/



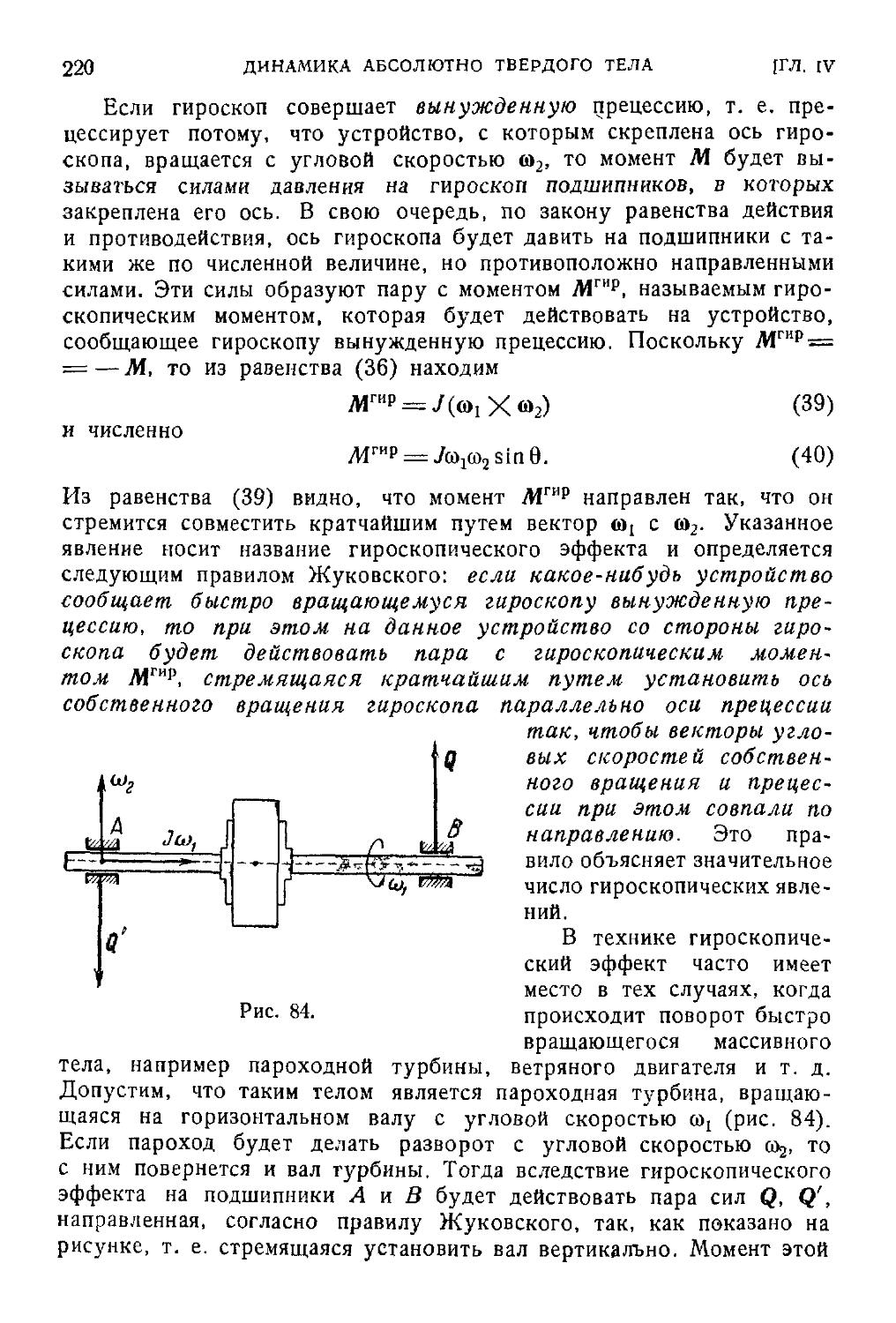

Similar




Text
Н. Н. БУХГОЛЫД
основной курс
ТЕОРЕТИЧЕСКОЙ
МЕХАНИКИ
ЧАСТЬ ВТОРАЯ
ДИНАМИКА СИСТЕМЫ
МАТЕРИАЛЬНЫХ ТОЧЕК
ИЗДАНИЕ ЧЕТВЕРТОЕ,
ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
С. М. ТАРГОМ
Допущено Министерством
высшего и среднего специального образования РСФСР
: качестве учебника для государственных университетов
ИЗДАТЕЛЬСТВО «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА 1966
531
Б 94
УДК 531/534
Николай Николаевич Бухгольц
Основной курс теоретической механики
Часть II
М., 1966 г., 332 стр. с илл.
Редактор И. А. Маркузоя
Техн. редактор К. Ф. Брудно Корректор О. А Сигал
Сдано в набор 22/11 1Э66 г. Подписано к печати 31/V 1Э66 г. Бумага бОхЭО'д,.
Физ. печ. л. 20,75. Условн. печ. л. 20,75. Уч.-изд. л. 19,95. Тираж 25 000 экз.
Т-08230. Цена книги 66 коп. Заказ № 90. •
Издательство «Наука»
Главная редакция физико-математической литературы
Москва. В-71, Ленинский проспект, 15
Ленинградская типография № 2 имени Евгении Соколовой Главпотаграфпрома
Комитета по печати при Совете Министров СССР. Измайловский проспект, 29.
2-4-2
281—66
ОГЛАВЛЕНИЕ
Предисловие к четвертому изданию 5
Глава I. Общие теоремы динамики системы материальных точек 7
§ 1. Основные понятия. Связи 7
§ 2. Основные динамические величины 13
§ 3. Общие теоремы динамики системы 24
§ 4. Динамика точки переменной массы 46
Глава II. Уравнения движении системы материальных точек ... 59
§ 5. Принцип Даламбера 59
§ 6. Общие теоремы динамики, выводимые из уравнения Далам-
Даламбера — Лагранжа 65
§ 7. Уравнения движения механической системы в декартовых
координатах • . . . 69
§ 8. Уравнения движения системы в обобщенных координатах . . 74
Глава III. Малые движения системы вблизи положения равнове-
равновесия. Устойчивость равновесия 109
§ 9. Малые колебания системы 109
§ 10. Устойчивость равновесия. Теорема Дирихле 124
Глава IV. Динамика абсолютно твердого тела 128
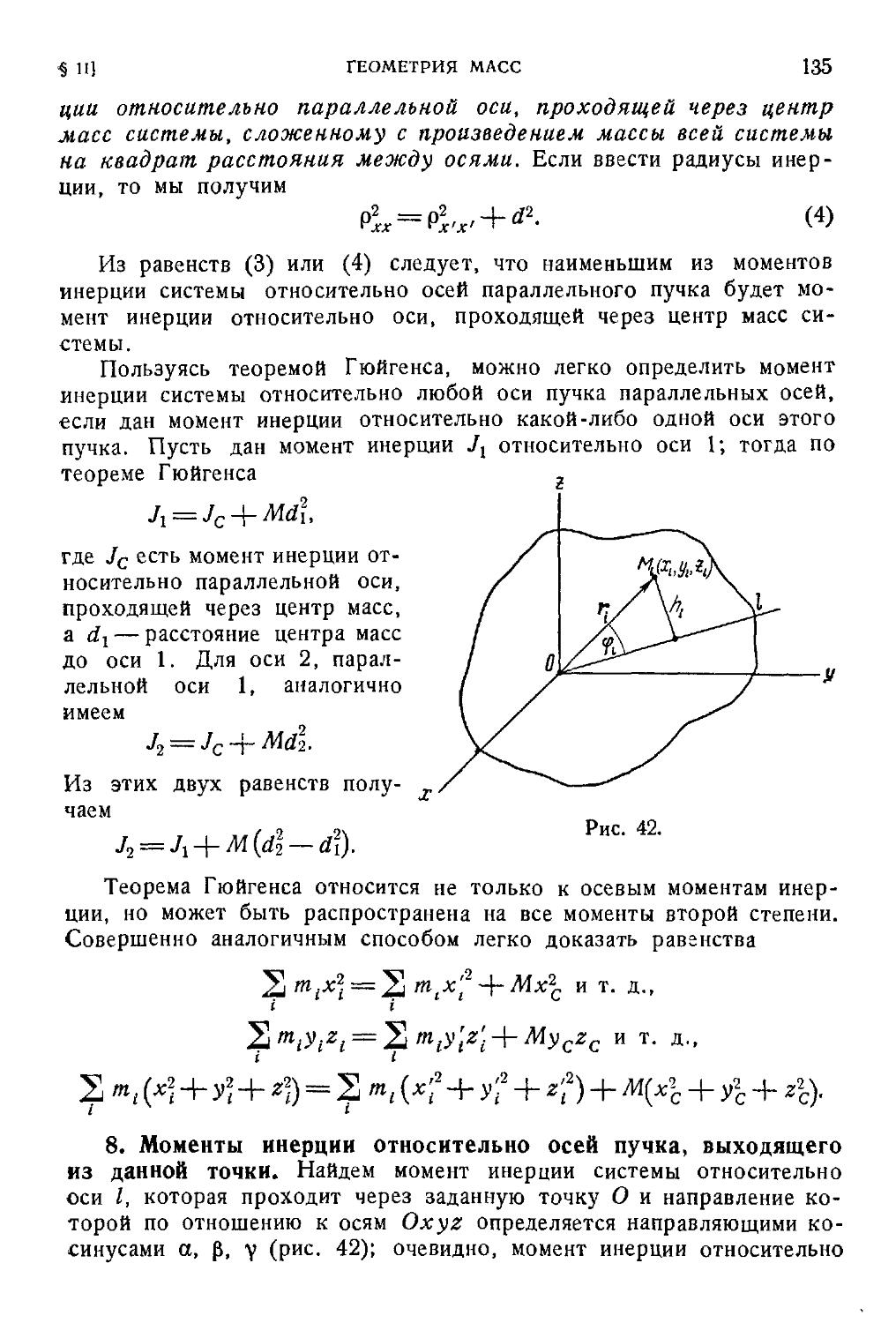
§11. Геометрия масс 128
§ 12. Вращение абсолютно твердого тела вокруг неподвижной оси 147
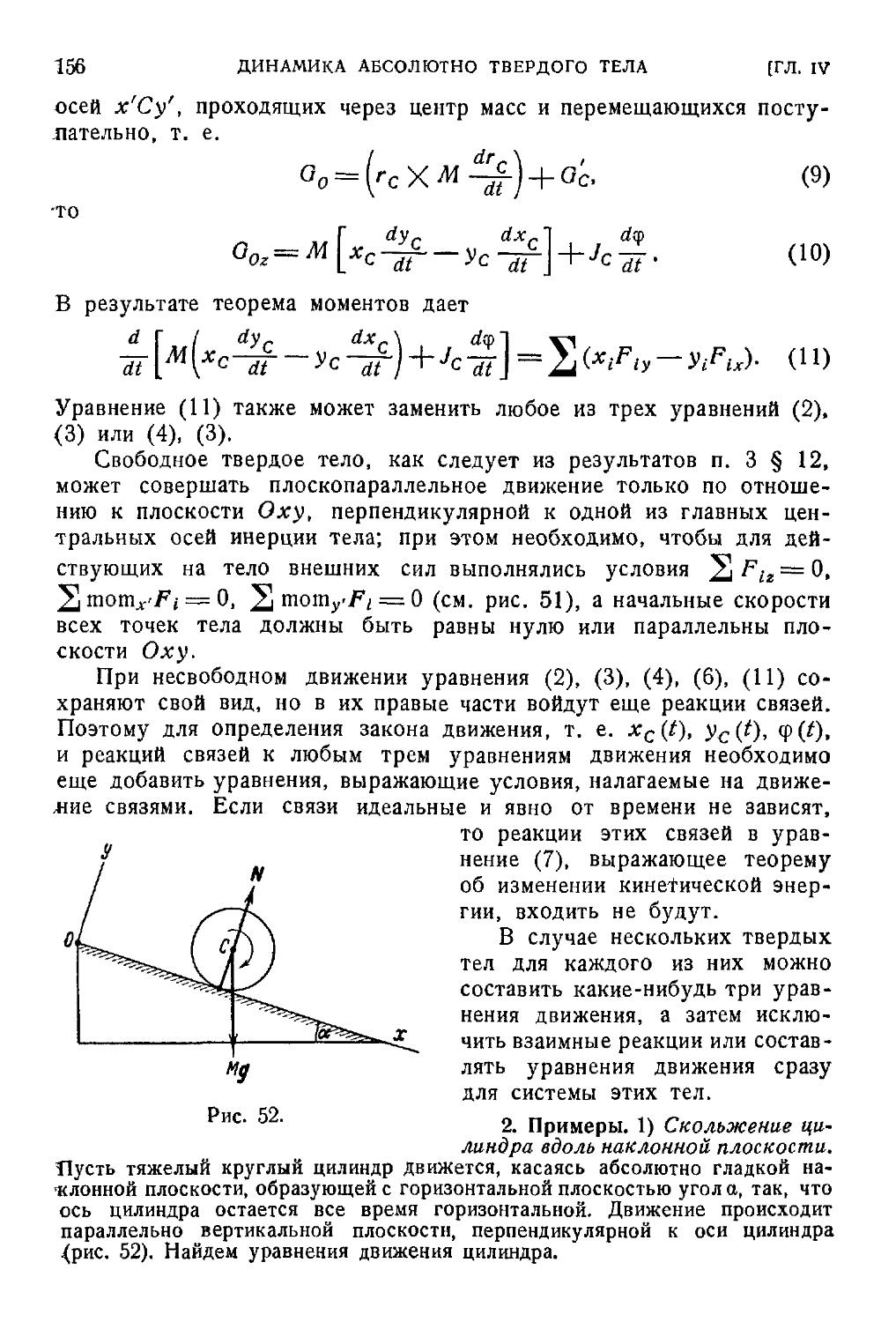
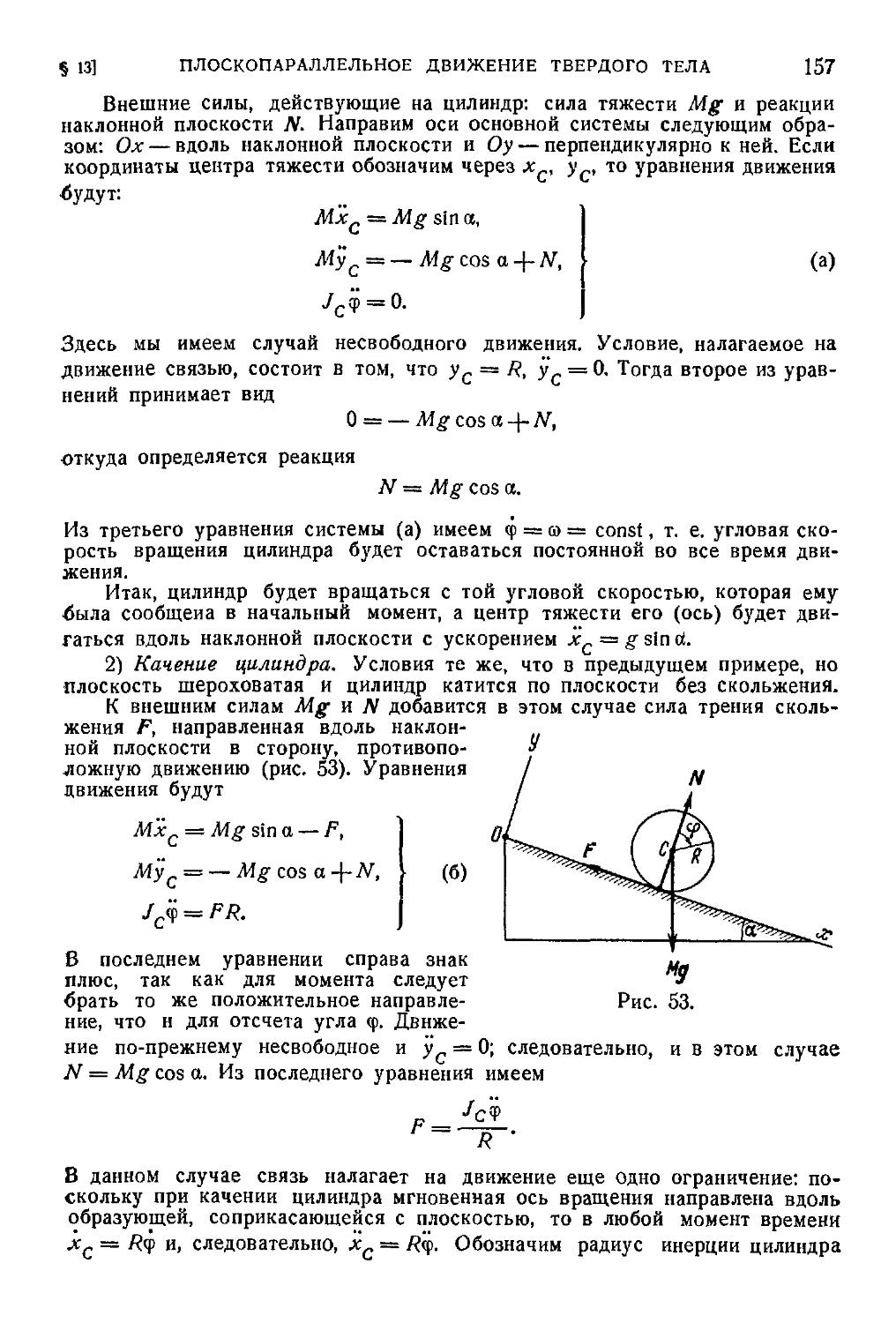
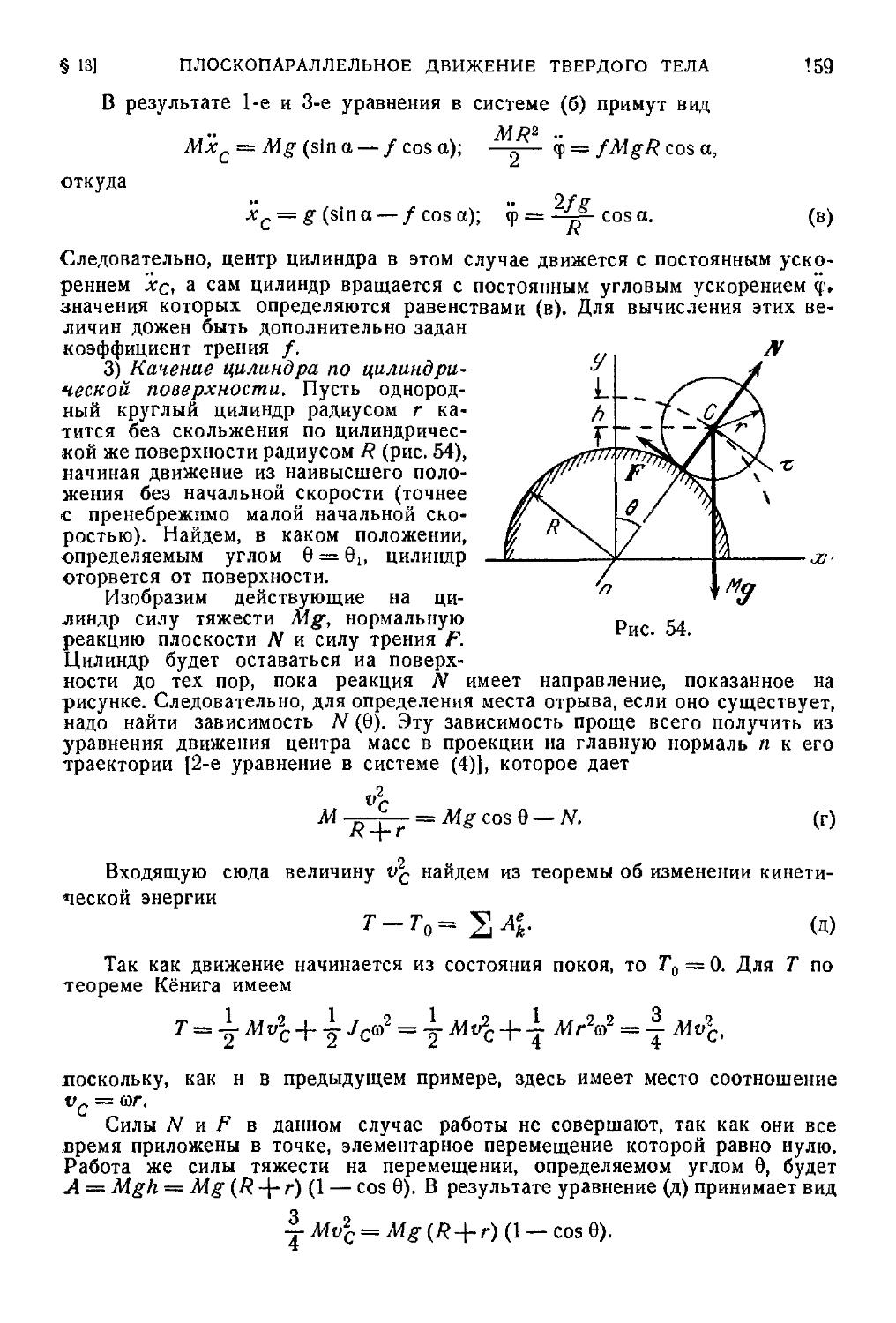
§ 13. Плоскопараллельное движение абсолютно твердого тела . . 154
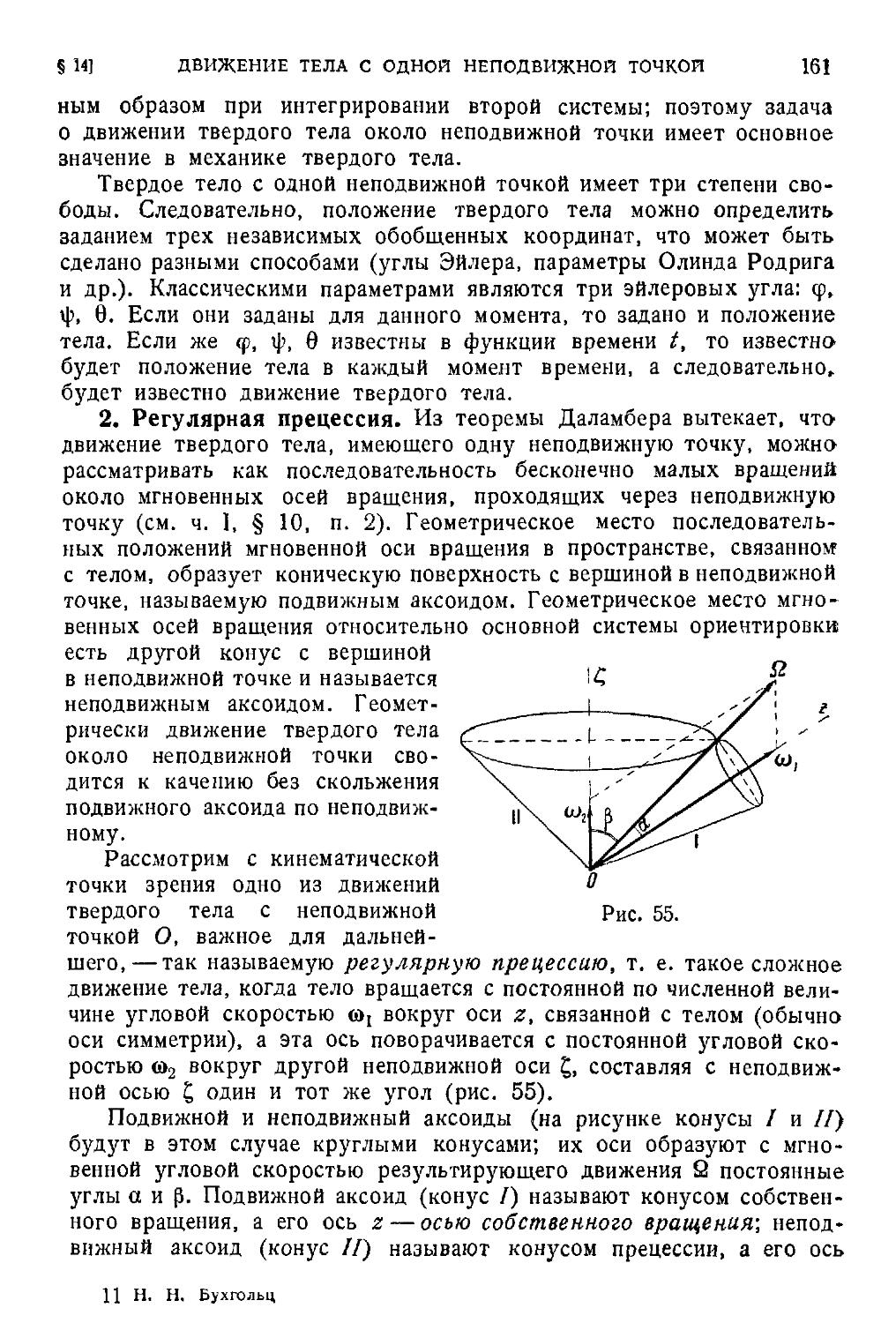
§ 14. Движение абсолютно твердого тела, имеющего одну непо-
неподвижную точку. Основные кинематические соотношения . . . 160
§ 15.Выражения основных динамических величин для твердого
тела, имеющего неподвижную точку 165
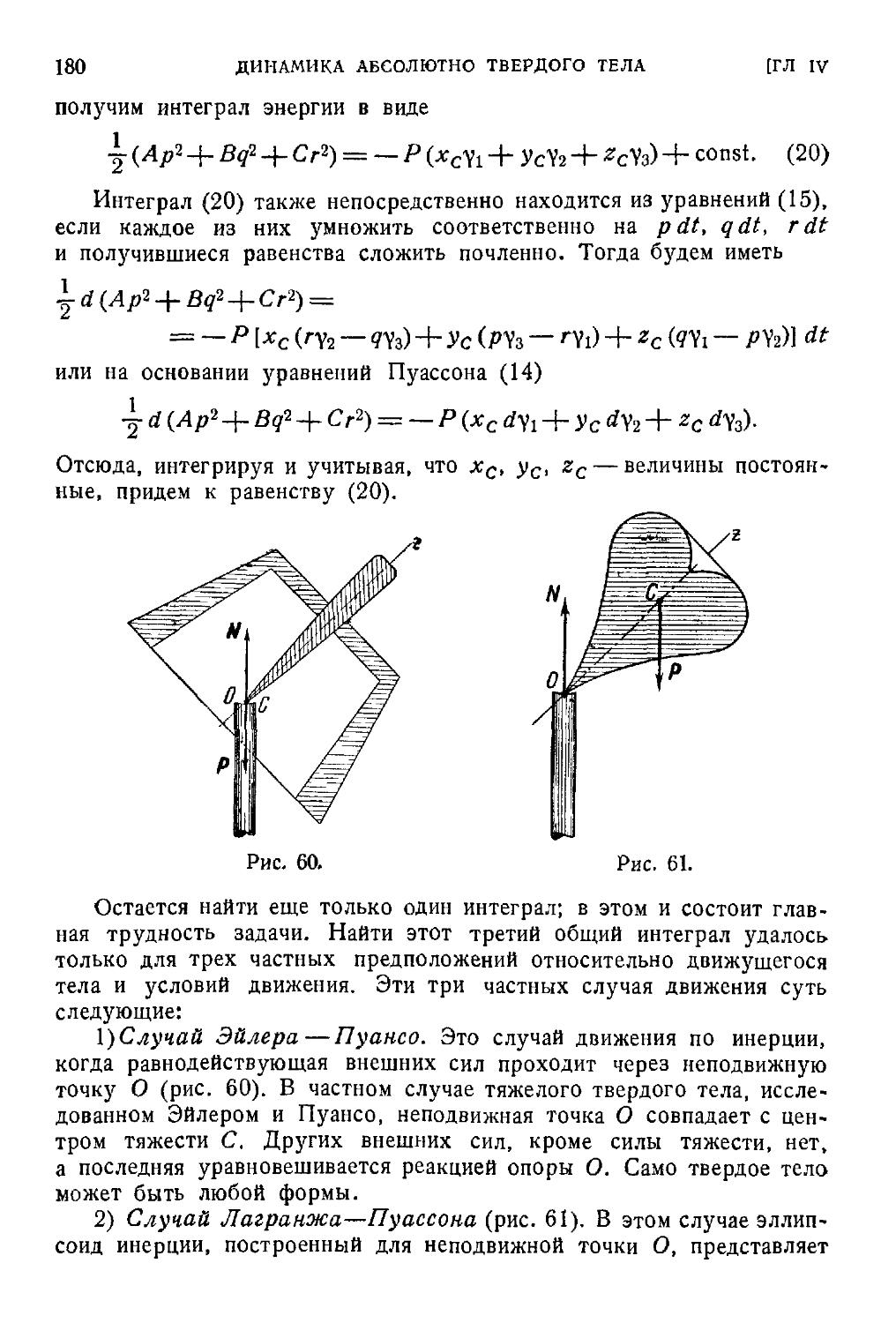
§ 16. Динамические уравнения Эйлера. Общая постановка задачи
о движении тяжелого твердого тела с неподвижной точкой . 172
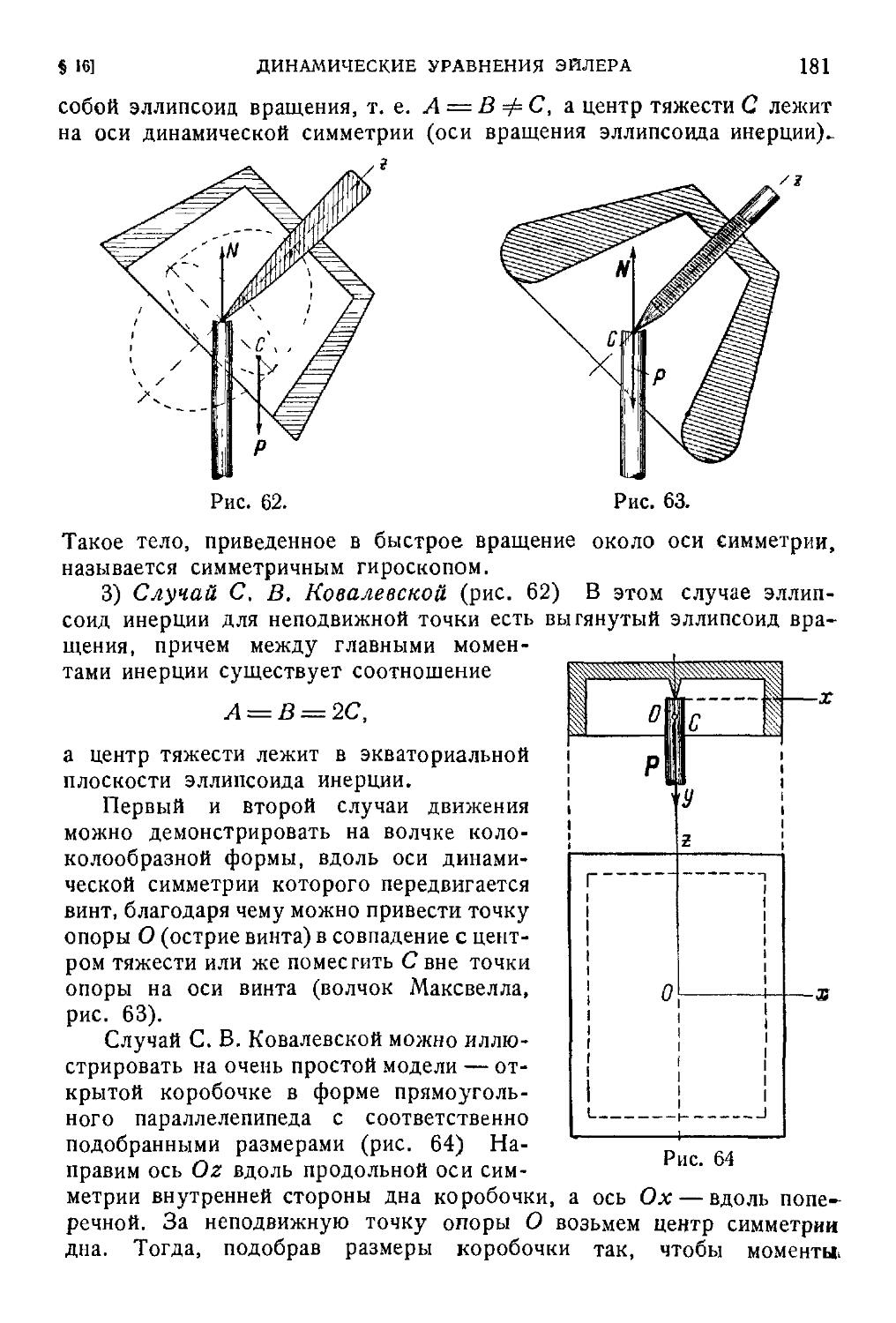
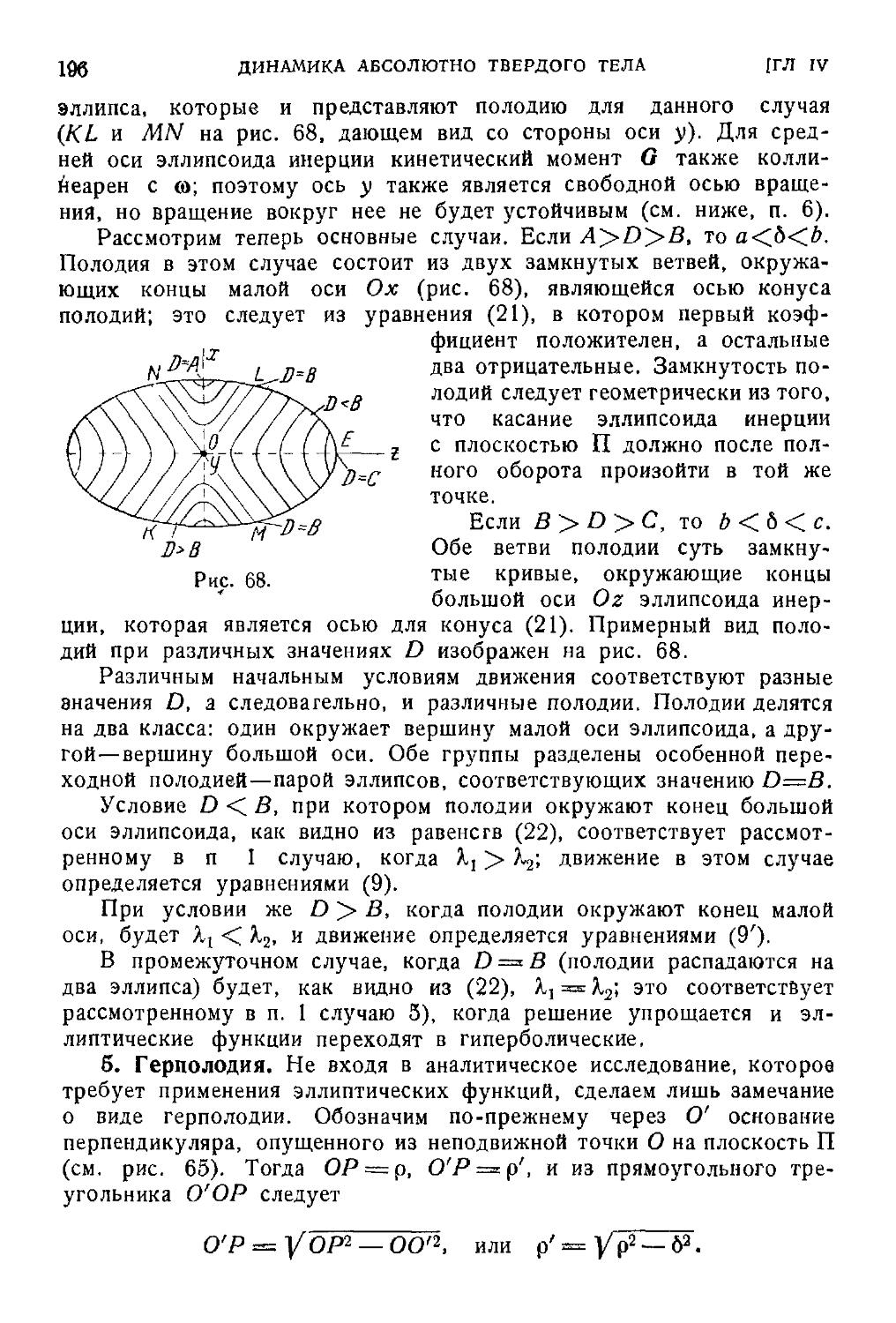
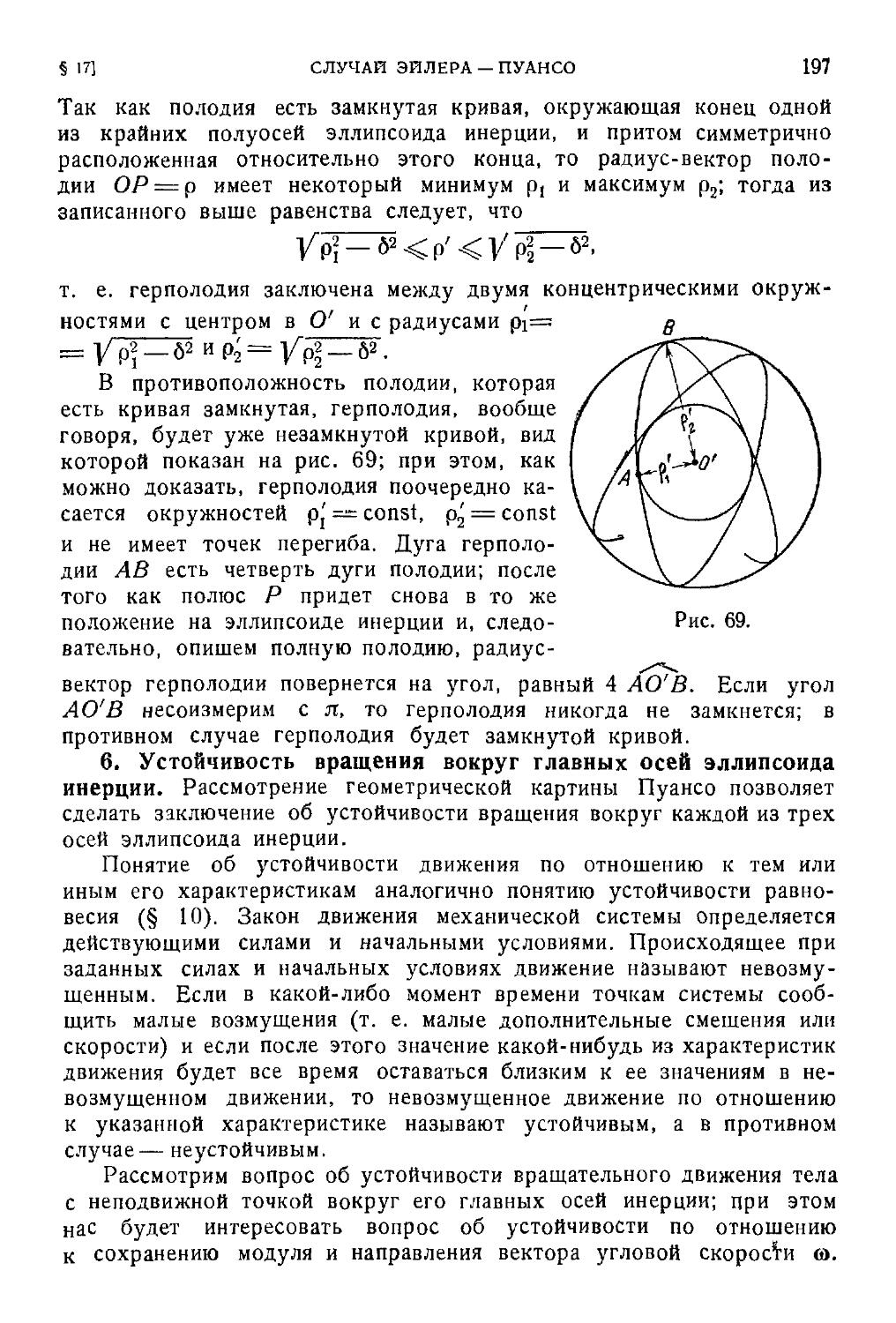
§ 17. Случай Эйлера — Пуансо 183
§ 18. Случай Лагранжа — Пуассона 201
§ 19. Случай С. В. Ковалевской 221
§ 20. Движение свободного твердого шла 224
Глава V. Канонические уравнения движения системы 227
§ 21. Вывод уравнений и первые интегралы 227
§ 22. Метод Якоби 238
§ 23. Метод Пуассона 244
1*
4 ОГЛАВЛЕНИЕ
Глава VI. Вариационные принципы механики 249
§ 24. Введение. Подразделение принципов 249
§ 25. Дифференциальные принципы 250
§ 26. Интегральные принципы 260
§ 27. Канонические преобразования . 278
Глава VII. Теория удара 286
§ 28. Теория удара материальной точки 286
§ 29. Теория удара системы материальных точек 292
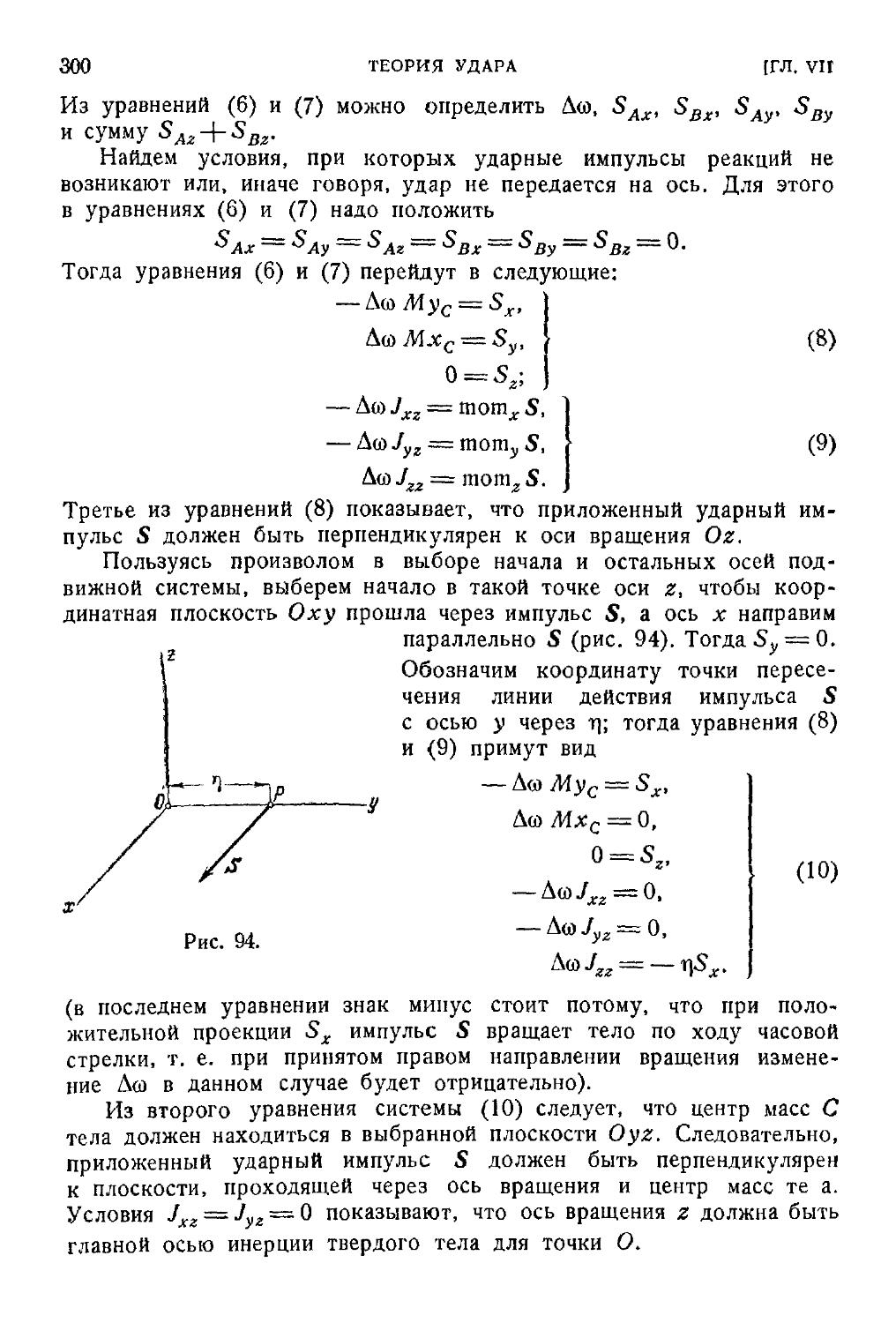
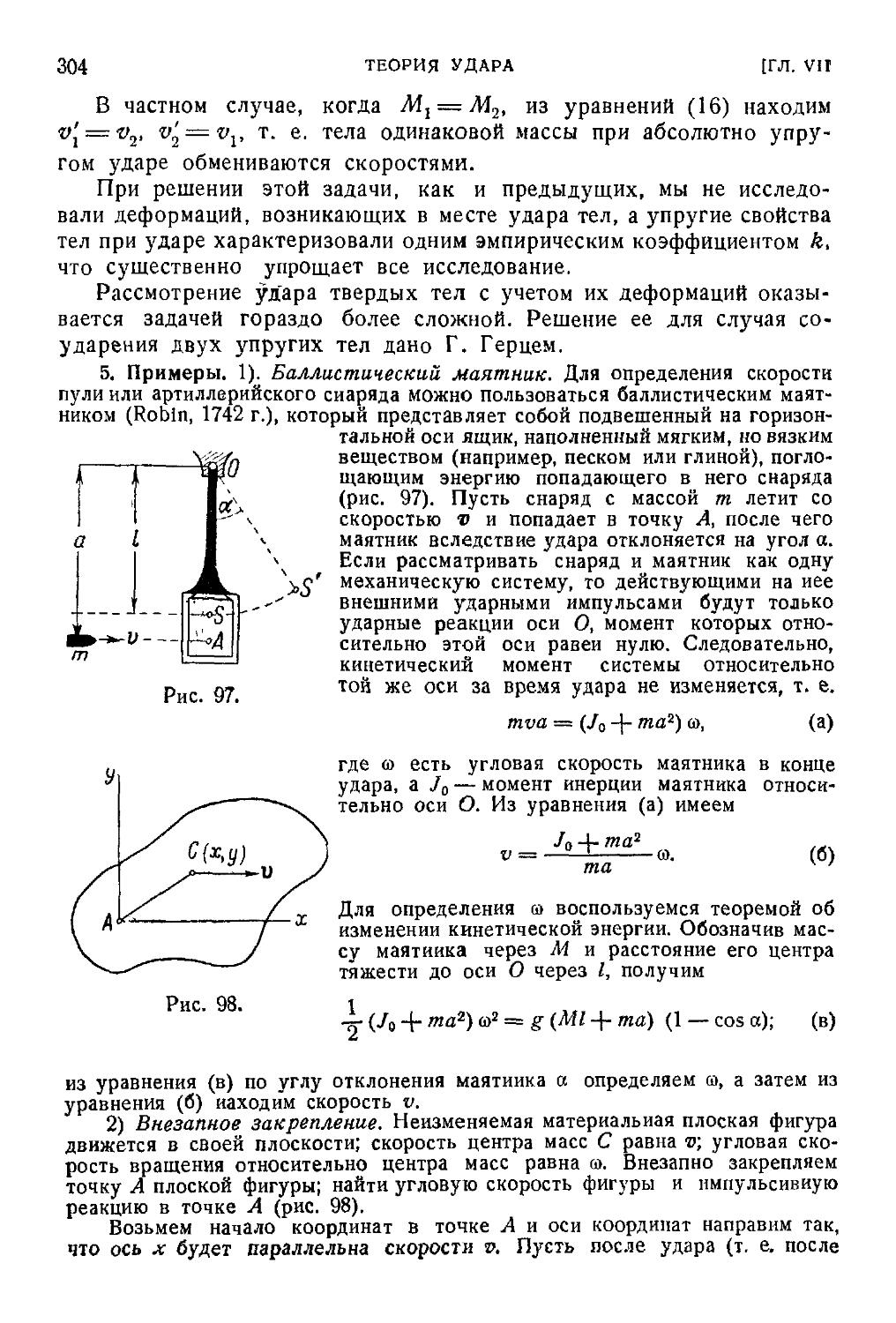
§ 30. Теория удара твердых тел 297
Глава VIII. Размерность и теория подобия 306
§ 31. Измерение и размерность механических величин 306
§ 32. Теория подобия механических систем 318
Литература 329
Предметный указатель 330
ПРЕДИСЛОВИЕ К ЧЕТВЕРТОМУ ИЗДАНИЮ
«Основной курс теоретической механики» профессора Н. Н. Бух-
гольца A880—1944), выдержавший при жизни автора несколько из-
изданий, зарекомендовал себя как хороший учебник для студентов
университетов и ценное пособие, которым могут пользоваться сту-
студенты других вузов, а также инженеры, желающие пополнить и углу-
углубить свои знания в области механики.
Вторая часть этого курса, как и первая, построена на материале
лекций, читанных автором в течение многих лет в Московском го-
государственном университете, и содержит динамику системы матери-
материальных точек, динамику твердого тела и начала аналитической ме-
механики; подробнее содержание книги видно из оглавления. Несмотря
на сравнительно небольшой объем книги, весь материал в ней изло-
изложен с достаточной полнотой и иллюстрируется целым рядом задач
и примеров.
При подготовке к печати настоящего издания (предыдущее третье
издание вышло в свет в 1945 г.) часть материала книги подверг-
подверглась переработке и в нее внесен ряд дополнений, учитывающих,
в частности, и изменения в программе университетского курса тео-
теоретической механики; одновременно устранены замеченные погреш-
погрешности и опечатки.
Наиболее существенные изменения внесены в материал п. 1 § 17,
пп. 1 и 3 § 18 и п. 8 § 26. Добавлены п. 8 в § 2, § 4, пп. 3 и 11
в § 8. п. 6 в § 9, пп. 4 и 6 в § 26 и п. 4 в § 30. Небольшие из-
изменения и добавления сделаны и во многих других местах книги.
Кроме того, в большую часть параграфов добавлены задачи и при-
примеры.
6 ПРЕДИСЛОВИЕ К ЧЕТВЕРТОМУ ИЗДАНИЮ
Как и в первой части, нумерация параграфов для удобства
ссылок сделана общей по всей книге. Термин «материальная частица»
заменен на принятый в первых изданиях термин «материальная точка»;
изменен также в целях единообразия ряд обозначений в гл. VIII.
Все остальные термины и обозначения, принятые автором, в основ-
основном сохранены.
Внесенные при переработке материала изменения и дополнения
в тексте книги специально не оговариваются; это лишь мешало бы
пользоваться книгой как учебником.
При чтении книги следует иметь в виду, что все содержащиеся
в ней ссылки на первую часть даются по шестому изданию !).
С. М. Тарг
>) Н. Н. Бухго льц, Основной курс теоретической механики, часть пер-
первая, изд. шестое, Изд-во «Наука», 1965.
ГЛАВА ПЕРВАЯ
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК
§ 1. Основные понятия. Связи
I. Механическая система. Виды связей. Механической системой
называется такое множество материальных точек, в котором движе-
движение каждой точки зависит от положения и движения остальных точек
системы. Условия, налагающие ограничения на движение точек системы,
называются связями; эти условия аналитически выражаются в виде
уравнений, связывающих между собой координаты и скорости точек
системы, а также время (см. ч. I, § 14, п. 5). Уравнение неосвобо-
ждающей связи дается равенством вида
/(*i. Уь *\> х2> Уз. *2 хп> Уп> zn\
*1. У1. К Х2- У2. ^2 Х'п> уа, Za\ t) = 0,
где п есть число точек системы, или, сокращенно,
f(x, у, z\ х, у, 'г; t) = Qi). A)
Для освобождающей же связи это уравнение имеет вид неравенства
f(x, у, z, х, у, 'г, 0>0. (Г)
Так как при движении системы координаты х, у, z и скорости х>
у, z являются функциями времени, то время в уравнения связи вхо-
входит неявно через эти аргументы; кроме того, оно может входить и
явно. Связь, не зависящая явно от времени, называется склероном-
склерономной или стационарной; если же связь явно зависит от времени, то
') При отсутствии индексов условимся в выражениях вида / (х, у, г,
х, у, г) под х понимать всю совокупность величин хь х2,..., хп, под
У — совокупность уь у2 уп и т. д.
8 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. t
она называется реономной или нестационарной. Уравнение склеро-
склерономной связи имеет вид
/(*. у, z, х, у, г) = 0. B)
а связь, выражаемая уравнением вида A), будет реономной.
Уравнения A) и B) определяют связи, налагающие ограничения
не только на координаты точек системы, но и на их скорости; такие
связи носят название кинематических или дифференциальных связей.
Связь, которая налагает ограничение только на положения точек
системы и, следовательно, выражается уравнением, связывающим
только координаты этих точек, называется геометрической или конеч-
конечной связью; уравнение геометрической связи имеет вид
f(x, у, г\ 0 = 0 или f(x, у, z) = 0. C)
Мы ограничимся рассмотрением кинематических связей, которые выра-
выражаются уравнениями, линейными относительно скоростей точек си-
системы. Эти уравнения, если связи реономны, имеют вид
п
2 K*v+KVv+cvzv) 4-0 = 0. D)
где flv, bv, cv, а суть функции координат х, у, z и, возможно,
йремени t, т. е.
х, у, z,
ev, bv, cv, a t
Если же эти связи склерономны, то они выразятся уравнениями вида
п
1i(avxv + bvyv-+-cvzv) = 0, E)
v=i
где av, bv, cv зависят только от координат х, у, г.
Умножая уравнения D) и E) на dt, получим выражения уравне-
уравнений кинематических связей в виде
0 Dа>
для реономной связи и
п
2i(avdxv-\-bvdyv-ircvdzv) = a Eа)
v = l
для склерономной связи. Левые части уравнений Dа) и Eа) пред-
представляют собой линейные формы относительно дифференциалов ко-
координат и, может быть, времени; если эти линейные дифференциаль-
дифференциальные многочлены являются полными дифференциалами какой-нибудь
ОСНОВНЫЕ ПОНЯТИЯ. СВЯЗИ
9
функции координат и времени (т. е. интегрируются), то после инте-
интегрирования дифференциальная связь перестает быть таковой и стано-
становится конечной связью, налагающей условия только на координаты
точек системы, т. е. геометрической связью. Следовательно, связь
будет дифференциальной только в том случае, если она неинте-
грируема.
По терминологии Г. Герца механическая система, имеющая только
связи, выраженные в конечной форме (геометрические), называется
голономной; если же на систему наложены дифференциальные неин-
тегрируемые связи, то система называется неголономной.
Примерами неголономных систем являются твердые тела, выну-
вынужденные катиться без скольжения по какой-либо шероховатой по-
поверхности. Кинематический характер такой связи виден из того, что
скорость точки касания тела с поверхностью должна равняться нулю.
Если уравнения, выражающие это условие, не могут быть проинте-
проинтегрированы, то связь будет неголономной.
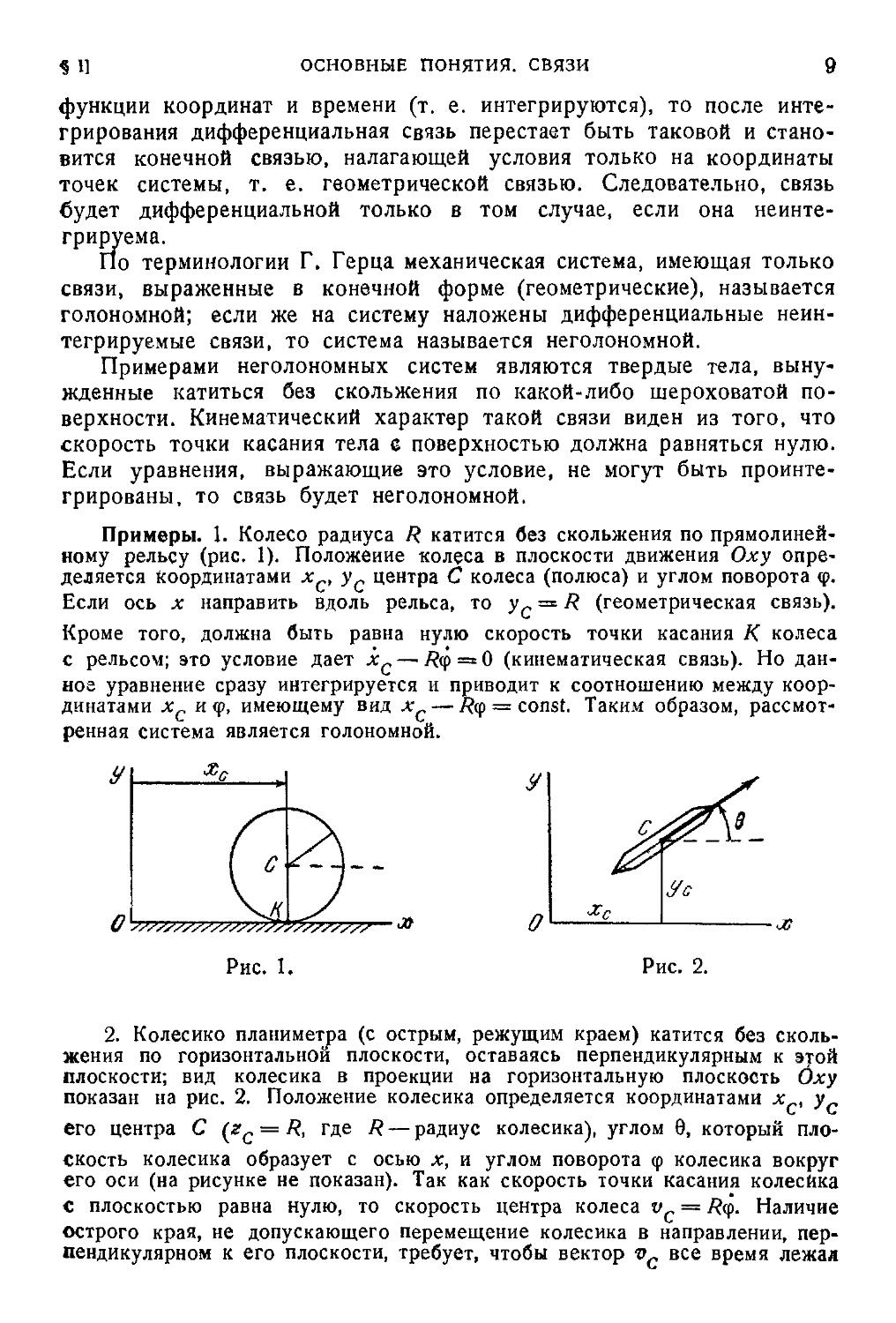
Примеры. 1. Колесо радиуса R катится без скольжения по прямолиней-
прямолинейному рельсу (рис. 1). Положение колеса в плоскости движения Оху опре-
определяется координатами хс, ус центра С колеса (полюса) и углом поворота ф.
Если ось х направить вдоль рельса, то yc = R (геометрическая связь).
Кроме того, должна быть равна нулю скорость точки касания К колеса
с рельсом; это условие дает хс— /?ф=0 (кинематическая связь). Но дан-
ног уравнение сразу интегрируется и приводит к соотношению между коор-
координатами хс и ф, имеющему вид хс — /?ф = const. Таким образом, рассмот-
рассмотренная система является голономной.
Рис. I.
Рис. 2.
2. Колесико планиметра (с острым, режущим краем) катится без сколь-
скольжения по горизонтальной плоскости, оставаясь перпендикулярным к этой
плоскости; вид колесика в проекции на горизонтальную плоскость Оху
показан на рис. 2. Положение колесика определяется координатами хс< ус
его центра С (ZQ = R, где R — радиус колесика), углом 9, который пло-
плоскость колесика образует с осью х, и углом поворота ф колесика вокруг
его оси (на рисунке не показан). Так как скорость точки касания колесика
с плоскостью равна нулю, то скорость центра колеса vc = /?ф. Наличие
острого края, не допускающего перемещение колесика в направлении, пер-
перпендикулярном к его плоскости, требует, чтобы вектор vc все время лежал
10 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. I
в плоскости колесика. Это приводит к следующим двум соотношениям между
координатами хс, ус, <р, 9:
хс = /?ср cos 9, yc = /?(psin0. (a)
Уравнения (а), когда 9 ф= const, не могут быть проинтегрированы; следова-
следовательно, система является неголономной.
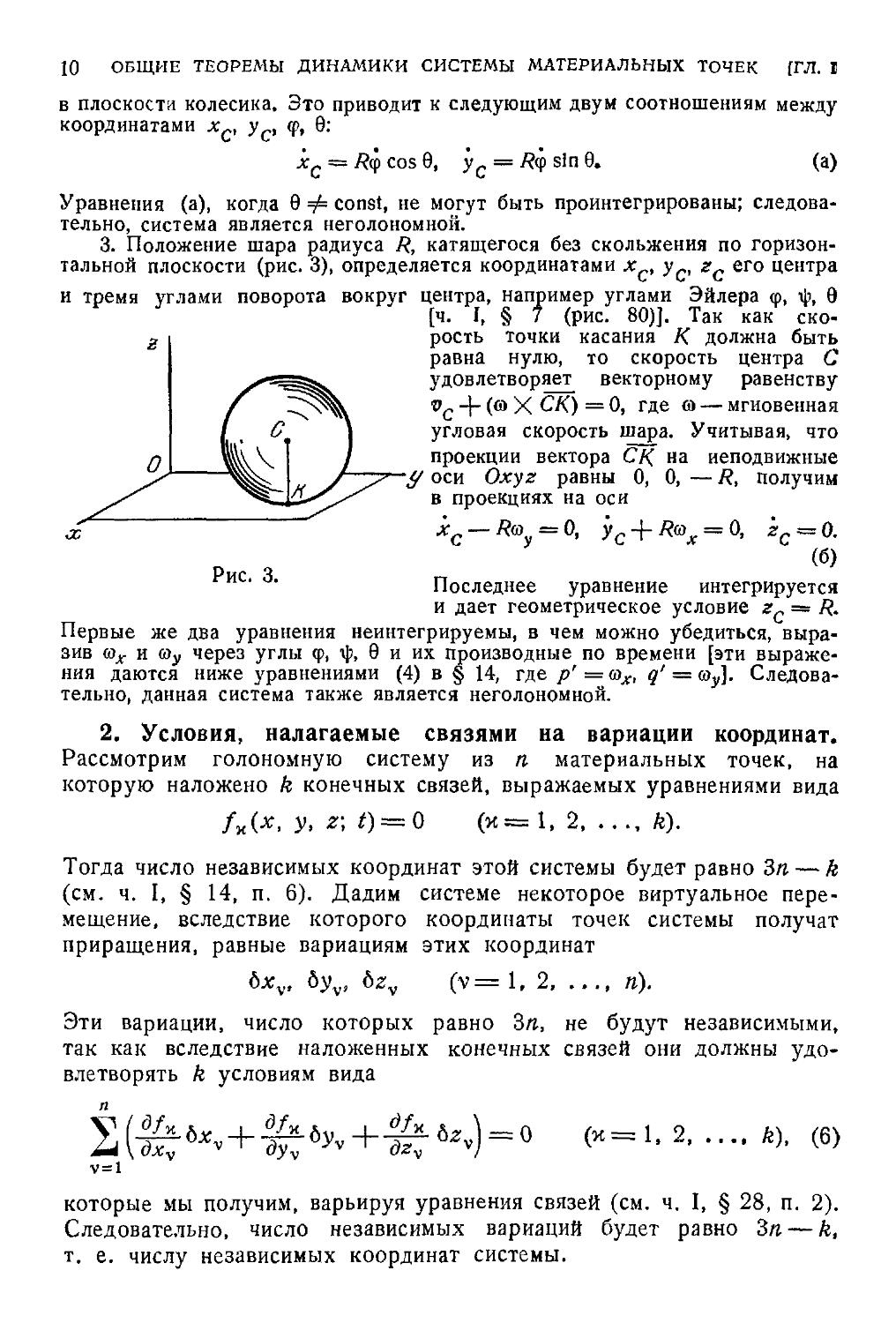
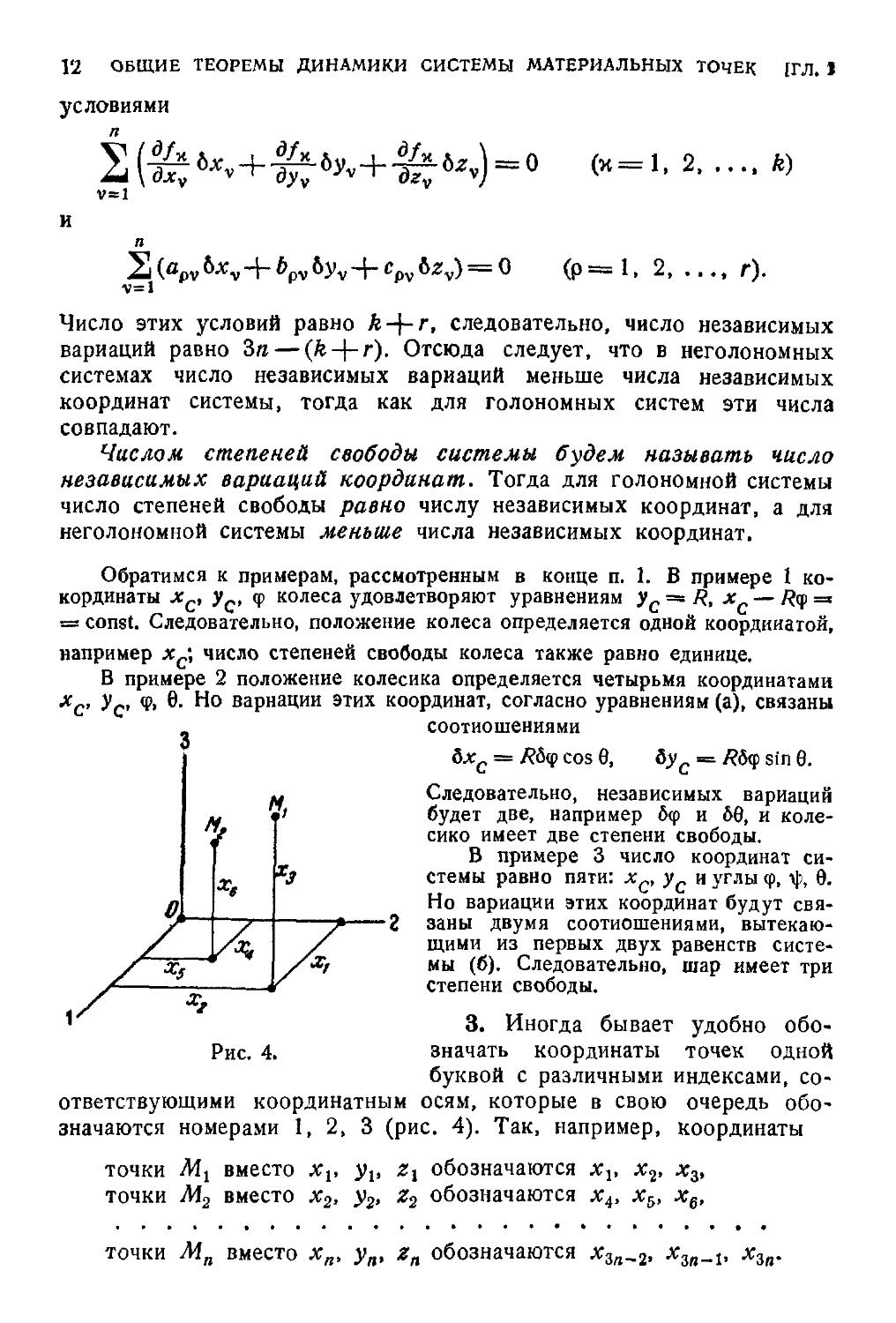
3. Положение шара радиуса R, катящегося без скольжения по горизон-
горизонтальной плоскости (рис. 3), определяется координатами je , ус, г„ его центра
и тремя углами поворота вокруг центра, например углами Эйлера ср, ty, 9
[ч. I, § 7 (рис. 80)]. Так как ско-
скорость точки касания К должна быть
равна нулю, то скорость центра С
удовлетворяет^ векторному равенству
Dc-(-(fflXCK)=0, где о — мгновенная
угловая скорость шара. Учитывая, что
проекции вектора Cf( на неподвижные
-у оси Охуг равны 0, 0, — R, получим
в проекциях на оси
у ^
Последнее уравнение интегрируется
и дает геометрическое условие гс = R.
Первые же два уравнения неинтегрируемы, в чем можно убедиться, выра-
выразив <ох и (Оу через углы <р, г|з, 9 и их производные по времени [эти выраже-
выражения даются ниже уравнениями D) в § 14, где р' = ах, q' = <ву]. Следова-
Следовательно, данная система также является неголономной.
2. Условия, налагаемые связями на вариации координат.
Рассмотрим голономную систему из п материальных точек, на
которую наложено k конечных связей, выражаемых уравнениями вида
fx(x, у, z\ t) — Q (я~\, 2 k).
Тогда число независимых координат этой системы будет равно 3/г — k
(см. ч. I, § 14, п. 6). Дадим системе некоторое виртуальное пере-
перемещение, вследствие которого координаты точек системы получат
приращения, равные вариациям этих координат
bxv, 6yv< 6zv (v=l, 2 п).
Эти вариации, число которых равно 3/г, не будут независимыми,
так как вследствие наложенных конечных связей они должны удо-
удовлетворять k условиям вида
Рис. 3.
v=l
(,= 1,2 k), F)
которые мы получим, варьируя уравнения связей (см. ч. I, § 28, п. 2).
Следовательно, число независимых вариаций будет равно 3/г — к,
т. е. числу независимых координат системы.
§ I] ОСНОВНЫЕ ПОНЯТИЯ. СВЯЗИ Ц
Предположим теперь, что система неголономна и на нее, кроме
конечных связей, выражаемых уравнениями вида
/„(*, у, г; 0 = 0, (и=1, 2 ft),
наложено еще г дифференциальных (неинтегрируемых) связей, урав-
уравнения которых имеют вид
л
%(apvdxv-\-bpvd\)v+cpvdzv)-\-apdt = O (p=l, 2, ..., г). G)
Уравнения G) связывают между собой проекции dx, dy, dz истин-
истинных перемещений точек системы, совершаемых за элементарный
промежуток времени dt. При виртуальном перемещении изменения
координат точек системы выражаются их вариациями 6х, 6у, 6z,
причем 6? = 0, так как виртуальное перемещение есть изменение
положения системы, соответствующее данному моменту (при опре-
определении этих перемещений время не варьируется). Поэтому уравне-
уравнение, связывающее между собой вариации координат 6х, by, bz,
мы получим из уравнения G) путем замены дифференциалов вариа-
вариациями, принимая во внимание, что 6^ = 0; следовательно, диф-
дифференциальные связи типа G) налагают на вариации координат условия
2
V=I
(apv 6xv + ?pv oyv + cpv Szv) = 0 (p = 1, 2 r). (8)
Отсюда ясно, что при дифференциальных связях, так же как
и при конечных, виртуальные перемещения совпадают с истинными
только в том случае, если связь склерономна, т. е. если уравнение
дифференциальной связи имеет вид
п
2 (flpv dxv + *pv dVv + cpv d*v) = °>
причем apv, bpv, cpv будут функциями только координат, но не вре-
времени, входящего явно.
Итак, пусть на систему наложено k конечных связей, выражае-
выражаемых уравнениями вида
/„(*. у, z\ 0 = 0 (и=1, 2, .... k).
и г дифференциальных неинтегрируемых связей, уравнения которых
имеют вид
п
1i(apvdxv-\-bpvdyv-\-cpvdzv) + apdt = 0 (р=1, 2 г).
¦v = l
Число независимых координат системы будет равно 3/г — k, где п
есть число точек системы. Вариации же координат будут связаны
12 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. 1
условиями
п
=1, 2
v=l
"=l. 2, .... f).
Число этих условий равно А + r, следовательно, число независимых
вариаций равно Зга — (k-\-r). Отсюда следует, что в неголономных
системах число независимых вариаций меньше числа независимых
координат системы, тогда как для голономных систем эти числа
совпадают.
Числом степеней свободы системы будем называть число
независимых вариаций координат. Тогда для голономной системы
число степеней свободы равно числу независимых координат, а для
неголономной системы меньше числа независимых координат.
Обратимся к примерам, рассмотренным в конце п. 1. В примере 1 ко-
кординаты хс, Ус, <р колеса удовлетворяют уравнениям ус — R, xQ — Щ =*
= const. Следовательно, положение колеса определяется одной координатой,
например хс', число степеней свободы колеса также равно единице.
В примере 2 положение колесика определяется четырьмя координатами
хс У'с *• ®" варнации этих координат, согласно уравнениям (а), связаны
соотношениями
я
8хс = /?бф cos 0, 8ус = Лбф sin 0.
Следовательно, независимых вариаций
будет две, например бср и 60, и коле-
колесико имеет две степени свободы.
В примере 3 число координат си-
системы равно пяти: хс, ус и углы ср, \р, 9.
Но вариации этих координат будут свя-
связаны двумя соотношениями, вытекаю-
вытекающими из первых двух равенств систе-
системы (б). Следовательно, шар имеет три
степени свободы.
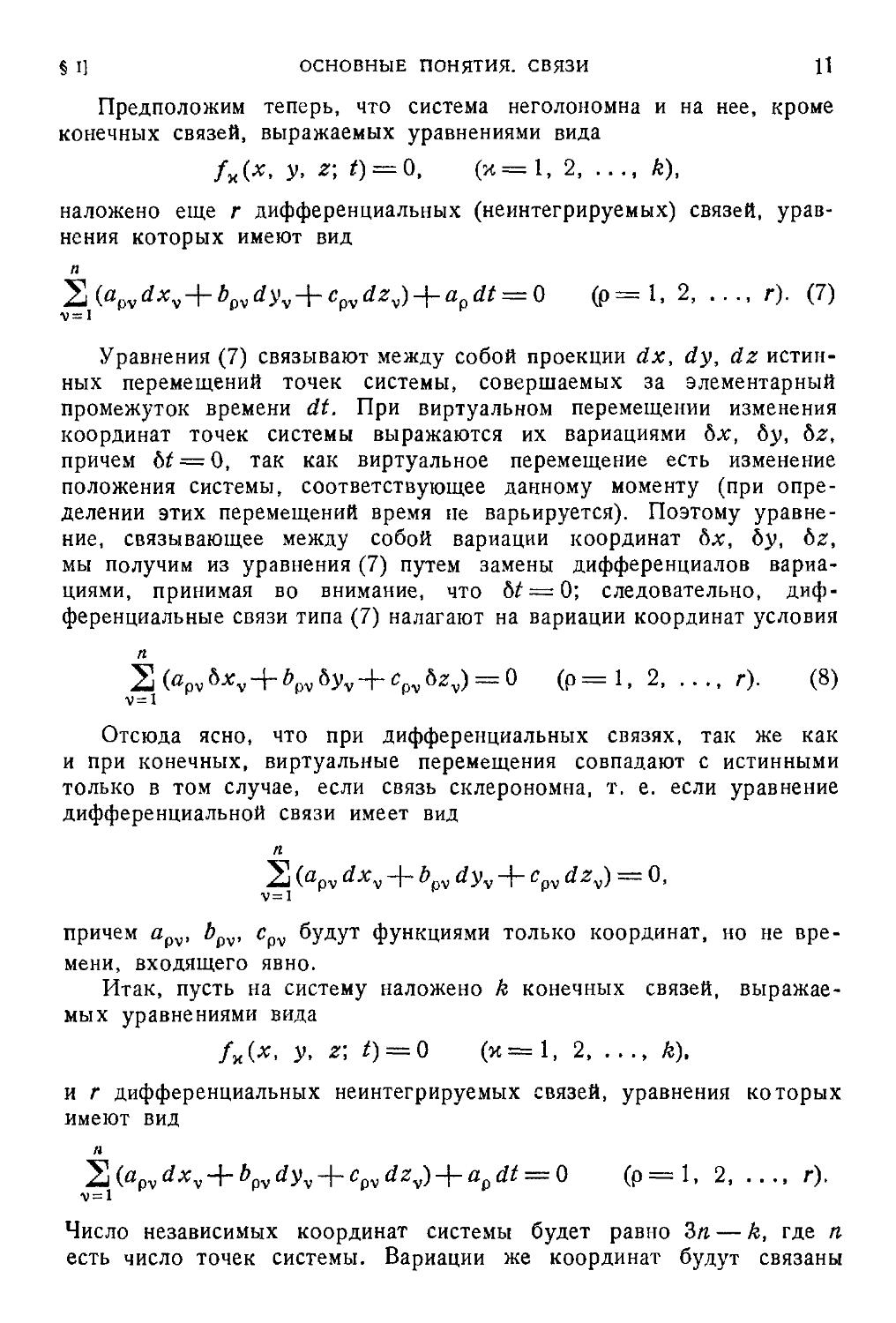
1 3. Иногда бывает удобно обо-
Рис. 4. значать координаты точек одной
буквой с различными индексами, со-
соответствующими координатным осям, которые в свою очередь обо-
значаются номерами 1, 2, 3 (рис. 4). Так, например, координаты
точки Mi вместо xv yu zx обозначаются xv x2, х3,
точки М2 вместо х2, у2, z2 обозначаются х4, х5, х6,
О,
А
А
—Н
Г
/
/
точки Мп вместо х„, у„, zn обозначаются х3л_2, х3п_1, х{
зя-
§21
ОСНОВНЫЕ ДИНАМИЧЕСКИЕ ВЕЛИЧИНЫ
13
Массы этих точек для удобства суммирования обозначаются одной
буквой с теми же индексами, что и координаты этих точек; напри-
например, масса точки Мх обозначается или т\, или т2, или т3, причем,
конечно, т1 — т2 = mz; масса точки М2 обозначается или т4, или т5,
или т6, причем т4 = т5 = т6; масса точки Мп обозначается или
Я13п_2, или ты_х, или щп, причем т3„_2== Щ„-\ = Щ„- Такими
обозначениями мы будем иногда пользоваться.
§ 2. Основные динамические величины
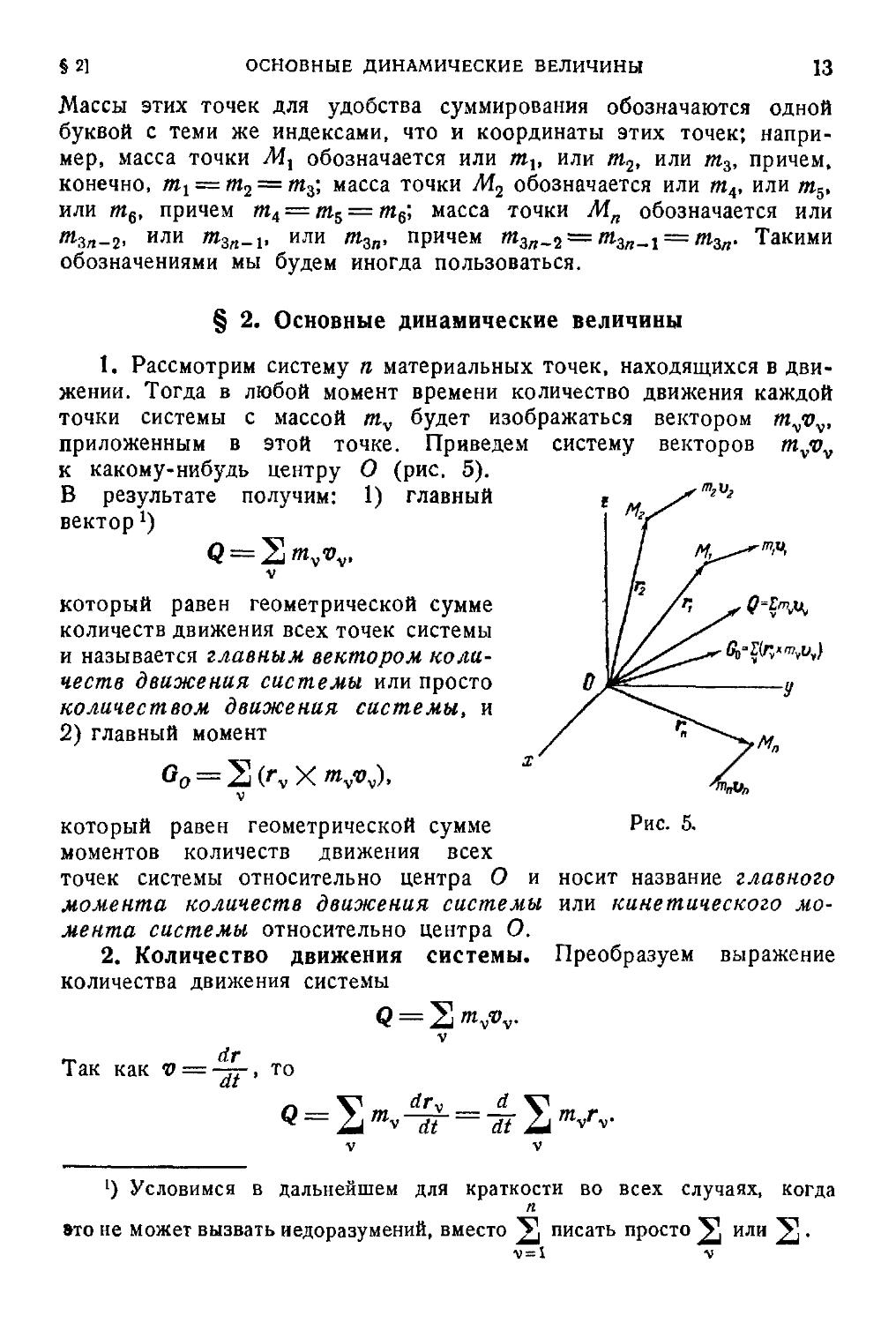
I. Рассмотрим систему п материальных точек, находящихся в дви-
движении. Тогда в любой момент времени количество движения каждой
точки системы с массой tnv будет изображаться вектором mvvv,
приложенным в этой точке. Приведем систему векторов mvvv
к какому-нибудь центру О (рис. 5).
В результате получим: 1) главный г
вектор')
v
который равен геометрической сумме
количеств движения всех точек системы
и называется главным вектором коли-
количеств движения системы или просто
количеством движения системы, и
2)главный момент /
который равен геометрической сумме Рис. 5.
моментов количеств движения всех
точек системы относительно центра О и носит название главного
момента количеств движения системы или кинетического мо-
момента системы относительно центра О.
2. Количество движения системы. Преобразуем выражение
количества движения системы
Так как 1° — ~тт> то
') Условимся в дальнейшем для краткости во всех случаях, когда
п
»то не может вызвать недоразумений, вместо 2 писать просто 2 или 2 •
14 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК ГГЛ. Г
Но из формулы, определяющей радиус-вектор гс центра масс си-
системы, следует, что
2 mvrv = Мгс,
где М = 2j mv есть масса всей системы; поэтому
V
.. drr
A)
где vc есть скорость центра масс. Отсюда имеем теорему: коли-
количество движения системы равно количеству движения, которое
имел бы центр масс системы, если бы в нем была сосредото-
сосредоточена масса всей системы. Иными словами, количество движения
системы равно произведению массы системы на скорость ее центра масс.
Проекции количества движения системы на оси координат будут
Из доказанной теоремы следует, что количество движения си-
системы по отношению к любым осям Cx'y'z'', имеющим начало
в центре масс С и перемещающимся вместе с этим центром, равно
нулю, так как относительно этих осей wc = 0. В частности, оче-
очевидно, будет равно нулю количество движения твердого тела, вра-
вращающегося вокруг оси, проходящей через центр масс этого тела.
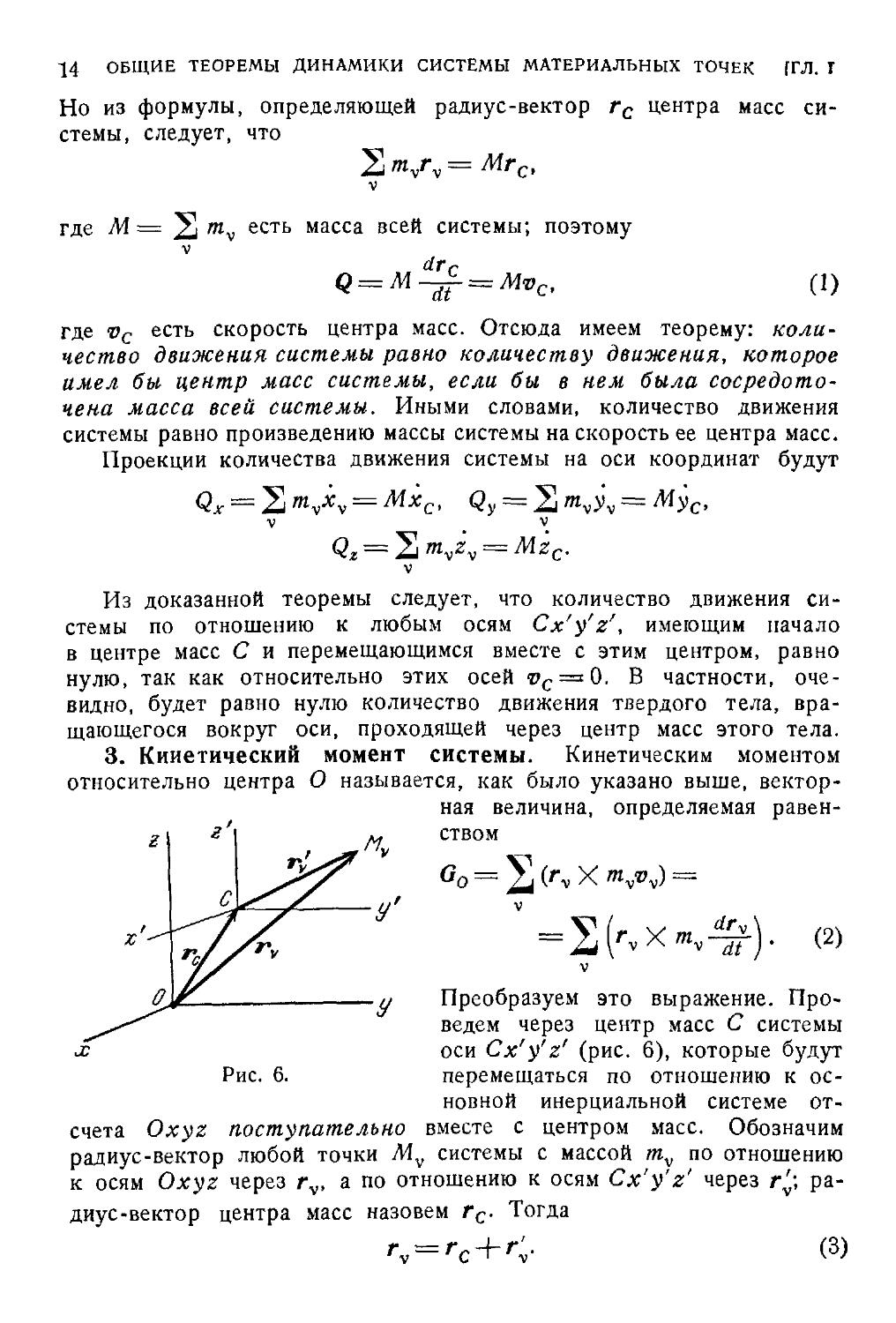
3. Кинетический момент системы. Кинетическим моментом
относительно центра О называется, как было указано выше, вектор-
векторная величина, определяемая равен-
ством
= 2 С\ X
= 7,\Г.
V т drv
¦)•
B)
Преобразуем это выражение. Про-
Проведем через центр масс С системы
оси Cx'y'z' (рис. 6), которые будут
Рис. 6. перемещаться по отношению к ос-
основной инерциальной системе от-
отсчета Oxyz поступательно вместе с центром масс. Обозначим
радиус-вектор любой точки Mv системы с массой mv по отношению
к осям Oxyz через rv, а по отношению к осям Cx'y'z' через r'v; ра-
радиус-вектор центра масс назовем гс. Тогда
C)
ОСНОВНЫЕ ДИНАМИЧЕСКИЕ ВЕЛИЧИНЫ
15
Если система движется, то rv, rc и /^ суть функции времени; по-
поскольку равенство C) имеет место в любой момент времени, то
dt ~~ dt •" dt '
Подставляя выражения (З) и D) в равенство B), получим
D)
2 [
drr
drr
Раскрывая скобки и обозначая скорость —±- центра масс через vc,
находим
X
vc) + 2 (
гс X mv
Заметим, что
здесь Ж — масса системы, а г^ = 0, так как-r^, есть радиус-вектор
точки С в осях Cx'y'z''. Тогда будем иметь следующие очевидные
равенства:
V
V=I
v=l
E)
где ©^ есть скорость точки с массой mv относительно осей Cx'y'z'.
На основании этих равенств получим выражение кинетического
16 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. В
момента Оо в виде
, X тух F)
Первый член правой части есть момент относительно центра О
количества движения, которое имел бы центр масс системы, если бы
в нем была сосредоточена масса всей системы. Второй член
представляет собой сумму моментов относительно центра масс коли-
количеств движения точек системы в ее движении по отношению к по-
подвижной системе отсчета Cx'y'z'.
Отсюда получаем теорему: кинетический момент системы
относительно какого-нибудь неподвижного центра равен мо-
моменту относительно этого ценщра количества движения
центра масс в предположении, что в нем сосредоточена масса
всей системы, сложенному с кинетическим моментом системы
относительно центра масс в ее движении по отношению к по-
подвижной системе отсчета, перемещающейся вместе с центром
масс поступательно, т. е.
F')
Равенство F') можно еще представить в виде
Go = гс X Mvc -f- Gc, F")
где Gc = 2 (r'v X m^°^)- ^ самом деле, так как, согласно фор-
муле D), v =<oc-\~v'v, то, учитывая третье из равенств E), будем
иметь
или GC = G'C-
Если перейти к декартовым координатам, положив
rc = xci + ycj+zck,
то проекции кинетического момента системы на оси координат, или,
что то же, кинетические моменты системы относительно координатных
§ 2] ОСНОВНЫЕ ДИНАМИЧЕСКИЕ ВЕЛИЧИНЫ
осей, выразятся так:
Ох = 2 «v (Уv*v — 2v)>v) =
17
: М (yczc - гсу с)
= Ж BСХС — XCZC)
mv (y'X -
Ог =
mv
G)
— ускс) +
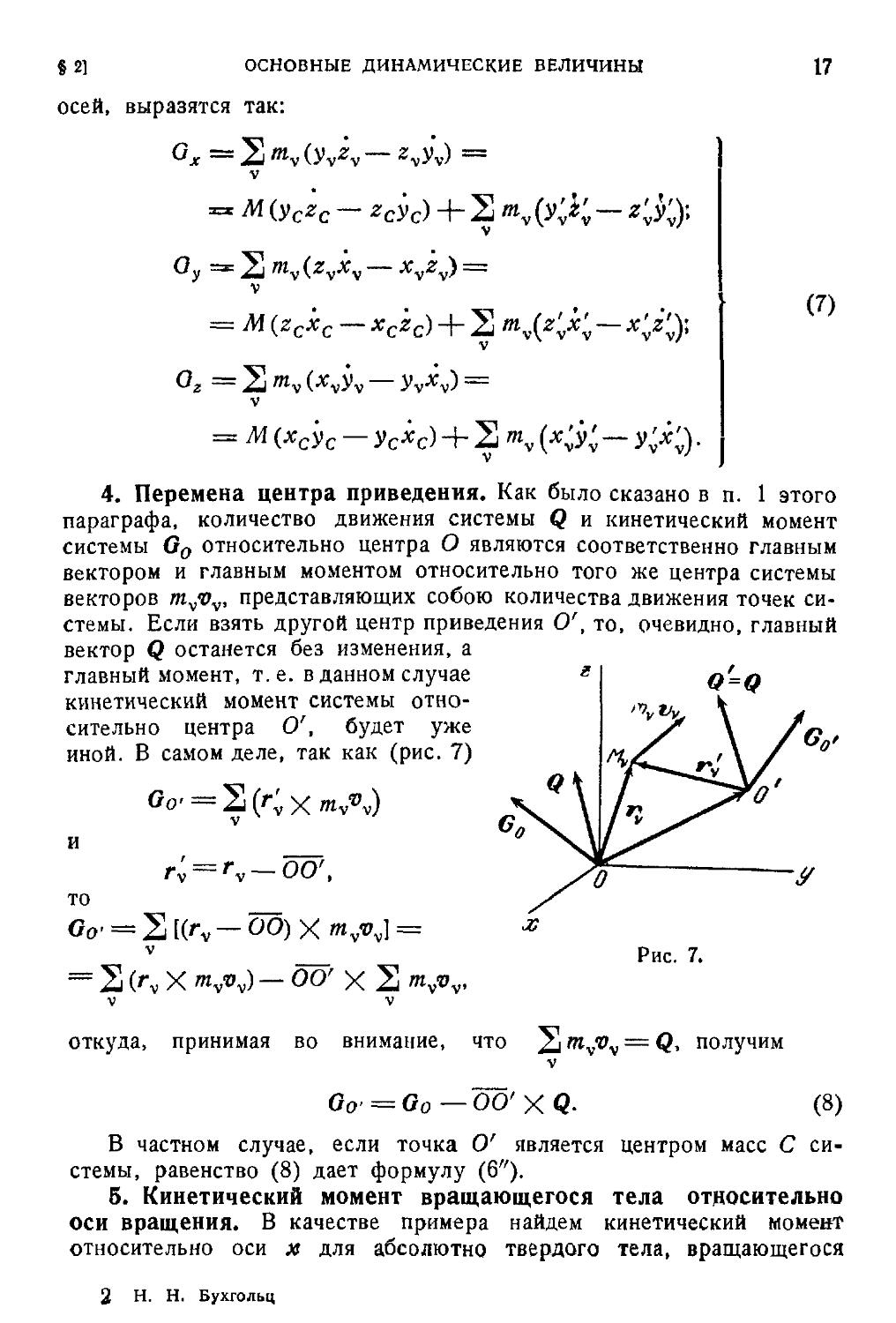
4. Перемена центра приведения. Как было сказано в п. 1 этого
параграфа, количество движения системы Q и кинетический момент
системы Go относительно центра О являются соответственно главным
вектором и главным моментом относительно того же центра системы
векторов mvvv, представляющих собою количества движения точек си-
системы. Если взять другой центр приведения О', то, очевидно, главный
вектор Q останется без изменения, а
главный момент, т. е. в данном случае
кинетический момент системы отно-
относительно центра О', будет уже
иной. В самом деле, так как (рис. 7)
то
о„' = 2
— 00) X mv«M =
V
S К X mv«»v) — 00' X 2 «
Рис. 7.
откуда, принимая во внимание, что
==Qi получим
К Q. (8)
В частном случае, если точка О' является центром масс С си-
системы, равенство (8) дает формулу F").
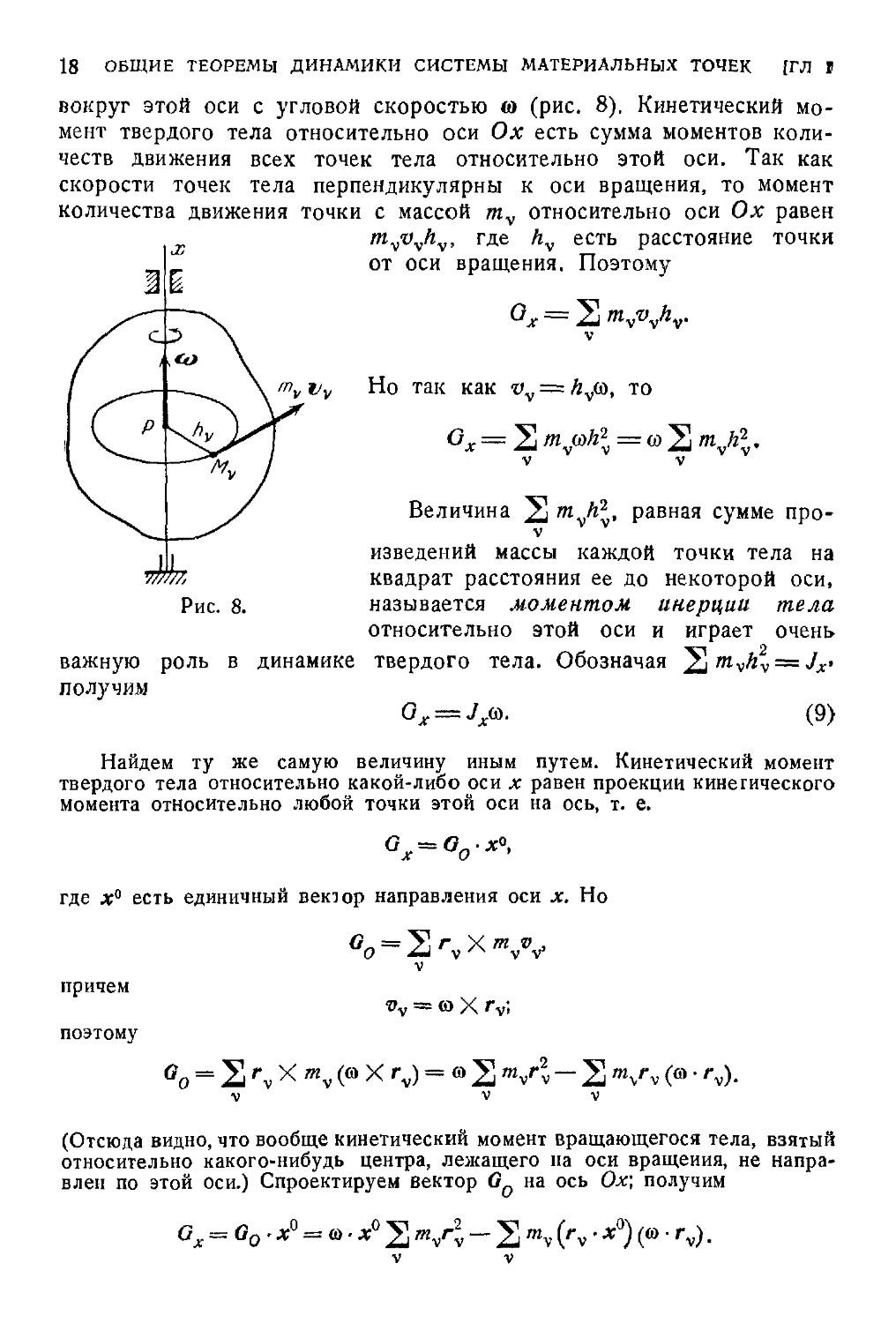
5. Кинетический момент вращающегося тела относительно
оси вращения. В качестве примера найдем кинетический момент
относительно оси к для абсолютно твердого тела, вращающегося
2 Н. Н. Бухгольц
18 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ Г
вокруг этой оси с угловой скоростью «> (рис. 8). Кинетический мо-
момент твердого тела относительно оси Ох есть сумма моментов коли-
количеств движения всех точек тела относительно этой оси. Так как
скорости точек тела перпендикулярны к оси вращения, то момент
количества движения точки с массой mv относительно оси Ох равен
где hv есть расстояние точки
mvvvhv,
vvv v
от оси вращения. Поэтому
ох = 2 ™-vvvh
V
Но так как vv = hva>, то
Gx = 2 mv>hI = to
Величина 2
V
равная сумме про-
изведений массы каждой точки тела на
квадрат расстояния ее до некоторой оси,
Рис. 8. называется моментом инерции тела
относительно этой оси и играет очень
важную роль в динамике твердого тела. Обозначая ^Pimvh2v = JX'
получим
OX = JX<*. (9)
Найдем ту же самую величину иным путем. Кинетический момент
твердого тела относительно какой-либо оси х равен проекции кинетического
момента относительно любой точки этой оси на ось, т. е.
где д:0 есть единичный вектор направления оси х. Но
причем
поэтому
V
rv X
rv;
X rv) = а 2 т-А — 2
О •
(Отсюда видно, что вообще кинетический момент вращающегося тела, взятый
относительно какого-нибудь центра, лежащего на оси вращения, не напра-
направлен по этой оси.) Спроектируем вектор QQ на ось Ох; получим
Gx = Оо ¦ х° =
- 2
°) (® • rv) •
§2)
ОСНОВНЫЕ ДИНАМИЧЕСКИЕ ВЕЛИЧИНЫ
19
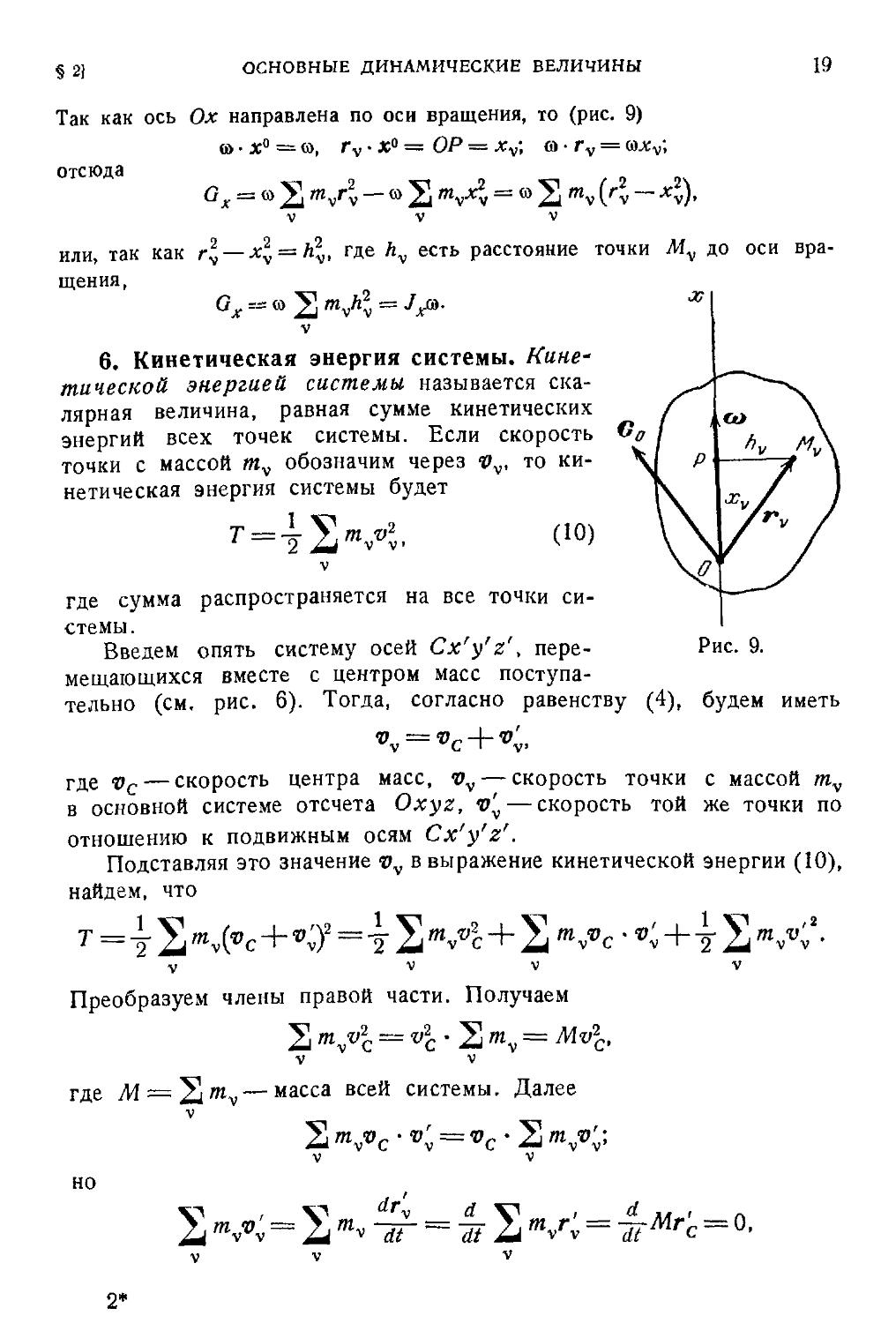
Так как ось Ох направлена по оси вращения, то (рис. 9)
е> • х" = «, rv ¦ х° = ОР = ду, о • rv = шу>
отсюда
Oj. = « ^ mvrv — w S mv*v = w 2 mv (rv — -*v)-
V V V
или, так как r^ — x\ = h^, где hv есть расстояние точки Mv до оси вра-
вращения,
V
6. Кинетическая энергия системы. Кине-
Кинетической энергией системы называется ска-
скалярная величина, равная сумме кинетических
энергий всех точек системы. Если скорость
точки с массой mv обозначим через uv, то ки-
кинетическая энергия системы будет
'X. A0)
где сумма распространяется на все точки си-
системы.
Введем опять систему осей Cx'y'z', пере- Рис. 9.
мещающихся вместе с центром масс поступа-
поступательно (см, рис. 6). Тогда, согласно равенству D), будем иметь
где vc — скорость центра масс, vv — скорость точки с массой mv
в основной системе отсчета Oxyz, v'v — скорость той же точки по
отношению к подвижным осям Cx'y'z'.
Подставляя это значение vv в выражение кинетической энергии A0),
найдем, что
V V V
Преобразуем члены правой части. Получаем
v44v
V V
где M = 2jmv—масса всей системы. Далее
2 "W <=^с • 2 "у;;
НО
SV4
20 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ I
так как г'с = 0; следовательно,
v v v
В результате окончательно будем иметь
V
Первый член правой части равенства (] 1) есть кинетическая
энергия, которую имел бы центр масс, если бы в нем была сосре-
сосредоточена масса всей системы; второй член представляет собой кине-
кинетическую энергию системы при ее движении относительно подвижной
системы отсчета, имеющей начало в центре масс и перемещаю-
перемещающейся вместе с центром масс поступательно. Следовательно, кине-
кинетическая энергия системы равна кинетической энергии центра
масс в предположении, что в нем сосредоточена масса всей си-
системы, сложенной с кинетической энергией системы при дви-
движении ее относительно подвижной системы отсчета, переме-
перемещающейся вместе с центром масс поступательно (теорема
Кёнига).
Предположим теперь, что система точек движется относительно
подвижной системы отсчета, которая в свою очередь движется по-
поступательно относительно основной инерциальной системы ориен-
ориентировки с произвольной скоростью v0. Тогда, на основании теоремы
о сложении скоростей, скорость какой-либо точки системы с мас-
массой mv относительно основной системы отсчета будет
где v'y есть скорость той же точки по отношению к подвижной си-
системе отсчета В результате кинетическая энергия системы для
движения относительно основной системы отсчета будет равна
1
Но 2т v' есть количество движения системы относительно по-
v
движной системы отсчета; при этом, согласно равенству A),
где v'c есть скорость центра масс относительно подвижной системы
отсчета, поэтому предыдущее выражение кинетической энергии мо-
может быть представлено в виде
^Xv'c. A2)
$ 2] ОСНОВНЫЕ ДИНАМИЧЕСКИЕ ВЕЛИЧИНЫ 21
Если <о'с = 0, т. е. центр масс движущейся системы точек непо-
неподвижен относительно подвижной системы отсчета, то vc = 1>0 и
т. е. мы получаем теорему Кёнига.
7. Кинетическая энергия твердого тела. Найдем сначала кине-
кинетическую энергию абсолютно твердого тела, движущегося поступа-
поступательно. Тогда для любой точки тела ©v = ttc, где vc — скорость
центра масс, и
S S 4 A3)
Вычислим теперь кинетическую энергию абсолютно твердого тела,
вращающегося вокруг неподвижной оси Оле с угловой скоростью ок
Имеем
но vv = Avco, где kv есть расстояние точки с массой тх до оси вра-
вращения Од;, поэтому
Величина ¦/, = 2 mv*v есть момент инерции тела относительно оси
V
вращения. Заметим, что формула A4) будет справедлива и в том
случае, когда ось х является мгновенной осью вращения, так как
равенство vv = hv<i) имеет место и для этого случая. При этом Jx
будет моментом инерции тела относительно мгновенной оси вра-
вращения.
В общем случае движения кинетическая энергия твердого тела
вычисляется по теореме Кёнига. Так как по теореме Шаля движе-
движение твердого тела относительно подвижных осей Cx'y'z' слагается
из мгновенных вращений вокруг осей, проходящих через точку С,
то S^V^v ==1^o(°2> и Ф°РмУла A1
где JCx — момент инерции тела относительно мгновенной оси вра-
вращения, проходящей через его центр масс, со — мгновенная угловая
скорость тела. Формула A5) выражает теорему Кёнига для абсо-
абсолютно твердого тела.
22 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. I
8. Осевой момент инерции. При вычислении динамических харак-
характеристик вращающегося твердого тела в их выражения вошла величина
/r = 2»v*$. A6)
где Av есть расстояние точки с массой mv от оси х. Эта величина
Jx, как было сказано, называется моментом инерции тела относительно
оси х или осевым моментом инерции.
Выясним механический смысл величины Jx. Если твердое тело
движется поступательно со скоростью v, то его количество движе-
движения равно Mv, а кинетическая энергия Т = -=- Mv2, где М есть масса
всего тела. При вращении тела вокруг оси х с угловой скоростью со
кинетический момент тела относительно оси вращения будет Gx = Jxa>,
а кинетическая энергия T = -~-Jx<?>2. Сравнивая эти выражения с пре-
предыдущими, можно сказать, что при вращательном движении момент
инерции тела относительно оси вращения играет такую же роль, как
масса тела при поступательном движении.
Из равенства A6) видно, что размерность момента инерции Jx
есть [масса • (длинаJ]
Моменту инерции тела относительно оси можно еще дать другое
выражение. Положим
¦/x = 2mvAv= Mil A7)
где М есть масса всего тела; тогда 1Х есть некоторая длина, которая
называется радиусом инерции тела относительно оси х.
Радиус инерции, как видно из предыдущего равенства, равен рас-
расстоянию от оси х той точки, в которой нужно сосредоточить массу
всего тела, чтобы получить тот же момент инерции. Очевидно,
Из формулы A6) видно, что момент инерции тела относительно
данной оси зависит только от закона распределения масс в объеме,
занимаемом телом.
Вычислим моменты инерции некоторых однородных твердых тел
(тело называется однородным, если отношение массы любой части
тела к ее объему есть для всех частей тела величина постоянная;
это отношение называется плотностью тела).
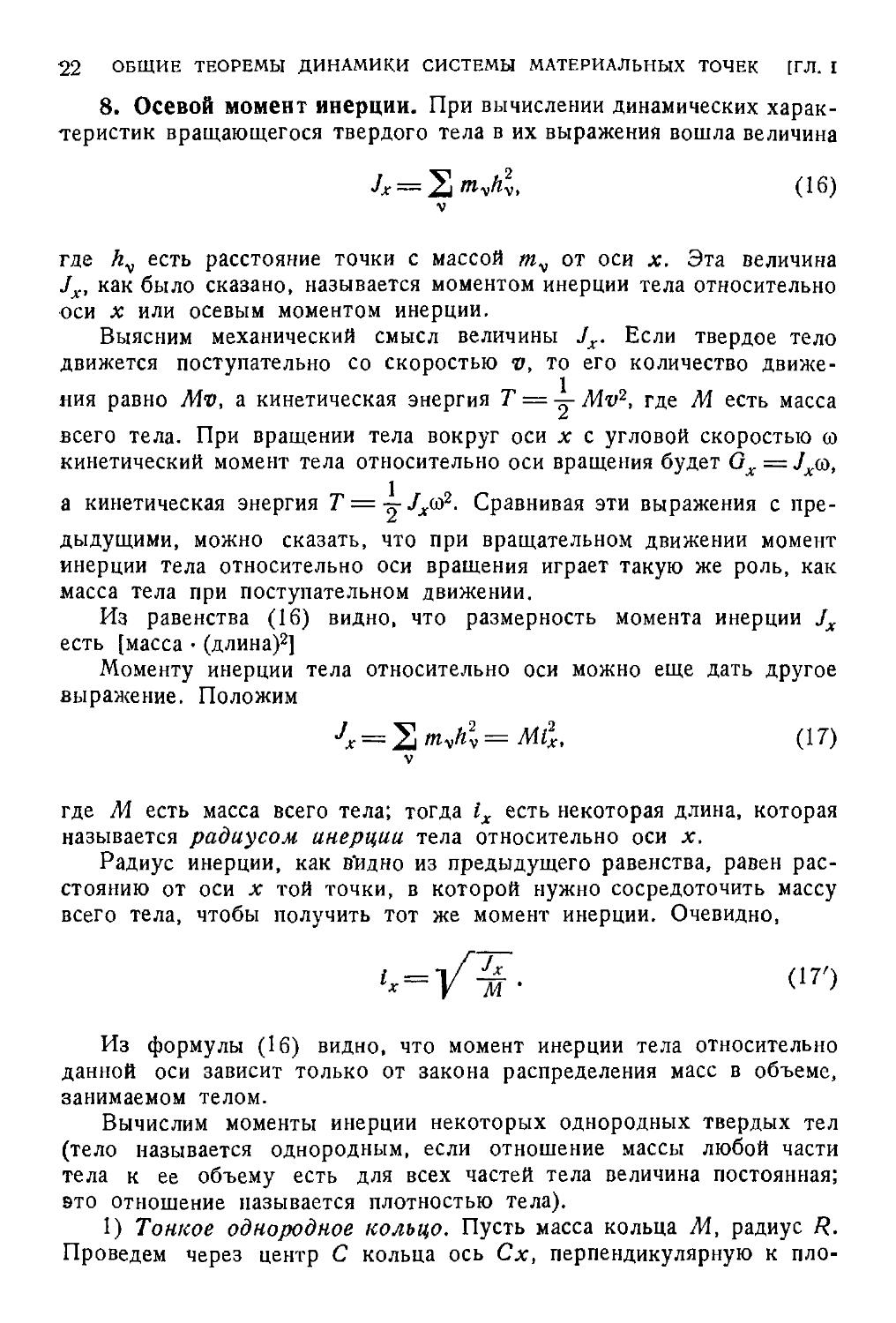
1) Тонкое однородное кольцо. Пусть масса кольца М, радиус R.
Проведем через центр С кольца ось Сх, перпендикулярную к пло-
§ 2]
ОСНОВНЫЕ ДИНАМИЧЕСКИЕ ВЕЛИЧИНЫ
23
скости кольца (рис. 10). Тогда для любой точки кольца /?v = R и
2 mv/?v = 2 m-vR2 — MR2. Следовательно, для кольца
JX=MR2. A8)
Очевидно, такой же результат получится для момента инерции тон-
тонкой цилиндрической оболочки массы М и радиуса R относительно
ее оси.
2) Круглая однородная пластина {или
цилиндр). Пусть масса пластины М, радиус R.
Разобьем пластину на тонкие концентрические
кольца (рис. 11, а) Площадь какого-нибудь
из этих колец с радиусом rv и шириною Arv
будет с точностью до (ArvJ равна 2nrvArv,
равна
—^ 2nrvArv.
Тогда момент
а масса
инерции этого кольца относительно оси Сх, Рис 10.
перпендикулярной к плоскости пластины,
будет, согласно формуле A8), равен [-^
вые моменты инерции всех колец и переходя к пределу при Arv->0,
мы получим выражение для момента инерции всей пластины в виде
определенного интеграла
Складывая осе-
осе~Ж Гr3dr_M^
~~ R1 J R1 4
Рис
Окончательно
Очевидно, такой же результат
получится для момента инерции
однородного круглого цилиндра массы М и радиуса R относитель-
относительно его оси (рис. 11, 6}
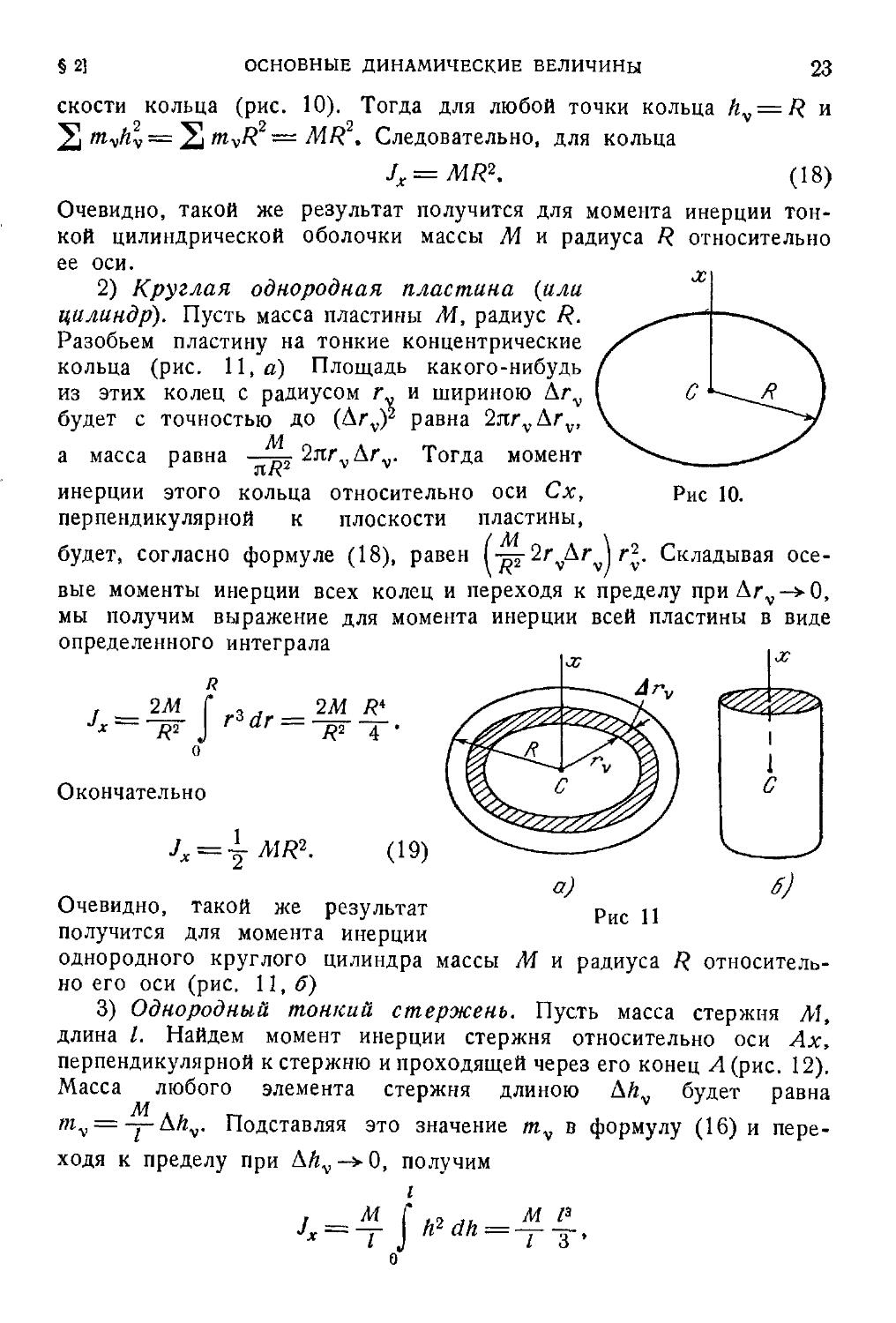
3) Однородный тонкий стержень. Пусть масса стержня М,
длина /. Найдем момент инерции стержня относительно оси Ах,
перпендикулярной к стержню и проходящей через его конец А (рис. 12).
Масса любого элемента стержня длиною A/zv будет равна
mv = -y- Ahv. Подставляя это значение mv в формулу A6) и пере-
переходя к пределу при Ahv->0, получим
i
м
/И Г., ,, М В
= т J h*dh = -rT,
•24 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. I
или окончательно
B0)
Если таким же образом вычислить момент инерции относительно
оси Сх', проходящей через центр масс С тела и параллельной
оси Ох, то получим
-JC
МР.
B0')
Заметим, что вообще между моментами инер-
инерции тела относительно параллельных осей Ох
¦ -я и Сх', из которых Сх' проходит через центр
масс тела, имеет место соотношение
Jox = JcX' + Md2, B1)
где d — расстояние между осями (теорема
В Гюйгенса).
рис J2. Равенства B0) и B0') могут быть полу-
получены одно из другого с помощью формулы B1).
Подробнее вопрос о моментах инерции тела и их свойствах будет
рассмотрен в § 11; там же будет доказана и теорема Гюйгенса.
§ 3. Общие теоремы динамики системы
1. Общие теоремы динамики системы, являясь прямым следствием
уравнений движения, дают связь между динамическими величинами,
характеризующими движение системы, и Действующими на систему
силами; в некоторых случаях из общих теорем можно получить пер-
первые интегралы движения. Эти интегралы часто дают достаточно
данных для определения движения системы и поэтому имеют боль-
большое значение при решении практических задач; кроме того, они
допускают наглядную физическую интерпретацию и могут быть
выражены в виде определенных физических законов, вследствие чего
часто называются законами динамики.
Для полного решения механической задачи необходимо проинте-
проинтегрировать систему уравнений движения и найти координаты всех
точек системы как функции времени, что в большинстве случаев
связано со значительными трудностями, особенно если число уравне-
ешй велико; но практически иногда требуется знать лишь некоторые
величины, характеризующие движение системы в целом, вследствие
чего можно не интегрировать всю систему уравнений, а найти только
некоторые ее интегралы, что часто может быть легко достигнуто
применением общих теорем динамики.
S3]
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ
25.
К
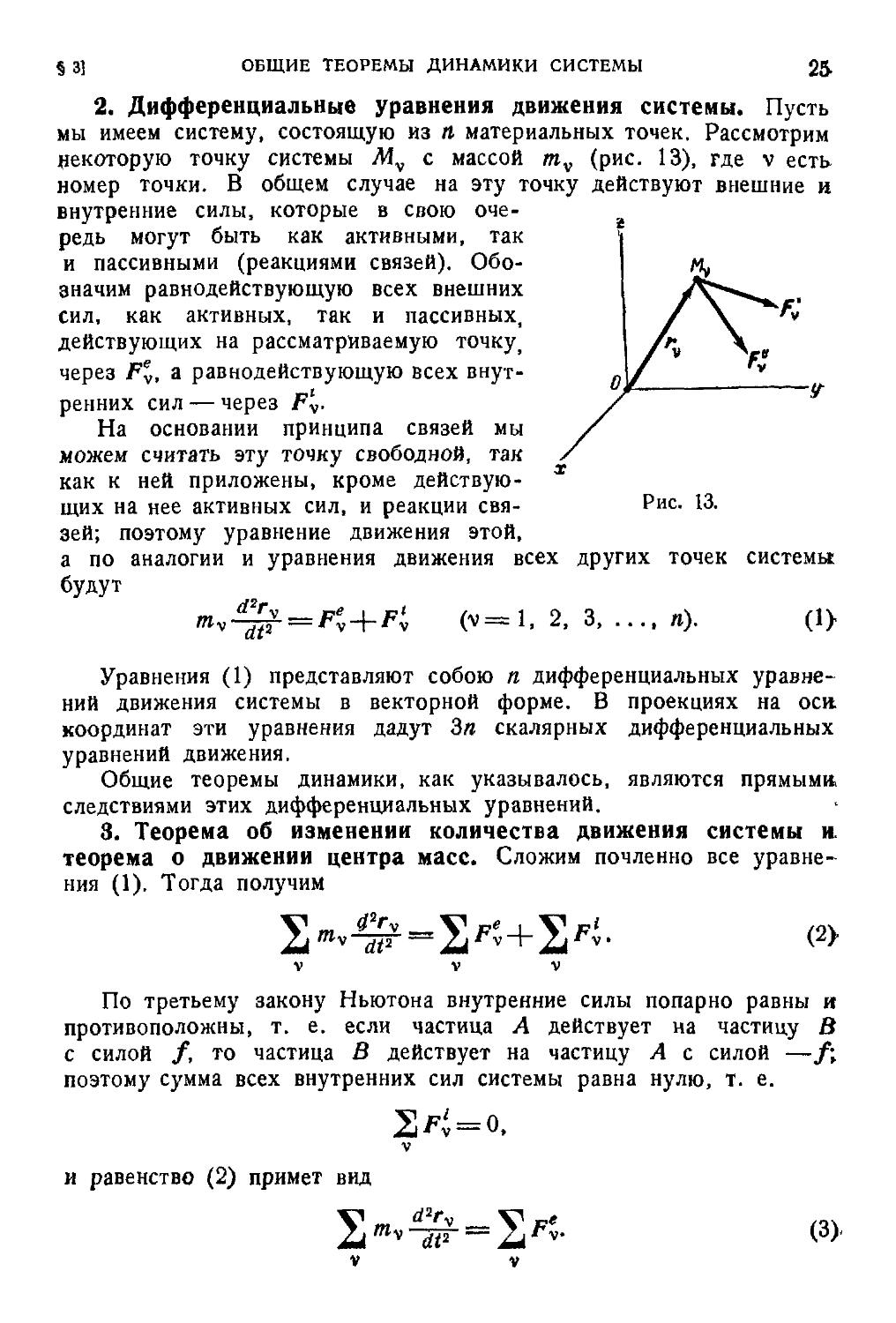
2. Дифференциальные уравнения движения системы. Пусть
мы имеем систему, состоящую из ft материальных точек. Рассмотрим
некоторую точку системы Mv с массой /rav (рис. 13), где v есть
номер точки. В общем случае на эту точку действуют внешние и
внутренние силы, которые в свою оче-
очередь могут быть как активными, так
и пассивными (реакциями связей). Обо-
Обозначим равнодействующую всех внешних
сил, как активных, так и пассивных,
действующих на рассматриваемую точку,
через Fev, а равнодействующую всех внут-
внутренних сил — через F'v.
На основании принципа связей мы
можем считать эту точку свободной, так
как к ней приложены, кроме действую-
действующих на нее активных сил, и реакции свя-
связей; поэтому уравнение движения этой,
а по аналогии и уравнения движения всех других точек системы:
будут
(v=l, 2, 3, .... я). A>
Рис. 13.
Уравнения A) представляют собою п дифференциальных уравне-
уравнений движения системы в векторной форме. В проекциях на оси.
координат эти уравнения дадут Зя скалярных дифференциальных
уравнений движения.
Общие теоремы динамики, как указывалось, являются прямыми,
следствиями этих дифференциальных уравнений.
3. Теорема об изменении количества движения системы и
теорема о движении центра масс. Сложим почленно все уравне-
уравнения A). Тогда получим
/га».
dt1
По третьему закону Ньютона внутренние силы попарно равны и
противоположны, т. е. если частица А действует иа частицу В
с силой /, то частица В действует на частицу А с силой —/;
поэтому сумма всех внутренних сил системы равна нулю, т. е.
и равенство B) примет вид
<U v dt2 ~
v v
26 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ, I
Принимая во внимание, что ~^~=='°\> имеем
dQ
dt jUm^~dT~~dt
V
где вектор Q= 2 "*v"v есть количество движения системы. Заме-
v
няя левую часть уравнения C) ее значением, получаем
%-2* w
или в проекциях на оси
dQx Xi „, dQ,
— Zi^vjf. —ЯГ— Tj^vy. ~7Г— ZjF^- D)
л — jU ' v*' dt — АЛ1 w dt
v v v
Равенство D) выражает первую основную теорему динамики системы,
именно теорему об изменении количества движения: производная по
времени от количества движения системы равна сумме всех
действующих на систему внешних сил.
Эту теорему можно также представить в интегральной форме.
Умножая обе части векторного равенства D) на dt и беря от них
определенные интегралы в пределах от t0 до t, получим
t
Q — Qo = ^i I F\dt или Q — Qo = Л^ Sev, E)
v it, v
где Qo — количество движения системы в момент tQ, sl Q — количество
движения в момент t\ Sev есть импульс силы /•"? за промежуток вре-
времени t —10. Таким образом, изменение количества движения си-
системы за некоторый промежуток времени равняется сумме
импульсов всех действующих на систему внешних сил за тот оке
промежуток времени. В проекциях на оси координат будем иметь
v v v vz'
Из векторного соотношения D) легко получить теорему о движении
центра масс системы. В самом деле, принимая во внимание, что
где М есть масса всей системы, а <ос — скорость ее центра масс,
найдем из уравнения D)
dt
§ 3] ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ 27
ИЛИ
М f = V Fv, F)
v=l
d2rc
где —щ- есть ускорение центра масс. Уравнение F) показывает,
что центр масс системы движется как материальная точка
с массой, равной массе всей системы, на которую действуют
все приложенные к системе внешние силы (теорема о движении
центра масс).
В некоторых случаях эти теоремы могут дать интегралы движе-
движения. Пусть на систему действуют только одни внутренние силы;
тогда
л
V ке п
и, следовательно, из уравнения D) имеем -~^- = 0, откуда
Q = const, G)
или, так как
Q~ Mvc,
то
<ос = const. G')
В этом случае центр масс системы движется по инерции, и коли-
количество движения системы есть величина постоянная. Проектируя обе
части равенств G) и G') на оси координат, получим три первых
иптеграла
Qx = clt Qy = c2, Qz = c3, (8)
или
хс = с[, yc = c'v гс = с'у (8')
Еели внешние силы, действующие на систему, таковы, что сумма
проекций этих сил на какую-либо ось, например на ось х, равна
нулю, т. е. если 2^иг = 0> то из уравнений D') "имеем
dQx
-О,
dt
откуда
Qx = Мхс = const. (8")
Следовательно, при указанном условии проекция количества движения
системы на ось х есть величина постоянная, или, что то же, проек-
проекция центра масс системы на эту ось имеет постоянную скорость;
теорема дает в этом случае один первый интеграл.
28 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. t
Примеры. 1. Если пренебречь притяжением звезд, то на тела, составляю-
составляющие солнечную систему, не будут действовать внешние силы. Поэтому
центр масс солнечной системы должен двигаться прямолинейно и равномерно
относительно системы неподвижных звезд.
2. При взрыве артиллерийского снаряда возникают внутренние ударные
силы, которые не могут изменить движения центра масс. Поэтому центр
масс всех осколков снаряда и прочих остатков после взрыва продолжает
двигаться по той же самой траектории, по которой двигался центр масс
снаряда до взрыва. Это вполне верно для движения в пустоте и лишь при-
приближенно справедливо для движения в сопротивляющейся среде, ибо при
взрыве на осколки действуют внешние силы сопротивления воздуха, отлич-
отличные от сил, которые действовали на снаряд.
3. На человека, стоящего на гладкой горизонтальной плоскости, дейст-
действуют сила тяжести и реакция плоскости, проекции которых на эту плоскость
равны нулю. Поэтому идти по идеально гладкой плоскости человек не мог бы;
это становится возможным лишь вследствие наличия трения. Если человек,
стоя на плоскости, выдвинет вперед ногу, то другая нога должна отодви-
отодвинуться назад для сохранения неподвижности проекции центра масс иа гори-
горизонтальную плоскость. Это и имеет место, если плоскость идеальная. Если же
плоскость шероховатая, то при скольжении развивается сила трения, напра-
направленная вперед и являющаяся внешней силой, делающей возможным движе-
движение. Под действием одних внутренних мускульных сил человек не может
переместить свой центр тяжести.
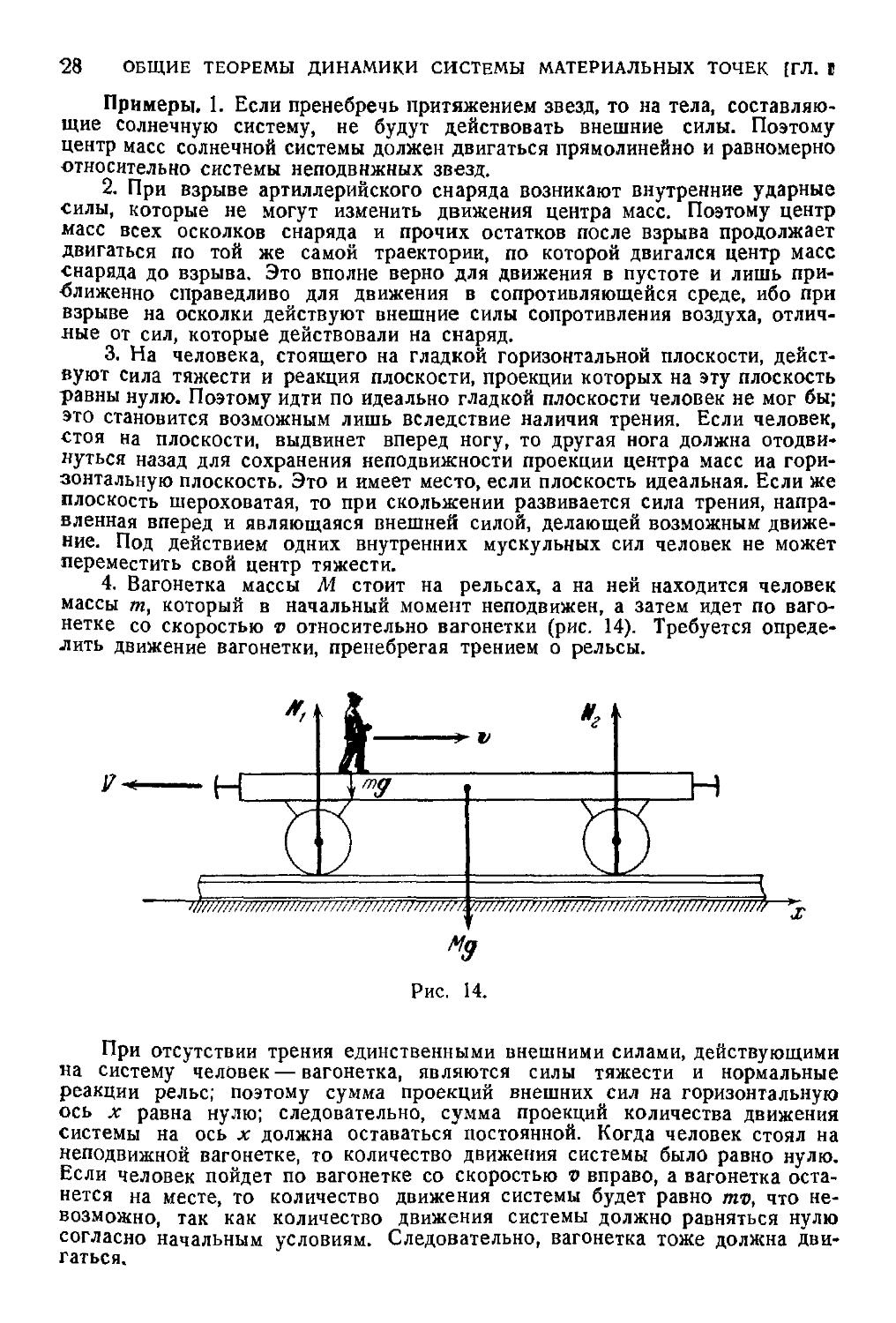
4. Вагонетка массы М стоит на рельсах, а на ней находится человек
массы т, который в начальный момент неподвижен, а затем идет по ваго-
вагонетке со скоростью v относительно вагонетки (рис. 14). Требуется опреде-
определить движение вагонетки, пренебрегая трением о рельсы.
При отсутствии трения единственными внешними силами, действующими
на систему человек — вагонетка, являются силы тяжести и нормальные
реакции рельс; поэтому сумма проекций внешних сил на горизонтальную
ось х равна нулю; следовательно, сумма проекций количества движения
системы на ось х должна оставаться постоянной. Когда человек стоял на
неподвижной вагонетке, то количество движения системы было равно нулю.
Если человек пойдет по вагонетке со скоростью ч> вправо, а вагонетка оста-
останется на месте, то количество движения системы будет равно mv, что не-
невозможно, так как количество движения системы должно равняться нулю
согласно начальным условиям. Следовательно, вагонетка тоже должна дви-
двигаться.
3]
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ
29
Обозначим через V скорость вагонетки; тогда теорема об изменении
количества движения дает в проекции на ось х уравнение
V. Из последнего
ибо скорость человека относительно рельс равна г>
уравнения определится скорость движения вагонетки
Знак минус показывает, что вагонетка будет двигаться в сторону, обратную
движению человека.
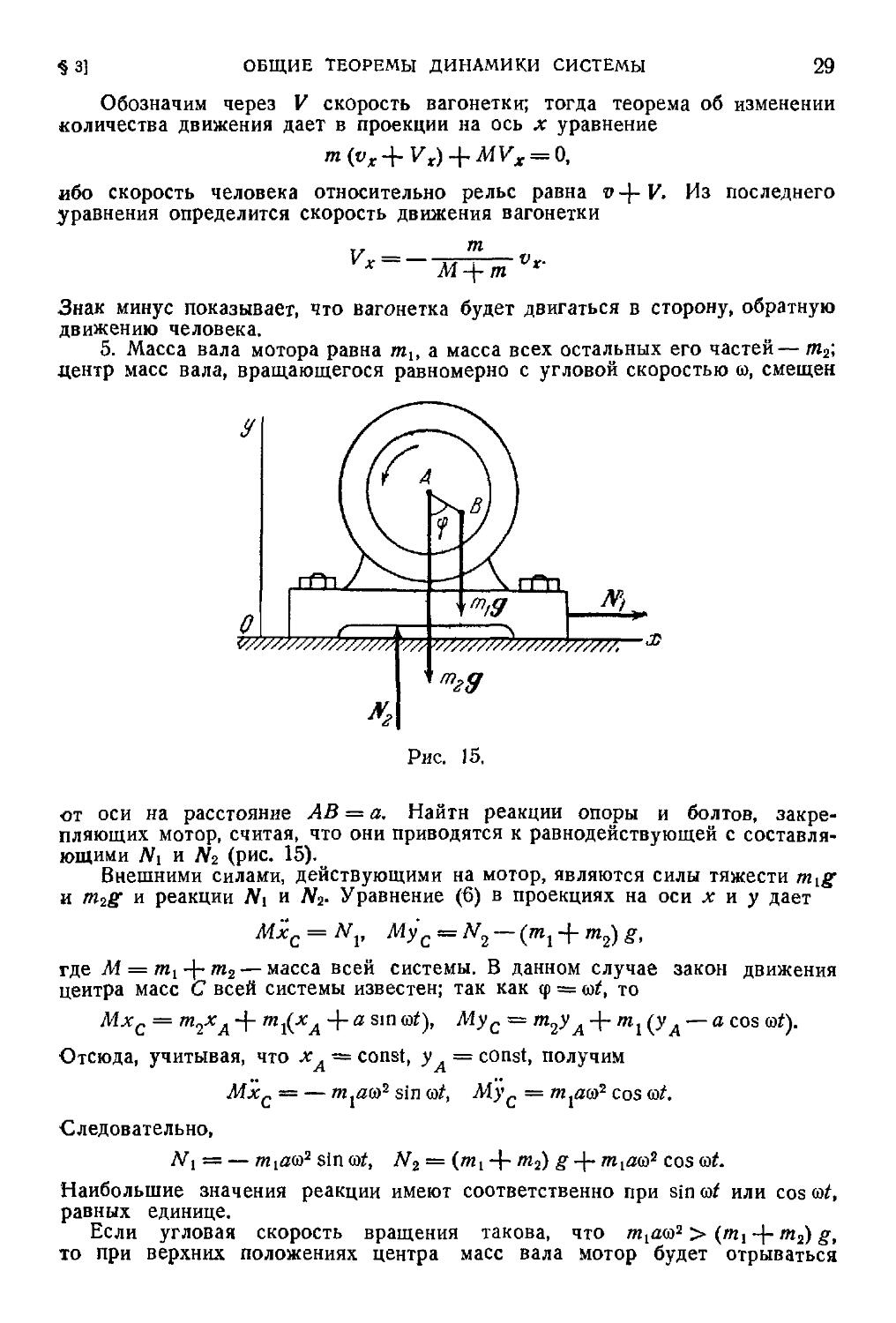
5. Масса вала мотора равна ть а масса всех остальных его частей—т2;
центр масс вала, вращающегося равномерно с угловой скоростью а), смещен
V////7//////777777/\77^\777/////'V7/////Y////A
тг9
x
Рис. 15.
от оси на расстояние АВ = а. Найтн реакции опоры и болтов, закре-
закрепляющих мотор, считая, что они приводятся к равнодействующей с составля-
составляющими N\ и N2 (рис. 15).
Внешними силами, действующими на мотор, являются силы тяжести
и m2g и реакции N{ и N2. Уравнение F) в проекциях на оси х и у дает
Мхс = Nv My'c = N2 — (ml + m2) g,
где М = тх -\- т2 — масса всей системы. В данном случае закон движения
центра масс С всей системы известен; так как q> = a>t, то
Мхс = т2хА -f т1(хА + a sin erf), Мус = т2уА + т1 (уд — a cos at).
Отсюда, учитывая, что хА
const, уА = const, получим
Мхс
sin at,
cos at.
Следовательно,
ЛГ, = —/Hidf<B2slnorf, Я2 = (/п1-т-/и2) g-^-micm2 cos at.
Наибольшие значения реакции имеют соответственно при sin at или cos at,
равных единице.
Если угловая скорость вращения такова, что mlaa2> (mi-\-m2) g,
то при верхних положениях центра масс вала мотор будет отрываться
30 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. Г
от опорной плоскости (прижиматься к головкам болтов, а при незатянутых
болтах — подпрыгивать).
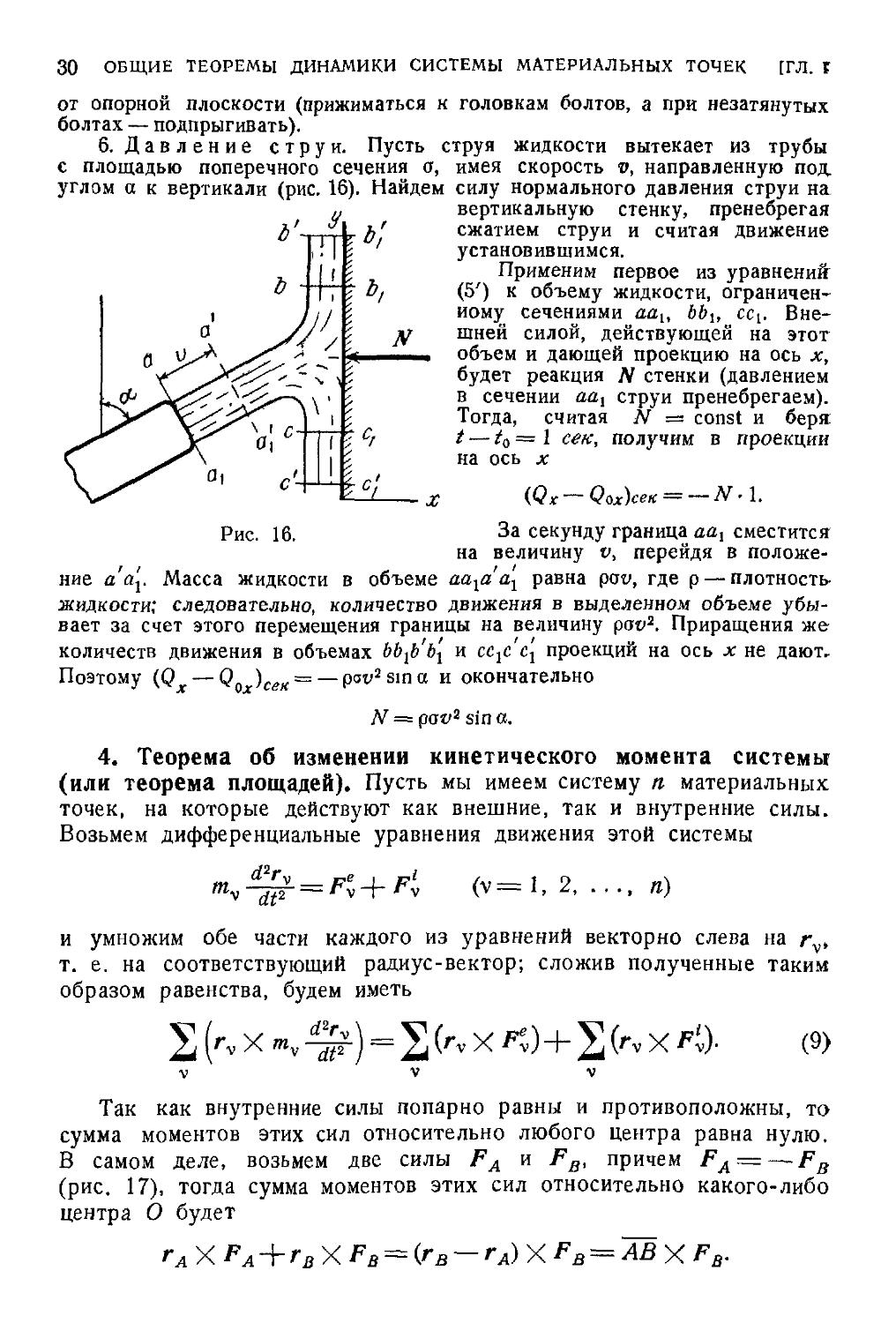
6. Давление струи. Пусть струя жидкости вытекает из трубы
с площадью поперечного сечения а, имея скорость г», направленную пол
углом а к вертикали (рис. 16). Найдем силу нормального давления струи на
вертикальную стенку, пренебрегая
сжатием струи и считая движение
установившимся.
Применим первое из уравнений
E') к объему жидкости, ограничен-
ограниченному сечениями ааи bbit cc^. Вне-
Внешней силой, действующей на этот
объем и дающей проекцию на ось х,
будет реакция N стенки (давлением
в сечении аа{ струи пренебрегаем).
Тогда, считая N = const и беря
t ¦— ^0 = 1 сек, получим в проекции
на ось х
Рис. 16. За секунду граница аа1 сместится
на величину v, перейдя в положе-
положение а'а[. Масса жидкости в объеме ааха'а[ равна рои, где р — плотность-
жидкости; следовательно, количество движения в выделенном объеме убы-
убывает за счет этого перемещения границы на величину pav2. Приращения же
количеств движения в объемах bb-fi'b\ и сс^'с[ проекций на ось х не дают.
Поэтому (Qx — QOx)cex = — pav2sina и окончательно
4. Теорема об изменении кинетического момента системы
(или теорема площадей). Пусть мы имеем систему п материальных
точек, на которые действуют как внешние, так и внутренние силы.
Возьмем дифференциальные уравнения движения этой системы
^V H~ *V
(v=l, 2 п)
и умножим обе части каждого из уравнений векторно слева на rv,
т. е. на соответствующий радиус-вектор; сложив полученные таким
образом равенства, будем иметь
Так как внутренние силы попарно равны и противоположны, то
сумма моментов этих сил относительно любого центра равна нулю.
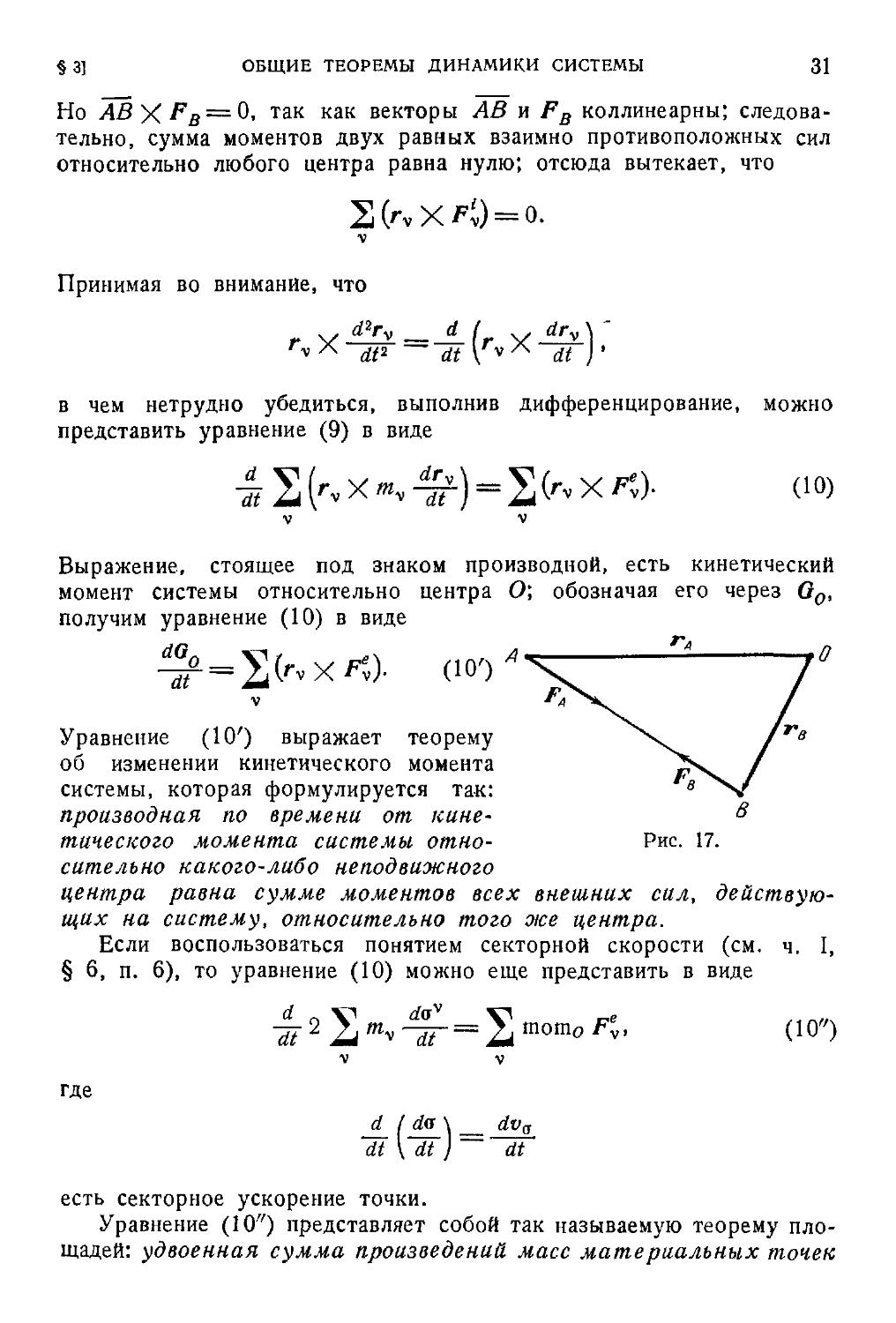
В самом деле, возьмем две силы FA и Гв, причем FA = —FB
(рис. 17), тогда сумма моментов этих сил относительно какого-либо
центра О будет
г А X
X FB = (rB —
§ 3] ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ 31
Но АВу( FB = 0, так как векторы АВ и FB коллинеарны; следова-
следовательно, сумма моментов двух равных взаимно противоположных сил
относительно любого центра равна нулю; отсюда вытекает, что
Принимая во внимание, что
y
в чем нетрудно убедиться, выполнив дифференцирование, можно
представить уравнение (9) в виде
" A0)
Выражение, стоящее под знаком производной, есть кинетический
момент системы относительно центра О; обозначая его через Оо,
получим уравнение A0) в виде
Уравнение (Ю') выражает теорему
об изменении кинетического момента
системы, которая формулируется так:
производная по времени от кине-
кинетического момента системы отно-
относительно какого-либо неподвижного
центра равна сумме моментов всех внешних сил, действую-
действующих на систему, относительно того же центра.
Если воспользоваться понятием секторной скорости (см. ч. I,
§ 6, п. 6), то уравнение A0) можно еще представить в виде
dt
где
425Х^-=5>ото^, A0")
dt\dt)~
dVg
dt
есть секторное ускорение точки.
Уравнение A0") представляет собой так называемую теорему пло-
площадей: удвоенная сумма произведений масс материальных точек
32 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. I
на их секторные ускорения относительно какого-либо центра
равна сумме моментов всех внешних сил системы относительно
того же центра.
Предположим, что сумма моментов внешних сил относительно
некоторого центра О равна нулю (что, например, имеет место, если
внешние силы на данную систему не действуют); тогда
следовательно,
dt ~u'
откуда получаем векторный интеграл
Оо = const,
т. е. при этих условиях кинетический момент системы Оо есть вели-
величина постоянная. Плоскость, перпендикулярная к направлению Оо,
будет тоже иметь постоянное направление в пространстве и назы-
называется неизменяемой плоскостью Лапласа (иногда ее также называют
плоскостью максимума площадей).
Проектируя обе части равенства A0) на оси координат, получаем
следующие уравнения:
dG, _
(ft
dOy
(ID
ИЛИ
(ПО
V
Уравнения A1) можно еще представить в другом виде, спроектировав
§ 3] ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ
обе части равенства A0") на оси координат; получим
33
A1")
Если сумма моментов всех внешних сил относительно одной из
осей, например х, равна нулю, т. е. если 2 тот*^ = 0, то из
V
уравнений A1) получаем скалярный интеграл
G^ = 2 mom_r(mv©v) = const;
V
таким образом, если сумма моментов всех действующих внешних сил
относительно какой-либо оси равна нулю, то сумма моментов коли-
количеств движения системы относительно той же оси, или, что то же,
проекция кинетического момента на эту ось постоянна.
Из уравнений A1") тот же интеграл получается в виде
. = 2 7, Ш
dt
= const,
следовательно, если сумма моментов внешних сил относительно
какой-нибудь оси равна нулю, то сумма произведений масс всех
точек системы на секторные скорости их проекций на плоскость,
перпендикулярную к той же оси, есть величина постоянная.
Рассмотрим теперь применение теоремы о кинетическом мо-
моменте к движению системы относительно центра масс, т. е. от-
относительно осей Cx'y'z', имеющих начало в центре масс и переме-
перемещающихся вместе с центром масс поступательно по отношению
к основной системе отсчета Oxyz (см. рис. 6). Пусть положение
центра масс С определяется координатой гс, и пусть радиус-вектор
точки с массой mv относительно осей Cx'y'z' будет r'v. Тогда
ry = rc + r'v. A2)
Теорема об изменении кинетического момента при движении по
отношению к основной системе отсчета имеет вид
3 Н. Н. Бухгольц
34 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. I
Заменим справа вектор rv его значением A2), а величину Оо ее
выражением F), полученным в § 2. Тогда будем иметь
Известно, что центр масс системы движется как точка с массой,
равной массе всей системы, к которой приложены все действующие
на систему внешние силы; поэтому по отношению к движению центра
масс имеют место все теоремы динамики точки и, в частности, тео-
теорема о кинетическом моменте; следовательно, имеем
л
v=I
Сокращая в уравнении A3) равные члены, получим
или, обозначая 2j (f'v X теХ) = **с-
v
dt ~
V
т. е. при движении системы относительно центра масс производная
по времени от суммы моментов количеств движения всех точек си-
системы относительно центра масс равна сумме моментов всех дей-
действующих внешних сил относительно того же центра1).
Таким образом, для движения относительно центра масс теорема
об изменении кинетического момента выражается совершенно так же,
как если бы центр масс был неподвижной точкой
В предыдущих рассуждениях мы считали центр О, относительно
которого брали кинетический момент системы, неподвижным и полу-
получили выражение теоремы об изменении кинетического момента
в виде
причем как сумма моментов количеств движения всех точек системы,
так и сумма моментов всех внешних сил взяты относительно непо-
неподвижного центра О. Посмотрим, как изменится это выражение,
') Движением относительно центра масс мы будем в дальнейшем назы-
называть движение относительно системы отсчета, имеющей начало в центре
масс и движущейся вместе с центром масс поступательно по отношению
к основной системе отсчета.
§ 3] ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ 35
если за центр моментов взять точку О', которая движется относи-
относительно основной системы отсчета. Выше [§ 2, уравнение (8)] мы
нашли, что
Go' = Go — 00' X Q,
или, обозначая для удобства письма Go' = G'; Go = G,
G' = G — OO'XQ- A6)
Дифференцируя равенство A6) по времени и принимая во внимание*
что —л7"~—^ есть скорость центра О' относительно основной си-
системы отсчета и что на основании уравнения D)
получим
dt It xv X^ v ( у
V
Определяя отсюда величину —п- и подставляя ее в уравнение A5),
найдем
или, принимая во внимание, что rv — OO' = r'v (см. рис. 7),
Уравнение A8) выражает теорему об изменении кинетического
момента системы по отношению к центру О', движущемуся со ско-
скоростью v' относительно основной системы отсчета. При этом сле-
следует иметь в виду, что G' = ?i(f"'v'X. "^"Д т е- ПРИ вычислении О'
скорости <flv точек системы берутся относительно основной системы
отсчета, а моменты векторов mvvv берутся относительно подвижного
центра О'; в правой части уравнения стоит сумма моментов внешних
сил также относительно подвижного центра О'.
Если v' = 0, то уравнение A8) переходит, очевидно, в уравне-
уравнение A0) Если же О' совпадает с центром масс С системы, то
tf'XQ —ч^сХ Mvc = 0 и уравнение A8) принимает вид
Это уравнение совпадает с A4'), если учесть, как было показано
в § 2, п. 3, что G'c—Gc-
36 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. Г
Примеры. 1. Если не принимать во внимание притяжения неподвижных
звезд, то главный момент внешних сил, действующих на солнечную систему,
равен нулю, поэтому кинетический момент солнечной системы О„ относи-
относительно центра масс должен оставаться неизменным, т. е. Qc = const. Пло-
Плоскость, перпендикулярная к направлению О„, также будет сохранять свою
ориентировку относительно неподвижных звезд и называется, как уже было
сказано, неизменяемой плоскостью Лапласа, который предложил относить
движение тел солнечной системы к этой плоскости.
2. Если человек стоит на платформе Жуковского (круглая горизонталь-
горизонтальная платформа на шариковых опорных подшипниках, которая может вра-
вращаться с малым трением вокруг вертикальной оси), то на эту систему
(человек — платформа), если пренебречь трением, действуют только сила
тяжести и нормальные реакции опор. Сумма моментов этих внешних сил
относительно вертикальной оси х равна нулю; следовательно, если системе
сообщить толчком вращение вокруг оси х, то во все последующее время
будет
Gx = Jxe> = const, B0)
где Jx—момент инерции системы относительно оси je, со — угловая ско-
скорость вращения. Величина Jr здесь может изменяться, например, за счет
движения рук человека. Если руки вначале были разведены в стороны,
а затем будут опущены, то Jх уменьшится и угловая скорость а увеличится
и наоборот.
Аналогичный результат получается при прыжке акробата в воздухе,
когда он делает сальто. В начале прыжка акробат сообщает своему телу
угловую скорость вокруг горизонтальной оси х, проходящей через центр
масс тела. Так как единственная действующая на него внешняя сила —
сила тяжести—проходит через центр масс (сопро-
(сопротивлением воздуха пренебрегаем), то ее момент
относительно оси х равен нулю, и здесь имеет место
равенство B0). Группируя корпус, акробат умень-
уменьшает момент инерции Jх, в результате чего угло-
угловая скорость увеличивается (для достижения пол-
полного оборота).
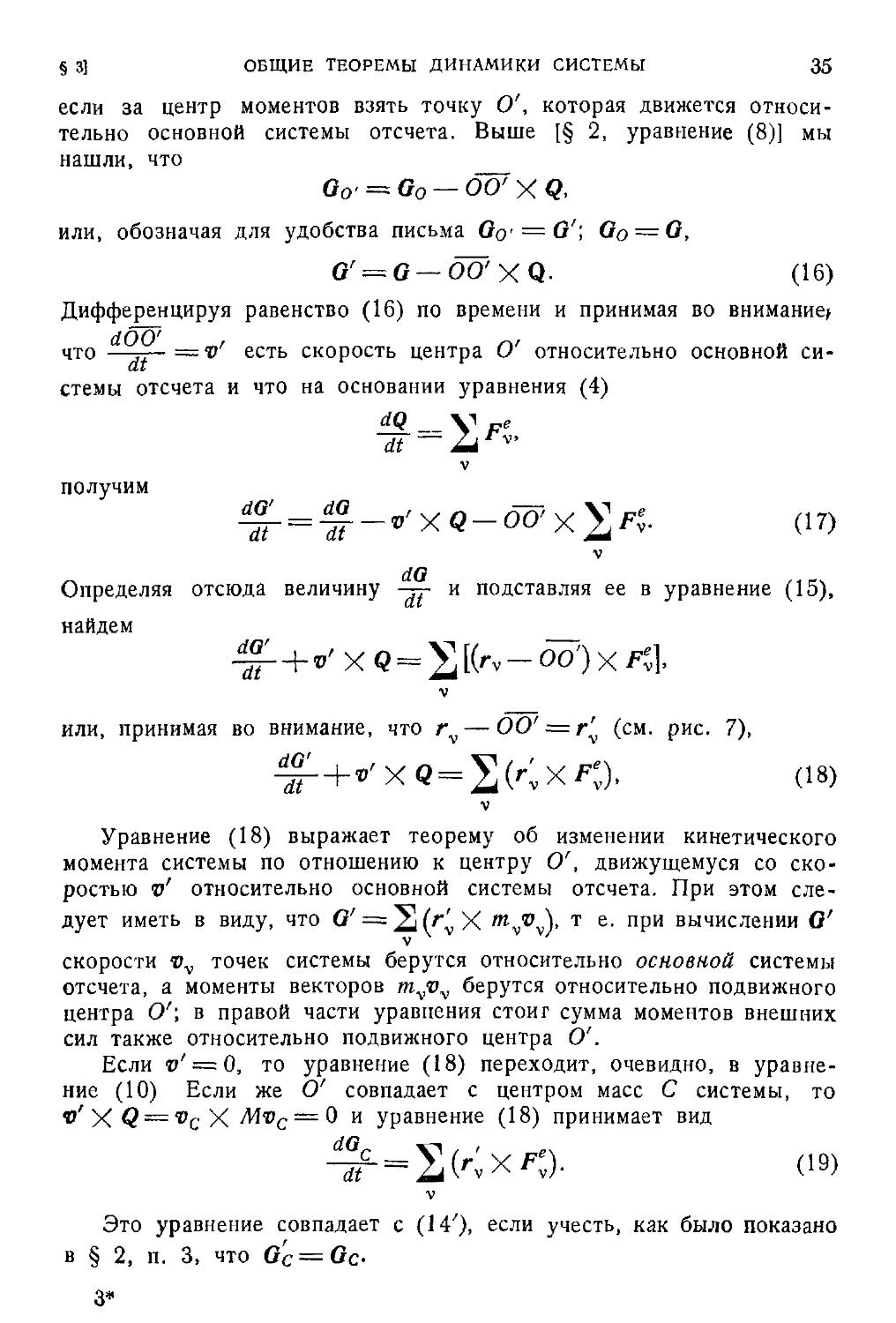
3. На круглой горизонтальной платформе
радиуса R и массы М (рис. 18), могущей вращаться
без трения вокруг вертикальной оси Oz, стоит чело-
человек массы т. В некоторый момент он начинает
идти вдоль окружности платформы со скоростью v
(относительно платформы). Найти угловую скорость
вращения платформы,
р 1Я Так как силы тяжести параллельны оси вра-
¦ щення, а реакции подшипников эту ось пересекают,
то сумма моментов внешних сил относительно оси г
равна нулю и, следовательно, Qz — const. Но в начальный момент ни чело-
человек, ни платформа не двигались; поэтому Qz = 0 во все время движения.
Если бы при движении человека платформа не вращалась, то кинетический
момент системы не был бы равен нулю; следовательно, для того чтобы Gz
было равно нулю, необходимо, чтобы сама платформа вращалась с неко-
некоторой угловой скоростью Q.
Если момент инерции платформы относительно оси г обозначим через J2,
то кинетический момент платформы относительно этой оси будет равен JJ,}.
Скорость человека относительно земли равна | г»отя -\- г»пер | = v -f- QR. Тогда
момент количества движения человека относительно оси г будет равен
§ 3] ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ 37
m(v-\-QR)R. Вставляя все найденные величины в условие Gz = 0, получим
= O, откуда О = -
Если платформа однородна, то по формуле A9) из § 2 Jz = „
г, mvR
mv
MR2
Знак минус указывает на то, что платформа будет вращаться в сторону,
обратную движению человека.
4. Через сплошной неподвижный блок весом р перекинута гибкая не-
нерастяжимая нить с грузами весом Р и Q на концах (рис. 19). Пренебрегая
весом нити и трением в оси, найти ускорения
грузов при движении системы.
Применяя теорему об изменении кинетического
момента относительно оси вращения блока Ох, со-
составим первое из уравнений A1):
^)... (а)
Величина Gx слагается из кинетических мо-
моментов блока и грузов и будет равна
— R2
где ш—угловая скорость блока, R — его радиус,
v — скорость грузов. Учитывая, что /*
о
и 0 = —, получим окончательно
Рис. 19.
Далее, 2 тотж (f*) = Р/?— QR (полагаем для определенности, что Р > Q,
и момент силы считаем положительным в том же направлении, что и мо-
момент количества движения; моменты силы р и реакции N относительно
оси Ох равны нулю). Подставляя все найденные величины в равенство (а),
получим
{p + 2P + 2Q)^^-=(P-Q).
откуда
5. Теорема об изменении кинетической энергия системы.
Пусть мы имеем систему п материальных точек. К каждой точке си-
системы, кроме действующих на нее активных сил, приложим реакции
Связей и разделим все приложенные к точке силы на две группы:
38 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. Г
внешние силы, равнодействующую которых обозначим через F%, и
внутренние силы, равнодействующая которых пусть будет F'v; тогда
каждую точку системы можно рассматривать как свободную, нахо-
находящуюся под действием двух сил Fe4 и Flv. По отношению к каждой
точке системы имеет место теорема об изменении кинетической энер-
энергии, являющаяся следствием уравнений A):
K-dr4-\-Fi4.drv (v=I. 2, 3 я). B1)
Сложив эти п уравнений почленно, получим
d 2 (у «vf I) = 2 К ¦ drv + J] F% ¦ drv.
Величина
¦ drv + J] F% ¦ drv.
V V
есть кинетическая энергия системы. Таким образом, окончательно
будем иметь
dr = 2^-drv+2^^rv B2)
V V
Равенство B2) выражает следующую теорему об изменении ки-
кинетической энергии (в дифференциальной форме): дифференциал ки-
кинетической энергии системы равен, сумме элементарных работ
всех действующих на систему внешних и внутренних сил.
Если каждое из уравнений B1) представить в конечной форме
п).
где А% и Л„ — работы сил F% и F\ на перемещении точки системы
из начального положения в данное, и затем просуммировать эти ра-
равенства, то мы получим
г-го = 2М$+2 4, ... B3)
V V
Равенство B3) выражает теорему об изменении кинетической
энергии в конечной (интегральной) форме: изменение кинетической
энергии системы при перемещении ее из какой-то начальной,
конфигурации в данную равно сумме работ на этом переме-
перемещении всех приложенных к системе внешних и внутренних сил.
Рассмотрим, что представляет собою сумма работ внутренних сил,
полагая, что эти силы, как силы взаимодействия между точками си-
системы, являются функциями только расстояния между этими точками
§ 3] ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ 39
и направлены по прямой, их соединяющей. Пусть материальная точка А
действует на точку В с силой FA, а точка В на точку А с силой Fв
(см. рис. 17); тогда по третьему закону Ньютона
Положим, что
1^1 = 1^1=/(Рал).
где Рлд —^??' Если точки Аи В совершат некоторые элементарные
перемещения drA и drB, то работа этих сил будет
FA ¦ drA + FB ¦ drB = FB ¦ {drB — drA) = FB-d (rB—rA)=FB ¦ dAB.
Обозначим орт вектора АВ через а0. Тогда АВ = рАва°, FB =
i=±/(pAB)a0 (знак зависит от направления силы FB) и dAB=^
= флвао4-рлвб?а0. В результате, учитывая, что a°-a°=l и
ао . daP — 0, получим
?а ¦ drA + FB-drB^FB-dAB^±f (рлв) dpAB.
Отсюда следует, что элементарная работа внутренних сил, с ко-
которыми две точки системы действуют друг на друга, равна произвг-
дению силы взаимодействия на дифференциал расстояния между этими
точками. Итак, если внутренние силы зависят только от расстоя-
расстояния, то
v к, I
Положим, что
±% V\ B4)
где Uw есть функция взаимных расстояний между точками системы,
которая называется потенциалом внутренних сил (такая функция су-
существует, потому что каждый член суммы есть дифференциал неко-
некоторой функции от pw); тогда уравнение B2) можно представить
в виде
dT — dlfl) ^Ъ К • drv,
V
или
( @) = S^-rfrv. B5)
где V^ = — U^ есть потенциальная энергия внутренних сил, или,
просто, внутренняя потенциальная энергия системы.
40 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ 1
Если мы имеем неизменяемую систему, то для такой системы все
dpki = 0. потому что расстояния между точками системы не изме-
изменяются; поэтому
откуда lfl) = const.
В этом случае работа внешних сил идет только на приращение
кинетической энергии системы. Если система изменяемая, то, как по-
показывает формула B5), работа внешних сил идет и на приращение
кинетической энергии, и на изменение внутренней энергии системы
(например, упругой энергии). Итак, для неизменяемой системы имеем
йТ = 2 Р% • drv, B6)
V
т е дифференциал кинетической энергии неизменяемой системы
равен сумме элементарных работ внешних сил. Эту теорему
можно также представить в интегральной форме, аналогичной B3).
Допустим, что внешние силы, работа которых отлична от нуля,
потенциальны (нулю может равняться работа идеальных связей; под-
подробнее об этом см. § 7, п. 2). Тогда
где Vie) — внешняя потенциальная энергия системы, и уравнение B5)
дает d{T^\-V(()-)-V(<;)) = 0. Отсюда следует, что в рассматриваемом
случае имеет место интеграл энергии
7-|-V@4-V(e) = const или Е = const,
где Е — полная механическая энергия системы. Механическую систему,
для которой имеет место интеграл энергии, называют консерва-
консервативной.
Рассмотрим теперь теорему об изменении кинетической энергии
системы при ее движении относительно центра масс, т. е. относи-
относительно подвижной системы отсчета, перемещающейся вместе с центром
масс поступательно.
Для движения по отношению к основной (инерциальной) системе
отсчета имеем
dT = 2 Fev ¦ drv + 2 ^v • drv. B7)
V V
На основании теоремы Кенига [§ 2, формула A1)] будет
<. B8)
$ 3] ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ CHCTFMbI 41
Кроме того, rv = rc + r'v, где гс — координата центра масс, a r'v —
координата точки с массой mv относительно подвижных осей Cx'y'z'
(см рис 6); поэтому
2
v-l v=l
drc+Ъ К ¦ Л\-|-2 К -йгсЛ-ЪК- dr'v
V V V V
ИЛИ
= S Fv • drc +2 К • A\ + S ^"v • dry. B9)
V V V
так как третий член правой части предыдущего равенства
V V
поскольку по третьему закону Ньютона
v=l
Вставляя в уравнение B7) выражения B8) и B9), получим
-Л^ C0)
Так как центр масс системы движется как материальная точка, к ко-
которой приложены все внешние силы и в которой сосредоточена вся
масса системы, то для него, как и для всякой материальной точки,
имеет место теорема об изменении кинетической энергии, т е.
C1)
поэтому, сокращая в равенстве C0) равные члены, получаем
d \X2 S wv<] = 2 *% ¦ *-;+2 К ¦ К • C2)
% *;+2 К К
v
Уравнение C2) выражает теорему об изменении кинетической энергии
для движения системы относительно ее центра масс, а именно: диф-
дифференциал кинетической энергии системы в ее движении отно-
относительно центра масс равен сумме элементарных работ всех
внутренних и внешних сил на перемещениях их точек приложе-
приложения по отношению к центру масс.
42 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. I
Примеры. Теорема об изменении кинетической энергии позволяет уста-
устанавливать зависимость между перемещением системы и скоростями ее точек
(тел) в начале и в конце перемещения. Для систем с одной степенью сво-
свободы с помощью этой теоремы составляется дифференциальное уравнение
движения.
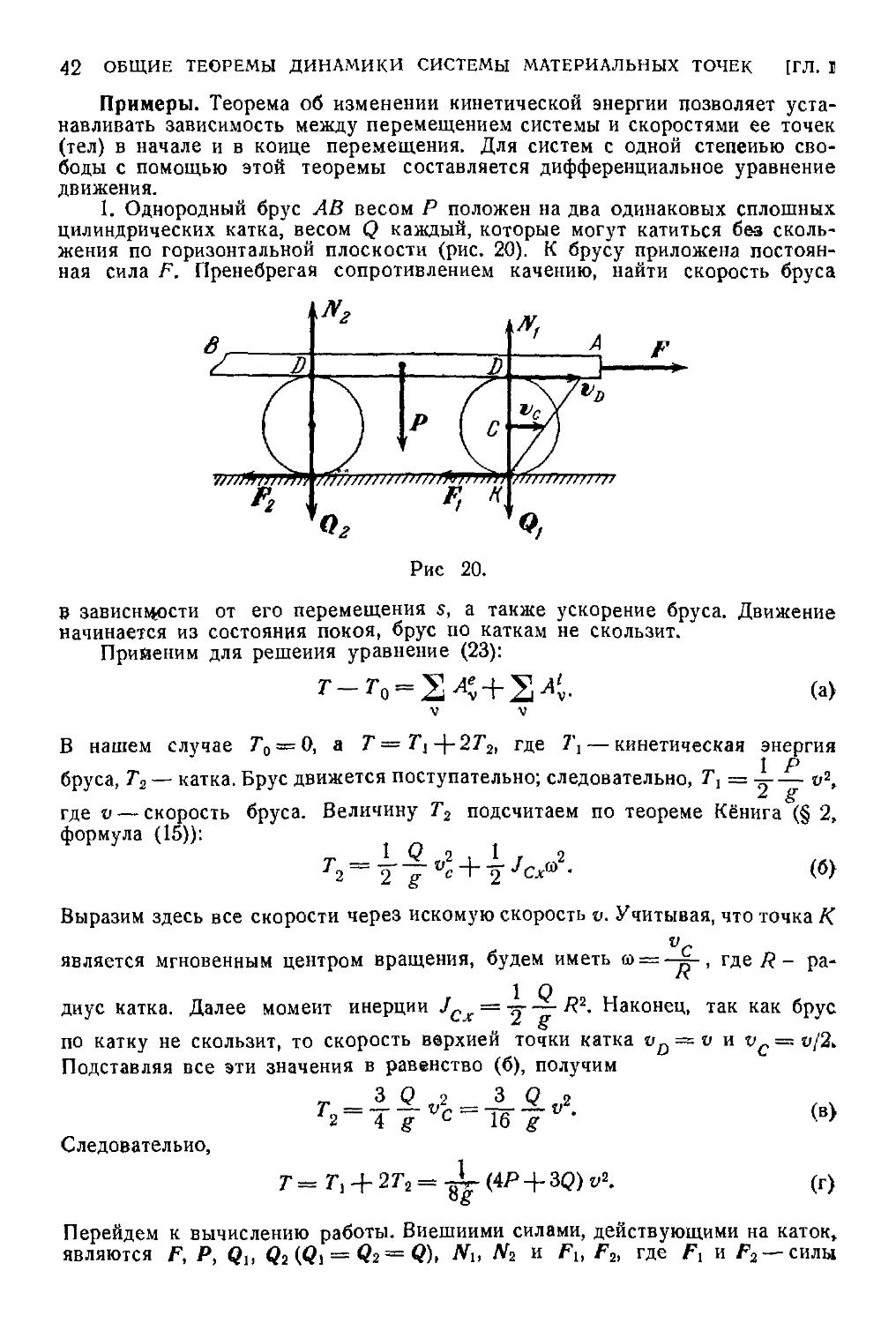
1. Однородный брус АВ весом Р положен на два одинаковых сплошных
цилиндрических катка, весом Q каждый, которые могут катиться без сколь-
скольжения по горизонтальной плоскости (рис. 20). К брусу приложена постоян-
постоянная сила F. Пренебрегая сопротивлением качению, найти скорость бруса
Рис 20.
в зависимости от его перемещения s, а также ускорение бруса. Движение
начинается из состояния покоя, брус по каткам не скользит.
Применим для решения уравнение B3):
В нашем случае 7 = 0, а Т= Ti-\-2T2, где 7\ — кинетическая энергия
1 Р
бруса, Т2 — катка. Брус движется поступательно; следовательно, Т^ = — v2,
где v — скорость бруса. Величину Т2 подсчитаем по теореме Кёнига (§ 2,
формула A5)):
Т2 ТУ с г" ~2 JCx<i> • (б>
Выразим здесь все скорости через искомую скорость v. Учитывая, что точка К
является мгновенным центром вращения, будем иметь ч> = —~, где R - ра-
радиус катка. Далее момент инерции JCx = у — R2. Наконец, так как брус
по катку не скользит, то скорость верхней точки катка vD = v и и = tr/2.
Подставляя все эти значения в равенство (б), получим
Следовательно,
'8 = T7V
16
(в)
(г)
Перейдем к вычислению работы. Внешними силами, действующими на каток,
являются F, Р, Qb Qi (Qi = <?2 = Q), ЛГь N2 и Fu F2, где Ft и F2 — силы
13]
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ
43
трения, препятствующие скольжению катков. Работа сил Р, Q] и <?2 равна
нулю, так как они перпендикулярны к перемещениям их точек приложения.
Для точки К имеем vK = 0 и йгк = vKdt = 0. Поэтому Nr • dr K = О,
F. • drк = 0; следовательно, работа этих сил на конечном перемещении будет
также равна нулю. Аналогичный результат получим для сил N2, F2, а также
для внутренних сил давления и трения, действующих в точках D касания
бруса н катков (относительные скорости перемещения этих точек равны
нулю, как и скорость точки К). Следовательно' работу совершает только сила
F и Ae = F-s.
Подставляя все найденные значения в уравнение (а), получим
(Д)
откуда
Для определения ускорения бруса продифференцируем обе части равен-
равенства (д) по времени; будем иметь
"ж-"ж-
ds
Но -тг = v, поэтому, сокращая, найдем окончательно
dv
w = =
dt
4F
4P + 3Q g'
Обращаем внимание на примененный здесь прием определения ускорения
с помощью теоремы об изменении кинетической энергии.
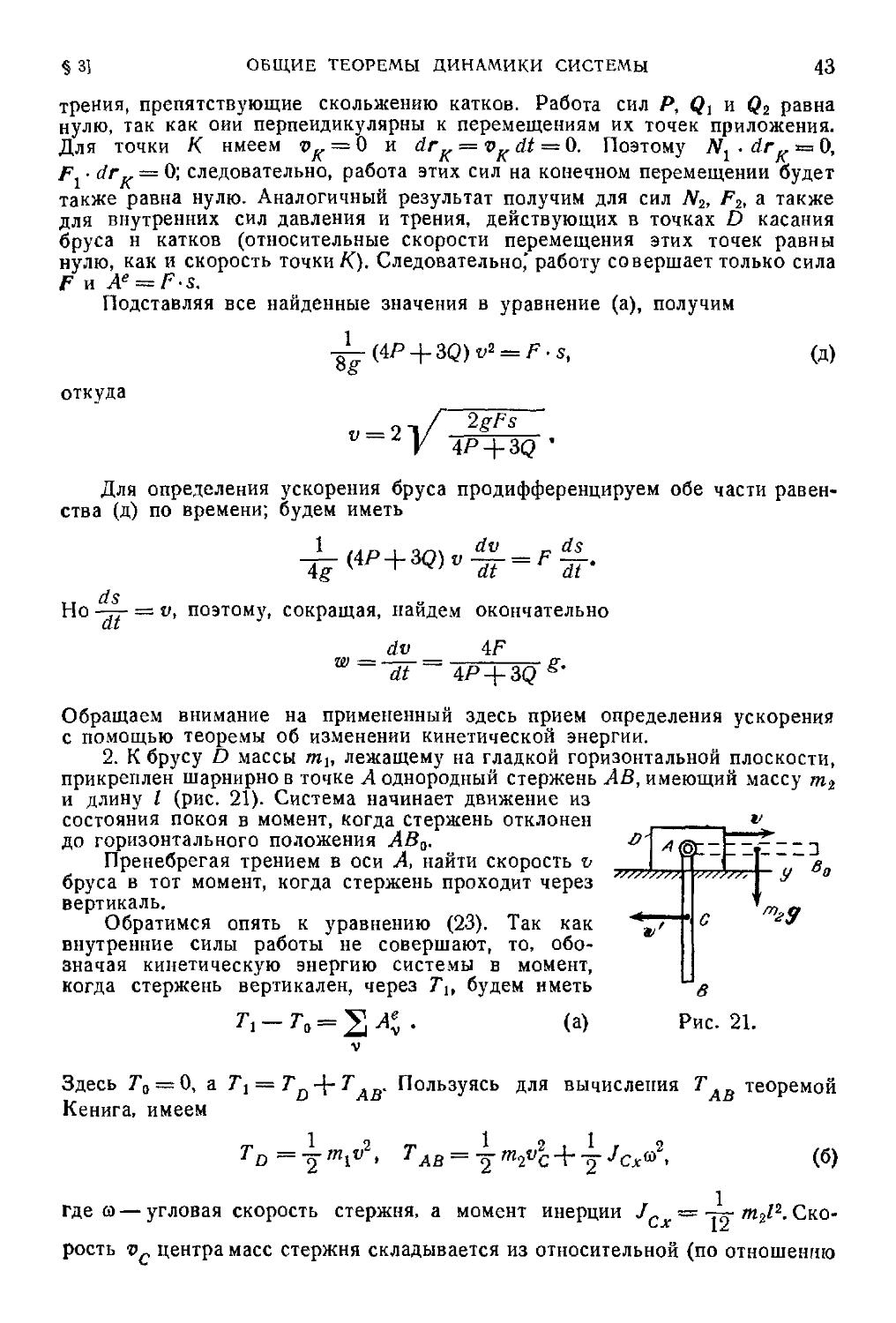
2. К брусу D массы ти лежащему на гладкой горизонтальной плоскости,
прикреплен шарнирно в точке А однородный стержень АВ, имеющий массу т2
и длину / (рис. 21). Система начинает движение из
состояния покоя в момент, когда стержень отклонен
до горизонтального положения АВа.
Пренебрегая трением в оси А, найти скорость ь
бруса в тот момент, когда стержень проходит через
вертикаль.
Обратимся опять к уравнению B3). Так как
внутренние силы работы не совершают, то, обо-
обозначая кинетическую энергию системы в момент,
когда стержень вертикален, через 7( будем иметь
(а)
в
Рис. 21.
Здесь Та = 0, а Тх = 7"д + ТАв- Пользуясь для вычисления ТАв теоремой
Кенига, имеем
(б)
1
где а—угловая скорость стержня, а момент инерции Jc = -рг- ntr,l2. Ско-
Скорость vc центра масс стержня складывается из относительной (по отношению
44 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. I
к брусу) скорости -о', численно равной 0,5 to и переносной скорости V,
следовательно, t>c = 0,5to — v. В результате
m2l2<i>2 __1_
2
«2 -\
(в)
Чтобы исключить отсюда величину и, заметим, что все действующие на
систему внешние силы вертикальны. Следовательно, сумма их проекций на
горизонтальную ось у равна нулю и проекция количества движения Q
системы на эту ось должна быть величиной постоянной. Так как Qa = 0,
то Q = m^jy -J- mg)c = 0. Учитывая направления ю и юс, находим отсюда
/f \ ,
Подставляя это значение to в равенство (в), найдем окончательно
6/к2
¦V
(г)
Работу здесь совершает только сила тяжести m2g; при этом Лг = 0,5Ь rn2g.
I Следовательно, уравнение (а) принимает
¦ А вид
Tt = — / • mag.
Заменяя здесь 7", найденным значением,
получим окончательно
У Dт, + т2) (m, + ms)
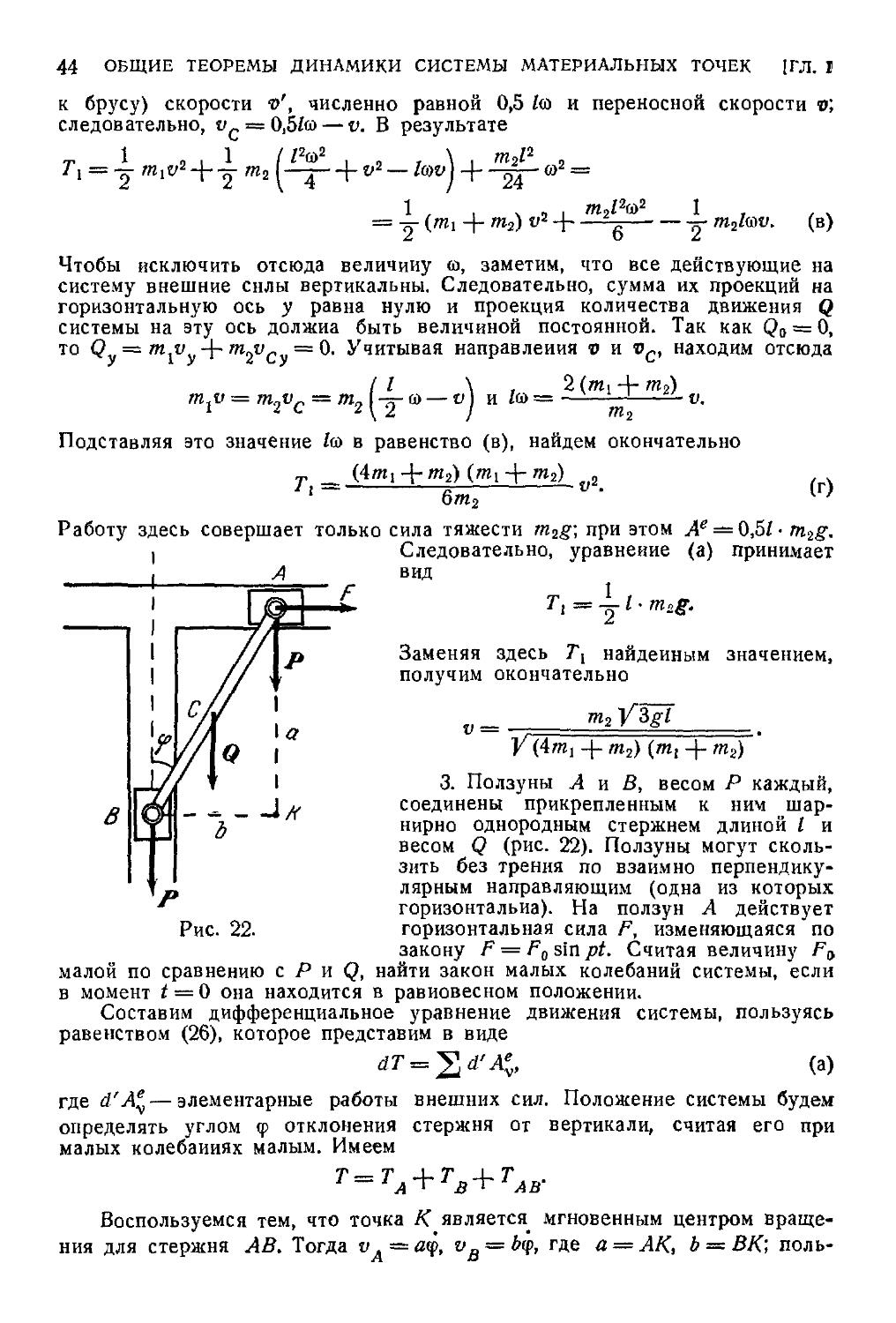
3. Ползуны А и В, весом Р каждый,
соединены прикрепленным к ним шар-
нирно однородным стержнем длиной / и
весом Q (рис. 22). Ползуны могут сколь-
скользить без трения по взаимно перпендику-
перпендикулярным направляющим (одна из которых
горизонтальна). На ползун А действует
Рис. 22. горизонтальная сила F, изменяющаяся по
закону F = Fo sin pt. Считая величину Fa
малой по сравнению с Р и Q, найти закон малых колебаний системы, если
в момент ? = 0 она находится в равновесном положении.
Составим дифференциальное уравнение движения системы, пользуясь
равенством B6), которое представим в виде
йТ = ^й'А1, (а)
где d'Ay—элементарные работы внешних сил. Положение системы будем
определять углом <р отклонения стержня от вертикали, считая его при
малых колебаниях малым. Имеем
Воспользуемся тем, что точка К является^ мгновенным центром враще-
вращения для стержня АВ. Тогда «,=йф, vR = b(p, где а = АК, Ь = ВК] поль-
§ 3] ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ 45
зуясь тем, что формула A4) § 2 справедлива и для мгновенного враще-
вращения, получим
Но так как точки К и А находятся на одинаковом расстоянии 1/2 от центра
масс С стержня, то по теореме Гюйгенса JКх = JДх = QP/3g. В результате,
учитывая, что а2-\-Ь2 = I2, будем иметь
Для вычисления элементарной работы воспользуемся тем, что она равна
моменту силы относительно оси поворота на элементарный угол поворота
[см. ч. I, § 30, формула B1)]. Так как в нашем случае момент относительно
оси Кх совпадает с моментом относительно центра К, то
V d'A% = {— PI sin ф — Q у sin ф + Fl cos ф) dtp.
Вычисляя из равенства (б) dT и подставляя все значения в уравнение (а),
получим
~ (р + -|) *» М = [~ (Р + Щ Sin
Но ifdt = d<f. Поэтому, произведя сокращение, найдем дифференциальное
уравнение движения системы в виде
¦g-CP + Q) ФН ^- sin ф = Fo sinpt cos ф. (в)
Для малых колебаний, полагая sincp « ф, созф и 1 и вводя обозначения
SgBP + Q) _ 3gFa
2lCP+Q) ~ • /CP+Q)~ ' (>
будем иметь
(д)
Это диффрц ур ынужденных колебаний, общее реше
которого имеет вид (см. ч. I, § 35,
Это дифференциальное уравнение вынужденных колебаний, общее решение
( I § 35, п. 3)
[Г
° ^ (e)
Здесь а и а — постоянные интегрирования. Определяя их по начальным дан-
данным: при ? = 0ф = 0, ф = 0, найдем окончательно закон колебаний
(ж)
Система может совершать малые колебания вдали от зоны резонанса p = k.
При этом, если р <^_ k, то приближенно
г г
Ф = -jr sin pt,
т. е. колебания являются вынужденными с частотой р и периодом т = 2п/р.
46 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ I
Если же р ~^> к, то приближенно
На i j
го = —- sm kt,
Y pk
т. е. колебания будут собственными с частотой k и периодом т = 2я/й, где зна-
значение k дается равенством (г)
Пример показывает, что, пользуясь теоремой об изменении кинетической
энергии в дифференциальной форме, можно составить дифференциальное
уравнение движения любой механической системы с одной степенью сво-
свободы при любых действующих на систему силах.
6. В кинематике мы имели теорему Шаля, согласно которой всякое
движение твердого тела можно рассматривать как совокупность по-
поступательного движения, определяемого движением произвольной
точки тела, и движения тела около этой точки как неподвижной.
Вышеизложенные теоремы динамики показывают, что за такую точку
удобнее всего брать центр масс В самом деле, движение центра
масс определяется по соответствующей теореме как движение матери-
материальной точки под действием всех приложенных к системе внешних сил, а
к движению относительно центра масс теоремы об изменении кинети-
кинетического момента и об изменении кинетической энергии применяются
совершенно так же, как и к движению около неподвижной точки.
Поэтому всякое движение механической системы можно изучать, рас-
рассматривая его как совокупность двух движений: поступательного,
определяемого движением центра масс, и движения около центра
масс как неподвижной точки.
§ 4. Динамика точки переменной массы
1. Понятие о теле и точке переменной массы. Под механи-
механической системой мы понимаем такую совокупность материальных
точек, в которой положение или движение каждой точки зависит
от положения и движения всех остальных. Эта зависимость обусло-
обусловлена наличием сил взаимодействия между точками системы (внутрен-
(внутренних сил). До сих пор мы считали множество точек, образующих
каждую рассматриваемую систему, неизменным. Между тем на практике
могуг иметь место случаи, когда в некоторые моменты времени
tv t7, ... взаимодействие каких-то отдельных точек системы с осталь-
остальными ее точками практически мгновенно прекращается; таким образом,
эти точки после моментов времени tit t2, ... уже не будут входить
в рассматриваемую систему. В результате состав, т. е. множество
точек, образующих данную систему, а следовательно, и масса си-
системы будут со временем изменяться. Аналогично могут иметь место
случаи, когда в какие-то моменты времени tlt t2, ... с рассматри-
рассматриваемой системой мгновенно начинают взаимодействовать точки, до
этого в данную систему не входившие (с нею не взаимодействовав-
взаимодействовавшие) В результате также будет происходить изменение состава
системы и ее массы. Примером может служить движущийся транспор-
§ 4) ДИНАМИКА ТОЧКИ ПЕРЕМЕННОЙ МАССЫ 47
тер, с которого в какие-то моменты времени снимают (или на ко-
который кладут) грузы.
Для изучения движения системы в указанных случаях нужно
всякий раз после моментов времени tlt t2, ... составлять для обра-
образовавшейся новой системы свои уравнения движения, учитывая мгно-
мгновенное изменение ее скорости в момент отделения (присоединения)
частицы методами теории удара (гл. VII).
Однако в ряде случаев процесс отделения (или присоединения)
частиц можно практически считать непрерывным, а следовательно,
рассматривать как непрерывный и процесс изменения массы системы.
Примерами таких систем в природе являются плавающая льдина,
масса которой убывает при таянии или возрастает при намерзании,
планета, масса которой изменяется вследствие оседания' метеоритной
пыли и т. д., а в технике — ракета на активном участке траектории
или реактивный самолет, масса которых убывает при выгорании
топлива, веретено, на которое наматывается или с которого сматы»
вается нить, и т. п.
Систему (в частности, тело), масса которой непрерывно изменяется
со временем вследствие изменения состава системы, т. е. непрерыв»
ного присоединения к ней или отделения от нее частиц, и принято
называть системой (телом) переменной массы. Если расстояния, про-
проходимые точками тела, велики по сравнению с его размерами или
если тело движется поступательно, то его (пренебрегая изменением
положения центра масс, происходящим в процессе отделения или
присоединения частиц) можно рассматривать как точку перемен-
переменной массы. Движение такой точки переменной массы мы и рассмот-
рассмотрим, полагая, что масса М этой точки является непрерывной и диф-
дифференцируемой функцией времени M(t) и что взаимодействие с этой
точкой отделяющихся частиц после отделения мгновенно прекращается,
а присоединяющиеся частицы до момента присоединений с этой
точкой не взаимодействуют Для такой точки можно составить диф-
дифференциальные уравнения, описывающие ее движение в течение всего
времени изменения массы.
2. Дифференциальные уравнения движения точки перемен-
переменной массы (уравнения Мещерского). Составим уравнение движения
точки переменной массы, масса которой изменяется вследствие одно-
одновременного отделения и присоединения частиц Обозначим в момент
времени t через M(t) всю массу точки, через Ml(t) — массу вошед-
вошедших в ее состав присоединяющихся частиц и через M2{t)— массу
входящих в ее состав отделяющихся частиц; здесь M^t) — возрас-
возрастающая функция (dMl > 0), а М2— убывающая (dM2 < 0), функ-
функция же М (t) может быть как возрастающей, так и убывающей и>
в частности, постоянной
Применим теорему об изменении количества движения к системе,
состоящей из точки с массой M(t), присоединяющейся к ней за
48 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. I
малый промежуток времени At частицы с массой AMt и отделяющейся
от нее в течение того же промежутка времени частицы с массой
|АМ2| (рис. 23). По сделанным выше предположениям, указанные
частицы и точка взаимодействуют, т. е. образуют механическую
систему лишь в момент времени t (после
отделения или до присоединения взаимодей-
взаимодействия нет). Поэтому результаты наших рас-
рассуждений будут справедливы, когда мы со-
совершим предельный переход, полагая At —>-0.
Упомянутая теорема дает
Qt — Qo^FAt, A)
где Qo— количество движения системы в мо-
момент t, a Qx — в момент t-{-At; F— равно-
равнодействующая приложенных к точке сил.
Обозначим абсолютную скорость точки с мас-
Рис. 23. сой M(t) через v, а абсолютные скорости
присоединяющейся частицы с массой АМг
и отделяющейся частицы с массой | ДЛТ21 через их и щ соответ-
соответственно. Тогда
Q, = (М -f- Л М , — | А М2 [) (v + Av) +1А М21 в2.
где Av — приращение скорости точки за промежуток времени ЛЛ
Подставляя эти величины в уравнение A) и учитывая, что | A AI21 =
= —&М2 (масса частицы—величина положительная, a M2(t) — функ-
функция убывающая), получим
MA v + AAlj (v — «О + АМ2 (v — в2) + (AMi + А/И2) Av = F At.
Отсюда, деля обе части равенства на А? и переходя к пределу при
At—>Q, найдем окончательно
^ v)^L. B)
Это и есть дифференциальное уравнение движения точки переменной
массы или обобщенное уравнение И. В. Мещерского, составленное
для случая одновременного отделения и присоединения частиц.
Если имеет место только присоединение (или только отделение)
dM, dM I dM2 dM \ ,n.
частиц, то ¦ ' ¦ = —j7- 1ИЛИ ~^ = ~rf7~) - и Уравнение B) прини-
принимает вид
-*)*?-• C)
§ 4] ДИНАМИКА ТОЧКИ ПЕРЕМЕННОЙ МАССЫ 49
где и — абсолютная скорость присоединения (или отделения) частиц.
Уравнение в виде C) было получено И. В. Мещерским в 1897 г.,
а в обобщенном виде B) опубликовано в работе 1904 г.
Величина ur = u — v представляет собой относительную (по от-
отношению к основной точке с массой М) скорость присоединения
(отделения) частиц. Если ввести эту величину, то уравнение C) при-
примет вид
,, dv г, , dM /лх
Как видим, и при отделении и при присоединении частиц уравнения
C) или D) имеют один и тот же вид, с той лишь разницей, что
dM . Л
в случае присоединения частиц .. > 0, а в случае их отделения
dM
Если абсолютная скорость присоединяющихся (отделяющихся)
частиц равна нулю, т. е. в = 0, то уравнение C) можно представить
в виде
^^ = F, E)
если же относительная скорость присоединяющихся (отделяющихся)
частиц есть нуль, т. е. вЛ = 0, то уравнение Мещерского принимает
такой же вид, как для точки постоянной массы, т. е.
однако М в левой части является при этом величиной переменной.
Заметим, наконец, что если ввести величину
то уравнение D) можно представить тоже в виде уравнения движения
точки постоянной массы
M^-^F + Ф. (8)
Из уравнения (8) следует, что эффгкт отделения (присоединения)
частиц эквивалентен действию на точку (тело) некоторой добавочной
силы Ф, называемой реактивной силой.
dM
Обозначим через Осек =
dt
секундный расход отделяемой (или
присоединяемой) массы, и пусть Ф1 и Ф2 — реактивные силы соотг
ветственно при присоединении и отделении частиц. Тогда
Ф1 = СсеА- Ф2 = — OLeKar, (9)
•4 Н. Н. Бухгольц
5 0 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ I
т. е реактивная сила равна численно произведению секундного рас-
расхода массы на относительную скорость отделения (присоединения)
частиц и направлена противоположно вектору иг в случае отделения
частиц и так же, как вектор вг, в случае присоединения частиц
Отметим в заключение, что преобразования, проделанные с урав-
уравнением C), можно таким же образом произвести и с обобщенным
уравнением B).
Рассмотрим несколько примеров приложения уравнений Мещер-
Мещерского
3. Движение ракеты вне поля сил. Формула Циолковского.
В качестве первого примера рассмотрим случай поступательного дви-
движения ракеты вне поля сил A-я задача Циолковского). Тогда, по-
полагая в равенстве D) F — 0, полу-
¦ $> чим для движения ракеты в этом
X)^f^ случае векторное уравнение
.. dv dM
Направим ось х вдоль вектора
скорости v ракеты (рис 24) и до-
допустим, что относительная скорость
кис> ¦"• отделения частиц ит (скорость вы-
вылета продуктов горения топлива из
сопла ракетного двигателя) постоянна и направлена противоположно <о
Тогда, проектируя обе части равенства A0) на ось х и учитывая,
что vx = v, игх = — иг, будем иметь
Mdv = — urdM
Отсюда, интегрируя и полагая в начальный момент скорость ракеты
равной vQ, а массу равной Мо, получим окончательно
v = vo+ur\n-^. A1)
Формула A1) устанавливает, по какому закону возрастает скорость
ракеты с уменьшением ее массы Если начальную массу топлива
обозначить /Ит, а массу корпуса ракеты со всем оборудованием и
полезным грузом через Мк, то yVfo= MK-\- /Ит, а масса ракеты в мо-
момент, когда сгорит все топливо, будет равна Мк В результате най-
найдем, что предельная (наибольшая) скорость, которую получает ракета,
когда будет израсходовано все топливо, определяется равенством
A2)
Это известная формула К Э Циолковского, опубликованная в его
работе 1903 г.
§4]
ДИНАМИКА ТОЧКИ ПЕРЕМЕННОЙ МАССЫ
51
Из формулы Циолковского следует тот интересный факт, что пре-
предельная скорость ракеты зависит только от относительного запаса
топлива и относительной скорости истечения продуктов его горения,
от того, по какому закону расходуется топливо, предельная скорость
ракеты не зависит
Для закона движения ракеты в рассматриваемом случае получаем
из A1), полагая, что при ?0 = 0, х —О-
— vot-\-ur In
M{t)
dt
A3)
Следовательно, закон движения будет зависеть от закона расхода
топлива, т е от вида зависимости M(t), которая для вычисления
интеграла, входящего в правую часть равенства A3),
должна бы^ь задана
4. Вертикальное движение ракеты в однородном
поле тяжести. Рассмотрим ракету, движущуюся верти-
вертикально вверх в однородном поле тяжести при отсут-
отсутствии сопротивления среды B-я задача Циолковского).
Направим ось х также по вертикали вверх и примем,
что вектор иг относительной скорости отделения частиц
постоянен и направлен по вертикали вниз (рис. 25).
Учитывая, чго на ракету действует сила тяжести Р= Mg,
получим уравнение движения D) в проекции на ось х
в виде
A4)
Интегрируя это
? = 0 М=М0, v0
нения скорости.
уравнение и полагая, что при
О, найдем следующий закон изме-
= иг1п^Ш-~ St A5)
Рнс. 25.
Для дальнейшего интегрирования уравнения A5) надо задать ка-
какой-го закон изменения массы Примем, что масса М убывает по по-
показательному закону
М — Moe~at,
A6)
где а — постоянный коэффициент, характеризующий быстроту изме-
изменения массы. Тогда уравнение A5) примет вид
A7)
52 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЩ [ГЛ I
Отсюда, интегрируя и считая при ? = 0 х~0, найдем закон дви-
движения ракеты:
х = (шг — #)у. A8)
В этом равенстве аиг есть, очевидно, ускорение, сообщаемое ракете
реактивной силой, в чем можно убедиться и непосредственно; в самом
деле, вычисляя с учетом равенства A6) реактивную силу, по фор-
формуле G), получим
Фх = — аг —т?- = aurMoe-at = mrM.
Из уравнения A7) следует очевидный вывод, что вертикальный
подъем при 1*0=0 возможен лишь в случае, когда aur > g, т. е.
когда ускорение, сообщаемое реактивной силой, больше ускорения
силы тяжести
Допустим теперь, что масса ракеты может убывать до некоторого
значения Му (разность Мо — Мх равна запасу топлива), и найдем,
какой будет полная высота И подъема ракеты. Время tx движения
под действием реактивной силы (активный участок траектории) опре-
определяется из равенства Mt = Moe~at>, откуда
где
я=1птиг- <19'>
Подставляя это значение tx в равенства A8) и A7), найдем для
длины X; активного участка и скорости V\ в конце этого участка
значения
x^^St^M., 4 = »^-. B0)
После момента tx масса ракеты остается постоянной; имея в этот
момент скорость vlt ракета пройдет еще до наивысшей точки путь
2g —П
Тогда для полной высоты подъема получим значение Н'= xx-\-h
или
Как видим, Н, в отличие от v, зависит от параметра а, определяю-
определяющего быстроту расхода топлива. При этом Н тем больше, чем,
больше а. Наибольшая высота подъема
§ 4] ДИНАМИКА ТОЧКИ ПЕРЕМЕННОЙ МАССЫ 53"
получается при а=оо, т. е. при мгновенном сгорании топлива.
Практически этот результат означает, что для получения наибольшей
высоты подъема в однородном поле тяжести при отсутствии сопро-
сопротивления надо возможно быстрее сжигать топливо
Решим теперь другую экстремальную задачу. Найдем, при каком
значении а длина активного участка xY будет наибольшей (такой
режим обеспечит движение с наименьшим ускорением, т. е. с наи-
наименьшими перегрузками). Из B0) получаем
2а3
Приравнивая эту производную нулю, найдем, что указанный опти-
оптимальный режим имеет место, когда
а = &, B2)
т. е. когда ускорение, сообщаемое реактивной силой, вдвое больше
ускорения силы тяжести. По знаку второй производной легко убе-
убедиться, что при найденном значении а величина хг действительно
имеет максимум. Из равенств B0) и B1) находим, что при aur = 2g
пЧт п2и2г
Х1 max— "ХГ"' П —~П~"
Полная высота подъема Н в этом случае вдвое меньше оптимальной,
определяемой равенством B Г)
Можно поставить еще одну оптимальную задачу, при заданной
длине активного участка xY найти значение а, для которого число п
(характеризующее у ракеты запас топлива) будет наименьшим. Для
этого из B0) выражаем п2 через х^ и а; находим
аиг— 1
Вычисляя отсюда производную от к2 по а и приравнивая ее нулю,
получим, что п имеет минимум при том же значении а, которое
определяется равенством B2). Таким образом, в данном случае одик!
и тот же закон изменения массы обеспечивает максимум xY при за-
заданном значении п и минимум п при данной величине xv
Рассмотрим теперь другую, так называемую обратную задачуг
найдем, по какому закону должна изменяться масса ракеты, чтобы
ракета совершала вертикальный подъем с постоянной скоростью.
Для этого положим в уравнении A4) v = const; получим для опре-
определения закона изменения массы уравнение
^ 0. B3>
54 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. I
Отсюда, интегрируя и полагая при ? = 0 М=М0, найдем
= Мое
B4)
Таким образом, равномерный подъем ракеты возможен только в том
случае, когда закон изменения массы имеет вид A6); при этом должно
быть a — g/ur, или aur~ g (ускорение, сообщаемое реактивной силой,
равно ускорению силы тяжести).
При выводе уравнения A4), а следовательно, и B3) мы считали
вектор вг направленным вертикально вниз.
Рассмотрим еще, какой результат получится, если считать ско-
скорость вг направленной по вертикали вверх. Тогда в уравнении B3)
вместо иг будет стоять —иг, и мы, интегрируя, получим
М = Мое иг . B4')
Следовательно, равномерное движение по вертикали возможно и
тогда, когда масса возрастает по показательному закону. В этом слу-
случае реактивная сила направлена так же, как вектор вг, т. е. вертикально
вверх, и уравновешивает силу тяжести. Такой случай мог бы иметь
место, конечно, не при движении ракеты, а, например, при падении
капли воды в насыщенной водяными парами атмосфере, если допу-
допустить, что масса капли вследствие конденсации на
ее поверхности пара будет возрастать по закону B4'),
а сопротивление движению пренебрежимо мало.
5. Вертикальное движение тяжелой нити. Меха-
х ника тел переменной массы находит интересные при-
приложения и в динамике нити. Рассмотрим следую-
следующую задачу. Пусть нерастяжимая гибкая однэродная
нить АВ длиною I смотана в клубок, лежащий на
краю стола (рис. 26). Высота стола над полом
равна h < I. Исследуем процесс падения нити со
стола на пол, пренебрегая сопротивлением разматы-
разматыванию нити, а также сопротивлением воздуха при ее
движении. Задача распадается на 3 этапа: 1) с мо-
момента начала движения до момента, когда свобод-
свободный конец А нити коснется пола; 2) от конца первого этапа до
момента, когда другой конец В нити сходит со стола; 3) от конца
второго этапа и до момента, когда конец В нити коснется пола.
1) Переходя к рассмотрению первого этапа движения, проведем
координатную ось Ох вертикально вниз, беря начало координат О
в плоскости стола, и будем положение нити при ее движении опре-
определять координатой х точки А (рис. 26). Найдем движение нити
при начальных условиях
?0 = 0, х = 0, v = x = 0. B5)
§ 4] ДИНАМИКА ТОЧКИ ПЕРЕМЕННОЙ МАССЫ 55
Из физических соображений ясно, что условиями B5) последующее
движение не определяется однозначно: если считать, что в момент
*0—О точка А не имеет ускорения, то нить будет оставаться в покое;
если же точка А имеет ускорение (со стола свешивается бесконечно
малый элемент нити), то нить придет в движение. Нас будет инте-
интересовать второй случай.
Составим уравнение движения нити. В произвольный момент вре-
времени t со стола свешивается отрезок нити О А длиною х < h, кото-
который движется поступательно и может рассматриваться как точка
с переменной массой М = рх, где р — масса единицы длины нити.
К этому отрезку непрерывно присоединяются частицы нити, свернутой
в клубок, имея в момент присоединения абсолютную скорость и = 0.
Следовательно, уравнение движения нити (уравнение C)) имеет вид.
м ^" — F ^^
~dT~~~dT'
где F — в данном случае действующая на нить сила тяжести, численна
равная рх?\ Проектируя обе части этого уравнения на ось х и учи-
учитывая, что vx = v, Fx=-F, а Л1=рх, будем иметь
B6)
Легко видеть, что уравнение B6) имеет особое решение х^О, удов-
удовлетворяющее начальным условиям B5), при котором и ie> = .x;==O.
Это решение соответствует упомянутому выше случаю покоя нити.
Будем искать другое решение уравнения B6), дающее интересующий.
нас случай движения нити. Для этого, учитывая, что ~#" — Х~"лГ —
= v —г-, приведем уравнение B6) к виду
х d(v*) , „
Общим решением этого линейного дифференциального уравнения
первого порядка будет
,2 , С
При начальных условиях B5) С = 0; следовательно,
Отсюда, интегрируя вторично, получим
56 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. I
и закон движения нити в рассматриваемой задаче будет
х = 1^2. B8)
Движение по такому закону длится до момента, когда станет x — h,
Ж
т. е. в течение промежутка времени tx — Т/ — . В момент tt конец А
нити касается пола; скорость нити в этот момент, как видно из фор-
формулы B7), будет
2) С момента tr начинается второй этап движения нити (рис. 27).
В течение этого этапа в движении находится отрезок нити, имеющий
постоянную длину h, но состав этого отрезка все
время изменяется: к нему непрерывно присоеди-
присоединяются частицы клубка, лежащего на столе (абсо-
(абсолютная скорость этих частиц в момент присо-
присоединения, как и в предыдущем случае, равна нулю,
т. е. Mi = 0); в то же время от указанного отрезка
непрерывно отделяются частицы нити, падающие
на пол, имея в момент отделения абсолютную ско-
скорость, равную скорости нити, т. е. в2 = ?> (было бы
ошибочно считать а2 = 0, так как когда скорость
отделившейся частицы нити вследствие ее взаимо-
взаимодействия с полом обращается в нуль, взаимодей-
взаимодействие этой частицы с движущимся отрезком нити
отсутствует, поскольку нить не воспринимает уси-
усилий сжатия, а в2, как было отмечено при выводе
уравнения Мещерского, представляет собой скорость отделяющейся
частицы в момент, когда она еще взаимодействует с нитью). Таким
образом, движение рассматриваемого отрезка нити описывается урав-
уравнением B), которое при указанных значениях их и в2 принимает вид
в
'/////////.
D
h
^^
0
,А
X
Рис. 27.
dt r
dt
C0)
Будем на этом этапе движения снова отсчитывать время от нуля,
полагая ^ = 0; далее, обозначим через х координату той точки D
нити (см. рис. 27), которая в момент tl находилась в точке О (на
краю стола). Тогда в уравнении C0) М = ph — const, F = pgh и
Mx = px [заметим одновременно, что здесь M2 = ph—рх, но в урав-
уравнение C0) эта величина не входит, так как в2 — г» = 0]. Проектируя
обе части уравнения C0) на ось х и заменяя М, F и Мг их значе-
значениями, получим
dv dx
" dt
§ 4] ДИНАМИКА ТОЧКИ ПЕРЕМЕННОЙ МАССЫ 57
Введем обозначение
Тогда предыдущее уравнение примет вид
dv 1,ч 9
C2)
Это уравнение совпадает с уравнением движения точки постоянной
массы, падающей вертикально в среде, где сопротивление пропор-
пропорционально квадрату скорости. Интегрируя уравнение C2) и принимая
во внимание, что при t=^tl = O v — vv где vr определяется равен-
равенством B9), найдем окончательно для скорости движения нити выра-
выражение
| 4' 4
h
| 4 4
1 — пе h eh — tie h .„„.
ЛТ7 =a~Tt IZ7' C3>
l+ne h e h + ne h
где
a-t-t/, /3+/2
Нетрудно также найти зависимость v(x), если представить урав-
уравнение C2) в виде
dv__l_( 2_ 2\
dx Л *¦ '
и проинтегрировать его, учитывая, что при х = 0 v = vy В резуль-
результате будем иметь
-2 —
о о
или, так как, согласно равенствам B9) и C1), v\ = -5- g"A = -5- а2,
= ay 1 —3-
C4)
Из полученных результатов следует, что скорость падения нити
стремится, и притом достаточно быстро, к предельной величине
Ч
Используя формулу C4), легко подсчитать, что когда после
момента tY с клубка смотается отрезок нити, равный 1.5А, скорость
его падения будет отличаться от предельной меньше чем на 1 %.
Поэтому, если l"^>h, скорость v2 падения нити в конце второго
этапа можно считать равной а = ]/gh; в противном случае эта ско-
скорость определяется по формуле C4).
58 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК (ГЛ. I
Чтобы найти время падения нити до момента начала третьего
этапа, следует проинтегрировать уравнение C3). Учитывая, что при
tz=tx = Q х = 0, получим закон движения нити в виде
x = ft In
t
-i-ne
- — i
h
1+я
C5)
Отсюда, полагая х = / — 2ft, найдем время t2 движения нити
до конца второго этапа.
3) На третьем этапе (рис. 28) происходит непрерывный процесс
уменьшения массы движущейся части нити, причем, как было уста-
установлено выше, абсолютная скорость отделяющихся частиц в момент
¦отделения равна скорости нити v,r. e. и — v. Масса движущейся части
нити Ж = р(А — х), где х — координата конца В
нити. Тогда, составляя для движущейся части нити
уравнение C) в проекции на ось х, получим
или -jL=
Отсюда, ведя теперь отсчет времени от момента t2
конца второго этапа, т. е. полагая t2 = 0, и учи-
учитывая, что при t2 = 0 v = v2, найдем
2
V~V2-\-gt
C6)
Таким образом, конец В нити в этом случае падает
с постоянным ускорением g как свободная мате-
материальная точка постоянной массы. Скорость конца В можно еще
представить в виде
v — Yv\-\-2gx . C7)
Время t3 движения нити до конца третьего этапа и скорость v3 точки
в момент падения на пол найдутся из уравнений C6) и C7), если
в них положить х = й.
В частности, считая l^>fi и принимая v2 = a= tfgh, найдем, что
Все время движения нити от начала первого этапа до конца третьего
будет T = tl-)rt2-\-t3.
Рассмотренная задача интересна тем, что в ней на первом этапе
происходит движение системы при непрерывном присоединении частиц,
на втором — при одновременном непрерывном присоединении и отде-
отделении частиц и, наконец, на третьем — при непрерывном отделении
частиц.
ГЛАВА ВТОРАЯ
УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК
§ 5. Принцип Даламбера
1. Принцип Даламбера для точки. В применении к одной ма-
материальной точке принцип Даламбера заключается, как известно,
в том, что в каждый момент движения действующие на точку актив-
активные силы и реакции связей можно уравновесить добавлением к ним
силы инерции (см. ч. I, § 38, п. 15). Если сумму всех действую-
действующих на точку с массой т активных сил обозначим через /¦", уско-
ускорение — через w и сумму всех реакций
связей (пассивных сил) — через N, то на /\
основании принципа Даламбера имеем
-mw
Q. A)
Сила F — mw = R (рис. 29) названа Далам- W-
бером потерянной силой, так как она урав-
уравновешивается силой N и не сообщает точке
ускорения; поэтому принцип Даламбера может
быть еще формулирован так: в каждый мо-
момент движения потерянная сила уравновеши-
уравновешивается реакциями связей, т. е. рис 29
/? + ЛГ = О. (Г)
2. Принцип Даламбера для системы. Применим теперь принципе
Даламбера к произвольной системе п. материальных точек. Рассмо-
Рассмотрим какую-либо точку системы с номером v и массой mv. Пусть,
равнодействующая всех действующих на точку активных сил (как.
внешних, так и внутренних) будет Fv, а пассивных (реакций свя-
связей) Nv; ускорение точки обозначим через wv. Тогда, на основании
аксиомы связей, эту точку можно рассматривать как свободную и
составить для нее уравнение A), т. е.
Fv —mvw
или, полагая Fv — mvwv~Rv,
'60 УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. II
Уравнения B) или B'), составленные для всех точек системы, выра-
выражают принцип Даламбера для системы: в любой момент движения
действующие на каждую точку системы активные силы и реакции
связей могут быть уравновешены добавлением к ним соответствую-
соответствующей силы инерции, или, другими словами, в любой момент движения
для каждой точки системы потерянные сиЛы уравновешиваются реак-
реакциями связей.
Составив для всех точек системы уравнения B) или B') и сложив
их почленно, получим
2/4,-1X^+2^ = 0, C)
V V V
ИЛИ
Далее, умножая каждое из уравнений B) или B') векторно на rv и
складывая их затем почленно, получим
2(rv X Fv) — 2 Cv X » vwv) + S(rvXiVv) = 0, D)
V
ИЛИ
При этом из свойств внутренних сил следует, что в уравнениях C)
и D) сохранятся только внешние активные силы и реакции.
Уравнения C) и C') или D) и D') показывают, что в любой
момент движения действующие на систему внешние активные силы,
реакции связей и силы инерции (или потерянные силы и реакции свя-
связей) удовлетворяют основным уравнениям статики, т. е. сумма всех
этих сил и сумма моментов всех этих сил относительно произволь-
произвольного центра равны нулю.
Таким образом, принцип Даламбера, как и в случае одной точки,
дает возможность составлять уравнения движения системы в форме
уравнений равновесия, вводя в рассмотрение силы инерции, которые
считаются приложенными к точкам системы.
3. Если механическая система движется относительно инерциаль-
«ой системы отсчета, то, применяя теоремы об изменении количества
движения и кинетического момента, мы будем иметь два векторных
уравнения:
которые связывают действующие на систему внешние силы с дина-
динамическими величинами Q и G. Эти уравнения, как указывалось в на-
начале § 3, можно часто с успехом использовать для изучения движе-
§ 5] ПРИНЦИП ДАЛАМБЕРА 61
ния системы; однако полностью определить это движение с их по-
помощью можно не всегда. В самом деле, в проекциях на оси ко-
координат равенства E) дают 6 скалярных уравнений и, следова-
следовательно, позволяют найти 6 неизвестных (координат, определяющих
положение системы, и реакций внешних связей); между тем в общем
случае этих неизвестных может быть значительно больше. Но, напри-
например, для абсолютно твердого тела положение которого определяется
шестью параметрами, равенства E) дают систему уравнений, позво-
позволяющих изучить его движение полностью.
Если уравнения E) представить в виде
и посмотреть на них с точки зрения принципа Даламбера, то, срав-
сравнивая уравнения F) с уравнениями C) и D), мы убедимся, что вели-
dO dO
чины ¦—¦ и -тг представляют собою соответственно геометри-
геометрическую сумму (главный вектор) сил инерции и сумму моментов (глав-
(главный момент) сил инерции точек движущейся системы, которые в силу
принципа Даламбера должны вместе со всеми внешними силами
(как активными, так и пассивными), действующими на систему,
образовать уравновешенную систему сил. Уравнения F) являются
основными уравнениями кинетостатики; они аналогичны основным
уравнениям статики, в которые переходят, если система находится
в покое, потому что в этом случае Q —0 и О = 0.
Как и в статике, основные уравнения кинетостатики являются
для любой механической системы только необходимыми, но не до-
достаточными. Однако для абсолютно твердого тела они будут также
и достаточны и, следовательно, как было указано выше, вполне опре-
определяют движение (конечно, при заданных начальных условиях); вся
задача сводится только к интегрированию этих уравнений.
Необходимо заметить, что производные -тр и —гг в равенствах E)
берутся относительно инерциальной системы отсчета; если же эти
уравнения отнести к подвижной системе, то они примут вид
dt
dO'
dt
где w есть мгновенная угловая скорость, v' — скорость начала под-
подвижной системы, причем производные будут уже локальными.
62
УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК
[ГЛ. 1Г
4. Примеры. 1. Через неподвижный блок перекинута гибкая нерастяжимая
нить, на концах которой подвешены грузы весом Р и Q (рис. 30, а). Найти
ускорение грузов, натяжение нити и давление на ось. Массой блока и нити
пренебречь.
Предположим, что Р > Q; тогда система грузов А и В будет двигаться
с некоторым ускорением w. Поскольку грузы движутся поступательно, их
можно рассматривать как материальные точки. Прикладывая к грузам А и В,
кроме активных сил Р и Q, силы инерции, составим, согласно принципу
Даламбера, условие равновесия системы, приравняв нулю сумму моментов
всех сил относительно оси блока; сократив на г,
имеем (так как момент реакции N равен нулю)
g g
откуда получим ускорение
— "-Q.g.
Для определения натяжения S нити мысленно
разрежем нить в какой-либо точке и составим
условие равновесия оставшейся части (рис. 30, б);
получим
g
откуда, подставляя w из предыдущей формулы,
найдем
е
Сила давления на ось при движении грузов, которую обозначим NA, равна,
очевидно, 25. Следовательно,
Если грузы были бы неподвижны, то статическое давление на ось равня-
равнялось бы NCT = P + Q. Легко подсчитать, что
„ „ (P-Q)**
Следовательно, NA < NCT, т. е. при движении грузов давление на ось будет
меньше статического, причем величина NA тем меньше, чем больше раз-
разность Р — Q.
2. Однородный стержень АВ длиною I и весом Р, укрепленный посред-
посредством шарнира в точке А, равномерно вращается вокруг вертикальной оси,
проходящей через эту точку (рис. 31); при этом стержень концом В опи-
опирается на горизонтальную плоскость и образует угол а с вертикалью. Найти,
при какой угловой скорости ш давление стержня на плоскость равно нулю
и чему при этом равна реакция в точке А.
Пользуясь принципом Даламбера, присоединим к действующим на стер-
стержень внешним силам активной Р и реакциям JV, ХА, Уд силы инерции. Так
как стержень вращается вокруг оси у равномерно, то каждый его элемент
имеет только нормальное ускорение, направленное к оси и равное ха>2, где
х — расстояние элемента от оси у. Следовательно, для каждого элемента
сила инерции направлена от оси и равна dJ = x<o2 dm, где dm — масса эле-
I 5] ПРИНЦИП ДАЛАМБЕРА
мента. Направляя вдоль стержня ось At,, будем иметь * = J;sin<z и dm
= ^-r d\. Тогда
О 1 г
63
Действующие на стержень внешние силы и силы инерции лежат в одной
плоскости и образуют, согласно принципу Даламбера, уравновешенную си-
систему сил. Составляя для них известные
уравнения статики и учитывая, что суммы
сил инерции и их моментов выразятся со-
соответствующими интегралами, будем иметь:
F ~Х -4-Я(°2
mom/-v = — Р \ sin a + N1 sin a
Pw2
-\ —sin a cos a
последний результат следует из того, что
mom dJ = dJ | cos a. Из третьего уравне-
уравнения при JV = 0 находим
cos oA sin a = О,
Р L
откуда
cos a
(а)
Из первых двух уравнений при этом зна-
значении ю и при N = 0 получим
3 л1_ ГЛ=Я. (б)
•т&тт, /I
Рис. 32.
Уравнение (а), по существу, определяет
ту угловую скорость, с которой должен
вращаться стержень, чтобы составлять
с вертикалью данный угол а. Как видно,
отклонение стержня от вертикали начи-
начинается, лишь когда to > Y%gl2l.
3. Составим, пользуясь принципом Даламбера, дифференциальное уравне-
уравнение движения тела, вращающегося вокруг неподвижной оси АВ, которую
назовем осью г (рис. 32). Приложим в каждой точке тела с массой mv, на-
находящейся на расстоянии /zv от оси АВ, касательную Jvx и нормальную Jvn
силы инерции; численно /VT = mvhve, Jvn = mvhva2, где ш и е—угловая
скорость и угловое ускорение тела. Согласно принципу Даламбера эти силы
вместе с активными силами Pft и реакциями R и RB образуют уравнове-
64 УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. II
шенную систему. Составляем уравнение равновесия *S\ тотг Ft = 0, в кото-
которое не войдут неизвестные реакцни R. н R?. Учитывая, что и тотг J п = 0,
будем иметь
ft v
Так как momzjvt и угловое ускорение е всегда имеют противоположные
знаки, то momz/VT = — /vtAv = —mvAve. Далее, обозначим ^imomzPtt =
ft
= Mz, где величина Mz называется вращающим моментом. Подставляя
все эти значения в равенство (8), найдем, что
Но сумма, стоящая в скобке, представляет собой момент инерции Jz
тела относительно оси г\ в результате получим
Jzt = Мг нли Jz ф = Мг, (9)
т. е. произведение момента инерции тела относительно оси вращения на
угловое ускорение тела равно вращающему моменту.
Уравнение (9) представляет собой дифференциальное уравнение движе-
движения твердого тела, вращающегося вокруг неподвижной оси. Другим путем
это уравнение будет1 получено в § 12. Из уравнения (9) непосредственно
видно, что осевой момент инерции является мерой инертности тела при
вращательном движении (см. § 2, п. 8).
5. Уравнение Даламбера — Лагранжа. Пользуясь принципом Да-
Даламбера, можно придать уравнениям движения форму уравнений
равновесия, если к заданным активным силам и реакциям связей при-
присоединить силы инерции.
Это позволяет использовать для решения задач динамики принцип
виртуальных перемен чий (см. ч. I, гл. V). Пусть мы имеем систему
п материальных точек с неосвобождающими идеальными связями.
Тогда для каждой точки системы с массой mw, согласно принципу
Даламбера, имеет место уравнение B)
^v— wv-^f + Nv = 0 (v=l, 2, ...,»). A0)
Сообщим точкам системы виртуальные перемещения (см. ч. I, § 28)
и умножим каждое из уравнений A0) скалярно на виртуальное пере-
перемещение 6rv соответствующей точки; сложив полученные выражения
почленно, будем иметь
v
Но для связей идеальных и неосвобождающих 2 Wv • 6rv = 0 (см.
ч. I, § 30). Следовательно,
A1)
§ 6] ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ 65
Выражая скалярное произведение, стоящее под знаком суммы
в уравнении A1), через проекции сомножителей, получим
2 [(/V -
причем суммирование распространяется на все точки системы.
Уравнение A1) представляет собой соединение принципа Далам-
бера с принципом виртуальных перемещений и иногда называется
уравнением Даламбера—Лагранжа или символическим уравнением
динамики. Это уравнение является наиболее общим уравнением меха-
механики и, можно сказать, включает в себя всю механику; из него
можно получить как следствие общие теоремы динамики и уравне-
уравнения движения механической системы.
§ 6. Общие теоремы динамики, вьиодимые
из уравнения Даламбера — Лагранжа
1. Предварительные замечания. Общие теоремы динамики, из-
изложенные в § 3, устанавливают завись^ости между динамическими
величинами, характеризующими движение системы, и действующими
на систему силами, как активными, так и реакциями связей, причем
связи могут быть любыми. Эти теоремы можно получить и из урав-
уравнения Даламбера — Лагранжа, если, отбросив с^язи, заменить их соот-
соответствующими реакциями и рассматривать эти реакции как активные
силы, а все точки системы считать при этом свободными, т. е. имею-
имеющими любые виртуальные перемещения.
Пользуясь указанными теоремами, можно, как мы видели, изу-
изучать движение системы и определять реакции связей. При этом, если
нас интересует только изучение движения, то реакции связей из соот-
соответствующих уравнений нужно тем или иным способом исключать.
Уравнение Даламбера—Лагранжа позволяет получить другие вы-
выражения общих теорем динамики, не содержащие реакций связей и
дающие непосредственно зависимость между динамическими величи-
величинами, характеризующими движение системы, и действующими на нее
активными силами. Однако при этом на связи системы должны
быть наложены некоторые ограничения.
2. Частный случай теоремы об изменении количества движе-
движения системы. Пусть на систему наложены идеальные стационарные
связи, обладающими тем свойством, что они допускают поступатель-
поступательное перемещение системы как абсолютно твердого тела параллельно
некоторой неподвижной оси х. Тогда к виртуальным перемещениям
5 Н. Н. Бухгольц
66 УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. II
системы будут принадлежать и такие, для которых перемещения
всех точек системы одинаковы, т. е.
6rv = *°6s (v=l. 2 а). A)
где 6s имеет одно и то же значение для всех точек системы, а
х°— const. Уравнение A1) из § 5 для такого виртуального переме-
перемещения системы примет вид
Отсюда, сокращая на 6s и учитывая, что
dt jU
= d<l
' dt '
v v
получим
dQ О X^ |7(й, е) 0 ,пч
~ж 'х ~2и v 'x' {>
Заметим, что в правую часть равенства B) входит сумма активных
сил, и притом только внешних, ибо сумма всех внутренних сил,
как попарно равных и противоположных, дает нуль; чтобы подчерк-
подчеркнуть это обстоятельство, здесь и введен символ «(а, е)».
Учитывая, что Q-x° — Qx и Fv-x° = Fvx, где Qx и Fvx суть
проекции векторов Q и jFv на ось х, будем окончательно иметь
Уравнение C) дает следующее выражение теоремы об изменении
количества движения системы: если на систему наложены идеаль-
идеальные стационарные связи, допускающие в любой момент времени
поступательное перемещение системы параллельно некоторой
неподвижной оси, то производная по времени от проекции коли-
количества движения системы на ату ось равна сумме проекций на
ту же ось всех действующих на систему внешних активных сил.
Выше мы имели
Q = 2 mvvv = Mvc,
v
где <ос есть скорость центра масс, а М — масса всей системы. Отсюда
где vCx есть проекция скорости центра масс системы на ось х,
параллельно которой возможно поступательное перемещение системы.
Подставляя это значение Qx в равенство C), получим
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
67
Это равенство выражает теорему о движении центра масс системы
в форме, аналогичной той, которую уравнение C) дает для теоремы
об изменении количества движения,
3. Частный случай теоремы об изменении кинетического мо-
момента системы. Пусть наложенные на систему идеальные стацио-
стационарные связи допускают поворот системы как абсолютно твердого
тела вокруг некоторой неподвижной оси х (рис. 33). Тогда к числу
виртуальных перемещений любой точки с мас-
массой mv будет принадлежать перемещение
6rv = 6фЛ:° X rv, E)
где бф есть элементарный угол поворота во-
вокруг оси х, a rv — радиус-вектор, проведен-
проведенный из какого-нибудь центра О, лежащего на
этой оси. Подставляя выражение E) для 6rv
в уравнение Даламбера — Лагранжа [фор-
[формула A1) § 5], получим
или, переставляя циклические множители в смешанном произведении
и сокращая на 6ф,
Это уравнение можно представить в виде
dt2
F)
Здесь
dt
где Оо есть кинетический момент системы относительно центра О.
Заметим еще, что в правой части равенства F) сохранятся только
моменты внешних активных сил, поскольку сумма моментов внутрен-
внутренних сил, как попарно равных и противоположных, обращается в нуль;
таким образом, будем иметь
dQn
Но
Qo • Xq = Ох. a (rv X
= (rv X FJX = momxFv.
68 УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. II
В результате окончательно получаем
—уг~:=^ /ivvX^v' )х или —if~== / j niom^ Fv' . G)
dt ^ш1ч ' at ^J л v /
V V
Уравнение G) дает следующее выражение теоремы об изменении
кинетического момента системы: если на систему наложены иде-
идеальные стационарные связи, допускающие в каждый момент
времени вращательное перемещение системы вокруг некоторой
неподвижной оси, то производная по времени от кинетического
момента системы относительно этой оси равна сумме момен-
моментов относительно той же оси всех действующих на систему
внешних активных сил.
4. Частный случай теоремы об изменении кинетической энер-
энергии системы. Пусть на систему наложены идеальные стационарные
связи. Как известно (см. ч. 1, § 28), при стационарных связях истин-
истинное перемещение системы принадлежит к числу виртуальных. Тогда,
принимая за виртуальные перемещения точек системы их истинные
перемещения, т. е. полагая
brv — drv (v=l, 2, .... п),
мы получим уравнение Даламбера — Лагранжа в виде
Но
=4 2
V
где
v
есть кинетическая энергия системы. Следовательно,
*v (8)
Равенство (8) дает следующее выражение для теоремы об изме-
изменении кинетической энергии системы: если на систему наложены
идеальные стационарные связи, то дифференциал кинетической
анергии системы равен сумме элементарных работ действую-
действующих на систему внешних и внутренних активных сил.
Если же система является неизменяемой, то в правой части уравне-
уравнения (8) останется элементарная работа только внешних активных сил.
S 7] УРАВНЕНИЯ ДВИЖЕНИЯ В ДЕКАРТОВЫХ КООРДИНАТАХ 69
Примечание. При решении примеров, рассмотренных в § 3, п. 5,
мы, по существу, пользовались уравнением (8), так как в этих примерах
наложенные на систему связи были идеальными и стационарными.
В частности, первый из рассмотренных в п. 5 примеров показывает, что
шероховатая поверхность, вдоль которой тело катится без скольжения, явля-
является идеальной связью, если мы пренебрегаем деформациями поверхности и
катящегося тела, так как элементарная работа реакций поверхности (нормаль-
(нормальной и силы трения) равна нулю. Но если тело скользит вдоль шероховатой
поверхности, то такая связь не является идеальной, поскольку в этом случае
работа силы трения не равна нулю.
§ 7. Уравнения движения механической системы
в декартовых координатах
1. Уравнения Лаграпжа 1-го рода. Рассмотрим механическую
систему, находящуюся под действием активных сил (как внутренних,
так и внешних) и подчиненную конечным и дифференциальным (не-
интегрируемым) связям. Условимся в дальнейшем число точек системы
обозначать через Л/, а декартовы координаты этих точек — одной
буквой х с индексами 1, 2 ЗЛ/ (см. § 1, п. 3). Соответственно
проекции действующих на точки системы активных сил будем обо-
обозначать одной буквой X, а проекции реакций связей — буквой R
с теми же индексами.
Таким образом, масса точки системы с индексом v, ее коорди-
координаты и проекции равнодействующих приложенных к этой точке актив-
активных сил и реакций связей будут соответственно
m3v-2= m3v-l = m3v> x3v-2' ^v-l' -*v;
^3v-2> ^3v-l' -v' ^3v-2- ^3v-I> ^3v'
При этих обозначениях получаем следующие дифференциальные
уравнения движения точек системы в проекциях на оси декартовых
координат:
(v=l. 2, .... ЗЛО. A)
ПйГ
Эти уравнения содержат 6Л/ неизвестных: ЗЛ/ декартовых коорди-
координат xv и ЗЛ/ проекций реакций Rv, которые должны быть опреде-
определены как функции времени.
Пусть на точки системы наложены: 1) связи конечные, выражае-
выражаемые уравнениями вида
/„(*; 0 = 0 (к=1, 2, .... к); B)
2) связи дифференциальные, линейно зависящие от скоростей и вы-
выражаемые уравнениями вида
3N
^apv^v + ap = 0 <р=1, 2 г), C)
v=l
70 УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. II
причем
apv, а0\х; t.
Таким образом, мы имеем неголономную систему, на которую нало-
наложено k конечных и г дифференциальных неинтегрируемых связей,
причем все связи явно зависят от времени.
Дифференциальные уравнения движения A) вместе с уравнениями
связей B) и C) дают систему 3/V-f- k-f-r уравнений для определе-
определения 6Л/ неизвестных xv, Rv. Следовательно, число неизвестных будет
на ЗЛ/— (fe-f-r), т. е. на число степеней свободы системы, больше
числа имеющихся уравнений. Отсюда видно, что задания связей их
уравнениями вида B) и C) недостаточно для того, чтобы сделать со-
соответствующую задачу динамики определенной. Необходимо, очевидно,
наложить на связи системы дополнительные ограничения.
Допустим, что все связи являются идеальными. Тогда, как мы
увидим, задача будет определенной. При идеальных связях восполь-
воспользуемся для изучения движения системы уравнениями A1') из § 5,
в которые реакции связей не входят. При наших обозначениях эти
уравнения Даламбера — Лагранжа имеют вид
^(*v-mv-^-N*v = 0. D)
v=l
Вариации координат dxv(v= I, 2 3<V) связаны между собой
условиями, налагаемыми на них уравнениями связей B) и C); эти
условия, согласно п. 2 § 1, будут
g^-6xv = 0 (к=1, 2 k) E)
v=l
И
3N
J]apv6*v=0 (P=l. 2 г). F)
v=l
Таким образом, ZN вариаций 6xv связаны k-\-r условиями E)
и F), следовательно, независимых вариаций будет 3/V — (& + г),
а остальные (k-\-г) будут зависимыми. Определив из уравнений E)
и F) k-\-r зависимых вариаций через ЗА/—(k-\-r) независимых
(которые можем выбрать произвольно), подставим выражения зависи-
зависимых вариаций в уравнение D); после этого оно будет содержать
только независимые вариации. Ввиду произвольности этих вариаций
множители при них должны быть равны нулю, что дает 3/V — {k-\-r)
уравнений; присоединяя к этим уравнениям k-\-r уравнений связей A)
и B), получим систему ЗА/ уравнений, определяющих 3N координат
точек системы как функции времени.
§ 7] УРАВНЕНИЯ ДВИЖЕНИЯ В ДЕКАРТОВЫХ КООРДИНАТАХ 71
Но исключение зависимых вариаций удобнее выполнить, пользуясь
методом неопределенных множителей Лагранжа, подобно тому как
это делается в аналитической статике. Для этого умножим каждое
из k уравнений E) соответственно на А,и(и=1, 2 k) и каждое
из г уравнений F) на цр(р= 1, 2, . .., г) и сложим полученные ра-
равенства почленно с уравнением D); получим одно уравнение
v=l и=1 р=1
Пользуясь неопределенностью лагранжевых множителей X и \i, число
которых равно fe-f-r, выберем их так, чтобы множители при k-\-r
зависимых вариациях обратились в нуль; тогда множители при остав-
оставшихся 3N—(fe + r) независимых вариациях должны быть также
равны нулю; таким образом, получаем 3N уравнений
JpflPv (v=L 2 ЗЛО. (8)
и=1 р=1
Присоединяя к этим уравнениям k-\-r уравнений связей
/х(*; /) = 0 (х=1, 2 к) B')
и
3iV
2' (Р=1. 2 г)' C'>
v=l
получим полную систему 3N-\-k-}-r уравнений для определения 3N
координат точек системы, а также k\-r лагранжевых множителей К
и \i. Проинтегрировав эту систему при заданных начальных условиях,
мы найдем х, X, \i как функции времени t. Уравнения xv=xv(t)
определяют закон движения системы. С помощью же множителей Я,и@
и цр @ найдутся динамические реакции связей. В самом деле, срав-
сравнивая уравнения (8) с дифференциальными уравнениями движения A),
мы видим, что
&pap (v=1'2 зд°- (9)
и=1 р=1
Таким образом, механическое значение множителей Хя и ц.р такое же,
как и в статике, т. е. они пропорциональны реакциям связей.
Равенства (9) определяют реакции связей, заданных уравнениями B)
и C), если эти связи являются идеальными. Отметим, что справедливо
и обратное утверждение, т. е. связи, заданные уравнениями B) и C),
будут идеальными, если их реакции можно представить в виде (9).
72 УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. II
Итак, уравнения (8) вместе с уравнениями связей B) и C) опре-
определяют движение любой неголономной системы с идеальными связями
при условии, что неголономные связи являются линейными функциями
скоростей !). Эти уравнения движения системы в декартовых коорди-
координатах принято называть уравнениями Лагранжа 1-го рода.
Поскольку интегрирование уравнений (8) является задачей весьма
сложной, то обычно ими пользуются лишь для определения реакций
связей, а закон движения системы находят с помощью других урав-
уравнений, которые будут получены ниже.
2. Интеграл энергии. Уравнения Лагранжа 1-го рода (8) дают
интеграл энергии, если: 1) силы, действующие на систему, имеют
потенциал, т. е. если существует функция U {хх, х2, .... x3N) такая,
что
¦j^ = Xv (v=l. 2, .... ЗЛО, (Ю)
и 2) связи идеальны, причем конечные связи B) склерономны, а диф-
дифференциальные связи C) однородны относительно скоростей, т. е.
= 0 (х=1,2 к); ар = 0 (р=1, 2 г). A1)
Умножая каждое из уравнений системы (8) соответственно на dxv и
складывая, получим
3N
S
v=l
3N 3W * 3N
v=l v=1m=1 v=1р=1
Преобразуем уравнение A2). Для левой части имеем
3N 3N 3N
mv ~1F^ v ~ Zi v dt \ dt j ~ Zi 2 v \ dt
v=l v=l v=l
A3)
далее, на основании равенства A0),
ZN 3N
^X,dxv^^-dxv = dU. A4)
v=l v=l V
') На практике уравнениями, которые мы получаем для идеальных свя-
связей, можно пользоваться и в случае связей, для которых работа сил трения
не равна нулю. Эти силы можно рассматривать как неизвестные активные
силы, связанные с нормальными реакциями некоторыми эмпирическими зави-
зависимостями (например, в виде законов трения скольжения или качения).
§ 7] УРАВНЕНИЯ ДВИЖЕНИЯ В ДЕКАРТОВЫХ КООРДИНАТАХ 73
Дифференцируя уравнения голономных связей B), получим
l^v+ %« = <> («=1.2 ft).
v=l
откуда
злг
кроме того, из уравнений неголономных связей C), которые можно
представить в виде
3N
^apvdxv-\-apdt = 0 (р=1, 2 г),
v=l
имеем
злг
Цяр,^ = -арЙ. A6)
v=l
Принимая во внимание равенства A3), A4), A5) и A6), пре-
преобразуем уравнение A2) к виду
HaAdt. A7)
и=1 р=1
Если имеют место условия A1), то второй и третий члены правой
части уравнения A7) обращаются в нуль, и мы имеем
dT = dU.
откуда, интегрируя, получим интеграл энергии
T = U-\-h. A8)
Итак, уравнения Лагранжа 1-го рода дают интеграл энергии,
если: 1) активные силы, действующие на систему, имеют потенциал;
2) геометрические (конечные) связи системы идеальны и склерономны,
т. е. от времени явно не зависят; 3) дифференциальные (неголономные)
связи системы идеальны и являются линейными и однородными функ-
функциями скоростей. Очевидно, что уравнения Лагранжа 1-го рода дадут
интеграл энергии и в случае, когда неголономные связи являются
склерономными, т. е. когда apv не зависят явно от времени и ар = 0,в
но это требование не является необходимым; необходимо лишь,
чтобы было flp = 0, т. е. чтобы эти связи были однородны отно-
относительно скоростей.
74 УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. II
§ 8. Уравнения движения системы
в обобщенных координатах
1. Уравнения движения голономной системы в обобщенных
координатах (уравнения Лаграижа 2-го рода). Рассмотрим движе-
движение по отношению к основной инерциальной системе отсчета меха-
механической системы, состоящей из 7V материальных точек. При этом
положения точек системы определяются 3/V декартовыми коорди-
координатами xv. Пусть на систему наложены только голономные связи
вида
/„(*; 0 = 0 (и = 1. 2 k).
Тогда число независимых координат будет равно
п = Ж — k
и положение системы можно однозначно определить п соответствую-
соответствующим образом выбранными независимыми между собой параметрами
любой размерности qx, q2 <?„, которые называют обобщенными
(или лагранжевыми) координатами системы. Заметим, что пара-
параметры qt могут быть отнесены и к любой подвижной системе от-
отсчета, движение которой по отношению к основной системе известно.
Поскольку параметры qt определяют положение системы одно-
однозначно, то все декартовы координаты xv могут быть выражены
через ql равенствами вида
¦*v = <iPv(?i- Чг Чп> О- О)
Уравнениями A), по существу, учитываются все наложенные на си-
систему голономные связи. Если функции <pv явно не содержат времени,
механическую систему называют склерономной.
Так как
жЬЧ1 (v==1-2
то, подставляя эти выражения вариаций координат в уравнение
Даламбера—Лагранжа, получим
3JV п
(Н
v=l 1=1
или, раскрывая скобки,
ZN n 3N
v=i (=1 v=i
§ 8] УРАВНЕНИЯ ДВИЖЕНИЯ В ОБОБЩЕННЫХ КООРДИНАТАХ 75
Первая из сумм в левой части равенства B) есть элементарная
работа ЬА всех действующих на систему сил, так как
ЗЛГ 3/V п
v=l v=l 1 = 1
Ясно, что
3JV л п 3N
v=U = l
где величина
37V
называется обобщенной силой, отнесенной к координате qt.
Преобразуем теперь второй член левой части уравнения B).
Имеем
3JV п 3JV п
d2xv V1 dxv « \Г1 V1 d2xv dxv ,
L2fi?22m^*?
v=i г=1 v=u=i
t=l\v=l
Сделаем теперь предварительно несколько замечаний относительно
дифференцирования координат. Очевидно, что
Взяв от обеих частей частную производную по qt, получим
——; — , ID)
dqi dqi
Далее,
dt [dqt) 2u dqtdqj qi "+" dqt dt dqt { 2j dq] qi + dt' )'
Выражение в скобках есть, очевидно, —-^-^xv; следовательно,
d ( dxv \ dxv
It
76 УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ II
На основании равенств F) и G) преобразуем двойную сумму в пра-
правой части уравнения E); имеем
п /3N
v=l
Введем теперь выражение кинетической энергии системы
1 V С- • /Q\
2, Лл ^ '
V = l
тогда, так как х | q, t, то х \ q, q, t и
3N . ЗЛ'
дТ VI • dxv . дТ_ VI • dxv
Следовательно, выражение для двойной суммы в уравнении G') пре-
преобразуется к виду
и 3IV п
V"! VI d2xv dxv . V! ( d j дТ
i=\\—\ i=\
Возвращаясь к равенству B), получаем уравнение Даламбера —
Лагранжа в обобщенных координатах в виде
В этом уравнении все вариации обобщенных координат bqt про-
произвольны, а потому, полагая все, кроме одной, равными нулю,
получим, что выражение в фигурной скобке при этой вариации равно
нулю. Рассуждая так же по отношению к оставшимся теперь п— 1
слагаемым, найдем, что выражение в фигурной скобке и при сле-
следующей вариации равно нулю, и т. д. Таким образом, получим сле-
следующую систему п уравнений:
Т \ дТ _ /j 1 о \
~"^=С?' ( >2 п)>
§ 8] УРАВНЕНИЯ ДВИЖЕНИЯ В ОБОБЩЕННЫХ КООРДИНАТАХ 77
Эта система есть система обыкновенных дифференциальных уравне-
уравнений второго порядка относительно обобщенных координат qv
Чч, •••• Чп (см- п- 2). Интегрируя ее, находим координаты си-
системы q как функции времени и 2л произвольных постоянных,
которые определяются обычным способом по начальным условиям.
Следовательно, система уравнений A0) вполне определяет движение.
Уравнения A0) называют уравнениями Лагранжа 2-го рода.
Важног преимущество уравнений A0) по сравнению с уравнениями
движения в декартовых координатах состоит в том, что число этих
уравнений равно числу степеней свободы системы и от числа частиц,
образующих систему, не зависит; кроме того, уравнения A0) не со-
содержат наперед неизвестных реакций связей. Поэтому уравнениями
Лагранжа 2-го рода широко пользуются для изучения движения
голономных систем.
2. Выражение кинетической энергии в обобщенных коорди-
координатах. Кинетическая энергия системы в декартовых координатах
имеет вид
3N
т^. (И)
Для преобразования этого выражения к обобщенным координатам
подставим в равенство A1) выражения производных от декартовых
координат по времени. Принимая во внимание зависимости A),
получим
2|^+^ (v=l. 2 ЗЛО.
При этих значениях xv равенство A1) дает
3N / п \2
v=l \i=l
или, возводя в квадрат и меняя порядок суммирования,
и 3N n 3JV
d d
3N
78 УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. II
Введем обозначения
3N
A3)
¦у ал
2л mv Si
V=I
где ar. — пц. Тогда
v=l
'v dxv
dxv dxv
3N
v=l
Ox \^
ot J
— ь,
причем вообще
a. b, c\qlt q2 qn\ t,
и T2, Ti и То соответственно будут функциями второй, первой и ну-
нулевой степени от скоростей. Следует заметить, что в выражении A4)
коэффициенты а, Ь, с могут явно от времени не зависеть.
Таким образом, в общем случае кинетическая энергия системы
представляет собой функцию второй степени от обобщенных ско-
скоростей q. Если система склерономна (связи явно от времени не за-
зависят), то в правые части равенств A) время явно не войдет и
^l = 0 (v=l, 2 ЗЛО-
Тогда
^ = 0, с = 0 A=1, 2 п),
и выражение кинетической энергии в этом случае приобретает вид
п
Г===Т S ai'flA)> A5)
i, j = i
где atj будут функциями только координат qv q2, .. ., qn. Таким
образом, в случае склерономной системы кинетическая энергия есть
однородная функция второй степени от обобщенных скоростей, или,
иначе, квадратичная форма от этих скоростей.
Из равенств A4) или A5) видно, что левые части уравнений A0)
представляют собой некоторые функции от qt, qt, qit и, следовательно,
уравнения Лагранжа 2-го рода действительно являются системой обык-
обыкновенных дифференциальных уравнений второго порядка относи-
относительно обобщенных координат qt. Ясный вид этих уравнений будет
получен в п. 7.
§ 8] УРАВНЕНИЯ ДВИЖЕНИЯ В ОБОБЩЕННЫХ КООРДИНАТАХ 79
Механическую систему с л степенями свободы, положение кото-
которой определяется л обобщенными координатами qY< q2, . . ., qn, можно,
следуя идеям Г. Герца, рассматривать как одну точку в простран-
пространстве л измерений.
Тогда уравнения
9\ = Я\ @. 9ч = 9г@ Яп = ЯаУ)
представляют собой закон движения этой «изображающей» точки или,
если на время t смотреть как на параметр,—уравнение траектории
этой точки в параметрической форме; эта траектория будет, оче-
очевидно, кривой в пространстве л измерений, и ее можно назвать
траекторией системы. Каждая точка этой траектории соответствует
конфигурации системы в данный момент времени, определяемой со-
совокупностью значений координат ^j, q2, ¦ ¦ ¦, д„.
ЗЛГ
Если приписать «изображающей» точке массу М = 2 mv. т. е.
v=l
массу, равную массе всей системы, то выражение кинетической энер-
энергии A5) можно преобразовать следующим образом. Согласно ра-
равенствам A3)
3JV 3N
Ч Li v dqi dq-, Li M dqi dq,-
v=l v=l
Тогда, полагая
3JV n
V^i mv dxv dxv , VI ' а л а 2
^¦й! А4 dqi dqi ti ^н '-? J
v=i /, j—l
получим
Выражение
n
ds2= ^ a'ij^id9j
представляет собой фундаментальную метрическую форму, определяю-
определяющую метрику рассматриваемого л-мерного пространства; ds является
элементом дуги «траектории системы», т. е. траектории точки, изо-
изображающей систему в я-мерном пространстве.
3. Обобщенные силы. Из равенства C) (см. п. 1) следует, что
выражение элементарной работы действующих на систему активных
сил имеет вид
f ... +Q;i6?rt. A6)
80 УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. II
По аналогии с выражением элементарной работы силы, действующей
на точку с координатами хх, х2, хг,
6А = Х]Ьх1
величины Ql и называют обобщенными силами. Из равенства A6)
видно, что обобщенные силы можно определить как коэффициенты
при вариациях обобщенных координат в выражении элементарной
работы действующих на систему сил.
Размерность обобщенной силы зависит от размерности соответ-
соответствующей обобщенной координаты и определяется соотношением
Например, если q — угол, то Q имеет размерность момента силы.
Величины Qi могут вычисляться по формуле D). Однако практи-
практически часто удобнее пользоваться другим приемом. Так как все bq
между собой независимы, то для определения Ql можно сообщить
системе такое виртуальное перемещение, при котором bql Ф 0, а все
остальные bq равны нулю. Подсчитав работу ЬАЬ всех сил на этом пере-
перемещении, мы, согласно равенству A6), будем иметь
bAt = Qfiqt. A7)
Следовательно, коэффициент при bqt в выражении A7) и дает иско-
искомую обобщенную силу Qt.
Пример. Пусть тело совершает плоскопараллельное движение параллельно
плоскости Оху под действием сил Flt F2, ..., Fn. Примем за обобщенные
координаты декартовы координаты х„ и ус центра масс тела и угол пово-
поворота ф вокруг оси Сг', перпендикулярной к плоскости Оху и проходящей
через центр масс (qx = xc, q^ = yc, q3 = ф). Тогда, сообщая телу виртуальное
перемещение, при котором координата Хс получает приращение Ьх~, найдем,
что на этом перемещении элементарная работа
Аналогично найдем, что Q2 = ^] Р\у Сообщая теперь виртуальное переме-
v
щение, при котором тело совершает поворот вокруг оси Cz' на угол 6ф,
получим
ЬА3 = /2 monV Рц\ ^Ф и Оз = 2 monV
v I v
Случай потенциальных сил. Если все действующие на
механическую систему активные силы потенциальны, т. е. для них
существует потенциальная функция U{хх, хг x3N; f), то
§8] УРАВНЕНИЯ ДВИЖЕНИЯ В ОБОБЩЕННЫХ КООРДИНАТАХ 81
Учитывая, что xv = (pv(qx, q2 qn\ t), мы можем представить
U в виде U(qb q2, .... qn; t). Тогда по формуле D) получим
W 3N
W"i „ дх., V^ dU
qi dxv
v=l v=l
ИЛИ
т. е. обобщенная сила в этом случае равна частной производной от
силовой функции по соответствующей обобщенной координате.
4. Уравнения Лагранжа для системы, находящейся под дейст-
действием потенциальных сил. В этом случае уравнения A0), если заме-
заменить в них Q[ значениями A8), примут вид
±im-!L. = ZL A=1,2 п). A9)
dt \ dqt I dqt dqt
Учитывая, что U—U(qx, q2 qn, t), и, следовательно, —т- = 0,
можно уравнения A9) представить в иной форме, а именно
d
dt
Полагая здесь
окончательно получим
d_i dl\ dL
dt [~д<
— L(q, q, t), B0)
= 0 (/=1. 2 n). B1)
Уравнения B1) являются уравнениями Лагранжа для голоном-
ной системы, находящейся под действием потенциальных сил. Функ-
Функция Т =T-\-U = T — V, представляющая разность между кинети-
кинетической и потенциальной энергиями системы, называется функцией
Лагранжа или кинетическим потенциалом (по Гельмгольцу). Эта
разность, как и кинетическая энергия Т, является вообще функцией
второй степени от скоростей, т. е.
, + L0, B2)
где L2 и Lx являются соответственно функциями второй и первой
степени от скоростей qt, a Lo зависит только от координат qt.
Из уравнений B1) видно, что движение системы вполне опреде-
определяется заданием для нее некоторой функции L(q, q, t), которая
вообще может и не определяться равенством B0). Если функция L
определяется равенством B0), где U=U(q, t), т. е. имеет вид B2),
6 Н. Н. Бухгольр
82 УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. II
то систему будем называть динамической. Если же L будет произ-
произвольной функцией от скоростей q, то систему называют лагранже-
еой системой.
5. Интеграл энергии. Уравнения Лагранжа дают первый интеграл,
когда система находится под действием потенциальных сил и удовле-
удовлетворяет некоторым дополнительным условиям. Если действующие силы
потенциальны, уравнения Лагранжа имеют вид B1). Умножим каждое,
из этих уравнений на qL и сложим их. Получим
Но
d I dL\ ¦ d I dL ¦ \ dL
поэтому предыдущее равенство можно представить в виде
п п
1-1 ' 1 = 1 4l • 4l
Пусть L от времени явно не зависит, т. е. L~L(q, q). Тогда
dL • ^^ dL •• dL
~dqlq ~dq~i41 ~~~dT
и равенство B3) примет вид
¦jU^7-^-?A —1.| = 0. B4)
Отсюда имеем интеграл
п
2 №- <i}\ — L = const. B5)
Рассмотрим отдельно следующие случаи.
1) Произвольная динамическая система. В этом
случае
г. = ?2 + ?1 + ?0, B6)
где L2 и Z-] являются, как было выше указано, соответственно функ-
функциями второй и первой степени относительно скоростей qt, a Lg,
зависит лишь от одних координат qt. По известной теореме Эйлера
об однородных функциях
§ 8] УРАВНЕНИЯ ДВИЖЕНИЯ В ОБОБЩЕННЫХ КООРДИНАТАХ 83
вследствие чего полученный интеграл уравнений движения сразу
упрощается, а именно, подставляя в равенство B5) величины B6)
и B7), получим
2L2 + Lx — (L2 -f Ц + La) = const,
или
L2 — L0 = const. B8)
Полученное соотношение называется обобщенным интегралом энер-
энергии для динамической системы. Этот результат можно представить
в ином виде. В рассматриваемом случае имеем
Разлагая Т на части второй, первой и нулевой степени относительно
скоростей, т. е. полагая, согласно равенству A4), Т~ Т2~\-Т1-\-Тй,
найдем, что
1*2 — 7*2' ^1 — ^1> А) == ^0 Н~ ^-
Тогда интеграл B8) принимает вид
Т2 — Тй—U— const. B9)
Этот обобщенный интеграл энергии называют также интегралом
Якоби, который впервые нашел его на примере относительного дви-
движения.
Итак, если система голономна, а действующие силы потенциальны,
причем потенциальная функция явно не зависит от времени, и если
кинетическая энергия системы также от времени явно не зависит
(но система не обязательно склерономна), то для такой системы имеет
место обобщенный интеграл энергии B9). Заметим, что соотно-
соотношение B9) нельзя назвать физическим интегралом энергии, так как,
хотя его левая часть и имеет размерность энергии, она не представ-
представляет полной энергии системы, поскольку разность Т2—То не есть
кинетическая энергия системы. При этом величина 7\, являющаяся
частью кинетической энергии системы и содержащая члены, линейно
зависящие от скоростей, в интеграл B9) вообще не входит. Такие,
не входящие в выражение кинетической энергии Т члены (когда Т
явно от времени не зависит) называют гироскопическими членами.
Примечание. Пусть действующие силы потенциальны и Т — Т2 +
-\-Ty-\- Та, причем Т не зависит явно от времени. Тогда уравнениям A0),
учитывая, что То = То (q), можно придать вид
dt \дд. ) dq. dqt dq.
где
dqt
6*
84 УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. И
Величины , ° и Qt можно считать некоторыми обобщенными силами инер»
ции, наличие которых позволяет рассматривать систему с кинетической
анергией Т2 как склерономную. Первые нз этих сил, зависящие только от
координат q, потенциальны и имеют силовую функцию То, а вторые, т. е. Q,\
зависят линейно от скоростей q и обладают тем свойством, что сумма их
работ равна нулю, т. е.
S 5,^ = 0. C2>
В последнем легко убедиться, если учесть, что Т1 = 2 ^9г и
dbi • ^LV дЬ} •
Силы Qlt зависящие от скоростей, сумма работ которых на истинных пере-
перемещениях системы равна нулю, носят название гироскопических сил (по
Томсону и Тэту). В силу свойства C2) они и не входят в обобщенный инте-
интеграл энергии B9). Примером таких сил служат кориолисовы силы инерции
(см. п. 6, пример 4).
2) Склерономная система. Для склерономной системы
кинетическая энергия является однородной квадратичной функцией
от скорости, имеющей вид A5). Следовательно, в этом случае Г = 72,
а Т1 = Та=0 и интеграл B9) переходит в обычный физический
интеграл энергии
T2~U = const. C3)
Следовательно, для голономной системы имеет место интеграл Энер-
Энергии, если система склерономна, а действующие силы потенциальны,
причем потенциальная функция явно от времени не зависит.
3) Лагранжева система. Пусть теперь L{q, q; t) есть про-
произвольная функция скоростей. Полагая, что ~аГ=®< и повторяя
в точности приведенные выше рассуждения, придем к равенству B4).
Введем функцию
У^, C4)
q
7
причем, очевидно, H* — H*(q, q; t). Тогда будем иметь
-^-=0 и И* = const. C5)
Это соотношение также можно назвать обобщенным интегралом
энергии для лагранжевой системы; для существования этого инте-
интеграла необходимо, чтобы было -^- = 0.
6. Примеры. При решении задач обычно пользуются уравнениями
Лагранжа в виде A0). Для их составления, установив число степеней
свободы системы, выбирают обобщенные координаты q и выражает
§8]
УРАВНЕНИЯ ДВИЖЕНИЯ В ОБОБЩЕННЫХ КООРДИНАТАХ
85
кинетическую энергию системы Т через эти координаты и обобщен-
обобщенные скорости q в* виде A4) или A5). Имея выражение T(q, q), легко
составить левые части уравнений A0). Входящие в правые части
обобщенные силы обычно вычисляют так, как это показано в п. 3.
Рассмотрим примеры.
1. Составим, пользуясь уравнениями Лагранжа, дифференциальное урав-
уравнение движения твердого тела, вращающегося вокруг неподвижной оси г-
(см. рис. 32 на стр. 63). В данном случае тело имеет одиу степень свободы.
В ббй б ( ) Т а
( р р ) у
В качестве обобщенной координаты выберем угол <р
нение Лагранжа примет вид
у
= <p). Тогда урав-
уравdt \dtf
Кинетическая энергия тела
1
и, следовательно,
дТ
dtp
дТ
Оф
(а)
где Jz — момент инерции тела относительно оси вра-
вращения г.
Сообщая телу виртуальное перемещение—пово-
перемещение—поворот на угол ёф, найдем, что
ЬА = (^ шотг F^ 6ф = Мг 6ф;
следовательно,
Рис. 34.
Подставляя все найденные величины в уравнение (а), получим
Угф = М2. (б).
Результат совпадает с найденным выше [см. § 5, п. 4, пример 3].
2. Через блок перекинута нить с двумя грузами А и В массой т, и тг
иа концах (рис. 34). Пренебрегая массой нити и блока, найдем движение
системы, считая, что блок подвешен на вертикальной пружине с жесткостью с
(такая схема учитывает влияние упругих деформаций оси блока). Движение
начинается из состояния покоя.
При условиях задачи грузы будут перемещаться по вертикали и поло-
положение системы определяется двумя параметрами х и у (q\ = x, qi = y)i где
х — смещение оси блока от положения статического равновесия, у — рас-
расстояние груза А от блока.
Выражение кинетической энергии системы через х и у имеет, оче-
очевидно, вид
Отсюда
—- = /и1 (х + у) + т2(х— у), Ц- = ,
дх ду
iZL=ii.
дх ду
86 УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. II
Теперь, сообщая системе виртуальное перемещение, при котором х из-
изменяется на Ьх, а у = const, и учитывая, что х отсчитывается от статиче-
статического положения, в котором сила тяжести (т, -\~ т2) g уравновешена
упругой силой пружины, будем иметь
ЬАХ = — сх-Ьх и Qi = — ex.
Сообщая затем системе другое независимое от первого виртуальное
перемещение, при котором у изменяется на by, a x = const, получим, что
на этом перемещении
6Л2= (triig — m2g)by и Q2 = (/«i — m1)g.
Составляя теперь уравнения Лагранжа
~~дх~
dt \ду 1 ду ~ 2'
получим
(mj -\- т2) х~\- (тх—т2) у = — сх, (а)
Исключив из этой системы у, найдем для определения х (t) уравнение
x-\-k2x= —а, (в)
где обозначено
а = —\m,J ' (г)
Решение уравнения (в) при начальных данных t = 0, jc = 0, х = 0, дает
¦* = — -р- О — cos *0. (д)
Ось блока совершает гармонические колебания с частотой k и амплитудой
а _. (mi—m2J j ^
k2 tnx-\- m2 с
Из решения примера 1 в § 5, п. 4 (см. рис. 30) видно, что эта ампли-
амплитуда пропорциональна разности между статическим ЛГСТ и динамическим NA
давлением на жесткую ось. При этом, так как Л^д < Л^ст, то естественно,
что из начального положения ось начинает движение вверх, на что указы-
указывает знак минус в уравнении (д).
Интегрируя теперь дважды уравнение (б) и отсчитывая у от начального
положения, получим
(тх + т2) у = (/«1 — т2) -^ {т — т2) х.
Заменяя здесь х его значением из уравнения (д), найдем окончательно
nit — т2 gt2 . т — /«[ а .
у=—Ц --%-Ч i --ггA—coskt). (e)
Равенство (е) определяет закон удаления груза А от оси блока; для абсо-
абсолютного движения груза А будем, очевидно, иметь у,= у -J- х, а для груза ,8
-8]
УРАВНЕНИЯ ДВИЖЕНИЯ В ОБОБЩЕННЫХ КООРДИНАТАХ
87
соответственно Ув = )г — х, где ув отсчитывается от начального положения
груза вверх.
Поскольку все действующие на систему силы потенциальны, то для нее
можно составить функцию Лагранжа
= T + U = -^-
^-(х-y)-
const.
Тогда, используя уравнения B1), придем к тем же результатам, т. е. к урав-
уравнениям (а) и (б).
3. Составить дифференциальные уравнения движения и найти закон
малых колебаний системы, состоящей из сплошного однородного цилиндра
весом Р и шарнирно прикрепленного к его оси стержня АВ длиною / и ве-
весом р (рис. 35). Цилиндр находится иа шероховатой горизонтальной пло-
плоскости, вдоль которой может катиться без
скольжения.
Система имеет, очевидно, две степени
свободы, и ее положение определяется па-
параметрами х и ф (дх — х — расстояние ци-
цилиндра от его начального положения,
д2 = \у — отклонение стержня от вертикали).
Вычислим сначала кинетическую энер-
энергию 7"ц цилиндра и 7"ст стержня. По тео-
теореме Кёнига
g
PR'
2g
рР
•¦k-^vl + ^g-*' (a)
Рис. 35.
где множители перед юц и юст являются соответственно моментами инерции
цилиндра и стержня относительно осей, проходящих через точки А и С
перпендикулярно к плоскости рис. 35.
Выражая все скорости через х и ф и учитывая, что ^с = °отн + °пер>
где численно ^0Ta = 0,5ttp, f = v., имеем
X
vA=x, % = -?>-'
=Ф>
о
v с =
+ х* + hx c«s Ф-
В результате окончательно получим
Отсюда
дТ
—г-
дх
2g
х 4-
pi
2g
cos
дТ р II ¦ /2
—— = — [—x cos cp -4
дФ g\2 T3
>; f = 0;
ox
= — Ixtf sin ф.
Для вычисления обобщенных сил сообщаем сначала системе перемещение,,
при котором х получает приращение Ьх, а ф = const, получаем ЬА{ =0и,
следовательно, Q1==0. Сообщая теперь другое, независимое от первого-
"88 УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. ц
перемещение, при котором ф получает приращение бф, а ж= const, найдем
¦&Ai = — р — э1пф6ф; следовательно, Q2 = — Р-у^пф1-
Составляя теперь уравнения Лагранжа, получим после очевидных со-
сокращений
-^ {(ЗР + 2р) х +ply cos <(]= О, ...
-^ (х
х cosф + -д-
sinф = — gsmy.
(а)
Исключая из этих равенств х, найдем для определения ф уравнение
Таковы искомые дифференциальные уравнения движения системы. Чтобы
иайти закон малых колебаний, примем, считая угол ф малым, sin ф я <р,
совфяа! и пренебрежем членом д:фф, содержащим произведения малых
величин. Тогда окончательно получим следующие дифференциальные урав-
уравнения малых колебаний системы:
(б)
(в)
(г)
(Д)
из
= 0
где
fct_
бР+р
g_
I
Интегрируя уравнение (в) и полагая при t = О ф = ф0, ф = 0, получим
Ф = Фо cos kt.
После этого,
уравнений (б)
х = 0, х — 0, найдем
интегрируя
и полагая
первое
при t--
, A — cos kt). (e)
Уравнения (в) и (е) определяют
закон малых колебаний системы, ча-
частота которых равна к. Такой сравни-
сравнительно простой результат для системы
Рис. 36. с двумя степенями свободы получился
здесь благодаря тому, что Q\ = 0.
В общем же случае при Qi Ф 0 и ??2 ф 0 колебания системы с двумя сте-
степенями свободы выглядят значительно сложнее (см. гл. III).
4. Рассмотрим материальную точку с массой т, которая движется в потен-
потенциальном силовом поле с потенциальной функцией U (х, у, г) относительно
подвижной системы отсчета хуг, вращающейся с постоянной угловой ско-
скоростью ю вокруг оси г (рис. 36); вращение происходит по отношению к инер-
циальной системе отсчета Х\у^г^.
Выберем в качестве обобщенных координат координаты точки х, у, г
в подвижной системе отсчета. Для составления уравнений Лагранжа вы-
вычислим проекции абсолютной скорости точки на подвижные оси (напоми-
(напоминаем, что в уравнениях Лагранжа Т есть кинетическая энергия абсолютного
движения). Имеем
vx = х — юу; vу — у 4- <лх, vz = z.
§ 8] УРАВНЕНИЯ ДВИЖЕНИЯ В ОБОБЩЕННЫХ КООРДИНАТАХ
Тогда кинетическая энергия точки будет
или
Отсюда
дТ • . дТ , •
—т-= /«(•* — «У). ——= m (<ву
ду
, = — m (ых— <в2у);
ду
дТ
дТ vi n
—— = mz, = 0.
дг дг
Теперь, составляя соответствующие уравнения Лагранжа, будем иметь
m (х — 2юу — <о2х) =
/и
mz =
dU
dU_
дг
Мы получили дифференциальные уравнения относительного движения
точки. Как видим, при применении метода Лагранжа эти уравнения состав-
составляются так же, как и уравнения абсолютного движения; все определяете»
лишь выбором соответствующих обобщенных координат.
Первые два из уравнения (б) можно представить в виде
dU
тх = —s \- 2/июу -J- твРх;
dU
ту = -г \- (—2тюх) -\- та>2у.
Легко видеть, что последние члены в правых частях уравнеиий (в) пред-
представляют собой проекции переносной (центробежной) силы инерции, а пред-
предпоследние — кориолисовой силы инерции. Таким образом, результат совпа-
совпадает с тем, который дает метод, изложенный в части I, § 39.
В рассматриваемом примере уравнения, дающие связь декартовых ко-
координат точки в основной системе отсчета, т. е. xt, yt, zu с обобщенными
координатами х, у, г, имеют вид
= х cos at —
— x sin arf -(- у cos n>t, zi =
и содержат явно время. Следовательно, система не является склерономной
(в силу условий, налагаемых движением системы отсчета xyz, к которой
отнесены обобщенные координаты); поэтому здесь, в отличие от предыдущих
примеров, кинетическая энергия ие является однородной квадратичной.
90 УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. II
формой от скоростей и, как видно из равенства (а), имеет вид Т = Т2 -+- Тх -\- То,
где
Но поскольку оказалось, что Т, как и U, явно от времени не зависят,
лдесь имеет место обобщенный интеграл энергии (интеграл Якоби)
Т%— Та— U = h
или
j m (i2 + у2 + **) — 1 /им2 (х2 + у2) — */ = Л. (г)
В этом равенстве первый член можно рассматривать как кинетическую
энергию точки в относительном движении, а второй — как потенциал пере-
переносной (центробежной) силы инерции, который накладывается на поле по-
потенциала U. Гироскопический член Т{ = тю {ху — ух) в выражение инте-
интеграла (г) не входит.
В соответствии с равенством C1) гироскопическая сила должна иметь
проекции:
q =_Mj!Zj дтц q г d дтх дтх -I
* [dt дх дх J' у [ dt ду ду J'
Но
дТх d дТ, ¦ дТ,
—— = — тюу, — = — tnmy и = /«coy.
дх dt дх дх
Следовательно, Qx = 2тау; аналогично Qy = — 2/июлг, т. е. гироскопической
силой здесь является кориолисова сила инерции [см. равенство (в)]. Ее работа
dA = Qxdx-\-Qydy = 2та> (у dx — х dy) =2ma>(yx—x'y) dt = O
<см. также ч. I, § 39, п. 4). По этой причине и отсутствует гироскопический
член в интеграле (г).
7. Уравнения движения для склерономной системы, разре-
разрешенные относительно вторых производных. Для склерономной
системы кинетическая энергия будет однородной квадратичной формой
скоростей, а уравнениями движения будут уравнения A0), т. е.
dt \ dqk I dqk
где, по предположению,
Очевидно, что
дТ
ч
с
d
дТ
dqk
j
Л
¦iflib
" 2 ^ш
Li
1 VI
~ Zi
l, к
— j/j al\
§ 8] УРАВНЕНИЯ ДВИЖЕНИЯ В ОБОБЩЕННЫХ КООРДИНАТАХ 91
Подставляя эти выражения в уравнения C6), имеем
j j
C7)
В эти уравнения вторые производные входят линейно, и нетрудно
разрешить эту систему п уравнений относительно qlt q2, . . •, qn.
Более изящное решение получим, введя особый символ, так на-
называемый символ Кристоффеля. Разбивая второй член левой части
в уравнениях C7) на два и переставляя в последнем из них ин-
индексы / и j, будем иметь
I, J i. i I, j
и уравнения C7) примут вид
'" '¦ i C8)
Введя теперь символ Кристоффеля
dgj==l k J'
2 \dq, +
получим уравнения движения C8) в следующей форме:
п
S [/[wi^Q* (*=!. 2. .... n). D0)
Обозначим через Z)^||ei4|| дискриминант квадратичной формы
2 &ik4i4k'' минор D, соответствующий элементу aik, обозначим че-
/, k
рез Aik; тогда
A
будет элементом определителя, взаимного с D, причем будут иметь
место два следующих соотношения:
2 аыаы — 0 (если / Ф I),
k
¦у ~ 1
k
¦92 УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. II
Умножим теперь обе части уравнений D0) на akl и просуммируем
по k\ получим
п п п п п
' k]
При I = / член первой двойной суммы будет <7,2 я^а^ = <7г; если же
k
i Ф I, то члены первой двойной суммы обращаются в нуль. Вводя
теперь новый символ, так называемый символ Кристоффеля 2-го рода,
получим окончательно
п п
*'+ S {M^; = S^«Qft ^=1. 2 я). D2)
I, .7 = 1 * = 1
Равенства D2) выражают .уравнения Лагранжа в виде системы
¦обыкновенных дифференциальных уравнений второго порядка с ис-
.комыми функциями q, разрешенных относительно вторых производных.
Еслл мы предположим, что движущаяся система свободна от дей-
действия активных сил, т. е. Qft = 0 (ft=l, 2 п), и будем рас-
рассматривать систему как точку в «-мерном пространстве (см. п. 2
этого параграфа), то изображающая систему точка будет двигаться
по геодезической линии данного «-мерного пространства; следова-
следовательно, система уравнений
•будет представлять собой дифференциальные уравнения геодези-
геодезических линий «-мерного пространства в параметрической форме, при-
причем t будет параметром.
8. Игнорирование координат. Функция Рауса. Как известно
<см. ч. I, § 40, п. 7), циклической координатой называется коорди-
координата, входящая в лагранжеву функцию L(q, q; t) только своей про-
производной; явно, следовательно, эта координата в L не содержится.
Раус показал, что в таком случае число уравнений движения можно
уменьшить на число циклических координат.
Пусть, для определенности, будут циклическими первые / коор-
координат, т.е. qh q2 ?*. где '•<«; производные qx, q2 qt от
циклических координат будем называть циклическими скоростями;
тогда
i Яп< Чи Ь- ¦•¦• 4i' Чг+и ••-. qal О-
§ 8] УРАВНЕНИЯ ДВИЖЕНИЯ В ОБОБЩЕННЫХ КООРДИНАТАХ 93
Для циклических координат qx 4v очевидно, имеем
^=° (* = 1-2 о.
и поэтому уравнения движения для этих координат примут вид
° (*=1. 2 0- D4;
dt \ dqk
Интегрируя эти / уравнений, находим / первых интегралов уравнений
движения:
~ = ck (fe=l,2 0. D5)
k
где сь c2, . ¦•, ct суть произвольные постоянные; эти интегралы бу-
будем называть циклическими интегралами. Выразив из этих равенств про-
производные циклических координат, т. е. ql4 q2 qlt в функции осталь-
остальных нециклических координат, их производных и произвольных по-
постоянных cv с2, ¦ ¦ ¦, с( и подставив найденные функции вместо
4], q2, .... qi в оставшиеся п — I уравнений движения, получим,
опять лагранжеву систему уравнений движения, но уже с п—I не-
неизвестными. Это и выполнил Раус (Routh); примененный им способ
называется способом исключения или игнорирования координат.
Введем новую функцию, играющую ту же роль, что и функция
Лагранжа. Эта функция, называемая функцией. Рауса, имеет вид
В функции Рауса производные циклических координат ^i qt за-
заменены указанным выше способом, и потому
1, ..., qn\ ql+1, ..., qn; cv c2, .... ct\ t).
Варьируя правые и левые части равенства D6), находим
В правой части полученного равенства второй и последний члены
сокращаются. Тогда, приравнивая в обеих частях этого равенства
94 УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. II
множители при одинаковых вариациях и учитывая при этом, что,
согласно равенствам D5), 6(—— ) = &сй, находим
_dL___dR_ }
dL dR t (k = l+l я).
D7)
Подставляя найденные выражения для и —г- в уравнения дви-
дЯь dqk
жения B1), получим
— —— = 0 (ft = t+l, ..., п). D8)
dt\dqkj dqk
Таким образом, мы действительно получаем п — / уравнений того же
лагранжева вида, но в которых роль функции Лагранжа играет
функция Рауса; эти уравнения содержат только нециклические коор-
координаты и их производные.
Зная функцию Рауса, легко определить и циклические коорди-
координаты, так как последнее из равенств D7) дает
qk=— j—dt (k=l, 2, ...,/). D9)
В заключение отметим, что если R явно от времени не зависит, то
уравнения D8) дают обобщенный интеграл энергии (см. п. 5):
-«+ 2 ?*•-
const.
Если же, кроме того, R есть функция второй степени от нецикли-
нециклических скоростей ql+1, ql+2, .... qn, т. е. если
/? == /?2 ~Г 'vi ~Т~ °0'
то предыдущий интеграл обратится в интеграл Якоби
R2 — /?о= const;
члены, содержащиеся в Rlt будут в этом случае гироскопическими
членами функции R.
Пример. В задачах, рассмотренных выше (п. 6), все или часть
координат были циклическими, чем мы непосредственно пользовались
§ 8] УРАВНЕНИЯ ДВИЖЕНИЯ В ОБОБЩЕННЫХ КООРДИНАТАХ 95
при интегрировании сравнительно простых уравнений, не вводя функ-
функции Рауса. Покажем на примере, как производится игнорирование
циклических координат методом Рауса.
Рассмотрим систему с двумя степенями свободы, определяемую коор-
координатами qi и q2; пусть кинетическая энергия системы равна
т 1 ч\ ,1-2
а потенциальная
причем а, Ь, с, е суть постоянные. Функция L выразится так:
Координата qx будет циклической. Циклический интеграл получим в виде
dL у
у, _
dqt + b\
откуда
где а есть постоянная, определяемая начальными условиями. Составляем
функцию R; имеем
dL . 1 q\ \ .. „
R~ L — ^-4\^=—-cy г—y + "о Чч — с — е92-
dqx 2 a + bqi 2
Исключая циклическую скорость qt, получим
Задача сводится к интегрированию одного уравнения
d dR dR ^Q
dt dq2 dq2
или
откуда
q2 = A sin (/2e + 6a2i + e),
где Л и e — постоянные интегрирования, определяемые по начальным ус-
условиям.
Циклическая координата qx получится из уравнения
Подставляя сюда вместо q2 найденное выражение и выполняя интегрирование,
найдем 01.
96 УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. II
9. Уравнения движения неголономной системы в обобщенных
координатах с множителями Лагранжа (уравнения Рауса). Пусть
на систему материальных точек наложено k голономных связей, урав-
уравнения которых имеют вид
/„(*, t) = 0 (к=1, 2 k), E0)
и г неголономных линейных связей, выраженных уравнениями вида
3W
2epvrfjfv+ep<#=° <P=1. 2, .... г). E0')
Учитывая сначала только голономные связи и вводя n = ZN — k
обобщенных координат qt, мы, рассуждая так же, как и в п. 1,
придем к уравнению (9)
Однако теперь в данном равенстве вследствие условий E0') вариа-
вариации 6<7; не независимы, а потому коэффициенты при вариациях tqt
вообще не равны нулю. Для получения уравнений движения в этом
случае применим способ неопределенных множителей (см. § 7),
Так как xv = <pv(q, t), то
^p-dqt (v=I. 2 ЗЛО.
< = 1
Подставляя эти выражения dxv в равенства E0'), преобразуем урав-
уравнения неголономных связей к обобщенным координатам; имеем
ZN n SN
v=l 1=1 v=I
или, меняя порядок суммирования в двойной сумме,
п ,'ZN \ /ЗЛГ
)
п ,ZN
11 1
1=1 4V=1
Вводя обозначения
ЗЛГ ЗЛГ
v=l v=l
получим уравнения неголономных связей в обобщенных координатах
в виде
S^p/rf?j + j4p'« = 0 (P=L 2 г). E2)
§ 8) УРАВНЕНИЯ ДВИЖЕНИЯ В ОБОБЩЕННЫХ КООРДИНАТАХ 97
Условия, налагаемые этими связями на изохронные вариации коор-
координат, будут
Jl/p/ty = O (р=1, 2 г). E2')
Умножим теперь обе части равенств E2') на Хр и просуммируем
по р; получим
Сложив почленно равенство E3) с уравнением E1), найдем
В этом равенстве всего я вариаций 6^, .. ., &qn, из них, в силу
условий E0'), г зависимых; но и число неопределенных множителей А.
тоже равно г. Тогда, применяя обычные при способе неопределенных
множителей рассуждения, получим п уравнений движения системы
в виде
Присоединяя к этим уравнениям уравнения связей E2), будем иметь
полную систему п~\-г уравнений с п-\-г неизвестными функциями
цъ q2, .. ., <7„ и Xlt Х2 кг. Заметим, что идея обобщенных коор-
координат по самому смыслу предполагает, что и их вариации независимы,
чего нет в рассмотренном методе. Этот метод, предложенный Рау-
Раусом, является комбинацией Лагранжевых методов обобщенных коор-
координат и неопределенных множителей. Поэтому в уравнения E4)
входят еще множители Хр, т. е. реакции связей, чем утрачивается
одно из важных преимуществ уравнений Лагранжа 2-го рода.
10. Уравнения Аппеля. Аппель в 1899 г. нашел уравнения,
которые по типу своему близко подходят к уравнениям Лагранжа
2-го рода и применимы к неголономным системам (а следовательно,
и к голономным, которые являются частным случаем неголономных).
Выведем эти уравнения из основного уравнения динамики Далам-
бера — Лагранжа.
Пусть имеем систему N материальных точек, положение которой
определяется п обобщенными координатами qlt q2 qn\ тогда
xv = cpv (q; t) и, следовательно,
1=1 1=1
7 H. H. Бухгольц
98 УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. II
Пусть, далее, на систему наложены неголономные связи, уравнения
которых в обобщенных координатах имеют вид
р,<*?1 + вр<« = 0 (Р=1. 2 г). E6)
Эти связи, как известно, налагают на вариации координат условия
iapi6<7, = 0 (р=1, 2 г). E6')
Таким образом, п дифференциалов dqb ..., dqn, а также и вариа-
вариаций 6<7i bq2, • • • ¦ &qn связаны г условиями E6) и E6'); поэтому
число независимых дифференциалов и вариаций (а следовательно,
и число степеней свободы системы) будет равно п — г (см. § 1, п. 2).
Посредством равенств E6) и E6') исключим из уравнений E5)
г зависимых дифференциалов и вариаций; получим, обозначая соот-
соответствующие коэффициенты через Av[ и Av
%
(v=l, 2 ЗЛО. E7)
причем здесь дифференциалы и вариации будут уже независимы.
Возьмем уравнение Даламбера — Лагранжа
2 (^v ~ »*vxv)oxv — °
v=l
и вставим в него выражения вариаций 6xv из равенств E7); получим
п-г 3N п-т 3N
S 2 mvxvAvl dqt = 2 2 *Hv/ 6-7/. E8)
i=l V=l (=1 V=l
В правой части уравнения E8) стоит элементарная работа активных
сил, которую, введя обозначения
^XvAvi=Q'( A=1, 2, .... п — г), E9)
V=I
можно представить в виде
П-Г 3jV П-Г
2 v2 xv\i b<?t = Ц Q't t>gt¦ F0)
Величины Q't являются здесь обобщенными силами для независи-
независимых вариаций обобщенных координат и число их равно п — г, т. е.
меньше числа обобщенных координат п [в отличие от обобщенных
сил Qt, входящих в выражение A6), которые вычисляются для
всех вариаций координат и число которых равно п].
§ 8] УРАВНЕНИЯ ДВИЖЕНИЯ В ОБОБЩЕННЫХ КООРДИНАТАХ 99
Преобразуем теперь левую часть уравнения E8). Разделив пер-
первую группу уравнений E7) на dt, получим
%j (v=I. 2 ЗАО;
продифференцировав это равенство по времени, найдем
1=1 1=1 /=l ' )=\ ' i=\
(v=l, 2 ЪЫ).
Из полученного равенства имеем
тогда левую часть уравнения E8) можно представить в виде
п~т ZN п-т 3N
V Jj mvxvAvl oqt =
i = l v=l i = l v=l
Введем функцию
3/V
которая по аналогии с кинетической энергией называется энергией
ускорений. Тогда, очевидно,
ЗЛГ
mvxv-^ = —- (;=1, 2 л —/¦)
v=i ^ й?г
и уравнение E8) преобразуется к виду
откуда, так как вариации 6*^ здесь независимы, имеем
•#- = <?/' ('=1. 2 » —О- F2)
Уравнения F2) и представляют собой уравнения Аппеля; они,
как и уравнения Лагранжа, образуют систему обыкновенных диффе-
дифференциальных уравнений 2-го порядка, число которых равно п — г,
т. е. числу степеней свободы системы (а не числу п обобщенных
координат).
lOO УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ II
Для получения уравнений F2) надо составить выражение энергии
ускорения 5 F1), выразив в нем все ускорения через координаты
дг q2 qn, а затем посредством уравнений неголономных свя-
связей E6) исключить из S вторые производные тех из координат q,
которые в силу уравнений E6) являются зависимыми (при всех этих
расчетах слагаемые, не содержащие q, могут, очевидно, не вычисляться).
Для нахождения Q'. составляется выражение элементарной работы
действующих сил в виде A6), т. е.
и из этого выражения посредством уравнений E6'), выражающих
условия, налагаемые на вариации координат дифференциальными свя-
связями, исключаются вариации зависимых координат; тогда коэффи-
коэффициенты при вариациях п — г независимых координат, дадут вели-
величины Qj, Q'2 Q'n-r' После этого составляются уравнения F2),
которые вместе с уравнениями дифференциальных связей E6) дают
систему п уравнений для определения п функций qlt q2 qn.
Заметим, что для энергии ускорений S имеет место теорема,
аналогичная теореме Кёнига для кинетической энергии (см. § 2, п. 6).
Применяя те же обозначения, что и в § 2, имеем
v=l
или, так как rv = rc-{-r'v,
v=l v=l
Последний член правой части равен нулю, так как
v=l
Следовательно,
1 Mw% +1 ? mvwv» F3)
где w'^ есть ускорение в движении системы относительно центра
масс.
¦S8]
УРАВНЕНИЯ ДВИЖЕНИЯ В ОБОБЩЕННЫ'Х КООРДИНАТАХ
101
Уравнением F3) бывает удобно пользоваться для вычисления
энергии ускорений твердых тел.
Пример. Рассмотрим движение вдоль наклонной плоскости саней,
(рис. 37, а), пренебрегая трением. Система является неголономной, если
«читать, что сани не могут перемещаться в направлении, перпендикулярном
к полозьям.
Положение саней в плоскости движения Оху определяется тремя ко-
координатами, в качестве которых выберем декартовы координаты х, у центра
масс С саней и угол <р, который полозья образуют с линией наибольшего
ската (рис. 37, 6), т. е. примем qx — х, q2 = у, ?з = Ф-
Рис. 37.
В силу указанного выше условия вектор скорости vQ центра масс саней
всегда направлен параллельно полозьям, что налагает на его проекции х, у
условие y = ;ttg«p или
* tg Ф — У = 0. (а)
Это уравнение неголономной связи вида E2) или E6).
На сани в плоскости движения действует составляющая силы тяжести
mgi (gi = g sin а), параллельная оси х; кроме того, для уяснения всех осо-
особенностей метода допустим еще, что к саням приложена в центре масс С
постоянная сила F = та, параллельная оси у (на рисунке сила F не показана).
1) Уравнения с множителями. Составим сначала уравнения
движения саней, пользуясь уравнениями E4) с множителями Яр. Кинетиче-
Кинетическая энергия системы по теореме Кйнига будет
¦2JczV2'
(б)
где JQz— момент инерции саней относительно оси, проходящей через центр С
перпендикулярно к плоскости ху.
Выражение элементарной работы действующих сил имеет внд
6Л = mgj Ьх -\- та бу; (в)
(г)
следовательно, Q[ = mgx, Q2 = та, Q3 = 0.
Уравнение (а) накладывает на вариации координат условие
tg ф ¦ 6* — бу = 0.
102 УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК (ГЛ. II
Сравнивая это выражение с равенством E2'), заключаем, что в нашем слу-
случае Ац—tgq; ^12 = —1; Ап = 0 и уравнения E4) принимают вид
тх =
ту = та — X,
/СгФ=0.
Присоединяя сюда уравнение связи (а), получаем четыре уравнения для
определения четырех функций х, у, ц>, X.
Для решения системы исключаем сначала из первых двух уравнений
системы (д) множитель X; сокращая одновременно на т, получаем
Отсюда в свою очередь с помощью уравнения (а) исключаем вторую
производную от зависимой координаты у. Дифференцируя равенство (а),
имеем
X tg ф -4- ХФ =-— = У- («)
Ь Т ' Т COS2 ф } Ч '
Подставляя это значение у в равенство (е), получаем
х A + tg2 Ф) + *Ф -^^ = gi + a tg Ф.
Окончательно задача сводится к интегрированию системы уравнений
;+^tg<P = = . (з>
Ф. \
2) Уравнения Аппеля. Покажем теперь, как этот же результат
получается с помощью уравнений Аппеля.
Для составления энергии ускорений воспользуемся формулой F3). Учи-
Учитывая, что движение саней относительно центра масс является вращатель-
вращательным вокруг оси Сг и при этом w'v — hv у ф2 -\- ф4, где hv — расстояние ка-
какой-либо точки саней от оси вращения, а ^тч^2ч — JCz, найдем
s = -2~(x2 + y2)+-2 Jcz^
Исключаем отсюда вторую производную от зависимой координаты у с по-
помощью уравнения связи (а). Это уравнение дает для у выражение (ж);
в результате получим
1
-Wr/P + ¦¦•> (и>
где многоточие указывает на невыписанные члены, не содержащие х илн ф.
Для нахождения Qt обратимся к выражению элементарной работы (в).
Входящие туда вариации Ьх, бу связаны в силу уравнения (а) условием
tg ф Ьх — Ьу — 0, откуда by = tg ф Ьх.
Подставляя это значение бу в равенство (в), получим
ЬА = {mgi -+- та tg ф) Ьх + 0 • 6ф.
§ 8] УРАВНЕНИЯ ДВИЖЕНИЯ В ОБОБЩЕННЫХ КООРДИНАТАХ 103
Следовательно,
[ 0. (к)
Составляя теперь с помощью функции (и) уравнения
найдем
В результате сразу получаем систему (з).
3) Интегрирование уравнений движения. Проинтегрируем
теперь дифференциальные уравнения движения, считая, что при< = 0 х — 0,
у = 0, ф = 0, х = v0, ф = <в0 [величина Уо не может быть задаваема, так как
она связана с х0 соотношением (а)]. Кроме того, будем считать, что на сани
действует только сила тяжести, т. е. положим а = 0 (сила Р = та была
введена лишь с целью отметить все особенности вычисления величин QX
Тогда из второго уравнения системы (з) получаем ф = оо^ и первое
уравнение принимает вид
X -[- (Do** tg (OQt = gx COS2 00^.
Это линейное уравнение легко интегрируется, например, подстановкой
jc = pq и при указанных выше начальных условиях дает
х = — sin <й^ cos <o0t -j- v0 cos <o^;
тогда из уравнения (а) имеем
у = — sin2 со,/ -f v0 sin ao<.
Интегрируя полученные уравнения еще раз и учитывая начальные условия,
найдем окончательно
х = -% sin2 со,/ + — sin aot,
2eog oo0
у = -?*- г1 + — A — cos ooof) — -Ц- sin гюог1,
2оо0 оо0 4®о
(л)
Уравнения (л) и определяют закон движения саней. Из них следует, что
сани будут равномерно вращаться вокруг центра масс с угловой ско-
скоростью а0, а центр масс будет описывать кривую, заключенную между го-
ризонтальными прямыми х = —д" Ч и л; = , в чем можно убедиться,
2<в0 <в0 2gl
решив уравнение х = 0.
104 УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ II
В частном случае, когда vo = O, центр масс описывает циклоиду
х = -Щ- A — cos 2<в<Д у = -?b B<V — sin 2oo^)
4<в0 4000
с точками возврата на оси у.
В другом частном случае при движении вдоль горизонтальной плоскости
(^, = 0) траекторией центра масс будет окружность
имеющая центр на оси у и касающаяся оси х в начале координат.
Наконец, при <В(> = 0 уравнения (л) дают после раскрытия неопределен-
неопределенностей очевидный результат: х = уйЬ-\-Щ:—, у = 0.
И^ея решение (л), можно из уравнений (д) определить реакцию неголо-
номной связи. Согласно уравнениям (д)
Nx = Xtg<oQt, Ny = — %.
Кроме того, А = — ту (при а = 0), т. е.
А = — т (gi sin 2(o0t -J- 1/0(й0 cos «</).
Следовательно,
N=y N2^ 4- Ny = tn j w0oo0 -)- 2gj sin oo^ ].
Направлена реакция N, как нетрудно проверить, перпендикулярно к век-
вектору vc (см. рис. 37,6").
11. Уравнения Чаплыгина. Пусть система, положение которой
определяется п координатами qx, q2 qn, подчинена г стацио-
стационарным неголономным связям, налагающим на обобщенные скорости
и вариации координат условия
и п
2ард = 0, 2flpA; = ° (р = 1, 2 г), F4)
где apj не зависят явно от t. Таким образом, независимых вариаций
будет 1 — п — г. Условимся обозначать в дальнейшем символом qt
A=1, 2, ..., I) те из координат q}, вариации которых мы будем
считать независимыми, а через qa (or = / —J— 1, 1 + 2 п) осталь-
остальные (зависимые) координаты.
Тогда из уравнений F4), линейных относительно qj, bqjt можно
выразить все qa и 6qa через qt и bqt в виде
п), F5>
я). F5')
§ 8] УРАВНЕНИЯ ДВИЖЕНИЯ В ОБОБЩЕННЫХ КООРДИНАТАХ 105
п
Далее, в равенстве 6A=^iQl6qj, определяющем элементарную
/ = i
работу действующих сил, можно с помощью F5 ) выразить все зави-
зависимые вариации 6qa через bqt и представить ЬА в виде
бл=2<г;ч, F6)
г = 1
где Q't — те же обобщенные силы, которые входят в уравнения Ап-
пеля.
Пусть теперь рассматриваемая система такова, что все коэффи-
коэффициенты bai в равенствах F5), а также обобщенные силы Q(' и кине-
кинетическая энергия системы Т зависят не более чем от 1 — п—г коор-
координат, где п—г есть число степеней свободы системы, т. е., напри-
например, зависят только от qlt q2 qt (но в выражение Т могут
входить все обобщенные скорости qv q2 qn)- Тогда для такой
неголономной системы имеют место уравнения, полученные С. А. Чап-
Чаплыгиным в 1897 г.
Выведем эти уравнения исходя опять из уравнения Даламбера —
Лагранжа, которое в обобщенных координатах (см. п. 1) приводится
к виду
Так как, по предположению, Г от ql+1, ql+2, .. ., qn, не зависит, то
л i
Далее, согласно равенству F6),
Наконец,
7,
где, согласно соотношениям F5').
106 УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. It
Подставляя все найденные величины в равенство F7), будем иметь
Отсюда, так как все bqt между собой независимы, находим
Условимся в дальнейшем вместо F (qv q2 qt) писать F (qt)
и т. д. Тогда, согласно сделанным допущениям, Т — Т (jqt, qt, qa).
Обозначим через Т то выражение кинетической энергии, которое
получится, если из Т исключить все qa с помощью равенств F5).
Таким образом,
T(ii. ii)—T{alt q\, 9o)j ..
где символ qa->qt означает, что здесь все ^0 Должны быть выра-
выражены через qt. Тогда, принимая еще во внимание равенства F5'),
получим
*L — iZLj_ V iL^l — iZLi V дТ V dbah ff
дТ дТ ¦ у ?? дЧа iLL Y JL
а также, поскольку все Ьо1 зависят только от qit
d (*L\±(J!L\l V */i!U 4 V дт V
— \—г-\ и
dt [dqj
Вычисляя из найденных равенств значения — [-^-\ и , под-
ставляя их в уравнения F8) и учитывая, что / = п — г, будем иметь
J-(lL\ ^L—Q'-j-fl (/=1,2 n — r), F9)
гае
n
cr =/+1 *o
yldbsL_dbSil\-a 1
2л [dq^ dq ) ^ '
§ 8] УРАВНЕНИЯ ДВИЖЕНИЯ В ОБОБЩЕННЫХ КООРДИНАТАХ 107
Уравнения F9) и представляют собой уравнения Чаплыгина. Напо-
Напоминаем, что эти уравнения справедливы для склерономной системы,
обладающей тем свойством, что коэффициенты в равенствах, выра-
выражающих зависимые обобщенные скорости через независимые, а также
кинетическая энергия и обобщенные силы системы зависят не более
чем от s — г координат, где s—г — число степеней свободы системы.
Такой класс систем в приложениях встречается довольно часто.
Для получения уравнений Чаплыгина надо вычислить два выра-
выражения кинетической энергии: выражение Т через все обобщенные
скорости и выражение Т через независимые обобщенные скорости,
затем подсчитать обобщенные силы Q^ так же, как при составлении
уравнений Аппеля, и, наконец, найти по формулам G0) члены Вь
(подчеркнем, что в выражения Bt входит Т, а не Т). После этого
составляются уравнения F9).
Уравнения F9) указывают также на то, какая ошибка будет
сделана, если для неголономной системы составить обычные уравне-
уравнения Лагранжа, исключив предварительно из выражения Т зависимые
обобщенные скорости с помощью уравнений связей: при этом утра-
утратятся члены Bt.
Пример. Составим уравнения движения сане й вдоль наклонной пло-
плоскости (см. пример в конце п. 10 на стр. 101), пользуясь уравнениями
Чаплыгина.
В этой задаче положение системы определяется координатами х, у, <р
{п = 3), а уравнение неголоиомнои связи имеет внд
у = (tgq>) к. (а)
Кроме того,
% ±JCzi* (б)
и обобщенные силы [см. п. 10, равенства (к)]
' 0('ф,=0. (в)
Коэффициент при к в уравнении (а) и обобщенная сила Q('x1 зависят
только от ф, а в равенство (б) координаты вообще не входят. Следова-
Следовательно, для данной системы справедливы уравнения Чаплыгина.
Заменяя в выражении (б) у его значением из равенства (а), получим
? m к2 1 •
Отсюда
дТ х d I дТ \ mx , лт^фз1пф дТ
—— = m , —I—;-1 = \-2 1 —;
дх cos2 ф dt \ дх j cos2 ф coss ф дх
дТ • дТ х2 sinw .я^гф
—г- = Jr ф. = tn — = m —=-*-.
дф d<f cos3tp cos2 ф
(Д)
108
УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК (ГЛ. II
Для установления соответствия с формулами п. 11 будем считать x = qlt
ф = q2, у = q3. Тогда, учитывая, что в данном случае число неголономных
связей г = 1, а 1 = п — г = 2, и сравнивая равенства F5) и (а), имеем
*3i = tgq>, Ь32 — 0; далее в членах В{ будет а = 3 и они примут вид
2
дТ V4 (db3i дЬзХ\ • , „.
"I=—*~ 7 Л~л з—\ Ч\ (/ = 1,2).
Заметим сразу, учитывая равенства (б) и (а), что
дТ дТ • • ,
—— = —— = ту == тх [gy.
Тогда, опуская члены, обращающиеся в нули, получим
\ dq2 Ч1)
(е)
Составляя с помощью соотношений (д) и (е) уравнения Чаплыгина
d IдТ \ дТ _/ , „ _^_/^^^ *^Т .у
dt \ дх I дх ' ' dt \ д<р) (Эф
и учитывая равенства (в), получим окончательно
х -\- xq> tg ф = gx cos2 ф -[- о. sin ф cos ф, <р = О,
т. е. придем к той же системе уравнений, что и система (з) на стр. 102.
Неучет членов Bi привел бы, как виднм, к ошибочным результатам.
ГЛАВА ТРЕТЬЯ
МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ ВБЛИЗИ ПОЛОЖЕНИЯ
РАВНОВЕСИЯ. УСТОЙЧИВОСТЬ РАВНОВЕСИЯ
§ 9. Малые колебания системы
1. Уравнения движения системы под действием потенциаль-
потенциальных сил в сопротивляющейся среде. Функция рассеяния. Рассмот-
Рассмотрим голономную механическую систему, состоящую из N материаль-
материальных точек, подчиненных связям, явно не зависящим от времени (т. е.
склерономным). Пусть система имеет п степеней свободы; тогда по-
положение системы будет определяться п независимыми координатами,
которые обозначим через qx, g2 qn. Допустим далее, что силы,
действующие на систему, имеют потенциал U(g}, q2, ¦•-, дп); тогда
потенциальная энергия системы выразится функцией V = —О. Нако-
Наконец, положим, что система движется в сопротивляющейся среде,
влияние которой механически характеризуется тем, что на каждую
точку системы действует сила, являющаяся функцией скорости и
имеющая направление, противоположное направлению скорости. При
малых скоростях можно считать, что обобщенная сила сопротивления,
отнесенная к координате дг, есть линейная функция обобщенных ско-
скоростей 9i. Чч< • • •> 9л точек системы, т. е.
Я, = —2«гЛ (г=1. 2. •¦¦• «)• (О
3=1
Введем для сил сопротивления функцию F, аналогичную потенциаль-
потенциальной функции для обычных сил и называемую функцией расссеяния
или диссипативной функцией. Для этого положим
n dF V * /о\
Легко видеть, что сама функция рассеяния будет однородной
функцией второй степени (квадратичной формой) обобщенных
ПО МАЛЫЕ ДВИЖЕНИЯ [ГЛ. III
скоростей, т. е.
п
/7 = Т S "rshjs- C)
r,s=l
При сделанных предположениях уравнения движения системы будут
(г=1, 2 »). D)
dt \dqr) dqT dqr dqr
Кроме того, нами еще наложено ограничение на связи, а именно мы
полагаем, что связи склерономны. В этом случае кинетическая энер-
энергия системы будет однородной функцией второй степени от обоб-
обобщенных скоростей, т. е
ajrgs, E)
Г, S
где коэффициенты ars зависят явно только от координат д.
Используя уравнения движения D), нетрудно выяснить механиче-
механический смысл функции рассеяния. С этой целью обе части уравне-
уравнения D) умножим сначала на qT, а затем просуммируем по индексу г
от 1 до п; получим
Полученное выражение легко преобразуется в более простое. Дей-
Действительно, по теореме Эйлера об однородных функциях имеем
V JL а — 2F
Очевидно также, что
dv * dV
4
_ „„ ... <7)
т
Далее,
Sd I дТ \ • VI дГ • d
— 1—— \Qt— 7, 9r = —
(8)
Так как по условию Т есть однородная функция второй степени от
скоростей q, то по той же теореме Эйлера
§9] МАЛЫЕ КОЛЕБАНИЯ СИСТЕМЫ III
вторая же сумма в правой части равенства (8) равна —тг\ поэтому
d [дт\'а _V dJ_a -
т Tt\df,Lr ? dqT 9r~
—тг
dt~ df
Подставляя выражения G) и (9) в уравнение F), получим
d(T + V) _
dt ~~ '
или, обозначая полную механическую энергию системы через Е, т е.
полагая T-\-V — E, будем иметь
2Р
Выполняя интегрирование, находим, что
Е = — J 2Fdt-\-const. AС)
Механический смысл функции рассеяния теперь ясен. Функция 2F,
как видно из равенства A0), дает меру убывания энергии в единицу
времени, а формула A0') — то же самое для конечного промежутка
времени при движении системы в сопротивляющейся среде; итак,
функция рассеяния есть мера убывания механической энергии системы.
2. Уравнения малых движений. Допустим, что рассматриваемая
система может в некотором положении находиться в равновесии.
Будем отсчитывать координаты qr системы от положения равновесия,
считая, что в этом положении qT = 0 (г=1, 2, ., я) Тогда вблизи
положения равновесия координаты дг и их производные по времени
будут величинами малыми; пользуясь этим, можно существенно упро-
упростить изучение малых движений системы вблизи положения равнове-^
сия, заменяя полные уравнения движения приближенными, в которых
будут сохранены лишь члены первого порядка малости. Кроме того,
изучение малых движений вблизи положения равновесия, к рассмот-
рассмотрению которых мы сейчас перейдем, позволяет судить и о характере
самого равновесия
Пусть рассматриваемая система под действием приложенных к ней
потенциальных сил находится в равновесии (силы сопротивления
среды, зависящие от скоростей, при равновесии равны нулю). Тогда
в положении равновесия потенциальная энергия V должна, как из-
известно, иметь стационарное значение, т. е.
112 МАЛЫЕ ДВИЖЕНИЯ [ГЛ. Ш
Так как вариации 6^г между собой независимы, отсюда следует, что
необходимые и достаточные условия равновесия системы имеют вид
° (и2)
Допустим теперь, что система сообщением ей небольших возму-
возмущений выведена из положения равновесия, и составим для нее урав-
уравнения D), ограничиваясь случаем малых движений, т. е. сохраняя
в этих уравнениях члены с qr qT, qT только первого порядка ма-
малости. Поскольку в уравнения D) входят производные от функций
V, Т и F по qr или qr, то, чтобы сохранить в уравнениях D) члены
с qT и qT первого порядка, надо при вычислении функций V, Т и F
сохранить в них члены второго порядка.
Будем, как уже указывалось, отсчитывать координаты qr от по-
положения равновесия, считая в положении равновесия qr = 0. Тогда,
разлагая потенциальную энергию системы в окрестности gr = 0 в ряд
Тейлора, получим
Т Г, S
где индексом 0 отмечены значения функции V и ее производных
в положении равновесия, т. е. при </,.== О (г=1, 2, .... я). Первая
сумма в правой части равенства исчезает вследствие того, что в по-
положении равновесия выполняются условия A1). Членами порядка
выше третьего мы также, как было указано, пренебрегаем. Наконец,
поскольку потенциальная энергия системы определяется с точностью
до аддитивной постоянной, то полагаем аддитивную постоянную вы-
выбранной так, что Vq = 0; в результате получаем
V=-k-bcrsW*- A2'>
где коэффициенты crs — I —I постоянны.
Преобразуем теперь выражение кинетической энергии E). Разлагая
коэффициенты ars, являющиеся функциями координат qr, в ряд Тей-
Тейлора, получим
Вследствие малости скоростей удержим члены лишь второго порядка
малости; тогда в разложении коэффициентов а„ придется ограни-
ограничиться только первым членом (arsH, так как все остальные члены
$ 91 МАЛЫЕ КОЛЕБАНИЯ СИСТЕМЫ 113
в произведении с qrqs дадут члены не ниже третьего порядка. Выра-
Выражение кинетической энергии поэтому примет вид
jrq5; A3)
в обозначениях коэффициентов ars здесь опущен индекс нуль; не
следует, однако, забывать, что эти коэффициенты теперь являются
постоянными. Коэффициенты в разложениях V, Т и F носят спе-
специальное название, а именно: crs называются коэффициентами вос-
восстановления или квазиупругими коэффициентами; ars — коэффи-
коэффициентами инерции и кгз — коэффициентами сопротивления.
Принимая во внимание равенство A3), имеем
дТ
Кроме того, из равенств B) и A2') находим
Подставляя эти выражения в уравнения движения D), получим урав-
уравнения малых движений системы вблизи положения равновесия
п
2 (ajs + х„^+ crsqs) = 0 (г = I. 2 п). A4)
Таким образом, уравнения малых движений системы вблизи положе-
положения равновесия представляют собой систему п обыкновенных диффе-
дифференциальных уравнений второго порядка относительно п неизвестных
координат q. Проинтегрировав эту систему, мы найдем координаты q
s функции времени и 2« произвольных постоянных, определяемых
начальными условиями.
3. Интегрирование уравнений движения. Как известно, линей-
линейные однородные уравнения, а таковыми и являются уравнения малых
движений A4), интегрируются подстановкой
где As и к суть постоянные величины. Подставляя эти выражения
координат в уравнения движения A4), получим
-,) = 0 (г-1,2 и), A5)
s=\
т. е. систему п однородных линейных уравнений относительно As.
Известно, что система однородных линейных уравнений, в которой
8 Н. Н. Бухгольц
114 МАЛЫЕ ДВИЖЕНИЯ [ГЛ. III
число неизвестных равно числу уравнений, дает решения, отличные
от нуля только в том случае, если определитель системы равен нулю,
т. е. если
или, в развернуто м виде,
11 —I— 11 ^11 12 —— 12 1^ 12 ••• ui«^i T 1я 1 га
.22 . .22 . ?2. . ."'". . .2л . Т = о.
вя^Ч-ИмН^в»
Уравнение A6) есть уравнение степени 2« относительно К; оно назы-
называется характеристическим или уравнением частот. Решая его,
найдем 2га значений "К, называемых собственными значениями. Под-
Подставляя какое-либо из этих значений ^а в уравнения A5), мы опре-
определим одну из систем решений этих однородных уравнений, т. е. п
значений множителей Аа, которые обозначим через
Al АЧ Аап.
Эти значения множителей А пропорциональны некоторой произволь-
произвольной постоянной, которая является постоянной интегрирования, так
как из теории однородных линейных уравнений известно, что если
им удовлетворяет некоторая система решений, то им удовлетворяет
и всякая иная система, полученная из первой путем умножения ее
решений на какое-либо число. Таких систем значений множителей А
будем иметь столько, сколько корней имеет характеристическое урав-
уравнение, т. е. 2п. Каждая из этих систем, определяемая индексом а,
включает в себя произвольную постоянную; число этих произвольных
постоянных равно 2/г, т. е. их столько, сколько и должно содержаться
в общем решении системы A4). Число всех значений А будет, оче-
очевидно, 2«2. Тогда, согласно теории обыкновенных дифференциальных
уравнений, найдем окончательно для координат точек системы сле-
следующие выражения:
2л
?,= 2-A?«V (s=l. 2, .... га), A7)
Вид функций qs, а следовательно и характер малых движений, опре-
определяется свойством корней уравнения частот "Ка.
4. Исследование корней и характер малых движений. Свойство
корней характеристического уравнения дает возможность судить не
только о характере малых движений, но и о характере равновесия
системы.
§ 9] МАЛЫЕ КОЛЕБАНИЯ СИСТЕМЫ 115
Чтобы получить выражение, удобное для исследования характера
движения в зависимости от вида корней уравнения частот, рассмот-
рассмотрим какой-нибудь корень уравнения A6), который для общности бу-
будем предполагать комплексным; пусть этот корень будет Х = ц-\-1у,
а корень, ему сопряженный, X' = ц — iv. Тогда множители А, соот-
соответствующие корню "К, будут, вообще говоря, комплексные вида
Так как уравнения A5), которым удовлетворяют значения А, линей-
линейные, однородные и с действительными коэффициентами, то множи-
множители А, соответствующие сопряженному корню X', будут комплекс-
комплексными и сопряженными As, т. е. будут иметь вид
Умножим каждое из уравнений системы A5), т. е. уравнения
л
¦s) = 0 (г=1, 2 л),
на Аг{г=\, 2, ..., д) и сложим полученные выражения почленно;
будем иметь
№ 2 в,ИЯ+ X 2 *,ИгЛ,+ 2 crsA'rAs = 0. A8)
Г, S Г, S Г, S
Так как
то множители при коэффициентах ars, Krs, crs в двойных суммах
имеют вид
ArAs-\- AsAr;
подставляя вместо А их комплексные выражения, получим
(). A9)
Следовательно, квадратное уравнение A8) будет иметь действитель-
действительные коэффициенты и примет вид
Д-2 2««(<м*,+ра) + а. 2 к„ (<*,«*+мд+2 <v, («,«,+рл) = о.
Г, * Г, S Г, S
Принимая во внимание, что функции ^ '
Г, S Т, S Г, S
представляют собой квадратичные формы, легко видеть, что двойные
суммы в коэффициентах квадратного уравнения B0) являются теми же
8»
116 МАЛЫЕ ДВИЖЕНИЯ [ГЛ. III
квадратичными формами, но выраженными в переменных а и р, т. е.
2а„аЛ = 2Г(а), 2 и,ЛЛ. = 2F (а), 2 <WV», = 2V (а).
г, i r, s г, «
2 «„РА = 2Г (р), 2 к„РА - 2Z7 (р), 2 cjtf, = 2У (p).
Г, S Г, S Г, S
Подставляя эти выражения в уравнение B0), получим
l4T(a) + TW)] + l[F(a) + F(№-\-V(a)+VW) = 0, B1)
откуда
[У(п)+У(Р)]
В зависимости от дискриминанта левой части уравнения B1)
Л = 4 [Т (а) + Г (р)] [К (а) + У (р)] - [Z7 (а) + F (р)]2 B2)
корни уравнения B1) могут быть трех видов:
1) если Л > 0, то корни комплексные.
2) „ Д < 0 » „ действительные и различные,
3) „ А = 0 „ в действительные и равные.
Таким образом, вид корней % зависит от знака дискриминанта Л.
Так как кинетическая энергия Т всегда положительна, то ква-
квадратичная форма Т = -j 2j ars4r4s будет определенной положитель-
r,s
ной формой, т. е. будет положительной при любом действительном
значении переменных; поэтому 7(а)>0, Г(р)>0. То же самое
относится и к функции рассеяния F = у \> "^тзЯтЧз- Что же касается
г, *
потенциальной энергии V = -^ V cTSqTqs, то эта функция может быть
Т, S
и положительной, и отрицательной и, следовательно, не является
определенной квадратичной формой. Поэтому ясно, что от знака
функции V (т. е. потенциальной энергии) и зависит главным обра-
образом характер малых движений системы в расположенной вблизи кон-
конфигурации равновесия малой области D, а также характер и самого
равновесия системы. Могут быть три основных случая: 1) когда
в области D будет V < 0; поскольку мы приняли, что в положении
равновесия V = V0 = 0, то, следовательно, в этом случае потен-
потенциальная энергия системы имеет в положении равновесия максимум;
2) когда в области D будет V > 0, т. е. когда потенциальная энер-
энергия системы имеет в положении равновесия минимум; 3) когда в об-
области D значение V может быть и больше и меньше нуля, т. е.
§ 9] МАЛЫЕ КОЛЕБАНИЯ СИСТЕМЫ 117
в положении равновесия потенциальная энергия будет ни maximum,
ни minimum (так называемый minimax). Мы ограничимся исследо-
исследованием только первых двух случаев:
I. V < 0; тогда Л < 0 и, следовательно, корни квадратного
трехчлена действительные и различные. Из выражения для корней к
следует, что они будут положительными, если квадратный корень
взять со знаком плюс, и, наоборот, отрицательными, если квадрат-
квадратный корень взять со знаком минус. Тогда в равенствах A7), опре-
определяющих значения координат qs, множители eV, для которых
Xa>0, будут со временем неограниченно возрастать и, следова-
следовательно, система будет все больше и больше удаляться от положения
равновесия. Равновесие системы в этом случае называют неустой-
неустойчивым.
Таким образом, если потенциальная энергия системы в положении
равновесия имеет максимум, то равновесие системы в этом положе-
положении будет неустойчивым (по первому приближению). Если такую
систему вывести из положения равновесия, то вначале, вблизи по-
положения равновесия, ее движение будет апериодическим (т. е. не ко-
колебательным). О характере последующего движения системы по пер-
первому приближению здесь, конечно, судить нельзя.
II. V > 0. В этом случае малые движения системы носят раз-
различный характер в зависимости от того, будет ли сопротивление
среды очень велико, очень мало или равно нулю; каждый из этих
случаев рассмотрим в отдельности:
1) Сопротивление велико настолько, что F2 > 4VT и при этом
А < 0; тогда корни к квадратного трехчлена будут действитель-
действительными и отрицательными.
В этом случае в равенствах A7) все е s* < 1 и со временем не-
неограниченно убывают, стремясь к нулевым значениям; система при
этом асимптотически возвращается в равновесное положение. Со-
Состояние равновесия, для которого это имеет место, называют устой-
устойчивым.
2) Сопротивление настолько мало, что F2 < WT и Л > 0; тогда
корни квадратного трехчлена будут комплексные и сопряженные вида
%a = Ha±iva (a=l. 2 я).
Докажем, что вещественная часть корней ца отрицательна.
По известному свойству корней квадратного уравнения будем иметь
из уравнения B1)
-*•*- Г(а) + Г(р)'
Так как функции F и Т положительны, то из полученного соотно-
соотношения заключаем, что ц < 0. Принимая во внимание доказанное.
118 МАЛЫЕ ДВИЖЕНИЯ [ГЛ. III
можем корень А,а представить в виде
где ца суть числа только положительные. В таком случае выраже-
выражения для координат qs в равенствах A7) будут следующими:
л
q,= 2 е~^ъ*\Аа5е va*-\- Aase~lval] (s= I, 2 п). B3)
a=l
Делая известные преобразования, можно вместо показательных функ-
функций мнимого аргумента ввести функции тригонометрические; тогда
получим
4S = 2 е'11 [aas cos (V) + Ь% sin (va0] (s = 1. 2 «). B3')
a=l
Равновесие системы здесь также будет устойчивым, а ее малые дви-
движения вблизи положения равновесия представляют собой затухающие
колебания.
Резюмируя оба случая, можем сказать, что если потенциальная
энергия системы имеет в положении равновесия минимум, то равно-
равновесие системы в данном положении будет устойчивым. Если такой
системе сообщить небольшое возмущение, то она будет стремиться
вернуться в положение равновесия. Возникающие при этом малые
движения будут апериодическими, если сопротивление среды велико,
или затухающими колебаниями, если сопротивление среды мало.
3) F = 0 (сопротивление отсутствует). В этом случае, полагая
в уравнении B1) F—0, найдем, что
а так как V > 0 и Т > 0, то корни к будут мнимыми, т. е. будут
иметь вид
la=±ika (a=l. 2 в).
Тогда из уравнений A7) найдем следующие выражения для ко-
координат qs:
п
Яз = 2 [«"cos(kat)-\-bas sin(kat)] (s = 1, 2 я), B4)
a = l
или, преобразуя выражение в квадратных скобках обычным спо-
способом:
л
Яа= 2 Blsin(V + P") (s=l, 2 п). B4')
Поскольку координаты «всех точек системы могут быть выражены
через gs, то, следовательно, точки системы совершают в этом случае
около их положений равновесия сложные незатухающие колебания,
§ 9] МАЛЫЕ КОЛЕБАНИЯ СИСТЕМЫ 119
являющиеся в общем случае результатом суперпозиции п простых
колебаний с разными частотами Аа(а=1, 2 я). При этом,
так как начальные возмущения считаются малыми, система во все
время движения остается вблизи ее конфигурации равновесия. Равно-
Равновесие системы в этом случае также называют устойчивым (по пер-
первому приближению).
Однако может случиться, что некоторые корни окажутся равными
между собой, например кт = кп; в таком случае будут равны и ча-
частоты соответствующих колебаний. Из теории обыкновенных диф-
дифференциальных уравнений известно, что решение, соответствующее
корню второй кратности, каковым является Хт я, будет иметь вид
(Л?+Л^)/"'•"'.
На этом основании Лагранж полагал, что в этом случае равновесие
будет неустойчивым, так как при t -> со член Ant также стремится
к бесконечности.
Эта ошибка держалась долгое время, пока Вейерштрасс не об-
обнаружил, что это не так. В 1858 г. он доказал, что в этом случае
имеет место тождественность двух или большего числа уравнений A5)
в зависимости от кратности корня; следовательно, корень факти-
фактически остается первой кратности, и тогда отпадает решение, со-
соответствующее кратному корню, а вместе с тем и заключение
Лагранжа. Вейерштрасс пришел к этому на основании теории ква-
квадратичных форм, каковыми являются выражения кинетической и по-
потенциальной энергии:
2 ajq' V = -1
-1
Т, S Г, S
Согласно теории квадратичных форм написанные квадратичные формы
всегда можно привести к каноническому виду, т. е. к виду, содер-
содержащему скорости и координаты только в квадратах. Эта задача
равносильна задаче об отыскании главных осей поверхности второго-
порядка или, что то же, главных направлений тензора.
5. Нормальные координаты. В общей теории квадратичных
форм доказывается, что если одна из квадратичных форм Т или V
является определенной (а в данном случае определенной положи-
положительной формой является Т), то всегда можно найти такое линейное
преобразование координат
п
?,= Sy,i!( (*=1. 2 а),
что Г и V одновременно преобразуются к каноническому виду
B5)
120 МАЛЫЕ ДВИЖЕНИЯ [ГЛ. III
где сц и с1 суть коэффициенты, полученные в результате преобра-
преобразования ').
Уравнения Лагранжа для координат %i в случае отсутствия оэ-
лротивления (F = 0) примут вид
дТ\ дТ dV //19 „\
или, после подстановки выражений Г и V из равенств B5),
а°1<+с*6< = 0 (/=1.2 и). B6)
Интегрируя эти уравнения, найдем
?, = ,Vos(V) + S,-shW) (/=1. 2 я),
хде
Координаты !г называются главными или нормальными коорди-
координатами. Из полученных для |г выражений следует, что каждая
нормальная координата будет совершать гармоническое колебание
со своей собственной частотой; другие же координаты, являясь
линейными функциями нормальных, будут иметь сложные колебания
как результат наложения п простых, что мы и имели прежде. Здесь
•с особенной ясностью обнаруживается тот факт, что если несколько
корней, например два, между собой равны, то соответствующие
им нормальные координаты имеют одинаковые частоты; при этом
имеет место только явление унисона и не происходит бесконечного воз-
возрастания координат. Ясно также, что в системе уравнений B6),
а следовательно, и в системе уравнений A5) уравнения, соответ-
соответствующие равным корням kt, будут тождественны.
6. Двойной физический маятник. Рассмотрим, как конкретно иссле-
исследуются малые колебания системы около положения устойчивого равновесия
«а примере двойного физического маятника, состоящего из двух однородных
стержней ОА и АВ одинаковой длины I и массы т, соединенных в точке А
шарниром (рис. 38). Стержни могут совершать колебания в вертикальной
плоскости Оху. Трением в осях и сопротивлением воздуха пренебрегаем.
Система имеет две степени свободы. В качестве обобщенных координат
.выберем углы q>i и <р2, которые стержнн образуют с вертикалью. Нетрудно
убедиться, что у системы будет четыре положения равновесия:
1) ф, = 0, <р2 = 0; 2) ф, =0, ф2 = л; 3) ф, == л, ф2 = 0; 4) ф( = п, ф2 = п.
') См., например, Смирнов В. И., Курс высшей математики, т. Ш,
ч. I изд. 7. 1956, стр. 137—138.
9]
МАЛЫЕ КОЛЕБАНИЯ СИСТЕМЫ
121
При этом только для первого потенциальная энергия в положении равно-
равновесия имеет минимум и равновесие будет устойчивым. Исследуем малые
колебания системы около этого положения равновесия. Для этого, считая ф!
и ф2 малыми, вычислим кинетическую Т и потенциальную V энергии си-
системы, сохраняя в них члены второго порядка малости. Имеем
, ml2 f,. n
где /i = —= момент инерции стержня О А относительно оси О,
о
~тх
момент инерции стержня АВ относительно его центра масс С
и «с — скорость этого центра масс. При этом (см. рис. 38) vc = vl -[- v'c,
где численно t/1 = lyv v'c = -^-ф2 . Следовательно,
72
-4- Ч>2 + /2(Pi<P2 cos (I*2 — Ч>')-
Поскольку в выражении Т сохраняются только члены второго порядка ма-
малости, то, учитывая, что cos (ф2 — фО =
= 1 — jD>2 — <PiJ+ •¦-, получим оконча-
тельно
или, по аналогии с формулой A3),
Т = у (а11Ф 1 + 2a12<Pl(P2 + а22<Р 1) • B7)
где
> Я12= ~~0~> «22 = —о~ • (^/ )
Рис. 38.
Для потенциальной энергии, если ее считать в положении равновесия
равной нулю, будем иметь
= mg-^(l — cos
—cos
Замечая, чтосозф! = 1—-д- <Р? + • • •. cosф2 = 1—7Т-Ф2+ ..., найдем, со-
сохраняя члены второго порядка малости,
122 МАЛЫЕ ДВИЖЕНИЯ (ГЛ. III
или по аналогии с формулой A2')
V = -J (Cll4>l + 2c12<Pl<P2 + С22<$' <28)
где
3 1
B8')
Составляя теперь для рассматриваемой системы уравнения Лагранжа D),
найдем по аналогии с A4) следующие дифференциальные уравнения малых
колебаний системы:
-j- Я22ф2 -J- С12ф, + ^22ф2 = 0.
В рассматриваемом нами случае V > 0 (потенциальная энергия в поло-
положении равновесия имеет минимум) и F = 0 (сопротивление отсутствует).
Следовательно, по доказанному в п. 4 корни уравнения частот будут чисто
мнимыми и общее решение должно иметь внд B4'). Поэтому для упрощения
выкладок решение уравнений B9) можно сразу искать в виде
Ф, = В,51п(« + РI Va = B2sln(« + P). C0)
Подставляя этн значения ф, и фг в уравнения B9), получим следующие два
отнородных уравнения для определения В, и В2:
(с„—аи**)В1 + (с„ — я12й2)В2 = 0( |
(с12 — ай2)В + (с ай2)В = 0 ]
Приравнивая определитель этой системы нулю, находим для отыскания k
следующее уравнение частот:
= 0 C2)
(С12 — Я j2ft2) (С22 — Я22Й2)
или
(Сц — Л12?2) (с22 — а22?2) — (С[2 — «i2&2J = 0. C2')
Решая это биквадратное уравнение при значениях коэффициентов, да-
даваемых равенствами B7') и B8 ), получим
откуда
= 2,301/ -?-. C3)
В результате находим два частных линейно независимых решения урав-
уравнений B9), соответствующих частотам kt и й2:
а) первое решение
^ ) C4)
б) второе решение
qf> = fl<2> sin (k2t + p2), фB2) = Bf sin (k2t + p2). C5)
Два гармонических колебания, определяемых уравнениями C4) и C5), на-
называют главными колебаниями, а их частоты kx к k^ — собственными ча-
$ 9) МАЛЫЕ КОЛЕБАНИЯ СИСТЕМЫ 123
стотами системы; при этом колебание с меньшей из частот, т. е. с часто-
частотой kb называют первым главным колебанием, а колебание с частотой
*2—вторым главным колебанием.
На постоянные Р[ и р2 никаких ограничений не накладывается; следова-
следовательно, это произвольные постоянные. Постоянные же В^\ В21) и Bf\ Bf*
должны удовлетворять уравнениям C1) соответственно при k = kl и k — k2.
Полагая в C1) k = ku будем иметь
- «22*1) 41' = 0- j
Так как определитель C2) этой системы при k = kt обращается в нуль,
то одно из уравнений C6) является следствием другого. Тогда, считая, на-
например, В*/' = В\, где В1 — произвольная постоянная, найдем, что
с»-д
"*|
Аналогичный результат получим для В^2) и Bf\ полагая в уравне-
уравнениях C1) k = k2. Введем обозначения
«!= -j, П2 = -J. F7)
cl2 — aakl с12 — я12я2
Тогда
В(,1> = В11 ЯР) = Я1В1: &?=В2; Bf = n2B2 C8)
и решения C4), C5) примут вид:
а) для первого главного колебания
^ 11( )) C9)
б) для второго главного колебания
cpf > = В2 sin (k2t + р2), qf > = п2В2 si n <k2t + p2), D0)
где Ви Р,, В2, р2 — произвольные постоянные.
Общее решение системы дифференциальных уравнений B9), содержащее
указанные четыре произвольные постоянные, имеет вид
ф2 = щВх sin (kxt + Р0 + п2В2 sin (ktt + p2).
Решение D1) и определяет закон сложных незатухающих малых колебаний
системы около положения устойчивого равновесия при произвольных на-
начальных условиях. Мы видим, что колебания могут быть всегда предста-
представлены как результат наложения двух главных колебаний.
При соответствующих начальных условиях система может совершать
одно из главных колебаний в чистом виде: первое главное колебание при
В2 = 0 или второе главное колебание при В1 = 0. Амплитуды каждого из
главных колебаний зависят от произвольных постоянных Вг или В2, опре-
определяемых по начальным условиям. Однако отношения этих амплитуд, равные
соответственно для первого главного колебания щ, а для второго главного
колебания «2, как видно из равенств C7), от начальных условий не зависят.
124
МАЛЫЕ ДВИЖЕНИЯ
[ГЛ. Ш
Числа «! и п2, определяющие отношения амплитуд или отношения коор-
координат ф[ и ф2 при главных колебаниях, называются коэффициентами формы
этих колебаний.
В рассматриваемой задаче при значениях коэффициентов ars, crs и ча-
частот, даваемых равенствами B7'),
B8') и C3), коэффициенты формы
будут равны
Сц — i
^-=1,43,
Ct1— t
я, =
- = — 2,10.
Знаки коэффициентов я( и па в дан-
данном случае оказались разными. От-
*-) сюда следует, что если система бу-
а) ' дет совершать одно из главных ко-
колебаний, то при первом главном
Рис- 39. колебании (колебании с меньшей
частотой й() стержни в любой момент
времени будут отклонены от вертикали в одну и ту же сторону (рис. 39, а),
•а при втором главном колебании с частотой й2 — в разные стороны
(рис. 39, б).
§ 10. Устойчивость равновесия. Теорема Дирихле
1. Понятие об устойчивости равновесия. При изучении малых
движений системы около положения равновесия мы столкнулись
с понятием об устойчивости равновесия, смысл которого сводится
к следующему. Допустим, что механическая система в некотором
положении (конфигурации) находится под действием приложенных
к ней сил в равновесии. Если эту систему вывести из положения
равновесия, сообщив ее точкам достаточно малые начальные смеще-
смещения и начальные скорости, то в последующем движении точки си-
системы могут или оставаться все время вблизи их положений равно-
равновесия, или все более и более удаляться от этих положений; в первом
случае рассматриваемое положение равновесия называется устойчивым,
а во втором — неустойчивым.
Определим эти понятия более строго. Пусть система имеет п
степеней свободы. Не нарушая общности, можно, во-первых, сделать
все обобщенные координаты и обобщенные скорости безразмерными,
отнеся каждую из них к соответствующей, характерной для данной
координаты (илн скорости) величине, и, во-вторых, как мы уже де-
делали, отсчитывать все обобщенные координаты системы qT от кон-
конфигурации равновесия О, полагая для этой конфигурации qr — 0
(r=i, 2 л).
Допустим, что в некоторый момент времени t0 система выведена
.из конфигурации равновесия; ее обобщенные координаты и скорости
¦§ 10] УСТОЙЧИВОСТЬ РАВНОВЕСИЯ. ТЕОРЕМА ДИРИХЛЕ 125
в этот момент обозначим через q^ и q^. Тогда равновесие системы
в конфигурации О называется устойчивым (по Ляпунову), если, задав
любое сколь угодно малое число р > 0, можно указать такое число
11 (р) > 0, что при
\Яго\<Ч и \U\<4 (' = 1. 2 п) A)
в любой момент времени t > tQ будет
\qf\<9 (г = 1. 2 я). B)
В противном случае равновесие системы в конфигурации О назы-
называется неустойчивым.
Равенства \qf\=p определяют вблизи конфигурации равнове-
равновесия О некоторую область D (в я-мерном пространстве). Если рав-
равновесие в конфигурации О устойчиво, то при малых возмущениях
система, выведенная из состояния равновесия, будет двигаться, оста-
оставаясь все время в области D.
В § 9 мы видели, как можно исследовать вопрос об устойчиво-
устойчивости равновесия (по первому приближению), рассматривая малые дви-
движения системы вблизи положения равновесия; этот метод применим
и к системам, не находящимся под действием потенциальных сил.
В случае консервативных систем вопрос об устойчивости равно-
равновесия можно исследовать непосредственно, зная потенциальную энер-
энергию системы.
2. Теорема Лежен Дирихле. Для равновесия консервативной
системы со склерономными связями необходимо и достаточно вы-
выполнение условия f>V(ql3 q2 <7я) = 0, где V — потенциальная
энергия системы. Однако по этому условию нельзя судить о харак-
характере равновесия.
Достаточное (но не необходимое) условие равновесия консерва-
консервативной системы со склерономными связями дает следующая теорема
Лежен Дирихле: если для какой-либо конфигурации консерва-
консервативной системы со склерономными связями потенциальная
энергия V имеет минимум {а следовательно, силовая функция
U — — V имеет максимум), то равновесие системы устойчиво.
Перейдем к доказательству теоремы. Пусть для конфигурации
равновесия О (т. е. при ql^=q2= ... =<7„ = 0) потенциальная
энергия V равна нулю (что всегда можно сделать, так как потен-
потенциальная энергия определяется с точностью до аддитивной постоян-
постоянной) и имеет минимум; тогда всегда можно найти такое достаточно
малое число р, чтобы в области D(|<7|^p) потенциальная энергия V
была положительна.
Пусть, далее, какая-либо обобщенная координата системы, напри-
например qr, принимает предельное значение \qf\ =p, а все остальные
координаты принимают любые значения, по абсолютной величине не
]26 МАЛЫЕ ДВИЖЕНИЯ [ГЛ. Ill
превышающие р или равные р. Пусть Рт есть значение потенциаль-
потенциальной энергии в этом случае. Тогда для системы с п степенями сво-
свободы существует п положительных чисел Pv Р2 Р„, получае-
получаемых как значения потенциальной энергии V{qx, q2 qn), если
последовательно приравнивать модули обобщенных координат числу р.
Таким образом,
1=l/(P. 42'
любые в области D
.. Р. Чъ' ¦ ¦ ¦ > Чп)'
:> 42' •¦¦> Чп-Ъ Р)"
любые в области D
Пусть наименьшее из чисел Рь Р2, ¦ • ¦, Р„ есть Р; тогда обяза-
обязательно V(qv ..., д„)^-Р, как только одна из обобщенных коор-
координат достигнет по модулю значения, равного р, а все другие коор-
координаты будут принимать любые значения в области D. Отклоним
систему от положения равновесия, давая координатам qr значения qrQ
по модулю, меньшие р, и сообщим точкам системы начальные ско-
скорости v1Q, v20, ..., vn0. Тогда система придет в движение, и по-
поскольку она консервативна и склерономна, будет иметь место инте-
интеграл энергии
или
откуда
T = (T0\-V0)-V.
Но поскольку всегда Т > 0, то, следовательно, в любой момент
движения
К<Г0 + К0. C)
Так как в области D потенциальная энергия положительна, сумма
G0 + К0) непременно положительна, и вследствие непрерывности 7'в,
Vo эту сумму можно сделать сколь угодно малой. Иначе говоря,
можно найти число т), меньшее р, такое, что при |<7rt| < т) и 1^1 < т]
будет иметь место следующее неравенство:
1) Чтобы удовлетворить этому неравенству, достаточно, например, вы-
Р Р
брать такие qra ндгй, чтобы было Тв < -~- н Vo < -~-.
§ 10] УСТОЙЧИВОСТЬ РАВНОВЕСИЯ. ТЕОРЕМА ДИРИХЛЕ 127
Тогда из неравенства C) следует, что в любой момент движения
Р — V > 0. D)
Поскольку начальные значения обобщенных координат лежат внутри
области D, то из D) мы видим, что ни одна из координат qr не может
во время движения достигнуть значения р (т. е. система не может
выйти из области D), так как тогда разность (Р — V) становилась
бы отрицательной, что невозможно.
Следовательно, конфигурация равновесия системы устойчива.
Теорема, противоположная теореме Лежен Дирихле, формули-
формулируется так: если для некоторой конфигурации консервативной
системы потенциальная энергия V имеет стационарное значение
и не есть минимум, то равновесие системы неустойчиво. Эта
теорема может быть доказана только с некоторыми ограничениями.
Ляпунов доказал две теоремы, устанавливающие критерии неустойчи-
неустойчивости равновесия консервативной системы, которыми практически
охватываются все возможные случаи. Первая .теорема относится к слу-
случаю, когда разложение потенциальной энергии в ряд вблизи положе-
положения равновесия [см. ряд A2) в § 9] начинается с членов второго по-
порядка. Эта теорема гласит: если потенциальная энергия консерва-
консервативной системы в положении равновесия не имеет минимума,
причем отсутствие минимума устанавливается по разложению
потенциальной энергии в ряд, в котором сохранены только
члены второго порядка, то равновесие системы неустойчиво.
Вторая теорема устанавливает критерий неустойчивости для случая,
когда разложение потенциальной энергии в ряд начинается с членов
третьего или более высокого порядка. Она гласит: если потенци-
потенциальная энергия консервативной системы имеет в положении
равновесия максимум, причем наличие максимума устанавли-
устанавливается по разложению потенциальной энергии в ряд, в котором
сохранены члены наименьшего порядка, не обратившиеся в нули,
то равновесие системы неустойчиво.
ГЛАВА ЧЕТВЕРТАЯ
ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
§11. Геометрия масс
1. Понятие о твердом теле. Как известно, система материальных
точек (частиц), в которой расстояния между двумя любыми точками
остаются постоянными, называется неизменяемой системой. Если же,
кроме того, точки системы расположены непрерывно, т. е. заполняют
область пространства, занятую системой, сплошным образом, то такая
неизменяемая система называется абсолютно твердым телом. Абсолютно
твердое тело, согласно определению, не может подвергаться никаким
деформациям и представляет собой идеальный образ, который тем
ближе подходит к реальному твердому телу, чем меньше последнее
способно деформироваться под действием сил.
Благодаря неизменяемости расстояний между своими частицами,
абсолютно твердое тело представляет собой механическую систему,
отличающуюся по сравнению с другими системами особыми свойствами,
вследствие чего динамика твердого тела выделяется в особую главу,
тем более, что эта глава динамики имеет большое значение в тех-
технических приложениях. В конце главы I было указано, что для опре-
определения движения неизменяемой системы достаточно уравнений, ко-
которые дают теоремы об изменении количества движения и кинети-
кинетического момента системы, поэтому уравнения движения абсолютно
твердого тела представляют собой развитие этих уравнений.
2. Характеристики распределения масс. В динамике абсолютно
твердого тела играют большую роль величины, характеризующие
распределение масс в теле. Учение об этих величинах носит название
геометрии масс.
Величины, характеризующие распределение масс в системе, носят
название (не совсем удачное) моментов:). Момент представляет собой
') Это понятие относится к любой механической системе. Но в случае
абсолютно твердого тела для системы координат, связанной с этим телом,
величины моментов будут постоянными и могут быть заранее определены
как характеристики распределения масс в теле (см., например, § 2, п. 8).
§ II] ГЕОМЕТРИЯ МАСС 129
сумму произведений масс всех точек системы на однородную функ-
функцию координат этих точек, т. е. имеет вид 2 mtx^jizl, причем
i
п = а-\-$-\-у называется степенью момента. Если массы распреде-
распределены непрерывно и плотность тела р (отношение массы частицы тела
к ее объему) есть непрерывная функция координат, т. е. р = р(х, у, г),
то момент выражается в виде объемного интеграла
\ \ | р(х, у, z) xaybz*!dxdy dz.
взятого по всему объему тела (если же функция р прерывна, то ин-
интеграл берется1 в смысле Стилтьеса). Когда тело однородно, плотность р
от координат не зависит, и момен имеет вид
хау z^dxdy dz,
т. е. представляет собой произведение плотности на объемный интег-
интеграл от функции только координат, который будет уже чисто геомет-
геометрической величиной; эту величину мы будем называть геометри-
геометрическим моментом а-й степени. Таким образом, в случае однород-
однородного тела момент (физический) равен плотности, умноженной на
геометрический момент.
В механике встречаются обыкновенно только моменты первой и
второй степени; моментами высших степеней иногда пользуются
в теории прочности.
3. Моменты первой степени. Моменты первой степени, называе-
называемые обычно статическими моментами, выражаются величи-
величинами 2отггг> гДе ri есть радиус-вектор частицы с массой т^ Это
i
выражение представляет собой статический момент системы отно-
относительно центра О, служащего началом векторов rt. Известно, что
2m,r; = Mrc,
где М есть масса всей системы, а гс—радиус-вектор центра масс;
поэтому, если центр О совпадает с центром масс, то статический
момент 2w»r( обращается в нуль. Ясно, что
2 mtrt = 2 Щ*{ + 2 «/Уь/ + 2 «,*<*•
Величины 2ОТЛ> 2отгУ;> 2 mizi представляют собой статиче-
i i i
ские моменты относительно координатных плоскостей yz, zx,
ху, причем
^iii c ^iiyl yc ^i
i i i
9 H. H. Бухгольц
130 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
где хс, ус, zc суть координаты центра масс. Размерность стати-
статического момента равна произведению размерностей массы и длины.
Если начало координат О совпадает с центром масс С, то стати-
статические моменты относительно координатных плоскостей будут, оче-
очевидно, также равны нулю.
4. Моменты второй степени. Моменты второй степени имеют
вид:
J(yz) = 2 тх2' J(zx) = 2 mf< J(xy) = 2 mz2'>
Jo = 2 «(*2 + / + *2) = 2 mr\
Первые три из них, представляющие суммы произведений масс
на квадраты их расстояний соответственно до плоскостей yz, zx,
ху, называются моментами инерции относительно этих плоско-
плоскостей, вторые три называются центробежными моментами или
произведениями инерции, три третьих, как суммы произведений из
масс на квадраты их расстояний до осей х, у, z, — моментами
инерции относительно этих осей или осевыми моментами инер-
инерции; наконец, последний, как сумма произведений из масс на квадрат
их расстояний до точки О, — моментом инерции относительно
точки О, или, иначе, полярным моментом инерции относительно
этой точки. Из этих определений ясно, что:
1) Размерность момента второй степени равна произведению раз-
размерностей массы и квадрата длины. Единицей измерения этой величины
в системе СИ будет 1 нм2, а в технической системе единиц —
1 кГмсек2.
2) Сумма трех плоскостных моментов инерции равна полярному
моменту инерции, т. е.
Луг) ~Г •'(zx) ""Г" •'(ху) — •'О-
3) Сумма трех осевых моментов инерции равна удвоенному по-
полярному моменту инерции, т. е.
Jxx ~Г •'уу Ч~ ¦'zz = "•'О-
4) Сумма двух осевых моментов инерции всегда больше треть-
третьего, т. е.
•>хх ~Т~ "/уу ^-* ^zz' •'yy I •'zz -"^ ^xx' •'zz'T'Jxx -^ "'у у
В самом деле, так как
то
И Т. Д.
§ II] ГЕОМЕТРИЯ МАСС 131
5. Момент инерции относительно оси. В динамике твердого
тела из моментов второй степени преимущественно встречаются мо-
моменты инерции относительно оси (осевые) и произведения инерции.
Как уже было сказано, моментом инерции системы относительно
данной оси, например оси х, называется сумма произведений масс
точек системы на квадраты их расстояний до этой оси, т. е. выра-
выражение вида 2от»^ь гДе суммирование распространяется на все точки
системы (см. § 2, п. 8). Если мы имеем сплошное абсолютно твер-
твердое тело, то масса элементарной частицы тела будет равна pdv,
где р есть плотность тела, a dv— элемент объема; поэтому момент
инерции относительно оси х в этом случае выразится (если р есть
непрерывная функция координат) объемным интегралом, взятым по
всему объему тела, т. е.
jxx == J ph2dv = J J j p(x, y, z){yi-\-zi)dxdydz.
Если тело однородное, то р постоянно и может быть вынесено за
знак интеграла, и мы получим
где Г h2dv есть геометрический момент инерции объема, который,
очевидно, имеет размерность (длинаM размерность р есть ма с .
Если тело представляет собой однородную тонкую пластину тол-
толщиной Ъ (b— const), то, полагая dv — bda, где da есть элемент
площади пластины, будем иметь
Здесь pb — p'— поверхностная плотность (отношение массы элемента
пластины к ее площади), а интеграл
h2da = j j (у2-{- z2)dydz,
взятый по площади пластины, будет геометрическим моментом инерции
площади; его размерность (длинаL.
Точно так же в случае нахождения момента инерции однород-
однородного тонкого стержня с площадью поперечного сечения s (s — const),
полагая dv=sdl, где dl — элемент длины стержня, найдем, что
Здесь ps = p" — линейная плотность (отношение массы элемента
стержня к его длине), а интеграл Г h2dl, взятый вдоль отрезка
132
ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
[ГЛ. IV
кривой (вдоль оси стержня), есть геометрический момент инерции отрезка
линии, имеющий размерность (длинаK. Таким образом, для вычисле-
вычисления осевых моментов инерции однородного тела, пластины или стержня
нужно вычислить соответствующие геометрические моменты инер-
инерции, т. е. моменты инерции объема, площади или отрезка линии
(что является задачей интегрального исчисления) и затем умножить
найденную величину на соответственную плотность (т. е. объемную,
поверхностную, линейную).
Заметим еще следующее. Пусть нужно вычислить момент инерции
однородного призматического тела (т. е. тела, ограниченного поверх-
поверхностью призмы или цилиндра и перпендикулярными к оси призмы
сечениями) относительно оси х, параллельной образующей (рис. 40).
Рис. 40.
Задача, как мы видели, сводится к вычислению геометрического мо-
момента инерции объема этого тела относительно оси х, т. е. вели-
величины h2dv. Возьмем за элемент объема объем волокна, площадь'
поперечного сечения которого равна da, а длина равна длине тела L;
тогда dv — L da, и
Г h2dv = L Г Л2 da,
причем интеграл берется по всей площади поперечного сечения. Оче-
Очевидно,
J h2da=J0,
т. е. этот интеграл равен полярному моменту инерции площади по-
поперечного сечения относительно точки О. Следовательно, геометри-
геометрический момент инерции призматического тела относительно оси,
параллельной образующей, равен LJ0, т. е. произведению длины тела
•§ II] ГЕОМЕТРИЯ МАСС 133
«а полярный момент инерции площади поперечного сечения относи-
относительно точки пересечения оси с плоскостью этого сечения.
6. Радиус инерции. Момент инерции системы относительно
какой-либо оси х можно выразить в виде
•> XX :=z 4
где М — масса всей системы, a pXJC есть линейная вгличина, которая
называется радиусом инерции относительно оси х. Из определения
следует, что радиус инерции есть длина, равная расстоянию от оси х
той точки, в которой нужно сосредоточить массу всей системы, чтобы
получить тот же момент инерции Jxx. Ясно, что
Рхх
м
Можно поставить вопрос иначе: найти массу М', которую нужно
сосредоточить в данной точке, находящейся от оси х на расстоянии d,
чтобы получить тот же момент инерции Jxx. Для определения М'
имеем равенство
М'й* = М&х.
откуда
Этот процесс называется приведением массы системы к данной точке.
Очевидно, что радиус инерции вполне определяет момент инер-
инерции системы относительно данной оси.
7. Моменты инерции относительно осей параллельного пучка.
Теорема Гюйгенса (Штейнера). Из определения ясно, что осевой
момент инерции данной неизменяемой системы зависит от положения
оси, относительно которой вычисляется момент инерции; следовательно,
осевые моменты инерции данной системы могут иметь относительно
различных осей бесконечное множество значений, которое, однако,
имеет нижнюю границу. Рассмотрим, как изменяется осевой момент
инерции при переходе от одной оси х к другой /; для этого рас-
рассмотрим: 1) моменты инерции относительно осей параллельного пучка
и 2) моменты инерции относительно осей пучка, выходящего из дан-
данной точки. Зная, каким образом изменяется момент инерции при пе-
переходе от одной оси к другой в первом и втором случаях, мы можем
по данному моменту инерции относительно какой-либо оси х найти
момент инерции относительно любой другой оси /. Для этого, взяв
произвольную точку О на оси /, находим сначала момент инерции
относительно оси х', параллельной х и проходящей через точку О,
я. затем от оси х' переходим к оси I.
134
ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
[ГЛ. IV
Начнем с установления зависимости между моментами инерции
относительно осей параллельного пучка. Проведем оси Oxyz (рис. 41)
и рассмотрим момент инерции си-
системы относительно оси х; он будет
i i
Возьмем ось х', параллельную оси
х и проходящую через центр масс
г' системы С, координаты которого
пусть будут хс, ус, zc; проведем
еще через С оси у' и г'', параллель-
параллельные осям у и z. Тогда
Рис. 41.
где х'., y'r z\ будут координаты
точки М относительно системы
осей x'y'z'. Подставляя эти выражения в равенство A), будем иметь.
= 2
УсJ
Первый член правой части равенства B) есть момент инерции си-
системы относительно оси х'\ второй член можем представить в виде
4) =
Ус
где Ж есть масса всей системы, a d — расстояние между осями х и
х'. Третий член равен нулю, потому что
а 2 miV\ и S mizi равны нулю, как статические моменты относи-
относительно плоскостей, проходящих через центр масс. Итак,
или
C)
Равенство C) выражает собой теорему Гюйгенса: момент инер-
инерции системы относительно какой-либо оси равен моменту инер-
II]
ГЕОМЕТРИЯ МАСС
135
циа относительно параллельной оси, проходящей через центр
масс системы, сложенному с произведением массы всей системы
на квадрат расстояния между осями. Если ввести радиусы инер-
инерции, то мы получим
р^. == р2 ,х, -j- d2. D)
Из равенств C) или D) следует, что наименьшим из моментов
инерции системы относительно осей параллельного пучка будет мо-
момент инерции относительно оси, проходящей через центр масс си-
системы.
Пользуясь теоремой Гюйгенса, можно легко определить момент
инерции системы относительно любой оси пучка параллельных осей,
если дан момент инерции относительно какой-либо одной оси этого
пучка. Пусть дан момент инерции У1 относительно оси 1; тогда по
теореме Гюйгенса
У, = Jc + Md\.
где Jc есть момент инерции от-
относительно параллельной оси,
проходящей через центр масс,
a dx — расстояние центра масс
до оси 1. Для оси 2, парал-
параллельной оси 1, аналогично
имеем
j2 = Jc -f- Mdl.
Из этих двух равенств полу-
получаем
. , ..г л .2ч Рис. 42.
Теорема Гюйгенса относится не только к осевым моментам инер-
инерции, но может быть распространена на все моменты второй степени.
Совершенно аналогичным способом легко доказать равенства
2л m,x) — 2j rnx, -+-Мх*, и т. д.,
и т-
8. Моменты инерции относительно осей пучка, выходящего
из данной точки. Найдем момент инерции системы относительно
оси /, которая проходит через заданную точку О и направление ко-
которой по отношению к осям Oxyz определяется направляющими ко-
косинусами а, р, у (рис. 42); очевидно, момент инерции относительно
136 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
оси I будет функцией этих направляющих косинусов. Согласно опре-
определению осевого момента инерции имеем
где hi есть расстояние точки с массой т1 до оси /. Возьмем начало
координат в точке О и положим OMi = ri, причем
Тогда
г tf = axl + РУ; + \zt = rt cos фг,
где ф; есть угол между направлениями rt и Р; далее, так как Ai =
= Г;81Пф(-, ТО
Уг = 2 mih2t = ^ mtr2t sin2 q>i = 2 mi [rl — (riC0S(Pif]-
Отсюда, принимая во внимание, что a2 + P2 + Y2=l» находим
или
Введем теперь следующие обозначения (см. п. 4 этого параграфа):
Тогда получим
А - ^х«2 + ^vP2 + Jz*y2 - 2Jy№ - 2^Л« - 2Ухуар. E)
или, в других обозначениях,
у, == Лес2 + #Р2 + Су2 — 2DPy — 2?\а — 2Fa$. E'>
9. Тензор инерции. Из равенства E) следует, что для определе-
определения момента инерции тела относительно любой оси пучка, проходя-
проходящего через точку О, достаточно знать шесть величин Jxx, Jyy, J2Z,
Jyz, Jzx, Jxy (или A, B, C, D, E, F) и, конечно, направление этой
оси, определяемое косинусами а, р, у; при этом Jxx, Jyy, Jzz пред-
представляют собой моменты инерции относительно соответствующих,
осей координат с началом в точке О, а Jyz, Jzx, Jxy — произведения
инерции. Эти шесть величин зависят от положения точки О и от
направления координатных осей, потому что с изменением точки Q
Ш
ГЕОМЕТРИЯ МАСС
137
и при перемене направления координатных осей координаты точек
тела xt. yt, zl изменяются. Указанные величины можно расположить
в виде симметричной матрицы
/ / /
(J)=\
'" ¦' J,
ух
—у,
yz
F)
— Л
— У
zy
которая носит название тензора инерции; элементы этой матрицы
называются компонентами тензора инерции. Из матрицы F) видно,
что диагональные компоненты тензора (У) представляют собой осевые
моменты инерции, а остальные—произведения инерции со знаком
минус, причем по определению У,гУ = Уу*. Jyz — Jzy> Jzx — Jxz- Тен-
зор (У) представляет собой символический оператор, который, дей-
действуя на некоторый вектор а, дает другой вектор Ь с проекциями,
являющимися линейными функциями проекций вектора а; при этом
матрицей линейного преобразования является матрица (У). Вектор Ь
называется линейной вектор-функцией вектора а, а самая операция
называется операцией умножения вектора а на тензор (У) и обозна-
обозначается так:
Ь — а (У).
Это равенство, согласно определению, запишется в проекциях сле-
следующим образом:
— — Jyxax
~~ Jzxax —
yyay — Jyzaz,
zyay "Г" Jzzaz-
Если за вектор а взять радиус-вектор точки М пространства
г = xi -f- yj -\- zk, то уравнение
где
«11 а\2
«31
«32
«13
«23
«33 J
определит точку пространства М'(х', у', z'), причем
z' — аг1х 4- а32
Таким образом, каждой точке М(х, у, z) пространства одно-
однозначно соответствует точка М' (х', у', z'). Такое преобразование
пространства называется аффинным, поэтому оператор (А) называется
138
ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
[ГЛ IV
аффинором. Следовательно, (У) также представляет собою аффинор,
и притом симметричный.
Посредством тензора (У) мы можем формулу E) выразить сле-
следующим образом. Возьмем единичный вектор направления оси /:
тогда
Умножая вектор /°(У) на вектор f скалярно, получим
P(J) ¦ Р = Jxxa? + УууР2 + Jxxy2 — 2Уугру — 2Jzxya — 2У,.уар
Обозначая стоящую в правой части квадратичную форму аргументов
а, р, у для сокращения записи через
2F (а, р, у), получим
f(J)-P=2F(a, p, Y) = y,.
Отметим в заключение, что вообще каж-
каждому симметричному аффинору соответ-
"№,уё) СТВует квадратичная форма; если аффи-
аффинор (Л) будет симметричный, т. е. если
aik~aki< T0 квадратичная форма, соот-
соответствующая (Л), будет 2F (х, у, г) =
= г(Л)т.
10. Эллипсоид инерции. В п. 8 мы
получили выражение E) момента инерции
относительно оси / в зависимости от на-
направляющих косинусов а, р, у этой оси;
следовательно, зная компоненты тен-
тензора (У) для точки О и данного направления координатных осей xyz,
мы можем найти момент инерции для любой оси, проходящей через
точку О. Можно дать геометрическую картину распределения момен-
моментов инерции относительно осей пучка с центром О путем построе-
построения эллипсоида инерции.
Возьмем на оси / пока произвольную длину ОМ = R; тогда
координаты точки М будут (ри?. 43)
Рис. 43.
Подставляя полученные из этих равенств значения а, р, у в выра-
выражение E) для У{, получим
G)
или, сокращенно,
§ II] ГЕОМЕТРИЯ МАСС 139
Выберем теперь R так, чтобы было
А2 (8)
или
где k есть постоянная величина. Тогда
или
2f(*, у, 2;) = ft2, (9')
т. е. геометрическим местом точек М будет поверхность 2-го по-
порядка, определяемая уравнением (9). Из уравнения (8') ясно, что
поверхность (9) не имеет бесконечно удаленных точек, поскольку
величина Jt существенно положительна и не равна нулю; следова-
следовательно, эта поверхность есть эллипсоид, который носит название
эллипсоида инерции тела относительно центра О. Уравнение эллип-
эллипсоида инерции (9) в иных обозначениях будет
Ах2 Н- By2 + С г2 — 2Dyz — 2Ezx — 2Fxy = k2, (9")
Центр эллипсоида инерции, как показывает его уравнение, нахо-
находится в точке О; постоянная k2 может быть выбрана произвольно
и определяет масштаб построения; меняя k2, мы будем получать по-
подобные эллипсоиды. Таким образом, каждой точке О данного тела
будет соответствовать (с точностью до масштаба) вполне определен-
определенный эллипсоид инерции. Если точка О взята в центре масс, то эл-
эллипсоид инерции, построенный для этой точки, называется централь-
центральным. Главные оси эллипсоида инерции называются главными осями
инерции тела для точки О.
Так как длина R удовлетворяет равенству (8'), то длина ради-
радиуса-вектора эллипсоида инерции обратно пропорциональна корню
квадратному из момента инерции тела относительно оси, направлен-
направленной по этому радиусу.
Если вместо Jt ввести соответствующий радиус инерции, т. е.
положить Jt = Mp2[t то формула (8') дает
т. е. длина радиуса-вектора эллипсоида инерции обратно пропор-
пропорциональна радиусу инерции тела относительно оси того же напра-
направления.
11. Главные оси инерции. Главными осями инерции тела в дан-
данной точке называются главные оси эллипсоида инерции, построен-
построенного для этой точки; поэтому нахождение главных осей инерции
140 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
тела в данной точке О сводится к нахождению главных осей эллип-
эллипсоида инерции, построенного для этой точки. Пусть уравнение этого
эллипсоида в системе координат xyz будет (рис. 44)
2F(x, у, z)==Jxxx2-\-Jyyy2-{-
+ Jzzz2 — 2Jyzyz — 2Jzxzx — 2Jxyxy = k2. A0)
Для нахождения главных осей эллипсоида инерции A0) будем исхо-
исходить из того соображения, что для главных осей направление ради-
радиуса-вектора R совпадает с направле-
направлением нормали к эллипсоиду, или из
того, что для главных осей R, а сле-
следовательно, как это вытекает из ра-
равенства (8'), и Jt имеют стационарное
значение; в обоих случаях вычисления
совершенно одинаковы.
Итак, будем искать направления,
для которых JR совпадает с направле-
направлением нормали к эллипсоиду. Эти на-
направления, очевидно, должны удовлет-
удовлетворять условию
Рис. 44.
gmdF(x, у, z) =
A1)
где X есть коэффициент пропорциональности. Условие A1) в проек-
проекциях на оси xyz будет иметь вид
дР _. dF _ , дР __,
~дх ~ АХ' ~di~ Ку> дг ~~ '
A1')
или, принимая во внимание значение F, даваемое равенством A0),
н перенося все члены в левую часть:
\Jxx к) х — Jxyy Jxzz — "•
-Jyxx + (Jyy-X)y-Jyzz = 0, A1")
— Jzxx — Jzyy -f- (Jzz — X) z = 0.
Условие совместности системы трех однородных линейных урав-
уравнений A1"), как известно, будет
Jyy X
= 0.
A2)
Уравнение A2) представляет собой так называемое характеристиче-
характеристическое (вековое) уравнение, которое в случае симметричности тен-
§ 11] ГЕОМЕТРИЯ МАСС 141
зора (У) и действительности его компонентов имеет три действитель-
действительных корня: Хъ Х2, Х3. Подставляя каждый из этих корней в си-
систему A1") и решая ее, получим три системы отношений координат
*i = Уг• гх, х2:у2: z2, х3:у3: гъ,
которые дают три действительных направления, удовлетворяющих
условию A1), т. е. дают три главные оси эллипсоида инерции.
Докажем, что эти три направления (которые по отношению к тен-
тензору (У) называются главными направлениями тензора) взаимно пер-
перпендикулярны; для этого докажем сначала перпендикулярность пер-
первого и второго направлений. Возьмем уравнения A1') для координат
первого направления, умножим их соответственно на х2, у2, z2 и
сложим; получим
); A3)
делая то же самое в обратном порядке, найдем
Вычитая почленно из A3) равенство A3'), получим
0 = (Xl — X2)(x1x2-\-y1y2-\-z,z2), A4)
так как левые части этих равенств, как соответствующие квадра-
квадратичной форме 2F(x, у, z) билинейные формы, будут равны, что
легко проверить непосредственно.
Предположим, что Х^фХ^, тогда из равенства A4) следует
а следовательно, fli_l_fl2. Точно таким же способом докажем пер-
перпендикулярность второго и третьего направлений, а также третьего
и первого. Итак, если корни характеристического уравнения A2)
различны, то в каждой точке тела О мы имеем три взаимно перпен-
перпендикулярных направления, удовлетворяющих условию A1); эти напра-
направления будут, следовательно, главными осями эллипсоида инерции,
а потому и главными осями инерции тела в точке О.
Возьмем теперь за оси координат главные оси инерции ^ и
рассмотрим, как преобразуются при переходе к этой системе осей
уравнение эллипсоида инерции (9) и компоненты тензора (J). Ясно,
что квадратичная форма 2F(x, у, z) преобразуется в другую квад-
квадратичную форму 2FQ,, т|, ?). причем для осей ?, ц, ? будут тожде-
тождественно удовлетворяться уравнения A1'). Для оси | (т. е. для случая,
¦когда вектор R направлен по оси ?) будет ч\ = 0, ? = 0, и мы
получим
dF , 9 dF n dF п /1 сч
U = 0 0; A5)
142 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
подобным же образом для осей ц и ? будем иметь
дР п дР . дР
Из равенства A5) имеем для оси | (г) = ? = 0)
т. е.
Таким же образом для оси f] (C = | = 0) имеем
т. е.
и для оси С (| = г) = 0)
[ГЛ. IV
A5')
A5")
A6)
A60
^ = JtS. Л? = ^=0- A6")
Формулы A6), A6'), A6") показывают, что: 1) корни уравнения A2)
Xv Х2, ^з соответственно равны У^, У^, J^j, т. е. равны моментам
инерции тела относительно главных осей инерции, 2) если за коор-
координатную ось взята главная ось инерции, то произведения инерции,
содержащие координаты, соответствующие этой оси, обращаются
в нуль, т. е. если ось | главная, то -4T1 = -/j? = 0 и т. д. Моменты
инерции Уц, Jm, Jn называются главными моментами инерции
тела для центра О.
Следовательно, если за оси координат взяты главные оси инер-
инерции |, г), С, то квадратичная форма
Jxxx2 + Jyyy2 4- JZzz2 — 2Jy2yz — 2Jzxzx — 2Jxyxy
переходит в форму
и тензор
Jxx Jxy
— J,
ух
Jy
— J,-
— J
yz
г
0
0
0
0
0
0
Л
Уравнение эллипсоида инерции, отнесенное к главным осям, будет
Ш
ГЕОМЕТРИЯ МАСС
143
или в других обозначениях
Если уравнение A2) имеет два равных корня, например Хх = Я.2,
то заключение о перпендикулярности направлений 1 я 2, как видно
из уравнения A4), не имеет места; в этом случае мы имеем
т. е. два главных момента инерции между собою равны, и условию
(П) будут удовлетворять все направления в плоскости |г], выходя-
выходящие из точки О; следовательно,
все оси в плоскости |ti будут
главными осями инерции, и эллип-
эллипсоид инерции будет эллипсоидом
вращения, а плоскость 1ц — его
экваториальной плоскостью.
Если все три корня будут
равны, т. е. если ^1 = Я,2==^з, то
эллипсоид инерции обращается
в сферу, и все оси, проходящие
через точку О, будут главными;
в этом случае точка О называется
шаровой точкой тела.
12. Свойства главных осей
инерции. В предыдущем пункте
было доказано, что если какая- Рис. 45.
либо ось, например х, является
главной для точки О, то произведения инерции, содержащие коорди-
координату х, обращаются в нуль, т. е.
•Лгу —.
A8)
Обратно, если имеют место равенства A8), то ось х будет глав-
главной осью инерции. Действительно, в этом случае уравнение эллип-
эллипсоида инерции будет
V
откуда следует, что ось х будет главной осью этого эллипсоида.
Следовательно, условия A8) являются необходимыми и достаточными
для того, чтобы ось х была главной осью инерции.
Докажем, что если однородное абсолютно твердое тело имеет
ось симметрии, то эта ось будет главной осью инерции для всех
точек данной оси. Пусть ось х (рис. 45) будет осью симметрии
однородного абсолютно твердого тела; тогда каждой частице тела
144
ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
[ГЛ. IV
М (х, у, z) будет соответствовать такая же частица М' (х, —у, —г),
а поэтому
следовательно, ось х будет главной осью инерции для точки О, при-
причем приведенное доказательство имеет место для любой точки О на
оси симметрии.
Точно так же можно доказать, что если однородное абсолютно
твердое тело имеет плоскость симметрии, то для всех точек этой
плоскости одна из главных осей инерции будет к ней перпендику-
перпендикулярна. В самом деле, если примем плоскость симметрии за пло-
плоскость ху, то всякой частице М(х, у, z) будет соответствовать
X(zy такая же частица Мг (х, у, — г), сле-
следовательно,
Рис. 46.
а потому ось z, перпендикулярная
к плоскости ху, будет главной осью
инерции для точки О, причем положе-
положение точки О в плоскости симметрии
совершенно произвольно.
Главные оси инерции для центра
масс тела называются главными цен-
центральными осями инерции. Точки,
лежащие на главных центральных осях инерции тела, обладают тем
свойством, что для всех этих точек главные оси инерции парал-
параллельны главным центральным осям инерции (а следовательно, и
между собой). Действительно, пусть С есть центр масс тела, а х,
у, z—главные центральные оси инерции (рис. 46). Возьмем на оси х
точку М, причем СМ = а, и проведем через М оси у' и z' парал-
параллельно осям у и z. Так как ось х есть главная для точки С, то
Переходя к системе координат х', у', г' с началом в М, имеем
xl = xl' + a, у, = уЛ «( = «/:
подставляя эти величины в предыдущие равенства, получим
2 щ &+о) у\=0, s «, (*;+«)«;=о.
или
но так как
§ И] ГЕОМЕТРИЯ МАСС 145
как статические моменты тела относительно плоскостей, проходящих
через центр масс, то имеем
следовательно, ось х будет главной осью инерции и для точки М.
Далее, так как оси у и г будут тоже главными, то 2т<У<г* = 0,
а отсюда следует, что
следовательно, оси у' и z' будут также главными осями инерции
для точки М, что и требовалось доказать. Нужно заметить, что
другие точки тела этим свойством вообще не обладают.
13. Взаимный (гирациониый) эллипсоид инерции. В некото-
некоторых случаях вместо эллипсоида инерции, рассмотренного в п. 10 и
обыкновенно называемого эллипсоидом Пуансо, удобно пользоваться
взаимным эллипсоидом инерции.
Эллипсоид Пуансо для точки О, если за координатные оси взять
главные оси инерции, имеет уравнение
А*2 + Ву2 + С*2 = ?2, A9)
где А, В. С суть главные моменты инерции для точки О. Полу-
Полуоси этого эллипсоида, согласно равенству (8'), будут
УК Ув ус
т. е. обратно пропорциональны корням квадратным из главных мо-
моментов инерции; или, если ввести главные радиусы инерции, положив
то
т. е. полуоси будут обратно пропорциональны главным радиусам
инерции.
Во взаимном эллипсоиде инерции, наоборот, полуоси прямо про-
пропорциональны корням квадратным из главных моментов инерции или
главным радиусам инерции. Взаимный эллипсоид инерции получается
из эллипсоида Пуансо A9) путем двойного преобразования. Первое
преобразование состоит в том, что через каждую точку М эллип-
эллипсоида A9) проводим касательную плоскость и из центра О опу-
опускаем на нее перпендикуляр; пересечение этого перпендикуляра с
10 Н. Н. Бухгольц
146
ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
[ГЛ. IV
касательной плоскостью определит точку М' (рис. 47), Геометрическое
место точек М' будет поверхностью, которая называется подерной
поверхностью данного эллипсоида относительно центра О. Второе
преобразование заключается в инверсии точки М' относительно окруж-
окружности произвольного радиуса R, т. е.
в построении точки М", которая опреде-
определяется равенством
R2
ОМ' '
B0)
Геометрическое место точек М" и даст
поверхность, которая будет эллипсоидом,
взаимным эллипсоиду A9). Найдем1 урав-
уравнение этого эллипсоида, для чего необхо-
необходимо найти выражения координат точки М
эллипсоида A9) через координаты то-
точки М" и подставить в уравнение A9).
Выразим сначала координаты точки
М (х, у, z) через координаты точки
М"(х", у", z"). Так как ОМ' есть рас-
расстояние точки О до касательной плоскости, проведенной через
точку М (х, у, z) эллипсоида, причем ОМ' параллельно нормали
к эллипсоиду A9) в точке М, то имеем
Рис. 47.
cos (ОМ', х) = -^f-, cos(OM', y) = -S??, cos(OM', z) = - k2-,
B1)
далее, из равенств B0) и B1) имеем
" = —; х" = ОМ" cos (ОМ', х) =
у" = ОМ" cos (ОМ', у) =
отсюда
z" = ОМ" cos (ОМ', г) =
Х А 02 • У R
A R2
В
г к2
"С" Ж'
B2)
Подставляя значения B2) в уравнение эллипсоида A9), получим
у г ft*
' В ' (Г^Ж'
т. е. геометрическое место точек М" есть эллипсоид B3), который
и будет взаимным по отношению к эллипсоиду A9). Легко видеть,
что главные оси эллипсоидов A9) и B3) совпадают, причем для
12]
ВРАЩЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ
147
эллипсоидаB3) полуоси будут прямо пропорциональны корням квад-
квадратным из главных моментов инерции, т. е.
Если преобразования, посредством которых мы получили из эл-
эллипсоида A9) эллипсоид B3), применить к эллипсоиду B3), то, как
нетрудно показать, получим эллипсоид A9), вследствие чего оба этих
эллипсоида и называются взаимными.
§ 12. Вращение абсолютно твердого тела вокруг
неподвижной оси
1. Уравнение движения. Пусть абсолютно твердое тело вра-
вращается вокруг неподвижной оси под действием системы активных
сил Flt F2, .... Fn. Для вывода уравнения движения применим теорему
об изменении кинетического момента относительно неподвижной оси,
которую примем за ось z (рис. 48).
Имеем !)
Но, как было показано [см. § 2 фор-
формулу (9)], для тела, вращающегося вокруг
неподвижной оси z.
Подставляя это значение Ох в равенство A),
получим уравнение движения твердого
тела, вращающегося около неподвижной
оси, в виде
7 " Т ^^
22 dt* ~
B)
Рис. 48.
Интегрируя это уравнение, находим угол <р как функцию времени
и этим вполне определяем движение, ибо в данном случае система
имеет одну степень свободы и положение ее вполне определяется
углом <р. Если внешние силы отсутствуют или направление их про-
проходит через ось вращения z, то 2mornJ/7i = 0, и мы имеем
= 0, -^ = 0 = const. <p =
т. е. вращение будет происходить с постоянной угловой скоростью.
') Реакции связей, закрепляющих тело на оси (например, в точках А и
В), пересекают ось г и поэтому в правую часть уравнения A) не войдут.
10*
148
ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
[ГЛ. IV
2. Давление иа ось. Вращение твердого тела вокруг неподвиж-
неподвижной оси можно рассматривать как движение твердого тела, при ко-
котором две его точки А а В неподвижно закреплены. Последнее опре-
определение удобно тем, что вполне определенно решается вопрос о реак-
реакциях связи, а именно можно сказать, что связь, осуществляемая
двумя неподвижными точками А и В, по аксиоме о связях эквива-
эквивалентна двум реакциям, приложенным в этих точках; эти реакции
обозначим через А к В. Активные внешние силы обозначим через F\,
F2, • ¦ •. Fn\ начало координат возьмем в точке Л и за ось Az примем
ось вращения (рис. 49). Применяя теорему
об изменении количества движения, имеем
Проектируя обе части равенства C) на коор-
координатные оси, получим три уравнения:
dt
4t 2 m#i =
Ву
Рис. 49.
D)
Применяя теорему об изменении кинетического момента относительно
центра А, имеем
E)
4t 2<r* X тРд =
Имея в виду, что
i j k
О О АВ
Bx By B,
и проектируя обе части равенства E) на координатные оси, получаем
еще три уравнения:
¦зг 2 да* (**'* - *'*<)=-
АВ •
2 ил» - z*F^-
4" 2
§ 12] ВРАЩЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ Н9>
Преобразуем шесть уравнений D) и F), имея в виду, что
х == г cos ф, х = — г sin ф ¦ ф = — усо, х = — ха2 — yw,
у=Г51Пф, у = г cos ф • ф = ха>, у =— усо2 + д;со.
z — const, z = 0, z — 0;
тогда, выполняя дифференцирование и подставляя значения х, х, у*
у, z, z в уравнения D) и F), получим
2
= — АВ • Ву+ 2 (У^«г-
— « 2 «^.У^ - «2 2 «/г,*
to 2 mt (xj -f- у?)
Принимая во внимание, что
G)
= Jzx' 2a mi \xl + УU ~ Jzz'
где С обозначает центр масс тела, представим уравнения G) в виде-
i — Жуси = Ах -\- Вх -f 2 Fxi>
(8)
— Угжо> = — ЛВ ¦ Ву + 2
./гл.(о2 —
= AB ¦ Bx + 2 momy (Z7,).
Последнее уравнение системы G) или (8) не содержит реакций и,,
следовательно, дает уравнение вращения твердого тела около непо-
неподвижной оси B); интегрируя это уравнение, мы найдем сначала угло-
угловую скорость и, а затем и угол ф в функции времени t. Остальные
пять уравнений содержат проекции неизвестных реакций А и В, число
которых равно шести; система, следовательно, оказывается неопре-
неопределенной, а именно, из уравнения третьего первой группы мы можем
150
ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
[ГЛ. ГУ
определить лишь сумму Az-\-Bz, [Эту неопределенность можно устра-
устранить соответствующим выбором форм подшипников (связей) в точ-
точках А и В.]
3. Условия, при которых динамические реакции равны стати-
статическим. Если бы твердое тело, имеющее неподвижную ось враще-
вращения, было неподвижно, то со = со = 0, и левые части уравнений (8)
равнялись бы нулю; первые пять уравнений были бы тогда обыкновен-
обыкновенными уравнениями равновесия и служили бы для определения реакций,
которые в этом случае назовем статическими, а последнее уравнение,
как не содержащее реакций, было бы условием равновесия.
В отличие от статических реакций, реакции при вращении твер-
твердого тела будем называть динамическими. Возникает вопрос, весьма
важный в технике, об условиях, при которых вращение не вызывает
добавочных давлений на ось, т. е. об условиях, при которых дина-
динамические реакции делаются равными статическим.
При произвольных условиях вращения твердого тела динамиче-
динамические реакции могут весьма сильно отличаться от статических. Это
видно хотя бы из того, что если бы в случае равновесия все внеш-
внешние активные силы равнялись нулю, то и реакции также были бы
равны нулю; однако при вращении твердого тела около неподвижной
оси динамические реакции при отсутствии внешних активных сил уже
не будут равняться нулю, так как левые части четырех из уравне-
уравнений (8) не равны нулю. Отсюда, между прочим, ясно, что для полу-
получения давления на ось, вызываемого вращением тела, нужно внешние
активные силы в этих уравнениях приравнять нулю.
Найдем условия, при которых вращение твердого тела не вызы-
вызывает добавочных реакций, т. е. условия, при которых динамические
реакции равны статическим; для этого необходимо и достаточно,
чтобы левые части уравнений (8), за исключением, конечно, послед-
последнего, не содержащего реакций, равнялись пулю, т. е.
— У<уй2 = 0
Так как определители
2 со
(О
(О2
ОJ (О
(О (О2
при вращении тела не равны нулю, то равенства (9) могут иметь
место тогда и только тогда, когда
т. е. если центр тяжести тела лежит на оси вращения и ось враще-
вращения будет главной осью инерции для одной из своих точек. Соединяя
12]
ВРАЩЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ
151
оба результата, можем сказать, что при вращении абсолютно твер-
твердого тела не возникает добавочных давлений на ось вращения*
т. е. динамические давления равны статическим тогда и только
тогда, когда осью вращения будет одна из главных централь-
центральных осей инерции.
Все изложенное относилось к вращению несвободного твердого
тела, у которого закреплены две точки. Рассмотрим, при каких
условиях может происходить вращательное движение свободного
твердого тела. Допустим, что никакие заданные внешние силы на
тело не действуют. Поскольку тело является свободным, все реакции
связей будут также равны нулю. Тогда из уравнений (8) следует,
что и в данном случае должны выполняться условия (9), т. е. свобод-
свободное тело может совершать чисто вращательное
движение только вокруг одной из своих глав-
главных центральных осей инерции. По этой при-
причине указанные оси называют еще свободными
осями вращения.
В поле тяжести твердое тело может также
совершать чисто вращательное движение вокруг
одной из своих главных центральных осей инер-
инерции, если закрепить какую-нибудь одну из точек
этой оси и если равнодействующая сил тяжести
будет проходить через эту точку; примером
служит вращение вертикального волчка.
4. Физический маятник. Физическим маят-
маятником называется абсолютно твердое тело,
которое может вращаться вокруг неподвижной
оси под действием силы тяжести. Ось вращения будем считать гори-
горизонтальной и примем ее за ось z. Примем за плоскость ху верти-
вертикальную плоскость, перпендикулярную к оси Z и проходящую череа
центр тяжести С маятника (рис. 50). Составляя для маятника урав-
уравнение движения B) и вводя обозначение ОС = а, получим
A0)
где Jo есть момент инерции тела относительно оси z.
Уравнение C0) можно представить в виде
d2qp . Mga sin ф „
Сравнивая уравнение A0') с уравнением движения плоского (кру-
(кругового) математического маятника, которое имеет вид (см. ч. I, § 38)
152 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
находим, что физический маятник будет колебаться по такому же
закону, как плоский математический маятник длиною
где а есть расстояние от центра тяжести до оси вращения; такой
математический маятник называют синхронным данному физическому,
-а величину I— приведенной длиной физического маятника.
Для малых колебаний физического маятника полагаем sin ф ~ ср;
тогда уравнение A0') примет вид
откуда
где а и е — постоянные, определяемые из начальных условий дви-
движения.
Период малых колебаний физического маятника будет, очевидно,
Т = 2лЛ/ 4г~ ' О2)
У Mga K '
Полагая Jo = Mi20, где 1О есть радиус инерции тела относительно
оси z, получим из равенства A1) для приведенной длины физиче-
физического маятника выражение
Так как по теореме Гюйгенса
Р Р A4)
хде Jc есть момент инерции тела относительно оси, проходящей
через центр тяжести С параллельно оси z, a tc — радиус инерции
относительно той же оси, то, подставляя значения A4) в выраже-
выражение A3), получим
'с
Из равенства A5) видно, что всегда / > а, т. е. приведенная
длина физического маятника всегда больше расстояния от центра
«с
тяжести до оси вращения. Полагая — = ?, имеем
§ 12] ВРАЩЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ 15&
т. е. длина % является третьей пропорциональной величин а и 1С и
может быть получена простым геометрическим построением (рис. 50).
Докажем, что если за ось вращения физического маятника взять-
прямую, параллельную первоначальной оси вращения z и проходя-
проходящую через точку О', которая лежит в плоскости ху на расстоянии
1 — а-\~% от оси z, то период колебания физического маятника не
изменится. Действительно, возьмем за ось вращения ось О'(см. рис. 50),
параллельную оси г; тогда для этой оси, на основании равенства A5),.
приведенная длина маятника будет
подставляя во второй член правой части этого равенства значение |„
получим
т. е. для оси О' приведенная длина будет та же, что для оси О,
откуда и следует доказываемое. Таким образом, оси О я О' являются
взаимными. На этом основано свойство оборотного физического
маятника, используемое в известном из курса физики оборотном
маятнике Катера, применяемом для экспериментального определения
ускорения силы тяжести. Заметим, что точку О называют центром
качаний физического маятника.
б. Давление маятника на ось. Для определения давления физи-
физического маятника на ось вращения воспользуемся уравнениями (8) п. 2,
причем предположим, что тело однородно и симметрично относи-
относительно плоскости Оху, проходящей через центр тяжести С (см. рис. 50).
Тогда ось z будет главной осью инерции тела для точки О (§ 11, п. 12);
следовательно, Jxz — Jyz = 0. Так как в данном случае на тело дей-
действует только одна сила Mg, приложенная в точке С(хс, ус) в пло-
плоскости Оху и параллельная оси х, то уравнения (8), если считать
точку А совпадающей с О, примут вид
Ах + Вх + Mg,
A6)
— а>2Мус -f- (аМхс = Ау-\- By,
0 = Л, + Вг,
0 == — АВ • Ву,
0 = АВ- ВХ,
где 5—какая-нибудь точка оси z. Принимая во внимание, что на осно-
основании уравнений A6) Вх = Ву = 0 и считая закрепление в точке В
таким, что Вг = 0, получим
154
ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
[ГЛ. IV
Уравнения A7) показывают, что в случае симметрии реакция оси
сводится только к одной силе А, приложенной к точке О в плоско-
плоскости Оху; проекции этой силы на оси х ц у определяются уравне-
уравнениями A7).
§ 13. Плоскопараллельное движение абсолютно твердого тела
1. При плоскопараллельном движении точки тела движутся в пло-
плоскостях, параллельных некоторой неподвижной (основной) плоскости
{см. ч. I, § 9, п. 1). Всякое движение твердого тела кинематически
и динамически можно рассматривать состоящим из движения центра
масс и движения тела относительно центра масс. При плоскопарал-
плоскопараллельном движении центр масс дви-
движется параллельно неподвижной пло-
плоскости, а движение относительно центра
масс есть вращение тела вокруг оси,
проходящей через центр масс и перпен-
перпендикулярной к неподвижной плоскости.
Проведем через центр масс С тела
плоскость, параллельную неподвижной,
и возьмем в этой плоскости неподвиж-
неподвижные оси Оху (рис. 51). Плоскость Ох у
пересечет тело по некоторому сечению,
положением которого относительно
осей Оху определяется положение тела.
Проведем через центр масс С оси Сх'у', параллельные осям Оху,
и подвижные оси Сх"у", скрепленные с телом. Тогда положение
тела будет определяться положением центра масс С, т. е. радиу-
радиусом-вектором гс (хс, ус) и углом ф между осями Сх' и Сх".
По теореме о движении центра масс имеем
A)
Рис. 51.
тде 2 Fi есть главный вектор внешних сил, действующих на тело,
М — масса тела. Проектируя обе части равенства A) на оси основ-
основяой системы, получим
dt2
Теорема моментов относительно центра масс дает уравнение
B)
где Jc есть момент инерции тела относительно оси Cz', проходящей
через центр масс.
§ 13] ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 155>
Интегрируя систему трех уравнений B) и C), определим хс,
ус и <р как функции времени /.
Уравнения движения центра масс можно составить также в проек-
проекциях на касательную и главную нормаль к траектории, т. е. в виде
где vc есть скорость центра масс, а рс — радиус кривизны его траек-
траектории. Тогда определение движения тела сведется к интегрированию
системы уравнений C), D).
При интегрировании системы уравнений B) и C) или D), C),
можно эти уравнения заменять другими, получающимися в резуль-
результате их взаимных комбинаций.
1) Воспользуемся теоремой об изменении кинетической энергии.
Кинетическая энергия твердого тела относительно неподвижной си-
системы Оху по теореме Кёнига равна
(Mv2 + Jc<»2) = 4 К
где vc есть скорость центра масс, а /с = у —¦ есть радиус инер-
инерции тела, относительно оси Cz'', проходящей через центр масс.
По теореме об изменении кинетической энергии имеем
Подставляя выражение кинетической энергии в это равенство,
получим уравнение
которым можно заменить любое из трех уравнений B) и C) или D), C).
Уравнение, выражающее теорему, можно составлять и в конечной
(интегральной) форме
Т — Т0 = ^А\. (8)
2) Применим теорему моментов относительно оси Oz основной
(неподвижной) системы. Так как, по доказанному ранее (см. § 2, п. 3),
кинетический момент относительно неподвижного центра О равен
сумме кинетического момента центра масс, в котором сосредоточена
масса тела, относительно центра О и кинетического момента тела
относительно центра С в его движении по отношению к системе
156
ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
[ГЛ. IV
осей х'Су', проходящих через центр масс и перемещающихся посту-
поступательно, т. е.
(9)
Ф
7- (Ю)
1у — У1р1х)- О1)
-то
QOz=,M[xc^-y
В результате теорема моментов дает
Уравнение A1) также может заменить любое из трех уравнений B),
C) или D), C).
Свободное твердое тело, как следует из результатов п. 3 § 12,
может совершать плоскопараллельное движение только по отноше-
отношению к плоскости Оху, перпендикулярной к одной из главных цен-
центральных осей инерции тела; при этом необходимо, чтобы для дей-
действующих на тело внешних сил выполнялись условия 2 ^и ~ 0»
2 momX'Fi = 0, 2 тоту> Ft = 0 (см. рис. 51), а начальные скорости
всех точек тела должны быть равны нулю или параллельны пло-
плоскости Оху.
При несвободном движении уравнения B), C), D), F), A1) со-
сохраняют свой вид, но в их правые части войдут еще реакции связей.
Поэтому для определения закона движения, т. е. xc(t), yc{t), (f(t),
и реакций связей к любым трем уравнениям движения необходимо
еще добавить уравнения, выражающие условия, налагаемые на движе-
движение связями. Если связи идеальные и явно от времени не зависят,
то реакции этих связей в урав-
уравнение G), выражающее теорему
об изменении кинетической энер-
энергии, входить не будут.
В случае нескольких твердых
тел для каждого из них можно
составить какие-нибудь три урав-
уравнения движения, а затем исклю-
исключить взаимные реакции или состав-
составлять уравнения движения сразу
для системы этих тел.
2. Примеры. 1) Скольжение ци-
цилиндра вдоль наклонной плоскости.
Пусть тяжелый круглый цилиндр движется, касаясь абсолютно гладкой на-
наклонной плоскости, образующей с горизонтальной плоскостью угол а, так, что
ось цилиндра остается все время горизонтальной. Движение происходит
параллельно вертикальной плоскости, перпендикулярной к оси цилиндра
4рис. 52). Найдем уравнения движения цилиндра.
N
13]
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
157
Внешние силы, действующие на цилиндр: сила тяжести Mg и реакции
наклонной плоскости N. Направим оси основной системы следующим обра-
образом: Ох — вдоль наклонной плоскости и Оу — перпендикулярно к ней. Если
координаты центра тяжести обозначим через хс, ус, то уравнения движения
Мхс = Mg sin a,
Му'с = — Mg cos a-\-N,
= 0.
(a)
Здесь мы имеем случай несвободного движения. Условие, налагаемое на
движение связью, состоит в том, что ус = R, ус — 0. Тогда второе из урав-
уравнений принимает вид
О = — Mg cos a -\- N,
откуда определяется реакция
N = Mg cos a.
Из третьего уравнения системы (а) имеем <р = и = const, т. е. угловая ско-
скорость вращения цилиндра будет оставаться постоянной во все время дви-
движения.
Итак, цилиндр будет вращаться с той угловой скоростью, которая ему
•была сообщена в начальный момент, а центр тяжести его (ось) будет дви-
двигаться вдоль наклонной плоскости с ускорением хс = g sinot.
2) Качение цилиндра. Условия те же, что в предыдущем примере, но
плоскость шероховатая и цилиндр катится по плоскости без скольжения.
К внешним силам Mg и N добавится в этом случае сила трения сколь-
скольжения F, направленная вдоль наклон-
наклонной плоскости в сторону, противопо-
ложную движению (рис. 53). Уравнения
движения будут
M'xQ = Mg sin a — F,
Мус = — Mg cos а -\-N,
(б)
В последнем уравнении справа знак
плюс, так как для момента следует
брать то же положительное направле-
направление, что н для отсчета угла <р. Движе-
Движение по-прежнему несвободное и ус = 0; следовательно, и в этом случае
N = Mg cos а. Из последнего уравнения имеем
/=• =
В данном случае связь налагает на движение еще одно ограничение: по-
поскольку при качении цилиндра мгновенная ось вращения направлена вдоль
образующей, соприкасающейся с плоскостью, то в любой момент времени
х. = Ry и, следовательно, х„ = R<f. Обозначим радиус инерции цилиндра
158 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
относительно оси С через i^\ тогда У^ = Mic, и выражение для Р примет
вид
Подставляя это выражение в первое из уравнений (б), получим
Mi%xc
Мхс -| ^— = MS sin a,
или
откуда
¦¦ _ gsinct
Сравнивая полученное выражение с результатом предыдущего примера,
мы видим, что в случае чистого качения ускорение будет меньше, чем
в случае чистого скольжения. Такой же результат можно получить и нз
теоремы об изменении кинетической энергии.
Для случая однородного цилиндра
, MR* .2 /?2 .. 2 ,
Jr = —^— > ir = —гг и хг = т g sin a.
Ускорение, следовательно, меньше на одну треть по сравнению с тем, кото-
которое будет при чистом скольжении. Сила трения равна Р — -5- Mg sin a.
о
Найдем дополнительно, при каких значениях коэффициента трения /
цилиндра о плоскость возможно рассматриваемое движение (т. е. качение
без скольжения). Заметим, что когда цилиидр ие скользит вдоль плоскости,
сила трения может не достигать предельного значения; поэтому Р к N здесь
связаны неравенством P^fN. Подставляя сюда найденные значения Р
и N, имеем
•=¦ Mg sin a < fMg cos a,
о
откуда
Если коэффициент трения будет меньше этой величины, то цилиндр
будет катиться вдоль плоскости с проскальзыванием. Уравнения движения
при этом сохранят вид (б), но одно из условий, налагаемых связями, изме-
изменится, а именно равенство хс — R($ не будет иметь места. Однако вместо
этого появится другое соотношение: поскольку точка касания скользит
вдоль плоскости, то сила трения имеет предельное значение и, следова-
следовательно, Р =fN.
13]
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
159
В результате 1-е и 3-е уравнения в системе (б) примут вид
Мхс = Mg (sina — /cosа); —=—
откуда
— / cos а); ф =
<р = fMgR cos a,
R
(в)
Следовательно, центр цилиндра в этом случае движется с постоянным уско-
ускорением хс, а сам цилиндр вращается с постоянным угловым ускорением <р,
значения которых определяются равенствами (в). Для вычисления этих ве-
величин дожен быть дополнительно задан
коэффициент трения /.
3) Качение цилиндра по цилиндри-
цилиндрической поверхности. Пусть однород-
однородный круглый цилиндр радиусом г ка-
катится без скольжения по цилиндричес-
цилиндрической же поверхности радиусом R (рис. 54),
начиная движение из наивысшего поло-
положения без начальной скорости (точнее
с пренебрежимо малой начальной ско-
скоростью). Найдем, в каком положении,
определяемым углом 6 = 6Ь цилиндр —и. ^ р л-
оторвется от поверхности.
Изобразим действующие на ци-
цилиндр силу тяжести Mg, нормальную
реакцию плоскости N и силу трения F.
Цилиндр будет оставаться иа поверх-
поверхности до тех пор, пока реакция N имеет направление, показанное на
рисунке. Следовательно, для определения места отрыва, если оно существует,
надо найти зависимость N (9). Эту зависимость проще всего получить из
уравнения движения центра масс в проекции на главную нормаль п к его
траектории [2-е уравнение в системе D)], которое дает
У
L
h
Г
/С
7ТО5&[ 7
0 / \
7
JV
А
/Л
JK-c
\
1
Рис. 54.
М
R + r
= Mg cos 0 — N.
(г)
Входящую сюда величину v2c найдем из теоремы об изменении кинети-
кинетической энергии
г-го=24 (д)
Так как движение начинается из состояния покоя, то Тй = 0. Для Т по
теореме Кёнига имеем
поскольку, как н в предыдущем примере, здесь имеет место соотношение
f с = аг.
Силы N a F в данном случае работы не совершают, так как они все
время приложены в точке, элементарное перемещение которой равно нулю.
Работа же силы тяжести на перемещении, определяемом углом 9, будет
А = Mgh = Mg (/? ~\- г) A — cos 6). В результате уравнение (д) принимает вид
|- Mv2c=Mg(R + r) (I- cos 6).
160 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
Определяя отсюда значение Mv2c и подставляя его в равенство (г), найдем
окончательно
ЛГ = -^G cos 0 — 4). (е)
о
Отсюда видно, что если 7 cos 6 < 4, то N > 0, т. е. реакция имеет направле-
направление, показанное на чертеже, и цилиндр остается на поверхности; если же
7 cos 6 > 4, то N < 0 и направление реакции меняется на прямо противопо-
противоположное. Но реакцию, имеющую такое направление, поверхность развить не
может. Следовательно, место отрыва определяется равенством
cos 9, = у (9( я 54°)
и от величин радиусов не зависит.
Найдем, каким должен быть коэффициент трения, чтобы цилиндр мог
катиться без скольжения до точки отрыва. Для этого надо вычислить вели-
dvr ..
чину Р. Составим 1-е из уравнений D) и уравнение C). Замечая, что —тр = *с»
получим
Эти уравнения такие же, как 1-е и 3-е уравнения системы (б) в предыдущем
примере. Поэтому, учитывая, что и здесь sc = rq>, и исключая из двух со-
составленных уравнений ускорение, найдем аналогично предыдущему примеру,
1 F
Mg sin 9 Длее мем F^fN оа />
1 F
что Р = -g Mg sin 9. Далее имеем F^fN, откуда />-vr-. Но при 6 = 9,
р ф 0, а N = 0. Следовательно, чтобы качение без скольжения происходило
до места отрыва, должно быть / = со. Практически это возможно, если между
катящимся цилиндром и цилиндрической поверхностью будет зубчатое заце-
зацепление. Если же величина / будет конечна, то, не доходя до места отрыва,
цилиндр начнет скользить; при этом зависимость vc F) изменится и место
отрыва станет другим.
§ 14. Движение абсолютно твердого тела, имеющего одну
неподвижную точку. Основные кинематические соотношения
1. Предварительные замечания. Согласно теореме Шаля (см.
ч. I, § 12, п. 1) всякое движение свободного твердого тела можно
рассматривать как совокупность двух движений: поступательного
движения, определяемого движением произвольно выбранной точки
тела, и движения (вращения) около этой точки как неподвижной;
в динамике часто выбирают за такую точку центр масс твердого тела.
Тогда движение тела будет слагаться из поступательного движения,
определяемого движением центра масс, и движения тела около центра
масс как неподвижной точки.
В ряде случаев движения твердого тела дифференциальные
уравнения, определяющие поступательное движение тела (урав-
(уравнения движения выбранной точки), не зависят от уравнений движения
тела около выбранной точки, и обе системы уравнений можно само-
самостоятельно интегрировать. Аналитические трудности возникают глав-
§ 14] ДВИЖЕНИЕ ТЕЛА С ОДНОЙ НЕПОДВИЖНОЙ ТОЧКОЙ 161
ным образом при интегрировании второй системы; поэтому задача
о движении твердого тела около неподвижной точки имеет основное
значение в механике твердого тела.
Твердое тело с одной неподвижной точкой имеет три степени сво-
свободы. Следовательно, положение твердого тела можно определить
заданием трех независимых обобщенных координат, что может быть
сделано разными способами (углы Эйлера, параметры Олинда Родрига
и др.). Классическими параметрами являются три эйлеровых угла: ср,
\|>, 6. Если они заданы для данного момента, то задано и положение
тела. Если же <р, ф, в известны в функции времени t, то известно
будет положение тела в каждый момент времени, а следовательно»
будет известно движение твердого тела.
2. Регулярная прецессия. Из теоремы Даламбера вытекает, что
движение твердого тела, имеющего одну неподвижную точку, можно
рассматривать как последовательность бесконечно малых вращений
около мгновенных осей вращения, проходящих через неподвижную
точку (см. ч. I, § 10, п. 2). Геометрическое место последователь-
последовательных положений мгновенной оси вращения в пространстве, связанном1
с телом, образует коническую поверхность с вершиной в неподвижной
точке, называемую подвижным аксоидом. Геометрическое место мгно-
мгновенных осей вращения относительно основной системы ориентировки
есть другой конус с вершиной
в неподвижной точке и называется
неподвижным аксоидом. Геомет-
Геометрически движение твердого тела
около неподвижной точки сво-
сводится к качению без скольжения
подвижного аксоида по неподвиж-
неподвижному.
Рассмотрим с кинематической
точки зрения одно из движений
твердого тела с неподвижной
точкой О, важное для дальней-
дальнейшего,— так называемую регулярную прецессию, т. е. такое сложное
движение тела, когда тело вращается с постоянной по численной вели-
величине угловой скоростью ©! вокруг оси z, связанной с телом (обычно
оси симметрии), а эта ось поворачивается с постоянной угловой ско-
скоростью ©2 вокруг другой неподвижной оси ?, составляя с неподвиж-
неподвижной осью ? один и тот же угол (рис. 55).
Подвижной и неподвижный аксоиды (на рисунке конусы / и //)
будут в этом случае круглыми конусами; их оси образуют с мгно-
мгновенной угловой скоростью результирующего движения 2 постоянные
углы аир. Подвижной аксоид (конус /) называют конусом собствен-
собственного вращения, а его ось z — осью собственного вращения; непод-
неподвижный аксоид (конус //) называют конусом прецессии, а его ось
И Н. Н. Бухгольц
162
ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
[ГЛ. IV
?—осью прецессии. Эти названия астрономического происхождения.
Земная ось (если отвлечься от движения центра масс Земли), являясь
осью собственного вращения, медленно поворачивается (прецессирует)
в пространстве и в период около 26 000 лет (годовая прецессия « 50")
описывает конус (конус прецессии), ось которого (ось прецессии)
перпендикулярна к плоскости эклиптики и составляет с земной осью
угол, равный 23° 28' (в настоящую эпоху).
Прецессия называется прямой, если угол между угловой скоростью
собственного вращения о, и угловой скоростью прецессии ©2 острый
(касание конусов / и /У при этом внешнее), и обратной (рис. 56),
если угол между со, и <л2 тупой (касание аксоидов внутреннее). Пре-
Прецессия земной оси есть пример обратной прецессии.
С
Рис. 57.
Между угловыми скоростями ©,, <й2 и И существуют соотношения,
вытекающие из параллелограмма угловых скоростей, а именно:
Q = ©j -J- й>2;
0J <¦>! Si
sin a sin Э sin (а + Р)
и
22 = ю^ -|- со2, -+- 20»^ cos (а -f- P).
8. Кинематические уравнения Эйлера. Обозначим (рис. 57)
основную систему ориентировки через ОЁ,^, а подвижную систему,
неизменно связанную с твердым телом, — через Oxyz. Начала обеих
систем координат совпадают с неподвижной точкой О твердого тела.
Положение тела в данный момент времени определяется положением
подвижной системы отсчета относительно неподвижной, которое будем
§ 14] ДВИЖЕНИЕ ТЕЛА С ОДНОЙ НЕПОДВИЖНОЙ ТОЧКОЙ 163
задавать тремя эйлеровыми углами ф, ф, 8 (см. ч. I, стр. 93). Пря-
Прямая пересечения плоскостей О^ц и Оху называется линией узлов;
обозначим ее через ОК Положительное направление на ней выби-
выбирается так, чтобы наблюдатель, расположенный вдоль ОК, видел по-
поворот от оси О? к Oz совершающимся против хода часовой стрелки.
Напомним, что эйлеровыми углами будут:
Ф — угол между линией узлов ОК и осью Ох,
ф — угол между осью О| и линией узлов ОК
и
6 — угол между осями ОС и Oz.
Ось Oz называется осью собственного вращения, и в соответ-
соответствии с этим угол ф и угловая скорость q> называются углом и угло-
угловой скоростью собственного вращения. Ось Ot, называется осью пре-
прецессии, а угол ф и угловая скорость if будут соответственно углом
и угловой скоростью прецессии. Линия узлов ОК называется осью
нутации, а угол 6 и угловая скорость 6 — углом и угловой ско-
скоростью нутации.
Когда изменяется только один из эйлеровых углов, например ф
(ф и 6 остаются постоянными), то движение твердого тела есть вра-
вращение около соответствующей оси, в данном случае оси z, с угловой
скоростью ф = ф2°, направленной по оси z. Если же изменяются все
три угла ф, ф, в, то угловая скорость о твердого тела по теореме
о сложении угловых скоростей, пересекающихся в одной точке (ч Г,
§ 11, п. 3), будет суммой угловых скоростей <р, ij) и б, направлен-
направленных соответственно по осям Oz, Ot, и ОК', при этом
Ф = Ф2°, ч> = \к° и ё = ,
где К0 есть единичный вектор линии узлов. Таким образом, имеем
Обозначим проекции угловой скорости ю на оси подвижной си-
системы координат через р, q, r, а на оси неподвижной системы через
р'', q', r'. Выведем кинематические уравнения Эйлера, дающие р, q, r
в функции эйлеровых углов и их производных. Проведем вспомога-
вспомогательную прямую От, перпендикулярную к плоскости OKz, и раз-
разложим угловую скорость прецессии яр по направлениям Oz и От.
Это разложение возможно, ибо От по построению перпендикулярно
к OK, a Oz и Ot, также перпендикулярны к ОК и, следовательно,
все три прямые Oz, O? и От лежат в одной плоскости. Так как От
перпендикулярно к Oz, то в параллелограмме ОАСВ угол при
11*
164 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
вершине О прямой, следовательно, параллелограмм является прямо-
прямоугольником и
J j
Отсюда следует, что
¦^ = г;Оф cos 9 -f- /»°ф sin 9. B)
Проектируем обе части равенства A) на подвижные оси, принимая
во внимание соотношение B) и замечая, что [_ КОх = /_ тОу — <р;
получим
р = ф cos -к + (ф cos 9) cos -к + (Ф sin 9) cos \-к — ф) + 9* cos Ф>
q — q cos-^- + (ф cos 8) cos 5-+ (ф sin 8) cos
r = ф + ф cos 6 + 0 cos -g-.
После упрощения имеем
р = ф5т9зтф + 8cosf,
Ф = ф sin ® cos ф — 9 sin ф, C)
г — ф cos 8 + qt.
Для получения кинематических уравнений. Эйлера в неподвижной
системе ориентировки проведем другую вспомогательную прямую Oft,
перпендикулярную к плоскости OKZ,, и разложим угловую скорость
собственного вращения ф = ф2° по направлениям On и Ot,; будем
иметь
Тогда, проектируя обе части равенства A) на неподвижные оси и
принимая во внимание найденное выражение для: ф, а также то, что
2^^?. ?(Ж=ф, получим
% — щ,
q' =(<psmtf)cos(rt—ty) + (<j>cosO)cos -j-t-ipcos-s+b cos
r' = (?cos9 + ^ + 9cos-|.
Окончательно будем иметь
pf = ф sin 8 sim]) + © cos if,
r' =<* " Г
§ 15] ВЫРАЖЕНИЯ ОСНОВНЫХ ДИНАМИЧЕСКИХ ВЕЛИЧИН 165
Приведем другой вывод уравнений C). Представим равенство A),
введя единичные векторы, в виде
Выразим единичные векторы ?° и К0 через единичные векторы под-
подвижных осей л°, У, 2°; имеем
(Г)
единичные векторы
К0 = cosy • xfi — sincp
и
?0 = cos6.z0-bsine
Но так как /_тОу = q>, то
?0 —cos Q . 2;0_]_sJn9(sir^ • JC°-f-COS<p • y°).
При найденных значениях К0 и ?° равенство (Г) примет вид
о = <р2° -{- ф (cos 6 • 2° + sin 9 sin ф • лг°+5т8со5ф ¦ у1)) -\-
-\- В (cos ф • Jt° — sin ф • з»°)
или
<й = jc° (ij>sin8sinф-f-0cosф)+У>(Фsin0 cos ф — 9 si n <p) -f-
—f- г° (ф -f- ^ cos ф),
Отсюда получаем систему C).
Уравнения C) или соответственно D) позволяют вычислить мгно-
мгновенную угловую скорость тела <й через ее проекции р, q, r (или р',
q', г'), когда закон движения тела, т. е. зависимости ф(^), \|)(*). 6@
известны.
При решении основной задачи динамики уравнения C) дают три
соотношения между шестью неизвестными функциями времени ф, \|),
6, р, q, r. Присоединяя эти три уравнения к трем динамическим
уравнениям Эйлера, которые устанавливают зависимость между р, q, r
и действующими силами (эти динамические уравнения будут полу-
получены в § 16, п. 1), будем иметь систему шести дифференциальных
уравнений первого порядка, из которых могут быть найдены шесть
величин р, q, r, ф, ф, в как функции времени.
§ 15. Выражения основных динамических величин
для твердого тела, имеющего неподвижную точку
1. Кинетический момент. Так как скорость точки твердого тела
есть v = о X *". то кинетический момент Оо твердоге тела относи-
относительно неподвижной точки О будет (в дальнейшем для кратности
166 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
индекс О при векторе Go опускаем)
О = 2 (г, X m.vt) = 2 [rs X я», О X г,)] =
= о 2 «,>"? — 2 «Л- (гг • **)•
Проектируем обе часта этого равенства на подвижные оси. Проекция
на ось х будет
Ох — р 2 я, (*? + ft + *?) — 2 я,*, (/>*, + ?У, + г*,) =
= Р 2 я, (у] ¦+- «^ — q 2 я,-«|У| — г 2 «,*,«,.
Вводя компоненты симметрического тензора инерции относительно
неподвижной точки и повторяя вывод для осей у и z, получим окон-
окончательно
A)
или, в других обозначениях,
Gx=Ap — Fq—Er,
Gy= — Fp + Bq — Dr, (l')
G^ = — Ер — D? -f- Cr.
[Последние две из формул A) или A') получаются из первой посред-
посредством циклической перестановки индексов х, у, z и соответственно
p. q. г.]
Формулы A) показывают, что проекции G являются линейными
функциями проекций о, коэффициентами которых являются компо-
компоненты тензора инерции.
Обозначая тензор инерции символом (У), можно представить ра-
равенство A) в виде
О = ©(/), B)
т. е. представить вектор О как произведение вектора о на тензор (У)
(см. § 11, п. 9).
Формула B) показывает, что вектор кинетического момента G
есть линейная вектор-функция угловой скорости о; при этом век-
вектор G получается аффинным преобразованием вектора ю посредством
тензора инерции (У).
Если за подвижные оси взять главные оси инерции тела для непо-
неподвижной точки, то произведения инерции обратятся в нуль, т. е.
§ 15] ВЫРАЖЕНИЯ ОСНОВНЫХ ДИНАМИЧЕСКИХ ВЕЛИЧИН 167
Jyz = Jzx = Jxy = 0, и формулы B) перейдут в более простые,
а именно:
Ox = JxxP = ApA
C)
2. Кинетическая энергия. Выразим кинетическую энергию твер-
твердого тела в фукции вектора о. Согласно определению имеем
27 г= 2 mtvj = 2 mtvt • vt = 2 *»,«, • («> X г,) =
= 2 © • (Tt X m^) = о • 2 ('"i X «i^j) == t» • О.
Итак,
27 = С-со, D)
т. е. удвоенная кинетическая энергия твердого тела, имеющего непо-
неподвижную точку, равняется скалярному произведению кинетического
момента относительно этой точки на угловую скорость тела.
Выражая скалярное произведение D) через проекции сомножите-
сомножителей на оси и заменяя проекции G их выражениями A), получим
27 = Jxxp* + Ууу(?2 + J»r* - 2Jvzqr - 2Jzxrp - 2Jxypq, E)
или в других обозначениях
27 = Ар2 + Bq2 + Сг2 — 2Dqr — 2Erp — 2Fpq, E')
что можно записать короче
2Т = 2Ф(р, q. r). F)
Из формулы E) мы заключаем, что кинетическая энергия твердого
тела есть однородная квадратичная функция проекций угловой ско-
скорости.
Если за подвижные оси взяты главные оси инерции тела, то
Jyz = Jzx = Jxy = 0, и формула E) примет вид
27 = У^Р2 + ^2 + V2. G)
или в других обозначениях
. G')
Для вычисления кинетической энергии тела с неподвижной точкой
можно указать еще другую формулу. Если обозначить момент инер-
инерции тела относительно мгновенной оси вращения через Уш, то, по-
поскольку мгновенное распределение скоростей точек тела при эле-
элементарном повороте вокруг мгновенной оси является таким же, как
при вращении вокруг неподвижной оси, для вычисления кинетической
168 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
энергии тела с неподвижной точкой должна быть справедлива фор-
формула
Г = }УшоJ. (8)
Покажем, что эта формула вытекает и из равенства E). В самом
деле, если обозначить направляющие косинусы мгновенной оси вра-
вращения через a, (J, у, то
р=аа, <7 = а>р, г = (яу.
Подставляя эти значения в равенство E), получим
27 = (Jxy + V2 + J*zV2 - 4*PY - 2Juya - 27,уар) о*
т. е. придем к равенству (8), так как, согласно формуле E) из
п. 8, § 11, выражение в скобках равно Ja. По формуле (8) можно
также вычислить У^, если величины Т и со в данный момент времени
известны.
Отметим в заключение, что если взять частные производные от
выражения E) по р, д, г и принять во внимание формулы A), то
получим следующую зависимость между величинами G и Т:
Л7* f^T1 ЛТ1
что можно записать короче:
,,r7\ (9')
где индексы р, q, r указывают переменные, по которым берется
(формально) операция grad.
3. Эллипсоид энергии. Выясним энергетический смысл эллипсоида
инерции Пуансо (см. § 11, п. 10). Будем откладывать от неподвиж-
неподвижной точки О на векторах угловой скорости & отрезки ОМ = /?j,
пропорциональные модулю соответствующей угловой скорости; получим
векторы
/?1 = /г1(д, A0)
где &! = const — коэффициент пропорциональности. Обозначим проек-
проекции ^i на подвижные оси временно через xv yu zx. Тогда
x1 = klp, y1 = k1g, z1 = klr. A1)
Определяя из равенств A1) р, q, r и подставляя их в выражение F)
для кинетической энергии, получим
2Tk**=2O(xv yv г,). A2)
Если потребовать, чтобы было 2Т = const, то равенство A2) обра-
обратится в следующее:
2Ф(лг,, yv Zl) = 2Tk\ = const, A3)
§ 15] ВЫРАЖЕНИЯ ОСНОВНЫХ ДИНАМИЧЕСКИХ ВЕЛИЧИН 169
или в развернутом виде:
Jxx*\ + Vi+ Vi - 2JyJizi-4x*ixi-K>xiyi= 2Tk\ = const.
A3')
Это уравнение поверхности второго порядка (эллипсоида), подоб-
подобной эллипсоиду инерции и подобно с ним расположенной.
Для всех точек эллипсоида получаемые из формулы A0) уг-
Ri
ловые скорости <a = -ri- соответствуют одному и тому же числен-
ному значению кинетической энергии твердого тела; поэтому поверх-
поверхность A3') носит название эллипсоида энергии. Меняя значения
константы k в формуле (9) из п. 10 § 11 или константы kx в фор-
формуле A3'). можно построить для данной точки твердого тела семей-
семейство эллипсоидов инерции (или энергии). Каждому из них будет
соответствовать свое значение кинетической энергии твердого тела.
В 'этом и заключается энергетический смысл эллипсоида инерции
Пуансо.
Каждый из семейства эллипсоидов инерции (построенного для
данной точки) является в то же время и эллипсоидом энергии. Легко
заметить зависимость между константами k и kx в формулах (9) из
§ И и A3'), соответствующими одному и тому же отдельному
эллипсоиду семейства.
Согласно формулам (8') § 11 и A0)
Если это один и тот же эллипсоид, то необходимо, чтобы было
/? = /?х. Отсюда
k
V~J~
Далее, согласно формуле (8), имеем
27 = Усо2;
вычисляя отсюда величину со и подставляя ее в предыдущее равен-
равенство, получим
V7
или
k = kiyW. A4)
4. Связь между направлением вектора кинетического момента
и эллипсоидом инерции. Из формул A) и A1) следует, что
проекции на подвижные оси кинетического момента твердого тела
170 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
относительно неподвижной точки можно представить в виде
°* = Т[
A5)
для Gy и Gz получаются две аналогичные формулы. Но из выраже-
выражений A3), A3') для функции Ф(хь ух, гг) следует, что
¦STX = Jxxx\ — Jxyyi — hz*b A6)
дФ дФ „
и два аналогичных выражения получаются для -т— и -^— . Срав-
Сравнивая между собой равенства A5), A6) и им аналогичные, заключаем,
что
их—к{дхГ У~ТГдУ1' u*~ ft, 5iT* { '
Три скалярных равенства A7) можно записать в виде одного век-
векторного:
0 = -^-grad(,l>y1>ei)O(*ll уь zx). A7')
Заметим, что соотношения A7), A7') можно получить непосред-
непосредственно из равенств E) или (9'), если учесть обозначение A2) и за-
зависимости A1).
Итак, кинетический момент твердого тела относительно непо-
неподвижной точки есть (с точностью до постоянного множителя) градиент
скалярной функции Ф (xv у,, zx). Но
градиент скалярного поля Ф нормален
к поверхностям уровня поля Ф = const
(см. ч. I, § 33, п. 5). Следовательно,
кинетический момент Q, будучи при-
приложен в неподвижной точке О, парал-
параллелен нормали v° к эллипсоиду инер-
инерции (энергии) в точке M(xlt yv zt),
в которой эллипсоид пересекается
мгновенной осью вращения (рис. 58).
Соединяя доказанную теорему с пред-
предшествующими выводами, можно ска-
сказать, что кинетический момент G твер-
твердого тела относительно неподвижной точки тела есть вектор, полу-
получаемый аффинным преобразованием вектора угловой скорости & при
посредстве тензора инерции. Этот вектор, являясь градиентом ска-
скалярной функции Ф^!, ух, Zi) (с точностью до постоянного множи-
множителя), параллелен нормали к эллипсоиду инерции в той точке, в
которой ось мгновенного вращения пересекает эллипсоид инерции.
Рис. 58.
15]
ВЫРАЖЕНИЯ ОСНОВНЫХ ДИНАМИЧЕСКИХ ВЕЛИЧИН
171
5. Динамический смысл главных осей инерции. Возьмем
в качестве подвижных координатных осей главные оси эллипсоида
инерции. Тогда проекции кинетического момента будут определяться
формулами C) из п. 1:
A8)
Из этих формул следует, что кинетический момент и угловая ско-
скорость могут быть направлены одинаково в трех и только в трех
различных случаях, а именно в тех случаях, когда направления этих
векторов совпадают с направлениями главных осей инерции (если
только эллипсоид инерции не есть эллипсоид вращения или сфера).
Для доказательства положим в формулах A8) две из проекций
угловой скорости <й равными нулю. Например, пусть q — О, г=0,
т. е. предположим, что вектор <л направлен по оси х; тогда по-
получим
Следовательно, и кинетический момент направлен по той же оси х.
Аналогичный результат получим и для двух других осей.
Покажем теперь, что в случае неравенства между собой моментов
инерции А, В и С главные оси будут единственными направлениями,
для которых угловая скорость о коллинеарна с кинетическим момен-
моментом О. В самом деле, если G и <л коллинеарны и не равняются
порознь нулю, то имеет место уравнение
или
Отсюда
/ j k
Ар Bq Cr
p q r
= 0.
(C — A)rp =
(A-B)pq =
A9)
В зависимости от значений А, В и С могут иметь место три случая:
1) Л, В, С не равны между собой; тогда уравнениям A9) можно
удовлетворить, только положив две из проекций угловой скорости со
равными нулю, а это и дает три главных направления эллипсоида
инерции.
172 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
2) Два из моментов инерции А, В, С равны между собой, на-
например В — Сф А, т. е. эллипсоид инерции есть эллипсоид враще-
вращения. В этом случае первое из уравнений A9) тождественно удовлет-
удовлетворяется. Чтобы удовлетворить двум остальным уравнениям, доста-
достаточно положить либо <7=0 и г —0, что дает одно из главных
направлений, именно ось л;, либо р = 0, что дает о бесконечное
множество направлений, расположенных в экваторной плоскости yz
эллипсоида инерции.
3) А~В = С; тогда эллипсоид инерции превращается в сферу.
В этом случае уравнения A9) удовлетворяются всегда при любых
р, q, г; тогда о и О коллинеарны при вращении вокруг любой
из осей, проходящих через неподвижную точку, т. е. в любом на-
направлении.
Итак, кинетический момент О и угловая скорость о могут быть
коллинеарны только по главным осям эллипсоида инерции. В этом
и заключается динамический смысл главных направлений эллипсоида
инерции.
Заметим, что геометрически полученные здесь результаты непо-
непосредственно вытекают из теоремы, доказанной в п. 4. Согласно этой
теореме вектор G параллелен нормали v° к поверхности эллипсоида
инерции, проведенной в точке М(х\, уь zx), где эта поверхность
пересекается с мгновенной осью вращения тела, т. е. с направлением
вектора ©. Отсюда следует, что коллинеарность векторов О и ю
имеет место лишь тогда, когда нормаль v° в точке Мх поверхности
эллипсоида направлена вдоль радиуса-вектора г этой точки. Но если
А ф В Ф С, то условие v°||r имеет место только для главных осей
эллипсоида; при В = С Ф А это имеет место для оси х и для всех
всей, лежащих в плоскости yz; наконец, при А = В = С указанное
условие имеет место для любого направления. Отсюда и следуют все
сделанные выше выводы.
§ 16. Динамические уравнения Эйлера. Общая постановка задачи
о движении тяжелого твердого тела
с неподвижной точкой
1. Динамические уравнения Эйлера для движения твердого тела
около неподвижной точки. Пусть твердое теле движется около
неподвижной точки О. Как и в § 14, кроме основной системы
осей ОЕ,Г|? (неподвижной), возьмем систему подвижных осей
Oxyz, неизменно связанных с телом и движущихся вместе с ним
относительно неподвижной системы О1,ц1,.
Теорема об изменении кинетического момента относительно основ-
основной (неподвижной) системы ориентировки 0E,ri5 дает уравнение
^ = Л!0> A)
§ 16] ДИНАМИЧЕСКИЕ УРАВНЕНИЯ ЭЙЛЕРА 173
где Мо есть главный момент всех внешних сил, действующих на
твердое тело, относительно неподвижной точки О.
Проектировать уравнение A) на неподвижные оси ОЕ,т]? весьма
невыгодно, ибо, хотя формула B) § 15 0==<a(J) и дает выраже-
выражения проекций О|, G^, Gj [аналогичные формулам A) § 15, но на-
написанные для осей O|ri?], однако коэффициенты в них, т. е. компо-
компоненты тензора инерции движущегося тела относительно неподвижных
осей, меняются со временем, и уравнения движения в проекциях
будут иметь сложный вид.
При выводе динамических уравнений движения твердого тела
Эйлер сделал два упрощения. Первое из них состоит в проектиро-
проектировании обеих частей уравнения A) па оси подвижной системы.
da
Если -JT- есть производная какого-либо вектора а относительно
основной системы, —?¦, так называемая локальная производная (из-
(изменение а относительно подвижной системы), то, как известно,
da da <
_ = _ + *>Xa
(см. ч. I, § 13, п. 2). Применяя эту формулу к вектору О, получим
do dO . _
_r = _r + ft,XG1
и уравнение A) примет вид
4? + <»ХО = Л1о. B)
Спроектируем обе части равенства B) на оси подвижной системы
Oxyz, причем при проектировании —гт- опустим знак локальной про-
производной, ибо локальная производная берется именно относительно
подвижной системы; получим
dt
dGx
C)
dt
где Gx, Gy и Gz определяются формулами A) или A') из п. 1 § 15,
а именно:
D)
Gz= — Ep — Dq+Cr.
174
ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
[ГЛ IV
Здесь компоненты тензора инерции А, В, С, D, E, F суть постоян-
постоянные числа.
Второе упрощение Эйлера — выбор за оси подвижной системы
ориентировки главных осей инерции тела относительно неподвижной
точки. При этом выборе формулы D) упростятся и запишутся так:
E)
Gy=Bq,
Gz = Cr.
В результате уравнения C) примут вид
A~dt
F)
Система F) представляет дифференциальные уравнения движения
твердого тела около неподвижной точки, впервые выведенные Эй-
Эйлером A765 г.); эти уравнения называют динамическими уравне-
уравнениями Эйлера
Присоединяя к уравнениям F) три кинематических уравнения
Эйлера
р = iJ3sinBsin(p -f- Bcosq),
q = ф sin 8 cos <p — 0 sin ф,
r =ij}cos0-)-(p,
G)
получим систему шести обыкновенных нелинейных дифференциаль-
дифференциальных уравнений первого порядка относительно шести неизвестных
функций времени р, q, г, ф, \|), 8. Общие интегралы должны со-
содержать шесть произвольных постоянных, которые определятся,
если задать начальное положение и начальною угловую скорость
тела, т. е. ф0, ф0, 80, р0, q0, r0.
Исключая из уравнений F) и G) р, q и г, можно получить три
дифференциальных уравнения второго порядка относительно трех
эйлеровых углов ф, ф, 8.
Если принять во внимание, что в общем случае проекции глав-
главного момента внешних сил Мх, Му, Мг являются сами функциями
t, ф, ф, 8, р, q, r, то становятся понятными трудности, возникаю-
возникающие при интегрировании системы шести уравнений F) и G); даже
частный случай, именно случай движения твердого тела около не-
неподвижной точки под действием одной лишь силы тяжести, не мо-
может быть решен в общем виде (см. § 19, п. 2).
§ 16] ДИНАМИЧЕСКИЕ УРАВНЕНИЯ ЭЙЛЕРА 175
2. Определение реакции неподвижной точки. Реакция R не-
неподвижной точки О не входит в уравнения Эйлера, так как R про-
проходит через О и, следовательно, momo /? = 0. Для определения R
достаточно применить другую теорему динамики—теорему о дви-
движении центра масс, т. е.
(8)
где т есть масса тела, wc — ускорение центра масс, a F — главный
вектор активных внешних сил.
Ускорение wc, входящее в равенство (8), может быть выражено
по теореме Ривальса (см. ч I, § 10, п 5), т. е.
wc — <д X гс Н- ft» X (ft» X гс),
или
wc = е» X гс -\- со (е» • гс) — (о2гс. (9)
Проектируя обе части равенств (8) и (9) на подвижные оси, по-
получим
Fx,
A0)
A1)
при этом (о2 = р2 Н- q2 -f г2.
Если уравнения Эйлера F) и G) проинтегрированы, то ф, ф, Э,
/?, q, r известны в функции t, а следовательно, известен закон дви-
движения тела. Подставляя р, q, r в уравнение A1), найдем wCx,
wcy wcz B функции t, а тогда, после подстановки их в уравне-
уравнения A0), найдутся искомые проекции реакции неподвижной точки.
В частном случае, если центр масс совпадает с неподвижной точ-
точкой, реакция R точки О может быть определена независимо от ин-
интегрирования уравнений Эйлера В самом деле, в этом случае гс = 0,
следовательно, и wc = 0. Поэтому уравнение (8) примет вид
0 = R-\-F,
откуда
R = — F.
3. Общая постановка задачи о движении тяжелого твердого
тела около неподвижной точки. Рассмотрим движение твердого
тела около неподвижной точки под действием одной только силы
тяжести Р. Направим ось О? основной системы ориентировки О|т]?,
где
Wcx = k*c — he + P (Pxc + ЯУс И- rzc) —
wCy = rxc — pzc H- q (pxc + qyc + rzc) —
wcz == РУс — Яхс + r (Pxc + 9Ус + Г2С)
176
ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
[ГЛ. IV
связанной с Землей, вертикально вверх (рис. 59):). Обозначим: че-
через Oxyz— подвижную систему ориентировки; через rc(xc, ус, zc) —
радиус-вектор центра тяжести С относительно начала О; через ylt
Ъ> Уз — косинусы углов вертикальной неподвижной оси О? с под-
подвижными осями. Так как угловая скорость ф (§ 14, п. 3) направ-
направлена по оси О?, то направляющие косинусы О? будут равны мно-
множителям при ф в кинематических
уравнениях Эйлера G). Следо-
г ^^_-| _ вательно,
cos (?, лг)—Yi=sin 9sin<p,
cos(?, y)=Y2=sin 8 cos ф,
cos(S, z)=Y3=cos9.
Очевидно, Yi> Y2> Y3 СУТЬ про-
проекции единичного вектора ?с
на подвижные оси. Поэтому
где i, j, k суть единичные век-
Рис. 59. торы подвижных осей, связан-
связанных с телом.
Так как направление силы тяжести, или, что то же, направле-
направление оси Ot,, неподвижно относительно Земли, то
или, употребляя символ локальной производной,
Следовательно,
dt
i j k
p q r
Yi Y2 Ya
A3)
') Выбирая таким образом основную систему ориентировки и рассмат-
рассматривая в качестве внешних сил, действующих на твердое тело, силу тяже-
тяжести, направленную по вертикали в данном месте земной поверхности, мы
в дальнейшем пренебрегаем влиянием суточного вращения Земли на дви-
движение твердого тела, имеющего закрепленную точку на поверхности Земли.
§ 16)
ДИНАМИЧЕСКИЕ УРАВНЕНИЯ ЭЙЛЕРА
177
Проектируя обе части этого равенства на подвижные оси, мы по-
получим уравнения, выведенные Пуассоном:
= Pb — Пи
-J±
A4)
Напишем динамические уравнения Эйлера. Сила тяжести Р на-
направлена противоположно оси ?; следовательно,
р />го
Главный момент внешних сил равен
i ] k
Yi Y2 Ъ
хс Ус zc
Таким образом, для рассматриваемого случая уравнения Эйлера при-
примут вид
Л 4г+(С ~ B)qr = Р (Ъ2с —
A5)
Система уравнений A4) и A5) есть система шести обыкновенных
нелинейных дифференциальных уравнений первого порядка с шестью
неизвестными функциями времени у{1 у2> Уз> Р< Я> г'> величины А, В,
С, хс, ус, zc суть постоянные. Если Yi> Y2> Уз> Р. Я> г найдены
в функции t интегрированием системы A4) и A5), то для полного
решения задачи, т. е. для определения эйлеровых углов в функции t,
необходимо лишь из любого уравнения системы G) найти ф(^) одной
квадратурой, так как Q(t) и q>(t), поскольку Yi(O> Ъ(*)> Уз(?) из-
известны, непосредственно даются равенствами A2).
Итак, основная часть решения задачи о движении тяжелого твер-
твердого тела около неподвижной точки состоит в отыскании шести ин-
интегралов системы A4) и A5). Однако легко доказать, что задача
сводится всего лишь к отысканию одного интеграла. В самом деле,
представим уравнения системы в каноническом виде:
dp __ dq_
П ~ Q
_
Г,
A6)
12 H. H. Бухгольц
]78 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
где
П = -J [Р^с — УъУс)-(С —В)qr\. Г, = гу2 — ду3;
Q = -glp(VsXc — yi*c) — (A — c)rp]. T2 = P4*-Hv \ A7)
R = -^1Р (Y'yc ~~ ЪХс) — E — л) Р?Ь гз = <7Yi — PY2-
Так как время t не входит явно ни в одну из функций A7), то
вместо системы шести уравнений A6) можно интегрировать отдельно
систему первых пяти уравнений, именно систему
Если систему A6') удастся проинтегрировать, то время t найдется
простой квадратурой. Система A6') имеет уже только пять интег-
интегралов.
Согласно теории последнего множителя Якоби для канонической
системы дифференциальных уравнений'), этот множитель М для
системы A6') имеет значение Ж=1, так как
дП dQ . dR dr. , дТ2 . <ЭГ3_0
dp ~> dq ~т~ дг ' ду{ ' ду2 дуз
Ко если последний множитель системы известен, то для приведения
задачи к квадратурам достаточно знать не пять, а только четыре
интеграла системы A6').
Один из этих четырех интегралов получается непосредственно
из пр сгого геометрического соображения. Действительно, Yi. Y2> %
суть i а 1равляющие косинусы оси О?, или, что то же, проекции еди-
единичного вектора этой оси. Следовательно,
Yi + Yj-r-Y3=l- A8)
Stot тривиальный интеграл можно получить и из уравнений A4).
Умножая la соответственно на ух, у2, у3 и складывая почленно,
получим
d\i . йуг , йуг г,
Yi —77- -\- V9 —гг- -4- Vi —М- = О,
dt dt ut
или
что и дает интеграл A8).
') См., например, Г. К. Суслов, Теоретическая механика, М. — Л„
1946, гл. XL.
§ 16] ДИНАМИЧЕСКИЕ УРАВНЕНИЯ ЭЙЛЕРА 179
Итак, остается найти три интеграла. Первый из них получим,
применяя теорему об изменении кинетического момента относительно
оси О?. Так как момент силы тяжести Р относительно оси О? равен
нулю, то
dGr
——- = Л4? = 0, и потому Gj = const.
Но
Qt = G ¦ g° = (Apt + Bqj-+- Crk) ¦ (Yl/ + yj + Y3*) =
~Apy1-}-Bqy1-}-Cr\3.
следовательно,
Apyl~\-Bqy2 + Cry3 = const. A9)
И этот интеграл A9) можно получить непосредственно из уравнений
движения. В самом деле, умножая уравнения A5) соответственно
на Yi. Y2. Уз и складывая их почленно, получим
— А) Ъгр + {А —
Это равенство можно преобразовать к виду
JL (АрУ1 + Вду2 + Сгу3) = (Я — С) у,?г + (С — А) Ъгр +
Если теперь заменить в правой части производные функций Yi. Y2- Y3
их выражениями из уравнений A4), то легко убедиться, что правая
часть равенства тождественно равна нулю, и мы получим
^ (Ару, + Bqy2 + Cry3) = 0.
Интегрируя, найдем интеграл A9).
Для получения второго из оставшихся трех интегралов применим
теорему об изменении кинетической энергии, которая дает
где ?с обозначает координату центра тяжести тела относительно
основной системы отсчета. Интегрируя, получим
Т = — Р1С + const.
Используя формулу G') § 15, дающую выражение для кинетической
энергии, и учитывая, что
1с = г с ¦ Iй = (-М + Ус/ + *сЪ • Ш + W + Уз*) =
= *cYi + УсЪ
12»
180 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ IV
получим интеграл энергии в виде
¦i- (Ар* + Bq> 4- С г*) = — P (jfcYi + УсЪ ¦+- ^cY3) + const. B0)
Интеграл B0) также непосредственно находится из уравнений A5),
если каждое из них умножить соответственно на pdt, qdt, r dt
и получившиеся равенства сложить почленно. Тогда будем иметь
(ЯУг — РУгЛ
= — Р[хс (гу2 — ЯУз) + Ус (РУз — rYi) +
или на основании уравнений Пуассона A4)
¦j d (Л р2 4- Bq* 4- С/-2) = — Р (хс dYi + Ус <^Y2 + ^ с ^Уз)-
Отсюда, интегрируя и учитывая, что хс, ус, zc — величины постоян-
постоянные, придем к равенству B0).
N
Рис. 61.
Остается найти еще только один интеграл; в этом и состоит глав-
главная трудность задачи. Найти этот третий общий интеграл удалось
только для трех частных предположений относительно движущегося
тела и условий движения. Эти три частных случая движения суть
следующие:
1)Случай Эйлера — Пуансо. Это случай движения по инерции,
когда равнодействующая внешних сил проходит через неподвижную
точку О (рис. 60). В частном случае тяжелого твердого тела, иссле-
исследованном Эйлером и Пуансо, неподвижная точка О совпадает с цен-
центром тяжести С. Других внешних сил, кроме силы тяжести, нет,
а последняя уравновешивается реакцией опоры О. Само твердое тело
может быть любой формы.
2) Случай Лагранжа—Пуассона (рис. 61). В этом случае эллип-
эллипсоид инерции, построенный для неподвижной точки О, представляет
§ 16]
ДИНАМИЧЕСКИЕ УРАВНЕНИЯ ЭЙЛЕРА
181
собой эллипсоид вращения, т. е. А = В фС, а центр тяжести С лежит
на оси динамической симметрии (оси вращения эллипсоида инерции)-
/г
Рис. 62.
Рис. 63.
Такое тело, приведенное в быстрое вращение около оси симметрии,
называется симметричным гироскопом.
3) Случай С. В. Ковалевской (рис. 62) В этом случае эллип-
эллипсоид инерции для неподвижной точки есть вытянутый эллипсоид вра-
вращения, причем между главными момен-
моментами инерции существует соотношение
А = В = 2С,
а центр тяжести лежит в экваториальной
плоскости эллипсоида инерции.
Первый и второй случаи движения
можно демонстрировать на волчке коло-
колообразной формы, вдоль оси динами-
динамической симметрии которого передвигается
винт, благодаря чему можно привести точку
опоры О (острие винта) в совпадение с цент-
центром тяжести или же поместить С вне точки
опоры на оси винта (волчок Максвелла,
рис. 63).
Случай С. В. Ковалевской можно иллю-
иллюстрировать на очень простой модели — от-
открытой коробочке в форме прямоуголь-
прямоугольного параллелепипеда с соответственно
подобранными размерами (рис. 64) На-
Направим ось Oz вдоль продольной оси сим-
Рис. 64
метрии внутренней стороны дна коробочки, а ось Ох — вдоль попе-
поперечной. За неподвижную точку опоры О возьмем центр симметрии
дна. Тогда, подобрав размеры коробочки так, чтобы моменты!
182 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
инерции относительно осей Ох и Оу были равны, т. е. А = В, а С = -^-,
мы получим иллюстрацию случая С. В. Ковалевской.
4. Некоторые сведения из теории эллиптических функций.
Интеграл
X
[ dx B1)
¦называется эллиптическим интегралом 1-го рода (в обозначении Якоби).
Если сделать подстановку * —sinq), то интеграл примет вид
(в обозначении Лежандра).
Интеграл и есть функция верхнего предела q>. Обратная функ-
дия ф от и носит название «амплитуда» и обозначается
Ф = ати = ат/?(ф, k). B3)
По определению Якоби эллиптическими функциями аргумента а
называются тригонометрические функции от функции am и, именно:
sin ф = sin araa = sn и,
cos ф = cos am и = en и
= Аф = Дат и ^= dn и
B4)
(средний столбец — обозначения Якоби, последний — Гудерманна;
Д обозначает оператор: Дф=]А—&2siii2<jp).
Очевидно также, что
sn2 и -\- сп2 и ~ 1. B5)
Если модуль k = 0, то эллиптические функции sn и и спи вы-
вырождаются в sin и и cos и. Из равенств B2) и B4) следует, что
snO = O, cnO= I, (in0 = 1.
Из этих же равенств следует, что эллиптические функции Якоби
являются функциями периодическими с действительным периодом,
равным 4/С, где К есть эллиптический интеграл Лежандра 1-го рода
2
К
i
= J__|L_. Bб)
О
§ 17] СЛУЧАЙ ЭЙЛЕРА — ПУАНСО 183-
§ 17. Случай Эйлера —Пуансо
1. Интегрирование уравнений движения. В случае Эйлера —
Пуансо главный момент внешних сил, действующих на твердое тело_
относительно неподвижной точки равен нулю, т. е. Мо = 0, и дина-
динамические уравнения Эйлера примут вид
dt
Найдем первые интегралы уравнений A), полагая, что
Для этого умножаем уравнения A) соответственно на р, q, r и скла-
складываем их почленно; получаем
Интегрируя, находим
2 2 2 = /г, B)
где h есть произвольная постоянная. Это есть интеграл энергии, так
как левая часть равенства B) есть удвоенная кинетическая энергия 27\
[Интеграл B) можно получить непосредственно из теоремы об изме-
изменении кинетической энергии, так как линия действия равнодействую-
равнодействующей проходит все время через неподвижную точку и работа внеш-
внешних сил равна нулю.]
Для нахождения второго интеграла умножим уравнения движе-
движения B) соответственно на Ар, Bq, Сг и сложим их почленно; по-
получим
интегрируя, будем иметь
^V + 5V-r-C2r2 = G2, C)
где G есть произвольная постоянная, очевидно, равная квадрату
кинетического момента. [Интеграл C) можно непосредственно полу-
получить из теоремы об изменении кинетического момента. В самом деле,
так как Мо = 0, следовательно, -j7~ = 0, а потому О = const и
G2 = const.]
Для нахождения р, q, r в функции от / необходим еще третий
интеграл, который можно получить следующим образом. Выразии.
184 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
величины г и р через q, используя интегралы B), C), и предполо-
предположим одновременно для определенности, что А > В > С. Тогда по-
получим
-CH-B (B-C) Л =
D)
где вместо О и А введены новые постоянные A,j и ^2 согласно ра-
равенствам
Л«г — 02 = 5(Л — 5) Я,?; G2 — Ch — D{B — C)AJ- E)
При этом поскольку /»2>0, г2>0 и Л > В > С, то к\^-д2.
п п
А.2^?; подстановка начальных данных в равенства D) дает для A,t
и Х2 значения
2 2 . С (А — С) 2 ,2 2 , А (А — С) 1 ,„.
^ = ?0+;Г0 ^ = ?0+(д_С)/>0- (б)
Теперь, подставляя во второе из уравнений A) найденные значения
г и р, получим
Сохраняя справа знак плюс (выбор знака для окончательного вида
решения не существен), разделяя переменные и интегрируя, найдем
= f
dq , G)
где а — постоянная интегрирования; при этом обозначено
Из правой части равенства G) следует, что зависимость q (t) может
быть представлена с помощью эллиптических функций Якоби. Вид
этой зависимости окончательно определяется значениями постоян-
постоянных Xi и Х2, т. е. начальными условиями.
1) Если А.1 > А,2, то, полагая <7 —^2s'n(P> чт0 всегда возможно,
поскольку q -^Я-2. получим из G)
^J- f
Ч о
f
о У 1
sm2
17]
СЛУЧАИ ЭЙЛЕРА - ПУАНСО
185
где kl = -Y' .Сравнивая интеграл, стоящий справа, с формулойB2)
и учитывая равенства B4) §16, заключаем, что sm<p = sn(A.
где СЦ — новая постоянная; следовательно,
q = Х2 sn CkiOt -)- ах).
Если считать при t = 0 д = q0, то постоянная ах определяется ра-
равенством
Подставляя найденное значение q в правые части равенств D) и
учитывая соотношения B4), B5) § 16, и также, что т-2=?1( легко
определить величины р и г. Окончательно будем иметь
сп
= xiV
В{А — В),., . . .
С (А-С) dn(V^-r-a,).
(9)
2) Если Я,! < к2, то, полагая ^;=
—l- = k2, найдем таким же путем, что
%2
q =^%lsn{X2ot -j- a2),
и вводя обозначение
a2),
= А.! у c[^Z
cn
где
находится из равенства
sna, = -|^-.
Л j
Кроме рассмотренных основных двух случаев, возможны еще
следующие:
3) А,! = 0; при этом, как видно из равенств D), должно быть все
время г = 0, q = 0 (так как А > В > С, а г2>0) и р = const = ;?0;
тело в этом случае совершает равномерное вращение вокруг оси Х'у
4) А-2 = 0; в этом случае все время jp = O, <7 = 0иг = const = г0 —
тело вращается равномерно вокруг оси z;
5) Хг = %2 == А; в этом особом случае интеграл G) вырождается
в обыкновенный u p, q, r будут гиперболическими функциями аргу-
аргумента (kot -\- а).
186 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
Так как эллиптические функции суть функции периодические,
то из равенств (9) следует, что р, д, г, а также « суть функции
периодические с действительным периодом fi==-jr— (при А,х > А,2)
или То = -j— (при Xi < А^), где К есть эллиптический интеграл
Лежандра 1-го рода, определяемый равенством B6) § 16.
Следовательно, по истечении периода т мгновенная угловая ско-
скорость примет прежнее положение в теле (но не относительно основ-
основной системы ориентировки, что возможно, как показывает исследо-
исследование, лишь в очень частном случае).
Чтобы довести задачу до конца, нужно еще выразить эйлеровы
углы в функции времени, т. е проинтегрировать кинематические
уравнения Эйлера G) § 16 Так как в данном случае Мо = 0, то из
теоремы об изменении кинетического момента
вытекает, что О = const, т. е. кинетический момент G постоянен по
модулю и по направлению. Если за неподвижную ось OL, взять напра-
направление кинетического момента G, то исследование упрощается.
- Поскольку вектор tf направлен вдоль оси ?, то при выбранном
направлении этой оси проекции Gx = Ар, Cy = Bq, и Cz = Cr век-
вектора О на оси х, у, z будут вычисляться так же, как проекции
лектора if, входящие в формулы G) § 16; следовательно.
Ар = О sin 0 sin ф,
Bq — Gs\nQcosq>, A0)
Cr = G cos 8.
Из равенств A0) можно сразу найти формулы, определяющие <p(t)
и 8@, если подставить в них вместо р, q, r их значения (9). Тогда,
ограничиваясь случаем Xt > Х2 (при A,j < А^ подсчеты аналогичны),
лолучим
Ар 1/"
V — С)
где постоянная О определяется равенством C).
Для нахождения угла vp берем первые две из формул G) § 16.
Умножая первую на эшф, вторую на совф и складывая, получии
р sin ф -j- q cos ф = ф sin 9,
откуда
§ 17] СЛУЧАЙ ЭЙЛЕРА - ПУАНСО 187
Теперь умножим сначала первые два из равенств A0) соответственно
на р и q и сложим, затем возведем обе части их в квадрат и опять
сложим; получим
Ар2-\- Bq2 — GsinQ(psmq>-1rqcos(p),
Пользуясь этими равенствами, найдем, что
_ Ар2 -f Вд*
* ~~ sin 0 ~~ А'р* -f ВV
Подставляя сюда значения р и q из равенств (9) и учитывая соот-
соотношение B5) § 16, будем окончательно иметь
А — Г, (В-С) + (А- В) ю> (W + а,)
* "— Л (В — С) + С (Л — В) sn2 (Jl,c* + а,) *
Отсюда ф найдется квадратурой от эллиптических функций:
—О Г
Так как функция sn (Я,^-f-«i) имеет период т = Хо-. то
Интегрируя по /, получим
где с есть постоянная интегрирования. Функция ф уже не будет
периодической; по истечении промежутка времени t она получает
приращение, равное с. В этом и заключается причина, что w займет
по истечении периода т = у—, вообще говоря, другое положение
в пространстве, если только случайно не окажется, что прираще-
приращение с = 2л.
2. Интегрирование уравнений движения в частном случае,
когда эллипсоид инерции является эллипсоидом вращения.
В частном случае, когда эллипсоид инерции относительно непо-
неподвижной точки есть эллипсоид вращения, интегрирование уравнений
движения для случая Эйлера — Пуансо доводится до конца в эле-
элементарных функциях. Действительно, в этом случае В— А, кроме
188 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА (ГЛ. IV
того, Л1о = 0, и уравнения Эйлера принимают вид
С~ —О
Умножая обе части этих уравнений соответственно на р, q, г, а затем
на Ар, Bq, Cr, складывая полученные выражения и интегрируя,
найдем два первых интеграла уравнений движения
A(p2~>i-q'1)-\-Cr2~h,
Кроме того, третье из уравнений Эйлера дает интеграл
г = r0 = const.
Второй из найденных интегралов выражает, что модуль кинетического
момента G постоянен; но вектор G постоянен и по направлению
(относительно основной системы). Для доведения интегрирования
до конца, т. е. для получения углов ф, ф, 8 в функции времени t, при-
примем во внимание неизменность направления кинетического момента О.
Для простоты вычислений направим ось О? основной системы по
направл&нию вектора G; тогда проекции кинетического момента на
подвижные оси будут определяться равенствами A0), т. е.
Ар = Q sin9 sinq), ]
Aq = Gs\n§CQby, \ A0')
C/- = Qcos8. I
Из последнего уравнения в системе A0') следует, что
Q Cr Сгл
G G
Так как С, г0 и G суть постоянные, то угол в = const = 00. Кине-
Кинематические уравнения Эйлера G) § 16 дают при 8 = 8О
р = i
Подставляя это значение р в первое из уравнений A0'), получим
j= Gsm90sin(p
или
откуда
ф = —?- = const = п.
4 17] СЛУЧАЙ ЭЙЛЕРА. — ПУАНСО 189
Интегрируя, получим
где i|70 есть начальное значение ф. Наконец, подставляя г = г0 (тре-
(третий интеграл) и 0 = Эо в третье из уравнений G) § 16, получим
или, учитывая, что г(з = const = n,
ro = n cos 80
откуда
Ф = г0 — п cos 80;
следовательно, ф тоже постоянно; полагая
получим
ф =
где ф0 есть значение ф при ^ = 0. Итак, мы нашли, что
Движение, определяемое уравнениями A1), есть регулярная прецес-
прецессия, рассмотренная кинематически в § 14, п. 2. Здесь щ=щ,
а 0J = и, причем постоянные 90, п, «j связаны между собой соот-
соотношением
r0 —ncos80 = n!.
3. Геометрическая интерпретация Пуансо для движения твер-
твердого тела около неподвижной точки по инерции. В историческом
развитии механики методы аналитический и геометрический имели
самостоятельное значение. Нередко оба метода проникали друг в друга,
и замечательным примером этого является геометрическая интерпре-
интерпретация движения твердого тела с одной неподвижной точкой для слу-
случая Эйлера, данная Пуансо.
Возьмем, как и раньше, за подвижную систему ориентировки
систему с началом в неподвижной точке О и с осями, направлен-
направленными по главным осям эллипсоида иИерции, построенного для непод-
неподвижной точки О. Уравнение этого эллипсоида инерции пусть будет
Ax2-\-Bf-\- C22=l. A2)
Будем, согласно Пуансо, называть полюсом Р точку пересечения
мгновенной оси вращения (т. е. мгновенной угловой скорости в*)
190 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
с эллипсоидом инерции. Обозначим через р радиус-вектор полюса Р
относительно неподвижной точки; тогда
Докажем три теоремы, положенные Пуансо в основу его интер-
интерпретации.
1) Проекция мгновенной угловой скорости <в на направление
кинетического момента есть величина постоянная.
В самом деле, проекция fi> на неподвижный в пространстве век-
вектор О есть
A
что вытекает из формулы D) § 15 и интегралов уравнений движе-
движения B) и C). Следует обратить внимание на то, что формула
справедлива и для общего случая движения твердого тела около
неподвижной точки.
Введем обозначения
Щ- = й и ¦?- = ,!, A5)
причем D и ц будут, очевидно, постоянны; тогда
G = D\i. А = ?>ц2, A5')
причем, согласно равенству A4),
т. е. равно проекции мгновенной угловой скорости на направление
кинетического момента. Размерность D такая же, как размерность
момента инерции. В самом деле, в системе CGS
(И I* t
2) Длина радиуса-вектора полюса р пропорциональна вели-
величине угловой скорости <л.
Действительно, из равенства A3) имеем для координат полюса Р
выражения
¦§ 17] СЛУЧАЙ ЭЙЛЕРА — ПУАНСО 191
Подставляя эти координаты в уравнение A2) эллипсоида инерции,
которому они должны удовлетворять, получим
а потому, согласно равенству B),
откуда следует
й = РуТ. A7)
Другими словами, отношение модуля угловой скорости к радиусу-
вектору полюса Р равно У А .
3) Касательная плоскость к эллипсоиду инерции в полюсе Р
перпендикулярна к кинетическому моменту О и находится на
постоянном расстоянии от неподвижной точки, т. е. эта пло-
плоскость неподвижна относительно основной системы ориенти-
ориентировки.
Первая часть теоремы (перпендикулярность О касательной пло-
плоскости к эллипсоиду инерции в точке пересечения мгновенной оси
вращения, т. е. в полюсе) имеет место для общего случая движения
твердого тела около неподвижной точки и уже доказана в § 15,
п. 4 настоящей главы. Докажем вторую часть, т. е. постоянство
расстояния касательной плоскости к эллипсоиду инерции в полюсе
от точки О.
Уравнение плоскости, касающейся эллипсоида инерции A2) в по-
полюсе Р(х, у, z) имеет вид
AxX-{-ByY-\-CzZ—\, A8)
где X, Y, Z суть текущие координаты этой касательной плоскости,
ах, у, z — координаты полюса. Известно, что расстояние какой-
либо точки (х', у', г') от плоскости A8) дается формулой
6 _ Ахх' + Вуу' + Czz' — 1
— V А2х* + В V ¦+- Cszs '
В нашем случае точка (х', у', г'~) есть начало координат О, сле-
следовательно, х' = 0, у' = 0, z' = 0, и поэтому
~~
В выражении под знаком корня заменим координаты полюса Р зна-
значениями A6), затем преобразуем полученное выражение, пользуясь
192 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
равенствами C), A7) и A5); получим
Л2*2
Следовательно.
р2Л
h
[ГЛ. IV
A8')
6=Xf = 7F- A9)
Формулу A9) можно получить из следующих простых соображе-
соображений. Расстояние б от неподвижной точки до касательной плоскости
равно проекции радиуса-вектора р на направление вектора кинети-
кинетического момента (рис. 65), т. е.
_h _УТ
GpyT
= pcos(p, С0) = р cos (<о, G°) =
Доказанные положения являются основанием для построения гео-
геометрической картины движения твердого тела в случае Эйлера, дан-
данной Пуансо.
Так как плоскость, касающаяся эллипсоида инерции в полюсе Р,
не только сохраняет постоянное направление в пространстве (пер-
(перпендикулярна к кинетическому мо-
моменту О, неподвижному для рассматри-
рассматриваемого случая Эйлера), но и отстоит
от неподвижной точки О на постоянном
расстоянии [согласно теореме 3, фор-
формула A9)], то она неподвижна относи-
относительно основной системы; эта плоскость
называется неподвижной плоскостью
или плоскостью Пуансо. Обозначим ее
буквой П.
Эллипсоид инерции, связанный с те-
телом, все время касается плоскости П
в полюсе Р. Так как полюс Р по определению есть точка тела,
представляющая пересечение эллипсоида инерции (центр которого
находится в неподвижной точке О) с мгновенной осью вращения,
го скорость точки касания Р равна нулю. Следовательно движе-
движение твердого тела около неподвижной точки по инерции можно
геометрически представить как качение без скольжения (и верчение)
эллипсоида инерции с неподвижным центром О по неподвижной
плоскости П (рис. 65). Вместе с эллипсоидом инерции движется и
связанное с ним твердое тело. Угловая скорость й> направлена по
радиусу-вектору ОР = р точки прикосновения и по теореме 2 изме-
изменяется пропорционально длине ОР, т. е.
и=уц. op.
5 П] СЛУЧАЙ ЭЙЛЕРА - ПУАНСО 193
Мгновенная ось вращения ОР, меняя свое положение в теле, опи-
опишет коническую поверхность (подвижной аксоид), которая будет
пересекаться с эллипсоидом инерции по кривой, описываемой полю-
полюсом Р и называемой полодией. Подвижной аксоид называется также
конусом полодий. На плоскости Пуансо полюс Р также опишет
некоторую кривую, называемую герполодией. Неподвижный аксоид
имеет вершину в точке О, и направляющей ему служит герполодия;
у подвижного аксоида вершина находится также в О, а напра-
направляющей является полодия. Поэтому движение тела можно еще пред-
представить как качение без скольжения подвижного аксоида по неподвиж-
неподвижному с мгновенной угловой скоростью »= ОР ¦ ~\fh .
4. Полодии. Так как полодия лежит на эллипсоиде инерции, то
текущие координаты точек полодии должны удовлетворять уравне-
уравнению эллипсоида инерции A2):
Ax2-{-By2 + Cz2=l. A2)
С другой стороны, расстояние неподвижной точки О до плоскости
Пуансо постоянно и дается формулой A8'). которую можно записать
в виде
A2x2 + B2y2-\-C*z2 = D = ±. B0)
Уравнения A2) и B0) определяют аналитически полодию как гео-
геометрическое место точек, лежащих на эллипсоиде A2), причем каса-
касательная плоскость к эллипсоиду в этих точках находится на посто-
постоянном расстоянии 6 от точки О. Так как уравнение B0) есть также
уравнение некоторого эллипсоида, то полодия есть кривая пересече-
пересечения двух эллипсоидов и, следовательно, замкнутая алгебраическая
кривая четвертого порядка.
Для удобства исследования уравнения A2) и B0) можно преоб-
преобразовать. Умножим обе части уравнения A2) на D и вычтем из
уравнения B0); получим
А(А~ D)x2-\-B{B — D)y2-\-C(C — D)z2 = 0. B1)
Уравнение B1) есть уравнение конуса с вершиной в начале коорди-
координат О — неподвижной точке; ему удовлетворяют координаты точек
подвижного аксоида. Следовательно, B1) есть уравнение конуса по-
полодий, или подвижного аксоида. В пересечении с эллипсоидом инер-
инерции A2) конус полодий дает полодию.
Чтобы иметь возможность сравнивать получаемые ниже резуль-
результаты с тем, что было найдено в п. 1 аналитическим путем, заметим,
что, согласно равенствам E) и A5), постоянные kh k2 связаны с D
зависимостями
B(A — B)%\ = {A — D)h, B(B—C)kl — (D — C)h. B2)
t3 Н. Н. Бухгольц
194 .ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
Исследуем изменение вида полодии в зависимости от различных
значений D, т. е. при различных расстояниях плоскости П от не-
неподвижной точки [см. формулу A9)], или, иными словами, при раз-
различных начальных условиях движения. Для определенности предпо-
предположим, как раньше, что Л> В > С, т. е. что эллипсоид инерции
трехосный, причем наибольшая ось направлена по оси z, наимень-
наименьшая— по оси х и средняя — по оси у. Наибольшей оси будет со-
соответствовать наименьший момент инерции, т. е. С, а наименьшей
оси — наибольший момент инерции, т. е. А. В самом деле, величины
полуосей эллипсоида инерции будут определяться равенствами
1 , е==.
— уТ* "~Yb' —ус'
следовательно, a < b < c.
Чтобы конус полодий был действительным, коэффициенты уравне-
уравнения B1) должны иметь разные знаки, т. е. необходимо, чтобы
или по A9)
В противном случае, если, например, было бы D > А, то конус
был бы мнимым и в пересечении с эллипсоидом инерции не давал бы
ии одной действительной точки; движение было бы невозможно,
что ясно и геометрически, так как в этом случае .¦_ < -v="> ° < #.
т. е, расстояние неподвижной плоскости от неподвижной точки
было бы меньше наименьшей полуоси а эллипсоида инерции. Также
ясно, что невозможен и случай D < С, 6 > с, так как тогда пло-
плоскость П совсем не может касаться эллипсоида. Заметим, что со-
соотношение А 5>D ^-С следует и из равенств B2).
Рассмотрим сначала три частных случая:
1) D = A. Уравнение конуса полодий B1) примет вид
В (В— А) у2-{-С(С— A)z2~0;
в этом случае конус вырождается в пару мнимых плоскостей
У = ±У —
В (А — В)
пересекающихся по оси Ох, так как это уравнение удовлетворяется
при у = 0, z = 0 и, следовательно, конус полодий сводится к одной
действительной прямой Ох—малой оси эллипсоида инерции. Это
ясно и геометрически, так как в этом случае расстояние плоскости П
от неподвижной точки равно 6 — г_ = ._:¦ = а, т. е. малой оси
Yd Ya
эллипсоида, а полодия и герполодия сводятся к одной точке каса-
17]
СЛУЧАИ ЭЙЛЕРА — ПУАНСО
195
ния О'—концу малой оси. Твердое тело будет все время вращаться
вокруг малой оси эллипсоида инерции с постоянной угловой скоростью.
Действительно, если тело начало вращаться около малой оси
эллипсоида инерции, то векторы со и G коллинеарны и, следовательно,
проекция со на G будет иметь в начальный момент наибольшую
величину. Но по теореме
1) [формула A4)] проек-
проекция со на G есть величина
постоянная, а поэтому тело
будет продолжать вращаться
около оси Ох с постоян-
постоянной начальной угловой ско-
скоростью, ибо при нарушении
этого движения проекция о>
на G уменьшится.
Итак, движение твердого рис gg
тела будет перманентным
вращением вокруг малой полуоси эллипсоида инерции (рис. 66).
Поскольку, как видно из B2), при D = А Кг = 0, этот вывод совпа-
совпадает с полученным в п. 1 [см. п. 1, случай 3)].
2) D = C. В этом случае в уравнении B1) пропадет последний
член, и конус опять распадается на
пару мнимых плоскостей д
А (А —С)
пересекающихся по большой оси
эллипсоида инерции Oz. Полодия
и герполодия вырождаются в точку
касания, лежащую на конце оси z.
Рассуждая так же, как и в преды-
предыдущем случае, убедимся, что дви-
движение твердого тела будет перма-
перманентным вращением вокруг большой
оси эллипсоида инерции (рис. 67).
При аналитическом решении этот
случай, как видно из B2), соответствует Х2 = 0 и дает тот же ре-
результат [п. 1, случай 4)].
3) D = В. В этом случае конус распадается также на две, но
уже действительные плоскости, уравнения которых будут
Рис. 67.
,=+ /А(А-В)
V с (В — С)
Эти плоскости пересекаются по средней оси Оу эллипсоида инер-
инерции и в пересечении с эллипсоидом инерции дают два действительных
13*
ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
[ГЛ IV
¦М'В
-D<B
с
эллипса, которые и представляют полодию для данного случая
(KL и MN на рис. 68, дающем вид со стороны оси у). Для сред-
средней оси эллипсоида инерции кинетический момент G также колли-
неарен с <о; поэтому ось у также является свободной осью враще-
вращения, но вращение вокруг нее не будет устойчивым (см. ниже, п. 6).
Рассмотрим теперь основные случаи. Если Л>Л>?, то а<6<?.
Полодия в этом случае состоит из двух замкнутых ветвей, окружа-
окружающих концы малой оси Ох (рис. 68), являющейся осью конуса
полодий; это следует из уравнения B1), в котором первый коэф-
коэффициент положителен, а остальные
два отрицательные. Замкнутость по-
полодий следует геометрически из того,
что касание эллипсоида инерции
с плоскостью П должно после пол-
полного оборота произойти в той же
точке.
Если ? > ?> > С, то b < б < с.
Обе ветви полодии суть замкну-
замкнутые кривые, окружающие концы
большой оси Oz эллипсоида инер-
инерции, которая является осью для конуса B1). Примерный вид поло-
полодий при различных значениях D изображен на рис. 68.
Различным начальным условиям движения соответствуют разные
значения D, а следовательно, и различные полодии. Полодии делятся
на два класса: один окружает вершину малой оси эллипсоида, а дру-
другой— вершину большой оси. Обе группы разделены особенной пере-
переходной полодией—парой эллипсов, соответствующих значению D=B.
Условие D < В, при котором полодии окружают конец большой
оси эллипсоида, как видно из равенств B2), соответствует рассмот-
рассмотренному в п 1 случаю, когда Ху > %2\ движение в этом случае
определяется уравнениями (9).
При условии же D > В, когда полодии окружают конец малой
оси, будет Xt < А,2, и движение определяется уравнениями (9').
В промежуточном случае, когда D = В (полодии распадаются на
два эллипса) будет, как видно из B2), А,] = Я,2; это соответствует
рассмотренному в п. 1 случаю 5), когда решение упрощается и эл-
эллиптические функции переходят в гиперболические,
б. Герполодия. Не входя в аналитическое исследование, которое
требует применения эллиптических функций, сделаем лишь замечание
о виде герполодии. Обозначим по-прежнему через О' основание
перпендикуляра, опущенного из неподвижной точки О на плоскость П
(см. рис. 65). Тогда ОР = р, О'Р = р', и из прямоугольного тре-
треугольника О'ОР следует
О'Р =
— ОО'2, или
§ 17]
СЛУЧАИ ЭЙЛЕРА — ПУАНСО
197
Так как полодия есть замкнутая кривая, окружающая конец одной
из крайних полуосей эллипсоида инерции, и притом симметрично
расположенная относительно этого конца, то радиус-вектор поло-
полодии ОР = р имеет некоторый минимум р{ и максимум р2; тогда из
записанного выше равенства следует, что
Рис. 69.
т. е. герполодия заключена между двумя концентрическими окруж-
окружностями с центром в О' и с радиусами pi=
= Ур2_62 Ир^= Y?\ — б2 .
В противоположность полодии, которая
есть кривая замкнутая, герполодия, вообще
говоря, будет уже незамкнутой кривой, вид
которой показан на рис. 69; при этом, как
можно доказать, герполодия поочередно ка-
касается окружностей Pj = const, p^ = const
и не имеет точек перегиба. Дуга герполо-
дии АВ есть четверть дуги полодии; после
того как полюс Р придет снова в то же
положение на эллипсоиде инерции и, следо-
следовательно, опишем полную полодию, радиус-
вектор герполодии повернется на угол, равный 4 АО'В. Если угол
АО'В несоизмерим с я, то герполодия никогда не замкнется; в
противном случае герполодия будет замкнутой кривой.
6. Устойчивость вращения вокруг главных осей эллипсоида
инерции. Рассмотрение геометрической картины Пуансо позволяет
сделать заключение об устойчивости вращения вокруг каждой из трех
осей эллипсоида инерции.
Понятие об устойчивости движения по отношению к тем или
иным его характеристикам аналогично понятию устойчивости равно-
равновесия (§ 10). Закон движения механической системы определяется
действующими силами и начальными условиями. Происходящее при
заданных силах и начальных условиях движение называют невозму-
невозмущенным. Если в какой-либо момент времени точкам системы сооб-
сообщить малые возмущения (т. е. малые дополнительные смешения или
скорости) и если после этого значение какой-нибудь из характеристик
движения будет все время оставаться близким к ее значениям в не-
невозмущенном движении, то невозмущенное движение по отношению
к указанной характеристике называют устойчивым, а в противном
случае— неустойчивым.
Рассмотрим вопрос об устойчивости вращательного движения тела
с неподвижной точкой вокруг его главных осей инерции; при этом
нас будет интересовать вопрос об устойчивости по отношению
к сохранению модуля и направления вектора угловой скорости <й.
198 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
Движение будем считать устойчивым, если при малом возмущении
численная величина и направление вектора <й во все последующее время
будут мало отклоняться от его начальной постоянной величины соо
и начального направления, совпадающего с направлением главной оси
инерции; в противном случае это движение неустойчиво.
Заключение об устойчивости (или неустойчивости) для рассматри-
рассматриваемого движения можно сделать по расположению полодий на эллип-
эллипсоиде инерции.
Если твердое тело вращается вокруг большой оси эллипсоида
инерции (оси z, совпадающей с осью ?), то при весьма малом воз-
возмущении, которое вызовет изменение начального направления мгно-
мгновенной угловой скорости «о, эллипсоид инерции перестанет касаться
плоскости Пуансо в одной точке (конце большой полуоси), а станет
катиться, касаясь плоскости Пуансо вдоль точек одной из полодий,
окружающих конец большой полуоси и очень близких к вершине Е
(см. рис. 68). При этом угол отклонения вектора <й от первоначаль-
первоначального направления будет мал и численно w будет мало отличаться
от со0, что следует из равенства A4). Следовательно, согласно ска"-
занному выше, вращение вокруг большой оси эллипсоида инерции
будет устойчивым. То же рассуждение можно повторить и для малой
оси эллипсоида, и, следовательно, вращение твердого тела вокруг
большой или малой оси эллипсоида инерции является устойчивым.
Напротив, вращение вокруг средней оси эллипсоида инерции оказы-
оказывается неустойчивым. В самом деле, при весьма малом возмущении
вращения вокруг средней оси эллипсоида инерции Оу новое движе-
движение будет осуществляться качением эллипсоида по плоскости П,
причем геометрическим местом точек прикосновения будет служить
одна из полодий, весьма близкая с кривой, составленной из каких-
либо половин двух эллипсов KL и MN (см. рис. 68). Эта полодия
будет конечных размеров; тогда в последующем движении и модуль
и направление вектора й) будут значительно отличаться от их началь-
начальных значений, и следовательно, движение будет неустойчивым. То
обстоятельство, что движение при этом одинаково вероятно по любой
из достаточно близких полодий, лежащих в четырех областях, на
которые разделяется двумя эллипсами K.L и MN поверхность эллип-
эллипсоида инерции, характерно для неустойчивого вращения вокруг оси Оу
и существенно отличает этот случай от вращения вокруг большой
и малой осей, когда возмущенное движение осуществляется качением
эллипсоида инерции вдоль весьма близкой полодии, лежащей в той же
области эллипсоида, что и конец соответствующей полуоси, которую
полодия окружает.
В § 12 (п. 3) было доказано, что главные оси эллипсоида инер-
инерции являются свободными осями вращения твердого тела. Докажем
обратное, т. е. что если ось вращения твердого тела с неподвижной
точкой, на которое не действуют никакие внешние силы, перманентна
§ 17) СЛУЧАИ ЭЙЛЕРА - ПУАНСО 199
(т. е. сохраняет неизменное направление относительно тела), то эта
ось есть одна из главных осей эллипсоида инерции, построенного для
неподвижной точки. Так как ось перманентная, то проекции угловой
скорости <й на подвижные оси будут
р = аи, q = рсо, г = у®, B3)
где а, р, у суть постоянные направляющие косинусы угловой ско-
скорости <й, которая по условию имеет постоянное направление относи-
относительно тела. Докажем, что <а постоянна не только по направлению
относительно подвижной системы, но и по модулю. В самом деле,
подставляя значения B3) в интеграл энергии B), получим уравнение
из которого следует, что | © | = const, a следовательно, постоянны
и вектор <й и его проекции р, д, г. Уравнения Эйлера A) для слу-
случая постоянных р, q, г примут вид
(С— B)qr = 0, (A—C)rp = 0, (B — A)pq = 0. B4)
Отсюда следует, что если эллипсоид инерции трехосный (А > В > С),
то, чтобы удовлетворить уравнениям B4), надо принять две из проек-
проекций угловой скорости равными нулю; это и доказывает, что един-
единственные перманентные оси тела суть главные оси эллипсоида инер-
инерции. Если эллипсоид инерции есть эллипсоид вращения, например,
если А~В, то, чтобы удовлетворить уравнениям B4), надо поло-
положить или /- = 0, или p=q = 0; но равенство г = 0 показывает, что
любое направление в плоскости экватора Оху есть перманентная ось,
а из равенства p — q—Q следует, чго ось Oz также является пер-
перманентной осью. Если эллипсоид инерции есть сфера, т. е. если
А = В = С, то уравнениям B4) удовлетворяют любые значения р,
q, r, т. е. любая ось будет перманентной.
7. Герполодограф. Недостаток геометрической интерпретации
Пуансо заключается в том, что в ней движение вполне задано гео-
геометрически качением эллипсоида инерции по плоскости Пуансо, но
кинематические обстоятельства движения приходится осуществлять
дополнительно. Если осуществить материально аксоиды с вершинами
в неподвижной точке О (и ограниченные: неподвижный — герполо-
дией, а подвижный — полодией), то для полного воспроизведения дви-
движения недостаточно просто катить подвижный конус по неподвиж-
неподвижному, а необходимо катить так, чтобы угловая скорость, направлен-
направленная вдоль общей образующей ОР, равнялась со=ОР-|Ай [формула
A7)]. Реально осуществить такой закон изменения угловой скорости
на основании геометрической интерпретации Пуансо невозможно.
200
ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
[ГЛ IV
Дарбу и Кенигс восполнили указанный пробел следующим обра-
образом Разложим угловую скорость <й на две составляющие: (лх вдоль
вектора G и g>2 — параллельно плоскости П (рис. 70), так что
G) =
Щ.
П'
Рис. 70.
Согласно доказанному в п. 3 [формула A4)] первая составляющая
tOj = t*G постоянна; изменяется, следовательно, только <о2.
Проведем через точку О плоскость П', параллельную плоскости П,
и заставим плоскость П' вращаться равномерно с угловой скоро-
скоростью <й1 вокруг вектора G. Тогда угловая
скорость эллипсоида инерции относительно
плоскости П' будет равна <а — <а, = <й2.
Во время движения вектор <а2 будет зани-
занимать различные положения относительно
тела и опишет в теле некоторый конус К
(второго порядка, как это можно дока-
доказать). Если этот конус К осуществить
материально, то движение можно пред-
представить как качение конуса К по подвиж-
подвижной плоскости П' с угловой скоростью <а2.
Осуществим материально плоскость П,
эллипсоид инерции, конус К и плос-
плоскость П', могущую равномерно вращаться
с заданной угловой скоростью вокруг
вектора С; при этом предположим, что либо все эти поверхности
шероховатые, либо связаны одна с другой соответствующими зубча-
зубчатыми зацеплениями. Если теперь эллипсоид инерции будет катиться
с надлежащей угловой скоростью
со = ОР • Yh по неподвижной
плоскости П, воспроизводя дей-
действительное движение, то конус К
заставит соприкасающуюся с ним
плоскость П' вращаться равно-
равномерно с угловой скоростью ©!•
Если, напротив, заставить вра-
вращаться только плоскость П' с по-
постоянной угловой скоростью й>!,
т0 плоскость ГР, соприкасаясь
с конусом К, передаст движение
эллипсоиду инерции, который, катясь по плоскости П, осуществит
действительное движение. Кенигс и Дарбу построили соответствую-
соответствующий прибор, названный герполодографом (рис 71) потому, что
материально осуществленный эллипсоид, катясь по плоскости П,
вычерчивает на этой плоскости герполодию.
рис_ 71.
18)
СЛУЧАЙ ЛАГРАНЖА - ПУАССОНА
201
§ 18. Случай Лагранжа — Пуассона
1. Уравнения движения симметричного тяжелого гироскопа
и качественное исследование. В случае Лагранжа — Пуассона
эллипсоид инерции твердого тела относительно неподвижной точки
есть эллипсоид вращения, т. е. А = В, и центр тяжести тела лежит
на оси вращения эллипсоида инерции, т. е. на оси динамической сим-
симметрии. Такое тело, имеющее неподвижную точку, часто называют
симметричным гироскопом. Заметим, что если однородное твердое
тело имеет ось геометрической симмет-
симметрии, то эта ось будет также и осью
динамической симметрии, но не на-
наоборот.
По-прежнему свяжем с телом под-
подвижную систему ориентировки Oxyz
(рис 72) и направим ось Oz по оси
динамической симметрии с положитель-
положительным направлением от О к центру тя-
тяжести С. Ось Ot, основной системы
отсчета направим вертикально вверх.
Обозначим радиус-вектор центра тя-
тяжести С относительно О через а (О,
О, а), а направляющие косинусы вер-
вертикальной оси Ot, относительно под-
подвижных осей — через Yi. Y2. У& их выражения через углы Эйлера
определяются формулами A2) § 16. Проекции силы тяжести на под-
подвижные оси имеют значения Р(—Py^ —Py2, —Руз)- Составим
динамические уравнения Эйлера. Момент внешней силы относительно
неподвижной точки О будет
J *
Рис. 72.
Yi Y2 7з
0 0а
следовательно,
Мх = PaY2.
Му = — Pay 1,
Mz=:0.
Тогда динамические уравнения Эйлера примут вид
В
dq_
dt
dr
A)
202 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
К этим уравнениям необходимо еще присоединить кинематические
уравнения Эйлера:
/> = -ф sin в sin ф-f-Ocos q>,
q == ф sin 0 cos ф — 9 sin ф,
г =ф-)-\|)соз в.
B)
При общей постановке задачи о движении тяжелого твердого тела
около неподвижной точки (§ 16, п. 3) было выяснено, что кроме
тривиального интеграла у? ~т~ У\ ~f~ Y3~ 1 необходимо для решения
задачи отыскать еще три интеграла. Применим теорему об изменении
кинетической энергии
dT = —
где ?с есть координата центра тяжести относительно основной системы
отсчета. Очевидно, что ?с = (a)j = ауз- Интегрируя и заменяя кине-
кинетическую энергию Т ее выражением G') § 15, получим интеграл
ш.ергии
C)
при этом учтено, что А = В.
Для получения второго из интегралов применим теорему об изме-
изменении кинетического момента в проекции на ось 0?. Получим
поскольку Mi = 0\ следовательно,
Gj= const.
Но так как
О; = О ¦ ?° - (A pi + Aqj + Crk) • (Yl* + yj + V3*) =
то окончательно будем иметь
^(PYi + <7Y2) + CrY3 = const. D)
Третий интеграл получаем из третьего уравнения системы (l)i
г = const. (б)
Заметим, что интегралы C) и D) можно получить и непосредственно
из уравнений A), как это было показано в § 16, п. Ь.
Введем в полученные интегралы эйлеровы углы. Возводя обе
части первых двух уравнений системы B) в квадрат и складыйая их
почленно, получим
§ 18] СЛУЧАЙ ЛАГРАНЖА - ПУАССОНА 203
Кроме того, Y3 = cos^- Если, наконец, постоянную величину Сг2
объединить с h, то интеграл C) примет вид
osQ — h1, F)
где hx = h—Cr2.
Далее, умножая два первых из уравнений B) соответственно
на Yi> Y2 и принимая во внимание равенства A2) § 16, получим
jOYi = ф sin2 в sin2 ф+ 9 cos ф sin 0 sin ф,
qy2 = -ф sin2 9 cos2 ф — 0 sin ф sin 9 cos q>.
Отсюда после почленного сложения находим
В результате интеграл D) преобразуется к виду
Лф sin2 0 + Cr cos 0=й. G)
Наконец, интеграл E) после замены г его значением из кинематиче-
кинематических уравнений Эйлера B) примет вид
ifcos 9-|-ф = г = const. (8)
Входящие в интегралы F), G), (8) постоянные hv bur опреде-
определяются по начальным условиям.
Для отыскания закона изменения в зависимости от времени эйле-
эйлеровых углов ф, \J5 и 0 необходимо проинтегрировать систему трех
обыкновенных дифференциальных уравнений первого порядка F), G)
и (8). Неизвестное ф в уравнения F) и G) не входит, поэтому урав-
уравнения F) и G) можно интегрировать отдельно от уравнения (8).
Определяя из уравнения G) ф (скорость прецессии), получим
; Ь — Cr cos 9 ,„.
*= Asin'B ¦ <9>
Затем, разрешая уравнение F) относительно 02, будем иметь
д, hi — 2Ра cos 9 ;, . 9П
02 = — -г \[з2 sin2 0;
подставляя сюда вместо г|) его значение (9), найдем
Л, h{ — 2PacosQ (Ь — Cr cos 6J
6 = А ЖШв '
Уравнение A0) дает выражение для квадрата скорости нутации.
Интегрирование этого уравнения можно довести до конца; 0 выра-
выразится в виде эллиптической функции времени. Затем, подставляя
найденное значение 9 в уравнения (9) и (8), можно найти ф и ф
в виде квадратур от эллиптических функций. Не проводя до конца
204 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
этого интегрирования, проведем на основании вида дифференциаль-
дифференциального уравнения A0) качественное исследование характера движения,
дающее достаточно ясное представление о всех его особенностях.
Преобразуем уравнение A0) к виду
A2 sin2 Q- G2 = A (hx — 2Ра cos 0) sin2 0 ~(b— С г cos 0J A0')
и введем новое переменное s, полагая
cos 8 = 5, — sinG • Э= ^-. A1)
Тогда уравнение A0') примет вид
A>(fJ = f(s), A2)
где обозначено
f(s) = A(h1—- 2Pas) (l—s2) — (b — CrsJ. A3)
Исследуем корни уравнения f(s) — 0, т. е. найдем те значения s,
при которых — обращается в нуль. Легко видеть, что уравнение
/(s) = 0 будет иметь три действительных корня. В самом деле, из
равенства A3) следует, что
/(—1) = —(А —С«)*<0,
/(+i) = —(&—?«)*< о.
/(+оо)=Н-оо.
Последнее соотношение имеет место потому, что член /E) со стар-
старшей степенью 5 имеет вид -\-2PaAsz.
Так как s = cos 0 и — 1 -^ cos 0-^1, то для действительного
движения должно иметь место —1-^s-^l. А ввиду того, что и
~-гг должно быть действительным, а не мнимым, выражение /E)
должно быть положительным в некотором интервале, лежащем между
— 1 и —|— 1 соответствующем действительному движению. Но так как
при s = — 1 и 5 = -)- 1 /E) < 0, а в упомянутом интервале /(s) > 0,
то между s = — 1 и S — -f-1 существуют два действительных корня
f (s), которые обозначим через sx и s2. Кроме того, так как
/(-j-oo) =-|-оо, то за значением 5 = -|-1 функция / (s) имеет еще
один действительный корень s3 [примерный график функции / (s)
изображен на рис. 73].
Воспользуемся проведенным исследованием для общей характери-
характеристики движения симметричного гироскопа и применим для этой цели
сферическое изображение. Опишем сферу единичного радиуса с цент-
центром в неподвижной точке О и отложим от точки О вдоль положи-
положительного направления оси динамической симметрии гироскопа Oz
единичный вектор АО = а°; конец его А, называемый апексом,
18]
СЛУЧАЙ ЛАГРАНЖА - ПУАССОНА
205
будет все время двигаться по построенной сфере. Движение апекса А
по сфере полностью изобразит движение оси Oz, т. е. прецессию й
нутацию гироскопа.
Исследуем сначала, как изменяется при движении гироскопа угол
нутации 0. Так как s = cos0, то из заключения, что для действи-
действительного движения s находится в границах Si<JXJ*2> вытекает,
Рис. 73.
что cos Oj-^ cos 0 <^cos02, где QX и 02 — углы, соответствующие
корням $! и s2; следовательно,
01 ^- 9 ^- 02-
Это двойное неравенство означает, что сферическая кривая, которую
описывает апекс, заключена между двумя параллелями Л1Л1 и АчА'ч,
плоскости которых перпендикулярны к вертикальной оси OZ, и от-
отстоят от О на расстояниях ^1 = cos01 и
?2 = cos02. Ось Oz во все время движе-
движения будет находиться между двумя кону-
конусами с общей вершиной О и направляю-
направляющими A\Ai и А4А2 (рис. 74). Так как из
равенства A1) следует, что
ds dcos 6 . й dQ
и так как 0 Ф 0, ибо этот угол заклю-
„ „ dQ л
чен между 0j и 02, то —тг обращается
в нуль одновременно с —гг. Тогда из
уравнения A2) следует, что —тг = 0 только
Рис. 74.
для корней уравнения /(s) —0, т. е. когда траектория апекса дости-
достигает граничных параллелей А^д^ и А2д'2_
Следовательно, изменять направление нутационного движения (от
движения вниз на движение вверх и наоборот) ось гироскопа может
только на параллелях A\Ai, A^Ai.
Таким образом, траектория апекса будет иметь вообще вид вол-
волнистой сферической кривой, заключенной между параллелями А\А\
206 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
и идущей от одной параллели к другой. При этом время
движения tK от параллели А\А\ до А2А2 остается постоянным и
равным времени t2l движения от параллели А2А2 до А\Аи т. е. ну-
нутационное движение является колебательным с периодом Т = 2t12.
В самом деле, из уравнения A2) следует, что As—±Yf(s)> где
знак плюс берется, когда s > 0, т. е. когда s растет от Sj до s2,
и знак минус — при убывании s от s2 до sv Тогда
Si *, S2
m л Л
12~ J vfW' 21~ J ~-v7W~ J УТШ'
Таким образом, величины tl2 и t2l определяются одним и тем же
интегралом, причем нетрудно показать, что этот интеграл имеет ко-
конечное значение; следовательно, t12 = ^21 = const.
Если корни S\ и 52 очень близки друг к другу, то параллели
А\А[ и А2А2 очень сближены, траектория апекса извивается в узкой
полосе между ними, мало отличаясь от окружности, а ось гироскопа
вращается (прецессирует) вокруг оси О?, испытывая очень малые
колебания; имеет место так называемая псевдорегулярная прецессия.
Рассмотрим теперь, какой вид может иметь траектория апекса
между ограничивающими ее параллелями. Это зависит от характера
прецессионного движения, т. е. от условий скорости прецессии ф,
определяемой формулой (9)
Поскольку в знаменателе здесь стоит величина существенно по-
положительная, то направление прецессии будет зависеть от значения
постоянной Ь, т. е. от начальных условий. Возможны следующие
случаи:
1) b >Cr cos 02 (или b <Crcos0!). Поскольку во все время дви-
движения cos 0^ cos 02 (и cos0>cos01), то в этом случае ф имеет
все время один и тот же знак и никогда не обращается в нуль,
т. е. гироскоп прецессирует все время в одном и том же направле-
направлении. При этом на параллелях А\А\ и АчА'ч скорость Э обращается
в нуль и ось гироскопа имеет только скорость \р; следовательно,
траектория апекса касается граничных параллелей. В итоге заклю-
заключаем, что траектория апекса будет в данном случае иметь вид кри-
кривой, показанной на рис. 74.
2) ? —Crcos02. В этом случае ф также имеет все время один
и тот же знак, но на верхней параллели АчА2 обращается в нуль.
Так как на этой параллели и 9 = 0, то у траектории апекса на па-
18]
СЛУЧАЙ ЛАГРАНЖА — ПУАССОНА
207
Рис. 75.
раллели ЛгДг будут точки возврата. Таким образом, траектория
апекса имеет в этом случае вид сферической циклоиды, изображен-
изображенной на рис. 75.
Заметим, что случай ?=Crcos0! физически невозможен, так как
тогда на параллели AiA\ было бы одновременно \р = 0, 0 = О,
а потенциальная энергия гироскопа при 0 = 0t имеет минимум (центр
тяжести гироскопа занимает наинизшее поло-
положение); следовательно, в последующем дви-
движении от параллели AiAi к AiAi, когда
будет \j) Ф О, О Ф О, должны одновременно ^"
возрастать и кинетическая и потенциальная
энергии гироскопа, что противоречит закону
сохранения энергии. Таким образом, траекто-
траектория апекса с точками возврата на нижней
параллели невозможна.
3) С г cos 0] < b < С г cos 02. В этом слу-
случае, пока cos 0!-^ cos 0 < b, угловая ско-
скорость прецессии Jj?> 0, а при ?< cos 9-<!cos92
будет ф < 0. Следовательно, при угле 0 = 0*,
определяемом равенством cos 6* = b, направление прецессии изменяется.
Траектория апекса будет петлеобразной кривой, напоминающей по
виду трохоиду (рис. 76). При этом из соображений, аналогичных вы-
высказанным при рассмотрении предыду-
предыдущего случая 2), следует, что петли траек-
траектории могут располагаться только вблизи
верхней параллели Л2Л2.
Рассмотрим частный пример. Пусть ^//
в начальный момент t = 0, <р = ф0, ф = О,
0 = 0 и 0 = 0О, т. е. гироскопу сообщают
собственное вращение с угловой скоростью
Фо и отпускают ось без толчка, накло-
наклонив ее под углом 0О к вертикали. Под-
Подставляя эти начальные данные в уравне-
уравнения F) и G), находим, что в данном
случае h1 = 2Pa cos 60, b = Cr0cos%, и равенство A3) принимает
вид
Рис. 76.
где so = cos0o. Отсюда следует, что одним из корней уравнения
/(s) = 0 будет s = s0 (или 0 = 0О). Но, как было установлено выше
при рассмотрении случая 2), возможно только равенство ? = Crcos02.
Следовательно, в данном случае 02 = 0О, т. е. параллель А2А'2,
ограничивающая траекторию апекса сверху, определяется начальным
208 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
положением оси гироскопа. Траектория апекса имеет вид, изобра-
изображенный на рис. 75, где 02 = 0О.
В заключение отметим, что при особых начальных условиях
может иметь место случай, когда оба корня ^ и s2 уравнения
/ ($) = о будут равны друг другу (st — s2); тогда 0! = 92 и апекс
описывает окружность параллели, а ось гироскопа — круглый конус
вокруг вертикали 0?, т. е. движение будет представлять собой ре-
регулярную прецессию.
2. Приближенное интегрирование уравнений движения сим-
симметричного тяжелого гироскопа. В большинстве случаев для прак-
практических целей бывает достаточно иметь приближенное решение
уравнений движения гироскопа. Найдем такое приближенное решение
для симметричного тяжелого гироскопа при следующих начальных
условиях:
т. е. рассмотрим случай, когда гироскоп в начальный момент полу-
получает угловую скорость со вращения вокруг своей оси динамической
симметрии Oz, которая в этот момент образует угол в0 с верти-
вертикалью.
Подставляя эти начальные данные в равенства F), G) и (8),
найдем, что в этом случае г = ю, A1 = 2Pacos90, b = Cu>cos 90.
Тогда уравнение A0) примет вид
02 = ^Е± (cos ео _ cos 0) _ J**q, (cos 0О - cos 9J
или, вынося первый член правой части за скобку,
02 ^ 2Р« (cos 9q - cos 9) [ 1 - 2Р™п2 е (cos 90 - cos 9)] . A4)
Из результатов, полученных в п. 1, следует, что во все время дви-
движения cos 0-^ cos 90') и, следовательно, 9^90. Левая часть урав-
уравнения A4) существенно положительна; один из множителей правой
части, именно cos90 — cos0, по доказанному больше нуля, следова-
следовательно, второй множитель, т. е. выражение в квадратных скобках,
должен быть существенно положителен, а для этого необходимо,
чтобы второй член в квадратных скобках был меньше единицы.
Будем в дальнейшем рассматривать случай, обычно имеющий
место на практике, когда начальная угловая скорость со гироскопа,
а с нею произведение Сы, называемое собственным моментом гиро-
') Это ясно и из того, что если бы было cos 6 > cos 6Ol то выражение
в квадратных скобках уравнения A4) было бы положительным, а следова-
следовательно, вся правая часть этого уравнения была бы отрицательной, что не-
невозможно, так как левая часть в2 существенно положительна.
§18] СЛУЧАЙ ЛАГРАНЖА —ПУАССОНА 209
скопа (начальный кинетический момент гироскопа), настолько велики,
что выполняется неравенство
Но в таком случае, чтобы второй член в квадратных скобках был
меньше единицы, необходимо, чтобы множитель при нем (г. е. вели-
величина cos 90 — cos 0) был достаточно мал. Это в свою очередь будет
иметь место тогда, когда очень мала разность 0 — 90, а потому
можно положить
e = 9e + «. A5)
где и есть весьма малая положительная величина (угол, на который
изменяется начальное значение угла нутации). В дальнейшем будем
ограничиваться в выражениях тригонометрических функций членами
первого порядка малости относительно и и полагать
cos и sw 1, sin и ти.
Тогда
cos 0 = cos@o-f- и) —cos 0О cos и — sin 0O sin и «cos0o—Msin0o, \
sin0 = sin@o-f-M) —sin0ocosM-f-cos0osin« «* sin0o-f-«cos0o; J
отсюда
cos0o — cos 0#» a sin0o. A7)
Поскольку мы считали С2©2^>2РаЛ, то для удержания в квадрат-
квадратной скобке правой части уравнения A4) членов одинакового порядка,
необходимо в множителе при 2„ю сохранить член с и. Вычисляя
этот множитель с учетом равенств A6), A7), получим
cos 60 — cos 8 и, sin 9а и
sin2 9 ~ sin2 9e + 2м sin 6e cos 60 sin90 A +2м ctg 0O)
(du,y 2PaMSine0 [i С2ю2ц 1
\dt}~ A L 2Pa^sine0 J1
Кроме того, из соотношения A5) следует, что 6—~«-. В резуль-
результате уравнение A4) заменится следующим приближенным уравнением:
или
Введем обозначения
С®
14 H. H. Бухгольц
210 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
Тогда уравнение A9) примет вид
откуда
Разделяя переменные, будем иметь
du
, i —adt. B2)
Таким образом, задача свелась к квадратуре. Для окончательного
интегрирования сделаем подстановку
M = psin2e; B3)
тогда
du = 2p sin e cos г de.
Уравнение B2) после подстановки B3) примет вид
2Р sin е cos e dt ,,
У Р sin2 е (р — р sin2 г)
или, после сокращения,
о
Интегрируя, получим
а ^ t
Подставляя это значение г в равенство B3), находим
Для определения постоянной интегрирования Cj учтем начальные усло
вия: м = 0 при ? —0. Тогда
0=psm2c1, откуда Cj = 0
Заменяя здесь константы а и р их значениями B0), будем иметь
Наконец, подставляя этот результат в равенство A5), получим окон-
окончательно следующее выражение для угла нутации:
^^l'j B5)
$18]
СЛУЧАЙ ЛАГРАНЖА — ПУАССОНА
211
Из равенства B5) видно, что угол нутации периодически изме-
изменяется от значения Эо до значения
C2co2
Следовательно, если вокруг вертикальной оси описать два конуса
с углами раствора при вершине 290 и 201( то ось гироскопа будет
все время находиться в пространстве между этими
конусами (рис. 77). Период изменения угла нута-
нутации будет, согласно уравнению B5), равен
2пА
B6)
Формулы B6) и B5) показывают, что чем
больше собственный кинетический момент гиро-
гироскопа, тем меньше период нутации (больше часшта)
и теснее границы 0О и Э1р между которыми ко-
колеблется (нутирует) ось гироскопа. Сказанным
объясняется явление, состоящее в том, что вол-
волчок, приведенный в быстрое вращение, издает
звук (жужжание) тем более высокого тона, чем больше скорость
вращения.
Найдем выражение скорости прецессии. Для этого воспользуемся
интегралом G). При принятых начальных условиях л = ю, ? = Ccocos0o
и этот интеграл дает
откуда
1 Sin2 0 = Си) (COS 0О COS 0),
: Cat cos 60 — cos 6
™ А ' sin2 Go '
Заменяя здесь последний множитель в правой части его приближен-
приближенным значением A8), будем иметь
т ~ A sin 60 '
Наконец, заменяя и его значением B4), найдем окончательно сле-
следующее приближенное выражение для скорости прецессии:
1j, = ^sina(^./). B7)
Таким образом, мы приближенно определили законы прецессии и
нутации быстро вращающегося тяжелого гироскопа при принятых
начальных условиях.
Осью нутации является линия узлов, а осью прецессии — непо-
неподвижная вертикальная ось О?. Закон изменения угла нутации дается
14*
212 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
формулой B5). Из этой формулы следует, что ось собственного
вращения Oz колеблется в плоскости 01,2 (вокруг линии узлов) около
некоторого среднего своего положения. Величина ф есть скорость
вращения линии узлов или плоскости O?z (перпендикулярной к ли-
линии узлов) вокруг оси О?. Ось собственного вращения совершает,
следовательно, сложное движение. Из равенства B7) следует, что
скорость прецессии г|) сохраняет в нашем случае все время один и
тот же знак, одинаковый со знаком со; следовательно, ось собствен-
собственного вращения прецессирует (вращается вокруг оси О?) все время
в одном и том же направлении, причем, если гироскоп вращается
вокруг оси в каком-либо направлении, то и его ось поворачивается
вокруг вертикали в том же направлении. Из формулы B7) также
заключаем, что период для изменения скорости прецессии тог же,
что и для угла нутации. Одновременно из формул B5) и B7) вы-
вытекает, что
Отсюда видно, что при минимуме угла нутации, т. е. при 9 = Эо,
скорость прецессии равна нулю, т. е. тоже минимальная, а при мак-
максимуме угла нутации, т. е. при наибольшем отклонении оси собствен-
собственного вращения от вертикали, имеется и максимум скорости прецессии,
1Ра
равный —я—. Следовательно, траекторией апекса будет сферическая
циклоида, касающаяся нижней параллели @ = 0j) и имеющая точки
заострения на верхней параллели @ = 02=8О), т. е. как и было
установлено в п. 1 [при принятых начальных условиях имеет место
второй из рассмотренных в п. 1 случаев (см. рис. 75)]. При этом
опускание оси собственного вращения сопровождается возрастанием
скорости ее вращения вокруг оси Ot, и наоборот.
Когда скорость собственного вращения гироскопа очень велика,
изменение угла нутации настолько мало и незаметно (границы Эо и 0t
очень близки друг к другу), что прецессия кажется регулярной.
Такая нерегулярная прецессия, мало отличающаяся от регулярной,
называется, как было уже сказано в п. 1, псевдорегулярной пре-
прецессией. Для псевдорегулярной прецессии вводится понятие средней
скорости прецессии, которая определяется как среднее значение ско-
скорости прецессии ф за промежуток времени, равный периоду пре-
прецессии.
Согласно определению среднего значения функции в некотором
интервале изменения ее аргумента средняя скорость прецессии будет
равна
§ 18] СЛУЧАЙ ЛАГРАНЖА - ПУАССОНА 213
где t± есть произвольно взятый момент времени. Легко показать,
что ф не зависит от момента tlm В самом деле, заменяя величину ф
под знаком интеграла ее выражением B7), получим
Г 1 С 2Ра . „(Cat'
^ T j С» \ 2.
tx
Делая подстановку t = tl-\-x, найдем
г
Cffl^i + T) , _
2A пХ~
Последние два члена внутри квадратной скобки взаимно уничто-
уничтожаются, что обнаруживается, если представить в них значение Т из
равенства B6). Итак,
Среднюю скорость псевдорегулярной прецессии можно определить
также как постоянную скорость некоторой воображаемой регулярной
прецессии, при которой воображаемый апекс, двигаясь равномерно,
описывает дугу параллели между двумя точками прикосновения кон-
концов ветви траектории настоящего апекса в то же самое время (пе-
(период Т), в которое настоящий апекс описывает ветвь своей траек-
траектории (двигаясь неравномерно). Поскольку мы в ходе расчетов считали
величину Сю большой, то из формул B8) или B7) следует, что при
принятых начальных условиях угловая скорость прецессии будет ве-
величиной малой, т. е. имеет место медленная прецессия.
Найдем, наконец, зависимость угла прецессии от времени. Инте-
Интегрируя равенство B7), получим
о
Ра
Са>
о о
Г, А . CatV Pa Г, А . Cat!
\t я— sin—т— =-7>— * ^—sin—т- ;
L С» A Jo С» L С» A J'
214
ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
[ГЛ. IV
окончательно
— J-
B9)
Из равенства B9) следует, что угол прецессии будет постоянно воз-
возрастать, что, впрочем, следует и из равенства B7), так как произ-
производная if положительна. Итак, ось собственного вращения будет вра-
вращаться вокруг вертикали все время в одном и том же направлении.
Изменение угла прецессии может быть представлено графически, если
вычертить графики двух функций
. , , Ра , , РаА . Cat
¦'¦ —'- ' * " ¦'" -sin—г-,
Tl — ТО "Г" Cft) - " Y2 — С2(а2
т. е. прямую и синусоиду, а затем сложить их ординаты; тогда
Если собственный кинетический момент гироскопа Сю очень ве-
велик, то можно, раскрыв скобки, пренебречь третьим членом в фор-
формуле B9); тогда для угла прецессии получим
приближенную формулу
C0)
.„„El,,,,),;?,,,,,
7у/77777777777777/777/777777
Из этой формулы можно было бы также по-
получить найденную выше среднюю скорость
прецессии B8).
Последняя из величин, характеризую-
характеризующих движение гироскопа, т. е. ф, опреде-
определяется из интеграла (8) и равна
C1)
Рис. 78.
Поскольку, как видно из формул B7) или
B8), 1ф<С1й>. то практически можно счи-
считать фЛй©, т. е. что собственное вращение гироскопа происходит
«с постоянной угловой скоростью.
3. Элементарная теория гироскопа. Гироскопом (или волчком)
обычно называют быстро вращающееся вокруг оси симметрии одно-
однородное тело вращения, ось которого может изменять свое направле-
направление в пространстве. Гироскоп большей частью выполняется в виде
массивного цилиндра или тора, закрепленного так, что одна из точек
его оси остается все время неподвижной. Такое закрепление осуще-
осуществляется, например, с помощью так называемого карданова подвеса
.(рис. 78).
У гироскопа обнаруживается целый ряд на первый взгляд пара-
парадоксальных явлений, обусловленных его быстрым вращением. Эти
§ 18] СЛУЧАЙ ЛАГРАНЖА - ПУАССОНА 215-
явления называют гироскопическими. Они возникают всюду, где
имеются быстро вращающиеся тела, ось вращения которых может
изменять свое направление, и потому имеют большое техническое
значение.
Выше мы видели (см. пп. 1 и 2), что точное исследование дви-
движения гироскопа под действием даже одной только силы тяжести
является довольно сложной задачей и что решение этой задачи можно
упростить, когда угловая скорость собственного вращения гироскопа,,
достаточно велика.
Дальнейшее упрощение проблемы дается в элементарной теории
гироскопа, основанной на непосредственном применении к изучению*
его движения теоремы об изменении кинетического
момент?.
Рассмотрим гироскоп, закрепленный так, что его
центр тяжести совпадает с неподвижной точкой О оси
гироскопа (рис. 79). Назовем такой гироскоп урав-
уравновешенным. Пусть этот гироскоп вращается вокруг
своей оси симметрии с угловой скоростью <йх. Так
G=J<*>,
как угловая скорость направлена в данном случае г—
по главной центральной оси инерции, то кинетиче- ( О
ский момент О гироскопа относительно точки О ^
будет направлен по той же оси, и при этом Q = J(au
где J—момент инерции гироскопа относительно его
оси. Если никакие внешние силы (кроме силы тяжести)
на гироскоп не действуют, то главный момент всех рис 7д
внешних сил относительно центра О равен нулю
и по теореме об изменении кинетического момента -^-=0, откуда1
О = const. Так как вектор О при этом все время направлен вдоль
оси симметрии гироскопа, го, следовательно, ось в данном случае
будет сохранять свое начальное направление относительно инерциаль-
ной системы отсчета, а угловая скорость оа1 будет постоянной.
Допустим теперь, что на гироскоп действуют какие-нибудь внеш-
внешние силы; тогда, как известно, гироскоп, кроме собственного
вращения, будет совершать еще прецессионное и нутационное
движения.
Исследования, проведенные в п. 2 для случая движения гироскопа
под действием силы тяжести, показывают, что у быстро вращаю-
вращающегося гироскопа направление оси вследствие нутационных колебаний
изменяется в очень малых пределах 0j — 90 и угловая скорость ну-
нутации 0 при этом также очень мала [см. формулу B5)]. По этой
причине нутационным движением оси в элементарной теории гиро-
гироскопа вообще пренебрегают.
Угловая скорость прецессии, которую мы здесь будем обозна-
обозначать (й2, также мала, но при ее наличии ось гироскопа со временем.
216
ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
[ГЛ. IV
Рис. 80.
значительно изменяет свое направление; поэтому угловая скорость &2
в элементарной теории гироскопа учитывается. Тогда мгновенная
угловая скорость гироскопа будет at = а>1 -)- в>2 (рис. 80). Но так как
у быстро вращающегося гироскопа численно со2<|^«1,
то приближенно можно считать, что o = c>i, т. е. пола-
полагать, что и при наличии прецессии угловая скорость
гироскопа в каждый момент времени равна угловой
<f>/скорости его собственного вращения и направлена
вдоль оси симметрии гироскопа. При этом допущении
вектор кинетического момента будет также в любой
момент времени равен /cui и направлен по оси гиро-
гироскопа, т. е. будет О = У(й1.
Напомним, что вообще когда тело, имеющее непо-
неподвижную точку, не вращается вокруг своей главной оси
инерции, то эта ось, вектор о и вектор О имеют разные
направления (см. § 15, п. 4).
Основное допущение элементарной теории гироскопа
состоит в том, что у быстро вращающегося гироскопа
эти три направления приближенно считаются совпадаю-
совпадающими, т. е. принимается, что в любой момент времени
вектор мгновенной угловой скорости и вектор кинетического мо-
момента О направлены по оси гироскопа и при этом
О = Mv C2)
Сделанное допущение позволяет судить о перемещении оси гиро-
гироскопа по изменению направления вектора О, используя для этого
теорему об изменении кинетического момента в истолковании Реззля.
Согласно этой теореме
-f- = M. C3)
где М есть главный момент относительно неподвижной точки О всех
действующих на гироскоп внешних сил. Если конец вектора О обо-
обозначить буквой В (рис. 81), то величину, стоящую в левой части
равенства C3), можно (считая масштабный коэффициент равным еди-
единице) рассматривать как скорость ч>в точки В, и тогда это равенство
лримет вид
VB=M. C4)
Таким образом, скорость конца вектора кинетического момента равна
численно и по направлению главному моменту внешних сил (теорема
Резаля). В элементарной теории вектор О считается все время на-
направленным по оси гироскопа. Следовательно, точка В всегда сов-
совпадает с точкой оси гироскопа, отстоящей от неподвижной точки О
на расстоянии OB = G. Поэтому, Объединяя теорему Резаля с ос-
основным допущением элементарной теории гироскопа, будем в даль-
18]
СЛУЧАЙ ЛАГРАНЖА — ПУАССОНА
217
нейшем равенство C4) истолковывать следующим образом: скорость
точки В оси гироскопа, отстоящей от неподвижной точки О на рас-
расстоянии OB==G=MU имеет в любой момент скорость, равную
численно и по направлению главному моменту М внешних сил отно-
относительно центра О.
Рассмотрим теперь, что произойдет с уравновешенным гироскопом,
если на его ось начнет действовать сила F (рис. 81), момент кото-
которой относительно неподвижной точки О равен М (или пара с мо-
моментом М, направленным перпендикулярно к оси гироскопа). Согласно
равенству C4) точка В оси получит при этом скорость <vB — M и
отклонится за малый промежуток времени
Д^ на угол Дф, двигаясь в плоскости, пер-
перпендикулярной к вектору F. Следова-
Следовательно, под действием силы F ось гиро-
гироскопа начнет отклоняться не в сто-
сторону действия силы, а в ту сторону,
куда направлен вектор момента М
этой силы относительно неподвижной
точки О (т. е. перпендикулярно к силе).
В этом проявляется одно из интересных
свойств быстро вращающегося гироскопа.
Пусть теперь в некоторый момент вре-
времени действие силы F прекращается.
В обычных условиях точка (или тело)
с прекращением действия силы продолжает
двигаться по инерции. Для оси же гиро-
гироскопа при F=0 мы получим М = 0, а следовательно, и <ов — 0,
т. е. с прекращением действия силы отклонение оси гироскопа
прекращается. В этом состоит второе интересное свойство гиро-
гироскопа (безынерционность движения его оси).
Пользуясь этими результатами, рассмотрим сначала, какое дей-
действие на гироскоп оказывает мгновенная сила (или удар), т. е. боль-
большая по численной величине сила F, действующая в течение столь
малого промежутка времени т, что ее импульс Fx есть величина
конечная (см. гл. VII). Пусть на гироскоп подействовала мгновенная
сила F (см. рис. 81), момент которой относительно неподвижной
точки равен М, причем численно М= hF. Тогда, согласно уравне-
уравнению C4), vB = hF и точка В за время т переместится на расстояние
ВВ' = hFt; а так как ОВ = G = Mh то ось гироскопа за время х
повернется на угол Дф, определяемый равенством
= -!?-• C5)
Рис. 81.
Поскольку произведение hFx, как было указано,—величина конеч-
конечная, а собственный момент гироскопа Уо^ является величиной очень
¦2U
ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
[ГЛ. IV
большой, то угол AiJ) будет очень мал (тем меньше, чем боль-
больше to{).
По истечении же промежутка времени т действие силы F пре-
прекращается, а следовательно, как было установлено, прекратится и
отклонение оси.
В результате приходим к выводу, что действие мгновенной силы
практически не изменяет направления оси бысто вращающегося урав-
уравновешенного гироскопа (примером может служить кубарь). Следо-
Следовательно, быстро вращающийся гироскоп обладает устойчивостью
по отношению к сохранению направления его оси. Это—одно из важ-
важных свойств гироскоаа, широко исполь-
используемое в технике.
Перейдем теперь к рассмотрению
движения гироскопа под действием сил.
Пусть главный момент этих сил отно-
относительно неподвижной точки О изобра-
изображается вектором М, перпендикулярным
к оси собственного вращения г гиро-
гироскопа '). Тогда точка В оси z (рис. 82)
„ будет двигаться со скоростью VB = M,
' а сама ось поворачиваться вокруг не-
неподвижной точки О. Поскольку нута-
нутацией в элементарной теории пренебре-
пренебрегают, то движение оси около точки О
представляет собой прецессию, т. е.
вращение вокруг некоторой неподвиж-
неподвижной оси ? с угловой скоростью <л2. Очевидно, что скорость <ов связана
с <о2 соотношением ив = о2ХОВ или, поскольку 0Я=<7 = Ло1,
чо flB = <»2 X Л»1- В результате приходим к следующему основному
равенству, связывающему величины М и «2:
У(<й2Х«»1) = М- C6)
Собственный кинетический момент Jti>x считается величиной задан-
заданной. Поэтому уравнение C6) позволяет, зная M(t), определить ю2,
т. е. прецессию, вызываемую этим моментом, и наоборот, зная и2,
•определить, каков момент М, под действием которого эта прецессия
происходит.
Рассмотрим сначала решение первой из названных задач. Из урав-
уравнения C6) видно, что вектор Л1 в любой момент времени направлен
перпендикулярно к плоскости zO?, т. е. по линии узлов ОК (см.
Рис. 82.
') Если вектор М не перпендикулярен к оси г, то составляющая М вдоль
этой оси вызовет ускорение или замедление собствеиного вращения, и тогда
надо будет лишь в получаемых результатах считать а>{ величиной перемен-
переменной. На практике, однако, с помощью соответствующего моторчика всегда
обеспечивают равномерное собственное вращение гироскопа.
18]
СЛУЧАЙ ЛАГРАНЖА - ПУАССОНА
219
рис. 57 на стр. 162). Следовательно, при выполнении условия Mj_Oz
вектор Л1 при движении гироскопа будет перемещаться по отношению
к основной системе отсчета |т)? в плоскости %Ov\. А так как век-
вектор с>2 направлен по оси ?, то отсюда следует, что вектор угловой
скорости прецессии направлен перпендикулярно к неподвижной пло-
плоскости, в которой перемещается вектор М; сторона, в которую на-
направлен вектор с>2, определяется равенством C6). Наконец, числен-
численное значение ю2 также определяется из равенств C6), которое дает
М
sin 0
C7)
где Э—угол между векторами щ и щ, т. е. угол нутации, причем
0 = const. Последнее следует из того, что в элементарной теории,
нутацией пренебрегают (или непосред-
непосредственно из того, что i)B = M, а так
как вектор AI перпендикулярен к плос-
плоскости zOt, то точка В оси Oz в этой
плоскости не перемещается).
В качестве конкретного частного
примера рассмотрим прецессию тяже-
тяжелого гироскопа (волчка), поставленного
под углом 0 к вертикали. В этом слу-
случае на гироскоп действует сила тя-
тяжести Р (рис. 83). Момент М этой силы
относительно точки опоры О при любом
направлении оси Oz гироскопа лежит
в горизонтальной плоскости, проходящей через точку О; следова-
следовательно, ось прецессии Ot, вертикальна и при указанном направле-
направлении с»! вектор «2 направлен вертикально вверх. Численно М = Ра sin 0,
где а= ОС — расстояние центра тяжести от точки опоры. Подставляя
это значение М в равенство C7), найдем, что гироскоп в этом случае
прецессирует с угловой скоростью
Рис. 83.
Ра
C8)
не зависящей от значения угла 0. Сравнивая этот результат с равен-
равенством B8) из п. 2, находим, что даваемая элементарной теорией
величина угловой скорости прецессии, совпадает со средней величи-
величиной этой скорости, найденной путем интегрирования соответствующих
приближенных уравнений движения.
Обратимся теперь ко второй из названных выше задач. Если
угловая скорость прецессии ю2 известна (и величина J&i по условию
также задана), то из равенства C6) сразу определяются численная
величина и направление момента М, под действием которого такая
прецессия может происходить.
220 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. [V
Если гироскоп совершает вынужденную прецессию, т. е. пре-
цессирует потому, что устройство, с которым скреплена ось гиро-
гироскопа, вращается с угловой скоростью <й2, то момент М будет вы-
вызываться силами давления на гироскоп подшипников, в которых
закреплена его ось. В свою очередь, по закону равенства действия
и противодействия, ось гироскопа будет давить на подшипники с та-
такими же по численной величине, но противоположно направленными
силами. Эти силы образуют пару с моментом Л1гир, называемым гиро-
гироскопическим моментом, которая будет действовать на устройство,
сообщающее гироскопу вынужденную прецессию. Поскольку Мгир =
= —М, то из равенства C6) находим
и численно
Mrlip = yco1(u2sin0. D0)
Из равенства C9) видно, что момент Л1гир направлен так, что он
стремится совместить кратчайшим путем вектор а>1 с <й2. Указанное
явление носит название гироскопического эффекта и определяется
следующим правилом Жуковского: если какое-нибудь устройство
сообщает быстро вращающемуся гироскопу вынужденную пре-
прецессию, то при этом на данное устройство со стороны гиро-
гироскопа будет действовать пара с гироскопическим момен-
моментом Л1гир, стремящаяся кратчайшим путем установить ось
собственного вращения гироскопа параллельно оси прецессии
так, чтобы векторы угло-
Q вых скоростей собствен-
собственного вращения и прецес-
прецессии при этом совпали по
? направлению. Это пра-
*г-^ вило объясняет значительное
^ число гироскопических явле-
явлений.
В технике гироскопиче-
гироскопический эффект часто имеет
место в тех случаях, когда
Рис- 84. происходит поворот быстро
вращающегося массивного
тела, например пароходной турбины, ветряного двигателя и т. д.
Допустим, что таким телом является пароходная турбина, вращаю-
вращающаяся на горизонтальном валу с угловой скоростью о^ (рис. 84).
Если пароход будет делать разворот с угловой скоростью к^, то
с ним повернется и вал турбины. Тогда вследствие гироскопического
эффекта на подшипники А и В будет действовать пара сил Q, Q',
направленная, согласно правилу Жуковского, так, как показано на
рисунке, т. е. стремящаяся установить вал вертикально. Момент этой
ш.
§ 19] СЛУЧАИ С. В. КОВАЛЕВСКОЙ 221
пары определяется формулой D0); поскольку в данном случае 9 = 90°,
то Жгир = Усо1оJ- С другой стороны, момент пары Q,, Q' равен Q-AB.
Отсюда находим силу добавочного давления на каждый подшипник,
обусловленного гироскопическим эффектом:
При больших значениях J^ эта сила достаточно велика и должна
учитываться в соответствующих инженерных расчетах. Если же по-
поворот будет сделан очень резко (с большой величиной со2), то сила Q
может вызвать разрушение подшипника.
В настоящее время область технических приложений гироскопов
громадна. Гироскопы используются в качестве стабилизаторов как
прямого действия, в которых используются массивные гироскопы
(например, гироскопические успокоители качки судов, гироскопиче-
гироскопические стабилизированные платформы и т. п.), так и не прямого дей-
действия, в которых гироскоп играет роль чувствительного элемента,
передающего сигналы моторам, приводящим в движение соответст-
соответствующие рули (например, прибор, стабилизирующий движение торпеды,
всевозможные автопилоты и др.).
Большое применение находят различные гироскопические навига-
навигационные приборы: гироскопические компасы, гирогоризонты, указа-
указатели поворотов и т. д.
В технике используют также гироскопические тахометры, гиро-
гироскопические интеграторы ускорений (прибор, позволяющий в любой
момент времени определить скорость неравномерно движущегося
объекта) и многие другие устройства, основанные на использовании
рассмотренных выше свойств гироскопа.
§ 19. Случай С. В. Ковалевской
1. Интеграл Ковалевской. Новый интегрируемый случай движе-
движения тяжелого тела около неподвижной точки, полученный в 1889 г.
С. В. Ковалевской, определяется двумя условиями: 1) А — В = 2С
и 2) центр тяжести лежит в экваториальной плоскости эллипсоида
инерции, который, как показывает первое условие А = В = 2С,
есть вытянутый эллипсоид вращения вокруг оси Oz.
Основные оси О|т)?, связанные с Землей1), выбираем, как и ранее,
так, чтобы ось 01, была направлена по вертикали. Оси подвижной
системы Oxyz направляем по главным осям инерции тела. Ось Oz
по условию совпадает с осью динамической симметрии (в данном
случае с большой осью эллипсоида инерции) Если эллипсоид инер-
инерции есть эллипсоид вращения, то любая ось в его экваториальной
') См. сноску на стр. 176.
222
ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
[ГЛ. IV
плоскости есть главная ось инерции; поэтому, не ограничивая общ-
общности рассуждения, можно ось Ох провести через центр тяжести С;
тогда направление оси Оу определится само собой. Обозначим, как
и раньше, радиус-вектор центра тяжести С относительно неподвиж-
неподвижной точки О через ОС = а(а, 0, 0), а направляющие косинусы
вертикали О? относительно подвижных осей — через уг, у2, у$.
Момент силы тяжести Р относительно точки О будет
j
0
k
0
=Р
i
Yi
а
j
Y2
0
k
Y.3
0
Динамические уравнения Эйлера при наличии условия
А = В = 2С
и при найденном значении Мо примут вид
2С^-Сдг = 0,
±
dr
или, деля обе части каждого из уравнений системы на С и обо-
Ра
значая постоянную —^- = п,
dr
К системе A) необходимо еще присоединить уравнения A4) § 16:
B)
dt
= ЯУ1 — РЬ-
Уравнения A) и B) представляют систему шести обыкновенных
дифференциальных уравнений первого порядка с шестью неизвест-
неизвестными функциями времени р, д, г, уь у2, у3. Для данной системы,
как и в двух рассмотренных выше случаях, можно легко получить
§ 19] СЛУЧАЙ С. В. КОВАЛЕВСКОЙ 223
три известных алгебраических интеграла, именно: интеграл
энергии, интеграл площадей, получающийся проектированием ки-
кинетического момента на вертикаль О?, и тривиальное соотношение
0 9 9
между косинусами Y1+Y2 + Y3—1- К этим трем интегралам
С В. Ковалевская добавила четвертый. Для получения его умножим
второе из уравнений A) на мнимую единицу i = Y—1 и сложим
с первым; таким же образом умножим на / второе из уравнений B)
и сложим с первым. Получим
2 -^ (р + tg) = — tr (Р Ч- tq) + i
4 = —lr (Yi + 1Ъ) + 'YsiP
Исключаем у3 из двух полученных уравнений, умножая первое из них
на p-\-lq и вычитая из него второе, умноженное на п; получим
2 (Р + Ф W (Р +'?) — 4t п ^ + ^ = ir [n <Yi + ^а)
или
что можно записать в виде
± 1п [(р + '# — » (Yx + *Y2>] = —tr. C)
Проделаем те же операции, но умножая не на /, а на отрица-
отрицательную мнимую единицу —/ = —у —1, Тогда после выкладок
совершенно таких же, как и предшествующие, мы придем к выра-
выражению, очевидно, получающемуся из равенства C), если произвести
в нем замену i на —I, т. е.
Складывая равенства (З) и D) почленно, получим
-J- In { Цр + iqf — я (Yi + /Y2)l I(P — *'<7J — я (Yi — iYa)I} = °- E)
Интегрируя уравнение E), найдем четвертый алгебраический интеграл:
[(Р + iqf — «(Yi + 1Ъ)\ [(Р — iqf — я (Yi — t'Y2)l = const. F)
Преобразуя выражение F), будем иметь
{(р2 — q2 — «Yi) + i @Pq — raY2)] X
X 1(P2 —q2 — nyx) — I Bpq — ny2)] = const,
или
(p2 — q2 — «YiJ + Bp? — nY2J = const = k. G)
Зто и есть интеграл Ковалевской. Окончательно задача сводится
к квадратурам гиперэллиптического типа.
224 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
2. Заключительные замечания. В рассмотренных выше трех
случаях движения тяжелого твердого тела около неподвижной точки,
т. е. в случаях Эйлера, Лагранжа и Ковалевской, кроме трех первых
интегралов (тривиального, интеграла энергии и интеграла площадей),
существует еще четвертый алгебраический интеграл, благодаря ко-
которому задача приводится к квадратурам. Возникает вопрос о том,
могут ли быть, кроме этих трех, другие случаи движения твердого
тела около неподвижной точки, для которых также имеет место
четвертый алгебраический интеграл. Исследования Хуссона (Husson)
A905 г.), Бургатти (Burgatti) A910 г.) и др. показали, что для
других случаев, кроме трех рассмотренных, не существует других
алгебраических интегралов, кроме тривиального, интеграла энергии
и интеграла площадей.
Это заключение относится к общим интегралам, имеющим место
при любых начальных условиях. Тем не менее различными авторами
найдены случаи, для которых существуют частные алгебраические
интегралы, т. е. интегралы, имеющие место только при некоторых,
специфически выбранных начальных условиях. К таким случаям
относятся случаи Гесса (Hess), С. А. Чаплыгина, Бобылева — Сте-
клова, Д. Н. Горячева и других авторов (см. Г. К. Суслов, Теоре-
Теоретическая механика, 1946, гл. L1).
§ 20. Движение свободного твердого тела
1. Уравнения движения свободного тела. Если обозначить
через OZ,r\t, основную систему отсчета, то уравнения движения центра
масс свободного твердого тела получатся из теоремы о движении
центра масс в виде
A)
где т — масса тела, ?с, tic, ?с — координаты его центра масс С
относительно осей основной системы, а /??, R^, /?c— проекции на
те же оси главного вектора внешних сил.
Если провести через центр массы С оси ?', т)', ?', соответст-
соответственно параллельные осям основной системы, и обозначить через Cxyz
подвижные оси, связанные с телом и направленные по главным осям
инерции тела в точке С, то движение твердого тела около центра
масс, как около неподвижной точки, определится движением осей Cxyz
относительно системы Cl,'r)'t,', которое будет известно, если известны
соответствующие углы Эйлера в функции времени.
Так как теорема моментов применима и к относительному дви-
движению около центра масс, то для движения твердого тела отно-
§ 20] ДВИЖЕНИЕ СВОБОДНОГО ТВЕРДОГО ТЕЛА 225
сительно центра масс будем иметь те же самые динамические урав-
уравнения Эйлера, что и для тела с неподвижной точкой, т. е.
Jf I V'1 "/ ' f '"VI \^>
Система уравнений A) и B) представляет собой систему шести
дифференциальных уравнений движения для свободного твердого тела.
Так как неизвестными являются три абсолютные координаты центра
масс |с, т|с, ?с и три угла Эйлера ф, г|з, 0, то к системе A),
B) необходимо еще присоединить кинематические уравнения Эйлера
[уравнения G) § 16].
Обычно в простых случаях движения, например в случае дви-
движения твердого тела в безвоздушном пространстве, проекции глав-
главного вектора внешних сил /?g, R^, R% не зависят от углов Эйлера,
а проекции главного момента Мх, Му, Mz не зависят от координат
центра масс. В таком случае уравнения A) и B) можно интегри-
интегрировать независимо друг от друга; |с, г|с, ?с выразятся в функции
времени и шести произвольных постоянных, а ф, гр, 6 — в функции t
и шести других (независимых от первых) произвольных постоянных.
Однако в некоторых более сложных случаях, например в случае
движения тела в сопротивляющейся среде, главный момент М внеш-
внешних сил относительно центра масс будет зависеть от координат |с,
tic, ?с, а действующая на тело сила сопротивления будет зависеть
от ориентировки тела, т. е. углов ф, ф, 6 и уравнения A) и B)
образуют совместную систему. В этом общем случае интегрирования
интегралы системы A), B) будут содержать 12 произвольных по-
постоянных интегрирования.
2. Примеры. 1) Допустим, что свободное твердое тело движется вне
поля сил (/? = О, МС = 0). Тогда, как видно из уравнений A) и B), его центр
масс будет двигаться равномерно и прямолинейно, а движение тела около
центра масс будет таким же, как в случае Эйлера — Пуансо. Это движение
можно назвать движением твердого тела по инерции в общем случае.
2) Допустим, что твердое тело движется в однородном поле тяжести
при отсутствии сил сопротивления. Тогда на тело действует только сила
тяжести, равная mg, приложенная в центре масс и направленная по вер-
вертикали вниз. Если ось ? направить вертикально вверх, то уравнения A)
примут вид
1С = °- 11с = °' ?с = ~ g-
Отсюда (см. ч. I, § 36) найдем, что при произвольных начальных условиях
центр масс тела будет двигаться по параболе. Движение около центра масс,
поскольку и здесь Мс = 0, будет таким, как в случае Эйлера — Пуансо.
15 Н. Н. Бухгольц
226 ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА [ГЛ. IV
3) Рассмотрим движение планеты в поле тяготения Солнца, пренебрегая
притяжениями других небесных тел. Если планету считать состоящей
из однородных сферических слоев, то, как доказывается в теории потен-
потенциала, планета будет притягиваться к Солнцу как материальная точка,
масса которой равна массе т планеты и сосредоточена в центре масс
(силы притяжения имеют при этом равнодействующую, проходящую через
центр масс). Тогда уравнения A) можно преобразовать так же, как в слу-
случае движения материальной точки под действием центральной силы (см. ч. I,
§ 37); в результате найдем, что траекторией центра масс будет коническое
сечение, в частности, при соответствующих начальных условиях, эллипс
с фокусом в притягивающем центре.
Момент Мс равнодействующей сил тяготения относительно центра масс
здесь опять равен нулю. Но, поскольку при сделанном допущении о форме
планеты центральный эллипсоид инерции является сферой, то движение пла-
планеты около центра масс будет равномерным вращением вокруг оси, сохра-
сохраняющей неизменное направление в пространстве (направление этой оси и
величина угловой скорости вращения определяются начальными условиями).
Если же не считать планету состоящей из однородных сферических слоев
и учесть ее реальную форму, например для Земли форму геоида, то ока-
окажется, что равнодействующая сил притяжения уже не будет проходить че-
через центр масс планеты и будет Мс Ф 0. Тогда движение планеты около
центра масс будет аналогично движению гироскопа, т. е. помимо собствен-
собственного вращения планета будет совершать еще прецессию вокруг оси, перпен-
перпендикулярной к плоскости эклиптики, а также нутационные колебания. В част-
частности, прецессию под действием сил притяжения Солнца и Луны совершает
и земная ось; период этой прецессии равен приблизительно 26000 лет.
ГЛАВА ПЯТАЯ
КАНОНИЧЕСКИЕ УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ
§ 21. Вывод уравнений и первые интегралы
1. Канонические переменные. Лагранжева система уравнений
представляет собой систему п обыкновенных дифференциальных урав-
уравнений второго порядка относительно обобщенных координат q и в слу-
случае, когда действующие силы потенциальны, имеет вид
где
L = L(qb q2 qn; qu q^ qn; t)
есть функция Лагранжа (или кинетический потенциал), зависящая от
координат q, скоростей q и, в общем случае от времени t. Коорди-
Координаты, от которых функция L явно не зависит и которые входят в L
только своими производными, носят название циклических. Если L
есть функция второй степени от скоростей, то система A) называется
динамической; в этом случае (см. § 8, п. 4)
Систему A) можно легко привести к системе 2га обыкновенных
дифференциальных уравнений первого порядка, считая скорости q за
неизвестные функции. Такая система будет иметь вид
d I dL\ dL . dq.
Система B) определяет неизвестные функции qx, q^, .... qn\ qb
<?2> ¦ • • • Чп> которые называются лагранжевыми переменными, и, как
видно, является системой 2и обыкновенных дифференциальных урав-
уравнений первого порядка.
15*
228 КАНОНИЧЕСКИЕ УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. V
Для приведения системы A) к каноническому виду вместо лаг-
ранжевых переменных qt и qt (координат и скоростей) введем новые
переменные, а именно обобщенные координаты qt и обобщенные им-
импульсы pt, где
pt=~ {1=1, 2 я). C)
дд{
Эти переменные будем называть каноническими переменными.
Такое преобразование (принадлежащее Пуассону и Гамильтону)
будет возможно, если система п уравнений C) может быть разре-
разрешена относительно qt, а это в свою очередь возможно тогда, когда
функциональный определитель (якобиан) системы тождественно не
равен нулю, т. е.
dL SL
)(JL
[til
til db,
Ча)
dqt
о.
Лагранжева система, для которой определитель Гесса —:—:— не
II дЬ дЯ] II
равен нулю, называется нормальной системой. Если система динами-
динамическая, то
Ь
причем
2 S ifli4) 12 iki
i, ^=l 1=1
поэтому для динамической системы обобщенные импульсы равны
п
т. е. являются линейными функциями скоростей, и определитель
Гесса будет
dqt dqf
т. е. равен дискриминанту квадратичной формы L2, который не мо-
может быть тождественно равен нулю. В самом деле, функция L2 == ^2
всегда положительна и обращается в нуль только в том случае, если
все qt равны нулю, а если бы дискриминант ||а,у|| этой положительной
квадратичной формы был тождественно равен нулю, то система од-
однородных линейных уравнений
= ° ('=!¦ 2 «)
§ 21] ВЫВОД УРАВНЕНИЙ И ПЕРВЫЕ ИНТЕГРАЛЫ 229
удовлетворялась бы при значениях q, отличных от нуля, и следова-
следовательно, согласно теореме Эйлера, было бы
>?f4 = 2L2 = 0,
т. е. функция L2 обращалась бы в нуль при значениях q, отличных
от нуля, что невозможно. Итак, динамическая система будет всегда
нормальной, и преобразование Пуассона — Гамильтона для нее всегда
возможно.
Разрешая систему уравнений C) относительно q, получим
b~f{4i. ?> Яп> Pi' Рч> •¦-. Рп' О С=1. 2 «)• D)
Подставляя выражения D) в функцию L, мы получим
L(q, q; t)-+L(q, р; t),
т. е. функция L выразится в канонических переменных. Тогда,
подставляя выражения C) и D) в лагранжеву систему A), будем
иметь
dp. лТ
-L!- = -p- (/=1,2 га). E)
dt ^t к ' у '
Уравнения D) и E) образуют систему 2га обыкновенных диффе-
дифференциальных уравнений первого порядка
da.
-j± = fiq, p; t) (i=l, 2 га). D0
dp, dL (a, p; t)
которые и будут уравнениями движения в канонической форме.
2. Уравнения Гамильтона. Гамильтон в 1834 г. дал иной вид
каноническим уравнениям движения, выразив правые части уравне-
уравнений D') и E') через одну функцию, которая носит название функ-
функции Гамильтона. Для вывода этих уравнений возьмем вариацию функ-
функции L{q,q;t), выраженной в лагранжевых переменных; получим
7 dai i dat
Преобразуем второй член правой части уравнения F); имеем
^-(?f")-?"s(t)-
16 Н. Н. Бухгольц
230 КАНОНИЧЕСКИЕ УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. V
Внося выражение G) в уравнение F) и изменяя группировку членов,
получим
В левой части уравнения (8) под знаком 6 стоит функция, которая
встречалась уже в § 8, п. 5 и была обозначена через Н*. Введем
в уравнение (8) вместо лагранжевых переменных канонические, заме-
заменив q их выражениями D). Тогда функция
после этого преобразования перейдет в функцию
(9)
9-+Р
Функция H(q, p; t), взаимная по отношению к функции L, но
выраженная в канонических переменных, называется функцией Га-
Гамильтона. Поскольку —г- = р,, функцию Н можно еще представить
дд{
в виде
H(q. р, t) = (J!iPiq\—L). . A0)
Отсюда сразу определяются выражения qt через функцию Н, анало-
аналогичные выражениям C) импульсов pt через функцию L. Действитель-
Действительно, вычисляя из выражения A0) производную от Н по р{ и учиты-
учитывая, что в этом выражении Н зависит от pt как явно, так и через
переменные qit получим
д'Ч) V dL dq'
f j dPl jidqj dPt'
Входящие в правую часть суммы сокращаются, поскольку —г-=р;-,
и окончательно будем иметь
Найдем теперь вторую группу уравнений, которые собственно и
являются уравнениями движения. Для этого перейдем в правой части
равенства (8) к каноническим переменным. Тогда функция L(q, q; t)
§ 2Ц ВЫВОД УРАВНЕНИЙ И ПЕРВЫЕ ИНТЕГРАЛЫ 231
перейдет в L{q, р; t), а —г- заменится через pt, и уравнение (8)
dqt
примет вид
bH{q, p; t) = -^
или, принимая во внимание равенство E),
р; t) = —
2l
Развертывая в левой части вариацию Н, получим
II i I
Отсюда, учитывая равенства A1), находим
t
Это соотношение, поскольку все б^ между собою независимы, дает
дН ,, , г. .
Присоединяя сюда равенства A1), приходим к следующей системе
уравнений:
§- = ?L, 4?=-# (f=l. 2, ....»). A3)
dt dpi dt dqt v ' v
Уравнения A3) носят название канонической системы уравнений
движения в форме Гамильтона или просто уравнений Гамильтона.
Они представляют собой систему обыкновенных уравнений первого
порядка, определяющих qx, q2, ¦ ¦ ¦, qn и ръ р2 рп как функ-
функций времени, т. е. q, p\t.
В случае динамической системы уравнения A) применимы только
тогда, когда система консервативна, т. е. когда силы, действующие
на систему, имеют потенциал, ибо L = T-\-U; следовательно, и
уравнения A3) тоже имеют место только для этого случая. Но весьма
легко получить уравнения Гамильтона и для неконсервативной дина-
динамической системы.
Предположим для общности, что на динамическую систему дейст~
вуют силы как консервативные, имеющие потенциал U, так и некон-
неконсервативные; тогда уравнения движения такой системы будут иметь,
вид
dt \dq) d d ^ ' V
16*
232 КАНОНИЧЕСКИЕ УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. V
ИЛИ
jL/i^iL=Qi (/==i. 2 »),
Л ^ I V » /I
где L = T-\-U, причем L\q, q, t. Полагая по-прежнему
dL
P
и вводя канонические переменные, получим уравнения D') и E')
в виде
а равенство A2) в виде
6Я = -
откуда тем же путем, что и при выводе уравнений A3), получим
= - 2 (р, - Q
2 (р, ,) q; + S
Уравнения A4) представляют собой уравнения Гамильтона для некон-
неконсервативной системы.
Необходимо заметить, что уравнения Гамильтона, как полученные
из уравнений Лагранжа второго рода, применимы только к голо-
номным системам.
3. Функция Гамильтона. Функция Гамильтона, как было уже
сказано в предыдущем пункте, есть функция, взаимная по отноше-
отношению к функции L и выраженная в канонических переменных, т. е.
Координаты q, не входящие явно в функцию Н, называются цикли-
циклическими. В случае динамической системы имеем
поэтому по теореме Эйлера
а следовательно,
H(q, p; t) = L2 — Lg, A6)
§ 21] ВЫВОД УРАВНЕНИЙ И ПЕРВЫЕ ИНТЕГРАЛЫ 233
где L2 есть функция L2, в которой скорости q выражены через им-
импульсы р. Так как в случае динамической системы скорости q, со-
согласно формуле C'), суть линейные функции импульсов р, то из
равенства A5) следует, что Н есть функция второй степени от им-
импульсов р.
Если
то
^2 = 7Y> Lo = То -f- U
и, следовательно,
H(q. p; t) = T2-T0 — U. A5')
Если, как это бывает в большинстве конкретных случаев, кине-
кинетическая энергия Т есть однородная функция второй степени от ско-
скоростей (а следовательно, и от импульсов), т. е. если
Т = Т2 — y 2 a iflflfi То = 0,
U )
то
Н=^Т2 — и = Ё, A6)
т. е. функция Н есть сумма кинетической и потенциальной энергии
или полная энергия системы, в которой скорости q выражены через
импульсы р.
Пример. Составим уравнения Гамильтона для свободной материальной
точки с массой т, движущейся в потенциальном поле сил. В этом случае
положение точки определяется тремя независимыми координатами х, у, г.
Кинетическая энергия точки будет
а потенциальная равна — U (х, у, г), где U есть потенциал силового поля.
Полная энергия равна
Б = -j/и (.** + $* + ?»)-?/(*, у, z).
Чтобы получить функцию Н, нужно в выражении В вместо скоростей ввести
импульсы. Имеем, согласно C),
дТ
Рк = —~ = тх,
дх
дТ
ру = —т- = ту,
ду
дГ
Pz=—^-— mz\
dz
17 Н. Н. Бухгольц
234 КАНОНИЧЕСКИЕ УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. V
отсюда
т
Ру
Подставляя выражения (а) в Е, получим
(а)
Уравнения Гамильтона A3) будут иметь вид
dx дН dpx дН
—тг = ~л— и т. д. и -~- = -з— и т. д.,
dt дрг dt дх
или
dx
dt
dy_
dt
dz __ pz
dt ~~ m'
Px
m '
Py
dpx _ dU
dt ~ дх '
dpy dU
~~~dj'
dU
dz '
dt
dt
Подставляя выражения рх, pv, pz из первых трех уравнений в остальные,
получим уравнения Ньютона
dU
дх '
d2y
dt2
дЦ
ду '
dU
dz
4. Первые интегралы. Первым интегралом канонической системы
уравнений A3), т. е. уравнений
dqt дН dpt дН
dt
1. 2 я),
A3)
называется функция f(q, p; t), которая остается постоянной при
всех значениях q и р, удовлетворяющих уравнениям A3); иначе
говоря, если f(q, p; t) есть первый интеграл системы A3), то
/(Я, Р: 0 = const
во все время движения при любых начальных условиях. Ясно, что
если /= const есть первый интеграл, то любая функция F(f) = const
будет тоже первым интегралом.
Задача интегрирования системы A3) заключается в определении
переменных р и q в функции времени и 2и произвольных постоян-
постоянных, т. е. в определении
c2
с2п.
§ 21] ВЫВОД УРАВНЕНИЙ И ПЕРВЫЕ ИНТЕГРАЛЫ 235
Если для системы A3) найдены 2га независимых между собою
первых интегралов
Д==с1. /2 = с2 /2„ = с2„, A7)
т. е. таких, что ни одна из этих функций / не может быть выра-
выражена как функция остальных, то система A3) проинтегрирована,
так как из 2га уравнений A7) можно найти р и q как функции
t и 2га произвольных постоянных. Это возможно, так как опреде-
определитель Якоби
d(Qi qn\ Pi Pn)
вследствие независимости между собой функций /.
В некоторых частных случаях система A3) непосредственно дает
первые интегралы, а именно:
1) Если функция Н явно не зависит от времени, т. е. —зт- = 0.
Для доказательства возьмем производную от функции Н по времени;
получим
dH (q, р; t) дН . \1 / rW_ ¦ . дН
dt dt ' ^ у dq. ^l ' dpi '
Подставляя во второй член правой части выражения qt и р, через
функцию Н из уравнений A3), мы видим, что этот член равен нулю,
следовательно,
dH__dH_
dt dt ' ^°>
Поэтому если ~5т-:= 0, то и —- = 0, а следовательно,
H{q, p) = h, A9)
где h есть постоянная, т. е. имеем первый интеграл. Принимая
во внимание выражение (9) для Н, мы видим, что интеграл A9)
есть обобщенный интеграл энергии. Для динамической системы этот
интеграл обобщается на основании равенства A5') в интеграл Якоби
2 — T0 — U = h,
а в случае, если Т—Т2, в интеграл энергии в физическом смысле
? — U=h;
постоянная h в этом случае есть постоянная энергии (ср. § 8, п. 5),
2) Если некоторые из координат явно не входят в функцию Н,
т. е. будут циклическими. Пусть циклическими будут первые k коор-
координат qx, q2 Яи (k < га); тогда
1- Яил-i ?«: Рь Рч Рп, О-
17*
^35 КАНОНИЧЕСКИЕ УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. V
В этом случае
¦^ = ° (' = 1.2 *).
и уравнения Гамильтона A3) дают k первых интегралов
pl = al. //2 = а2, .... pk — ak, B0)
где at суть постоянные. Эти интегралы носят название циклических
и выражают собой тот факт, что циклические импульсы постоянны.
Поэтому очень важно найти такое преобразование канонических
переменных q и р, при котором уравнения A3) сохранили бы свою
гамильтонову форму и возможно большее число координат стало бы
циклическим. Такие преобразования канонических переменных, при
которых уравнения A3) переходят в уравнения того же вида, назы-
называются каноническими; о них будет сказано ниже (см. § 27).
Предположим, что координаты все циклические, т. е. что функ-
функция Н зависит только от одних импульсов и времени, т. е.
Н = Н(рь р2, .... рп; t);
тогда из уравнений A3) имеем
pt = at (/ = 1, 2 п),
где с^ суть постоянные.
Если предположить еще, что —зт- = 0, т. е. что функция Н
не зависит явно от времени, то тогда функция Н = H(av a2 ап) —
— const, и первая группа уравнений A3) приводит к остальным
п интегралам. В самом деле, в этом случае
dq. ( дН ,
1L — I \ —л, л.-.,.*хл. (/ = 1, 2, .... п),
dt
Т. е. координаты q суть линейные функции времени.
Таким образом, если все координаты циклические, то канониче-
каноническая система уравнений движения легко интегрируется. Возникает
вопрос о возможности отыскать такие преобразования переменных
q и р в переменные q и р, при которых система уравнений дви-
движения осталась бы по-прежнему канонической, но все координаты q
были бы уже циклические. Такие преобразования несомненно суще-
существуют, хотя и не найдены до сих пор.
Пример. Составим уравнения движения материальной точки с массой т
под действием центральной силы. Поскольку движение является плоским,
выберем в качестве независимых координат полярные координаты точки г
и ф, беря начало отсчета г в центре силы. Тогда кинетическая энергия
точки будет
§ 21] ВЫВОД УРАВНЕНИЙ И ПЕРВЫЕ ИНТЕГРАЛЫ 237
а потенциальная равна — U (г). Введем в выражение Т вместо скоростей
импульсы
дТ ¦ дТ
Рг — ~~У~ = fnr, pm = —г- =
ОГ 0ф
Получаем
Рг . Ра,
г =
ш' ч- mr*
Следовательно, функция Гамильтона имеет вид
Координата ф оказалась циклической; следовательно, имеем первый интеграл
P<t = a; (a)
это интеграл площадей.
Кроме того, поскольку Н не зависит явно от t, имеет еще место
интеграл энергии
2 \
или
Следовательно, здесь рф = const, а рг есть функция только г. Поскольку
найдено два первых интеграла, решение задачи сводится к интегрированию
только двух дифференциальных уравнений первого порядка (вместо четырех),
например
dr дН dtp дН
dt ~ dpr dt ~ дру '
т. е., учитывая, что р^ = а,
dr _ рг d<f __ а .
Из первого уравнения, поскольку зависимость рг (г) дается равен-
равенством (б'), найдем г (t); после этого из второго уравнения определяется
зависимость ф@-
Если уравнения (в) поделить почленно и заменить одновременно рг
его выражением рг (г) из равенства (б'), то получим дифференциальное
уравнение траектории
dr _ r*pr (г)
dw a
238 КАНОНИЧЕСКИЕ УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. V
§ 22. Метод Якоби
1. Некоторые сведения из теории уравнений в частных произ-
производных первого порядка. Общий вид уравнения в частных произ-
производных первого порядка есгь
^Oi хп; z; pv ..., рп) = 0, A)
где р-ь = -^—. Функция
z = z{xx хп; av .... ап),
удовлетворяющая уравнению A) и зависящая от стольких неаддитив-
неаддитивных произвольных постоянных, сколько уравнение содержит незави-
независимых переменных, называется полным интегралом уравнения A).
Если функция F не содержит явно z, т. е. уравнение в частных
производных имеет вид
F{xl *„; PV .... Рп) — 0, B)
то одна из произвольных постоянных будет аддитивной, т. е. будет
входить в общий интеграл в качестве слагаемого; следовательно,
полный интеграл уравнений B) будет иметь вид
z = z(xu .... хп; cj ап-\) + ап-
Если уравнение в частных производных будет вида
F(xk+l, .... х„; pv .... р„ Р„) = 0, C)
т. е. часть независимых переменных, в данном случае первые k
из них: хь х2, ¦ ¦ ¦, xk (k<~^ га), будут входить в функцию F
не явно, а только посредством частных производных рх, р2, .. ., рк,
то число независимых переменных уравнения C) можно сделать
равным (п — k), т. е. понизить на k единиц. В самом деле, полагая
+ 1 х„),
дифференцированием находим
и, следовательно, уравнение C) примет вид
-м х»> а а*> ^
Очевидно, уравнение D) имеет п—k независимых переменных.
Полный интеграл этого уравнения напишется в виде
§ ^2] метод якоби 239
и, следовательно,
z = alxl-\- ... -{-akxk-\-
~\~*KxkA V •••' хп'' al< •¦•• ak> ak + l an-l)~h an-
Наконец, напомним, что уравнения характеристик для уравнения
представляется следующей системой обыкновенных дифференциаль-
дифференциальных уравнений:
dx\ dxn dpi __ dpn .-,
где
dF „ dF
apt v~l
2. Уравнение Якоби. Каноническую систему уравнений движе-
движения [A3) § 21]
дН dp. дН
= 1> 2
можно представить в виде
dqn _ dp, __ __ dpn _ dt
dH_ — ¦" ~~ Ш_ ~ _ dH_ — •"• ~~ __dH_
дрх дрп dq, dqn
Сравнивая эту систему уравнений с уравнениями характеристик E),
легко убедиться, что каноническую систему уравнений можно рас-
рассматривать как уравнения характеристик следующего уравнения
в частных производных первого порядка:
где неизвестная функция обозначена через 5. Это уравнение назы-
называется уравнением Якоби. Во многих случаях оказывается проще
найти полный интеграл этого уравнения, а затем, опираясь на тео-
теорему Якоби, и самые интегралы канонической системы F), чем
непосредственно интегрировать эту систему уравнений. Вообще же
интегрирование уравнения Якоби не представляет упрощения задачи,
так как эта задача, как известно, сводится к интегрированию системы
обыкновенных дифференциальных уравнений E), которые для урав-
уравнения Якоби G) представляют собой ту же систему F).
Неизвестная функция 5 называется главной функцией Гамиль-
пона; iC ней мы встретимся еще в главе о вариационных принципах.
Очевидно, qu q2 qn; t будут независимыми переменными для
функции S и, следовательно, полный интеграл уравнения G) будет
240 КАНОНИЧЕСКИЕ УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. V
содержать л-(-1 произвольных постоянных, из которых одна,
поскольку функция 5 явно не входит в уравнение Якоби, будет
аддитивной. Следовательно, полный интеграл уравнения Якоби будет
иметь вид
5 = 3(/; Яг Чп. «1
3. Теорема Якоби. Предположим, что полный интеграл (8) урав-
уравнения Якоби найден. Возьмем уравнения
"Lb,. -щ-^Pt d=1.2 «), (9)
где Ь( суть произвольные постоянные. Теорема Якоби состоит в том,
что если известен полный интеграл уравнения Якоби
(?) 0, G,
т- е. найдена функция
qn\ t; a,, a2 а„)
тождественно удовлетворяющая уравнению G), то уравнения (9)
будут интегралами канонической системы уравнений F). Таким
образом, согласно теореме Якоби, переменные qt, р(, определенные
из уравнений (9) в функции времени t, и 2га произвольных постоян-
постоянных av .. ., ап; Ьи . . ., Ьп будут тождественно удовлетворять кано-
каноническим уравнениям движения F). В этом можно убедиться непо-
непосредственной подстановкой найденных из уравнений (9) значений
переменных q, p в канонические уравнения движения F); проще,
однако, сделать обратное, т. е. показать, что функции q, p, опре-
определенные из канонических уравнений движения, тождественно удо-
удовлетворяют уравнениям (9).
Дифференцируя первые га уравнений (9) по времени t, получим п
уравнений вида
Заменяя в левой части полученных равенств q, их выражениями из
канонических уравнений, т. е. через -s— , получим
d*S , \Ь (?2§ дН
dat dt~^~ 2u dat dq} dp
Докажем, что полученное уравнение есть тождество, если переменные,
входящие в функцию Н, заменить их значениями из уравнений (9).
§ 22] МЕТОД ЯКОБИ 241
Выполняя эту замену, получим
Но левая часть этого равенства есть частная производная по at от
левой части уравнения Якоби G), в котором функция 5 заменена
через полный интеграл 5, т. е. равна
dS . „Л dS d'S
а потому тождественно равна нулю; следовательно, равенство A0)
есть тождество, что и требовалось доказать.
Аналогичные рассуждения применим для доказательства того же
положения огносительно второй группы уравнений (9). Дифференцируя
по t уравнения второй группы (9), будем иметь
Заменяя q и р их выражениями из канонических уравнений, получим
Покажем, что полученное равенство обращается в тождество, если
переменные, входящие в функцию Н, заменить их значениями из урав-
уравнений (9). Выполняя эту замену, получим
d2S . дН . у дН д*§ „
у _
dgt ^Zi , д$\ dqidq-U- A1)
} [
Левая часть равенства A1) есть частная производная по qt от левой
части уравнения Якоби G), в котором функция 5 заменена через
полный интеграл 5, т. е, эта левая часть равна
dS dS
П. ... /7 • -— , ...
41 Чп> dq dq
а потому тождественно равна нулю; следовательно, равенство A1)
есть тождество.
Таким образом, если полный интеграл (8) уравнения Якоби
известен, то по теореме Якоби канонические переменные qit pt
242 КАНОНИЧЕСКИЕ УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. V
определяются как функции времени t и 2й произвольных постоянных
«!, ...,а„;Ь1 Ьп из уравнений (9), представляющих собой по
отношению к ql и pi систему алгебраических уравнений.
4. Случай, когда Н явно от времени не зависят. Этот случай
встречается в большинстве практических вопросов. Пусть
H = H{qx, .... qn\ рь .... рп).
Уравнение Якоби будет иметь вид
Поскольку ? в уравнение явно не входит, то число независимых пе-
переменных можно уменьшить на единицу. Для этого, согласно п. 1,
положим
i qn),
где h есгь постоянная. Функция W, с которой мы еще встретимся
в главе о вариационных принципах, называется характеристической
функцией.
Так как
0s и dS dW /¦, о л
д и ylZП)
___д и _____ y—l.Z П),
то, подставляя в уравнение Якоби вместо 5 и ее производных эти
вначения, получаем для определения функции W уравнение
не содержащее переменной t. Предположим, что полный интеграл
уравнения B3), имеющий вид
qn\ a, ав_,;
найден. Тогда полный интеграл уравнения A2) будет
5=_ — ht + W{qi qn; ax
Отсюда легко получить систему (9) интегралов канонических урав-
dS dW dS dW л
нений; принимая во внимание, что -s— = -^—, -т— = ——-, будем иметь
~r = bt (/=1. 2 я—1). A4)
~ = pt (/=1.2 ft), A5)
4 ^ . A6)
§ 22] МЕТОД ЯКОВИ 243
где t0 есть произвольная постоянная. Первые п—1 интегралов, т. е.
интегралы A4), называются геометрическими. Они не содержат вре-
времени и в многомерном пространстве определяют кривую, кото-
которая является траекторией изображающей точки. Последний инте-
интеграл A6), содержащий время, называется кинематическим; он дает
закон движения изображающей точки по траектории. Интегралы A5)
называются промежуточными интегралами и служат для определения
импульсов р, а также постоянных интегрирования.
Пример. Найдем траекторию и закон движения тяжелой материальной
точки массы т. в однородном поле тяжести. Направим ось Oz вертикально
вверх; тогда
U = -mgz; 7" = -y
Дифференцируя Т по х, у, г, получаем выражения для импульсов
рх — тх, ру — ту, рг — mz;
отсюда находим
Рх Ру . Рг
х = —; у — —; z = — •
mm m
Следовательно, функция Гамильтона Н=Т — U будет иметь вид
Заменяя в функции И импульсы частными производными от характери-
характеристической функции W по соответствующим координатам и приравнивая по-
полученное выражение постоянной h, получим следующее уравнение Якоби
для определения функции W:
ldW\i . fdWYi
Ыг) +Ur)
Здесь две координаты х и у циклические, а потому, полагая
и подставляя в уравнение (а), приходим к обыкновенному дифференциаль-
дифференциальному уравнению первого порядка
(^) (б)
Из уравнения (б) имеем
=± y2mk — a2 — f,2 —
откуда, интегрируя, определяем / (z); таким образом, задача свелась к одной
квадратуре. Обозначая выражение / (г), полученное после интегрирования,
через / {г; а, р, А), будем иметь (с точностью до аддитивной постоянной)
/ (г; а, р, А) = т -g4j (У 2иЛ - а2 - р2 - 2m*gz ?. (в)
Тогда
+/р h (г)
244 КАНОНИЧЕСКИЕ УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ V
Отсюда получаем интегралы движения A4) и A6)
Х ' да ~ '' У ' <Э|3 ~ 2> dft ~~ °
или в явном виде
х-\ — F (г< а> Р> К) = *ь У -\ \—F (г'> «. Pi h) = Ь
1
где обозначено
F {г; а, р, К) = ± V^mh — a* — $2 — 2migz. (д')
Первые два интеграла в системе (д) геометрические; они являются урав-
уравнениями цилиндрических поверхностей, пересечение которых дает траекторию
точки. Из этих интегралов сразу следует, что
X Ьх у *2
т. е. что траектория лежит в плоскости, параллельной оси z. Если совместить
плоскость Охг с этой плоскостью, то будет у^О; тогда в равенствах (г)
и (д) следует положить р == 0. В этом случае первое из уравнений (д), ко-
которое можно представить в виде
(х - б,J = -;—¦ {2mh - а* - 2т*gz),
дает уравнение траектории хочки в плоскости Охг; нетрудно видеть, что это
парабола с осью, параллельной оси г.
Третий интеграл в системе (д) кинематический; он дает закон движения
точки в виде
2mh — а* — Р2 — 2m*gz _ , 2.
^г-г V — h).
следовательно, координата z при движении возрастает (или убывает) про-
пропорционально (t — ^оJ.
Задача решена при шести произвольных постоянных а, E, 6,, ьъ h, t0,
которые определяются заданием начальных условий, т. е. начального поло-
положения точки (три координаты) и начальной скорости (три ее проекции). Для
определения этих постоянных надо еще составить три промежуточных инте-
интеграла A5), имеющих вид
Рх = а. Ру = Р. Рг = ?г (г; а, Р, Л) ... (е)
Подстановкой начальных данных в равенства (д) и (е) определяются все
шесть постоянных интегрирования.
Таким образом, задача решена в самом общем случае и геометрические
интегралы сразу охватывают все возможные траектории, чего не дают урав-
уравнения движения в форме Лагранжа. В этой большей общности получаемых
результатов и заключается преимущество канонических уравнений.
§ 23. Метод Пуассона
1. Скобки Пуассона, В задачах механики часто случается, что
по самому характеру данной задачи несколько интегралов канониче-
канонической системы уравнений, определяющей движение, уже известно.
Метод Пуассона дает возможность, зная два интеграла, найти третий
§ 23] МЕТОД ПУАССОНА 245
и таким образом получить в некоторых благоприятных случаях пол-
полную систему независимых между собой интегралов, а следовательно,
и определить движение системы. Прежде чем приступить к изложению
самого метода, введем несколько предварительных понятий, которые
понадобятся в дальнейшем.
Пусть ф и ф будут функции канонических переменных q, p и вре-
времени t, т. е.
Ф. МЧ1> 4i Чп\ Ри Pi Рп> *•
Выражение, составленное из этих функций, вида
носит название скобки Пуассона.
Из этого определения весьма просто вытекают основные свойства
скобок Пуассона; отметим некоторые из этих свойств, которыми при-
придется пользоваться.
1) Очевидны равенства
(ф. Ф) = — (Ф- ф); (ф. — ф) = — (Ф. Ф) = (Ф. ф).
2) Далее, если с есть постоянная величина, то
(Ф, с) = 0.
3) Найдем частную производную от (ср, ф) по /; меняя порядок
дифференцирования по t и q и по t и р, получим
-(*•¦)+(»•#)• <2>
2. Тождество Пуассона. Возьмем три функции /, ф, \|), причем
/. Ф- МЯъ 4i Чп. Рь Р& •••¦ Рп> *•
Тогда между скобками, составленными из этих функций, имеет место
соотношение, которое называется тождеством Пуассона; это тожде-
тождество имеет вид
(/. (Ф. Ф)) + (Ф. (Ф. /)) 4- (Ф. (/. Ф)) = О- C)
Доказать это тождество можно непосредственным вычислением
входящих в него двойных скобок Пуассона, но это вычисление,
246 КАНОНИЧЕСКИЕ УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ V
несмотря на свою простоту, довольно громоздко. Для сокращения вы-
вычислений можно исходить из того соображения, что каждый член
тождества должен обязательно содержать производную второго по-
порядка от функций /, ф или ф; поэтому, если мы докажем, что левая
часть равенства C) не будет содержать ни одной производной вто-
второго порядка, то это покажет, что она равна нулю, и тождество
будет доказано. Так как левая часть равенства C) симметрична от-
относительно функций /, ф и ф, то доказательство можно провести
только для одной функции, например для /, что значительно сократит
вычисления. Для этого возьмем сумму двух членов, в которые могут
входить вторые производные функции /, т. е.
и, вычисляя правую часть этого равенства, легко убедимся, что она
вторых производных / содержать не будет.
3. Теорема Пуассона. Прежде чем доказать теорему Пуассона,
найдем условие, которому должна удовлетворять функция f(q, p\ t)
для того, чтобы f (q, p; t) = c было интегралом канонической си-
системы уравнений
dqt дН dpt дН
~dT=z~dfi' 1T = ~'Wl О'=1' 2> •••' й)- D)
Пусть /(<7i, <72' •••> Яп'< Ръ Рг> •••> Рп'< 0 = с есть интеграл
системы D). Так как функция / постоянна для всех значений q и р,
определяемых системой D), го
Подставляя в тождество E) значения qt и р1 из системы D), полу-
получим
д/ ,у(д/ дН df дН\_
dt T U\dqt dPi dp, dgi) — u>
или, пользуясь скобками Пуассона,
•§f-K/, Я) = 0. F)
Условие F), следовательно, необходимо и, как легко показать,
составляя уравнения характеристик для F), достаточно для того,
чтобы / = с было интегралом системы D).
Теперь докажем теорему Пуассона, которая состоит в следую-
следующем Если функции ф(<7, р; t)~a и ty(q, p; t) = b будут пер-
первыми интегралами канонической системы D), то функция
§ 23] МЕТОД ПУАССОНА 247
(ф, ф) = с будет тоже интегралом этой системы. Действительно,
так как ф = а и ф = 6 суть первые интегралы системы D), то на
основании тождества F) будет
-2.
Но по тождеству Пуассона
(Я, (Ф, ф)) + (ф. (ф. Я))-КЧ>. (И, ф)) = 0; (8)
а так как из равенства G) следует, что
(Ф, //)¦=--&. №. л> = ~& •
то, принимая во внимание соотношение
(Я, Ф) = -(ф. Я)=-^-
и подставляя эти значения (Я, ф) и (if, Я) в равенство (8) шлучим
(я. (ф.
или
((Ф. ф).
Так как
K> dt
to окончательно имеем
¦^+«Ф. Ф). Я)^0. (9)
Тождество (9) показывает, что (ф, ф) = с есть интеграл системы D),
что и требовалось доказать.
Рассмотрим частный случай, когда функция Я не зависит явно
от времени. В этом случае, как сказано в § 21, п. 4, каноническая
система уравнений D) допускает обобщенный интеграл энергии
Я = /г. Предположим, что известен еще один интеграл системы D)
где а есть постоянная. Тогда на основании теоремы Пуассона функ-
функция (ф, Я) = с будет также интегралом системы D). Но так как
ф = а есть интеграл системы, то на основании тождества F)
•248 КАНОНИЧЕСКИЕ УРАВНЕНИЯ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. V
откуда Д- = (ф, Н), и мы получаем интеграл
<кр
Таким образом, если ср = а есть интеграл канонической системы
с функцией Н, явно от времени не зависящей, то -Д- = с будет
также интегралом этой системы, а следовательно, интегралами будут
<92ф д3а> _
и фуи..'ши 7j7T = ci' ~A?i~ci и т- д- Если же функция ф явно от
времени не зависит, то -st"=0. и следовательно, (ф, Я) = 0; по-
поэтому (ф, Я) уже не будет интегралом системы D).
Итак, метод Пуассона дает способ, посредством которого можно
по двум известным интегралам канонической системы найти третий
и т. д. Казалось бы, что этим процессом можно получить все 2п
интегралов системы, но это, к сожалению, не всегда удается. Часто
случается, что скобка Пуассона от двух интегралов или является
функцией уже найденных интегралов или же тождественно обра-
обращается в нуль и, следовательно, не дает интеграла.
Если мы возьмем систему интегралов Д, /2 fm, причем
/i. /2 /т\Яь Яг Яп> Pi- Р2 Рп>
и если
(Д, Д)==0 (I, /г=1, 2 т),
то такая система носит название инволюционной системы интегралов
следовательно, если мы имеем два интеграла, принадлежащих к инво-
инволюционной системе, например Д и fk, то скобка Пуассона (Д, Д)
нового интеграла не даст.
ГЛАВА ШЕСТАЯ
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
§ 24. Введение. Подразделение принципов
1. Введение. Под термином «принцип» мы будем подразумевать
такое аксиоматическое положение, которое, обладая достаточной
общностью, является для данной области науки основным, так что все
остальные положения вытекают из него как логическое следствие.
В развитии наук всегда существовало и существует стремление свести
систему данной науки к наименьшему числу исходных положений и
в идеальном случае к одному основному принципу, который потен-
потенциально заключал бы в себе все содержание этой науки и объеди-
объединял бы все ее положения. Это стремление, вызываемое, с од-
одной стороны, требованием научной эстетики, имеет, с другой сто-
стороны, целью найти наиболее общие законы природы. Создание
основных объединяющих принципов преследует цель не только исклю-
исключительно компактной систематизации фактов, но и ставит более вы-
высокие задачи познания законов окружающего нас мира, к которому
мы с прогрессом науки можем неограниченно приближаться путем
наблюдения, опыта и логической обработки результатов. Очень важно,
чтобы принцип удовлетворял не только присущим ему по существу
логическим требованиям, но и обладал еще эвристической ценностью,
т. е. чтобы из него, как следствие, вытекали не только те факты,
синтезом которых он является, но и те, которые во время создания
этого принципа не были известны; тогда мы можем сказать, что
этот принцип действительно представляет собой найденный нами
объективный закон природы (например, периодический закон Менде-
Менделеева, уравнения Максвелла и др.).
2. Принципы механики. В истории развития механики принципы
играли очень большую роль. Созданные на базе гениальных иссле-
исследований Галилея законы Ньютона, являющиеся по существу прин-
принципами, легли в основу этой науки и в значительной степени
послужили ее развитию; принцип Даламбера дал могущественный
метод для решения разнообразных задач, а принцип виртуальных
18 Н. Н. Бухгольц
250 ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ [ГЛ. VI
перемещений Лагранж считал основным для всей механики. В настоя-
настоящее время учение о принципах механики, в особенности вариацион-
вариационных, находится в достаточном развитии; мы имеем различные прин-
принципы механики, и все они обладают общим свойством: из них логи-
логически вытекают уравнения движения, а следовательно, и остальные
положения механики, ибо, как известно, последние мы всегда можем
получить из этих уравнений. Разница между различными принципами
заключается в большей или меньшей общности их применения по
отношению к различным механическим системам. Отсюда ясно, что
из какого-либо одного принципа можно получить, как следствие,
все остальные, причем область применимости этих остальных будет
та же, что и исходного принципа.
Принципы механики могут быть невариационные и вариационные;
как те, так и другие разделяются также на дифференциальные и
интегральные.
Невариационный принцип представляет собой некоторое общее
для всех движений свойство, которое имеет место или для данного
момента времени (дифференциальный принцип), или для конечного
интервала времени (интегральный принцип); например, принцип со-
сохранения энергии есть невариационный интегральный принцип, а прин-
принцип Даламбера — дифференциальный.
Вариационный принцип дает признак, отличающий истинное,
реальное движение от класса других движений, кинематически воз-
возможных при тех же условиях, и состоящий в том, что для истин-
истинного движения определенная функция, зависящая от координат и их
производных, дает экстремум по сравнению с другими движениями,
принадлежащими к определенному классу. Таким образом, для ка-
каждого вариационного принципа нужно установить: 1) функцию, ко-
которая для истинного движения обладает экстремальными свойствами,
и 2) класс движений, по сравнению с которыми эта функция дает
экстремум для истинного движения; отсюда следует, что получение
уравнений движения из вариационного принципа сводится к вариа-
вариационной задаче при тех или иных дополнительных условиях. Вариа-
Вариационные принципы, так же как и невариационные, разделяются на
дифференциальные и интегральные; первые дают критерий истинного
движения, отнесенный к моменту, а вторые — к конечному интер-
интервалу времени.
В настоящей главе мы будем рассматривать только вариационные
принципы, причем сначала дифференциальные, а затем интегральные.
§ 25. Дифференциальные принципы
1. Принцип виртуальных перемещений и принцип Далам-
Даламбера— Лагранжа. Принцип виртуальных перемещений можно фор-
формулировать так: положение равновесия системы отличается от
§ 25] ДИФФЕРЕНЦИАЛЬНЫЕ ПРИНЦИПЫ 251
смежных положений, совместимых со связями, тем, что только
для положения равновесия сумма элементарных работ актив-
активных сил, действующих на систему, для всяких виртуальных
перемещений системы равна нулю, т. е. для положения равнове-
равновесия мы имеем
N
2 Ft • brt = 0,
i 1
или, выражая все величины через их проекции и пользуясь обозна-
обозначениями, оговоренными в § 7, п. 1,
1=1
Хотя в выражение этого принципа и не входит вариация какой-
либо функции, но он имеет характер дифференциального вариацион-
вариационного принципа, потому что в левой части его аналитического выра-
выражения мы имеем линейную функцию вариаций координат, что, по
существу, является вариационным выражением.
Если предположить, что активные силы системы имеют потен-
потенциал, т. е. если
X = — A=1 2
то
и, следовательно, выражение принципа приобретает вид
Ш = 0. B)
В этом частном случае, т. е. когда система сил потенциальна,
мы получаем, что для положения равновесия системы вариация от
потенциальной функции должна равняться нулю, т. е. принцип имеет
уже явно вариационный характер.
Соединяя принцип виртуальных перемещений с принципом Да-
ламбера, мы получаем принцип Даламбера — Лагранжа, дающий кри-
критерий, по которому истинное движение в каждый момент отличается
от кинематически возможного, т. е. совместимого со связями, что
более полно формулируется следующим образом: во всякий момент
времени истинное движение отличается от кинематически воз-
возможного тем, что только для истинного движения сумма эле-
элементарных работ сил активных и сил инерции при всяких
18*
252 вариационные принципы механики [гл. vr
виртуальных перемещениях системы равна нулю, т. е. для истин-
истинного движения имеем
или, в проекциях,
Здесь, так же как и в предыдущем случае, в выражение прин-
принципа входит не варьируемая функция, а линейная функция вариаций^
координат, которую можно рассматривать как результат вариацион-
вариационного процесса; поэтому принцип Даламбера — Лагранжа благодаря
вариационному характеру принципа виртуальных перемещений (назы-
(называемого часто принципом Лагранжа) является вариационным, и при-
притом дифференциальным, так как движения сравниваются в каждый,
момент времени.
Из принципа Даламбера — Лагранжа можно вывести уравнения
движения системы, когда на нее наложены связи голономные или
неголономные линейные, в чем мы имели возможность убедиться
при их выводе (гл. II).
2. Принцип Гаусса (принцип наименьшего принуждения).
Принцип Даламбера — Лагранжа не единственный принцип диффе-
дифференциального типа. Принцип Гаусса, или принцип наименьшего при-
принуждения, также является дифференциальным принципом; его преи-
преимущество по сравнению с принципом Даламбера — Лагранжа состоит
в том, что он дает возможность получить уравнения движения си-
системы при каких угодно неголономных связях, в то время как из-
принципа Даламбера — Лагранжа эти уравнения получаются лишь
в случае линейных неголономных связей. Таким образом, принцип
Гаусса является наиболее общим принципом механики и обладает
большой эвристической ценностью, благодаря которой он послужил
основанием для дальнейшего развития механики. Достаточно указать
на механику Г. Герца, которая возникла главным образом на осно-
основании идей, заключающихся в этом принципе
Принуждением в данный момент Гаусс называет меру отклонения
системы, движущейся под действием активных сил при наложенных
на неё произвольных голономных и неголономных связях, от сво-
свободного движения, которое она имела бы, начиная с рассматривае-
рассматриваемого момента, двигаясь под действием тех же активных сил, если
бы с этого момента были устранены наложенные на нее связи.
Пусть точка системы с массой ть находится в момент времени t
в положении Mt (рис. 85). За весьма малый промежуток времени t
точка по инерции совершит перемещение MtAt — и,т, где <о1 есть
§25]
ДИФФЕРЕНЦИАЛЬНЫЕ ПРИНЦИПЫ
253
скорость, которую она имеет в момент t. Если на точку будет действо-
действовать активная сила Ft, то под действием этой силы свободная точка за
тот же промежуток времени т совершит перемещение ЛГ^Щ, кото-
которое, с точностью до малых третьего порядка, будет равно
Если же на рассматриваемую точку наложить еще связи, то ее пе-
перемещение под действием силы Ft и при галичии связей будет
с точностью до малых третьего порядка ,
где <B)l — ri есть ускорение точки.
Отклонение точки от свободного движе-
движения представится вектором Bfit; ясно, что
Рис. 85.
с точностью до малых третьего порядка.
За меру отклонения точки от свободного движения Гаусс при-
принимает величину, пропорциональную квадрату отклонения BtCt, ко-
которую называет «принуждением» (по-немецки Zwang); принуждение
выражается так:
Суммируя принуждения для всех точек системы, найдем принуждение
для всей системы:
N
я—2!-. (;,-?)'¦
или, выражая все величины через их проекции,
3JV
8.-2Д". (*,-?)'•
D')
Идея меры отклонения системы от свободного движения в форме
суммы величин, пропорциональных квадратам отклонений частиц
системы, —заимствована Гауссом в им же построенной теории ошибок.
Принцип Гаусса состоит в том, что в каждый момент времени.
истинное движение системы, находящейся под действием актив-
активных сил и подчиненной идеальным связям, отличается от всех
кинематически возможных (т. е. согласных с теми оке связями}
254
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
[ГЛ. УГ
движений, совершающихся из той оке начальной конфигурации
и с теми же начальными скоростями, тем свойством, что для
истинного движения мера отклонения от свободного движения,
т. е. принуждение, есть минимум. Математически это означает,
что для истинного движения
63-ву = О,
причем вариация берется при неизменяемых координатах и скоростях,
т. е. варьируются только ускорения; такого рода вариацию не-
некоторые авторы называют гауссовой
вариацией.
Выполняя варьирование функции $w
и приравнивая найденную вариацию
нулю, будем иметь
^ 'bxi=^0. E)
Рис. 86.
Принцип Гаусса можно проиллю-
проиллюстрировать следующим простым при-
примером. Пусть материальная точка дви-
движется в поле сил тяжести вдоль глад-
гладкой наклонной плоскости, образующей
с горизонтом угол а, причем движение начинается из положения М
без начальной скорости (рис. 86). Кинематически возможны переме-
перемещения точки с разными ускорениями а»,-, если вектор wt лежит в этой
плоскости; при этом, так как по Гауссу координата, скорость и время
не варьируются, то все рассматриваемые перемещения должны начи-
начинаться из положения М без начальной скорости и совершаться за
один и тот же промежуток времени т. Тогда эти перемещения будут
равны
Действующей на точку активной силой является сила тяжести mg;
свободное перемещение точки под действием этой силы за то же
время т при <о0 = 0 будет направлено по вертикали вниз и равно
т2
MB = -=- g. Тогда принуждение при каждом из рассматриваемых
кинематически возможных движений будет пропорционально ква-
квадрату векторов BClt ВС2, ¦ ¦ ¦ Легко видеть, что наименьшим из всех
векторов BCt является вектор BCV направленный по перпендикуляру,
опущенному из точки В на наклонную плоскость; при этом численно
ВСХ = MB sin а, откуда wl = gsina. Таким образом, с помощью
принципа Гаусса приходим к известному результату: движение точки
вдоль наклонной плоскости при vQ—Q происходит по линии наимень-
наименьшего ската с ускорением «e»j = i
5 25] ДИФФЕРЕНЦИАЛЬНЫЕ ПРИНЦИПЫ 255
3. Вывод уравнений движения системы из принципа Гаусса,
Прежде всего заметим, что если на систему не наложено никаких свя-
связей, то вариации ускорений bxt будут независимыми, и следовательно*
Xi — mixi — 0 A—1,2
В этом случае все точки системы будут свободными, и мы для них
получаем обычные уравнения движения. Это, между прочим, следует
и из принципа Даламбера — Лагранжа C), так как если система
свободная, то все вариации координат независимы и мы приходим
к тем же уравнениям.
Пусть теперь на систему наложено k голономных связей
/иОа. *2 хзп> 0 = 0 (и=1, 2, .... k)
и г неголономных связей какого угодно вида
Фр(*1, х2 х3п; хь х2 хЪп; t) = 0 (р=1, 2 г).
Дифференцируя дважды функции /и(я; t) по времени, получим
3N
где символом Фи обозначено выражение, не содержащее ускорений.
Варьируя затем полученное выражение и имея в виду, что варьи-
варьируются только ускорения, будем иметь
3N
S4f-6** = ° iH=h 2 k)- F)
(=1 '
Дифференцируя теперь функции <рр(х; х; t) по времени один раз,
получим
зл
2l-^*t + Xpft(x\i;t) = 0 (p=I. 2 г),
где символом ^ обозначено выражение, не содержащее ускорений.
Варьируя затем полученное выражение, будем иметь
3JV
Соотношения F) и G) показывают, что из 3Af вариаций ускоре-
ускорений 6jc зависимых будет k-\-r, а остальные ЪЫ — (k -\- г) будут
независимы. В соответствии с этим введем k-\-r неопределенных
256 ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ [ГЛ. VI
множителей Лагранжа; с этой целью умножаем равенства F) и G)
соответственно на кк и цр, суммируем первые по и от 1 до k,
а вторые по р от 1 до г', получим
k ZN
и=1 1 = 1
т ZN
Меняя теперь в обеих двойных суммах порядок суммирования, будем
иметь
злг / ft
Складывая найденные выражения (8) и (9) с основным уравнением E),
получим
к=1 р=1 -1
Так как число зависимых вариаций равно k-\-r, то ft-J-r неопре-
неопределенных множителей Лагранжа выберем так, чтобы выражения в ква-
квадратных скобках при зависимых вариациях равнялись нулю; тогда
остальные квадратные скобки вследствие независимости оставшихся
вариаций будут также равны нулю, и таким образом мы получаем
3N уравнений движения системы
df
p-^ = 0 (/=1.2...., ЗЛО- (Ю)
Присоединяя уравнения связей, будем иметь 3N-\- к-\- г уравнений
с 3N-\-k-\- r неизвестными.
4. Вывод принципа наименьшего принуждения из принципа
Даламбера — Лагранжа. Рассмотрим точку системы с массой mt,
занимающую в момент времени t положение Mt. Пусть, как и в п. 2,
элементарные перемещения этой точки за малый промежуток времени t
по инерции и свободное под действием активной силы Fi изобра-
изображаются соответственно векторами MiA( и Mfi^ и пусть вектор М(С{
§ 25]
ДИФФЕРЕНЦИАЛЬНЫЕ ПРИНЦИПЫ
257
изображает истинное перемещение точки за время т под действием
той же активной силы и при наличии связей (рис. 87). Рассмотрим
какое-нибудь другое кинематически допустимое элементарное пере-
перемещение MiC'i, которое точка могла бы совершить за тот же про-
промежуток времени т, не нарушая наложенных связей и начиная дви-
движение из того же положения Mt и с той же скоростью ¦»;, но
двигаясь с другим ускорением 11}{, отлич-
отличным от ускорения <wi = rl в истинном
движении (напоминаем, что в принципе
Гаусса варьируется только ускорение).
Покажем, что для истинного движения
принуждение будет меньше, чем для лю-
любого другого указанного выше кинемати-
кинематически допустимого движения.
Прежде всего, ясно, что
Рис-87>
возведя в квадрат обе части составленного равенства, получим
В п. 2 мы имели равенства
отсюда для истинного движения
Для сравниваемого кинематически возможного движения имеем
N
^ , 2
1=1
)
или, подставляя вместо \BCi) выражение A1),
N N
т'
^
258 ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ [ГЛ. VI
Рассмотрим третий член правой части равенства A2); он равен нулю.
Действительно, кинематически возможное перемещение Mfi'i совер-
совершается при сохранении наложенных связей и за тот же промежуток
времени т, что и истинное перемещение MtCt, следовательно, век-
вектор CiC'i, соединяющий истинное положение точки в момент t-{-x
и какое-то другое положение, которое она может занимать в тот же
момент при сохранении наложенных связей, представляет собой вирту-
виртуальное перемещение точки в момент t-{-%, т. е. СгС(' = 6г. Тогда,
принимая во внимание выражение для вектора Bfi^ будем иметь
N N
Но, в силу принципа Даламбера — Лагранжа [формула C)],
N
а следовательно, и третий член правой части A2) равен нулю.
Итак, имеем
N
2 m' С'С'1 •
1 = 1
¦откуда ясно, что
Зхг/ > Зда.
т. е для истинного движения принуждение имеет минимум.
5. Принцип прямейшего пути Г. Герца. Из принципа Гаусса
непосредственно вытекает принцип прямейшего пути Г. Герца, кото-
который является обобщением ньютонова закона инерции. Этот принцип
состоит в том, что всякая «свободная» система движется по пря-
прямейшему пути (т. е. по пути с наименьшей кривизной). Сам Герц
формулировал свой принцип, перефразируя первый закон Ньютона,
так: «Systema omne liberum perseverare in statu suo quiescendi vel
movendi uniformiter in directissimam» (т. е. всякая «свободная» система
стремится пребывать в состоянии покоя или равномерного движения
по прямейшему пути). Нужно заметить, что Герц в своей механике
устраняет понятие о силе в том виде, как оно фигурирует в меха-
механике Ньютона, и рассматривает силы как эффект явных или скрытых
связей; поэтому понятие «свободная система» в смысле Герца озна-
означает, что точки системы находятся только под действием наложенных
на систему связей.
Пусть имеем систему N материальных точек, координаты которых
обозначим через lv |2 |злг- ГеРц вводит понятие о траектории
§ 25] ДИФФЕРЕНЦИАЛЬНЫЕ ПРИНЦИПЫ 259
системы, определяя ее как кривую в пространстве ЗЛГ измерений^
элемент дуги которой равен
N 3JV 3JV
2
V=l 1 = 1 1 = 1
где
ЗЛГ N
1-1 v=l
М называется массой системы, а величина -^ — "У,*2,— скоростью-
i
системы.
Известно, что кривизна k кривой в трехмерном пространстве
определяется равенством
k2-±-Y(
«=i
обобщая эту формулу на ЗЛ^-мерное пространство, получим
ЗЛГ
Возьмем выражение гауссова принуждения D') при отсутствии
активных сил; имеем
№\^il\ или 3^ — t
Так как
¦ dxi • ¦¦ d2Xj -2 dxt ¦•
Xl~~dTS' Xl — ~dl*~S^-~dTs'
то, возводя xt в квадрат, получим
Подставляя полученное выражение в равенство A5), находим
i i
Но из равенства A3) следует, что
') Множитель М, как постоянный, в выражении Qw опускаем.
260 ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ [ГЛ. VI
откуда, дифференцируя по s, имеем
Sdxj d^Xj __ n
ds ds* "
i
Принимая это во внимание, получим из равенства A6)
23да = fe V + &
Так как активные силы отсутствуют, то при склерономных связях
Т — -о Zj mi|i — — М ^ *? = -у ^s2 = const;
следовательно, s = const, и
5 = 0;
поэтому
По принципу Гаусса для истинного движения $w есть ми-
минимум, но так как на основании равенства A7) s = const, то k
должно иметь минимум. Отсюда вытекает принцип прямейшего
пути: для механической системы, подчиненной склерономным
связям и свободной от действия сил, истинное движение про-
происходит с постоянной скоростью, причем траектория системы
имеет наименьшую кривизну по сравнению со всеми другими
траекториями, допускаемыми связями.
§ 26. Интегральные принципы
1. Замечания о варьировании. Пусть точка имеет одну степень
свободы и положение ее определяется координатой
q = f{t).
Дифференцируя это равенство по времени, получим
dq = f'(t)dt.
Здесь мы имеем изменение функции q вследствие изменения самого
аргумента, т. е. времени; дифференциал координаты соответствует
поэтому ее изменению вследствие действительного движения (рис. 88).
Изменим теперь вид самой функции q = f(t) и положим
где е есть произвольно малое постоянное число, a r\(t) — произволь-
произвольная дифференцируемая функция времени. В этом случае изменение
координаты q вследствие изменения вида самой функции обозначается
i 261
ИНТЕГРАЛЬНЫЕ ПРИНЦИПЫ
261
через bq и называется простой или изохронной вариацией (рис. 89);
следовательно, будем иметь
bq = q — q — er\(t). A)
Докажем, что изохронная вариация и дифференцирование по вре-
времени обладают свойством коммутативности, т. е. что
B)
В самом деле, дифференцируя равенство A) по t, получим
так как, согласно определению изохронной вариации,
q—'q — bq;
таким образом, требуемое доказано. Заметим еще, что в случае
изохронной вариации bt = 0.
q
Я " -
У*
¦ел-
Рис. 88.
t
Рис. 89.
Введем теперь понятие о полной вариации. Полной вариацией
будем называть изменение функции как вследствие изменения вида
функции, так и вследствие изменения аргумента; полную вариацию q
будем обозначать через Д^. Изменение аргумента можно ввести сле-
следующим образом. Положим
где через 7 обозначен измененный аргумент, а через |(?) — произволь-
произвольная дифференцируемая функция. Обозначая изменение аргумента
через Д^, т. е. полагая
— t = M, или M =
будем иметь следующее выражение для полной вариации функции q.
C)
262 ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ [ГЛ. УГ
т. е. изменение функции Aq состоит из двух частей; первая bq есть
изохронная вариация, вторая q At есть изменение функции q вслед-
вследствие изменения аргумента t на величину At. Эта формула наглядно
показана на рис. 89.
Докажем, что полная вариация и дифференцирование по t свой-
свойством коммутативности не обладают. Действительно, дифференцируя
равенство C) по времени, получим
^Aq = bq+'qAt-+q±~.
Но для полной вариации функции q будем иметь, согласно равен-
равенству C):
Aq — dq-\-q At.
Подставляя отсюда выражение q At в предыдущее равенство, получим
i = 4,+,l. D)
Из равенства D) ясно, что ¦ ,?- Ф A -J- и что эти выражения будут
равны только в том случае, если ¦ , = 0, т. е. если вариация
изохронная.
Но для случая q~t между операциями полного варьирования и
дифференцирования по времени имеет место свойство коммутативности.
Действительно, из равенств
At = t — t = el(t) и d"t — dt = el'(t) dt = A dt
очевидно, что
¦*?-= *'(*). -^-=4'0).
откуда имеем
2. Принцип стационарного действия Гамильтона1). Принцип
стационарного действия Гамильтона исторически является более позд-
поздним принципом, чем принцип Лагранжа — Мопертюи (см. п. 7).
Однако логически целесообразнее изложить сначала принцип Гамиль-
Гамильтона, как более общий.
') Принцип был изложен Гамильтоном в работах 1834—1835 гг. для
случая стационарных связей. Независимо от него и в более общей форме,
охватывающей случай нестационарных связей, принцип был сформулирован
в 1848 г. М. В. Остроградским (см. сборник «Вариационные принципы меха-
механики», М., 1959). По указанной причине многие авторы называют этот прин-
принцип принципом Гамильтона — Остроградского.
§ 26] ИНТЕГРАЛЬНЫЕ ПРИНЦИПЫ 263
Чтобы выяснить смысл принципа Гамильтона, обратимся опять
к интерпретации движения в многомерном пространстве. Пусть в мо-
момент t=^tu система характеризуется точкой А многомерного про-
пространства, а в момент t = tl — точкой В. Следовательно, за проме-
промежуток времени t^ — tQ система под действием сил перейдет из кон-
конфигурации А в конфигурацию В. Пусть траекторией движения системы
будет кривая АВ (рис. 90). Кинематически возможны и другие тра-
траектории, например АпВ и т. п., по которым
система за тот же промежуток времени tl — tQ
может перейти из положения А в положение В.
Траектории АпВ называются траекториями
сравнения (или окольными путями), а траекто-
траекторию АВ называют еще прямым путем. Все
траектории сравнения должны допускаться свя-
связями и проходить через фиксированные точки А
и В. Движения по траекториям сравнения, со- Рис. 90.
вершающиеся за тот же промежуток времени
t^ — tQ, называются возможными или кинематически допустимыми дви-
движениями.
Сущность принципа Гамильтона состоит в том, что он дает кри-
критерий, на основании которого мы в состоянии среди всех кинема-
кинематически допустимых движений указать истинное движение или среди
всех траекторий сравнения определить ту, по которой действительно
будет происходить движение системы между конфигурациями А к В.
Покажем теперь, как из уравнений движения Лагранжа можно
получить выражение принципа Гамильтона. Возьмем уравнения дви-
движения для голономной системы с п степенями свободы, находящейся
под действием потенциальных сил; имеем
=1.2,.... п). E)
Умножая левую часть каждого из уравнений E) на 6^ и складывая,
получим
Учитывая соотношение B), найдем, что
d I dL\. dL , d I dL .
подставляя это выражение в равенство F), будем иметь
264 ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ [ГЛ. VI
Так как L = L(q, q\ t), то
поэтому равенство G) принимает вид
Возьмем от обеих частей этого равенства определенные интегралы
в пределах от t = t0 до t = tv где ta — момент времени, в который
система находится в конфигурации A, a tx — момент, когда она при-
приходит в конфигурацию В; получим
LI ^1 -J/o Io
Так как точки А к В фиксированы (см. рис. 90), то [bqt\t = 0 и
[6<7(] =0. Следовательно, для истинного движения системы между
двумя конфигурациями Л и В мы имеем
U
J bLdt = O,
или, так как вариация изохронная,
л
O. (Ю)
Интеграл
J Ldt = S (И)
принято называть действием по Гамильтону; следовательно, равен-
равенство A0) можно представить в виде:
65=0. AС)
Равенства A0) или A0') являются математическим выражением прин-
принципа Гамильтона, который формулируется так: действительное дви-
движение системы между двумя заданными конфигурациями отли-
отличается от кинематически возможных движений, совершаемых
между теми же конфигурациями и в тот же самый промежу-
промежуток времени, тем, что для действительного {истинного) дви-
движения вариация действия по Гамильтону равна нулю; или,
§ 26] ИНТЕГРАЛЬНЫЕ ПРИНЦИПЫ 265
иными словами, для действительного движения действие по Га-
Гамильтону имеет стационарное значение.
Для динамической системы
L = T-\-U,
где T~\-U есть разность между кинетической и потенциальной энер-
энергиями системы, и выражение принципа Гамильтона имеет вид
и
6 JG + ?/)<tt = 0. A2)
и
или
л
j t = 0. A2')
Равенству A0), выражающему принцип Гамильтона, можно придать
другой вид, введя в него функцию Гамильтона Н*. Так как
то, определяя отсюда функцию Лагранжа L и подставляя в выраже-
выражение принципа A0), получим
Е^Ь^0- A4)
Это выражение принципа, как и A4), имеет место только для си-
системы, находящейся под действием потенциальных сил.
Заметим, наконец, что действие по Гамильтону можно предста-
представить в виде
и
где L* есть среднее значение функции Лагранжа в промежутке вре-
времени t1 —10. Размерность величины S есть работа X время (единицы
измерения в системе СИ кгм2/сек; в технической системе единиц
кГм сек).
3. Вывод уравнений движения из принципа Гамильтона. По-
Постулируя принцип Гамильтона как основной, нетрудно получить из
него уравнения движения. Имеем выражение принципа Гамильтона:
6S = 6 J Ldt=
266 ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ [ГЛ. VI
Развертывая вариацию 6L, получим
?)¦
Применяя к членам второй суммы интегрирование по частям и имея
в виду свойство коммутативности для изохронной вариации, будем
иметь
dt
J,, ,J dt \dqt] J dt \dqi,
ибо [6^(]^' = 0, что нам уже встречалось.
Имея в виду полученное равенство и подставляя его в уравне-
уравнение A5), найдем
^o. A6)
dt \dq)\^1 K
Равенство A6) также представляет собой математическое выражение
принципа Гамильтона. Так как интервал интегрирования здесь произ-
произволен и вариации координат bqt независимы, то равенство нулю
интеграла возможно только при условии равенства нулю подынте-
подынтегрального выражения; следовательно, для действительного движения
получим
JLpii. _^_=о A=1. 2 в),
dt \dqil dqt '
т. е. уравнения движения в форме Лагранжа.
С точки зрения вариационного исчисления уравнения Лагранжа
являются уравнениями пучка экстремалей, причем та из них, которая
проходит через точки А и В, дает экстремум интеграла Г Ldt или,
иными словами, дает экстремум действия по Гамильтону, эта экстре-
экстремаль и будет истинной траекторией движения.
4. Обобщение принципа Гамильтона на случаи неконсерва-
неконсервативной и иеголономной систем. Для динамической системы принцип
Гамильтона можно представить равенством
§ 26] ИНТЕГРАЛЬНЫЕ ПРИНЦИПЫ 267
Введем в него вместо члена Ш, выражающего элементарную работу
потенциальных сил, величину
т. е. элементарную работу сил непотенциальных, выраженную через
обобщенные силы (здесь символ 6' уже не обозначает вариацию
какой-либо функции). Тогда получим
или
A8)
В этой форме принцип имеет место и для системы, находящейся под
действием непотепциальных сил. Равенству A8) можно еще придать
другой вид, если интеграл от ЬТ преобразовать так же, как это было
сделано в п. 3 с интегралом от &?, т. е. к виду, аналогичному A6).
Тогда получим выражение принципа Гамильтона для неконсервативной
системы в виде
Отсюда сразу следует справедливость принципа в форме A8) для
неконсервативной системы, так как его выражение A9) дает урав-
уравнения движения этой системы. В самом деле, поскольку интервал
t1 —10 произволен, а bqt между собой независимы, то из A9) полу-
получаются уравнения движения системы в форме Лагранжа
dt \ dqi I dqi
Можно убедиться, что принцип Гамильтона в форме A9) спра-
справедлив и для системы с линейными неголономными связями, так как
из него можно получить и уравнения движения такой системы. Дей-
Действительно, если на систему наложены г линейных неголономных
связей, уравнения которых имеют вид (см. § 8, п. 9)
л
Ltff = O <р=1. 2 г).
268 ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ [ГЛ. VI
то при этом вариации координат должны удовлетворять соотноше-
соотношениям
S V*7i = 0 (P=1- 2 ")¦
Умножим каждое из этих равенств на лагранжев множитель Хр и про-
просуммируем по р. Полученное выражение, равное нулю, прибавим
к сумме, стоящей под знаком интеграла A9). Тогда будем иметь
Теп"ерь выбором множителей Хр обращаем в нуль р слагаемых в сумме,
стоящей под знаком интеграла; тогда остальные слагаемые также
должны быть равны нулю, поскольку оставшиеся под знаком инте-
интеграла п — г вариаций bqi между собой независимы. В результате
получим известное нам уравнение движения неголономной системы
с множителями Лаграпжа [см. § 8, п. 9, уравнения E4)].
Отметим в заключение, что принцип Гамильтона, обобщенный на
случай неконсервативной и неголономной систем, уже не является
вариационным, так как выражения A8) или A9) не представляют
собой вариацию какого-нибудь интеграла.
Принцип Гамильтона в вариационной форме A0) обладает тем
важным преимуществом, что он не связан ни с какой системой коор-
координат; в его выражение входят лишь функция L и время. Поэтому
данный принцип при соответствующем обобщении понятий находит
широкие приложения в различных областях физики.
5. Действие по Гамильтону и главная функция S в уравне-
уравнении Якоби. Докажем, что действие по Гамильтону совпадает с глав-
главной функцией 5 в уравнении Якоби. Для этого рассмотрим 5 как
функцию времени t, полагая
t
S= J Ldt,
to
т. е. считая верхний предел у интеграла переменным. Дифферен-
Дифференцируя теперь функцию 5 по времени, получим
4г=/" <20>
Обратимся к уравнению Якоби [см. § 22, формула G)]
§ 26] ИНТЕГРАЛЬНЫЕ ПРИНЦИПЫ 269
полный интеграл которого будет
S = S(qv q2 qn; t; av a2 an)-f-an+I.
Дифференцируя функцию 5, являющуюся полным интегралом уравне-
уравнения Якоби, получим
dS _ dS , Vi dS •
^2Я
Но из уравнения Якоби, принимая во внимание, что -^—= pt,
имеем
^ = -H(q; p; t);
кроме того, согласно определению импульса, = р,=——; поэ-
dqt dqi
dS _ _ w* _
~dT~ ~ i=1 -„
n
а так как Н =» — L-f- 7j—~<7(> то получим
т. е. то же, что и для производной по времени от действия по Га-
Гамильтону. Так как производные по времени от действия по Гамиль-
Гамильтону и от главной функции 5 в уравнении Якоби равны, то эти
функции совпадают с точностью до аддитивной постоянной.
6. Замечание о характере экстремума действия по Гамильтону.
В принципе Гамильтона сравниваются движения за некоторый промежуток
времени t\—ta по прямому пути АВ и по окольным путям, проходящим
через те же фиксированные точки А и В (см. п. 2, рис. 90); при этом для
движения по прямому пути действие S имеет экстремум.
Остановимся иа двух связанных друг с другом вопросах: 1) будет ли
при произвольном выборе точек А а В прямой путь единственным; 2) каким
является характер экстремума действия (минимум, максимум) при движении
по прямому пути. Наглядное представление о возможных ответах на эти
вопросы дает следующий простой пример. Рассмотрим материальную точку,
движущуюся по гладкой сфере радиуса /?; пусть никакие активные силы
иа точку не действуют. Тогда оиа будет двигаться по геодезической линии
(см. ч. I, § 38, п. 9), т. е. по дуге большого круга, с численно постоянной
mva
скоростью vo- При этом, очевидно, L = Т = —«— = const и S = So =
1
19 Н. Н. Бухгольц
270 ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ [ГЛ. VI
Если взять на сфере две произвольные точки Л и В (рис. 91), то через
иих пройдет два прямых пути: АВ (АВ < nR) и АВ0В (АВ^В > я/?). Исклю-
Исключение представляет случай, когда точка В совпадает с Во, т. е. с точкой,
диаметрально противоположной точке А; в этом случае через точки А а Во
проходит множество бесконечно близких друг к другу прямых путей (мери-
(меридианы). Такие две точки А и Ва, через которые проходит множество беско-
бесконечно близких друг к другу прямых путей, назы-
называются сопряженными кинетическими фокусами.
Тогда на основании данного примера можно
сделать следующие выводы о характере экстре-
экстремума действия, справедливые и в общем случае:
1) если прямой путь не проходит через кине-
кинетический фокус, сопряженный начальной точке
(в нашем примере путь АВ), то действие на нем
имеет минимум (в нашем примере любой околь-
окольный путь будет больше дуги АВ, и чтобы пройти
его за тот же промежуток времени tl—ta, точка
должна двигаться со скоростью v > v0; поэтому на
любом окольном пути S > So);
2) если прямой путь проходит через кинети-
кинетический фокус, сопряженный начальной точке (в на-
нашем случае путь АВ0В), то действие на этом пути не имеет минимума
(в нашем примере это следует из того, что при прямом пуги АВаВ найдутся
окольные пути, которые будут короче АВ0В; для этих путей будет v < v0
я S < So).
Таким образом, точки А и В можно всегда выбрать настолько близкими
друг к другу, что действие на прямом пути будет наименьшим (отсюда и
термин «принцип наименьшего действия»); для этого надо лишь, чтобы
путь АВ не достигал кинетического фокуса, сопряженного точке А.
7. Принцип стациоиариого действия Мопертюи — Лагранжа.
В 1744 г. Мопертюи опубликовал принцип, согласно которому для
действительного движения частицы интеграл от vds, взятый
по отрезку траектории между двумя какими-либо ее точками,
есть минимум по сравнению с такими же интегралами, взя-
взятыми по отрезкам других кривых, проведенных между теми же
точками. Интеграл Г vds, где v — скорость частицы, Мопертюи
назвал «действием», а самый принцип — принципом наименьшего
действия. К этому принципу вначале отнеслись очень недоверчиво,
так как автор не дал для него никакого доказательства, но Эйлер
понял важность открытия Мопертюи и стремился дать его принципу
строгое математическое обоснование, что удалось только впослед-
впоследствии Лагранжу, вследствие чего этот принцип и носит название
принципа Мопертюи — Лагранжа.
Принцип Мопертюи — Лагранжа по своей конструкции похож на
принцип Гамильтона и состоит в том, что действительное движение
голономной консервативной системы между двумя конфигурациями А
и В отличается тем свойством, что для него некоторая функция,
5 26] ИНТЕГРАЛЬНЫЕ ПРИНЦИПЫ 271
выражаемая определенным интегралом и называемая действием по
Лагранжу, имеет экстремум по сравнению со значением этой функции
для других кинематически допустимых движений, совершаемых между
теми же конфигурациями и с той же энергией. Таким образом, раз-
разница между принципами Гамильтона и Мопертюи — Лагранжа состоит
в том, что, во-первых, действие по Лагранжу имеет вообще иной
вид, чем действие по Гамильтону, а во-вторых, в принципе Мопер-
Мопертюи—Лагранжа сравниваются движения с одной и той же энергией,
тогда как в принципе Гамильтона сравниваемые движения совер-
совершаются за один и тот же промежуток времени.
Возьмем выражение действия по Гамильтону для динамической
консервативной системы между двумя конфигурациями А и В, при-
причем положим, что начальная конфигурация А соответствует моменту
? = 0, а конфигурация В — моменту i — t^; при этом момент tx здесь
не является фиксированным, так как система, двигаясь по окольным
путям с постоянной энергией, будет приходить в конфигурацию В
в разные моменты времени (индекс 1 здесь указывает лишь то, что
переменная величина tx означает момент прохода системы в конфи-
конфигурацию В). Тогда будем иметь
<¦ и
5= [ Ldt= Г (T-\-U)dt.
Кроме того, так как система по условию консервативна, имеет место
интеграл энергии
Подставляя выражение U из интеграла энергии в выражение S,
получим
о
Функция
U U N
W= J 2Tdt= J ^m.v]dt B1)
о о i=i
называется действием по Лагранжу и является всегда положительной
и ограниченной только снизу. В результате находим
S = W — ht1 или W~S-\-htv B2)
Поскольку верхний предел интеграла tt, как было указано, является
переменным, то, обозначая его через t, можем переписать равен-
равенство B2) в виде
W = S-\-ht. B2')
19*
272 ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ [ГЛ. VI
Полученная формула показывает, что функция W совпадает с харак-
характеристической функцией уравнения Якоби (см. § 22, п. 4).
Далее, на сравниваемые движения налагается условие, чтобы эти
движения совершались с одной и той же энергией h. Но, как это
вытекает из интеграла энергии, кинетическая энергия Т, а потому
и скорости точек системы зависят от U, т. е. зависят от положения
системы в данный момент. Поэтому время, в течение которого си-
система переходит из А в В, зависит от пути и им определяется.
Следовательно, времена перехода системы из конфигурации А в В
по различным путям различны и зависят от этих путей, т. е., как
было указано, предел ?, в интеграле B1) является переменным.
Поэтому при переходе от одного пути к другому должны варьиро-
варьироваться не только координаты и скорости (как в случае принципа
Гамильтона), но и время, т. е. в случае принципа Мопертюи — Ла-
Лагранжа вариация должна быть полной. Если мы будем интерпрети-
интерпретировать движение системы в виде движения изображающей точки
в пространстве п измерений (где п есть число координат системы),
то принцип Мопертюи — Лагранжа будет формулироваться следующим
образом: действительное движение голономной консервативной
системы между двумя заданными конфигурациями А и В отли-
отличается от кинематически возможных движений, совершаемых
между теми же конфигурациями и с той же полной энергией
тем, что для действительного движения полная вариация дей-
действия по Лагранжу равна нулю; иными словами, для действитель-
действительного движения действие по Лагранжу имеет стационарное значение.
Математически это означает, что для действительного движения
и
А Г 27 dt = AW — 0, B3)
о
где, как уже было сказано, вариация берется полная.
Действие по Лагранжу, так же как и действие по Гамильтону,
имеет на прямом пути минимум (по сравнению с его значениями на
окольных путях), если прямой путь не достигает сопряженного на-
начальной точке кинетического фокуса (см. п. 6).
8. Вывод принципа Мопертюи — Лагранжа из уравнений дви-
движения и уравнений движения из принципа Мопертюи — Лагранжа.
Найдем сначала выражение AU^, исходя из равенства B2). Получим,
учитывая, что h = const,
где tx — переменный момент прихода системы в конечную конфигу-
конфигурацию В.
1 26] ИНТЕГРАЛЬНЫЕ ПРИНЦИПЫ 273
Преобразуем правую часть, используя формулу C) из п. I; будем
иметь &S = bS-\-S&t. Но, согласно равенству B0), S — L. Следо-
Следовательно,
Так как принцип Мопертюи — Лагранжа имеет место для консерва-
консервативной системы, то L = T-\-U, a h = T—U, в результате находим
&W = bS-+-2Ttov B4)
Теперь вычислим 65, учитывая опять равенство L = T -}- U; получим
= [ (bT-\-bU)dt =
5
Преобразуем второй член правой части, интегрируя по частям; учи-
учитывая равенство B) из п. 1, будем иметь
'i я
В результате равенство B5) примет вид
*s= f sr-4(я+^+л^+^т^Г
J ^[ «^«rj a», d«rj L^der, Jo
Заметим, что в последнем члене полученного выражения [bqfi^Q = 0,
так как все движения начинаются из конфигурации А в один и
тот же момент времени ?0 = 0. Но [b<li]t=t Ф 0, так в конфигура-
конфигурацию В система, двигаясь по разным окольным путям, будет прихо-
приходить в разные моменты времени tt, а в случае изохронного варьиро-
варьирования вариация берется при одном и том же фиксированном значе-
значении ?] (если, например, этим фиксированным значением будет момент
прихода системы в конфигурацию В при движении по окольному
пути 1, то при движении по пути 2, система в тот же момент в положе-
положение В не придет, следовательно, для всех окольных путей [o<7j^ Ф 0Y
Перейдем поэтому в последнем члене правой части равенства B6)
от bqt к Л<7(. По формуле C) из п. 1 имеем bqi=*kql—q &t; следо-
следовательно,
п
274 ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ [ГЛ. VI
Но [Л<7,],_0 = 0 и [Aqt]t=( = 0; последний результат следует из того,
что здесь время варьируется, а в моменты tb какими бы они ни
были, система по условию приходит в одну и ту же конфигурацию В.
Кроме того, для консервативной системы Т является однородной
п
функцией второй степени от скоростей и V —г- Я> = 27. В резуль-
¦*¦ од.
тате равенство B7) дает
Lг=i 4i Jo
Тогда равенство B6) примет вид
7-\ , дТ , dt
Подставляя это значение 65 в формулу B4), получим окончательно
следующее выражение для полной вариации действия по Лагранжу:
Уравнения движения голономной консервативной системы имеют вид
— (——\ — -— = -— (/=1, 2 п). B9)
dt \ до. I да, да.
Следовательно, при действительном движении такой системы будет
№ = 0 или Л J 27 dt = 0, C0)
о
и мы приходим к принципу стационарного действия Мопертюи —
Лагранжа.
Если теперь принцип Мопертюи — Лагранжа принять за исходный,
то из него можно получить уравнения движения голономной консер-
консервативной системы. В самом деле, повторяя все проделанные выкладки,
мы снова придем к соотношению B8). Но, согласно принципу Мо-
Мопертюи— Лагранжа, для истинного движения должно быть AW^ = 0,
а так как интервал времени t1 —10 произволен и вариации между
собой независимы, то из равенства нулю интеграла, стоящего в пра-
правой части соотношения B8), следуют уравнения движения системы B9).
9. Различные формы выражения принципа Мопертюи — Ла-
Лагранжа. Принцип Мопертюи — Лагранжа, как мы видели, состоит
§ 26] ИНТЕГРАЛЬНЫЕ ПРИНЦИПЫ 275
в том, что для действительного движения голономной консервативной
системы между двумя данными конфигурациями действие по Лагранжу
имеет экстремум по сравнению с кинематически допустимыми движе-
движениями между теми же конфигурациями при одной и той же энергии.
В зависимости от выражения действия W этот принцип может быть
выражен в различных формах.
а) Форма Мопертюи. Выше мы имели выражение действия
в форме Лагранжа:
W = | 27 dt = J ^ mtv\ dt,
о ( = i
где N есть число точек системы. Так как vidt = dst, где dst есть
элемент дуги траектории точки системы с номером I, то
v2t dt = vl dsl
и, следовательно,
в n
W= j^mptdst, C1)
A i = l
причем интегрирование совершается по дугам траекторий точек си-
системы от конфигурации А до В. Формула C1) дает выражение
действия в форме Мопертюи.
б) Форма Якоби. Выражение действия в форме Якоби отличается
тем, что в нем при помощи интеграла энергии исключается время.
Имеем
кроме того, интеграл энергии дает
271=2(t/ + A). C2)
Следовательно,
N
dt*
откуда
fit
dt—— ' C3)
276 ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ [ГЛ. VI
Подставляя значения 27 и dt, даваемые равенствами C2) и C3),
в выражение W в форме Лагранжа, получим
W
h
= J 2Tdt = j Yi(U-\-h)- V^m^s]. C4)
A
Здесь так же, как и в формуле C1), интегрирование совершается
по дугам траекторий от конфигурации А до В. Формула C4) дает
выражение действия в форме Якоби; это выражение имеет геометри-
геометрический характер, так как время и скорости в нем исключены.
Если мы введем независимые координаты и выразим xv х2 x31lf
в функции от qx, q2 qn, то
N ZN n
^imlds2i=^imidx2= % a dqidq,,
и выражение действия в форме Якоби приобретает вид
в I л
А ' i,j = l
W = J УЩГЙОЛ/ %at,dqtdqj. C4')
А ' i,j = l
В частном случае, когда внешние силы на систему не действуют,
(J = const, и поэтому на основании формул C4) и C4') мы можем
выразить действие W, отбрасывая постоянный множитель, в виде
В Г N В
А ' ( = 1 А
w
Интерпретируя движение системы как движение точки в простран-
пространстве п измерений, для которого элемент дуги (фундаментальная мет-
метрическая форма) имеет выражение
п
do2= ^^ijd
можем написать
в
W = J da. C5)
А
Таким образом, задача об определении движения голоном-
ной системы по инерции сводится к нахождению минимума ин-
интеграла C5), т. е. к задаче геодезических линий. Принцип стацио-
стационарного действия в этом случае может быть формулирован так:
голономная система по инерции движется так, что точка, изоб-
изображающая систему в соответствующем пространстве п изме-
измерений, движется по геодезической линии этого пространства.
§ 26] ИНТЕГРАЛЬНЫЕ ПРИНЦИПЫ 277
К задаче геодезических линий можно свести определение движе-
движения голономной системы и в том случае, когда она движется в по-
потенциальном силовом поле, определяемом силовой функцией U. Дейст-
Действительно, так как U зависит только от координат q, то
п п
2(U-\-h) 2 ai}dqidqj— 2 ^ljdqldqi,
где btj = 2 (U -j- h) пц\ поэтому
в
W =
A
где в данном случае
п
do == ^i biidq-dq^M C6)
i,) = \
Таким образом, движение голономной системы под действием
потенциальных сил всегда можно рассматривать как движение по
инерции в пространстве Римана, метрика которого определяется фун-
фундаментальной метрической формой C6); согласно принципу стацио-
стационарного действия движение происходит по геодезической линии этого
пространства. Эта идея лежит в основе общей теории относитель-
относительности А. Эйнштейна.
10. Пример. Для уяснения принципиальной разницы между принципом
Гамильтона и принципом Мопертюи — Лаграижа рассмотрим применение
обоих этих принципов к определению движения материальной точки вдоль
гладкой поверхности по инерции. В этом случае .?/ = const; интеграл энер-
энергии дает
— mv2 = const,
следовательно, « = const.
Согласно принципу Гамильтона для действительного дви-
движения действие по Гамильтону имеет стационарное значение по сравнению
с движениями между теми же положениями А к В, совершающимися в одно
и то же время t, т. е.
6 j G"-\-U)dt = O.
о
Так как для рассматриваемого движения действие по Гамильтону 6' будет
t
, 1
то для действительного движения (так как Ы = 0) имеем
bS = tb Ц- mvA = 0,
278 ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ [ГЛ. VI
откуда 6 (v5) = 0, следовательно, v = vmln. Таким образом, из всех кинемати-
кинематически возможных движений точки между положениями А а В, совершаю-
совершающихся в одно и то же время t (но с различными скоростями), действитель-
действительным будет то, для которого v = %in, а следовательно, и vt = s = vmln, т. е.
движение по кратчайшему пути или, иначе говоря, по геодезической линии.
Согласно принципу стационарного действия Мопер-
тюи — Лагранжа для действительного движения действие по Лаг-
Лагранжу имеет наименьшее значение по сравнению с движениями между
теми же положениями А и В, совершающимися с одной и той же энер-
энергией, т. е.
t
\
2Tdt=0.
о
Для рассматриваемого движения действие по Лагранжу W будет
t
W = Г mvidt=mv4,
о
для действительного движения имеем
bW = mv3M=0
1
ибо энергия я = -nmv2, а следовательно, и скорости к для сравниваемых
движений одни и те же, и поэтому Av = 0), откуда At = 0. Таким образом,
из всех возможных движений точки, совершающихся между положе-
положениями А а В с одной и той же скоростью (но в различное время), дейст-
действительным будет то, которое удовлетворяет условию At = 0, т. е. t = tmla
следовательно, действительным движением будет то, которое совершается
в кратчайшее время или, так как vt = s, по кратчайшему пути, т. е. по
геодезической линии.
§ 27« Канонические преобразования
1. Вывод канонических уравнений из принципа Гамильтона.
Согласно принципу стационарного действия .Гамильтона для дейст-
действительного движения системы между двумя конфигурациями имеем
h
6 J Ldt = Q,
'о
где L\q, q; t. Действие по Гамильтону можно представить через
функцию И* в виде [см. § 26, формула A4)]
§ 27} КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ 279
или, выражая функцию H*(q, q, t) в канонических переменных и
учитывая, что —г- = Pi,
dqi
t,
f, \ I I
Так как для действительного движения
)d( = 0, B)
то, развертывая вариацию в левой части, получим
/ = 1 t(J
Преобразуя последний член левой части, будем иметь
J Pi bqt dt = [pt fiflr,] J — J jb, 6^ Л = — J /7'(
(» /о ''о
вследствие того, что [&9(]<=0 = 0 и [б^/]^ =0. В результате находим
t /[(-^->-)f.+(-^+»O'
Коэффициенты при 6р, в левой части равенства C) обращаются
в нули в силу соотношений A1) из § 21. Тогда, поскольку интер-
интервал интегрирования ft —10 произволен и вариации bqt независимы,
то коэффициенты при них также должны равняться нулю; поэтому
окончательно будет
^ ^ (/12пУ D)
В результате мы получили каноническую систему уравнений движе-
движения. Отсюда вытекает, что выражение принципа Гамильтона
в виде B) эквивалентно канонической системе уравнений D).
2. Канонические преобразования. Каноническими преобразова-
преобразованиями называются такие преобразования переменных q и р, при ко-
которых канонические уравнения движения сохраняют свою форму,
т. е. переходят тоже в канонические уравнения, но вообще с какой-то
280 ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ [ГЛ. УГ
другой функцией Гамильтона Н. Введем вместо переменных ql и pt
новые независимые переменные Qt и Р(, полагая
Qi = QdVi. ft. ¦••- яп\ Pi. Pi. •••¦ Рп> 0.
Pt = Pti4,b WP,,A P.: 0
При этом предполагается, что соотношения E) разрешимы относи-
относительно qt, pi% т. е. что из них можно найти
qt =ft(Qi. Q2. • • ¦¦ Q«; Л. я2. • • ¦• Л,; 0.
Так как каноническая форма уравнений D) непосредственно вы-
вытекает из выражения принципа Гамильтона B), то для сохранения
канонической формы уравнений после преобразования E) необхо-
необходимо, чтобы принцип Гамильтона в новых переменных Q и Р со-
сохранил свое выражение, г. е. чтобы было
l^A F)
где H(Q, P; t) есть некоторая функция новых переменных Q и Р,
являющаяся для них функцией Гамильтона. Время здесь при варьи-
варьировании считается фиксированным, как и в выражении B).
Нетрудно убедиться, что соотношение F) будет выполняться, если
подынтегральные выражения в равенствах B) и F) будут разли-
различаться на производную по времени от произвольной функции ста-
старых и новых переменных V(p, q, P, Q; t), г. е. если будет
— H(q, p; t) + 2^piqi^ — H{Q, P; t)+2uPiQl — -2JL-. G)
В самом деле,
Г dV
-—-dt = [V]_. — [V],_ .
J at t-u t-to
Поэтому, какова бы ни была функция V, вариация этого интеграла
будет равна нулю, так как при t = t0 и t=^t1 функция V имеет
фиксированные значения и b[V]t_i =b[V]t=t = 0. Но поскольку
для старых переменных имеет место соотношение B), то при на-
наличии равенства G) будет выполняться и соотношение F).
Покажем теперь, что, задавая функцию V произвольно, можно
однозначно определить преобразования E). Заметим предварительно,
что поскольку старые и новые переменные связаны соотношени-
соотношениями E), из которых, по сделанным предположениям, любые две
§27] КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ 281'
группы переменных могут быть выражены через две другие (напри-
(например, р, Q через q, P и т. д.), то функция V, являющаяся функцией
старых и новых переменных, может иметь один из следующих
видов:
Vx{q. Q; t), V2(p, Q; t), V3(q, P; t), VA(p, P; t).
Рассмотрим сначала случай, когда V = V1 (q, Q; t). Умножая обе
части равенства G) на dt и определяя из него величину dVlt по-
получим
я
t=l 1=1
Поскольку все переменные считаются независимыми, то, сравнивая
коэффициенты при одинаковых дифференциалах в правой и левой
частях равенства (8), получим
(/=1.2 п). (9")
. (9W)
Формулы (9) дают возможность найти выражения новых пере-
переменных Q и Р через старые q и р при каноническом преобразо-
преобразовании или, другими словами, найти такое точечное преобразование
координат 2л-мерного фазового пространства (q, p)—>(Q, P), при
котором каноническая система уравнений
dqt _ дН dPi _ дН _ „
dt—dpi' ~dt —~~Ъ^1 ^~ [' z п)
переходит также в каноническую систему
dQi _ дН dPt _ дН _
dt — dPi' ~dT~~~d& {l~ l' Z n)-
Это преобразование, как видно из формул (9), зависит от вы-
выбора произвольной функции V1(q, Q; t), которая называется произ-
производящей функцией.
Чтобы найти выражения переменных Q и Р через q и р, нужно
сначала из уравнений (9"), т. е. уравнений
ау, (у, Q; t)
282 ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ [ГЛ. VI
определить Qj, Q2 Qn в функции аргументов qlt q2 qn;
рх, р2 рп; t. После этого, подставив найденные выражения Q
в уравнения (9'), т. е. в уравнения
дУг (q, <?; t) 2
Pi ~ dQi { ~ ' "" ''
определяем из них Ри Р2, ..., Ра в функции тех же аргументов
qb q2, .... qn; px, p2 рп\ t. Наконец, равенство (9'") поз-
позволяет найти новую функцию Гамильтона Н.
3, Другие формы канонических преобразований. Найдем те-
теперь формулы, определяющие канонические преобразования при дру-
других видах производящей функции. Для этого воспользуемся равен-
равенством (8)
2PtdQi -liPidq, + {H — H)dt = dV{(q. Q; t). (8)
Преобразуем член ^2iPidqt, учитывая, что
HjPidqi^d^jPiqi — ^qidpt. A0)
(' I i
Подставляя выражение A0) в равенство (8) и перенеся полный
дифференциал в правую часть, получим
[1(q, Q; O + S
В члене, заключенном справа в квадратные скобки, будем считать
все qt выраженными через pit Qt посредством соотношений E), E')
и введем обозначение
\Vdq. Q; 0 + 2 Л?Л =V2(p.Q;f),
1 l J?-»-(P, Q)
P, Q)
где V2 — новая производящая функция. Тогда будем иметь
2 Pt dQt + 2 4t dPi + (H — H)dt = dV2 (p. Q; t),
откуда путем сравнения коэффициентов при одинаковых дифферен-
дифференциалах получаются формулы, определяющие каноническое преобра-
преобразование, а именно
('=1.2 n). A1)
5 27] КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ 283
Для определения новых координат Q и Р из второй группы
уравнений A1) определяем Q\q, р, t и вставляем в уравнения пер-
первой группы, откуда определяем P\q, р, t. Преобразования A1)
представляют собой иную форму канонических преобразований, от-
отличную от преобразования (9).
Для получения третьей формы канонических преобразований пре-
преобразуем ^PidQi, представив ее в виде
IiiQid'EPiQi-'EQldPi. A2)
Подставляя выражение A2) в равенство (8), получим
S
= d [Vi (q, Q; t) — 2 QA| = dV, (q.P-.t). A3)
При этом опять предположено, что в правой части все Q, выражены
через qt, Pt. Сравнивая коэффициенты при одинаковых дифферен-
дифференциалах в равенстве A3), получим третью форму канонических пре-
преобразований
0=1- 2 п). A4)
Эта форма может быть получена из формы A1) простой переста-
перестановкой старых и новых переменных и поэтому не является новой.
Если сделать преобразование первого и второго членов левой
части равенства (8), представив их в виде
то, подставляя, эти выражения в равенство (8), получим четвертую
форму канонических преобразований. Подстановка дает
A5)
L I i J
откуда получим
dV. dVA
av ('=1.2 n), A6)
где
V4(p, Я; 0 = ^i(?, Q; 0 —
284 ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ [ГЛ. VI
причем в правой части все qt и Qi считаются выраженными
через pit Pr
Итак, в зависимости от выбора производящей функции, мы полу-
получаем вышеуказанные четыре формы канонических преобразований.
3. Пример. Рассмотрим движение материальной точки под действием
центральной силы в плоскости Оху (точка О—центр силы). Беря в каче-
качестве обобщенных координат декартовы, т. е. полагая qt = x, 92 = У, полу-
получим выражения для кинетической и потенциальной энергий
Т =!?¦& +у»), V = F{\
Отсюда рх = тх, ру — ту и функция Гамильтона
Для осуществления перехода к новым (полярным) координатам рассмотрим
производящую функцию
V, - - (л V^+y^ + P* arctg ?) .
Тогда из первой группы уравнений A4) находим
где г и ф — полярные координаты.
Из второй группы уравнений A4) получим
п — дУз — Р * р у ¦ п — dVi — р У л. р х м
Рх~—dT-Fl7~P2W р* ду~ ~ 1 У + 2 г»" ()
Отсюда, умножая обе части первого равенства на х, а второго на у и
складывая полученные выражения почленно, найдем, заменив рх и ру их
значениями тх, ту:
Р
т (хх -\- уу) = —~(х2-\-у2) или mrr = Plr
откуда
Р, = тг. (г)
Далее, умножая обе части первого из равенств (в) на —у, а второго на х
и складывая, будем иметь
т (ху — ух) = Ръ
а из выражения для Q2 в равенствах (б) находим
ху — ух _ ху — ух
Следовательно,
Р2 = тг\. (д)
Равенства (б), (г), (д) и дают значения новых канонических переменных
в полярных координатах (см. пример в § 21, п. 4).
§ 27] КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ 235
Поскольку производящая функция V3 в данном случае явно от премени
не зависит, то, согласно последнему из равенств A4), Н = Н. Поэтому, под-
подставляя в формулу (а) значения рх, ру из равенств (в), найдем функцию
Гамильтона для новых переменных в виде
Вторая из новых координат, т. е. Q2 = <p, оказалась циклической. Следова-
Следовательно, имеем сразу первый интеграл
Р2 = mr\ = const.
Кроме того, поскольку Н явно от t ие зависит, здесь еще имеет место
интеграл энергии (см. пример в § 21, п. 4).
Рассмотренный пример показывает, как путем канонического преобра-
преобразования можно среди новых координат получить циклические [в старых
координатах х, у, как видно из выражения (а), ни Одна из координат цикли-
циклической не являлась].
20 Н. Н. Бухгольц
ГЛАВА СЕДЬМАЯ
ТЕОРИЯ УДАРА
§ 28. Теория удара материальной точки
1. Основные понятия и определения. Теорема об изменении
количества движения материальной точки имеет в дифференциальной
форме вид
d{mv) = Fdt. A)
Проинтегрируем обе части уравнения A) в интервале от t — Q до
/ = т, предполагая, что сила F может быть представлена как функ-
функция времени; получим
nvo — nvoQ = F dt. B)
о
Левая часть равенства B) представляет собой приращение количества
движения, а правая — импульс силы F за промежуток времени т.
Во всех предыдущих главах мы имели дело только с такими слу-
случаями, когда количество движения получало конечное приращение лишь
за конечный промежуток времени; иными словами, количество дви-
движения всегда представлялось непрерывной функцией от времени.
Сущность явления удара заключается в том, что при ударе проис-
происходит конечное изменение скорости v, а следовательно, и количества
движения nvo за весьма малый промежуток времени, практически
измеряемый тысячными и меньшими долями секунды.
Обозначая среднее значение ударной силы F в интервале очень
малого промежутка времени т через F*. получим из равенства B)
(по теореме о среднем значении)
nvo — mv0 = F*t . C)
Равенство C) показывает, что при малом т приращение количества
движения будет иметь конечную величину, только в том случае,
если F* очень велико (порядка — J, что действительно и наблюдается
§ 28] ТЕОРИЯ УДАРА МАТЕРИАЛЬНОЙ ТОЧКИ 287
во время удара. Измерять ударные силы непосредственно неудобно,
ибо они достигают очень больших величин и к тому же во время
удара не остаются постоянными. Поскольку приращение количества
движения остается величиной конечной, постольку, как это следует
из равенств B) и C), гораздо удобнее при всех измерениях и рас-
расчетах оперировать не с ударными силами, а с их импульсами. Будем
в дальнейшем ударный импульс обозначать через S, так что
Fdt. D)
о
Следовательно, .равенство B) перепишется в виде
mv — mv0 = S. E)
В излагаемой ниже общей теории удара время удара т считается
величиной бесконечно малой.
Силы F, которые, действуя в течение бесконечно малого про-
промежутка времени т, сообщают точке конечное изменение скорости,
будем называть ударными силами. В дальнейшем будем отличать
ударные силы от конечных сил, действием которых за время удара т
можно пренебрегать. В самом деле, из равенства C) видно, что при
конечной величине F* правая часть будет бесконечно малой величи-
величиной порядка т, а следовательно, и левая часть, т. е. приращение
количества движения, вызываемое конечными силами F, будет также
бесконечно мало.
2. Перемещения точки за время удара. Докажем, что переме-
перемещение точки за время удара будет бесконечно мало. Заметив, что
где г есть ^радиус-вектор, определяющий положение рассматриваемой
точки относительно некоторой системы отсчета, умножим обе части
равенства E) на dt и проинтегрируем в интервале от нуля до г,
получим
t
r = ro + vox + -^ J Sdt,
о
откуда
Лг = г — г0 = vox -f- -^ S*r.
Здесь S* есть среднее значение ударного импульса за время т. Учи-
Учитывая, что v0 н S* суть величины конечные, а т бесконечно мало,
приходим к выводу, что за время удара перемещение Лг точки также
бесконечно мало.
20*
288 ТЕОРИЯ УДАРА [ГЛ. VII
3. Основное уравнение теории удара (теорема об изменении
количества движения точки при ударе). Обозначим приращение
количества движения mv — mv0, которое может быть названо «при-
«приобретенным количеством движения», через Атг>; тогда из равен-
равенства E) найдем
Ляш = 5. F)
Этот результат можно сформулировать так: количество движения,
приобретенное точкой за время удара, равно ударному импульсу.
Так как в теории удара мы отказались от рассмотрения ускоре-
ускорений, которые весьма велики, и поскольку мы можем пренебрегать
перемещениями при ударе (см. п. 3), постольку уравнение F), ана-
аналогичное уравнению Ньютона mW — F, является основным уравне-
уравнением теории удара, с помощью которого можно сразу определить
искомое изменение скорости точки по заданному ударному импульсу,
или наоборот. Заметим, что это уравнение является конечным,
а не дифференциальным уравнением; поэтому задачи теории удара
точки и системы материальных точек в механике сводятся обычно
к решению системы конечных уравнений.
4. Теорема об изменении момента количества движения точки
при ударе. Умножив обе части равенства F) векторно слева на
радиус-вектор г, получим г X A (rnv) = г X S или
Д(гХш>) = гХ5. G)
потому что
г X A (mv) = А (г X mv) — (Аг X mv) = А (г X mv),
ибо с точностью до членов первой степени малости Аг = 0 (см. п. 2)t
Следовательно, приращение за время удара момента количества дви-
движения точки относительно некоторого центра равно моменту удар-
ударного импульса относительно того же центра.
б. Принцип Даламбера. Перенося в уравнении E) все члены
в одну сторону, получим
S-\-(mv0 — mv) = О, (8)
или
0. (8')
Выражение в круглых скобках в двух последних формулах предста-
представляет собой «потерянное количество движения», которое можно
также назвать «ударным импульсом силы инерции». Если, кроме
того, на точку наложены связи, то необходимо учесть еще ударные
импульсы реакций. Таким образом, получим
Q, (9)
где Sa и SN — соответственно ударные импульсы активных ударных
сил и ударных реакций связей. Таким образом, за время удара
i 28]
ТЕОРИЯ УДАРА МАТЕРИАЛЬНОЙ ТОЧКИ
289-
активные и пассивные ударные импульсы, действующие на точку,
могут быть уравновешены ударным импульсом силы инерции—Smv.
Это есть формулировка принципа Даламбера в теории удара точки.
6. Упругий и неупругий удары точки о неподвижную поверх-
поверхность. Коэффициент восстановления. Рассмотрим случай, когда
точка массы т, движущаяся со скоростью v, встречает на своем пути
неподвижную поверхность (рис. 92).
Благодаря мгновенному наложению
связи, что создает ударный импульс
реакции, точка испытывает удар и мгно-
мгновенно изменяет свою скорость.
Обозначим скорость точки в конце
удара через v'. На основании уравне-
уравнения F) получим
— mv — S .
A0)
Разложим скорости г» и г»' по направ-
направлениям нормали и касательной к по- рис 92
верхности в точке удара А (берем
ту касательную к поверхности, которая лежит в одной плоскости-
с вектором v и нормалью). Тогда
«=«в+«\. «' = *;-+-<•
Будем предполагать связь идеальной, следовательно, ударный
импульс реакции будет направлен по нормали, и поэтому составляю-
составляющая скорости по направлению касательной к поверхности не изме-
изменится за время удара, так что
В самом деле, проектируя обе части равенства A0) на направление
касательной т, получим
mv'x — mvx = 0,
откуда следует справедливость равенства A1).
Рассмотрим три возможных случая удара:
1) 17^ = 0. Этот случай называют абсолютно неупругим ударом
точки о связь, и саму связь называют абсолютно неупругой. Здесь-
происходит полная потеря нормальной составляющей скорости.
2) v' ==— vn. Этот случай называют абсолютно упругим ударом
точки о связь и саму связь — абсолютно упругой. Здесь нормальная-
составляющая скорости не изменяется по численной величине, а только-
меняет свое направление на противоположное.
2C0 ТЕОРИЯ УДАРА [ГЛ. VII
3) v'n = — kvn, где 0<&<1. Этот случай называют несовер-
несовершенно упругим ударом и саму связь — несовершенно упругой. Здесь
имеет место изменение (частичная потеря) нормальной составляющей
скорости по численной величине.
Все эти три случая можно объединить одним равенством
где для 1-го случая k — Q, для 2-го случая k = \ и для 3-го
О < k < 1, так что вообще
«; = -*«« @ <*<!)• A2)
Величина к, равная отношению модулей нормальных составляю-
составляющих скорости точки в конце и в начале удара, носит название коэф-
коэффициента восстановления (коэффициента удара) и характеризует при-
природу (упругость, пластичность) ударяющих тел. Знание этого коэф-
коэффициента, введенного Ньютоном, необходимо для исследования явлений
удара.
Обозначая через аир углы, образованные нормалью с г» и г»',
т. е. углы падения и отражения (см. рис. 92), получим
Отсюда, согласно равенству A2), найдем
i?l_J!«. = ft. A3)
tgP ~ vn
т. е. коэффициент восстановления есть отношение тангенса угла па-
падения к тангенсу угла отражения. При абсолютно неупругом ударе
получим р = -я-, при абсолютно упругом ударе tga = tgp, a = p и
при несовершенно упругом ударе Xg a < Xg p, a < p.
7. Опытное определение коэффициента восстановления. Упру-
Упругий шарик, падающий свободно на упругую горизонтальную непод-
неподвижную плоскость с высоты А, ударившись о плоскость, подскочит
затем над ней на некоторую высоту h'. Имея эти данные (А и hr),
легко найти значение к, соответствующее материалу ударяющихся
тел. Согласно формулам Галилея имеем (оставляя для скоростей обоз-
обозначения предыдущего пункта)
тогда
В идеальном случае абсолютно упругих тел получим h' = h, а для
абсолютно неупругого тела А' = 0; для несовершенно упругих тел
§ 28] ТЕОРИЯ УДАРА МАТЕРИАЛЬНОЙ ТОЧКИ 29!
тел 0 < h' < h. Например, средние значения коэффициента k при
v«3 м/сек таковы: для стали и пробки & —-д-, для слоновой
О 1С i
кости k =-q-. для стекла к — -гтг, для дерева & = -^-. Значение
скорости v, при которой происходил удар, необходимо указать, ибо
вообще величина коэффициента k также зависит от v.
8. Изменение кинетической энергии точки при ударе (тео-
(теорема Карло). Докажем теорему Карно, позволяющую определить
изменение кинетической энергии в тех случаях, когда точка испыты-
испытывает удар благодаря тому, что на нее мгновенно накладывается или
с нее мгновенно снимается абсолютно неупругая идеальная связь.
Это значит, что связь, наложенная во время удара, будет продол-
продолжать существовать и после удара, а связь, снятая во время удара,
будет отсутствовать и после удара. Так, например, в задаче, рас-
рассмотренной в п, 6, мы имели, что при абсолютно неупругой связи
нормальная составляющая скорости точки после удара была равна
нулю, т. е. точка после удара продолжала свое движение согласно
со связью. Иными словами, доказываемая теорема относится к случаю
абсолютно неупругого удара.
Указанные два случая отличаются один от другого, но для обоих
случаев будет справедлива формула A0):
mv' — mv = SN. A0)
1-й случай', мгновенное наложение связей. Умножим обе части
равенства A0) скалярно на скорость v' точки в конце удара; получим
mv'2 — mv-v' = SN- v'.
Так как перемещение точки после удара согласно со связями, нало-
наложенными во время удара, и связи идеальны, то скалярное произве-
произведение SN -чу' равно нулю. Поэтому по сокращении на т из предыду-
предыдущей формулы найдем такое вспомогательное соотношение:
v'2 — v . v' = 0. A5)
Определим теперь искомое изменение кинетической энергии при
мгновенном наложении связей на движущуюся точку; оно равно
(Ш)
Разность квадратов, входящих в правую часть равенства A6), можно
преобразовать, вычтя из нее удвоенную левую часть равенства A5),
равную нулю; получим
v'2 — v2 = v'2 — v2 — 2v'2 + 2v ¦ v' = — (v'2 — 2v ¦ v' + v2) =
292 ТЕОРИЯ УДАРА [ГЛ. VII
Тогда
Этот результат можно сформулировать так: кинетическая энергия,
потерянная точкой при мгновенном наложении на нее абсо-
абсолютно неупругой связи, равна кинетической энергии, которую
имела бы точка, двигаясь с потерянной скоростью; при этом
•под «потерянной скоростью» подразумевается разность v — <о'.
2-й случай: мгновенное снятие связей. Умножим обе части
равенства A0) скалярно на скорость v точки в начале удара; полу-
получим вместо равенства A5) такое вспомогательное соотношение
v> . v _ vi = о, A8)
так как теперь обращается в нуль скалярное произведение SN ¦ v,
потому что со связями согласно перемещение точки не после удара,
«огда связи оказываются снятыми, а перемещение до удара. Раз-
ность квадратов скоростей в формуле A6) преобразуется таким же
•образом:
v'2 ~ v* = v'2 — v2~2v'-v-\- 2v2 = v2 — 2v-v'-Jf v'2 — (vr — vf.
-Поэтому
mv'2 mv2 m
что можно сформулировать так: кинетическая энергия, приобре-
приобретенная точкой при мгновенном снятии связей, равна той кине-
кинетической энергии, которую имела бы точка, двигаясь с приоб-
приобретенной скоростью.
§ 29. Теория удара системы материальных точек
1. Теорема об изменении количества движения системы при
ударе. Разделим все ударные импульсы, действующие на систему,
¦состоящую из N материальных точек, на внутренние и внешние по
тем же соображениям, какие были приведены в случае подразделе-
подразделения обыкновенных сил; тогда, согласно равенству F), для каждой
точки с массой mv будет справедливо равенство
A)
тде Sv и Slx суть внешние и внутренние ударные импульсы, дей-
действующие на точку с массой mv. Составив подобные уравнения для
точек системы и сложив их, получим
§ 29] ТЕОРИЯ УДАРА СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК 293-
ИЛИ
AQ = Л 2 mvVv = 2 Sv + 2 Sv>
V V V
где через Q^2OTv"v мы обозначили количество движения системы.
V
Замечая, что 2Sv = 0 на основании третьего закона Ньютона, при-
V
ходим к такому результату:
AQ = ЖЛфс = 2 Sv, B)-
V
т. е. количество движения, приобретенное системой за время удара,.
равно сумме всех внешних ударных импульсов, приложенных к си-
системе.
Если на систему внешние ударные импульсы не действуют, то
количество движения системы Q и скорость центра масс vc при
ударе не изменяются.
2. Теорема об изменении кинетического момента системы
при ударе. Умножим обе части равенства A) векторно слева на
радиус-вектор rv точки с массой mv, проведенный из некоторого
центра О, и просуммируем это равенство по индексу v для всех
точек системы; получим
2 [rv X A («v«v)l = 2 (rv X Sv) + 2 (rv X Sv). C>
V V V
На основании рассуждений, изложенных в § 28 п. 4, левую часть-
равенства C) можно преобразовать к виду
2 [rv X A (»v«v)l = Л S (rv X «v«v);
V
V
кроме того, вторая сумма в правой части равенства C) равна нулю,
ибо для каждого внутреннего ударного импульса найдется равный и
противоположно направленный импульс; поэтому вместо равенства (Ъу
будем иметь следующее:
А 2 (rv X mvvv) = 2 (rv X Sv).
V V
или
V
где Go ss 2 (rv X wv©v) есть кинетический момент системы относи-
v
тельно некоторого выбранного центра О, а 2 nionio(Sv)^2 (rv X Sv)
V V
есть сумма моментов относительно того же центра всех внешних,
ударных импульсов. Таким образом, уравнение D) можно сформу-
294 ТЕОРИЯ УДАРА [ГЛ. Vlt
лировать так: изменение за время удара кинетического момента
системы, взятого относительно некоторого центра, равно
сумме моментов, взятых относительно того же центра, всех
внешних ударных импульсов.
Заметим, что поскольку перемещениями точек системы за время
удара мы пренебрегаем, то доказанная теорема справедлива относи-
относительно любого центра О, связанного или не связанного с системой,
и, в частности, относительно центра масс системы.
3. Изменение кинетической энергии системы при ударе (тео-
(теорема Карно). Докажем теорему Карно для системы, предполагая,
как и в § 28, п. 8, что удар происходит или от мгновенного нало-
наложения, или от мгновенного снятия абсолютно неупругих идеальных
связей. В обоих случаях для каждой точки системы с массой mv
будет справедлива формула A0) § 28, т. е.
mvvv — mvvv = Sv > E)
где v и v'v суть скорости соответствующей точки в начале и в конце
удара, a S^ — ударный импульс реакций, приложенных к этой же
точке.
Найдем изменение кинетической энергии в следующих двух
случаях:
1-й случай: связи мгновенно налагаются. Умножая обе части
равенства E) на v'v и произведя суммирование по индексу v для
всех точек системы, получим
2»v<-2»X-<»v = o, F)
V V "
ибо 2^' S^ = 0 (см. § 28, п. 8). Изменение кинетической энер-
гии Т'—Т за время удара будет
:^vvl G)
Так как выражение, стоящее в левой части формулы F), равно нулю,
то его можно вычесть из правой части равенства G); тогда, при-
приведя подобные члены, найдем
Так как правая часть равенства (8) отрицательна, то отсюда сле-
следует, что кинетическая энергия Т' после удара меньше кинетической
энергии Т до удара. В результате из равенства (8) находим
I — I =
§ 29) ТЕОРИЯ УДАРА СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК 295
т. е. кинетическая энергия, потерянная системой при мгновен-
мгновенном наложении на нее абсолютно неупругих связей, равна той
кинетической энергии, которую имела бы система, если бы ее
точки двигались с потерянными скоростями.
2-й случай: мгновенное снятие связей. В этом случае мы будем
умножать обе части равенства E) скалярно не на вектор v'v, а на
вектор ©v, ибо теперь 2^-5^ = 0 (см. § 28, п. 8); проведя
V
затем такие же рассуждения, как и в предыдущем случае, получим
следующее выражение для изменения кинетической энергии системы
при ударе:
Правая часть формулы A0) положительна, следовательно, Т' > Т, и
мы приходим к такому выводу: кинетическая энергия, приобре-
приобретенная системой при внезапном снятии связей, равна той кине-
кинетической энергии, которую имела бы система, если бы ее точки
двигались с потерянными скоростями.
В качестве иллюстрации для этого второго случая можно при-
привести явление взрыва гранаты; можно утверждать, что явлению
взрыва сопутствует увеличение кинетической энергии 1).
4. Принцип Даламбера. Разделяя ударные импульсы, действую-
действующие на каждую точку системы с массой mv, на активные и пассив-
пассивные, получим, согласно формуле (9), следующее:
$S4-S-(— Amvi»v) = 0 (v=l, 2, ..., N), A1)
т. е. во время удара активные и пассивные ударные импульсы, дей-
действующие на систему материальных точек, могут быть уравновешены
инерционными ударными импульсами. Это положение представляет
собой принцип Даламбера для системы в теории удара.
5. Уравнение Даламбера — Лаграижа в теории удара. Умно-
Умножим скалярно обе части равенства A1) на виртуальное перемеще-
перемещение 6rv и просуммируем по индексу v для всех точек системы, при-
принимая во внимание, что для идеальных связей
Получим
2E? — AmvDv) • 6rv == 0. A2)
V
Итак, сумма элементарных работ активных ударных импульсов и
ударных импульсов сил инерции равна нулю при всяком виртуаль-
виртуальном перемещении системы.
') См. также «Беседы о механике» В. Л. Кирпичёва.
296 ТЕОРИЯ УДАРА [ГЛ. VII
5. Уравнения Лагранжа 2-го рода для удара. Пользуясь сим-
символикой, оговоренной в § 1, п. 3, выразим уравнение Даламбера—
Лагранжа A2) через проекции всех векторных величин на оси коор-
координат. Получим
3JV
2 (Sxv — &mvxv) 6xv = 0, A3)
v=l
где N есть число точек системы. Пусть на систему наложены голо-
номные связи вида
Мх; 0 = 0 (х=1, 2 к).
и пусть эти связи имеют место как до, так и после удара; тогда
число независимых координат системы будет ЗМ—k = n. Выразим
координаты точек системы х в функциях п независимых перемен-
переменных <7i, q2, ••¦. <7„. которые будут обобщенными координатами си-
системы; тогда
Преобразуем уравнение A3) к этим координатам. Имеем
r6ft (v=1'2
подставляя эти выражения в уравнение A3), получим, меняя порядок
суммирования:
п / 3/V ЗЛ \
Щ4
l=\ Vv=l ' v=l
Но
злг
v=l
где Pt есть обобщенный ударный импульс, отнесенный к коорди-
координате qt; далее, так как [см. § 8, п. 1, уравнение F)]
dxv
го
ЗЛГ ЗЛГ
• dxv dT
где Т есть кинетическая энергия системы.
30] ТЕОРИЯ УДАРА ТВЕРДЫХ ТЕЛ 297
Подставляя выражения A5) и A6) в уравнение A4), получим
Так как вариации bq независимы, то из уравнения A7) имеем
A~g- = P,. (f=l. 2 п). A8)
Уравнения A8) представляют собой уравнения Лагранжа 2-го
рода для удара и выражают то обстоятельство, что за время
удара конечные приращения обобщенных импульсов равны соответ-
соответствующим обобщенным ударным импульсам.
Заметим, что уравнения A8), как и все полученные ранее урав-
уравнения рассматриваемой теории удара, являются алгебраическими, а не
дифференциальными. Составляются они, как обычные уравнения Лаг-
Лагранжа; при этом обобщенные ударные импульсы Pi можно находить
так же, как и обобщенные силы Qt, т. е. вычисляя элементарную
«работу»-ударных импульсов на виртуальных перемещениях системы
и определяя в полученном выражении коэффициенты при вариациях
соответствующих обобщенных координат.
Простой пример такого расчета дан ниже в § 30, п. 2.
§ 30. Теория удара твердых тел
1. Изменение при ударе угловой скорости твердого тела,
имеющего неподвижную точку. Пусть имеем твердое тело, одна
точка О которого закреплена неподвижно. Примем точку О за начало
осей координат, которые направим вдоль главных осей инерции тела
и воспользуемся теоремой об изменении кинетического момента
системы в форме D) § 29. Тогда, используя формулы для проекций
кинетического момента Go на главные оси инерции тела относительно
центра О [см. § 15, п. 1, формулы C)], получим из равенства D)
§ 29 следующие уравнения:
В (9, — <70) = 2 mom
V
С (Г\ — Го) =
y
A)
где А, В, С суть главные моменты инерции; рх, qh rx и р0, q0,
г0 — проекции мгновенной угловой скорости ш в конце и в начале
удара; в правых частях уравнений A) стоят моменты относительно
осей координат ударных импульсов активных сил, действующих на
298 ТЕОРИЯ УДАРА [ГЛ. VIT
твердое тело. В эти уравнения не входят моменты импульсов удар-
ударных реакций, ибо эти ударные импульсы приложены к началу коор-
координат, а потому их моменты относительно осей обращаются в нули.
2. Изменение при ударе угловой скорости твердого тела,
вращающегося вокруг неподвижной оси. Если твердое тело имеег
неподвижную ось, которую примем, например, за ось г, и угловая
скорость его вращения в начале удара есть «>0, а в конце удара ©j,
то из равенства A) получим
Jz («1 — <оо) = 2 тотг St B)
где Jz есть момент инерции твердого тела относительно оси враще-
вращения, а справа стоит сумма моментов ударных импульсов активных
сил относительно той же оси. Моменты ударных импульсов реакций
оси в равенство B) не входят, так как эти моменты равны нулю.
Покажем, как этот же результат можно получить с помощью
уравнений Лагранжа A8) § 29. Связи, наложенные на твердое тело,
вращающееся вокруг неподвижной оси, при ударе сохраняются,
следовательно, указанные уравнения здесь применимы. Тело имеет
одну степень свободы и за обобщенную координату можно принять
угол поворота ф. Тогда уравнение Лагранжа имеет вид
Вычисляя величину Т и ее производную, получим
Далее, вычисляя элементарную «работу» приложенных импульсов S",
будем иметь
6AS = Г 2 тотг Sv] бф, откуда Яф = 2 niom^ S%.
L V J V
Подставляя все найденные величины в равенство C), придем к урав-
уравнению B).
3. Действие удара на твердое тело, вращающееся вокруг
неподвижной оси. Центр удара. Пусть твердое тело может вра-
вращаться вокруг неподвижной оси, которую примем за ось z прямо-
прямоугольной системы Oxyz, связанной с телом. Положение начала и
двух других осей оставим пока произвольным. Если на это твердое
тело подействовал ударный импульс активных сил S, то он вызовет
ударные импульсы реакций, проходящих через ось. Так как этот
случай движения можно рассматривать как движение твердого тела,
имеющего две неподвижные точки А и В, то ударные импульсы
реакций оси можно свести к двум импульсам SA и SB, приложенным
в точках А и В, лежащих на оси (рис. 93). Воспользуемся теоре-
. 30]
ТЕОРИЯ УДАРА ТВЕРДЫХ ТЕЛ
299
мами об изменении количества движения и кинетического момента,
выведенными в § 29, пп. 1 и 2. Обозначим проекции ударных им-
импульсов реакций SA и SB через SAx, SAy, SAz, SBx, SBy, SBz, а при-
приращение угловой скорости тела за время удара обозначим через Л<о.
Теоремы об изменении количества движения и кинетического
момента дадут уравнения
л + 5„, D)
AG = moni01
Так как v =
- mom
Хг,
О$А
ТО
+ mot
n0SB.
E)
= A
X rv) =
(
A («a X Mrc) = Аш X Mrc =
I j k
0 0 A«
Mxc Myc Mzc
Рис. 93.
Здесь М есть масса тела, a rc(xc, yc, zc) — радиус-вектор
центра масс С; равенство А (ш X Мгс) — Аш X Мгс следует из того,
что при ударе величина АМгс бесконечно мала и ею можно прене-
пренебречь (см. § 28, п. 2).
Так как G = m(J), то конечное приращение кинетического момента
равно AG = Ag>(J). Тогда из формул A) § 15, п. 1, учитывая, что
в данном случае p = q = Q, r = co, следует:
AGX = ApJxx — AqJxy — ArJxz = - ^ ,xz,
AqJzy + ArJzz = + A« Jzz.
АОг = -
Тогда, проектируя обе части уравнений D) и E) на оси координат,
получим:
AQy= + Aa>Mxc = Sy
АУ
— АсоЛ
xz —
Аой У„, =
S -{-
» А'
'А'
.SB,
F)
G)
АОг ==
= mom. 5.
300
ТЕОРИЯ УДАРА
[ГЛ. Vlt
Из уравнений F) и G) можно определить Д<о, SAx, SSx, SAy, SBy
и сумму SAz-\-SBz.
Найдем условия, при которых ударные импульсы реакций не
возникают или, иначе говоря, удар не передается на ось. Для этого
в уравнениях F) и G) надо положить
SAx = SAy = SAz = SBx = SBy = SBz = 0.
Тогда уравнения F) и G) перейдут в следующие:
— Дм Мус — S
(8)
— A» Jxz = morn^. S,
— Дой Jyz — monij S,
_, = mom^S.
Третье из уравнений (8) показывает, что приложенный ударный им-
импульс S должен быть перпендикулярен к оси вращения Oz.
Пользуясь произволом в выборе начала и остальных осей под-
подвижной системы, выберем начало в такой точке оси z, чтобы коор-
координатная плоскость Оху прошла через импульс S, а ось х направим
параллельно S (рис. 94). Тогда Sy — 0.
Обозначим координату точки пересе-
пересечения линии действия импульса S
с осью у через т); тогда уравнения (8)
и (9) примут вид
-1—id —A® Myc = Sx,
~У "¦ Мхс = О,
A0)
Рис. 94.
(в последнем уравнении знак минус стоит потому, что при поло-
положительной проекции Sx импульс S вращает тело по ходу часовой
стрелки, т. е. при принятом правом направлении вращения измене-
изменение Дш в данном случае будет отрицательно).
Из второго уравнения системы A0) следует, что центр масс С
тела должен находиться в выбранной плоскости Oyz. Следовательно,
приложенный ударный импульс S должен быть перпендикулярен
к плоскости, проходящей через ось вращения и центр масс те а.
Условия Jxz = Jyz = 0 показывают, что ось вращения z должна быть
главной осью инерции твердого тела для точки О.
§ 30] ТЕОРИЯ УДАРА ТВЕРДЫХ ТЕЛ 301
Первое из уравнений A0) дает зависимость между проекцией удар-
ударного импульса активных сил S на ось х и приращением угловой
скорости, а именно
S
Подставляя выражение Sx в последнее из уравнений A0), получим
= Дсо Jzz.
Отсюда имеем расстояние линии действия ударного импульса от оси
вращения:
Итак, если твердое тело вращается вокруг неподвижной оси, то
для того, чтобы ударный импульс, подействовавший на тело, не пере-
передавался на ось вращения, необходимо выполнение следующих условий:
1) Ось вращения должна быть главной осью инерции тела для
одной из своих точек О (главная точка).
2) Приложенный ударный импульс (произвольный по величине)
должен лежать в плоскости, перпендикулярной к оси вращения и
проходящей через главную точку О.
3) Ударный импульс должен быть перпендикулярен к плоскости,
проходящей через центр масс и ось вращения.
4) Точка пересечения Р линии действия ударного импульса с этой
(упомянутой в условии 3) плоскостью должна находиться с той же
стороны от оси вращения, что и центр масс С, и отстоять от оси
вращения на расстоянии г\, которое определяется формулой A1).
Определенная таким образом точка Р называется центром удара
относительно оси z.
Формула A1) имеет такой же вид, как и формула для приведен-
приведенной длины физического маятника, который получится, если ось вра-
вращения z сделать горизонтальной. Отсюда следует, что центр удара
может быть найден построением Гюйгенса для нахождения оси кача-
качания. В самом деле, обозначим через Jc момент инерции тела относи-
относительно оси, параллельной z и проходящей через центр масс С; тогда
по теореме Гюйгенса
Jzz = JC + МУс = Щ + МУС'
где 1С есть радиус инерции относительно оси, проходящей через,
центр масс, и мы получим
с щ.
отсюда
(Л — Ус) Ус = 'с.
21 Н. Н. Бухгольц
302
ТЕОРИЯ УДАРА
[ГЛ. VIГ
Н
В
Рис. 95.
и построение можно выполнить, основываясь на свойстве высоты
в прямоугольном треугольнике (рис.495). Определив для осн z глав-
главную точку О, проводим в плоскости, проходящей через центр масс С,
ось у, перпендикулярную к оси z. Через С проводим ось Cz',
параллельную г, и от точки D пересечения Cz' с осью у отклады-
откладываем отрезок DK = ic, т. е. равный радиусу инерции тела относи-
относительно оси Cz'. Соединяем точку О с К
и проводим в точке К прямую КР J_ OK
до пересечения с осью у в точке Р, ко-
которая и будет центром удара тела отно-
относительно оси z.
В частном случае, если центр масс
находится на оси вращения, т. е. хс =
= ус = 0, формула A1) дает ti~oo,
т. е. центра удара нет на конечном рас-
расстоянии от оси; поэтому все удары, дей-
действующие на тело, будут передаваться
на ось вращения. Так как в этом случае
левые части уравнений F) обращаются
в нуль, то ударный импульс S вызовет
равный и противоположный ему суммарный импульс реакций
SA-\-SB, т. е. удар полностью передается на ось. Это имеет место
для уравновешенных вращающихся деталей машин. Все удары пере-
передаются полностью на опоры и дей-
действуют на них разрушительно.
4. Прямой центральный удар
двух тел (удар шаров). Рассмот-
Рассмотрим удар двух движущихся посту-
поступательно твердых тел при следую-
следующих условиях (рис. 96): а) центры
масс С1 и С2 тел лежат на общей
нормали п к поверхностям тел в то-
точке удара (такой удар называется
центральным; в частности, центральным всегда будет удар двух
любых шаров); б) скорости центров масс тел в начале удара напра-
направлены параллельно общей нормали к поверхностям тел в точке удара
(такой удар называется прямым).
Выберем на нормали С±п положительное направление от Сх к С2
и обозначим через vt и v2 проекции на нормаль п скоростей цент-
центров масс тел в начале удара, а через v'v v'2 — проекции тех же ско-
скоростей в конце удара. Массы тел пусть будут Мх и М2, а коэффи-
коэффициент восстановления k. Зная Мь М2, vx, v2 и k, найдем v[, v'2 и
действующий на тела при ударе ударный импульс S.
Если рассматривать оба тела как одну механическую систему, то
поскольку внешние ударные импульсы на эту систему не действуют,
Рис. 96.
§ 30] ТЕОРИЯ УДАРА ТВЕРДЫХ ТЕЛ 303
количество движения- в конце удара должно равняться количеству дви-
движения в начале удара. Отсюда имеем
М,»; -f- M2v^ = Mjtf, + M2vr A2)
Второе уравнение дает выражение для коэффициента восстановления,
который будет равен модулю отношения разностей скоростей тел
в конце и в начале удара, т. е.
1 / /I / /
*Р=A3)
Последний результат следует из того, что до удара должно быть
vi > V2 (иначе удар не произойдет), а после удара будет v'2 *.> v\
в силу непроницаемости тел.
Решая систему уравнений A2), A3), найдем искомые скорости
в конце удара v[ и v'r
Ударный импульс, действующий на соударяющиеся тела, можно
найти, составив для одного из тел, например для первого, уравне-
уравнение B) § 29 в проекции на нормаль п. Получим, учитывая закон
равенства действия и противодействия,
5i = ^W-*i) и S2 = -Sv A4)
где Sj и 52 — проекции импульсов на нормаль п.
Рассмотрим два частных случая:
1) Абсолютно неупругий удар (& = 0). В этом случае
из уравнений A2), A3), A4) находим
A5)
Тела после удара движутся в этом случае с одной и той же
скоростью v'v
2) Абсолютно упругий удар (&=1). В этом случае
уравнения A2), A3), A4) дают
A6)
Интересно отметить, что при абсолютно упругом ударе ударный
импульс вдвое больше, чем при абсолютно неупругом.
21*
304
ТЕОРИЯ УДАРА
[ГЛ. VIT
В частном случае, когда Мх = М2, из уравнений A6) находим
©j = vv v'2 = vv т. е. тела одинаковой массы при абсолютно упру-
упругом ударе обмениваются скоростями.
При решении этой задачи, как и предыдущих, мы не исследо-
исследовали деформаций, возникающих в месте удара тел, а упругие свойства
тел при ударе характеризовали одним эмпирическим коэффициентом k,
что существенно упрощает все исследование.
Рассмотрение удара твердых тел с учетом их деформаций оказы-
оказывается задачей гораздо более сложной. Решение ее для случая со-
соударения двух упругих тел дано Г. Герцем.
5. Примеры. 1). Баллистический маятник. Для определения скорости
пули или артиллерийского сиаряда можно пользоваться баллистическим маят-
маятником (Robin, 1742 г.), который представляет собой подвешенный на горизон-
горизонтальной оси ящик, наполненный мягким, но вязким
веществом (например, песком или глиной), погло-
поглощающим энергию попадающего в него снаряда
(рис. 97). Пусть снаряд с массой т летит со
скоростью v и попадает в точку А, после чего
маятник вследствие удара отклоняется на угол а.
II 1 \ Если рассматривать снаряд и маятник как одну
jJ^ XS' механическую систему, то действующими на иее
I J 1]^е_['~'" внешними ударными импульсами будут только
Z ~^>~ ' ударные реакции оси О, момент которых отно-
•~*-у \-°А сительно этой оси равен нулю. Следовательно,
кинетический момент системы относительно
той же оси за время удара не изменяется, т. е.
: (Уо + та2) о, (а)
L
Рис. 97.
mva ¦¦
где о есть угловая скорость маятника в конце
удара, a Jo — момент инерции маятника относи-
относительно оси О. Из уравнения (а) имеем
v-
та2
та
-ш.
(б)
Для определения в воспользуемся теоремой об
изменении кинетической энергии. Обозначив мас-
массу маятника через М и расстояние его центра
тяжести до оси О через I, получим
Рис.
= 8
та) 0 — cos
(в)
из уравнения (в) по углу отклонения маятника а определяем в, а затем из
уравнения (б) находим скорость v.
2) Внезапное закрепление. Неизменяемая материальная плоская фигура
движется в своей плоскости; скорость центра масс С равна v; угловая ско-
скорость вращения относительно центра масс равна в. Внезапно закрепляем
точку А плоской фигуры; найти угловую скорость фигуры и импульсивную
реакцию в точке А (рис. 98).
Возьмем начало координат в точке А и оси координат направим так,
что ось х будет параллельна скорости г>. Пусть после удара (т. е, после
§ 30] ТЕОРИЯ УДАРА ТВЕРДЫХ ТЕЛ 305
закрепления точки А) угловая скорость фигуры будет о,; тогда
Jc(ai-o,)=momcSA = -xSAy+ySAx, (a)
где SA есть импульсивная реакция в точке А, а х, у — координаты точки С.
Ударный импульс Sfi определим из того соображения, что
где Q есть количество движения фигуры, равное, как известно, количеству
движения центра масс, в котором сосредоточена масса всей системы, т. е.
AQ = М Avc.
Так как после удара вс = »ХАХ?, а до удара vc = v, то
Дяс = т1 X АС — v;
отсюда
Подставляя эти выражения в уравнение (а), получим
Jc (Oj — ш) = — Мо>1 (х2 + у2) — Mvy,
откуда
У„а> — Mvy Jca> — Mvy
ГЛАВА ВОСЬМАЯ
РАЗМЕРНОСТЬ И ТЕОРИЯ ПОДОБИЯ
§ 31. Измерение и размерность механических величин
1. Измерение. Результат сравнения какой-либо величины с другой,
ей однородной и принятой за единицу сравнения, выраженный чис-
числом, называется измерением этой величины; величина, принятая за
единицу сравнения, называется единицей меры, а число, получив-
получившееся от измерения, — численным значением измеренной величины.
Обозначая измеряемую величину символом Q, единицу меры — через q
и численное значение величины Q через и, имеем
Q~v.q или х = —-.
Таким образом, численное значение какой-либо величины есть от-
отвлеченное число, выражающее отношение этой величины к выбран-
выбранной единице меры. Если за единицу меры взять другую величину q\
причем q' = nq, то численное значение величины Q станет, очевидно,
иным и равным
f
При этом, как легко видеть, величины и' и и связаны соотношением
*' = ?. О)
Следовательно, новое численное значение равно прежнему, разделен-
разделенному на число, равное отношению новой единицы меры к прежней.
2. Единицы меры. Для каждой физической величины за единицу
меры может быть принята любая однородная ей величина, но ввиду
того, что между различными физическими величинами существуют
соотношения, устанавливаемые физическими законами или самим опре-
определением этих величин, достаточно установить единицы меры только
для таких величин, которые являются между собой независимыми,
т. е. не связаны между собой каким-либо соотношением; тогда
§ 311 ИЗМЕРЕНИЕ И РАЗМЕРНОСТЬ МЕХАНИЧЕСКИХ ВЕЛИЧИН 307
единицы меры для остальных величин определятся через единицы меры
этих независимых величин, которые называются основными едини-
единицами. Действительно, пусть какая-либо величина X зависит от других
величин Q, R, S, ...; тогда она будет пропорциональна произведе-
произведению различных степеней этих величинг), т. е.
X = kQaR^Sy .... B)
где k — коэффициент пропорциональности. Но так как Q = щ, R = рг,
5 = as, где к, р, ст, . . . суть численные значения, q, r, s, .. . —
единицы меры для величин Q, R, S, .... то
X — (x«pPav . . .)kqar$sy ... C)
Полагая k=l, получим, что численное значение величины X, т. е.
|, будет ! —xapPov .. ., а единица меры для X, т. е. х, определится
равенством
х = <7arM ... D)
и будет, следовательно, выражаться через единицы меры для вели-
величин Q, R, S В более общем случае зависимость X от Q, R, S, . ..
может быть выражена в виде многочлена, представляющего собой
сумму членов типа B), причем, очевидно, единица меры каждого
члена должна быть та же, что и для величины X', т. е. этот много-
многочлен должен быть однородным относительно основных единиц.
3. Механические величины. В механике встречаются величины
трех видов: геометрические, кинематические и динамические (или
кинетические).
Геометрической величиной называется величина, пропорциональ-
пропорциональная произведению нескольких длин, т. е. величина вида
Qj = kL,L, . .. Ln. E)
Если за единицу длины выбрать длину /, то будет
Z,j = Aj/, Z-2 = XJ., .. ., Ln = Anl;
тогда, полагая k—\, получим
Ql = XlX2 ...Xnla. F)
Отсюда видно, что единицей меры для величины Q1 будет
?! = /". G)
Таким образом, для геометрических величин оснозной единицей
является единица длины I, все же остальные выражаются через / и
') Справедливость этого утверждения можно доказать, исходя из того
физического условия, что отношение любых двух численных значений дай-
дайной производной величины не должно зависеть от выбора основных единиц
меры.
308 РАЗМЕРНОСТЬ И ТЕОРИЯ ПОДОБИЯ [ГЛ. VIII
имеют вид I", т. е. будут производными единицами; следовательно,
установив единицу длины, мы тем самым устанавливаем единицы
для всех геометрических величин. Тот факт, что единица меры для
величины Qx определяется через единицу меры основной величины L
(длины) формулой G), выражается, согласно обозначению, введен-
введенному Максвеллом, символом
[Qil = ?B. (8)
Выражение в правой части (8) называется размерностью величины Qu
а самая формула (8) — формулой размерности1). Формулы раз-
размерности для геометрических величин будут иметь вид:
[площадь] = L2,
[объем] = Z.3,
[статический момент длины] = L2,
[статический момент площади] = Z.3,
[статический момент объема] = Z.4,
[момент инерции длины] — Z.3,
[момент, инерции площади] = Z.4,
[момент инерции объема] = Z,5.
Кинематической величиной называется величина, которая зависит,
кроме геометрических величин, еще от времени, т. е. имеет вид
Q2 = kLa1*. (9)
где k есть коэффициент пропорциональности, L—длина, Г — время,
а и р — действительные (в задачах механики обычно целые) числа;
в частном случае а может равняться нулю. Полагая, по предыдущему,
А=1, L = kl, T=rt, где / и t суть выбранные единицы длины и
времени, и принимая во внимание, что в классической механике
длина и время считаются между собой независимыми, мы можем
принять единицы I и t за. основные и получим для кинематической
величины выражение
Q2 = A,\W; A0)
следовательно, для кинематической величины единицей меры будет
q2 = ffi, а формула размерности имеет вид
[Q2] = Ie7*; A1)
') В формулах размерности принято символ производной (вторичной)
величины заключать в квадратные скобки, а для основных величин скобок
не ставить, полагая [L] = L.
§ 31] ИЗМЕРЕНИЕ И РАЗМЕРНОСТЬ МЕХАНИЧЕСКИХ ВЕЛИЧИН 309
в частности
[скорость] = LT~l,
[ускорение] = LT~2,
[угловая скорость] = Г,
[угловое ускорение] = Т~2,
[момент скорости или секторная скорость] = L2T~l,
[момент ускорения или секторное ускорение] =L2T~2.
Если механическая величина помимо геометрических и кинемати-
кинематических величин зависит от массы, то она носит название динами-
динамической (или кинетической) и имеет вид
A2)
где k есть коэффициент пропорциональности, L — длина, Т — время,
М — масса, а, р, у — действительные числа, причем в частном слу-
случае аир могут равняться нулю. Полагая, как и раньше, k=\,
L = Xl, T~xt, М = цт, где /, t, m суть выбранные единицы
длины, времени и массы, и принимая во внимание, что в классической
механике между длиной, временем и массой не существует никаких
зависимостей (как, например, это имеет место в релятивной механике),
мы можем принять единицы /, t, m за основные; тогда динамическая
величина Q3 примет вид
Q8 = a,V|iv/aA«v. A3)
Таким образом, для всех динамических величин единицы меры
выразятся в основных единицах I, t, m в виде qz — latmy, а общая
формула размерности для этих величин будет
[Q8] = LaT*M\ A4)
Если, в частности, Y —0> то величина Q3 будет кинематической,
а если 7 = 0 и Р—0> то геометрической; если же а = $ = у = 0,
то величина Q3 называется безразмерной или отвлеченной.
Формулы размерности для различных динамических (кинетических)
величин выразятся следующим образом:
[сила] = MLT~2,
[момент силы] = ML?T~2,
[работа, энергия] = ML2T~2,
[мощность] = Ш.2?.
[количество движения, импульс] = MLT~l,
[момент количества движения] = ML2T~l,
[действие по Гамильтону и Лагранжу] = М1}Т~1,
[принуждение по Гауссу, 3W] =
[момент инерции] = ML2,
[плотность] = ML~3.
310 РАЗМЕРНОСТЬ И ТЕОРИЯ ПОДОБИЯ [ГЛ. VIH
4. Переход от одинх единиц меры к другим для одной и той же
системы. Из формулы A3) следует, что если за основные единицы
меры принять какие-либо единицы длины, времени и массы /, t, m,
то единица меры любой механической величины Q будет иметь вид
а сама величина представится в виде
Q = x/W, A5)
где х будет численным значением величины Q.
Совокупность величин, единицы которых принимаются за основ-
основные, называется системой основных единиц; сами же единицы основ-
основных величин могут быть выбраны произвольно. Пусть какая-нибудь
механическая величина Q выражается в некоторых единицах системы
(/, t, m) формулой A5); возьмем другие единицы той же системы:
l' = —, t' = — , m' = —; A6)
Щ Щ пт
тогда, подставляя в формулу A5) выражения I, m, t в новых еди-
единицах из A6), получим выражение Q в единицах V', t', m', а именно
Q = х n« nP rev i'a t'?m'y; A7)
таким образом, численное значение величины Q в единицах (I', f, т.')
будет
Число я"я|я^, на которое нужно умножить численное значение
какой-либо величины, выраженной в некоторых основных единицах,
для того чтобы получить численное значение той же величины, выра-
выраженной в других единицах той же системы, называется коэффициен-
коэффициентом перехода.
5. Теорема однородности. Пусть какая-нибудь механическая вели-
величина Q зависит от ряда других величин Rv R2, R-i, ..., которые
выражены в единицах системы (/, t, m); тогда эта величина Q будет
зависеть от некоторого числа длин Lx, Z.2, L3 времен Ть Т2, Тг, ...
и масс Мх, М2, Мг причем
Li = Xll (/=1.2 a); T, = x,t (/=1, 2 р);
(k=l, 2 у).
где Kt, Ту, \t,k суть численные значения этих величин. Численное зна-
значение х величины Q будет функцией Xlt %2> ^з- •••> Ti> Т2> тз> •¦••
Щ. Ц2. ^з т- е-
и = /(Я-1, Я,2, ...; tj, т2.
§ 31] ИЗМЕРЕНИЕ И РАЗМЕРНОСТЬ МЕХАНИЧЕСКИХ ВЕЛИЧИН 311
Возьмем вместо единиц меры (/, t, т) другие единицы той же си-
системы (/', t', m'), причем
Щ Щ пт '
тогда при новых единицах (/', t', m') будем иметь
И
B0)
Поскольку уравнение A8) должно иметь место при любых единицах
меры (конечно, в пределах одной и той же системы) или, другими
словами, уравнение A8) должно быть ковариантно при переходе от
одних единиц меры к другим, то в единицах /', t', m!
х'=/(*,;. Ц, ...; х\, х2, ...; vl'v \х'2, . ..), B1)
или, принимая во внимание A9) и B0),
Так как равенство B2) имеет место при каких угодно щ, nt, nm,
то оно должно быть однородно относительно A,,-, Xj и цк, т. е. всякое
уравнение механики должно обладать тройной однородностью отно-
относительно численных значений основных величин данной системы;
в этом и состоит теорема об однородности.
6. Системы основных единиц. До сих пор мы принимали за основ-
основные единицы системы единицы длины, времени и массы; такую си-
систему единиц называют абсолютной. Термин «абсолютный» в данном
случае имеет историческое значение и отражает собой то обстоя-
обстоятельство, что в конце 18-го столетия (во время Конвента) француз-
французские физики стремились для этих величин установить такую систему
мер, которая была бы независима от всякого рода случайных причин,
влияющих на изменение эталонов. Но, как известно, такая попытка
оказалась неудачной, и в настоящее время «абсолютными» единицами
длины и массы называются те, которые определяются соответствую-
соответствующими эталонами этих мер, хранящимися в Международной Палате
мер и весов в Севре (Франция).
Абсолютная система основных единиц впервые была предложена
Гауссом; основными единицами меры для этой системы были при-
приняты: для длины — 1 см, для времени — 1 сек и для массы — 1 г
(масса). Такая абсолютная система носит название CGS (т. е. санти-
сантиметр — грамм — секунда). В системе CGS единица силы будет произ-
производной единицей, а именно 1 дина= 1 см сек* г (см. ч. I, § 14, п. 3).
В настоящее время принята другая аналогичная система основных
312
РАЗМЕРНОСТЬ И ТЕОРИЯ ПОДОБИЯ
[ГЛ. VIII
[Q2] = La'
единиц — система СИ, в которой единицами являются для длины — 1м,
для времени — 1 сек и для массы — 1 кг (масса). Единицей силы
в этой системе является сила, сообщающая массе в 1 кг ускорение
в 1 м/сек2; такая единица называется 1 ньютон, A «=1 кгм/сек2).
Кроме абсолютной можно построить различные другие системы
основных единиц, выбирая в качестве основных единиц единицы меры
для трех каких-либо независимых между собой механических величин.
Найдем условие, необходимое и достаточное для того, чтобы три
механические величины Qv Q2, Q3 были между собой независимы.
Пусть размерности этих величин в абсолютной системе будут
B3)
Тогда единицы меры qlt q2, q3 для этих величин выразятся через /, t, m
в виде
B4)
где я,, п2, пг — численные коэффициенты, которые соответствующим
выбором <7i> Чч> Чъ можно всегда сделать равными единице. Если
величины Q], Q2, Q3, а следовательно, и единицы их измерения qx, qv q3
между собой независимы, то из уравнений системы B4) можно опре-
определить /, t, т. как функции qlt q2, q$, для этого нужно, чтобы соот-
соответствующий определитель Якоби был отличен от нуля, т. е. чтобы
г, Яз)
д (I, t, m)
a2la* lt
*-VJ,
y2l
m
ФО.
Умножая столбцы определителя последовательно на /, t, m, т. е.
весь определитель на Um, и деля строки определителя последова-
последовательно на ta'i
Q2, Q3 в виде
Pi«,Yi
, т. е. весь определитель на
\ получим условие независимости величин Qx,
«2 Р2 у2 ФО. B5)
Рз Уз
Итак, для того чтобы три механические величины Q,, Q2 и Q3
были между собой независимы, необходимо и достаточно, чтобы
i 31]
ИЗМЕРЕНИЕ И РАЗМЕРНОСТЬ МЕХАНИЧЕСКИХ ВЕЛИЧИН
313
определитель, составленный из показателей размерности этих величин,
был отличен от нуля (причем размерность может считаться относи-
относительно любой системы основных единиц).
7. Переход от одной системы основных единиц к другой.
Пусть в системе основных единиц /, t, m единицей меры какой-либо
величины R является
r = ftbmc. B6)
Чтобы найти единицу меры (или размерность) той же величины /?
в каких-то других основных единицах qlt q2, q3, нужно из урав-
уравнений системы B4) выразить единицы I, t, m в новых основных
единицах qlt q2, q3 и подставить эти значения в равенство B6).
Допустим, что, разрешая систему B4), мы получаем
I = Vj q\ qf q\
t = v2
Подставляя эти значения в B6), найдем, что единицей меры вели-
величины R в новой системе основных единиц будет
/¦' = V qali+bli+cb даг],+Ьц2+ст\з qat,+bl2+cl^ B7)
При этом надлежащим выбором единиц можно всегда сделать v=l.
В качестве примера возьмем за систему основных единиц еди-
единицы длины, времени и силы, т. е. I, t, f. Выражения этих новых
основных единиц через единицы I, t, m будут
f = ir2m.
B8)
Такая система употребляется столь же часто, как и абсолютная,
и называется технической или практической (см. ч. I, § 14, п. 3).
Основные единицы этой системы независимы, так как
1 О О
0 1 О
1 — 21
Разрешая уравнения B8) относительно /, t, m, получаем для
перехода от абсолютной системы к технической соотношения
l = t, т = /BГ]
B9)
314 РАЗМЕРНОСТЬ И ТЕОРИЯ ПОДОБИЯ [ГЛ. VIII
Таким образом, например, если единицей меры энергии ? в абсо-
абсолютной системе /, t, m является
е = ?Г2т, C0)
то в технической системе /, t, / этой единицей будет
Рассмотрим теперь другой пример. Возьмем за основные еди-
единицы единицы скорости, ускорения и силы v, w, f. Выражения этих
единиц через единицы /, t, т имеют вид
г> = /гУ, w = lt~2m°, f = ir2m. C2)
Так как
1 — Г 0
1 — 20
1 — 21
то эти величины независимы, а следовательно, такая система основ-
основных единиц возможна. Формулы перехода от единиц измерения
в абсолютной системе к единицам измерения в системе v, w, f
найдутся из уравнений C2) в виде
/ = — * = — т = -?- C3)
w ' да ' w '
Подставляя, например, эти значения в равенство C0), найдем, что
единицей измерения энергии в системе v, w, f будет
-.л _.. п у.
w2v2w
8. Метод нулевых размерностей. Метод нулевых размерностей
основан на теореме однородности (п. 5) и может с большим успехом
применяться для определения характера зависимости какой-лцбо физи-
физической величины от других величин, ее обусловливающих. Посред-
Посредством этого метода можно частично, а в некоторых случаях и вполне,
установить закон, дающий связь между величинами с точностью до
безразмерного (отвлеченного) коэффициента, который может быть
определен или теоретически, или экспериментальным путем.
Пусть некоторая величина Q зависит от ряда других величин Qlt
Q2, ..., Qn и некоторых безразмерных величин x:, щ, .... и пусть
единицы меры для этих величин будут соответственно q и qlt q2, .... qn\
тогда единица меры q будет зависеть от qv q2 qn и xt, и2 т. е.
Ч = /(Яг. Яг. <7з- ••¦• Яп'' «1. К2- •••)• C4)
Выберем из величин qv q2, . .., qn три какие-либо независимые
между собой величины, удовлетворяющие условию B5), напри-
§ 31] ИЗМЕРЕНИЕ И РАЗМЕРНОСТЬ МЕХАНИЧЕСКИХ ВЕЛИЧИН 315
мер qx, q2, q3, и примем их за основные единицы новой системы;
тогда остальные величины q, q4, q5, . . ., qn будут производными
в этой новой системе единиц и выразятся через основные еди-
единицы 0i> q2, ft- Пусть размерность величины Q в новой системе
будет
3
Принимая во внимание, что уравнение C4) должно обладать тройной
однородностью относительно qv q2, q3 (п. 5) и заменяя в C4)
qv q2 qn отношениями этих величин к их единицам меры
в новой системе qx, q2, q3, будем иметь
q = <fl<&<nF(\. 1. 1. qv qv .... qn\ *v *,. . . .), C5)
О
где qx обозначает безразмерную величину, равную отношению qt
к ее единице меры, выраженной через qv q2, q3, причем, очевидно,
о о п
9Г1 = ?2 = 9'3=1»
Таким путем, величина q (или Q) может быть представлена в виде
произведения некоторых степеней величин qlt qv qb (или Qlt Q2, Q3)
на безразмерный коэффициент F, зависящий от безразмерных аргу-
аргументов, благодаря чему структура данной величины становится более
определенной.
Этот метод точно так же применяется и в том случае, когда
в ряде величин qx, q2, ..., qn имеются только две, между собой
независимые, или даже одна, которые можно выбрать за основные
и через них выразить все остальные.
9. Примеры. 1) Математический маятник. Период колеба-
колебания математического маятника может зависеть только от его длины I,
массы т, ускорения силы тяжести g и начального угла отклоне-
отклонения ф0, т. е.
Гн = /(/, т. g. ф0).
Здесь ф0 — величина безразмерная, а размерности остальных величин
в абсолютной системе L, Т, М будут
Эти величины, как легко видеть, удовлетворяют условию B5)
и, следовательно, между собой независимы. Возьмем за основные
единицы новой системы I, m, g. Так как размерность Тм в си-
системе L, Т, М есть
то в системе I, m, g размерность Тн будет
V Mj — * S — I/ —.
316 РАЗМЕРНОСТЬ И ТЕОРИЯ ПОДОБИЯ [ГЛ. VIII
следовательно,
/~F(ll,l,tpd или Гм =
где F (ф0) есть безразмерный коэффициент, который зависит от ф0 и,
как известно (см. ч. I, § 38, п. 5), равен АК- Для малых колеба-
колебаний, учитывая из соображений симметрии, что F{—%) = F($q),
т. е. что /^(фо) — функция четная и считая ее при этом регулярной,
можно положить
Пренебрегая здесь членами с ф^ и выше, получим F (ф0) ~ а = const;
как известно, из решения соответствующей задачи а=2я.
2) Движение вязкой жидкости в трубе круглого сечения.
При движении вязкой жидкости в ней возникают силы «внутреннего
трения», т. е. силы, противодействующие относительному переме-
перемещению смежных слоев. Если взять в жидкости два соседних слоя,
то эта сила, отнесенная к единице площади, будет, как показывает
опыт, пропорциональна разности dv скоростей частиц жидкости
в соседних слоях, отнесенной к расстоянию dn между слоями, т. е.
dv
^ dn
Коэффициент пропорциональности ц, зависящий от природы и состоя-
состояния жидкости, называется коэффициентом вязкости. Размерность \х
в абсолютной системе LTM определится из уравнения
откуда
[ji] = L~ T~ M.
Для жидкости, текущей по горизонтальной трубе круглого сече-
сечения, величина давления р в каком-нибудь сечении трубы зависит
от диаметра трубы D, средней скорости V, плотности жидкости р
и коэффициента вязкости ;х, т. е.
p = f(D, V, p, ц).
Размерности этих величин в абсолютной системе LTM будут
[D] = L, [V) = LT~\ [p] = Z.~3M, [p]=L~1T~2M.
Выберем за основные единицы величины D, V, р, которые, как
легко видеть, между собой независимы, так как удовлетворяют
условию B5). Размерности \i и р в системе (D, V, р) будут
§ 31] ИЗМЕРЕНИЕ И РАЗМЕРНОСТЬ МЕХАНИЧЕСКИХ ВЕЛИЧИН 317
поэтому
F есть безразмерный коэффициент, зависящий от безразмерной (от-
(отвлеченной) величины
J
___J_
DVp R "
Отвлеченная величина R = — называется числом Рейнольдса.
Это число играет большую роль при изучении динамики вязкой
жидкости.
3) Сопротивление прямоугольной пластинки. Тонкая прямо-
прямоугольная пластинка, двигаясь в жидкости поступательно, испытывает
со стороны жидкости сопротивление. Сила сопротивления W зависит
от размеров пластинки а и Ь, ее скорости V, угла 0 между пло-
плоскостью пластинки и направлением ее поступательной скорости, давле-
давления жидкости р, плотности р и коэффициента вязкости ц, т. е.
W = f(a, b, 0, v, р, р, ц).
Вместо размеров пластинки а и Ь введем новые величины
a = ab, k = ^-;
о
тогда
W = fl(a. v, р, р, (х, k, 6).
Размерности всех этих величин в системе LTM будут
[a] = L2, [v)=LT~1, [p] = L~3M, [p] = L~1T~2M,
Выберем за основные единицы величины о, р, V, которые удо-
удовлетворяют условию B5) и, следовательно, между собой независимы;
тогда размерности предыдущих величин в новой системе о, p. v
выразятся так:
отсюда
Величина F есть безразмерный коэффициент, зависящий от безраз-
безразмерных аргументов
а ь _ а мч.— vl q2t>P
(/$Г'
22 Н. Н. Бухгольц
318 РАЗМЕРНОСТЬ И ТЕОРИЯ ПОДОБИЯ [ГЛ. VIII
Величина k есть удлинение пластинки, М = —^г (так назы-
ваемое число Маха) есть отношение поступательной скорости пла-
пластинки к величине Т/ — , равной скорости распространения звука
в той среде, в которой движется пластинка; R есть число Рей-
нольдса, встречавшееся в предыдущем примере.
Таким образом, сопротивление пластинки выражается формулой
W = F(M, R, k, Q)apv2.
Эта формула первоначально была дана Ньютоном, который предпо-
предполагал коэффициент F постоянным.
§ 32. Теория подобия механических систем
1. Теория подобия механических систем возникла из практиче-
практического вопроса о сравнении условий работы двух геометрически по-
подобных сооружений. Первоначальные исследования в этом направле-
направлении принадлежат Галилею, который в своих знаменитых «Discorsi»'}
ставит вопрос о том, что весьма часто модель машины работает
иначе, чем оригинал, и находит причину этого обстоятельства в раз-
различии возникающих во время движения сопротивлений. Основная
теорема о механическом подобии дана Ньютоном.в его «Математи-
«Математических принципах натуральной философии» (книга II, отдел 1, пред-
предложение 22), где на основании этой теоремы выводится закон со-
сопротивления жидкости движущимся в ней телам.
Понятие «механическое подобие» гораздо сложнее, чем понятие
«геометрическое подобие», потому что здесь приходится учитывать
не только отношение соответственных линейных размеров, но и
других величин, кинематических и динамических, обусловливающих
движение сравниваемых механических систем; поэтому для того,
чтобы две геометрически подобные механические системы (например,
оригинал и модель какого-либо сооружения) были подобны механи-
механически, необходимо ввести еще ряд дополнительных условий.
2. Геометрическое и материальное подобие. Две системы то-
точек Ль Ач, .. ., Ап и Л], А'2, ..., Ап называются геометрически
подобными, если между точками этих систем можно установить
взаимно однозначное соответствие так, чтобы соответственные от-
отрезки находились в постоянном отношении, т. е. чтобы было
=% (/, k=zl, 2 Я).
') Есть русский перевод: Галилео Галилей, Беседы и математиче-
математические доказательства. ГТТИ, М. — Л., 1934.
§ 32] ТЕОРИЯ ПОДОБИЯ МЕХАНИЧЕСКИХ СИСТЕМ 319
Из этого определения следует, что углы между соответственными
отрезками равны, что какая-либо фигура, составленная из точек
первой системы, подобна геометрически фигуре, составленной из
соответственных точек второй системы, что отношение соответствен-
соответственных площадей есть А,2, а соответственных объемов Я,3 и т. д.
Если точки Ль A<i А„ и А[, Ач А„ двух геометри-
геометрически подобных систем снабжены массами (т. е. будут материальными
точками) и если массы соответственных точек щ, т2 тп и
т[, т'2 т'п находятся в постоянном отношении, т. е.
-2LL = H (/=1, 2 л),
mt
то такие системы материальных точек называются материально
подобными. Простейшим примером материально подобных систем
являются оригинал и модель какого-либо сооружения, в которых
соответственные части сделаны из одного и того же материала
(в этом случае (х=1).
3. Кинематическое подобие. Геометрическое подобие двух си-
систем точек E) и (?') можно установить, сравнивая конфигурацию
системы (S) в какой-либо момент t с конфигурацией системы (S')
в другой момент t' (в частности, t = t'); эти моменты будем назы-
называть соответственными моментами. Если в частном случае си-
системы (S) и (?') будут неизменяемыми, то геометрическое подобие
этих систем, установленное для соответственных моментов t и f
(в частности, для одного момента), будет сохраняться все время,
т. е. геометрическое подобие двух неизменяемых систем не нару-
нарушается. Но тем не менее две геометрически подобные неизменяемые
системы могут двигаться относительно некоторой системы отсчета
совершенно различно, с различными скоростями и ускорениями со-
соответственных точек, которые могут описывать произвольные траек-
траектории; отсюда следует, что наличие геометрического подобия для
последовательности соответственных моментов еще недостаточно для
того, чтобы системы точек были подобны кинематически, т. е. чтобы
одна система в увеличенном или уменьшенном виде копировала дви-
движение другой системы.
Для определения кинематического подобия двух точечных систем
(S) и E') будем рассматривать движение системы E) относительно
системы отсчета О и движение E') относительно системы отсчета О',
причем системы отсчета О и О' неподвижны относительно основной
системы отсчета 2; тогда E) вместе с О, так же как (S') с О',
будут представлять собой фигуры, изменяющиеся с течением вре-
времени, которые можно считать новыми точечными системами @5)
и (O'S').
Если можно установить непрерывную последовательность соот-
соответственных моментов t и ? (считаемых от одного и того же
22*
320 РАЗМЕРНОСТЬ И ТЕОРИЯ ПОДОБИЯ [ГЛ. VIII
начального момента), для которых системы @5) и @'5') будут гео-
геометрически подобны с постоянным, не зависящим от времени отно-
отношением подобия к, причем соответственные моменты связаны между
собой соотношением
t — xt', A)
где х постоянно, то движущиеся системы E) и E') называются ки-
кинематически подобными.
Примечание. Если соответственные моменты t и ? считаются от раз-
различных начальных моментов tQ и t'o, то соотношение A) имеет вид
Из определения кинематического подобия двух систем E) и E')
вытекают следствия:
1) Траектории соответственных точек двух кинематически подоб-
подобных систем геометрически подобны с отношением подобия %, равным
отношению геометрического подобия движущихся систем в соответ-
соответственные моменты времени.
Действительно, пусть координаты какой-либо точки At системы E)
относительно системы отсчета О в момент t будут xt, yh zt, а ко-
координаты соответственной точки А\ кинематически подобной си-
системы E') относительно системы отсчета О' в соответственный мо-
момент ? будут х'г y'it z't-t тогда, так как системы @5) и (O'S')
в соответственные моменты времени, согласно определению, геоме-
геометрически подобны, будем иметь
xt(t) = Xx'i(f). yt(t) = W). zi(t) = bz'l(t') B)
(/ = 1, 2 п)
для двух любых соответственных моментов t и f. Следовательно,
траектории соответственных точек А и А' будут геометрически по-
подобны. Отсюда следует, что фигура, состоящая из совокупности
траекторий точек системы E), будет подобна геометрически фигуре,
состоящей из траекторий соответственных точек системы E').
2) В соответственные моменты времени модули скоростей соот-
соответственных точек двух кинематически подобных систем E) и E')
находятся в постоянном отношении Ад:, а модули ускорений —
в постоянном отношении Хх~2, причем системы векторов скоростей
и ускорений этих точек для различных моментов времени предста-
представляют собой геометрически подобные фигуры (конечно, при одина-
одинаковых масштабах построения).
В этом легко убедиться, дифференцируя равенства B) один и два
раза по t и принимая во внимание, что на основании A)
dt = xdt'. C)
§ 32] ТЕОРИЯ ПОДОБИЯ МЕХАНИЧЕСКИХ СИСТЕМ 321'
Имеем
dx, dx', dt' dx\
-W = %sr-dr = u ~dF> или "'.r = k"V«^' D>
d Xf d x, dt d x
U-2—г, или wlJt = kt-*w'u,, и т. д. E>
dt' ~ dt'2 dt
(I—I, 2
Из равенств D) и E) видно, что проекции скорости и ускорения-
соответственных точек на координатные оси систем О и О' в соот-
соответственные моменты находятся в постоянном отношении, а отсюда,
непосредственно следует, что и модули скоростей и ускорений на-
находятся в том же отношении, а векторы скоростей и ускорений*
одинаково ориентированы относительно соответственных траекторий.
4. Механическое (или динамическое) подобие. Если две си-
системы (S) и (S') подобны кинематически и материально, то такие
системы называются механически подобными. Для механически по-
подобных систем, вследствие их кинематического подобия, имеем для;
соответственных частиц и моментов
wi = lx-2w'i (i=l, 2 л), F>
а вследствие материального подобия
ml = \xm'i (i= I, 2 л). G>
Перемножая равенства F) и G) с одинаковыми индексами, по-
получим
miwi = Хх~2\х • т'{ео\ (/=1, 2, .... л). (8>
Принимая во внимание, что
miwi = Fi, m'iw\ = F'i (l= 1, 2, .. ., л), (9>
где F. и F\ суть модули сил, действующих в соответственные мо-
моменты на соответственные частицы двух механически подобных си-
систем, находим из (8)
/^(pF! (/ = 1, 2, .... л), A0>
тде
Ф = Ят-2ц A1).
есть постоянное число. Итак, в механически подобных системах
в соответственные моменты времени соответственные длины, модули
соответственных скоростей, ускорений и сил находятся в постоянных
отношениях, равных X, Ят~\ hx~a, Ят~2|1; кроме того, векторы сил,
так же как и ускорений, одинаково ориентированы.
322 РАЗМЕРНОСТЬ И ТЕОРИЯ ПОДОБИЯ [ГЛ. VUT
б. Теорема Ньютона. Пусть система (S) и система E') удовле-
удовлетворяют следующим условиям: 1) в соответственные начальные мо-
моменты tQ и t'o система E) материально подобна системе (S1); 2) в эти
начальные моменты скорости соответственных точек систем E) и (S')
имеют пропорциональные модули и подобно расположены, т. е.
пусть для соответственных начальных моментов tQ и t'u
(/=1. 2 л)
и
mt = \un't A=1, 2 я). A3)
и пусть, наконец, 3) силы, действующие на соответственные точки
систем (S) и E') в соответственные моменты движения этих систем t
и f, имеют пропорциональные модули с постоянным отношением
хр = Я,т~2ц и подобно расположены, т. е. пусть
(/=1. 2 п),
причем
t-to = T(f-fy A5)
При соблюдении указанных трех условий системы E) и E') меха-
механически подобны.
Действительно, из условия 3) имеем, деля равенства A4) по-
почленно на равенство A3):
wtx = Xx-aw'lx. и т. д. (/=1. 2 п) A6)
или
_1 = А,т-»_^ и т. д. (/=1,2 п). A60
Умножая равенство A6') на dt = xdt' и интегрируя, получим
2 '
-?± = Хх-г -^1-\-а( и т. д. (/==1, 2 «). A7)
Принимая во внимание, что для начальных моментов ta и V имеют
место равенства A2), получим, что все постоянные интегрирования
равны нулю. Далее, умножая равенства A7) на dt = xdt' и инте-
интегрируя еще раз, получим
(/=1. 2 л).
§ 32] ТЕОРИЯ ПОДОБИЯ МЕХАНИЧЕСКИХ СИСТЕМ 323
причем постоянные интегрирования, в силу условия 1), обращаются
в нуль. На основании равенств A8) заключаем, что системы (S)
и E') механически подобны (см. п. 4), что и требовалось доказать.
6. Ковариантность уравнений движения. Свойства механически
подобных систем, которые дает теорема Ньютона, можно легко по-
получить, исходя из соображений о размерности механических величин.
Известно, что полная система уравнений, определяющих движение
механической системы (S) под действием данной системы сил, может
быть получена как следствие уравнения Даламбера — Лагранжа, ко-
которое иначе называется символическим уравнением динамики (см.
§ 5, п. 5 и §§ 7 и 8); это уравнение имеет вид
3N
v=i
Изменим линейные размеры системы E) в А, раз; время, в Течение
которого система переходит из одного положения в другое — в т раз;
массы точек системы — в ц раз и силы, действующие на точки си-
системы,— в ф = АТ~2|а раз, т. е. сделаем преобразование
xv = Xx'v, t = xf, »v = |i/»;. Xv = lx~'i\iX'v B0)
(v=l, 2 3W).
После преобразования B0) из системы (S) получится новая система (S'),
которая будет механически подобна системе (S).
Так как на основании B0)
dx—b dx' dt> -}.т-' dx' ¦
dt — a dt, df — at -dp-,
, , <Px' dt' , d*x'
= AT 5 = AT
t'2 dt
5 = AT 5- ,
dt'2 dt dt'2
то уравнение A9) перейдет в уравнение
т. е. в уравнение Даламбера — Лагранжа, а следовательно, и все
выводимые из него уравнения движения будут ковариантны относи-
относительно преобразования B0).
Отсюда вытекает весьма важное следствие: движения двух меха-
механически подобных систем описываются одними и теми же уравнениями,
причем параметры этих уравнений преобразуются по формулам B0);
кинематические и динамические величины, характеризующие движе-
движения механически подобных систем, при переходе от одной системы
к другой, получаются тем же преобразованием B0), которое, как.
мы видели в п. 4, можно считать определением механического подобия-
324 РАЗМЕРНОСТЬ И ТЕОРИЯ ПОДОБИЯ [ГЛ. VIII
7. Преобразование механических величин. В § 31 было уста-
установлено, что характер зависимости какой-либо механической величины
от основных единиц определяется размерностью этой величины. Пусть
гнекоторая механическая величина для системы E) имеет в абсолют-
абсолютной системе вид
Q = qfflm>i B1)
размерность этой величины, очевидно, будет
[Q] = LaT^M\ B2)
Чтобы получить значение той же величины для системы E'), меха-
механически подобной системе E), нужно сделать преобразование B0),
т. е. заменить
1-+U, t-*xt, m-±\im; B3)
тогда для системы (S') величина Q будет иметь значение
¦следовательно, численное значение величины Q для системы (S')
-будет
q = </ГтУ ¦ B4)
¦Формула B4) по своему виду похожа на формулу A7) § 31, но,
конечно, имеет совсем другой смысл, так как здесь единицы меры
не изменяются; однако число hax®\iy, на которое нужно умножить
¦численное значение q для перехода к системе (S'), совпадает с коэф-
коэффициентом перехода, благодаря чему можно установить вытекающее
.из этого обстоятельства очевидное правило.
8. Примеры. 1) Прямолинейный осциллятор. Пусть точка
массы т движется прямолинейно под действием силы, притягиваю-
притягивающей ее к неподвижному центру пропорционально расстоянию (прямо-
(прямолинейный осциллятор). Уравнение движения точки будет
— ь
— ЛХ,
еде k есть квазиупругая постоянная. Общее решение этого уравне-
уравнения имеет вид
х =
где (о = 1/ — есть круговая частота колебания точки.
Для механически подобной системы будем иметь
m'±±r==—.k'x' и A:' = asin(ft)
§ 32] ТЕОРИЯ ПОДОБИЯ МЕХАНИЧЕСКИХ СИСТЕМ 325-
(а и е — произвольные постоянные). Так как
1 ' длина
то
Чтобы механически подобный осциллятор имел ту же частоту, нужно,,
чтобы было т=1, а следовательно,
k' = \xk.
2) Центральное движение. Пусть точка массы т движется под*
действием центральной силы F = fmMr", притягивающей ее к не-
неподвижной точке с массой М пропорционально я-й степени расстоя-
расстояния; / есть гравитационная постоянная. Для механически подобно*
системы будем иметь
F' = fm'M'r'n,
откуда
Из последнего уравнения имеем
т2 = й.1-"|1-1. B5>
Если массы притягивающего центра и притягиваемой точки в обеих
системах одинаковы, то [г=1 и
В случае ньютонианского притяжения п = — 2 и
т. е. получаем 3-й закон Кеплера]).
Для ньютонианского закона притяжения формула B5) приобре-
приобретает вид
*2 = ^; B5'>
поэтому, если бы плотности тел солнечной системы остались преж-
прежними, но их размеры, так же как и взаимные расстояния, изменились-
в к раз, то, гак как при этих условиях (х = Я,3, мы имели бы, что-
т=1,
т. е. времена обращения остались бы прежними.
') Для солнечной системы этот закон справедлив приближенно, есл»
пренебречь различием в массах планет, малых по сравнению с массой Солнца
(см. ч. I, § 37, п. 8).
326 РАЗМЕРНОСТЬ И ТЕОРИЯ ПОДОБИЯ [ГЛ. VIII
9. Модели. Для изучения работы какого-либо проектируемого
сооружения весьма часто пользуются изучением его модели, т. е.
строят это сооружение в уменьшенном масштабе из тех же самых
материалов, получая таким образом систему, материально подобную
проектируемому сооружению, и экспериментально, путем измерения,
определяют все требуемые величины, а из них, пользуясь методами
теории подобия, находят соответствующие величины для этого соору-
сооружения в натуральных размерах.
При учете сил, действующих на различные части сооружения,
нужно прежде всего принять во внимание веса его составных частей,
которые в случае материального подобия изменяются пропорционально
кубам линейных размеров; поэтому веса соответственных деталей
двух материально подобных сооружений, так же как и их массы,
имеют отношение ДА Следовательно, для осуществления механиче-
механического подобия необходимо, чтобы и соответственные силы, действую-
действующие на детали, находились в том же отношении. Но это не всегда
может быть достигнуто, так как некоторые силы (например, силы
-сопротивления, различные виды трения и пр.) изменяются при пере-
переходе от одной системы к другой, механически подобной, в ином
отношении. В этом случае при построении модели для сохранения
механического подобия приходится пожертвовать материальным подо-
подобием и подбирать соответствующим образом материалы деталей и
условия их работы.
В дальнейшем будем предполагать простейший случай, когда все
¦соответственные силы, так же как и веса, находятся в отношении Я3.
Тогда будем иметь
о о о ~—
[г = X , Хх~ ц = К , откуда т = Я.2.
При этом предположении, на основании формулы B4) п. 7 для
«определения какой-либо величины Q проектируемого сооружения,
нужно соответствующую величину q, найденную для модели, умно-
умножить на переходный коэффициент
-следовательно,
Формула B6) выражает собой так называемое «правило Ньютона».
10. Примеры. 1) Статические сооружения. В статических со-
сооружениях (например, мосты, фермы, краны) действующими силами
•обыкновенно являются силы тяжести, действующие на тела, которые
эти сооружения поддерживают, следовательно, имеют место уело-
§ 32] ТЕОРИЯ ПОДОБИЯ МЕХАНИЧЕСКИХ СИСТЕМ 327
вия п. 9. Пусть напряжение в различных частях сооружения выра-
выражается величиной о, причем
сила ?-1г-2ж
1 '
площадь
следовательно, а = —1, р=—2, y=1.
Подставляя эти значения в равенство B6), будем иметь соотно-
соотношение между напряжениями в материально подобных сооружениях
в виде
2 = la.
Отсюда вытекает положение довольно общего характера, что модель-
прочнее своего оригинала (конечно, при наличии материального подо-
подобия и при условии, что модель меньше оригинала).
2) Двигатели. Для двух материально подобных и механически,
подобных двигателей внутреннего сгорания (или паровых машин) ско-
скорости соответственных частей должны находиться в отношении Ят~Ч
но так как при наших условиях т = А, , то это отношение должно-
быть равно Ук. Итак, соответственные скорости двух механически
подобных двигателей пропорциональны квадратным корням из отно-
отношения их линейных размеров. При этом необходимо заметить, что
для осуществления механического подобия давления в цилиндрах
этих двигателей не могут быть произвольными. Так как давление р
имеет размерность
[p] LTM,
площадь
т. е. такую же, как напряжение, то переходный коэффициент, на
основании равенства B6), равен I, а следовательно,
Р = 1р,
т. е. давления в цилиндрах механически подобных двигателей должны?
быть пропорциональны их линейным размерам. Отношение мощно-
мощностей двигателей получится, если, принимая во внимание размерность-
мощности
работа, = ?2;г-зЖ1
1 время
подставим в равенство B6) а = 2, р = —3, y=1; получим
Практически интересно сравнить работу двух материально подоб-
подобных двигателей при различном отношении давлений в их цилиндрах.
Для этого мы должны отказаться от условия, что соответственные
силы в двигателях пропорциональны АЛ так как в этом случае наи-
наиболее существенной силой будет сила давления на поршень, которая
328 РАЗМЕРНОСТЬ И ТЕОРИЯ ПОДОБИЯ [ГЛ. VIII
равна произведению давления на площадь поршня и будет пропорцио-
пропорциональна яЯ,2, где л; есть отношение давлений; остальными силами
(силами тяжести и вредными сопротивлениями) будем пренебрегать,
так как в неподвижных двигателях веса отдельных частей достаточно
уравновешены и предполагается хорошая смазка. Для механического
подобия необходимо (см. п. 4), чтобы соответственные силы нахо-
находились в отношении Кх~2ц, т. е. чтобы
причем вследствие материального подобия ц = ДА Остюда
п = l2x~2 = (tar1J,
т. е. соответственные скорости (см. п. 3) будут пропорциональны
квадратным корням из давлений. Если давления в цилиндрах обоих
двигателей одинаковы, т. е. л=1, то линейные скорости равны.
При я=1 отношение угловых скоростей, или, что то же, чисел
оборотов в минуту, равно х~1 = Х~1, ибо х = %; отношение мощ-
мощностей будет
3) Сопротивление движению судов. Суда при своем движении
по воде испытывают сопротивление движению, которое при употреб-
употребляемых скоростях можно считать пропорциональным квадрату ско-
скорости. Так как сопротивление движению судна пропорционально пло-
площади миделевого сечения и квадрату скорости, то сопротивления
двух материально подобных судов пропорциональны
(здесь приняты во внимание условия п. 9 и то, что т = яУ*); сле-
следовательно, силы сопротивления также удовлетворяют условиям п. 9,
а поэтому можно пользоваться формулой B6). Так как отношение
скоростей двух механически подобных систем равно Хх~1, а при усло-
условиях п. 9 T = A,'f, то отношение скоростей двух материально подоб-
подобных судов будет равно %'*. Отсюда вытекает так называемое пра-
правило Фруда: если какое-либо судно при скорости v имеет сопроти-
сопротивление /?, то судно, материально подобное, при скорости v У~Т,
будет иметь сопротивление R№, где к есть отношение линейных
размеров.
ЛИТЕРАТУРА
Жуковский Н. Е., Теоретическая механика, изд. 2, 1952.
К и р п и ч е в В. Л., Беседы о механике, изд. 4, 1950.
Крылов А. Н., Вибрация судов, 1936
Ландау Л. Д. иЛифшиц Е. М., Механика, 1966.
Лойцянский Л. Г. и Лурье А. И., Курс теоретической механики, т. 2,
изд. 5, 1955.
Лурье А. И„ Аналитическая механика, 1961.
Р о з е Н. В., Динамика твердого тела, 1932.
Седов Л. И., Методы подобия и размерности в механике, изд. Б, 1965.
Суслов Г. К., Теоретическая механика, изд. 3, 1946.
X а й к и н С. Э., Физические основы механики, 1963.
Чаплыгин С. А., Механика системы, 1923—1924, а также в Собрании со-
сочинений, т. IV, 1949.
Аппель П., Теоретическая механика, т. II, перев. с франц., 1960.
Балле Пуссен Щ. Ж., Лекции по теоретической механике, т. II, перев.
с франц., 1949.
Вебстер А., Механика материальных точек, твердых, упругих и жидких
тел, перев. с англ., 1933.
Голдстейи Г., Классическая механика, перев. с англ., 1957.
Л а м б Г., Теоретическая механика, т. 2 и т. 3, перев. с англ., 1936.
Леви-Чивита Т. и Амальди У., Курс теоретической механики, т. II,
ч. 1 и ч. 2, перев. с итал., 1952.
П л а н к М., Введение в теоретическую физику, ч. 1, Общая механика, перев.
с нем., 1933.
Поль Р., Введение в механику и акустику, перев. с нем., 1933.
У и т т е к е р Е. Т., Аналитическая динамика, перев, с англ., 1937.
По теории гироскопа
Булгаков Б. В., Прикладная теория гироскопов, изд. 2, 1956.
Ишлинский А. Ю., Механика гироскопических систем, 1963.
Крылов А. Н. и Крутков Ю. А., Общая теория гироскопов, 1932.
Грамм ель Р., Гироскоп, его теория и применение, т. I и II, перев. с нем.,
1952.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Аксоид неподвижный 161
— подвижный 161
Апекс 204
Аппеля уравнения 99
Вариация гауссова 254
— изохронная 261
— полная 261
— простая 261
Вектор количества движения системы
главный 13
Величина безразмерная 309
— геометрическая 307
— динамическая 309
— кинематическая 308
— кинетическая 309
Волчок 214
— Максвелла 181
Вращение тела вокруг неподвижной оси
147
Гамильтона преобразование 225
— принцип стационарного действия 262,
265, 266, 277
— уравнение 231
— функция 229, 232, 265
главная 239
Гаусса принцип 252, 253, 256
Геометрия масс 128
Герполодия 193, 196
Герполодограф 200
Герца принцип прямейшего пути 258
Гироскоп 214
—, его элементарная теория 214
— симметричный 201, 208
Гюйгеиса теорема 24
Даламбера принцип в теории удара 295
для системы 59, 65
для точки 59
Даламбера — Лаграижа принцип 251, 256
уравнение 65
в теории удара 245
Движение неустойчивое 197
— относительно центра масс 34
— ракеты в однородном поле тяжести 51
• вне поля сил 50
— свободного твердого телв 224
— тела, имеющего одну неподвижную точ«
ку 160
плоскопараллельное 154
Движение тяжелого твердого тела около
неподвижной точки 175, 180, 181, 183, 187,
201, 221
— тяжелой нити вертикальное 54
— устойчивое 197
— центральное 325
Действие по Гамильтону 264, 268, 269
— по Лагранжу 271
— по Мопертюи 270
Единица меры 306
Единицы основные 307
— производные 308
Жуковского правило 220
Игнорирование (исключение) координат
93
Импульс обобщенный 228
— ударный 287
Интеграл геометрический 243
— кинематический 243
— промежуточный 243
— циклический 93
— энергии 72
обобщенный 83, 84
— Якоби 83
Интегралы движения первые 24, 27, 32, 33,
40
— канонической системы уравнений пер
вые 234
Карно теорема 291, 294
Кёнига теорема 20
Колебания главные 122
— системы малые 109
Количество движения системы 13
Конус прецессии 161
— собственного вращения 161
Координаты главные 120
— лагранжевы 74
— нормальные 120
— обобщенные 74, 228
— циклические 92, 227
Коэффициент восстановления ИЗ, 29»
— инерции 113
— квазнупругий ИЗ
— сопротивления ИЗ
— формы колебаний 124
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
331
Кристоффеля символ 91
второго ряда 92
Лагранжа принцип 251
— уравнения второго рода 77
для системы, находящейся под
действием потенциальных сил 81
для удара 297
первого рода 72
— функция 81
Лежеи Дирихле теорема 125
Ляпунова теоремы 127
Максвелла волчок 181
Маятник баллистический 304
— математический 3E
— оборотный 153
— физический 15!, 153
двойной 120
Метод нулевых разчерностей 314
— Пуассона 244
— Якоби 238
Мешерского уравнение 48
Модели и их испытание 326
Момент второй степени 130
— геометрический я-й степени 129
— инерции геометрический 13J, 132
— — осевой (относительно оси) 18, 22, 130,
131, [3d, 135
относительно плоскости 130
точки 130
полярный 130
центробежный 130
— кинетический 13, 14, 16S, 170
— количества движения главный 13
— первой степени 129
— статический 129
Моменты ииерцни главные 142
Мопертюи — Лаграижа принцип стационар-*
иого действия 270, 272, 274, 275, 277,
278
Ныотоиа правило 326
— теорема 322
Нутация (нутационное Движение) 205, 206
Оси инерции главные 139, 143
, их динамический смысл 171
— — — центральные 144
Осциллятор прямолинейный 324
Ось вращения свободная 151
— нутации 163
— прецессия 162, 163
— собственного вращения 161, 163
Переменные канонические 22S
— лаграижевы 227
Перемещение виртуальное 10, Ц
— истинное If
Плоскость Пуансо неподвижная 192
Поверхность подерная 146
Подвес карданов 214
Подобие геометрическое 318
— динамическое 321
— кинематическое 320
— материальное 319
механическое 318, 321
Полодия 193
Потенциал кинетический 81
Правило Жуковского 220
— Ньютона 326
Преобразование Гамильтоиа 228
— каноническое 236, 279, 282
— Пуассона 228
Прецессия вынужденная 220
— обратная 162
— прямая 162
— псевдорегулярная 208
— регулярная 161
Принцип виртуальных перемещений 250
— Гаусса 252, 253, 256
— Даламбера в теории удара 288 295
для системы 59, 65
для точки 59
— Даламбера — Лагранжа 251, 256
— Лагранжа 252
— наименьшего принуждения 252, 253
— прямейшего пути Герца 258
— стационарного действия Гамильтона 262
265, 266, 277
Мппертюи — Лагранжа 270, 272, 274,
275, 277, 278
Принципы механики 249, 250
вариационные 250
— — дифференциальные 250
интегральные 250 260
невариационные 250
Произведения инерции 130
Пуаисо геометрическая интерпретация дви-
движения тела около неподвижной точки
189
— плоскость 192
— теоремы 190, 191
— эллипсоид 145
Пуассона метод 244
— преобразование 228
— скобка 245
— теорема 246
— тождество 245
Путь окольный 263
— прямой 263
Равновесие неустойчивое 117. 124, 125
— устойчивое 117, 118. 119, 124, 125
Радиус инерции 22. 133
Размерность величины 308
Рауса уравнение 97
— функция 93
Реакции динамические 150
Связь 7
— геометрическая 8
— дифференциальная 8
— кинематическая 8
— конечная 8
— неосвобождающая 7
— нестационарная 8
— освобождающая 7
— реономная 8
— склерономная 7. 8
— стационарная 7
Сила гироскопическая 84
— обобщенная 75, 80
— потерянная 59
— реактивная 49
— ударная 287
Символ Кристоффеля 91
второго рода 92
332
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Система голономиая 9
— динамическая 82, 227
— единиц основных 310, 311
— абсолютная 311
техническая 313
СИ 312'
CGS 311
— лаграажева 82
— механическая 7
¦ консервативная 40
— неголономная 9
— неизменяемая 128
— нормальная 228
— уравнений движения каноническая 279
Скобка Пуассона 245
Скорость нутации угловая 163
— прецессии угловая 163
— собственного вращения угловая 163
Тело абсолютно твердое 128
— переменной массы 47
Тензор ннерцин 137
Теорема Гюйгенса 24, 134
— Карно 291, 294
— Кёнига 20
— Лежен Дирихле 125
— Ньютона 322
— о движения центра масс 27
— о кинетическом моменте системы 16
— о количестве движения системы D-
— об изменении кинетического момента
системы 31, 68
— об изменении кинетического момента
системы при ударе 293
— об изменении кинетической энергии си-
системы 38, 41, 68
— об изменении количества движения си-
системы 26, 66
— об изменении количества движения при
ударе 287, 292
— об изменении момента количества дви-
движения при ударе 288
— однородности 310
— площадей 31
— Пуассона 246
— Якоби 240
Теоремы динамики системы общие 24,
65
— Ляпунова B7
— Пуансо 190
Тождество Пуассона 245
Точка изображающая 78
— переменной массы 47
— шаровая 143
Траектория сравнения 263
Углы Эйлера 163
Угол иутацин 163
— прецессии 163
— собственного вращения 183
Удар 286
— абсолютно неупругий 289
упругий 289
— двух тел прямой 302
— упругий 290
— твердых тел 297
шаров 302
Уравиеине вековое N0
— Даламбера — Лаграижа 65
в теории удара 295
— динамики символическое 65
— Мещерского 48
— Рауса 97
— характеристическое 114, 140
— частот 114
— Якоби 239
Уравнения Аппеля 99
— Гамильтона 231
— движения системы в декартовых коор-
динатах 69
в обобщенных координатах 74
для точки переменной масси 47
— Лагранжа второго рода 77
для системы, находящейся под
действием потенциальных сил S!
¦ — для удара 297
первого рода 72
— малых движений системы вблизи по*
ложения равиовесил ИЗ
— Чаплыгина 107
— Эйлера динамические 174, 225
кинематические 164, 174
Устойчивость вращения вокруг главных
осей эллипсоида инерции 197
Функция Гамильтона 229, 232, 265
главная 239
— главная в уравнении Якоби 268
— диссипативная 109
— Лаграижа 81
— производящая 281
— рассеяния 109
— Рауса 93
Центр качаний физического маятника 153
— удара 301
Циолковского формула 50
Чаплыгина уравнения 107
Частота собственная 122
Число степеней свободы 12
Члены гироскопические 83
Эйлера уравнения динамические 174, 225
кинематические 164, 174
Эллипсоид инерции 139
взаимный 145
гирациоиный 145
центральный 139
— Пуансо 145
— энергии 169
Энергия кинетическая 19, 20, 167
в обобщенных координатах 77
— — твердого тела 21
— система потенциальная 39, 40
— ускорений 99
Эффект гироскопический 220
Явления гироскопические 2E
Якоби интеграл 83
— метод 238
— теорема 240
— уравнение 239