/

















































































































Text
I. II. 1»11’13КИП
РЕШЕНИЕ ЗАДАЧ ПО ТЕОРЕТИЧЕСКОЙ
МЕХАНИКЕ
Часть третья
ИЗДАТЕЛЬСТВО МОСКОВСКОГО УНИВЕРСИТЕТА
1977
МИНИСТЕРСТВО ВЫСШЕГО И СРЕДНЕГО СПЕЦИАЛЬНОГО ОБРАЗОВАНИЯ СССР
НАУЧНО-МЕТОДИЧЕСКИЙ КАБИНЕТ ПО ЗАОЧНОМУ И ВЕЧЕРНЕМУ ОБУЧЕНИЮ МОСКОВСКОГО ГОСУДАРСТВЕННОГО УНИВЕРСИТЕТА имени М. В. ЛОМОНОСОВА
Е. Н. БЕРЕЗКИН
РЕШЕНИЕ ЗАДАЧ
ПО ТЕОРЕТИЧЕСКОЙ МЕХАНИКЕ
ЧАСТЬ ТРЕТЬЯ
ДИНАМИКА СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК
Учебно-методическое пособие для студентов-заочников механико-математических факультетов государственных университетов
ИЗДАТЕЛЬСТВО МОСКОВСКОГО УНИВЕРСИТЕТА
1977
Рекомендовано кафедрой теоретической механики механико-математического факультета МГУ
Рецензенты:
профессор Ю. А. Архангельский, доцент Н. Н. Колесников
Введение .3
Динамика системы материальных точек....................4
Основные теоремы динамики системы материальных течек 4
Некоторые особенности применения теорем . . .21
Определение реакций .связи . '......................27
Неидеальные связи...................................32
Уравнения Лагранжа второго рода.....................44
Малые колебания механической системы около положения устойчивого равновесия ......... 59
Вращение твердого тела вокруг неподвижной оси и неподвижной точки............................................ 75
Элементы теории удара . . . ,.....................83
Ответы и методические указания к задачам . .91
Литература..............................................112
© Издательство Московского университета, 1977 г.
ВВЕДЕНИЕ
Третьей частью завершается издание пособия по решению задач по теоретической мек-анике. В нее ©ош<ли задачи по -разделам: общие теоремы динамики системы материальных точек, уравнения Лагранжа второго рода, малые колебания системы материальных точек, .вращение твердого тела вокруг неподвижной оси и точки, элементы теории удара. Особенное внимание обращено на применение общих теорем динамики системы и уравнений Лагранжа второго рода.
Основная цель третьей части пособия заключается в том, чтобы научить составлять дифференциальные уравнения движения механических систем и с их помощью проводить элементарный анализ движения системы.'
Здесь приведен разбор многочисленных примеров. Прежде чем приступать к самостоятельному решению задач, рекомендуется изучить теоретический материал но одному из предлагаемых в конце книги руководств и внимательно прочитать данные нами указания.
Примеры на применение уравнений Гамильтона, метода Гамильтона—Якоби и других методов аналитической механики в настоящем пособии не рассматриваются.
ДИНАМИКА СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК
Основные теоремы динамики системы материальных точек
В основу динамики -системы материальных точек можно положить общий принцип, из которого -следуют все свойства движения такой системы. Этим принципом является принцип Даламбера—Лагранжа, справедливый для всех -механических систем с идеальными связями, т. е. такими связями, сумма работ реакций которых равна нулю на любом возможном перемещении 'системы. Если исходить из этого принципа, то изучение движений механической системы будет связано с анализом ее возможных перемещений.
Движение ‘механической системы так же, как и движение одной материальной точки, определяется силами, действующими на точки системы. Как и для одной материальной точки действующие силы -могут быть разделены на активные и пассивные. Последние не создают движения точек системы, а только накладывают ограничения на характер движения точек. Пассивные силы называют еще реакциями связей.
Уравнения движения, которые могут быть получены из принципа Даламбера—Лагранжа, не содержат реакций связей, и движение определяется только одними активными силами, действующими н-а точки системы.
Математически принцип Даламбера—Лагранжа представляется в виде общего уравнения динамики
п
2 (mv jv — Fv)6rv =0,
V = 1
где jv —вектор ускорения v-й точки системы;
Fv — равнодействующая активных сил, действующих на v-ю точку системы;
rv —радиус-вектор v-й точки.
Наиболее простым следствием общего уравнения динамики являются общие теоремы динамики системы материальных точек: теорема об изменении количества движения системы материальных точек, теорема об изменении .момента количества движения системы и теорема живых сил. Эти теоремы мо
4
гут -быть получены из принципа Даламбера—Лагранжа при некоторых частных предположениях о связях, накладываемых на систему .материальных точек. Ню в математичеакие уравнения, которые выражают полученные таким образом теоремы, не входят неизвестные реакции связей, и движение системы определяется одними только активными силами.
Приведем формулировки основных теорем динамики системы материальных точек:
1. Теорема об изменении количества движения системы (теорема о движении центра масс). Если связи, наложенные на систему материальных точек, допускают поступательное перемещение всей системы квк одного целого вдоль некоторого неподвижного направления, то производная по времени от проекции количества движения системы на это направление равна сумме проекций внешних активных сил на данное направление.
2. Теорема об изменении момента количества движения системы. Если среди возможных перемещений имеется поворот всей системы, как одного твердого тела, вокруг некоторой неподвижной оси, то производная по времени от проекции момента количества движения системы на эту ось равна сумме моментов внешних активных сил относительно той же оси.
3. Теорема живых сил. Если действительные перемещения системы находятся среди возможных,’то изменение живой силы этой системы будет равно сумме работ всех активных сил, действующих на систему на ее действительном перемещении.
В такой формулировке основные теоремы динамики системы были впервые предложены Лагранжем в его «Аналитической динамике». Указанные в условиях теорем ограничения на связи могут быть всегда выполнены, если вместо наложенных на систему связей ввести неизвестные силы реакции, рассматриваемые как силы, действие которых на систему эквивалентно действию связей. После введения сил реакций система может, рассматриваться как свободная *от /связей, а возможные перемещения точек системы оказываются произвольными и независимыми. Это обстоятельство дает возможность применять общие теоремы динамики системы материальных точек без ограничений на связи. Получающиеся при этом уравнения движения могут содержать больше неизвестных, чем имеется самих уравнений движения. В числе неизвестных величин оказываются теперь и силы реакции связей. До определения движения 'системы нужно сначала исключить эти реакции, что далеко не всегда просто сделать. Тем не менее, такой способ составления уравнений движения будет полезен, когда по характеру задачи нужно определять реакции связей.
Для успешного применения общих теорем динамики системы материальных точек необходимо уметь вычислять динамические характеристики механической системы: количество дои -
5
жения системы Q, момент количества движения системы К и живую силу Т. По определению, 'количеством движения системы называют вектор Q, который равен геометрической сумме векторов количества движения точек системы, так что
Q = 2 mv vv ,
и суммирование распространяется на все точки системы. В курсах теоретической механики доказывается, что вектор количества движения системы равен количеству движения центра масс системы. При решении задач большое значение имеет не сам вектор количества движения системы, а его проекции на некоторые неподвижные направления. Очень часто механическая система состоит их нескольких твердых тел. Тогда количество движения системы будет равно сумме количеств дви
Рис. 1
жения центров масс тел, составляющих систему.
Так, например, рассматривая сложную механическую систему, состоящую из призмы массы М, которая скользит по неподвижной горизон -тальной плоскости со скоростью и скатывающегося по ней без скольжения с угловой скоростью соо однородного цилиндра массы m (рис. 1), равно Mvq, а количество Проекция
заметим, что количество движения
движения цилиндра — тпУу2о+со2оГ2 + 2и0соо cos а.
количества движения системы на горизонтальную плоскость
Qi = М vq + m (v0 + coo г cos а).
Проекция количества движения системы на вертикаль (положительную вертикаль будем считать направленной -вверх)
Q2 = — tn coo г sin а.
Возьмем другой пример. Пусть по горизонтальной плоскости катятся без скольжения с одинаковыми, но направленными в противоположные стороны скоростями навстречу друг ДРУГУ два .совершенно одинаковых однородных шара. Количество движения такой системы, равное сумме количеств движения шаров, равно нулю, хотя каждая часть системы, т. е. каждый шар, совершает движение с отличным от нуля количеством движения.
По определению, моментом количества движения системы относительно неподвижной оси называется сумма моментов 6
количеств движения всех точек (системы относительно той же оси. Выбирая в качестве неподвижной оси ось z, будем иметь
•Кг -- 2 (^V У V Уу Ху ) •
V
В ряде случаев для подсчета момента количества движения относительно неподвижной оси удобнее пользоваться формулами Кёнига. Тогда вычисления сводятся к определению момента количества движения относительно оси, проходящей через центр масс системы, и определению момента количества движения одной точки — центра масс. Все вычисления значительно .упрощаются при рассмотрении движения системы твердых тел.
В самом деле, подсчитаем момент количества движения относительно оси z для однородного тонкого диска, который катится без скольжения по оси %. Пусть —скорость центра
масс диска. По формуле Кёнига, момент количества движения диска будет равен моменту количества движения его центра масс, сложенному с моментом количества движения относительно оси Кёнига, параллельной оси г. В относительном движении диск совершает вращение вокруг неподвижной оси с угловой скоростью со=— , где г — радиус диска, и его мо-г мент количества движения
__ тг2 ур _ ____ тг у0
Z~ ~ 2 г ~ 2
Момент количества движения центра масс диска
Koz = — Ш Vo г.
Поэтому момент количества движения получит вид
Kz = K0z + K\ = --^-mrv0.
2
Живая сила системы определяется как сумма живых сил точек системы
у __ у, Wi
Но в большинстве случаев удобнее пользоваться формулой Кёнига. Последняя особенно полезна при исследовании сложных движений твердого тела или системы твердых тел.
Так, ,в рассмотренном выше примере (рис. 1) для системы, состоящей из скользящей призмы и скатывающего по ней ци-
7
лин др а, живая сила складывается из живой силы цилиндра и живой силы призмы. Призма совершает поступательное движение, а .скорости в-сех ее точек равны по величине и по направлению. Поэтому живая сила призмы
т М v20 т' = — -
Живая сила цилиндра определяется по формуле Кёнига. Она складывается из живой силы центра масс цилиндра
T2i — — v\ =— (у20 -J- о)20 г2 4- 2у0 coo г cos а) 2 2
и живой силы движения' цилиндра относительно осей Кёнига. В осях Кёнига цилиндр вращается с угловой скоростью соо, а потому его живая сила
ГГ\ I (020
где I — момент инерции цилиндра относительно оси симметрии.
Окончательно имеем
т = 7\ + T2i + 722 = ^- +
-|——— (с^о Ч~ со^о Ч~ 2Vo (00 г cos я) -f- -- •
2 2
Успех в решении задач по теоретической механике зависит от правильности определения динамических характеристик.
Приступая .к решению задач, прежде всего необходимо выбрать параметры, определяющие положение механической системы. В общем случае они могут оказаться зависимыми и тогда следует выбрать независимые параметры, полностью определяющие положение системы. Число таких независимых параметров называют числом степеней свободы данной системы. Выбор независимых параметров связан с анализом возможных перемещений системы, допускаемых наложенными на нее связями. Число независимых возможных перемещений равно числу независимых параметров, полностью определяющих положение системы. Особенное внимание следует обратить на связи, зависящие явно от времени, вида
f (Л Уи х2, . . . , zn) =0.
Такого рода связи могут появиться и тогда, когда один или несколько параметров, определяющих положение системы, 8
задаются заранеее как некоторые известные функции времени. Такие параметры не являются определяющими координатами системы.
После того, как определено число степеней свободы и выбраны независимые параметры, определяющие положение системы, следует перейти к составлению дифференциальных уравнений движения, выражающих закон изменения этих параметров. Для полного определения движения системы нужно составить столько независимых дифференциальных уравнений движения, сколько имеется у нее степеней свободы. Для со|ста;влен1ия этих дифференциальных уравнений могут быть применены общие теоремы динамики системы материальных точек. Сформулированные выше общие теоремы динамики (системы представляются математически в виде дифференциальных уравнений движения. Эти дифференциальные уравнения в ряде случаев могут быть проинтегрированы в самых общих предположениях. При составлении дифференциальных уравнений необходимо знать условия существования первых интегралов уравнений движения и там, где это возможно, вместо дифференциальных уравнений движения сразу же выписывать первые интегралы этих уравнений.
Покажем все сказанное на примерах.
Пример 1. Сплошной однородный цилиндр радиуса г и массы т скатывается без 'скольжения под действием силы тяжести по наклонной плоскости, образующей угол а с горизонтом. Определить закон движения цилиндра.
Решение (рис. 2). Положение цилиндра полностью определяется дву-мя параметрами, в качестве которых У могут быть выбраны координата х лУ центра тяжести цилиндра и угол <р по-ворота цилиндра вокруг своей оси сим- )
метрии. Эти параметры не являются независимыми и связаны кинематиче-скими условиями отсутствия проскаль-зывания цилиндра. Так как скорость точки контакта цилиндра и плоскости равна нулю, будем иметь Рис. 2
х' + г д/ = 0.
Дифференциальное условие между- двумя величинами ф и х говорит о том, что параметры ф и х не могут изменяться независимо один от другого. Следовательно, независимой является одна из названных величин. Записанное уравнение может быть проинтегрировано и представлено в виде конечного соотношения
X = — Г ф + С,
9
где С — произвольная постоянная, определяемая из начальных условий .задачи. Для определенности 'примем в качестве независимой переменной координату <р.
Переходя к составлению дифференциальных уравнений движения, рассмотрим сначала возможные перемещения системы (цилиндра). Последние сводятся к бесконечно малому повороту цилиндра вокруг мгновенного центра вращения. Этому же условию удовлетворяют и действительные перемещения цилиндра. Следоватёльно, действительное «перемещение системы находится среди возможных, а значит имеет место теорема живых сил. Действующие на точки системы активные силы —силы тяжести —обладают силовой функцией
U — — mgr ф sin а.
Если же имеется силовая функция, то из теоремы живых сил следует первый интеграл — интеграл живых сил:
Т = U+ h.
Подсчитывая живую силу цилиндра по формуле Кёнига, будем иметь
г тх'2 . тг2 ,9
1 =------------ф' 2
2 4 Y
или после подстановки значения х' из уравнения связи,
Т = — m г2 ф'2,
4
после чего интеграл живых сил получает вид
— т г2 ф'2 = — mgr ф sin а + /г,
4
где постоянная h определяется из начальных условий задачи.
Полагая, что в начальный момент выполняются условия ф = 0 и ф'=0, будем иметь
— т г2 ф'2 = — mgr ф sin а,
4
откуда видно, что в действительном движении должно быть выполнено условие ф<С0. Интегрируя полученное уравнение, найдем
gP • Ф =------— sin а.
Зг
Закон изменения параметра ф определяет закон движения цилиндра.
10
Заметим, что среди возможных перемещений, допускаемых наложенными на систему связями, отсутствует поступательное перемещение цилиндра, а потому для определения движения цилиндра нельзя .применить теорему о движении центра масс, не доводя реакций связи.
Для определения движения цилиндра может быть применима теорема об изменении момента количества движения относительно неподвижной точки Д, совпадающей с мгновенным центром вращения цилиндра At в рассматриваемый момент времени, так как .среди возможных перемещений цилиндра имеется бесконечно малый поворот вокруг этого неподвижного центра (рис. 2). Заметим, что применение указанной теоремы требует большой осторожности, так как легко сделать ошибку и вместо неподвижной точки А рассматривать мгновенный центр вращения цилиндра А±, который не является неподвижным, а движется вместе с цилиндром. Мы ограничимся здесь этим замечанием, а ниже более подробно рассмотрим упомянутую особенность.
В том случае, когда по условиям задачи требуется определить давление, которое оказывает цилиндр на наклонную плоскость, необходимо освободить цилиндр от связей, введя вместо последних неизвестные силы реакции TVi и Мг, направленные соответственно вдоль и ортогонально к наклонной плоскости. После такого освобождения среди возможных перемещений появится как поступательное перемещение цилиндра по наклонной плоскости, так и поступательное перемещение в направлении, ортогональном к наклонной плоскости.
В первом случае это дает возможность применить теорему о движении центра масс цилиндра вдоль наклонной плоскости,. откуда получим
т к" = TVi + mg sin а.
Во втором — теорему о движении центра масс в ортогональном к наклонной плоскости направлении. Применяя последнюю, получим
т у" = Л'2 — mg cos а.
Реакции 2Vi и /V2 действуют так же, как и связи, поэтому в освобожденном движении имеют место условия
х” = — г и у” = 0.
Подставляя эти значения в уравнение и имея в виду, что
ср" =---— — sin а,
Y 3 г
П
найдем значения реакций:
Nt = — — mg sin a, jV2 — mg cos а.
3
Пример 2. Вагон, масса которого равна М, катится без скольжения по прямолинейным горизонтальным рельсам со скоростью vq. Сверху в вагон падает груз массы т (рис. 3). Как изменится скорость движения
Рис. 3
вагона, если всякое сопротивление движению вагона отсутствует, а массой колес можно пренебречь?
Решение'. Связи допускают поступательное перемещение системы в горизонтальном направлении, а никаких сил в горизонтальном направлении на систему не действует. Поэтому, применяя теорему об изменении количества движения си-
стемы в горизонтальном направлении, получим первый интеграл уравнений движения — закон сохранения количества движения системы, состоящей из ва-
гона и груза:
Q = const.
В начальный момент Q = MvOl а после того, как груз попадает в вагон, будем иметь
Q — (М + т) Vi.
Отсюда легко получаем
Рис. 4
Пример 3. Однородная тонкая палочка АВ, которая поддерживается за верхний конец В и опирается концом А на гладкий горизонтальный пол, вначале находится в покое, образуя с полом угол а. Затем палочку отпускают и она пада-дает под действием силы тяжести. Определить траекторию точки В и закон изменения угла наклона палочки к горизонту (рис. 4).
Решение'. Положение палочки в в вертикальной плоскости пол-
ностью определяется двумя независимыми параметрами, в качестве которых могут быть выбраны горизонтальная координата х центра тяжести палочки и угол а, который она
12
образует с горизонтом. Среди допускаемых связями возможных перемещений имеется поступательное перемещение палочки в 'горизонтальном направлении. Это обстоятельство дает возможность применить в горизонтальном направлении теорему о движении центра масс. Активные силы — силы тяже-' спи — не дают проекций на горизонтальное направление, поэтому имеет место первый интеграл—закон сохранения количества движения в горизонтальном направлении:
QXi = const.
В начале движения палочка находилась в покое, и количество движения палочки равнялось нулю. Поэтому, обозначая через горизонтальную координату центра масс, получим
mx'ic = О,
где т — масса палочки. Отсюда следует
Xw — const,
т. е. центр масс палочки не перемещается в горизонтальном направлении. Если теперь выбрать неподвижную систему осей так, чтобы ось Оу проходила через центр тяжести стержня, то во все время движения центр тяжести будет находиться на оси Оу. Обозначая через х, у координаты точки В, а через 2/—длину палочки, получим уравнение траектории точки В:
х2 + (-^-]2 = 12.
\ 2 /
Для полного определения движения остается найти закон изменения угла а в зависимости от времени /. Заметим, что наложенные на палочку связи, ограничивающие ее перемещение вниз, не зависят явно от времени и, следовательно, можно применить теорему живых сил для определения движения палочки. Последняя дает первый интеграл — интеграл живых сил, так как действующие активные силы обладают силовой функцией
U = — mgl sin а.
В явном виде интеграл живых сил запишется так:
где I — момент инерции палочки относительно ее центра масс. Для палочки длины 2/ будем иметь
г ml2 f .
1 =-----, ус'= I sin а,
3
13
и тогда интеграл живых сил получит вид
(3 cos2 а + I) а'2 = — mgl sin а + h. 6
Если в начальный момент при а=ао имеем а'=0, то для h получим значение
h = mgl sin «о, а интеграл живых сил перепишется в виде а'2 = ------------------------- (sin «о — sin а),
/ (3 cos2 а-|-1) 7
откуда найдем
a ________________
t = fl/ /(3cos2a+ 1) r/ff J r 6g (sin a0 — sin a) a0
и a будет определяться как неявная функция времени.
В некоторых задачах часть параметро-в иногда задается варанее в виде известных функций времени. Тогда эти параметры уже не могут определяться из уравнения движения и число степеней свободы соответственно уменьшается.
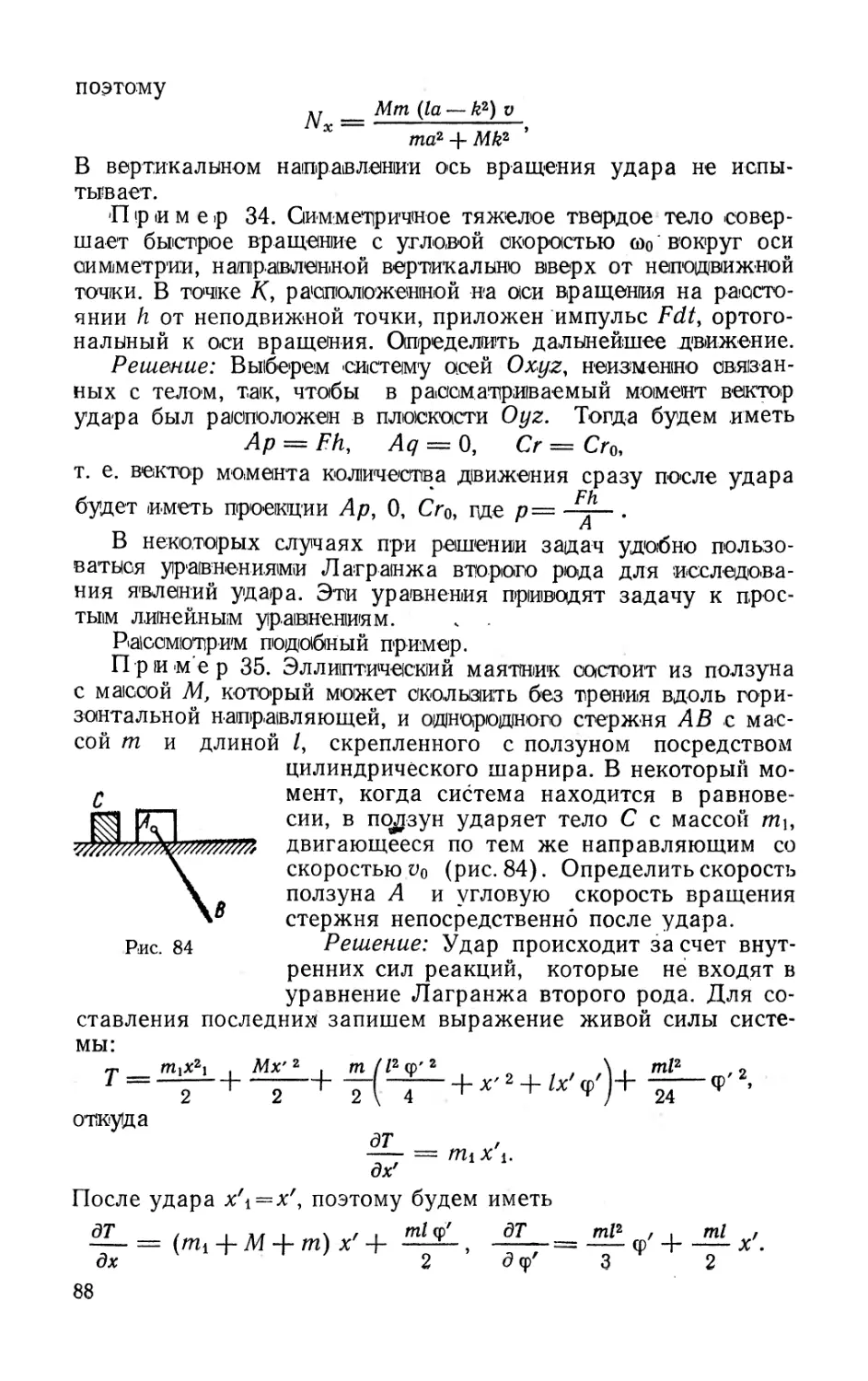
Пример 4. Маятник состоит из q н ползуна О массы М, который может
—га-------утя свободно скользить по горизонтально-
\ му рельсу, и шарнирно с ним соеди-
ненному стержню длины 2/ и массы т, /tjJX находящемуся под действием только
х силы тяжести (рис. 5). В начальный
момент маятник отпускают без начальна ной скорости из положения, в котором
стержень образует с вертикалью угол Ф = <ро. Определить дальнейшее движение системы.
Решение: Положение системы определяется двумя параметрами: координатой ползуна s и углом ф, который стержень образует с вертикалью. Для определения движения системы нужно составить два дифференциальных уравнения движения.
Наложенные на систему связи допускают поступательное перемещение системы в гори131онтальню1М направлении, а потому можно применить теорему об изменении количества движения. Так как сила тяжести не дает проекции на горизонтальное направление, то будем иметь первый интеграл уравнений движения—закон сохранения количества движения
Qx = const, или
М s' + т (s' + I ф' cos ф) = С.
(1)
14
Постоянная С определяется из Начальных условий и при заданных условиях оказывается равной нулю.
Наложенные на систему связи не зависят явно от времени, а сила тяжести — консервативная сила. Поэтому будет существовать интеграл живых сил
Т = U + й, или
(S' 2 + /2 ф' 2 + 11 s' ф' iCOS ф) +
Ч ~^~ф'2 — mglcosqh. (2)
6
Из начальных условий получим
h = — mgl cos фо-
Исключение из уравнений (1) и (2) величины s' приведет к уравнению
Г—_|_ msin2<p) +^^.1 ф'2 = 2 mgl (соэф— icos фо),
[ М + m 3 J
откуда может быть определен угол ф в функции времени /, после чего уже легко найти s из уравнения
,__ ml <р' cos ф
М + m
Изменим условия рассмотренной задачи и предположим, что один из параметров, скажем угол ф, изменяется по наперед заданному закону. Тогда будем иметь совершенно иные условия связи и совершенно иные уравнения движения.
В самом деле, пусть, например,
ф = ф (/)
— некоторая заданная функция времени. Тогда на возможные перемещения будет наложено ограничение
б Ф = О
(время не.варьируется при возможных перемещениях системы), т. е. угол ф уже не является определяющей координатой и остается постоянным при всех возможных перемещениях системы. Среди возможных перемещений остается только поступательное перемещение. Это дает возможность применить
15
теорему о движении центра масс вдоль горизонтального направления, откуда будем иметь первый интеграл
Ms' ^-т (s' + ly' cos ф) = С,
полностью определяющий движение системы.
Пусть для определенности угол ф изменяется по линейному закону
Ф = coo t.
Тогда из первого интеграла получим
(Л4 + т) s' = С — ml coo cos coo t.
Подобрав начальные условия так, чтобы постоянная С была равна нулю, получим
ml . j .
S =-----------Sin (Do t + So,
M + m
и движение системы
будет полностью определено*
Пример 5 {Задача Чаплыгина). На гладкой горизонтальной плоскости лежит круглый диск. По ободу диска из состояния покоя начинает двигаться жук с постоянной скоростью и. Оп-- ределить абсолютное движение диска Л и жука (рис. 6).
Решение'. Для полного определения движения системы достаточно найти движение диска. Положение послед-
него может быть полностью определено двумя координатами х, у центра масс диска Qi и углом ф поворота диссимметрии. Эти три независимых пара-
Рис. 6
ка вокруг своей оси
метра полностью определяют положение системы.
Заметим, что наложенные на систему ювязи в каждый момент времени допускают поступательное перемещение всей системы в любом горизонтальном направлении. Это обстоятельство дает возможность применить теорему об изменении количества движения системы в любом горизонтальном направлении. Действующие на систему внешние активные силы — силы тяжести — не имеют проекций на горизонтальную плоскость. Поэтому в последней будет иметь место закон сохранения количества движения. Количество движения системы равно количеству движения ее центра масс. А так как в начальный момент система была в покое и пришла в движение только за счет действия внутренних сил, центр масс системы будет оставаться в покое во все время движения.
16
Нетрудно видеть, что центр масс системы С всегда находится на прямой, ^соединяющей центр диска Oi с жуком т, причем имеет место зависимость
М . Oi С = т • СА.
Обозначая через /? радиус диска, а через х— расстояние от центра диска до центра масс системы, будем иметь
Мх = т (R — х) или х = ——— .
М + т
Из этих соотношений видно, что возможными траекториями центра диска и жука являются концентрические окружности с центром в центре масс системы, а абсолютные скорости центра диска v и жука Vt параллельны и направлены в-сегда перпендикулярно к прямой OiA.
Обозначая через со абсолютную угловую скорость диска, положительное направление которой противоположно движению часовой стрелки, и применяя теорему об изменении количества движения системы, получим
Mv + т (v + со X Я + и) — 0.
Если теперь © некоторый момент .выбрать систему осей с началом в общем центре масс системы, направив ось х в сторону, где находится жук, а ось у — ортогонально к оси х в плоскости диска, то для проекции полученного векторного уравнения движения на ось у получим выражение
Mv + т (у + со»/? + и) = 0. (1)
Последнее уравнение содержит две неизвестные величины: v и со, и для полного определения движения системы нужно составить, по меньшей мере, еще одно уравнение движения. Это уравнение может быть получено из теоремы об изменении момента количества движения. В самом деле, существующие связи допускают поворот всей системы вокруг любой вертикальной неподвижной оси и, в частности, вокруг вертикальной оси, проходящей через центр масс системы С. Внешние силы не дают момента относительно вертикальной оси. Поэтому'будет иметь место закон сохранения момента количества движения относительно вертикальной оси, проходящей через центр масс системы, т. е.
о2 = const.
Принимая во внимание, что в начальный момент система находилась в покое, будем иметь
о2 = 0.
2—1626
17
Подочмтывая по теореме Кёнига момент количества движения диска относительно оси г, будем иметь
си = — Mvx + I со =
MmRv
Мт
+ I со,
где / — момент инерции диска относительно его оси симметрии. Момент количества движения жука относительно той же оси будет
cr2z = т (/? — х) (у + о/? 4- и). Окончательно
012 4" O2z = —
MmRv
М + tn
4- / со 4-
откуда
tnRM
М + т
(у 4~ со R 4" и) = О,
_____mMRu_______
I (М 4- т) 4- tnMR2
oz =
Теперь из первого уравнения получим
1ти v —-----------------------.
I (М 4- Ш) 4- rnMRb
Замечание: При исследовании решения мы не рассматривали возможность применения в этой задаче теоремы живых сил. Последняя не может быть -применена в рассматриваемой задаче, так как наложенные на систему -связи таковы, что действительные перемещения не находятся среди возможных. В самом деле, по условиям задачи жук движется по диску с постоянной относительной скоростью. Если обозначить через s путь, проходимый жуком по диску, то будет иметь место зависимость
S = nt 4~ Sq.
Варьируя это условие связи, получим
6s = и bt = 0.
Так как время не варьируется, в уравнении связи б/=0. Для действительных перемещений имеем условие
ds = udt #= О,
т. е. среди возможных перемещений нет перемещения жука по диску и действительное перемещение не находится среди воз
18
можных. Обстоятельство это можно объяснить еще тем, что в данной задаче мы не в состоянии вычислить работу внутренних сил, приводящих систему в движение, и вынуждены в связи с этим задавать закон движения жука.
При применении теоремы об изменении момента количества движения и об изменении живой силы системы немалое
значение имеет вопрос о вычислении этих динамических характеристик. Задача часто упрощается применением формул
Кёнига. Иногда удобно применять теорему о сложении скоростей.
Пример 6. Однородная палочка массы т и длины а может свободно вращаться в пространстве вокруг своего неподвижного конца. В начальный момент ее приводят в горизонтальное положение и сообщают вращение вокруг вертикальной оси с угловой скоростью соо (рис. 7). Определить наименьшее значение угла <р, образуемого палочкой во время движения.
Решение: Положение палочки может быть полностью определено двумя независимыми параметрами: углом <р, который образует палочка с верти-
калью, и двугранным углом Ф, обра-
зуемым вертикальной плоскостью (л), в которой расположена палочка, с координатной плоскостью Oxz. Для определения
этих двух параметров необходимо иметь, по .меньшей мере, два уравнения движения. Эти уравнения могут быть получены из теорем об изменении момента количества движения и
живой силы системы.
Действительно, наложенные на систему связи допускают поворот палочки вокруг неподвижной вертикальной оси г, проходящей через неподвижную точку О. Это дает возможность применить теорему об изменении момента количества движения относительно оси г. Но момент относительно оси г внешних активных сил (сил тяжести), действующих на палочку, равен тождественно нулю. Поэтому имеет место первый интеграл — закон сохранения момента количества движения относительно оси z. Количество движения элементарной частицы палочки ту , отстоящей от неподвижной точки О на расстоянии s, можно представить двумя составляющими: относительной mv sq/, расположенной в вертикальной плоскости (л), момент которой относительно вертикальной оси z равен нулю, и составляющей от переносного движения вместе с плоскостью (л) mv s О' sin (р, которая расположена в горизонтальной плоскости и момент которой относительно вертикальной оси z равен ту s2-&' sin2 ср. Момент количества движения всей па
19
лочки относительно вертикальной оси z получим, суммируя элементарные моменты количеств движения, т. е.
Kz — s2 ft' sin2 (р dm = — О' sin2 ф J s2 ds ft' sin2 <p.
0 a 0 3
Принимая во внимание начальные условия задачи, первый интеграл запишем теперь в виде
— ma2#' sin2 ф = — т а2 со0.
3 3
Отсюда, после сокращений, имеем
Ф'sin2 <р = й)0. (1)
Таким образом, получено одно уравнение движения системы.
Для получения второго уравнения заметим, что наложенные на систему связи не зависят явно от времени, а действующие активные силы — силы тяжести — обладают силовой функцией. Поэтому для определения движения системы может быть применена теорема живых сил, из которой следует интеграл живых сил
Г = U+ h.
Подсчитаем живую силу системы. По определению,
Т = — 2 mi v2i.
2
Но скорость i-той точки палочки складывается из относительной vr = sq/ и переносной ve = sft'sin <р, причем относительная скорость расположена в плоскости (л), а переносная направлена ортогонально плоскости (л). В силу ортогональности относительной и переносной скоростей будет иметь место зависимость
U2 — v2e v2r*
а потому
Т = — % mv2e-\—-2 m v2r, 2 2
откуда
Т — — 2 sin2 <р 2 m s2 -|—— ф'2 2 m s2.
2 - 2
Так как 2 ms2 = ~ ma\ будем иметь
Т = — m a2 (tH^sin2 ф + Ф'2) •
6
20
Силовая функция U—-±- mga cos ф, значит интеграл живых сил запишется в виде
(ф'2 + О'2 sin2 ф) —— mga cos ф + h. (2)
6 2
Здесь постоянная h определяется из начальных условий:
После сокращения на та из интеграла живых сил (2) получим
а (ф'2 + О'2 sin2 ф) = 3 g cos ф + а со2о.
Палочка будет опускаться до тех пор, пока угловая скорость не обратится в нуль. Это обстоятельство будет условием, определяющим минимальное значение угла ф, т. е.
а О'2 sin2 ф = 3 g cos ф 4- а Л
Подставляя сюда значение определенное из интеграла сохранения момента количества движения, получим
а J?-0 = 3 g cos ф + я <о2о, sin2 ф
или
а <о2о = 3 g cos ф — 3 g cos3 ф -f- а ®2о — а о>2о1005 2 Ф-
Отсюда после сокращений имеем
3 g cos3 ф + a A cos2 ф — 3 g cos ф = 0.
Последнее уравнение имеет два действительных решения
п — а (о2о + fa2 g>2o 4 36g2
cos ф1 = 0, cos ф2 =---------------——— .
6g
Здесь ф1 соответствует начальному положению палочки, а ф2—искомый наименьший угол.
Некоторые особенности применения теорем
При применении теорем об изменении количества движения или об изменении момента количества движения механической 'системы нужно всегда помнить, что в формулировках этих теорем всегда предполагается наличие некоторой непод
21
вижной системы координат, ото отношению к которой механическая оистема совершает движение. Именно по отношению к этой системе определяется неподвижное направление. Так, если связи допускают поступательное перемещение всей системы вдоль упомянутого неподвижного направления, то изменение проекции количества движения системы на неподвижное направление будет определяться только одними активными силами, действующими на систему.
Если наложенные на систему связи допускают поворот всей системы, как одного целого, вокруг неподвижной оси, то производная по времени от проекции момента количества движения на эту ось равняется сумме моментов внешних активных сил относительно оси.
При применении теорем нужно следить, чтобы выбранное направление оставалось неподвижным во все время движения. Несоблюдение этого условия может привести к ошибочным результатам. Так, в случае плоскопараллельного движения твердого тела может оказаться, что наложенные на систему связи допускают поворот твердого тела вокруг мгновенного центра вращения. Тогда теорему об изменении момента количества движения можно будет применять относительно неподвижной точки, которая в рассматриваемый момент времени совпадает с подвижнькм мгновенным центром вращения. Но нельзя применять ее относительно мгновенного центра * вра-
щения.
Рис. 8
Пример 7. Однородная палочка АВ длины 2/ под действием силы тяжести скользит своим концом А по внутренней поверхности цилиндрической трубы радиуса г, ось которой горизонтальна (рис. 8). Составить уравнения плоскопараллельного движения палочки, полагая, что она все время остается в вертикальной плоскости, перпендикулярной к оси цилиндра, и пренебрегая трением.
Решение: Положение палочки может быть определено двумя независимыми параметрами: углом ср, который образу-
ет с вертикалью радиус цилиндра, проведенный из точки контакта, и углом который палочка образует с вертикалью. Для определения закона движения палочки нужно найти зависимость этих параметров от времени, которая может быть найдена из уравнений движения,
22
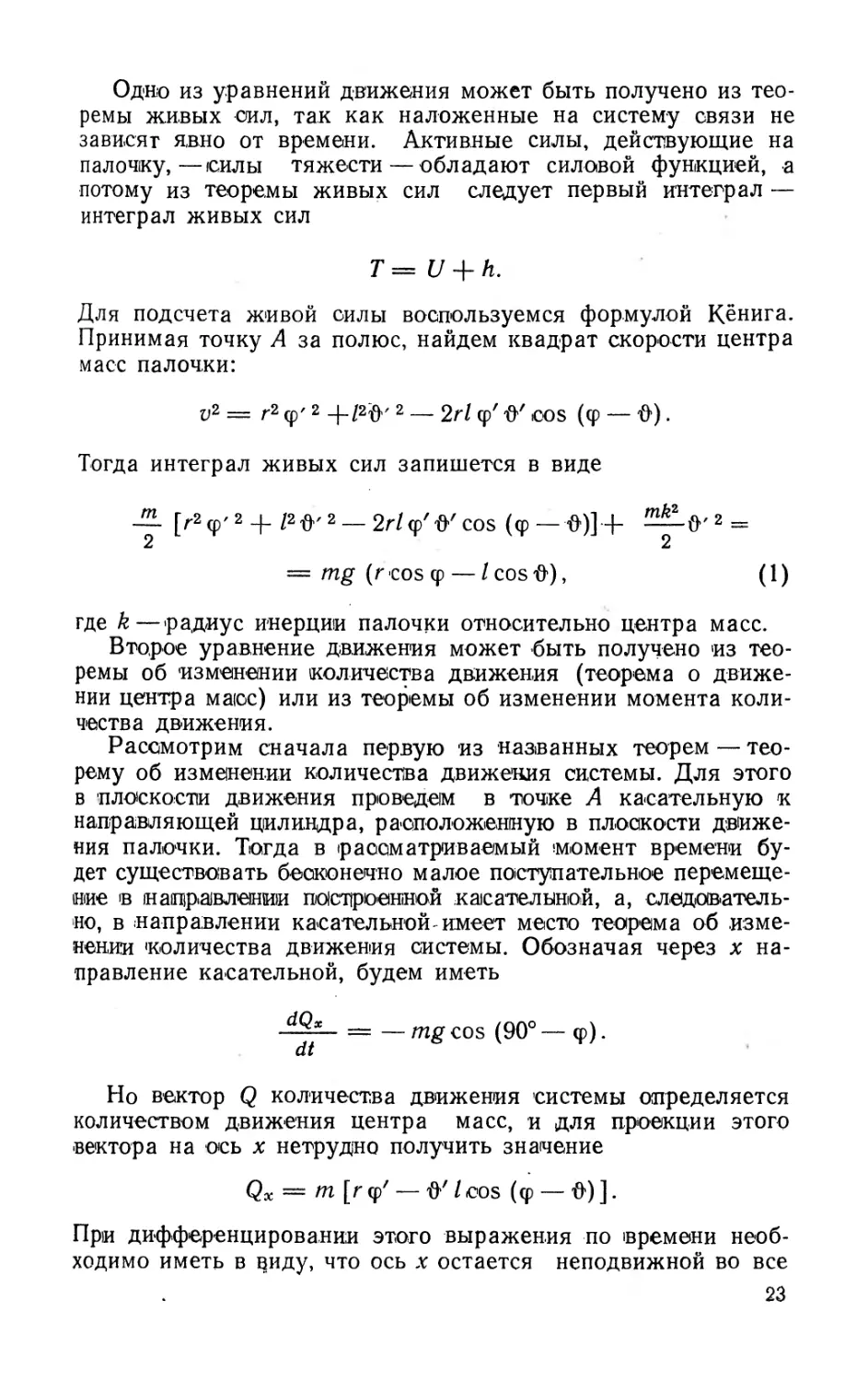
Одно из уравнений движения может быть получено из теоремы живых сил, так как наложенные на систему связи не зависят явно от времени. Активные силы, действующие на палочку,—силы тяжести—обладают силовой функцией, а потому из теоремы живых сил следует первый интеграл — интеграл живых сил
Т = U + h.
Для подсчета живой силы воспользуемся формулой Кёнига. Принимая точку А за полюс, найдем квадрат скорости центра масс палочки:
v2 = г2 <р'2 +/2:&'2 — 2г/ ф' О' cos (ф — О).
Тогда интеграл живых сил запишется в виде
-у [г2 ф' 2 4-12<&'2— 2гI ф'#' cos (ф — ‘0’)]+ ^|-0'2 =
= mg (г cos ф — I cos ft), (1)
где k—радиус инерции палочки относительно центра масс.
Второе уравнение движения может быть получено из теоремы об изменении количества движения (теорема о движении центра масс) или из теоремы об изменении момента количества движения.
Рассмотрим сначала первую из названных теорем—теорему об изменении количества движения системы. Для этого в плоскости движения проведем в точке А касательную к направляющей цилиндра, расположенную в плоскости движения палочки. Тогда в рассматриваемый момент времени будет существовать бесконечно малое поступательное перемещение в направлении построенной касательной, а, следовательно, в направлении касательной имеет место теорема об изменении количества движения системы. Обозначая через х направление касательной, будем иметь
—*- = — mg cos (90° — ф). dt
Но вектор Q количества движения системы определяется количеством движения центра масс, и для проекции этого вектора на ось х нетрудно получить значение
Qx = tn [г ф' — 'ft' I cos (ф — О) ].
При дифференцировании этого выражения по времени необходимо иметь в виду, что ось х остается неподвижной во все
23
время движения палочки, а потому при дифференцировании выражения Qx нужно считать постоянной величиной угол ф, стоящий под знаком тригонометрических функций. Тогда будем иметь
—* = т [гф"— О" / cos (ф — О*) —-0'21 sin (ф — О’)], dt «
а соответствующее уравнение движения получит вид
т \.ГЧ>" — О’"/cos (ф — О’) —О’'21 sin (ф — О’) ] = — mg sin ф.
Присоединяя сюда интеграл живых сил (1), получим полную систему дифференциальных уравнений, определяющих движение палочки.
Уравнения, определяющие изменение количества движения вдоль оси х, можно получить и несколько другим путем, исходя из уравнения движения центра масс в виде
т х"с = Fx,
(2)
Где х” —проекция ускорения центра масс на ось х. Принимая точку А за полюс, заметим, что ускорение полюса имеет две составляющих, одна из которых Гф" направлена вдоль оси х (рис. 9), а вторая гф'2 ортогональна к оси х. Ускорение центра масс в движении относительно полюса имеет тоже две составляющих, одна из которых I направлена ортогонально к палочке, а вторая Ф'2/ направлена вдоль палочки к полюсу. В результате проекция ускорения центра масс на
ось х получает вид
х"с — г ф" — ft" I cos (ф — #) — О' / sin (ф — О).
Подставляя это значение в записанное выше уравнение (2), получим уже известный результат.
Вместо уравнения движения, получаемого из теоремы о движении центр# масс, можно записать другое уравнение движения, получаемое из теоремы об изменении момента количества движения системы относительно неподвижной точки, совпадающей в рассматриваемый момент с точкой А. Теорема эта может быть применена потому, что наложенные на систему связи допускают в данный (момент поворот вокруг 24
неподвижной точки, совпадающей о точкой А палочки. В общем случае эта теорема может быть записана в виде
2 т (ху" — ух") = топы F, или, применяя формулу Кёнига,
т (хс у"с — ус х"с) + mk2 Ъ" = mgl sin ft.
Здесь выражение, стоящее в круглых скобках, представляет собой момент вектора ускорения центра масс относительно точки А. Подсчитывая его, будем иметь (рис. 9)
/2— г ср" / cos (ф — ft) + Гф'2/sin (ф —ft).
После лод1ста1Н1О1В1К1и этого значения ,в записанное .выше уравнение теоремы об изменении момента количества движения, получим
™ [/2ft" —Гф"/с-О5 (ф —ft) + Г ф' 2 I sin (ф—ft) +^2^q = = mgl sin ft
Для определения движения палочки можно воспользоваться любыми двумя из трех полученных уравнений движения. Можно показать, что эти три уравнения не являются не-
зависимыми.
Примере. Однородный полукруглый диск радиуса г и массы т может кататься без скольжения по абсолютно шероховатой горизонтальной плоскости и подвержен действию только силы тяжести. Составить уравнения движения диска в неподвижной вертикальной плоскости и найти первые интегралы уравнений движения (рис. 10).
Решение: Положение диска в вертикальной плоскости полностью
Рис. 10
определяется всего одним парамет-
ром, в качестве которого может быть взят угол ф, образуемый радиусом, проходящим через центр масс, с вертикалью. Для определения закона движения диска достаточно составить всего одно дифференциальное уравнение движения, из которого может быть определен этот угол.
Такое уравнение может быть получено из теоремы живых сил. Эта теорема3 в рассматриваемом случае имеет место, так как действительные перемещения пластинки находятся среди
возможных и определяются одним параметром — углом ф.
25
Активная сила, действующая на пластинку, — сила тяжести — консервативна, а потому имеет место первый интеграл уравнений движения — интеграл живых сил
Т = U + h.
Подсчитаем сначала живую силу, воспользовавшись формулой Кёнига. Так как в точке А находится мгновенный, центр вращения пластинки, будем иметь
»с — р <р'.
Здесь р = Уг2+а2 — 2arcos<p, а а—расстояние от центра пластинки до ее центра масс—равно ——— . Обозначим через 3 л
k радиус инерции пластинки относительно ее* центра масс, будем иметь
т = ~ (г* + «2 — 2ar cos ф) ф'2 ф'
Силовая функция U = mgacos ф, а потому интеграл живых сил получает вид
(г2 + а2 — 2ar cos ф + £2) ф'2 = mga cos ф — h,
где постоянная h определяется из начальных условий. Полученное уравнение определяет закон изменения угла ф. Оно не может быть проинтегрировано в элементарных функциях, но дает зависимость угловой скорости от положения пластинки.
Рассмотренную задачу можно было бы решать исходя из другой теоремы — теоремы об изменении момента количества движения, так как наложенные на систему связи допускают поворот системы (пластинки) вокруг неподвижной точки. Последняя совпадает в рассматриваемый момент с мгновенным центром вращения Л. Но теорема может быть применена только относительно неподвижной точки, что необходимо учитывать при составлении уравнений движения. Момент количества движения пластинки
Kz = тр2ф' + тА?ф\ (1)
где
р2 = а2 _|_ г2 — 2ar cos ф.
Но если продифференцировать это выражение по времени:
= щ (а2 + г2 + ^2 — Йагсоэф) ф" + 2tnarф'2sin ф dt
и подставить полученное выражение в формулу, вытекающую 26
из теоремы об изменении момента количества движения, то получим результат, отличный от того, который следует из теоремы живых сил. Это объясняется тем, что подсчитанный по формуле (1) момент количества движения определен относительно мгновенного центра вращения, являющегося подвижной точкой, относительно которой теорему применять нельзя. Записывая момент количества движения относительно неподвижной точки, последнюю нужно определить параметром фо. Тогда
Кя = т (хс у'с ус х'с) + mk2 ф', где
хс — — г (ф — ф0) + a sin ф, ус = г — a cos ф,
и будем иметь
Kz = -~тг (<Р — фо) # ф' sin ф +
+ т(а2 + г2 — 2arcos ф + k2) ф'. (2)
При ф=фо формулы (1) и (2) совпадают, но при изменении Kz появляется дополнительный член. Момент количества движения, записанный относительно неподвижной точки Л, имеет вид (2). Дифференцируя это выражение по времени, получим:
= т [— га ф'2 sin ф — г (ф — ф0) а ф" sin ф — dt
— г(ф — фо) а ф' 2icos ф + (а2 + г2 — 2ar cos ф + k2) ф" +
+ 2ш*8Шфф'2].
При ф='фо, когда" только и справедлива теорема, получаем
= т [ (а2 + г2 — 2ar cos ф + к2) ф" + аг ф'2 sin ф].
dt
Отсюда следует уравнение движения:
т [-(а2 + г2 — 2ancos ф + k2) ф" + аг ф'2 sin ф] = = — mg a sin ф,
совпадающее с тем, которое получается из теоремы живых сил.
Определение реакций связи
До сих пор рассматривались вопросы определения движения механических систем. Не менее в-ажной является задача нахождения реакций в точках опоры системы. Метод определения реакций сводится к освобождению механической системы от соответствующей связи, благодаря чему появляется дополнительная -степень свободы системы. Это обстоятельство дает возможность применить на появляющемся возможном
27
перемещении одну из общих теорем, причем в числе сил, действующих на систему, рассматривается также и |реакция освобожденной связи. Так как действие реакций связи эквивалентно действию связей, полученное уравнение будет служить для нахождения неизвестной реакции связи. Рассмотрим не-
которые примеры.
Пример 9. Однородный прямолинейный стержень АВ длиной 2а и весом mg движется в вертикальной плоскости под действием силы тяжести, опираясь своим верхним концом А о гладкую вертикальную стенку, а нижним — о гладкий горизонтальный пол (рис. 11). Стержень начинает движение из состояния покоя, образуя в начальный момент угол фо с горизонтом. Определить при каком значения угла ф стержень отойдет от стенки.
Рис. 11 Решение: Сначала нужно определить
закон движения стержня. Положение стержня полностью может быть определено всего одним параметром, в качестве которого выберем
угол ф, образуемый^стержнем с горизонтом. Для определения движения стержня нужно составить .всего одно дифференциальное уравнение движения. Оно может быть получено ли-
бо из теоремы живых сил, так как действительное перемеще-
ние стержня находится среди возможных (все перемещения стержня определяются изменением одного угла ср), либо из
теоремы об изменении момента количества движения относительно неподвижной точки. Причем, последняя совпадает в
рассматриваемом положении с мгновенным центром вращения стержня S, так как возможные перемещения определяются поворотом стержня вокруг мгновенного центра вра
щения.
Теорема живых сил имеет в данном случае то преимущество, что сразу же дает первый интеграл — интеграл живых сил, так-как действующая активная сила —сила тяжести — допускает силовую функцию
U = — mga sin ср.
Живая сила стержня легко определяется по формуле Кёнига у____________________ mv2c . / qr 2
где ц2с = (aq/)2, а / так что ~та2<р'2, а интеграл живых сил имеет -вид
о
— та2 ср'2 = — mga sin ф + h. з
28
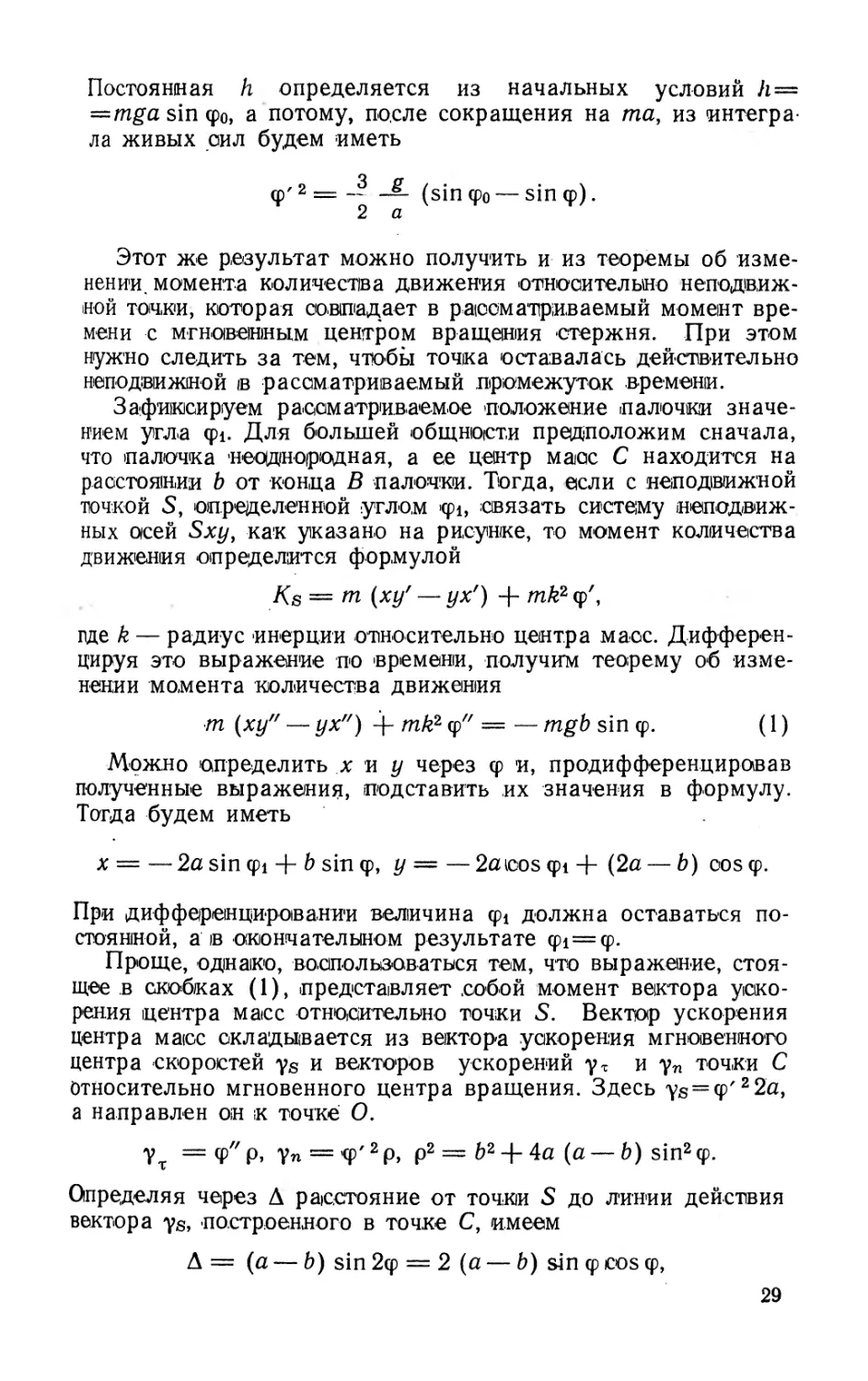
Постоянная h определяется из начальных условий Л= = mga sin фо, а потому, после сокращения на та, из интеграла живых сил будем иметь
Ф'2 = -~ — (sin фо — sin ф).
2 а
Этот же результат можно получить и из теоремы об изменении. момента количества движения относительно неподвижной точки, которая совпадает в рассматриваемый момент времени с мгновенным центром вращения стержня. При этом нужно следить за тем, чтобы точка оставалась действительно неподвижной в рассматриваемый промежуток времени.
Зафиксируем рассматриваемое положение палочки значением угла фь Для большей общности предположим сначала, что палочка неоднородная, а ее центр масс С находится на расстоянии b от конца В палочки. Тогда, если с неподвижной точкой S, определенной углом фь связать систему неподвижных осей Sxy, как указано на рисунке, то момент количества движения определится формулой
Ks — т (ху' — ух') + ф',
где k — радиус инерции относительно центра масс. Дифференцируя это выражение по времени, получим теорему об изменении момента количества движения
т (ху" — ух") 4- mk2 ср" = — mgb sin ф. (1)
Можно определить х и у через ф и, продифференцировав полученные выражения, подставить их значения в формулу. Тогда будем иметь
х = —2а sin epi + b sin ф, у — —2шсозф1 + (2а— Ь) соэф.
При дифференцировании величина ф1 должна оставаться постоянной, а в окончателыном результате ф1=ф.
Проще, однако, воспользоваться тем, что выражение, стоящее в скобках (1), представляет .собой момент вектора ускорения центра масс относительно точки S. Вектор ускорения центра масс складывается из вектора ускорения мгновенного центра скоростей и векторов ускорений у? и уп точки С Относительно мгновенного центра вращения. Здесь ув = ф'22а, а направлен он к точке О.
ух — ф"р, Уп = 'Ф'2р, р2 = Ь2 + 4а (а — Ь) зт2ф.
Определяя через Д расстояние от точки S до линии действия вектора ys, построенного в точке С, имеем
Д = (а — b) sin 2ф = 2 (а — b) sin ф cos ф,
29
после чего момент вектора ускорения центра масс относительно точки S будет равен т = ф'22аД + q/'p2. Подставляя это выражение в выражение для теоремы об изменении момента количества движения, получим
т {<р'2 4а (а — b) sin ф cos ф + ф" [Ь2 + 4а (а — b) sin2 ф]} + + mk2 ф" = — mgb cos ф.
В частном случае, когда Ь = а, уравнение сильно упрощается и получаем
— та2 ф" — — mgd cos ф, 3
что совпадает с результатом, полученным из теоремы живых сил.
4 До сих пор мы рассматривали различные пути определения движения стержня. Перейдем теперь к определению условий его отрыва от стенки.
Освободив стержень от связи в точке А и введя вместо связи силу реакции N, получим новое возможное перемещение— поступательное перемещение в горизонтальном направлении. При наличии такого возможного перемещения может быть применена теорема об изменении количества движения системы, которая получит вид
my"i = N.
Здесь у\ (координата центра масс стержня) равен асоэф, где изменение угла ф в действительном движении подчинено выведенным выше уравнениям движения. Подставляя значение yi в уравнение, определяющее реакцию W, будем иметь
N = — та (ф" sin ф + ф'2 cos ф) или [3 3
—— sin ф cos ф + — sin фо cos ф —
---— sin ф cos ф^= — [6 sin фо — 9 sin ф] cos ф.
Отрыв от стенки происходит в тот момент, когда реакция N обращается в нуль. Это произойдет при обращении в нуль выражения, стоящего в скобках, откуда будем иметь
2 .
Sin ф =--- Sin фо.
3
Заметим, что если фо=6О°, то в начальный момент реак-3 V3 1
ция No = —-—mg, а в момент отрыва sin ф= — .
30
Пример 10. Однородная палочка длиной 2/ опирается одним из 'Своих концов на гладкий горизонтальный пол, образуя с ним угол а. Отпущенная из -состояния покоя, палочка начинает падать под действием своего веса. Определить давление палочки на пол в момент начала движения (рис. 4).
Решение: Выше мы рассмотрели задачу о движении стержня, опирающегося на гладкую горизонтальную плоскость (пример 3), причем оказалось, что центр масс палочки совершает движение, оставаясь все время на одной и той же вертикали, а угол а изменяется по закону
а'2 =------—------ (sin ссо — sin а).
(3 cos2 а + 1)
Этот результат был получен из теоремы живых аил.
Для определения закона изменения угла а можно было’бы воспользоваться теоремой об изменении момента количества движения относительно неподвижной точки, совпадающей в рассматриваемый момент с точкой контакта А. Справедливость этой теоремы следует из того, что среди возможных перемещений палочки имеется поворот вокруг неподвижной точки А. Но применение теоремы требует того, чтобы точка А действительно была неподвижной, т. е. чтобы не изменялось расстояние от точки А до точки О. При этом момент количества движения палочки относительно точки О
Ко = т • АО • у' + ф',
з
где i40=const. Но yc = Zsin ф, так что y'c=lq' cos ф. Далее, дифференцируя по времени и приравнивая результат моменту силы тяжести относительно точки А, получим
/2
т [АО (Z ф"юо8ф — I ф'2 sin ф) -|-ф"] = — mglcos ф.
3
Подставляя сюда значение ЛО = /со8ф и производя сокращения, получим
(3 -cos2 ф + 1) ф" — 3 ф'2 sin ф cos ф = — 3 ~ cos ф.
Для определения реакции пол-а, освободим палочку от связи (убрав пол и заменив его действие силой N'j и введем силу реакции Тогда среди возможных перемещений появится поступательное перемещение вдоль вертикальной оси у, что дает возможность применить теорему об изменении количества движения вдоль оси у. Она может быть записана так
ту" с = — mg +
31
откуда
N = т (g 4- у"с)
или, после под1Станов1К1и значения y"c = lq" cos ф— /ф' sin ср,
/V == т (g + I у" cos ф — I ф'2 sin ф), где величины ф'2 и ф" определяются в действительном движении из его уравнений. В начальный момент ф'2 = 0, а
// 3g cos фо mg
ю = —.--------------, поэтому w =--------------------.
(Зсоз2фо+1)/ Зсоз2фо+1
Интересно отметить, что если фо=9О°, то N=mg, «и палочка остается в состоянии покоя, находясь в положении неустойчивого равновесия. При фо=6О° в начале движения .будем иметь
N = -у mg.
Неидеальные связи
Рассмотрим задачи о движении механических систем, на которые наложены неидеальные связи. Примером такой связи может служить связь с трением. Общее уравнение динамики справедливо только для идеальных (Связей. Но принцип Даламбера—Лагранжа может быть ’применим для определения движения систем с не.и1деальным1и связями (силами трения), если доопределить действующие на систему силы, присоединив к ним и силы трения в соответствии с той или иной гипотезой о трении. Оставшиеся силы реакции будут удовлетворять определению идеальных связей, и принцип Даламбера—Лагранжа, вместе со всеми следствиями, вытекающими из него, может быть применим для решения задач с трением.
Пример 11. Однородный круглый
У/ диск, расположенный в вертикальной
/ плоскости, поставлен на неподвижную
/ прямую Ох, составляющую с горизон-
Xй—х том угол а, и находится под действием
\ силы тяжести. Между диском и прямой
J существует трение (сила трения опре-
делена по закону Амонтона — Кулона).
. Определить, будет ли диск катиться
_______ —или скользить, если он начинает движение без начальной скорости (рис.
Рис. 12 12).
Решение: При наличии реакции трения найдется такое возможное перемещение, на котором работа сил реакции уже будет отлична от нуля, т. е. наложенная на диск связь не является идеальной. Чтобы можно было приме-32
нить принцип Даламбера — Лагранжа, в число действующих на систему сил включим и силу трения, определив ее по закону Амонтона — Кулона как силу, пропорциональную нормальному давлению:
F = kN.
Здесь k — некоторый коэффициент пропорциональности, удовлетворяющий условию
1*1 с f,
где / — коэффициент трения. Знак неравенства имеет место лишь до тех пор, пока не 'начнется проскальзывание.
Для полного определения силы трения необходимо знать величину нормального давления или нормальную реакцию. Поэтому при решении задачи наложенные на диск связи заменяют силами реакции N й fN. Тогда среди возможных перемещений диска появляется поступательное перемещение вдоль оси Ох и поступательное перемещение вдоль оси Оу. Следовательно, вдоль этих направлений может быть применена теорема о движении центра масс системы (диска), откуда будем иметь
тх" = mg sin а — kN, 0 = — mg cos а + N.
Кроме того, можно применить теорему об изменении момента количества движения относительно центра масс диска, откуда будем иметь
Предположим сначала, что проскальзывание отсутствует. Тогда имеют место условия
х' — г <р' или х” = г ф".
Исключая из уравнений х”, и N, получим
3 k mg cos а = mg sin а,
т. е. k—— tg а и является постоянной величиной. Условие 3
отсутствия проскальзывания запишется теперь в виде
f > 4-^, О
а исключение k и N приводит к уравнению
х" = — g sin а. 3
3-1626
33
Отсюда находим
gt* • х = sin a.
3
Если условие f >— tg а не выполняется, то качение без скольжения становится невозможным, а сила трения приобретает максимальное значение
fN = fmg cos a.
Связь х'=гф' исчезает, «а уравнения, получающиеся из тео^ рем о движении центра масс и об изменении момента количества движения, становятся независимыми. И.з первого получим
х" = g; (sin а — f cos а), откуда интегрируя, найдем
х = (sin а — fcosa).
Из второго уравнения будем иметь
~~ qp" = rfmg cos a, откуда
ф cos a г
Скорость точки «контакта
v = gt (sin a — 3f cos a)
постоянна по величине и не обращается ib нуль.
Пример 12. Однородная палочка дли-
ны 2/ опирается на шероховатый горизонтальный пол и шероховатую вертикальную стенку. Коэффициент трения на обоих концах палочки равен f. До начала движения палочка находится в покое, составляя угол Фо с вертикалью, а затем начинает падать. Составить уравнение движения палочки (рис. 13).
Решение: Освободим палочку от связей,
введя вместо последних неизвестные силы рис. 1з реакции /V и а также силы трения fN и fNi, действие которых эквивалентно действию связей. Для определения движения палочки, свободной от связей, можно, применить теорему о движении центра масс. Из этой теоремы будем иметь два уравне
ния
тх"с = Ni — fN и ту"с — — mg + N + fNi,
34
где хс и ус могут быть представлены через угол <р:
хс = I sin <р, ус — I cos <р.
Отсюда
х"с = I <р" cos <р — I <р'2 sin <р, у"с — — / ф" sin ф — I ф'2 cos ф.
Теперь из уравнений движения центра масс получим
ml <р" cos ф — ml ф'2 sin ф = М — fN,
— mlq>" sin<p— т/ф'2созф = —mg -|-Л/ + /W,.
Применяя теорему об изменении момента количества движения относительно неподвижной точки, которая в рассматриваемый момент совпадает с мгновенным центром вращения, будем иметь
т (ху" —.ух") + ф" = mgl sin ф — 2lf (N cos ф + Ni sin ф).
3
После подстановки сюда значений х, у, х", у", выраженных через ф, получим
— ml <р" = — mg sin <р + 2f (N cos <p + Ni sin <p). 3
Полученные три уравнения полностью определяют движение палочки. Дальнейшее исследование сводится, прежде всего, к исключению неизвестных сил реакции N и Ni. После исключения последних будем иметь
A ml ф" = — mg sin ф + [mg (cos ф + f sin ф) —
-Л1/(/ф" + ф'2)].
Это уравнение позволяет определить угловую скорость движения палочки в зависимости от угла ф. Вводя обозначения
А = mi A _L±4fL, в = _ АА_
з 1+Р 1+Р
C = mg=±±^,D = -^,
s 1 + Р 1 + Р
перепишем уравнения в виде
А <р" = В ф'2 + С sin ф — D cos ф.
Интегрируя это уравнение, найдем величину квадрата угловой скорости
2Аф
Ф'2 == ае
-2 лр + гвс _2 ac-2SD
А2 + 4В2 А2 + 4В2
35
где а — произвольная постоянная, определяемая из начальных условий. На дальнейшем анализе движения останавливаться не будем.
Задачи для самостоятельных упражнений
1. Две свободные материальные точки А и В с массами mi и т2 соответственно (находятся в одной вертикальной плоскости под действием силы тяжести. В начальный момент обе точки расположены на одной и той же вертикальной прямой на расстоянии а друг от друга, как показано на рисунке 14.
Точке А сообщена горизонтальная скорость и0, а точка В находится в покое. Определить траекторию и скорость центра масс системы.
2. Две свободные материальные точки А и В с массами mi и т2 взаимно притягиваются по закону Ньютона. В начальный момент точка В имеет скорость v2, направленную по АВ, а точка А — скорость Vi, перпендикулярную к АВ. Определить траекторию и скорость центра масс этой системы (рис. 15).
3. Эллиптический маятник состоит из двух материальных точек А и В с массами и т2 соответственно, соединенных между собой абсолютно твердым невесомым стержнем длины I (рис. 16). Точка А может свободно скользить по гладкой горизонтальной прямой, а точка В .может совершать колебания около точки А под действием силы тяжести. В начальный момент система находится в покое, а стержень АВ составляет угол <ро с вертикалью. Определить абсолютную траекторию точки В маятника.
4. На одном конце лодки, находящейся в покое, в точке А находится человек. Он начинает двигаться вправо, вдоль лодки и переходит в точку В (рис. 17). Определить, пренебрегая сопротивлением воды, на какое расстояние влево продвинется лодка, если вес лодки равен Р, вес человека—р, а длина АВ=2а.
36
5. Ha шкив радиуса г ;и весом Q, который может свободно вращаться вокруг горизонтальной оси О, навернута веревка, к концу которой привязана гиря весом Р (рис. 18). Система начинает движение под действием силы тяжести из состояния покоя. Определить скорость движения груза в тот момент, когда он опустится на расстояние h.
Рис. 18
Рис. 19
Рис. 17
6. По однородному круглому диску радиуса R и веса Р, свободно вращающемуся вокруг неподвижной вертикальной оси, начинает двигаться из конца диаметра человек весом Q, перемещаясь по диаметру с постоянной скоростью Vo. На какой угол повернется диск к тому времени, когда человек дойдет до противоположного конца диаметра, если начальная угловая скорость диска равна од.
7. Концы материальной однородной прямой АВ массы М и длины 2 а могут скользить без трения по горизонтальной окружности радиуса R. Материальная точка классы т вынуждена двигаться по прямой АВ с постоянной относительной скоростью Уо, начиная движение из центра прямой в тот момент, когда прямая находится в покое (рис. 19). Определить движение стержня.
8. Стержень длиною I за один ’конец подвешен на шарнире к горизонтальной оси О. Какую наименышую начальную скорость v0 нужно сообщить нижнему концу стержня Л, чтобы стержень начал вращаться без остановки вокруг горизонтальной оси О?
9. Определить закон движения тяжелой однородной нити длины /, половина которой в начальный момент свешивается с края гладкого горизонтального стола и в начальный момент нить находится в покое (рис. 20).
10. Определить закон движения тонкого тяжелого стержня АВ длины 21 и массы т, концы которого скользят без трения по двум неподвижным осям, одна из которых горизонтальна, а вторая вертикальна (рис. 21).
11. Однородный круглый цилиндр массы mi обмотан веревкой и может кататься без скольжения по шероховатой горизонтальной плоскости. Свободный конец веревки протя-
37
нут горизонтально и перекинут через неподвижный блок, не имеющий массы, как показано на рисунке 22. К веревке привязан груз массы т2. Определить скорость движения груза ги2, когда он опустится на расстояние а, начиная движение из состояния покоя.
12. Груз массы тх опускается вниз под действием силы тяжести посредством нерастяжимой нити, переброшенной через блок и намотанной на шкив радиуса R вала радиуса г, катящегося без скольжения по горизон-
Рис. 20
тальному рельсу, как показано на рисунке 23. Масса вала со шкивом равна т2, а его радиус инерции относительно центра масс равен k. Определить скорость движения
груза т\ в тот момент, когда он опустится на расстояние а, начиная движение из состояния покоя, и реакцию в точке AL
Рис. 22
Рис. 23
13. На барабан катушки, масса которой равна т, а больший радиус г, /способной катиться без скольжения по шероховатой горизонтальной плоскости, намотана нить, к свободному концу которой приложена постоянная по величине и по направлению сила F, действующая под углом а к горизонту. Меньший радиус катушки равен а, радиус инерции ее относительно горизонтальной оси, проходящей через центр 'симметрии, равен k. Определить ускорение центра масс катушки и реакцию в точке контакта М (рис. 24).
14. Маятник, который представляет собой однородный сплошной круговой цилиндр массы М и радиуса г, может кататься без скольжения по шероховатой горизонтальной плоскости. С цилиндром жестко соединен невесомый стержень ОВ длины /, на конце В которого закреплена тяжелая материал ь-38
ная точка массы т. Определить закон изменения угловой скорости вращения цилиндра, если в начальный момент он находится в покое, а стержень образует с вертикалью угол фо (рис. 25).
Рис. 24
Рис. 26
15. Шкив радиуса г и веса Р обмотан нитью, конец которой прикреплен к неподвижной точке, как показано на рисунке 26. Шкив /начинает -движение из юостояния покоя, натянутая часть нити вертикальна. Определить скорость движения центра масс «шкива в тот момент, когда он опустится на расстояние а, а также натяжение нити .в этот момент, считая
тг2 момент инерции шкива относительно центра масс равным—^—, где т — маоса шкива.
16. Брусок Л, скользящий в вертикальной прорези, опирается на клин В, который может скользить по гладкой горизонтальной плоскости. Масса бруска— /П1, масса клина — т2. Угол клина— а. Определить ускорение, с которым начинает двигаться клин В (рис. 27).
17. Призма А весом Р может свободно скользить по горизонтальной плоскости. По призме скользит груз весом р. Система начинает движение из состояния покоя под действием аилы тяжести. Определить ускорение,
двигаться призма, и давление, оказываемое грузом на призму. Угол наклона призмы равен а (рис. 28).
18. Шероховатый -сплошной однородный цилиндр массы т и радиуса г может кататься без скольжения по внутренней поверхности полого цилиндра радиуса R и массы М, который может свободно вращаться вокруг своей горизонтальной оси О (рис. 29). Моменты инерции цилиндров относительно их
39
Рис. 27
с которым начинает
осей симметрии равны соответственно -у- и MR2. Составить уравнения движения системы и найти их первые интегралы.
19. Треугольная призма массы М с углом при основании а может свободно скользить по гладкой горизонтальной плоскости. По призме может кататься без скольжения однородный круглый сплошной цилиндр радиуса г и массы т (рис. 30). Система начинает движение из состояния покоя, когда цилиндр находится в наивысшем положении. Найти первые интегралы уравнений движения и определить угловую скорость движения цилиндра в зависимости от его положения на призме.
Рис. 28
Рис. 29
20. Шкив радиуса R и массы т обмотан нитью, другой конец которой наматывают на барабан Л, «вращающийся с постоянной угловой скоростью о. Найти ускорение центра
Рис. 32
шкива, предполагая, что в начале движения нить занимает вертикальное положение, и определить натяжение нити. Радиус барабана равен г, момент инерции относительно горизонтальной оси, проходящей через центр масс, /= (рис. 31).
21. Однородная весомая нить длины 2а, висевшая на гладком штифте и нахо
дившаяся в равновесии, начинает двигаться с начальной скоростью v0. Определить скорость движения нити в тот момент, когда она сойдет со штифта (рис. 32).
22. Вдоль образующей однородного кругового конуса массы М, ось которого вертикальна, а вершина обращена вверх, просверлен тонкий канал. Конусу сообщают угловую скорость вращения соо вокруг его оси си;м/метрии и одновременно с этим опускают в верхнее отверстие канала скользящий по его поверхности шарик /массы т, не сообщая ему начальной ско
40
рости. Какова будет угловая скорость вращения конуса в тот момент, когда шарик выскочит из канала?
23. Тонкий однородный стержень АВ массы т и длины 21 может скользить по вертикальной прямой концом А. Конец В стержня вынужден оставаться на горизонтальной' плоскости. Стержень совершает движение под действием силы тяжести при произвольных начальных условиях (рис. 33). Составить уравнения движения стержня и найти их первые интегралы.
Рис. 35 44
24. Тяжелый однородный цилиндр массы т и радиуса г, получив ничтожно малую начальную скорость, начинает скатываться без скольжения с горизонтальной площадки, край которой параллелен образующей цилиндра. В момент отделения цилиндра от площадки плоскость, проходящая через ось цилиндра и край площадки, отклоняется от вертикального положения на угол ф. Определить угловую скорость цилиндра и угол ф (в момент отделения цилиндра от площадки, (рис. 34).
25. Однородная палочка АВ длиной 2 а и весом Р положена в гладкий неподвижный полуцилиндр с центром в точке О. Угол, образуемый радиусами, проведенными из концов палочки, составляет 90° (рис. 35). Палочка начинает движение из состояния покоя в тот момент, когда радиус ОА горизонтален. Определить реакцию в точке А в зависимости от угла ф, который образует прямая ОС с горизонтом, если С — центр масс стержня.
26. Тяжелый однородный шар радиуса г и массы т окатываются без скольжения по неподвижной абсолютно шероховатой цилиндрической поверхности радиуса /?, начиная движение из состояния покоя в самой верхней ее точке. Определить точку на цилиндрической поверхности, в которой шар оторвется от поверхности цилиндра.
27. Тонкая однородная палочка АВ длины 21 и массы т подвешена горизонтально на двух нитях одинаковой длины
41
(рис. 36). Определить натяжение одной из нитей в тот момент, когда другую .внезапно перерезают.
28. Однородная палочка АВ длины 2/ и несом Р подвешена в точке О на двух нитях, равных с ней по длине (рис. 37). В некоторый момент перерезают одну из нитей и палочка приходит в движение. Определить полное ускорение центра масс и натяжение оставшейся нити в момент начала движения палочки.
29. Однородная палочка длины 2 а и массы т опирается одним своим концом о гладкую горизонтальную плоскость. Палочка начинает падать из состояния покоя, когда она образует угол а с горизонтом. Определить угловую скорость движения палочки и реакцию в тот момент, когда палочка
примет горизонтальное положение.
30. Однородный прямой круговой цилиндр радиуса г может кататься /без скольжения по внутренней поверхности неподвижного цилиндра радиуса R, ось которого горизонтальна. Определить закон изменения абсолютной угловой скоро-
сти цилиндра (рис. 38).
Рис. 39
31. Доска ввсом Р движется по шероховатой горизонтальной плоскости под действием горизонтальной силы F. Коэффициент трения между доской и плоскостью равен f. На доске лежит однородный сплошной круглый цилиндр весом Q, который может кататься по доске без скольже-
ния. Определить ускорение доски (рис. 39).
32. Катушка, внешний радиус которой равен R, а радиус шейки — г, скатывается под действием силы тяжести по ше-
роховатой наклонной плоскости, преодолевая силу трения с
42
коэффициентом трения f и начиная движение из состояния покоя. На катушку намотана нить, прикрепленная к стенке, как показано на рисунке 40. Масса катушки равна т, а центральный радиус инерции — k. Определить зависимость пути, проходимого центром масс катушки, от времени и натяжение нити.
Рис. 40
Рис. |1
Рис. 42
33. Цилиндр, который может свободно вращаться около вертикальной оси OOi, имеет на поверхности винтовой желобок, в который кладут маленький шарик с массой т. Найти скорость, с которой шарик выкатывается из нижнего отверстия желобка, двигаясь под действием силы тяжести при отсутствии трения. В начале движения система находится в покое. Масса цилиндра равна М, его радиус инерции относи-
р
тельно оси .вращения k= высота цилиндра — а.
34. Однородная полусфера радиуса R и массы т опирает* ся на гладкую горизонтальную плоскость так, что ее основание параллельно гладкой вертикальной стенке, с которой соприкасается сферическая поверхность полусферы. Вначале полусфера находится в покое, а затем начинает скользить под действием силы тяжести (рис. 41).. Определить .скорость движения центра масс полусферы в тот момент, когда ее ос-иование займет горизонтальное положение.
35. По горизонтальной плоскости катится без скольжения однородный шар радиуса г .со скоростью 0о и переходит на наклонную плоскость, образующую с горизонтом угол а. Какое наибольшее значение можно придать углу а, чтобы при переходе на наклонную плоскость шар не оторвался от опоры?
36. На шкив радиуса г и веса Q, который может свободно вращаться вокруг неподвижной горизонтальной оси О, навернута веревка, на которой висит груз весом Р (рис. 42). Система вначале находится в покое, а затем груз под действием некоторых .внутренних сил начинает двигаться по веревке
43
вверх с постоянной относительной скоростью v. Определить, как будет двигаться груз в пространстве?
37. По доске длины 2 I и весом Р, опирающейся своими концами на гладкий горизонтальный пол и на гладкую вертикальную стенку, бежит животное весом р (рис. 43), начиная свое движение из верхней точки доски. Как должно бежать животное, чтобы доска оставалась в покое? Определить давление доски на стену.
Рис. 44
Рис. 43
38. Круглый однородный цилиндр, масса 'которого равна М, а радиус — г, положен на совершенно гладкую неподвижную наклонную плоскость с углом наклона к 'горизонту, равным а. На цилиндр намотана гибкая нерастяжимая невесомая нить, перекинутая через неподвижный блок, массой которого можно пренебречь. К свободному концу нити подвешен груз -массы т (рис. 44). Определить движение цилиндра и груза, натяжение нити, условия, при который возможно только вращательное движение, и условия, при которых груз остается неподвижным во все время движения.
39. Шкив радиуса R и массы М обмотан нитью, другой конец которой намотан на барабан радиуса г и массы т. Шкив может свободно вращаться «вокруг горизонтальной оси, а начинает падение из состояния покоя под действием силы тяжести. Определить ускорение центра шкива, полагая, что моменты инерции 'шкива и барабана относительно их осей равны соответственно—-—и (рис. 31).
Уравнения Лагранжа второго рода
Уравнения Лагранжа второго рода являются наиболее общими ура|внениями, определяющими движение механических систем, на которые наложены идеальные голономные связи. Эти уравнения не содержат реакций связи, а число их равно •числу независимых параметров, полностью •определяющих движение .системы материальных точек. При применении уравнений Лагранжа второго рода нужно помнить основные ус-44
ловия, при которых выводились эти уравнения. Наиболее важным вопросом ври применении уравнений Лагранжа второго рода является выбор независимых параметров, определяющих положение механической системы (лагранжевых координат). После того, как такие координаты выбраны, дальнейшие действия сводятся к определению ж’И.вой силы системы и обобщенных сил, действующих на систему. Для написания уравнений движения остается продифференцировать выражение для живой силы.
Для определения характера движения механической системы нужно .не только уметь составлять дифференциальные уравнения движения, но и проводить его анализ. Для этого очень важно уметь находить первые интегралы уравнений движения, знать условия их существования. Наиболее общими из первых интегралов являются интеграл Якоби и циклические интегралы. При наличии циклических координат применение метода Рауса игнорирования этих координат нередко дает преимущества в решении (конкретных задач.
Уравнения Лагранжа второго рода не включают реакций связи, тем не менее эти уравнения могут быть использованы и для определения реакций связи. Метод определения реакций тот же, что и IB аналитической статике. Нужно добавить к действующим на систему активным силам силы реакции связей. После этого система может рассматриваться как свободная от соответствующих связей. Это освобождение систе-м ы соп р овожд а ется доб а в л ением допо л нител ьн ой степени свободы, которой соответствует новый .параметр q, определяющий движение системы. Составляя уравнение Лагранжа для этого нового параметра, получим уравнение, содержащее новую неизвестную величину — реакцию связи. Параметр q определяется как величина, сохраняющая постоянное значение. Поэтому полученное уравнение будет служить для определения неизвестной реакции связи.
При рассмотрении примеров на применение уравнений Лагранжа второго рода следует заметить, что -все эти примеры могут быть решены и при помощи общих теорем динамики системы материальных точек. Но в некоторых случаях применение общих теорем делает задачу более сложной. Иногда для полного решения задачи о движении при помощи общих теорем необходимо ‘вводить неизвестные реакции связей, а уж потом исключать эти реакции из уравнений движения. И все же полезно примеры и задачи, которые предлагаются в качестве упражнений на применение уравнений Лагранжа второго рода, решить еще и с помощью общих теорем динамики системы.
Пример 13. Составить уравнения Лагранжа второго рода для материальной точки, совершающей пространственное
45
движение, определяя ее движение сферическими координатами.
Решение: Декартовы координаты точки могут быть выражены явно через сферические координаты (рис. 45):
х — г sin б loos ср, у = г sin б sin <р, z = г cos б.
точки в сферических координатах
Живая сила
[г2<р'2 sin26 + г2 + г2б'2].
Для определения обобщенных сил подсчитаем работу силы, действующей на материальную точку, на произвольном возможном перемещении точки. Сначала разложим эту силу на три ортогональных направления: 1) направление радиуса г (обозначим эту составляющую силы через Fr)\ 2) направление, перпендикулярное плоскости, проходящей через ось z и радиус-вектор точки, в сторону возрастания угла (обозначим эту составляющую через Аф ) иЗ) направление, перпенди-
кулярное радиусу-вектору г, в сторону возрастания угла б (в плоскости, образуемой осью z и радиус-вектором точки), эту составляющую силы обозначим через
F® . Тогда работа силы на произвольном возможном пере
мещении получит вид
б А = Fr б г + Рф г sin б б <р + F# г б б1.
Обобщенными аилами являются коэффициенты при вариациях координат бг, бср, бб в выражении работы, т. е.
Qr = Fr, (?ф = F^ г sin б, Qo = F# г.
Уравнения Лагранжа второго рода теперь получат вид:
тг" — тг (чр'2 sin2 б + 2) = Fr,
(mr2q/cos26) = F^ rsin6, dt
тг2ft" + 2mrr' ft' — tnr2 <p'2 sin cos ft = F$ r.
В частном случае движения сферического маятника имеем r=iconst, а действующая на точку сила —юила тяжести — обладает силовой функцией £/=—mg cos ft. В качестве коорди-46
нат Лагранжа могут быть выбраны углы ф и ft, а обобщенными силами будут Q<? =0 и Q mgr sin ft. Составим функцию Лагранжа
L = Т + U — (ф'2 sin2 ft + ft'2) — mgr cos ft.
Здесь координата ф является циклической и ей, следовательно, соответствует циклический интеграл
или
dL д <р'
= const
mr2 ф' sin2 О = const.
Кроме того, первым интегралом в данной задаче является интеграл живых сил, так как наложенные на точку связи не зависят явно от времени, а действующие силы — силы тяжести— обладают силовой функцией. Этот интеграл имеет вид
(ф'2 sin2 ft + ft'2) = — mgr cos ft + h. 2
Полученные два уравнения полностью определяют движение •сферического маятника.
Пример 14. Найти закон движения тяжелой материальной точки, которая может скользить без трения по материальной прямой ОЛ, вращающейся с постоянной угловой скоростью соо вокруг вертикальной неподвижной оси Oz. Прямая образует с осью угол ft.
Решение: Материальная точка имеет одну степень свободы, а потому всего один параметр полностью определяет положение этой точки на вращающейся прямой. В качестве такого параметра можно выбрать расстояние s от точки О. Выражая зависимость декартовых координат от этого параметра, будем иметь
х = s • sin ft cos G)o t, У = 5 • sin ft sin too А г = s • cos ft, откуда видно, что наложенные на точку связи зависят явно от времени.
Последнее условие можно записать еще и иначе, если •представить угол поворота прямой ОА вокруг вертикальной оси через время: ф=-соо/+фо. Параметр s определяет относительное положение точки в движущейся системе отсчета. Для составления уравнений движения запишем живую силу точки:
Т= ~ (s'2 4~ to20 s2 sin2 ft).
2
47
Действующая на точку сила тяжести обладает силовой функцией
И = — mgs cos ft.
Так как живая сила точки и силовая функция не зависят явно от времени, будет иметь место первый интеграл уравнения движения — интеграл Якоби:
— (s'2 — со2о s2 sin2 О) = — mgs cos ft + ht
где h—постоянная, определяемая из начальных условий.'
Интегрируя последнее уравнение и полагая, что при s = s0 относительная скорость точки равна нулю, легко получим
/ gCOS# \ 1 у . gCOS# 9 9 • 9 а
s — ( so--------- ch a t +—------ ; а2 = ^2о sin2 -ft,
\ а2 / а2
Пример 15. Система состоит из двух стержней. Невесомый стержень ОА длины /0 вращается в горизонтальной плоскости хОу с постоянной угловой скоростью соо вокруг неподвижной точки О. С. ним соединен шарнир-у * но в точке А стержень АВ длины 2Z и мас-сы т, который может вращаться в горизон-^2i тальной плоскости Оху вокруг точки А. Оп-/Ла ределить закон относительного движения стержня АВ (рис. 46).
Решение: Положение стержня АВ пол-* ностью определяется координатой ф, опре-Рис. 46* деляющей угол между направлениями стержней ОА и АВ. Наложенные на систему связи мргут быть представлены равенством
Ф — coo t + фо*
Отсюда видно, что связи зависят явно от времени.
Живая сила системы может быть подсчитана по формуле Кёнига, откуда будем иметь
Т = [/2 (соо + ф/) 2 + /20 <020 Н" 2//о соо (соо + фх) cos ф] -|-
4“^ Сф' + соо)2.
6
Это выражение не зависит явно от времени, а потому (отсутствуют активные силы) имеет место интеграл Якоби:
ml2 ф'2-----1- ml2 со2о — mile со2о icos ф = h.
48
Из этого интеграла может быть определен закон изменения
угла -ф.
npiH 'Meip 16. Исследовать движение шарика, помещенного в трубку, имеющую форму окружности и способную вращаться без трения вокруг вертикального диаметра. В началь-
ный момент шарик относительно трубки находится в покое, а радиус ОМ составляет с вертикальным диаметром угол ф0. Трубке в начальный момент сообщена угловая скорость соо вращения вокруг вертикального диаметра (рис. 47).
Решение: Обозначим через I момент инерции трубки относительно вертикального диаметра, через О — угол поворота плоскости трубки вокруг вертикального диаметра, а через <р — угол отклонения радиуса ОМ от вертикали. Эти параметры ф и # являются независимыми координами Лаг
Рис. 47
ранжа, определяющими положение системы.
В этих координатах живая сила системы получает вид
т = 1^-?- 4-^- (7-2-ft'2 Sin2 ф+ Г2ф'2),
а силовая функция
U = mgr cos <р.
Отсюда видно, что координата Ф является циклической и ей соответствует циклический интеграл
--- = (/ -|- mr2 sin2 ф) = р. д О'
Циклическая координата Ф может быть полностью исключена при помощи метода Рауса. Здесь функция Рауса R будет иметь вид
% = Т+и — р#',
где 'в’,=р(/+тг2з1п2ф)~1.
Подставляя значения Т, U и будем иметь
, R = ---— (г2 2 sin2 ф + г2 ф'2) + mgr cos ф —
2 2
--------Р--------— ф' 2 । mgr cos ф —— (I + mr2 sin2 ф)-1.
/4-mr2sin2<p 2 2
4—1626
49
Первая часть этого выражения-^—ф'2 представляет собой живую силу шарика в его отнааителыном движении. Вторая часть
[/* == mgr icos ф------—-------
2 (I + mr2 sin2 <р)
представляет силовую функцию сил, действующих на шарик в пространстве позиционных координат.
Закон относительного движения точки можно теперь определить из уравнения Рауса
d дЯ дЯ = 0
dt ф' д ф
или в раскрытом виде
тг2 _ Р2 mr2 sin Ф cos Ф (/ + mr2 sin2 ф)2
+ mgr sin ф = 0.
Из него найдем первый интеграл
— ф'2 Ч------------*--------
2 2 (/ + mr2 sin2 ф)
= mgr cos ф + h,
аналогичный интегралу живых сил в абсолютном движении.
Координата ф, которая определяет относительное положение точки, является позиционной координатой. Система может совершать движение, при котором позиционные координаты не изменяются. Такие движения называются стационарными. Стационарному движению соответствует равновесие в -позиционных координатах.
Для определения стационарного движения нужно рассмотреть стационарные точки для силовой функции 17*. Они определяются из условия
д ф
ИЛИ
— mgr sin ф + Р2 (/о + шг2 sin2 ф) ~2 mr2 sin ф cos ф = 0, откуда получим: 1) 8Шф = 0, т. е. ф=0 или ф=л;
2) -
-mgr+ .-P2.^2-£gMP---------- = о.
s (/ + mr* sin2 <p)2
Последнее условие равносильно уравнению — g (I -j- mr2sin2cpi)2 + p2rcos<pi = 0,
50
из которого может быть найдено соответствующее значение угла фь
Рассмотрим более подробно стационарное движение, которому отвечает значение угла <pi, определенное из последнего уравнения. Из циклического интеграла получим условие
(/ + mr2 sin2 (pi) 'ft'i = р.
Подставляя это .значение р в уравнение, получим — Mgr Р2 ~2 + Р2 mr<2 COS ф1 = О,
откуда cos ф1=—— . Это значение угла ф1 существует, если ф/2Г
g^'l.
Если шарик поместить в положение, определяемое углом Фь и сообщить трубке угловую .скорость ft'o, то система будет вращаться с этой именно постоянной угловой скоростью вокруг вертикального диаметра, как одно твердое тело.
Для исследования устойчивости стационарных движений рассмотрим вторую производную от функции U*. Будем иметь
= — mgr cos ф + т P2f2 (I + mr2 sin2 ф)“3[(/ + д ф2
+ mr2 sin2 ф) cos 2ф — mr2 sin2 2ф].
При ф=0 отсюда получим
д2£7*
—_ = -mgr + о qpz
Р...С2.. = — mgr + mr2 0'2 = — mr (g — r -ft'2).
Z2
При имеем------------->0 и положение стационарного дви-
д ф2
жения при ф=0 оказывается неустойчивым (на основании теоремы Лагранжа об устойчивости равновесия).
При ф=л имеем
= mgr _|_ т 2 Г2 > Оэ д ф2
а, следовательно, это положение стационарного движения будет всегда неустойчивым.
При ф = ф1 имеем
— mgr = — mr2 Фо'2 cos фЪ
51
так что
?-— = — тг2 Фо'2 icos2 ф + т Ф'2 г2 cos 2<pi дф2 L
тг2 sin2 2ф1
I + тг2 sin2 ф
= — тг2 Ф'2 sin2 epi
/и2г4 sin2 2ф1 Фх 2
I + пгг2 sin2 ф
<0;
и, следовательно, это положение стационарного движения устойчиво.
Пример 17. Тонкий однородный ц стержень АВ длины 21 и массы М мо-
жет свободно скользить своими конца-Л. ми по окружности радиуса 7? (рис. 48).
1 стержню движется с постоянной
I ) скоростью Уо материальная точка мас-
k 0 1 сы т, начиная свое движение из се-
\ J редины стержня, когда вся система на-
ходится в покое. Определить закон движения стержня.
Рис. 48 Решение: Система имеет одну сте-
пень свободы, а ее положение определяется всего одним независимым параметром. В качестве последнего можно взять угол поворота стержня ф, который в начальный момент можно положить равным нулю. Живая сила системы получит вид
Т = -Л ^..-0 Ф'8 ф' 2 ЛЬ [v2 (£2 _ /2 + у2/2) ф'2+
+ 2иУ/?2 —/2<р'].
Тогда
^ = 0, д ф
М <3?8.-..?.fiiL.. ф' -J- [ (#2 _ /2 у2/2) ф' _|_ v ytf2_/2]
д ф' 3
Координата ф является циклической и ей соответствует дТ
первый интеграл-— = const, или, принимая во внимание на-д ф'
чальные условия,
М- (3R2 — 2/2) <р' + m [ (R2 — /2 + v42) <p' + v ]IR* — /2] = 0.
Отсюда
M (3R* — 2P) + 3m (R2 — l2+ vW)
52
Здесь /?>/, а потому
Ф =
____________________________arctg_________^узт__________
УЗт [Л1 (ЗЯ1 2 — 2Z2) + Зт (R2 — Z2) ] УМ (ЗЯ2 — 2Z2) + Зт (R2 — Z2)
Пример 18. Составить уравнения движения материальной точки, отнесенные к осям, совершающим вращение вокруг неподвижной прямой.
Решение: Пусть вращение совершается вокруг неподвижной оси Oz. Обозначим через х, у, z относительные координаты точки. Проекции переносной скорости получим из формулы Эйлера
V = [®, г], и проекции относительной скорости.будут х', у', z'. Живая сила системы получит вид
7 = ^- [(х'-©у)2 + (/ + wX)2 + r2].
Теперь уравнения движения запишутся в виде
—— [т (х' — © у) ] — т © (у' + © х) = X, dt
[т (у' + и %) ] + т © (*' — <о У) = Y, dt
-1- [mz'] = Z. at
После дифференцирования
тх" — 2т ы у' — ты' у — ты2х = X,
ту" + 2т ых' -\-ты' х — ты2у = У, mz" = Z.
Здесь живая сила системы не содержит явно времени, поэтому, если действующие на точку силы обладают силовой функцией, будет иметь место интепрал Якоби:
-1 т (x'a+z/'2 + z'2) — -у ©2 (x2+z/2) = и 4- /г.
Пример 19 (рис. 16). При помощи уравнений Лагранжа второго рода исследовать движение механической системы, состоящей из двух материальных тел. Одно из них имеет
53
массу М и вынуждено скользить без трения по гладкой горизонтальной плоскости. Второе представляет собой материальную точку массы т, которая находится на конце невесомого стержня длины I. Последний свободно вращается в вертикальной плоскости вокруг точки А первого тела. Система находится под действием силы тяжести и начинает движение из состояния покоя, когда <р=фо- ч Определить давление первого тела на гладкую горизонтальную плоскость в момент начала движения.
Решение: Система имеет две степени свободы и ее положение может быть определено двумя координатами. Одной из них является горизонтальная координата х ползуна (первого тела). В качестве второй может быть выбран угол ф, который стержень образует с вертикалью.
Живая сила системы получает вид
Т — — х'2 + — (х'2 + /2 <р'2 + 2/ ф' х7 cos ф), 2 2
а силовая функция U=mgl cos ф. Здесь координата х является циклической и ей соответствует циклический интеграл
(Л1 + т) х1 + ml ф' cos ф — 0.
Применяя метод Рауса игнорирования циклических координат, построив функцию Рауса
R = L — ф' р =
ml2 <р'2
2 (2И + т)
(М + т sin2 ф) + mglws ф
(постоянная £ здесь в силу начальных условий обращается в нуль).
Уравнение движения для позиционной координаты получает вид
(Л4 + т зт2ф) I ф" + ml ф'2 sin ф cos ф = — (М + т) g sin ф.
Этому уравнению соответствует первый интеграл, аналогичный интегралу живых сил, который можно записать в виде
/ф'2 (М 4-тзш2ф) = 2(М + т) £со5ф + h.
Здесь постоянная h определяется из начальных условий h= ==— 2(MA~m)g cos ф0. Уравнение это полностью определяет закон изменения координаты ф. Оно не может быть разрешено в элементарных функциях.
Можно построить приближенное решение. Для этого заметим, что стержень будет совершать колебания около стационарного режима движения, определяемого условием
д <р
54
или (М-\-т)g sin ср = 0. Этому режиму соответствует значение угла ф=0.
Полагая, что величина ф мало отличается от нуля, получим уравнение малых колебаний системы в пространстве, определяемом позиционной координатой ф
Ml q>" = — (М + т) g ф.
Период малых колебаний будет
Т = 2л ]/ . м/ _ .
Он существенно отличается от периода малых колебаний простого математического маятника.
Зная закон изменения координаты ф, легко определить закон изменения координаты %, если воспользоваться циклическим интегралом.
Для определения давления, оказываемого первым телом на горизонтальную плоскость, введем дополнительную степень свободы. Для этого освободим тело А от связи, убрав горизонтальную плоскость и заменив ее действие на систему силой реакции N. Появляющемуся новому возможному перемещению точки А будет соответствовать изменение ее координаты у, которая в действительном движении равна нулю.
Живая сила освобожденной системы
Т = ^ (Х'2 + //'2) [х'2+/2<Р'2 + ^2 +
+ 2/ ф' (%' cos ф — у' sin ф) ],
а обобщенная сила, соответствующая координате у, имеет вид Qy = N~ (m+M)g.
Производная = Му' + т(у' — 21 ф'sinф). Дифференцируя ду'
это выражение по времени и полагая в действительном движении г/=0, получим уравнение
— 2ml у" эшф — 2/ф'2созф = N— (М g, из которого может быть определена реакция /V. Сюда нужно еще подставить значения величин ф" и ф'2, выраженных через Ф и взятых из уравнения движения (интеграла живых сил). В начальный момент движение начинается из состояния покоя, когда ф'=0, а
,, _ (М + m) g sin ф
I (7И + т sin2 ф)
55
Подставляя эти значения, получим уравнение для определения N:
(т + М) g М + т sin2 фо
(М + 3m sin3 фо).
Нетрудно видеть, что это значение будет больше статистического давления.
Пример 20. Однородная палочка АВ длиной 2 а и массы т положена в гладкий неподвижный полуцилиндр с горизонтальной осью, проходящей через точку О, причем угол АО В = 90°. Палочка движется под действием своего веса, начиная движение и;з -состояния покоя, когда радиус АО горизонтален. Определить реакцию в точке А в зависимости от положения палочки (рис. 35).
Решение: Палочка имеет одну степень свободы, а ее положение полностью может быть определено всего одним параметром. В качестве такого параметра можно взять угол, который радиус, проходящий через центр палочки, образует с горизонтом. Обозначим этот угол через ф. Тогда живая сила палочки получит вид
Т = — тш2ф'2.
3
Действующая на палочку активная сила — сила тяжести — консервативна и обладает силовой функций U=mga sin у. Уравнение Лагранжа, построенное для координаты ф, имеет вид
— та2 ф" = mga cos ф.
Оно допускает первый интеграл — интеграл живых сил — ma2q'2 — mga (этф — sin фо),
1/2
где sin фо— . Последнее уравнение дает возможность в неявном виде определить закон изменения угла ф. Будем иметь
Ф ____
Г а У.---------= ± 1/ 3g I.
J fsin ф — sin фо У 2а
Фо
Для определения реакции в точке А освободим палочку от связи в точке Л, заменив действие связи силой реакции Теперь среди возможных перемещений палочки появится та-56
кое, при .котором изменяется угол б, образуемый палочкой с радиусом ОВ. В освобожденном движении параметры <р и О являются независимыми лагранжевыми координатами. Живая сила в этих параметрах получает вид
лрл, /пи2с . та2 / п / . /х о
Т* = ——и — (б + ф )2 = 2 О
[2<р'2+ (б' + ф')2 — 2У2<р' (ф' + б')созб] +
(б' + ф')2.
6
Вычисляя работу всех сил, действующих на систему, на возможном перемещении, которые соответствуют изменению угла & 'имеем mgacos(90°—ф)60+2/Уасоэ(90°+45°)бб= = Q #66, откуда
=± mga sin ф — Na ^2.
Дифференцируя Т* по б' и О:
= та2 (б' + ф') — ф' }'2 cos б j ,
— == та2 У2 ф' (б7 + ф') sin б
и принимая во внимание, что в действительном движении б'=б"^0, получим уравнение Лагранжа, соответствующее координате б, для действительного движения
та2 (1 — ]/2cos6) ф" + ф" — ma2q>'2 = mga sin ф — Na^2.
Отсюда _
TV = — (mg sin ф — ср" + та2ф'2). 2 3
После подстановки сюда значений ф'2 и ф", взятые из уравне-
ний движения, получим
N = [У2 (10 sin ф — icos ф) — 6] .
8
Задачидля самостоятельных упражнений
40. Предлагаем решить задачу 39 методом составления уравнений Лагранжа (рис. 31).
57
41. Два шкива Afi и М2, соответственно с массами mi и т2 и радиусами и и г2, обмотаны нитью, перекинутой через блок ЛГз с массой т3 и радиусом г3, вращающийся без трения вокруг неподвижной оси О. Найти угловое ускорение блока и ускорения центров обоих шкивов (рис. 49), предполагая, что нить не проскальзывает по блоку и что центры шкивов движутся по вертикальным прямым.
Рис. 50
42. Два цилиндрических вала весом Pi и Р2 скатываются по наклонным плоскостям, образующим соответственно углы а и 0 с горизонтом. Валы соединены прикрепленной к ним и намотанной на них нерастяжимой нитью, как показано на рисунке. Считая валы однородными круглыми цилиндрами и пренебрегая весом нити, определить ускорения их центров (рис. 50).
43. Два одинаковых стержня АС и ВС длины I и массы т каждый могут скользить без трения концами А и В по неподвижной вертикальной прямой Ог и вращаться вокруг этой прямой (рис. 51). В точке С стержни соединены шарниром.
Рис. 51
Определить движение системы, принимая за параметры угол чр, который образуют стержни с горизонтальной плоскостью, угол & поворота плоскости системы вокруг оси Ог и расстоя-58
ние z=OD, где D—середина отрезка АВ. В начальный момент ф=фо, ф'=0, ©=0, ©'=©'о, z = 20, z' = 0.
44. Концы однородного тяжелого бруска длиной 21 и массы т -вынуждены скользить без трения один по горизонтальной, другой — по вертикальной прямой. Определить движение бруска, предполагая, что горизонтальная прямая сама (Вращается вокруг вертикальной оси Оу с постоянной угловой скоростью coo и что в начальный момент брусок находится в относительном покое, образуя угол фо с горизонтом (рис. 52).
45. Полый цилиндр радиуса В вращается с постоянной угловой скоростью со вокруг своей неподвижной горизонтальной оси. По внутренней стороне этого цилиндра катается без скольжения сплошной однородный цилиндр радиуса г и массы т. Составить уравнение движения системы и найти его первый интеграл (рис. 29).
46. Круглый однородный цилиндр массы т и радиуса г может свободно скользить по гладкой наклонной плоскости, образующей угол а с горизонтом. Вокруг цилиндра обмотана нить, свободный конец которой тянут вверх по наклонной плоскости с ускорением а. Определить ускорение центра масс цилиндра (рис. 53).
47. Концы однородного прямого стержня АВ длины 21 и массы т скользят без трения по горизонтальному и вертикальному стержням рамки, вращающейся с постоянной угловой скоростью со вокруг вертикальной стороны (рис. 54). Определить вертикальное давление стержня на рамку в точке А, предполагая, что в начальный момент стержень находится в относительном покое, образуя с горизонтом
угол ф0.
48. Треугольная призма массы Л4
с углом при основании а помещена на гладкой горизонтальной плоскости. По наклонной грани призмы скатывается без скольжения однородный круглый цилиндр массы т и радиуса г. Определить ускорение призмы.
Малые колебания механической системы около положения устойчивого равновесия
' Одним из наиболее интересных приложений уравнений Лагранжа второго рода является исследование малых колебаний системы около положения устойчивого равновесия. При исследовании малых движений системы около положения равновесия используются приближенные методы составления дифференциальных уравнений движения, справедливые при
59
выполнении условий устойчивости рассматриваемого положения равновесия. В этих предположениях живая сила и силовая функция могут быть представлены в виде однородных квадратичных форм: первая относительно обобщенных скоростей, вторая—относительно обобщенных координат. Получающиеся уравнения движения оказываются линейными дифференциальными уравнениями с постоянными коэффициентами, что значительно облегчает их исследование.
Особенное внимание при (применении методов малых колебаний следует обращать на выбор координат, определяющих отклонение системы от положения устойчивого равновесия. Координаты Лагранжа должны быть выбраны так, чтобы дискриминант квадратичной формы живой силы в положении равновесия был отличен от нуля. Если это условие не выполнено, нужно выбрать другую систему лагранжевых координат.
Так, например, если для точки, движущейся на плоскости и имеющей в начале координат положение равновесия, выбрать в качестве лагранжевых координат полярные координаты, то’ эти координаты не будут определять малые движения в окрестности положения равновесия. Ведь полярный угол, определяющий положение точки сколь угодно близко от начала координат, может быть как угодно велик, а дискриминант живой силы
Т= -у (г'2 + г2О'2)
обращается в нуль в положении равновесия. Если в качестве лагранжевых координат выбрать декартовы координаты точки, то в достаточно малой окрестности начала координат эти величины будут оставаться малыми, а дискриминант живой силы
(*'2 + *Л'2)
будет отличен от нуля.
Может оказаться, что при сделанном выборе лагранжевых координат разложение силовой функции начинается с членов выше второго порядка. Тогда получающиеся уравнения малых движений в окрестности положения равновесия уже не будут линейными, и изучение малых колебаний такой системы будет сводиться к исследованию нелинейных уравнений. Это обстоятельство не будет зависеть от выбора переменных, определяющих движение механической системы в окрестности положения равновесия. Период малых колебаний нелинейной системы может вообще зависеть от амплитуды колебаний.
В общем случае малые колебания системы совершаются около положения устойчивого равновесия. Поэтому, прежде 60
чем рассматривать процесс колебаний, нужно убедиться, что изучаемое положение равновесия устойчиво, т. е. выполнены условия теоремы Лагранжа об устойчивости равновесия.
Рассмотрим некоторые примеры.
Пример 21. На неподвижный круглый цилиндр радиуса'г, ось кото- .
рого горизонтальна, положен однородный круглый сплошной цилиндр радиуса /?, ось которого тоже горизон- —"V. ’”Л
тальна и перпендикулярна к оси пер- ( 7г\
вого цилиндра (рис. 55). Определить ( 4 )
период малых колебаний второго ци- J
линдра около устойчивого положения ''чйвпяй» равновесия, если его масса равна т, а длина I. Рис. 55
Решение: На верхний цилиндр действует сила тяжести с силовой функцией
U = — mgyc = — mg (г cos ср + г (р sin ф + /? cos ф).
В положении равновесия выполняется условие
= — mg (г ф cos ф — R sin ф) = О, д ф
поэтому положение ф=0 является положением равновесия. Для определения условий его устойчивости рассмотрим вторую производную от функции U:
d2U , । • , п \
-----== (— г cos ф + г ф sin ф + л cos ф) mg.
д ф2
При ф=0 будем иметь
-^_= (-r + R)mg. д ф2
При R<r это положение равновесия будет устойчивым, и система, выведенная из него, будет -совершать малые колебания около положения -равновесия. Раскладывая -силовую функцию в ряд по степеням малых значений угла ф, получим в окрестности положения равновесия
U _ &U ф* .
д Ф2 2
. 2
<р=0
Живая сила системы подсчитывается по формуле Кёнига и имеет вид
Т== ОТ/?2<Р'2 -Lf2 ф2 JJ у'2 =
2 2[ 4 \ 3 /J
= ^2 [ 15R2 + /2 + 12Г2 ф2] .
61
При малых значениях угла ф приближенное значение живой силы имеет вид
т= +
24
Для силовой функции получим приближенное выражение
и = — mgr-=^-q2.
Отсюда сразу находится уравнение малых колебаний
— (15Я2 _|_ /2) ф" = _ mg (Г _ #) ф
с периодом
Рис. 56
жение
Т — п 1/ _15*2 + /2
У 3g(r-g)
Пример 22. Материальная точка массы m привязана нитью длины а к неподвижной точке О и соединена со второй точкой такой же массы m при помощи нити длины а. Система находится в однородном поле силы тяжести. Определить частоты малых колебаний и нормальные колебания системы.
Решение: В качестве обобщенных координат, определяющих положение -системы, могут быть выбраны углы ф и ф, которые нити образуют с вертикалью (рис.' 56). Тогда для живой силы системы получим выра-
Т = ma У------Н ~ (а2 ф' 2 + а2 Ф'2 + 2а2 ф' ф' cos (<р — ф)).
Приближенное значение живой силы
^(2<р'2 + Г2 + 2<рЧ')-
Силовая функция 1систе1мы имеет вид
[/ = mga icos ф + mg (a cos ф + a cos ф) + const.
Ее приближенное значение в окрестности положения равновесия
(2<p24-i|52).
62
А потому уравнения Лагранжа для малых колебаний будут иметь вид
2а ф" + а -ф" = — 2g ф, а ф" + а ф77 = — g ф.
Решение этой системы уравнений может быть представлено в виде
Ф = A cos kt, ф = В cos kt.
Для определения значений А и В получим уравнения
— 2ak2A — ak2B = — 2gА,
— ak2A — ak2B = — gB.
Эти уравнения имеют нетривиальное решение, если обращается в нуль определитель
— 2ak2 + 2g — ak2 _ $
— ak2 — ak2 + g
что эквивалентно уравнению
а2$ — 4agk2 + 2g2 = 0.
Это уравнение имеет корни k2= -%- (2±У2). а
При&21= — (2+У2) для определения величин А и В и'ме-а
ем уравнение
— 2 (ak2 — g) A— ak2B — Q. (1)
Отсюда, после подстановки значений k2, получим А =—±-В]/2.
V2
Положив В=1, будем иметь А = —
При&22= — (2 — У2) для определения величин А и В име-а
ем уравнение (1), откуда после подстановки значения k22 получим При В=1 будем иметь А==^~ . Такие же
значения k2 получим, если будем искать решение в виде
ф = А1з{п^/, гр = Bi sin kt.
Общее «решение уравнений движения для малых колебаний теперь можно представить в виде
Ф = [— Ci cos kit — с2 sin kit + c3 cos k2t + c4 sin k2f\,
ф = croos kit — c2 sin kit + c3 cos k2t + q sin k2t,
63
где постоянные с2, с3, определяются из начальных условий
Вводя новые переменные
х = Ф~ у-М’- г/ = ф+-у-^>
получим для них
х — — (ci oos kxt + с2 sin kit), у = У2 (с3 cos k2t + с4 sin k2t).
Переменные хну являются главными координатами системы.
Уравнения движения в главных координатах получают вид
х" =-----(2 + У2) х. у" =--------(2 — у2) у.
П(ри'ме|р 23. Два одинаковых маятника длины I и массы т каждый соединены на уровне h упругой жесткой пру-
жиной жесткости с, прикрепленной концами к стержням маятников. Определить малые колебания системы в плоскости равновесного положения маятников после того, как одному из них сообщено отклонение на угол а от положения равновесия и система начинает движение из состояния покоя. Массами стержней и массой пружины можно пренебречь (рис. 57).
Решение: Пусть дч и ф2 соответст-
венно углы отклонения маятников от положения равновесия. Тогда живая сила системы
Т’=2у(фГ2+ф/2).
-Силовая функция системы /состоит из двух частей U=Ur\-+ U2i первая из которых U\ определяется действием силы тяжести
Ui = mgl (icos ф1 + oos фг).
Вторая U2 обусловлена действием силы натяжения пружины. Если обозначить через Д удлинение пружины, то эта функция будет иметь вид U2=-------~ Д2. Здесь Д определяется равен
ством
д = у&2 ((Ct0S — (00S ф2) 2 _|_ (ft sjn фА — Л sin фг — а)2 — а =
4h2 sin2 ——— + 4ha sin ——— eos—+ a2 — a,
64
где а — длина невытянутой пружины’, равная расстоянию BiB2. Отбрасывая в подкоренном выражении члены выше третьего порядка малости, будем иметь
Д = (ф2 _ (р1) я] 2 —а = /г (ф2 — ф1).
Поэтому приближенное выражение для U2 получает вид:
и2 = -^- Ctp2-<Pi)2.
Записывая приближенное выражение функции Лагранжа
• -i- = -4“ (ф1' 2 + <Р2' 2) — (ф12 + ф22) —~ (ф2 — Ф1) 2,
2? Z Л
получим уравнения Лагранжа для малых колебаний
ml2q” = — (mgl + ch2) (pi + ch2 ф2, ml2 ф2" = — (mgl + ch2) ф2 + ch2 ф2.
Уравнение частот для этих уравнений движения имеет вид
mgl + ch2 — ml2k2 = ± ch2,
откуда
^2==_£ = _ 8 2ch*
1 Z ’ 2 ml2 I ml2
Первому значению k2 отвечает решение
Ф1 = a cos kit + с2 sin kit,
ф2 = a cos kit + с2 sin kit.
Второму значению
Ф1 = — c3<cos k2t — с4 sin k2t, ф2 = c3'cos k2t + c4 sin k2t.
Общее решение системы теперь запишется в виде
Ф1 = a ‘Cos kit + с2 sin kit — с3 eos k2t — Сь sin k2t,
ф2 = c2eos kit + c2 sin kit + c3 cos k2t + c4 sin k2t.
При заданных начальных условиях будет иметь
Ф1 = -у (coBs kit + cos k2t), ф2 = (cos kit — cos k2t).
Главными координатами будут
* = Ф1 + ф2, У — ф2 — ф1.
5—1626 65
Если частоты главных колебаний очень мало отличаются друг от друга, т. е. kC^>k2z—k\ то возникает явление биения. Условие возникновения биения можно представить в виде
2ch2 ё
ml2 /
Для выполнения этого условия требуется, чтобы коэффициент с был достаточно мал.
Рис. 58
Пример 24 (рис. 58). Три нити связаны в точке С. Две из них перекинуты через небольшие блоки А и В и несут на концах равные грузы массы гп\. К концу третьей нити подвешен груз с массой т2, причем m2<2mi. Найти период малых колебаний системы около положения
равновесия, предполагая, что система остается симметричной во все время движения и что расстояние АВ = 2 а.
Решение: Обозначая через у расстояние CD, а через yi — расстояние от груза mi. до точки А, для силовой функции получим выражение
V = m2gy + 2migyi.
Здесь yi=l—Уа2+у2, а I — длина половинььнити, так что
U = т^у + 2mig (Z — fa2 + у2).
В положении равновесия
Ji
Ур 2 ’
откуда для равновесного значения у получаем
9 Ш22 а2
г/2Р =-----------.
4m2i — тп22
Т1
В окрестности положения равновесия —
где отклонение координаты у от равновесного значения. Здесь
d2U 2mxga2
ду2 _з_
(а2 + У2) *
При у—ур получаем
з
-^-1 ------(4т\ — т\) ,
ду2 ft/р 4т2 ta
66
а потому в окрестности положения равновесия з
U =------(4m2i — т22) 2 %г,
,8ат\ 7
Живая сила системы
Т = пцу1'2+ ~-у'2.
Подставляя сюда значение y't, выраженное через у', получим
7 __ (2т< + от») У2 + 'nzQ2 у 2
2 (а* + у») У '
Определяя коэффициент при у2 в положении равновесия, получим живую силу в окрестности положения равновесия
j,__ (2тх + т2) т2
4m 1
Движение системы в окрестности положения равновесия будет определяться уравнением
(2m1 + /n2)m1 /z =---g _ }
2тх Ьт\а
которое представляет собой уравнение малых колебаний сис-
темы с периодом
2amim2
g (2mi — m2) f4m2i — m22
Пр и м e p 25. Согнутая в виде окружности радиуса а трубка, плоскость которой вертикальна, может свободно вращаться вокруг неподвижного вертикального диаметра (рис. 59). Внутри трубки находится шарик массы т. Трубке сообщают начальную угловую скорость вращения соо, причем шарик находится в положении относительного равновесия при а = ао, где а — угол, образуемый радиусом окружности, проходящим через шарик, с вертикалью. Исследовать малые колебания шарика около положения его относительного равновесия.
Решение: Ж’ивая сила системы
Т = - - - (а2 2 sin2 а + я2 а'2),
2 2 V
67
где ф — угол поворота плоскости окружности вокруг вертикального диаметра, I — момент инерции трубки относительно вертикального диаметра. Силовая функция
U = mga cos а.
Непосредственно применить метод малых колебаний к этой задаче нельзя, так как циклическая координата ф не остается малой величиной во время движения, а неограниченно возрастает со временем. Малой величиной может быть только отклонение позиционной координаты а от своего равновесного значения. Но циклическая координата может быть исключена из рассмотрения при помощи метода Рауса игнорирования циклических координат. Ей соответствует циклический интеграл
(/ + та2 sin2 а) ф' = р.
Составляя функцию Рауса
R = L — р ф' = mga cos а+---------------------—2.
v X 2 (/ + та2 sin2 а) 2
можно рассматривать движения в пространстве, определяемом позиционной координатой а. Движение это определяется силовой функцией
= mga\cos а —
Р2
2 (/ + та2 sin2 а)
стационарные значения которой определяет положение относительного равновесия. Они находятся из равенства
dU* . . В2 та2 sin a cos а п .
= — mga sin а -J—-— -— О, да---------------------------------(/ + та2 sin2 а)2
которое выполняется, когда sin а=0 или
— mg,(/ + imn2sin2a)2+ P2w,acosa = 0.
Из последнего равенства, исключая р2, находим
g
cos a = —— co2oa
Это решение /существует, если
Для определения устойчивости относительного положения равновесия рассмотрим вторую производную от функции /7*:
------= — mga cos a + m р2 a2 {1 -J- та2 sin2 a) ~3 [/ + d a2
+ ma2 sin2 a) cos 2a — ma2 sin2 2a].
68
При а=ао имеем
d2U*
-----= — mga icos ао + та2 <о2о Г cos 2ао — та2 (/ + д а2
+ та2 sin2 а0) sin2 2а].
Но при а=а0 имеем — mga-\-ma2 со20 cos ао = 0, поэтому cW та2 со2о Н . 9/110 9 \ 1
ТГ = ~7Т—2 - 2 [' + та U + 3cos2ao)].
о а2 I 4- та2 sin2 а0
~ д2£/
ото значение-------отрицательно, а потому в рассматривае-
ма2
мом положении относительного равновесия силовая функция имеет максимум, а само положение относительного равновесия устойчиво.
В позиционных координатах уравнение малых движений около положения относительного равновесия получает вид
та2 х" = ——- 0 sin a° [/ -р та2 (1+3 cos2 ao) ] х, Z + ma2sin2a0
где x=a—ao. Это уравнение определяет малые колебания около положения равновесия с периодом
соо sin a0
I + та2 sin2 a0
I 4- zna2(l 4- 3 cos2 a0)
Пример 26 (Вынужденные колебания). Пружина длины /1 прикреплена своим верхним концом к поршню, совершающему вертикальные колебания по закону s=sin2t К нижнему концу этой пружины прикреплен груз массы mt, соединенный пружиной длины 12 с грузом массы т2. Определить колебания системы, если т^—З кг, т2=2 кг, жесткость пружины с=36 н/см.
Решение: В качестве лагранжевых координат выберем длину пружины Zi, которую обозначим через Xi, а длину пружины /2 обозначим через х2. Если Ц и 12 соответственные длины невытянутых пружин Л и /2, то силовая функция системы получит вид
U = (mi 4- m2) gXi + m2gx2---- (%i — Л)2---(х2 — 12)2.
Живая сила системы
Т = (х'1 + s')2 (х'1 + х'2 + s')2-
69
Здесь s—некоторая заданная функция времени, т. е. имеем систему со связями, явно зависящими от времени. Стационарные значения силовой функции определяются условием
-^=0, -™=0, dxi дх2
т. е.
(mi-j-m2) g — с (Xi — It) = 0, m2g — c (х2 —/2) = О, откуда
x*t — (mt + m2) — + It, x*2 = + l2.
C c
Малые отклонения определяются величинами y*i=Xt — х*,. Поэтому для приближенных значений будем иметь
= (у21 + у22).
Уравнения движения получат теперь вид
(/'i + 5") + т2 (у'\ + у"2 + s") = — cy^
^2 (у"1 + У„2 + S") = — Су2, ИЛИ
+ т2 (у'\ + /'2) = —суi— (mi + m2) s",
•m2 (y"i + /'2) = — cy2 — m2s".
Выражения —(mi-\-m2)s" и —m2S" представляют собой возмущающие силы, действующие на систему, а величины yi и у2 — возмущения относительных координат. Уравнение частот для собственных колебаний имеет вид
— (mi + m2) k2 + с — m2k2 _ 0 — m2k2 — m2k2 + с
или т^т2& — с (mi + 2т2) k2 + с —0.
При выбранный значениях масс и с имеем ^ — 42^+216-= 0, откуда &2i=6, 622=36.
Частные решения для собственных колебаний системы ищем в виде
yi — cl cos kt, y2 — p cos kt.
2k2 Коэффициенты а и(3 связаны зависимостью а=———р. — 5&2 + 36
70
При k = ki имеем а=2 р, при k=k2 а=------- р. -Поэтому об-
щее решение для собственных колебаний получит вид
yi = 2 (ci cos Уб t + с2 sin Уб /)-- (c3cos 6 / + с4 sin 6 f),
у2 = Ci cos Уб t + с2 sin Уб t + с$ cos 6 t + c4 sin 61.
Для определения вынужденных • колебаний будем искать частное решение вида
yi = A sin 2/, у2 = В sin 2/.
Тогда для определения амплитуды вынужденных колебаний получим уравнения
— 20Л — 8В = — 36Л + 20,
— 8А — 8В = — 36В + 8, ’
13 3
откуда находим А= — , В = —. Общее решение для вынужденных колебаний теперь получит вид
yi = 2 (ci cos Уб t + с2 sin Уб /) — — (с3 cos 61 + с4 sin 6t) +
2
+ — sin 2/,
8
у2 = Ci cos У61 +'c2 sin У61 + c3 cos 61 + c4 sin 6 t +
+ — sin 2 t.
4
Задачи для самостоятельных упражнений
49. Однородный сплошной цилиндр радиуса г может кататься без скольжения по внутренней поверхности неподвижного цилиндра радиуса R с горизонтальной осью. Определить малые колебания цилиндра около положения ра|ВНО|Весия.
50. Однородный тонкий горизонтальный стержень АВ длины 2га подвешен на двух вертикальных нитягх одинаковой длины I (бифилярный подвес). Определить период колебаний, которые будет совершать стержень, если его повернуть на небольшой угол вокруг вертикальной оси, проходящей через середину стержня, а затем отпустить.
51. Шкив радиуса г и массы М может свободно вращаться вокруг своей горизонтальной оси симметрии (рис. 60). Шкив обмотан верейкой, к свободному концу которой подвешен груз массы т. Расстояние центра тяжести С шкива от оси О
71
а т тл
равно а, причем —>— . Радиус инерции шкива относитель-r М
но горизонтальной оси, проходящей через центр тяжести, равен k. Определить период малых колебаний системы около
Рис. 60
положения равновесия.
52. Маятник состоит из жесткой) невесомого стержня длины /, способного вращаться вокруг неподвижной точки О и несущего на свободном конце тяжелую материальную точку массой т. К стержню прикреплены две пружины жесткости с на расстоянии а от закрепленного конца. Противоположные концы пружин закреплены (рис. 61). Определить период малых колебаний маятника.
53. Материальная точка массы т соединена шестью пружинами жесткости с с вершинами правильного шестиугольника. Длина каждой пружины в ненатянутом состоянии равна а, сторона правильного шестиугольника равна г (рис. 62). Определить период малых колебаний, которые может совершать система в горизонтальной плоскости.
У
Рис. 61 Рис. 62 Рис. 63
54. На нерастяжимой нити длины 4 а находится три груза, массы которых соответственно равны m, М и т. Грузы делят нить на отрезки равной длины. Нить симметрично подвешена за концы так, что ее начальный и конечный участки образуют углы а с вертикалью, а средние участки — углы р. Груз М совершает малые'вертикальные колебания около положения равновесия. Определить частоту колебаний (рис. 63).
55. К точке, которая движется по горизонтальной прямой по закону g=g(/), прикреплен маятник, совершающий колебания в вертикальной плоскости. Маятник представляет собой материальную точку массы т, подвешенную на нерастя-жимюй нити Длины I. Найти закон его движения, если прямая находится в плоскости движения маятника.
56. Определить малые колебания околю положения устойчивого равновесия тяжелого однородного стержня ОА дли-72
Рис. 64
ной I и весом Р, который может свободно вращаться вокруг неподвижной горизонтальной оси О и к концу А которого прикреплена пружина АВ. Пружина закреплена в точке В, расположенной на расстоянии I над точкой О (рис. 64). Длина нерастяжимой пружины /, коэффициент ее жесткости с.
57. Однородный тяжелый стержень АВ длиной I и весом Р может свободно вращаться вокруг неподвижной горизонталь-ной оси. К концу В стержня прикреплена нерастяжимая нить, перекинутая через блок С, расположенный на одной горизонтали с точкой А на расстоянии I от нее. На конце нити подвешен груз весом Q (рис. 65). Определить период малых колебаний системы
около_положения устойчивого равновесия, если Q = _ pVl 6
Рис. 65
Рис. 66
58. Однородная полусфера радиуса г расположена на неподвижной абсолютно шероховатой полусфере радиуса /?. Определить условие устойчивости положения равновесия и период малых колебаний около положения устойчивого равновесия.
;59. Горизонтальная балка АВ маюсы М соединяет концы двух вертикальных стоек СА и DB. К середине балки на веревке длиной I подвешен груз массы т. При небольшом горизонтальном отклонении верхнего конца стойки действующая на балку сила пропорциональна этому отклонению, причем коэффициент пропорциональности равен с (рис. 66). Определить частоты малых колебаний системы около положения 'равновесия.
60. Однородный прямолинейный стержень ОА длины / и веса Р может вращаться на шарнире О вокруг верхнего конца, вертикальной упругой стойки 05, нижний конец В которой закреплен неподвижно. При небольшом отклонении верхнего конца стойки упругая горизонтальная сила, действующая на стержень, пропорциональна этому отклонению, причем 'коэффициент пропорциональности равен с (рис. 67). Найти
73
малые колебания стержня около положения равновесия, принимая з-а параметры горизонтальное отклонение х верхнего конца стойки и угол -ft стержня с вертикалью. В начальный момент х=0,
61. Прямолинейная трубка О А может вращаться без трения в горизонтальной плоскости вокруг неподвижной вертикальной оси О. В трубке находится шарик массы т, соединенный с точкой О пружиной, упругая сила которой пропорциональна ее удлинению, с коэффициентом пропорциональности с. Когда трубка вращается с постоянной угловой скоростью соо, шарик находится в положении относительного равновесия Мо. Момент инерции трубки относительно оси вращения равен I. Определить период малых колебаний, которые будет совершать шарик около положения Мо, если ему -сообщить небольшую относительную скорость движения вдоль трубки.
62. Маятник состоит из ползуна с массой М, скользящего без трения по горизонтальному рельсу, и шарика массы ги, 'соединенного с ползуном стержнем длины /, который может вращаться вокруг горизонтальной оси ползуна (рис. 68). К ползуну прикреплена пружина жесткости с, другой конец которой закреплен неподвижно. Определить частоты малых колебаний системы.
Л| - П*
Рис. 68 Рис. 69 Рис- 70
63. Стержень АВ весом Q находится на двух пружинах одинаковой жесткости с, закрепленных на расстояниях I по обе стороны от центра тяжести. Определить частоты малых колебаний стержня, если его радиус инерции относительно центра масс равен k (рис. 69).
64. Две одинаковые материальные точки, весом Q каждая, прикреплены симметрично на равных расстояниях от концов натянутой упругой нити, имеющей длину 2^а-{-Ь) (рис. 70). Натяжение нити равно р. Найти частоты главных колебаний и главные координаты.
65. Определить малые колебания груза, подвешенного на пружине, если известно, что пружина может свободно поворачиваться в вертикальной плоскости вокруг точки О. Весом пружины пренебречь, вес груза равен Р, длина пружины в невытянутом состоянии равна /, жесткость пружины с. В начальном положении груз отклонен от вертикального положения.
74
Вращение твердого тела вокруг неподвижной оси и неподвижной точки
Задача о малых колебаниях системы материальных точек около положения устойчивого равновесия является одной из интересных в /механике. Это можно сказать и о вращательных движениях твердого тела. Наиболее простой и самой распространенной является задача о вращении твердого тела вокруг неподвижной оси. Основные уравнения вращательного движения и уравнения для определения реакций связей рассматриваются во всех курсах теоретической механики. Они представляют собой уравнения в проекциях на неподвижные оси.- Основой для их составления служат две основные теоремы динамики системы материальных точек — теорема о движении центра масс и теорема об изменении момента количества движения. Неподвижные оси в общем случае могут быть выбраны произвольно. Но чтобы получить более удобные для анализа уравнения, целесообразно при выборе направления осей руководствоваться соображениями симметрии в рассматриваемый момент времени (для данного положения тела). Наиболее серьезные затруднения представляет вычисление моментов инерции.
Более сложными являются задачи определения движения твердого тела, вращающегося вокруг неподвижной точки. В основу здесь принимаются формулы, определяющие вращение твердого тела, которые получаются из динамических уравнений Эйлера. В отдельных случаях при решении задач делаются известные приближения.
Рассмотрим некоторые примеры.
Пример 27. Однородный равнобедренный прямоугольный треугольник ОАВ весом Р вращается с постоянной угловой скоростью со вокруг невесомой неподвижной вертикальной оси, к которой он подвешен катетом ОА — а. Каково должно быть значение со для того, чтобы реакция нижнего цилиндрического шарнира равнялась нулю (рис. 71)? Определить реакцию верхнего сферического шарнира О.
Рис. 71
Решение: Выберем неподвижные оси ко-
ординат так, чтобы начало их совпадало с точкой О, а ось z была направлена вертикально вверх. Рассмотрим тот моменд,
когда плоскость г треугольника совпадает с плоскостью xOz. Из теоремы об изменении момента количества движения от-
носительно оси z получим только подтверждение того факта, что вращение происходит с постоянной угловой скоро-ростью (0.
75
Применяя теорему о движении центра масс, заметим, что a s центр масс ‘находится на расстоянии — от оси вращения. 3
Его ускорение /ц = со2 — направлено к оюи вращения. Поэтому, проектируя векторное уравнение, получающееся из теоремы об изменении количества движения, на три ортогональные оси, получим:
— —-и2 —- = Nох -f- Nлх, 0 = Nоу + Nду, -J- Р = Nqz. g з
Теорема об изменении момента количества движения относительно осей у и х дает два уравнения:
2 m(zx" — xz") = Р -j — NAxa,
2 т (yz" — zy") — NAy a. Здесь
x' = — co y, y' = © x, z'0;
x" — — © y' = — CO2 X, y" -&x' — — ©2 y.
Подставляя эти значения, получим
— ©2 2 mxz — (------Na* a,
\ 3 /
co2 2 mzy — NAy a.
Рис. 72
При вычислении произведений 2 mxz и 2 mzy заметим, что если в качестве осей, проходящих через точку О, выбрать ось симметрии g треугольника и ортогональную к ней ось ц (рис. 72), связанные с осями х, у формулами
х= a+n)4’
Z= (-g + n) V’
то для произведения /инерции 2 mxz полущим значение
2 mxz =2 m (г)2 — g2) = ^-2mr)2--^-2 mg2.
Оси g и г} являются главными осями инерции для треуголь-pffl п Pcfi
ника, и 2тт]2=——,.2т^=——. Поэтому
2 mxz = — , 2 туг — 0.
g
76
Подставляя эти значения в формулы для определения реакций будем иметь
7VАу — О, NАх — ~~— (g 3 со2 и).
3g
Возвращаясь к уравнениям, полученным из теоремы о движении центра масс, найдем
NOx = — — 2со2а), NOy — 0, HOi = P.
Пример 28. Определить давление на ось вращения тон-
кого однородного круглого диска, оеь симметрии которого составляет угол а с осью вращения. Радиус диака равен г, его масса т. Ось вращения вертикальна. Расстояние от центра
диска до подшипников соответственно равны а и b (рис. 73). К диску приложен постоянный момент Mt вращающий его вокруг вертикальной оси. Движение начинается из состояния покоя.
Решение: Прежде всего выберем систему координат так, чтобы в рассматриваемый момент времени оси были расположены симметрично относительно диска. Выберем начало координат в положении нижнего подшипника, направив ось z вдоль оси вращения вертикально вверх. Проведем через ось z плоскость (л), являющуюся плоскостью симметрии для диска. Ось у, перпендикулярную к оси z, расположим в плоскости (л), а ось х — перпендикулярно к плоскости zy (рис. 73).
Применяя теорему об изменении момента
Рис. 73
количества дви-
жения относительно оси z, получим
dt2
где ф — угол поворота диска вокруг оси z, Iz—момент инерции диска относительно этой оси. Выберем подвижные оси: ось 21 —перпендикулярно к плоскости диска, а ось yi — в плоскости диска и в плоскости yz. Оси r/i, zi, Xi — главные оси инерции. Моменты инерции относительно этих осей равны соответственно I=1 у = I = Момент инерции
«/I 4 41 2
относительно оси z
Iz = I sin2 а + I cos2 а — (2 — sin2 а).
У\ ‘ zi 4 v
77
Подставляя это значение lz в уравнение движения, получим
„ 47И , 4ЛМ
ф = --------------, ф' = -------------.
тг2 (2 — sin2a) тг2 (2 — sin2a)
Для определения реакций в подшипниках освободим систему от связей /в точках О и А и введем вместо «связей вилы реакций NAx, NAy, Nx, Ny. Применяя теперь теорему о движении центра масс и имея в виду, что центр масс во все время движения остается в покое, получим:
Me + NАх = 0, Ny 4~ NАу = О, N2 = mg.
Применяя теорему об изменении мо«мента количества движения относительно oicen х и у, будем иметь
2 т (yz" — zy") = — NAy
(1)
2 т >(zx" — xz") = NAx (a + 6).
Так как
x' = — у q', у' = x q/, z' = 0;
x" = — ф' 2 x — q" y, y" = — qT2 у + q" x, уравнения (1) получают вид:
Ф'2 2 mzy — q" 2 mzx = — NAy (a-j-b),
— Ф'22 mzx — q" 2 mzy = NAx (a-j-b).
Здесь
2 myz =im (r/ieos a — Zi sin a) (yt sin a + Zi cos a) = = 2 m (y2i — z2i) sin a icos a + 2 my^ ziicos2a — 2 mzi r/i sin2 a;
2 mzx = 2 m {y± sin a + z^ cos a) =
= 2 myi Xi sin a + 2 mzi Xi cos a.
Так как оси yi, — главные оси инерции для диска, будем иметь:
2 myz == sin a cos a, 2 mzx = 0.
Окончательные уравнения получат вид
2 sin doos a = —NAy (a-j-b),
4
—q/z sin aicos a = NAx (a + b),
4
откуда будем иметь
KT Msin2a
NAx = —------—-------------—,
2 (a + b) (2-Sin2a)
78
KT 2M2/2sin2a
/ * Av — ~‘ 5 •
mr2 (2 — sin2a)2 (a + b)
Рассмотрим в качестве примера применения теоремы об изменении момента количества движения движение гироско-пичеоких приборов. В основе элементарной теории гироекомических явлений лежит предположение о том, что скорость собственного вращения симметричного твердого тела, имеющего одну неподвижную точку, является настолько большой, что с достаточной степенью точности можно считать вектор момента количества движения о направленным по оси симметрии твердого тела. В этих предположениях уравнение
+ [со о] = т, dt L J
определяющее движение твердого тела около неподвижной точки, можно записать в виде
[со о] = т. (а)
Это уравнение будет определять прецессионное движение твердого тела под действием приложенного момента сил и справедливо только при больших скоростях собственного вращения.
Точное уравнение, которое определяет момент внешних сил, вызывающих регулярную прецессию симметричного твердого тела, имеет вид
т = С coiIC02 sin О [1 + ——-— — cos б! , (b)
L С coj J
где С — момент инерции относительно оси симметрии, сог — скорость прецессии, со± — скорость собственного вращения твердого тела, А—момент инерции относительно оси, перпендикулярной к оси симметрии.
Рассмотрим примеры.
Пример 29. Ось турбины, приводящей в движение винт парохода, направлена вдоль корпуса корабля. Турбина делает п оборотов в минуту. Ее момент инерции относительно оси вращения равен /. Корабль испытывает вертикальную килевую качку с периодом Т и амплитудой а, происходящую по гармоническому закону. Определить давление на подшипники турбины, расстояние между которыми равно /.
Решение: Изменение угла наклона корабля определяется углом
2л 7 ср = a sin t,
так что скорость прецессии
79
скорость собственного вращения
2л п
(01 = --------
60°
Векторы col и «2 ортогональны, поэтому момент сил
г 4л2па т 2л .
ГЛ = С01 (02 / ~ -------I COS--- /,
60Т т
а реакции в подшипниках горизонтальны и определяются равенством
Л7 m л2па г 2л ,
/V =---=-------1 cos ----t.
I \ЬТ1 т
Следует отметить, что полученный здесь из приближенной формулы результат совпадает с результатом, который может быть получен из точной формулы (Ь), так как ,&=90о.
Пример 30. Колесо, ось которого образует угол Ф с вертикалью и закреплена в точке О, катается без скольжения
по шероховатой горизонтальной плоскости. Ось колеса вращается вокруг вертикали с постоянной угловой скоростью (о2-Определить реакцию плоскости (давление колеса на плоскость), если радиус колеса равен г, длина оси I. Колесо представляет л собой тонкий однородный диск массы т, XPK/z ось колеса невесома (рис. 74).
Решение: Вектор мгновенной угловой 77/227///^^^ скорости (о проходит через неподвижную * точку О и точку А касания колеса с гори-
Рис. 74 зонтальной плоскостью. Пусть а — угол, ко-
торый образует линия действия вектора мгновенной угловой скорости с осью сим-
метрии колеса, так что tg а=— , тогда, раскладывая вектор о, как указано на чертеже, будет иметь:
€01
(Од
sin (О' — a) sin а
Величину угловой скорости собст1венното вращения уже нельзя считать большой, по сравнению с cdi, а потому нужно воспользоваться формулой (Ь) для определения момента сил, действующих на твердое тело, и обеспечивающих регулярную прецессию:
fnx = 1 +
С — A sin a cos О' \ sin (О' — а) sin О'
С sin (*0 — а) / sin а
80
Здесь С=-^~—, А=-!~------\-rnl2, а потому
тх = — (2rZsinft— г2 cos ft— 4/2 cos ft) cousin ft. 4
Так как действующий на колесо момент аил создается реакцией опоры и весом, будем иметь
тх = N р sin (ft — а) — mgl sin ft, где p = О A,
откуда
__ m \4gl sin ft + (2lr sin ft — r2 cos ft — 4Z2 cos ft) cd22 sin ft] _
4 (I sin & — r cos &)
В
Рис. 75
Задачи для самостоятельных упражнений
66. Однородное твердое тело, имеющее форму тела вращения вокруг оси 2^ вращается с постоянной угловой скоростью о вокруг неподвижной вертикальной оси г, проходящей через центр тяжести тела О. Определить горизонтальные реакции подпятника А и подшипника В, если угол между осями Zj иг равен а, момент инерции тела относительно оси главен Л и момент инерции тела относительно оси, проходящей через О и перпендикулярной равен Л. Расстояние между подпятниками равно h (рис. 75).
67. Однородный тонкий стержень ОС весом Р и длиной I прикреплен концом О под углом а к валу, вращающемуся в подшипниках А и В под действием внешнего момента М. Определить реакции подшипников в тот момент, когда угловая скорость вращения станет равной со, если расстояния от точки крепления стержня равны а (рис. 76).
подшипников до
Рис. 78
3g
Рис. 79
я
I
вокруг вертикаль-
68. Квадратная рама ABCD вращается
ной оси АВ с постоянной угловой скоростью со2. Вокруг диагонали рамы BD с постоянной угловой скоростью coi вращается ротор, представляющий собой сплошной однородный диск 6—1626 81
радиуса г и веса Р (рис. 77). Определить гироскопические давления на подшипники Е и F, если стороны ра,мы равны а.
69. Однородный диск радиуса г и веса Р ’вращается с большой угловой скоростью co=iconst вокруг невесомого стержня ОД, имеющего в точке О сферический шарнир, и в то же время совершает регулярную прецессию вследствие наличия момента силы тяжести. Определить приближенное значение горизонтальной составляющей реакции шарнира О, если расстояние от него до центра диска равно Z, а угол между стержнями и вертикалью равен а (рис. 78).
70. Центр тяжести тонкого диска, вес которого равен Р, находится на расстоянии а от горизонтальной оси вала. Расстояния подшипников от колеса равны между собой. Определить реакции подшипников, если вал вращается равномерно, делая п оборотов в минуту, а расстояние между подшипниками равно I (рис. 79).
71. Брусок АВ, укрепленный в точке О
2 на шарнире, ось которого горизонтальна,
вращается вокруг вертикальной оси z с уг-
/ ловой скоростью со. Известно, что О А—а, а
/ ОВ = Ь. Определить положение относитель-
Л кого равновесия бруска, т. е. угол ф откло-
А' • нения его оси от вертикали (рис. 80).
1S 72. Прямой однородный стрежень АВ
Рдас. 80 весом Р подвешен концом А к неподвижной точке. В начальный момент стержню придают вертикальное положение, так что конец В находится над точкой подвеса, и отпускают с ничтожно малой начальной скоростью. Найти давление на точку подвеса при прохождении стрежня через нижнее вертикальное положение.
73. Однородный круглый диск -сначала качается вокруг своей горизонтальной касательной, потом этот же диск качается вокруг горизонтальной оси, нормальной к его плоскости и проходящей через какую-нибудь точку его- окружности. Найти отношение приведенных длин для первого и второго
случаев.
74. Доказать, что если к физическому маятнику прикрепить в центре качания материальную точку какого угодно веса, то период колебаний маятника не изменится.
75. Гироскоп, в котором А = В=2С, вращается по инерции вокруг своего центра тяжести, совершая регулярную прецессию. Зная угловую скорость coi собственного вращения гироскопа и угол между осью гироскопа и осью прецессии = 60°, найти угловую скорость прецессии сог-
76. Однородный круглый диск вращается по инерции вокруг своего центра тяжести. В начальный момент диску сообщена угловая скорость ан вокруг некоторой оси, (составляющей
82
с плоскостью диска угол а. Определить угловую скорость прецессии и угол р, который ось прецессии составляет с плоскостью диска.
77. Тяжелый симметричный гироскоп совершает регулярную прецессию вокруг вертикальной оси Oz, причем угловая скорость cot 'собственного вращения вокруг этой оси очень велика по сравнению с угловой скоростью прецессии. Найти приближенное выражение для горизонтальной силы реакции в •неподвижной точке О, если вес тела равен Р, расстояние от точки О до центра тяжести равно а, момент инерции тела относительно оси z равен С, угол нутации (между осями z и 21) равен fh
Элементы теории удара
Под ударом в механике понимают такие явления, при которых мгновенно изменяются скорости отдельных частиц двигающихся тел. При изучении явлений удара остаются справедливыми общие теоремы динамики системы, определяющие движение системы материальных тел. Но ввиду того, что явления удара происходят за очень короткий промежуток времени, из общих теорем можно получить только возможность сравнивать скорость соударяемых тел до и после удара. Сами общие теоремы динамики системы получают новое выра
жение, но сохраняют свое содержание.
При решении конкретных задач следует начинать с анализа возможных перемещений, допускаемых наложенными на систему связями. Особенное внимание необходимо при применении следствий из теоремы живых сил — теорем Карно. Применение этих теорем возможно только при выполнении некоторых дополнительных условий.
Рассмотрим примеры.
Пример 31. Два гладких шара с массами т£ и т2 движутся поступательно по горизонтальной плоскости по взаим
•скорастями Vi и v2
но перпендикулярным направлениям со соответственно. В момент их столкновения линия центров шаров совпадает с направлением скорости до удара. Считая шары идеально гладкими, а коэффициент восстановления равным е. найти скорости шаров после удара (рис. 81.) Шары рассматривать как материальные точки.
Решение: В рассматриваемом случае происходит косой удар шаров, при ко-
тором не происходит удара в направле- • нии, перпендикулярном к линии удара. Изменение количества движения происходит только в направлении этой линии (изме*
83
няется количество движения отдельных шаров, но сохраняется количество движения в|сей системы). Выбрав неподвижную систему осей Оху так, чтобы ось х .проходила через центры шаров в момент их столкновения, заметим, что эта ось будет совпадать с линией удара. Ось у, перпендикулярная к линии удара, будет перпендикулярной и к оси х. Из теоремы об изменении количества движения системы получим
mi Vi = mi Ui 4- m2 и2,
где щ и и2 — проекции скоростей шаров пц и т2 на ось х. Из теоремы Карно получим
£^ + £i2Ek_^u21_mi(w22 + o22) =Lz£.r^. (rZ1_V1)2 +
2 2 2 2 1 + е L 2
т2 9
2 “2
ИЛИ
tni (V21 — U21) — /Л2 U22 = ----------—
1 + е.
[mi (ui — oi)2 + т2 u22] .
Подставляя сюда разность Vi — щ, выраженную через «2 из теоремы об изменении количества движения и сокращая на м2, получим
, . 1 — е тг (mi + тг)
т2 (ui — — т2и2 =------------- —— и2.
14-е т.
Подставляя сюда и2, будем иметь
(/п2 —/П1) щ + '(т24- т2) Ui — (mi + m2) (vi —«О,
1 + е откуда
„ — "h — emt _ mUl+e)
гп\ + ma + m2
В случае абсолютно неупругого удара е=0, поэтому
В случае абсолютно упругого удара е— 1 и будем иметь
гп\ — т2 2/И1
Щ ----- V{, U2 = -----------Vi.
ГП1+ГП2 ~ т1 + т2
Если в последнем случае массы miapo® одинаковы, то после удара
Ui = 0, u2 = Vi,
84
т. е. шары обмениваются скоростями в направлении линии удара.
П ip и м е р 32. Однородный диск радиуса г и веса Q может свободно, вращаться вокруг горизонтальной оси О, расположенной на расстоянии-^- от центра диска. В точку В диска, расположенную в конце его горизонтального диаметра, ударяет материальная точка ве- __
сом Р. Какова должна быть скорость v ма-материальной точки для того, чтобы диск у f О Y£ \ после удара совершил один полный оборот —*Sk—с 2 )
вокруг оси О, считая удар абсолютно не- k J
упругим (рис. 82)? ;
Решение: Удар происходит за счет внутренних сил. Поэтому, применяя теорему об рис. 82 изменении момента количества движения, за время удара будем иметь
т. е.
Pr „ (Qr2 . Qr2 \ . 5Рг2
2g \ 2g 4g / 4g
2Pv co = -----------.
(3Q + 5P)r
Дальнейшее движение происходит так, как будто тело вращается вокруг неподвижной оси. Скорость вращения должна быть такой, чтобы центр масс ^системы перешел через вертикальное положение равновесия. Для определения этого положения равновесия составим выражение для силовой функции, приняв за параметр, определяющий положение системы, угол Ф отклонения отрезка ОС от вертикали. Тогда
U = Q — cos ф -j- Р ~~~ cos (а — ф), где
2 1 ,,
sin а = — , cos а = —, т. е. U =
V5 V5
tcos ф + 2Psin ф].
n dU А
В положении равновесия------- =0, или
dtp
_£- [ — (Р 4- Q) sin ф 4- 2Рcos ф] = 0, откуда
. 2Р
tg ф = -------.
85
Силовая функция в верхнем положении равновесия получает вид
г Г (P + Q)2 + 4P21
2 L V5P2 + 2PQ + Q2J ’
В начал ыном положении <р=0, тогда
670==_r-(.P+Q).
Определяя движение теле удара из теоремы живых сил, будем иметь
т— т0 = и—и0.
Но в верхнем положении равновесия 7'=0, поэтому
-То= и—и0.
Здесь г W + 5F г![о2= -----------------W-------
8g 2g (3Q + SP)
поэтому искомая скорость
.2=3Q + 5^g rjP+QE+4^_________(P+Q)1
Р2 L V(P + Q)2 + 4P2 J
Пример 33. Баллистическим маятником называют прибор, предназначенный для измерения скоростей быстро движущиеся предметов. Он состоит из трубы, заполненной песком и подвешенной к горизонтальной оюи, вокруг которой может вращатыся. Предмет, скорость которого требуется замерить, застревает в песке. Предположим, что центр масс маятника расположен в точке G на расстоянии I от оси вращения, масса маятника равна Mf его момент инерции относительно оси вращения I=Mk2. Пусть масса движущейся матери------------- альной точки, скорость которой измеряют, /||\-------равна ш. После удара маятник отклонится
/ Jl \ на некоторый угол а от вертикального поло* / |j \ жения. Определить скорость движения точ-I ки до удара и реакцию оси вращения во вре-
I мя удара (рис. 83).
Решение: Рассмотрим последовательно Рис. 83 происходящие явления. Сначала происходит
неупругий удар с наложением связи, затем маятник, получив импульс, отклоняется от положения равновесия. Изменение скорости за время удара может быть определено из теоремы об изменении момента количества движения. Так как внешние активные силы не созда-86
ют момента относительно оси вращения в начале удара, будем иметь
A kz = О, или
(Mk2 + та2) со — mav = О, откуда
та2 + Mk2 V =-------•----
та
После удара система совершает вращение вокруг оси как одно целое тело. Применяя теорему живых сил, из которой в рассматриваемом случае следует первый интеграл
Т= U + !i, где
гр hAk2 “I- та2 п гт z I я я i\ г\
Т —------------со2, и _ (та mi} g cos ф
(здесь О — угол отклонения маятника от вертикали), получим
----------со2 = (та + Ml) g eos ft + h.
Постоянная h определяется из и ачальных условий. Когда
mavQ со ------------ ,
та2 + Mk2
имеем 0=0, так что
h =
m2a2v2Q
2 (Mk2 + та2)
(та + Ml) g.
В конце движения угловая 'скорость обращается в нуль, 0,= а, поэтому имеем
о = (та + М1) g.cos а + - — (та + Ml) g,
2 (Mk2 + та2) или _______________________
__ 2 У (Mk2 + та2) (та + Ml) g . а
Для определения реакции оси во время удара применим теорему об изменении количества движения системы. Будем иметь
kQx = N,
где N— горизонтальная составляющая ударной силы реакции.
A Qx = — mv + (Ml + та) со =
Мт (la — k2) у та2 + Mk2
87
поэтому
уу __ Mtn (la — k2) v
x та2 + Mk2
В вертикальном направлении о>сь вращения удара не испытывает.
П «р им ер 34. Симметричное тяжелое твердое тело совершает быстрое вращение с угловой скоростью со0 вокруг оси симметрии, направленной вертикально вверх от неподвижной точки. В точке /С, расположенной на оси вращения на расстоянии h от неподвижной точки, приложен импульс Fdt, ортогональный к оси вращения. Определить дальнейшее движение.
Решение: Выберем систему осей Oxyz, неизменно связанных с телом, так, чтобы в рассматриваемый момент вектор удара был расположен в плоскости Oyz. Тогда будем иметь Ар = Fh, Aq = О, С г = Сг0,
т. е. вектор момента количества движения сразу после удара будет иметь проекции Ар, 0, Сг0, где р= .
В некоторых случаях при решении задач удобно пользоваться уравнениями Лагранжа второго рода для исследования явлений удара. Эти уравнения приводят задачу к простым линейным уравнениям. . .
Рассмотрим подобный пример.
Пример 35. Эллиптический маятник состоит из ползуна с массой М} который может скользить без трения вдоль горизонтальной направляющей, и однородного стержня АВ с массой т и длиной /, скрепленного с ползуном посредством цилиндрического шарнира. В некоторый мо-q мент, когда система находится в равнове-
ВрГП сии, в ползун ударяет тело С с массой т\,
двигающееся по тем же направляющим со \ скоростью щ (рис. 84). Определить скорость \ ползуна А и угловую скорость вращения стержня непосредственно после удара.
Рис. 84 Решение: Удар происходит за счет внут-
ренних сил реакций, которые не входят в уравнение Лагранжа второго рода. Для составления последних! запишем выражение живой силы системы:
Т = ^+ !^-+ f + X- . + и ф-)+
откуда
дТ — = 1. дх'
После удара х\ = х', поэтому будем иметь
дТ / . ,, , ч / , ml <р' дТ ml2 , . ml f
---= (mi + M + m) х' H —, --------=----ф Ч х . дх-2 ду' 3--------------------------------2
88
Уравнения Лагранжа
л дТ
А Г7 = 0, дх'
получают вид
О ф
mi х\ — (mi + М 4- т) + <р', —- ц/ + — х' = 0-
2 3 2
Здесь х' = Уо, поэтому
4miuo
— 6 m iUq
x' = -------, m' =
4 (mi + M) + m I (4/Hi + 4Af + m)
Нетрудно видеть, что записанное здесь второе уравнение Лагранжа представляет собой теорему об изменении момента количества движения относительно точки А. Эта теорема здесь может быть применена, так как мы пренебрегаем перемещениями за время удара и точку А во все время удара считаем неподвижной.
Тот же результат можно было бы получить и с помощью теоремы Карно, ню в этом случае вычисления оказываются значительно сложнее. Действительно, исходя из теоремы Карно, получаем:
mivzo (mi + М + m) v2 । ml2 ,2 . mlq>' v _
2 ~ 2 + 6 45 ‘ 2
mi (vq — v)2 . M + m 9 . ml2 , 9 , mlqfv ------------L--------— v2 + — <p 4-------------—
2 6
2
2
или после-несложных преобразований
miVVo = (nii + М + т) v2 + — ml <р'2 + ml qr v.
3
Подставляя сюда значение
__ 2m1u0 — ml ф7
2 (mi + M + m) определенное из теоремы о сохранении количества движения, получим
, бт^о
* [4 (mi +М) +т]1
Задачи для самостоятельных упражнений
78. Груз весом Р падает без начальной скорости с высоты h на плиту весом Q, укрепленную на пружине жестко-
89
сти с. Найти величину сжатия пружины после удара, предполагая, что удар неупругий (рис. 85).
79. Однородная доска длины 21 и весом Р положена на стол так, что половина ее свободно свешивается над столом. На конце доски, лежащем на столе, находится груз весом Qi. Груз весом Q2 падает на свешивающуюся часть доски с высоты h2 на расстоя-ЕЗ нии b от края стола. Определить высоту, на
которую подскочит груз Qi после удара, счи-I * 1 тая удар неупругим и пренебрегая сопротив-
лениями.
80. Однородный стержень ОА длины I и массы М может вращаться в вертикальной Рис. 85 плоскости вокруг неподвижной горизонталь-
ной оси О, начиная движение из состояния покоя, когда он горизонтален. Стержень затем ударяет по материальной точке В, расположенной на горизонтальной плоскости под точкой О на расстоянии I (рис. 86). Определить начальную скорость точки В, если ее масса равна т, а удар абсолютно упругий.
81. Задача Гюйгенса. Три совершенно упругих шара с массами т2 и т3 нахо-дятся на одной горизонтальной прямой. Шар ° т\ ударяет в шар т2 с известной скоростью vq. Какова должна быть масса шара т2, чтобы после его удара о шар т3 скорость л д последнего была наибольшей?
82. Однородный куб с мдесой М и ребром а скользит по гладкому горизонтально-Рис. 86 му полу со скоростью v и ударяется о неподвижный упор. Какую скорость vc получает его центр тяжести после удара, если удар неупругий? Каково должно быть значение v для того, чтобы куб после удара опрокинулся, если высотой упора можно пренебречь?
, 83. Плоская пластинка движется в 'Своей плоскости так, что точка О этой пластинки имеет скорость vQ, а угловая (Скорость вращения пластинки равна соо. Радиус инерции пластинки относительно точки О равен k. Расстояние точки О ют центра тяжести С пластинки равен /. Угол между направлениями ОС и скоростью раней а. Точка О* внезапно закрепляется. Найти угловую скорость пластинки после закрепления этой точки.
84. Однородный стержень длины 21, который движется поступательно в плоскости чертежа со скоростью v, перпендикулярной к стержню, наталкивается на опору А, находящуюся от его конца на расстоянии-—- . Определить угловую скю-90
расть вращения стержня и жорсисть его центра тяжести после удара, считая последний неупругим.
85. Платформа с помещенным на ней грузом в виде призмы АВ катится по горизонтальным рельсам со скоростью v. На платформе у ребра В груза имеется выступ, который не позволяет грузу скользить по платформе вперед, но не препятствует вращению его около ребра В. Определить угловую скорость со вращения груза около ребра В в момент мгновенной остановки платформы, если высота центра тяжести груза над платформой равна h, радиус инерции груза относительно ребра В равен k (рис. 87).
V
Рис. 87
ОТВЕТЫ И МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ЗАДАЧАМ
1. Центр масс движется по параболе
__g (rni + rna)2 %2 mg .
2 /Tl2iU2o + ^2
проекции скорости центра масс
2. Траектория центра масс — прямая линия, образующая угол с направлением скорости vt, где tg а= . Скорость движения центра масс
v _ + m22t>22
"»i + тг
3. Связи дают возможность применить теорему о движении центра масс в горизонтальном направлении. Из этой теоремы следует, что центр масс системы не перемещается в горизонтальном 'Направлении. Выбирая систему неподвижных осей так, чтобы ось у, направленная вниз, проходила через центр масс системы, а ось х была бы направлена вдоль горизонтальной прямой, без труда получим:
/ mi + V 2 । у2
I mJ ) I*
s = 2а —-
* Г) I
5. Связи допускают поворот всей системы, как одного твердого тела вокруг неподвижной оси—оси вращения шки
91
ва. Поэтому можно применить теорему об изменении момента количества движения. Будем иметь
(/ + -£_Г2) у" = Рг, g
откуда легко находим
y = 21/-^—•
V Q + 2P
Тот же результат может быть получен и из теоремы живых сил.
6. Связи дают возможность применить теорему об изменении момента количества движения, из которой следует первый интеграл — закон сохранения момента количества движения относительно вертикальной оси симметрии диска:
Г_Р_/?2 + 0_ (/? — voO2]<P' ==[— Я2+— Я21 ®о.
I 2g g J L 2g g J
Полученное уравнение с разделенными переменными легко интегрируется, в результате чего
го..-то,.— -P + Q 2^<оо -|/~2Q_arctgi Л2Q_.
Q «о Г P V P
7. Обозначая через ф угол поворота палочки, из интеграла площадей будем иметь
М (R2~ а2) <р' + т—<р' + т (y2ot2-\-R2— а2)ф' +
3
+ mvQ у/?2 — а2 = О,
откуда, разделяя переменные и интегрируя, найдем
------dt
ф — фо — — mv01R2 — a2 J-------------------------------
о М (R2 — —a2) + m(R2 — a2 + t>20i2). 3
После вычисления интеграла будем иметь
mv01/R2 — а2 Ф — фо ------------— ....................... —
21/ mv20 [М (R2 — -у а2) + т (R2 — а2)]
vot
arctg—~ ..-—
/ М 2
1/ R2-a2 + —(7?’-—о2)
Г m3
92
8. Положение системы (стержня) определяется всего одним параметром — углом <р, который стержень составляет с вертикалью. Для определения этого параметра можно воспользоваться либо теоремой об изменении момента количества движения, либо теоремой живых сил. Последняя имеет то преимущество, что допускает существование первого интеграла — интеграла живых сил, откуда может быть определена скорость изменения угла <р в зависимости от положения стержня. Обозначим через т массу стержня. Будем иметь
ml* <р'* mgl । <
---—= —-— cos q> + n,
3 2 2
где h—1П|ромз1В10льная постоянная.
Скорость изменения угла <р должна обратиться в нуль только тогда, когда угол <р достигнет величины л. Тогда
При <р=0 будем иметь
wZ2<po'2 mgl . mgl
6 — 2 2
Определяя отсюда <р'о, найдем
1>о = I <р'о = l/6gl.
9. Предположим сначала, что часть нити, лежащая на столе, прямолинейна и расположена под прямым углом к краю стола. Действительное перемещение нити является одним из возможных, поэтому можно применить теорему живых сил. Из нее следует интеграл живых сил, так как действующие силы — силы тяжести — обладают силовой функцией. Скорости всех точек нити равны между собой, поэтому живая сила нити
Сила, движущая нить, равна весу свешивающейся части нити, т. е. -^-gx, а работа силы на элементарном перемещении --OTg* dx = dU, где U = •
Поэтому интеграл живых сил получает вид
mo* mgjfl . 2 2/ ’
где постоянная h — определяется из начальных условий. В начальный момент будем иметь
0 = ^4-Л, т. е. й=^-,
8Z 8
93
а потому скорость движения нити будет определяться из формулы
ё I 4
Закон движения нити определяется законом изменения коор-dx
динаты х. Подставляя значение v—------ и интегрируя урав-
dt
некие, получим
Если несвесившаяся часть нити смотана, в клубок, который находится у края стола, то будет происходить более сложное движение с постоянным изменением количества движения частиц. Движение свешивающейся части нити можно будет теперь определить при помощи уравнения Мещерского
— х~
I dt*
dx \2 dt /
= mgx ~^\
где последний член представляет собой реактивную силу. Отсюда получим
хх" = gx — х'2.
Интегрируя последнее уравнение, будем иметь
где Ci — произвольная постоянная, определяемая из начальных условий.
При х===~ *'=0, поэтому скорость движения нити может быть определена по формуле:
х'2 = — gx-----.
3 12х2*
Этот результат не может быть непосредственно получен из теоремы живых сил, так как при выводе нужно учитывать изменение м»асеы движущейся 'системы (см., например, А. А. Космодемьянский. Курс теоретической механики, ч. II. М., 1966 /или И. В. Мещерский. Работы по механике тел переменной массы. М., 1952).
10. Положение стержня полностью определено (всего одним параметром, ® качестве которого можно выбрать угол О, который стержень образует с вертикалью. Для определения зако-94
на движения, т. е. закона изменения параметра ft можно применить теорему живых сил, так как действительные и возможные перемещения определяются одним и тем же параметром— углом О. Из теоремы живых сил сразу следует первый интеграл — интеграл живых сил
— ml2 ft'2 = mgl cos ft + Л-
3
Если стержень начинает движение из состояния покоя, то h=—mgl cos Фо, так что
. — Ift' 2 — g (Cos ft — cos ft0). 3
Это уравнение совпадает с уравнением движения математического маятника длины /1=— /, а, следовательно, движение 3 будет периодическим с периодом
v—(R — r) |/
11. Из теоремы живых сил следует
m20g 3m 1 + 8m2
12. Из интеграла живых сил имеем
_________2m,cg________
m2 (r* + fe*) +m! (R — ry
_ fnim2g (Rr + k2)
* (R — r)2 + m2(r2 + k2) ’
Ny = m2g.
13. Применяя теорему живых сил, получим
откуда
Реакции
d Г—(1 х'21 = f(cos а------—) dx,
L 2 \ г2 / J \ г )
_ F (r cos а — Q) г m (г2 + k2)
= , Ny^mg-Fsina.
14.
, 2_______4mgl (cos <p — cos <po)_
ф ~ 3Mr2 + 2m (r2 + Z2 — 2lr cos <₽)
95
15. Связи, наложенные на -систему, можно представить в виде равенства
х' — г ср7 = О,
где х — вертикальная координата центра масс шкива, а (р — угол поворота шкива. Это равенство не включает явно времени, поэтому может быть применена теорема живых сил для определения единственного параметра, определяющего положение системы. Активные силы — силы тяжести — допускают существование силовой функции, а значит имеет место интеграл живых сил
тх’2
2
тг2 4
Ф'2 = mgx + h.
Постоянная Л=0, а ф и х связаны уравнением связи. Поэто-тому будем иметь
х'2 = — gx
3
и при х—а получим
Для определения натяжения нити заменим последнюю неизвестной силой N, действие которой эквивалентно действию нити. Тогда, применяя теорему о движении центра масс, получим
N = mg — тх" =
независимо от положения шкива.
16. Применив теорему живых сил, найдем у _ tg а
m2 4- mi tg2 а
17. Два параметра полностью могут определить движение системы. В качестве таких параметров могут быть выбраны горизонтальная координата х, определяющая положение призмы, и координата у, определяющая положение груза на призме. Для определения закона изменения этих параметров можно применить теорему живых сил, так как (связи, наложенные на 'систему, не зависят я/вно от времени, и теорему об изменении количества движения системы, так как наложенные на-систему связи допускают поступательное перемещение в горизонтальном направлении. Из этих теорем получим два первых интеграла
Рх' + р (х' + у' cos а) = О,
Рх'2 + р (х'2 + у'2 + 2х'у' cos а) = 2pgy sin а,
96
откуда легко найдем
, 9 ( Р 4- Р sin2 а \ п
У т.,--------- = 2sy sin а.
\ Р + р )
Дифференцируя это соотношение, получим
„ _ (Р + р) g sin а
Р + р sin2 а ’ откуда следует искомое уравнение
%,г pg sin q cos a
P + p sin2 q
0'сво'боди.в груз от 'связи и введя реакцию N, запишем закон движения груза в горизонтальном направлении:
— (*" + У"cos а) — N sin а.
g
После подстановки сюда значений х" и у" будем иметь
__ Рр cos q
Р + р sin2 q
18. Принимая в качестве параметров, определяющих положение системы, угол О поворота большого цилиндра и угол Ф, который прямая, соединяющая центры цилиндров, образует с (вертикалью, из теоремы живых сил и теоремы об изменении момента количества движения получим
2_^+..{W -fl2.fr, 2. jn (£_гуц,2_т_ % (fl —Г) =
4 4 2
= mg (R — г) (cos ср — cos фо)
»" + <р" = — mg (/? — г) sin <р.
19. Мх' + m (%' + г q/ cos а) = О,
Мх'2 + m [х'2 4~ г2 qr2 + 2х' ф' г cos а] + ф'2 =
= Zmgr ф sin а;
обозначая через s = rcp путь, пройденный цилиндром, будем иметь
, 2_ 4 (7И + m) gs sin q
[3 (М + m) — 2m cos2 q] r2
7—1626
97
20. Из теоремы об изменении момента количества движе имя, которую мож1но применить относительно точки В, гд< нить касается барабана, найдем
-~mR2(f"—mgR, откуда х" =_|_ g.
Натяжение нити Т — .
3
21. Решать задачу можно с помощью теоремы живых сил или теоремы об изменении момента количества движения
v — Уо20 + ga.
22.
ЗМ ©о СО — ------х--- ,
ЗЛ4 + 10/п
23. Связи допускают .поворот стержня вокруг вертикальной оси, следовательно, может быть применена теорема об изменении момента количества движения относительно вертикальной оси г. Эта теорема дает первый интеграл — закон сохранения момента количества движения относительно оси z.
— ml2 Ф' sin2 (р = const.
3
Действительные перемещения системы определяются изменением углов ф и # так же как и возможные перемещения. Поэтому имеет место теорема живых сил, из которой следует интеграл живых сил
— ml2 (<р'2 + О'2 sin ф) = — mgl cos ф + h.
24. Из теоремы об изменении живых сил определяем закон изменения угловой скорости
Для определения момента отрыва нужно найти условие обращения в нуль нормальной реакции опоры. Освободив цилиндр от опоры и введя реакцию связи, можно применить теорему о движении центра масс, из которой получим
mr ф'2 — — N 4- mg cos ф.
Подставляя сюда найденное значение ф'2 = со2 и приравняв N нулю, получим уравнение для определения ф в момент отрыва
— mg (1 — cos ф) = mg cos ф,
98
откуда cos ф==— . Тогда угловая скорость в момент отрыва
со =
25. Воспользовавшись теоремой об изменении момента количества движения относительно центра цилиндра О или теоремой живых сил, определим закон изменения угла ф:
"1 / (sin <р — sin фо).
dt Г 2а
Для определения реакции в точке А освободим палочку от связи в этой точке, после чего можно применить теорему о движении центра масс в напревлении касательной к направляющей цилиндра, построенной в точке В. Применяя теорему о движении центра масс, необходимо следить за тем, чтобы выбранное направление оставалось неподвижным. Тогда при движении палочки будет изменяться угол а, образуемый палочкой с направлением касательной. Обозначив через х положительное направление касательной, будем иметь
Ух = —а Ф cos а,
S
откуда получим
я г Р 1
---— а ф' cos а, = N + Р cos (ф + а), dt L g J
принимая во внимание, что после дифференциро-
вания получим
— а (ф" cos а + ф'2 sin а) = N + Р cos (ф + а). g
После подстановки сюда значений ф'2 и ф", определенных из уравнения движения и значений а=45° и ф0=45°, будем иметь
N = Р~- (10sinф — соэф — 3}'2).
26. Из теоремы живых сил ловой скорости вращения шара зуемого углом ф
определяется зависимость уг-от его положения, характери-
ф' 2 = ——-— (1 — cos ф) . т 7 R + r
99
В момент отрыва шара обращается в нуль нормальная составляющая реакции цилиндрической поверхности. Освобождая шар от связи (вводя силу реакции N) и применяя теорему о движении центра масс, будем иметь
т qr2 (7? + г) — тё cos ф — N.
Положив N— О, после подстановки значения ф'2 получим уравнение для определения угла отрыва. Из уравнения находим
10
cos ф = — .
7
27. Пусть обрезается нить AAi (рис. 36). Обозначим через гр угол поворота нити BBlf через ф — угол поворота палочки. Принимая точку В за полюс, получим картину распределения ускорений, показанную на рисунке 36 (с. 42). Применяя теорему об изменении момента количества движения относительно неподвижной точки, совпадающей в рассматриваемый момент с точкой В палочки, и имея в виду, что в начальный момент ф'=1|/ = 0, будем иметь
т/ ф" + ф" = mgl,
3
откуда q"— — S- . Применив теперь теорему о движении 4 I
центра масс в вертикальном направлени, получим ml ф" — mg — N,
откуда
N — mg — ml ф" = .
4.
28. Обозначим через гр угол отклонения оставшейся нити от вертикали, а угол поворота палочки относительно горизонтали обозначим через ф. Полагая, что перерезана нить ОА, и принимая точку В за полюс, получим следующую картину распределения ускорений в начальный момент (рис. 37 на с. 42). Уравнения движения палочки получим из теоремы о движении центра масс в направлении, перпендикулярном к оставшейся нити, и из теоремы об изменении момента количества движения относительно неподвижной точки, совпадающей в рассматриваемый момент с точкой В:
т (21 гр" — I ф" sin а) == — mg sin а,
т (— 2/2 гр" sin а + I2 ф" + — ф") — mgl;
3
или, после подстановки значения а и сокращений,
Z ф" — 4Z гр" =. g, 4Z ф" — 3Z гр". = 3g, т. е. ц>" = ,
13Z
100
1b" = — -S-,
13/
Отсюда проекции ускорения центра масс:
; ______10_„ ; . gTlWj
,х 13 ’ 1у 13 ё’ 1 13 ’
а натяжение нити, определяемое из теоремы о движении центра масс:
N = (mg — ml <р") cos 30° = 2^3 mg.
/ 3j? тё
29. со — 1/ sin a, N = ~^~ независимо от угла а.
30. <а2 = — - — — (cos ф — cos фо).
3 г
31. Система, состоящая из цилиндра и доски, имеет две степени свободы. На нее наложены неидеальные связи, которые могут быть заменены идеальными, если ввести силу трения, действующую на доску со стороны пола, равную f (Q+ Н-Р). После такой замены к системе может быть применена теорема о движении центра масс и теорема живых сил. Из этих теорем получим уравнения движения:
—х" +-^- (х" + у") =F-f(P + Q), .
g g
+ (х' + у')\+ -£-У'2 = [F-Z (P + Q)]X,
2g 2g 4g
откуда находим иокомюе ускорение:
, = х” = 3g .
ЗР + 0
32. Для получения уравнения движения можно воспользоваться теоремой живых сил, которая приводит к первому интегралу:
(г2 + k2) ф'2 = 2g ф [г sin а — f (Р + r) cos а].
Действительное движение возможно, если
। .. с J? -f- Г
tga>f—.
Г
После этого можно получить ускорение центра масс
х" = Г(р" = —SL— [rsina — f (R + r) cosa].
101
Натяжение нити:
Т = ~Тм' ' sin а — / (Я + г) г cos а].
Г2 + №
33.
^2 __ ___ 4ga (А! -{- m)2___________
2 (АГ + m)2 — (ЗА! + 2m) m cos2 <р *
34.
со2 = —— sin ф.
8 /?
При горизонтальном положении основания
со2 = _11_£
8 R 8 V 8R
Отрыв от -стены произойдет тогда, когда основание займет горизонтальное положение.
35. Если cos а= l0g^l~7p ° , u2o=£^gr, то шар будет ка-
титься без отрыва.
36. х =.^2~2/р<
2 (/ + тг2)
Р 1 Qr2
где m — — , 1 — —— g 2g
37. Движение животного должно подчиняться закону
j-2 / (1 — cosU),
где %—1/ —8----
г 21 sin <р
Горизонтальная реакция стенки
N — — р + 2р ctg ф cos % t,
2 Р + р
в момент t= — реакция обращается в нуль и доска, отой-2Х
дя от стенки, начинает падать.
38. Ускорение центра тяжести цилиндра
/ц —
ускорение груза /гр==
(2m — М) sin а 4- ап М + 3m
{3 m — М sin a)g\ Натяжение ни
ни
Т= _^L.C0SZ Af + Зап
л а
4 3
Проскальзывание отсутствует, если
----------------------, Olli U, .
М 1 — 2 sin а 2
102
Груз остается в покое, если — — — sin а.
М3
39. Применив теоремы живых сил и теоремы об изменении момента 'количества движения, получим
. 2(пг + М)
7 3m + 2Л1
40. Обозначая через ф угол поворота барабана, а через Ф угол поворота шкива, для живой силы получим выражение
__ tnr^ .. п । М / , / I /, g । MR* о
' = —ф 24-—(гф 4-^ф)2Ч—
Для определения обобщенных сил подсчитаем работы всех сил на произвольном возможном перемещении
6Л =— Mg (гбф + Я6ф).
Уравнения Лагранжа получат вид
(т 4- 2М) г ф" + 2MR ф" = — 2Mg,
2Мг ф" 4- 3MR <р" = — 2Mg.
Отсюда найдем ускорение центра масс шкива:
/== — (/? 4- г ф") = 2g
j к -г V / ® (3m + 2Af)
41.
у " =- 2 (3 <OTi + w») + maJ a u" = 2 t3 (ma + a
yi 3 [2 (m1 + m2) + 3m3] У2 3 [2 (m, 4-m2) + 3m3]
Угловое ускорение блока
, _ 2 (m, 4- m2) g
[2 (m, 4- m2) 4- 3m8] r
(3Pj + 2P2) sin a — P2 sin p
3 (Pi + p2) 8
V ,z x2
(2Pi + ЗРд) sin p — Pi sin a 3(Pi + P2)
43. Живая сила системы T = rn (z' 2+~/2ф' 2+ — /2 О'2 cos2 ср).
>3 3
Силовая функция U——2 mgz. Координата О является циклической и ей соответствует циклический интеграл
2 2
— m/2^' icos2 <р=р, где р=________ml2 ^'о cos2 ф0.
3 3
103
Исключая циклическую координату, получим функцию Рауса
R = т (z'2 + — /2 <р'2) — 2mgz — —---------—----.
3 7 m2l2 cos2 ф
Отсюда для z получим значение z=-— g/24~Zo. Для определения q> получим уравнение
т/2 2 = 9 Р2 (cos2 Ф — cos2 <Р°)
4 ml2 cos2 ф cos2 фо
Интегрируя это уравнение и подставляя значение р, получим
sin ф = sin фо cos ({Ио t cos ф0).
Закон изменения угла ft определяется уравнением
О' [ 1 — sin2 фо (COS2 (ф'о t COS фо) ] = ф'о COS2 фо,
интегрируя которое найдем
tgO = —— tg (Фо/cos фо).
COS фо
44. Закон изменения угла ф определяется уравнением
2Z ф'2 = 2Z со2 (cos2 ф — cos2 фо) + 3g (sin ф — sin фо).
Положение относительного равновесия бруска определяется уравнением
— — 21 со2 cos ф sin ф + 3g cos ф — О, д ф
откуда имеем два решения
л 3g
Ф1 =----, COS ф2 = —------- .
Т 2 21 со2
Последнее решение (существует, если
3g^2Zco2.
При выполнении неравенства последнее положение равновесия является устойчивым.
45. Движение определяется из первого интеграла
— т (R — г) 2 2 _ mg — /-) c,os $ h,
4
где ft—угол, образуемый прямой, соединяющей центры цилиндров с вертикалью, а -постоянная h определяется из начальных условий.
104
46.
• 2 / а • \
/ =—----------g'sina .
3 \ 2 /
3
47. Относительное движение стержня определяется уравнением, получаемым из уравнений Лагранжа 'второго рода:
4/ ф" + 4/ со2 sin ф cos ф = — 3g cos ф.
Этому уравнению (соответствует первый интеграл
— I ф'2 = g (sin фо — sin ф) Ч---— I со2 (cos2 ф — cos2 фо).
3 3
Реакция
48.
N — m[g (-— + ~~ sin2 ф---------sin фо sin ф) —
— I о2 (2 sin ф cos2 ф — sin фо sin ф) ].
. __________mg sin 2а______
3 (M + m) — 2m cos2 a
49. Если за параметр выбрать двугранный угол ф, который образует плоскость, проходящая через оси цилиндров, с вертикальной плоскостью, то этот угол будет изменяться по закону ф = С1 cos ( _z+a), где Ci и a — произволь-
ные постоянные, определяемые из начальных условий. Период колебаний
50.
Т = 2л
т = 2л Д / _L
V 3g
51.
у___/ М (^2 4" fl2) + mr2
У g уМ2а2 — m2r2
52. Вертикальное положение будет устойчивым лишь при выполнении условия а2> • Тогда маятник будет совер-
шать малые колебания с периодом
Т = 2л1
tn
2са2 — mgl
105
53. Выбрав систему прямоугольных координат ху с началом в положении равновесия точки и обозначив координаты точек А, В, С, D, Е, F соответственно через щ и р,, для силовой функции получим выражение
U =-----с- {S W(x-ai)z+(y-fW-a]*}.
Если величины х и у являются малыми отклонениями от положения равновесия будем иметь
[У (х-аг)* 2+ (f/ —Рг)2-а] = а2г + Р2г - 2 (щ X + pi у) +
4-х2 + у2 + а2 — 2аГУа2г + р2; — а<*+р<? .д-
L Га2< Д р2,-
Р2< х2 — 2а< flt ху + а2< у2 . 1
' з т" • •
. 2 (а2. + рМ 2
а, и р, принимают соответственно значения:
(Pi) zVL.o, ' 2 2 2 2
Поэтому будем иметь
а2; + р2. = r2j 2 = о, 2 Pi = 0;
2 a2i = 3r2, 2 p2i = 3r2, 2 щ p, = 0.
После суммирования и отбрасывания постоянного члена получим приближенное выражение для силовой функции:
О = — А .3(.2.{.-А- (Х2 _|_ у2) .
2 г
Уравнения для малых колебаний теперь получат вид:
тх" ==-----ЗА. (2г — й) х, ту" —-----— (2г —а) у.
г г
Они представляют уравнения малых колебаний точки с частотой __________
л / ЗХ (2г а) .
V fnr
54. Принимая в качестве лагранжевой координаты угол a получим для живой силы выражение
Т = та2 а'2 + (a' sin а + pz sin Р)2,
2
106
где а и р связаны соотношением
a (sin а + sin 0) = const,
откуда 0Z=—со-° а'. Живая сила получает вид: cos р
r=rffla2+Aaasin40-a)la,2
[ 2 cos2 р J
Силовая функция
U = 2mga cos a + Mga (cos a + cos 0).
В положении равновесия
= — 2mga sin a 4- Mga (— sin a — sin 0 = 0.
да da /
i-r W
Подставляя сюда значение — , получим da
— —2mga sin a + Mga sin — o, da cos 0
откуда найдем в положении равновесия
т М sin (Р — а)
2 sin a cos р
Для живой силы получим теперь выражение
у__ Ma2 sin (Р — a) cos (Р — a) cos а 2
2 sin a cos2 р
Для определения разложения силовой функции по малым значениям отклонения координаты а от равновесного положения необходимо подсчитать производную от функции U:
d2U п 1/ / , . Л 1 cos2 a
-----= — 2mga cos a — Mga ( cos a + sin a tg 8 H----------
d a2 \ cos8 0
Подставляя сюда значение m, получим
d2U
да2
— —Mga
sin 0 cos2 P + sin a cos2 a sin a cos3 p
Обозначая через x отклонение координаты a от равновесного значения, получим приближенное выражение для живой силы и силовой функции
Ma2 sin (Р — a) cos (0 — a) cos а 2
2 sin a cos2 р
107
U — — Mga
sin [3 cos2 [3 + sin a cos2 a x2
sin a cos3 P
Отсюда получаем частоту ,колебан1ий
55.
k = -i / g (sin |3 cos2 [3 + sin a cos2 a)
a cos p cos a sin (P — a) cos (P — a)
Ф = Ci sin -y- t + C2 cos y/'~~ t —I"
/ X • 1 / £
g (t) sin |/ —
(t — t) dt,
где Ci и C2— >произ1В10ЛБНые постоянные, определяемые из начальных условий.
56. Если Р>1с, то устойчивым будет положение равновесия при ф=л. Система будет совершать около него малые колебания, которые определяются уравнением:
_ (P-cZ) z
3g 2
Если P>cl, то устойчивым будет .положение равновесия, определяемое углом фЬ который определяется равенством
(Pl cl
SIH —=------:-----.
2 2d — Р
Выведенная из положения равновесия система будет совершать малые колебания, определяемые уравнением
57.
58.
Pl2 „ Z(P — 3cZ) (d — P) 3g ё 2(2cZ —P)
т / (8 — 3 V3) I .
Г = 2яУ 5<е
Т = 2л.
6г(К + г) g(3/?-5r)
2
6-
59. Частоты определяются из уравнения
60.
х =
ММ — [(Af + m) g + 2cl] k2 + 2cg = 0.
[cos kit — COS k2t],
2 2
о о
g + k\)
108
[ (g-----— lk2z) k\ cos kit + (g —
3
g(k\-k\)
---— lk\) k22 COS k2t] ,
3
где k2i и k22 — положительные корни характеристического уравнения
*4-2g (-^+7-) + =0.
61. Функция Лагранжа имеет вид
L = а+тх^) дуг с (х/}2
2 2 2
Здесь / — длина нерастянутой пружины, а ср — циклическая координата, поюле исключения которой получим функцию Рауса
£= z------Р------
2 2 2 (1 + тх2)
В положении относительного равновесия
Cl ^9
х0 —------------ , с > т (о2о.
с — т б)2о
Малые колебания около этого положения определяются уравнением
_ zz J (с —т со2о) + т*2о (С + 3m й>20) «.
а период колебаний
Т — 2л -в /________________т (Z + тх20)__________________
у Zf(c — m со2о) + тх20 (с + Зт со20)
62. Частоты колебаний являются корнями уравнения
Mlk^ —. [cl + g (М + ni) ] k2 + gc = 0.
63.
64. Предполагается, что натяжение нити остается неизменным ( можно пренебрегать его из;менением при малых изменениях длины нити). Тогда -силовая функция U=phl, где А/ — удлинение нити: А7=2А/г-.
109
Но
A k = V + а,- = аф +
— 1 + • • • ]— ~Z (yi+i yt)2-J 2at
Здесь #i=0, у2=Х1, Уз~Х2, уь=О, поэтому
U = -p Г-^-4-Ц- (Х2 — Xj)2— Х^2 1 ,
L 2а 4Ь 2а J
Т = -2- (Х1'2 + х2'2).
2g
Уравнения движения
%1 —х3
(Xi — х2) ;
S
g \ а 2b J
откуда (х/' + х2") —---£ (Xi + х2),
0-(х1"-х2")=-
g аЬ ______
частоты главных колебаний: fei=l/ Iff—,
_________ г Qa
ft2= j/ Pgja+b).
У Qab
65. Система будет совершать колебания около положения равновесия с частотами
ft2=
ki = 1/ , ^2=1/ —-------
V р V kc+p
66. Поступая так же, как и в примере 28, найдем
УЛ= (l»-b)sin2a Ы2, ув= _ уА, Ха = Хв = 0. 2h
V* -
v (21 cos a — 3a) Af (21 cos a + 3a) M
Aa=------------------- , Ab = j-----------;---------
4a/ sin a 4a/ sin a
Pl co2 Pl
Ya — -------- (21 cos a — 3a) sin a — ---sin a,
\2ga 4a
"Ув= — — (2Z cos a + 3a) sin a + sin a.
12ga 4a
110
68.
lag
69. Применяя методы приближенной теории (уравнение (а) с. 79), найдем угловую скорость прецессии, после чего, применяя теорему о движении центра масс, найдем
n 4PFg .
«гор- = SIH а.
70. Горизонтальные и вертикальные составляющие реакций подшипников равны .ооотвепсивенно между собой, причем
V Р 9 v Р I Р 9 2лп
X =-------со2 a sin сс, Y—------со2 cos а, со = ---,
2g 2 2g 60
где а — угол, который образует отрезок, соединяющий центр тяжести с осью вращения, с опущенной вниз вертикалью.
71. 1) sin <р=0, 2) cos<p=— ——- -.
2 ыг а3 + Ь3
72. 4 А
73. Л : /2=5 : 6.
75. <1)2=2 (Di.
76. Для однородного диска Л==-~^, С= ~~ , С—2Л.
В -случае регулярной прецессии угол '&=90°— р остается постоянным, поэтому
tg ₽ = — 2tg а.
Apo
Раскладывая «хи на направление оси снимет рии диска и направление вектора момента количества движения, найдем (рис. 88)
со2 = «и У1 + 4tg2 a cos а. 77.
# = —•рз°3— sin О'.
C3ga2
Рис. 88
78. Наибольшее сжатие пружины после удара
р (Р + Q) + р V(P + Q)2 + 2ch (Р + Q) 2с (Р + Q)
79.
3Qibl________
РР + 3 (Qib2 + QJ2)
111
80.
у = ——— y6g/.
М + Зт ’ 6
81. Применяя теорему о 'сохранении количества движения и теорему Карно, найдем выражение для скорости третьего шара после удара
4/nim2^o
Уз =-------------------.
(т{ + т2) (т2 + т3)
Определяя экстремум этого выражения, найдем
т2 = У/ni т3.
82. vc= V- Минимальная, необходимая для опрокиды-
вания скорость v = 2 Aag,’(]/2 — 1).
83. со = (0о± — I sin а. Знак (+) или (—) берется в зави-k2
си мости от того, в какую сторону происходит вращение.
84.
ЛИТЕРАТУРА
Аппель П. Теоретическая механика. Т. 2. М., I960.
Березкин Е. Н. Курс теоретической механики. Из-во МГУ, 1974.
Бухгольц Н. Н. Основной курс теоретической механики. Ч. 2. М., 1966.
Бухгол.ь.ц Н. Н., Воронков И. М., Минаков А. П. Сборник задач по теоретической механике. М.—Л., 1948.
З е.р.цов Б. С. Задачи по теоретической механике. Ч. 2. Динамика. М.—Л., 1931.
Мещерский И. В. Сборник задач по теоретической механике. М., 1972.