным на нем крылом при наличии угла крена.
ХПО. Как изменится подъемная сила плоской комбинации кор-
пус — крыло, если имеется угол крена?
Х|.11. Что произойдет с боковой силой (в направлении оси 021)
плоской комбинации корпуса и крыла нулевой толщины при наличии
угла крена (см. рис. З.Х1.3)?
Х].12. Тонкое тело вращения с крыльями в виде треугольных плас-
тинок (см. рис. 2.Х1.1),движущееся под углом атаки ос=0,1рад, пово-
рачивается на угол крена ср=20°. Рассчитать аэродинамические харак-
теристики летательного аппарата при условии, что число Моо=1,5,
роо= 104 кГ/м2.
ХЫЗ. В чем особенность интерференции (в рамках аэр0динамичес-
кой теории тонкого тела) корпуса и расположенного на нем крестооб-
разного крыла по сравнению с плоской комбинацией?
_
,
2Г'ддн
$3
5т
__ „
хг =З м, хд=3 м, гц=0‚5 м, ’дон =0‚8 м, зт -=3‚2 м
403
Х1.14. В каком случае центр давления смещается больше: для ин—
терференционных сил при ос;&0‚ [3:0 или для сил, вызванных креном
(осэ&0; (3750)?
ХМБ. Чему равен момент крена тонкой крестообразной комбинации
с одинаковыми консолями, находящейся в слабовозмущенном сверх—
звуковом потоке под углами атаки со и скольжения В?
ХМБ. Как влияет интерференция крыла с корпусом на положение
центра давления летательного аппарата в виде тонкой крестообразной
:сц -
!” тт
дм _1 „81 фщ \
12.
Рис. 2.Х1.2. Схема и размеры летательного аппарата с крестооб-
разным оперением:
г=0‚5 м; вт =3,5 м; хд =З м; хк=12 м
| _
|
__ { ‚‚
\ __:— (Сс'ц-Т)пп : [; ін.;
ос , А5
. ‚ ' “ч ш 331
„..
ЦК
Рис. 2.Х1.3. Схема и размеры крылатого о-перенного летательного
аппарата:
1—корпус; 2—крыл0; 3—оперение; 4—вихревые жгуты; (Зт)кр=2›5 м;
(эт )°П=1'5 М; (хЦ°Т)Оп=4 м; хкр=2 м; х0п=1‚5 м; Г=0‚5 м
комбинации, находящегося в слабовозмущенном сверхзвуковом потоке
под углами атаки и скольжения?
30.17. Как изменяется влияние хвостовой части корпуса, располо-
женного за консолями крыла (см. рис. 3.Х1.2)‚ на аэродинамические
характеристики летательного аппарата при уменьшении числа М…?
Х|.18. Как смещается центр давления летательного аппарата под
влиянием хвостовой части корпуса, расположенной за консолями кры-
ла (см. рис. 3. Х1.2)?
Х|.19. Определите аэродинамические характеристики летательного
аппарата в виде крестообразной комбинации корпуса и тонких тре—
угольных консолей при условии, что число Моо= 1,5, давление ‚100:
=104 кГ/м2‚ угол атаки ос=0‚1 рад, угол крена ср=20°. Форма и раз-
меры летательного аппарата показаны на рис. 2.Х1.2.
Х|.2О. В чем заключается физическая природа интерференции меж—
Ду оперением и расположенным перед ним крылом?
404
Х|.21. Какое крыло сильнее скашивает поток: изолированное или
присоединенное к корпусу?
Х!.22. Что представляет собой упрощенная вихревая МОДель ком-
бинации корпус—крыло, применяемая при исследовании интерферен-
ции оперения с крылом при сверхзвуковых скоростях?
Х|.23. На рис. 2.Х1.3 приведена схемаипоказаны размеры летатель-
ного аппарата, представляющего собой комбинацию корпуса, крыльев
и оперения в виде тонких треугольных пластинок. Определите эффек-
Рис. 2.Х1.4. Схема и размеры крылатого Рис. 2.Х1.5. Схема и размеры летательного
летательного аппарата С В'НеШНИМ рулем: аппарата с внутренним рулем;
1 "' КОРПУС; 2 '— КРЫЛО; 3 '— РУЛЬ; $т=2‚5 м; 1 — корпус; 2 — крыло; 3— внутренний руль:
35:1’25 м; г=0,5 м; хкр =2 м хкр =2 м; $і=1*5 м; г=0‚5 м; Ьр=0,25 м; вт =2‚5 м
тивность оперения при
условии, что Мос: 1,5, а
угол атаки а=0,1 рад. СШ.
№24. Влияет ли фор-
ма рулевой поверхности в
плане „на величину созда- = 3— - %
ваемои ею силы, если ис-
ходить из аэродинамиче- .
ской теории тонкого тела? (Аш…)оп Ькр ггг = шир
Х1.25. На тонком кор- '
пусе летательного аппа-
рата с радиусом г=0,6 м , 33”
установлен орган управ-
ления в виде поворотного
крыла (пластинки) с по-
луразмахом $т= 1,5 м. Та-
кое изолированное крыло
при полете под углом ата-
ки ш=5° создает подъемную силу Укр=9000 КГ . Определите состав—
ляющие управляющей силы Ур, возникающие соответственно на корпусе
(А)/№№) и консолях крыла (АУкр(т)б) при поворОТе этих консолей на
угол б=5° и значении угла атаки летательного аппарата (корпуса)
ос=5°.
Х!.26. Вычислите коэффициент управляющей (подъемной) силы,
создаваемой рулем, который представляет собой часть внешней поверх-
ности крыла. Такое крыло движется со скоростью, соответствующей чи-
слу М°о`=1‚5, а руль повернут на угол б=0,1. Форма и размеры крыла
с участком рулевой поверхности показаны на рис. 2.Х1.4.
341.27. Определите эффективность органа управления в виде подвиж—
ного крыла (см.рис. 2.Х1.4) при условии, что число М…=1‚5‚ а угол по-
ворота руля б=0‚1 рад.
Х|.28. Для комбинации корпус—крыло—оперение (см.рис. 2.Х1.З)
определите аэродинамические коэффициенты ПОДъемной силы при усло—
вии, что крылья и оперение играют одновременно роль управляющих
405
_
‚—
' (эт)кр
(бт)ап
_
`
(ЬКДЛШ _ 3:0”
[` ‚д`
“___ '
Рис. 2.Х1.6. Мопель крылатого оперенного летательно-
го аппарата:
=4.7; (ькрьп =1.5: хк=21; (зт›кр=4‚1;
хкр=10‚7; Ькр
=2; 2г=2; хмид=5‚5; х 18
(зт)оп оп:
устройств, которые поворачиваются относительно корпуса соответствен—
но на углы бкр=0‚05 и боп=0‚1 рад. Число Маха обтекающего потока-
Моо=1,5‚ давление рю= 104 кГ/м2‚ угол атаки ос=0‚1 рад.
Х!.29. Определите управляющую (ПОДъемную) силу руля, представ—
ляющего собой часть внутренней поверхности крыла, которая отклоня-
ется на угол б=0‚1 рад. Размеры И форма крыла и рулевого участка
показаны на рис. 2.Х1.5. Число Маха обтекающего потока Моо=1,5.
Х!.30. Рассчитайте аэродинамические характеристики плоской моде-
ли комбинации корпус—крыло—оперение (рис. 2.Х1.6) для М…:
=2,68. Все линейные геометрические параметры на рисунке являются
безразмерными и отнесены к радиусу цилиндрической части корпуса
(г=гмид=20 мм), а расстояние от носка до центра вращения принято
равным хвр=10‚5.
Х||. АЭРОДИНАМИКА РАЗРЕЖЕННОЙ СРЕДЫ
х…. Крыло в виде тонкой пластинки с хордой Ь=5 м движется со
скоростью Уоо=3000 м/сек в атмосфере Земли на высоте Н=100 км.
Охарактеризуйте режим обтекания этого крыла.
ХП.2. Летательный аппарат, имеющий форму тонкой пластинки
с хордой Ь=10 м, производит спуск в атмосфере Земли с постоянной
скоростью Усс:—5000 м/сек. Определите предельную высоту спуска, для
которой режим обтекания пластинки соответствует свободномолекуляр-
ному течению воздуха.
ХП.З. В каких случаях )(}?!
реализуется схема зеркаль- у
ного отражения молекул от
обтекаемой поверхности и 7…
когда вероятней диффузное —-’>0 $ <ъ
отражение?
ХНА. Средняя скорость
беспорЯДочного_ движения и: \
молекул в газе сі=832 м/сек. Ь72
Найдите наиболее вероят- Ь
ную скорость молекул и со- ` >11
ОТВЭТСТВУЮЩУЮ СКОРОСТЬ Рис. 2.ХП.1. Схема профиля. Уравнение обра—
звука при условии, что &= зующей .и размеры:
=Ср/С'0=1‚4— у=(А/Ь)х(2—2 Х/Ь); А=5 м; Ь=10 м
ХП.5. От чего зависит
давление на обтекаемой по-
верхности при взаимодейст- .
вии с ней молекул? у
ХП.6. Чем обусловлено
возникновение напряжения
трения при взаимодействии
молекул со стенкой?
ХП.7. Оп е елите авле- [3/2 '
р Л Д Ь
ние и напряжение трения на
профиле в точках с коорди-
натами х=2‚5 м и 7,5 м при РИС' 23…2' КРЫЁЁЁеЬЁОМбОВИдНЫМ “РО"
обтекании его свободномо- А=2 м; ‚3:8 % 1:4 м
лекулярным потоком (&=
=ср/с„=1‚4) со скоростью
Уоо=7000 м/сек. Условия обтекания соответствуют полету на высоте
Н = 160 км, полностью диффузному отражению и значению коэффициента
аккомодации п= 1. Форма и размеры профиля показаны на рис. 2.ХП.1.
ХП.8. Покажите, что при зеркальном отражении молекул от обтека-
емой поверхности коэффициент аккомодации і=0.
ХП.9. Как изменяется коэффициент давления р; на передней площад-
ке обтекаемой поверхности при увеличении коэффициента аккомода-
ции?
ХП.10. Пластинка движется под углом атаки ос=10° в разреженной
воздушной атмосфере на высоте Н =1ОО км со скоростью Уоо=
=3000 м/сек. Определите давление и напряжение трения на этой пла-
стинке при условии, что примерно 90% молекул отражается диффузно,
а остальная часть—зеркально. Материал пластинки—сталь или алю-
миний с обработанной поверхностью, для которой температура Тот/‚=,и
25300 К, а коэффициент термической аккомодации п=0,7.
ХП.11. По условиям задачи Х11.1О рассчитайте энергию падающих
и отраженных частиц.
#” …
?…
_п› О
ні.
407
ХП.12. По условиям задачи ХП.1О определите лобовое сопротивле-
ние и подъемную силу пластинки, а также соответствующие аэродина-
мические коэффициенты.
ХП.1З. По условиям задачи ХП.1О вычислите тепловые потоки на
пластинке, а также равновесную температуру ее поверхности. Хорда
пластинки Ь=5 м, размах !=2 м.
ХП.14. Крыло с ромбовидным профилем движется в атмосфере Зем-
ли на высоте Н =160 км со скоростью УЮ=4ООО м/сек под нулевым уг-
лом атаки. Требуется определить лобовое сопротивление при условии,
что коэффициент аккомодации принимается равным единице. Форма
и размеры крыла показаны на рис. 2.ХП.2.
ХП.15. Летательный аппарат в—виде конуса высотой п=5 м-с поло—
виной угла при вершине |Зн=15° движется в атмосфере на высоте Н=
=2ОО км со скоростью Уоо=4500 м/сек под нулевым углом атаки. Най-
дите аэродинамическое сопротивление при условии, что отражение мо—
лекул полностью диффузное, а термический коэффициент аккомодации
равен единице.
ХП.16. Летательный аппарат в виде круглого цилиндра радиусом
КТ=2 м и длиной !=5 м движется в направлении нормали к продоль-
ной оси в атмосфере на высоте Н =1ОО км со скоростью У…:
=4000 м/сек. Вычислите аэродинамическое сопротивление при усло-
вии, что коэффициент аККОМОДаЦИИ импульса і и термический коэффи-
циент аккомодации п равны единице. -
ХП.17. Сравните коэффициенты лобового сопротивления конуса и
параболической головки с одинаковым удлинением жмид=2 и миделе-
вым сечением при условии зеркального отражения молекул от гладкой
поверхности. Параболическая образующая задана уравнением г=х><
><(2—х), в котором г=-г/гмид, х=х/хмид (см. рис. 2.1Х.6).
ХП.18. Определите коэффициент сопротивления сдС конуса с полови—
ной угла при вершине БК=ЗО°‚ принимая следующие схемы взаимодей—
ствия между частицами воздуха и поверхностью: зеркальное (упругое)
отражение; диффузное отражение; смешанное (одновременно зеркаль-
ное и диффузное отражение); ныотоновские схемы ударного и эластич-
ного отражений. Полет происходит под нулевым углом атаки на высоте
Н =100 км со скоростью, соответствующей числу М…:Уоо/аі=2(аі —
скорость звука в атмосфере). Коэффициент аккомодации импульса і:
_ , .
ХП.19. Определите аэродинамическое качество крыла в виде тонкой
пластинки, совершающей полет на высоте Н =160 км под углом атаки
ос=30°. Рассмотрите случаи, соответствующие значениям коэффициен-
та аккомодации і=0; 0,8 и 1,0, при условии, что число Моо=3‚0. Срав—
ните полученные величины с теми, которые соответствуют схемам удар—
ного и эластичного отражений.
ХН.2О. Летательный аппарат сферической формы движется с первой
космической скоростью на высоте Н =1ОО км. Определите тепловой по-
ток и поверхности, а также равновесную температуру стенки при ус-
ловии, что термический коэффициент аккомодации п=0‚7, а степень
черноты поверхности е=0,8. Причем такие потоки тепла, как солнеч-
ная или земная радиация, а также тепло оборудования, не учитываются,
а стенка хорошо охлаждается.
РАЗДЕЛ третий
ОТВЕТЫ НА ВОПРОСЫ И РЕШЕНИЯ ЗАДАЧ
ПО АЭРОДИНАМИКЕ
|. ОСНОВНЫЕ СВЕДЕНИЯ ИЗ АЭРОДИНАМИКИ
!.1. Силовое воздействие вязкого газа на движущееся в нем тело
характеризуется возникновением на каждом элементе поверхности тела
п о в е р х н о с т н о й с и л ы Р, являющейся векторной суммой пР—|—Рт
двух составляющих: сил нормального напряжения Р„ и трения Рт
(рис. 3.1.1). В идеальной жидкости, в которой предполагается отсутствие
вязкости (трения), силовое воздействие на площадку 41$ сводится голь-
ко к силам от нормального напряжения (давления), т. е. Рп =Р. По-
верхностные силы, представляющие собой пространственную систему,
могут быть приведены в соответствии с правилами механики к силе Р—
главному вектору системы элементарных аэр0динамических сил Р ——и к
моменту М—главному моменту тех же сил относительно какой-либо
точки приведения.
1.2. Для вязкой ЖИДКОСТИ характерны два вида движения. Первое
из них —ламинарное (слоистое) —отличается упорядоченным располо-
жением струек, не смешивающихся между собой во все время движения.
В ламинарном потоке перенос количества движения и вещества из од-
ного слоя в другой происходит за счет межмолекулярного проникнове-
ния, а тепла ——за счет теплопроводности. Такое движение возникает
и сохраняется обычно при небольших скоростях. Если эта скорость воз-
растает, то при некотором ее значении ламинарное движение разруша-
ется и переходит в новый вид движения, для которого характерно попе-
речное по отношению косновному потоку перемещение частиц, что
вызывает перемешивание жидкости. Упоряцоченное, слоистое течение
исчезает, перехопя в турбулентное. На молекулярное хаотическое дви-
жение, которое было характерным для ламинарного течения, в турбу-
лентном потоке накладывается перемешивание макроскопических час-
тиц. Это течение имеет неустановившийся характер, при котором
скорость и другие параметры в данной точке меняются во времени. На-
личие интенсивного перемешивания потока при турбулентном течении
приводит к дополнительным напряжениям в ЖИДКОСТИ, к более интен-
сивному переносу в ней вещества и тепла.
1.3. Возникновение сил трения в ламинарном потоке объясняется не-
ремещением в нем молекул, приводящим к переносу количества движе-
ния из одного слоя в другой. При наличии относительного движения этих
409
слоев жидкости такой обмен молекулами вызывает появление сил тре—
ния между слоями.
В соответствии с гипотезой, высказанной Ньютоном, напряжение тре-
ния тд пропорционально градиенту скорости по нормали к поверхности,
разделяющей два слоя жидкости:
т„ : „ (дУ/дп), (3.1.1)
где р—коэффициент пропорциональности, называемый коэффициен—
том динамической вязкости.
В турбулентном потоке возникновение сил вязкости также связано
с проникновением из одного слоя в другой, но уже не только отдельных
Рис. 8.1.1. Силовое воздействие Рис. 3.1.2. Действие аэр0дина-
вязкого газа на движущееся в нем мических сил и моментов на те—
тело ло вращения .в зависимости от
ПОЛОЖЕНИЯ ТОЧСК ПРИВЭДеН-ИЯ
молекул, но и макроскопических частиц. Величина напряжения трения
может быть найдена следующим образом.
Рассмотрим два соприкасающихся слоя жидкости, расположенных
на малом расстоянии [’ друг от друга. Известно, что осредненная ско-
рость в направлении оси х в некоторой точке турбулентного течения рав-
на И…. Для соседнего слоя'осредненная скорость будет %+ (41/33/6111) [’.
Положим, что частица, переместившаяся из первого слоя во второй, со-
храняет свою скорость Ух и, следовательно, в момент появления этой
частицы во втором слое, имеющем свою скорость, будет наблюдаться
пульсационная скорость
11; : (ай,/ау) 1’. (3.1.2)
Макрочастица жидкости совершает перемещение из первого слоя во
второй вдоль оси координат у со скоростью У’у’д У„” Количество движе-
ния, которое переносится массой макрочастиц рУу (18 через элементар-
ную площадку 618, будет равно по абсолютной величине рУу( Ух-і—Ух )48.
Это количество движения обусловливает дополнительное напряжение
тт, происходящее от пульсационных скоростей.
1.4. Такое утверждение неправильно. В непосредственной близости к
обтекаемой поверхности поток сохранится ламинарным. Здесь турбу-
лентное течение не образуется, так как стенка препятствует макроско-
пическому перемешиванию в соседних слоях.
1.5. Расположение и направление действующих на летательные ап-
параты главного вектора сил Р и главного вектор-момента [И будут в
соответствии с условием задачи такими, как показано на рис. 3.1.2. Глав-
ные векторы Р будут приложены в точках А и В, а моменты АТ в первом
и втором случаях будут иметь разные величины и разные направления.
1.6. Переход от одной системы (х, у, г) прямоугольных координат
'
410
к другой (хьуь 21) осуществляется по известным из аналитической ге-
ометрии формулам преобразования:
х1 : а1х —|— а2у —!— авг;
21 :: с1х —|—' 0211 —|— 032;
х : а1х1 + [7191 + 0121;
у : а2х1 + [7291 + 0221; (3—1-4)
2 : “3х1 + дві/1 + 6321,
в которых а… 17… сп (п: 1, 2, 3) представляют собой соответствующие
направляющие косинусы.
В общем случае их значения могут быть вычислены через тригономет-
рические функции трех независимых углов Эйлера ср, «49 и 6
(см. рис. 2.1.3, (1) :
а]=—зіпсрзіпф+созсрсозфсо56; а2=зіпсрсозф+ 1
+ созсрзіпфсозе; из:—созфзіпе; 171:
=—созфзіпф—зіпфсозфсоз6; Ь2=созсрсозф— ‚ (3-1-5)
—$іпср$іпфсоз @; 173 : зіпср зіпВ; 01 : созфзіп @;
с2=зіпфзіп6; сз=созб. ,
В случае Движения ле- д)
тательного аппарата, име- О)
ющего пр0дольную сим- у, "‘ .Ч
метрию‚ поворот связан-
ных и скоростных осей ‚72
происходит таким обра-
’-зом‚ что вертикальные оси О "‘
Си и Оу располагаются в
одной плоскости симмет-
рии (см. рис. 2.1.3, 6). При
этом один из углов Эйле- 2.2,
ра ф оказывается равным .. „
нучю Сравнивая рис Рис. 3.1.3. Расположение связаннои и скоростнои
систем координат при различных видах движения
2'1'3’ Ц И 2'1'3’ б? нетрудно летательного аппарата
убедиться в том, что
оставшиеся углы ср и 6 соответственно равны углам атаки а и скольже-
ния В.
В соответствии с этим:
331
(11 : соз оссоз Б; (12 : зіп ос; аЗ =——созо.$іп @; 5
171 =— зіп ос созр; 172 : соз о.; 173 : зіп ос зіп @; '; (3.1.6)
. 1
01 : зщ @; 02 = О; 03 : соз [5.-
Отсюда видно, что для осуществления пересчета аэродинамических коэф-
фициентов с одной системы координат в другую требуются по существу
два угла, а именно: угол атаки со и угол скольжения [$.
1.7. Углом атаки ос называется угол между продольной осью Ох] ле-
тательного аппарата и проекцией вектора скорости Уоо его центра масс
на плоскость х1Оу1. Угол скольжения [’)—это угол между вектором ско-
рости Уоо центра масс и плоскостью х10у1 (рис. 2.1.3, 6).
Графическое изображение относительного расположения скоростной
и связанной систем координат Для случаев движения летательного ап-
парата без скольжения под углом атаки и со скольжением под нулевым
углом атаки приведено соответственно на рис. 3.1.3, а и 6.
411
!.8. Связь между составляющими аэродинамических сил и моментов
в скоростной и связанной системах координат определяется правилами
аналитической геометрии. Зная углы атаки ос И скольжения @, можно
осуществить этот пересчет, воспользовавшись табл. 3.1.1.
Таблица 3.1.1
Скоростная система
Связанная
система
Ох | Оу Ог
0х1 соз ос созБ зіп ос —соз ос зіпБ
03/1 —зіп ос созБ соз ос зіп а. зіпБ
021 зіп В О сов В
В соответствии с данными этой таблицы формулы пересчета, в част—
ности для силы лобового сопротивления
/\ /\ /\
Х : Х1 соз (х1 х) + У1 соз (у1 х) + 21 соз (21 х)
и момента крена
/\ /\ А
М. = М… сов (›‹1 х) + М.,. сов (у. х) + мы соз (21 х),
принимают вид:
Х=Х1созоссозр—У1зіпоссозр+21зіпр; \ (317)
МХ : Мх1созоссозБ—Му1зіпоссозв +М21зіпБ. 1 …
Аналогично можем получить формулы пересчета и Для других состав-
ляющих:
У =— Х1зіп 06 + У1 СОЗ 06; } (3.1.8)
[иу : М„1 зіп ос + Му1 соз ос;
2 =— Х1 соз ос зіПБ + 1/1 5111 06 51135 + 21 СОЗ @; } (3.1.9)
м2 =_— М„1 соз ос зіпБ + Му1 зіп ос зіпБ + мл 005 5-
При необходимости произвести пересчет со скоростной на связанную
систему координат формулы записывают в виде:
Х1=ХсозоссозБ+Узіпос—2созосзіпв; } (3_1_10)
Мх1 : М„ созоссозБ + Му ЗіПОФ—Мг (30505… Б?
уі:.—Хзіпоссоз[5+Усозос+28іг1068іП6; } (3111)
Му1 =— Мх зіпоссозБ —|— Му СОЗОФ + Мг 5…“51” Б;
21 : х зіпБ + гсозв; } (3.1.12)
М21 : Мх зіпБ + М2 соз [З.
Применяя формулы (3.1.7)+(3.1.12)‚ получаем для движения сим-
метричного летательного аппарата без скольжения (@=0) под углом
атаки (осэЬО) следующие результаты. Силы 21 и 2 равны нулю, так как
нет физических причин, вызывающих их появление (аппарат симметри-
чен и угол 6:0); моменты Му, М…, Мх и Мы также равны нулю в силу
тех же причин.
412
С учетом знаков величин Х, Х1‚ У, У1 получаем в скоростной системе:
—Х =—Х1созос—У1зіпос;
У =——Х1зіпос + У1созос;
Мг=Мгг
Для связанной системы:
—Х1 =—Хсозос + Узіпос;
У1 : Хзіпос —|— Усозос;
Мг1 = Мг.
Полученные результаты графически изображены на рис. 3.1.4, а.
Рис. 3.1.4. К пересчету сил и моментов из скоростной в
связанную систему координат
Для движения симметричного аппарата без угла атаки (ос=0)‚ но
со скольжением (БфО) имеем У1=У=0‚ а также Мх1=Мх=М11=
=М2=0. При этом также в скоростной системе координат:
-—Х=—Х1соз[5—21зіп[5;
—-2=Х15іп[3—21соз @;
Му : М)…
а в связанной:
—Х1=—ХсозБ—|—25іп[3;
—21=—Хзіп[5—2соз[5;
2,'‚2’
МУ1 : М),. Рис. 3.1.5. Схемы для пересчета аэр0динами—
ЧВСК‘ИХ СИЛ И МОМЕНТОВ
Графически эти результаты
изображены на рис. 3.1.4, 6.
1.9. Для тел вращения вместо двух углов (ос И [З), характеризующих
связь между поточными и связанными координатами, иногда применя-
ют лишь один угол атаки (ос’), измеряемый меЖДу вектором скорости
центра масс летательного аппарата и его продольной осью симметрии
0х1 (рис. 3.1.5, а).
Переход к новому углу атаки ос’ определит собой новую систему ко-
ординат, в которой: ось Ох’ совпадает с осью Ох (т.е. направлена по
вектору скорости У…); ось Оу’ перпендикулярна оси Ох’ и лежит в плос-
кости угла ос’; боковая ось Ог’ направлена перпендикулярно плоскости
х’Оу’. Это будет как бы новая поточная система координат х’, у’, 2’. Так
как скольжения летательного аппарата не будет (по условию‚6=0)‚ то
новая связанная система координат хі, у;, 21’ относительно новой поточ-
ной х’, у’, 2’ расположится так, как показано на рис. 3.1.5, а. При пере-
ходе к новой системе координат остались неизменными положения осей
4.13
Ох’ (Ох) и Ох'1 (0х1), следовательно, лобовое сопротивление Х и про—
дольная сила Х, (12) также не изменяются.
Из анализа рис. 3.1.5 ясно, что М2 = №21, а составляющие момента
МХ, МЛ, Му и Му1 будут равны нулю, так как нет причин для их возник-
новения.
Угол атаки ос’ может быть найден по формуле сферической тригоно-
метрии, в соответствии с которой для прямоугольного сферического тре—
угольника (рис. З.1.5‚б) косинус гипотенузы равен произведению косину-
сов катетов:
/\
соз (хх1) : соз ос соз [З,
откуда
соз ос’ : соз ос сов [З.
1.10. Неправдоподобность схемы„
приведенной на рис. 2.1.6, б‚—кажу-
щаяся, что видно из картины действия
аэродинамических сил на движущееся
тело, которая изображена на рис.
3.1.6. В зависимости от угла атаки
главный вектор аэродинамических
сил Р, проектируясь на оси связанной
системы координат, дает либо поло—
житеЛьную (рис. 3.1.6, 6), либо отри-
цательную (рис. 3.1.6, а) проекцию—
осевую силу Х1(К). Однако механизм
образования толкающей силы 132 (см..
рис. 2.1.6) нельзя объяснить только
закономерностями проецирования.
Экспериментальные данные, получен-
РИС 3-1-6- Проекции ГЛЗВНОГО %* ные в аэродинамических трубах, пока-
тора аэрод‘інамических СИЛ на оси зывают, что при дозвуковом обтекании
СВЯЗЗННОИ системы координат
профиля крыла под углом атаки на
передней кромке его образуется силь-
ное разрежение, создающее тянущую силу, как это изображено на
рис. 2.1.6, 6.
Из приведенных на рис. 3.1.6 схем ясна разница между осевой силой
Х1(К) —проекцией главного ве_ктора Р на ось 0х1 тела и лобовым со-
противлением Х—проекцией Р на ось Ох, совпадающую с вектором
скорости У….
1.11. Для определения величины аэродинамических сил воспользу—
емся данными табл.3.1.1 и формулами пересчета (3.1.7)—:—(3.1.12).
Подъемная сила У в зависимости от осевой К и нормальной № сил при
условии [3:0 и осЭЬО
У =—К5іпос —|—1\/созос.
Нормальная сила при тех же условиях
А! : Хзіпос —|— Усозос.
Преобразуем полученные зависимости, приняв для малых углов ата—
ки этои/за, сова,/=; 1—ос2/2. В соответствии с этим:
у =—Нос +1\/(1—оъ2/2);
№ : Хоа + У (1 — ок?/2).
1.12. По известным составляющим главного вектора момента М в свя-
занных координатах (М…, М… и Мы) можно найти его составляющие
414
в поточной и скоростной системах координат. При этом следует иметь
в виду, что переход от поточной системы координат к скоростнои (и на—
оборот) не изменяет ни направления вращения, ни величины рас-
сматриваемой составляющей момента, поэтому можно пользоваться
табл. 3.1.1 без каких-либо корректив.
В общем случае (движение аппарата совершается под некоторым
углом атаки ос со скольжением п0д углом @) формулы для пересчета
будут иметь вид:
Мх = МХ1 соз оссоз [3 — Му1 зіп оссозв + Мг1 зіп @;
Му : Мх1 зіп ос + МУ1 соз ос;
М2 =— Мх1 соз осзіпБ + Му1зіпос$іпБ + М21 сов В.
В случае движения без скольжения в
ы
этих формулах надо принять [3=О:
Мх : МХ1 сов ос — МУ1 зіп ос; ›‹ 0 /А
. /
МУ : Мх1$1пос + Му1созос; ` _
‘Л45 ::'А4%1' с _
г-‹—-——›—1
При условии, что ос=0‚ ВЧЕО: ‚Е О _____„_Ё
М : М сов М зіп °
" "1 В+ 21 В ’ Рис. 3.1.7. Схема дЛЯ пересчета
Му : Му1; аэродинамического момента от
. точки А к точке О
М2 =—Мх1 з1пБ+ МД соз [$.
1.13. Общее выражение для силы лобового сопротивления, как изве-
стно, имеет вид Х=схаоо$ (где 8—характерная площадь летательного
аппарата, а са,—соответствующий этой площади аэродинамический ко-
эффициент). Записав эту формулу дважды:
Х=Сх1аоозми И Х: х2аоо‘5‘кр’
д
получаем следующую зависимость между аэродинамическими коэффи-
ЦИЗНТЗМИ:
Н.И. Запишем формулы для определения необходимых аэродинами-
ческих сил:
У : су ооо ЗЫ), А] = с“ сую Бир, В : сд, (100 Змид.
Формула для пересчета из связанной системы координат в скорост-
ную имеет вид (3.1.8)
У : Кзіпос+№созос.
Подставив сюда найденные значения В и №, получаем
су : сд (Змид/Бкр) в… со + с” соз ос.
1.15. Для летательного аппарата, симметричного относительно гори-
зонтальной плоскости, проходящей через продольную ось, моменты от-
носительно точек А и О создает нормальная сила №, точка приложения
которой в рассматриваемом случае нам неизвестна. Допустим, что та-
кой точкой является точка К (рис. 3.1.7).
Момент силы А/ относительно точки А можно записать в соответст—
вии с условием задачи следующим образом:
мт : № : с„ 400 вкр а
__ или
М2А=тгдбіоо$ х
мид к'
415
Относительно точки О соответствующие выражения для момента
принимают вид:
Мга =№(а—с) : „(100 Бкр(а—с)
И
МгО : тго Чоо ЗКР ЬКР'
После некоторых преобразований получаем
т -— с а с С
_ _ _ № _
гО № ькр дкр
и
а вкр Ькр
тгА
Ькр змид хх
С учетом этого
_ змид хк С змид хк \
тгО гА _ _ ' '
вкр Ькр а вкр Ькр
или
8 х 0
тэо: гА МНД“ к—м
$кр дкр дкр
Мб. В соответствии с условиями задачи запишем:
Мх=тх4ш Зирі; \
МЛ : тх] с]… Зкр [, МШ : ‚пд/16700 Зкр !;
М : ”221400 $
21 кр хк'
СЧИТЭЯ, ЧТО движение ЛЭТЭТЭЛЬНОГО аппарата ПРОИСХОДИТ ПОД УГЛЭМИ
атаки 06 И скольжения В, ПОЛУЧИМ, ВОСПОЛЬЗОВЗВШИСЬ формулами пере-
счета (3.1.7)—:— (3.1.12),
М„ : М,;1 созос соз [3 — М),1 зіп ос созБ + М21 зіп В.
Переходя к аэродинамическим коэффициентам, найдем
тх : т„1 соз ос соз В — т),1 зіп ос созБ + т.д (хк/ !) зіп [З.
1.17. Аэродинамические силы и моменты определяются в общем слу-
чае по формулам:
12 : сд, 400 $ и М = таво $1; (3.1.13)
здесь 8 и 1—характерные геометрические размеры летательного аппа-
рата.
При осуществлении расчетов в качестве таких размеров для лета-
тельных аппаратов самолетных схем принято выбирать следующие:
$нр — площадь крыла в плане; 1— размах крыла; Ь —хорда крыла. Ес-
ли крыло имеет переменную по размаху хорду, то в качестве характер—
ного размера выбирается средняя аэродинамическая хорда ЬСАХ' Из
двух длин ! и 17 таким характерным размером выбирают размах крыла
при определении моментов Му, М…, мх, М… и хорду в случае вычисле-
ния моментов тангажа Мг, Мп.
1.18. Определение аэродинамической силы или момента можно осу-
ществить, если известны [см. (3.1.13)] помимо аэродинамических коэф-
фициентов также скоростной напор аю=рооУЁю/2 и характерные геомет-
рические размеры летательного аппарата ($ и 1). По условию, кроме аэ-
родинамических коэффициентов известны также высота и скорость
полета, т.е. можно определить скоростной напор. Однако, так как не за-
416
даны геометрические размеры летательного аппарата, вычислить аэро-
динамические силу и момент не представляется возможным
1.19. Полный коэффициент сопротивления тела вращения определим
в виде суммы составляющих:
Сх=схр +схі ‘ Схдон;
здесь коэффициент сх, как и его составляющие в правой части, должен
быть рассчитан по одному и тому же характерному геометрическому раз—
меру. Для летательного аппарата в виде тела вращения таким разме-
ром является площадь миделевого сечения Змид. По условию, коэффи-
циент сопротивления от давления рассчитан по Змид (т.е. с :'схр
Найдем выражения коэффициентов с ди сид?н соответственно через за—
данные значения С… и схдош Очевидно, что действующие силы не зависят
от того, по каким коэффициентам они вычисляются, т.е. для силы тре-
ния можем написать
Х]с =схіс/оо ЗП =С;;Ч…3
мид’
а для донного сопротивления
Х : с с'
дон х дон Ооо 8дон : х дон асю 8мид'
Таким образом,
%*:Сх; ЗП/З
В сответствии с этим полный коэффициент
Сх : Схр + Сх? зп/Змид %" Сх дон Блок/выйд-
Подставляя данные, находим
сх : 0,2 + 0,01 -1/0,1 + 0,3-1/1‚2 :: 0,55.
1.20. К геометрическим характеристикам крыла помимо площади
в плане ЗКр и размаха ! относится также удлинение 7», равное отноше-
нию квадрата его размаха к площади крыла в плане:
:о 8 /8
мид’ Схдон хдон дон мид”
‚"/Зкрэ
а также сужение
"] : Ькр/Ькш
где Ьнр —— корневая, а Ьнц—концевая хорды крыла (см.рис. 2.1.10, 6).
Площади в плане прямоугольного, трапециевидного, треугольного
крыльев будут соответственно следующими:
. ь—:—Ь/2 1
$,р1=1ь, ви,: Т' зкр3=—2—1ь.
,
По этим значениям площадей можем найти удлинения:
[2 1 „ 12 4
——‘———ё^г= =——°—ч Жи: # =?!—
$КР1 Ь ЗКР? З Ь $кр3 Ь
Сужения рассматриваемых крыльев, очевидно, равны:
ч1=1; ч2=2‚ пз=°о.
Е.21. Средней геометрической хордой крыла дор называют отношение
площади крыла Зкр к размаху !:
а среднеи аэродинамическои хордои дслх —хорду такого эквивалентно-
го прямоугольного крыла, моментные характеристики которого и аэро-
динамические силы равны соответствующим их значениям для крыла
заданной формы с той же площадью, что и у эквивалентного крыла.
27——927 ;417
В СООТВЗТСТВИИ СО СКЭЗЭННЫМ МОМЕНТЫ ДЛЯ ПРЯМОУГОЛЬНОГО КРЫЛЭ
! 2
м2: т28нрЧ°оЬ
. __ ’ 2 -
САХ и для заданного крыла М2—2ётг (10°!) -сіг должны
быть равны. Считая т’2 неизменным вдоль размаха крыла и полагая
т’‚= тг, найдем
1/2
ь… : % 5” таг.
0
Для стреловидного крыла это выражение может быть представлено в
виде
Ь _ _2_Ь П2+П+1
САх— кр ' ""_—'—
3 №1 +71)
где п = Ьнр/Ьнц —— сужение крыла.
Определим величины, необходимые для вычисления средних геомет-
рической и аэродинамической хорд:
ЗКР : [(ЬКР + Ь,) __;— Ц7, _ % [[(Ькр + Ь,) _ дин]:
=%1‹Ькр+ь…›=%‹1 +о‚2›=3;
п : Ькр/Ькц : 1/0,2 : 5.
Таким образом
Ьср=—53—=О‚6; 17 2 152+5+1=0,689.
САХ: Ё° 5(1+5)
|.22. Нормальная сила №, приложенная в центре давления (ц.д),
создает момент
М =—1\/х
2 Ц-д : _ С“ Чт ЗХЦ-д
относительно носка (точка О). С другой стороны, тот же момент
М2 : тг (100 817.
Из этих двух выражений получаем
хдд/Ь : Сц.д : — тг/см.
При малых углах атаки, когда коэффициенты подъемной и нормаль-
ной сил приблизительно равны (сия,/су),
сЦ-д : _тг/Су°
Как показали исследования, центр давления меняет свое положение
с изменением угла атаки. Для летательных аппаратов, не имеющих гори-
зонтальной симметрии, их летные свойства удобнее оценивать не по цен-
тРУ Давления, а по фокусному расстоянию. Из рис. 2.1.12 следует, что
для линейной зависимости су от т2 можно написать
тг : т.д, —|— сУ (дтг/дсу).
В соответствии с этим
сц.д : _ (тэо/Су + дтг/дсу)’
где тд)—значение коэффициента момента при су=0 (см. рис.2.1.12).
Величина (Эти/дсу равна ’[3-(р или, согласно рисунку,
дт_‚,/дсу : ’сёхср : — О,2/О,47 : — 0,426.
Эта величина и определяет безразмерную координату фокуса в соот-
ветствии с зависимостью
хг = хр/Ь : — дтг/дсу : 0,426.
418
Для коэффициента центра Давления получим
сц_д : — тэо/0у + Тс .
Из рис. 2.1.12 видно, что тт:—0,1. Таким образом,
с…, = 0,1/су + 0,426.
Для нескольких значений су, взятых из того же рисунка, подсчитаны
следующие значения сц_д:
с.... 0
у .о
О, 0 —0‚1
Сц.д . 1
1
‚426 00 —1‚426
Как следует из полученных результатов, координата точки фокуса
не изменяется, в то время как центр давления является функцией коэф—
фициента су (или угла атаки).
1.23. Поляра профиля устанавливает связь между подъемной силой
и лобовым сопротивлением, или, что то же самое, между соответствую-
щими аэродинамическ'ими коэффициентами, и представляет собой гео:
метрическое место концов векторов полной аэродинамической силы Р,
действующей на профиль при разных углах атаки, или соответствующе—
го вектора коэффициента сг этой силы, определяемого в соответствии
с соотношением ср=Р/(с;°о$).
Поляра позволяет определить для любого угла атаки аэродинамиче-
ские характеристики профиля. Так, например, аэродинамическое качест-
во профиля [если на графике масштабы су(У) и сх(Х) одинаковы]
[( : в),/с„ : У/Х
и может быть определено как тангенс угла наклона к оси абсцисс век-
тора, проведенного из начала координат (полюса) в точку полярной
диаграммы, соответствующую выбранному углу атаки (рис. 3.1.8).
Н'аивыгоднейший угол атаки сэнди… соответствующий максимально-
му качеству Кшах=і8сршах (см. рис. 3.1.8, а), находят, проведя из нача-
ла координат касательную к поляре. Точка, в которой касательная
встретится с полярой, оп-
ределяет анаив. 0)
Максимальная подъемная Сч су…… %… д)
сила соответствует точке по- “мЭго—ЁЁ}?— —— _“п
ляры, в которои су=сушах‚ и ъ’ч : 0С>.__
достигается при движении { ; 33
с так называемым критиче- агсіуктаг „…
ским углом атаки акр. По- “2 ,; 2
ляра на рис. 2.1.13‚а соот- О \“, сд… % ОС>—
ветствует несимметричному х
ПрОфИЛЮ’ & на РИС' Рис. 3.1.8. Определение с помощью поляры (а)
2°1-13› б _ симмеТРИЧНОМУ- В аэродинамических характеристик профилей (б):
СООТВЭТСТВИИ С ЭТИМИ РИСУН- 1—несимметричный; 2—симметричный
ками находим для несиммет-
ричного профиля: Кшах=
=18Фшах=21‚5; оснаив=1°15’; Сушах=1‚18; оскр=14'°, а для симметрич-
ного: Кщах=21‚6; оснаив=4°10’; Сушах=1‚18', оскр=18°.
1.24. Определение положения центра давления связано с расчетом
статической устойчивости тела вращения в полете. Эта устойчивость за-
висит от нескольких факторов: геометрической формы тела; положения
его центра массы; скорости полета; угла атаки; величины аэродинами-
ческой силы и точки ее приложения. Эти факторы будут определять ве-
личину момента относительно центра массы.
Движение тела может характеризоваться различным взаимным
расположением центров давления и масс. На рис. 3.1.9,а показано зад-
27" 419
нее расположение центра давления. Нетрудно видеть, что при этом уве-
личению возникшего угла атаки будет препятствовать момент силы Р
относительно центра массы, стремящийся восстановить равновесие. По-
лет такого тела будет статически устойчивым—. При заданной аэроди-
намической форме тела заднее расположение центра давления обуслов-
лено утяжелением носовой "части этого тела и соответствующим сме-
щение'м центра массы.
На рис. 3.1.9, 6 центр давления совпадает с центром массы летатель-
ного аппарата. В этом случае момент, восстанавливающий равновесие,
будет равен нулю. Поэтому тело может вращаться относительно цент—
а)
у
[О
!
;:
Рис. 3.1.9. Взаимное расположение центра давления и центра мас—
сы для статически устойчивого (а) и статически неустойчивого (в)
тел, а также тела (6), нейтрального в отношении статической
устойчивости
ра массы и полет будет неустойчивым. Правда, отклонение на доста—
точно большой угол атаки приведет к возникновению аэродинамической
силы, отличной от первоначальной (Р) и приложенной в другой точке,
не совпадающей с центром массы, т.е. появится момент, стремящийся
восстановить равновесие. Однако такой полет статически устойчивого
тела с большими колебаниями около центра массы рассматривается
динамически неустойчивым. Такое совмещенное положение
центров давления и массы при заданной форме тела могло произойти
за счет соответствующей «центровки» тела, при которой несколько об-
легчена его носовая часть.
На рис. 3.1.9,в показан случай статически неустойчивого тела, кото—
рому соответствует переднее расположение центра давления. Появив-
шийся угол атаки продолжает возрастать, чему способствует момент от
силы Р около центра массы (дестабилизирующий момент). Такое сме—
щение центра давления относительно центра массы в рассматриваемом
случае могло произойти за счет перераспределения массы и утяжеления
хвостовой части тела вращения.
1.25. Эта особенность заключается в учете влияния сжимаемости
газа на аэродинамические характеристики обтекаемых тел.
При движении с большими скоростями в газе около обтекаемой по-
верхности возникают значительные перепады давления. Это влечет за
собой “изменение плотности газа, а следовательно, изменение характера
и величины силового и теплового воздействий на летательный аппарат
по сравнению с несжимаемой жидкостью. .
При малых скоростях движения газа изменение давления в потоке
незначительно, поэтому плотность меняется мало и влияние сжимаемо-
сти невелико. В силу этого при скоростях до 7О+8О м/сек можно рас-
считывать давление в потоке газа так, как если бы этот газ был не—
сжимаемым. Но с ростом скорости ошибка в расчетах по формулам для
несжимаемой жидкости растет. Например, при скорости полета, равной
68 м/сек, ошибка в определении плотности составляет 2%, а при ско—
рости 270 м/сек она уже равна 35%. Поэтому при больших скоростях
в аэродинамических расчетах следует пользоваться соответствующими
зависимостями для сжимаемой жидкости.
‘420
1.26. При торможении воздуха, движущегося с очень большими ско-
ростями, развиваются высокие температуры. При этом нагрев газа вле-
чет за собой изменение его термодинамических параметров, а также
различные физико-химические превращения. Например, в случае нагре—
ва воздуха, находящегося под давлением в одну атмосферу, до темпе-
ратуры около 1500К начинается заметное возбуждение колебательных
уровней внутренней энергии молекул; при нагреве до температуры по-
рядка 3000 К эти уровни для кислорода оказываются полностью возбуж-
денными и дальнейшее нагревание приводит к его диссоциации, завер—
шающейся при температуре около 6000 К. При такой температуре одно-
временно идет интенсивная диссоциация азота и развивается процесс
Ср -10`5, Мг/(Сек2° град)
30
20
+
3 000 5000 7000 9000 Т, К
Рис. 3.1.10. Зависимость Ср=Ср(Т‚ р) для диссоциирую—
щего воздуха
возбуждения электронных степеней свободы, что при дальнейшем повы-
шении температуры приводит к появлению в газе свободных электро-
нов.
1.27. Степенью диссоциации называется отношение числа образовав-
шихся при диссоциации частиц к общему числу частиц в заданном объ-
еме газа. В частности, для двухатомного газа, в котором диссоциация
происходит по уравнению А2 :: 2А, степень диссоциации
ос = пА/(пА + №№),
где нА —число атомов, получившихся в результате диссоциации. По ус-
ловию задачи, пА=2п, 2пА2=2(т——п), следовательно,
ос : 2п/[2п —|— 2 (т — п)] = п/т.
1.28. Известно, что процесс диссоциации определяется температурой,
общим давлением, под которым находится газовая смесь, а также весо-
выми долями химических элементов этой смеси. Наибольшее влияние
на диссоциацию газа оказывают его температура и меньшее—давле—
ние. При этом снижение давления способствует более интенсивному рас-
паду молекул на атомы, т. е. увеличению степени диссоциации. Наобо—
рот, повышение давления препятствует этому распаду, т. е. как бы
подавляет диссоциацию. Это не относится к таким смесям, в которых
химическая реакция протекает без изменения числа молей (например,
реакция 2М02М2+02). В этом случае изменение давления не влияет
на состав диссоциирующей смеси.
1.29. Исследования показывают, что удельные теплоемкости возду—
ха значительно меняются в зависимости от давлений и температур
421
(рис. 3.1.10). Характер этого изменения имеет свои особенности. Так,
при температуре примерно до 1500К теплоемкости не зависят от дав-
ления, но величина их Меняется с изменением температуры. Происхо—
дит это от того, что по мере нагрева воздуха подводимое тепло идет не
только на увеличение энергии поступательного и вращательного движе-
ний молекул, но и на возбуждение колебательных степеней свободы
атомов в молекулах, а при повышении температуры свыше 1500—:—
2000К—и на диссоциацию. Поэтому здесь удельные теплоемкости
растут.
При наступлении диссоциации удельные теплоемкости зависят не
только от температуры, но и от давления. Причем общая тенденция, на-
блюдаемая при таком изменении, такова, что с уменьшением давления
и повышением, следовательно, степени диссоциации и ионизации удель-
ные теплоемкости возрастают, хотя и немонотонно (см. рис. 3.1.10).
6)
‚сьо10’ік/Тсек/мг
2Ц
20
16
12
)и- 70:3 К/ЮЛ/(М- сек- град)
С!
р=/0 кГ/с 2
ДЦО—гк!—
Ш
6
5
0
5
2
!
0
0
0000 8000 т, к 2000 #000 6000 0000 10000 Т, К
Рис. 3.1.11. Зависимость кинетических характеристик воздуха (?» и и) от
температуры и давления
1.30. Правильным является третий ответ. Систематизированные рас-
четы [17] показали, что при отсутствии диссоциации коэффициенты ди-
намической вязкости „ и теплопроводности ?» зависят лишь от темпе-
ратуры, в то время как в диссоциируюшем газе на них влияют и тем-
пература и давление.
Происхождение сил вязкости и возникновение процесса теплопро-
водности в газе связано с молекулярным строением вещества. Переме-
щение молекул приводит к переносу массы, энергии и количества дви-
жения. При этом изменение количества движения вызывает появление
силы вязкости, а перенос энергии обусловливает теплопроводность. От-
сюда следует, что с ростом температуры увеличиваются коэффициенты
теплопроводности и динамической вязкости в газе (рис. 3.1.11,а и 6).
При возникновении диссоциации происходит изменение химического со-
става воздуха вследствие нарушения внутримолекулярных связей. На
это расходуется часть тепла и коэффициент теплопроводности умень-
шается (см. рис. 3.1.11,а). Однако дальнейшее повышение степени дис—
социации приводит к росту числа частиц, участвующих в процессах пе-
реноса и, как следствие, к увеличению кинетических коэффициентов
и И ?».
1.31. Если предположить, что диссоциация отсутствует, то [20]
ср/сроо : (Т,/Т…)Ф.
Полагая здесь (р=0,1; Тоо=288 К; ср=0,24 ккал/(кГ—град) [1002
м2] (сек2 - град) ], найдем
с„ = 1002 (5000/288)°'1 : 1,35.10З ‚и?/(сек? . град).
422
С учетом диссоциации соответствующую величину удельной тепло-
емкости найдем из таблиц [33] по значениям Т: 5000 К и р=0, 1 ‚СГ/01142:
ср=12- 103 м2/(сек2 град).
Таким образом, удельная теплоемкость, вычисленная без учета дис-
социации, меньше действительного значения примерно в девять раз.
|.32. Плотность недиссоциированного воздуха уменьшилась бы, как
и давление, в 100 раз (это следует из уравнения состояния р=рКТ).
Однако при диссоциации изменение будет иным, так как плотность в
этом случае будет зависеть от степени диссоциации воздуха.
Непосредственно из рис. 1.4.6 [20] или рис. 1- 1 [17] можно найти,
что при Т=4000 К и р1=1 кГ/см2 плотность р1=8 10—3 КГ сек2/м4, а
при Т=4000К и р2=
=10—2 [СГ/01142 плотность дер
р2=10—4 кГ-сек2/м4. Таким
образом, при снижении дав-
ления в 100 раз уменьшение 25
плотности диссоциирующего
газа определяется величи-
р = 100 кГ/см?
ной р2/р1=1‚25- 10—2. 20
1.83. Средний молеку- …
лярный вес воздуха мер не 15 1
изменяется под воздействи- 3,011
ем давления и температуры,
пока в нем не начались фи-
зико-химические превраще-
НИЯ ИС . '
(Д СОЦЁ'ЁЦЁЯ) Графи Рис. 3.1.12. Изменение среднего молекулярного
КИ Нд РИС- - - ‚ получеН- веса воздуха в зависимости от температуры
ные расчетным путем [33], и давления
позволяют проследить ха—
рактер влияния давления
и температуры на величину мер. Повышение температуры способствует
распаду молекул воздуха на атомы, а затем вызывает отрыв электронов
от этих атомов. Все это обусловливает уменьшение молекулярного веса
диссоциирующего и ионизирующего газа (см. рис. 3.1.12). При этом по-
вышение давления в таком газе способствует более интенсивной реком-
бинации, что приводит к росту мер.
1.34. Из рис. 1.4.8 [20] определяем по значениям Т=3500 К И р=
=0,01 кГ/см2 скорость звука с учетом Диссоциации адисс=1230 м/сек.
При постоянных удельных теплоемкостях и величине Ь=ср/су=1‚4
эта скорость
а…,с, : тнт : 1/1,4-287—3500 : 1183 м/сек,
2000 3000 #000 5000 5000 7000 Т, К
что несколько меньше по сравнению со случаем диссоциации.
Предполагая, что диссоциация отсутствует, а удельные теплоемко-
сти являются функциями температуры, найдем (рис. 1.4.3 [20] 12:
=ср/с„= 1,27. В соответствии с этим
а…, = 1/ тет : 1/1,27—287-3500 : 1129 м/сек.
Как видим, скорость звука стала еще меньше по сравнению с ее дей-
ствительным значением в диссоциированном газе.
1.35. Для диссоциированного воздуха энтальпию і определим из
рис. 1.4.6 [20] по давлению р=0,1 кГ/см2 и температуре Т=4000 К:
іішисс=8,З-106 м2/сек2. Полагая ср и с„ постоянными, а значение іе=1,4,
найдем
к р тет 1,4.287.4ооо
. : _ о :: * = = . 6 2 2 0
и…,… ‚аг—1 1‚4_1 4,03 10 м /сек (48,66).
Кг
|
‚_
'Ф
423
В процентах указана разница в сравнении с энтальпией, полученной
с учетом Диссоциации. '1еперь примем, что удельные теплоемкости яв—
ляются функциями температуры. В этом случае
с /
:пер : род,-(рК) : ср Т.
Для Т=4000 К и р=0,1 кГ/см2 из рис. 1.4.2 [20] найдем ср=2,3-
-103 м2/(сек2—град). В соответствии с этим значением
іпер=2,3- 103-4000=9‚2- 106 м2/сек2 (11,1 % ) .
1.36. В целях упрощения исследований процессов, происходящих в
диссоциирующем воздухе, можно вместо такого реального воздуха рас-
сматривать его модель, состоящую из смеси Диссоциирующих компонен-
тов 1\12 и 02, не взаИМОДействующих между собой, но подвергающихся
диссоциации. При этом каждый компонент рассматривается как неко-
торый условный двухатомный газ, состоящий из молекул одного вида,
которые в результате соударений Диссоциируют на два атома. В свою
очередь атомы могут рекомбинировать в молекулы. Если при этом пред-
полагается, что диссоциация равновесная, то исследуется химическая
реакция вида
Г
в
2<:> 2/1.
’в
В этой реакции скорости ее протекания слева направо Гр и справа на-
лево гв (соответственно скорости диссоциации и рекомбинации) одина-
ковы.
1.37. Для определения степени равновесной диссоциации двухатом-'
ной модели кислорода используем зависимость [20]
сог/(1 —ос) : 1 №№) (3.1.14)
И уравнение СОСТОЯНИЯ _ __
р=рТ(1 +01), (3.1.15)
где р_=р/рд; 5=р/рд; Т:: Т/Тд; значения рд, рд, Та представляют собой
соответственно характеристические давление, плотность и температуру
диссоциации.
Исключая из (3.1.14) и (3.1.15) плотность р, найдем
_ __ —1/2
01: (1+ {_а/Т) . (3.1.16)
Т
В соответствии с данными табл. 1.5.1 [20]
В : 0,01/(2з.107) : 0,435-10—9; ? = 3000/59000 : 0,051.
Таким образом,
0,435-10—9 1/0 051 ‘—1/2
ос= 1 ————е ’ = 5 5.
( + 0,051 › О’ 1
1.38. Для определения среднего молекулярного веса диссоцииро-
ванного азота воспользуемся формулой
”ср : Неро/(1 + 05), (3.1.17)
где неро—средний молекулярный вес недиссоциированного азота. Как
видно, величину пор можно вычислить, найдя степень диссоциации 01.
Для этого воспользуемся зависимостью (3.1.16). Из табл. 1.5.1 [20] на-
ходим:
рд : 4,1 —107кГ/см2, Та : 113000 К.
В соответствии с этим для р=0,01 кГ/см2 и Т=5000 К получаем
_ р — ("01 =о‚244-1о—9‚ Т Т = 5000 =0,0442.
рд—р—д_ 4,1-107 “`—Е 113000
424
СЛЭДОВЗТёЛЬНО, степень ДИ ССОЦИЭЦИИ
о . 0—9 —1/-2
ос = (1 + 34—1—— е“°-№) = 0 164
0,044?
а соответствующий средний молекулярный вес
пер = 28/(1 + 0,164) = 24,1.
1.39. Для решения задачи нам потребуются значения рд, То; и ид,
представляющие собой соответственно характеристические давление,
температуру и энергию диссоциации. Эти значения для азота определя-
ем из табл. 1.5.1 [20]:
р„ = 4,1 -1О7кГ/см2, Тд=11ЗОООК‚ и„ = 3,4-1О7м2/сек2.
Температуру газа можно определить, воспользовавшись уравнением
(3.1.16). Внося значения -ос=0,5‚_ р‹д;=р/ра=0,01/(4,1-107)=О‚244-10—9
и решая это уравнение, найдем Т=О,О494. Следовательно,
т =`Т-т„ = 0,0494.11з 000 = 5670К.
Энтальпию двухатомного газа вычислим при помощи формулы
?=а+7и+щ, @щш)
в которой _і_=і/ид. После подстановки находим
? = 0,5 + 0,0494 (4 + 0,5) = 0322.
Таким образом,
і = ги, = 0722.3,4-107 = 2,45-107м3,сек2.
Соответствующая безразмерная величина внутренней энергии
3 = 37 + ос,
где Е=и/ид. В результате подстановки находим
іі = 3-0‚0494 + 0,5 = 0,639.
Следовательно, внутренняя энергия
и = Би„ = 0,639—3‚4- 107 = 2,17-107 ‚иЗ/сек?
1.40. Для определения степени диссоциации разогретого воздуха,
рабочая модель которого представляет собой совокупность чистых дис-
социирующих компонентов №2 _и 02, применяем формулу (3.1.16). Най—
дем относительные величины р= _р/рд и Т= Т/Тд, входящие в эту фор-
мулу. Для этого необходимо знать характеристические давление рд и
температуру Та воздушной смеси. Исходя из того, что кислорода в ней
23,5%, а азота 76,5%, получаем:
рд = 0,765рд1`12 + 0,235рд 0: =
= О,765-4,1 .107 + 0235-23-10Т = 3,7-1О7кГ,см2;
Тд = 0,765Т‘Ш2 + 0,235Тд 02 = 0,765-113-103 + 0235-59-103 =1ОБК‚
где соответствующие значения рд и Та для азота и кислорода определе-
ны из табл. 1.5.1 [20]. В соответствии с полученными величинами рд и
Т д для смеси газов безразмерные давление и температура:
5 = 0,01 /(з‚7. 107) = 027.104; Т“ = 4500/100000 = 4,5.10—2.
Таким образом, степень диссоциации
О - —9
@=(1+Ш3222'_Ю/ =0‚_19
0,045
28—927 425
Относительная энтальпия смеси
2 = 0. + ?(4 + ос) = 0,19 + 0,045 (4 + 0,19) = 0,38.
Так как характеристическая энергия диссоциации модели воздуха
(см. табл. 1.5.1 [20])
ид : 0,765иды2 + 023515102 : О,765-3,4-1О7 +
—;— 0,235- 1,5-107 : 3-10Т м2д’сек2,
то энтальпия воздушной смеси
і= Би„ = 0,38-3-107 = 1,14-1О7м2/сек2.
Далее определим относительную величину внутренней энергии:
22 = 37 + а, = 30,045 + 0,19 = 0,325.
Соответствующее абсолютное значение
и = Ди„ = 0,325—3407 = 0975107 м2/сек2.
1.41. Средний молекулярный вес воздушной смеси определим по
формуле (3.1.17). Полагая в ней поро=29, получим
„„ = 29/(1 + 0,19) = 24,4.
Для коэффициента динамической вязкости воспользуемся зависимо—
стью, учитывающей влияние диссоциации [20]:
И Т 1/‘21—1—111/Тоо 1 1,42
„оо—(Т 1+111/Т 1+0‚89ос/(1—ос) 1+1,26(1—а)/а'
00
ПОДСТЗВЛЯЯ известные ВЭЛИЧИНЫ, НЭХОДИМ
„ _ /4500 1/2 1+ 111/288 [ 1 +
и… \288) 1+111/4500 1+0,89-0,19/(1——0,19)
. 1,42
_,… ‘ =5,6.
1+1‚26‹1—0‚19)/0‚19
Полагая при Тоо=288К значение и…=1,82- 10—6 кГ-сек/м2‚ найдем
р, : (р.-"нос) их : 5,6-1,82-1О—6 : 1,02-10—5 кГ-сек/м2.
||. КИНЕМАТИКА ЖИДКОЙ СРЕДЫ
П.]. В м е т о д е Э й л е р а изучается поле скоростей в пространст-
ве, заполненном движущейся жидкостью. В соответствии с этим методом
рассматривается некоторая точка с координатами х, у, г и изучается как
изменение скоростей в указанной точке с течением времени, так и изме-
нение скоростей вследствие перех0да к другим точкам пространства.
Следовательно, скорость представляется как функция координат и вре—
мени:
Ух : і1(х›у9291‘1);
уу: 1:2(х’у92’і);
УЗ =і3(х›у›2›[)°
Произведя здесь замену Ух=аіх/сіі, Уу=ёу/сіі, У =сіг/сіі‚ получим
систему дифференциальных уравнений, интегрируя которую, найдем
уравнение траектории в параметрической форме:
х : ср1(а‚ Ь, с, 1);
у = % (а, ь, см); (ЗП-2)
2 : % (а, Ь, 0,15).
Исключая отсюда параметр !, можно получить уравнение траектории
в обычной форме. В этом уравнении произвольные постоянные а, Ь, с
определяются из начальных условий.
В меТОДе Л агр а нж а исследуется движение 11ндивндуальных
частиц жидкости вдоль их траекторий. Так как частиц бесчисленное
множество, то для задания траектории необходимо определенным обра-
зом охарактеризовать ту частицу, к которой эта траектория относится.
В качестве характеристики частицы выбирают координаты а, Ь, с
в начальный'момент времени 1:10. Таким образом, координаты жидкой
частицы х, у, 2 будут зависеть от величин &, Ь, с и времени :? [см.
(3.11.2)].
Составляющие скорости в этом случае находятся в результате диф—
ференцирования (311.2):
11, = дф1/ді; Уу = дф2/ді; У, = дфз/ді. (311.3)
Заданное условиями задачи движение жидкости является плоским
(У =О) и неустановившимся, поскольку параметры потока являются
функциями не только координат точки, но и времени (время ! входит
в выражения для Ух и Уу в явном виде) .
Для перехода от переменных Эйлера к переменным Лагранжа
и определения уравнения траектории следует проинтегрировать урав-
нения:
(311.1)
(іх/Щ! : Ух = тх + ті; (311.4)
сіу/ф,‘ = Уу = — [гу +11. (З.П.Б)
При интегрировании (З.П.4) положим
х = и (15) -0 (1); (3.11.6)
тогда
(іх/аг! = 0 (аи/(іі) + и (ао/(іі). (311.7)
Подставляя (З.П.?) в (З.П.4), найдем
0 (аи/а: — ти) —|— и (ао/с!!) —— п! = 0. (3.11.8)
Пользуясь произволом в выборе одной из функций, и(і) или и(і),
выберем функцию и(!) такой, чтобы
сла/щ _ ти = 0. (311.9)
28* 427
В соответствии с этим
и(сіо/сіг‘) _пъ‘ = 0. (3.11.10)
Решение уравнения (3.119) имеет вид
и = с1ет’. (3.11.11)
Подставляя (3.11.11) в (3.11.10), получим
сіо/сі! = (п./01) е—тЧ. (3.11.12)
Интегрируя (3.11.12), найдем
0 = (12/01 т2) (— тіе—т‘ — е—т’) + сз. (3.11.13)
Подставляя (3.11.11) и (3.11.13) в (311.6), получим
х = 03 а”” — пг/т — п/тв. (3.11.14)
Аналогично интегрируется (311.5):
у = 04 е_“ + Ш/г— Шаг. (3.11.15)
Константы сз и 04 ‚найдем из начальных условий, полагая і=0‚ т. е.
(:3 = х + п/т2; (3.11.16)
С„ = у + і/іг2. (3.11.17)
В соответствии с методом Лагранжа координаты частицы жидкости,
движение которой изучается вдоль траектории, должны быть известны
в начальный момент времени ([=О). Выберем эти координаты равными
х=—п/т2; у=—1/іг2. Тогда на основании (3.11.16) и (3.11.17) с3=с4=0.
Таким образом, для искомой траектории:
х = — ті/т—п/т2; (3.11.18)
у =!13/іг—1/іг2‚ (3.11.19)
откуда, исключая время !, найдем уравнение траектории:
[т ! 1 1
у +БП—_??(Ё +?), (3.11.20)
представляющей собой п р я му ю л и н и ю.
11.2. 1. Движение жидкости задано проекциями скоростей:
Ух = _ау‚ Уу = ах, Уд = 0. (3.11.21)
Определим линии тока, представляющие собой в общем случае кри-
вые, которые характеризуются тем, что в данный момент времени 1.‘ ка-
сательные к ним в любой точке совпадают по направлению с вектором
скорости. Дифференциальные уравнения линий тока имеют следующий
вид:
азс/Ух = сіу/Уу = сіг/Уг. (3.11.22)
Траектория—кривая, по которой перемещается частица жидкости
в пространстве. Касательная к этой траектории совпадает с вектором
скорости, однако в отличие от линии тока, построение которой произво-
дится в фиксированный момент времени, понятие о траектории
связано с некоторым .про межутком времени, в течение которого
частица проходит определенный путь. Из этого следует, что линия тока
и траектория, являющаяся следом движения одной и той же частицы,
совпадают в установившемся течении.
Исследуемое движение плоское (так как У2=О) и установивщееся,
поскольку составляющие скорости Ух и Уу от времени не зависят.
В случае .плоского движения дифференциальное уравнение линий
тока (3.11.22) можно записать в следующем виде:
ахи/‚ = ауд/„
428
или, после подстановки значений Ух и Уд,
ах/(— ау) = ау/ (ах).
Разделяя переменные, получим
хсіх + усіу = О.
Интегрируя, найдем линии тока:
)(2 + у2 = 0, (3.11.23)
которые представляют собой семейство концентрических окружностей
с центром в начале координат (рис 3.111). Поскольку рассматриваемое
течение установившееся, то траектории совпадают с линиями тока.
да“-.и) ` .
/
чи “
Рис. 311.1. Линии тока тече- Рис. 3.112. Линия то- Рис. 3.113. Пространствен—
ния жилкости, составляющие ка, проходящая в мо— ный источник
скорости которого Ух=—ау, мент времени ! через
У„=ах точку А (—1‚—1)
Для определения направления движения жидкости следует найти
косинусы углов между вектором скорости и осями координат:
соз (17, х) = И.,/\] = —у/1/х2 + у2;
сов (17, у) = Уу/У = + х/ 1/‚х2 + у“.
Так как ДЛЯ ТОЧКИ С П'ОЛОЖИТСЛЬНЫМИ ЗНЗЧСНИЯМИ КООРДИНЗТ
соз(У‚ у) >О, а соз(У‚ х) <О, то скорость образует с осью х угол, боль-
ший п/2, и, следовательно, движение происходит против часовой
стрелки.
2. Движение жицкости задано проекциями скоростей:
У„ = х + :, и„ = —у + :, У, : 0. (3.11.24)
Это движение жидкости плоское (У2=0) и неустановившееся, поскольку
составляющие скорости Ух, Уу зависят не только от координат точки,
но и от времени. Следовательно, в данном случае траектории и линии
тока не совпадают.
Дифференциальное уравнение линий тока (3.11.22) имеет вид
сіх/(х + 13) = ау/(— у —|— 1).
Интегрируя это уравнение и считая при этом время 15 фиксированным,
получим
(х —|— !) (і — у) = 0, (3.11.25)
т. е. линии тока представляют в каждый момент времени семейство ги—
пербол.
На рис. 3.112 построена линия тока, проходящая в момент времени
і=0 через точку А (—1, —1). Соответствующее уравнение гиперболы
имеет вид
ху = 1. (311.2 6)
429
Для определения траекторий необходимо проинтегрировать урав-
нения:
(іх/ай = х + 1‘; (3.11.27)
ау/сі! = —у + :. (3.11.28)
При интегрировании (3.11.27) положим, *как и в предыдущей задаче,
= ии.
После дифференцирования, соответствующих подстановок и интегри-
рования (3.11.7)+(3.11.10) найдем:
1
и = с1е‘; 0 = —- (— хеч—ед) —|— 02.
1
ПОДСТЗВЛЯЯ значения и И @, ПОЛУЧИМ ДЛЯ х следующее выражение:
х = 03 е‘ — і —— 1. (3.11.29)
Аналогично можно найти зависимость:
у = 04 е—‘ —|— г.“ — 1. (3.11.30)
Для определения траектории, которую описывает частица жидко-
сти, находящаяся в момент времени і=0 в точке А (——1‚ —1), найдем
значения констант сз, с4. Подставляя в (3.11.29) и (3.11.30) 13:0, х=——1,
у=—1‚ получим с3=с4=0. Следовательно, для искомой траектории
х=—1‘—1‚ у=г—1,
или, исключая время !,
х+у= —2. (3.11.31)
Сопоставляя (3.11.26) и (3.11.31), нетрудно заметить, что при неуста-
новившемся движении линии тока и траектории не совпадают.
3. Движение жидкости задано проекциями скоростей:
Ух = сис/КЗ, Уу = сиу/КЗ, УЗ = аг/Кз. (3.11.32)
Исследуемое течение является пространственным и установившимся
(параметры от времени ! не зависят). Следовательно, траектории и ли-
нии тока совпадают. Дифференциальное уравнение линий тока (3.11.22)
принимает в этом случае следующий вид:
сіх/х = сіу/у = (12/2.
Интегрируя его, найдем:
х = су, х = 012, _а,“ = 022. (3.11.33)
Система уравнений (3.11.33) представляет собой уравнения прямых
линий в пространстве, проходящих через начало координат. Значения
констант с,- с1‚ с2 определяются координатами точки, через которую про-
ходит линия тока (траектория).
Рассмотрим линию тока, проходящую через точку А (4'; 3; 2)
(рис. 3.113). В соответствии с этими условиями с=4/3, с1=2‚ с2=3/2.
Уравнение этой линии тока можно представить в виде системы
3х—4у=0, х—2г=0.
Поток жидкости, линии тока которого представляют собой лучи, ис-
ходящие из начала координат, называется и с т 0 ч н и к о м (а>0) .
Течение с линиями тока в виде прямых, сходящихся в начале координат,
называется ст 0 к о м (а<0) .
11.3. В отличие от твердого тела, движение которого определяется
поступательным перемещением вместе с центром массы и вращением
вокруг мгновенной оси, проходящей через этот центр, движение жидкой
430
частицы характеризуется, кроме того, наличием деформационной со-
ставляющей этого движения, изменяющей форму частицы.
Деформационное Движение жидкой частицы складывается из ли-
нейной деформации, характеризуемой коэффициентами линейной де-
формации:
6„ : дУх/дх, Оу = дид/ду, 62 = дУ2‚/дг‚
и у гл 0 в ой деформации, определяемой величинами:
1 дУ дУ 1 дУ дЪ’ 1 дУ дУ
__( г у) 8у_____(_1_с__1_ 2)‚82=_2_(__у+__ё_)_
8” _ 2 д '
у дг 2 да дх дх ду
ПОЛУСКОРОСТЯМИ СКЭШИВЗНИЯ УГЛОВ. у
1
Поступательное движение жидкой
частицы характеризует скорость Ух, вра-
щательное — величины шуаіг к (виду, де-
формационное—значения Охах, вуаіг и
еду.
ПА. Относительная скорость кубичес-
кого расширения частицы жидкости с
элементарным объемом т=сіх—аіу-аіг оп- Рис. 311.4. деформация жидкой
ределяется дивергенцией скорости частицы, имеющей форму круга
№17 = дЁ/ЁТ ' д_."у +дд— —- _в, + 9, + в,. (3.11.34)
Исследуемый поток плоский у-і—(Уи 20) и установившийся, следова-
тельно,
дім/= ддх+д_1/у =_С_. у2_х° _; "" _і(_‘_)_д_
дх ду р (262+у2)‘3 ‘х2-'гу2 дх @
с х2— 2 сх д 1 с д ’ 1 д 1
+—._у—-+ " ._(_)= [х_— {_ —)—[—у—(——)].
р (ХЗ-гуд? х2+у2 ду @ х2+ у2 дх‘ \ @ ду @
Для несжимаемой жидкости (р=сопз’с) величина (ііу У=0.
П.Б. Обозначим через х2‚ у2 координаты, которые будет иметь точка
А частицы через бесконечно малый промежуток времени 0115. Поскольку
0х1 и Оу1 являются главными осями, то вдоль них имеют место только
линейные деформации и, ‚следовательно,
х2 : х1 + (дУх/дх) х1 (115;
92 = % + (дУу/ду) 511611“;
ОТСЮДЭ
ха
х1 : 3
1 + (дУх/дх) аг
111 : №
1 + (ду,/ду) @: '
Подставляя значения х1, у] в уравнение заданной бесконечно малой
частицы в форме круга, найдем
"3 уё 1 31135
г2[1 + (дУх/дх) 4112 + г2[1+(дУу/ду)аг12 _ ` ( ' ' ›
Уравнение (3.11.35) является уравнением эллипса с полуосями
г [1 + (дУх/дх) аг] и г [1 + (ду,/диаг].
Таким образом, бесконечно малая частица в форме круга, деформи-
руясь, обращается в бесконечно малый эллипс, оси которого направлены
по главным осям деформ а ци и (рис. З.П.4).
431
Найдем изменение площади рассматриваемой бесконечно малой
частицы. Для этого следует из площади эллипса вычесть площадь круга:
А8 = т [1 + (дУх/дх) аг] г [1 + (дУу/ду) 031] — ш”. (3.11.36)
Осуществляя элементарные преобразования и пренебрегая членом выс—
шего порядка малости, получим
А8 = ш“ (дУх/дх + дУу/ду) (113. (3.11.37)
11.6. Угловая скорость вращения жидкой частицы характеризуется
вектором го’с У (или вихрем)
гот 17 = 225, (3.11.38)
где составляющие вектора угловой скорости Ш=Шхі+СОуі+Ю1Ё имеют
следующие значения:
(в =(1/2) (дУг /ду— дУ у/дг);
: (1/2) (дУ /д2— дУ /дх); (3.11.39)
0) =(1/2) (дУу/ дх —— дУх, ду).
Течения жидкости, для которых го’с Уфо (это имеет место, если
хотя бы одна из составляющих (ох, (Оу, (02 о_тлична от нуля), называются
вихр евы ми. Потоки, для которых го1У=О (т. е. Шх=03у=033=0),
называются безвихревыми, или потенциальными.
Таким образом, для установления характера течения жидкости в тру-
бе следует определить составляющие вихря шх, (Оу, (02. В рассматривае-
мом течении Уу= У2==0‚ следовательно, это течение параллельно стенке
трубы и в нем шх=шу=0. Третья составляющая угловой скорости
1 дУу __дУх 1 д у 71 п утех у п—1
(92 : __х___) ————— Утик (_) = '— — ' "— _) -
2 дх ду 2 ду го , 2 го го ‚
Величина этой скорости не равна нулю (%#О) и, следовательно, тече-
ние жидкости является вихревым. Ротор скорости в этом случае гот У=
=2ш212= —п ( Уши/го) ( у/го) №№.
".7. Для выявления характера течения жидкости (потенциального
или вихревого) необходимо найти величину вихря го’г У (или его состав-
ляющих (ох, Шу, (о,). Поскольку рассматриваемый поток плоский, то
шх=шу=0, и для анализа течения достаточно определить значение
(02 = (1/2) (дУу/дх — дУх/ду).
Для заданного течения составляющие скоростей УЭС и У„ могут быть
представлены в следующем виде:
У„ = У соз (17‚х) = ——5— (305 (У, х) = — Су ; (3.11.40)
х2-1-у2 х2+у2
Уу = У соз (17, у) = —2——_с__ (305 (У, у)= х——2+у 2 (3.11.41)
х +у2
Следовательно,
(02: і[ у2_х2 + х2_у2 ]:
2 ‹х=+у2›2 (хг—гугл
Таким образом, рассматриваемое течение будет потенциальным.
В общем случае для безвихревых (потенциальных) течений на осно-
вании того, что го’с У=0 (или Шх=Шу=Ш1=0)‚ должны выполняться
следующие соотношения:
дУх/ду = дУу/дх, дУх/дг = дУг/дх‚ дУу/дг = дУг/ду. (3.11.42)
432
Для заданных условий, как это следует из (3.11.40) и (3.11.41), соотно-
шения (3.11.42) выполняются, т. е. дУх/ду=дУу/аіх.
11.8. Равенства (3.11.42) являются необходимыми И достаточными
условиями того, чтобы дифференциальный трехчлен Ухсіх-і—Уусіу—Ъ—Щсіг
был полным дифференци алом некоторой функции ср, т е.
сіср = У„ [іх + У„ ау + У, (12. (3.11.43)
С другой стороны,
дср : (дф/дх) (іх + (дф/ду) @ + (дср/дг) (12. (3.11.44)
Сравнивая (3.11.43) и (3.11.44), найдем, что
У„ : дф/дх, Уу = дф/ду, У2 = дер/де.
Как вицно, величина скорости в каком-либо направлении определя—
ется быстротой изменения потенциала ср в том же направлении. Если
рассматривается направление 3, то быстрота изменения этого потенциа—
ла равна частной производной дф/дз. Величину дср/дз можно рассматри—
вать как проекцию на направление 3 некоторого вектора, называемого
гр адиентом функции (р и совпадающего с направлением наиболее
быстрого возрастания этой функции. Очевидно, что этот вектор равен
вектору скорости, т. е. У=8Г861 ср.
11.9. Составляющие угловой скорости частиц жидкости будут следу—
ЮЩИМИЗ
] 1’ У
од:—{дг—Ц) “?"—у;
2 ду дг ‚ 2
(ру:-і .д_1/_х__..дУ2)_____Е..2,
2 ., дг дх 2
…,____1(9У_у_д№>__1х
2 ддт ду 2
11.10. Для вывода уравнения неразрывности следует рассмотреть
некоторый подвижный объем жидкости, изменяющийся по времени, но
состоящий из одних и тех же ча сти д. В соответствии с законом
сохранения массы
рсрт : сопз’с,
где рср— средняя плотность в пределах объема т. Следовательно,
итд)/(11:0 или, учитывая, что плотность и объем—величины пере-
менные,
‚оср а: ' т (115
Это уравнение относится к произвольному малому объему. Чтобы по-
ЛУЧИТЬ СООТНОШЗНИЗ, характеризующее Движение ЖИДКОСТИ В КЭЖДОЙ
точке, необходимо перейти в последнем уравнении к пределу при 1: —› 0:
$ .3‘3 + (ііу ? = 0.
9 Ш
11.11. Уравнение неразрывности можно вывести, рассматривая в со—
ответствии с методом Эйлера протекание р а зличных ч а сти ц жид-
кости через некоторый фиксированный объем. Согласно предположению
о неразрывности среды разность между расходом жилкости из выделен-
ного объема и количеством жидкости, поступившей в этот объем за не—
который промежуток времени, равна изменению количества жидкости
в объеме за то же время.
11.12. Выделим в потоке газа за цилиндрической ударной волной
(см. рис. 311.5) элементарный объем АВСВ единичной ширины.
_Е.№'_1_.Ё=О
433
Количество газа, втекающего за время а?! в выделенный объем через
цилиндрическую поверхность единичной ширины АБ, равно
рУ‚г-‹16- (11.
Количество газа, вытекающего за то же время из выделенного объ—
ема через цилиндрическую поверхность единичной ширины ВС, будет
рУ‚г-сіО-сіі+ —дд—(рУ‚г—с16)сіг-сі!.
Г
Таким образом, в выделенном объеме за время а! произошло измене-
ние- массы газа:
римейк _;— —дд— (руд-ае) сіг-сіі —рУ‚ г-аеш = Б“?- (рУ‚г-‹19) агни. (3.11.45)
Г Г
Согласно закону сохранения массы из-
менение количества газа в объеме долж-
но привести к изменению его плотности,
которое характеризуется частной произ-
водной по времени др/дъ‘. В соответствии
с этим изменение массы газа за время
аг в выделенном объеме будет равно
_; атив-аг. (3.11.46)
Приравнивая (3.11.45) и (3.11.46), по-
лучим после преобразований уравнение
неразрывности
Рис. З.П.б. Частица в потоке газа
„ „ „ др д
за цимндрическои ударном волнои ‚_ + _ ГУ _ 0_ 3_П_47
д! дг (Р ,) ( )
11.13. Цилиндрические коорди н аты. Выделим в окрестно-
сти произвольной точки А (с координатами х, г, 6; рис. З.П.б) бесконеч-
но малый фиксированный объем, равный г.сіЭ—сіг-аіх. Согласно закону
сохранения массы разность меЖДу количеством газа, вытекающего из
и
у “г №——-— __________ ёьшпв
" |
с} с’ д’ ‹
Г А уд: }
В % "? Ан
/ \\ СЮ: П; \\ :
\6 \»«Р ГПО \\ {
\\ \} О
0 сс
Рис. 311.6. К выводу уравнения нераз— Рис. 311.7. К выводу уравнения
рывности в цилиндрических координатах неразрывности в сферических коор-
ДИНЭТЗХ
этого объема за некоторый промежуток времени, и количеством газа,
втекающего в этот объем, равна изменению массы внутри выделенного
объема.
Количество газа, втекающего в элементарный объем через грань
АВС!) в единицу времени, равно
рУхг-сЮ-сіг,
а масса газа, вытекающего через противоположную грань А181С101‚
будет
434
рУ г аг дн+—(№ г сіг ..,ае)ат=[рУ г+— д д(рУ„ г)‹іх]сіг ае
РЭЗНОСТЬ МЕЖДУ ЭТИМИ ВЭЛИЧИНЗМИ СОСТЗВЛЯЗТ
ді (РУ; ,) („стае. (3.11.48)
26
Количество газа, протекающего в направлении оси г через грани
‚4141010 и ВВ1С1С‚ соответственно можно записать так:
рУ, “ах г (16 и [ри г —|——д—- д(рУ‚ г) аг] ах (16,
а разность между ними равна
Бд' (рУ, дат—41х59. (3.11.49)
‚
Аналогично для граней АВВ1А1 и БСС1В1 массы протекающего газа
равны '
рУе— ах сіг и [рУЭ +д— де(рУ9)сіВ] ах аг,
а разность между ними —
д
ББ (рУе) СЮ -сіх - аг. (3.11.50)
Изменение массы газа в выделенном объеме можно получить, скла-
дывая (3.11.48), (3.11.49) И (3.11.50):
[—(рУ г) +—- д(рУ‚ г) + —(рУе)]‹іх сіг ае. (3.11.51)
Сдругой стороны, изменение массы газа, заключенной в этом объеме,
в единицу времени равно
— (др/д!) г—сіх-сіг «16. (3.11.52)
Приравнивая (3.11.51) и (3.11.52), получим уравнение неразрывно-
сти в цилиндрических координатах:
гЁ—Ё- + —(рУ г) +— д(У‚ рг) +д —— д(рУе) : 0. (3.11.53)
С ф е р и ч е ски е к о о р д и н а т ы. Выделим в окрестности произ-
вольной точки А (с координатами г, 6, у; рис. 311.7) элементарный об`ъ—
ем г2 эіпе-аг-сіе-сіу и подсчитаем разность между количеством газа,
протекающего через противоположные поверхности этого объема в еди-
ницу времени:
через грани АВС]? и А1В1С1В1—
ді (рУ,г2) зіпб -сіг-‹16-сіу; (3.11.54)
‚
через грани 1414101!) и ВВ1С1С—
г %- (рУО зіп вит-56.65; (3.11.55)
через грани АВВ1А1и ВСС101 —
д
Т_д—У (рУ?) сіг-сЮ-сіу. (3.11.56)
Изменение массы газа внутри выделенного объема получим, сумми-
руя (3.11.54), (3.11.55) и (3.11.56):
__д_ 2 ' 1 3 - і . .
[ дг (РУ‚г ) $111 6 —г г де (РУэ $111 6) + г д? (рУт)] аг (16 (№. (3.11.57)
435
С Другой стороны, изменение массы газа в элементарном объеме
в единицу времени равно
_ % ггзіп ваще-ау. (3.11.58)
Приравнивая (3.11.57) и (3.11.58), получим уравнение неразрывности
в сферических координатах:
. д . д д . д .
г2 вт 6 д—Ё + 5111 6 ; (рУ, г2) + г —д—О- (рУ6 вт 6) + г дт? (рут) : 0. (3.11.59)
11.14. На рис. 311.8 показаны схемы движения газа с плоской, ци-
линдрической и сферической волнами. Рассмотрим протекание газа че-
рез некоторые фиксированные объемы, выбранные в каждом потоке.
1 2 АЧ
‚_
Рис. 3.11.8. Схемы движения газа с плоской (а), цилиндрической (б) и сфериче—
ской (в) волнами:
] — поршень; 2 — ударная волна
В соответствии с рис. 3.11.8,а количество газа, втекающего в такой
объем за время 0%,
(12 : рУ (ШР/4) (115,
а расход этого газа
‹71 = 672 + 2—3 ах : {рУ (31:112/4) + 23% [рУ (пени)] дх} а:.
Разность расхода и прихода 671—42 равна количеству газа в объеме:
Ао : {д [р (ші2/ 4) (іХ1/ ді} а:.
Таким образом, уравнение неразрывности для течения с плоско-йвол—
ной будет иметь вид
др/ді + д (рУ)/дх : 0.
Если рассмотреть течение с цилиндрической волной (рис. 3.11.8_ б)‚то
(71 = рУ-госіВ-сіъ‘, (72 : [ри-(16 + №№] 021,
Г
В соответствии с этим уравнение неразрывности будет
г-др/ді + д (рУг)/дг = 0 или др/ді + д (рУ)/дг + рУ/г : О.
Наконец, рассмотрим течение со сферической волной (рис. 3.11.8.в):
(11 = рУг2-сіф-(16-сіі, @, = а, . _? сіг,
Г
А4 : (% (рР-сіО-сіф-сіг) а:.
436
Таким образом, уравнение неразрывности будет следующим:
г2. др/дъ‘ + д (рУг2)/дг = 0 или др/дг‘ + д (рУ)/дг + 2рУ/г = 0
Полученные уравнения можно записать в одной форме:
др/ді + д (рУ)/дг + врУ/г = 0
11.15. 1. В случае, когда частицы жидкости при Движении описывают
окружности, перпендикулярные постоянной оси и с центром на ней, то
составляющие скорости Ух, У,. в цилиндрической системе координат
равны нулю, и уравнение неразрывности (3.11.53) примет следующий
вид:
до 1 д
_.— | _ ° _ (РУО) : 0.
д! г дБ
Заменяя здесь 159 на юг (10:49/031 — угловая скорость вращения части-
ЦЫ) , получим
9—9 +— (РФ)=0
2. В случае, когда частицы движутся в пространстве симметрично
по отношению к неподвижному центру, причем скорость каждой такой
частицы направлена либо от центра, либо к центру, параметры потока
являются функцией только расстояния г от центра (пространствен-
ные источник или сток). Таким образом, в уравнении неразрывности
в сферических координатах (3.11.59) производные параметров по углам
@ и у обращаются в нуль, и уравнение принимает вид
ЁЁ Ц.…і 2:
д! + г2 дг (р1/‚г) О.
3. Если частицы жидкости движутся в плоскости, проходящей через
ось х, то параметры потока не зависят от координаты 6. Следовательно,
уравнение неразрывности в цилиндрических координатах (3.11.53) бу—
дет таким:
г — '°+д— дот) + гд—д (Р‘/„)=
11.16. При движении частиц жидкости вдоль траекторий, расположен-
ных на поверхностях коаксиальных цилиндров, в уравнении неразрыв-
ности в цилиндрических координатах (3.11.53) следует положить д/дг:
=0; тогда оно примет вид
Ёе. _д_ ' ь]— . —д—. :
д! + дх (Рух) Т г де (руб) О.
В случае, когда траектории расположены на поверхности конусов,
коаксиальных с осью х и имеющих общую вершину, в уравнении нераз-
рывности (3.11.59) в сферических координатах следует положить д/дб=
=0; тогда оно примет ВИДд
др
__— “г _ ;(Руг 2) +
015 г2 -$іп0 5;
11.17. В общем случае пространственного неустановившегося течения
сжимаемой жидкости уравнение неразрывности в декартовых координа-
тах имеет следующий вид:
др
5 +— (911 „) +—— —(рУ,.)+ дг —(рУг) = 0. (3.11.60)
Для установившихся течений параметры жидкости являются функ-
циями только координат точек, следовательно, частные производные
параметров по времени обращаются в нуль.
———(рУ)=0
437
При исследовании плоских установившихся течений сжимаемой жид-
кости (в частности около профиля крыла) уравнение неразрывности
записывается в форме
— дд(рУх) +— д(рУу)— — 0
а при исследовании пространственных установившихся течений (напри—
мер обтекания крыла конечного р а 3 М а х а) —в виде
-— ;(РУХ) +д— дЁ/(РУУ) +— д(рУг)— — 0-
11.18. Как известно,
‹1іУ (РТ/)= — ;(рУх) +— д(рУ,.)' +— дд(рУг)
или после дифференцирования
аіч<рУ›=У У—д—р+У—- у+У —+ р(д—УХ+9`;у+д %.)
Трехчлен в правой части можно представить в виде скалярного произ-
ведения
_1_ т _! ЁЁ :—
Ухд— дх Иу— уд; 1/2 дг Уегасі р,
а выражение
`дх ду дг
Следовательно, уравнение неразрывности (3.11.60) можно записать
таким образом:
(_д__1/„_ д_1/_у+ д_У_)_ рсііУ17
др/ді + 173гас1 () + () оіу ? = 0.
11.19. В отличие от потенциала скоростей ср, существующего только
для 6 е з в и х р е в ы х течений, функция тока «49, являющаяся решением
уравнения неразрывности, существует и для вих р ев ых плоских
и пространственных осесимметричных течений.
Связь межлу функцией тока и составляющими скорости имеет сле—
Дующий вид:
1 дф 1 дф
Ух : ' 9 У =_ 8 3.11.61
у ру дх ( )
где для плоского потока е=0‚ а для пространственного осесимметрично—
го е= 1, у=г.
Известно также, что частная производная от потенциала ср .по коор—
динате равна проекции скорости на соответствующую координатную
ось, т. е.
11, = дф/дх, 1/ =. дср/ду. (3.11.62)
Приравнивая соответствующие зависимости (3.11.61) 11 (3.11.62), можно
найти связь между потенциалом скоростей и функцией тока:
_ді__1__ді №=__1_ (№ (31163)
дх' вуз ду’ ду руе 3?
Для плоского потока несжимаемой жидкости соотношения (3.11.63) при—
нимают вид:
—д"’ дф ————д—"’— (3.11.64)
х ду, ду дх.
"
__
Ф
6
438
11.20. Используя соотношения (3.11.64), можно по известному потен-
циалу скоростей ср определить функцию тока ф:
__ _Ёі _
ср _ ; дх ау + с(х). (3.11.65)
Константа в уравнении (3.11.65) является функцией координаты х, по-
скольку при интегрировании по у фиксируется только х.
По заданному потенциалу скоростей ср находим производную
дср/дх=2ах и подставляем ее в (3.11.65):
“Ф = Я 2ахсіу + 0 (х) = 2аху + 0 (х). (3.11.66).
Здесь произвольная постоянная с(х) определяется путем сопоставления
двух значений дф/дх, одно из которых получают в результате дифферен-
цирования (3.11.66) по х, а другое—используя
формулу (3.11.64), в которой дср/ду=—2ау. В
соответствии с этим
2ау + сіс/сіх : 2ау,
откуда находим значение с( х) =соп5’с.
Таким образом,
11) : 2аху + сопз’с.
Для определения кинематической картины
течения жидкости найдем уравнение линий то-
ка. С этой целью приравняем функцию тока
9
7
„ Рис. 3.11.9. Течение жидко-
ПОСТОЯННОИ величине, Т. е. СТИ, потенциал которого (р.—_—
=а(х2—у2)‚ где а>0 (тече-
ф : 2аху : СОПЗЁ’ ние внутри угла)
откуда находим
ху : сопзі.
Согласно этому уравнению линии тока представляют собой семейство
гипербол, асим-птотами которых являются координатные оси. Если кон-
станта с>О (в этом случае х>О, у>0 или х<0, у<О), то ветви гипер—
бол будут находиться во второй и четвертой четвертях; при с=О линии
тока совпадают с осями координат.
Таким образом, исследуемое течение располагается внутри прямого
угла (рис. 311.9). Для определения направления этого течения найдем
скорость в точке А, лежащей на оси х с координатами у=0‚ х>0:
УМ =2ах> О, УуА=О,
т. е. скорость в точке А направлена в положительную сторону оси х.
11.2]. Если, в частности, для несжимаемого потока существует потен-
циальная функция ср, то можно указать на следующую связь между нею
и функцией тока ср:
дф/дх = дф/ду, дср/ду =— дф/дх.
В соответствии с этим
_ді _ ЁЁ _1_ д_ср _ Ё."… _ - .
дх дх . ду ду _ 0. (3.11.67)
Последнее соотношение показывает, что каждая кривая семейства ср=
=-сопзі пересекается под прямым углом с любой кривой семейства ли—
ний ф=сопз’с; иначе говоря, линии тока ортогональны эквипотен-
циальным линиям.
11.22. Рассмотрим общий случай двухмерного (плоского или прост-
ранственного осесимметричного) течения сжимаемого газа. При этом
439
расход будем определять для плоского течения между двумя заданными
линиями тока ф=с1, ф=с2, а для осесимметричного — между двумя по-
верхностями вращения ф=сд, ф=02. Этот расход определяется как мас—
са жидкости, протекающая в единицу времени через контур АВ, и равен
криволинейному интегралу
3.
3 (виде 914, 45, (3.11.68)
А
где Ур,—составляющая скорости У, нормальная к элементу (1$ дуги
контура АВ, расположенного между заданными линиями тока; е=0
и 1—соответственно для плоского и осесимметричного потоков.
Величина И, может быть выражена через проекции Ух и И, на коор-
Дннатные линии:
дб,;шт У„ = У„ сов (п, х} + У). соз (п, у).
Используя известные выражения для косинусов углов,
образуемых нормалью с осями координат,
соз (12, х) : ду,/(із, соз (и, у) =— (іх/(із,
получим для расхода
В
‹г = [ (25…89 (и % — 143$) аз.
А сіз ' аз
Произведем здесь замену Ух и И, в соответствии с ра—
венствами (3.11.61). В результате получим
8
.(Ё—фау—і—і— .дісіх) ,
ау рг дх
казательству теоре- 91/8
мы Гельмгольца
о постоянстве откуда
вдоль вихревои
трубки ее интен-
В
сивности @ = 3‘ (2508 41]! = (25980193 "" ФА)-
А
В
Рис. 3.11.10. к до- @ = 5 (2…)Вр(
А \
Таким образом, расход газа через произвольную кривую АВ опреде-
ляется разностью значений функции тока в ее конечных точках и не за-
висит от формы кривой. В соответствии с этим расход жилкости, проте-
кающей между двумя линиями тока на всем их протяжении, есть вели-
чина постоянная.
11.23. Используя связь между потенциалом скоростей гр и функцией
тока 113 для несжимаемой жидкости (3.11.64), найдем значение функции
тока для заданного теч-ения:
Ф = 37-53—45! + от—
Подставляя сюда дср/дх=3(х2—у2)‚ получим
@= Миг—уйду + сосу,
откуда
“42 = у (Эй—512) + №)-
Произвольную функцию с(х) определяем путем сопоставления двух
значений дф/дх, одно из которых получаем путем дифференцирования
последнего выражения .по х, а другое — используя соотношение (3.11.64):
бху + ас,/(іх : бху.
440
В соответствии с этим с(х)=сопз’[. Таким образом, для заданного те-
чения
__ 3 2_ 2 __1_ ‚[
ф_у(х у)‚сопз.
Расход жидкости через некоторую кривую АВ определяется разно-
стью значений функции тока в ее конечных точках, т. е.
__ _ 3
О_фВ—трА_2 м /сек.
11.24. В теории вихревого движения жидкости интенсивность вихре—
вой трубки определяется как произведение вихря (о на площадь попереч-
ного сечения трубки о, нормального к ее оси. Для доказательства теоре-
мы Гельмгольца о постоянстве этой интенсивности вдоль трубки
воспользуемся выражением для дивергенции вектора угловой скорости
№6 : ды,/дх + ды,/ду + ды,/де. (3.11.69)
ПОДСТЗВИВ СЮДЭ вместо КОМПОНЭНТ ВИХРЯ (О ИХ СООТВВТСТВУЮЩИС выра—
ЖЭНИЯ, ПОЛУЧИМ
дім—Б: _1_ . _д_(дУ-.—__д№) +_‘_._д_(д1’х_ дУг‘з. +
2 дх ду дг 2 ду дг дх }
+ _1_ __д_ (% _ а) _
2 да дх ду
Произведя дифференцирование, можно убедиться, что
аш?) : 0. (3.11.70)
Это выражение действительно для любой точки пространства, занятого
жидкостью. Рассмотрим некоторый объем ее У, ограниченный поверх-
ностью 6. Согласно теореме Остроградского
;… (111; 5а17=-—Пш„ао‚ (3.11.71)
(… ($")
где (оп—составляющая вектора угловой скорости вихря по нормали
к поверхности 6. Так как оіу5=0‚ то, очевидно, интеграл
… ш„сіо : 0. (3.11.72)
(8)
Это означает, что сумма потоков вектора (1) («расходов») сквозь эле-
ментарные площадки равна нулю для любой замкнутой поверхности.
Отнесем равенство (3.11.72) к замкнутой поверхности, которая полу-
чится, если в вихревой трубке провести два произвольных поперечных
сечения (рис. 3.11.10):
0 : (Ы (‚›„аз : … ш„боксіобок + 51519…601—1— (Ы ш2псіо2. (3.11.73)
Интеграл, распространенный на боковую поверхность трубки, равен ну-
лю, так как по определению вихревой трубки вихревые линии целиком
лежат на ее поверхности, следовательно, здесь шп=0. Интегралы, рас-
пространенные на сечения (1) и (2), вычислим из предположения о том,
что ввиду малости этих поперечных сечений величины (в… и тп в пре-
делах каждого из них можно считать постоянными. В соответствии
сэтим
бок
55 (91:1 5101 : _Ю1 Ср 5) Юга (Юз : (9252,
(1) (2)
Где ОП:—(0111; Ш2=Ш2п —УГЛОВЬ1е СКОРОСТИ соответственно В первом
И втором СеЧЕНИЯХ‚ & 01, СЗЗ—площади ЭТИХ С6Ч8НИЙ, перпеНДИКУЛЯРНЬ1е
441
к векторам (01, (92. Отрицательный знак в выражении для первого интег-
рала поставлен потому, что (01 направлено в сторону, противоположную
внешней нормали к сечению (1). Уравнение (3.11.73) принимает вид
(01 61 = (02 02.
Так как сечения (1), (2) были взяты произвольно, то можно записать
в общем виде для Данного момента времени уравнение
соо : сопз’с,
которое применимо для всех сечений одной и той же трубки. Таким об—
разом, теорема Гельмгольца доказана.
Из теоремы Гельмгольца вытекает свойство вихревой трубки, заклю-
чающееся в том, что она не может внезапно оборваться или закончиться
острием. Последнее обусловлено тем, что при площади сечения трубки
о—› О угловая скорость вращения со стремилась бы в соответствии с тео-
ремой Гельмгольца к бесконечности, что физически нереально.
11.25. Для определения ротора скорости 9=гоіУ необходимо вы-
числить составляющие угловой скорости (ох, еду и (92:
(1) _ ] (дУ2 дУу> 1 дуг дву
х .— —— — —— _ : — . —— : — ,
2 ду дг 2 ду у (Р (2) _ 2Ё2 (х2+у2)
(1) _ 1 (д‘/„ дуг `) 1 дУ2 #226
2 д‘” С” 2 дх Уфе) — № (хг + и)
(02 : —1 (№ _ №) : Ё_
2 дх ду ,
Ротор скорости
Ё=гоП7 : 2(ш„і+шуі+шгіг),
следовательно, его модуль
№1 : 1/‹2‹о„›2 + (г…,дг + (гсвг? =
= у % 1/ +2 (хг + $) + ср (2) —— №№ + № .
(№) — № (хдд/2)
Найдем модуль вектора скорости:
/ 9
|У| : У УЁ+УЁ +У“ =Уіг2(х2+у2)+Ф(г)—21г2(х2 +112) .
В соответствии с этим
21+:
У снг) —2іг2 ‹х2 + уз)
Для определения направления вектора $2 найдем тангенсы углов на-
клона соответствующих составляющих векторов У и (о:
Уу/Ух : ——х/у; (ду/(ох : —х/у;
19| : |и.
& = ’“ . …__„ =.. ігх .
”2 УФ (г)—течении ’ "’г Уфе) —2№ ‹х2+у2› ’
к; _ _Уср‹г›—2іг2‹х2+у2› _ & : _Уср‹г›—2іг2‹х2+у2› _
Ух _ ігу ’ (ох ігу
На основании этих соотношений можно сделать вывод, что вектор 9
имеет то же направление, что и вектор скорости У.
442
11.26. Циркуляцией скорости по некоторому контуру К называют ли-
нейный интеграл
г = 57.413, (3.11.74)
(К)
в котором У-аЁЁ — скалярное произведение Двух векторов У и 418, равное
7—43= Ухсіх+Уусіу+ Угаіг. В безвихревом потоке циркуляцию можно вы-
разить через потенциал скоростей, поскольку Ухсіх—|—Уусіу—|—У2сіг=сіср‚
т. е.
г = 3 сіср : ср… _ %, (3.11.75)
(К)
где Фш, (рия—значения потенциальной функции на концах рассматри-
ваемого контура.
Рис. 3.11.11. К определению Рис. 3.11.12. Схема расчета скорости
циркуляции Г в потоке, по- гшдуцированной вихревым кольцом
тенциал которого ‹р=а6
Течение жидкости, заданное условиями задачи, является плоским,
установившимся и, так как дУу/дх=дУх/ду (т. е. (02:0), также потен-
циальным. При этом потенциал (р можно определить, вычислив скорость
потока
У=1/УЁ—і—УЁ =а/1/х2+у2=а/г‚
где г—полярный радиус точки (рис. 3.11.11). Угол 6 находится из соот-
ношения
У а: г
СО$6:_і: “!.—:і_
У г
[Ф
Отсюда следует, что вектор скорости У перпендикулярен полярному ра-
диусу точки. Таким образом,
1/20 у___у___і___ді=$,ЁЕ'Р_
’ ’ 3 г д г де
Интегрируя последнее уравнение, найдем
(р : ае.
Этому значению соответствует функция тока
ф : — а 111 г.
Отсюда можно найти уравнение линий тока: ф=—а1п г=с. Согласно
этому уравнению такие линии представляют собой окружности г=с
с центром в начале координат.
443
Найдем циркуляцию скорости:
В
Л .
Г=фаФ2ФВ——ФА=а-Ё— :—_
54
Если подсчитать величину этой циркуляции по любому замкнутому-'
контуру, охватывающему начало координат, то окажется, что
Г : "ъсіср :: (р„1 —срА : 2ла.
К
Отсюда следует, что а=Г/2:гс.
Физически этот случай, согласно теореме Стокса, соответствует на-
личию в особой точке (г=0) вихревой нити интенсивностью, равной
Рис. 3.11.13. Скорости, индуцируемые в первом вихре от
второго (Г1=Г2=Г)
циркуляции Г. При этом вне вихревой нити течение будет безвихревое.
11.27. Вихри, расположенные в потоке, вызывают в окружающем
пространстве дополнительную индуцированную скорость. В соответст-
вии с формулой Био—Савара элементарная величина индуцироват-тной
скорости в центре кольца (рис. 3.11.12)
аг) _ & _г’хаГ
451: 73
В данном случае модуль векторного произведения
} ха ?, : г зіп (г, Ь) аъ : г зіп (л;/2) сіЬ=г2сіос,
поэтому
Г дос
(10) = — . —
4л г
Полная скорость 2
П
Г
со : — дос : —Г— .
41пзг 2г
0
Подставляя данные, найдем
= 100/(2— 1) = 50 м/сек.
11.28. Случай 1-й (рис. 3.11.13). Рассмотрим скорость, которая со-
общается первому вихрю вторым:
Г . (2) Г
И? = — этос 1/1 : созос
" 2Л11 13 у [ 1
д 1
444
ИЛИ
У(21) __ Г і __ Гіі __ ГН __ _Г__ _
" зли, :, г…; 2л(1ъ2 + нг) 4лп ’
ЪА%)—— 1` 11 __ Гй ГН Г
!! _ ' _ _ _ _ — = _ -
25:11 11 „„а—глин 4лн
Индуцпрованная скорость от третьего вихря
3 3
1/11) = @, УЫ : Г/(2л2/1) : Г/(4лп).
Суммарные значения скорости от воздействия обоих вихрей:
С»
Г Г . Г Г
У =——'У. =——;———=—.
"1 4лп ’ ”1 43111 43111 211311
9
Г ’ 5
= . и
‹2)
1 из, , |
; ”из ‘
. . Г
2 А
& Уіг ’,_"!Ъ ] 0 Ь Ь ]
Ю * а:
2
Рис. 3.11.14. Движение системы трех пря— Рис. 3.11.15. Определение скорости, инду-
молинейных вихрей (Г,=Г2=Г3=Г) цируемой в (первом Г )вихре вторым
2= _ 1
Подставляя данные, найдем:
100 100
= — = 15 9 м/сек— У = —— = 318 м/сек.
"1 4п-0, ’ ’ ” 2л-0,5 ’
Рассмотрим скорости, индуцируемые во втором вихре:
от первого —
1/92) = — Г/(4л11), и}? = — Г/(4лИ);
от третьего —
1155) = — пили), 119 = Г/(4л/1).
Таким образом, суммарные составляющие скорости:
У„2 = — Г/(2лп), У).2 = 0.
Подставляя исходные данные, найдем
|Ух2| = 100/(2п-0‚5) = 31 ‚8 м/сек.
Для третьего вихря скорость Ухз будет такой, как У… для первого,
а вертикальная составляющая будет противоположна по знаку, т.е.
° Г 100
У =У =——= =15,9мсек-
”3 "1 4лп 4л-0‚5 / ’
Г 100
У =—У‚=———= =318мсек.
” ” зли 2п-0,5| ’ /
На рис. 3.11.14 показан характер движения вихрей в соответствии
с полученными значениями скорости.
Случай 2-й (рис. 3.11.15). Рассмотрим скорость, которая сообща-
ется первому вихрю:
445
от второго —-
от третьего —
ИЕ? : 0; 1153)— _ Г/(4лп).
Суммарные составляющие скорости:
Ух1 : — Г/ (4л/1); Уу1 : 0.
С учетом заданных значений Г и 11
|Ух1| : 100/(4п- 0,5) = 15,9 м/сек.
Рассмотрим. скорости, индуцируемые во втором вихре:
от первого —
115}; = _ Г/(4л/1), УЩ— _ _ Г/(4л/1);
от третьего —
1153) = _— Г/(4л/1), 1133) : Г/(4л/1).
Таким образом, суммарные составляющие:
У„2 : —— Г/(2п/1), У),2 : О.
Подставляя исходные данные, найдем
|Ух2| : 100/(2-3‚14.0,5) : 31,8 м/сек.
Рассмотрим скорости, индуцируемые в третьем вихре:
от первого —
7532 = 0, У}Ё’— _ — Г/(4лп);
от второго —
ИЁЬ — _ Г/(4л/1), 14,5%): Г/(4лп).
Соответствующие суммарные составляющие:
Уха : — Г/(4л/т), 113,3 : 0.
Согласно условиям
|Ух3| : 100/(4- 3,14-0‚5) : 15,9 м/сек.
О : @—
“7:2 33 Рис. 3.11.17. К определению потенциа-
ла скоростей (р и функции тока 1]; те—
Рис. 3.11.16. Движение системы трех пря- чения, индуцируемого парои прямоли—
молинейных вихрей неиных вихреи (Г1=Г2)
На рис. 3.11.16 показан характер Движения вихрей в соответствии
с полученными значениями скорости.
". 29. Случ а й 1- -й (рис. 3.11.17). Выберем точку А с координатами
х, у и вычислим в ней скорости, индуцируемые вихрями.
446
Первый вихрь сообщает этой точке скорости:
1/21) : Г зіп ос1 : Г(у/11) : Гу : Гу _
2311 2“11 гм? 2“ (362 + 5/2) ‚
У… ___ _Гсозсхд __ _ Г(х/11) : _ Гх : _ Гх
" гла гла ш? гл №№)
Соответствующие значения этих скоростей, индуцируемых вторым
вихрем:
у<2>=№=№=іа= Гу .
" гла щ щ гл [(п — х›2 + №1 ’
Уш _ Гсозос2 __ Г[(іъ—х)/!2] __ Г(іъ—х)
” 2л12 %% % [(п — х)2 + у2] '
Полные составляющие:
1 Г Г
15:11; ’+Уі2) : ——у— + у ;
2л (х2 + 5/2) 2л [(И — х)2 + №]
1 2 Гх Г н—х
2л (х2+у2) 2л [(Н—х)2+ у2] '
Известно, что дифференциал потенциальной функции
@=Ёщ+Ё@=щщ+щщ
дх ду
поэтому
_ Гу Гу
аф _ {гл ‹х2 + у2) + %: [(п — х›2 + и} ах +
| {_ ГХ ‚ Г (”!, —— х) (1
Т 2л (х2 + у?) Т % [(п _х)2 + И} у.
Это выражение перепишем в виде
Г д И д И
(1 = _— __ __ _ _ _ _
ф 2 [ (дх агс’сё х )сіх (ду агс’сё х )сіу +
2. у _д_ _у :
+ (дх агс’вд 11—х) (іх + (ду агс’сд & _)) ау]
_ і _ —__—‘/_ _у_
_ 2Л [ @ (агс’сз х ) + сі (агс’сё н_х>] .
Интегрируя, получим для потенциала скоростей
__Ё _ _у #
ср __ 2П ( агс’сд х + агс’сён_х) . (3.11.76)
Нетрудно заметить, что эта величина определяется в виде суммы потен—
циалов скоростей:
от первого вихря —
_ __Г_ _ё/_
‹р1 _ % агс’сё х (3.11.77)
и от второго вихря —
_ 3 у
% — % агсіе ‚14. (3.11.78)
Воспользуемся этим свойством наложения (суперпозиции) несжимае—
мых потоков, чтобы определить суммарную функцию тока
Ф = 1191 + %,
447
где чм, ф2—функции тока соответственно для первого и второго вихрей.
Функцию 1131 найдем следующим образбм. Из (3.11.77) следует, что
(131 = _ _ агеіёі : _і' 1›
х 2
ОТКУДЗ ПОЛНЗЯ СКОРОСТЬ
__ дф] __ 1 дФ1 __ Г
"’—Б; _Т._&>с_1__2л11°
Очевидно, что эта величина равна составляющей скорости, нормальной
к радиусу—вектору точки А. Радиальная компонента скорости в этой
точке Ут=0. Таким образом, для функции тока напишем
дф1/д!1 : — Уз = Г/ (251.11),
откуда
№1 : Г 111 11/2п. (3.11.79)
Соответственно для второго вихря, расположенного относительно
первого по другую сторону от точки А, найдем
% = — Г 1п12/2л. (3.11.80)
Таким образом, суммарная функция тока
_- __Г_ _ =_Г_ &
ф—ф1—і—ф2—2Л (1п!1 11112) % 1Г112
ИЛИ
_ _Д х2+у2
ф _ 21… 111 “(__—Н_х)2+у2. (3.11.81)
Чтобы получить семейство линий тока, примем тр равной некоторой
константе с1:
_ __ 3 Ш
"’— С” эл 1” Маи—№№
или
х2 + у2
__ = 02,
(И — ›с)2+у2
4ЛС1/Г
где 02=е
Рис. 3.11.18. К определению потенциала Рис. 3.11.19. Исследование движения прямо—
скоростей (р и функции тока 11) течения, линейного вихря, находящегося внутри дву—
индуцируемого парой прямолинейных гранного угла
вихрей (Г1= —Г2)
Случай 2-й (рис. 3.11.18). Определение функции тока и потенциа-
ла скоростей ведем с учетом полученных ранее результатов, принимая
во внимание, что вращение второго вихря происходит не по часовой
стрелке, как в первом случае, а в противоположном направлении. В со-
448
ОТВВТСТВИИ С ЭТИМ ДЛЯ ПОТВНЦИЗЛЗ СКОРОСТЗЙ СУММЗРНОГО ПОТОКЗ МОЖНО
написать
Г у у
: = —— —— агсі — агс’с — .
(Р Ф1+Ф2 2л( 8х + ёп—х)
Аналогично для функции тока получим
Ф=Ф1+ Ф2=—1П11+—21П12=2—211П1/1т-Нпу/(И—Х)2+у21—
11.30. Покажем, что исследование движения одиночного прямоли—
нейного вихря, находящегося внутри двугранного угла, образованного
взаимно перпендикулярными стенками, э к в и в а л е н т н о в г и д р о-
динамическом смысле рассмотрению взаимодейст-
вия этого вихря с тремя прямолинейными вихрями,
расположенными согласно схеме на рис. 3.11.19.
В заданной системе (вихрь — двугранный угол) и о о р д и н а т н ые
оси совпа да ю т с л и н и я м и тока и, следовательно, нормальные
к этим осям составляющие скорости равны нулю. Таким же свой-ством
будут обладать взаимно перпендикулярные прямые, проведенные в по-
токе, образованном системой из четырех вихрей (см. рис. 3.11.19). Рас-
смотрим, например, точку А на оси Оу. Нормальная -к этой оси составля-
ющая скорости, индуцируемая расположенными симметрично отно-си—
тельно нее парами вихрей «1—4» и «2—3», интенсивности которых
одинаковы, но противоположны по знаку, равна нулю. Аналогичный
результат получается при определении составляющих скоростей, инду-
цируемых парами вихрей «1—2» и «3—4», в точке В оси Ох.
Рассмотрим скорости, индуцируемые в первом вихре:
от второго —
У‹21)=—5%-51-=—і—; УЁЁ›=0;
от третьего — у а у
У‹з›_ _ і 1 _ у ___ Д _ у _
251: „дс—_, + у, у—х2 + у, 4л х2+у2 ’
Г 1 х Г х
из): . . = _ _
—2_л 2Ух2+у2 1/х2-1—у2 4л $2+у2’
от четвертого —
У‘4’=О, №=_ __‘_=_Г_
2л 2х 4:п:х '
Таким образом, суммарные составляющие скорости:
Г Г у Г х2
__і._х_ _Г_=і_.у_2
Уу1_ 4л )с2—1—у2 +4пх 4лх г2 ’ (3.11.83)
где г2=х2+у2.
Используя уравнения (3.11.82), (3.11.83) и учитывая, что У…=а'х/сіі‚
У…:сіу/сіі, можем написать:
сіх Г 262 сіу Г 1/2
'— _— .
,
@: 4пу г2
Исключая из последних соотношений время !, найдем уравнение траек—
тории вихря:
29—927 449
или
(іх/х3 —|— сіу/уз : О.
Интегрируя, получаем
1/х2 +1/у2 : с.
!!.31. Для решения задачи рассмотрим сначала движение пары вих-
рей в жидкости, покоящейся на бесконечности.
Скорости, индуцируемые в первом вихре,
г 1 г
=_.—_—_-__, 1/ :о.
"1 251 гп 4лн “
Скорости, индуцируемые во втором вихре,
У”2_2л % 451—11 319220
Следовательно, Ух1=Ух2, и пара вихрей в рассматриваемом случае не-
ремещается поступательно вдоль оси Ох со скоростью Ух= Г/(451/1).
В соответствии с условиями задачи (вихри должны оставаться не-
подвижными) скорость движения жидкости на бесконечности следует
положить равной по величине, но противоположной по знаку скорости
перемещения вихрей, т. е.
Уш : _ Г/(4ЛН).
Выберем на плоскости произвольную точку А(х‚ у) и найдем значение
функции тока в этой точке, пользуясь принципом суперпозиции. При
этом функцию тока невозмущенного набегающего потока определим по
известной скорости У…. '
—У°о —Г/’(451і1)=_д1|э°с/ду.
Интегрируя, найдем
Ч)… = ГИМН”)-
Затем вычислим другие составляющие функции тока. С этой целью
вначале найдем скорости, индуцируемые в данной точке А парой вих-
рей (рис. 3.11.20).
Для первого вихря —
у‹1›_і.$._”_у=_г_..”—у=_г_ Н—у .
А 2“ 11 11 ЁЛ [% 251: х2—|—(і1—у)2 ’
у‹1›_і._1_.і_і і_і. *
И 251 11- 11 251: 1% 251: х2+(п_у)г’
а для второго —
№2): Д. 1_."+у 23.”+у 1-3 ___Цу__.
"А 251: 12 [2 251: 1% 251: х2—|—(й—і—у)2 ’
у<22=_і._'_.і:_і.і=_і __х__
у 251: 12 13 251 1% 25: х2—|—(/1—і—у)‘—’
Суммарные составляющие скорости:
_ і . _Щ _|_ & Щ .
"А 251: 562—і—(й—у)2 ' 251 х2—|—(11—|—у)2 ’
у 21. х Г *’
Поскольку ф(х‚ у), то можем записать
= (джи/дх) ах + (аф/ду) ау
450
или, учитывая связь межлу функцией тока И составляющими скорости,
сіфв = — Уу ах + Ух сіу.
Заменим в этом выражении Ух и И, их значениями в рассматриваемой
точкеА:
Г 26 х
Шри _—2—пт_[х2+(И—у)2 _х2+(/1—|—у)2]ах+
2л х2—|— (іъ—у)2 х2—|—(11—|—у)2
или иначе
сир„ : {л— {аш [х2 + (и +у)2] —сі1п[х2 + (Н—у)2]}.
р
{\
6
№№; *0 а:
8
Рис. 3.11.20. К определению Рис. 3.11.21. Схема расчета
картины течения жидкости, комплексного потенциала тече-
получающегося в результате ния, создаваемого плоским то-
наложения на поступатель- чечным диполем
ный поток течения, индуци-
руемого парой прямолиней-
ных вихрей (Г1=—Г2).
В соответствии с этим функция тока течения, индуцируемого заданной
парой вихрей, имеет вид
Ч? _—Г—1пх—————2+(‚НГ!/)2
3 4л х2—|—(11—у)2
Функция тока суммарного течения, возникающего в результате
наложения поступательного потока на течение, индуцируемое парой
вихрей, определяется как сумма:
Г у Г х2 + (11 + у)2
чэ=чэоо+ чэ.‚=— - — +-—1п———.
4л 11 4л 162 + (11 — у)2
Чтобы получить семейство линий тока, примем ф=сопзі‚ т. е.
_у_ +1пх2+№+у>2
И х2 + (11 — у)2
11.32. Кинематическое изучение плоского течения несжимаемой
жидкости связано с отысканием комплексного по т е н ци а л а,
представляющего собой аналитическую функцию комплексного пере-
менного і(2)=\17=ср+і1р и дающего определенную систему линий тока
ф=сопзі и эквипотенциальных линий ср=сопз’с.
Покажем, что условия (3.11.64) являются необходимыми и достаточ-
ными для существования такого потенциала. Комплексный потенциал
№=і(г) является не просто функцией двух переменных х, у, а зависит
29* 45!
: сопз’с.
от комплексной переменной 2=х+іу. В соответствии с теорией комп-
лексного переменного функция “7 будет а н а л и т и ч е с к о й в некото-
рой области, если в Данной точке этой области производная (1117/42 одна
и та же для всех направлении, т. е. если выполняется условие
апа/аг : (ЛУ/(іх : (ЛУ/д (іу).
Таккакздесь
Ё=д№+іф> 293+іді
,
дх дх дх дх
а_к ___,—д‹ч>+іч>› _д3__ід3_
ду ду ду ду’
то, следовательно,
дср/дх = д\д/ду, дср/ду : —— дар/дх.
Это и есть известные условия Коши—Римана, которые выполняются
Для потенциальных течений несжимаемой жидкости и являются, как
было показано, необходимыми и достаточными условиями существова—
ния комплексного потенциала.
11.33. Диполем называют совокупность источника и стока (одинако—
вых интенсивностей), размещенных на бесконечно маЛом расстоянии
друг от друга.
Пусть в двух точках А и В расположены соответственно точечные
источник и сток с одинаковой интенсивностью (] (рис. 3.11.21). Суммар-
ный потенциал от них в некоторой точке Р
Ф =і(41пг—су1пг1) : і1п 1—’1———’).
2“ 255 Г1
Так как г1—г= 2ес056, а 1п(1—'1_’)%—’1—г , то
’1
:; 2всозб
Ф: __ ' __-
2л г
Имея в виду, что момент диполя М=с12в‚ получим
ср : — М сов 6/(2лг). (3.11.84)
Для функции тока имеем зависимость
]
‘Р='2—(Че—Ч91) = ію—ед.
л 2л
Рассматривая криволинейные треугольники АВД, РАД (см. рис.
3.11.21)‚)‚ можем найти
6 _ 61 = 28 $111 61/Г.
Следовательно,
2 . ° @ - @
ф=_а_ _ езт : Мэт . (3.11.85)
2л г 2лг
С учетом (3.11.84) и (3.11.85) комплексный потенциал диполя
. 0—' ' 9
ц7___(1_р_]_1____М_соз авт 2—91,
2л г 2лг
где 2=г (сове-Н зіпе).
11.34. Воспользуемся известными значениями потенциала скоростей
и функции тока поступательного потока:
Ф1 : УХ, ф] : уу
И ПОТОКЗ ОТ ДИПОЛЯЕ
М х М Н
(ре.—ЁЁ. х2_|_у2’ ф2——2Ё х2+у2д
452
В результате наложения этих двух потоков получим течение, для ко—
торого:
М х
Ф — Ф1 + (Ра — Ух + 275 Щ’ (3.11.86)
чэ=тр+тр=Уу—-’і4-.—у—. (31187)
‚ 1 2 2“ х2 +у2 - …
В соответствии с этим комплексный потенциал .
_ . _ , м _ 1 . __ м _ 1
Ц7(2)_ср—|—1ф—Ух(1—г2лу х_2+у2)+шу(1 № х—2+у2)'
Введем полярные координаты @, г= У'хг—Ъ—уі’ и обозначим
М/(2лУ)=гё. Тогда, принимая во внимание, что х=г-соз 6, у=г-$іп @,
получим
2
2 о
’о . ’ .
117: У (1 + 7) г-созе + 11/(1— _а) г-51п6.
Г Г
Так как 2=г(соз 6+ізіп 6)=геіди соз 6—і—5іп6=е—'59=г/2, то оконча-
тельно
117 = У (2 + гЁ/г).
"35. Для определения геометрической картины течения (гидроди-
намического спектра) воспользуемся функцией тока (3.11.87). Приняв
эту функцию постоянной с, получим уравнение семейства линий тока.
или, учитывая обозначение М/(2 пУ) :’(?»
@ [‹хг + к) — га] = в <% + у?)-
Из этого уравнения видно, что линии тока представляют собой кривые
третьего порЯДка. Рассмотрим одну из линий тока, которой соответству-
ет значение с=0. Уравнение этой линии тока
, 2 2 2 __
Уу(_х +у —г0) — О.
В свою очередь это уравнение распадается на два:
у=0 и х2+у2=г3.
Первое уравнение изображает ось х, а второе— окружность с центром
в начале координат и радиусом го. Таким образом, в рассматриваемом
сложном потоке имеется струйка, которая направляется из бесконечно—
сти вдоль оси х, а затем разветвляется, образуя окружность с указан—
ным радиусом го.
Из сказанного следует, что если в качестве такой окружности взять
контур кругового цилиндра радиуса го, то поток около него будет та—
ким, как сложное течение, получаемое от сложения поступательного по-
тока и диполя. Зная радиус цилиндра го и скорость потока У, можно
найти момент диполя М=2 лид, который помещается на оси цилиндра
для того, чтобы воспроизвести картину его обтекания.
11.36. Для определения расхода жидкости через заданную окруж—
ность и циркуляции Г по этой окружности необходимо найти распреде—
ление особых точек на плоскости (источников, стоков, диполей, вихре-
вых точек) для течения, характеризуемого комплексным потенциалом
“Це), т. е. тех точек, в которых скорость обращается в бесконечность.
Преобразуем (211.1) к следующему виду:
[17:0 +і)[1п(2+1)+1п(г——1)]+(2—3і)[1п(г+2)+1п(г—2)] +1/г,
453
или,иначе,
117: 1п(2+ 1) + 1г1(г— 1) + 21г1(2+2) +21п(г——2) +
+ і1п(г+ 1) + і1п(г—— 1)—3і1п(2 + 2)——3і1п(г—2) + 1/2. (3.11.88)
На основании (3.11.88) можно сделать вывод, что суммарное течение,
характеризуемое заданным потенциалом 11’/(2), получается в результа-
те наложения следующих простейших потоков:
1) источников [с коМплексными потенциалами 1п(г+1),1п(2—1)‚
1п(2 + 2)‚1г1(2—2)] в точках с координатами 2=1; 2; —1;1—2 (т. е.
расположенных на действительной оси в точках х=1; 2; ;;—2)
2) диполя (его комплексный потенциал 1/2; момент М=—2 л), раз—
мещенного в начале координат 2=0;
3) вихревых точек [комплексные потенциалы і1п(2+1), і1п(2—— 1),
—3і1п(2+2), —3і1п(2—2)], расположенных в точках 2=1; 2, ——1;
—2, т. е. там же, где и источники. Заданная окружность х2+у2= 9 охва—
тывает все эти особые точки, поскольку ее центр размещен в начале
координат, а радиус г=3.
Диполь как комбинация источника и стока равных интенсивностей
не дает расхода через окружность, и, следовательно, суммарный расход
будет определяться интенсивностями четырех источников. Интенсив-
ность каждого из них может быть установлена следующим образом.
Как известно, комплексный потенциал течения от источника интенсив-
ностью (] имеет вид
117 : (7-1п 2/(2313). (3.11.89)
ПО УСЛОВИЯМ 38Д8ЧИ, КОМПЛЭКСНЫЙ ПОТЭНЦИЗЛ, например ИСТОЧНИКЭ, рас-
110Л0Ж6НН0Г0 В ТОЧКЭ ‚?= +1, дается СООТНОШЭНИеМ
и, = 111 (г— 1). (3.11.90)
Сопоставляя (3.11.89) и (3.11.90), находим интенсивность этого источни-
ка а1=2л. Найденные аналогичным путем интенсивности источников,
расположенных в точках 2=—1; 2; ——2, равны соответственно 2п,
4 л, 4 л.
Таким образом, расход жидкости в единицу времени через задан-
ную окружность
(2'341 +42+ЧЗ+Ч4= 12“-
Для определения циркуляции скорости по этой окружности восполь—
зуемся теоремой Стокса, согласно которой величина этой циркуляции
по какому-либо контуру равна сумме напряжений вихрей, пронизываю—
щих поверхность, охватываемую этим контуром.
Следовательно, циркуляция по заданной окружности будет равна
сумме напряжений четырех вихревых точек, расположенных на коорди-
натной оси Ох в точках х=+1; —1; +2; ——2. Интенсивность (напряже-
ние) каждой из них определяется следующим образом. Комплексный по—
тенциал течения, создаваемого вихревой точкой, имеет вид
117 = — іГ—1пг/(2л). (3.11.91)
По условиям рассматриваемой задачи, комплексный потенциал течения,
создаваемого, например, вихревой точкой с координатой 2=+1,пред-
ставляется выражением
117’ : і1п(г— 1). (3.11.92)
Сопоставляя (3.11.91) и (3.11.92), найдем Г1=—2:п;. Аналогично можно
определить интенсивности Г вихревых точек с координатами 2=—1; 2;
—2 Эти интенсивности равны соответственно ——2 л, бл и бл. Таким
образом, циркуляция Г по окружности х2+у2=9 будет
г=Г1+Г2+ГЗ+Г4=8Л.
454
11.37. Запишем комплексный потенциал (2.112) в виде
Угё Г
11/(2) : 1/2 + ————_—1пг.
?. 2511
Каждое слагаемое в этом уравнении представляет собой комп-
., 2
лексныи потенциал более простого течения: 1171=У2; 1172=Уго/2,
1173=—Г1п 2/(2лі).
Рассмотрим течение, характеризуемое комплексным потенциалом
1171=ср1+іф1. Учитывая, что 2=х+іу, можем написать для этого по-
тенциала
“71 : (131+ 1.1131 : УФС + Ш)-
Следовательно,
Ф1 = Ух, 1191 = Уу. (3.11.93)
5) 9
Рис. 3.11.22. Виды течений жидкости
Уравнение линий тока для этого течения ф1=Уу=сопз1, т. е. комп-
лексный потенциал 171=У2‚ характеризует поступательный поток, ско-
рость которого У направлена вдоль оси Ох (рис. 3.11.22, а).
Комплексный потенциал 1172=Уг3/2 характеризует течение от ди-
поля, расположенного в начале координат. Момент этого диполя М=
=—2 ли? ис. 3.11.22, 6 . Потенциал ско остей и нкцию тока диполя
О
определяем следующим образом:
“&= (Рв + №2 = (УгЁ/г) (соз @ — і зіп @.
Следовательно,
2 = (ИЗ/г) 00811 % = — (ИЗ/г) зіп @. (3.11.94)
Наконец, комплексный потенциал “@=—Г 1п 2/(2лі) определяет цир-
куляционное течение, создаваемое вихревой точкой, расположенной
в начале координат (рис. 3.11.22‚в). Для нахождения соответствующего
потенциала скоростей и функции тока заменим в выражении 1173 вели-
чину 1п 2=геі9 :
1173 : (рз + ир, : 2—25 (1… + 59).
Таким образом,
% = — Г6/(2л)‚ фз = Г 1п г/(2л). (3.11.95)
Линии тока в данном случае [их уравнение ф3=Г1п г/(2 л) =сопз1]
представляют собой концентрические окружности с центром в начале
координат.
455
".:-38. Для определения потенциала скоростей и функции тока задан-
ного результирующего течения воспользуемся зависимостями
(З.П.9З)—:—(3.П.95). Складывая соответствующие выражения для по-
тенциалов скоростей (1319,3) и функций тока Фиша» получим:
ср : Уг - сов 6 + (ИЗ/г) сов В — ГО, (2513);
ф :: Уг—зіп 6 —— (ИЗ,-г) зіпе + Г 1пг-(2л).
Соответствующее уравнение линий тока имеет вид
Уг - зіп 6 — (ИЗ/г) зіп 6 + Г 1п г/(2л) : сопз’с.
Рассмотрим одну из линий тока, которой соответствует значение
сопзі=0. Поскольку известно, что линии тока в циркуляционном пото—
ке- представляют собой окружности г=сопз‘[, то член Г1пг/ (2 л) можно
исключить из рассмотрения. Исследуем уравнение
Уг—зіп @ — (ИЗ/г) зіп 6 = О.
Заменяя здесь г-зін6=у и учитывая, что г2=х2+у2, найдем
2
ТО _
Это уравнение распадается на два:
_ 2 2_ 2
у _ О и х + у _ го.
Первое из них представляет собой ось х, а второе — окружность с цент—
ром в начале координат и радиусом го. Таким образом, в рассматривае-
мом сложном течении жидкости есть струй-
ка, которая направляется из бесконечности
вдоль оси х, а затем разветвляется, образуя
окружность радиуса го. В соответствии со
сказанным исследуемое течение будет та-
ким же, как и течение, возникающее при об-
текании неподвижного цилиндра ц и р ку-
ляционно-поступательным пото-
ком. Причем такое течение, как следует из
проведенного анализа, может быть получе-
но в результате сложения поступательного
потока, диполя и циркуляционного потока
(вихря).
Для определения скорости в произволь-
ной точке потока и на обтекаемом контуре
воспользуемся выражением для потенциала
скоростеи
Ф : У (1 + гЁ/г2) г.соз @ — Г6/(2л).
Вычисляя производные по г и 5, найдем соответствующие скорости в
произвольной точке потока:
Рис. 3.11.23. Плоский точеч-
ный источник
Уг2
У, = (23 = Усоз9——20со5 6;
Г Г
2
у8=в=щ.дз=_у.$…е(1 +2 _1.
3 г до г2 2лг
На обтекаемом контуре (окружность радиуса г=го)
ср : 2Уг0 -со5 6 — ГВ,/(230.
456
На этом контуре радиальная скорость равна нулю и тангенциальная
составляющая определяет величину полной скорости:
У,=У=ді=і-д—Ф-=—2У-зіпе— Г .
дз го дб 2лг0
11.39. Скорость от источника (стока) в некоторой точке потока изме-
няется обратно пропорционально ее расстоянию от этого источника
(или стока). Действительно, расход жидкости через окружность радиу-
са г с центром в источнике (рис. 3.11.23) равен интенсивности этого
источника с], т. е. (1:2 лгУ. Отсюда У=а/(2л:г).
Обозначим через рн давление на бесконечности и, учитывая, что
здесь жидкость покоится (УН=0)‚ получим при помощи уравнения
Бернулли давление
рУЁ, рУ2 ‚ -2
р:рн_|_ ___—_—_ __ЁКі)_
2 2 ** 22лг
Отсюда следует, что по мере удаления от источника давление возра-
стает. При г—>О (в центре источника, так называемой особой точке)
скорость У—›00‚ давление р—›—оо. Бесконечные скорости и давления
в жидкости возникать не могут, поэтому особые точки обычно из рас-
смотрения исключаются.
30—927
|||. ОСНОВЫ дИНАМИКИ ЖИДКОСТИ И ГАЗА
"1.1. В модели невесомого газа пренебрегают массовой силой тяже-
сти, полагая Х = У=2=0‚ а одномерное движение характеризуется
тем, что параметры газа изменяются в каком-либо одном направлении,
например вдоль оси х. В соответствии с этим уравнение движения для
одномерного неустановившегося течения (д‘/х дйчЬО) невесомого сжи-
маемого газа (дім \ЁЬО) имеет вид
дух 1 др 4 „дн/‚‚
а: р дх 3 дх2
где
сіУх/сіі = дУх/д! + (дУх/дх) Ух.
Параметры плоского движения изменяются в двух направлениях
(например, вдоль осей х и у), а свойство несжимаемости жидкости ха—
рактеризуется значением дім У=0. Таким образом, уравнения движе-
ния для плоского установившегося (дУх/ді=дУу/ді=0) течения неве-
сомой жидкости будут следующими:
д-У*`—=——1——д—р+уА\/„ Ш=_—1 —д—р—|—уАУ,
аг р дх д: р ду У
где
2 2 2 2
№: эщщ, №45 Ш,
дх2 ду2 дх2 ду2
ду„ _ _д_У_х у дух у ду„ _ ду„ У ду„ У
д: дх ‘+ ду У’ дк дх ““+ ду ›"
"1.2. Преобразуем уравнение движения (2111.1) к цилиндриче-
с к и м к о о р д и н а т а м, используя формулы перехода х=х, у::
=г сову, г=г зіпу (рис. 3.111.1).
Составляющие вектора скорости У в цилиндрической системе осей
координат Ух, Ут=аЁг/аіг‚ Ут =г(с!у/сіі), а полная производная проекции
Ух, например, в декартовых координатах
дух : дУх +дУх Ух дУх дУх ..
а: д! дх ду дг "
Заменим в этом выражении декартовы координаты цилиндрическими.
Очевидно, первые два члена в правой части останутся прежними, а для
скоростей И, и У: можно записать:
__.д
У аи
Уу+
‹1 аг (1
_— а! (гсоз'у)— Ёсозт+г27(созу)—
=У,созу—г($іпу)% =У‚с05у—Ут ЗіП’Р:
(12 (1 . сіг . (і .
: _Ё _Е-(гзту) __ д—Ёзту—Ьгэфти—
: У,зіпу+г(созу)% =У, зіпу—і—Удсозу.
Для соответствующей замены переменных в производных дУх/ду
и дУх/дг воспользуемся формулами преобразования:
д_‘°. _ АЁЗ 'д_‘° ,
ду ди до
Где
__ дФ/ди д\Р/ди
. _ в :
(аф/ди) (дФ/до) __ (дф/до) (д\Р/ди) ’ (аф/до) (дФ/ди) _ (аф/ди) (дф/ди) ’
458
и
ЁЁ. (уд—°) ВЁ‘З
дг ди до
где
дФ/до В : дФ/ди
(дФ/ди) (аф/до) _— (дф/до) (аф/ди) ’ (дФ/до) (аф/ди) — (дф/ди) (дФ/до) '
В нашем случае: ш=і(у‚ 2) =Р}, у=ср(и, а) =г соз у, 2=1р(и, а) =
=г зіп у, и=г‚ 0='у.
Находим коэффициенты А, В, С, 0:
д (г зіп у)/ду
: = соз ;
[д (г соз у)/дг] [д (г зіп у)/ду] —[д (г сов у)/ду] [д (г зіп у)]дг] ’У
_ д(г зіпу)/дг : _зіпу _
[6 (г сов у)/ду] [д (г зіп у)/дг] — [д (г соз у)/дг] [д (г зіп у)/ду] г ’
: д (г соз у)]ду : зіп ’У'
[д (г зіп у)/дг][д (г сов у)/ду] — [д (г зіп у)/ду][д (г соз у)/дг] '
___ д (г соз у) /дг _ соз у
[д (г зіп у) /ду][д (г соз у) /дг] — [д (г зіп у)/дг][д (г соз у)/ду] г .
:!
.'.Е
2 0
Рис. 3111.1 Элементарная частица жилкости Рис. 3.1112. К выводу уравне-
в цилиндрической системе координат ния диффузии
Теперь производные дУх/ду и дУх/дг можно представить в следую-
щем виде:
дУ дУ зіп дУ дУ соз дУх
.‹=<С…)_ас_( ‘“, *, У"=($іпт) д_„+(_ ——"‚—
ду дг г ду дг г ' ду
С учетом полученных соотношений для Уу, У„ дух/ду и дУх/дг на-
пишем
а_Ух__ дух х эт? зд _
(и _— +д ххУ +[(созу)дд—Гх —(— , )д?](У‚созу
. . . С
—У?51пу) +д‚(з1пу)—Ё +( о”)
; дг г
и после несложных преобразований получим
&: +% х_Уі
аи дг дУх Ух г '
%?] (У, зіп ? + У? соз у)
Таким образом, уравнение движения в проекции на координатную ось х
цилиндрической системы осей координат будет следующим:
У 1
%+ %…, , а_ш‚_«›=____др__
д‘? г р дх
30°“ 459
АНЗЛОГИЧНО, заменив дпеременные В ураЁНЭНИЯХ'
дУ_ _д_У_„ , __удУУ дУд_,_‚У ЦЭЁх—У 1 др _
ах да Т дх + у+д р ду ’
дУ2_ дУ2 дУЗУ дУгУ _д_У2У __ 1 др
а: _ д: дх ”+ + "' р дг ’
получим их в цилиндрических координатах:
дУ дУ У У? 1 д
_. | ’У ‚_?. __ __‘Р_ :_ _р_ -
д: Т дх ”+д г г р дг ’
едкие… _гдхы дх щ… __; а_р
‚ х ‚ ‚ . _ .
д! д дг г г рг ду
111.3. Рассмотрим установившееся плоское течение газа и выделим
элементарную частицу в виде прямоугольного параллелепипеда со сто-
ронами ах, ау, 1, построенного около точки М(х, у), составляющие ско-
рости в которой равны Ух и Уу (рис. 3111.2).
Расход і-го компонента газа в направлении оси у через поверхность
$у=аЁх-1
т), : рУу сі сіх- 1 —|— СЗ,—д,. сіх— 1,
где сі — концентрация; @іду=р0і (дві/ду) — диффузионный поток че-
рез единицу площади; В,- — коэффициент диффузии.
Через поверхность 8; (см. рис. 3.1112) раСХОД этого компонента
ту + (№) ду : ту + д___(р"у сд сіхсіу + __д‘діду сіхсіу.
ду ду ду
Приток компонента в рассматриваемый объем через грани Бу и $$$, оче—
видно‚равен
д У с- д -
———-(р у ‘) сіхсіу +`О‘ду дуах.
ду ду
Аналогично находим приток і-го компонента в направлении оси х
через поверхности 8х и 8 :
д(р:;х Сі) дудх _|_—_ дЁідх ауах
где @ідх=рВі(дсі/дх). Общий приток этого компонента равен его мас—
се (шхим)іёхау-1, образующейся за счет химических реакций в единицу
времени, где (шхим)‚;——скорость образования компонента в единице
объема, кг/(мЗ-сек).
Составляя баланс общего притока и расхода за счет химических ре-
акций, получаем уравнение диффузии
д (рух С;) _|_ д (руу Сі) + дОідх _|__д@$ду
дх ду дх ду
111.4. Д и с с и п а ц и е й называется необратимый переход части ме-
ханической энергии в тепло, обусловленный силами трения. В соответ-
ствии с этим в уравнении (2.111.2) диссипативными являются все чле-
ны, СОДержащие коэффициент динамической вязкости, т. е.
”{1(Ё—Ё"Г+<%Ё121——№>2+2(Ёт+%”)}-
При малых скоростях движения газа работа сил трения невелика и в
уравнении энергии (2.1112) можно пренебречь диссипативными члена-
ми. Кроме того, при этом мала также работа сил давления (др/дітО),
: (Шхим)і '
460
а параметры ср, 7», р можно рассматривать постоянными. С учетом с-ка-
занного уравнение энергии может быть записано в виде
3 : і дп; (А 8гас1 Т).
(11 рср
"1.5. Неизвестными величинами для рассматриваемого случая тече—
ния будут две составляющие скорости Ух, Уу, давление р, плотность р
и температура Т. Соответствующая система уравнений состоит из двух
уравнений движения, а также уравнений неразрывности, состояния и
энергии.
Для невесомого сжимаемого невязкого (и, следовательно, нетепло-
проводного) газа, пренебрегая изменением удельных теплоемкостей от
температуры и не учитывая диффузии и излучения, эта система уравне-
ний запишется так:
сіУх___і Ё ду„ 1 др_
___— __
__ . ___...— .
(11? р дх
др,/611+ 9 (№ 17 = 0, р = МТ, р = Ард,
причем вследствие установившегося характера движения (дУх/ді=
=дУу/ді=0) производные:
№23… дву №№
д: дх " ду 3” аг дх
”1.6. Для адиабатического течения газа имеет место зависимость
р=Ард, где А—некоторая постоянная. Вычисляя дифференциал ар,
найдем сір=А1гр’*—1сір‚ откуда
ар Аіг _
_ __ ._ (і Ха 1 _
р Ё 1 (р )
В соответствии с этим можем записать для некоторой функции Р с
точностью до постоянного следующую зависимость:
[>;—55$ =_і’1рк—1
р іг—1 ’
Цухдд—У—і— ;),.У
или, заменяя А =р/рд,
іг р
__
:Пр
"1.7. Уравнение (2111.3) называется интегралом Лагранжа. Этот ин-
теграл устанавливает, что в п о т е и ц и а л ьн о м потоке полная энер-
гия единицы массы в д а н н ый мо м ен т в р е м ен и есть величина,
одинаковая для всех точек потока.
Физический смысл величины дер/д! в интеграле Лагранжа заключа-
ется в следующем. При потенциальном течении проекция вектора ско-
рости на некоторое напрзавление 5 составляет У8 =дф/д8, откуда потен-
циальная функция ср: [ Узсіз, где 31 и $2—координаты двух рассмат—
риваемых точек. Производная по времени от этой функции дф/ді=
= [2 (дУз/діиз. Здесь дУз/ді —— локальное ускорение, определяющее'не—
51
которую инерционную силу, а произведение (диз/дож, очевидно, соот—
ветствует работе этой силы на участке 45. Таким образом, величина
дер/д! определяет энергию единицы массы жидкости, обусловленную из—
менением скорости в данной точке с течением времени, т. е. неустано-
вившимся характером движения.
”1.8. Уравнение Лагранжа (2111.4) отражает условие, в соответст-
вии с которым при неустановившемся потенциальном течении невязкой
461
жидкости для двух любых точек потока разность величин, равных сум—
ме кинетической энергии (\”/2), а также потенциальных энергий давле-
ния [ 5 (ар/р)] и положения (П) единицы массы жидкой частицы равна
удельной работе инерционной силы, соответствующей локальному уско-
рению, на любом участке между этими точками.
Уравнение Лагранжа (2111.5) записано для потенциального неуста-
новившегося течения невесомого сжимаемого баротроп-
н о г о газа при а д и а б а т и ч е с к о м характере этого течения. Дей-
ствительно, для невесомой жидкости изменением потенциальной энер-
гии положения [1 можно пренебречь, а при адиабатическом характере
течения сжимаемого баротропного газа (см. задачу 111.6) ) (аЁр/р)=
=[іг/(іг—1)](р/р)=срТ=і. С учетом сказанного уравнение (2.111.5)
получается из более общего вида уравнения Лагранжа (2.1113).
111.9. Интеграл Эйлера для сжимаемой весомой жнцкости имеет вид
72/2 + ( ар/р + и = сопзъ (3111.1)
и устанавливает, что при потенциальном у с т а н о в и в ш е м с я дви—
жении жидкости полная энергия единицы массы является величиной по-
стоянной для всех точек потока. Из (3111.1) находится интеграл Эйле-
ра вида
1/2/2 + р/р : сопзі,
который является частным интегралом уравнения движения Эйлера для
установившегося потенциального течения невязкой н е с ж и м а е м о й
н е в есо м о й жидкости. Действительно, для несжимаемой и невесо-
мой жидкости ) (др/р) =р/р и изменением потенциальной энергии по—
ложения (] можно пренебречь.
Интеграл Эйлера является частным видом интеграла Лагранжа
(2.1113) и отличается от него лишь тем, что вследствие установившегося
характера движения дср/ді=0 и функция С(7‚‘) =сопз1, т. е. также не за-
висит от времени.
111.10. Перепишем уравнение движения (2.1116) в ином виде. Пола-
гая, что массовые силы имеют потенциал И, так что дП/дх=—Х‚
дС-'/ду=—У, дП/дг=—2, найдем, что вектор ускорения от массовых
сил (?=—{Даб 11.
Для баротропной среды сір/р равно некоторой функции Р и
(1 /р) ёгаб р : ёгасі Р : егаб … (сір7р)] .
В соответствии сэтим можем написать уравнение (2111.6) втаком
виде:
дгаа (\”/2) + (гот 17) >< 17 =— 8гас1 П — егаб [ { (ар/р)]
или
ёгаб [Уа/2 + { (ар/р) + П] =— (го’г 17) >< 17.
Рассмотрим вектор
а? : сіхі + сіуі + сігіг,
представляющий собой дугу некоторой кривой в потоке газа, и опреде—
лим скалярное произведение:
азёгасі (\”/2 + {ар/р + П) =— 618—1601 17) Х 17].
462
Левая часть уравнения будет равна полному дифференциалу трех-
члена в круглых скобках:
%%+&%+щ +%ечт%+чф+
+д%ч%%+ч%=%еч%+ч-
дг 2 р
Правая часть представляет собой скалярное произведение:
(із-[(го’с У) Х У] = [(го’с У) Х У], ‹іх + [(тот У)>< У]у ау + [(тот У) >< У], (12,
причем составляющие вектора [(го’с У)><У] вычисляются с помощью
определителя третьего порядка:
і ] 12
(гот 17) >< 17 : 2Б><У : 2ш„ .‘Зсоу 20), = 2 [(…у 1/2 _ („г\/у) ,- _,-
Ух Уу У2
+ (Юг Ух _ ых Уа) ] + ((ох уу _ Фу Ух) [21°
С учетом полученных выражений
—‹1 (% +)? + и) = 2 [(тут—сожрет + (югу,—сожгит—
+ (ш„ Уу —— (ву Ух) сіг],
причем соотношение в квадратных скобках можно записать в виде он—
ределителя третьего порядка:
№ & (іх сіу (12
_а5\__|_5`р _р+и/`)=2 (0х Фу (’);:
У Уу У2
Выясним условия, при которых величина У2/›.‘‚2—|— { (аЁр/рН—П будет
постоянной, что соответствует сохранению полной энергии единицы мас-
сы газа при установившемся движении. Очевидно, для этого необходи-
мо, чтобы записанный выше определитель равнялся нулю, а это, как из-
вестно, будет иметь место, если элементы какой-либо строки пропорцио—
нальны соответствующим элементам другой строки. Следовательно,
можем написать следующие зависимости:
Ё_ау_аг ах ау аг Ух У„ 1/2
, ,
,
Ух Уу У2 (вх Фу сог (ох а) сог
из которых первая является уравнением линий тока, вторая—уравне-
нием вихревых линий. Третья зависимость определяет условие, при ко—
тором линии тока и вихревые линии совпадают, т. е. ЖИДкая частица
вращается вокруг оси, вдоль которой происх0дит движение.
Таким образом, получаем три частных интеграла установившегося
вихревого движения:
—2 +ХЁЕ+П=СЬ Ё +5ЁО+П=СЪ
р 2 Р
\=
—2+5%+П=С3‚
соответствующие полученным трем условиям. Постоянные С1, С2, С3 оп-
ределяются для точек, находящихся соответственно на одной линии то-
ка или вихревой линии, или для точек в той области, где вихревые ли-
нии совпадают с линиями тока.
"1.11. С физической точки зрения уравнение Бернулли (2111.7)
представляет собой закон сохранения энергии применительно к изэнтро—
пическому течению жидкости по трубке тока.
463
Рассмотрим ВЫВОД этого уравнения, что позволит выяснить физиче—
ский смысл вх0дящих в него членов. Выделим в установившемся пото--
ке н евяз ко й жидкости трубку тока, ограниченную двумя сечения-
ми 1 и 2, нормальными к оси трубки (рис. 3.1113). Поскольку поверх—
ность трубки тока непроницаема для жидкости, масса жидкости, заклю-
ченная между этими сечениями, будет одна и та же в любой момент
времени. В соответствии
с этим через рассматри-
ваемые сечения за равные
промежутки времени про-
текают одинаковые массы
жидкости. Полагая, что
течение в трубке тока ади-
абатическое, используем
закон сохранения энер-
гии, согласно которому
полная энергия потока
жидкости, протекающей
через сечение ] за некото-
Рис. 3.1113. К выводу уравнения Бернулли: рое ВреМЯ’ равна ПОЛНОИ
энергии потока жидкости,
а—трубка тока; б—нивелирная плоскость .,
вытекающеи через сече-
ние 2 за то же время.
Пусть параметры жидкости в сечении характеризуются средними ве-
личинами скорости У, давления р, плотности р и т. д. За промежуток
времени Ай через сечение ] (площадью 81) протекает масса жидкости
р1У1А181, полная энергия которой равна сумме кинетической энергии
(91 1/1 А181) (УЁ/2), потенциальной энергии давления ‚01 81 1/1 А! =
= (р1/р1) (рд/113181), потенциальной энергии веса (р1У1А2‘81)3у1
(здесь И — нивелирная высота, причем ось у, показанная на рис. 3.1113,
направлена против действия силы тяжести; е—ускорение силы тяго-
тения), а также внутренней энергии (Ард/№181 (здесь 111 — внутренняя
энергия единицы массы газа). Таким образом, полная энергия, перено-
симая массой р1У1А2581 через сечение ] за время А!, равна
2
У .
(Р1У1А131) _; + __21 (Р1У1АЁ'31) + (Р1У1А181) 8% + (1103171131181)-
1
Очевидно, за то же время А! через сечение 2 пройдет масса жидко-
сти р2У2А182=р1У1Аі$Ь полная энергия которой
1,2
(92У2А182) 2—2 + % (53217213182) + (9272А152)8у2 + “2 (927213132)-
2
Согласно закону сохранения энергии
2
"? рт 72 %
Т+Ё+П1+ву1=?+р—+и2+уу2
1 2
или, поскольку сечения ] и 2 были выбраны произвольно,
1/2/2 + р/р + (1 + ву : сопз’с.
Каждый член в это-м уравнении представляет, как видно из приведенно-
го вывода, соответствующий вид энергии единицы массы газа: 1/2/2—
кинетическая энергия; р/р—потенциальная энергия давления; 11——
внутренняя энергия и ву —— потенциальная энергия веса.
1/13 термодинамики известно, что энтальпия единицы массы газа
і= Н+р/р. Таким образом, уравнение Бернулли может быть записано
и так: ,
1/2/2 + і + зу = сопз’г. (3.1112)
464
Внутренняя энергия несжимаемой жидкости при условии, что тече-
ние происходит без подвода или отв0да тепла, является постоянной ве-
личиной. Таким образом, в уравнении Бернулли (2111.7) для н е с ж и-
м а е м о й весомой жидкости можно ввести внутреннюю энергию []
единицы массы в константу и записать уравнение в таком виде:
112/2 + р/р —|— ву : сопз‘с. (3111.3)
Уравнение Бернулли (3.1112) для сжимаемого н е в е с о м о г 0 га-
за запишется так:
№,? —|— і : сопз‘г, (З.111.4)
поскольку в этом случае можно пренебречь изменением потенциальной
энергии зу.
111.12. Параметром подобия при гидроиспытаниях является число
Фруда Рг= У2/(Ь3), равное отношению величины У2/Ь‚ обусловленной
влиянием инерционных сил, к ускорению силы тяжести 3 и характеризу—
ющее влияние веса жидкости на сопротивление тела.
В соответствии с правилом подобия по числу Фруда скорости модели
и корабля относятся как корни квадратные из отношения их линейных
размеров. Действительно, из равенства УЁ/(ЕЬН)=УЁ/(8Ьм) (Ргн=
=Ргм) следует, что ИЧП/Н: УЬМ/Ьн. Поцставляя в эту формулу ис-
ходные данные, определяем скорость модели:
Ум : 141/3/160 : 1,92 м/сек.
111.13. Определим коэффициент динамической вязкости при задан
ной в условии температуре Т=298 К, используя формулу
‚и = но (от”? (3111.5)
в которой Т0=288 К и мо=1,82- 10—6 кГ-сек/м2.
Подставляя данные, получим
„ = 1,82- 10—6 (298‚‚і288)0'76 : 1,87- 10—6 кГ- сек,/м2.
По уравнению состояния, принимая К=287 дж/(кг—град) и 1 атм=
= 1,033- 104 кГ/м2‚ находим плотность воздуха:
0-1 033.104
р : _р— : 2—’——— : 2,42 кГ—сек2/м4‚
КТ 287-298
а затем коэффициент кинематической вязкости модельного потока:
_в. —5 2
ум : рь/р : 1,87- 10 ‚.,/2,42 : 0,0775- 10 м ‚’сек.
Из условия равенства чисел Рейнольдса (КеН=КеМ) находим
[н ”м
Ум : _— ' _ Уи
[м ”и
или, подставляя данные и принимая при нормальных условиях коэффи—
циент кинематической вязкости ун=1,46-10—5 м2/сек,
УМ : 10 № У„ : 0,527Ун.
1,46-10_Ё
Для диапазона скоростей летательного аппарата УН=(83,5—:-
+167) м/сек получаем
Ум : 0,527 (83,5 + 167) = (44 + 88) м/сек.
111.14. Из равенства чисел Рейнольдса, соответствующих течениям
около натуры и модели (НеН=КеМ), нахоцим
465
Полагая ун=1‚46- 10—5 м2/сек, после подстановки данных найдем
„ = № 1,46- 10—5 = 5,44—10—7 м2/сек.
83,5-1‚2
Используя соотношения ум=ц/р и (3111.5), определим плотность мо-
дельного воздушного потока в аэродинамической трубе:
ТТ0‚76
:… / „› _
”м
9
Соответствующее давление
0,76
Р ___ РКТ : По (Т/То) КТ.
\’м
Подставляя данные [К=287 дж/(кг-град)], находим
_ _1 ,82-10'6 (303/288)0°76 287-303
= 29,9.104 кГ/м2.
5,44-10—?
111.15. Число Маха в рабочей части сверхзвуковой трубы
м = У/а=У/п/ мет. (3111.6)
Полагая Ь=ср/с„=1,4‚ К=287 дж/(кг-град), получим при Т=223 К
М=450/1/1‚4-287-223 = 1,50.
Как следует из (3.1116), повышение температуры увеличивает ско—
рость звука и уменьшает число Маха. В частности, при Т=288 К
М=450/у’1‚4.287.288 = 1,32.
111.16. При изотермическом увеличении давления в резервуаре мак-
симальная скорость истечения не изменится, поскольку в соответствии
с формулой Ушах= 1/2/гКТо/(іг—1) она определяется температурой га-
за То в этом резервуаре.
Скорость Ушах представляет собой ту предельную скорость, которую
получил бы движущийся газ при условии, что все его теплодержание
перешло в кинетическую энергию. Действительно, из уравнения Бер-
нулли (3.1114) находим, что при і=0 скорость У= Ушах. Поскольку ве-
личине і=0 соответствуют значения р=р=0, при которых возникает
абсолютный вакуум, очевидно, что эта скорость Ушах не может быть до-
стигнута реальным газом.
111.17. Максимальная скорость определяется по формуле Уши:
= 1/2ЫЧТ0/(1г—1)‚ в которой іг=ср/с„=1‚4‚ Е=287 дж/(кг-град),
а Т0=300 КЗ
;- ушах : 1/2. 1,4.287.300/(1‚4 — 1) = 780 м/сек.
111.18. Запишем уравнение Бернулли в виде
У2/2—і—а2/(іг—1) = Инди/2.
Так как согласно условию У= ушах/2, то из этого уравнения скорость
звука
.;. .” а=1/„„,х “%(Ё_1)=Утах “% (1,4—1) =0‚387У…„.
Соответствующее число Маха
4-66
а ОТНОСИТЕЛЬНЗЯ СКОРОСТЬ
ж=_У_=У…ах_1 _1_ /іг—|—_1__1 і___›4+1_123
а* 2а* Ъ— "ред: 2 іг—і _ 2 1,4—1
Для іг=ср/с„=1‚ 4 и К= 287 дж/(кг- -град) при То= 288 К:
Ут8х21/Ё—2 _Т—1КТ0=}/12——41’4 287288=762м/сек;
а : 0,387-762 : 285 м/сек.
"1.19. Зависимость Между М и ?» найдем, воспользовавшись урав-
нением Бернулли
ЁЁ а2 _ Аг +1
2 !г— 1 2 (іг _ 1)
Умножая члены этого уравнения на 2/1”, получаем
1 1
1 + (!г—1)М2/2_ (мим/(даму
_ зим-гп
м _ !_‚/1_‹Ё_1№/(Ё+1). (3111.8)
После подстановки значений ‚&= 1,2 и Ж=2,2 находим
м : \/ 2—2‚22/‹1‚4+ 1) = 2,80.
_ 1—(1‚4—1)2‚22/(1,4+1)
”1.20. Воспользуемся формулой для определения плотности в изэн-
ТРОПИЧЕСКОМ ПОТОКЗ
іг — 1 1Нда—1)
%—(1+—м) .
Разлагая в ряд по степеням МЁО правую часть записанного выражения
и ограничиваясь двумя первыми членами разложения, получаем
рО/роо : 1 + МЭО/2,
откуда относительное изменение плотности
Ар/рш = (ро—ресурс, = Ма,/2.
Когда в расчетах принимают плотность величиной постоянной (Ар:
=О), то, очевидно, допускают ошибку, равную №200 /2. В частности, при
У… =100 м/сек и 6100 =341 м/сек эта ошибка будет составлять
1002/(3412-2) =0,043 (4,3% ).
НЕЕ]. Воспользуемсря газодинамической функцией
ь—1МЬ/иео
%: =<1+— М>
Принимая во внимание, что при Моо<1 величина [(Ё—і)МЁо/2]<1‚
разложим функцию ‚пО/роо в биноминальный ряд по степеням МЕС:
&=1 ім2‘ім4фё__(2_
р… + 2 “+ 8 °° ' 48
Отсюда, имея в виду, что скоростной напор рооУЁо/2=Агр°°МЁо/2, по-
лучим выражение для коэффициента давления в точке полного тормо-
жения
*2
(3111.7)
откуда
!г)м‹:о__+
=_=-1
Ро рооУЁО/2 +—— °°+—М… +”
467
При Мо., =0‚8 и іг=ср/с„= 1,4 (для воздуха)
_ 082 2——14
_ + ‚_ _4_ ' _ 84 _ 7_
111.22. Критическая скорость звука определяется по формуле а*=
=1/ 2ЁКТо/(Ё—і-1), а температура торможения—по формуле То:
=Тх [1+ (іг—1)М2°о/2]. Таким образом,
,._ '2/е ь—і 2\
а _`/—Ё+1КТ00(1+—2 М.,.)-
Подставляя значения 1е=1,4‚ К=287 дж/(кг-град), ТОО =223 К и М… =
=1‚5, нахолим
„*= \/ “*4 287—223(1+ЩГ—11‚52)=328м/сек.
1,4—|—1 2
111.23. Из соотношения
‚!%—1 2-
Т„._Т„<1 Т_2 ма)
Ма: 2 СТО—Та,
ь—1 Та
где ТО и Та— температуры соответственно в форкамере и в рабочей ча-
сти аэродинамической трубы. Используя зависимость аа,: Ъ/ЫЧТЦ,
определяем скорость потока в рабочей части трубы:
НЭХОДИМ
ЪЪ:=4“ааа::_Ъ/ЪЁЁЧ]ЗПЪ_;ТЫ '
Принимая температуру воздуха в форкамере при отсутствии подогрева
равной 288 К, Ё=ср/с„=1‚4‚ 12:287 дж/(кг—град) и Та=78 К, находим
1,4—1
111.24. Разрешая относительно ?» соотношение (3111.7), получаем
и: “+ “м2” . (3111.9)
1—|—(іг— име/2
Из сравнения (3.1118) и (3.1119) находим, что
12—1 ! ‚де,—1 —1
— — №: 1 ——-— №
1 + 2 к ‚… )
У, : 1/ 2'1’4 287 (288—78) : 650 м/сек.
Таким образом, можно записать: _
_р_ = <] + іг—1м2)—іг/(іг—1): (1 _!е —1№\)/г/‹іе—1›_ (3111.10)
’
Ро 2 Ё+1
р іг—1 `—1/‹/а—1› ' [да—1 ние—п ‚
_: _М2 : —-_-?\‘2 ' '3. .11
.Он) <1> ›
Т іе—1 \—1 іг—1 \
_: 1 _М2 : 1———9ь2 _ З.111.12
То ( + 2 ,) 1 іг+1 ) ( )
111.25. Воспользовавшись формулами (3.111.10)+(3.111.12), получен-
ными в задаче 111.24, имеем для одного потока:
_ \іг/(іг—1)
& = (1 —Ё 17%) ;
Ро 113+ 1 ‚
468
& : (1 _іг—1жс1з)1/(іг—1)_
Ро Ё+1 ,
е = (1— >
ТО іг+1
а для Другого потока:
& =<1_Ё—1?\ё)іг/(іг—1);
Ро Ё+1
р., ( іг—1 \1/(12—1)
ро іг—і—1
Т_2=(1—Ё—1ЖЁ).
То іг—|—1
Отсюда в соответствии с условием, что для обоих потоков параметры
торможения одинаковы, найдем:
Р_1 : Г1—(1г—1Пё/(1гдг „№№—1)
102” _1—(Ё—1)ЖЁ/(Ь+1) _,
& : Г 1—(Ё—1)ЖЁ/(Ь+1)”1/‹к_1›
02 __1—(ь—1)›„3__і‹1е + 1) 3
т, [1—‹ё—1›жё/‹Ь+1›]
‚
‚
Та _ 1—(іг—1)ЖЁ/(іг+1)
Полученные соотношения могут быть использованы также для ис-
следования одного потока, в двух точках которого скорости соответст-
венно равны М и №.
111.26. Из соотношений Ж1=У1/а* и №: У2/а*‚ а также выражения
(3.1119) находим, учитывая, что М=1 (при М1=1), отношение скоро-
стей в сечениях:
У—2=7„2_—_-1/ (іг+1)МЁ/2 _\/ (1‚4+1)22/2 —163
У; 1+(ь—1)м3/2 _ 1+(1‚4—1)22/2_ ’ '
Воспользовавшись этим результатом, найдем, что У? =УЁ/2‚66. Для
плотностей … и № соответственно в сечениях ] и 2 имеем зависимости:
Ь—12—1/(Ь—1)
‚
іе— 1 —1/(Ё—-1)
92:90:ро(1+_2м2)
из которых, учитывая, что м1: 1, М2=2, &= 1,4, нахоцим
1 1,4—1 22 2 1/(1.4—1)
+ ( ) / ] = 2,75 92.
1+ (1,4—1)/2
Кинетическая энергия единицы объема воздуха (р1УЁ/2) в сечении
! с учетом полученных соотношений равна
‘2 2 2
р У 2,75р У ‚ р У
11: 2221,0522.
2 2-2‚66
Таким образом, величина этой энергии при движении газа от сечения,
где М]: 1, к сечению, где М2=2, уменьшается на 3%.
111.27. Воспользовавшись уравнением состояния, определяем плот—
ность, приняв К=287 дж/(кг—град):
Ро : ро/(КТО) : 1 - 104/(287о 1000) : 0,0348 кГ —сек2/м4.
91:92[
469
Критические параметры р*, р*, Т* определяются из соотношений
(3.111.10)-:—(3.Н1.12) для М=Ж=1:
*: 2 іг/(іг—1) *: 2 ‘1/(іг—1) *_ 2 \
” “(жен) ") р°(/г+1) ’Т_Т°(Ь+1)‘
При іг=1‚4 из этих формул следует, что р*=0,528 ро, р*=0‚634 ро,
Т* =0,833 То.
Подставляя значения ро, ро и То, находим:
\’‚М/СВК р* = 0,528] : 0,528 КГ/См2;
\5 р* = 0,634-0,0348 : 0,0221 кГ-сек2/м4;
' Т* = 0,833— 1000 = 833 К.
ШП
Рис. 3111.4. Кривая распределения
вдоль профиля крыла скорости У и
поперечного сечения $ воображаемой
струйки несжимаемой жидкости. обте-
кающей этот профиль
"1.28. Запишем уравнение Бернулли для несжимаемой ЖИДКОСТИ
для двух сечений струйки, обтекающей профиль: одно из этих сечений
расположено на бесконечности, где давление Р… и скорость Ут, а дру-
гое — в произвольном месте около профиля, где давление р и скорость У:
роо УЗО/2 + роо : роо У2/2 + р.
Из этого уравнения находим скорость:
У = Уш Ъ/Ттрі
где ;;: (р—роо)/(р°° УЗО/2) — коэффициент давления на профиле в рас-
сматриваемой точке. Пользуясь этой формулой и кривой распределения
р (см. рис. 2111.1), можно_построить зависимость У=і(_х) (рис. 3.1114).
В частности, для точек А(рА=1‚0)‚ С(рс=—0,5) и В(рв=0‚6) на кри-
вой рис. 2111.1 имеем соответственно (см. рис 3111.4): УА=0; Ус=
=У°°1/1—(—О‚5)=1‚22-У…=1‚22-100=122 м/сек и УВ=У…1/1—0,6=
=0,632- Уоо =0‚632— 100=63,2 м/сек.
Из уравнения расхода для струйки У$=сопзі находим, что площадь
3 поперечного сечения струйки обратно пропорциональна величине ско-
рости в этом сечении (см. рис. 3.1114).
"1.29. Определяем число Маха в рабочей части трубы, полагая &=
=ср/с„= 1,4 и К=287 дж/(кг-град):
У У
мш____… : … = 200
0… У “ЧТ… У 1,4-287—288
: 0,59.
Зная коэффициент давления Б=2(р—р°о)/(ігр°° МЭО), находим абсо-
лютную величину давления:
іе— , іг— ,
р=рт+7рр„мё=р…(1 тури.
После подстановки значений Ё=1,4, роо =1 кГ/см2‚—р=_0‚3 и мы:
=0‚59 находим
р = 1 (1 Ц?“ 0,3- 0,592) = 0,926 кГ/см”.
470
Воспользовавшись соотношением р/р„° =л(М)/л(М°о), находим
функцию
0,926
1
л (М) = рі и (мы) = 0,790 = 0,732.
Здесь величина л(М…)=О,790 найдена из табл. 9 [13] по Моо=0‚59.
По значению и(М) =О‚732 из той же таблицы находим М=0‚68. Далее
определяем плотность и температуру:
в (мес,) КТОС 8(М°о) 287—288-0‚845
_ т(М) _ 0,915 :
Т _ тоо чт…) _ 288 ___0’935 282 К.
В записанных выражениях 8 и 1: определяются по соответствующим зна—
чениям чисел Маха из табл. 9 [13].
Подсчитываем скорость звука, скорость потока и энтальпию:
а = имет = 1/1,4-287-282 = 336 м/сек;
У = М а : 0,68-336 : 228 м/сек;
і = 3— КТ: 1’4 287-282 = 28,5-104 дж/кг.
іг—1 1,4—1
"1.30. Воспользуемся следующей формулой для определения весо-
вого секундного расхода через сопло:
. __ [2/`(/г +1)1“‘*—“ 1/2Ё/(Ё+1)Р0 8*8
У кто
ОТКУДЗ ПЛОЩЗДЬ КРИТИЧВСКОГО СЁЧВНИЯ СОПЛЗ
о' уп:
ро [тент/““_” ужо—+ 1)“ в '
Подставляя сюда значения С=1 кГ/сек, К=287 дж/(кг—град), Т0=
=288 К, р0=6 кГ/см2‚ 12:1‚4 и 3=9‚81 м/сек2‚ находим
,
$*=
$$ : 11/287288
6 [2/(1 ‚4 +1)11/<1›4—1>1/2—1‚4/(1‚4 + 1) 9,81
= 7,1 см”.
"1.31. При расчетном режиме истечения давление на срезе сопла
(ра,) равно наружному давлению (рн). Примем, что 0н=ра=1 кГ/см2.
Скорость истечения [для іг=1‚4‚ К=287 дж/(кг-град) и Т0=288 К]
іг—1
т=›/%щ[ —<р—°>п=
Ро
1,4—1
= \/ 2'1'4 287—288[1 — (і) “ ] =598 м/сек.
1,4—1 30
Воспользовавшись соотношениями Та=Т0 [1—(12—1)?»3/(іе+1)]‚ ?„а :
=Уа/а* и а"2 =2ЁКТО/(іе—Н), устанавливаем, что
іг—1 "Ё )
471
Аналогично,
используя формулу Ра :ро [1—(1г—1)7„Ё/(Ё+1)]1 №"),
находим
‚?,—1 1,2 1/(12—1)
: 1 _ _ ‚ ___“_
Ра, РО( 2]? КТО)
или с учетом уравнения состояния
9 ___… &(1 __’г___1 _ _У‘Ёу/(Ё—Ц
" КТО % кто '
Подставляя данные, определяем:
Та=288 (1 —1’4—' . 5982 )=107К;
2-1‚4 287-288
30—104
р _ (1 1,4—1 5982 )1/‹1.4—1›
“ 287-288 21,4 287-288
"1.32. Используя соотношения ‚по:-ра [1+(Ё—1)М3/2]д/1’*—1), Т
=Та [1—|— (із—1) МСЗ/2] и Ма =Иа/аа = Уа/у/ЫЗТШ находим:
: 0,337 КГ -сек2/м4.
Ь—1 1,2 іг/(іг—1)
: 1 _. “ -
ро ра( _|_ 2 ддт“) ›
іг—1 1/3
Т =Т 1 _. .
° “( + 2 тета)
Принимая рн=ра=1 кГ/см2 (нормальные атмосферные
условия),
іг=1‚4, К=287 дж/(кг-град) и подставляя данные, получим:
1 4 ——1 8002 1,4/(1.4—1)
=1(1 ’ - =26,6 Г 2-
р" \ + 2 1,4-287-203) к ]дм’
1 4—1 8002
= 3 ’ . = 5 .
Т“ 20 (1 + 2 1,4-287-203) ШК
Из уравнения состояния находим плотность:
___ро_ 26,6-104
9“ КТО 287-527
: 1,83 кГ—сек2/м4.
"1.33. По значению газодинамической функции %(Ма)=$*/$а=0,2
из табл. 9 [13] для Ё=1‚4 находим: Ма=3‚16; 7…=2‚00; ла(Ма)=
=О‚О214; еа(Ма) =О‚0642; та(Ма) =О,333. Теперь определяем:
Та : ТО т„ (ма) : 293—0333 : 97,5 к;
_ _р&_ : 1
р“ _ ными) 0,0214
& _4,68-1О4
КТО _ 287-293
р, : ро в, (ма) : 0,565-0,0642 : 0,0364 кГ-сек2/м4;
: 4,68 кГ/см2;
р0 :: = 0,565 кГ-сек2/м4;
У, = Мааа : машет„ : 3,16 1/1,4-287-97,5 :. 198 м/сек.
Весовой расход газа через сопло
@ : р„ назад : 0,0364-198-0‚16-9‚81 : 11,3 кГ/сек.
"1.34. По заданным геометрическим размерам строим контур сопла,
как это показано на рис. 3111.5. При расчете изэнтропического течения
472
газа-'по такому соплу используем таблицы газодинамических функций
[13]. Порядок расчета следующий:
1. Зная функцию аі=і(х) по условию, определяем для каждого се-
чения сопла газодинамическую функцию &=&/№, где № —диаметр кри—
тического сечения.
2. По найденным значениям & из таблиц при Ё=1‚2 для дозвуковой
и сверхзвуковой областей течения определяем соответствующие значе-
ния газодинамических функций :п:(М)=р/ро‚ 1:(М)=Т/То‚ 8(М)=р/ро‚
а также параметров газа: давления р=рол(М); температуры Т=
=Т01:(М); плотности р=рое(М) (или р=р/КТ); числа Маха М(Е); от-
носительной скорости мг;); скорости потока У°=7ш*=?\‚ 1/2ЁКТ0/ (із—Н);
скорости звука а=У/М.
Результаты проведенного _ _33 _
расчета представлены в табл. 7-
3111.1.
По данным табл. З.1П.1 на
рис. 3111.6 построены графики
изменения параметров газа
вдоль сопла по сечениям, ука-
занным на рис. 3111.5.
Поскольку найденное дав-
ление на срезе сопла ра=
д2/2
(\:
%
ГЦ
Рис. 3.1115. Контур сверхзвукового сопла
игзцэь‘ 7`
=0‚250 кГ/см2 больше наружного давления ры=4‚1—10—2 кГ/см2‚ сопло
работает в режиме недорасширения.
Весовой расход газа через сопло
. які*? „0,022
6 = р*а*$*3 : р*а* @ = 0,256— 1050 9,81 = 0,829 кГ/сек.
111.35. Определяем вначале скорость звука диссоциированного воз-
духа на выходе сопла:
аа : Уа/Ма : 8000/5 = 1600 м/сек.
Из диаграммы а—р—З—і [17] по значениям аа=1600 м/сек и ра:
=0‚01 кГ/см2 нах0дим на выходе сопла энтальпию іа=20‚4- 106 ‚и?/сек?
и энтропию &= 15,5- 103 м2/(сек2-град).
"3
та,
шею?-щ? к дкГ/смг
09 У, мч -
М/сек М/сек
з-заии- ‚3- р „0
800— #7 ца- р_- _ \/
2-2000-3— 2-30- ‘ /‚ м
400- 2- 20_- _- Т
" 1 - 1000 — 1 _
1- ю— " _
и
о , м . Ш
1 2 53 211 0 | [7 8 9 № сечений
Рис. 3111.6. Графики изменения параметров газа: давления р,
плотности р, температуры Т, скорости У, числа Маха М и скоро-
с'ти звука а вдоль сопла
473
. __ . 2 _
Затем по уравнению 10 —-ъа+Уа/2 определяем энтальпию тормо
жения:
82.106
іо = 20,4-106 + : 52,4-106 мЗ/сек2.
Полагая течение воздуха в сопле изэнтропическим [$о=$а=15‚5><
Х103м2/(сек2-град)]‚ находим по р—З—і-диаграмме [17] для получен-
ных значений іо и 80 давление ро=300 кГ/см2‚ а по р—і—Т-диаграмме
[17] для значений ро и іо—температуру Т0= 13 700 К.
\/,'а‚ м/сен
4000—
9 8 7 6 5 4 5 2 1
| ‚‘,‘—` .
\ : // __ 3000“ \/=а=а*=2700м/сек “…
_ : ‚ 70
п\к`ц __, 2000
д " і,*= 44,7'705м2/сек2
7 Б 5 4 3 2' 1 “700 ' 4 \\” .
1 20 30 40 Ю’Б-ь, мг/свкг
Рис. 3.1117. С-верхзвуковое сопло: Рис. 3111.8. Кривые зависимостей скоро—
1—контур сопла; 11—критическое сечение, СТьИ У И СКОРОСТИ звука а ОТ ЭНТЗЛЬПИИЁ
П! — форкамера
"1.36. По известным значениям ро=100 кГ/см2 и Т0=12ОООК нахо—
дим при помощи і—З-диаграммы [17] для условий торможения энталь-
пию іо=48‚3-1О6 ‚и?/сек2 и энтропию 80:14‚5-103 м2/(сек2.град). Далее
определяем энтальпию в выходном сечении сопла:
іа = іо— [’;/2 = 48,3-106 — 8Ё-106/"2 = 16,3-106м2/сек2.
Задавшись рядом значений энтальпий ід(16‚3- 106<ід<48‚3- 106)
в соответствующих отдельных сечениях сопла (рис. 3111.7), вычисляем
по ним скорости Уд=1/2(іо—ід). Например, для значения ід=18><
><106 м2/сек2
Уд : 1/2 (48,3- 106 —18_106)= 7785 м/сек.
Принимая течение в сопле изэнтропическим, находим при помощи
і—З-диаграммы [17] для заданных значений гід и найденной величины
30:14‚5-103м2/(сек2—град) плотность рд, температуру Ц, давление рд.
По величинам рд и Уд вычисляем удельный массовый расход рдУд.
Используя диаграмму а—і [17], определяем скорости звука ад, со-
ответствующие значениям [д и 80, а затем подсчитываем числа Маха
Мд=Уд/ад.
Критическая скорость звука а*‚ а также соответствующая энтальпия
і* определяются следующим образом. Для ряда найденных значений ад,
Уд и [д строим кривые Уд=і(ід) и ад=і(ід)‚ точка пересечения которых
определяет значения а* и ?“ (рис. З.П1.8).
Плотность в критическом сечении р* находится из диаграммы і——$
[17] по значениям і* и 80. Из уравнения расхода (раУа$а=р*а*$*)
определяется площадь этого сечения:
$ * = ра Уа За,/(№№)-
Аналогично определяются площади других сечений:
Зи = Ра Уа ‘За/‚(Ріг Уи)-
474
…% …: ‚$… ……… …% …… о…о… …о… … …о… … оо… … о… …… ЁЁ ЁЁ З…… и Э……
…….… о…… :… ……_… …….… о…… оо.… о….о ……о.о ……о.о о ! …,…‚ЁПЗЕ
о……… оо…… оо…… о……… о…о… Ё… о…о… о…… о.…… …_…… о ЁЁ $,… „Ъ и 3…
$… ……_… ……_… …….… а.… %… оо.… о….о о…о.о ……о_о .. @…псі
@=…
……оооо …ооооо ………о.о ………о.о ………о.о ………о.о ………_о …о…_о ………_о ………_о ………_о „Ён; 53$ н …%
о……о.о о……о_о ………о.о о…ооо ……… ‚о :….о ………_о ……оо $3 83 | @… п 35…
о…: о……… о……… о……… Е…… о… …… о……… от…… ооо… ооо… ооо… …… $$… …: п $,…
……….о ……….о ……….о ……….о ………_о 83 …………о ……….о 82 ………_о | @… п 95…
о…….о о……о о……о …… …… …… ………… о…о… о. …… о. …… о. …… ЁЁ… Ё… & и 3…
То… .……….о То… .……о.о …о…оо оо…о_о оо…о.о ……… .о %….о ……….о ……….о 83 | @… и Е:…
8… …….… К.… о….… о…… о….… 8… …Ё ……‚… оо.… | %……„пёщ
…… … …… … …„ … … … … … …%… .…………„…………
559.8 …… ЁЁ…
::.ю …:…ЁоюшН
475
Таблица 3.1112
іЁ’ м 0,39 Рё! ай»
м2 Уд, — кГ-сек2 Т,? К кГ м мд $#, мг
сек. __ _—
сек2 м4 см2 сек
|
": ' ; рд Уй, '
Ё _ кГ-сегс/мз ; Ё
% У/г_ ЁЁ міг: _ра 1,080
Ё). Задаемся ущіо—ііг) Снимаем с диаграммы 1—8 ЁЁТ :Уд/аё "’—П—
2 О ЁЁ в
] іа = 1 Уа = 8000 ра : [ Т_а : 1 ра : ра Уа = аа : ма=5'26 за : 0,160
= 16,3-100 =8,5-10—5 =5200 =о‚о19 = 0.680 ___1520
2 18-106 7785 1,7 - 10—4 5500 0,039 1,32 1580 4 ‚93 0,082
3 20-100 7523 3 ‚610—41 5850 0,090 2,71 1660 4,53 0,040
4 25-106 6826 1,7-10—3 6700 0,52 11,6 1860 3,67 0,0094
5 30- 100 6050 6 ‚ 1 . 10—3 7600 2 , 4 36 ‚9 2050 2, 96 О, 0030
6 35-10" 5158 1,9—10—2 8600 8,0 98,1 2260 2,29 0,0011
7 40° 10° 4074 4,5 - 10—2 9750 23 183 2500 1 ‚63 0,00059
8 45-106 2569 9,4—10—2 11 050 58 241 2730 0,94 0,00045
9 і0= 0 р0= ТО= р0 =100 О ао: 0 ——
= 483100 ] =1,4-10—1 =12 000 } =2880 }
Результаты проведенного расчета приведены в табл. 3.1112.
Характер изменения параметров газа вдоль сопла, Соответствующий
данным табл. 3.1112, показан на рис. 3.1119, где также изображен кон-
тур сопла, построенный по вычисленным значениям площадей $„ его
поперечных сечений (від: 1/48д/л).
Из графика на рис. 3.1118 найдены значения а*=2700 м/сек и і*=
=44,7-106 м2/сек2‚ а из диаграммы і—З [17] по і°*‘=44‚7-106 м2/сек2‘
и 80:14‚5- 10з м2/(сек2—град) определена плотность р*=9‚2- 10—2 кГХ
><сек2/м4. Таким образом, площадь критического сечения сопла
_ 8,5-10—5-8000.0‚16
8* : 0,00044 м2.
9,2.10—22700
3 пт? к
умами/0,3 РМГ/см?
хРЮХЁ с—ек
«так2
м4 .
ТБ — 8
12 - Б
в — 4
4 — 2
0 ‘:’(—“1,11 |
8 765 4 3 2 1
Рис. 3.1119. Характер изменения давления р, плотности р,
температуры Т, скорости звука а, числа Маха М и ско-
рости потока У газа в сопле:
!. 11—соответственно критическое и выходное сечения; пункти-
ром изображен контур сопла, сечения которого отмечены цифра-
ми по оси абсцисс (1+8)
Н Н
Давление и температура в этом сечении равны соответственно р*
=56 кГ/см2 и Т*=11 000 К, а удельный массовый расход р*т‘
=248 кГ -сек/м3.
|У. ТЕОРИЯ СКАЧКОВ УПЛОТНЕНИЯ
ПМ. Картина на рис. 2.1\/.1,а соответствует дозвуковой скорости
движения газа (У<а), поскольку фронт малых возмущений, двигаясь
со скоростью звука, распространяется навстречу потоку. В случае, по—
казанном на рис. 2.1\/.1,б, скорость потока равна скорости звука
(У=а) и возмущения перемещаются только по потоку. На рис. 2.1\/.1, в
изображена картина распространения звуковых возмущений в сверх-
звуковом потоке (У>а), поэтому все слабые возмущения находятся
в пространстве (конусе Маха), ограниченном образующими—прямыми
АВ и АС.
“1.2. На рис. 2.1\/.2 показано распространение круговых волн малых
возмущений в сверхзвуковом потоке. Радиус каждого из них г=аі, где
[_ время перемещения центра круга со скоростью потока 'У>а вдоль
полупрямой О]… Очевидно, с изменением ! расстояние И и радиус кру-
га, равный а!, изменяются в одинаковое число раз, т. е. в этом случае, как
говорят, все круги имеют общий центр подобия 0. Поэтому область
плоскости, занимаемая кругами возмущения, представляет собой угол
ЗОТ с вершиной в точке О, образованный общими касательными всех
кругов в виде прямых, являющихся одновременно и огибающими.
“1.3. Местное число Маха М связано с углом наклона линии возму-
щения (линии Маха) выражением н=агсзіп (1/М). На рис. 2.1\/.3 угол
„В в точке В меньше угла „А в точке А (МВ<МА)› поэтому местное чис-
ло М в направЛении от точки А к точке В увеличивается (МВ>МА).
“1.4. Угол наклона линии Маха и=агсзіп(1/М) при увеличении дав-
ления не изменится, так как при заданных условиях скорость звука, за-
висящая только от температуры (а2=1гКТ), остается той же самой. По-
этому сохраняется то же число М= У/а, а следовательно, и угол М-
П/.5. При уменьшении температуры Т и неизменной скорости потока
У произойдет увеличение числа М= У/а, так как уменьшится скорость
звука а= УЁКТ, что вызовет уменьшение угла наклона линии Маха
р=агсзіп(1/М).
ПАБ. Известно, что при диссоциации число частиц газа в единице
объема возрастает. Это приводит к увеличению скорости распростране-
ния слабых возмущений, т. е. возрастанию скорости звука а по сравне-
нию со случаем постоянных теплоемкостей. Поэтому при учете влияния
диссоциации из-за уменьшения числа М=У/а произойдет увеличение
угла наклона линии Маха.
“1.7. Угол наклона линии Маха в диссоциирующем газе будет уве-
личиваться, если уменьшится давление. Это объясняется тем, что при
таком уменьшении давления увеличится степень диссоциации, т. е. воз—
растет количество частиц в единице объема. От этого будет больше ско-
рость звука а и произойдет уменьшение угла наклона линии Маха.
“1.8. Скачки уплотнения возникают при торможении сверхзвуковых
потоков в газе какими—либо преградами. Возмущения сжатия, вызывае-
мые отдельными точками преграды, распространяясь со скоростью зву-
ка, в сверхзвуковом потоке не могут выходить за пределы соответству-
ющих конических поверхностей, образованных волнами Маха (см.
рис. 2.1\/.2). Поэтому в ограниченном пространстве перед преградой
происходит многократное наложение возмущений сжатия, которое и
приводит к возникновению скачков уплотнения.
“1.9. Существенным отличием процесса перехода газа через скачок
уплотнения, сопровождаемого скачкообразным увеличением давления,
плотности и температуры, от течения с плавным, постепенным возраста-
нием указанных параметров является значительная величина работы
сил внутреннего трения в газе. В скачке уплотнения на расстоянии, не
превышающем нескольких длин свободного пробега молекул, ввиду
477
больших градиентов скорости силы внутреннего трения настолько вели-
ки, что необратимо переводят в тепло значительную часть механических
видов энергии газа. Это вызывает заметное возрастание энтропии.
В случае же течения газа с постепенным возрастанием параметров ра-
бота сил внутреннего трения оказывается пренебрежимо малой и про-
цесссчитаетсяизэнтропическим.
“1.10. С ростом температуры газа за скачком уплотнения увеличи-
ваются внутренняя и потенциальная энергии газа (или энтальпия
['=срТ). В соответствии с законом сохранения энергии (У2/2+і=сопзі)
ее величина за скачком не изменяется, что возможно лишь при умень-
шении кинетической энергии (\”/2). Поэтому скорость газа У за скач—
ком всегда уменьшается.
“1.11. Для определения неизвестных величин—отношений парамет-
ров газа за прямым скачком уплотнения и перед ним—в случае, если
поток за таким скачком диссоциирован, кроме числа М1 и показателя
адиабаты іг1=ср/с„ должны быть известны давление И и температура
Т 1 набегающего потока.
“1.12. Условием того, что соответствующие параметры газа за косым
и прямым скачками уплотнения будут одинаковыми, является выполне—
ние соотношения М1нос зіп 60=М1пр, т. е. когда «нормальная» составля-
ющая числа М…ос перед косым скачком уплотнения [(М1нос)п=
=М1кос зіп ее] будет равна соответствующему значению М…р перед
прямым скачком.
“1.13. Для решения задачи воспользуемся следующим соотношени-
ем, связывающим между собой углы наклона скачка уплотнения 0.3
и отклонения потока за ним [до:
щее =сівБс[—12—(рг/р1— 1) а %% (рым—1›2—‹рг‚/р1›т925с] . (зли)
После подстановки значений р2/р1= 10 и Бс=30° получим
іздс = СівЗО° [% (10— 1) $ |/—,11—(10—1)2— 10192301 =
_—_1‚732(4‚5 4 4,11).
Таким образом, получаем два значения угла:
6с2 : агсід 1,732 (4,5 + 4,11) : агс’сё 14,9 = 86°1О’;
9,1 : агсіё 1,732 (4,5 — 4,11) : агс’сё 0,670 = 33°50’.
По условию, возникающий скачок является присоединенным, поэто-
му следует выбрать меньший угол ИЗ двух полученных значений,
т. е. принять, что в заданном потоке реализуется скачок с углом накло-
на 601=33050‚.
Второй, больший по величине угол 602=86°10’ имеет место в случае
отсоединенного скачка и соответствует той точке на скачке, где наклон
вектора скорости непосредственно за ним Бс=30° (рис. 3.1\/.1).
“1.14. Для определения отношения скоростей У2/У1 воспользуемся
формулой косого скачка уплотнения
УЗД/% : 1 _ 51112 не [1 — ( МЫ?]. (зд/‚з)
Как видим, для нахождения этого отношения при заданном значении
р2/р1= 10 необходимо дополнительно знать угол наклона скачка Эс. В ре—
478
шении задачи “7.13 этот угол 601'=33°50’ для присоединенного скачка.
Внося его значение в (3.1\/.2), найдем
УЗД/% : 1 —' зіп2 33°50' ‹1 — 1/102) = 0,693,
откуда У2/У1=0,830.
Если рассмотреть отсоединенный скачок, для которого в решении за-
дачи 1\/'.1З угол 602=86°10’, то
УЗД/“% : 1 _ зіп2 86°10’ (1 _— 1‚102) = 0,014,
ОТКУДЗ У2/У1=0‚118.
“7.15. Воспользуемся следующим со-
отношением для разности энтальпий га- Ува,
за: __»
із _ 1.1 : (Рв _ 191)“ _ 91/92)/(291);
подставляя в него данные, найдем
:'2— і1 : 30-104(1—— 1/10)/(2-О,125) :
: 1,32-106м2/сек2.
“7.16. Казалось бы, что вследствие
равенства скоростей в рассматриваемых Рис. 3.1\/.1. Криволинейный ска_
точках (см. рис. 2.1\/.4) будут одинаковы чок уплотнения
и другие соответствующие параметры, в
частности давления или плотности. Од-
нако это не имеет места для течений, в которых возникают ударные
волны.
Давления в точках А и В определяются соответственно по зависи-
мостям
2 * 2 *‘
, УА д ' ‚ УВ д
рА:рОА 1— 2 Ирв=ров 1_ 2 °
Утах / тах
Так‚как скорости в этих точках одинаковы (УА=УВ), то рА/рв=
=рОА/ров. Здесь отношение рОА/рОВ<1 вследствие того, что точка
расположена на линии тока, проходящей через более интенсивную часть
скачка уплотнения. В соответствии с этим давление рА<рВ. Температу-
ры в рассматриваемых точках:
ТА : 6,4(1—1/3/731 )и Тв : Тов (1 __У2В/У12тчах)’
Ввиду равенства Т6А=ТЬВ значения ТА и ТВ в этих точках будут оди-
наковы.
Плотности определяются из соотношений
ах
1
. ] УЗ д ‚ 1/23 ‚…
РА=РОА —— ‚, нев—ров 1— , ‚
тах Утах
откуда рА/рв : РОА/РОВ'
Отношение род/ров можно наити, воспользовавшись уравнением со-
стояния, записанным для параметров торможения в точках А и В:
род = род КТОА И рОВ = ров КТОВ. Из этого следует, что
РЬА/Рдв : % ТЬА/(Рдв 763)-
Поскольку рдА/рдв <1, а ТЬА/ТЬВ =1, то рЬА/рдв <1 и поэтому РА< рВ .
“1.17. Уравнение расхода для Одномерного установившегося потока
имеет вид р1У1$1=р2У282. Соответствующие значения газодинамиче-
479
ской функции СДМ) будут равны: (;(М1)=р1 У1/(р`1' а;); (;(М2) :
= р2 У2/(р; а;). С учетом этого уравнения расхода найдем
8 ‹] М \Ыа‘ „
_2_ : (1—11. _ (зд/3)
31 ‘7 (м2) 92 “2
Поскольку за системой скачков уплотнения (см. рис. 2.1\/.5) Тд = ТО =
=сопз’с и а; =а'1" =соп5’с, то с учетом уравнения состояния ‚од/ро =
:рОТо/(р0Т0)и зависимости р*=р0[2/(1г+1)]1/(Ё—1), связывающей крити-
ческую плотность с плотностью в заторможенном потоке, из (3.1\/.3)
получим искомую формулу:
р
2/8 [ і=а‹м1›ро___№=ш.№‚
б 81 а(м2)р{‚ 0(М2)РЬ " “……
@ (ЗП/14)
П’. 18. Выясним прежде всего, как из-
/ меняется плотность газа в потоке за скач-
ком уплотнения по сравнению с изэнтро-
1 \ ' Рг/Р, пическим течением при одинаковом изме-
(РЫЮС (Рв/тив нении давления. Для этого воспользуем—
ся зависимостью между отношениями
Рис. 3.1\/_2_ Графики изэнтропы давлений и плотностей, полученной в тео-
(С!) И Ударной адиабаты (б) рии скачков уплотнения для случая по—
стоянных теплоемкостей,
Ё+1 92 1
РА — ‚;;—1 91 (3 Ш 5)
р1- _ (іг+1)/(іг—1)—р‹„›/р1
и формулой для изэнтропических процессов
ра,-101 = (ре/рт)? (З.Ы-6)
Графики уравнений (З.1\/.5) и (3.1\/.6), приведенные на рис. 3.1\7.2, по—
казывают, что при одинаковом изменении давления (р2/р1) плотность
газа за скачком будет изменяться меньше, чем в изэнтропическом тече-
нии [(р2/р1)с<(р2/р1)из]. Теперь с помощью уравнения состояния
Р2/Р1=р2Т2/(р1Т1) легко установить, что при одинаковом изменении
давления [(р2/р1)с= (р2/р1)из] температура за скачком уплотнения из-
менится больше, чем в случае изэнтропического потока, т. е. (Т2/Т1)с>
> (Т2/Т1)и3. Это не противоречит физическим представлениям, так как
в скачке уплотнения выделяется дополнительное тепло, обусловленное
работой сил вязкости.
Чтобы ответить на вторую часть вопроса об изменении скорости
в потоках со скачком и без него, рассмотрим известную формулу для
изэнтропического изменения давления
‚‚ : р, ( 1 — У2,/1/3…)“‘*—” . (З.п/7)
Она пригодна для любых видов изэнтропических течений, в том числе
для течения за скачком уплотнения._ Однако в последнем случае следу-
ет учитывать уменьшение давления торможения за скачком (Ро < ро).
С помощью (3.1\/.7) можем написать для условий течения газа пос-
ле и до скачка уплотнения (рО < ро)
‚„ „, 'ъ №№ %
._ = _ ___Ё‘;_ах , (зд/_в)
р1 с рО 1 _У1/Утах с
480
а также для соответствующих течений без скачка уплотнения (р[) = ро
із
р2 :У2/Утах 73:1
Поскольку по условию задачи 1(р2/р1)с= (р2/р1)из‚ то, сравнивая пра-
вые части (3.1\/.8) и (3.1\/.9-)‚ получим
' д’— 2 2
ВО_ —У2/У2 тах \Г_—1_1_У2/Утах ГЁ— 1
РО 11—У2/У12ттах / с 1 '— У2/У1'2пахи
Отсюда следует, что так как величина И…,){ за скачком не изменяется,
& рО/рО < 1, то
(1—У2с/Утах)> (1—1/2
2из
Д,так)“
Это неравенство справедливо только при У2С<У2из. Следовательно, при
одинаковом изменении давления скорость за скачком будет меньше,
чем в изэнтропическом течении. Такой вывод подтверждается физиче—
скими соображениями. Как было показано ранее, температура за скач—
ком (а следовательно, и энтальпия і=срТ) изменяется больше, поэто-
му согласно закону сохранения энергии величина №72 (и, значит, ско-
рость У) должна изменяться меньше.
“1.19. Зададимся в качестве первого приближения некоторым про—
извольным значением угла 6с>|30, равным 40°, и вычислим соответст-
вующее отношение плотностей:
& _ М? ЗіП2 9С (12+ 1) _ 52 $іП240° (12 +1)
91 энд—пмёзіт-Рес 2+(1‚2—1)52зіп240°
: 5,6. (З.п/‚т)
По формуле (3.1\/.1) находим угол наклона скачка во втором прибли-
жении:
’гв Вс = с’гз 30° [Ё— (5.6 —1) $ И 711— (5,6—1)2— 563432309] =
= 1,73 (2,30 1 1,85).
Так как скачок, по условию задачи, присоединенный, то выбираем знак
минус:
*на 9с : 1,73 (2,30 — 1,85) = 0,78.
Отсюда 6с=38°. По этому углу находим во втором приближении отно-
шение плотностей:
_р,_= (5 зіп38°)2 (1‚2+1) =5,36.
р1 2+(1,2—1)(5$іп38°)2
Производим последнее приближение для угла 6С:
тд @с = с’се 30° [;— (5,36 _ 1) _ М'ЁГ (5,36 —1)2— 5,36—‘(8230°] = 0,797,
откуда 6с=38°33’.
Окончательно находим отношения:
плотностей
& __ 52 8311238033, (1,2—[' 1) _ 5 42.
р1 2+‹1‚2 —1)525іп238°зз’ ’ ’
давлений (3.1%)
1,2 1
+ 5,42—1
р—г : "2—1 = 10 5-
Р1 (1‚2+1)/(1‚2— 1)—5‚42
31—927 481
температур
Та/Т1 : Рай/(№№) : 105/342 : 1,94;
скоростей звука
‘аз/щ = Ита/71 : УЁ4Т= 1,39;
Скоростей потока
112/111 : [1 — зіп2 6С (1 —— рё/рЁПЩ :
= [1 _ зіп 38°33’ (1 _ 1/5,422)1“2 : 0,791
И число Маха за скачком
м2 : (&) (іі-) М1 : 0,791—1—5 : 2,84.
У1 02 1,39
“1.20. Определим вначале (Эс—угол наклона скачка АоА (см.
рис. 2.1\/;6) И отноШение плотностей р2/р1‚ используя уравнения (3.1\/.1)
И (3.1\/.10). Подставляя в них значения М1=5; Бкл=15°‚ іг=1‚4‚ по-
лучим:
о ] 92 1 92 2 Р 0
Ё6с=сі 15 [—(——1—`/—__1 __31215];
8 8 2 01 ) 4 (91 ) 91 8
&_ 525іп26с(1‚4+1)
91- _2+(1,4—1)525іпгес'
Решая эти уравнения, найдем 60:24°16’‚ р2_/р1=2‚75. Соответствующее
число Маха за скачком определим из формулы
. _ 2 р іг—1 —1
Мё$тг(9с—Бкл)——(Ё—‚д] .
После подстановки значений получим
м3 зіп2 (24°16’ _ 15°) : # (2,75 — 1'4 — ‘Г ‚
1‚4+1 1,4-|—1
откуда М2=3‚50.
Теперь рассмотрим скачок АВ. Так как число Маха перед этим скач—
ком М2=3‚50‚ а угол отклонения потока за ним Бкл=15°‚ то
о 1 93 1 93 2 93\ о
геи,: г 15 —(——1)—1/———1)—(—‘г215];
& сё [2 92 4 (92 92) 8
№ __ 3,502зіп26с0(1‚4+1)
р2 _ 24—(1‚4—03502541129со '
Решая эти уравнения, найдем угол наклона отраженного скачка 6с0=
=29°19’‚ а также отношение плот-ностей рз/р2=2‚22. Соответствующии
угол отражения скачка
4ЕАВ = 9’ = в… —Б.… : 29°19’ _- 15° =14°19’.
“1.21. Известно, что коэффициент давления за косым скачком уплот-
нения
_ 172—101 2 (№ _ 4 2 ‚ 2
р : ___—_ ——1)———— М 5111 (Эс—1 .
2 41 ігМЁ2 Р1` м%(;д+1) ( 1 ) (3.1\7.11)
Вычислим предел этой величины при М1 —› оо:
- _ "' 4 .
№52 = ргоо = Двине… (зд/12)
482 .
Внесем это выражение в (3.1\/.11):
4
2 О
М1 (із + 1)
Из этой формулы следует, что при всех конечных значениях числа М,
коэффициент давления р2 меньше его предельной величины р2оо.
Используя (З.1\7.12)‚ подсчитаем предельные величины коэффициен-
та давления для &= 1,2 и &= 1,4 при 60=30°:
зіп230° : 0,454 (іг : 1,2);
5, = 5,00 — (З.п/‚139
"(1›____
№33 =
зіпЁЗО° : 0,417 (із : 1,4).
1,4+1 '
Для заданного М1=5 соответствующие коэффициенты давления по
(З.1\/.13):
Бу) : 0,454 ——4— = 0,381;
52 (1,2+ 1)
“3% = 0,417 ———4—— = 0,350.
52(1‚4+ 1)
“1.22. Давление в точке А на линии тока, проходящей через скачок
уплотнения (см. рис. 2.1\/.7)‚ определяется по формуле
рд : рд (1 _ УЁ/’У;ах)д/<Ё—1>, (антц
где рд — давление торможения за скачком уплотнения.
Давление в точке В на линии тока в случае изэнтропического те-
чения
__ — _ 2/ '2 іг/ іг—1 .
рВ _ ро (1 У„Утах) ‹ ›, (зд/15)
где Ро _ Давление торможения ПРИ ИЗЭНТРОПИЧВСКОМ СЖЗТИИ.
Отношение давлений торможения р[) и рО определяется по выра-
жению
ра./ро = (р1/р2)“‘*—” (ри/91)“ "“_”. (ЭЛ/16)
Отношения давлений р2/р1 и плотностей р2/р1 находятся из формул
косого скачка уплотнения по заданным значениям Вс=30°‚ М1=5 и &=
=1‚2. В таком виде была сформулирована задача “7.19. В результате
ее решения были найдены значения р2/р1=10,5 и р2/р1=5,42. В соответ-
ствии с этим из (3.1\/.16) для /е= 1,2 получим
рЬ/ро : (1‚/10‚5)1”"2—” (5,42)"2"1'2—1> : 0,204.
Найдем давление изэнтропического торможения:
\_ 2
іг 1.
р() = р1 (1 + % МЭК—1 : 1 (1 + $5734 : 1840 кГ/см2.
В соответствии с этим
рд = (рд/ро) рО : 0,204- 1840 = 368 КГ ‚'с/142.
Вычислим отношение У2/Ушах, которое входит в выражения для р„
и рв. С этой целью используем формулу
7% “3 1% 2 1 _1
У2 _УЗ Ё—і м? '
тах
31* 483
Подставляя данные, получим
2
: (1 ‚1)2( 2 )“1 = 0,864.
тах 1,2 — 1 52
Теперь подсчитываем Давление вточках А и В по формулам (ВЛ/14)
И (В.Л/15):
1
1,2
рд : 368 (1 — 0,864)1 2’“ 2—1) :2 ‚30 10—3кг/см2—
рв : 184О(1— 0,864)1’2…"_1) : 1,16—1О_2кГ/см2.
Как видим, статическое давление в потоке газа за скачком уплотнения
при той же скорости, что и в изэнтропическом течении, значительно
ниже.
“1.23. Для отыскания давления в форкамере трубы ро (см. рис. 2.1\/.8)
необходимо вначале определить угол наклона 6С скачка уплотнения АВ
(А’В’). Его величина находится по уравнению
18 9С _ МЁО зіп2 6с(іг+ 1)
$8 (9С — Вс) 2 + (!г— 1) м3, він? ес
Внося в него значения &= 1,4, Моо=4‚ Вс=2О°‚ получим"
щее _ 425іп26с(1‚4—|— 1)
{@ (ес—20°) _ 2 + (1,4 _ 1) 4254112 @с
Решая это уравнение, найдем 60=З2‚6°. По значению угла 60 и задан-
ному Моо=4 определим отношение давления торможения за скачком
Ро}: к давлению торможения перед ним (давлению в форкамере ро):
‚ (_ЁЁ— м2 $іп29с— 1)_(іе—1)(м°озіп @ )іе———1 [Ш](__’:—1)
род _ 4—1 4—1 ° (12+1)2
Ро 19+] _ ‚г
(14-й 1М2 зіп2 6 с‘)_ (‚г—'”
1 1,4 ——1 4
2 1 4 1——4_1 …_ [?(1 4—1)]1—4_'1
42 п2 32 6°—— 1 4 $ 32, 6° —— ‚
_1‚,4—1(14—1 51 ); ( п ) (1‚4+1)2
1‚4+1 \ “*
—1
(1’ + 42$іп2 32 6°) ' 4—1
= 20,65.
Если обозначить через рдп давление торможения для условий за пря—
мым скачком СВ (С’В’), то, очевидно,
_РШ _ 4—1 ><
Род ‚е_…
мЪ/(‘ё—Н
Х [2 (із—_ 1) Г/(Ё—Ц (_2іг_ №2 _ 1)1/112—1) (1+ /е_—_1 м2 )ЁАЁ—і )
(14+ 1)2 4—1 д 2 д
где Мд —число Маха за скачком АВ (А’В’). Его величина
МД : [ 2 + (!г— 1) м3, 212130 сов?“ ес Т”:
темі, зіп26с— (іг— 1) 2 + (іг— 1) міозіп‘дес
=[ 2+(1‚4—1) 42 + 2-42-С082 32‚6° ]1/2 _
2-1‚4-42-$іп2 32‚6° — (1,4 — 1) 2 —|— (1,4 — 1) 42-5іп2 32,6°
= 2,56. (3.1\/.17)
Таким образом,
РЁэп _ 1,4—1
' _ 1,4 1
род +
2 561.4/‹104_1)
)( , ' =
2 1, —1 1.4/(1.4—1) 2—1,4 1/(1.4—1) 1‚4_1 `-1‚4/‹1‚4-—1)
[№] (———2 562— 1) (1+——— 2, 6”)
Н
(1,4—|--1)2 1,4—1 2
= 0,475.
Давление на выходе диффузора
РВ _ —Р0п (] + Ш МЁЗ)_Ы(Ё—1)’
следовательно,
и 1 4
рдп = Рв (] + % М2В)Г—1= (111+———— 1О, ‚ЗТ—П =] ‚06 кГ/см”.
Теперь можно вычислить давление в форкамере:
р(, = род = ро“ = —1—’—06—— : 3,43 кГ/см2.
рдд/ро (рдд/ро)(р(’‚п/р(’‚д) 0,65-0,475
“’.24. Картины течения сверхзвукового потока после выхода из соп-
-ла, изображенные на рис. 2.1\/.9‚ возникают в зависимости от величины
отношения давлений в газе на срезе сопла ра к противодавлению, рав-
ному давлению рн в окружающей среде. Такое отношение обычно назы-
вают степенью нерасчетности (п=ра/рн). При п>1 (ра>рн) струя га-
за является недорасширенной. Для уменьшения давления на выходе из
сопла струе газа необходимо пройти через волну разрежения
(рис. 2.1\/.9‚а). Линии тока при этом расходятся от оси потока
(рис. 3.1\/.З,а). Так, например, пристеночная линия тока АВС повер-
нется на угол [З.
Рис. З.п/.В. Схемы поворота линий тока в струе:
а — недорасширенной; б — перерасширенной; ! — вол—
на разрежения; 2— скачок уплотнения; 3— границы
струи
Если п<1 (ра<рн)‚ то струя окажется перерасширенной. Повышен-
ное противодавление будет способствовать торможению этой струи.
В результате возникнет система скачков уплотнения (рис. 2.1\7.9‚ б)
и давление в струе возрастет. Линии тока в этом случае будут сходить-
ся к оси потока. На рис. 3.1\/.3, 6 это показано на примере пристеночной
линии тока А1В1С1.
“1.25. Сначала найдем угол скачка 00, при котором число Мг будет
равно единице. Для этого удобно воспользоваться равенством (3.1\7.17)‚
485
приняв в нем Мд=М2=1 и МОО=М1. Разрешив его относительно
зіп26с‚ найдем
1 .
2[(;гг+1)м2+1г1-—з+
1
+ у’‹/г+ 1›[/г+9 + щите—3) + (2 + №121].
Внося сюда значения М1=4 И Ё=1,‚4 получим
зіп26с=——_— [(1‚4+1)42+1‚4—з+
зіп2 6С :
+1/(1‚4 + 1)[1‚4 + 9 + 2-42(1‚4—3) + (1,4 + 1)44] = 0,82.
Определим соответствующий угол клина Вкл, используя зависимость
1 — зіп2 Ос . 12 + 1 . —1
із Бил : ‘/ №№ 5…2 ес— 1)[1 + (_— $1112 ес) м2] . (3.1\/.18)
Подставляя сюда значения зіп26с=0‚82, М1=4 и іг=1‚4‚ получим
тер…, ___ \/‘___Б'2282(42 0,82—1)[1+(‘—4Ц—082)42] =О‚805‚
откуда Вкд=38°50’.
“1.26. Воспользуемся зависимостью, связывающей между собой угол
скачка 60 и угол поворота потока Вс (угол клина Вкл),
(іе+1)м%/2
с‘с :Ъ В —————1
86° & °[мёзіп2ес—1 ]
и исследуем эту зависимость на экстремум. С этой целью произведем
дифференцирование:
Ь1М22 Ь1м4°29
‘ ‘ШС— ‘ [(+) 1/ —1] (+) 15… °. (зи/119)
ЗіП2 Вс (19° 1 — зіп2 9С м? З…? 9С __ 1 (М? $іП2 ес __ 1)2
Условием равенства сіВС/СЮС=О‚ при котором возможен экстремум ис-
следуемой функции, является равенство нулю правой части (3.1\/.19)‚
так как 1/зіп2вс=оо только при Вс=0‚ когда поворота потока нет вооб-
ще. Поэтому, приведя правую часть (3.1\/.19) к общему знаменателю
(М2 зіп2ОС—1)2(1—зіп26с), который не может быть бесконечно большим,
и приравнивая нулю числитель получившейся дроби, получим следую-
щее квадратное уравнение относительно М.2 зіп 2%…
. ‚г _—|-__ 1 1 іе — 1 `-
М?$1п49ст+%(1———М2>М2$іп26ст——(1Ё + —м2)=0.
Корнями этого уравнения являются величины
мёзіп2ест =— —(1 _— Ё——+'М2)+
13 4
—ъ/—1-’1—ШМ%2>+Ы
Подстановка значения М? зіп 260% взятого со знаком плюс, в (3.1\/.18)
дает значение максимально возможного угла поворота потока за скач-
ком Вст- В справедливости сказанного можно убедиться на частном
примере, когда М1=Мо°—›оо. Действительно, преобразуя (З.Ы/20), по—
лучим
1 1е+1
м? 4 )
‘ м2) . (зд/20)
. 1
эт2 Ост =— -? (
+
486
1 . іг+1 2 1 12 1
+ 1——М2 _— 2
_Ъ/МЁЬЁК 4 1)+Ьм;* (1+ 2 м,),
откуда при М1—›оо `
зіп2ест=Ш і Ш_
4іг 412
Очевидно, знак минус здесь не имеет физического смысла, поскольку
в этом случае 6С… было бы равно нулю. Поэтому
зіп2 ест : (А: + 1)/21г.
Подстановка этого выражения в (3.1\/.18) приводит к следующему ре-
зультату (при этом _Внл=[3с=|3ст):
*_—_1(Ш м2 _ 1
іг+1 213
Величина Вс… называется также критическим углом поворо-
та потока: Вст=Бкр.
1\’.27. При обтекании заостренного клина с присоединенным скачком
уплотнения коэффициент давления за ним зависит от числа М] набега—
ющего потока и угла клина Вкл, равного углу поворота потока за скач-
ком {Зш т. е. р=1с (М], 60). При этом с ростом угла [ЗС коэффициент дав-
ления увеличивается. Эту функцию можно представить в виде степен-
ного ряда по параметру БС. Чем больше значения угла Вс, тем большее
число членов ряда надо учитывать при вычислении коэффициента давле-
ния с заданной точностью. Если углы клина сравнительно небольшие,
то оказывается достаточным применять формулу разложения в ряд Тей-
лора с двумя членами:
_ 2
р=(Ёр `; Бс+і(д—”2—) %, (зд/21)
ЕВС ‚Вс=0 2 две Вс=0
в которой производные (др/дрс)зс=0 и (тр/дрэвсы находятся при Бс=
=0, т. е. для бесконечно слабого скачка уплотнения.
Для- вычисления этих производных применим правило дифференци—
рования сложных функций, поскольку, как это следует из выражений
(2.1\/.1) и (3.1\/.18), коэффициент давления является сложной функци-
ей угла БС. В соответствии с этим правилом получим
д}; _ дБ сі (зіп2 6С) _ ЁЁ. ЁЁ
д,?)с _ д(5іп2 Вс) . (”3С _ ( дх )/( дх ), (ЗПП/22)
где для краткости письма обозначено х=5іп260. Производная др/дх вы-
числяется с помощью (2.1\7.1):
дБ,/дх : 4/(іг + 1),
а производная две/дх — с применением (3.1\7.18):
вв.: 1 Х
дх у/Г1—Х(М%х—1)
х
іг—х
1+( 2 —х) м?
1 х 1/21 1—х _
><[__2_(1—х) я…“—№“ х “% _,
[чЁ—”№?
\
" __
шьет: )(1+’ЁБ_Е—‘м3) 1. (3.1У.2О’)
1—1—
487
><[1—1-(‚35Ь1 ——х )м2 )…+)/———( Мгх—1) м2
. (З.п/23)
[№№—№]
При Бс—+О величина х=з:іп26с—›5іп2…=1/М%‚ поэтому
(две/дх)вс=о= 2 1/ мгц/(№1),
а в соответствии с (ЗП/22)
(дБ/дБдвсЫ = 2/1/1“? — 1—
Производная
.ЁЁРЁ=_д_ д;):_д_(д5_) дх (ЗП/24)
дВЗ дВс дВс дВс две
дБ
две
ВВОДЯ ДЛЯ краТКОСТИ заПИСИ следующие Обозначения:
а=1+('г_+_1_х)м%; д=( х )1/2; С=-1—;
Значение Тэд—(— ) получаем с помощью дифференцирования (зд/23).
1_ 1/2
п=М%х—1; т=( х) ‚
х
получим с помощью (3.1\/.22) и (3.1\/`.2З)
4 т2п2
д(д_р)_ і іг+1а2(1+ (12+ :
дВс дх (_ % Ьсп + тМЁ) а + тпМ?
‚ : ‚ 1
(200 + 2тт п2 + 2т2 пп )[(— '2— Ьсп + тМЁ) а + тпМЁ`|
=іе+1
1 2“ 2 2
[(——5- Ьсп + тм1 ) а + тпм1)
/
„ 1 1 1
(а2+т2п‘)(—ЁЬ спа—Ты па——2—Ьспа+т М1а—
...__).
П— % Ьсп + тт?) а + тпМЁ]2
1 ' , ' '
———2—Ьспа +та Мг+т пМЁ+тп М?)
...—).
2
[(— _;— Ьсп + тт?) а + тпмц
ПРИ 60:0
4
%(д ) —о=_4—[— 1/ 2 + (ЁЩЪ (З.п/25)
_ 13 1
дБсв + м2—1(м2—-1)З
Учитывая, что
(дх) : іг+1
дБ“ В°=° 21/м%+1
из (зд/24) и (зд/25) найдем
дд; (іе+1)м;‘/2_2(м%—1)
(№№—0: (М?—17
а сам коэффициент давления
2 ВС“-д (%+!)МЁ—ЧМЁ—1)
им?—г * дмг—!>?
“1.28. Критическим углом называется максимальный угол поворота
потока за скачком уплотнения. При увеличении давления критический
‚
Б= ва.
И!
Рис. 3.1\/.4. График ударной поляры
угол поворота потока останется неизменным, так как он зависит лишь
от числа М1 и показателя адиабаты іг=ср/с„.
“1.29. С увеличением числа М1 сверхзвукового набегающего потока
критический угол поворота потока за скачком будет увеличиваться.
В этом нетрудно убедиться, рассмотрев выражение (3.1\/.20’) для тако-
го угла [Зо—т. С физической точки зрения с ростом числа М1 интенсив-
ность скачка уплотнения увеличивается, возрастает плотность газа за
скачком, фронт скачка приближается к обтекаемой поверхности и по-
ток получает возможность при необходимости разворачиваться на боль—
ший угол.
“1.30. Угол наклона вектора скорости по мере удаления от точки А
(см. рис. 2.1\7.1О) будет увеличиваться от нуля до некоторого макси-
мального значения вот, а затем уменьшаться. В точке В, расположен—
ной на участке волны, достаточно удаленной от обтекаемой преграды
и совпадающей с волной Маха, этот угол равен нулю.
“1.31. Большему значению угла 90 соответствует дозвуковое течение
за скачком уплотнения, а меньшему — сверхзвуковое, что видно из гра-
фика ударной поляры (рис. 3.1у.4).
“’.32. Угол наклона присоединенного скачка уплотнения 90 при уве-
личении угла клина БС возрастает. Это следует непосредственно из
графика ударной поляры, приведенного на рис. З.1\/.5. Согласно этому
графику при 9с2>6с1 имеет место ВСЁ>БСЪ
“1.33. Если увеличить число М1 набегающего сверхзвукового пото-
ка, то угол присоединенного скачка уплотнения перед клином умень-
шится. Это видно, например, из графиков двух ударных поляр, соот—
ветствующих числам м; и МЁ>М1 (рис. З.1\7.6).
“1.34. Проанализируем различные случаи, которые могут привести
к образованию скачков уплотнения, изображенных на рис. 2.1\/.11. Ото-
шедший криволинейный скачок уплотнения может быть в случае, когда
Внл>Вкр. Если да:/@, то, поскольку критическое значение угла пово-
рота потока вкр увеличивается с ростом числа Маха набегающего пото-
ка, указанная картина скачков уплотнения может быть лишь при со-
блюдении неравенства М…1>Моо2‚ когда один и тот же угол Вкл ока-
32—927 489
жется больше критического для потока с меньшей скоростью. Если
число Мш1=Моо2, то, поскольку вкр возрастает с уменьшением Аг, необ-
ходимым условием реализации картины скачков уплотнения будет не-
равенство Ё1<іг2. Если же М…фмщ и йдэЬАгв, то при М…1>М„2 и Ё1<
<.1г2 картина скачков (см. рис. 2.1\/.11) возможна, а при М°°1<М°о2 и
ігд>іг2 невозможна. Что же касается случаев, когда либо Мш1>
>М„2(іг1>іг2), либо Мю1<М…2(/г1<./г2), то существование рассматри-
ваемых скачков возможно лишь при вполне определенных значениях
М…, №002, Аг] и #2, входящих в эти неравенства.
Рис. В.Л/5. Зависимость угла скач-ка от угла
клина на графике ударной поляры
%; >и; )
/
Рис. З.1\/.6. Графики ударных поляр для раз-
личных чисел Моо набегающего потока
“’.35. Для расчета сверхзвукового обтекания заостренного клина
пригоден лишь участок ударной поляры от точки А до точки К
(см. рис. 3.1\/.4).
На участке КЗ скорость- за скачком будет дозвуковой, и он начнет
искривляться. Участок ЗВ практически не может применяться для рас-
чета отошедших криволинейных скачков уплотнения, возникающих пе—
ред клиньями со сверхкритическими углами, так как для него не имеет- .
ся однозначного соответствия между скоростью за скачком и положе—
нием точки на поверхности клина. Другими словами, участок ЗВ опи-
сывает совокупность отдельных косых и прямого (точка В) скачков
уплотнения, на которые может быть разбит криволинейный скачок.
С его помощью можно найти зависимость между скоростью и углом по-
ворота потока за скачком для отдельных струек газа, пересекающих
криволинейный скачок, но невозможно указать, где эти струйки распо-
ложены, т. е. какой будет форма этого скачка.
[У.Зб. На рис. 2.1\/.12 точке К (участок прямого скачка) соответст-
вует на ударной поляре (см. рис. 3.1\/.4) точка В. Точке [„ в которой
угол поворота потока максимальный (Бё=Вст)› соответствует точка 8,
а точке М на звуковой волне (волне Маха) — точка А.
1\’.37. В уравнение годографа скорости
7%, _ ›… ›„1- _ 1
(А1 _ А“?
2
—ж2 _аы
Ё+11+1 1и
490
необходимо подставить максимальное значение относительной скорости
Ъ1=Жт= 1/(іг+1)/(/г—1). Тогда
ни гг:—жди х/Ё— )1/211-
График этого уравнения представляет собой окружность, симметрич-
ную относительно оси ?… и пересекающую ее в точках с абсциссами
м= Уфы)/(№1) и 7…= 1/ ‹ь+1)/(ь—1)=ж….
“’.38. Определим вначале
А1 = |/ р2/р1 = У 5_= 2,24.
Этому значению соответствует число Маха перед скачком:
27»2 # 1 1/2 .
]… ___ 1/( + ) =[ 2 5/(1‚2+ 1) ]1/2 : 2,89,
1_жё‹ь—1)/‹Ь+1) 1—5‹1‚2—1)/(1‚2+1)
по которому подсчитываем отношение давлений:
& : 2іг 2_іг—1 __ 21,2 2 892_1‚2—1
р1 `іг+1 1 іг+1—1,2+1 ’ 1‚2+1
Пользуясь уравнением состояния, вычисляем отношение температур:
2/Т1(Р2/Р1)(Р1/Р2)= 9/5 — 1 80
В соответствии с этим отношение скоростей звука
а2/а1=1/Т2/Т1— 1/_1‚—80 _ 1 ‚.34
Так как отношение скоростей потока
1/2/1/1 : 1/7»? : 0,2,
: 9,00.
то
М2/м1 : (У2/У1)(а1/а2) : 0,2/1‚34 : 0,149.
Следовательно, число Маха за скачком
м2 : (м2/М1)М1 : 0,149'2,89 : 0,431.
“439. Скорость за прямым скачком всегда дозвуковая, а за косым
такая скорость может быть как сверхзвуковой, так и дозвуковой
(см. ударную поляру на рис. 3. 1\/.4).
П/АО. Применим следующую формулу для коэффициента давления
в точке полного торможения за прямым скачком уплотнения:
' гк , ___ь
Р0=Ц= 2 (& МЁ— __1_\)Г— 1М112_ _1(_ 2 _іг—1_1 _ (3.1\7.26)
(‚1- И“? ь+1 !г+1‚.1г+1/
Вычислим предельное значение этого коэффициента при М1—›оо:
]г—іг/(й—П ( 2 `—(Ё+1)/(Ё—1) (31`727)
„‘г + 1/ ,
а затем получим зависимость, связывающую величины ро и ро…. С этой
целью представим формулу (З.п/26) следующим образом:
_ _і _&1 _
Ро=21г д_1(_2_) й—1(1—Ц.—‘)— 2 .
іг+1 % м? ЁМЁ
Эту формулу можно переписать с учетом (З.Ы/27) в следующем виде:
— — !г—1 1 2
= 1— — — _ . З.п/28
ро ро… ( „, м, ) ‚гм, ( )
И… 50 =_Р_о°о : 2
М1—7-00
32” 491
Здесь значения 700… для Ь=1,2 и !г=1,4 соответственно будут:
_ _1_'2 ___Шіі
раз = 211,2 111— (——) 1›2—1=1‚93;
\ 1‚2+1
_ 1,4 , 2 _1,4+1
(?> : 2-1,4_1‚4—1(_—) 1,4—1 : 1,83.
°°° 1,4+1 .
По этим значениям определяем коэффициенты давления для М1=10:
_ 1 2—1 1 2
‹1›:193(1__;____ )____=1‚91.
ро ’ 24,2 102 1,2102 ’
582):1‚83 1__ Ш _ _]_)__2__=1‚82_
2—1‚4 102 1,4—102
“’.41. Из основного соотношения для прямого скачка уплотнения
Ж1№=1 находим №=1/?»1=1/1,9О=0‚526, а по формуле р2/р1=?ь% опре—
деляем отношение плотностей р2/р1=1‚902=3‚61.
Для определения отношения температур Т2/Т1 используем газодина-
_1 „
мическую функцию т(?ь)=Т/Т0=1——Ё_|_—1№‚ в соответствии с которои
& _ То тое)
Т1 То 17011).
так как температура ТОРМОЖЕНИЯ 321 СКЗЧКОМ УПЛОТНВНИЯ не изменяется
(ТО =Т0) ‚ ТО
712 Т (А,) 0,954
_ТТ : Щ : о_‚з—эз :
По уравнению состояния отношение давлений
102/191 : (р2/р1)(Т2/Т1) : 3,61 -2,40 = 8,66.
Для вычисления у=р6/р0 воспользуемся зависимостью
11 = (!%/(102% (зп/29)
2,40.
в которой функции
іг+1 1/'‹іг—1› Ё—1 ние—1)
(101,2) : (Т) ?”1‚2(1 _ Д №,?) '
Определяя из табл. 9 [13] по ?ь1=1,90 и №=О,526 значения (7011):
=О,ЗОО и С](7\‚2) =О‚736, найдем
\? : О,ЗОО/О,736 : 0,406.
“№12. Для определения максимально допустимого «загромождения»
потока в рабочей части сверхзвуковой аэродинамической трубы приме-
ним зависимость (3.1\/.4), полагая в ней 81 и 82 равными соответствен—
но площадям сечений потока в рабочей части и в наиболее «загромож-
денном» месте трубы, а М1=Моо. Тогда число Маха м2 в (3 1\/.4) бу—
дет определено для этого места трубы. Из (З.п/А) находим
81—82 1 (ММ…)
=1——
. . (зи/30)
$1 "’ Ч (м2)
Будем считать, что «пусковой» скачок является прямым. Поэтому для
него справедлива зависимость (зы/29), в которой следует принять
М1=М…(?ь1=?ьоо)‚ а М2=Мпр(№=?ьпр), где Мир—число Маха за пря-
мым скачком. В соответствии с этим
" : ‘? (мы)./Ч (Мир);
492
следовательно,
‹81— 80/81 = 1 —а‹м„р›/а‹м2›. (з.ч/31)
Допустимое значение (81—82)/81 должно быть несколько меньше ве-
личины, найденной из (зы/31) при М2= 1, т. е.
[(81 _— 82)/$1]гпах : 1 _ Ч (мир)° (31У32)
Действительно, если равенсТво (З.п/32) соблюдается, то в наиболее
«загроможденном» (т. е. в самом узком) сечении трубы при приближе-
нии к нему «пускового» скачка установится скорость, равная скорости
звука (М2=1). В этом случае говорят, что аэродинамическая труба бу—
дет «заперта», а рассматриваемое сечение станет критическим. Пуско-
вой скачок не пройдет через всю рабочую часть, а останется в этом
сечении, как бы перегораживая трубу. Поток перед моделью не будет
сверхзвуковым с заданными параметрами. Число Маха за таким прЯ‹
мым скачком
/
: 0,497.
МЁО+2.`(іг—1) “ 2,682+2/(1‚4—1)
МПР : ‘/ 2ігМЁ‘Ё;о/(іг—1)—1 : 2-1,4-2,б82‚'(1,4—1)—1
В табл. 9 [13] этому числу Мпр соответствует значение ЩМПр) =О,74О.
Поэтому
[($1 — 89/81]…ах :: 1 —— 0,740 : 0,260.
“’.43. Расчет отношения плотностей ведется по формуле р2/р1=
=(іг+1)/(/г——1). Для іг=1,2 отношение р2/1р1=6(1,2—|—1)/(1,2—1)=11,
а для !г=1 ‚4 отношение р2/р1= (1, 4—|—1)/(1, 4—1 )=6.
Предельные значения коэффициентов давления:
_ ___ Ре—Р1 2
р2 41:Г_'_1_1$іп ес;
— РЬ—т 2 -—— 26 ` * 3—
_____= __ ь—1 ' Г—1 9С
“’ 41 2С…) (‚Т—+1) 51“ Ё
ичисло Маха
: ([а-+1)2 2 /іг_——_12 1/2
м, {гиде—ЮРЦ; Ё°+‘ №1…
зависят, как видно, от угла скачка 00. Для определения 00 воспользуем—
ся формулой
1:9: СЁЗБС |: 2 +\/(_2—2—4 ___1{82 ].
8 ° 2.1г—1 ь+1— іг+1) ь+1 5“
Ё—і—1
Подставляя в нее значения &= 1,2 и Вс=30°, получим
СЁЗЗОО _ 2 +
2(1,2—1)/(1‚2+1) 1,2+1—
где,:
2 2 [2—1
+ " __ _;— 2 о : + .
_ "/ (1‚2+1) 4 1‚2__|_1 ЁЁ 30 ] 8,66_8‚00
Меньшее значение угла 0С соответствУет скачку уплотнения слабой ин—
тенсивности (верхняя часть отсоединенного скачка уплотнения):
{ЗОШ : 0,66, Вы : 33° 26’.
Большое значение относится к скачку повышенной интенсивности
(нижний участок отсоединенного скачка):
& 8 6,2 = 16,66, 6,2— _ 86° 34’
493
Вычислим коэффициенты давления для угла 601=33°26’:
р‹1›__ — Ц—зіпг 33° 26’ = 0,552;
1 2 + 1
р‹2› = —4——$іп2 33° 26’ = 0,506.
1,4 + 1
Для угла 6с2=86°34’ найдем:
4 ] зіп286° 34’ = 1,81;
1 зіп2 86° 34’ = 1,66.
Соответствующие значения коэффициента давления торможения при
Вс1=33°26’ будут такими:
1 1 2
2 __ 2-1 2 ———' .
(1) __ ___-___ 1.2—1 ___,— 1‚2—1 2 ° ! _ .
р0 —2( 1,2 ”\} ( 1,2 1 ) вт 33 26 823,
1 1,4
—(‹)г› = 2( 2 )—1.4_—1/_Щ)"17—'1 зіп2 33° 26’ = 36,2
1‚4+1 \ 1,4—+1
а при 602= 86°34’:
1 1,2
р<1>— — 2 к———1 22+! >_т(-1—22°і_і_2—1)—Ёдзіп286°34’ = 2,16;
1 1,4
”‘” " 2 (ті—1 ‚ГМ—“1 (%)—Щ $іп286° 34’ = 1,83.
Аналогично рассчитываем числа м2. Для угла 601=36°26’:
…: (1‚2+1)2 2 о , 1,2—121/2= _
м2 {2_1’2‹1‚2_1)[с’с9 33 26 +(——1‚2+1… 4,81,
‹2›_ (1,4-+1)2 2 о ‚ 1,4—1 2 1/2_
м2 _{2.1‚4‹1‚4—1) [сш 33 26 +(1,4+1)]} _ 3’45’
а для угла 9с2=86°34’:
__(1)___ (1‚2+1)2 2 о ‚ 1‚2_.1 2 1/2_ _
мё2) : [ (1 ‚4 + ”2 [0182 860 341+ ( 1,4 —1 )2]}1/2 : 0,402.
[2-1‚4(1‚4—1) 1‚4+1
“444. По заданным величинам М1=15, Бс=5‚73°/57‚3=0‚1 рад и
Ь=1‚4 вычисляем параметр подобия К=МВС=15-О,1=1‚5. По этому
значению найдем параметр подобия в виде
к“ 4/(іг+1)[1 +\/1+ к—2'‹1е+1)2]_
=4/(14_—5__+1›[ +У1+1 1,52 (14+1›2]=2’25'
Соответствующий угол наклона скачка
6С : Кс/М1 : 2,25/15 = 0,15 рад,
а коэффициент давления
Ь, = же [33 = 22,25…2 = 0,045.
494
Отношение плотностей
/ _ КЁ _ 2,252 _
92 91—2/(Ё+1)+К2(Ь_1)/(‚,+1) 2/‹1‚4+1)+2,252(1,4—1)/(1‚4+1)
=3,02.
Рассмотрим определение числа Маха:
к4
03м3= ‚% Ё 1° 2 41 =
2 ___ _ ___ 2
[(4+1)к°_4+1][(4+1)+4+1К°]
2,254
: 214 141 2 141 =2’67;
[(1,4+1)2’2Б2_1,4+1Н(1‚4+1)+ 1,4-1—12’252]
м, = [(ЭЁМЁМЭЁГ” = (2,67/о,152)“2 = 11.
Теперь вычислим параметры для аэролинамически подобных пото-
ков с числами М1=10, М1=20 и Ё=1‚4. По условию ПОДОбИЯ для этих
потоков, значения параметров К=М1Вс и КС=М160 будут такими
же, что и для заданного, т. е. К=1‚5 и Кс=2‚25. Им при М1=10 и 20
соответствуют следующие углы во и 0С:
[ЗС = К/М1 = 1,5/10 = 0,15, В„ = Кс/М1 = 2,25/10 = 0,225 (М1 = 10);
[3С = 1,5/20 = 0,075, Вс = 2,25/20 = 0,112 (м, = 20).
Коэффициенты давления будут следующими:
при М1=10 величина р2=_2 БСВС=2-0,15-0,225=0,068;
при М2=20 величина р2=2-0‚075—0,112=0,017.
Отношения плотностей для чисел Маха М1=10 и 20 останутся таки-
ми же, как и при М]: 15.
Числа Маха за скачком:
при М1=`10
м2 : [( 0% м3) /92]“`2 =(2,66/0,2252)“‘2 = 7,26;
при М1=20
м2 = (2,66/О,1122)172 = 14,6.
“1.45. Температура за скачком уплотнения в диссоциированном га-
зе будет меньше по сравнению с ее значением в случае постоянных теп-
лоемкостей. Это объясняется затратами энергии газа на тепловую дис-
социацию его молекул. Диссоциация газа в скачке уплотнения сопро-
вождается поглощением энергии, обусловливает некоторое снижение
температуры и, как следствие, увеличение плотности. Эта большая «по—
датливость» газа к сжатию уменьшает пространство между скачком
и обтекаемой поверхностью, уменьшая тем самым угол наклона скачка.
“1.46. При обтекания сверхзвуковым потоком поверхности заострен—
ного клина с некоторым углом [3с угол наклона скачка 0С при диссоциа-
ции будет меньше по сравнению со случаем постоянных теплоемкостей.
“7.47. Как показывают исследования, учет влияния диссоциации при—
водит к некоторому повышению давления за скачком уплотнения по
сравнению со случаем постоянных теплоемкостей. Объясняется это уве-
личением числа частиц в газе за счет диссоциации, возрастанием по-
терь кинетической энергии при их соударениях. Однако уменьшение
температуры в диссоциированном газе вызывает противоположный, но
меньший эффект. В результате давление возрастает, хотя и не намного.
“1.48. Поскольку температура газа за скачком уплотнения при дис—
495
социации оказывается существенно меньшей, чем при постоянных тепло-
емкостях, а давление изменяется мало, то газ Делается более податли-
вым (менее «жестким») и сжимается за скачком до большей плотности.
Это следует и из уравнения состояния газа за скачком р2=
=р2[120/(р„ср)2] Т2, в соответствии с которым уменьшение температуры
можно компенсировать только увеличением плотности.
“1.49. Если заменить поток с постоянными теплоемкостями течением
диссоциирующего газа, то критический угол поворота потока за скач-
ком уплотнения (критический угол клина) увеличится. Причиной этого
является увеличение плотности диссоциирующего газа и уменьшение
угла наклона скачка. Уплотненный газ имеет возможность разворачи-
ваться на больший угол.
“1.50. Определим прежде всего число Маха перед скачком уплотне-
ния:
м1 : У1/а1 : 8100/310 : 26,1.
При таком большом числе Маха набегающего потока воздух за скач—
ком будет диссоциирован и задачу о скачке необх0димо решать с уче-
том влияния диссоциации. Воспользуемся для этого методом последова—
тельных приближений. Задаваясь в первом приближении значением
АУ=1, соответствующим предположению о полном торможении потока
за ударной волной (У2=0), находим в первом приближении давление
за ним
р, : р, (1 + ь, м? №) : 0,01 (1 + 1,4-26,12) : 9,55 КГ/См2.
Энтальпия і2, равная энтальпии торможения, определяется зависимо-
стью
і2 : :'(; : срТ1—і— УЁ/2.
Принимая теплоемкость воздуха перед скачком Ср1=1000 м2/(сек2Х
Херад) и подставляя исходные данные, получим
: 1000- 236 + 81002/2 = 3,39— 107 м2/сек2 (7890 ккал/КГ).
По значениям ‚02 и і2 из і—З—диаграммы на фиг. 43 [33] найдем
температуру Т2=8500 К, а по рис. 111-1-5 [21] определим средний мо-
лекулярный вес (мер)2= 17,0.
По уравнению состояния, зная величины ‚02, Т2 и (”ср)2‚ вычислим
&: (Рв/Р1)[(Нср)2/(Нср)1] 9›55 17,0 236
= . . =15‚5_
р1 Т2/Т1- 0,01 29,0 8500
12:
Теперь уточним величину А7:
А17 =1— р1/р2 =1—1/15‚5 : 0,935.
Во втором приближении по этому значению АТ/ получим давление
р2 : 0,01 (1 —|—1,4-26‚12-0,935)= 8,91 кГ/см2
и энтальпию
м7 — 81002 о 935
__ _— _ —А __ 5 . ’
і, —і, [1У + :'1 (2 У)]— 2,36 10 [1+22‚36_105
>< (22 —— 0,935)] : 3,28-107 м2/сек2 (7860 ккал/КГ),
где і1=ср1Т1=1000-236=2,36- 105 м2/сек2.
Затем по і—З-диаграмме на фиг. 43 [33] найдем Т2=8450 К, а по
рис. 111-1-5 [21] — новое значение (рьср)2=16,1.
496
По уточненным значениям ‚02, Т2 и (Иср)2 определяем отношение
_& 8,91 16,1 236
=_- . . = 13,8.
@1 0,01 29,0 8450
Производим расчеты в третьем приближении:
АТ/ =1—1/13,8 : 0,928;
р2 : 0,01 (1 —|— 1,4-26,12-0,928) : 8,86 кГ/см2 (р2/р1 : 886);
. 2 О *
:, : 2,36-105 1+ 8100 . ›928 _.(2—0‚928)]= 3,27-107 м2/сек2 (7800 “““/’),
2 2,36-10° \ КГ
(нерв = 16,0; тэ = 8430 к (Тв/тт = 35,7);
&_ 8,86-16,0236 _ 137
р1 0,01 29,0 8430 ’ '
Результаты расчета показывают, что между третьим и вторым
приближениями имеется небольшая разница, в частности, отношение
плотностей отличается на величину менее 1%. Следовательно, для прак-
тических целей расчеты можно закончить третьим приближением.
Вычислим значение плотности за скачком, используя уравнение со-
стояния и значение универсальной газовой постоянной Ко=848
кГ-м/(кГ-моль-град):
ВА,—(№№ : 836404480 =0198 кг-сек2/м4
Т2 но 8430-848 ’
Из графика на рис. 111-1-6 [21] по известным р2 и Т2 найдем скорость
звука за скачком а2=2200 м/сек. Далее определим по і—З-диаграм-
ме на фиг. 43 [33] для р2=8‚86 кГ/см2 и і2=7800 ккал/КГ энтропию
82:3‚39 ккал/(кГ-град).
Рассматривая нулевую линию тока и считая, что течение вдоль нее
изэнтропическое, принимаем энтропию в критической точке $„ равной
ее значению $2 за ударной волной ($„ =82). Энтальпия в этой точке была
найдена ранее и равнялась і(',=7890 ккал/КГ. По значениям 86 и іі, при
помощи і—З-диаграммы определяем р(',=10 кГ/см2 и ТЕ, =8520° К.
График на рис. 111-1-5 [21] для данных значений р[, и ТЕ, дает величину
(рёр)о=17‚0. Это позволяет вычислить относительные параметры для
точки полного торможения:
рд/р1 : 10/0,01 : 1000;
Т,’,/Т1 .= 8520/236 : 36,2;
(Нср)0/(Нср)1 : 17/29 : 0,586»
2:
ЁЗЁ.№_Д:1000-0586—1—=162.
01 Г1 (Нср)1 ТС„ , 36,2 ,
“1.51. Для решения этой задачи необходимо знать параметры атмо-
сферы на заданной высоте Н=5 км. По таблицам стандартной атмо—
сферы [50] находим:
р, : (рН/рэ) рз : 5,334.10—1. 1,033 : 0,551 кГ/см2;
р1 = (рН/рэ) р„ : 6,012-10_1-0,1249 : 0,0751 кГ-секЗ/м“;
Т1 : 255,6К, 611 : 320,5 М/СЗК‚ („№191 : 28,97.
Определяем скорость полета:
1/1 : М1а1 : 11-320,5 : 3526 м/сек.
497
Из таблиц термодинамических функций воздуха [34] находим Ё1=
=1,405, ср1=1002 м2/(сек2-град), а затем вычисляем энтальпию:
і1 = с„1 Т1 = 1002.255,6 = 0,2561 -106 м2/сек2.
По графику на рис. 37 [22] для Бс=45° и М1=11 определяем угол
скачка 00=6О° при отсутствии диссоциации.
Имея. в виду, что при наличии диссоциации угол скачка будет мень-
ше, задаемся значением 00=55°‚ для которого подсчитываем в первом
приближении:
№„ = 1 _ 18 (0(: _ [зд/18 0с = 1 _— ъд (55° _ 453/18 55° = 0,877 ;
р2/р1 = 1 + Ь1МЁА7пзіп20с = 1 + 1,405-112-0,877—зіп2 55° = 101;
р2 = (р2/р1)р1 = 101 0,55] = 55,7 кГ/см2;
:'2 = і1 + 0,511? №2 0, А17„(2 _ Ай,) = 0,2561 .106 + 0,5-35262-зіп2 55°><
>< 0,877 (2 —— 0,877) = 4,36 - 106 миг/сек?
По графикам на фиг. 42 [33] и рис. 111—1-5 [21] определяем, зная &
и №, значения Т2=ЗЗ57 К и (рср)2=28‚70, а затем находим:
ЬМ2$іп29 —1 14 .112 - 2 0__
А : 1 1 с , = , 05 $111 55 1 =О‚495;
2151 м? він? 0с 2- 1.405112 $1112 55°
в_ ___1__( Те (Нср)1 __1) : 1 ( 3357 28,97 _1) _
51 м3 від? 0(: Т1 (мер)2 1,405-1125іп2 55° 255,6 28.70
= 0,108.
Теперь уточняем значение относительной скорости:
№„ = А + МАТ—_в = 0,495 + 1/0‚4952 '— 0,108 =0,866.
Это в свою очередь позволяет более точно определить угол скачка:
199с= Арн—УАТ’Ё—‘Ш—АТ’Д ___ 0,866—1/О‚8662—4(1—0‚866) :
2 (1 _ Ай,) 2 (1 _ 0,866)
= 1,506;
0с=56°25’.
По этим данным производим соответствующие расчеты во втором
приближении:
р2/р1 = 1 + 1,4105-112-0,866$іп2 56° 25’ = 103,2;
р2 = 103,2-0,551 = 56,86 кГ/смв;
{2 = 0,256] - 106 + 0,5.35262 зіп2 56° 25’-О,866 (2 — 0,866) =
= 4,49— 106 м2/сек2.
По графикам на фиг. 42 [33] и рис. 111-1-5 [21] определяем по уточ-
ненным значениям р2=56‚86 кГ/см2 и ъ'2=4‚49-106 ли?/сек2 величины
Т2=З424 К и (цср)2=28,64.
Теперь имеем возможность вновь уточнить значение угла 00, для че-
го осуществляем следующие вычисления:
1,405-112-эіп2 56° 25’ — 1
А: = 0,495;
2-1‚405—112$іп2 56° 25’
__ 1. ( 3424 _ 28,97 _1) : 0,1085;
1,405-112 $1п256° 25’ 255.6 28.64
498
№„ : 0,495 + 1/ 0,4952 _ 0,1085 =О,865;
0,865—1 0,8652—4(1—0‚865) _ о ‚
_ = 1 493 = 5 О .
{89° 2(1—0‚865) ’ Ю“ 6 О )
Вновь полученное значение угла Ос Достаточно близко к найденному
во втором приближении (56°25’), поэтому дальнейшее уточнение можно
не производить. Итак, принимаем: 60=56°; р2=56,86 кГ/см2 (р2/р1=
=1ОЗ,2); і2=4‚49— 106 м2/сек2 (і2/і1=17,54); Т2=3424 К (Т2/Т1=18,4);
(Нор) 2=28‚64 [ (Нор) 2/ (Мор) 1=0‚99] -
С помощью графика на фиг. 42 [33]находим по значениям Т1==
=255‚6 К и і1=0,2561-106 м2/сек2 энтропию воздуха до скачка $1=
=1,77 ккал/(кГ—град) [7,40-10З м2/(сек2—град)]‚ а по значениям Т2=
=3424 К и і2=4,49-106 м2/сек2—энтропию за скачком $2:
=2,18 ккал/(кГ-град) [9,15-103 м2/(сек2-град)]_ Увеличение энтропии
за скачком составит
А8 : $2 —$1 = 2,18 — 1,77 = 0,41 ккал/(кГ-град);
[1,75-10з м2/(сек2—град)].
Скорость звука за скачком определим при помощи графика на
рис. 111-1-6 [21] по величинам Т2=3424 К и р2=56‚86 ‚СГ/см?: @=
= 1094 м/сек.
Для вычисления скорости потока за скачком найдем
У„ = У1 (1 _ А17„)зіп е„ = 3526 (1 — 0,865) зіп 56° : 391 м/сек,
тогда :
У2 = У2д/зіп (9с — БС) : 391/зіп (56° — 45°) : 2007 м/сек,
а число Маха М2= У2/а2=2007/1О94= 1,835.
Плотность за скачком
92 : р1/(1 — [\\—1,1) : 0,0751/(1 — 0,865) : 0,557 (кГ-сек2)/м4 (92/91 = 7,45).
Расчет завершим, определив параметры воздуха в точке полного
торможения за скачком. Энтальпия торможения за скачком не изме-
няется, поэтому
:'(; = іо = {1 + УЁ/2 : 0,2561-106 + 35262/2 : 6,47— 106 м2/сек2.
Энтропия газа в точке полного торможения будет такой же, как не-
посредственно за скачком, т. е. $6 =$2=9,15-103 м2/(сек2-град). Зная
энтальпию и энтропию торможения, по і—З-диаграмме на фиг. 42 [33]
определим
рд = 330 кГ/см2; ТЕ, = 4490 К.
Этим данным соответствуют плотность р6=2,46 кГ-сек2/м4, а также
относительные величины:
рд/р1=599, ТЬ/Т1= 17,7, рд/р,=32,7.
“1.52. При решении задачи 1\/.50 были получены следующие отно-
сительные значения параметров воздуха для условий непосредственно
за прямым скачком уплотнения: р2/р1=886; Т2/Т1=35‚7; р2/р1=13‚7;
117 = ___—"і _ "?
1
=О,928.
Примем давление, температуру и плотность равными соответствен-
но: р1=0,01 [СГ/см?; Т1=236 К; р1=1,47_10—3 кГ-секг/м“. Эти парамет-
499
ры атмосферы будут такими, как на высоте Н%31 км. Получим пара—-
метры газа за скачком:
р2 : 886р1 : 8860,01 : 8,86 кГ/см2;
Тв : 35,771 : 35,7—236 : 8430 К;
92 : 13,7-91 : 13,7-1‚47-1О"З : 2,02—10_2 кГ'сеК2/М4—
Соответствующая скорость
1/2 : 1/1 (1 — 0,928) : 8100(1— 0,928) : ц83 м/сек.
По Данным решения задачи “7.50 скорость звука за скачком (12:
2200 м/сек, следовательно,- число Маха М2=У2/а2=583/2200=0‚265…
При таком числе Маха поток с известным приближением рассматрива—
ется несжимаемым, и Для расчета давления рО в точке полного торможе—
ния за скачком можно использовать уравнение Бернулли
198/92 = 192/02 + 113/52,
В соответствии С КОТОРЫМ
р,; : р, + р2У3/2 : 8,86 + 2,02-10’2-5832/2 : 9,20 кг,/см?.
Расчет с учетом диссоциации сжимаемого газа дает значение ‚05 :
=10 кГ/см2 (см. задачу 1\/.50)‚ которое несколько больше полученной
величины (р0=9,20 кГ/см2). Рассматривая поток несжимаемым, можно
определить Т6=Т2=8430 К. При точном расчете плотности и темпера-
туры их величины в диссоциирующем сжимаемом газе соответственно
равны: р[; =2‚48- 10—2 кГ-сек2/м4; Т6=8520 К.
“1.53. Чтобы определить параметры газа непосредственно за скач—
ком уплотнения, необхоцимо знать соответствующие значения этих па—
раметров перед скачком. Поэтому по таблицам стандартной атмосферы
[50] для высоты полета Н=10 км нах0дим: р1=0,269 кГ/см2; р1=-
=0,042З кГ—сек2/м4; Т1=223 К; а1=299‚5 м/сек; („ср)1=28,97. Прини-
маем для последующих расчетов /г=1‚4‚ ср=1000 м2/(сек2-град) и оп—
ределяем энтальпию:
і1 : ср Т1 : 1000.223 : 0,223-106 м2/сек2.
Далее подсчитываем:
АГ„ : 1 _— (тд 9с _ [зд/ц; 9с : 1 _ и; (55° _ 458/83 550 = 0,877.
Для расчета в первом приближении примем число М1=11,5. Тогда
1/1 : М1а1 = 11,5-299‚5 : 3440 м/сек.
Теперь определим давление и энтальпию за скачком:
р2/р1=1—|— Ё1М%А\7пзіп20с =1+1,4—11,520,877-зіп255° =110;
р2 : (р2/р1)р1 : 110—0,269 : 29,7 кГ/см2;
і, : і1 + 0,5-1/Ззіп2 ОСД/‚, (2… Ай,) : 0,228…6 +
+ 0,5— 34402 зіп2 55°.0,877 (2 — 0,877) : 3,77— 106 1142/сек2 (904 ккал/КГ ).
По графикам на фиг. 42 [33] и рис. 111-1-5 [21] находим, зная [2 и рэ,
значения Т2=3020 К и (мер)2=28‚8. Затем определяем:
М ___. ‘/ ‹т2/т1ншсрм/(мсрь1/‹1_А—У„>_Т :
1 51-9112 если
__ (3020/223)(29‚0/28,8)/(1—0,877)—1 : 11 1
_ \ 1,4-5іп255°-0‚877 ’ '
500
Осуществляем окончательные расчеты во втором приближении (для чис-
ла М1=11,1):
р2/р1= 102; р2=27‚5 кГ/см2; 1`2=3‚90-106 м2/сек2;
На этом приближения заканчиваем и определяем по графику на
фиг. 42 [33] энтропию 82:9‚20-103 м2/(сек2-град)‚ а по графику на
рис. 111-1-6 [21] — скорость звука @= 1040 м/сек.
Используя эти данные, п0дсчитываем параметры непосредственно за
СКЭЧКОМ УПЛОТНЗНИЯ:
у„ : 1/1 (1 _ А17„)зіп е„ = 3340 (1 _ 0,877) зіп 55° : 364 м/сек;
02 : 01/(1 _— А17„) : 0,0423/(1 —— 0,877) : 0,318 кГ-сек2/м4;
1/2 : У2„/51п (0С — БС) : 364/5іп (55О — 45°) : 2100 м/сек;
м2 : ша, : 2100/1040 : 2,06.
Энтальпия торможения
і,; : і„ : 1, + 1/3/2 : 0223106 + 33402/2 : 5,77 - 106 м2/сек2.
Энтропия
8,3 = 82 : 9,20-10З м2/(сек2- град).
“1.54. Для решения задачи следует вначале определить параметры
воздуха на заданной высоте Н =5 км. Воспользовавшись таблицами
стандартной атмосферы [50], находим: р1=0‚551 кГ/см2; р1=
=0‚07511 кГ-сек2/м4; Т1=255,6 К; (нор)1=28‚97; а1=320‚5 М/сек.
С помощью і—З-диаграммы на рис. 1-1 (лист 7) [17] по измерен-
ным значениям р6=330 кГ/см2 и Т,; =4500 К определяем для условий
торможения энтальпню 1'6=іо=6,5-106 м2/сек2 и энтропию $6 =82=
=9,18-10з м2/(сек2-град).
Затем подсчитываем скорость полета:
1/1 : 1/ 2 ($„ — с„ Т1) : 1/ 2 (6,5- 106—1000-256) :: 3530 м/сек
и соответствующее число:
М1 : 1/1/а1 : 3530/320‚5 : 11.
Поскольку не известны ни угол скачка 80, ни угол поворота [ЗС той
части потока за скачком уплотнения, которая претерпела полное тормо—
жение, то нахождение этих углов, как И параметров газа за скачком,
приходится вести методом последовательных приближений. Для этого
воспользуемся і—Б-диаграммой [17], на которой нанесены значения
плотности. Такая і—З—диаграмма облегчает решение задачи. В первом
приближении по графику на рис. 1—1 (лист 4) [17], зная $2=9‚18><
><10З ‚и?/(сек2-град) и задавшись значением энтальпии, за скачком і2=
=4‚6—106 ‚и?/сек2, определяем ‚02:58-104 кГ/м2 и р2=0,58 кГ-сек2/м4.
Далее вычисляем:
относительное изменение нормальной составляющей скорости
А 17, = 1 —— р1/р2 =1— 0,07511/0,580 : 0,870;
«нормальную» составляющую числа Маха до скачка
м„1 : Мир,/рд— 11/0471 17‚,) : ]/(53/0,5511 _ 1)./(1‚4.0,370) : 9,25
и соответствующую нормальную составляющую скорости
УП]. :: МЛ]. (11 : 9,25'320,5 : 2960 М/СЗК.
501
Уточним значение энтальпии {2 за скачком:
$, = {1 + 1131 АУ„(2 _ А 17„)/2 = 0,23-106 +
+ 2960=_ 0,870(2 — О,87О)/2 = 4,53. 106 мг/секя.
Во втором приближении с помощью і—З- д-иаграммы на рис. 1- 1
(лист 4) [17] по уточненному значению энтальпии @= —,453- 106 ли?/сек?
и $2=9, 18 103 мг/(сек2 град) определим р2=56 104 кГ/м2‚ _р2=
=0‚55 кГ—сек2/м4 и подсчитаем АУп—О 864 М…=9‚14, У…:
=2930 м/сек.
Теперь уточним энтальпию за скачком:
і2 = 4,46— 106 м2/сек2.
Ввиду того что полученное значение і2 близко к найденному ранее (і2=
=4,53-106 ‚и?/век?), дальнейшие приближения можно не производить.
Теперь определим углы 0с и Вс. Для этого воспользуемся зависимо—
стью
зіп 0с = М„‚/м‚.
Подставляя в нее значения М… и м1, получим
зіп 0с = 0,83 (0с = 56,1°).
Наконец, определяем УГОЛ поворота потока за СКЭЧКОМЕ-
ъе56‚1° : _Ра : 6,75 (3.1у.33)›‚
{856,10 '— Вс) 91
Решая (З.1У.ЗЗ)‚ находим Вс=43‚3°.
П/ББ. По измеренному отношению плотностей можно найти относи-
тельное изменение норма__льных составляющих скоростей до и после
скачка, т. е. величину АУ„= (У… — Уп2)/У…. С этой целью воспользу-
емся формулой АУп=1—р1/р2. Подставляя в нее значения р2/р1‚ полу"
чим соответственно для первого и второго режимов работы аэродина-
мической трубы:
(АГ/‚,)1 = 1 — 1/3,41 = 0,707;
(А17„)2= 1— 1/10 = 0,9.
Теперь определим соответствующие НЭКЛОНЫ КОСЫХ СКЭЧКОВ УПЛОТН6Н_ИЯ‚.
ИСПОЛЬЗУЯ ЗЭВИСИМОСТЬ
1 1 182Вс
’[0=с’[ , _.__-___ __ ___—‚_
8 ° 85 [2А1—м7 У/ 4 (1_А'Г/‚_)2 1—м7п]
После соответствующих ПОДСТЭНОВОК ПОЛУЧИМЗ
‚, 1 _0___, 707 0, 7072 03230 "
тес=ъз _. ___—___ „
($ )1 Св 0 [2 1—0 707 _… 1—0 707)2 1—0,7007} 1’12’
о 1 0,92 №2300
& 0 = ’: з ___—_ _ _ =
(в да се 0 Ь…О 1_09 1/4. (14,9? 143,9] 0,664
Согласно этим даНным
1,122
1 —— 1,122
(зіп 0С)1 = 0,754; (зіп 0С)2 = 0,553.
0 , 6642
= 0,306;
1—0‚6642
(зіп2 9д1 = = 0,554; (зіп2 0С)2 =
502
Используя эти данные, подсчитываем отношения скоростей:
(У,/У,), = 1/1 _ зіп” 0с [Н"/„(2 _ Ай,) =
= 1/ 1 — 0,554—0,707 (2 — 0,707) = 0,702;
(112/111)2 = 1/1 _ 0,806-0‚900(2—0,9) = 0,835.
Рассматривая случай постоянных теплоемкостей, найдем числа М,
перед скачками:
‹м1›1=.1 1/ 2"*+"_ = ‘ 1/ ”(“+” =з‚45;
$1п0с 2/(іг+1)—АУ„ 0,745 2/(1‚4+1)—0,707
(М)__ 1 2№+1> _ 1 1/ 0,334
” 0,553 2/(іг+1)—0‚9 0,533 0,834_0,9'
Как видим, число (М1)2 оказывается мнимым, что свидетельствует
о неприменимости формулы для случая постоянных темплоемкостей,
когда число М1 не превышает 5—2-6.
Параметры газа за скачком при (М1)1=3,45 определяются в соот—
ветствии с условием постоянства теплоемкостей:
_7_*„_ = 2/4 , _3—1
(71-й [Ь+1(м”)эте° к+1ПГ+1+
іг—1 . 214
+— (м1)%$1п20]/ [(М1)2 зіп20с]= (1‚_4—_+1 3,-452 0,554 —
4—
Ё+1
__1‚4—1 2 1 1 2 2 _
1’4+1)(1‚4+1+14’4+ 3,45 0…554)/(345 -‚—0554) 2,;21
&=& (“115511129 —Ё_1 =52'1’4 3,452-0554—1 = 13,76.
И 13+] ' с Ё+1 1,4+1 1_4_|_1
Расчет числа (№02 будем вести для случая диссоциации. Для этого
необходимо знать дополнительно температуру (Т1)2 и давление (и)?`
перед скачком. Зададимся этими величинами:
(Т1)2 = 459 К; (р1)2 = 0,01 кГ/см2.
Задачу решаем методом последовательных приближений. Прини-
маем М1=15,2 (У1=6460 м/сек); тогда отношение давлений после и до
скачка р2/р1=1—|—/2МЁ зіп20с—АУ„=1—|—1‚4-15,22-0,306-0,9=90, а давле-
ние за скачком (р2)2=0,90 кГ/см2. Энтальпия за скачком уплотнения
;, = і1 + (1/З/2)зіп?0с [1 —(р1/р2)2] = 0459.106 +
+ 646020306 [1 _— (0,1)21/2 = 6,76-106 м2/сек2‚
где і1= срТ1=1000- 459=О,459— 106 м2/сек2.
Далее по диаграмме рис. 1-1 [17] находим (Т2)2=371О К,
апо графику на рис. 111-1-5 [21] для (Т2)2=З710К и (р2)2=
=0,90 кГ/см2 определяем молекулярный вес (“‚2)ср=26,3. Используя
уравнение состояния, уточняем значение р2/р1: р2/р1=10-371Оо29/(450Х
><26,3)=90‚7‚ следовательно, можно уточнить значения числа Маха
и скорости:
_ _(____р2/р1)—1 90, 7—1 _ _
(№02 `— ь $1п—0с АУ _ _1/1 ‚4 0,306 0, 9 15’22 М _ 6470 шеек)’
Далее, еще раз повторяя расчет, в последнем приближении находим:
(р2)2—О 907 КГ/См2‚ ъ2=0 459 106+64702 0,306 [1 — (0,1)21/2=677><
><106 ‚и?/век?; Т2=3710 К; (ц2)ср=26, 3.
503
“7.56. Определить параметры за скачком уплотнения для рассматри—
ваемой модели воздуха можно, используя метод последовательных при-
ближений. Зададимся вначале ожидаемым отношением плотностей
р2/р1=15‚ которому соответствует относительное изменение нормаль-
ных составляющих скоростей ДО и после скачка:
АЙ, =1—р1/р2 : 1 _ 1/15 : 0,933.
По этому значению определяем &=&/ид (ид — характеристическая энер—
гия диссоциации):
72
{, = _; АТД, (2 _ Ай,) : 1—25-2- 0,933 (2 — 0,933) : 1,12. (3.1\/.34)
Далее находим отношение:
& :Ъ? 2.2. . & =15.1,5—10—7 : 22,5—10—7
Ра 91 Ра
И значение:
13 (93/92) = 13 (1/92) = 5,65—
Теперь из графика на рис. 111-1-8 [21] можно найти по значениям
18(р4/р2)=5,65 и Ё=1‚12 степень диссоциации 012=О,73. По этой вели-
чине уточняем АТ/„‚ используя формулу
_ З ___—_
Ау„ : „%(1 +1/1+1)/17З„), (зи/35)
в которой
В = (2/9) (7 —|— 042) (1 + 042) 042. (3.1\/.36)
После подстановки данных получим
1) = %— (7 + 0,73) (1 + 0,73) 0,73 = 2,17;
З
7-+—0,73
АР„ : (1 + 1/1+ 2,17/1‚52) : 0,932.
Затем уточняем относительные значения энтальпии по (3.1\7.34):
?, : № 0,932 (2 _ 0,932) : 1,12
2
и температуры _Т2=Т2/Тд (Та — характеристическая температура дис-
социации):
? _ 22…04, _ 1,12—0‚7з
, _ __ : 0,0824.
4+ос2 4+0‚73
Эту же величину относительной температуры можно найти, используя
формулу
_? _ _
7, : У„1АУ„(1—АУ„) _ 1,52.0,932(1—0‚9з2)
2 1+ос2 1+0,73
: 0,0819.
Из этих Двух значений выбираем среднее:
7, : _;— (0,0824 + 0,0819) : 0,0822.
По величине А7„=О,932 уточняем относительную плотность:
р2/р1 : 1/(1 _ А й,) : 1/(1— 0,932) : 14,3
504
И значение.:
92/99 = "62 = (Ре/91)'(Р1/Ра) = 14,8.1,5.1о—7=22,2.1о—7_
Теперь можно вычислить во втором приближении степень диссоциации:
% = ёе—“Ё (1/1 + 452е—1/72 _ 1) =
292
: 1 е—1/0‚0822(1/1 + 4_22,2_10—7е—1/0‚0822_ 1) = 0,755
2.22910—7
Учитывая приближенный характер расчета, этувеличину можно при—
нять окончательной. Зная а2=0,755, вычисляем в новом приближении:
в = % (7 + 0,755) (1 + 0,755) 0,755 = 2,30;
_ __3_' 2 :
АУ„_ 7+0_755(1 + 1/1 + 2,30/1,5 ) 0,936,
а также
2, = % 0,936 (2 _ 0,936) = 1,12,
_ ‚",—а, __1‚12—0‚755
* 4+ос2 4+о,755
92/91 = “(1 — 0,936) : 15,6;
62 = 15,6-1,5—10"7 : 2,34.10—7_
Из таблицы на рис. 111-1-1 [21] можно найти характеристические
величины рд, рд, ид, Та для азота и кислорода или их воздушной смеси
и определить соответствующие абсолютные значения параметров за
скачком уплотнения.
“7.57. Для того чтобы определить степень диссоциации воздуха по
известным значениям отношения давлений, плотностей и температур
Для условий после и до скачка уплотнения, необХОДимо использовать
соответствующую зависимость для степени диссоциации от указанных
отношений
= 0,0768;
052 : (Рз/ Р1) (91/92) (Т1/Т2) _“ 1.
Из решения задачи 1\/.51 имеем:
р2/р1 : 103,2; 01/02 : 0,134; Т1/Т2 : 0,075.
В соответствии с этими данными
ос2 = 103,2-0,134«О‚075 — 1 = 0,038.
“1.58. Степень диссоциации за скачком уплотнения
042 : (”ср)1ч/(”ср)2 _ 1
Полагая для воздуха (мор)1=29,0 и учитывая, что, ,по условию,
( пор) 2= 23,2, получим
042 = 29,0/23,2 — 1 = 0,25.
“1.59. Степень диссоциации за скачком уплотнения на участке длины
пути релаксации будет постепенно увеличиваться от величины, равной
нулю непосредственно за скачком, до равновесного значения. Причина
этого явления заключается в характере процесса диссоциации. Непо—
средственно за скачком уплотнения диссоциация еще не начинается
(а=0)‚ так как для этого требуется значительное число соударений мо-
лекул. Равновесное состояние диссоциации устанавливается постепенно
505
за время рел а ксации диссоциации, т.е. на длине пути ре—
лаксации.
“7.60. Рассмотрим предельный случай неравновесности, при кото—
ром скачкообразное изменение параметров газа происХОДит при посто-
янных удельных теплоемкостях (степень диссоциации за скачком а=0).
В этом случае отношение давлений за скачком и перед ним
& : ЗМ%_,ь—1 : 2.1,4 52_1‚4—1 : 730,
р1 іг+1 іг+1 1,4—1—1 1,4+1
а соответствующая абсолютная величина давления
р2 : (р2/р1)р1 : 730.0‚01 : 7,30 кГ/см2.
Отношение плотностей
іг 1м2
92/Р1= (+)1 — (1'4+1)252 =5‚95‚
2+(іг—1)МЁ— 2 +(1.4—1)252
где ПЛОТНОСТЬ до скачка
р1 = р1/(КТ1)= 0,01-104/(287250) = 1,39—10—3 кГ-сек2/м4.
С учетом ЭТОГО абсолютная величина ПЛОТНОСТИ за скачком
92 = (р2/р1)р1 = 5,95. 1,39—10—3 = 8,29-10—3 кГ—сек2/м4.
Отношения температур
Тз/Т1 : (Рв/Р1)(Р1/Ря) : 730/595 = 123.
определим Теперь степень равновесной диссоциации ае И соответст-
вующие параметры, характеризующие равновесное состояние газа.
Применим для этой цели зависимости, полученные для модели воздуха
В виде смеси двухатомных газов.
Зададимся в первом приближении отношением плотностей р2/р1=
= 10, для которого
А17 = (1/1 —У2)/У1 = 1 — р1/р2 = 1 _- 1/10 = 0,9.
Входящая сюда скорость И равна У1=М1а1, где М1=25, а1=
= УТ1/Т1а288. В свою очередь температуру Т; принимаем равной
288 К. Этой температуре соответствует скорость звука а288=340 м/сек.
Таким образом, У1=25—3401/ 250/288=792О м/сек.
Из табл. 111-1-1 [21] найдем для воздуха характеристическую ско—
рость диссоциации Уд=5400 м/сек. В соответствии с этим значением
Й=У1/Уд=7920/5400=1‚47‚ а относительная энтальпия
?, = №2) [№2 — А\7) = (1,472/2) 0,9 (2 — 0,9) = 1,069.
Вычислим относительную плотность @= р1/рд, используя уравнение
51 : (Рт/Ра)/(Т1/Та)°
Входящие вмэто уравнение величины определим следующим образом.
Из табл. 111-1-1 [21] находим р‹1=3,7-1О7 кГ/см2, а характеристическую
температуру диссоциации определяем по формуле
Та : Там, ’ы, + Тао/о„»
в которой Т,№2 =113 000 К и Т,],02 =59 000 К — характеристические тем-
пературы диссоциации соответственно азота и кислорода. Так как их
объемные доли в воздухе г1`12 =О,765, Гог =0,235‚ то
Т„ = 113 ООО-0,765 + 59 ООО-0,235 : 100 300 К.
506
В соответствии с этими данными
—- 0,01/ 3,7-107
91 : (Р1/Ра)/ (Т1/Та) : ( )
= 1,08—10—7.
250/100300
По этой величине, а также значению рг/р1= 10 находим
62 : 92/94 : (92/91)(Р1/Ра) : 10“ 1—‚08° 10—7 = 1,08 10—е.
Соответствующий логарифм
1% (рд/№) = 19[1/(1,08-10_6)1 = 5,97.
По значениям Т2=1,07 и 19(1/р—2)=5‚97 из графика на рис. 111-1-8 [21]
находим а2=0,74 и по этой величине уточняем АУ… Для этого вычис—
лим [см. (3.1\/.36)]
В : (2/9)(7 + 0,74)(1 + 0,74) 0,74 = 2,22,
а затем найдем
м7, : _в_
7-+-0‚74
(1 + 1/ 1 + 2,22/1‚472) = 0,939.
Соответствующая безразмерная величина энтальпии
Е, = 1—3—73 0,939 (2 — 0,939) = 1,076,
а отношение плотностей
92/р1 = 1/(1 — 0,939) : 16,4.
Тогда
52 =16,4—1,08-1О"7 = 1,77-10—6.
Так как логарифм величины 1/р2 равен 5,76, то из графика рис. 111-1-8
[21] определяем во втором приближении а2=0‚72. На этом приближе—
ния заканчиваем и окончательно находим:
в = (2/9) (7 + 0,72)(1 + 0,72) 0,72 = 2,12;
_ = 3 2 : .
АУ, „(№ (1 +1/1 +2,12/1‚47) 0,936,
62/6, = на _ 0,936) = 15,6;
52 = 15,6.1,06.10—7 = 1,68—10‘6.
Оценим время релаксации, используя формулу [20]:
іо= [Фарма—+ “‘ Л‘],
1—осе
&
12
где с: Т”?— (1+а)рд, а осе=ос2— равновесная степень диссоциации.
А
Характеристическая плотность рд в соответствии с табл. 111—1—1 [21]
равна для воздушной смеси 135 г/смз, а р2=1‚68- 10—6.
Для приближенной оценки влияния неравновесности на течение воз—
духа можно рассматривать двухатомную модель воздуха, состоящую из
аддитивной смеси кислорода и азота. В этом случае коэффициент с
определяют для кислорода, а все остальные параметры, в част-
ности степень равновесной диссоциации ае, характеристи-
ческие плотность и давление, находят для двухатомной модели воздуха.
В соответствии с этим константа скорости рекомбинации @=
507
=8,4-1О'4 смб/(моль2-сек), а масса атома тА=16 г/моль. Имея в виду,
что непосредственно за скачком ос=0, получим
. 14 ‚
с = 8—16?— 135 = 4,43. 1014 вмз/(сек-г).
Для этих данных время релаксации
0 2
@= 4,43—1014-1‚68—10—6-135(———7—
1 ——0,72
Соответствующая длина пути релаксации
1
Х : ? (Уа=0 + уе) [д’
где Уос=0 и У.е—скорости соответственно неравновесного и равновесного
течений газа. Используя уравнение импульса для сильной ударной вол-
ны р2+р2У ; =р1У%‚ наидем
р У2—р 1,39.10—3.79202—7‚30-104 ‚
112 = У —0 : 1/4—1—3 : 1/ 3 =1ЗООМ/сек.
°°— р2 8,29-10"
С учетом найденных выше величин АТ/=(У1—У2)/У1=О‚936 и И:
=792О м/сек, значение
112 = Уе = 1/1 (1 — А7) = 7920 (1 — 0,936) = 507 м/сек.
Таким образом, длина пути релаксации
х = _;— (1300 + 507)2,30-10—6 = 2,04.10—3м.
)]`1= 2,30. 10—6 сек.
У. МЕТОД ХАРАКТЕРИСТИК
\!.1. С помощью уравнения (2.\/.1) можно исследовать установившие-
ся газовые потоки, причем если в этом уравнении положить е=0‚ то оно
будет справедливо для двухмерного плоского потока, а при е=1—для
двухмерного пространственного (осесимметричного) потока.
Вместе с тем написанное уравнение пригодно для изучения как вих—
ревых (неизэнтропических), так и безвихревых (изэнтропических) дви-
жений газа. В первом случае оно может быть преобразовано к уравне-
нию для функции тока 113:
. д2 _1]; д2 __ф № _1 _
(УЭС—а 2)д_ +2 Ух …удд (УЗ—а2)Б—2— х(1__У2_)1—1е_
___Ё—і Уаз—_х , У2 #. 8 2 2 (18
21:5 12—У— “\ 1 „Знак )… у (0 У) [… ‚ (вул)
_ 1 ' (Е)—' .: _ 1 . ді
Где Ух _ руе ду ’ Уу ру8 дх ’
а во втором — к уравнению для потенциала скоростей (р:
(Уг— _а2)-д—Ф +2УУ дф +013— а2)Ё?_—е“2у"у=о, (вуз)
"‘ у дх ду ду2
2 У У
дх ду дхду. ду дх
\’2. Рассмотрим какую-нибудь линию тока. Уравнение движения
в проекции на нормаль п к этой линии имеет вид
7% = —‹1/р›-‹ар/ап›. (ЗМЗ)
где УЗ/г—ускорение частицы газа; г—радиус кривизны линии тока.
Вдоль каждой линии тока действительно уравнение энергии
1/2/2 + і : іо. (3.\/`.4)
Дифференцируя по п (3.\/.4), найдем
ёк а_і _ №
_ . (В.У.Б)
дп дп дп,
Заметим при этом, что вдоль одной и той же линии тока іо=сопзі и, сле—
довательно, ді0=0. Согласно второму закону термодинамики изменение
энтропии
а$_ — с _- 77:+_ *’ дн)—) (зуб)
Пользуясь уравнением состояния Тр=_рКТ‚ получим
61 (;)/9) = ёр/р + ра (1/р) = КЛ, (ЗУ-7)
откуда
рд (1/р) : РМТ — др,/р. (3.\/.8)
Из уравнений (3.\/.6) и (3.\7.8) находим
_ и ; _а
а$_с„Т+Т(1га р).
Отсюда, учитывая, что энтальпия і=срТ и газовая постоянная К=ср—
——с„, пОлучим
Т.-сі$ : сіі —сір/р. (В.У.Э)
509
Это же уравнение можно написать в виде
а_ч _ за _; и
_ . (3.\/.1О)
ап ап р ап
В таком виде уравнение (В.У.Ю) характеризует изменение энтропии
при переходе от одной линии тока к другой. Исключая из него значение
(іі/ст, получим
__.—_"‘—-——__ __ _
р ап ап ст
Используя это выражение и уравнение
движения (ЗА/.В), получим
У (сіУ/сіп _- У/г) : сііо/сіп _ Т (ав/ап).
(ЗА/. 1 2)
Покажем, что выражение (сіУ/сіп—У/г)
равно удвоенному значению вихря в дан-
той точке. Рассмотрим какую-нибудь ли—
нию тока (рис. 3.\/.1) и проведем каса-
тельную к ней в произвольной точке 0.
По касательной направим ось х, а по нор-
мали к ней — ось у. Для точки О произ-
водная
дУ_„/ду : сіУ/сіп, (3.\/'.13)
9551) 1 ар сііо У (№ (18 (3.\/.11)
Рис. В.У.]. Схема линии тока
так как вектор скорости в этой точке направлен по оси х. Если обозна-
чить через (13 элемент дуги линии тока, то можем написать
дУУ/дх : дУу/дэ
или
дУУ/дх : У (СЮ/(1$) : У/г. (3.\/.14)
Из (3.\7.13) и (3.\/.14) находим удвоенный вихрь:
2со2 : дУу/дх — дУх/ду : У/г — (ЛЛ/ап. (ЗУ. 15)
Подставляя (3.\7.15) в (3.\/.12), получим
21/(02 : сііо/сіп — Т (48/6111). (3.\/.16)
Из этого выражения следует, что вихрь со2 равен нулю при условии
сііо/сіп : 0, сіЗ/аЁп : О. (В.У.17)
В ином случае (при наличии потерь энергии или изменении энтропии
при переходе от одной линии тока к другой) поток будет вихревым.
Именно такой поток возникает за криволинейной волной, так как он
характеризуется значением аЗ/сіпэЕО. При этом если такая волна воз-
никает в «невязком» сверхзвуковом потоке, то сііо/сіп=0, если же она
образуется в потоке, где проявляется действие сил вязкости (например
в пограничном слое), то сііо/сіпэЬО.
№3. Условие постоянства энтропии соответствует равенству нулю.
полнои производной энтропии по времени, т. е.
48/41! = О. (З.\7.18)
Так как рассматривается да нная частица, то вычисление этой произ-
510
водной осуществляется для траектории (а не для линии тока), и такое
вычисление представляет собой п о л н о е д и ф ф е р е н д и р о в а н и е:
ёцёі .дд а_х+ё8_.д+ё.з_
(1! дід дх (іі ду (іі дг (1!
„+7 “З…/_ дв у+УЁдЁ
ИЛИ
дді! +7ёга68 : О.
`]..4 В СООТВЕТСТВИИ С первым ЗЗКОНОМ ТЗРМОДИНЗМИКИ ИЗМВНВНИВ
энтропии
(18 = (іі/Т —с1р/(рТ). (З.\/. 19)
По условию постоянства энтальпии торможения іо вдоль линии тока,
(іі + У-сіУ : О,
откуда ей:—7617. С Другой стороны, для движения вдоль линии тока
можно написать УсіУ=—сір/р или ді=сір/р. Внося это в (3.\/.19), полу-
чим равенство (1$ =О, в соответствии с которым вдоль линии тока 8 =
=сопз‘с.
\!.5. Решение уравнения (2.\/.2) для потенциала ср в окрестности
точки А/(х, у) на начальной кривой можно записать в виде ряда:
со 1 дп дп
Ф (Х… уе) = Ф (х, у) + 2 п—! [(Ах)” 3; + —’1’—(Ах)п—1 Ау дхн—$; +
п=1
+ ШГЦ (Ахл—2 ‹Ау›2д——— —„—”-—д_ ;; ,+-- -+ (№ д” (.,—3], (ЗА/20)
где хо, уо—координаты точки М, расположенной в непосредственной
близости от точки № (х, у). Расстояние между этими точками определя-
ется величинами Ах=хо—х, Ау=уо—у.
С помощью ряда (?А/20) можно получить решение, если на рассмат-
риваемой кривой известны значения функции ср и ее производные лю-
бого порядка диср/дхт дп-ср/(дхп—1ду) и т. д. Так как обычно на этой кри-
вой заданы значения первых производных дср/дх и дср/ду, то необходимо
дополнительно найти производные более высокого порядка. При решении
газодинамических задач обычно достаточно знать производные второго
порядка, т. е. д2ср/дх2, д2ср/(дхду) и д2ср/ду2. Следовательно, решение за-
дачи Коши в рассматриваемом классе задач связано с определением до-
полнительных условий, позволяющих определить указанные производ-
ные потенциальной функции ср более высокого порядка, входящие
в уравнения (2.\/.2) или (ЗА/20).
\/.-6. Для решения системы уравнений (2.\/.3) используется метод
определителей. В соответствии с этим методом вторые производные оты-
скиваются в следующем виде:
Ц=Фхх=Аи/Аэ 8=Фху=А8/Аэ Ё=Фуу=Аі/А‚
где Аи, А8, А; — частные определители; А — главный определитель систе-
мы уравнений (2.\/.3). Эти решения будут однозначными, если главный
определитель на начальной кривой не равен нулю.
УЛ. Для решения заданной системы уравнений (2.\/.4) составим сле-›
дующие определители:
000 000
А= 220=0; А1=220=0;
—151 351
511
000 000
А2= 22о=0; Аз= 222 =0.
—131 —153
В соответствии с этими значениями решение системы формально за-
пишется в следующем виде:
А- О А О А О
А 0 А 0 А О
Этой неопределенности в решении можно избежать. Непосредственно
из системы уравнений следует, что она имеет бесконечное множество
решений:
х; у: 1—х; 2=6х—2,
которые будут конечными при конечном значении х, несмотря на то
что все определители системы равны нулю. Например, при х=3 зна—
чения у=—2, г=16, а при х=4 значения у=—3, г=22 и т. д.
№8. Для существования конечных, хотя и не0днозначных решений
искомой функции ср [см. (2.\/.2)], определяемой разложением (3.\/.20)‚
необхолимо, чтобы главный и все частные определители системы урав-
нений (2.\/.3) равнялись нулю (т. е. А=О и Аи=А$=А‚='О).
\!.9. Решение (2.\/.6) представляет собой в дифференциальной фор-
ме систему уравнений—характеристик двух семейств, а значения
(сіу/сіх)1‚2 определяют углы наклона касательных к этим характеристи-
кам в рассматриваемой точке.
\!.10. Уравнения (2.\/`.5) и
А (у’а’ _р’) — 284’ —Н = 0 (р’ : ар/сіх, су’ = аа/Фс), (ЗА/121)
которые соответствуют равенству нулю главного, а также частных опре-
делителей системы (2.\/.3) и определяют существование конечных, хо-
тя и неоднозначных, решений для и, $, !, называются условиями
совместности
Геометрически эти условия означают, что решения уравнений для
характеристик в физической плоскости х, у являются отображением на
плоскость р, а, т. е. точкам кривых, описываемых уравнением (2.\/.5)‚
соответствуют точки кривых, определяемых уравнением (3.\/.21). Ина—
че говоря, перемещению вдоль характеристики в плоскости х, у соот-
ветствует перемещение вдоль характеристики того же семейства в пло-
скости р, 6].
№11. Отличительная особенность характеристик от других кривых,
проведенных в потоке, заключается в том, что если вдоль кривой, не
являющейся характеристикой, начальные условия можно задавать
произвольно, то вдоль характеристики этого делать нельзя Это объяс-
няется тем, что характеристики должны удовлетворять дифференциаль-
ному уравнению (2.\/.5) или (3.\/.21).
“12. По заданному числу М=2 определим угол наклона характе-
ристик (линий Маха) к вектору скорости в рассматриваемой точке:
р. = і агсзіп (1/М) = 1— агсзіп (1/2) : і 30°. (ЗА/22)
Так как, по условию, вектор скорости составляет с осью Ох угол
Б=4О°‚ то наклон этих характеристик к той же оси будет определятЬся
углами Він (рис. 3.\/.2): Б+м=70° (первое семейство) и [З—р,=10°
(второе семейство).
У.]З. Двухмерные (плоское или пространственное осесимметричное)
течения газа описываются общим- уравнением (2.\/'.1). Конкретный вид
уравнения для каждого из этих двух течений определяется наличием
свободного члена а2Уу/у.
512
Решения этих уравнений, как известно, хотя и неоднозначные, будут
при условии, что главный (А) и частные (А… А8, А;) определители
системы (2.\7.3) равны нулю. При этом равенство нулю главного опреде—
лителя соответствует условию существования характеристик в физиче-
ской плоскости газового потока. Таким образом, уравнение этих харак-
теристик будет (2.\/.5). ВИД этого уравнения зависит только от коэф-
фициентов А, В, С и, следовательно, будет одним и тем же как для пло-
ского, так и для пространственного осесим-
метричного течений. $7
\!.14. По условию, характеристики пер- 9
вого и второго семейств наклонены к оси
Ох под углами В+р=18° и В—м=—12°.
Следовательно, угол между этими характе—
ристнками в рассматриваемой точке равен
\\
\ '\
_ \ \_
2М=18°+12°=30°. С учетом этого угол д ‹ ‚$61!
и: 15°, а соответствующее число Маха 0 ’» '
М=1/$іпр=1/зіп15°=3‚86. 3
Рис. З.\/'„2. Направление ха-
рактеристик в физической
‚ плоскости
Направление вектора скорости совпада-
ет с биссектрисой угла между характери—
стиками, и, следовательно, угол наклона
этого вектора
@= (Б+н)—м= 18°—159=3°. (3.\/.23)
\!. 15. Для ответа на вопрос воспользуемся уравнением «эллипса ско-
ростей»
}\?
х №: 1.
(іг+1)/(!г—1) + у
Малая полуось этого эллипса равна единице, а большая 1/(іг+ 1__)/(іг—1__).
Он обладает тем свойством, что когда конец вектора скорости У (или 7»)
лежит на эллипсе, а центр эллипса совпадает с началом вектора, то
его большая ось совпадает с направлением характеристики одного из
семеиств в плоскости потока.
Вычертим на листе бумаги в каком—либо масштабе два таких эллип-
са, у одного из Которых большая полуось Ь1=Ъ/(іг1+1)/(іг1—1), а у дру-
гого Ь2=У(іг2+1)/(іг2—1) (рис. 3.\/.З). Затем проведем на рисунке из
центра 0 элемент дуги окружности радиусом, равным заданной ско-
рости )», и зафиксируем точки В и А пересечения этой дуги с ветвями
эллипсов.
?‘н
13;
132
Рис. 3.\7.3. Определение угла наклона характеристики и
с помощью изэнтропного эллипса скоростей
33—927 513
Углы № и … наклона прямых ОВ и ОА к большой полуоси представ-
ляют собой углы наклона характеристик соответственно в «горячем»
и «холодном» потоках. Как видим, характеристика в «горячем» потоке
наклонена под большим углом.
№16. Характеристики обоих семейств в физической плоскости опи-
сываются уравнением
((?—у) == @@ і и):
х 1,2
1 2 2
_Ё—Ё (Ух У), і а Ъ/У _а ). (3.\/.24)
Ух—а
Для рассматриваемой точки потока после соответствующей подстанов-
КИ СКОРОСТЗЙ ПОТОКЗ И СКОРОСТИ ЗВУКЗ ПОЛУЧИМ
__ __;— _ 2 2 _ 2
тва-Зі ц) _ 32024802 (320 150$ гевог/(320 +150) 280 ).
Таким образом, для характеристики первого семейства щаз—нь) =4,52‚
а для характеристики второго семейства 19(Б—ц)=—0,Б17. В соответ-
ствии с этими результатами Б+м=77°32’‚ [З—ц=—27°20’ и, следова-
тельно, [3=25°06’, ц=52°26’.
\!.17. Наклон характеристик в плоскости годографа можно опреде-
лить, используя свойство перпендикулярности этих и сопряженных ха—
рактеристик в физической плоскости. В соответствии с этим наклон
таких характеристик будут определяться углами В2=4Б°+90°=135°
(второе семейство) и |З1=13°+90°=103° (первое семейство).
№18. Для анализа воспользуемся уравнением
(1/1?) -с18/сіп : — (1 Ш рЬ/сіп. (ЗА/25)
Из этого уравнения следует, что при сіЗ/Сіп>0 производная сііпрЬ/сіп<0
и таким образом, давление торможения рь при переходе от одной линии
тока к другой с увеличением энтропии будет уменьшаться.
\!.19. При сверхзвуковом обтекании
91:02”: М: „ заостроенного профиля с участком клино-
>^ виднои поверхности перед ним возникает
скачок уплотнения, прямолинейный уча-
сток которого ограничен точкой В, распо-
ложенной на пересечении с характеристи-
// кой, проведенной из конца клина. За этой
\ точкой скачок искривляется в результате
взаимодействия с падающими волнами
разрежения образующимися при обтека-
нии криволинейного участка профиля
(см. рис. 2.\/.2), и, как следствие, проис-
ходит изменение его интенсивности. Это
в свою очередь вызывает изменение энтропии при переходе от одной
линии тока к другой, что является причиной вихревого характера дви-
жения газа за скачком.
Зона влияния такого характера движения на обтекание ограничива—
ется областью, расположенной внутри криволинейного скачка и харак—
теристики второго семейства В С, выходящей из точки В. Это объясняет-
ся тем, что в сверхзвуковом потоке возмущения распространяются толь-
ко за характеристиками (линиями Маха) в физической плоскости по-
тока.
\].20. Угол (о определяемый из выражений (2.\/'.8) или (2.\/`.9)‚ ра-
вен углу отклонения газового потока при его изэнтропическом расши-
рении от точки, где М=1‚ до состояния, характеризуемого некоторым
произвольным числом М>1, которое равно верхнему пределу при вы-
числении интеграла (2.\/.8) (рис. 3. №4).
Рис. 3.\7.4. К определению угла ш
514
\’21. Для точки А уравнение характеристик в плоскости годографа
будет
[31 = — (01 + 61, (3.\/.26)
а для точки В
52 = — (02 + 51. (ЗА/27)
Вычитая из второго первое, получим
[32— [31 : АБ : (01 —— (02. (337.28)
Из табл. 10 [13] находим для М1=5 и М2=10 соответственно (01:
=76,92° и ш2=102‚32°. С учетом этих данных
АБ : 76,92° — 102,32° =`—25,40°.
\!.22. Из уравнения (3.\7.28) находим
(02 = (01 _ АБ,
где угол (… в соответствии со значеним М1=3 равен 49,76° (см. табл. 10
[13]). Таким образом,
(02 : 49,76° _— 10° : З9,76°.
По этой величине из той же таблицы находим соответствующее число
М2=2,53. Как видим, число Маха уменьшилось, значит течение проис—
ходит со сжатием.
№23. Предельный угол отклонения потока (Шшах) определяется из
условия
(о…,… : % (у;—Ё — ) . (ЗА/29)
Величина этого угла для &= 1,4
(от,… : і(\/1'4+1—1)=130‚455°.
' 2 1,4—1
Угол (92, соответствующий заданному числу М2=10 (см. табл. 10 [13])‚
равен 102,316°. Таким образом, разность сотах—032: 130,455°—102‚З16°=
=28,1З9°.
\!.24. Из уравнения для характеристик в плоскости годографа
В1=ш+і31 следует, что
рта): : сотах "— БГ
Таким образом, предельный угол отклонения
Бтах _ В : АБтах : Штах _ 03—
Из табл. 10 [13] по М=5 находим ш=76,92°. В соответствии с этим
АБ…ах : 130,4559 — 76,92° : 53,535°.
\!.25. Для решения задачи воспользуемся табл. 10 [13].
Из этой таблицы для М1=3,2 находим угол ш1=53,47°‚ а также га—
зодинамические функции ж1=2‚008, л(?ь1)=0‚0202‚ е(7»1)=0,0616‚
т().1)=0‚328. Затем по уравнению (337.28) находим
(02 = (01 —— АБ : 53,47° + 13° : 66,47°.
Из той же табл. 10 по найденной величине (92 определяем число М2=
=4‚05 и соответствующие функции №=2‚144, л(№)=0‚00616‚ 8(7\‚2)=
=0‚0264, т(№) =0‚2З4.
Рассмотрим, как вычисляются по найденным газодинамическим
функциям абсолютные величины параметров, характеризующих тече-
33°“ 515
ние в струе. Давление, температура и плотность торможения рассчиты—
ваются по формулам:
Р1' Т1 91
ро : ‚ ТО : }\, , ро : А, '
“(М) Т( 1) 8( 1)
Для изэнтропического течения эти параметры остаются постоянны-
ми и, следовательно, их можно использовать для расчета соответству-
ющих значений давления, температуры и плотности, а также скорости
в заданном сечении струи:
ло,) _ 0 0616.10—2
ра = и — ‚ = 0,0366 [СГ/см?;
л (М) 0, 202. 10—1
—1
р, = , № : 0,02 Щ : 0,00856 кг.сек2/м4,
801) 0616.10—1
_ т (к,) __ 0,234 :
Т, _ г] ——т (41) __ 209 _О'328 148 К.
Скорость звука
а, = 20,1 ГТ}: 2011/1713 : 244 м/сек,
а соответствующая скорость газового потока
У2 : а2М2 : 244-4,05 : 988 м/сек.
\!.26. При истечении газовой струи одновременно происходит ее по-
ворот, сопровождающийся расширением, в результате которого стати-
ческое давление в ней становится равным противодавлению (давлению
в окружающей среде). Такое расширение газа представляет собой из-
энтропический процесс, характеризующийся постоянным давлением
торможения ро, определяемым из соотношения ро=ра/[л:(?»а) ]. По извест-
ной величине противодавления рн можно вычислить газодинамическую
функцию:
Л (ЖИ) : рн/РО : Л (жа) (рн/Ра)° (3У.30)
Для заданных условий по числу Ма=2,3 из табл. 10 [13] найдем
соответствующие функции ?ьа=1,756, и(жа)=0,0800‚ а также, угол
ша=34‚28°. Согласно этим данным ЛО…) =0‚0800(0‚11/0‚56) =О‚0157.
Из той же таблицы по величине и(жн) =0‚0157 определим функцию Жн=
=2‚О41‚ число МН=З‚37 и угол шн=56‚41°. По значению этого угла (он
находим угол поворота струи:
АБ : (он — соа = 56,41° — 34,28° : 22,13°.
№27. Рассмотрим плоское сверхзвуковое течение около выпУклой
поверхности (рис. 3.\7.5). НевозмуЩенная и возмущенная области это—
го течения разделяются характеристикой (назовем ее характеристикой
первого семейства), проведенной из точки О—границы прямолинейно-
го и криволинейного участков обтекаемого контура. Эта характеристи-
ка ОА/ является прямой линией, что следует из ее уравнения
ау/сіх = ?»1 = Ч; (6 + и) = *$ и,…
в котором рео=агсзіп (1/Моо) =сопз’с.
Теперь рассмотрим характеристику этого семейства, выходящую из
точки 01. Ее уравнение в дифференциальной форме напишем в виде
(З.\/.24)
@ _} _ Ухуу+а1/У2_аг
__ _ „_
(1х Уі_а2
516
Чтобы определить вид этой характеристики, рассмотрим характеристи-
ки в плоскости годографа (см. рис. З.\/.5). Проведем в этой плоскости
вектор У… до пересечения в точке А’ с эпициклоидой, являющейся ха-
рактеристикой второго семейства в плоскости годографа. Перемещаясь
вдоль характеристики ОМ в физической плоскости, будем располагаться
в плоскости годографа в одной и той же точке А’. Таким образом, для
всей возмущенной области течения характеристикой второго семейства
в плоскости годографа будет являться одна и та же эпициклоида, прохо—
дящая через точку А’.
Рис. 3.\/'.5. Определение скорости газа при изэнтропическом
расширении
На эпициклоиде можно найти точку В’, соответствующую точке 01
на контуре, где скорость У. Этой точке В’ соответствует характеристика
О1К первого семейства, вдоль которой, очевидно, скорость У будет по-
стоянной по величине и направлению. Отсюда следует, что в соответст—
вии с (ЗХ/24) эта характеристика, как и все другие характеристики это—
го семейства‚ будет п р я м о й л и н и е й.
№28. Рассмотрим уравнения для сопряженных характеристик в фи-
зической плоскости х, у и в плоскости годографа ?…, жу. Уравнения
в плоскости х, у напишем в виде (33/24)
йу‘ ] /_
?» = —— =—— У„У іаУУ2—а2).
1,2 (ах )1‚2 “:?:—“?( у ,
Если в точке А потока известно местное число М, то наклон характери-
стики определится углом р‚=агсзіп (1/М). Таким образом, вид харак-
теристики в физической плоскости не зависит от того, будет ли поток
плоским или пространственным осесимметричным, вихревым или потен-
циальным, а определяется распределением скоростей (чисел Маха,
см. рис. 2.\/.5‚ (1).
По физическому смыслу все эти характеристики являются линиями
Маха (линиями слабых возмущений). Однако вид характеристик в пло—
скости годографа будет неодинаков для рассмотренных случаев тече-
ния газа. На рис. 2.\/.5,б показаны характеристики в плоскости годо-
графа для пл оского потенциального течения, представляю—
щие собой эпициклоиды, уравнения которых в дифференциальной
форме
Шьх + ?ьшсіЖу : 0. (31/31)
Рассмотрим характеристики на рис. 2.\/.5,в. Как видно, они смеще-
ны на величину сдвига 61,`. 62 относительно характеристик плоского по-
5,17;
тенциального потока. Это обусловлено иным вилом уравнений таких
характеристик [20]:
аж _ с! с! 48
Т+Ё8МВ—87хі°1(м‚5)і "
131? дн
130,0) = 0, (ЗА/32)
где (1 (И, (3), 720», В) — некоторые функции Маха и наклона вектора ско-
рости; $ —— энтропия.
В соответствии с уравнением (3.\/.32) сдвиг характеристик относи—
тельно эпициклоид может быть в следующих случаях: 1) сверхзвуковое
течение плоское (8:0) и вихревое (непотенциальное, сіЗ/аЁпчЕО);
2) поток пространственный осесимметричный (8:1), являющийся либо
потенциальным (аЁЗ/сіп=0), либо вихревым (непотенциальным,
ёБ/сіпэЕО).
\’29. Из аэродинамики сверхзвуковых потенциальных течений газа
известно, что при плоском безвихревом обтекании поверхности все
характеристики одного семейства будут прямыми линиями, если хотя
бы одна из них окажется прямой (ОВ на рис. 2.\/.6‚ а). При этом сле—
дует иметь в виду, что всякое течение за криволинейным скачком
уплотнения будет, строго говоря, непотенциальным (вихревым) и при-
нятая схема потока с прямолинейными характеристиками является рас-
четной моделью, которая не учитывает вихревого характера движения.
При больших скоростях обтекания становится необходимым учиты—
вать такой характер движения за криволинейным скачком и пользо-
ваться при этом уравнениями характеристик, которые отличаются от
соответствующих уравнений для потенциальных течений. По этой при-
чине и вид таких характеристик в плоскости вихревого потока будет
иным, чем в плоскости потенциального течения, хотя в вихревом потоке
может существовать одна характеристика в виде прямой (СП на
рис. 2.\/.6‚б)‚ являющаяся границей между течением около клиновид-
ного носка и потоком на криволинейной стенке.
№30. Решение этой задачи связано прежде всего с определением
максимальной скорости потока:
. 2 03°
УБЮХ : ‚е_—_] ' 7 + 1 УЗО. (ЗПУЗЗ)
При температуре Тоо=288 К и значении 13:1,4 скорость звука а…:
=340 м/сек, следовательно,
2 3402 .
1/2 = ( . 1)У2 =2,03У2.
так 1,4—1 7502 + °° °°
По этому значению 1/2 а также заданным У…, УА и УВ можно вычис-
тах ’
ЛИТЬ Местные ЧИСЛЗ Маха В ТОЧКЗХ А И В:
м __ ‚2—1 Угпах Ё_1 _1/2__
А _ Т ”у? „в _
00 А
: (!”—1 (2,03 7502 —1)]"“2= 2,53; (З.\7.34)
2 8002
_ 1,4—1 7502 _ -1/2_
мВ _( 2 (2,03 8202 1)] _ 2,68.
Соответствующие углы наклона линий Маха:
„А : агсзіп (НМА) __ агсзіп (1/2‚53) : 23° 18’
”в : агсзіп (1/2,68) : 21955’.
5138
Таким образом, угол наклона характеристики первого семейства,
выходящей из точки В,
53 + „В = 32° + 21° 55’ = 53° 553
а соответствующее значение угла для характеристики второго семейст-
ва, проведенной из точки А,
[дА—„,А = 30°—23° 18’ = 6°42’.
Под этими углами проведем отрезки прямых—элементы характери-
стик—соответственно через точки А и В до пересечения в точке С
(см. рис. 2.\7.7). Для определения координат этой точки хе, ус необхо-
димо решить систему уравнений для характеристик первого и второго
семейств, проходящих соответственно через точки В и А:
ус _ув : (ХС _)Св} 15% (БВ + Р’В);
ус _уА : (хс _ ХА) ЁЁ (БА _НА)'
Подставляя данные, получаем:
ус —— 8 = (хс ——12)’[9 53° 55’;
ус — 10 = (ХС—1О)’[36°42’.
Решая эту систему относительно ха и ус, находим:
хС = 13,78, ус = 10,44.
Случай плоского движения. Для нахождения скорости в точке С
используем уравнения для характеристик в плоскости годографа:
Асов — АБВ = О (первое семейство); (3.\/.35)
АША + АВА : О (второе семейство). (3.\7.36)
Призведя в (3.\/.36) замену:
А®А=сос—соА=АшВ+соВ—ФА; (&`/37)
АВА : [ЗС—БА : АБВ + [”В—БА!
найдем
Аюв+соВ—ЮА+АБВ+БВ—БА=О.
Решая это уравнение совместно с (3.\/'.35) относительно Асов и АБВ, по-
лучим:
Асов = (°С;—033 : (1/2) [( БА—БВ) + (ЮА—ЮВ)];
АБВ = Асов = [ЗС—[ЗВ = (1/2) [“ЗА—БВ) + (ФА—(ОВ)].
Из табл. 10 [13] по МА=2‚53 и МВ=2‚68 находим соответственно (ОА:
=39‚82°, шв=43,19°. С учетом этих данных
Асов = (1/2) [(30° — 32°) + (З9,82° — 43,19°)] =— 2,68°‚
откуда
(”с = сов + Асов = 43,19°— 2,68° = 40,51°.
Из табл. 10 [13] по этому значению находим число Мс=2,56. Угол по-
ворота потока АБВ определим по значению Ашв:
АБВ = [56 _ р„ = Асов = — 2,68°.
В СООТВЗТСТВИИ С ЭТИМ ЗНЗЧЗНИЗМ УГОЛ НЗКЛОНЭ ПОТОКЭ В ТОЧКЕ С
вс = р„ + АБВ = 32°— 2,68° = 29,32°.
519
Пространственный осесимметричный поток. В этом случае для харак—
теристик в плоскости годографа используем систему:
Асов — АБВ — (АхВ/ув) [в = О (первое семейство); (337.38)
АША + АВА — (АхА/уА) т А = О (второе семейство), (3.\/.39)
где
[В = зіп [ЗВ-зіп рьВ/соз (БВ + ив); (3.\/.4О)
тА= зіпвА-зіпнА/соз(БА—№). (3.\/.41)
Произведя в (3.\/.39) замену согласно (337.37), получим
АсоВ+АБВ+юВ—шА+БВ—[3А—(АхА/уд)тд=О. (3.\7.42)
Решая это уравнение совместно с (3.\7.38), найдем
1 Ах Ах „З
АБВ=?[(_АтА_ В [В)—(юВ—ФА)——([5В—БА)]. (3.\/.43)
__ уА ув
По этому значению АВВ определим АшВ:
Асов = АБВ + (АхВ/ув) [В. (3.\/`.44)
ВЫЧИСЛИМ ОТДЗЛЬНЫЕ' параметры, ВХОДЯЩИВ В ПОЛУЧВННЫЗ СООТНО-
ШВНИЯі
АхА = хс —хА = 13,78 —— 10 = 3,78;
Ахв = хс—хв = 13,78— 12 = 1,78;
А : БіП (30°-він 23° 18’ = 0,200;
соз (30° — 23° 18’)
В : эіп 32°.зіп 21° 55’ = 0,336;
сов (32° + 21° 55’)
1 3,78
АБВ = во — вв = 7 [(Т №00 —
— (43,19° — 39,82°) —— (32° — 30°)] =— 2,66°.
В соответствии с этим значением АБВ
Вс : [38 + АБВ : 32° — 2,66° = 29‚З4°.
Далее вычисляем:
Асов =— 2,66° + (1,78/8) О,336-57,3° = 1,61°;
(ос = (”в + Асов = 43,19° + 1,61° = 44,8О°.
1
'878 0,336) 57‚3° _
Из табл. 10 [13] по этому значению угла (ос находим в точке С число
Маха Мс=2,76.
\!.31. Случай плоского движения. Для определения скорости в точ-
ке С следует воспользоваться системой уравнений Для характеристик:
Ахв Ард .,
Асов — АБВ—_ ‚ - —— в = О (первое семеиство); (3.\/.45)
_ дров Ап
А"А % - „ т
АША + АВА + [г ‚ . М (А = О (второе семеиство), (3.\/.46)
ров
где
Ард = рдд — рО'В ; (357.47)
св = $1П2ЦВ°СОЗ мВ/соз (БВ + ”в); (ЗХ/А8)
520
{А : зіп2рА-соз рА/соз (БА—рд); (3.\/.49)
Ап: (АС) зіп рд —|— (ВС)зіп Рв (ЗА/50)
Произведя в (3.\/.46) замену АША и АВА согласно (3.\/.37)‚ получим
уравнение
Ах Ар,
АшВ—і—А153 +-0)В—0)А+[ЗВ—|3А+ ,А- А0
дров ”
гА : 0. (З.\/`.51)
Решая это уравнение совместно с (З.\/.45)‚ найдем
1 1 Ард
А = _ _ . __ __
вв 2 [ #1063 А” (АхА {А+ Ахв св)
— (сов — (ОА) — (БВ —- БА) ] . (3.\/.52)
Этому решению соответствует величина
Ах АрЬ
А = А В . _— . з.у.5
(ОВ В В + ЁРЬВ Ап СВ ( З)
Произведем необходимые вычисления, используя данные, полученные
при решении задачи №30:
_ зіп223°18’-со523° 18’
А — =0‚145;
соз (30° _ 23° 18’)
зіп2 21° 55’-со5 21° 55’
В : о о г : 0’22;
соз (32 + 21 55)
Ард : род —Ров : 0,8р0—0‚77р0. _____0 039
Ров Ров 0,77р0
хС_хА 13,78—10 _ 382—
: соз (13,4 —рА) : соз (30°_23° 18’)
"С—"В : 13,78—12 _
со5(БВ—|—р‚в) со5(32°+21°55') _'
Ап = 3,82-5іп 23° 18’ —|— 3,02—5іп 21° 55’ = 2,62;
1 [ 1 0.039
3,02;
— (43,19° _ 39,82°) _- (з2° —— 30°)1 =— 2,97°.
По этому значению АБВ находим угол:
[ЗС : [ЗВ + АБВ : 32° — 2,97° : 29‚ОЗ°.
Далее вычисляем:
Асов ______2‚979+ 1,78_ 0,039
1.4 ` 2,62
О,22-57‚3° =— 2,73°.
С учетом этого значения определяем в точке С угол
(‚ОС = 003 + АФВ : 43,19° '— 2‚73° : 40,46°.
В табл. 10 [13] это-му углу соответствует число Маха Мс=2‚56.
34—927 521
Пространственный осесимметричный поток. Используем следующие
уравнения для характеристик:
А А А '
Асов _ АБВ _ ХВ [В _ ’ЁВ . [% св : 0; (З.\/.54)
ув [гроз
А А А ’
А…, + А0, —3 тд + ",А . Еро— [А = 0. (з.у.55)
УА дров ”
Произведя во втором уравнении замену АША и АВА согласно (3.`\/.37)‚
получим
АхА АхА Ард
АСОВ+АБВ+ЮВ—ША+ВВ—БА——тА—|—_,-°А— А:О’ (З…ЧББ)
уА ЁРов ”
причем в (3.\/.54) и (3.\/.55) значения [В и 171,4 находят по (3.\/.40)
и (3.\/.41).
Решая совместно уравнения (3.\/.54) и (ЗХ/56), найдем
1 [ Ард АХА Ахв
А =———————Ах1"Ахс ———т———1 ——
ВВ 2|: №63 Ап( ААТ вв)"}(уА А ув в)
—(соВ—соА)—([ЗВ—ВА)]. (3.\/.57)
По этой величине АБВ определяем Асов:
Ахв АхВ Арь
А0) =А` —і—-—1 ' ‚ 0—с. (3.\7.58
В вв ув В—Гігров Ап В )
Вычислим приращение угла АБВ, используя решения задачи \730:
1 1 О 039
=———.’—3 8. 45 78-022573°'
АВВ 2[ 1,4 2,62 ( 97 091 +19 9 ) › _Г—
3,78
10
1,78
+ ( 0,200 — Т 0,336) 57‚3° _ (43,190 _ 39,82°) —-
—— (32о — 30°)] =— 2,95°.
С учетом этого угол наклона вектора скорости в точке С
[ЗС : [ЗВ —|— АБВ : 32° — 2,95° : 29,05°.
Далее находим
Асов =—— 2,95° + “78 0,336-57,3°—|— Ш. “039 0,22.57,3° : 1,56°
8 1,4 2,62
И ОПРЭДЗЛЯЕМ УГОЛ'-
___- В + Асов : 43,19° + 1,56° : 44,75°.
(”с
Из таблицы 10 [13] по этому значению сос находим для точки С чис-
ЛО Мс=2‚75.
Сравнивая найденные значения во и Мс с соответствующими вели--
чинами, полученными в результате решения предыдущей задачи, мож-
но сделать вывод, что вихревой характер движения газа сказался на
уменьшении угла наклона вектора скорости и местного числа Маха.
\!.32. Вначале определим число Маха в точке 0. Для этого восполь—
зуемся _формулой (3.\/.34). В результате решения задачи №30 получено
значение Узда), Л’Ёо =2‚03, используя которое, найдем
мд: [‘*‘—‘ (2,03 7502 —1)]'“2= 2,53.
2 8002
522
Соответствующий угол Маха
…) : агсзіп (ЦМВ) : агсзіп (1/2,53) : 23°18’.
Угол наклона элемента характеристики второго семейства, проведенной
из точки 0,
__ о о ! __ о !
[ЗЭ—рд— 5 ——23 18 __—1818.
Эта характеристика (см. рис. 2.\/.8) пересекается со стенкой в точке В.,
координаты которой хз, ув определяются в результате решения уравне—
ний элемента характеристики:
ув _ув : (ХВ _хв) ‚(8 (вв—”в)
И образующей заданного тела вращения:
х х
в в
хт хт
Подставляя в эти уравнения данные, найдем:
ув — 0,8 : (хв — 5)13(5° —— 23° 18’);
х х х х "
ув : _В; 2__ В : _в_ 1__ & _
10 10 5 20
В результате решения этой системы находим: хв=5‚12; ув=0‚761.
Определим теперь соответствующий угол наклона вектора скорости,
равный углу наклона касательной к образующей в точке В. Для этой
цели вначале вычислим производную:
ау ___ 2ут (1-_ х )
хт ‘ .
(іх
хт
ВНОСЯ СЮДЗ значение х=хВ‚ ПОЛУЧИМ ТаНГеНС ОТЬ1СКИВЗЁМОГО угла:
(%:—); чз = — (1— іі? > =
В соответствии с этим угол Бв=5°35’.
Для определения скорости в точке В воспользуемся уравнением для
характеристики второго семейства в плоскости годографа
Ах Ах Ар,
:) в о
АШБ_—А130+ то . “_Ап д‚
ув дров
(ЗА/359)
где
Асов = („В —сод, АБВ : [ЗВ _рд, Ахд : хв —хд;
_ зіп Бд-зіпрд зіп2рдсозрд _
тд— соз(Бд—р‚д) , В: соз([3д—рд) ’
_і_ _ № ___ ( рЬА *Ров1С°5(Бв—дв1
пдд Ап %(хд—хв) зі“ ”в .
Произведем необходимые вычисления:
Ахд :: 5,12 — 5 = 0,12, Ард : 5°35’ — 5° : 35’ : 0,58°.
_ зіп 5°—5іп 23°18’
!) _ : 0,0363;
соз (5° —— 23°18’)
- 2 о ‚_ о г
15 ___ $1п 2318 соз23 18 20,151;
0 соз (5° _ 23°18’)
34* 523
1 @ (0,8р0 _- 0,77р0) соз (5° —— 23°18’)
‚ = _ 0 : _0‚75;
Рор А” 0,8!70 (5—5‚ 12) вт 23 18
№0 = —0 58° +930, 0363 57, 3° _91—150’75 0,15157,3°= _0 830
Из табл. 10 [13], зная Мр=2‚53‚ найдем Шр=39‚820. По найденному
значению Асов находим в точке В угол
(„В = % + Асов : 39,82° _ 0,83° : 38,99°.
При помощи табл. 10 [13], зная сов, определим число Маха МВ=2‚50.
Рассчитаем теперь число Маха без учета вихревого характера дви-
жения газа. В этом случае
0,12
Ашд_ —— _Ард —|— —тд : —0‚ 58° +—’—8 О, 0363 57, 3°_ —— —0,27°,
ув
а соответствующий угол
о о _ о
(03 : (од + Асов : 39,82 — 0,27 _— 39‚55 .
Из табл. 10 [13] по этой величине (ов находим Мв=2,52. Как видим,
это число Маха, полученное без учета вихревого характера движения
газа, оказалось больше, чем в неизэнтропическом потоке. ‚
\!.ЗЗ. Необходимые расчеты можно начать с определения угла Бо
наклона вектора скорости за косым скачком уплотнения в точке 8:
1
га рез __— с1199с3(МЁ°$іп26$—1)[1 + (Ё+—1—$іп26с$) мг,]— . (337.60)
Имея в виду, что 905=ЗО°, а Моо=1020/340=3‚ найдем
38 Без = сте 30° (32-5іп2 30°_— 1) [1 + ("42+ ‘ — зіп2 30°) 32]_1 = 0,226
и соответствующий угол Всв=12°45’, Теперь определим относительные
параметры газа за скачком:
13 1 м2 ' 20
(22) = ‘ + ) *$… сз (3.\/.61)
91 $ 2Ё—і—(іг—1)М2 зіп26с$
($) = ———м2 зіп26с$ —’і'——‘ (3.7.62)
Р1 Ё+1Ё’+1
' 1/(Ё—1) 13] (12—1)
(”—0) : (Ві) (52) ‚ (ЗА/163)
Ро 5 № 5 91 3
а также число Маха:
__ 2 . _2 _ & [3—1 1/2 ,
М23— {із—+ 1 5… (Без Без) [(01)5_1г+—_1] } . (ЗА/164;
Произведем вычисления:
‚№. _ _(_1›4+1)32 зіп2 30° : 1 86-
(91 )$_ 2+(1_4._1) 325іп2300 ‚ ‚
(&) ___ 2.1‚4 329112309— 14_ —-=246
У2 .
(_а) = “082 30° + 1 зіп2 30° = 0,822-
524
Из отношения квадратов скоростей можно найти скорость непосредст-
венно за скачком:
&= ‚/ 0,8221/30 = 1/ 0,822— 10202 = 925 м/сек.
Число Маха за этим скачком
__ _2 о о ‚ _!1‚4—1—1]1/2=
мгг ]]2 Т_Нзіп (зо— 1245)(1‚862 1‚4+1] 2,36,
а ОТНОШЕНИЕ ДЭВЛЕНИЙ ТОРМОРКЕНИЯ ДЛЯ УСЛОВИЙ ПОСЛЕ И ДО СКЗЧКЗ УП-
ЛОТНЕНИЯ
р, 1 1/(1‚4_1) '
(_0) ::(—] (1,86)1'“…'4_” : 0,930.
ро $ 2,46,
Для дальнейших расчетов нам потребуются производные в точке 8:
аес 92 іг — 1 92 > _ “352 (6с8— Без )
(іі—[33$ (91) [2 0052$ _ БСЗ) [ Ё +1 (р— )8 ] “352 9с$ +
_|_(_ВЁ_) }—1=1,86сЕ2С052(300—`12045/1)(1_ ‚4—1186)_
Р1 $ 1’4+1
_ соз2°‹30°—1245>+ 1 ‚86] 1:0‚978;
соз230°
жа —<=> * №
_ (16° р1 $ р1 $13 6с$ соз2 (без — Без) „ЦБС $ соз2 Без
Рв 92 1,86
__ _ : Х
+ (91 >13] + (91 )8} 18 30° С0$2 (30° — 12°45’)
>< {0,978 ] °°52 (30° _“ 122,452 — 1,86] + 1,86] = 4,35;
соз2 30°
ам2 ‚дав
((!—&=)!З: _М23[°Ё2 (2$ 2°8`[‘_ №35 _1] +
м2 А:
— 12°45’) (0,978— 1) + “*4 +4” 2362 51112 (30° _ 12045’) 4,35 ] = _ 2,88.
КРОМЕ ТОГО, ВЫЧИСЛИМ ПРОИЗВОДНЫЕЗ
(;;—ж >м [мята—>>> >Г=
=1/2‚36_—2_—1]2,’236(1+1——4—12,4362)] =0‚426;
аа)? ам2 аа»,
і--— : * =—288- 4 =— 3.
>. 01635 (две 3 (‚ам2 ]3 ’ О’ 26 1’2
Теперь определим число Маха в точке Р, применяя (3.\/°.З4).
Отношение 1/23 )(/1/2 в соответствии с выражением (3.\/`.ЗЗ)
2
Утах _ 2 340
1/30 1 ‚ 4 — 1 10202
2—|—1=1‚.56
С учетом это го
мр= ]1'4—1 (1,56 10202 —1)]'““2= 2,56.
2 9502
По этому значению Мг из табл. 10 [13] определяем шр'=40‚51°. _
525
Затем можно найти угол наклона потока в точке Н. С этой целью
используем формулу для изменения угла со при переходе вдоль харак—
теристики от точки Р к точке Н:
Асер : (от — а),: = (028 + (аш/арс)$ АБР — юр, (3.\7.65)
Где
АБР : [ЗН — Бр. (3.\7.66)
Одновременно воспользуемся уравнением для характеристики первого
семейства в плоскости годографа
Ах Ах А '
Аш, _ Ар, _- —’° [Р— —‚Р . 3 с„ = 0, (337.67)
у,: ‚грог А”
где
Ах!—* : хн `хр2
_ зіп ВР зіп р.,: _ зіп2 рр соз рр
со5([3р—|—рър) , [: соз([3р+рър) ’
А ' ' — ' " + `
_,1_ _ А_рО : (РОН, РОР) Соз [ЗРБР) (зуб9)
Рог ”’ Рог (хн _ хг) Зі“ Нг
Решая уравнения (ЗХ/65) И (З.\7.67) относительно АВЕ, находим
’ аш —1 Ах,.— Ахр АИ,)
А = — — + — + ' __ ° — °
[Зг “6153$ 1] (сор (028 у„— 1Р №61: Ап ср) (3 \? 70)
(З.\/.68)
В первом приближении, пренебрегая изменением энтропии (или, что то
же самое, давления торможения за скачком), из (3.\/.70) определим ве—
личину АВЕ, вычислив предварительно
_ зіп11°зіп23° : 00895-
1’ _ со5(11°-[—2З°) ’ ’
Ар? : (_ 1,23 _ 1 )—1 ( 40,51 ° _— 35,87° + 01—05 0,0895 . 57,3°) : _— 2,20°.
\
Примем теперь изменение угла [ЗС вдоль участка скачка $Н равным
изменению соответствующей ему величины вдоль характеристики пер—
вого семейства РН (т. е. АББН=АВЕН=Бн—Бр)_ Тогда можно определить
число Маха в точке Н в первом приближении:
М2н : М2$ + (аМ2/дрс)5 АБЗ”, (3.\/.71)
где
м2$ : м2 : 2,36, (дм,/арс)$ : _ 2,88;
АБЗН : АВЕН : —— 2,20/57,З : — 0,0384рад.
Подставляя эти данные, получим
м2” : 2,36 — 2,88 (——— 0,0384) : 2,47.
Давление торможения рд], в (3.\/.69) принимаем равным соответствую-
щему значению этого давления в точке 8, т. е. рд]; =0,930 ро, а величи-
ну рЬН в точке Н определим по числам М2Н=2,47 И Моо=3 Для этого
воспользуемся уравнениями:
м2
_2д:(р_1) (9—2) [с0529сн+(р—2)2 вине…], (3.\/.72)
МЭО Р2 Н 91 Н 91 Н
526
р 212 . 13—1
__2 : М2 2 _ ;
(и )н із + 1 °° 5… ОС” 11! + 1’ (&`/“622
2 (!г+1)МЁ° 5'112 ес
(})—) = ' ” (зубу)
91 Н 2+(/г—1)М2ю зіп2 6С”
В результате решения этих трех уравнений находим для точки Н уточ-
ненный угол скачка 60Н=27‚9°. Затем определяем отношение давлений
и плотностей:
(12%: 2 ——41 325 1п227‚9°—-1—'-4;'=2,15;
. р1 1, 4 _—|—_1 1,4 +1
(№) __ (1,4+ 1) 32 зіп2 27‚9° _ 1 71
и 2+‹1‚4—1›З2зіп227‚9° ’ ’
а также отношение давлений торможения по (ЗХ/63):
РЕ) 1 1/(1‚4-——1)
(4 : (2—15) (1,71›1'4’”'4—”= 0256—
Ро ›
Далее вычисляем;
.; . № __ (0,956—0,930) р0 со3(11° +230) _ 012.
Й,)р Ап 0,930р0.0‚5.51п 230 ‚ ‚
54П223°'°°523° ___ 0,17;
14: соз (11° + 23°)
АБ,… = в„ —— р„ = (_ 1,23 —1)—1 (40,51 ° _ 35,87° + 01—05 0,0895 . 57,3° +
+ Ё—Ёо,12—о‚17.57‚3°) : ——2‚38°—
?
И НЗХОДИМ УГОЛ наклона ПОТОКЗ 38 СКЗЧКОМ В точке Н.
в„ _в, + АВЕН—.11°——2,—38° _ 8 ,.62°
По этому значению угла уточняем угол скачка, используя формулу
(зубе):
18 8,62° : ста ес„ (3251112 ес„— 1) [1 + (‘———*2 4 + ‘ ——$іп2 9…) 32Г
РеЦЁЁУЁЁОТО уравнение ОТНОСИТеЛЬНО ОСН, НЗХОДИМ УТочнеННЬ1Й УГОЛ есН='
№34. Определим вначале по значениям роо=1 кГ/см2 и Моо=3 дав-
ление в форкамере трубы (давление торможения):
& 1,4
р0=р°о(1+4—'2'—‘м3°)2——1— (11+1—42—— 32)14— =36‚.7кг/см2
Затем вычислим плотность торможения ро, полагая, что при нормаль-
ных условиях (рн= 1 кГ/см2‚ Тн=288 К) плотность воздуха рн=
=О‚125 кГ-сек2/м4. Согласно уравнению состояния
Т_н 36, 7 288
Ро : РНЁ- ° Т — _О, 125 — @ =- 4,56 кГ-сек2/м4.
РН 0
Плотность и температура потока на выходе сопла равны соответственно:
1 1
Р…, 290 (1 + 5: М?) П : 4,56 (1 1 1 4_›2___—1 32)_1‚4—1 :
= 0,348 КГ -сек2/м4-
“, ‚2— 1 2 "'1 ‚4 — 1 2 —1
Тоо=Ток1+—2—Мю) =29О(1+12_—3) =107К.
Определим теперь по этим данным число Рейнольдса Кеоо=р°оУоо!/рьоо‚
где !=0,4 м—ширина сопла. Полагая, что при нормальной температу—
527
ре Тн=288 К скорость звука в воздухе ан=340 м/сек, найдем соответст-
вующую величину этой скорости на выходе сопла:
аш = 20,1 1/ $:: 20,1 1/ № : 208 м/сек.
Таким образом, скорость потока
У… : М… аш : 3—208 : 624 м/сек.
Имея в виду, что при температуре Тн=288 К коэффициент динамиче-
ской вязкости рн=1‚82- 10—6 кГ-сек/м2, вычислим соответствующее зна-
чение этого коэффициента для условий на выходе сопла:
Т п 0,76
в… = „„ (7:1) : 1,82—10—6 (1—07) = 0,91.1о—6кг.сек/м2.
\288
Согласно полученным данным число Рейнольдса
О 4-624-0 348
Не : ’ ’ =95-107.
°° 0,91-10—6 ’
‹: Площадь критического сече—
ния сопла $*=$рооУоо/р*а*, где
рооУоо/р*а* = с; —— относительный
удельный расход., являющийся функ-
цией числа Мао. Из табл. 10 [13] по
величине Моо=3 находим 0:0‚236 и
0 вычисляем:
‚„ ‚ $* = 86] : О,16-О‚236 : 0,0378 №.
ГД Нанесем на листе бумаги (рис.
4-
` * В.У.б) контур сопла в виде прямой,
Рис. 33/16. Непрофилированное плоское СОВПддаЮЩеИ С радиусом ОКРУЖНО'
сверхзвуковое сопло с радиальным по- СТИ Г А, вычисляемым по формуле
током ‚*А : $°360/ (25132?!)-
Примем согласно экспериментальным данным угол раствора сопла
2у=40°. В соответствии с этим
гА = 0,16-360/(2л-40--0‚4) : 0,573 м.
АНЗЛОГИЧНО ВЫЧИСЛЯЗМ расстояние ДО КРИТИЧВСКОГО С6Ч6НИЯ2
*. О О О — О
2л-2у-1 2л-40-О‚4
Из точки 0, как из центра, проведем в верхней полуплоскости семь
близко расположенных радиальных прямых (рис. 3.\/.7). В соответствии
с этим малый угол между соседними прямыми будет Ау=2‚5°. Найдем
теперь пересечение этих прямых с характеристикой второго семейства,
проведенной из точки А. Эта характеристика имеет вид ломаной линии.
Ее элемент в виде прямой АА, нанесем на чертеже под углом
рос =— агсзіп (1/Моо) =— агсзіп (1/3) =— 19,47°.
Для дальнейших построений воспользуемся уравнением для харак-
теристик второго семейства в плоскости годографа Аю=——АБ или, по-
скольку АВ=Ау‚ заменим Асо=——А1›.
Рассматривая точки А и А1, можем найти
АША : (ОА1 —ША9
откуда для точки А1
00,41: (ОА + АША = (нА—— Ау
528
Из табл. 10 [13] по значению Моо=3 находим шА=49‚757° И вычисляем
угол 01,41=49‚757°——2,5°=47‚257°. Затем из той же таблицы определяем
соответствующее число МА1=2‚87 и угол „А1=20,39°.
Под этим углом к прямой ОА1 проведем прямую до пересечения с со-
седним радиусом в точке А2 и т. д. Дальнейшие расчеты и построения
(см. рис. 3.\/.7) осуществляем по аналогии с предыдущим. Результаты
этих расчетов представлены в табл. З.\/.1.
Получив значения 00, М и рь для точки А7 на последней промежуточ-
ной радиальной линии, проведем из нее под углом …=—26‚77° к этой
В 0
05 рд 07 6
И
02 На
А П’
8 А
* 3
А
}; 2 А1
0. 0 А :с
. ‘, `
_ р*
< ‚_ РА \
Рис. ЗУ]. Схема профилирования сверхзвуковой части плоского сопла
линии прямую д.0 пересечения с верхним прямолинейным контуром соп-
ла в точке А8. За этой точкой контур сопла, который должен обеспечить
получение на выходе равномерного параллельного потока, строится сле—
Таблица 3.\/.1 Таблица 3.\/.2
Точки 0), град М и., град х/і и, см
А 49,757 3,00 19,47 1 5,20
А1 47,257 2,87 20,39 0,9 5,25
А2 44,757 2,75 21,31 0,8 5,42
Аз 42,257 2,64 22,26 0,7 5,68
А4 39,757 2,53 23,28 0,6 6,11
А5 37,257 2,44 24,19 0,5 6,76
А6 34,757 2,32 25,53 0,4 7,66
А7 32,257 2,22 26,77 0,3 9,08
0,2 11,6
0,1 17,7
дующим образом. Начальный участок этого контура за точкой А8 сов-
падает с направлением скорости на стенке и представляет собой пря-
мую, являющуюся пр0должением контура 0748 до его пересечения в точ-
ке 01 с характеристикой первого семейства 747131, проведенной под уг-
лом 11=26‚77° к прямой ОА7. За точкой 01 элемент контура совпадает
с направлением скорости в точке А7. Этот элемент получим, проведя из
точки 01 прямую, параллельную лучу 0147, до пересечения в точке 132.
Аналогично ведется построение остальных Ь
участков контура. За точкой 08, лежащей на ха-
рактеристике АВЗ, участок контура параллелен
оси сопла. Контур, совпадающий с линией А808
и построенный в виде плавной кривой, обеспечит
получение на выходе сопла параллельного сверх-
звукового потока с заданным числом Мао. Г
Дозвуковой участок сопла рассчитывается по *с ’
формуле Витошинского (1.1.1), в которой г=іг *:
(рис. 3.\/.8). Результаты этого расчета приведены
в табл. 3.\/'.2.
‹
Рис. З.\/.8. Построение профиля дозвуковой Ъ
части сопла :
У|. ПРОФИЛЬ И КРЫЛО КОНЕЧНОГО РАЗМАХА
В ПОТОКЕ НЕСЖИМАЕМОЙ ЖИДКОСТИ
УН. Для определения аэродинамических коэффициентов тонкого
профиля, обтекаемого несжимаемым потоком, следует воспользоваться
зависимостями, с выводом которых можно познакомиться в книге [20].
Для коэффициента подъемной силы имеем формулу
с), ‚„„ : 2л (ос + 80), (ЗА/1.1)
а для коэффициента момента ——
1
_тг нсж : 2 (1:1— 80 _ до) + Тс)! нсжя «}\/12)
Где
[31(1—созе)сіе; но:—% [31(1—соз29)616. (З.И.З)
ФС,—э.;]
1
80 =———
Я
Коэффициент [31 равен производной а'у1/сіх1, вычисляемой по уравне-
нию у1=у1 (хд) средней линии профиля (рис. 3.\71.1)‚ а угол 6 связан
с координатой х1 зависимостью
х1 : !) (1 — соз 6)/2. (ЗА/1.4)
Найдем уравнение средней линии заданного профиля:
х1`
1 1 .
у1 : ?(у1в + у…) : '2_[0‚2Х1( ——хьі) —О‚12х1( _Т)] :
=О‚О4х1( _?) .
\
Отсюда производная
[31 : ау1/ЁХ1 : 0,04 (1 _ 2Х1/Ь).
Заменяя здесь х1 согласно (3.\71.4)‚ найдем
[31 : сіу1/с1х1 : 0,04 сов В.
Вычисляем во и но по формулам (3.\/1.З):
Л
во=— 0'04 5С056(1—С059)с19= 0,02;
Л
О
Л
усоз9(1—2со56)46=0.
0
0,04
до ="—
Теперь можно определить аэродинамические коэффициенты по
(ЗА/1.1) и (ЗХ/1.2):
с), „„ : 2л (0,1 + 0,02) : 0,24л : 0,754;
_т, …,ж : 2 (і:— 0‚02 — 0) + _;- 0,24л : 0,07л : 0,220
530
и соответствующий коэффициент центра давления:
(сц_д)„сж : хдд/Ь =— тг „СЖ/су „СЖ : О,О7л/О‚24л = 0,291.
9 9! :б—уі-
[31 да:,
Рис. З.\/`1.1. Тонкий профиль в несжимаемом потоке:
! — профиль; 2 — средняя линия
77 &=&…
у 6=2+Ьу
о\ о
2
\2/8. ` О _` 0
Рис. 3.\/1.2. Конформное преобразование
окружности в отрезок прямой
\П.2. Для симметричного профиля уравнение его средней линии бу-
дет у1=0 и, следовательно, коэффициент В1=сіу1/сіх1=0. Поэтому па-
раметры во и Но равны нулю [см. (3.\/1.3)]‚ а аэродинамические коэффи-
циенты профиля в соответствии с (?А/1.1), (?А/1.2) будут следующими:
су нсж : 2пос = 2л-О‚1 : 0,628;
=№=Л_°‘=Ё'2_'1=0‚157_
д'»—
“<“
'.'1:
о
%
..Ь
Ю
тг НСЖ
Согласно этим данным коэффициент центра давления
тг нсж ЛОС/2
су нсж 251306
У!.З. Запишем формулу о=ё+1/; в виде
: .: . 1 = . Е—іп
о г+1у ё+т+——ё+щ ё+т+ё2+п2„
Приняв здесь Е2+п2=д2‚ после разделения на вещественную и мни-
мую части найдем:
2 =Е(1—[—1/К2)иіу : іп(1 —1/К2).
Для получения отрезка на плоскости уг (рис. `°›.\/1.2)‚ расположен-
ного вдоль оси 2, полагаем іу=0 и находим значение К=1. При этом
2=2ё‚ что соответствует отрезку прямой длиной 2а=4.
531
ИА. Запишем формулу о=;——1/?; в виде
. . 1 , . Е—іп
о=2 : : +ъ—,_——_——=і 1 .———.
+у & 11 %+”! ё+п ё2+п2
Так как ё2+п2=К2‚ то
о : 2 + іу : %(1—1/Е2)+іт1(1+1/К2).
Отсюда следует, что для получения отрезка, расположенного на верти-
нальной оси, необходимо принять радиус окружности К=1 (при этом
действительная часть 2:0). Значе-
9 _ нию 12:1 соответствуют равенство
\ 6=2+ьу п &:&—дд” у=2п и длина вертикального отрез-
Б \ ка, равная 2а=4 (рис. 3.\/1.3).
“ 0 ,} У!.Б. Возьмем производную от
“ 2 % 0 * & комплексного потенциала “7:
в №} =—ъ\_/оо(ё+ 1/ё) по переменному @=
` ==ё+щ:
сли/а;; =—- то; (1 _ 1/3).
Эт -
Рис. 3.\/1.3. Конформное преобразова- а ВеЛИоЧИНЗ называется 1510 М П
ние отрезка прямой в окружность Л е к С Н О И С к 0 Р 0 С Т Ь Ю. ОДУЛЬ
ее определяет абсолютное значение
скорости в рассматриваемой точке
потока. Согласно уравнению Бернулли давление в такой точке
_ _в_…эд: _М‘і 1__12
Р—Ро 2 і`\дё)—Ро 2 ( $2),
где ро—давление в точке полного торможения на цилиндре (в крити-
ческой точке).
Воспользовавшись формулой Жуковского—Чаплыгина, определим
аэродинамическую силу:
Р : х —іУ : іВ-шф(Ё—)2ас.
2 а;
Подставив сюда значение 51 “7/61 ;, получим
тт:—"‘Ьфуг 1——‘—>2а =0.
2 „( ;2 @
Таким образом, при бесциркуляционном обтекании потоком невязкой
несжимаемой жидкости кругового цилиндра результирующая сила дав-
ления потока на тело равна нулю. Этот аэродинамический эффект назы-
вается парадоксом Эйлера—Даламбера.
\іі.6. Потенциал скоростей для пластинки, обтекаемой несжимае-
мым потоком в поперечном направлении со скоростью Уоо (см.
рис. 2.\/1.1)‚ имеет вид ср=і—_Уоо1/а2—22‚ где знак плюс соответству-
ет верхней поверхности, а знак минус — нижней. Скорость на пластинке
1/2 : дф/дг : —Т- Уоо 2/1/а2 — 22 .
Согласно этой формуле в точке с координатой 2=0 скорость У2=О‚ а
у боковых кромок, где г=_—Ьа, У2—›оо. В соответствии с уравнением
Бернулли
УЗО/2 + рее/рю : УЁ/2+ рю/р
коэффициент давления
: (ЗА/1.5)
@… УЗО/2 1/2
Ь:
532
Внося сюда значение Уи, получим
р = 1 ——22/(а2—22).
В точках на верхней и нижней поверхностях с координатой 2=0
величина р=1‚ а на боковых кромках (г=іа) коэффициент давления
приобретает значение —— 00. Это значение практически не реализуется.
и действительный коэффициент давления имеет конечную величину. На
большей части пластинки этот коэффициент будет положительным.
В частности, в точках с координатами 2=іа/2 коэффициент р=1—
—(а/2)2/[а2—(а/2)2] =1/3, а в точках с координатами г=і2 а/З вели-
чина р=1— (2/3)2 (12/[612—(2/3)2 а?] =1/5. Распределение коэффициента
давления по верхней и нижней поверхностям одинаково, поэтому аэро-
динамическое сопротивление равно нулю.
\П.7. Комплексная скорость определяется как производная от ком-
плексного потенциала:
“%.—_— "… (1——\+5Г
Для точек контура цилиндра единичного радиуса (К: 1, см. рис. 2.\/1.2)
переменная
2ло
о=х+іу=Ксо56+ іКзіп6=еіе.
В соответствии с этим выражением находится распределение скорости
по обтекаемой поверхности. Для критических точек (точек полного тор-
можения) этой поверхности, где скорость равна нулю, производная
(ЛУ/(і о=0 и, следовательно,
1/00 (1 _— е—Ж’) =— і (Г/2л) е—‘е.
! 'В
умножая обе части этого равенства на е‘ и деля на У…, получим
еде — е_іе =—і(Г/2л\/°о).
Так как (ею—е_'°)/(2і) =зіп Вир, то зіп екр=_Г/ (45$ У…). По значениям
Г и У… можно найти углы вкр, определяющие положение критических
точек (на рис. З.\/1.4 точки А и В). Подставляя данные, получим
зіп В…, =— 314/(4л-50) =— 0,5.
В соответствии с этим значением (см. рис. 3.\/1.4)
екр ='—' 800 И екр =_1500.
Распределение давления определяется из уравнения Бернулли:
2
9001/00 9… №2_ 900730- 9… __1_
р=р°о+Г_—2———_—`(_) —Р…+————2-[У°о(1 0 )+
2 (Ш , 2 2
2 2 2
2 рос УФО рос Уш 21/00 _ ГУоо
і : _— —- _— У2 _|_ __ __ _|_, _
+ 25110 Г] р°° + 2 2 ( °° 2 по
_ ГУОО г2 )
_! __
лоз 4л2 02
Коэффициент давления
с \
"' р _Рсо 1 2 . Г . Г Г2
Р=—_=1_ _ „‚ —1__з——_—2—Ё—2°
„1/2 /2 04 0“ 311/00 о лУоо 0 4:11 1/00 0
Подставляя сюда о: ее, находим значение коэффициента давления в
любой точке на поверхности цилиндра, определяемой углом @.
533
Для нахождения результирующей силы давления на цилиндр при-
меним формулу Жуковского —Чаплыгина
' 2
Р=х—іУ_—_'—°21ф(№) ао.
ао,
ПОДСТЗВЛЯЯ СЮДЗ выражение ДЛЯ КОМПЛБКСНОЙ СКОРОСТИ, НЗХОДИМ
Г2
— ) (16
431202
д В Рис. 3.\/1.4. Круговой цилиндр в
несжимаемом ци-ркуляционно—по-
ступательном потоке
Круговые интегралы от всех функций, записанных в этом выражении,
за исключением функции іГ У… /(:п: о), равны нулю. Таким образом, по-
лучаем
. із… .РУС… 00017001“ .
Х—1У='Т ; -Ё=———— За:—№0014}.
л о 2:п: о
В соответствии с этим результатом
Х : 0, У=р°°У°оГ.
Подставляя данные, находим величину подъемной силы для цилиндра
единичной ширины:
У : 0,125-50—314-1 : 1960 кГ.
\’1.8. Подъемная сила, действующая на пластинку с размахом !,
равна
У : 2лос аіроо УЗО.
Полагая для воздуха роо=0‚125 кГ—сек2/м4‚ найдем
У : 2л— 0,1 - 1 — 1 -0‚125— 1002 : 75-10З кГ.
Соответствующий коэффициент подъемной силы
у 2лос аіроо УЗО
су — ___— : : 2313“
(рос УЗО/2) 2а1 (рю УЗО/2) 2а1
или после подстановки данных
сУ : 2п-0‚1 : 0,628.
Циркуляция скорости около пластинки
Г :— 2лосаУ°о
или согласно выражению для У
5-10з
г=____” =_——7 =—6—103 м2/сек;
[роо Уоо 1-0,125-100
знак минус соответствует направлению циркуляции по часовой стрелке.
Скорость на пластинке
У=У (ііос`/Ц_х)=у (1і0‚1‘/1_х)‚
°° а+х °° 1+х
534
где знак плюс соответствует верхней, а знак минус — нижней поверхно-
сти. При х=1 м (точка задней кромки) У= Уэс. Точке передней кромки
(х=—1 м) соответствует бесконечно большое значение скорости
(У_>і00). В реальных условиях обтекания тонких крыльев эти скоро-
сти будут большими, но конечными.
Рассмотрим значения скорости в точке х=—12/13 м (вблизи перед—
ней кромки):
У—100(1+О‚11/1————+12—/—13)=100(1і0‚5).
1—12/13
На верхней стороне У=1ОО (1+О‚5)=150 м/сек, а на нижней У=
=1ОО(1—О‚5)=50 м/сек.
Используя формулу (ЗХ/1.5), находим коэффициент давления:
2
— 1—х _ 1—х 1—х
=1— 1+0‚1 : 0,21/ — .
р ( _ |/1—'гх) + 1+х 0’011+х
На задней кромке (х=1 м) р=0‚ а на передней кромке (х=—1 м) ко—
эффициент давления по абсолютной величине бесконечно велик, что
практически нереально. Вблизи этой кромки (полагая х=—12/13 м)
1____+1_2_/1з 1+12/1з _
0 ‚2 |/ __0 1___ : _ .
=+ 1—12/13 ’О 1—12/13 +1 0’25
На верхней стороне р='——1‚25‚ а на нижней р=0‚75. Эти значения близ—
ки к реальным.
И.Э. Вихревая система, эквивалентная крылу конечного размаха
прямоугольной формы в плане, индуцирует в потоке дополнительные
скорости и этим вызывает скос потока. При помощи формулы Жуков-
ского
У : рю Ус… Гсрі
определяем среднюю циркуляцию по размаху крыла:
У 5000
ГОР: : 50 м2/сек.
9… У… 1 о 125 100 8
Для рассматриваемого крыла с размахом ! вихревая система может
быть заменена одним П—образным вихрем с постоянной циркуляцией
Гар; при этом расстояние между свободными (свернувшимися) вихрями
принимается равным размаху крыла [.
Определим угол скоса потока @, вызываемый такой вихревой систе-
мой в некоторой точке А (рис. З.\/1.5)‚ расположенной на расстоянии Ь
от крыла:
‚ _гс 1+$'пВ)
е=с1+2е2= 35150015516 . (з.у1.6)
Равенство е=е1+2 в; означает, что скос потока вызывается присоеди-
ненным вихрем (81) и каЖДым из двух свободных (в;).
Угол [3 в формуле (3.\/1.6), как видно из рис. 3.\/1.5‚ определяется
соотношением
зіпр= Ь/1/Ь212/4.
В частности, для точки, расположенной на расстоянии Ь=З м,
зіпр : „ЗП/№ : 0,6
и угол скоса потока согласно (?А/1.6)
50(1+0‚6) ___1_ „о
л-100-8-0,6 _ бл рад(…3).
535
УНО. Угол скоса потока для крыла конечного размаха произволь—
ной формы в плане определяется по формуле
в: "у (1—|—т)‚ (З.И.?)
лжкр
в которой коэффициент т учитывает изменение скоса потока вдоль раз—
маха и зависит от формы крыла в плане, его размаха, а также положе-
ния точки, в которой определяется величина угла скоса потока.
У крыла эллиптической формы в плане скос потока постоянен вдоль
Рис .ЗУЪБ. К определению угла скоса потока, вызы-
ваемого П-образной вихревой системой:
1 — крыло; 2 -- П-образный вихрь
размаха и подсчитывается по формуле (3.\/1.7) ‚ в которой т=0. Таким об-
разом,
& = сУ/(лжкр). (ЗА/1.8)
Подъемная сила крыла
У : су ( рю УЗО/2) Эш),
или, используя (3.\71.8)‚
У = елжкр (рф УЗО/2) Бир. (3.\71.9)
Учитывая, что ?…р=12/$кр, подставляем данные в (ЗА/1.9) и получаем
У = 0,0353'5—18—3- . № 10 = 4400 кГ.
И.Н. Скос потока, возникающий за крылом конечного размаха,
вызывает уменьшение угла атаки на величину угла скоса в. В соответст-
вии с этим истинное значение угла атаки
оси == ос — &, (3.\71.10)
где а— установочный угол атаки. Это в свою очередь вызывает откло-
нение вектора аэродинамической силы, поскольку он должен быть нор—
мален к направлению истинной скорости. В результате такого отклоне-
ния возникает составляющая Хі, направленная вдоль вектора скорости
невозмущенного потока, называемая и н д у кт и в н ым с о п р о т и в-
лением.` Как видно из рис. {ЗА/1.6, величина Хі=зУ
\’Н2. Если разделить индуктивное сопротивление Хі=е У на вели-
чину (рооУЁо/2)$кр‚ то получим коэффициент индуктивного сопротивле-
НИЯ
Схі = 80 (ЗА/1.11)
уо
536
или, используя (З.\/1.8)‚
с,„— = ЛЖ,… 82. (ЗА/1.12)
Подставляя данные Жкр=12/$Кр=82/10‚ в=2° (0,035 рад), получим
схі : л (82/10) 0,0352 = 0,0246.
ВЗЛИЧИНЗ ИНДУКТИВНОГО СОПРОТИВЛЗНИЯ
о…Уі
Х- : Схі Т ЗКР : 0,0246
&
. 2.
0,1251200 10 2154 КГ.
И.]З. Угол скоса потока за крылом
определяется зависимостью (ЗХ/1.7) и
в соответствии с ней возрастает при
уменьшении удлинения жкр=!/Ьср. Фи-
зически это можно объяснить следую-
щим образом.
Скос потока обусловлен П-образной
системой вихрей, индуцирующих в ок—
ружающей крыло среде некоторое по-
ле скоростей, направленных Берти-'
кально, причем индукция вихрей быст-
ро убывает с расстоянием (рис. 3.\/1.7). РИС- З-Щ-б- СКОС ПОТОіка У Крыла И
Рассмотрим средний скос потока вдоль ВОЗНИКНОВЁ‘ЁОТИЁЁЁЁИВНОГО С°“
некоторой линии а—а, лежащей за
крылом в плоскости вихрей.
Скорости И, (2), индуцированные свободными вихрями, сходящими
с концов крыла, изменяются в направлении размаха крыла, при этом
средняя величина индуцированной скорости Уу ср и, следовательно, сред—
Рис. 3.\/1.7. К объяснению зависимости угла^скоса потока от
удлинения крыла:
] — крыло; 2 -—- присоединенный вихрь; 3 -— свободный вихрь
ний угол скоса при постоянной величине интенсивности вихря Гср=
: (1/2) су ср Ьср У… будут тем больше, чем меньше размах крыла !, и на-
оборот. —
Скорость Уу (Ь), индуцированная присоединенным вихрем, и вызы-
ваемыи ею угол скоса на данном расстоянии от крыла пропорциональны
интенсивности вихря, т. е. средней циркуляции Гср, которая согласно
уравнению связи при постоянных значениях коэффициента подъемной
537
силы и скорости набегающего потока тем больше, чем больше хорда
крыла дор.
Таким образом, суммарный средний угол скоса потока за крылом
тем больше, чем меньше размах и больше хорда крыла, т. е. чем меньше
вытянутость крыла вдоль размаха, характеризуемая удлинением мр:
=1/Ьср.
(УХЛ/314. Истинный угол атаки в соответствии с выражениями (ЗХ/1.10)
и 3. .7)
оси : ос—з : ос— Су (1 + 15). (ЗА/1.13)
лжкр
Величина этого угла, как видно из (ЗХ/1.13), возрастает с увеличением
удлинения, приближаясь к значению установочного угла атаки оз. Истин-
ный угол атаки (см. рис. З.\/1.6) измеряется по отношению к фактичес-
кому направлению потока около крыла, отличающемуся от Направления
невозмущенного потока за счет возникновения скоса потока. Скос же по-
тока, как следует из (ЗА/1.7), уменьшается с увеличением удлинения
крыла (см. задачу УШЗ).
\П.15. В соответствии с формулой (3.\/1.11) коэффициент индуктив—
ного сопротивления уменьшается с уменьшением угла скоса потока. Та-
кое влияние удлинения на индуктивное сопротивлние можно объяснить
следующим образом. С физической точки зрения возникновение индук-
тивного сопротивлния обусловлено потерями части кинетической энер-
гии движущегося крыла, затрачиваемой на образование вихрей, сходя-
щих с его кромок. При этом чем больше удлинение, тем меньше суммар-
ный средний угол скоса потока за крылом за счет меньшего индуцирую-
щего влияния этих вихрей. Соответственно меньше доля кинетической
энергии движущегося крыла, идущая на вихреобразование, что приво-
дит к уменьшению индуктивного сопротивления.
УП. ПРОФИЛЬ В ПОТОКЕ СЖИМАЕМОГО ГАЗА
ЧП.]. В соответствии с данными линеаризованной теории обтекания
[20] углы атаки тонких профилей, один из которых расположен в не-
сжимаемом потоке (анти), & дРУгой— в сжимаемом (атк), связаны меж-
ду собой зависимостью
оснсж : оссж(у/1/1—МЁЮ ) , (ЗА/11.1)
где у—некоторый произвольный параметр, определяемый из условия
(рд = ф'у, (3.\/'11.2)
в котором (рд, ср’— потенциалы скоростей соответственно в несжимае-
мом и сжимаемом течениях. Соответствующие координаты точек профи-
ля (уд и у) определяются из соотношения
: у(…/ 1 _МЗО ). (3.\/П.3)
По условию задачи, (рд и ср’ одинаковы, следовательно, параметр у=1,
В СООТВЕТСТВИИ С чем
ОСнсж:_0(’сж/‘/1 _МЁо’ у02у/ М1—МЁО'
Таким образом, линеаризованному потоку сжимаемого газа, обтека-
ющему тонкий профиль, соответствует поток несжимаемой жидкости,
имеющий тот же потенциал скоростей, но обтекающий профиль, толщи—
на которого, как и угол атаки, больше в\/1—М`Ёю раз. Физически это объ-
ясняется тем, что с ростом числа Моо дозвукового обтекания свойство
сжимаемости среды приводит к более сильному увеличению местных
скоростей возмущения, вызванных присутствием тонкого тела, причем
это увеличение пропорционально 1/1/1—МЁЮ. Такое явление обуслов-
лено тем, что в сжимаемом газе при увеличении местных скоростей
в струйках около тела уменьшение давления вызывает уменьшение
плотности, а это в свою очередь вследствие постоянства местного
расхода в струйках, равного расходу Р… У… в невозмущенном потоке пе-
ред телом, должно быть компенсировано более значительным возраста-
нием местной скорости, чем в сжимаемом потоке при прочих равных ус-
ловиях. Это возрастание скоростей возмущения в сжимаемом потоке
компенсируется увеличением толщины и угла атаки того же профиля,
но обтекаемого потоком несжимаемой жидкости.
\’П.2. В соответствии с линеаризованной теорией обтекания у двух
одинаковых профилей, расположенных под одним и тем же углом атаки,
коэфф_ициенты давления в соответствующих точках профилей в сжимае-
мом (реж) и в несжимаемом (рнсж) потоках связаны между собой зави-
симостью (4.1.32). Используя известные выражения для коэффициентов
подъемной силы и продольного момента
10
2159,— р,) х (1х, (ЗА/11.5)
0
а также зависимость (4.1.32), найдем связь между коэффициентами су
и т2 в сжимаемом и несжимаемом потоках:
су сж су =снсж/‘/1 _ . (ЗПУ—116)
т /‚/ 1 _ мг. (ЗА/11.7)
: еж: тг нсж
539
Из формул °(3.\/Н.6) и (?А/11.7) следует, что для одного и того же про—
филя, расположенного под одним углом атаки, коэффициенты подъем—
ной силы и момента в сжимаемом потоке в 1/1/1—МЁО раз больше,
чем в несжимаемом. Такое изменение аэродинамических коэффициентов
обусловлено более сильным увеличением местных скоростей на профиле,
обтекаемом сжимаемым потоком (см. задачу УПА), что приводит к бо-
лее сильному разрежению (уменьшению коэффициента давления) на
верхней стороне профиля (при положительном угле атаки). Как следует
из формул (ЗХ/11.4) и (3.\/П.5)‚ коэффициенты подъемной силы и момен-
та в этом случае будут возрастать.
\!П.3. Находим коэффициент подъемной силы профиля в сжимае—
мом потоке по (З.\/`11.6):
_ '“— 2 _
_ с…, _ 0,3/1/1 —0,5 _ 0,347.
По формуле Жуковского, подъемная сила крыла единичного разма--
ха с заданным профилем, обтекаемого несжимаемым потоком,
Унсж : роо Уоо Гнсж'
С другой стороны,
У
нсж : Су нсж рос
Отсюда циркуляция скорости
Су нож Уоо Ь _ Су нсж МОО аоо Ь : 0,3—0,5—340°2
2 2 2
Для линеаризованного потока коэффициент су нсж связан с коэффи—
циентом Су сж и числом Мос зависимостью (ЗА/11.6). Принимая во внима-
ние последнюю формулу, можно считать, что аналогичная зависимость
связывает между собой Гнож, Гсж и Мос. Таким образом, для сжимаемого
потока
11; 19/2.
= 51 м2/сек.
Гнсж=
Гсж : су сж У°° Ь/2
гсж = гнсж (су сж/су …а = гнсжп/ 1 — між (ЗА/11.8)
В соответствии с этим
гсж : 51/1/1 — 0,52 = 59 м2/сек.
\’ПА. Критическим числом Маха Мо…р называют такое
число Маха невозмущенного дозвукового потока, при котором в какой-
либо точке обтекаемой поверхности скорость становится равной м ест-
нои скорости звука.
При увеличении толщины профиля число М…нр дозвукового набега-
ющего потока уменьшается. Это объясняется тем, что увеличение тол-
щины профиля приводит к большему поджатию струйки жидкости и уве-
личению местной скорости потока. Следовательно, звуковая скорость
на утолщенном профиле будет достигнута при меньшей скорости набега-
ющего потока.
При увеличении угла атаки профиля Моокр уменьшается, что также
объясняется большим поджатием струек жИДкости и связанным с этим
увеличением местной дозвуковой скорости. '
\!П.5. Согласно гипотезе акад. С. А. Христиановича местная звуко—
вая скорость, которой соответствует критическое число Маха Моокр набе-
гающего потока, возникает в том месте профиля, где в случае обтекания
несжимаемым потоком возникает наибольшее'разрежение. С. А. Христи-
анович установил связь между минимальным коэффициентом давления
540
ршіпнсж, соответствующим этому наибольшему разрежению, И числом
М…нр ,(см. график на рис. 4.1.15). Согласно заданному распределению р
на рис. 2.\/П.1 коэффициент ршшнсж=—1‚25. По этой величине из гра-
фика на рис. 4.1.15 находим Мшнр=0‚5
Возможен также расчет Моонр по методу С. А. Христиановича, осно—
ванному на применении полученной им таблицы относительных скоро-
стей.
По значению ршшнсж=—1,25 подсчитываем относительную скорость
так называемого фиктивного несжимаемого потока около профиля:
1/00, —
А…: „СЖ : ‚ 0,7о77 =_ 0.7577 20,505
* г—_-— —
а у1—Ртіпнсж У1—(—1›25)
По таблице Христиановича (см. табл. 4.1.1) находим соответствующие
этому значению Аоо=0‚505 величины ?»оокр=0,540 и Моонр=0,502.
“1.6. Из графика на рис. 2.\/Н.2 устанавливаем, что при Моо=О,5
минимальный коэффициент давления на профиле ршіп=—1‚0. Вычислим
соответствующий этому значению минимальный коэффициент давления
в несжимаемом потоке. Сначала определим, принимая іг=1‚4‚ относи-
тельную скорость Ж=7ьоо‚ соответствующую числу М=Моо=0‚5 [см.
(3.111.9)]:
^ =`/ (1’4+”°’52/2 =0,535.
°° 1+(1‚4—1)0,52/2
По этому значению из табл. 4.1.1 находим относительную ско-
рость фиктивного несжимаемого потока Аоо=0‚498. Далее по коэффи—
циенту ршш=—1,О определяем отношение абсолютных Давлений:
. _ ігМ2 1 4.0 52
Р_;тд : ртіп— + 1_ _ 1'_,—
Местная относительная скорость
' . (да—пле
;, : {Ш2 1_ (№ _ _“) “1/2:
іг—1 роо
___{„+_1[_ (№)‹ь_1›/к(1+;моо\11]} 2_ (3.\711.9)
+ 1 = 0,825.
іг— 1 роо 2 }
После подстановки данных
а : {ёё—+} [1 _ О,825”'4"1’”' (1 +——-1‚"52)о }}“? = 0,770.
Из табл. 4.1.1 по значению Ъ=0‚770 находим местную относитель-
ную скорость фиктивного несжимаемого потока А.=0,668. Используя
затем уравнение Бернулли, вычисляем соответствующий коэффициент
давления:
р…… „сж— _ —1 _ (А/А..)2= 1 _ (0,668 0 ‚498)2 _—_—— 0,820.
По графику Христиановича (рис. 4.1.15) находим критическое число
Маха набегающего потока: Моокр=0‚580.
_ \’11.7. На рис. 2.\/П.3 находим минимальный коэффициент давления
ршшнсж=—0‚8 и определяем по величине этого коэффициента из графи—
ка Христиановича (рис. 4.1.15) критическое число Маха Моонр=0‚580.
Поскольку заданное число Моо=` 0,5 меньше Мшкр=0,580, режим обтека-
ния профиля сжимаемым потоком будет докритическим и для пересчета
давления можно использовать мет-од Христиановича. По числу Моо=0‚5
для іг=1‚4 вычисляем относительную скорость ?…=0,535 (см. задачу
\711.6).
541
Из табл. 4.1.1 нах0дим фиктивную скорость несжимаемого потока
А…=0,498 и по уравнению Бернулли, задаваясь пересчитываемыми-зна-
чениями коэффициентов Давления в несжимаемом потоке (риши), вычис-
ляем соответствующие местные относительные скорости фиктивного не-
сжимаемого потока:
А=Аоо1/1—рнсж
По найденным значениям А из табл. 4.1.1 находим местные отно-
сительные скорости действительного потока %. Затем по формулам изэн—
тропического течения определяем отношение давлений:
&: 1—(1е—1)›„2/‹1е+1) шие—п: щи)
рю [1—‹1е_1)2„20/(/е+1)] ЩЖ…)
и коэффициент давления:
;: ? (д_1>=_2_[_л<^_>_1]
ЁМЁО р… №30 л (А…)
Таблица З.\7П.1
№ точек Ънсж А А. р/ роо 73
1 0,2 0,444 0,465 1,040 0,23
2 —0,5 0,610 0,684 0,891 —0,62
3 —0,8 0,668 0,770 0,824 —1,00
4 1,0 0 0 1,185 1,06
Результаты расчета для точек
1, 2, 3, 4 (см. рис. 2.\/11.3) приве-
дены в табл. 3.\/П.1.
Соответствующее полученным
данным распределение коэффици—
ента давления при Моо=0,5 пока-
зано на рис. 3.\711.1.
\П!.8. Вначале найдем крити-
ческое число Маха профиля, соот-
ветствующее заданному распреде-
лению р (см. рис. 2.\/Н.4). По чис-
лу М=Моо1=0‚4 и й=1‚4 опреде-
лим по формуле (3111.9) Ж=7ьоор
ртьп НСЖ
дмг-пв
_ 1 4 +1 0 42/2
Рис. З.\/П.1. Координатные диаграммы р= 4001 =: Ъ/ 1 51— (1,4 _і 1) 0,42/2 :
=]С(Х) ДЛЯ СИММеТРИЧНОГО профиля В ПОТО-
ке ПОД УГЛОМ ЭТЗКИЕ
_— —-несжимаемый поток; ————— сжи— : 0,431,
маемый поток с числом МОО =0,5
а из табл. 4.1.1 найдем для этой величины %… значение Аоо1=0,419.
Так как на рис. 2.\/П.4 минимальный коэффициент давления ‚От…:
=—0,6, то отношение
' _ _оо] 1,4'0,42
№=р… +1=— 0,6——+1=О‚933.
р„о 2
В соответствии с этим местная относительная скорость [см. (3.\/П.9)]
: {% [1 — (0,933)№—”д*4 (1 + Ц? он)—]”“? = 0,550.
542
Из табл. 4.1.1 для Ж=0‚550 найдем величину А=О‚514‚ а затем опреде—
лим, зная А…1=О,419‚ коэффициент
Б…… : 1 _— (А/А..1)2 : 1 — (0,514/0‚419)2 :— 0,505.
По этой величине из графика на рис. 4.1.15 находим Мюкр=0‚660. Так
как заданное число МФ2<М°°Кр‚ пересчет распределения давления на
число Моог можно вести по методу С. А. Христиановича.
Для конкретности выбе_рем на кривой (см. рис. 2.\/`П.4) точку с д’:
=0‚4 и найдем значение р” в этой точке, соответствующее М…2=0,6.
Вначале определим отношение давлений:
' іг—МЁО 14.042
5=р’—— 2 +1=О‚4————’ ’
затем по формуле (3.\/11.9)‚ полагая в ней ршш=р’‚ вычислим местную
относительную скорость:
‚ 1,4 +1 (1,4—1…‚4 1,4 — 1 —1 1/2
?» = _— _ _|_. __ 2 _
{ 1,4—1 [1 (1’045) (1 2 0’4) ]} 0’346
и по табл. 4.1.1 найдем величину А’=О‚336. Соответствующий коэффи—
циент давления несжимаемой жидкости
рнсж— _ 1 _- (А’/А…)2— — 1 _ (о, ззв/о ‚419)2: @, 355.
Производим пересчет этого коэффициента на число Моо2=0‚6 (см.
решение задачи \/'П.7). Находим по (3111.9), полагая М=Мо°2 и &=
=}ьоо2‚
№22“ (1‚4+1)0‚62/2 =О‚635
1—|—(1‚4—1)0‚62/2
-|— 1 = 1,045;
и по табл. 4.1.1 определяем Аоо2=0‚583. Теперь для вычисленного коэф-
фициента давления рнсж=0‚ 355 подсчитываем
А”:А..‚1/1— рнсж=0‚‚5831/1——0355=О‚.468
Из табл. 4.1.1 видим, что этому значению соответствует 71”=0‚446. Най-
дем отношение давлений:
р_” __ 1—(4—1)7„”2/(ь+ 1) щие—1) _
р... _ [1—(4—1)7„Ё„2/‹ь+ и] _
: [і— (1,4— 1) 0,4462/(1‚4+ 1) ]1‚4/‹1.4—1› =1 131
1 _ (1,4 _ 1) 0,6352/(1‚4+ 1) ’
и коэффициент давления:
//
—‚‚ 2 р \
__ _ _ _— 1— _ 5 1.
Аналогично осуществляется пересчет этих коэффициентов для других
точек заданной кривой. Результаты такого пересчета показаны на
рис. 3.\/П.2.
“1.9. Вначале следует найти критическое число Маха набегающе-
г_о потока (м…нр). Используя метод С. А. Христиановича, по значению
ршшнсж=—1,2Б определяем Моокр=0‚502 (см. решение задачи \7115).
Коэффициент волнового сопротивления вычисляем по формуле
(4.1.48), справедливой при условии, что числа Моо не превышают М…кр
более чем на 0,15. Расчет коэффициента волнового сопротивления по
формуле (4.1.48) для ряда принятых значений числа Маха приведен
в табл. З.\/П.2.
543
Таблица 337112
Мао (Мое ._мооКР) (М оо—МооКР)3 схв
0,55 0,048 0,111-10_З 0,00122
0,60 0,098 0,942°10"З 0,0104
0,65 0,148 3,25-10—3 0,0358
Определим силу волнового сопротивления участка крыла с задан-
ными размерами (Ь=2 м, 1=1 м) при М…=0,6. Скорость полета вбли-
зи Земли при скорости звука в воздухе аоо=340 м/сек
У… = Моо ас,о = 0,6- 340 = 204 м/сек.
Сила волнового сопротивления
ХВ = схв (Р… УЗО/2) Бир,
где роо 1/`,3’;о/2=0‚125-2О42/2=2‚6-10з кГ/м2; Бкр=1Ь=1—2=2 м2. С уче-
том этого
Хв = 0,0104-2‚6-103-2 = 54 кГ.
_ ИПО. Плоский сверхзвуковой
поток, обтекающий поверхность,
которая образует с направлением
невозмущенного течения тупой
угол, больший 18О°‚ называется
течением Прандтля ——
М а й е р а. Огибая угол, поток
‚. _ расширяется и, следовательно,
#щ%№ ЭС=:12/Ь скорость его увеличивается,
4№1№ 1,0 а Давление и плотность уменьша-
- ются. При этом ц е н т р и р о-
ванной волной разреже-
ния (веером разреже-
н и я) называется совокупность
бесконечного множества линий
4,0 — Маха, выходящих из точки по-
верхности, обтекаемой сверхзву—
Ъ—в———_ .
Рис. 3.\/П.2. оо инатные иаг аммы
_ _ К рд д р ковым потоком, рассматриваемым
р=1° (х) для симметричного профиля, 06—
текаемого под нулевым углом атаки по- как течение Прандтля _ Майера
токами с числами М…=0‚4 и М…2=О‚6 (РИС- З-\/'11—3)- ЭТОТ Беер Разреже'
ния ограничен линией Маха ОА
_ [ее угол наклона к вектору скоро-
сти У… равен Ноо=аГСЗіП(1/Моо)] и линией Маха ОВ, для которой угол
наклона ее к новому направлению потока ОС равен м=агсзіп(1/М)‚
причем вследствие расширения сверхзвукового потока М>М°° и
и<иоо-
Из теории характеристик известно, что при отклонении потока на
угол В
а) = В + со…, (3.\/П.10)
где 0) и (ооо—функции чисел Маха соответственно в отклоненном и на-
бегающем потоках. При іг=1‚4 из табл. 5.3.1 [20] для Моо=2 находим
ш…=26‚4°. Тогда
= 30° + 26,4° = 56‚4°.
Из той же таблицы или табл. 10 [13] по полученному значению (‚)=
=56,4° находим для отклоненной поверхности число М=3,38. Соответ-
ствующий угол Маха м=агс5іп(1/М)=агс5іп(1/З‚38)=17,1°. Отноше-
ние давлении
р [ 1+(1'г——1)МЁ0/2 Г…“) _[ 1+(1‚4—1)22/2 ]1‚4/‹1‚4—1›
17—00: 1-|—(іг—1)М2/2 _ 1—|—(1,4—1)3‚382/2
544
= 0,547.
АНЗЛОГИЧНО НЗХОДИМ ОТНОШ6НИ6 температур:
Т 1+(1г—1)МЁ°/2 1+(1‚4—1)22/2
_ : = = 0,845.
Тео 1—|—(іг—1)М2/2 1—|—(1,4—1)3‚382/2
Из рис. 3.\/П.3 видно, что угол веера разрежения
@ = (.по, + 6) —м‚ (ЗА/11.11)
где рю=агсзіп(1/Моо)=агсзіп(1/2)=ЗО°. Таким образом,
в = (30° + 30°)—17‚1° = 42,9°.
7…
Рис. З.\/П.З. Схема обтекания сверхзвуковым
потоком тупого угла:
1—обтекаемая поверхность; 2—веер разрежения;
3—направление потока со скоростью Уоо
При переходе через веер разрежения поток поворачивает на угол
В=30°‚ претерпевая расширение. При этом число Маха увеличивается
от значения Моо=2 до величины М=3‚38 на отклоненной поверхности.
Найдем число М’, которое соответствует отклонению потока от пер-
воначального направления на некоторый угол АВ. Для этого использу-
ем уравнение
ю : АБ + со…. (3.\/П.12)
Задавшись значением АБ, найдем величину 0), а затем определим число
М’. В частности, примем АВ=З°36’ (3,6°). Тогда 'ш=3‚6°+26,4°=30°.
Из табл. 10 [13] находим соответствующее число М’=2,13 и угол и’=
=агсзіп(1/2,13)=28°. Линию Маха, расположенную в веере разреже-
ния, проведем из точки излома под углом м’=28° к плоскости, откло-
ненной от направления вектора И,о под углом АВ=З‚6°. Задаваясь ря-
дом значений угла АВ, можно провести полный расчет течения в веере
разрежения.
\’П.11. Найдем параметр гиперзвукового подобия:
К=Мюос= 1О-О‚1 =1
и определим соответствующий коэффициент давления:
Б=№—Ъ/(’%Г+Ыё=№і—
__ .`//г(1‚42+1)2+%]062=_1‚13а2
или при а=0‚1 рад Ъ=—1‚1з-о,12=…—0,0113.
НаХОДим число Маха на пластинке [20]:
‚… :(М_1__ш О,)—1=(;_1_›4і „д)—1 ___ 12,5
2 10 2
35—927 545
Рассмотрим аэродинамически подобный поток около пластинки с уг-
лом атаки (1=0,05 рад. Для этой пластинки К=Мооа=1, поэтому
Мс,о : К/ос := 1/0,05 = 20.
Так как соотношение Б/ос2=—1‚13, то
5 =—1,13062 =—1‚13-0‚052 = —2,83-10"3.
Соответствующее число Маха
м = (= _- Ш— 0,05)“1 = 25.
20 2
\/П.12. Определим параметры сверхзвукового подобия для пласти-
нок:
К1 = Модов := 5-0‚1 : 0,5; К2 =: Мощи : 20—0,1 : 2.
Как видим, эти параметры отличаются значительно. Первый из них со-
ответствует линеаризованному, а второй—гиперзвуковому обтеканию.
В случае линеаризованного обтекания аэродинамические коэффици-
енты определяются по следующим формулам:
Щ=і=с_х_4 Ег_і
__ , _ _ _
01.2 042 043 К1 042 Ш-
Избыточная величина коэффициента давления на нижней и верхней
сторонах пластинки
Б„ _В, = 4ос2/К1 = 4.0‚12/0‚5 = 0,08,
а аэродинамические коэффициенты имеют следующие значения:
с), : 4042/К1 : 4—0,12/0‚5 : 0,08;
с„ : 4ос3/К1 : 4-0‚13/0,5 : 0,008;
_тг : 2ос2/К1 : 2-0‚12/0‚5 : 0,04.
Аэродинамическое качество
К : су/сх =1/ос : 1/0‚1 : 10,
а коэффициент центра давления
с„‚д = хдд/Ь =—т,‚/су = 0,04/0,08 : 0,5.
Рассмотрим случай гиперзвукового обтекания. Расчет аэродинамиче-
ских коэффициентов ведется по формулам:
_ ___ С С _ т _
Рн Рв = _у___ х _ 2к, _ г : к,
042 042
о„‘з
—_ іг+ъ2 1
После подстановки К2=2 и й=ср/с„= 1,4 получим
—_ 1‚4+1 2 1__
к_‘/( 4 )+22—О‚78.
В соответствии с этим:
Б„ _В, = 21—012 = 20,78…2 = 0,0156;
с, = 2Ёос2 = 2.0‚78.о‚12 = 0,0156;
с, = Жаз = 2-0‚78-О,13 = 0,00156;
_т, = Кон = 0,78-О‚12 = 0,0078.
где
546
Нетрудно заметить, что аэродинамическое качество и коэффициент
центра давления будут такими же, как и в случае линеаризованного
обтекания.
\ПЫЗ. Определим характер течения газа на верхней и нижней сто-
ронах профиля. Для этого вычислим угол В наклона касательной к кон-
туру профиля:
ау А 2х\ 2 2х 1 х
_: =+ — ——=—1— — ——=+— ——
(іх 1813 _2Ь(1 Ь) _212(1 12) _ 3(1 6).
В точке на носке профиля (см. рис. 2.`\711.5)
(а) : ш [30 : і і; ”50| : 18°26’(18,43°).
сіх @ 3
Так как угол атаки а=20° больше угла Бо=18°26’ у острия профиля,
то обтекание верхней стороны будет происходить с расширением, а ниж—
ней — со сжатием, вызванным возникновением скачка уплотнения.
Рассмотрим в е р х н ю ю с т о р о н у. В произвольной точке контура
сс:- сосо + (ос—Б).
Из табл. 5.3.1 [20] по Моо=5 находим шоо=76°55’ (76,92°) и опреде-
ляем
со : 76,92° + (20° — Б) : 96,92° ——[3.
По значениям (о для выбранных точек с различными углами наклона
касательных В находим из табл. 10 [13] соответствующие числа М, по
которым определяем отношения давлений:
& = [ 1+(іг—1)МЁо/2Г№_” _ [1+(1,4—1)52/2 Гм……)
р… 1—|—(іг—1)М2/2 _ 1+‹1‚4—1)мг/2
_ 6 3,5
_( 1—|—0,2М2) '
В табл. З.\/11.3 даны результаты расчета чисел М, отношений р/роо‚
а также коэффициентов давления
_ 2 р 2 р р
= ——1 = ——1 =О,0572 ——
: мр… ) № ) (р… )
для трех точек: О(х=0), №(х=Ь/2=6) и В(х=Ь=12), показанных
на рис. 2.\7Н.5.
Таблица З.\/`11.3
Точки х 185 6, град (0, град м Р/Роо 7,
О 0 0,333 18,43 78,49 5,19 0,82 ——1,03-10—2
№ 6 0 . 0 96,92 8,31 0,042 —5,48-10"°2
В 12 —0,333 —-18,43 115,35 18,87 1,64-10—4 —5,72-10-'°2
Проведем расчет обтекания нижней стороны профиля (рис.
3.\/'Н.4). Определим параметры газа в точке О, расположенной непо-
средственно за косым скачком уплотнения. При этом известными пара-
метрами являются число Моо=5 и угол отклонения потока за скачком
БС : о; _|— |[30| : 20° + 18,43° = 38,43° (38°26’).
Угол наклона скачка 600 находим из уравнения
196… = сте [54%(2— — 1)— \/ %(Ё—ЧЁ—Ёддтс ],(3.у11.13)
35* 547
в котором отношение плотностей для условий после и до скачка
рс м2, ЗіП2 есО
р„ 2/(/е+ 1) + (іе— 1) м2, зіп26со/(іг-1— 1)
Зададимся в первом приближении предельной величиной рс/р°о=6 ииз
уравнения (З.\/'11.13) найдем
где…: с1938°26’[—;—(6—1)—"/%(6—1)2—6’с8238°26’] : 1,17,
откуда Все: 49°29’.
(ах/11.14)
Рис. 3.\/11.4. Сверхзвуковое Обтекание нижней стороны
профиля с образованием скачка уплотнения:
[_ прямолинейный участок контура профиля; 11— криволиней-
ный участок контура профиля; !!!—прямолинейный участок
скачка уплотнения; !У—криволинейный участок скачка уплот-
нения; У—элемент характеристики первого семейства; У! — эле-
мент характеристики второго семейства
Действительный угол скачка будет больше найденной величины 900,
поэтому примем приближенно есо=60° и уточним отношение плотно-
стей, используя (ЗА/11.14):
52 'п260°
& : 5‘ „ = 4,74.
рос 2/‹1‚4 + 1) + (1,4— 1)52$іп260'/(1‚4 + 1)
Теперь по уравнению (3.\711.18) определим во втором приближении угол
скачка:
‚58 В… : сте 38°26’ [% (4,74 — 1) —
_ 1_(4,74 _ 1)2 — 4,74 {82 38°26’ = 1,47,
4
откуда 600=55°46’.
С учетом этого найдем новые значения:
р_с : 5251112 55°46’ _
р… 2/(1‚4 + 1) + (1,4… 1)52зіп2 55°46’/(1‚4—|— 1) _
4,64-
’
же в„ : сте 38°26’ Н— (4,64 -— 1) —
_ ‘/ і—(4,64 — 1)2— 4,64 {92 38°26’ ] = 1,50,
откуда 9с0=56°18’.
548
На этом приближения заканчиваем. По найденным значениям рс/роо
и 000 определяем число Маха Мс за скачком, а также отношения ста—
тических давлений рс/роо на скачке и давлений торможения ре./рО (р0 —
Давление ТОРМОЖЭНИЯ 38 СКЗЧКОМ УПЛОТН6НИЯ)3 ,
шаг-+ 01“2
м = - з.уп.15
° зіП(9со—Бс)[(рс/р…)—‹Ь— 1›/‹1г+ 011” ’ ( )
р_с_ Ь_’г_—1 _*_—1._9с_ .
Рос—(Роэ іг+1)|(1 іе—|—1 рш)’ (“ЧУП-16)
’ 1/(іг—1) іг/(іе—1)
р—0 = (&’-°) (‘)—°) . (ЗА/11.17)
ро Рс роо
Подставляем данные:
м : [2/‹1‚4+ 01“2 : 1_
5іП (56018! __ 380261) [4,64 _ (1,4 _1)/(1’4 +1)]1/2
Р_с_ _Ь4_:_1_ _Щ = .
рос—(454 им…] 1‚4+14’64) 19’7’
Ро
Ро
Коэффициент давления в точке О
_ — 2 2
р=Ц=_(і°__1)=_(19‚7—1)= 1,07.
[ 1/(1‚4_-1›
: (__) (4,64)1’4…’4_1› : 0,124.
19,7
1,4-52
Будем рассматривать в окрестности точки 0 участки контура про—
филя О!) и скачка О] прямолинейными. При этом точку В выбираем из
условия, чтобы в ней наклон касательной был меньше, чем в точке О на
(1/2)°, т. е. Бр=Бо—(1/2)°=18°26’—30’=17°56’ (знак минус для удоб-
ства опущен). Из уравнения касательной к контуру, подставляя 118613=
=Ё3 17°56’=0,324, находим
(1/3) (1 ——хд/6) : 0,324,
откуда Хр=0‚175. Координата ур определяется из уравнения контура:
_2 _х_0 =0›_17_5 _№._
уд—6( 6) 6 (2 6>_0‚057.
В точке В число Мр=Мс=1,41, а угол Маха ир=агс5іп(1/Мр)=
=агс5іп(1/1,41)=45°10’ (45,17°). Уравнение характеристики 01 перво-
го семейства
у1_ув : {53 (во + ”в) (х1 _х0)
или после подстановки
у] —— 0,057 : Ёе (17°56’ + 45°10’) (х! — 0,175).
Уравнение прямолинейного участка скачка О! '
у! : Ёе (Осо— ос) х] = ’[9 (56°18’ — 20°) х].
Последние два уравнения запишем в виде:
у, — 0,057 : 1,97 (х, — 0,175);
у] : 0,735х].
Решая эту систему относительно х; и у], находим уд=0‚171, х5=0,233.
Рассмотрим теперь точку Р (см. рис. З.\7П.4) на расстоянии Ах=
=0,06 от точки 0, т.е. с координатами:
х„ —_-—. х„ + Ах : 0,175 + 0,06 = 0,235;
5491
х - " 0,235 0,235
мг% (2_._Ё_) :Т( _Т) =О‚О765.
Найдем наклон касательной в этой точке:
в _ =_1_1_1°5_)=щ(_№ _
(ах )р—ЁЗБ” з ( 6 з 6 >_О’32О’
откуда Вр: 17°46’ (17,77°) .
Соответствующее число Маха определим следующим образом. По
числу Мр=1‚41 из табл. 5.3.1 [20] находим угол Шр=9°16’ (9,26°). Вы-
брав для точки В среднее значение угла
Бо+і3р _ 18°26’ + 17°56’ о ‚ о
(БВ)СР _ 2 _ 2 '_1811 (18718 ),
вычислим угол
со], : (од —}— ПВО)“) — [ЗР] : 9°16’ —}— (18°11’ —17°46’)= 9°41’(9‚68°).
Из той же таблицы или табл. 10 [13] по значению Шр=9‚68о находим
Мр=1,424 и угол Маха:
рр : агсзіп (ПМР) : агсзіп (1/1‚424) : 44°36’ (44‚6°).
Проведем из точки Р элемент характеристики первого семейства
у] __уг : {8051г + Р‘р) (х1—_хр)‚
; и13 точки 1 на скачке — элемент характеристики второго семейства
% _у1 : {%(51 _ Ш) (х1 —х1)'
После подстановки данных [&= (Вр) ср] получим:
у, — 0,076 : {@ (17°46’ —|— 44°36’) (Х1 — 0,235);
у, — 0,171 : $9 (18°11’ —45°10’)(х1 —— 0,233).
Решение этих уравнений дает координаты точки !: у1=0‚150; х1=0‚274.
Вычислим изменение угла наклона линии тока при перемещении
вдоль характеристики из точки 1 в точку 3, лежащую на продолжении
прямолинейного скачка:
1\+
%;
где
(№ —(ам (4—0) ° Ах —х—°
ав)!“ лвс): ам)…г ’_ 3 х”
, , ‚ 0050314411)
А = — ' А :———'
ро р01 розч ” Ах15іпр1
№ _ т ‚… 2 —1.
(ам)1_1/м_‚ 1[м_,(1+ 2 м,] ‚
дм __ ` __ ‚ДЭС—_
(авс)м_ М‘Рщеф […авс )
_|_
іг—|—1 . а с
ТМ351П2(6°°—Б°) в: (5… Л;
0! (Ре)_&_.щ 1 {@@[созцеСО—вд __9;]+_Рс_}.
сЦЗс Р… Р… 18 Все соз2 (0со _— Вс) две со52 600 р… Р…
авео с [ із — 1 р соз2 (0 — [3 ) —1
=- 2соз20 — (1——-—°—)— С° °“ _р°_
арс рос ( сО БС) іг -|— 1 900 соз2 Все + РОО .
ПРОИЗВОДИМ ВЫЧИСЛСНИЯі
(16…) : 4,64 [2 С052 (56018! __ 38026’) (1 — Щ 4,64) _
две 1,4 + 1
_ соз2 (56°18’ —38°26’) + 4 64 —1 _ 2 20
соз2 56°18’ ’ ] _ ’ ’
‘1 ("—° : 4,64 4 1 ><
азс р… и; 56°18’ соз2 (56°18’ _ 38°26’)
>< {2 20[ °°52<56°18’_38°26’) — 4 64] + 4 64} = 3 11—
’ соз2 56°18’ , , ’ ’
(ам ) = _ 1,41 [сте (56°18’ — 38°26’) (2,20 _ 1) +
арс …!
, 1,44-1— 1 1,4125іп2 (56°18’ — 38°26’) 3,11] = _ 5,74;
№ __ / 1 4—1 —1
_ : / 2 ‚ 2 = .
(дм); 1 1,41 1[1‚41(`1 + 2 1,41 )] 0,505,
(13) = __ 5,74-о‚5о5 : _ 2,9.
‹16 .!
Угол ш1=шг=9°41’ (9,68°)‚ а значение Ш1=03р=9°16’ (9,26°). Кро—
ме того, очевидно, р1=рр=44°36’ и |З1=|3р=17°46’.
Координату хз точки 3 найдем в результате решения системы урав—
нений:
у3_.’/1=Ё8(Б1 + Р“!) (хз—хі);
уз : ’[8 (Вед — ос) хз,
которая после подстановки данных примет вид:
уз — 0,150 : ’[9 (17°46’ —|— 44°36’) (хз — 0,274);
уз : ‚58 (56°18’ — 20°) хз.
Решение этой системы Дает х3=0‚317; у3=0,232.
Для нахождения величины Ард :рЬЗ—рьі надо знать рЬЗС учетом
искривления скачка. Примем в первом приближении, что отклонение
потока в этой точке уменьшилось на величину АБВ: (Бр)ср—|3р=
=18°11’—17°46’=0°25’‚ т. е. стало равным |З; =Бс—А|3р=38°26’—
—0°25’=38°01’. По этому значению [32:11 числу Мсо уточним угол 0С, пола-
гая величину рс/роо прежней и равной 4,64. По уравнению (3.\/П.13)‚
49 ес : сте З8°01’ Н— (4,64 _ 1) _
_ 1/ % (4,64 _ 1)2— 4,64 {82 38°01’ ] = 1,45,
откуда 0с=55°24’.
По этому значению (Эс уточним отношение плотностей:
рс : 52$іп255°24’ : 463
@… 2/(1‚4—|—1)—|—(1,4—1)52зіп255°24’/(1,4+1) ’ ’
а затем УГОЛ скачка:
{99° : сад 38001’ {$$$—1)…—
/і
_ і/ % (4,68 — 1)2 —— 4,68 {92 38°01’ ] = 1,46,
откуда 00=ББ°36’.
551
По величине с=55°36’ находим отношение давлений [см.
(3.\/11.16)]:
рс 1,4—1 1, 4—
— = 4 З— 1— ——4 =
(’6 1‚4+1)|( 14+1’63) 19’6
и отношение давлений торможения [см. (3.\711.17)]:
р' 1 1/(1‚4—1)
—°3 =—-( ) (4,63)1'4…’4_1] : 0,126.
ро 19 ‚6
Далее определяем:
00
А ' ' / — ' /
3— = р°3 ро, р“ р° ‚ (ЗА/11.18)
РО! Р01/Ро
где величина р61/ро=0‚124 найдена ранее. Находим
Ард/р[), : (0,126 — 0,124)/0‚124 = 0,0161.
Затем определяем:
Ах сов [3 +++ 0 ‚ 4 о ‚
_1_ (: :) __ соз(1746 + 436) =0‚660;
Ап _ зіп „, зіп 44°36'
$іП2Ц СОЗ“, ! 24403 г 440 ‚
1 : 1 1 : $111 6‚соз 36, : 0757
сов (В, —|— р, ) сов (17°46 —|— 44°36 )
Теперь вычисляем:
Ав, : [аз—[з, : (_ 2,9— 1)—1<0‚169— 0,162 +0—66°0‚ 0161 о ,757);
= — 0,0037рад; АБ] : — О°13’
и находим угол отклонения потока за скачком в новой точке 3’:
[3$ : ос + [31 —!— АВ] : 20° —|—17°46’ — 0°13’ : 37°33’.
Определим соответствующее число Маха. Для этого подсчитываем:
Аш, : …, + (%”) АБ1—ю1 : 9°16’ + (_ 2,9) (_ 0°1з’) _ 9°41'= 0°10’;
с .:
(0,3, : АО), + (0, : О°1О’ + 9°41’ : 9°51’.
Из табл. 10 [13] по углу (‚33‚=9°51’ находим М3‚=1‚43.
Уточним угол наклона скачка, используя формулу (3.\/11.15) в виде
_ ‚ 2 /рс _Ё—1—1
МЁ,51П2(9с_Бс) : (%+1)(р°° —іг+1)
и принимая рс/р°о=4‚63. После подстановки получаем
1,432-5іп2(6с—— 37°33’) : 2 14,63 _ ШГ ‚
1‚4+1 \ 1,4+1
откуда Вс=55°09’.
Найдем координаты точки 3’ из уравнений:
уз' __у1 218033! + ”3') (хз! —Х1);
уз' _ у: :: {9 (Вс _ “) (хз' _ хз),
где
53, = в, + Ар, : 17°46’ _ 0°13’ : 17°33’;
из, : агсзіп (1/М3‚) : агсзіп (1/1‚43) : 44°22’.
ПОСЛС ПОДСТЭНОВКИ ДЭННЫХ ПОЛУЧЭЗМ:
уз' — 0,150 = тв (17° 33’ + 44° 22’) ( хз, — 0,274);
552
у, _ 0,171 = ’[9 (55° 09’ — 20°) ( хз, —0‚233).
Решение этих уравнений дает у3,=0‚229‚ х3‚=0‚316.
Теперь выберем точку О на контуре вблизи точки Р так, чтобы
ха=хр—|—Ах=0‚235—|—0‚06=0‚295. Другая координата этой точки
__ ха ха 0 _2_,95 0,295 __
у0_—6—( _.Т)_ 6 __(2— 6 )—0‚096.
Наклон касательной здесь
ау 1 "О 1 0,295
(ах>а {850 3( 6 ) з(1 6 > О’ 7’
откуда Ба= 17°36’.
Определяем
(00 = (ор + (Вг—130) : 9°41’ + 17° 46’ ——17°36’ : 9° 51’.
Из табл. 10 [13] находим М6=1‚43 и угол
по :: агсзіп (НМО) : агсзіп (1/1‚4З) : 44° 22’.
Теперь пр0ведем из точки 0 элемент характеристики первого се-
мейства 0—2:
92—140 : 18 (150 + ”а) (хг—ха)
или
у2-— 0,096 : 18 (17° 36, + 44° 22’) (хг —— 0,295). (ЗА/11.19)
Из точки ] проведем элемент характеристики второго семейства
92 _ у! : ЁЁ (131 _ ”!) (х2 —х1)
или
у2 — 0,150 : 19 (17° 46’ — 44° 36’) (х, — 0,274). (33711.20)
Решение уравнений (ЗА/11.19) и (ЗА/11.20) дает координаты точки
2: х2=0‚313; у2=0‚130.
Теперь из точки 2 проведем элемент характеристики первого семей-
ства 2—5:
95 ___,/2 = {8 (132 + 112) (хб—хг),
а из точки 3’——элемент характеристики второго семейства 3’—5:
95—93' = {9 (133' _”3') (лсд—хз,) '
После подстановки данных найдем:
уд — 0,130 =18(17° 36’ —|— 44° 22’) (хб — 0,313);
уд — 0,229 : 19 (17° 33’ — 44° 22’) (хд — 0,316).
Решение этой системы дает: у5=0‚208; х5=0‚355.
Найдем далее изменение направления потока при переходе от точ-
ки 2 к точке 5:
1 АР`_0 ,
№2 : —2- [——‚ - Ап (ШСЗ, #3, т Ах2С2) — ((%—(Оз,) — ([32— В“ ] .
Производим вычисления:
": (х5 —х2) №1113, соз (02 + 112) =
= (0,355 — 0,313) зіп 44° 22’ соз (17° 36’ —|— 44° 22’) : 0,0138;
36—927 553
е : (хд _ хз,) 5… 112 соз (53, -— №,) :
= (0,355 — 0,316) зіп 44° 22’ соз (17° 33! __ 440 2?) : 0,0243;
1 _ № ___ (Р05 —р62) соз ( 132+ №) соз ( 53' _„3‚) _
4432 № 4432 (1 + в)
:: (Р03/Р0 _р01/р0) СОЗ (52 + №) СОЗ ( Вз' _Рз') ___
#( ра,/ро) (1 + е)
__ 0,0161-соз (17° 36’ + 44° 22’) соз (17° 33’ — 440 22’)
= 0,127
1,4 (0,0138 +0‚0243)
[здесь величина (рдз/ро—рьі/ро)/(р('„/ро)‚ вычисляемая по формуле
(З.\/11.18)‚ была определена ранее и равнялась 0,0161];
Ах3‚ : хд — хз, : 0,355 — 0,316 : 0,039;
Ахг : хд — хг : 0,355 — 0,313 :: 0,042;
51112 из, 608 из, __ зіп244° 22’-со5 44° 22’
3, : _ о ‚ о ‚4 = 0,390;
соз (ВЗ, —р3‚) со5(17 33 —44 22)
501202 созыв _ зіп244°22’-с0544°22’
2 соз (02 +02) соз (17°36’—|—44°22’)
: 0,740.
В соответствии С ЭТИМИ реЗУЛЬТЭТЗМИ
452 = % [—0‚127(0‚039.0‚з90 + 0,042 0,740) _ (9° 51’ _ 9° 513—-
— (17° 36’ _ 17° 33’)] = _; [—0‚127(0‚0з9.0,390+—0,042 0,740)—
—— (0,307 — 0,306)] _—_—_ 0,00335 рад (—00 12’).
Таким образом, в точке 5
65 = [32 + Авг : 17° 36’ — 0°12’ : 170 24’.
Приращение угла (0
А А ’
Аш, : АБ + ” - 34 С =-— 000335 + 0,042—0‚127.0‚740 :
2 Ёр' Ап 2
02
: 0,0006 рад (0° 02’).
В соответствии с этим
(0, = 2 —|— Асог : 9° 51’ + 0° 02’ = 9053’.
Из табл. 10 [13] находим М5=1,431 и м5=агс5іп (1/М5)=агс5іп
(1/1‚431)=44°20’.
Теперь из точки 2 проведем элемент характеристики второго семей—
ства до пересечения со стенкой в точке Н:
ун _ 92 : {8 (62 _ №) (хн _ х?)
или
уН — 0,130 =19(17° 36’ —— 440 22’) (Х” — 0,313). (ЗА/11.21)
Согласно уравнению контура
ун : (хН/б) (2 —х„/6).
554
Решая это уравнение и (3.\/11.21), находим: ун=0‚112; хН=0,350.
Вычислим угол наклона касательной в точке Н:
ау 1 х„ 1 0,350
_ :т: _ =—— —— =—- 1—_ 30314
(дх)н’[8і5н з( 6) з( 6) ”
откуда Бн=17°26’. „
оответствующии угол
(он : (до + (рд—рн) : 9° 51’ —|— 17° 36’ —17°26’ : 10°01’.
Из табл. 10 [13] находим по этой величине сон число МН=1,436 и:
угол Маха рн=43°58’.
В точке Н и во всем пространстве перед нею, ограниченном харак--
теристикой 1Н, течение безвихревое. Однако ниже по течению сказы-
вается влияние искривленного скачка, что проявляется в изменении эн-
тропии. Это влияние следует учитывать при расчете параметров потока
и выборе соответствующих зависимостей метода характеристик. Такой.
расчет ведется следующим образом. Из точек 5 и Н проводим характе-
ристики разных семейств до пересечения в точке б, координаты которой
определяются из решения уравнений:
,…„ = *е (0 + … (х,—хп;
уб—уб : 1:8 (рд—Нд) (хб—ХО.)
ИЛИ
% — Од 12 : із (17° 26’ + 43° 58’) (хб — 0,350)-‚
уд — 0,208 : 18 (170 26’ — 43° 58’) (хб — 0,355).
Решение этих уравнений дает: уб=0,191; хб=0,393.
Изменение угла |З в точке 6 будет следующим:
1 1 Ард
АБН=Ё|:_ЬрЬН . А_п(Ах515—}—АхНСН)—(юН—ю5)—([3Н—Бб)].
Производим вычисления:
і: [хб — хН) зіп рд. соз (БН + ин) : (0,393 — 0,350) зіп 44° 20’ ><
>< соз (170 26’ + 43° 58’) : 0,0144;
е : (хб —— хд) зіп „„ соз ([55 —— рд) : (0,393 —— 0,355) ><
>< зіп 43° 58’ соз (170 24’ — 44° 20’) : 0,0235;
; _ № ___ ( 1706 _рон) СОЗ (БН +дн) СОЗ ( 55 —Р5)
%„ ^” №2… (і +в)
: О›0161'С05(17°26’ +43°58’) со5(17°24’ —44°20’) _ о 129.
1,4(0,0144+0‚0235) _ ‚ ‚
Ахд : хб —— хб : 0,393 — 0,355 : 0,038;
АхН : хб — хН : 0,393 — 0,350 : 0,043;
зіП2 Нд-Соз №5 _ зіп2 44° 20'—со5 44° 20’ _ О 392.
соз (55 _ дб ) с°5 (170 24, _ 440 Ю,) , ,
” _ соз‚( рн + „Н) соз (17°26’ +430 58’)
36* 555
8іп2 НН . СОЗ НН _ $іп2 43° 58, -С05 430 58, = 0,725.
В соответствии с этими данными
АБН = ті,— [—0.129(0‚038-0,392 + 0,043—0,725) __ (10° 01’ — 90 53’) _
— (17° 26’ — 17° 24’)1 : _;— [—0,129(О,038—0‚392 + 0,043 . 0,725) _
_— 0,0023 _ 0,0006] =— 0,0044 рад (—0° 15’).
Таким образом, для точки 6 угол
[36 : [ЗН + АБН :17°26’ —00 15’ :17°11’‚
а приращение угла (о
А А '
хб „ЗС
Ап
АФН : АБН+ „ =— 0,0044 +
дрон
—|— 0,043-0,129—0,725 :— 0,0004 рад (——0° 01’).
В соответствии с этим
(06 : (он + Аш“ : 10° 01’—0°01’ =10°.
Из табл. 10 [13] находим по ш6=10° величину М6=1,44 и угол Ма-
ха м6=44°10’.
Теперь из точки 6 проведем элемент характеристики второго семей-
ства до пересечения в точке К с контуром (отрезок бК на рис. 3.\/11.4).
Координаты этой точки определяются из уравнений характеристики
ук_ 0,191 : {%(17° 11’ —44°10’)(хк— 0,393)
и контура профиля
ук : (хК/б) (2 —хК/6).
В результате решений этих уравнений находим: ук=0‚151; хк=
=0‚475.
Для определения числа Мк в точке К воспользуемся уравнением
Ахд
АЮ6=А66+ ' . Ап
ЁРок
Производим вычисления:
1 _ АРо _ ( Род —Рок) °°5( [36 _ Рв)
Ёрок Ап *РЬк ( хк —хд) Зі“ ”6
0 0 1 °1 ’— ° 0
: ,161соз( 7 1 _441) =0’254;
1,4 (0,475—0,393) зтп 44° 10’
Ахб = хК — хб = 0,475 — 0,393 = 0,082;
53112 На СОЗ Нд __ зіп2 44° 10' сов 44° 10’
соз (рд _ „д) соз (17° 11’ —44° 10’)
= 0,389.
6 :
После подстановки находим
Асад =— 0,0044 + 0,082 -0‚254—0‚389 : 0,0121 рад (0° 42’)_
Соответствующий угол
(ок : (06 —|— Асад =10° + 0° 42’ =10942’.
По этому значению (он из табл. 10 [13] находим Мк=1,46 и рк=
=43°16’.
556
Аналогично проводятся расчеты для остальной области потока, вре-
зультате которых определяется распределение чисел Маха по обтекае-
мому контуру и строится ударная волна в виде ломаной линии.
Затем по формуле
' 2 к! {;;—1
і_ ро 1+(/е—1)м‚,/2 “ >
Р… Ро 1 + (’г— 1)М2/2 ,
в которой величина рЬ/ро была определена ранее, подсчитываем вели-
чину этого отношения:
_в_ — 0124 ‘ +<1°4_”5№ 1’4"1’4_”— о 124 (___—6 )3'5
рю _ ’ [1+‹1‚4—1)м°/2] _ ’ 1+о‚2м°- '
Соответствующий коэффициент давления
2 _в___1 ____2_ в_ 20,0572 в__ _
ЁМЁО р… '›4'52 р… ро,
Результаты расчета представлены в табл. 3.\/П.4.
Таблица 3.\/П.4
(ЗА/11.22)
‚в:
О В Г 6 Н К
Параметры
х 0 0,175 0,235 0,295 0,350 0,475
196 0,333 0,324 0,320 0,317 0,314 0,307
М 1,41 1,41 1,42 1,43 1,44 1,46
Р/Еоо 19,98 19,98 19,72 19,54 19,41 18,79
р 1,086 1,086 1,071 1,060 1,053 1,018
\’11.14. Для выбора метода расчета рассмотрим общий характер об-
текания профиля. С этой целью определим течение за скачком уплот-
нения, возникающим перед клином.
Находим угол наклона скачка из уравнения (3.\/11.13)‚ полагая от-
ношение плотностей предельной величиной рс/роо=6:
199… : 1:18 15° [% (6— 1)— 1/71—(6— 1)2—619215°] : 0,336,
откуда 000=18°35’.
В реальном случае угол скачка будет больше этой величины, поэто—
му в первом приближении зададимся величиной 0с0=24° и найдем от-
ношение плотностей, воспользовавшись (ЗХ/11.14):
.0с
0
\ ОО
52 зіп2 24°
: :: 2,72.
2/(1 ‚4 +1) + (1 ‚4 _ 1) 52 $іп2 24°/(1 ‚4 + 1)
Затем по уравнению (3.\/11.13) уточним угол наклона скачка:
19 в… : с1815° [%(272— 1)— “%0472— 1)2—2‚7218215°]=0‚458‚
откуда 000=24°35’.
Проведем еще одно приближение:
Рс
@… : 2/(1‚4 + 1)+ (1,4 — 1) 52$іп224’ 35/0 ‚4 + 1)
52 зіп2 24° 35’
: 2,78-
% е„ = 618159 [% (2,78— 1) _ \/Т1 (2,78 — 1)2—2‚7819215°]=0,448‚
откуда 000=24°10’.
567
Полученное значение УГЛЗ НЭКЛОНЗ СКЭЧКЗ принимаем 38 оконча—
тельное И определяем соответствующее отношение плотностей:
рс : 5251112240 10’ 22 4
р… 2/ (1,4+ 1)+ (1,4_ 1) 52$іп224° 10'/ (1,4+1) ’
Число Маха за скачком согласно (3.\/`П.15)
Мс : [2/‹1‚4+ 1›1‘/2 : 3,57
зіп (24° 10’ _ 15°) [2,74 _ (1,4 _ 1)/(1‚4 +1>1'/2
и соответствующий угол Маха
ре : агсзіп (1/Мс) : агсзіп (1/З‚57) :: 16° 15’.
Рис. З.\/П.5. Сверхзвуковое Обтекание за-
остренного профиля:
1—прямолинейный участок контура профиля;
11—криволинейный участок контура профиля;
!!!—прямолинейный участок скачка уплотнения;
1У—криволинейный участок скачка уплотнения;
У—линия Маха: Уі—отраженная волна разре-
жения
Найдем координаты точки 0, где наклон касательной к оси Бр=
=ВО=ВС=15° (рис. З.\/П.5):
_. 3 __ Ц _щ
18БВ…(ФСЪЭ— Ь 1 Ь
\
ИЛИ после ПОДСТЭНОВКИ
2-2 2х1)
5° ::— —
{91 10 (1 10 ) ’
откуда хр=1‚65 (эта координата отсчитывается от точки 0; см.
рис. 3.\/11.5).
Другая координата
х Х
уд: 2АТВ( _ТВ) : 2.2№_(1_ 1›65)—_—о‚55.
10 10
Координата хЬ точки 0, отсчитываемая от точки 01 (от носка про—
филя), определяется следующим образом:
хЬ : ув/ц; [30 : 0,55/18 15° : 2,05.
Выбирая начало координат в точке О, получим для точки 01 коор-
динату х01=хр—хд =—0‚40.
Проведем из точки В характеристику первого семейства В! до пе-
ресечения в точке !. со скачком:
ур_уу : {%(Бр + На) (хр—х.!)
или
0,55 ——у1 : {9 (15°+16° 15’) (1,65 —х‚).
Решая это уравнение совместно с уравнением линии скачка-'
у] : {десохі : {824010’19 : 0,449х_,‚
наидёьё5координаты конца прямолинейного участка скачка: уд=128'
Х]: ‚ _ , ‘
558
Проведем из точки ! характеристику второго семейства:
у—ш : *в (Б.‚— М (х_х!)-
Так как здесь ш=мр и 61:61), то
у — 1,28 =18(15° _ 16° 15’)(х— 2,85)
ИЛИ
у : 1,342 _ 0,0218х.
На расстоянии х=Ь/2=5 координата точки характеристики у=
=1,233, а в конце профиля, где х=Ь=10, эта координата у=1‚124.
Таким образом, характеристика, представляющая собой линию возму-
щения, отраженную от скачка, не пересекает профиль. Следовательно,
криволинейный скачок, образующийся за точкой !, и возникающий в
этой области вихревой поток не будут влиять на Обтекание профиля.
В соответствии с этим течение вблизи профиля можно рассматривать
изэнтропическим и для расчета этого течения применять уравнения ха-
рактеристик в виде
(ОД : (”в + (вв—В!),
где Ь—произвольная точка на контуре (см. рис. 3.\/П.5). Пусть коор—
дината этой точки хд=2. Найдем угол наклона касательной в этой
ТОЧКЕ:
[двд—( сіх)Ь—2 ь( ь) 210<1 10) 0’24’
откуда в„ = 13°30’.
Из табл.5.3.1.[20] по МВ=МС=З,57 находим сдр=59°36’ и опреде-
ляем
% = 59° 36’ + (15°— 13° зо’) : 61°06’.
Из той же таблицы или табл.10 [13] по шд=61°06’ определим Мд=3‚67
и угол Маха пд=агсзіп (1/МЬ)=агсзіп (1/3,67)=15°48’. Давление в
рассматриваемой точке Ь вычислим при помощи формулы (ЗА/11.22),
в которой р=рь, (р[) /р0) определим по (ЗА/11.17), а отношение давлений
(ре/рао) — по (З.\/П.16).
Производим вычисления, принимая рс/'р…=2,74:
&_ 2,74—(1,4—1)/(1‚4+1) : _
р… _ 1—[(1,4— 1)/(1‚4+1)12‚74 ’ ’
рЬ
— : (ап)—““А“” (2,74)1'4/”'4—” : 0,682;
Ро
_РЬ : 0,682[ ”…А—“52” ]1’4'Щ'4'” : 4,70.
роо 1+ (1,4 _ 1) 3,672/2
Соответствующий коэффициент давления
_ 2 рЬ 2
рд ЬМЁ, (10°о 1) 1,4—52( ’ О )
Аналогично производим расчет чисел М и давлений в других точках
контура, задаваясь их координатами. Результаты этого расчета пред—
ставлены в табл. З.\/П.5.
Рассмотрим контур скачка за прямолинейным участком 01!
(рис. З.\/11.6). Форма этого контура определяется углами его наклона
ОС в точках !, 1, 11,...‚ расположенных на характеристиках, проведенных
соответственно из точек Ь, 1,2‚… на профиле. Покажем, как находится
угол наклона скачка в точке !(601). Его величина определяется по углу
559
Таблица З.\/П.5
Пара-
метры _
х у {в |З 6, град 03. град М и., град р/роо р
01 —0,40 0 0,268 15° 59036’ 3,57 16015, 4 , 74 0, 242
В 1,65 0,55 0, 268 15° 59°36’ 3, 57 16°15’ 4, 74 0,242
Ь 2 0,64 0,24 13°30’ 61006’ 3,67 15°48’ 4,70 0,211
1 3 0, 84 0, 16 9°06’ 65°30’ 3,99 14°32’ 3,55 0, 145
2 4 0, 96 0, 08 4°34’ 70°02’ 4 ‚ 35 13°18’ 2 , 23 0 , 0703
3 5 1,0 0 0° 74°36’ 4,76 12°10’ 1,34 0,0194
4 6 0,96 —0‚08 —— 4°34’ 79°10' 5,26 10°58’ 0,735 —0,0151
5 7 0, 84 ——0 , 16 — 9°06’ 83042, 5 ‚ 82 9°53’ 0 , 398 —0,0343
6 8 0, 64 —0, 24 ——13°30’ 88°06’ 6 , 49 8°52’ 0, 204 —0, 0456
7 9 0 , 36 —0 , 32 —18°40’ 93° 1 6’ 7 , 46 7°42’ 0 , 0837 —0 , 0522
8 10 0 —0 , 40 —21°50’ 96°26’ 8 , 20 7°00’ 0 , 0457 —0 , 0543
В; отклонения потока в этой точке, равному рд (вдоль прямолинейной
характеристики Ц угол наклона вектора скорости одинаков). Таким
образом, 131=БЬ=13°30‚- По этому углу и числу Моо=5 из графика на
9
а .
ево ААЁ’ / ,
Рис. 3.\/`Н.6. Построение контура скачка за
прямолинейным участком 010 профиля:
а —- прямолинейный участок скачка уплотнения:
б —-‹ линии Маха; в — профиль
рис. 4.3.1. [201 примем в качестве первого приближения 6с1=23° и по
уравнению (ЗА/11.14) найдем отношение плотностей:
52 __.'п2 23°
& “ ‚60
рос _ 2/(1,4+1)+(1,4—1)52зіп22З°/(1,4+1) :
Затем по формуле (ЗА/11.13) уточним угол наклона скачка:
,
18 6С, : ст,; 13°30’ {% (2,60 _ 1) _ “% (2,60 —1)2— 2,6019213°30’} :
= 0,411,
откуда 601=22°20’.
По этому углу 6С; находим новое отношение плотностей:
& = 52 зіп2 22° 20’ = 2 50
ро, 2/(1,4—|- 1) +(1,4— 1)525іп222°20’/ (1,4+ 1) ’
И УТОЧНЯеМ УГОЛ НаКЛОНЭ скачка:
18 6,1 = 618139 30’ [% (2,50 — 1) —
560
_/
_ у %(250—1)2—2‚5отд213°30’]=0‚418‚
откуда 601=22022’.
Под этим углом из точки ! на скачке проводим элемент скачка Л.
Аналогично определяются другие точки (1, 11, …) и соответствующие
углы наклона (601, Всп, ...).
\’ПЛБ. Определим общий характер обтекания, с тем чтобы решить
вопрос о выборе возможного метода расчета. Рассмотрим течение у
у ‹ ! В“ 2 5 Ц Щ Э …“
О ‚93 7 5 [Э]
_ _ <»
и… ‚ д :
м…ы Ь/2 „ Ь/2 >
Рис. 3.\7П.7. Симметричный криволинейный про-
филь, обтекаемый сверхзвуковым потоком под уг-
лом атаки и
точки О передней кромки (рис. 3.\/11.7). Это течение определяется углом
наклона касательной у острия:
А 2х 2-1
—— =+ _— — _— =+ — =+
{860_ (ах )х=о _ 2 !) (1 Ь >х=о _ 20 _ 0,1,
откуда 50=і0›1 рад.
Рассматривая нижнюю сторону, найдем для точки О (при МОО=З
и М…:2О) соответствующие параметры:
Согласно полученным значениям параметра К первый случай
(К<1) соответствует линеаризованному течению, а второй (К>1)—
маловозмущенному обтеканию с гиперзвуковой скоростью.
Гиперзвуковое обтекание (Мы:-20). Так как (1:50, то на ве р х н ей
стороне расчет числа М ведем по формуле
М=]—„}-;—’г_‘‹ос —в›] =]і———— “‘—" ‹01—в›] =
= [0,05 — 0,2 (0,1 —— [зп—21.
20
В точке О передней кромки, где [З: Бо=ос= О, 1 рад, число Маха та-
кое же, как и в набегающем потоке. В соседней точке с координатой
х1=2‚ где угол
2_А /
2, 2-1 22
Б1^5ТЁБ11—\1—%)=Ё_(1—2——0)=0‚,08
число Маха
М1——[О,ОБ ——О, 2 (0,1— 0,08)]_'1 : 21,7.
г\налогично проводим расчет этого числа для других точек на верхней
стороне профиля. Коэффициенты давления в этих точках
р=‹а—в›2]’г+—‘— ъ/(Ш) + к.,]—
Подставляя значения іг=1,4, оа=0,1 и учитывая, что К=М°о(а_р)=
=20 (0,1—6), найдем
Б=%‹о‚1—в›]‹о‚1— —Б)——1—]/к2—2—95—].
561
В частности, в точке О([3=[Зо=ос=0,1) коэффициент давления ‚50:0,
а в соседней точке 1, где Б=В1=0‚08 и К=20 (0,1—0,08) =0‚4, этот ко-
эффициент р1=—15‚8-10—4.
Рассмотрим н и ж н ю ю с т о р о н у. Коэффициент давления в произ-
вольной точке на этой стороне
_ _ 2 Ш 1 Ш? _4_
“(°“ В)[2Т)/(2)+к2]
или, так как ос=0‚1‚ й=1‚4‚ Моо=20 и К=Моо(ос—[3)=20(0‚1—[3)‚
— 6 1 , 25
р=—5—(0‚1—[5)[(0‚1—!3)+2—01/К +?].
В точке 0, где (0,1—Бо) )=[0‚1—(0,1)]=0,2 и К=20[0,1—(—0,1)]=4,
— 60,2 _ , 25 _
рО_—___— 5 (092Т210`\/4+ Т)—О›1›
а в соседней точке, где [З:—0,08, (0,1—[$) =[О‚1—(—0‚08)] =0‚18‚ К:
=20 [0,1—(—0,08)]=3, 6,
*‘ _6 0,18
р:-
5,(0 18 + —\ 3 ‚62+ ___—%;): 0,0817.
В точке задней кромки, где (0,1—[$) =0, величина р=0. Аналогично
определяем коэффициенты давления в остальных точках нижней сторо—
ны профиля.
Найдем распределение чисел М. Сначала определим число Маха
в точке передней кромки, используя формулы:
м2 2—1 2 2—1
___ 2 __ 2 / 2 .
м2 {(°/[(№№ Ь+1)\Ь+1+Ь+1к°)]’
кс : Мое 9со : БО Мос/[2 (“'— БОЛ-
В точке О коэффициент Бо=0,1‚ разность углов (а—Во)=[0‚1—
— (—0,1 )] = 0,2, поэтому
Кс : 0,1 -20/(2-0,2) : 5.
В соответствии с этим
м2 . _ _
__3252/[{ 21,4 52_ 1,4 1)( 2 +14 1 52Л20’170’
Моо \1А+1 1А+1 1А+1 1А+1
откуда
МО : 20 70,170 : 8,25.
За передней кромкой число Маха определим по уравнению характе-
ристик:
1 , Ё——1 __ __
М_[ЩТТ (во Б)]—[5—152502(01 +19]
Например, в точке с координатой х=2‚ где (0,1—|—[3)= (0,1—0,08)=
=0,02,
м : (Ц— — 020,02)“1 : 8,55,
8іЮ
а в точке задней кромки, для которой х=20 и (0,1—|—[3)=(0,1+0‚1)=
=0‚2,
м : (# _ 0,2-0‚2)—1 : 12,4.
8 5
,
ЫЮ
о :„55 $85 $35 $85 885 $55 385 ^…:.о Кто ::,о ……
…о …о…о З…о юоа шо…о 25 „то Е…о …:…о …:…о 8.5 …Тто
2 о то о ……о о 35 ……о о @ 85| 3 он. 8 о! то о! 2 о! @
ЁЁЁЗЁЁ щщщёзщ
:; „25 23 885 $35 ЁЁ $85 555 $86 355 о …!
85 25 …:.о 35 што ото шо…о $5 $6 85 о 9.3…
25| 86| 85! 35| 85! о ……о о 35 85 85 ото @
ЁЁЁЗЁЁ ЁЁЁШЩ
о… _ …: _ …: _ Е _ а _ о… _ …… _ …… _ т _ … о _ ……
Э … а _ …… _ к _ …… _ …. _ „…. _ …. _ щ _ ` _ о _ ЁЁ „2
_
„:>… 22…55
Ё: ю.: ш.: …}: ……2 ФФ…Ф ш……а :…Ф Ю…}… шт;… ю….ю Е
85 …:.о …:.о 35 „то его юоъ юоъ $5 85 о „гг:…
@ $5 $5 :; ю…… _ К … т…… …… Фо … ы….ю Ч…… 92 „от…
о то ……5 …; Ющ с…… Я… ю…… и…… Ф.… „„ а!}: сын….
о 85 35 Фо…о №1… 2 о „_.о «_.о юго …:.о 85 щіто
за юсб 85 % о …о о о то о! 3 о! ……о о! 85| г.о.. @
ЁЁЁЗЁЁ ЁЁЁЩ
од…… „…% Ёж… ……„юю З…… З…… З…… од…… Б… ……„2 @ Ё.…Т
о.…ч ©.ю т.т ю…ы «…и о…ш ю…… ш…_ ю…о т.е о Ащпітоуош”!
2: ч: Ч…… …… @ ….юю ю.…„ю Ё… РФ… №…… Ё… о… Е
85 …:.о …:…о 36 „до его ……о_о ……Ро 8.0 85 о щіто
25| 85! 85! 3 о! …о о! 8 о „о о 3 о ……о о 85 ото @
Ёюощжцёое „Задают
_ _
о… _ …: …: _ Е _ …… е_ …… _ …… т _ … _ о _ „…
Ё _ „… ю _ ц ш …. …… _ …. _ щ _ ` _ о _ „это.…. „2
ю.:>.ю юцычююн
Аналогично определяем числа Маха в остальных точках нижнего
контура. Все результаты расчета параметров обтекания профиля при
ведены в табл. 3.\/П.6.
Линеаризованное Обтекание (Моо=3). Н а в ер х н е й с т о р о н е-
профиля коэффициент Давления
Б=— ——2 (°°— 5) =— _? (… _ '” =—0,707 (0,1 — в).
1/М'іо— 1 1/32 _ 1
В точке передней кромки, где [3:60:0‚1 рад, этот коэффициент р—о=0…
В соседней точке (х1=2, В=Б1=0‚08)
5, =— 0,707(0,1— 0,08) =—0,0141.
В точке задней кромки (11:10:20, Б=Б10=—0‚10)
5… =— 0,70710,1—(—0‚1)1=——0,141.
Аналогично рассчитываются коэффициенты давления в остальных
точках верхнего контура.
На нижней стороне
В = __“? (°°— ‘і : ___—2 (О" _В) = 0,707 (0,1 __ в).
Ума—1 У32— 1
В точке передней кромки (х=0, в=ро=—0‚1)
50 = 0,70710,1 _ (__ 0,1)1 : 0,141,
а в соседней точке, где х=2 и [3=——0‚08‚
В = 0,707 [0,1 — (_ 0,08)] = 0,127.
В точке задней кромки, для которой 36:20 и Б=0‚1‚ коэффициент
давления равен нулю. Для остальных точек коэффициенты давления на
ходим аналогично. Все результаты расчета приведейы в табл. ВМН.?
\/П.16. Для определения аэродинамических коэффициентов профи,
ля заданной формы используем результаты распределения давления, по--
лученные в решении задачи \711.15.
Запишем общие формулы для аэродинамических коэффициентов:
коэффициент продольной силы
1 1
__ — _‘Ё —_1_ _ ‚ЁЁ—\ _-
сд _ РЦ ах )нах , _ рвф х ‚ сіх, (3.\/11.23)
В
коэффициент нормальной силы 1
с„= 515н_ В) (152. (ЗА/11.24)
0
В поточной системе осей координат коэффициент волнового сопротив-
ления (при небольшом угле атаки а_=0‚1 рад)
сх : смос + сд, : 0,10” + сд, (З.\/'П.25)
& коэффициент подъемной силы
су : СА,—скос : с„—0,1с‚,. (ЗА/11.26)
Расчет коэфф1ициента момента тангажа ведем по формуле
—т_‚_ : = ”1,250 —рв›хагх + [Б…у„(_3— ) —р‚‚ув арх (3 №127)
Чоо и _ (іх 11
')
гдех= х/Ь, у: у/Ь.
564
Коэффициент центра давления
с = хдд/Ь =— та,/см. (ЗХ/11.28)
Ц-д
В приведенные зависимости вх0дят производные аЁу/аіх для верхней и ни-
жней сторон. Находим
“1—11 —і _ _2_х 4— _1_
\а—х)в‚н 21)“ ь): 4220
(1- — 3—3) = 4; 0,1 (1 —0‚1х)
или, вводя х=х/Ь,
(ду/№№ : і 0,1 (1 — 23) % внж. (ЗА/11.29)
В относительных координатах Тс и ; уравнение контура примет вид
ё=і 2Ы‹1_Е)=і- 2516Ё(1—Ё)
ИЛИ
"= і— О,13Ё(1—)_с). (ЗА/11.30)
Внесем в формулу (З.\/11.23) значение ду/сіхжр:
1 1
су2 =— 5 Бирна)? + 5 5813,34}. (з.уп.23’)
о 0
Гиперзвуковые скорости (М…=2О). Вычисление интегралов по при—
веденным формулам осуществляется графически с использованием дан-
ных из табл. З.\/П.6. По этим данным рассчитываются вначале необхо-
димые для такого интегрирования параметры (см.табл.3.\/`П.8).
По данным табл. З.\711.8 строим график функции 150?) для разных
значений 3 (рис. З.\/11.8) и определяем площадь под кривой этой
функции:
Данной площади соответствует коэффициент продольной силы сн=
=$щ1№=1657- 10—4- 10—2=0,00166‚ Где №1=10—4 1/мм и и;=1О—2 1/мм—
масштабы соответственно величин ;& и х.
Аналогично ведется расчет коэффициента сд. По данным табл. 3. \711. %
строим график і2(х) 2(‚рис З…УП 9) и находим между кривой и осью х
площадь $= 3950 мм? Эта площадь определяет коэффициент нормаль-
ной силы
_ —$„‚2„_— _ 3950 10—3 10—2= о, 0395,
где №2=1О—3 1/мм и ”:::…—2 1/мм—масштабы соответственно Ь и х.
В поточных осях коэффициент волнового сопротивления
сх = 0,1 -О‚ОЗ95 —|— 0,00166 = 0,00561‚
а коэффициент подъемной силы
су = 0,03% — 0,1 -О‚ОО166 = 0,03%.
Аэродинамическое качество
К = С),/Сх = О ‚‚0393/0 00561 = 7,0.
Для _определения коэффициента момента, используя значение функ-
ции і3(х) в табл. 3..\7118‚ строим кривую этой функции (рис. &… 10).
565
55355 53555 55555 5………55 35…55 53…55 555…5…5 55555 5555 55555…5 5 „…
5 $555! 55555! …5…55| 55…55! 5 5555 5 55…„5 5 5555 5 5555 5 5 „5…^…….5…_5…_.5|=.5=5ё|5
5555 3555 55555 5:55 55…55 55…55 55…55 55…55 55…55 55555 5 тащіё
щЪщЩщЩ|ш№щЩщЩ+Ж^шЩ|щЩу ”мы ЩЗЁУЁЪЫЪ ‘
……555 5555 555 5…55 5555 _ …555 _ 5…55 _ …„555 _ 5555 _ 5555 _ 55…5 _ „„…
щщіщщнык …ЭЁЁЁы
55……5 :…5 5………5| 355! 555! 5 _ 5555 55; _ 555 _ ……„5 _ 5… _ „52
щдщщ+=ЮЁЩіНг` „33:39
5 5555 „555 5555 5…55 5 5…55| 5555! 55| ……55| 5 ……5………5.…_5…_щ
5 5555 5…55 …555 ……555 ^…555 ……555 …555 555 5555 5 55\…_5н…_№
55 :5 555 $.… 55 5 555! З…! …….…| 53| 5 „51…53…
55……| „55| 5.55! 555! 5.551 555! 5551 5.………| …551 5.2! 5 а….„щ
25! 555! 555! ……551. 555! 5 555 …„55 555 555 …5 ……5
25938550: Задают
5 5…555 5 …5555 _ 5 55555 . 5 …5555 5| 5 5…55 5 $8 5 5555 _ 5 5555. 5 5 “51555…
5 5555! 5…55| …555| ……5551 5555! …„555і …5551 5…55| 5555| 5 55…ш5нщт
5 55555! 55…55! 55…55 55555! 5 5555.5 ……555 …555 „$55 5.… „515$!
5 555 ……55 „…,… 55… Е.… ……55 555 $5 :5 5… „ЁЁ.
25 555 555 ……55 555 5 555! ……55і 555| 555! 25! &
ЁЁЁБЫФЁ щёёзщ
5_… 55 55 55 55 …5 ……5 55 55 …5 5 оыэнщ.
55 5… 5… …; 5… 5… …… 5 …„ 5 5 „…
Ё „… 5… “ ю …. `…. ш щ \ © 5:8. 52.
ю.:>.ю ю……хчююн
566
Площадь под кривой, равная 8:11 100 №142, определяет коэффициент
момента
—т2 : 811,3„3 : 11100.10—4-10—2 : 0,0111,
где №3=10—4 1/мм; „3:10—21/мм—масштабы соответственно величин
із И Х.
По найденным значениям т: и см находим коэффициент давления:
сц_д : хдд/Ь =_— ‚пз/% : 0,0111/0‚0395 : 0,281.
Линеаризованное Обтекание
&
(Моо=3). Коэффициент давле- 10 Ё
ния на верхней стороне про-
филя
_ _ 2 (ОС _ БВ)
21/м20 —1
=— [0,1— 0,1 (1 _ 5
У2 32_—— 1
_ 216] =— 01412,
а на нижней №100 52 83 :?::ш/Ь
_ _ П/ ”’ 'ч. 11/01/1111, "„
1/МЁО —1 У32— 1 Рис. 3.\/11.8_ График функции 1710?)
_ 1с
>< [0,1 + 0,1 (1 __ 2х)] : 0,2…
= 0,141 (1 _};
Внося эти выра>кения‚ а
также значения Бвд, ув,н [см.
(З.\/11.29)‚ (3.\/11.30)] в форму-
лы (3.\/11.23’)‚ (3.\/11.24), 0105
(3.\/11.27)‚ получим:
1
ск ==— "' 0,141 (1 _;Ё)[—0‚1(1—
‚// /
0 / /
_ 1 " // ‚ ., / / / "Е: "С/Ь
0,5
—2;?)]ах+5(—0‚141х) >< ‘0 ‚а
0
Х [О 1 (1 __ 2)?” а; : _ О ОО47° Рис. 3.\/11_9. График функции &&)
1
2$[0,141(1—Е)—(—0‚141Х)1‹1Х=0›141ё
О
1 1 _
_т, =510,141(1—})—(—0,141Е)1Еа}+ ({0,141 (1 _)?)1— 0,1}(1—х)1><
0 0’
>< [_ 0,1(1— 2211— (— 0,141})10‚17‹ (1 _)?)1 0,1 (1 — 23:11)? : 00705.
567
Коэффициент сы профиля оказался таким же, как для пластинки
под углом атаки а:
с„= 4а/1/м30_1=4.0‚1/1/32—1 =0‚141.
Величина коэффициента момента для пластинки под тем же углом
атаки
т2 =— СА,/2 =— 0,0705
также совпадает с полученным значени-
ем для тонкого профиля. Учитывая, что
для пластинки шириной 'Ь координата
центра давления хдд=Ь/2, коэффициент
сц_д=хд_д/Ь= _тг/сдт: 1/2. Такой же ре-
зультат получим для тонкого профиля
при линеаризованном обтекании.
\’П.17. Для выбора метода расчета
произведем оценку режимов течения око-
ло профиля указанных формы и разме-
" \ ров. Из рис. 2.\/11.7 видно, что Бв‚н=
,; ’ =іА/Ь=_—|;О‚1.
0,005— ’ __ Параметры подобия, рассчитанные по
` углу Вв‚н‚ будут следующими: для числа
Моо=3 значение К=Моо|6вд| =3-0,1=
=0‚3; для числа Моо=20 значение К=
.. =Моо|Вв,н|=20'0‚1=2.
“: В соответствии с этими значениями К
015 1,0 принимаем, что в первом случае течение
РЮ 3.\/11.10. График функцииізд) будет линеаризованным (К< 1), а во вто-
ром — маловозмущенным сверхзвуко-
вым (К>1). Определение аэродинами-
ческих коэффициентов рассмотрим для каждого случая отдельно.
Г иперзвуковое течение. Коэффициент давления на передней площад—
ке верхней стороны [20]
=< тэг [*$—‘+ъ/Ё%—'>+%]
или, так как К2р=МЁО(а—ВЕ)2‚
—п „ „ .іг—і—1 к2 іг—|—1
рее—№ …… —м> %т——>+1]-
Учитывая, что (111+1)/2=1,2;2 Моо=20; |а—В‘;|=|0‚05—0,1|=0,05;
К=Моо|а—Б‘; | =2О.О,05= 1, найдем
Ъ; = 0,05 {0,05-1,2 + % “% 1,22 + 1 ) = 0,00650.
0,010
0
На задней площадке [20]
53=<°‘—‘33>0°°—53>(Чд)—м—Ё; \/ ЁЁ?) + 1]
или, учитывая, что а—ВЗВ =О,05—(—О‚1)=0,15 И К=М°о(а—'ВЁ )=2ОХ
Х0,15=3‚
_в_ . _і ЁЁ 2 __
рв—О,15(О‚15 1,2 20 1/ 4 1,2 +1)—— 0,00384.
568
Аналогично проводится расчет для двух площадок по нижней сторо-
не. На передней площадке
БЕ=(ос—БЕ)[(ос—БЕ)(Ё+—1-)+— М&- 4 (’;—1) +1 )
или, поскольку (а—ВЁ)=0‚05—(—0‚1)=0‚15 И К=Моо(06—ВЕ)=
=20-0‚15=3‚
‚33 = 0,15 (0154,2 +% И? 1,22 + 1 ) : 0,0578.
На задней площадке, где 01<БЁ‚ возникает течение разрежения,
и коэффициент давления
Ъа=(а—Б:))( —Б:)(*—Ё‘)—тЁ-1/к— 4 (Т) “ )
Так как |сс—[ЗЁ| = |О‚О5—О‚1| : 0,05 и К : М„ )ос—Бщ : 2О-О‚05 : 1, то
‚3; = 0,05(0,05.1,2—%\/ %122 + 1 ) : —О,ОО283.
Определим теперь аэродинамические коэффициенты продольной
и нормальной сил. Для ромбовидного профиля:
сд = —`Ъ‚, (% ){ +733 (%) = —ЪЕБ‚‘3 $315; +5: в: + 536: =
= — 0,0578 (_ 0,1) _ (_ 0,00283) 0,1 + 0,00650-О,1 +
+ (_ 0,00384) (_ 0,1) : 0,00710;
с„ : Б:; + 5; _В; _В; : 0,0578 + (_ 0,00283) _
_- 0,00650 _ (_ 0,00384) : 0,0523.
Соответствующие коэффициенты сопротивления и подъемной силы
(в поточных осях):
сх : с},, + с“ 00 : 0,00710 + 0,0523—0,05 : 0,00972,
су : (‚`“—Ска : 0,0523— 0,00710-0,05 ; 0,0521.
Коэффициент момента тангажа будет определяться из выражения
М 1/2 1
ьЁ = (р:—р2)хдХ+)(р3—рё)хёх+
1/2
_‚7‘12 :
4…
1/2
+ ) (Ъ:: в: 5133 —Б: 62113545 +
0
1
+ ){Бабы—(140163—53631—0—516343
1/2
После подстановки и интегрирования получаем
— тг = (0,0578 — 0,00650) % + [— 0, 00283 — (—0, 00300)—
+ [0,0578 (_ 0,1)2 — 0,00650 (0,1)21 Ё+ """"""""
+ [(— 0,0283) (0,1)2 — (_— 0,00384) ‹- 0,1)21 (_ %) : 0,00684.
569
В соответствии с этим коэффициент центра давления
с,д : хдд/Ь : _ тг/сА, = 0,00684/0,052з : 0,131.
Линеаризованное Обтекание. Коэффициенты давления на передних
площадках сверху и снизу определяются следующим образом:
_ 2 _ П _
рЁ=__(Ё_БВ_)=_ “0105 011) 20,0437;
Ума—1 1/32—1
_ 2 _ “ _ _
РЕ: (01 Вы) 3210,05 ( 0,1)1 :…“
Име—1 32—1
На задних площадках:
_ 2 _— 3 _ _
РЁ=— (а БВ) =_2[0‚05 ‹ 0,1)1____О,131;
/мЁ°—1 1/32—1
—з=_№= “095—01” =_00437
Ума—1 1/32—1
Находим соответствующие аэр0динамические коэффициенты про-
филя:
ск = —53133—Бз133+53133+ 53133: —0‚131‹—0‚1›—
— (_ 0,0437) 0,1 + 0043701 + (_ 0,131) (_— 0,1) : 0,0349;
с„ = 5; +53—53 _В; = 0,131 —0‚04з7—0,0437 _- ‹—0,1з1) : 0,175;
с, = 0,0349 + 0,175.0‚05 : 00437;
с), = 0,175 — 0,0349.0,05 : 0,173;
—тг = (0,131 —0‚0437)—;— + [_ 0,0437—(— 0,131]% +
+ [0,131 (_ 0,1)2— 0,0437 (0,1)21 % +
+ [‹__ 00437) (0,1)? — ‹— 0,131) ‹— 0,1121(— %) —— 00434.
С учетом значений т„ и см коэффициент центра давления
сц_д : хдд/Ь : — тг/см : О,О434/0‚175 : 0,248.
№138. Определим по заданным геометрическим размерам профиля
углы (см. рис. 2.\/П.8):
%% 2
: П '.: 3 : і: —- = 1: —— = 603 ‚'
[ЗВ [ЗВ ”33| агс 917/2 агс 9 4 2 4 ‚
МЫ 1
= “ = 3 : агс’с : агс’с — : 14°О2’.
Эти углы определяют характер обтекания профиля и значения соответ-
ствующих параметров этого обтекания на верхней и нижней сторонах.
Передняя (верхняя) площадка ОА. Определим по углу Вв=26°34’
и мы =5 угол наклона скачка уплотнения 62. Вначале из рис. 111.1 [17]
570
найдем приближенную величину 613, =37°4О’ и вычислим отношение плот-
ностей по (ЗА/11.14):
рс 52 зіп2 это 91
Е,— = 2/(1,4 + 1) + (1,4— 1) 52 зіп2 37°4о'/(1‚4 + 1) :
По этой величине уточним угол наклона скачка [см. (3.\/П.13)]:
{% 62 :- с’сё 26°34’ [%— (3,91 —- 1) —
_ _1_ (3,91 _ 1)2— 3,91 —’с,с‚г226°34’ : 0,778,
4
откуда 62 =37°54’.
Затем осуществим следующее приближение:
Ре : 52$іп237°54’ : 3 2.
р… 2/(1,4+ 1)+(1‚4—1) 5251112 37°54’/(1,4+ 1) ’
+;; 93 : с’сё 26°34’ [% (3,92 — 1) _
_ 1/ % (3,92_1)2—3,92.ъд226°34’ ] = 0,775,
откуда 62 =37°47’.
Принимаем это значение угла скачка за окончательное. Ему соответ-
ствует отношение плотностей
2 ' 2 04 ‚
рс 5 $111 37 7 ‚91
р… 2/(1,4 +1) + (1,4-_ 1)252зіп237°47'/(1 ‚4+ 1) : 3
Находим далее, используя (3.\/11.6), (3.\/П.17) и (3.\/П.15)‚значения:
& =_”0_А : (3,91 _1'4—‘)/(1 _ 1‚‘*‘—13,91): 10,8;
р… рю 1,4+1 1,4+1
рд 1 ППА—1) 14 14 1
( ) : (_) (3,91) - ^ ' —>=0,309;
Ё… 10,8
( 2 1/2
1,4+1)
зіп (37°47' _ 26°34’) (3,91 —
мс : МОА :
: 2,40,
1,4—1 1/2
1,4 + 1)
.а также коэффициент давления
_ _ 2 РОА 2
р…— Ёмі ( 1) : 1,4.52 (10,8—1)=О,560.
Передняя (нижняя) площадка ОС. По углу наклона этой площад-
ки Вн=14°02’ и Моо=5 из рис. 111.1 [17] находим приближенный угол
скачка 62 =23°30’ и определяем соответствующее отношение плотностей:
& = 52 зіп2 23°30’ : 2 66
р… 2/(1‚4—|—1)+(1,4—1)52$іп223°30’/(1‚4+1) ’ '
Затем уточняем угол скачка:
15% 62 : сщ 14°О2’ {
Ю
1
?(2,66——1) _
_ ‘/ % (2,66— 1)2— 2,66 @ 14°02’ ] = 0,428‚
откуда 62 =23°09’‚ _
\
571
и осуществляем еще одно приближение:
& _ 525…223009’ _ 2 6-1-
0… 2/(1‚4+1)+(1‚4—1)52зіп223°09’/(1,4+1) ’ ’
1,905; : сі914°02’ [%(261 — 1) ——
_ ; (2,61 _1)2— 2,61 ъд214°02’ = 0,433,
4
откуда 62 =23°24’ .
Принимая это значение угла скачка за окончательное, определим со—
ответствующее отношение плотностей:
рс _ 52 зіп2 23°24’ _ 2 65
р… 2/(1‚4+ 1)+(1,4—1)52$іп223°24’/(1,4—|— 1) ’ ’
а также БеЛИЧИНЫ:
& 239.6; =(2‚65-—1’4_1)|(1—11—1265)=4‚44;1
рю рю \ 1‚4+1 1‚14+
‚р, 1 1/(1‚4_1)
(і) : (_) (2,65)1’4…’4_1’ : 0,728;
\ Ро 4,44
( 2 )1/2
ОС 1,4—1 1/2
зіп (23°24’—14°02’) (2,65— 1 ‚4+ )
_ 2 Рос
: , . _ 44—1 _ 0,197.
рос темі, ( р„ 1):1452(4 )
Рассмотрим обтекание задних площадок, которое сопровождается
расширением сверхзвукового потока.
Задняя (верхняя) площадка АВ. По числу МОА=2,4О из таблицы
[17] находим угол ш0А=36°42’. Затем из той же таблицы по величине
юАв=ш0А+2Вв=36°42’+2—26°34’=89°51’ определим МАВ=6,79 и под—
считаем:
_] _к/аг— _) _1‚4/‹1,4_1)
А—‚Ёр _(1 +-—— мдв) —_-( ‚2) = 0,000293.
Ро
Соответствующий коэффициент давления
БАБ: 22 (№.ЁЗ‚ЁЕ_1)=
Ёмоо Ро Ро Роо
: ——(0‚ 000293 0 ‚309 _— — 1) = — 0,0543,
1,42-5 0 0,0189
Г'Де
_Лг/(іг—1) —1‚4/(1‚4—1)
_р—°° =(1+Ё;1-М …) =-(1+1—4_15 52) =0‚00189.
Ро
Задняя (нижняя) площадка СВ. Из таблицы [17] по Мос=3, 57 на-
ходим соос=59° 36’, а по углу шсв=шос+2вн=59°36’+2-14°О2’=87°40’—
число Мсв=6,42. Затем подсчитываем отношение:
р— ———М1 —іг/(іг—1)
РО
572
1,4—1 —1.4/(1.4—1)
:. (1 + 2 6,422) = 0,000417
и коэффициент давления:
Б __ 2 РС В РО РО _
СВ _ —' . __ о _— _ _
№30 ро ро р…
: (0, 000417 0, 728 _ _ 1) = — 0,0480.
1,45 0,001189
На рис. 3.\/П.11 показан характер распределения коэффициента дав—
ления по профилю. Найдем соответствующие этому распределению аэро-
динамические характеристики профиля:
Рис. З.\/11.11. Характер распре- — <О
деления коэффициента давле- рдв
ния по несимметричному ром-
бовидному профилю, обтекае- __
мому сверхзвуковым потоком У…
с |Моо=5 под нулевым углом __)- В
атаки Мао №
. _ Р}; 0 ‚
рос) 0
коэффициент волнового сопротивления
181313 18 Вы
=(р0А + РАВ… "" (рос + |рсв') :
— …,(0 560 + 0 ,0543)—— “2 +(0, 197 + 0 ,О480)— “42 _ —О,184;
коэффициент подъемной силы
Су : (Бос _БОА + БСВ —БАВ)/2 :
= (0,197 — 0,560 — 0,0480 + 0,0543)/2 : — 0,178;
коэффициент продольного момента
— — 1 — — з
_тг :крОС—рОА) ? + (ров—РАВ) "8— =
=_- (0,197 — 0,560) % + (— 0,0480 + 0,0543) % = — 0,043;
коэффициент центра давления
сц_д =— т_‚‚/су = 0,043/0‚178 : 0,242.
\’П.19. Обтекание несжимаемым потоком с некоторой скоростью У…
ПОД углом атаки а скользящего крыла эквивалентно обтеканию прямого
крыла со скоростью УО…= У…, -соз Х под углом атаки ап=а/соз Х-
Коэффициенты подъемной силы и момента такого крыла можно опре—
делить соответственно по формулам (3.\/1.1), (ЭЖ/1.2) при условии, что
угол атаки принимается равным величине ап=а/соз Х- При расчете по
этим формулам необходимо знать также коэффициент 131, который сле-
Дует принять равным производной сіу1/сіх1‚ вычисляемой по уравнению
у1=у1(х1) средней линии профиля в плоскости х10у1 (см. рис. 2..\/119),
и, кроме того, угол 0, связанный с координатой х1 зависимостью х1=
= (дп/2) (1—соз 0).
573
Найдем уравнение средней линии заданного профиля
1 1 х
у1 : —2_ (.’/113 + у…) : _?— [02Х1 (1 _ %) — 0,12х1( — %)] =
П
= 0,04х1 (1 — іі) .
Ь
п
п
Согласно этому уравнению
[$1 = сіу1/сіх1 = 0,04 (1 — 2х1/Ьп),
или после замены х1=(Ьп/2) (1—со5 0)
[$1 = 0,04-сов 0.
Вычисляем во и до:
е,=— ° —0—4Ёсо50(1—со50)410=0‚02‚
Л
0
„, _ —0——24Ёсоз0(1 ——2со50)‹10— —— 0.
0
По этим значениям 80, до и углу атаки
ос„ = ос/соз )( = 0,1/со5 60° = 0,2
находим коэффициенты сунсж и тгнж, отнесенные к скоростному напору
ао… — —р… \” /2:
су нсж= 2л (ос„ + 80) = 211 (0,2 + 0,02) = 0,44:п: = 1,38;
1
'— тгнсж : 2 (% 80 _ до) + ТС): нсж=
=2(—о‚—02 0)+°4—44 :п:=0,12л=0‚.377
Соответствующий коэффициент центра давления
х . т2 нсж 0,12:п;
(СЦ-д)НСЖ : ЦД _
—— — —— = ——= 0,273.
Ь
Подъемная сила
унсж : су нсж Чот $кр9
где скоростной напор
„„: р°° 1,3… = р°° Уі'сс’згх =—о‚125.1002.0‚52 : 156 кпмг;
2 2 2
площадь участка крыла
Бир = Агоп/сови = 1 -1/соз 60° = 2м2.
С учетом этих данных
Унсж = 1,38-156-2 = 431 кГ.
Момент относительно передней кромки
м, ,… = ,„сжа…„$крь‚., : _ 0,377-156—2-1 : _ 117,5 кГ-м.
Рассмотрим подсасывающую силу, возникающую при дозвуковом об-
текании крыла, у которого передняя кромка может быть закруглена Мы
уже знаем, что для тонкого симметричного профиля, обтекаемого под
574
углом атаки, коэффициент подъемной силы Сунсж=2л(а+ео). Его вели-
чину можно рассматривать как сумму Двух составляющих: сунсж1=
=2ла—коэффициент для плоской пластины под углом атаки а—и
сунсж2=2пео—коэффициента, соответствующего значению для профиля
в виде слабоискривленной дуги с уравнением среднеи линии у1=(у1в+
+у1н)/2 под нулевым углом атаки.
Рассмотрим, создает ли подсасывающую силу этот профиль. Вычис-
лим для этого вначале производную сісунсж2/сіе. Так как во:
=_(1/Л)Ёсвд(1—соз 9)аЁВ, то
о
дс
№ = ——2Б1(1—со56).
46
Учитывая также, что х1=х1/Ьп= (1—соз СЗ)/2, найдем ах1=$іп ВШЭ/2. Та-
ким образом,
асунсж2 : _ В 1—со58
(1551 1 зіп @
Эту формулу можно выразить также через местные коэффициенты дав-
ления на нижней и верхней сторонах:
дс —— _ —
унсж2 _ _
———— — рн —рв — Ар.
(1х1
Известно, что для тонкого профиля коэффициент давления связан
с добавочной составляющей скорости Ух выражением р=—2Ух/Уооп.
Полагая, что на верхней и нижней сторонах значения Ух отличаются
только знаком, получим для абсолютной величины У'х зависимость У'х ==
=АрУ…„/4‚ в соответствии с которой
У' _ уст . ‹ісу нсж2 _ 1 —— сов 6 У
х _ — _ _ о 61 00,1.
4 (1х1 вт @
Подсасываюшая сила прямого крыла единичного размаха
_. 2
Т 1 _ этом с ,
где
2_ ° ' 2
_ 11гп [(Ух) (хг—хил.
х1+хп.к
Так как координата передней кромки в рассматриваемом случае
хп_н=0, то, очевидно,
: 1ігп [1/22 х1]
х1—›0
или, учитывая, что х1=Ё1дп= (дп/2) (1—соз 6),
2 =_- Ьіпз [(У.;,)2 (дп/2) (1 — сов В)]
Внося сюда значение (У; )2‚ получим
[1120,1 В? (1—соз @)2
зіп2 6
с2 = 1іт
0—›0
% (1—соз @)
где Вд=сіу1/аіх1= 0,04 соз6. Нетрудно заметить, что величина с= О. Та-
ким образом, в соответствии с формулой для подсасывающей силы Т1=
=лроо с2 тонкий профиль в виде слабоизогнутой дуги под нулевым уг—
лом атаки не создает подсасывающей силы. Эту силу создает тонкая
575
о о о _ о 2_ 2 2
пластинка с закругленнои переднеи кромкои, для которои с —Ь„а„У°о„.
Величина подсасывающей силы на участке скользящего крыла шириной
Аг (см. рис. 2.\/11.9)
._ _ 2 2
Т __ (Т1Агп) соз )( _— лос рю Уш Ьп А2.
После подстановки Данных получим
Т : л-0,12-О,125—1002—1-1 = 38,6кГ.
\/П.2О. Так как форма и размеры крыла, а также угол атаки те же,
что и в задаче \711.19, то можно использовать данные, полученные в ре—
зультате решения этой задачи и относящиеся к условиям обтекания не-
сжимаемым потоком.
Проведем пересчет коэффициент-а подъемной силы на скоростной на-
пор ([оо =О‚5_о°о\/Ёо :
‚ Угол 2
су нсж= Сунсж УТ : Сунсж СОЗ х'
Так как сунсж= 1,38, а х=60°‚ то
с' = 1,38 соз2 60° = 0,345.
унсж
Коэффициент момента вычислим по величине скоростного напора
2 '
6100=О‚5_ооо1/оо и хорде Ькр=Ьп/соз Х-
2
' ——т —У°°” .—Ь" —т с 53
гнсж _ гнсж УЗО Ькр _ : нсж 0 Х!
или после подстановки
т' — 0,377 соз3 60° == — 0,0472.
г нсж—
Коэффициент центра давления
: _ хЦ_д __ тг НСЖ __ 0,0472 _
(Сц.д)нсж _ Ь _ _ ‚ _ 0 345 _ 0’137'
кр ›
Определим для случая несжимаемого обтекания коэффициент подса-
сывающей силы (см. задачу \/11.19):
2Т 2лос2 рю УЗО Ь„ Аг
р… Уі в„ р… Уі Ь„(Аг/созх)
= 2лос2 соз )( : 2л-0,12-0,5 : 0,0314‚
а затем подсчитаем соответствующие коэффициенты с учетом влияния
числа Маха:
(Сит)нсж _
,
, С
Сусж : у нсж : 0,345 : 0,399;
, т, _
тгсж= _“1 : _Ш = —0‚0545;
1/1—м‘іо 1" 1——0‚52
‚ ((:‚ТЪНС' 0,0314
(схт)сж " ’к — : 0,0373.
1/1_м3_„ 1/1——о‚52
\/П.21. Выберем на передней кромке скользящего крыла какую—либо
точку, рассматривая ее как источник возмущения. Из этой точки прой-
576
дет линия Маха, образующая с направлением вектора У… угол
Н… = агсзіп (НМШ) = агсзіп (1/1‚2) : 56°24’.
Так как угол скольжения (х=60°)
Х > л/2 — „00 : 33°36’‚
то нормальная к передней кромке составляющая скорости Ус… будет
меньше скорости звука, т. е. Уооп=Уоо соз х<аоо. Следовательно, перед—
няя кромка будет дозвуковой, и расчет обтекания необходимо вести по
соответствующим зависимостям дозвуковой аэродинамики.
Найдем сначала аэродинамические характеристики профиля в несжи-
маемом потоке. Так как профиль симметричный, то сунсж=2лат где
ап=аісо5 Х- Величина Сунсж рассчитана по скоростному напору \ОооУіп/2.
Для другой величины скоростного напора, равной С/оо=О‚БрооУЁо‚
У
0011 = 23]: @
УЗО сов )(
‚
Су нсж= Су нсж
соэ2 )( = 2лос соз х,
ИЛИ
- с“нсж = 2л—О,1-соз 60° = 0,314.
С учетом сжимаемости
, ,
с;…к : Сунсж : Су : 0314 = 0,392.
` / 2 2
1/1—м2т 1/1—м30соз2х ! 1—1‚2-0‚5
Коэффициент момента
_тг нсж : лап/2 = лос/(2 соз х).
Пересчитывая эту величину на скоростной напор (70°, получим
1/2
, ЛЦ, 00 под ЛЦ, СОЗ
_тгнсЖ2 . „ =_С082х=—і_
2 соз )( у? 2 сов )( 2
После подстановки данных
—т' = л-0,1-соз 60°/2 : л-О‚1-О‚5-О‚5 : 0,0785_
2 НСЖ
С учетом сжимаемости
, ’
' тг НСЖ тг НСЖ
т : :-
”ж 1/1—м3т 1/1—м20 созгх
= —°'°785 =— 0 0981
1/1—1,22-соз2 60°
Отнеся это значение в хорде дыр-:о/соз х=1/соз 60°=2 м, найдем
' : т' _ь„_ : т;сж соз х =—— 0,0981 -со5 60°=—0‚0491_
(тг кр)сж гсж Ькр
Коэффициент подсасывающей силы несжимаемой среды, рассчитан-
ный по скоростному напору с;…=0‚5_оооУ2® (см. решение задачи \11120),
(схт)…Ж=О,0314. С учетом сжимаемости
_ ( ох,)нсж _ 0,0314
1/1_м2°° соз2х 1/1— 1,22-со5260°
: 0,0392.
37—927 577
Определим соответствующие силы и момент, Действующие на уча-
сток крыла площадью Бкр=Аг(Ьп/соз х)=1(1/соз 60°)=2 м2. Полагая
ратм=роо=0,125 кГ-сек2/м4‚ аатм=а°о=340 м/сек, находим при скорости
движения Ус,о = Моваоо = 1,2 - 34О=4О8 м/сек:
2
У .
у : 0; Ж %ізкр ___ 0,3920›_125_‘ЁЁ3_2_ 2 = 8160 кГ;
1/2 .
М : (т' ) Ш. 3 д —_——о‚0491 № 2.2=—2045 кГ-м;
2 ЗКР СЖ 2 кр кр 2
1/2 .
т : (сддж %;” вкр : о,оз92№ 2 = 816 кГ.
\!".22. Определим норМальную к передней кромке составляющую
скорости Уооп= Уоо соз х. Так как Уоо=Мооаоо, то
УО… = М… аш соз )( = Защ соз 60° :; 1,5аю.
Таким образом, нормальная составляющая скорости Уооп оказывается
сверхзвуковой; следовательно, для расчета обтекания профиля необхо-
димо применить соотношения сверхзвуковой аэродинамики.
Вследствие того что Мо…:Моо соз х=3со5 60°=—1,5 невелико и про-
филь тонкий, для расчета аэродинамических коэффициентов можно при—
менить соотношения линеаризованной теории.
Коэффициент давления на профиле
_ _ 2' _
рп _ $ 206111] 1/Мооп 1 '
0 0 2 _.
Этот коэффициент, пересчитанныи на скоростнои напор (]оо=О,5_оооУ„. _-
2
=0‚5 ЁРсюМООЭ
2
- — Уши _ 2 ‚ 2ост— соз2х
Р=Рп у? =РпС05Х=1 ‚___—-
°° 1/ МЭО со5‘3 )( — 1
Здесь угол атаки для местной пластинки на крыле
ОС…. : осп _ БН(В)’
где вниз)—угол наклона местных пластинок на нижней (или верхней)-
стороне профиля, или, учитывая, что ап=а/со5 %
ос,". : ос/соз )( —— вн….
В результате получаем
2 (ос/сов )( — ВН… ) соз2 )(
Ум“; соз2 )( — 1
Здесь знак плюс соответствует нижней стороне, а знак минус — верхней…
Найдем значения углов, пользуясь уравнением контура:
—[—<—л—‹—›
Ь=і
=; 3‘;_°5_(1_%)=; 0,1 (1 —2х1).
В соответствии с этим
2 [0,1/сов 60° $ 0,1 (1 —2›с1)]соз2 60°
= і
У 32 соз2 60° _ 1
Ь,… : і0‚448 [0,2 і— (0,1— 0,2х1)].
578
На нижней стороне
р„ = 0,448 (0,2 + 0,1 — 0,2х1)= 0,08% (1,5 —х1),
& на верхней
5, =— 0,448 (0,2 — 0,1 + 0,2х1) =— 0,08% (0,5 + х1).
Теперь найдем коэффициент нормальной силы:
1
С“ : 5 (рн—рн) (1х1 (х1 = х1/Ь ).
0
Подставив данные, получим
1
с„ = 5 [0,08% (1,5 _}1) + 0,08% (0,5 + Е)] 431 = 0,179.
0
Коэффициент продольной силы
1 1 1
с„ =—5Ь'нвна?, + 3791303431 =— 50,0896(1_5—7с1) [—0‚1 (1 —
О 0 0
1
— га)] (151+ 5 —О,О896 (0,5 + {> [0,1 (1 — 2291 ах] : 0,00299.
0
Соответствующие коэффициенты подъемной силы и сопротивления
(в поточных координатах):
0 , 1
сов 60°
0 , 1
05 60°
су=с№—оспсд=0,179—( )0,00299=0,178;
С=С
_|_
:: К'“
п
с„ = 0,00299 + ( )0‚179 = 0,0388.
С
Составляющие коэффициента подъемной силы
сущеу : 0,178,
а коэффициент-а силы сопротивления
с' : схсоз )( : 0,0388-соз 600 = 0.0194.
х
Коэффициент момента относительно точки на передней кромке
[см. формулу (ЗА/11.27), в которой второй интеграл принимается рав-
ным нул-ю]
1 1 _
__‚пг : 3 (Ри _рв)х1ах1=== 3 [0,0896 (1’5 —-Х1) +
0 0
+ 0,08% (0,5 +%] }, а}, = 0,08%.
Коэффициент центра давления
С хц.д тг 0,0896
: =— = = 0,5.
“'д Ь„ См 0,179
Вычислим силы и моменты, действующие на участок крыла пло—
щадью
[› 1
Бир-= ” Аг: —
созх 0,5
1 = 2 м2.
Подъемная сила У=с;, Чоо$нр. Так как скоростной напор
6]… = др„ мг;/2 = 1,4-1-104—32/2 : 6,3-104кГ/м2,
37* 579
ТО
У : О,178-6‚3-1О4-2 : 22,5-10З кГ.
Сила сопротивления
х = №… вкр = О,О194—6‚З-104—2 = 2,44-103 кГ
И момент
М2 : тгаоо ЗКР!) =—О,О896—6,3- 104-2-1 =— 11,3- 103 кГ-м.
Р’ ,
«\!
\ ?…
Рис. (ЗА/11.12. К расчету обтекания симметрич-
ного профиля диссоциирующим сверхзвуковым
потоком:
! — профиль; !! —- скачок уплотнения
“1.23. Решение задачи начинаем с определения параметров среды,
где происходит движение. По таблице стандартной атмосферы [21] для
высоты Н =2О км находим:
рф = (”В )рз = 5,455-10—2-1‚озз = 5134—10"2 кГ/см2;
Рз
рю ___. (р“ ) в = 7,255.10—2—0‚1249 = 0,907-10—2 кГ-сек2/м4;
Р
Т… = 216,7К, ак : 295,1 м/сек, пер „ = 28,97 кг/кмоль.
Принимаем ігоо=сроо/с„оо=1,4 и сроо=1002 дж/(кг-град).
Соответствующая энтальпия
і… : срю Т… =1002-216‚7 = 0,217—106 м2/сек2.
По скорости Усо=5000 м/сек и скорости звука а…=295‚1 м/сек под-
считываем число Маха:
мю = Усс/ат = 5000/295‚1 = 16,9.
Скоростной напор набегающего потока
% = 0,5.ож УЗ -= 0,51г` р… М“; = 0,5.1‚4-5‚64.10—2. 16,9‘2 =
: 11,3-104 кГ/м2.
Энтальпия торможения
УЗО 2. &
іо : 2 + 1.00 5 10
__ _2— + 0,217-106 = 12,7-106 м2/сек2.
Определим параметры обтекания на клиновидных поверхностях у не-
редней кромки профиля сверху и снизу. Эти параметры равны соответ-
ствующим значениям непосредственно за косыми скачками уплотнения,
образующимися перед клином с углом 603 и клином с углом Бон
(рис. 3.\/Н.12).
580
Скачок, образующийся на верхней стороне, рассчитывается по углу
отклонения потока Бс_в=60в—а, где угол Вов находится из уравнения кон-
тура профиля:
ау А 2х
18-6=— =і 2—1——- .
ах Ь !)
Полагая здесь х=0‚ найдем для верхней стороны (знак плюс) 19 Бов=
О О О
=2-2/4= 1, откуда Бов=45° И Вс.в=60в—а=45 —5 ———40 .
По мет0дике, изложенной в [21], пользуясь графиками, приведенны—
ми в работе [17], проводим расчет параметров газа на косом скачке
с учетом диссоциации (см. решение аналогичной задачи 1\/.51). В ре-
зультате этого расчета получаем:
02 = 020 = 46° 30’; рс_в = 11,1 кГ/см2; т‚'с_в = 6,92…6 м2/сек2;
Т…, = 4140К; (Нор)св = 26,23 кг/кмоль; Б…, = 10,3— 103 м2/(сек2-град);
а…, = 1260 м/сек; Уш, = 3400 м/сек; Мс_в = 1/с_„/ас_в =
= 3400/1260 = 2,69.
На нижней стороне расчет скачка уплотнения следует вести по углу
отклонения потока Бсд= | Бон] —|—а. Так как |БОН| =Бов=45°, то Вс.н=45°—|—
—|—5°=50°. Далее расчет параметров ведет-ся так же, как и для верхней
стороны. В результате находим:
0$ = 030 = 60°; ры, = 15,4 кГ/см2; і = 9,49-106 м2/сек2;
С.Н
Т…, = 5120К; (меде… = 24,92 кг/кмоль; Бы, = 10,8-10З м2/(сек2-град);
а…, = 1470 м/сек; У…,=2520 м/сек; М…, = 1/с_„/ас_П = 2520/1470 = 1,71.
Используя данные о параметрах газа на передней кромке, можно про-
вести расчет обтекания всей поверхности.
Нижняя сторона. Расчет параметров газа на этой стороне профи-
ля ведем в предположении, что течение изэнтропическое. Для энтальпии
торможения і0=12‚7- 106 м2/сек2, а также параметров непосредственно за
скачком в точке О ——энтропии $с_н=$о=10,8-103 м2/(сек2-град) и ско-
рости Ус.н= Уо=2520 м/сек (или энтальпии Ъс.н=іо=9,5- 106 м2/сек2) — из
таблиц [23] находим угол шс_н=шо=22,50° (22°30’).
Далее находим углы [З наклона касательных в выбранных точках,
определяем разности АБ=БОН—Б и подсчитываем в каждой из этих точек
значения оэ=‹о_о—|—|АВ|. Из той же таблицы [23] для $с.н=$о=
= 10,8- 103 м2/(сек2-град) и і0=12,7- 106 м2/сек2 по значениям углов со на—
ходим соответствующие параметры газа: У, і, 0, М. Затем по значениям
і и 8 из і—З-диаграммы [17] определяем давление р, подсчитываем раз—
ность р—роо и коэффициент давления р= (р—роо)/С]оо.
В качестве примера рассмотрим такой расчет для точки 1 на нижней
стороне профиля (см. рис. 3.\/П.12). Находим (для х1=0,4):
так =— 343 (1 —3'2—*4) =—0‚8 (&=—38° 40’);
[№1 =— 45° — (—38° 40’) =— 6° 20’;
(01 = 22° 30’ + |—6° 20’] = 28° 50’.
Из таблицы [23] для этого значения (01 по $с_н=$о=10,8><
><103 м2/(сек2-град) и і0=12,7-106 м2/сек2 находим: У1=2709 м/сек, і1=
=9,03- 106 м2/сек2‚ щ = 1408 м/сек, м, = 1,92.
По диаграмме і—З на рис. 1.1 [17], зная і1=9,03-106 1142/сек2 и $с_н=
=$о=10,8-10З м2/(сек2-град), определяем давление р1 = 10 кГ/см2. Затем
вычисляем Ар1=р1—роо=10—0,0564=9,944 кГ/см2 и соответствующий
коэффициент давления
р1 .= др,/40° : 9,944.104/(11‚з 104) = 0,88.
581
80.0! 80.0 83… ЁЁ ……35 80.0 Зто ю….о Зао ю…}… шт.… …
„8.0! $55 955 это $2 $0; …Ё; за…… $5… $3… $3; ЁЁ .ТотЁ
85 8.0 „то ю……о $5 _.… ……д о; …% О… Ю… „ЁЁ.Т2&
ФО:… „3 @; «од… %…… ты…… $.… З.… З…… З.… Е.… Е
%…… Ж…… З…… $2 $2 …и: 82 Ю…… З…: ……оі Ё; ЁЁ ;…
83 $$ 8$ ююз… %% ЮЗ… Фам… ююз оз… 85 З…… ЁЁ ‹…
$.… от…… ©; а…; ты:… 36 „Ф;… „……Ё эх…… шож… а}… ы…ёгё .…ТоЁ
оч…: 032 о……ша „ша…… ешё „ты…… ещё… Ош.…ё стаю… о…чюы ещё
3
Зои… _ 5:9: %% ага…… ёё 59$ ёё… ёё ы,…сюю Зою… Зои…
08| 30$! ЁЁ! »….„зююі ъгююі 0$! ё…оююі ёё! ёё! Зою! о …?
03 30% Зоо.… %% ёс… _ о ёс… _! $05! $08! ё…ошюі 0$! …_
о.… ……„о ……„о то „…о @ чо! то! ……„оі ф.оі од! Ё
_ЁБЕЁЁ
од… ю:… т.т… ш.… «.и о.… ю.… ш.… юб Чо @ к
2 а % … ю …. …… …, щ _ о Ё…оь
Ф.:>.ю шпщчюшн
582
Аналогично проводим расчет для остальных точек нижнего контура
(см. табл. 3.\711.9).
Верхняя сторона. По энтальпии торможения і0=12‚7-1О6 м2/сек2‚
энтропии 50_В=$о=10‚3-103 м2/(сек2—град) и скорости Ус.в=Уо=
=34ОО м/сек (или энтальпии іс_в=і0=6‚92- 106 м2/сек2) у острия профиля
находим из таблиц [23] угол шсдв=шо=52°„ Затем задаемся рядом
произвольных точек на контуре, для каждой из них нах0дим угол на-
клона касательной Б=агс18(сіу/сіх) и разность углов АБ=Бов—[3. По
этим значениям подсчитываем углы со=оэо—|—А[3‚ для которых из тех же
таблиц [23] по прежним значениям $с.в=$о=10‚3-103 м2/(сек2-град)
и {@= 12,7- 106 м2/сек2 находим соответствующие параметры.
Для примера рассчитаем параметры в точке ]. Так как координата
этой точки х1=0‚4, то
2-2 2-0‚4
15851“: ТЦ—
——4 ] = 0,8; 61 = 38° 40];
АБ1 := 45° — 38° 40’ .: 6° 20’;
031 = 52° + 6° 20’ = 58° 20’.
Из таблиц [23] по этому значению (01 для $с.в=$о=10,3><
><1ОЗ м2/(сек2-град) и іо=12‚7- 106 да?/сек? находим: У1=3560 м/сек; і1=
=6‚75- 106 м2/сек2; а1=1220 м/сек и М1=2‚93. Далее для і1=6‚75><
><1О6 м2/сек2 и $с_в=$о=10‚3- 10З ‚и2‚/(сек2—град) по і—З-диаграмме [17]
находим давление р1=9‚5 кГ/см2‚ вычисляем разность Ар1=р1——роо=9‚5—
—О‚0564=9,4 кГ/см2 и коэффициент Давления р1=(р1—роо)/аоо=9‚4><
><1О4/(11,3-1О4) =О,83.
Аналогично рассчитываются параметры обтекания для других точек
на верхней поверхности профиля (см. табл. 3.‘\/П.1О).
1111.24. Определим необходимые для расчета параметры набегающе-
го п-отока. Из диаграммы і—З [17] по температуре Тоо=4000 К и давле-
нию роо=0‚01 кГ/см2 находим: іоо=8‚8- 106 м2/сек2; $00= 13,1 - 10з м2/(сек2><
Херад); роо=7- 10—5 кГ—сек2/м4‚ а из диаграммы а—і [17] по значениям
$00 и {со определяем скорость звука 6100: 1300 м/сек.
Из графика на рис. 1.4.7 [20] по рао и Тео находим средний молеку-
лярный вес морю=24 кг/кмоль. Затем подсчитываем число Моо=Уоо/аоо=
=5000/1300=3‚85 и энтальпию торможения і0=УЁЮ /2—|—іоо=52— 106/2—|—
+8‚8- 106=21‚3— 106 м2/сек2.
С учетом этих параметров набегающего потока проведем расчет об-
текания верхней и нижней поверхности пластинки.
Верхняя поверхность. На этой поверхности имеет место течение рас-
ширения, вызванное поворотом потока на угол ос=20° относительно век-
тора У…. Скорость течения определяется по мет0ду характеристик сле-
дующим образом. Из таблиц [23] для $00=13‚1 -103 м2/(сек2—град) и {@=
=21,3- 106 м2/сек2 по Усо=5000 м/сек (или іоо=8‚8- 106 м2/сек2) находим
угол юоо=96°46’‚ а затем вычисляем со=оэоо+ос=96°46’—|—2О°=116°4б’
(116,76°).
По этому значению (в из тех же таблиц для $00=13‚1 - 10з м2/(сек2Х
Херад) и {0:21‚3- 106 1142/сек2 находим: Ув=5425м/сек‚ ів=6‚58-106м2/сек2‚
@= 1078 м/сек, М=5‚О4, а по і—З-диаграмме [17] по ів=6‚58- 106 м2/сек2
и 800: 13,1 -103 м2/(сек2-град) определяем давление рв= 1,51 - 10—3 кГ/см2‚
температуру Тв=2910 К и плотность _ов=1‚6-1О—5 кГ-сек2/м4. Соответ-
ствующий коэффициент давления
_ 2 _ . ——3_ 4
рн: (›‹)В Р…) : 2(1‚51 10 0,01) 10 =_0‚097_
рю УЗО 7-10—5.52.106
Нижняя поверхность. Параметры диссоциирующего газа на нижней
поверхности будут такими, как за косым скачком уплотнения, вызван-
583
Таблица 3.\/11.10
Точки О 1 2 3 4 5 б
\ 0 0,4 0,3 1,2 1,6 2,0 2,4
Параметры
166 1,0 0,8 0,6 0,4 0,2 0 _0,2
% 6 45° 38°40' 30°58’ 21°43' 11°18’ 0 ——11°18’
116 0 6°20’ 14°02’ 23°12' 33°42’ 45° 56°18’
52° 58°20’ 66°02’ 75°12’ 85°42’ 97° 108°18’
(0
52° 58‚3° 66,0° 75,2° 85‚7° 97° 103‚з°
1.10—6‚ м2/сек2 6,92 6,75 6,04 5,30 4,49 3,60 2,73
У, м/сек 3400 3560 3730 3920 4120 4340 4520
а, ..и/сек 1260 1220 1160 1110 1040 976 906
м 2,69 2,93 3,21 3,54 4,00 4,45 4,99
р—10—4, КГ,/м2 12 9,5 5,3 2,7 1,2 0,42 0,10
Ар—10—4‚ кГ/‚и2 11,944 9,444 5,244 2,644 1,144 0,364 0,044
;, | 1,06 0,33 0,44 | 0,23 0,10 ' 0,03 0,006
ным поворотом потока на угол Бс=01=20°. Такой поворот потока при
Моо=3‚85 в случае недиссоциированного газа вызывает (см. график на
рис. 111.1 [17]) наклон скачка на угол 6с=33°. Соответствующий угол
скачка в Диссоциирующем потоке будет меньше. Примем его величину
в первом приближении равной 30°. Затем подсчитываем (см. решение
задачи 1\/.51):
_ 153 (30° _ 20°)
Ай, = 1 = 0,695?
’:930°
_5 2 6
рн =1+ “0 5” 0,695зіп230°=4‚04;
0,01-104
00
рп : (%*—)!)… = 4,04-0‚01 = 4,04-10_2 кГ/смг;
і„ : 8,8-106 + 52Т№ зіп°30°.0,695 (2 _— 0,695) = 11,6— 10° м2/сек2.
584
Из графика на рис. 1- 1 [17] по ін=11, 6 106 1142/сек2 и рн= 4,04Х
><10—2 кГ/см2 находим Тн= 4550 К, а из графика на рис. 1.4.7 [20] по ТВ
и рн определяем средний молекулярный вес (”ср)нм2з кг/кмоль.
Теперь вычисляем:
1 0 01.104
А=—(1— * )=0386-
2 7-10—5-52-1065іп230° ’ ’
001404 4 0
= _5 2 , ( 55 __“ —1)=0‚0418
7.10 .5 .10 зіп230° \ 4000 23
и определяем во втором приближении:
АЙ, = 0,386 + 1/ 0,3862— 0,0418 = 0,713;
0,713 0,713 2
3 20° _ (& 20°)—4(1_0’713)
іеес= & 3
2 (1 =0,713)
= 0,526,
откуда Эс = 27°44’.
Найденному значению 00=27°44’ соответствуют следующие пара-
метры:
' —5 2 в
”“ =1+ ”0 '5'10 0,7135іп227°44’=3,70;
р… 0,01.104
р„ = 3,700, 01 = 3,70.10—2 кГ/см2;
=-8,8 106+———— 5 … зіп227°44’ 0713(2—0713)_ 11,3 106м2/сек2.
Одновременно из 2і—З-диаграммы [17] по значениям рн и ін опреде—
ляем температуру Тн=4420 К. Теперь вновь можно подсчитать &=
=0,368 и В=0,0390, что дает в третьем приближении значения АУп=
=0,679 и && 00=0‚550 (0с=28°12’), мало отличающиеся от найденных
во втором приближении.
Принимая окончательно 60 = 28°12’, рн= 3,70 10—2 кГ/см2, ін=
= 11,3 106 цій/сек2 и Тн= 4420 К, находим по і—р- диаграмме [17] эн-
тропию $Н=14,1 103м2/(сек2- град) иплотность рн=2,25- 10—5 КГ век?/м4,
а из диаграммы а—і по ін=11,3-106 1142/68702 и $н=14,1-103 м2/(сек2><
Херад) —скорость звука ап: 1430 м/сек.
Далее вычисляем (см. задачу 1\/.51):
У…, = 50000 — 0,679) зіп 28° 12’ = 759 м/сек;
У„ = Унп/зіп ((%)с — ос) = 759/він (28° 12’ —— 20°) = 5320 м/сек;
Мн = Ун/ан = 5320/1430 = 3,72
и определяем соответствующий коэффициент давления:
— 2 (д.,—ре,) 2 (з 710—2—0 01) 104
р = —— = ’ ' = 0,309.
" от 1/2, 7.10—5.52.106
По найденным значениям рв и рп вычисляем коэффициент нормаль—
ной силы:
с„ = ‚Ён —Бв = 0,309 _ (=0,097) = 0,406.
Очевидно, коэффициент продольной силы сн = 0.
Коэффициент ПОДъемной силы (в поточных координатах)
су = сд, соз ос = 0,406-со`з 20° = 0,382,
а коэффициент волнового сопротивления
. . „ __
с№ = с“ этос = 0,406-з1п 20 -— 0,139.
38—-927 585
Коэффициент момента относительно передней кромки
2
—т : с„ (хдд/Ь) : 0,406-О‚5 = 0,203.
По аэродинамическим коэффициентам подсчитываем для участка
крыла площадью Бкр = 171 = 2-5 = 10 м2 подъемную силу:
х = с), Ёі—ізкр : 0‚зз2№ 10 = 334.103 кг,
ВОЛНОВ08 сопротивление:
хв = схвіёзкр = 0,139 ”‘)—252406 10 =1,22.10З кГ
И МОМеНТ:
М2=т2№8крд= =0203№102= —з,55.103 кГ-м.
\11125. Определим параметры набегающего потока диссоциирую—
щего воздуха, воспользовавшись диаграммами термодинамических
функций воздуха [17]. По давлению рео= 0,01 кГ/см2и температуре Тоо=
=4000 К из і—р-диаграммы находим іоо=8‚8-106 м2/сек2‚ $00:
=13,1-103 м2/(сек2-град)‚ рс‚о=7—10—5 кГ—сек2/м4‚ а по значениям і… и
800 из а—і-диаграммы — скорость звука аоо=1300 м/сек. Затем опреде—
лим энтальпию торможения:
У
іо= —2°°_+і„=4—1—0+8‚8 106—_— 16,8 106м2/сек2
Теперь рассмотрим характер обтекания верхней стороны профиля,
т. е. выясним, происходит ли оно со сжатием или с расширением потока.
Для этого найдем угол заострения передней кромки, равный углу
наклона касательной к контуру в точке х=0:
@ _ _а ___.2_-_1_ _ ‚
(дх)х=0=_ъдво=2 ?(1 „@ 10 0,2, [з,—11°.19
Заданный угол атаки (ос= 17°11’) больше этого угла заострения, по-
этому обтекание верхней стороны происходит с р а с ш и р е н и е м.
Для расчета этого обтекания следует поступить следующим образом.
Сначала по значениям $… = 13,1 - 103 м2/(сек2-град), іо = 16,8-106
м2/сек2‚ Уоо = 4000 м/сек из таблицы [23] найдем угол (000 =
= 72,94°(72°56’). К этому значению 0000 прибавим угол АВА, на который
отклоняется поток от направления У… при обтекании контура в точке А.
Для нахождения угла АВА определим угол наклона касательной к кон-
туру в этой точке (хА = 6):
ду __ 2__у‚„ _ і : № _ _9_ = _ .
(дх )хА=6_ {: 86,4: хт (\1 хт )хА =6 5 (1 5 ) 0,04,
БА :=: — 2°18’
Таким образом‚угол, на который отклоняется поток,
АВА : ос—БА = 17°11’ — (— 2°21’)=19°29’.
586
Соответствующая величина
со = (,)00 + АВА = 72°56’ + 19°29’ = 92°25’ (92,42°).
Из таблиц [23] по этому значению со = 92,42°, а также величинам
$°о=13,1-103 м2/(сек2-град) и і0=17-106 м2/сек2 находим:
УА : 4440 м/сек; іА : 7,14-106 м2/сек2; ад : 1140 м/сек; М„1 : 3,89.
По іА=7,14-106 1142/сек2 и $00= 13,1 - 103 м2/(сек2-град) из і—З-ди-
аграммы [17] находим давление рА = 2,4- 10—3кГ/см2 и определяем соот-
ветствующий коэффициент давления:
— _ 2 (РА—рос) _ 2 (2,4.10—3—0‚01) 104 _
— 0,136.
“‘ р… УЁО 7404-42406
\’11.26. Для решения задачи воспользуемся диаграммами термоди—
намических функций воздуха при высоких температурах [17]. По значе-
ниям рв=0,01 кГ/см2 и Тв=3500 К из і—Б-диаграммы нах0дим эн-
тальпию ів = 7,75-106 м2/сек2 и энтропию ЗВ = 12,8-103 м2/(сек2-град),
а по ів и &, из диаграммы а—і— скорость звука ав: 1230 м/сек. Соот-
ветствующее число Маха на верхней стороне МВ = УР,/аВ = 4000/1230=
= 3,25, а энтальпия торможения
50 : і„ + [13/2 : 7,75-106 + 42.106/2 : 15,8.106 м2/сек2.
Из таблиц [23] по іо, ЗВ и УВ находим угол юв=73‚42°(73°25’). Вы—
читая из него угол ос = 20°, получим (000 = (ов—ов = 73°25’—20° = 53°25’.
По этому значению угла, а также по іо и ЗВ из тех же таблиц определим
У… = 3440 м/сек, і… = 9,90— 106 м2/сек2‚ а® = 1370 м/сек, а затем подсчи-
таем Моо = Усе/а… = 3440/1370 = 2,52. Наконец, по і… и 5… = ЗВ из
і—З-диаграммы найдем давление роо='5- 10—2 кГ/см2, плотность .роо=
= 3- 10—4 КГ - сек2/м4 и температуру Тоо = 4240 К.
\’11.27. Найдем параметры набегающего потока. Сначала по давле-
нию рсо = 0,01 кГ/см2 и температуре Т… = 5000 К по і—р-диаграмме
[17] найдем энтальпию іоо = 15,1-106 м2/сек2, энтропию $… = 14,5-10з
м2/(сек2-град)‚ плотность Роо=5‚2' 10—5 КГ -сек2/м4, а затем по энтальпии
іоо=15,1-106 м2/сек2 и энтропии $…=14‚5- 103 м2/(сек2-град) из диа-
граммы а—і определим скорость звука (100 = 1470 м/сек. Соответствую-
щее число Маха Моо=Уоо/аоо=4ООО/147О=2,72.
Определим угол заострения профиля:
Ё —т —2 А 1— 2") —-2"—02- —— 11°19’
(ах)х=о 850 Ь ( Ь х=0 10 ’ ’ 150 .
Таким образом, угол атаки оъ=0,3 рад (17°11’) больше угла заостре-
ния 60:11°19’, поэтому обтекание нижней стороны будет происходить со
сжатием, а верхней—с расширен ием. Заданная точка А распо-
ложена на верхней стороне, поскольку в ней число МА=М00+О,5=
=2,72+0,5=3‚22, т. е. больше числа Маха набегающего потока.
Координаты этой точки определяются следующим образом. Вычис-
лим энтальпию торможения:
. УЁО . 42-106
[ = — [, :
° 2 + °° 2
и по ее значению для $…=14,5- 103 м2] ( так?—град) и Ую=4000 м/сек из
таблицы [23] найдем угол ю…=61‚95°(61°57’). Из той же таблицы по
+ 15,1 — 106 = 23,1 -106 м2/сек2
38°“ 587
значениям іо и 8… для МА=3‚22 определим для точки А угол соА=
= 86,72°(86°43’). Разность углов (дА—(ооо Дает угол отклонения потока
в точке А от направления У…:
АБА = ос— [ЗА = (ОА —‹о°о = 86° 43’ —61° 57’ = 24° 46’ (24,77°).
Отсюда
БА = ос—АБА = 17° 11’—24°46’ = — 7°35’ и {дБА = —0‚133.
Продифференцируем уравнение верхнего контура:
ду А 2х 2-1 2х
___ъ _ _ __ ___ __ _ _
$5 2 Ь (1 Ь) 1 (1 1 ) 0,2 (1 0,2х)‘:
!
В соответствии с этим
{85,4 = 0,2 (1 —О‚2хд)‚
откуда
Вторая координата
уА=2АЁ_А(1 ___%) 22.1 №0 _.8433’) = 0,278.
У|". КРЫЛО В СВЕРХЗВУКОВОМ ПОТОКЕ
\ПП.1. Определим прежде всего характер передней кромки рассмат-
риваемого крыла. Найдем угол Маха:
Н… = агсзіп (“Мое) = агсзіп (1/1,5) = 41° 50’
и угол стреловидности передней кромки консоли:
’Х = & — агс18(‘-/Ё)= —Л— — агс18(і) = -л— — 38° 40’ = 51° 20’.
2 \д…, 2 5 2
Поскольку „…> (ЛЮ—х),
линия Маха проходит перед
передней кромкой, которая, сле-
Довательно‚ будет д о 3 ву к о- 0
в о й (рис. 3.\/111.1).
Для определения коэффи-
циента давления в произволь-
ной точке на поверхности кон-
соли (например, в точке А, см.
рис. 3.\/111.1) необходимо ис-
пользовать следующую зави-
симость:
2 Рис. 3.\/`Н1.1. К расчету обтекания треуголь—
д -—0 ной консоли крыла с дозвуковой передней
;:
?»
_ агс11
п2—1
2
лос’ 1/
п (1 —о) ’ кромкой: -
_ 1 — консоль крыла; 2 — линии Маха
(ЗА/111. 1)
где 01’ = Ума—1 ; п =18х/ос’; о =18х—186. }:)
Из формулы (ЗА/111.1) следует, что во всех точках на линии с углом
9 ее наклона к оси х давление одинаково.
Произведем вычисления:
“’=Ъ/мёо—1 =1/1‚52=1=1‚12;
п = 15; х/ос’ = 153 51° 2071,12 = 1,12;
0 =18Х°189 =1851°20д186 = 125186;
„2—е _ 1,122—1‚25136 1,12(1—136)
п(1——о)—1‚12(1=1,25196)= 1—1‚25196
После полстановки данных формула (3.\/111.1) принимает вид:
5: 2-0‚1
(ЗА/111.2)
агспа = 0,114 агсЬа
л-1‚121/1‚122—1
или, используя зависимость агс11 а=2,3 1,9(61—1—1/ а2—1),
5 = 0,114-2‚31,‹;(а + 1/412—1) = 0,26213 (а + уси—1), (ЗА/111.3)
где (1 определяется по (ЗА/111.2).
Для точек на поверхности крыла в корневом сечении @ = О, величи-
на (:= 1,12 и
5 = 0,26219 (1,12 + ›" 1,122= 1) = 0,0548.
Рассмотрим точку А на поверхности крыла, для которой примем
@ 9А=О‚5 (6А=26°33’). По (3.\/111.2) определяем а=1‚12(1—0,5)/
/(1—1‚25—О‚5) = 1,49, а по (ЗА/111.3) —коэффициент давления
Б= 0,26219 (1,49 +у’1,492— 1) = 0,108.
Аналогично находится коэффициент давления для других точек на
поверхности крыла (О<6<л/2—х). При этом на передней кромке (о= 1)
теоретический коэффициент давления, как следует из (3.\/111. 1) равен
бесконечности. Практически, на передней кромке, которая несколько
скруглена, реализуется давление торможения, соответствующее дозву-
ковой скорости потока Уооп=У°о созх. По величине М,‚,…=Моо соз Х:
=1,5 соз 51°2О’=0,'935 находим коэффициент давления на передней
кромке [см. (4.1.34)]:
2”
ро___1 2;Ь4 №_ 2,—14 2124
Рассмотрим,4 как определяется коэффициен2т давления в точках,
расположенных вне крыла. Коэффициент давления для точек, лежа—
щих между боковой кромкой—осью х—и линией Маха (например,
точка В на рис. 3.\/`1П.1)‚ определится по формуле
— _ 27» п2+ о
р __ Л_а’ 1/„2 _ 1 агсп п———(1 + О) . (ВЖ/111.4)
Найдем величину
п2+о : 1,122+1,25199 =1,12(1+і36)
п(1—|—о) 1,12(1+1‚25щ0) 1+1,25130 ' (З'ЩП'Б)
Тогда, учитывая, что агс11 а1=2,319 (ад—Н/аЁ—Ц, запишем (ЗА/1114)
в следующем виде:
(11:
В = 0,26219 (а1 + Иа? _ 1). (ЗА/111.6)
Примем для точки В значение 1963=0,5(Ов=26°33’) и ‚по формуле
(3.\/1П.5) найдем
=1,12(1+0‚5)=1033
1 1+1‚25-0‚5 ’ ’
а по формуле (3.\/111.6) — коэффициент давления
В = 0,26219 (1,033 + 1/1‚0332—' 1 ) = 0,0288.
Для линии 6 = 0 формулы (ЗА/111.5), (3.\/1П.6) дают значения а1=
= а = 1,12 и р = 0,0548.
В точках вне крыла, расположенных между передней кромкой крыла
и линией Маха (например, в точке С на рис. 3.\/П1.1), коэффициент
давления
_ 2?» 112 ——о
р — № ЗГСП „ (О _1) . (3.\]1П.7)
После подстановки данных и использования зависимости агс11а2=
= 2,3 19(а2—Н/аЁ—1) формула (3.\/111.7) получает вид:
В = 0,26219(а2 + Уаё— 1 ), (ЗА/111.8)
где
„2—6 _ 1,12(1—ц;6)
п(о—1) _ 1,25180—1
Например, для точки С примем Вс= 40° (л/2—х<ес<м…). Тогда
в соответствии с формулами (З. \7111. 9) и (3. \7111. 8) найдем:
2 : 1,12(1—1340°) : 3,76;
1,251940°—— 1
В = 0,26218 (3,76 + 1/3,762—— 1) = 0,227.
(ЗА/111.9)
(12:
590
На линии Маха, для которой 6=роо‚ имеем
о=і3хіёрю = {ах—_}— =ш—2(-=п.
Ума—1 “
Из формулы (ЗА/111.9) следует, что
_ п2—о _ п2—п __
_п(о—1) __ п(п—1) _
Тогда, согласно (ЗА/111.8)
Б=О,26219(1+1/12—1)=О.
Вычислим волновое сопротивление рассматриваемой консоли. Сна-
чала определим элементарную величину этой силы, действующую на
площадку (1$ = (1/2) Ьнрсіг (см. рис. З.\/П1.1):
сіХв = (р—роо) 487».
Принимая во внимание, что давление действует на обе (верхнюю и
нижнюю) стороны крыла, и интегрируя по всей поверхности, найдем си-
лу волнового сопротивления:
Хв=2 {(р —р°°) из,
3
откуда, учитывая, что схв = Хв/(Чоо ЗКР),
1.
(12
1
с„ = 2 5 ‚Эм 5, (3.\71П.1О)
0
где (15 = щз/зкр).
Так как 2/Ькр=‘[9 6, то
аз : (1/2) ьіраад @)
или, имея в виду, что о= тех-$39,
аз : (1/2)Ьір (ао/тд х).
Разделив на площадь консоли крыла $кр=Ькр(1/2)/2 и учитывая, что
(1/2) (Ькр) = 1/‘59 х, получим
43 = ‹! (8/8кр) = 610. (ЗА/111.1 1)
С учетом (3.\/1Н.11) и (З.\7П1.1) формула (ЗА/111.10) примет вид
1
;„2 2—
с„В = 2 У—2——— агсЬ—п——°—сіо‚
Ьпос’ п2—1 ”(1—0)
ИЛИ ПОСЛЭ ПОДСТЗНОВКИ данных
1
с„ ==0‚0227 УагсЬ #25 _ "
ь
1,12(1_ о) (ЗА/111.12)
Расчет коэффициента волнового сопротивления по (ЗА/111.12) прове—
дем путем графического интегрирования, полагая, что на передней кром-
ке (о= 1) коэффициент давления равен определенной ранее величине
ро. Из формул (ЗА/111.10) и (ЗХ/111.12) найдем соответствующее зна-
чение
1,25—0' __ гид, __ 2-о‚1.1‚24
агсй ————— —— —
1,12(1—о) 0,0227 0,0227
= 10,9.
591
Определив, таким образом, значение подынтегральной функции
_1›_25_—_Ч__
1,12(1—о)
при о= 1, строим далее кривую с=1°(о) по ряду значений о(0<о< 1) и с
(рис. 3.\/П1.2) и определяем площадь Р, мм2 под этой кривой. Коэффи—
с ‚ циент волнового сопротивления
… _” схВ : 0,0227 Рис на,
где „с и но, “мм—соответственно
* масштабы по осям ординат и абс-
цисс величин с и 0. Как показали
расчеты, Р=1100 мм2 (при Мс:
=1О—1 1/мм и мс‚=10—2 1/мм). Сле—
довательно,
с„ = 0,0227-110040—140—2 = 0,025.
Для заданных размеров консоли
СИЛЗ ВОЛНОВОГО сопротивления
ігри №30
с = агс11
‚„ 7///////////////// . . .
‘ 0,5 1,0
Рис. 3.\’П1.2. Кривая зависимости с= дкр (1/2)
=і(о) для треугольной консоли крыла Х———= 0,0
с дозвуковой передней кромкой 2 2 2
== 3,94-103 кГ.
\’1112. Из решения задачи \1111.1 имеем угол Маха р…=41°50’ и угол
стреловидности х=51°20’ (рис. З.\/111.3). Из этих Данных следует, что
„…> (л/2—х) и, следовательно, передние кромки крыла являются 11 о—
Х13 : схВ (700 ЗКР = с
ХВ
2г`1,4-1—1041-1‚52 ЁЁ:
Рис. 3.\7111.3. К расчету обтекания треугольного кры-
ла с дозвуковыми передними кромками:
1 —— крыло; 2 —— линии Маха
звуковыми (линии Маха располагаются перед этими кромками, как
показано на рис. З.\/1П.З). С учетом этого выбираем соответствующие
расчетные зависимости.
Коэффициент давления в произвольнои точке на поверхности крыла
' : __‘Ё— агс11 ”2—02, (ЗА/111.13)
лос п _—
где ос’ш1/МЁо—1 =1/1,52—1=1‚12;
п=і9х/а’=‘[951°2О’/1,12= 1,12;
о=18х-186=1951°2О’-196= 125496
592
После ПОДСТЗНОВКИ ЭТИХ ДаННЫХ ПОЛУЧЗЭМ
— 40,1 П% —1,252ъ820
р = агсп 2 2 =
д.1,121/1,122—1 1—1*25 *$ 9
” __ 2
= 0,227 агсЬ \/ ‘*25 "56% @
1—1,56’с926
или, используя соотношение агсЬ а=2,319(а—Н/а2—1),
В = 052218 (а + 1/ а2—1) , (ЗА/111.14)
где
(:= 1/ ‘*25—1'56Щ26 . (ЗА/111.15)
1— 1,56 {926
Для точек профиля, лежащих в корневом сечении крыла, 6:0, (:=
= 71,25 и
р"= 0,5221зЬ/1Ё + 1/(1/Г‚2_5)2— 1] = 0,110.
Для точек на крыле (в частности, точка А на рис. 3.\/1Н.3)‚ для кот0-
рых о=0,5 и, следовательно, 6 =6А= агс’сз ((г/’с; Х) = агс’ц; (0,5/ц; 51°20’) =
=21°48’, найдем:
“_ [1,25—1,56’с@221°48’ _ -МЁ_
У 1—1‚56і9221°48’ з ’
5:0,52218[\/% +1/(1/% )— 1]=0‚124.
Для точек,_близко расположенных к передней кромке (до,г 6—›1/’с8х‚
откуда о—›1), р—›оо [см. формулу (З.\/1П.1З)].
Рассмотрим область между передней кромкой и линией Маха. Здесь
коэффициент давления определяется по формуле
,; : _і^__ агсЬ М”“; . (ЗА/111.16)
пос’ і/п2—1 02—
ПОСЛЗ ПОДСТЗНОВКИ ИЗВЭСТНЬ1Х БеЛИЧИН ПОЛУЧИМ
— 4-0,1 ‚ 1,1 2— 1
р = агсп `/ —2—— ,
п-1,12Ъ/1,122—1 1›252*829—1
или, используя соотношение агсЬ а1=2,319(а1+ Усё—1),
5 = 0,52218 (а, + д/аг— 1), (зупъп)
где
(11 = 0,5/1/ 1 ‚56 1920 — 1. (3.\/111‚18)
На линии Маха, где и; 6=і9 поо=Ё9 41°50’,
0,5
(11 — = 1;
1/1‚5613241°50’—1
‚В: 0,52218(1 _ 12—1)=0.
На произвольной линии с углом 6 (при л/2—х<6<роо), в частности
593
для точки В, для которой ВВ=41° (см. рис. 3.\/1П.3), находим
(11 = ‚5 = 1,19;
1/1‚5613241°—1
‚?= 0,52219(1‚19 +1/1‚192— 1) = 0,138.
Для Другой консоли крыла И области между передней кромкой И ли-
нией Маха расчет ведется аналогичным образом.
Вычислим теперь коэффициент
волнового сопротивления. Посколь-
’Ё’ : получим соотношение
43 : сиг/2. (ЗА/111.113
Учитывая (3.\/1Н.11’) И прини-
мая во внимание, что коэффициент
давления определяется по (ЗА/ПТ.
13), а крыло состоит из двух консо-
лей, соединенных вместе, выраже-
№" /
71111111 1/111111/111Ж/////////////////
0' 5 ние (З.\/111.1О) можно записать в
Рис. 3.\/111.4. Кривая зависимости с= следующем виде:
=1°(0') для треугольного крыла с до- 1
звуковыми передними кромками Схв : Хв : _]— 2.2 {БАШ} :
Чизкр 2 0
1 2 2
= _852__ 5 агсЬ [/ Чао. (ЗА/111.19)
лос’ 1/112 —— 1 о 1 _ 6
После интегрирования по частям получаем
сд, : ——Ё`—2——- (1пп —|— [П? — 1 агсзіп і) (З.\7Ш.2О)
пос’ 1/112 — 1 п
ИЛИ, ПОДСТЗВЛЯЯ ДЗННЫЭ,
с„в : 8-0‚12 (1п 1,12 + 1/1‚122— 1 агсзіп —1—) = 0,12.
л-1‚121/1,122—1 112
Полученное теоретическое значение коэффициент-а волнового сопро-
тивления является завышенным. Это объясняется тем, что, как отмеча-
лось ранее, на передней кромке (о=1) вычисленный коэффициент дав—
ления равен бесконечно-сти [см. (3.\/П1.13)], тогда как практически на
ней реализуется давление торможения дозвукового потока, имеющего
скорость Ув…. Воспользовавшись найденным в задаче \/111.1 значением
этого коэффициента давления Ъо= 1,24, определим ВХОДящее в (3.\/1П.19)
значение
_ 2 71. ’ 2_ _ . . . 2__
тем]/Г о : 2 лос 1/п 1170 :2 0,1 л: 1,12 1,12 11,24=5’45_
1—02 812 80,12
Определив таким образом значение подынтегральной функции при
о= 1, наХОДим коэффициент волнового сопротивления по (З.\/111.19) гра-
фическим интегрированием. Для этого строим кривую с=1°(о) [где
і(о)=агсп`і/ (п2— 02)/(1—о2)] по ряду значений о(О<о<1) (рис.
3. \7111 .4) и определяем площадь Р, мм2, под этой кривой. Соответствую-
щий коэффициент волнового сопротивления
Ри’с На?
с = ——
хв пос’ 1/112 — 1
594
где Мс и по, 1/мм — соответственно масштабы по осям ординат и абсцисс
величин с и 0. Как показали расчеты, Р=695 мм2 (при рьс=10—1 1/мм и
на = 10—2 1/мм). В этом случае
8-0 12 _ _
с„ = : 695-10 1.10 2=0‚032.
тнг-1,12 1/1‚122— 1
По этому коэффициенту вычисляем силу волнового сопротивления:
2
‚гр… М… 2 д,… (1/2) __
хв 2 2 _
Х : охват ЗКР : с
В
= 0,032 ‘*4'1'1204'1'52 2% = 9,9.103 кГ.
\ПП.3. Определим угол наклона линии Маха:
рю == агсзіп(1/М°с)= агсзіп (1/2,5) : 23° 35’.
Из решения задачи УПП находим угол стреловидности крыла Х:
=51°2О’. Поскольку выполняется условие рао< (л/2—х), передние кром-
ки будут сверхзвуковыми
(линии Маха проходят на поверх- и
ности крыла, как показано на 0
рис. 3.\/1П.5). /
Соответствующая зависимость
для коэффициента давления в
точках на поверхности крыла
между линией Маха и передней
кромкой имеет вид
‚7: 27ъ/(ос’1/1—п2)‚ (ЗА/111.21)
Где _ Рис. 3.\71П.5. К расчету обтекания треуголь-
а,’ = Ум? _1 : ной консоли крыла со сверхзвуковой пе-
°° редней кромкой:
: 1/2052 _ 1 = 2,29; ] —— консоль крыла; 2 —линии Маха
п=і3 х/оь’=18 51° 2О’/2,29 ==О‚546.
Таким образом, для всех точек в этой области (в том числе для точ—
ки В, см. рис. `’3.\/П1.5) коэффициент давления будет одинаковым и
равным
Б:. 2—0‚1/(2‚29 1/1—О‚5462)= 0,104.
В области межцу боковой кромкой и линией Маха этот коэффициент
“..—$ __1_ Ш
р— (ЖИ—„2 [1 Л агссозп(1_б)]. (ЗА/111.22)
Вносим в эту формулу известные величины:
_ 2-0‚1 [ 1 о—0,5462
р = 1— — агссоз———] :
2,29 1—0‚5462 “ °›546(1"“°)
= 0,104 [1 _ 3— агссоз Щ] ‚ (ЗА/111.23)
Е Л 0,546 (1 —0)
где о=і9 Х'ЁЕ 6=і9 51°2О’-1Е,С‚›Г 6=1‚25-’[,<‚›Г @.
Для корневой хорды (6=О; о=0)
5 = 0,104 [1 _ ‚% агссоз (_ О,546)] = 00333.
595
Для точек на линии Маха, где 6=ц°° И о=і9х-Ё96=19х-13р =
=18 х/а’=п‚ получим из (3.\71П.22)
5: _” = 0,104,
ос’ 1/1 — п2
т. е. давление будет такое же, как на участке между передней кромкой
и линией Маха.
Для произвольной точки А давление определяется следующим обра-
зом. Пусть 6А= ——°,2О тогда о= {9х {96= ЪЗБ1°2О’ ц; 2О°= 0,455 и соглас-
но формуле (3.\/111.23)
В = 0,104 [1 — —1— агссоз 0’455—0’298
11 0,546 (1 —0,455)
Рассмотрим область между боковой кромкой и линией Маха. Здесь
коэффициент давления
]=0тт.
р— = ———2&-— агссоз “2 + О . (ЗА/111.24)
лос’Уі—п2 ”(]—ЕО)
После подстановки данных в (З.\/111.24) получим
— 2-01 0,5462 + о
р = агссоз ———— =
тт:-2,291/1—0‚5462 °*546(1+°)
= 0’104 агссоз 02984… ‚ (ЗА/111.25)
0,546 (1 + а)
где о=’с,‹; Х'ЁЗ 6=’[,‹; 51°2О’-Ё8 6=1‚25-’[8 @.
В корневом сечении (6=О; о=О')
5 = 0’104 агссоз№ = 0,333.
п 0.546
На линии Маха, где 6=цоо и о=і8 Х'ЁЗ 6=і3 ‚и; рт=і9 х/оъ’=п, как.
следует из формулы (ЭЖ/111.24),
_. 2х 2
р = _агссоз ” +”
„тм/11,12 п<1+п> :
Теперь определим коэффициент волнового сопротивления, используя
формулы (ЭЖ/111.10), (3.\/1П.11)‚ причем коэффициент давления
в (ЗА/111.10) заменяется выражениями (З.\/111.21) и (ЗА/111.22) соответ-
ственно для двух областей крыла. Получим
1
Х
схв=—‘==25——— _п‘г—сіо—ЪЁ— [1—
С] 8 {„2 ос’1/1—п2
——1—8ГСС05 Ц] СіО'}1 : 2 [ЩЕ— (5 40+ 5610) _
„ п(1—0) щ/ ут ‚, ,
п
2
_; агссоз 240] =„_47‘__[1_
04’1/1ж—п2л ”(]—пб) (1,1/1—112
п
1
_ — агссоз
Л
_ 2 до] =0,0208><
п‹1—®
0,546
1 о—0,298
><[1О — —— { агссоз до] .
л !
_— (ЗА/111.26)
0,546 (1 _ о)
596
Представим (ЗХ/111.26) в следующем виде:
сх,э : 0,0208 (1 —А/л)‚ (ЗА/111.263
0,546
где А: Евас; с=агс соз @; а= (о—0‚298)/[0‚546(1—о)]. Задаваясь ря-
0
ДОМ значений 0, определим а и с (см. табл. 3.\/П1.1).
По данным табл. 3.\/1П.1 строим график с=]°(о) (рис. 3.\/1П.6) и
определяем площадь Р, им?, под кривой. При выбранных масштабах
„с: -10—2 и „0:10—2 1/мм эта площадь Р:
=4ООО мм? Соответствующее значение Т а 6 Л И Ц & ЗА…“
0,546 0
__ __ _ —2 —2 __ а С
А _ 5040 _ где…, _ 4000240 —10 __ 0,8,
0
0 —0,546 2,15
а коэффициент волнового сопротивления 0,1 —0‚4О2 1,98
с =О‚0208 1—- 0,8 п = 0,016. 0›2 —0›224 1›80
”В ( / ) 0,3 0,005 1,57
По этому коэфициенту определяем волновое 0,4 0,313 1,25
сопротивление: 0,5 0,740 0,74
2 0,546 1,000 0,00
‚гр…, МЮ 0 (1/2)
ХВ=СХВЧ°°$КРЕСХВ 2 . кр2 :
. . 4. 2 .
: 0,016Щ _ 5—4 = 7.103 КГ_
2
ИПА. Из решения задачи \71113 следует, что угол м…=23°35’, а из
_решения задачи УПЦ —угол х=51°20’. Так как выполняется условие
поо< (лат—х), т. е. линии Маха проходят за передними кромками по по-
верхности крыла, как показано на рис. 3.\/`П1.7‚
\ то передние кромки будут св е рхз вуков ым и.
2,0 Коэффициент давления в любой точке на по—
" верхности крыла в области между передней кром-
кой и линией Маха (в частности, в точке В,
._ ъ
/
@ й г
/‚
Рис. 3.\7П1.6. График
функции с=Г(0') для
треугольной консоли
крыла со сверхзвуко-
С
Рис. 3.\/1П.7. К расчету обтекания треугольного
крыла со сверхзвуковыми передними кромками:
БОЙ передней кромкой 1-—-крыло; 2—линии Маха
см. рис. 3.\/П1.7) один и тот же. Его величина определяется по формуле
(3.\/П1.21) и, как следует из решения задачи \71113, равна 0,104.
В области меЖДу линиями Маха коэффициент давления на поверх-
ности крыла
597
Б:
“ __???”(11/21А_ — — агсзіп Ъ/ТЁ— 2—02 02) , (ЗА/111.27)
где а’=2‚29‚ п‚=0,546, ?»=О,1 (см. решение задачи \ППВ). Внося эти ве—
личины в (З.\/П_1.27)‚ получим
2 . \/ 0,5462—о2 )
1 —- —— агсзт _— =
л 1 — 02
2 0,1 (
2, 29 1/1— 0 ‚5462
=- О,1О4 (1 — —2— агсзіп “ЁЁЗЭ .
л 1——о2 .
Для точек, лежащих в корневом сечении крыла (6=О; о=0),
5 = 0,104 (1 — Загсзіп 1/0‚298) : 0,0657.
Л
На линии Маха, где 6=ноо и о=п=0‚546‚ согласно (ЗА/111.27) коэф—
фициент Давления
Б:
В: 2ж/(ои1/1—п2) = 0,104.
Для произвольной точки А (см. рис. 3.\/Н1.7)‚ расположенной внутри
угла Маха, коэффициент Давления определяется следующим образом.
Пусть 6А=20°‚ тогда о=і9 х—‘гд 6=’[,‹; 51°2О’-’с,‹;г 20°.=О‚455 и по формуле
(ЭЖ/111.27) находим
В = 0,104 (1 _— і агсзіп }/ 0,298 43552 ) = 0,0640.
л 1 —0,4552
Определим коэффициент волнового сопротивления, воспользовавшись
формулами (З.\/111. 10), (3.\/111. 11’ ), (3.\/111. 21), (3.\/111. 27) и учитывая,
что крыло состоит из двух консолей:
2
6х3: ХВ 2—1—2-2|і5,_2&__а0'_і_
Ч°° вкр 2 п 04’ 1/1—112
+5а—7217`1—п2(1——агсзіп у /п ;:Ё2О)сіо] :
=——4^—2———(1 1—3; 2240). (З.\/111.28)
04’1/1—112 Л 0
Так как
Хагсзіп |/ ”12:22 40: % (1—1/1—112),
0
то в соответствии с (3.\/1П.28) коэффициент волнового сопротивления
схв : 4Ж2/ос’ : 4-О‚12/2‚29 = 0,017.
Сила волнового сопротивления
‚гр…МЁо д 1 14.1.14- 2
2 . к; =0,017 * 20 2’5 5-4=14‚9-103кГ.
\’іП.5. Определим угол Маха:
Н„ = агсзіп(1/М°о) : агсзіп (1/1‚З) : 50° 18’
ХВ : схв 000 8кр : Схв
598
и углы стреловидности передней и средней кромок (рис. З.\7111.8):
=і__ № _в_ 2/2 __ о.
Х1 2 агс’г8(ь )— агс‘с8( 5 )—59 ‚
кр ?
:п: 1/2 л 6/2 0
= __ т _ = _ __ _ :
№ 2 агс9(дкр_ь‚) 2 агс’г3(5_2) 45.
Поскольку ноо> (л/2— _
—Х1) И ноо>(:п:/2—Х2)‚ обе
кромки дозвуковые и линии а
Маха, проведеные из точек ; в \\ г
О и 01 крыла, проходят пе- ‚ив/В \{;
ред ними. “° Ё/// в„ “ °° \
Определим распределе- ] ‚ в - 0, \{
ние давления по крылу. В г / \{ ’ "\
области ОАО1 (или 014101) 5 ” ’ \
коэффициент давления будет 1 /п" дми; В \
постоянным вдоль лучей, вы- 2 ‚‚’ с ” въ ` \\?
хоцящих из вершины крыла ‚*’ и) в… 81 \
О под углом 0 к оси х, и оп- дц
ределяется по формуле ; ь В
в, _2 с
_ 4)“. _ Г
Р = _— >< ` "‘ " \
лос’ 1/п2 — 1 7]
1 Рис. 3.\7П1.8. К расчету обтекания треугольно-
112 02 то крыла с симметричным ромбовицным профи-
аГСЬ 1_ 1 (3 \ПП 29) лем и дозвуковыми передними и средними
1 ’ ' кромками:
1—-крыло; 2—линии Маха
в которой
% : А/(2Ь’) = 0,2/(2-2) = 0,05;
ос’ =. 1/м3° —1=1/1‚32—1= 0,83;
111 = ’[9 961/06, = {фт/0,83 = 2;
01 = 19х1і90 =1959°130 = 1,66190.
После подстановки этих данных в (3. \7111. 29) получим
— 4 о /22— 2 2 6
Р __ ‚05 № 11 у 1,66 Ёе ___
ло‚8з1/2—2—1 1—1’6621329
[ 26
_ —‚о 045 агсь “: 2 76 89 . (ЗА/111.29)
1 —2 ‚76 {320
В области О АВ (или2 О А В ) коэффициент давления
2
_ _ 1
————__агс11 усё —°1 — 4 (^ + ^_1) агсЬ МБ;—_, (ЗА/111.30)
п—1—1
Ъ!
!!!
,
ЛЦ.
где
А2 = А/[2 (Ькр —Ь’)] = 0,2/[2 (5 — 1)] = 0,03;
112 = 19х2/ос’— — ‚58 45°/0‚ 83 = 1,21;
02— — ‚58 Х2' 15% 61: 158 450'21891 {8 61,
причем угол 01—это угол межцу лучом, проведенным из точки 01,
и осью х (см. рис. 3.\/1П.8). Подставляя данные в (ЗА/111.30), находим
599
_ 2—1662 29
р: 40,05 _агсЬ\/2 , щ __
п—ОЗЗУ 2——,__ 1—1,662 1820
_ 4(0,08+0,05) агсЬ\/-1—’212_1 : 0,045 ШСП `/4—2,76ш20 _
Л-0‚83\/22—1 ‚582 91—1 1—2,76 {32 0
—— 0,072 агсЬ “%%. (З.\/1П.ЗО’)
,_
Наконец, в области ОдВС (или О1В1С1) коэффициент давления
тг —2_ 2
__4_711__ агсЬ 1/п1 (;1 — 4 0”? Щ агсЬ МЦ , (З.\7111.З1)
пос’ 1/п‘12— 1 1_01 пос’ 1/713— 1 1_62
причем здесь, как и в (З.\/111.30), углы М и № берутся по абсолютной ве-
личине.
Подставляем данные:
40,05 22— 1,662192 0
= агсЬ —
д.0,8з1/22—1 ‘_12662*Ё29
2__ 2
4(0,03+0,05) а…] ‘/ 1,21 218 01 :
д.0 ‚831/1,212—1 “48 91
= 4—2 ‚27618 9 _ 8 911__46—ЁЁ2 З 1131!
0,045агсЪ11/-1————_2’ 76Ё829 0,1 агс111/Г1___‚с8291 .(.\П . )
Рассмотрим в качестве примера определение распределения коэф-
фициента давления по профилю РЬ (см. рис. 3.\/1П.8)‚ координата 2 ко-
торого |2р| = 1,5.
В точке Р (на передней кромке) 0=л/2—Х1, ’[9 0=1/’[8 Х1 и, следова-
тельно, о=1, а теоретический коэффициент давления в соответствии
с (ЗА/111.29) равен бесконечности. В некоторой точке К на участке РН,
ДЛЯ которой 0к=27° и хк= |гр|/’[8 9к=1‚5/’Е8 27°=2,95, коэффициент
давления
‚;:
Ё |
—27613227°
1—2 76 492 27°
Определим положение точки Н. Как видно из рис. 3.\/1П.8‚
хн = Ь’ —|—|21‚|/‘[,‹;р°° : Ь’ +12Р|ос’ : 2 —}—1,5-0,83 : 3,24
_ —,0 045 агсь \“ - _0,0850.
и
{90}, =,2Р\/хн = 1 ‚5/3 ‚24=0463(0Н =24°51’).
Вычислим коэффициент давления в этой точке. Поскольку на линии
01/11 (или О А), являющейся линией Маха, 02:18“ № Ёе поо=ц3 х2/а’— _
=п2, второй член в правой части выражения (3. \7111. 30) равен нулю,
и, следовательно, это выражение совпадает с формулой (ЗА/111. 29). Та-
ким образом, для точки Н
р„ =. 0,045 агсЬ 1/4 4276024632 : 0,0775.
1—2, 760, 4632
В некоторой точке М на участке НО, для которой, например, 0м=
=24° (13 0№=0 ‚445)и
2 2
№ = ' Р' : 1,5 = 3,37, 1:8 61№ : | Р' : 1,5 =19099
где„ 0,445 х„—ь' 3,37—2
600
коэффициент Давления согласно (З.\/1П.30’)
— 4—2 760 4452 О 46
:: ’ * _ 11 ————’ = 0,002 .
рд, 0,045 агсп 1/1 _2‚76_0,4452 0,072 агс 1/1 ‚092 _ 1 0
В точке @, лежащей на средней кромке,
О'2__ _“ 1% Х2' {% 61:1[8 Х2/ЁЁ Х2— _ 1
и, как следует из (3.\/1Н. 30) или (3.\/111.31), теоретический коэффици—
ент давления равен —00.
Определим коэффициент давления в промежуточной точке М на.
участке 61 Примем 0М= 20° (@ (Эм—0 364) тогда.
2 2
хм: 'Р'— —1—5— =4‚,13’[901М=|Р| = "5 =0,704.
щем —0 ‚364 хМ—Ь’ 4,13—2
Согласно формуле (3.\7111.31’)
_ __ _ 2
рм : 0,045а.гс11 1/4 2,76 “364 — 0,18 агс11 \/ № : — 0‚оззо‚
1—2,76-0,3642 _ 1—0 7042
Аналогично наХОДится ко-
эффициент давления в точке Ь, 102,6
для которой
|2 | 15 12'
189: Р = ' =о‚з, №49…—
ькр 5
|2 1 5 8 '
: —“—- = —' = 0,5.
ЬКр—Ь’ 5—2
_ ц
Подставляя эти значения в {
/
(ЗА/111.31 ), подсчитываем О 05 дб : : _ Ё=$/Ькд
_ “___ _ 2 . ‚ 0.7 0,8 (19 1,27,
рд : 0,045 агсіт Ш_ ‚
1—2,76-0,32 |
. ц _ :
__ 2
— 0,18 агсп і/ЩЁ— ______ |
1 ——0‚52 & ..….)
= — 0,0745.
Характер распределения ко- _,2 _ }
эффициента давления по про- {
филю РЬ показан на рис. '
33/1119, где - ‚д _ %
_ х 2 {
х];` = і : 'ЩЁЬ : Рис. 3.\/1П.9. Характер распределения коэффи-
Ькр Ькр циента давления по профилю РЬ крыла, изо-
браженного на рис. 3.\/`1П.8
1,5-1,66
= —— % 0,5.
5
Коэффициент сопротивления крыла определяется по формуле [48]:
__22‘3-12 102011,“ __ Р(п2,г) 1
хв __ _, _— __ . __
ЛОС [г(1—г)2 (1_Г)2 ‚(1_,)
111011 Г) 11] ‚11 1 1
>< `_ — _— —|— агсзіп — — агсзіп _ ,
“лёд—1 1/п%_1 п1г ”1'
в которой
Г : (Ькр_Ь’)/Ькр› Е: А”)
кр;
1п пі _|_ г агсЬ п1
Миг—1 Миг—1
+ 1 111 1+ 21/п1г2 —1
1/21”2 —1 п1(1—г)—|—]/п1—1—1/п1г2—1 _
1п(п1—г) _|_ 1 … ”17—1+1/((”1’2”—1)(1 '—1) (;
Инги—1 Мга—1 ’На—’) [
причем функция Р(п2‚ г) записана с учетом того, что п2/п1=’[9 Х2/Ё8 Х1=г.
Производим вычисления:
, : (5 __ „5 = 0,6, 5 : 0,25 = 0,04;
о,… г)=1_г
1+г +
Р(п2‚Г)— _ 1—_|_;
(;‚(п г(=1—0‚6( 1п2 +0,6агсп2
2 1 '+0›6т1/22—1 1/22—1
/ . _
+ __1___1п(1—[— “№2 1___]}=0,354;
і,” 22-О,62—1 2(1—0‚6)+Ъ/22—1—У22-0,62—1
Р(ГЪ.2‚Г)21_О’6( 1п(2.0‚6) +
_|_
1+0›6 1/22-0,62—1
2-0 —1 2.0 2— 2—1
+ 1 …(2 ‚@ +1/‹2 ‚6 1›‹2 )(}20234;
_ 20,042 0,354 _ 0,234 1 Ш (2-О,6)
“ :п;-О,83(О‚6(1——0,6)2 (1—О,6)‘3 О,6(1—О,6)Ъ/2Т0’62—__'1
1п 2 1
— —— + агсзіп — — агсзіп —] _ ——‚0 00482.
1/2 _1 2 0,6 2 (
Соответствующая сила волнового сопротивления
2
[гроо МОО Ькрі
ХВ 2 .
ХВ : Схв Чоо Бир _
: 0,00482 № ><
ХБ; : 0,858 103 кГ.
\1П!.6. Определяем угол Маха:
Н… = агсзіп (“Мое) = агсзіп (1/1‚3) : 50° 18’
и углы стреловидности передней и средней кромок (рис. СЗХ/111.10):
_і_ !__/2\___ 8/2 _ о ‚_
Х1 — 2 агс’с8 ([7 Ькр/ 2 агсі9(—— 5 )— 50 21 ‚
{ПЭ 1/2 Л 8/2 о
___ _ _ __ _ __ ъ __ _ 3 ‚_
№ 2 агс’вё ( Ькр Ь’ ) 2 агс ,с; (5 3) 26 4
Для передней кромки имеет место условие „…> (л/2—Х1), а для зад-
ней рьоо<(:гв/2—Х2). Отсюда найдем, что передние кромки—дозвуковые
(линии Маха, проведенные из вершины крыла, проходят перед кром-
ками), а средние— сверхзвуковые (линии Маха, проведенные из точки
01, расположены за ними; см. рис. 3.\7П1.10).
Найдем распределение коэффициента давления по крылу. В обла-
602
стях ОАО1 (или 014101) величина этого коэффициента постоянна вдоль
луча, проведенного из вершины крыла 0 под углом 0 к оси х, и опре-
деляется по формуле
2__ 2
‚, ___ _“;— агсь 1/ ”1 °; , (ЗА/111.32)
‚ 2 1_"01
в которой _
711 =: А/2Ь’ : 0,6/2-3 : 0,1, ос’ : УМЗ, — 1 : УЁЗТП := 0,83;
111 = 18 911/06] =18 50° 21’/0‚83 : 1,45,
01 =19х1—і90 =1850°21д130 = 1,2180.
! 11 3
в; "1
’ 1—1-
/ …
/ В„ \
/ \
10 / вн \
./ в \
/ [: м \
/ _ 96 \_ ,
// К / дм 9 \
_5 ч - 4 „, 2
/' /’ \ \\
1/ ‚" 762
2 , н , д \ \
у / ім \ \
/ / - ` \
// В“ Р’ \ \\
’ 8 \\2
/ 8/6. 81 \
]! 2У/М \\
Г „ : А
А, / , Ь _2 _: В \
‚__ _ .
Ь
Рис. З.\/'1П.10. К расчету обтекания треугольного крыла с
симметричным ромбов'идным профилем, дозвуковыми перед-
ними и сверхзвуковыми средними кромками:
! _— крыло; 2 — линии Маха
Подставляем эти данные в (3.\/1Н. 32):
__ 4-‚01 \/1452_1,22Ё829
Р= агс11 :
3130831/1 452_1 1—1‚221820
/ _
__ _0 146 ЗГС1'11/2’1 1 4,41829 ‚ (3`ППЗ2’)
1—1,441820
В области О1АВ (или О1А1В1) коэффициент Давления
7:3
Б: .—№'—— агс11 1/“11 °; _ №, (ах/111.33)
пос’ Мп? — 1 _ О] ос’ }/1—пё
где значения углов М и № берутся по абсолютной величине. Имея в ви-
ду, что
?»2 : А/[2 (Ькр — Ь’)] : 0,6/[2 (5 — З)] : 0,15;
% = ‚58 х2/оь’ : 18 26° 34’/0,83 : 0,603,
НЭХОДИМ
/2‚1——1 ‚441820 _ 2(0‚15+0,1)
1—3 4418 @ 0,831/1—о‚6032
_ = 0,146 агсй'
603
— _‚0 146 агсп Е/ 2 '“ 44229 —0‚75з. (эх/111.334
1—1‚344і 20
В областях О1ВС (или 01 В 1С) коэффициент Давления
/ 2 2
__ 4 1 ”1_°1
р— агсп 1/ —02
— №( 1 _ -2— агсзіп М”? 05) , ‹3.у1п.34)‚
\ Л —0.2
62 = 4% 942355361 = ’[8 26°34’-‘[8 61 = 0,5% 61,
причем 61 представляет собой угол между лучом, проведенным из точки.
0], и осью х (см. рис. З.\/1П.1О). Учитывая, что
пё = 0,6032 = 0,364 и 03 = 0,52ъд2е, = 0,25 49291,
записываем (ЗХ/111.34) в следующем виде:
[?= 0146агсЬ .\/2‚1—1‚44-і926 —
’ 1—1‚44-’с3‘36
_ о,753(1 —2 агсзіп 1/ 02644125292 91) . (3.у111.34’>
:п: 1—О‚2о-13261
где
Рассчитаем коэффициенты давления для профиля РЬ (см.
рис. 3.\/П1.10), координата которого |2р|=1‚5. В точке Р (передняя
кромка)
6=:п:/2—х1, {36— =1’с9х1, 61=1,
и, следовательно, теоретический коэффициент давления равен бесконеч—
ности [см (ЗА/111. 32)] В некоторой точке К на участке РН, для кото-
рой, например, 6к= 30° (щек—0 577) и хк=|2р|/’[36к=1, 5/0, 577= 2,6,
коэффициент давления согласно формуле (3. \1111. 32)
1_1 ‚44 0 ‚5772
1—1‚44- 0, 5772
рК =0‚146агс11 Ъ/ 2 =0‚171.
Определим положение точки Н. Как видно из рис. 3.\/111.1О,
хн = Ь’ —|— |2Р1/і3(\_л/2—х2) = Ь’ + |2г| {9х2 = З+1,5-0‚5 : 3,75,
Находим далее
$8611, = И, |/хН = 1,5/3‚75 = 0,4 (ОН = 21°48’)
и определяем коэффициент давления в этой точке по (ЗХ/111.32):
2,1 ——1‚44—0‚42
рН : 0,146 ЗГСЬ `_/ 1_1 44.0 42
С другой стороны, точка Н принадлежит области 0114181, и коэффи—
циент давления в ней определяется по формуле (ЗА/111.330, т. е.
‚");, = 0,148 — 0,753 = — 0,605.
Для некоторой токи М на участке НО принимаем Вдт=20° (із Вы:
=О,364). Тогда
= 0,148.
х„ = |и, № 9„ = 1,5/О‚364 = 4,13.
604
По формуле (3.\/1П.33’) находим
В„ = 0,146 агсь `/2*1_ "44'0'3642— 0,753 = —0,608.
1—1,44-0,3642
Положение точки 6 определяется следующим образом. Как видно из
рис. 3.\/`Н1.10,
ха = Ь’ + 'гР'ос’ = 3 —і—1‚5—0,83 = 4,24,
тогда
1800 = |21__|/х6 = 1,5/4,24 = 0,354 (00 = 19° 30’).
Коэффициент давления в этой точке согласно (3.\7111.33’)
— 21—144-0 3542
= › ’ › _ = _ 9.
р6 0,146 агс11 ‘/ 1_1‚44_0,3542 0,753 0,60
Такой же результат получаем и из формулы (3.\/П1.34)‚ полагая
в ней
02 = 0,5—‘(8 010 = 0,5 ‚58 Н… = 0,5/06’ = 0,5/0,83 = 0,603 = 11.2.
Определим коэффициент давления в точке М(0М=17°30’; {@ 6М=
=0,315). Вычисляем:
хм = ‚21, |№; е„ = 1,5/0,з15 = 4,77;
13 91м = | 21, “(хм—д’) = 1,5/(4,77 —3) = 0,848.
Из формулы (3.\/1П.34’) находим „
_ 0,5
_ __ О 146 аки / 2,1—1,44-о,з152 _
рм— ’ Ъ 1_1,4 4.3152
0,ц_
2 . 0 364—0 256 8482
_ ‚753 —агсз1п ‘/ ’ ’ ’ =
0 + л 1—0,25—0,8482 „_
= — 0,297. _
0 : а: „'с/!%
0.35 0.5 0.7.5 1.0
Наконец, в точке Ь, для которой
1% бд = |г„_|/Ькр = 1,5/5 = 0,3 (в, = 16° 42); 0.2—
49… = языки;—д') = № —3› = 0,75, „,…
П, Б
коэффициент давления ф
51. = 0,146 агсЬ ‘/ 2,1 -—1‚44°0‚32 _ 0,753 + Рис. 3.\/Н1.11. Характер рас-
1 __ 1 44_0 32 пределения коэффициента
’ ’ давления по профилю РЬ
[ крыла, показанного на рис.
/ 0,364 ——0‚25-0‚752 _ _ О 271 3.\/'1П.10
1——0‚25-0‚752
2 .
+ —— агсзш
Л
Характер распределения коэффициента давления по профилю РЬ по-
казан на рис. 3.\/П1.11, где
}„ = хР/Ькр = |2, | те х1/Ькр = 1,5-1,2/5 = 0,36.
Коэффициент волнового сопротивления крыла определяется по фор-
муле [48]:
605
—2 1 . 1
с„„ : 2А 02011”) + —1— і——п—п1——агс51п — ,
пос’ г(1— г)2 г(1—г) 2 “”?—1 ”1
\ 1
в которой
1—г 1пп- гагспп
62(п1‚г)= 1 +_—1+
1—|—г 1/пЁ—1 МПЗ—1
]/1——п%г2
+ ————агсі9
1/1—пёг2 п1—і—1/пЁ—1—п1г
Учитывая, что
г : (Ь„ _— Ь’)/ь„р : (5—3)/5 == 0,4 и Ж : А,ькр=о‚6/5 : 0,12,
ВЫЧИСЛЯ6М:
1—О,4 1п 1,45 0,4 агсп 1,45
+ ’ УЧАт—л 1/ъмж—1
__ 452.0 42
+ 2 агс’с3 (— 1/ 1 1, * )]: 0,728;
1/_1-—-1‚452-о,42 1,45—ъ у/1‚452._.1__.1‚45 0,4
__2одт 03% _+
*“ ат 0,83 0,4-(1——-о,4)2
—% и (15__ 1п1А5 __Шюйп 1 )]==ОЩП55
0,4(1 __о‚4) 2 1,45,__ 1 1,45
Соответствующая этому коэффициенту сила волнового сопротив—
ления
№„Мі ь№1
ХВ: Охват Бкр=схв 2 0 2 ::
4. ‚104. 2 5.8
=0‚07551* 12 ‘*3 .Ё=17,21озкг
\]!!!‚7. Определим угол Маха:
рос = агсзіп (НМШ) : агсзіп(1/2) : 30°
и углы стреловидности передней и задней кромок (рис. 3.\/1Н.12):
д 1/2 л 812 о
—— _ _ —— —— -—- = 5 '
х1 — 2 агс’вд ( Ь ) 2 агс’сд ( 4 ) 4 ‚
.кр
313 1/2 Л 8/2 0 /
= ——агс’[ —— : ——агс’[ — =26 34.
№ 2 %(Ькр_д‚\, 2 %(4_2)
Поскольку ноо<(л/2—х1) и цю<(л/2—Х2)‚ обе кромки—сверхзву—
ковые (линии Маха, проведенные из точек О и 01 крыла соответствен—
но, проходят за этими кромками, как показано на рис. 3.\/1Н.12).
Определим распределение давления по крылу. .В области ОАВ (или
ОА1В1) коэффициент давления
‚В : 2ж1/ (ос’ 1/1 —п°13) (3.\/Ш.35)
или, учитывая, что
и, =: А/(2Ь’) : 0,4/(2.2) : 0,1;
ос’ = Ума—1 =1/22—1=1,73;
606
111 = ‚58 х1/ос’ =- ЁЁ 45°/1 ‚73 = 0,578;
5 = 2-о,1/(1‚7з1/1—о‚5782) = 0,118.
В области АВС (или А1В1С1) коэффициент Давления также будет по-
стоянным; его величина определяется из выражения
— ?» ?» ?»
р : 2 1 _ ?( 2+ 1) _ (зупгзез)
ос’ 1/1—п% ос’1/1—пд22
7… М…
0
\ ен \ Х, 2
\
/ . \\
__п ; // * \Ь \
/ в„ В \
Н дд \\
$- “ //К ім 0! в \\ ,
"° //# \ 22 у\
в ‘ в
/ в, \ \
2 // ‚ В; \ \\?
М Д Рао .. \
, в 1 \
_] г/ В, 2744, № \\ В \ А
А , 76, В, / [. _2 Е [г\ ст\
г _
Рис. СЗХ/111.12. К расчету обтекания треугольного крыла
с симметричным ромбовидным профилем и сверхзвуковыми
передними и средними кромками
] —— крыло; 2 —— линии Маха
в котором
% : А/[2 (Ькр— Ь’)] : 0,4/[2 (4 — 2)] = 0,1;
% = ’[9 Хв/Ос’ : ’[8' 26°34’/1 ‚73 = 0,289.
Вычисляем:
В = 0,118 —— “ШШ : —0‚124.
1,731/1-—о‚2892
В области ОВО, (или 08101) коэффициент давления
5: _ЗЬ_ 1 _ 3 №5… ”%*—°? _ (3.`\7111.37)
л _ 2
ос’1/1—п% 1 61
Этот коэффициент является постоянным вдоль луча, проведенного из
вершины крыла О под углом @ к оси х. Величина 01 в (3.\/1П.37) опре-
деляется следующим образом:
01 = {9361499 : {943496 : ЩО.
После подстановки данных формула (ЗА/111.37) примет вид
В = 0,118 (1 _— 3— агсзіп ‘/ №) (зупгзщ
л 1—— {326
607
Рассмотрим теперь область ОдвСВ (или О1В1С101). Коэффициент
Давления здесь
2_ 2 `
Б :: __2Ь___ 1 _ &. агс5іп % _ № , (3__\/П138')
04’1/1—пЁ л 1—01 сс’]/1—-п3
ИЛИ, ПОСЛС ПОДСТЭНОВКИ ДЗННЫХ,
— _(о__ ‚236 /о‚зз4—1826
ЗГС$1П
п 1 — {32 0
Наконец, в областях О1ПЕ и ОдддЕ коэффициент Давления
2 2
_ п —0
р=_2ё'_1__ 1—'—2—ЗГС5іП 1 91 _
. л _ _
сх"/1—п% 1 01
2
2—-
_ _2_____0‘2+7‘1)2(1———агсзіп2 ”2 02 (3.\/111.39)
+ 0,124) . (зупъзз')
2 ‚
Л _
= ‚583035891 = іе26°34’-’[901 = 0 ,5-‘с301,
причем 01 является углом между лучом, проведенным из точки 01,
и осьюх (см. рис. З.\/`.1П 12). Учитывая, что
пд = 0,2892— _ 0,084 и 05 = 0,52 ‚582 01 = 0,25 {532 01,
после подстановки данных в (ЗА/111.39) получим
— 0,484 “0,084—02518201
р = — агс зіп —
Л
где
1— 0,25 1382 61
_- № агсзіп “№ — 0,124. (з.уш.39')
п 1—— {82 0
Для примера покажем, как рассчитываются коэффициенты давления
на профиле РЬ (см. рис. 3.\/П1.12)‚ расположенном на расстоянии
|2р|=1‚0 от корневой хорды и имеющем относительную координату
?„ = ‚с,/ьы, = |%, {@ ‚(,/Ь„р = 1 .48- 45°/4 = 0,25.
_ На участке РН коэффициент давления будет постоянным и равным
РР11=0,118. Для точки Н величина
01 = ’[9 961358 ОН =і3х1-і3рю = ’[8 х1/ос’ =п1‚
и из формулы (ЗА/111.37) также следует, что Ън=0‚118.
Определим коэффициент давления в точке К, для которой примем
0к=26° ($90к=0,488 и координата хк=|2р|/’с90к=1/0,488=2‚05):
Бк : 0,118 (1 — 3- агсзіп 1/0’334—0’4882) : 0,0910.
л 1—0‚4882
Аналогично в точке @, Для которой в соответствии с рис. 3.\/1Н.12
ха = Ь’ —!— |2Р| ’[8' х? = 2 + 1 “*$ 26°34’ = 2,5;
‚58 90 = [ад/х6 = 1/2,5 = 0,4 (06 = 21°48’)‚
коэффициент давления
608
- 2 . /0 334— 0 42
__ 8 1 _ _ _›__›_ __
рд 0,11 ( агсзт у 1 ‚42 ) 0,0824.
Поскольку точка 6 принадлежит области 01В1С1В1, коэффициент
давления в ней можно определить по формуле (ЗА/111.38):
р'д : 0,0824 _- 0‚242 : — 0,160.
Положим 0№=18° (190№=0‚325; хм:|2р|/190№=1/0,325=3‚08).
Тогда согласно (3.\/111.38’)
_— _ ___, ‚ , 1 __ 1 Зо
рд, _ ( агс51п \/ 1 03252 + О, 24) 0, 6
В точке Р, для которой
хР = Ь’ + |гр|ос’ = 2 + 1-1,7З = 3,73;
1801, = |2Р|/хр =- 1/3,73 = 0,268 (ОР = 15°),
коэффициент давления
О ‚236
— ___ _ агсзіп 0,334 _ 0,2682
рр „ Б/
1—0‚2682
Поскольку эта точка Р принадлежит области О1В1Е‚ коэффициент дав-
ления в ней можно определить также по формуле (ЗА/111.39), которая
с учетом того, что
02 = 0,5-19 0“, = 0,549 Н… = 0,5-18 30° = 0,289 = 112,
дает то же значение Бр: ——0,166.
Определим теперь коэффициент давления в точке М(0М=14°30’;
18 0М=0,259). Для этой точки
хм = |2р|/’[3 ВМ = 1/0,259 = 3,85;
‚58 От :|2г1/(хм ——Ь’) = 1/(З‚85 —2) = 0,54.
Из формулы (3.\7111.39’) находим
_- 0,484 . 0,084— 0,25-0‚542
рМ = _ агсзт —
л 1—0‚25-0,542
—№ агсзіп `/ 0,334—0‚2592 — 0,124 = — 0,144.
л 1-—о‚2592
Наконец, в точке Ь, для которой
Ёе 0‚_ = |2Р|/Ькр = 1/4 = 0,25 (91. = 14°02’);
’[9 911. = |2Р|/{ЬКр—Ь’) = 1/(4—2) = 0,5,
коэффициент давления
— 0,484 . 0,0484— 0,25-0‚52
рд = — агсзт —
л 1—0,25—0‚52
+ 0,124) = —0,166.
о . _ 2
— ’236 агсзш \ 0’334 0’25 — 0,124 = — 0,143.
л 1—0,252
Характер распределения коэффициента давления по профилю РЬ
показан на рис. 3.\/1П.13.
Коэффициент волнового сопротивления [48]
№ 1 + 1 [“ + ' ( )]
Схв : , аГССОЗ ”1 “___—=: *_2— аГС51П 17,1” ,
““ “_”) 1/1—п% ‚1/1—п3г2
39—927 609
где
В = А/Ькр : 0,4/4 =_- 0,1; г : (Ь„р _ {х)/дц, : (4 _ 2)/4 = 0,5.
Согласно этим данным
2—0‚12
сх,з = агссоз 0,578 +
л—1‚73 (1 —0‚52) 1/1——_ 0 5782
1 л .
+ [_ + агсз1п(0‚578-О‚5) ]} = 0,0243.
0,5 1/1 _ 0,5782-0‚52
_ СООТВВТСТВУЮЩЗЯ СИЛЭ ВОЛНОВОГО СОП-
р ротивления
0,1 _ \ Хер м2 ь :
_ _ 00 00 кр __
_ ХВ _ схв Чоо вкр _ схв 2 . 2 _
17… м,: 1,ч
О : : $=ЁС/_Ькр
0.25 0.50 0,75 і,0| ; 2
_ , / \
у %
і / `
: е_ // В Род \\
' Л // В \\
-0‚і г- | / \ 2
: 27/ ‚4613,2. `<\
' / 2 \\
/ \! / ‘ ’ \
. ’ [\ а;
Рис. зуныз. Характер рас- "“ ’
пределения коэффицЁ‘нта дав- Рис. 33111114. К расчету обтекания плоского
шеНИЯ ПО профилю крыла, треугольного крыла с дозвуковыми кромками:
изображенного на рис. з.\/111.12
1 _- крыло; 2 —— линии Маха
. . 4. 2 .
: 0,0243Ш . ЁЁ =10‚9-103кГ.
2 2
“11.8. Установим характер передних кромок рассматриваемого кры-
ла. Найдем угол Маха:
Н… = агсзіп (“М…) = агсзіп(1/1 ‚4) : 45°36’
и угол стреловидности передней кромки:
Х ___.- —_ Л_агс’сд ([]—2— ) : & —агс’[3 (ЗЁЁ— _— 51°20’.
2 2 5
кр ‚
Поскольку „…>(п/2—х), линии Маха располагаются перед перед-
ними кромками (рис. З.\/111.14), которые, следовательно, будут дозвуко—
выми. Соответствующий коэффициент давления на поверхности крыла
; = *С 2“ (з №1140)
Е(твх 1/1—02 ,
где о=і9 Эдгарс: (г/х)’[8 х; Е (Ё) — эллиптический интеграл второго
рода с параметром
із —_— 1/1—1/п2; (ЗА/111.41)
знак «+» определяет коэффициент давления на нижней, а знак ‹<——» _—
на верхней сторонах крыла. Для заданных условий:
610
п = 18 х/а’ : 18 ‚и]/мг, _ 1 = 18 51°20’/1/1,42—- 1 = 1,28;
іг = 1/1—1/1,282 = 0,62.
Величина Е(Ё) находится из табл. 4.2.1 по величине 1/п=0‚784 или
из таблиц эллиптических интегралов [8] по а=агсзіпй=агсзіп 0,62:
=38°2О’ и равна Е(Ё) = 1,407. В соответствии с этим
і2-0‚1
__ + 0,091
1,407—1851°20' 1/1—1826.182 51°20’ _ 1/0‚64—із26
Поле давлений на таком крыле является коническим относительно
вершины крыла, т. е. на луче 6=сопз’1(2/х=сопз’с) коэффициент давле—
ния р=сопзі. На корневой хорде (’196=0)
В = і 0,091/1/0‚64 = $ 0,114.
Например, для некоторой точки А (см. рис. З.\/1П.14)‚ расположен—
ной на верхней стороне крыла, Для которой 6А=30°‚
5,4 := _ 0,091/1/ 0,64 — @ 30° : _ 0,163.
;:
Из формулы (ЗА/111.40) следует, чт_о у передней кромки, где ’[3 О»
—›1/’[9х и о—›1, коэффициент давления р—›оо.
Коэффициент подъемной силы
С __ 2ла __ 2л 0,1
У Е (10) 13 х 1,407.1,‹‚г 51°20'
= 0,357.
Коэффициент сопротивления, обусловленный действием подъемной
силы (коэффициент индуктивного сопротивления),
2 . 2
с,“- = с, ос : Ш = 2“ °" : 0,0357.
Е (із) івх 1,407-1851°20’
Как известно, у крыльев с дозвуковой передней кромкой эту кромку
несколько скругляют. При этом возникает подсасывающая сила, умень-
шаюшая сопротивление. В результате общий коэффициент сопротивле-
ния уменьшается на величину коэффициента подсасывающей силы:
п2 п
, __
сп: {11991 1/1_—_‘_ ___— °›43572 1851°20’-0‚62 : 0,00785.
Л
Таким образом, коэффициент волнового сопротивления крыла
с„„ = с,“. —— с,.Т : 0,0357 — 0,00785 = 0,0279.
Центр давления крыла расположен в точке корневой хорды на рас-
стоянии 2/3 высоты от вершины, т. е. хц_д= (2/3) Ькр. Следовательно, ко-
эффициент центра давления
сц_д : хц-д/Ькр =: 2/3.
В соответствии с формулой сц_д= _т2/су коэффициент момента
— т„ = ‹:у сшд : 0,375 (2/3) = 0,238.
Определяем СОПРОТИВЛСНИЗ, ПОДЪ6МНУЮ СИЛУ И момент:
ігр м2 Ь„ 1
__ _. __°° °° ___Р__ _
Хв схв Ч… Бир с -
хв 2
= 0,0279 : 7,68-103кГ;
2
1,4.1-104.1‚42 5_.8
2 2
39* 611
ігр м2 ьк :
__ __ 00 00 р __
У—суатБкр—су 2 . 2 __
1,4.1-104.1‚42 5-8
= 0,357 - — = 97,8-103кГ;
2 2
[гр м2 :;к :
__ __ 00 оо р
Мг _ тг Чао вкр Ькр _ тг . ЬКР :
2
2
= _ 0238 “444204442 . 523 5 =—О,375-10°кГ-м.
\/|П.9. Определим угол Маха:
Н… :: агсзіп (НМШ) = агсэіп (1/2) : 30°.
Так как угол стреловидности х=51°20’
(см. решение задачи \ПН.8)‚ то, очевид—
но, выполняется условие цео< (л;/2—х),
13 что соответствует сверхзвуковым перед-
ним кромкам, когда линии Маха распо—
% лагаются на поверхности крыла за этими
’, ° кромками (рис. 3.\/П1.15).
@ 3 Коэффициент давления в областях ме—
/ “ Жду передней кромкой и линией Маха
\ 2 (заштрихованы на рис. 3.\/'Н1.15) постоя-
к вен и определяется по формуле
' — +204
Рис. 3.\/1П.15. К расчету обте- Р _ ос’ 1 2 (З'УПЬ‘Щ)
КЗНИЯ ПЛОСКОГО ТРБУГОЛЬНОГО _”
Крыла СО свеРХЗВУКОВЫМИ КРОМ- Внося сюда значение а=0,1 рад, а также
ками: значения
1 — крыло; 2 — линии Маха; 3 -- об-
ласть постоянного давления “, = № : 1/22—_—1 : 1,73;
п 3158 х/а’ : ’[3 51°2О’/1 ‚73 = 0,722 ‚
найдем
3120,1
1,731/1—о‚7222
В области межцу линиями Маха коэффициент давления на поверх-
ности крыла
?= $$$—— (1 ——2— агсзіп 1/31? _02> , (ЗА/111.43)
04’ 1/1 ——п2 Л 1— 02
где 0:13 Х“ ’[8 6—15; 51°20’- 18 6: 1,2519 @. Подставляя данные, получим
_ . . 0722_1‚52т2
[?=—і 20’1 (1—іагсз1п‘/ ’ 2 2 86):
173 Ё/1—о‚7222 “ 1—1,252т82е
_ . 0, —1,5 2
=і0‚‘67(1——2—агс51п \/ 523 еще ).
л: 1—1‚56і326
Определим, например, коэффициент давления в точке А, лежащей
на верхней стороне крыла, для которой 6А=20°:
— 2 . 0,523— 1 ‚56 {8220°
: _ _ _ = —0 0945.
рА 0,167 (1 Л агс51п \/ 14,56 {82200 ) ‚
В = = $ 0,167.
612
На корневой хорде, где 6=О (196=0), Б= 10,1670—
—-—і— агсзіп 0,722 ) = 4; 0,0813.
Для точек на линии Маха, где 6:11… и о=п, из (ЗА/111.43) следует,
_что коэффициент давления определяется по формуле (3.\/'1П.42) и равен
р=і0‚167.
Коэффициент подъемной силы будет таким же, как для тонкой пла-
стинки. Согласно (4.2.16), где с1=1/ос’,
у = 4ос/а’ = 4-0‚1/1,73 = 0,231.
Коэффициент сопротивления
сд, = су @ = 4ос2/ос’ = 4-0,12/1,7З = 0,023].
Центр давления треугольного крыла находится на расстоянии 2/3
корневой хорды от вершины, следовательно, коэффициент центра дав-
ления
сц_д : хдд/дк], = 2/3.
Коэффициент продольного момента относительно оси 02, проходя—
Шей через вершину,
—т2 = (2/3) с)) = (8/3) (а/а’) = (8-О‚1)/(3-1,73) = 0,154.
Определим подъемную силу, волновое сопротивление и момент:
У=су .5'щ,=су 2 . 2 =
. . 4. 2 .
= 0231 № . Ё=131.103кг;
2 2
2 2
роо Уш !грао Моо Ь 1
Хв =слив—__‘Зкр : схв ' кр :
2 2 2
1 4.1.104. 2 5-
= 0,0231=—і.-—8 = 13,1 —103кГ;
2 2
р… УЗ, дер… МЗ, ь !
Мг : тз _2_ ‘Зкр Ькр : тг 2 ' к; Ькр :
.. 4.2 .
_0‚1541‚41 10 2 _в;
5 = — 0,431 . 106кГ-м.
\’ПЫО. Определим угол Маха
рю = агсзіп (ЦМШ) = агсзіп (1/1,4) = 45° 36’,
а также углы стреловилности передней и задней кромок (рис. [ЗА/111.16):
:п, 1/2 Л 5/2 о !
;& = —2—— агс13(—Ьі—) = 3— — агсі3(—ё—) = 50 12;
/
—і_ _1/_2_ =і_ № : о ‚
Хв— 2 агсі9< кр_ь2) 2 агс13(7_6) 21 48.
В соответствии с этими данными (л:/2—Х2) >моо> (л:/2—х1).
Таким образом, передние кромки крыла являются дозвуковыми,
а задние—сверхзвуковыми. Такой вид задних кромок исключает воз—
действие вихревой пелены за крылом на его обтекание. Однако необхо-
димо учитывать влияние боковых кромок на течение газа в областях
крыла, ограниченных соответствующими линиями Маха и этими кром-
ками. Три области, в каждой из которых расчет коэффициента давле—
ния ведется по соответствующим формулам, показаны на рис. {ЗА/111.16,
613
Коэффициент давления в области ! находится по формуле (З.\/111.4О).
в которой х=х1 и о=і96-і9х1=(2/х)’сдх1. Находим для заданных ус-
ловий:
о=і950°12’-’[36=1,2-’[96;
а’=1/м3„—1—_-1/1‚42—1=0‚98;
п = {@ х1/оэ’ : ’[3 50° 1270,98 : 1,23;
___- 1/__—1_1/„2=т„/ 1 —1/1‚2з2 = 0,582.
Из таблиц полных эллиптических интегралов [8] по оз—агсзіпігг-
=агсзіп О,582=35°36’ находим Е(й)=1‚74. После подстановки
в (3.\/Н1.40) получаем
— ‚ 2-о,1 _ 0,08
р! :: __ —_—і—_ '
1,74 щзт 12’ 1/1—1‚22 1326 Уши—1829
Из этой формулы следует,
что коэффициент давления в
области 1 постоянен вдоль ли-
нии с углом 9. В частности, для
точек на корневой хорде (6:0;
{36:0)
р] : і 0,98—
1/0]
: 3: 0,0957‚
а на передней кромке, где
339=1П8х1 И о1=1, значение
р1=00. Вдоль луча с углом @=
:= 30°, например,
Рис. 3.\/1П.16. К расчету обтекания плоско- Ъ! := —|_— 0’08 = —|_— 0,132.
го шестиугольного крыла с дозвуковыми пе- 1/0 7__ 1.62 300
редними и сверхзвуковыми задними кром- ’ °
КЗМИ
(пунктиром показаны линии Маха) В области ]] КОЭффИЦИСНТ
давления
_ 2“ , ,
р : $ ———]./ос @ м (1 + п). (3.\ 11144)
” Е из) те )и
Из этой формулы следует, что во всех точках области 11 коэффициент
давления одинаков:
— 2-0 1
=+ ’ 098і 50°12’ 1 1,23 ==+ 0,155.
р“ “ 1,74ъ850°12’ 1/ ’ 8 ( + ) —
В области 111 избыточное давление равно нулю и коэффициент дав-
леНИЯ рт =0- „
Рассмотрим расчет коэффициента подъемнои силы. Величина этои
силы, найденная для области 1,
У, = суд … вкр : 4 5 Ар, дБ„
$
!
ОТК а
Уд 81/8
кр_ __
су1=4 ! дав„ (ах/111.45)
О
614
где 45? =щ31/3Кр). Из рис. з.\/п1.16 видно, что
аз, =(1/2)і12с1(і86)‚
где И=Ь15іпцоо=[191+1/(2’с8моо)]зіп р…… Учитывая, что о=і96—’[8х,‚
находим аш; 6)=сіо/’[9х1 и
_ 31 ’ 112
аз, = а ( ) = (___—__) ао, (ЗА/111.46)
вкр 21:8 Х]. ЗКР ;
С учетом (ЗХ/111.46) формула (ЗА/111.45) запишется так:
1
из --—
с = 4 —— ао,
„, 2гзх1$крэр1
или, заменяя здесь коэффициент давления согласно (ЗА/111.40),
1
4112 сіо
Су! : .
Е (1?) 182 Х1 зкр {1/1 __ 02
0
Интегрируя, находим
„_ _
с , = № . Ш : . ”2 у“ . (3.\71П.47)
у В (ё) тег х13кр 4 Е аг) тег х1 вкр
Производим вычисления:
$„р =5-З/2 + (6—3) 5 + 5(7—6)/2 = 25;
Н = [3 —|— 5/(2 {9 450 36’)] зіп 450 36’ = 3,92;
у, = 3322 у” = 0,434.
1,74-і82 50° 12’-25
Для области ]] коэффициент подъемной силы
У 4А $ _ $
с „ = ” = Щ = 4р„- —’=. (ЗА/111.48)
у Чтзкр Чт Бир Бир
Определим площадь $11=8кр/2—$1_$111. Величина площади области 1
(см. рис. {ЗХ/111.16)
$, = (1/2) Ь, (1/2) = (1/2) [191 + 1/ (2128 род)] (1/2);
области 111
$”! : (1/2)Ь1”И‚’ : (1/2) Ь?“ [13% НОО/(1 "|— )[ё ”со 1:8 Х;)]‚
где Ё1п=ЬНр—Ь1=Ькр—[Ь1+ ”(2 11% Нос)].
Производим вычисления:
Ь! = 3 —|— 5/(2 {9 45° 36’) = 5,45;
$! = (1/2) 5,45 (5/2) = 6,80;
Ь… = 7 —5‚45 = 1,55;
_ , т845°36’ : 84-
81”_(1/2)1’55 1+ъ845°36'-т921°48' 0’ ’
$„ = 25/2 — 6,80 — 0,84 = 4,86;
су“ = 4-0,155(4‚86/25) = 0,116.
615
Для крыла в целом
су = су, + су” = 0,434 + 0,116 = 0,550.
СООТВСТСТВУЮЩЗЯ ПОДЪЭМНЗЯ СИЛ а
Лароо М2
00 1,4—1—10‘1-1,42
у _ суд„ зщ, _ 9—2— зкр = 0,550
25 = 188—103 кГ.
Коэффициент волнового сопротивления крыла
схв : Схі _ сит»
где
схі = су 00 = 0,550-0,1 = 0,055;
С
2 ’ 1 5502 1
__ _у_ _ _ —- __’__ ° ’ _ _
с,ст __ № 13)“ у 1 ”2 _ 4л 1950 12 1/1 1232 —О‚О17.
Таким образом,
с„ = 0,055 — 0,017 = 0,038,
а СИЛЗ ВОЛНОВОГО СОПРОТИВЛСНИЯ
100001112… 1,4-1.104.1‚42
вкр = 0,038 , 25 = 13.103 кГ.
Х = схв Ч… ЗКР = с):
В В
\ПП.11. По числу Моо=2 определим угол Маха-
11… = агсзіп (НМШ) =
= агсзіп (1/2) = 30°,
Под этим углом к боковым
кромкам крыла проведем из
точек 0 и 0’ (рис. 33111117)
линии Маха, которые разделя-
ют поверхностъ крыла на две
области (1 и 11) с различным
характером возмущенного дви-
Рис. з.\/1Н.17. К определению аЭРОДИНЗМИ' жения.
ческих характеристик плоского прямоуголь- В Области ] вне конусов
ного крыла
Маха коэффициент давления
(пунктиром показаны линии Маха; область влия—
ния боковых кромок заштрихована) определяется ТЗК же, как ДЛЯ
плоскои пластинки бесконечно-
го размаха:
51: $ —3°‘—— = і 2—’°"— = $ 0,116. (ЗА/111.49)
Ъ/МЗО— 1 1/22 — 1
Здесь знак «+» относится к нижней, а знак <<—» — к верхней поверхно-
стям крыла.
В области 11 коэффициент давления сохраняет постоянное значение
вдоль лучей, исходящих из передних кромок О и О’ концевых сечений
(см. рис. [ЗА/111.17), и определяется по формуле
Ь‚,= і %— агсзіп 1/05’ 18 0 , (ах/111.50)
где ои=1/м30—1 =1/22—1=1,7з.
На боковых кромках (0:0) коэффициент давления равен нулю,
а на линиях Маха ОА и О’А’, где 130=13 ц…=1/ос’‚
616
- 4 4-0‚1 :п,
р=4_———“—агс5іп1=і -—=1г_0,116.
лос’ л-1,73 2
Коэффициент подъемной силы крыла (при ?…р=!/Ь=6/2=3)
су: 4“ (1_ 1 ):Щ(1— —1—)=0,209. (ЗА/111.51)
ос’ эжкрси 1,73 201,73
Коэффициент волнового сопротивления
с„„ = су ос = 0,209-0,1 : 0,021; (3.\7111.52)
коэффициент момента относительно передней кромки
_т, =Ё. (1 _ 2 )= 2“… (1———2—) : 0,105; (3.\/'Ш.53)
ос’ ЗЖкрос’ 1,73 3-3-1‚73
коэффициент центра давления
__ хц‚д =_ т2 : 0,105“, 5
сшд _ Ь Су —0’209 …0, . (З.\/1П.54)
Значения соответствующих сил и момента будут следующими:
2
- іг М . . .
У=с ‹; _3 =(; _рщышодфщ-Ю—‘Ёіз-в =70-10З кг,
у °° Кр у 2 2
іг м2 . . .
ХВ: 63…67… вкр :схв—рі2—1Ы= 0,021 Щаз = 7.103 кГ.
Мг : ”120… Бир!) =— Ухц_д= —Усц_дд =—70-103-0‚5-2 = —70- 103 КГ ом.
ИП.12. Определим угол Маха:
рос = агсзіп (“М…) : агсзіп (1/1‚4) : 45° 39!
и проведем под этим углом _
к боковым кромкам линии и… М…
Маха (рис. {ЗА/111.18) до пе- 0
ресечения с задней кромкой. ? ‚,! » !
В этом случае поверхность ‚и р.;,
крыла, как видно из рисун- -
ка, разбивается на три об- 43
1
//`
ласти (1, 11, 111), ограничен- - 6 /
ные линиями Маха и кром- %…
ками крыла. ` _ , @…
і,],
?…
Коэффициенты давления _
в областях ! и 11 рассчиты- , - . __
ваются соответственно по
формулам (3_\/1П_49) И Рис. ВА,/111.18. К расчету обтекания плоского
(З.\/'П1_50)‚ В которых [шт.= прямоугольного крыла
(пунктиром показаны линии Маха)
= 1,3;04’ == 1/м‘7’ю— 1 = 71,32— : 0,98, Находим:
_ 2-0 1
= + —’— = + -
р, _ 0,98 _ 0,204,
511: $ Щ агсзіп 1/0,98 т;; 0 = і— 0,13 агсзіп 1/0,98 тд 0.
Следует иметь в виду, что по последней формуле рассчитывается ко—
эффициент давления вдоль луча с углом 0 только в пределах области 11
(см. рис. (ЗА/111.18).
40—927 617
В области 111 коэффициент давления
_ — _ Зов . —— _ 2ос
рт ": 2рл _ р! : і" '—‚_ агсзт Уос’ ‚589 + _,
лос СС
определяется для части луча, проведенного под углом 6 из точки 0 (или
О’) и находящегося в этой области.
Рассмотрим расчет аэродинамических характеристик крыла. Пред-
ставим подъемную силу, действующую на крыло, в виде суммы сил:
У : У1 + уп + Упр
где У], УП, У1„ —подъемные силы соответственно для областей !, П
и 111. Для каждой из этих сил можно записать:
У, : „а… вкр : 2 Ядрдзд
31
уп : су]! Ч… 'Зкр : 4 5“ Ар“ дБ;/;
311
у… : су,/1С]… 'Зкр :“ 4 5“ Ар… 4$“-
3…
Интегрирование ведется по области 1 и по полуобластям 11 и 11!
(заштрихованы на рис. 3.\/111.18), площади которых соответственно
81, $” =8п/2 и 8… =8п1/2. Из записанных соотношений следует, что
_ $ - —, _ _,
су : 2р13 ! + 4 Ур„ (Ю”—і— 4 5 р… (18111,
кр , ‚
$
311 П!
г_де _аЁЁ'П ЁЩБЬ/Знр) и сіЁ}„=сі($}„/8кр). Подставляя выражения для
р], рп и Ртп И интегрируя, найдем коэффициент подъемной силы крыла,
который будет определяться по формуле (ЗХ/111.51). Внося в нее значе-
ние мр= 1/[9 =6/4= 1,5, получим
4-О‚1 ']
у= (1 -— —
0,98 \ 2-1,5-0‚98
Коэффициенты волнового сопротивления, момента и центра давле-
ния соответственно будут следующими [см. (3.\/111.52)+(3.\/1П.54)]:
с„ .= О,269-О‚1 : 0,027;
) .= 0,269.
. 1
_ 2; 20, (1__2_)=0‚112;
0,98 3-1‚5-0‚98‚‚
0 112
с : -’— = 0,418.
ц'д 0,269
Подъемная сила, волновое сопротивление и момент крыла относи-
тельно передней кромки соответственно равны:
‘)
іг М“ . . .
кг…—сук; 3 :о Щы:0‚269 1,411041’42 4-6:88‚5-103кГ;
°° КР у 2
.’г м2 . . .
ХВ =схвч… $„р =схв—Ёі2—“ЬЬ 0,027 1'41 1041’42 4-6 : 8,85—103 кГ;
# м2 .. .
М2=т2с1ю ЗкрЬ=тгёіыд=_о‚112 1,41 1041,42 4.6.4=
: —147- 103 кГ-м.
618
|Х. АЭРОДИНАМИКА ТЕЛ ВРАЩЕНИЯ
|Х.1. Рассмотрим картину обтекания сверхзвуковым потоком остро-
го конуса с половинным углом вы при вершине. В этом случае перед ко—
нусом возникает скачок уплотнения в виде коническои поверхности с со-
ответствующим углом Вс. Сверхзвуковое те-
чение, образующееся между поверхностями
конуса и скачка, является по своему харак-
теру коническим. Это означает, что па-
раметры потока (плотность, температура,
Давление и др.) остаются постоянными
в д о л Ь п р я м ых, проведенных из вершины
конуса. Этот признак конического течения
остается в силе также и для прямых, сов-
падающих с поверхностями конуса и ска-
чка.
Рассматриваемые параметры изменяют-
ся при переходе от одной прямой (ОА’),
расположенной под углом 6’ (рис. 3.1Х.1), к
другой (ОА”) с углом 9”. При этом любой
параметр является функцией угла 9, поэто-
му можно записать, что частные производ—
ные
Эд; (рд’, р, У) =]: 0_ (3_[Х_1) Рис. 3.1Х.1. Коническое те-
чение около острого конуса:
!— ; 2—
Однако такого изменения не наблюдается скач“ К°НУ°
вдоль прямых ОА, поэтому любая частная
производная от параметров газа по сферической координате г (см. рис.
3.1Х.1) равна нулю, т. е.
(‚‚—‘} (р, т, р, У) = 0. ‹з.1х.2)
@
Коническое течение около конуса разрушается, если скорости за
скачком становятся д о 3 в у к о в ы м и.
|Х.2. На рис. 2.1Х.1 видно, что дуга радиуса а* (критическая ско-
рость звука) пересекает годограф скорости 2 в некоторой точке. Это
значит, что скорости, определяемые участком годографа, лежащим
внутри области, ограниченной радиусом а*, будут дозвуковыми, а ско-
рости, определяемые участком годографа, лежащим вне этой обла-
сти, с в е р хз в у ко в ым и. Таким образом, возмущенное течение будет
см еш а н н ым. В области, примыкающей к скачку уплотнения, течение
будет сверхзвуковым, а вблизи поверхности конуса —дозвуковым. Для
еще большего угла конуса (Б…>Бк2) годограф скорости ] располагает-
ся левее дуги а*, и, следовательно, возмущенный поток будет полностью
дозвуковым. Что касается годографа 3, то он определяет полностью
сверхзвуковое течение в возмущенной области.
!Х.3. Критическим называется такой угол конуса Вк_нр‚ при превыше-
нии которого скачок уплотнения отходит от острия конуса (рис. 3.1Х.2‚б)
и превращается в отошедшую ударную волну. Критический угол являет-
ся при заданных условиях обтекания (давление р…, плотность р…, пока—
затель іг=ср/с„) функцией только скорости У… набегающего потока .(со—
ответственно числа М°о= Усс/аоо или относительной скорости ?\юо= Усс/&’“).
Определить Види) можно, проведя из начала координат О касатель-
ную ОВ к «яблоковидной» кривой так, как это показано на рис. 3.1Х.2‚ а.
”(А. Известно [20], что «яблоковидная» кривая, позволяющая гра-
фически определять параметры течения в возмущенной области между
40* 619
скачком уплотнения и конусом, расположена относительно ударной
поляры так, как показано на рис. 3.1Х.2, а. Точки, лежащие на ударной
поляре, определяют скорости потока сразу за скачком уплотнения.
Величины критических углов для конуса Вккр И для клина Бнлдр н.а-
0- ‚ (
[ЗК.кр [Зилкр ,
Рис. 3.1Х.2. Определение критического угла конуса:
] — отошедшая ударная волна; 2 — конус
ходят, проводя касательные соответственно к «яблоковидной» кривой
и к поляре. Из рис. З.1Х.2 ясно видно, что Бк_кр>[3нл_кр, т. е. при задан-
ном числе Мос максимальный
угол _полураствора конуса зна-
чительно больше соответствую-
щего угла клина. Объясняется
это тем, что течение около ко-
нуса имеет пространственный
характер, обеспечивающий га-
зу возможность более плавно-
го изменения направления те—
чения по сравнению с клином.
1Х.5. Задачу об обтекании
конуса потоком с числом Мос:
=5 решим в предположении,
что удельные теплоемкости при
переходе газа через скачок уп—
лотнения останутся постоянны—
ми. Схема течения представле-
на на рис. 3.1Х.3‚ а. Расчет про-
Рис. 3.1Х.З. Расчетные схемы для опреде- ИЗВеДеМ ПО методу, изложен—
ления параметров конического течения: ному В © 92 [20]_
К—конус; С—скачок Определим продольную со-
ставляющую скорости за скач-
ком, отнесенную к максимальнои скорости Ушах:
итд/тах : 17,00 =- 7“ = 70° соз Ос.
Имея в виду, что
=—’*;‘ (изд—Уа)
И _СООТВСТСТВУЮЩЗЯ ЭТОМУ значению ОСЗРЗЗМСРНЗЯ ВСЛИЧИНЗ
” _ 2 1 —1/2__ ’ 2 # —1/2__
Ую—Уоо/Утах_(іг_1 ' М?» +1) “_(1’4—1 ' 52 +1) —0,912‚
найдем
„ Н
УСГ : У… созЭс = 0,912-со5 30° : 0,79.
: Обозначая для удобства дальнейших вычислений 6с=61, найдем
норМальную составляющую скорости за скачком:
929
’У в = 1791 = 71—— (_Е*2+ *_1 1731) . (3.1Х.3)
с У зіпЭ1 Ё+1
Здесь
2 13—1 2 2 1,4—1
„ + мю + 52
0,2: 134—12 11—1—1 =1,4+1 1‚4+1 =.0,167.
м2 52
3—1 + °° 1,4—1 +
Таким образом,
17, =———1——(— О,167+ 4—1О‚792)=—О‚136.
‘ 0,912-5іп30° 1 4+1
Область течения между скачком и конусом расчленим на участки
при помощи прямых (лучей), выходящих из точки О .(рис. 3.1Х.3,б),
и определим параметры последовательно на каждой из прямых, начи—
ная с образующей скачка уплотнения. При этом величину шага А6 вы-
берем равной О,5°. Так как А6 откладывается каждый раз против поло—
жительного направления угла 6, то знак А6 будет отрицательным. Все
лучи пронумеруем, причем образующая скачка уплотнения будет являть-
ся первым таким лучом (см. рис. 3.1Х.З,б). Для второго луча
_ |А0| = 30° _ 0‚5° = 29‚5°.
Радиальная составляющая скорости на этом луче
17 =’У‚,+УО,А0=0‚—79+( 0,136)——035—=0‚.7912 (3.1х.4)
СООТВЭТСТЪУЮЩЗЯ НОРМЗЛЬНЗЯ СОСТЭВЛЯЮЩЭЯ СКОРОСТИ
176, = 1761 + (ай,/ае), А0, (3.1х.5)
где
37 72 72 —1
(_?) = —У еще +12, & —2 1— З . (3.1Х.6)
де 91 2 „2
1 (11 а]
Находим:
а? 272: 3—1 72 “2 ]=1'4—1 [1=‹0 792+01362)1=00707'
1 2 [1_(Уг1+уе1) 2 , , , .
’а’У _
Кха) = [0,136 с’сд 30°+ 0,79 (“1362 — г)] (1 _ 0,1362) 1= _ 1,54.
1. 0,0707 0,0707
Следовательно,
У92 =— 0,136 + (—1‚54) (_ %) = —0‚136 + 00135 = —0‚1225.
Теперь определим скорость на третьем луче, для которого
63 = 61 — 2 |А6| = 30° — 2-О‚'59 = 29°;
У 3=У2+У62А6=0,7912+—_0—5(— —0‚1225)=0,‚7923
„ „ 4179 %%
Уез = У62 + ( ае АО— _ __0, 1225 + А6.
2 2
621
Аналогично осуществляются расчеты для остальных прямых (лучей).
Результаты таких расчетов представлены в табл. 3.1Х.1.
Таблица 3.1Х.1
Номе @= пА , м „ ‚__, ду
лучар её;};д @ Уг УО “2 @
де
] 30 0,7900 —0‚ 1360 0,0707 ——1 ‚54
2 29,5 0,7912 ——0,1225 0,0714 —1‚52
3 29 0,7923 —0,1095 0,0716 ——1,50
4 28 ‚ 5 0 , 7933 —0‚ 0965 0 ‚ 0720 —1 , 49
5 28 0,7941 —0,0845 0,0726 ——1 ‚50
6 27,5 0,7948 —0,0715 0,0728 ——1 ‚50
7 27 0, 7954 —0‚0595 0, 0733 ——1 ‚51
8 26,5 0,7959 —0,0465 0,0736 —-1 ‚52
9 26 0,7963 —0‚ 0335 0,0738 —1 ‚54
10 25,5 0,7966 —0‚0200 0,0740 ——1 ‚56
11 25 0, 7968 —0 ‚ 0065 0 , 0740 —1 , 58
12 24,5 0,7969 0,0065 — ——
Из табл. З.1Х.1 видно, что где-то между одиннадцатым и двенадца-
тым лучами скорость Уд =О. Это может быть лишь на твердой поверх—
ности отыскиваемого конуса, которая отстоит от одиннадцатого луча
на угол [20]
47911 — (—0,0065) _
— 0,0041 : —— 0,24°.
—1,58
А9„= ‚… _
(ауд/али
Таким образом,
Бк : 91 "— 2' [А6] : 300 _ 59240 : 24° 46,’
Ук : У, = 0,797.
Теперь можно найти коэффициент давления на конусе:
р —р 2 р' 1—72 к 1
рк : _к__°°_ : 9 __°_ " _1 , (3_1х_7)
а… [гм-дю ро 1—17?
где отношение давлений рЬ/ро=0,5 определено по (9.2.26) [20] для
6с=30° и Моо=5. Следовательно,
1,4
„: : _‘2_ [05 (№)?— “— _1] = 0,366
1,4-52 1—О,9122
Определим соответствующие плотность и температуру газа:
1 1
рк 233 1—73 1751—20, (1—0‚7972)1.—4—1___338
Р… ро 1_*`72;° \ 1—0,9122
? =(1_^172)(1+Ё—Ё—щ)=‹1—о‚*27972)(1+1——4_152)=2‚.17
Известно, что для острого конуса коэффициент волнового сопротив-
ления равен коэффициенту давления, т. е. схв=рк. Поэтому величина
такого сопротивления
ХГ. __СхвЧо, Змид— _ 0,51%:лркд’!2 р (3.1Х.8)
оо ‚миц—
622
Положив роо=1 кГ/см2, а высоту конуса 5 м, получим
ХВ : О,5-1‚4-л-О‚366-52- 1 - 104 (Б-ЪЁ 24° 46’)2 = 168-104 кГ.
ЦХ.6. При обтекании острого конуса сверхзвуковым потоком перед
ним возникает скачок уплотнения. Образующая этого скачка представля—
ет собою прямую линию ОА (см. рис. 2.1Х.2). Если бы конус был беско-
нечной длины, то скачок продолжался бы за точку А в виде такой пря-
мой. Это следует из того, что течение в области между поверхностями
скачка и конуса по своему характеру коничес к о е. Однако конечные
размеры конуса являются причиной искривления скачка, начиная с точ—
ки А. Происходит это потому, что угловые точки конуса В и С (вернее,
ес, град
ЦБ
\
“"‚Ч' "
цб "" __
м…, @с
чч - -› А
ца \
н=60км/\ \\
[+2 '
5 10 15 20 М…
Рис. 3.1Х.4. Взаимодействие Рис. 3.1Х.5. Изменение угла
конического скачка уплотне- скачка уплотнения перед
ния с линиями слабых воз- острым конусом при увели-
мущений: чении числа Моо полета
! —— скачок уплотнения; 2 — ли-
нии слабых возмущений
каждая точка, лежащая на окружности основания конуса) являются ис-
точниками малых возмущений (рис. 3.1Х.4)‚ которые, распространяясь
в коническом потоке, достигают скачка уплотнения в точках А, А’, …, А”.
Внутри угла, ограниченного крайними линиями возмущений ВА и ВА",
происходит расширение сверхзвукового потока. Возмущения, исходящие
от точек В и С и являющиеся по своему характеру волнами разреже-
ния, взаимодействуют со скачком уплотнения, уменьшая его интенсив-
ность и тем способствуя его искривлению. Это искривление начинается
в точке А, где на скачок падает первая линия ВА слабых возмущений.
1х7. Угол наклона скачка уплотнения ее перед острым конусом
с ростом числа Мс,о полета уменьшается. Это, в частности, хорошо вид-
но на рис. 3.1Х.5‚ где по результатам расчетов обтекания острого конуса
с углом Вк=40° построены графики зависимостей 60=6с(Моо) как без
учета диссоциации (Ь=1,4), так и с ее учетом. Такой характер измене-
ния угла конуса обусловлен дополнительным уплотнением газа у обте-
каемой поверхности при возрастании скорости и, следовательно, боль-
шим приближением фронта ударной волны к этой поверхности.
|Х.8. С увеличением угла конуса [ЗК увеличивается угол скачка 6С,
что влечет за собой более интенсивный разогрев газа около конуса,
вследствие чего возрастает степень диссоциации. Этот процесс проис-
ходит с поглощением тепла, что вызывает снижение температуры ТК на
поверхности конуса по сравнению с той, которая была бы в газе, если
бы не происходило физико-химических превращений. Расчеты показали
также, что давление р]К на поверхности, вычисленное с учетом диссоциа-
ции, мало отличается от давления, рассчитанного без ее учета.
623
1Х.9. Расчет параметров на конусе при заданных условиях невозму-
щенного сверхзвукового потока произведем с учетом физико-химических
превращений обтекающего воздуха. По таблицам стандартной атмо-
сферы находим параметры воздушной атмосферы на высоте Н =5 км;
роо=р1=0,07511 кГ—сек2/м4; роо=р1=0,5511 кГ/см2; Т…=Т1=255,6 К;
аш=а1=320‚5 м/сек; „ср=цср1=28,97.
Скорости звука а1=320,5 м/сек и числу М1=Моо=20 соответствует
скорость полета
У1 = М1а1 : 20—32О,5=641О м/сек.
Энтальпия воздуха на рассматриваемой высоте
і1 = ср1Т1 = 1002-255,6 = 0,26- 106 м2/сек2.
Расчет обтекания конической поверхности обычно начинают с опре-
деления параметров газа за косым скачком уплотнения по известным
МЮ=М1 И ее (см. задачу 1\/.52).
В первом приближении полагаем величину АУ„=(У9… —Ус…)/
Шеф =(Уп1—Уп2)/У…=О,9 (см. рис. 3.1Х.3) и получаем:
р2 = р1 (1 + 181 А7, МЁЗіп26с) = 05511 (1 + 1,4-О,9-2О2-О‚7662) :
= 163 кГ/см2;
12:1, +(1/%/2)$іп2 0с А У„ (2 — А Га,) = 0,26-106 +
+ 63233 0,7662 . 0,9 (2 — 0,9) :. 12,17 . 106 м6/сек6.
Зная 132 и №, по графикам [17] находим Т2=6675 К, а по [33] №132:
=24,6. Теперь находим значения:
161МЁ6іп268—1___1,4.202-0‚7662—1
А = —— = 0,498;
2ь1мёзіп2 0с 2-1‚4-206—0,7882
В=__1_(_Т_2_Мср1__1)= 1 (6675_ 29 _1)=0091
181 мёзіпгес Т1 №2 1,4—202-0,7662 255,6 24,6 ’
и по ним определяем АЙ, во втором приближении:
А Р„ : А + 1/А6 _ В = 0,498 + 1/ 0,4986—0‚091 = 0,894.
Так как значения АЙ… в первом (0,9) и втором (0,894) приближениях
не совпадают, произведем дополнительный расчет в третьем приближе-
нии, полагая АУп=О,894:
р2 = 0,5511 (1 + 1,4-О‚894-2О2-О,7662) = 162 кГ/смг;
і2 : 0,28106 + 647102 0,7662—О,894 ‹2 — 0,894) = 12,16- 106 м6/сек6.
По найденным р2 и 132 находим с помощью [17] и [33] Т2=667О К
И “4313222436.
Определив соответствующие величины А=О,498 и В=О,О91, полу-
чаем в третьем приближении
А?, = 0,498 + 1/ 0,4986—0‚091 : 0,894.
Видим, что АУп=О,894 совпало с тем значением, которое мы получили
во втором приближении. Значит, эта величина найдена правильно. Те-
перь можно определить параметры газа за скачком, воспользовавшись
[17]: р2=162 кГ/см2; 13_‹д=12,16-106 м2/сек2; Т2=667О К; цср2=24‚6; $2:
= 10,4- 103 м2/(сек2-град); @= 1640 м/сек.
Определим приближенно область возмущенного течения, т. е. угол
между образующими скачка уплотнения и конуса, используя результа-
624
ты расчета обтекания конуса недиссоциированным потоком. Из рис. 60
[22] находим примерное значение Вс—Вк=5°. При этом имеем в виду,
что действительная величина (Эс—Бк будет еще меньше вследствие влия—
ния диссоциации. Разделим рассматриваемую область при помощи пря—
мых (лучей), выходящих из вершины, на десять интервалов с шагом
|А9|=0‚5°. Обозначим соответствующий луч номером, считая первым
образующую скачка уплотнения. Таким образом, параметры на скачке
теперь будут иметь индекс «1» вместо индекса «2», как это было приня-
то ранее, т. е. р1=р2=162 кГ/см2; і1=і2=12,16-106 м2/сек2; Т1=Т2=
=6670 К; Цср1=цср2=24‚6; $1=З2=1О‚4°103 м2/(сек2-град); а1=а2=
=1640 м/сек.
Параметры на втором луче имеют индекс «2», на третьем— «3»
и т. д. Параметры на луче, соответствующем образующей конуса, обо-
значим индексом «к».
На первом луче
_.
У,1 = УНП/оо : соз 61 = соз 9С = соз 50° = 0,6428;
1761= —У…/У… = — (1 _ А 17,1) зіп 6с = = (1 —О,894) 0,766 = —О‚О812 .
Определение параметров газа на втором луче осуществляется сле-
дующим образом. Радиальная составляющая скорости здесь (см.
рис. З.1Х.З)
0 5
17,2 = 17,1 + 176, А6 = 0,6428 + (_ О,О8‘12)(—57’ 3) = 0,6435.
Нормальная составляющая скорости определяется при помощи фор-
мул (З.1Х.5) и (3.1Х.6), в которых все скорости будем относить не
к Уши, а к У…. Например, вместо 1/92 =Уег/Ушах примем 1/6.2 :
=У62 /У„ и т. д. С учетом этого
а, 76 _ 0 № _
(ЁЁ—)1 __ {0,0812 СЁЁ 50 + 0,643[ 16402/64102 2]} Х
>< 1 _№ “1 =_=. __1 29
[ 16402/64102 ] ’
176, = —О,О812 — 1,29 (_ 0,5/57,3) = _ 0,0699.
Соответствующая энтальпия
1/9 _ _ __ _
і, __— і1 + _;— [0/31 + 1/31) — (1/32 + %)] = 12,16-106 +
+ 6%? {[О‚6432 + (_ 0,0812)2] — [0,64352 + (_ 0,0699)2]} =
:=— 12,17-106 м/сек2.
Считая, что течение в возмущенной области изэнтропическое, найдем
по 82:81 и і2 с помощью [17] скорость звука а2=1650 м/сек и безраз-
мерную величину аё = (а/Уоо)2= (1650/6410)2=0‚066. В соответствии
с (3.1Х.6)
‘”76 . (=— 0 0699)2
_ — 9 ° _ ° __*__ _
( ае )2 {0,069 с’се (50 0,5 ) + 0,6435[ 0,066 2” ><
Х1—№_1——127
[ 0,066 ] _ ’ '
По вычисленным параметрам газа на втором луче можно найти со-
ответствующие параметры на луче с индексом «3»:
625
_ _ 0,5 _ _
У„ : У„ +1162 А6 _- 0,6435 + (— 0,0699) (_ 5—73) _ 0,644,
476
=:—0‚0699 —1‚27 _; =—‚ 8,
д6)2А6 +( )( 3) 0058
Уез : Уег + (
із : 12,174. 106 + 6—4322
_— [0,6442 + (_ 0,0588)21} : 12,184-106 м2/сек2.
По $3=$1 и із наХОДим с помощью [17] аз: 1656 м/сек.
Аналогично осуществляем рачеты для других конических поверхно-
стей (см. табл. 3.1Х.2).
„0,64352 + (_ 0,0699)21—
Таблица 3.1Х.2
н _ — — до —. —°‚ 3'102—3' ‚
лоуміеар В—Вс—і—пАе Ут УО ъм1230ек2 _м__ м7сек
‘19 сек2—град
! 50° 0,6428 —0,0812 ——1‚290 12,16 10,4 1640
2 49°30’ 0, 6435 —0, 0699 —1 ‚ 270 12 , 17 10, 4 1650
3 49° 0,6440 —-0‚0588 ——1,265 12,18 10,4 1656
4 48°30’ О , 6445 ——0 ‚ 0477 —1 ‚ 262 12 ‚ 19 10 , 4 1662
5 480 0 ‚ 6449 —0 ‚0366 —1 ‚ 260 12, 20 10,4 1668
б 47°30’ 0 ‚ 6452 —0‚0255 —1 , 276 12 ‚ 21 10, 4 1674
7 47° 0,6454 —0‚0154 —-1 ‚280 12,226 10,4 1680
8 46°30’ 0, 6455 —0,0042 —1 ‚287 12 ‚23 10,4 1682
.9 46° 0, 6456 0, 0071 ]
Из табл. 3.1Х.2 видно, что величина Уе на девятом луче изменила
знак на противоположный. Это указывает на то, что приращение угла
|А6| в последнем интервале должно быть меньше выбранного (т. е.
меньше 0‚5°). По формуле интерполирования [20] найдем это значение:
”4 46 .;8
Значит, угол конуса Бк=61—7-0‚5°—11’=46°19’‚ а скорость на нем
Г/к : 17,к : 17,8 + 1768.А0„_, = 0,6455 + 0004200032 = 0,6456.
СООТВЕТСТВУЮЩЗЯ энтальпия газа
(173—7373,
——2—— : 12,16-106 +
_ 679 3—1 _1
А6 : —Уез —; = 0,0042 (— 1,287) = —— 0,0032 = — 11’.
ік : іс +
| 64102 2 2 2 6 2 2
+ —2-(О,6428 + 0,0812 —-О‚6456 )=12,23- 10 м /сек .
Зная ін и ЗН с помощью графика [17] находим: рк=170,5 кГ/см2; Тк:
=6700 К; рк=0,73 кГ-сек2/м4‚ а также коэффициент давления на ко-
нусе:
— _2(рк—р…) __ 2 170,5—0‚5511 _ 1 12
" іг1МЁороо 1,4.202 0,5511 ’ '
Волновое сопротивление для конуса длиной 5 м
ХВ : О,5-1,4л2О2-1‚12-0‚5511—104(5’[346° 19’)2 =148-106 КГ.
1х.10. При подъеме на высоту острого конуса, движущегося с гипер-
звуковой скоростью, за скачком уплотнения вследствие сильного разо-
626
грева газа будет происходить диссоциация. Этот процесс зависит поми-
мо температуры также от давления, которое убывает с высотой. Из-
вестно, что уменьшение давления приводит к увеличению степени дис-
социации, а это в свою очередь уменьшает угол скачка 60. О характере
этого уменьшения можно судить по графикам на рис. 3.1Х.5, где сплош-
ными линиями изображены кривые, полученные с учетом диссоциации.
|Х.11. Коэффициент волнового сопротивления острого конуса с ро—
стом числа Моо полета уменьшается, что видно, в частности, из прибли-
женной формулы
с„ : Б„ = (0,0016 + 0,002 м;?) (6,1)1'7.
При физической интерпретации этого явления удобнее исходить из ана-
лиза изменения соответствующей величины лобового сопротивления ко-
нуса, определяемой из выражения Хв=схваоо$мид. В этом выражении
скоростной напор а°о=0‚5 ігрооМЁо. Таким образом, если бы коэффици-
ент схв был постоянным, то сопротивление изменялось бы пропорцио—
нально квадрату числа Маха. Однако исследования показывают, что
при сверхзвуковых скоростях такое возрастание пропорционально числу
Мсо не во второй, а в меньшей степени. Именно это отражает факт не-
которого снижения коэффициента с,СВ с возрастанием числа Маха.
|Х.12. Коэффициент центра давления тела вращения сд_д=хц_д/хк мо-
жет быть вычислен, если известны момент тангажа М„ и нормальная
сила №, действующая на это тело. В тех случаях, когда угол атаки мал,
удлинение тела и скорость сравнительно невелики, можно пренебречь
влиянием на М2 и № силы трения и считать, что момент и нормальная
сила есть следствие действия Одних лишь сил давления, т. е. М2=М‚р‚
а №=№р. В этом случае для вычисления величины спд воспользуемся
равенствами (5.1.5), (5.1.6) и (5.1.7), в которых момент МЦ, и сила А/р
заменены их коэффициентами:
1 л 1 мл
5 73221; \, Бсозуау+(27ьк)_1 [17213 Всіх 55 соз усім
_та : 0 0 0 0
. (3.1х.9)
Сц-д= С“ _ … д-
р гсіх Хрсоз усіу
0
(зд.,-д _.
Так как движение в возмущенной области около конуса, движуще-
гося под углом атаки, обладает свойством конического течения, в соот-
ветствии с которым коэффициент давления р не зависит от координат
х, г, а является лишь функцией меридионального Угла у, то (3.1Х.9)
можно написать в виде
1 „ „ 1 „
27ък5-Ёхс1х—і—Хрщвсіх
0 0
Сц-д _
1
27… ( ‚$43?
0
Для конуса (рис. 3.1Х.6): г=х; хн=хмид; №=1/(2’[8 Вы). Поэтому после
интегрирования получаем сд_д= (2/3) (1448259-
Как видим, с утолщением конуса (увеличение угла Вы) центр давле-
ния сдвигается к хвостовому участку. Это объясняется тем, что возра-
стают силы от давления, действующие на этом участке, и значительней
становится стабилизирующий момент от этих сил, способствующий та-
кому сдвигу центра давления.
|Х.13. Важное для практики аэродинамическое свойство затуплен-
ных тел, обусловливающее их применение, состоит в том, что они при
движении в атмосфере с очень большими скоростями нагреваются
627
(а следовательно, и разрушаются) меньше, чем заостренные тела. Рас-
смотрим газодинамические явления, связанные с таким эффектом.
Схема течения около затупленного конического тела изображена на
рис. 3.1Х.7, а. Перед телом ] образуется отошедшая ударная волна 2 с
переменной интенсивностью в различ—
ных точках ее поверхности. Наиболь-
шей эта интенсивность будет в окрест-
ности точки 0 полного торможения.
„мид
&.
дк _{Н ! Можно считать, что здесь волна пред-
` ставляет собой прямой скачок уплот—
` нения. Переход частиц газа через та-
и: ` кой сильный скачок будет сопровож-
` $к2$МЦд \ даться значительными потерями пол—
# ного напора и повышением энтропии.
Рис. 3.1Х.6. Геометрические раз- В результате поверхность тела покры-
меры острого конуса: вается слоем 3 некоторой толщины, в
г_=г/’мид= х,;х/хк котором газ обладает высокои энтро—
пией. В этом слое, называемом в ы со-
коэнтроп ийным, скорость газа
будет значительно меньше, чем она была бы при прочих равных услови-
ях на поверхности острого конуса, где нет такого интенсивного скачка
и газ тормозится слабее (см. рис. 3.1Х.7, б).
Рис. 3.1Х.7. Течение газа около затупленного (а) и острого (б)
конусов
Пограничный слой (пунктирные линии на рис. 3.1Х.7), как правило,
значительно тоньше высокоэнтропийного слоя, и скорость на внешней
границе пограничного слоя у затупленного тела меньше, чем около ост-
рого конуса. Такое уменьшение скорости является важной причиной сни-
жения аэродинамического нагрева затупленного тела. Это ВИДНО из
формулы для удельного теплового потока, передаваемого газом к твер-
дой стенке,
Чк : 05 ‹Тг _ ТСТ)9
где Т,. и ТОТ—соответственно температуры восстановления и стенки;
ос—коэффициент теплоотдачи, зависящий от скорости движения газа
Уб на внешней границе пограничного слоя, плотности газа рд и ряда
других причин.
В общем виде, как показывают исследования, можно записать, что
ос=АрдУд, где А—некоторый коэффициент, слабо изменяющийся при
заданных условиях обтекания. Таким образом, уменьшение скорости на
внешней границе пограничного слоя снижает количество тепла, посту-
628
ПЗЮЩСГО ОТ газа К ПОВЕРХНОСТИ тела ВРЗЩСНИЯ. ЕСЛИ ИМЕТЬ В ВИДу ВЛИЯ-
НИЕ ПЛОТНОСТИ рб , ТО следует УЧИТЫВЗТЬ, ЧТО ее ВЕЛИЧИНЗ на отдельных
участках затупленного конуса может быть выше, чем на остром, однако
это увеличение не имеет существенного значения в изменении теплопе—
редачи.
Существенная особенность обтекания затупленного тела заключает-
ся также в том, что под влиянием затупления изменяется характер те—
чения в пограничном слое. Вследствие уменьшения чисел Рейнольдса,
подсчитываемых по скорости в высокоэнтропийном слое, ламинарный
пограничный слой переходит в турбулентный гораздо ниже по течению,
т. е. протяженность такого слоя возрастает. Это способствует снижению
трения и, как следствие, тепловых потоков к стенке.
Рост энтропии обусловливает увеличение (по сравнению с острым
конусом) температуры на внешней границе пограничного слоя, что спо-
собствует некоторому повышению теплового потока к стенке. Однако
суммарный эффект при соответствующем подборе степени и формы за-
тупления связан с уменьшением тепловых потоков.
|Х.14. Сравним скорости У… и Укг в соответствующих точках на по-
верхностях затупленного и острого конусов, полагая, что скорости У…
полета этих конусов одинаковы и диссоциации воздуха у их поверхно-
сти не происходит. Примем также, что движение происходит изэнтропи—
чески. С учетом этого используем следующие формулы для расчета об-
текания:
Р… = Рдзат (1 — УЗ, 18/1/31, №№”;
рк2 : рбостр ( __“,2/1/1211 „№№—1)—
Первая из этих формул написана применительно к обтеканию затуплен-
ного конуса, а вторая—острого. По условию, рк1=рк2‚ поэтому
рд (1 дешёвые—” = р… ( 1 —У32/Уг…№-”)-
Здесь соответствующие давления торможения (для Ё=ср/с„= 1,4):
166,7 м;
(ті, — 1)2'5 (1 +о‚2мі‚)3_5
166,7 м; зіп7 ес
(7МЁО зіп26с— 1)2'5 (1 +о‚2 м3о $і1’126с)3’5 '
рОзат=рО
рОостр— рО
Так как величина ро (давление изэнтропического торможения) в обоих
случаях одна и та же, то, подставляя значения рОзат и роостр в преды-
Дущее равенство, получим зависимость, связывающую между собой ско—
рости У… и Укгі
Г1 _ (Ук1/Угпах)2 7М‘2Х’ _ 1 2’5/3’5 1+0‚2 Мао
[1 — (укв/ушах)2] 7м3о зіп2 ес _ 1 1 + 0,2м2о зіп2 6с
эіп2 6С.
Из этого соотношения следует, что на затупленной поверхности конуса
скорость У… будет всегда меньше, чем на заостренной Ук2.
|Х.15. С известным приближением коэффициент волнового сопротив-
ления полусферы определяется зависимостью [20]
схв : 0,5 50,
где Бе — коэффициент давления в точке полного торможения. В случае,
когда ТВПЛОЕМКОСТИ газа неизменны, ВСЛИЧИНЭ ро С ПОДЪСМОМ НЭ ВЫСОТУ
ПРИ ПОСТОЯННОМ ЧИСЛЕ Мао не ИЗМСНЯСТСЯ, так как она ЗЭВИСИТ ЛИШЬ ОТ
,629
ЧИСЛЗ Мод И ОПРВДЭЛЯЭТСЯ ЗЗВИСИМОСТЬЮ
_
—: 2 іг—1 (ян—№ :… МЗ,
р“ №30 „№№—ы]
1 _ 1! . (3.1Х.1О)
[2Ь/(іг—1)—1/МЁ]Ё_—1
Предельное значение ро имеет место при бесконечно большом значении
М00 и равно ропр6д= 1,83 (при іг=1,4).
Если рассмотреть случаи диссоциации, то, как известно, за счет па-
дения атмосферного давления с подъемом на высоту степень этой диссо-
циации возрастает. Это в свою очередь вызывает некоторое повышение
давления, соответствующее увеличению коэффициента ро, и, как след—
ствие, рост схв. Например, на высоте 10 км у полусферы, двиЖущейся
с числом Моо=16,7, действительная величина ро=2,08, т. е. превышает
значение ро=1,83 без учета диссоциации. Следовательно, будет больше
на соответствующую величину и коэффициент сопротивления.
1Х.16. По таблицам стандартной атмосферы определим параметры
воздуха на высоте Н =15 км: роо=1234 кГ/м2; роо=0,01985 кГ—сек2/м4;
Т°о=216,7 К; аоо=295,1 м/сек. По этим параметрам и числу Моо=15 рас-
считаем отношение плотностей р=рооір2 для прямого скачка уплотнения
[20]. Полагаем в первом приближении значение АУ= (УФО—У2)/Уоо=0‚9‚
что соответствует заданию относительной плотности для скачка р2/роо='
= (1—АУ)—1= (1—0,9)—‘= 10.
Затем найдем давление за скачком (см. задачу 1\7.51) р2=1234><
Х(1+1‚4-152-0,9)=35‚56-104 кГ/м2, а также вычислим энтальпию і2,
принимая во внимание, что ее значение в набегающем потоке іоо=
=срооТсо=1002-216,7=0,2171-106 м2/сек2. С учетом этого і2=0,2171><
><1об+ (295‚1><15)2 923 (2—03) =9,82— 106 м2/сек2.
По ря и 13; с помощью і—З-диаграммы [17] находим температуру га--
за за скачком Т2=5340 К, а из [33] определяем средний молекулярный
ВЕС ”ср2=25‚2.
Затем по уравнению состояния находим соответствующую плотность:
р _ Р2 Нср2 __ 35,56'104'25,2
2 _ _ . .
Ко Т2 8 848 5340 9,81
Таким образом, р2/роо=0,202/0‚01985=10,1; А17=1—роо/р2=1—0,099=
=0,901. _
Расхождение между величиной АУ, заданной в первом приближении
(_0,9), и полученным значением (0,901) невелико, поэтому принимаем
р=роо/р2=0,099‚
В соответствии с этим относительная величина отхода скачка $о=
=$о/Кс_О (где Код—Радиус его кривизны на оси; рис. 3.1Х.8):
: 0,202 кГ -сек2/м4.
30 = Ё" = Б(1—Б›'2[1—‹2Б—'62›“21 =
СоО
= 0,099 (1 ___ 0,099)—2 [1 — (гг-0,099 _ 0,0992)“21 _ 0,0593. (3.1х.11
)
Определив отношение радиусов кривизны ударной волны и сферы:
Ё _а… =1/(1—Б„)—2'5=1 (1 —0‚0593)—2'5= 1,16,
СоО _
Т
находим Кс.о=КтЁс.о=2-1,16=2,З2 м и расстояние от этой волны до
сферы $0=Еокс_о=о,0593—2‚32=0‚138 м.
630
055896 „…,…ошохъщюищощо оо тощоёъйщщц „…да
‚35 очомо $5535… $585 9556 ФХ; 95
_ _ _ не,
в в Ё % ч… 3 „№…… …,
_ _ …
‚
, ш…: „з…… [Т/Ё
7
с" \
\ ‹
д’
&
"
".
,!
‚\
\\
\
\
/
/
/
___$__._
\
\.
оЁох ЁЁЁЁЁЁ ‚[ щ „шахтинский мотмхо .| \
…юоЁож о,…оЁФЁЁюю очоыо 32 …За
.БЕЁЁ 3263 53 шгшио 6324… .…Ещ
\ош\
г\`\щоф\ пт _…
д 7, _ ь …… 8>
ь
& А'!‘
Н. Аоо
Ё-…п'і'іі _ 2
_
…
мцоео |. …… „котами !%
„355395 дощомъщюжцошо оо ……ЁФЕЁА
‚ЕЕ _…Ёоео оцохо …дЁощ ….„бщщочЕ „……ФБ
-…Ззоьо Ёшойочопоюц _…Ёио ‚Ю.К….ю 95
„……
Для определения формы ударной волны воспользуемся уравнени-
ем [4]
(х + а)2/а2 — гад)2 = 1, (3.1Х.12)
в соответствий с которым образующая ударной волны представляется
в виде гиперболы с полуосями а и Ь. Длины этих полуосей:
а= К…(МЁО— 1) = 2,32(15“`— 1) = 524 м;
0 = к…,/мі—1 = 2,321/152—1 = 34,7 м.
Следовательно,
г = 4 34,7 1/ (х + 524)2/5242— 1 м.
Зная отход 50, можно по этому уравнению построить скачок уплотнения
около сферы (рис. З.1Х.9).
!Х.17. Из таблиц стандартной атмосферы находим параметры воз—
Духа на высоте Н =ЗО км: роо=120‚7 кГ/м2; роо=1‚825- 10—3 кГ-сек2/м4;
Тоо=230,3 К; Нерю=28,97; аоо=304‚8 м/сек.
Рассчитаем параметры воздуха непосредственно за прямой частью
ударной волны (рис. 3.1Х.1О). Следуя [20], положим в первом прибли—
жении АУ=О‚9‚ что соответствует отношению плотностей
;),/ро, = (1—1117)—1 = (1 —0,9)—‘ = 10.
Затем найдем давление за скачком (см. задачу 1\7.51):
р2= 120,7[1 +1,4(2—000)О,9]=2‚641041сГ/м2
И СООТВСТСТВУЮЩУЮ ЭНТЗЛЬПИЮ'
12 = 1002 230, 3 + № 0 ,—9(2 0,9) = 8,11 -106 м2/сек2.
По этим величинам из диаграммы [17] определим: р2=1‚825Х
><1О—2 кГ-секг/м“; Т2=4250 К; 82:11020 мг/(секг-град).
Проверяем, правильно ли выбрана величина АУ=О‚9:
А\7 = 1 —р°о/р2 = 1 —О,1825- 10—2/(1,825-10_2) = 0,9.
Видим, что заданная величина АУ и полученная совпадают, следова-
тельно, параметры за скачком определены правильно.
Найдем относительный ОТХОД ударной волны перед точкой полного
торможения:
3 =3 „,/К _052 [р/(1)]°86_052 [01/(1—01)]°86_0057‚
& Т ЗКЖЕ ОТНОШЕНИё:
_? _
^“ 30 _ _0, 0572
во/Кс_о=$О=——2-(1 _/1 +4/33)= 2(1 —\/1+0 0572)= —0‚0538.
Градиент скорости в окрестности точки .полного торможения (точка
О’ на рис. 3.1Х.1О)
Й=(д_щ_)х=0_ 231/(2р—0М1—80):
дх у=0 Кт
= 4—0209 1/ (20,1 _— 0,12) (1 —О,0538) = 843 1/сек.
6.32
Скорость в окрестности этой точки
У„ = Хх =Хктср/57‚з = 29,3 @,
гдеср—полярный угол (см. рис. 3.1Х.10).
1Х.18. По таблицам стандартной атмосферы находим для высоты
Н=10 км; роо=0‚2701 кГ/смг; р…=0,4217-10—1 кГ-сек2/м4; Тоо=223,2 К;
аоо=299‚4 м/сек; рсроо=28‚97; с,… = 1002 м2/сек2.
По этим данным и числу Моо=.Уоо/аоо=5000/299‚4=16,7 рассчитаем
параметры воздуха непосредственно за прямой частью ударной волны,
а также в точке полного торможения на сферическом носке (см. зада—
чу 1\/.51). __
Полагая в первом приближении АУ=0‚9‚ получаем: р2=0‚2701(1—|—
+1,4-16‚7-0‚9) =92 [СГ/см?; і2=1002-223,2+(50002/2)0‚9- 1,1 = 12- 106
114.2/сек2 Затем по і—р- диаграмме [17] находим: р2=4,-2 10—1 кГ сек2/м4;
Т2=6650 К; &= 10640 мг/(сек2 град). В соответствии с этими данными
м7 = 1 — ();/р? = 1— 0,42—10—1/о‚42 = 0,9.
Как видим, это значение совпадает с заданным, и, следовательно, пара-
метры газа за прямым скачком определены.
Найдем параметры воздуха в точке полного торможения на сфериче—
ском носке, считая течение за скачком изэнтропическим. Энтальпия
в этой точке
= 100 + 0,5 УЗО = 1002-223‚2 + 0,5-50002 = 12,75. 106 м2/сек2.
С помощью і—р-диаграммы по 136 и 86 = 82 определим: р[) =
=4,6-10—1 кГ-секг/м“; р[) =110 кГ/см2; Т('‚= 6700 К. Соответствующий ко—
эффициент давления
' = (‚?/[е м2 ) (рд/р _ 1) = (2/1, 4- 16 ‚72) (110/0, 2701 = 1) = 2,08.
Величина этого коэффициента в произвольной точке обтекаемой поверх-
ности р= ро соз2ср= 2,08 созгф. В частности, в конце сферического уча-
стка (см. рис. 2..1Х 3), где фк= л/2— Вк=9О°—20°=70°‚
р= рк— _ 2,08 соз2 7О°--— —0 ‚2.44
С известным приближением можно принять, что этому значению равен
коэффициент давления на всей конической поверхности.
Теперь определим градиент скорости в точке полного торможения:
Х— (а_у) 1 і/2(рЬ—р…) _`ё.`/2‹11о=о,2701)1о4__
дх х=о= Н_т рЬ 2 4,6.10—1
у=0
: 10,9-102 1/сек‚
и скорость в произвольной точке на сферическом носке:
У„ = ЖХ=№тср/57‚з = 10,9-102-2-ф/57,З = 0,405-102ф
В частности, в конце этого носка (на конусе) Ук=40‚5-70=2840 м/сек.
Определим волновое сопротивление конуса с затупленным носком.
Соответствующая величина аэродинамического коэффициента согласно
формуле (9.4.85) [20]
Х _ 1?
с„‚====р„{ ;
Ооо ЗМИД ‚МИД
соз26К (1 _С—С)%В—К) +
+
Г
“ зіпз Бк (2г…‚д — хК зіп ВК)] .
МИД
633
Здесь
‘ [т—вта —5іп рд] : —1—[5—2(1—зіп20°)] = 3,91м;
соз Бк сов 20°
г…,д = Кт соз [ЗК + )(к зіп [ЗК : 2-со5 20° + [5 — 2 (1 — зіп 20°)] ‚58 2О°=З,21 м
В соответствии с этим
с„ = 2,08 [& соз2 20° (1 _ №) +
3 212 2
?
Хк:
3,91
+ 3,212
зіпз 20° (2-З,21 — 3,91 - зіп 20°)] = 0,58,
а СИЛЗ ВОЛНОВОГО СОПРОТИВЛЕНИЯ
х„, = 0,5 (:,в 0, р„ м3, „дид = 0,5.0,58.1‚4—0,2701 .104><
>< 16,72л_з‚212 = 9,65.10в кГ.
Бо: 50/0'7 {ЕТ/ГО,
„ №
02: “"“;:
; 0,95
0,;7
0,90
0,13 м„
0,35—
т
009 0,80
1
0,05 0.75
3 5 7 3 И 13 м… 0 0,2 0,0 вы:/я,
Рис. 3.1Х.12. Изменение тем-
пературы на поверхности
Рис. 3.1Х.11. Зависимость
величины относительного от-
хода волны перед сферой от
числа Маха полета в слу-
чаях:
сферического затупления го-
ловной части в случаях рав-
новесного ] и неравновесно-
ТЯ
1—полностью равновесной дис- ГО 2 расш“рения газа
социации; 2—постоянных теп-
лоемкостей
ВШЭ. Если предположить, что между ударной волной и поверхностью
тела химических реакций не происходит и газ не меняет своего состава
по сравнению с условиями до скачка, то повышение давления никак не
отразится на величине отхода.
Возникающая в реальных условиях диссоциация вызывает снижение
температуры и обусловливает увеличение плотности, дополнительное
поджатие газа и, как следствие, приближение к обтекаемой поверхности
переднего фронта ударной волны.
В качестве иллюстрации на рис. 3.1Х.11 показано изменение относи-
тельной величины отхода $0=$о/Кт перед сферой радиуса Кт=0,4 см,
обтекаемой кислородом при роо=0‚02_63 атм и Тоо=293 К, в случаях по-
стоянных теплоемкостей и полностью равновесной диссоциации.
!Х.20. Газ, движущийся от точки А полного торможения по поверх-
ности затупления (рис. 3.1Х.12), подвергается интенсивному расшире-
нию и, следовательно, охлаждению. Это влечет за собой уменьшение
степени диссоциации. Процес рекомбинации, который при этом будет
происходить более интенсивно, сопровождается дополнительным выде-
лением тепла и соответствующим ростом температуры газа. Очевидно,
что такой нагрев будет в случае полностью равновесного течения боль-
шим, чем .при неравновесном обтекании. Кривые на рис. 3.1Х.12, полу—
634
ченные расчетным путем для сферы радиуса Кт=1 см, обтекаемой
потоком кислорода при Моо=10, роо=0‚01 атм и Тоо=290 К, показыва-
ют, что это превышение температуры на некотором удалении от точки
полного торможения составляет примерно 8%.
№21. При очень больших скоростях обтекания (Моо>10) газ за
ударной волной разогревается до очень высоких температур, при кото-
рых на его движение существенное влияние могут оказать процессы пе-
реноса энергии в форме излучения. Расчеты показали, что излучение
газа обусловливает значительное уменьшение температуры и, как след-
ствие, повышение плотности в ударном слое и на поверхности обтекае-
мого тела. Такое повышение плотно-
сти, особенно заметное вблизи точки
полного торможения, обусловливает
уменьшение отхода ударной волны.
№
мид
Г
{В
Рис. 3.1Х.1З. Влияние пограничного слоя Рис. 3.1Х.14. Искривление скач-
на Обтекание тела вращения: ка уплотнения при воздействии
1— тело вращения; 2—пограничный слой; на него слабых ВОЗМуЩеНИИ’ ИС—
3—свободный поток ХОДЯЩИХ ОТ поверхности ДВИ—
жущегося тела
№22. Кривая 1 на рис. 2.1Х.4, характеризующая распределение дав-
ления по поверхности тела вращения, соответствует обтеканию этого
тела несжимаемым потоком (Мод=0) идеальной жидкости. На это ука-
зывает симметричный относительно вертикальной оси (1!) вид этой кри-
вой. Нетрудно видеть, что лобовое сопротивление тела равно нулю, так
как силы давления, действующие на передний участок поверхности,
уравновешиваются такими же силами, возникающими в хвостовой
части и направленными в противоположном направлении.
Кривая 2 характеризует Обтекание того же тела .потоком реальной
жидкости, обладающей свойствами вязкости. При этом так как избы-
точное давление на передней части поверхности меньше, то, очевидно,
и скорость такого потока будет меньше, чем в первом случае.
Изменение закона распределения Давления объясняется возникнове-
нием (рис. З.1Х.1З) на обтекаемой поверхности пограничного слоя. Та-
кой слой воздействует на внешний поток, оттесняя его от этой поверхно-
сти. Возникает явление, связанное с кажущимся «утолщением» обтекае-
мого тела на величину, равную толщине вытеснения б*. В силу этого
несжимаемый поток увеличивает свою скорость по сравнению с обтека-
нием того же тела идеальной средой. Такое увеличение скорости и при-
водит к снижению давления (см.. рис. 2.1Х.4).
!Х.23. Слабые волны возмущений ] (рис. 3.1Х.14)‚ Достигающие
скачка уплотнения 2, взаимодействуют с ним и искривляют его образую-
щую, начиная с точки А. В эту точку падает первая такая волна, исходя—
щая из точки С, где прямолинейная образующая тела переходит в кри-
волинейную. На криволинейном скачке уплотнения, в силу того что
интенсивность его в различных точках неодинакова, происходит измене-
ние характера движения газа: вместо потенциального (безвихревого)
оно становится вихревым. Это приводит к увеличению аэродинами-
635
ческого сопротивления, так как на образование вихрей необратимо
затрачивается дополнительная часть кинетической энергии потока. Та-
кой эффект увеличения сопротивления связан с повышением давления
на поверхности тела по сравнению с его потенциальным обтеканием.
Проведенные расчеты показали, что учитывать вихревой характер
течения газа за скачком следует при достаточно больш их скоростях,
в частности при таких, которым соответствуют значения параметра
К1=Моо/Жмид> 1,5, Где Жмид=хМид/ (2гмид).
[Х.24. Ли…неаризация уравнений движения газа около тонких тел
вращения, движущихся под малыми углами атаки, заключается в при—
ведении нелинейных дифференциальных уравнений, не имеющих общих
решений, к линейному виду. Такое упрощение уравнений возможно, если
сделать предположение, что параметры возмущенного течения
около тонких тел мало отличается от соответствующих их значений
в невозмущенном потоке, т. е. можно записать, в частности, для состав-
ляющих скорости (в цилиндрических координатах), Ух=Уоо+Ух‚ Ут=
__- -У‚;У„‚= И„ а также для давления, плотности и скорости звука: р=
=р°о+р’‚ р= род—НУ, а= аоо—і—а’. Здесь: У…, рос, ооо, асю—параметры не-
возмущенного потока; Ух, "„ У„ , р’, р’, а ’——добавочные составляющие
соответствующих параметров, обусловленные возмущенным характером
течения. Значения этих составляющих являются такими по величине,
что Ух<< Усс, У‚<< Усс, Ут<< У…, р’<<роо‚ р’<<роо‚ а’<<аоо.
Аналогичному условию должны удовлетворять добавочный потенци-
ал ср’ в выражении для его полной величины ‹р=сроо+ср’, т. е. (р’<<сроо.
При этих условиях нелинейное уравнение для потенциальной функции,
д2ф д2ф 1 д_2ср
(736—02); + (73—02) д? + 30,33 _“2)— д„а +
дд], _1/‚(а2 +113) _0
д2ф __ д2ср _
+21/ху'дятс-дг—1—2"‘УУ"дх-д'\гЁ+ "]?дг-ду г
линеаризуется, т. е. преобразуется к виду
_ 2 _ &' даа _1_.д‹р’= х 3.
(1 Мф) дх2 дг2 + г ду2 + г дг 0. (3.1 .1 )
Это уравнение, линейное относительно искомой функции (р’, составляет
теоретическую основу аэродинамики стационарных слабовозмущенных
(линеаризованных) течений около тонких тел вращения. В силу ма—
лости возмущений перед тонким телом не возникают скачки уплотнения;
вместо них в потоке наблюдаются лишь слабые волны возмущений (ли-
нии Маха).
!Х.25. Потенциал скоростей в случае линеаризованного обтекания
тонкого тела вращения можно записать в виде ср=сро°+ср’‚ где ср’—доба-
вочный потенциал скоростей возмущенного линеаризованного потока
(потенциал возмущения); (р… —потенциал скоростей невозмущенного
потока. В свою очередь величина ср’ может быть представлена в виде-
суммы (рис. 3.1Х.15):
Ф’ = Ф; + Ф;, (3.1Х.14)_
где функция (р1(х‚ г) представляет собой добавочный потенциал ско-
ростей возмущенного осесимметричного течения, а ф? (х, г, у) —допол-
нительную составляющую возмущенного потенциала, обусловленную
поперечным обтеканием. Таким образом,
ср : сроо + ф; (х, г) + (р; (х, г, у). (3.1Х.15)-
В теории линеаризованных течений (р; и (р; рассматриваются как функ-
686
‚ции, которые, являясь решениями уравнений движения, определяют не-
зависимые друг от друга потоки.
[Х.26. Сущность метода источников заключается в замене обтекае—
мого тела системой непрерывно распределенных вдоль продольной оси
источников и стоков. Закон распределения источников и стоков должен
быть таким, чтобы в результате наложения невозмущенного потока на
течение от этих источников одна из линий тока суммарного потока сов-
пала бы с образующей тела вращения. В этом случае параметры течения
будут такими, как при обтекании реального тела вращения.
а: 33 .
к _
+ @
‘Р : (РФ: (“+ (Р; %: ф‚'(ш‚г')
Рис. З.1Х.15. Тонкое тело вращения в линеаризованном потоке
под малым углом атаки:
а —— несимметричное Обтекание; б — осесимметричное Обтекание; в — доба-
вочное поперечное Обтекание
]Х.27. Исследования показывают, что применение линеаризованных
методов расчета обтекания тел вращения дает удовлетворительные ре-
зультаты, если параметр подобия К1=М°°Ммид< 1. Таким образом, если
число Моо возрастает, то может наступить такой момент, когда для за-
данного тела вращения с удлинением МШД применять линеаризованный
метод будет невозможно, так как в потоке появятся не слабые, как это
предполагает теория линеаризованных течений, а сильные возмущения
(скачки уплотнения) .
1Х.28. Коэффициент давления в ‚некоторой точке А (г, х) образующей
тонкого тела вращения (см. рис. 2.1Х.6)
' ‹1 "2-2
Б: 1 (из,— бх "‘ + 3х "‘ )—р2. (3.1Х.16)
жіид и и2
…Здесь
Мид : хмид/(2гмид) : 10/(2-0,5) : 10;
Б: сіг/сіх : (1 —х/хм„д)/7»мид = (1 —х/10)/10,
а функция
: х/(гос’) :; х/ (‚ 1/м30 _1 \ : (х/'г)(1/1/22— 1) = 0,578х/г.
Принимая во внимание, что
г = х (2 —х/хм,.,д)/(2?ьм„д) : (2 — х/10) х/20,
найдем
и =11,56/(2 — х/1О).
В частном случае при х=0 (коническое острие) значение этой функции
и : ик =11,56/2 = 5,78,
а у донного среза, где х=10‚ величина
и : ид : 11,56/(2— 1) = 11,56.
637
Таблица З.НХВ
___-‚"'
и :'2 іі іі }} 132 ;, 72
6,0 2,478 8,953 37,21 0,073 0,0086 0,0346 0,0197
6,6 2,575 10,47 48,86 0,248 0,0057 0,0243 0,1888
7,2 2,663 12,04 62,37 0,394 0,0037 0,0156 0,4004
8,4 2,818 15,33 95,18 0,624 0,0014 0,0024 0,737!
9,4 2,932 18,21 128,7 0,770 0,0005 —0,0055 0,8971
10,6 3,052 21,80 176,7 0,909 0,000] 40,0123 0,9833
11,56 3,140 24,77 221,3 1,000 0 —0‚0160 1,0000
5-10?
4 Р
11 7,2
@
’! Г : 0 1 1 т ь 1111
' 0,2 0,0 0,5 0,0 :,0 5
Рис. 3.1Х.16. Графическое определение ко- Рис. 3_1Х_17_ Графическое
эффициента волнового сопротивления те- определение коэффцииента
ла вращения: нормальной силы:
__ Г' _3 . _ __ —2 . _ ——= . —31 л_‚ ' _: _21’ /'
ир —0,о.10 1/мм, „72 _10 1/мм, ”$ _0‚5>< ”с 2 10 /ми‚ их 10 _‚мл.
><10—51/мм2; $=2350 мг „8 =2—10_5 1/мм2; $=1о 550 №2
Выберем ряд значений и в интервале 5,78<и<11,56 и определим
.О '1 2
для каждого из них по табл. Х1-2-1 [21] величины мы И,» 1 . а затем вы—
числим значения х=х/10, используя уравнение
х =х/10= 2—11,56/и.
‹: — 2
Одновременно наидем безразмерную величину г2=г2/гмид , применив
уравнение
изво—ва
а также определим квадраты углов:
62 :: (1/100) (1 —х/10)2.
Все результаты расчетов вносим в табл. 3.1Х.3.
Используя зависимость (3.1Х.16), найдем р (см. табл. 3.1Х.3), а за-
тем вычислим коэффициент волнового сопротивления:
1
ХВ _ _
0 == —— = сіг2.
хв (70° Змид Яр
О
Величина этого коэффициента, получен-ная графическим интегрирова—
нием (рис. З.1Х.16)‚ схв=р5$=0‚0118.
638
Соответствующая сила сопротивления (для условий полета вблизи
поверхности Земли)
ХВ: О,Бсхвігр°о М2 нг? _ —‚05 0,0118 141033 104. 2251: О‚=52 27ОкГ.
мид
ЦХ.29. Коэффициент волнового сопротивления острого конуса может
быть найден по формуле [20]:
схв=ві[21п(ик+ъ/иі—1)—1]‚
где
„к:—Ацы… =1/[,/м_2__—1(г мид/х /х)]=11‚.55
Таким образом,
С,… = (1/20)2 [2.2303 18 (11,55 + 1/1—1Т5—5ЁТ) __ 1] : 0,01328.
Соответствующая СИЛЗ СОПРОТИВЛЕНИЯ
ХВ = 0,50хвігроо м2 ж? =0,5.0‚01328-1‚4.1,033.104-22.л.о,52=292‚3 кГ.
МИД
ПХ.ЗО. Коэффициент нормальной силы тонкого тела вращения будет
равен согласно линеаризованной теории [20]
1
№ 4ос’ос - . 6)? . 2 . ` —
с = = [г (212 —-— 1}+З_’5_ 12 )сіх. (3.1Х.17)
и “2
№
р 000 Змид [”МИД
Здесь:
Жмид : хмид/(2гмид) == 10/(2о0‚5) = 10;
ос’: 1/м2 —1==1/22—1=1‚73;
и : х/(ос’ г): :‚х/{1 73 [гмидх(2— х/хмид)/хм„д]} : 11,56/(2 —х/1О).
Функции і„ і„ ЁЁ находим из табл. Х1-2-1 [22] в зависимости от па—
раметра и. Для острия тела (х=0) этот параметр и=ик=5‚78‚ а для
донного среза (х=10) значение и=ыд=11‚56.
Функции іО і1‚‚ і; ‚ найденные для значений и, расположенных в ин-
тервале 5,78 <и< 11 ‚56, приведены в табл. 3.1Х.4.
В табл. 3.1Х. 4 приведены также относительные координаты
х= х/хмид‚ Найденные по уравнению_ 36: 2—11 ‚бб/и, и соответствующие
безразмерные радиусы г=х(2—х). По этим данным вычислены
функции
_ .?
— 4ос’ос _ . 6х ., —- 1
в: г(212—— ъг+8х2—')
и и2
мид
при условии, что
’ 4ос’ос/Жмид = 4.1,7з.о‚1 /10 : 0,0692.
Используя значения функции с, представленные в табл. 3.1Х.4‚ вычисля-
ем при помощи графического интегрирования (рис. 3.1Х.17) коэффици-
ент нормальной силы:
1
=. 53.4; : „83:2.10—5.10550==о,211.
О
Соответствующий коэффициент момента, определяемый относительно
поперечной оси, проходящей через острие, определяется для тонкого те-
ла вращения по формуле [20]:
639
Таблица31Х4
„ $2 ;} іі _„ 7 7 'с:
5,78 0 0 0 0
6,0 5,916 16,51 60,07 0,075 0,144 0,106 0,0020
6,6 6,524 20,24 82,08 0,250 0,438 0,267 0,0169
7,2 7,130 24,34 108,8 0,395 0,634 0,318 0,0314
7,8 7,736 28,80 140,6 0,519 0,770 0,311 0,0404
8,4 8,341 33,62 178,1 0,623 0,858 0,277 0,0432
9,0 8,944 38,80 221,4 0,715 0,919 0,227 0,0405
9,4 9,348 42,47 253,6 0,770 0,948 0,190 0,0366
9,8 9,751 46,29 289,5 0,820 0,968 0,158 0,0324
10,2 10,15 50,26 328,0 0,867 0,982 0,122 0,0264
10,6 10,53 54,40 369,8 0,910 0,995 0,0792 0,0181
11,0 10,93 58,68 415,0 0,950 0,998 0,0539 0,0128
11,56 11,52 65,03 485,0 1,000 1,000 0,0097 0,0024
1
: __ _ _2 .
т-: — °… 5хг(2іЭ—ЁС— 13+ зі 1% )сіх.
" 2
мид и и
_ , Вводя обозначение
01'10 _ __2 2
__ . 6х . х і
: 0 — — 1 3 —'
#20 _ 01 мид ХГ (21, и 1, + “2 ) ,
3,5 _ найдем
1
532“ тг = _бУсгсіх.
2,8 —
Вычисленные значения с1 показаны в
274 _ .
табл. 3.1Х.4. Используя эти значения и осу-
дд _ ществляя графическое интегрирование (рис.
3.1Х.18), находим
1,6 — _
т, = —„,$ = —2.10 6.12100 = —о‚0242.
д2_.
Полученным аэродинамическим коэффици-
0,8 _ ентам соответствуют нормальная сила
О:“ ‘ № = 0,50” ігроо МЗ, лгаид = 0,5-0,211-1‚4 Х
1 | | 1 4 2 2 _… 3
0 0,2 дд 0,6 0,8 1,0 :? ><1,033-10 .2 -л-0,5 __ 4,64010 кГ
Рис. 3.1Х.18. График для оп-
ределения коэффициента мо-
мента:
=О ' —=10_2 ' —=
со ‚1, их 1/мм, 1101
___—2.10—4 1/мм; 11$ =2-10_61/мм2
и момент
_ 2 2
М2 _— 0,5тг ігри М… Шмид х
Х0,0242-1,4о1,033- 104.22-л-0,52-10 :
=— 5,32-103кГом.
——О,5><
мид _
$=121оо мм? „
По наиденным значениям т„ и см опре-
деляем коэффициент центра давления:
Сц.д =— тг/с№ : 0,0242/0,211 = 0,1146.
1Х.31. Коэффициент осевой силы тонкого конуса, движущегося под
малым углом атаки @, найдем по формуле [20]:
сК=БЁ[21п(ык+1/иі—1 )—1]—ос2.
640
Здесь: а=0,1; Вк=гмид/хмид=0,5/10=0,05;
ик :… 1 /(ос’[’›) : хмид/ (гмид / дЁ—Т) =10/(0‚5 1/ ??:—1) = 11,55.
По этим величинам находим
сд : 0,052 [2.230313 (11,55 + 1/№) _ 1] _ 0,12 : 0,00328.
Соответствующий коэффициент нормальной силы
с„ : 206/50, ‚д;—1: 21/22——1'.0,1.0,051/ГГ,'55Т—_= 0,199.
Переходя к поточным координатам, определим коэффициенты сопро-
тивления и подъемной силы:
сх : сд + смос : 0,00328 + 0,199-0,1 : 0,0232;
су : См— он ос :: 0,199 — О,ООЗ28—0,1 : 0,198.
Соответствующие сопротивление и подъемная сила будут следующими:
Х : 0,50хігроо МЁО лгёид = 0,5—О,0232—1,4—1,033—104—22-згъ—0,52 = 51ОкГ;
У : 0,50уігрю М?” лгЁШд : 0,5-0‚198-1,4-1,033—104-22-п—0,52 = 4350 кГ.
Коэффициент центра давления конуса
спд : 2/3 (1 + 6$) = 2/3 (1 + 0,052) : 0,668,
а коэффициент момента относительно поперечной оси, проходящей через
вершину,
т2 : —сЦ_д с“ = — 0,668-0,198 : ——0,1З22.
Соответствующий момент
Мг = 0,5т2 ігроо МЁО лгіид хк =: — 0,5-0,1З22-1,4-1,033 ><
>< 104-22—л—0,52— 10 = —29 030 кГ-м.
41 -—927
Х. ТРЕНИЕ И ТЕПЛОПЕРЕДАЧА
Х. 1. По таблицам атмосферы [31; 50] определяем для заданной высо-
ты Н=1О км параметры воздуха: рд =О, 2701 кГ/см2; рд =О, 04217кГ><
Хсек2/м4; мд =3, 52 10—5 м2/сек; Тб =22З ,2К; ад =299, 4 м/сек; пор б=
=28,97_ Найдем число Маха свободного потока: Мд =Уд /ад =
= 700/299‚4 % 2,34.
Вычислим длину ламинарного участка хлам из условия, что
Кекр — ——Уб хл`:м/\76 = 105,
откуда
= 105уб/Уё =:105-З,52-10:5/700:= 0,503—1О_2м_
отношение ТОЛЩИН ПОГРЗНИЧНОГО СЛОЯ на ЛЗМИНЗРНОМ участке
іж__ =1( +Ё—_1МЁ)(1+—МЁ)Л—_1. ‹з.х.1)
бнсж
ЗДеСЬ ДЛЯ несжимаемой ЖИДКОСТИ
д…,ж— _ ьднсж— _ 4,64х1/2 {две;/2, ‹з.х.2)
где Я: х/Ь; ке,: УдЬ/уд.
Приняв Ь=хлам—длине ламинарного участка, будем иметь Кеь=
=Кекр= 105 и, следовательно,
4 . о .10—2 — _ —
бнсж : ‚64 0,5 3 х1/2 : 7,38—10 5 _х1/2 М.
006)“2
Полагая п=0,76, іг=ср/с„= 1,4 и учитывая, что Мб =2,З4, получим
0,76—1
бсж=(1+14_12‚°2342)(1+1442,342) ? 738-10—53”:
= 11,6.10—5—31/2м.
В конце ламинарного участка (76=1) бсж=11‚6-10—5м.
Отношение толщин для Ма =2,З4
бНСЖ
_бс—Ж— _°(1+'43—12‚342)( ‚)0_7Ё_ =1‚57.
Как видим, сжимаемость приводит к увеличению толщины слоя
на 57%.
ДЛЯ напряжения трения имеем ЗЗВИСИМОСТЬ
п—1 0,76—1
№=(1+ЕЁМЁ)°Т=(1+1°4:12342)" _0‚912.
(Тст)нсж
В соответствии с этим результатом напряжение трения в сжимаемом
потоке уменьшается. Для несжимаемой жидкости
(ТСТ)нсж : 032396 УЁ 1/_;_ :
: 0,323—4217—10—2-7002 10_4 ____ 6___6‚ 8 10—2 КГ
УЕ УКех №2
где Кех= Уд х/у @ =700-х/(3,52- 10—5) = 1,99- 107-х, причем
0<х<хлам°
642
Таким образом,
17 ) 66,8-10—2 60,9.10—2 КГ
(Тст)сж : Щ (тет)нсж : 0,912 ___—_— : ___—$2— .
(тст)нсж Упс,; УКех
Для конца ламинарного участка (х.=хлам)‚ где Цех=Некр= 105,
(тет)сж=6о‚9— 10—2/1/№= 19,3. 10—4 кГ/смг.
Отношение местных коэффициентов трения
(07Х)СЖ/(сіх)нсж : (тст)сж/(Тст)нсж : 0,912-
Здесь
(Сіднсж : 0’646/1/к—ех : (тсТ)нсж/(рб УЁ)’
поэтому
(сіх)сж= 2 (Тст);ж : (Сіх)сж (сіх)нсж : 0,912 ОЁЁ : 0,589 _
рб Уб (Сіх)нсж Ъ/кех Укех
“‹ В частности, для конца ламинарного участка
(с;х›сж= 0’5'3 =1‚86—10—З.
1/105
Средний коэффициент трения на ламинарном участке
п—1
іг — 1 ——
‹схдсж = (сти…, (1 + Тмг,) 2 - ‹з.Х.з_›
Здесь
(тыж = 1 ‚29/1/53; (з.Х.4)
Так как Ь=хлам, то Кеь=Кекр= 105 и
(сх‚›нсж= % = 4,09—10—3‚
105
отсюда
0, 76—1
(ах,),ж = 4,09-10—з (1 + “2—1 2,342) 2 : 4,09.1о—3.о,912 : 3,7з.1о—8.
Сила трения, создаваемая обеими сторонами пластинки,
Х —2 $ ——2 Щётёя —
ілам_ схіаб пл —' Сх; 2 хлам—
= 2.3,7з.10—з "403312342 1.0‚5оз.1о—2.104=: 0,385к1`.
Х.2. Определим параметры атмосферы на высоте Н=1О км и число
Мд=700/299‚4=2‚34 (см. задачу Х.1). Из решения задачи Х.! имеем
длину ламинарного участка х№м=0,503-10—2 м. На длине пластинки
х(хлам<х<!э) пограничный слой будет турбулентным. При расчете па-
раметров этого слоя исходим из предположения, что турбулентный
поток начинается у передней кромки. Местный коэффициент турбулент-
ного трения определяется по формуле Дородницына:
0,242 : `/ іг—1 ,
—— 1—і———М 19 Кех схсж—
1/(Сіх)сж 2 б { [ ( і ) ]
іг—1
_ 1119 (1 + —2— мд) + 0,33} . ‹з.х.5)
\
41 * 643
Внося сюда значения Мб =2‚34‚ 13: 1,4, п=0‚76, получаем
14
//г ’ _1
0,242 : у 1+ 2 2,342{18[кех(сіх)сж]_
1/(сіх)сж
_ 0,7619(1 + "42“ 2,342) + 0,33}
или
0,168/1/ ((,—„)„Ж : 18 [не, (с„дсж] + 0,09. (3.Х.6)
В качестве первого приближения определяем (спс)…н из формулы
21‹2
(Сіх)сж :: ° (3…Х7)
13—1
41 +ТМЁ)
Примем здесь 2: 10 и К=О‚391:
20,3912
(СГХ)СЖ : _ ‚ 1,4__1
102(1+ 2
После подстановки этой величины в правую часть (3.Х.6), положив
Кех= 106, найдем
0,168/1/(с‚,),ж : 18 (106000147) + 0,09 = 3,26.
В соответствии с этим во втором приближении получим ( ст) сж=0,00266.
Произведем повторную подстановку в правую часть (3.Х.6):
0,163/‘1/(с‚„)сж =; 19 (106—0,00266) + 0,09 = 3,52.
отсюда (С]:ЭС) сн{:0‚00227.
Осуществляем еще одно приближение:
0,168/ исты, : 13 (106000227) + 0,09 = 3,45,
откуда ( Стх)сж=0‚00237. На этом приближения можно закончить. Ко-
ордината точки пластинки, которой соответствует эта величина коэффи-
циента трения, находится из условия
пе, = Удх/уд : 106 : 7ООх/ (3,5210—5),
СОГЛЗСНО КОТОРОМУ
х : (106—3‚52.10—5>/700 = 00503 м.
Аналогично можно найти знач-ения ( еж)СЖ в других заданных точках
турбулентной зоны обтекания пластинки. Соответствующие значения
толщин пограничного слоя находим из формулы
іг — 1 МЁ
— беж 0,212} 2 2 2
беж : = 1— — (1— + Т) . (3.Х.8)
2
м0
: 0,00147.
2 342)
Ь гсж 1 + 13"— 1 2сж ;
' 2
СЖ
Величину гсж определяем из (3.Х.7) по значению (сд)сж=0,00237:
21‹2 2.0 12
= 3 1 : 13 94 1 : 7’85'
(сіх)сж(1 + — мЁ) 0,00237 (1 + —’2—— 2,342)“
ЗОЖ
2
Имея в виду, что безразмерная координата
} : х/Ь : 0,0503/5 : 1,0.10—‘і
644
получим
_ 2
— беж __0‚212.1.1о—2 1 2 (
:: _ _ 1,4—1
” 7’85 1+-——2 2,842
СЖ
7 ‚85 7,852) :
=0,16—10_3.
Аналогично находим толщины для других точек пластинки.
Для сравнения определим на расстоянии от передней кромки х=
=0‚0503 м коэффициент трения и толщину слоя в случае несжимае—
мой жидкости:
№№ (№№ = 19 [не, «:„мн + 0,33. (МБ)
Задавшись гноя,: 10, находим в первом приближении
(с”)нсж = 218/23СЖ : 2-0,3912/1О2 =: 0,00306.
Внося это значение в правую часть (3.Х.9), подсчитаем для Цедс=106
во втором приближении
0,242/Ъ (см)нсж : 18 (106- 0,00306) + 0,33 = 3,82,
откуда ( сіх)нсж=0‚004. Затем проводим следующее приближение:
0,242/1/ (вы)нсж == 13(106-О,ОО4) + 0,33 = 3,93,
согласно которому (сіх)нсж=0,00378. Наконец, последнему прибли—
жению
9,242/1/(57)? : 18 (106-О,ООЗ78) + 0,33 = 8,91
соответствует величина ( Сіх)нсж=0‚00382- По этой величине находим
г…,ж = КУ№ : 0,891 У№ = 8,98
и относительную толщину слоя
— _ _ 0 . ‚ . _? _
бнсж : бнсж : 0,212х : ‚212 1 0 10 : 0235.10 3.
Ь 2нсж 8,98
Рассмотрим применение закона «корня седьмой степени». Относи-
тельная толщина слоя в несжимаемой жидкости
б„сж— _ б…,/Ь: 0 3,7 х/ке“°.
Для заданного Цех=106 и соответствующей величины Ё=х/Ь==
=0,0503/5=1,0- 10—2 найдем
б,.сж/ь = 0,37-1,О-10_2/(10 6)“5 = 0232-10—31
Местный коэффициент трения
(сыт„ : 0,0598’Кех1/5 =: 0,0598/(106)“5 :- 0,00378.
Средний коэффициент трения пластинки на указанном участке Ь—хлам
(см. рис. 2.Х.1)
_ 2Х;НС-‚к _ О, 0598 ’? __
(Схі)нсж _ 2 _ ` 1/5
рд Уб (!)—хлам) 1 _хлам х., Нех
хлам
1 __
0,0598 5 (іх __ 0‚075(1—хЁ/5)
(1_ Здам) КеЁ/5_ 21/5 (1——хлам … № '
хлам
84.5
Так как першу/„д : 700-5/(3,52-10—5)%108И Елам=хлам/Ь=о‚5оз><
>< 10—2/5= 1,0. 10—3, то
_ 0,075 [1—(1‚о-1о—3)4/5] _ _3
(сх/)нсж _ ` _ . —-З 81/5 “_1›88'1О °
(1 1,010 )(10)
С учетом сжимаемости
—3
(Схі)сж : (схі)нсж (1 + 0,12 “@)—“2: 1,88… = 1,46'1О_3-
(1+0‚12_2,342)1/2
Сила трения турбулентного участка пластинки
Хіт : 2 (схі)сж аб Зил : 2 (схі)сж
= 24,46-10'3"4'0'2201'2'3421‹5—0‚00503)104 = 151 кг.
2
№„,_, _
2
лам) _
Сложив эту силу с величиной сопротивления трения на ламинарном уча-
стке (см. задачу Х.1), получим полную силу трения:
Х, : Х]:лам + Х„ : 0,385 КГ —|— 151 КГ ъ151кГ.
Х.З. Определяем по таблицам [31; 50] параметры воздуха на высоте
Н=20 км: рд =5,636-10—2 кГ/см2; рд=0,9062- 10—2 кГ-сек2/м4; Тд=216‚7 К;
ад =295,1 м/сек; „Срд =28‚97; цб =1‚45-10—6 кГ-сек/м2. Число Маха
Мб =Уд /ад =4000/295‚1%13‚55.
Находим определяющую энтальпию:
і* : 0,5 (іст —|— ід) + 0,22 (і, — ід). (3.Х.10)
Так как, по условиям, стенка теплоизолированная, то энтальпия газа
у такой стенки равна энтальпии восстановления, т. е.
. ›_ . _ о 2
ъст _ гг __ 16 + гУб/2. (З.Х.1 1)
Примем для ламинарного течения глам= УЁГ, где при высоких темпера-
турах число Прандтля Рг=0‚64. Поэтому глам= 1/0‚64=0‚8. Далее
примем (ср5)т=216‚7к =0,24 ккал/(кГ-град). В соответствии с этим
Т6 3А=0‚24-216,7-9,81 о427:0,218-106 м2/сек2.
16 : (Срд) Т=216‚7К
Следовательно, используя (3.Х.11), найдем
і, = 0,218-106 —|— 0,8 (40002/2) : 6,62 -106 м2/сек2.
Определяющая энтальпия
і* : 0,5(6,62-106 + 0,218—106) + 0,22 (6,62- 106 — 0,218 - 106) =
= 4,83- 106 м2/сек2.
Из таблиц [17] по этому значению Р‘“ и раз=5,636-10—2кГ/см2 находим
с учетом диссоциации определяющую температуру Т*=2940 К, а из
[33] — средний молекулярный в-ес цср=26,95.
Вычислим отношение толщин пограничного слоя в сжимаемом и не-
сжимаемом потоках:
№1 № 0,76+1
беж Т* 2 нерв 2940 "_2' ' 28,97 “2
=( > ( ) =<—> (—› =
бнсж 75— ”гр 216,7 26,95
Так как
бнсж : 4,64 Эдика/2, } = х/Ь,
646
а число Рейнольдса
% рд Ь 4000—0,9062-10_2-5
м6 1,45-10—6
==1‚25-108‚
ТО
бнсж = 4,64—31/2-5/(125—108)“2 = 2,0710—3 2%.
Следовательно,
беж = 10,1 -2,О7-10_3)_с1/2 = 209-10—23?“2 м.
В конце пластинки, Где х=х/Ь=1, бсж=2,О9-1О—2м=2,09 см.
Отношение местных коэффициентов трения
п—1 0,76—1
(стс-‚к : (7337 ( игр)“; (2940) 2 (26,95)1/2___ О 695
(сгх)нсж То Мерв 216,7 28,97 ’ '
Имея в виду, что
На 0,646 __1/2
с = 0,646 1/ - = _ х =
( іх)нсж Уб ‚06 х УНЧ,
ТГ“? = 0,577 . 10—4Я—“2,
__ 0,646
1/ 1,25108
найдем
(с„дсж = 0,695 (с„днсж = 0,695—0,577-10—4324/2 = 0,401 - 104%“?
В частности, у задней кромки пластинки (Ёе: 1) (Стх)сж=0‚401 - 10—4.
Отношение средних коэффициентов трения
п—1
(Схі)сж : (Ё)? ( игр)“? : О 695
(схг)нсж Тб ”Срд , .
Так как
(с„_г).…ж ——— 1,29/1/ЁЁЬ = 1,29/1/ №= 1,15.10"4‚
ТО
(сх/‚)сж = 0,695 (ох,)„сж = 0,695-1,15-10—4 = 0,8.10—4.
Сопротивление трения обеих сторон пластинки
= 2—О‚8—10_41’4°563’6`13’5525—1 = 58 кг.
Х/сж : 2 (схі)сж (76 'Зпл
Для сравнения определим сопротивление трения без учета сжимае-
МОСТИі
\ ` 1
Х =Х № =58— =8з,4к‚г.
інсж ‚СЖ (схі)сж 0,695
Х.4. Для решения задачи используем параметры воздуха на высоте
Н=20 км, приведенные в задаче Х.З. Примем число Прандтля Рг=0‚64
и определим коэффициент восстановления для турбулентного течения
Гт= / Рг=0,862, а также энтальпию газа у стенки, равную энтальпии
восстановления:
у?
7, = ід + г,?5 = 0,216-106 + 0,8621103—02 = 7,11-106 м2/сек2,
где значение ід взято из решения задачи Х.З.
647
Определяющая энтальпия находится по (З.Х.1О):
і*=0‚5 (7,11 -106 —|— 0,218-106) + 0,22 (7,11-106— 0,218—106) :
: 5,18-106 м2/сек2.
Из таблиц [17] по этому значению определяющей энтальпии Р‘“ и давле-
нию рд=5‚ 636- 10—2 кГ/см2 находим определяющую температуру Т*=
=ЗООО К и средний молекулярный вес [33] Нср=26› 67.
Толщину пограничного слоя с учетом диссоциации определяем из
выражения
п+1 0,76—|—1
беж Т:]: \—5 , “’срб \ 1/5 [3000 5 28,97 __1/5
_: _) п— ==ж——) (——‚= =2‚55‚
бнсж Тб ”ср ‘216‚7‚ 26,67 _.
5
до 4/5 6 > 0,37 —4/5
Где бнсж :: 0737і/Уб рб Х ; НЬСК : (Кед)1/5 Х '
Значение Кеь=1,25- 108 (см. задачу Х.З). Поэтому
бы „ 0,37 —4/5 —2 /5
Ё=№х =0’89'10 "‘
Таким образом,
беж : 2,55.бнсж =_= 25550394045)?” : 11,4.10—252‘“5 м.
В частности, на задней кромке (1—6= 1) бсж=11‚4- 10—2 м.
Отношения местных и средних коэффициентов трения
п—4 4/5 0,76—4
_(____с;х)сж __ (___схтж _(Т_*)5 _(игср) _(3000) 5 (26,67)4/5= 0,170.
(сіх)нсж —(Схі)нсж Тб ; Цсрб \216 , 7 28 ‚ 97
Здесь ДЛЯ НВСЖИМЗЭМОЙ ЖИДКОСТИ:
— — 5 Н 1/5 ——1/5
(сіх)нсж : 0,0898Х “ (__—б) : № :
Уб Рв (Кед)1/5
= —9’————°598 х_“Б— __ 0,144 10—24: 4/5
(1,25-108)“5 ’
0,075 0,075 _2
(Сх/)нсж : __ = __ : О,18°1О .
(Кед)1/5 (1 ‚25. 108)“5
СИЛЗ- СОПРОТИВЛЕНИЯ ТРЭНИЯ, СОЗДЗВЗЕЁМЗЯ ВЕРХНЭЙ И НИЖНЭЙ СТОРОНЗ-
МИ ПЛЗСТИНКИ, равна ДЛЯ Н@СЖИМЗЗМОЙ ЖИДКОСТИ
Х : 2 (%;)нсж (‚бэнд =2—О‚18-10_21’4'563’6°13’552 5.121300 кГ,
інсж
& ДЛЯ СХСИМаеМОГО газа
Хісж : Хіпсж [(Схі)сж/(Схі)ксж] : 1300'09170 : 221 КГ-
Х.5. Для решения задачи используем параметры воздуха на высоте
Н=1О км, приведенные в задаче Х.1. Определим число Маха: Моо=
= Усс/асо=5000/299,4 % 16,7.
По таблицам [23] находим параметры невязкого потока на поверх—
ности конуса, которые принимаются такими же, как на внешней границе
пограничного слоя: Уб =Угк_= —°651 м/сек; іб =ік =6,06 106114;2/сек2 рд :
=рк =49‚5 кГ/см2; рб == рк=0‚41 КГ век?/м4- , ТдшТ =4090 К; 86 :
=8к=9610 м2/(сек2-град); „рд =27‚70.
К
648
Далее ВЫЧИСЛЯЭМ ОПРЗДЭЛЯЮЩУЮ ЭНТЗЛЬПИЮЗ
і* .= 0,5 (іст + 126) + 0,22 ($, — дб).
Так как, ПО УСЛОВИЮ‚ ПОВёРХНОСТЬ ТеПЛОИЗОЛИРОВЗНЭ, ТО ЭНТЭЛЬПИЯ газа
на СТЭНКЭ равна ЭНТЭЛЬПИИ ВОССТЗНОВЛ6НИЯ, Т. е.
іст = і, = ід —|— гУЁ/2.
ПринтЗ/тая число Рг=0,64, найдем коэффициент восстановления гдам=
=]/0‚64=0‚8. В соответствии с этим
іст = і, = 6,06—106 + 0,8-36512/2 = 11,4— 106 м2/сек2;
тогда
і*=0‚5 (11,4-106+6‚06- 106)—|—0‚22 (11,4-106— 6,06—106) = 9,89— 106 м2/сек2.
По этому значению энтальпии и давлению рб =рк;=49,5 КГ/см2 найдем
из таблиц [17; 34] определяющую температуру Т*=5475 К и средний
молекулярный вес воздуха ”:р =25‚16
Произведем расчет ПОГраНИЧНОГО СЛОЯ ДЛЯ ПЛЗСТИНКИ ПО парамет-
рам СВОбОДНОГО ПОТОКЭ на КОНУСЗ. Отношение местных ТОЛШИН ЛЭМИНЭР-
НОГО СЛОЯ
п+1 0 76+1
б… _ Ц)? ”спб 1/2… (5372) . 2 (Ш))1/2—136
днсж (тд „:р 4090 25,16 ' ’
а отношения местных и средних коэффициентов трения
(вы)сж : (схдсж : (Е) 2 ( мер) : (№) ? (№“: 0,915
(Сіх)нсж (Схі)нсж Тб ”срб 4090 27,70 .
Проведем аналогичные расчеты для турбулентного пограничного
слоя. В этом случае гт=Ё/Й_4=О‚862 и, следовательно,
іст = і, = ід + гтУЁ/2 = 6,06—106 + 0,862-36512/2 = 11,8-106 м2/сек2;
П“ = О,5(11‚8-106+6‚06— Шен—0,22 (1 1,8-106 — 6,06—106) = 10,2-106 м2/сек2.
По этому значению энтальпии и давлению рд =рк=49‚5 кГ/см2 нахо—
дим из таблиц и графиков [17; 33; 34] определяющую температуру
Т*=5600 К и средний молекулярный вес „:р =25,0.
Отношение местных толщин турбулентного пограничного `слоя
п—|—1 0,76+1
беж _(Ё)_5 нерв “5_(Е№) 5 “(27,70)“5_1 14
б…„к Тб „:р 4090, 25,0, ’ '
Отношения соответствующих местных и средних коэффициентов
трения
п—4 0 ‚ 76—4
“теж : (Сх/‘)сж =(Ё)Т ”:р 1’5= (№) 5 (25,0)“20751.
(Сіх)нсж (сх;)нсж Тв „Срд 4090, 27,70
Определим области ламинарного и турбулентного пограничных сло-
ев на конусе. С этой целью найдем критическое число Рейнольдса.
Из графика [20] видно, что это число является функцией числа Мб =
=Уд/ад и относительной температуры стенки Тст=Тст/Т‚.. Скорость по-
тока Уд=3651 м/сек, а скорость звука ад=1214 м/сек определяем из
таблиц [17] по іб=6‚06- 106 м2/сек2 и рд=49‚5 кГ/см2. Следовательно,
М6=Уд/ад=3_651/1214=3,01. По этому значению Мб и относительной
температуре Тст=Тст/Тт=1 находим [20] Кекр%3‚8- 106.
42—927 649
Теперь можно найти длину хлам участка конуса, занятого ламинар-
ным пограничным слоем. Записываем:
кек]? : Уб хлам рб/Н‘б : 3,8. 106'
Здесь коэффициент динамической вязкости
„, = и… (т,/тю)”= 1,49—10—6 (4090/223‚2)°'76 = 13,23-10—6 кГ-сек/м2.
Имея также в виду, что Уб =3651 м/сек, р 6 =0‚41 кГ-сек2/м4, получим
и 1 . —6
хлам: @ 3,8 1 6 _ 3,210
6 = _ _.2
1/6 рд —— 3651-0‚41 3,810 3,35 10 м.
На этой длине образующей погра-
ничный слой будет ламинарным, а
на остальном участке—турбулент—
ным (рис. 3.Х.1).
На ламинарном участке мест—
ный коэффициент трения, отнесен-
ный к скоростному напору, рассчи-
танному по параметрам сво60дного
потока,
сіхк : УЗ—Сіхпл : уЗ—[№](сіх) нсж :
_ (Сіх)нсж
21/3 0,915 (С]х)нсж:1›58(СТХ)НСЖ'
Для пластинки в несжимаемом по-
токе
Рис. З.Х.1. К расчету смешанного по-
_—1/2 ' _
граничного слоя на конусе: (сіх)нсж : 0›646'х „/ Ксд
! _- ламинарный пограничный слой; 1! —— турбу- ()?—Х/Х )
лентный пограничный слой _ лам ›
Где кед: Убрбхлам/Цб= К'екр=з›8' 106-
В соответствии с этим
(с„днсж = О,646—эЁ—1/2/1/3,8— 106 = 0,332—10—33—“2.
Тогда
(с„дсж = 1,58—О,ЗЗ2—1О_3-)_с_“2 = 0,526- 10—3-5—“2.
Соответствующий средний коэффициент трения
схік= уё— схіпл : 1/3— [$$$] (Схі)псж : /3— ' 0,915 (Схі)нсж :" 1›58 (СхГ)НСЖ°
Так как для пластинки
(с„,)нсж = 1,29/1/к—е, = 1,29/1/з‚8. 106 = 0,663—1О_3,
то
с„к = 1,58—О,663— 10—3 = 1,05.1о—3.
Этот коэффициент отнесен к скоростному напору Рв УЁ/2, рассчитанному
по параметрам свободного потока на конусе.
Коэффициент, отнесенный к скоростному напору набегающего по-
тока,
1/2 .
с = с % ° = 1,05.1о—3№2— = 5,44.10—3.
хі°° № 9… 1/30 0,04217.50002
Толщина пограничного слоя
дк = 0,578 в…„ (3.х.12)
650
где бпл=(бсж/бнсж)бнсж. При этом толщина бис… определяется по за—
висимости
: а…: 4,645” : 4,64і/2 : 4,642“2 : 2,3810—331/2.
хлам уке!) У/Цекр У 3,8.106
В СООТВ&ТСТВИИ С ЭТИМ результатом
б…, = 1,36 б.… ——— 1,36—2‚38- 10—331/2хлам = 1,36-2‚38-1‹гз ><
>< 335.104?“2 : 10,8—10_5)_с1/2м.
бн СЖ
В конце ламинарного участка (х=1) бШЛ=10‚8-10—5 м. Таким об-
разом, в конце ламинарного участка на конусе в соответствии
с (З.Х.12) толщина бК%0‚578—0,108=6,3- 10—2 мм.
Произведем расчет параметров трения на турбулентном участке.
Так как в точке перехода толщины ламинарного и турбулентного по-
граничных слоев равны, то
0,578.4‚64—хл… кегр1’2(——6°Ж ) : 0,523—0‚37—Ах век;/5%“) ‚
где Ах=О’П (см. рис. 3.Х.1) и
Уб Ах Уб рб
3651-0,41
кеАх— Ах =———————
„6 №; 13,210—6
Ах =1,13-108Ах.
Имеяв виду, что критическое число Рейнольдса Кекр=3‚8- 106, а хлам=
=3‚35- 10—2 м, получим
0,578—4,64-3,35-10_2 (3,8-106)_“2 1,36 : 0,523-0‚37 ><
>< Ах(1,13-108-Ах)_1’/5-1‚14‚
откуда Ах=О’П=З‚8- 10—3 114. Эта величина определяет расстояние от
точки перехода П до условной передней кромки пластинки (точка О’
на рис. 3.Х.1)‚ на которой пограничный слой полностью турбулентный.
Отсчет координаты хт в соответствующих формулах для параметров
турбулентного пограничного слоя необходимо вести от точки О’. Для
местного коэффициента трения на конусе имеем зависимость
с… = 1,17 с…… = … [№] ‹с‚‹х›нсж=1‚17-0‚751 (една : 0,879 ‹с‚х›„сж‚
(Сіх)нсж
где (с‚х)нс…=о‚_о598 5—“5/ (не…) “5 (Тс:х/Ьт).
Согласно рис, 3.Х.1
дт = (017) + (пк) : Ах—і— (хк _ х……) : 0,38-10—2 + (5—3,35-10_2)‚ъ4‚97 м
В соответствии с этим
Уб рб дт __ 3651 -о,41.4,97
из _ _1з‚2-1о—6
0,0598-2—1/5
(5,64—108)“5
не… : — 5,64—108;
(с„днсж : = 0,106. 10—2 ?“5 .
Таким образом, на конусе
с,… = 0,879—0‚106-10—2.}—“5 = 0,932-10—32—“5.
В конце конуса ()?: 1) Сіхн=0‚932' 10—3.
42* 651
Средний коэффициент трения
ад„ = 1,17 от„.„ = 1,17 [Ь—Схтж ](с„‚)„,ж— _ 1 ‚17 0, 751 ( с,)нсж =
(Схі)нсж
0,075
—3
(5,64.108)1/5 =1,17-10 _
= 1,17-О‚751
Отнесем эту величину к скоростному напору набегающего потока:
1/2
рд б =11710—3 0‚-41 36512
_ — —1О—3.
у? 0, 04217 50002 _б’Об
хік
Толщина пограничного слоя
бк : О›523 б =0›523 (беж/бнсж) бнсж : 01523 ' 1,14 бнсж : О›596 бнсж—
Далее находим
П Л
внж/д, = 0,37 24/5/(1ъэдт)“5 (Тс = х/Ьт).
Так как НеьТ=5,64- 108, Ьт=4,97 м, то
дне„ = 4,97 .0,37.}4/5/(5‚64-108)“5 = 3,27 . 10—2 34/5111.
Поэтому
а„ = О,596-3,27- 10—252“5 = 10510434511.
В конце конуса (‚Ё-=1) бн=1‚95- 10—2 м.
Определим средний коэффициент трения для конуса с боковой по—
верхностью $6:
8,71 8 8
_ лам ЗМ т1 _Т_1 т? тв
Схі— 'Схік— + Схік— 8—6 хік 86 '
Здесь:
03%? = ах,… = 5,44.10—3; с:}к = ох,… = 6,06-10_3:
Далее определяем
Уд рд Ах 3651-0 410 38-10—2
Нем = _— = ' ' = 0,431 -106
из 13,2-10—6
И НЗХОДИМ
0,0 5 0,41- 512
с;;к = 1,170,751 7 36
. = 25,5—10—3.
(0,431-106)“5 0,04217-50002
Для соответствующих участков поверхности “конуса имеем
(см. рис. З.Х.1):
Здам ——- лглам хлам : лхіам зіп [ЗК : 31 (3,35- 10—2)2зіп 40°-_ — 7, 21 - 10—411;
811 = л ( х„ — 41…00 = л зіп 0 03— ‚10
Так как
х,;ам = х…… _ Ах = 3,35. 10—2— 038-104: 310“? м,
ТО
8,1 = лзіп 40° [52— (3 10—2)2] = 16,111:-
3.12 = Л ( гл… хлам — 031… №…) — “ 51110 (х лам — хлём) =
= 71: зіп [ЗК [хіам — (хлам — Ах)2 ] = л 5111 40° [(3‚35-10"2)2 —
—(3‚35.10—‘3— 0,38. 10—212] = 1,54…“4 л.
652
Боковая поверхность конуса
__ _. 2 ' _ _ 2_ ' 0_
$д— :гвгмидхк _— :гвхкзшрк—л 5 №140 _ 16,1л_
Определяем средний коэффициент трения:
_ 1.10—4 _ “1 ‚1
сх,‹——— 5,44—10 ЭШ +6,06-10 3 6 ” _
16,1л 16,13%
_ 1, 4.10-4 _.
—25‚5—10 З-З—Цжврв—ю *.
16,1л
Соответствующая сила сопротивления
др… М?… 2 _.
Х, :: сдаю 88: сх, лхк зъп Бк =-
1,4-0,.‘2701-104-16,72
2
Х.6. Определяем некоторые геометрические характеристики профи-
ля. Угол наклона касательной в произвольной точке находится из выра—
жения
Ё813= % 2№ (1 _ "1 )= 2'°’°4(1 — "1—1)= 0‚О8(1—х1).
(1161 х1мид х1мид 1
=6‚06-10_3 л52 зіп 40° »» 161000 кг
В точке передней кромки
’[8 (50: (сіу1/сіх1)х=0= 0,08 (130% 4° 34’).
Из рис. 2.Х.2 видно, что элемент дуги
(іх : сіх1/соз В = №4115.
Перейдя к переменной интегрирования и=і85=0‚08(1—х1)‚ найдем
таб \
__ 2 _ _:
_ 51/14—и( 0,08 сш]
ЁЁВО
: 0116 (шви/1нато—теш/щъзтнп *ЁВ°+УГ1+*82Б°\.
‚ тев+Ъ1+те2в ‚’
Например, при х1=0,1 м ([86=0,О72)
: О 16 (0,081/1 + 0,082—О‚072 1/1 + 0,0722+
+ 1п °'°8+`/1+°'°82 ) : 0,1002 м.
0,072 + 1/1+0‚0722
Используя таблицы стандартной атмосферы [31; 50], можно найти
по заданной высоте Н= 20 км параметры невозмущенного набегающего
потока (см. задачу Х.,З) а также его скорость Усо=Мооаоо=2—295‚1=
=590 м/сек.
Определим параметры воздуха в свободном потоке около профиля.
На КЛИНОВИДНОМ носке находим по значениям Моо=2 и БКЛ=БО=4‚574°
из графика [17] угол наклона скачка уплотнения 60=33‚9°. Далее вы—
числим параметры потока за этим скачком, имея в виду, что число
Мо…=Моо зіп 60=2-0,558=1,116:
% _ созбс _ 0,830
У СОЗ (6С _ Бо) .. 0,872
: 0,952;
653
р, / Ё—1 ‹) Ё__1
р… ( №) _… 1,25%
9% м3…
_ ___ = 1,196;
р… 1—(1г-—1›/‹1г+ 1›+№— 1›/‹іг+ 1›1м‚%…
(гео/а; = 1/ (р…/рэ) (в;/р…) = №646;
м; = (у;/Усс) (ах/а;) м … : О,952—О‚9646-2 : 1,8367.
Для расчета чисел М в Других точ-ках контура воспользуемся мето—
дом характеристик и соответствующей таблицей [17] значений углов
ш(М), определяемых по уравнению ші=шо+ (Бо—Ба“)-
Здесь значение шо=21‚784° находится из той же таблицы по числу
м; =1,8367 за скачком уплотнения. Например, в точке с координатой
х1=0‚1 м ъзв1=0‚08(1—0‚1)=0‚072 (61:4‚118°) угол ш1=шо+(во—
—[31)=21,784°+(4‚574°—4,118°)=22,24°. По этому значению из табли-
цы [17] находим соответствующее число М на внешней границе погра-
ничного слоя Мд1 = 1,8528.
Аналогично рассчитываем числа Мы в других точках контура. По
найденным значениям Мы определяем относительную скорость:
=[ —<1+’%1М%і>”Т”-
01, У
тах
В частности, для Мы = 1,8528
17513 [1 — (1 + “2—1 1,85282)_1]1/2' = 0,63805.
ПО ТЗбЛИЧНЫМ данным ПРИ ПОМОЩИ ЧИСЛВННЫХ МЕТОДОВ МОЖНО опреде-
лить местные значения производной кіУд/сіхр
(іХ1 , 2,1 ,
х1
где шаг Н…:ОД м. В частности, для точки 1
(ауд ) _ РВЗ—1760 _ 0,64126—О‚63474
(іХ1 1 2нх, 2'0›1
= 0,0326 1/м.
Производные в первой и последней точках находим с использовани-
ем конечных разностей. Далее, используя данные о первых производ—
(1217 -‚-’сіх2.
НЬ1Х, определяем вторые ПРОИЗВОДНЬ1е б„ 1
ДЛЯ определения параметров ЛЭМИНЭРНОГО пограничного СЛОЯ необ’
ходимо проинтегрировать дифференциальное уравнение [20]:
(”ь/Ш; : М1(7”)№1 (Ё) + мг 0”) №2 (Ё),
$$$-ах аё=р—‘Ё х;
Ро Ро
0
шт 12_1‚927„—0‚2№)
}\, :: , '
М1( ) 213,12—5‚76›„—›„2 ’
М … 7257,6—1336,32А + 37,9%2 + 0,873
2 _ 213,12—5‚76›„—›„2
где
654
У 17 У
№2‹а=——— ° б +——=———°—_,—;
1—У Уб Уд(1—Уд)
У,; : аУд/аё; У; = (12 Уд/ан.
Преобразуем это уравнение к переменной хд:
ігм мдм—_— №1‹&› +М20») №№) .
(1х1 ФЧШЁ (1351/6113 ,
„1‹Е)_4Уб(аУб/ах1) (УТ/дмг? дд
№1(Х_1) _ _ _? ___ . __ ;
(іх—№25 1—Уб аУд/аг; 4х1
„2 (Е) (1Уд/(1л1
2 ( 1) '.`—: : - _2 .
(ім/ёё Уб (1— Уд)
Здесь:
((Т/д (ГУб (1х1- ((Уё р,;
_ : —— : —соз —°
аа (1х1- аа (1х1- 6 рд ’
(12173 „ (аУд)__ (, (ай,),щ. &.
(1%2 (1% (1% (1х1 (1% (135 (1% ’
((У (1 аУ р’ (12 У р’
і(_і)=_ ЦСОЗБ—О“ : бс056і+
(1х1- (1% (1х1- (1х1р‘5 (1х? рб
+; —(созі3)—— +—соз 86— (до—).
Рв х1 “1 Рв
Производные (1(соз [$)/(1х1 и (1(р(')/рб )/с1х1 определяются следующим об—
разом. Поскольку ’[3 [3.=0‚О8(1—х1) , то
(ЦЗ/№5213 =- — 0,08с1х1 и (ЦЗ/(1х1 : — 0,08 соз2 [З.
Следовательно,
(1 (соз |З)/ (1х1 : — зіп [5 (—О,О8 соз2 [$) = 0,04 соз [3- зіп 26.
Производная
_д_ 12). =і[(1_172)_ь—_ЁТ]=__Ё_(1_112) 1%"1(_2\7)%_=
(1х1 рб х1 6 іг—1 б (1х1
% рг) Уд ((1176/(1х1)
**" Рв 1—УЁ .
Таким образом,
(1У Р' а‘У
і< _Е)—_-со озр— °+0‚04зіпзр_+
+ за Уд (%)2 _
ь—1 1—Т’Ё (1х1- ’
655
ТаблицаЗХі
Н - ‚_
же 3 м ?“ $$$/21+ мы Ат Азж'
точек
0 0 0,29649 | 2,9649 ——0‚0807
1 0,29649 | | 2,8842 | | 5
о 0 ] 0,29246 | 2,9649 |——0‚0801і——0‚0333|
1 0,29246 | 0,28438 ! 2,8848 |_—0‚0468| |
2 0,57684 | | 2,8380 | | |
о 0 ‘ 0,29219 | 2,9649 \——0‚0801’——0‚0330| ——0,0010
1 0,29219 | 0,28646 | 2,8848 \__0,0471’-_0,0340 0,0490
2 0,57865 0,28004 2,8377 ——0‚0131 0 01 0 __0 0 34
0,28340 ’ 5 ’ 2
3 0,85869 0,28035 2 8246 0 0019 -—-0 0084 ——0 01 9
0,86205 0,28223 ’ ’ ’ ’ 2
4 1,1424 0,28521 2 8265 ——0 0065 -—0 0 13 __0 0
1,1443 0,28236 ’ ’ ’ 2 ’ 256
5 1,4295 0,28046 2 8200 ——0‚0278 ——0 046 0 0
1,4267 0,28084 ’ ’ 9 ’ 614
Г
б` 1,7072 0,27646 2 7922 -—0 0747 0 0145 —-0 0
1,7075 0,27598 ’ ’ ’ ’ 213
7 1,9840 0,26509 2,7175 ——0‚0602 ——0,0068 ——0‚0089
1,9835 0,26836_
8 2,2486 0,26558 2,6573 -——0‚0670 -—-0,0157 0.1725
2,2529 0,26253
9 2,5185 0,25460 _ 2,5903 —-0,0827 0,1568 ——О‚0460
2,5154 } 0,25506
10 2,7700 0,24564 2,5076 0,0741 0,1108 ——0‚1886
2,7705 0,25244
11 3,0161 0,27487 2,5817 0,1849 -——0,0778 0,0210
3,0229 0,26668
12 3.2978 0,28880 „ 2,7666 0,1071 ——0‚0568 0,0738
3,2896 0,28345
1 3,5784 0,28241 2,8737 0,0503 0,0170 _40‚0044
3 3,5730 0,29027
3,839? 0,29334 2 9240 0 0673| 0 0126 ——0 0003
14 3,8633 0,29531 ’ ’ | ’ ’
4,1516 0,30597 2 9913 0 0799 0 0123 ——0 0
15 4,1586 0,30304 , › ' › ‚1 28
4,4646 0,31148 3 071 о 09 __
16 4,4616 0 31163 ‚ 2 ‚ 22 0,0905 0,0674
4,7731 0,32145 ,
17 4,7732 0 31761 3,1634 0,0017 -—0‚0231 0,0216
5,0946 0,30897 |
[8 5,0908 , 0,31534 3,1651 ,——0‚0214!-——0‚0015
5,3998 0,31486 '
19 5,4061 ' 0 31315 3,1437 ——0‚0229| !
5,7210 ! '
20 5,7192 | | 3,1208 | ,
656
№ _в : КЩёнЖЁУв/ЁП №№) . ё —
ЁТ/б/ЁЕ (іх1 (ЁЁб/Ёх1) СОЗ ВРЗ/рб 4х1
(1217 /‹іх2 _ % 17 а?
= —_—б—1— + 0,04 5… 26 —|— - б_2 - б
аУд/ах1 іг— 1 1 _ Уд ‹іх1
Учитывая, что при &= 1,4 величина 21г/(іг—1) =7,
47 @? /‹іх @? 7 /‹іх2 _ 717 (17
№1(х1)= 6( 5“ 1) ——__—6———1—+О‚О451П2Б+——_б_2_"—б.
1 _ УЁ аУд /с1х1 1 _ Уд Фа
Итак, для определения параметров ламинарного пограничного слоя име-
ем Дифференциальное уравнение
аж
д—х = м1 0”) №1 (351) + мг 0”) №2 (161), (ЗХ-13)
].
в котором №1(х1) и №2061) вычисляются в каждой точке контура следу-
ющим образом:
11176 (1176 _ аЁТ/‘б/ахё
№1(х1) : ___—2 ' (1 + 0.04'51П 26 + ___—;
1 _ Уд х1 (лаз/ах1
(117 /‹іх
№2061): :—'—б-_1—2 -
Уд (1 _ Уд)
Используя полученные данные Для функций №1 и №2‚. производим
численное интегрирование уравнения (З.Х.13) и определяем значения ?»
для каждой из выбранных точек. При этом начальным условием инте-
грирования является значение Ж=0 для Е=0 (х1=0). Интегрирование
проводим методом конечных разностей с шагом 11х1=0‚1 м при помощи
расчетного бланка (см. табл. 3.Х.1).
Поскольку при вычислениях А?» используется формула численного ин-
тегрирования наклонной строки с учетом конечных разностей третьего
порядка, необходимо иметь по крайней мере четыре значения производ—
ной сіЖ/сіхъ В начале вычислений мы имеем только одно значение произ-
водной в начальной точке А6, определяемое по (3.Х.1З) при условии, что
для х1=0 значение Ж=0. Для определения недостающих значений мож-
но использовать, в частности, способ последовательных приближений.
Этот способ заключается в уточнении полученных значений функций и
их производных в первых точках. Расчеты производятся в следующем
порядке.
Проводим первое приближение:
МО : пд жд, ?»1 : же + Ахо,
затем второе:
м0 : пд ( ›„5 + % мд) ‚ ?„1 = % + м0;
‚ 1 ‚
АА __— х1(›„1+_2_Ажд)‚ ж2=ж1+м1;
1
далее третье:
[, ’ ] ‚ 1 ,
АХО :: Их, [\ АО + _2— М»“ _ 1_2_ 132%) ‚ А1 : АО + АХО;
/ ‚ 1 ‚ 1 ‚
[\}/1 :: ‚1х1 ` }\«1+ ? АЖ] _ _]? А2ЖО) , }\‚2 = }\,1 _|_— АХЧ;
\
% х; м х, м 19 В В;“ град ВЭД;—Ё? Фі' град. мбі $3 :Ё ?>?
8 [и …
Ё |:?
0 0,080 4,574 0,000 21,784 1,8367 0,63474 0,59712
1 0,1 0,1002 0,072 4,118 0,456 22,240 1,8528 0,63805 0,59291
2 0,2 0,2004 0,064 3,662 0,912 22,696 1,8685 0,64126 0,58883
3 0,3 0,3005 0,056 3,205 1,369 23,153 1,8850 0,64452 0,58459
4 0,4 0,4006 0,048 2,748 1,826 23,610 1,9010 0,64768 0,58045
5 0,5 0,5007 0,040 2,291 2,283 24,067 1,9171 0,65093 0,57634
6 0,6 0,6008 0,032 1,833 2,741 24,525 1,9334 0,65406 0,57222
7 0,7 0,7009 0,024 1,374 3,200 24,984 1,9494 0,65711 0,56818
8 0,8 0,8010 0,016 0,9165 3,657 25,441 1,9660 0,66029 0,56402
9 0,9 0,9011 0,008 0,4583 4,116 25,900 1,9822 0,66333 0,55998
10 1,0 1,0011 0,000 0,0000 4,574 26,358 1,9991 0,66648 0.55577
11 1,1 1,1011 ——0‚008 ——0‚4583 5,032 26,816 2,0161 0,66963 0,55160
12 1,2 1,2012 ——0,016 ——0,9165 5,490 27,274 2,0323 0,67253 0,54765
13 1,3 1,3013 ——0,024 ——1‚374 5,948 27,732 2,0495 0,67564 0,54345
14 1,4 1,4014 ——0,032 ——1,833 6,507 28,191 2,0664 0,67869 0,53938
15 1,5 1,5015 ——0,040 ——2,291 6,865 28,649 2,0829 0,68162 0,53542
16 1,6 1,6016 ——0‚048 ——2,748 7,322 29,106 2,1000 0,68454 0,53135
17 1,7 1,7017 ——0,056 ——3,205 7,779 29,563 2,1172 0,68754 0,52729
18 1,8 1,8018 ——0,064 ——3,662 8,236 30,020 2,1346 0,69050 0,52321
19 1,9 1,9020 ——0,072 ——4,118 8,692 30,476 2,1520 0,69341 0,51916
20 2,0 2,0022 ——0,080 ——4,574 9,148 30,932 2,1696 0,69634 0,51509
, 1 ' 5 ‚
Аж, : %(жд Ём, + _]?— Ачо), ›„3 : 12+ м,
и, наконец, четвертое:
‚ , 1
№0: %()…—
‚ 1 ‚ 1 ‚
; Ам— 7,42 % + и А3 Жо), м = % + Мо;
‚ 1 ‚ 1 ‚ 1 ‚
АМ : НДРЙ + ? АМ —ЁА2›‘о——24_ АЗЖО) › ?»2 : 41+ Ши;
. 1 ‚ 1 ‚ 1 ‚
м, .: идр, + _2— Аж2——12— АЧ, —Ы—А3ж0)‚ >», : 7…— м,.
‚Далее вычисления проводят следующим образом. По элементам наклон-
ной строки определяют:
‚ _ 1 ‚ 5 ‚ з ‚
(Мп), : их, ( А„ + —2— М,… + Ё А“»… + ; А3 ?»„_3) ;
?‘п—н : ?‘п + (А?»п)1,
а по уравнению (З.Х.1З) находят А;,“ . Теперь, зная МНЦ, можно вычис-
лить конечные разности АД„ №7414, [330414 и уточнить А)… с использо-
ванием ломаной строки:
' 1 ‚ 1 ’ і \
(АМ)], = ”№№ + _— А?» _ ЧЕ' лвл,… —`21Т А3?»
2 п 11—21 .
В бланке численного интегрирования (табл. 3.Х.1) приведены два
значения ?» и А)»: в числителе—менее точное, найденное с помощью на-
658
Таблица З.Х.2
& $ 1
: > ‘; % * “ё
_: “>;“ ”и“ №21: жі …“ „— ,: од:, % Ё
`:__, 35 Х…, ;( .';_, Х__ ;; (Ё…
‘ЁЁЮ % 22° из РБ 3 ЁЁ &&&
0,0330 —0‚0045 0,25586 0,087065 0,0000 1,53 1,08 оо со 0 со
0,0326 ——0,0035 0,28426 0,086175 0,29219 1,52 1,06 5,43 3,20 0,396 0,962
0,0323 —0,0025 0,31465 0.085541 0,57865 1,51 1,05 2,20 1,30 0,786 0,682
0,0321 —0,0015 0,34704 0,085193 0,86205 1,51 1,03 1,83 1,09 1,17 0,558
0,0320 ——0‚0010 0,36536 0,085121 1,1443 1,50 1,01 1,61 0,973 1,55 0,485
0,0319 ———0,0010 0,36817 0,085034 1,4267 1,49 0,992 1,47 0,892 1,92 0,435
0,0318 —0‚0015 0,35522 0,084967 1,7075 1,48 0,974 1,36 0,835 2,29 0,398
0,0316 —0‚0025 0,32481 0,084636 1,9835 1,47 0,957 1,28 0,791 2,65 0,370
0,0313 —0,0030 0,30850 0,084047 2,2529 1,47 0,940 1,21 0,756 3,00 0,347
0,0310 —0,0035 0,29167 0,083455 2,5154 1,46 0,923 1,16 0,729 3,35 0,328
0,0306 —0,0040 0,27293 0,082611 2,7705 1,45 0,906 1,11 0,705 3,69 0,312
0,0302 —0,0030 0,30330 0,081764 3,0229 1,44 0,889 1,07 0,685 4,02 0,299
0,0300 —0,0015 0,35397 0,081452 3,2896 1,43 0,873 1,04 0,670 4,35 0,287
0,0299 —0,0010 0,37354 0,081434 3,5730 1,43 0,856 1,01 0,656 4,67 0,277
0,0298 —0,0010 0,37635 0.081404 3,8633 1,42 0,840 0,978 0,645 4,99 0,268
0,0297 —0,0010 0,37905 0,081382 4,1586 1,41 0,825 0,954 0,635 5,30 0,260
0,0296 —0,0010 0,38185 0,081377 4,4616 1,40 0,810 0,932 0,627 5,60 0,252
0,0295 —0,0010 0,38475 0,081375 4,7732 1,39 0,794 0,912 0,619 5,90 0,246
0,0294 —0,0015 0,37069 0,081377 5,0908 1,39 0,779 0,893 0,616 6,19 0,240
0,0292 —0,0020 0,35480 0,081111 5,4061 1,38 0,758 0,874 0,612 6,42 0,235
_ 0,0290 —0‚0025 0,33869 0,080854 5,7192 1,37 0,749 0,866 0,608 6,75 0,229
клонной строки, в знаменателе — уточненное с помощью ломаной строки.
Например, для четвертой точки
(Аж-3), = 0,1 (2,8246 — ?] 0,0131 _ _;— 0‚0340 — % 013010) = 0,28035;
(ж,), : из + (м3), :: 0,86205 + 0,28035 : 1,1424_
По этому значению из (3.Х.13) найдено ?»;=2‚8265 и подсчитаны соот-
ветствующие конечные разности. Уточненное значение конечной разно-
сти будет следующим:
1 1 1
?» _— _ __ __ __
(А з)]! 0,1(2,8246 —|— 2 0,0019 12 0,0150 24 0,0490) 0,28223,
а величина (?»4) п=0,86205—|—0‚28223= 1,1443.
Таким образом, уточнение величины №,… преследует две цели: во-
первых, оно уменьшает накопленную ошибку вычислений, а во-вторых,
является контрольной операцией, помогающей в известной степени вы-
явлению грубых ошибок.
Теперь можно перейти к определению местного напряжения и соот-
ветствующего коэффициента трения:
аТ/ _ —і(п+*—+1)
тст:Убутахъ/Р'брбутах—ісозви—УЁ) 2 ’*‘—1 Х
(1х1
чин-;?
659
(Г 1 к+1
__ +—
21." б 2" 2 (” 5—1)
Сіх=_°_Т2э_ 21/р—У кивка—;] УбеозБП—Уд) ><
% Уд углах
…( {%)—177?
где Ут )( —— _а ‘/—— +- МЁ— -— 295,1 ‘/—]42—1 + 22 = 885 м/сею.
Коэффициент динамической вязкости ,
”61: : „со (Ты/Т…)О’Ю : „00 [1,8 (1 _ рал-0,75;
например, для х1=0‚1 м
„„ = 1,45. 10—6 (1 ,8—О‚593)°'76 : 1,52.1о—6 кг щек/м2.
Плотность
‚
вы ‚ вы 96 92
рот:—_, Ро=—‚ ——‚—-—р….‚
Ро Ро 92 920
где рва/96 : (1 _Т/ЁУ/(к—п : (1 _ ЁЁ)2‚5_
р5/р0= рбО/ро— -(1 — 112 0)1/(*—1>——- (О, 597)" 5 : 0,276;
рЁ/рт : 1,196; рю : 0,009062 кГ-сек2/м4.
Например, в точке ]
р61 = 0,5932’55Ё1,196-0,009062 : 0,0106 КГ-сек2/м4_
Все результаты расчетов Нбр рб„ а также те“. и с… приведены
в табл. З.Х.2. В этой таблице помещены также значения ст, которые по—
лучаются без учета продольного градиента скорости:
іхі
07‘=.0=0‚—.'—646(1 Ё;1М№‘(%і)п2—1 —1:‚
Ужас„
У .р .х 17 .р .х
где к хг": б:, 65 :Утах 61 б: .
›Цбі Нбі
В частности, при х—О,1002 м
885-0‚63805-0,0106—0,1002
Нех :
1 ‚52-10—6
1—4——‘— 1,85282)
:: 0,396-102;
—0‚ 12:3 1
с7=.‘—’———0,646к1 + .: 0,962-10_5.
іх:
1/о‚396-1о6
Х.7. По таблицам атмосферы:
определяем для Н=10 км парамет—
ры воздуха, которые одновременно
9 будут являться параметрами на гра—
! ’ нице пограничного слоя пластинки
д’,’ „ (см. задачу Х.1) . Далее находим чис-
О 403: 33 .по Маха Моо=Мб=Уб/аб =4000/
дім… /299‚4=13‚36 и определяем протя—
Ь женность ламинарного участка х……
*'” " > пограничного слоя (рис. З.Х.2)‚ ис—
Рис. З.Х.2. Смешанный пограничный ПОЛЬЗУЯ КРИТИЧЗС-Кое ЧИСЛО Рей—
слой на плоской пластинке нольдса:
660
Удрбхлам _ 4000 .4 , 217. 10—2 хлам
Ке = 106 = — ;
“р #0 1,49.10—°6
отсюда хлам=0‚0088 м.
Теперь найдем по (3.Х.10) определяющую энтальпию. Входящая
в (3. Х 10) энтальпия восстановления
і =іб . д—гУЁ/2,
где ід—срдТд—О 24 2,232 9,81 427= 0,224 106 мг/сек2, а гдам= |/ Рг для
ламинарного и гт= 1, Р_г для турбулентного течений. Примем число Пра-
ндтля Рг=0,64. Тогда для ламинарного потока глам=]/0,64= 0,8 и
і, = 0,224-106 —{— 0,8—40002/2 = 6,62-106 м2/сек2,
а ДЛЯ турбулентного гт=дЗ/0,64=0,862 и
і, = 0,224— 106 + 0,862-40002/2 = 7,12-106 м2/се‘к2.
Для расчета і* надо знать энтальпию газа при температуре стенки:
іСТ = ср „ ТСТ = О,24-300-9‚81-427 = 0,302-106 м2/сек2.
В соответствии с этими данными для ламинарного пограничного слоя
і* : 0,5 (0,302- 106 + 0,224-106) + 0,22 (6,62— 106 — 0,224-10“) =
=] ‚67 106 м2/сек2.
По таблицам [17; 34], зная рд =0, 2701 кГ/см2 и і*= 1,67 106 м2/сек2‚
найдем Т*= 1515 К, Нср=28› 97.
Для турбулентного пограничного слоя
* = 0,5 (0,302. 106 + 0,224-10“) + 0,22 (7,12- 106 — 0,224-106) =
= 1,78-106 м2/сек2.
Из таблиц [17; 34] по этому значению і* и давлению рб =0,2701 кГ/см2
определяем Т*= 1612 К, п2р=28‚97.
Средний коэффициент трения на ламинарном участке находим из
условия
(___-сто,; __ Т* ‘5—1 НЁр )“215157‘37'1 28, 97 1/2 _0 787
(Схі)нс'‚к _ (Тв ‚2) (нерв =(2_23, 2>ТО (28 ,97) _ ’ ’
а на турбулентном —
(Схі)сж : (ДУШ (_ Р’ср ) 4,5 : (№)0’7`Ё—4 . [№
(Й,-‘)нсзк Тб ‚' \ ”срб 223,2 (28,97
Рассмотрим теплопередачу на ламинарном участке пограничного
слоя. На этом участке средний коэффициент трения
(Схі)сж=' _і[(схі)сж/(схі)г сж] (схі)нсж›
)4’5 = 0,276.
где
1,29 _ 1,29 _ 1,29
уке): лам укекр ТО?
(Схі)нсж : = 1229 _10—3,
откуда
(ох,)сж : 0,787— 1 ‚29. 10—3 : 1,02.10—‹°›.
Соответствующее среднее число Стантона
& = %— РГ—2/3= № 0,64—2’3 = 0,687—10—3,
661
удельный тепловой поток
с] = ЗірдУд (і —і ист): О ‚687-10—3-4217-10—2-9,81 ><
><4ООО (6 62 106—0, 302 106) ___——
——172О—— ккал /(м2 — сек),
981 427
а ПОЛНдЯ теплопер едача
Олам : азлам : Чхламі : 1720…О›00881 : 15,1 ккал/сек.
Рассмотрим турбулентный участок. Определим условную длину пла—
стинки, на которой всюду пограничный слой турбулентный. Исходим из
уравнения
4,64.хлам(кекр)_“2- (—"—бб) — _0‚ 37Ах ке—1/б(_бсж )
НСЙК лам НСХС Т
ИЛИ
4,64-О,ОО88(106)_“25‚З4 =О,З7Ах( 4000“ )—1’52,00.
3,5210—5
Здесь:
(№) : Е)”? „е_рд №=(_15_15__ № . '2__8‚97‘“2 =_534.
б]НСЖ лам (Тб „:р 223,2) (28,97) _ ’ ’
(бсж : ( Т* )”“? _ нерв “5 _( 1612 )Ш (28,97)1/5 : ,) 00
бнсж )т 76 „:р 223, 2 28,97 “’ ’
Таким образом, Ах%0,004 м.
Теперь можно определить средний коэффициент трения:
сх? __ _ с;]; $Т1 с;; $Т2 ,
ПЛьТ ‚ЗП-П Т
Где
ст1 :: С Т] : (Схі)сч‹ ] С _
ХГ ( хі)сж [ (Схі)нсж ( хдНСЖ’
хі нсж (“_—№ .
Так как Ь1=Ь—хдам+Ах=5—— ——О,(_)О88—|—О,ОО4=4,995 м, то
% Ь _ 4000.4,995
кед1 : __ —— : 5,67'108‚
‚\76 3,52'10—5
поэтому
(с с,)„сж— _ () ‚075/(5, 67 108)“5_--— 1,33 10“.
Таким образом,
с;} : О,276-1‚33— 10—3 : 0,368.1о—3.
Далее находим
С , "
СТ2_ "' (едут : [№ (схі)нсж›
хі СЖ (Схі)нсж
где
0,075 0,075 0,075
сх н ж == _ :: = = . _3.
( 7) с (нед,)“Б (Уд Ах/уд)1/5 [4000'0’004/(3*52'Ю_БЛПБ 5,54 10
Таким образом,
с1,— __ 0,276 5 ‚54 104: 1,53 10“.
662
В соответствии с этими данными
сі:ст1Ь—хлам+Ах _ст2_Ах_
х хі Ь _ хлам хі Ь _ хлам
35 —0‚0088 —|— 0,004 __1 53-10—3 0,004
5—0‚0088 ’ 5—0,0088
Среднее число Стантона
Зі : % РГР2/з=
2
= 0,368-10—
: 0,367 -10_3.
_0'362'1°_3 0,644“:— 0,248.10_3‚
удельный тепловой поток
с] = Зірд Уб (іг— іст) : 0,248-10—3-4‚217-10—2 ><
>< 4000 (7,12. 106— 0,302.106). 517 = 666 ккал/(м2-сек)‚
а соответствующая суммарная теплопередача
От : (‚Билд : (] (Ь —хлам) [ = 666 (5 — 0,0088) 1 = 3320 ккал/сек.
Полный тепловой поток к одной стороне пластинки
62 = О…… + От := 15,1 + 3320 = 3335 ккал/сек.
Х.8. При помощи таблиц атмосферы [31; 50] определяем параметры
воздуха на высоте Н=10 км (см.задачу Х.1). Заданной высоте и ско-
рости полета соответствует число Маха М…: с„,/ас„‚=3500/299,4%11,7.
По таблицам [23] находим параметры невязкого потока на поверх-
ности конуса, которые принимаем за параметры на внешней границе
пограничного слоя: Уд =У…=2527 м/сек; 1'6=1'к=3‚16-106 м2/сек2; рд:-
= рк=15 кГ/см2; рд : рк =0,33 кГ-сек2/м4; Тб =Тк=2630 К; 85 =$к =
=8960 м2/(сек2-град); морд =28‚91; ад=968 м/сек.
По скорости Уд=2527 м/сек и скорости звука ад =968 м/сек опреде—
ляем местное число Маха М6=Уд/ад=2527/968=2,61.
Далее вычисляем определяющую энтальпию по формуле (3.Х.10).
Входящая в эту формулу энтальпия газа при температуре стенки Тст=
=600 К равна іст=9срстТст=0,24-6009,81-427=0‚604—106 м2/сек2‚
Рассмотрим ламинарный пограничный слой. Полагая число Пранд-
тля Рг=0,64, найдем гдам=]/Й ==]/0‚64=0‚8 и получим:
{, : іб + глам УЁ/2 = 3,16— 106 + 0,8. 25272/2 : 5,71 -106 м2/сек2;
і* : 0,5 (0,604-106 + 3,16-106) + 0,22 (5,71 - 106— 3,16—106) :
= 2,44- 106 м2/сек2.
По этому значению Р‘ и давлению рб=15 кГ/см2 из таблиц [17; 34] и
графиков [17; 33] находим Т*=2150К‚ р2р=28‚96.
Для турбулентного слоя гт=]/Р_г=-;З/0‚Ё1=0‚862‚ следовательно,
;, ___. 66 + „иё/2 : 3,16- 106 + 0,862 25572 : 5,91 . 106 м2/сек2;
‚6 =— 0,5 (0,604—106 + 3,16—106) + 0,22 (5,91 - 106 —3›16-10“> =
: 2,48'106 м2/Сек2‚
Из таблиц [17] и графиков [34] по Р‘ и рб=15 кГ/см2 находим Т*=
=2155 К, мёр=28‚96.
Произведем расчет средних коэффициентов трения для пластинки по
параметрам свободного потока на конусе.
663
Отношение коэффициентов трения для ламинарного пограничного
слоя
п—1 0, 76—1
(ах,)сж _(Д> 2“ иЁр “2_(2150 ' 2 (28,96 1/2 _ 104
(ах,)нсж Тв „Срд 2630) 28,91) ’ ’
а для турбулентного—
п—4 0,76—4
— " 4 5
(Схі)с-‚к _ ( Т*) 5 Мер ’ _( 2155 > 5 (28,96)4/5_ 1 14
(ох,)нсж тд „Срд 2630 28,91, ’ '
Определим теперь протяженность.ламинарного пограничного слоя.
на основании экспериментаЛЬНЬ1х ДЗННЬТХ установлена следующая 38-
висимость критического числа Рейнольдса от температурного фактора
Тст=Тст/Тт3
Ю
кекр/(кекръ-Т =1=(’Тст)—Ё, (3.Х.14)
СТ
где (Ненр)7ст=1—критическое число Рейнольдса при Т_ст=Тст/Т‚…=1.
По значению Мд=2,61 из графика [20] находим (Кенр) Тст=1%4-106
и вычисляем величину Тст=Тст/Т‚.=О,158 (где температура Тт=3805 К
определена из таблиц [34]) по значению іт=5‚71-1О‘51142/сек2 и рб =
= 15 кГ/см2). Следовательно, в соответствии с (3.Х.14)
Кекр = (кэш))?“=1 (Д)—”3 = 4,0—106'(О‚158)_2/3х 13,7.10'6.
Протяженность ламинарного участка находим из уравнения
кекр : Уб рб хлам/рб“
Здесь коэффициент динамической вязкости цб=9‚35- 10—6 КГ тек/1142.
Учитывая также, что рд=0‚33 кГ-секЁ/м“ и Уд=2527 м/сек, получим
13,7 . 106 = 2527.0,33.х„,м/(9‚з5- 1043),
откуда хддм=0,154 м.
Средний коэффициент трения на ламинарном участке
Схік : 1/Ёсхіпл : ЪГЁ [(схі)с>к/(схі)нсж] (схі)нсж›
где
(ох,)„сж = 1,29/у’кекр : 1,29/1/1:>‚,7-106 = 034910“,
поэтому
„„,а/Ё 1,04.0,349.10—3 = 0,626—10—3.
Среднее число Стантона
_3 о _
& = 5%- РГЩЗ = 0———’62Ё'Ю 0,64'43 = 0,422.10_3‚
соответствующий удельный тепловой поток
с] = 81 рдУд (і‚— Ы : 0,422.10—3.0,33—2527><
>< (5,71 .106 _— 0,604-106) 4%; _ 4,21 - 10з ккал/(м2-сек).
Полная теплопередача на ламинарном участке
Флам : азлам : ЧЛГлам хлам : 4,21 °1Озлхіам$іп 400 =
: 4,21—103-3‚14-О‚1542-О,643 = 0,202-10З ккал/сек.
3664
Определим координату точки 0’ на конусе, являющейся началом тур-
булентного пограничного слоя (см.рис. 3.Х.1). Напишем уравнение
0,578.4,64-х№Ке—1/2(Ё_°_ж) —— _о ‚523 0,37 Ах ке—“Ч—бсж ).
кр
нсж лам \ нсж т
Здесь:
№…, : уд рб т\х/„б : 2527.0‚33-Ах/(9,35— 10-6) = 0,892-108 Ах;
(беж/бнсж)лам; (беж/бнсж)т—отношения местных толщин соответст-
венно для ламинарного и турбулентного пограничных слоев:
п+1 0,76+1
* 2 Н 51/2 —‘2—
<: » —<г——› ‚‹ :) чё) №—
нсж ; лам _ Р‘ср 2630 28, 96
Ш 1/5 О——’76+1 1/5
* - " 5
(беж) ___.)Т_\ ° . ”2336 =)2__155) ‚(?—831) =0,933.
бнсж „ ,Тд ) „ср _2630 28,96
Таким образом, Ах=0‚76- 10—2 м.
Средний коэффициент трения на турбулентном участке
т _ ”(Схі)сж
17 — 1,17[——…‚>…3 №…,
Где (Сх;)нсж=0‚075/(кеЬт)1/5.
Согласно рис. 3.Х.1
!).г = Ах + ()(к
Внося сюда хК=/1/соз 6к=5/со5 4О°=6‚53 м, найдем
дт : 0,0076 + (6,53 — 0,154) :: 6,38 м.
В соответствии с этим
Кеш, : Уд рд {эт/мд :- 2527—О‚33-6‚38/(9‚35 . 16—51: 5,68-108;
_ хлам)°
тогда
(ох,)„сж : 0,075/(5‚68-108)1/5 : 1,зз.10—3.
Поэтому
с;}, :… 1,17.1,14.1,з:>>.1о—з = 1,78—1075’.
Средний коэффициент турбулентного трения на участке Ах
ойк— _ 1 17 [_ (Схі)сж ‚\(сЛЪ-ЮЖ’
1/5 (Схі)нсж
Где (Схг) нсж=0‚075/(кеАх) .
Так как
Нем : Уд Рв Амс/‚ид : 2527.0‚33.0‚0076/(9‚35. 1075) 19,676. 106,
то
с;;к—__--.- .-1 ‚17 1 ‚14——°°7—5—— 683.104,
(0,676 106)1/5
Средний коэффициент трения на турбулентном участке
$ ‹ 8
Н _т_1_ 2 &
Сді'К =СХГК $6.1‘ СЪГК 86 т ,
гдеЗт =л(г х—г' х' )=лзіп6к(х2—х2).
мид к лам лам лам
Так как хн=Ръ/соз[3к=5/соз 4О°=6,53 м и хлам =хЛдМ——Ах=0‚ 154——
—0 ‚0076= О, 146 м, то
ЗП :: л зіп 409 (6,532 — 0,1462) = 27,36 л м2.
665
Далее находим
$т2 = я зіп Бк (Х2 — х'2 ) = 31: зіп 40° (0,1542 — 0,146)2 = 0,0015 л м2.
ЛЭМ лам
Боковая поверхность
86:1' % $6 = Ш х = 31 зіп [ЗК хі = я зіп 4О°-6,532 = 27,38 л 1112.
МИД К
Следовательно,
_. 27,3 _ , _
с„‚к= 1,78—10 ЗЩ—6‚8З-1О 3№1_5&=1‚77.10 3.
27,3851: 27,38л
Соответствующее число Стантона
_ 1,7 .1 —3 _ _
$1= СЯС—ггг 2^”‘=#2°——0‚64 2/3= 1,19.10 3.
Удельный тепловой поток
‹; = ЗірдУд ( і, — іст) = 1,19.10—3.0‚зз.2527 (5,91 . 106 — 0,604—106) 712% =
= 12,4-10З ккал/(м2—сек).
Полная теплопередача на турбулентном участке
@ = (;(8т1— 8,2) = 12,4-103—27‚36л = 1,06-106 ккал/сек.
Суммарный тепловой поток к конусу
С? = Олам —|— От = 0,202-10з + 1,06—106:=; 1,06— 106 ккал/сек.
Х.9. По таблицам стандартной атмосферы определяем параметры
воздуха на высоте Н=2О км (см. задачу Х.З), вычисляем число Моо и
знтальпию іоо:
мю = УФО/аш = 4000/295‚1 = 13,55;
і = с т, = О,24-216‚7-9‚81 .427 = 0,218-106 м2/сек2.
Далее рассчитываем параметры воздуха непосредственно за прямой ча—
стью ударной волны с учетом диссоциации. Для этого принимаем в
первом приближении отношение скоростей за скачком уплотнения И не—
ред ним У2/У°о=0,15 (это отношение несколько меньше У2/У°о=0‚17 за
прямым скачком уплотнения без учета физико-химических превращений
воздуха). По этому значению 1/2/1/оо определяем давление за ударной
волнои:
;),/р„ = 1 + 1300 №11 —1/,/1/„) = 1 + 1,4.13‚552(1—0‚15) = 220.
Следовательно, р2=220 роо=22О-О,05636%12,4 кГ/см2.
Энтальпия за скачком уплотнения
2 2
СЮ
.- 1/2 ' у 2
і2=ію°`7+ … [1_(У_2) ]=0‚218-10°+ 40002 (1—0‚152)=
= 8,02-106 м2/сек2.
По значениям р2= 12,4 кГ/см2 и энтальпии 1'2=8,02-106 1142/сек2 из графи-
ков [17] и таблиц [34] определяем температуру за ударной волной
Т2=4525 К и средний молекулярный вес воздуха рср2=25,73. Затем
можно определить новое значение скорости:
У2 ”срос Т2 р… _ 28,97 4525 1
=_.___.____ . . =О‚1О7
т р2 25,73 216,7 220
и найти соответствующие другие параметры.
666
Удовлетворительные результаты получаются в третьем приближе-
нии: р2=13,0 кГ/см2; р2=0‚0875 кГ-сек2/м4; Т2=4585 К; цср2=25,62;
і2 = 8,13- 106 м2/сек2;
$2 = 10,5—10З м2/(сек2-град); У2 = 0,1ОЗУЮ = 412 м/сек;
412 = 1344 м/сек; №= 14,3 10“6 кГ-сек/м2.
Теперь найдем параметры в точке полного торможения сферическо-
го носка (точка О на рис. 2.Х.3). По значениям $2 =10,5-10з ли?/(секгх
Херад) и энтальпии
2
У
„ + ТОО = 0,218- 106 + 40002/2 : 8,22-106 м2/сек2
из таблиц [17] или графиков [34] находим р6=15 кГ/см2‚ ТЬ=4620 К,
р[) =0,1 кГ -сек2/м4. Затем подсчитываем коэффициент динамической вяз—
кости:
°°\Т 16,7
Градиент скорости в точке торможения
Ждёт/‚,) : 1 2(р;‚_р„)= 1 1/2(15—0,05636)104=
х—О
сіх Вт 96 1,5 0,1
Т, 0,70 „
„' =” (_ __ОТ) =1‚45.1О—6(#)0'7б=14,4-1О—°кГ—сек/м2.
= 1153
СЕК
-УД6ЛЬНЫЙ ТЕПЛОВОЙ ПОТОК В ЭТОЙ ТОЧКЭ
ЧО : 0158 РГ—2/з 729071110 Ад./( _іэст)
где і, и іст имеют размерность ккал/КГ. Здесь іст=срстТст. В свою оче-
редь
срст : ср„ (Т…/Т…)О’1 = 0,24 (500/2107)“1 : 0,261 ккал/(кГ-град),
поэтому іст=0‚261 о500—9,81 -427=О‚547— 106 м2/сек.
Энтальпия восстановления будет такой. как энтальпия торможения
і‚.= і0=8‚22 - 106 м2/сек2.
Принимая число Р1°=0‚64‚ найдем
ао=0‚5-9‚ 81 (0, 64)_2/3 1/2—О,1-14,4-10—6—1153(8,22-106 _
__0 ‚547 106) = 697 ”’“” .
9, 81- 427 мв-сек
В некоторой точке сферического носка с полярным углом ‹р (см.
рис. 2.Х.З) удельный тепловой поток
%: = % (ах/ао),
где отношение
(іх/Чо = 203 зіп Ф [соз2ср + (рю/рд) зіп2 Ф] 134/209)-
667
Таблица 3.Х.3
„=
№9 ‘?
точек ср, рад (ах/00)” =: х А’сп А2’сп Аз’сп Аіп "Ё
' (п) 57° п
Хзт Фп
О 0 1 0 О , 0867 —0 , 0033 —0 , 0040 0 , 00379 —
1 0 , 0873 0 , 9940 0 , 0867 О , 0834 —0, 0073 —0 ‚ 0025 0 , 01 12 0 , 00379
2 0,1746 0,9798 0,1701 0,0761 —0,0098 —0‚0028 0,0182 0,0150
3 0,2619 0,9513 0,2462 0,0663 ——0,0126 —0‚0021 0,0245 0,0333
4 0,3492 0,9137 0,3125 0,0537 —0‚0147 —0,0016 0,0297 0,0577
5 0 ‚ 4365 0 , 8666 0 ‚ 3662 О , 0390 —0, 0163 —0 , 0012 0 , 0338 О ‚ 0875
6 0,5238 0,8103 0,4052 0,0227 —0‚0175 0,0010 0,0365 0,121
7 0,6111 0,7457 0,4279 0,0052 ——0,0165 0,0001 0,0377 0,158
8 0,6984 0,6739 0,4331 —0,01 13 —0,0164 — 0,0374 0,196
9 0 ‚ 7857 0 , 5965 0 , 4218 —0 ‚ 0277 — — О , 0357 0 , 233.
10 0,8730 0,5145 0,3941 — — — — 0,269:
Функция
рао . .
[)(ср): 1———‚— (4срсозср—з1пср)$1п3ср+
Ро
рСО . .
+ (3 _,— +1) (ср2 + 51112 ср —— ср $1п 2ср). (3.Х.15)
Ро
Здесь с хорошим приближением рос/р[):1/(ЁМЁО) и при М…=13,55 этим.
отношением можно пренебречь. Тогда
В (ср)=(4ср соз ср — зіп ср) 51113 ср + ср2 + 51112 ср — ср зіп 2ср.
Примем, в частности, ср=50° (конец сферического участка):
ш500) : ( 4'5°° соз 50°—511150°) зіпз 50° +( 50° >2—
57 3 57,3
. 50°
$1112 50° —
+ 57 3
51п(2-50°) = 1,15;
2ср зіп ср (сов2 ср + +)? 51112 ср) % 2ср зіп ср соэ2 ср :
Ро
: 2 50°
57 3
$111 50° соз2 50° = 0,552.
В соответствии с этим
(;…/40 : 0,552/1/ №“: 0,514,
откуда
(750 : дуо—0,514 : 697-О,514 = 359 ккал/(м2—сек).
Суммарный тепловой поток к сферическому носку
‹р
Осф= 23113 % 5 (ах/(10) зіп ср сіср,
1)
(3.Х.16)-
Интегрирование (3.Х.16) проводится численно с использованием ме-
тода конечных разностей (табл. 3.Х.3).
668
При постоянном шаге аргумента (р=5°(0,0873 рад) подсчитывают-
ся соответствующие значения отношений (іх/Чо и подынтегральной функ—
ции і=(с;х/с]о)зіп ср. Конечные разности определяются из условий
Аіп =іп+1_]сп; А2]; : Аіп—Н—Аіп; Азіп : А2‚сп-|-1_А2і:п’
“’.
а величина 1Ф=3 (ах/ао)$іпс_о-сіср представляется в следующем виде:
0
”Ф 2НФ ?
1$ = ) (ах/ао) зіп Ф-сіср + 5 (ах/ао) зіп Ф-сіср +— - -+ ; (ах/ао) зіп ср 'дФ-
О
”Ф (‚ъ—`на“,
При этом значение интеграла А! за шаг изменения аргумента вычисля-
ется по формулам горизонтальной и ломаной строк:
для горизонтальной строки последовательных элементов
1 1 1 `
: ——А ——А2 _ з .
мп пф(і„+ 2 г„ 12 і„+24Аі„)‚
для ломаной строки
_ _ _Ь ___1_ 2 ___1_ 3
А1”, _ пФ (‚сп |— ? А’сп 12 А ‚гг—1 24 А ‚сп.—2) '
Например,
0,0873
А], = 5 (ах/ао) зіп срсіср==0,0873 (0 + % 0,0867 — % 0,0033 _
О
_ # 0,0040) : 0,00379.
24
Таким образом, суммарный тепловой поток к сферическому носку всо-
ответствии с (З.Х.16)
@сф = 2—3,14—1‚52-697.0,269 : 2640 ккал/сек.
Произведем расчет теплопередачи на конической поверхности. В не-
которой точке с произвольной координатой х (см. рис. 2.Х.З) отноше-
ние удельных тепловых потоков
‘70 У в (Фк) + 6 (УК)
р… _
2 (№2 Фк+—‚—зіп2 Фк) Фк сов Фк'хк
ах
_ і _ 16 РОО . —з 3
где Хк = хк/Кт; 0 (ХК) = ? (сов2 срк + ——‚— 51112 (рк) (хк —— ’[9 (рк) (рк соз2 (рк.
Ро
Функция Е((рк) находится по (З.Х.15) для ср=срк=50°. Кроме того, в
нашем случае М…» 1, т. е. можем написать
О (хи) : —3— соз2 срк (хдд; — {93 фк) (рк соз2 (рк.
Полный тепловой поток к боковой поверхности конуса
хк2
ок: глкізіпркао 5 (&)Екаік. ‹з.х.17)
Чо
хк1
669
Интеграл в (З.Х.17) может быть представлен в следующем виде:
4 х —сіхк= ———хксіх ‚ 3.Х.18
_ (ао) “ _ 1/В+С$Ё, “ ( )
хк1 хк1
где
А = 2‹рк соззсрк = 2 {Зі—°С;) 0,643З = 0,463;
16 16 .
В = В (Фк) _ ? (РК СО54 Фк {83 Фк : В (Фк) _ 'З— (Рк ЫПЗ Фк СОЗ (РК :
= в (50°) _ $6453 0,7663—О,643 =— 0,192;
3-57‚3
_19 4 : 16—50 4:
с_ з ср„соз (рк з—_57‚30‚643 0,794.
Пределы интегрирования:
;да =Ё8Фк : {8 500 = 1,19;
—=К————Т*8‘Рк+’*<=ъ 5:119 3:45
к2 Кт Зфк Кт › +1 5 › 2°
Интегрируя, найдем
,
_ _
хк2 хк2
& _ .СГ : (% В—ЬСЁсЗ) :
_Х(ао)хк х“ ЗС 1/ ' “.
хк1 хк1
2 0 463 4'52
= . , — _—3 :
(30,7941/ 0,192 +0‚794 хи) | 2,91.
1,19
Таким образом, тепловой поток к боковой поверхности конуса в ст
ответствии с (3.Х.17)
Ок == 2-3‚14-1,52—0,643—697—2‚91 :: 18400 ккал/сек.
Суммарный тепловой поток к затупленному конусу
@ = Осф + Ок = 2640 + 18400 : 21000 ккал/сек.
Х.]О. Для нахождения дополнительного теплового потока, обуслов—
ленного диффузией в пограничном слое, воспользуемся данными, най-
денными при решении задачи Х.9. В результате этого решения получен
тепловой поток от разогретого омывающего потока газа к стенке без
учета диффузии в пограничном слое. Обозначим величину этого тепло-'
вого потока ли:] . Если диффузия учитывается, то тепловой поток к
стенке
‹: = сие:, [1 + ‹Ьег’зср— 1) . ‘”. ], (33919)
1г_’ст
Где
..|
ср = [1 + 0,5 $с"2/3 1/2рд „(', ’Х №„ да…—1 (З.Х.20)
так называемый каталитический коэффициент, определяемый констан—
той Азот скорости каталитической реакции в газе, зависящий в свою оче-
редь от материала стенки; Ье и $с—соответственно числа Льюиса—
670
Семенова и Шмидта. Величина 1}; представляет собой энтальпию диссо-
циации, равную
ід = %(осб—осст), (3.Х.21)
где гад—характеристическая энергия диссоциации; осб и сост—соответ-
ственно степени диссоциации на границе пограничного слоя и на стенке.
Рассмотрим следующие два крайних случая теплопередачи в погра-
ничном слое. Первый из этих случаев характеризуется бесконечно ма-
лой скоростью рекомбинации, имеющей место на п е к а т а л и т и ч е с -
к о й стенке, при которой константа скорости реакции дот—>О. При этом,
как следует из (З.Х.2О)‚ каталитический коэффициент ср—›О. Отсюда сле-
дует, что
С] : ЧЬе=1 [1 _ д.р/(і, _ істЛ' (3…Х22)
Во втором случае скорость рекомбинации рассматривается беско-
нечно большой, т.е. дет—>00 (стенка каталитическая, способствующая
бесконечно быстрой реакции). Из (3.Х.2О) видно, что в этом случае
ср—›1 и, таким образом,
а = где:, [1 + (Ьег’з— 1) ——"°—] . (3.Х.23)
дг _ іст
Вычислим тепловые потоки (3.Х.22) и (3.Х.23) в окрестности точки пол-
ного торможения. Для приближенной оценки энтальпии ір воспользуем-
ся зависимостью
—і
{13:1
(з.х.24>
О ос=0'
По температуре в точке полного торможения Т('‚=4620 К находим эн-
тальпию недиссоциированного воздуха:
Т' 0,1 0,1
5:0 : срс, (%) дАтд = о,24(2416—62°7) 9,81 .427 ><
>< 4620 = 6,31 . 1063.
сек2
Так как іо=8‚22- 106 м2/сек2‚ то энтальпия диссоциации
ід = 8,22—106 — 6,31 — 106 = 1,91 —106 м2/сек2.
С учетом этого значения
— 1— "91406 —0751-
% _ (…%…) 8,22-106—0‚545-106 _ ’ (№№…”
Полученный результат показывает, что применение некаталитичес-
кого материала стенки приводит к снижению теплового потока пример—
но на 25%.
Во втором случае стенка принимается каталитической ((р: 1,0). При-
мем для этого случая число Льюиса—Семенова равным Ье= 1,45. В со-
ответствии с этим значением
2/3 1,91-106
70 : (](1.е=1)0 [1 + (1,45 _1)
8,22-106 —О‚545-1О6
]: 1,07.с;„_е=„0.
Таким образом, применение стенок из каталитического материала, обус-
ловливающего бесконечно большую скорость рекомбинации, привело
к увеличению теплового потока за счет диффузии на 7%. В случае ко-
нечной скорости рекомбинации для расчета теплового потока надо поль-
зоваться формулой (3.Х.19).
671
Отношение количества тепла с], выделившегося при конечной скоро-
сти рекомбинации, к тепловому потоку судим в случае бесконечно бы-
строго катализа будет
Ь 2/3 _ ^!
__‹7____ = 1“ ° Ф 1) ‘В (з.х.25)
ада—”° 1 + (Ье2/3 — 071)
где ір=ір/(іт—іст).
Рассмотрим материал стенки в виде стекловидного вещества, для
которого коэффициент Ь0т=10 см/сек. В точке полного торможения на
охлаждаемой стенке плотность
рд Т… _315-104 216.7 кГ-сек2
р =роо—. =9,062-10 —.—=1‚05—.
ст р… тСТ 563,6 500 м4
Пользуясь другими данными, полученными при решении задачи Х.9,
а также приняв число Шмидта $с=0,49, найдем
о 5.0 49—2/31/2-0 1.14 4—10—6-1153 )_1
== 1 ’ ’ ’ ’ = 0,692.
Ф ( + 1,05.1о_1о—‘2
Имея в виду, что &=ір/(іт—іст) =О,249, получим
‹: _ 1+(1‚452/3-О‚692 _ 1)о‚249 _ О 908
“дет-№ 1 +(1‚452/3—1)о‚249 ’
Таким образом, в реальных случаях применения материалов стенки,
обусловливающих конечные скорости рекомбинации, теплопередача бу-
дет меньше, чем при бесконечно быстром катализе, но, очевидно, боль-
ше, чем в случае некаталитической стенки.
Х.]1. Из решения задачи Х.9 имеем следующие значения парамет-
ров на границе слоя в окрестности точки полного торможения: р[) :
=15 кГ/см2; Т6=462О К; р6ш=0‚1 кГ-сек2/м4; % =14,4-1О—6 кГ-сек/м2;
іо=іт=8‚22- 106 м2/сек2. Соответствующий градиент скорости в этой точ-
ке Ё=1153 1/сек.
Равновесную радиационную температуру Те определяем из уравне—
ния теплового баланса
осх (і, — іе)/(ср)е = еоТЁ, (3.Х.26)
в котором коэффициент теплоотдачи
осх = №№:, [1 + (Ье2/З-ср—1) ?д] (з.х.27)
находится по удельному тепловому потоку
Оу5°р —2/3 ! г ", . .
ЧЬе=1 : __;— 1/290 ”0 7” (‘, _ де) (3.Х.28)
и каталитическому коэффициенту
"_‚_‚—м —1
0,5—8с—2/31/ 290 до к
(р = 1 + .
Ре [ест /
‹з.х.29)
В уравнении (3.Х.26) постоянная Больцмана о=1‚36-1О—”[ккал/
/(м2—сек.град4)]; ( Ср)е[ККЦЛ/КГ -град], іе[м2/сек2], ре[кГ-сек2/м4] — со-
ответственно удельная теплоемкость, энтальпия и плотность газа на стен-
ке при равновесной температуре. Далее имеем:
672
?„ : {„/(і, _— ге); (з.х.30)
{В г:. на (осб — осе) = 3- 107 (осб —осе) м2/сек2‚ (3.Х.31)
где осб И оле—соответственно степени диссоциации при температурах Т6
и Тв. Следовательно,
ід=З-1О7(осд—осе)/(і‚—-іе). (3.Х.32)
Степени диссоциации определяются при помощи соотношений
д…в і<1+щ а_в А №
_ . ‚ _ . . ‚
из которых
ос: (Нерео/”ср) _1’
где Нерео, мер—средние молекулярные веса воздуха соответственно при
Тсо и Т. В соответствии с этим на границе слоя
осб : (мери/реф) — 1, (3.Х.33)
а на стенке
все : (”ср…/Рсре) — 1. (3.Х.34)
Здесь величина меров берется из таблиц атмосферы для высоты Н =
=2О км.
Таким образом, получаем систему уравнений для определения рав-
новесной радиационной температуры стенки, состоящую из зависимо-
стей (3.Х.26)+(3.Х.29)‚ (З.Х.З2)—:—(З.Х.З4)‚ а также соотношений:
(Ср)е : Дрё; Те); ]
іе : іе (рс’п Те);
Мерв = нервов, Т,); „› (3.Х.35)
рЬ
8 Но Те/Нсре . )
Первые семь уравнений этой системы можно преобразовать к трем:
ТЗ : А1 „‚_—дд [1 +(ье2/зф__1)и{р];
ЁЁ
‚:, 3-107 (Мери/Нсрб _ ”сраз/”см) .
1 _ ‚
Ре:
В _ і, — іе
ср : ‹1 + Аим—1,
где
0,5 Рг—2/3 ` ‚ ,; 0‚5$с_2/31/2.06 №37»
А1=Т 2РОНОЖ; 142: [г .
СТ
Подсчитаем значения А1 и А2, полагая числа Прандтля Рг=0‚64‚
Льюиса—Семенова Ье=1‚45 и Шмидта 5с=0‚49‚ а также имея в ви-
ду, что А=427 кГ—м/ккал:
о, -О‚ —‘2/3
А1: 5 64
427
у/2-0д .14‚4. 10—6. 1153 : 0308—10"4 ккал—СВК/м4;
А _ 0,5.о,49—2/31/ 2-о‚1.14‚4-1о—6-115з
2 _ 10-10—2
48—927 673
= 0,467 кГ -сек2/м4.
Принимая е=0,7; о=1‚36-1О—” ккал/(м2-сек-град4)‚ а также учи-
тывая, что і+=іо=8,22-106 м2/сек2, пероо=28‚97 и пере =25‚64‚ можно
приведенную систему уравнений написать следующим образом:
Т:: = 9,47-106 (8,22-106—іе`, [1 +(1‚28.Ф_1)2Ъ]; \
из 3107 28,97 _
В _ 8,22-106—іе (1’13_ „Сре )’ '_ (3.Х.36)
== (1 + 0,467/ре)—1; і, : іе (р'0‚ те),
Нсре : ”сре (рб? Те); ре : 18 мере/Те' ]
Эта система уравнений решается методом последовательных приближе-
ний. Задаемся в первом приближении температурой Те<То=462О К,
равной, например, Те=2700 К. Из таблиц [17] по этому значению Те и
давлению р6=15 кГ/см2 определяем энтальпию іе=783 ккал/КГ =
=3‚28- 106 м2/сек2‚ а также средний молекулярный вес пере=28‚90. Да-
лее находим:
;.чв : 3.107 `(1,13_5ЁЗ›_97) ___, 0,776;
8,22-103—3‚28-1О6 28 90
ре = 18—28‚90/27ОО :: 0,193 кГ-секЗ/м“;
(р = (1 + О,467/0,193)_1 = 0,293.
‚ !
Подставляя значения 1}, ір и ср, определим Те1=2200 К.
Поскольку разница между температурой Те, которой задавались, и
полученной в результате вычислений значительная, необходимо прове-
сти еще ряд приближений. Расчеты показали, что удовлетворительные
результаты получаются в четвертом приближении (іе=649 ккал/КГ =
=2,72 - 106 м2/сек2; пере=28,96) :
Н _ ?
%: 31° (1,13—28——*91)=0‚708;
8,22-106—-2‚72-106 28,96
ре = 18-28‚96/2319 = 0,225 кГ—секЗ/м‘і;
Ф = (1 + 0,467/0,225)—1.—_- 0,326; Т…, = 2338 К_
Отличие найденной температуры Тату от ее значения в предыдущем при-
ближении составляет примерно 0,8%.
Х.12. Из решения задачи Х.9 имеем тепловой поток в окрестности
точки торможения (без учета диффузии) 670=67(т_е=1›0=697 ккал/(ЖХ
Хсек), а из решения задачи Х.10— тепловой поток с учетом диффузии
670=О,751С]ц_е=1)0 =523 ккал/(м2-сек). Энтальпия газа в окрестности
точки полного торможения і0=іт=8,22-106м2/сек2.
При использовании материала покрытия в виде тефлона эффектив—
ная теплота его абляции
* : 527+0‚5 [1 + 1.165/1'0] (іо— і‘і) , (3.Х.37)
1+ 1165/10—4143/(70
где аиз— тепловой поток от излучения с поверхности; іо, ккал/КГ — эн-
тальпия торможения; іст, ККЦЛ/КГ —— энтальпия газа на стенке.
Температура газа у стенки примерно равна температуре абляции
тефлона (Тетщ445 К). При такой температуре энтальпия іст << іо, а ра-
диационный поток аиз_<< (10. Тогда можно написать
‚„ = 527 + 0,5 [1 + 1165/і0] і,
4 № 116…) . (3.Х.38)
674
Так как здесь
1, : 822—108 —‘— : 8,22-106—1— = 1960 Ш,
дА 9,81-427 кГ
ТО
(!* : 527+0,5(1 + 1165/1960) 1960 : 131Оккал _
1 4—1165/1960 к1`
Удельный унос массы вещества с поверхности
т = ЧоК/* = 523/1310 = 0,399 кГ/(м2-сек).
Снижение теплового потока, обусловленное абляцией, определяется
зависимостью
Чі/ЧО : ] —О›5°і0/а*1 (3…Х39)
в которой аі—теплопередача при наличии абляции. Подставляя дан—
ные, получим
(];/Чо = 1 — 0,5-1960/1310 = 0,252.
Как видим, в данном случае унос части материала покрытия привел
к снижению теплопередачи примерно на 75%.
Рассмотрим покрытие из стекловидного материала.
1. Стекловидное вещество, обладающее свойством
одновременного плавления и испа рения (30% пластмас-
сы и 70 % стекла). Для этого вещества эффективная теплота абляции
* 1254-27 % '178 рын 1/(3+п)( {О 3.64/(3441) Х
Ч "_ [ › КТ®3_Г ( Р…з) КТФЗ) ]
>< (1— №) 1. (з.х.40)
00
Пренебрегая в этом выражении величиной ([из/(10, принимая п=10 и
учитывая, что для атмосферного воздуха у Земли КТЮЗ=18‚8 ККЦЛ/КГ,
получим
\
* 125 27 "О 178 р*“ №69 "О 0'28
С] ‘— +` › ГЗ—ГЗ—і— ( 0003) (із—‚Б) .
Подставляя сюда значение іо=1960 ККЦЛ/КГ, а также величину
рын/реоз=7,25—1О—2, найденную из таблиц [31; 50], определим
1960
дж : 125 + 2,71%. + 178 (7,25-10—2)“0769 (';—2623028: 941 ккал/КГ.
Соответствующий удельный унос массы
т : (д,/47°“ : 523/941 : 0,556 кГ/(м2—сек).
отношение ТОПЛОВЫХ ПОТОКОВ
91/90 = 1 —Бг71іо/а*‚ (311.41)
где т=т„/т (пы—часть вещества, уносимая с поверхности путем ис-
парения). Примем пЁ=0‚25 (т.е. 25% вещества испаряется), а также
положим В=0‚5. Тогда
91/00 = 1 _ 050,25. 1960/941 : 0,74.
2.Стекловидное вещество, абляцирующее только
пл авлением, В этом случае эффективная теплота абляции
* 178 рын 0.0769 ’:0 0,28
С]— (9003) (НЗ—8) :
= 178 (7,25—10—2)°'°769($9038: 534 ккал/КГ.
43* 675
Удельный унос массы
т .:- ао/а* : 523/534 = 0,979 [СГ/(мд. сек).
Так как материал плавится, но не испаряется (т=0)‚ то в соответ-
ствии с (3.Х.41) 01/00: 1, т.е. в рассматриваемом случае тепловой поток
полностью поглощается расплавленным веществом, уносимым с поверх-
ности.
Х.]З. Расчет необходимой толщины теплозащитного покрытия спус—
каемого аппарата связан с определением некоторых параметров внеш—
него обтекания. При этом необходимо найти температуру торможения
ТЬ за ударной волной и равновесную радиационную температуру Те воз—
духа на стенке. Заданными параметрами являются число Мэо и высота
полета Н, причем адиабатическая температура стенки Т,. принимается
вдоль траектории равной ТЕ) (за исключением начального участка ат—
мосферы с высоким разрежением). Полученные таким образом резуль—
таты приведены на рис. 3.Х.3.
В соответствии с этими данными время полета т, в течение которого
на спускаемый аппарат действует тепловой поток, составляет 26 сек.
Осредненная по этому времени равновесная ‚температура стенки соглас-
но данным рис. 3.Х.3
т„р : 2 Те,. (м,/т) = 1600 к.
і=1
Полагая температуру атмосферы равной 293 К, определим повышение
температуры на наружной поверхности стенки:
АТст = 1600 — 293 = 1307 К.
Кроме того, примем, что на внутренней поверхности теплозащитного-
покрытия температура не должна превышать 373 К. Тогда повышение-
температуры на этой поверхности
АТ,зн : 373 —— 293 = 80 К.
Найдем относительный температурный градиент по толщине обшивки:
еп : 1 —- АТМ,/АТст = 1 — 80/1307 : 0,94.
Осредняем по времени температуру адиабатической стенки (см. рис.
3.Х.3):
т„р : 2 Т„- (АТ,/т) = 5870 к.
і=1
Используя зависимость
осх (Т, —ТСТ) : еоТ4
ст’
вычисляем среднее значение коэффициента теплоотдачи:
вот4 0,8-13‚6-10_12-16004
СТ : = 0,0] 68 ккал ,
Тюр —— Теср 5870 — 1600 м2-сек—град
где для коэффициента излучения поверхности принято значение е=0‚8.
В качестве теплозащитного покрытия выбираем стеклотекстолит, для
которого ?»=0,7-1О—4 ккал/(м-сек-град), у=1600 кГ/мз; с=0‚24 ккал/
/(кГ-град).
Задача по определению толщины теплозащитного покрытия решает-
ся методом итераций. Задаемся ориентировочной толщиной покрытия
б1=10 мм и определяем величину критерия Био:
[&= вас„ был : О,0168—0‚01/(О‚7- 10—4) : 2,4_
676
Таблица 3.Х.4
м
то-ъітіиеза Ат, сек Тр К “У" б\Т' мм то?]?кійева Ат. сек Т,. К “УГ. буг' мм
траектории мм /сек ' траектории мм /сек ’
1 2 4370 0,185 0,37 8 1 7500 0,309 0,31
2 2 9 000 0,309 0,61 9 1 5000 0,220 0,22
3 2 102500 0,340 0,64 10 1 3100 0,170 0,17
4 2 11500 0,370 0,74 11 1 1800 0,03 0,03
5 2 12 000 0,377 0,75 12 2 950 — —
б 2 11 800 0,370 0,74 13 3 600 — —
7 1 10000 0,340 0,34 11
2 17 — — 4,92
л:]
Используя график [20], находим для [3=2‚4 и еп=0,94 критерий Фурье
ср=0,125 и определяем толщину теплоизоляции:
6, : 1/ат/(р : ъ/2.10—7-26/0‚125 : 6,45 мм.
Здесь коэффициент температуропроводности а=М (су) =О‚7- 1'0—4/ (0,24><
><1600)=2-10—7 м2/сек. По найденной величине б1=6‚45 мм рассчи—
тываем критерий Био во втором приближении:
В: О,0168-О,00645/(О,7- 104) = 1,55.
По значениям [3=1,55 и еп=0‚94 из графика [20] уточняем крите-
рий Фурье ср=0‚127. В соответствии с этой величиной новая толщина
покрытия
вэд—_- 3‚-/’2—10*‘7—26/О,127 = 6,4 мм.
Как видно из проведенного расче-
та, влияние [3 на конечный резуль-
тат незначительно, поэтому допусти-
мо определять значение ссср, входя—
щее в величину [3 с небольшой точ-
ностью.
Найденное расчетным путем зна—
чение покрытия несколько увеличи—
вают, вводя коэффициент запаса
толщины і=1,3—:—1,6. Приняв і=1‚5‚
получэщ б1=1‚5-6,4=9,6 мм. Эта &
толщина теплозащитного покрытия 5 10 .:
рассчитана без учета его абляции и РЮ 3.Х.з. График температуры, раю
механического повреждения СТРУК' считаш-юй для условий входа спу-
туры.'Для учета ЭТИХ факторов ВОС— скаемого аппарата в плотные слои
пользуемся экспериментальной за- аТМОСфеРЫ
висимостью скорости уноса (угара)
стеклотекстолита от температуры. Используя эту зависимость, опреде-
лим толщину угораемого слоя теплозащиты в различных точках траек-
тории, причем в качестве температуры Т, являющейся аргументом для
скорости угара цур, используем температуру адиабатической стенки Т,.
Результаты расчета толщины угораемого слоя представлены в
табл. 3.Х.4.
Из табл. 3.Х.4 следует, что угорание теплозащитного покрытия пре-
кращается до.истечения заданного времени полета (т=26 сек), что
объясняется уменьшением скорости спускаемого аппарата при тормо-
жении в плотных слоях атмосферы и, как результат, снижением темпе-
Т,К
10000
ДП
20 Т, сек
44—927 677
ратуры Т,. ДО величины 950 К, при которой абляции не происходит.
Толщина абляцирующего покрытия достигает величины
11
дуг : 2 бУГ „ = 4,92 мм.
п=1
Толщина слоя повреждения материала составляет, по эксперимен—
тальным Данным [20], бпв= (О,3—:—О‚4)буг. Приняв для рассматриваемо-
го случая бпв=0‚4-буг‚№`‚2 мм, получим толщину разрушенной структу-
ры буг+бпв=6‚92 мм. С учетом принятого коэффициента запаса і=1‚5
эта толщина б2=1‚5-6‚92%10‚4 мм. Таким образом, общая толщина
теплозащитного покрытия
биз = 61 + 62 = 9,6 мм + 10,4мм : 20 мм.
Определим вес теплозащитного покрытия, приняв, что защитный мате-
риал нанесен на переднюю часть сферического спускаемого аппарата,
поверхность которой $= (1/2)4лг2=6‚28 м2:
виз : би3у8 : 20-10—3-1600-6‚28=2О1 кг,
что составляет примерно 16% от веса спускаемого аппарата.
Хі. АЭРОДИНАМИЧЕСКАЯ ИНТЕРФЕРЕНЦИЯ
ХЦ. Аэродинамическая интерференция—это явление взаимодей—
ствия частей потока, обтекающего близко расположенные тела, напри—
мер корпус и крыло (или оперение) летательного аппарата. В результа-
те такого взаимодействия сумма аэродинамических сил или моментов,
взятых отдельно (изолированных) крыла, корпуса, оперения и рулей,
не равна полной силе или моменту комбинации, состоящей из этих же
6)
а) і
? + мёд/Ь + , :: .
2 „ь %>
Рис. З.Х1.1. Схема аэродинамической интерференции:
а — изолированные элементы; 6 — элементы, соединенные в единой конструкции
(комбинации) летательного аппарата; ! — рули; .? — крылья; 3 — оперение;
4 — корпус; 5 — летательный аппарат
элементов и представляющей собой единое целое—летательный аппа-
рат (рис. 3.Х1.1).
Х|.2. По сравнению с изолированным крылом подъемная сила тако—
го же по размерам и форме крыла при его присоединении к корпусу
увеличится. Это происхо-
дит потому, что поток,
возмущенный корпусом,
обтекает крыло под боль-
шими местными углами
атаки. При этом возра-
стает перепад давлений
снизу и сверху крыла, что
и обусловливает увеличе—
ние его подъемной силы.
Х1.3. По сравнению с
изолированным корпусом
еГО подъемная сила В при- Рис. 3.Х1.2. Зоны взаимного влияния крыла и кор-
сутствии крыла будет пуса:
больше. Это обусловлено 1—корпус; 2—крыло; 3—граница зоны влияния корпу-
са на крыло; 4—границы зоны влияния крыла на корпус
ПОВЫШ6НИ6М ДЗВЛЗНИЯ на
нижней и снижением это—
го давления на верхней поверхностях корпуса, что вызвано присутствием
крыла и влиянием его на Обтекание самого корпуса.
Х|.4. Размеры зоны взаимного влияния крыла и корпуса в сверхзву-
ковом потоке обусловлены действием аэродинамического закона, в со-
ответствии с которым возмущения распространяются только вниз по по-
току в пределах конусов Маха с полууглом при вершине иоо=агсзіп
(1/Моо). На плоском крыле эта зона представляет собой треугольник с
вершиной в начале бортовой хорды (рис. 3.Х1.2)‚ а на цилиндрической
44а—927 679
поверхности корпуса такая зона ограничивается линией пересечения ко—
нуса Маха с цилиндром. При этом согласно аэродинамической теории
тонкого тела нагрузки, индуцируемые крылом, распространяются по
корпусу на площади, расположенной непосредственно под консолями
(участок АВСВ на рис. 3.Х1.2).
Х|.5. По исходным данным определим вначале коэффициент ПОДЪ-
емной силы изолированного крыла:
ещ, == с,т.„/‹кт.„ + к, + к,…) = 1,9/‹о‚5 + 0,8 + 1,45) = 0,691.
Этому значению соответствует коэффициент подъемной силы крыла в
присутствии корпуса
Ас =с Ккр=0‚691—1‚45=1.
у кр(Т) у кр
Х|.6. Прежде всего найдем сумму коэффициентов интерференции
Ккр+Кт= ($…—|—1)2/$т‚ где $т= зт/г—2/ 1— . После подстановки
Ккр+Кт= (2—|—1)2/22=2‚25. Далее подсчитываем Кт.и+Ккр+Кт=
=сут‚нр/сукр=1,72/0,637=2‚7. В соответствии с этим Кт.и=сут_Кр/суКр-—
—(Ккр—|-Кт)=2‚7—2‚25=0‚45. Коэффициент подъемной силы изолиро-
ванного корпуса сут=сунрКтд=О‚6З7-О‚45=О‚287.
Х!.7. Согласно аэродинамической теории тонкого тела в результате
интерференции комбинации корпус—крыло местный угол атаки вдоль
корпуса остается постоянным и индуцируемый корпусом на консолях
крыла перепад давлений распределяется примерно равномерно по всем
несущим поверхностям. Вследствие этого не наблюдается существенно-
го изменения положени-я центра давления консолей как по размаху,
так и по хорде. Иной будет картина на корпусе. Местный угол атаки
изменяется вдоль размаха консоли крыла, поэтому крыло в различных
поперечных сечениях корпуса будет индуцировать неодинаковые пере-
пады давлений. Это вызовет существенное изменение положения центра
давления. Так-ое влияние интерференции особенно заметно в так назы-
ваемых предельных случаях. В первом из этих случаев рассматривается
бесконечно тонкий корпус. Очевидно, для него центр давления мож-
но считать расположенным на середине бортовой хорды консоли [ко-
эффициент центра давления (сд_д)о_т‹кр> =О‚5]. Второй предельный слу-
чай характеризуется бесконечно малым размахом консоли, при котором
вся подъемная сила крыла передается на корпус и его центр давления
оказывается близким к центру давления изолированного крыла
[(СП-д)0—Т(кр) %2/31-
Х|.8. Тонкой называется такая комбинация корпус—крыло, у кото-
рой поперечные размеры (например, размах крыла !) значительно мень—
ше продольной длины Ь, т.е. [<< Ь. Течение около такой комбинации
носит линеаризованный характер. При этом можно принять, что хвосто—
вой участок корпуса вместе с оперением (крыльями) находится на зна-
чительном удалении от носовой части, так что ее влияние на обтекание
оперения пренебрежимо мало. Таким образом, хвостовой участок будет
обтекаться практически невозмущенным потоком с числом Моо=1,5.
При этом условии рассмотрим расчет аэродинамических характеристик.
Давление. Для расчета коэффициента перепада давления Ар=рн—
_рв в точках с координатой 2 на нижней и верхней сторонах корпуса
(см. рис. 2.Х1.1) с учетом интерференции с крылом необходимо восполь-
зоваться формулой
г4 (13 сіг г2 22
4 1——)— 2 .———(1 __ _)
“[< 34 сіх+ ах + 2 ]
;
_ $
Арт(кр) : ' [(1_|_ 2—22)4 `Ё_:_:|1/2
680
Здесь:
д.3 8т_гЦ —3’2—0‚5=О‚9'
=
,
__
ах "В 3
_сі_г_ __ гдон—гц _ 0,8——0,5__О 1_
(іх хр 3 , ,
3 == гц + х ((із/(іх) =- 0‚5 + 0,9х;
г _ гц+х(сіг/с1х) _ 0,5—|—0‚1х _ 5+х _
Т _ гц+х(сі$/сіх) _ 0‚5+0‚9х _ 5+9х’
2/3 : (г/з) сов В = (5 + х) соз 6/(5 + 9х); г/г = сов В.
УЧИТЫВЗЯ ЭТИ ДЗННЫВ, ПОЛУЧИМ
рт… ,: 4.0‚1{[1—<ЁЁ)]№ 551—90, 1[1Ё(55і;х)2—2со526]} .
{МЁЁЗХП— (551193…„4/ (3х…
Для х=0 (см. рис. 2.Х1.1)
— _ 4-0‚1-2-1-0‚1(2—2соз29)
Артщэ) "— (4_4.1.с0529)1/2
ДЛЯ ССЧВНИЯ корпуса у ДОННОГО среза, где х=хр=3‚ НЗХОДИМЗ
5+х : 5+3 2025;
5+9х 5—|—9-3
АБ : 4.0 1 … —(0‚25)4[ 0‚9+2.0,25.0‚1 [1 + (0,25)2—:гсоз2 01}
№?) [[1 + (0, 25)2[2—4 (0, 25)2со52 0}1/`2
_ _0 ‚4[0, 897+0, 05(1‚ 06—2со526)]
(1, 13—0, 25 со529)1/2 '
Задаваясь различными х и В, можно определить по формуле
(З.Х1.1) распределение коэффициента перепада давления по корпусу в
присутствии крыла.
На крыле коэффициент перепада давления находится по формуле
405 41$ г4
= _ 1__ _ +
КИТ) 2 ‚ 4 '1/2 {д ( 4)
[(1+Г4/84)—%(\1+—;Т)] х 8
+;._4_’[2(і_1)+(1—;—Ё>2]}.
$ ах 32
А5
После ПОДСТЗНОВКИ ДаННЫХ ПОЛУЧИМ
5+х4 5—|—х ’" 5+х,2 [ ! Ё‘Ч
[ =4'0’1(°’9 [1—(5+9х)(+5+9х°’1 (2… 5+9х’ 1_і+ (1—22)}/
РКРП“) 1+ 5—|—х4 Ё. 5—|—х 1+__ 1/2 '
(( (5+9х)]_г2(5+9х)( га)}
Для х=0 величина 2=г и Арнр(т)=0. Для задней кромки, где х=
=хв=3, Г=Гдон=0,8,
44а* 681
0 в2 2
4.0‚1(0,9[1—(0‚25)41+0‚25-о‚1{2[(0‚25)2—11+[1—<г_)] })
АД :
в ‹т› 2
р {[1 —|— (0,25)4] _(оізт (0,25)2 [1 + (();—{ЗПР
0,4 {0,897+0,025 [_ 1,88—|— (1 _- ОЁ П}
_ 22 0,84 1/2
1,004— 0,0 25 1
[ 0,82 6 (+ и)]
При отсутствии расширения корпуса в хвостовой части (сіг/сіх=0)
коэффициенты перепада давления на корпусе и крыле определяются
соответственно из выражений:
г4 із 5+х 4
№ __ 44134)“ _ 0,36[1_(5+9х>] _
т(к )_ _ ’
р [очага—гг” {г+(пэт—403020520“?
г‘ (13
А_ 4ОЬ<1—8—4)Ъ—х-
РКРП): ‚4 22 ‚4 1/2 __
[(1+3_4)'2?(1+2_4Л
5+х 4
0’36[1—(5+9х) ]
5_|_х 4 5+х 2 ім: 1/2
{[1+(5+9х)]—(з+9х) [1+( з)]соз2е}
В частности, в донном сечении летательного аппарата, совпадающем
с задней кромкой крыла (х=хр=3)‚
АБ : 0,359 _
ТОФ) (1,13 —0‚25 ‹:оз.2 0)“2 ’
—— 0,359
Аркрп): 22 0,84 1/2'
[1,004—0‚0625 0 82 (1+ 24 )]
Полученные значения практически мало отличаются от соответствую-
щих коэффициентов для случая, когда имеется какое-либо небольшое
изменение радиуса корпуса. Поэтому в расчетах обычно влияние этого
изменения не прИнимают во внимание.
Коэффициенты интерференции. Определим вначале коэффициент
Кт, равный отношению ПОДъемной силы участка корпуса за счет влия-
ния крыла к подъемной силе изолированного крыла:
Ас 2 52 '— 1 л — 1 (32 + ”2 "
[@=—№: ’”. —|—— $9 +— ——”і——агсі вт .
Сукр :п: (3… —- 1)2 Эт ? '" ЕЁ“ 3,271 8
Примем здесь Ёт=$т/гц=3‚2/О‚5=6‚4. В соответствии с этим
= 2 “2—1 ш 3. 2 _1_ __№__+1_>Ё :
Кт “ (6‚4_ № [ 6,4 1 2 (6,4 + 6,42) 6,42 агс’се 6,4] 0,213.
Коэффициент интерференции крыла с корпусом
А ' 2 2
[(кр : № : Щ_КТ =(Щ_ 0,213 =1‚122_
сукр $2 6,42
т
682
Подъемная сила комбинации. Величина этой силы находится по фор-
муле [20]:
умр = эошвгп (1— ЦБ; + “753,3 4…—
Внося сюда скоростной напор
% = 0,5 Адрес МЭО = 0,5-1,4-1О4- 1,52= 1,57-104 кГ/м2
и остальные данные, получим
Уъкр = 20,1—3‚14-3,22(1—1/6,42 + 1/6‚44) 1,57- 104 = 9,8-104 кГ.
Уточнение по линеаризованной теории (с учетом влияния числа
М…). В соответствии с этой теорией коэффициенты интерференции Кт,
Ккр сохраняются прежними (Кт=0‚213 и Ккр=1,112), а коэффициент
ПОДъемной силы изолированного крыла определяется по линеаризован-
ной теории. _
Угол стреловидности такого крыла (см. рис. 2.Х1.1)
% : агс19( хр ) = агс’се (ЖЗ—ГБ) :: 48°,
Зт—ГЦ , — ,
поо = агсзіп (НМШ) = агсзіп (1/1‚5) = 41°50’.
Таким образом ж<(л/2—н°о)‚ так как 48°<(90°—41°50’)=48°10’‚
и, следовательно, передняя кромка крыла будет сверхзвуковой. В соот—
ветствии с этим
суд,: «зщ/мг, — 1 : 4.0‚1/1/1‚52— { = 0,357.
Коэффициент подъемной силы корпуса принимаем равным соответству-
ющему значению для головного конуса, полагая при этом, что такой
коэффициент рассчитан по площади двух консолей Бир. В результате
получим
а угол Маха
сут = 2ос’ 043, 1/ „3—1 (Бид/ЗКР)-
Здесь:
ос’ = Ъ/МЁ—Т -_—_- /1‚52— 1 = 1,12;
Бк = Гц/ХР = 0,5/3 = 0,167;
ик = 1/(оъ’ Бк) = 1/(1‚12-0,167) = 5,5;
в…… : ті : 3,14.0,52
экр (8…— гц) ха (зд—10,5) 3
После подстановки этих Данных находим
с,т : 2-1,12-0‚1 -О,167 УЁЪЁГ. 0,097 : 0,0198.
Таким образом, Для комбинации корпус—крыло
сумр = сут + (Кт + Кир) сукр = 0,01% + (0,213 + 1,122) 0,357 = 0,490.
= 0,097.
Соответствующая подъемная сила
У = с
т у т.кр Чт зкр'
Поскольку
ЗКР = (вт— гц) хд= (3,2— 0,5) 3 = 8,1 м“, то
У…,р = О,490—1,57- 104-8,1 = 6,22-104 кГ.
Центр давления. По линеаризованной теории сверхзвукового обтека-
ния центр Давления треугольного крыла находится от вершины на рас-
стоянии 2/3 его высоты. Под влиянием интерференции с корпусом это
расстояние согласно данным табл. Х\/-1-1 [21] будет равно для г/$…=
=1/6,4=0,156 значению
(Ч…)ы кр… хр : 0,654-3 = 1,96.
Центр давления сдвигается ближе к передней кромке по сравнению с
изолированным крылом. Для симметричного участка изолированного
корпуса центр давления располагается посредине, а под влиянием ин-
терференции (см.табл. Х\/'-1-1 [21])
, у, его расстояние от начала участка
изменится и составит 0,532 от дли-
? У, ны этого участка, т.е. центр давле-
ния сместится к дн\у.
% Х1.9. Накренение плоской ком-
“чъчт/ бинации корпус—крыло, находя-
=— щейся в сверхзвуковом потоке под
[УМ 2 углом атаки, изменяет характер ин-
у 13 \ терференции между крылом и кор-
°° пусом. Правая консоль (рис. 3.Х1.3)
50 после накренения наХОДится в попе-
речном потоке со скоростью Усього
“оо“ под углом, меньшим :п:/2‚ а левая—
под углом, большим :пэ/2. Поэтому
Рис. з.Х1.з. Система координат удог, на правой консоли перепад давле—
ПРИ Крене летательного аппарата ний увеличится, а на левой умень-
шится. В соответствии с этим подъ-
емная сила правой консоли возрастает, а левой—уменьшается. Рас-
смотренный эффект интерференции зависит от углов атаки о и крена ср
(или угла скольжения В).
ХНО. При наличии угла крена взаимодействие между крылом и
корпусом плоской комбинации приводит к увеличению подъемной силы
для правой и уменьшению величины этой силы для левой консоли
(см. задачу Х1.9). Врамках аэродинамической теории тонкого тела на
одинаковых консолях эти изменения подъемных сил оказываются оди-
наковыми. Следовательно, суммарная подъемная сила комбинации бу-
дет оставаться такой, как и при отсутствии накренения.
ХМ]. Крыло нулевой толщины не оказывает влияния на Обтекание
комбинации в направлении оси 021, следовательно, боковая сила в
этом направлении создается только корпусом. Величина этой силы обус-
ловлена обтеканием корпуса поперечным потоком со скоростью Усов
(см. рис. З.Х1.З).
Х!.12. Для расчета аэродинамических характеристик используем за-
висимости, полученные в аэродинамической теории тонкого тела (см.,
например, [21]).
Давление. Коэффициент перепада давления на нижней и верхней
сторонах корпуса, обусловленный интерференцией с крылом,
А рт(кр) : р?…» _ ракр) :
а а 2 2
4ос “ьн/396173 +2 % . 4; (1+ % —2 %>] + 32045 (%> соз @ зіп2 0
_ ‚2 2 22 1/2
К' +?) 4—5]
Отбрасывая член с сіг/сіх, оказывающий пренебрежимо малое влияние
6.84
на Давление, и п0дставляя значения ос=осс соз ср, Б=ас зіп ср, г/г= соз 0,
а также другие данные (см. задачу Х1.8)‚ найдем
Г 5 х 4 5
4-0,1соз20°[1—(5——_Ё;> ]0,9—|—32-0,1-со520°-0,1—$іп 20°(5Ё;) созезіп20
рт(кр)= 5—|—х 22 5+х 2 1/2
„№№-+%” _4<5+9х) №26}
5+х4 5+х _
0,338[1—<5——_|_ 9х) ] —|— 0,102 (5 _|_ 9х) соз0 вт2 0
'5+х\22 5+х 2 11/2
{[1+<5+9х/ ] _ 4(5 + 9х) (30526 |
На корпусе у вершины крыла (х=0)
А Б……) = 0,102-соз @ вине/2 зіп0 : 0,051 -соз @ зіп @.
У задней кромки крыла, где х=хр=3‚
' 5+3 4 5+3
0 3 1— —— 0,102 '2
‚38[ (5+9-3>]+ (5_|_9 з)со50$1п 6
рт‹кр› _ {[1+(5+3)2]2_4<5_+_3>20526}1/2 _
5+9 3 5+9 з
:__0 ‚‚338+0 026 со50 зіп20
(1, 13—0, 25 соч2 в)“2
Рассмотрим коэффициент перепада давлений на крыле в присутствии
корпуса:
швзцо—аііг—ъгс—і— >1+—<1——>}+4ав (1+;—:><1—;—:>*
ркр(т)= \ 2 2 2 2 2 1/2
[(№—;;) еть—)]
Отбрасывая здесь член с аЁг/ах и подставляя имеющиеся данные, най-
дем
401соз20°{0,9 91Г _(5+х)4] '401со 01з'п Х
. , . Т о , $ , 1
[ 5+9 Ф Ф
рКР(Т): 5—|—х 2 2
{[1+(5+9х„ (о‚5+о‚9х> Х
0,5—|—0,9х( + 22 )( _ 22
0,52 1/2
%+ 1}
Здесь знак ‹<—|—» относится к правой консоли, а <<—»—к левой.
В вершине крыла (х=0)
0 52 2
+ 0,04 —— 1 _ —’—)
_ _ СО$Ф$1ПФОЁ5 (0 252)( 22
ркр(т)— 22 0,52 2 1/2
14— (' +—)]
0,52 22
На задней кромке (х=хр=3)
‚ _ 3,2 22 22 )
КИТ): 22 0 52 1/2
1,13 — 1 ’—
1 3,2% + 2211
Ар
685
Подъемная сила комбинации в направлении оси Оу1 (рис. 3.Х1.3)
У1 = 2осссозср-лзгп (1 —1/5Ёп +1/531)4„ :
= 2-О‚1-соз 20°—З‚14-3‚22(1 —— 1/6‚42 + 1/6‚44) 1,57-104 = 9,25- 104 кГ.
Боковая сила
21 = — 2осс ті зіп ср-аоо = — 2-О‚1-3‚14-О‚52-5іп2О°-1‚57- 104 =
= — 0,84-10з кГ.
Соответствующие аэродинамические коэффициенты:
сш = 70021: = госссозсрёгп (1 — 1/3; +1/531) =
= 2`О‚1-со5 2О°—6‚42 (1 —— 1/6‚42 + 1/6‚44) = 7,64;
= —і1—— = _ 2осс зіп (р = 2-О‚1—$іп20° = — 0,0685.
С 1
укр…
% 2,
С) \; СЪ’
‹ \‘Р
(Шцд)остг
СЕ
Х
Рис. 3.Х1.4. Схема сил, приложенных к ле— Рис. 3.Х1.5. Система координат
тательному аппарату у’Ог’ при крене летательного ап-
парата
Коэффициент дополнительной подъемной силы консоли, вызванной
креном,
Асу кр… : КФ 06с 5… Ф°сукр
Из табл. Х\/'-2—1 [21] по значению г/$…=1/6,4=0‚156 находим КФ =
=0‚683. Коэффициент сукр принимаем сначала равным соответствующе-
му значению по аэродинамической теории тонкого тела (для характер—
ной площади Змид=лг3):
сукр = 206 зіп ф (з'т— 1)2 = 20,1 зіп 20° (6,4— 1)2 = 1,99.
В соответствии с этим
Ас = О,683-0,1-зіп 2О°— 1,99/с’с8 48° = 0,023.
укр…
Вычисляем затем Сукр по линеаризованной теории (для характерной
площади Бир):
е_… = 4а/1/м30 _ 1 = 4-0‚1/1/1‚52— 1 = 0,322.
/с’[8 %.
Тогда
Ас : 0,683.0‚1 „9,111 20 _ Бир 0,322 : 0,0765.
!! “Р… ещ 48° з…‚д
Из табл. Х\/'—1-2 [21] по г/5…=0,156 находим относительные коорди-
наты центра давления одной консоли при крене (рис. 3.Х1.4):
(СЦ-д)ФКР(Т) : (ххх-дФ/Ькр)кр(Т) : 0'672;
686
(гц—д1Фкр(т) : (гцдср __ Г)/($ _ г\) : 0’525'
Силы и моменты для комбинации корпус— крыло с учетом влияния
крена. Коэффициент подъемной силы (рис. 3.Х1.5)
с ‚ = (с!/‚)т —|— (дву/нос)…) (КТ + Кир) ос соз ср.
51
171
Здесь:
ос = осо соз ср = 0,1 -со5 200 = 0,094;
(су,)т = 206’ осБк/иі— 1 (Змид/Зкр) = 2—0,1-1,12-0,1671/5,52—1 ><
›‹ 0,097 = 00191;
(№) = 4/1/м3° —1 = 4/‚/1‚52— 1 = 3,57.
6106 кр
В соответствии с этим
су, = 0,0191 + 3,57 (0,213 + 1,122) 0,1 соз2 20° = 0,442.
Коэффициент боковой силы
с ‚ = (см + (дву/№№ (19 + к,…) Всоз ‹…
2
Где
В = ас вт ср = 0,1-$111 20° = 0,0342;
(са,)т = 206’ оссзіп (‚>—вк 1/ иі— 1 (зщ/вкр) =
= 2-1,12—0,1-5іп 20°—0,167 /5‚52— 10,097 = 0,00650.
Таким образом,
ег, = 0,00650 + 3,57 (0,213 + 1,122) 0,0342-0,937 = 0,159.
Коэффициент момента тангажа относительно поперечной оси, проходя-
щей через вершину крыла (точка А на рис. 3.Х1.4),
__ ас соз2 ср 40
тг’ _ (тг')т_ [КТ(хц-д1ост(кр› + Кир (хи-д1акр(т)] хи (Готика.
Здесь:
хк=хг+хц+хд=3+6+3= 12м;
(та,)т _ (с,), "“ + “_ 12/3)“ = 0,0065 6+3—(2’3) 3 = 0,0038.
хк 12
Из табл. ХУ-1-1 [21] для г/$т=0‚156 имеем
(хц‘да/Ькръшр) = 0,532, а (хц_да/Ькр)кр(т) = 0,654, откуда
(Хаджи… = 0,532 х,) = 0,532-3 = 1,60;
(хц_д\акр(т) = 0,654 хр = 0,654-3 = 1,96.
В соответствии с этими данными
тг, = 0,0038— (0,213. 1,60+1,122-1,96)О’1(№2200 . 4 = — 0,0629.
12 1/1,52—1
Коэффициент момента крена
тх’ : _ Кир
сіс 2 .
__у ( ц д)сскр(Т) осс соз Ф-
сіос кр х,;
687
Здесь боковая координата центра давления определяется следующим
образом. Из табл. Х\/-1-1 [21] по г/$т=0,156 находим
г
(гц-д)оскр(т) : ( ц-дос _ г)/(8т_ г) = 0'420-
Имея в виду, что г=гц=0‚5, а $т=3,2, подсчитаем:
‚гидОС = 0,420 (вт — гц) + Г„ =_— О,42О (3,2 — 0,5) + 0,5 = 1,63.
Таким образом,
т„ : —1,122—4-1,63-О,1-О,937/(1/1,52—112):— —0‚051.
ХЫЗ. При наличии скольжения тонкой крестообразной комбинации
(цилиндрический корпус и одинаковые консоли нулевой толщины) осо-
бенностью аэродинамической интерференции (в рамках аэродинамиче-
ской теории тонкого тела) является независимость от угла крена вели—
чины подъемной силы, определяемой в вертикальной плоскости, парал-
лельной набегающему потоку и проходящей через продольную ось
летательного аппарата. Это следует из формулы
у : 2осслв31(1—1/ТЗ‚Ё, +1/Е3,)с;ю.
Как видим, в эту формулу угол крена не входит.
Физически такую особенность интерференции можно объяснить сле-
дующим образом. Вертикальные консоли нулевой толщины не влияют
на Обтекание комбинации в продольном направлении под углом ата-
ки @, а горизонтальные —в направлении угла скольжения [З. Это позво-
ляет рассматривать два независимых потока, один из которых обтекает
комбинацию корпус—вертикальное крыло под углом [з, а другой —
корпус -— горизонтальное крыло п0д углом а. При этом известно, что
суммарная подъемная сила таких плоских комбинаций не зависит от уг-
ла крена (см. задачу Х1.10). Следовательно, не будет зависеть от этого
угла и подъемная сила всей крестообразной комбинации.
Х1.14 Для интерференционных сил, вызванных креном (од:/&О, ВфО),
происходит большее смещение центра давления, чем для интерференци—
онных сил при отсутствии скольжения (аэЬО, 6:0). Это объясняется
дополнительным перераспределением давления за счет воздействия по-
тока, обусловленного скольжением.
ХМБ. Момент крена тонкой крестообразной комбинации с одинако-
выми консолями, находящейся в невозмущенном сверхзвуковом потоке
под углами атаки ов и скольжения [З, равен нулю, так как согласно аэро-
динамической теории тонкого тела вертикальные консоли создают та-
кой же по величине момент крена, как и горизонтальные консоли, но
обратный По направлению.
Х!.16. Если летательный аппарат в виде тонкой крестообразной ком-
бинации находится в слабовозмущенном сверхзвуковом потоке под уг-
лом атаки и скольжения, то ПРОИСХОДИТ взаимная интерференция несу-
щих консолей. Наличие вертикальных консолей уменьшает воздействие
поперечных потоков со скоростями Уфа и Усов (рис. 3.Х1.3) на перерас-
пределение давления по консолям и снижает индуцированную нормаль-
ную силу крыла. Несимметричное Обтекание не изменяет распределе—
ления давления по корпусу, а координаты центров давления консолей
оказываются близкими к соответствующим значениям для изолирован-
ных консолей, поэтому интерференция крыла с корпусом не оказывает
заметного влияния на положение центра давления всего аппарата.
Х!.17. Влияние хвостовой части корпуса, расположенного за консо-
лями крыла, на аэр0динамические характеристики летательного аппа-
рата с уменьшением числа Мсэ будет возрастать, так как вследствие уве-
личения угла Маха [м…=агсзіп (1/Моо)] на все большую площадь кор-
688
нуса будет передаваться нагрузка, индуцируемая крылом (см.
рис. 3.Х1.2).
Х!.18. Влияние хвостовой части корпуса, расположенной за консоля—
ми крыла, сказывается в смешении центра Давления в направлении к
донному срезу, поскольку нагрузки, индуцируемые крылом, распрост—
раняются на эту часть корпуса и способствуют возникновению больше-
го стабилизирующего эффекта.
Х!.19. Рассмотрим расчет по аэродинамической теории тонкого те—
ла. Коэффициент перепада давлений на нижней И верхней сторонах кор-
пуса в присутствии крыла
2 2 2
4і__і__г__(1+г_)[2; .3+ё(1_г_)]
'— ___406 г2 ах $ 52- 3 сіх ах $2 +
рт(кр) _ ‚2 2 22 1/2 _
№+2У42]
22
64043 — (1 _ г2/г2)
32
і ' 2 21/2 2 2 2 1/2 ’
г2 2 ' г 2
№+БТ2Ы К—БУНЕ1
где знак плюс относится к правой половине корпуса, а минус — к левой.
В НЗШВМ случае КОРПУС Нд УЧЗСТКЭ раСПОЛ03К6НИЯ КОНСОЛИ имеет ПОСТО-
янный радиус, поэтому сіг/аіх=0. Учитывая также, что а—озс соз ср и
33=осс зіпср, найдем
(13 г4
4осс СОЗ (Р Б 1—8—4
Арпкр) : ‚2 \2 22 1/2
“‘ +?) ——4,т]
2 - Зі Ё
64осс соз ср вт ср 32 (1— г2 )
+
_ г2 2 221/2 г2ч2 4221/2
1 — —4— 1——
[(и) 32] [( мы]
Вычисляем (см. рис. 2.Х1.2):
ос„ зіп ср == 0,1-він 20° : 0,0342; осс соз ср = 0,1 —соз 20° = 0,0940;
Зі Ш : ?25_—°_›5 : . : Зі : -
а'х хр з 1, 3 г + х сіх 0,5 + х,
г г __0,5_1
$ : г+х(сі$/сіх) _О‚5—}—х_ 1+2х;
2/г : сов В; 2/3 : (2/г)/(г/$) : сов 6/(1 —|— 2х).
С учетом этих Данных
4-0,094[1—;]
(1 +2х)4
рТ(К1Э)= 1 2 1 1/2 _
__ _ \ 2 __
{[1+(1+2х)2] 4соз 6(1 +2х)2}
64-0,094-0,0342-с $2 в ——
+ ° (1+2х)2
{[,+__1__Г_…,…_1__}№{[, __1__2+4 „‚_1__у/2
(1+2х)2 (1+2х)2 _(1+2х)2] СОЗ (1+2х)2‚
689
(1 — соз2 6)
1
0,376[1—(—1_+Тх)4]
_ {[1+_1 Г_ 4соз20 }1/2 _
(1 +2х)2 (1—|—2х)2
0,204-со526-5іп26
+ (1+2х)2
[[1+ _]2—1—11/24С0826 {[] _ 1 Г—і— 4со526 }1/‚2
[ (1 +210? (1 +2х)2! (1_|_ 2х)2 (1+2х›2
Коэффициент Давления ДЛЯ х_О (точки на корпусе у вершины;
крыла)
. 0,204-со5‘3 0 зіп2 0 _
Арт(кр)= 1— 2$іП6—2со56 = 1 0,05 со5051п 0.
Для х=хр=3
— 0376 (1 _ 0 ,00042)
Ар „ __
№”: [(1 + 0 ,0204)2 _ 4 0, 0204 соз2 0]
_1_ 0,204 соз2 6$іп200,0204 _
_ [(1 + 0,0204)2 _ 4.0‚0204 сов2 611/2 [(1 _ 0,0204)2 + 4.0‚0204 сов2 01“2 _
0,376 0,0042
1/2 і 1/2 1/0 .
(1 ‚04 — 0,0816 со52 @) (1 ‚04—0,0816 со52 6) (0,996+ 0,0816 сез.2 0) ‹
Коэффициент перепада давления на горизонтальных консолях (на
правой со знаком плюс, на левой — со знаком минус)
4 \2
(1 — ’ —)
24
_ сіх _1_
Арк : '
Р… ‚4 22 ‚4 1/2— ‚4 2 24 ‚4 211/2
[1+;:—:г(1+-;Л №57?) “доп—д)]
Подставляя Данные, получим
Ар 40,1 сов 20° [1 _ 1/(1 +2х)4] +
КР“): {1+1/(1+ 2х)4— [гг/(0,5 +х)21[1 +1/(1+2х)4]}1/2 _
; [4г2/(0,5+х)210,1-соз200-0,1.зіп20°[1 __‹0,5/г)412 _
; {'п +1/(1+2х›412—[г/‹о‚5+х›1ч1+ (од/№№ _
0,376[1—1/(1+2х)4] ‚
{1+1/(1+2х)4—[?/(0,5 +…2 [1 + на +2х)4]}1/2 :
_ 0,0128 [1 _ (0,5/2)4]2 22/(0,5 + х)2
1 {[1 + на + 20412 — [г/‹0.5 + х]4 [1 + (Од/гии?” '
Для х=0
0,0128 (2/0,5)2 [1 _ (05/29412
Арки“: {4 — 070504 [1 + (од/0410“2 ’
а ДЛЯ х=хр=3
АБ : 0 ‚376 (1 _ 0,00042)
“Р”) [1 +0‚00042——(22/12‚25) (1 +0,00042)11/2
+ 0,128[1—(0,5/2)4]2 2271225 :
; {‹1 + 0,00042)2 _ (241/150) [1 + (0,5/2)4]2}1/2
0,376 0.001 .22 [1 _ (0,5/2)4]2
: (1 _;›‚2/12,25)1/2 _ {1 —(г4/150) [1 +(0,5/г)4]2}1/2 '
Вычисляем коэффициент перепада давлений на нижней (знак плюс)
и верхней (знак минус) консолях:
690
— 45 (аз/ах) (1 _ г4/84)
Аркщт) : [1 + ,4/34_ (уз/$2) (1 + ‚4/34)2]1/2 _|_—
+ 4 (112/82) 066 (1 —— №№)2
_ [( 1 + г4/34)2 — (шт/34) (1 + г‹ъ/у4)21“`2 '
‘После соответствующих подстановок получим
Ар 4 0,1 зіп20°[1——О,54/(0,5+х)4] +
“Р…: {1 +0, 54/( 0,5 + х)4— [у2/(0‚5 +х)4] (1 + 0,54/у4)2 }“2 *
_!_ 4 [у2/(О,5+х)2]О‚1--со520° 0,1-5іп20°(1——О,54/у4)2 _
’ {п +о‚54/‹о‚5+х›4г-’- —[у4/‹о‚5 +х)41‹1+о‚54/у4›2}“2 _
_ О,137[1—0‚54/(0‚5+х)4] +
_ {1 + 0,54/(о‚5 + х)4 _ [у2/(0‚5 + х)2] ‹1 + 0,54/у4)2}1/2 _“
. №№ №№ + №1 (1 — 0,5%)2
; {“ + °»54/(0›5 + 40412 — [тг/(0,5 + х›41 ‹1 +о,54/у4)2}“`2 '
Для х=0
_ _ 0,0128 (у2/0‚5‘3) (1 —0‚54/у4>2
Арки-г) '— і—[4 _ (уд/0,54) (1 + 0,54/у4)2]1/2 ›
адлях=хр=3
0,137 (1 —о‚00042)
[1 +о‚00042 —(у2/12‚25) (1 + 0,54/у4)]1/2
0,0128(у"*/12‚25)(1—О‚5"=/у"*)2
_ [(1 + 0,00042)2 — (514/150) (1 +0,54/у4)]1/2
0,137 0,001у2 (1 —0‚54/у4)2
[1—‹у2/12‚25)(1+0‚54/у4)]“`2 _ [1,004—(у2/150)(1+0.54/у4)11/2 .
Аркшт) :
Рассчитаем Действующие силы, моменты и их коэффициенты. Коэф-
фициент Дополнительной силы, действующей на корпус в направлении
отсчета угла ос, отнесенный к площади $Кр двух изолированных кон—
солей,
АсОС = К (дву Мос
у т‹кр› СОЗ Ф
;кр ОСС
Здесь производную (аЁсу/аіоьдр определим по линеаризованной теории.
С этой целью вычислим вначале угол стреловидности крыла:
3,5—0‚5 : 450
З
% = агс’се (№) = агс’гд
хд
и угол Маха:
рю = агсзіп (“М…) = агсзіп(1/1‚5) = 41°50’.
Согласно этим данным и<л/2—мо° (45°<л/2—41°50’=48°10’) и, сле-
довательно, передняя кромка крыла будет сверхзвуковой. Для такого
крыла
(ас/(104 кр… 4/1/м—2—1=4/1/1‚52—1 =3‚57
Из табл. ХУ-1-1 [21] по величине г/$…=0‚5/3‚5=0‚143 находим Кт:
=0‚195‚ тогда
Ас“ —О‚195-—3‚57-0‚1 -соз 20° = 0,0655.
Ут(кр)
Соответствующий коэффициент силы в направлении отсчета угла В
АСВ = — Кт (дву/дос) зіп ср— _ — 0,195 3,57 0,1 зіп 20° =— 0,024.
у 'Цкр) № 06с
691
В направлении оси Оу’ коэффициент ПОДъемной силы
с : =Ас°° соз ср— АСВ зіп ср = 0,0655 - соз 20° +
ут…р) у тиф) у т‹кр)
+ 0,024—зіп 200 = 0,0698.
Боковая сила в направлении 02’ равна нулю. Коэффициент поцъемной
силы всей комбинации (см. рис. З.Х1.5)
(: ' : Су; + (аду/(10°)кр (Кт + Кир) 06
!!
Где
С у; : 206,06‘: 6“ ]/ ні _ 1 Змид/Зкр=
=21/1, 52— 10,01 _ 1 - 3*14'°*52 =О,0198.
1/1‚52__1о‚5/з (з,5_о‚5)з
Коэффициент Кир находим из табл. Х\/-1-1 [21] по значению г/$т=
=0,14З. Его величина Ккр=1‚113. В соответствии с этими данными
су, = 0,0198 + 3,57 (0,195 + 1,113) 0,1 = 0,484.
Вычислим теперь коэффициент момента тангажа (см. рис. З.Х1.4):
т ___—Мг, т (хи-д)04КР(Т) 1{кр—|_("сц.д)ост(кр) Кт (ад!/) со
2:—' = : _— _ с.
40081… з'ск гт хк асс р
Ранее был найден коэффициент тг ‚ _0 0038 (рассчитанный по
площади консолей ЗКР). Кроме того, по гтабл. Х\/- 1- 1 [21] определим,
зная г/$т=0,143, безразмерные коэффициенты центров давления:
(х ”7 0,654;
Ц да КР)КР(Т)=
(х пр №…: 0,530.
Ц-да КР
(сц.д)…‹р‹т›=
(СЦ-д)осТ(кр)=
По этим данным нах0дим, полагая Ькр=ХБ=З м,
(хц_д)№… : 0,654—3 : 1,96; ‹хц_д)№р, =0,530—з = 1,59.
Таким образом,
тг, = 0,0038 — 1,96" "13 +1'59'0’195 3,57.0‚1 : _ 0,070.
12
Определим подъемную силу:
У’ = су, ат ЗКР = 0,484- 1,57- 104 (3,2 — 0,5) 3 = 6,2—104КГ
и момент:
Мг, = тг, Ч… $крхк : — 0,070-1,57-104-8,1-12 = —10,7-104кГ-м.
Затем ПОДСЧИТЗЗМ КООРДИНЗТУ ЦЭНТра ДЗВЛЭНИЯ:
х = _ мл” : 10,7-104/(6,2-104) : 1,7Зм.
Ц-д
По теории тонкого тела определим суммарные силы и коэффициен-
ты. Коэффициент подъемной силы в направлении оси Оу1 (см.
рис. 3.Х1.3)
су, : 2ос—$_31(1—1/531 + 1/331).
Так как здесь `;…:зт/г=3,2/О,5=6‚4‚ то
0,1 = 2-0‚1—соз 20°-6,42(1 — 1/6‚42—]—1/6,=44) 7 ,.51
692
Коэффициент боковой силы в направлении оси 021
021 = —2рБ‚2„ (1 — 173,2, + 1/33) = —2-О,1-$іп2О°—6,42(1 — 1/6‚42 +
+ 1/6,44) = — 2,74.
Найдем соответствующие силы У1 и 21:
1/1 = 5,1% Змид = 7,51 —1,57—104—0,785 = 9,30—104кГ;
21 = 0210… Змид = — 2,74-1‚57-104-О,785 : — 3,40-1О4кГ.
Коэффициент подъемной силы в направлении оси Оу
су = 206531“ —1/'в'‚2„ +153) = 2-0‚1-6,42(1—1/6,42 +1/6,44)= 8.
Соответствующая сила
У = %% Змид = 8-1,57—104-0,785 = 9,94-104кГ.
Как уже было установлено ранее, боковая сила в направлении оси Ог’
равна нулю.
\
Рис. 3.Х1.6. Упрощенная вихревая модель комбинации корпус—
крыло:
! — корпус; 2 — крыло; 3 —— оперение; 4 — П-образные вихри
Х1.2О. Физическая природа интерференции между оперением и кры—
лом заключается в том, что вихревая пелена, сбегающая с крыла и про—
ходящая вблизи оперения, вызывает скос и торможение потока и, как
следствие, уменьшение его угла атаки и подъемной силы.
Х1.21. Крыло, присоединенное к корпусу, сильнее скашивает поток.
Это объясняется тем, что такое крыло вследствие интерференции с кор-
пусом обладает большей, чем изолированное крыло, подъемной силой.
При возросшей подъемной силе интенсивнее будет сбегающая с крыла
вихревая пелена, индуцирующая за ним большие скорости и сильнее
скашивающая поток.
Х!.22. Упрощенная вихревая модель комбинации корпус —крыло,
применяемая при исследовании интерференции оперения с крылом при
сверхзвуковых скоростях, представляет собой две пары П—образных
вихрей (рис. 3.Х1.6). Причем присоединенный вихрь (перекладина «П»)
расположен частично на консоли крыла и корпусе. Один свободный
вихрь сбегает с консоли, а другой располагается вдоль корпуса. На—
правление вращения этих сопряженных вихрей противоположное.
Х!.23. Коэффициент эффективности оперения находится по формуле
. '2
‚п _ уъкр—оп '— ут.кр _ 1 + ЬОП Кир (дву/аа)кр вкр (зт)оп
оп _ й _
уъоп _ Ут 8 [(Зт)оп + Гоп]2 “ [(зт)оп _ Гоп] (20 _ ’кр)
. (з Х[.2)
693
Эта формула определяет отношение приращения подъемной силы при
установке оперения на комбинацию крыло—корпус к приращению
подъемной силы при установке оперения на изолированный корпус.
Параметр іоп в (3.Х1.2) представляет собой отношение двух безраз-
мерных величин: приращения ПОДъемнои силы корпуса и оперения под
воздействием вихря и циркуляции, характеризующей интенсивность
сбегающего вихря, и вычисляется по выражению
і __ _ 450 [(Ёт)оп—11(Кко)оп
оп _“ - — —
(5/3 + 23) (з…)…
Боковая координата вихря у оперения 2„ в расчетах интерференции бе—
рется такой же, как на крыле, поскольку исследования показывают,
что смещение вихря в боковом направлении мало.
Из табл. Х\/`-2-1 [21] находим для г/(зт)нр=0‚5/2,5=0,2 значение
(2„—г)/($…——г)кр=0‚76‚ по которому определяем координату:
г„ = г —|— 0,76 [(зт)кр — г] = 0,5 + 0,76 (2,5 — 0,5) = 2,02
и ее относительное значение:
5, = г,/(з‚„)о„ = 2,02/1 ‚5 = 1,34.
Координату у„ найдем в соответствии с рис. 2.Х1.3 как катет прямо-
угольника АВС, предполагая, что она расположена под центром тяже-
сти площади оперения с учетом части, занятой корпусом, а направление
вихрей совпадает с направлением потока:
у„ = (х…)оп ос = 40,1 = 0,4.
Относительная величина этой координаты
Э„ = уд/(Зт)оп = 0,4/1‚5 = 0,267.
По табл. Х\/-1-1 определяем для г/(зт)0п=0,5/1‚5=0‚333 значение
(Ккр)оп=1‚285. Имея в виду также, что (3…)0п=($…)оп/г=1,5/0,5=3‚
найдем
__ _4.1‚34(з_ 1) 1,285
:… — = — 2,45.
[(0‚267)2 + (1,34)21 з
Теперь можно вычислить коэффициент эффективности по формуле
(З.Х1.2), В которой Ккр определяется из табл. Х\/-1-1 [21] по г/(зт)кр=
=0,5/2,5=0,2 и равен Кнр=1,162. Для определения (ас,/аа)…р необхо-
димо сначала установить характер передней кромки крыла. Угол стре-
ловидности
% = агс‘сд —х“Ё—— = агсід —2— = 45°,
(вт)кр —гц 2,5 — 0,5
а угол Маха
Н… = агсзіп (НМШ) = агсзіп (1/1‚5) = 41°50’.
Отсюда видно, что
% < л/2 — „ (45° < л/2 — 41°5о’ = 48°1О’).
00
Таким образом, передняя кромка является сверхзвуковой. Для этого
случая
(аду/аа)“, = 4/]/ м3, _ 1 = 4/1/1,52— 1 = 3,57
Имея в виду, что площади консолей крыла
ЗКР = [(вт)кр — г] хкр = (2,5 — 0,5) 2 = 4 м2,
694
найдем после подстановки в (3.Х1.2) всех данных
—2‚45—1‚162.3‚57—4-1‚52
по“ : 1 + : 0,4.
8(1,5+ 0,5)2з‚14(1‚5—о,5)(2,02—о,5)
Х1.24. Согласно аэродинамической теории тонкого тела сила, созда-
ваемая рулевой поверхностью, сосредоточивается на ее передней кром-
ке, поэтому форма этой поверхности не влияет на величину управляю—
щей силы. С физической точки зрения это можно объяснить следующим.
На летательных аппаратах, которые могут считаться тонкими телами,
размах рулевой поверхности сравнительно невелик, поэтому изменения
подъемной силы, которые имеют место при изменении формы рулевой
поверхности и объясняются различной несущей способностью участков
поверхности, расположенных на различных удалениях от корпуса, по-
лучаются незначительными.
Х1.25. По табл. Х\/-1-1 [21] для отношения г/$…=г3=0‚6/1‚5=0,4
находим коэффициент интерференции Ккр=1,349. С его помощью, ис-
пользуя свойство подвижного крыла вызывать при повороте на угол &
такую же подъемную силу, как и при повороте комбинации корпус ——
неподвижное крыло на угол атаки ос=б‚ определим суммарную управ-
ляющую силу:
У„ = кк, УК„ —_—.1,349.9ооо = 12100 кГ.
Далее подсчитаем значение коэффициента интерференции:
іг = АУкр(т)б/Укр : Кір/(1 + гв)2 == 1,3492/(1 + 0,4)2 =_— 0,928
КР
И СООТВЗТСТВУЮЩУЮ ПОДЪЭМНУЮ СИЛУ!
Аукр('г)б : {акр Укр : 0,928—9000 = 8350 кГ .
Поскольку Ур : Аукрщд + Аут…рю, то
Аутшгю : Ур —- АУКРШд : 12140— 8350 = 3790 кГ.
Х1.26. Отношение коэффициентов подъемной силы рулей и соответст-
вующих изолированных крыльев
У __ 2 л ' — 1/2 _ 1/2
Ё—П[Т(1—’Ё)2—(БЁ"ГЁ) (1—5?) +
1—23353 ЁЁ
__ ,
+—1—(1+Г3)агсзіп———+г2агсзіп (1+Г5)'$і_2Г5 ‚
2 1—г3 $ (1—г3)83‘ г
где Е,. = ві/вт : 1,25/2‚5 : 0,5; г, = г/вт : 0,5/2‚5 : 0,2'.'
Внося эти данные, получим
У 2
0 : Сур .; _ і(1—0‚22)2—(0›52—0›24)1/2(1 ——0‚52)1/2 +
л (1 _ 0,5)2 4
1— 2-О‚52 + 0,24
_1_ 4 -
+ 2 (1 + 0,2 )агсз1п 1—0’24 `„+
+ О 22агсзіп(1_'_0’2ё)0’52__2°0’24 = 1 59
’ (1—о‚24)о,52 ’ '
Определим сунр изолированного крыла. Поскольку его форма и
размеры, а также условия обтекания (Мос и а=б) оказываются таки—
ми же, как в задаче Х1.23, то имеем
сущ, = (сісУ/сіос)кр ос : 3,57-О‚1 : 0,357.
695
В соответствии с этим для руля
сур = с›‚кр (сур/е_…р) = 0,357- 1,59 = 0,56.
Таким образом, подъемная сила руля вследствие интерференции ока-
зыватся большей, чем соответствующего изолированного крыла.
Х1.27. Отношение коэффициентов п0дъемной силы руля (подвиж-
ного крыла) и изолированных консолей Сур/Сукр=Ккр. Этот коэффици-
ент интерференции Ккр по Данным табл. Х\/-1-1 [21] Для г/$…———
=0‚5/2‚5=0‚2 равен 1,162. Поэтому су р/су кр: 1,162.
Как видно, подъемная сила руля возрастает за счет интерферен-
ции с корпусом более чем на 16% по сравнению с изолированным кры—.
лом.
Из решения предыдущей задачи имеем сукр=0,357. В соответст-
виисэтим
сур = сущ, (Сур/Сукр) = 0,357- 1,162 = 0,416.
Х1.28. Коэффициент подъемной силы летательного аппарата, отне-
сенный к площади изолированного крыла, определяется в ВИДе суммы
нескольких составляющих:
су : сут + (Су)Кр('г)+ (Су)т(кр) + (су)оп(т) + (су)т(ОП) + (сд/)(т-опнз'
Найдем каждую из этих составляющих. Коэффициент подъемной силы
корпуса принимаем равным соответствующему коэффициенту для го-
ловного конуса:
сут : 2ос’осБЁ 1/и3— 1 эщщ/вкр,
ос’ : д/мзо—1=ъ/’Т‚_5'Г_—1 =1,12,
р„ =…;, : 0,5/3 : 0,167;
„„ :- 1/(ос’БЁ)= 1(1,12-О‚167)= 5,35,
з…,д/зкр = лг2/{хкр №…)“, — г]} = 3,14—о,52/ [2 (2,5 — 0,5)1 : 0,196.
В соответствии С ЭТИМИ ДаННЫМИ
су,. : 2-О‚1-1‚12-О‚167 У№0д96 : 0,039.
Коэффициент подъемной силы поворотного крыла в присутствии кор-
пуса
( су)кр(Т) : (Кир ос + Ёкр бир) (Откр
‚ЦЛЯ ИЗОЛИРОВЭННОГО КРЫЛЗ ПРОИЗВОДНЗЯ
(с;),ф =.: (сісу/сіос)кр = 413/мг; _1 =!— 4/1/1‚52—- 1 = 3,57.
Этот результат соответствует сверхзвуковой передней кромке крыла
(см. решение задачи Х1.23).
Далее из табл. ХУ—1-1 [21] по отношению г/(зт)нр=г3=0,5/2,5=
=О‚2 нах0дим Ккр= 1,162 и определяем
ігкр =: [(%)/(1 + гв)2 = 1,1622/(1 + 0,2)2 = 0,938_
С учетом этих величин
(с).)крш = (1,162-О‚1 —|— О,938-О‚05) 3,57 = 0,583.
Коэффициент подъемной силы корпуса в присутствии крыла
(су)Т(КР) : (КТЦ! + ЁТбКР) (СЁЪ‘Р
Здесь Кт находится из таблицы Х\/—1-1 [21] по Г/(Зт)кр=0‚2 и равен
0,278, а коэффициент !% —— из выражения
!гт : Кир — іекр : 1,162— 0,9З8 :: 0,224.
Таким образом,
(Су)т‹кр)= (0,278-0,1 + 0,224-0,05) 3,57 = 0,139.
Коэффициент поцъемной силы оперения в присутствии корпуса (без
учета влияния вихрей крыла)
(Су)оп(т) :; (Кон ОС + Ёоп ' боп) (СЁ)ОП (Зои/Зкр)'
Консоли оперения геометрически подобны консолям крыла и, таким
образом, имеют также сверхзвуковые передние кромки и то же значе-
ние коэффициента (с?) оп: (с? )кр=3,57.
Отношение площадей
_$_‘Ш_ : [(Зт)оп— ’] хоп_ : (1›5 —0,5)1 : О 25
$кр [(Зт)кр _ ’] хкр (2,5 '— 0,5) 2 ,
Коэффициент Коц, Найденный из табл. Х\/`-1-1 [21] по параметру
Г/(Зт)оп=г3=0,5/1‚5=0,333, равен 1,285, а коэффициент
іеоп : кг…/(1 + дуг… = 1,2852/(1 + 03332 = 0,920
Таким образом,
(орон…: (1 ,285- 0,1 + 0,929- 0,05) 3,57—0,25 : 0,156.
Коэффициент подъемной силы корпуса в присутствии оперения (без
учета влияния вихрей крыла)
(Су)т(оп) = [(К—+1)п “ + (’Я—)(… б…] (03°)… (З…/3кр1—
Здесь (Кт)ОП согласно данным табл. Х\/-1-1 [21] и величине г/($…)0п=
=0,333 равен 0,495, а коэффициент
(Ь,)… = к…, _ (г…, = 1,285 — 0,926 : 0,359.
В СООТВСТСТВИИ С ЭТИМИ данными
(с!/)т… .— (0‚495—0‚1 + 0359005) 3,57—0,25 : 0,06.
Коэффициент подъемной силы оперенного участка, вызываемой влия—
нием вихрей крыла,
с > =‚- (д)„ (с;)… (Кир…крбкы [Ы…—г]
( у (т.оп)в оп 25137»… (го—г)
Здесь удлинение изолированного оперения
4[(—‘9т)оп_—’]2 4(1›5'—0›5)2
?”оп : = =
3… (1,5—0,5)1
Из решения задачи Х1.23 имеем іоп=—2‚45. Внося эти данные и другие
известные величины, получим
_ 2 45 3,57-3,57 (1,162—0‚1 + 0,938-0,05)(1,5——0,5)
[су](т.оп)в __ ’
23144 (2,02 —0,5)
Теперь вычисляем суммарный коэффициент подъемной силы:
су : 0,039 + 0,583 + 0,139 + 0,156 + 0,06 — 0,093 = 0,884
и соответствующую величину этой силы:
=_— —- 0,093.
2
дарю мю 1,4.104-1‚52
2
У : су Ч… Бир : су 2 [(зт)кр— ;] хкр : 0,884
(2,5 — 0,5)2—_—
: 5,67-104 кГ.
697
Х|.29. Подсчитаем необходимые для дальнейшего расчета вели-
чины:
г, = г/зт = 0,5/2,5 = 0,2, $,. = зі/зт = 1,5/2,5 = 0,6;
Ч… = (1е/2)р°с МЁЮ =(1‚4/2)1О4-1‚52 : 1,57-104 кГ/м2.
Здесь величина скоростного напора вычислена при условии, что полет
происходит в атмосфере воздуха при давлении р‹‚.‚=104 кГ/м2. Соглас—
но аэродинамической теории тонкого тела [21] подъемная сила комби-
нации корпус— крыло — руль, обусловленная отклонением подвижно-
го органа управления с той же хордой, что и у заданного руля,
' ?. 2 2
= 2 & _ 2 2__ __ 2 (1_+г5__ ' 1 —г$_ :
УР.п.п 46000 Зт [ 4 (1 ГЗ) ГЗ (1 ГЗ) + 2 аГС$1П1 + ГЗ ]
= 2 3 __ 22_ __ 2 Ш ° Щ] :
46000 34 4 ‹1 0.2) 0,2 ‹1 0,2 )+ , агсзт , +022
: 1,17 (46000 331).
Теперь получим для этой комбинации псдъемную силу, вызванную от-
клонением внешнего руля с той же хордой, что и у заданного,
ур.нш : 464… 8%[311—(1—ГЭ2—(ЕЁ—ГЭ1/20 _;Ё)1/2+
—2 4 4 —2 4
1 _ 1—25.—[—г 1 г $.—2г
+—(1+г4)агс51п——'—— (+ 5) ‘ $ =
2 $ 1—г;1
$ 2 .
+г8агс51п 1 4 _2
( _’8)3і
=4бсл, 3,24% (1 — 0,22)2 _ (0,02 _ 0,24)“2 (1 _ 0,62)“2+
+ _;— (1 + 0,24) агсзіп 1— 2'0’62 +024 + 0,22 агсзіп(1 + 02490152 _ 2'0224] :
1—0,24 (1 —0,24) 0,62
= 0,448 (40400 3%).
Затем определяем отношение подъемной силы, зависящей от отклоне-
ния внутреннего руля, к соответствующей величине этой силы для изо-
лированного крыла, представляющего собой соединенные вместе внут- '
ренние рули:
2
! ур_вн ур_п_п _ ур_вш _ (1 ,17—0‚488) 460,ю вт _
: 2лбс;со (зі _ г)2 _
Кукрън'тл' 2ЛбС]эо (3$ — г)2
2 1 17— 2
= ( ‚ 0,488)2‚5 : 2,71
:ПЗ(1,5—0‚5)2
Значение подъемной силы для изолированного крыла, вычисленное по
линеаризованной теории,
4ос
(У
КР-Вн)л.т= 2 (5,- — ")2 др (]оо —_ :
1/М’іо—1
4'0'3— = 2830 кГ.
: 2 (1,5 _ 0,5)20,25. 1,57 _ 104
1/1,52—1
Этому значению соответствует подъемная сила комбинации корпус——
крыло — внутренний руль
Уран : (ур.вн/Укр.вн)т.т (укр.вн)л.т : 2,71'2830 : 7660 КГ—
698
Х|…30 Вычисляем вначале с учетом интерференции производную
по углу атаки 01 от коэффициента нормальной силы комбинации кор—
пус —— крыло — оперение:
(%)т. кр…о п =(Ккр + Кт + Кт. и) (са)кр + (коп + Кт) (03111011 (Зои/Зкр)‘ (З.П.З)
Эта формула содержит результаты расчета коэффициентов интерфе-
ренции для комбинаций соответственно корпус—крыло и корпус—
оперение. Определим эти коэффициенты, используя графики и табли—
цы, приведенные в [21]. По величине (г8)нр—г/($т)нр—1/41—О 244
из табл. Х\/--31 находим Кнр=(Су)кр(т)/(Су)кр=1,2‚ а по графику на
рис. ХУ- 1- 8,6 для
2619/11“, = 2‚/м2 —1(г/ь ) = 21/5Жи— 1(1/4,7)=1‚06;
’ 2 №: 2__ 4,1—1 :
01 188“, =/м ——1 Ь 72,68 1 4 7 1,65
кр ›
определяем Ёт=3,3. Подсчитав
_ ___-___. дс 4
ос’= М2—1=1/2,682—1 =2,49; (і) — ещ ___—::=
1/ °° дог „„ (“*:“р 1/2‚682—1
= 1,61; дюн/дц, : 0 и (вт)кр/г = 4,1,
получим
1‹,=Кури/(дожди)кр (1 +Ькц/Ькр)(вт/г—1)] :
=3„,З/[249-161-1(4,1—1)]=О,266.
Аналогично находятся соответствующие коэффициенты интерферен—
ции для оперения. По величине (гв) оп—г/(зт) оп—1/2О,5из табл. ХУ-З- 1
определяем К0п=(су)оп(т)/(су)оп=1, 45, а по графику на рис. ХУ-1-8, @
для
261’ наук,)… = 22,49/1 ‚5 = 3,32 и 01’18 е…, = ос’ изд,… — ток,)… =
= 2,49 (2 -— 1)/1‚5 = 1,65
получаем Ёт=0,5 и по этому значению находим
К,. = 0,5/[2,49. 1,61 . 1 .(2 — 1)] = 0,125.
Вычислим коэффициент КТ.… учитывающий подъемную силу изолиро—
ванного корпуса:
Ктм : (01%)т8мнд/[(СОЬ)ЪФ $КР]°
Для этого найдем по теории тонкого тела производную от коэффициен—
та нормальной силы корпуса по углу 01:
(с;-д), = (№№/дос), = 6 (2ос)/дос = 2.
Производная от коэффициента подъемной силы крыла по углу 01 была
определена ранее: (со“кр =1‚.61 Так как площадь 31… д=пг2=3,14,
а площадь крыла (сумма площадей двух консолей)
$кр = [(мир _ г] (ькр— д…,) = (4,1 _— 1)*4,7 = 14,6,
ТО
к…, = 2-3,14/(1,61 - 14,6) = 0,267.
Учитывая, что площадь оперения
8011 : [(Бт)оп _ Г] [(Ькр)0п _ (Ьк.ц)оп] : (2 _ 1) 195 = 1,5,
произведем расчет по формуле (3.Х1.3):
' (с“) _ (1,2 —|— 0,266 —|— 0,267) 0,0282 +
№‚т..кроп_
+ (1,45 + 0,125) 0,0282 11—456— = 0,0534.
В этои формуле принято для коэффициентов равенство (ей,)оп : (%)“р
ввиду одинаковои формы в плане крыла и оперения и, кроме того, про-
изведен их пересчет с радианной меры измерения углов на градусную:
(036)… = (сю…) = 1,61/57‚3 = 0,0282.
Производные от коэффициентов нормальной силы крыла и оперения
в присутствии корпуса по углу их поворота б определяются из следую-
щих выражений:
(Сб )крт : (‚акр + Ёт) (Сайт;
(06 )…=т (і'гп + Ё`)(„)0п1$оп/$р-)
Входящие в эти выражения коэффициенты интерференции определим
с помощью табл. Х\/-3-1 [21]. По величине (г8)кр=0‚244 находим ігкр=
=0,94, ігт=0,27, а по значению (г8)0п=0‚5—Величины Ёоп=0,94‚ ігт=
=0,51. Таким образом,
(сюит = (0,94 + 0,27) 0,0282 = 0,0341;
(СЮ….Т = (0,94 + 0,51) 0,0282 (1,5/14,6) = 0,0042.
Для вычисления производной от коэффициента продольного момента по
углу 01 воспользуемся формулой
(тщтмр оп : {Кир [хвр _ ( хц.дос)кр] + Кт [хвр— (хц.дос)Т] +
+ КТ-И [ХЕР—_ (хц- д) Т]}С№кр/хк + {Кт1[х13р_ хц.дос)ОП] +
+КТ[Х Вр —( х.тцдос) “С“ №011 80 п/ (зкр ХК) ' (З'Х1'4)
Определим входящие сюда координаты центров давления. По значению
(Гз)кр=0‚244 из табл. ХЧ-1—1 [21] находим (хц_да/Ькр)нр(т)=0‚648_ В со-
ответствии с этим
(хц_№)кр = хкр +х ( эоцда/Ькр)кр(т) лир = 10,7 + О,648-4‚7 = 13,75.
По значению 201’г/Ькр=1,06‚ используя график Х\/`-1-9, б [21], получаем
(Хиди/дыр) т(кр)= 1,05 и определяем
(хц_дс,)т=тхкр+( юцдш/Ькрмр) Ькр = 10,7+1,05-4,7 = 15,5,
ТОЧНО так же находятся координаты центра Давления оперения.
Из табл. Х\/`-1-1 для (гз)оп=0‚5 получаем (хц_дО,/Ькр) оп(т)=0‚647 и под—
считываем
(хц_дос)0п : хоп —|— (хц_да/Ькр)оп(т) (Ькр)0п : 18 + 0,647-1,5 :: 18,97.
Расстояние до центра давления корпуса в соответствии с аэродинами-
ческой теорией тонкого тела
(хц_д)т : хмид [1— —ЪУ/ Т/(Лі’2
2 _ _ _
где “7 :алгмид хМИД объем головной части; а коэффициент этого
объема. Для оживальной головной части а=0,495, поэтому
(х,…)Т : Х…… (1 — а) = 5,5 (1 —— 0,495) : 2,78.
мид хмидЛ ’
Далее по графику на рис. Х\/-1—9, а [21] для величины 201’г/(17кр)0п=3,32
находим [хц_да/(Ькр)оп]т(0п)=0,67 и подсчитываем координату центра
700
Давления Дополнительной нормальной силы корпуса, обусловленной
влиянием оперения,
(хшдш)т : хоп + [хц_да/(Ькр)оп]т(оп) - (Ькр)оп := 18 + 0,67- 1,5 = 19.
Подставим найденные величины в (3.Х1.4):
(тіС )“…)п = [1,2 (10,5 — 13,75) + 0,266 (10,5 — 15,6) +
+ 0,267 (10,5 — 2,78)] 0,0282/21 + [1,45 (10,5— 18,97) +
+ 0,125 (10,5 —— 19)] 0,02821,5/(14,6-21) =— 0,0063.
Вычислим теперь производные (тз)крт и (тб)опт. С этой целью по
табл. ХУ-3-1 [21] для значения (г3)кр=0‚ 244 найдем (хцдд/Ькр)кр(т)=
=0, 667, а для (гз)оп=0, 5 определим [хц дд/(Ь кр)оп] оп<т>=0, 664 Имея эти
данные, подсчитаем:
(хц_дб)кр : хкр +х ( х_цдб/ькрдрщ .ькр = 10, 7 + 0,667-4‚7 : 13,85;
(хц_дб)оп— _ хоп +х [х пдд/( д-кр)оп]оп‹т) (ь \ _ =18 + 0,664-1‚5 : 19.
кр оп
Искомые значения производных будут равны:
(т2)кр-т : {Ёкр [хвр _ (хц.дб)кр] + Ёт [хвр _ (Хидео) ТН с№кр/хк :
= [О, 94 (10, 5— 13,85) + 0,27 (10,5— 15 ,6)] 0 ‚0282/21 =— 0 ‚0061;
(т г.:)оп т {130 П[хвр —(хц.дб)оп] _1— [ет [хвр_ ( х.цдос) ТНС №оп зол/(вкр Хк):
__ —-[0,94 (10,5— 19) + 0,51 (10,5 — 19)] 0,0282-1,5/(14‚6-21)=—— 0,00171.
Вычислив остальные составляющие коэффициентов нормальной си-
лы с,", и продольного момента т;, можно определить их значения для
всей комбинации, не учитывая пока влияния вихрей крыла. Найдем эти
величины для следующих условий полета: угол атаки а=6°; углы пово—
рота оперения (кбе)оп=0; 10 и 15°; угол поворота крыла (бе)кр=0. Со—
ответствующие расчетные зависимости имеют следующий вид:
СМ : (0%)т.кр.оп 06 + (са/)опл (бе)оп + (СКС/)тфп) (бе)кр;
т; :: (т3)т.кр.оп 06 + (т2)оп.т (бе)оп + (т2)кр(т) (бе)кр'
ПОСЛЕ! ПОДСТЭНОВКИ В НИХ данных ПОЛУЧИМ!
(бд—доп › град С;“ ' _т;
0 0,320 0,0380
10 0,362 0,0551
15 0,383 0,063?
Теперь произведем расчет этих аэродинамических характеристик
с учетом влияния вихрей крыла. Коэффициент нормальной силы
[Кир “ + [акр (бе)кр1 его)/Кр СЁОП (вт _ г)0п “57’3
2д7‘10п[(20 _ ‚‘)/(8… _ г)]кр (3т _ ’)кр .
Определим входящие сюда неизвестные величины. Удлинение
7»… == 4 [(эт)(… —— Г1/(дкр)оп : 4 (2 — 1)/1,5 : 2,67.
Из графика ХУ-2-8 [21] по Ж=Ьк_ц/Ькр=0 и
Жир ос’ : 4 [(зт)Кр —г] ос’Л)кр : 4 (4,1 — 1) 2,49/4,7 : 6,55 (где Жкр = 2,64)
получим [(20—1’) / (з…—г) ]кр=0‚68.
45—927 701
[ОП
С№_ _ см +
По графику Х\/'-2-9 найдем значение коэффициента интерференции
іоп. Для этого предварительно подсчитаем значение (Ах… )оп=
з „ (з‚„)0„+1 3 2+1 ‘
сти консолеи оперения и перекрываемой ими части корпуса
(см. рис. 2.Х1.6), а также значения
(га/8,71)… = {[(20 — г)/(8т— Г)]… [1 — (г$)кр1 + (г$)кр}(8}п)кр/(8т)оп =
= {0,68 (1 — 0,244) + 0,244} 4,1/2 =— 1,56
(уз/Зт)оп : {[хоп _ ХКр _Ькр + (Ахц-Т)Оп] О: _ доп (бе)кр}/ [5793 (Зт)оп] :
: [(18—10,7— 4,7 + 0,5) 6]/(57,3-2) : 0,162.
В соответствии с полученными значениями (а,/$…) оп=1,56, (у„/$…)оп=
=0,162 и величиной (г/зт)оп=0,5 коэффициент і0п=—1‚З.
Согласно этим данным
‚ 1,3—7‚2—0‚0282-0‚0282 (2 — 1) 57,3
с“ =с№— :
2-3,14-2,67-0,68 (4,1 _ 1)
см — 0,012,
откуда
АСМ : с“ _ с” =— 0,012;
_ ’ _1_ ’ _ _
тг _ тг ' АСМ [хвр (хц.дб)оп]’/хк _
: т2 + АСМ (10,5 — 19)/21 : тг — АСМ-0,405.
По этим зависимостям, используя ранее полученные значения с},
и тг , найдем следующие значения аэродинамических коэффициентов:
( бе )оп град СА! —т2 сц_д =—т2/с№
.
0 0,308 0,0331 0,107
10 0,350 0,0502 0,144
15 0,371 0,0588 0,158
Определим продольную и поперечную эффективность поворотных
консолей хвостового оперения. Производная коэффициента момента ,
крена т,с по углу ба, при дифференциальном отклонении горизонталь—
ных консолей, характеризующая поперечную эффективность, равна
дтх/дба :— Жкр.0’167 [1 + 3’71 (гз)оп] (0%)кр.л.н/(с%)кр.т.г
отношение СТЭТИЧЕЗСКИХ ПРОИЗВОДНЫХ С&С/кр, ВЫЧИСЛЕЗННЫХ соответственно
по линеаризованной теории и аэродинамической теории тонкого тела,
а 06 __ !
(с \ /(с \ _8/(лс7. Жкр).
№.кр.л.н № “кр.т.т
Так как а‚›\‹нр=6‚55‚ то
(СЮКМЛ/(сад)„ръТ : 8/(3,14-6‚55) : 0,389.
Таким образом,
дтх/дба =— 2,64 -0,167 (1 —|— 3,71 -0‚5)0,389 =— 0,490.
Производная коэффициента продольного момента по углу бе при сим-
метричном отклонении горизонтальных консолей, характеризующая про—
дольную эффективность, определяется по следующей формуле:
тнг—№13 (… +
Ькр Ькр
хц.дос хц-т 0,
+ [ет [( Ькр ‚)ТЮП) + ( Ькр )ОП]} СМ оп'
702
Для нахождения этой величины предварительно найдем из
табл. Х\/'—1-1 [21] по (г$)0п=0‚5 значение (хц_да/Ькр)т(оп)=0‚598‚ а так—
же вычислим
(хц.т)оп : хоп _ хвр + (Ахц.т)оп : 18 _ 10,5 + 0,5 : 8
Приняв в качестве характерного размера ! длину корпуса хк=21‚ пос—
ле подстановки получим
дхн,/дб, : :; [0,94 (0,664 + 1—85) + 0,51 (0,598 + %)] 1,61 =— 0,996,
9 /
Для сравнения полученных расчетом значений коэффициентов см
и т2 при а=6° с соответствующими экспериментальными данными из
лабораторной работы 6.2.1 пересчитаем эти коэффициенты на площадь
Змид=3‚14. Тогда получим:
6, град СМ —т2
14,6 14,6
0 0,308 =1,43 0,0331 =0,154
3,14 ‚
14,6 14,6
10 0,350 =1,63 0,0502 _— =0,234
3,14 3,14
14,6 14,6
15 0,371 =1,72 0,0588 _:31—4 =0,274
Совпадение результатов удовлетворительное.
Х||. АЭРОДИНАМИКА РАЗРЕЖЕННОЙ СРЕДЫ
ХП.1. по таблицам атмосферы [50] определим параметры воздуха
на высоте Н=1ОО км: ‚о,-=2,18-10—З кГ/мг; р…д=3,81-10—8 кГ—сек2/м4;
Ті=199 К. Из этих же таблиц найдем среднюю скорость молекул сі=
=381,8 м/сек, по которой определим наиболее вероятную скорость:
ст == 5, Унт—М : 381 ‚8 Унт : 338 м/сек
и скорость звука:
а,. : Е,. 1/ лиг/8 = 381 ‚8 1/ :пэ- 1,4/8 = 283 м/сек.
Вычислим теперь число Кнудсена:
Кп : 0,264 1/ У… „,./(ру,). (З.ХП.1)
Для нахождения и,- воспользуемся формулой щ=цн(Т,—/Тн)°›76. Внося
сюда значения цн=1,82-10—6 КГ-сек/м2 и ТН=288 К, найдем
„,. : 1,82-10"6(199/288)°'76 : 1,38-10‘6 кГ-сек/м2.
Учитывая значения Ь=5 м и Усо=3000 м/сек, получим
Кп = 0,2641/3000-1,38'10—6/(2,18-10—3-5) = 0,164.
Согласно кинетической теории газов при О,1<Кп<1,0 обтекание ха—
рактеризуется скольжением. Таким образом, в соответствии с по—
лученным значением числа Кнудсена (Кп=0,164) течение около пла-
стинки и будет определяться режимом скольжения.
ХП.2. Режиму свободномолекулярного течения соответствуют числа
Кнудсена Кп=1/б>10 (где і—длина свободного пробега молекулы;
б—толщина пограничного слоя у задней кромки пластинки, вычис-
ленная по обычным соотношениям для сплошной среды). Это число
определяется по формуле (3.ХП.1). Внося в нее Ь=1О м и У…:
=5000 м/сек, получим
Кп : 0,264 1/5000„,./(р,. 10) = 5,91 1/ „,./р,…
Приняв здесь минимальное значение Кп= 10, найдем
1970 : УНЧ/рд“
Зададимся наименьшим значением … в диапазоне высот О<Н<2ОО км.
Эта величина соответствует температуре стратосферного воздуха Ті=
=216‚7 К. В этом случае значение рі будет наименьшим, а соответству-
ющая высота наибольшей. При таком значении высоты предположение
о свободномолекулярном течении будет более достоверным. Приняв
н=288 К, Нн=1‚82' 10—6 кГ-сек/м2, найдем
и,. = „„ (Т,/Тн)°’76 : 1,82 . 10'—6 (216,7/288)°'76 : 1,48-10—6 кг щек/м2,
С учетом этого 1,70= 1/1,48-1О—6/рі, а соответствующее давление рі=
=5,19-1О—11 кГ/см2. По таблицам атмосферы [50] находим Н> 400 км.
ХП.З. Схема зеркального отражения молекул от поверхности реали-
зуется в том случае, когда она очень гладкая и наклонена под малым
углом атаки. Однако даже при полированной поверхности только ма-
лая часть молекул отражается зеркально. Наиболее вероятной оказы—
вается схема диффузного отражения, которая предпблагает наличие
шероховатостей и щелей, размеры которых соизмеримы с поперечными
размерами молекул. В этой схеме молекулы в результате соударения
с поверхностью полностью передают ей свой импульс и энергию, попа—
дая в щель или оказываясь между бугорками шероховатостей. По исте-
704
чении некоторого малого промежутка времени они отражаются от нее
в произвольном направлении с некоторой скоростью. \
ХНА. Для расчета наиболее вероятной скорости молекул восполь-
зуемся зависимостью ст=сі1/л/4. Подставив в нее значение сі=
=832 м/сек, получим
С… = 832 1/574 = 737 м/сек.
ПО ВЭЛИЧИН6 01 можно найти также СКОРОСТЬ звука:
а,- = Е,. Унтё/8 = 832 Унт-1,4/8 = 616 м/сек.
ХП.5. Давление, вызванное взаимодействием со стенкой падающих
и отраженных молекул, определяется количеством движения, переда-
ваемым этими молекулами в нормальном к стенке направлении. Чис—
ленно одна молекула обусловливает давление, равное ее количеству
движения то (где т—масса молекулы; о—нормальная составляю-
щая скорости). Полное давление получается в результате суммирова-
ния давлений от всех взаимодействующих со стенкой молекул.
ХП.6. Так как при диффузной схеме взаимодействия падающая мо-
лекула полностью теряет тангенциальную составляющую количества
движения, равную ты (где и—тангенциальная составляющая скоро—
сти), то это и обусловливает эффект трения и возникновение соответ-
ствующего касательного напряжения. Просуммировав действие всех
молекул в единицу_времени, получим величину напряжений трения,
В случае указанной схемы взаимодействия при отражении равновероят—
но любое направление молекул, покидающих стенку, поэтому они не
создают напряжения трения. Таким образом, трение обусловлено лишь
диффузным взаимодействием с поверхностью падающих молекул.
ХП.7. По таблицам атмосферы [50] определяем параметры: рі=
=4,19-1О—5 кГ/м2; рі=0,114-1О—9 кГ-сек2/м4; Ті=1207 К; сі=
=954,7 м/сек. Наиболее вероятная скорость, соответствующая найден—
ной величине сі,
с… = 954,7 1/ @= 845 м/сек,
а скорость звука
а,. = 954,7 1/ л- 1 ‚4/8 = 708 м/сек.
Число Маха, рассчитанное по этой скорости звука, М…=У°о/а‚-=
=7ООО/708=9,9. Теперь найдем величину
? = зіп2 [5 м3, №, (3.ХП.2)
где [З—угол наклона касательной к контуру в заданной точке. Этот
угол определяется из уравнения
{36 = сіу/сіх = (2А/Ь)(1 — 2х/Ь).
Так как координата заданной точки х=2‚5 м, то
195 = (2-5/10)(1 —— 2-2,5/10) = 0,5.
Для точки на хвостовом участке (х=7,5 м)
136 = (2-5/10)(1 — 2-7,5/1О) =—— 0,5.
В соответствии с этими данными
22 = 0,2-9,92.1‚4/2 = 13,7 (} = 3,7).
По полученным данным рассчитываем коэффициент давления на не—
р е д н е й с т о р о н е поверхности, обусловленный соударением с пада—
ющими молекулами. Так как найденная величина х=3,7 достаточно
705
ВВЛИКЗ, ТО С ХОРОШИМ приближением МОЖНО ИСПОЛЬЗОВЭТЬ ДЛЯ такого
расчета ЗЭВИСИМОСТЬ
5„=№=25іп2в(1 + 3 \. (з.хп.3)
У2 2х2 ]
,: 00
Для рассматриваемой точки с х=3,7 И зіп2 [3:02
р,; : 2-0,2 [1 + 1/(2-13‚7)] : 0,415.
Соответствующее абсолютное давление
р„ : Б,.‚р, 71/2 : 0,415—0,114—10—9.70002/2 = 0,115.1о—2 кГ/м2.
Коэффициент давления за счет отраженных молекул
В„ —_—= (зіп2 №) 1/ пт,/т„ (з.хп_4)
где ДЛЯ УСЛОВИЯ ДОСТЗТОЧНО бОЛЬШОГО значения ;С— МОЖНО ПРИНЯТЬ
Т‚/Т,. : (5 + ьміжь — 1)/(А›‚ + 1). (з.хп.5)
Подставляя данные, получаем:
Т‚/Т,- : (5 —|— 1,4-9,92)(1‚4— 1)/(1,4 —|— 1) =: 23,7;
Б,‚ : (О,2/З,7) 1/ № : 0,466.
Соответствующее абсолютное давление
р„ = Б„ р,. УЗО/2 : О,466-0,114-1О_9-70002/2 : 0,'129.1о—2 кГ/м2.
Полный коэффициент давления, обусловленный действием падаю-
щих и отраженных молекул,
В; = Эд; + Ъ,; = 0,415 + 0,466 = 0,881.
Соответствующее абсолютное давление
р, : р„ +… : 1,15.10—3 + 129.10“3 : 2,44.10—3 кГ/м2.
Коэффициенты давления в точке на задней стенке поверхности
(при х—>2) считаем с достаточным приближением равными нулю
(Біь=і—9ть=0). Следовательно, будут равны нулю и соответствующие
абсолютные давления.
Рассчитаем коэффициент и напряжение трения. Для точки на перед-
ней стороне коэффициент трения (при ?с>2) можно принять равным
(с,—і), : зіп 26 = 0,798,
а соответствующее напряжение трения
”с,-‚с : (с,-;);рд Уі/2 :. О,798-0‚114-10'—9—7ООО2/2 : 221.10—З кГ/м2.
Для точки на задней стороне (с++)ь=0 и,
следовательно, соответствующее напряже—
ние трения тіь=0.
ХП.8. В соответствии со схемой зеркаль-
ного отражения молекул (рис. 3.ХП.1) каса-
тельная составляющая скорости не Меняет-
ся ни по величине, ни по направлению, в то
время как нормальная составляющая, со-
храняя свою величину, изменяет направле-
ние на обратное. В соответствии с этим рі=
=рт=р и ті=тт=т. Подставив эти значе—
Рис. З.ХН.1. Схема зе_ркально_ ния в выражения для коэффициентов акко—
го отражения молекул МОДЭЦИШ ПОЛУЧИМ3
706
]сп:_Ш_—_р_г_=р_—__р =О іст=1:,-—т‚=т—т =О.
Рі _Рст р—Рст ті Т
ХП.9. Для анализа влияния аккомодации на изменение коэффициен-
та давления воспользуемся выражением Бі=2(2—і)зіп2[3‚ полученным
для «холодной» стенки (Тст<Ті) и значений Ё>2. Из этого выражения
видно, что с ростом коэффициента аккомодации величина ‚Б,: уменьша-
ется. Физически такой эффект объясняется уменьшением числа моле-
кул, которые, отражаясь зеркально, создают дополнительныи импульс
(<<реактивную» силу) и способствуют повышению давления.
ХП.10. По таблицам атмосферы [50] находим для высоты Н=
=100 км параметры воздуха: рі=2,18-10—З кГ/м2; р‚—=3,81-10—8 кГХ
><сек2/м4; Ті=199К, а также ускорение силы тяжести 9=9‚50 м/сек2
и среднюю скорость молекул Ёі=381‚ 8 м/сек. Найденному значению ;
соответствуют наиболее вероятная скорость молекул ст= 381, 8 Мл/4=
=338 м/сек, скорость звука аі=381‚8 1/313- 1,4/8= 283 м/сек и число
Маха Моо=Уоо/аі=ЗООО/28З=1О‚6. Этой величине соответствует зна-
чение
? : этими/2 : зіп2 10°. 10,62—1‚4/2=2‚38 (‚?= 1,54).
Определим отношение температур отраженных и падающих моле-
кул, используя формулу
& : ТСТ „ _Ч)__ Еі Ёе
Т,- Т,- [2т—М-1КТСТЬ + ] (3.Х11.6)
в которой
1 _ 1
Е. : _ №. 2 . —}— . . .
‚ 2т‚[У„+КТ‚(4 ‹р+1)]’ ‹зхп7)
Ф = 842 [$1 УЕ (1 + шёл—1; (3.Х11.8)
_ 1 5— ЗЁ тНТі .
‚32 _ 1 + Еі . [е_] 2 5? (3.Х11.9)
да -—-— (Аг + 1)/[4 (да _ … (3.Х11.10)
В (3.Х11.8) знак ‹<—|—>› относится к передней стороне поверхности,
а <<—>›—к задней. Вх0дяшая в формулу для (р функция егі? определя-
ется по величине х из таблицы [42]. Подсчитываем коэффициент ср:
(р = [238 [і—1‚54—л(1 + 0,971)г‘,
а также значения:
вт,. : 9502927. 199 = 55 400 м2/сек2;
КТ… : 9,50. 29, 27 … 300_ — 83500 м2/сек2.
_Еі_ _ .і _ 2 _ 1 __
2т1\/1?ТСТ _ 4 КТ…[УЮ ]ГКТ‘(4 + (Мд)]—
1 1
= _ 30002 + 55400 (4 + , _ \ —
4 83500 —[ е_2'38[і1,54-1/п(1і0‚971)]—1+1 !
Для передней стороны после преобразований, беря знак <<—|—>>‚ получим
Еі/(2тА/і КТСТ) : 27,8;
а Для задней стороны (знак ‹<——»)
.Еі/(2т1\/,— КТСТ) : 28,1.
Далее находим отношение
707
Еі _____ Еі _ Тст
2т№і КТ; 2т№і КТСТ Т,;
которое для передней стороны
Еі/(2тА/іКТі) : 27,8-300/199 : 41,8,
,
а для задней
Еі/(2тМі КТ,-) : 28,1 -ЗОО/199 : 42,4.
Теперь вычислим соответственно для передней и задней сторон:
1 1 5 —3—1 4
!г =] _— ___—+=101.
2 + 4 1,4_1 ’ ’
1 5—3-1‚4
‚% 21+ 42,4 'Т` 1,4—1
Так как параметр ігд=(1,4—|—1)/[4(1‚4——1)]=1,5 то с учетом других
полученных данных отношения температур будут следующими:
для передней стороны поверхности
&= 300 [(1—0‚7)27‚8-1,01_|_0‚7]=9,52;
т,- 199 1,5
= 1,01.
для задней
&_ зоо [(1—о‚7)28‚1-1‚01+0’7]:9‚60.
Т,- _ 199 1,5
Коэффициент давления, обусловленный взаимодействием с падаю—
щими и отраженными молекулами,
[)= №=51п2а[(2_д[1іі/_і+(1+
05730 х 31;
і ><14ег1;>]+
2х2
+ 222 `/Т— Т_{т [е " +х1/л(1 +егіХ)]}. (з.хп.11)
Из таблицы [42] по Ё=1‚54 находим егі2Ё=О‚971‚ а из таблицы [8]
а""2 =О,О926. По этим данным определяем:
для передней стороны
‚7, = 51112 10° {(2 — 0,9) [№
1,541/5
][ 3—0—0 99[„00926+1541/л(1—|—0,971)]}=О119°
22—,9—38 У1 ’ ’
+(1+ 22,38
\(1 + 0,971)] +
ДЛЯ задней
— . —0 0926 1 \
= з1п210° 2—0,9 ’ +(1—і— 1—0,971
рв {‹ ›[154 у; „38 )( ›]+
0,9 300 _ _ __ _ _.3
+ 22,38 \/— 199 [о, 0926 1,541/лз(1 0971)]}_- 0,139 10 .
Напряжение трения
217
9,412
@
с, : ізіп оссоз оь[ Ёе__ —|— (1 і— жд)] . (З.ХП.12)
х 312
После подстановки данных находим
с, = 0,9зіп 10°со510°[і—0’0—9—2Ё——|—
+(1 + 0, ,971)]
1,54
708
Таким образом, для передней стороны (знак «+») (с;);=0‚308‚ а для
задней (знак «—») (с;)ь=—О‚462— 10—3.
Для сравнения определим коэффициенты давления И трения в слу-
чае полного диффузного отражения (і= 1).
Коэффициент давления
_ _ _ 2 іе_х2 1 _
р…,) _ 5… “{? +(1+ Ё)(1і ег”) +
х 31; \
1 Т—ст —.›с2 ' _ . ' __
+ЁЪ/Ё[е іХУЛ(116ГіХ)]}-—
: зіп210°{——-і0’092Ё + (1+ '
1,54 ул \ 2'2,38
1 /" 300 , —
__ ‚ + _
2238 У 199 [0,0926 1,54 Ул (1 0,971)]}
В соответствии с этим результатом на передней стороне (знак «+»)
р‚2=0,116‚ а на задней (знак «—») рь=0‚147-10—3.
Коэффициент трения
)(1 + 0,971) +
+
с, = зіпоссозос [ _іе—Ё + (1 75 тд)] ::
х 313
: 5іп10°соз 10° [№ + (1 ‚3 0,971)] .
1,541/31;
Отсюда следует, что на передней стороне (С;);=0‚342‚ а на задней
(С;)ь=—0‚518-10_3. Сравнение полученных данных показывает, что при
отсутствии аккомодации коэффициенты трения возрастают, коэффи-
циент давления на передней стороне убывает, а на задней увеличи-
вается.
ХП.11. Из решения задачи ХН.1О известны: х=1‚54; КТі=5‚54><
><104 м2/сек2, Уоо=3000 м/сек; ‚рі=3‚81—1О—8 кГ-сек2/м4; Тт/Ті=9‚52
(для передней стороны) и Тт/Ті=9'‚6 (для задней стороны).
Для расчета энергии падающих молекул воспользуемся выражением
Е,. : і у ёрдУЙЦе—Ёі )Ёі/Е(1іегіх_)]><
. 1
>< [Удо + вт,. (4 + _)], (з.хп.13)
ср+ 1
в котором знак «+» относится к передней поверхности, а знак «_»—
к задней. Подставляем в это выражение данные:
в, = ді— 1/_і_ 3,81 .10—8 ъ/5‚54.104[0,0926 + 1,54 ум + 0,971)] ><
>< [30002 + 5,54.104(4+ +)],
Ф+1
причем для передней стороны берем ср=0‚974-1О—2, а для задней ср=
=—О‚663. В результате вычислений получаем значения (Еі)‚‹=91 кГХ
Хм/(м2-сек) (для передней стороны) и (Еі)ь=0‚246 кГ-м/(м2-сек)
(для задней стороны).
Энергию отраженных молекул определим по формуле
‚ = УЖ… КТ,— (Т,/Ті) `Юта—Т,- [е—Р і :? 1/ Ба і егіяб] . (з.хп.14)
709
Производим вычисления с учетом того, что для передней стороны
ТТ/Т,=9,52, а для задней Тт/Т,=9,6:
Е, = 1/2/л-3,81 - 10_8-5,54-1О4(Т‚/Т,)1/5,54—1О4[0‚0926 і
4 1,54 М?… + 0,971)].
В результате находим для передней стороны (Е,),=20,7 кГ-м/(м2-сек),
а для задней (Ет)ь=0,0547 кГ-м/(м2-сек).
ХП.12. Из решения задачи ХП.10 используем данные о коэффициен-
тах давления и трения на пластинке в случае, когда принимается во
внимание смешанный характер отражения (коэффициент аккомодации
импульса і=0,9) и учитывается, что коэффициент термической акко-
м0дации п=0‚7. Значения коэффициентов давления“ и трения сле-
дующие:
р,: № : 0,119, ‚5, : № : 0,139.10—3;
931/30 ріУЗо
2 2т _
(од,: .“? =0,308, (с,),--— р. 1“? =.—0,462-10 3.
По этим значениям рассчитаем аэродинамические коэффициенты и со-
ответствующие силы, принимая во внимание, что ширина пластинки
(хорда) Ь=5 м, а длина (размах) 1:2 м.
Коэффициент сопротивления для передней стороны пластинки
2Х;
_2_ = Б] зіп ос —|— (с,),созоа : 0,119-зіп 10° +
9,7… Бир
С)”:
—|— 0,308-соз 10° : 0,324,
а соответствующая сила
2
0- У,… 3,31-10—830002
ХГ : хі " Бир : 0,324
5-2 = 0,545 кГ.
Аналогичный коэффициент для задней стороны
ох,: 2Х; :Ъ, зіп ос + (с,), соз ос : 0,139-10_3-зіп 10О ——
рі У2ю зкр
_ 0,462—10_З соз 10° =— 0,431 -10—3‚
а сила
.У? . —8. 2
Хь : Схд иТоозкр =__ 0,431 _ 10—3 3,81 10 3000 5_2 =_0’74_10_3 кд
2
Суммарный коэффициент сопротивления
с„ = с„ — с„ = 0,324 + 0,431 -10—3 = 0,324
И СООТВЕЗТСТВУЮЩЗЯ СИЛд
х : х, _ х, = 0,545 + 0,74-10—3 : 0,546 кГ.
Рассчитаем коэффициент подъемной силы для передней стороны
пластинки:
237; '— - о.
с : ———— : р созсх— (с,),зшос == 0,119соз 10 —
УГ 2 ]:
— 0,308 зіп 10° = 0,063.
710
Этот же коэффициент для задней стороны
суд: і— : рд созос -— (с;)д зіп ос : 0,139-1О_3соз 10° +
рі УЗО зкр
+ 0,462-1О_35іп 10° : 0,217-10—3.
Соответствующие значения подъемной силы будут следующими:
‹)
р-У“ 3,81-10_8- 0 2
: Суі _??— Бир : 0,063
5.2 = 0,108 кг,
‹)
-У“ . —8_
У„=сУЬ—р‘2—°1$ =0,217.10_33'81 102 300025-2=0‚372-10_3к1`.
кр
Суммарный коэффициент подъемной силы
С, = С„ — су„ : 0,63- 10"'1— 0,217—10—з : 0,0628‚
а величина этой силы
У : Уі _ У„ : 0,108— 0,37210—з : 0,108 кГ.
Аэродинамическое качество
К : С),/Сх : О,0628/0‚324 : 0,194.
ХП.13. Для расчета удельного теплового потока воспользуемся вы-
ражением
_эв ГДЕ 2 ; _ *_‚72
(‚_ 2 / 2л{ь,[ую+кті(4+ ФМЛ ищущие +
і } УЕ (1 4; ей)—с)] ‚ (3301.15)
в котором для передней стороны принимается знак «+», а для задней
«_». Из решения задачи ХН.10 имеем: р…„-=З‚81-10—8 кГ-сек2/м4;
т1=0,7; КТі=5,54-1О4 м2/сек2; КТСТ=8,35—104 м2/сек2; х=1,54; егіх=
=О,971; е—х2=0‚0926; іг1=1‚5‚ а также значения ср=0‚974-10—2, іг2=
=1‚01 для передней стороны и (р=—0‚663‚ іг2=1‚01 для задней сто-
роны.
Подставляя соответствующие данные, определяем удельный тепло-
вой поток к передней стороне поверхности:
_0,7.з,81.10—8 / 5,54104 2 4 1
а;— 2 у 2“ {1,01[3000 +5‚54-10 (4+1+о‚974-10“‘2Л
—4—8,35-1О4—1,5*[0,0926 + 1,541/Б(1 + 0,971)] # = 0, 8 Ш
1 427 м2-сек
и соответствующую величину теплопередачи:
@; :: к]; ЗКР : 0,138-5—2 : 1,38 ккал/сек.
Удельный тепловой поток к задней поверхности
_ 0,7.3‚81-10—8 /5,54-104 „_ _ 4 1 '
ад— 2 1 _2л {1,01[3000 . 5,54 10 (4+————1_0‚663 )
—4 . 8,35- 104. 1,5} [0,09% — 1,54 1/ Я; (1 _ 0,971)] : 0376.10—3 №№
1
427 м2 - сек ’
а СООТВеТСТВУЮЩЗЯ теплопередача
@, : % зкр : (),376-10"3 52 : 3,76—1О"3 ккал/сек.
711
Суммарный удельный тепловой поток к пластинке
(; = с;, + („, = 0,138 + О,376-1О"3 = 0,138 ккал/(м2—сек),
а теплопередача
@ = @, + о„ = (‚зкр = 1,38 + 3,76-10—3 = 1,38 ккал/сек.
Равновесную температуру/ё стенки рассчитываем по формуле
т— _ %(щ + 4 + Т—Т)’ (З.ХП.16)
в которой
хі = м2, 14/2 = 10,62-1,4/2 = 78,6.
С учетом этой величины для передней стороны поверхности
1,01.199 1 _
ег _ “ЗГ-1? (2 78’6 + 4 +1+ 0,974—10—2) _ 5450 К’
а для задней
_ 1,01_199 +
Тед—_ ___“,5 (2 78 ‚6 4 + 1_01663.=) 549ок.
ХП.14. Определим при помощи таблиц атмосферы [50] параметры
воздуха на высоте Н=і160 км: рі=4,19- 10—5 кГ/м2; рі=1,14—1О-1° кГХ
><сек2/м4; Ті=12_07 К; сі=954‚7 м/сек.
По величине с,; находим наиболее вероятную скорость молекул:
ст = 3,- Ъ/Ё : 954,7 УЕ/Т} = 845 м/сек
и скорость звука:
ос,- =с',1/№ : 954,7 У№= 708 м/сек.
Соответствующее число Маха
МОО = Усс/ад = 4000/708 : 5,68.
Далее находим величину
? = 51112 БМЁО 14/2.
Здесь угол В определяем из условия
{96 : 2А/Ь =1-2/8 = 0,25.
В соответствии с этим зіп Б=О‚242 и
322 = 0,2422.5,682.1,4/2 = 1,3 ‹} = 1,14).
Так как профиль симметричный и установлен под нулевым углом атаки,
то значения коэффициентов сопротивления для передних и задних пло—
скостей профиля будут одинаковыми, а для всего профиля коэффи-
циент сопротивления будет вдвое больше, чем для одной поверхности.
Коэффициент сопротивления, обусловленный взаимодействием па-
дающих молекул с передней поверхностью,
Схіі : ЁЁБ|:е2 _
х Л
_+ (1 + 51“ 2,226) (1 + егіх)] (3.ХП.17)
Ив таблицы [42] по БЁ=1‚14 определяем егі7с=0‚893‚ а из таблицы [8]
е—х2=0,273. Согласно этим данным для передней стороны профиля
схіг— —‚025(1°’12473 +(1+ ° 2423)(1+О,893)]=0,518,
‚ Л 2-1
712
а для задней
Схід=ъёв[_—]/е-;2
—]—1—}—( 51112 жгв)(1—егіх)]=
=0,25[ЩЗ +(1 + 3143 )(1 —0‚893)] =—0,65.10—2.
1,141/л;
Полный коэффициент сопротивления, обусловленный действием падаю-
щих молекул на переднюю и заднюю стороны поверхности,
сх,— = с… —с,„-д = 0,518 + 0,65-10—2 : 0,524.
Отраженные частицы также создают силу сопротивления, коэффициент
которой
1 П2 1: 2
С„ =: — - Щ ЁЁ“ + х1/л;(1 + егіх)]‚ (3.ХП.18)
2 х2 Т,— .
где знак <‹—|—>> относится к передней стороне, а знак <<—>>—к задней.
Отношение Тт/Т, находим по формуле
ТГ—[1 Ём2°° 1 ]42 3хп19
Ті— + 4 +4«р+1› 71’ (‘ ')
в которой
(р = е—52 [431/50 4 егіЗс')]—1;
5—З/г тКТ- іг+1
1 , _
Ё2—1+Ё,`4—1° 2 №“ ‚гі—н/г—ц'
Производим вычисления:
ср = е_1’3 [4 1,14 и… 4 0,893)]—1;
КТ,— : 9,33-29‚27— 1207 := 3,29—105м2/сек2.
Одновременно находим отношение
25,- 2 1
тнт,№,— :,КТ _[Ут +КТ (4+ср+1)]°
Приняв здесь для 1передней стороны ср=0, 715 104, получаем
2Е- , 1
‘ —— 9 5 4 :
‚пят,-№,- :‚з 29 105 [4000 + 3’ 2 10 ( + 1+0,715.10—1>] 53’5’
а для задней (ср=—1,127)
2Е,
__ _— 40002 3, 29 105 (4 >] = 48 6.
тКТ,—№,- =,329105[ + +1_1‚27 ’
Согласно этим данным для передней стороны
1 5 —3.1 4
іг —— —- ——’ = 04
2 НГ53,5 1,4—1 1’
и для задней
№2 =1_|_—1 5—З.1‚4
=1‚04.
48,6 1,4—1
Так как параметр й,: (1,4—|—1)/[4(1‚4—1)] = 1,5, то с учетом других по-
лученных величин отношение температур для передней поверхности
Т_г_
Тя
1,4-‚2568 1 1,04
=[1+ + 4(1—|—0,10715)]‚5 _…86
713
а для задней
Тг ‚ ‚
Ё—[1+ 4 +4(1__1,27)
Теперь можно вычислить коэффициенты сопротивления:
для переднеи стороны
С :__1_ _ 0,2422-0,25
"” 2 1,3
для задней
1 О 2422-0 25
с‚„ь= ? - —’—1—3’— ‚/7‚90 [0,273 _ 1,14 И? (1 —— 0,893)] : 0,901 - 10—3.
Полный коэффициент сопротивления за счет отраженных молекул
сх, = с„‚; —Сх‚ь : 0,678е10—1— 0,901 - 10_3 : 0,0669.
Суммарный коэффициент сопротивления обтекаемого тела
сх : Сх,- + сх, : 0,524 + 0,0669 : 0,591,
а соответствующая аэродинамическая сила
р,- УЁ, 1 ‚145.10—1040002
—2—8„„_ —-- 0 ‚591 2 8-4 : 0,0173 кГ.
. 2 1,0
14568 _ 1 ]15437,90_
868 [0 273—; 1 141 л(1—}—0,89З)]=0,678 10-1,
Х=с‚_
ХП.15. При помощи таблиц атмосферы [50] определяем параметры
воздуха на высоте Н= 200 км: р,=1,66 10—5 кГ/м2; рі=3‚ 74- 10—11 кГХ
Хсек2/м4; _Т=1404 К; съ=1063 м/сек; {е,—9 22 м/сек2. Найденному
значению 0, соответствует
ст =Е,У№= 10631/л—/4`= 941 м/сек
а,. : ЁіЪ/ЕЬТЕЗ: 1063 ‚/ л 14 8— _ 787м/сек
По заданной скорости У… и величине аі вычисляем число Маха:
МОО : Усс/а!. : 4 500/787 : 5,72.
Учитывая, что, по условию, [?…-= 15°, найдем
3,2, = 511120, №; 4/2 = 51112 150.5,722.1,4/2 : 1,54 бс, : 1,24).
В соответствии с этими значениями
3630 : м3, 4/2 : 5,722.1,4/2 : 22,9 (71600 : 4,78).
Из таблицы_ [42] по х_к=1‚24 находим значение егіЁк=0‚920‚ а из таб—
лицы [8] е—ХЁ=О‚214. Затем вычисляем
—х2 — — _ _
Ф __— е и [х„ 1/л (1 + егіхк)]_1 : 0,214 [ 1,24 1/л (1 + 0,92)]—1 : 0,0507
И НЗХОДИМ ОТНОШ6НИ6
‚$,-Бит +Н—ТіР/2 + КТ (41+ ТТЛ
в котором
НТ,- = 9,22-29‚27е 1404 : 3,8—105м2/сек2.
После СООТВВТСТВУЮЩИХ ПОДСТЗНОВОК ПОЛУЧЗВМ
2Еі :: 1 2 5
‚№№ 3,840? [4500 +3,8 10 (4+
__‚Л 58,1.
1+0 0507
714
Таким образом, коэффициент
5—зь тИЦ-№ 5—з.14
1 ’ _
’гг-—1+Е°Ё_1' 221+5-‚57 ПЁГ"'1’03°
Учитывая, что іг1=(іг+1)/[4(іг—1)]=1,5, найдем отношение темпе-
РаТУР3
Т “М; 1 ` 13
_а: 1 _ _2_ :
Ті [ + 4+4(Ф+1)]Ё1'_
=[1_}_1,4-5,722_{_4 1 ]1—’053——-873
4 4(1 +0, 0507)
Подставляя полученные результаты, рассчитаем коэффициент силы
сопротивления, действующей на переднюю сторону поверхности:
"‘7
е к 1 зіп Т-
Схг=0хіг+0хгі= _ ( ‚_ +—_—БК`/—’)+
хк / 2хоо Ті ,
тп
+(1—і— еГіЁК)(1}—2х—1Т-—Ъ—+$і—П—_Бкмо"/ ЛТ— ) :
20,214( 1 +$іп15°;оі8——73)+
1,24 '/л_ 2-‚478
+ (1 +0,92)<1 +2229+2121758Мл 8_,73)=2,35
Коэффициент силы сопротивления, _действующей на донную часть по-
верхности при больших значениях хоо (х…>2)‚ можно принять равным
нулю (схь=схіь—|—с„ь=0). Следовательно, суммарный коэффициент
сопротивления конуса
сх : сд —|— схд : сд : 2,35,
а соответствующая аэродинамическая сила
_ 2
Х _ сх рі УФО Змид/З.
С учетом того, что
8 : тд?/тд : :п: (&&& [$)2 : :п; (5 1.9 15°)2 : 5,64 м2,
мид
эта сила
Х : 2,35-3,74-10—11-4 5002-5,64/2 : 5,04-10—3кГ.
ХП.16. Определяем по таблицам атмосферы [50] параметры воздуха
на заданной высоте 1:1_= 100 км: р,-=2,18—10—З кГ/м2; рі=3,81 — 10—8 кГХ
Хсек2/м4; Т,: 199 К; сі=381‚8 м/сек.
Затем находим скорость звука:
а, : Е,. Унтё/8 : 381,8 Ул—1‚4/8 : 283 м/сек
И соответствующее число Маха:
МОО = Усс/а, : 4000/283 =14,2.
По этому числу подсчитываем величину
53, : м3, № =14‚22.1‚4/2 : 140 (50° =11,8).
Принимаем, что отношение температур Тт/Т одинаково для всех точек
поверхности и равно его значению в точке с углом наклона касательной
|[3| =45°‚ которой соответствует величина
715
32 = зіп25МЁо № = 51112 45°. 14,22. 1,4/2 : 70 (} = 8,36).
Так как найденное значение х велико, то можно принять в уравнении
(3.Х11.19) фто, а в формуле (З.ХП.9) 122%1. Учитывая также, что
121: 1,5, определим отношение
Т, _! 1,4.14‚22 # _
Тд—(1+ 4 + 4)1,5 47’5
Величина этого отношения принимается во внимание при расчете сум-
марного коэффициента сопротивления цилиндра:
———{<—)(—)1 (Ё)+1(`Ё°)]}+
32 _
“] 7_`г_
4500 Ті .
(з.хп.20)
Для больших значений аргумента хЁо модифицированные функции Бес-
селя можно рассчитать по следующим зависимостям:
31/2
—2 2 _ 2
]0()С;°°)=_е__ 1+ _12 _|__1__Ё3___|_... _ (3ХП21)
2 Мля—63° 4х°о 21 (4х30)2 › - -
_ 3,2
] хЁо _ е *” 1 1.3 1.3.5
1 ? —.__[ —4_2'_ _ ““”] (3_ХП.22)
/Л;ЗО 1600 2! (41608)
После подстановки соответствующих Данных получим:
] (;і ) е’70 (11+ +___ + ) е'70 1 002
0 _ ”“:—__ — " =__: ‚ ;
“2
х ?0 . . . 70
11(;„)=_е_(1_1з_ 1352_…)=__е____0‚995_
Таким образом,
___ Ул:— е_70 [ е70
с _
х ”›8 118
_ 1,002 +(140 +і) (——е7° _ 1,002 +
2 11 8
` 3/2 _ '
+ __е7_0_: 0,995 + _Ч— 1/47‚5 : 2,82.
11 8 4-11‚8
СООТВВТСТВУЮЩЗЯ ЗЭРОДИНЗМИЧВСКЗЯ СИЛЗ
ріУЁо СхръУЁс
3,81 .10—8 40002
х 8— —
Х—_—
2Кт1:2‚82
2-2-5 : 17,2 кГ.
ХП.17. Рассмотрим общую формулу для расчета коэффициента со-
противления тела вращения с криволинейной образующей при условии
зеркального отражения молекул от поверхности. Из рис. З.ХН.2 видно,
что элементарный поток массы
сіт = 2113$), Уш г-сіг = 2лрі УФО гг’ Лх,
где р, — плотность воздуха на заданной высоте; г’=сіг/сіх.
716
При зеркальном взаимодействии угол отражения [3 равен углу па-
дения. Общее изменение направления скорости относительно оси тела
вращения определяется углом 26. Это изменение направления вызывает
изменение количества движения молекул при отражении от участка по-
верхности 2лгс!г‚ которому соответствует лобовое сопротивление
сіХ : 2лрі УЗО (1 — соз 25) гг’ (іх.
и… ‘
Интегрируя последнее выражение, по— 25
лучаем полное сопротивление: ’” 70° /1/\!3
2 хм.ид [3 &!
Х==2лріУ°о 5 (1 — соз 25) гг’ (1х. & в
О _ О. \ а:
Поскольку 1—соз 2В=2 $1112 [3=2(г’)2/ \\ ` `___'_°:__
/[1+(Г’)2]‚ ТО ЁЁ
хыид ( !)з СКС
Х=4 ‚УЗ; _’__С___ 4 _ д;
пр, д‘ 1 +“? х : мид
Рис. З.ХН.2. К расчету коэффи-
Эту же силу можно выразить через ко— циента сопротивления тела Бра-
эффициент сопротивления Сх: щения при зеркальном отраже-
2 нии
Х: с…(р р.У 00/2) ЛГмид‚
а затем найти выражение для этого коэффициента
1 __ , 3
сх=16_7\м„д Ш—ах. {(з.хп.2з›
1 + (г’)2
0
Для параболического тела вращения 7=ЗЁ(2—Ё)‚ а производная
г’ = сіп’сіх = (№……) (1 _ Тс).
Следовательно,
. 1 _ _ ..
‹с„›„ = ты,-‚Эд ”{ ”2—х… '*’”Ё 432.
О 1+‹1/ж…„д›2‹1—х›2
В результате интегрирования получим
14 З?»2 Ж6 №4“
((,—‚дп ={—— _М2—“д + ТТД —( ";—_“дцг {'“—д )1п[1+(1/жм„д)21 юм…д (3.ХП.24)
Для конуса уравнение образующей г—=х—‚ а производная Г‚=1/(27\‹мид).
Поэтому
1 _
(с › = 16 ж 5 „ [“ЩЩ’Р а;
х К "“до 1 + [1/(27\‹мид)]2
Интегрируя, найдем
1
жі„д{1+[1/‹2жм„д›12} '
(оди = (з.хп.25)
|ак как для конуса
1 1
2 _ _ _ _ ° 2
Жмид 4 (этти 1) ‚ то (Оди 451п Бк.
_01—12сёс5ле подстановки жмид=2(рн= 14°) имеем (сх)п=0‚‚32 (сх)к=
46—927 71 7
ХП.18. При зеркальной схеме отражения (см. рис. З.ХП.1) пол-
ностью сохраняется касательная составляющая скорости (щ=и‚…),
а нормальная составляющая изменяется по направлению, оставаясь
постоянной по величине (о,-=—0т). Для этой схемы отражения коэффи—
циент аккомодации импульса і=0.
При диффузном отражении молекулы, соударяясь со стенкой, попа-
дают в щель или в пространство между бугорками поверхности и прак-
тически полностью абсорбируются стенкой, передавая ей свой импульс
и энергию. По истечении некоторого
промежутка времени они отражаются
от нее в произвольном направлении с
некоторой скоростью (рис. 3.Х11.3).
Следует учесть, что любое направле—
0 а: ние отражения равновероятно. При та-
/ \ , ком отражении коэффициент аккомо-
Дации импульса і=1.
На практике чаще реализуется схе-
ма смешанного отражения, при кото-
Рис. 3.ХП.3. Схема диффузного рой большая часть молекул отражает-
ОТражеНИЯ ся диффузно, а меньшая—зеркально.
В этом случае величина коэффициента
аккомодации импульса соответствует условию 0<1°<'1. Так как сме—
шанная схема является наиболее общей, то, получив соответствующие
зависимости для этой схемы, можно затем в случае зеркального или
полностью диффузного отражения найти из этих зависимостей необхо-
димые результаты, приняв соответственно Г=0 или і=1.
Рассчитаем коэффициент сопротивления конуса для общего случая
отражения. По таблицам атмосферы [50] определяем параметры воз-
духа на высоте Н=1ОО км: р,-=2‚18-1О—З кГ/м2; рі=3,81-1О_8 кГХ
Хсек2/м4; Т,: 199 К; сі=381‚8 м/сек.
Соответствующая скорость звука
а,. : Б,. угла/8 = 381 ‚8 1/л. 1 ‚4/8 : 283 м/сек.
Для заданных условий рассчитываем параметры:
563 : зіп2 вк МЗ, № : 51112 30°-22.1‚4/2 : 0,7 (ЕК : 0,835);
230 : м3, № : 22.1‚4/2 : 2,8 (Ею : 1,67).
Определяем значение функции (|) для передней поверхности конуса
и для донного среза, используя выражение (З.ХН.8). Для этого `из таб-
лицы [42] по _хк=0,835 находим егі Ёк=0‚762, по 39:1,67—знач_ение
_ _х2 _;
егі хоо=0,982, а из таблицы [8] —соответственно в “ =0,497 и е °° =
=О,0608.
Используя найденные значения, вычисляем для передней поверх—
ности
ср, : 0,497 [0,835 1/3? (1+О‚762)]_1 : 0,191
И ДЛЯ ДОННОГО среза
_(рд : 0,0608 [— 1,67 1/55 (1 _— 0,982)]"1 : _ 1,14.
Затем рассчитываем БеЛИЧИНУ
КТ,— : 9,50.29‚27. 199 = 554.104 мЗ/сек2
И отношения соответственно ДЛЯ передней СТОРОНЫ:
718
2Е— 1 1
_д—= У? + Т. 4 _— :
‚пм-КТ; вт„-[ °° К ( +ф+1Л
1 2 / 1
=———— -8З2'554-144 _: 6
554.104 [2 2 Т ’ Ок +1+о,191)] 10’
идля задней:
?Еъ' : __1 [22-2832—і— 5,54.1о4(4 + —1——-)] = 1,03.
тм,- КТ,- 5,546104 1 _ 1 ‚14
Подставляя полученные данные в (3.ХН.9), рассчитываем величину
коэффициента 122 для передней поверхности
1 5—3-1 4
в =1 __ .———* = 1,19
2 + 10,6 1,4—1
И ДЛЯ ДОННОГО среза
1 5—31 4
& =1 —-———’—=2,94.
2 + 1,03 1,4—1
Принимая [г:-1,5, находим отношение температур Для передней по—
верхности:
дм? _ ,
&=[1+_313+_1__]Ё2=[1+1’422+ 1 Ы=2‚61
<О
Т,- 4(‹р+1) Е 4 4(1+о,191) 1,5
и для задней
Т—'=[1+1’4'22+ ' ]Ш= 1,2.
Т,- 4 4(1__1‚14) 1,5
В случае смешанного отражения коэффициент давления на передней
поверхности конуса, обусловленный взаимодействием падающих и отра-
женных молекул определится из выражения
_}?
&=&-; + 5,1 = $іп25к{(2—1°)[-_——: + (1 + %) 11+… 32,1] +
дв“ л хі
+Д /Ё[е_;'2‘+Ё 1/5‹1+е11})] (31111 26)
23% у Т,- к к , . .
а напряжение трения —
(с,); : ізіп [ЗК соз Бк[ е к_ + (1 —|— егіЁск)] . (3.ХП.27)
;1/ л
Коэффициент сопротивления для элементарной площадки поверхно-
сти конуса (рис. З.ХН.4) будет равен
до“ = В] зіп Бк + (с,); соз Бк,
а суммарный коэффициент сопротивления
с„ = Я [Б, зіп р„ + (с,); сов В„] 45, (З.ХП.28)
3
где Ё=$/$мид.
Для острого конуса
(15 : аз ___ 211511 : гп,-аг : {№ _
Змид лгмид лгмид з1п [ЗК з1п Вы
46-* 719
После подстановки значений коэффициента Давления (3.ХП.26)
и напряжения трения (3.ХП.27) в (3.ХП.28) и интегрирования получаем
"")
? ""; _
ар=Ы№&№Ш—Ъ } __+(1+-Ё2)О+ыі№4—ь
_хк л 2Хк
“"_ _.}? __
+ ‚, У/Т—ГЬ К+Ёк]/Ё(1+егіхк)]1+
‘ 222 7% - ]
К
_313
+ ісоз2 [ЗК [ е _ + (1 +егі хк)] . (3_ХЦ‚29)
Тек п
аз=2лмъ Для донного среза величина
у , 'З (С;)ь не оказывает влияния на зна—
_ &; чение коэффициента сопротивления
У… [дк конуса, так как совпадает по на-
—‘3’д Р 4 а: правлению с плоскостью дна, ко—
торая нормальна оси конуса. Сле-
довательно, коэффициент Схь зави-
щ сит только от величины коэффици-
33 ента давления, обусловленного вза—
гск _ имодействием с поверхностью пада-
ющих и отраженных молекул, и на-
Рис. 3. ХН.4. К расчету обтекания ходит-ся из выражения (3.ХП.3)‚ в
конуса свободЁЁЁЗЁекулярным по- КОТОРОМ следует ПРИНЯТЬ Б=д/2 И
заменить х на —х…. Коэффициент
силы, действующей на донную по-
верхность, в этом случае равен коэффициенту давления:
_}2
—е °° 1 —
т—г—і— 1+т (1—егіхоо) +
2262
х1/л
СхЬ=Схдон =БЬ= (2—і)[
@ СХ)
+ ; 1/5 [[а—32“, У? (1 — ен год] . (3.хп.30)
2 220 Ті
Суммарный коэффициент сопротивления конуса с учетом того, что на
донный срез действует подталкивающая сила, равен
С, = сх, — сх дон. (З.ХП.З1)
Для заданных условий задачи определяем значения коэффициентов:
. о 497 1
с„ = 230° 2— —'-— 1 _ 1 0,762
! $… {( ”[шюынъ+‹ +2Щд(%— )}%
+ 22—77% [0,497 + 0,835 1/50 + О,762)]} + і005230°><
О 497
>< _=__ + (1+0,762)] = 1,53 351,421;
[0,8351/3?
—О 0608 1
Сх он=(2_і) _‚—_+(1 +——)(1—0,982)] +
д [1,671/31 2°2’8
+ 5.58 1/ П [0,0608 — 1,67 УЁ(1—О,982)] =О,0012+0,000871°;
с„ = с„,— ‹:‚„…,Н = 1,53 + 1,42і— 0,0012 —0‚00087і = 1,53 + 1,42 і.
.7-20.
В случае зеркального отражения молекул воздуха в этих формулах
следует положить {= 0. Тогда сх‚‹=1‚ 53 и схдон=1, 2 10—3. Соответству—
ющая величина сх=сх‚‹—схдон= 1,53.
Для полностью диффузного отражения коэффициент і=1‚ следова—
тельно, сщс=2‚95‚ схдон=2‚07— 10—3, сх=сх‚‹—с„сдон=2,95
При смешанном отражении принимаем согласно условию задачи
і=0,8. Соответствующие значения коэффициентов будут следующими:
схі=2,66; схдон= 1,9- 10—3; сх=сх;—схдон=2,66
Согласно ударной теории Ньютона сила сопротивления определяет-
ся полной потерей количества движения частиц на площади наибольше-
го поперечного сечения. Так как рассматривается Обтекание конуса
под нулевым углом атаки, то его наибольшая площадь равна лгмид,
а действующая сила сопротивления при обтекании его свободномолеку-
лярным потоком со скоростью Удо будет Х= р У`2 №2 Следовательно,
мътд'
коэффициент сопротивления
сх : 2Х/(роо \” нг? ): 2.
мид
Согласно ньютоновской схеме эластичного отражения частицы после
столкновения продолжают движение вдоль стенки, т. е. отклоняются
на угол встречи молекул со стенкой. При этом нормальная составляю-
щая скорости погашается, а касательная остается без изменения. Для
этой схеМы изменение количества движен: тя по нормали к элементар-
ной площадке (13$ в единицу времени равно
ры У„ (Уд — 0) аз : рю 147-148,
где Уп=У°о зіп [ЗК— нормальная составляющая скорости. Отсюда зна-
чение коэффициента давления
Бк = 2 (рт У3)/(р„ УЗО) = 2 5іп2Бк,
Так как для конуса &=&, то
С„ = 25іп2 Бк : 25іп2 30° = 0,5. (3.ХП.32)
В рассмотренных ньютоновских схемах отражения взаимодействия
молекул с донным срезом конуса не происходит и, следовательно,
Схдон=0—
Для расчета значения с:,с при зеркальной схеме ньютоновского отра-
жения воспользуемся выражением (3.ХП.25). После подстановки в не-
го значения Жмид=1/(2’53 Бк)=1/(2 $830°)=О,867 получим
]
0,8672 {1 + [1/(2-0‚867)]2}
Разница значений, полученных при расчете по формулам (3.Х11.32)
и (3.ХП.25)‚ объясняется тем, что в первом случае не учитывается дей—
ствие отраженных от поверхности молекул.
Если сравнить значения коэффициентов сопротивления в случае зер—
кального отражения молекул, рассчитанные по зависимостям (3.ХП.25)
и (3. ХП. 29), в котором положим і=1‚ то Одинаковые результаты полу—
ЧИМ, если ВО ВТОРОЙ ЗЗВИСИМОСТИ ПРИМВМ Х>2 И соответственно егіхіч
…1, а 8—12210. При меньших значениях х величина коэффициента сх,
рассчитанная по зависимости (З.ХП.29)‚ оказывается большей. Это объ—
ясняется тем, что в формуле (3.ХП.25) не учитывается реальный харак-
тер взаимодействия молекул с поверхностью конуса.
ХП.19. По таблицам атмосферы [50] определяем параметры возду-
ха на заданной высоте Н=160 км: ‚о,-=4,19-1О—5 кГ/м2; рі=1‚14><
ХШ“… кГ-сек2/м4; Т,: 1207 К; сі=954,7 м/сек.
По известному значению с…,- вычисляем скорость звука:
Сх
72|
а,. : Е,. 1/ ліг/8 : 954,7 1/ :п;- 1,4/8 = 708 м/сек.
По величине Моо=3,0, углу атаки 01=30° и іг=1‚4 рассчитываем пара-
метр: '
32 : зіп2осМЁо 19/2 = 511112 30°-32-1,4/2 : 1,58 (2:1,26).
Принимая ТСТ=ТТ, определим из (3.ХП.19) отношение:
т №30 1 ] 16
__г = 1 _ _2
т,- 1 + 4 +4«р+1› и '
Для нахождения величины ср воспользуемся формулой (З.Х11.8). По зна-
чению х=1‚26‚ используя таблицу [42], найдем ег1х=0‚925‚ а из таб-
лицы [8] _ величину е—х*=0,206. Для передней поверхности пластинки
Ф;=0‚206 [1,26 1/ а? (14-0,925)]—1 : 0,048,
а для задней
(рд = 0,206 [_- 1,26 1/ Е (1 __ 0,925)] —1 = — 1,23.
Далее вычисляем
КТ,. = 9,33-29,27- 1207 = 3,29 -105 мЗ/сек2,
затем находим для передней стороны
іЁЬ—_ — ___—[32 7082+3‚29105(4 + ——‘—)] = 18,6
т1\/„-КТ‚- 3 29 105 1+ 0,048
и для задней
2Е,- _ 1
_— —— 32 2 ‚9 5 __ _
Используя полученные данные, по зависимости (З.Х11.9) вычисляем
значения коэффициента 132 соответственно для передней стороны:
1 5—3-1‚4_
Ё2_1+Е‚Б'_1П—1’11
и для задней
Ё2=1+— Ш
=1,15.
13,3 1,4_1
Следовательно, отношение температур для передней стороны с уче-
том значения Ё1=1,5
” =[ _] ]1'—”=з‚24‚
т,; 4 4(1—|—0,048) 1,5
адля задней
14 32 1 115
-, _Т_‚:4[1+ +4(1—1‚23)]1‚5_2’35
Рассчитаем значения коэффициентов давления от действия пада-
ющих и отраженных молекул соответственно для передней и задней по—
верхностей крыла:
_ е—х2 )* _
р =зіп2ос (2—і) _ Т—’><
і 2 7.
х Ул ‘
0,206
>< [г;2 —|— 31/50 + егі ?Я} : зіп2 30° {(2— і) [__—— У— +
1 ‚26 л
+<1+ Ё )(14е11})]+
2х2
722`
1
21,58
+ (1 + )(1 + 0,925)] + ЁУЁЖ [0,206 + 1261/50 + 0,925)]} =
= 1,32 _ 0,015і;
БЬ=51П2°°{(2—1°)[ —е—х2 +(1+Ё)(1—егіх)]+ ; ><
,; 1/ ,? 2х2 №
>< 1/5: [ищи/яп _егг 301} = зіп230° {‹2 —/°) ><
::
_0 206
>< —’—+ (1 +
[тЫ/Ё
1 _ ; /—
2-1,58)(1 032$] +24,581 2’35 Х
>< [0,206 _- 1,26 1/ На — 0,925)]} = 0,00325 + 0,00813і.
СоОтветствующие коэффициенты трения для передней поверхности
_
—х
(с;),с =1°зіп ос соз ос[ 81/_ + (1 + ег1})] :
Ф
_
_
х Л
: ізіп 30° соз 30° { Щ + (1 + 0,925)] = 0,875і,
_1,26 я
для задней
_ —эг2 _
(С;)д : [СЗіПСССОЗ ОС [_—8_—_—_ +(1— 611.20] :
х Л
—— 0,206
: ізіп 30° соз 30° [
1,26 Ул
+ (1 — 0,925)] =— 0,00758і.
Суммарный коэффициент лобового сопротивления
сх : Б„ зіп ос + (с;)? соз ос —— Ъ„ зіп ос — (с;)д соз ос :
= (1,32 —- 0,015і) зіп 30° + 0,875і соз 30° — (0,00325 +
+ 0,00813і) зіп 30° + 0,00758і соз 30° : 0,658 + 0,752]°.
Коэффициент подъемной силы крыла
су : Б; соз ос —— (с;); зіп ос —— Б„ соз ос — (едь зіп ос :
= (1 ‚32 — 0,01 51°) соз 30° — 0,875і зіп 30° — (0,00325 +
+ 0,00813і) соз 30° + 0,00758і зіп 30° : 1,14 — 0,559і.
Отсюда аэродинамическое качество тонкой пластинки
К : су/сх : (1 ‚14 —— 0,559і)/(0,658 + 0,752і).
Производя вычисления для значений і=0; 0,8 и 1,0, получим соответ-
ственно К=1,73; 0,55 и 0,404. Такой характер изменения качества ле-
тательного аппарата объясняется тем, что при уменьшении і величина
с]: также убывает, а это приводит к уменьшению величины с:.с и увели-
чению су.
Для ньютоновской схемы эластичного отражения (см. задачу ХП.18)
коэффициент давления на нижней поверхности р=2зіп2 а. Соответст-
вующие значения аэродинамических коэффициентов
с„ : 25іп30с и сУ : 2зіп2оссозос,
8. аЭРОДИНЗМИЧЕСКОВ КЗЧВСТВО
723
К : су/сх = соз ос/зіпос : строе.
Для заданных условий задачи при а=30° значение К=с1830°=1‚73.
При ударной схеме ньютоновского отражения (см. задачу Х11.18)
коэффициент давления р=2 зіп2 а, а коэффициент трения с1=
=2 зіп асоз а. Соответствующие аэродинамические коэффициенты бу-
дут следующими:
с), = 2 зіп2ос соз ос— 2 соз2ос зіп ос;
сх = 2 соз2 ос зіп ос + 2 зіп2 ос зіп ос.
Аэродинамическое качество
К = су/сх :: соз ос (з1п ос — соз 06).
Для условий задачи при а=30° значение К=со5 30° (зіп 30°—соз 30°) =
=—0‚312. Такое значительное уменьшение аэродинамического качества
летательного аппарата, отрицательного по знаку, объясняется резким
возрастанием касательной составляющей поверхностной аэродинамиче-
ской силы. .
ХП.2О. По таблицам атмосферы [50] определяем параметры возду—
ха на высоте Н=1ОО км: р,-=2,18-10—3 кГ/мг; ;),-=З,81-10—8 кГ—сек2,/м4;
Ті= 199 К; сі=381,8 м/сек.
По значению с, находим скорость звука:
а,- =: 381,8 |/ :п:-1,4/ : 283 м/сек
и соответствующее число Маха:
М…, : Усс/а,- : 7 960/283 : 28,2.
Удельный тепловой поток в некоторой точке с углом [З наклона ка-
сательной к направлению скорости потока
(, : 1,17.10—3пр,УЁ; (1 + 52 )5іпБ=1,17-1О_3—О,7 ›‹
М
(Ю
>< 3,81 — 10—8-79603(1 + ЁЁ?) зіпБ = 15,7 зіпБккал/(м2-сек). (З.ХП.ЗЗ)
В точке полного торможения, для которой В=л/2, величина этого теп-
лового потока (10: 15,7 ккал/'(м2-сек).
Теплопередачу в точке полного торможения можно также отыскать
по экспериментальной формуле
% = 7,35- 1071] (рын/росзЖі/ю/Удз ккал/(м2-сек), (З.ХП.34)
в которой Ус — первая космическая скорость; раоН и р…з— плотность воз-
духа соответственно на высоте Н и у Земли. Отношение этих плотно-
стей определяется по таблицам атмосферы [50]:
—8
9:0}! : & : 3,8110 ___: 3,0410—7
р…, рэ 1 ‚25-10—1
Так как, по условию, УЮ=УС и п=0,7, то
(„ = 7,35. 107-01 (394.104) 1 = 15,6 ккал/(м2-сек).
По известному тепловому потоку можно определить равновесную
радиационную температуру стенки (ТСТ=Те) :
Те : (11/4 (вс)—…. (З.ХП.35)
Так как е=0,8 и о=1,36-1О—11 ккал/(м2-сек-К4), то («;о)—“4 =(0,8><
><1,36- 10—11)—1/4=550. В соответствии с этим
Т& = 550 „},/4 = 550 (15,6)“4 = №№.
724
Таблица перевода единиц измерения, применяющихся в аэродинамике,
из системы МКГСС в Междунар0дную систему (СИ); ГОСТ 9867—61
Наименование и обозначение
Старая единица (система
МКГСС)
Новая система (СИ)
Длина
Айасса
Сила
Время
Температура термодинамиче-
ская (абсолютная)
Основные единицы
Метр (м.)
Килограмм (кГ)
Секунда (сек)
Градус (по шкале Кель-
вина, °К)
1 кГ=9‚81 н (ньютон)
Производные единицы
Скорость
Ускорение
Ускорение силы тяжести
Плотность (масса единицы
объема)
Удельный объем (объем еди-
ницы массы)
Удельный вес (вес единицы
объема)
Весовой секунлный расход
Давление
Коэффициент динамической
вязкости
Коэффициент кинематичес-
кой вязкости
Работа, энергия
Мощность
Количество теплоты
Удельная теплоемкость
Энтропия (удельная)
Энтальпия (удельная)
Удельный тепловой поток
Коэффициент теплоотдачи
Коэффициент теплопроводно-
сти
Коэффициент лучеиспуска-
ния абсолютно черного тела
(постоянная Стефана — Больц-
мана)
Постоянная Больцмана
Газовая постоянная
Универсальная газовая по-
стоянная
1 м/сек
[ м/сек2
9,81 м/сек2
1 кГ—сек2/м4
1 м4] (кГ . сек?)
1 кГ/мЗ
_
кГ/сек
кГ/см2
кГ -сек/м2
__
_
м2/сек
кГ -м
кГ-м/сек
ккал
ккал/ ( кГ -ерад)
ккал/(кГ—град)
ккал/кГ
ккал / (м2- сек)
ккал/ (м2- сек — град)
ккал/ (м - сек - град)
___—___…—
1,36-10—11 ккал/(м2-секХ
Херад“)
14,1-10—25 кГ-м/ерад
1 кГ-м/(кГ-град)
1,99 ккал/(градХ
>< кмоль) = 847,82 кГ Х
Хм/(град-кмоль)
Метр (м)
Килограмм (кг)
Секунда (сек)
Градус (по шкале Кель-
вина, К)
1 м/сек
[ м/сек2
9,81 м/сек2
9,81 ке/м3
0,102 мЗ/кг
9,81 н/м3
9,81 н/сек
9,81-104 к/м2
9,81 н—сек/м2
1 ли?/сек
9,81 дж (джоуль)
9,81 вт (ватт)
4,19—103 дж
4,19.103 дж/ (кг—град)
4,19-10З дж/(кг-град)
4,19-10з дж/кг
4,19—103 вт/м2
4,19-10з вт/(м2—ерад)
4,19-10З вт/(м-град)
5,67 - 10—8 вт/ (м2 - град")
1,38-10—23 дж/град
9,81 дж/(ке-град)
8,31-10З дж/(градх
Хкмоль)
ЛИТЕРАТУРА
1. А р ж а ни к о в Н. С.. М а л ь ц е в В. Н. Аэродинамика. Оборонгиз, 1956.
2. А р ж а ни к о в Н. С., С а д е к о в а Г. С. Аэродинамика больших скоростей.
«Высшая школа», 1965.
3. Аэрофизические исследования сверхзвуковых течений. «Наука», 1967.
4. Б е л о ц е р -к о в с к и й О. М. Обтекание затупленных тел сверхзвуковым потоком
газа. Изд. Вычислительного центра АН СССР, 1967.
5. Б е л о ц е р к о в с к и й О. М. Тонкая несущая поверхность в дозвуковом потоке
газа. «Наука», 1965.
6. В а бенко К. И. [и др.]. Пространственное обтекание гладких тел Идеальным
газом. «Наука», 1964.
7. Бойко Н. А. [и др.]. Измерение давлений при быстропротекающих процессах.
«Энергия», 1970.
8. Б р о н ш т е й н П. Н., С е ме н д я е в К. А. Справочник .по математике. «Нау-
ка»‚1965.
9. Г и н 3 б у р г И. П. Аэродинамика. «Высшая школа», 1966.
10. Г 0 р л игн С. М. Экспериментальная аэромеханика. «Высшая школа», 1970.
[( 6 11. Г 0 р л и н С. М., С л е з и нг е р И. И. Аэромеханические измерения. «Наука»,
…) 4.
12. Горшенин Д. С., Мартынов А. К. Руководство .к практическим заня-
тиям в аэродинамической лаборатории. «Машиностроение», 1967.
13. Д а в и д с о в В. Е. Основы газовой динамики в задачах. «Высшая школа», 1965.
14. Д о р о д н и ц ы н А. А. Пограничный слой в сжимаемом газе. «Прикладная мате-
матика и механика». 1942, т. \71, вып. 6.
1961 15. Д р а к и н И. М. Аэродинамический и лучистый нагрев в полете. Оборонгиз,
16. Идельчяик И. Е. Справочник по гидравлическим сопротивлениям Госэнер-
гоиздат, 1960.
17. К и б а р д и н Ю. А. [и др.]. Атлас газодинамических функций при больших ско-
ростях и высоких температурах воздушного потока. Госэнергонздат, 1961.
18. К о 3 л о в Л. В. Экспе-риментальное исследование поверхностного трения на
плоской пластине в сверхзвуковом потоке при наличии теплообмена. Изв. АН СССР.
ОТ Н. «Механика и машиностроение». 1963, № 2.
19. Ко чи н Н. Е. [и др.]. Теоретическая гидромеханика. Ч. 1, 2. Физматгиз, 1963.
20. К р а с но в Н. Ф. Аэродинамика. «Высшая школа», 1971.
21. Кр аснов Н. Ф. [и др.]. Аэродинамика ракет, «Высшая школа», 1968.
22. К р а с но в Н. Ф. Аэродинамика тел ‚вращения. «Машиностроение», 1964.
23. Кузнецов С. И. Диаграммы и таблицы течения диссоциирующего воздуха
около клина, конуса и выпуклой поверхности. Оборонгиз, 1962.
24. Л а н д а у Л. Д., Л и ф ш иц Е. М. Механика сплошных сред. Гостехиздат,
1958.
25. Л е 6 е д е в А. А., Ч е рн о б р о в к и н Л. С. Динамика полета. Оборонгиз, 1962.
26. Л о й ц яин с к.и й Л. Г. Механика жидкости и газа. «Наука», 1970.
27. Мар ты н о в А. К. Экспериментальная аэродинамика. Оборонгиз, 1951.
28. Ме л ь-н ик о в А. П. Аэродинамика больших скоростей. Воениздат, 1961.
29. М х и т а р я н А. М. Аэродинамика. «Машиностроение», 1970.
30. Н а д е ж д и н Ф. В., Л е в ч у к Н. Д. Задач-ник по экспериментальной аэр0ди-
намике. Оборонгиз, 1945.
31. О с т о с л а в с к и й И. В., С т р а ж е в а И. В. Динамика полета. Траектории
летательных аппаратов. Оборонгиз, 1963.
32. Паничкин И. А., Ляхов А. Б. Основы газовой динамики и их приложе-
ние к расчету сверхзвуковых аэродинамических труб. Изд. Киевского университета, 1965.
33. П р е д в о д и т е л е в А. С. [и др.]. Термодинамические функции воздуха для
726
температур от 1000 до 12000°К и давлений от 0,001 до 1000 атм (графики функций).
Изд-во АН СССР, 1960.
34. П р е д в о д и т е л е в А. С. Таблицы термодинамических функций воздуха (для
температур от 6000 до 12000°К и давлений от 0,001 до 1000 атм.). Изд-во АН СССР,
1957.
35.
36.
37.
Пов х И. Л Техническая гидромеханияка. «Машиностроение», 1964.
Р а х М а т у л и н Х. А. [и др.]. Газовая динамика. «Высшая школа», 1965.
С ед о в Л. И. Методы подобия и размерности в механике. «Наука», 1965.
38. Седо в Л. И. Механика сплошной среды. Т. 1, 2. «Наука», 1970.
39. Ф а б р и к а н т И. Я. Аэродинамика. «Наука», 1964.
40. Х р и ст и а н о в и ч С. А. Обтекание тел газом при больших скоростях. Труды
ЦАГИ, № 481, 1940.
41. Черный Г. Г. Течения газа с большой сверхзвуковой скоростью. Физмат-
гиз‚1959.
42. Ко р н Г., Ко рн Т. Справочник по математике для научных работников и ин-
женеров. «Наука», 1970.
43. 0 с в а т и ч К., Ш в а р д е н б е р г е р Р. Сборник задач и упражнений по газо-
вой динамике. «Мир», 1967.
44.
1968.
45.
ростях.
46.
47.
48.
49.
50.
51.
Поуп А., Гойн К. Аэролмнамические трубы больших скоростей. «Мир»,
Современная техника аэродинамических исследований при гиперзвуковых ско-
«Машиностроение», 1965.
Техника гиперзвуковых исследований. «Мир», 1964.
Ударные трубы. ИЛ, 1962.
Ф ер р и А. Аэродинамика сверхзвуковых течений. Гостехиздат, 1953.
Ракетная техника и космонавтика (АЛАА).
ГОСТ 4401—64.
П ов х И. Л. Аэродинамический эксперимент в машиностроении. «Машинострое-
ние», 1955.
52. П е нк х ё р с т Р., Х 0 л д е р Д. Техника эксперимента в аэродинамических тру-
бах. ИЛ, 1955.
ОГЛАВЛЕНИЕ
Стр.
Предисловие 3
Раздел первый
МЕТОДЫ ЭКСПЕРИМЕНТАЛЬНЫХ ИССЛЕДОВАНИЙ
И АЭРОДИНАМИЧЕСКОГО РАСЧЕТА
Глава 1. Аэродинамические трубы . . . . . . . . . . . . . . . 7
$ 1.1. Принципы устройства и работы аэродинамических труб . . 7
1. Основные понятия . . . . . . . . . 7"
2. Классификация труб и основные требования, предъявляемые к ним 13
3. Основные виды экспериментов в аэродинамических трубах . . . . 18
4. Влияние условий эксперимента в трубах на величину аэродинамических
коэффициентов . . . . . . . . . . . . . . . . . . . . . 21
$ 1.2. Трубы дозвуковых скоростей . . . . . . . . . . . . . . 23
1. Незамкнутые трубы (трубы прямого действия) . . . . . . . 23
2. Замкнутые аэродинамические трубы . . . . . . . . . . . . 25
3. Трубы с низкой турбулентностью . . . . . . . . . . 25
4. Аэродинамические трубы переменной плотности . . . . . . . . 26
5. Расчет аэр0динамических труб . . . . . . . . . . . . . . . . 27
$13. Трубы околозвуковых скоростей . . . . . . . . . . . . . 28
5 1.4. Сверхзвуковые аэрол-инамические трубы . . . . . . . . . 31
1. Труба кратковременного действия . . . . . . . . . . . . . 31
2. Гиперзвуковые аэродинамические трубы . . . . . . . . . . . 35
3. Аэродинамические установки адиабатического сжатия . . . . . 37
4. Газодинамический расчет сверхзвуковых аэролинамических труб [32] 38
5. Определение допустимых размеров моделей . . . . . . . . . 44
5 1.5. Ударные трубы . . . . . . . . . . . . . . . . . . . . 46
1. Устройство и принцип работы . . . . . . . . . . . . . . . 46
2. Аэродинамические ударные трубы . . . 48
3. Газодинамический расчет ударных труб . . . . . . . . 48
Г л а в а Н. Измерительные приборы и устройства . 50
© 2.1. Манометры и приемники давления газа (насадки) . . . . . . . . 50
]. Жидкостные манометры . . . . . . . . . 50
2. Электрические датчики давления . . . . . . . . . 54
3. Измерение разрежений , . . . . . . . . . . . 60
4. Групповой регистрирующий манометр . . . . . . . . . . 61
5. Приемники давления газа (насадки) . . . . . . . . . . . . . 64
@ 2.2. Приборы для измерения скорости потока . . . . . . . . . . . . . 7
1. Термоанемометры . . . . . . . . . . . . . . . . . . 71“
728
2. Другие приборы для измерения скорости . .
3. Приборы для измерения направления скорости потока
9 2.3. Приборы для тепловых измерений
1. Температура
2. Теплопередача
@ 2.4. Аэродинамические весы
1. Общие понятия . .
2. Внешние аэродинамические весы
3. Внутренние аэродинамические весы . . . . .
4. Аэродинамические весы с пьезоэлектрическими датчиками усилий
5. Аэродинамические весы для измерения сил и моментов летательных ап-
па-ратов, совершающих колебательные движения
45 2.5. Оптические приборы
1. Зеркально- менисковый прибор конструкции Д. Д. максутова
2. Интерферометр системы Маха—Цендера
"Г л а в а 111. Техника и методика измерения параметров газовых течений . .
$ 3.1. Тарировка измерительных приборов и устройств
Работа 3.1.1. Тарировка жидкостного микромаанометра
Работа 3.1.2. Тарировка насадков . . . . . . . . .
Работа 3.1.3. Тарировка пятиточечного насадка, предназначенного для оп-
ределения направления скорости потока . .
Работа 3.1.4. Статическая тарировка приборов для измерения температуры
Работа 3.1.5. Динамическая тарировка датчиков температуры торможения
Работа 3.1.6. Тарировка термоагнемометра . . . . . .
Работа 3.1.7. Тарировка трехкомпонентных тензометрических весов
@: ..2 Измерение параметров газового потока .
Работа 3.2.1. Измерение скорости потока при помощи насадка
Работа 3.2.2 Определение скорости воздушного потока по методу измере—
ния перепада давлений . . . . . . . . . . . . . . .
Работа 3.23. Определение числа Маха невозмущен-ного сверхзвукового по-
тока..........................
Работа 324 Определение поля давлений и скоростей в аэродинамической
трубе......... .. ..
Работа 3.2.5. Исследование турбулентности воздушного потока
Работа 3…26 Определение угла скоса потока . .
Работа 3.27. Исследование параметров газового потока в ударной трубе
Г л а в а 1\/`. Аэродинамические исследования на моделях крыльев
@ 4.1. Экспериментальное определение аэродинамических характеристик профиля
Работа 4.1.1. Определение аэродинамических коэффициентов профиля кры—
да в дозвуковом потоке по измеренным давлениям на его поверхности
Работа 4.1.2. Определение лобового сопротивления профиля в дозвуко-
вом потоке методом импульсов .
Работа 4.1.3. Определение коэффициента подъемной силы профиля мето-
дом электроаналогии . . .
Работа 4.1.4. Профиль крыла в сверхзвуковом потоке
Работа 4.1.5 .Исследование сверхзвукового обтекания профиля оптическим
методомд.. .. ..
Работа 4.1.6. Исследование влияния скольжения крыла на Обтекание про-
филя
@ 4.2. Экспериментальное определение аэродинамических характеристик крыла
Работа 4.2.1. Исследование распределения давления по крылу
Работа 4.2.2. Измерение аэродинамических сил и моментов, действующих
накрыло..........-.............
Стр.
76
77
81
81
85
86
86
87
93
96
97
98
99
1 03
106
106
106
110
114
117
119
121
124
129
129
132
135
139
145
148
150
154
155
155
176
183
196
209
218
229
229
239
“729
Гл а в а \!. Экспериментальная аэродинамика тел вращения
5 5.1. Определение аэродинамических характеристик тел вращения по измерениям
давлений... . ..
Работа 5.1. 1. Исследование распределения давления до обтекаемой поверх-
ности тела вращения . . . . . . . . . . . . . .
Работа 5.1..2 Исследование влияния инжекции газа на Обтекание затуплен-
ного тела вращения . . . . . . . . . . . . . . . . .
© 5.2. Исследование аэродинамических характеристик тел вращения при помощи
аэродинамических весов . . . . . . . . . . . . . . _
Работа 521. Применение тензометрических весов для измерения аэр0ди-
намических сил и моментов . . . . . . . . . . . .
Г л а в а 1/1. Исследование аэродинамических параметров летательных аппаратов
@ 6.1. Аэродинамическая интерференция . . . . .
Работа 6.1.1. Экспериментальное исследоваНИе влияния интерференции на
Обтекание летательного аппарата
Работа 6.1.2. Исследование аэродинамической интерференции летательного
аппарата при помощи весовых испытаний .
Работа 6.1.3. Аэродинамические исследования оперения
@ 6.2. Исследование устойчивости летательных аппаратов
Работа 6.2.1. Измерение параметров статической устойчивости
Работа 6.2.2. Исследование динамической устойчивости летательных аппа-
ратов ..
© 6.3. Определение аэродинамических характеристик органов управления
Работа 6.3.1. Аэр0динамические исследования руля в виде поворотной кон-
соли...
Работа 6…32 Исследование рулевого устройства в виде интерцептора
Работа 6.3.3. Исследование комбинированного органа управления (КОУ)
Работа 6.3.4. Определение шарнирного момента руля
Г ла в а \111. Экспериментальные исследования трения
@ 7.1. Определение параметров пограничного слоя . . . . . . . . . . . .
Работа 7.1.1. Измерение давления и температуры торможения в погранич-
номслое.......
Работа 7.1…2 Исследование пульсаций скорости в пограничном слое на
плоской пластинке . . . . . . . . . . . . . .
Работа 7.1.3. Исследование распределения давления и полного аэр0дина-
мического сопротивления шара, обтекаемого потоком вязкой несжима—
емой жидкости . .
Работа 7.1.4. Исследование влияния шероховатости на обтекание поверх-
ности -
Работа 7.1.5. Весовые измерения силы трения .
Стр.
249
250
250
268
275
275
283
283
283
288
291
297
297
303
307
307
31 3
320
325
330
330
330
340"
344
351
356
Раздел второй
ВОПРОСЫ И ЗАДАЧИ ПО АЭРОДИНАМИКЕ
1. Основные сведения из аэродинамики
П. Кинематика жидкой среды . . . .
111. Основы динамики жилкости и газа
1\/. Теория скачков уплотнения . . . .
17. Метод характеристик . . . . . . . . . . . .
\!1. Профиль и крыло конечного размаха в потоке несжимаемой жилкости
\711. Профиль в потоке сжимаемого газа . . . . . . .
\1111. Крыло в сверхзвуковом потоке . . . . . . . . . .
730
361
368
373
377
384
389
391
396
1Х.
Х1.
ХП.
П.
111.
ПГ.
\’1.
ЧП.
\7111.
1Х.
Х1.
ХП.
Стр.
Аэродинамика тел вращения . . . . . . . . . . 398
. Трение и теплопередача . . . . . . . . 401
Аэродинамическая интерференция . . . . . . . . 403
Аэродинамика разреженной среды . . . . . . . . . . . . . 407
Раздел третий
ОТВЕТЫ НА ВОПРОСЫ и РЕШЕНИЯ ЗАДАЧ
ПО АЭРОДИНАМИКЕ
. Основные сведения из аэродинамики . . . . . . . 409
Кинематика жидкой среды . . . . . . . . . 427
Основы динамики жидкости .и газа . . . . . . . . . . 458
Теория скачков уплотнения . 477
.Метод характеристик . . . . . . . . . . . . . . . . . 509
Профиль и крыло конечного размаха в потоке несжимаемой жидкости 530
Профиль в потоке сжимаемого газа . . . . . . 539
Крыло в сверхзвуковом потоке . . . . . . . . . . . . . . . 589
Аэродинамика тел вращения . . . . . 619
.Трение и теплопередача . . . . . . 642
Аэродинамическая интерференция . . . . . . . 679
Аэродинамика разреженной среды . . . . . . . . . . . 704
Таблица перевода единиц измерения, применяющихся в аэродинамике, из
системы МКГСС в Международную систему (СИ); ГОСТ 9867—61 . . . 725
Литература....................... 726
Николай Федорович Краснов, Всеволод Николаевич Кошевой,
Анатолий Николаевич данилов, Вадим Федорович Захарченко,
Евгений Эдуардович Боровский, АлексаНдр Иванович Хлупнов
ПРИКЛАДНАЯ АЭРОДИНАМИКА
Редактор В“. А. Титова. Художник В. 3. Казакевич. Художественный редактор
Н. К. Гуторов. Технический редактор. 3. В. Нуждина.
Корректоры Г. А. Чечеткина, М. И. Козлова
Т—07358. Сдано в набор 31/Ч11—73 г. Подп. к печати 6/У—74 г. Формат 70Х108'/ю. Бумага типогр. № 1.
Объем 45,75 печ. л. 64,05 усл. п. л. Уч.-изд. л. 56.48. Изд. № СТД—187. Тираж 9000 экз. Цена 2 р. 31 к.
План выпуска литературы для вузов и техникумов издательства «Высшая школа»
на 1974 г. Позиция № 125
Москва. К-51‚ Неглинная ул., д. 29/14. Издательство «Высшая школа»
Владимирская типография Союзполнграфпрома
при Государственном комитете Совета Министров СССР по делам издательств,
полиграфии и книжной торговли
Гор.- Владимир, ул. Победы, д. 18-6.
Зак. 927
Опечатки
СТР— СТРОК?! 1-1апсчата1-ю След>/ст читать 31:2
44 10 св. 1<съп1Де|1сг|цр1я в‹)3- [(энденсапня кислорода Тин.
ду х а_ Определим потреб- начинается раньше, чем азо-
нук›температуру та‚поэтому тем-
іг— ‘ \——!е/—1 іг—і ., —іг/(ё-—1)
141 ! сн _] м3) ) . . .——М;) Тип.
2 :\ 2 .
161 7 св. ..„пу‚... --чпЁД... Тип.
168 5 сн. сд,” : Р„-— „, (4_1_5) (‚др :: Рх р.;) „!; , (4.1.56) Тип.
168 20 СН- трёіму). р—=із)(х`2—) и ”$:/мд). Б: 3 (32). Тип.
р;і4(у2—)_ И—р=і4(;2)-
172 5 сн. ...не“ _—_ уши,/„к :… Не" = У“ Ь/щ :… Тин.
206 2 сн. :;1(х)... Б:: {1 (Тс)… Тип.
275 23 сн. .. .Ёсо : део дт: . . .ЁСО : ксе/кт; Тип.
412 17 сн. Му=М_\_15іпа—|_…. Му=——М_„ зіп ос—|—--- АВТ.
1
2 ___ уз 1
509 10 св. . 1__——;і—— 1—* == (1 —— „ )д—ц == 'Гин.
Уіпах №……
1 12
2 ___ уз __
509 іісв. . (1__ Ъ, )”“1... (1—— )Ь`1 Тип.
и? \”
тах тах
532 3 сн. ..…+.р®/р %—р/рю Тин.
Ф-ла іг—і ’г— 1) ( .
„ .…———- „. -——— 1… ЧН.
549 (3.\/П.1Ь) 12—1— 1)](1 Ё+1 / "
1.4—1 1.4—1)/(
‹ 10 св. ..————————— ... 1-— 'Тип.
5“ 1.4+1…' 1‚4+1
1.4—1 1 4—1 /(
3 св. ... ( __ ) 1 Тип.
552 1.4+1)|__'- 14+1
1,4—1 1.4—1 / _
72 10 св. ... |<1___ ) 1-- Тип.
5 1.4+ 1 ) 1—4+ 1
626 ] св. 17,3: 7г2+у62 №:… У‚3= „+ У9›А9 —— Тип.
630 1С”. "'30=Е;КС—О="' °°°ЭЧО=$0КС.0="' ‚ГИН.
650 18 СН. ...: Убрё хлам-.. ...:Уё рб хлам-оо ‚ТР“-[_
У х У х
вы ісв. „___№=___ „.=—“№.:... ……
”в до
691 1 св. "' (1'—'Г4/54) 4_ "'(1 -—'Г‘/54) ’Ги
___(1 +Г4/84)2_|1/2 — ___(1+ ‚4/34)]1/2 П.