/

























































































































































































































































































































































































































































































































































Author: Юхно П.М.
Tags: языкознание и языки лингвистика оптические приборы и аппаратура фотоэлектрические приборы фотоэлементы радиотехника
ISBN: 978-5-93108-149-6
Year: 2017




Text
П.М. Юхно
ПРЕДНАМЕРЕННЫЕ
ОПТИЧЕСКИЕ ПОМЕХИ
ВЫСОКОТОЧНОМУ ОРУЖИЮ
Москва
Радиотехника
2017
УДК 81.782.47+681.782.473
ББК 32.854
Ю 94
Рецензенты:
В. И. Карпухин - лауреат премии Совета Министров СССР,
засл, деятель науки России, д.т.н., проф.,
гл. науч, сотрудник НИИЦ «РЭБ и ОЭСЗ»
ЮЛ. Козирацкий - засл, деятель науки России,
д.т.н., проф. ВУНЦ ВВС «Военно-воздушная академия
им. проф. Н.Е. Жуковского и Ю.А. Гагарина»
Юхно П.М.
Ю 94 Преднамеренные оптические помехи высокоточному
оружию. Монография. - М.: Радиотехника, 2017. - 640 с.
ISBN 978-5-93108-149-6
Рассмотрены вопросы анализа и синтеза преднамеренных оптиче-
ских помех ИК-, телевизионным, тепловизионным и лазерным
системам наведения высокоточного оружия. Впервые приводятся
результаты непараметрического синтеза преднамеренных помех
измерителям координат целей и системам наведения, статистиче-
ского синтеза устройств помехозащиты от преднамеренных помех,
синтеза помех в условиях неполной информации о системах высо-
коточного оружия.
Для специалистов, связанных с разработкой средств и комплексов
создания помех высокоточному оружию с оптико-электронными
системами наведения. Может быть полезна специалистам в об-
ласти радиоэлектронных систем наведения, а также преподава-
телям и студентам соответствующих специальностей.
УДК 81.782.47+681.782.473
ББК 32.854
©П.М. Юхно, 2017
ISBN 978-5-93108-149-6 © ООО «Издательство «Радиотехника», 2017
ОГЛАВЛЕНИЕ
Предисловие...................................................7
Список сокращений............................................11
Условные обозначения.........................................13
Введение.....................................................19
_______________________________1_______________________________
Классификация высокоточных средств поражения,
преднамеренных помех и задач их создания
1.1. Классификация высокоточных средств поражения............26
1.2. Классификация преднамеренных помех и средств их создания.38
1.3. Задачи синтеза преднамеренных помех.....................43
_______________________________2 ______________________________
Энергетические модели сигнально-помеховой обстановки
2.1. Энергетическая модель процесса формирования изображений..52
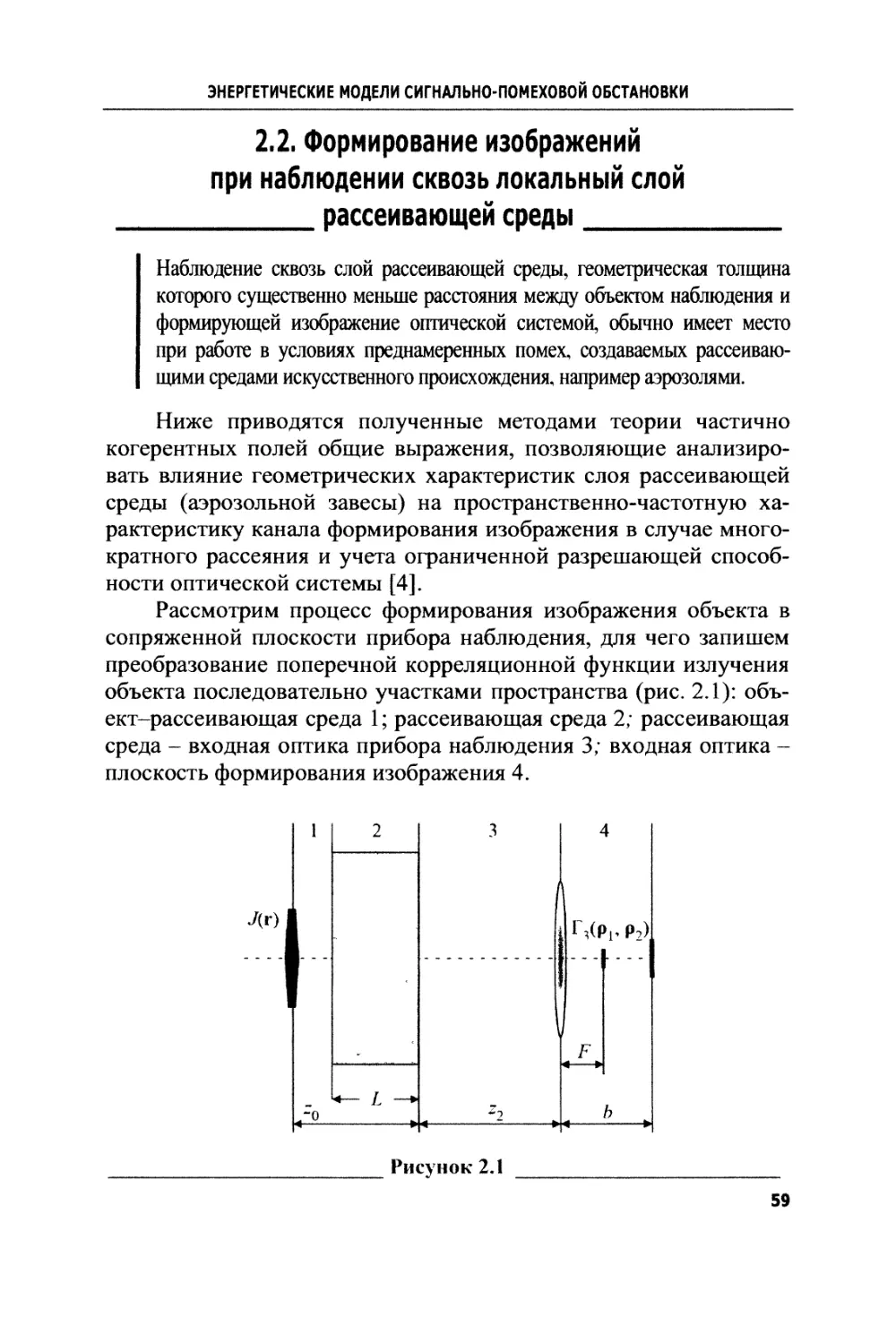
2.2. Формирование изображений при наблюдении
сквозь локальный слой рассеивающей среды.....................59
2.3. Формирование изображений при наблюдении
в турбулентной атмосфере.....................................65
2.4. Пространственно-угловые характеристики лазерного луча
на выходе аэрозольного слоя..................................70
2.5. Прямое и обратное рассеяние лазерного луча
аэрозольным слоем............................................78
_______________________________3 ______________________________
Типовые помеховые эффекты
3.1. Помеховые эффекты в контурах самонаведения..............88
3.1.1. Линейный режим работы.............................88
3.1.2. Помеховые эффекты в линейном контуре самонаведения.98
3.1.3. Имитационная модель нелинейного контура самонаведения... 103
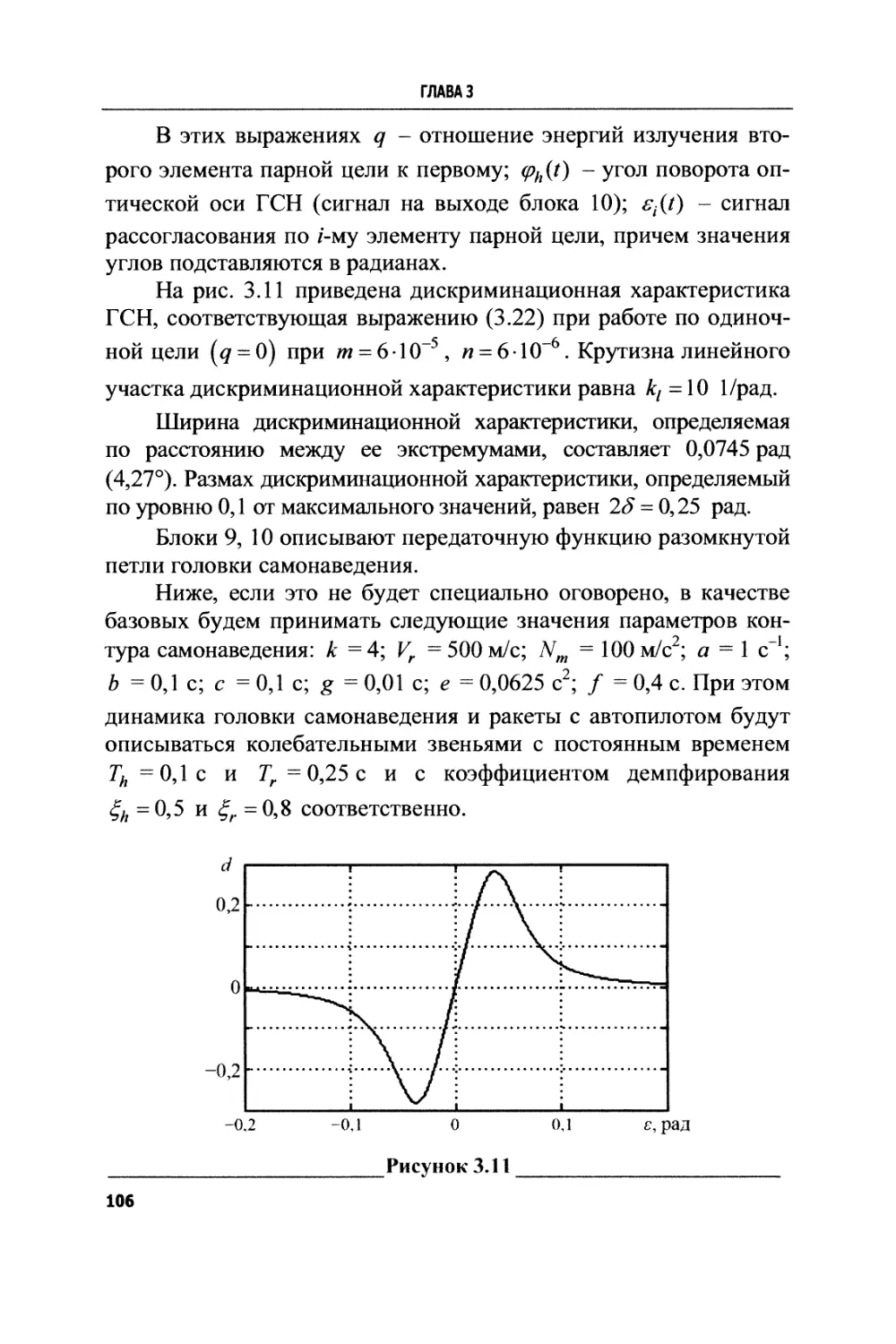
3.1.4. Помеховые эффекты в нелинейном контуре самонаведения .... 109
3.2. Помеховые эффекты в контуре командного наведения.......129
3.3. Помеховые эффекты в следящих измерителях координат.......138
3.3.1. Следящий измеритель координат....................138
3.3.2. Разрешение парной цели...........................142
3.3.3. Метод статистических эквивалентов................144
3
ОГЛАВЛЕНИЕ
3.3.4. Дискриминационная и флуктуационная характеристики.148
3.3.5. Срыв слежения в следящих измерителях координат...155
3.3.6. Увод и перенацеливание следящего измерителя......159
3.4. Помеховые эффекты в элементах оптико-электронных средств ... 165
3.4.1. Фотоприемные устройства..........................165
3.4.2. Устройства автоматического нормирования сигналов..174
3.5. Помеховые эффекты при обнаружении
пространственных объектов...................................178
3.5.1. Обнаружение объектов, наблюдаемых
в аппликативной смеси с фоном...........................180
3.5.2. Поиск и обнаружение пространственных объектов....198
3.5.3. Обнаружение объектов при воздействии аддитивных помех.... 205
3.5.4. Влияние формы объектов на характеристики
их обнаружения и различения.............................210
3.5.5. Обнаружение объектов в присутствии
пространственно-временного шума.........................220
3.5.6. Обнаружение объектов в мультиспектральном режиме.227
_______________________________4 _______________________________
Непараметрический синтез помех
4.1. Особенности задач непараметрического синтеза помех.....238
4.2. Маскирующие помехи корреляционным координаторам.........242
4.2.1. Одностороннее ограничение на помеху..............243
4.2.2. Двухстороннее ограничение на помеху..............249
4.2.3. Эффективность оптимальных маскирующих помех......254
4.3. Имитирующие помехи корреляционным координаторам.........260
4.3.1. Нормальные ошибки................................260
4.3.2. Аномальные ошибки................................263
4.3.3. Не дифференцируемое поле яркости.................268
4.3.4. Эффективность оптимальных имитирующих помех......270
4.4. Имитирующие помехи координаторам
с растровой разверткой......................................274
4.5. Помехи контурам наведения..............................283
4.5.1. Помехи линейному контуру наведения...............283
4.5.2. Помехи нелинейному контуру самонаведения.........285
4.5.3. Оптимальные помеховые воздействия................294
_______________________________5 _______________________________
Параметрический синтез помех
5.1. Характеристики сигнала на выходе
корреляционного координатора................................300
4
ОГЛАВЛЕНИЕ
5.2. Синтез помех корреляционному координатору...............308
5.2.1. Область нормальных ошибок.............................308
5.2.2. Область аномальных ошибок.............................320
_______________________________б _______________________________
Синтез помех в условиях априорной неопределенности
6.1. Типовые задачи синтеза помех
в условиях априорной неопределенности.......................328
6.2. Уравнение Стратоновича для задач
траекторно-параметрической фильтрации.......................334
6.3. Синтез измерителей координат............................340
6.3.1. Корреляционный координатор........................340
6.3.2. Координатор источника
с пространственно-временной модуляцией..................347
6.4. Синтез устройств помехозащиты...........................360
6.4.1. Спектральная селекция.............................361
6.4.2. Пространственная селекция.........................371
6.4.3. Траекторно-пространственная фильтрация............377
6.5. Синтез алгоритмов комплексирования информации...........385
6.5.1. Алгоритм комплексной обработки тепловых сигналов
и изображений...........................................385
6.5.2. Алгоритм комплексной обработки изображений,
формируемых в различных физических полях................393
6.6. Синтез адаптивных помех.................................404
6.6.1. Контроль эффективности помех......................406
6.6.2. Алгоритм адаптивного управления помехами..........420
_______________________________7 _______________________________
Оптико-электронное подавление типовых образцов ВТО
7.1. Подавление ВТО с координаторами пространственно
протяженных целей............................................432
7.1.1. Особенности устройства
корреляционных координаторов.............................436
7.1.2. Особенности устройства светоконтрастных координаторов.444
7.1.3. Преднамеренные помехи ВТО с координаторами
пространственно протяженных целей.......................450
7.2. Подавление ВТО с ПЛГС...................................465
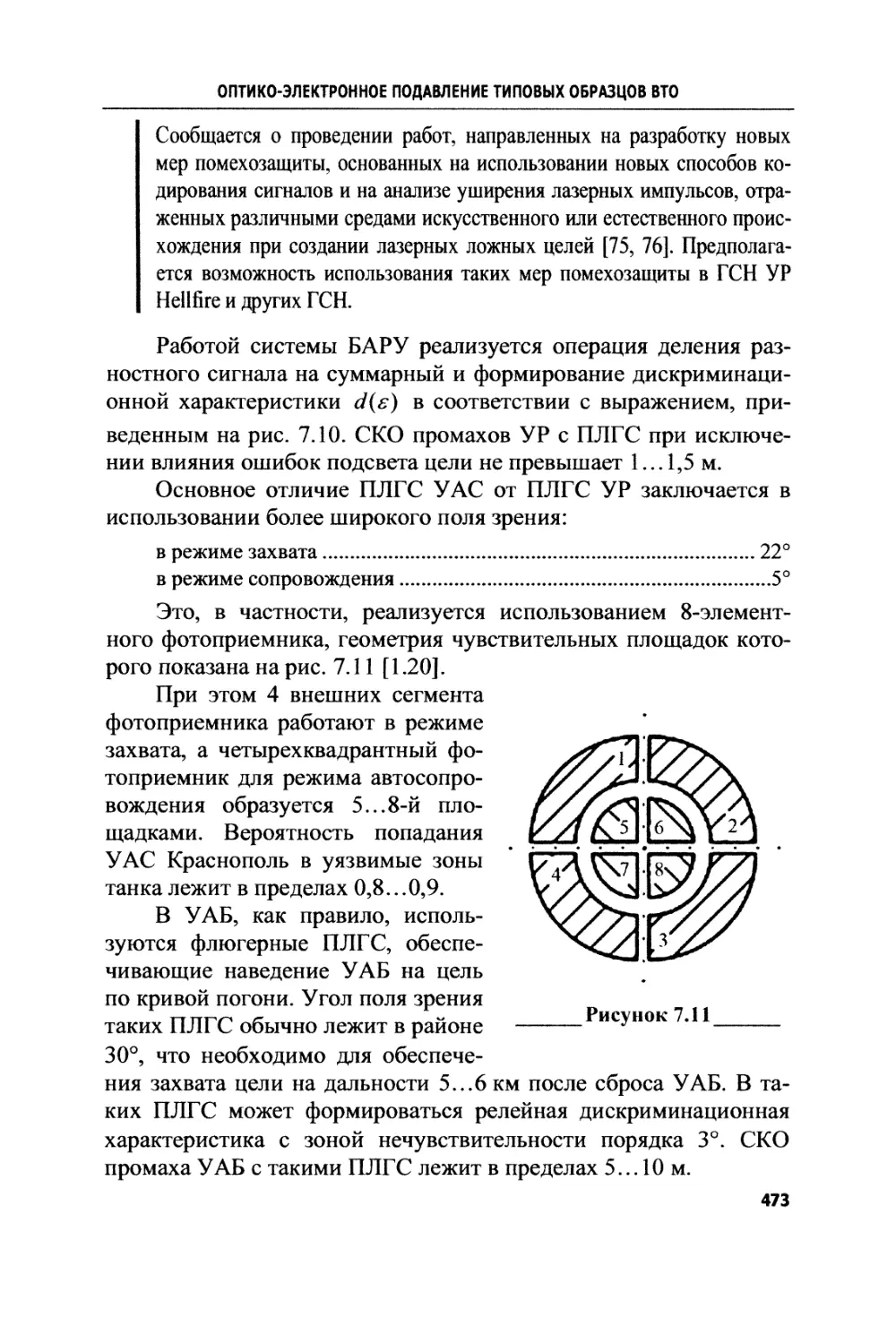
7.2.1. Особенности устройства ПЛГС.......................468
7.2.2. Преднамеренные помехи ВТО с ПЛГС..................474
7.3. Подавление ВТО с ИК-координаторами......................486
7.3.1. Особенности устройства ИК-координаторов
точечных целей..........................................487
5
ОГЛАВЛЕНИЕ
7.3.2. Особенности устройства ИК-координаторов
пространственно протяженных целей.......................491
7.3.3. Преднамеренные помехи ВТО с ИК-координаторами
точечных целей..........................................496
7.3.4. Преднамеренные помехи ВТО с ИК-координаторами
пространственно протяженных целей.......................509
7.4. Средства создания оптических помех......................514
7.4.1. Активные средства создания помех..................514
7.4.2. Аэрозольные завесы................................526
7.4.3. Ложные цели.......................................538
7.4.4. Средства маскировки...............................545
7.5. Средства информационного обеспечения....................557
7.5.1 Индикаторы лазерных излучений......................558
7.5.2 Пассивные пеленгаторы ракет........................562
7.5.3 Активные пеленгаторы...............................565
7.5.4 Телевизионные и тепловизионные средства наблюдения.568
_______________________________8 _______________________________
Комплексы оптико-электронного подавления систем ВТО
8.1. Классификация комплексов оптико-электронного подавления
систем ВТО..................................................574
8.2. Формирование технического облика комплекса
оптико-электронного подавления..............................579
8.3. Идентификация атакуемого объекта групповой цели.........588
8.4. Типовые образцы комплексов оптико-электронного
подавления систем ВТО.......................................596
Заключение...................................................609
Приложения
1. Обобщенное уравнение Стратоновича.....................611
2. Оценка корреляционной матрицы ошибок измерений.......615
3. Классификация информации о характеристиках
высокоточных средств поражения..........................617
Литература...................................................621
Предметный указатель.........................................637
6
_____________________Предисловие______________________
Мы живем в изменяющемся мире, трансформация которого
в существенной мере определяется многообразием конфликтов
мирного и военного времени. В ряду этих конфликтов все боль-
шее значение приобретают информационные конфликты, вырас-
тающие до уровня информационных войн между экономически-
ми системами, государствами, корпорациями. Важную роль в
техническом обеспечении развития и разрешения информацион-
ных конфликтов играют радиоэлектронные и оптико-электрон-
ные системы и средства наблюдения и разведки, связи и управле-
ния, прицеливания и наведения высокоточного оружия. Этим
системам и средствам противостоят в информационных конфлик-
тах системы и средства создания радио- и оптических преднаме-
ренных помех. Применение помех представляет альтернативную
составляющую информационных конфликтов, которые в военной
сфере принимают формы радиоэлектронной борьбы.
Преднамеренные помехи оказывают важное, а во многих
случаях и определяющее влияние на течение и исход информа-
ционных конфликтов, составляющих содержание радиоэлектрон-
ной борьбы. Вопросам их исследования посвящено значительное
число публикаций, в числе которых монографии С.А. Вакина и
Л.Н. Шустова [1.34, 1.35], Ю.М. Перунова, К.И. Фомичева и
Л.М. Юдина [1.36], А.И. Куприянова и Л.Н. Шустова [6.9], груп-
пы авторов под редакцией М.В. Максимова [6.1], группы авторов
под редакцией В.Г. Радзиевского [1.10] и другие. Однако во всех
этих работах основное внимание уделяется рассмотрению пред-
намеренных помех, создаваемых в радиодиапазоне электромаг-
нитного излучения. Преднамеренные помехи оптического диапа-
зона или не рассматриваются совсем, или им уделяется весьма
незначительное внимание. Данная монография ориентирована на
ликвидацию этого пробела.
Монография адресована, в первую очередь, специалистам,
связанным с разработкой средств и комплексов создания помех
высокоточному оружию с оптико-электронными системами наве-
дения. Она также может быть полезна разработчикам этого ору-
жия. Круг возможных пользователей определяется тем, что по
общему количеству не менее 80...90% единиц высокоточного
7
ПРЕДИСЛОВИЕ
оружия используют оптико-электронные системы наведения. При
разработке материалов монографии предпринята попытка удов-
летворить как запросы состоявшихся специалистов и аспирантов,
владеющих необходимым методическим аппаратом, так и запро-
сы прикладников, начинающих исследователей, студентов, заин-
тересованных в использовании достаточно простых расчетных
соотношений и их ясной физической интерпретации. С целью
удовлетворения интересов именно этой последней группы воз-
можных пользователей представление отдельных результатов до-
водится до уровня достаточно простых расчетных соотношений.
Вместе с тем монография содержит ряд результатов, недостаточ-
но освещенных в литературе и базирующихся на использовании
разнообразного формального аппарата исследований, включаю-
щего теорию вероятности, теорию статистических решений, ста-
тистические методы современной теории управления, математи-
ческие методы оптимизации в пространствах дискретных и не-
прерывных величин и функций, методы атмосферной и аэрозоль-
ной оптики, обработки изображений, а также методы анализа и
синтеза систем оптической локации и систем наведения высоко-
точных средств поражения. К числу таких результатов, в первую
очередь, относятся результаты непараметрического синтеза пред-
намеренных помех, статистического синтеза устройств помехо-
защиты от преднамеренных помех, синтеза преднамеренных по-
мех в условиях неопределенной информации о системах высоко-
точного оружия, подлежащих подавлению помехами.
Закономерности воздействия помех на оптико-электронные
средства и системы, исследованию которых посвящены материа-
лы 3 6 глав, отражают наиболее общие физические принципы
построения, принципиально присущие соответствующим типам
рассматриваемых средств и систем. В случаях, когда для выявле-
ния таких закономерностей использовались численные методы, в
частности, методы имитационного моделирования, все расчеты
выполнялись для средств и систем с некоторыми гипотетически-
ми характеристиками.
Обзоры средств и комплексов оптико-электронного подавле-
ния, содержащиеся в гл. 7, 8, не претендуют на полноту отражения
ретроспективы создания таких изделий, а имеют основной целью
составить у читателя представление о порядке значений реализуе-
мых в настоящее время характеристик и особенностях построения
8
ПРЕДИСЛОВИЕ
этих средств и комплексов. Причем предпочтение отдавалось опи-
санию таких средств и комплексов, характеристики которых наи-
более полно отражены в имеющихся открытых источниках.
Представляется целесообразным обсудить некоторые осо-
бенности подходов к решению задач, содержащихся в моногра-
фии. Так, достаточно очевидно, что при наличии полной инфор-
мации о принципах построения и характеристиках конкретного
оптико-электронного средства противника, подлежащего подав-
лению, синтез помех, т.е. определение наиболее опасных видов
помех и их характеристик, является вполне решаемой задачей
(разработчики оптико-электронных средств хорошо знают слабые
стороны своих изделий). Однако на практике при синтезе помех
приходится иметь дело с существенной априорной неопределен-
ностью информации о характеристиках объекта подавления.
Кроме того, одна и та же помеха чаще всего предназначается
для подавления нескольких объектов, принадлежащих к одному
классу, но созданных различными разработчиками и имеющих
вследствие этого отличающиеся характеристики. Поэтому при
синтезе помех, как правило, приходится ориентироваться на учет
лишь наиболее общих (универсальных) закономерностей по-
строения и особенностей функционирования объектов подавле-
ния и на реализацию наиболее универсальных помеховых эффек-
тов. С этим связана, в частности, относительная простота (не де-
тальность) математических моделей, используемых при синтезе
помех, а также характер предположений и допущений при анали-
зе закономерностей и получении количественных оценок.
По нашему мнению, такой подход относится не к недостат-
кам, а, скорее, к принципиальным особенностям исследований по
проблематике радиоэлектронной борьбы, ориентированной на
реализацию гарантированной эффективности подавления радио и
оптико-электронных средств противостоящей стороны. Поэтому
при выполнении таких исследований в ряде случаев допустимо
не учитывать ограниченную производительность бортовых про-
цессоров реальных систем высокоточного оружия - объектов по-
давления и ориентироваться на возможность реализации близких
к оптимальным алгоритмов обработки сигналов в таких системах.
В современных системах высокоточного оружия широко ис-
пользуются матричные фотоприемные устройства и цифровая
обработка сигналов. Однако при изложении материалов в моно-
9
ПРЕДИСЛОВИЕ
графин отдается предпочтение непрерывному, а не дискретному
представлению сигналов и выполняемых над ними преобразова-
ний. Связано это как с возможностью представления в этом слу-
чае конечных результатов в более компактном и наглядном виде,
так и со сравнительной простотой преобразования при необходи-
мости соответствующих выражений в дискретную форму, что
обычно осуществляется при построении цифровых имитацион-
ных моделей или при выполнении других количественных расче-
тов на цифровой вычислительной технике.
Все результаты, содержащиеся в монографии, базируются на
материалах, выложенных в Интернете или опубликованных в от-
крытых зарубежных и отечественных источниках. Ссылки на эти
источники приводятся по тексту монографии. В числе цитируе-
мых около 30 статей, опубликованных в центральных периодиче-
ских изданиях и выполненных автором самостоятельно либо в
соавторстве с С.Н. Артюхом, А.Ф. Данилкиной, А.А. Донцовым,
И.В. Егоровым, А.К. Калинковым, В.И. Лютиным, Я.Л. Марек,
С.М. Огребом, В.Н. Рехвиашвили, А.В. Рыжовым, В.Г. Фекли-
стовым, Е.И. Ярмошевичем, за что автор выражает соавторам
свою искреннюю и, к сожалению, отчасти запоздавшую призна-
тельность. Формированием взглядов на проблематику оптико -
электронного подавления автор во многом обязан плодотворному
общению с исследователями и разработчиками первых отечест-
венных средств и комплексов оптико-электронного подавления,
среди которых хочется отметить Г.А. Алешина, Г.И. Гуменюка,
В.И. Данилюка, Л.И. Демченко, Р.Н. Дыблю, В.И. Евдокимова,
Ю.Л. Козирацкого, Ю.М. Кравченко, А.А. Марусенко, А.Г. По-
кровского, В.Н. Тимохина. Особая благодарность В.А. Понькину
и Ю.С. Сухорукову за обсуждения, приведшие к постановке и
решению ряда рассмотренных в монографии задач. Значительная
часть редакционных замечаний устранена благодаря терпению и
заботливому вниманию «домашнего редактора» Т.А. Шаровой.
Монография не претендует на полноту изложения затрону-
тых в ней вопросов, так же как и на полноту списка цитирован-
ных источников. Автор просит читателей сообщать ему свои за-
мечания, соображения, а также сведения о новых или не нашед-
ших достойного отражения в монографии публикациях по вопро-
сам, рассматриваемым в монографии.
ю
Список сокращений
аэрозольная завеса
активная лазерная головка самонаведения
автоматическая регулировка усиления
автоматическая регулировка яркости
амплитудно-частотная характеристика
бортовой излучатель
беспилотный летательный аппарат
боевой элемент точного наведения
боевой элемент точного прицеливания
взрывчатое вещество
высокоточное оружие
высокоточное средство поражения
головка самонаведения
забрасываемый источник оптических помех
инфракрасный
инфракрасный координатор
комплекс взаимной защиты
комплекс групповой защиты
комплекс индивидуально-групповой защиты
комплекс индивидуальной защиты
корреляционный координатор
комплекс объектовой защиты
комплекс оптико-электронного подавления
коэффициент полезного действия
тройное соединение кадмий-ртуть-теллур
логарифмическая амплитудная характеристика
лазерный дальномер
лазерный дальномер-целеуказатель
лазерная ложная цель
логарифм одношаговой функции правдоподобия
ложная тепловая цель
ложная цель
научно-исследовательская работа
опытно-конструкторская работа
обнаружитель оптических систем
11
СПИСОК СОКРАЩЕНИЙ
ОЭ - оптико-электронный
ОЭП - оптико-электронное подавление
ОЭС - оптико-электронная система
ОЭСр - оптико-электронное средство
ПЗ - помехозащита
ПЗРК - переносной зенитный ракетный комплекс
ПЗС - прибор с зарядовой связью
пкс - пиксель
ПЛГС - полу активная лазерная головка самонаведения
ПТРК - противотанковый ракетный комплекс
ПТУР - противотанковая управляемая ракета
ПЧХ - пространственно-частотная характеристика
РЛ - радиолокационный
РЛС - радиолокационная станция
РПС - разведывательно-прицельная система
РЭБ - радиоэлектронная борьба
РЭП - радиоэлектронное подавление
СКО - среднеквадратическое отклонение
ТВ - телевизионный
ТВГС - телевизионная головка самонаведения
ТО - технический облик
ТПВ - тепловизионный
ТПВГС - тепловизионная головка самонаведения
ТПП - теплопеленгатор
УАБ - управляемая авиационная бомба
УАС - управляемый артиллерийский снаряд
УБ - управляемый боеприпас
УР - управляемая ракета
УФ - ультрафиолетовый
УФП - ультрафиолетовый пеленгатор
ФКБ - фильтр Калмана-Бьюси
ФПК - Фоккера-Планка-Колмогорова (уравнение)
ФПУ - фотоприемное устройство
ФРТ - функция размытия точки
ФЧХ - фазо-частотная характеристика
ЧМ - частотная модуляция
12
Условные обозначения
Геометрические и физические величины
а - ускорение
А - работа
с - скорость света
D,d - дальность, текущая дальность
F ~ сила
G - гравитационная постоянная
/ - сила тока
/ - длина
т - масса
Р - мощность
О - энергия
R - сопротивление электрическое, расстояние
5 - площадь
/, т - время
Т - температура
U - разность потенциалов
V - объем, скорость
х, у, z - прямоугольные декартовы координаты
X, К, Z - координатные оси
£ - угловое ускорение
р - кривизна
й) - угловая скорость
fl - телесный угол
Э - электродвижущая сила
Вероятностные характеристики,
математическая нотация
аТ, (...)т - транспонированный вектор, матрица
d^a* - дисперсия величины х
- оптимизируемый функционал
13
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
F(„.) £(...) Д-] W(x), F(x) - gif), g(a>) - h.,h} - функция или функционал правдоподобия - отношение функционалов правдоподобия - оператор Фоккера-Планка-Колмогорова - интегральный закон распределения величины х - спектральная плотность - гипотезы отсутствия и наличия цели соответст- венно
mx E{J), N P Рлт Pho Pun Poa Py Pno Pnod Pp Pc Rect (...) Sinc(...) R - математическое ожидание величины х (...) - символы математического ожидания - спектральная плотность белого шума - вероятность события - вероятность ложной тревоги - вероятность необнаружения - вероятность непопадания - вероятность аномальной ошибки - вероятность увода - вероятность правильного обнаружения - вероятность подавления - вероятность распознавания - вероятность срыва слежения - прямоугольная функция - функция sin(x) / х - корреляционная матрица, функция, коэффициент корреляции
rl> w(x), f(x) - £(•••) 7 A(...) - элементы корреляционной матрицы - корреляционный отклик - плотность вероятности величины х - дельта-функция (функция Дирака) - порог обнаружения - логарифм отношения функционалов правдоподо- бия
14
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
П(...) - логарифм функционала (функции) правдоподобия
Ф(х), erf (х) - интегралы вероятности,
_ ч 2 Хг г А , „ х ч
Ф W = ехР(_ ~^dt = erf <~7r)
J 2 V2
F[...], F”1 [...] - прямое и обратное Фурье-преобразование
L [...], L"1 [...] - прямое и обратное преобразования Лапласа
Оптические характеристики
В - яркость
С - оптический контраст
Е - освещенность, облученность, поверхностная плотность
излучения
h - постоянная Планка
Н - световая экспозиция
J - сила излучения (сила света)
к - постоянная Больцмана, волновое число
L - геометрическая толщина рассеивающего слоя
п - показатель преломления
Q - световая энергия (количество света)
г - радиус частицы
R - светимость
Т - оптическая толща рассеивающего слоя
а - угол дифракционной расходимости, коэффициент ос-
лабления
аа - коэффициент поглощения
as - коэффициент рассеяния
е - коэффициент излучения
т] - квантовая эффективность
2 - длина световой волны
р - коэффициент отражения, показатель световозвращения
су - полное сечение ослабления частицы
г - коэффициент пропускания
Ф - поток излучения
fl - угол расходимости излучения
15
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
Прием и обработка сигналов, полей, изображений
а - линейный размер элементарного фотоприемника
А - амплитуда
As - апертура (площадь входного зрачка)
^(...) - функция окна (индикаторная функция)
£>* - удельная обнаружительная способность
D - диаметр входного зрачка
е(г,/) - действительная часть комплексного электромагнит-
ного поля
Е(г,/) - комплексное электромагнитное поле
Е(г,бу) - Фурье-преобразование £(г,Г) повремени
F - фокусное расстояние, частота кадров
G(...) - пространственно-частотная характеристика
7/(...) - корреляционная функция входной оптики
Я^(р - г) - импульсная реакция свободного пространства
/(...) - интенсивность (мощность) оптического сигнала
J(...) - интенсивность диффузного излучения
J(r,t) - функция лучевой интенсивности
/ - пространственный ресурс помехи
L - область существования объекта, полубаза помехи
М - область анализа
А/(...) - функция когерентности среды
Мр - множество помеховых сигналов
п - число чувствительных элементов приемника излу-
чения
«(...) - шумовой сигнал
/?(...) - сигнал преднамеренной помехи, фона
q2 - энергетическое отношение сигнал/помеха, сиг-
нал/шум, помеха/сигнал
5 - скважность
s(...) - полезный сигнал
Т - период
w(...) - обрабатываемый сигнал
w - угол поля зрения
16
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
w = (m’j , и’2) - вектор пространственных частот
₽ = - вектор параметров помехи
8,е А О - относительная ошибка (оценок, измерений) - шаг дискретизации - относительное отверстие
к = (..., ,...) - вектор оцениваемых параметров
А V - область маскирования - коэффициент неравномерности чувствительно- сти элементов фотоприемной матрицы
<(•••) г ф(...) - белый временной или пространственный шум - длительность импульса - функция спектральной чувствительности фото- приемника
<р Т(р,<у) - фаза - апертурная функция объектива
Характеристики систем сопровождения и наведения
- амплитудно-частотная характеристика - дискриминационная характеристика - частота
F(p) W h(t) Цсо) n N P,s - передаточная функция замкнутой системы - флуктуационная характеристика - переходный процесс, промах - логарифмическая амплитудная характеристика - перегрузка ракеты - поперечное ускорение ракеты - аргументы передаточной функции, операторы дифференцирования
T w(r) W(p) £ - постоянная времени - весовая функция (импульсная реакция) - передаточная функция - ошибка (слежения, измерения) - коэффициент демпфирования
17
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
0,ф - углы поворота вектора скорости по тангажу и курсу
<р - угол поворота линии визирования
<Рг ф(«),ф(/) - угол разрешения головки самонаведения - фазочастотная характеристика
(У <у(г) - угловая частота - сопряженная весовая функция контура самона- ведения
«с - частота среза
18
_______________________ Введение _______________________
В настоящее время в развитых странах Запада в рамках кон-
цепций «Ведение боевых действий в едином информационном
пространстве», «Сетецентрическая война» ведется коренное ре-
формирование вооружённых сил с целью преобразования их в
вооружённые силы информационного века [1, 2]. В соответствии
с этими концепциями ход и исход современных вооруженных
конфликтов будет определяться широким использованием высо-
коточного оружия на всех завершающих этапах боевых действий
и высокой степенью взаимодействия высокоточного оружия и
других средств поражения с системами предварительной и ис-
полнительной разведки. В соответствии с диалектикой развития
противоречия меры и контрмеры естественной альтернативой
высокоточному оружию служит разработка и применение средств
и систем радиоэлектронной борьбы. Оптико-электронное подав-
ление является важной составляющей радиоэлектронной борьбы,
входящей в иерархию составляющих РЭБ через радиоэлектрон-
ное поражение и радиоэлектронное подавление. Во избежание
дальнейшего неоднозначного толкования приведем основные оп-
ределения используемых здесь и ниже понятий [3].
□ Радиоэлектронная борьба (РЭБ) - совокупность мероприя-
тий и действий войск по выявлению (радиоэлектронной раз-
ведке) радиоэлектронных средств и систем противостоящей
стороны, воздействию на них средствами радиоэлектронного
поражения, а также по радиоэлектронной защите радиоэлек-
тронных средств своих войск и объектов.
□ Радиоэлектронное поражение - организованное воздейст-
вие на радиоэлектронные средства и системы противника
средствами радиоэлектронного поражения, приводящее к
необратимой или обратимой потере работоспособности либо
к снижению эффективности применения этих средств. К
средствам радиоэлектронного поражения относятся специа-
лизированные средства огневого поражения (ракеты с пас-
сивным самонаведением на источники радиоизлучения),
мощные средства лучевого и пучкового поражения, средства
радиоэлектронного подавления.
19
ВВЕДЕНИЕ
л Радиоэлектронное подавление (РЭП) - составляющая РЭБ,
заключающаяся в организованном воздействии непосредст-
венно на радиоэлектронные средства или на среду распро-
странения электромагнитных волн и фоноцелевую обстанов-
ку преднамеренными радио- и оптическими помехами, при-
водящем к нарушению работоспособности этих средств.
□ Оптико-электронное подавление (ОЭП) - радиоэлектрон-
ное подавление, ведущееся в диапазонах инфракрасных,
видимых и (или) ультрафиолетовых волн против оптико-
электронных средств (ОЭСр), работающих в этих же диапа-
зонах.
□ Преднамеренные оптические помехи - излучение, дополни-
тельное к рабочему излучению подавляемых ОЭСр, или из-
менение характеристик этого излучения, создаваемые одной
из сторон радиоэлектронной борьбы и снижающие эффек-
тивность функционирования ОЭСр другой стороны. Пред-
полагается, что помеховые изменения рабочего излучения
ОЭСр осуществляются путем различного рода воздействий
на среду распространения излучения, фоноцелевую обста-
новку или излучающий объект.
п Высокоточное оружие (ВТО) объединяет средства исполни-
тельной разведки (средства прицеливания, сопровождения) и
высокоточные средства поражения, которые вместе обеспе-
чивают реализацию принципа «выстрел - поражение» [4],
т.е. поражение цели с вероятностью 0,7...0,8 и выше за один
акт применения ВТО.
□ Высокоточные средства поражения (ВСП) подразделяются
на средства индивидуального и группового поражения. К
высокоточным средствам индивидуального поражения отно-
сятся управляемые боеприпасы (УБ), т.е. бомбы, ракеты, ар-
тиллерийские снаряды, мины, а также беспилотные лета-
тельные аппараты и крылатые ракеты с обычной (не ядер-
ной) боевой частью, оснащенные радиолокационными, ла-
зерными, телевизионными, тепловизионными, инфракрас-
ными, акустическими или комбинированными системами
наведения на малоразмерные объекты.
20
ВВЕДЕНИЕ
К высокоточным средствам группового поражения относят-
ся кассетные боевые элементы точного наведения (БЭТН) и точ-
ного прицеливания (БЭТП), а также средства их доставки к цели.
В качестве средств доставки боевых элементов могут использо-
ваться бомбы, ракеты, артиллерийские снаряды, мины, авиацион-
ные кассеты и беспилотные летательные аппараты. Хотя вероят-
ность поражения малоразмерной цели одним боевым элементом
может не превышать 0,3...0,4, однако возможность доставки
большого числа боевых элементов одним средством доставки и
относительная дешевизна создают возможность их массирован-
ного применения, обеспечивая тем самым высокую вероятность
поражения до 70...80% объектов групповой цели. Это дает осно-
вания относить кассетные боевые элементы также к высокоточ-
ным средствам поражения.
□ Средства исполнительной разведки, входящие в состав ВТО,
предназначены для поиска и обнаружения целей, находя-
щихся в зоне действия ВТО, и, при необходимости, измере-
ния их координат и сопровождения на всем этапе наведения
управляемых боеприпасов на цель.
Уникальные возможности ВТО
Способность точного (с вероятностью, приближающейся к
единице) поражения малоразмерных целей на любой даль-
ности, в том числе превышающей 1000 км.
Возможность применения ВТО из зон вне досягаемости
средств поражения противника.
Возможность автоматического наведения на слабоконтраст-
ные и неконтрастные пространственно протяженные цели.
Реализация концепции «выстрелил - забыл», т.е. освобожде-
ние оператора от необходимости контролировать управляе-
мый боеприпас после его пуска (сброса).
Возможность создания роботизированного ВТО с автомати-
зацией всех этапов его применения, включая этапы поиска,
обнаружения, распознавания, выбора цели для поражения и
наведения управляемого боеприпаса на цель.
Возможность избирательного поражения целей в плотной
городской застройке с нанесением минимального ущерба
окружающим объектам.
21
ВВЕДЕНИЕ
Возможность наведения боеприпаса в наиболее уязвимую
точку цели.
Использование широкой номенклатуры способов и средств
измерения координат целей, что затрудняет реализацию эф-
фективных способов радиоэлектронного подавления ВТО.
Способность эффективно функционировать в сложных ме-
теоусловиях.
Военная доктрина Российской Федерации [5, 6] в числе основных осо-
бенностей современных военных действий отмечает возрастающее зна-
чение высокоточного оружия, в том числе развертывание стратегиче-
ских неядерных систем высокоточного оружия.
По взглядам ряда специалистов, ВТО по эффективности по-
ражения при его массированном применении уже сейчас при-
ближается к тактическому ядерному оружию и может рассматри-
ваться в качестве основной компоненты стратегического неядер-
ного сдерживания [5]. Роль ВТО в развитии военных конфликтов
последнего времени постоянно растет. Если во время войны во
Вьетнаме в 1968-1972 гг. доля ВТО составляла 2% от всех при-
менявшихся по объектам систем оружия, то во время боевых дей-
ствий в Ираке в 1991 г. - 11%, в Югославии в 1999 г. - 76%, в
Ираке в 2003 г. - до 90% [4].
Одной из основных контрмер, противостоящих развитию и примене-
нию ВТО, является радиоэлектронная борьба и, в частности, такая ее
составляющая как оптико-электронное подавление. Значение ОЭП
определяется тем, что не менее 60% образцов высокоточных средств
поражения по номенклатуре и не менее 80...90% образцов этих
средств по общему количеству используют оптико-электронные сис-
темы наведения.
Объектами оптико-электронного подавления могут быть
все оптические и оптико-электронные средства и системы воен-
ного назначения, обеспечивающие поиск, обнаружение и распо-
знавание целей, а также прицеливание стрелкового, артиллерий-
ского и ракетного неуправляемого оружия. Но наиболее рель-
ефно вклад ОЭП в защищенность гражданских и военных объ-
ектов проявляется при подавлении оптико-электронных средств
и систем высокоточного оружия: систем командного наведения,
22
ВВЕДЕНИЕ
самонаведения с полуактивными лазерными, телевизионными,
тепловизионными головками самонаведения, контейнерных и
артиллерийских БЭТП и БЭТН. Не будет большим преувеличе-
нием считать, что основная задача ОЭП - борьба с существую-
щими и перспективными системами ВТО. Поэтому дальнейшее
возрастание роли ВТО в разрешении вооруженных конфликтов,
определяемое существующими военными концепциями и док-
тринами, должно и будет сопровождаться адекватным развити-
ем средств и систем ОЭП.
Начало активных работ в стране по созданию средств ОЭП
для защиты самолетов и кораблей ВМФ относится к 1950—
1960 гг. В числе первых результатов, полученных в этом направ-
лении, следует отметить создание авиационных и корабельных
ложных тепловых целей [12]. Результатом оснащения практиче-
ски всех самолетов и вертолетов средствами ОЭП в Афганском
конфликте стало увеличение к 1986 г. количества пусков пере-
носных зенитных ракетных комплексов, используемых для пора-
жения одного летательного аппарата, с 10 до 74 [11].
Работы по созданию средств ОЭП для защиты наземной и, в
первую очередь, бронетанковой техники были развернуты в
1960-1970 гг. На рубеже 1980-1990 гг. они завершились пионер-
ской разработкой первого отечественного танкового комплекса
ОЭП «Штора-1». Комплекс обеспечил снижение относительных
потерь танков в среднем в 1,5 раза, а по ряду образцов ВТО - до
2,5...3,5 раз. На учебных и демонстрационных стрельбах ни одна
из нескольких десятков противотанковых управляемых ракет ря-
да модификаций не попала в танк, защищенный комплексом
«Штора-1» [3, 16]. В то же время высокая эффективность ВТО
при применении по объектам, не защищенным средствами ОЭП,
продемонстрирована в локальных конфликтах на Ближнем Вос-
токе и в Югославии, что подчеркивает важность работ по совер-
шенствованию и дальнейшему развитию техники ОЭП.
В настоящее время в нашей стране и за рубежом использует-
ся или находится в стадии разработки широкая номенклатура
средств и комплексов ОЭП. В их числе лазерные и некогерент-
ные станции ОЭП, средства постановки аэрозольных завес, ла-
зерных, тепловых и комбинированных ложных целей, теплопе-
ленгаторы и индикаторы лазерных излучений, комплексы ОЭП
23
ВВЕДЕНИЕ
для индивидуальной и групповой защиты самолетов, вертолетов,
кораблей, объектов бронетанковой техники, других подвижных
объектов военной техники, а также стационарных объектов воен-
ной и гражданской инфраструктуры. Развитие техники ОЭП ба-
зируется на использовании новейших достижений современной
науки и вносит важный вклад в укрепление безопасности госу-
дарства в военной области.
24
_________1_____________
КЛАССИФИКАЦИЯ высокоточных
СРЕДСТВ ПОРАЖЕНИЯ,
ПРЕДНАМЕРЕННЫХ ПОМЕХ
И ЗАДАЧ ИХ СОЗДАНИЯ
Дана общая характеристика проблемы синтеза преднаме-
ренных оптических помех.
Приведена классификация высокоточных средств пораже-
ния, входящих в состав образцов высокоточного оружия.
Показана классификация преднамеренных помех и средств
их создания.
Конкретизированы основные задачи синтеза преднамерен-
ных помех, т.е. выбор и обоснование их характеристик.
ГЛАВА 1
1.1. Классификация
высокоточных средств поражения
Эффективная защита от высокоточного оружия (ВТО) об-
разцов военной техники и объектов военной инфраструктуры
обеспечивается оптико-электронным подавлением, в первую оче-
редь, высокоточных средств поражения (ВСП), имеющихся в со-
ставе ВТО. Большое разнообразие образцов ВСП, отличающихся
как принципами построения, так и техническими характеристи-
ками [15-33], актуализирует задачу их классификации с позиций
и с целью последующей систематизации средств и способов их
подавления. Боевые возможности ВСП с оптико-электронными
системами наведения определяются тремя группами факторов:
типаж поражаемых целей, в составе которых можно разли-
чать точечные - малоразмерные - протяженные, контраст-
ные - неконтрастные, подвижные - неподвижные, излучаю-
щие - неизлучающие и т.п.;
диапазон естественных условий эффективного боевого при-
менения (метеоусловия, время суток, условия освещенности,
сезон, географический район и т.п.);
тактико-технические характеристики (дальность, скорость
полета к цели, рабочий диапазон излучений, энергетические
и сигнальные характеристики, динамические характеристики
контуров сопровождения и наведения, особенности режимов
поиска и захвата цели, возможность захвата или перенацели-
вания в полете, возможность выбора уязвимой точки для по-
ражения цели, степень автоматизации процесса наведения,
защищенность от преднамеренных помех и т.п.).
С целью расширения типажа поражаемых целей создаются
телевизионные, тепловизионные и ИК-системы самонаведения
управляемых боеприпасов (УБ) не только на точечные и протя-
женные контрастные цели, но также и на неконтрастные в рабо-
чем диапазоне атакующего боеприпаса. При атаке неподвижных
целей это достигается использованием корреляционного метода
измерения координат путем совмещения текущего изображения
цели с ее эталонным изображением, записанным в память голов-
ки самонаведения.
26
КЛАССИФИКАЦИЯ ВЫСОКОТОЧНЫХ СРЕДСТВ ПОРАЖЕНИЯ...
В различных боеприпасах могут использоваться два основ-
ных способа записи эталона. Так, в ракетах класса воздух-
поверхность Maverick AGM-65B,D,F и класса поверхность-
поверхность Javelin FGM-148 распознавание цели и выбор эта-
лонного участка на текущем телевизионном или тепловизионном
изображении выполняет оператор перед пуском ракеты непо-
средственно при визуальном контакте с целью.
В управляемых боеприпасах с большой дальностью пуска,
например в крылатых ракетах (КР) Tomahawk BGM-109B,C и
AGM-86C с корреляционными системами наведения ракеты на
конечном участке DSMACK, и в управляемых авиационных бом-
бах (УАБ) AGM-158 JASSM визуальный контакт оператора с це-
лью перед пуском и в процессе полета исключается. В этом слу-
чае эталонные изображения цели и участков коррекции траекто-
рии должны формироваться заблаговременно по данным предва-
рительной разведки. В рамках технологии THASSID рассматри-
вается также способ самонаведения боеприпасов на замаскиро-
ванную неконтрастную цель по нескольким побочным ориенти-
рам, расположение цели относительно которых известно.
Поражение слабоконтрастных подвижных целей, которые
способен обнаружить и сопровождать оператор, обеспечивается
применением управляемых боеприпасов с полуактивными лазер-
ными головками самонаведения (ПЛГС) типа Maverick AGM-65C,
Hellfire AGM-114, GBU-15, Copperhead. В этом случае оператор
нацеливает узкий луч лазера-целеуказателя на цель, и УБ с ПЛГС
наводится на лазерное излучение, рассеянное целью. Корреляци-
онный метод наведения на слабоконтрастные подвижные цели
может применяться на конечном участке подлета боеприпаса к
цели, когда ее изображение начинает занимать значительную
часть площади формируемого головкой самонаведения телевизи-
онного или тепловизионного изображения. В частности, он мо-
жет использоваться в телевизионно-командных системах наведе-
ния УАБ типа GBU-15 и в системах наведения УБ типа EFOGM,
Polyphem, в которых изображение цели передается с УБ операто-
ру, осуществляющему пуск, по радио- или волоконно-оптиче-
ским линиям связи.
В боеприпасах точного прицеливания и наведения типа
SAD ARM, Skeet, ВАТ, доставляемых в район групповой цели,
27
ГЛАВА 1
например танковой роты на марше, авиационной кассетой, бом-
бой, артиллерийским снарядом или миной и атакующих объекты
этой групповой цели с малой дальности (высоты) порядка
30... 150 м, возможность заблаговременной записи пространст-
венных эталонов цели отсутствует. Наведение или прицеливание
таких боевых элементов с последующим поражением цели удар-
ным ядром обеспечивается на основе использования в них режи-
ма автоматического распознавания объектов военной техники по
совокупности спектральных и пространственно-энергетических
признаков.
Расширение диапазона естественных условий эффективно-
го боевого применения высокоточных средств поражения с ОЭС
достигается переходом к повсеместному использованию тепло-
визионных датчиков. Такие датчики обеспечивают формирова-
ние изображения цели по ее собственному тепловому излуче-
нию в спектральных диапазонах 3...5 мкм и 8... 14 мкм, как в
ночное время, так и в сложных метеоусловиях, исключающих
эффективное применение телевизионных или оптико-визуаль-
ных приборов наблюдения. Так, тепловизионные, в том числе
двухспектральные, головки самонаведения используются или
планируются к использованию в ракетах класса воздух-воздух
последнего поколения типов Sidewinder AIM-9X, ASRAAM,
IRIS-T, Python-4,5. Тепловизионными визирами оснащаются все
наземные ПТРК последних модификаций, такие как TOW-2,
НОТ-2, Milan-2.
Излучение ИК-области спектра используется в активной ла-
зерной головке самонаведения управляемого боеприпаса
LOCAAS, представляющей собой сканирующий ладар, форми-
рующий наряду с яркостным также дальнометрическое изобра-
жение (объемный образ цели) с сантиметровым разрешением по
высоте. Расширение диапазона условий боевого применения с
одновременным повышением помехозащищенности ВСП дости-
гается также разработкой комбинированных головок самонаведе-
ния с двумя и более датчиками, работающими в различных спек-
тральных диапазонах, в том числе в миллиметровом, или исполь-
зующих совмещение тепловизионного и лазерного полуактивно-
го самонаведения.
28
КЛАССИФИКАЦИЯ ВЫСОКОТОЧНЫХ СРЕДСТВ ПОРАЖЕНИЯ...
Основные направления совершенствования
тактико-технических характеристик
высокоточных средств поражения
Увеличивается дальность боевого применения УБ с ОЭС до
значений, когда оптический контакт боеприпаса с целью в
момент его пуска полностью исключен. Это достигается ис-
пользованием для вывода боеприпаса в район цели инерци-
альных навигационных систем, спутниковых навигационных
систем GPS, корреляционных систем навигации по картам
местности (КР AGM-86, BGM-109, УАБ JDAM).
Использованием ПТРК с передачей изображения цели с ра-
кеты на пусковую установку и команд наведения с пусковой
установки на ракету по волоконно-оптическим линиям связи
решаются задачи поражения хорошо замаскированных це-
лей, находящихся в укрытии, в окопе, за насыпью (EFOGM,
Polyphem).
Обеспечивается решение задачи всеракурсного поражения
целей. Применительно к борьбе с самолетами эта задача на-
шла решение созданием тепловизионных головок самонаве-
дения, работающих не только по факелу двигателя, но и по
излучению нагретого фюзеляжа самолета за счет использо-
вания излучения средней ИК-области спектра 3...5 мкм
(Sidewinder AIM-9X, ASRAAM, IRIS-T).
При этом обеспечивается захват цели головкой самонаведе-
ния после пуска ракеты и атака целей, наблюдаемых под углом
±90° и более к направлению пуска ракеты. На решение задачи
всеракурсного поражения целей и на повышение помехозащи-
щенности направлено создание головок самонаведения перенос-
ных зенитных ракетных комплексов, использующих излучение
ультрафиолетовой области спектра (Stinger POST). Поражение
наземных хорошо бронированных целей со стороны слабее за-
щищенной брони верхней полусферы обеспечивают боеприпасы
точного наведения и прицеливания SAD ARM, Skeet, ВАТ, ПТУР
TOW-2B.
Разработкой ПТРК LOSAT, обеспечивающего наведение по
лазерному лучу гиперзвуковых ракет КЕМ на несколько одновре-
менно сопровождаемых в оптическом диапазоне целей, решается
задача создания ВТО с повышенной боевой производительностью.
29
ГЛАВА!
Характеризуя общую политику разработки новых образцов
ВТО с ОЭС, следует отметить две (в определенной мере проти-
воречивые) тенденции, которые в ряде новых образцов проявля-
ются достаточно выпукло.
С одной стороны, наблюдается тенденция существенного
усложнения используемых в УБ алгоритмов обработки текущей
информации, доставляемой оптическими датчиками. Это приво-
дит к усложнению используемых технических решений, аппара-
турному усложнению образцов ВТО, увеличению их стоимости.
Одновременно все большее распространение находят также
принципы построения систем управления ВТО, когда основные
задачи наведения боеприпасов на цель решаются на пусковой ус-
тановке, что приводит к ее усложнению и удорожанию при одно-
временном упрощении функций, возлагаемых на бортовую аппа-
ратуру боеприпаса, наводимого на цель и являющегося расхо-
дуемым средством.
Таким образом, существенно увеличивается кратность боевого исполь-
зования наиболее сложных и дорогостоящих элементов комплекса
ВТО. Достаточно ярко эта тенденция проявляется, например, при соз-
дании комплексов ВТО с наведением ракет по лазерному лучу
(TRIGAT MR, MAP ATS, MAF).
С другой стороны, наблюдается тенденция разработки дос-
таточно простых и дешевых боеприпасов, относительно невысо-
кая эффективность каждого из которых компенсируется их коли-
чеством и массированным применением. Эта тенденция наиболее
полно реализуется созданием кассетных противотанковых бое-
припасов точного наведения и прицеливания типов SADARM,
Skeet, ВАТ и других.
Предлагаемая ниже классификация ВСП ориентирована на
ее соответствие интересам решения задач ОЭП. Возможности оп-
тико-электронного подавления ВТО, в первую очередь, опреде-
ляются способом обработки принимаемых оптических сигналов,
которые используются в оптико-электронных средствах (ОЭСр),
входящих в состав ВТО, для измерения относительных простран-
ственных координат цели, т.е. они определяются типом коорди-
натора цели, а также способом использования измеренных ими
координат для формирования команд управления боеприпасом
30
КЛАССИФИКАЦИЯ ВЫСОКОТОЧНЫХ СРЕДСТВ ПОРАЖЕНИЯ...
(ракетой, снарядом и т.п.) на траектории его наведения на цель
(типом системы наведения).
В соответствии с этим ВСП целесообразно классифициро-
вать по типу используемых координаторов целей и по типу сис-
тем наведения боеприпасов на цель. (Координатор цели - функ-
ционально согласованная совокупность элементов ОЭСр, форми-
рующая по принимаемому оптическому излучению сигнал, про-
порциональный углу отклонения направления на цель от оптиче-
ской оси ОЭСр.)
По способу обработки оптических сигналов и, соответствен-
но, по типу используемых координаторов ОЭСр, прежде всего,
подразделяются на ОЭСр с гетеродинными фотоприемными уст-
ройствами и ОЭСр с энергетическими фотоприемными устройст-
вами.
Гетеродинные ОЭСр используют когерентные оптические сигналы и за
счет оптического смешения полезного сигнала с сигналом гетеродина
наделяются чувствительностью к несущей частоте и фазе принимаемо-
го сигнала.
Поэтому способы обработки сигналов с выхода фотоприем-
ника в гетеродинных ОЭСр аналогичны способам, используемым
в радиолокационных станциях (РЛС). В соответствии с этим и
классификация гетеродинных ОЭСр аналогична классификации
РЛС. В настоящее время гетеродинные ОЭСр в высокоточных
средствах поражения практически не используются. В связи с
этим классификация таких ОЭСр здесь не рассматривается.
В системах наведения ВТО обычно используются ОЭСр с энергетиче-
скими фотоприемными устройствами, чувствительными к энергетиче-
ским параметрам принимаемых оптических сигналов, но не к их несу-
щей частоте или фазе.
Схема классификации ОЭСр с энергетическими фотоприем-
ными устройствами по типам используемых в них координаторов
целей приведена на рис. 1.1.
Наиболее широкое распространение в настоящее время в
системах наведения получили координаторы точечных и про-
странственно протяженных целей, показанные на позициях 1 и 2.
К координаторам точечных целей относятся такие, у которых
31
ГЛАВА 1
________________________Рисунок 1.1 ______________________
изображение цели в плоскости фотоприемника совпадает с изо-
бражением точечного источника излучения. Кроме того, к коор-
динаторам точечных целей относятся координаторы, у которых
размеры элемента пространственного разрешения больше гео-
метрических размеров изображения цели. К таким координато-
рам принадлежат координаторы полуактивных лазерных и ИК-
головок самонаведения, ИК-координаторы ПТРК с командным
наведением типа TOW, Milan.
Координаторы точечных целей с параллельным анализом
(поз. 1.1) позволяют измерять пространственное положение цели
по одному принятому импульсу полезного сигнала. Ошибки из-
мерения положения цели координаторами с квадрантными фо-
топриемниками (поз. 1.1.1), используемыми в ПЛГС (Hellfire
AGM-114), могут быть меньше размеров элемента пространст-
венного разрешения фотоприемного устройства.
32
КЛАССИФИКАЦИЯ ВЫСОКОТОЧНЫХ СРЕДСТВ ПОРАЖЕНИЯ...
Алгоритмы формирования сигнала ошибки в таких коорди-
наторах аналогичны используемым в моноимпульсных РЛС с
суммарно-разностной обработкой. Координаторы с многоэле-
ментными анализаторами (поз. 1.1.2) измеряют положение цели
с точностью до размеров элемента пространственного разреше-
ния и аналогичны в этом смысле РЛС с построчным обзором
пространства узким лучом.
Координаторы с последовательным анализом (поз. 1.2)
имеют растровые анализаторы и обеспечивают измерение про-
странственного положения цели только по сигналу, принятому на
интервале времени, не меньшем периода сканирования растрово-
го анализатора. На рис. 1.1 не приведена достаточно полная клас-
сификация растровых модуляторов и реализуемых ими видов мо-
дуляции принимаемого сигнала (при необходимости см., напри-
мер, [7]). Однако на позициях 1.2.1, 1.2.2 специально выделены
два вида модуляций, достаточно широко используемых в ОЭСр
систем наведения ПТРК TOW, Milan и других. К ним следовало
бы добавить координаторы с розеточной разверткой, применяе-
мые в противосамолетных самонаводящихся ракетах типа Stinger.
Координаторы пространственно протяженных целей
(поз. 2) обладают высоким пространственным разрешением и от-
носятся к классу координаторов с формированием изображения
цели. К координаторам этого типа относятся телевизионные и те-
пловизионные координаторы головок самонаведения, активные
лазерные координаторы (ладары), формирующие изображение
цели путем ее зондирования узким лазерным лучом (LOCAAS).
Размеры элемента пространственного разрешения таких коорди-
наторов, приведенные к плоскости наблюдаемого сюжета, суще-
ственно меньше геометрических размеров существенных деталей
этого сюжета (меньше геометрических размеров цели).
Корреляционные координаторы (поз. 2.1) принадлежат к это-
му типу координаторов. Они обеспечивают измерение координат
цели путем совмещения текущего изображения цели с ее эталон-
ным изображением, заранее записанным в память координатора.
При этом в автокорреляционных координаторах (поз. 2.1.1) в ка-
честве эталонного используется изображение цели, полученное в
одном из предыдущих циклов обзора (Maverick AGM-65B,D,F).
Во взаимнокорреляционных координаторах (поз. 2.1.2) эталонное
33
ГЛАВА 1
изображение может формироваться любыми другими способами,
например по планам местности. Оно записывается в память коор-
динатора заблаговременно до пуска боеприпаса (DSMACK).
В координаторах с сопровождением по ориентирам
(поз. 2.2.3) осуществляется слежение за тремя и более ориенти-
рами, находящимися в окрестности цели, и такими, что положе-
ние цели относительно них известно и может быть, при необхо-
димости, пересчитано в любую систему координат (THASSID).
Для слежения за неподвижными ориентирами предпочтительно
использование корреляционных координаторов.
Если корреляционные координаторы наиболее полно ис-
пользуют для измерений текущую информацию о пространствен-
но-яркостной структуре цели, то, в отличие от них, в светоконт-
растных координаторах (поз. 2.3) используется лишь некоторая
часть этой информации, в основном характеризующая контраст-
ные характеристики цели. Так, в координаторах со слежением по
балансу областей (поз. 2.3.1) осуществляется слежение за гео-
метрическим либо энергетическим центром контрастной цели.
Положение этого центра по каждой измеряемой координате оп-
ределяется балансом интегральных сигналов от цели, попадаю-
щих в два пространственных полустроба.
В координаторах центроидного слежения (поз. 2.3.2) выде-
ляется контрастный контур цели, а слежение осуществляется за
определяемым по той или иной логике центром этого контура.
Координаторы краевого слежения (поз. 2.3.3) осуществляют вы-
деление края контрастной цели путем построчного пространст-
венного дифференцирования ее изображения и последующее
слежение за точкой, привязанной к этому краю.
К классу ОЭСр с малоэлементными фотоприемниками
(поз. 2.2) принадлежат ИК-датчики точного прицеливания и на-
ведения кассетных боевых элементов типов SAD ARM, Skeet, ко-
торыми могут оснащаться бомбы, ракеты, артиллерийские снаря-
ды, мины, авиационные кассеты и беспилотные летательные ап-
параты. Такие ИК-датчики имеют малоэлементные, обычно двух-
спектральные фотоприемники, и обеспечивают автоматическое
обнаружение и распознавание военных целей типа объектов бро-
нетанковой техники по пространственным и спектральным при-
знакам на дальностях их боевого применения порядка 30... 150 м.
34
КЛАССИФИКАЦИЯ ВЫСОКОТОЧНЫХ СРЕДСТВ ПОРАЖЕНИЯ...
Современный этап развитая ОЭСр систем наведения ВСП характеризу-
ется широким использованием в системах ВТО комбинированных ко-
ординаторов (поз. 3), которые могут иметь в своем составе два и более
датчика, получающих информацию о цели в различных спектральных
диапазонах или физических полях.
Это могут быть телевизионные, тепловизионные и ИК двух и
более спектральных датчиков, лазерные датчики, в том числе обес-
печивающие формирование высотного профиля цели, радиолока-
ционные датчики и датчики, использующие излучение ультрафио-
летового и миллиметрового диапазонов. Использованием комби-
нированных координаторов достигается решение задач повышения
точности наведения и помехозащищенности ВТО, расширение
диапазона условий эффективного боевого применения ВТО.
В координаторах с комплексированием информации (поз. 3.1)
выполняется совместная обработка информации, одновременно
поступающей от нескольких датчиков, что обеспечивает повыше-
ние точности измерения координат цели в различных условиях об-
становки. В комбинированных координаторах с последовательной
обработкой (поз. 3.2) на каждом этапе процесса наведения ВТО
используется один датчик из имеющихся, обеспечивающий наибо-
лее высокую вероятность обнаружения или точность измерения
положения цели. Таким образом, реализуется адаптация координа-
тора к текущей фоноцелевой и помеховой обстановке.
Классификация систем наведения ВСП по способу исполь-
зования информации от ОЭСр при наведении боеприпасов на
цель приведена на рис. 1.2. В системах конечного наведения (поз.
1) целью управления ВСП является минимизация конечного про-
маха или приведение боеприпаса по той или иной траектории в
точку встречи с целью. По существу, эти системы управляют ко-
нечным положением боеприпаса, т.е. являются системами терми-
нального управления.
В системах самонаведения (поз. 1.1) такое управление осу-
ществляется с помощью информации об относительном угловом
положении цели, доставляемой в процессе полета управляемого
боеприпаса ИК-, лазерной, телевизионной либо тепловизионной
головками самонаведения. Эта информация используется для
реализаций того или иного метода наведения, обычно пропор-
циональной навигации (УБ типа Maverick, Hellfire).
35
ГЛАВА 1
_______________________Рисунок 1.2 ______________________
Особенностью систем самонаведения, существенной с пози-
ций их подавления, является то, что точность измерения относи-
тельных линейных координат цели возрастает по мере сближения
боеприпаса с целью. Это диктует необходимость при их подавле-
нии во многих случаях создавать помехи вплоть до момента
встречи боеприпаса с целью.
В системах командного наведения (поз. 1.2) используются
ИК-, лазерные, телевизионные или тепловизионные координато-
ры для сопровождения цели и боеприпаса на траектории, обычно
размещаемые на пусковой установке. Команды управления, фор-
мируемые на пусковой установке в ручном, полуавтоматическом
либо автоматическом режиме, могут передаваться на боеприпас в
полете по проводным, оптико-волоконным, радио- или оптиче-
ским линиям связи (УБ типа TOW, Milan).
Системы комбинированного наведения (поз. 1.3) занимают
промежуточное положение между системами командного и са-
монаведения и сочетают достоинства этих систем. Источник ин-
формации о цели в таких системах размещен на боеприпасе. Эта
информация по линии связи поступает на пусковую установку,
где формируется команда управления и по той же линии связи
36
КЛАССИФИКАЦИЯ ВЫСОКОТОЧНЫХ СРЕДСТВ ПОРАЖЕНИЯ...
передается на боеприпас. К таким системам относят телевизион-
но-командные системы наведения управляемых авиационных
бомб, системы наведения противотанковых ракет с передачей
команд и изображений целей по волоконно-оптической линии
связи (УБ типа GBU-15, EFOGM).
В системах с коррекцией траекторий наведения (поз. 2)
система управления по информации с ОЭСр автоматически
формирует на борту управляемого боеприпаса команды управ-
ления, удерживающие его на заданной траектории. В случае
систем с лазерно-лучевым наведением, являющихся представи-
телями систем с наведением по оптическому лучу (поз. 2.1), эта
траектория задается положением в пространстве лазерного луча,
направляемого с пусковой установки на цель (УБ типа TRIGAT
MR, MAF). В случае систем с коррекцией по планам местности
(поз. 2.2), используемых в крылатых ракетах, траектория задает-
ся участками коррекции положения ракеты (КР типа AGM-86,
BGM-109).
Управление ракетой между участками коррекции осуществ-
ляется с помощью инерциальных или других навигационных
систем. Привязка к местности на участках коррекции выполняет-
ся обычно с помощью корреляционных алгоритмов.
В системах прямого поражения (поз. 3) управление боепри-
пасом на траектории его движения к цели не производится. В
системах с поражением «ударным ядром» (поз. 3.1), представи-
телем которых являются кассетные суббоеприпасы с ИК-дат-
чиками точного прицеливания, по информации от этих датчиков
решаются задачи автоматического обнаружения, распознавания
цели и формирования команды на отстрел «ударного ядра» (УБ
типа SADARM, Skeet). Это «ударное ядро» направляется на цель
с точностью, определяемой величиной элемента пространствен-
ного разрешения ИК-датчика суббоеприпаса.
В артиллерийских системах (поз. 3.2) по информации о ко-
ординатах цели, получаемой от ОЭСр, производится расчет точки
прицеливания. Такие системы также можно относить к системам
высокоточного оружия в случаях, когда они реализуют принцип
«выстрел-поражение», т.е. обеспечивают поражение цели с веро-
ятностью 0,7...0,8 и выше одним выстрелом во всем диапазоне
возможных дальностей их использования.
37
ГЛАВА 1
1.2. Классификация
преднамеренных помех и средств их создания
Развернутая классификация радиоэлектронных помех по 27
классификационным признакам, частично включающая в рас-
смотрение и оптические помехи, содержится в [10]. Наиболее
существенные позиции этой классификации ниже уточняются и
конкретизируются применительно к преднамеренным оптиче-
ским помехам.
По реализуемому при действии на ОЭСр эффекту преднаме-
ренные помехи подразделяются на маскирующие, имитирующие,
возмущающие, ослепляющие и поражающие. Первые три вида
помех являются помехами без последействия, т.е. при их созда-
нии помеховый эффект исчезает сразу после прекращения дейст-
вия (выключения) помехи.
□ Ослепляющие и поражающие помехи являются помехами с
последействием.
Помеховый эффект при их создании сохраняется и после
прекращения действия помехи. Эти помехи могут создаваться
прямым воздействием на фотоприемные устройства достаточно
мощного оптического некогерентного или лазерного излучения.
Если такое излучение приводит к обратимым изменениям (на-
пример, засветке) характеристик фотоприемного устройства,
исчезающим через некоторое время после прекращения дейст-
вия помехи, то соответствующая помеха относится к ослеп-
ляющим. Если изменения фотоприемного устройства необрати-
мы (прожиг фоточувствительного слоя, разрушение фотокато-
да), то реализующая это воздействие помеха относится к по-
ражающим.
Помехи без последействия направлены на противодействие
процессам обнаружения, захвата на сопровождение, распознава-
ния и измерения координат цели в ОЭСр. В подавляющем боль-
шинстве ОЭСр эти процессы обычно используют процедуру
формирования корреляционного отклика координатора ОЭСр.
При этом процесс обнаружения и распознавания сводится к ана-
лизу превышения корреляционным откликом координатора неко-
торого порога.
38
КЛАССИФИКАЦИЯ ВЫСОКОТОЧНЫХ СРЕДСТВ ПОРАЖЕНИЯ...
Процесс измерения сводится к определению положения
главного пика корреляционного отклика на оси измеряемой ко-
ординаты.
□ С учетом этого к маскирующим относятся помехи, изме-
няющие форму корреляционного отклика (уменьшающие
относительный максимум, кривизну либо объем его главно-
го пика и т.п.), но не претендующие на изменение положе-
ния максимума главного пика.
л Имитирующие помехи - помехи, смещающие положение
максимума главного пика корреляционного отклика либо
приводящие к появлению многопиковости этого отклика.
л Возмущающие помехи - помехи, которые не относятся к пер-
вым двум видам.
Своей эффективностью они обязаны неидеальностям и дру-
гим особенностям технической реализация принципов измерения
координат: особенностям построения и инерционностям схем
нормировки сигнала, особенностям переходных процессов в ди-
намических элементах ОЭС, наличию нелинейностей в цепях об-
работки сигнала и т.п.
п Частным случаем возмущающих помех являются засветоч-
ные помехи, которые могут быть созданы воздействием
мощного когерентного или некогерентного излучения на фо-
топриемное устройство ОЭСр.
Действие засветочных помех проявляется в виде засветки
некоторой области фотоприемной матрицы ОЭСр, обусловлен-
ной рассеянием помехового излучения неоднородностями атмо-
сферы на трассе его распространения до фотоприемного устрой-
ства, а также его рассеянием неоднородностями входной оптики
и многократным переотражением помехового излучения конст-
руктивными элементами фотоприемного устройства.
По способу взаимодействия с полезным сигналом помехи
подразделяются на аддитивные, мультипликативные, апплика-
тивные,
□ Если действующий на входе ОЭСр сигнал можно предста-
вить как результат сложения полезного и помехового сигна-
лов, то соответствующая помеха является аддитивной.
39
ГЛАВА 1
п Если во входном сигнале велика составляющая, пропорцио-
нальная произведению полезного и помехового сигналов, то
соответствующая помеха относится к мультипликативным.
□ Кроме аддитивных и мультипликативных помех, характер-
ных и для радио диапазона, в оптическом диапазоне при ана-
лизе ОЭСр с высоким пространственным разрешением и
формированием изображений часто встречаются апплика-
тивные помехи, т.е. помехи, образующие аппликативную
смесь с сигналом.
Аппликативная смесь может иметь место только для про-
странственно распределенных (протяженных) помех и полезных
сигналов. Она характеризуется тем, что на фрагментах сюжета,
на которых помеха не равна нулю, она полностью замещает ис-
ходный сюжет, образуя, таким образом, аппликацию помехи и
полезного сигнала.
п По степени соответствия характеристикам подавляемого
ОЭСр различают заградительные и прицельные помехи. В
свою очередь, такие помехи подразделяются на загради-
тельные или прицельные по направлению, времени создания,
спектральному диапазону, закону модуляции и т.п.
□ Точечные помехи создаются из области пространства, не вы-
ходящей за пределы одного элемента пространственного
разрешения фотоприемного устройства ОЭСр.
По числу источников излучения точечные помехи подразде-
ляются на одноточечные, двухточечные и многоточечные.
К точечным относятся помехи, создаваемые прожекторами и
станциями когерентных (лазерных) помех.
□ Пространственно протяженные помехи создаются из об-
ласти пространства, занимающей несколько элементов про-
странственного разрешения фотоприемного устройства. Ти-
пичным представителем пространственно протяженных по-
мех являются аэрозольные завесы.
Преднамеренные помехи могут создаваться широким набо-
ром средств, использующих различные физические эффекты. По
ресурсному признаку эти средства подразделяются на расходуе-
40
КЛАССИФИКАЦИЯ ВЫСОКОТОЧНЫХ СРЕДСТВ ПОРАЖЕНИЯ...
мые и нерасходуемые, по энергетическому - на активные (имею-
щие собственное помеховое излучение) и пассивные (не имею-
щие собственного помехового излучения и создающие помехо-
вый эффект только за счет рассеяния, ослабления, переотражения
и т.п. других излучений) [3].
Соответственно, помехи, создаваемые активными и пассив-
ными средствами, также определяются как активные и пассивные
помехи.
□ В случае согласованного по времени и месту применения ак-
тивных и пассивных помех можно во многих случаях увели-
чить эффективность подавления ОЭСр. Такие помехи полу-
чили название активно-пассивных или комбинированных.
Примером комбинированной помехи является лазерная лож-
ная цель, создаваемая путем подсвета аэрозольного образования
лазерным помеховым излучением.
В табл. 1.1 в качестве примера представлена совокупность
ряда средств создания помех, классифицированных по ресурс-
ным и энергетическим признакам. Специальным видом нерас-
ходуемых средств создания помех являются средства снижения
оптической заметности. Отличительным, т.е. классифицирую-
щим, признаком средств снижения заметности является их
неотъемлемая принадлежность к конструкции защищаемого
объекта.
_______________________Таблица 1.1 _____________________
Ресурсные признаки Энергетические признаки
Активные Пассивные
Нерасходуемые Станция некогерентных по- мех (прожектор), станция ко- герентных помех (лазер), средство создания лазерных ложных целей, лазерный ретранслятор и т.п. Детальная оптическая лож- ная цель, уголковый лазер- ный отражатель, экраны, покрытия и т.п.
Расходуемые Пироизлучатель, ложная теп- ловая цель, боеприпас быст- рой постановки аэрозольных завес, боеприпас ослепляю- щего действия и т.п. Дымовые шашки, пеноге- нератор, средство поста- новки облака микростекло- сфер и т.п.
41
ГЛАВА 1
Примерами достаточно широко применяемых в настоящее
время средств создания помех отечественной и иностранных раз-
работок могут служить средства постановки ложных тепловых
целей ППИ-26, GEN-X, ТСТ-60-У, станции некогерентных помех
ТШУ-1-7, Л370-5, AN/VLQ-8, станции когерентных (лазерных)
помех комплексов MANTA, AN/ALQ-24, боеприпасы быстрой
постановки аэрозольных завес ЗД17, L8A1, GALIX-3, средство
создания лазерных ложных целей DHY332 и другие. С более де-
тальным описанием некоторых из этих средств можно ознако-
миться в гл. 7.
На практике использование различных средств создания по-
мех всегда ограничено условиями их размещения на защищаемом
объекте и требует минимизации весовых, габаритных характери-
стик и энергопотребления этих средств. В свою очередь, задача
минимизации таких характеристик может быть решена на основе
оптимизации (обоснования) пространственных, энергетических,
спектральных, временных характеристик помех, подлежащих
реализации этими средствами. Так, при обосновании характери-
стик средств создания ослепляющих и поражающих помех в пер-
вую очередь подлежат определению длина волны, сила, угол рас-
ходимости, рабочий сектор, временные и модуляционные харак-
теристики помехового излучения (длительность и частота следо-
вания импульсов, интервал времени создания помехи и т.п.).
При анализе и обосновании характеристик активных средств
создания маскирующих, имитирующих и возмущающих помех
дополнительно к перечисленным может также понадобиться оп-
тимизация траекторных характеристик ложных целей, выбор бо-
лее тонких частотно-временных характеристик помеховых сигна-
лов (частотного спектра, глубины и закона модуляции, длитель-
ности импульсов и крутизны их фронтов, допустимого времени
задержки ответных помеховых импульсов и т.п.), а также спек-
тральных и пространственно-частотных характеристик помех,
определяющих степень подобия помехи сигналу по спектраль-
ным и пространственно-энергетическим признакам.
При анализе и обосновании характеристик пассивных средств
создания помех дополнительно к перечисленным подлежат опреде-
лению такие характеристики как коэффициенты ослабления и от-
ражения излучения, а также параметры, описывающие степень ва-
42
КЛАССИФИКАЦИЯ ВЫСОКОТОЧНЫХ СРЕДСТВ ПОРАЖЕНИЯ...
риации этих коэффициентов по спектральной и пространственной
осям или характеризующие форму индикатрисы рассеяния мелко-
дисперсных образований, время их существования и т.п.
Следует отметить, что при обосновании перечисленных ха-
рактеристик помех в большинстве случаев можно ограничиться
анализом эффективности их воздействия на отдельные ОЭСр.
Однако для решения задачи подавления оптико-электронных сис-
тем наведения ВТО обоснование только этих характеристик мо-
жет оказаться недостаточным. Необходим также дополнительный
учет особенностей работы ОЭСр в составе систем наведения бое-
припасов, что позволяет обосновать такие существенные с пози-
ций оптико-электронного подавления требования к характери-
стикам помех и способам их создания, как момент постановки и
интервал времени создания помехи, база источников помех, их
размещение относительно точки прицеливания, характеристики
подлежащих реализации ошибок сопровождения цели.
1.3. Основные задачи
синтеза преднамеренных помех
Задача обоснования пространственных, энергетических,
спектральных и временных характеристик помех, подлежащих
реализации средствами их создания решается на этапе функцио-
нального синтеза помех.
п Функциональный синтез - обоснование (оптимизация в ши-
роком смысле) видов и параметров помех, удовлетворяющих
требованиям по эффективности при наличии ресурсных ог-
раничений, обычно монотонно связанных с массогабарит-
ными характеристиками, стоимостью и энергопотреблением
средств их создания.
Этап функционального синтеза помех является задающим,
ключевым при формировании технического облика средств и
комплексов создания помех, а также общей концепции защиты
конкретных объектов средствами ОЭП. Ошибки и недоработки,
имевшие место на этом этапе, как правило, не поддаются устра-
нению в дальнейшем и ведут к снижению эффективности подав-
43
ГЛАВА 1
ления и к укорочению жизненного цикла разрабатываемых
средств и комплексов.
Основные особенности функционального синтеза помех
отражают особенности построения
и функционирования подлежащих подавлению
оптико-электронных средств и систем
1. В основной номенклатуре оптико-электронных средств
ВСП используется энергетический приём и обработка сигналов,
т.е. приёмные устройства этих средств, как правило, нечувстви-
тельны к фазе обрабатываемого электромагнитного излучения
оптического диапазона.
2. Видовые (т.е. формирующие изображение фоноцелевой
обстановки) оптико-электронные средства обычно функциони-
руют при относительно небольших уровнях естественных помех,
что в ряде случаев делает вполне оправданным использование
детерминистских постановок задач анализа и синтеза помех.
3. Высокое пространственное (угловое) разрешение оптико-
электронных средств определяет необходимость рассмотрения в
качестве целей пространственно протяжённых объектов, сиг-
нальная структура которых может описываться функцией двух
координат в картинной плоскости или трех пространственных
координат. Тогда и синтез помех должен приводить к отысканию
их сигнальной структуры в виде функции этих же независимых
переменных.
4. Пространственно протяжённый характер целей приводит к
необходимости рассмотрения при синтезе помех наряду с адди-
тивной и мультипликативной также специфической аппликатив-
ной смеси сигнала фона с полезным сигналом цели, характери-
зующейся тем, что сигнал цели замещает сигнал находящегося
под целью участка фона.
5. Имеет место большое разнообразие фоноцелевых ансамб-
лей с существенно различающимися характеристиками, изме-
няющимися как по времени суток, так и по временам года. С
этим связана необходимость использования в качестве показате-
лей эффективности помех наряду с другими также вероятностных
показателей, усреднённых по множеству возможных фоноцеле-
вых ансамблей (актов наблюдения).
44
КЛАССИФИКАЦИЯ ВЫСОКОТОЧНЫХ СРЕДСТВ ПОРАЖЕНИЯ...
Вместе с тем, во многих случаях представляется весьма проблематичным
использование вероятностных показателей эффективности. Это связано с
тем, что возможную совокупность реальных фоноцелевых ансамблей,
как правило, не удаётся представить в виде выборки некоторого случай-
ного поля с фиксированными статистическими характеристиками, т.е.
достаточно корректно задать на языке теории вероятностей.
В этих условиях для того, чтобы сохранить возможность ис-
пользования в исследованиях хорошо развитого аппарата теории
вероятностей и вероятностных показателей эффективности, при
проведении основного объема исследований представляется
вполне оправданным использование вместо реальных некоторых
модельных представлений фоноцелевых ансамблей, например в
виде совокупности выборок некоторого случайного поля с фик-
сированными статистическими характеристиками.
Естественно, что наиболее существенные характеристики такого мо-
дельного случайного поля (например, величина интервала пространст-
венной корреляции) должны соответствовать аналогичным характери-
стикам реальных фоноцелевых ансамблей.
При этом на завершающем этапе исследований возникает
задача выборочного подтверждения применимости основных ре-
зультатов, полученных с использованием таких модельных пред-
ставлений, к случаям работы соответствующих средств на реаль-
ных фонах.
Полезные с позиций ОЭП эффекты при воздействии помех
могут иметь место как на выходе неохваченных обратной связью
решающих устройств (обнаружителей, координаторов ОЭСр), так
и на выходе замкнутых следящих систем и контуров наведения ра-
кет. Это приводит к необходимости решения в общем случае задач
синтеза помех на уровнях, соответствующих основным уровням
структурной организации подавляемых систем ВТО.
В частности, при синтезе помех на уровне незамкнутых решающих уст-
ройств определяются характеристики помехи, минимизирующие веро-
ятность правильного обнаружения или максимизирующие ошибки еди-
ничных измерений.
Синтез помех на уровне следящих измерителей направлен
обычно на максимизацию вероятности перенацеливания (увода)
45
ГЛАВА 1
следящего измерителя на ложную цель либо на максимизацию
вероятности срыва слежения за целью. (Отметим, что и перена-
целивание, и срыв слежения принадлежат к классу нелинейных
эффектов, появление которых обусловлено тем, что все следящие
измерители являются, по существу, нелинейными системами с
угловым или пространственным стробированием).
Синтез помех на уровне контуров наведения направлен на
максимизацию промаха ракеты в конце этапа наведения и должен
базироваться, помимо прочего, на учете резонансных свойств и
существенных нелинейностей контура наведения. Таким образом,
существо синтеза оптических помех состоит в обосновании эф-
фективных видов и параметров помех типовым представителям
оптико-электронных средств и систем на основных этапах их
функционирования.
Синтез помех часто должен выполняться в условиях недостаточной ин-
формации о принципах построения и параметрах подавляемых ОЭСр.
В соответствии с этим полезно различать две группы задач
синтеза:
1) задачи синтеза в условиях полной (достаточной) априор-
ной информированности о характеристиках подавляемых ОЭСр;
2) задачи синтеза в условиях неполной (недостаточной) ап-
риорной информированности о характеристиках подавляемых
ОЭСр.
Результаты решения первой группы задач составляют во
многих случаях основу решения и задач второй группы, и в этом
качестве они могут интерпретироваться как базовые. В совокуп-
ности задач синтеза помех при полной априорной информиро-
ванности можно выделить задачи параметрического и непарамет-
рического синтеза помех.
□ Параметрический синтез решает задачу оптимизации пара-
метров фиксированных видов помех, сигнальная структура
которых (пространственно-яркостная, пространственно-
временная, временная, спектральная и т.п.) задана с точно-
стью до подлежащих оптимизации параметров.
п Непараметрический синтез решает задачу определения за-
ранее неизвестной оптимальной или квазиоптимальной
структуры помехи [3].
46
КЛАССИФИКАЦИЯ ВЫСОКОТОЧНЫХ СРЕДСТВ ПОРАЖЕНИЯ...
В настоящее время наиболее широкое использование нахо-
дит параметрический синтез помех. В основе параметрического
синтеза лежит анализ помех, то есть получение в том или ином
виде (явном, неявном, аналитическом, табличном, графическим и
т.п.) по результатам теоретических исследований имитационного
моделирования или натурного эксперимента зависимостей пока-
зателя эффективности помехи от её параметров. После этого вы-
полняется отыскание экстремума этого показателя по анализи-
руемым параметрам в рамках существующих технических огра-
ничений на средства создания помех. Очевидным достоинством
параметрического синтеза является его конструктивный характер,
хорошая приспособленность к решению практических задач.
Формально задача параметрического синтеза ставится как
задача отыскания параметров помехи Popt, доставляющих экс-
тремум показателю эффективности - некоторому функционалу
Ар(х,Р)):
Popt = arg opt J(p(x, Р)) при р(х, р)еМр. (1.1)
₽
Здесь р(х,р) - помеховый сигнал; х - вектор независимых пере-
менных (пространственных, времени и т.п.); р - вектор оптими-
зируемых параметров помехи; М - допустимое множество ви-
дов помеховых сигналов.
Таким образом, при решении задач параметрического синте-
за выделяются два этапа.
Этап L Получение зависимости значений функционала
J(p(x, Р) от р (этап анализа).
Этап 2. Оптимизация функционала - показателя эффектив-
ности.
На практике широко распространены случаи, когда задача
второго этапа имеет тривиальное решение (например, когда
J(p(x, Р) зависит от р монотонно и экстремум достигается на
границе области возможных значений р, определяемой ресурс-
ными ограничениями). Основные особенности проблематики
ОЭП проявляются на этапе анализа. При этом способ определе-
ния значений функционала J(p(x, р) обычно достаточно инди-
видуален для каждой конкретной задачи. Выбор вида помехи при
47
ГЛАВА 1
параметрическом синтезе является обычно эвристической проце-
дурой, т.е. подобен изобретательству.
При постановке задач непараметрического синтеза помех
решающим устройствам ОЭСр (обнаружителям, координаторам
ОЭСр) полагаются известными с той или иной степенью детали-
зации структура решающего устройства и формальное описание
полезного сигнала. В отличие от задач параметрического синтеза
структура помехи полагается неизвестной.
При непараметрическом синтезе ставится задача отыскания такой
структуры и параметров помехи, которые при условии удовлетворения
наложенным на помеху ограничениям, обычно энергетическим, обес-
печивают максимальное ухудшение характеристик обнаружения или
оценки параметров полезного сигнала в подавляемом ОЭСр, макси-
мальное снижение точности наведения боезапаса на цель. Основу мето-
дов решения задач непараметрического синтеза помех составляют ме-
тоды вариационного исчисления.
По существу непараметрический синтез направлен на опре-
деление оптимальной структуры помехи в виде функции тех же
независимых переменных, которые фигурируют в формальной
записи полезного сигнала. Задачи непараметрического синтеза
помехи решающему устройству ОЭСр могут быть представлены
следующим образом: требуется определить помеховый сигнал
popt(x) , доставляющий оптимум некоторому функционалу-
показателю эффективности помехи
A>pt(x) =аг§ °Pt Др(х))> (1-2)
р{\)&Мр
где М - некоторое допустимое множество помех, обычно зада-
ваемое ограничениями на р(х).
В задачах непараметрического синтеза помех динамическим
системам (следящим координаторам, контурам наведения) пола-
гается известной система дифференциальных уравнений движе-
ния соответствующей динамической системы
^ = /(х,/,р(Х,О). (1.3)
at
Здесь х - вектор фазовых координат, от которых может зависеть
помеховый сигнал p(*9t).
48
КЛАССИФИКАЦИЯ ВЫСОКОТОЧНЫХ СРЕДСТВ ПОРАЖЕНИЯ...
Непараметрический синтез помехи в этом случае заключает-
ся в оптимизации функционала, построенного на фазовых траек-
ториях х(г) системы (3):
Popt(V) = arg opt (1.4)
р(х,/)еЛ/^
Для решения задач синтеза помех в условиях неполной ап-
риорной информированности о подавляемых ОЭСр может ис-
пользоваться достаточно большая совокупность методических
подходов, которые можно подразделить на три основные группы.
Группа L Синтез помех на основе байесовского подхода,
обеспечивающего определение оптимальных в среднем помех,
где усреднение выполняется по множеству возможных вариантов
построения подавляемых ОЭСр.
Группа 2. Синтез помех на основе максиминных (минимакс-
ных) стратегий, то есть в рамках теоретико-игровых методов.
Среди этих методов отметим, в частности, методы, базирующие-
ся на рефлексивном подходе [8, 9] и сводящиеся к оптимальному
синтезу «за противника» структуры и определению наиболее не-
благоприятных с позиции ОЭП значений параметров подавляе-
мых оптико-электронных систем.
Если ограничиться первым рангом рефлексии, то основу реф-
лексивного подхода фактически составляет синтез «за противни-
ка» устройств помехозащиты от некоторого набора помех. В осно-
ву такого синтеза может быть положена процедура, в соответствии
с которой задача синтеза измерителя с устройством помехозащиты
может быть поставлена как задача статистического синтеза опти-
мального измерителя, но в присутствии преднамеренной помехи и
по критерию, характеризующему качество оценки координат из-
мерителем, а не оптимизацию каких-либо промежуточных показа-
телей (например, отношения помеха/сигнал).
В системах помехозащиты перспективных ОЭС предполагается ис-
пользование механизмов адаптации, основанных на анализе помеховой
обстановки с целью последующего выбора устройства помехозащиты,
оптимального в смысле повышения помехозащищенности к действую-
щему и распознанному виду помехи.
Использование такой логики помехозащиты является доста-
точным основанием для того, чтобы ограничиться при синтезе
49
ГЛАВА 1
устройства помехозащиты «за противника» в рамках рефлексив-
ного подхода первым рангом рефлексии.
Группа 3. Синтез помех в рамках адаптивного подхода.
Здесь особый интерес представляют задачи восстановления
(идентификации) неизвестных (неточно известных) параметров,
подлежащих подавлению ОЭСр и систем наведения УБ.
Целесообразно различать прямой и косвенный способы вос-
становления неизвестных параметров систем наведения УБ. За-
дача прямого восстановления обычно ставится как классическая
задача идентификации параметров объекта управления по ре-
зультатам текущих наблюдений его фазовых координат [13].
Задача косвенного восстановления параметров может быть
интерпретирована как задача контроля эффективности помех. Она
состоит в том, что по результатам текущей оценки ожидаемого эф-
фекта действия помехи принимается решение на изменение пара-
метров или смену вида помехи так, чтобы максимизировать оценку
ожидаемого эффекта, например величину промаха управляемого
боеприпаса. При этом, хотя неизвестные параметры объекта подав-
ления впрямую не восстанавливаются, но зато обеспечивается вы-
бор параметров или вида помехи, наилучшим образом согласован-
ных с характеристиками объекта по эффекту подавления.
Следует отметить, что функциональный синтез помех -
это только первый этап итерационной процедуры функцио-
нального и последующего технического синтеза средств и
комплексов ОЭП. При этом основное содержание функцио-
нального синтеза комплексов заключается в выборе конкрет-
ных видов помех и согласованных с ними способов получения
необходимой для применения этих помех информации при од-
новременном обеспечении требуемой эффективности подавле-
ния угрожающих защищаемому объекту образцов ВТО.
Основное содержание следующего этапа (этапа техниче-
ского синтеза) состоит в определении технического облика
средств и комплекса ОЭП, обеспечивающего реализацию вы-
бранных видов помех и удовлетворяющего массогабаритным,
энергетическим, стоимостным ограничениям и существующим
возможностям технической реализации отдельных средств
комплекса и условиям их размещения на защищаемом объекте.
50
_________2______________
ЭНЕРГЕТИЧЕСКИЕ МОДЕЛИ
СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКИ
Рассмотрены вопросы формирования изображений фоно-
целевой обстановки в общем случае присутствия на трассе
распространения излучений рассеивающей среды.
Дан анализ пространственно-угловых характеристик ла-
зерного луча на выходе аэрозольного слоя.
ГЛАВА 2
2.1. Энергетическая модель
процесса формирования изображений
Рассмотрим процессы формирования сигналов на входе или
выходе чувствительных элементов энергетических фотоприем-
ных устройств после преобразования энергетических характери-
стик оптических сигналов наблюдаемой сцены средой распро-
странения и элементами оптической системы. Эти процессы, не-
редко определяемые в литературе как процессы формирования
изображений, являются общими для всей номенклатуры оптико-
электронных средств и систем.
Необходимо получить совокупность аналитических выраже-
ний, справедливых в широком диапазоне характеристик среды
распространения и оптической системы, для расчета интенсив-
ности изображений, формируемых на фотоприемнике. Решение
этой задачи выполняется на основе анализа процесса формиро-
вания изображений в общем случае частично-когерентного поля
[1,2].
Пусть поле реальной сцены в картинной плоскости описыва-
ется функцией пространственных координат г и времени /:
e(r,O = Re(£](r,/)), (2.1)
где £*](г,/) - комплексное поле.
Рассмотрим процесс формирования изображения реальной
сцены отображающей системой, включающей объектив и фото-
приемник с заданной пространственно-частотной функцией чув-
ствительности.
Поле в плоскости входной апертуры оптической системы в
среде со случайными параметрами записывается так [2]:
00
£’2(р^)= j£l(r,fi>)g(r,p,a>)#fi,(p-r)Jr. (2.2)
Здесь Ех(г,й)), Е2(р,а>) - Фурье-преобразование ^(г,/), Е2(Р’О
по времени; р - вектор пространственных координат в плоскости
апертуры объектива; g(r,p,6y) - случайный комплексный муль-
типликативный коэффициент, описывающий изменение ампли-
52
ЭНЕРГЕТИЧЕСКИЕ МОДЕЛИ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКИ
туды и фазы спектральных составляющих поля на частоте со при
распространении от точки г до точки р в случайной среде (в сво-
бодном пространстве g(r,p,<a) = 1); ЯДр-г) - импульсная ре-
акция свободного пространства на частоте со; R - дальность до
объекта; с - скорость света;
Яй)(р-г) =
СО
2nRci
[ .со п . СО I .2
exp I—R + i------р- г
Ч с 2Rcl 1
(2-3)
Преобразование комплексного поля £2 (Р, объективом
описывается выражением
£3(р,й>) = £'2(р,го)ехр -|р|2 ^(р,®),
V 2Fc J
(2.4)
где F - фокусное расстояние; Т(р, со) - апертурная функция объ-
ектива (в общем случае комплексная), характеризующая его раз-
меры и качество.
Рассмотрим изображение, формируемое объективом в опти-
чески сопряженных плоскостях, удовлетворяющих условию
JL-1 1
F ~ R + Я, ’
(2.5)
где J?j - расстояние до плоскости формирования изображения.
Поле в плоскости формирования изображения записывается
аналогично (2.2):
£4(r,®) = [£2(р,ю)Т(р,бУ)ехр(-^-|р|2 |//1<у(р —r)t/p, (2.6)
J V 2Fс )
-00
тт z ч со (.СО п . СО I |2]
где Я1й,(р-г) = ——ехр /-/?!+/—-р-г . (2.7)
2tcR\Ci с 2Rxc )
Подставляя (2.2) в (2.6) и учитывая (2.3)-(2.5), получаем вы-
ражение для интенсивности изображения в полосе спектральной
чувствительности фотоприемника:
00 00 4
У(г) = (е4(г,/)Е;(г,о) = —- f... [—-^-2-7Ф(<»)С1(Г1,Г2,£У)Х
' 2л-_^(2л-с) R-
53
ГЛАВА 2
ХеХР 7Г'(|Г1|2_|Г2|2) Л/(Г1’Р|>Г2’Р2>®)ВЧ'(Р|>Р2><у)Х
\2Rc' 7
( ia>( г} г )
хехр----------И + — Pi ехр
I С I /V /V] j
ico( r2 г )
— о +Ъ“ Р2 \drxdr2dp\dp2d(o.
С I lx. /vj J 1
(2.8)
Здесь верхняя звездочка определяет комплексно-сопряженную
величину;
.W(r|,p1,r2,P2,69) = (g(r|,pI,69)g*(r2,p2,69
- функция когерентности среды; Ф(бу) - функция спектральной
чувствительности фотоприемника; Gj(r1?r2?6y) - Фурье-преоб-
разование по времени пространственно-временной корреляцион-
ной функции
Re (Г], г2, г) = (я, (Г] ,t)E* (r2 ,t + т)},
(р,, р2,69) = Т(р,, (У)Т*(р2,6У) (...)
- операция усреднения по времени на интервале накопления сиг-
нала энергетическим фотоприемником.
В ряде случаев представляет интерес определение интенсив-
ности изображения путем усреднения соответствующего поля по
ансамблю реализаций. В этом случае выражение (2.8) не претер-
пит изменений. Однако в (2.8) скобки (...) следует понимать как
обозначение усреднения по ансамблю реализаций, а
&р(Р|,Р2,г) = ^Т(р|,бУ)Ч/*(р2,69^ •
Выражение (2.8) можно интерпретировать как математиче-
скую модель процесса формирования изображений оптической
системой. Она может быть положена в основу цифровых имита-
ционных моделей широкого класса оптико-электронных средств.
В частных случаях из достаточного сложного общего выражения
(2.8) могут быть получены более простые выражения.
Так, в случае наблюдения через неизменяющуюся во време-
ни среду, а также если время накопления сигнала фотоприемни-
ком тс значительно меньше постоянной времени изменения среды
rs (tc«ts), то имеет место равенство
54
ЭНЕРГЕТИЧЕСКИЕ МОДЕЛИ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКИ
W|,Р|, Г2,р2,(О) = g(rj,Pi,0>)g*(Г2,р2,&>) .
Тогда выражение (2.8) может быть приведено к виду
0° 0° .
Лг)=— [... [лФ(бУ)С1(г1,г2,бу)ехр[^-(|г||2-|г2|2)|х
2яг J J \2Rcx )
—оо —оо
_ О) ( Fj Г
xZ------— +— L
I 2тгс \ R Ry J
' G) f Г2 Г У
k 2tvc R Rx
dcodrx dr2.
(2.9)
Здесь
r a> ( r r
Z ------- — + —
I 2tvc I R Ry
J—
(2ttc)4R2R2
(2.Ю)
В случае когерентного излучения на частоте
G| (и, г2, со) = 2л-Ех (г, )Е, (г2 )<У(й> - ),
и (2.9) упростится и примет вид
exp
( . I |2 A
< 2Rc ;
du
(2.П)
В случае точечного источника монохроматического излуче-
ния с координатами г0, когда £1(г) = £|^(г-г0), из (11) следует
выражение
2
7(г) = .4ФП)£,2 L +
2яг1 R Ry
(2.12)
В свободном пространстве g(r,p,ty) = l и интенсивность
изображения, как это следует из (2.10), (2.12), пропорциональна
Фурье-преобразованию от апертурной функции объектива. При
выполнении энергетических расчетов по (2.12) следует учиты-
вать, что мощность излучения точечного источника и поле Е|
связаны соотношением
55
ГЛАВА 2
(213)
Л
где А - длина волны излучения.
Если наблюдаемая сцена является диффузным отражателем
(излучателем) и исходное поле Ex(r.t) образовано отраженным
(собственным) излучением, то имеет место случай пространст-
венно-некогерентного излучения. При этом Gx (Г|, г2, со) =
= J(rx,co)3(rx -г2) и выражение (2.9) приводится к виду
00 00 z х
/(г) = [ |*А/(и,бу)Ф(бу) Z
j j I 27ССу
U г
--------I--
^2tcc^R Rx
2
dud со. (2.14)
При выполнении реальных измерений, когда обычно имеет
место достаточно малый, но все же конечный интервал простран-
ственной корреляции поля реальной сцены, в качестве У(г,бу) в
(2.14) следует принимать J(r,co) = Р(г,со)сг. Здесь а - площадь
пространственной корреляции поля реальной сцены, величину
которой можно оценить по величине угла рассеяния а некоге-
рентного излучения в пространстве (ст = Я2 / €?/ я Р(г, со) - изме-
ренная интенсивность излучения реальной сцены в точке с коор-
динатой г на частоте со.
В случае точечного источника пространственно-некоге-
рентного излучения, когда J(r.co) = G(co)d(r -г0), выходное изо-
бражение является суперпозицией изображений (2.12), получен-
ных для составляющих некогерентное излучение гармоник
00
2я J
jr Г0 । Г
I 2лт1 R R}
(2.15)
dco.
Если время накопления сигнала фотоприемником превышает
интервал времени, в течение которого среда распространения ос-
тается неизменной (rc»rs), то необходимо использовать усред-
ненную за время накопления тс функцию среды Л/(г1,р1,г2,р2,й>) •
Так, при наблюдении через слой рассеивающих аэрозольных
частиц это заведомо имеет место, когда за время накопления тс
56
ЭНЕРГЕТИЧЕСКИЕ МОДЕЛИ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКИ
средняя длина пробега частицы существенно превышает длину
волны излучения, формирующего изображение, то есть когда вы-
полняется неравенство тс-с! 2na)V , где V - средняя скорость
аэрозольной частицы.
При усреднении в (2.8) не по времени, а по ансамблю реали-
заций, все приводимые ниже соотношения описывают некоторое
фиктивное среднестатистическое изображение, соответствующее
всему ансамблю рассматриваемых оптических систем.
При некогерентном излучении и слабой зависимости
тИ(г1,р1,г2,р2,бу) и ВЧ/(р1,р2,б9) от со из (2.8) следует
1 оо оо
/(Г) = — |л./(и,6й)Ф(бУ)Л/(р|,р2,и)Л1,(р|,р2)х
xexpf-—(^ + Т->|(Р| -p2))4Zpl<7p2J'u<7<y, (2.16)
с R R})
где Л/(р1,р2,г) = Л/(р1,р2,г1,г2) при г,=г2=г - функция коге-
рентности среды, которая для важного на практике случая про-
странственно-однородной изотропной среды записывается в виде
W|,P2’r) = M(|Pl -P2I)-
Функция ^т(р19р2) во многих случаях может быть пред-
ставлена как
St(Pi,P2)='F(Pi)4'*(P2Wi -Р2Х
где Т(р) - регулярная составляющая апертурной функции опти-
ческой системы; #>(pt - р2) - случайная составляющая, усреднен-
ная по ансамблю оптических систем рассматриваемого типа,
имеющих случайные отклонения, например в материале обработ-
ки их поверхности.
При таких предположениях выражение (2.16) можно пред-
ставить так:
1 7 ХЖ/ XI,(^CR ( 2kcR
7(г) =— \ВЛу^.й))Ф(й))М\------w Ы-------w х
2л * \ со ) \ а) )
(2kcR R > , ,
хг -------w ехр -12л—rw \dwaa>. (2.17)
V о) ) R\ )
57
ГЛАВА 2
Здесь
2
Г СО
J(v, со) = I J(r,d>)exp(~z2^wr)Jr, В -------—-,
J (2лс)2 R2
( 2л cR г * 2xcR
а Т\-----w = I Чцр)^ (р--------w)Jp - автокорреляционная
V СО ) J со
функция регулярной составляющей апертурной функции объ-
ектива.
В случае некогерентного излучения и пространственно-однородной
изотропной рассеивающей среды, зависимостью характеристик кото-
рой от длины волны оптического излучения в рассматриваемом диа-
пазоне можно пренебречь, пространственно-частотная характеристика
(ПЧХ) канала формирования изображения G(co) описывается произ-
ведением функции когерентности среды на автокорреляционные
функции регулярной и случайной составляющих автокорреляционной
функции объектива. Причем в этих функциях разность пространст-
венных аргументов pj - р2 формально заменяется пространственно-
частотным аргументом w с соответствующим коэффициентом про-
порциональности:
ч (2лс№ ) (2лcR \rr(2KcR
G(nv) = M\-------w Ш--------w 171-------w
V co ) \ co ) \ co
(2.18)
Полученное выше общее выражение (2.8) и следующие из
него для частных случаев более простые выражения (2.9), (2.11)-
(2.18) могут быть положены в основу имитационных моделей оп-
тических средств формирования изображений и моделей оптико-
электронных систем в целом. Эти выражения обеспечивают учет
влияния на энергетические характеристики выходного изображе-
ния таких факторов, как степень когерентности поля реальной
сцены, рассеяние излучения в среде распространения и во вход-
ной оптике, дифракция излучения на входной оптике, относи-
тельное пространственное расположение объекта и оптико-элект-
ронного средства.
58
ЭНЕРГЕТИЧЕСКИЕ МОДЕЛИ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКИ
2.2. Формирование изображений
при наблюдении сквозь локальный слой
рассеивающей среды
Наблюдение сквозь слой рассеивающей среды, геометрическая толщина
которого существенно меньше расстояния между объектом наблюдения и
формирующей изображение оптической системой, обычно имеет место
при работе в условиях преднамеренных помех, создаваемых рассеиваю-
щими средами искусственного происхождения, например аэрозолями.
Ниже приводятся полученные методами теории частично
когерентных полей общие выражения, позволяющие анализиро-
вать влияние геометрических характеристик слоя рассеивающей
среды (аэрозольной завесы) на пространственно-частотную ха-
рактеристику канала формирования изображения в случае много-
кратного рассеяния и учета ограниченной разрешающей способ-
ности оптической системы [4].
Рассмотрим процесс формирования изображения объекта в
сопряженной плоскости прибора наблюдения, для чего запишем
преобразование поперечной корреляционной функции излучения
объекта последовательно участками пространства (рис. 2.1): объ-
ект-рассеивающая среда 1; рассеивающая среда 2; рассеивающая
среда - входная оптика прибора наблюдения 3; входная оптика -
плоскость формирования изображения 4.
59
ГЛАВА 2
В приближении Френеля в случае, когда задняя кромка рас-
сеивающей среды совмещена с наблюдаемым объектом (z0 L)
поперечную корреляционную функцию излучения объекта на
выходе слоя рассеивающей среды можно представить следую-
щим выражением [5]: 7
7?1(Г],Г2,2о) =
= (^о) 2 p(q)Wi -r2)expf-q|2 -|r2 -q|2)Lq ,
M \ zzv> )
(2.19)
где z0 - отстояние передней кромки рассеивающей среды (заве-
сы) от наблюдаемого объекта; J(q) - интенсивность излучения
диффузно излучающего объекта; Л/(г, -г2) - функция когерент-
ности слоя изотропной рассеивающей среды; к = Я - волно-
вое число; М - область существования объекта.
Тогда корреляционная функция в плоскости входной оптики
прибора наблюдения запишется так:
R2 (Гр Г2 ’ Z0> z2 ) = Г2 (Az2 Г2 х
х JJP<4)M(W2 -»,)exp(/4(22or' (|w, -q|2 _qP))x
WWW n
xexp^zj-1^ -W1|2 -|r2 -w2|2))rfq (2 20)
где z2 ~ расстояние от слоя рассеивающей среды до плоскости
входной оптики; W - область существования излучения объекта
на выходе слоя среды.
Взяв интеграл по wl9w2 в правой части выражения (2.20),
получим
7?2(r1,r2,z) = (Az)"2x
X Р(ч),м[^(г, -r2)]exp|j|(|r, -q|2 -|Г2 -q|2)U (2 21)
где z = z0 + z2 - расстояние между плоскостями объекта и вход-
ной оптики.
60
ЭНЕРГЕТИЧЕСКИЕ МОДЕЛИ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКИ
Учитывая известное [2] преобразование корреляционной
функции излучения оптической системой, описываемой выраже-
нием (2.4), получаем следующую запись корреляционной функ-
ции изображения в сопряженной плоскости прибора наблюдения:
T?3(r1,r2,z,Z>) = (Xz)~2(Xb)~2 |г| -г2|2)х
х яр(р)м [у(t*2 -q ’ 0£(ч 1 *Г| ’(чг ’Гг ’р)</р dq 1 dq2,
МАА
(2.22)
где I(qz,rz,p) = 4/(qz)exp(~/A:(p/z + rz /Z>)qz); rz - координаты в
сопряженной плоскости прибора наблюдения; ^(q) - апертурная
функция объектива (входного зрачка); b - определяется из усло-
вия \/b = l/F-1/z ; F, А - фокусное расстояние и апертура вход-
ной оптики соответственно.
Теперь интенсивность изображения объекта /(г) можно оп-
ределить, если положить в (2.22) =r2 = r, qj =q2 +£ и взять
интеграл в правой части (2.22):
/(г)-(Лг)~2(ЛЬ)~2 х
х jg0(J^/z)M(z0E, / z)#(£)exp(-zh^ / b)d^, (2.23)
А
где g0(&,/ z)= jj(r)exp(-/^r I z)dr - пространственный спектр
м
излучения объекта; Я(^) = jT(q + ^)4/*(q)Jq - автокорреляцион-
А
ная функция входного зрачка.
Из (2.23) с учетом замены ^/z = w, где w - вектор про-
странственных частот, вытекает выражение для пространствен-
ного спектра изображения объекта
g(wz / b) = (Az)~2gQ(w)M(yvzQ I k)H(wz I к). (2.24)
Из (2.24) следует, что среда распространения излучения со-
вместно с прибором наблюдения является линейным фильтром
61
ГЛАВА 2
пространственных частот с пространственно-частотной характе-
ристикой
G(w) = М(wz0 / k)H(yvz / к).
(2.25)
Из (2.25) следует, что ширина полосы пропускания этого
фильтра при прочих равных условиях линейно уменьшается с
увеличением расстояния от объекта до передней кромки завесы
z0 = L. В спектре изображения будут присутствовать только со-
ставляющие низких частот спектра объекта, которые передают
неполную информацию об объекте. Следовательно, качество изо-
бражения существенно зависит не только от оптических характе-
ристик слоя рассеивающей среды, но и от ее геометрической
толщины.
Пространственно-частотная характеристика канала формирования изо-
бражения при наблюдении сквозь локальный слой рассеивающей среды
описывается произведением функции когерентности слоя рассеиваю-
щей среды на автокорреляционную функцию входного зрачка прибора
наблюдения. Причем вместо пространственных аргументов г , от кото-
рых зависят эти функции, формально должны быть подставлены час-
тотные аргументы w с соответствующими множителями, характери-
зующими геометрическую толщину рассеивающей среды и длину трас-
сы наблюдения.
Если рассеивающая среда может быть приближенно пред-
ставлена некоторым модулирующим транспарантом со случай-
ной амплитудно-фазовой модулирующей функцией и соответст-
вующей ей функцией когерентности вида M(rj-r2), то и для
этого случая справедливы полученные выше выражения, в кото-
рых zq уже характеризует расстояние от наблюдаемого объекта до
такого транспаранта.
Для выполнения количественных расчетов воспользуемся
малоугловым приближением для функции когерентности среды
[5], учитывающим, как известно, и условия многократного рас-
сеяния:
Л/(/?) = exp(-aai - asL(\ - /?(/?))).
(2.26)
62
ЭНЕРГЕТИЧЕСКИЕ МОДЕЛИ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКИ
В этом выражении aa.as - коэффициенты поглощения и
рассеяния среды соответственно; р - |г> - г2| - расстояние между
двумя точками в соответствующей плоскости наблюдения.
Функция /3(р) характеризует изменение степени попереч-
ной когерентности поля на выходе слоя рассеивающей среды в
зависимости от р и определяется выражением
71 1
/7(р) = | J</0(2^wp tg(6>) / A)cr(6>)sin(0)dw dd ,
о о
(2.27)
где /о(...) - функция Бесселя; <т(0) - нормированная, в соответ-
ствии с выражением ^cr(0)s\n(0)d0 = 1, индикатриса рассеяния
о
излучения с круговой симметрией.
Аппроксимируем индикатрису рассеяния гауссоидой [11]:
а(0) = с ехр(-а#2). Здесь а - коэффициент, определяющий ее
ширину; с - нормирующий множитель.
В соответствии с [7] автокорреляционная функция круглого
входного зрачка имеет круговую симметрию и
координатных осей описывается выражением
вдоль любой из
W) =
.2 Р
A— arccos—-
\2
1-И
\d J
при
£<1,
d (2.28)
О
при
d
В этом выражении d - диаметр входного зрачка; А - его
площадь.
Графики рис. 2.2 иллюстрируют зависимость пространст-
венно-частотной характеристики канала формирования изобра-
жения при наличии локального слоя аэрозоля от расположения
передней кромки этого слоя. Расчеты выполнялись с использова-
нием выражений (2.24)-(2.27) при p -\\ L / к для функции коге-
рентности среды и p = wz/k для автокорреляционной функции
входного зрачка.
63
ГЛАВА 2
Исходные данные при расчетах принимали следующие зна-
чения:
длина волны.................................к = 10,6 мкм
диаметр входного зрачка формирующей оптики....d = 0,05 м
дальность наблюдения..........................z - 5000 м
коэффициент поглощения излучения...........аа = 0,001 м~1
коэффициенты индикатрисы рассеяния.....с= 25,4; сг=12,5,
что соответствует ширине индикатрисы рассеяния по уровню 0,6
порядка 0,4 рад.
При построении графиков варьировались значения as и L.
Причем, кривым 1-3 соответствуют значения L = 100 м, для кри-
вой 4 £ = 50 м, для кривых 5, 6 L = 20 м . Кроме этого, для кривых
3, 6 as - 0,01м"1, для кривых 2, 7, 5 1 = 0,02 м"1, для кривой 1
as = 0,03 м"1. Из графиков рис. 2.2 следует, что применительно к
использовавшимся при расчетах исходным данным в области
пространственных частот, больших 0,1 м"1, при геометрической
толщине аэрозольного слоя L = 100 м в формировании изображе-
ния в основном участвует только прошедшее сквозь рассеиваю-
щий слой ослабленное, т.е. не поглощенное и не рассеянное этим
слоем, излучение (кривые 7, 2).
64
ЭНЕРГЕТИЧЕСКИЕ МОДЕЛИ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКИ
Если в качестве приемлемых полагать условия наблюдения,
когда G(w) / 6(0) > 0,7, то рассеянная составляющая позволит
наблюдать в этом случае объекты с линейным размером, соответ-
ствующим пространственным частотам w< 0,05 м-1, т.е. превы-
шающим 20 м. Как показывают кривые 5, 6, при уменьшении
геометрической толщины рассеивающего слоя до 20 м за счет
рассеянной составляющей могут наблюдаться объекты с линей-
ным размером не менее 1,25... 1,5 м.
При усилении рассеивающих свойств слоя (увеличение значений as)
диапазон пространственных частот, при которых в формировании изо-
бражения объекта еще участвует рассеянное слоем излучение, умень-
шается.
2.3. Формирование изображений
при наблюдении в турбулентной атмосфере
Для получения пространственно-частотной характеристики
канала формирования изображений в турбулентной атмосфере
может использоваться выражение (2.25). Причем, если рассеи-
вающий слой занимает все пространство z между объектом и
средством наблюдения, то формально в (2.25) следует положить
z0 = z = L. Рассмотрим случай, когда интервал стационарности
турбулентной атмосферы меньше времени экспозиции. В этом
случае нормированная пространственная корреляционная функ-
ция поля на выходе однородного анизотропного рассеивающего
слоя имеет вид [13]
А/(р) = (e(r)Z(r + р)У (e(r)e*(r)} = exp(-D(p)/ 2). (2.29)
Здесь е(г) - поле в точке с координатами г плоскости на выходе
слоя; Z)(p) - структурная функция поля [14]. Структурная функ-
ция в случае турбулентной атмосферы, в соответствии с [13]
представляется так:
f |р| у/з
Z)(p) = 6,884 — , (2.30)
65
ГЛАВА 2
где г0 - интервал пространственной когерентности поля на вы-
ходе слоя.
Через структурный коэффициент атмосферной турбулентно-
сти С3 структурная функция для сферической волны, т.е. для
случая наблюдения не слишком удаленных источников излуче-
ния, представляется следующим образом [13]:
£)(р) = 2,914Аг2 |р|5/3 |с2(х)(х / £)5/3dx. (2.31)
О
В случае плоской волны, т.е. при наблюдении на больших
дальностях
Р(р) = 2,9Ш2 |р|5/3 jc2(x)dx .
О
(2.32)
Из сопоставления (2.30), (2.31) вытекает, что для сфериче-
ской волны
г0 = 0,1846А6/5
z х-3/5
Jc2(x)(x/L)5/3<&
(2.33)
Аналогично для плоской волны:
г0 = 0,1846А6/5
(z Т3'5
Jc2(x)dr
<0 )
(2.34)
Выражения (2.33), (2.34) определяют характер зависимости
величины интервала когерентности г0 от длины волны Я и по-
зволяют пересчитывать значения г0, полученные для каких-либо
значений длины волны и трассы наблюдения, на другие длины
волн для той же трассы. Теперь из (2.25), (2.29), (2.30) следует,
что нормированная по максимуму к единице ПЧХ рассеивающего
слоя, приведенная к плоскости визируемого объекта, может быть
представлена следующим образом:
M(w) = exp(-3,442(zw / £г0)5/3). (2.35)
66
ЭНЕРГЕТИЧЕСКИЕ МОДЕЛИ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКИ
Если коэффициент С„ постоянен вдоль всей оптической
трассы, что обычно имеет место для горизонтальных трасс, то
выражение (2.33) для сферической волны трансформируется к
виду
г0 = 0,33226/5 (C2z)~3/5. (2.36)
Для плоской волны получим
r0 = 0,18426/5(C2z)"3/5 . (2.37)
Значения структурного коэффициента определяются экспе-
риментально, зависят от времени суток, времени года, метеоус-
ловий, характеристик подстилающей поверхности и могут изме-
няться в достаточно широком диапазоне. В случае распростране-
ния излучения в приземном слое атмосферы в летнее время над
сухой освещенной солнцем травой на высоте до нескольких мет-
ров для оценочных расчетов можно пользоваться следующей за-
висимостью [13]:
С2(/?)~10-|2/Г2/3, (2.38)
где h - высота трассы над поверхностью земли.
Для трасс ниже 20 км над уровнем моря там же приводится
простая формула
С2 (Л) ® 1,5-10~13/Л.
(2.39)
Существенно более простые приближенные выражения для
ориентировочных оценок характеристик ПЧХ можно получить,
если аппроксимировать приведенные выражения более удобными
для формальных преобразований, в частности, гауссовскими
функциями.
Аппроксимируем с приемлемыми ошибками выражение
(2.30) для структурной функции следующим образом:
( л2
£>(/?) = 6,884 .
U)
(2.40)
Здесь р = |р|.
67
ГЛАВА 2
Тогда выражение (2.35) ПЧХ атмосферного участка примет
вид
М(zw / к) & ехр -3,4
(zw/ к)2
к >
(2.41)
После аппроксимации (2.28) гауссовской кривой и подста-
новки в соответствии с (2.25) p = zw / к. выражение, аппрокси-
мирующее ПЧХ формирующей оптики, представим в виде
/ 2 Л
H(zw / к)« А ехр -4---—
d J
(2.42)
Тогда ПЧХ канала формирования изображений, нормиро-
ванная по максимуму к единице (т.е. при А = 1), приближенно
представляется следующим выражением:
G(w) = M(zw / k)H(zw / к)« exp(-6w2),
(2.43)
, z2f3,4 4
где 6 = -^ +
k ro a
Функцию размытия точки (ФРТ) g(x) для этого канала
можно получить, взяв обратное Фурье-преобразование от (2.43):
/ \ 1
g(x) =----7^=ехР
/47 z^2
где аг = л/2р =------
г к
Г Л1'2
3,4 4 ]
2 + >2
k го d )
(2-44)
ФРТ на выходе элемента разрешения фотоприемной матри-
цы gw (х) вдоль любой из координатных осей определяется инте-
гралом свертки:
gm(x) = J g(y)h(* - y)dy.
(2.45)
Здесь /?(х) - весовая функция элемента фотоприемной матрицы с
элементарным угловым полем зрения 39 приведенная к плоско-
сти объекта, причем
68
2сг2
ЭНЕРГЕТИЧЕСКИЕ МОДЕЛИ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКИ
й(л) =
'Mz8
<
о
при - z8 / 2 < х < z8 / 2,
при |х| > z8 / 2.
(2.46)
Интеграл свертки (2.45) есть не что иное, как проинтегриро-
ванная по площади фотоприемной матрицы функция размытия
точки, наблюдаемая в плоскости этой матрицы. Свертке (2.45)
соответствует в области пространственных частот произведение
соответствующих ПЧХ:
G„,(w) = G(w)GA(w).
(2.47)
Здесь Gw(w), Ga(w) - Фурье-преобразование gw(x), h(x) соот-
ветственно.
Фурье-преобразование h(x) имеет вид:
GA(w) = Sm(^2). (2.48)
zow/ 2
Как и выше, аппроксимируем главный лепесток выражения
для Gh(w) гауссоидой:
Gh « exp
w2(z3)2 Л
15 ,
(2.49)
Тогда нормированная по максимуму к единице ПЧХ канала
формирования изображений по выходу элемента фотоприемной
матрицы представляется следующим образом:
где
Gm(w) = G(w)Gh(w) = exp(-cw2),
z282
15
3,4z2 4z2 z232
k2r2 + k2 d2+ 15
(2.50)
(2-51)
с —b +
Теперь по аналогии c (2.44) ФРТ по выходу элемента фото-
приемной матрицы принимает вид
/ч 1 *
gm(*) =----/Г=еХР -------2 ’
<7^ л/ 2тг ,
(2.52)
где ат = 41с .
69
ГЛАВА 2
При анализе пространственных сигналов как функции двух
переменных х, у можно полагать ПЧХ и ФРТ факторизуемыми,
т.е. допускающими представление в виде
gm(x,y) = gm(x)gm(y), Gm(w) = Gm(wl)Gm(w2). (2.53)
Ошибки, связанные с таким упрощением, обычно не превы-
шают 10%.
2.4. Пространственно-угловые характеристики
лазерного луча на выходе аэрозольного слоя
При решении прикладных задач конфликтного взаимодейст-
вия лазерных измерительных и связных систем со средствами аэ-
розольной защиты [9] возникает необходимость исследования ха-
рактеристик узконаправленного лазерного пучка на выходе ло-
кального слоя аэрозольной среды. Такие исследования могут
быть положены в основу модельного представления, необходи-
мого для разработки методики косвенного измерения таких ха-
рактеристик аэрозольных завес, как оптическая толща и парамет-
ры усредненной индикатрисы рассеяния элементарного объема
[10]. Особый интерес представляют задачи отыскания места ло-
кализации энергетического центра излучения узкого лазерного
пучка внутри аэрозольного слоя и определения пространственно-
угловых характеристик излучения на его выходе. Рассмотрение
этих вопросов выполнено в [8].
Геометрическая схема взаимодействия лазерного луча с аэ-
розольной завесой, соответствующая [8], приведена на рис. 2.3.
Система координат получена параллельным переносом
системы координат 0XYZ, начало которой совмещено с центром
узкого (с углом расходимости Ъ х Ъ ) лазерного луча на входе аэ-
розольного слоя с геометрической толщиной L . Достаточное для
многих практических приложений представление о пространст-
венно-угловых характеристиках лазерного луча на выходе аэро-
зольного слоя дает функция лучевой интенсивности J(r, t)
[Вт/м2ср], определяемая путем решения уравнения переноса из-
лучения [И]. Здесь r(x,y,z) - вектор пространственных коорди-
70
ЭНЕРГЕТИЧЕСКИЕ МОДЕЛИ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКИ
нат рассматриваемой точки аэрозольного слоя; t(/,w,w) - еди-
ничный по модулю вектор направляющих косинусов излучения.
Анализ случаев распространения лазерного пучка сквозь аэро-
зольный слой с большой оптической толщей требует учета много-
кратного рассеяния излучения. На длине волны л = 1,06 мкм и ме-
нее для типовых аэрозолей обычно выполняется условие вытяну-
тости индикатрисы рассеяния отдельной частицы р =------> 1
А
(г - средний радиус частицы). Это позволяет в качестве удовле-
творительного приближения для функции лучевой интенсивности
использовать малоугловое приближение решения уравнения пе-
реноса излучения, учитывающее и эффекты многократного рас-
сеяния. Согласно [11] малоугловое приближение функции луче-
вой интенсивности на выходе слоя соответствует диапазону уг-
лов рассеяния, для которых справедливо приближенное равенст-
во п & 1 (см. рис. 2.3), и имеет вид
J(L, р, s) = F [Fo (х, q + lL)K (L, %, q )],
где
( L
^'(£,X,q) = exp -|/(l-l/4^P(q + x(i-z)))rfz
< о
X
________________________Рисунок 2.3 ______________________
(2-54)
(2.55)
71
ГЛАВА 2
X<x,q) = F 'p0(p,s)], Xq) = F 1 [Xs)],
P = (x,y), s = (l,m), X = (Z1,Z2), q = (<7i,<72), (2-56)
Y [1 / м] - показатель ослабления (поглощения и рассеяния) из-
лучения; J0(p,s) - функция лучевой интенсивности лазерного
пучка на входе аэрозоля; /?(s) - фазовая функция, характери-
зующая индикатрису рассеяния частицы, усредненную по разме-
рам частиц; F[...], F"1 [...] - прямое и обратное Фурье-преобра-
зование.
Количественные расчеты J(£,p,s) с помощью (2.54) сводят-
ся к четырехкратному интегрированию. Однако основной прак-
тический интерес представляет не сама функция лучевой интен-
сивности, а некоторые ее интегральные характеристики и, в част-
ности, суммарное угловое распределение интенсивности излуче-
ние со всего лазерного пятна на выходе аэрозольного слоя (сила
излучения лазерного пятна), определяемое выражением
L
J(L,s) = ^J(L,p,s)dp . (2.57)
О
Из (2.57) с учетом известного свойства Фурье-преобразо-
вания следует, что
J(£,s) = F[Fo(O,q)K(£,O,q)]. (2.58)
Определим J(£,s) для случая расходящегося гауссова ла-
зерного пучка, когда
т ( 2 2 /2 2 А
т z х х + у I +т
Jo (Р’s) = —777ехР------г-----7Т~ ’ (2-59)
ла о \ a °)
где аиЬ характеризуют ширину пучка по линейной и угловой
координате соответственно.
Аппроксимируем фазовую функцию также гауссоидой [11]:
p(s) = 4crPF0 exp^-cr^/2 +m2^, (2.60)
где Wq - доля рассеянного излучения (альбедо) частицы.
72
ЭНЕРГЕТИЧЕСКИЕ МОДЕЛИ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКИ
После подстановки (2.59), (2.60) в (2.57), (2.58) получим
4л
сс 00 ( / 2 / 2
П(<71 иг г
ехр —-—— + Ид/£ехр - -- - х
xcos(/^j + mq2)dq{dq2 , (2.61)
где yL - оптическая толща аэрозольного слоя.
Из (2.61) следует, что суммарное угловое распределение ин-
тенсивности зависит от оптической толщи yL, а при равенстве
оптических путей - не зависит от геометрической толщины аэро-
зольного слоя. Функция является осесимметричной.
На рис. 2.4 приведены ее сечения, нормированные по мак-
симуму к единице, при вариации значений оптического пути /£:
a) yL = 12, Jmax = 0,14; б) yL = 6, Jmax = 0,83; в) yL = 4, Jmax = 3,27;
г) yL = 2, Jmax = 18,85, а также при L = 24 м, I = 0, Jmax= J(£,0,0)
[Вт/ср]. Расчеты выполнялись при следующих исходных данных:
Jq= 1 Вт; Ио= 0,9; а=1м; b = 0,05 рад; а ~ 0,5л 2, 5 = 0,2 рад.
73
ГЛАВА 2
При этом учитывалось, что альбедо частиц аэрозолей на основе
фосфорных составов близко к единице. Принятое при расчете
значение Жо = О,9 характеризует долю излучения, рассеянного
частицей вперед. Графики рис. 2.4 показывают, что при больших
оптических толщах величина рассеянного аэрозольным облаком
лазерного излучения спадает до 0,4...0,5 от максимального зна-
чения в секторе углов ±(30°...40°) от направления оптической оси
лазерного луча. При малых оптических толщах наблюдается уз-
кий пик слабо рассеянного излучения.
Для определения места локализации в аэрозоле энергетиче-
ского центра рассеянного излучения рассмотрим случай визиро-
вания просвечиваемого лазером слоя аэрозоля с больших дально-
стей, когда можно полагать, что все участки лазерного пятна на
выходе слоя визируются под одинаковыми углами. Учитывая
осесимметричность функции лучевой интенсивности, для опре-
деления места расположения энергетического центра достаточно
рассмотреть ее вид вдоль одной пространственной оси X или Y
при вариации углов излучения (а, значит, и углов наблюдения) в
плоскости, проходящей через эту ось. Следовательно, интере-
сующая нас интегральная функция лучевой интенсивности
J(L.x.l) может быть определена следующим образом:
У(Дх,/)= ^J(L,x,y,l,m = tydy. (2.62)
Из (2.62) с учетом известных свойств Фурье-преобразования
следует, что
J{L,x,l) = —Ц
(2^)3
X
оо оо оо
х J J JcosU1x + g|/)F0Ui,Z2=°>9i+Zi^?2)x
—ОО —00 —оо
xF(L, , /2 = 0, , q2 )dq2d%} dq}.
(2.63)
С учетом (2.55), (2.56), (2.59), (2.60) подынтегральное выра-
жение в (2.63) принимает вид
74
ЭНЕРГЕТИЧЕСКИЕ МОДЕЛИ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКИ
= Jo ехр(-/£)ехр
Результаты расчетов J(L.x,l) с помощью (2.63), (2.64) при
а = 1 м, £ = 24 ми прочих исходных данных, приведенных выше,
представлены на рис. 2.5.
Причем yL = 12 для рис. 2.5,a. yL = 6 и yL = 4 для рис. 2.5,б,в
соответственно. Кроме того, на рис. 2.5,в для сравнения приведе-
на одна кривая, соответствующая L = 48 м.
Графики на рис. 2.5 указывают на смещение максимума
функции J(L.xJ) в направлении /, с которого ведется наблюде-
ние. При этом положение энергетического центра излучения на
внешней кромке аэрозольного облака практически совпадает с
точкой максимума интегральной функции J(L.x,l}. Графики по-
казывают также, что положение максимума практически
не зависит от оптической толщи yL аэрозольного облака, а зави-
сит только от направления наблюдения /. Смещение максимума
функции относительно точки выхода оси лазерного луча
из аэрозольного облака пропорционально геометрической тол-
щине аэрозольного облака L (рис. 2.5,в).
Представляется полезным определить место локализации
энергетического центра излучения на оптической оси лазерного
луча. Для этого положение энергетического центра выразим ве-
личиной его смещения по оси лазерного луча вглубь облака, от-
несенной к геометрической толщине L облака:
e-//L = xmax/(£tg/). (2.65)
75
ГЛАВА 2
в)
________________________Рисунок 2.5 ______________________
76
ЭНЕРГЕТИЧЕСКИЕ МОДЕЛИ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКИ
________________________Рисунок 2.6 ______________________
Соответствующая схема наблюдения, из которой следует
(2.65), показана на рис. 2.6.
На рис. 2.7 приведены графики, иллюстрирующие зависи-
мость относительного положения энергетического центра излу-
чения на оси лазерного луча от значения угла наблюдения I
[рад]. Из рис. 2.7, в частности, следует, что в секторе углов на-
блюдения 35°...45° от направления оси лазерного луча энергети-
ческий центр располагается на удалении (0,35...0,45)А от внеш-
ней кромки облака. При уменьшении угла наблюдения энергети-
ческий центр смещается вглубь облака. При одинаковой оптиче-
ской толще аэрозольного облака энергетический центр будет тем
более удален от точки вхождения луча в облако, чем больше гео-
Рисунок 2.7
77
ГЛАВА 2
метрическая толщина этого облака. Таким образом, пространст-
венно-угловое распределение излучения, создаваемого узким ла-
зерным лучом на выходе аэрозольного слоя, практически не зави-
сит от геометрической толщины аэрозольного слоя и определяет-
ся в основном только его оптической толщей.
2.5. Прямое и обратное рассеяние
лазерного луча аэрозольным слоем
Выше исследованы пространственно-угловые характеристи-
ки рассеянного вперед лазерного луча на выходе из аэрозольного
слоя. Задача определения характеристик рассеянного назад излу-
чения, рассмотренная в [12], отличается дополнительным учетом
наличия распределенного в аэрозольном слое источника излуче-
ния, происхождение которого обусловлено рассеянным вперед
излучением [11].
Как и ранее, рассматривается геометрическая схема наблю-
дений, показанная на рис. 2.3. В соответствии с [11] уравнение
переноса излучения в малоугловом приближении может быть
представлено в виде
---4------ ~ • X - Y)J\ (г,ЪЮ -
oz
[^(s-^yi^x,»])^!-£(z,x,s) = 0. (2.66)
В этом выражении - Фурье-образ по p от s(z, p, s),
где ^(z,p,s) [Вт м3ср'] - функция источника, характеризующая
мощность излучения единицы объема слоя в единичный телесный
угол в направлении s ; /?(s), как и раньше, - безразмерная фазовая
функция, характеризующая индикатрису рассеяния частицы,
(2,X,s) = Г J(z,p,s)exp(zxp)Jp , (2.67)
Z = (ХьХг) ~ пространственная частота [1/м].
78
ЭНЕРГЕТИЧЕСКИЕ МОДЕЛИ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКИ
Решение уравнения (2.66) в интегральной форме получено в
[11] в предположении, что ^(z,p,s) = 0 и, соответственно,
£’(z,x,s) = 0. Воспользовавшись процедурой решения, аналогич-
ной приведенной в [И], получим решение этого уравнения для
общего случая, когда ^(z,p,s) ф 0. Обозначим:
J] (z,X,s) = J2(z,x,s)exp((zsx - /)z), (2.68)
p(q) = р(s)exp(/sq)t/s;
^(^x»q)= p2(2>z>s)e*p('sqPs;
(2.69)
(2.70)
^o(^X>q) = |£(z,x,s)exp(/sq)Js, (2.71)
—oo
где q = (<7j,<72) “ угловая частота.
После подстановки (2.68)-(2.71) в (2.66) получим
- 7^P(q-Xz)F(z,x,q - X*) -
az 4тг
-£o(z,x,q-X2)exp(/z) = O.
Это дифференциальное уравнение первого порядка относи-
тельно независимой переменной z, Решение его при известных гра-
ничных условиях ./(z = (),p,s) = J0(p,s), определяющих исходные
пространственно-угловые характеристики лазерного луча на входе
аэрозольного слоя, можно привести к следующему виду [11]:
F(z’X>q) = e*P fp(q~xz)dz
V О
х
Л)
Z
(x>q)+ pb(*>x>q-x*)exP
О
у
— 4ягх
4тг
p(q-x4Jz dx ,
° _
(2.72)
79
ГЛАВА 2
где
Fo (x>q)=^(O-x^q) =
s.
(2.73)
С учетом (2.68) и (2.70) запишем
Ji(z’X,q) = ^(z,x>q+xz)exp(-rz)-
(2.74)
Учитывая (2.67) и взяв обратное Фурье-преобразование от
(2.74), получим окончательно
•/(Z’P’S) = T^T4 х
х j jexp(-/xp + (zsx-/)z)exp(-zsq)F(z,x,q)^X^q- (2-75)
После подстановки (2.72) в (2.75) упростим (2.75), заменив в
нем q на q' = q -jz, и опустим после этого штрих у символа q' в
последующих выражениях. Тогда искомая функция лучевой ин-
тенсивности представится в виде
~-*-v f pi(z,x>q)exp(-z(xp + sq))</x^q>
(2л-) J
(2.76)
где
A(z.X,q) = exp
* I 4л-
o k
z-zx
_о
1
4 л-
(2.77
X
о
80
ЭНЕРГЕТИЧЕСКИЕ МОДЕЛИ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКИ
Выражения (2.76), (2.77) обеспечивают определение харак-
теристик как рассеянного вперед, так и рассеянного назад излу-
чения.
В соответствии с общим подходом, описанным в [11], для
этого необходимо разделить лучевую интенсивность на прямую и
обратную лучевую интенсивность:
J(z,p,s) =
J+ (z,p,s) при sz>0,
J~(z,p,s) при sz<0,
и дальше использовать итерационную процедуру, в соответствии
с которой при расчете п-го приближения J*(z,p,s) используется
предыдущее приближение J“(z,p,s), и наоборот.
При малых значениях коэффициента рассеяния одной частицы «назад»
(когда интегральная мощность рассеяния назад не превышает <5 = 0,1
интегральной мощности рассеяния вперед) вполне достаточно ограни-
читься первым приближением при решении задачи как прямого, так и
обратного рассеяния. Как можно заметить, относительные ошибки ре-
шения уравнения переноса будут при этом иметь значения порядка <52,
т.е. не будут превосходить единиц процентов.
Первое приближение решения уравнения переноса в прямом
направлении (точнее, Фурье-образ этого приближения) может
быть получено из (2.77) при £0(z,x,s) = 0 и записывается так:
•V(^x>q)=
= ехр -pjl-^-P+(q + x(z-Zj))!<&! Fo(xq + xz), (2.78)
= ехр
где Р+ (...) - Фурье-преобразование фазовой функции рассеяния
вперед.
Соответственно, Фурье-преобразование искомого первого
приближения для обратной интенсивности может быть получено
после подстановки в (2.77) выражения
81
ГЛАВА 2
Ео Ux,q)p“ (x>q)>
(2.79)
после чего (2.77) примет следующий вид:
J\ (г,Х>ч) = ехр
Г 1 I
- fzI1 + х(2~Z|)) rZ|
J I 4тг v I
о
z
pi+(^-x,X,q + z(z-x))P’(q + z(z-x))x
4ТГ J
0
(2.80)
В выражении (2.80) проведена замена координаты z на L -z.
т.е. для уравнения обратного рассеяния задача решается по коор-
динате z как бы в обратную сторону.
Кроме того, в (2.79) Р~(...) - Фурье-преобразование фазовой
функции рассеяния назад.
Теперь функции лучевой интенсивности на выходе слоя аэ-
розоля для случаев рассеяния вперед и назад окончательно пред-
ставляются в виде:
J+(Z,p,s) = F“’ [j(+(£,x,q)];
г п (2‘81)
7-(0,р,8) = Р-'[7Г(£,х,Ч)],
где, как и раньше, F 1 [...] - обратное Фурье-преобразование.
Количественные расчеты функции лучевой интенсивности
выполним для случая расходящегося гауссовского пучка (2.59).
Тогда
Шч)ЧехР
^+зу у+зуу
4 4
(2.82)
Если фазовые функции P+(s) и Р (s) аппроксимировать га-
уссоидами, то можно записать
82
ЭНЕРГЕТИЧЕСКИЕ МОДЕЛИ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКИ
Р+ (s) - 4afW0 expf-oy |s|2 ),
P~ (s) = 4ab (1 - W0)exp(-ab |s|2
(2.83)
где otf,ah ~ множители, характеризующие ширину фазовой
функции для направления рассеяния вперед и назад соответст-
венно; - коэффициент, с помощью которого учитываются от-
носительные доли рассеянного вперед и назад излучения.
Тогда Фурье-преобразование от (2.83) будет иметь вид
< 2 2 л
/>+(<7|^/2) = 4л'^оехР -?1 +Чг
4о7 )
7’”(<?i^2)=MI-wo)exP
I 4аь )
(2.84)
Теперь выражение для интенсивности излучения, рассеян-
ного вперед и назад, можно получить путем последовательной
подстановки (2.84) в (2.78), (2.80) и этих выражений в (2.81).
Для нахождения представляющего наибольший практический
интерес суммарного углового распределения интенсивности ла-
зерного излучения, рассеянного облаком как вперед, так и назад,
необходимо проинтегрировать функцию лучевой интенсивности
по р = (х,у).
В области спектров (с учетом свойства Фурье-преобразова-
ния) это эквивалентно тому, чтобы положить в (2.81)0. Тогда
окончательно выражения для суммарного углового распределе-
ния излучения, рассеянного вперед и назад, примут вид:
V 7 4л-2
/2 2 \ А
И]I +<72)
---------- X
4af )
xcos(/#j + tnq2 }dq{dq2\ (2.85)
exP
x
83
ГЛАВА 2
4тг2
х J Jexp yL (1-Wo)exp -
2 2 Л
41 +42
4ал >
х
I /22
- 1-Woexp -41 +<h
I I 4a/
(exp(AyZ)-l)
x—-----------cos(Z^ + mq2 )dq{dq2,
A
где J = 2-fF0exp
4a f
(2.86)
-(l-^o)exp -
2 , 2 A
4\ +42
*ab ,
Необходимо еще раз отметить, что выражения (2.85) и (2.86) представ-
ляют собой не саму функцию лучевой интенсивности, а суммарное уг-
ловое распределение интенсивности излучения со всего лазерного пят-
на на выходе и входе аэрозольного облака соответственно, то есть ин-
теграл функции лучевой интенсивности по площади лазерного пятна.
На рис. 2.8 представлены рассчитанные по (2.85) и (2.86)
кривые, иллюстрирующие характер рассеяния узкого лазерного
луча аэрозольным слоем. Расчеты выполнялись при следующих
исходных данных:
1 Вт; Жо= 0,995; b = 0,05 рад;
- 0,5sy2; = 0,55^2 ; зу = 0,3 рад; sb - 0,2 рад.
Кривые, приведенные на рис. 2.8, соответствуют случаю не-
поглощающих частиц с показателем преломления п = 1,33 и сле-
дующими значениям оптических толщ:
7-у£ = 2; 2-у£ = 4; 3-у£ = 8.
84
ЭНЕРГЕТИЧЕСКИЕ МОДЕЛИ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКИ
85
ГЛАВА 2
Таким образом, выполненные количественные оценки
показывают, что, в отличие от рассеяния вперед, когда вид
функция лучевой интенсивности существенно зависит от зна-
чения оптической толщи аэрозольного облака, при рассеянии
назад вид функции лучевой интенсивности почти не изменяет-
ся с изменением оптической толщи. Причем при значениях оп-
тической толщи, больших 4, не только вид, но и абсолютные
значения функции лучевой интенсивности рассеянного назад
излучения изменяются незначительно.
86
_________3____________
ТИПОВЫЕ
ПОМЕХОВЫЕ ЭФФЕКТЫ
Проанализированы типовые помеховые эффекты, возни-
кающие при воздействии преднамеренных помех в систе-
мах наведения высокоточных средств поражения, в сред-
ствах сопровождения целей и в элементах этих средств -
устройствах нормирования сигналов, фотоприемных уст-
ройствах.
Рассмотрены особенности обнаружения пространственных
целей на неравноярких (распятненных) фонах и в присут-
ствии пространственно-временного шума, а также при ис-
пользовании мультиспектрального обнаружителя.
ГЛАВА 3
3.1. Помеховые эффекты
в контурах самонаведения
Особенности функционирования контуров наведения бое-
припасов, обусловленные действием преднамеренных помех, яв-
ляются общими для контуров с измерителями координат как оп-
тического, так и радиодиапазонов. Полезные с позиций оптико-
электронного подавления помеховые эффекты, на реализацию
которых обычно направлена постановка преднамеренных помех,
обязаны своим появлением, во-первых, принципиальным струк-
турным особенностям контуров самонаведения, определяющим
существенный колебательный характер переходных процессов, и,
во-вторых, наличию существенных нелинейностей, основными из
которых являются ограничение скорости поворота головки само-
наведения, ограничение нормальной перегрузки управляемого
боеприпаса, а также нелинейность дискриминационной характе-
ристики, придающая головке самонаведения свойства селекции
(стробирования) источников излучения по углам пеленга.
Специфические помеховые эффекты могут также наблюдать-
ся при создании помех более, чем из одной точки пространства.
3.1.1. Линейный режим работы
Анализ основных особенностей функционирования конту-
ров самонаведения, обусловленных колебательным характером
переходных процессов при воздействии помех, выполним в ли-
нейном приближении, воспользовавшись результатами, имею-
щимися в [1]. Развитый там подход позволяет получить выраже-
ния, связывающие характеристики промаха управляемого бое-
припаса с характеристиками помеховых воздействий, когда по-
следние не приводят к выходу фазовых координат за пределы ли-
нейных участков существенных нелинейностей контура самона-
ведения.
Будем называть помехи, удовлетворяющие этому условию,
слабыми по эффекту, в отличие от сильных по эффекту помех,
когда влиянием существенных нелинейностей контура пренеб-
речь не удается.
88
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
Итак, в соответствии с [1], воспользуемся для описания про-
цесса наведения в одной плоскости прямоугольной системой ко-
ординат XOY с осью ОХ. ориентированной в начале процесса
наведения вдоль линии визирования управляемый боеприпас R -
цель С (см. рис. 3.1).
На рис. 3.1 Х^ОУ^ - земная система координат, Vr.Vc - век-
торы скорости ракеты и цели соответственно.
Полагая малым угол ср поворота линии визирования RC в
процессе наведения, что вполне допустимо при исследовании
слабых по эффекту помех, линеаризованные уравнения кинема-
тики сближения можно представить так:
НО ~ {уг - Ус ^)/(Do - М’
(3.1)
Здесь Do - начальная дальность наведения; « const - скорость
сближения ракеты с целью.
При наведении на неподвижную цель .
При использовании для наведения усовершенствованного
метода пропорциональной навигации закон наведения ракеты
формируется в соответствии с выражением
N = kVs(p,
(3.2)
где N - требуемое нормальное к линии визирования ускорение
ракеты; к - навигационная постоянная контура самонаведения;
ф - угловая скорость поворота линии визирования ракета - цель.
________________________Рисунок 3.1
89
ГЛАВА 3
(Отметим, что (3.2) отличается от выражения для классиче-
ского метода пропорциональной навигации в = кф. где в - угло-
вая скорость поворота вектора скорости ракеты, независимостью
в линейном приближении и слабой зависимостью в общем случае
динамических свойств контура самонаведения от абсолютного
значения вектора скорости цели и от угла сближения с ней.)
При стрельбе с близким к нулевому углом упреждения, то
есть при стрельбе по малоподвижным и неподвижным целям, эк-
вивалентная структурная схема линейного контура самонаведе-
ния может быть представлена в виде, показанном на рис. 3.2,а, и
после соответствующих эквивалентных преобразований приведе-
на к виду 3.2,6.
На этих рисунках pWx(p), ^(р)’ ^з(р) ~ передаточные
функции головки самонаведения, корректирующего фильтра и
ракеты с автопилотом соответственно; Nr - поперечное ускоре-
ние ракеты; to =D^/VS - время до расчетного момента встречи
ракеты с целью (время наведения); t - текущее время наведения;
И^}(р) = Иг1(/?)И^(/?)Иг3(/?) - передаточная функция последова-
тельного соединения стационарных линейных элементов контура
самонаведения.
0
_______________________Рисунок 3.2_____________________
90
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
Таким образом, контур самонаведения при принятых допу-
щениях может рассматриваться как линейная нестационарная
система с нестационарностью вида 1 / (f0 — Г).
Как известно [2, 3], импульсная реакция (весовая функция)
линейной нестационарной системы w(r,£) является функцией
двух переменных: времени наблюдения отклика (аргумент t) и
момента подачи на вход б -функции (аргумент £).
При решении задач анализа и синтеза помех нас, в первую
очередь, интересует изменение конечного промаха боеприпаса,
обусловленное их воздействием. Для оценки конечного промаха
достаточно знать импульсную реакцию контура самонаведения в
момент времени t = . Тогда, учитывая что £ = t0 - т , где т -
время, оставшееся до встречи боеприпаса с целью в момент по-
дачи S -функции, импульсную реакцию контура самонаведения
можно представить в виде w(r0,/0 - г), т.е. в виде функции только
одной переменной т. сохраняющей, в тоже время, параметриче-
скую зависимость от времени наведения /(). Для упрощения по-
следующих выражений введем обозначение o>(r) = w(/0, f0-r).
Тогда координата боеприпаса в конце самонаведения, опреде-
ляющая конечный промах по цели, маневрирующей по произ-
вольному закону yc(t), может быть определена следующим об-
разом:
»('о)= (3.3)
о
Интеграл свертки (3.3) аналогичен использующемуся при
исследовании стационарных линейных систем, что указывает на
возможность применения традиционного аппарата передаточных
функций для анализа рассматриваемой нестационарной системы.
Импульсная реакция бу(г) может быть определена, как реакция
контура самонаведения в момент времени /0 на S -импульс, по-
данный на его вход в момент, когда до встречи боеприпаса с це-
лью осталось т секунд.
91
ГЛАВА 3
С другой стороны, как показано в [2, 3], эта же импульсная
реакция о>(т) может быть определена и как реакция некоторой
инверсно-сопряженной системы на 6 -импульс, поданный на ее
вход. Структурная схема этой инверсно-сопряженной системы,
показанная на рис. 3.3, может быть получена из схемы рис. 3.2,6
по описанным в [2, 3] формальным правилам структурных преоб-
разований, сводящимся к следующему.
1. Направления передачи воздействий во всей структурной
схеме заменяются на обратные.
2. Сумматоры заменяются на разветвители, а разветвители
на сумматоры.
3. Аргумент t нестационарных звеньев заменяется на tQ - т .
Импульсной реакции соответствует получаемая с по-
мощью преобразования Лапласа сопряженная передаточная
функция контура самонаведения F^s) со входом, соответст-
вующим линейному смещению цели yc(t) в нормальном к линии
визирования направлении, и с выходом, соответствующим ли-
нейному смещению в нормальном направлении боеприпаса
yr (tQ) в расчетный момент встречи ракеты с целью.
В соответствии с [1] эта передаточная функция может быть
представлена в виде
(3.4)
f^0G),
ехр - - as
J 5
?М=>-
S
Передаточной функции (3.4) соответствует сопряженная пе-
редаточная функция Fh(p) с тем же входом, но с выходом по
промаху боеприпаса:
________________________Рисунок 3.3 _____________________
92
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
ГА(р) = 1-Г,(р) =
(3-5)
В случае, когда передаточные функции ГСН, ракеты с авто-
пилотом и корректирующего фильтра аппроксимируются апе-
риодическими и форсирующим звеньями, т.е. когда
wt(p)=——, jf(p)=Z4£±L w3(p)=—?—,
1V 7 Ttp+1 2V 7 r2p+i 3V 7 Г3/?+1
= (3’6)
(T1p4-l)(r2j9 + l)(T3p + 1)
то сопряженная передаточная функция контура самонаведения по
промаху принимает следующий вид
Fh(p) = [p(p + l/T])a(p + l/T2),’(p + UT3)c)k, (3.7)
где а—Т2(Т4-Т2) Щ-Г3)
(т; -г2)(?] -г3)’ (т2-т^т2-т3) ’ (т3-т\)(т3-т2) '
Соответственно, сопряженная передаточная функция по от-
клонению Fz(p) = l-Fh(p). Для более простых передаточных
функций Wq(p) выражение для Fh(p) может быть получено из
(3.7) приравниванием соответствующих постоянных времени ну-
лю. Получающаяся при этом неопределенность вида оо° раскры-
вается как 1.
Если Yc (р) = (г)] - преобразование Лапласа от функции
yc(t). описывающей маневр цели (см. рис. 3.1), то промах ракеты
hk в конце этапа самонаведения может быть определен с помо-
щью выражения
^=%) = Ь-'[Кс(р)^(р)1=<о. (3.8)
Здесь L, LT1 - символы прямого и обратного преобразований Ла-
пласа.
93
ГЛАВА 3
С учетом известного свойства преобразования Лапласа [4]
выражение для конечного промаха при достаточно большом вре-
мени самонаведения также определяется выражением
hk = ^PYMFM)- (3-9)
При степенном характере маневра цели (й(/) = tm)
Ус(р) = /и!/У”+|.
Поскольку FA(p) содержит сомножитель рк, то, как это
следует из (3.9), hk = 0 при т < к, т.е. контур самонаведения
имеет порядок астатизма по конечному промаху, равный значе-
нию навигационной постоянной к.
Амплитуда отклика траектории ракеты в момент tQ на сину-
соидальный маневр цели yc(t) = sma)t = sin(27rft) может быть
определена путем построения амплитудно-частотной характери-
стики (АЧХ), соответствующей передаточной функции F^p}:
Л(/) = |^(2л-^)|. (3.10)
На рис. 3.4 приведены АЧХ контура самонаведения по откло-
нению для передаточной функции Wo (р), задаваемой выражением
94
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
(3.6), при 7] =0,1 с, Т2 =0,2 с, Т3 =0,4 с, к = 4 и при вариации
значений постоянной времени форсирующего звена Т4.
Кривые рис. 3.4 подтверждают колебательный характер ди-
намических процессов в контуре самонаведения. Так, при частоте
входного синусоидального воздействия fm, соответствующей
максимуму АЧХ, амплитуда конечного отклонения ракеты может
в 2 и более раза превышать амплитуду входного воздействия.
При этом для рассматриваемой передаточной функции fm лежит
в пределах 0,3...0,7 Гц.
На рис. 3.5, 3.6 приведены графики сопряженных весовых
функций и переходных процессов, соответствующих передаточ-
ной функции Ио(р) вида (3.6) с указанными выше значениями
постоянных времени. Графики описывают зависимость конечно-
го (в момент времени /0) отклонения ракеты от центра цели при
поступлении на вход контура самонаведения помеховых воздей-
ствий в виде 6 -функции и единичного скачка соответственно. По
оси абсцисс на этих графиках откладывается время, оставшееся
от момента воздействия помех до момента встречи ракеты с це-
лью (г = Г0 -£).
95
ГЛАВА 3
При наличии аналитического выражения для сопряженной
весовой функции бу(/) отклонение ракеты от цели для любого
входного воздействия yc(t) определяется с помощью выражения
(3.3). Однако в общем случае получить явное выражение бу(г) в
элементарных функциях не удается, что затрудняет теоретиче-
ский анализ помеховых эффектов. Но если постоянная времени
форсирующего звена Т4 выбирается равной постоянной времени
ГСН Т{, т.е. когда форсирующее звено компенсирует инерцион-
ность ГСН, а Т3 = 2Т2, выражения для весовых функций по бу(т)
приобретают достаточно простой вид, приведенный в табл. 3.1
(смысл величин, приведенных в последнем столбце табл. 3.1 бу-
дет пояснен ниже). Реакция контура Л(т) на единичный скачок
при Тх = Т4, Т2 = 0,2, Т3 = 0,4, к = 4 описывается выражением
й(г) = 1 + (0,121г7 + 0,339г6 -2,44г5 +4,88г4 +
+7,81г3+9,37г2 -2,5г-1)ехр(-2,5г). (3.11)
На рис. 3.7 приведены графики весовых функций <у(/) при
Г, = Т4, Т2 = 0,2 с, Т3 = 0,4 с и при вариации значений навигаци-
онной постоянной к. Графики иллюстрируют еще одно универ-
сальное свойство контуров самонаведения, характеризующее их
96
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
колебательность и состоящее в том, что число пересечений нуле-
вого уровня сопряженной весовой функцией не может быть
меньше (в реальных контурах, как правило, оно равно) навигаци-
онной постоянной контура самонаведения. При этом к числу пе-
ресечений относится и точка в начале координат.
________________________Табл и ца 3.1 ____________________
к Т? т3 <w(r) ^inax
4 0,4 0.8 (-0,0012? + 0,13? - 2,44? + 6,2т)ехр(-1,25т) 2.61
4 0,3 0,6 (-0,0118? + 0,714? - 7,72? + 11,11т)е.хр(-1,667т) 2,643
4 0,2 0,4 (-0,3? + 8,14? - 39,1? + 25т)ехр(-2,5т) 2.652
4 0,15 0,3 (-3,02? + 45,72? - 123.4? + 44,44т)ехр(-3,33т) 2,653
3 0,2 0.4 (2,03? + 19,5? + 18,75т)ехр(-2,5т) 2,07
2 0.2 0.4 (-6,5?+ 12,5т)ехр(-2,5т) 1,53
Если на вход контура самонаведения поступает случайное
стационарное помеховое воздействие yc(t) с математическим
ожиданием mn(t). корреляционной функцией Rn(r) и соответст-
вующей ей спектральной плотностью gn(a>), то при времени на-
ведения, в несколько раз превышающем интервал корреляции
97
ГЛАВА 3
входного воздействия, математическое ожидание и дисперсия
dj отклонения ракеты в момент /0 могут быть определены с по-
мощью следующих выражений [3]:
т,= £mn(t0-r)<v(r)dT, (3.12)
о
z0 z0
67/2 = f f<y(ri)ft,(r2)/?»(ri ~?2)dTxdT2 =
-0-0
= j|Fz (/\y)|2 gn {co)dco.
(3.13)
В частном случае помехового воздействия в виде белого
шума, т.е. когда Rn{r) = Nd(r), то gn(a>) = N, и выражение для
дисперсии отклонения преобразуется к виду
df = N jco2{r)dT = N j|Fz(z®)|2 dco . (3.14)
0 -00
3.1.2. Помеховые эффекты
в линейном контуре самонаведения
Воздействие преднамеренных помех приводит к появлению
вызывающего промах ракеты эквивалентного углового воздейст-
вия yn(t) на входе контура самонаведения, В случае слабых по
эффекту помех, когда фазовые координаты не выходят за преде-
лы линейных участков нелинейностей контура самонаведения,
анализ промахов может выполняться с использованием соотно-
шений, приведенных выше в 3.1.
Угловое помеховое воздействие может быть создано излучением одно-
го или нескольких источников активных помех, имитирующих сигнал,
приходящий от цели, и расположенных со смещением относительно
центра цели (точки прицеливания).
98
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
Путем изменения мощности источников помех можно созда-
вать воздействия, приводящие к различным помеховым эффектам.
Так, малобазовая синхронная мерцающая помеха может
быть реализована путем размещения двух источников помех на
защищаемом объекте (цели) со смещением их на расстояние L от
центра цели в противоположных направлениях. При создании
этой помехи выполняется противофазное изменение мощности
(переключение) источников помех по меандру. При достаточной
их мощности, на порядок и более превышающей мощность по-
лезного сигнала, помеховое воздействие у„(/) также будет изме-
няться по закону, близкому к меандру с частотой fn. соответст-
вующей частоте переключения источников помех. Тогда ампли-
туда первой гармоники входного воздействия а равна а = AL/я.
а кривые рис. 3.4 будут описывать зависимость от частоты мер-
цаний f амплитуды этой же гармоники на выходе контура само-
наведения, то есть величину максимального отклонения ракеты
от центра цели (максимального промаха), отнесенного к величине
4£/тс.
Вследствие близкой к синусоидальной зависимости промаха
от фазы мерцаний, при случайной фазе, равномерно распреде-
ленной от реализации к реализации процесса наведения в интер-
вале 0...2 л-, промах будет распределен по закону, близкому к за-
кону арксинуса [5, 9], и плотность вероятности промаха будет
/(х) = 1(а2Л2(/)-х2) 2.
ТС
(3.15)
Вероятность попадания ракеты в интервал +у относительно
центра цели
р *— arcsinf У I, (3.16)
а вероятность попадания в базу источников помех округляется
выражением
Pl
2
« — arcsin
тс
тс
99
ГЛАВА 3
Так, при Л(/т) = 2 (см. рис. 3.4) pL =0,26. (Под базой
здесь и выше будем понимать расстояние 2L между источника-
ми помех.)
Исключить случайный характер промаха и обеспечить на-
дежный вывод ракеты за базу источников помех удается, если
привязать моменты переключения их мощностей ко времени т,
оставшемуся до встречи ракеты с целью. Эти моменты могут
быть определены из выражения (3.3), в которое в качестве вход-
ного воздействия y(t) следует подставить помеховое воздейст-
вие yn(t). Из (3.3) следует, что максимальный промах при реали-
зации оптимальной малобазовой помехи, создаваемой с базы 2L
(будет обеспечен, если упор1 (/0 -т) = Lsign а>(т).
Действительно, промах ракеты йтах в этом случае определя-
ется выражением
z0 z0
/?тах = Уг Go) = L Jsign(6y(r))6y(r)dr = L ||бу(г)|б?г. (3.17)
о о
В последнем столбце табл. 3.1 показаны значения промахов
Лтах/£ ПРИ создании оптимальной малобазовой помехи, соответ-
ствующие приведенным значениям параметров контуров самона-
ведения.
Рис. 3.8 иллюстрирует вид оптимально помехового воздей-
ствия (оптимальной помехи), создаваемого с малой базы.
В [8] приведен графический способ определения промаха,
получаемого при создании оптимального помехового воздейст-
вия. Его существо поясняет рис. 3.9, где пунктиром показана со-
пряженная весовая функция контура самонаведения б?(т),
сплошной линией - кривая соответствующего ей сопряженного
переходного процесса й(г), а жирной сплошной линией - кривая
накопленного промаха й„(г) при реализации оптимального воз-
действия. Символами rl, т2, тЗ обозначены положения локаль-
ных экстремумов переходного процесса.
Кривая накопленного промаха йл(г) строится следующим об-
разом. На интервале O...rl hn (г) совпадает с й(г). На интервале
100
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
________________________Рисунок 3.9 ______________________
г1...г2, соответствующем ниспадающему участку весовой функ-
ции, Л„(г) является зеркальным отражением Л(г) относительно
горизонтальной оси, расположенной на уровне Л(г1). На интер-
вале г2 ... гЗ кривая Лл(г) повторяет ход кривой А(г), но со
смещением по вертикали на величину Лл(г2), -Л(г2) и т.д. При
101
ГЛАВА 3
величине полубазы помехового воздействия L накопленный про-
мах будет равен Lhn{r). При этом, как следует из рис. 3.9, он бо-
лее, чем в 1,5 раза будет превышать величину L .
Еще один способ вывода ракеты за базу источников помех со-
стоит в реализации пространственной синхронной мерцающей по-
мехи. Пусть помеха создается путем кругового (в картинной плос-
кости) вращения вокруг центра цели достаточно мощного источ-
ника помех. Если £, fn - радиус и частота вращения источника
помех, то на вход горизонтального и вертикального каналов кон-
тура самонаведения будут поступать помеховые воздействия
х„(/) = Zsin(2^/WZ + ^O), yn(t) = Zcos(2^/W +%) соответственно.
Тогда составляющие промаха по выходу этих каналов
К =^(/„)sin(2^/„? + ^0 +Ф(/„)),
(3.18)
hy = LA(f„ )cos(2^/„/ + <р0 + Ф(/„)),
где Л(/п) - АЧХ сопряженной передаточной функции контура
самонаведения (см. рис. 3.4); Ф(/) - ее фазочастотная харак-
теристика (ФЧХ).
При этом модуль (абсолютное значение) промаха
1
\h\^$ + ffi = LA(fn\ (3.19)
т.е. независимо от начальной фазы % при оптимальной частоте
помехи соответствующей максимуму АЧХ, промах всегда
будет превышать величину L .
Пространственная синхронная мерцающая помеха может
быть реализована с помощью 4-х (или более) неподвижных рав-
номерно распределенных вдоль окружности радиусом L источ-
ников помех, мощность каждого из которых последовательно пе-
реключается по кругу с частотой fn и со скважностью, равной
числу источников помех.
Модуль промаха при этом
? Я
(3.20)
71
102
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
где множитель 2,81л характеризует относительную величину
амплитуды первой гармоники помехового воздействия.
Эффективность перенацеливания контура самонаведения
ракеты на ложную цель (ЛЦ) при достаточной ее энергетике, ко-
гда мощностью полезного сигнала можно пренебречь, характери-
зуют графики сопряженных переходных процессов (рис. 3.6). Из
них, в частности, следует, что, например, при Т4 =0,3 с попада-
ние ракеты в ложную цель будет иметь место, если ложная цель
будет поставлена не позднее, чем за 2,5 с до расчетного момента
встречи ракеты с целью, либо точно за 1 с до этого момента.
Если же ЛЦ будет поставлена за 0,5 с, то ракета отклонится
за базу ЛЦ, равную L, на величину 0,55 L, т.е. промах ракеты по
истинной цели достигнет величины 1,55 L .
3,1.3. Имитационная модель
нелинейного контура самонаведения
Специфические помеховые эффекты проявляются в контуре
самонаведения при создании сильных по эффекту помех, приво-
дящих к выходу сигналов на нелинейные участки его соответст-
вующих характеристик.
Теоретический анализ нелинейных эффектов в контуре са-
монаведения удается выполнить только при использовании ряда
допущений или упрощений. Для проверки их корректности и по-
лучения количественных оценок эффективности помех обычно
используется метод имитационного моделирования.
Приведем описание упрощенной имитационной модели кон-
тура самонаведения при стрельбе по неподвижной цели. Модель
имеет в своем составе блоки, воспроизводящие особенности
функционирования при воздействии помех основных нелинейно-
стей контура:
нелинейность дискриминационной характеристики головки
самонаведения, проявляющаяся при больших углах рассо-
гласования;
ограничения нормальной перегрузки управляемой ракеты
(боеприпаса);
нелинейная кинематика наведения.
Модель будет использоваться для подтверждения достовер-
ности результатов, получаемых при теоретическом анализе нели-
103
ГЛАВА 3
нейных эффектов, сопровождающих воздействие преднамерен-
ных помех, а также для получения количественных оценок эф-
фективности помех.
Имитационная модель типового нелинейного контура само-
наведения разработана в среде Matlab с использованием приклад-
ного пакета визуального моделирования Simulink.
Схема контура в графическом представлении пакета Simu-
link: 1 - модель головки самонаведения; 2 - корректирующий
фильтр; 3 - блок формирования команды управления при наведе-
нии ракеты по методу пропорциональной навигации; 4 - ограни-
читель нормальной (поперечной) перегрузки ракеты F(x); 5, 6 -
динамические звенья, аппроксимирующие передаточную функ-
цию ракеты с автопилотом; 7 - блок кинематики
________________________Рисунок 3.10 _____________________
104
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
Как и раньше, к - навигационная постоянная; Vr - скорость
ракеты.
Кроме того, на рис. 3.10,а,в для обозначения параметров ди-
намических звеньев контура самонаведения (постоянных време-
ни, коэффициентов усиления и т.п.) используются символы
a,byc.e.f.g9 а символ 5 используется в обозначениях пакета Mat-
lab как аргумент передаточных функций вместо принятого в оте-
чественной литературе символа р.
Модель имитирует процесс наведения ракеты в одной плоскости в об-
щем случае на двухточечную (парную) неподвижную цель.
Скорость ракеты в процессе полета полагается постоянной.
Нормальная перегрузка ракеты ограничивается по уровню Nm.
Угол поворота вектора скорости ракеты вг с выхода блока 6 по-
ступает на вход блока кинематики 7. Схема блока кинематики
представлена на рис. 3.10,6. При этом в блоке 11 формируются
углы поворота линии визирования с ракеты на каждый из двух
элементов парной цели в соответствии с выражением
(p^t) - arctg------—^212 (/ = 1,2). (3.21)
-хг
В этих выражениях (xd, Ус1), (хс2, Х-2) “ векторы прямо-
угольных координат элементов парной цели в инерциальной де-
картовой системе координат, привязанной к начальной точке
размещения ракеты; ) - вектор текущих координат ракеты.
Сигналы (р2 с выхода блока кинематики поступают на
вход модели головки самонаведения (ГСН), схема которой пред-
ставлена на рис. 3.10,в. В блоке 8 формируется сигнал на выходе
дискриминатора d(t) при работе по парной цели в соответствии
с выражением
<3-22’
1+<р + £| (/) n + S2\t)J
где £,(/) = «?,(/)-<ph(t).
105
ГЛАВА 3
В этих выражениях q - отношение энергий излучения вто-
рого элемента парной цели к первому; (ph(t) - угол поворота оп-
тической оси ГСН (сигнал на выходе блока 10); ^(/) - сигнал
рассогласования по z-му элементу парной цели, причем значения
углов подставляются в радианах.
На рис. 3.11 приведена дискриминационная характеристика
ГСН, соответствующая выражению (3.22) при работе по одиноч-
ной цели (q - 0) при т - 6 • 10-5, и - 6 • 10"6. Крутизна линейного
участка дискриминационной характеристики равна = 10 1/рад.
Ширина дискриминационной характеристики, определяемая
по расстоянию между ее экстремумами, составляет 0,0745 рад
(4,27°). Размах дискриминационной характеристики, определяемый
по уровню 0,1 от максимального значений, равен 23 = 0,25 рад.
Блоки 9, 10 описывают передаточную функцию разомкнутой
петли головки самонаведения.
Ниже, если это не будет специально оговорено, в качестве
базовых будем принимать следующие значения параметров кон-
тура самонаведения: к =4; Vr = 500 м/с; Nm = 100 м/с2; а = 1 с-1;
Ъ = 0,1 с; с = 0,1 с; g = 0,01 с; е = 0,0625 с2; f = 0,4 с. При этом
динамика головки самонаведения и ракеты с автопилотом будут
описываться колебательными звеньями с постоянным временем
ГА=0,1с и Тг=0,25с и с коэффициентом демпфирования
=0,5 и =0,8 соответственно.
Рисунок 3.11
106
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
На рис. 3.12, 3.13 приведены графики сопряженного перехо-
да процесса и весовой функции по промаху контура самонаведе-
ния для базовых значений параметров контура при малых откло-
нениях входных воздействий, т.е. при работе контура в линейном
режиме. На рис. 3.12 пунктиром показана кривая, описывающая
(также как и график сопряженного переходного процесса) зави-
симость относительного (отнесенного к величине скачка возму-
щающего воздействия) промаха в зависимости от интервала вре-
107
ГЛАВА 3
мени т от начала скачка до расчетного момента времени встречи
с целью. Эта кривая соответствует величине скачка входного
воздействия, равной 40 м, и иллюстрирует случай, когда сущест-
венные нелинейности контура и, главным образом, нелинейность
пеленгационной характеристики начинают оказывать заметное
влияние на процесс отработки скачка контуром самонаведения.
Необходимо отметить, что пунктирная кривая на рис. 3.12 не
имеет такого универсального значения, как сплошная кривая со-
пряженного переходного процесса, позволяющая оценивать про-
мах ракеты при произвольных, но достаточно малых входных
воздействиях, не выводящих контур самонаведения в нелиней-
ный режим работы. Пунктирная кривая определяет промах толь-
ко по отношению к конкретному входному воздействию (в рас-
сматриваемом случае - к скачку величиной 40 м) и будет изме-
няться при вариации не только вида, но и параметров (величины
скачка) входного воздействия.
Необходимо отметить, что аналитические выражения гл. 3.1 для сопря-
женных передаточных функций и сопряженных реакций контура само-
наведения в линейном приближении удалось получить благодаря ис-
пользованию уравнения кинематических связей в виде (3.1).
В то же время в [7, 9] приводится отличное от (3.1) линеари-
зованное уравнение кинематических связей, включающее член,
учитывающий кориолисово ускорение:
d(p + 2d<p = -Nr (d<0). (3.23)
Здесь (р, d - текущее значение угла поворота линии визирования
и дальности ракета-цель.
Использование этого уравнения не позволяет получить об-
щие выражения для сопряженных передаточных функций конту-
ра самонаведения в достаточно простом виде, аналогичном (3.4),
(3.5). Возникает вопрос, насколько сопряженные реакции конту-
ра, полученные выше с использованием приближенного выраже-
ния (3.1), соответствуют реальности. Для ответа на него проведем
сравнение сопряженных весовых функций, полученных расчет-
ным путем и с использованием описанной выше имитационной
модели, реализующей воспроизведение кинематических связей
без использовавшихся при получении (3.1) упрощений.
108
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
_______________________Рисунок 3.14____________________
На рис. 3.14 сплошными линиями показан вид весовых
функций, полученных моделированием для параметров переда-
точной функции стационарной части контура самонаведения
Т]=Г4, Г3=2Г2 и при Т2=0,2с для кривой /, Г2=0,4с для
кривой 2, Пунктиром на этом же рисунке показаны весовые
функции, рассчитанные с помощью выражений из столбца 4
табл. 3.1. Практически полное совпадение пунктирных и сплош-
ных кривых подтверждает корректность результатов, получен-
ных в разделе 3.1.
3.1.4. Помеховые эффекты
в нелинейном контуре самонаведения
К числу существенных нелинейностей, в основном опреде-
ляющих появление нелинейных помеховых эффектов, относят
нелинейность дискриминационной характеристики головки са-
монаведения, наблюдающаяся при больших углах рассогласова-
ния, а также ограничение нормальной перегрузки ракеты.
При наведении на двухточечную цель, образованную, на-
пример, полезным и помеховым сигналами одинаковой энергети-
ки, разнесенными по пространству на расстояние 2L ( 2L - база
двухточечной цели) на большом удалении от цели головка само-
наведения будет сопровождать энергетический центр двухточеч-
109
ГЛАВА 3
ной цели, совпадающий в рассматриваемом случае с ее геометри-
ческим центром (центром базы).
При сближении боеприпаса с целью увеличивается визируе-
мый с ГСН угол (угловая база) между направлением на полезный
и помеховый сигналы. При достижении угловой базой некоторой
величины (рг (угла разрешения) будет иметь место разрешение
двухточечной цели, т.е. близкий к скачкообразному переход го-
ловки самонаведения на сопровождение по углу либо полезного,
либо помехового сигналов. Причем угол разрешения <рг оказыва-
ется, как правило, близким к угловому разносу положительного и
отрицательного максимумов пеленгационной характеристики
(рис. 3.11). Ниже процесс разрешения будет рассмотрен более де-
тально.
Сейчас же отметим, что наличие информации о величине уг-
ла разрешения срг позволяет определить базу двухточечной цели,
обеспечивающую максимизацию промаха самонаводящегося бо-
еприпаса по разрешенной головкой самонаведения цели.
Действительно, из кривой рис. 3.6, например при Т4 = 0,05 с
следует, что максимальное значение промаха по разрешенной це-
ли, достигающее величины 1,67 L будет иметь место, когда раз-
решение двухточечной цели наступает за время тг «1 с до конца
процесса самонаведения, т.е. на дальности до цели, равной VrTr.
А для этого величина базы двухточечной цели должна удовле-
творять условию
2L = VrTr<pr. (3.24)
Существенное влияние на динамику процесса разрешения оказывает
соотношение мощностей излучения элементов двухточечной цели. Ре-
зультаты моделирования в виде зависимости промаха h по центру ба-
зы двухточечной цели от отношения q мощностей излучения ее эле-
ментов при 2L = 20 м, 40 м, 60 м, 80 м приведены на рис. 3.15.
Как следует из этих рисунков, попадание ракеты в точку,
близкую к центру базы, будет иметь место только тогда, когда
мощность сигналов ее элементов на входе ГСН отличается на
110
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
единицы - первые десятки процентов. Например, из рис. 3.15,в
также следует, что если это отношение мощностей лежит в пре-
делах 1,05 ... 1,35, то будет иметь место вылет управляемого бое-
припаса за базу двухточечной цели более, чем на 20 м в сторону
источника с большей мощностью.
Если преднамеренная помеха приводит к появлению на выходе го-
ловки самонаведения периодического помехового возмущения, близ-
кого по форме к синусоиде с достаточно большой амплитудой, то это
может вызывать подавление на ограничителе перегрузки F(x)
управляющего сигнала вынужденными колебаниями, обусловленны-
ми действием помехи.
Физические эффекты, возникающие при этом, поясняет
рис. 3.16.
ш
ГЛАВА 3
Рисунок 3.16
Когда на вход линейного участка нелинейности F(x) поступает по-
лезный сигнал Xj, на выходе нелинейности появится сигнал
F(x1) = x1. Если на вход F(x) поступает смесь полезного сигнала
и обусловленных помехой вынужденных колебаний с частотой со
(рис. 3.16,я), то, вследствие несимметричного ограничения амплитуды
вынужденных колебаний нелинейностью F(x), среднее значение сиг-
нала на выходе нелинейности M{F{xx + Лзтб#/)), несущее инфор-
мацию о величине сигнала х}, будет меньше Xj.
112
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
Это значит, что в присутствии вынужденных помеховых ко-
лебаний крутизна преобразования полезного сигнала нелинейно-
стью F(x) уменьшается, что иллюстрирует пунктирная кривая,
показанная на рис. 3.16,6.
Для приближенного количественного анализа особенностей
самонаведения в этом случае воспользуемся методом гармониче-
ской линеаризации [6]. Уравнение кинематических связей (3.23)
при постоянной скорости сближения и наведении по методу про-
порциональной навигации принимает вид:
d(p + 2d(p= Nr=kd<p, d - const <0. (3.25)
На вход ГСН поступает сигнал вида (р(1) + (pn(i). где
(pn{t)~ Ап sin а> t - эквивалентное помеховое воздействие, при-
веденное ко входу ГСН. Тогда с использованием метода замо-
роженных коэффициентов динамика контура самонаведения
(см. рис. 3.10) может быть приближенно описана следующим
нелинейным дифференциальным уравнением в операторной
форме относительно сигнала х на входе ограничителя пере-
грузки F(x):
(rfp2 + 2£hThp + l)(s> + \)(T2p2 + 2%rTrp +1) x
x^(z>0 + dt]p + 2d}x =
= (Ф + 1)(г^+2£Лр + 1)х
x((D0 +dt}p + 2d}p(pn(t)-(cp + \)F(x). (3.26)
Здесь p - оператор дифференцирования; pcpn{t) = Ana)wsa)t.
F(x) = \kVrX ПрИ
[М» при
Между фазами колебаний p(pn{t) и вынужденных колеба-
ний на входе нелинейности х(/) в общем случае существует
сдвиг по фазе на угол цг. Для упрощения последующих преобра-
зований можно учитывать этот сдвиг не в вынужденном колеба-
113
ГЛАВА 3
нии x(t). а в задающем колебании /?^(/), что позволит искать
периодическое решение для x(t) в виде
х(^) = х1(/) + х2(/),
где G) - медленно изменяющая полезная составляющая сигна-
ла; W ~ sin ~ пеРвая гармоника вынужденных колеба-
ний, обусловленных действием помехи.
При этом, в соответствии с [6], pcpn(t) может быть пред-
ставлена следующим образом:
РФп = cosi/л -^^р\2 (t) . (3.27)
При использовании метода гармонической линеаризации не-
линейность F(x) заменяется выражением
F(x)«F1(x1,/4z,) + ^(x1,4?)x2(/), (3.28)
в котором ^(х|,Л6), ~ известные коэффициенты гармо-
нической линеаризации [6]. Подстановка (3.27), (3.28) в (3.26) по-
зволяет получить решение последнего уравнения, определяющее
xx{t\ Аь.у/. численными методами. Однако при некоторых до-
пущениях можно получить простые приближенные зависимости,
связывающие параметры помехи и характеристики процесса са-
монаведения.
На большой дальности до цели полоса пропускания координатора бо-
лее, чем на порядок, превышает полосу пропускания контура самонаве-
дения.
Поэтому амплитуда вынужденных колебаний определя-
ется, в основном, амплитудно-частотной характеристикой коор-
динатора и корректирующего фильтра:
Аь = АпсоА(со),
где
114
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
Л(й>) = (czty+l) (3.29)
(giv+1)(тй2 (йу)2 + +1)
Плавность измерения функции позволяет выпол-
нить для нее обычную линеаризацию, после чего получим:
F. « kadxx. ка - —arcsin . (3.30)
1 я-
/г KaAs±l.
Здесь ка - навигационная постоянная, обусловленная действием
помехи.
Подставив (3.28), (3.29) в (3.26) и выделив уравнение для
медленных движений, получим дифференциальное уравнение в
операторной форме:
(гАУ + 2%hThp + l)(gp + 1)(тгу + 2£rTrp +1) X
x^D0 + dt}p + 2d}xx -(cp + l)kadx{ =0.
На любой дальности до цели, соответствующей некоторому
моменту времени t, согласно критерию Гурвица для устойчиво-
сти самонаведения необходимо, чтобы коэффициент при послед-
нем члене уравнения (3.31) был больше нуля, т.е. необходимо,
чтобы (2d-kad) 0. С учетом того, что d < 0, полученное нера-
венство преобразуется к виду ка 2.
Невыполнение этого неравенства приведет к возрастанию х}, а также к
угловой скорости поворота линии визирования ф при сближении раке-
ты с целью, и. следовательно, к промаху ракеты.
На рис. 3.17 приведен график зависимости ка от частоты
помехи а), полученный с использованием выражения (3.30).
График рассчитан для приведенной к входу ГСН амплитуды по-
мехи, равной « 0,015 рад, при А = 4 и при значениях парамет-
ров передаточных функций ГСН и корректирующего звена, соот-
ветствующих приведенным в 3.1.3.
115
ГЛАВА 3
Аналогичные эффекты могут иметь место при создании с
достаточно большой базы рассмотренной в 3.1.2 синхронной
мерцающей помехи.
При базе двух мерцающих источников помех, равной 2£,
амплитуда первой гармоники вынужденных мерцающей помехой
колебаний на входе ограничителя перегрузки изменяется с изме-
нением дальности до цели и принимает значение
। ~ 4La)A(co)
bX^D0-Vrt\
(3.32)
При Ab \,33Nm/^kVr^ величина обусловленной действием
помехи эквивалентной навигационной постоянной ка с точно-
стью не хуже 10% может быть представлена вытекающим из
(3.29), (3.30) выражением
А„,(£>о-Иг/)
° 2|Гг|£4У А(а) '
(3.33)
Из условия ка = 2 может быть определена граничная даль-
ность db , начиная с которой процесс самонаведения при воздей-
ствии мерцающей помехи становится неустойчивым:
116
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
^=(D0-^t) = -^-^L^4(a,). (3.34)
т
При этом относительное перемещение ракеты и цели будет
приближенно описываться уравнением кинематики (3.25), кото-
рое в рассматриваемом случае принимает вид
(Do - Vrt)ip- 2Vr<j> *q(D0- ^)ф, (3.35)
где q = Nm/(2LaA((o)).
Это уравнение имеет следующее решение:
^(/) = . exp(-gf). (3.36)
Учитывая известное выражение для мгновенного промаха
(h = d2<p/d), из (3.36) получим выражение для текущего промаха:
h(t) = A(0)exp(-^z).
(3.37)
Здесь й(0) - начальный промах.
117
ГЛАВА 3
На рис. 3.18 приведена рассчитанная с помощью (3.37) кри-
вая зависимости мгновенного промаха h в момент времени
t = 5,5 с от частоты мерцающей помехи при L = 15 м,
У = 100 м/с2, й(0) = 60 м, г0 = 3000 м, Vr = 500 м/с.
Следует отметить, что уравнения (3.25), (3.35), записанные в
предположении выполнения условия d &Vr= const, являются
приближенными, поскольку не учитывают изменение скорости
сближения ракеты с целью при отработке начального промаха,
имеющее место даже при Vr - const.
Ошибки оценки ф с помощью этих уравнений начинают резко расти,
когда перестает выполняться условие (Z)o -Vrt) > (5...10)ft(z), т.е.
когда текущая дальность до цели становится сравнимой с величиной
мгновенного промаха.
С учетом этого t при использовании выражения (3.37) необ-
ходимо выбирать исходя из выполнения условия
/ < —-(5...10)—. (3.38)
Vr vr
Особенности функционирования контура самонаведения при
воздействии преднамеренных помех не определяются одним
только рассмотренным эффектом уменьшения крутизны преобра-
зования полезного сигнала существенной нелинейностью - огра-
ничением перегрузки.
В случае периодических помеховых воздействий на величину промаха
оказывают существенное влияние параметры динамических звеньев
контура, определяющие колебательный характер фиксируемых в нем
процессов. В случае создания помех из двух и более точек пространства
величина промаха будет в значительной мере определяться динамикой
процесса разрешения источников помех, обусловленного нелинейно-
стью дискриминационной характеристики ГСН.
Представление о характере влияния этих факторов дают
представленные ниже результаты имитационного моделирова-
ния.
118
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
На рис. 3.19 сплошной линией показана зависимость конеч-
ного промаха h от частоты синусоидальной помехи со, получен-
ная с использованием описанной в 3.1.3 модели при дальности
пуска ракеты 3000 м, начальном промахе +60 ми Д = 0,015 рад.
Начальная фаза помехи была равна нулю, что соответствует сов-
падению первой полуволны помехового сигнала с направлением
(со знаком) начального промаха.
Моделирование также показало, что величина конечного
промаха при низкой частоте помехи существенно зависит от на-
чальной фазы помехового сигнала. На этом же рисунке пункти-
ром показана аналогичная зависимость, полученная при таких же
исходных данных, но при начальной фазе помехового сигнала,
равной я . При произвольной начальной фазе промах может при-
нимать значения из области, заключенной между двумя кривыми
(рис. 3.19).
С увеличением частоты помехи зависимость промаха от значения на-
чальной фазы становится менее существенной.
Результаты оценки эффективности синхронной мерцающей
помехи, полученные с использованием модели, приведены на
рис. 3.20. Сплошная кривая описывает зависимость промаха от
частоты мерцаний при L = 15 м и при включении в начальный
119
ГЛАВА 3
момент помехового источника, смещенного от центра базы в сто-
рону начального промаха, равнявшегося 60 м. Пунктирная линия
соответствует включению в начальный момент противоположно-
го излучателя, т.е. подтверждается отмеченный выше эффект за-
висимости промаха от начальной фазы помехового воздействия
при малых частотах мерцания.
Синхронная мерцающая помеха препятствует отработке мгновенного
промаха. Однако для исходного образования такого промаха необходи-
мо использовать более сложные законы изменения положения энерге-
тического центра излучения двух помеховых излучателей. Накопление
мгновенного промаха путем увода ракеты по углу за счет действия уво-
дящей по углу помехи, создаваемой из двух точек, обеспечивается при
реализации пилообразного закона изменения углового положения энер-
гетического центра излучения помеховых источников (рп (t).
Сущность нелинейных эффектов, приводящих к росту мгно-
венного промаха, поясняется рис. 3.21.
Для уяснения основных особенностей реализации увода ра-
кеты пренебрегаем анализом переходных процессов в динамиче-
ских элементах контура самонаведения и ограничимся учетом
только кинематических соотношений. Тогда уравнение контура
120
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
________________________Рисунок 3.21______________________
при воздействии помехи (pn(t) в простейшем виде описывается
уравнением
dp + 2d<p=F(kd(<p+<j>„)) (j<0) (3.39)
где выражение в правой части характеризует нормальную к ли-
нии визирования перегрузку ракеты, формируемую на выходе ог-
раничителя перегрузки при воздействии полезного (ф) и помехо-
вого сигналов.
Определим скорость изменения углового помехового воз-
действия из условия реализации максимальной перегрузки Nm :
Nm = kd(<p + <pn\
(3.40)
121
ГЛАВА 3
Из (3.40) следует
kd
(3.41)
Если путем соответствующего изменения мощности двух
источников помех, создаваемых с базы 2£, обеспечить переме-
щение энергетического центра с угловой скоростью фп от, на-
пример первого источника помех ко второму, то ракета начнет
отклоняться от центра базы в направлении второго источника
помех с максимальной перегрузкой . Через интервал времени,
примерно равный 2L/d<pn. положение энергетического центра
совпадет со вторым источником и для повторения цикла увода
необходимо переместить энергетический центр на первый источ-
ник с максимальной угловой скоростью обратного хода
Фпо ~ ^тах > где ^тах ” максимальная скорость поворота угломер-
ного координатора контура самонаведения.
До тех пор, пока имеет место неравенство \фпо\ > \фп\, сигнал
управления на выходе нелинейности F(...) во время обратного
хода энергетического центра будет ограничиваться в общем слу-
чае сильнее, чем во время прямого хода (рис. 3.21,6). За счет это-
го среднее значение сигнала на выходе нелинейности получит
приращение М ^kd (ф л-фп)^ (рис. 3.21,6), вызывающее увод
ракеты в направлении второго источника помех и возрастание
мгновенного промаха.
Наиболее простым законом перемещения энергетического центра, реа-
лизующим накопление мгновенного промаха в течение нескольких
циклов, является линейный пилообразный закон с постоянной частотой
следования циклов увода и с линейным законом перемещения энерге-
тического центра между элементами двухточечной цели на интервале
длительности каждого цикла.
При работе на линейном участке дискриминационной харак-
теристики ГСН такой закон реализуется путем противофазного
изменения мощности излучения каждого элемента парной цели
также по линейному пилообразному закону.
122
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
Кривые (рис. 3.22), полученные с использованием описан-
ной выше модели, показывают для этого случая зависимость ве-
личины увода ракеты за базу двухточечной цели h от частоты
следования циклов помехи. При этом кривая 1 соответствует ве-
личине полубазы помеховых источников L "10 м, для кривой 2
L = 20 м.
По мере возрастания промаха при уводе ракеты под действием помехи
будет иметь место увеличение угловой скорости поворота линии визи-
рования цели ф со знаком, противоположным знаку фп, имевшему
место на интервале прямого хода энергетического центра помехового
излучения.
С учетом этого выражение для угловой скорости перемеще-
ния энергетического центра помеховых источников, обеспечи-
вающей увод ракеты с максимальной перегрузкой \т, вместо
(3.41) следует представить в виде
(3.42)
Выражение (3.42) показывает, что по мере создания помехи
вследствие роста |ф|, обусловленного уводом ракеты, для макси-
123
ГЛАВА 3
мизации мгновенного промаха должна также увеличиваться ско-
рость перемещения энергетического центра |^| на интервале его
прямого хода. Одновременно должна уменьшаться скорость воз-
вратного перемещения энергетического центра в соответствии с
выражением
(3.43)
Время прямого (/я) и обратного (/0) перемещения энерге-
тического центра с одного на другой помеховый источник зави-
сит от дальности г и базы двухточечной цели и определяется
очевидными выражениями:
2L 2L
d\<pn\' to d\<pno\
(3.44)
Из (3.43), (3.44) следует, что длительность помеховых цик-
лов должна изменяться при сближении ракеты с целью в соответ-
ствии с выражением равна
_2L_ !
1
(3.45)
Тп - + zo ~
При этом уменьшение текущей дальности до цели d дейст-
вует в сторону увеличения Тп , в то время как увеличение фп мо-
жет приводить к уменьшению Тп, т.е. закон изменения Тп при
сближении ракеты с целью может иметь достаточно нетривиаль-
ный вид.
Когда |^[ = \фпо\ или, что одно и то же, tn = , т.е. когда ско-
рость перемещения энергетического центра на интервалах прямо-
го и обратного хода сравняется, возрастание мгновенного прома-
ха прекратится, после чего ракета начнет выбирать накопивший-
ся промах. Этому моменту соответствует значение угловой ско-
рости линии визирования, определяемое выражением
1_
(3.46)
124
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
Не следует забывать, что на рассмотренный выше процесс увода раке-
ты существенно влияют как параметры динамических звеньев контура
самонаведения, так и характер процесса разрешения одного из источ-
ников помех, что обусловлено существенной нелинейностью дискри-
минационной характеристики головки самонаведения.
Учет этих факторов и оценку значений промахов ракеты вы-
полним методом имитационного моделирования с использовани-
ем описанной ранее имитационной модели.
Выражение (3.42), описывающее требуемый закон увода (за-
кон перемещения энергетического центра помеховых излучате-
лей), реализуется в модели управлением скоростью изменения
отношения мощностей q двух помеховых источников на интер-
вале длительности цикла увода по закону
(з-47)
При этом q изменяется в пределах от 0 до 1. По завершении
каждого цикла увода (т.е. когда q достигало значения q = 1)
принималось q = Q и начинался следующий цикл увода. Таким
образом, при моделировании время обратного хода энергетиче-
ского центра излучения от одного помехового излучателя до дру-
гого задавалось равным нулю (/0 = 0).
При получении выражения (3.47) мы также не учитывали
инерционность головки самонаведения и корректирующего
фильтра на входе ограничителя перегрузки. Более полный учет
всех этих факторов может потребовать корректировки закона
увода (3.47), что и достигается введением в него некоторого по-
стоянного коэффициента с.
На рис. 3.23 приведена зависимость, характеризующая величи-
ну h увода ракеты за базу двух помеховых источников при законе
увода (3.47) и при вариации значений корректирующего коэффици-
ента с . Кривые 1-4 на этом рисунке получены для значений полу-
базы источников помех L = 5 м, 10 м, 20 м и 30 м соответственно.
На рис. 3.24 в качестве примера показана одна из реализаций
закона увода q(t). полученная на модели при построении кривых
рис. 3.23.
125
ГЛАВА 3
Рассмотренный закон управления источниками помех (3.47) можно от-
нести к классу законов управления с замыканием обратной связи по
эффекту воздействия, в нашем случае - по угловой скорости переме-
щения линии визирования атакующей ракеты ф. Его реализация тре-
бует наличия на защищаемом объекте системы сопровождения по углу
атакующей ракеты.
Сравнение графиков (рис. 3.22 и 3.23) показывает, что значе-
ния максимальных промахов, получаемых при использовании за-
конов перемещения энергетического центра с постоянной длитель-
126
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
ностью цикла увода и с замыканием обратной связи практически
совпадают. Однако закон с замыканием обратной связи может ока-
заться более предпочтительным при отсутствии полной информа-
ции о характеристиках контура самонаведения атакующей ракеты.
Как следует из кривых (рис. 3.22, 3.23), при L = 20 м умень-
шение промаха на 17% обеспечивается при отклонении длитель-
ности цикла помехи (и, соответственно, частоты следования цик-
лов помехи) от оптимального значений на 27%. В то время как
аналогичное уменьшение промаха при использовании закона
управления с замыканием обратной связи обеспечивается при от-
клонении используемого в (3.47) значения максимальной пере-
грузки ракеты Nm от истинного значения на 67%.
Рассмотренные законы перемещения энергетического центра излуче-
ний не исчерпывают все возможности уводящей по углу помехи. Так,
для помехи, соответствующей рис. 3.22, имеет место еще один локаль-
ный максимум эффективности при более высоких частотах следования
циклов увода (рис. 3.25).
При этом кривая 1 получена при L = 20 м, кривая 2 - при
L = 30 м. Кривая 3 получена при L 30 м и при отключении ис-
точника помехи, в сторону которого уводится ракета, за 0,8 с до
расчетного момента встречи ракеты с целью. За счет этого
127
ГЛАВА 3
уменьшается скорость отработки накопившегося мгновенного
промаха после разрешения по углу одного из источников помех,
вследствие чего конечный промах увеличивается в 1,4... 1,5 раза.
На рис. 3.26 для сравнения приведены графики абсолютных
значений промахов ракеты при создании синхронной мерцающей
по меандру помехи с базы 2L = 60 м. Причем на этом рисунке
промахи отсчитывались не от ближайшего к ракете источника
мерцающих помех, как это имело место на ранее приведенных
рисунках, а от центра базы источников помех. Кривые 1-4 соот-
ветствуют частотам мерцаний 0,5, 1, 2 и 3 Гц. По оси абсцисс от-
ложены значения относительной фазы мерцаний J, в качестве ко-
торой принималось отношение величины задержки фиксировано-
го закона мерцаний к длительности одного периода мерцающей
помехи. Причем величина задержки при моделировании вводи-
лась путем эквивалентного изменения начальной дальности пуска
ракеты при фиксированной начальной фазе мерцаний в момент
пуска ракеты. Это, в частности, объясняет некоторую асиммет-
рию хода кривых, приведенных на рис. 3.26.
Графики рис. 3.26 показывают, что синхронная мерцающая
помеха или не обеспечивает увод ракеты за базу источников по-
мех, или величина этого увода не превышает 5...6 м, т.е. по эф-
фективности эта помеха заметно проигрывает рассмотренным
ранее уводящим по углу помехам.
128
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
3.2. Помеховые эффекты
в контуре командного наведения
Динамика контуров командного наведения как в беспомехо-
вой обстановке, так и при воздействии преднамеренных помех
существенно отличается от динамики контуров самонаведения.
Это обусловлено отличием методов наведения, определяющих
закон формирования команды управления ракетой, и достаточно
широким использованием в контурах командного наведения, в
частности, в контурах наведения ПТУР, незамкнутых (неследя-
щих) измерителей угловых координат. Кроме того, в отличие от
контура самонаведения, имеющего нестационарность вида
1/(г0 -/), контур командного наведения с допустимой точностью
может быть представлен при некоторых дополнительных допу-
щениях в виде линейной стационарной системы, что заметно об-
легчает анализ эффектов, обусловленных действием преднаме-
ренных помех.
Рассмотрим основные особенности анализа контуров ко-
мандного наведения при воздействии помех на примере наведе-
ния ракеты на неподвижную цель по методу трехточки. Существо
этого метода состоит в удержании ракеты при ее полете к цели на
линии визирования «пусковая установка - цель».
Для описания процесса наведения воспользуемся прямоуголь-
ной системой координат XOY. начало которой совместим с ме-
стом расположения пусковой установки Р (рис. 3.27): R - ракета
129
ГЛАВА 3
на траектории полета к цели; С - цель; ОМ - ориентация марки
прицела, сопровождающего цель; £>0, d - расстояние от пусковой
установки до цели и ракеты соответственно; / - величина отлета
ракеты от линии визирования цели; Vr, Nr - скорость и попереч-
ное ускорение ракеты соответственно; ср, р, //, 0 - углы, опре-
деляющие соответствующие направления, показанные на рисунке.
Эквивалентная структурная схема контура командного наве-
дения ракеты в одной плоскости по методу трехточки может быть
представлена в виде, показанном на рис. 3.28: И^(р) - переда-
точная функция корректирующего фильтра; - передаточ-
ная функция ракеты с автопилотом; W3(p) - передаточная функ-
ция фильтра, формирующего сигнал ошибки сопровождения це-
ли; £(/) - белый шум, формирующий ошибку сопровождения це-
ли; N - требуемое для наведения по методу трехточки попереч-
ное ускорение ракеты, пропорциональное величине ее отлета от
линии визирования цели; блок 1 - координатор ракеты, форми-
рующий сигнал управления м, пропорциональный линейному
отклонению (отлету) ракеты на траектории от оптической оси
прицела ОМ; блок 2 - блок кинематики, преобразующий попе-
речное ускорение ракеты Nr в ее угловое уклонение р ; блок 3 -
ограничитель нормальной (поперечной) перегрузки ракеты;
Пунктир - возможные линии ввода эквивалентных сигналов
преднамеренных помех срп и возмущений <т, характеризующих
влияние случайной ветровой нагрузки и эксцентриситета силы
тяги двигателя ракеты.
________________________Рисунок 3.28______________________
130
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
При стрельбе по неподвижной или малоподвижной цели
можно пренебречь ошибками сопровождения цели, полагая
// « (р. Если при этом угловая ошибка наведения s = р-(р не вы-
ходит за пределы линейного участка дискриминационной харак-
теристики координатора ракеты, то сигнал управления на выходе
координатора описывается выражением
и = kxsd,
где к} - крутизна линейного участка дискриминационной харак-
теристики, d - расчетная дальность до ракеты, которая может
определяться, например, путем интегрирования по времени из-
вестного закона изменения скорости ракеты.
Сигнал на выходе блока кинематики также может быть оп-
ределен путем деления на d линейного отклонения ракеты / от
линии визирования цели, определяемого путем двойного интег-
рирования поперечной перегрузки Nr. С учетом этих допущений
и эквивалентных структурных преобразований, связанных с вы-
носом множителя d за пределы замкнутого контура, схема кон-
тура командного наведения по методу трехточки преобразуется к
виду, показанному на рис. 3.29: (рп - эквивалентное помеховое
воздействие, приведенное ко входу координатора ракеты, h - ко-
нечный промах, определяемый, как величина отлета ракеты / от
линии визирования цели в конце этапа самонаведения, т.е. при
rf = D0.
Передаточную функцию ракеты с автопилотом W2{p) в пер-
вом приближении можно аппроксимировать колебательным зве-
ном, а передаточную функцию корректирующего фильтра Wx (/?) -
форсирующим и инерционным звеньями:
\<Р>
________________________Рисунок 3.29______________________
131
ГЛАВА 3
) = А(Г1Р + 1) w = —!-----—. (3.48)
' Т2р + \ 2УР> T2p2+^rTrp + \
Здесь к - коэффициент усиления разомкнутой петли контура на-
ведения.
Таким образом, как следует из рис. 3.29, контур командного
наведения с хорошим для целей исследования слабых по эффекту
преднамеренных помех приближением может рассматриваться
как линейная стационарная система с астатизмом второго поряд-
ка, обеспечивающим отработку без ошибок по промаху как на-
чального положения цели, так и ее поперечного перемещения с
постоянной скоростью.
Существует несложная инженерная методика, позволяющая
выбирать параметры передаточной функции корректирующего
звена W^p), обеспечивающие приемлемое качество регулирова-
ния в линейных динамических системах.
Для обеспечения устойчивости и хорошего качества пере-
ходного процесса логарифмическая амплитудная характери-
стика (ЛАХ) разомкнутого контура £(бу) должна иметь доста-
точно протяженный линейный участок, пересекающий ось абс-
цисс на частоте среза а>с с наклоном 20 дБ/дек (децибел на де-
каду) [10, 11]. Причем, если бц, а)2 - точки перегиба асимптоти-
ческой ЛАХ, лежащие слева и справа от сос. то они должны
удовлетворять условиям
а>с I а\ =2...3; би^/бУс>3. (3.49)
Частота среза а>с примерно соответствует ширине полосы
пропускания замкнутого контура наведения.
Пусть параметры передаточной функции ракеты с автопило-
том J^2(p) имеют следующие значения: Тг = 0,1 с, ег =0,75. Не-
трудно убедиться, что передаточная функция корректирующего
звена, удовлетворяющая приведенным выше требованиям к ЛАХ,
должна иметь вид
(3.50)
Г2Р + 1 0,05р + 1
132
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
Рисунок 3.30
Асимптотическая ЛАХ разомкнутого контура с указанны-
ми значениями параметров передаточных функций показана на
рис. 3.30. Причем координаты характерных точек перегиба этой
ЛАХ связаны с параметрами передаточных функций звеньев кон-
тура наведения следующими зависимостями:
Соответствующие импульсная реакция бу(г) и переходный
процесс Л(г) замкнутого контура командного наведения со вхо-
дом по углу (р и с выходом по углу р показаны на рис. 3.31, 3.32.
(О.
Рисунок 3.31
133
ГЛАВА 3
Передаточная функция замкнутого контура со входом по уг-
лам (р. фп или 8 и с выходом по углу р имеет вид
_ ,,5п
р2+1ГМИ'1(рУ
Достаточно большое перерегулирование и колебательность
переходного процесса, показанного на рис. 3.32, связана с нали-
чием двойного интегратирующего звена в схеме рис. 3.29. При
передаточной функции корректирующего звена опреде-
ляемой выражением (3.48), условие ^/^>3 (3.49) не может
быть выполнено. Это подтверждает и анализ ЛАХ (рис. 3.30).
Также можно заключить, что это условие будет выполнено и пе-
ререгулирование переходного процесса уменьшится, если вклю-
чить в состав корректирующего фильтра дополнительные форси-
рующие звенья со значениями постоянных времени, близкими к
величине Тг.
Статистические характеристики промаха при поступлении на вход кон-
тура случайных воздействий могут быть оценены с использованием ме-
тодов статистической динамики стационарных линейных систем.
Так, дисперсия промаха при подаче на вход контура ко-
мандного наведения случайного помехового воздействия со спек-
тральной плотностью g(<y) определяется с помощью выражения
134
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
4-оо
d2h = Dl jg(a>)\F(»|2 da). (3.52)
Если координатор ракеты измеряет ее угловое положение по
сигналу бортового излучателя (БИ) ракеты, то эффективное по-
давление контура командного наведения помехами обеспечивает-
ся имитирующей помехой, создаваемой путем размещения на за-
щищаемом объекте помехового источника, имитирующего излу-
чение БИ. При больших значениях отношения помеха/сигнал q.
под которым здесь будем понимать отношение облученности
входного зрачка координатора помеховым сигналом к облучен-
ности зрачка излучением БИ ракеты, и в случае смещения поло-
жения помехового источника от точки прицеливания координа-
тора на рассеяние А, на вход координатора ракеты будет посту-
пать постоянный помеховый сигнал срп = b/DQ .
При скорости полета Vr и коэффициенте усиления разомк-
нутого контура наведения к под действием помехового сигнала
(рп ракета начнет отклоняться от линии визирования цели в попе-
речном направлении с ускорением
(3.53)
Тогда линейное отклонение ракеты от линии визирования /
составит:
7(/) = [ Lvr (х,) dxxdx2 = (3.54)
о °
и промах в конце этапа наведения, т.е. при t-D^IVr = /0, будет
равен
Л = = (3.55)
6^2 6 0
Так, при £ = 4-^, 6 = 1 м, Го =10 с промах h может доста-
ет
гать величины порядка 60.. .70 м.
135
ГЛАВА 3
При полете ракеты к цели, вследствие ее удаления от пуско-
вой установки, отношение облученности входного зрачка коор-
динатора помеховым излучателем к облученности излучением
БИ изменяется в широких пределах, увеличиваясь с удалением
ракеты от пусковой установки. Кроме того, дискриминационная
характеристика координатора ракеты существенно нелинейна,
что начинает проявляться при больших значениях /(/). Более
полный учет влияния на промах ракеты этих и других факторов
(например, переходных процессов в динамических элементах
контура наведения) может быть выполнен методами имитацион-
ного моделирования.
Схема имитационной модели контура командного наведе-
ния, разработанная в среде Matlab, показана на рис. 3.33 в графи-
ческом представлении пакета Simulink.
Схема рис. 3.33 отличается от схемы рис. 3.10,6/ алгоритма-
ми, реализованными в блоках 7, 3, 7 и параметрами передаточных
функций блоков 2, 5. Структура блока кинематики (блок 7) ана-
логична представленной на рис. 3.10,6, но отличается алгоритмом
работы блока 77, на выходе которого формируются текущие зна-
чения относительных углов визирования ракеты = р-(р) и
помехового источника ( 8г - рп - ср) с пусковой установки с по-
мощью выражений, подобных 3.21. Кроме того, в этом же блоке
определяется текущее значение расстояния d{t) от пусковой ус-
тановки до ракеты.
В блоке 1 формируется выходной сигнал w(z) не охваченно-
го обратной связью координатора ракеты с помощью выражения
________________________Рисунок 3.33_____________________
136
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
(3.22) при т - 2,5-10 9, и = 2,4-10 10, q(t) = qxd2(t)/. что со-
ответствует ширине дискриминационной характеристики коор-
динатора 20' при его работе по одному источнику излучения, т.е.
при qx = 0 (q{ - отношение силы излучения помехового источ-
ника к силе излучения бортового излучателя ракеты). Коэффици-
ент усиления блока 3 выбран таким, чтобы коэффициент усиле-
ния разомкнутого контура к = 4.
На рис. 3.34, 3.35 приведены полученные методом имитаци-
онного моделирования для различной дальности пуска DQ гра-
фики зависимости конечного промаха ракеты h от отношения qx
силы излучения источника помех к силе излучения БИ.
Графики показывают, что промахи возрастают почти про-
порционально смещению b положения помехового источника от
точки прицеливания координатора ракеты.
При одних и тех же значениях отношения помеха/сигнал qx промахи
также увеличиваются при увеличении дальности пуска г0 . Это объяс-
няется тем, что при увеличении дальности пуска увеличивается интер-
вал времени полета ракеты, на котором отношение помеха/сигнал q
превышает некоторое (любое) пороговое значение.
137
ГЛАВА 3
3.3. Помеховые эффекты
в следящих измерителях координат
3.3.1. Следящий измеритель
Широкое использование в ВТО находят следящие измерите-
ли угловых координат, типичными представителями которых яв-
ляются головки самонаведения (ГСН). Независимо от физической
природы используемых для измерения угловых координат сигна-
лов и от типов фотоприемных устройств укрупненная схема го-
ловки самонаведения в предположении идеальной работы систе-
мы угловой стабилизации (гиростабилизации), может быть пред-
ставлена в виде, показанном на рис. 3.36: (p(j) - угол, характери-
зующий направление на цель; 7 - угловой дискриминатор, на вы-
ходе которого формируется функция сигнала рассогласования
= <p(t) - cph (/) (дискриминационная характеристика J(^));
2 - фильтр с передаточной функцией 3 - оконечное ис-
полнительное устройство, выполняющее разворот на угол cph (t)
оптической оси ГСН (двигатель или гироскоп, прецессирующий
под воздействием датчика моментов и т.п.) с передаточной функ-
цией, близкой к передаточной функции интегратора 1/р.
138
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
________________________Рисунок 3.36______________________
В контурах самонаведения по методу пропорциональной на-
вигации для управления ракетой используется сигнал со входа
блока 3, равный, как нетрудно уяснить из рис. 3.36, производной
сигнала cph.
Дискриминационная характеристика, формируемая в блоке /,
определяется характеристиками фотоприемного устройства и по-
следующих устройств обработки, выделяющих сигнал рассогла-
сования, закодированный в оптическом излучении, поступающем
на вход головки самонаведения. Типовой вид дискриминацион-
ной характеристики представлен на рис. 3.11. В области малых
углов рассогласования имеет место линейная зависимость сигна-
ла d на выходе дискриминатора от сигнала рассогласования в.
При этом головка самонаведения может рассматриваться как ли-
нейная следящая система с астатизмом первого порядка, что оп-
ределяется наличием одного интегратора в передаточной функ-
ции разомкнутой петли Wh (р):
w„(
р
где kv - коэффициент усиления разомкнутой петли слежения,
учитывающий и крутизну линейного участка дискриминацион-
ной характеристики.
Для анализа процессов воздействия помех на ГСН в этом
случае могут использоваться методы качественного и количест-
венного анализа линейных стационарных динамических систем
[8, 10, 11]. Приведем только некоторые простые зависимости, ко-
торые удобно использовать при выполнении экспресс анализа и
синтеза таких систем.
139
ГЛАВА 3
В установившемся режиме после затухания переходных
процессов системы с астатизмом первого порядка отрабатывают
постоянное входное воздействие (p{t) = const без ошибок. Уста-
новившаяся ошибка слежения при отработке постоянной скоро-
сти изменения входного воздействия (ф = const) равна 8-ф!kv.
Показатели устойчивости замкнутой системы слежения оп-
ределяются распределением корней знаменателя ее передаточной
функции
При этом нередко ближе к мнимой оси располагается пара
комплексно-сопряженных корней, а остальные корни находятся
на удалении от мнимой оси. В этом случае передаточная функция
замкнутой системы может быть приближенно представлена коле-
бательным звеном
гт~,2 2 . о с т 1
Р + ^shThP + 1
(3.56)
Характеристики переходного процесса такой системы опре-
деляются следующими выражениями:
-резонансная частота колебаний
Th ’
- период колебаний
аО”’
- декремент затухания, равный отношению амплитуд коле-
баний на соседних периодах
Если передаточная функция разомкнутой системы
Wh(p) = Kv/p(Tp + \),
140
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
то передаточная функция замкнутой системы точно описывается
выражением (3.56) (см. например, схему модели ГСН (рис. 3.10).
Для того чтобы уменьшить ошибки слежения за полезным сигна-
лом при одновременной эффективной фильтрации высокочастот-
ных помех, спектр которых лежит вне полосы спектра полезного
сигнала, и при сохранении хорошего качества переходного про-
цесса, используют передаточные функции разомкнутой системы
более сложного вида. Так, в [11] в качестве типовой рассматрива-
ется Wh(p^ вида
w„ (р) = (з 57)
Асимптотическая ЛАХ, соответствующая передаточной
функции (3.57), приведена на рис. 3.37.
Как отмечалось в 3.2, для обеспечения устойчивости и хоро-
шего качества переходных процессов в замкнутой системе ЛАХ
должна пересекать ось абсцисс участком с наклоном -20 дБ/дек, а
частота перегибов ЛАХ должна удовлетворять соотношениям [11]:
= £к = 2..,3; — >3; ^->2,..., (3.58)
®i ®г <*>с
где а>с - частота среза (частота, на которой ЛАХ пересекает ось
абсцисс).
141
ГЛАВА 3
На рис. 3.38 приведен график переходного процесса замкну-
той системы слежения для случая, когда Wh(p) удовлетворяет
выражениям (3.57, 3.58), причем а>с = 20 с-1, kv - 40 с-1.
Необходимо иметь ввиду, что при неудачном подборе частоты перегиба
ЛАХ следящая система с Wh (р) типа (3.57) может приобрести свойст-
ва условно-устойчивой системы, особенностью которой является то,
что она может потерять устойчивость не только, как обычно, при уве-
личении kv, но также и при уменьшении kv.
3.3.2. Разрешение парной цели
Нелинейность дискриминационной характеристики опреде-
ляет основные особенности функционирования ГСН при сопро-
вождении парной цели.
На рис. 3.39 представлена совокупность дискриминацион-
ных характеристик, полученных с использованием выражения
(3.22) при различном угловом расхождении cpL элементов парной
цели ^(pL = |^| -^2|) и ПРИ равенстве энергий излучения элементов
парной цели (q -1 ). Кривая 1 соответствует случаю наблюдения
одноэлементной цели (cpL - 0), для кривых 2-5 (pL принимало
142
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
значения 0,05 рад, 0,075 рад, 0,1 рад и 0,2 рад соответственно. По
оси абсцисс на рис. 3.39 отложено угловое рассогласование е
между оптической осью ГСН и направлением на центр парной
цели. Кривые 2, 3 показывают, что при увеличении (pL происхо-
дит уменьшение крутизны дискриминационной характеристики
kd/ks в окрестности точки в = 0 с последующей переменой зна-
ка крутизны с положительного на отрицательный.
Одновременно появляются два участка дискриминационной
характеристики с положительной крутизной, расположенные в
окрестности направления на первый и второй элементы парной
цели. Это приводит к неустойчивости сопровождения центра
парной цели и переходу ГСН к сопровождению одного из двух
образующих ее элементов. В процессе полета УР при ее наведе-
нии на парную цель имеет место увеличение угловой базы пар-
ной цели вследствие уменьшения текущей дальности до нее. При
этом дискриминационная характеристика ГСН последовательно
во времени претерпевает трансформацию, иллюстрируемую кри-
выми рис. 3.39, и после достижения некоторой дальности насту-
пает разрешение одного из элементов парной цели и почти скач-
кообразный переход ГСН на сопровождение этого элемента.
Анализ получающихся при этом промахов УР выполнен в 3.1.4.
Рисунок 3.39
143
ГЛАВА 3
3.3.3. Метод статистических эквивалентов
Когда на вход ГСН поступают случайные воздействия, сигнал на выхо-
де дискриминатора может быть представлен некоторым случайным
процессом, характеристики которого в общем случае могут зависеть не
только от характеристик входных случайных сигналов и времени, но и
от текущих значений ошибок сопровождения полезного и (или) по-
мехового сигналов.
Аналитическое исследование поведения замкнутой ГСН в
этом случае представляет определенные трудности, а строгое ре-
шение задачи оценки эффективности помех во многих случаях
оказывается вообще невозможным. Приближенный подход к ана-
лизу поведения следящих измерителей при наличии случайных
воздействий, основанный на использовании метода статистиче-
ских эквивалентов, развит в [12]. Существо метода статистиче-
ских эквивалентов состоит в следующем.
При наличии случайных входных полезного и (или) помехо-
вого сигналов в случайном процессе на выходе дискриминатора
можно выделить медленную квазидетерминированную и
более быструю флуктуационную составляющие. В качестве ква-
зидетерминированной составляющей d(£,/) рассматривается ма-
тематическое ожидание сигнала на выходе дискриминатора, оп-
ределяемое по ансамблю реализаций :
J(f,z) = Л/(«(£,/)). (3.59)
Составляющая рассматриваемая как функция ошиб-
ки сопровождения е, получила название дискриминационной ха-
рактеристики и является статистическим эквивалентом дискри-
минационной характеристики, обсуждавшейся выше.
Основной характеристикой флуктуационной составляющей
является корреляционная функция сигнала и(^,/):
= МJ(^,/))(w(^J + t)-d(c,t + r))^ . (3.60)
Ширина спектра флуктуационной составляющей определя-
ется малой инерционностью структурных элементов дискрими-
144
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
натора, увязанной со спектром быстрых флуктуаций обрабаты-
ваемых входных сигналов. В то же время, полоса пропускания
замкнутой системы измерителя согласуется с динамикой воз-
можного относительного пространственного маневра цели и по-
этому, как правило, бывает заметно уже ширины спектра быст-
рых флуктуаций. Поэтому флуктуационную составляющую с
приемлемой точностью можно считать белым шумом с двухсто-
ронней спектральной плотностью, определяемой выражением
+оо
<^=0=
(3.61)
Функция N(e9t) получила название флуктуационной ха-
рактеристики.
Теперь статистический эквивалент сигнала на выхо-
де дискриминатора можно записать следующим образом:
пе (^,r) = d(^,/) + (3.62)
где £(/) - белый шум с единичной спектральной плотностью.
При наличии на входе дискриминатора п сигналов (целей),
е в выражениях (3.59)-(3.62) следует рассматривать как вектор с
п составляющими (е = ••£„)), где =срг ~(ph, или в вектор-
ной форме £ = <р - (ph, где ф = (ср^...срп) - вектор с составляющими
определяющими направление на z-ю цель. С учетом (3.62)
эквивалентная схема ГСН может быть представлена в виде, пока-
занном на рис. 3.40.
________________________Рисунок 3.40______________________
145
ГЛАВА 3
Аналитические исследования особенностей функционирования ГСН с
приведенной эквивалентной схемой связаны с определенными трудно-
стями и требуют, как правило, использования дополнительных допу-
щений.
Математически строгое определение изменяющегося во
времени одномерного закона распределения фазовых координат
системы (рис. 3.40) сводится к решению соответствующего урав-
нения Фоккера-Планка—Колмогорова (ФПК). В простейшем слу-
чае, когда W(р) = к, система (рис. 3.40) описывается следующим
стохастическим дифференциальным уравнением:
£ = #(£,/) + />(£,/)£(/), (3.63)
где a^s.t) = -к d(s,t) + <p(t); b(e,t) = к N(e,t)i/2.
Уравнению (3.63) соответствует уравнение ФПК [12-15] от-
носительно искомой плотности распределения ошибки сопрово-
ждения
^7^=-^-(«(^0/(^0)+|тт(й2 • <3-64)
ot os 2 де
Уравнение ФПК - это уравнение в частных производных па-
раболического типа. Его аналитическое решение даже в рассмат-
риваемом простейшем случае получить не удается и приходится
прибегать к использованию численных методов. Универсальным
методом его численного решения, хорошо согласованным с фи-
зическим существом рассматриваемых нами задач, является ме-
тод Монте-Карло. Он состоит в использовании имитационной
модели, алгоритм которой реализует выражение (3.63), т.е. в ис-
пользовании имитационной модели исходной системы слежения,
и в наборе и обработке статистики на множестве реализаций фи-
гурирующего в (3.63) белого шума .
Имитационное моделирование динамических систем, опи-
сываемых системой обыкновенных дифференциальных уравне-
ний, сводится к реализации на цифровой вычислительной техни-
ке тех или иных существующих и достаточно детально описан-
ных в литературе алгоритмов численного решения дифференци-
альных уравнений.
146
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
Исследование исходной динамической системы с непрерывным време-
нем заменяется численным исследованием некоторой эквивалентной в
том или ином смысле системы с дискретным временем. Моделирование
динамических систем, описываемых стохастическими дифференциаль-
ными уравнениями типа (3.63), дополнительно предполагает необходи-
мость корректного воспроизведения при моделировании соответст-
вующих реализаций белого шума £(/).
Белый шум при моделировании обычно воспроизводится
случайным дискретным процессом с некоррелированными отсче-
тами. При этом необходимо установить соответствие между дис-
персией отсчетов дискретного шумового процесса и спектраль-
ной плотностью исходного белого шума. В [42] на основе анализа
предельного перехода к белому шуму от его допредельной дис-
кретной модели показано, что если N - спектральная плотность
белого шума, то дисперсия а2 некоррелированных отсчетов его
дискретного аналога при моделировании выбирается в соответст-
вии с выражением а2 = А'/А , в котором А - шаг дискретизации,
т.е. для одной и той же спектральной плотности белого шума
дисперсия отсчетов его дискретной модели зависит от шага мо-
делирования и должна изменяться с изменением этого шага.
Применительно к представлению уравнения (3.63) в форме
дифференциалов такая модель реализует приращение на каждом
шаге чисто диффузионного процесса с дисперсией этого прира-
щения, равной произведению спектральной плотности шума на
шаг счета.
В случае пространственного белого шума с корреляционной
функцией А д(х)д(у) дисперсия независимых случайных отсче-
тов его дискретного аналога определяется выражением
ст2 = Nl&xky , в котором Ах, А^ - шаги дискретизации про-
странства по координатам х и у.
Возникает естественный вопрос: стоит ли заниматься в
дальнейшем весьма трудоемкими аналитическими исследования-
ми, если для получения количественных оценок все равно прихо-
дится прибегать к имитационному моделированию. Не лучше ли
ограничиться использованием для оценок эффективности помех
универсальных методов имитационного моделирования. Тем бо-
147
ГЛАВА 3
лее, что в распоряжении исследователей имеются такие совре-
менные программные продукты (как Matlab), многократно
уменьшающие сроки разработки имитационных моделей и, в ча-
стности, обеспечивающие использование высокопроизводитель-
ной технологии визуального моделирования Simulink.
Безусловно, там, где речь идет об оценке эффективности ре-
альных образцов техники в конкретных условиях ее применения
и тогда, когда все необходимые характеристики этих образцов
доступны исследователю, методы имитационного моделирования
являются основными и их преимущества вполне очевидны. Од-
нако уяснение физического существа процессов в исследуемых
системах невозможно без использования аналитических, в том
числе и приближенных, методов исследования. Более того, осо-
бое значение при этом приобретают способы такого максималь-
ного упрощения решаемой задачи, которое позволяет получить
конечный результата в виде явного выражения, то есть в замкну-
том виде. По нашему мнению, именно такой комплексный под-
ход обладает значительным эвристическим потенциалом и созда-
ет необходимую основу для дальнейшего развития соответст-
вующей предметной области, в нашем случае - для развития про-
блематики создания преднамеренных оптических помех.
3.3.4. Дискриминационная и флуктуационная
характеристики
Основные особенности определения дискриминационной и
флуктуационной характеристик рассмотрим на примере ГСН с
четырехквадратным фотоприемным устройством (ФПУ). Та-
кие устройства имеют, в частности, полуактивные лазерные го-
ловки самонаведения (ПЛГС).
На рис. 3.41 приведено изображение четырехквадрантного
фотоприемника и двух показанных сплошной линией и пункти-
ром сигналов (например, сигнала цели и помехи), спроектиро-
ванных на него оптической системой ФПУ.
Радиусы г пятен целевого и помехового сигналов равны и
определяются фокусным расстоянием оптической системы ФПУ
и, как это имеет место в ПЛГС, величиной смещения плоскости
фотоприемника от фокальной плоскости. Обозначим с^е^ cify)
148
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
Рисунок 3.41
показанные штриховкой площади сегментов первого и второго
пятна соответственно, проектируемых на 1-й и 4-й квадранты.
Тогда суммарный сигнал с выходов квадрантов 1, 4 в предполо-
жении взаимной некогерентности принимаемых сигналов запи-
шется так:
5] =1с^)Ех + Ic(s2)E2
(3.65)
Здесь I - крутизна кривой световой чувствительности фотопри-
емника; Е{, Е2 - облученность фотоприемника первым и вторым
сигналом соответственно.
Аналогично запишется выражение суммарного сигнала с
выхода квадрантов 2, 3 фотоприемника:
s2 -1(лг2 +/(ят2 ~с(^2))£2. (3.66)
При использовании суммарно-разностной обработки сигнал
на выходе горизонтального канала дискриминатора запишется
так:
S| -s2 _ (2c(g|)-^-r2)£'i +(2c(g2)-zrr2)f2
5(+s2 лт2(£1 + Е2)
(3.67)
В общем случае Е}, Е2 следует рассматривать как реали-
зацию некоторых случайных (флуктуирующих) процессов.
Конкретизируем дальнейшие выражения для случая, когда кор-
149
ГЛАВА 3
реляционные функции этих случайных процессов имеют вид
7?z(r) = of ехр(-Д|г|), а математические ожидания принимают
значения ах, а2 соответственно. Если выполняются условия
ах > ЗсГ}, а2 > Зс>2, то знаменатель выражения будет слабофлук-
туирующим, и его вполне допустимо заменить выражением
яг2 (а2 + ). С учетом этого выражение для дискриминационной
характеристики примет вид
= М{п) = лг2}ах + {2с(£2)-ят2)а2),
(3.68)
где
яг (ах+а2)
Обычно взаимная корреляция процессов Ех, Е2 отсутствует:
л/(£1(/)£2(/+г)) = о.
С учетом этого выражение (3.60) для корреляционной функ-
ции сигнала п на выходе дискриминатора запишется так:
R(£,т) - Ь2Ц2с(£]) - яг2)2R} (г) + (2с(£2) - яг2)2 R2(г)). (3.69)
И тогда для флуктуационной характеристики, определяемой
выражением (3.61), получим:
К(£',£2) = Ь2 (2с(£1)-яг2)2=^- + (2с(£2)-яг2)2=^- .(3.70)
Р\
Pl
В области небольших ошибок сопровождения
(sj < г / 2,6*2 < г / 2) выполняется приближенное равенство
2c(6*z )-лт2
(3.71)
с учетом которого выражения для дискриминационной и флук-
туационной характеристик существенно упрощаются:
~~—е2
\а}+ а2 ах+ а2
150
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
Л’(^,г2) =
К2 (2af
(ог1+ог2)21а
2сг2 2 ^
+ —-£2 .
A 2J
(3.73)
Здесь К =4/(яг) - крутизна дискриминационной характеристики
при работе по одиночной цели.
В случае когерентных целевого и помехового сигналов не-
обходимо учитывать волновой характер поля, поступающего на
элементы четырехквадратного фотоприемника.
При этом выражения суммарного поля полезного и помехо-
вого сигналов, поступающего на 1 -й и 4-й, а также квадранты 2 и 3
фотоприемника соответственно по аналогии с (3.65), (3.66) при-
мут вид:
5, = yjcfa )Д (z)cos(ty/ + (/)) + ^с(^2)Л2 (f)cos(tyr + (рг (/)),
s2 = )АХ (r)cos(ty/ + (рх (/)) +
+^лт2 -с(^2)Л2 (/)cos(ty/ + ^2(r)).
(3.74)
Здесь со - несущая частота, Ц(/), $(/) - случайные амплитуда и
фаза принимаемых сигналов (плоской волны) wz = Д cos(ty/ + ^(0) •
Существующие фотоприемники реагируют на энергию
(мощность) поступающих сигналов. Поэтому при использовании
суммарно-разностной обработки сигнал на выходе дискримина-
тора в этом случае представляется выражением
2 _ 2
<3-75)
г+^2
При раскрытии (3.75) будем учитывать, что в выражениях типа
sf = с(^)Д2(/)сО82(бУ^ + ^(/)) +
+с(^2 )^2 WcOS2 (tyf + <р2 (/)) +
+21Ус(^1)с(^2)Д2 (t) A2 (z)cos(^ (/) - <р2 (/)) X
xcos(2eut + (рх (/) + ср2 G))
151
ГЛАВА 3
последнее быстро (с частотой 2еи) осциллирующее слагаемое бу-
дет отфильтровано инерционностью фотоприемного устройства,
и поэтому может быть отброшено. По этой же причине cos2(...) в
последующих выражениях заменим его средним значением, рав-
ным 0,5. Тогда выражение (3.75) преобразуется к виду
(2с( ) - лт2 ) Л2 (/) + (2с(^2 ) ~ ) Л2 G)
тгг2(д2 (г) -ь Лз (/))
В области небольших ошибок слежения справедливо выра-
жение (3.71). И тогда
(42(/)g1 + ^(/)g2y
где К определено выше.
Рассмотрим случай, когда амплитуда полезного сигнала А}
распределена по закону Рэлея, а амплитуда помехи Л2 = const.
Тогда дискриминационная характеристика ГСН с четырехквад-
ратным ФПУ определяется выражением
,г2) = |и(4 )(Л, / <т2 ) ехр (- Л2 /2сг2) dA}.
о
Воспользовавшись [18], получим [16]:
d(£],£2) = А7 + Л2£2),
= qeqEi(-q) + l, (3.77)
^2=1-^.
Здесь q - Л2 / 2сг2 - отношение мощностей флуктуирующего и
нефлуктуирующего сигналов; Ei(-q) - интегральная показа-
тельная функция.
Используя разложение в ряд по ортогональным полиномам
Ляггера L® [17] для двумерной рэлеевской функции распределе-
ния и заменяя двухкратный интеграл квадратом двойного, полу-
152
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
чим выражение для корреляционной функции центрированного
сигнала на выходе дискриминатора:
Л(г) = ^Л1(г)2л х
2
Здесь 7?] (г) - огибающая корреляционной функции сигнала щ.
Используя [18], после необходимых преобразований полу-
чим [16]:
я(г)=к2(£х-е2)2^М2п с2„,
п={
^к\к\(п-к)\
А+1
(-1/qk+le«Ei(-q ) + £(/ - 1)!(-?)А+'~'
/=|
(3.78)
Тогда флуктуационная характеристика, определяемая соот-
ношением (3.61), примет вид
a(£1,£2) = a:2z>(^-^2)2,
(3.79)
где
Ь = —У —, если А‘1(г) = ехр(-/?||г|), (3.80)
П=1 ”
Ь =
, если /?] (г) = ехр(-/?2г2/4).
(3-81)
Аналогичные характеристики могут быть получены и тогда,
когда и Л, и А2 распределены по закону Рэлея. Дискриминаци-
онная характеристика описывается в этом случае выражением,
совпадающим с (3.77). Однако в нем
153
ГЛАВА 3
9-11 ?-iJ
2/2
? = <Т2/СГ1 •
(3.82)
Корреляционная функция может быть представлена так:
R(t) = К2-ег )2^^С„2К2п(t)R2‘!(r),
п=0 /=0
= у и!(-1/ , Hiy ;!(£ + j + l)!(-l)J+l
' ^y!j!(/-j)!(A: + j + 2)
xF(l,k + j + 2;k + j + 3;l-g) +
/с+1
+]Г(/- 1)!(-9)*+,-zF(-i,k-I + 2;l;l)0t + 1-7)! ,
/=1
(3.83)
где и + z^O; F - гипергеометрическая функция; Т?1(г),Л2(г) -
огибающие корреляционных функций сигналов. При
Я1(г) = ехр(-Д|г|), R2(t) = ехр(-/?2|г|) получим выражение для
флуктуационной характеристики, аналогичное (3.79), в котором
b = У У —’
(3.84)
где n + i *0.
Таким образом, с точностью до принятых при анализе до-
пущений дискриминационная характеристика есть линейная
функция ошибок сопровождения исходных сигналов, а флуктуа-
ционная характеристика есть функция квадрата разности этих
ошибок. Полученные соотношения можно использовать для оп-
ределения точностных характеристик сопровождения следящим
измерителем любого из сигналов, а также для определения веро-
ятности перехода в режим сопровождения одного из входных
сигналов.
154
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
3.3.5. Срыв слежения
в следящих измерителях координат
Ограниченный размах дискриминационной характеристики
приводит к тому, что при воздействии достаточно мощной шумо-
вой помехи может иметь место выход ошибки сопровождения
полезного сигнала за ее пределы. При этом в выходном сигнале
дискриминатора пропадает полезный сигнал, т.е. составляющая,
способствующая возвращению ошибки сопровождения в область
нулевых значений. Перевод ГСН в такое состояние называют
срывом слежения.
Для определения вероятности срыва слежения необхо-
димо иметь плотность распределения ошибки сопровождения
/(«?,/), параметрически зависящую от времени t:
8
PS^ = \- \f(^t)d£. (3.91)
-8
Плотность распределения координат нелинейных динамиче-
ских систем при воздействии шумовых помех в общем случае
определяется решением соответствующего уравнения Фоккера-
Планка-Колмагорова (ФПК) (3.64).
Рассмотрим воздействие на систему (рис. 3.40), описывае-
мую уравнением (3.63), белого шума с постоянной спектральной
плотностью Ar(^,/) = N = const. Уравнение ФПК, соответствую-
щее этому случаю, имеет вид
5^1 = + (3.92)
dt dsv 7 2 ds
Точное нестационарное аналитическое решение уравнения
ФПК даже в рассматриваемом простейшем случае получить не
удается. Стационарное решение этого уравнения при / —> оо и при
<jM = const = 0 (f(s)~/(^,Г-»оо)) можно найти, приравняв его
левую часть нулю:
2С
/U) = -2—ехр
kN
о 7
(3.93)
155
ГЛАВА 3
Здесь С определяется из условия нормировки площади под кри-
вой /(<?) к единице. В случае, когда дискриминационная харак-
теристика задается выражением (3.22) при д = 0, получим окон-
чательно
/•/ \ 2С Г 1,4 £ _..
f\£) = —z—ехр —arctg— . (3.94)
k2N VkN 8 )
При £ —> ±оо /(^) принимает конечное значение, равное
2С 0,7^
—ехр------.
k2N kN
Это выражение свидетельствует, с одной стороны, о том, что /(б*) не
может быть пронормирована к единице, поскольку площадь под кривой
/(б*) равна бесконечности, и, с другой стороны, о том, что при доста-
точно большом времени наблюдения при любых, в том числе малых
значениях спектральной плотности шума N, ошибка слежения будет
выходить за пределы дискриминационной характеристики, т.е. с веро-
ятностью, равной единице, будет иметь место срыв слежения. Причем,
как нетрудно заметить, такой результат будет иметь место при любой
форме дискриминационной характеристики с линейным участком в ок-
рестности нулевых ошибок слежения и с одним пересечением оси абс-
цисс в точке £ = 0.
Стационарное решение уравнения ФПК не содержит инфор-
мацию о временных характеристиках процесса срыва слежения,
наиболее важных при исследовании эффективности преднаме-
ренных помех. Одним из приемов введения в рассмотрение вре-
менных зависимостей является трактовка срыва слежения как
первого достижения траекторией исследуемого процесса некото-
рой границы. При этом задача о первом достижении границы
формализуется как первая граничная задача (задача с поглощаю-
щими границами) уравнения ФПК.
В литературе (см. например, [21]) приводятся приближенные
методы ее решения. Однако они дают приемлемые по точности
результаты при исследовании достаточно малых вероятностей
срыва слежения (порядка 0,2 и менее). Да и сама трактовка веро-
156
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
ятности срыва как вероятности первого достижения ошибкой
слежения некоторой границы не вполне удовлетворяет задачам
исследования преднамеренных помех.
Такая трактовка относится к случаю, когда замкнутая петля
слежения ГСН принудительно размыкается из-за соответствую-
щего срабатывания схем селекции или специальных схем поме-
хозащиты ГСН, а момент срабатывания этих схем определяется
моментом достижения ошибкой слежения определенного порого-
вого уровня.
Во многих случаях исследования воздействия преднамерен-
ных помех требуется иметь закон распределения ошибки слеже-
ния в произвольный момент времени, чаще всего в момент вы-
ключения преднамеренной помехи.
При этом под вероятностью срыва будем понимать не вероятность
первого достижения ошибкой слежения некоторой границы, а вероят-
ность того, что ошибка слежения находится за пределами этой границы
в некоторый момент времени t. Для определения так интерпретируе-
мой вероятности срыва слежения необходимо иметь нестационарную
плотность распределения /(^,/), определяемую как решение задачи
Коши (задачи с начальными условиями, но без граничных) для соответ-
ствующего уравнение ФПК, в нашем случае - для уравнения (3.92).
В связи с отсутствием аналитических решений уравнения
ФПК обратимся к численным методам. Воспользуемся методом
Монте-Карло решения уравнения (3.92), состоящем в имитаци-
онном моделировании функционирования системы (рис. 3.40)
при воздействии шумовой помехи со спектральной плотностью
N. При этом не восстанавливая по результатам моделирования
вид закона распределения , будем сразу оценивать интере-
сующую нас вероятность срыва слежения рс (/), определяемую
выражением (3.91).
Пусть дискриминационная характеристика d(e) описывает-
ся выражением (3.22) при g = 0,a W(p)-k-\ (рис. 3.40). Тогда
коэффициент усиления разомкнутой системы (рис. 3.40)
кх. =10 рад/с. Для этого случая на рис. 3.42 представлено семей-
157
ГЛАВА 3
ство графиков, характеризующих зависимость вероятности срыва
слежения, т.е. вероятность выхода ошибки слежения г за преде-
лы апертуры дискриминационной характеристики 23 = 0,25 рад,
от времени действия и от спектральной плотности шумов N,
приведенных к выходу дискриминатора. Поскольку размерность
сигнала на выходе дискриминатора рад/с, то размерность спект-
ральной плотности шумов на рисунке рад^с.
На рис. 3.43 эти же графики представлены в более детальном
временном масштабе. Графики получены методом имитационно-
го моделирования по 5000 реализаций процессов слежения для
каждой кривой (рис. 3.42, 3.43).
На рис. 3.44 приведены графики зависимости вероятности
срыва слежения от времени при фиксированной величине спек-
тральной плотности шумов N = 0,05 рад2/с и при вариации значе-
ний коэффициента усиления разомкнутой петли слежения kv, за-
дававшихся соответствующим изменением W(р) = к . Причем
показанным на рис. 3.44 значениям Kv =5; 10; 20; 40 рад/с для
линейного участка дискриминационной характеристики соответ-
ствуют эффективные полосы пропускания следящей системы
&f = kv/2 = 2,5; 5; 10; 20 Гц.
158
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
3.3.6. Увод и перенацеливание
следящего измерителя
При воздействии на ГСН и другие оптико-электронные из-
мерители имитирующей помехи с возрастающей отстройкой по
измеряемой координате от полезного сигнала может иметь место
увод измерителя, т.е. его перевод из режима слежения за полез-
ным сигналом в режим слежения за имитирующей помехой. При
постановке ложной цели на фиксированном удалении от истин-
159
ГЛАВА 3
ной и при сближении ГСН с целью увеличивается угол между
направлением на истинную ( <рх ) и ложную ( ср2) цели.
Когда этот угол достигает значений, сравнимых с шириной
дискриминационной характеристики ГСН, может наблюдаться
перенацеливание ГСН на ложную цель. Эффекты увода и перена-
целивания обусловлены тем, что все следящие измерители имеют
дискриминационную характеристику, отличную от нуля лишь в
ограниченном диапазоне значений измеряемого параметра, т.е.
являются существенно нелинейными системами со стробирова-
нием. Достаточно универсальным методом определения вероят-
ности увода (перенацеливания) является метод имитационного
моделирования.
Рассмотрим аналитическую методику оценки вероятности
увода и перенацеливания следящего измерителя имитирующей
помехой [19]. (Для краткости дальше будем оперировать только
понятием вероятность увода.)
В основу методики положено описание сигнала на выходе
дискриминатора с помощью метода статистических эквивалентов
и представление схемы следящего измерителя (ГСН) в виде, по-
казанном на рис. 3.40.
Рис. 3.45 иллюстрирует характер переходного процесса при
уводе измерителя. Здесь q>d (/) = <р2 (/) - q\ (t) - закон увода (моно-
тонно возрастающая функция времени); 23 - ширина дискрими-
национной характеристики, измеряемая по расстоянию между ее
160
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
экстремумами; /ь/2 - моменты времени, в которые, соответст-
венно, cpd(t^ = 8 и ^(/2) = 2J. Поскольку при t>t2 полезный
сигнал или помеха выйдут за пределы дискриминационной ха-
рактеристики, вероятность увода ру можно приближенно оце-
нить с помощью выражения
Ру = p(h(^)|>^) = l- f (3.95)
h W
где - плотность распределения выходного сигнала из-
мерителя при воздействии полезного сигнала и имитирующей
помехи.
Эта плотность определяется решением задачи Коши для со-
ответствующего уравнения Фоккера-Планка-Колмогорова. Од-
нако известные трудности получения нестационарного решения
этого уравнения для нелинейных динамических систем высокого
порядка требуют отыскания альтернативных приближенных спо-
собов определения .
Рис. 3.39 показывает, что когда угол (pd становится близким
к величине разноса максимумов дискриминационной характери-
стики, ее крутизна в окрестности 0 меняет знак на обратный, что
ведет к резкому переходу ГСН на сопровождение полезного или
помехового сигналов. Это дает основание принять в качестве 28
именно эту величину разноса максимумов дискриминационной
характеристики, полученной для одноэлементной цели. Как сле-
дует из (3.77)-(3.83), дискриминационная характеристика в окре-
стности небольших ошибок слежения описывается линейной
функцией этих ошибок, а флуктуационную характеристику при
известном законе увода можно считать известной функцией вре-
мени, в частном случае - квадратичной функцией закона увода
(pd (/). Тогда на интервале времени, на котором |^| < 8 и |^2| < Я,
следящий измеритель можно рассматривать как линейную систе-
му с нестационарным входным возмущением.
Нетрудно заметить (см. рис. 3.45), что при монотонном за-
коне изменения сигнала на выходе следящего измерителя (ГСН)
(ph(t) на полуинтервале увода /и..г2 вероятность выхода ошибки
161
ГЛАВА 3
слежения за пределы 8 на интервале увода 0..72 (т.е. иско-
мая вероятность увода) у исходной системы равна вероятности
того, что (ph(t) соответствующей линейной системы в момент
времени t2 будет более, чем на 8 отличаться от отслеживаемого
параметра полезного сигнала (z). При этом на предшествую-
щем полуинтервале увода 0...^ закон изменения (ph{t) может
быть и немонотонным.
Для приближенной оценки вероятности увода следящего измерителя с
помощью (3.95) можно воспользоваться плотностью распределения
соответствующей эквивалентной линейной системе с неста-
ционарным входным возмущением. Корректность такого подхода мож-
но оценить по степени близости закона изменения (ph (j) к монотон-
ному на полуинтервале увода ^.../2 для соответствующей линейной
системы путем анализа числа пересечений нулевого уровня производ-
ной ^А(/).
Покажем возможности и особенности предлагаемого подхо-
да на примере оценки вероятности увода ГСН ложной целью.
Пусть передаточная функция разомкнутой петли слежения ГСН
содержит один интегратор, a W(p) = kv (см. рис. 3.40). Здесь ко-
эффициент усиления разомкнутой петли kv учитывает и крутизну
дискриминационной характеристики. Тогда эквивалентная струк-
турная схема ГСН (рис. 3.40) описывается нестационарным ли-
нейным стохастическим дифференциальным уравнением
^ = -kv<ph + kv^(t) + kvB2<pd(t) + kvJb(pd(t)^t), (3.96)
at
где - закон изменения направления на истинную цель;
q>d(t) - закон увода (относительного перемещения ложной цели);
В2, b - коэффициенты определенных 3.3.4 дискриминационной
и флуктуационной характеристик.
Дисперсия нестационарного случайного процесса q>h(t) на
выходе системы, описываемой уравнением (3.96), определяется
так [2]:
162
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
a2(t)=^b<p1d(t-T)yV2(T)dT. (3.97)
О
Здесь и'(г) - весовая функция, соответствующая (3.96).
Математическое ожидание m(f) процесса <ph(t) находится
как решение уравнения (3.96) при b = 0. В рассматриваемом слу-
чае w(r) = kv exp(-kvT). Опуская промежуточные выкладки при
определении статистических характеристик процесса со-
ответствующего (3.96), приведем окончательное выражение для
искомой плотности распределения ПРИ ^(0 = 0, и при
линейном законе увода, когда <pd(t) = dt, и t2 = 23/d:
jexp((^; - w(/2))2/2<r2(z2)),
lj!
&2(^ = тН1 “ exp(-4£„ )) + (2kv3 -d)b3,
m(t7) = B,\ 23+— (exp(2k8ld\-1)1.
(3.98)
Теперь вероятность увода p рассчитывается с помощью
выражения (3.95). На рис. 3.46 приведены результаты расчетов
зависимости ру от отношения помеха/сигнал q и скорости увода
d для случая нефлуктуирующего полезного сигнала и флуктуи-
рующего сигнала ложной цели, когда В2 и b определяются вы-
ражениями (3.77), (3.78). Расчеты выполнены при £г=20с-1 и
Д = 38 с-1, что соответствует ширине спектра флуктуаций сигна-
ла ложной цели 5 Гц.
Из рис. 3.46 следует, что при небольшой скорости увода с
ростом отношения помеха/сигнал вероятность увода приближа-
ется к единице. Однако при возрастании скорости увода даже для
больших отношений помеха/сигнал значения вероятности увода,
близкие к единице, не достигаются.
163
ГЛАВА 3
Оценим погрешность определения вероятности увода изме-
рителя с помощью рассмотренного методического подхода. Для
этого необходимо оценить степень близости закона изменения
(ph(t) к монотонному на интервале Монотонность (ph(t)
будем оценивать по среднему числу пересечений нулевого уров-
ня производной dcph{t) / dt. Для упрощения дальнейшего анализа
заменяем нестационарное случайное входное возмущение ста-
ционарным со спектральной плотностью, соответствующей мак-
симальному значению спектральной плотности исходного неста-
ционарного возмущения и статистические
характеристики (ph(t) будем определять применительно к уста-
новившемуся режиму. Заметим, что такая замена обеспечивает
получение оценки сверху для среднего числа пересечений нуле-
вого уровня производной d(ph(t)/dt. Так как нас интересует по-
ведение d(ph(t}/dt на втором полуинтервале увода, то, пренебре-
гая переходными процессами, нетрудно установить, что матема-
тическое ожидание M(d(ph(t)/di)^ B2d. Теперь для определения
искомого среднего числа пересечений нулевого уровня п можно
воспользоваться соотношениями [17]
(3.99)
где aj,a2 “ среднеквадратические отклонения разности
фь(1) - М и vh(t) в установившемся режиме.
164
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
Опуская промежуточные выкладки, приведем окончатель-
ные выражения применительно к рассматриваемому случаю:
*2=[pV
V 7 (3.100)
<?! =
4bk2S2 '
2л
г- ( (к
Ру[я-л;ку 1-Ф
ехР
fiJJ
к.
.2
где Ф (...) - интеграл вероятности. При d = 10, q-2 и прочих
исходных данных, аналогичных приведенным выше, получим,
что п « 0,05. Следовательно, из 20-ти реализаций процесса увода
по крайней мере в 19-ти условие монотонности выполняется.
Значит, погрешность определения вероятности увода измерителя
с помощью предложенной методики не превысит 5%.
Необходимо отметить, что в общем случае флуктуационная
характеристика может зависеть не только от закона увода, но
также от ошибки сопровождения полезного сигнала . Это, на-
пример, имеет место для JV(£|,£2), задаваемой выражением (3.73)
после подстановки в него = ех + 4^(0 • В этом случае в выраже-
ние для флуктуационной характеристики вместо ех следует под-
ставить математическое ожидание определяемое путем
решения уравнения типа (3.96) при 6, равном 0. Тогда флуктуа-
ционная характеристика становится функцией только времени и
оценку вероятности увода можно также получить с помощью
описанной методики.
3.4. Помеховые эффекты
в элементах оптико-электронных средств
3.4.1. Фотоприемные устройства
При воздействии мощной оптической помехи может иметь
место функциональное подавление ОЭС, заключающееся в фоно-
вой засветке фотоприемника в области, окружающей изображе-
165
ГЛАВА 3
ние источника помех. При этом может существенно (вплоть до
нулевого) уменьшиться контраст объекта на формируемом в
плоскости фотоприемника изображения [7.33]. Это ухудшает или
полностью исключает обнаружение, распознавание объекта или
измерение его координат. Помеха, создающая засветку только на
время поступления помехового излучения на вход оптической
системы ОЭС, определяется как засветочная.
При дальнейшем увеличении энергетических характеристик
помехи может иметь место обратимое нарушение режима нор-
мального функционирования фотоприемника, когда эффект за-
светки сохраняется и на некоторое время после выключения ис-
точника помех, по прошествии которого основные характеристи-
ки фотоприемника восстанавливаются. Дальнейшее увеличение
энергетики помехи может приводить к необратимому нарушению
работоспособности фотоприемника, в частности, к его физиче-
скому повреждению [7, 48].
Основные факторы,
ответственные за засветку фотоприемника
Рассеяние помехового излучения оптическими неоднород-
ностями на трассе его распространения.
Рассеяние помехового излучения оптическими неоднород-
ностями формирующей изображение оптической системы.
Диффракционная расходимость и абберационные эффекты,
определяемые характеристиками оптической системы.
Растекание (перераспределение) фотоиндуцированных за-
рядов по элементам фоточувствительного слоя фотоприем-
ника.
Многократное переотражение и рассеяние излучения опти-
ческими элементами, элементами фотоприемной матрицы,
другими элементами конструкции объектива ОЭС.
Применительно к фотоприемным устройствам (ФПУ),
формирующим изображение, при дальности метеорологической
видимости порядка 5... 10 км и более уровень засветки в области
дальних боковых лепестков дифракционного пятна рассеяния оп-
ределяется, в основном, действием последнего фактора - переот-
ражением и рассеянием помехового излучения элементами кон-
струкции объектива и фотоприемной матрицы.
166
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
В настоящее время отсутствуют достаточно надежные ана-
литические методики, обеспечивающие оценку параметров за-
светки расчетным путем.
По существу, единственным надежным способом определе-
ния параметров зоны засветки, значит, и обоснования характери-
стик засветочных помех, является экспериментальный, преду-
сматривающий проведение прямых испытаний подлежащего по-
давлению ОЭС (ФПУ), или его ближайшего аналога. В этих ус-
ловиях предварительные требования к характеристикам засве-
точных помех, предполагающие, как правило, необходимость по-
следующего экспериментального подтверждения, можно форми-
ровать, основываясь на следующих посылках.
1. Линейный участок световой характеристики (динамиче-
ский диапазон) основных типов фоточувствительных элементов
фотоприемников обычно лежит в пределах изменения их осве-
щенности на 10. ..20 дБ (в 10... 100 раз). При этом полный дина-
мический диапазон ФПУ, достигающий 30...50 дБ и более, обес-
печивается инерционными системами автоматической нормиров-
ки: диафрагмированием объектива, регулированием рабочей точ-
ки фотоприемного устройства путем изменения напряжения пи-
тания и т.п.
2. Требуемый для получения необходимого помехового эф-
фекта уровень боковых засветок при подавлении ОЭС с форми-
рованием изображений (телевизионных, тепловизионных) дол-
жен зависеть от вариации (размаха) освещенности плоскости фо-
топриемника, обусловленной вариацией яркости наблюдаемой
сцены, т.е. от размаха полезного оптического сигнала. При этом в
случае телевизионных ОЭС вариация яркости наблюдаемой сце-
ны зависит от ее освещенности.
В то же время, для тепловизионных ОЭС вследствие исполь-
зования в них при обработке сигналов операции блокирования
постоянной составляющей размах полезного сигнала в цепях об-
работки будет слабо зависеть от абсолютного значения радиаци-
онной температуры наблюдаемого объекта и будет, в основном,
определяться разностью радиационной температуры наиболее на-
гретого и наиболее холодного участков визируемого объекта, т.е.
контрастной радиационной температурой.
167
ГЛАВА 3
3. Освещенность фотоприемника в зоне боковых засветок
обычно лежит в пределах 103.. .105 от освещенности централь-
ного элемента, на котором формируется изображение точечного
помехового источника. При этом на уровне порядка 105 засвечи-
вается значительная часть площади фотоприемника, а на уровне
10 3 элементы фотоприемника, лежащие в ближайшей окрестно-
сти изображения помехового источника.
Приведенные положения позволяют определить ориентиро-
вочные характеристики активных оптических помех, приводящих
к засветке фотоприемных устройств.
Рассмотрим ОЭС, использующие излучение дальней ИК-
области 8...12мкм, т.е. тепловизионные ОЭС. Контрастная ра-
диационная температура объектов военной техники (танки, БМП,
самоходные артиллерийские установки, командно-штабные ма-
шины и т.п.), в основном, лежит в диапазоне температур
0...35 °C. В табл. 3.2 приведена рассчитанная с использованием
закона излучения Планка плотность излучения (светимости) R
серого тела для коэффициента излучения е = 0,8 и интервала длин
волн 8... 12 мкм в зависимости от его температуры Т К.
_______________________Таблица 3.2______________________
Г, К 260 270 280 290 300 310 320 330
R, Вт/м2 47 57 67 82 96 112 128 144
Данные табл. 3.2 показывают, что вариация плотности излу-
чения г в диапазоне 8... 12 мкм объектов военной техники, соот-
ветствующая максимальной разнице радиационных температур
35 К, находится в пределах 30...50 Вт/м2. Тепловизионные ОЭС,
предназначенные для работы на земных фонах, должны обеспечи-
вать наблюдение в достаточно малом диапазоне радиационных
температур и плотностей, незначительно превышающих их диапа-
зон, показанный в табл. 3.2. Это позволяет заключить, что помехо-
вая освещенность, в q = 2...5 раз превышающая размах полезного
сигнала ( q - коэффициент подавления), приведет к выводу чувст-
вительных элементов тепловизора в режим насыщения, т.е. к его
засветке. Для обеспечения этого эквивалентная плотность излуче-
ния помехового источника Еп должна отвечать условию
168
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
E„=qrlk, (3.101)
где к = (10-3...10~5) - подлежащий реализации относительный
уровень освещенности фотоприемника ТПВ в зоне боковых за-
светок, г - размах (вариация) плотности излучения наблюдаемой
сцены.
Если разрешающая способность, а точнее, размер одного
элемента фотоприемника, согласован с углом дифракционной
расходимости оптической системы а (ср), то сила излучения по-
мехового источника, эквивалентная плотности излучения ЕпУ
создаваемой с одного элемента разрешения, может быть оценена
по формуле
Jn=EnaDH7c, (3.102)
где £>0 - дальность до подавляемого ТПВ.
С учетом (3.101), (3.102) окончательное выражение, опреде-
ляющее требования к силе излучения помехового источника,
приводящей к засветке фотоприемного устройства, представится
в виде
Jn = </radD02 /(А:л-) - qrl1 /(кя), (3.103)
где I - минимальное линейное разрешение ТПВ на местности.
Отметим, что в эти выражения не входит коэффициент ос-
лабления излучения на трассе распространения, поскольку имеет
место ослабление в равной мере как помехового, так и полезного
сигналов. Так, в соответствии с (3.103), Jn = (104...4-106) Вт/ср
при / = 0,7 м. Причем нижнее значение Jп соответствуют за-
светке окрестности источника помех, а верхнее - засветке значи-
тельной части фотоприемного устройства. При мощности излу-
чения когерентного или некогерентного помехового источника
порядка 100 Вт в рабочем диапазоне ТПВ засветка окрестности
источника помех обеспечивается при угле расходимости помехо-
вого излучения порядка 6°, а засветка значительной части площа-
ди фотоприемной матрицы - при угле расходимости порядка 20'.
Обратимся теперь к рассмотрению ОЭС, использующих из-
лучение видимой области спектра (телевизионных ОЭС). Вариа-
ция значений яркости наблюдаемой сцены в видимом диапазоне
169
ГЛАВА 3
определяется вариацией возможных значений освещенности сце-
ны (10... 105 лк), диапазоном изменения коэффициента отражения
элементов фоноцелевой обстановки р и углом наклона визируе-
мой поверхности к источнику освещения (солнцу) и к направле-
нию на ОЭС наблюдения. В случае отсутствия прямого солнеч-
ного освещения вариация яркости наблюдаемой сцены будет, в
основном, определяться ее освещенностью и вариацией значений
коэффициента диффузного отражения р ее элементов. Для про-
водимых ниже оценок можно положить, что р может лежать в
пределах р =0,1...0,9. При этом светимость R элементов на-
блюдаемой сцены изменяется в пределах 1,6-10-3... 144 Вт/м2.
В табл. 3.3 приведены рассчитанные с помощью выражения
(3.103) значения требуемой для засветки силы излучения помехо-
вого источника Jn, а также угла расходимости его излучения Q
при мощности излучения Р = 100 Вт для различных уровней ос-
вещенности наблюдаемой сцены. При расчетах принималось
/ = 0,1 м2, q =5.
_______________________Таблица 3.3______________________
Освещенность сцены Е, лк 10 1000 10 000 100 000
Диапазон светимости сце- ны R, Вт/м2 (4,2... 37,5)-1О3 (4,2...37,5)-10*‘ 4,2... 37,5 42...375
Jn, Вт/ср к — 10’5 53 5,3-103 5,3-104 5,3-Ю5
Б’Вт/ср 100 1,9 100 1,9-10 2 100 1,9-10 3 100 1,9-1 О’4
Результаты расчетов показывают, что засветка значительной
площади фотоприемной матрицы телевизионных ОЭС в условиях
солнечного освещения сцены (104... 105 лк) обеспечивается толь-
ко при малых углах расходимости помехового излучения, т.е. с
помощью лазерных излучателей и при точном наведении по на-
правлению источника помех на подавляемое ОЭС.
170
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
При дальнейшем увеличении энергетики помехового излучения может
иметь место необратимое физическое повреждение фотоприемников
ОЭС, повреждение (сколы) обтекателей, элементов оптической систе-
мы. Наименьшие требования к энергетике поражающей помехи предъ-
являются при ее создании для повреждения фотоприемников ОЭС, раз-
мещаемых в фокальной плоскости оптической системы. При этом соз-
дание большой поверхностной плотности помехового излучения на фо-
точувствительном слое определяется фокусировкой излучения.
Возможность и количественные показатели повреждения
фотоприемников зависят от множества факторов, к основным из
которых можно отнести мощность и длительность (экспозицию)
помехового воздействия, характеристики материала фоточувст-
вительного слоя фотоприемника, длину волны помехового излу-
чения. Физические эффекты, сопровождающие действие пора-
жающей помехи, обусловлены поглощением лазерного излуче-
ния, величина которого возрастает при наличии резонансного
взаимодействия лазерного излучения с веществом фоточувстви-
тельного слоя. При этом происходит локальное повышение тем-
пературы, давления и испарение вещества фотослоя. При плотно-
сти излучения порядка 10 ... 108 Вт/см2 наблюдается дальнейшее
многократное поглощение фотонов парами вещества фотослоя и
образование плазмы.
При проведении ориентировочных оценок эффективности
можно считать, что при длительности помехового импульса
г IO’5 с пороговая плотность мощности поражающей помехи
на фоточувствительном слое Еп, [Вт/см2] (минимальная плот-
ность мощности, обеспечивающая поражение фоточувствитель-
ного слоя) обратно пропорциональна длительности помехового
импульса, т.е. основным поражающим фактором в этом случае
является плотность энергии излучения О [Дж/см2], причем поро-
говая плотность энергии Qn = const при т 10~5 с.
При 10~5с т 10-2 с пороговая плотность энергии QnX пора-
жающей помехи, находится в обратно пропорциональной зави-
симости от корня квадратного из величины уширения длительно-
сти помехового импульса:
2„, =g„(r/io“5)_|/2. (З.Ю4)
171
ГЛАВА 3
Значение пороговой плотности энергии в общем случае за-
висит от коэффициента поглощения излучения, теплоемкости и
температуры плавления материала фоточувствительного слоя,
от длины волны помехового излучения, условий теплообмена и
т.п. Для фотоприемников на основе соединений HgCdTe,
PbSnTe, InSb пороговая плотность энергии Qn= 1...5 Дж/смЕ 2 *.
Для фотоприемников на основе PbS, PbSe пороговая плотность
Qn = 0,1...0,5 Дж/см2. При больших экспозициях (г > К)2 с) оп-
ределяющим фактором поражения становится пороговая плот-
ность мощности Еп = const, не зависящая от г. А от величины
экспозиции зависят, в основном, размеры зоны повреждения фо-
топриемника [7.48].
Одним из основных факторов, определяющих описанные зависимости
изменения пороговых плотностей интенсивности помехи от длительно-
сти экспозиции, являются механизмы отвода части энергии в виде теп-
ла из зоны повреждения, определяемые характеристиками теплопро-
водности материала фотоприемника и условиями его охлаждения. Роль
этих механизмов возрастает при увеличении длительности помехи.
Плотность мощности поражающей помехи Ео на входе оп-
тической системы ОЭС, обеспечивающая создание пороговой
плотности мощности Еп на фотоприемнике, определяется соот-
ношением
Е ~Е ^=Е Г -..Е Q’61a2
° ~ n tD4 n tD2O2 п гд2
(3.105)
Здесь Я - длина волны помехового излучения; F - фокусное
расстояние объектива; D - диаметр входного отверстия объекти-
ва; г - коэффициент пропускания оптической системы; О = D/F -
светосила объектива; а = 1,22Я/£) - угол дифракционной расхо-
димости излучения.
Следует отметить, что диафрагмирование объектива резко
увеличивает требования к плотности мощности помехи Ео как
вследствие уменьшения мощности, попадающей на фотоприем-
ник, так и вследствие уширения дифракционного пятна рассея-
172
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
ния, формируемого на фотоприемнике. Действительно, из выра-
жения (3.105) следует, что диаметр D объектива входит в него в
4-й степени. Значит, если, например, за счет диафрагмирования
диаметр входного отверстия объектива уменьшается в 2 раза, то
плотность энергии помехи на входе объектива ОЭС для достиже-
ния того же эффекта поражения должна быть увеличена в 16 раз.
Необходимо отметить, что физическое повреждение элемен-
тов фотоприемника при воздействии поражающей помехи не га-
рантирует успешное решение задачи подавления ОЭС в целом.
Так, например, поражение одного или даже нескольких элемен-
тов многоэлементного фотоприемника ОЭС наведения совсем не
исключает возможность измерения пространственных координат
протяженной цели с точностью, достаточной для самонаведения
на нее управляемой ракеты.
Это диктует необходимость анализа эффективности поражающих по-
мех по более общим информационным и информационно-боевым пока-
зателям, таким, например, как вероятность необнаружения цели, веро-
ятность срыва наведения ракеты и т.п. Причем методики, используемые
при выполнении такого анализа, должны быть чувствительны к разме-
рам зоны поражения фотоприемника.
В ОЭС с растровыми анализаторами подвижный или непод-
вижный модулирующий растр с прозрачными и непрозрачными
участками обычно размещается в фокальной плоскости ФПУ.
При этом поражающей помехой может повреждаться простран-
ственная структура растра и, следовательно, искажаться закон
модуляции растром приходящего излучения, что приводит к уве-
личению ошибок измерения координат цели. Поскольку размеры
изображения точечного (в том числе помехового) источника,
формируемые на растре и фотоприемнике, обычно согласуются с
геометрическими размерами участков секторного растра, т.е. в
общем случае не согласуются с условиями, применительно к ко-
торым получено выражение (3.105), то это выражение требует
соответствующей корректировки. Помимо этого необходимо
также учитывать, что использование для повреждения фотопри-
емников ОЭС с растровыми анализаторами импульсной пора-
жающей помехи требует согласования момента излучения поме-
хи с моментом, когда это излучение попадает на прозрачный уча-
сток модулирующего растра.
173
ГЛАВА 3
Оценки, получаемые с помощью предложенных подходов, являются не
более, чем ориентировочными. При исследовании вопросов воздейст-
вия засветочных, ослепляющих и поражающих помех на конкретные
образцы ОЭС такие оценки непременно должны проверяться и уточ-
няться. Причем основным способом их уточнения в настоящее время
остается проведение прямого физического эксперимента.
3.4.2. Устройства
автоматического нормирования сигналов
К устройствам автоматического нормирования сигналов
относятся системы автоматической регулировки усиления сигна-
ла, системы автоматической регулировки усиления по шумам,
системы автоматической регулировки диафрагмы, яркости, экс-
позиции, и тому подобные устройства. Основное назначение та-
ких устройств - согласование диапазона изменения величины ра-
бочих сигналов на их выходе с диапазоном работы последующих
оконечных устройств, в частности, защита оконечных устройств
от перегрузки.
Устройства автоматического нормирования сигналов при-
надлежат к классу систем автоматического регулирования, ос-
новным регулируемым параметром в которых является суммар-
ный уровень обрабатываемых сигналов. Поэтому вполне естест-
венно, что изменение уровня преднамеренных помех, подавае-
мых на вход оптико-электронного средства вместе с полезным
сигналом, может искажать штатный режим регулирования уровня
полезного сигнала в устройствах автоматического нормирования
вплоть до полного исключения возможности решения задач по
основному назначению этого оптико-электронного средства.
Устройства автоматического нормирования сигналов делят-
ся на устройства регулирования по разомкнутому циклу (регули-
рование «вперед») и на обладающие большими возможностями
устройства регулирования с обратной связью (регулирование
«назад»).
Рассмотрим наиболее важные с позиций оптико-электронно-
го подавления особенности работы устройств нормирования сиг-
налов при воздействии преднамеренных помех на примере сис-
темы автоматической регулировки усиления (АРУ) с обратной
связью, схема которой представлена на рис. 3.47: 7-усилитель
174
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
________________________Рисунок 3.47______________________
с регулируемым коэффициентом усиления к (u^)9 2 - детектор,
3 - фильтр [37, 38].
Как утверждается в [38], конкретный вид регулировочной
характеристики оказывает слабое влияние на динамические ха-
рактеристики АРУ. Поэтому для упрощения дальнейшего анализа
нелинейную, в общем случае, регулировочную характеристику
усилителя аппроксимируем линейным выражением
в котором kQ - максимальный коэффициент усиления усилителя.
Работа детектора описывается так:
О при мвых < Е3,
* (ивых Е3) при ивых > Е3.
Здесь Е3 - сигнал задержки.
Таким образом, для малых входных сигналов, для которых
«вых = ^owbx - £3 ’ петля АРУ оказывается разомкнутой. Величина
сигнала задержки Е3 обычно выбирается равной величине вы-
ходного сигнала усилителя, когда на его вход поступает сигнал,
соответствующий порогу чувствительности приемного устройст-
ва, обслуживаемого этой системой АРУ. Теперь совокупность
выражений, описывающих работу системы АРУ, приобретает вид
^вых
>owBX при мВЬ1Х < Е3,
^оО-СИфЧх при мвых>£3.
(3.106)
^фйф Иф ^д^ф (мвых )•
175
ГЛАВА 3
Из (3.106) следует, что реакция системы АРУ на скачок
входного сигнала wBX = щ такой, что щ > Е3, описывается сле-
дующим дифференциальным уравнением:
. кщЕ3 к^щ
——и + и = —-—— ч - -
-I , J 41 ВЫХ МВЫХ л , J 1.7 ’
1 + кщ 1 + кщ 1 + кщ
в котором коэффициент к = ск^к$. Выражение (3.107) показыва-
ет, что при обычно выполняющемся неравенстве кщ »1 посто-
янная времени Т процесса регулирования усиления связана об-
ратно пропорциональной зависимостью с амплитудой входного
скачка щ (Т = Т$/(1 + кщ) &Тф/(кщ)). Выражение для статиче-
ской характеристики, описывающей зависимость выходного сиг-
нала усилителя АРУ от входного сигнала в установившемся ре-
жиме, то есть при мвых =0, следует из (3.106), (3.107):
и
вых
^О^вх
^WBX^3 . ^OWBX ~ . *0
1 ч- кивх 1 ч- кивх к
при wBbIX <£3,
при и >Е3.
(3.108)
Для любого фиксированного диапазона изменений входного
сигнала требуемый диапазон изменений выходного сигнала мо-
жет быть обеспечен соответствующим выбором коэффициента к.
При этом требуемая постоянная времени Т процесса регулиро-
вания усиления может быть обеспечена соответствующим выбо-
ром постоянной времени Гф.
Зависимость постоянной времени Т от величины входного
сигнала является специфической особенностью систем АРУ с об-
ратной связью, определяющей возможность создания прерыви-
стых помех измерителям координат различного назначения,
имеющим в своем составе такие системы АРУ или другие уст-
ройства нормирования сигналов. Прерывистая помеха создается в
виде периодической последовательности импульсов, излучаемых
с защищаемой цели и по спектральным и другим характеристи-
кам, подобных полезному сигналу. Амплитуда импульсов помехи
ип должна в 10 и более раз (в общем случае - в п раз) превосхо-
дить амплитуду полезного сигнала (ип = пивх ).
176
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
Длительность помеховых импульсов т выбирается соответ-
ствующей постоянной времени реакции системы АРУ на поло-
жительный скачок входного сигнала, т.е. исходя из выполнения
условия т > Т^[кпи^ , обеспечивающего отработку системой АРУ
этого скачка. Интервал между импульсами тх выбирается соот-
ветствующим постоянной времени реакции системы АРУ на от-
рицательный скачок входного сигнала, т.е. исходя из выполнения
условия /киъ^ . обеспечивающего отработку системой АРУ
отрицательного скачка. Тогда частота следования помеховых им-
пульсов определяется выражением
/п=1/(г + г,)«Ь/вх/Тф.
Результатом действия каждого помехового импульса будет
резкое уменьшение коэффициента усиления усилителя АРУ при-
мерно в и раз. Поэтому на начальном участке интервала между
помеховыми импульсами амплитуда полезного сигнала на выхо-
де усилителя АРУ будет почти в п раз меньше номинального
значения, необходимого для обеспечения штатного режима
функционирования последующих оконечных устройств. Вслед-
ствие этого в оптико-электронных средствах следящего типа
могут иметь место перерывы в поступлении информации о цели
с частотой, соответствующей частоте следования помеховых
импульсов.
В головках самонаведения различных типов это может при-
водить к увеличению ошибок сопровождения цели или к срыву
режима автосопровождения. Так, в полуактпивных лазерных го-
ловках самонаведения (ПЛГС), использующих сигналы с время-
импульсным кодированием, может иметь место пропуск на
приеме нескольких лазерных импульсов, что затрудняет пра-
вильное декодирование принимаемой импульсной последова-
тельности и чревато срывом режима автосопровождения цели. В
этом случае требуемое превышение помехи над сигналом может
быть реализовано не только активными, но пассивными средст-
вами создания помех, например с помощью матрицы уголковых
отражателей.
Прерывистая помеха не исчерпывает весь перечень помех,
эффективность которых связана с воздействием на системы нор-
177
ГЛАВА 3
мирования сигналов. Так, например, в ПЛГС наряду с АРУ по
полезному сигналу используется также АРУ по шумам, обеспе-
чивающая формирование порогового уровня обнаружения полез-
ного сигнала над уровнем текущих фоновых шумов. Вполне оче-
видно, что помеха, имеющая частотный спектр в полосе усилите-
ля АРУ по шумам, близкий к частотному спектру фоновых шу-
мов, может, при соответствующей ее мощности, поднять порог
обнаружения полезного сигнала до уровня, превышающего теку-
щий уровень полезного сигнала и воспрещающего обнаружение
этого сигнала.
В телевизионных датчиках и головках самонаведения система АРУ
используется для усиления и стабилизации размаха видеосигнала.
Кроме этого, для согласования экспозиции с текущими условиями ос-
вещенности визируемой сцены используются системы автоматиче-
ского регулирования диафрагмы, яркости и (или) электронной экспо-
зиции. Мощная прерывистая или непрерывная активная засветочная
помеха, создаваемая из одной или нескольких точек пространства, пу-
тем воздействия на системы автоматического нормирования сигналов
телевизионных датчиков и головок самонаведения может приводить к
искажению или подпороговому маскированию видеосигнала цели и ее
изображения на видеоконтрольном устройстве, к росту ошибок
вплоть до срыва режима сопровождения цели в телевизионных голов-
ках самонаведения.
3.5. Помеховые эффекты
при обнаружении пространственных объектов
Задача обнаружения пространственных объектов, имеющая
место при использовании ОЭСр с высоким пространственным
разрешением в общем случае должна решаться при их наблюде-
нии на пространственно коррелированном (неоднородном) фоне
и при отсутствии априорной информации об их местоположении.
Учет особенностей обнаружения объектов на неоднородном фоне
требует использования при анализе гипотезы не об аддитивной, а
об аппликативной смеси сигналов объекта и фона. Отсутствие
информации о местоположении объекта приводит к необходимо-
сти рассматривать возможность его поиска и обнаружения в поле
178
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
пространственного обзора средства разведки. Обсудим более де-
тально существующие конструктивные подходы к учету этих
особенностей.
Традиционно используемый в литературе (см., например,
[22, 23]) подход, если его трансформировать к исследованию во-
просов обнаружения пространственных объектов в присутствии
мешающих воздействий, состоит в использовании гипотезы об
аддитивном характере смеси сигналов объекта и помехи, в каче-
стве которой может рассматриваться неоднородный фон. При
этом фиксируемое средством разведки изображение формируется
как сумма изображений объекта и помехи (в нашем случае - фо-
на). Однако в этом случае не принимается во внимание, что изо-
бражение объекта замещает участок фона, на котором располага-
ется объект. На учет этого обстоятельства и направлено исполь-
зование гипотезы об аппликативной смеси сигналов объекта и
фона. На рис. 3.48 в качестве иллюстрации приводятся изображе-
ния одних и тех же объектов (равнояркого квадрата) и случайного
фона при аддитивном (рис. 3.48,а} и аппликативном (рис. 3.48,6)
характере их смесей.
Учет аппликативного характера смеси сигнала с фоном существенно
изменяет по отношению к аддитивному случаю закономерности влия-
ния основных характеристик формируемого изображения объекта на
вероятность его обнаружения. Так, например, может иметь место не
уменьшение, как обычно, вероятности обнаружения объекта при умень-
шении его яркости (освещенности), а, наоборот, ее увеличение [24].
б)
_____________________ Рисунок 3.48________________________
179
ГЛАВА 3
Рис. 3.48 наглядно иллюстрирует существенные различия в
возможностях обнаружения объектов при использовании различ-
ных гипотез о характере смеси сигнала с фоном и подчеркивает
актуальность анализа отличий в характеристиках обнаружения
объектов, обусловленных аддитивным или аппликативным видом
этой смеси.
Обнаружение объекта при отсутствии точной информации о
местоположении объекта, т.е. необходимость его поиска в поле
пространственного обзора средства разведки существенно изме-
няет характеристики обнаружения и, особенно, вероятность лож-
ной тревоги. Оценка потенциальных возможностей обнаружения
объекта при его неизвестном местоположении сводится к синтезу
решающего устройства совместного обнаружения и оценки коор-
динат наблюдаемого объекта и определению характеристик его
обнаружения таким устройством. В ряде работ, в частности, в
[23, 25], приводятся формальная постановка задачи и дается син-
тез алгоритма совместного обнаружения и оценки параметров
для аддитивной смеси сигналов объекта и фона, но для случая,
когда рассматриваемые сигналы являются функцией одной пе-
ременной - времени.
Эта постановка очевидным образом может быть распространена на
случай поиска и обнаружения пространственных объектов, когда в ка-
честве сигналов используются функции двух переменных - элементов
вектора пространственных координат х = (х19х2) в плоскости сфор-
мированного изображения.
3,5.1. Обнаружение объектов,
наблюдаемых в аппликативной смеси с фоном
Рассматривается обнаружение объектов, образующих ап-
пликативную смесь с фоном. Задачи синтеза и анализа оптималь-
ного обнаружителя при аппликативной смеси полезного и фоно-
вого сигналов получили развитие, например, в работах [24, 26,
36, 39]. В этих работах рассматривается обнаружение неподвиж-
ного объекта с известными местоположением и формой его
внешней границы. Исследования, проведенные в [24, 36], осно-
вываются на допущении о том, что наблюдателю точно известна
пространственно-яркостная структура как подлежащего обнару-
180
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
жению объекта, так и реализации участка фона, который распо-
ложен под этим объектом.
Вполне очевидно, что такая информация о фоне в большинстве реаль-
ных ситуаций наблюдателю недоступна в принципе.
В [26, 39] решается задача обнаружения пространственного
объекта для случая, когда пространственно-яркостные структуры
объекта и фона описываются двумя разными реализациями слу-
чайных гауссовских полей. Причем предполагается, что наблю-
дателю известны не конкретные реализации этих полей, имею-
щие место в текущем акте наблюдения, а только их статистиче-
ские характеристики. В то же время, в большинстве практических
ситуаций наблюдатель в каждом акте наблюдения имеет дело с
одной визируемой им вполне конкретной реализацией фона, ко-
торая может изменяться от акта к акту наблюдения. Во многих
случаях пространственно-яркостная структура объекта также из-
вестна наблюдателю.
Таким образом, формальные постановки задач обнаружения
пространственных объектов, использованные в указанных выше
работах, не вполне согласуются с потребностями практических
приложений. При этом отсутствует ответ на вопрос о том, могут
ли и каким образом должны интерпретироваться результаты этих
работ в применении к практике обнаружения пространственных
объектов. Рассмотрим особенности и возможные подходы к ре-
шению задачи обнаружения пространственных объектов, наблю-
даемых в аппликативной смеси с известной реализацией фона,
которая является выборкой из случайного гауссовского поля с за-
данными статистическими характеристиками.
Как отмечалось выше, использованное в [24, 36] допущение
о наличии у наблюдателя информации о пространственно-яркост-
ной структуре участка фона, расположенного под объектом, не
согласуется с практикой обнаружения неподвижных пространст-
венных объектов. Однако при обнаружении подвижных объектов
такое допущение становится вполне обоснованным. Вопросы об-
наружения подвижных пространственных объектов, наблюдае-
мых в аппликативной смеси с фоном, рассматриваются в [40, 41]
и в других работах. Их особенностью является исследование слу-
чая прямолинейного движения объекта с неизвестным вектором
181
ГЛАВА 3
скорости. Также предполагается фиксированным время наблюде-
ния. За пределами внимания авторов этих работ остался фор-
мальный аппарат [35], соответствующий существу задач обнару-
жения и оценки параметров подвижных объектов по их изобра-
жениям и позволяющий снять ограничения, накладываемые
в [40, 41] и в других работах на характер движения объекта и
время наблюдения.
С учетом этого синтезируем структуру квазиоптимального
устройства совместного обнаружения и оценки параметров (по-
ложения) подвижного объекта в том числе имея ввиду и конкре-
тизацию на этой основе особенностей интерпретации сущест-
вующих подходов к решению задачи обнаружения неподвижных
объектов [47].
Итак, пусть наблюдается изображение объекта в апплика-
тивной смеси с фоном:
w(x,Z) = - v)s(x - v) + (1 - //d(x - v)) /?(x) + w(x,Z). (3.109)
Здесь 5(x) = 5(X],x2) ~ известная функция вектора пространствен-
ных переменных х = (jq, х2), описывающая пространственно-
яркостную структуру объекта в выпуклой области L его сущест-
вования; d(x) - функция окна, равная единице в области L и ну-
лю всюду за ее пределами; р(х) - известная реализация случай-
ного гауссовского поля, описывающего фон и заданного в облас-
ти анализа М(Л/о£); и(х,/) - пространственно-временной
шум наблюдений, в частном случае 8 - коррелированный;
v = (v1?v2) - вектор сдвигов изображения объекта; // - параметр
обнаружения, принимающий значение 1, когда объект на изобра-
жении есть, и 0, когда объект отсутствует.
Закон перемещения объекта в общем случае задается систе-
мой стохастических дифференциальных уравнений относительно
элементов вектора сдвигов:
Й =/i(h^2’0+gll0>0l(^ (3 110)
Й> = Л (И > v2>0 + 822 (')«02 (0,
где и01, и02 - процессы формирующего белого шума с единичной
спектральной плотностью.
182
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
Систему (3.110) необходимо дополнить очевидным диффе-
ренциальным уравнением для параметра обнаружения:
/7 = 0. (3.111)
Требуется синтезировать оптимальное (квазиоптимальное)
решающее устройство оценки параметров Vj, v2, // по результа-
там наблюдения текущего изображения w(x,/). Такой синтез мо-
жет быть выполнен путем решения соответствующего уравнения
Стратоновича, обобщенного в [35] (см. 6.2) на случай исследова-
ния вопросов обработки изображений (в общем случае п -мерных
пространственно-временных полей).
Уравнение Стратоновича является дифференциальным урав-
нением в частных производных относительно апостериорной
плотности распределения подлежащих оценке параметров. В об-
щем случае оно не поддается строгому аналитическому решению.
Решение уравнения Стратоновича в квазилинейном (гауссовском)
приближении, когда апостериорная плотность вероятности ап-
проксимируется функцией, содержащей только математические
ожидания и корреляционные моменты оценок параметров, сво-
дится к решению следующей системы дифференциальных урав-
нений [14, 15], определяющей оптимальные по критерию макси-
мального правдоподобия оценки параметров :
б/Д / Ч5П(1,/)
—L=£(X,/)+> rh(t)—L-2-2,
dt л lJ dJL
;=1 J
dry(t)
dt
rik(0+
г>4
(3.112)
A=1 k=\ l=\
В этих выражениях члены с нижними индексами, которые
отсутствуют в выражениях (3.110), (3.111), полагаются равными
0, а для упрощения записи последующих выражений введено
новое обозначение для вектора оцениваемых параметров:
Х = (Я1,Я2,Лз) = (к1,к2,//). Если A£(Ax)<!>(AZ) - корреляционная
функция белого пространственно-временного шума наблюдений
183
ГЛАВА 3
и(х,Г), то, в соответствии с [35], производная по времени лога-
рифма функционала правдоподобия П(Х,/), входящая в (3.112),
принимает вид:
П(М) = —— j(w(x,/)-c(x,X))2<&, (3.113)
м
Причем, как это следует из (3.109), здесь
с(хД) = Я3^(х1 -Л},х2 -“^) +
+(1-A3d(xx — Я|,х2 -Л2))р(х},х2). (3.114)
Таким образом, выражения (3.112), (3.114) представляют в
общем виде структуру квазиоптимального устройства совместно-
го обнаружения и оценки координат подвижного пространствен-
ного объекта, изображение которого образует аппликативную
смесь со случайным гауссовским фоном.
Решение об обнаружении объекта может приниматься, когда оценка Л3
при наблюдаемой реализации фона будет удовлетворять неравенству
Яз>0,5. Оценка показателей эффективности этого устройства, на-
пример характеристик обнаружения, при работе по ансамблю реализа-
ций фона с заданными статистическими характеристиками может быть
выполнена методами имитационного моделирования. При этом в каж-
дом акте моделирования при наборе статистики устройству должны
предъявляться для обнаружения различные реализации фона.
Дальнейшая детализация полученных выражений и опреде-
ление методами имитационного моделирования количественных
оценок показателей обнаружения для какой либо конкретной си-
туации не связаны с преодолением принципиальных трудностей
и здесь не рассматриваются. Остановимся на анализе основных
особенностей обработки изображений при обнаружении и оценке
параметров объекта, определяемых последним слагаемым правой
части первого уравнения системы (3.112), а точнее - производной
dTI(,k,t)/dAi . Для неэнергетических параметров Я,, Л}, Я^, каки-
ми они являются в рассматриваемом случае, выражение, напри-
мер для Sn(X,Z)/S^2 » принимает вид
184
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
5П(Хд) 1 г . ч5с(х,Х) , 1 г z ч
—= - |М(х,Т)-А-^Л = - |м(х,/)х
Л J ЭЛ, Л J
z Л/ z АЛ
5d(x-X)r z _ч / м .X5s(x-k)
———-[-s(x - X) - р(х)] + Лз<7(х - X)——-
СЛ2 дЛг
dx. (3.115)
Если х2 = vw(X]) - уравнение верхней (выпуклой) части гра-
ницы объекта, а х2 = vd (jq) - уравнение нижней (вогнутой) части
границы, то частная производная ^(х-Х)/^ запишется так:
dd(x-'k)
дЛ,
J(x2 ~ vu (*i ~ Л )) (иа верхней границе),
О (всюду кроме границ),
-3(х2 - vd (xj - )) (на нижней границе),
(3.116)
С учетом (3.116) и свойств входящих в это выражение
8 -функций, (3.115) преобразуется к следующему виду:
\ а *тах
дло A J
xmin
-P^\,VU(X\ -Ai ))](&! +
xmin
[ М(Х1’РЛЛ1 -4M)fc(Xl-A^-A?)-
N J
imax
“4 ))]<&! +
jw(x)J(x-X)^^Jx . (3.117)
Л 6^2
Здесь xmin, xmax - граничные по оси точки области определе-
ния s(x) (области L).
Сумма первых двух интегралов в (3.117) есть не что иное,
как криволинейный интеграл по контуру объекта от произведе-
ния текущего изображения на разность сигналов объекта и фона
на границе объекта. Последний интеграл в (3.117) определяет
вклад в качество оценок внутренней структуры поля яркости объ-
185
ГЛАВА 3
екта. Как можно заметить, он соответствует случаю оценки ме-
стоположения объекта при отсутствии случайного фона.
Выражение для 5П(Х,/)/сЦ , также фигурирующее в (3.112),
можно представить в виде, аналогичном (3.117). И, наконец,
5П(Х,/)/бЛз запишется так:
= . (3.118)
5Л, A J
3 м
При этом необходимо отметить, что хотя выражение (3.118) и
не содержит криволинейный интеграл, тем не менее оценка пара-
метра обнаружения также будет зависеть от перепада яркости изо-
бражения на границе объекта и фона. Действительно, из (3.112)
следует, что дифференциальное уравнение, определяющее оценку
Лз, также зависит от 5П(Х,/)/сЦ и .
Таким образом, полученные выражения указывают на существенную
зависимость качества оценок параметров сдвига и характеристик обна-
ружения от информации, содержащейся в перепаде яркости наблюдае-
мой сцены на границе объекта с фоном. А это также хорошо согласует-
ся и с очевидными физическими представлениями о том, что эффек-
тивность обнаружения объектов, наблюдаемых человеком-оператором
в аппликативной смеси со случайным фоном, должна существенно за-
висеть от перепада яркостей на границе объекта с фоном, имеющего
место в данном конкретном акте наблюдения.
При обнаружении неподвижных пространственных объектов
с точно известным местоположением поле яркости фона, нахо-
дящееся под объектом, недоступно наблюдению, вследствие чего
полученные результаты на этот случай не распространяются. Как
отмечалось, адекватная физическим представлениям и потребно-
стям практических приложений постановка и, тем более, решение
задачи обнаружения пространственного объекта на аппликатив-
ном фоне в настоящее время отсутствуют. Полученные в работах
[24, 26, 36, 39] результаты по определению вероятности обнару-
жения таких объектов могут интерпретироваться только как не-
которые оценки этой вероятности.
Остановимся на рассмотрении особенностей трактовки та-
ких оценок. Вполне очевидно, что качество алгоритма обнаруже-
ния в общем случае определяется полнотой учета доступной ин-
186
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
формации о характеристиках наблюдаемых объектов, фонов и
шума при решении задачи синтеза этого алгоритма. Оценки снизу
характеристик обнаружения формируются тогда, когда в поста-
новке соответствующей задачи синтеза обнаружителя использу-
ется не в полном объеме вся доступная наблюдателю информа-
ция, т.е. оценка снизу вероятности обнаружения полностью из-
вестного неподвижного объекта на аппликативном случайном
фоне может быть получена, если предположить, как это имеет
место в [26, 39], что известны только статистические характери-
стики фона, но не вид его конкретной реализации, окружающей
объект в каждом акте наблюдения, доступной наблюдателю и по-
зволяющей, в частности, экстраполировать значения фона на об-
ласть, замещенную объектом. В этом случае задача обнаружения
объекта при точно известном его местоположении ставится сле-
дующим образом. Наблюдаемая в области L аппликативная
смесь сигнала объекта с фоном имеет вид
м(х) =
s(x) + w(x), xczi, (гипотеза Нх\
р(х) + и(х), х с £, (гипотеза Н(}).
(3.119)
В (3.119) /?(х) - шум наблюдений с корреляционной функ-
цией Лл(х1,х2) = ^(х1 -х2), р(х) - некоторая случайная реали-
зация фона, относительно которой известно только то, что она
принадлежит к ансамблю гауссовских фонов с известной корре-
ляционной функцией 7?р(х1,х2). Тогда функционал правдоподо-
бия для первой гипотезы (в наблюдаемом изображении г/(х) объ-
ект присутствует) имеет вид [25]
=fc,exp jj(w(x1)-5(x1))gi(x1,x2X«(x2)-s(x2))Jx16/x2
I L
= k\ exp
-2 Jj5(x1)g|(x1,x2)w(x2)<7x1t/x2 +
L
+ £p(xI)01(xl,x2)^(x2)47xIrfK2) ,
L J,
(3.120)
187
ГЛАВА 3
где g1(x1,x2) - функция, обратная корреляционной функции шу-
ма наблюдения (обратное ядро). Как известно, для белого шума
наблюдения и(х) эта функция имеет вид
2l(x1,x2) = (l^)J(x1-x2).
(3.121)
С учетом этого выражение (3.120) преобразуется к виду
^=^ехр —— f(w2(x)-25(x)w(x) + 52(x)Vx .
2N J
\ L J
(3.122)
Функционал правдоподобия для альтернативной гипотезы (в
наблюдаемом изображении w(x) объект отсутствует) имеет вид
F2 = k2 exp
(3.123)
Здесь 02(х1?х2) ~ функция, обратная корреляционной функции
правой части нижней суммы выражения (3.119).
Теперь выражение для отношения функционалов правдопо-
добия можно представить так:
к\
— = —Lexp
^2 ^2
w2(x) 2s(x)w(x) s2(x) v(x)w(x)^
~^2N~ + ^~2N 2F+ ‘
(3.124)
Здесь
v(x)= jw(y)62(x,y)<fy.
L
(3.125)
Если /?p(xj x2) - корреляционная функция фона, то корре-
ляционная функция правой части нижней суммы выражения
(3.119)
/?р„(х1,х2) = Ar<J(xj-х2) + /?р(х1,х2), Х|,х2е£.
Тогда, как показано в [28], обратное ядро (х1^ х2) следует
искать в виде
188
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
б2(х„х2) = 1/Лг(^(х1 -Х2)-Л(Х1,Х2)), (3.126)
где Л(х19х2) удовлетворяет следующему уравнению оптимальной
пространственной фильтрации (Винеровской) случайного фона,
наблюдаемого в аддитивном белом шуме:
Л’Л(Х1,х2) + ^h(x],y)Rp(y,x2)dy = Rp(x{,x2). (3.127)
L
С учетом этого (3.125) преобразуется к виду
v(X) = jw(y)(J(y - х) - h(y, x))dy = 1(«(х) - И (*)), (3.128)
L
где vt(x) = Jw(y)/?(y,x)rfy - сигнал на выходе оптимального вине-
L
ровского фильтра.
Тогда, в соответствии с (3.124), (3.128), логарифм отношения
функционалов правдоподобия FjF2
Л = in А = ~ |i/(x)(2s(x) - V] (x))Jx - р2 (х) dx + In A.
(3.129)
Поскольку в этом выражении два последних слагаемых не
зависят от наблюдаемого изображения м(х), из (3.129) вытекает
следующее решающее правило обнаружения:
fw(x)(25’(x)-Vj(x))c/x 7 . (3.130)
I "о
Здесь Я|, Яо - решение о наличии/отсутствии цели соответст-
венно; г] - порог обнаружения, определяемый критерием обна-
ружения и зависящий в общем случае от двух последних слагае-
мых правой части выражения (3.129). При обнаружении по кри-
терию Неймана-Пирсона порог устанавливается по требуемому
значению вероятности ложной тревоги и рассмотренные зависи-
мости можно не принимать во внимание.
189
ГЛАВА 3
Когда интервал корреляции фона меньше линейных разме-
ров области интегрирования L, пределы интегрирования в
(3.123) можно заменить на бесконечные. Тогда, преобразовав по
Фурье (3.127), получим
^(wl»w2) + FA(wl>w2)Gp(wl’W2) = Gp(Wl’W2)- (3.131)
Здесь Fa(^,l>2) = f[A(x1,x2)] и G/,(i>1,l>2) = f[7?/,(x1,x2)], f[..J -
символ Фурье-преобразования.
Для фона с корреляционной функцией вида
Rp(xi,х2) = 0-2 ехР| “1*1 - *31“1*2 -*41L (3.132)
V И ^2 )
где элементы векторов хьх2 обозначены х^^,^), х2-(*3’х4)>
имеем
z ч 4<72^2
G ( , И’2 ) = ' 2
(jfwf + iXJ^ + i)
Из (3.131), (3.133) следует, что
4<т2^2
(3.133)
^(Wj,^) 2 2 е2 2 i\ л 9 е е
А (^ + 1)(^2 W2 + 0 + 4сГ#1<52
(3.134)
Расчеты оценок снизу вероятности правильного обнаруже-
ния выполнялись с использованием критерия Неймана-Пирсона
на имитационной модели, реализующей решающее правило
(3.130). При этом корреляционная функция фона и передаточная
функция оптимального пространственного винеровского фильтра
задавались выражениями (3.132), (3.134).
Моделирование выполнялось применительно к задаче обна-
ружения равнояркого квадрата с размером сторон а х b и контра-
стной (по отношению к среднему значению яркости фона) ярко-
стью В.
На рис. 3.49 приведены полученные зависимости оценок
снизу вероятности обнаружения от отношения сигнал/шум
qQ = ^B2ab/N . При моделировании варьировалось отношение
190
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
величины интервалов корреляции фона к линейным размерам об-
наруживаемого объекта /3 ~2д}/а = 262/Ь, а также отношение
среднеквадратического отклонения яркости фона к яркости объ-
екта qx - су/В. Кривые соответствуют вероятности ложной трево-
ги рлт= 0,001.
При моделировании порог обнаружения для заданной веро-
ятности ложной тревоги определялся по 10 000 реализаций слу-
чайных полей, в то время как вероятность правильного обнару-
жения определялась по 1000 реализаций. На графиках /7 = 0,1,
q} = 5 для сплошных кривых, [3 - 0,4, д, =0,2 для пунктирных
кривых, /3 = 0,1, q} =0,2 для кривых, выделенных точками. Звез-
дочками показаны значения вероятностей при у? = 0,1, ^=1
(кривая, соответствующая обнаружению равнояркой фигуры на
равномерном фоне).
Приведенные на рисунке кривые показывают, что оценка
снизу - вероятность правильного обнаружения в основном опре-
деляется отношением сигнал/шум q$ и в интервале значений
/?<0,4, и qx<A хорошо совпадает с вероятностью, соответст-
вующей обнаружению равнояркой фигуры на равномерном фоне.
Влияние неравномерного фона на характеристики обнаружения
191
ГЛАВА 3
начинает заметно проявляться, когда СКО освещенности фона
превышает освещенность объекта в 5 и более раз.
Качество алгоритмов обнаружения в общем случае зависит от полноты
учета доступной априорной информации о характеристиках наблюдае-
мых объектов, фонов и шума. В случае аппликативной смеси сигнала
объекта с фоном конкретная реализация участка фона, накрытого обна-
руживаемым объектом, не поддается прямому наблюдению. Методами
статистической экстраполяции в принципе можно восстановить с той
или иной степенью достоверности вид этой реализации по наблюдению
участков фона, окружающих объект. И тогда задача обнаружения объ-
екта, замещающего фон, трансформируется в задачу различения объек-
та и восстановленного таким образом участка фона. При этом очевид-
но, что оценка сверху значений вероятности обнаружения объекта на
аппликативном случайном фоне может быть получена, если предполо-
жить, что точно известен вид конкретной реализации участка фона, за-
мещенного объектом, имеющим место в данном акте наблюдения.
Таким образом, задача синтеза алгоритма оценки сверху ве-
роятности обнаружения сводится к задаче синтеза алгоритма раз-
личения двух гипотез, также описываемых выражением (3.119).
Однако в этом случае реализация фона р(х) полагается точно из-
вестной.
Функционал правдоподобия Fi для гипотезы Hi представля-
ется в виде (3.112), и при наблюдении в белом шуме приводится к
виду (3.114).
Функционал правдоподобия для гипотезы Но представляется
аналогично:
F2 = к2 expf-—!— f(w2(x)-2/?(x)w(x) + j92(x))c7x\
2N J
\ L 7
(3.135)
Теперь отношение функционалов правдоподобия запишется
так:
-5- = у-ехр| -2- Г((2р(х) - 2s(x))w(x) + s2(х) - p2(x))Jx
F2 k2 J
(3.136)
192
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
а логарифм этого отношения примет вид
Л = Inf—1 = Inf—1 +
V 2 J I ^2 J
+ ~ if(-s(x) - p(x))w(x) - i?(x) + p2(x)lzx.
Л Д 2 2 7
(3.137)
Оставляя в левой части только члены, зависящие от наблю-
дений w(x), запишем решающее правило обнаружения:
Гы(х)(5(х)-/2(Х))</Х^77,
L "о
(3.138)
где г) - порог, зависящий в общем случае от отношения кх/к2 , а
также от энергии сигнала p2(x)t/x и фона p2(x)Jx.
При любом критерии обнаружения, включая критерий Ней-
мана-Пирсона, этот порог, как следует из (3.137), должен изме-
няться с изменением реализации фона /?(х). Однако, во-первых,
если интервал корреляции фона в разы меньше линейных разме-
ров обнаруживаемого объекта, то флуктуациями члена J/>2(x)t/x
в силу их малости можно пренебречь. Во-вторых, поскольку мы
предполагаем получить характеристики обнаружения, усреднен-
ные на множестве реализаций фона, то необходимо использовать
фиксированный порог, полученный усреднением на этом множе-
стве реализаций фона. Именно такой порог мы и будем использо-
вать при получении количественных оценок вероятности обна-
ружения в рассматриваемом случае.
Как и выше, расчеты вероятности правильного обнаружения
выполняются с использованием критерия Неймана-Пирсона на
имитационной модели, реализованной в соответствии с решаю-
щим правилом (3.138).
Результаты оценки сверху вероятности правильного обна-
ружения приведены на рис. 3.50 при />лт = 0,001. Все обозначения
на рисунках и исходные данные при построении кривых анало-
гичны использовавшимся выше при построении кривых рис. 3.49.
193
ГЛАВА 3
Ломаный характер кривых на рисунках связан с ограничен-
ным объемом статистики, полученной при моделировании.
Приведенные на рисунке кривые показывают, что, как и в слу-
чае оценок снизу, оценки сверху вероятности правильного об-
наружения в основном определяются отношением сигнал/шум
qo и в интервале значений >0<О,4 и qx <1 хорошо совпадают с
вероятностями, соответствующими обнаружению равнояркой
фигуры на равномерном фоне. Влияние неравномерного фона на
характеристики обнаружения здесь также начинает заметно
проявляться, когда СКО яркости фона становится больше яр-
кость объекта.
Существенное различие между оценками снизу и сверху ве-
роятности обнаружения хорошо иллюстрирует рис. 3.51, на кото-
ром сведены воедино оценки снизу и сверху вероятности обна-
ружения для двух значений исходных данных: кривая >0 = 0,1,
qx =5 и кривая (>0 = 0,1, qx =1). Таким образом, существующие
подходы к решению задачи обнаружения неподвижного про-
странственного объекта на случайном фоне фактически опреде-
ляют только оценки сверху и снизу вероятности обнаруженния.
Вопрос о решении в рамках теории статистических решений за-
дачи обнаружения неподвижного пространственного объекта, на-
блюдаемого в аппликативной смеси со случайным фоном, остает-
ся открытым.
194
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
Вместе с тем, из сопоставления кривых (рис. 3.49, 3.50) сле-
дует, что когда линейные размеры объекта в 2 и более раза пре-
вышают интервал корреляции фона, а СКО яркости фона не пре-
вышает значения яркости объекта, вероятность обнаружения объ-
екта на таком случайном фоне практически совпадает с вероятно-
стью обнаружения такого же объекта на равноярком фоне.
При больших значениях СКО яркости фона, т.е. когда q} > 1
и одновременно /?<0,5, можно получить достаточно простые
выражения для гарантированной оценки (оценки сверху) вероят-
ности обнаружения объектов, наблюдаемых на аппликативном
случайном фоне. Действительно, из (3.138) следует, что рассмат-
риваемая задача обнаружения свелась к задаче обнаружения раз-
ностного изображения J(x) = 5(x)-/?(x), откуда отношение сиг-
нал/помеха по мощности, определяющее характеристики обна-
ружения, приобретает вид
У =-J- Г(5(х)-Хх))2Л = ^. (3.139)
J N
L
Поскольку /?(х) в (3.139) является реализацией случайного
фона, то как отношение помеха/сигнал q, так и соответствующая
ему оценка вероятности правильного обнаружения pno(q). яв-
195
ГЛАВА 3
ляющаяся функцией q, будут случайными величинами. Тогда в
качестве искомой оценки вероятности обнаружения объекта на
ансамбле реализаций случайного фона представляется вполне
оправданным использовать математическое ожидание
Л/(рпо(д)). Здесь М(...) - символ математического ожидания,
определяемого на ансамбле реализаций фона р(х). Чтобы ис-
пользовать для последующих оценок приближенное равенство
ЩрпО(Я))~Рпо(Щ<1У>’
(3.140)
обратимся к определению . С учетом того, что А/(р(х)) = 0,
представим выражение для математического ожидания энергии
разностного сигнала M(D) в виде
М{Ь)-М / J(52(x)-25(x)/7(x) + /22(х))й?х
= р2(х)б7хч-М / J/?2(x)fi?x\.
L \L /
(3.141)
Вполне очевидно, что для однородного фона
(3.142)
где а2 - дисперсия яркости реализаций фонового ансамбля; SL -
площадь области L, занимаемой объектом.
Таким образом,
И<г) = р(х)Л + ^SL "I ± .(3.143)
1 1 \L J
Как известно, характеристики обнаружения определяются не
энергетическим (д2), а амплитудным отношением сигнал/помеха
q. Введем обозначение qp =M(q} и с использованием прибли-
женного равенства M(q} « ^A/(g2) из (3.143) получим
196
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
(1 V'2 /уг
=VM1+
<t2Sl
(3.144)
При обнаружении равнояркого объекта имеет место равен-
ство Es - B^SL, где Bs - яркость объекта. С учетом этого выра-
жение (3.144) для действующего отношения сигнал/помеха мо-
жет быть представлено в виде
Яр =4'о(1 + ^)1/2
Ло(1 + ^2/2)
при q} « 1,
при q} » 1.
(3.145)
Здесь q{} - ^EjN - базовое отношение сигнал/помеха, соответ-
ствующее обнаружению равнояркого объекта на равноярком фо-
не; qx = a[Bs - поправка к базовому отношению сигнал/помеха,
учитывающая факт обнаружения на случайном фоне.
На рис. 3.52 приведены кривые, показывающие зависимость
вероятности обнаружения рпо от базового отношения сиг-
нал/помеха q{} при различных значениях параметра qx, характе-
ризующего отношение СКО яркости случайного фона к яркости
обнаруживаемого объекта. Кривые рассчитывались с использова-
нием параметра обнаружения qp. определяемого выражением
(3.145). Для кривой 1 qx = 5, для кривой 2 qx =1, для кривой 3
197
ГЛАВА 3
qx =0,3 обнаружение объекта на равноярком (не распятненном)
фоне. Всем кривым соответствует вероятность ложной тревоги
рлт = 0,001. На этом же рисунке кружками и звездочками показа-
ны значения рпо, полученные методом имитационного модели-
рования при р - 0,1 и при тех же значениях отношений qQ и q} .
Результаты, представленные на рис. 3.52, показывают хорошее
совпадение оценок, полученных расчетным путем и методом
имитационного моделирования, чем подтверждается допусти-
мость использованных при выводе (3.145) приближений.
3.5.2, Поиск и обнаружение
пространственных объектов
Задача обнаружения пространственных объектов при на-
блюдении на пространственно коррелированном (неравноярком)
фоне в общем случае должна решаться при отсутствии информа-
ции об их местоположении. Оценка потенциальных возможно-
стей обнаружения сводится в этом случае к синтезу и анализу оп-
тимального решающего устройства совместного обнаружения и
оценки координат наблюдаемого объекта. Как правило, про-
странственный объект образует с фоном аппликативную смесь.
Однако задача синтеза оптимального обнаружителя при апплика-
тивной смеси полезного и фонового сигналов и отсутствии ин-
формации о местоположении подлежащего обнаружению объекта
до настоящего времени не имеет более или менее строгих реше-
ний. В то же время, в ряде работ [23, 25] решается задача синтеза
алгоритма совместного обнаружения и оценки параметров для
случая аддитивной смеси полезного и помехового сигналов, опи-
сываемых функцией одной переменной - времени. Эти результа-
ты можно распространить на случай поиска и обнаружения про-
странственных объектов, когда в качестве обрабатываемых сиг-
налов используются функции двух переменных - элементов век-
тора пространственных координат х = (Х],х2) в плоскости сфор-
мированного изображения [45].
С учетом этого рассмотрим основные закономерности поис-
ка и обнаружения пространственных объектов на примере адди-
тивной смеси.
198
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
Тем более, что (см. 3.5.1) при небольших значениях диспер-
сии яркости фона, специфические особенности аппликативной
смеси сигналов объекта и фона оказывают незначительное влия-
ние на характеристики обнаружения объекта.
Итак, пусть s'(x,X) = s'(x1 -Л?) ~ финитная функция,
описывающая пространственно-яркостную структуру объекта.
Пусть 5(*j -Л1,х2-Л2) = 0 всюду за пределами области L . В этих
выражениях \определяют координаты объекта. Пусть так-
же изображение наблюдаемого фоноцелевого ансамбля опреде-
ляется выражением
н(х) = 5(х,Х) + и(х),
заданным в области наблюдения М такой, что LaM. Здесь п -
случайный фон, описываемый центрированным аддитивным га-
уссовским шумом с корреляционной функцией R(x]9x2). Тогда
логарифм функционала правдоподобия можно представить сле-
дующим образом [23, 25]:
П(к)= JJw(x1 )0(x1,x2)s(x2,X)</x1</x2, (3.146)
м
а правило принятия решения примет вид
1
sup-П(1)^ 7(^). (3.147)
к q
Здесь q{q) - порог обнаружения, определяемый видом исполь-
зуемого критерия обнаружения; О(х,,х2) - функция, обратная
корреляционной функции шумов наблюдения T?(xhx2); q - от-
ношение сигнал/шум по амплитуде (в нашем случае - по яркости
обрабатываемого изображения):
? = [ jp(Xl)2(x1,X2)5(x2)JxIrfx2
< А
Как и раньше, Нх, Н$ - решение о наличии или отсутствии
объекта. Множитель 1/q в левой части (3.147) обеспечивает
199
(3.148)
ГЛАВА 3
нормировку П(Х), так что для критерия максимального правдо-
подобия порог обнаружения q(q) принимает значение q / 2.
Если принято решение Нх , то оценка координат Я,, объ-
екта (элементов вектора X) определяется с помощью выражения
2,Л =argsuP— ПЦЛ) • (3.149)
^^2 Я
При отсутствии информации о положении объекта вероят-
ностные характеристики его обнаружения задаются вероятно-
стью:
ложной тревоги (р]ГТ), правильного обнаружения при нор-
мальной ошибке измерения координат (рпо);
правильного обнаружения при аномальной ошибке измере-
ния координат (/7оа), когда положение объекта определяется
по боковому отклику корреляционного измерителя, т.е. не-
верно.
В [23] предложен подход к получению асимптотических
(при условии <?->оо) оценок этих показателей. Для произволь-
ных значений q существует подход к приближенной оценке ве-
роятностей рпо, роа, , состоящий в замене непрерывного кор-
реляционного отклика (3.146) его дискретными некоррелирован-
ными отсчетами [23, 25]. Недостатком этого подхода является от-
сутствие оценок точности получаемых приближений. В то же вре-
мя, его использование позволяет выявить и количественно проана-
лизировать основные взаимосвязи между характеристиками ис-
ходного изображения и характеристиками обнаружения. После-
дующее изложение выполняется в рамках такого подхода [45].
Разобьем область анализа М анализа на п непересекающих-
ся подобластей, каждая из которых образована сдвигом исходной
области L, в которой расположен подлежащий обнаружению объ-
ект с координатами X. Максимально возможное количество таких
подобластей определяется частным п- SM /SL , где SM, SL -
площадь поля анализа и области L соответственно. Полагаем, что
подлежащий обнаружению объект - Ли, ^ - ^) = л; (х, Xz)
может находиться в любой z-й подобласти поля анализа.
200
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
Функции sz(x,Xz) образуют систему п ортогональных функ-
ций (сигналов), удовлетворяющих условию
Js/(x,X/)sjt(x,Xjt)rfx = 0 при i^k, (3.150)
м
Теперь задача определения местоположения объекта форму-
лируется как задача различения п ортогональных сигналов
sz(x,Xz). При этом решающее правило (3.149) может быть пред-
ставлено следующим образом: выносится решение об обнаруже-
нии объекта в z-й подобласти, если
1 П(Х,) > -П(ХА) при всех ХА * X,-. (3.151)
Я Я
Для последующей оценки вероятностных характеристик
обнаружения обратимся к определению законов распределения
элементов решающего правила (3.151). Если объект находится в
z-й подобласти, то, в соответствии с (3.146), имеет место выра-
жение
-П(1А) = - ffw(x1,k;)O(xl,x2).sA(x2-kA)^1Jx2 =
Я Ч LJ
м
= - |р,(х„Х,.)0(Х|,х2)5А(х2 -кА)(7Х]47х2 +
м
+- jJ«(X|)6(X|,X2)5A(x2 -XA)JX]6/x2.
Л /
(3.152)
Математическое ожидание последнего слагаемого в (3.152)
равно нулю вследствие равенства нулю математического ожида-
ния и(х). Дисперсия этого слагаемого
стА =-^- J... |е(и(Х1)и(х3))0(х1,х2)х
Л/ м
х2(х3,х4)^(х2 -1а)уДх4-kk)d^d*2d\3d*4, (3.153)
где £(...) - символ математического ожидания.
201
ГЛАВА 3
С учетом того, что 0(х19х2) удовлетворяет интегральному
00
уравнению 7?(xI,x2)Q(x2,x3)rfx2 = <?(*! -х3), получим
J • Р?(х,, х3Х^х,, х2 )2(х3, х4 )sk (х2 - )sk (х4 - )dxidx2(h3dx4 =
м м
= JJp(Xl ’ Х4 Х2(х1 > х2 К (х2 - Ч К (х4 - h )dxxdx2dx4 =
м
= jpA (х| -Ч)2(Х1>Х2)5л(Х2 ~^Wx1^x2 (3.154)
м
откуда следует, что = 1. Закон распределения этого слагаемого -
нормальный, что следует из линейности функционала, опреде-
ляющего это слагаемое. Математическое ожидание первого сла-
гаемого в правой части (3.152) равно нулю при k*i вследствие
ортогональности ^(x^kj и sk(x2 -X*). А из (3.148) следует, что
это слагаемое при к = i равно q.
Отклик решающего устройства при опросе подобласти поля анализа, в
которой находится объект, распределен по нормальному закону с пара-
метрами Wj = Norm(g,l), а при опросе подобласти, в которой объект
отсутствует - с параметрами w0 = Norm(0,l).
Тогда при использовании критерия максимального правдо-
подобия вероятность правильного обнаружения в соответствии с
[23, 25] определяется выражением
Рпо
= JwiW §w0(y)dy
q!2 V-oo
(3.155)
dx.
Вероятность превышения порога обнаружения хотя бы в од-
ной из подобластей, где цели нет, равна
Р1 = 1-
'q/2
J И’0(х)б/х
202
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
Тогда вероятность появления аномальной ошибки, т.е. при-
нятия решения об обнаружении объекта в одной из и-1 подоб-
ластей, в которой он на самом деле отсутствует, равна
Роа С Poo) Pi 0 Рпо) 1
^/2
j w0(x)<&
(3.156)
Вероятность ложной тревоги, т.е. принятия решения об об-
наружении объекта, на самом деле отсутствующего в поле анали-
за, представляется следующим образом:
<,/2
Рлт =1 - | yv0(x)dx
Окончательно, выражения для рп0, рол, рлт
следующий вид:
(3.157)
принимают
Рпо(^") =
JW" ’(x)expf-—(x-q)2 jctc,
«/2
Psn(q,n) = \-Wn(q/2),
W(x)-—^==r fехр(-(х2/2))б/х.
(3.158)
На рис. 3.53-3.55 приведены рассчитанные по (3.158) кри-
вые, отражающие зависимость показателей обнаружения от от-
ношения сигнал/помеха q при различных размерах поля наблю-
дения (параметр п ).
203
ГЛАВА 3
________________________Рисунок 3.54______________________
________________________Рисунок 3.55______________________
204
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
3.5.3. Обнаружение объектов
при воздействии аддитивных помех
При создании помех видовым оптико-электронным средст-
вам путем распятнения наблюдаемой сцены излучением актив-
ных оптических излучателей на вход этих средств поступает ад-
дитивная смесь полезного и помехового сигналов. При постанов-
ке маскирующих аэрозольных завес в общем случае образуется
аддитивно-мультипликативная смесь полезного и помехового
сигналов. Однако в отдельных случаях, когда помеховый эффект
определяется, в основном, собственной яркостью завесы (ее соб-
ственным или рассеянным излучением), а изменением значений
коэффициента ее пропускания в пределах области формирования
изображения можно пренебречь, в первом приближении можно
считать также аддитивным характер смеси помехи и сигнала на
входе оптико-электронного средства.
Вероятностные характеристики обнаружения объекта 5(х)
на фоне аддитивной пространственной однородной помехи опре-
деляются полученными выше выражениями (3.158). В случае
коррелированной пространственной однородной помехи отноше-
ние помеха/сигнал входящее в (3.158), удобно вычислять, за-
менив выражение (3.148) его эквивалентным представлением в
частотной области [46]:
Я
xl/2
J
(3.159)
где Gs(m’|,u’2), gp(^i^2) ~ Фурье-преобразование сигнала объ-
екта 5(х) и корреляционной функции помехи Rp(\ -х2).
Полученные выражения позволяют оценить характеристики
обнаружения объектов произвольной формы. Для уяснения ос-
новных закономерностей обнаружения выполним количествен-
ные оценки характеристик обнаружения для наиболее наглядно
интерпретируемого случая обнаружения фигуры прямоугольной
формы со сторонами длиной а и b и с яркостью В [45]. Для ис-
следования влияния степени коррелированное™ помехи на ко-
нечный результат, рассмотрим аддитивную помеху р(х), со-
205
ГЛАВА 3
стоящую из двух составляющих - некоррелированной рДх) с
корреляционной функцией RpX (xj, х2) = АА1<У(х1 )£(х2), характери-
зующей внутренние шумы наблюдения, и коррелированной функ-
цией /?2(х), представляющей собственно преднамеренную помеху
с экспоненциальной корреляционной функцией вида (3.132).
В процессе анализа будем варьировать отношение у спект-
ральных плотностей этих составляющих на нулевой частоте:
7 = Л2/у( = 4o-2J]J2/ati , ,V2 - , (3.160)
оставляя неизменной их сумму Ао :
Ао - М + ;V2 = const. (3.161)
Теперь с учетом обозначений Д =2Sx/a. /32 = 282/Ъ выра-
жение (3.159) конкретизируется следующим образом:
92=9oV, = ВгаЬ/]\{},
(1+/) 7 +z2a2+, ,
я2 22 Л2(1 + х+у2Д2 + 22а2+Л2А2А2)
(3.162)
В этих выражениях - базовое отношение сигнал/помеха
по мощности, соответствующее отношению энергии сигнала объ-
екта В2аЬ к спектральной плотности на нулевой частоте суммар-
ной помехи Nq . В (3.162) v сложным образом зависит от / (от
доли коррелированной составляющей помехи) и от относитель-
ных (отнесенных к длине сторон наблюдаемой фигуры) значений
интервалов корреляции этой составляющей Д, Д2. Назовем v
параметром формы^ фиксируя тем самым то, что этот параметр
зависит только от геометрии обнаруживаемой фигуры и формы
корреляционной функции помехи, но не зависит от их энергети-
ческих характеристик.
1Из (3.162), в частности, следует, что если в качестве базовых взять по-
казатели обнаружения квадрата в случае квазиизотропной (= <52)
206
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
коррелированной помехи, то показатели обнаружения прямоугольника
в случае неизотропной помехи (Д ф д2) будут равны базовым, когда
отношение интервалов корреляции помехи равно отношению сторон
прямоугольника, то есть когда в каждой его стороне укладывается оди-
наковое число интервалов корреляции.
На рис. 3.56, 3.57 приведены рассчитанные по (3.162) зави-
симости параметра формы v от у и Д, /32. Эти зависимости
207
ГЛАВА 3
показывают, что при фиксированных энергетических соотноше-
ниях характеристики обнаружения зависят как от формы обнару-
живаемого объекта, так и от формы (параметров) корреляцион-
ной функции помеховой составляющей наблюдаемого сигнала,
учитываемой значениями величин Д, Д2.
На рис. 3.58-3.60 приведены рассчитанные по полученным
выражениям зависимости вероятностей рпо, роа, рт от отноше-
ний Д, Д2 величины интервалов корреляции помехи к линейным
________________________Рисунок 3.58______________________
________________________Рисунок 3.59______________________
208
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
размерам обнаруживаемого объекта. При этом принималось, что
= 9, п -100, , причем значение у - 0 соответствует от-
сутствию коррелированной аддитивной составляющей помехи, а
у = 100 - случаю, когда на характеристики обнаружения в основ-
ном влияет только эта коррелированная помеха. Кривые соответ-
ствуют принятию решения по критерию максимального правдо-
подобия и иллюстрируют характер зависимости вероятностей
/?по > Роа > Рлт от размеров зоны поиска (поля анализа).
При интерпретации приведенных результатов необходимо иметь в виду
особенности использовавшейся нормировки сигналов, состоящие в
следующем.
Как это видно из (3.160), при фиксированной спектральной
плотности на нулевой частоте коррелированной составляющей
помехи, равной (^2 = М) ~ М ) > мощность помехи ст2 с изме-
нением значений Д, /?2, обусловленных изменением интервалов
корреляции помехи , 62 также меняется по закону
<т2 = ^/(4^2)-
С уменьшением 8Х,82 (расширением спектра коррелированной со-
ставляющей помехи) при принятой нормировке, определяемой выраже-
209
ГЛАВА 3
ниями у = const, = const, увеличивается мощность коррелиро-
ванной составляющей помехи, вследствие чего уменьшается вероят-
ность правильного обнаружения.
Рис. 3.58 также показывает, что при уменьшении интервала
корреляции помехи вероятность правильного обнаружения /?по
падает, приближаясь к значениям, соответствующим случаю об-
наружения объекта при наличии только некоррелированной со-
ставляющей помехи.
3.5А. Влияние формы объектов
на характеристики их обнаружения и различения
В задачах обработки изображений факторами, определяю-
щими зависимость характеристик обнаружения (различения) объ-
ектов от их формы могут быть:
аддитивный коррелированный шум (помеха);
пространственно-коррелированный фон, образующий ап-
пликативную смесь с изображением объекта;
угловая ориентация объекта при его наблюдении на корре-
лированном фоне или шуме;
деформация изображений, порождаемая средой распростра-
нения оптического сигнала и конечной разрешающей спо-
собностью входных элементов оптико-электронных систем.
Влияние последнего фактора на характеристики обнаруже-
ния пространственно-протяженных объектов по их изображениям
рассматривалось в [27].
В частном случае аддитивных экспоненциально коррелиро-
ванных шумов наблюдения удается установить простые связи
между формой визируемых объектов и показателями их обнару-
жения и различения. Для того чтобы выявить парциальный вклад
только структурной составляющей изображения объекта в опре-
деляемые показатели, остановимся на рассмотрении случая обна-
ружения равнояркого объекта на равномерном фоне. Будем ре-
шать поставленную задачу в дискретном представлении, что по-
зволит, как это показано в дальнейшем, получить простые алгеб-
раические выражения для оценки характеристик обнаружения и
различения [31].
210
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
Использование известной процедуры синтеза оптимального
(в смысле критерия максимального правдоподобия) алгоритма
обнаружения детерминированного дискретного изображения
равнояркого объекта на равномерном фоне в аддитивной смеси
с коррелированным гауссовским шумом с нулевым средним по-
зволяет оценить качество принимаемых решений (вероятности
правильного обнаружения рпо и ложной тревоги рлт) с помо-
щью параметра обнаружения q (обобщенное отношение сиг-
нал/шум) [30]:
0,0=4;, (3.163)
i j к I
где
V(/, j) e L,
L\jLf=M, L(\Lf = 0,
C0 - энергетический (яркостной или какой-нибудь другой) кон-
траст объекта по отношению к фону; М , L, Lj - области анали-
за, объекта и фона соответственно; Rijkl - массив коэффициентов
межэлементной корреляции аддитивной шумовой компоненты
изображения; пх,пу - размеры изображения, пкс.
Очевидно, что на параметр q2 оказывают влияние как энер-
гетические, так и структурные свойства сигнальной и шумовой
компонент изображения. Однако при использовании представле-
ния (3.163) анализ влияния этих свойств может быть выполнен
только численными методами, и результаты его, поэтому будут
носить частный характер.
Перейдем от двумерного способа задания изображений к од-
номерному путем прочтения исходного массива Су последова-
тельно по столбцам. При этом структура параметра обнаружения
изменится несущественно;
?2=ЕЕЖ'(/0~1; М = (3.164)
i J
211
ГЛАВА 3
где С* - соответствующим образом сформированные одномер-
ные массив; R* - матрица коэффициентов корреляции размерно-
сти (пххпу)2, структура которой обсуждается ниже.
Полагая
=<т2ехр
f l/-£l |j~/|]
1^1 ‘М
(3.165)
где а2 - дисперсия шумовой компоненты изображения, одинако-
вая для всех элементов; , д2 - коэффициенты, характеризую-
щие степень корреляции шумовой компоненты по строкам и
столбцам соответственно, с учетом свойств прямого левого про-
изведения матриц [30], получаем
/р‘г1 1 М} М2 0 ... М2 М3 М2 0 ... 0 0 М2 М3 М2 0 М3 М2 0 ’ 0 м2 м3 м2 0 м2 (3.166) , M3=(\ + r2)R-^
<т> ' II 1 1 II о
о ....
(1 + г;) -гу ... 0
"Гу О + Гу ) ...
~ГУ
0 (1 + г2)
, (3.167)
гх = ехр(-1/£]),
гу = ехр(-1М2).
212
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
Матрица 7?ст} имеет размерность (пххпу). Матрица (/?*) 1
имеет блочно-трехдиагональную структуру, причем каждый блок -
также трехдиагональная матрица.
Введем дополнительное легко выполнимое на практике ог-
раничение - элементы изображения объекта не должны распола-
гаться в крайних строках и столбцах зоны анализа. Характер
«сцепления» элементов изображения объекта с элементами мат-
риц (7?*)-1 определяется видом (3.164) и для конкретного вариан-
та изображения объекта схематично показан на рис. 3.61,а - ва-
риант эталонного изображения объекта; рис. 3.61,6 - схематичное
представление векторов изображения объекта и структуры мат-
рицы (Л*)-1).
Очевидно, что при выполнении введенного ограничения, не-
зависимо от формы изображения объекта и его местоположения в
зоне анализа, в формировании значения параметра обнаружения
участвуют только элементы матриц М2 и М3, не расположенные
в крайних строках и столбцах. В свою очередь, поскольку М2 и
М3 являются трехдиагональными (т.е. ненулевые элементы рас-
положены только на главной и двух соседних с ней диагоналях),
в параметр обнаружения могут входить только такие парные
произведения элементов изображения объекта, индексы которых
отличаются не более, чем на единицу.
Рассмотренные свойства параметра обнаружения позволяют
ввести понятие примитивов - элементарных структурных еди-
ниц, с помощью которых можно описать изображение объекта
произвольной формы. Такими примитивами являются единичный
элемент изображения и попарно связанные соседние элементы
изображения, расположенные горизонтально, вертикально и диа-
гонально (рис. 3.62).
Обозначим вклад каждого примитива в параметр обнаруже-
ния через Jo, d{, d2 и d3 соответственно. Тогда
do =(l + rx2Xl + ry2), dt=rx(l + r^), d2=ry(\ + r^), d3 = rxry,
(3.168)
С учетом (3.168), выражение для параметра обнаружения
примет вид
213
VTZ
19"£ яонХэил
(9
[/V 1— 1 1 1 1 1 1 1 I । । । । । !°! • : ! ! I ! ! 0 0 0 0 0 0 0
w 1 1 r~j— ! । । _ —A Г 1 Ц 1 J Г » 1 1 I 1 ГТ” lwj 1 I — — — p_ 0 _0
1 • « t- —— ► —- 1 1 1 1 ’ 1 1 0 0 0 0
— r~‘ l_ _ . 1 1 r 1 1 1 r~ l__. * 1 1 1 1 1—1— 1 1 I — 1 _ i p
1 1 w । । 1 1 Wi ! : Z£J
— 1 । 1 1 1 t 1 —
। । ! 0 0 0 0 0 0 0 0 0 0
0 — i— _ _ i_ _ 1 1 1 1 i 1 ! ! i—r~ । L_L-j |W; | । 1 1 Г~1 I 1 l_ l 1 1 w 1 ► — 1 1 — W
0 0 । .1 I 1 1 1 i 1 1 1 I 1 1 1 " 1 pv 1 1 1 W
|0|0| 0|0 |0 |0|0|гМ0| 0|0|0МгМ0|0|0|1~М0 |0|0|0 |Q|o| 0 I
(o
0 0 0 0 0
0 0 0 0 0
0 ££J (ZJ 0
0 0 Z(J 0 0
0 0 0 0 0
St? £ Z I t
Evavifj
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
<Л)
________________________Рисунок 3.62_____________________
Я ~ а^о\^о^о+ 2(/j6Z|+/2^2)] ’
1______
^“^(1-^X1-^)’
(3.169)
где PQ...Р3 - число примитивов соответствующего вида в изо-
бражении.
На «языке» введенных структурных единиц (примитивов) параметр об-
наружения объекта произвольной формы компактно описывается вы-
ражением (3.169). Причем данное описание устанавливает прямую
связь между формой изображения объекта, определяемой числом соот-
ветствующих примитивов, и качеством его обнаружения при фиксиро-
ванных энергетике изображения объекта и статистических свойствах
шумовой компоненты.
Предлагаемый способ описания формы изображений и вычис-
ления параметра обнаружения иллюстрирует табл. 3.4. Зависимость
вероятности ложной тревоги рт от коэффициента корреляции г
помеховой компоненты изображения (при г - гх = гу и С(2 /<т2 = 1)
для объектов различной формы представлена на рис. 3.63.
_______________________Таблица 3.4______________________
№ Вид фигуры Л> Рх р? Рз 92
1 1 □2 1 4 2 2 2 4аС02(</0+^-Ц-Л)
2 4 3 0 0 Л 3 \ 4аС02 к 4 >
3 П |Ц| 4 2 1 2 2f 1 А 4дС0 dQ + dy — d} —~d2J
4 4 0 0 4 4aC2(<Zo+2J3)
215
ГЛАВА 3
Вычисления производились по формуле /?лт = 1-1Т(д/2),
где W(x) определяется выражением (3.158). При этом, как из-
вестно, вероятность правильного обнаружения /?[10 и необнару-
жения объектов рпн по критерию максимального правдоподобия
связаны с рпт соотношениями рпп = 1 - n п = р .
л Л1 -I UU Л л I ' Л LIH Л Л1
Помимо задач, связанных с оценкой качества статистически-
оптимальных алгоритмов обнаружения, соотношение (3.169) мо-
жет быть использовано при решении различного рода оптимиза-
ционных задач. Покажем последнее на простом примере. Как
следует из (3.169), максимум параметра обнаружения, при сохра-
нении общего числа примитивов и при варьировании только
состава примитивов dx...d3 (при фиксированной энергетике изо-
бражения), достигается при условии
/М+Р2(/2=0, (3.170)
что эквивалентно (при dx ф 0 и d2^^} условию
Pj+P2=0, (3.171)
т.е. отсутствию в изображении объекта парных горизонтальных и
вертикальных связей между его элементами. Такими свойствами
обладает изображение типа «шахматная доска». В области об-
216
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
работки временных сигналов аналогию этому результату можно
найти в [29], где показано, что сигнал, оптимизирующий харак-
теристики обнаружения, должен иметь максимальное число пе-
ремен знака. Минимальная вероятность обнаружения будет
иметь место для фигур типа «квадрат» или «полоска», у кото-
рых диагональные связи между элементами отсутствуют или их
влияние компенсируется влиянием горизонтальных и верти-
кальных связей.
Для сложных изображений предлагаемый способ описания формы объ-
екта позволяет относительно легко рассчитывать вероятность правиль-
ных и ошибочных решений и оценивать влияние степени корреляции
шумовой компоненты на эффективность обнаружения или различения.
На рис. 3.64 схематично представлены изображения боковой
проекции объекта типа «автомобиль-фургон». Как нетрудно убе-
диться, каждое из этих изображений содержит следующее число
примитивов:
а) Р0=34, Р} = 27, Р2=25, Р3=44;
б) ?0 = 1б, р\ = °, = ^=0;
в) Р0=16, Р| =0, Р2=0, Р3 = 20;
г) Р0 = 16, ^1=3, А=4, Л=8-
________________________Рисунок 3.64 _____________________
217
ГЛАВА 3
На рис. 3.64,<7 дано неискаженное изображение объекта, а на
рис. 3.64,б-г - с искажениями различных типов, которые могут
быть реализованы, например, путем специальной окраски или с
помощью затеняющих экранов. Деформация изображений на
рис. 3.64,6,в выполнена в соответствии с правилами, вытекаю-
щими из полученного представления параметра обнаружения
(3.169). Деформация изображения, приведенного на рис. 3.64,г,
выполнена произвольно с сохранением общего числа неискажен-
ных элементов таким же, как для изображений на рис. 3.64,б,в.
Таким образом, для всех вариантов деформации остается неизменным
общее число элементов объекта, контрастных по отношению к фону
(Ро=16).
На рис. 3.65 представлены изолинии вероятностей ложной
тревоги рт, имеющих место при обнаружении объектов, пред-
218
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
ставленных на рис. 3.64 соответственно. Характер изолиний зави-
сит от степени коррелированное™ помеховой компоненты по ка-
ждой координате ( гг, гу ). Расчеты проведены для случая, когда
Со7<т2=0,2.
Отметим наиболее интересные особенности, вытекающие из
полученных зависимостей. Сравнение графиков на рис. 3.65,6/ и
3.65,в, показывает, что снижение общей «энергетики» изобра-
жения объекта (общего числа контрастных по отношению к фо-
ну элементов объекта) не обязательно ведет к ухудшению каче-
ства его обнаружения. Возможно даже улучшение качества (см.
на рис. 3.65,<7,в значения рлт в диапазоне изменения гх9 г от 0,0
до 0,6).
Произвольная камуфлирующая окраска (рис. 3.64,г, 3.65,г)
снижает общую энергетику объекта, однако качество обнаруже-
ния практически не ухудшается по сравнению с исходным изо-
бражением (рис. 3.64,6/, 3.65,6/) и наиболее «заметным» (рис.
3.64,в, 3.65,б).
Наличие информации о преобладающем направлении корре-
лированное™ шумов, например в телевизионных системах с по-
строчным сканированием, позволяет за счет той или иной «окра-
ски» объекта (рис. 3.64,б-г) варьировать в определенных преде-
лах качество обнаружения.
Развитый подход может быть использован и при оценке ве-
роятности различения объектов. При этом для вычисления пара-
метра q2, в соответствии с выражением (3.169), число примити-
вов соответствующего вида необходимо определять не для каж-
дого из изображений, а для разностного изображения каждой па-
ры различаемых объектов.
Специфические свойства параметра обнаружения для случая аддитив-
ной смеси изображения объекта с экспоненциально коррелированным
гауссовским шумом позволяют описывать форму объекта с помощью
примитивов - элементарных структурных единиц изображения. Каче-
ство обнаружения (различения) полностью определяется числом при-
митивов соответствующих типов и в этом смысле предложенное опи-
сание формы объекта обусловлено марковским характером пространст-
венных шумов наблюдения и является исчерпывающим.
219
ГЛАВА 3
Установленная связь между структурными свойствами
формы объектов и качеством их обнаружения (различения) ука-
зывает пути целенаправленной модификации формы объектов в
интересах оптимизации процессов их обнаружения и различе-
ния.
3.5.5. Обнаружение объектов
в присутствии пространственно-временного шума
В общем случае обнаружение объектов ведется в присутст-
вии не пространственного, а пространственно-временного шума
наблюдений. В литературе по обработке изображений [30, 33] на
основе фиксации момента принятия решений временная компо-
нента шума обычно тем или иным образом трансформируется в
пространственный шум, и исходная задача таким образом сво-
дится к традиционной задаче обнаружения в присутствии только
пространственных шумов. Особенности и ограничения такого
подхода обычно не обсуждаются. Наряду с этим в литературе по
пространственно-временной обработке сигналов [34] за счет фик-
сации интервала наблюдения 0...Т переходят к обработке в рас-
ширенном трехмерном пространстве наблюдений, когда про-
странственные и временные особенности обработки оказываются
неразделимыми.
Вместе с тем, характер зависимости наблюдаемого изобра-
жения от пространственных координат отличается от характера
зависимости от времени. Эти различия обусловлены, во-первых,
независимостью внешнего вида обнаруживаемого объекта от
времени, во-вторых, неограниченностью в общем случае времен-
ного интервала наблюдения и развитием процесса наблюдения во
времени при одновременной ограниченности и постоянстве про-
странственной области наблюдений. В связи с этим возникают
вопросы о возможности и условиях разделения пространственной
и временной обработки и об асимптотическом поведении полу-
чаемых характеристик обнаружения вдоль временной оси. Обра-
тимся к рассмотрению этих вопросов [32].
Пусть подлежащий обнаружению объект s(x) = s(x1,x2) на~
блюдается в присутствии однородного аддитивного пространст-
венно-временного гауссовского шума л(х,Г) с разделимой по
220
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
времени и пространственным координатам корреляционной
функцией (матрицей) вида
Я„(Дх, АГ) = О(А/)7?х(Ах),
где J(...) - дельта-функция; Rx нормирована по максимуму к
единице или также является дельта-функцией.
В случае полной априорной информированности (известны
5(х), 7?Л(Дх,Д/)) текущее изображение в области xeL можно
представить в виде
w(x,0 = As(x) + n(x,t), (3.172)
где Я = 0, если объект отсутствует (гипотеза Яо); А = 1, если
объект присутствует на изображении (гипотеза Я,).
Требуется выполнить синтез и анализ эффективности опти-
мального обнаружителя объекта s(x). Имея ввиду получение, в
отличие от [30, 33, 34], не только ансамблевых, но и выборочных
характеристик обнаружения, используем подход, базирующийся
на уравнении Стратоновича, обобщенном в [35] для решения за-
дач траекторно-пространственной фильтрации (см. также ниже
6.2). В рассматриваемом случае этот подход заключается в оты-
скании оптимальной оценки параметра А из (3.172), удовлетво-
ряющего вследствие того, что А - const, дифференциальному
уравнению А - 0. В соответствии с [35] интегродифференциаль-
ное симметризованное уравнение Стратоновича для апостериор-
ной плотности вероятности параметра А имеет вид
dw(A,0
dt
= П(Л,()~ jn(A,t)w(2,t)d2 w(A,t),
(3.173)
где
П(Я,0 = ]"]*( w (х 1 ,t) -^(X1))/?;'(x,,x2)(w(x2,Z)- As(x2 )>/Х] Jx2 ,
L
(3.174)
ЛДх^Хз) - функция, обратная Rx(x},x2) [30].
Априорную плотность вероятности можно записать так:
221
ГЛАВА 3
w(A,O) = Ро(О)3(A) + Р] (0)3(Л -1), Ро(О) + А(0) = 1. (3.175)
Для априорной плотности вероятности (3.175) апостериор-
ная плотность
w(A^) = Po(t)3(A) + P1(t)3(A-l)9 Po(t) + Pl(t) = l. (3.176)
После подстановки (3.176) в (3.173), отделения членов, со-
держащих сомножитель 3(Л -1), и интегрирования левой и пра-
вой частей полученного уравнения по Л получим уравнение для
апостериорной вероятности наличия объекта, соответствующей
текущему наблюдению:
АЮ = (Р1Ю-/’12(0Х^)-^), (3.177)
где
r(t) = ,t)Rx 1 (х1, х2 )5(х2 )dxAdx2,
L
q2 = jp(X] )RX 1 (X], х2 >(х2 ХХ]Л2 .
L
Нелинейное дифференциальное уравнение (3.177) решается
методом разделения переменных:
Р|(0= —ехр
Аи
(3.178)
к о
где рю = я(0), рт =1 -р10 = ро(О).
Правило принятия решений, соответствующее критериям
максимума апостериорной вероятности и максимального прав-
доподобия (в последнем случае необходимо положить
Роо - Рю - 0,5), может быть получено из условия Р} (г) > 0,5 :
0 L V0
Р
Х1,Х?)5(х2)б7х1б/Х2^ ^-1П-^-.
^0 Роо
(3.179)
222
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
При этом pi(/) (3.178) интерпретируется как выборочная ха-
рактеристика качества оптимального обнаружителя.
Уравнение (3.177) имеет стационарное решение Р|(<») = 1,
которое получается, если положить в (3.177) Д(Г) = 0 . Это реше-
ние свидетельствует о том, что синтезированное устройство -
асимптотически надежный обнаружитель. Вместе с тем, (3.178)
показывает, что характер изменения p{(t) при увеличении вре-
мени наблюдения не является монотонным, т.е.
Для каждого текущего наблюдения увеличение времени наблюдения на
конечную величину не гарантирует увеличения д(/), значит, и на-
дежности правильного обнаружения.
Ансамблевые характеристики обнаружения (вероятность
правильного обнаружения, ложной тревоги) могут быть получе-
ны путем отыскания статистических характеристик левой части
неравенства (3.179), усредненной по ансамблю наблюдений, для
гипотез Яо и Нх. Опуская обычные преобразования, аналогич-
ные приведенным, например в [30, 34], получим, что для гипотез
Нх и Но левая часть неравенства (3.179) распределена по нор-
мальным законам с параметрами и, = Norm (2/7/, 2/д) и
w0 =Norm(0,2/g) соответственно. При этом вероятность пра-
вильного обнаружения и ложной тревоги при р^ - /?10 = 0,5 оп-
ределяется так:
рпо =W(qs[H2), рт =\—W\qy/tT2). (3.180)
Здесь, как и раньше, №(х) описывается выражением (3.158).
Использование матричных фотоприемных устройств и циф-
ровых методов обработки изображений определяет целесообраз-
ность рассмотрения алгоритмов обнаружения в дискретном пред-
ставлении. Расширив пространство независимых отсчетов (пере-
менных) добавлением к двум пространственным отсчетам вре-
менных с некоторым интервалом дискретизации, представим со-
вокупность наблюдений на интервале временных отсчетов
l...g в виде матрицы, в которой столбцы являются развернутой в
вектор размерности т х n ( т , п - число строк и столбцов в мат-
223
ГЛАВА 3
рице фотоприемника соответственно) пространственной матри-
цей наблюдений для некоторого фиксированного временного от-
счета, а строки - временными векторами наблюдений размерно-
сти g , получаемыми на выходе каждого элемента матрицы фото-
приемников: w/A=sz+w/A, / = 1...тихи, k = l...g, si - сигнал, nik -
шумы наблюдений.
Если при этом корреляционная матрица R шумов наблюде-
ния п1к разделима, т.е. допускает представление в виде прямого
произведения корреляционных матриц строк Т и столбцов V
( R = V ® Т ), то, используя свойство обращения прямого произве-
дения, дискретный аналог решающего правила (3.179), в соответ-
ствии с [30, 33], может быть представлен прироо^рю в виде
Ur(V4 ®T“')S>' -s' cv-1 ®T"')S, (3.181)
//0 2
где U, S - развернутые, аналогично [30], в вектор-столбцы раз-
мерности mxnxg матрица наблюдений и матрица сигналов об-
наруживаемого объекта. Достаточная статистика D(U) в левой
части (3.181) допускает следующее представление:
W) = £ uikVyt^Sj = ^akfk = > (3.182)
ij-kj к ij
где
«а = = Sm«v(/57 ’ c‘ = ^и^к1 ’ (3.183)
/ i.J kJ
vL-, tkl - элементы матриц V-1 и T-1 соответственно.
Из (3.182), (3.183) следует, что оптимальный алгоритм об-
наружения реализует разделимую по временной и пространст-
венной осям обработку текущих наблюдений. При этом можно
вначале выполнить временную фильтрацию сигналов на выходе
каждого элемента матрицы фотоприемников в соответствии с
выражением для ci (3.183), после чего осуществить пространст-
венную обработку в соответствии с последним членом в (3.182),
224
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
и наоборот. При этом решающее правило (3.181) преобразуется к
виду
^kfkH>< ^^s‘v‘Jsj=akq’ °*=Za* ’ •
к Hq i,j к i,j
(3.184)
В случае некоррелированных по временной координате шу-
мов наблюдения (tkl = 8к1, 8kl - символ Кронекера) ак = к. и ха-
рактеристики обнаружения будут определяться выражением
(3.180) с подстановкой в него q из (3.184) и к вместо /.
Выражение (3.184) определяет и возможность реализации
рекуррентного алгоритма обработки, при котором на каждом
временном шаге дополнительно обрабатывается только инфор-
мация, поступающая на этом шаге:
/Л
?к-\ + akfk < (^4-1 + «, Л = 1 ...g, (3.185)
«о
где 7;. = FiA + а,/-, а, = о-,_] + а,-, Fo = 0, <т0 = 0.
Следует отметить, что для решающих правил (3.179),
(3.181), (3.184), (3.185) характерно использование переменного
порога, величина которого зависит от времени (от шага, на кото-
ром принимается решение).
Рассмотренные особенности оптимальных алгоритмов обна-
ружения являются следствием разделимости корреляционной
функции шумов наблюдения. Возникает вопрос: могут ли обла-
дать алгоритмы оптимального обнаружения свойствами раздели-
мости и в других случаях? Можно утверждать, что при обнару-
жении пространственного объекта в присутствии аддитивного га-
уссовского пространственно-временного шума разделимость
корреляционной функции (матрицы) шумов наблюдений является
необходимым и достаточным условием разделимости алгоритма
оптимальной обработки на пространственную и временную.
Доказательством достаточности этого утверждения является
предшествующее изложение. Доказательство необходимости
сводится к доказательству обратного утверждения: если опти-
мальный алгоритм обнаружения реализует разделимую по вре-
225
ГЛАВА 3
менной и пространственной осям обработку текущих наблюде-
ний, то корреляционная функция (матрица) аддитивного гаус-
совского шума наблюдения разделима.
Действительно, если алгоритм обнаружения реализует раз-
делимую обработку, то элементы весовой матрицы обработки D
допускают представление в виде 2k l - г^1к^, т.е. матрица об-
работки может быть представлена как прямое произведение двух
матриц D = V, 0Tj. Из оптимальности алгоритма следует, что D
является матрицей, обратной к корреляционной матрице шумов
наблюдений, а из свойства обратимости прямого произведения
матриц следует разделимость корреляционной матрицы шумов
наблюдений, что и требовалось доказать.
Доказательство обратного утверждения для рассмотренного
непрерывного случая вытекает из возможности представления
левой части правила (3.163) в виде
1 * 1
—- JJ J Jm(Xj, 6 )£(б -12 (Xj, х2 )5(х2 dx2dt}dt2
л о о
и свойства обратимости разделимой корреляционной функции.
Выражения (3.180) для рпо(/) и рлт(/), имеющие место в
случае некоррелированности шумов наблюдения вдоль времен-
ной оси, показывают, что с увеличением времени наблюдения ве-
роятность правильного обнаружения (в отличие от выборочной
характеристики обнаружения (3.178)) изменяется монотонно и
Рпо->1> Рят-^-О при
Допредельной моделью разделимого случайного поля, не-
коррелированного вдоль временной оси, является последователь-
ность реализаций пространственных случайных полей с корре-
ляционной функцией \7?л(Дх), сменяющих одно другое на каж-
дом интервале временной дискретизации. Если при этом для
каждого фиксированного элементарного пространственного
объема выполнить операцию линейной временной фильтрации,
то можно получить разделимое поле, коррелированное и вдоль
временной оси.
Свойствами разделимости обладает корреляционная функ-
ция шумов наблюдений при обнаружении равноярких объектов в
226
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
присутствии тепловых и фотонных шумов матричного фотопри-
емного устройства, когда
ЛЛ(Дх,Дг) = А^(ДО^(Лх).
Полученные асимптотические свойства характеристик обна-
ружения позволяют заключить, что вероятность обнаружения в
этом случае не ограничивается уровнем тепловых и фотонных
шумов, а ограничивается только временем наблюдения.
Таким образом, при оптимальном обнаружении объектов в
присутствии пространственно-временного шума разделимость по
пространственным и временной осям корреляционной функции
аддитивных шумов наблюдения является необходимым и доста-
точным условием разделимости алгоритма оптимальной обработ-
ки на пространственную и временную.
В случае разделимости корреляционной функции шумов на-
блюдений оптимальное решающее правило предполагает исполь-
зование переменного во времени порога принятия решения. В
случае <5-коррелированности вдоль временной оси шумов наблю-
дения с разделимой корреляционной функцией выборочная (апо-
стериорная вероятность наличия объекта) и ансамблевая (вероят-
ность правильного обнаружения) характеристики обнаружения
стремятся к единице при увеличении времени наблюдения.
При этом ансамблевая характеристика возрастает монотонно, в то вре-
мя как изменение выборочной характеристики может носить немоно-
тонный характер. Последнее указывает на возможность не только уве-
личения, но и уменьшения в каждом акте наблюдения надежности при-
нятия правильного решения при увеличении времени наблюдения.
3.5.6. Обнаружение объектов
в мультиспектральном режиме
В последние годы в сельском и лесном хозяйстве, в геологии
при поиске полезных ископаемых, при мониторинге хозяйствен-
ной деятельности и последствий природных катастроф а также в
военном деле все большее применение находят мультиспек-
тральные (или многозональные) и гиперспектральные снимки,
получаемые авиационными или космическими носителями реги-
227
ГЛАВА 3
стрирующей аппаратуры. Яркость, зафиксированная такой аппа-
ратурой в разных спектральных зонах позволяет уверенно отли-
чать и выделять даже замаскированный объект на снимке.
Мультиспектральные системы формируют несколько от-
дельных изображений в относительно широких спектральных зо-
нах в диапазоне электромагнитных излучений от видимого до
инфракрасного. В отличие от мультиспектральных, гиперспект-
ральные съемочные системы одновременно формируют изобра-
жения в узких спектральных зонах шириной порядка единиц на-
нометров.
Для гиперспектральной съемки важно не количество спек-
тральных зон (каналов), а ширина зоны (чем меньше, тем лучше).
Таким образом, система с 20-ю каналами относится к гиперспект-
ральной, если она перекрывает диапазон 600...700 нм, а при этом
ширина каждой спектральной зоны не превышает 5 нм. В то же
время система с 20-ю отдельными каналами, перекрывающими
как всю видимую область спектра, так и ближнюю ИК-область,
относится к мультиспектральной [43].
Исследования возможностей обнаружения объектов разве-
дывательной аппаратурой, использующей мультиспектральный
или гиперспектральный режим, в отсутствие или при постановке
маскирующих помех носят обычно экспериментальный характер.
Формулируемые на их основе заключения о направлении и сте-
пени изменения показателей обнаружения по отношению к пан-
хроматическому режиму являются частными, жестко увязанными
с характером исследуемой ситуации.
Наиболее существенные закономерности обнаружения объектов при
использовании, в частности, мультиспектрального режима, по-види-
мому. можно установить на основе постановки и решения задачи син-
теза в рамках теории статистических решений и анализа оптимально-
го мультиспектрального обнаружителя пространственных объектов.
Итак, пусть имеются I спектральных диапазонов (/ = 1.../),
5z(x) - сигналы объекта, принимаемые в каждом диапазоне.
Пусть измерениям сопутствует аддитивный белый шум со спек-
тральной плотностью Az в каждом спектральном диапазоне. Для
уяснения общих закономерностей мультиспектрального обнару-
228
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
жения рассмотрим простейший случай обнаружения равнояркого
объекта на равноярком фоне при априори известной форме и ме-
стоположении обнаруживаемого объекта.
Если 1(х) - единичное поле, определенное во всей области
анализа М , s(x) - индикаторная (единичная) функция, прини-
мающая значения, равные единице, на всей области L располо-
жения объекта, я,, fi - яркость объекта и фона соответственно в
z-м спектральном канале, то наблюдаемые сигналы можно пред-
ставить следующим образом:
п/(х) = ^5(х) + (1(х)-5(х))/+л/(х). (3.186)
Отсюда
= (3.187)
и логарифм функционала правдоподобия для z-ro спектрального
канала при наличии сигнала примет вид
Пп = -^- Г(«,(х)-1(х)/;-5(х)(«,.-/,))2Л. (3.188)
2Л, J
1 м
При отсутствии сигнала логарифм функционала правдопо-
добия представляется так:
[(н,(х)-1(х)/;.)2Л. (3.189)
2Л,- J
1 м
Учитывая статистическую независимость шумов в каждом
из спектральных каналов, функционал правдоподобия для обна-
ружителя в целом может быть представлен, как произведение
функционалов правдоподобия всех спектральных каналов. С уче-
том этого отношение функционалов правдоподобия L для мно-
госпектрального обнаружителя принимает следующий вид:
I
Пехр(П,,)
L = -^--------. (3.190)
Пехр(П0,)
229
ГЛАВА 3
Тогда логарифм отношения правдоподобия будет иметь вид
Л = 1пА = У [(и/(х)-1(х)у;-5(хХа/-Л))2Л +
<=iL 2N‘m
+ ^Г f(w,(x)-l(x)/)2Jx
2Л; J
м
(3.191)
После возведения в квадраты и с учетом того, что
52(х) = 5(х) , выражение в квадратных скобках преобразуется к
виду
Л = Ж L (Х)с/х-^(а,. +/)
Л; J 2
(3.192)
где L - область, занимаемая обнаруживаемым объектом, S -
площадь этой области. Если спектральная плотность шумов на-
блюдения одинакова для всех спектральных каналов (= N для
всех i), и если ввести обозначение ai - / = А,, то логарифм от-
ношения правдоподобия представляется следующим образом:
1
N
_L 1
(3.193)
Решающее правило при обнаружении по критерию макси-
мального правдоподобия записывается так:
О,
"о
(3.194)
где , Яо - решения об обнаружении объекта или необнаруже-
нии соответственно. С учетом (3.193) решающее правило (3.194)
трансформируется к виду
A/J/ Ho^i
(3.195)
230
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
Анализ левой части решающего правила (3.195) позволяет
более аргументировано подходить к совершенствованию методи-
ческого обеспечения оценки возможностей мультиспектральных
средств обнаружения.
Для определения характеристик обнаружения необходимо
знать закон распределения значений функционала, стоящего в ле-
вой части неравенства (3.195), как при наличии, так и при отсутст-
вии на изображении обнаруживаемого объекта. При наличии объ-
екта выражение в левой части неравенства (3.195) принимает вид
v +Mxwx=
L i L ‘
= j^A;«,^x + -^ j^M (x)^x (3.196)
L ’ L i
=^ZA^+^Z4"'(X)JX-
i ‘ L
Из (3.196) следует, что функционал, стоящий в левой части
неравенства (3.195), распределен по нормальному закону с мате-
матическим ожиданием тх9 определяемым первым членом пра-
вой части выражения (196) и дисперсией J2, определяемой вто-
рым членом. Таким образом,
(3197)
i
Обозначим угловыми скобками (...) операцию определения
математического ожидания на множестве реализаций величины,
в них заключенной. Поскольку в силу взаимной некоррелирован-
ности шумов различных спектральных диапазонов
= ||(«/(х)«;(У))^х^ = О,
231
ГЛАВА 3
JX(x)c/x^ = ~2^ JJX(x>,(yWxdy^ =
= -^7 jj(n, (x)w/(y))rfx4y =
<3198)
L L
то дисперсия d2, определяемая вторым членом выражения
(3.196), равна
rf2=£^A2. (3.199)
/
При отсутствии объекта функционал, стоящий в левой части
неравенства (3.196), имеет вид
1 ££(ал.(Х))л fw(x)Jx • (3-20°)
L i I 1 i L
Этот функционал распределен по нормальному закону. Его
дисперсия также определяется выражением (3.199), а математи-
ческое ожидание то 9 как нетрудно заметить, будет равно
m«=7Z4^-
/
Разделив левые и правые части (3.195) на d -
(3.201)
решающее правило приведем к виду
Ns 1 °
Тогда параметры законов распределения левой части этого
неравенства запишутся так:
232
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
(3.203)
Если под отношением сигнал/шум q понимать отношение
разности математических ожиданий сигналов для конкурирую-
щих гипотез к среднеквадратическому значению шума на входе
решающего (порогового) устройства, то из (3.203) следует, что
q = mx-mQ
(3.204)
По аналогии с (3.204) обозначим символом qi отношение
сигнал/шум в i -м спектральном канале:
( $ Л2>
Qi = —4
\N )
(3.205)
Тогда из (3.204), (3.205) следует, что
-Г=!</,'.
/
(3.206)
Сравним характеристики обнаружения объектов мультис-
пектральным и панхроматическим (одноканальным) обнаружите-
лями. В случае работы панхроматического обнаружителя в сум-
марной полосе частот мультиспектрального обнаружителя сигна-
лы объекта as и фона fs на выходе его фотоприемного устрой-
ства и энергетическое отношение сигнал/шум qj определяются
такими выражениями:
о. = • Л = • Ч2, = ...у-'.... (3-207)
233
ГЛАВА 3
Тогда частное энергетических отношений сигнал/шум пан-
хроматического обнаружителя к мультиспектральному записыва-
ется так:
% = ----Нг- = 4ц---------F- (3.208)
i i
Из (3.208) следует, что вероятность обнаружения объекта пан-
хроматическим обнаружителем будет выше по отношению к муль-
тиспектральному только тогда, когда выполняется неравенство
(3-209)
или эквивалентное ему неравенство
(ai-fi\aJ-fJ)>0. (3.210)
Это условие выполняется, в частности, тогда, когда во всех
спектральных диапазонах выполняется либо условие az > yj, либо
условие yj > at, Однако если в части спектральных каналов вы-
полняется условие а, > у, в то время как в остальных каналах вы-
полняется противоположное условие J] > а,, то вероятность обна-
ружения объекта мультиспектральным обнаружителем может быть
как выше, так и ниже по отношению к панхроматическому. Так,
если в каждом канале I - канального мультиспектрального обна-
ружителя сигналы объекта и фона одинаковы, т.е. at. = а , fi~ f ,
причем а > f . тогда из (3.204), (3.207) следует, что
2SI(a-f)2 2(Ia-If)2S_I2(a-f)2S
Я N ,4s N N
И теперь вполне очевидно, что q2/q2 = 1 .То есть энергетиче-
ское отношение сигнал/шум панхроматического обнаружителя в I
раз превышает такое же отношение для мультиспектрального обна-
ружителя с I спектральными каналами. На физическом уровне это
объясняется тем, что в каждом канале мультиспектрального обна-
234
ТИПОВЫЕ ПОМЕХОВЫЕ ЭФФЕКТЫ
ружителя присутствует свой шум, вследствие чего эквивалентная
спектральная плотность шумов в мультиканальном обнаружителе
при прочих равных условиях в I раз превышает спектральную
плотность шумов панхроматического обнаружителя.
В случае обнаружения неравнояркого объекта на неравнояр-
ком (распятненном) фоне выражение (3.186) приобретает вид:
«/(х) = 1(х)5/(х) + /.(х)-1(х)/;(х) + и/(х), хс=М . (3.211)
Причем в этом выражении 1(х) - функция, принимающая
значение 1 в области расположения объекта А, и 0 всюду за пре-
делами этой области. Тогда решающее правило (3.195) примет вид
к(х)(^(х)-/(х))^х< [(4(х)-/;2(х))с/х.
А/ J На 2А “1 J
1 L и i L
(3.212)
Выражение в левой части неравенства (3.212) распределено
по нормальному закону с математическим ожиданием тх при на-
личии объекта, и /и0 при его отсутствии, причем
p,(x)(s,.(x)-/.(x))</x,
i L
то= vX fz(xX^(x)-Z(x))^x- (3.213)
i L
Дисперсия d1 левой части неравенства определяется выра-
жением
d1 J(5,.(x)-Z(x))2 Jx . (3.214)
i L
Как нетрудно убедиться, использование выражений
(3.212)—(3.214) для вывода соотношений, аналогичных (3.202)-
(3.209), приводит к результатам, не изменяющим сформулиро-
ванных выше выводов, касающихся сравнения характеристик
обнаружения объектов в панхроматическом и мультиспектраль-
ном режимах.
235
ГЛАВА 3
Рассмотрим в качестве примера обнаружитель, имеющий 4
спектральных диапазона. Пусть сигнал фона в каждом из каналов
обнаружителя в соответствующих единицах измерений равен 1, и
отношение S/N также равно 1. Пусть, кроме того, амплитуда сиг-
налов а, обнаруживаемого объекта в каждом канале определяется
значениями, приведенными в табл. 3.5. Второй, третий и четвертый
варианты данных таблицы соответствуют случаю, когда неравенст-
во (19) не выполняется. Результаты, соответствующие этим вариан-
там и приведенные в последнем столбце таблицы, подтверждают,
что при невыполнении неравенства (19) отношение сигнал/шум,
значит, и вероятность обнаружения объекта панхроматическим об-
наружителем могут быть как выше, так и ниже по отношению к та-
ким же показателям для многоспектрального обнаружителя.
_______________________Таблица 3.5______________________
№ варианта а, Qs <L Q
1 2 3 4
1 0,5 0,5 0,5 0,5 1 2 2
2 2 0,5 0,5 0,5 1,32 0,5 0,38
3 2 2 0.5 0,5 1,58 1 0,63
4 2 2 2 0,5 1,8 2,5 1,39
5 2 2 2 2 2 4 2
Таким образом, представленные выше результаты позволяют
сделать следующие выводы.
Преимущества панхроматического или многоспектрального
режимов съемки при обнаружении пространственных объектов
определяются разностью энергетических характеристик излуче-
ний объекта и фона, фиксируемой отдельно в каждом из имею-
щихся спектральных каналов.
Панхроматический режим обеспечивает более высокую вероятность
обнаружения по сравнению с многоспектральным, если во всех спек-
тральных каналах эта разность имеет один и тот же знак, то есть при-
нимает или положительные или отрицательные значения. В противном
случае более высокую вероятность обнаружения может иметь как пан-
хроматический, так и многоспектральный режим. Выше получена фор-
мальная запись условий, позволяющих определить в каждом конкрет-
ном случае преимущество одного из этих режимов.
236
_____4_____
НЕПАРАМЕТРИЧЕСКИЙ
СИНТЕЗ ПОМЕХ
Рассмотрены задачи параметрического синтеза помех из-
мерителям координат целей и системы наведения высоко-
точных средств поражения.
В качестве основного математического аппарата решения
этих задач используются методы вариационного исчисле-
ния.
ГЛАВА4
4.1. Особенности задач
непараметрического синтеза помех
Задачи непараметрического синтеза помеховых воздействий
являются обратными по отношению к классическим задачам син-
теза измерителей и систем наведения. Их основное содержание
состоит в определении потенциальных возможностей помеховых
воздействий в условиях ограниченного ресурса и ограничений на
параметры помех, а также в отыскании помеховых воздействий,
максимально ухудшающих качество обнаружения, измерения ко-
ординат цели и наведения ракет. Общими методами решения за-
дач непараметрического синтеза являются методы вариационного
исчисления и оптимального управления динамическими систе-
мами. Особенностями формулируемых при синтезе вариацион-
ных задач является их вырожденность и неклассический характер
оптимизируемых функционалов и ограничений на помеховое
воздействие.
В современных образцах ВТО для обнаружения и измерения
относительных координат объектов широко используются корре-
ляционно-экстремальные системы с формированием изображе-
ний в оптическом или радиодиапазонах волн. К таким системам
относятся, в частности, телевизионные, тепловизионные и ра-
диометрические корреляционные измерители координат про-
странственно протяженных целей, системы управления полетом
по картам местности [1-3] и т.д.
Обнаружение и измерение координат в этих системах ос-
новано на формировании пространственной взаимно-корреля-
ционной функции текущего изображения цели и ее изображе-
ния, занесенного в память бортового вычислителя. Особенно-
сти построения корреляционных координаторов более детально
рассматриваются в [7] и в 7.1.1. Борьба с такими системами
способами и средствами оптико-электронного подавления оп-
ределяет необходимость постановки и решения задач парамет-
рического и непараметрического синтеза эффективных помех
этим системам.
Задачи непараметрического синтеза помех решающим уст-
ройствам (обнаружителям, пеленгационным устройствам) ОЭС
238
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
можно трактовать как обратные задачи оптической локации. При
их решении полагаются известными с той или иной степенью де-
тальности структура решающего устройства, описание полезного
сигнала. Ставится задача отыскания помехового сигнала, макси-
мально по тому или иному критерию ухудшающего качество об-
наружения или оценки параметров полезного сигнала.
По существу непараметрический синтез направлен на определение оп-
тимальной структуры помехи в виде функции тех же независимых пе-
ременных, которые фигурируют в формальной записи полезного сигна-
ла. Поэтому постановка задачи непараметрического синтеза имеет
практический смысл в тех случаях, когда структура помехи определя-
ется в виде функции тех же независимых переменных, по которым чув-
ствительные элементы решающего устройства ОЭС имеют высокую
разрешающую способность.
Этим условиям удовлетворяют телевизионные и тепловизи-
онные координаторы корреляционного типа, использующие фор-
мирование изображений и имеющие фотоприемные устройства с
высокой разрешающей способностью по пространственным ко-
ординатам.
Методы непараметрического синтеза могут также приме-
няться для оптимизации временной структуры помех координа-
торам точечных целей, использующих различные типы растро-
вых анализаторов, которые выполняют временную развертку
принятого сигнала. В то же время оптимизация, например спек-
тральной структуры помехи, методами непараметрического син-
теза в настоящее время неактуальна, поскольку в ОЭС высоко-
точного оружия обычно используются не более, чем двух- или
трехспектральные приемники. Оптимизация спектральной струк-
туры помех таким ОЭС может быть выполнена методами пара-
метрического синтеза. Однако в связи с появлением в последнее
время мультиспектральных и гиперспектральных фотоприемных
устройств задачи непараметрического синтеза спектральной
структуры помехи могут также встать на повестку дня. Область
применимости методов непараметрического синтеза может быть
распространена и на задачи подавления контуров наведения
управляемых боеприпасов.
239
ГЛАВА4
При синтезе имитирующих и маскирующих помех корреляционным
координаторам телевизионных и тепловизионных головок самонаведе-
ния проблема парирования неопределенности информации о противни-
ке в определенной мере снимается. Это связано с тем, что полезный
сигнал в таких ГСН задается пространственно-яркостной структурой
защищаемого объекта, и защищающаяся сторона может обладать дос-
таточно полной информацией об этой структуре.
Формально задачи непараметрического синтеза помех кор-
реляционным координаторам могут быть поставлены следующим
образом [1.3, 1.10].
Пусть наблюдаемому объекту соответствует его изображе-
ние, формируемое фотоприемным устройством подлежащего по-
давлению ОЭСр, т.е. полезный сигнал s(x-X), существующий в
некоторой области L пространственных переменных х = (х],х2)
и известный с точностью до вектора параметров сдвига
k = определяющих местоположение объекта. Полезный
сигнал может искажаться помехой /?(х), которая образует вместе
с сигналом некоторую смесь, описываемую функцией
f (л(х - X), р(х)), определенной в области И , причем Lg\L
Требуется определить помеховый сигнал popt(x), доставляющий
оптимум некоторому функционалу-показателю эффективности
помехи:
Popt (х) = arg opt J(/(x-X), р(х)), (4.1)
где М р - некоторое множество допустимых помех.
Вся совокупность типовых задач непараметрического синте-
за будет определяться конкретным типом смеси сигнала с поме-
хой /(s(x-X), р(х)), видом оптимизируемого функционала
«/(/(s(x-X), /?(х))) и множеством допустимых помех М р. Ниже
рассмотрим формальные постановки различных задач непарамет-
рического синтеза. Пока же мы ограничимся общим обзором со-
вокупности типовых задач.
240
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
В качестве типовых смесей /(s(x-X), р(х)) необходимо
рассматривать, в первую очередь, аддитивную и аппликативную
смеси полезного и помехового сигналов. Последняя характерна
для ОЭСр с формированием изображений и отличается тем, что
изображение помехового образования замещает изображение
части объекта, над которой это помеховое образование располо-
жено.
Известно [2, 3, 7], что при гауссовской статистике аддитив-
ных шумов оптимальное обнаружение и измерение относитель-
ных координат пространственного объекта основано на форми-
ровании корреляционного отклика
Т(Х) = Jw(x,X0)s(x-X)tf?x. (4.2)
м
Здесь м(х,Х0) - изображение реальной сцены; Хо - вектор пара-
метров сдвига, определяющий истинное положение объекта.
В реальных корреляционных дискриминаторах один из со-
множителей в подынтегральном выражении (4.2) задается в каче-
стве эталона. Причем, для того чтобы обеспечить формирование
корреляционного отклика в необходимом диапазоне изменения
значений X, область определения одного из сомножителей долж-
на быть подобластью области определения другого сомножителя.
При синтезе преднамеренных помех с достаточной для надежного по-
давления энергетикой можно считать, что уровни как полезного, так и
помехового сигналов существенно превышают уровень шумов наблю-
дения, влиянием которых в этом случае можно пренебречь.
Это значит, что в первом приближении можно полагать, что
w(x)~/(s(x-X), р(х))- Таким образом, из (4.2) следует, что
применительно к ОЭСр корреляционного типа в качестве опти-
мизируемого функционала целесообразно, в первую очередь, рас-
сматривать обобщенный показатель качества помехи, связанный
со степенью изменения формы или уменьшения величины глав-
ного пика корреляционного отклика Т(X).
В то же время в ряде случаев, например при создании лож-
ных целей или, что одно и то же, при реализации аномальных
ошибок, требуется обеспечить необходимое изменение формы
241
ГЛАВА4
корреляционного отклика Т(Х) в широком диапазоне изменений
параметра сдвига X. В этом случае в качестве оптимизируемого
удобно использовать некоторый функционал от Т(Х), т.е.
J(T(k)).
Множество допустимых помех М будем определять нало-
жением соответствующих ограничений на /?(х). Основным огра-
ничением, подлежащим учету при синтезе, является ограничение
на пространственный ресурс помехи I:
p(x)Jx</. (4.3)
м
Другим актуальным ограничением является ограничение на
энергетические характеристики помехи, которое в общем случае
может быть представлено следующим образом:
TAnin ~ Р(^-) — Ртах • (4 «4)
В рассмотренной постановке задачи непараметрического
синтеза принадлежат к классу задач, решение которых предпола-
гает использование методов вариационного исчисления.
4.2. Маскирующие помехи
корреляционным координаторам
В разделе 1 к маскирующим отнесены помехи, изменяющие
форму корреляционного отклика (уменьшающие значение мак-
симума, кривизну, объем его главного пика и т.п.), но сохраняю-
щие неизменным положение максимума главного пика.
За счет такой трансформации корреляционного отклика может быть
обеспечено уменьшение вероятности обнаружения и распознавания це-
ли, или увеличение ошибок измерения координат вплоть до срыва ре-
жима сопровождения цели.
В системах с формированием изображений маскирующий
эффект может быть достигнут путем закрытия или искажения тех
или иных участков реальной сцены и, следовательно, изображе-
242
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
ния цели помеховыми образованиями различной физической
природы (экраны, аэрозольные завесы, источники засветочных
помех и т.п.). При этом возникает задача определения тех участ-
ков реальной сцены, на закрытие которых следует использовать
располагаемый помеховый ресурс с тем, чтобы максимизировать
маскирующее действие помехи. На решение этой задачи и на-
правлен синтез маскирующих помех, представленный по мате-
риалам работы [6, 1.10].
4.2.1. Одностороннее ограничение на помеху
Рассмотрим аппликативное помеховое воздействие, которое
может иметь место, если в качестве помехи используется сово-
купность непрозрачных или в общем случае, полупрозрачных эк-
ранов. Такие экраны могут быть реализованы, например, с помо-
щью локальных аэрозольных образований или непрозрачных ма-
сок, каждая из которых закрывает лишь часть площади наблю-
даемой сцены или элемента пространственного разрешения кор-
реляционного координатора.
При наличии одностороннего ограничения на энергетику
помехи (яркость экрана) аппликативная смесь помехи с сигналом
описывается выражением
w(x) = 5(x)-(5(x)-Z>)r(x). (4.5)
Здесь помеха /?(х) = 6г(х), где b - собственная яркость; г(х) -
функция прозрачности маскирующего экрана, удовлетворяющая
неравенству
0<г(х)<1. (4.6)
Тогда, как следует из (4.5), z/(x) = s(x) при г(х) = 0,
w(x) = b при г(х) = 1. Следовательно, помеха представляет собой
экран с изменяющимся по пространству коэффициентом пропус-
кания излучения г(х), имеющий максимальную собственную яр-
кость b. При записи (4.5) и ниже для краткости принято не огра-
ничивающее общность последующих результатов условие Хо = 0,
т.е. начало координатных осей в плоскости изображения полага-
ется совмещенным с координатами цели.
243
ГЛАВА 4
С целью учета ограниченного ресурса на создание маски-
рующего экрана наложим на г(х) дополнительное ограничение
(4.7)
Качество маскирования может быть охарактеризовано неко-
торым функционалом, однозначно связанным со степенью иска-
жения корреляционного отклика Г(Х) (4.2). Рассмотрим функ-
ционал I типа.
Поскольку качество обнаружения при корреляционной обработке свя-
зано с формой основного пика корреляционного отклика Т(X), задачу
маскирования в общем случае можно поставить как задачу минимиза-
ции объема корреляционной функции в некоторой области маскирова-
ния A cz М.
В этом случае решается задача минимизации функционала
У(Г(Х)) = |г(^М = j jw(x>(x - k)dxdk = ju(x)F(x)dx, (4.8)
А АЛ/ Л/
где
F(x)= p(x-X)JX.
Л
(4-9)
Частным случаем функционала I типа является функционал,
следующий из (4.8) при F(x) = 5(х):
7(Г(1)) = Г(Х = 0)= jw(x>(x)Jx.
м
(4.Ю)
Этот функционал определяет максимум корреляционного отклика. При
его превышении обычно принимается решение об обнаружении цели.
Задача отыскания помехи г(х), минимизирующей функцио-
нал (4.8) при выполнении условий (4.6), (4.7), является некласси-
ческой вариационной задачей. Будем решать ее путем сведения к
тривиальной [5]. Для этого исходную задачу оптимизации с огра-
244
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
ничениями в виде неравенств преобразуем в классическую изо-
периметрическую задачу путем дополнения пространства мини-
мизирующих функций подлежащей дальнейшему определению
функцией v(x), а также путем замены неравенства (4.6) ограни-
чением в виде равенства 2r(x)-l = sinv(x). Так как sin(v(x)) мо-
жет принимать значения из интервала -1...+1, то г(х), удовле-
творяющая этому равенству, будет принимать только значения,
задаваемые неравенством (4.6).
Если в (4.7) выполняется строгое равенство, то рассматри-
ваемая задача при X = О трансформируется в следующую:
г z(x) = arg min
r(x)
j[5(x)-(5(x)-Z>)r(x)]F(x)Jx,
м
2r(x)-l -sinv(x) = 0,
Jr(x)c/x = /.
Л/
(4.И)
С использованием метода множителей Лагранжа эта задача
сводится к тривиальной задаче минимизации расширенной функ-
ции Лагранжа:
Ф(х) = [Хх) - (s(x) - Z>)r(x)]F(x) + //(х)(2г(х) -1 - sin v(x)) + ur(x),
(4.12)
где //(x), u = const - подлежащие дальнейшему определению
множители Лагранжа.
Из необходимых условий оптимальности Эйлера-Лагранжа
<ЭФ/дг = 0, ЭФ/5у = 0 следует
-(s(x) - b)F(x) + 2//(х) + о = 0,
(4.13)
-//(x)cosv(x) = 0.
Эти выражения, совместно с двумя последними равенства-
ми в (4.11), образуют систему четырех уравнений с неизвестны-
ми г(х), //(х), v(x), и. Если эта система имеет единственное
решение, то соответствующая ему функция г(х) и доставляет
экстремум оптимизируемому функционалу. Подставив выраже-
ние для Xх), вытекающее из первого уравнения (4.13), и выра-
245
ГЛАВА 4
жение для cosv(x), следующее из второго уравнения в (4.11)
(cos v(x) = (1 - sin2 v(x))1/2 = (1 - (2r(x) -1)2)1/2), во второе уравне-
ние (4.13), получим
[(s(x) -Z>)F(x) -i)]y/l- (2r(x) -1)2 = 0 . (4.14)
Пусть 5(x) таково, что (s(x)-b)F(x) Ф и при произвольном
и везде в области М, кроме, быть может, конечного числа то-
чек. Тогда из (4.14) следует, что почти всюду в области М, за
исключением этого конечного числа точек, функция прозрачно-
сти г(х) должна принимать значение 1 либо 0. Для определения
того, какое из этих двух значений г(х) доставляет минимум оп-
тимизируемому функционалу, воспользуемся необходимым ус-
ловием оптимальности Лежандра-Клебша.
Поскольку в рассматриваемом случае б2ф/dr2 - с^ф/сгёу = 0,
условие Лежандра-Клебша сводится к требованию выполнения
неравенства б2ф/dv2 > 0, которое приводится к виду
//(x)sin v(x) = ^((^(х) - 6)F(x) - t>)(2r(x) -1) > 0. (4.15)
Для г(х) = 1 неравенство (4.15) выполняется, когда
(s(x) - Z>)F(x) - и > 0. Для г(х) = 0 неравенство (4.15) выполняет-
ся, когда (s(x)-b)F(x)-v<0. На конечном множестве точек об-
ласти А\ где (s(x)-b)F(x)-u = 0, г(х) может принимать любые
значения, удовлетворяющие (4.6, 4.11), что не отразится на вели-
чине оптимизируемого функционала. Таким образом, искомая
функция прозрачности г(х), минимизирующая функционал
(4.11) и определяющая области объекта, подлежащие закрытию
непрозрачным экраном, определяется выражением
/1 при (s(x)-Z>)F(x)>t>,
roPt(x) = L (4-16)
к [ 0 в остальных случая.
Следовательно, оптимальная функция прозрачности в рас-
сматриваемом случае принимает только значение 0 или 1. Значит,
246
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
при оптимальном маскировании весь ресурс помехи должен быть
израсходован на создание непрозрачного экрана.
В выражение (4.16) входит неизвестная величина и. Она
должна выбираться так, чтобы выполнялось последнее равенство
в (4.11). Явное выражение для и в общем случае получить не
удается. Для каждой фиксированной функции s(x) величина и.
значит, и г(х) может быть определена численными методами с
использованием следующего алгоритма.
Этап 1. Для произвольного начального значения и опреде-
ляются по (4.16) зоны на объекте, подлежащие прикрытию не-
прозрачным экраном.
Этап 2. Для выбранных зон проверяется выполнение нера-
венства (4.7). При его невыполнении повторяется операция по 1,
но с увеличенным значением и. При выполнении неравенства вы-
числения по 1 и далее повторяются с уменьшенным значением и .
Этап 3. Вычисления прекращаются при выполнении с необ-
ходимой точностью третьего равенства в (4.11) или при достиже-
нии интегралом Jr(x)rfx стационарного значения, меньшего I.
л
Полученные выражения для оптимальной функции прозрачности (4.16)
справедливы для произвольных значений яркости помехи b (как
больших, так и меньших средней яркости сюжета 5(х)) только если
сюжет 5(х) в этих выражениях описывается центрированным полем с
нулевым средним значением.
Причем яркость b также центрирована по средней яркости
сюжета, т.е. может принимать как положительные, так и отрица-
тельные значения. Если же в качестве сюжета s(x) используется
некоторое нецентрированное поле (с ненулевой средней ярко-
стью), то рассмотренный функционал I типа не является универ-
сальным в том смысле, что он доставляет решение задачи маски-
рования, хорошо согласующееся с физическими представления-
ми, только в том случае, когда собственная яркость экрана b
меньше средней яркости объекта.
Действительно, исходя из физических предпосылок, только
в этом случае целесообразно использовать ограниченный ресурс
247
ГЛАВА 4
для прикрытия наиболее ярких участков объекта, т.е. в соответст-
вии с соотношением (4.16).
В случае нецентрированного поля s(x) и большой яркости
экрана b следует иметь в виду следующие соображения. Очевид-
но, что при большой яркости экрана целесообразнее прикрывать
экраном наиболее темные участки объекта. При этом качество
маскирования при использовании функционала (4.8) целесооб-
разно характеризовать не степенью уменьшения объема пика
7(Х), а степенью выравнивания Т(Х) за счет подъема ее спа-
дающих участков в пределах области А. Формально это сводится
к требованию не минимизации, а максимизации (4.8).
Вполне очевидно, что все условия оптимальности сохраняются при
этом прежними, за исключением изменения неравенства (4.16) на про-
тивоположное.
Известно, что кривизна пика корреляционного отклика оп-
ределяет качество измерения координат объекта [3.34]. С учетом
этого при оптимизации маскирующей помехи естественно доби-
ваться оптимизации функционала вида
J(T(X)) = ^^ (/ = 1,2). (4.17)
х=о
Нетрудно убедиться, что оптимальная функция прозрачно-
сти в этом случае определяется также с помощью выражения
(4.16), в котором
F(x) = ^^ (/=1,2). (4.18)
Sxf
С помощью преобразований, аналогичных приведенным
выше, нетрудно показать, что когда помеха образует аддитивную
смесь с сигналом вида w(x) = s(x) + Z>r(x), функция прозрачности
оптимальной маскирующей помехи, соответствующая функцио-
налу (4.8) и ограничениям (4.6), (4.7), принимает вид
( , [1 при -5(x)>t>/Z>,
''opt(x) = 1n (4.19)
(О в остальных случаях.
248
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
Численный алгоритм определения порога и совпадает с
описанным выше.
Для аддитивного маскирующего помехового воздействия весь ресурс
помехи так же, как и в случае аддитивно-мультипликативного воздей-
ствия, должен расходоваться на искажение фрагментов сюжета, вы-
бранных в соответствии с выражением (4.19).
4.2.2. Двухстороннее ограничение на помеху
Рассмотрим теперь аппликативное помеховое воздействие
при двухстороннем симметричном ограничении на помеху:
-1 < г(х) < 1. (4.20)
Например, это может иметь место, когда в качестве экрани-
рующей помехи используются два типа полупрозрачных помехо-
вых образований, имеющих собственную яркость соответственно
больше или меньше средней яркости сюжета («черная» и «белая»
аэрозольные завесы). Здесь, как и выше, полагаем, что поле ярко-
сти сюжета 5(х) центрированное.
При наличии аппликативного воздействия формальная за-
пись текущего изображения (смеси помехи и сигнала) должна
удовлетворять следующим условиям:
+b при r(x) = 1,
w(x) = < s(x) при r(x) = 0,
-Z> при r(x) = -L
(4-21)
где b , как и раньше, собственная яркость экрана.
Нетрудно убедиться, что эти условия будут выполнены, если
представить м(х) в виде
w(x) = s(x) - Г2(х)5(х) + br(x) .
(4.22)
Поставим задачу определения помехи ropt(x), минимизи-
рующей корреляционный интеграл:
ropt(x) = argmin Jw(x>(x)«7x . (4.23)
249
ГЛАВА 4
Для учета ограничений (4.20) введем, как и раньше, вспомо-
гательную функцию v(x) в соответствии с соотношением
r(x) = sinv(x). Учитывая знакопеременность г(х), ограничение
на ресурс будем задавать в виде
jr2(x)Jx</. (4.24)
м
Теперь функция Лагранжа, соответствующая решаемой оп-
тимизационной задаче, имеет вид
Ф(х) = 5(х)[.у(х) - r2(x)s(x) + г(x)Z>] + //(x)(r(x) - sin v(x)) + иг2(х).
(4.25)
Из необходимых условий экстремума 5Ф/Эг = 0, ЭФ/Эу = 0
следует:
[2г(х)52(х) - bs(x) - 2z?r(x)]^/l - г2 (х) =0. (4.26)
Из условий минимума этого экстремума б2ф/dv2 > 0,
52ф/дг2 > 0 вытекают следующие соотношения:
и >52(х),
^2r(x)s2(x)-Z>5(x)-2L>r(x)Jr(x) >0. )
Совместный анализ (4.26) и (4.27) приводит к следующему
решению поставленной задачи:
+1
^optOO = 1 -1
при
при
2s2(x)-fo(x) > ц,
252(х) + Й5(х) > Ц,
(4.28)
Й5(Х)/(252(Х)-Ц) в остальных случаях,
где t\=2u, т.е. здесь весь ресурс помехи уже не расходуется на
создание черных или белых фрагментов экрана. Часть ресурса
при его оптимальном использовании должна быть израсходована
на создание полупрозрачных фрагментов помехового экрана в
соответствии с последним равенством (4.28). Порядок определе-
250
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
ния порога , удовлетворяющего ограничению на ресурс, и со-
ответствующих этому порогу значений ropt(x) аналогичен опи-
санному выше. Кроме того, первые два неравенства в (4.28) могут
одновременно выполняться в совпадающих областях поля анали-
за. Для каждой такой области необходимо дополнительное опре-
деление того, какое из двух значений г(х) доставляет минимум
функционалу (4.23).
Возможным способом создания помех корреляционным координаторам
является использование только непрозрачных экранов и масок, имею-
щих фиксированную яркость («черных» и «белых») и маскирующих
отдельные фрагменты сюжета (цели).
При этом возникает задача оптимального выбора тех участ-
ков сюжета, которые следует при ограниченном ресурсе (сум-
марной площади экрана) прикрывать соответственно «черным»
или «белым» экранами. Предшествующие исследования не дают
решение этой задачи, поскольку решение в виде (4.28) содержит
фрагменты, где экран формируется как полупрозрачный. По-
видимому, это является следствием записи ограничения на ресурс
в виде (4.24), левая часть которого для областей, где |r(х)| < 1, не
описывает площадь экрана.
Решение задачи синтеза оптимального непрозрачного экрана
будем искать для общего случая несимметричных двухсторонних
ограничений на г(х) вида
-А<г(х)<1 (0<А<1). (4.29)
При таких ограничениях на ресурс можно использовать сле-
дующую приближенную запись ограничения на площадь экрана:
— Jarctg(tfr2(x))rfx < I. (4.30)
71 м
Интеграл в левой части (4.30) тем лучше определяет пло-
щадь экрана даже в случае, когда (r(x)| < 1, чем больше коэффи-
циент а. Поэтому при последующем анализе будем полагать а
сколь угодно большим. При ограничении (4.30) формальная за-
251
ГЛАВА 4
пись текущего изображения должна удовлетворять следующим
условиям:
b при г(х) = 1,
ы(х) = < 5(Х) при г(х) = 0,
-kb при г(х) = -к.
(4.31)
Нетрудно убедиться, что этим условиям соответствует за-
пись смеси сигнала и помехи w(x) в виде
= -г2(х>(х) + г(х)л(х)(1 -к) + r(x)kb + fa(x) - >
к (4.32)
-i2s(x) + k2b + kb) + &25(x) + As(x)
Для учета неравенства (4.30) при синтезе ограничений вве-
дем вспомогательную функцию v(x) в соответствии с выраже-
нием
2г(х)-1 + & .
——---------= sin v(x).
l + k
(4.33)
При этом обеспечивается сведение задачи отыскания опти-
мизирующей функции г(х) с областью значений из замкнутой
области (4.29) к задаче отыскания оптимизирующих функций
г(х), v(x) с областью значений из открытой области. Теперь за-
дача определения оптимального непрозрачного экрана формули-
руется как задача отыскания r(x), v(x), доставляющих минимум
функционалу (4.10), где w(x) определяется выражением (4.32)
при ограничениях (4.30) и (4.33).
Функция Лагранжа в этом случае имеет вид
Ф(х) = $(х)м(х) +
2г(х)-1 + £ .
+М«) -----:—;------sinv(x)
L 1 + £
/. 2
+—L>arctg(ar (х)).
71
Из необходимого условия оптимума функции Лагранжа
6Ф/Эг = 0 следует, что
252
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
Xх) = ^-(5(x)[(2r(x)(As(x) + 5(х)) -
2к
. th nix 2иаг(х)(\ + к) .. ...
-$(х) + Fs(x) - kLb - kb])------. (4.34)
лг(1 + я г (x))
Из условия бФ/dv = -//(x)cosv(x) = 0 имеем
[(s(x)[(2r(x)(fo(x) + 5(х)) - 5(х) + k2s(x) - k2b - kb]) -
/ s2\,/2
4kuar(x)(\ + k) ( ( 2r(x) -1 + к >
/r(l + a2r4(x)) J I 1 + * J J ( f
Из условия минимума функции Лагранжа 52ф/сф2 =
= //(x)sinv(x) > 0 следует
[(2r(x)(fa2 (х) + s2 (х)) - s2 (х) + k2s2 (х) - k2bs(x) - kbs(x) -
4kuar(x)(l + к)
?г(1 + a2r4(x))
f2r(x)-l + £\ Q
I l + k )
(4.36)
В этих выражениях а можно выбрать настолько большим,
чтобы 1 +a2r4(x)»1, и тогда, пренебрегая единицей в знамена-
теле соответствующих слагаемых, из (4.35), (4.36) получим:
''opt(X) =
1 при s2(x)(k + V)-s(x)bk > ц,
-к при s2 (х)(к +1) + s(x)bk > ц /к3.
(4.37)
где t>] -4ик1(тга).
Из (4.35) следует, что ropt(x) может принимать значения из
интервала -Zr<ropt(x)<l только тогда, когда выражение в квад-
ратных скобках равно нулю:
г3 (x)[2r(x)(As2 (х) + s2 (х)) - $(х) + А-25(х) - k2b - kb~\ =
= 4ui<‘+ *>. (4.38)
ла
253
ГЛАВА 4
Поскольку при достаточно больших значениях а правая
часть этого выражения может быть сколько угодно близкой к ну-
лю, то равенство (4.38) выполняется при г(х) также сколь угодно
близкой к нулю, т.е. ropt(x) = 0 везде в других областях, где не
выполняются неравенства (4.37).
Таким образом, неравенства (4.37), дополненные условием
ropt(x) = 0 для оставшихся областей, дают решение поставленной
задачи синтеза оптимальной аппликативной помехи. Порог ц в
(4.37) следует выбирать так, чтобы был израсходован весь ресурс
/. Алгоритм определения порога ц при фиксированном / сов-
падает с описанным выше. В выражении (4.37) отражена нетри-
виальная взаимосвязь между порогами ц и цД3 , служащими
для определения участков сюжета, подлежащих маскированию
фрагментами «белого» или «черного» экранов.
Полученное решение подтвердило гипотезу о том, что появление полу-
прозрачных фрагментов экрана при оптимизации рассматриваемых по-
мех обусловлено типом используемых ограничений на ресурс.
Нетрудно заметить, что, как и следовало ожидать, при к = 1
решение (4.37) становится эквивалентным решению (4.28) за ис-
ключением фрагментов, где |г(х)| * 1.
4.2.3. Эффективность
оптимальных маскирующих помех
В связи с трудностями получения в общем виде аналитиче-
ских оценок качества синтезированных оптимальных помеховых
воздействий, оценка их эффективности выполнена методом ими-
тационного моделирования. При этом в качестве полезного сиг-
нала 5(х) использовались синтезированные на ЭВМ реализации
дискретного гауссовского случайного поля размерности 256x256
элементов разрешения с корреляционной функцией вида
T?(Z],z2) = сг2 ехр|--^|z]|--^|z2| |,
V И °2 )
254
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
сглаженные круговым усредняющим фильтром [8] с радиусом
3 пкс.
При моделировании полагалось, что = 82 . Рассмотрим за-
дачу оптимизации функционала (4.10), когда F(x) = s(x). Обо-
значим через г] отношение величины главного максимума корре-
ляционного отклика при оптимальной аппликативной маски-
рующей помехе, сформированной в соответствии с выражением
(4.16), к такой же величине при отсутствии помехи. Результаты
расчетов зависимости т] от отношения 8 площади сюжета, при-
крытой помехой, к общей площади сюжета (поля анализа) приве-
дены на рис. 4.1.
Расчеты выполнялись по 50-ти различным реализациям слу-
чайного поля, представлявшего полезный сигнал. При этом порог
и пробегал множество из 50 значений из заданного интервала.
Для каждого порога генерировалось случайное поле s(x), для ко-
торого с использованием неравенств (4.16) формировалась опти-
мальная помеха. Для этой помехи рассчитывались и выводились
на графики (рис. 4.1) соответствующие ей значения т] и 8.
Такая процедура моделирования позволяет оценить потен-
циальные возможности оптимальной помехи при одновременном
исключении достаточно трудоемкого процесса отыскания вели-
чины порога и для каждого значения располагаемого ресурса /.
Кроме того, от варианта к варианту моделирования изменялись
значение яркости помехи b и величина интервала корреляции
полезного сигнала б),. Линейный размер поля анализа h оставал-
ся неизменным и был равен 128-ми элементам разрешения.
Результаты, приведенные на рис. 4.1,я,б, получены при от-
ношении h/8x = 12,8. Они отражают зависимость показателя эф-
фективности помехи г] от относительной площади помехи 8 и ее
собственной яркости b . Точками на рис. 4.1,я показаны результа-
ты, соответствующие равенству яркости помехи и средней ярко-
сти полезного сигнала. Поскольку при анализе использовались
центрированные поля как полезного, так и принятого сигнала, то
при моделировании в этом случае полагалось равным нулю от-
ношение яркости помехи к СКО полезного сигнала (/>/<т = 0).
Крестикам на рис. 4.1,а соответствует отношение />/сг = 2, звез-
255
ГЛАВА 4
дочкам - b/(5 = 3. На рис. 4.1,6 для точек А/<т = 0,5, для крести-
ков Ъ/су = 1.
б)
________________________Рисунок 4.1 _____________________
Анализ результатов моделирования, приведенных на этих рисунках, по-
зволяет сделать вывод о том, что при одностороннем ограничении вида
(4.6) на ресурс маскирующей помехи эффективность маскирования
практически не зависит от особенностей конкретной случайной реали-
256
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
|зации полезного сигнала, если собственная яркость помехи равна сред-
ней яркости полезного сигнала.
Эффективность маскирования возрастает при увеличении
собственной яркости помехи, характеризуемой отношением
b / а. При этом может иметь место не только уменьшение вели-
чины пика корреляционного отклика, но и перемена знака его ве-
личины с положительного на отрицательный.
Результаты, приведенные на рис. 4.1,в,г, отражают влияние
отношения линейного размера поля анализа (эталона) к интерва-
лу корреляции полезного сигнала h/ 8Х на эффективность поме-
хи. Рис. 4.1,в соответствуют значения h /^=12,8 (точки) и
h / 8Х = 4,3 (крестики). При этом 6 / ст = 0. На рис. 4.1,г при тех же
значениях отношения h/ 8Х отношение 6/сг = 3. Рис. 4.1,в указы-
вает на то, что при яркости оптимальной помехи, равной средней
яркости поля анализа, зависимость т] от 8 слабо изменяется для
значений относительной величины поля анализа, удовлетворяю-
щих неравенству h/ 8Х >4. В то же время (рис. 4.1,г), при увели-
чении яркости помехи до значений, соответствующих отноше-
нию b / а = 3, зависимость т/ от 8 приобретает хаотический ха-
рактер, не позволяющий установить какие-либо простые и устой-
чивые статистические закономерности. Однако зависимость ц от
8, рассчитанная для одной и той же реализации случайного поля,
приобретает вполне устойчивый характер, что иллюстрируется
сплошной кривой (рис. 4.1,г), полученной при /г / = 12,8 .
Хаотический характер зависимости (рис. 4.1,г) позволяет заключить,
что эффективность маскирования в этом случае в определяющей мере
зависит от особенностей конкретной реализации полезного сигнала.
В качестве иллюстративного примера на рис. 4.2,а показана
одна из реализаций полезного сигнала, на рис. 4.2,6 - эта же реа-
лизация в смеси с синтезированной для нее оптимальной аппли-
кативной маскирующей помехой (области серого цвета).
Рис. 4.2,6, в частности, показывает, что оптимальная помеха за-
крывает участки сюжета, имеющие как минимальную, так и мак-
симальную яркость.
257
ГЛАВА 4
_______________________Рисунок 4.2 _____________________
На рис. 4.3 показан характер изменения формы главного пи-
ка корреляционного отклика при создании маскирующей помехи,
соответствующего изображениям рис. 4.2 (сплошная линия - при
отсутствии, пунктирная - при наличии помехи). Расчеты выпол-
нялись для h/8} = 12,8, Ь/су -1,5 . При этом оптимальная помеха с
площадью, прикрывающей менее 20% площади защищаемого
объекта (8 = 0,19, прикрываются как темные, так и светлые уча-
стки), обеспечила уменьшение величины пика корреляционного
отклика более, чем в 50 раз (ту = 0,019).
На рис. 4.4 приведены результаты моделирования для случая
двухсторонней аппликативной помехи, структура которой зада-
ется выражением (4.37). При моделировании полагалось, что
h!8} -Ы 82 =12,8. Результаты моделирования, показанные на
рисунке, соответствуют симметричному ограничению на яр-
кость помехи (к -1 ). Анализировалась зависимость степени
уменьшения величины главного пика корреляционного отклика
7 от относительных значений собственной яркости помехи
b / а . Причем крестикам соответствуют значения b / су = 0,5, для
точек b / су = 1, и для звездочек Ъ / су = 2 . Сравнение этих резуль-
татов при Ъ / су = 1 с аналогичными результатами для случая од-
ностороннего ограничения на помеху, показанными на рис. 4.1я,
позволяет сделать вывод о почти двукратном уменьшении мак-
симума корреляционного отклика в случае помехи с двухсторон-
ним ограничением на ее яркость по отношению к помехе с одно-
сторонним ограничением.
258
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
0,4
0,2
О
0,2
0,1 0,3
0,5 0,7 0,9
________________________Рисунок 4.4 ______________________
259
ГЛАВА 4
4.3. Имитирующие помехи
корреляционным координаторам
4.3.1. Нормальные ошибки
Основным эффектом, к которому приводит создание имити-
рующих помех, является увеличение ошибок измерения коорди-
нат цели. Как известно ([7, 3.46], см. также раздел 7.1.1), для кор-
реляционных координаторов, выполняющих измерение сдвига
текущего изображения относительно эталонного путем опреде-
ления максимума их взаимной корреляционной функции, нор-
мальная ошибка /Ц определения сдвига вдоль выбранной коор-
динатной оси в первом приближении (при условии существова-
ния второй производной 5(х)) с точностью до несущественного
для дальнейшего анализа постоянного множителя описывается
выражением
Д2,~ [и(х,Х0)а5(х,Х)б?х . (4.39)
J дх}
м 1
Под нормальными ошибками здесь понимаются ошибки,
значения которых не превышают величины интервала корреля-
ции наблюдаемого сюжета, а знак ~ определяет пропорциональ-
ную зависимость. В выражении (4.39) Хо - вектор координат ис-
тинного положения объекта. В дальнейшем там, где это возмож-
но, с целью упрощения формального представления выражений
типа (4.39) будем символ опускать. Вполне естественно опре-
делять оптимальную помеху, исходя из требования обеспечить
либо максимум, либо минимум (в зависимости от желаемого зна-
ка) этой ошибки. Тогда оптимальная помеха popt(x) = feropt(x)
должна доставлять экстремум функционалу (4.8), в котором
F(x) = &(х) / сх1, и удовлетворять ограничениям на ресурс (4.9) и
на яркость помехи.
Следуя [4], рассмотрим случай аддитивной помехи при не-
симметричном (одностороннем) ограничении. Формальная по-
становка задачи синтеза записывается следующим образом.
Пусть имеется аддитивная смесь помехи с сигналом
260
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
м(х) = 5(х) + Ьг(х) (4.40)
и ограничения на функцию прозрачности (4.6) и на ресурс (4.7).
Требуется определить помеху г(х), доставляющую максимум
функционалу
J = . (4.41)
м 1
К такой постановке сводится, например, задача определения
наилучшего размещения на местности совокупности уголковых
отражателей при подавлении корреляционных систем навигации
или наведения, лоцирующих сцену в активном режиме. Способ
определения ropt(x) здесь аналогичен использованному выше.
Поэтому ограничимся его кратким изложением.
Функция Лагранжа рассматриваемой вариационной задачи
имеет вид
Ф(х) = р(х) +/>г(х)1———— 4- //(хХ2^(х)-1 -sinv(x)) + L>r2(x).
Sxj
Из необходимых условий экстремума Ф(х) по v(x), г(х)
следует равенство
_ u|Jl-(2r(x)-l)2 = 0. (4.42)
ЭХ] )
Из условия максимума J следует
||(2г(х)-1)<0. (4.43)
дхх j
Из (4.42), (4.43) вытекают следующие соотношения для оп-
ределения оптимальной функции прозрачности, определяющей
оптимальную имитирующую помеху:
р при &(х)/йх, >-и/Ь =
ropt(x)-k (4.44)
(0 в остальных случаях .
261
ГЛАВА4
Численный алгоритм определения величины порога и, со-
ответствующего располагаемому ресурсу, аналогичен описанно-
му в разделе 4.2.1.
Выражение (4.44) показывает, что для получения систематической
ошибки измерения координаты цели яркостная структура оптимальной
имитирующей помехи определяется производной полезного сигнала
(сюжета) по пространственной оси, в направлении которой требуется
реализовать ошибку измерения координаты цели.
Переходя к анализу аппликативных помеховых воздейст-
вий, заметим, что формальные постановки задач синтеза ими-
тирующих помех отличаются от постановок задач синтеза мас-
кирующих помех только видом оптимизируемого функционала
(4.8), в котором в случае имитирующих помех следует поло-
жить F(x) = &(х) / дхх.
Поэтому решение задач синтеза имитирующих помех оче-
видным образом следует из решений аналогичных по ограни-
чениям задач синтеза маскирующих помех (см. §4.2) после за-
мены в последних F(x) на ds(x)/dxx.
При этом, в зависимости от желаемого знака ошибки изме-
рения координат, знаки неравенств в полученных таким обра-
зом выражениях для синтезированной помехи могут заменяться
на противоположные.
Так, в частности, в случае смеси сигнала и помехи, задавае-
мой соотношением (4.5), и при ограничениях на ресурс (4.7), (4.8)
выражение для оптимальной функции прозрачности, реализую-
щей имитирующую помеху, максимизирующую ошибку измере-
ния координат цели, примет вид:
''opt(x) = <
1 при С$(х) - b)ds(x) / дх} <и,
О в остальных случаях.
(4.45)
В случае аппликативной смеси сигнала с помехой и двух-
стороннего несимметричного ограничения на яркость помехи
(ограничение на ресурс при этом формально представляются вы-
ражением (4.30)) выражение для оптимальной функции прозрач-
ности при и< 0 по аналогии с (4.37) будет иметь вид
262
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
+1 при (s(x)(k + l)-bk)ds(x)/dxi < и,
ropt(x) = <-£ при (s(x)(k + l) + bk)ds(x)/dxi <и/к3,
(4.46)
О в остальных случаях.
Аналогично может быть определена оптимальная функция
прозрачности и при других ограничениях на помеху, рассматри-
вавшихся в §4.2. При этом алгоритмы определения и здесь также
аналогичны описанным ранее.
4.3,2. Аномальные ошибки
Обратимся теперь к синтезу помеховых воздействий, реали-
зующих аномальные ошибки. При создании помех, приводящих к
увеличению аномальных ошибок, помеховое образование необ-
ходимо ставить так, чтобы получить достаточно большой лож-
ный боковой максимум при одновременном уменьшении главно-
го максимума взаимной корреляционной функции полезного сиг-
нала (эталона) и смеси помехи с сигналом. Пусть К(Х) - некото-
рый желаемый вид указанной выше взаимной корреляционной
функции, удовлетворяющий этим условиям. Тогда задача синтеза
оптимальной помехи может быть сформулирована как задача
отыскания помехи ropt(x), минимизирующей функционал сле-
дующего вида:
Гг 12
J(T(X)) = |[T(k) - лГ(Х)] dk (4.47)
л
где Т(Х) - взаимная корреляционная функция (4.2); Л - некото-
рая область маскирования; a - некоторая в общем случае заранее
неизвестная постоянная, которую необходимо определить при
решении задачи оптимизации.
Функционал (4.47) характеризует степень отклонения вза-
имной корреляционной функции эталона и искаженного помеха-
ми сигнала Т(Х) от некоторой желаемой корреляционной функ-
ции У(к).
Задача минимизации по г(х) функционала (4.47) для случая
аппликативной смеси помехи с сигналом (4.5) и при наличии ог-
263
ГЛАВА 4
раничений (4.6), (4.7) является вариационной задачей, некласси-
ческий характер которой связан как с наличием в функционале
заранее неизвестной константы а. так и с наличием квадратично-
го интегрального члена:
j(T(k)) =
2 \
| -2аУ(Х) |w(x)5(x-X)Jx + a2K2(X) dk.
' м J
(4.48)
Решим задачу минимизации (4.47) методом ее погружения в
задачу минимизации для расширенного пространства независи-
мых переменных х, z [6, 1.10]. Для этого перепишем (4.48), ис-
пользуя новую независимую переменную z и представив квадра-
тичный член в виде соответствующего двухкратного интеграла
j(T(X))= j J|w(x)Hz)s4x-X)s(z-l)dxdz-
A \М
-2aY(k) p(x)s(x - XVx + a2Y2(X) W
м )
(4.49)
Введя функции
P(x,z)= Js(x-X)5(z-X)dX, F(x)= Jf(X)5(x-X)dX
A A
и
JY2(k)A
A
для прямоугольных областей A, M , преобразуем (4.49) к виду
(7 2 1
w(x)w(z)P(x,z)--u(x)F(x)-^~ dxdz,
SM SM )
(4.50)
где SM - площадь области M.
Если теперь определить искомую функцию прозрачности,
входящую в п(х) (4.5) как функцию двух переменных r(x,z),
264
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
удовлетворяющую условию r(x,z) = r(z,x), то для дальнейшего
определения оптимальной r(x,z), минимизирующей (4.50), мож-
но воспользоваться подходом, аналогичным использовавшемуся
выше. После дополнения пространства минимизирующих функ-
ций функцией v(x,z) в соответствии с соотношением
2r(x,z)-l =sinv(x,z) и введения множителей Лагранжа //(x,z),
и = const, исходная задача сводится к тривиальной задаче мини-
мизации функции Лагранжа Ф(х,г):
ф(х,г) = (s(x)-r(x,z)(s(x)-/>))x
x(s(z) - r(x,z)(s(z) - Z>)) P (x,z) -
——(5(x)-r(x,z)(s(x)-Z>))F(x) + ^y^ +
5ЛY
-1 -sinv(x,z)) + b>r(x,z). (4.51)
Нас интересует только функция г(х), являющаяся сечением
r(x,z) при х = z, т.е. (г(х) = г(х,х)). Ее можно найти, формально
положив в (4.51) z = x. Тогда из необходимых условий экстре-
мума Эйлера-Лагранжа дФ/дг = 0, дФ/дг = 0 следует
^(х) = (5(х)-б)[5(х)-г(х)(5(х)-/>)]р(х,х)-
(s(x)-/>)F(x)--, (4.52)
^А/ 2
а(х)>/1-(2г(х)-1)2 = 0 . (4.53)
Из условия минимальности Лежандра-Клебша имеем
//(х)(2г(х)-1)>0,
(4.54)
а из необходимого условия экстремума функционала (4.50) по а
следует
(4.55)
265
ГЛАВА 4
При //(х)^0 в (4.53), (4.54) условия выполняются, если
r(x)= 1 (при //(х)>0), либо г(х) = 0 (при //(х)<0). Отсюда с
учетом (4.52) вытекают следующие искомые соотношения для
определения ropt(x):
1 при (s(x)-Z>)Z>P(x)——(s(x)-Z>)F(x) >—,
/ \ SM 2
^optb) =
О при (.s(x) ~//).s(x)P(x)——(s(x)-Z>)F(x) <—.
(4.56)
Множества значений х, в которых ropt (х) = 0 или ropt (х) = 1,
могут пересекаться только тогда, когда разность А левых частей
неравенств (4.55) на множестве пересечений принимает положи-
тельные значения. Как нетрудно убедиться, в рассматриваемом
случае A = -(s(x)-Z>)2Р(х) <0 . Таким образом, области, в кото-
рых ropt(x) = 0 и ropt(x) = l, не пересекаются. Значения ropt(x) в
остальных областях удовлетворяют неравенству 0<ropt(x)<l,
т.е. задаются в открытой области. Поэтому их можно опреде-
лить путем минимизации (4.51) без учета слагаемого
//(x,z)(2r(x,z)-l-sinv(x,z)). Это эквивалентно условию // = 0,
из которого следует, что в области, не удовлетворяющей нера-
венствам в (4.56),
(s(x)-Z>)s(x)P(x)——(^(х) — fe)/r(x) —
'opt W =-----------7-^--------------------(4-57)
(s(x)-Z>)2P(x)
Соотношения (4.55)-(4.57) вместе с ограничением на ресурс
(4.7) составляют систему нелинейных уравнений и неравенств,
достаточную для определения искомых ropt (х), а = const. Ее ре-
шение может быть получено численными методами. Так, при ис-
пользовании метода последовательных приближений основные
этапы численного решения задачи состоят в следующем.
1. Для некоторого начального приближения а определяются
ropt(x) и и по алгоритму, аналогичному описанному выше.
266
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
2. Подстановкой полученного приближения ropt (х) в (4.55)
определяется новое приближение для а. после чего вычисления
по пп. 1, 2 повторяются.
Анализ выражений (4.56), (4.57) показывает, что, в отличие
от помехи, определяемой выражением (4.44), в рассматриваемом
случае оптимальная помеха включает фрагменты полупрозрач-
ных экранов с функцией прозрачности, удовлетворяющей соот-
ношению (4.57).
В случае использования для создания помехи только непро-
зрачных экранов при формальной постановке последней задачи
синтеза ограничение (4.6) следует заменить условием: г(х) мо-
жет принимать только значения из конечного множества (0,1).
Методом, аналогичным использованному в 4.2.2, можно пока-
зать, что в этом случае ropt (х) = 1 только в области, определяемой
первым неравенством в (4.56).
Пусть, например, задачей постановки имитирующей помехи
является создание ложной цели, то есть получение максимума
отклика корреляционного измерителя в планируемой точке ее
формирования Ху. Тогда в качестве К(Х) можно использовать
дельта-функцию К(Х) - £(Х-Ху). При этом F(x) примет вид
F(x) = 5(х-Ху). Корреляционный отклик Т(Х) в общем случае
является знакопеременным. Для того чтобы сделать величину
возможных боковых максимумов Г(Х) достаточно малой, необ-
ходимо а в (4.47) выбирать достаточно большим. При таком а
вторые слагаемые в левых частях неравенств (4.57) станут суще-
ственно больше первых слагаемых, а область существования
ropt(x), не равного нулю или единице, станет пренебрежимо ма-
лой. При этом условие (4.57) для ropt(x) трансформируется к сле-
дующему достаточно простому виду:
''optW =
1 при -(s(x)-b)s(x- Aj-) > о/2,
0 при -(s(x)-b)s(x- Aj) < и!2.
(4.58)
Вследствие того, что при b » s(x) аддитивная и апплика-
тивная смеси помехи с сигналом отличаются незначительно, вы-
267
ГЛАВА4
ражения (4.58) для ropt(x) в этом случае можно использовать и
при реализации аддитивной помехи.
4.3.3. Недифференцируемое поле яркости
Рассмотрим особенности синтеза помеховых воздействий
для недифференцируемого поля яркости сюжета. При экспонен-
циальной корреляционной функции поля яркости и для сюжетов
типа фрагмента городской инфраструктуры полезный сигнал
s(x) является недифференцируемым по пространственной пере-
менной х. В этом случае полученные выше выражения для оп-
тимальных имитирующих помех типа (4.44)-(4.46) не имеют
смысла. При недифференцируемом полезном сигнале s(x) бес-
поисковый метод измерения координат может быть реализован за
счет двух основных способов:
1) разностный метод, т.е. путь формирования разности сдви-
нутых на ±е полей эталона (или сюжета);
2) предварительное сглаживание принимаемого изображе-
ния или эталона с помощью пространственного фильтра и ис-
пользования после этого дискриминатора с дифференцировани-
ем, реализующего обработку в соответствии с выражением (4.39).
Последний способ может также применяться для стабилиза-
ции размаха (величины линейного участка) дискриминационной
характеристики и в случае дифференцируемого полезного сигна-
ла. При использовании разностного метода операция дифферен-
цирования в выражении (4.39) для ошибки на выходе корреляци-
онного дискриминатора заменяется операцией формирования
разности сдвинутых на ±£ полей эталона:
ЛЛ1 ~ Ji/(x,X0)(s(x-X + £j)-s(x-k-£i))67x . (4.59)
м
Здесь =(/;],()) - вектор сдвига, соответствующий определению
ошибки /Ц вдоль одной из координатных осей.
Требование максимизации ошибки измерения 2Ц сводится
в рассматриваемом случае к максимизации не функционала
(4.41), а функционала
268
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
J= Jw(x)(5(x + £1)-5(x-EI))Jx. (4.60)
Л/
Нетрудно убедиться, что при этом процедура получения вы-
ражений для оптимальной помехи полностью аналогична исполь-
зованной в этом параграфе, а сами выражения для оптимальной
помехи будут совпадать с приведенными выше при замене в по-
следних F(x) на (^(x + s^-^x-Sj)).
Так, при аддитивной смеси помехи и сигнала и ограничени-
ях типа (4.6), (4.7)
[1 при (5(x + £i)-5(x + £1))>D],
^OptW (4*61)
[0 в остальных случаях.
При аддитивно-мультипликативной смеси вида (4.5) и тех
же ограничениях будем иметь
[1 при (sW-ZjXXx + e^-Xx-eJ)^,
^optx^v I n (4.O2J
[Ob остальных случаях.
При использовании для измерения координат второго спосо-
ба (сглаживание эталонного сигнала с помощью узкополосного
пространственного фильтра), сглаженный, например по коорди-
нате Х|, эталонный сигнал при произвольных значениях х2 мож-
но записать так:
М*1>*2>= (4.63)
м
Здесь и’(Х]) - весовая функция сглаживающего фильтра по коор-
динате xt. Рассмотрим идеальный сглаживающий фильтр,
имеющий весовую функцию вида:
1 при |х, | < с>,
w(Xl) =
0 в остальных случаях.
Такой фильтр будет иметь частотную характеристику вида
sinx/x и ширину полосы пропускания, обратно пропорциональ-
ную 8. Тогда
269
ГЛАВА 4
dw(xx)/dxx = 3(хх +£j)- J(x1 — £х).
Здесь 3{...) - дельта-функция. С учетом этого получим:
«М»,.*!)/*! = ру.Лг)8"'^' V|i<Aj =
и *'
= 5(%! +6Г1,Х2)-5(Х1 -^1?Х2)«
(4.64)
После подстановки dsw(xx)ldxx в (4.44), (4.45) получим вы-
ражения, совпадающие с (4.61), (4.62).
Таким образом, помимо доказательства эквивалентности двух рассмат-
риваемых подходов к определению оптимальной имитирующей помехи
при недифференцируемом сигнале (эталоне) мы одновременно показали,
что формирование дискриминационной характеристики корреляционно-
го измерителя разностным методом эквивалентно предварительной про-
странственной фильтрации эталонного сигнала низкочастотным идеаль-
ным фильтром. Причем ширина полосы пропускания этого фильтра об-
ратно пропорциональна величине сдвига £ эталонного сигнала.
4.3.4. Эффективность
оптимальных имитирующих помех
Эффективность оптимальных имитирующих помех оценива-
лась методом имитационного моделирования при исходных дан-
ных, приведенных в разделе 4.2.3, если иное специально не ого-
варивается.
На рис. 4.5 приведены полученные при моделировании гра-
фики, характеризующие зависимость среднего значения относи-
тельной ошибки измерения координат цели (ошибки АЛ, отне-
сенной к величине полуинтервала корреляции сигнала цели Зх)
от относительной площади помехового образования 5 (отноше-
ния площади помехи к площади цели или эталона) при постанов-
ке аппликативной оптимальной имитирующей помехи, описы-
ваемой выражением (4.45). Каждая кривая получена по 1400-м
реализациям случайных полей - изображений цели при
h/3x= 25.6. Яркость помехового образования характеризуется
отношением b / ст. которое для кривой 7 равно 1, для кривых 2, 3,
4 соответственно равно 2, 4, 10.
270
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
На рис. 4.6 представлены кривые, аналогичные показанным
на рис. 4.5, но полученные для оптимальной аддитивной помехи
(4.44). Ломаный характер графиков (рис. 4.5, 4.6) обусловлен ве-
личиной пространственных дискрет, описывающих при модели-
ровании пространственный сигнал s(x). Так, полуинтервалу кор-
реляции поля 5(х) по уровню 1/е соответствовали при модели-
ровании 5 дискрет. Как следует из этих графиков, оптимальные
имитирующие помехи, определяемые выражениями (4.44), (4.45),
обеспечивают измерение координат цели с ошибками, не превы-
271
ГЛАВА 4
шающими 0,6 полуинтервала пространственной корреляции поля
полезного сигнала даже при большой яркости помеховых образо-
ваний. Вместе с тем, для получения таких ошибок достаточно за-
крыть помехой порядка 1/5 площади, занимаемой защищаемым
объектом.
Влияние отношения hl , характеризующего количество ин-
тервалов корреляции, укладывающихся в линейный размер защи-
щаемого помехой объекта, иллюстрируют графики (рис. 4.7), по-
лученные при тех же исходных данных, что и графики на рис. 4.5,
но при h/ 8Х = 12,8 .
Установленные при моделировании ограничения на значе-
ния ошибок, реализуемых рассмотренными помехами, связаны с
тем, что выражение для ошибки измерения координат цели (4.39),
положенное при синтезе помех в основу построения оптимизи-
руемого функционала (4.42), справедливо лишь в ограниченных
пределах, соответствующих ширине линейного участка дискри-
минационной характеристики корреляционного измерителя и
примерно равных интервалу пространственной корреляции по-
лезного сигнала.
Оценим теперь возможности реализации аномальных оши-
бок на основе постановки оптимальных помех, синтезированных
исходя их условия максимизации функционала (4.47). В частно-
сти, исследуем далее возможности помехи, описываемой выра-
жением (4.58).
272
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
Графики (рис. 4.8) характеризуют зависимость вероятности
появления аномальных ошибок от относительной площади объ-
екта 8. прикрытой оптимальной имитирующей помехой. При
моделировании принималось, что /у = 3^. По оси ординат на
рисунке отложена вероятность раХ смещения максимума корре-
ляционного отклика под действием помехи на 3 полуинтервала
корреляции от исходного положения, то есть в точку Яу . Кривая 1
на рисунке получена при значениях относительной яркости по-
мехи b / су = 1, для кривой 2 b / су - 2 , для кривой 3 Ы су = 3 . По-
лученные результаты позволяют утверждать, что рассматривае-
мая имитирующая помеха при Ы а >2 и £>(0,15...0,3) обеспе-
чивает уверенное перенацеливание корреляционного координа-
тора на ложную цель, смещенную от истинной цели на расстоя-
ние, определяемое значением Яу.
При £>0,6 помимо детерминированных аномальных оши-
бок, определяемых значением , могут иметь место также слу-
чайные аномальные ошибки. Вероятность их появления ра1 ха-
рактеризуют графики на рис. 4.9. С учетом этого общая вероят-
ность появления аномальных ошибок определяется очевидным
выражением ра = раХ + ра1.
273
ГЛАВА4
4.4. Имитирующие помехи
координаторам с растровой разверткой
При исследовании вопросов подавления систем, исполь-
зующих модулирующие растры при пеленгации точечных источ-
ников, возникает задача определения законов модуляции, вызы-
вающих максимальный помеховый эффект при ограниченной
мощности источника помех. Определение оптимального закона
модуляции помехи на основе решения вариационной задачи с
учетом достаточно полной совокупности взаимодействующих
факторов и даже формальная постановка такой задачи в общем
случае наталкиваются на определенные трудности. Их преодоле-
ние становится возможным при учете только наиболее сущест-
венных особенностей процесса анализа и обработки сигналов и
при некоторой идеализации роли других факторов, например ра-
боты системы автоматической нормировки сигналов, системы
отработки ошибок рассогласования и т.п.
Ниже мы будем полагать, что источник амплитудно-
модулированных помех расположен на защищаемом объекте, и
на него ориентирована оптическая ось координатора с растровой
разверткой. Ставится задача определения закона амплитудной
модуляции излучения источника помехи, максимизирующего
274
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
ошибку единичных измерений координатора. Следуя [9], вариа-
ционную постановку задачи синтеза помехи рассмотрим на при-
мере подавления ОЭСр, использующих растровые анализаторы
изображений с амплитудно-фазовой или частотно-фазовой моду-
ляцией и с синхронным детектированием при выделении угловых
координат точечного источника.
Представим модулирующую функцию растра при размеще-
нии источника помех в точке прицеливания в виде где
6?, ср - несущая частота и начальная фаза сигнала на выходе раст-
ра, t ~ текущее время. Причем
0</(б?/,^)<1. (4.65)
Синтезируем закон модуляции точечного помехового излу-
чателя, максимизирующий ошибку измерения направления на не-
го. Пусть Pu(t) - подлежащий определению помеховый сигнал,
причем
О < u(t) < 1, (4.66)
Р - максимальная амплитуда помехи.
Тогда помеха на выходе растра может быть представлена
следующим образом:
p(t) = Pu(t)f(a)t,<p). (4.67)
Пусть также Q - круговая частота развертки изображения
помехового излучателя по секторному растру (она же - опорная
частота фазового детектора), которая в случае амплитудно-
фазового анализатора может совпадать с со. Составляющая по-
мехового сигнала на выходе фазового детектора, входящего в со-
став углового дискриминатора, по одной из координатных осей с
точностью до несущественного для дальнейшего анализа посто-
янного коэффициента определяется выражением
т
d ~ Jp(/)sinQ/t7r, (4.68)
о
где Т - период развертки изображения; sin О/ - опорный сигнал
фазового детектора.
275
ГЛАВА4
Пусть также имеется ограничение на энергетический ресурс
помехи вида
т
P^u(t)dt = I. (4.69)
О
Учет этого равенства становится актуальным, например, при
создании помехи в виде последовательности лазерных импуль-
сов, когда выражение (4.69) может ограничивать число помехо-
вых импульсов. Теперь задача формального синтеза помехи мо-
жет быть поставлена следующим образом. Требуется найти
функцию u(t), доставляющую максимум функционалу (4.68) при
ограничениях (4.66) и (4.69) .
Для учета при синтезе помехи ограничения (4.66) введем,
как и раньше, вспомогательную функцию v(/), удовлетворяю-
щую выражению
l-2w(/) + sinv(/) = 0. (4.70)
Как нетрудно заметить, при любом значении v(/) функция
u(t) будет удовлетворять неравенству (4.66), если она удовлетво-
ряет равенству (4.70). Таким образом, использование при опти-
мизации выражения (4.70) вместо условия (4.66) позволяет по-
ставленную вариационную задачу с ограничениями типа нера-
венств трансформировать в классическую, когда на амплитуду
функции u(t) не накладываются ограничения в виде неравенств.
Для отыскания u(t) воспользуемся методом множителей Ла-
гранжа.
Функция Лагранжа, подлежащая оптимизации, с учетом
(4.67) приобретает вид
Ф(/) = Pu(t)f + //(/)(! -2z/(Z) +sin v(/)) + t>w(/).
(4.71)
Здесь и и = const - неизвестные множители Лагранжа.
Из необходимого условия экстремума ЭФ/Sw = 0 следует
ju(t) = 0,5Р/(6ttf,^)sinQ/ + 0,5b>. (4.72)
276
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
Из необходимого условия экстремума бФ/Sv = 0 следует
//(Z)cos v(t) = 0. (4.73)
Подставив (4.72) в (4.73) и учитывая, что
cosv(Z) = д/1 - sin2 v(t) = ^/1 -(2w(/)-l)2 ,
получаем необходимое условие экстремума Ф(/) в следующем
виде:
[0,5/y(6y/,^)sinfi/ + 0,5v]y/l-(2u(t)-l)2 = 0. (4.74)
На конечном множестве точек, в которых сомножитель,
стоящий в квадратных скобках в (4.74), равен нулю, u(t) может
принимать любые конечные значения, поскольку они не оказы-
вают влияния на величину оптимизируемого функционала (4.68).
За исключением этого конечного множества условие (4.74) вы-
полняется только тогда, когда u(t) принимает значения 0 либо 1.
Для разделения областей, где u(t) = 0 или u(t) = 1, воспользуемся
одним из необходимых условий максимума функционала
52Ф / dv2 < 0, которое в нашем случае можно представить так:
= -[0,5P/(6?/,^)sinQz + 0,5г>]-1) < 0. (4.75)
При w(/) = l неравенство (4.75) выполняется только тогда,
когда выражение в квадратных скобках принимает положитель-
ные значения. И, наоборот, u(t) = 0, когда выражение в квадрат-
ных скобках принимает отрицательные значения. Отсюда опти-
мальная помеха описывается следующим выражением:
[1 при /(d>/,^)sinOz>U|,
Mopt(0 = ) „ (4.76)
[ 0 в остальных случаях,
где ц - некоторая постоянная (порог).
В соответствии с (4.75) ц = -и/Р . Величина порога ц зави-
сит от располагаемого энергетического ресурса помехи / (см.
(4.69)) и может быть определена численным методом с использо-
ванием следующего итерационного алгоритма.
277
ГЛАВА 4
Этап 1. Задается некоторое начальное значение ц .
Этап 2. С помощью (4.76) находится wopt(/).
Этап 3. С помощью (4.69) определяется величина израсхо-
дованного ресурса 1}.
Этап 4. Если /, > /, то порог ц для следующей шага итера-
ции увеличивается, а в противном случае уменьшается на неко-
торое достаточно малое приращение Ац . Далее повторяются вы-
числения этапа 2 и так далее.
Рассмотрим в качестве примера систему с секторным рас-
тром, представленным на рис. 4.10. Такой растр обычно имеет
24...36 секторов во внешнем поясе и осуществляет частотно-
фазовую модуляцию сигнала точечного источника при круговой
развертке изображения этого источника по внешнему поясу сек-
торного растра.
Частота развертки изображения обычно лежит в интервале
20...40 Гц. Амплитуда девиации частоты сигнала цели, преобра-
зованного растром, определяет угол рассогласования, а фаза де-
виации определяет направление (знак) сигнала рассогласования.
Модулирующую функцию такого растра при нулевом угле рассо-
гласования можно представить в виде
f = 0,5(1 -I- sign(sin(6z)Z + ср))). (4.77)
________________________Рисунок 4.10______________________
278
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
Тогда (4.76) конкретизируется следующим образом:
woPt(0
при (1 + sign(sin(69/ + (р))) sin £1/ > 2ц,
в остальных случаях.
(4.78)
Выражение (4.78) показывает, что оптимальная помеха
представляет собой пачку коротких импульсов, излучаемых на
интервале времени, не превышающем полупериод развертки изо-
бражения по секторному растру. При этом помеховые импульсы
должны излучаться в моменты, когда изображение помехового
излучателя попадает на прозрачные участки растра. Выполнение
последнего условия может быть обеспечено только тогда, когда
известна начальная фаза ср сигнала на выходе секторного растра.
Получение такой информации на стороне постановщика по-
мех средствами оптической локации часто представляется невоз-
можным или, по крайней мере, затруднено. Поэтому рассмотрим
случай, когда информация о начальной фазе (р отсутствует. Этот
случай сводится к определению помехи, доставляющей макси-
мум среднему значению d помехового сигнала на выходе фазо-
вого детектора (усреднение по случайной начальной фазе (р).
При неизвестной начальной фазе подлежащий оптимизации
функционал приобретает вид
Т 2я
d = 0,5Р J Jм(Г)(14- sign(sin(^ 4- ^)))sin(£10w(^)d/rf^. (4.79)
о о
Полагая закон распределения начальной фазы ™(ср) равно-
мерным в интервале О...2;т, нетрудно получить, что
т
d = 0,5Р jw(/)sin(£l/)d/,
о
[1 при sin£lt 2ц,
wopt(0 | л
[О в остальных случаях.
(4.80)
(4.81)
Значит, в этом случае вместо пачки коротких импульсов
должен излучаться один импульс с длительностью, равной дли-
тельности пачки. Модуляция этого импульса с частотой бУ, что
279
ГЛАВА 4
необходимо для обеспечения его прохождения через частотно-
избирательные элементы углового дискриминатора, будет осуще-
ствляться элементами секторного растра. При одинаковом эф-
фекте подавления потребная средняя энергия такой помехи будет
вдвое больше энергии помехи, определяемой выражением (4.78),
что является естественной платой за отсутствие необходимой
информации.
Представляет практический интерес определение оптималь-
ной помехи при отсутствии ограничения на ее ресурс вида (4.69)
и наличии только ограничения на амплитуду помехи вида (4.66).
Формально в этом случае при записи функции Лагранжа мы
должны исключить из нее слагаемое вида uu(t). Выполнив после
этого преобразования, аналогичные приведенным выше, получим
окончательно
fl при sinQt>0,
«opt(')= п (4-82)
и (0 в остальных случаях.
Если имеется ограничение только на ресурс помехи, а огра-
ничение на амплитуду (4.66) заменяется естественным ограниче-
нием w(/)>0, то оптимальная помеха, как несложно убедиться,
будет иметь вид
wopt(0 = -arg max sin Q/j, (4.83)
где - дельта-функция.
На практике помеха (4.83) может быть реализована с помо-
щью периодической последовательности коротких импульсов
максимальной амплитуды с периодом повторения 2zr/Q и с
энергией, равной /. При этом, однако, отсутствие информации о
начальной фазе ср может привести к тому, что помеховый им-
пульс будет попадать на непрозрачную часть растра, вследствие
чего помеха в ряде реализаций утратит эффективность. Для ис-
ключения этого вместо периодической последовательности оди-
ночных импульсов можно создавать такую же последователь-
ность парных импульсов, смещенных один относительно другого
по времени на величину л / а>.
280
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
Из приведенных выражений видно, что для реализации оп-
тимальной помехи необходимо иметь информацию о частоте Q
развертки изображения в подавляемом координаторе. При этом
информация о фазе развертки в общем случае необязательна для
реализации оптимальных помех. Такая информация может пона-
добиться только тогда, когда требуется за счет создания помехи
обеспечить ошибку измерения координаты точечного источника
в некотором наперед заданном направлении, определяемом углом
ф в картинной плоскости ( ф отсчитывается от нулевой фазы раз-
вертки изображения по растру). При этом во всех полученных
выше выражениях для оптимальной помехи необходимо аргу-
мент Q/ заменить на (Q/ + ^). Характер оптимизируемого функ-
ционала (4.68) показывает, что оптимальная помеха направлена,
по существу, на искажение дискриминационной характеристики
пеленгатора и на нарушение тем самым нормального режима
функционирования его замкнутых или разомкнутых систем изме-
рения координат.
Оценим характер изменения дискриминационной характери-
стики при создании синтезированной помехи с помощью имита-
ционной модели частотно-фазового дискриминатора, структурная
схема которой приведена на рис. 4.11 [15]. В модели воспроизво-
дится преобразование входного сигнала трехпоясным секторным
растром, изображенным на рис. 4.10, с последующим учетом осо-
бенностей работы блоков нелинейной нормировки, фильтрации
сигнала и фазового детектирования при выделении угловой ин-
формации. Отдельные блоки модели выполняют следующие
функции: 2 - полосовой фильтр на несущую частоту со, опреде-
ляемую частотой развертки Q и количеством секторов растра;
3 - амплитудный ограничитель; 4 - линейный детектор; 5 - блок
дифференцирования; 6 - полосовой фильтр на частоту развертки
Q; 7, 8 - сглаживающие фильтры. Блоки 4, 5 представляют мо-
дель частотного дискриминатора, блоки 7, 8 вместе со стоящи-
ми перед ними перемножителями образуют модель фазового де-
тектора. Таким образом, в модели учтен ряд дополнительных
факторов, не фигурировавших в исходной постановке задачи син-
теза помехи, что повышает достоверность приводимых ниже ре-
зультатов. На рис. 4.12 приведены полученная на модели исход-
281
ГЛАВА4
________________________Рисунок 4.11______________________
282
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
ная дискриминационная характеристика пеленгатора при работе
его по постоянному точечному излучателю (сплошная кривая) и
дискриминационная характеристика при работе по излучателю с
синтезированной помехой, определяемой выражением (4.82)
(пунктирная кривая). По осям отложены нормированные по мак-
симуму значения углового отклонения а оси пеленгатора от на-
правления на излучатель помехи и сигнала d на выходе фазового
детектора.
Сравнение двух приведенных кривых показывает, что синтезированная
помеха трансформирует дискриминационную характеристику из сим-
метричной биполярной в униполярную, что при достаточной энергети-
ке помехи и наличии точной информации о частоте развертки изобра-
жения источника помехи Q по растру практически исключает воз-
можность измерения координат точечного источника излучения.
4.5. Помехи контурам наведения
4.5.1. Помехи линейному контуру наведения
Теоретической основой непараметрического синтеза помех
системам наведения ракет являются методы теории оптимальных
систем управления [10-13, 3.14]. Формальная постановка задачи
непараметрического синтеза в этом случае сводится к следующе-
му. Пусть контур наведения описывается системой в общем слу-
чае нестационарных нелинейных дифференциальных уравнений
х = (4.84)
где p(t) - помеховый сигнал, принадлежащий некоторому до-
пустимому множеству М помеховых сигналов.
Время t изменяется в интервале от 0 до Т , где Т - момент
окончания наведения, то есть момент прогнозируемой встречи
ракеты с целью.
Если целью создания помех является получение максималь-
ного промаха ракеты в конце этапа наведения, то в качестве под-
лежащего оптимизации функционала J при синтезе оптимальной
283
ГЛАВА 4
помехи /?opt(/) следует рассматривать некоторую функцию фазо-
вых координат системы (4.84) в момент времени Т :
Popt(T)^^g max (4.85)
p(t)aMp
Поставленная таким образом задача принадлежит к классу
вариационных задач Майера.
Если система (4.84) является линейной, то текущий промах
ракеты в горизонтальной и вертикальной плоскостях наведения
обычно определяется одной из фазовых координат или линейной
комбинацией небольшого числа фазовых координат.
В последнем случае заменой одной из фазовых координат на
новую, определяемую этой линейной комбинацией, нетрудно до-
биться того, чтобы текущий промах ракеты и в этом случае опре-
делялся также одной фазовой координатой, которую обозначим
как xh. Тогда для линейной стационарной системы наведения
промах в конце этапа наведения xh(Г) определяется интегралом
свертки
т
xh(T) = ^p(t)w(T - t)dt, (4.86)
О
где w(/) - весовая функция (импульсная реакция) контура наве-
дения по входу p(t) и выходу xh(t) в момент времени Т . Если
множество допустимых помех М задается неравенством типа
|р(фл„, (4.87)
то из (4.86) следует, что оптимальная помеха должна принимать
максимальные значения +рт в соответствии со знаком весовой
функции
Popt (0 = pmsign(w(7’ - /)). (4.88)
При максимизации промаха ракеты оптимизируемый функ-
ционал принимает вид J(x(T)) = xh(T), а выражение (4.88) оста-
ется справедливым и тогда, когда контур наведения описывается
284
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
системой линейных нестационарных уравнений. Это имеет место,
в частности, при синтезе помех контурам самонаведения. Только
в этом случае в качестве и(7 - /) необходимо использовать со-
пряженную весовую функцию контура по промаху. Рис. 3.8 и ма-
териалы раздела 3.1.2 иллюстрируют этот случай непараметриче-
ского синтеза помехи.
Завершая рассмотрение задач синтеза помех линейным кон-
турам наведения, необходимо отметить, что основная техниче-
ская трудность при определении j?opt(/) состоит в получении вы-
ражения для сопряженной весовой функции w(T -/) в явном ви-
де. Однако численными методами эта функция всегда может
быть определена с необходимой точностью.
4.5.2. Помехи нелинейному контуру самонаведения
Линейный режим работы контура самонаведения может
иметь место только при достаточно малых значениях размаха по-
мехового воздействия рт . При больших значениях рт имеет ме-
сто выход фазовых координат контура за пределы линейных уча-
стков его существенных нелинейностей, к числу которых в пер-
вую очередь относятся нелинейная дискриминационная характе-
ристика, ограничения перегрузки, углов поворота рулевых плос-
костей и угловой скорости поворота головки самонаведения.
Синтез оптимальной помехи для нелинейного контура самонаве-
дения сопряжен с определенными трудностями и, как правило,
может быть выполнен с привлечением только численных мето-
дов. Пример применения одного из них приводится ниже.
Пусть имеется контур самонаведения с линеаризованной ки-
нематикой (рис. 4.13). На этом рисунке в блоке 1 показана пере-
даточная функция головки самонаведения и корректирующего
фильтра, в блоке 2 - ограничение перегрузки ракеты, в блоке 3 -
передаточная функция ракеты с автопилотом. Блок 4 выполняет
пересчет поперечного ускорения ракеты в ее линейные отклоне-
ния от номинальной траектории. В блоке кинематики 5 произво-
дится пересчет линейных отклонений ракеты в угловые. Схеме на
рис. 4.13 соответствует система нелинейных дифференциальных
уравнений
285
ГЛАВА 4
________________________Рисунок 4.13______________________
*1 = х2,
1 2£ 1 1
Х2 =---^Х}----1~Х2--z---------X* + —Z-------p(t).
Ту Ту Ty2(D0-Vst) T^-Vj)
i3=^4,
х4 = -77*3 -~^*4 + Д-^(л2), (4.89)
‘2 12 У2
*5 = ХЬ’
xb=X3 + N!’
_ ч \kvsx2 приЛ'^х2<Лт,
^(*2) = )
в остальных случаях.
В системе (4.89) использованы следующие обозначения:
х2 - измеренная ГСН угловая скорость поворота линии визиро-
вания цели; х3 - поперечное ускорение ракеты; х5 - линейное
отклонение ракеты от номинальной траектории; Т3,Т4 - постоян-
ные времени головки самонаведения и корректирующего фильт-
ра; 72,с2 - эквивалентная постоянная времени и коэффициент
демпфирования ракеты с автопилотом; Nm - максимальное по-
перечное ускорение ракеты, определяющее уровень ограничения
перегрузки; Nt - поперечное ускорение маневрирующей цели; к -
навигационная постоянная; Do, Vs - начальная дальность и ско-
рость сближения ракеты с целью; p(t) - помеховое воздействие.
286
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
Дальнейшие количественные оценки будем производить при
следующих значениях параметров этого контура:
Г3=0,1с, Г4=0,4с, Zj = д/7^7^ - °,2 с,
= (Г3+Г4)/27] = 1,25, Г2=0,1с, £>=0,8,
Do = 2500 м, r{ = 100 м, Vs = 400 м/с,
л;2=1оом/с, л;=о, к = 4.
Здесь г} - дальность ослепления ГСН (дальность окончания про-
цесса самонаведения, обусловленного резким возрастанием оши-
бок измерения углов головкой самонаведения на предельно ма-
лых дальностях).
При дальности ослепления т\ конечный промах ракеты h
определяется так:
Й = Л5(/1) + ^-Л6(/1), (4-9°)
где =(£>0-^)/^ .
Сопряженная импульсная реакция по промаху, соответст-
вующая линейному контуру самонаведения с указанными харак-
теристиками, приведена на рис. 4.14 в виде функции от оставше-
гося времени г до встречи ракеты с целью. Рассматривается уг-
ловое помеховое воздействие p(t) на головку самонаведения,
создаваемое с линейной базы 2L .
На рис. 4.15 сплошной линией приведена зависимость нор-
мированного к полубазе L промаха ракеты h от величины базы
помехового воздействия. Промах соответствует оптимальному
для линейного контура самонаведения помеховому воздействию,
определяемому выражением (4.88), в котором pm= L, 2L - база
помехи (в случае двухточечного источника помех - расстояние
между двумя помеховыми излучателями). Смысл пунктирной кри-
вой будет пояснен ниже. Кривая на рис. 4.15 показывает, что при
малых значениях базы помехи, когда сигнал х2 (см. рис. 4.13) не
выходит за пределы линейного участка нелинейности F(x2),
промах пропорционален величине базы помехи, что иллюстриру-
ет горизонтальный участок этой кривой. Однако при дальнейшем
287
ГЛАВА 4
увеличении базы помехи имеет место выход сигнала х2 на уро-
вень ограничения перегрузки, вследствие чего резко уменьшают-
ся значения конечного промаха ракеты. Это подтверждает акту-
альность задачи непараметрического синтеза помехи нелинейно-
му контуру самонаведения.
Рассмотрим более детально задачу непараметрического син-
теза углового помехового воздействия контуру самонаведения,
288
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
имеющему в качестве основной существенной нелинейности ог-
раничение перегрузки ракеты. Пусть требуется определить закон
изменения углового помехового воздействия p(t), который обес-
печивает реализацию максимального промаха ракеты в конце
этапа самонаведения. Способ создания на практике углового по-
мехового воздействия может быть любым. Так, при подавлении
ракет с ПЛГС такое воздействие может быть реализовано, на-
пример, перемещением на местности пятна от помехового лазера
по требуемому закону. При подавлении ПЛГС и свегоконтраст-
ных ТВГС угловое помеховое воздействие также может быть
реализовано с помощью двух разнесенных по пространству излу-
чателей путем соответствующего перемещения их энергетиче-
ского центра за счет программного изменения мощности этих из-
лучателей.
Задача синтеза оптимального углового помехового воздей-
ствия контуру самонаведения ставится как задача отыскания та-
кого p(f), которое максимизирует функционал (4.90), построен-
ный на решениях нелинейной системы дифференциальных урав-
нений (4.89) при условии, что помеха создается с ограниченной
базы, т.е. что p(t) удовлетворяет неравенству
|р(/)|<£. (4.91)
Поставленная задача принадлежит к классу задач Майера
вариационного исчисления. Для ее решения могут использо-
ваться различные численные методы, включая базирующиеся на
использовании формализма принципа максимума Понтрягина
[10-12]. Существо этих методов сводится в конечном итоге к не-
обходимости численного решения краевой задачи для некоторой
расширенной по отношению к (4.89) системы. Воспользуемся
прямым методом решения вариационных задач, разработанным
Л.И. Шатровским [12, 13] и основанным на построении максими-
зирующей последовательности вариаций управления (помехового
воздействия), в которой каждая вариация определяется для ли-
неаризованной в окрестности текущих значений фазовых коор-
динат исходной системы.
Составим систему уравнений в вариациях, соответствую-
щую (4.89), (4.91):
289
ГЛАВА 4
8х} = 8х2.
Зх-> = - -^-Зх2-----.---?----Зх5 + —;—J-----3p(t),
- Тг2 T2(D0-Vst) T2(D0-Vst)
8х3 = 8х4,
1 ^(Х2)х
Ч-г— ' 8*2,
Ti ^2
5г- 1 е _
ОХл =----------------ОХл +
г22 г2
8хъ - 8х^
8хв = 8х3 + Nt.
(4.92)
Системе (4.92) соответствует следующая сопряженная сис-
тема [12, 13]:
2£ 1 dF(x.)
1
72
(4.93)
У4 = -Уз+^У^
12
1
У5 T^D.-V^
У(,=~У5-
Конкретизируя метод Шатровского для нашего случая, не-
трудно показать, что (/ + 1)-е приближение для искомого опти-
мального углового помехового воздействия pi+l(t) имеет вид
,,ч + при pi+i(t)<L,
[L в остальных случаях,
где
3Pi (0 = —j——- 5
T^D.-Vst)
(4.94)
(4-95)
290
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
ст - коэффициент, определяющий скорость сходимости алгорит-
ма, y2i - решение сопряженной системы (4.93) на i -м шаге при
следующих условиях на конце:
Ух (tx y4(tx) - 0, y5(tx) = -1, y6(tx ) = -rxIVs. (4.96)
В качестве х2 при вычислении dF(x2)/flx2 подставляется
решение системы (4.89) при = p^t) и начальных условиях
Xj(0),...,x6(0) = 0. При этом dF(x2)/dx2 = kVs если х2 находится
на линейном участке ограничителя перегрузки, и 8F(x2) / дх2 = 0,
когда х2 достигает уровня ограничения. В качестве первого при-
ближения для p(t} использовалось управление, определяемое
следующим выражением
= Ly2^ , (4.97)
У2 max (О
где y2(t) - решение системы (4.93) при F(x2) = kVsx2 ; J^2max(0 “
максимальное значение этого решения.
Путем эквивалентных структурных преобразований схемы
(рис. 4.13) (замена фазовой координаты х2 на х21 -х2 IVS и блока
кинематики на 1 / т , где т - время, оставшееся до встречи ракеты
с целью) нетрудно убедиться в том, что характер обработки по-
меховых воздействий в системе самонаведения и вид оптималь-
ного управления можно представить в виде, не зависящем от ,
то есть как функцию расчетного времени г, оставшегося до
встречи ракеты с целью, и времени ослепления tx. Будем учиты-
вать это при выполнении расчетов и построении соответствую-
щих графиков.
На рис. 4.16 показана кривая, характеризующая скорость
сходимости процесса отыскания оптимального управления. По
оси абсцисс на этом рисунке отложены номера итераций счета,
по оси ординат - относительный (отнесенный к величине полуба-
зы) конечный промах ракеты, отсчитываемый от центра базы.
Соответствующее этому промаху на последней итерации
счета оптимальное угловое помеховое воздействие (оптимальное
управление) на нелинейный контур самонаведения представлено
291
ГЛАВА 4
кривой 1 на рис. 4.17, где по оси абсцисс отложено время /, от-
считываемое от начала процесса наведения. На этом же рисунке
кривая 2 показывает оптимальное воздействие на линейный
контур, определяемое выражением (4.88), кривая 3 характеризу-
ет сопряженную весовую функцию этого контура. Расчеты, ре-
зультаты которых приведены на рис. 4.16, 4.17, выполнялись при
2А-30м, сг = 0,05.
292
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
На рис. 4.18 показана зависимость максимального промаха,
реализуемого оптимальным помеховым воздействием, от уровня
ограничения перегрузки ракеты Nm и базы помехи 2L . Кривые
на рис. 4.18 по существу определяют потенциальные возможно-
сти помех по углу, создаваемых с ограниченной базы. На рис
4.15 пунктиром показана кривая, построенная по данным рис.
4.18 для Nm = 100 м2/с . Сравнение сплошной и пунктирной кри-
вых рис. 4.15 наглядно иллюстрирует выигрыш в эффективно-
сти помехи, получаемый от использования оптимального угло-
вого помехового воздействия для подавления нелинейных кон-
туров самонаведения.
Рис. 4.19 иллюстрирует характер изменения оптимального
помехового воздействия в зависимости от изменения некоторых
параметров контура и базы помехи. На этом рисунке кривая 1
построена при следующих базовых для рисунка значениях па-
раметров: Nm = 100 м/с, т -1 с, Vs = 400 м/с, 2L = 20 м. Все ос-
тальные кривые построены при изменении значений только од-
ного параметра по отношению к приведенным выше базовым.
Так, Aw=200m2/c для кривой 2, Kv=600m/c для кривой 5,
L = 50 м для кривой 7.
293
ГЛАВА 4
Наиболее заметное влияние на форму оптимального помехового воздей-
ствия оказывает изменение таких параметров, как база помехи и уровень
ограничения перегрузки ракеты, а наименьшее влияние - скорость полета
ракеты. Значит возможна реализация оптимального углового помехового
воздействия в виде программного управления, форма которого выбирает-
ся в соответствии со значениями этих существенных параметров.
4,5.3. Оптимальные помеховые воздействия
Синтезированные оптимальные угловые помеховые воздей-
ствия являются программным оптимальным управлением для
контура самонаведения с полностью известными параметрами.
Постановщику помех обычно точно не известны параметры кон-
тура самонаведения. Однако анализ возможных принципов по-
строения, а также известных тактико-технических характеристик
контуров, которым создается помеха, всегда позволяет с опреде-
ленной степенью достоверности получить обобщение этой ин-
формации в виде диапазона возможных значений параметров
контура самонаведения. Тогда можно сформулировать задачу
отыскания оптимального помехового воздействия при неполной
информации о параметрах контура как задачу отыскания такого
воздействия, которое максимизирует среднее значение промаха
ракеты, где усреднение производится по неточно известным па-
раметрам контура самонаведения. Будем называть такое воздей-
294
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
ствие оптимальным в среднем помеховым воздействием. Фор-
мальная постановка задачи синтеза оптимального в среднем по-
мехового воздействия сводится к следующему.
Пусть контур наведения описывается системой в общем слу-
чае нестационарных нелинейных дифференциальных уравнений
х = f(x, а, р(Г), Г), (4.98)
где помимо введенных в п. 4.5.1 обозначений символом а обо-
значен вектор неточно известных параметров контура наведения.
Полагаем вектор параметров известным с точностью до их
совместного закона распределения и’(а). Рассматривая терми-
нальную задачу управления (максимизацию промаха ракеты в
конце этапа наведения), качество управления будем характеризо-
вать, как и раньше, функционалом майеровского типа:
•/ = Дх(П), (4.99)
При любом фиксированном /?(0 функционал J = J(x(T),a)
является функцией вектора параметров а , а управление, макси-
мизирующее J при любых значениях вектора a, в общем слу-
чае не существует. Так как вектор параметров а задан стати-
стически, то будем искать такое оптимальное в среднем управ-
ление p(t)9 которое максимизирует среднее значение показате-
ля качества J при заданном законе распределения вектора па-
раметров a :
00
/?(Z) = arg max f J(x(T),a)w(a)da. (4.100)
J
Для определения p(t) воспользуемся методом стохастиче-
ской аппроксимации в сочетании с методом Шатровского оты-
скания оптимального управления в динамических системах (см.
п. 4.5.2). Следуя основной идее подхода, разработанного в [14],
конкретизируем все необходимые соотношения для нашего слу-
чая синтеза оптимальной в среднем помехи для нелинейной ди-
намической системы, описываемой системой уравнений (4.89).
То есть для нахождения оптимального в определенном нами
295
ГЛАВА 4
Pi(t) =
смысле помехового воздействия предлагается следующая вычис-
лительная процедура.
Пусть на i -м шаге имеются i -я выборка значений вектора
параметров az в соответствии с их законом распределения и
(/ —1)-е приближение к оптимальному в среднем помеховому
воздействию р/ч.
1. При значениях элементов вектора az, соответствующих
z-й выборке, и при помеховом воздействии с помощью
(4.94) вычисляем текущую вариацию Sp^t) помехового воздей-
ствия.
2. Вычисляем i -е приближение к оптимальному в среднем
помеховому воздействию в соответствии с выражением
ПРИ (4 101)
L в остальных случаях,
Здесь /(/) - коэффициент стохастической аппроксимации,
зависящий от номера итерации и определяющий сходимость все-
го алгоритма, для чего он должен удовлетворять обычным усло-
виям, налагаемым на него методом стохастической аппроксима-
ции [14].
3. Генерируем z + 1 выборку значений элементов вектора
а/+1 и вычисления по п. 1 повторяем.
Эффективность алгоритма проверялась в численном экспе-
рименте при конкретном синтезе оптимального в среднем поме-
хового воздействия контуру самонаведения, схема которого
представлена на рис. 4.13. Вектор неточно заданных параметров
контура имел вид a = (74,72,g2,A’,.\w). Априорный закон распре-
деления этих параметров был представлен в виде произведения
равномерных законов распределения каждого параметра:
w(a) = .
Математические ожидания значений каждого параметра
имели следующие значения: Т4 = 0,4 с, Т2 = 0,2 с, £2 = 0,7, к = 4,
Nm =200 м2/с. Размах областей возможных значений парамет-
ров относительно их математических ожиданий задавался вы-
296
НЕПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
ражениями: А7’4=+0,1с, А7’2=±0,1с, А£2=±0,15, АА=±1,
АЛ;„ = ±100м2/с.
На рис. 4.20 сплошной линией представлено соответствую-
щее этому априорному закону распределения неточно известных
параметров оптимальное в среднем помеховое воздействие при
L = 50 м. Пунктиром на этом рисунке показано оптимальное в
среднем воздействие при L = 20 м . Для сравнения точками пока-
зано оптимальное воздействие на контур с точно известными
значениями параметров, равными указанным выше математиче-
ским ожиданиям. Определение оптимальных в среднем воздейст-
вий производилось по 6000 итераций, причем на первых 3000
итераций коэффициент /(/) полагался равным единице. На по-
следующих итерациях этот коэффициент полагался равным
/(z) = l/(/-3000).
Гистограммы промахов, реализуемые оптимальным в сред-
нем воздействием с базы 2L = 50 м, приведены на рис. 4.21. Гис-
тограммы построены по 1000 реализаций актов наведения. В ка-
ждой реализации параметры контура принимали случайные зна-
чения в соответствии с описанным выше априорным законом их
распределения.
297
ГЛАВА 4
298
_________5_____________
ПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
Решены задачи анализа и параметрического синтеза помех
корреляционным измерителям координат пространственно
протяженных целей.
ГЛАВА 5
5.1. Характеристики сигнала
на выходе корреляционного координатора
Будем исходить из предположения, что формальное описа-
ние помехи известно с точностью до значений некоторых неиз-
вестных параметров, подлежащих определению (оптимизации)
при параметрическом синтезе помехи. В основе параметриче-
ского синтеза лежит анализ помех, т.е. получение в том или
ином виде (явном, неявном, аналитическом, табличном, графи-
ческом и т.п.) по результатам теоретических исследований,
имитационного моделирования или натурного эксперимента за-
висимостей показателя эффективности помехи от её параметров.
После этого выполняется определение экстремума этого показа-
теля по анализируемым параметрам с учетом существующих
технических ограничений на средства создания помех.
Задачи параметрического синтеза помех связаны с анализом
реакции измерителей координат, обнаружителей или систем наве-
дения на помеховые и полезные сигналы. В таком качестве эти за-
дачи близки к традиционным, решаемым разработчиками соответ-
ствующих средств и систем при обосновании характеристик на на-
чальных этапах их разработки. По существу в рамках методологии
параметрического синтеза выполнен представленный в гл. 3 анализ
основных помеховых эффектов, имеющих место в контурах наве-
дения, в замкнутых следящих системах и координаторах с четы-
рехквадрантными фотоприемными устройствами головок самона-
ведения (ПЛГС), в устройствах обнаружения пространственно
протяженных целей. За пределами этого анализа остались вопросы
параметрического синтеза помех устройствам измерения коорди-
нат пространственно протяженных целей корреляционного типа,
широко используемым в существующих и разрабатываемых сис-
темах ВТО. Этот раздел и ориентирован на рассмотрение задач па-
раметрического синтеза помех таким измерителям.
Для оценки ошибок корреляционного координатора (КК),
вызванных помехами, определим корреляционную функцию по-
меховой составляющей его выхода, для чего рассмотрим доста-
точно общий случай, когда на вход КК поступает аппликативная
300
ПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
смесь полезного сигнала с преднамеренной помехой. Причем по-
меха закрывает часть сюжета в пределах поля анализа, то есть в
пределах окна, в рамках которого выполняется корреляционное
совмещение принятого изображения с эталоном. Сигнал на входе
КК представляется в виде
м(хДи) = л/(хДй) + и(х) + /7и(х). (5.1)
Здесь - часть полезного сигнала цели в области L поля ана-
лиза; - параметр сдвига, определяющий истинное смещение
цели относительно эталона; рп - преднамеренная помеха в об-
ласти N поля анализа; и(х) - пространственный шум, сущест-
вующий во всем поле анализа М = L U N.
Кроме того, L A N = 0, m.l.n - площади поля анализа М
и областей L.N соответственно, т.е. часть наблюдаемой сцены
в пределах поля анализа, соответствующая области N 9 при-
крыта непрозрачной преднамеренной помехой (аппликатив-
ной). Предположим, что сигнал и помеха рп центрированы,
т.е. имеют нулевое математическое ожидание. Также предпо-
ложим, что эталонное изображение сцены $(х,1) задано во
всём поле анализам при любых рассматриваемых векторах
сдвига к.
Ненормированный отклик корреляционного измерителя, оп-
тимизированного для обработки полезного сигнала 5z(x,Xw) в
присутствии аддитивного шума и(х), при подаче на его вход
смеси (5.1) представляется в виде [3.25, 3.46, 4.7]:
П>-) = ({«(х|Ди)е(х1,х2)х(х2Д)Л1Л2 =
м
= |р(х)Лй)0(Х1,Х2)5(х2Д)Л14/х2 +
Л/
+ jp„(xiA„)0(xi,x2)5(x2,X)AlJx2 +
м
+ Ди(Х1)2(х1,х2)5(х2Д)</х|<7х2, (5.2)
М
301
ГЛАВА 5
причем 0(х1?х2) удовлетворяет интегральному уравнению
p„(Z],z3)g(z3,z2)<fe3 = £(z, —z2), (5.3)
м
где /?rt(Z],z3) - корреляционная функция аддитивного и, в общем
случае, коррелированного шума и(х).
Первый член правой части выражения (5.2) определяет сиг-
нальную составляющую отклика корреляционного координатора,
т.е. функцию неопределенности T/(XW,X) полезного сигнала, от-
личного от нуля в области L при приеме на фоне аддитивного
коррелированного шума и(х). Последние два члена в (5.2) харак-
теризуют помеховую составляющую отклика измерителя ТЛ(Х).
Определим корреляционную функцию помеховой состав-
ляющей Г„(Х):
(т;(к,)глк2)) = адл2) =
(j- j/7„(x1)pn(x3)2(x1,X2)0(x3,X4>(X2Al>(X4A2)^l-4 + \
N N \
+2 J... jp„(xl)/7(x3)2(xl,x2)2(x3,x4).s(x2Al).s(x4,k2)<7xl_4 + V
¥ N /
+ J- J«(X1>(X3)0(X|,X2)2(X3,X4)5(X2A|)5(X4A2)JX1_4 /
М М I
(5.4)
Здесь и ниже для сокращения записи обозначено:
dx}_4 = dx}dx2dx3(7x4, а (...) - обозначение операции усреднения
по множеству реализаций рл(х), и(х). Нетрудно показать (см.,
например, [3.25]), что для третьего члена в (5.4) имеет место ра-
венство
( J ... J >(х3 )О(Х!, х2 )2(х3, х4 >(х2, )5(х4, k2 )JXj_4 ) =
м м
= JJ6(x1,x2)s(x1A1)4x2A2 Wx2 =TsM(k},k2). (5.5)
302
ПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
Здесь (к|,к2) - функция неопределенности эталонного сигна-
ла (финитного) 5(хД), определенного в области М.
Меняя местами операции интегрирования и усреднения по
множеству, первый член в (5.4) в случае отсутствия корреляци-
онной связи между /?„(х) и s(x,X) представим в виде
Д2) -
= J- J<P„(X|)P„(x3))O(X|,X2)2(x3’X4)-s(X2A|><X4A2)^XI-4 =
= Jp$(x2’X4)5(X2> ^1 Хх4,Х2 )Jx2Jx4, (5.6)
N
где Гр(х2,х4)= |р/,(х1,Хз)6(х1Л2)2(хз,х4)Л1Лз '> ЛР(х1>хз) ~
/V
пространственная корреляционная функция преднамеренной по-
мехи рп(х).
Если корреляционный координатор синтезирован для прие-
ма в белом шуме (T?w(zj,z2) = ATod>(zj -z2)), то, как известно,
0(х1,х2) = ^(х1-х2)/Ло
и тогда
rp(x2,x4) = 2?p(x2,x4)/^o- (5.7)
В этом случае (5.6) можно записать так:
Г (X,,X2)=~ (Р? (xl,x2)5(xlA1)x(x2,k2)t/X|Jx2. (5.8)
Л-о
Вследствие некоррелированности и(х) и р„(х) второй член
в (5.4) равен нулю. Выражение (5.4) позволяет определить ряд
довольно представительных показателей качества работы КК в
присутствии преднамеренных помех. Оно, в частности, характе-
ризует изменение показателей пространственного разрешения
измерителя в присутствии помехи, а также обеспечивает оценку
характеристик выходного сигнала КК в районе боковых лепест-
303
ГЛАВА 5
ков корреляционного отклика. Это выражение позволяет при на-
личии преднамеренных помех оценить такие характеристики, для
оценки которых при отсутствии преднамеренных помех исполь-
зуется функция неопределенности сигнала. Это позволяет интер-
претировать корреляционную функцию помеховой составляющей
сигнала на выходе измерителя как функцию неопределенности
смеси сигнал/помеха.
На практике нас обычно интересует среднее качество работы
КК применительно к ансамблю типовых реализаций полезного
сигнала - некоторых выборок случайного поля с фиксированны-
ми статистическими характеристиками. Для выполнения такого
анализа целесообразно ввести понятие обобщенных функций не-
определенности сигнала и смеси сигнал/помеха, выполнив усред-
нение соответствующих выражений (5.5), (5.6) по множеству
реализаций полезного сигнала s(x). Конкретизируем выражения
для обобщенных функций неопределенности для случая, когда
сигнальные и помеховые случайные поля являются пространст-
венно однородными и соответствующие им корреляционные
функции 7?s, Rp являются функциями разности своих аргумен-
тов. Если Rn(z}9z3) и 0(z3,z2) (см. (5.3)) спадают до нуля к гра-
нице области М, то 0(z3,z2) можно также считать функцией
разности своих аргументов, т.е. O(z3,z2) = O(z3-z2). С учетом
этого из (5.5), (5.6) для прямоугольных областей М с размерами
тп = тп} х т2 и N с размерами п = п}хп2 следует:
т;о(х1д2)=<гУ(х|д2)),=
= -X] -х2 + Х2)0(х,-х2)^х2 =
м
= 4т [fl—~\dz2 [fl- АЛ1,г2 -
04 ”h) 0Ч ”h)
(5.9)
r;(x1,x2)=(r/,(x1,x2))j =
= j]X>(X2 -X4X5(X2,X|)5(x4,k2))5rfx2Jx4 =
N
304
ПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
Ур (?1> Z2 )RS (г1-ЛЛ1,г2-ЛЯ2 )dz{.
(5.10)
Здесь (...)5 - символ усреднения по множеству сигналов s;
АХ = Х2 ~ - (АЯИЛЛ2) - вектор сдвига поля сигналов.
Если и(х) некоррелированное случайное поле со спектраль-
ной плотностью Nq, то х2) = -х2)/Л0 . При этом выра-
жения (5.9), (5.10) еще более упростятся (см. (5.7)):
7;°(ДХ) = 4ш/?5(ДЯ1,ДЯ2)/Ло,
tO/aix 4и
Ло
- А/^ }dzx
(5-11)
Пространственные корреляционные функции Rp, Rs можно
представить в виде
/?p(zl’z2) = arp(zbz2)’ RA^T2) = brAz}’Z2^
где а. b - некоторые постоянные множители; г rs - нормиро-
ванные по площади к единице корреляционные функции.
Теперь, если ширина пика корреляционной функции Rp го-
раздо уже ширины пика функции Rs (по крайней мере, в не-
сколько раз) и, в свою очередь, ширина пика Rs значительно
меньше по соответствующим осям, чем п}, п2, то второе выра-
жение в (5.11) упростится:
Гр°(ДХ)«^^(АЛЛЛ)- (5-12)
Д02
И, наоборот, если ширина пика Rp много больше ширины пи-
ка Rs и много меньше (по соответствующим осям), чем пх, п2. то
305
ГЛАВА 5
Тр°(ДХ)«-^/?р(ДЛ,АЛ>). (5.13)
Если rp, rs имеют гауссову форму, то соответственно
b = ^Rs(P,Q), a = ^2pRp(Q,Q),
где 8S, 8р - ширина интервала пространственной корреляции
сигнала и преднамеренной помехи по уровню 0,6.
С учетом этого вместо (5.12), (5.13) получим
\nqqрг5(ДХ) при 6s^S .
sp s Р (5.14)
[™МрГр(Ы-) при
Здесь qs = 7tS2Rs(0,Q)/Nq, qp = m5pRp(0,0) / N0 - энергетические
отношения сигнал/внутренний шум и помеха/внутренний шум
соответственно. Аналогично, Т® (дк) можно записать в виде:
7;°(АХ) = 2^Л(Ак). (5.15)
Тогда (5.4) после усреднения по множеству полезных сигна-
лов окончательно представляется в виде
T„o(AM = (^i-X2)V
J qsrjtik)(2m + nqp) при (5.16)
\qs(2mrs(AK) + nqprp(M)) при Ад. «Ар.
Когда интервал пространственной корреляции полезного сигнала суще-
ственно больше интервала пространственной корреляции преднамерен-
ной помехи, то корреляционная функция помеховой составляющей на
выходе корреляционного координатора близка по форме к корреляци-
онной функции поля сигналов.
В случае, когда интервал корреляции преднамеренной помехи сущест-
венно больше интервала корреляции полезного сигнала, эта функция
при увеличении площади и энергии преднамеренного помехового обра-
зования стремится по форме к корреляционной функции преднамерен-
306
ПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
ной помехи. При этом степень трансформации корреляционной функ-
ции ТЛ°(ДХ) по форме от гДдХ) к гр(дХ) пропорциональна отноше-
нию nqp / 2т, т.е. возрастает с увеличением энергии преднамеренной
помехи и с увеличением отношения площади, прикрытой помехой, к
оставшейся площади.
Напомним, что соотношения (5.16) получены в предположе-
нии некоррелированности р„(х) и 5(х,Х). В случае коррелиро-
ванных р„(х) и s(x,X) первый член в (5.4) можно записать так
[3.17]:
<|... p„(xl)p„(x3)2(xI,x2)g(x3,x4)5(x2,Xl)s(x4,X2)Jx1_4) =
/V TV
= j J<P„(X|)A,(X3))2(X|,X2)2(X3,X4)<^(x2A|).s(X4A2))</x|_4 +
/v TV
+ j- |<Ря(Х1>(х2,Х|)>0(Х|,Х2)б(Х3,Х4Хр„(Хз)5(Х4Д2))б/х|_4 +
N' N
+ J-- J</>„Cx,>sCx4,X2)>Q(x1,x2)<?(x3,x4)</?„(x3ys(x2,X1)>67X]_4.
N N
(5.17)
При g(xh x2) = ^(xj - x2) / Nq и для случая однородно-
связанных случайных полей рл(х) и $(хД) после выполнения
над (5.17) преобразований, аналогичных приведенным выше, по-
лучим для корреляционной функции помеховой составляющей
сигнала на выходе корреляционного координатора следующее
выражение:
Л„(Х1,Х2) = -^-/?/в(11)/?/м(12) + ^-^г1(ДХ)+
ло ло
\ "iy \
— dz2 j| 1-— Rp(zi,z2)Rs(zl -AA^,z2 ,
о \ "17
л ПТ-(
4п г
м
z2
n2;
(5.18)
где rl(Ak) = rs(Ak) при ds> др,и r{(Ak) = rp(tik) при ds '< dp.
307
ГЛАВА 5
В (5.18) Rps - взаимно корреляционная функциярп(х) и
5(х,Х). Из (5.18) следует, что в случаях, когда сигнал и предна-
меренная помеха коррелированы, корреляционная функция по-
меховой составляющей зависит не только от разности сдвигов
АХ, но и от их значений XbX2, т-е- соответствующее этой корре-
ляционной функции случайное поле уже не является пространст-
венно-однородным. Причем интервал пространственной корре-
ляции этого поля зависит не только от 8р, 8S, но также и от <5ps,
т.е. от ширины функции взаимной корреляции.
На практике может представлять интерес случай аддитивной смеси
сигнала и преднамеренной помехи, когда сигнал на входе КК представ-
ляется в виде
м(х, Х„ ) = sm (х , X) + и(х) + рт (х).
Такой случай, в частности, будет иметь место при маскировании объек-
та аэрозольной завесой, которая имеет одинаковую по пространствен-
ной координате оптическую толщу, но меняющиеся значения коэффи-
циентов рассеяния (отражения).
При этом, как нетрудно убедиться, вместо (5.16) будут иметь
место соотношения:
(ЯДХ.-Х,)^
4smrs (АХ)(2 + qp) при 3S » Зр,
<
qsm(2rs(АХ) + qprp (АХ)) при 8S «: 5р.
(5.19)
5.2. Синтез помех
корреляционному координатору
5.2.1. Область нормальных ошибок
Как и раньше, рассмотрим случай, когда смесь сиг-
нал/помеха представляется выражением (5.1). Оценим ошибки
измерения координат дЛ^д^, характеризующие смещение под
308
ПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
воздействием помех пика корреляционного интеграла (5.2) отно-
сительно истинных значений этих координат Хи = (Ли>Лм) •
Согласно, например, формуле [3.46] выражения для д^, д/^
в первом приближении можно записать так:
д, 1Г дТ^и) ) дт&и) д2т<ки) ~
D[ д^и дЛ2и дЛ1идЛ2и]
i\dT(ku)d2T(ku) дт&и) д2т^и)
дАп —
D
(5.20)
7И
D 82Т(ки)д2Тди)
7 Л2
д2Т(Хи)
5А1иЭЛ2м ,
Здесь и ниже выражения типа ЭТ(Хм)/ЭЯ1м интерпретируют-
ся следующим образом:
ат(хи)^аг(лЛ)
в точке ’к-’ки. Путем соответствующего выбора координатных
осей (5.20) преобразуется к более простому виду:
(5.21)
«Л. / и* /
(Чтобы не загромождать символику, здесь и ниже для новых
координатных осей используются старые обозначения). Подста-
вив в (5.21) выражение (5.2) при О(х|,х2) = ^(х1-х2)/Лг0, пРе“
небрегая при этом шумом и(х) и учитывая только помеху /?w(x),
получим, например для дА,, выражения:
L
~ku)ds(X ^dx+ [рд(х)&(Х ,
M?a(x,-A„) f
525(х-Х ) , Г б25(х-1и) ,
p„(x)^-i--------------------^dx.
д2(х}-А,и)
(5.22)
309
ГЛАВА 5
Если взять первый интеграл в квадратных скобках (5.22) по
частям, то получим окончательно для прямоугольной области L :
1 Z22
j*(‘S’2(A2 “ Ам,’Х2 ~ +
Z21
+ fp„(x)g(X~^Ul, (5.23)
где /ц712^21^22 ~ координаты границ прямоугольной области L
по координатным осям Xj и х2 соответственно.
Первый интеграл в (5.23) не зависит от р„(х), но зависит от
положения области задания помехи. Следовательно, он определя-
ет составляющую ошибки ДЯ|, обусловленную краевыми эффек-
тами, вызванными самим фактом постановки аппликативной по-
мехи.
Выражение (5.23), дополненное аналогичным выражением
для дЛо > может быть положено в основу параметрического син-
теза детерминированного помехового воздействия р„(х) в слу-
чае, когда это воздействие задано с точностью до произвольного
набора подлежащих оптимизации параметров. (Отметим, что в
случае аддитивной смеси помехи и сигнала соответствующее вы-
ражение получается из (5.21) аналогичным образом и в интересах
экономии места здесь не приводится.)
На практике встречается случай, когда помеха реализуется в
виде не детерминированного, а в общем случае некоторого слу-
чайного поля, статистически связанного с наблюдаемым полем
реальной сцены. Например, это может иметь место тогда, когда
полная информация об эталоне, используемом в подлежащем по-
давлению преднамеренной помехой образце вооружения, отсут-
ствует, т.е. эталон может рассматриваться как статистически за-
данный. В этом случае показателями качества помехи, оптимизи-
руемыми при статистическом синтезе, могут служить первый и
второй статистические моменты корреляционного отклика.
Усредняя Dx (см. (5.22)) по множеству однородных и одно-
родно-связанных полей /?„(х), 5(х,Х) и обозначив через Rps(z)
310
ПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
их взаимно корреляционную функцию, нетрудно получить сле-
дующее выражение:
а27?5(х(,о) ^2Rps(zl’Z2) z\ Au z2=~^2u
о dzi2 _V]=0 1
(5-24)
В ряде случаях имеет место неравенство
МчНч.-
Тогда в (5.22) можно положить D{ «(Dj. С учетом этого
после усреднения (5.23) по множеству реализаций полезного и
помехового сигналов имеем:
п 5Rps(z^z2)
(5.25)
Ф\) pS dz\ -i—Au
z2=~^2u
Если помеха и сигнал смещены по оси jq на одинаковую ве-
личину и /?p5(z) является четной функцией z15 то из (5.25)
следует, что (^) = 0.
Ненулевое среднее значение ошибки измерения \\, обу-
словленное действием помехи, для четной функции Rps(i) мож-
но получить, смещая вдоль выбранной оси координат каждую
реализацию помехового поля. Если это смещение относительно
сигнала равно ух9 то
и dRpAri,Q)
XWps д7х
(5.26)
Рассматриваемый случай можно интерпретировать как случай создания
имитирующей, в частности, уводящей помехи. При этом качество ими-
тации помехой сигнала характеризуется степенью близости взаимно-
корреляционной функции Rps(z) к автокорреляционной функции сиг-
нала T?5(z). Причем невысокое качество имитации при реализации не-
которого требуемого значения ошибки можно компенсировать
соответствующим увеличением смещения .
311
ГЛАВА 5
Действительно, пусть, например,
ЯрД2) = ^ps exp(-|z|2/2^),
Rs(z) = exp(-|z|2/2^2)•
(5-27)
Тогда при Y\/8ps<<\ после очевидных преобразований вы-
ражение (5.26) приводится к виду
(5.28)
Введя обозначения бг = (АЯ1)//1, 8~6psl6s, q = Ig2/nG2ps ,
из (5.28) получим
где q - некоторое обобщенное энергетическое отношение сиг-
нал/помеха, зависящее как от соотношения площадей, занятых
сигналом и помехой, так и от соотношения их интенсивностей.
Выражение (5.29) характеризует достаточно простую и общую
взаимосвязь между реализуемой относительной ошибкой измере-
ния координат, относительной энергией помехи и качеством ими-
тации помехой сигнала.
Отношение интервала корреляции взаимно корреляционной функции
помехи и сигнала к интервалу корреляции сигнала, характеризующее
качество имитации помехой сигнала, при достижении одного и того же
помехового эффекта находится в квадратичной зависимости от отно-
шения площадей, занятых сигналом и помехой.
Соотношению (5.29) соответствуют графики, позволяющие
предъявлять количественные требования к качеству имитации
помехой сигнала, к площади помехового образования и к необхо-
димому пространственному смещению помехи относительно
сигнала для получения требуемого имитирующего эффекта по-
мехи (рис. 5.1).
312
ПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
Существует еще одна важная и достаточно общая возмож-
ность получения неравного нулю среднего значения ошибки из-
мерения координаты цели. Известно, что взаимно корреляцион-
ная функция случайного процесса и его производной в окрестно-
сти нулевого сдвига пересекает ось абсцисс и имеет максималь-
ную крутизну. Поэтому, если Rps(z) будет близка к такой взаим-
но корреляционной функции, то, как видно из (5.26), при z = ()
величина (2Ц) будет существенно отличаться от нуля. Эти усло-
вия будут выполнены, если в качестве помехи использовать про-
изводную полезного сигнала по соответствующей пространст-
венной координате, т.е. если
A,(X) = a^, (5.30)
где а - некоторый коэффициент пропорциональности.
Будем называть в дальнейшем такую помеху дифференци-
рующей. Нетрудно заметить, что в этом случае
Rps(z) = -adRs(^ldzx. (5.31)
Использование (5.25) для определении (2Ц) в этом случае
неправомочно, поскольку приближение (5.21), использовавшее-
ся при получения (5.25), при больших значениях ЛЯ| является
слишком грубым. Однако специфический вид Rps(z}
313
ГЛАВА 5
(см. (5.31)) позволяет получить точное решение уравнения
правдоподобия дТ(X) / = 0 . Действительно, при п(х) = 0 и
Q(xj,x2) - ^(xi ~х2)/ М) выражение (5.2) запишется так:
Г(1) = — fs(x).s( х - l)Jx + — p^s(x - k)<7x. (5.32)
М) I M) J dxx
Известно, что взаимно корреляционная функция ста-
ционарного процесса x(t) и его производной x'(t) удовлетворяет
соотношениям [3.17]:
(x(t)x'(t + г)) = -{x'(/)x(/ + г)} = 6Rx(t) / дт,
где Rx{t) - корреляционная функция процесса х(/).
С учетом этого и воспользовавшись свойством эргодичности
пространственно-однородного поля сигналов 5(х), выражение
(5.32) преобразуем к виду
т(.. 1 7Р/1Ч ^(-к)
lRs(~^)~an 5
Ло< d(Ai)
Из (5.33) вытекает уравнение правдоподобия:
,аядх) а2т?5(к) _
дЛ?
(5.33)
(534)
Для корреляционной функции Т?5(Х), имеющей гауссову
форму, уравнение (5.34) преобразуется в квадратное уравнение
относительно величины \, характеризующей сдвиг экстремума
Т(Х) относительно исходного положения (см. (5.32)), значит, и
ошибку измерения . Из (5.34) следует:
-ап = 0. (5.35)
8\s
Решение уравнения (5.35) имеет вид:
ДЯ, = (у - а/1 + у2 )5к, (5.36)
314
ПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
где дь. - интервал пространственной корреляции полезного сиг-
нала вдоль рассматриваемой оси; v = /3SXs / (2а), /3 = 1 / п.
На основе сравнения дисперсий сигнала 5(х) и помехи
рл(х), задаваемой соотношением (5.30), получим выражение для
а, дающее физическую интерпретацию этого множителя:
a = ap8is/as. (5.37)
Здесь сг„,сг - СКО помехи и сигнала соответственно.
Если помеха занимает все поле анализа (7 = 0), то реализуется макси-
мальная ошибка измерения, равная величине интервала корреляции ис-
ходного сюжета (| | = б>ь.).
Графики, рассчитанные по (5.36) и характеризующие значе-
ния относительных ошибок измерения ту = Д2| / £1Л< в зависимости
от значений v, приведены на рис. 5.2.
При v 2, не хуже, чем с 6% точностью, выполняется при-
ближенное равенство
71+l/v2 «l + l/2v2.
С учетом этого (5.36) трансформируется к виду
дЛ| «-a/0 = -CTp8isl<ysp.
(5.38)
315
ГЛАВА 5
Значит при v > 2 ошибка измерения координат пропорцио-
нальна отношению СКО помехового сигнала к полезному и от-
ношению площадей, занятых помехой и фрагментом сюжета.
Проанализируем еще одну возможность получения специ-
фических помеховых эффектов. При гауссовой форме корреляци-
онной функции сигнала (см. (5.27)) выражение (5.33) преобразу-
ется к виду
АрПА.О)
1-
ехр
мм
IxJ
(5.39)
А
На рис. 5.3 сплошной линией приведена рассчитанная по
(5.39) при г = 0,2 нормированная функция отклика КК
—уY— = А при воздействии описанной выше дифференци-
СГ5/
рующей помехи. График показывает, что смещение максимума
отклика относительно начала координат не превышает величины
интервала корреляции J15, а минимум смещен на величину, пре-
вышающую , т.е. если за счет создания соответствующего по-
мехового сигнала поменять местами максимум и минимум Г(к)
(трансформировать отклик измерителя так, как это показано на
рис. 5.3 пунктиром), то эффект помехи возрастет. Анализируя
(5.33), можно заметить, что искомая трансформация будет иметь
316
ПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
место при изменении на обратный знака перед первым членом
правой части (5.33). Это физически можно интерпретировать как
создание в области сюжета L декоррелирующей помехи, то есть
помехи, имеющей яркостную структуру, обратную по знаку яр-
костной структуре исходного полезного сигнала (pz(x) = -s(x)).
При этом (5.36) примет вид
= —(у + V1 + v2)£15 . (5.40)
При v >2 это выражение, в свою очередь, запишется так:
b^(J323l + a2)l/3a. (5.41)
На рис. 5.4 приведен график, рассчитанный с использовани-
ем выражения (5.39) и характеризующий относительную величи-
ну смещения максимума отклика измерителя при воздействии на
него рассматриваемой декоррелирующе-дифференцирующей по-
мехи. График показывает, что смещение максимума в этом слу-
чае может в несколько раз превышать величину интервала корре-
ляции сюжета €>15. Следует, однако, иметь в виду, что при боль-
ших v (v 2) сама величина максимума становится исчезающе
малой на фоне внутренних шумов, т.е. при больших v в основ-
ном можно рассчитывать на декоррелирующий эффект помехи
(уменьшение положительного максимума отклика Г(к)).
317
ГЛАВА 5
Рассмотренные имитирующая, дифференцирующая и декор-
релирующе-дифференцирующая помехи обеспечивают получе-
ние несимметричной (в частном случае - нечетной) взаимно-
корреляционной функции помехи и сигнала Rps(z). В случае
четности Rps(z), т.е. когда (2Ц) = 0, оценку качества помех
можно выполнить на основе анализа второго статистического
момента. Получим выражение для дисперсии ошибки измерения
2
координаты аЛ1 для этого случая.
Из (5.22) следует:
-<АЯ12>~ 2 х
\UV ps
dsix-'kj.) , _ ч &(z-ZM)\, ,
--------^-5(z - 1 )------WxJz +
u)ds(zx-^u)P
L
&(Х-Х„) &(z-ka) \
------------------— )axaz 4-
as(x]-^la)a5(z]-^la)/
X
&(x-la) &(z-l ) \
------------------— ) axaz 4-
м
м
&(х - ka ) ds(z - ха ) \ ^
---------------------— )dxaz
8s{X\~ Ss(Z\- j
(5.42)
Здесь Az(x) = l при xg£, Az(x) = 0 при xg£, Aw(z) = l при
z g N9 hn(z) = 0 при z £ N, M - L U N.
Первый интеграл, стоящий в квадратных скобках (5.42),
можно представить следующим образом:
L
4-
(5(X-Ia)s(z-Ia)}
ау(х-Х„) ds(z-X„)
&(*] -2la)&(zl -Я,а)
+
318
ПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
. , ч &(z-k„) \ , , . &(x-X„) V, ,
+(s(x - Хя)— ---)(s(z - Х„)—1)]dxdz =
\ ds{xx-^u)l
- ГГгр _^4(z-x) + a/?5(z-x)aT?5(z-x)Wz
dxxdzx dxx J
(5.43)
dz\
L
При выводе (5.43) учтено, что для четнойRs(z) первое сла-
гаемое в подынтегральном выражении до знака равенства равно
нулю. Для прямоугольной области £ площадью I = /j х/2 выраже-
ние (5.43) после замены переменных у = z-x = (y1,y2) и взятия
интеграла приводится к виду
“ ds(Xl-^u) U,ds(zx-\U)F
„ z v Д Rs(yi,y2)
-----—------ + “s (У1, Уз)-----“3------
к дУ\ J------------------------8у}
dy} dy2.
(5.44)
Выполнив преобразования, аналогичные описанным выше,
над всеми слагаемыми соотношения (5.42), получим выражение
=7“Т2-х
W)„,
а. .d2/?s(z-x) dRs(z-x) dRs(z-x)
Rs(z - х)---—------- + —------------------\dxdz +
dxxdzx dxx dzx
ГГг D / xS2Rs(z-x)
+ |l[7? (z-x)...f-,
JJ dx.dz,
w ' 1
dRps(z-x)dR (z-x)
+ —1-----------------Joxdz
dxx dz}
Э fL Z \Z. Z VD Z чд2Я5(г-х) dRs(z - x) SR (z - x)
+2 Ip/(х)Л„(z)[Rps(z-x)—< +
** dxxdzx dxx dzx
(5.45)
319
ГЛАВА 5
При выводе (5.45) было учтено, что помеха рп(х) смещена
по осям относительно начала координат на ту же величину ,
что и полезный сигнал. Без ущерба для общности это эквива-
лентно при получении (5.44) условию = 0 .
В случае, когда имеется не аппликативная смесь сигнала и
помехи, а аддитивная, при оценке области интегрирования в
двух первых интегралах правой части (5.42) необходимо заме-
нить на М .
Если области L.M^N имеют прямоугольную форму, а их
линейные размеры, по крайней мере, в несколько раз превышают
величину интервалов корреляции Rs(z\R (z), последним чле-
ном в (5.45) можно пренебречь. И тогда (5.45) приводится к виду
(5.46)
5,2.2, Область аномальных ошибок
Когда корреляционный координатор осуществляет захват
цели из режима поиска, его подавление можно обеспечить путем
увеличения за счет помех уровня боковых максимумов взаимной
корреляционной функции. Это эквивалентно увеличению вероят-
ности аномальных ошибок корреляционного измерителя.
320
ПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
Для определения вероятности появления аномальной ошибки необхо-
димо знать корреляционную функцию отклика измерителя в области
боковых лепестков и значения двух первых статистических моментов
отклика в точке его максимума.
Корреляционную функцию отклика в области боковых лепе-
стков можно получить в рамках методического подхода, анало-
гичного использовавшемуся для получения (5.45), (5.46). Если
помеховое образование в виде некоторого случайного поля пол-
ностью замещает сцену (полезный сигнал), выражение для кор-
реляционной функции отклика координатора в области боковых
лепестков приобретает вид
RT (АХ) = (Т’(Х)Г(Х - АХ)} =
xRs(zi,z2)Rp(zi -лЯ],22 - AA2)dzldz2 . (5.47)
При аддитивной смеси сигнала и помехи (w(x) = x(x) + /?(х))
корреляционная функция отклика КК в области боковых лепест-
ков принимает вид
Rr (АХ) = (ПХ^СХ - АХ)} ®
xRs(Zi,z2)[rs(z} -ая1,22-дя2)+
+Rp(zx - A^,z2 - A/12) + /?/k(z1 - AA,,z2 -АЛ2) +
+Rps(~z\ + A/l|,-Z2 +AA2)]dzidz2 .
(5.48)
321
ГЛАВА 5
При этом дисперсия отклика будет равна erf =Rr(Q). Выра-
жения (5.47), (5.48) получены для области значений |1|, значи-
тельно превышающих величину интервалов корреляции входя-
щих в эти выражения пространственных корреляционных функ-
ций. Кроме того, случайные помеховое и сигнальное поля пола-
гались однородными и однородно связанными.
Обратимся теперь к определению статистических моментов
отклика КК в точке его максимума. В случае, когда реальная сце-
на помехой не закрыта, математическое ожидание отклика в точ-
ке максимума тт описывается соотношением
тт ± (Г(0)} = j(s(x)s(x))rfx = m/?5(0). (5.49)
м
Если помеха и сигнал образуют аддитивную смесь, то выра-
жение для тт примет вид
/иг = j((s(x) + p(x))s(x)} А = m(Rs(Q) + Rps(0)).
м
Дисперсия erf отклика КК в точке его максимума
быть определена с помощью выражения
<г2={т2(0))-(Т(0))2.
Для аддитивной смеси
^Г2(0)) = / j(5(x) + /?(x))5(x)</x j(s(z) + p(z))s(z)dz\ =
\л/ А/ /
= ff(52(x)?(z))jxJz+ JJ(s(x)/?(x)s(z)p(z)}*/x<fc +
м м
+ JJ^52(x)5(z)/?(z)^i/X4/z + JJ^5(x)/?(x)52(z)^/xt/z =
М М
= А + В+С + D.
(5.50)
может
(5.51)
322
ПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
Используя выражение математического ожидания произве-
дения четырех случайных величин через коэффициенты корреля-
ции всех пар этих величин, каждый интеграл в (5.51) приведем к
виду [3.17]
А = m2R2s (0) + 2 jp?52 (z - x)Jxdz,
м
B = m2Rps(0) +
+ (z - *)Rp (z - x) + Rsp (z - x) Rps (z-\))d* dz,
M
C = m2R2(fi)R2ps(Q) + 2 jp?5(z - x)7?sp(z - x)A dz,
M
D = m2R2(0)R2ps(0) + 2 j]\(z - x)7^(z - x)Jxdz. (5.52)
M
Сравнивая (5.51) и (5.52), можно заметить, что сумма первых
членов в (5.52) равна (Г(0)}2. С учетом этого, а также после за-
мены переменных z-x = y окончательное выражение для дис-
персии отклика корреляционного координатора в точке его мак-
симума запишется так:
х[2^2(у1,у2) + /?Ду1,у2)7?р(у|,у2) +
Rps(y^y2)Rps(-yv-yz>) +
+2/?/у1,У2)/?рД-у1,-у2) + ЛрДу1,У2))]б/у|4/у2 • (5-53)
Если в измерителе используется логика захвата цели по
максимальному значению его отклика в зоне поиска, опреде-
ляемому после просмотра всей зоны, то вероятность появления
323
ГЛАВА 5
аномальной ошибки можно определить, воспользовавшись со-
отношением (3.25):
Рт 1
30 Г .X "I*"1
J/iW J/2(ZWZ dx-
Здесь /j(x) = Norm(m7 ,cT7 ), ./2(т) “ Norm(0,сгл) - гауссовские за-
коны распределения с параметрами, определенными выше. В
этой же формуле q-S/б^ . где S - площадь зоны поиска; 6^ -
площадь области корреляции полезного сигнала, которую для
удобства будем называть элементом различения.
Рассмотрим более подробно случай использования порого-
вой логики, когда отсутствует возможность повторного просмот-
ра зоны поиска и захват цели осуществляется по первому превы-
шению порога обнаружения в зоне поиска.
Пусть pnQ - вероятность правильного обнаружения цели и
pjn - вероятность ложной тревоги во введенном выше элементе
разрешения.
Тогда, если в процессе поиска элементу различения, соот-
ветствующему истинному положению цели, предшествуют к
элементов различения, где цели нет, вероятность правильного
обнаружения цели за один цикл поиска задается выражением
Рок “ 0 “ Рт ) Рпо *
Полагая закон распределения положения цели по элементам
разрешения равновероятным, среднюю вероятность правильного
обнаружения цели в зоне поиска можно представить в виде
РоМ
РтЯ
(5.54)
Вероятность не обнаружения ни цели, ни ложного максиму-
ма за цикл поиска описывается выражением
(5.55)
324
ПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ПОМЕХ
Теперь вероятность появления аномальной ошибки за один
цикл поиска (вероятность захвата ложного максимума) может
быть представлена следующим образом:
Роа=Х-РоМ-РНО- (556>
При анализе закономерностей поведения роа в зависимости
от параметров помех целесообразно учитывать функциональную
связь между рпо и /?лт, которая при нормальном законе распре-
деления отсчетов задается выражением
А,о = I + М - ' (1 - 2рлт Д (5.57)
1 Л СТр (Ту J
в котором Ф, Ф“1 - интеграл вероятности и функция, обратная
интегралу вероятности соответственно.
Соотношения (5.54)-(5.57) достаточны для исследования ин-
тегральных (за цикл поиска) характеристик правильного обнару-
жения и ложной тревоги в зависимости от локальных характери-
стик обнаружения, приведенных к одному элементу разрешения.
Рассмотрим случай аддитивной смеси сигнала и помехи, ко-
гда помеха закрывает не только саму цель, но и некоторую доста-
точно большую ее окрестность. Пусть помеха и сигнал имеют
пространственные корреляционные функции 7?v(z), 7?p(z) гаус-
совской формы, типовой вид которых представлен выражением
(5.27).
Полагаем, что помеха и сигнал взаимно некоррелированы,
т.е. Rsp(z)-Q. После подстановки таких корреляционных функ-
ций в (5.48), (5.53) получим:
(О)Д1
4 I "--Ь
(5.58)
2 _ m^Rs (0) f ^2 * 4Р
аТ-------Т--- «s(0)+«p(0) 2 2 •
4 I 4+Sp)
325
ГЛАВА 5
Подстановка этих выражений в (5.57) и далее в (5.54)-(5.56)
позволяет оценить вероятность появления аномальной ошибки и
обеспечить рациональный выбор характеристик помехи Rp(0\ 8р
в рамках процедуры ее параметрического синтеза.
326
_________б_____________
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ
АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
Обсуждены подходы к синтезу помех в условиях неопре-
деленности информации о характеристиках, подлежащих
подавлению оптико-электронных средств.
Выполнен синтез измерителей координат и устройств по-
мехозащиты, реализующих спектральную и пространст-
венную селекцию, а также траекторно-пространственную
фильтрацию координат цели.
Синтезированы алгоритмы комплексирования информации
различных датчиков.
Решена задача синтеза адаптивных помех на основе кон-
троля их эффективности по траекторным измерениям.
ГЛАВА б
6.1. Типовые задачи синтеза помех
в условиях априорной неопределенности
В общем случае результаты оптимизации характеристик по-
мехи при ее параметрическом или непараметрическом синтезе
зависят от степени полноты информации о принципах построе-
ния и характеристиках подавляемого оптико-электронного сред-
ства (системы). При наличии достаточной информации определе-
ние эффективной помехи и подавление любой сколь угодно со-
вершенной системы может быть обеспечено и обычно является
задачей более простой, чем создание такой системы.
Однако на практике синтез помех обычно осложняется су-
щественной неполнотой имеющейся информации о принципах
построения и характеристиках подлежащих подавлению ОЭС.
Вполне очевидно, что в общем случае не приходится рассчиты-
вать на такое восполнение недостающей информации, которое
способно обеспечить достижение предлагаемыми помехами эф-
фективности, сравнимой с эффективностью помех, синтезиро-
ванных для случая полной информации о характеристиках подав-
ляемых ОЭС. Во многих случаях синтез помех в условиях апри-
орной неопределенности о характеристиках подавляемых ОЭС
целесообразно ориентировать на определение помех с некоторым
гарантированным уровнем эффективности подавления.
Для решения задач синтеза помех в условиях неполной ап-
риорной информированности может использоваться достаточно
большая совокупность методических подходов. Наиболее пред-
почтительными из них представляются следующие.
1. Синтез помех на основе байесова подхода. обеспечиваю-
щего определение оптимальных в среднем помех, когда усредне-
ние выполняется по множеству возможных вариантов построения
подавляемых ОЭС.
2. Синтез помех на основе теоретико-игровых подходов.
Здесь наиболее согласованной с проблематикой синтеза предна-
меренных помех представляется методика, базирующаяся на
рефлексивном подходе [1.9]. При минимальном ранге рефлексии
основу этой методики на первом этапе составляет синтез струк-
туры и конкретизация параметров подавляемых ОЭС «за против-
328
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
ника». На последующих этапах определяются характеристики
помех, обеспечивающих наиболее эффективное подавление ОЭС
с определенной на первом этапе структурой и параметрами.
Такой подход позволяет оценить потенциальные возможности подав-
ляемых ОЭС по решению возлагаемых на них задач в присутствии
преднамеренных помех. Одновременно обеспечивается реализация не-
которой гарантированной эффективности подавления этих ОЭС.
3. Синтез помех в рамках адаптивного подхода. В основе
этого подхода лежат задачи идентификации параметров подле-
жащих подавлению ОЭС и идентификации их текущих состоя-
ний, в том числе на основе контроля эффективности помех по ре-
зультатам текущих сигнальных или траекторных измерений.
В общем случае в условиях неполной априорной информа-
ции о подавляемых ОЭС могут ставиться задачи как параметри-
ческого, так и непараметрического синтеза помех. Типовая по-
становка задачи параметрического синтеза в рамках байесова
подхода состоит в следующем. Требуется определить параметры
Popt оптимальной в среднем (на множестве возможных вариантов
построения ОЭС) помехи р(х,сР), доставляющей экстремум
показателю эффективности - некоторому функционалу
J(c,p(x,r,p)):
00
₽opt=argmax [j(c,p(x,/,P)Xc)dc. (6.1)
реВ J
-00
Здесь с - вектор параметров ОЭС, вся априорная информация о
значениях которых содержится в дифференциальном законе рас-
пределения и’(с); В - множество допустимых значений вектора
параметров помехи р.
Аналогичная процедура может использоваться при выборе
оптимального в среднем вида помехи из конечного множества
помех, описываемого вектором р = ,/?7-,...,/?w) , при подав-
лении ОЭСр с возможными вариантами технического облика
(например, вариантами устройств помехозащиты), описываемого
вектором a = (a1,...,4?z,...,a/w) .
329
ГЛАВА 6
Итак, пусть имеется вектор р = (р},..., f,..., рп) возможных
видов помех и вектор а = возможных вариантов
технического облика подавляемых ОЭСр. При этом не будем
упускать из вида, что в реальном образце ОЭСр реализован толь-
ко один вполне конкретный, но неизвестный помеховой стороне
вариант технического облика . Пусть также известны матрица
показателей эффективности видов помех с элементами p{ahpf)
и вектор априорных вероятностей (в рассматриваемом случае они
могут быть только субъективными) вариантов технического об-
лика ра =(pa],...,pai,...,pam).
Определяющее значение для выбора оптимального вида по-
мехи имеет правило принятия решения.
Макси-минный подход к принятию решения также, как и
традиционный игровой подход, заключающийся в определении
седловой точки в чистых или смешанных стратегиях, не учиты-
вают априорную информацию о векторе рй и являются чрезмер-
но осторожными. Байесов критерий оптимизации, определяемый
в этом случае выражением
Popt = arg max y',PaiP(ai’Pj') ’ (6-2)
PJ^Pj
где M - множество возможных видов помех, позволяет учесть
накопленный опыт, формализованный в виде вектора априорных
вероятностей вариантов технического облика . Однако не сле-
дует забывать, что байесов критерий не обеспечивает в рассмат-
риваемой задаче получения гарантированного выигрыша, пре-
вышающего нижнюю цену игры max minp(ahpj).
Последнее обусловлено субъективным характером априор-
ного распределения ра, не являющегося, как отмечалось, объек-
тивной характеристикой какого-либо реального статистического
эксперимента.
В рамках теоретико-игровых подходов наиболее предпочти-
тельным представляется использование рефлексивного подхода
[1.9]. Если ограничиться первым рангом рефлексии, то этот под-
330
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
ход фактически сводится к определению «за противника» струк-
туры и параметров подлежащих подавлению ОЭСр и (или) их
устройства помехозащиты (ПЗ) и последующему параметриче-
скому или непараметрическому синтезу помех этим ОЭСр или
устройствам ПЗ.
Таким образом, использование рефлексивного подхода предполагает по-
становку и решение задач формального синтеза функциональной струк-
туры подлежащих подавлению ОЭСр или устройств их помехозащиты.
Традиционно выбор и обоснование характеристик уст-
ройств помехозащиты выполняются в рамках эвристических
подходов [1, 2.9]. В то же время, задача синтеза помехозащи-
щенного измерителя может быть поставлена как статистическая
задача синтеза оптимального измерителя в присутствии предна-
меренной помехи и по конечному критерию, характеризующе-
му, например, качество оценки измеряемых координат, а не оп-
тимизацию каких-либо промежуточных показателей (например,
отношения сигнал/помеха).
Рассмотрим основные особенности такой постановки на
примере синтеза схемы пространственной селекции точечного
бортового излучателя цели в присутствии точечного помехового
излучателя.
Пусть оптико-электронным средством с высоким простран-
ственным разрешением наблюдается аддитивная смесь сигналов
точечных излучателей цели и помехи
u(x, k, р) = s(x - к) 4- р(х - р) + п(х). (6.3)
Здесь s(x-k) - сигнал цели; р(х-р) - сигнал помехи; к, р -
координаты точечного излучателя цели и помехового излучателя;
и(х) - пространственный шум наблюдения с известными харак-
теристиками, обычно белый.
Форма сигналов точечных цели и помехи определяется
функцией рассеяния точки (аберрационным и дифракционным
кружками рассеяния, турбулентностью атмосферы и т.п.) и пола-
гается известной с точностью до значений векторов координат
k, (I. Требуется синтезировать устройство оптимальной совме-
стной оценки векторов к,р по наблюдениям и(х,к,р). В такой
331
ГЛАВА 6
постановке задача синтеза схемы пространственной селекции
трансформируется в традиционную задачу оптимальной оценки
параметров в рамках теории статистических решений.
Системы помехозащиты ОЭСр могут иметь в своем составе устрой-
ство анализа помеховой обстановки, обеспечивающее идентифика-
цию вида создаваемой помехи и последующий выбор на этой основе
устройства (меры) помехозащиты, оптимального в смысле повыше-
ния помехозащищенности к этому виду помехи. Использование та-
кой логики помехозащиты в ОЭСр является достаточным основанием
для того, чтобы ограничиться при синтезе устройств помехозащиты
«за противника» в рамках рефлексивного подхода минимальным
рангом рефлексии.
Существо адаптивного подхода к синтезу помех в условиях
неполной информации сводится к восстановлению тех или иных
характеристик подавляемого ОЭСр или контура наведения по
результатам наблюдений за ними на некотором интервале вре-
мени и к последующему синтезу помехи ОЭСр или контуру с
восстановленными по результатам такого наблюдения характе-
ристиками.
Будем различать прямой и косвенный способы восстановле-
ния неполно заданных характеристик объекта подавления.
Прямой способ восстановления значимых для подавления
характеристик атакующих ОЭСр часто сводится к непосредст-
венному измерению (оценке) параметров сигналов, излучаемых
активными ОЭСр или переотраженных пассивными ОЭСр. К
этому же классу способов относится и распознавание типа ата-
кующего средства или системы и восстановление их характери-
стик по совокупности сигнальных и траекторных признаков.
Задача прямого восстановления характеристик контуров на-
ведения ставится как классическая задача идентификации пара-
метров объекта управления по результатам текущих наблюдений
его фазовых координат. Пусть контур наведения описывается
системой в общем случае нелинейных дифференциальных урав-
нений
dx
^ = /(Х,р(Х,О,по(О,аЛ), (6.4)
at
332
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
где а - вектор известных; 1 - вектор неизвестных и подлежа-
щих восстановлению параметров контура наведения; - из-
вестное текущее помеховое воздействие на контур наведения (в
частном случае может быть /?(x,Z) = O); п0(7) - векторный слу-
чайный процесс (шум наведения).
Априорная информация о параметрах X может задаваться
их совместным законом распределения и’(Х). Полагаем доступ-
ной наблюдению (например, с помощью локационных средств)
совокупность некоторых функций фазовых координат h(x,Z) в
аддитивной смеси с гауссовскими шумами n(z):
u(x,r) = h(x,Z) 4- n(z). (6.5)
Требуется по результатам наблюдений u(x,r) на некотором
интервале времени 0...Г сформировать оптимальную оценку век-
тора неизвестных параметров X . Эта задача принадлежит к клас-
су задач идентификации, и для ее решения может быть использо-
ван достаточно хорошо развитый аппарат теории условных мар-
ковских процессов [3.14, 3.15].
Основу задачи косвенного восстановления параметров со-
ставляет контроль эффективности помех. Его существо сводится
к тому, что по результатам текущей оценки ожидаемого конечно-
го эффекта действия помехи, например, конечного промаха раке-
ты, принимается решение на изменение параметров или смену
вида помехи так, чтобы максимизировать оценку ожидаемого
эффекта. При этом, хотя неизвестные характеристики объекта
подавления впрямую не восстанавливаются, но зато обеспечива-
ется выбор параметров или вида помехи, наилучшим образом со-
гласованных с этими характеристиками объекта подавления по
эффекту подавления.
Формальная постановка задачи контроля эффективности по-
мех применительно к контурам наведения может быть представ-
лена следующим образом.
Пусть контур наведения описывается системой (6.4). Пусть
также совокупность доступных наблюдению (измеряемых) вели-
чин задается выражением (6.5). Конечный эффект действия по-
мехи в общем случае может быть представлен как некоторая
333
ГЛАВА 6
функция фазовых координат /г(х(ТА )) в конечный момент време-
ни Тк , т.е. в момент пролета ракетой цели. Требуется по наблю-
дениям u(x,Z) на интервале времени 0.../, где t<Tk, сформиро-
вать оптимальную оценку функции /z(x(TAJ), т.е. решить задачу
экстраполяции конечного эффекта действия помехи (в частном
случае - конечного промаха ракеты). Как и для задачи идентифи-
кации, для решения задачи экстраполяции также может быть ис-
пользован развитый аппарат условных марковских процессов
[3.14,3.15, 3.42].
6.2. Уравнение Стратоновича
_ для задач траекторно-параметрической фильтрации _
Общий случай синтеза измерителей и устройств помехоза-
щиты в интересах последующего обоснования характеристик по-
мех в условиях априорной неопределенности предполагает фор-
мирование квазиоптимальных оценок координат визируемого
объекта (вектора параметров X ) как для случаев, когда X = const,
так и для более общего случая, когда X является некоторой
функцией времени. Конструктивным подходом к формированию
оптимальной или в нелинейном случае квазиоптимальной оценки
параметров, когда наблюдаемый в присутствии аддитивного вре-
менного шума п(г) сигнал s(X,r) зависит от времени и от вектора
оцениваемых параметров X (фазовых координат некоторой сис-
темы), которые, в свою очередь, определяются решениями систе-
мы стохастических дифференциальных уравнений, является под-
ход, основанный на использовании уравнения Стратоновича
[3.14,3.15, 3.42].
Однако в более общем случае траекторно-параметрической
фильтрации, в частности, при анализе устройств помехозащиты,
наблюдаемый сигнал может зависеть также и от совокупности
других независимых переменных z, в числе которых могут быть
спектральные переменные, пространственные переменные в не-
которой экранной системе координат и даже время как дополни-
тельная переменная, используемая для описания быстро проте-
кающих процессов в дискриминаторах оптических или радиоло-
каторов.
334
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
При этом актуализируется задача обобщения уравнения
Стратоновича на случай, когда наблюдаемый сигнал является не
только функцией времени и фазовых координат некоторой сис-
темы, но также скалярным полем в пространстве независимых
переменных в общем случае произвольной размерности. Следует
отметить, что, по-видимому, впервые обобщение уравнения
Стратоновича на случай фильтрации пространственно-временных
сигналов получено в [2, 4.2]. Однако там это уравнение выводит-
ся только для случая, когда размерность пространства неза-
висимых переменных (включая время) равна двум, а пространст-
венно-временной шум наблюдения имеет экспоненциальную
корреляционную функцию как по временной, так и по простран-
ственной переменным. При этом использована физически нереа-
лизуемая модель пространственно-временного поля с экспонен-
циальной корреляционной функцией, что допускает физическую
интерпретацию полученных выражений только после устремле-
ния интервалов корреляции шума наблюдения к нулю, т.е. для
белого шума.
В [3.35] приводится формальный вывод уравнения Страто-
новича для случая наблюдения скалярного поля достаточно об-
щего вида, когда пространственно-временной шум наблюдения
отличен от белого, а изображение формируется в пространстве
любой конечной размерности. Следуя [3.35], будем иметь в виду
общую задачу оценки траектории изменения параметров некото-
рого скалярного поля при его искажении аддитивным простран-
ственно-временным шумом. Однако в интересах более наглядной
физической интерпретации исходных данных и конечных резуль-
татов без ущерба для их общности все последующее изложение
ориентируем на рассмотрение корреляционно-экстремальной
системы совмещения изображений, решающей задачу оценки
траектории сдвигов принимаемого текущего изображения отно-
сительно эталонного.
Итак, пусть траектория т -элементного вектора сдвигов X
текущего изображения относительно эталонного задается стохас-
тическим дифференциальным уравнением.
X = f(X,O + g(Z)no(Z). (6.6)
Здесь X,f,n0 - вектор-столбцы размерности т; п0(Г) - форми-
рующий векторный белый шум с единичной спектральной плот-
335
ГЛАВА 6
ностью, отдельные компоненты которого некоррелированы и мо-
гут быть равны нулю; g(z) - квадратная матрица размерности
тхт .
Пусть также наблюдается текущее изображение
tt(z,Z) = s(z, X) + h(z, t), (6.7)
где z = (z]9...zk) - вектор независимых переменных (в частном
случае обработки изображений - вектор пространственных коор-
динат в экранной системе координат, когда к = 2); n(z,Z) - гаус-
совский однородный пространственно-временной шум наблюде-
ний; 5(z, X) - текущее изображение (полезный сигнал), т.е. из-
вестная с точностью до вектора параметров 1 функция вектора
пространственных переменных z, заданная в области М при
любых значениях вектора X. Будем также полагать, что s(z, X)
имеет непрерывные частные производные по элементам векторов
z,X, по крайней мере, до второго порядка включительно.
Сепарабельная по временной и совокупности пространст-
венных переменных корреляционная функция шумов наблюде-
ния может быть представлена в виде
/?„(Az,AZ) = W(Ar)7?2(Az) . (6.8)
Тогда, согласно [3.35], несимметризованное уравнение Стра-
тоновича представляется следующим образом:
*5=rwi,,)]^x
dt N
х JJ(a(z1, X) - E ^(zj, X)})/?”1 (z,, z2 )(w(z2, t) - E (s(z2 Jz2.
л/
(6.9)
Здесь и’(Х,/) - апостериорная плотность распределения вектора
оцениваемых параметров X; £*[w(X,Z)] - несимметризованный
оператор Фоккера-Планка-Колмогорова (ФПК) [3.15];
7?21(z1,z2) - функция, обратная корреляционной функции
/?z(Az) = /?2(zj -z2); - операция усреднения выражения в уг-
ловых скобках по апостериорному распределению параметров X.
Симметризованное уравнение Стратоновича имеет вид
336
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
—= Дм<х,/)]+[П(Х,г)- [п(ШМЖМ, (6.10)
5t J
где L[ и(Х,/)] - симметризованный оператор ФПК; П(Х,^) - ло-
гарифм функционала правдоподобия по пространственным пере-
менным:
W)] = X ’
м 8Л> 8W*J
(6.П)
П(М) = -“ (Z],z2Xm(z2,/)-s(z2 ,X))ofei^2 •
M
(6-12)
В (6.11) (g(OgT(O)/j ~ элемент, стоящий в i -й строке и j -м
столбце квадратной матрицы g(OgT(O • П(Х,^) можно также
трактовать как производную по времени логарифма полного
функционала правдоподобия текущего наблюдения w(z,r), опре-
деляемого выражением (6.7). Подстановкой (6.12) в (6.10) сим-
метризованное уравнение Стратоновича приводится к эквива-
лентному виду:
dt N
X jj(5(Zj,X) - Е(s(Z|,X)))R;](z, ,z2)w(z2,/)cZZ| Jz2 -x
M
X JJ^5(z 1, X)/?“1 (Zj, Z2 )5(z2 , X) - E , X)/?J1 (z1, Z2 )5(z2 , lk)^dz[dz2.
M
(6.13)
Причем последнее слагаемое в правой части (6.13) отсутст-
вует, если оцениваемые параметры X являются неэнергетиче-
скими, т.е. такими, при изменении которых энергия текущего
изображения не изменяется.
337
ГЛАВА 6
Вывод выражений (6.9)-(6.12) приведен в Приложении 1 и
основан на анализе дискретного аналога задачи с последую-
щим предельным переходом к непрерывному случаю и «сши-
ванием» использованной в [3.15] процедуры вывода уравнения
Стратоновича с процедурой вывода функционала правдоподо-
бия гауссовского процесса [3.25], что обеспечивается допуще-
нием (6.8) о сепарабельности корреляционной функции шумов
наблюдений.
Выражения (6.10)-(6.12) указывают на разделимость про-
цессов траекторной фильтрации и пространственной обработки
при решении общей задачи траекторно-параметрической фильт-
рации. При этом из (6.12) следует, что пространственная обра-
ботка принимаемых текущих изображений выполняется с ис-
пользованием тех же корреляционных алгоритмов, которые ис-
пользуются при решении обычной задачи оценки параметров
(сдвигов) пространственных полей изображений. Отмеченное
свойство разделимости обработки является следствием сепара-
бельности корреляционной функции шумов наблюдения
7?w(Az,Ar).
Уравнение Стратоновича, являющееся дифференциальным уравнением
в частных производных, в общем случае не поддается аналитическому
решению. Поэтому для получения количественных результатов, как
правило, необходимо использовать численные методы.
При аппроксимации апостериорной плотности вероятности
функцией с конечным числом параметров решение уравнения в
частных производных заменяется решением системы обыкновен-
ных стохастических дифференциальных уравнений, доставляю-
щих квазиоптимальное решение задачи траекторно-парамет-
рической фильтрации. В частном случае такой подход приводит к
получению уравнений фильтра Калмана-Бьюси.
Ниже приводятся полученные в рамках такого подхода и
наиболее часто используемые на практике уравнения квазиопти-
мального нелинейного фильтра в квазилинейном (гауссовском)
приближении, когда апостериорная плотность вероятности ап-
проксимируется функцией, содержащей только математические
338
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
ожидания и корреляционные моменты оценок параметров X.
[3.14, 3.15]:
J=1 J
dry(t)
dt
r„(/)+ Jl riu(t) +
дЛ lfl &Л JfJ
v1 z / \ z \ z 4s2n(x,z)
+SX«)M') +
//=1 //=1 V=1 P V
(6.14)
В этих выражениях
дП(М)_ 1
5/1; - N Х
w(z,,/)/?z
ds(z2,k)
( ” 2) дл,
sCziA^'Cz,^)^^’*-)
дЛ,-
б/Z]
д2П(М)_ 1
длудлу ~a-x
Z ЧП-1/ x525(z2,k) z r4_-lz , 525(z,,k)
M(Z!,/)T?z (z,,z2) 2------«(ZjA)/?, (z,,z2) я _-..
OA дАу дА дл^
ds(z},i.)
S;'(Z|,Z2)«bA
ад,
б/z j di >2
(6.15)
Выражения (6.15) соответствуют случаю оценки энергетиче-
ских параметров. При оценке неэнергетических параметров в по-
дынтегральных выражениях, стоящих в квадратных скобках, со-
храняются только первые слагаемые. Иногда, в частности, при
использовании для расчетов программного продукта Matlab,
удобно использовать запись выражений (6.14) в приведенной ни-
же матричной форме:
339
ГЛАВА 6
— = f(M) + R^^>
dt дЛ
dR df(M)„ „Sf(M)T „52П(Х,/)„т
— = -k-L2R + R-A^2 + g(z)gT(z) + R 7rT.
dt дЛ дЛ д2Л
(6.16)
В этих выражениях R - корреляционная матрица ошибок
ап(£,о
оценки параметров с элементами ------------ - вектор-столбец
ЗЛ
производных П по параметрам Л^...^Лт размерности wxl;
af(i,z) _ _ a2n(Y)
----- - матрица Якоби размерности тих/и; -----z—- - сим-
ЗЛ д2л
метричная матрица Гесса вторых производных П по параметрам
Л\,...,Лт размерности тхт.
6.3. Синтез измерителей координат
6.3,1. Корреляционный координатор
Ниже приводятся полученные в рамках рефлексивного под-
хода результаты формального синтеза «за противника» измерите-
ля пространственных координат, использующего фотоприемное
устройство с высоким пространственным разрешением. Такой
синтез позволяет установить предельные возможности простран-
ственных шумовых помех, фигурирующих в формальной поста-
новке задачи синтеза, а также функциональную структуру коор-
динатора, реализующего эти возможности.
Результаты решения задачи статистического синтеза изме-
рителей относительных координат изображений в присутствии
пространственного гауссовского шума имеются в [3-5, 3.46] и в
других работах. Показано, что оптимальный измеритель осуще-
ствляет пространственную корреляционную обработку сигналов,
т.е. является корреляционным координатором (КК). Однако в вы-
полненных работах не учитываются некоторые особенности кор-
реляционных координаторов, имеющие место при использовании
последних в системах управляемого оружия, а именно: наличие
340
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
пространственных искажений изображения сюжета относительно
эталона.
Предельные возможности пространственных шумовых по-
мех при наличии указанных особенностей остаются до настояще-
го времени недостаточно исследованными. Решению указанных
вопросов и посвящены материалы настоящего раздела.
При использовании КК в головках самонаведения управляе-
мых боеприпасов в процессе полета боеприпаса к цели имеет ме-
сто рассогласование масштабов и углов поворота исходного (эта-
лонного) и принятого изображения цели, ведущее к декорреляции
расположенных на периферии растра фрагментов принятого и
эталонного изображений и возрастанию вследствие этого ошибок
измерения координат цели.
Так, согласно [7], при 40%-ном рассогласовании масштабов
сюжета и эталона ошибки корреляционного измерителя при
/ / = 20 (/ - линейный размер поля анализа; 8 - величина ин-
тервала пространственной корреляции наблюдаемого сюжета)
становятся сравнимыми с величиной интервала корреляции сю-
жета, вследствие чего измеритель теряет работоспособность.
Для оценки предельных возможностей оценки координат и
связанных с ними предельных возможностей пространственных
шумовых помех при подавлении корреляционных измерителей
систем ВТО, синтезируем оптимальный измеритель сдвигов сю-
жета относительно эталона в условиях пространственных иска-
жений сюжета.
Пусть имеется некоторый объект и соответствующее ему
эталонное изображение 5(х), представляющее заданную в облас-
ти L пространственных переменных x = (xj,x2) реализацию од-
нородного случайного поля с пространственной корреляционной
функцией T?5(z). За пределами области L будем пола-
гать 5(х) = 0. Принимаемое текущее изображение объекта (в
дальнейшем - просто изображение) в общем случае размасшта-
бирования и наличия поворота координатных осей изображения
относительно эталона можно представить так:
w(x) = 5(x,X,//,6Z) + w(x) = 5(//(xlcos^“x2S^n6Z)~ 17)
, //(%! sin а + х2 cos or) - Я2) + и(х)«
341
ГЛАВА 6
Здесь и(х) - гауссовская пространственная однородная шумовая
помеха с корреляционной функцией Rn(z); X = (lj,^2) - вектор
сдвигов изображения относительно эталона; а - угол относи-
тельного поворота координатных осей; // - коэффициент мас-
штабных искажений.
Текущее значение // равно значению текущей дальности до
объекта, нормированному к значению этой дальности в момент
записи эталона. С учетом этого задача синтеза корреляционного
координатора сводится к задаче синтеза оптимального измерите-
ля сдвигов изображения относительно эталона X при наличии
неизвестных параметров /л,а, являющихся в рассматриваемой
задаче несущественными. В соответствии, например, с [3.22,
3.25] эта задача может быть решена путем синтеза измерителя,
осуществляющего совместную оценку существенных и несуще-
ственных параметров.
В наиболее простом случае дельта-коррелированного шума
и(х) со спектральной плотностью N функционал правдоподобия
может быть представлен в виде [8, 3.22]
F(u / X,//,cr) = A expf—T(k,/i,a)——£(X,//,6z) |, (6.18)
k N 2N J
где к - несущественный для последующего анализа постоянный
множитель;
Г(Х,//,«)= Jw(x)5(x,X,//,a)eZx,
м
E(k)ju,a)= р2(х,Х,//,а>/х.
м
(6.19)
Здесь М - область определения w(x), причем LcU.
Совместная оптимальная по критерию максимума функции
правдоподобия оценка параметров определяется решени-
ем системы уравнений правдоподобия:
^ = 0, ^ = 0, ^ = 0, ^ = 0.
д\ д^2 д/л да
(6.20)
342
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
(6.21)
&о(х) &0(х) ]
"1 Лу С*А,
дх} дх2 )
X! Jx.
В случае малых отклонений значений измеряемых параме-
тров от опорных значений ( ^ = О, =0, // = 1, # = 0 ) можно по-
лучить в явном виде выражения для оценок этих параметров, ре-
шив систему (6.20) после подстановки в нее трехчленного разло-
жения в ряд Тейлора функционала правдоподобия (6.18):
; 1 f z х^50(х) ,
А =-Т77— |"(х)-^-----
Ч||^ дх1
J 1 f / ч&о(х) .
Л=-Т7;— M(XW—£/х’
^Л22 Л 3*2
м
А = 1 + т4~ [(«(х)-50(х))
Па J
а--1_ L(x)f ds0(x) <Ч(х)
NAaa J \ дх{ дх2
аа м у Y 2
Здесь 50(х) = 5(х,к,//,а) при //=1, а=Я1=Л2=0, Али,АЛ22.
Ааа.А^ - элементы корреляционной матрицы ошибок оценки
параметров, определяемые ниже.
При выводе (6.21) учитывалось, что параметры яв-
ляются неэнергетическими, а параметр /л - энергетическим.
Правые части выражений (6.21) определяют структуру соответст-
вующих дискриминаторов при построении устройств оценки не-
известных параметров в виде следящих систем.
Если s(x,X,//,6z) = 0 на границе области Л/, то, по крайней
мере, для прямоугольной области интегрированием по частям не-
трудно убедиться в справедливости равенства
М
&(х) &(х)
——х, +—— х?
дх} дх2
rfx = - 52(х)б/х.
) и
м
С учетом этого выражение для // из (6.21) можно предста-
вить и в другом виде:
м
&о(х)„ . &о(х)
•АЛ Г •А'**}
С/Х| ^^2
Jx + -^—,
А
№
343
ГЛАВА 6
где q2 =— j52(x)t7x - энергетическое отношение сигнал/помеха.
м
Появление в выражении для // дополнительного слагаемого
обусловлено следующим. Корреляционный интеграл
тц(ц)= j s(x, 0,0,1,0)$(х, 0,0, ц, 0) </х
м
не достигает максимума при // = 1. В этом нетрудно убедиться,
вычислив значение его производной по // в точке // = 1:
kx)[^l+^w,2Lx=-Pw**o-
J V бх1 дх2 ) J
м м
При //= 1 достигает максимума логарифм функционала
правдоподобия (6.18), отличающийся от корреляционного инте-
грала Т(...) сигнальным членом, который и определяет появле-
ние дополнительного слагаемого в приведенном выше выраже-
нии для оценки jbi. Оценку потенциальной точности измерений
выполним путем определения оценки снизу корреляционной
матрицы ошибок измерений при усреднении по ансамблю сю-
жетов 5(х).
Можно выделить два вида таких оценок. При определении
оценок первого вида вначале определяется оценка снизу корре-
ляционной матрицы ошибок измерений для некоторого фиксиро-
ванного сюжета л(х), после чего эта оценка усредняется по ан-
самблю сюжетов, т.е., по существу, находится среднее по ан-
самблю сюжетов граничных оценок значений корреляционной
матрицы. Отыскание оценок этого вида связано с определенными
трудностями при получении конечных выражений в замкнутом
виде, поскольку включает операцию определения среднего эле-
мента обратной матрицы.
Существенно проще находится более интересная для практических
приложений оценка второго вида - граничная оценка средних (по мно-
жеству сюжетов) ошибок измерения. Такая оценка есть не что иное, как
оценка снизу корреляционной матрицы ошибок измерений, полученной
344
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
усреднением как по множеству реализаций шумов измерений л(х), так
и по множеству сюжетов 5(х).
Именно оценки второго вида и определяются ниже на основе
подхода, использовавшегося в [3.22] и распространенного на рас-
сматриваемый нами случай усреднения ошибок по множеству
сюжетов (сигналов объекта). В результате его применения (см.
Приложение 2) выражение для оценки снизу искомой корреляци-
онной матрицы ошибок измерений принимает вид
(6.22)
где/? - корреляционная матрица ошибок измерений с элемента-
ми Гу; А~х - матрица, обратная матрице А, имеющей элементы
а = -L Щ 1^1. . (6.23)
U N 3 Л dV: dV: /
м \ 1 J /
Здесь Л/Д...) - символическая запись операции усреднения вы-
ражения в скобках по множеству сюжетов; - z-й измеряемый
параметр (в дальнейшем будем полагать , и2 = . v3= //,
v4 = а ).
Воспользовавшись известными зависимостями между кор-
реляционными функциями однородного случайного процесса
(поля) и его производных, из (6.23) получим явные выражения
для элементов матрицы А :
а\ 1 - 1 (0,0), а22 = “/?522(0’0)’
Л Л
а12 =а21 =Т7 ^12(0,0),
Л
«33 = --^-(с27?511(0,0) +J2/?s22(0,0)),
12Л (0.24)
=-7^77(^41(0,0) + С27?522(0,0)),
12Л
«34=«43=7^7^2(0,0)(б?2-С2),
12Л
*13 ~ *14 ~ *23 ~ *24 ~ *31 ~ аЪ2 ~ *41 “ *42 ~
345
ГЛАВА 6
Выражения (6.24) получены для прямоугольного растра эта-
лона размером c*d . При этом использованы обозначения
а2
l=c*d, Ri(0,0) = ———R(zi,z2) при z(=0,z2=0.
7 OZfiZj
Из (6.24) следует, что матрица А является клеточной сим-
метричной. Следовательно, и обратная матрица А~] также явля-
ется клеточной симметричной и имеет вид
А4
где А{ =
4"1 о
О
а21
^12
а22
л _ Г*33 а34
’ Л2 ~ II
ЦЯ43 #44
(6.25)
Из (6.22), (6.25) следует, что предельные значения ошибок
измерения сдвигов и параметров геометрических искажений син-
тезированным измерителем некоррелированы. Кроме того, как
нетрудно заметить, предельные значения дисперсий ошибок из-
мерения сдвигов, определяемые выражениями, вытекающими из
(6.25),
^2 _ г > _N_______________^у22(0>в)___________
Л 11 " / 7?511(0,0)7?522(0,0)-7?22(0,0)’
Л2 22 I 7?511(0,0)7?522(0,0)-/?212(0,0)
(6.26)
совпадают с таковыми, полученными при отсутствии геометри-
ческих искажений (см., например, ниже 7.1.1). Из (6.22) также
следует, что дисперсия ошибок измерения коэффициента мас-
штабных искажений, значит, и относительной дальности до объ-
екта определяется выражением
.2
- гзз -
а44
2
Я33Я44 Я34
(6.27)
Для получения количественных оценок рассмотрим случай
квадратного растра ( с - d ) и гауссовской формы пространствен-
346
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
ной корреляционной функции вида (5.27). Тогда (6.27) преобра-
зуется к виду
где t -d8S - число интервалов пространственной корреляции
сюжета, укладывающихся в линейный размер растра;
<? = ^Х(о,о)/ N - отношение сигнал/помеха.
В более общем случае пространственной шумовой помехи с
корреляционной функцией T?w(z],z2) имеет место очевидная кон-
кретизация выражения (6.23):
= V (6.29)
J N JJ \ dv; dv, /
м \ 1 J /
где 0(хьх2) удовлетворяет интегральному уравнению (5.3).
6.3.2. Координатор источника
с пространственно-временной модуляцией
В системах командного наведения малой дальности для
уменьшения ошибок слежения за ракетой используется ее марки-
рование бортовыми оптическими излучателями. При этом с це-
лью повышения помехоустойчивости канала слежения использу-
ют различные способы временного кодирования или спектраль-
ной окраски сигнала бортового излучателя. Для этих же целей
может использоваться способ пространственно-временной моду-
ляции сигнала, заключающийся в перемещении излучателя отно-
сительно центра масс ракеты по известному на принимающей
стороне с точностью до некоторой случайной составляющей за-
кону. Так, во вращающихся ракетах пространственно-временная
модуляция сигнала может обеспечиваться бортовым излучателем,
вращающимся в полете вместе с корпусом ракеты вокруг ее про-
дольной оси. Можно ожидать, что системы наведения, в полной
мере реализующие преимущества такого способа модуляции, мо-
гут обладать повышенной помехоустойчивостью, что обусловле-
347
ГЛАВА б
но очевидными техническими трудностями реализации соответ-
ствующей имитирующей помехи.
Целью дальнейшего рассмотрения является синтез алгорит-
ма оценки координат ракеты, имеющей бортовой источник излу-
чения (трассер) с пространственно-временной модуляцией, соз-
даваемой вращением этого источника вокруг продольной оси ра-
кеты. Предполагается, что для слежения за ракетой используется
ТВ- или ТПВ-датчик с высоким пространственным разрешением.
Тогда формальная постановка задачи синтеза алгоритма оценки
координат ракеты состоит в следующем.
Траектория движения ракеты к цели под воздействием фор-
мируемых команд управления и совокупности действующих на
нее в полете случайных факторов в общем случае описывается
системой нелинейных стохастических дифференциальных урав-
нений вида (6.6). С целью упрощения последующих выкладок и
интерпретации результатов синтеза собственно координатора ап-
проксимируем движение ракеты вместо (6.6) системой стохасти-
ческих дифференциальных уравнений первого порядка:
*г = /1(хг,/) + И|(0, Уг = f2(yr,t) + n2(t). (6.30)
Здесь xr(t\yr{t) - текущие координаты ракеты в горизонтальной
и вертикальной плоскости соответственно в экранной системе
координат; nx{t\ n2(t) - процессы формирующего белого шума
со спектральной плотностью Лг19 N2, причем = N2.
Введем также следующие обозначения: s(x,y) - поле ярко-
сти изображения исходной реальной сцены (фоноцелевой обста-
новки), формируемое ТВ-датчиком в отсутствие пятна трассера;
r(t) - величина радиуса круговой развертки сигнала трассера на
ТВ-изображении; яХ/), (р - круговая частота и начальная фаза
развертки сигнала трассера.
Тогда координаты трассера xt.yt в экранной системе коор-
динат могут быть представлены в виде:
xt (Z) = xr(t) + r(t)cos(co(t)t + (р\
(6.31)
У/(0 = Л-(0 + r(0sin(<w(0' + (р)-
348
= яехр| —y(x-xr - г ws(o)t + (р))
\ b
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
Строго говоря, аргумент тригонометрических функций в
t
этих выражениях следовало бы записывать в виде Jtz? (t)dt + (p.
о
Однако при малой скорости изменения представляется до-
пустимым использовать этот аргумент в виде, приведенном в вы-
ражениях, показанных выше.
Пусть 5,(х,у,/) - функция, описывающая пространственно-
яркостную структуру изображения трассера. Так, например, при
аппроксимации 5r{x,y,/) гауссовской поверхностью с парамет-
рами а,Ь имеем
st(x,y,t) =
2-^y-yr-r^(at + (py>2\
b )
(6.32)
В (6.32) для упрощения записи зависимость переменных
xr->yrS,co от времени явно не обозначена. Теперь пространствен-
но-яркостная структура сформированного ТВ-изображения запи-
сывается следующим образом:
м(х, у, 0 = 5(х, у) + st (х, у, Z) + и(х, у, t\ (6.33)
где n(x.y,t) - пространственно-временной шум наблюдения, об-
разуемый шумами элементарных приемников фотоприемной
матрицы и другими шумами, обусловленными особенностями ал-
горитмов и устройств последующей обработки, но допускающи-
ми соответствующий учет на этапе постановки задачи.
В предположении однородности и некоррелированности
шума наблюдений по временной и пространственным перемен-
ным, представим его корреляционную функцию в виде
Rnu (Дх, Ду, Д/) = N8{\t)8{ \х. Ду),
где N - спектральная плотность; <5(Д/),^(Дх, Ду) - дельта-
функции от приращений соответствующих переменных.
349
ГЛАВА б
Если закон изменения по времени круговой частоты со и ра-
диуса г развертки сигнала трассера на ТВ-изображении точно
неизвестен, то систему уравнений (6.31) необходимо дополнить
двумя стохастическими дифференциальными уравнениями, опи-
сывающими возможную динамику их изменения во времени:
r = f^r,t) + n3{t), <b = f4(a>,t) + n4(t). (6.34)
Здесь n3(t\n4(t) - формирующие шумы со спектральными плот-
ностями Аг3, А 4 соответственно.
Заметим, что в случае, когда имеются априори известные за-
коны изменения круговой частоты и радиуса развертки сигнала
трассера бЦ)(/),г0(^), уравнения (6.34) будут описывать поведение
возможных ошибок реализации этих законов, а истинные значе-
ния круговой частоты и радиуса вращения трассера будут пред-
ставляться суммами вида бУ0(7)+ &>(/), r0(z) + r(7) соответственно.
Дополним также систему уравнений (6.31), (6.34) дифферен-
циальным уравнением для неизвестного значения начальной фа-
зы ср круговой развертки сигнала трассера:
^ = /5(^) = 0. (6.35)
Теперь задача синтеза алгоритма определения координат ра-
кеты в общей постановке может быть сформулирована как задача
совместной оценки по наблюдаемому ТВ-изображению м(х,у,Г)
переменных хг,уг.г.а).(р, изменение которых во времени опреде-
ляется уравнениями (6.31), (6.34), (6.35). Синтез такого алгоритма
можно выполнить на основе использования формализма уравне-
ния Стратоновича (см. 6.2). Решение уравнения Стратоновича в
гауссовском приближении позволяет определить общую структу-
ру системы оценки координат как многосвязной замкнутой сис-
темы со своими дискриминационными характеристиками по каж-
дому из каналов слежения.
Введем единообразную систему обозначений для подлежа-
щих определению переменных :
X = (Л), ^2, /Ц, 24, /Ц)т =(хг,уг,г,бУ,^)т. (6.36)
350
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
С учетом этого система уравнений (6.31), (6.34), (6.35) в
матричной форме примет вид
X = f(X,Z) + n(r), (6.37)
где f(x,r) = (/1(x,o,...,/5(^O)T;
Тогда, в соответствии с (6.16), искомые квазиоптимальные
оценки в гауссовском приближении переменных xr,yrJ\dy(p по
наблюдаемому ТВ-изображению w(x, у, /) доставляются выраже-
ниями, представленными ниже в векторно-матричной форме:
dk/dt = f (X,/) + RtOII/M), (6.38)
JR / dt = N + fj (Xj)R(O + R(OfiT(M) + RT(/)n2(X,/)R(O, (6.39)
где
п1(х,/) = (ап(х,г)/ал1,...,ап(х,/)а^)т при x = x; (6.40)
fj(Xj) - матрица размерности 5 5 с элементами fy = dAj
при X = X; II2(Z,X) - матрица Гесса размерности 5 5с элемента-
ми П/7 = а2П(/, X) / адаЛу при X = X; N - диагональная матрица
размерности 5 5 с элементами \| j = 7%, N22 = N2, А33 = N3,
Л44 = At4 , Л55 = 0. В этих выражениях
= 5(x,j)-st(x,y,t))2dxdy, (6.41)
2A JJ
м
П(/Д) - логарифм функционала правдоподобия; М - область
определения ТВ-изображения w(x,y,Z), a st(x,y,t) определяется
выражением (6.32).
При этом собственно алгоритм обработки ТВ-изображения,
на выходе которого формируются регулирующие воздействия
для блоков траекторной фильтрации оцениваемых переменных,
определяется выражениями (6.40), (6.41). Элементы вектора
П](Х,0 можно интерпретировать как дискриминационные харак-
теристики, устанавливающие связь между наблюдаемым (вход-
351
ГЛАВА 6
ным) текущим ТВ-изображением и регулирующим воздействием
по z-й координате.
Перейдем к более детальному анализу этих дискриминаци-
онных характеристик.
Использование в дальнейших преобразованиях гауссовской аппрокси-
мации формы пятна трассера (см. (6.32)) на ТВ-изображении при весь-
ма несущественном повышении точности получаемых оценок неоправ-
данно усложняет алгоритм обработки и делает его недостаточно на-
глядным и не вполне просто интерпретируемым.
Кроме того, форма пятна трассера, по которой должен рабо-
тать алгоритм, в общем случае точно неизвестна. Для упрощения
последующих выкладок будем полагать, что равнояркое пятно
трассера формируется на изображении м(х,у,/) в квадратной об-
ласти с размерами 2а*2а . Тогда сигнал трассера на ТВ-изобра-
жении вместо (6.32) можно представить следующим образом:
st (х, у. t) = d (1(х - хг - г cos(6tf t + (р) + а) -
-1(х-х„ -rcos(a> t + (p)~ tf))x
z (6.42)
х(1(т~Уr ~^sin(6y/4-^) + 6z)-
-1(Т~ У г - rsin(6y t + (р) - а)}.
Здесь 1(...) - единичная функция своих аргументов, т.е. 1(х) = 0
при х < 0 и 1(х) = 1 при х > 0, d - амплитуда сигнала трассера на
ТВ-изображении.
После возведения в квадрат подынтегрального выражения
логарифм функционала правдоподобия (6.41) примет вид
П(М) = --^х
2А
х Д[(м(х, у, t) - .(х, у)}2 - 2(м(х, у, Г) - 5(х, у)) X
м
х st (х, у, Z) - s2 (х, у, Г)] dxdy.
При определении элементов вектора ПДХ,/) оставим только
среднее слагаемое в приведенном выше подынтегральном выра-
352
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
жении, поскольку только это слагаемое зависит одновременно от
и и от оцениваемых переменных и, следовательно, только от не-
го будут зависеть подлежащие определению оценки переменных.
Далее будем использовать выражение для функционала правдо-
подобия в урезанном виде:
П(Х, t) = jj(w (х, y,t)-s(x, у)) • st (х, y,t)dxdy. (6.43)
Л/
Введем также следующее обозначение для разностного изо-
бражения:
wrf(x,y,t) = u(x,y,t)-s(x,y). (6.44)
Теперь первый элемент вектора 11,(1,/) можно представить
так:
ап _ ап _ j
62, дхг N
х J Jud(х,у,t\\{y-yr~rsin(6y/ + ф) + а)-
Л/х
~l(y-yr - + ф) - a))dy ]х (6.45)
х——(l(x-xr -rws(a>t + ф) + а)-
дхг
- 1(х - xr - г cosfybt + ф) - a))dx.
Здесь Мх,Му - область определения изображения u(x,y,t) по
осям х (горизонтальной) и у (вертикальной) соответственно.
Выражение, стоящее в квадратных скобках в (6.45), есть не
что иное, как сумма по вертикальной оси пикселов (в случае пе-
рехода к дискретному представлению), попадающих в селекти-
рующий строб размером 2а9 центр которого находится в окрест-
ности (с точностью до ошибок оценки) центра пятна сигнала
трассера. Примем для этого выражения обозначение udx(x,t). По-
сле дифференцирования последнего сомножителя в (6.45) по хг
получим
353
ГЛАВА 6
сП d
---— — х
дхг N
х Judx(xd)[S(x-xr -rcos(a)t+ а)-3(х-xr -rcos(d)t + ф)-a)]dx =
Мх
= ^(Udx (*Г + ' COS(^ + <£) -
О “ udx(*r + ^COS(&)Z + (£>) + fl,Z)),
(6.46)
где - дельта-функция своих аргументов.
Таким образом, производная сП / 8хг в каждый момент вре-
мени с точностью до постоянного множителя равна разности зна-
чений udx(x,t) на краях пространственного селектирующего по х
строба размером 2а.
Строго говоря, полученные выражения соответствуют слу-
чаю, когда пятно трассера на ТВ изображении имеет прямоуголь-
ную форму. Как уже отмечалось, строгий учет формы пятна при
несущественном выигрыше в точности оценок привел бы к ус-
ложненным и плохо интерпретируемым выражениям. Для того
чтобы сделать выражение сП / 8хг, во-первых, малочувствитель-
ным к форме пятна и, во-вторых, использовать при формирова-
нии 5П/йхг полную энергию пятна, целесообразно разность,
стоящую в скобках выражения (6.46), заменить интегральной
разностью, характеризующей разность средних значений udx для
левой и правой частей пространственного строба, т.е. предста-
вить <ЭП / 5хг в виде
( xr+r cos( cbt+<p)
дП d г , , ,
---= — udx(x-x -rms{o)t + (p))dx-
дхг N _ < А
xr +r cos( йЯ+ф)-а
.... 4 (6.47)
xr+rc,os(aA+(p)+a \
- J udx{x-xr -rcGs(d)t + $))dx .
xr+rcos(z£rf+^) j
Эвристический прием, состоящий в формировании дискриминационной
характеристики в виде (6.47), достаточно широко используется в радио-
и оптической локации, например в импульсных дальномерах с времен-
ными дискриминаторами на разнесенных временных полустробах.
354
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
________________________Рисунок 6.1 ______________________
Рисунок 6.1 поясняет принципы обработки изображения, оп-
ределяемые выражением (6.47). На рисунке сплошной кривой по-
казана истинная траектория сканирования трассера с центром хг.
пунктиром - восстановленная с помощью оценок переменных,
определяемых выражениями (6.38), (6.39), траектория со сме-
щенным центром хг. Для наглядности рисунок иллюстрирует
случай, когда все прочие переменные кроме хг оцениваются без
ошибок. Точка с определяет центр пятна трассера, а точка 01 -
оценку положения этого центра. Центр квадратного пространст-
венного строба со сторонами 2а совмещен с точкой 0ь Квадрат-
ный строб разбит на 4 пронумерованных квадранта. Обозначим
символом ut разностные сигналы снимаемые с площади каж-
дого z-ro квадранта.
В системе координат , связанной с центром строба,
эти сигналы представляются так:
0 а щ - fdx ^(х, у, t)dy, -а 0 0 0 и3 = JrTx jud(x,y9t)dy, -а -а а а и2 = ^dx ^ud(x, у, t)dy, ° °0 (6-48) w4 = рг jud(x,y,t)dy. 0 -а
355
ГЛАВА 6
С учетом (6.48) выражение (6.47) окончательно перепишет-
ся так:
ап
дхг
d
aN
»3)-(М2+М4))’
(6.49)
Повторяя выкладки, аналогичные приведенным выше, полу-
чим следующее выражение для ап / дуг:
-|^ = -^7((м3+и4)-(«1+и2)). (6.50)
дуг aN
Обратимся теперь к получению выражения для ап / дг . С це-
лью сокращения последующих выражений введем обозначения:
е = 1(х - xr - г cos(atf + ф) + а) - 1(х - xr - г cos(d)t + ф) - а),
f = Ку~Уг -гыъ(а)1 + ф) + а)-\(у-уг -rsix^cbt+ ф)-а).
(6.51)
Тогда
<5П 5П d ff . . д , _ , ,
^7‘ = ^ = Т‘ \\ud(x’yd) ^(ef)dxdy =
дЛп dr N дг
3 м
d ff z .( .де df ,
= — + \dxdy'
N JJ I dr dr J
Az/
Раскрывая (6.52), получаем:
an d( а /л ~x \
-^7- = — \udx[xr+rm^(ot + (p)-a)-
-Udx[xr + r cos(/y t + Ф} + fl)jcos(6tf t + ф} +
(6.52)
(6.53)
+ rsin(/y t + ф^-а
~udy (yr + sin(/y t + ф} + a} jsin(/w t + ф}.
Здесь определяется аналогично , но интегрирование
при этом выполняется вдоль горизонтальной оси.
Заменяя, как и выше, разности двух стоящих в скобках вы-
ражений на интегральные разности, преобразуем (6.53) к виду
356
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
ап_^_
dr aN
х[((м2 + и4 ) “(м| + и3 ))cos(fi> t + <£>) + ((«, + w2) - (u3 + w4))sin(<y t +
(6.54)
Аналогично могут быть получены выражения для <ЗП / dip,
dn/da:
д<Р aNLV ’ (6.55)
- ((w3+w4)-(w, +w2))cos(®Z + ^)],
— г = ——Г((м1 +мз)~(м2 +w4))sin(<y/ + ^)-
da> 37 3 2 4,> ' (6.56)
- ((«3 + м4 ) - («I + «2 ))cos(<y t + £)].
В наиболее простом случае в качестве уравнений движения
(6.30), (6.34) могут использоваться линейные стохастические
уравнения первого порядка. При этом вектор
f(X,Z) = (/I] / / ГГ,Я4 / 7^,0), а Т имеет физический смысл
эквивалентной постоянной времени контура наведения.
Полученные выражения (6.38), (6.39), (6.48), (6.49),
(6.54)-(6.56) представляют общую структуру квазиоптимального
алгоритма оценки координат вращающейся ракеты по ТВ-изо-
бражению визируемой сцены в виде многосвязной нестационар-
ной нелинейной системы оценки собственно координат ракеты в
картинной плоскости совместно с радиусом, частотой и началь-
ной фазой вращения трассера, т.е. в виде системы, осуществляю-
щей слежение центром прямоугольного строба за центром пятна
трассера на ТВ-изображении. Причем нестационарные коэффи-
циенты усиления вида sin(&> Z + 4>), cos(&> t + q>) (см. (6.54)-(6.56))
фактически согласуют изменение знака и крутизны дискримина-
ционной характеристики по соответствующей переменной с те-
кущей фазой развертки сигнала трассера.
Поскольку количественные значения постоянных времени
Т.ТМ,ТГ. спектральных плотностей шумов Л',ЛГ|,...,ЛГ5, а также
уравнения движения (6.30), (6.34) задаются при синтезе с извест-
357
ГЛАВА 6
ной долей произвола, соответствующие значения элементов мат-
рицы R(/) в уравнениях (6.39), выполняющих функции коэффи-
циентов усиления по каждому из оцениваемых параметров, могут
нуждаться в корректировке в направлении обеспечения устойчи-
вого слежения за пятном трассера и необходимого качества пере-
ходных процессов. На практике вполне допустима замена зави-
сящих от времени значений элементов матрицы R(z) постоян-
ными коэффициентами и подход к определению значений этих
коэффициентов методами инженерного синтеза следящих систем,
обеспечивающими необходимое качество отработки широкого
диапазона возможных входных воздействий.
Синтезированный алгоритм обладает высокой помехозащищенностью
по отношению к преднамеренным помехам. Причем главным факто-
ром, определяющим помехозащищенность, является наличие вращаю-
щегося пространственного строба, только в пределах которого собст-
венно и выполняется обработка ТВ-изображения. При этом формиро-
вание разностного выражения ud(x,y,t) (см. 6.44) обеспечивает ком-
пенсацию стационарных источников имитирующих помех, попадаю-
щих в пространственный строб.
При математическом моделировании процесса функциони-
рования синтезированного алгоритма диаметр изображения бор-
тового излучателя ракеты при ее отлете от координатора изме-
нялся в пределах от 24 до 4 пкс, а отношение удвоенного радиуса
вращения излучателя к диаметру его изображения принималось
равным 3. Для обеспечения необходимой величины линейной зо-
ны дискриминационной характеристики и необходимого качества
пространственной селекции источников помех размер простран-
ственного строба должен не более, чем в 2...3 раза превышать
размеры пятна трассера. В модели отношение этих величин также
принято равным 3.
Небольшие размеры пространственного строба предъявляют жесткие
требования к допустимой величине ошибок слежения, которые должны
быть заведомо меньше полуширины строба. А это можно обеспечить
расширением полосы пропускания соответствующих следящих систем,
что ведет к снижению помехоустойчивости координатора. При на-
стройке модели компромисс между противоречивыми требованиями к
358
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
I полосе пропускания каналов слежения за ракетой был найден при ши-
рине полосы пропускания этих каналов порядка 10 Гц.
На рис. 6.2 представлены полученные моделированием кри-
вые, иллюстрирующие процесс слежения ТВ-координатора за
положением трассера ракеты по горизонтальной и вертикальной
осям координат, когда ракета по оси У перемещается по синусои-
де, а по оси X- по случайному закону. Пунктирные линии на ри-
сунке определяют истинные координаты ракеты. Математическое
моделирование процесса функционирования алгоритма показало,
что устойчивое сопровождение цели с вероятностью, близкой к
единице, обеспечивается при компенсации неравномерности фо-
на до значений отношения «сигнал / СКО остатков фона»
g >80...100, в том числе при возможном наличии до 2-3 источ-
ников стационарных помех в области пространства, ометаемой
вращающимся бортовым трассером.
По существу, эффективное воздействие помех на контур наведения ра-
кеты при реализации такого алгоритма может иметь место при поста-
новке сплошной аэрозольной завесы или при создании активных помех,
приводящих к засветке значительной площади ТВ-изображения.
359
ГЛАВА 6
6.4. Синтез устройств помехозащиты
В условиях отсутствия достоверной информации о характе-
ристиках устройств помехозащиты, используемых в подлежащих
подавлению системах ВТО, при определении характеристик по-
мех необходимо ориентироваться на выявление потенциальных
возможностей таких устройств, которые можно установить мето-
дами их формального синтеза. Обычно функциональный синтез
устройств ПЗ выполняется в рамках эвристических подходов [1,
9, 2.9], а потенциальные возможности их подавления чаще всего
не выявляются. Ниже развиваются методические основы фор-
мального синтеза помехозащищенных измерителей и приводятся
некоторые примеры их синтеза, а также анализ потенциальных
возможностей их подавления.
Положения, положенные в основу предлагаемого подхода
1. Основными факторами, ограничивающими качество се-
лекции цели на фоне преднамеренных помех, являются шумы
измерений (объективный фактор) и уровень априорной информи-
рованности о характеристиках целей и преднамеренных помех
(субъективный фактор). Потенциальные возможности и наиболее
универсальные закономерности измерения координат цели в при-
сутствии преднамеренных помех определяются действием объек-
тивного фактора - шумами измерений. Поэтому научно-методи-
ческую основу исследования вопросов подавления устройств ПЗ
составляют методы анализа качества их работы в условиях огра-
ничения шумами измерений.
2. Задача синтеза помехозащищенного измерителя ставится
как статистическая задача синтеза оптимального (квазиоптималь-
ного) измерителя в присутствии преднамеренной помехи по ко-
нечному критерию, характеризующему качество оценки изме-
ряемых координат, а не оптимизацию каких-либо промежуточ-
ных показателей (например, не оптимизацию отношения сиг-
нал/помеха). При этом определение предельных возможностей
подавления помехозащищенных измерителей, как и всюду в этой
главе, осуществляется на основе анализа выражений, характери-
зующих потенциальную точность синтезированного измерителя.
3. На практике полное формальное описание помехового, а
зачастую, и полезного сигналов, как правило, отсутствует, а из-
360
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
вестны лишь некоторые их обобщенные характеристики (напри-
мер, соотношение энергий сигналов в двух спектральных диапа-
зонах). Кроме того, условиями технической реализуемости изме-
рителей могут задаваться ограничения на их структуру, напри-
мер, на количество спектральных каналов обработки при-
нимаемых сигналов. В этих условиях задача синтеза помехоза-
щищенного измерителя и оценки потенциальных возможностей
его подавления может быть решена как задача синтеза измерите-
ля с частично заданной структурой.
6.4.1. Спектральная селекция
Для повышения помехозащищенности оптических локаторов
от имитирующих помех типа естественной или преднамеренно
поставленной ложной цели применяются устройства спектраль-
ной селекции [2.9J. Разнообразие возможных параметров имити-
рующих помех, а также способов построения и параметров таких
устройств приводит к разнообразию эффектов, в которых может
проявляться действие помех. В этих условиях определенный инте-
рес представляет исследование предельных возможностей спек-
тральной селекции цели в оптических локаторах в присутствии
имитирующей помехи. Ориентируясь на оценку предельных воз-
можностей спектральной селекции, будем рассматривать случай
полной априорной информированности о характеристиках лоци-
руемой цели и помехи. Синтез алгоритма селекции выполним
применительно к пассивному оптическому локатору с четырех-
квадрантным двухспектральным измерителем координат [19, 1.10].
При этом предполагается, что цель и источник помех находятся в
одном разрешаемом пространственном объеме. Для упрощения
вывода и физической интерпретации конечных соотношений из-
мерение координат цели рассматривается в одной плоскости.
Для сепарабельной модели сигналов цели и имитирующей
помехи интенсивность сигнала, приведенная к плоскости фото-
приемника, принимает вид
w(x,v) = ?15s(x,2)5(i/) + Арр(х,р) (6.57)
где - пространственный и спектральный аргументы соответ-
ственно; 5(1/),p(v) - спектральные характеристики излучения
361
ГЛАВА б
цели и помехи; Я, ц - пространственные координаты цели и ис-
точника помех; 5(х,Я),- функции, описывающие про-
странственную форму сигналов цели и помехи.
Будем полагать функции $(х,Я),нормированными
по максимуму к единице.
Взаимное расположение сигналов цели, источника помех и
двух площадок фотоприемника для любого из двух спектральных
диапазонов показано на рис. 6.3, где Ъ - линейный размер пло-
щадки фотоприемника; as,ap - полуширина изображений (сиг-
налов) цели и помехи s(x,Я),/?(%,//) при использовании прямо-
угольной аппроксимации их формы.
Такая аппроксимация вполне допустима, в частности, тогда,
когда для получения достаточной величины линейного участка
дискриминационной характеристики координатора фотоприем-
ники смещают от фокальной плоскости оптической системы,
формирующей изображение.
Сигналы на выходе площадок работающего на линейном
участке световой характеристики фотоприемника в 1-м спект-
ральном диапазоне можно представить так:
________________________Рисунок 6.3_______________________
362
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
О ОО Ь 00
zx = Jdx Jw(x, v) Ф] (v) Jv, z2 = |dx и)Ф] (v}dv. (6.58)
~b 0 0 0
Сигналы на выходе площадок фотоприемника во 2-м спек-
тральном диапазоне запишутся аналогично:
О 00 b оо
z3 = Jrfr ^(х,у)Ф2(г)б7г, z4 = ptr ^*м(х,г)Ф2(у)б/у , (6.59)
-Ь О 0 0
где Ф1 (v), Ф2(и) - спектральные характеристики фотоприемни-
ков 1-го и 2-го спектральных диапазонов.
Подставив (6.57) в (6.58), (6.59) и учитывая наличие адди-
тивного временного шума измерений иД/), сигналы, наблюдае-
мые на выходе каждой площадки фотоприемника для случая то-
чечной цели и источника помех (когда as =ар=а \ запишем так:
Щ = Z| (Я, //) + (?) = (Я + a) Ps} + (/? + а) Ppi + пх (?),
w2 = z2 (Л, ц) + и2 (?) = (а-Л) PS1 +(a~/j) Рр1 + и2 (?),
(6.60)
w3 =г3(Я,//) + п3(?) = (Я + л)Р52 +(// + а)Рр2 +н3(?),
w4 = z4 (л> р) + «4 (0 = (а - Я) Ps2 + (а-р) Рр2 + п4 (?),
00 00
где Р„ =ЛД, Ppi=ApP', Si = p(v)O>,.(t/)Jv, Р, = jp(v)O>, (v')dv ;
О о
wz(r) - гауссовы независимые процессы белого шума с одинако-
выми двухсторонними спектральными плотностями N,
Пусть случайная траектория движения цели определяется
стохастическим дифференциальным уравнением
Я = Дя + 1«0(?), (6.61)
где и0(/) - формирующий белый шум с двухсторонней спект-
ральной плотностью No.
363
ГЛАВА 6
Если источник имитирующей помехи смещен относительно
цели на некоторую постоянную, но заранее неизвестную величи-
ну L = A(t) + L), то удовлетворяет дифференциально-
му уравнению
1 1 / \
А = -р“ + у"о(')’
(6.62)
в котором «о (0 ” та же реализация белого шума, что и в (6.61).
Теперь исходная задача статистического синтеза функциональ-
ной структуры устройства спектральной селекции может быть
сформулирована как задача отыскания алгоритма оптимальной
оценки параметров 2,//, удовлетворяющих уравнениям (6.61),
(6.62), при наличии измерений w19..., w4, задаваемых выраже-
ниями (6.60), т.е. как задача оптимальной линейной фильтра-
ции.
Как это следует из (6.2), ее решение требует определения
производной по времени логарифма функционала правдоподо-
бия измерений и,,..., н4, которая в рассматриваемом случае
имеет вид
П (/, 2, //) = j(«; - 2,- (2, //))2.
(6.63)
Первые и вторые производные П(/,Я,//) по подлежащим
оценке параметрам представляются следующим образом:
ЭП(/,Я, //) 1 < / ч / ч
—Ч;-------- = -V {^1 («2 - «1) + Лг («4 - «3) +
ОЛ,
+22 + Р/2 ) + 2// (PslPpi + Ps2Pp2)},
(6.64)
dn(i,A,ju) 1 ( , . , .
----~------= - — {Ppi («2 - «1) + Pp2 («4 - «3 ) +
dju Av
+22(PslPpl +P52Pp2) + 2//(p2 +P22)},
364
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
a2n(/,A/z) 1 ^i+^2) = 4
дЛ2 №
д2П((,Л,//)_ d/j2 (^1+^2) = 5, (6.65)
д2П(1,Л,р)_ 8 Л dju -I1 {^Ppi+Ps2Pp2) = C.
Теперь, согласно (6.1), искомый алгоритм оптимальной ли-
нейной фильтрации определяется системой дифференциальных
уравнений относительно искомых оценок параметров Я, :
Л^-~Л-глл^(и2-и1)+/^(и4-и3)-Л^-1цС^
Рр\ ( \ Рр2 (
-%1-Гг(«2-“1) + ^г(«4
/V /V
-и3)-ЛС - jliB >,
N
(6.66)
& = ~U - Q/Z - М1 ) + ^(м4 - мз) - ) -
“(м2 “ М1 ) + ~^ЧМ4
N V 2 17 N V 4
-и3)-ЛС - juB >.
При этом апостериорные центральные моменты 2-го порядка
измеряемых параметров глл, г^, г удовлетворяют системе
уравнений
Ги = А01 - dru + Аглл + 2СглРглл + BrL,
?ЛР = Л01 ~j(rM + ГЛР) + АгЛЛгЛР +С(гЛр+гЛЛгЛр) + ВгЛрг^ (6-67)
~ h01 ~ ВгЛц + АгЛр + Вгир•>
где А'о1 = N0/T2, d^2/T.
Слагаемые правых частей (6.66), заключенные в фигурные
скобки, определяют алгоритм работы дискриминатора со спект-
365
ГЛАВА 6
ральной селекцией. Физический смысл процедуры обработки
сигналов щ ,..., w4, задаваемый этими слагаемыми, наиболее про-
сто уяснить в случае измерения координат не маневрирующих
цели и источника помех, когда вместо (6.61), (6.62) имеют место
уравнения А = 0, /7 = 0. Тогда при /~>оо дифференциальные
уравнения (6.66) преобразуются в два алгебраических уравнения
относительно А, //:
^1(М2-«1) + ^-(ы4-и3)-ЛЛ-х/С = 0,
^-(и2-и,) + ^-(и4-и3)-ЯС-/}В = 0,
совместное решение которых приводит к выражению, опреде-
ляющему следующий алгоритм обработки сигналов м19..., w4 в
дискриминаторе со спектральной селекцией
(»2~»l) ?(»4~»з)
2(^2?”Л1) 2(/^.2^-Ps))
(6.68)
Здесь q = PpX/Pp2.
Анализ (6.68) показывает, что оптимальный дискриминатор со спект-
ральной селекцией реализует принцип компенсации ошибки оценки
положения цели, обусловленной наличием помехи, за счет использова-
ния 2-го спектрального диапазона.
Этот вывод становится особенно наглядным, когда полоса
пропускания приемника 2-го спектрального диапазона выбрана
так, что на его выходе отсутствует сигнал цели (Д,2 = 0) и дейст-
вует только помеховый сигнал. Действительно, в отсутствие шу-
мов измерений и при Ps2 = 0 после подстановки в (6.68) выраже-
ний для из (6.60) первое частное в выражении (6.68) принима-
ет значение А4-рРр\/Р5\ . Ошибка измерения параметра А, опре-
деляемая наличием помехи в 1-м спектральном диапазоне, равна
piPp\/Ps\ • После аналогичных подстановок второе частное выра-
366
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
жения (6.68) также принимает значение /uPp}j Ps} , что подтвер-
ждает вывод о компенсации ошибок 1-го спектрального диапазо-
на сигналом с выхода 2-го спектрального диапазона.
Оценку предельных возможностей фильтрации траектории
маневрирующей в соответствии с (6.61) цели выполним примени-
тельно к установившемуся режиму фильтрации, т.е. при/1—>оо.
Уравнения (6.66) определяют несмещенные оценки параметров
Я, //. Вследствие постоянного смещения L = const источника по-
мех относительно цели имеют место равенства ги = - г,
и каждое из уравнений системы (6.67) приводится к виду
2 э
r = N^-dr-—gr2, (6.69)
где
g = [(^+^i)2+^2+Pp2)2]- (6-70)
Обычно d2 <^(8NQg / NT2) . С учетом этого при t —>оо из
2 7
(6.69) следует квадратное уравнение N^-dr---gr~ =0, имею-
N
щее приближенное решение
Y/2
-уг---------------------и • (6.71)
2T2[(Pjl+Ppl)2+(Pj2+jPp2)2]J
Минимум второго центрального момента г, определяющего
дисперсию ошибок оценки параметров Я,//, достигается, когда
достигает максимума знаменатель выражения (6.71). Поэтому
требования к полосам пропускания 1- и 2-го спектральных диапа-
зонов, минимизирующим г, могут быть установлены путем ис-
следования на условный экстремум зависимости g от PvI, Ps2,
определяемой выражением (6.70). Как нетрудно убедиться, ми-
нимум g при фиксированной суммарной энергетике полезного
сигнала Ps = PsX 4- Ps2 = const и при фиксированных значениях
РрХ. Рр2 имеет место при
r^(NN0/2T2g)i/2^
367
ГЛАВА 6
р; =Ps/2 + (Pp2 -Рр|)/2, р;2 = Ps/2-(Pp2-Рр1)/2. (6.72)
Функция g = g{Ps\->PS2) описывает эллиптический параболо-
ид и поэтому достигает максимума на границе области определе-
ния переменных PS\,PS2> задаваемой ограничением
Ps\ + PS2 =PS~ const. Отсюда следует, что максимум g. а значит,
и минимум г достигается при PsX = 0 или при Ps2 = 0, а точнее -
при Р51 = 0, когда Р х > Рр2 9 и наоборот.
Таким образом, максимальная эффективность спектральной
селекции будет обеспечена тогда, когда полоса пропускания од-
ного из спектральных каналов назначена так, чтобы мощность
сигнала цели (но не помехи) на его выходе была минимальной.
Спектральная схема не должна максимизировать отношение сиг-
нал/помеха в суммарной полосе пропускания приемников всех имею-
щихся спектральных диапазонов.
Приведем (6.71) к более удобной для расчетов форме. Если
/э = \/(2Т) - эффективная полоса фильтра (6.61), формирующего
2
траекторию движения цели, а ал - дисперсия этой траектории в
установившемся режиме, то ал = Nof3 -Nq/{2T} . Как следует из
(6.66), эффективная шумовая полоса синтезированного устройст-
ва оптимальной линейной фильтрации также равна f3. Тогда ес-
ли сГщ - дисперсия шумов фотоприемного устройства, соответ-
ствующая этой шумовой полосе, то сГщ = N/{2T). С учетом этого
(6.71) преобразуется к виду
2 У/2
г = . (6.73)
I g )
В соответствии с определением обнаружительной способно-
сти D* дисперсия шумов а? может быть представлена следую-
щим образом:
^=a2f3/Dt2^a2/(2TD*2),
где а2 - площадь фотоприемника.
368
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
Выразив g через силу излучения полезного и помехового
источников в первом и втором спектральных диапазонах
(Л/’ *= )’ вместо (6.70) получим
s = [(Л1 +Л>1)2 +(Л2+jp2)2] ч2^/^4 •
Здесь As, г/ - апертура и квантовая эффективность ФПУ; г - ко-
эффициент пропускания оптики ФПУ и атмосферы; D - даль-
ность до источников полезного и помехового излучений.
Теперь выражение (6.73) примет окончательный вид:
2 ( V'2
cy-.aD 1 ,,
Г = ~Г---------2------------ГТ • (6-74)
4^ |<7’[(41+-/p1)2+(42+^2)2jJ
Выражения (6.71), (6.74) показывают, что СКО измерения
координат как полезного, так и помехового источников могут
принимать сколь угодно малые значения при увеличении знаме-
нателей этих выражений, то есть при увеличении мощности сиг-
налов, поступающих на вход ФПУ. При этом имеет место пара-
доксальная ситуация, когда точность измерения увеличивается
при увеличении не только мощности сигналов цели, но также и
при увеличении мощности помехи на выходе двух спектральных
каналов фотоприемника. Это обусловлено, как можно заметить,
принятым при анализе условием о фиксированном, но априори
неизвестном пространственном смещении источника помех отно-
сительно цели. Высокая точность измерения координат цели в
присутствии помехи обусловлена также допущением о наличии
полной априорной информации об амплитуде сигналов цели и
помехи Р51, Ps2, Рр2 на выходе каждого спектрального канала
фотоприемника.
На практике такую информацию можно получить, если ими-
тирующая помеха не присутствует постоянно, а появляется, на-
чиная с некоторого момента времени. При этом Psi9Ps2 могут
быть измерены до момента появления помехи, а Рр\,Рр2, могут
быть восстановлены по скачку сигналов на выходе спектральных
каналов фотоприемника в момент включения помехи.
369
ГЛАВА 6
При фиксированной мощности помехового источника
Рр = Рр} +Рр2 = const представляет интерес задача оптимального с
позиций ОЭП распределения этой мощности по рабочим диапазо-
нам устройства спектральной селекции, т.е. требуется определить
Р !, Рр2, доставляющие максимум среднеквадратическому откло-
нению ошибок измерения положения цели, определяемому выра-
жением (6.71), значит, доставляющих минимум выражению для g.
Исследование на условный экстремум правой части выраже-
ния (6.70) приводит к выводу, что максимальные ошибки измере-
ния положения цели будут иметь место, когда мощности помехо-
вых сигналов в каждом спектральном диапазоне определяются в
соответствии со следующими выражениями, подобными выраже-
ниям (6.72):
Р^Р^-Г^Р.
Рг’Рр-ир-Р^р. ' ’
Схемы спектрально-траекторной селекции могут быть син-
тезированы и для более сложных гипотез об относительном рас-
положении источника помех. Выполним такой синтез для случая,
когда источник помех перемещается относительно цели с посто-
янной, но априори неизвестной скоростью v. Это может иметь
место, например, при постановке с защищаемого объекта (само-
лета, космического аппарата, корабля и т.п.) уводящей ложной
цели. В этом случае координаты ложной цели ju(t) определяются
выражением
ju(t) = A(t) + L0+vt,
в котором £0 - начальное смещение ложной цели относительно ис-
тинной. Система исходных уравнений движения записывается так:
Л = -у2+уИо('),
L = v, v = 0, (6.76)
1 , т 1 , ч
^ = ~^ + L+-n0(t).
370
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
Этой системе соответствуют следующие уравнения опти-
мальной фильтрации:
(6.77)
а —г-^~а2,
Т Уо Уо
Д = --Л + L —Г-^-А, А2,
т No n0
1 = у-Ила -^а7,
М) *0 -
{,=-^а-^а2,
М> М) -
где
А = Psl (и2 - М1 ) + Ps2 («4 - «3 ) + + Л2 ) + 2Ж| Рр\ + Ps2Pp2 X
4 = РрАи2 ~Щ) + Рр2(и4 ~«3) + 2^(PslPp\ + Ps2Pp2> + 2P(Pp\ +Рр2^
а выражения для элементов корреляционной матрицы гАА,...,гп,
могут быть получены путем соответствующей конкретизации
уравнений (6.16) для системы (6.76).
6.4.2. Пространственная селекция
Перейдем к анализу устройств пространственной селекции.
На основе синтеза и анализа потенциальных возможностей таких
устройств могут быть предъявлены требования к степени подо-
бия помехи сигналу по пространственно-яркостной структуре,
определяющей эффективность помехи. Преследуя цель выявить
наиболее жесткие требования к помехе, рассмотрим случай, ко-
гда имеется полная информация о пространственно-яркостной
структуре помехи. Итак, пусть наблюдается аддитивная смесь
сигнала цели и помехи
w(x) = s(x,A) + р(х,//) + и(х), (6.78)
где сигнал цели s(x,A) и помеха /?(х,//) известны с точностью
до параметров сдвига А,// по координате^; п(х) - пространст-
венный белый шум с корреляционной функцией А д'(х).
371
ГЛАВА 6
Логарифм функционала правдоподобия в рассматриваемом
случае имеет вид
П(Я, fi) = Г(м(х) - х(х,Я) - p(x,/z))2rfx,
м
где М - область анализа изображения.
Система уравнений правдоподобия 5П/5Я = 0, 6П/6// = 0
имеет следующее приближенное решение [3.46]:
д = дП(Л,у) /а2П(Я,//)
ая / ая2 л = о,/< = о’
(6-79)
ащя,//)/а2п(я,//)
с/л / dfi2 A. = O.fi = O
ап 1 Г . ds(x,0)
Т7 = -Т7 (и(х)-5(х,0)-р(х,0))—----<Zx,
аЯ N • дх,
м 1
ап 1 ь (ч ( ач / пччар(х,о)
O/U i\i иХ\
б2П 1 Ь ( Ч / АЧ < АЧЧ5^’0)^
'ГТ:=Т7 (и(х)-4х,°)-р(х,0))——5—dx-
ая2 л J ах.2
м 1
(6.80)
а2п 1 г а2р(х,о)
VV = T7 (м(х)-5(х,0)-р(х,0))———Jx-
ip-p^Lx.
дх} J N JI дх} .
17 1 7
Измеритель, осуществляющий обработку в соответствии с
выражением (6.79), реализует принцип компенсации помехи.
Причем нижняя граница дисперсии ошибок измерения параметра
Я определяется выражением
372
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
(6.81)
в котором, в соответствии с [3.25],
а2П(Л,/у)_ 1 с( ф(х,0)У
j
а2П(Л,//)_ 1 гдх(х,0) др(х,0)^
SA ср N j дхх дх}
(6.82)
Рассмотрим случай, когда цель и помеха являются точечны-
ми источниками излучения и когда форма сигналов 5(х,2),
р(х,//) определяется, в основном, формой дифракционного и
аберрационного кружков рассеяния и смещением фотоприемного
устройства от фокальной плоскости. Аппроксимируем форму
сигнала и помехи гауссовскими поверхностями с одинаковым ха-
рактерным размером b по ортогональным пространственным
осям:
5(х,Л) = ——ехр
2л7>2
(х, -Л)2+х^
2Ь2
2ло
(X] - //)2 + X2 '
2Ь2
(6.83)
Подстановка (6.83) в (6.82) приводит к следующим выраже-
ниям:
р2 Р2
4 = s А = р
' ЛЛ 8/гЛЪ4 ’ 8л-АЪ4 ’ „
(о.о4)
Р Р (1-2/2)ехр(-/2)
Д — ____£.______________
Л“ 8nNb4
где / = (Л - //)/(2&) - относительная база цели и источника помехи.
373
ГЛАВА 6
Подстановка (6.84) в (6.81) приводит к выражению
^U-(l-2Z2)exp(-2Z2)J ’
где ^ = урй/Ь - относительное СКО ошибок измерения сдви-
га Я; q = Ps/^Nb2 - отношение сигнал/шум (отношение мощно-
сти полезного сигнала к СКО шумов измерения, снимаемых с
площади фотоприемника, равной площади изображения цели).
График, построенный по (6.85), приведен на рис. 6.4. Из это-
го рисунка, в частности, следует, что если помеха отнесена по
пространственной координате от цели на 0,7 ширины кружка рас-
сеяния (/ = 0,7), то при отношении сигнал/шум <? = 50 потенци-
альная точность измерения положения цели, характеризуемая
СКО ошибки измерения, достигает величины, равной 0,1 ширины
кружка рассеяния. Получение такой же точности измерения при
сближении помехи с целью, т.е. уменьшении базы Ь. требует
дальнейшего увеличения отношения сигнал/шум q.
Из (6.85) следует независимость ошибок измерения от мощности поме-
хи, что обусловлено принятым при синтезе допущением о наличии
полной информации о форме и мощности как полезного сигнала, так и
помехи. Реализация синтезированной схемы пространственной селек-
374
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
|ции требует использования многоэлементного фотоприемного устрой-
ства с высоким пространственным разрешением.
Возможности подавления рассматриваемой схемы селекции
характеризуются тем, что в распоряжении постановщика помех
для борьбы с ней имеются два основных способа: уменьшение
относительной базы сигнал цели-помеха до величин, меньших
0,5, и увеличение эквивалентных шумов измерений, что можно
обеспечить путем дополнительного распятнения фона, увеличе-
ния фоновой засветки измерителя и т.п. Требуемую величину
уровня шумов или базы при этом можно оценить с помощью вы-
ражения (6.85) или графиков рис. 6.4.
Так (см. рис. 6.4), при получение СКО ошибок изме-
рения, не меньших b, будет обеспечено при использовании про-
тивником любой схемы пространственной селекции, если за счет
преднамеренных помех отношение сигнал/шум будет снижено до
значений, не превышающих 5.
Если информация о мощности помехи отсутствует, а ее из-
мерение осуществляется с ошибками, то эти ошибки также при-
ведут к возрастанию ошибок измерения параметра Я. Отсюда
вытекает еще один способ подавления устройств пространствен-
ной селекции рассматриваемого класса - модуляция мощности
помехового сигнала.
Перейдем к рассмотрению потенциальных возможностей
пространственной селекции пространственно-протяженных (не
точечных) источников излучения я(х,Я), р(х,//). С целью полу-
чения и представления основных закономерностей пространст-
венной селекции в виде хорошо интерпретируемых аналитиче-
ских зависимостей будем рассматривать в качестве я(х,Я), /?(х,//)
некоторые реализации однородных случайных полей с корреля-
ционными функциями Rs(z\Rp(z) соответственно.
Обозначим символом Rps(r) - взаимную корреляционную
функцию сигнала и помехи. Если помеховое и сигнальное поля
являются эргодическими, то, воспользовавшись выражением
корреляционной функции производной случайного процесса (по-
ля) через корреляционную функцию исходного случайного про-
цесса, приведем выражение для Алл (см. (6.82)) к виду
375
ГЛАВА 6
_ т 1 гдл(х,Л) &(х,Я) , ~ т d2Rs(0,0)
N т J дх{ дхх N dz?
к м 1 1 J 1
Здесь т - площадь области интегрирования М .
Аналогично получим
wa2T?p(o,o) = т d2Rps(Q,o)
А7 &2 ’ N dz2 ‘
(6.86)
(6.87)
Проанализируем более детально случай, когда корреляцион-
ные функции Rs(z\R (z)9R (z) имеют гауссову форму:
7?/z) = Лехр(-(7] + z2)2/2^2 )>
7?/z) = J8exp(-(zl+z2)2/2^2),
Rps(z) = Cexp(-(zx+z2)2/282ps).
(6.88)
После подстановки (6.86)-(6.88) в (6.81) и выполнения необ-
ходимых преобразований получим:
N82
( С28282
mA 1-----V~
I АВ8Ъ J
(6.89)
Введем обозначения: = “ относительное СКО
ошибки измерения координат цели; qx = Лт / mA - энергетическое
отношение шум/сигнал; d = C282S2pI^ABSAps^ - параметр подобия
помехи сигналу.
С учетом этих обозначений выражение (6.89) представляется
в простом виде:
1 )'/2
\-d2)
(6.90)
376
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
Выражению (6.90) соответствует график (рис. 6.5). Если по-
меха и сигнал некоррелированы, то С = 0, d = 0. В этом случае
ошибки измерения положения цели принимают наименьшие зна-
чения и становятся равными ошибкам измерения в случае нали-
чия только одной цели с полностью известными, кроме измеряе-
мого, параметрами. Если d >0,9, то наблюдается резкое возрас-
тание ошибок измерения координат цели, что свидетельствуете
о принципиальной неэффективности пространственной селек-
ции в случаях, когда сигналы цели и помехи отличаются незна-
чительно. В то же время, при d = 0,5 , q} =0,002 из (6.90) следу-
ет, что может быть обеспечено измерение положения цели с
СКО, не превышающим 0,05 величины интервала корреляции
сигнала цели.
6.4.3. Траекторно-пространственная фильтрация
С помощью методического аппарата траекторно-пространст-
венной фильтрации решается задача оптимальной или квазиоп-
тимальной оценки траектории пространственно протяженного
объекта (цели) по его изображению, формируемому телевизион-
ными или тепловизионными фотоприемными устройствами с вы-
соким пространственным разрешением. Для оценки потенциаль-
ной точности устройств траекторно-пространственной фильтра-
377
ГЛАВА 6
ции в общем случае приходится решать систему нелинейных
дифференциальных уравнений большой размерности.
Рассмотрим задачу минимальной размерности, допускаю-
щую аналитическое решение и, вместе с тем, имеющую практи-
ческий интерес и позволяющую достаточно наглядно проанали-
зировать влияние характеристик помех на эффективность траек-
торно-пространственной фильтрации.
Пусть, как и раньше, случайная траектория движения цели
задается уравнением
Я = -~Л + ~п0((), (6.91)
где л0(/) ” формирующий белый шум с двухсторонней спек-
тральной плотностью Nq .
Пусть также наблюдается пространственное поле яркости
цели в комбинации с пространственно-временным шумом (по-
мехой):
w(x,Z) = s(Xj -A,x2) + n(x},x2,t), (6.92)
причем 7?w(z,r) = A\5(z)J(r) - корреляционная функция шума;
T?5(z) = Rs(z} -z2) - корреляционная функция поля сигналов.
Вытекающая из (6.16) система уравнений квазилинейной
фильтрации, соответствующая (6.91, 6.92), имеет вид
2 1 * 6П(Я,^) . Ад ,2 /Г
Я =---Л + г----—r = —~-ar + br, (6.93)
Т дЛ т2
где а = 2/Т; г - дисперсия ошибок оценки Л; П(Л,^) определя-
ется выражением (6.12):
6 = 77 ( (w(M)-s(M)) Д J ML N JI дЛ ) к л v ' а25(х,2) р5(хД)?Ъ я ал2 1 дл J (6.94)
378
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
Нелинейное дифференциальное уравнение для г решается
методом разделения переменных. Для начального условия
г(0) = г0 его решение получается в виде
1 + (26г0 - а-с)/2brQ - а + c)exp(Zc)
z ч а с
—-------1-------------------------------------- ,
2b 2b[ \ -(2br0 - a-c)/(2brQ - a + c)exp(tc)
где c = (aI 2-4N0b/T2)V2.
В установившемся режиме, т.е. при t -» оо
г а-с 2(1-А7>)'/2
2b Т
(6.95)
(6.96)
По аналогии с (6.86) имеет место приближенное равенство
, m d2R(0,0)
b = —-----
N dz\
Обычно -4NbIT2 » a2. И тогда выражение для дисперсии
г установившихся ошибок оценки параметра 2 еще более упро-
щается:
/ ,, \1/2 ( vv V'2
r»f— ---------------------------- (697)
I T2b) [ T2m((d2Rs^)ldz2}J
Учитывая известную связь между No и дисперсией а] сиг-
нала А (Ло = 2Тсу2^) на выходе системы, задаваемой уравнением
(6.91), получим
I T2m(d2Rs^)!dz2)}
Использовать (6.98) на практике не всегда удобно, поскольку
величина N не вполне наглядна и прямому измерению не подда-
ется. Поэтому преобразуем это выражение таким образом, чтобы
в него входили физические величины, допускающие прямые из-
379
ГЛАВА 6
мерения или известные априори. Для этого будем полагать, что
реальные измерения яркостной структуры сигнала и помехи вы-
полняются измерительным фотоприемником со временем накоп-
ления Ту и величиной элемента пространственного разрешения
на местности d. Тогда дисперсия сигнала помехи, соответст-
вующего элементарной площадке фотоприемника, будет описы-
ваться выражением
a2 = NTfd2,
а дисперсия полезного сигнала, определенная на множестве эле-
ментарных площадок, выражением
ст2 = Rs(0,0)T2d4.
Кроме того, если T?5(z) аппроксимируется гауссоидой, то
d2Rs(0,0)/dz2 =-Rs(0,0)32,
где 8S - интервал пространственной корреляции полезного сиг-
нала.
Подставив выражения для Ат, Т?5(0,0), 82 Rs(0.0) / 8z2 в (6.98),
получим
r = aAd
^к2 )
(6.99)
Здесь к2 = т / д2, г] = сг2/а2, v = T/Tj.
Таким образом, дисперсия ошибки оценки измеряемого па-
раметра Л обратно пропорциональна корню квадратному от от-
носительной величины поля анализа к2 , от относительного време-
ни накопления v и от отношения дисперсий сигнала и помехи на
выходе элементов разрешения измерительного фотоприемника.
Выражения (6.98), (6.99) характеризуют предельные воз-
можности пространственно-временных шумовых помеховых воз-
действий, задаваемых спектральной плотностью Л' или отноше-
нием дисперсий сигнала и помехи v .
380
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
В [11] приводится явное выражение для функционала
плотности вероятности экспоненциально коррелированного га-
уссовского случайного процесса. Его использование позволяет
получить выражения, аналогичные (6.98), (6.99), для случая, ко-
гда пространственно-временной шум наблюдений w(x,Z) (см.
(6.92)) коррелирован по пространственным координатам, т.е.
когда его корреляционная функция 7?„(z,r) = A7?„(z)J(t), причем
7?w(z) = exp(-a|z|). Опуская промежуточные выкладки, полно-
стью аналогичные использовавшимся выше, отметим, что полу-
ченное при этом конечное соотношение совпадают с (6.98) с по-
правкой на то, что в нем Ат следует заменить на N / а .
Обратимся теперь к оценке ошибок траекторно-простран-
ственной фильтрации при наличии постоянных пространствен-
ных шумовых помех. Такие помехи могут иметь место при мас-
кировании цели случайно распределенными на местности ло-
кальными отражателям или излучателями, а также при учете ва-
риации по пространству чувствительности элементов матрицы
фотоприемников.
Пусть случайная траектория цели задается дифференциаль-
ным уравнением
^g(2)+M0> (6.100)
где по-прежнему и0(/) - дельта-коррелированный шум со спект-
ральной плотностью А'о.
Пусть также текущие наблюдения задаются следующим вы-
ражением:
w(x,/) = 5(x1 -Я,х2) + ХлЪЛ2) + '7СХ1’Х2^)> (6.101)
в котором р(Х|,х2) - аддитивная однородная пространственная
помеха, реализация которой наблюдателю неизвестна; Rp(r) - ее
пространственная корреляционная функция.
Определим статистические характеристики обусловленной
помехой ошибки оценки параметра 2 системой траекторно-
пространственной фильтрации, синтезированной для случая, ко-
гда р(х},х2) = 0.
381
ГЛАВА б
Уравнения квазиоптимального фильтра, вытекающие из
(6.16) в предположении, что = и корреляционная функ-
ция шума наблюдений 7?„(z,r) = N<5(z)S(t) , имеют вид
* = gW + -^ (6.102)
NJ дл
м
При наличии аддитивной помехи /?(х) действительную тра-
екторию квазиоптимального фильтра можно описать следующим
уравнением:
Л=Ж) + Т7 [(м(х’О + Р(х)-5(х,А))^|т^й?х • (6.103)
N J дЛ
м
Причем w(x,Z) в уравнениях (6.102) и (6.103) совпадают.
Разложим нелинейные члены в (6.103) в ряд Тейлора в окрестно-
сти точки Л, обозначив е - Л{ - Л и ограничившись первыми
членами разложения:
g(i,)=g(i)+^£,
дл
z 14 / п &(х,2) ,, 1А.Ч
5(х,Л1) = 5(х,Я) +---Е, (6.104)
дЛ
Ss(x,2j) _ &(х,2) й25(х,2)
дЛ дЛ дЛ2
После подстановки (6.104) в (6.103) разность уравнений
(6.102) и (6.103) примет вид
Л z Л \2
, = г (х)*ои>Л (6105)
6Л N JI дЛ ) N J дЛ
' м
В (6.105) отброшены члены второго порядка малости отно-
сительно з. а также члены вида J (и - s)c2s / ёЛ2с1х в силу их
малости по сравнению с членом JJ(6s73/l)2dx. Установившееся
значение ошибки можно определить, положив ё - 0 при t —> оо :
382
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
A Z а \2
8g(A) N 8s(x,A)
8 Л г JI 8 Л
dx
(6.106)
Статистические характеристики ошибки £ можно оценить
путем ее усреднения на множестве реализаций полей
/?(х), 5(хД). Поскольку из Е (/?(х)) = 0 следует Е = 0, то
су2=Е^£2^. Знаменатель в (6.106) слабо флуктуирует относи-
тельно своего среднего значения. Поэтому при определении
Efy вполне допустима замена значения знаменателя выражения
(6.106) его средним значением:
д2/?л(0,0)
8z2
(6.107)
Определим математическое ожидание квадрата числителя
(6.106):
4
\2
\w 7 /
М М \ /
J J сг(х-у)
ММ \ J J
R (z,,z2)d R^Z',Z^dz, dz2 .(6.108)
Последний переход при выводе (6.108) справедлив, когда
область М имеет прямоугольную форму, причем т = тпх х тп2 -
площадь области М . Учитывая (6.106)-(6.108), получим
383
ГЛАВА 6
1 Z2^oz xd27?5(Z|,Z?) .
1----~ \Rp(zl’Z2)----/- -J -~- dzl dz2
m2 ) uzx oz2
Ndg(A) d2Rs(0,Q)
г 8Л dzf
(6.109)
Когда корреляционные функции, входящие в (6.109), имеют
гауссовскую форму, определяемую выражениями (6.88), а урав-
нение (6.100) представляется в виде (6.91), (6.109) преобразуется
к виду
.2
8
лтАВд4ф(т?/д2)ф(т1/д2)
„4 N Ат
5 гТ А2
(6.110)
где Ф(...) - интеграл вероятности; 52 = В2В2/(д2 + 52).
При медленных блужданиях параметра Я (слабо маневри-
рующая цель, т.е. случай большого Т и малого N ) имеет место
неравенство N /2Т с Ат / 82 , в силу которого первым членом в
квадратных скобках знаменателя (6.110) можно пренебречь. То-
гда, поскольку обычно Ф(т1 / J2)«1, из (6.110) получим простое
и хорошо физически интерпретируемое соотношение
(6.111)
в котором А2 = тп/ 82 9 q}= А/ В . Таким образом, дисперсия
ошибки оценки положения цели (параметра Я), обусловленная
наличием постоянной пространственной шумовой помехи, прямо
пропорциональна квадрату обобщенного интервала корреляции
смеси сигнала с помехой и обратно пропорциональна отношению
дисперсий (мощностей) сигнала и помехи и относительной вели-
чине поля анализа.
384
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
Из выражения для следует, что если значения интервалов корре-
ляции сигнала d>s и помехи 8р существенно различаются, то значе-
ние 6 будет приближаться к наименьшему из значений этих интер-
валов. Отсюда с учетом (6.111) следует, что при создании простран-
ственных шумовых помех системам траекторно-пространственной
фильтрации следует выбирать величину интервала пространственной
корреляции помехи, не меньшую величины интервала корреляции по-
лезного сигнала.
6.5. Синтез алгоритмов
комплексирования информации
В современных разведывательно-прицельных системах, го-
ловках самонаведения, датчиках боеприпасов точного наведения
и прицеливания используется формирование изображений фоно-
целевой обстановки в нескольких спектральных диапазонах элек-
тромагнитного излучения или различных физических полях (оп-
тическом, радиотепловом, поле высот и т.п.). Комплексное ис-
пользование общего объема получаемой таким образом инфор-
мации направлено на повышение качества решения задач обна-
ружения, распознавания и измерения координат визируемого
объекта. Однако алгоритмы комплексирования информации, оп-
ределяющие качество решения перечисленных задач, стороне-
постановщику помех часто неизвестны.
Вследствие этого возникает необходимость синтеза опти-
мальных или квазиоптимальных алгоритмов согласованной обра-
ботки получаемых изображений и сигналов с целью оценки по-
тенциальных возможностей комплексирования информации и по-
следующего обоснованного выбора на этой базе параметров по-
мех, обеспечивающих подавление с приемлемой эффективностью
таких комплексированных систем.
6.5.1. Алгоритм комплексной обработки
тепловых сигналов и изображений
В ряде источников, например в [15-17] и других, рассмотре-
на достаточно представительная совокупность алгоритмов совме-
385
ГЛАВА 6
стной обработки изображений, получаемых в различных спек-
тральных диапазонах. Вместе с тем, имеется ряд вопросов совме-
стной обработки изображений, формируемых в ИК-диапазоне,
требующих дальнейшего освещения. Исследуем возможность по-
вышения качества алгоритмов совместной обработки таких изо-
бражений (в дальнейшем - тепловизионных изображений) на ос-
нове учета особенностей их формирования в различных участках
спектра ИК-излучения.
Как известно, качество обнаружения и распознавания объектов на под-
стилающих фонах зависит как от контрастных, так и от абсолютных
значений параметров их излучения. При этом, с одной стороны, качест-
во обнаружения малоконтрастных объектов ограничивается шумами и
неравномерностью чувствительности датчиков, формирующих изобра-
жение. С другой стороны, контрастная энергетическая сила излучения
или контрастная яркость объектов при наблюдении в диапазонах 3...5 мкм
и 8...14 мкм может изменяться в 1,3...1,5 и более раз при изменении
условий наблюдения и, в частности, при переходе от наблюдения на
зимних фонах к наблюдению на летних фонах.
Поэтому использование при обнаружении объектов контра-
стной энергетической силы излучения (яркости) может приво-
дить при фиксированном пороге обнаружения к эквивалентному
уменьшению отношения сигнал/шум также в 1,5 и более раза. В
то же время результаты полевых измерений показывают, что бо-
лее устойчивой, т.е. менее зависящей от времени года, суток, по-
годных условий, характеристикой излучения объектов в дальней
ИК-области спектра является цветовая температура наиболее ин-
формативных нагретых участков цели.
Это позволяет предположить, что алгоритмы комплексной
обработки тепловизионных изображений целесообразно базиро-
вать на оценке цветовой температуры объектов по их изображе-
ниям, получаемым в используемых спектральных диапазонах.
На этапе предварительной обработки с использованием имеющихся
двух или более изображений наблюдаемой сцены, полученных в раз-
личных диапазонах дальней ИК-области спектра, следует восстановить
поле цветовой температуры сцены с целью его предъявления человеку-
оператору или автоматическим решающим устройствам для принятия
386
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
решения об обнаружении или распознавании объектов интереса. Учет
особенностей такой обработки при обосновании характеристик помех
позволяет рассчитывать на получение гарантированных оценок эффек-
тивности подавления комплексированных систем.
Рассмотрим основные положения методического подхода и
дадим обоснование расчетных соотношений для оценки цветовой
температуры сцены по ее тепловизионным изображениям [18].
Особенность подхода, определяющая возможности повышения
качества совместной обработки изображений, состоит в дополни-
тельном учете априорной информации о ходе спектральных кри-
вых излучения абсолютно черного или серого тела в соответст-
вии с законом излучения Планка [6].
Итак, пусть на выходе двух спектральных каналов одного и
того же пространственного элемента двухспектральной матрицы
фотоприемника имеем в момент отсчета измерения и^и2:
щ = £ г\(Т) + и19 и2 = £ г2(Т) + п2. (6.112)
Здесь
г}(Т) = !ф,(Л)г(Л,Т)</Л , гг(Т) = \Ф2(Л)г(Л,,Т)(1Л, (6.113)
где г(Я,Г) - распределение по спектру энергии излучения абсо-
лютно черного тела в соответствии с законом Планка;
0,(2), Ф2(Я) - спектральные характеристики фотоприемника в
первом и втором спектральных диапазонах соответственно;
щ,п2 - ошибки измерений (гауссовские случайные величины с
нулевым математическим ожиданием и CKO dx, d2 соответст-
венно). Значения коэффициентов излучения визируемого участка
£ полагаем практически совпадающими для обоих спектральных
диапазонов.
Тогда логарифм функции правдоподобия F(m19w2 / £, Т), со-
ответствующий измерениям (6.112), с точностью до постоянного
коэффициента может быть записан следующим образом:
Zd2
387
ГЛАВА 6
Теперь структура устройства совместной оценки температуры
Т и коэффициента излучения визируемого участка е может быть
определена из решения системы управлений правдоподобия:
5/fc(lnF(wl,w2/£,7’)) = 0, (6 115)
5/ar(lnF(wl,w2/f,7’)) = 0.
Решение системы (6.115), значит, и искомая оценка темпера-
туры Т, могут быть получены численным методом. При этом
структура спецвычислителя, реализующего тот или иной при-
ближенный метод решения, может быть интерпретирована как
структура устройства квазиоптимальной оценки температуры Т
и коэффициента излучения ё.
При использовании метода Ньютона для решения системы
(6.115) строится итерационная процедура, позволяющая на каж-
дом А-м шаге определять приближения Т(к), ё(к) путем реше-
ния следующей системы линейных уравнений:
А(к -1) +(£) " T(k -1)) +
+ 8f^k~}\g(k)-е(к -1)) - О,
5£(£-1)
дТ(к-1)
+ а/2(А:-1)
a^(jt-i)
Здесь использованы обозначения:
Л(к)--^—\пЕ(щ,и2/£(к), Т(к)\
О О (/v )
Более простое решение системы (6.115) получается, когда
имеется достаточно хорошее начальное приближение оценки
388
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
температуры Ти. допускающее возможность использовать разло-
жение в ряд Тейлора выражений т\(Т\ г2(Т) с точностью до чле-
нов второго порядка малости. Тогда можно записать:
г}(Т)^П(Ти) + Г{(Ти)(Т-Ти),
(6.116)
г2(Т)^г2(Ти) + г2(Ти)(Т-Ти),
где r^T„) = dri(T)/dT при Т = Ти.
Подставив (6.116) в (6.114) и далее в (6.115) и заменив в пер-
вом уравнении (6.115) Т на Ти, получим в результате решения
системы (6.116) следующее выражение, описывающее структуру
квазиоптимального устройства оценки температуры визируемого
участка:
Т = Ти+&Т = Ти +
। (», (6-117)
t(r{2(TJd2+rf(Ttt)d2)
ГПР ? = Ц1Г1(Г«)^2 +»2^2(7LW12
r2(Tu)d2+r2(Tu)d2
В соответствии с правилом Рао-Крамера, нижняя граница
дисперсии ошибки оценки температуры определяется выраже-
нием
df > (~82 (In F(и,и2 /е, Т))/дТ2 У'. (6.118)
При использовании матричных фотоприемников одна из ос-
новных составляющая шумов измерений в (6.112) обусловлена
разбросом чувствительности элементов матрицы фотоприемника:
ni - ver^T) , где 0 < v < 1.
Конкретизируя для этого случая выражение (6.118), получим
dT >-----------------------------пт- (6-119)
(r{2(Ttt)/r2(Tu)+^(Tu)/r2(Tu))
Здесь dv - СКО коэффициента v , полагавшееся одинаковым для
обоих спектральных диапазонов.
389
ГЛАВА 6
При эксплуатации наземных объектов в полевых условиях
диапазон изменения возможных значений е относительно неве-
лик и близок к 0,8. Если при разработке фотоприемников выпол-
нен принцип равноточности измерений в двух спектральных диа-
пазонах (d} ~d2), то можно заметно упростить структуру синте-
зированного устройства, описываемого теперь вместо (6.117) вы-
ражением
Т = Ти + ДГ = Ти + к}щ + к2и2 - к3 , (6.120)
где коэффициенты устанавливаются равными:
к.=г{(Ти)/0,^2(Ти) + ^2(Ти)),
k2 = r^Tu)/Q,^2(Tu) + r^(Tu),
кз = (Л Ы(Ти) + r2 (Ти)г2(Ти ))/(<2(4 )Г]'2(Ти )).
Обработка сигналов в соответствии с выражениями (6.117)
или (6.120) по выходу каждого элемента фотоприемной матрицы
обеспечивает формирование единого изображения из двух ис-
ходных в виде поля цветовых температур наблюдаемой сцены.
При этом в сформированном изображении сохраняются все ин-
формативные признаки, имеющиеся в каждом из исходных. Это
изображение может быть выведено на экран монитора для реше-
ния задач обнаружения и распознавания объектов человеком-
оператором или использовано в автоматическом решающем уст-
ройстве.
Качество предложенного алгоритма обработки можно оценить по точ-
ности восстановления цветовой температуры элементов сцены, являю-
щейся объективной характеристикой объекта в обоих спектральных
диапазонах.
На рис. 6.6 приведены рассчитанные с помощью выражения
(6.119) графики зависимости СКО ошибки оценки температуры
визируемого участка dT от dv. Расчеты выполнены при £* = 0,8,
соответствующем среднему значению коэффициента излучения
запыленных наземных объектов, для случая работы фотоприем-
ников в спектральных диапазонах 3,5...5,5 мкм и 8... 12 мкм. Из
390
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
графиков, в частности, сле-
дует, что, например, при сред-
ней температуре элемента
сцены Т =300 К и вариации
значений dv в пределах
0,1...0,05, dT будет лежать в
пределах 3,2... 1,6°. Для срав-
нения СКО ошибок оценки
температуры при использова-
нии только одного спектраль-
ного диапазона определяется
выражением
_ dvn(T)
dT — .
1 дг^Ту/дТ
При Т= 300 К и Я=8...12 мкм это выражение принимает
вид dT = 65б?и , т.е. при тех же значениях dv СКО ошибок оценки
температуры будет лежать в пределах 3,25...6,5° и превышать
аналогичные ошибки, соответствующие случаю обработки сиг-
налов двух спектральных диапазонов, в 2 раза. Кроме того, здесь
принципиально необходима калибровка измерений по излучению
абсолютно черного тела, что не требуется при использовании
синтезированного алгоритма.
Аналогично может быть синтезирована квазиоптимальная
схема оценки температуры для случая, когда основной вклад в
ошибку оценки вносит внутренний шум, т.е. когда неравномер-
ность чувствительности элементов фотоприемной матрицы устра-
нена аппаратурным или алгоритмическим методом, или когда ис-
пользуются двухспектральные одноэлементные фотоприемники.
Пусть на элемент фотоприемной матрицы проецируется уча-
сток объекта с площадью S и с равномерной яркостью, не изме-
няющейся за время наблюдения. В этом случае выходной сигнал
в / -м спектральном канале можно представить в виде
ui(T,T) = clri(t)r+ J n^tydt^ (6.121)
zo
391
ГЛАВА 6
где с, = s^AgSe/лЬ1; 5, - чувствительность приемника в /-м
спектральном канале; г, - коэффициенты пропускания излуче-
ния атмосферы и оптической системы в i -м диапазоне, As -
площадь приемной апертуры; т - время накопления; /0 - момент
отсчета наблюдений; D - расстояние до объекта; - шумы
приемника в i -м спектральном канале с корреляционной Функ-
ам.
цией Остальные обозначения аналогичны использован-
ным выше.
Если <7Z = 5z^a2A// /Д* ~ СКО шумов в z-м спектральном
канале; а2 - площадь элемента фотоприемника; А/ - полоса
пропускания цепей обработки сигнала; D* - обнаружительная
способность приемника, то
Ni=d2/kf = s2a2 / D*2 .
С учетом введенных обозначений выражение (6.117) примет
вид
Т = Ти+&Т = Ти +
, д'г(ц1 ~rc/i(7«))n'(rH) + -vi(»2“Т/гЮкЖ) (6.122)
И^(^^))2+м(^2(7;))2)
При этом дисперсия ошибки оценки температуры определя-
ется выражением
4 = —(---------------------гт • <6.123)
2г ((^'(т;))2 лг2+Ы(7;))2л))
На рис. 6.7 приведена зависимость dT{T)9 рассчитанная при
следующих значениях основных параметров: S = 1 м2, D = 500 м,
rz=0,9, £ = 0,8, 4 = Зх10"3м2, г = 5х10"4с, п2=10"2см2,
D* = 2х1О10 см^Гц^Вт"1. График указывает на возможность по-
вышения точности оценки температуры объекта на порядок и бо-
392
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
лее в случае компенсации разброса чувствительности матричного
приемника аппаратурными или алгоритмическими методами.
На основе синтезированного алгоритма предварительной обработки
двух тепловых изображений, полученных в разных участках дальней
ИК-области спектра, может быть сформировано единое изображение
всей сцены или интересующей ее части, представляющее поле цвето-
вых температур этой сцены. При этом обеспечивается повышение в
2-3 раза отношения сигнал/шум, а также обнаружение и распознава-
ние объектов как человеком-оператором, так и автоматическим ре-
шающим устройством по более устойчивым и менее подверженным
влиянию условий наблюдения (погоды, времени суток и года) при-
знакам, связанным с температурой, а не с контрастной яркостью из-
лучения.
6.5,2. Алгоритм комплексной обработки изображений,
формируемых в различных физических полях
Повышение точности и помехозащищенности систем наве-
дения управляемого оружия возможно на основе комплексирова-
ния информации о пространственно-энергетических характери-
стиках объектов и фонов, содержащейся в изображениях, кото-
рые формируются в различных участках спектра электромагнит-
393
ГЛАВА 6
ного излучения - ультрафиолетовом, видимом, инфракрасном,
радиотепловом и в различных физических полях - энергетиче-
ском, дальнометрическом и т.п.
Формально задача объединения результатов наблюдения
объектов различными средствами может быть интерпретирована
как задача совместного различения (обнаружения) и оценки па-
раметров сигналов. Задачам совместного различения временных
сигналов и оценки их параметров на фоне помех посвящена мо-
нография [3.23]. Дальнейшее изложение базируется на результа-
тах, полученных в [10, 20], где рассматриваются изображения,
каждое из которых представляется двумерным массивом отсче-
тов, фиксируемых двумя и более разнородными датчиками в раз-
личных физических полях.
При автоматической обработке двумерные или многомерные
изображения в различных диапазонах длин волн и с различным
разрешением зачастую комплексируются в единое трех-, четы-
рех- и, в общем случае, в п -мерное изображение, каждый из от-
счетов которого соответствует одному элементу разрешения
комплексированного изображения и является суммой сигнала,
формируемого соответствующим этому элементу разрешения
датчиком и собственным шумом этого датчика.
Целью последующего изложения является синтез статисти-
чески оптимальных (квазиоптимальных) алгоритмов автоматиче-
ского распознавания и оценки координат объекта, на основе ко-
торых определяется способ объединения результатов наблюде-
ний в различных физических полях, определяющий структурную
схему системы совместной автоматической обработки форми-
руемых изображений.
Предположим известными (заблаговременно сформирован-
ными) эталонные изображения объекта наблюдения в различных
диапазонах длин волн под различными ракурсами, с различными
масштабами и с указанием на изображениях точек, с которыми
должен быть совмещен центр поля зрения системы наблюдения.
При этом для каждого спектрального диапазона или физического
поля изображение представляется двумерным цифровым масси-
вом, зависящим от дискретного случайного параметра, опреде-
ляющего вариант изображения наблюдаемого объекта в данном
физическом поле, и от единого для всех физических полей непре-
394
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
рывного случайного отслеживаемого параметра, определяющего
координаты наблюдаемого объекта.
В качестве одного из эталонов для каждого физического
поля принимается изображение фона при отсутствующем объ-
екте, а дискретный параметр может относиться к наблюдаемо-
му изображению объекта, которое изменяется вследствие ра-
курсных масштабных или других пространственных искажений
и т.п.
Для упрощения математических выражений и без ущерба
для общности результатов допустим, что объект наблюдается в
двух физических полях (каналах), чему соответствуют две по-
следовательности дискретных параметров: рк, рк = 1,..., М ;
vk. vk = 1,...,А. Здесь к - номер временного шага; M.N - чис-
ло эталонных изображений, полученных заблаговременно в ка-
ждом из физических полей соответственно; рк. vk - номер этих
эталонных изображений для различных физических полей на
к -м шаге.
Априорное распределение вероятностей дискретных пара-
метров может задаваться двояко.
1. Для случая описания изменений дискретных параметров
марковской цепью - в виде вероятностей перехода и начального
распределения
p(a|/4-i)>pC«i)> (6.124)
2. Для случая описания изменений дискретного параметра
последовательностью независимых испытаний - безусловными
вероятностями значений
р(//А ), в частности, р(рк) = М~', (6.125)
в частности, /j(va) = F’. (6.126)
Описание вида (6.124) является более общим и его жела-
тельно применять всегда. В частности, при р(рк \рк_х) = Зк к_х, где
S - символ Кронекера, (6.124) описывает случай наличия только
одного заранее неизвестного дискретного параметра. Однако, как
показано далее, применение описания, задаваемого выражением
395
ГЛАВА 6
(6.124), не позволит получить решение поставленной задачи в яв-
ном виде.
Описания вида (6.125), (6.126) предполагают, что от кадра к
кадру изменения видимых проекций объекта происходят незави-
симо.
Априорное рекуррентное стохастическое уравнение для из-
менений непрерывного параметра Я в дискретном представлении
имеет вид
Л “ + >
где/?; - коэффициент корреляции между значениями параметра
на соседних шагах; (у\ - априорная дисперсия параметра Я; £к -
гауссовская случайная последовательность такая, что (<^ = 0,
^2) = 1Д = 1,2....
Тогда межкадровая дисперсия непрерывного параметра
примет вид
<72=(1-^)а2,
плотность распределения
вероятностей перехода непрерывного
параметра запишется так:
w(^k К-1)-
---- ехр,
2
(6.127)
В каждом канале наблюдается последовательность двумер-
ных цифровых изображений, каждое из которых зависит от одно-
го дискретного параметра и общего для всех изображений непре-
рывного параметра. Результаты наблюдения на каждом к -м шаге
представляют собой отсчеты пространственных функций в пер-
вом (ук ) и втором (хк ) каналах, которые являются аддитивной
смесью изображений объекта с отсчетами пространственного га-
уссовского шума
yk(hq) = sk(Ak,^k,l,q) + nk(l,q), l = \...L, q = \...Q
(о. Izo)
396
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
Здесь l.q.i.j - номер отсчетов в плоскостях изображений каждо-
го канала; пк rk(i,j} - отсчеты шумов, являющихся собст-
венными шумами приемников излучений.
Отсчеты шумов имеют нулевое среднее и некоррелированны
по пространству и времени. Дисперсия шумовых отсчетов равна
сг^сг2. Тогда, в силу статистической независимости шумов, од-
ношаговая функция правдоподобия параметров записывается в
виде произведения
£ Q / / (6.129)
/=1 M j=\
где - плотность распределения отсчетов шумов.
Благодаря подобному представлению логарифм одношаго-
вой функции правдоподобия (ЛОФП) записывается в виде суммы
ЛОФП для каждого дискретного параметра:
пк \4 . № > vk ) = nt ( Лк; Цк ) + nt (Лк. , vk ). (6.130)
При гауссовском характере шумов ЛОФП записывается (с
точностью до несущественного для дальнейшего анализа посто-
янного слагаемого) в виде [11, 3.15]
k (А, №, п)=~ХХ—Н----
/ q
V* V" ^Xijk “ fijk (Ак ’ Vk ))2
В случае неэнергетических параметров
пк (лк^к^к ) = (лк^к)-
/ я
(6.131)
I J
397
ГЛАВА б
Оптимальное устройство формирует финальное апостериор-
ное совместное распределение вероятностей параметров
Л,к,/лк,ук, определяемое рекуррентным уравнением
wps (*к>Рк>vk) = h к ехР{П* (л,цк ,vk:)}w3 (,цк, vk), (6.132)
где
л/ N
- постоянная нормировки.
Входящая в это выражение экстраполированная на один шаг
плотность вероятности непрерывного параметра при фиксиро-
ванных дискретных равна
w3(4,//x„vj =
М N
= 2 S }W(Ak’Pk’Vk\\-l’Pk-\’Vk-\)X
«1-1=1 vx._,=l лк_,
xwps (Л-i ’ А*-1, ^-1) <4-1 ’ (6.133)
где к(Лк,рк,гк |Л*_, ,vA_, ) = И’(Л |4-i )р(Рк |a*-i )р(^к 1^-1) •
Апостериорные распределения вероятностей параметров оп-
ределяются известными соотношениями:
М N
wPSw=2 '5У’рАлк’РкР/к)’
№='п=1 (6.134)
(Рк ^к) = ррт (Л> Рк ^k)d^k.
Ч
В качестве искомой оценки непрерывного параметра
можно использовать среднее апостериорного распределения
^р5(ЯА), которое во многих случаях будет совпадать с оценкой
по критерию максимума апостериорной вероятности:
4 = тк = f 4 (4 )d4 (6.135)
4
398
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
Дисперсия оценки непрерывного параметра, характеризую-
щая точность наведения, равна
dl = J(4 - тк )2 WPS (Ч .
4
Рекуррентное уравнение для оценки непрерывного парамет-
ра Лк, вытекающее из (6.133), удается получить при использова-
нии гауссовского приближения для апостериорного распределе-
ния и’/м. (ЛА) и для случая описания изменений дискретного па-
раметра последовательностью независимых испытаний, т.е. в со-
ответствии с выражениями (6.125), (6.126).
При малом уровне собственных шумов и медленных изме-
ненях непрерывного параметра безусловное финальное апостери-
орное распределение вероятностей непрерывного параметра
wps(Ak) будет приближаться к гауссовскому [11], в котором апо-
стериорное среднее тк является оценкой параметра ( Лк = тк ) по
критерию максимума апостериорной вероятности, а апостериор-
ная дисперсия dk характеризует точность оценивания этого па-
раметра.
Применяя разложение ЛОФП в ряд Тейлора по непрерывно-
му параметру в окрестности значения Лэк = • Лк^, соответст-
вующего максимуму экстраполированной плотности вероятности
этого параметра, из выражений (6.134), (6.135) получаем алго-
ритмы определения апостериорных вероятностей дискретных па-
раметров и фильтрации непрерывного параметра в виде, анало-
гичном [20]:
wPs(^^к) = скехр] пах
1 J (6.136)
хехр{|^ ’П)[п>.)] j,
М N
+ (6.137)
399
ГЛАВА 6
х exp
(6.138)
где Ck - постоянная нормировки; D = d^ + - дисперсия
экстраполированной оценки непрерывного параметра; П^(...) -
первая производная от ЛОФП по параметру, представляющая
собой дискриминационную характеристику корреляционно-
экстремальной системы слежения за этим параметром. Кроме
того,
% к (Рк> vk)=--7—т---------тг;
= -сг12[^лИ°,№) + - сигнальная
часть второй производной ЛОФП [3.15];
[_Sijk (^к ’ №к )] [ЛуА ( А ’ Vk )]
= ;..2.....- 9 2 - отноше-
/=1 j=\ /=1 q=\ 1(Jr
ния сигнал/шум, определяемые как отношения энергий изобра-
жений к дисперсии шумовых отсчетов для каждого канала;
7?^(0,/?"((), иА) - вторые производные от нормированных
автокорреляционных функций изображений при точном совме-
щении оптической оси устройства формирования изображений и
линии визирования объекта.
Значения величин XiA^k^k} ПРИ высоких отношениях сиг-
нал/шум приближаются к границе Рао-Крамера, а при отношени-
ях сигнал/шум, близких к нулю, не превосходят величины D.
Для приведения алгоритмов к упрощенному виду целесообразно
выбрать величину Za(Aa,va) одинаковой для всех значений //,и
400
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
и соответствующей номинальному режиму наблюдения, т.е. при
точном совмещении оптической оси и линии визирования объ-
екта или при нулевой ошибке экстраполяции непрерывного па-
раметра.
Выбранное значение ja(/7a,va) обозначим К и назовем ша-
гом подстройки. Тогда алгоритм оценки непрерывного параметра
(6.137) принимает вид
м
Л = К + & ™ps (Ик )П2 (л* ^к ) +
(6.139)
При высокой апостериорной точности оценок имеют место
приближенные равенства
ЛМ*, П'ДяЛА.)«0. (6.140)
Тогда (6.136) преобразуется к виду
wps > П) = с а ехр (щ (К > Zza. П)}>/** 1 •
М N
Определив Ск из условия нормировки
rt.=ln=l
и учитывая (6.130), получим окончательно:
м
Хехр{п4Л*’^
А=1
W
Ps
(^А)«ехр{пА(яАэ,/АА)}
(6.141)
Как следует из синтезированного алгоритма (6.139), оценка непре-
рывного параметра, определяющего положение объекта, формирует-
ся как весовая сумма сигналов рассогласования, определяемых пер-
401
ГЛАВА 6
выми производными от ЛОФП, а в качестве весов выступают апосте-
риорные вероятности обнаружения объектов, наблюдаемых в раз-
личных физических полях. Величина К представляет собой коэф-
фициент усиления разомкнутой петли следящей системы. Первые
производные от ЛОФП как при алгоритмической, так и при техниче-
ской реализации устройств их вычисления представляются в виде
первых конечных разностей. При этом алгоритм или устройство их
вычисления выполняет функции дискриминатора. В случае слежения
за изображениями объектов по углу это будет дискриминатор угло-
вых перемещений.
Следует иметь ввиду, что синтезированный алгоритм оценки
непрерывного параметра (6.139) получен в предположении о рав-
новероятности и независимости смены дискретных параметров в
соответствии с законами распределения (6.125), (6.126). Вне это-
го предположения решение задачи фильтрации непрерывного па-
раметра в замкнутом виде получить не удается. Однако можно
полагать, что и при других законах изменения дискретных пара-
метров /Jk,vk. в том числе определяемых выражениями (6.124),
алгоритм (6.139) сохранит работоспособность. Естественно, точ-
ность оценок непрерывного параметра Лк при этом будет отли-
чаться от потенциальной.
Задача оценки точности слежения при многоальтернатив-
ной ситуации наблюдения объекта достаточно сложна. Поэто-
му для проведения предварительного анализа влияния значе-
ний показателей обнаружения объекта в отдельных каналах на
точность слежения рассмотрим случай, при котором в каждом
канале наблюдается объект на равномерном фоне с постоян-
ным контрастом во всех элементах разрешения. Вероятность
обнаружения объекта комплексированной системой датчиков
изображений равна
1 U / X
отно-
шения сигнал/шум в каждом из каналов наблюдения; Ф(...) -
интеграл вероятности; и = Ф-1(2рлт-1); рлт - вероятность
ложной тревоги.
Анализ ошибок слежения выполним с использованием ре-
куррентного выражения для дисперсии апостериорной оценки
402
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
непрерывного параметра (6.138), которое с учетом (6.140) приво-
дится к виду
(6.142)
В случае двух состояний (объект есть / объекта нет) (6.142)
записывается так:
<1к=(1-Ро)°л + Ро
D
С введением понятия относительной апостериорной диспер-
сии = d% / а2 это выражение принимает вид
+ <71+<72 -1
(6.143)
На рис. 6.8 приведены графики зависимости вероятности об-
наружения объекта для случая рлт =0,01, на рис. 6.9 показаны
графики стационарных значений относительной апостериорной
дисперсии S2 = Sl, £->оо для случая 7?л=0,95, характеризую-
щие точность слежения. В обоих случаях варьируемыми являют-
ся отношения сигнал/шум (параметры обнаружения) в каждом
канале.
403
ГЛАВА 6
В результате выполненных исследований установлен способ объедине-
ния результатов наблюдений объекта, полученных в нескольких кана-
лах. Способ предполагает суммирование сигналов управления системой
автоматического слежения, вырабатываемых по результатам наблюде-
ния объекта в различных спектральных диапазонах или физических по-
лях с весами, которые определяются вероятностями обнаружения объ-
екта в соответствующем физическом поле. Оценка влияния вероятно-
сти различения на точность слежения позволяет определить требования
к отношениям сигнал/шум в каждом из каналов. Причем может быть
произведен размен числа доступных каналов наблюдения на качество
различения объектов в каждом из них.
6.6. Синтез адаптивных помех
Типовая ситуация создания помех в оптическом диапазоне
волн системам наведения ВТО обычно характеризуется неопре-
деленностью информации о принципах построения и характери-
стиках подавляемых оптико-электронных средств и систем. Так,
при создании помех системам самонаведения, принадлежащим к
классу систем терминального управления, распространенными
являются случаи отсутствия информации о типе атакующей го-
ловки самонаведения (например, телевизионной или тепловизи-
онной, светоконтрастной или корреляционной), о варианте ис-
пользуемой в ней схемы помехозащиты (например, схемы вре-
менной селекции в лазерной головке самонаведения) и т.п. Это
обычно приводит к необходимости преимущественного исполь-
зования способов подавления ВТО, базирующихся на постановке
универсальных маскирующих аэрозольных завес или активных
помех в заградительных по направлению и времени режимах.
Наращивание эффективности подавления перспективного ВТО требует
применения в комплексах ОЭП прицельных (по типам атакующего
ВТО и параметрам его элементов и подсистем, а также по времени и
направлению) режимов создания помех. Реализация таких прицельных
помеховых воздействий, согласованных с характеристиками конкрет-
ного образца атакующего ВТО, возможна на основе использования ме-
тодов прямой или косвенной идентификации в процессе атаки типов и
характеристик атакующего ВТО, а также методов текущей оценки ре-
404
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
зультатов действия помех с целью последующего замыкания контура
управления их характеристиками обратной связью по эффекту подав-
ления. Для такой идентификации могут применяться как сигнальные,
так и траекторные признаки, добываемые методами пассивной или ак-
тивной локации.
Использование сигнальных признаков требует существенно-
го расширения состава датчиков, подлежащих размещению на
защищаемом объекте, что обусловлено чрезвычайно широкой
номенклатурой возможных средств и систем атакующего ВТО,
использующих различные диапазоны излучения (ультрафиолето-
вый, видимый, ближний ИК, средний ИК, дальний ИК, милли-
метровый), большим разнообразием типов атакующего ВТО,
принципов построения и характеристик используемых ими опти-
ко-электронных средств (активные, пассивные, когерентные, не-
когерентные, телевизионные, тепловизионные, с широкой но-
менклатурой растровых анализаторов, комбинированные, ком-
плексированные и т.д.). Однако во многих случаях размещение
достаточного для целей ОЭП количества датчиков на защищае-
мом объекте представляется неприемлемым.
В этих условиях значительный интерес представляет разви-
тие методов и средств формирования информационных решений
на основе траекторных измерений, т.е. на основе измерения ко-
ординат атакующего ВТО с помощью оптического или радиоло-
катора. Вполне очевидно, что при этом вся широкая номенклату-
ра средств ВТО с различными принципами построения и харак-
теристиками может обслуживаться одним средством траекторных
измерений. Адаптивный способ противодействия в этом случае
может базироваться на реализации пробных помеховых воздей-
ствий, каждое из которых эффективно, по крайней мере, против
одного из возможных вариантов технического облика, например,
головки самонаведения (ГСН).
Контроль эффективности этих пробных воздействий позволяет полу-
чить информацию, необходимую для косвенной идентификации вари-
анта технического облика подавляемой ГСН и последующего выбора
на этой основе наиболее эффективной помехи на заключительном этапе
процесса создания помех. При этом в основе косвенной идентификации
лежит задача контроля эффективности помех.
405
ГЛАВА 6
Она заключается в оценке эффекта действия помехи, при от-
сутствии которого принимается решение на изменение парамет-
ров или смену вида помехи так, чтобы максимизировать в после-
дующем, например, вероятность непопадания управляемой раке-
ты в цель. При этом, хотя неизвестные характеристики объекта
впрямую и не восстанавливаются, но обеспечивается выбор па-
раметров или вида помехи, наилучшим образом согласованных с
характеристиками ОЭС по эффекту подавления.
6.6.2. Контроль эффективности помех
Целью дальнейшего анализа является исследование возмож-
ностей контроля эффективности помех по траекторным призна-
кам на основе использования математического аппарата уравне-
ния Стратоновича, в частном случае преобразуемого в уравнение
обобщенного фильтра Калмана-Бьюси (ФКБ).
Следуя [14], рассмотрим воздействие на систему самонаве-
дения преднамеренной двухточечной мерцающей помехи или
ложной цели. Задача контроля эффективности в этом случае за-
ключается в определении факта эффективного действия мерцаю-
щей помехи или перенацеливания самонаводящейся ракеты на
ложную цель по результатам измерения с защищаемого объекта
ее текущих пространственных координат.
Решение о факте эффективного действия помехи может быть принято
на основе оценки текущих фазовых координат атакующего контура са-
монаведения с использованием уравнений фильтра Калмана-Бьюси.
Рассматривается процесс наведения управляемой ракеты,
контур самонаведения которой может быть описан системой не-
стационарных, в общем случае, нелинейных дифференциальных
уравнений, в матричной форме имеющей вид:
х = f(x, Ар(Ц, t) + п0 (/). (6.144)
Здесь р(7) - помеховое воздействие, которое в общем случае
может быть представлено в векторной форме; А - коэффициент,
принимающий значение 1, если сигнал помехи влияет на поведе-
ние контура самонаведения (помеха эффективна) или 0 в против-
406
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
ном случае; п0(г) - эквивалентный белый шум наведения с мат-
рицей спектральных плотностей No.
Задача контроля эффективности помехи в общем виде может
быть поставлена следующим образом.
Пусть доступен наблюдению в шумах вектор и размерности
к, элементами которого являются известные функции фазовых
координат контура самонаведения:
u=h(x,O + n(O> (6.145)
где h - векторная функция наблюдения (в частном случае - те-
кущие координаты) ракеты размерности к в системе координат
сопровождающего ее локационного средства); п(/) - векторный
белый шум наблюдения с матрицей спектральных плотностей N .
Требуется синтезировать решающее устройство, обеспечи-
вающее распознавание факта эффективного или неэффективного
действия на контур самонаведения помехового воздействия р(г).
При этом помеховое воздействие p(Z) полагается известным, а по
наблюдениям u(Z) требуется обнаружить присутствие в контуре
самонаведения этого помехового воздействия, то есть принять
решение о коэффициенте А (А = 1 - помеха действует, А = 0 -
помеха не действует). Таким образом, в приведенной постановке
задача контроля эффективности помехи трансформировалась в
задачу оптимальной оценки значения параметра А.
При известном значении параметра А уравнения квазиоп-
тимальной нелинейной фильтрации фазовых координат системы
(6.144) (обобщенные уравнения ФКБ) имеют следующий вид
[3.14]:
^Х ft- Q .4 r/dh(X,Z)Y
— = f(x,2p(z),0 + R -4т--'
at д х )
N-1(u-h(x,O),
dR _ af(x,Ap(r),Z) ( af(x,2p(Z),0 Y
--------------------------------IV + IV ----------------------
dt di------------------------------------}
(6.146)
407
ГЛАВА 6
и df(x,0
где К - ковариационная матрица ошибок оценивания; —-—
дх
dh(x,r) ~ .
---------якобианы соответствующих функции; х - вектор оце-
дх
нок фазовых координат системы (6.144).
При синтезе решающего правила распознавания факта эф-
фективного действия помехи воспользуемся формальным аппара-
том различения марковских процессов. Пусть - апосте-
риорная вероятность гипотезы Н{ (А = 1, помеха действует);
- апостериорная вероятность гипотезы //0 (А О, помеха
не действует). Пусть также z(r) = p{Hvt)l p(H^t) - отношение
этих апостериорных вероятностей. Тогда как показано в [3.15]
(см. 3.1.199), z(t) удовлетворяет уравнению
(6.147)
В этом выражении для случая энергетического параметра А
Fapi = p?a?9).(x,Ow(x,/|H,)c7x,z = 0,l,
(6.148)
FaPi = А-'(2йа(х,/|Я,)«/?0)-/га(х,/|Я/.)^(х,/|Я/)), (6.149)
w’(x,/|//z) - условная (в предположении справедливости гипотезы
Н1) апостериорная плотность распределения х; - элемент
обратной матрицы N-1. Теперь решающее правило распознава-
ния факта эффективного действия помехи может быть представ-
лено в виде
Тк к
О а=1 Л=1
- -I
-77а/?О^ + 1п(Р1//’о)Д°-
(6.150)
Здесь р^рц - априорные вероятности гипотез Нх.
408
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
Для упрощения структуры решающего устройства его фор-
мальный синтез выполним для случая отсутствия нелинейных
звеньев в контуре самонаведения авиационной ракеты на назем-
ную цель, но с использованием нелинейных уравнений кинема-
тики сближения ракеты с целью.
На рис. 6.10 показана структурная схема такого контура для
одной плоскости наведения. Этой структурной схеме соответст-
вует система дифференциальных уравнений (6.144), которая в
развернутом виде для двух плоскостей наведения записывается
следующим образом:
xt=x2, Х2=Х3’
1 а4 а3 1
х3 = —*1------х2---~х3+—</>()’
Q2 О') @2
х4 = кх2 + Я|Х3 + и0),
Х5=Х6, *6= *7’
1 а4 а3 1
Х1 =---х5-----ХЬ---Х1 + — <Р<р,
а2 а2 а2 а2
x^kx^+ap^+n^,
= -Vry]cos2 (х4) - ЯП2 (х8),
*10 = -*>т(х4), -*11= ^Лп(х8),
^=arctg
*10
2 +(Х11 -(Zc +ЛРг(0))2
^>=arctg -
Xii~(zc+Ap2(t))
~(хс+Лрх(/)))2 +х102
(6.151)
Здесь Я| = kT\, а2 - Т2Т2, а3 = 2Т2£Т3 + Г2, а4=Т2+ 2дТ3; Т\, Т2, Т3 -
эквивалентные постоянные времени ракеты и корректирующего
звена соответственно; £ - коэффициент демпфирования ракеты с
автопилотом; к - навигационная постоянная контура самонаве-
дения; h0|(Z), и02(0 - независимые компоненты формирующего
409
ГЛАВА 6
_______________________Рисунок 6.10______________________
белого шума п0(/) со спектральной плотностью N01 =2VO2 = ATO,
задающие эквивалентные случайные воздействия на контур са-
монаведения; Vr - скорость полета ракеты.
Фазовые координаты системы (6.151) имеют следующий фи-
зический смысл: х4,х8- углы поворота вектора скорости ракеты
по тангажу (0 ) и курсу (ср} соответственно, х9, х10, х} ] - текущие
пространственные координаты ракеты в декартовой системе ко-
ординат XYZ (X - продольная, Y - вертикальная и Z - попе-
речная оси координат). Кроме того (р0. (рф - углы поворота линии
визирования цели по тангажу и курсу; хс, ус = 0, zc - координаты
цели; р(/) = (рг(/), = Pz(t)) - известное помеховое воздей-
ствие, характеризующее смещение от цели координат точки, в
которую наводится ракета, под воздействием помех; Я - коэф-
фициент, принимающий значение 1 или 0 и характеризующий
наличие или отсутствие влияния помехи на поведение контура
самонаведения, т.е. эффективность или неэффективность помехи.
Взаимное расположение ракеты R и цели С в декартовой
системе координат показано на рис. 6.11. В матричной записи
системы (6.151) фигурируют матрицы и вектора согласованных
размерностей с нулевыми элементами на местах в соответствии с
представлением (6.144).
Если оптический или радиолокатор сопровождения ракеты,
размещенный на защищаемом объекте, измеряет углы визирова-
ния ракеты в вертикальной и горизонтальной плоскостях и даль-
ность до ракеты, то размерность вектора наблюдений и , опреде-
ляемого выражением (6.145), к = 3, а его компоненты могут быть
представлены так:
410
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
щ = hx (х,т) + «| = arcsin
+ «!,
w2 = h3(x,t) + п2= arcsin
ы3 = h3(x,t) + w3 = 7^ + Х]20 + xj2, + п3.
(6.152)
Теперь для рассматриваемого случая выражения (6.148) мо-
гут быть конкретизированы следующим образом:
^1 = (2ha Н\ ~ ha (V|H} H} )) ,
(6.153)
Fa0O = Na'p (2ha '|H0 )u/3(0 ~ ha '| H0(*>'|H0 )) •
411
ГЛАВА 6
Выражения (6.153) получены с учетом справедливости для
нелинейных функций наблюдения приближенных равенств типа
А/^ЛДх,/))« h^M = /?z(x,r),
в которых - символ математического ожидания.
В случае некоррелированности шумов наблюдения в отдель-
ных каналах, то есть для диагональной матрицы N, решающее
правило (6.150) примет окончательный вид:
*(П =
dt +
+ in(Pl/P0)ff °’
(6.154)
где оценки фазовых координат х системы (6.151) доставляются
решением системы (6.146), в которой элементами матрицы
f(x,Ap(Z),/) являются правые части уравнений системы (6.151).
Причем выражения типа означают, что эти оценки по-
лучены при подстановке в f(x,2p(/)0 значения 2 = 1, соответст-
вующего гипотезе Я1, в то время как для выражений типа
ha(x,t\H0) подставляется 2 = 0, что соответствует гипотезе Яо.
Таким образом, квазиоптимальный алгоритм контроля эф-
фективности помех по траекторным измерениям образуют сис-
тема уравнений нелинейной фильтрации (6.146), матрицы
f(x,2p(Z),/), h(x,Z), элементы в которых составлены из правых
частей выражений (6.151), (6.152), и решающее правило (6.154).
Если система дифференциальных уравнений, принятых при
описании динамического объекта в рамках процедуры синтеза
фильтра Калмана-Бьюси, точно совпадает с системой уравнений
реального движения этого объекта, то эффективность алгоритма
оценки фазовых координат определяется матрицей ковариаций
R, т.е. решением системы (6.146).
412
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
С целью упрощения алгоритма оценки фазовых координат, использова-
лась упрощенная система уравнений контура самонаведения. В этом
случае оценка качества алгоритма может быть выполнена методом
имитационного моделирования с использованием более реалистичной
(усложненной) модели контура самонаведения. Такой подход необхо-
дим при оценке качества алгоритма контроля эффективности помех по
показателям типа вероятности правильного распознавания факта эф-
фективного действия помехи.
Для исследования качества синтезированного алгоритма
контроля эффективности использовалась более детальная про-
странственная имитационная математическая модель контура са-
монаведения, укрупненная схема которой для одной плоскости
наведения представлена на рис. 6.12. В отличие от схемы
рис. 6.10 эта структурная схема включает блоки, описывающие
функционирование следящей системы головки самонаведения с
нелинейной дискриминационной характеристикой d(£},£2) при
наведении на двухточечную цель, а также существенную нели-
нейность - ограничитель перегрузки F(x). Кроме того, в блоке
уравнений кинематики рассчитываются два угла визирования
^1,^2 каждого элемента двухточечной цели, которым соответ-
ствуют ошибки сопровождения , е2 •
Дискриминационная характеристика при сопровождении
двухточечной цели определяется выражением (3.22), а ее вид ил-
люстрирует рис. 3.11. Нелинейность F(x) задается выражением
_______________________Рисунок 6.12_______________________
413
ГЛАВА 6
F(x) =
kVrx
Ar„,sign(x)
при X
при X
(6.155)
>кт,
в котором Nm - максимальное поперечное ускорение ракеты;
к - навигационная постоянная.
Набор статистики в модельном эксперименте выполнялся по
следующей схеме. По выходам модели нелинейного контура са-
монаведения, структурная схема которого для одной плоскости
наведения представлена на рис. 6.12, с помощью первых слагае-
мых, стоящих в правой части выражений (6.152), определяются
текущие значения углов визирования ракеты локатором по углу
места и азимуту, а также дальность ракета - локатор.
Наблюдаемое в каждой реализации значение u(Z) подается
на вход решающего устройства, описываемого неравенством
(6.154), левая часть которого рассчитывается с использованием
выражений (6.146), (6.151). Набор статистики для оценки показа-
телей качества контроля эффективности помех выполняется по
выходу этого решающего устройства после многократной про-
гонки реализаций процесса самонаведения ракеты.
Адекватными показателями качества контроля эффективно-
сти помех являются вероятности правильного распознавания рр
факта эффективного действия помехи и ложной тревоги /?лт.
Ниже приводятся результаты исследований качества алгоритма
контроля эффективности помех контуру самонаведения УР по
этим показателям на примере перенацеливающей и мерцающей
помех.
Оценки рр, рлт выполнялись по 50 реализациям процессов
наведения ракеты на атакуемый объект при дальностях пуска
Dq = 3 км, 6 км, высотах пуска, соответственно, HQ = 1 км, 1,5 км,
скорости ракеты Vr = 500 м/с для следующих параметров нели-
нейного контура самонаведения: кх = 1; 7] = 0,3 с; Т2 = ОД с;
Т3 = 0,25 с; Т4 = 0,1 с; = 0,9, к= 3; д = 100 (q - отношение
энергий излучения второго элемента парной цели (ложной цели)
к первому); Nm = 100 м/с2.
414
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
Случайный характер траектории наведения ракеты форми-
ровался с помощью случайных сигналов, подаваемых на вход
каждого из каналов головки самонаведения и определяемых слу-
чайными блужданиями точки прицеливания по цели. Эти блуж-
дания были представлены при моделировании стационарным бе-
лым шумом со спектральной плотностью 0,16 м2-с. Параметры
линеаризованного контура самонаведения (6.151) и соответст-
вующего ему фильтра Калмана-Бьюси (6.146) принимались сле-
дующими: Тх = 0,005 с; Т2 =0,15 с; Т3 = 0,25 с; £ = 0,9; к = 3.
Спектральная плотность формирующего стационарного белого
шума наведения, фигурирующая в (6.146), полагалась равной
4)1 - М)2 “ М)= 4,65-10"6 рад2-с. Кроме того, полагалось известным
текущее значение помехового воздействия p(r) = (px(t)9 pz(t)) , ко-
торое при исследовании мерцающих помех имело вид:
Рх (0 = 0, pz (0 = Zsign(sin(2^/Wr + (pQ)),
где fm - частота мерцаний.
Результаты контроля эффективности ложной цели, созда-
ваемой на первой секунде после модельного пуска ракеты, в виде
графиков зависимостей вероятности правильного распознавания
рр факта эффективного действия помехи (факт перенацеливания
ракеты на ложную цель) и вероятности ложной тревоги /?лт от
времени с момента модельного пуска УР, совпадающего с мо-
ментом постановки и началом контроля эффективности помехи,
для различных значений базы помехи L приведены на рис. 6.13.
Расчеты выполнялись для 2L = 20 м, 40 м, 80 м (кривые /, 2, 3
соответственно) и дальности пуска D(} = 6 км. Спектральная плот-
ность белого шума наблюдения в канале дальности А33 = 4 м2с,
в угломерных каналах Лн = N22 = ЛТ = 1,35-10-8 рад2с, что соот-
ветствует СКО угловых ошибок измерения положения ракеты
локатором порядка Г при полосе пропускания угломерного кана-
ла локатора 1,5 Гц.
Немонотонное поведение полученных зависимостей на начальном уча-
стке полета ракеты обусловлено, по-видимому, спецификой конкрет-
ных значений начальных условий R(0) при решении системы (6.146),
общее правило по назначению которых, как известно, отсутствует.
415
ГЛАВА б
Зависимость, характеризующая влияние на рр дальности до
ракеты Dq , на которой начинается постановка помехи и контроль
ее эффективности, показана на рис. 6.14 для 10 км, 6 км,
3 км (кривые У, 2, 3), 2L = 80 м и при СКО ошибок измерения уг-
ловых координат ракеты сгиХ - аи2 = Г и СКО ошибок измерения
дальности аи3 «5м.
Влияние точности измерения углов визирования цели иллю-
стрируют кривые рис. 6.15, полученные при £>0= 6 км, 2L = 80 м.
При этом кривым 7, 2, 3 рис. 6.15 соответствуют спектральные
416
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
плотности шумов наблюдения N} ] = Лг22 = 6,64 О-7 рад2с,
1,3540~8 рад2-с; 3,754О-10 рад2-с (аи} =сги2 «7', Г и 10" соответ-
ственно) и N33 «4 м2*с (аи3 « 5 м). На всех рисунках по оси абс-
цисс откладывается время, прошедшее от момента начала соз-
дания помехи, совпадающего с началом контроля ее эффектив-
ности.
/7 т
— ? 3 : 2; /
; /
—' Л Л/\у- I
д и №
> 'V
• v: *
• *
0 1 234 56789 /, с
________________________Рисунок 6.15______________________
417
ГЛАВА 6
Анализ результатов, приведенных на графиках рис. 6.13-6.15, показывает,
что при СКО ошибок измерения углов визирования ракеты Г и 10" и
СКО ошибок измерения дальности порядка 5 м правильное распознава-
ние факта перенацеливания ракеты на ложную цель, смещенную на
20...80 м от истинной, обеспечивается с вероятностью порядка 0,8...0,9
через 2,5...6,5 с после начала создания помехи и контроля ее эффектив-
ности. Эти результаты соответствуют случаю, когда дальность до раке-
ты, на которой начинает создаваться помеха, составляет 3...10 км. При
этом указанная вероятность распознавания факта перенацеливания
обеспечиваются при подлете ракеты к цели до дальности порядка
1,7...6,8 км.
Результаты контроля эффективности мерцающей помехи,
создаваемой на первой секунде после модельного пуска ракеты, в
виде графиков зависимостей вероятности правильного распозна-
вания рр факта эффективного действия помехи р(/) и вероятно-
сти ложной тревоги от времени прошедшего с момента пуска
ракеты, приведены на рис. 6.16. При этом 2L = 40 м, 80 м (кривые
7, 2 соответственно), Do= 6 км, частота мерцаний fm = 0,7 Гц,
СКО угловых ошибок аи1 = <уи2 «Г и СКО измерения дальности
до ракеты сгм3 «5 м. Влияние частоты мерцаний на вероятность
рр показано на графиках рис. 6.17. Расчеты выполнены для fm =
= 0,5 Гц, 1 Гц (кривые 7, 2) при DQ = 6 км, 2L = 80 м, аи] = аи2 « Г,
<тй3 = 5 м.
Результаты контроля эффективности мерцающей помехи
при вариации точности измерения углов визирования иллюстри-
рует рис. 6.18. При этом кривым 1-3 соответствуют СКО ошибок
измерения углов аиХ =&и2 ~2'. Г, 10" соответственно и дально-
сти сгм3 «5 м. Кроме того, для этих кривых Do = 6 км, 2L = 80 м,
А, = 0,7 Гц.
Приведенные результаты показывают, что распознавание факта эффек-
тивного действия мерцающей помехи с базой 40...80 м и частотой мерца-
ний 0,5... 1 Гц обеспечивается с вероятностью 0,8...0,9 через 0,5...4 с
после начала создания помехи. Такая вероятность распознавания обес-
418
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
печивается при подлете ракеты к цели до дальностей порядка 2,5...8
км. При этом контроль эффективности мерцающих помех для получе-
ния одинаковых показателей эффективности контроля требует на
2...2,5 с меньше времени по сравнению с контролем эффективности
перенацеливания ракеты на ложную цель.
419
ГЛАВА 6
________________________Рисунок 6.17______________________
6.6.2. Алгоритм адаптивного управления помехами
Рассмотрим адаптивный способ управления помехами, бази-
рующийся на реализации пробных помеховых воздействий, по
результатам контроля эффективности которых может быть обес-
печен выбор наиболее эффективной помехи на заключительном
этапе процесса наведения ракеты. Возможности контроля эффек-
тивности помех по траекторным признакам на основе использо-
420
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
вания методов квазиоптимальной фильтрации рассмотрены вы-
ше. При этом остаются открытыми вопросы построения собст-
венно алгоритма адаптивного управления, позволяющего транс-
формировать результаты текущего контроля эффективности в ал-
горитм выбора помех на этапе пробных помеховых воздействий и
на заключительном этапе подавления. Последующее изложение
посвящено синтезу и анализу алгоритма адаптивного управления
помехами при наличии неопределенности информации о вариан-
те технического облика объекта подавления.
Предполагая использование полученных результатов кон-
троля эффективности помех, при формальной постановке задачи
синтеза будем ориентироваться на особенности и допущения,
адекватные случаю подавления систем самонаведения. Рассмот-
рим N -шаговый процесс подавления, в котором длительность
каждого шага определяется временем затухания переходных про-
цессов в системе самонаведения при воздействии каждой помехи,
принадлежащей допустимому (реализуемому в рассматриваемой
ситуации) множеству помех размерности I: и е (w1,.. .и1... .и1).
Здесь и ниже верхние индексы будем использовать для обо-
значения элементов соответствующих множеств, а нижние - для
обозначения номера шага. Ограничимся рассмотрением случая
применения «сильных» по эффекту помех. Они характеризуются
тем, что состояние объекта противодействия х после воздействия
такой помехи можно считать принадлежащим множеству из двух
элементов: хе(х' ,х2), где х1 - состояние, соответствующее эф-
фективному действию помехи, ах2 - неэффективному.
Примером такой помехи может служить постановка ложной
цели. Тогда х1 соответствует состоянию, когда перенацеливание
ГСН на ложную цель состоялось, ах2 - соответственно не со-
стоялось. Информационное решение у, принимаемое по резуль-
татам контроля эффективности помех, в этом случае также будет
принадлежать множеству из двух элементов: уе(у\у2), где у1 -
решение о том, что объект подавления находится в состоянии х1,
2 2
а у - соответственно в состоянии х .
421
ГЛАВА 6
Кроме того, полагаем, что вариант технического облика а
объекта подавления (атакующей ракеты)принадлежит известному
множеству из М элементов: а е (а1,..ам). В рамках при-
нятых допущений объект подавления можно рассматривать как
объект без последействия, текущее состояние которого на любом
шаге описывается матрицей вида
F =||р(х' /а"1,и')||. (6.156)
Здесь элементы р(хх /ат,и1) матрицы размерности Мх! задают
условную вероятность того, что объект подавления с ат -м тех-
ническим обликом при воздействии и1 -й помехи попадет в со-
стояние х1.
Пусть также заданы априорные вероятности вариантов тех-
нического облика /?0(а), а функционирование информационного
канала описывается матрицей условных вероятностей (информа-
ционной матрицей) G размерности 2x2:
G=||xy/^)||, i,j = 1,2. (6.157)
Элементами этой матрицы являются вероятности p(yl / xJ)
того, что будет принято / -е решение о факте эффективно-
го/неэффективного действия помехи в то время, когда объект на-
ходится в j -м состоянии.
В общем случае выбор помехи на А-м шаге производится на
основании совокупности наблюдений, определяемых вектором
У к =(У\’У2’--’Ук}’ и совокупности помех на предыдущих шагах,
задаваемой вектором ил-1 = (м0,М|,...,мА_1) (см. систему обозначе-
ний, соответствующих N -шаговому процессу подавления, схе-
матично представленному на рис. 6.19).
Синтезируем оптимальную A-шаговую последовательность
помех Uyy.j, обеспечивающую максимальную финальную веро-
ятность подавления объекта на последнем шаге. Ориентируясь на
использование метода динамического программирования, пред-
полагающего аддитивность оптимизируемого функционала J , и
422
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
Начальное состояние 1-й шаг 2-й шат *• »' (А-1)-йшаг А-й шаг (АЧ)-й шаг (А-1)-й шаг .V-й шаг ... к-2 к-l к А+1 ... У-1 /V
0 1 2
Помеховое воздействие Состояние “0 “1 к Щ-2 UA-1 UA uA-2 «V-1
объекта Результат хо X] Х2 -VA-1 хк '4+1 T'V-l XN
контроля V’| тффективносги >2 У к-l У к А+1 ^V-l y'N
________________________Рисунок 6.19______________________
учитывая стохастический характер решаемой задачи, представим
J в виде
\
2й*/- (6.158)
к=\ /
Здесь Е - символ математического ожидания, a Wk отражает
монотонно связанный с эффективностью помехи выигрыш на
каждом шаге.
В рассматриваемом случае максимизации вероятности по-
давления на последнем шаге можно положить
1 при к = \\xN = х\
О в остальных случаях.
(6.159)
Теперь задача синтеза оптимального адаптивного управле-
ния может быть сформулирована следующим образом. Требуется
определить оптимальную Аг -шаговую последовательность поме-
ховых воздействий u*V4 = на объект подавления
при неполной информации о его техническом облике а, макси-
мизирующую функционал (6.158), т.е. обеспечивающую макси-
мальную в среднем на множестве реализаций эффективность по-
мехи на последнем N -м шаге:
^argmaxf^). (6.160)
W/V-l
В терминах теории управления эта задача принадлежит к
классу задач синтеза терминального управления стохастической
423
ГЛАВА 6
системой без последействия с неизвестными параметрами и сто-
хастическим каналом наблюдения. Методам и результатам реше-
ния задач этого типа для систем с дискретным временем и конти-
нуальным множеством состояний посвящена монография [12].
Ниже подходы, развитые в [12], используются для синтеза управ-
ления рассматриваемой системой с дискретным временем и дис-
кретным множеством состояний.
В соответствии с процедурой динамического программиро-
вания [13] начнем с определения оптимальной помехи на
последнем А-м шаге. Пусть известны векторы yA/_j, ил/_2? и оста-
лось найти лишь помеховое воздействие на последнем шаге,
доставляющее максимум функционалу J
J = E{WN/yN_x,uN_x) = р(4/уд,ч,и^!) =
м
= '^р(аП''/уN-1>UN-2 ) p(x\Jam’UN-\ ) - )•
т=\
(6.161)
Здесь символ = вводит новое обозначение, а апостериорная
вероятность значений неизвестного параметра ат на любом и-м
шаге определяется выражением
Po^nHWат ’"/-!)
p(am/y„,U„_}) = ^-----. (6.162)
Х^^ПН )
т=1 /=1
Тогда вид оптимальной помехи на Л-м шаге определя-
ется следующим образом:
«1-1 =argmaxyA,(yA/_l,ujV_1) = w^_1(yA,_1>uiV_2). (6.163)
uN-\
Введем следующие обозначения:
Y*n -rv(y,v-i>u^-2>«I-i) = n(yv-i-u,v-2)' (6.164)
424
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
Из (6.163) следует, что оптимальная помеха полностью
определяется результатами наблюдений у^ и значениями u v_2
на предыдущих шагах.
Перейдем к определению оптимальной помехи на (А-1)-м
шаге. При использовании на последнем шаге помехи
u*n-\ (У A-bu/V-2) и с учетом (6.159) оптимизируемый функционал
примет вид
= ^,Y*N<yЫ-\^Ы-2)Р(УЫ-\ luN-^UN-i) =
XV-1
= Yn-\ (y^-2,U,V-3’»V-2)’ (6.165)
Учитывая (6.165) и применяя принцип оптимальности Велл-
мана [13], получаем
UN-2 ~
= argmax У (у,ил_3,uN_2)p(yV-i /u.v_3,w^_2) =
“Л/-2 „
(6.166)
Оптимальный выигрыш за два последних шага может быть
представлен как
r,v-i =/лм(у^-2»«у-3’«л-2) = /л-1(у.у-2’«л-з) • (6.167)
По аналогии, в общем случае для произвольного А-го шага
получаем
ик-\ ~
= arg max У yt+l (у a-i , Л >u4-2>«t-i )Ял 1 «*-2>»*-1 ) =
Uk~' л
= м*-1(Ул-1,Ил-2)> (6.168)
где
425
ГЛАВА 6
Yk (yA’Ui-2’«Ll)p(n / и*-2>мХ*ч) = П(П-1,и4-2)>
Ук
p(yk1 ик-2>ик-\ )=^р(а/ y*-i ,ил-2 )р(хк1 a’uk-i)p(yk /xkY
а,хк
(6.169)
На первом шаге эти выражения принимают вид
Wo -argmaxY/2(У1’«о)р(У1 /мо)>
"° л
У* =^У2(у}Уо)р(у1 /мо) = У|(Ро(«))> (6.170)
У1
р(Уу Iuo} = ^pMp(x\/а>ио)р(У\ /х1)-
a,jq
При этом Л (ро(я)) - не что иное, как вероятность подавле-
ния объекта противодействия при применении оптимального ал-
горитма управления, соответствующая исходной априорной ин-
формации, содержащейся в векторе р0(л).
Вычисляя рекуррентно функции ук+}, находим оптимальные
управления в обратном порядке: w^_|,w7y_2,...,wo. После того как
оптимальная стратегия построена, образующие ее помехи ис-
пользуются в порядке «прямого» хода времени и реализуются на
каждом к -м шаге в виде функции и*к (уА ,u^ j) .
Проверка качества синтезированного оптимального алго-
ритма проводилась методом статистических испытаний при сле-
дующих исходных данных:
F= с рх
с
с
Р\
рР ‘-^Ц
Х-Рр Рр\\
А
G =
с с
с = ^-Уу, р0(а) = (0,33; 0,33; 0,34).
426
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
________________________Рисунок 6.20______________________
На рис. 6.20 приведена зависимость вероятности подавления
/?ПОд объекта противодействия от числа шагов N
при различных вероятностях эффективного действия помех р{,
полученные при реализации синтезированного оптимального ал-
горитма (/?р характеризует работу информационного канала в
условиях помех).
Из графиков следует, что вероятность подавления возрас-
тает с 0,33 до 0,8 при трех пробных помеховых воздействиях
Pi >0,9, что свидетельствует о достаточно высокой эффектив-
ности оптимального алгоритма. Табличное представление опти-
мального управления u*v в iV-шаговом процессе при использо-
/V
вании I управлений (помеховых воздействий) занимает 2! Г
i=0
ячеек памяти.
Представляет практический интерес задача отыскания более
простых в реализации алгоритмов адаптивного управления и
оценка их качества по сравнению с оптимальным. При выполне-
нии такой оценки рассмотрим следующие алгоритмы.
1. Алгоритм, обеспечивающий оценку неизвестного пара-
метра а на каждом шаге по максимуму апостериорной вероятно-
427
ГЛАВА 6
сти и выбор по этой оценке наиболее эффективного помехового
воздействия на каждом шаге:
Ci = argmax[p(a*_I/yjt_1,u*_2)],
Г ( ! / Я (6171)
«*-1 =a^max[p(x*/C1,M*_JJ.
w£-l
2. Алгоритм, обеспечивающий чередование пробных помехо-
вых воздействий на шагах идентификации и выбор на последнем
шаге наиболее эффективной помехи по максимуму апостериор-
ной вероятности. Правило выбора помех при реализации этого
алгоритма имеет вид:
«ХО-1 = argmax [p(av_,/yy_),uN_2)] ,
aw~'r/i/ Я (6Л72)
«^-i =argmax|_p(xA,/a^_1,wiV_JJ .
uN-\
где u x.^2 ~ вектор чередующихся пробных помеховых воздейст-
вий.
3. Алгоритм, отличающийся от первого алгоритма тем, что
оценка неизвестного параметра а выполняется методом стохас-
тической аппроксимации:
Л+1 («,-) = -
Рк Oi) + 0 - Рк Oi ))> ПРИ У к = У}
Рк Oi )-у(ОРк Oi)> при ук = у2
где коэффициенты у(к) при к оо должны удовлетворять сле-
дующим условиям:
00 00
= ^у2(А)<оо.
к=\ к=\
В данном случае принимается у (к) = 1 / (10 + к).
На графиках (рис. 6.21) показана зависимость вероятности
подавления объекта противодействия от числа шагов N при реа-
лизации оптимального алгоритма (О ) и квазиоптимальных алго-
ритмов 1, 2, 3. Из рис. 6.21 следует, что наиболее близок по эф-
428
СИНТЕЗ ПОМЕХ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ
фективности к оптимальному первый алгоритм, обеспечивающий
оценку апостериорной вероятности неизвестного параметра объ-
екта противодействия на всех шагах адаптации. На рис. 6.22 по-
казана зависимость вероятности подавления рпод объекта проти-
водействия от числа шагов N при реализации алгоритмов
0,1,2,3 для следующей матрицы F :
0,9
0,05
0,05
F =
0,2 0,35
0,6 0,35
0,2 0,3
429
ГЛАВА 6
Графики (рис. 6.22) подтверждают более высокую эффективность оп-
тимального алгоритма по сравнению с квазиоптимальными. Причем
выигрыш в эффективности оптимального алгоритма возрастает при
увеличении разброса в эффективности пробных помеховых воздейст-
вий, т.е. при увеличении отличий матрицы F от симметрической. Вме-
сте с тем этот выигрыш в случаях, иллюстрируемых графиком на
рис. 6.21, не настолько существен, чтобы исключить возможность ис-
пользования на практике и неоптимальных адаптивных алгоритмов,
описанных выше.
430
_________7______________
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ
ТИПОВЫХ ОБРАЗЦОВ ВТО
Дано описание основных особенностей построения корре-
ляционных и светоконтрастных телевизионных и теплови-
зионных координаторов пространственно протяженных це-
лей, инфракрасных координаторов точечных и протяжен-
ных целей, полуактивных лазерных головок самонаведе-
ния.
Рассмотрены помехи, предназначенные для подавления
таких координаторов.
По материалам отечественных и зарубежных источников
выполнен обзор существующих активных средств создания
помех, средств постановки аэрозольных завес, ложных це-
лей, средств маскировки, а также средств информационно-
го обеспечения постановки помех (индикаторов лазерных
излучений, пассивных и активных пеленгаторов ракет, те-
левизионных и тепловизионных средств наблюдения).
ГЛАВА 7
7.1. Подавление ВТО с координаторами
пространственно протяженных целей
К координаторам пространственно протяженных целей от-
носятся координаторы, использующие формирование изображе-
ний фоноцелевой обстановки с высоким пространственным раз-
решением. Их типовыми представителями являются координато-
ры телевизионных (Maverick AGM-65A,B), тепловизионных
(Maverick AGM-65D, F, G, GBU-30 JDAM, Javelin FGM-148, Si-
dewinder AIM-9X, IRIS-T, Python-4,5) и активных лазерных
(LOCAAS) головок самонаведения тактических и крылатых ра-
кет, бомб, координаторы телевизионно- и тепловизионно-
командных систем наведения бомб (GBU-15), ракет с передачей
изображений по волоконно-оптическим линиям связи (EFOGM,
Polyphem), лазерно-телевизионных и тепловизионных авиацион-
ных и наземных прицельных систем (TADS, LANTIRN).
В соответствии с классификацией, приведенной в §1.2, ко-
ординаторы, обеспечивающие автоматическое сопровождение
целей, подразделяются на корреляционные и светоконтрастные.
(Заметим, что применительно к ТПВГС корректно употреблять
термин теплоконтрастные вместо светоконтрастные. С целью
упрощения терминологии там, где это не будет приводить к не-
оправданным недоразумениям, мы и применительно к ТПГС бу-
дем также использовать термин светоконтрастные.}
Корреляционные координаторы являются в настоящее время
основным типом оптико-электронных измерителей пространст-
венных координат целей по их изображениям, формируемым в
видимой (телевизионные координаторы) или в ИК- (тепловизи-
онные координаторы) областях спектра электромагнитных волн.
Относительное положение цели в корреляционных координато-
рах определяется на основе совмещения ее текущего изображе-
ния с эталонным, записанным в память координатора. Это со-
вмещение выполняется путем определения положения максиму-
ма корреляционного отклика координатора, т.е. максимума
функции корреляции текущего и эталонного изображений.
432
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
При визировании подвижной цели, наблюдаемой на распятненных, в
частности, земных фонах, текущее изображение, попадающее в область
анализа помимо перемещающейся цели обычно включает также фраг-
мент неподвижного фона, в связи с чем положение подвижной цели та-
ким координатором будет определяться с погрешностью. Поэтому при
стрельбе по наземным объектам корреляционные координаторы при-
меняются преимущественно в ГСН, предназначенных для поражения
неподвижных, в том числе малоконтрастных или неконтрастных целей,
а также на последнем участке самонаведения, когда изображение цели
или ее части начинает занимать всю область анализа.
В светоконтрастных координаторах на начальных этапах об-
работки прежде всего выделяется изображение контрастной цели
в принятом текущем изображении. А ее координаты определяют-
ся путем соответствующей обработки только этого контрастного
изображения цели. Поэтому светоконтрастные координаторы мо-
гут применяться при стрельбе по контрастным как неподвижным,
так и подвижным целям
Представителями управляемых ракет с телевизионными
системами наведения являются управляемые ракеты Maverick
AGM-65A, В (США) и управляемые бомбы КАБ-500 КР (Россия),
разработанные в конце 1970-х гг. При использовании этих типов
ВТО с ТВГС поиск цели, ее обнаружение, распознавание и при-
нятие решения о ее поражении осуществляется летчиком или
бортовым оператором. Перед пуском (сбросом) ракеты или бом-
бы летчик наблюдает изображение на экране видеоконтрольного
устройства, на котором отображается участок местности с целью,
попадающий в поле зрения головки самонаведения.
Маневрируя самолетом и положением прицельной марки,
летчик добивается совмещения изображения цели с изображени-
ем прицельной марки. После этого подается команда на замыка-
ние контура сопровождения цели в головке самонаведения и по
достижению разрешенной дальности производится пуск (сброс)
управляемого боеприпаса. При этом УБ переходит в режим авто-
матического наведения на цель, а самолет может выполнять про-
тивозенитный маневр. Участие человека в процессах поиска, об-
наружения, распознавания и захвата целей на сопровождение го-
ловками самонаведения обусловливает сравнительно малые
дальности применения ВТО с ТВГС.
433
ГЛАВА 7
Технические характеристики телевизионных головок само-
наведения УР Maverick и УАБ КАБ-500 КР во многом подобны.
В качестве фотоприемного устройства в них используются види-
кон или суперортикон.
Обобщенные характеристик
таких управляемых боеприпасов
и их головок самонаведения [5, 1.14-1.18, 1.211.26]
Скорость полета ................................150.. .450 м/с
Дальность захвата на сопровождение цели типа танк ..4.. .12 км
Вероятность попадания в цель типа танк.................0,85
Спектральный диапазон ..........................0,4... 1,2 мкм
Рабочая освещенность сцены........................102...105 лк
Угол поля зрения..................................2,5°...5°
Количество строк разложения изображения.............525.. .625
Угловой размер области анализа (эталона) .........0,2°.. .0,65°
Частота кадров......................................25...30 Гц
При использовании корреляционного дискриминатора при-
нятое текущее изображение в момент захвата цели на сопровож-
дение запоминается в качестве эталона. Текущая ошибка сопро-
вождения, т.е. смещение текущего изображения относительно за-
помненного эталона, может быть определена путем дифференци-
рования одного из этих изображений, их последующего пере-
множения и пространственного интегрирования полученного
произведения.
По мере сближения управляемого боеприпаса с целью воз-
никают масштабные, ракурсные и креновые деформации текуще-
го изображения относительно эталонного. С целью компенсации
этих деформаций в корреляционных измерителях применяется
периодическое обновление эталона.
Новое эталонное изображение может формироваться из оче-
редного текущего в момент, когда масштаб текущего изображе-
ния изменится относительно эталонного вследствие сближения с
целью не больше, чем на 50...60%. При этом между двумя после-
довательными перезаписями эталона может производиться про-
граммная непрерывная или дискретная подстройка масштаба
изображения к эталону, или наоборот. Дискретная подстройка
масштабов может выполняться при размасштабировании текуще-
го и эталонного изображений на 5...7%.
434
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
Для стабилизации формы дискриминационной характеристики может
использоваться как система автоматического регулирования чувстви-
тельности видикона, так и система автоматического регулирования пе-
ременной составляющей видеосигнала. Сигнал ошибки сопровождения
с выхода корреляционного дискриминатора подается на гиропривод,
управляющий положением оптической оси головки самонаведения.
При этом оптическая ось поворачивается таким образом, чтобы устра-
нить сдвиг текущего изображения относительно эталонного.
В современных модификациях УР с ТВГС Maverick AGM-65K
в качестве фотоприемника используется матрица ПЗС. При этом
автоматическое регулирование чувствительности видикона заме-
няется автоматическим регулированием времени накопления за-
рядов, а вся последующая обработка сигналов выполняется спец-
вычислителем в цифровой форме. Это обеспечивает более каче-
ственную реализацию как алгоритмов формирования дискрими-
национной характеристики, так и алгоритмов работы других воз-
можных блоков, например устройств помехозащиты.
В современных тепловизионных головках самонаведения
ракет класса воздух-воздух обычно используется матрица чувст-
вительных элементов на основе InSb, работающая в диапазоне
З...5мкм. УР и УАБ класса воздух-поверхность оснащаются
матрицами, выполненными на основе тройного соединения
HgCdTe и использующими излучение диапазона 8... 14 мкм.
Строка таких матриц обычно содержит от 64 до 256 чувствитель-
ных элементов.
Процедура обработки сигналов с выхода матрицы при фор-
мировании дискриминационной характеристики в тепловизион-
ных головках самонаведения близка к процедуре, используемой в
телевизионных головках и описанной выше.
В настоящее время значительное внимание уделяется увеличению
дальности применения управляемых ракет, бомб и крылатых ракет с
тепловизионными головками самонаведения. При этом обеспечивается
решение задачи применения ВТО со средней и большой дальности без
захода носителей такого ВТО в зону действия системы противовоздуш-
ной обороны объекта. Повышение дальности применения ВТО достига-
ется путем оснащения входящих в его состав высокоточных средств
поражения приемниками глобальной навигационной системы GPS, а
435
ГЛАВА 7
также инерциальными навигационными системами, корректируемыми
по данным GPS, и системами навигации по картам местности типа
TERCOM.
Навигационные системы обеспечивают вывод управляемого
боеприпаса в район цели, после чего на заданном рубеже приво-
дится в действие тепловизионная головка самонаведения. К чис-
лу таких образцов ВТО с ТПВГС относятся УАБ GBU-29, -30,
-31, -32 JDAM (США), УР AGM-158 JASSM (США), «Storm
Shadow» (Великобритания), KEPD 350 (Германия, Швеция),
KPBGM-109 Tomahawk BlockIV. Особенностью тепловизионных
головок самонаведения, применяемых в этих образцах ВТО, яв-
ляется запись эталонного изображения цели, сформированного по
данным предварительной разведки, до пуска ракеты, и реализа-
ция в головке самонаведения режима автономного обнаружения
и распознавания цели.
7.1.1. Особенности устройства
корреляционных координаторов
Рассмотрим более детально некоторые особенности по-
строения корреляционных координаторов. Если к = (Л1,Л2) -
вектор относительных пространственных координат цели,
£ = (/^,/<2) - вектор оценок этих координат, s(x-X) - изобра-
жение цели, заданное в области пространственных координат
x = (xj,x2)g L и равное нулю за пределами этой области (т.е.
5(х-Х) - финитная функция); w(x) - текущее изображение, оп-
ределенное в области анализа М (хе Л/), причем Lg\L то
операция определения вектора оценок X путем поиска гло-
бального максимума корреляционного отклика может быть
описана так:
X = arg maxT(X) = arg max м(х)$(х-Х)б/х. (7.1)
Z Z J
Л/
Если текущее изображение формируется в присутствии про-
странственного аддитивного белого гауссовского шума наблюде-
ний и(х), т.е. когда
436
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
2/(х) = 5(х - к) 4- w(x), (7.2)
то корреляционный отклик Т(к) в (7.1) есть не что иное, как ин-
формативная часть логарифма функционала правдоподобия, а
оценка X , доставляемая выражением (7.1), будет оптимальной по
критерию максимального правдоподобия [1, 3.25, 3.46].
Поиск глобального максимума корреляционного отклика обычно ис-
пользуется во взаимно-корреляционных координаторах, например в ко-
ординаторах крылатых ракет, в которых эталонное изображение цели
формируется и записывается в память координатора заблаговременно
до пуска ракеты, а ракета может быть выведена в район цели с больши-
ми ошибками.
В случаях, когда начальная ошибка оценки положения цели
меньше ширины главного лепестка корреляционного отклика,
для оценки координат цели используются беспоисковые алго-
ритмы следующего типа (см. 6.3.1):
Ai = [^(xj,х2) '%2)dx} dx? . (7.3)
J SX:
м 1
Здесь A; - нормирующий коэффициент.
Беспоисковые алгоритмы обычно используются в телевизи-
онных и тепловизионных автокорреляционных координаторах
тактических ракет и бомб, в которых оператор перед запуском
боеприпаса распознает на текущем изображении визируемого
сюжета цель, совмещает с ней марку прицела и записывает уча-
сток этого изображения, попавший в окрестность марки, в память
координатора в качестве эталона.
Выражения (7.1), (7.3) указывают на то, что при исследова-
нии корреляционных координаторов поле полезного сигнала
вполне допустимо воспроизводить с точностью до его автокорре-
ляционной функции.
Пусть полезный сигнал является определенной в области L
(где по-прежнему L cz М ) реализацией гауссовского случайного
однородного поля с корреляционной функцией /?5(zj,z2). Тогда
оценка Д минимизирует обусловленную шумом дисперсию
ошибки измерения е. = Д. - \ , если
437
ГЛАВА 7
g27?5(Z],z2)
Sz2
kj =------------------——---------------у при z, = z2 = 0 . (7.4)
d2Rs(zx,z2)d2Rs(z{,z2) + Гg2-Kt(z„z2) j
&2 c?z2 dzldz2 )
Если и(х) - белый шум со спектральной плотностью ;V0, то
дисперсия ошибки измерений по z-й координатной оси
удовлетворяет неравенству
а2„>-к^, / = 1,2, (7.5)
где / - площадь области L, занимаемая полезным сигналом, т.е.
визируемым объектом [7, 3.46].
При гауссовой форме Rs(zl9z2)9 когда
^(2],Z2) = <T2eXp
(7.6)
)
имеют место равенства кх = к2 , <у£пХ = <у£п2 . Поэтому там, где это
не будет приводить к ошибкам, нижний индекс i в выражениях
типа (7.5) можно опустить. Тогда для области L9 имеющей квад-
ратную форму, (7.5) принимает вид
2 >
£п
(7.7)
Можно также показать [5], что если аддитивный шум w(x)
также имеет корреляционную функцию гауссовой формы с дис-
персией (У^ и интервалом корреляции 8п, то (7.7) преобразуется
к виду
2 = 2л82г2
°еп~ kt2(1 + г2)2 ’
(7.8)
где г = 8s/8n , к = а2/а2п , t = J1/8S.
438
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
Помимо ошибок, вызванных шумами наблюдения, при рабо-
те корреляционных координаторов появляются также ошибки,
обусловленные краевыми эффектами, возникающими из-за ко-
нечных размеров текущего изображения или эталона. Все приве-
денные выражения получены для случая наблюдения финитного
изображения объекта на равномерном фоне. Вместе с тем, более
распространен на практике случай, когда в качестве объекта
s(x-k) выступает определенная в области L часть неравноярко-
го (распятненного) фоноцелевого ансамбля, принадлежащего об-
ласти М с площадью т , причем, как и прежде, LaM, / < т . В
этом случае помимо ошибок измерения координат, вызванных
шумами наблюдений, появляется также сигнальная составляю-
щая ошибки, связанная с краевыми эффектами, возникающими
из-за конечных размеров текущего изображения или эталона.
Рисунок 7.1 поясняет причины возникновения такой ошиб-
ки. На этом рисунке показано сечение эталона, являющегося
фрагментом фона, и сечение фона вдоль одной из координатных
осей. При смещении эталона относительно соответствующего
ему участка фона влево яркость фона на границах эталона, то
есть в точках а и с, превышает значения фона в точках b и d ,
соответствующих границам несмещенного эталона. Следователь-
но, максимум корреляционного отклика в этом случае будет дос-
тигаться при некотором смещении эталона относительно соот-
ветствующего ему участка фона, с чем и связано появление
ошибки, обусловленной краевыми эффектами.
Как следует из [4], для фона с корреляционной функцией
(7.6) дисперсия этой ошибки по любой координатной оси равна
________________________Рисунок 7.1 ______________________
439
ГЛАВА 7
(7.9)
В [4] также показано, что если оценку, например координаты
цели Я,, формировать вместо (7.3) в соответствии с выражением
\=kx \u{xXyx2)^S-X-X— dxxdx2 -
J дхх
м 1
1 х2к
-- \^2(x}k,x2)-s2{x}n,x2))dx2, (7.10)
2 *
х2п
где хХп, ххк - координаты вертикальных; х2п. х2к - координаты
горизонтальных границ области М, то появление ошибок, обу-
словленных краевыми эффектами, можно исключить.
Еще одним источником ошибки корреляционных координа-
торов являются масштабные и креновые деформации принимае-
мого изображения относительно эталона. Действительно, при
сближении ракеты с целью изменяется с масштабным коэффици-
ентом а масштаб текущего изображения относительно эталона, а
из-за неидеальной стабилизации ракеты по крену текущее изо-
бражение может быть развернуто относительно эталонного на
некоторый угол 0.
Общее выражение для оценки дисперсии ошибки, вызванной
такими искажениями, получено в [6.7]. На его основе в [5] пока-
зано, что зависимость дисперсии такой ошибки от t (см. (7.8))
носит экстремальный характер, причем минимум дисперсии име-
ет место, когда
\1/2
I 6
'орИ(1-а2
При t<topX дисперсия суммарной ошибки, обусловленной
краевыми эффектами, масштабными и креповыми деформациями и
коррелированной аддитивной помехой, описывается выражением
+ 'г^/2~ 2ч2 ^Хр(0,5/2((1 - а2) + О2)). (7.12)
г kt2(\ + crl у)
=
440
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
Как следует из (7.3), в беспоисковых корреляционных алго-
ритмах присутствует операция дифференцирования эталона (или
текущего изображения) вдоль пространственной оси, соответст-
вующей измеряемой координате. Поэтому разнообразие возмож-
ных модификаций беспоисковых корреляционных алгоритмов
соответствует множеству возможных способов численного либо
аналогового дифференцирования пространственных сигналов.
Из (7.3) после подстановки в него выражения (7.2) следует,
что форма дискриминационной характеристики корреляционного
координатора J(xz) вдоль пространственной оси xz определяется
производной вдоль этой же оси корреляционной функции, т.е.
d(Cj) ~ dRs(z}9z2)/ dZj. Так как 7?5(z1,z2) изменяется в соответст-
вии с пространственно-яркостной структурой конкретной визи-
руемой цели, то и дискриминационная характеристика должна
также изменяться от цели к цели. Однако обеспечение приемле-
мого качества измерения координат возможных целей требует
стабилизации основных параметров дискриминационной харак-
теристики, в частности, ее размаха и крутизны. Стабилизацию
крутизны дискриминационной характеристики можно обеспечить
нормировкой размаха сигнала с выхода фотоприемного устройст-
ва с помощью схем автоматической регулировки усиления.
Стабилизация размаха характеристики может быть обеспе-
чена фильтрацией сигналов эталона или текущего изображения
пространственным фильтром нижних пространственных частот.
На практике находит применение разностный метод формирова-
ния оценки Д , при котором операция дифференцирования эта-
лона заменяется операцией формирования разности двух сдвину-
тых на величину ±Д эталонов:
Zj = к} Jm(x,,x2)(s(xi -Д,х2)-5(х1 + A,x2))dxjdx2. (7.13)
N
Можно показать, что преобразования, определяемые выражением
(7.13), строго эквивалентны процедуре пространственной фильтрации
эталонного сигнала с помощью идеального фильтра с прямоугольной
весовой функцией, имеющего пространственно-частотную характери-
стику вида sinx/x с шириной полосы пропускания, обратно пропор-
441
ГЛАВА 7
циональной сдвигу А, и последующему дифференцированию про-
фильтрованного эталона. Таким образом, использование разностного
метода формирования оценки Ai обеспечивает одновременно и стаби-
лизацию размаха дискриминационной характеристики в районе значе-
ний 2А.
Еще одной причиной нестабильности дискриминационной
характеристики являются масштабные и другие деформации те-
кущего изображения при сближении ракеты с целью. Во взаимно
корреляционных координаторах для парирования этих деформа-
ций может использоваться программное перемасштабирование
эталона или отслеживание масштабных и креновых рассогласо-
ваний с использованием алгоритмов типа синтезированных в раз-
деле 6.3.1.
В автокорреляционных координаторах для парирования
масштабных и креновых деформаций часто используется много-
кратная перезапись эталона в ходе атаки цели, как частая (через
1...4 кадра), так и редкая, выполняемая, когда различие масшта-
бов изображения и эталона достигает 20...60%. Однако такая пе-
резапись приводит одновременно к появлению кумулятивной
ошибки, которая формируется путем накопления отдельных
ошибок, имевших место при каждой перезаписи эталона.
Вместе с тем, процесс перезаписи эталона может рассматриваться как
своеобразная и достаточно эффективная схема защиты от преднаме-
ренных помех.
Действительно, при перезаписи вновь поставленная помеха оказывает-
ся включенной в новый эталон. Поэтому на последующих этапах изме-
рения координат она фактически теряет качества помехи и, по сущест-
ву, становится полезным сигналом. Для подавления таких координато-
ров необходимо создание нестационарных помеховых воздействий с
интервалом нестационарности, сравнимым с интервалом между двумя
последовательными перезаписями эталона.
Основным преимуществом корреляционных координаторов
перед рассматриваемыми ниже светоконтрастными является их
способность сопровождать на неравноярком (распятненном) фоне
неподвижные распятненные цели даже с нулевым средним кон-
трастом. Однако возможности сопровождения таким координато-
442
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
ром подвижных целей с небольшим средним контрастом весьма
ограничены. Требования к контрастным характеристикам под-
вижной цели, необходимым для ее устойчивого сопровождения
корреляционным координатором на неравноярком фоне можно
оценить с помощью выражений (7.7), (7.9).
Поскольку при текущей записи эталона в нем сразу после
записи присутствуют как фрагмент, соответствующий цели, так и
фрагмент фона, то качество сопровождения цели будет опреде-
ляться балансом ошибок сопровождения этих фрагментов. При
этом в соответствии с (7.7), (7.9) дисперсия суммарной ошибки
сопровождения фрагмента цели определяется выражением
.2
ЕС 1<у2 I3'2 ’
(7-14)
(7.15)
а дисперсия суммарной ошибки сопровождения фрагмента фона -
выражением
2 = 82NQ 4л 8}
°ef (т-1)а2 (т-1)32
Теперь условие сопровождения цели можно записать так:
<J£c<o’£f' В случае, когда при формировании ошибок опреде-
ляющую роль играет их шумовая составляющая, это условие
принимает вид
. (">-1)82
СУ2Г 16}
(7.16)
В этих выражениях сгу- - дисперсия флуктуаций фона; 8j -
интервал пространственной корреляции фона; I. т-l -площади
цели и фона, попадающие в область корреляционного анализа.
Необходимо отметить, что точность сопровождения целей такими ко-
ординаторами в определяющей мере зависит от степени парирования
масштабных, креновых и ракурсных деформаций текущего изображе-
ния и от обеспечения инвариантности дискриминационной характери-
стики к статистическим характеристикам пространственно-яркостной
структуры визируемой сцены.
443
ГЛАВА 7
Некоторые особенности решения этих задач обсуждались
выше. В [29] можно найти описание других подходов к стабили-
зации дискриминационной характеристики корреляционного ко-
ординатора, эффективность которых подтверждена значительным
объемом результатов имитационного моделирования. Однако
обязательным этапом процедуры сравнительного анализа различ-
ных подходов к построению алгоритмов корреляционной обра-
ботки должен быть этап анализа их функционирования в присут-
ствии преднамеренных помех, отсутствующий в [29].
7,1,2. Особенности устройства
светоконтрастных координаторов
В светоконтрастных координаторах на начальном этапе об-
работки выполняется выделение контрастной цели на сформиро-
ванном оптической системой изображении фоноцелевой обста-
новки. При этом по среднему значению интенсивности излучения
сюжета, попадающего в область анализа, устанавливается порог
отсчета сигнала цели: все участки сюжета в поле анализа, интен-
сивность которых превысила порог, принимаются за участки це-
ли [9]. По другой логике за цель принимаются участки сюжета,
превысившие порог не более, чем на некоторую заданную вели-
чину. Последняя логика позволяет уменьшить влияние мощных
точечных помеховых источников излучения на качество работы
дискриминатора.
Для выделения сигнала цели может также использоваться
двухпороговая логика, в соответствии с которой формируются
ворота, образуемые двумя порогами, выставляемыми выше и ни-
же интенсивности излучения цели в центральной точке области
анализа (в малом измерительном стробе). В этом случае к цели
относятся участки сюжета, интенсивность излучения с которых
попадает в ворота, образованные двумя порогами. В [14] описана
более сложная логика выделения сигнала цели, основанная на
анализе гистограмм яркости различных участков визируемого
сюжета.
В классе светоконтрастных координаторов определенное распростра-
нение получили координаторы со слежением по балансу областей. В
таких координаторах в поле анализа выделяются две пары полустро-
444
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
бов - по паре на каждую из ортогональных координатных осей. Фор-
мирование сигнала ошибки слежения вдоль каждой из координатных
осей в простейшем случае выполняется в дискриминаторе путем опре-
деления разности интегральных сигналов участков цели, попадающих в
два полустроба и превысивших порог. Для стабилизации характеристик
дискриминатора используется нормирование по амплитуде сигналов
цели, превысивших порог.
В качестве меры помехозащиты может использоваться пе-
риодическое обновление порога отсчета в соответствии с теку-
щим изменением яркости сюжета, попадающего в поле зрения.
Светоконтрастные координаторы обычно применяются для
сопровождения подвижных целей, в том числе наблюдаемых на
случайном фоне. Их предельные возможности по сопровождению
целей можно уяснить на основе формальной постановки и реше-
ния задачи статистического синтеза измерителя координат про-
странственно протяженных целей с частично заданной структу-
рой. Такой статистический синтез выполнен в [7] применительно
к случаю измерения одной из координат \ геометрического цен-
тра прямоугольного объекта размером 2a*2d , имеющего равно-
мерную интенсивность излучения В и наблюдаемого в условиях
аддитивного шума л(хьх2) и аппликативной смеси со случай-
ным фоном /(х1?х2).
Таким образом, рассматривается случай, когда принимаемое
текущее изображение может быть представлено в виде
w(xl9X2,A|) = /(х1,Х2)4-/7(х1,Х2,А)(^-/(Х1’Х2)) + П(Х1’Х2) • G-17)
Здесь /г(х1,х2,21) - функция окна, принимающая значение 1 в об-
ласти пространства L, занимаемой объектом, и значение 0 всюду
кроме области L.
На рис. 7.2 штриховкой показана область £, занимаемая
объектом, а символами М} и М2 - области, занимаемые двумя
полустробами светоконтрастного координатора. Требуется мето-
дами теории статистических решений синтезировать устройство
оценки координаты цели \ для случая, когда наблюдению дос-
445
ГЛАВА 7
________________________Рисунок 7.2 _____________________
тупны интегральные сигналы z}. z2 с выхода каждого из полу-
стробов, определяемые выражением
2/(Л)~ JJw(xbX29^)^1^2 ’ (7.18)
Ч
Следовательно, требуется синтезировать решающее устрой-
ство с частично заданной структурой, характеризуемой наличием
двух полустробов, в сигналах с выхода которых помимо адди-
тивного белого шума и(х19х2) также присутствует шум, обуслов-
ленный участками случайного фона, попадающими в каждый по-
лустроб.
Как показано в [7], структура оптимального по критерию
максимума функции правдоподобия решающего устройства (дис-
криминатора) определяется выражением
d(zx (Л, ),z2 (\)) = Кх («2 - ul) + К2 (в - Bf)(«, - «2). (7.19)
Здесь - средняя интенсивность излучения фона; Кх. К2 - ко-
эффициенты, зависящие от статистических характеристик f (xj, х2)
и w(x19x2), = z-t - Bja/3 -2^B - Bj^cd,, c = 2a-a2+ax+a (зна-
чения символов поясняются рис. 7.2).
446
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
Анализ выражения (7.19) показывает, что оптимальный дис-
криминатор выполняет следующие операции:
вычитание среднего уровня фона из сигнала текущего изо-
бражения или, что эквивалентно, сигнала В^а/З из измере-
ний Zj и z2;
вычитание среднего значения остатка сигнала цели
(B-Bf}cd из Z|, z2 ;
квадратичную и линейную обработку, задаваемую выраже-
нием (7.19), над сигналами щ и w2, сформированными из
сигналов с выхода полустробов zx и z2 .
В [7] показано, что квадратичный член вносит заметный
вклад в дискриминационную характеристику при малой разности
средних интенсивностей цели и фона B-Bj. При больших зна-
чениях B-Bj квадратичной обработкой можно пренебречь и в
составе операций оптимального дискриминатора оставить только
линейную обработку.
Рассмотрим случай, когда корреляционную функцию интен-
сивности фона /(х19х2) можно аппроксимировать экспоненци-
альной зависимостью:
^(^,^2) = of ехр
him
ч ^2 >
(7.20)
Минимальное значение ошибок измерения, например коор-
динаты \ будет иметь место, когда полустробы располагаются
симметрично относительно контура объекта. Если интервал кор-
реляции интенсивности фона меньше а, то вытекающее из нера-
венства Рао-Крамера выражение для нижней границы дисперсии
ошибки измерения координат принимает вид [7]
где
447
ГЛАВА 7
q = (Noa0 + Р)/(<т2е), k = 4d2(B-Bf )2 /(а2 е),
А = а-с/2,
г) о 2 с 2 с 2 ( & -«
P = 8ai<51<52 ехр—— + —-1
к I и) и
2( ( 2а) 2а )
Е =2г>2 ехр------+------1 .
I \ $2) д2 .
f а ] а .
ехр-----+-------1
Ч 81) 82
(7-21)
При Л/^>| «: 2 выражение (7.21) упрощается:
2 = (^2+<?)
Л' 2fc2(A2+q) + 4A2
Нетрудно заметить, что с уменьшением ширины полустроба
2
а монотонно уменьшается аЛ], т.е. точность оценки положения
объекта увеличивается при уменьшении размеров полустробов и
при размещении их в окрестности контура объекта. Однако одно-
временно при этом уменьшается область допустимых ошибок
предварительного целеуказания, в пределах которой возможна
оценка положения объекта с необходимой точностью.
Полученные выражения позволяют оценить значения кон-
трастных характеристик объекта, обеспечивающих его устойчи-
вое сопровождаемых светоконтрастным координатором на слу-
чайном фоне.
Рассмотрим светоконтрастный координатор, имеющий по-
лустробы с размерами а = fl = 2a, и сопровождающий подвиж-
ный объект, у которого a = d (см. рис. 7.2). Пусть также выпол-
няется условие А«а (полустробы соприкасаются). Для учета
наиболее неблагоприятных условий сопровождения, когда про-
странственный интервал корреляции случайного фона сравним с
линейным размером цели, положим = <52 - 8 , 2а! 8- \. Будем
под контрастом объекта С понимать отношение квадрата разно-
сти средних интенсивностей излучения объекта и фона к СКО
интенсивности фона:
C = (B-Bf)/as. (7.22)
448
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
Тогда из (7.21) следует:
2-0,95/?2 У4
рг J
(7.23)
где /3 = о\\1а - СКО относительной ошибки измерения коорди-
наты объекта.
Если положить, что для устойчивого сопровождения объекта
необходимо выполнение неравенства (3 < 0,5, то из (7.23) следует,
что контраст устойчиво сопровождаемого на неравноярком фоне
объекта, определяющий отношение контрастной яркости объекта к
СКО яркости фона, должен удовлетворять неравенству
С =
>1,6.
(7.24)
5
Вполне очевидно, что происхождение ошибок измерения
координат, диктующих необходимость выполнения условия
(7.24), связано с наличием случайного фона, попадающего на
участки полустробов, не занятые визируемым объектом. Поэтому,
на первый взгляд, можно добиться уменьшения этих ошибок путем
использования нелинейной обработки - выставления порога от-
счета сигналов объекта, заведомо превышающего уровень фоно-
вых излучений.
Однако при этом одновременно уменьшится отношение сиг-
нал - внутренний шум.
Применительно к принимаемым при синтезе светоконтрастного или
любого другого измерителя исходным данным никакая дополнитель-
ная, в том числе нелинейная, обработка в принципе не может улучшить
качество работы этого измерителя по принятым при синтезе показате-
лям эффективности. Это позволяет считать справедливыми как оценку
(7.21), так и неравенство (7.24) и в случае использования в светокон-
трастном координаторе дополнительной нелинейной обработки. Вместе
с тем дополнительная нелинейная обработка может повысить качество
измерения координат в случаях, когда при формальном синтезе изме-
рителя не удается корректно учесть всю совокупность исходных дан-
ных о характеристиках излучений объекта и фона, имеющих место в
реальных ситуациях измерений.
449
ГЛАВА 7
7.1.3. Преднамеренные помехи ВТО с координаторами
пространственно протяженных целей
Рассмотрим возможность подавления маскирующими поме-
хами типовых средств систем наведения ВТО, использующих
корреляционные измерители (ТВГС и ТПВГС, ТВ и ТПВ датчики
прицельных систем). Маскирующие помехи уменьшают относи-
тельную величину главного пика корреляционного отклика изме-
рителя. За счет этого при постановке их на этапе сопровождения
цели увеличиваются ошибки измерения координат вплоть до зна-
чений, исключающих сопровождение цели.
При создании помех на этапе поиска и захвата уменьшается вероят-
ность захвата на сопровождение истинной цели и увеличивается веро-
ятность захвата боковых лепестков корреляционного отклика измери-
теля (ложной цели).
Очевидным способом создания маскирующих помех являет-
ся прикрытие цели (реальной сцены) равномерным по яркости
непрозрачным или полупрозрачным экраном. Такой экран можно
создать путем постановки облаков мелкодисперсных частиц (на-
пример, аэрозольных облаков), поглощающих, отражающих либо
излучающих в ИК-области спектра, а также путем засветки фото-
приемника мощными активными помехами [48, 6.9]. Маскирую-
щий эффект при создании помех на этапе поиска и захвата может
быть достигнут также увеличением уровня боковых лепестков
корреляционного отклика измерителя путем постановки помехо-
вого образования, яркость которого является случайной функци-
ей пространственных координат. Такие помехи могут быть реа-
лизованы путем постановки неоднородных (черно-белых) аэро-
зольных завес, случайного размещения на местности уголковых
световозвращателей при подавлении активных корреляционных
систем и т.д.
Рассмотрим основные закономерности воздействия равнояр-
ких маскирующих помех на корреляционный измеритель. Пусть
пространственная корреляционная функция цели (сюжет) имеет
гауссовскую форму (7.6). Если часть сюжета (прямоугольник
размером пх х п2 ) прикрыта равнояркой маскирующей помехой,
яркость которой равна среднему значению яркости сюжета, то,
450
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
как отмечалось выше, ошибки измерения координат цели будут
иметь шумовую и сигнальную составляющие.
Сигнальная составляющая ошибки обязана своим появлением краевым
эффектам, возникающим на границе помехового образования, и в связи
с априори неизвестным расположением помехи на сюжете не может
быть парирована аппаратурно с использованием выражения типа (7.10).
Общий вид сигнальной составляющей ошибки вдоль одной
из координатных осей описывается первым слагаемым выраже-
ния в квадратных скобках (5.45). После вычисления соответст-
вующих интегралов выражение для дисперсии сигнальной со-
ставляющей ошибки при l\/3s > 2 , /2/^ > 2 приводится к виду
(7.25)
где кх =l/(jc8^ - число некоррелированных элементов сюжета,
укладывающихся в область анализа площадью /.
Геометрия расположения помехи, соответствующая этому
случаю, показана на рис. 7.3. Схема компенсации краевых эффек-
тов, представленная выше в разделе 7.1, позволяет компенсиро-
вать только эффекты, имеющие место на границе эталона, но не
на границе помехи. Поэтому при наличии этой схемы ошибка,
обусловленная только помехой, будет вдвое меньше, чем опреде-
ляемая выражением (7.25).
Рисунок 7.3
451
ГЛАВА 7
Дисперсия ошибки измерения, обусловленная шумами, оп-
ределяется выражением (7.7), которое в рассматриваемом случае
может быть представлено так:
.2
£П
&sP
(7.26)
Здесь р = т = т{ х т2 при отсутствии равнояркой маскирующей
помехи, закрывающей часть сюжетами, и р = 1 = 1Х х/2 при ее по-
становке.
Формулу (7.26) можно преобразовать к виду
Z х2
— = — , (7.27)
I кР
где q = - отношение спектральной плотности шума к
спектральной плотности мощности сигнала на нулевой простран-
ственной частоте; кр = р/тсб^ ~ число некоррелированных эле-
ментов сюжета, укладывающихся в область анализа р .
Зависимость относительных среднеквадратических сигналь-
ных и шумовых (пунктир) ошибок измерения координат от отно-
сительных (отнесенных к площади корреляции сюжета) размеров
области анализа (фрагмент эталона), неприкрытой помехой, при-
ведена на рис. 7.4, а аналогичная зависимость от относительных
размеров площади эталона р-п/т, прикрытой маскирующей
помехой, на рис. 7.5.
Графики (рис. 7.4, 7.5) рассчитывались при # = 0,2. Причем
при построении графиков рис. 7.5 учитывалось очевидное соот-
ношение кх = кр = (1 - т[)кт , где кт = т/ 8^ .
Кривые (рис. 7.5) показывают, что даже при закрытии равнояркой по-
мехой с яркостью, равной средней яркости сюжета, до 90% площади
сюжета, соответствующей эталону, ошибка измерения координат не
превышает 0,2 величины интервала корреляции поля яркости сюжета
(цели). Таким образом, срыв режима сопровождения цели корреляци-
онным координатором при создании такой помехи может быть обеспе-
452
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
чен только при закрытии помехой практически всей площади сюжета.
Однако при отсутствии точного целеуказания такая помеха может при-
водить к предотвращению захвата истинной цели и появлению значи-
тельных аномальных ошибок при существенно меньшей площади по-
мехового образования.
Рисунок 7.5
При постановке равнояркой маскирующей помехи светокон-
трастной ГСН с координатором, работающим по балансу облас-
тей, сигнал на выходе дискриминатора падает до нулевого уров-
ня, и под действием дрейфа гиростабилизатора в случайном на-
453
ГЛАВА 7
правлении и со случайной скоростью ГСН переходит на сопро-
вождение контрастного края помехового образования.
Рассмотрим возможность снижения требований к помехам
на основе использования маскирующих помех со случайной яр-
костной структурой (неравноярких помех). Пусть пространствен-
ная корреляционная функция помехи имеет гауссовскую форму:
^(zl,z2) = ^exp -
(7.28)
2^
Полагаем, что взаимно-корреляционная функция помехи и
сюжета 7?p5(z1,z2) = 0 Выражение для дисперсии помеховой со-
ставляющей ошибки сг2рХ при аппликативной смеси помехи с сиг-
налом и при геометрии постановки помехи, соответствующей
рис. 7.3, определяется последним слагаемым (5.45). После взятия
интегралов это выражение при njds >2, п2/88 > 2 приводится к
виду
(7.29)
где rf = 5s/8p, rj = n/m.
Нетрудно убедиться, что экстремум правой части выражения
(7.29) по ту достигается при ту = 1, т.е. максимальное значение
помеховой составляющей ошибки измерения координат имеет
место при равенстве коэффициентов корреляции сюжета и мас-
кирующей помехи. Зависимость ошибок измерения координат
цели от отношения коэффициентов корреляции полей сюжета и
помехи, рассчитанная по (7.29), показана на рис. 7.6. Расчеты вы-
полнены при кт =100. Для кривой 1 /у = 0,8, для
кривой 2 су2р1а2 = 1, г/ = 0,8, для кривой 3 <у2р1а2 = 2, ту = 0,5.
На рис. 7.7 приведены графики зависимости ошибок измере-
ния от относительной площади помехи, полученные при ту = 1,
кт =100. Причем для кривой 1 для кривой 2
454
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
= 2, для кривой 3 = 4. Сравнение графиков
(рис. 7.5, 7.7) показывает, что при равных относительных площа-
дях помехового образования неравнояркая аппликативная помеха
обеспечивает реализацию почти на порядок большей ошибки из-
мерения координат цели, чем равнояркая.
Очевидные физические соображения позволяют с достаточ-
ной степенью надежности утверждать, что выражение (7.29) от-
ражает общие закономерности формирования ошибки измерения
координат при воздействии неравнояркой маскирующей помехи
455
ГЛАВА 7
для различных, в том числе непрямоугольных конфигураций по-
мехового поля, попадающего в поле анализа корреляционного
координатора.
При воздействии аппликативной неравнояркой маскирующей помехи
помимо нормальных может появиться также аномальная ошибка изме-
рения, когда глобальный максимум корреляционного отклика измери-
теля будет смещен более чем на интервал корреляции наблюдаемой
сцены относительно истинного положения цели. Появление такой ано-
мальной ошибки приводит к невозможности выполнить захват истин-
ной цели корреляционным измерителем из режима поиска.
На рис. 7.8 приведены полученные моделированием по 40-ка
реализациям графики, характеризующие зависимость вероятно-
сти появления аномальной ошибки роа от относительной площа-
ди сюжета г/. прикрытой неравнояркой маскирующей помехой.
Расчеты выполнены для экспоненциальной корреляционной
функции поля помехи и сюжета при кл = 64 и прочих значениях
параметров, аналогичных использовавшимся при построении
графиков рис. 7.7.
В корреляционных ГСН тактических ракет классов воздух-
поверхность, поверхность-поверхность обнаружение цели и пер-
вая запись ее эталона выполняются до пуска ракеты человеком-
оператором.
456
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
При постановке стационарных (не изменяющихся во времени) неравно-
ярких маскирующих помех головкам самонаведения таких ракет, обыч-
но использующим перезапись эталона в процессе наведения ракеты на
цель, помеховое поле при первой после постановки помехи перезаписи
будет записано в эталон и в дальнейшем будет восприниматься корре-
ляционным измерителем головки самонаведения как полезный сигнал.
Поэтому постановка стационарных неравноярких помех
более целесообразна не таким ракетам, а образцам ВТО с корре-
ляционными измерителями, обеспечивающими коррекцию тра-
ектории полета по заблаговременно записанным в память изме-
рителя эталонам а также образцам ВТО, имеющим корреляци-
онные ГСН, в которых захват цели выполняется без участия че-
ловека-оператора с использованием эталона, также предвари-
тельно записанного в память ГСН. Типовыми представителями
такого ВТО являются крылатые ракеты с большой дальностью
полета.
Стационарная неравнояркая помеха, созданная, например,
путем использования деформирующих масок при подлете раке-
ты к цели, будет приводить к появлению неприемлемых ошибок
определения местоположения цели головкой самонаведения на
этапе захвата цели на сопровождение, т.е. на этапе первона-
чальной привязки предварительно записанного эталона к теку-
щему изображению цели. При отсутствии информации о време-
ни подлета ракеты к цели периодическим изменением деформи-
рующих масок можно добиться такого же эффекта за счет того,
что текущее изображение цели с большой вероятностью не бу-
дет соответствовать ее изображению, имевшему место в момент
записи эталона.
Для подавления корреляционных ГСН тактических ракет, исполь-
зующих перезапись эталона в процессе наведения ракеты на цель,
предпочтительнее постановка нестационарных неравноярких помех с
интервалом нестационарности, не превышающим текущий интервал
перезаписи эталона. Такая помеха вносит дополнительную ошибку в
оценки координат цели при каждой перезаписи эталона, способствуя
увеличению кумулятивной ошибки, т.е. суммарной ошибки, накоп-
ленной корреляционным измерителем в процессе последовательных
перезаписей эталона.
457
ГЛАВА 7
Оценка эффективности таких нестационарных помех и оп-
тимизация их характеристик связаны с необходимостью учета
специфических особенностей динамики наведения тактических
ракет с корреляционными ГСН, состоящих в следующем.
1. Кумулятивная ошибка измерения координат цели, обу-
словленная последовательными перезаписями эталона, являются,
по существу, новым классом возмущений в контуре самонаведе-
ния, присущих только корреляционным ГСН и приводящих к на-
ведению ракеты на некоторую фиктивную цель, блуждающую
относительно истинной.
2. Кумулятивная ошибка существенно зависит как от ошиб-
ки единичных измерений, так и от динамической ошибки сопро-
вождения цели. Это заставляет предъявлять более жесткие требо-
вания к контуру углового сопровождения ГСН, в частности, ис-
пользовать следящие системы с более высоким порядком аста-
тизма.
3. Заметное влияние на кумулятивную ошибку могут оказать
нестационарные помеховые воздействия с малым периодом не-
стационарное™ (меньшим постоянной времени контура автосо-
провождения ГСН по углу). В то же время такие помеховые воз-
действия обычно оказывают слабое влияние на точностные ха-
рактеристики контуров самонаведения с обычными ГСН вследст-
вие хороших фильтрующих свойств этих контуров.
Следует отметить, что срыв сопровождения цели в корреляционной
ГСН, определяемый как выход ошибки сопровождения за пределы цен-
трального участка дискриминационной характеристики, как правило,
не будет иметь места. Это обусловлено тем, что при каждой перезаписи
эталона ошибка сопровождения в момент перезаписи обнуляется.
Нестационарная неравнояркая помеха может быть реализо-
вана на основе использования активных когерентных или некоге-
рентных излучателей, работающих в импульсном режиме и облу-
чающих защищаемый объект или наиболее информативные его
участки и изменяющих тем самым пространственно-яркостную
структуру объекта, или засвечивающих фотоприемное устройст-
во ГСН из одной или нескольких точек пространства. При защите
стационарных объектов для создания неравнояркой помехи могут
использоваться также маски переменного контраста, выполнен-
458
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
ные, например, в виде шторного или жалюзного устройств. С по-
мощью таких устройств возможно создание и декоррелирующей
помехи (см. раздел 5.2.1), использующей изменение на обратный
знака контраста части или всех информативных фрагментов изо-
бражения цели.
К числу наиболее распространенных способов создания мас-
кирующих помех относится также постановка над защищаемым
объектом аэрозольных завес в виде облаков рассеивающих и по-
глощающих излучение мелкодисперсных частиц [48, 1.3, 2.9, 6.9].
При определении основных характеристик аэрозольных завес,
следующих из задач подавления, будем исходить из того, что по-
становка такой завесы уменьшает полезный сигнал на входе из-
мерителя, а, значит, увеличивает отношение шум/сигнал.
В матричных ФПУ, используемых в корреляционных коор-
динаторах, может иметь место нескомпенсированная (остаточ-
ная) неравномерная чувствительность элементов фотоприемника,
достигающая единиц - десятка процентов и эквивалентная появ-
лению дополнительных шумов измерений. Причем уровень этих
дополнительных шумов при работе в условиях высокой освещен-
ности (яркости) сюжета, т.е. в условиях, наиболее неблагоприят-
ных с позиций подавления, может заметно превышать уровень
обычных шумов, и, следовательно, оказывать влияние на соот-
ветствующие характеристики маскирующей помехи, в частности,
аэрозольной завесы.
При постанове равнояркой полупрозрачной маскирующей
помехи на фотоприемник поступает сигнал (5(х) + 50)г + р0, где
г, - коэффициент пропускания и собственная яркость поме-
хового образования, s(x) (как и раньше) - центрированное изо-
бражение (яркость) сюжета (объекта), s() - средняя яркость сю-
жета.
С учетом действия системы АРУ с коэффициентом усиления
к (здесь к~\/т\ нормирующим размах видеосигнала s(x), сиг-
нал в цепях обработки координатора с точностью до несущест-
венного для последующего анализа множителя можно предста-
вить в виде м(х) = 5(х) + 50 + Pq/t . Когда имеет место неравенство
5(х) <50+ ]70/т, помеха, обусловленная неравномерной чувстви-
459
ГЛАВА 7
тельностью фотоприемника, образует смесь с сигналом, близкую
к аддитивной, т.е. м(х)« s(x) + /?(х). Здесь р(х) - случайный не-
коррелированный от элемента к элементу разрешения помеховый
сигнал с нулевым математическим ожиданием.
СКО этого сигнала
сгр = сг„(х0+р0/г), С7-30)
где сту - СКО относительной неравномерности чувствительности
фотоприемника (0 < av << 1).
Аппроксимируем р(х) эквивалентным белым шумом исходя
из гипотезы о том, что матричный (дискретный) фотоприемник
можно рассматривать как допредельную модель непрерывного
фотоприемного устройства. При этом дискретный шум матрич-
ного фотоприемника, обусловленный неравномерностью его чув-
ствительности, будем рассматривать как допредельную модель
эквивалентного непрерывного белого шума со спектральной
плотностью N = a^d, где d - площадь проекции элементарного
фотоприемника на плоскость сюжета [3.42]. С учетом этого по-
лучим
N = a2(s0 +p0/r)2d. (7.31)
Подставив (7.33) в (7.28), получим
-+-Ц/Л- <7-32)
Здесь £•] = <т5/50 , е2 = <ys/р0 , k\=m/d. Обычно , и тогда
(7.34) упрощается
^- = CTvl-. (7.33)
На рис. 7.9 приведена построенная по выражению (7.35) за-
висимость коэффициента пропускания помехового образования,
требуемого для реализации среднеквадратического отклонения
ошибок измерения координат, удовлетворяющих равенству
= ds, от его собственной яркости. Выражение (7.35) и графики
460
рис. 7.9 показывают, что сохранение маскирующего эффекта по-
мехового образования при увеличении его коэффициента про-
пускания может быть достигнуто путем пропорционального уве-
личения его собственной яркости р0, т.е. требования к коэффи-
циенту пропускания и яркостным характеристикам помехового
образования должны задаваться в комплексе.
Рассмотрим количественно случай подавления корреляци-
онных ТВГС тактических ракет. При использовании на защи-
щаемых объектах мер и средств маскировки (маскирующее ок-
рашивание и т.п.) наиболее неблагоприятные для подавления
ТВГС условия будут иметь место в солнечный день. Яркостная
структура цели в этих условиях наиболее резко подчеркнута и
определяется минимальным отношением освещенности участков
цели, находящихся в тени, к освещенности участков, находящих-
ся на солнце.
Согласно [8] (см. табл. 3.21), это отношение для средних
широт имеет значения, не превышающие 0,2. Учитывая это и
ориентируясь на обоснование параметров маскирующей помехи,
гарантирующих эффективное подавление, можно считать, что
£i > где 5тах “ максимальная яркость исходного сюже-
та. Если р0 > 5max (обычно выполняется для маскирующих обла-
ков на основе фосфорных составов), то контраст С облака отно-
сительно защищаемого объекта
С = (Р0-^х)/Р0-
461
ГЛАВА 7
Тогда для обеспечения эффективного подавления корреля-
ционных ТВГС коэффициент пропускания облака должен удов-
летворять неравенству
г < 2^/(1-С)^. (7.34)
Так, при crv=0,l; = 32; С = 0,3...0,5 коэффициент про-
пускания помехового образования т в видимой области спектра
излучения не должен превышать (0,9...1,25)10~2.
В связи с определенными трудностями реализации малых коэффициен-
тов пропускания излучения аэрозольными образованиями в диапазоне
8... 14 мкм, достижение необходимого маскирующего эффекта в этом
случае возможно за счет использования активно-пассивных аэрозоль-
ных образований (завес), маскирующий эффект которых обусловлен
как ослаблением проходящего излучения, так и собственным излучени-
ем («теплые» аэрозольные образования).
Конкретизируем требования к коэффициенту пропускания и
радиационной температуре Т аэрозольного образования. Пусть
при коэффициенте излучения, близком к единице, радиационная
температура защищаемого объекта Г0=3()()К, а ее СКО
АТ^ =4,3 К . Выразим коэффициенты s2. входящие в (7.34),
через Тр/т > 3000 К . При этом, как это можно показать с исполь-
зованием, например [8], для диапазона 8... 14 мкм будут иметь ме-
сто следующие приближенные равенства: «4,8АТО/ТО ,
£2«4,8аг0/т;.
Подставим эти выражения для , в2 в (*7.34), одновременно
потребовав выполнения условия cr£n=8s. Тогда для <7v=0,l,
= 16 условия эффективного действия аэрозольной помехи
сведутся к выполнению неравенства
7^/г^ЗОООК. (7.35)
В частности, если аэрозольная помеха обеспечивает ослаб-
ление излучения цели в 5 раз (т = 0,2 ), то, как следует из (7.37),
462
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
радиационная температура маскирующего аэрозольного образо-
вания должна быть не менее 600 К.
В [92] предложен способ создания протяженной ложной теп-
ловой цели с помощью комбинированной лазерно-аэрозольной
помехи. Способ предусматривает постановку аэрозольной завесы
из частиц, вступающих в экзотермическую (с выделением тепла)
фотохимическую реакцию в результате подсвета завесы излучени-
ем ультрафиолетового лазера. При этом путем, например сканиро-
вания, лазер должен формировать на завесе изображение ложного
объекта с превышением его температуры над фоном на 20...50°С,
которое обеспечивается, в основном, ходом возбужденной лазером
экзотермической реакции. Утверждается, что тепловая энергия,
выделяемая в ходе экзотермической реакции, может в 10... 100 и
более раз превышать энергию подсвета ультрафиолетового лазера.
В качестве возможных экзотермических фотохимических реакций
в [92] рассматриваются реакции полимеризации, окисления и, в
частности, реакция окисления жидкого бензоальдегида.
Реализация оптимальной аддитивной имитирующей помехи, структура
которой определяется выражением (4.45), может быть обеспечена пу-
тем размещения на защищаемом объекте совокупности точечных излу-
чателей или световозвращателей (последнее - в случае подавления
средств активной оптической локации с корреляционными измерите-
лями) с геометрическими размерами, как минимум на порядок мень-
шими, чем размеры на местности элемента разрешения подлежащих
подавлению КИ, что позволяет пренебречь излучением лежащих под
такими излучателями участков поверхности защищаемого объекта.
В соответствии с результатами, представленными на рис. 4.7,
при отношении Ь/су = 10 (т.е. при отношении силы излучения та-
кого излучателя b к СКО поля яркости объекта защиты ст, ус-
редненного по площади элемента разрешения) для получения
ошибок измерения координат ДА = 0,6^ (<5| - полуинтервал кор-
реляции поля яркости объекта) достаточно разместить такие из-
лучатели только на 17% элементов разрешения, укладывающихся
в площадь объекта. Типовые значения сг в диапазоне 8... 14 мкм
могут лежать в интервале от долей до первых единиц Вт/ср2. То-
гда сила излучения точечных помеховых излучателей должна
463
ГЛАВА 7
принимать значения из интервала единицы - десятки Вт/ср2 соот-
ветственно. Очевидным достоинством рассматриваемой помехи
является то, что направление отклонения КИ от центра объекта в
картинной плоскости при ее создании может быть выбрано по
желанию стороны - постановщика помехи.
Еще одним способом борьбы с ТВГС и ТПВГС корреляционного и све-
токонтрастного типов может быть создание возмущающих помех, дей-
ствие которых основывается на учете особенностей технической реали-
зации принципов обработки сигналов, используемых в конкретном из-
мерителе. Наиболее подверженными действию возмущающих помех
являются каналы нормировки и квантования сигналов, а также выбора
рабочего знака контраста в светоконтрастных ГСН.
Если выбор рабочего знака контраста путем измерения
уровня сигнала в малом измерительном стробе и (йДи) выбор
уровней квантования сигнала осуществляются только на этапе
захвата цели в ГСН, то, создавая засветочную помеху ограничен-
ной мощности в направлении ГСН после пуска, можно исклю-
чить точное наведение ракеты на цель. При этом эффективность
помехи будет определяться не только маскирующим эффектом
засветки фотоприемного устройства, но будет дополнительно
увеличиваться за счет искажения знака контраста цели, а также
искажения облика цели при выборе порога квантования внесен-
ными возмущениями.
Таким образом, применением традиционных средств создания помех
может быть обеспечено подавление корреляционных и светоконтраст-
ных координаторов пространственно протяженных целей, используе-
мых в телевизионных и тепловизионных головках самонаведения и раз-
ведывательно-прицельных системах. При этом могут быть реализованы
практически все основные эффекты подавления: воспрещение захвата
цели, формирование нормальных и аномальных ошибок измерения ко-
ординат цели, перенацеливание координатора на ложную цель (в на-
значенную стороной-постановщиком помех точку пространства).
Основная особенность практической реализации эффектив-
ных помех состоит, за небольшим исключением, в необходимо-
сти их формирования в виде пространственно протяженных ста-
ционарных или нестационарных помеховых образований.
464
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
7.2. Подавление ВТО с ПЛГС
Полу активные лазерные головки самонаведения (ПЛГС) ис-
пользуются для оснащения управляемых боеприпасов классов
поверхность-поверхность и воздух-поверхность, предназначен-
ных для поражения стационарных и подвижных наземных и над-
водных целей. К числу боеприпасов с ПЛГС относятся управляе-
мые ракеты классов поверхность-поверхность и воздух-поверх-
ность типов Maverick AGM-65E, Hellfire AGM-114 С, Е, К (США),
AS-30 L (Франция), Х-25 Л, Х-29 Л (Россия), управляемые авиаци-
онные бомбы типов GBU-10, -12, -16, -24, -27, -28 (США), артил-
лерийские снаряды и мины типов Copperhead (США), Bussard
(ФРГ), Краснополь, Сантиметр, Китолов, Грань (Россия) и др.
По некоторым оценкам не менее 40% существующего арсе-
нала ВТО классов воздух-поверхность (управляемые ракеты и
бомбы) и поверхность-поверхность (артиллерийские снаряды и
мины) оснащаются полуактивными лазерными головками само-
наведения. Сообщается, что до настоящего времени произведено
более 200 000 единиц УАБ типа GBU с ПЛГС, из которых более
40 000 единиц применены в локальных конфликтах последнего
времени [61].
ПЛГС требует подсвета цели узким направленным лучом ла-
зерного дальномера-целеуказателя (ЛДЦУ), установленного на
самолете-носителе, другом самолете - целеуказателе, беспилот-
ном летательном аппарате, или подсвета цели передовым авиаци-
онным или артиллерийским наводчиком с земли. Подсвеченная
цель диффузно отражает (рассеивает) лазерный луч и становится
вторичным источником излучения, на который и наводится
ПЛГС. Удержание луча ЛДЦУ на цели может производиться в
ручном или автоматическом режиме.
Для обеспечения подсвета цели и удержания на ней лазерно-
го луча с необходимой точностью используются авиационные
бортовые разведывательно-прицельные системы (РПС), а также
бортовые и наземные лазерные дальномеры-целеуказатели типов
PaveSpike, TADS, LANTIRN, ATFLIR, Litening (США, Израиль),
Кайра, Клен, Сапсан-Е, ГОЭС 451, 1Д22, 1Д26 (Россия) и др.
Подсвет цели обычно производится в импульсном режиме на
длине волны 1,06 мкм [55, 60, 103].
465
ГЛАВА 7
Длительность импульсов, используемых для подсвета..1.. .40 нс
Средняя частота следования импульсов...............8...30 Гц
Энергия в импульсе..............................0,1.. .0,3 Дж
Угловая расходимость излучения..................0,1.. .1 мрад
Разработанная фирмой Martin Marietta (США) вертолетная
разведывательно-прицельная система TADS включает оптико-
визуальный, телевизионный и тепловизионный каналы наблюде-
ния и прицеливания, лазерный дальномер-целеуказатель, борто-
вую ЭВМ и обеспечивает следующие характеристики [57].
Обзор по горизонту в секторе..........................±120°
Обзор по вертикали в секторе.....................-50°.. .+30°
Углы поля зрения оптико-визуального канала.........4° и 20,5°
Углы поля зрения ТВ-канала .......0,5о*0,67о, 2,4°хЗ,2°, 12° 16°
Углы поля зрения ТПВ-канала ........1,6°>1,2°, 8°*6°, 40° <30°
Диаметр входного зрачка объектива ТВ-канала.........20,3 см
Диаметр входного зрачка объектива ТПВ-канала.........10,2 см
Диаметр входного зрачка объектива
лазерно-дальномерного канала.........................10,2 см
Энергия излучения ЛДЦУ в импульсе...................125 мДж
Угловая расходимость................................0,13 мрад
Длина волны излучения...............................1,06 мкм
РПС LiteningAT имеет ИК-станцию переднего обзора
AN/AAQ-28(V) с матрицей размерностью 640^512 элементов
разрешения и ТВ камеру на ПЗС с матрицей 1024 1024 элемента
разрешения [102, 107]. В конструкциях РПС и ПЛГС реализуются
технические решения, исключающие влияние лазерного излуче-
ния от других самолетов в группе. При использовании современ-
ных РПС в задачу летчика входит только обнаружение и марки-
рование поражаемого объекта на ТВ или ТПВ индикаторе. Точ-
ное удержание луча подсвета на цели обеспечивается телевизи-
онной или тепловизионной автоматической следящей системой.
Применение УР с ПЛГС с авиационных носителей сводится
к следующему. В авиационных УР обычно используются гиро-
стабилизированные ПЛГС. Летчик с помощью бортовой РПС,
имеющей телевизионную и (или) тепловизионную станцию пе-
реднего обзора (FLIR), обнаруживает подлежащую поражению
цель и захватывает ее на автосопровождение этой станцией. По-
сле захвата цели на автосопровождение включается ЛДЦУ. По-
скольку оптическая ось ЛДЦУ совмещена с оптической осью
466
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
станции переднего обзора, то излучение лазера падает на цель.
Подачей соответствующих команд летчик совмещает оптическую
ось ПЛГС с оптической осью ЛДЦУ, после чего отдается команда
на захват головкой самонаведения сигнала ЛДЦУ, отраженного
целью.
Убедившись в устойчивом сопровождении цели лазерной
головкой самонаведения, летчик отдает команду на пуск ракеты с
ПЛГС. После пуска самолет может выполнять противозенитный
маневр. При этом РПС продолжает сопровождать и подсвечивать
цель излучением ЛДЦУ. В процессе полета ракеты к цели ПЛГС
непрерывно сопровождает цель, обеспечивая формирование на
борту ракеты команд управления (обычно по методу пропорцио-
нальной навигации), приводящих к поражению цели.
Особенность применения УАБ определяется тем, что они нередко ос-
нащаются более дешевыми не гиростабилизированными, а флюгерны-
ми ПЛГС, оптическая ось которых аэродинамическими силами уста-
навливается вдоль набегающего воздушного потока. Поэтому в таких
УАБ используется метод наведения на цель по кривой погони, в соот-
ветствии с которым вектор скорости УАБ удерживается направленным
на цель.
Кроме того, захват цели в ПЛГС этих УАБ может произво-
диться после сброса УАБ, т.е. на траектории ее полета к цели.
Для обеспечения захвата цели после сброса такая ПЛГС имеет
более широкое поле зрения, чем ПЛГС УР. Подсвет цели при
применении авиационных УР и УАБ может выполняться не толь-
ко с носителей этих боеприпасов, но также с соседних или беспи-
лотных летательных аппаратов и с земли передовыми авиацион-
ными наводчиками.
ПЛГС артиллерийских снарядов могут быть гиростабилизи-
рованными. Захват цели на сопровождение в артснарядах и ми-
нах, так же как и в УАБ, выполняется после отстрела снаряда или
мины на последнем участке, обычно за 3 км до их подлета к цели.
Подсвет цели выполняется, как правило, выдвинутым вперед пе-
редовым артиллерийским наводчиком.
Типовым представителем УР с ПЛГС является УР Maverick
AGM-65E, предназначенная для использования против защищен-
ных и бронированных наземных целей, надводных кораблей днем
467
ГЛАВА 7
и ночью независимо от погодных условий. Ракета имеет нор-
мальную самолетную аэродинамическую схему и оснащена
2-режимным твердотопливным двигателем с временем работы
3,5 с. Осколочно-фугасная боевая часть ракеты массой 135 кг
имеет массивный стальной корпус, внутри которого размещается
мощный заряд ВВ. Конструкция корпуса исключает его рикоше-
тирование и за счет большого веса обеспечивает пробивание кор-
пуса цели. Подрыв ВВ осуществляется с некоторым замедлением,
выбираемым в зависимости от характера цели.
Масса ракеты......................................286 кг
Максимальная дальность пуска...........................27 км
Дальность захвата цели.............................18 км
Средняя скорость полета на большую дальность..........320 м/с
При пуске УР с больших дальностей возможен захват цели
после пуска УР.
7.2.1. Особенности устройства ПЛГС
Координаторы ПЛГС принадлежат к классу координаторов
точечных целей с параллельным анализом. Они обеспечивают
оценку относительных угловых координат цели по каждому при-
нятому лазерному импульсу. Это достигается за счет использова-
ния 4-квадрантного фотоприемника и суммарно-разностной об-
работки поступающих с него сигналов. Особенности построения
ПЛГС рассмотрим на примере УР с ПЛГС.
ПЛГС УР обычно имеет в своем составе гироузел и элек-
тронный блок. В состав гироузла входят фотоприемное устройст-
во и гиростабилизатор. ФПУ служит для приема отраженного це-
лью сигнала лазера-целеуказателя, содержащего информацию о
положении цели в пределах поля зрения ПЛГС. В состав ФПУ
входят оптическая система в виде линзы Кассегрена с площадью
входной апертуры порядка 50 см2 и 4-квадрантный фотоприем-
ник, состоящий из четырехплощадочного фотодиода, каждая
площадка которого имеет индивидуальный предусилитель. Угол
поля зрения ФПУ УР обычно лежит в пределах 2.. .4°.
Гиростабилизатор служит для стабилизации и управления
оптической осью ФПУ в пространстве и для выдачи управляю-
щих сигналов, пропорциональных угловой скорости и углам пе-
468
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
ленга цели, в контур ракеты по двум каналам в двух взаимно
перпендикулярных плоскостях управления.
Электронный блок вместе с ФПУ формирует дискриминаци-
онную характеристику определяющую зависимость сред-
него значения сигнала на выходе электронного блока от ошибки
сопровождения цели е, Схема электронного блока типовой
ПЛГС для одной плоскости сопровождения цели приведена на
рис. 7.10 [32, 72, 1.20, 4.7]:
ИУ - импульсный усилитель;
БАРУ - блок быстрой автоматической регулировки усиления;
АРУШ - блок автоматической регулировки усиления по
шумам;
БАК - блок анализа и команд;
ДО - детектор огибающей;
БЛ - блок логики;
Z - сумматор;
А - блок разности.
________________________Рисунок 7.10______________________
ИУ представляет собой усилительно-преобразующее уст-
ройство с автоматической регулировкой по шумам (АРУШ) и
быстрой АРУ (БАРУ) и служит для усиления и преобразования
сигналов с выхода ФПУ. БАРУ решает задачу стабилизации дис-
криминационной характеристики, реализуя деление разностного
469
ГЛАВА 7
сигнала на суммарный. Система АРУШ обеспечивает выставле-
ние порога обнаружения отдельных сигнальных импульсов на
уровне, превышающем уровень естественных шумов. Вся после-
дующая обработка выполняется только над импульсами, превы-
сившими этот порог.
БАК служит для формирования служебных команд и сигна-
лов (в частности, для формирования команды на захват цели и
переход к режиму ее автосопровождения; для формирования
стробирующих импульсов ворот, обеспечивающих временную
селекцию сигналов цели, в том числе и тогда, когда используется
временное кодирование излучения лазера-целеуказателя) и выда-
чи их в другие блоки и систему управления.
БЛ обеспечивает повышение помехозащищенности ПЛГС от
естественных (атмосферных помех обратного рассеяния) и пред-
намеренных активных помех.
Оценка относительных угловых координат цели по каждому
принятому лазерному импульсу достигается за счет использова-
ния 4-квадрантного фотоприемника (см. рис. 3.41) и суммарно-
разностной обработки поступающих с него сигналов. Для форми-
рования дискриминационной характеристики с линейным участ-
ком достаточной (для устойчивого сопровождения цели) протя-
женности фотопрйемник обычно выносится из фокальной плос-
кости оптической системы ПЛГС. При этом размер лазерного
пятна становится сравним с размерами одного элемента четырех-
квадрантного фотоприемника, благодаря чему и формируется ли-
нейный участок дискриминационной характеристики. Более под-
робно соотношения, определяющие формирование дискримина-
ционной и флуктуационной характеристик ПЛГС, описаны в раз-
деле 3.3.4.
Основные меры помехозащиты, используемые в ПЛГС
Использование узкополосных оптических интерференцион-
ных фильтров.
Кодирование излучения подсвета лазера-целеуказателя.
Временное стробирование сигналов в ПЛГС.
Ширина полосы пропускания оптического интерференцион-
ного фильтра определяется шириной спектра излучения твердо-
тельного лазера подсвета в рабочем диапазоне его температур, а
470
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
также смещением максимума его полосы пропускания как вслед-
ствие температурных флуктуаций, так и вследствие отличных от
нулевого углов падения излучения на фильтр, обусловленных
мгновенным углом поля зрения и светосилой оптической систе-
мы ПЛГС, определяющими угол сходимости лучей на фотопри-
емнике. С учетом этих факторов полоса пропускания интерфе-
ренционного фильтра ПЛГС УР должна быть порядка 20...30 А, а
ПЛГС УАБ и артснарядов - порядка 50.. .90 А.
Кодированный сигнал подсвета можно трактовать как сиг-
нал с избыточной информативностью, введение которой и обес-
печивает помехозащищенность ПЛГС. Возможным способом ко-
дирования излучения лазера-целеуказателя является изменение
на единицы Гц-частоты следования импульсов подсвета цели для
ПЛГС, запускаемых с разных носителей. Таким кодированием
обеспечивается распределение одновременно запущенных ракет
по разным целям и повышается помехозащищенность ПЛГС от
преднамеренных помех.
Альтернативным вариантом может быть использование для
кодирования циклического временного позиционного кода, когда
в течение кодовой посылки по любому, например случайному за-
кону, изменяется от импульса к импульсу интервал между им-
пульсами. Такой способ кодирования позволяет реализовать про-
цедуру захвата головкой отраженного сигнала как на подвеске,
так и в полете, т.е. после старта ракеты. Кроме того, он хорошо
согласуется с использованием схем жестокого временного стро-
бирования в ПЛГС. Типовое число импульсов в одной кодовой
посылке 4...64.
Предполагается также возможность использования неперио-
дического псевдослучайного кода [61]. Для начального захвата
отраженного сигнала в ПЛГС может использоваться процедура
сжатия сигналов одной кодовой посылки, реализуемая на цифро-
вом регистре с отводами. При этом обеспечивается существенное
повышение отношения сигнал - помеха на наиболее слабо поме-
хозащищенном этапе захвата сигнала от цели на сопровождение в
ПЛГС.
При отсутствии позиционного временного кодирования излучения
ЛДЦУ цепь автосопровождения цели замыкается после приема не ме-
нее трех подряд импульсов подсвета цели. При применении позицион-
471
ГЛАВА 7
ного временного кодирования переход ПЛГС в режим автосопровож-
дения становится возможным после приема не менее двух кодовых по-
следовательностей.
После захвата сигнала в ПЛГС формируются стробирующие
временные импульсы ворот, открывающие приемник ПЛГС толь-
ко на время ожидаемого прихода отраженного от цели сигнала.
Интервал между этими импульсами ворот определяется парамет-
рами используемой кодовой последовательности. Начало интер-
вала, определяющего момент создания очередного импульса во-
рот, обычно отсчитывается от момента прихода предыдущего от-
раженного целью импульса ЛДЦУ.
Минимальная длительность импульсов ворот, существенно
определяющая помехозащищенность ПЛГС, зависит от погреш-
ности формирования временного положения импульсов лазера-
целеуказателя, от изменения интервала между принимаемыми
импульсами из-за сближения ракеты с целью, от тактовой часто-
ты цифровых схем обработки сигналов в ПЛГС и т.п. и, как пра-
вило, не может быть меньше 1...2 мкс.
Описанные выше операции, связанные с декодированием принятых
сигналов, а также формирование временного положения и длитель-
ности импульсов ворот, формирование команды захвата выполняют-
ся в БАК.
При совмещенном подсвете цели, когда ЛДЦУ размещается
в той же точке пространства, что и пусковая установка УР, может
иметь место ситуация, когда в ПЛГС сначала поступает импульс
ЛДЦУ, рассеянный назад атмосферой, а после этого сигнал, от-
раженный от цели. Без принятия специальных мер ПЛГС во мно-
гих случаях теряет возможность сопровождения цели. В БЛ для
борьбы с такой помехой обратного рассеяния может быть реали-
зован режим срабатывания по последнему принятому импульсу.
При этом после прихода первого импульса, попавшего в строб
ворот, формируется временной интервал, равный интервалу вре-
мени двухкратного распространения лазерного импульса на мак-
симальную дальность (обычно порядка 80... 100 мкс). На сопро-
вождение передается последний принятый импульс, попавший в
этот интервал.
472
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
Сообщается о проведении работ, направленных на разработку новых
мер помехозащиты, основанных на использовании новых способов ко-
дирования сигналов и на анализе уширения лазерных импульсов, отра-
женных различными средами искусственного или естественного проис-
хождения при создании лазерных ложных целей [75, 76]. Предполага-
ется возможность использования таких мер помехозащиты в ГСН УР
Hellfire и других ГСН.
Работой системы БАРУ реализуется операция деления раз-
ностного сигнала на суммарный и формирование дискриминаци-
онной характеристики в соответствии с выражением, при-
веденным на рис. 7.10. СКО промахов УР с ПЛГС при исключе-
нии влияния ошибок подсвета цели не превышает 1... 1,5 м.
Основное отличие ПЛГС УАС от ПЛГС УР заключается в
использовании более широкого поля зрения:
в режиме захвата
22°
в режиме сопровождения...............................5°
Рисунок 7.11
Это, в частности, реализуется использованием 8-элемент-
ного фотоприемника, геометрия чувствительных площадок кото-
рого показана на рис. 7.11 [1.20].
При этом 4 внешних сегмента
фотоприемника работают в режиме
захвата, а четырехквадрантный фо-
топриемник для режима автосопро-
вождения образуется 5...8-й пло-
щадками. Вероятность попадания
УАС Краснополь в уязвимые зоны
танка лежит в пределах 0,8.. .0,9.
В УАБ, как правило, исполь-
зуются флюгерные ПЛГС, обеспе-
чивающие наведение УАБ на цель
по кривой погони. Угол поля зрения
таких ПЛГС обычно лежит в районе
30°, что необходимо для обеспече-
ния захвата цели на дальности 5...6 км после сброса УАБ. В та-
ких ПЛГС может формироваться релейная дискриминационная
характеристика с зоной нечувствительности порядка 3°. СКО
промаха УАБ с такими ПЛГС лежит в пределах 5... 10 м.
473
ГЛАВА 7
Диапазон значений характеристик ПЛГС
управляемых боеприпасов
Мгновенный угол поля зрения .......................2°.. .30°
Площадь входного зрачка ........................15.. .50 см2
Полоса пропускания интерференционного фильтра
на длине волны 1,06 км 30.. .300 А
Длительность импульса ворот .................40.. .5000 мкс
Пороговая чувствительность
(по облученности входной апертуры)......10-7...10~8 Вт/см2
Динамический диапазон по входному сигналу......(2.. .3)-104
Расширение динамического диапазона фотоприемника ПЛГС может
обеспечиваться системой автоматического регулирования положения
рабочей точки фотоприемника.
7.2.2. Преднамеренные помехи ВТО с ПЛГС
Повышение защищенности объектов от ВТО с ПЛГС может
быть обеспечено применением красок, покрытий, маскирующих
накидок, снижающих показатели отражения защищаемым объек-
том зондирующего излучения ЛДЦУ противника.
Создание покрытий, снижающих коэффициенты отражения лазерного
излучения до уровня, препятствующего эффективному применению
ВТО с ПЛГС во всем диапазоне дальностей его возможного примене-
ния, является достаточно сложной технической задачей. Однако вполне
реально обеспечить уменьшение дальности эффективного применения
такого ВТО и, следовательно, повысить эффективность защиты маски-
руемого объекта.
Оригинальный способ уменьшения уровня излучения ЛДЦУ,
отражаемого объектом в направлении на атакующую ПЛГС, обсу-
ждается в [37]. Он основан на применении тонкопленочных покры-
тий со световозвращающими свойствами, изменяющими в задан-
ном направлении угол между падающим и возвращаемым излуче-
нием и тем самым уменьшающими облученность ПЛГС отражен-
ным излучением лазерного далъномера-целеуказателя. Более раз-
вернутое обсуждение таких покрытий содержится в разделе 7.4.4.
Широко распространенным способом создания маскирую-
щих помех против ПЛГС является постановка на линии визиро-
474
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
вания ракета - цель аэрозольной завесы (АЗ) [48, 1.12, 3.44]. При
совмещенном подсвете цели, когда ЛДЦУ и пусковая установка
боеприпаса с ПЛГС находятся в одной и той же точке простран-
ства, аэрозольные облака нарушают визуальный контакт носите-
ля с целью, т.е. исключают сопровождение цели, значит, и точное
удержание лазерного луча на ней. В этом случае эффективность
маскирующих помех при подавлении ракет с ПЛГС обусловлена,
в первую очередь, эффективным подавлением ТВ- и ТПВ-
координаторов бортовых прицельных систем носителей, обеспе-
чивающих наведение луча ЛДЦУ на цель.
При разнесенном подсвете цели, когда подсвет и пуск бое-
припаса с ПЛГС могут выполняться с разных носителей или из
разнесенных точек пространства, возможны ситуации, когда
аэрозольная завеса перекрывает только линию визирования
ЛДЦУ - цель, но не линию визирования ПЛГС - цель. Эффек-
тивность помехи в этом случае определяется успешным перена-
целиванием ПЛГС с ослабленного лазерного пятна на цели,
сформированного приходящим сквозь аэрозольную завесу излу-
чением ЛДЦУ, на лазерное пятно, образованное излучением ла-
зера-целеуказателя, рассеянного аэрозольной завесой назад, т.е. в
направлении на ПЛГС.
Лазерное пятно на завесе можно трактовать как своеобразную лазер-
ную ложную цель (ЛЛЦ), спектрально-временные характеристики ко-
торой автоматически воспроизводят спектрально-временные характе-
ристики излучения ЛДЦУ, что обеспечивает преодоление сигналом
ЛЛЦ-устройств спектрально-временной селекции ПЛГС.
Для диффузно-отражающей цели отношение на апертуре
ПЛГС мощности (энергии) сигнала, рассеянного завесой, к мощ-
ности отраженного целью сигнала (отношение помеха - сигнал)
определяется выражением
Р^а
(7.36)
где
_СР_
- нормированная (соответствующая единичной
мощности подсвета) индикатриса рассеяния завесой назад излу-
475
ГЛАВА 7
чения ЛДЦУ (см. 2.3), характеризующая силу излучения ЛЛЦ,
образовавшейся на АЗ; а - угол между направлением на ЛДЦУ
и ПЛГС; Dc. Da - дальность от ПЛГС до цели и завесы соответ-
ственно; рс - коэффициент отражения цели; та - коэффициент
пропускания АЗ.
Для обеспечения устойчивого перенацеливания ПЛГС на АЗ,
как это следует из рис. 3.46, необходимо выполнение неравенства
4>3...5. (7.37)
Будем под коэффициентом светимости s(a) подсвеченной
лучом лазера АЗ или любой другой поверхности понимать отно-
шение облученностей некоторой оптической системы, создавае-
мых рассеянным завесой назад лазерным излучением и рассеян-
ным тоже назад излучением идеального диффузного отражателя,
нормаль к которому ориентирована на эту оптическую систему.
Как нетрудно заметить,
s(a) = 7iJ(a), (13$)
(Иногда коэффициент 5 при а«0 называют коэффициен-
том отражения АЗ.) Из (7.38)-(7.40) следует, что при Dc « Da
для обеспечения уверенного перенацеливания ПЛГС на АЗ необ-
ходимо выполнение следующего соотношения между коэффици-
ентами светимости (отражения) и пропускания АЗ:
^^>(3...5). (7.39)
Рс*а
Перспективным способом борьбы с управляемыми боеприпасами, ос-
нащенными ПЛГС, является постановка лазерных ложных целей [34,
35, 61, 69].
ЛЛЦ представляет собой лазерный помеховый излучатель,
расположенный на некотором удалении от пятна на цели, образо-
ванного излучением ЛДЦУ, обозначающим атакуемую цель. В
частном случае ЛЛЦ может быть создана путем подсвета излуче-
нием помехового лазера участка местности, аэрозольного облака
или специальной мишени, расположенных вблизи защищаемого
объекта.
476
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
|При защите кораблей ЛЛЦ может создаваться путем подсвета помехо-
вым источником морской поверхности.
При создании ЛЛЦ необходимо обеспечить преодоление
сигналом ЛЛЦ интерференционного фильтра и устройств вре-
менной селекции ПЛГС, т.е. обеспечить с минимальной задерж-
кой повторение помеховыми импульсами зондирующих цель им-
пульсов ЛДЦУ. Последнее может быть выполнено путем исполь-
зования в качестве помехового излучателя лазерного усилителя-
ретранслятора, а также путем декодирования и последующего
воспроизведения кодовой импульсной последовательности, ис-
пользуемой ЛДЦУ.
При создании ЛЛЦ путем подсвета излучением помехового
лазера аэрозольной завесы, выражение (7.38), характеризующие
отношение помеха/сигнал на входе ПЛГС, при Dc « Da принима-
ет вид
_ />„*/(«) Pns(<z) (7 40)
^сРс ^сРс.
Здесь Рп, Рс - мощность (энергия) импульсов помехового лазера
и ЛДЦУ соответственно.
При создании ЛЛЦ путем подсвета водной поверхности
[35, 77] отражение лазерного излучения от нее носит зеркально-
диффузный характер. С учетом этого облученность апертуры
ПЛГС таким излучением определяется выражением
Еп \\jn(a,/3^a,/3)dad/3. (7.41)
л-D
Здесь а. ft - углы наклона оси помехового излучения по азиму-
ту и углу места соответственно, отсчитываемые от зеркального
направления на ПЛГС; <7П(«,Д) - сила излучения помехового ла-
зера; т - коэффициент пропускания атмосферы на трассе рас-
пространения; D - дальность от помехового пятна на морской
поверхности до ПЛГС; 5 («,/?) - коэффициент светимости поме-
хового пятна.
477
ГЛАВА 7
На рис. 7.12 приведены полученные экспериментально при
двухпозиционной схеме наблюдения значения коэффициента
светимости морской поверхности s(a,p}. Подсвет морской по-
верхности выполнялся на длине волны 1,06 мкм. Оптическая ось
приемника была ориентирована по углу места на 95° (отсчиты-
вается от вертикали). Измерения выполнялись при волнении
моря 2 балла и при углах падения лазерного излучения подсвета
а , р, отсчитываемых от зеркального направления на приемник
излучения.
Графики свидетельствуют о значительной вытянутости изо-
линий коэффициента светимости вдоль угломестной оси и о зна-
чительно меньшей ее протяженности вдоль азимутальной оси
(эффект «лунной дорожки»). Причем угол расходимости рассе-
янного излучения по азимуту увеличивается с увеличением на-
клона луча подсвета по углу места. Из этого следует, что при соз-
дании ложной цели путем подсвета водной поверхности луч под-
света по азимуту необходимо достаточно точно ориентировать в
направлении на подавляемую ПЛГС, в то время, как по углу мес-
та направление подсвета может, по крайней мере, на 10... 15° от-
личаться от зеркального на ПЛГС направления.
478
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
Информация о значения ,v(cr,/7) позволяет для любого зако-
на подсвета ./п («,/?) определить интенсивность излучения лож-
ной цели, создаваемой подсветом морской поверхности, на вход-
ной апертуре ПЛГС. Так, при Jn = const = Pn/Q
П-42)
где S = — $s(a,/?)dad/? - интегральный коэффициент свети-
Q
мости.
Излучение, рассеянное морской поверхностью, в общем слу-
чае является флуктуирующим. Приведенные выражения (7.42)-
(7.44) по существу описывают зависимость между математиче-
скими ожиданиями входящих в них величин. Также вполне оче-
видно, что случайная составляющая этих величин будет умень-
шаться с увеличением угла расходимости помехового излучения
подсвета морской поверхности.
Так, при рассмотренных условиях и угле расходимости по-
мехового излучения порядка 5-ПГ4 ср СКО флуктуаций сгЕ не
превышает единиц процентов от математического ожидания Еп ,
а интервал их корреляции лежит в пределах 0,5... 1,5 с. Влияние
флуктуаций сигнала ЛЛЦ на вероятность перенацеливания на не-
го ПЛГС рп при вариации отношения помеха - сигнал q иллю-
стрируют кривые на рис. 7.13, рассчитанные по методике, данной
в 3.3.6.
Кривые получены для усеченного по нулевому уровню нор-
мального закона распределения мощности сигнала, принятого от
ЛЛЦ. Пунктиром показана кривая для рэлеевского закона рас-
пределения этого сигнала. Кривые соответствуют случаю, когда
интервал корреляции флуктуаций мощности превышает постоян-
ную времени контура слежения ПЛГС. Особенности поведения
промахов ракеты при постановке ЛЛЦ рассмотрены в 3.1.3, 3.1.4.
На кильватерном следе корабля или на взволнованной под
действием ветра морской поверхности наблюдаются участки пе-
ны, характеристики отражения которых более или менее близки к
характеристикам ламбертовских отражателей с коэффициентом
479
ГЛАВА 7
отражения р. На рис. 7.14 приведены полученные в серии лабо-
раторных экспериментов значения коэффициентов отражения
морской пены, заимствованные из [13].
Если ложная цель является пространственно протяженной,
например, если она создается подсветом земной поверхности под
большими углами места (отсчитываются от вертикали), то для
обеспечения перенацеливания на нее ПЛГС отношение поме-
ха/сигнал должно быть увеличено. Действительно, при равно-
480
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
мерной интенсивности излучения протяженной ложной цели по-
ложение энергетического центра парной цели определяется оче-
видным выражением
х.= ?п Ь, (7.43)
1 Р +Р
л п ’ г с
в котором Ь - расстояние между целью и центром протяженной
ЛЛЦ (база); х} - смещение энергетического центра от истинной
цели.
Граничные условия перенацеливания ПЛГС на ложную цель
после начала процесса разрешения, т.е. когда часть протяженной
ложной цели начинает выходить из поля зрения ПЛГС, опреде-
ляются неравенством
Ь + 1/2 / п л л \
хх>—^—, VM)
где I - линейный размер протяженной ЛЛЦ.
После подстановки (7.45) в (7.46) получается искомое выра-
жение для граничного отношения помеха/сигнал qg :
2 +а
где а-1/b (0<я<2).
На рис. 7.15 приведена зависимость граничного отношения
помеха - сигнал qg от отнесенного к базе b линейного размера
протяженной ложной цели. Кривая свидетельствует о существен-
ном (вплоть до 10 раз и более) повышении требований к лазерной
ложной цели, если она создается как пространственно протяжен-
ная (например, путем подсвета земли под малыми к поверхности
земли углами).
В проблематике ОЭП в последнее время заметное место от-
водится вопросам групповой защиты, т.е. защиты помехами из
одной точки группы объектов, размещенных в различных точках
некоторой области пространства [67].
Возможности групповой защиты в общем случае ограничиваются тем,
что помехи, создаваемые из одной точки пространства, могут не попа-
481
ГЛАВА 7
дать в поле зрения ПЛГС ракеты, атакующей другой объект группы.
Создание эффективных помех с направлений вне поля зрения ПЛГС (с
боковых направлений) требует увеличения на 1...3 и более порядка
мощности источника помехового излучения.
Рисунок 7.15
________________________Рисунок 7.16_____________________
Это иллюстрирует приведенный на рис. 7.16 график зави-
симости относительного уровня к сигнала на выходе фотопри-
емного устройства от угла прихода (р излучения на апертуру
его оптической системы. Точками на рис. 7.16 отмечены ре-
зультаты натурных измерений, выполнявшихся с использова-
нием макета ФПУ, имевшего кассегреновскую оптику с углом
поля зрения ±2,5° и фотоприемник, смещенный вперед от фо-
кальной плоскости.
482
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
Из рис. 7.16 следует, что при удалении источника засветок
от оптической оси ФПУ на угол 10... 15° относительный уровень
боковых засветок не превышает 21 О’4 от уровня сигнала, регист-
рируемого на оптической оси ФПУ. Кривая на рис. 7.16 позволя-
ет ориентировочно оценить требования к энергетическим харак-
теристикам помех при их создании с направлений вне поля зре-
ния ПЛГС. Такие требования обязательно должны уточняться в
экспериментах с реальными ПЛГС.
Основные факторы, определяющие возможность
подавления ПЛГС с боковых направлений
к Дифракция принимаемого излучения на элементах приемной
оптической системы.
Рассеяние излучения атмосферой на трассе распространения.
Рассеяние излучения на неоднородностях входной оптики.
Многократное переотражение и рассеяние излучения конст-
руктивными элементами фотоприемного устройства ПЛГС.
Сравнительная оценка роли этих факторов показывает сле-
дующее. Средний уровень дифракционных лепестков с учетом
выноса фотоприемника ПЛГС из фокальной плоскости, т.е. в
предположении дифракции Френеля, на несколько порядков
меньше наблюдавшегося в эксперименте. Аналогичное заключе-
ние справедливо и для вклада, обусловленного рассеянием на не-
однородностях входной оптики. Ответственными за уровень из-
лучений, принимаемых с боковых направлений, могут быть рас-
сеяние излучения атмосферой на трассе распространения в усло-
виях увеличенной замутненности атмосферы и, главным образом,
многократное переотражение и рассеяние излучения конструк-
тивными элементами фотоприемного устройства ПЛГС.
Наряду с маскирующими и имитирующими для подавления ПЛГС мо-
гут использоваться также возмущающие помехи, действие которых
связано с засветкой (ослеплением) фотоприемника ПЛГС [33, 61]. За-
светочная помеха создается импульсным или непрерывным лазерным
помеховым излучением достаточной мощности, лежащим в полосе
пропускания интерференционного фильтра. При этом согласование
временной последовательности помеховых импульсов с кодовой после-
довательностью импульсов ЛДЦУ, т.е. преодоление устройств времен-
ной селекции ПЛГС не обязательно.
483
ГЛАВА 7
Возможными способами создания возмущающих помех мо-
гут быть также способы, основанные на воздействии на цепи
АРУ подавляемых ПЛГС [33, 48]. Наличие во входных цепях
ПЛГС петли АРУ по шумам, обеспечивающей формирование по-
рогового уровня захвата цели, приводит к тому, что в результате
воздействия достаточно мощного когерентного или некогерент-
ного помехового сигнала, преодолевшего интерференционный
фильтр, такая система АРУ вместо формирования порога захвата
цели по средней мощности естественных (фоновых и внутрен-
них) шумов будет формировать порог захвата по средней мощно-
сти проникающего помехового сигнала, наделенного квазислу-
чайной шумовой модуляцией. При этом полезный сигнал в уси-
лителе, охваченном петлей АРУ, окажется подавленным. Такая
помеха, так же как и засветочная, не требует согласования вре-
менной последовательности помеховых импульсов с кодовой по-
следовательностью импульсов ЛДЦУ.
Другим видом возмущающих помех могут быть помехи,
действующие по цепям регулирования положения рабочей точки
фотоприемника и БАРУ и приводящие к насыщению каскадов
усиления и перерывам поступления информации о цели в ПЛГС
(прерывистые помехи) [48, 6.9]. Вполне очевидно, что уровень
облученности входной апертуры ПЛГС, приводящий к насыще-
нию ФПУ, задается произведением пороговой чувствительности
ПЛГС по входному сигналу на величину ее динамического диа-
пазона.
Для обеспечения надежного подавления ПЛГС этот уровень
должен быть превышен помеховым сигналом в 3...5 и более раз,
т.е. составлять, как это следует из данных раздела 7.2.1, не менее
(0,5...0,8)-10~2 Вт/см2. В ряде контуров самонаведения, исполь-
зующих излучение как оптического, так и радиодиапазонов, для
исключения нежелательного маневрирования ракеты в непосред-
ственной близости к цели при насыщении ее приемных устройств
контур самонаведения размыкается, и ракета завершает процесс
самонаведения в неуправляемом полете.
Дальность, на которой это происходит, называют дально-
стью ослепления. Она может составлять десятки - первые сотни
метров. При создании помехи, приводящей к насыщению ФПУ
ПЛГС на больших дальностях и соответствующему увеличению
484
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
дальности ослепления до сотен метров - первых километров, ра-
кета с такой ПЛГС будет вынуждена преодолевать значительную
часть траектории наведения в неуправляемом полете.
Для создания прерывистой помехи следует обеспечить периодическую
модуляцию по амплитуде поступающего на вход ПЛГС полезного сиг-
нала с не менее, чем десятикратным перепадом амплитуды за период.
Физические основы помехового эффекта при создании пре-
рывистой помехи обусловлены двумя факторами.
1. Как показано в разделе 3.4.2, эквивалентная постоянная
времени АРУ Т -Т^кщ обратно пропорциональна амплитуде
входного сигнала. Здесь - постоянная времени фильтра цепи
АРУ; к - некоторый постоянный коэффициент; и{ - амплитуда
входного сигнала.
Таким образом, при десятикратном перепаде амплитуды
входного сигнала (wlmax/wimin ~Ю) постоянная времени реакции
АРУ на и1тт(т.е. Tmin) будет почти на порядок больше времени
реакции на zzlmax (т.е. Ттах). Поэтому если величину периода пре-
рывистой помехи выбирать близкой сумме + Ттах, интервал
создания входного сигнала с амплитудой сделать близким к
^тах , а с амплитудой wlmin - к близким Tmin , то в течение значи-
тельной части интервала времени Tmin , когда АРУ еще не отрабо-
тало величину wlmin, амплитуда импульсов на выходе усилителя,
охваченного петлей АРУ, будет ниже пороговой. При этом может
быть обеспечена скважность поступления информации в ПЛГС
порядка 2...4.
2. Обычно команда на захват цели в ПЛГС формируется
специальными логическими схемами лишь при наличии устойчи-
вого приема полезного сигнала в течение интервала времени по-
рядка 0,3... 1 с. Наличие неустойчивого режима, описанного вы-
ше, может исключить срабатывание таких схем, за счет чего мо-
жет быть сорван захват цели в ПЛГС. При использовании коди-
рованного излучения для подсвета цели описанная прерывистая
помеха искажает принимаемую кодовую последовательность, что
485
ГЛАВА 7
для некоторых схем декодирования может также исключить за-
хват по коду полезного сигнала в ПЛГС.
Периодическая амплитудная модуляция входного сигнала при создании
прерывистой помехи может быть реализована с помощью активного ла-
зерного излучателя, или пассивного лазерного управляемого световоз-
вращателя, размещаемого на защищаемом объекте.
Такой световозвращатель может быть построен в виде мат-
рицы элементарных уголковых оптических отражателей или па-
кета оптоволоконных линий с собирающей линзой на их прием-
ном конце и зеркальной поверхностью на другом конце [48], пе-
ред которыми установлен, например, механический прерыватель
лучистого потока. Как нетрудно показать, площадь входной по-
верхности матрицы уголковых отражателей или собирающей
линзы необходимо выбирать в соответствии с выражением
S = v№/(^q), (7.46)
где v - требуемое отношение W]max/Wimin '> > СР ~ Углы расхо-
димости излучения ЛДЦУ и отраженного световозвращателем
(уголковым отражателем) соответственно; р0,рц - коэффициен-
ты отражения матрицы уголковых отражателей и защищаемого
объекта; D - максимальная дальность подавления ЛГС.
При типовых значения D = 5,103 м; j = ПГ6 ср; в = 104 ср;
=0,9; рц =0,2; v = 10 площадь входной поверхности управ-
ляемого отражателя 5= 17 см2, что не создает принципиальных
трудностей для размещения такого устройства защиты на мало-
размерных подвижных объектах.
7.3. Подавление ВТО с ИК-координаторами
За рамками рассмотренных вопросов остались координаторы
точечных целей с последовательным анализом и координаторы
пространственно протяженных целей с малоэлементными фото-
приемниками (см. позиции 1.2, 2.2, рис. 1.1). Общим для всех та-
ких координаторов является использование ИК-излучения для
определения координат визируемых целей.
486
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
ИК-координаторы с последовательным анализом используются для оп-
ределения координат высокоэнергетических источников излучения, ко-
торые почти во всем диапазоне дальностей работы координаторов вос-
принимаются как точечные излучатели, пространственные размеры ко-
торых не превосходят пространственных размеров мгновенного поля
зрения ИК-координатора.
В качестве таких излучателей могут выступать факелы рабо-
тающих двигателей самолетов и вертолетов на большой и сред-
ней дальности наблюдения, пиротехнические и другие (лазерные,
на газоразрядных лампах высокого давления) бортовые излучате-
ли (трассеры) противотанковых ракет с командным наведением.
ИК-координаторы пространственно протяженных целей с
малоэлементными фотоприемниками обычно используются для
определения координат целей по собственному низкотемпера-
турному тепловому контрасту этих целей с фоном. Общей осо-
бенностью таких координаторов, отличающей их с позиций оп-
тико-электронного подавления от тепловизионных координато-
ров, является наличие режима автоматического распознавания
целей не по их детальным эталонным изображениям, а по сово-
купности относительно простых пространственных и спектраль-
ных признаков.
7.3.1. Особенности устройства
И К-координаторов точечных целей
Наиболее широкое применение ИК-координаторы (ИКК) то-
чечных целей нашли в первых поколениях авиационных самона-
водящихся ракет класса воздух-воздух Sidewinder (США), К-13
(Россия), в ракетах класса поверхность-воздух переносных зе-
нитных ракетных комплексов (ПЗРК) RedEye, Stinger (США),
Стрела, Игла (Россия), в переносных противотанковых ракетных
комплексах (ПТРК) с командным наведением Dragon, TOW
(США), НОТ, Milan (ФРГ), Bill (Швеция), Фагот, Метис (Рос-
сия), где они используются для сопровождения противотанко-
вой управляемой ракеты (ПТУР) по сигналу ее бортового излу-
чателя (БИ).
В таких ИК-координаторах для последовательного анализа
пространства чаще всего устанавливают растровые анализаторы с
487
ГЛАВА 7
розеточной разверткой, с амплитудно-частотной, частотно-
фазовой, время-импульсной и другими видами модуляции.
В противотанковых ракетных комплексах с командным на-
ведением по методу трехточки оптическая ось ИК-координатора,
размещенного на пусковой установке, удерживается на обстрели-
ваемой цели в автоматическом или полуавтоматическом (с уча-
стием человека - оператора) режиме. Атакующие цель противо-
танковые управляемые ракеты оснащаются пиротехническими
либо непиротехническими (на лазерных диодах, ксеноновых
лампах высокого давления и т.п.) оптическими излучателями.
После пуска ракеты ИК-координатор измеряет угловое откло-
нение ракеты от его оптической оси по принимаемому сигналу
бортового излучателя ракеты. По этим отклонениям формируются
команды управления, передаваемые на ракету по проводам или ра-
диоканалу. Исполнение этих команд на ракете обеспечивает ее
удержание на оптической оси ИК-координатора, за счет чего и
реализуется наведение ракеты на цель по методу трехточки.
В ПТРК НОТ, Milan, Фагот используются непрерывные бор-
товые излучатели ракет и ИК-координаторы с интегрированной
регистрацией излучений, фотоприемные устройства которых по-
стоянно принимают общий поток излучений от всех источников,
находящихся в поле зрения, и формируют сигнал, определяющий
положение энергетического центра этих источников [1.16]. Ти-
пичными представителями таких координаторов являются коор-
динаторы, использующие дискриминаторы с частотно-фазовой
модуляцией.
Упрощенная схема типового дискриминатора с частотно-
фазовой модуляцией, который может применяться как в ИК-
координаторах разомкнутого типа противотанковых ракетных
комплексов с командным наведением по методу трехточки, так и
в ИК-головках самонаведения ракет классов воздух-воздух, по-
верхность-воздух, приведена на рис. 4.11.
В реальных координаторах могут использоваться более сложные пере-
даточные функции полосовых, сглаживающих и дифференцирующих
фильтров, чем показанные на рис. 4.11.
В ИК-координаторах и ИК-головках самонаведения послед-
них модификаций особое внимание уделяется разработке широ-
488
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
кого набора мер борьбы с преднамеренными помехами, реали-
зующих спектральную, частотную, временную, траекторную се-
лекции истинной цели на фоне ложных целей и других помех.
Типичным представителем ПТРК с таким координатором являет-
ся ПТРК TOW-2B.
На пусковой установке ПТРК TOW-2B размещаются опти-
ческая прицельная система, усовершенствованная ТПВ система
наблюдения и прицеливания IT AS, ИК-координатор со счетно-
решающим устройством, формирующим команду управления,
которая посылается по проводам на ракету. На ракете размещены
БИ на ксеноновой лампе со стандартным спектром излучения
ксеноновых ламп в диапазоне 0,2... 1,2 мкм и пиротехнический
БИ с излучением в полосе 8... 14 мкм. ИК-координатор имеет две
кремниевые фотоприемные площадки, развернутые одна относи-
тельно другой на 90° и предназначенные для приема излучения
ксенонового БИ, наделяемого амплитудной модуляцией с часто-
той порядка единиц кГц.
Результатом круговой развертки принятого излучения БИ по
плоскости фотоприемных площадок является время-импульсная
модуляция принятого излучения, несущая информацию об угло-
вом смещении ракеты с БИ относительно оптической оси ИК-
координатора, которая удерживается оператором на цели. На ос-
нове этой информации формируется и передается по проводам на
ракету команда управления, направленная на совмещение поло-
жения ракеты с оптической осью ИК-координатора.
При формировании команды управления импульсы, снимае-
мые с каждой площадки фотоприемника и наделенные амплитуд-
ной модуляцией БИ, проходят через полосовой фильтр, настро-
енный на частоту модуляции ксенонового БИ, за счет чего обес-
печивается частотная селекция поступивших на обработку сигна-
лов [1.16]. В отличие от координаторов с интегрированной реги-
страцией излучений ИК-координатор ПТРК TOW-2B следует от-
нести к классу координаторов с раздельной регистрацией излуче-
ния от источников, попадающих в его поле зрения. Сигналы БИ и
помехового излучателя на выходе ФПУ такого координатора раз-
решаются по времени и могут обрабатываться раздельно.
Описанная схема построения ИК-координатора свойственна
всем модификациям ПТРК TOW. Для повышения помехозащи-
489
ГЛАВА 7
щенности ПТРК TOW-2B в его состав включены система наблю-
дения и прицеливания IT AS с тепловизором, обеспечивающим
автоматическое сопровождение ракеты по излучению пиротехни-
ческого БИ, и лазерный дальномер. При появлении в поле зрения
ИК-координатора дополнительного помехового источника излу-
чения с параметрами, близкими к параметрам излучения ксено-
нового БИ, на борт ракеты передается команда на инициирование
пиротехнического БИ, на автосопровождение которого перево-
дится тепловизор системы IT AS. В составе блока обработки сиг-
нала пиротехнического трассера для повышения его помехоза-
щищенности предусмотрено применение алгоритмов селекции
излучения пиротехнического БИ по изменению его энергетиче-
ских и траекторных параметров [70].
Команда управления ракетой комплекса обеспечивает ее пролет над це-
лью на высоте 5... Юм. Ракета ПТРК TOW-2B снаряжена тандемной
боевой частью типа «ударное ядро», ориентированной вниз. Ракета
снабжена лазерным рельефометрическим и магнитометрическим не-
контактными взрывателями, срабатывающими при пролете над целью.
Благодаря этому обеспечивается поражение цели типа танк с наименее
защищенной броней верхней полусферы. Дальность поражения целей
ПТРК TOW-2B лежит в диапазоне 65...3750 м, скорость полета ракеты
320 м/с, вероятность поражения малоразмерной бронированной цели
0,85...0,95 [68].
Типичным представителем помехозащищенных ИК-головок
самонаведения является ГСН ракеты Stinger RMP. Ракета входит
в состав переносного зенитного ракетного комплекса, запускает-
ся с плеча стрелка-наводчика и обеспечивает всеракурсное пора-
жение воздушных целей на дальности до 4,75 км при высоте их
полета до 3,5 км.
Масса ракеты .......................................10,1 кг
Масса боевой части..................................2,3 кг
Головка самонаведения имеет двухспектральное охлаждае-
мое фотоприемное устройство с розеточным сканированием, ис-
пользующее излучение ближнего ИК- и ультрафиолетового диа-
пазонов и обеспечивающее эффективную селекцию целей на ес-
тественных фонах и в присутствии преднамеренных помех. На
ракете установлен перепрограммируемый микропроцессор, реа-
490
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
лизующий различные алгоритмы помехозащиты и допускающий
перепрограммирование под новые угрозы [71].
Основными факторами, определяющими эффективность селекции це-
ли на фоне преднамеренных помех, являются естественные шумы из-
мерений (объективный фактор) и уровень априорной информирован-
ности о характеристиках целей и помех (субъективный фактор). Та
или иная степень такой априорной информированности определяет
построение используемых устройств помехозащиты. В свою очередь,
при отсутствии априорной информации о характеристиках устройств
помехозащиты потенциальные возможности их преодоления конкрет-
ной помехой могут быть установлены путем формального синтеза и
последующего анализа оптимального (квазиоптимального) устройства
измерения координат цели в присутствии этой помехи и при наличии
естественных шумов измерений, то есть в рамках подхода, представ-
ленного выше в разделе 6.
7.3.2. Особенности устройства
И К-координаторов пространственно протяженных целей
ИК-координаторы пространственно протяженных целей
принадлежат к классу координаторов с малоэлементными фото-
приемными устройствами (см. рис. 1.1) и находят применение в
кассетных боевых элементах точного наведения или прицелива-
ния (БЭТП, БЭТН), доставляемых в район групповой цели сбра-
сываемыми авиационными кассетами, ракетами, бомбами, артил-
лерийскими снарядами или минами. К таким координаторам от-
носятся ИК-координаторы БЭТП SAD ARM, Skeet (США), SMArt
(ФРГ), BONUS (Швеция), ACED (Франция), СПБЭ-Д (Россия),
БЭТН ВАТ (США) [100, 101, 104, 1.20, 1.28].
Отличительной особенностью БЭТП и БЭТН является отно-
сительно невысокая стоимость, определяющая возможность их
массированного применения. Невысокая стоимость помимо дру-
гих факторов определяется использованием малоэлементных фо-
топриемников и связанной с этим относительной простотой уст-
ройств обработки сигналов. Типовым представителем таких бое-
вых элементов является БЭТП SADARM, предназначенный для
поражения групповых бронированных целей и используемый для
оснащения кассетных боевых частей артиллерийских снарядов
491
ГЛАВА 7
калибра 155 мм и снарядов РСЗО MLRS, тактических ракет
ATACMS, бомб и авиационных кассет.
Артиллерийский снаряд несет два или три боевых элемента,
каждый из которых оснащен боевой частью типа «ударное ядро»
и комбинированным координатором цели. Последний включает
пассивный ИК-канал, работающий в диапазоне 8... 14 мкм, и ак-
тивный радиолокационный канал миллиметрового диапазона
волн (8 мм), выполняющий также функции высотомера. БЭТП
доставляется в район скопления бронетехники. В районе цели
на высоте около 750 м происходит вскрытие корпуса и разброс
боевых элементов. С помощью тормозного устройства гасится
угловая скорость вращения элемента до 4 об ./с, раскрывается
ленточный парашют и включаются радиолокационный канал,
работающий в режиме дальнометрирования до момента вклю-
чения ПК-канала.
Парашютная система обеспечивает вертикальный спуск эле-
мента со скоростью до 9... 15 м/с и наклоном 25...30° от вертика-
ли. На высоте 150...200 м включается ИК-канал, а радиолокаци-
онный канал переводится в режим обнаружения цели. В процессе
снижения, благодаря собственному вращению БЭТП, комбини-
рованный координатор цели сканирует местность по сходящейся
спирали с радиусом сканирования порядка 75...35 м.
При попадании контрастного объекта в поле зрения координатора и от-
несения его к классу целей выполняется подрыв боевой части и пора-
жение цели со стороны наименее защищенной броней верхней полу-
сферы. Вероятность поражения танка одним боевым элементом невы-
сока и лежит в пределах 0,25...0,35. Однако за счет массированного
применения БЭТП достигается высокая вероятность поражения значи-
тельного числа танков атакуемой группировки.
Большинство боевых элементов оснащаются комбинирован-
ными ПК- и РЛ- (пассивными (радиометрическими) или актив-
ными) координаторами цели мм диапазона, что позволяет повы-
сить вероятность распознавания истинной цели среди ложных и
увеличить зону поиска цели. Исключением являются БЭТП
BONUS и Skeet, использующие излучение только ИК-диапазона,
а также БЭТН ВАТ, имеющий наряду с ИК также акустический
датчик.
492
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
ИК-координаторы управляемых мин Strix, (Швеция), GAMP
(США), применяемые с минометных установок и предназначен-
ные для поражения малоразмерных подвижных военных целей,
также можно отнести к классу ИК-координаторов протяженных
целей. Они отличаются использованием фотоприемных уст-
ройств с более высоким пространственным разрешением и более
сложных алгоритмов обработки сигналов, допускающих возмож-
ность перепрограммирования в соответствии с типом и другими
параметрами цели [1.20]. Дальность применения этих мин дости-
гает 7,5 км.
Общей особенностью ИК-координаторов протяженных це-
лей является возможность автоматического, т.е. без участия че-
ловека-оператора, поиска, распознавания цели и ее поражения.
Наиболее простыми и одновременно широко распространенными
представителями таких устройств являются координаторы БЭТП,
БЭТН, алфавит распознаваемых классов для которых можно по-
лагать состоящим из двух (объекты военной техники - другие
объекты), либо из трех классов (объекты бронетанковой техники,
прочие объекты военной техники, другие объекты).
Основная проблема, которую приходится решать разработ-
чикам ИК-координаторов БЭТП в соответствии с их назначением
это селекция малоразмерных подвижных объектов военной тех-
ники (танки, бронетранспортеры, самоходные артиллерийские
установки и т.п.) на фоне костров, пожарищ, следов разрывов
снарядов на поле боя и т.п., т.е. на фоне высокотемпературных
излучателей точечных, или с довольно большой площадью горе-
ния. В соответствии с этим в составе возможного словаря при-
знаков наиболее информативными можно считать спектральный
и пространственный признаки, т.е. контрастную цветовую темпе-
ратуру и площадь излучающей поверхности.
Такой состав алфавита распознаваемых классов и словаря
признаков вполне согласуется с назначением, особенностями
применения и построения БЭТП. Действительно, эффективность
БЭТП как средств группового поражения определяется, в основ-
ном, их массированным применением, которое возможно лишь
при их невысокой стоимости и, следовательно, относительно
простом построении. Поэтому БЭТП обычно оснащаются фото-
приемными матрицами или линейками с небольшим числом эле-
493
ГЛАВА 7
ментов разрешения и с невысоким угловым разрешением. (Так,
сообщается [100], что в БЭТП BONUS используется матрица из
6-ти элементов). Приемлемые значения реализуемого простран-
ственного разрешения порядка одного метра и менее достигаются
за счет применения БЭТП с небольших дальностей до цели (вы-
сот) порядка 30.. .200 м.
При обнаружении цели, излучающей как серое тело, спектральная се-
лекция, в принципе, может быть реализована при работе фотоприемни-
ка только в одном спектральном диапазоне.
Действительно, если пространственное разрешение фото-
приемника меньше размера участка цели с фиксированной тем-
пературой, то сигнал с его выхода будет пропорционален яркост-
ной температуре визируемого участка цели. Поэтому с помощью
адаптивного порогового устройства, подстраиваемого по яркост-
ной температуре фона, можно с той или иной достоверностью се-
лектировать участки визируемого объекта, имеющие контраст-
ную температуру, лежащую в диапазоне контрастных температур
реальных целей.
При использовании двухспектральных фотоприемных устройств вместо
цветовой температуры в качестве признака при распознавании может
использоваться функционально связанное с ней отношение интенсив-
ностей излучения объекта в двух спектральных диапазонах [2.9]. Одна-
ко можно показать, что использование этих способов для спектральной
селекции эквивалентно уменьшению точности оценки цветовой темпе-
ратуры визируемого объекта не менее, чем в 1,5...2 раза по сравнению
со способом селекции, основанным на использовании алгоритма, син-
тезированного в 6.4.1.
Для определения основных требований к характеристикам
помех, гарантирующих эффективное подавление ИК-координа-
торов БЭТП, целесообразно ориентироваться на подавление по-
мехозашищенных координаторов с наиболее совершенными уст-
ройствами спектральной селекции, использующими близкие к
потенциальным оценки температур объекта и фона в соответст-
вии с результатами 6.4.1. Причем принципиальные особенности
построения таких измерителей, определяющие выбор средств и
494
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
способов их оптико-электронного подавления, можно охаракте-
ризовать следующим.
Решение о принадлежности к цели визируемого каждым эле-
ментом фотоприемника участка можно полагать формируемым по
двухпороговой логике, то есть по принадлежности измеренной
температуры визируемого объекта к интервалу температур от
Т+ ГПШ1 до Ту + Ттах , где Ту - средняя цветовая температура фо-
на, которая может быть определена на начальном этапе сканирова-
ния местности фотоприемником. Величину Гпвп при этом целесо-
образно выбирать близкой к СКО температуры фона, также изме-
ренному на начальном этапе функционирования ИКК. По сущест-
ву, выбор Тf, Tniin по результатам предварительных измерений оз-
начает использование адаптивного (по фону) порога обнаружения.
Температуру Ттах целесообразно выбирать близкой к верх-
ней границе диапазона контрастной температуры возможных це-
лей с работающим двигателем, исключая температуру отдельных
точечных высокотемпературных участков цели, например темпе-
ратуру среза выхлопного патрубка.
Контрастная температура объектов военной техники даже с
неработающим и остывшим двигателем обычно находится в пре-
делах 5...7°, что определяется разными значениями теплоемкости
маскируемого объекта и фона. При проведении ориентировочных
оценок можно полагать, что Г • =2...3°, =30...40° . При ата-
ке с верхней полусферы площадь поверхности танка в этом ин-
тервале температур обычно лежит в пределах 2...4 м2.
Решение об обнаружении цели может приниматься по ре-
зультатам ее пространственной селекции, осуществляемой также
по двухпороговой логике: цель полагается обнаруженной, если
площадь ее участков с температурой из указанного диапазона,
попадающая в пространственный строб ИК-измерителя, лежит в
диапазоне допустимых площадей от Smin до Smax .
Ориентируясь на поражение танков и других подвижных объ-
ектов военной техники, а также на то, что для исключения захвата
источников точечных помех излучающая поверхность пели долж-
на проектироваться не менее, чем на два-три элемента фотопри-
емной матрицы, можно считать, что 5min «1,5 м2, 5^ = 8...10 м2.
495
ГЛАВА 7
Суммируя изложенное, условия обнаружения и захвата цели на сопро-
вождение (обстрел) можно определить так: попадание температуры ви-
зируемого объекта в диапазон температур 5...400 над уровнем фона для
количества элементарных фотоприемников, соответствующего площа-
ди визируемой ими подстилающей поверхности, лежащей в диапазоне
От ^min ^тах *
Формирование сигнала управления по углу может при этом
выполняться путем определения геометрического центра элемен-
тов обнаруженной цели.
ИК-координаторы боевых элементов точного прицеливания
могут обладать возможностью повторения циклов обнаружения
цели. Поэтому при необнаружении цели на первом цикле в ИКК
возможен отказ от использования некоторых признаков цели на
последующих циклах обнаружения: от спектральной селекции
или от верхнего и (или) нижнего пространственных порогов.
Реализуемые точности восстановления температуры элементов визи-
руемого объекта при использовании двухспектральных ИК-коорди-
наторов позволяют считать, что в перспективе в указанных координа-
торах может быть реализовано более детальное распознавание объектов
военной техники, например, по гистограммам распределения темпера-
тур их излучающих поверхностей и по более детализированным про-
странственным признакам.
7.3.3. Преднамеренные помехи ВТО
с ИК-координаторами точечных целей
Высокую эффективность подавления ИК-координаторов
ПТРК с командным наведением и с большинством типов растро-
вых анализаторов имеет активная имитирующая помеха, созда-
ваемая размещенным на защищаемом объекте помеховым излу-
чателем, воспроизводящим по спектральному составу и частотно-
временным характеристикам излучение бортового излучателя ра-
кеты. Анализ воздействия такой помехи на координаторы с ам-
плитудно-фазовой, частотно-фазовой и время-импульсной моду-
ляцией содержится в [48, 6.9].
Как показано в разделе 3.2, подавление ПТРК командного
наведения с ИК-координаторами обеспечивается постановкой
496
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
прицельной по характеристикам излучения БИ активной имити-
рующей помехи. Такая помеха, начиная с некоторой дальности
подлета ракеты к цели, вносит ошибки в измерение относитель-
ных угловых координат ПТУР, следовательно, и ошибки в ко-
манды управления ракетой. Причем эффективность помехи су-
щественно зависит от смещения помехового излучателя от точки
прицеливания ИК-координатора, что иллюстрируется кривыми
рис. 3.34, 3.35. Воспользовавшись результатами, приведенными в
[16] и полученными методом имитационного моделирования,
рассмотрим возможности повышения эффективности помехи за
счет дополнительной модуляции помехового излучения, согласо-
ванной по параметрам модуляции с соответствующими парамет-
рами сигнала на выходе модулирующего растра ИК-координато-
ра. При этом обеспечивается исследование влияния на эффектив-
ность помехи совокупности факторов, учет которых при ее фор-
мальном синтезе представляется достаточно проблематичным.
Отметим, что метод имитационного моделирования позволяет доста-
точно корректно исследовать влияние на эффективность помехи сово-
купности факторов, учет которых при ее синтезе представляется доста-
точно проблематичным.
Имитационная модель контура командного наведения вклю-
чает модель частотно-фазового ИК-координатора, соответствую-
щую структурной схеме рис. 4.11, и модели динамических эле-
ментов контура наведения и кинематики, разработанные в соот-
ветствии с рис. 3.28, 3.33. Моделировался процесс атаки непод-
вижной цели на дальности 1500м при скорости полета ракеты
200 м/с. Ошибка слежения оператора ПТРК за целью полагалась
распределенной по нормальному закону с нулевым математиче-
ским ожиданием и СКО, равным 0,3 м. В качестве показателя
эффективности подавления использовалась вероятность непопа-
дания ПТУР в цель в виде прямоугольника размером 1,8у2,5 м.
Действие синтезированной помехи, определяемой выраже-
нием (4.81) и представляющей собой периодическую последова-
тельность импульсов на частоте Q развертки изображения бор-
тового излучателя со скважностью 2, приводит, как показано на
рис. 4.12, к изменению знака одного плеча дискриминационной
характеристики.
497
ГЛАВА 7
Зависимость вероятности непопадания рнп ПТУР в цель от
отношения помеха/сигнал qc (отношение средней силы излуче-
ния помехи к силе излучения БИ ракеты) иллюстрирует сплош-
ная кривая на рис. 7.17. При этом сдвиг (р начальной фазы поме-
хи относительно начальной фазы процесса развертки по растру
изображения БИ принимался распределенным по равномерному
закону. Смещение положения бортового излучателя L относи-
тельно среднего положения точки прицеливания ИКК полагалось
равным 0. Для сравнения на этом же рисунке пунктирная кривая
показывает зависимость вероятности непопадания ПТУР в цель в
случае использования немодулированного помехового источни-
ка. Сравнение кривых показывает, что при нулевом смещении БИ
от точки прицеливания ИКК (L = 0) имеет место пятикратный
выигрыш в эффективности синтезированной помехи. Однако при
этом эффективность помехи остается недостаточно высокой.
О возрастании эффективности помехи при увеличении L и
при жесткой привязке начальной фазы помехи к фазе процесса
развертки изображения БИ свидетельствуют кривые, показанные
на рис. 7.18. На этом, так же как и на всех последующих рисун-
ках, отношение помеха/сигнал q характеризует уже отношение
не средней, а пиковой силы излучения источника помех к силе
излучения БИ ракеты. Для кривой 1 Л = -1м, для кривой 2
L -1 м .
Для этих кривых сдвиг фаз (р. как и раньше, полагался рас-
пределенным по равномерному закону. Кривые 3, 4 получены
для фиксированного сдвига фаз (р между фазой модуляции по-
498
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
мехи и фазой развертки изображения БИ по растру ИКК. При
этом для кривой 3 L = -l м, #>=л72 рад, для кривой 4 L = 1 м ,
рад. Более детально зависимость вероятности непопада-
ния /?нп от величины сдвига фаз ср показывают кривые рис. 7.19,
полученные при q = 5 .
Для кривой 1 L = -1 м , для кривой 2 L = 1 м . Результаты
моделирования, иллюстрируемые рисунками 7.18, 7.19, свиде-
тельствуют о высокой эффективности оптимальной помехи при
согласовании значения ее начальной фазы с направлением
смещения источника помехи относительно точки прицеливания
ИКК.
Следует отметить, что для реализации такой помехи необходима ин-
формация о частоте и текущей фазе развертки изображения в ИК-
координаторе. Получение такой информации, особенно информации о
499
ГЛАВА 7
фазе, во многих случаях представляется достаточно проблематичным.
В то же время можно ожидать, что при расстройке частоты модуляции
помехового излучения AQ относительно частоты развертки изображе-
ния БИ, лежащей в полосе пропускания контура наведения ракеты, от-
сутствие информации о фазе развертки будет не столь существенно
сказываться на уменьшении эффективности помехи.
Это подтверждают результаты моделирования, полученные
при £ = -1 м, q = 4 и показанные на рис. 7.20.
Сплошной кривой соответствует сдвиг начальной фазы за-
кона модуляции помехи = Пунктирная кривая получена
при равномерном законе распределения (р. Из графиков рис. 7.20
следует, что при расстройке частоты модуляции помехового из-
лучения относительно частоты сканирования изображения БИ,
составляющей 0,3...0,5 Гц, информация о начальной фазе раз-
вертки изображения БИ теряет актуальность.
Начальная фаза при реализации помехи на частоте, отстро-
енной от частоты развертки изображения БИ, может принимать
любые значения из диапазона 0,3...0,5 Гц.
Рис. 7.21 показывает характер зависимости /?нп от q при
L = 1 м и при вариации значений AQ. Для кривых 7, 2
AQ = 0,5 Гц, для кривых 3, 4 AQ = 0,3 Гц и AQ = 0,7 Гц соот-
ветственно. Кроме того, для кривой 2 принималось ср-Зл/2^ а
для всех прочих кривых (р - л/2.
500
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
В случае фиксированной пиковой мощности помехи изме-
нение ограничения на ее энергетический ресурс трансформиру-
ется в изменение скважности помеховой последовательности
импульсов.
Результаты исследований эффективности модулированной
помехи для этого случая при отношении пиковой мощности по-
мехи к мощности сигнала q = 5 приведены на рис. 7.22, где вве-
дено обозначение: 5 - скважность помеховой последовательно-
сти импульсов. Для кривой 1 АГ2 = 0Гц, для кривой 2
AQ = 0,3 Гц. Из графиков рис. 7.22 следует, что при расстройке
частоты модуляции помехового излучения относительно частоты
развертки изображения БИ на 0,3 Гц требования к средней энер-
гетике помехового излучения можно снизить в 1,3... 1,4раза по
501
ГЛАВА 7
сравнению со случаем отсутствия расстройки частоты модуляции
помехового излучения и прочих равных условиях.
Можно считать, что при подавлении систем самонаведения ракет, ис-
пользующих угломерные координаторы с растровыми анализаторами,
реализующими частотно-фазовую модуляцию принимаемых сигналов,
качественные закономерности воздействия активных модулированных
помех, частота модуляции которых согласована с частотой развертки
изображения по растру координатора, в основном сохраняются.
Точнее, сохраняется общее поведение кривых типа 7, 2 на
рис. 7.18, пунктирной кривой рис. 7.20, и кривых типа приведен-
ных на рис. 7.21, 7.22, характеризующих зависимость показателя
эффективности помехи рнп от отношения помеха/сигнал q2, от
величины расстройки частоты модуляции помехового излучения
AQ относительно частоты развертки изображения БИ, а также от
скважности помеховой последовательности импульсов s. Однако
абсолютные значения показателя эффективности /?нп в общем
случае будут отличаться от приведенных на этих рисунках вслед-
ствие принципиальных отличий динамики командного наведения
от динамики самонаведения. Так, отличие показателей эффектив-
ности рассмотренных помех самонаводящимся ракетам от пока-
зателей, показанных на приведенных выше рисунках и соответст-
вующих подавлению систем командного наведения, определяется
следующим.
В отличие от случая подавления систем командного наведения имити-
рующая немодулированная помеха практически полностью утрачивает
эффективность при подавлении систем самонаведения в случае не-
больших смещений L положения бортового излучателя относительно
положения энергетического центра излучения защищаемого объекта.
Более того, в этом случае она фактически выполняет функ-
ции дополнительного источника полезного сигнала. При больших
значениях L источник такой помехи будет выполнять функции
ложной цели. Поэтому в общем случае получение корректных
оценок значений рнп для систем самонаведения требует прове-
дения специальных исследований, в том числе с широким при-
влечением методов имитационного моделирования.
502
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
Для реализации модулированной помехи системам команд-
ного наведения или самонаведения необходима информация о
типе и характеристиках растра, текущей частоте развертки изо-
бражения в ИК-координаторе, которая в общем случае может из-
меняться в процессе сближения ракеты с целью. При отсутствии
такой информации для подавления ИК-координаторов предложе-
но создание хаотической импульсной помехи в виде случайной
последовательности помеховых импульсов [80]. Вместе с тем,
необходимая для создания эффективных помех информация мо-
жет быть получена путем облучения оптической системы ИКК
зондирующим сигналом в рабочем диапазоне волн этой оптиче-
ской системы [78]. В этом случае сигнал, отраженный оптической
системой ИКК в обратном направлении (ретроотраженный сиг-
нал), будет промодулирован растровым анализатором ИКК.
Угол расходимости ретроотраженного излучения близок по
величине к углу поля зрения формирующей это излучение опти-
ческой системы [1.16]. Прием и соответствующая обработка рет-
роотраженного сигнала позволяет восполнить отсутствующую
информацию о типе и характеристиках используемого в ИКК
растра, в частности, о несущей частоте сигнала на выходе растра
со, а при известном числе секторов растра - и о частоте Q раз-
вертки изображения в ИКК. Оценим возможность реализации
средства разведки с приемлемыми характеристиками обнаруже-
ния излучения, отраженного оптическими системами ИКК.
Если J - сила зондирующего излучения средства разведки,
D - дальность до разведуемого ИКК, то мощность сигнала на
выходе фотоприемного устройства средства разведки определя-
ется выражением
JpT0T2DAsT]m
s D4
(7.47)
Здесь r0, td - коэффициенты пропускания оптической системы
и атмосферы; As. г) - апертура и квантовая эффективность его
ФПУ; т - коэффициент модуляции ретроотраженного излуче-
ния; р - показатель световозвращения ФПУ ИКК, равный отно-
шению силы ретроотраженного излучения ИКК к облученности
его оптической системы.
503
ГЛАВА 7
Пороговый поток фотоприемника
D*
(1AZ)
где а - площадь фотоприемника; А/ - полоса пропускания ана-
лизатора ИКК; £>* - удельная обнаружительная способность фо-
топриемника.
Для условий надежного приема в пренебрежении фотонным
шумом из равенства Ps = Ф„ следует оценка требуемой силы зон-
дирующего излучения средства разведки:
- (7.49)
D RroTDAsTjm
На рис. 7.23 приведена рассчитанная по (7.51) зависимость
требуемой силы зондирующего излучения от дальности разведки
D. Расчеты выполнялись применительно к таким исходным дан-
ным: р = 150 м2/ср; ro=0,9; td= 0,9; As = 50 см2; т =0,7;
ту - 0,9; а = 0,04 см2; - З Ю11 см Гц1/2 Вт-1. Из рис. 7.23, в ча-
стности, следует, что для разведки несущей частоты со на даль-
ности 1 км с точностью порядка 1 Гц сила зондирующего излуче-
ния средства разведки должна быть не меньше 2107Вт/ср. При
Рисунок 7.23
504
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
мощности лазера 10 Вт такая сила излучения будет реализована
при угле расходимости его излучения не более 2,5'.
В ряде ПТРК командного наведения используются БИ ракет, излучение
которых наделяется амплитудной модуляцией (импульсной, меандром
и т.п.). Высокая эффективность подавления ИК-координаторов таких
ПТРК модулированной помехой будет иметь место только тогда, когда
помеха имитирует излучение БИ по частотно-временным характери-
стикам. т.е. по параметрам закона модуляции излучения БИ. Однако в
общем случае закон модуляции излучения БИ конкретной атакующей
ракеты может быть неизвестен постановщику помехи, и разведка его
параметров также может быть обеспечена на основе анализа ретроот-
раженного сигнала БИ.
Благоприятные для такой разведки условия складываются
при наведении ракеты с БИ по методу трехточки, когда пусковая
установка ПТРК, ракета с БИ и атакуемый объект располагаются
на одной линии, а оси оптических систем пусковой установки
ПТРК направлены на защищаемый объект, с которого создается
помеха. В этом случае может быть обеспечен прием и оценка па-
раметров модуляции излучения бортового излучателя ракеты,
ретроотраженного оптическими системами пусковой установки
ПТРК в направлении на средство разведки, размещенное на за-
щищаемом объекте.
Оценку требуемых характеристик соответствующего фото-
приемного устройства можно получить на основе анализа нера-
венства (7.51), в которое в качестве J следует подставлять силу
излучения БИ. При наблюдении ретроотраженного излучения БИ
на ярком естественном фоне и невысокой силе излучения БИ вы-
ражение (7.51) необходимо модифицировать в направлении учета
шумовой составляющей излучения фона.
Для борьбы с имитирующими помехами, создаваемыми из-
лучением станции активных помех, размещенной на защищаемом
объекте, в ИК-координаторах систем командного наведения и са-
монаведения управляемых боеприпасов могут использоваться
схемы спектральной селекции [2.9]. Вопросы анализа потенци-
альных возможностей таких схем применительно к координато-
рам с интегрированной регистрацией излучений, представителем
которых являются координаторы с частотно-фазовой модуляци-
ей, рассматривались в разделе 6.4.1.
505
ГЛАВА 7
Подавление такого ИК-координатора ПТРК, имеющего устройство
спектральной селекции, требует создания имитирующей помехи со
спектральной характеристикой излучения, согласованной со спек-
тральной характеристикой излучения бортового излучателя атакую-
щей ракеты.
Выражение (6.75) определяет для этого случая основные
требования к спектральным характеристикам помехи в виде пра-
вила распределения ее мощности по спектральным каналам ИКК.
При этом обеспечивается реализация максимального помехового
эффекта, т.е. максимизация ошибки измерения положения цели,
описываемой выражениями (6.71), (6.74).
Из (6.75) следует, что разность мощностей помехи, посту-
пающей в два спектральных канала, должна выбираться так, что-
бы она была равна взятой с обратным знаком разности мощно-
стей сигналов в этих же каналах, что хорошо согласуется с оче-
видными физическими представлениями:
Ppx-Ppi=-^-Psi). (7.50)
Подставив (6.75) в (6.70), для оптимального распределения
мощности помехи по спектральным каналам получим
gV2=(Ps + Pp)/Jl. (7.51)
В этом выражении Ps9 Рр - суммарные по двум спектраль-
ным каналам мощности полезного сигнала и помехи соответст-
венно. Теперь предельную возможность имитирующей помехи по
подавлению ИК-координаторов с интегральной регистрацией из-
лучений, использующих оптимальное устройство спектральной
селекции, синтезированное в предположении доступности ин-
формации о спектральных характеристиках помехи, можно оце-
нить с помощью выражения (6.74), которое определяет устано-
вившуюся дисперсию ошибок оценки координат БИ и источника
помех. При этом из (7.53) следует, что выражение в квадратных
скобках, фигурирующее в (6.74), можно заменить следующим:
[...] = [(J5 + в котором Js, Jр - суммарная сила излуче-
ния БИ и помехового источников в двух спектральных каналах.
506
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
Спектральная селекция цели (излучения БИ) в координато-
рах с раздельной регистрацией излучений, в частности, в коорди-
наторах с время-импульсной модуляцией или использующих ро-
зеточное сканирование, когда сигналы цели и помехи могут на-
блюдаться раздельно, по существу, сводится к решению задачи
распознавания полезного и помехового сигналов [79]. В качестве
признака распознавания нередко используют отношение ампли-
туд сигналов на выходе фотоприемников каждого из спектраль-
ных каналов [2.9]. Если спектральные характеристики таких ка-
налов не выходят за пределы полосы 3...14 мкм и настроены на
прием и обработку собственного теплового излучения корпусов
атакуемых объектов, то отношение амплитуд сигналов на выходе
спектральных каналов будет функционально связано с цветовой
температурой визируемого объекта, т.е. использование в качестве
основного признака распознавания отношения амплитуд сигна-
лов на выходе спектральных каналов по существу эквивалентно
оценке цветовой температуры визируемого объекта.
В 6.5.1 синтезированы квазиоптимальные алгоритмы оценки
цветовой температуры и исследованы статистические характери-
стики ошибок такой оценки. Эти результаты позволяют предъя-
вить требования к допустимому отличию цветовой температуры
защищаемого объекта и помехового излучателя, при котором га-
рантируется успешное преодоление помехой устройств спек-
тральной селекции.
В ПТРК с командным наведением и с лазерно-лучевыми
системами наведения оператор сопровождает цель в ручном или
автоматическом режиме вплоть до момента встречи ракеты с це-
лью. Поэтому естественным способом борьбы с такими ПТРК яв-
ляется нарушение визуального контакта оператора с целью путем
постановки маскирующей танк помехи, например, аэрозольного
облака. Недостаток такой помехи состоит в том, что при ее по-
становке исключается выполнение танком его основной боевой
задачи - поражение целей противника на поле боя, что можно
частично избежать путем создания аэрозольных завес, реали-
зующих условия одностороннего оптического преимущества при
наблюдении сквозь аэрозольную завесу, либо путем создания за-
весы, постановка которой инициируется каким-либо физическим
полем пролетающей ракеты, например излучением бортового
507
ГЛАВА 7
трассера, акустическим или оптическим излучением маршевого
двигателя пролетающей ракеты и т.п.
Последний способ постановки АЗ реализуется путем забла-
говременного размещения на поле боя на возможных направле-
ниях атак ПТУР забрасываемых источников оптических помех
(ЗИОП). Каждый ЗИОП имеет в своем составе датчик физическо-
го поля пролетающей над ним ПТУР и устройство быстрой (от-
стрелом аэрозолеобразующего состава) постановки локальной
аэрозольной завесы [23]. Такая завеса прерывает оптический кон-
такт ПТУР с пусковой установкой и тем самым размыкает систе-
му командного наведения ПТУР или систему лазерно-лучевого
наведения, одновременно демаскируя направление на атакующий
ПТРК.
Условия одностороннего оптического преимущества при
адекватности спектральных диапазонов работы средств наблюде-
ния, используемых сторонами конфликта, в принципе всегда воз-
никают при наличии несимметричных для сторон условий на-
блюдения. Эта несимметрия может выражаться в различных ус-
ловиях освещенности объектов конфликтующих сторон, в раз-
личном удалении маскирующих образований от средств наблю-
дения, в несимметричной пространственно-яркостной структуре
маскирующих образований относительно сторон конфликта и т.п.
Так, условия одностороннего преимущества могут быть созданы путем
постановки двухслойной аэрозольной завесы, имеющей поглощающий
(темный) слой со стороны наблюдателя и рассеивающий (светлый) слой
со стороны наблюдаемого объекта. Эффект одностороннего оптическо-
го преимущества может иметь место также при наблюдении ночью в
условиях небольшой дымки при освещении поля боя осветительными
боеприпасами, разбрасываемыми над расположением противника.
Как показано в 2.2, такой же эффект может возникнуть и при
наблюдении объектов через тонкий рассеивающий слой, распо-
ложенный в непосредственной близости от наблюдаемого объек-
та. Возможным комбинированным активно-пассивным способом
реализации условий одностороннего оптического преимущества
может быть постановка на трассе двухстороннего наблюдения
аэрозольной завесы с небольшой оптической толщей и подсвет ее
в спектральном диапазоне работы средств наблюдения противни-
508
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
ка когерентным или некогерентным излучением с защищаемого
объекта или из вынесенного источника в преимущественном на-
правлении на противника. Причем размеры аэрозольных частиц
должны обеспечивать формирование несимметричной индикат-
рисы рассеяния, вытянутой в преимущественном направлении
вперед. За счет такого подсвета на завесе может быть создан мас-
кирующий фон, видный преимущественно со стороны противни-
ка и затрудняющий ему распознавание и пеленгацию защищае-
мого объекта.
Таким образом, реализация условий одностороннего оптического пре-
имущества является, вообще говоря, достаточно тривиальной задачей,
нередко спонтанно реализуемой на практике. Вопрос не столько в
принципиальной возможности реализации таких условий, сколько в
эффективности их реализации, т.е. в достаточности создаваемого опти-
ческого преимущества для обеспечения надежного выигрыша одной из
сторон боевого конфликта.
73.4. Преднамеренные помехи ВТО
с ИК-координаторами пространственно протяженных целей
Способы подавления ИК-координаторов пространственно
протяженных целей основываются либо на искажении темпера-
турных и пространственных характеристик излучения цели и ок-
ружающего фона, затрудняющем распознавание целей атакую-
щими боевыми элементами, или на создании ложных целей с
температурно-пространственными характеристиками, аналогич-
ными характеристикам истинных целей.
Относительно просто реализуемым способом создания мас-
кирующей помехи режиму обнаружения цели является установка
теплорассеивающего экрана над моторным отделением защи-
щаемого объекта (далее - танка) с целью уменьшения потока из-
лучения, поступающего на вход ИКК [1.16]. Для того чтобы ис-
ключить срабатывание устройства спектральной селекции ИКК,
контрастная (по отношению к фону) температура теплорассеи-
вающего экрана не должна превышать Tmjn « 3...5 К .
Если тепловая маскировка цели осуществляется постановкой
аэрозольной завесы, то для эффективного маскирования коэффи-
циент пропускания т завесой теплового излучения должен удов-
509
ГЛАВА 7
летворять неравенству r(Tmax)r < r(Tmin), в котором взаимосвязь
r(Tmax) с r(^min) описывается выражением типа (6.116). Из этого
неравенства следует:
т < f 1 + /(Гт1п)(Ттах - rmin . (7.52)
I r(^min) J
Так, например, для спектрального диапазона 3,5...4,1 мкм при
Tmin=300K, Tmax=33OK, r(rmin) = 9,75-10-5 Вт/см2, r'(fmin) =
= 4,56-К)'6 Вт/(см2 град) получим, что маскирование объекта от
его обнаружения ИКК БЭТП в этом спектральном диапазоне бу-
дет обеспечено, если г не превысит 0,4.
В случае постановки излучающих («теплых») аэрозольных
образований взрывного типа требования к силе излучения и ко-
эффициенту пропускания такой аэрозольной помехи близки к оп-
ределенным в разделе 7.1.3.
Имитирующие помехи ИКК БЭТП и БЭТН могут создавать-
ся путем постановки низкотемпературных ложных целей [104].
Поэтому, как следует из 7.3.2, контрастная (к фону) температура
ложной цели должна лежать в диапазоне 5...40°, а площадь излу-
чающей поверхности может принимать значения из диапазона
1,5...10 м2.
Такая ложная цель, в принципе, может быть реализована и с
помощью неселективных точечных излучателей. Для имитации
излучения цели по спектральному составу их излучение может
быть откорректировано светофильтром. Эффект пространствен-
но-протяженной цели при этом создается размещением по одно-
му излучателю в одном элементе пространственного разрешения
подавляемых ИК-измерителей.
Для создания одной ложной цели необходимо использовать
3...4 точечных излучателя, установленных на местности с интер-
валом порядка 0,7... 1 м. Контрастную плотность излучения одно-
го элемента разрешения, подлежащую имитации одним точечным
излучателем, можно определить для i -го спектрального диапазо-
на по формуле Аа; (Т) = г'(Т)АТ , в которой Т - средняя темпера-
тура фона. Тогда требуемая мощность точечного излучателя в i -м
510
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
спектральном диапазоне определяется с помощью очевидного
выражения
Р( = , (7 53)
Л
где S - площадь элемента разрешения на местности, Q - угол
расходимости излучения помехового излучателя. При АГ = 20 К ,
5 = 6,4-103 см2, Q = lcp получим, что Р{ =0,58 Вт в диапазоне
3,5...4,1 мкм и Вт в диапазоне 8... 12 мкм.
Если ложная цель будет создаваться с помощью неселектив-
ных высокотемпературных излучателей с температурой рабочего
тела порядка 3000 К, то такая мощность излучения в указанных
диапазонах может быть обеспечена при площади рабочего тела
порядка 0,7 см2 и при использовании светофильтра с коэффици-
ентом пропускания в диапазоне 8... 14 мкм, близким к единице, а
в диапазоне 3,5...4,1 мкм порядка 0,11. При низком коэффициенте
полезного действия таких излучателей потребляемая мощность
одного излучателя может измеряться десятками - сотней ватт.
Учет вклада рассеянной излучателем мощности в энергетические ха-
рактеристики помехи может позволить заметно снизить требования к
потребляемой одним излучателем мощности.
Низкотемпературные ложные цели с достаточным для эф-
фективного подавления временем существования можно также
создавать путем экранировки аэрозольной завесой высокотемпе-
ратурного пиротехнического источника излучения [81]. При этом
приближение спектра излучения такой ложной цели к спектру
излучения низкотемпературного абсолютно черного тела дости-
гается за счет того, что многие существующие аэрозольные со-
ставы имеют в диапазоне З...5мкм коэффициент пропускания
излучения в несколько раз меньший, чем в диапазоне 8... 14 мкм.
Возможным способом создания возмущающих помех ИКК
со спектральной селекцией может быть искажение спектральных
характеристик излучения защищаемого объекта таким образом,
чтобы уменьшить наблюдаемую цветовую температуру объекта
до температуры фона или увеличить до температуры высокотем-
пературных излучателей. На рис. 7.24 приведена зависимость от
511
ГЛАВА 7
________________________Рисунок 7.24_______________________
температуры Т интегральной плотности излучения абсолютно
черного тела г (Г) в двух спектральных диапазонах: 3,5...4,1 мкм
(кривая 7) и 8... 12 мкм (кривая 2).
Уменьшить наблюдаемую цветовую температуру объекта до
температуры фона, т.е. на величину порядка 35 К, можно при-
крытием объекта маскирующим образованием, например, аэро-
зольным облаком с коэффициентом пропускания излучения, от-
личающимся для различных спектральных диапазонов. Значения
этих коэффициентов пропускания от температуры фона для ука-
занных спектральных диапазонов показаны на рис. 7.25.
Коэффициент пропускания т для i -го спектрального диапа-
зона определялся с помощью выражения
т = г-(Т)Д.(Т + 35К). (7.54)
Пунктирная кривая показывает, каким должно быть отноше-
ние коэффициентов пропускания первого и второго диапазонов
для реализации рассматриваемого эффекта маскирования. Из
рис. 7.25 следует, что при температуре фона Т = 300 К эффек-
тивное помеховое образование, исключающее правильное реше-
ние задачи спектральной селекции цели, должно иметь коэффи-
512
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
циент пропускания порядка 0,3 в диапазоне 3,5...4,1 мкм и по-
рядка 0,6 в диапазоне 8... 12 мкм.
Для преодоления устройств спектральной селекции с помощью высоко-
температурных помеховых источников можно разместить такие источ-
ники на объекте защиты в нескольких элементах пространственного
разрешения ИКК. Причем сила их излучения должна превосходить си-
лу излучения этого элемента пространственного разрешения в направ-
лении на подавляемый ИКК в 2...3 и более раза.
Еще одним способом создания возмущающих помех может
быть создание в окрестности защищаемого объекта случайного
теплового поля, например из горящих на грунте осколков пиро-
технического снаряжения отстреливаемых средств быстрой по-
становки аэрозольных завес [1.16].
При этом в непосредственной близости от защищаемой ма-
шины или группы машин и над ними может быть создано общее
тепловое поле, состоящее из высокотемпературных пиротехниче-
ских излучателей и клубов теплого дыма. Это приведет к загруб-
лению уровня адаптивного по фону порога обнаружения цели
вплоть до полного исключения возможности обнаружения ее ИК-
координатором боевого элемента.
513
ГЛАВА 7
7.4. Средства создания оптических помех
7,4,1. Активные средства создания помех
К активным средствам создания помех относятся средства,
помеховый эффект действия которых определяется собственным
помеховым излучением этих средств. Соответственно, и помехи,
создаваемые такими средствами, определяются как активные.
Активные помехи могут создаваться некогерентными (про-
жекторными) и когерентными (лазерными) станциями активных
помех, а также боеприпасами оптического действия и пиротехни-
ческими излучателями, в которых оптическое излучение генери-
руется соответственно реакциями взрыва и горения. В узком
смысле к активным относят только помехи, создаваемые прожек-
торами или лазерами.
Основной энергетической характеристикой активных
средств является сила излучения J, Вт/ср, а эффект их помехово-
го действия на ОЭСр определяется облученностью входной апер-
туры ОЭСр Е, Вт/м2, рассчитываемой по формуле
E = Jt/d\ (7.55)
в которой D, м - дальность от средства помех до ОЭСр; т - ко-
эффициент ослабления излучения атмосферой на этой дальности.
Оценка значений пороговых облученностей, реализующих
засветочную помеху, содержится в 3.4.1. Облученность апертуры
ОЭСр при создании имитирующих помех обычно должна пре-
восходить облученность, создаваемую полезным сигналом, не
менее, чем в 3...5 раз. Важными характеристиками активных
средств также являются характеристики закона модуляции поме-
хового излучения, угол его расходимости О, ср и спектральный
диапазон, обычно задаваемый граничными значениями длин волн
излучения прожектора или длиной волны излучения лазера.
В качестве источника излучения в некогерентных станциях помех пре-
имущественно используются тепловые источники, газоразрядные лам-
пы и светодиоды [17]. Известно использование в качестве теплового
источника излучения нагретого до высокой температуры элемента из
карбида кремния (в станции AN/ALQ-144), а также традиционных ламп
514
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
накаливания. Светоотдача ламп накаливания обычно не превышает
20 лм/Вт, спектр излучения сплошной, близкий к спектру излучения
черного тела при температуре, которая может достигать 2900...3300 К.
У газоразрядных ламп светоотдача возрастает до 100 лм/Вт и
более. Срок их службы в 5...6 раз превышает срок службы ламп
накаливания. Важным преимуществом газоразрядных ламп явля-
ется возможность модуляции излучения с частотой до 10 кГц.
Излучение газоразрядных ламп образуется при дуговом разряде в
заполняющих колбу инертных газах (ксенон, аргон) с возможны-
ми присадками паров металлов (ртуть, натрий, цезий, цирконий).
Наиболее высокие световые характеристики имеют газоразряд-
ные лампы высокого давления, в несколько раз превышающего
атмосферное. Спектр излучения таких ламп сплошной с харак-
терными спектральными полосами в ближней ИК-области.
На рис. 7.26, заимствованном из [12], показано спектральное
распределение силы излучения Jксеноновой лампы высокого
давления с мощностью 5 кВт за вычетом силы излучения нагре-
тых колбы и электродов.
Спектр газоразрядных ламп сосредоточен в ближней ИК-
области спектра, что, в частности, иллюстрирует рис. 7.26. Соз-
дание мощных некогерентных излучателей, перекрывающих
спектральный диапазон работы современных тепловизионных
средств является достаточно сложной задачей. Лампы накалива-
ния обычно не обеспечивают достаточную для подавления ТПВ
приборов силу излучения в дальней ИК-области спектра.
515
ГЛАВА 7
В качестве возможного источника некогерентного излучения
в диапазоне 8... 14 мкм может рассматриваться, например, газо-
вая (СО2) плазма, образованная высокочастотной электромагнит-
ной или электроразрядной накачкой. В [73] утверждается, что ис-
пользование газовой смеси на основе СО2 с электроразрядной на-
качкой обеспечивает создание достаточно производительного ис-
точника ИК-излучения. При этом путем изменения таких пара-
метров, как концентрация электронов, состав рабочей смеси, дав-
ление газов, напряженность электрического поля, объем активной
среды, возможно управление амплитудно-спектральными харак-
теристиками выходного излучения.
Представителем средств некогерентных активных помех яв-
ляется станция оптико-электронного подавления ТШУ-1-7, вхо-
дящая в состав танкового комплекса индивидуальной защиты
«Штора-1». Излучение этой станции с достаточной для подавле-
ния точностью имитирует по спектральным и частотно-вре-
менным характеристикам сигналы бортовых излучателей ата-
кующих ракет [1.16].
Таким образом реализуется имитирующая помеха, особен-
ности которой достаточно детально рассмотрены в 3.2. Пионер-
ская разработка станции ТШУ-1-7, не имевшей зарубежных ана-
логов, завершена в 1986 г. Станция решила задачу защиты танков
от основной номенклатуры ПТРК 1980-х гг., таких как TOW,
НОТ, Milan, Dragon, Bill, Фагот. Станция предназначена для раз-
мещения на танках типов Т-72, Т-80, Т-90, на БМП-3. На испыта-
ниях было произведено около 100 реальных пусков ракет по це-
лям, защищенным излучением станции ТШУ-1-7, причем ни одна
ракета не поразила цель.
В состав станции входят два излучателя, схему размещения
которых на танке иллюстрирует рис. 7.27. В качестве источников
излучения в станции используются газоразрядные короткодуго-
вые ксеноновые лампы высокого давления. На выходе каждого
излучателя установлен красный светофильтр.
Основные технические характеристики станции ТШУ-1-7
[82, 1.16]
Угол расходимости излучения одного излучателя
(азимут угол места).................................20- 4,5°
Угол расходимости излучения двух излучателей........40^4,5°
516
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
Диапазон излучения.............................0,7...2,5 мкм
Частота следования импульсов.......................сменная
Скважность..............................................2
Глубина модуляции..............................не менее 0,9
Потребляемая мощность одного излучателя........0,8...1 кВт
Рисунок 7.27
Большой угол расходимости излучения по азимуту указыва-
ет на то, что станция работает в режиме заградительных по углу
помех, то есть не требует внешнего целеуказания на направление
атаки в рабочем секторе излучателей. После 1991 г. некогерент-
ные станции имитирующих помех аналогичного назначения
AN/VLQ-6, AN/VLQ-8 (США), ViolinMk2 (Израиль) начали уста-
навливаться на зарубежные образцы бронетанковой техники.
Важным направлением совершенствования станций некогерентных по-
мех является использование в качестве излучателя матрицы мощных
диодов, излучающих в ИК-диапазоне, что позволяет создавать широко-
полосные помехи в традиционных диапазонах длин волн 0,6... 1,2 мкм и
1,8...2,7 мкм и обеспечивает значительное (до несколько сотен часов)
увеличение ресурса станции при одновременном существенном умень-
шении энергопотребления и массогабаритных характеристик [15].
По такому пути пошли, в частности разработчики герман-
ской станции помех EIREL. Очевидным достоинством использо-
вания матрицы излучающих ИК-диодов в станциях помех являет-
517
ГЛАВА 7
ся простота реализации прицельных по времени (ответных) им-
пульсных помех.
Представителем станций заградительных по направлению
некогерентных помех, предназначенных для защиты авиацион-
ной техники (вертолетов) от поражения переносными зенитными
ракетными комплексами (ПЗРК) типа Stinger, Игла-1М, является
украинская станция оптико-электронного подавления «Квадрос»
КМ-01 В, представленная на рис. 7.28.
________________________Рисунок 7.28______________________
Разработчиками этой станции рекламируется [47] возмож-
ность подавления на дальности 0,3...5 км (в зависимости от типа
ГСН) управляемых ракет с инфракрасными головками самонаве-
дения, использующими амплитудно-фазовую, частотно-фазовую
или время-импульсную модуляцию и спектральную селекцию
сигнала от цели.
Сила излучения станции в диапазоне 2.. .5 мкм........300 Вт/ср
Сектор защиты
по азимуту......................................... 15...345°
по углу места......................................20.. -30°
Вероятность непоражения
защищаемого вертолета одной ракетой..................0,85 [47]
518
Рисунок 7.29
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
Аналогичными по назначению станциями некогерентных
помех являются станции Л166В1АЕ (Россия), AN/ALQ-144,
AN/ALQ-157 (США), предназначенные для защиты самолетов и
вертолетов.
Представителем станции прицельных по направлению неко-
герентных помех, предназначенной для защиты вертолетов от
поражения переносными зенитными ракетными комплексами
(ПЗРК) типа Stinger, Игла-1М, является отечественная станция
оптико-электронного подавления Л370-5, представленная на
рис. 7.29. Станция входит в состав авиационного комплекса ОЭП
Президент-С. В станции используется газоразрядная лампа высо-
кого давления с сапфировой колбой, создающая излучение в
спектральных диапазонах работы подлежащих подавлению ракет.
Излучение станции модулируется по специальному закону, фор-
мируется в узкий луч и направляется на входную оптику ата-
кующей ракеты. Эффективность станции подтверждена реальны-
ми обстрелами ПЗРК макетных и реальных образцов летательных
аппаратов. Ни одна из запущенных ракет не поразила цель [62].
В качестве источников
излучения в лазерных станци-
ях помех наиболее перспек-
тивным является использова-
ние твердотельных, полупро-
водниковых и газовых лазеров
[18, 26]. Длина волны их излу-
чения определяется спект-
ральным диапазоном работы
подлежащих подавлению ОЭС,
который, в свою очередь, со-
гласуется со спектральными
окнами прозрачности атмо-
сферы. Наряду с окном про-
зрачности в видимой области
спектра существуют окна про-
зрачности атмосферы в ИК-
области спектра.
На уровне моря они ха-
рактеризуются следующими
519
ГЛАВА 7
примерными значениями границ: 1,5...1,8 мкм, 2...2,7 мкм;
3...4,1 мкм; 4,3...5,1 мкм; 8... 14 мкм.
В лазерных дальномерах и лазерных головках самонаведе-
ния используется излучение с длинами волн 1,06 мкм; 1,54 мкм;
10,6 мкм. В ИК-головках самонаведения и координаторах ПТРК
преимущественно используется излучение в диапазоне
0,8...2,4 мкм, в тепловизионных прицелах и головках самонаве-
дения - в диапазонах 3,3...5,1 мкм и 8... 14 мкм.
Создание помех на длине волны 1,06 мкм обеспечивают
твердотельные лазеры на иттрий - алюминиевом гранате (ИАГ) с
неодимом или стекле с неодимом, имеющие КПД порядка 1,5% и
5...6% соответственно. В твердотельных лазерах используется
оптическая накачка газоразрядными лампами или полупроводни-
ковыми излучающими диодами. Лазер на ИАГ с неодимом обес-
печивает создание как непрерывного, так и периодического им-
пульсного излучения. Типовые значения длительности импульсов
10...30 нс, частота повторения импульсов может достигать еди-
ниц кГц, типовое значение энергии в импульсе в режиме модули-
рованной добротности 1... 10 Дж.
Лазер на стекле с неодимом обеспечивает создание импуль-
сов с большой энергией, достигающей десятков кДж. Но при
этом становится проблематичным излучение лазерной помехи в
непрерывном режиме. Для перекрытия помеховым излучением
требуемого диапазона длин волн используется многокаскадное
преобразование частоты на нелинейных кристаллах ниобата ли-
тия и других.
Создание лазерных помех в видимом диапазоне на длине
волны 0,63 мкм обеспечивает газовый гелий-неоновый лазер, ис-
пользующий накачку тлеющим разрядом. Возможно также излу-
чение гелий-неонового лазера на конкурирующей длине волны
3,39 мкм и длине волны 1,15 мкм. Для создания помехи на длине
волны 0,53 мкм может также использоваться излучение лазера на
ИАГ с неодимом с удвоением частоты. Излучение помехи с длиной
волны 1,54 мкм, 2,94 мкм обеспечивает лазер на стекле с эрбием.
Создание помех в дальней ИК-области спектра 8... 14 мкм
обеспечивает газовый СО2 лазер. Лазер излучает на колебатель-
ных переходах молекул углекислого газа, имеет достаточно вы-
сокий КПД порядка 30%.
520
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
Мощность излучения
В непрерывном режиме..............................десятки кВт
В импульсном режиме...............................единицы ГВт
Энергия в импульсе ........................несколько кДж
Частота следования импульсов......................единицы кГц
Лазер может излучать более, чем на 50-ти спектральных ли-
ниях в полосе 9... 11 мкм, благодаря чему может быть обеспечена
реализация режима перестройки по частоте.
Высокую мощность излучения реализуют газодинамические
и химические СО2-лазеры. Более скромные, но достаточные для
создания преднамеренных помех энергетические характеристики
излучения, реализуют СО2 лазеры с электрической накачкой. Так,
СО2-лазеры с тлеющим разрядом обеспечивают съем 50... 100 Вт
излучаемой мощности с 1 м газоразрядной трубки. СО2 TEA лазе-
ры (лазеры атмосферного давления с поперечным возбуждением)
в приемлемых весах и габаритах могут реализовать излучение с
энергией в импульсе более 10...20 Дж. Перспективным для целей
создания помех представляется также использование СО2-лазеров
с высокочастотной накачкой.
Существующие инжекционные полупроводниковые лазеры с
накачкой постоянным током обеспечивают перекрытие диапазона
длин волн от 0,6 мкм до 3,4 мкм в непрерывном или импульсном
режиме. Использование твердых растворов PbSnTe и CdHgTe по-
зволяет создавать лазеры с длиной волны излучения до 40 мкм.
Полупроводниковые лазеры имеют высокий КПД порядка 40%,
отличаются малой инерционностью, возможностью плавной пе-
рестройки длины волны излучения, простотой конструктивного
исполнения.
Особенностью полупроводниковых лазеров является боль-
шой угол расходимости излучения, достигающий 40°, что непло-
хо согласуется с потребностями практики при создании помех в
заградительном по направлению режиме. Основным недостатком
полупроводниковых лазеров является малая излучаемая мощ-
ность, не превышающая в непрерывном режиме единиц Вт. Од-
нако этот недостаток компенсируется их малыми габаритами, по-
зволяющими суммировать мощность помехового излучения тре-
буемого количества полупроводниковых лазеров, образующих
матрицу помеховых излучателей.
521
ГЛАВА 7
На роль излучателей станции преднамеренных оптических
помех могут также претендовать СО-лазер, химические лазеры на
красителях, эксимерный лазер и т.п. Газовый СО-лазер с накач-
кой активной среды тлеющим разрядом может работать как в не-
прерывном, так и в импульсном режиме, излучает в диапазоне
5...6,5 мкм. Суммарный по всем излучаемым длинам волн КПД
лазера приближается к КПД СО2-лазера.
В химических лазерах инверсная населенность активной
среды поддерживается цепными химическими реакциями, в ко-
торых обычно участвуют галогеноводородные радикалы. Основ-
ная длина волн, на которых излучают такие лазеры - 2,7 мкм,
3,7 мкм, 4,2 мкм. При этом может быть получена генерация на
многих спектральных линиях в окрестности этих длин волн.
В лазерах на красителях, в качестве которых используются
жидкие растворы сложных органических молекул, используется
оптическая накачка. Такие лазеры обеспечивают плавную пере-
стройку длины волны излучения в рабочем диапазоне используе-
мого красителя. Лазеры на красителях могут излучать в диапазо-
не, простирающемся от ближней ИК-области спектра до ближней
УФ-области.
В эксимерных лазерах используется накачка активной среды
пучком быстрых электронов или газовым разрядом. Наиболее ха-
рактерные длины волн излучения эксимерных лазеров 0,22, 0,25,
0,31 и 0,35 мкм. Обзор современного состояния развития лазер-
ных технологий, перспективных для использования в лазерных
станциях оптико-электронного подавления, содержится в [26].
Представителем станции активных лазерных помех является
переносной лазерный прибор оптико-электронного противодей-
ствия ПАПВ, изображенный на рис. 7.30 [19]. Прибор предназна-
чен для обнаружения ОЭС, ведущих встречное наблюдение и
прицеливание, и постановки им лазерным излучением импульс-
ных ослепляющих помех, обеспечивающих засветку прибора на-
блюдения в течение некоторого времени и после прекращения
действия помехового импульса. ПАПВ имеет полуавтоматиче-
скую лазерную систему обнаружения ОЭС противника, осущест-
вляющую сканирование пространства пучком маломощного зон-
дирующего лазера в невидимой человеку области спектра и обна-
ружение ОЭС по ретроотраженному этим ОЭС излучению.
522
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
________________________Рисунок 7.30______________________
Применение для обработки отраженных сигналов специальных алго-
ритмов обеспечивает селекцию сигналов, отраженных стеклом, очками,
диффузно отражающими предметами и исключает срабатывание ПАПВ
по таким сигналам. Подавление обнаруженных ОЭС производится си-
ловым лазером на стекле с неодимом с использованием удвоения час-
тоты излучения, что позволяет генерировать помеховый импульс одно-
временно в видимой и ближней ИК-областях спектра на длинах волн
0,53 мкм и 1,06 мкм.
Частота следования импульсов силового лазера........0,1 Гц
Энергия в импульсе
на длине волны 0,53 мкм............................0,3 Дж
на длине волны 1,06 мкм............................1,5 Дж
Мощность импульса зондирующего
излучения на длине волны 0,86 мкм....................2 Вт
Частота следования импульсов.........................6 кГц
Диапазон дальностей эффективного применения ПАПВ
по дневным и ночным каналам ОЭС...............0,3... 1,5 км
Лазерные станции прицельных по направлению помех вхо-
дят в состав комплексов защиты самолетов и вертолетов от пора-
жения ракетами с ИК-головками самонаведения AN/AAQ-24
(США, Великобритания), AN/AAQ-112 (США), MANTA (Россия,
Испания).
523
ГЛАВА 7
Станция, входящая в состав комплекса AN/AAQ-24, исполь-
зует в качестве излучателя помех многоволновый твердотельный
лазер с диодной накачкой Viper, потребляющий мощность
320 Вт. При этом обеспечивается создание помех с единственным
законом амплитудной импульсной модуляции излучения на трех
длинах волн, соответствующих рабочим диапазонам атакующих
ракет [20].
В состав комплекса MANTA входит лазерная станция при-
цельных по направлению импульсных помех ALJS, использую-
щая импульсно-периодический электроразрядный HF-DF хими-
ческий лазер с замкнутым циклом смены рабочей смеси. Лазер
имеет высокий КПД и излучает на длинах волн в окрестности
3,8 мкм. При этом обеспечивается генерация многих спектраль-
ных линий для преодоления такой меры помехозащиты ИК-
головок самонаведения как применение узкополосных оптиче-
ских фильтров-пробок.
Специальным образом кодированное импульсное излучение
лазерной станции помех с силой излучения, значительно превос-
ходящей силу излучения больших самолетов в спектральных
диапазонах работы ИК-головок самонаведения, обеспечивает на-
дежное подавление таких головок.
Оптико-механический блок станции выполняет наведение
лазерного помехового луча на атакующую ракету. Для обеспече-
ния защиты в секторе 360° по азимуту и 90° по углу места на ле-
тательном аппарате могут устанавливаться две станции ALJS.
Это позволяет отражать атаки с двух направлений. При этом ка-
ждая станция обеспечивает последовательное подавление двух
одновременно атакующих ракет внутри защищаемого сектора.
Потребляемая мощность комплекса MANTA.........около 4 кВт
Вероятность обнаружения и взятия целей
на сопровождение ...................................0,9
Вероятность подавления ГСН
полуторасекундным лазерным залпом...................0,8
Промежуток между выстрелами..........................1 с
По словам разработчиков, ALJS должна защищать от боль-
шинства современных управляемых ракет класса воздух-воздух
(«Sidewinder» всех модификаций, «Magic», Р-73 и т.д.), а также от
ПЗРК («Stinger», «Mistral», «Игла» и проч.). Опубликована ин-
524
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
формация о том, что ALJS будет обнаруживать авиационные ра-
кеты на дальности 10...20 км, а стартующие с земли - на дально-
сти 5... 10 км [21, 59].
В качестве пиротехнических средств создания активных оптических
помех могут использоваться осветительные ракеты и парашютируе-
мые осветительные боеприпасы. Мощные одиночные оптические им-
пульсы, засвечивающие или ослепляющие ОЭСр различного назначе-
ния, могут создаваться боеприпасами оптического действия, предло-
женными в [22].
В таких боеприпасах в качестве активной (излучающей)
среды используются тяжелые инертные газы ксенон, криптон.
Излучение инициируется подрывом содержащегося в боепри-
пасе взрывчатого вещества с удельным энергосодержанием не
менее 4 МДж/кг, например гексогена. Под воздействием взрыва
в инертном газе формируется ударная волна, средняя скорость
которой при калибре боеприпаса 30 мм и начальном давлении
ксенона 1 бар может достигать 7,5 км/с, а температура ударно
сжатого ксенона за фронтом ударной волны доходить до
40 000 К.
При такой температуре ударно нагретый ксенон интенсивно
излучает в широком спектральном диапазоне от коротковолново-
го ультрафиолета до дальней инфракрасной области. Длитель-
ность импульса излучения для боеприпасов калибров 30 мм,
57 мм составляет около 10... 15 мкс. Полная мощность излучения
в диапазоне прозрачности воздуха составляет примерно 10 МВт
для снаряда калибра 30 мм и порядка 40 МВт для калибра 57 мм.
Суммарная излученная в полосе прозрачности воздуха энергия
для снаряда калибра 30 мм составляет около 170 Дж и для калиб-
ра 57 мм около 900... 1000 Дж. До 75% энергии излучения сосре-
доточено в УФ-области спектра, до 20% - в видимой, остальная
энергия - в инфракрасной области.
Такие параметры излучения боеприпаса позволяют создавать помехи
оптико-электронным средствам военного назначения в радиусе десят-
ков и сотен метров в зависимости от калибра боеприпаса, вида и кон-
кретных характеристик подавляемого средства. Частичное перерас-
пределение спектра излучения из области коротковолнового УФ-из-
525
ГЛАВА 7
лучения в области ближнего УФ, видимого и ближнего ИК-диапазона
спектра может достигаться нанесением на поверхность головной про-
зрачной части боеприпаса покрытия в виде пленки металла толщиной
порядка 10 мкм с областью поглощения в УФ-диапазоне. При этом
изменение спектрального состава излучения происходит за счет соб-
ственного излучения разогретого и испарившегося материала такой
тонкой пленки [22].
7.4.2. Аэрозольные завесы
Под аэрозолем понимается взвесь в воздухе мелких твердых
или жидких частиц, имеющих форму шара, или изометрических
(имеющих близкие размеры по трем измерениям), пластинчатых
или волоконных [2.6]. Помеховое действие аэрозолей обязано
физическим эффектам рассеяния и поглощения оптического из-
лучения на взвешенных в атмосфере малых частицах, образую-
щих аэрозольную завесу, а также их собственному тепловому из-
лучению. Причем то или иное помеховое воздействие на оптико-
электронные средства может иметь место при работе последних в
различных визируемых полях, в частности, в оптическом яркост-
ном (в видимой, ближней и дальней ИК-областях спектра) поле
собственного (радиотеплового) или отраженного излучения, в
лазерном яркостном или (и) дальнометрическом (рельефомет-
рическом) полях. И в этом смысле помеховое воздействие, реа-
лизуемое средствами создания аэрозольных завес (АЗ), почти
всегда по своим возможностям подавления различных типов
ОЭСр является комбинированным. Однако во многих случаях
предпринимаются специальные меры для усиления помеховых
эффектов в некоторых из этих полей. Термин комбинированная АЗ
будем использовать именно для таких случаев. Так, примером
комбинированной АЗ может служить облако, образованное го-
рением пиротехнических составов и частицами углеволокни-
стых материалов, предназначенных для создания помех в мм-
диапазоне излучения.
В основе классификации средств создания АЗ (далее - аэро-
зольных средств) лежат функциональные особенности этих
средств, характеризующие их как средства создания помех. Как и
любая другая предлагаемая классификация помимо систематизи-
рующей функции выполняет также и некоторую эвристическую
526
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
функцию в той мере, в какой она позволяет проявить может быть
ускользавшие ранее от внимания особенности аэрозольных
средств как средств оптико-электронного подавления.
Объектами ОЭП с использованием аэрозольных средств могут быть все
оптико-электронные средства военного назначения: средства предвари-
тельной и непосредственной разведки и прицеливания, лазерные, теле-
визионные и тепловизионные головки самонаведения управляемых бо-
еприпасов, оптико-электронные координаторы систем командного на-
ведения и т.п.
Аэрозольные средства обеспечивают создание аэрозольных
маскирующих и имитирующих помех. Аэрозольные средства соз-
дания маскирующих помех решают задачу срыва или ухудшения
характеристик обнаружения объекта и увеличения случайных
ошибок измерения его координат. Их помеховое действие обыч-
но проявляется в уменьшении наблюдаемого контраста объекта
или его характерных элементов. При обработке сигналов в по-
давляемом ОЭС это приводит к уменьшению главного пика кор-
реляционного отклика обнаружителя. В свою очередь, аэрозоль-
ные маскирующие помехи (а, значит, и средства их создания)
можно подразделить:
экранирующие - прикрывающие объект и окрестные участки
фона путем, например, постановки аэрозольной завесы дос-
таточной протяженности на направлении атакующего управ-
ляемого боеприпаса;
изменяющие фон - уменьшающие контраст объекта путем
изменения наблюдаемых характеристик фона (например, пу-
тем постановки за защищаемым объектом АЗ с контрастны-
ми характеристиками, близкими к исходным контрастным
характеристикам защищаемого объекта).
В особый класс маскирующих помех целесообразно отнести
помехи, реализующие условия одностороннего оптического пре-
имущества, обсуждавшиеся в 7.4.1.
Телевизионным, тепловизионным и малоэлементным ИК-координато-
рам протяженных целей, а также средствам прицеливания и наблюде-
ния могут создаваться аэрозольные имитирующие помехи в виде про-
странственно протяженных помеховых образований.
527
ГЛАВА 7
Так, телевизионным координаторам корреляционного типа,
использующим перезапись эталона, пространственно протяжен-
ная имитирующая помеха может создаваться постановкой мало-
размерного (сравнимого с размерами защищаемого объекта) кон-
трастного аэрозольного облака, изображение которого будет вна-
чале запомнено в координаторе в качестве эталона и далее будет
восприниматься им как истинная цель.
Наращивание эффективности аэрозольных помех в ряде случаев может
быть достигнуто за счет реализации неоднородной по пространству и
(или) нестационарной по времени яркостной структуры аэрозольной
завесы, что дает основания для классификации помех по признакам
стационарности и однородности.
По этим признакам аэрозольные помехи подразделяются на
стационарные и нестационарные по времени, а также на одно-
родные (равнояркие) и неоднородные (неравнояркие) по про-
странственным координат. Так, при закрытии участка местности
в окрестности цели неоднородной (черно-белой) аэрозольной за-
весой с интервалом пространственной корреляции, близким к
геометрическим размерам защищаемого объекта, светоконтраст-
ная ГСН может наводиться на контрастный участок такой завесы
как на ложную цель.
Неоднородные маскирующие завесы могут создаваться в ви-
де дискретных аэрозольных образований. При групповой защите
боевого порядка подразделения наземных подвижных объектов
(например, танковой роты на марше) за счет использования дис-
кретного режима постановки может быть достигнуто снижение
расхода аэрозолеобразующего состава.
Следующей важной с позиций ОЭП группой признаков
классификации средств создания помех являются признаки, от-
ражающие способ создания помехового поля. Необходимость
классификации аэрозольных средств по этой группе признаков
становится очевидной, когда мы обращаемся к решению задач
синтеза индивидуальных, групповых или объектовых комплексов
ОЭП. И, в частности, когда определяется состав и характеристики
средств создания аэрозольных помех, рекомендуемых к включе-
нию в эти комплексы, и конкретизируются требования к инфор-
мационному обеспечению их создания.
528
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
По моменту постановки завесы средства создания АЗ под-
разделяются на средства создания прицельных или заградитель-
ных по времени, т.е. ответных и неответных завес. Применение
средств создания АЗ, заградительных по времени (моменту) по-
становки, не требует точной информации о моменте начала и фа-
зе атаки. Примером таких средств являются большие дымовые
шашки, обеспечивающие заблаговременное задымление защи-
щаемого пространства. Примером средств создания ответных по
времени завес являются выстреливаемые аэрозольные боеприпа-
сы типа ЗД17, входящие в состав танкового комплекса ОЭП
«Штора» и предназначенные для быстрой постановки (подрывом
боеприпаса) аэрозольной завесы в ответ на облучение танка из-
лучением лазерного дальномера или лазера-целеуказателя.
К отдельному классу по способу постановки будем относить
средства постановки комбинированных (активно-пассивных} по-
мех. создаваемых путем подсвета аэрозольного облака лазерным
или некогерентным излучением. Отнесение их к отдельному
классу диктуется необходимостью выполнения специфических
требований по согласованному применению средств постановки
аэрозольных завес и активных средств их подсвета.
Достоинства и перспективы применения активно-пассивных
помех связаны с тем, что на основе использования таких помех
можно получить высокодинамичные нестационарные и неодно-
родные пространственно-яркостные помеховые структуры, по-
зволяющие реализовать пространственную и временную модуля-
цию помехового излучения, приходящего от аэрозольного обла-
ка, на частоте до сотни герц и выше. Это может найти примене-
ние, например, при подавлении телевизионных или тепловизион-
ных ОЭСр. Кроме того, за счет использования для подсвета аэро-
зольной завесы активных источников излучения различного
спектрального состава достигается расширение спектрального
диапазона эффективного действия помехи. Активно-пассивные
помехи могут найти применение и при реализации условий одно-
стороннего оптического преимущества.
По способу доставки аэрозольного средства к месту его ини-
циирования будем различать стационарные (например заблаго-
временно размещаемые на местности), подвижные (например,
средства дымопуска на базе автомобильных шасси) и отстрели-
529
ГЛАВА 7
ваемые средства создания завес. В свою очередь, отстреливае-
мые средства по месту формирования аэрозольного облака под-
разделяются на средства постановки завесы у защищаемого объ-
екта, на трассе распространения оптического излучения и у
атакуемого объекта.
От места постановки завесы существенно зависит расход аэ-
розолеобразующего состава, необходимый для прикрытия заве-
сой одной и той же области пространства, наблюдаемой с защи-
щаемого объекта. При небольшом относительном угловом сме-
щении защищаемого объекта и носителя атакующего боеприпаса
расход аэрозолеобразующего состава минимизируется при поста-
новке аэрозольной завесы у атакующего объекта или на трассе
распространения оптического излучения. При большой угловой
скорости относительного перемещения атакуемого объекта и но-
сителя ВТО расход минимизируется при постановке завесы у за-
щищаемого объекта.
И, наконец, по способу управления постановкой завес сред-
ства их создания можно подразделить на неавтономные, авто-
номные и инициируемые внешними воздействиями. Приведение в
действие неавтономных средств осуществляется по внешним ко-
мандам, поступающим от системы управления комплекса ОЭП. В
составе неавтономных средств создания помех можно выделить
средства с дистанционным и непосредственным управлением.
Отличительной особенностью средств с непосредственным
управлением является их размещение на одном носителе или
объекте с системой управления. Необходимость создания средств
с дистанционным управлением возникает при защите стационар-
ных объектов большой пространственной протяженности, когда
может потребоваться заблаговременное размещение аэрозольных
боеприпасов на большом удалении как от системы управления,
так и один от другого (создание протяженных аэрозольных по-
лей) и приведение их в действие радиокомандами.
К автономным средствам создания помех будем относить
заблаговременно размещаемые на местности средства создания
АЗ, оснащенные собственными датчиками, инициирующими
приведение этих средств в действие. Примером автономного
средства создания АЗ являются забрасываемые источники опти-
ческих помех [23], снаряженные собственными оптическими дат-
530
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
чиками, воспринимающими излучение пролетающей над таким
боеприпасом ПТУР, и обеспечивающими после этого быструю
(отстрелом) постановку аэрозольной завесы, прерывающей опти-
ческий контакт ИК-координатора ПТРК с бортовым трассером
ПТУР.
К средствам с дистанционным управлением, инициируемым
внешним воздействием, будем относить средства создания неак-
тивированных помеховых образований высокой объемной кон-
центрации (по типу боеприпасов объемного взрыва) с их после-
дующей активацией полями пролетающей ракеты или другими
внешними воздействиями, например лазерным излучением [92].
Среди специалистов, непосредственно не связанных с разработкой и
оценкой эффективности применения средств создания аэрозольных за-
вес, достаточно распространено представление об этих средствах как об
универсальных средствах дымовой маскировки, достаточно простых в
разработке и применении. В противовес такому представлению приве-
денная выше классификация характеризует большое разнообразие за-
дач, потенциально решаемых созданием АЗ так же, как и способов их
постановки, и большое разнообразие характеристик АЗ, которые опре-
деляют их эффективность.
Маскирующее действие АЗ определяется ослаблением про-
ходящего через АЗ оптического излучения, вызванным рассеяни-
ем и поглощением излучения на аэрозольных частицах. Интен-
сивность (например, сила излучения J) неослабленного излуче-
ния на выходе АЗ подчиняется закону Бугера-Бера:
J - , а - аа + as, (7.56)
в котором .70 - сила излучения на входе АЗ; а - коэффициент
ослабления; аа - коэффициент поглощения; as - коэффициент
рассеяния; / - продольный размер АЗ (геометрическая толщина).
АЗ приобретает белый цвет, когда основной вклад в ослаб-
ление оптического излучения вносят эффекты его рассеяния аэ-
розольными частицами, черный цвет определяется эффектами
поглощения излучения.
Если оптическая система формирует изображение сюжета,
наблюдаемого сквозь однородную АЗ, пространственное распре-
531
ГЛАВА 7
деление его яркости В(х1?х2)> определяемое неослабленной ча-
стью прошедшего сквозь АЗ излучения, также подчиняется зако-
ну Бугера-Бера:
В(л19х2) - 50(х1,х2)ехр(-а/). (7.57)
Необходимо иметь ввиду, что элементы сюжета, соответст-
вующие низким пространственным частотам, могут, как показано
в 2.2, формироваться также и рассеянным завесой излучением.
Оптическая толща завесы Т определяется как произведение Т = al.
Закон Бугера-Бера, как правило, выполняется для значений оптических
толщ до 20 и более и перестает выполняться для больших значений об-
лученности на входе завесы (порядка 105...107 Вт/см2), при которых мо-
жет иметь место нелинейное взаимодействие излучения с веществом
АЗ. С осторожностью необходимо пользоваться законом Бугера-Бера и
при анализе распространения узконаправленного лазерного или неко-
герентного пучка излучения сквозь АЗ.
Действительно, в этом случае при оптической толще
Т >8... 10 имеет место многократное рассеяние излучения, и ка-
кая-то часть рассеянного излучения начнет распространяться в
том же направлении, что и неослабленная часть исходного излу-
чения, т.е. будет неотличима по энергетическим характеристикам
от последнего [27]. Естественно, такие особенности распростра-
нения закон Бугера-Бера не учитывает. Для их учета можно вос-
пользоваться подходом, изложенным в 2.4, 2.5.
Для полидисперсного аэрозоля с дифференциальным зако-
ном распределения радиусов частиц w(r) коэффициент ослабле-
ния а определяется выражением [27, 2.10]
a-N Jcr(r)w(r) dr = Ncrr, (7.58)
о
где N - число аэрозольных частиц, находящихся в единице объе-
ма, 1/м3; а(г) - полное сечение ослабления (рассеяния и поглоще-
ния) одной частицы, м2; ог - среднее значение полного сечения
ослабления частиц полидисперсного аэрозоля, м2. (Полное сече-
ние ослабления частицы - это отношение потока излучения, изы-
532
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
маемого частицей из падающего на нее пучка, т.е. рассеянного во
всех направлениях и поглощенного частицей, к плотности потока
излучения в падающем на частицу пучке.) Эти величины имеют
размерность площади. Общее выражение для определения полно-
го сечения ослабления сферической частицы дает теория Ми
[27, 63]. С учетом (7.60) закон Бугера-Бера (7.58) принимает вид
J = Joexp(-Acrr/) = Jo exp(-MCZ). (7.59)
В этом выражении М - маскирующая способность аэрозоля,
м2/г; С - весовая концентрация аэрозоля, г/м3.
Связь arc М определяется выражением М = сгг/тпг , в кото-
ром mr - средняя масса одной аэрозольной частицы, г. Маски-
рующая способность количественно равна площади, при маски-
ровании которой аэрозольная завеса, сформированная одним
граммом аэрозолеобразующего вещества, обеспечивает ослабле-
ние излучения в 2,72 раза (в е раз). Или, что эквивалентно, мас-
кирующая способность количественно равна оптической толще
завесы с продольным размером (геометрической толщиной)
/ = 1 м и с концентрацией аэрозоля С = 1 г/м3.
Ориентировочные значения маскирующей способности наи-
более часто используемых аэрозолеобразующих составов, систе-
матизированные по данным различных источников (см., напри-
мер, [3, 24, 25]), приведены в табл. 7.1. При этом необходимо
иметь ввиду, что значение маскирующей способности может из-
меняться в зависимости от конкретной рецептуры аэрозолеобра-
зующего состава, температуры и влажности воздуха, длины вол-
ны зондирующего излучения, времени, прошедшего с момента
постановки завесы.
К числу лучших аэрозолеобразующих составов белого дыма принадле-
жат составы на основе белого и красного фосфора. На воздухе белый
фосфор самовозгорается с образованием фосфорного ангидрида, при-
соединяющего молекулы атмосферной воды. В результате этого возни-
кает множество мелких аэрозольных частиц в виде капелек слабого
раствора фосфорной кислоты, ответственных за рассеяние света аэро-
зольной завесой. При этом, в зависимости от влажности воздуха, обра-
зующийся аэрозоль вместе со сконденсировавшейся на нем влагой мо-
жет в 15...25 раз превосходить по массе исходное количество фосфора.
533
ГЛАВА 7
_______________________Таблица 7.1 _____________________
Аэрозолеобразую- щий состав Маскирующая способность м2/г в спектральных диапазонах
0,4...0,8 мкм 0,8...1,6 мкм 1,6...3 мкм 3...5 мкм 8... 14 мкм
Фосфорный 7...3,7 9...2,6 4,7... 1,8 3,5... 1,5 1,3...0,4
Металл охлоридн ы й 4...3,5 3,3...0,9 1,2...0,7 1...0,25 0,5...0,1
Антраценовый 3,8...3,6 1,4...0,9 1..Д8 0,2...0,1 0,15...0,09
Нефтепродукты 6,8...2,8 5,8...1,2 1.5...0.4 0,3...0,1 0,04...0,03
Основу состава металлохлоридных смесей образуют поро-
шок алюминия, окислы железа, цинка, гексахлоретан (С2С16). Ре-
зультатом реакции горения состава с температурой, достигающей
1 000 К, являются хлориды металлов, которые, взаимодействуя с
атмосферной влагой, образуют мелкие капельки аэрозольных
частиц, в основном рассеивающих проходящее оптическое излу-
чение. Результаты горения металлохлоридных смесей могут вы-
звать поражение людей, находящихся в аэрозольной завесе без
противогаза более 30 мин.
В антраценовые смеси входят антрацен (СмНю), хлористый
аммоний и бертолетова соль. При сгорании антраценовой смеси с
температурой порядка 400 К в зависимости от количественного
соотношения компонентов образуется белая или черная АЗ. При-
чем состав для черного дыма включает только антрацен и берто-
летову соль.
В качестве жидких аэрозолеобразующих составов обычно
используются нефтепродукты в виде солярного масла или ди-
зельного топлива. В результате испарения нефтепродуктов горя-
чими частями или газами работающих двигателей, они становят-
ся центрами конденсации влаги из воздуха, образуя мелкие час-
тицы белой непросматриваемой АЗ.
Мультиспектральные аэрозольные завесы могут также соз-
даваться мелкодисперсным распылением воды с образованием
капель, имеющих размеры, сравнимые с длиной волны подлежа-
щего ослаблению завесой излучения [28].
Аэрозольные завесы с повышенной маскирующей способно-
стью в ИК-диапазоне можно создавать диспергированием в атмо-
сферу частиц твердого вещества. В [83] предложено диспергиро-
534
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
вать порошок графита, имеющий 72%...81% частиц с диаметром
5...14 мкм, 15%...20% частиц с диаметром 2,5...5 мкм, 2%...8%
частиц с диаметром 1...2,5 мкм. Маскирующая способность
предложенного состава в диапазоне 3... 14 мкм составляет
1,78 м2/г.
Для повышения эффективности маскировки объектов на естественных
фонах могут использоваться цветные аэрозольные завесы. Наиболее
благоприятствующим постановке эффективных АЗ считается слабый
ветер со скоростью порядка 5 м/с. При скорости ветра более 15 м/с АЗ в
большинстве ситуаций теряют свою эффективность.
К числу выстреливаемых средств быстрой постановки АЗ
относится дымовая граната ЗД17, входящая в состав танкового
комплекса индивидуальной защиты «Штора». Момент постанов-
ки АЗ двумя гранатами ЗД17 иллюстрирует рис. 7.31 [82].
________________________Рисунок 7.31_____________________
Граната снаряжается 8-ю прессованными таблетками крас-
ного фосфора и отстреливается на дальность 50...70 м из мортир
системы 902 («Туча») калибра 81 мм. Каждая таблетка имеет 2
крестообразных пропила. Пороховой замедлитель обеспечивает
инициирование пиротехнических элементов и взрывное раскры-
тие гранаты через 1 с после ее отстрела. При этом таблетки раз-
рываются на мелкие и 32 крупных осколка, образующих своими
535
ГЛАВА 7
дымовыми хвостами аэрозольную завесу. После падения на грунт
они продолжают подпитывать завесу. При запуске одной гранаты
сплошная непросматриваемая завеса шириной не менее 15 м в
спектральном диапазоне 0,2...2 мкм формируется за время 1 ...3 с
при скорости ветра до 10 м/с и существует не менее 20 с. Время
маскирования в диапазоне 8... 14 мкм определяется временем го-
рения осколков и охлаждения завесы и составляет 5...6 с. Коэф-
фициент отражения излучения на длине волны 1,06 мкм лежит в
пределах 0,3...0,4. Разрыв одной гранаты экранирует защищае-
мый объект в секторе 10°...14°. Снаряжение модернизированной
гранаты ЗД17М дополнено пакетом дипольных отражателей, спо-
собных создавать ложную радиолокационную цель [30, 1.16].
Аналогичными по назначению выстреливаемыми средства-
ми быстрой постановки АЗ являются зарубежные дымовые гра-
наты L8A1 для английского гранатомета М239, французские ды-
мовые гранаты GALIX-3, GALIX-13, американская дымовая гра-
ната М-76 для пусковой установки М-6, украинская граната ГД-1.
В английской системе быстрой постановки АЗ VIRSS использу-
ются одноразовые пластиковые модули, которые могут снаря-
жаться 20-ю разнотипными аэрозольными боеприпасами калибра
20 мм с пиротехническим составом, микростеклосферами или
дипольными отражателями. При этом в зависимости от выбран-
ного способа защиты может быть реализован гибкий режим от-
стрела боеприпасов различного типа, в том числе постановка
комбинированной (многоспектральной) АЗ [1.16].
Боеприпас постановки аэрозольной завесы СО-50 калибра 120 мм, несу-
щий 7,3 кг аэрозольного снаряжения, предназначен для защиты кораблей
малого, среднего и большого водоизмещения путем постановки завесы
на удалении 20...50 м от борта корабля. Пуск боеприпасов производится
из 10-ти ствольной пусковой установки КТ-216, входящей в состав ком-
плекса помех ближнего рубежа ПК-10 («Смелый») [85,99,106].
К числу стационарных средств постановки АЗ относятся ма-
лые, унифицированные и большие дымовые шашки ДМ-11,
ДМХ-5, УДШ, БДШ-5, БДШ-15 и другие.
Унифицированная дымовая шашка УДШ, представленная на
рис. 7.32, предназначена для постановки маскирующих АЗ как
вручную, так и с использованием минного заградителя ПМЗ-1 и
536
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
вертолетного минного раскладчика ВМР-1. В качестве аэрозоле-
образующего вещества используется комбинация медленногоря-
щего и быстрогорящего металлохлоридных составов. Предусмот-
рена возможность дистанционного инициирования дымопуска.
Масса шашки ........................................13,5 кг
Время разгорания .....................................30 с
Продолжительность дымопуска ....................8.. .10 мин
Длина не просматриваемой части завесы [84]......100...150 м
К представителям подвижных средств постановки АЗ отно-
сятся дымовые машины ТДА-2М, ТДА-2 К, ТМС-65. Дымовая
машина ТДА-2М показана на рис. 7.33.
________________________Рисунок 7.33_____________________
537
ГЛАВА 7
Принцип работы машины базируется на испарении нефте-
продуктов газотермическим генератором, состоящим из камеры
сгорания, испарительной камеры и сопла, и последующей кон-
денсации образовавшихся паров нефтепродуктов в атмосфере.
Длина непросматриваемой части
поставленной АЗ ............................1000 м и более
Спектральный диапазон
маскирующего действия завесы .................0,4... 1,2 мкм
Время непрерывного дымопуска одной заправкой ....4.. .13 ч
Скорость движения при дымопуске...............10.. .40 км/ч
Расход аэрозолеобразующего вещества [84, 86]..320.. .940 л/ч
На тепловой машине для специальной обработки военной
техники ТМС-65 диспергирование нефтепродуктов при поста-
новке АЗ производится путем их ввода в струю работающего
турбореактивного двигателя ВК-1А (двигатель истребителя
МиГ-15), который входит в состав тепловой машины.
7.4.3. Ложные цели
Понятие ложная цель обычно используется для обозначения
как вида помехи, так и средства создания такой помехи. Как вид
помехи ложная цель (ЛЦ) принадлежит к классу имитирующих
помех.
По реализуемому при создании помехи эффекту ложные це-
ли подразделяются на отвлекающие и уводящие ложные цели.
Отвлекающие ложные цели применяются на этапах поиска, обна-
ружения, распознавания и захвата целей на сопровождение опти-
ко-электронными средствами систем ВТО. При этом решается
задача сохранения истинной цели за счет замыкания контура на-
ведения атакующего боеприпаса не по истинной, а по ложной це-
ли с момента начала процесса его наведения. Уводящие ложные
цели применяются на этапе сопровождения целей оптико-элект-
ронными средствами систем ВТО. При этом решается задача пе-
ренацеливания, т.е. перевода ОЭСр, уже сопровождающего ис-
тинную цель, в режим сопровождения ложной цели.
Эффективность ЛЦ определяющим образом зависит от степени совпа-
дения ее информативных (с позиций подавляемого ОЭСр) неэнергети-
ческих оптических характеристик с аналогичными характеристиками
истинной цели. Энергетические характеристики отвлекающей ложной
538
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
цели, такие как средняя контрастная яркость, сила излучения, площадь
излучающей поверхности, также не должны существенно отличаться от
характеристик истинной цели. Однако для успешного перенацеливания
ОЭСр на уводящую ложную цель энергетические характеристики по-
следней должны в 3...5 и более раз превосходить аналогичные характе-
ристики истинной цели.
По составу существенных с позиций оптико-электронного
подавления информативных неэнергетических характеристик,
определяемых типом атакующего ВТО, ложные цели подразде-
ляются на детальные, тепловые, лазерные и комбинированные
ложные цели.
Детальные ложные цели применяются для подавления
ОЭСр, осуществляющих формирование изображений фоноцеле-
вой обстановки. К числу таких ОЭСр относятся телевизионные и
тепловизионные координаторы и головки самонаведения, актив-
ные лазерные головки самонаведения со сканирующим ладаром,
а также телевизионные, тепловизионные и оптические визиры,
предназначенные для использования человеком - оператором.
Детальные ложные цели должны обеспечивать в спектральном
диапазоне работы подавляемого ОЭСр формирование простран-
ственно-яркостной помеховой структуры, максимально совпа-
дающей с пространственно-яркостной структурой изображения
истинной цели, построенного с учетом пространственной и тем-
пературной (для тепловизионных систем) разрешающей способ-
ности объекта подавления. Детальные ложные цели обычно ис-
пользуются в качестве отвлекающих ЛЦ.
Наиболее распространенными средствами создания помех в
виде детальных ложных целей являются надувные ложные цели.
Их очевидные достоинства - хорошая транспортабельность, воз-
можность быстрой установки и размонтирования, ремонтопригод-
ность и возможность многократного использования. Применение
надувных ложных целей позволяет решать задачу увеличения на-
ряда систем ВТО, требующихся противнику для решения конкрет-
ной боевой задачи, а также задачу введения в заблуждение систе-
мы разведки противника и увеличения таким образом эффективно-
сти защиты от поражения ВТО объектов военной техники и ин-
фраструктуры. Примеры надувных ложных целей фирмы Shapeln-
temational (Великобритания) приведены на рис. 7.34.
539
ГЛАВА 7
Как следует из рекламного проспекта фирмы [87], эти на-
дувные ложные цели имеют коэффициенты отражения, близкие к
коэффициентам отражения реальных целей, в видимом, ИК- и
радиодиапазонах излучения, т.е. по существу они являются ком-
бинированными ложными целями. Для удовлетворения более
широкому спектру условий подобия комбинированных ложных
целей истинным, определяемых требованиями эффективной
борьбы с перспективными системами ВТО, комбинированные
ложные цели должны также имитировать собственное и отра-
женное излучение поверхности цели в мм и ИК-диапазонах, а
также имитировать акустическое поле, создаваемое истинной це-
лью. Надувные ложные цели, подобные показанным на рис. 7.34,
производятся отечественными производителями, такими как
«Русбал», студия аэродизайна «Neo».
Ложные тепловые цели (ЛТЦ) подразделяются на точечные
и протяженные. К точечным относятся ЛТЦ, линейные размеры
которых, наблюдаемые в картинной плоскости подавляемого
ОЭСр, не превышают величину пространственного разрешения
этого ОЭСр. В противоположность этому к протяженным отно-
сятся ЛТЦ, изображение которых занимает более одного элемен-
та пространственного разрешения ОЭСр. Точечные ЛТЦ обычно
используются для подавления ИК-координаторов точечных целей
с растровыми анализаторами и ИК-головок самонаведения. Так,
патрон помеховый инфракрасный ППИ-26 калибра 26 мм предна-
значен для постановки точечных уводящих ложных целей управ-
ляемым ракетам классов воздух-воздух, земля-воздух с ИК-
головками самонаведения.
При срабатывании электровоспламенителя происходит возго-
рание пиротехнического состава патрона и выброс его из гильзы.
540
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
Время горения пиросостава.
Максимальная сила излучения
одного ППИ-26.............
......не менее 3 с
не менее 12 кВт/ср
Для применения ППИ-26 используются устанавливаемые на
самолетах и вертолетах устройства выброса типов АСО-2И, УВ-3
и другие. Процесс применения ППИ-26 с самолета Су-27 иллю-
стрирует рис. 7.35,а [88].
и) б)
________________________Рисунок 7.35_____________________
Средствами создания помех аналогичного назначения осна-
щаются зарубежные военные летательные аппараты. Рис. 7.35,6
иллюстрирует применение ЛТЦ с борта американского военно-
транспортного самолета С-17 Globemaster III. На этом самолете
установлены устройства отстрела ЛТЦ AN/ALE-47, позволяющие
применять новые ЛТЦ типов РОЕТ, GEN-X [89].
В прессе также приводятся сообщения о том, что для осна-
щения самолетов гражданской авиации в Израиле разработаны
темные ЛТЦ, невидимые человеческому глазу [93].
В современных системах наведения управляемых боеприпа-
сов при стрельбе по летательным аппаратам могут использовать-
ся устройства траекторной селекции, позволяющие исключить
перенацеливание УБ на ложную цель, если траектория последней
заметно отличается от траектории защищаемого с помощью ЛТЦ
летательного аппарата. Для преодоления таких устройств селек-
ции применяются ложные цели с аэродинамическим качеством,
т.е. планирующие или буксируемые ЛТЦ.
541
ГЛАВА 7
Создание протяженных отвлекающих ЛТЦ в виде облака тлеющих пи-
ротехнических элементов, характеристики излучения которых имити-
руют характеристики излучения кораблей в инфракрасном диапазоне
длин волн, обеспечивают отечественные корабельные комплексы ПК-2,
ПК-16 путем отстрела помеховых снарядов ТСТ-47 калибра 140 мм и
ТСТ-60У калибра 82 мм.
На рис. 7.36 показано изображение одной из таких ЛТЦ,
формируемое на экране тепловизора [95] и подобное изображе-
нию корабля. Помеховый снаряд ТСТ-60У предназначен для за-
щиты кораблей малого водоизмещения от управляемого оружия
на средних и дальних рубежах обороны путем отвлечения на
ЛТЦ ракет, атакующих корабль.
Длина снаряда........................................653 мм
Масса...........................................8,15 кг
Масса помехового снаряжения.....................0,53 кг
Дальность полета снаряда,
имеющего ракетный двигатель.....................до 3500 м
Удаление ЛТЦ от защищаемого корабля.........2000.. .3500 м
Рисунок 7.36
Головная часть снаряда со-
держит систему факел-парашют со
специальным помеховым составом,
создающим при его воспламенении
ложную тепловую цель в диапазоне
2...5 мкм в течение 50...80 с в виде
облака тлеющих пиротехнических
элементов, характеристики излуче-
ния которых имитируют характе-
ристики излучения корабли в ин-
фракрасном диапазоне длин волн.
Пусковая установка КЛ-101 пред-
ставляет собой пакет с 16-ю на-
правляющими трубами. Установка
имеет вертикальное наведение от 0 до 60° с шагом 10°. Обеспе-
чивается автоматическая стрельба при любой заданной последо-
вательности схода снарядов со скорострельностью 2 выстрела в
секунду [91].
Близкие по назначению и способам применения средства по-
становки ЛТЦ, такие, например, как помеховые снаряды LRCR,
542
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
MRCR, Heatrap, SEACLAD, HIRAM, SeaGnat, LOROC и многие
другие устанавливаются практически на все корабли военно-
морских сил развитых стран Востока и Запада.
Имитирующие помехи ПЛГС в виде лазерных ложных целей (ЛЛЦ) мо-
гут быть созданы путем подсвета помеховым лазером участка подсти-
лающей (в том числе морской) поверхности или искусственного обра-
зования (аэрозольной завесы, специальной мишени), попадающих вме-
сте с целью в поле зрения ПЛГС, или в результате излучения помехово-
го сигнала из вынесенной точки в направлении на ПЛГС.
Для успешного перенацеливания ПЛГС на имитирующую
помеху необходимо решить две задачи: обеспечить прохождение
помехового сигнала через каналы селекции ПЛГС (обеспечить
попадание помеховых импульсов во временной строб ПЛГС) и
обеспечить необходимое превышение помехи над сигналом на
апертуре ПЛГС [33, 61].
Основные способы создания прицельных по коду помех,
обеспечивающих преодоление каналов селекции ПЛГС
Создание ответных импульсных помех на основе упреж-
дающей разведки побочных излучений ЛДЦУ (спонтанного
излучения активной среды, излучения ламп накачки и т.п.).
Создание ответных импульсных помех с помощью быст-
родействующего полупроводникового лазера, лазера с по-
лупроводниковой накачкой или лазерного усилителя-
ретранслятора (например, на основе волоконных лазерных
усилителей).
« Создание ответных по коду помех путем логического вос-
становления и воспроизведения с любым опережением или
запаздыванием структуры периодической кодовой посылки
импульсов ЛДЦУ.
При этом длительность помеховых импульсов не должна за-
метно отличаться от длительности импульсов лазерного дально-
мера-целеуказателя. Для преодоления каналов селекции ПЛГС
могут также использоваться заградительные по коду помехи:
хаотическая импульсная или периодическая импульсная с боль-
шой частотой следования импульсов. Однако при этом сущест-
венно возрастают требования к средней мощности помехового
излучения.
543
ГЛАВА 7
Требования к энергетическим характеристикам помехи,
обеспечивающим превышение сигнала ЛЛЦ над сигналом ЛДЦУ,
достаточное для перенацеливания ПЛГС на ЛЛЦ, рассмотрены
в 7.2.2 для создания ЛЛЦ путем подсвета помеховым излучением
некоторого вынесенного отражателя или подстилающей поверх-
ности.
Если ЛЛЦ создается путем прямого излучения лазерного
помехового сигнала из отнесенной от цели точки пространства в
направлении на ПЛГС, то требования к энергетическим характе-
ристикам помехи могут быть существенно снижены за счет
уменьшения угла расходимости и, как следствие, увеличения си-
лы помехового излучения. Однако при этом придется дополни-
тельно решать задачу наведения по углам помехового излучателя
на ПЛГС ракеты на траектории ее полета к цели.
В [34] сообщается об экспериментальном подтверждении
эффективности способа постановки ЛЛЦ, предназначенного для
защиты малоразмерных наземных или надводных объектов. Осо-
бенностью этого способа является формирование ЛЛЦ путем
подсвета подстилающей поверхности при подавлении боеприпа-
сов с ПЛГС, атакующих цель по наклонной траектории, и ис-
пользование установленного на мачте над защищаемым объектом
помехового излучателя с круговой индикатрисой излучения, яв-
ляющегося лазерной ложной целью для боеприпасов, атакующих
цель по траекториям, близким к горизонтальным. Рис. 7.37 иллю-
стрирует такой способ формирования ЛЛЦ.
544
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
Необходимо отметить, что,
несмотря на значительное число
исследований, посвященных
проблематике ЛЛЦ, информация
об успешно завершившихся раз-
работках аппаратуры создания
ЛЛЦ и тем более о характери-
стиках такой аппаратуры публи-
куется достаточно редко.
На рис. 7.38 представлен
образец такой аппаратуры -
французская станция постановки
ЛЛЦ DHY332, предназначенная
для защиты кораблей и назем-
ных объектов военной техники
[35, 94]. Станция может работать
в дежурном режиме круглые в
сутки. После приема лазерного
сигнала подсвета противника
она обеспечивает постановку ЛЛЦ в автоматическом режиме с
задержкой не более 1 с путем подсвета подстилающей поверхно-
сти кодовой последовательностью импульсов на длине волны
1,06 мкм, имитирующей кодовую последовательность импульсов
лазерного дальномера-целеуказателя противника.
Также реализовано перемещение лазерного помехового пят-
на по водной поверхности для увода атакующей ракеты за преде-
лы контура корабля. Однако приоритет в создании средства по-
становки лазерных ложных целей следует, по-видимому, отдать
украинскому комплексу Каштан-3, опередившему французскую
разработку на несколько лет, или его предшественнику, разрабо-
танному для защиты кораблей еще в рамках соответствующих
военных программ до распада СССР [36].
7.4.4. Средства маскировки
Технические средства тактической маскировки, также как и
рассмотренные выше средства постановки протяженных аэро-
зольных завес (большие дымовые шашки, дымовые машины) и
детальные ложные цели, являются средствами инженерного
545
ГЛАВА 7
обеспечения боевых действий войск и, как правило, не относятся
к средствам оптико-электронного подавления. Однако они могут
вносить заметный вклад в защиту объектов военной техники от
высокоточного оружия с оптико-электронными системами наве-
дения. Этот вклад становится там более заметным при их совме-
стном применении с традиционными средствами оптико-элект-
ронного подавления, что и служит достаточным основанием для
их рассмотрения.
Технические средства тактической маскировки решают за-
дачу скрытия от противника объектов военной техники и военной
инфраструктуры, боевых подразделений тактического звена, а
также задачу дезинформирования противника об этих объектах.
Поэтому основными показателями эффективности решения задач
маскировки являются вероятность правильного обнаружения и
вероятность распознавания объектов маскировки.
Успешное решение задачи маскировки, выражающееся в снижении ве-
роятности обнаружения защищаемого объекта до значений, близких к
нулю, не является гарантией защищенности объекта от поражения ВТО
хотя бы потому, что современные системы ВТО с ТВГС или ТПВГС
способны обеспечить точное наведение управляемого боеприпаса на
цель по побочным ориентирам или по информации от спутниковой на-
вигационной системы.
К основным средствам маскировки относятся лакокрасоч-
ные покрытия, гибкие покрытия, маскирующие пенные покры-
тия, пленочные покрытия, экраны, имитаторы излучения объек-
тов. Представительный обзор современных средств маскировки
содержится в [3, 37]. Ниже при выборочном представлении от-
дельных средств маскировки мы будем использовать эти источ-
ники. Обратим только внимание на неудачное название моногра-
фии [37], посвященной, скорее, не средствам снижения заметно-
сти, а средствам маскировки. (Во избежание часто встречающей-
ся в литературе терминологической путаницы к средствам сни-
жения заметности следует относить только средства, являющиеся
неотъемлемой частью конструкции защищаемого объекта.)
Лакокрасочные покрытия применяются для защитного, деформирую-
щего или имитирующего окрашивания объектов. Защитное окрашива-
ние решает задачу уменьшения вероятности обнаружения объекта пу-
546
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
тем подбора красок, снижающих его контраст на фоне подстилающей
поверхности. В случае маскирования от наблюдения в видимом диапа-
зоне это обычно одноцветное окрашивание или многоцветное с мелки-
ми пятнами различных цветов, то есть с пространственно-цветовой
структурой, приближающейся к структуре пятен окружающего фона.
Отмечается [64], что коэффициент излучения масляных и нитроэмале-
вых красок в ИК-диапазоне в 2...3 раза выше красок на основе алюми-
ниевой пудры.
Деформирующее окрашивание решает задачу искажения
формы наблюдаемого объекта и уменьшения вероятности его
распознавания путем нанесения крупных пятен двух, трех или
четырех цветов.
Существуют альбомы образцов рисунков деформирующего окрашива-
ния техники и вооружения, разработанных применительно к раститель-
ным, пустынным и снежным фонам. Имитирующая (подражательная)
окраска под объекты другого типа или назначения применяется, в ос-
новном, для маскирования стационарных или подвижных объектов, на-
ходящихся длительное время на одном месте. Для окрашивания техни-
ки в полевых условиях применяют полевую окрасочную станцию ПОС.
Защитное окрашивание техники и вооружения для снежных,
пустынных, степных фонов, а также все виды деформирующего
окрашивания осуществляют маскировочными водоэмульсионны-
ми красками ЭВА-524 восьми цветов, безопасными в работе и
легко разбавляемыми чистой водой.
Сообщается об использовании в странах НАТО трехцветного маскиро-
вочного окрашивания, состоящего из зеленого, коричневого и черного
цветов [38]. Такому окрашиванию обычно подлежат боевые гусенич-
ные и колесные машины, орудия полевой артиллерии, фургоны, кон-
тейнеры и другие объекты. По мнению западных военных экспертов,
трехцветное окрашивание в 1,5...2 раза снижает вероятность обнару-
жения противником объекта по сравнению с одноцветным.
В [3] по материалам патента США приводится описание
способа адаптивного деформирующего маскировочного окраши-
вания. Применительно к задаче тепловой маскировки в ИК-диа-
пазоне суть способа состоит в окрашивании объекта совокупно-
му
ГЛАВА 7
стью узких двухцветных полос, ширина каждой из которых не
превышает линейный размер элемента пространственного разре-
шения ТПВ прибора наблюдения.
________________________Рисунок 7.39______________________
Раскраска каждой узкой полосы выполняется в соответствии
со схемой рис. 7.39, на которой ааХ. аа2 - коэффициенты погло-
щения участков, окрашенных первой и второй краской соответ-
ственно, причем ааХ «1, аа1 & 0. Если выполняются эти требова-
ния к значениям коэффициентов поглощения участков, показан-
ных на рис. 7.39, то эквивалентное значение коэффициента по-
глощения каждой окрашенной полосы будет изменяться вдоль ее
длины, пробегая все значения между 0 и 1. Таким образом, при
любом знаке и значении теплового контраста объекта на каждой
закрашенной полосе найдется участок с нулевым контрастом к
фону. Вследствие этого изображение объекта существенно де-
формируется, как бы распавшись на две части.
Одним из недостатков способов маскировки объектов путем
их защитного окрашивания является практическая невозмож-
ность получения хорошего маскирующего эффекта одновременно
в видимой и ИК-областях спектра. Способом маскировки, позво-
ляющим в необходимых случаях парировать этот недостаток, яв-
ляется использование гибких покрытий в виде маскировочных
сетей, накидок, масок и т.п.
Современные гибкие покрытия выполняются из хлопчатобумажных
или синтетических тканевых или пленочных материалов. Синтетиче-
ские материалы имеют по сравнению с хлопчатобумажными лучшие
спектральные характеристики, больший срок службы, высокую стой-
кость к неблагоприятным атмосферным и химическим воздействиям,
меньшую массу и объем при транспортировке.
Покрытия бывают транспарантные, т.е. просвечивающие
(изготовленные на сеточной основе, с просветами), и нетранспа-
548
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
рантные. Транспарантные покрытия имеют меньшую массу,
лучше выдерживают ветровые нагрузки, во многих случаях луч-
ше сливаются с окружающим фоном. Синтетические покрытия с
высокой транспарантностью могут снизить тепловой контраст
объекта в 3...4 раза. Однако тепловые контуры объекта при этом
практически не размываются [3].
Нетранспарантные покрытия, особенно установленные с за-
зором над защищаемым объектом, могут иметь больший маски-
рующий эффект. Гибкие покрытия обычно используются в виде
накидок, укрывающих защищаемый объект, или в виде искусст-
венных масок. Маска укрывает или весь защищаемый объект, или
его отдельные элементы и обычно представляет собой рамную
конструкцию с уложенным на нее гибким покрытием.
Для создания масок формируются табельные маскировочные комплек-
ты, включающие в свой состав гибкое покрытие и элементы рамного
каркаса в виде опорных стоек, соединительных шнуров, оттяжек и тому
подобных элементов. Гибкие комбинированные покрытия имеют в со-
ставе элементы, обеспечивающие маскирование в нескольких спек-
тральных диапазонах, в том числе включающих радиодиапазон.
Отечественные табельные маскировочные комплекты МКТ,
МКС, «Шатер» предназначены для маскировки боевой техники и
сооружений на растительных фонах и на фонах обнаженных
грунтов. Обычно они бывают трех типов по размеру покрытий:
Зу6, 6^6, 12x18 м2. Так, маскировочный комплект МКТ-4Л, раз-
работанный ООО НПО «Экопортрет-М», включает 4 маскиро-
вочных покрытия размером 6 9 м2. Они представляют собой се-
тевую основу с вплетенными в нее гирляндами из просеченных и
скрученных цветных полосок трехслойного электропроводящего
материала. Комплект предназначен для маскировки объектов на
летних фонах в оптическом и радио диапазонах излучения. Рису-
нок покрытия - четырехцветный асимметричный с темно-зеле-
ным, светло-зеленым, зеленым и черным цветами окраски. Масса
комплекта - 180 кг [105]. Комплект «Накидка», разработанный
специалистами ОАО «НИИ Стали», предназначен для защиты
бронетанковой техники не только в статичном положении, но и в
движении. Материал комплекта представляет собой стеганую
многослойную ткань, снижающую эффективную поверхность
549
ГЛАВА 7
рассеяния объекта защиты в диапазоне 0,8...4 см и его излучение
в ИК-диапазоне. Материал обладает тепловой инерцией, подоб-
ной тепловой инерции подстилающего фона. При этом вероят-
ность обнаружения танка приборами, работающими в видимом и
ИК-диапазонах, уменьшается в 1,3...3 раза [39].
Гибкие покрытия аналогичного назначения производятся
многими зарубежными фирмами. Легкое маскировочное много-
цветное покрытие LWCS фирмы Teledyne Brown Engineering из-
готовлено из материала, покрытого поливинилхлоридом, с нарез-
кой по форме и размерам листвы. Масса 1 м2 покрытия составля-
ет 170 г. Комплект содержит два модуля шестиугольной и ромбо-
видной формы общей массой 29,5 кг со сторонами каждого моду-
ля длиной 4,9 м. Стороны снабжены замками для быстрого со-
единения между собой. Окраска покрытий адаптирована к при-
менению в условиях леса, пустыни и крайнего севера [37].
В армиях стран НАТО применяются шведские маскировоч-
ные покрытия фирмы SAAB. Мультиспектральное сверхлегкое по-
крытие ULCAS (Barracuda) предназначено для маскировки непод-
вижных объектов военной техники [74]. Оно состоит из двух скре-
пленных между собой полотен синтетического волокна. Причем
верхнее полотно содержит надрезы, придающие покрытию объем-
ность и увеличивающие эффективность маскирования от обнару-
жения приборами, использующими излучение видимой, ИК- и ра-
дио областей спектра. Масса 1 м2 покрытия не превышает 250 г.
Рис. 7.40 иллюстрирует результаты маскирования объекта
таким покрытием в видимом (левый рисунок) и ИК-диапазонах.
________________________Рисунок 7.40______________________
550
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
Для маскирования объектов военной техники в статике и в
движении применяются маскирующие пенные покрытия на осно-
ве водно-органических, водно-полимерных составов и пенопо-
лиуретанов. Пенные покрытия обладают хорошей адгезией к лю-
бым поверхностям, стойкостью к действию большинства органи-
ческих растворителей, имеют хорошие маскирующие свойства
как в радио, так и в ИК-диапазоне, низкий коэффициент отраже-
ния лазерных излучений, допускают окрашивание в цвета типо-
вых фонов местности.
Используемая в российской армии двухкомпонентная пено-
образующая рецептура ПОР-02ПУ представляют собой суспен-
зию наполнителя (модифицированное углеволокно «Углен-9») в
смеси полиэфиров и полиизоцианатов соответственно. При норме
расхода порядка 3 л/м" и толщине покрытия 5 см обеспечивается
снижение эффективной поверхности рассеяния объектов в диапа-
зоне 0,8... 10 см в 2 раза и снижение излучения объектов в ИК-
диапазоне 1,5... 14 мкм до уровня фона. Маскирующие свойства
покрытия сохраняются в течение 180 сут.
Для нанесения покрытия используются генератор маски-
рующих пенных покрытий ГМПП и станция подвижная пенная
универсальная СППУ. Одной зарядкой рецептуры ПОР-02ПУ
при толщине слоя пены 3 см СППУ обеспечивает обработку по-
верхности площадью до 150 м2, что достаточно для маскировки 3
объектов типа танк. Производительность станции СППУ по пене -
2...3 м3/ч [84].
На рис. 7.41 показан бронетранспортер БТР-80, покрытый
пеной состава ПОР-02ПУ.
________________________Рисунок 7.41______________________
551
ГЛАВА 7
Рассмотренные покрытия в основном ориентированы на ис-
пользование эффектов поглощения и диффузного рассеяния па-
дающего излучения. В [37] рассматриваются защитные тонкоп-
леночные структуры со световозвращающими свойствами, обес-
печивающими изменение в требуемом направлении углов между
падающим и возвращаемым светом.
Такие покрытия минимизируют величину диффузно рассе-
янного объектом падающего излучения, чем резко ограничивают
диапазон возможных углов прихода на апертуру атакующего
управляемого боеприпаса излучения объекта, отражаемого им
только в ограниченные угловые секторы. Так, при формировании
в пленочном покрытии рельефа в виде правильных и-гранных
отражающих микропирамид с различными углами при их верши-
нах будет происходить возвращение сплошного потока падающе-
го излучения в виде нескольких отдельных различно направлен-
ных один относительно другого узких пучков.
Их количество и пространственное положение зависят от
геометрических параметров микропирамид и от угла падения
приходящего излучения. Энергетика отдельных возвращенных
лучей зависит от количества переотражений внутри каждой мик-
ропирамиды и от оптических характеристик материала пленки и
нанесенных на нее отражающих или поглощающих покрытий. В
[37] описываются использовавшиеся в экспериментах пленки с
рельефом из трех и четырехгранных пирамид с правильными
многоугольниками в основании со стороной основания, равной
100 мкм, и углами при вершине 120, 90 и 30°.
В качестве отражающих поверхностей использовался алю-
миний с коэффициентом отражения, изменяющимся в зависимо-
сти от длины волны в пределах 0,7...0,97. При наведении ракеты
с ПЛГС на объект, защищенный таким маскирующим пленочным
покрытием, вследствие многолучевого характера отражения сиг-
нал лазера-целеуказателя на входе ПЛГС может периодически
пропадать, что будет приводить к срыву захвата цели в ПЛГС.
Отдельные лучи отраженного сигнала могут формировать лож-
ные цели на подстилающей поверхности. Совокупное действие
этих факторов может привести к уменьшению вероятности пора-
жения цели ракетой с ПЛГС.
552
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
Для снижения теплового контраста наиболее нагретых элементов кон-
струкции защищаемых объектов широкое применение находят маски-
рующие экраны.
Крыша моторного отделения объектов бронетанковой тех-
ники является одним из таких элементов. Для снижения тепло-
вого контраста крыши до уровня, приближающегося к тепло-
вому контрасту других элементов защищаемого объекта, может
использоваться маскирующий экран в виде установки сверху
над крышей с некоторым зазором теплоизоляционной накидки
и продувки через этот зазор холодного наружного воздуха
[1.16].
В ряде случаев цель может иметь устойчивый отрицатель-
ный контраст по отношению к окружающему фону. Отрицатель-
ный контраст в радиотепловом диапазоне (3 мм, 8 мм) имеют на-
блюдаемые с верхней полусферы объекты бронетанковой техни-
ки вследствие отражения металлическими элементами плановой
проекции машины участков неба с низкой радиационной темпе-
ратурой, имеющей место в этом спектральном диапазоне. Отри-
цательный радиометрический контраст объектов бронетанковой
техники в мм диапазоне может быть уменьшен с помощью уста-
навливаемых на них широкополосных шумовых генераторов [41,
1.16]. Частотный диапазон излучения генератора должен соответ-
ствовать диапазону работы атакующего ВТО, а шумовой харак-
тер его излучения - шумовому характеру радиотеплового излуче-
ния фона.
В настоящее время ведутся работы по созданию маскировочных по-
крытий с новыми свойствами на основе применения новых технологий,
в частности, нанотехнологий. Изучается возможность создания маски-
ровочных покрытий на основе технологий, используемых в гибких
дисплеях, когда мобильные частицы пигмента, покрывающие поверх-
ность скрываемого объекта, могут изменять свое положение или ориен-
тацию, создавая новую окраску, зависящую от направления наблюде-
ния. Уже сейчас можно создавать нити и ткани, поглощающие излуче-
ние в видимом и инфракрасном диапазонах, причем коэффициент от-
ражения для такого покрытия можно регулировать в реальном времени.
Предполагается, что практическое применение покрытий на этой осно-
ве осуществится в ближайшие годы [42].
553
ГЛАВА 7
В печати обсуждаются возможности реализации адаптивной
маскировки и, в частности, возможности создания адаптивных
покрытий типа «хамелеон», динамично приводящих свои оптиче-
ские характеристики в соответствие с оптическими характери-
стиками окружающего фона с целью уменьшения текущего кон-
траста объекта, несущего такое покрытие. Адаптивная маскиров-
ка может быть реализована путем измерения оптических харак-
теристик излучения участка текущего фона, находящегося за за-
щищаемым объектом, и формирования с поверхности объекта из-
лучения с характеристиками, совпадающими с измеренными зна-
чениями характеристик излучения фона.
Реализация адаптивной маскировки включая создание адап-
тивных покрытий в настоящее время вступает в полосу своего
реального воплощения. Наиболее просто принцип адаптивной
маскировки реализуется при борьбе с образцами ВТО, исполь-
зующими малоэлементные фотоприемные устройства.
Так, в [40] предложено устройство индивидуальной защиты
летательного аппарата от управляемых ракет с оптическими го-
ловками самонаведения, использующими ультрафиолетовый
диапазон излучения. Устройство обеспечивает снижение отрица-
тельного контраста летательного аппарата на фоне неба, имею-
щий место в этом диапазоне.
Устройство содержит измеритель яркости фона дневного
неба и датчик регистрации освещенности поверхности летатель-
ного аппарата, которые позволяют с помощью бортового вычис-
лительного устройства получать объективную информацию о
контрастном образе летательного аппарата в УФ-диапазоне длин
волн на текущем небесном фоне. Это позволяет регулировать
мощность УФ-помехового излучателя до уровня, обеспечиваю-
щего минимизацию контраста поверхности летательного аппара-
та с фоном наблюдения, и тем самым повысить эффективность
его защиты от поражения ВТО с головками самонаведения, ис-
пользующими излучение УФ-диапазона.
В [41, 1.16] приводится описание адаптивной системы ши-
рокополосных шумовых генераторов для маскировки бронеобъ-
ектов. Снижение их контраста в радиотепловом диапазоне до
уровня ниже порогового уровня обнаружения достигается регу-
лированием мощности широкополосных шумовых генераторов в
соответствии с характеристиками излучения подстилающего фо-
554
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
на и погодными условиями. Причем уровень мощности генерато-
ра устанавливается соответствующим разности радиояркостных
температур неба и подстилающей поверхности, которая опреде-
ляется с помощью специального бортового радиометра.
Израильская компания Eltics объявила о создании нового
типа маскировки Black Fox, которая позволяет делать любую во-
енную технику невидимой в диапазонах З...5мкм и 8... 14 мкм
[43]. В состав системы Black Fox входит набор маскировочных
пластин, тепловизионная камера, компьютер и пульт управления.
Камера предназначена для получения информации о температур-
ных характеристиках окружающего фона. Эта информация по-
ступает на вход компьютера, который формирует команды на на-
грев до определенной температуры пластин, прикрепляемых сна-
ружи к поверхности маскируемого объекта, например, к поверх-
ности танка. При этом обеспечивается снижение теплового кон-
траста танка до уровня ниже порогового, что исключает его об-
наружение и сопровождение тепловизионными приборами разве-
дывательно-прицельных систем и тепловизионными головками
самонаведения управляемых боеприпасов.
Реализуется также возможность имитации тепловых портретов танков
противостоящей стороны конфликта. По данным Eltics, система Black
Fox в серийном производстве будет иметь приемлемую цену. Она про-
ста в использовании и не требует глубокой модернизации оснащаемой
техники. Система может быть установлена на уже имеющиеся объекты
бронетанковой техники, вертолеты или корабли без внесения сущест-
венных изменений в их конструкцию. На рис. 7.42 показан танк, осна-
щенный системой Black Fox.
В последнее десятилетие появились работы, предлагающие
новые пути решения задачи маскировки объектов. Так, в частно-
сти, исследуется возможность создания покрытия, делающего не-
видимым объект с находящимся на нем покрытием, но остав-
ляющего видимым фон, расположенный за этим объектом, т.е.
речь фактически ведется о возможности создания идеального
маскирующего покрытия. Первая демонстрация рабочего макета
такого покрытия, разработанного японскими специалистами, по-
видимому, состоялась в 2004 г. на выставке технических дости-
жений в Сан-Франциско. Посетители могли наблюдать человека,
555
ГЛАВА 7
одетого в специальный плащ, и видеть очертания предметов, на-
ходящихся за ним. Это обеспечивалось тем, что на поверхности
плаща расположено множество передающих миникамер и излу-
чающих минипрожекторов. Камеры передают принимаемые со
спины изображение фона на прожекторы, формирующие изобра-
жение этого фона и находящиеся на передней стороне плаща. Так
что, взглянув на замаскированный объект, можно было увидеть
контуры предметов, расположенных за ним [44].
Уникальные возможности маскирования объектов открывает новая
ветвь оптических наук - трансформационная оптика. «Трансформаци-
онная оптика, по аналогии с общей теорией относительности, в которой
время и пространство искривлены, показывает что пространство, в ко-
тором распространяется свет, может быть изогнуто почти произволь-
ным заранее заданным образом. Одним из самых головокружительных
приложений концепции трансформационной оптики является плащ-
невидимка для оптической маскировки, который может изгибать свет
вокруг себя (наподобие обтекания водой камня в ручье), что делает и
сам плащ и скрытый под ним объект невидимыми [45].»
Практическая реализация эффектов трансформационной оп-
тики обеспечивается созданием и использованием метаматериалов,
т.е. специально сконструированных материалов с физическими
свойствами, отсутствующими или существенно отличающимися от
имеющихся в естественных материалах, например имеющих ко-
эффициент преломления, меньший единицы. Сообщается [46], что
исследователи из университета Пердью (США), руководимые
556
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
В. Шалаевым, создали теоретическую модель устройства, в кото-
ром применяется множество крошечных игл толщиной примерно
10 нм, расположенных слоями, исходящими из центральной спицы
в цилиндре. Устройство, напоминающее круглую щетку, должно
отклонять свет вокруг маскируемого объекта.
Утверждается, что объекты на заднем плане будут видны, но объект,
окруженный цилиндрическим массивом наноигл, станет невидимым.
Устройство предполагается сделать из немагнитных метаматериалов.
Особенностью устройства является изменение коэффициента прелом-
ления от нуля на внутренней поверхности плаща-невидимки до едини-
цы на его внешней поверхности.
Хотя реализация указанных принципов создания плаща-
невидимки весьма далека от практического применения и экспе-
риментальное подтверждение заявленных свойств устройства в
настоящее время отсутствует, однако, по-видимому, можно счи-
тать установленной принципиальную возможность создания та-
кого устройства.
Следует отметить, что выполненные теоретические проработки отно-
сятся к случаю использования для наблюдения монохроматического
излучения. Принципиальная возможность создания устройств с анало-
гичными свойствами для случаев наблюдения объектов в панхромати-
ческом режиме в настоящее время остается неустановленной.
7.5. Средства информационного обеспечения
В ряде случаев информация об атакующих боеприпасах, не-
обходимая для эффективного применения средств оптико-
электронного подавления, может быть получена от штатных ин-
формационных средств, входящих в состав бортового комплекса
вооружения защищаемого объекта. К числу таких средств отно-
сятся РЛС обнаружения и сопровождения целей, телевизионная и
тепловизионная аппаратура бортовых разведывательно-прицель-
ных систем, приборы ночного видения, лазерные дальномеры.
Для решения специфических задач оптико-электронного подав-
ления, как правило, необходимо создание и специальных средств
информационного обеспечения постановки помех.
557
ГЛАВА 7
7.5.1. Индикаторы лазерных излучений
Индикаторы лазерных излучений (ИЛИ) предназначаются
для обнаружения и определения параметров излучений лазерных
средств противника, приходящих на защищаемый объект, и для
последующей реализации на основе полученной информации мер
по его защите от поражения высокоточным оружием.
Источники приходящих на объект лазерных излучений
Лазерные дальномеры.
Лазерные дальномеры-целеуказатели.
» Лазерные лучевые системы наведения управляемых боепри-
пасов.
Лазерные локаторы.
Лазерные станции оптико-электронного подавления.
Лазерные системы связи.
Лазерные подсветчики цели для приборов ночного видения.
В качестве регистрируемых излучений могут рассматривать-
ся прямое, рассеянное атмосферой и другими образованиями и
спонтанное излучение лазерных средств, а также излучение сис-
тем накачки, используемых в лазерах этих средств. В соответст-
вии с этим спектральный диапазон работы ИЛИ может прости-
раться от ультрафиолетовой до дальней ИК-области спектра.
В настоящее время наиболее широкое применение в ком-
плексах оптико-электронного подавления находят ИЛИ, предна-
значенные для обнаружения и определения параметров излуче-
ний лазерных дальномеров (ЛД), лазерных дальномеров-целеука-
зателей (ЛДЦУ) и лазерных лучевых систем наведения (ЛЛС)
управляемых боеприпасов. Информация, получаемая от ИЛИ, в
этом случае обычно используется для определения момента и на-
правления постановки аэрозольной завесы атакующему ВТО, а
также для выбора режима излучения помехового лазера в случае
создания лазерной ложной цели на подстилающей поверхности
или на каком-либо искусственном образовании, например на аэ-
розольной завесе.
В современных ЛД военного назначения обычно использу-
ется излучение лазерных импульсов с модулированной добротно-
стью на длине волн 1,06 мкм, 1,54 мкм и реже на длине волны
10,6 мкм. В ЛДЦУ используется излучение в виде последова-
558
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
тельности коротких импульсов со средней частотой порядка
10...30 Гц. В ЛЛС используется непрерывное модулированное
излучение или квазинепрерывное, т.е. импульсное излучение с
малой скважностью и с большой частотой повторения импульсов,
достигающей единиц кГц. В качестве излучателей в ЛЛС обычно
используются полупроводниковые лазеры на арсениде галлия и
СОг-лазеры [48], что соответствует диапазонам спектральных из-
лучений 0,85... 0,9 мкм, 1,06 мкм и 9,2... И мкм.
Таким образом, ИЛИ, предназначенные для обнаружения
излучения ЛД, ЛДЦУ, ЛЛС, должны обеспечивать прием лазер-
ных излучений на всех указанных выше длинах волн. Рабочий
диапазон облученностей входной оптики ИЛИ при приеме им-
пульсных излучений ЛД и ЛДЦУ составляет КГ4 Дж/см2
при 1 = 1,06 мкм, 5-Ю"10...5-10-4 Дж/см2 при X =1,54 мкм,
IO 8... 10 3 Дж/см2 при X = 10,6 мкм.
При приеме непрерывных или квазинепрерывных излучений
ЛЛС средняя рабочая облученность ИЛИ на длине волны
1,06 мкм лежит в диапазоне 1О'7...1О'4 Вт/см2 [49]. Там же дела-
ется вывод о том, что фотоприемное устройство ИЛИ, исполь-
зующее охлаждаемую КРТ матрицу, может обеспечить необхо-
димую чувствительность на всех указанных длинах волн.
Однако применение охлаждаемых матриц в таких приложениях не име-
ет перспектив [49]. Задача регистрации лазерного излучения в ближней
и дальней областях спектра может решаться с использованием разных
каналов. При этом одновременно будет решаться и задача определения
спектрального диапазона приходящего лазерного излучения. Необхо-
димо иметь ввиду, что характеристики устройства обработки импульс-
ных сигналов ЛД и ЛДЦУ, поступающих с выхода фотоприемного уст-
ройства ИЛИ, могут существенно отличаться от характеристик такого
устройства, обеспечивающих эффективное решение задачи обнаруже-
ния непрерывных и квазинепрерывных сигналов ЛЛС. Поэтому совме-
щение функции обнаружения сигналов ЛД, ЛДЦУ с функцией обнару-
жения сигналов ЛЛС в одном устройстве связано с преодолением опре-
деленных технических трудностей.
Задача определения направления на источник приходящего
излучения в случае использования многоэлементных матрицы
или линейки фотоприемников решается тривиально. Увеличение
559
ГЛАВА 7
точности определения направления при использовании фотопри-
емников с 4...6 чувствительными элементами до точности много-
элементных матричных фотоприемников может быть достигнуто
применением технологии оптических масок, обеспечивающих
получение на выходе малоэлементного фотоприемника информа-
ции о точном направлении на регистрируемый излучатель, фор-
мируемой в двоичном коде [48].
В принципе, на ИЛИ может быть дополнительно возложено решение
задач оценки энергетических характеристик, точного определения дли-
ны волны и временных параметров импульсной последовательности
приходящего излучения. Это создает необходимые предпосылки для
решения задачи распознавания класса, к которому может принадлежать
атакующее ВТО, и оценки его отдельных параметров, что позволяет
повысить эффективность применения имеющихся средств создания
помех.
Фирмой GOODRICH (США) разработан индикатор лазерных
излучений AN/WR-1, предназначенный для оснащения назем-
ных подвижных объектов военной техники (рис. 7.43). Для обес-
печения кругового по азимуту сектора обзора в состав индикато-
ра включены 4 приемных головки. Спектральный диапазон рабо-
ты AN/VVR-1 0,5... 1,6 мкм, рабочий сектор одной приемной го-
ловки 90° по азимуту и 55° по углу места, время реакции 0,1 мс.
Точность определения направления на источник лазерного излу-
чения ±1° при работе по сигналам ЛД, ЛДЦУ, и ±45° при работе
по сигналам ЛЛС. Порог обнаружения задается исходя из появ-
ления не более одной ложной тревоги на 100 ч работы [50].
Рисунок 7.43
560
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
Аналогичные характеристики при меньших массогабарит-
ных параметрах имеет разработанный этой же фирмой ИЛИ
301 MG1. Фирмой GOODRICH разработана целая линейка ИЛИ,
включающая помимо указанных выше также индикаторы
AN/VVR-2, AN/WR-3.
Вертолеты и военные суда США, Великобритании и других
стран оснащаются ИЛИ AN/AVR-2A(V). В ряду разработок, вы-
полненных в других странах, отметим такие ИЛИ, как COLDS
(Германия), LWD-21 (Великобритания), LIRD-4 (Словения),
AMCORALWS-2 (Израиль), HARLID (Канада), RL1 (Норвегия).
Так, ИЛИ COLDS имеет расширенный рабочий диапазон
(0,4...2 мкм), а точность определения направления по углу места
и азимуту составляет 3°. Причем помимо определения направле-
ния на источник лазерного излучения, индикатор позволяет опре-
делять также длину волны, вид излучения, частоту повторения
импульсов и тип лазерного устройства [52].
В канадском индикаторе HARLID, использующем малоэле-
ментное фотоприемное устройство, точность определения на-
правления повышена до ±0,8° за счет применения технологии оп-
тических масок.
В ИЛИ, входящем в состав украинского танкового комплек-
са индивидуальной зашиты «Варта», спектральный диапазон ра-
боты расширен до 12 мкм [96].
В ряду первых в мировой практике разработок ИЛИ, приня-
тых на снабжение войск, находятся отечественный комплект при-
емных головок лазерного излучения ТШУ-1-1, ТШУ-1-11, вхо-
дящий в состав танкового комплекса индивидуальной защиты
«Штора-1», и корабельный ИЛИ «Спектр-Ф» [53, 1.16]. Эти ин-
дикаторы предназначены для обнаружения излучений ЛД и
ЛДЦУ.
Приемная головка ТШУ-1-11 регистрирует лазерное им-
пульсное излучение в диапазоне 0,65... 1,55 мкм в секторах 45° по
азимуту и 30° по углу места, определяет направление на источник
излучения с ошибкой менее 4°, распознает факт облучения сиг-
налами ЛД или ЛДЦУ. Головка ТШУ-1-1 определяет только факт
лазерного подсвета в секторе по азимуту 135°. Минимальная ра-
бочая облученность головок 1,5-10~7 Дж/см2 [82, 1.16].
561
ГЛАВА 7
7.5.2. Пассивные пеленгаторы ракет
Пассивные пеленгаторы ракет предназначаются для обнару-
жения факта и направления атаки защищаемого объекта управ-
ляемыми ракетами. Возможность обнаружения возникает тогда,
когда атакующая ракета наблюдается как контрастный объект на
окружающем фоне. Положительный контраст атакующей ракеты
в общем случае может определяться собственными рассеянным
солнечным излучением ее корпуса, а также собственным излуче-
нием корпуса и факела работающего двигателя в диапазоне от
ультрафиолетовой (УФ) до дальней ИК-области спектра. Помимо
этого имеет место отрицательный контраст корпуса ракеты на
фоне яркого дневного неба при наблюдении в УФ- и видимом
диапазоне. Головная ударная волна гиперзвуковых ракет также
может быть источником УФ-излучения.
Спектральный диапазон работы пассивного пеленгатора за-
дается прежде всего его назначением, конкретизирующим типы и
характеристики подлежащих обнаружению ракет и характери-
стики оптической трассы, на которой должно проводится наблю-
дение (настильная, трассы поверхность - воздух, воздух - по-
верхность). И далее - условиями распространения излучения
вдоль этой трассы, освещенностью сцены солнечным излучени-
ем, характерными для рассматриваемой ситуации шумами. В ря-
де случаев при наблюдении на настильных трассах оказывается
предпочтительным диапазон 8... 14 мкм, а при наблюдении на
трассе «поверхность - воздух» - диапазон 3... 5 мкм.
В настоящее время наиболее широкое применение находят
теплопеленгаторы (ТПП), работающие по тепловому излучению
корпуса и факела двигателя, и ультрафиолетовые пеленгаторы
(УФП), работающие по излучению факела двигателя в ультра-
фиолетовом диапазоне.
ИК-излучение ослабляется атмосферой гораздо меньше, чем излучение
УФ-диапазона. Именно поэтому ТПП способны обнаруживать ракету на
большей дальности, чем УФП. Кроме того, ТПП могут обнаружить раке-
ту или управляемую бомбу при неработающем двигателе по излучению
нагретой оболочки их корпуса. В то время как излучение УФ-диапазона
генерируется, в основном, факелом работающего двигателя.
Вместе с тем, ТПП подвержены сильному воздействию фо-
новых помех, что отрицательно сказывается на их чувствитель-
562
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
ности. Это вынуждает использовать в ТПП фотоприемные уст-
ройства с узким мгновенным полем зрения и ведет во многих
случаях к необходимости применения охлаждаемых фотоприем-
ников. Для реализации большого поля обзора применяются ли-
нейки или матрицы с большим количеством чувствительных эле-
ментов. А это, в свою очередь, усложняет алгоритмы селекции
сигнала ракеты на фоне помех и чревато возрастанием вероятно-
сти ложных тревог. Требуемые характеристики вероятности об-
наружения атакующей ракеты теплопеленгатором при низком
уровне ложных тревог удается обеспечить путем применения
специальных мер спектральной, частотной, временной и про-
странственной селекции.
Одной из таких мер является использование адаптивного,
т.е. выставляемого по фону порога обнаружения. За счет приме-
нения этих мер парируется негативное воздействие на ТПП про-
странственно-временных шумов фона, солнечных бликов, вспы-
шек выстрелов и излучения горящих фрагментов фоноцелевой
обстановки. Методы траекторной фильтрации используются для
отбраковки ракет, не наводящихся на защищаемый объект.
В то же время, для УФ-диапазона характерен низкий уро-
вень фоновых помех, что позволяет использовать в УФП неохла-
ждаемые фотоприемные устройства с большим мгновенным уг-
лом поля зрения.
Типичным представителем УФП является пеленгатор
MAW300 (SAAB Avitronics, Швеция), предназначенный для ос-
нащения самолетов и вертолетов.
В состав MAW300 входят блок обработки и управления
EWC и от 4 до 6 показанных на рис. 7.44 чувствительных головок
с фотоприемными устройствами, чувствительными к излучению
УФ-диапазона, и сигнальными процессорами.
Угол поля зрения головки ............................110°
Точность измерения угла ..............................2°
Вероятность обнаружения ракеты
на рабочей дальности при одной ложной тревоге
за 10 ч работы............................приближается к 1
Одновременное сопровождение...............более 8 объектов
Отсеивание пролетающих мимо ракет
по траекторным признакам [97, 98]
563
ГЛАВА 7
________________________Рисунок 7.44______________________
К числу авиационных пеленгаторов, также использующих
излучение УФ диапазона, относятся AN/AAR-54 (V), AN/AAR-57
(CMWS), AN/AAR-60 (все США), Guitar-350 (Израиль), MAW200
(Швеция). Причем последний предложен также для использова-
ния в составе танкового комплекса индивидуальной защиты.
В информационных источниках сообщается о разработке до-
вольно широкой номенклатуры авиационных ТПП, таких как
AN/AAR-44, AN/AAR-47 (все США), PAWS-2 (Израиль), Elix-IR
(Великобритания), SAMIR (Франция), Л-136 («Мак-Ф», Россия) и
другие. Для оснащения подвижных объектов бронетанковой тех-
ники предназначен ТПП Tandir (Израиль).
Двухцветный пассивный ИК-пеленгатор ракет MIMS
(NorthropGrumman, США) входит в состав комплекса индивиду-
альной защиты самолетов и вертолетов армейской авиации
AN/AAQ-24(V) NEMESIS. Чувствительная головка имеет распо-
ложенную в фокальной плоскости оптической системы фотопри-
емную матрицу размерности 320 256 элементов, разделенную на
две площадки [20].
На каждую площадку поступает оптическое излучение,
сформированное отдельными оптическими подсистемами с поло-
совыми фильтрами, соответствующими двум ИК-поддиапазонам.
Селекция сигнала цели от помеховых излучений фона выполня-
ется путем сравнения энергии сигналов, поступающих с каждой
площадки фотоприемной матрицы, за счет чего обеспечивается
высокая вероятность обнаружения подлетающей ракеты при низ-
ком уровне ложных тревог. Почти сферический сектор обзора
564
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
обеспечивают 6 чувствительных головок, круговой сектор обзора
в азимутальной плоскости - 4 головки.
Следовательно, угловая разрешающая способность пеленга-
тора может лежать в пределах 0,3...0,5°. На полевых испытаниях
подтверждена способность MIMS обнаруживать реальные пуски
ракет даже на дальностях, лежащих в диапазоне 4,7... 16 км [20].
7.5.3. Активные пеленгаторы
Наряду с пассивными пеленгаторами целей для получения
координатной информации, необходимой для постановки пред-
намеренных помех, используются активные пеленгаторы, к кото-
рым относятся активные обнаружители оптических систем,
двух - 4-координатные оптические (лидары) и радио (радары) ло-
каторы, обеспечивающие измерение угловых координат, скоро-
сти сближения и дальности до атакующих управляемых боепри-
пасов. В качестве зондирующего в лидарах может использоваться
как некогерентное, так и лазерное излучение.
Наиболее широкое применение в системах оптико-элект-
ронного подавления находят активно-импульсные обнаружители
оптических систем (ООС) по бликам отраженного ими в сторону
наблюдателя (ретроотраженного) зондирующего излучения.
Если оптическая ось подлежащего обнаружению оптиче-
ского прибора (объекта разведки) направлена на источник зон-
дирующего оптического излучения, то прицельная марка или
фотоприемник этого прибора отражают зондирующее излуче-
ние в малом угле расходимости и в направлении на источник
этого излучения. Причем угол расходимости отраженного из-
лучения сравним с углом поля зрения прибора - объекта раз-
ведки. Отраженное излучение создает сильный блик, который
может хорошо наблюдаться не только в ночных, но и в дневных
условиях.
Энергетические характеристики отраженного оптикой излу-
чения характеризуются коэффициентом световозвращения р
[м2/ср], который в общем случае изменяется от типа к типу оп-
тической системы объекта разведки:
p = J/E, (7.62)
565
ГЛАВА 7
где J - сила излучения [Вт/ср], отраженного оптической систе-
мой объекта разведки, Е - облученность входной оптики этой
системы зондирующим излучением, [Вт/м2].
В качестве зондирующего может использоваться некоге-
рентное или лазерное излучение. Для получения отраженного
блика спектральный диапазон (длина волны) этого излучения
должен соответствовать спектральному диапазону или длине ра-
бочей волны объекта разведки. В то же время для обеспечения
высоких контрастных характеристик блика, гарантирующих его
обнаружение, длина волны зондирующего излучения должна на-
ходится в области, соответствующей возможному минимуму фо-
новых засветок.
Для увеличения дальности и вероятности обнаружения бликующей оп-
тики применяется импульсная модуляция зондирующего излучения,
создающая возможность использования в ООС эффективных алгорит-
мов частотно-временной обработки принимаемых сигналов.
В качестве приемников излучения в ООС могут использо-
ваться малоэлементные фотоприемные устройства видимого и
ИК-диапазонов, электронно-оптические преобразователи прибо-
ров ночного видения, многоэлементные матричные телевизион-
ные и тепловизионные фотоприемные устройства. Решение об
обнаружении объекта разведки по блику его оптической системы
может приниматься как непосредственно человеком-оператором,
так и автоматическим решающим устройством.
Зондирующее излучение с большим углом расходимости позволяет
вскрывать расположение сразу нескольких ОЭСр, попадающих в этот
угол, за один акт зондирования.
Если на объекте разведки имеется несколько оптических систем, обра-
зующих определенную пространственную конфигурацию, характерную
только для этого объекта разведки, то при достаточном угловом разре-
шении в ООС будет формироваться подобная же пространственная
конфигурация бликов, позволяющая решать задачу распознавания объ-
екта разведки.
Дополнительные возможности как распознавания, так и оп-
ределения существенных для решения задач ОЭП характеристик
566
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
объектов разведки создает использование непрерывного зонди-
рующего излучения. Так, в случае, например, зондирования та-
ким излучением головки самонаведения с растровым анализато-
ром отраженный сигнал будет промодулирован по амплитуде в
соответствии с законом растровой модуляции, используемым в
этой ГСН. Это позволяет восстановить ряд параметров растро-
вой модуляции (таких, например, как частота развертки изобра-
жения по растру в ГСН), необходимых для оптимизации пара-
метров активных помех таким ГСН. Отраженный сигнал может
также содержать информацию об отдельных характеристиках
оптической системы зондируемого ОЭСр, а также о факте эф-
фективного или неэффективного воздействия на ОЭСр предна-
меренных помех [78].
Решение рассмотренных и других подобных задач информа-
ционного обеспечения образует основу для реализации адаптив-
ных способов создания помех.
На рис. 7.45 показан отечественный представитель активно-
импульсных ООС - малогабаритный лазерно-локационный при-
бор дистанционной разведки оптико-электронных средств «Ан-
тиснайпер-1». При коэффициенте световозвращения /? = 5м2/ср
дальность обнаружения ОЭСр составляет 500 м. Для зондирова-
ния ОЭСр используется лазер с мощностью излучения 0,7 Вт, из-
лучающий на длине волны 0,8 мкм. В качестве приемника излу-
567
ГЛАВА 7
чения используется ТВ камера на основе матрицы ПЗС с чувст-
вительностью до 1(Г3 лк и углом поля зрения 5*7°. В модифика-
ции этого прибора «Антиснайпер-М2» за счет использования бо-
лее чувствительной ПЗС-матрицы, а также пространственного
интегрирования и временного накопления сигналов дальность
обнаружения ОЭСр с р -1 м2/ср увеличена до 2 км и более при
работе в диапазоне освещенностей сцены 10~3...7 104 лк.
В приборе используется полупроводниковый лазерный из-
лучатель с мощностью 2 Вт и частотой повторения импульсов
50 Гц. Угол расходимости лазерного излучения на выходе прибо-
ра 2° *3 °. Угол поля зрения приемного канала по горизонту изме-
няется от 3 до 18° [54].
Активные оптические системы пеленгации целей по сигналу, рассеян-
ному целями в соответствии с их эффективной поверхностью рассеяния
или отраженному их оптическими системами в соответствии с коэффи-
циентом световозвращения последних, входят в состав всех сущест-
вующих или разрабатываемых ослепляющих или поражающих систем
лазерного оружия, таких, как ПАПВ, StingrayAN/VAQ-7, ABL, ATL,
THEL, Excalibur, Centurion и других.
7.5.4. Телевизионные и тепловизионные
средства наблюдения
Телевизионные и тепловизионные средства наблюдения,
обеспечивающие формирование изображений визируемой сцены,
предоставляют информацию, достаточную для реализации широ-
кого класса эффективных алгоритмов сопровождения подвижных
объектов, в том числе атакующих боеприпасов на траектории на-
ведения последних на цель (на объект защиты). Вместе с тем, та-
кие средства характеризуются более скромными возможностями
по поиску и раннему обнаружению объектов. Последнее связано
с тем, что для повышения отношения сигнал/шум при обнаруже-
нии объектов на большой дальности необходимо увеличивать
время накопления сигналов фотоприемником и использовать оп-
тические системы с небольшим углом поля зрения. А это увели-
чивает при поиске цели время обзора атакоопасной области про-
странства.
568
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
Получаемая ТВ- и ТПВ-средствами наблюдения информация
о пространственно-временных характеристиках развития атаки и
текущих координатах атакующего боеприпаса может использо-
ваться как для выбора момента и направления постановки помех,
так и для выбора параметров помех и реализации адаптивных
способов подавления, использующих контроль эффективности
помех по данным траекторных измерений.
Информация о разработке специальных ТВ- и ТПВ-средств
наблюдения, ориентированных только на решение задач ОЭП, в
настоящее время отсутствует. Вместе с тем, ТВ- и ТПВ-средства
обнаружения и сопровождения воздушных целей широко исполь-
зуются в зенитных ракетных и ракетно-артиллерийских комплек-
сах, в авиационных обзорно-прицельных системах, в наземных и
корабельных ОЭСр наблюдения и разведки. Примером такого
средства является отечественная оптико-электронная станция со-
провождения целей, предназначенная для использования в соста-
ве зенитных ракетно-артиллерийских комплексов [56]. В состав
станции входит показанное на рис. 7.46 интегрированное устрой-
ство формирования изображений фоноцелевой обстановки «Гри-
фон» и многофункциональная система обработки видеоизобра-
жений типа «Охотник».
_______________________Рисунок 7.46______________________
Изображения фоноцелевой обстановки формируются в ви-
димом и ближнем ИК-диапазонах ТВ-каналом на основе низко-
569
ГЛАВА 7
уровневой ПЗС-матрицы форматом 768^576 элементов разреше-
ния, а в диапазоне 8... 12,5 мкм - тепловизором, использующим
фотоприемник на основе неохлаждаемой микроболометрической
матрицы форматом 320 >"240 элементов. Диапазон рабочих осве-
щенностей ТВ-канала 5 10-3... 5-104 лк, минимальная обнаружи-
ваемая разность температур ТПВ-канала 0,1.. .0,05°.
Изделие «Грифон» построено по коаксиальной схеме со-
вмещения оптических осей с расположением объектива и ТВ-
электроники в зоне слепого пятна зеркально-линзового объектива
ТПВ-канала. Каналы имеют одинаковое поле зрения 4,7 <6,2°, уг-
ловая разрешающая способность ТПВ-канала составляет
0,265 мрад, а ТВ-канала - 0,11 мрад. Дальность обнаружения це-
лей типа самолет измеряется десятками километров.
Возможности многофункциональной системы
обработки видеоизображений «Охотник»
Улучшение телевизионных и тепловизионных изображений
и их комплексирование для повышения эффективности об-
наружения и распознавания целей.
Пространственные преобразования изображений (поворот,
масштабирование, стабилизация кадра и т.п.).
Обнаружение, захват и сопровождение от 1 до 8 целей в
ручном и автоматическом режимах.
я Формирование сигналов управления платформой с располо-
женными на ней видеоканалами так, чтобы сопровождаемая
цель находилась в центре кадра.
Комплексирование разноспектральных видеоизображений путем их со-
вмещения после предварительной обработки обеспечивается отсутст-
вием стереобазы за счет использования коаксиального видеоканала. В
результате комплектования формируется изображение более инфор-
мативное, нежели каждое из исходных. Пространственные преобразо-
вания позволяют станции электронным путем парировать нежелатель-
ные механические воздействия (вибрации, крен носителя и т.п.).
В режиме автоматического сопровождения целей использу-
ются алгоритмы, адаптированные под разные виды целей. Так
при сопровождении движущихся и малоразмерных целей типа
БПЛА используется полуавтоматический метод захвата цели на
570
ОПТИКО-ЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ ТИПОВЫХ ОБРАЗЦОВ ВТО
сопровождение и алгоритм автосопровождения светоконтрастно-
го типа. Для сопровождения малоподвижных размерных целей
может использоваться корреляционный алгоритм, предполагаю-
щий наличие (формирование) эталонных изображений и разност-
ную корреляционную обработку на апертуре 64 64 элемента раз-
решения без масштабирования и на апертуре до 256 256 элемен-
тов при масштабировании изображений.
Разработанное алгоритмическое обеспечение предполагает
выделение движущихся объектов и работу в замкнутом контуре
автосопровождения. Повышение помехоустойчивости режима
автосопровождения при полном или частичном экранировании
цели помехами или плохом ее выделении из анализируемого изо-
бражения достигается на основе применения алгоритма экстра-
поляции положения цели.
______________________Рисунок 7.47____________________
Многофункциональное многоспектральное средство наблю-
дения и сопровождения целей с повышенной разрешающей спо-
собностью SAFIRE 380-HD (США) показано на рис. 7.47. Сред-
ство может оснащаться средневолновой ТПВ-камерой, работаю-
щей в диапазоне З...5мкм, ТПВ-камерой ближней ИК-области
спектра, камерой цветного ТВ на ПЗС-матрице, низкоуровневой
камерой цветного ТВ [58]. Характеристики этих камер приведены
571
ГЛАВА 7
в табл. 7.2. Кроме того, средство может оснащаться лазерным
дальномером (рабочая дальность до 25 км) и лазерным целуказа-
телем, маркирующим предназначенную для поражения различ-
ными образцами ВТО цель узким лазерным пучком с мощностью
0,1 Вт на длине волны 0,83 мкм.
_______________________Таблица 7.2______________________
Тип камеры Формат матрицы Оптическое усиление Угол поля зрения
ТПВ, средний ИК 720x1280 120 30...0,25°
ТПВ, ближний ИК 720x1080 112 28...0,25°
ТВ с ПЗС 720x1080 116 29...0,25°
ТВ низкоуровневый 720x1080 37 55...1,5°
Для обеспечения работоспособности низкоуровневой ТВ ка-
меры в условиях нулевой освещенности предлагается использо-
вание подсвета цели широкоугольным лазерным подсветчиком с
мощностью 2 Вт на длине волны 0,83 мкм.
Запросам, предъявляемым проблематикой ОЭП, по своим функцио-
нальным возможностям могут удовлетворять авиационные обзорно-
прицельные системы AN/AAQ-33 Sniper, AN/AAS-38 ATFLIR,
AN/AAQ-28 Litening (США), а также оптико-локационные станции
ОЭПС-ЗОИ, ОЛС-ЗО, ГОЭС 342 (Россия) [60] и многие другие.
572
_________8_____________
КОМПЛЕКСЫ
ОПТИКО-ЭЛЕКТРОННОГО
ПОДАВЛЕНИЯ СИСТЕМ
Рассмотрены комплексы оптико-электронного подавления
объектов ВТО.
Приведена их классификация.
Обсуждены особенности методического подхода к форми-
рованию их технического облика, решается задача иден-
тификации атакуемого объекта групповой цели по траек-
торным измерениям.
Дан краткий обзор разработанных комплексов оптико-
электронного подавления.
ГЛАВА8
8.1. Классификация комплексов
оптико-электронного подавления
_______________________систем ВТО__________________________
Наличие эффективных видов помех, способов и средств их
создания является необходимым, но далеко не достаточным ус-
ловием успешной реализации эффективной защиты объектов во-
енной техники и инфраструктуры от поражения системами ВТО.
Применение помехи будет эффективным тогда, когда эта помеха
соответствует особенностям построения атакующего образца
ВТО, этапу атаки и текущим пространственно-временным харак-
теристикам ее развития. Значит, для эффективной постановки
помехи необходимо иметь адекватную текущей ситуации инфор-
мацию и уметь правильно распорядиться этой информацией.
Таким образом, в качестве базового помехового ресурса, определяюще-
го эффективность ОЭП, целесообразно рассматривать не вид помехи
или способ ее создания, а способ оптико-электронного подавления
(способ ОЭП).
Под способом ОЭП будем понимать увязанную с условиями обстанов-
ки и предназначенную для подавления установленного множества объ-
ектов ВТО на определенном этапе их функционирования триаду, вклю-
чающую вид помехи и способ ее создания, способ информационного
обеспечения (разведки) и способ управления постановкой помехи.
Заметим, что вместо понятия способ ОЭП удобно использо-
вать в ряде случаев его синоним - способ защиты, т.е. когда один
и тот же базовый помеховый ресурс рассматривается с пассивной
позиции защиты и будет фигурировать как способ защиты, а ко-
гда с активной позиции нападения - как способ ОЭП,
Большое разнообразие возможных помеховых эффектов, ви-
дов помех, способов и средств создания помех и разведки опре-
деляют возможности организации эффективной защиты широкой
номенклатуры объектов военной техники и инфраструктуры.
Реализация этих возможностей на практике связана с созданием
комплексов оптико-электронного подавления.
574
КОМПЛЕКСЫ ОПТИКО-ЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
Комплекс оптико-электронного подавления (КОЭП) - сово-
купность функционально и технически согласованных средств
создания помех, информационного обеспечения (разведки) и
управления, ориентированных на реализацию увязанных с усло-
виями боевой обстановки способов ОЭП и достижение таким об-
разом целей защиты объектов от ВТО средствами оптико-элект-
ронного подавления.
В основе приводимой классификация КОЭП лежит деление
объектов, подлежащих защите от ВТО, на подвижные и непод-
вижные объекты. Для защиты подвижных объектов военной тех-
ники может использоваться индивидуальная, взаимная и группо-
вая защита, а также возможные комбинации этих видов защиты
(индивидуально-взаимная, индивидуально-групповая, взаимно-
групповая). В соответствии с этими видами защиты классифици-
руются и КОЭП [1, 2, 7.67].
Комплекс индивидуальной защиты (КПЗ) предназначен для
защиты от ВТО отдельного подвижного объекта военной техники
с помощью средств создания помех, информационного обеспече-
ния и управления, размещенных непосредственно на защищае-
мом объекте.
К достоинствам КПЗ относится возможность автономного
применения каждым объектом имеющихся средств создания по-
мех в соответствии со складывающейся боевой обстановкой.
Эффективность КПЗ часто существенно ограничивается не-
возможностью размещения всех необходимых средств ОЭП на
каждом защищаемом объекте. К недостаткам КПЗ можно отнести
ограниченные возможности создания помех из нескольких точек
пространства, т.е. наиболее эффективных видов помех угломер-
ным каналам атакующего ВТО, определяющим точность наведе-
ния управляемого боеприпаса на цель. По существу, единствен-
ным видом таких помех, в принципе реализуемым КПЗ, являются
ложные цели. Кроме того, постановка помех демаскирует защи-
щаемый объект, чем создаются предпосылки для его атаки дру-
гими носителями ВТО или для применения противником пассив-
ного режима наведения ВТО. Недостатком является и необходи-
мость оснащения комплексом каждого объекта подверженного
атаке тактического воинского формирования.
Комплекс взаимной защиты (КВЗ) предназначен для защиты
от ВТО подвижных объектов тактического воинского формиро-
575
ГЛАВА 8
вания с помощью однотипных средств создания помех, информа-
ционного обеспечения и управления, размещенных на каждом
объекте этого формирования.
При этом средства ОЭП каждого подверженного атаке объ-
екта при их автономном применении могут не обеспечивать за-
щиту этого объекта с требуемой эффективностью. Однако их со-
вместное применение с нескольких объектов позволяет реализо-
вать наиболее эффективные виды помех угломерным каналам
атакующего ВТО из нескольких точек пространства, в том числе
мерцающих помех, помех из направлений вне поля зрения опти-
ческих систем атакующего ВТО (боковых засветок) и т. п. Недос-
татком и в этом случае является необходимость оснащения ком-
плексом каждого объекта подверженного атаке тактического во-
инского формирования.
Комплекс групповой защиты (КГЗ) предназначен для защи-
ты от ВТО подвижных объектов тактического воинского форми-
рования с помощью средств создания помех, информационного
обеспечения и управления, размещенных на специальном носи-
теле КГЗ, придаваемом защищаемому воинскому формированию.
Использование специального носителя КГЗ создает необхо-
димые условия размещения на нем более широкой номенклатуры
не только средств ОЭП, но и средств РЭП. Так, в составе КГЗ для
защиты наземных объектов могут использоваться высокоинфор-
мативные средства обзора верхней полусферы, использующие
излучение как оптического, так и радио диапазонов, средства
бликовой оптической локации. В состав системы управления мо-
гут включаться средства информационного обмена с объектами
защищаемого формирования и внешними источниками информа-
ции, средства спутниковой топопривязки. При этом возможно, в
частности, выявление текущего целераспределения атакующих
боеприпасов по объектам защищаемого комплексом тактического
формирования с целью оптимизации на этой основе способов
применения как групповых средств создания помех (отстрели-
ваемых средств создания аэрозольных завес, средств создания ак-
тивных помех и лазерных ложных целей), так и средств КПЗ в
случае их наличия на объектах защищаемого формирования [4].
Наряду с этим обеспечивается организация взаимодействия с
зенитными ракетно-артиллерийскими комплексами ближнего ру-
576
КОМПЛЕКСЫ ОПТИКО-ЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
бежа. К достоинствам КГЗ также относится возможность его ис-
пользования для защиты от ВТО тактических формирований,
объекты которых не оснащены средствами и комплексами ОЭП.
К числу слабых сторон КГЗ относится его вероятное позициони-
рование противником, как объекта первоочередного удара систе-
мами ВТО.
Комплекс индивидуально-групповой защиты (КИГЗ) разра-
ботан для создания условий размещения полного набора средств
ОЭП, необходимых для эффективной защиты танкового подраз-
деления от возможного арсенала образцов атакующего ВТО на
всех этапах выдвижения, боевого развертывания танков и обще-
войскового боя [4].
Состав КИГЗ (средства, на специальном носителе)
и Комплект средств разведки, получающих информацию об
угрозе атаки, составе атакующих систем ВТО и о параметрах
пространственно-временного развития атаки подразделения.
« Информационно-управляющая система с подсистемой теле-
кодовой связи и спутниковой топопривязки, формирующая и
транслирующая команды на применение средств создания
помех всем танкам защищаемого подразделения.
Эти средства образуют групповую составляющую КИГЗ.
Индивидуальную составляющую КИГЗ образуют размещаемые
на каждом танке и на рассмотренном выше специальном носите-
ле средства оптико- и радиоэлектронного подавления, средства
снижения заметности а также средства информационного обмена
с информационно-управляющей системой специального носите-
ля. В отличие от КГЗ специальный носитель в этом случае дол-
жен не придаваться, а входить в состав защищаемого воинского
формирования, в рассматриваемом примере - танкового подраз-
деления. И он также будет объектом первоочередного удара ата-
кующих систем ВТО.
По принадлежности объектов защиты к основным видам
вооруженных сил комплексы защиты подвижных объектов под-
разделяются на наземные, воздушные и корабельные.
В классе неподвижных (стационарных) объектов защиты от
ВТО будем различать пространственно сосредоточенные (оди-
ночные) и пространственно рассредоточенные (многоэлемент-
ные) объекты военной техники и инфраструктуры. К числу таких
577
ГЛАВА8
объектов относятся, например, командные пункты, узлы связи,
аэродромы, базы хранения, переправы, боевые позиции артилле-
рийских батарей и батарей ЗРК и т.п. Эффективная защита таких
объектов может быть обеспечена совместным и согласованным
применением средств и систем огневой поддержки, средств ин-
женерной маскировки и снижения заметности, комплексов опти-
ко- и радиоэлектронного подавления.
Комплексы объектовой защиты (КОЗ) - КОЭП, предназна-
ченные для защиты стационарных объектов.
Целесообразность такого обособленного выделения КОЗ оп-
ределяется тем, что объектовые комплексы могут предъявлять
повышенные требования к эффективности ОЭП, что определяет-
ся большими размерами подлежащих защите объектов и выте-
кающей из этого необходимостью увода атакующей ракеты от
защищаемого объекта на значительные расстояния. Помимо это-
го условия размещения таких комплексов обычно не связаны с
необходимостью выполнения жестких ограничений на массо-
габаритные характеристики и энергопотребление, как это имеет
место при размещении КПЗ на подвижных объектах. Это позво-
ляет использовать в них более эффективные средства ОЭП в том
числе с повышенными энергопотреблением и массо-габаритными
характеристиками.
КОЗ могут обеспечивать реализацию всех рассмотренных видов защи-
ты: индивидуальной, взаимной, групповой и их комбинаций. Так, ком-
плекс защиты одиночных стационарных объектов реализует способы
индивидуальной защиты и может рассматриваться как специализиро-
ванный вариант КИЗ. Для защиты многоэлементных стационарных
объектов могут использоваться все определенные выше виды и соот-
ветствующие им способы защиты. Причем, при индивидуальной защи-
те комплексами индивидуальной защиты не обязательно одинакового
состава должны оснащаться все важные объекты, входящие в состав
многоэлементного стационарного объекта защиты.
Наряду с объектовой для защиты многоэлементных стацио-
нарных объектов может использоваться также такой специфиче-
ский вид защиты как территориальная.
Территориальная защита предполагает применение таких
способов защиты, которые не требуют увязки с расположением
578
КОМПЛЕКСЫ ОПТИКО-ЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
на местности и другими особенностями отдельных элементов за-
щищаемого объекта, а предполагают прикрытие помехами всей
1ерритории, которую занимает многоэлементный стационарный
объект.
Примером территориальной защиты может служить поста-
новка сплошной аэрозольной завесы над всей территорией рас-
средоточения отдельных элементов, входящих в состав объекта
защиты.
И, наконец, для полноты обзора возможных видов защиты и
соответствующих им комплексов необходимо упомянуть такой
более свойственный проблематике не ОЭП, а РЭП вид защиты
как зональная.
Зональная защита предполагает одновременное прикрытие
помехами нескольких стационарных и (или) подвижных объек-
тов, рассредоточенных на большой площади, измеряемой десят-
ками, сотнями или тысячами км2.
Способы зональной защиты могут приобрести актуальность
при подавлении активными помехами спутниковых навигацион-
ных систем, информация от которых находит все более широкое
использование при наведении на цели современных образцов ВТО.
8.2. Формирование технического облика
комплекса оптико-электронного подавления
Основным содержанием этапа формирования технического
облика КОЭП являются выбор и обоснование технических харак-
теристик средств создания помех, разведки и управления, отве-
чающих требованиям по эффективности КОЭП в заданных усло-
виях боевой обстановки и согласованных с технологическими
возможностями разработчиков этих средств и условиями их раз-
мещения на защищаемом объекте. Вполне очевидно, что форми-
рование технического облика (ТО) КОЭП актуализируется и ста-
новится возможным только по результатам выполнения цикла
предшествующих поисковых и экспериментальных работ, ре-
шающих задачи анализа и синтеза помех широкой номенклатуре
ОЭСр и систем наведения существующих и перспективных об-
разцов ВТО. Основное содержание этих задач отражено в семи
предшествующих главах настоящей монографии.
579
ГЛАВА8
Результаты решения таких задач анализа и синтеза, т.е. определение
видов и обоснование параметров помех, должны быть конкретизирова-
ны для наиболее важных реальных образцов ВТО применительно к их
основным техническим характеристикам.
Конкретизация видов и параметров помех для подавления
реальных образцов ВТО, прежде всего, сводится к выбору между
универсальными помехами, отличающимися вследствие их уни-
версальности относительно невысокой, но приемлемой эффек-
тивностью против более или менее широкого класса ОЭС, и спе-
циализированными (адресными) помехами, имеющими высокую
эффективность, но только против достаточно узкого класса ОЭС.
Результаты такого выбора зависят от состава доступной априор-
ной информации, а также от текущей информации об атакующем
ВТО, предполагаемой к получению средствами информационной
подсистемы комплекса ОЭП.
Особенно высокие требования к текущей информации будут предъяв-
ляться в случаях использования наиболее эффективных адаптивных
способов ОЭП, реализующих управление видами и параметрами помех
с замыканием обратной связи по эффекту их воздействия на противни-
ка, в том числе при подавлении высокоточных средств поражения
(ВСП) в составе систем ВТО.
В Приложении 3 приводится классификация информации
(информационных решений) о характеристиках ВСП, наличие
которой определяющим образом влияет на результаты предвари-
тельного выбора видов и обоснование параметров помех кон-
кретным образцам ВСП при формировании ТО КОЭП с требуе-
мой эффективностью.
Непосредственное формирование технического облика КО-
ЭП начинается в поисковых и экспериментальных научно-
исследовательских работах (НИР) и в основном завершается при
эскизном и техническом проектировании в рамках опытно-
конструкторской работы (ОКР) по созданию опытного образца
КОЭП. С определенной долей условности можно выделить два
этапа формирования ТО КОЭП: этап функционального синтеза и
этап технического синтеза КОЭП.
580
КОМПЛЕКСЫ ОПТИКО-ЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
Определяющими задачами функционального синтеза является отбор
способов ОЭП, обеспечивающих выполнение требований к эффектив-
ности КОЭП в заданных условиях боевой обстановки и предваритель-
ное обоснование основных технических характеристик средств ОЭП,
позволяющих реализовать выбранные способы ОЭП. Определяющими
задачами технического синтеза является уточнение технических харак-
теристик и конкретизация принципов построения средств ОЭП, отве-
чающих технологическим возможностям их разработчиков и ограниче-
ниям на размещение этих средств по массогабаритным характеристи-
кам, энергопотреблению, условиям взаимодействия с основным воору-
жением защищаемого объекта.
Задачи функционального синтеза решаются преимущественно на этапе
НИР и частично при эскизном проектировании КОЭП в ОКР. Задачи
технического синтеза решаются преимущественно в ОКР на этапах эс-
кизного и технического проектов и частично в НИР, предваряющих ОКР.
Этапы функционального и технического синтеза обычно
тесно взаимоувязываются. Процедура формирования техническо-
го облика в общем случае представляет собой итерационный
процесс, когда на первом шаге функционального синтеза уже не-
обходимо использовать некоторую обобщенную информацию о
возможностях и особенностях технической реализации и разме-
щения средств ОЭП. С другой стороны, на этапе технического
синтеза может не найти подтверждения возможность техниче-
ской реализации средств ОЭП, удовлетворяющих требованиям по
эффективности и условиям размещения. А это потребует уточне-
ния состава и характеристик подлежащих реализации способов
ОЭП, т.е. выполнения второй итерации этапа функционального
синтеза ТО КОЭП. При необходимости итерации процедуры син-
теза ТО повторяются и в дальнейшем.
Этап функционального синтеза является задающим, ключе-
вым при формировании технического облика комплекса создания
помех. Ошибки и недоработки, имевшие место на этом этапе, как
правило, не поддаются устранению в дальнейшем и ведут к сни-
жению эффективности подавления и к укорочению жизненного
цикла КОЭП. Поэтому сосредоточимся на рассмотрении основ-
ных особенностей формирования ТО КОЭП именно на этом эта-
пе. Исходными для этапа функционального синтеза являются
общие требования к комплексу по назначению, которые необхо-
581
ГЛАВА 8
димо детализировать до развернутого представления условий
боевой обстановки и увязанных с ними требований к показателям
его эффективности.
Условия боевой обстановки удобно типизировать в виде ти-
повых боевых эпизодов и типовых боевых ситуаций. В примене-
нии, например к наземным КОЭП, предназначенным для защиты
роты танков, в качестве типовых боевых эпизодов могут рассмат-
риваться следующие: рота в районе сосредоточения, при выдви-
жении к линии боевого соприкосновения, при атаке переднего
края линии обороны противника, в обороне. В качестве основных
характеристик каждого боевого эпизода конкретизируются отно-
сительная частота (вероятность) возникновения боевого эпизода,
боевой наряд и типы носителей ВТО и (или) систем ВТО, приме-
няемых противником в каждом боевом эпизоде, вероятности
применения в эпизоде каждого возможного типа носителей и об-
разцов ВТО, число заходов на атаку и пусков управляемых бое-
припасов (при атаке роты бронетанковой техники авиационными
носителями ВТО), пространственно-временные характеристики
развития атаки (дальности и ракурсы применения носителей
ВТО, интервалы времени между атаками) и т.п.
В качестве типовых боевых ситуаций рассматривается сово-
купность дуэльных ситуаций, соответствующих атаке отдельного
танка роты конкретным образцом средства высокоточного пора-
жения, используемого носителем ВТО.
Основные характеристики боевой ситуации
Дальность и ракурсы применения средства поражения.
Тип системы наведения (в соответствии с рис. 1.1, 1.2).
Типы применяемых противником ОЭСр и их основные ха-
рактеристики, включая характеристики, определяющие ин-
формационные составляющие, доступные возможным
средствам разведки защищаемого подразделения (рабочий
диапазон, частотно-временные и энергетические характе-
ристики используемых активных излучателей, углы поля
зрения).
Особенности взаимодействия с носителем ВТО и т.п.
Кроме того, в условиях обстановки отражаются возможные
диапазоны значений параметров, характеризующих состояние
582
КОМПЛЕКСЫ ОПТИКО-ЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
внешней среды (скорость ветра, температура, условия освещен-
ности, время суток, время года и т.п.).
В составе показателей эффективности КОЭП, используемых
на этапе функционального синтеза, целесообразно различать бое-
вые, информационно-боевые и информационные показатели эф-
фективности.
Боевые показатели эффективности
* Показатели эффективности, характеризующие изменение
боевых возможностей защищаемого подразделения или объ-
екта (при индивидуальной защите) по результатам заверше-
ния боевого эпизода или совокупности боевых эпизодов:
-среднее или относительное число сохраненных объектов
тактического воинского формирования за счет применения
КОЭП;
- вероятность сохранения объекта в эпизоде или совокупно-
сти эпизодов для индивидуальных комплексов защиты.
Информационно-боевые показатели эффективности
Показатели эффективности, характеризующие результаты
применения КОЭП при подавлении высокоточного средства
поражения в боевой ситуации:
- вероятность непоражения объекта в одной атаке, статисти-
ческие характеристики промахов средств поражения;
-вероятность непопадания средств поражения в заданную
область пространства, окружающую объект защиты.
Информационные показатели эффективности
Показатели эффективности, характеризующие снижение ин-
формационных возможностей оптико-электронных средств
атакующего ВТО:
- вероятность обнаружения, распознавания и срыва сопрово-
ждения объекта;
- вероятность перенацеливания на ложную цель;
- статистические характеристики ошибок сопровождения
объекта.
Процедура функционального синтеза КОЭП в значительной
мере базируется на эвристических предпосылках. Общие для всех
типов комплексов защиты последовательность и содержание че-
583
ГЛАВА8
тырех основных этапов функционального синтеза КОЭП обсуж-
даются в [5] на примере комплекса групповой защиты наземных
объектов.
Этап L Формируются варианты подсистем создания помех,
каждый из которых включает набор средств создания помех и
реализуемых ими видов помех, обеспечивающих подавление с
требуемой эффективностью всех образцов ВТО, фигурирующих в
типовых боевых эпизодах и ситуациях. На этом этапе может быть
выполнен предварительный отбор предпочтительных вариантов
по формальным эвристическим правилам или субъективным
предпочтениям лица, принимающего решения. Эти правила и
предпочтения должны в той или иной мере отражать вклад каж-
дого средства и вида помехи в общую эффективность комплекса,
а также базироваться на ориентировочной (экспертной) оценке
возможности размещения средств создания помех каждого вари-
анта на защищаемом объекте.
Этап 2. Фиксируются информационные потребности каж-
дого варианта средств создания помех в виде состава и характе-
ристик показателей текущей информации, а также состава и ал-
горитмов формирования на основе этой информации вторичных
информационных решений, необходимых для реализации ото-
бранных на первом этапе видов помех.
Этап 3. Формируются варианты подсистем информацион-
ного обеспечения, каждый из которых включает средства непо-
средственной разведки, обеспечивающие получение всей необхо-
димой текущей информации, определенной на втором этапе. При
этом так же как и на первом этапе, может быть выполнен предва-
рительный отбор предпочтительных вариантов по формальным
эвристическим правилам или субъективным предпочтениям. На
этой основе путем сопоставления каждому варианту подсистемы
создания помех варианта подсистемы информационного обеспе-
чения формируются варианты технического облика КОЭП.
Это позволяет конкретизировать способы ОЭП, реализуемые
каждым вариантом ТО КОЭП. Наличие нескольких вариантов
подсистем информационного обеспечения приводит к тому, что
количество вариантов ТО КОЭП может превосходить число ва-
риантов подсистем создания помех.
Этап 4. На основе сравнительной оценки эффективности
сформированных на третьем этапе вариантов определяется наи-
584
КОМПЛЕКСЫ ОПТИКО-ЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
более эффективный вариант ТО КОЭП, состав и технические ха-
рактеристики которого уточняются и конкретизируются в даль-
нейшем на этапе технического синтеза.
В качестве основных показателей эффективности вариантов
комплексов на этом этапе используются боевые показатели эф-
фективности. Однако это не исключает возможности использова-
ния показателей эффективности двух нижних уровней. Так, на-
пример, для сравнительной оценки эффективности вариантов ТО
комплекса создания лазерных ложных целей на этапе его функ-
ционального синтеза вполне допустимо использовать такой пока-
затель, как вероятность перенацеливания управляемого боепри-
паса с ПЛГС на лазерную ложную цель.
При оценке эффективности сформированных вариантов
КОЭП необходим учет всех наиболее важных аспектов взаимо-
действия противоборствующих сторон:
пространственно-временные характеристики развития типо-
вых боевых эпизодов;
я боевой наряд;
я типы и характеристики атакующих систем ВТО;
я порядок их применения и расхода управляемых боеприпасов;
я характеристики и порядок применения средств КОЭП;
я их влияние на ход и исход боевого конфликта;
я порядок и результаты применения основного вооружения
защищающейся стороны по атакующим системам ВТО про-
тивника и т.д.
Корректный учет этих аспектов может быть выполнен методами ими-
тационного моделирования на основе разработки имитационной моде-
ли информационно-боевого конфликта тактического воинского форми-
рования, оснащенного комплексами ОЭП с системами ВТО противника
(далее информационно-боевой конфликт КОЭП-ВТО).
На предшествующих временных отрезках создания первых
образцов КОЭП исследование информационно-боевого конфлик-
та методами имитационного моделирования чаще всего выполня-
лось путем разработки и использования иерархии частных ими-
тационных моделей, что было связано с ограниченными возмож-
ностями имевшейся вычислительной техники. На нижнем уровне
этой иерархии использовались имитационные модели конфлик-
585
ГЛАВА 8
тов типа «отдельное ОЭСр - средство создания помех», воспро-
изводившие процедуры обработки сигналов и помех элементами
ОЭСр. Информационные показатели эффективности, полученные
на этом уровне, использовались в моделях более высоких уров-
ней. За счет такого вложения в модель верхнего уровня показате-
лей, получаемых с использованием моделей нижних уровней,
обеспечивалась приближенная оценка эффективности вариантов
КОЭП по боевым показателям эффективности в совокупности
боевых эпизодов и ситуаций, характерных для рассматриваемого
КОЭП.
Однако возможности существующей вычислительной тех-
ники и программного обеспечения во многих случаях позволяют
отказаться от разработки иерархии имитационных моделей и
обеспечить более полный и корректный учет всех существенных
аспектов взаимодействия атакующей и защищающейся стороны в
рамках единой имитационной модели информационно-боевого
конфликта КОЭП-ВТО.
В такой модели могут быть воспроизведены с необходимой детально-
стью все существенные аспекты взаимодействия сторон конфликта, на-
чиная с процедур обработки сигналов в присутствии преднамеренных
помех функциональными подсистемами различных типов ОЭСр, участ-
вующих в конфликте, и заканчивая процессами боевого взаимодейст-
вия сторон конфликта в динамике его развития.
Анализ рассмотренных этапов функционального синтеза ТО
КОЭП показывает, что основным содержанием работ на этих
этапах является компромиссное согласование возможностей
средств разведки и создания помех в рамках имеющихся ограни-
чений на размещение этих средств и формирование на этой базе
способов ОЭП, подлежащих реализации подсистемами информа-
ционного обеспечения и создания помех.
Остановимся на рассмотрении некоторых особенностей спо-
собов ОЭП, продиктованных особенностями современных объек-
тов ОЭП и, в частности, рядом особенностей современных опти-
ко-электронных систем наведения ВТО. К таким особенностям и
тенденциям развития современного и перспективного ВТО, су-
щественным с позиций ОЭП, можно отнести следующие.
586
КОМПЛЕКСЫ ОПТИКО-ЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
1. Высокое пространственное разрешение, определяющее
возможности формирования и обработки в пеленгационных уст-
ройствах ВТО изображений пространственно протяженных (не
точечных) целей. Это, в свою очередь, диктует необходимость
реализации способов ОЭП, использующих помехи в виде протя-
женных активных или пассивных пространственно-яркостных
структур, образующих аддитивную или аппликативную смесь
помехи с полезным сигналом и фоном.
2. Возрастание степени адаптации ВТО к фоноцелевой и по-
меховой обстановке, базирующееся на комплексировании ин-
формации датчиков, формирующих изображения в различных
физических полях, и на использовании специальных устройств
помехозащиты. При этом следует отметить, что вклад комплек-
сирования информации и применения специальных устройств
помехозащиты в снижение эффективности подавления не столь
однозначен, как это может показаться на первый взгляд, посколь-
ку при этом одновременно появляются новые каналы и пути воз-
действия преднамеренными помехами на ВТО, расширяющие
возможности ОЭП.
3. Автоматизация всех этапов функционирования ВТО
вплоть до его полной роботизации, когда вмешательство челове-
ка не требуется даже на этапах поиска, распознавания и выбора
цели для обстрела. С позиций ОЭП повышение детальности рас-
познавания, обеспечивающее создание роботизированного ВТО,
связано с увеличением количества более доступных искажению
помехами признаков распознавания, создающих дополнительные
возможности подавления таких систем ВТО.
4. Наличие двух в известной степени противоположных тен-
денций развития ВТО. С одной стороны, это создание и массиро-
ванное применение относительно простых и дешевых контейнер-
ных и кассетных суббоеприпасов с относительно невысокой ве-
роятностью поражения цели одним боеприпасом (порядка
0,2...0,4). С другой стороны, это создание образцов ВТО с разви-
тыми системами обработки сигналов и управления, использую-
щими последние достижения науки и техники в области искусст-
венного интеллекта.
Эти тенденции определяют целесообразность развития как
прицельных по объекту подавления (адресных) способов ОЭП,
587
ГЛАВА 8
противопоставляемых конкретному атакующему боеприпасу, так
и не прицельных по объекту способов, основанных на использо-
вании заградительных по пространству помех и ориентирован-
ных на одновременное подавление всех боеприпасов боевого на-
ряда.
5. Наведение управляемого боеприпаса в наиболее уязвимую
область цели. Нарушение такого режима наведения в ряде случаев
может быть обеспечено более простыми средствами и способами
подавления, чем срыв режима наведения боеприпаса на цель.
Полезные с позиций ОЭП эффекты при воздействии помех могут иметь
место как на выходе неохваченных обратной связью решающих уст-
ройств (обнаружителей, пеленгационных устройств), так и на выходе
замкнутых следящих систем и контуров наведения ракет. Соответст-
венно и отдельные способы ОЭП могут быть также ориентированы на
подавление незамкнутых решающих устройств, следящих систем или
контуров наведения ракет.
8.3. Идентификации атакуемого объекта
___________________групповой цели_______________________
Одной из основных, а в некоторых случаях и единственной
задачей, решение которой при использовании индивидуально-
групповой или групповой защиты должна обеспечивать инфор-
мационная подсистема головной машины, является определение
объекта защищаемого тактического формирования, на который
наводится атакующая ракета, то есть идентификация атакуемого
объекта групповой цели.
Решение этой задачи необходимо для организации своевре-
менной и эффективной защиты атакуемого объект с привлечени-
ем необходимых средств ОЭП всего тактического формирования.
Ее решение может быть обеспечено на основе сопровождения ра-
кеты информационными средствами комплекса на траектории ее
наведения на атакуемый объект.
Рассмотрим синтез алгоритма идентификации атакуемого
объекта групповой цели по траекторным измерениям и проведем
исследование эффективности этого алгоритма по информацион-
ным показателям.
588
КОМПЛЕКСЫ ОПТИКО-ЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
Решение задачи идентификации атакуемого объекта на ос-
нове использования формального аппарата фильтров Калмана-
Бьюси (ФКБ), приводится в [6]. Это решение ограничено рас-
смотрением плоскостной задачи, т.е. учетом априорной инфор-
мации о динамике самонаведения только в одной плоскости. В то
же время, вполне очевидно, что для определения координат точки
прицеливания и наведения атакующей ракеты принципиально
необходимо учитывать основные особенности пространственного
наведения.
Итак, рассматривается случай пространственного наведения
управляемой ракеты на один из объектов групповой цели при на-
личии на другом объекте радио- или оптического локатора, позво-
ляющего измерять координаты ракеты на траектории ее наведения
на цель. Система координатных осей, соответствующая рассмат-
риваемому случаю, показана на рис. 6.11.
Задача заключается в определении факта наведения ракеты
на конкретный объект групповой цели по результатам измерения
ее текущих пространственных координат с объекта, оснащенного
локатором. Решение о факте наведения ракеты на конкретную
цель группы может быть принято на основе оценки с использова-
нием аппарата ФКБ пространственных координат точки прице-
ливания ракеты совместно с фазовыми координатами контура са-
монаведения.
Для упрощения структуры решающего устройства его фор-
мальный синтез выполним для случая линеаризованного контура
самонаведения с нелинейными уравнениями кинематики полета
УР. Такой контур самонаведения описывается системой неста-
ционарных дифференциальных уравнений (6.151), которую необ-
ходимо дополнить двумя дифференциальными уравнениями, ха-
рактеризующими пространственные координаты точки прицели-
вания на земной поверхности:
х12=0, х13=0. (8.1)
Здесь Х|2, х13 - продольное (вдоль оси X) и поперечное (вдоль
оси Z ) смещения атакуемого объекта от объекта, оснащенного
локатором. Кроме того, в (6.151) следует положить
589
ГЛАВА8
<Ре = arctg
хю
<Р<р = arctg
(8-2)
х9-х12) +*ю )
Система (6.151), (8.1), представленная в матричной форме,
имеет вид
x = f(x,/) + n0(/).
(8.3)
Матричное уравнение (8.3) образуют матрицы и вектора со-
гласованных размерностей с нулевыми элементами на местах в
соответствии с представлением (6.151), (8.1).
Задача определения факта наведения ракеты на конкретный
объект групповой цели может быть поставлена следующим обра-
зом. Пусть доступны наблюдению в шумах углы визирования ра-
кеты в вертикальной и горизонтальной плоскостях и дальность до
ракеты
щ = arcsin
^10
и2 = arcsin
у1(х9~хы )2 + (х )2 + (* 11 )2
Xl 1 ~ zlok
+ "1
>/(Х9~xlok)2 + (х 10~У/ок +(xU~zlok )2
+ «2, (8.4)
мз = л/(*9-хы)2 +(хю“Ж)2 +(х11-^)2 + «3>
где пх, п2, п3 - составляющие векторного белого шума наблюде-
ния п со спектральной плотностью N}, N2 и соответственно;
, у1ок. zlok - координаты локатора.
В матричной форме (8.4) представляется так:
u =h(x,/) + n .
(8.5)
Относительное положение z-го объекта групповой цели, оп-
ределяемое значениями полярных (</9z, /z), или декартовых
(Ху = 7у cos^, zz = /z sin^z) координат, иллюстрирует рис. 8.1.
590
КОМПЛЕКСЫ ОПТИКО-ЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
Требуется синтезировать решающее устройство, которое
формирует оценку положения точки прицеливания х12, х13 ата-
кующей ракеты по текущим наблюдениям и . Квазиоптимальная
по критерию минимума СКО оценка достигается решением нели-
нейной системы дифференциальных уравнений, общий вид кото-
рой представляет выражение (6.146). В качестве правила приня-
тия решения о факте наведения ракеты на z-й объект будем ис-
пользовать следующее:
^(х^-х^2 +(х13-?')2 < d,
(8.6)
где х12, х13 - оценки координат точки прицеливания на земной
поверхности; xz, zi - истинные значения координат объекта
(продольного и поперечного смещения атакуемого объекта от
объекта, оснащенного локатором); d - допустимая ошибка оцен-
ки координат атакуемого объекта (см. рис. 8.1); - решение о
том, что ракета наводится на z-й объект групповой цели.
Оценка эффективности решающего устройства по вероятно-
сти принятия правильного решения рр об атаке z-ro объекта вы-
полнена с использованием метода имитационного моделирова-
ния. Для исследования качества синтезированного алгоритма
идентификации атакуемого объекта использовалась более де-
тальная пространственная имитационная математическая модель
591
ГЛАВА8
контура самонаведения, описание и параметры которой приведе-
ны в разделе 6.6.1, а укрупненная схема для одной плоскости на-
ведения представлена на рис. 6.12.
Набор статистики в модельном эксперименте выполнялся по
следующей схеме. По выходам модели контура самонаведения,
описываемого уравнениями (8.3), с помощью выражений (8.5)
определяются текущие значения углов визирования ракеты лока-
тором по углу места и азимуту, а также дальность ракета - лока-
тор. Наблюдаемое в каждой реализации значение и(/) подается
на вход решающего устройства, описываемого выражениями
(6.146), (8.6). Набор статистики для оценки показателей качества
алгоритма идентификации выполнялся по выходу этого решаю-
щего устройства после многократной прогонки реализаций про-
цесса самонаведения ракеты.
Расчеты проводились при скорости ракеты Vr = 500 м/с по
50-ти реализациям процессов ее наведения на атакуемый объект.
Начальные координаты точки пуска: х9(0)= 6000 м,
х10(0) = 1000 м, х11(0) г 0. Параметры контура самонаведения при
синтезе алгоритма идентификации, фигурирующие в системе
(6.151), имели следующие значения:
?! -0,005 с, Т2 = 0,15 с, 73 = 0,25 с, £ = 0,9, к = 3.
Результаты оценок по траекторным измерениям характери-
стик поперечного и продольного смещения от локатора точки
прицеливания, в которую наводится атакующая ракета, показаны
на рис. 8.2-8.4. На этих рисунках приведены графики зависимости
от времени до встречи ракеты с целью т средних (по множеству
реализаций) значений математических ожиданий т12, шхз и СКО
сг12, сг13 ошибок оценки продольной и поперечной координат точ-
ки прицеливания ( m]k = М Qxxk - xi, ахк = М к - xz12 ),
полученных с выхода решающего устройства, то есть по результа-
там решения системы (6.146).
При этом истинное положение точки прицеливания, то есть
положение z-го объекта относительно локатора (рис. 8.1), харак-
теризуется значениями /,= 50 м и (pt= 0°, 30°, 60°, 90° (кривые 1-4
592
КОМПЛЕКСЫ ОПТИКО-ЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
________________________Рисунок 8.3______________________
593
ГЛАВА 8
соответственно). Спектральная плотность белого шума наблюде-
ния в канале дальности Л3 35,8 м2-с, в угломерных каналах
ЛТ] = N2 = 1,3540"* рад2-с, что соответствует СКО угловых оши-
бок измерения положения ракеты локатором порядка Г при по-
лосе пропускания угломерного канала локатора 1,5 Гц.
На рис. 8.2 показаны результаты оценок продольной коор-
динаты точки прицеливания ракеты, а на рис. 8.3 - поперечной.
Рис. 8.4 показывает, что СКО ошибок оценки координат точки
прицеливания, значит, и вероятность правильного решения Rt
слабо зависят от значений угла (ph т.е. от угла между направле-
ниями на атакующую УР и атакуемый объект.
Немонотонное поведение кривых рис. 8.2-8.4 на начальном
участке полета ракеты обусловлено, по-видимому, спецификой
конкретных значений начальных условий при решении второй
группы уравнений системы (6.146), общее правило по назначе-
нию которых, как известно, отсутствует.
Из графиков (рис. 8.2-8.4) следует, что ошибки оценки про-
дольной координаты положения объекта х12 заметно превышают
ошибки оценки поперечной координаты х13. Это объясняется
следующим образом. Ошибки оценки продольной и поперечной
координат объекта в картинной плоскости имеют примерно оди-
наковую величину. Однако когда эти ошибки проектируются на
земную поверхность, то при подлете ракеты к объекту под малым
углом места ср ошибка оценки продольной координаты, измерен-
ная в картинной плоскости, возрастет на множитель l/sin^?,
вследствие чего и имеют место неравенства тп » тхз9 ап >> сг13 .
Зависимость от т вероятности /?р правильного решения о
том, что ракета наводится на Z-й объект групповой цели, соответ-
ствующая графикам рис. 8.2-8.4, приведены на рис. 8.5 для
d = 25 м. Кривые 1...4 на рис. 8.6 характеризуют зависимость ве-
роятности правильного решения рр от удаления защищаемого
объекта от локатора при (р( = 90° и соответствуют значениям
= 50 м, 100 м, 150 м, 200 м.
Кривые рис. 8.5 подтверждают слабую зависимость качества
исследуемого алгоритма от значений при времени до встречи
594
КОМПЛЕКСЫ ОПТИКО-ЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
с целью, меньшем 3 с. При этом вероятность правильной иденти-
фикации атакуемого объекта рр достигает значений 0,8...0,9 за
3...3,5 с до встречи ракеты с целью для 7; = 50 м, 100 м (кривые
/, 2 рис. 8.6). Аналогичные значения вероятности для 7, = 150 м,
200 м (кривые 3, 4 рис. 8.6) достигаются за 4,5...5 с до встречи.
Анализ представленных на рис. 3.5,3.7 графиков сопряженных весовых
функций по промаху типовых контуров самонаведения, а также мате-
риалов раздела 3.2.1 показывает, что накопление конечного промаха
ракеты обязано воздействию помех на последнем участке наведения за
2...2,5 с до ее встречи с целью. Таким образом, интервал времени от
595
ГЛАВА 8
момента идентификации атакуемого объекта до момента завершения
этапа наведения ракеты вполне достаточен для реализации эффектив-
ных способов взаимно-групповой или групповой защиты этого и дру-
гих объектов групповой цели.
8.4. Типовые образцы
комплексов оптико-электронного подавления
______________________систем ВТО__________________________
В два первых послевоенных десятилетия на вооружение ар-
мии, авиации и флота промышленно развитых стран начали ши-
роким потоком поступать образцы управляемого оружия с радио
и оптическими системами наведения. Тогда же с небольшим от-
ставанием по времени началась и разработка отдельных средств
создания помех таким системам. К числу первых средств созда-
ния помех в оптическом диапазоне относятся появившиеся в
1950-1960 гг. авиационные ложные тепловые цели.
Вплоть до рубежа 1970-1980 гг. отдельные разработанные
средства создания оптических помех применялись автономно или
в составе комплексов радиоэлектронного подавления, имеющих
станции помех и средства информационного обеспечения пре-
имущественно радиодиапазона. Необходимость создания не
только средств, но и комплексов оптико-электронного подавле-
ния была осознана в конце 1970-х гг. в связи с массовым поступ-
лением на вооружение большой номенклатуры образцов тактиче-
ского высокоточного оружия с оптико-электронными обзорно-
прицельными системами и системами наведения. По-видимому,
первым комплексом ОЭП стал принятый на вооружение в 1986 г.
отечественный комплекс индивидуальной защиты танков ТШУ-1
(«Штора-1») [1.16,7.82].
Комплекс «Штора-1» состоит из двух относительно самостоя-
тельных систем, завязанных на пульты управления: система поста-
новки аэрозольных завес, обеспечивающая перекрытие аппаратур-
ных и визуальных полей зрения систем прицеливания и наведения
боеприпасов, которые используют лазерные дальнометрирование
или подсвет цели, а также станции оптико-электронного подавле-
ния ТШУ 1-7 в составе двух излучателей и двух модуляторов из-
596
КОМПЛЕКСЫ ОПТИКО-ЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
лучения, которые обеспечивают создание ложных сигналов управ-
ления противотанковыми ракетами второго поколения с полуавто-
матическим командным наведением на цель.
Состав системы постановки аэрозольных завес
Индикатор лазерного излучения, имеющий две точные
(ТШУ-1-11) и две грубые (ТШУ-1-1) приемные головки ла-
зерного излучения.
До 12-и мортир системы 902 («Туча»), снаряжаемых дымо-
выми гранатами ЗД17.
Характеристики основных средств, входящих в состав ком-
плекса «Штора-1» приводились в 7.4.1, 7.4.3, 7.5.1. Общий вид
танка Т-90, оснащенного комплексом «Штора-1», показан на
рис. 8.7: / - ТШУ-1-7; 2 - ТШУ-1-11; 3 - мортиры системы 902 с
гранатами ЗД17; 4 - ТШУ-1-1
Станция оптико-электронного подавления ТШУ-1-7 являет-
ся источником модулированного помехового ИК-излучения с па-
раметрами, близкими к параметрам излучения бортовых трассе-
ров ПТУР второго поколения типов TOW, НОТ, Milan, Dragon,
Bill, Фагот и других. Воздействуя на ИК-приемник полуавтома-
тической системы наведения этих ПТУР, она обеспечивает фор-
мирование команд управления ракетой не по сигналу бортового
трассера, а по сигналу станции ТШУ-1-7, что приводит к срыву
наведения ракеты на цель.
________________________Рисунок 8.7 ______________________
597
ГЛАВА 8
Излучатели станции ТШУ-1-7 установлены в поворотных
кронштейнах, связанных параллелограммным механизмом со
стволом пушки, что обеспечивает стабилизацию луча станции по
углу места при угловых колебаниях корпуса танка. Помехи соз-
даются в заградительном по углу режиме в секторе ±2° по верти-
кали ±20° по горизонту от ствола пушки.
Подавление ПТУР, атакующих с других направлений, обеспечивается
разворотом башни танка. При угрозе атаки предполагается превентив-
ное включение станции на все время существования такой угрозы, т.е.
станция работает в заградительном и по времени режиме.
Система постановки аэрозольных завес предназначена для
срыва атаки противотанковых управляемых ракет, корректи-
руемых артиллерийских снарядов и мин с полуактивными ла-
зерными головками самонаведения типов Maverick, Hellfire,
Copperhead, Bussard и других. Суммарный сектор приема четырех
размещенных на башне танка приемных головок индикатора ла-
зерных излучений составляет по горизонтали 360° и по вертикали
-5...+25°. В качестве источника информации для отстрела аэро-
зольных гранат используются только точные головки ТШУ-1-11,
имеющие приемный сектор по горизонтали ±45° от ствола пуш-
ки. Этот же сектор защищают 12 мортир системы 902.
Система постановки аэрозольных завес имеет три режима
работы: автоматический, полуавтоматический и ручной. При ра-
боте в автоматическом режиме после приема лазерного излуче-
ния система автоматически определяет тип источника излучения
(дальномер или целеуказатель) и направление на него с точно-
стью не хуже 4° по горизонту, выдает эту информацию экипажу
танка, определяет мортиру, с которой должен быть произведен
отстрел аэрозольной гранаты, и вырабатывает команду на ее от-
стрел. В полуавтоматическом режиме для отстрела гранаты необ-
ходимо дополнительно нажать кнопку «Пуск».
Через 1...3 с после отстрела гранаты линию лазерного зондирования
перекрывает образовавшаяся аэрозольная завеса шириной не менее
15 м на удалении от танка порядка 50...70 м. При этом лазерная голов-
ка самонаведения атакующего боеприпаса перенацеливается с распола-
гавшегося на танке пятна лазера-целеуказателя на пятно этого же целе-
598
КОМПЛЕКСЫ ОПТИКО-ЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
указателя, переместившееся на аэрозольную завесу. В ручном режиме
управления реализуется возможность отстрела одной гранаты из вы-
бранной экипажем мортиры, а также залповый отстрел всех оставшихся
в мортирах гранат.
Для повышения эффективности защиты в комплексе «Штора-1» реали-
зован полуавтоматический режим разворота башни танка на источник
лазерного излучения с точностью, достаточной для постановки аэро-
зольной завесы при подсвете танка с боковых направлений. Режим дает
возможность провести цикл защиты постановкой аэрозольной завесы и
за время ее действия подготовиться к огневому поражению источника
излучения.
Показатели, которыми характеризуется эффектив-
ность защиты танков средствами комплекса «Штора-1»
Вероятность срыва наведения управляемых ракет, мин, кор-
ректируемых снарядов с полуактивными лазерными голов-
ками самонаведения типов Maverick, Hellfire, Copperhead,
Bussard - 0,8.
Вероятность срыва наведения противотанковых управляе-
мых ракет с командным наведением типов TOW, НОТ,
Milan, Dragon, Bill, -0,6...0,9.
Кроме того, при условии своевременного обнаружения атаки
может быть обеспечен срыв наведения ракет с телевизионными го-
ловками самонаведения типа Maverick с вероятностью, большей
0,5, путем постановки аэрозольной завесы в ручном режиме. По-
становкой аэрозольной завесы также обеспечивается снижение в
1,5 раза вероятности поражения танка при стрельбе по нему из тан-
ковой пушки неуправляемым снарядом. Испытания подтвердили
эффективность комплекса «Штора-1». Во время испытаний было
пущено более 100 ракет, и ни одна из них не поразила цель [8.12].
Концепция защиты танков, реализованная в комплексе
«Штора-1», с начала 1990-х гг. тиражировалась в ряде зарубеж-
ных комплексов ОЭП. Одним из первых образцов таких комплек-
сов, по-видимому, стал израильский комплекс ОЭП ARPAM,
размещаемый на танках Merkava.
Состав комплекса
Три приемных головки индикатора лазерных излучений
LWS-2, обслуживающие сектор 360° по азимуту.
599
ГЛАВА 8
Пассивная система кругового обзора Piano.
Станция оптических помех Violin МК2.
Система постановки аэрозольных завес POMALS, вклю-
чающая моноблоки с 6-ю или 16-ю пусковыми установками
аэрозольных гранат калибра 80 мм [7].
В состав информационной подсистемы комплекса MUSS
(Германия), разработанного для оснащения основного боевого
танка Леопард и боевых машин пехоты «Puma», наряду с индика-
тором лазерного излучения COLDS (0,45... 1,65 мкм, ±1°) вклю-
чен пассивный датчик предупреждения о пуске ракет AN/AAR-60
MILDS, использующий излучение ультрафиолетового диапазона,
характерное для факела работающей двигательной установки
атакующего боеприпаса. В составе комплекса используется ИК-
станция помех типа EIREL [8].
Характерной особенностью комплекса ОЭП шведского лег-
кого танка CV 90-120 является использование в информационной
подсистеме радиолокатора для обнаружения боеприпасов, ата-
кующих по настильной траектории и с верхней полусферы. В со-
став комплекса также включены пусковая установка многоспект-
ральных аэрозольных завес и пассивный пеленгатор УФ-диапа-
зона MAV200.
Проработана возможность создания мультиспектральной аэ-
розольной завесы мелкодисперсным распылением воды с образо-
ванием капель, имеющих размеры порядка 5...25 мкм.
Сообщается об использовании на танке адаптивной системы
маскировки в ИК-диапазоне, с помощью которой танк не только
«превращается в «невидимку», но и показывает вместо себя в те-
пловизорах ложный объект, фантом, «нарисованный» электрони-
кой» [16, 18].
Французский комплекс КВСМ, устанавливаемый на танках
AMX-10RC и LeclercMBT, имеет в своем составе пассивный пе-
ленгатор атакующих ракет, индикатор излучений лазерных даль-
номеров-целеуказателей и лазерно-лучевых систем наведения,
систему постановки аэрозольных завес GALIX и станцию некоге-
рентных ИК-помех для подавления ПТУР типа TOW. Комплекс
может оснащаться станцией лазерных помех. Предусмотрена
также возможность реализации взаимной защиты путем коорди-
нированного применения имеющихся средств создания помех
одновременно с нескольких танков [9].
600
КОМПЛЕКСЫ ОПТИКО-ЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
Традиционные комплексы ОЭП не обеспечивают защиту
объектов бронетанковой техники от поражения выстрелами руч-
ных противотанковых гранатометов. В интегрированном ком-
плексе защиты IAAPS, США, имеющем в своем составе традици-
онные средства ОЭП, для борьбы с гранатометами предусмотре-
но использование модуля активной защиты, включающего недо-
рогую РЛС ближней зоны для определения направления на ата-
кующую гранату, и пусковую установку для запуска боеприпаса,
перехватывающего гранату на расстоянии 30 м от защищаемого
объекта.
При обнаружении пуска противотанкового боеприпаса вна-
чале осуществляется постановка ПК-помех для его подавления в
дальней зоне. Средства модуля активной защиты применяются
только тогда, когда постановка ПК-помех оказалась неудачной и
боеприпас приблизился к ближней зоне защиты [10, 11]. Пораже-
ние подлетающих боеприпасов противотанковых гранатометов
специальными осколочно-фугасными гранатами предусмотрено
также в одной из модификаций комплекса MUSS.
Для создания лазерных ослепляющих помех разработаны тактические
лазерные комплексы ОЭП, обычно размещаемые на подвижной, в том
числе гусеничной базе.
На рис. 8.8 представлен первый самоходный лазерный ком-
плекс 1К11 Стилет, который был принят на вооружение совет-
ской армии в 1982 г. [13, 14, 20]. Комплекс предназначен для вы-
ведения из строя оптико-электронных систем наведения и прице-
ливания ПТРК, танков, самоходных артиллерийских установок,
низколетящих вертолетов. После обнаружения цели Стилет зон-
дирует ее лазерным лучом с целью обнаружения бликующих оп-
тических приборов. По принятому блику выполняется точное на-
ведение помехового лазера, поражающего обнаруженный прибор
мощным лазерным импульсом боевого лазера, выжигающим фо-
топриемный элемент этого прибора.
Лазерная система комплекса смонтирована на шасси гусе-
ничного минного заградителя. Наведение боевого лазера по го-
ризонтали выполняется поворотом башни, по вертикали - с по-
мощью системы точно позиционируемых крупногабаритных
зеркал.
601
ГЛАВА 8
В рамках дальнейшего развития тактических лазерных ком-
плексов в период до 1992 г. в СССР были разработаны комплекс
Сангвин для борьбы с воздушными целями, корабельный ком-
плекс Аквилон, комплекс 1К17 Сжатие для подавления наземных
целей. В этих комплексах было реализовано наведение боевого
лазера на цель без использования крупногабаритных зеркал, ра-
бота боевого лазера в 12-канальном режиме с индивидуальной
системой наведения каждого канала и с реализацией подавления
в различных диапазонах. Дальность действия комплекса Сжатие
достигает 10 км [13, 14].
На рис. 8.9 представлен тактический лазерный комплекс
ОЭП FN/VLQ-7 Stingray (США), использовавшийся в 1991 г. во
время боевых действий в зоне Персидского залива. Комплекс
размещен на шасси боевой машины Bradley. После обнаружения
бликующей оптики противника поражение чувствительных эле-
ментов его фотоприемных устройств производится излучением
СО2-лазера с импульсной мощностью 1 кВт и излучением им-
пульсного твердотельного лазера на алюмоиттриевом гранате с
неодимом как без удвоения, так и с удвоением частоты, с энерги-
ей в импульсе порядка 0,1 Дж. Комплекс имеет широкоугольную
сканирующую поисковую систему, позволяющую фиксировать
блики нескольких оптико-электронных приборов противника,
определять их положение и сопровождать по углу с целью после-
дующего поражения или перегрузки фотоприемных устройств.
602
КОМПЛЕКСЫ ОПТИКО-ЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
Дальность подавления фотоприемных устройств противника дос-
тигает 8 км. Комплекс может работать в автоматическом, полуав-
томатическом или ручном режиме управления [3, 7.61].
________________________Рисунок 8.9 ______________________
Особенностью тактических лазерных комплексов создания
ослепляющих помех является то, что такие комплексы обеспечи-
вают подавление оптико-электронных приборов противостоящей
стороны только в моменты, когда оптические оси этих приборов
ориентированы на носитель лазерного комплекса, т.е., по сущест-
ву, они реализуют только индивидуальную защиту (самозащиту)
лазерного комплекса. Считается, что такие комплексы будут ока-
зывать мощное психологическое воздействие на противника.
Одна лишь вероятность присутствия такой машины на поле
боя заставляет наводчиков, наблюдателей, снайперов с опаской
относиться к использованию имеющейся оптики под страхом
лишиться зрения.
Тактические лазерные комплексы не подпадают под действие Протоко-
ла ООН, запрещающего применение ослепляющего оружия, поскольку
они предназначены для поражения оптико-электронных систем, а не
личного состава. Использование оружия, для которого ослепление лю-
дей является возможным побочным эффектом, не запрещено.
Характерным представителем комплексов индивидуальной
защиты самолетов и вертолетов является англо-американский
603
ГЛАВА8
комплекс AN/AAQ-24(V)NEMESIS, предназначенный для созда-
ния помех ракетам классов воздух-воздух, земля-воздух с систе-
мами наведения, использующими излучение ИК диапазона [15,
7.20, 7.65]. Для обнаружения пусков ракет в комплексе может ис-
пользоваться УФ-пеленгатор AN/AAR-54(V) или двухцветный
ИК-пеленгатор MIMS, в приемных головках которого использу-
ется фотоприемная матрица размерности 320x256 чувствитель-
ных элементов. Для обеспечения всеракурсного приема на само-
лете или вертолете устанавливаются 4 приемных головки. В ба-
зовом комплекте средств комплекса имеются два варианта излу-
чателей помех, выполненных в виде малой (SLTA) или большой
(МРТА) турельной установки.
________________________Рисунок 8.10______________________
Малая турельная установка, представленная на рис. 8.10,
имеет систему точного автосопровождения ракет, использующую
матрицу размерности 256х256 чувствительных элементов, уста-
новленную на карданном шарнире с 4-мя степенями свободы.
Точное ориентирование оптической оси излучателя на цель обес-
печивается небольшими доворотами хорошо стабилизированной
вокруг двух других осей зеркальной оптической системы. Ис-
пользование зеркальной системы позволяет использовать в каче-
стве излучателей помех лазеры, генерирующие излучение с раз-
личными длинами волн без замены оптической системы.
В первоначальных вариантах малой турельной установки в
качестве излучателя помех использовалась цезиевая дуговая лам-
604
КОМПЛЕКСЫ ОПТИКО-ЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
па. Впоследствии она была заменена лазером Viper, обеспечи-
вающим излучение помех большей мощности на трех длинах
волн, соответствующих рабочим диапазонам подавляемых голо-
вок самонаведения. Помеховое излучение наделяется амплитуд-
ной модуляцией с единым законом модуляции, оптимизирован-
ным для подавления различных образцов ракет с ИК-системами
наведения. Кроме перечисленных средств в состав комплекса
AN/AAQ-24(V) также входят блок системы управления и систем-
ный процессор.
Большая турельная установка МРТА характеризуется боль-
шей мощностью помехового излучения, реализуемой за счет ис-
пользования в ней двух помеховых лазерных излучателей. Эф-
фективность комплекса AN/AAQ-24(V) была подтверждена поле-
выми огневыми испытаниями с пуском 35 ракет с ИК-системами
наведения 6-ти различных типов. Испытания показали, что веро-
ятность защиты летательных аппаратов превышает 0,9.
Российско-испанский лазерный комплекс защиты летатель-
ных аппаратов от ПЗРК MANTA имеет систему обнаружения
пусков ракет типа MWS, состоящую из двух датчиков и обеспе-
чивающую выдачу информации о факте пуска и угловых коорди-
натах атакующих ракет, и лазерную станцию помех ALJS.
Состав станции помех
и Лазерный источник помехового излучения.
« Оптико-механический блок, обеспечивающий обнаружение
ракеты по предварительному целеуказанию от системы об-
наружения пусков и ее автоматическое сопровождение.
» Блок управления и питания.
Помимо создания помех в широком ПК-диапазоне, станция
ALJS обеспечивает оценку факта срыва наведения ракеты по
пропаданию излучения, отраженного от ИК-головки самонаведе-
ния. В станции ALJS используется импульсный электроразряд-
ный HF-DF лазер с замкнутым циклом смены рабочей смеси, из-
лучающий в диапазонах работы существующих и перспективных
головок самонаведения. В каждом диапазоне происходит генера-
ция многих спектральных линий, что делает проблематичной за-
щиту головок самонаведения с помощью узкополосных оптиче-
ских фильтров. Все операции по обнаружению и сопровождению
605
ГЛАВА 8
атакующей ракеты, а также наведение на нее модулированного
лазерного помехового излучения и установление факта срыва
атаки выполняются в автоматическом режиме. Для обеспечения
защиты в секторе 360° по азимуту и 90° по углу места на лета-
тельном аппарате устанавливаются две станции ALJS.
Оптико-механический блок станции обеспечивает обнару-
жение ракеты по предварительному целеуказанию от системы
обнаружения пусков ракет и ее автоматическое сопровождение, а
также идентификацию и селекцию ракет с ИК-наведением на фо-
не других угроз, наведение на ракету помехового лазерного излу-
чения и определение факта ее подавления [7.21, 7 59].
Вертолеты и самолеты США и Великобритании оснащаются
комплексом индивидуальной защиты AN/ALQ-212 ATIRCM/
CMWS, также предназначенным для защиты от ракет с ИК-
системами самонаведения.
Базовый состав комплекса
УФ-пеленгатор ракет AN/AAR-57 в составе 4-х приемных
головок.
Турельная установка для точного сопровождения атакую-
щих ракет и наведения на них узкого луча некогерентного
помехового излучателя на дуговой лампе или излучения
мощного многодиапазонного помехового лазера AgileEye 2.
Блок системы управления ECU.
Устройство отстрела ложных тепловых целей AN/ALE-47
[7.51].
В последнее время в связи с появлением и ростом террори-
стических угроз разработчики комплексов ОЭП уделяют большое
внимание созданию комплексов ОЭП, предназначенных для за-
щиты самолетов гражданской авиации. Характерным представи-
телем таких комплексов является российский комплекс ОЭП
Президент-С.
Состав комплекса ОЭП
Индикаторы лазерных излучений.
УФ-пеленгатор пусков ракет.
Некогерентная станция ОЭП Л370-5.
Устройства отстрела ложных тепловых целей.
Устройство управления.
606
КОМПЛЕКСЫ ОПТИКО-ЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
Полевыми испытаниями с реальными пусками ракет под-
тверждена высокая эффективность комплекса [7.62].
Комплексы ОЭП аналогичного назначения разрабатываются
в США, Израиле и других странах. В их состав наряду со средст-
вами информационного обеспечения, использующими излучение
оптического диапазона, включаются также радиолокационные
станции обнаружения и сопровождения атакующих ракет. Такая
станция включена, в частности, в состав комплекса индивидуаль-
ной защиты самолетов WIPPS, США.
Представителем комплексов объектовой защиты является
украинский комплекс ОЭП «Каштан-3». Комплекс предназначен
для защиты военных и гражданских стационарных объектов (ко-
мандных пунктов и узлов связи, боевых позиций артиллерийских
батарей и зенитных ракетных комплексов, мостов, электростан-
ций и т.п.) от поражения управляемыми бомбами и ракетами с
полуактивными лазерными головками самонаведения. Путем
подсвета участка местности излучением помехового лазера ком-
плекс обеспечивает создание лазерной ложной цели, на которую
должны перенацеливаться атакующие боеприпасы с ПЛГС.
Состав комплекса ОЭП «Каштан-3»
от 1 до 3 лазерных помеховых излучателей с устройствами
управления угловой ориентацией лазерных лучей.
2...4 приемные головки индикатора лазерных излучений.
Консоль управления.
Устройства энергоснабжения.
Комплекс обеспечивает обнаружение и пеленгацию лазер-
ных дальномеров и целеуказателей, постановку лазерной ложной
цели, обмен данными с внешними источниками и потребителями
информации, управление в ручном и автоматическом режимах,
реализацию способа постановки ложной цели, согласованного со
складывающимися условиями обстановки, автоматическую про-
верку работоспособности и поиск неисправностей, документиро-
вание текущих процессов.
Чувствительность индикатора
лазерных излучений..........................510-11 Дж/см2
Рабочий сектор
по азимуту........................................360°
по углу места...................................-15...90°
607
ГЛАВА 8
Вероятность перенацеливания
атакующего боеприпаса
с ПЛГС на ложную цель.....
не менее 0,6...0,8
Комплекс также может использоваться для индивидуальной
защиты кораблей. В этом случае лазерная ложная цель создается
на кильватерном следе корабля [7.36]. Эффективность комплекса
была подтверждена в полевых испытаниях перенацеливанием
всех сброшенных 24 управляемых бомб, оснащенных ПЛГС, на
поставленные комплексом лазерные ложные цели [17, 7.36].
608
_____________________Заключение________________________
Развитие техники ОЭП сопровождается конфликтным взаи-
модействием с развитием систем ВТО.
Основные тенденции и особенности развития
современного ВТО (существенные с позиций ОЭП)
1. Расширение номенклатуры систем ВТО, отличающихся
использованием различных диапазонов оптического излучения,
принципами построения и характеристиками.
2. Комплексирование информации датчиков, формирующих
сигналы и детальные изображения целей в различных физических
полях, а также использование информации от бортовых и спут-
никовых навигационных систем.
3. Возрастание степени адаптации ВТО к фоноцелевой и по-
меховой обстановке на основе использования специальных, в том
числе перепрограммируемых, устройств помехозащиты.
4. Автоматизация всех этапов функционирования ВТО
вплоть до его полной роботизации, не требующей вмешательства
человека даже на этапах поиска, распознавания и выбора цели
для поражения.
Ответ стороны ОЭП на эти тенденции
1. Развитие адаптивных способов, средств и комплексов
ОЭП, направленных на создание наиболее эффективных имити-
рующих помех, прицельных по характеристикам атакующего ВТО.
2. Развитие универсальных способов и средств «силового»
подавления ВТО, нечувствительных или малочувствительных к
значениям характеристик подавляемых ОЭС, на основе поста-
новки мощных засветочных, ослепляющих, поражающих помех,
создаваемых станциями активных (лазерных и некогерентных)
помех и боеприпасами оптического действия.
3. Создание активных, пассивных и активно-пассивных про-
странственно протяженных широкодиапазонных помеховых об-
разований с динамично изменяющейся, в том числе управляемой,
пространственно-яркостной структурой.
4. Создание устройств динамичного изменения сигнатур
объектов на наименее помехозащищенных этапах их обнаруже-
609
ЗАКЛЮЧЕНИЕ
ния, распознавания и захвата на сопровождение высокоточными
средствами поражения.
Важным направлением реализации возможностей ОЭП яв-
ляется функциональная и конструктивная интеграция оптико-
электронных средств ВТО и средств ОЭП, например на основе
использования общих зондирующих сигналов и (или) объединен-
ной информационной системы, обеспечивающей как применение
высокоточных средств поражения, так и постановку преднаме-
ренных помех. В рамках этого направления находится и создание
ударно-помеховых модулей или комплексов защиты объектов
вооружения и военной техники.
Преднамеренные помехи в ряде случаев могут парадоксаль-
ным образом трансформировать достоинства современного и пер-
спективного ВТО в его недостатки. Так с помощью ложных целей
может быть обеспечено нацеливание ВТО в точку, выбранную не
нападающей, а защищающейся стороной, что невозможно обеспе-
чить при защите от обычного неуправляемого оружия. Увеличение
размерности признакового пространства, используемое в ВТО для
повышения качества и детальности распознавания целей, создание
роботизированных систем ВТО облегчают подавление такого ВТО
относительно просто реализуемыми преднамеренными помехами,
искажающими сигнатуру защищаемых объектов. Комплексирова-
ние в ВТО информации о цели, получаемой в различных физиче-
ских полях, предоставляет в ряде случаев стороне ОЭП новые ка-
налы и способы воздействия на ВТО, расширяющие возможности
ОЭП. К этому же может приводить и использование в ВТО адап-
тивных устройств обработки сигналов и помехозащиты.
Все это объективно формирует разумные пределы в наращи-
вании интеллектуального совершенства ВТО. Не будет большим
преувеличением полагать, что развитие средств и способов ра-
диоэлектронной борьбы, в том числе средств и способов оптико-
электронного подавления, является основной преградой на пути
создания абсолютного оружия, т.е. оружия, способного наносить
неприемлемый урон боевому потенциалу противника при сохра-
нении в безопасности личного состава своих воинских формиро-
ваний, на основе использования высокоточных роботизирован-
ных средств поражения и сетецентрического управления. А это
может быть важным фактором преобразования нашего однопо-
лярного мира в многополярный.
610
__________________Приложения__________________
ПРИЛОЖЕНИЕ 1. Обобщенное уравнение Стратоновича
Вывод выражений (6.9)—(6.12) выполним в рамках общей процеду-
ры вывода уравнения Стратоновича, предложенной в [3.15] и состоящей
в рассмотрении дискретного аналога задачи и последующем предель-
ном переходе к конечным выражениям для исходного непрерывного
случая. Но дополним эту процедуру также дискретизацией области про-
странственных переменных М .
Итак, пусть А - шаг дискретности по времени, Az = (А,,...,Дда) -
вектор шагов дискретности по пространственным переменным z . Если
входящие в (6.6), (6.7) функции определены в области пространства
V/ Ur, то, определив A, Az, зададим конечное множество отсчетов этих
функций. Для любого фиксированного момента времени можно по про-
извольному правилу перенумеровать все элементарные пространствен-
ные дискреты, каждая из которых занимает объем Az = At х А2 х...х Aw .
Пусть i - номер текущего временного отсчета, пробегающий зна-
чения от 1 до g ; I - номер текущей пространственной дискреты, при-
нимающий значения от 1 до f . Тогда дискретный аналог (в прираще-
ниях) выражения (6.7) имеет вид
^=^Zz+^Zz, (П1.1)
где
= f u(z,t)dzdt x J u(z,t)dt -
tL -Д ^zl h“д
8sh ~ I I 5 ^Z’ ~ ^Zs(zl ’ )) - ^zSh •> (П1.2)
tL
Зп^ ~ J f
д2/
Здесь AzZ - l -ая пространственная дискрета; zz - модуль вектора про-
странственных переменных, принадлежащего I -й пространственной
дискрете; - время, соответствующее началу i -й временной дискреты.
611
ПРИЛОЖЕНИЯ
Учитывая принятое допущение о сепарабельности корреляцион-
ной функции шумов наблюдения, можно показать, что если шаг А вы-
бран достаточно малым, так что выполнены условия (3.1.12), (3.1.18) из
[3.15], а также условие А «с min NRzlk /(s^), то случайные величины,
введенные выражениями (П1.2), имеют следующие статистические ха-
рактеристики (ниже угловыми скобками (...) обозначается операция ус-
реднения на множестве реализаций результатов наблюдения):
(<Ч) = 0’ (<Ч) = АДА, (jM;,^,) = AAMa.+0(A),
(3nlldnkl) = jV J J J J Rz (z - v) - s)dz d\ dt ds - NW2zRzlk.
A A,; t£ -A t£ -A
В этих выражениях Rz,k -Rz(zL-zk) - элементы корреляционной
матрицы дискретного пространственно-временного шума наблюдений
dnL, в совпадающие моменты времени.
Теперь формула Байеса для апостериорной плотности вероятности
вектора параметров X в i -й момент времени может быть записана так:
w(Xz |&/F/)=cw(Xz \duFj-i)w(duFl \ 'kl) . (П1.4)
Здесь использование в качестве нижних индексов заглавных букв,
например I, означает, что в записи учитываются все отсчеты, получен-
ные с начального до i -го включительно. В выражении (П1.4) с - нор-
мирующий множитель, w(X, \8uFаприорная плотность распреде-
ления X на i -м шаге, экстраполированная по результатам наблюдений
на предшествующих i -1 шагах; w(duF £ | X,) - одношаговая (по време-
ни) функция правдоподобия. Выражение для и’(Х, |£wF /_j) следует из
соответствующего уравнению (6.6) уравнения Фоккера-Планка-
Колмогорова:
18ир ;_,)] = Г [W(V. (П1.5)
где £*[...]- несимметризованный оператор Фоккера-Планка-Колмого-
рова.
Целью дальнейших преобразований является получение удобного
для последующего предельного перехода выражения для одношаговой
функции правдоподобия. Поскольку дискретный шум 6nLl имеет гаус-
совское распределение, то допредельное выражение функции правдопо-
добия можно представить следующим образом:
612
ПРИЛОЖЕНИЯ
w(3uF t | X,) = h exp
i /
-- (8u.,-AA2sb)(NR2lk^y'^uki -AAA)
I J,_1
(П1.6)
Здесь и ниже верхний индекс -1 используется для обозначения соответ-
ствующих элементов обратной матрицы; h - нормирующий множитель.
Разложив показательную функцию в (П1.6) в ряд и ограничившись
членами порядка малости не выше Д, получим с учетом обозначений,
введенных выражениями (П1.2):
| X,) = /г,[1 4-2- (2«йК^иа, -л';Д~Хд) +
/ 2-1
7 ; (пи)
+ п аг2 SliSmi^zlk^zmn^Utki^Utm + 0(А)]>
2А
где h{ - несущественный для дальнейшего анализа множитель, не зави-
сящий от к.
Слагаемое с двойной суммой в (П1.7) обязано своим появлением
квадратичному члену разложения показательной функции в ряд и также
имеет порядок малости Д, поскольку (8uth8utni) = NR^Д.
Устремив в (П1.7) Д, к нулю, в пределе получим
lim w(8uFl |Х.) = Л2(1 + Д+4), (П1.8)
дг ->о
2N }J (П1.9)
—Длг (z j, tl )R~l (Zj, z2)5,(z2, tl )}dixdi2,
A, =7772 f . (П1.10)
2 A'
м
В этих выражениях 3u(zk3l) = J u(-ik,t)dt, a Rz l(zt,z2)- функ-
—Д
ция, обратная корреляционной функции 7?z(Zj-z2), т.е. удовлетворяю-
щая интегральному уравнению
|X(Z,-z2)R;'(z2,z3)dz2 =d(zt-z3).
м
С учетом (П1.5), (П1.8) выражение (П1.4) можно представить в виде
613
ПРИЛОЖЕНИЯ
w(l, \SuP I) = cl(w(kl_l I SuF Л1) + АА*[w(k,_| \8uP /4)])(1+D, + A,),
(П1.11)
где с} - нормирующий множитель.
Дальнейшие преобразования выражения (П1.11) направлены на
выполнение предельного перехода при А-^0 и аналогичны использо-
вавшимся в [3.15]. После интегрирования левой и правой частей выра-
жения (П1.11) по X и использования разложения (1 + х)"1 = 1 -х + х2 + ...
нормирующий множитель может быть представлен следующим обра-
зом:
(П1.12)
Здесь Есимвол усреднения стоящего в скобках выражения по
апостериорному распределению X;
м
xR~x (z^z2)R~l (z3,z4)du(z2,tl)du(z4dl)dz[dz2dz3dz4 . (П1.13)
Подставив (П 1.12) в (П 1.11) и сохранив только члены малости по-
рядка Д, получим
w(Xz \duFJ) = w(ki_i \SuF/_l) + EL*[w(kt^ \$uF
X - Dt - E(D,} + JJJ|[s'(z!,t, ) -£'(i’(zl,t, )s(z3,t,)) -
-2s(z{, t; )E (s(z3, ^ )) + 2E ^(Zj, t, )}E{s(z3, t,)}] x
xR~l(zx,z2)R~\z3,z4)du(z2,tl)du(z4,tl)dzldz2dz3dz4 f+ 0(Д). (П1.14)
Учитывая, что при A -> 0 имеет место переход
^u(z2dl)^u(z4,tl) ~^E(du(z2,tl)du(z4,tl)},
и воспользовавшись (П1.9) при раскрытии разности D -E^Dt}, приве-
дем (П 1.14) к окончательному виду:
, |&F,
Д L J N
x ИМЯ],t,) -E(s(Z|,t,-E{s(b3,tl(z,,z2)</Zj Jz2. (П1.15)
614
ПРИЛОЖЕНИЯ
Устремив А -> 0 в (П 1.15), получим несимметризованное уравнение
Стратоновича (6.9). Симметризованное уравнение (6.10) получается с по-
мощью аналогичной процедуры, если при выводе (П1.7) положить, что
{8utkl8utm) = NRzkn\2 или, что эквивалентно, положить в (П1.8) Д = 0(A).
ПРИЛОЖЕНИЕ 2. Оценка корреляционной матрицы
ошибок измерений
Приведем вывод выражений (6.22), (6.23) по аналогии с тем, как
это выполнено в [3.22] (см. стр. 90), но введя дополнительную операцию
усреднения по ансамблю сюжетов.
Как нетрудно убедиться, при Л/—>оо выражения (6.21) определя-
ют несмещенные оценки соответствующих параметров. Будем рассмат-
ривать в качестве ансамбля сюжетов реализации некоторого случайного
коррелированного однородного поля, заданного в области L с линей-
ными размерами, существенно превосходящими величину интервала
корреляции этого поля.
Пусть вектор uk описывает некоторое к -е дискретное приближе-
ние к формируемому в соответствии с (6.27) текущему изображению
объекта w(x). (Дискретное приближение может быть получено разло-
жением соответствующих полей в ряды по ортогональным собственным
функциям [3.22] или аналогично тому, как это выполнено в [3.25]). В
этом случае для любой конкретной реализации сюжета s(x,v) будет
иметь место соотношение
(со \
J («Л)Ps 1 v)duk I = v, > (П2.1)
-00 /
где vls - оценка параметра и по s -й реализации сюжета; p5(uA/v) -
закон распределения и*. , соответствующий этой конкретной реализации
сюжета, Ms - как и ранее, символ усреднения по множеству сюжетов.
Дифференцируя (П2.1) по v,, получаем
(00 \
(nP/Ufc/V) Ps^k I *)<*»* ) = , (П2.2)
Jo /
где Д - символ Кронекера.
Покажем справедливость (6.22), например для i = 1. Образуем 5-
мерный случайный вектор у :
615
ПРИЛОЖЕНИЯ
у = ainp/u^/v)
dV} Slnps(uA /V)
dv4
С учетом (П2.2) корреляционная матрица, соответствующая векто-
ру у, при усреднении как по ансамблю шумов, так и по ансамблю сю-
жетов, принимает вид
rll 1 0 0 0
1 «11 «12 «13 «14
M,(M<(yYT) 0 «21 «22 «23 «24
0 «31 «32 «33 «34
0 «41 «42 «43 «44
(П2.3)
где, в соответствии с [3.22],
\ \ 8v.
=± {м
NJ \ dv, dv. Г
Пи = м, (Ч.(((Й.'Ч)~И)2)У
(П2.4)
Учитывая свойство неотрицательности определителя матрицы
(П2.3) и разложив этот определитель по первой строке, имеем
г\ к det Ак {к > 0 .
(П2.5)
где det Ак - определитель матрицы Ак с элементами aljk ; At lk - алгеб-
раическое дополнение элемента а{ {к матрицы Ак.
Теперь из (П2.5) следует выражение r{{k > А{хк /det Ак , где справа
от знака неравенства представлен соответствующий элемент матрицы
Ак1, обратной матрице Ак, Повторив аналогичные выкладки для каж-
дого элемента корреляционной матрицы ошибок измерений Rk, в кото-
рой произвольный ij -й элемент определяется выражением
616
ПРИЛОЖЕНИЯ
rvk = (Ми {((v;J /ut) - v. )((v,s / u J - Vj, (П2.6)
получим окончательно:
(П2.7)
В результате предельного переход, соответствующего к -> оо, из
(П2.7) следуют выражения (6.22), (6.23).
ПРИЛОЖЕНИЕ 3. Классификация информации
о характеристиках высокоточных
средств поражения
Информация (информационные решения) о характеристиках опти-
ко-электронных средств и систем наведения высокоточных средств по-
ражения (ВСП), необходимая для формирования способов подавления
ВСП, может быть разбита на 3 группы.
С -информация о характеристиках конкретного образца ВСП
(статическая)
Т - информация о характеристиках текущего этапа функциониро-
вания (атаки) образца ВСП (текущая)
К - информация о результатах действия помех (контрольная)
Дальнейшая укрупненная детализация примерного состава инфор-
мации каждой группы приводится ниже.
Статическая информация
С1 - пространственно-угловые характеристики
CI.I - размеры зоны поиска и захвата
CI.2 - угол мгновенного поля зрения
С1.3 - угол поля анализа
С1.4 - рабочий диапазон дальностей
С2 - энергетические и спектральные характеристики
С2.1 - вид зондирующего сигнала (импульсный, непрерывный)
С2.2 - мощность (энергия) зондирующего сигнала
С2.3 - диапазон рабочих частот
С2.4 - длина рабочей волны
СЗ -способ измерения координат (активный, полуактивный,
пассивный)
С4 - характеристики угломерного канала
С4.1 -тип координатора (точечные цели, протяженные цели
(корреляционный, светоконтрастный))
617
ПРИЛОЖЕНИЯ
С4.2 - способ формирования угловых отсчетов (мгновенный (мо-
ноимпульсный), последовательный)
С4.3 - параметры растровой развертки (вид растровой развертки,
частота развертки)
С4.4 - параметры строчной и кадровой развертки
С4.5 - способ задания и параметры (частота) обновления эталон-
ной информации
С4.6 - объем и степень детализации эталонной информации
С4.7 - степень автоматизации режимов работы (обнаружения,
распознавания, измерения)
С4.8 - параметры системы углового сопровождения (полоса про-
пускания, параметры переходного процесса, уровень огра-
ничения по скорости слежения)
С4.9 - параметры системы развязки от угловых движении
С4.10-характеристики устройств помехозащиты угломерного ка-
нала
С5 - характеристики устройств селекции
С5.1 - временная селекция
С5.1.1-длительность и закон повторения зондирующих импульсов
С5.1.2- ширина временного строба
С5.1.3-динамические характеристики канала слежения по задерж-
ке
С5.1.4-наличие и параметры специальных устройств защиты (ра-
бота по переднему фронту импульса, по последнему им-
пульсу)
С 5.2 - частотная селекция
С5.2.1-параметры амплитудно-частотной характеристики (шири-
на полосы пропускания) усилительного тракта
С5.2.2-наличие и характеристики системы слежения по доппле-
ровскому сдвигу
С5.2.3-наличие и параметры специальных устройств защиты
С5.3 - спектральная селекция
С5.3.1-спектральные диапазоны и полосы пропускания оптиче-
ских фильтров
С5.4 -наличие и характеристики устройств поляризационной се-
лекции
С6 - характеристики устройств нормировки сигналов
С6.1 -рабочий диапазон яркостей и динамические характеристи-
ки (постоянная времени) канала нормировки яркости
618
ПРИЛОЖЕНИЯ
С6.2 -то же для систем автоматической регулировки усиления по
сигналу и шумам
С6.3 -наличие и характеристики схем квантования по уровню
сигналов
С7 -характеристики устройств комплексирования информации
различных датчиков.
С8 -характеристики фотоприемного устройства (площадь при-
емной апертуры, угловое разрешение, инерционность фо-
топриемников и полоса пропускания ФПУ, пороговая чув-
ствительность, наличие устройств защиты от мощных за-
светок, тип фотоприемника (матричный, линейка, одно-
элементный))
С9 - характеристики системы наведения
C9.I - тип системы наведения (командная, командная через раке-
ту, по лучу, самонаведения, прямого поражения, комбини-
рованная)
С9.2 -метод наведения (трехточка, прямое наведение, пропор-
циональная навигация)
С9.3 -параметры разомкнутого контура наведения (навигацион-
ная постоянная, ограничение по перегрузке, постоянные
времени корректирующих фильтров)
С9.4 - характеристики сопряженной импульсной реакции контура
наведения по промаху (длительность, величина первого
максимума, число пересечений нуля),
С9.5 - параметры амплитудно-частотной характеристики системы
«ракета с автопилотом»
С9.6 -характеристики алгоритма формирования управляющего
сигнала в комбинированных системах наведения
С9.7 -характеристики устройств помехозащиты в контуре наве-
дения
Текущая информация
Т1 -этап атаки (обнаружение, распознавание, захват цели на
сопровождение, наведение)
Т2 - моменты пуска ракет
Т2 - число и типы атакующих ракет
Т4 - целераспределение ракет
Т5 -текущие координаты носителя и (или) ракеты (дальность,
скорость, углы)
Тб - время до встречи ракеты с целью
619
ПРИЛОЖЕНИЯ
Т7 -условия обстановки на трассе наведения (характеристики
фона, сила и направление ветра, характеристики задым-
ленности атмосферы)
T9 - характеристики цели (размеры, скорость, контраст, энерге-
тические характеристики отраженных сигналов)
Т10 -статическая информация, получаемая в ходе развития ата-
ки средствами пассивной и активной локации (С2.1, С2.4,
С5.1.1), а также методами прямой и косвенной идентифи-
кации
Контрольная информация
К1 -состояние фотоприемного устройства (поражено, засвече-
но, в рабочем режиме)
К2 -состояние угломерных каналов (срыв сопровождения, пе-
ренацеливание, в рабочем режиме)
КЗ - состояние каналов селекции (преодолены, не преодолены).
К4 - величина текущего и прогноз конечного промахов
К числу наиболее важных задач информационного обеспечения
способов ОЭП относятся:
задачи обнаружения и определения условного типа атакую-
щего боеприпаса, обеспечивающие правильное назначение
вида помехи для его подавления;
задачи определения характеристик используемых в боепри-
пасе устройств обработки сигналов, необходимых для теку-
щего управления параметрами помех;
задачи оценки результатов действия помех, обеспечивающие
реализацию эффективных адаптивных способов подавления
в условиях дефицита информации о характеристиках опти-
ко-электронных средств и системы наведения атакующего
боеприпаса.
620
_______________________ Литература __________________________
Введение и глава 1
1. Костюхин А., Горбунов Г, Сажин А. Информационные операции в
планах командования ВС США // Зарубежное военное обозрение.
2007. №5. С. 7-12.
2. Молшпвин А. О реализации единого информационного пространст-
ва НАТО //Зарубежное военное обозрение. 2008. № 1. С. 23-27.
3. Koziratsky J.L., Jukhno P.M. Synthesis of the optical jamming // Pro-
ceeding of the 3 International AOC Electronic Warfare Conference. Zu-
rich, Switzerland. 2000. May 21-24. 15 p.
4. Духов Б.И., Сизов Ю.Г. Высокоточное оружие и борьба с ним //
Вооружение. Политика. Конверсия. 2008. № 1. С. 13-18.
5. Военная доктрина Российской Федерации // Российская газета.
2010. 10 февраля. № 146.
6. Сысуев Ю.Н. Современные военные конфликты, их особенности.
Роль высокоточного оружия в их предотвращении и разрешениии //
Актуальные проблемы защиты и безопасности: Труды 10-й Все-
российской научно-практической конференции. Т. 3. СПб.: НПО
Спецматериалов. 2007. С. 28-41.
7. Мирошников М.М. Теоретические основы оптико-электронных
приборов. Л.: Машиностроение. 1983. 696 с.
8. Дружинин В.В., Конторов Д.С Конфликтная радиолокация. М.:
Радио и связь. 1982. 123 с.
9. Лефевр В.А. Конфликтующие структуры. М.: Сов радио. 1973. 160 с.
10. Быков В.В, Понькин В.А, Юхно П.М и др. Современная радиоэлек-
тронная борьба. Вопросы методологии / Под ред. В.Г. Радзиевско-
го. М.: Радиотехника. 2006. 424 с.
11. К 100-летию радиоэлектронной борьбы. Основные этапы развития
1904 - 2004. Воронеж, 2004. 440 с.
12. Покровский А.Г. Вооружение кораблей средствами выстреливае-
мых помех // Морской сборник. 2008. № 5. С. 15-17.
13. Эйкхофф П. Основы идентификации систем управления. М.: Мир.
1975.680 с.
14. Состояние и перспективы развития оружия класса «воз дух-воз дух»
для самолетов 5-го поколения //Аналитический обзор / Под ред.
Е. А.Федосова. М.: ГосНИИАС. 2004. 92 с.
15. Егоров К. Перспективы развития зарубежных управляемых ракет
класса «воздух-воздух» // Зарубежное военное обозрение. 2001.
№ 8. С. 32-37.
621
ЛИТЕРАТУРА
16. Евдокимов В.И., Гуменюк Г.А., Андрющенко М.С. Неконтактная
защита боевой техники. СПб.: Реноме. 2009. 176 с.
17. Щербинин Р. Головки самонаведения перспективных зарубежных
управляемых ракет и авиабомб // Зарубежное военное обозрение.
2009. № 4. С. 64-68.
18. Авиационная энциклопедия. 2008. http://www.airwar.ru/enc/weapon
19. Колмогоров Г.С., Костромина Е.В., Лучина ИИ, Мальцев А.П. Оп-
тоэлектронная система самонаведения THASSID // Зарубежная ра-
диоэлектроника. 1987. № 10. С. 57-68.
20. Бабичев В.И., Ветров В.В., Игнатов А.В., Орлов А.Р. Основы уст-
ройства и функционирования артиллерийских управляемых снаря-
дов / Под ред. АЛ Шипунова. Тула: Изд-во КБП. 2003. 178 с.
21. Оружие России, www.arms-expo.ru
22. www.pentagonus.ru
23. Зубров В. Перспективные управляемые ракеты класса «воздух-
земля» // Зарубежное военное обозрение. 2004. № 12. С. 43-Л6.
24. Кириллов А. Основные программы совершенствования УР класса
«воздух-земля » большой дальности в ведущих странах НАТО //
Зарубежное военное обозрение. 2008. № 1. С. 52-56.
25. Дмитриев В. Новые противотанковые управляемые ракеты для су-
хопутных войск США // Зарубежное военное обозрение. 2006. № 1.
С. 40-44.
26. News, views and contacts from the global Army industry, www.army-
technology.com
27. Растопшин M. Ракета против танка (обзор ПТРК).
http://armor.kiev.ua/ptur/weapon/ptrk.html
28. Строев В. Кассетные боеприпасы с самоприцеливающимися бое-
выми элементами // Зарубежное военное обозрение. 2000. № 8.
С. 20-25.
29. Мельник П., Ильин С. Предвестники восстания машин // Авиапано-
рама. 2007. № 2.
30. Гуменюк Г., Евдокимов В., Ребриков В. Системы наведения проти-
вотанковых ракетных комплексов и противодействие им // Защита
и безопасность. 2006. № 2. С. 34-39.
31. MGM-166 LOS AT Kinetic Energy Missiles (КЕМ).
http ://www.gl obal security. org/ mili tary/sy stem s/muniti ons/1 osat.htm
32. FIM-92A Stinger Weapons System: RMP & Basic.
http://www.fas.org/man/dod-101/sys/land/stinger.htm
33. Палий А.И, Донсков Ю.Е., Запорожец ГВ., Куприянов А.Я. и др.
Радиоэлектронная борьба в войнах и вооруженных конфликтах /
Под ред. И.В. Филиппова, Д.В. Гордиенко. М.: ВАГШ. 2007. 357 с.
34. Вакин С.А., Шустов Л.Н. Основы радиопротиводействия и радио-
технической разведки. М.: Сов. радио. 1968. 448 с.
622
ЛИТЕРАТУРА
35. Вакин С./L, Шустов Л.Н. Основы радиоэлектронной борьбы. М.:
ВВИА им. Н.Е.Жуковского. 1986.434 с.
36. Перунов Ю.М., Фомичев К.И., Юдин Л.М. Радиоэлектронное по-
давление информационных каналов систем управления оружием.
М.: Радиотехника. 2003. 415 с.
37. Козирацкий ЮЛ., Юхно П.М. Синтез оптических помех // Радио-
техника. 2000. № 10. С. 52-60.
38. Сизов Ю., Коваль С. Защита объектов от высокоточного оружия //
Военный парад. 1997. № 1. С. 102-105.
Гпава 2
1. Понькин В.А., Юхно П.М. Энергетическая модель процесса форми-
рования изображения оптической системой // Радиотехника и элек-
троника, 1983. Т. 27. № 6. С. 1051-1057.
2. Борн М., Вольф Э. Основы оптики. М.: Наука. 1973. 720 с.
3. Зуев В.Е., Кабанов М.В. Перенос оптических сигналов в земной ат-
мосфере. М.: Сов. радио. 1977. 367 с.
4. Юхно П.М., Ярмошевич Е.И. Пространственно-частотная характе-
ристика канала формирования изображений при наличии локаль-
ного слоя рассеивающей среды // Известия ВУЗ: Радиоэлектрони-
ка. 1987. №7. С. 14-17.
5. Галъярди Р. М., Карп Ш. Оптическая связь. М.: Связь, 1978.
6. Райст П. Аэрозоли. Введение в теорию. М.: Мир. 1987. 278 с.
7. О,Нейл Э. Введение в статистическую оптику. М.: Мир. 1966. 254 с.
8. Юхно П.М., Марек Я.Л. Пространственно-угловые характеристики
лазерного луча на выходе аэрозольного слоя // Радиотехника. 1999.
№ 8. С. 44-Л7.
9. Якушенков Ю.Г., Луканцев В.Н., Колосов М.П. Методы борьбы с
помехами в оптико-электронных приборах. М.: Радио и связь. 1981.
180 с.
10. Ринкявичус Б. С. Лазерная анемометрия. М.: Энергия. 1978. 160 с.
11. Исимару А. Распространение и рассеяние волн в случайно-
неоднородных средах. Т. 1. М.: Мир. 1981. 280 с.
12. Юхно П.М., Рыжов А.Ю. Рассеяние лазерного луча в направлении
вперед и назад // Радиотехника. 2001. № 10. С. 43-Л7.
13. Справочник по инфракрасной технике / Под ред. У. Вольфа, Г. Ци-
сис. М.: Мир. 1995.606 с.
14. Рытое С.М., Кравцов Ю.А., Татарский В.И. Введение в статисти-
ческую радиофизику. Ч. 2. М.: Наука. 1978. 464 с.
15. Бронштейн И.Н, Семендяев КА. Справочник по математике. М.:
Наука. 1986. 976 с.
623
ЛИТЕРАТУРА
Глава 3
1. Быков В. В., Сухоруков Ю.С. Точность радиолокационного самона-
ведения объектов в условиях блужданий центра излучения и ма-
невра цели // Современная радиоэлектронная борьба. Вопросы ме-
тодологии / Под ред. ВТ. Радзиевского. М.: Радиотехника. 1994.
С. 104-113.
2. Солодов А.В. Линейные системы автоматического управления с пе-
ременными параметрами. М.: Физматгиз. 1962. 324 с.
3. Лившиц Н.А., Пугачев В.Н. Вероятностный анализ систем автома-
тического управления. Т. 1. М.: Сов. радио. 1963. 896 с.
4. Лаврентьев М.А., Шабат Б.В. Методы теории функций комплекс-
ного переменного. М.: Наука. 1965.716 с.
5. Горяйнов ВТ, Журавлев А.Г, Тихонов В.И. Статистическая радио-
техника. Примеры и задачи. М.: Сов. радио. 1980. 544 с.
6. Попов Е.Р., Пальтов И.П. Приближенные методы исследования
нелинейных автоматических систем. М.: Физматгиз. 1960. 792 с.
7. Криницкий Е.И. Системы самонаведения. М.: Машиностроние.
1970. 236 с.
8. Техническая кибернетика. Теория автоматического регулирования /
Под ред. В.В. Солодовникова. Кн. 3. Ч. 1. М.: Машиностроение.
1969. 607 с.
9. Батков А.А., Горский А.А., Левитин В.Ф., Себряков Г.Г. и др. Про-
ектирование систем наведения / Под ред. Е.А. Федосова. М.: Маши-
ностроение. 1975. 296 с.
10. Красовский А.А., Поспелов Г.С. Основы автоматики и технической
кибернетики. М.-Л.: Госэнергиздат. 1962. 600 с.
И. Крогиус,Э.А. Радиолокационная автоматика. М.: Изд-во ВКАС.
1962.
12. Бакут П.А., Большаков И А. и др. Вопросы статистической теории
радиолокации. Т. 2 / Под ред. Г.П. Тартаковского. М.: Сов. радио.
1964. 1080 с.
13. Тихонов В.И. Статистическая радиотехника. М.: Радио и связь.
1982.624 с.
14. Справочник по теории автоматического управления / Под ред. А.А.
Красовского. М.: Наука. 1987. 385 с.
15. Тихонов В.И., Кульман Н.К Нелинейная фильтрация и квазикоге-
рентный прием сигналов. М.: Сов. радио. 1975. 704 с.
16. Юхно П.М. Воздействие двух узкополосных сигналов на систему
фильтр с АРУ - частотный дискриминатор // Радиотехника и элек-
троника. 1971. Т. XVI. № 5. С. 797-801.
17. Левин Б.Р. Теоретические основы статистической радиотехники.
Кн. 1. М.: Сов. радио. 1966. 728 с.
624
ЛИТЕРАТУРА
18. Градштейн И. С., Рыжик И.М. Таблицы интегралов, сумм, рядов и
произведений. М.: Физматгиз. 1962. 1100 с.
19. Юхно П.М. Определение вероятности увода следящих систем //
Информационный конфликт в спектре электромагнитных волн.
Приложение к журналу «Радиотехника». 1994. С. 79-84.
20. Первачев С.В., Валуев А.А. Статистическая динамика радиотехни-
ческих следящих систем. М.: Сов. радио. 1973.488 с.
21. Обрезков Г.В., Разевиг В.Д. Методы анализа срыва слежения. М.:
Сов. радио. 1972. 240 с.
22. Ван Трис. Г. Теория обнаружения, оценок и модуляции. Т. 1. М.:
Сов. радио. 1972. 744 с.
23. Трифонов А.П., Шинаков Ю.С. Совместное различение сигналов и
оценка их параметров на фоне помех. М.: Радио и связь. 1986. 264 с.
24. Иванкин Е.Ф., Понькин В.А. Теоретические основы защиты инфор-
мации об объектах наблюдения. М.: Горячая линия-Телеком. 2008.
448 с.
25. Фалькович С.Е. Оценка параметров сигналов. М.: Сов. радио. 1970.
336 с.
26. Трифонов А.П. Прибытков Ю.Н. Обнаружение квазидетерминиро-
ванного изображения при наличии фона с неизвестными парамет-
рами // Автометрия. 2002. Т. 38. № 4. С. 19-31.
27. Поветко В.Н., Понькин В.А. Оценка качества обнаружения про-
странственно-протяженных объектов по их изображениям // Радио-
техника и электроника. 1993. Т. 37. № 4. С. 685-688.
28. Ван Трис. Г. Теория обнаружения, оценок и модуляции. Т. 3. М.:
Сов. радио. 1997. 662 с.
29. Нестерук В.Ф. Влияние формы сигналов на помехоустойчивость их
приёма на фоне коррелированных помех при ограничении пиковых
значений // Радиотехника и электроника. 1971. № 11. С. 2098-2105.
30. Прэтт У. Цифровая обработка изображений. Т. 1. М.: Мир. 1982.
312 с.
31. Юхно П.М., Огреб С.М., Марек Я.Л. Форма объектов и качество их
автоматического обнаружения и различения // Радиотехника. 2001.
№ 10. С. 86-89.
32. Юхно П.М., Огреб С.М. Особенности обнаружения пространствен-
ных объектов в присутствии пространственно-временного шума //
Радиотехника. 1998. № 6. С. 21-24.
33. Красильников Н.Н. Теория передачи и восприятия изображений.
М.: Радио и связь. 1986. 248 с.
34. Фалькович С.Е., Пономарев В.И., Шкварко Ю.В. Оптимальный
прием пространственно-временных сигналов в радиоканалах с рас-
сеянием. М.: Радио и связь. 1989. 296 с.
625
ЛИТЕРАТУРА
35. Юхно П.М. Траекторно-пространственная фильтрация в корреля-
ционно-экстремальных системах // Автоматика и телемеханика.
1992. №7. С. 79-85.
36. Бычков А.А., Понькин В.А. Обнаружение изображений пространст-
венно протяженных затеняющих фон объектов // Автометрия. 1992.
№ 4. С. 33-ЛО.
37. Тартаковский Г.П. Динамика систем автоматической регулировки
усиления. М.-Л.: Госэнергоиздат. 1957. 192 с.
38. Кривицкий Б.Х. Автоматические системы радиотехнических уст-
ройств. М.-Л.: Госэнергоиздат. 1962. 664 с.
39. Трифонов А.П., Прибытков Ю.Н. Обнаружение случайных изо-
бражений пространственно протяженных объектов, затеняющих
фон // Автометрия. 2000. № 4. С. 14-22.
40. Трифонов А.П., Куцов Р.В. Обнаружение движущегося с произ-
вольной скоростью объекта при неизвестных интенсивностях изо-
бражения и фона // Автометрия. 2006. № 4. С. 3-16.
41. Трифонов А.П., Куцов Р. В. Обнаружение и оценка скорости движения
неоднородного пространственно-протяженного объекта по изобра-
жению // Теория и системы управления. 2008. № 2. С. 115-125.
42. Хазен Э.М. Методы оптимальных статистических решений и зада-
чи оптимального управления. М.: Сов. радио. 1968. 256 с.
43. Колесникова О.Н., Черепанов А. С. Возможности ПК ENVI для об-
работки мультиспектральных и гиперспектральных данных // Гео-
матика. 2009. № 3. С. 24-27.
44. Ольгин С. Проблемы оптоэлектронного противодействия // Зару-
бежное военное обозрение. 2002. № 9. С. 35-41.
45. Огреб С.М., Юхно П.М. Характеристики обнаружения пространст-
венных объектов при неопределенности информации об их место-
положении // Телекоммуникации. 2010. № 11. С. 42-Л8.
46. Левшин В.И. Обработка информации в оптических системах пелен-
гации. М.: Машиностроение. 1978. 168 с.
47. Юхно П.М. Обнаружение пространственных объектов, затеняющих
фон // Автометрия. 2012. № 4. С. 104-111.
48. Юхно П.М. Особенности определения вероятности срыва слежения
в радиолокационных измерителях // Радиотехника и электроника.
1976. № 12. С. 2633-2635.
Глава 4
1. Красовский А.А., Белоглазов И.Н., Чигин Г.П. Теория корреляцион-
но-экстремальных навигационных систем. М.: Наука. 1979. 640 с.
2. Баклицкий В.К, Юрьев А.Н. Корреляционно-экстремальные мето-
ды навигации. М.: Радио и связь. 1982. 256 с.
626
ЛИТЕРАТУРА
3. Баишринов А.Е., Тучков Л. Т., Поляков В.М., Ананов Н.И. Измере-
ние радиотепловых и плазменных излучений. М.: Сов. радио. 1968.
389 с.
4. Данилкина А.Ф., Юхно П.М. Потенциальная помехозащищенность
корреляционно-экстремальных систем совмещения изображений //
Автоматика и телемеханика. 1987. № 8. С. 90-97.
5. Воробьев Л.М., Воробьев Д.Т. Нелинейные преобразования в при-
кладных вариационных задачах. М.: Энергия. 1972. 208 с.
6. Юхно П.М. Синтез маскирующей помехи радиометрическим кор-
реляционно-экстремальным системам // Радиотехника. 1994. № 7.
С. 12-17.
7. Астапов Ю.М., Васильев Д.В., Заложнев Ю.И. Теория оптико-
электронных следящих систем. М.: Наука. 1988. 328 с.
8. Гонсалес Р., Вудс Р., Эддинс С. Цифровая обработка изображений в
среде MATLAB. М.: Техносфера. 2006. 616 с.
9. Артюх С.Н., Юхно П.М. Синтез помех пеленгаторам с растровыми
анализаторами // Радиотехника. 2002. № 10. С. 78-81.
10. Понтрягин Л.С., Болтянский В.Г., Гамкрелидзе Р.И., Мищенко
Е.Ф. Математическая теория оптимальных процессов. М.: Наука.
1969. 393 с.
11. Моисеев Н.Н. Элементы теории оптимальных систем. М.: Наука.
1975.528 с.
12. Афанасьев В. И, Колмановский В.Б., Носов В.Р. Математическая
теория конструирования систем управления. М.: Высшая школа.
2003.616 с.
13. Шатровский Л.И. Об одном численном методе решения задач оп-
тимального управления // Журнал вычисл. математики и мат. фи-
зики. 1962. № 3. С. 488-491.
14. Пропой А.И. Цыпкин Я.З. О синтезе оптимальных в среднем автома-
тических систем // ДАН СССР. МФ. 1967. Т. 175. № 6. С. 1242-1244.
15. Артюх С.Н., Юхно П.М. Математическая модель ИК координатора
с частотно-фазовой обработкой сигнала // Актуальные проблемы
защиты и безопасности: Труды 10-й Всероссийской научно-
практической конференции. Т. 3. СПб.: НПО Спецматериалов.
2007. С. 103-107.
Глава 6
1. Максимов М.В., Бобнев М.П., Кривицкий Б.Х. и др. Защита от ра-
диопомех / Под ред. М.В. Максимова. М.: Сов. радио. 1976. 496 с.
2. Баклицкий В. К Оптимальное измерение параметров оптического
сигнала на фоне пространственно-временной помехи // Изв вузов:
Радиоэлектроника. 1977. № 9. С. 17-21.
627
ЛИТЕРАТУРА
3. Казамаров А.А., Хорол Д.М., Шкурский Б.И. Оптимальное выделе-
ние оптических сигналов на фоне помех при наличии собственных
шумов приемника излучения // Автоматика и телемеханика. 1974.
№ 9. С. 53-59
4. Векслер В.М., Казамаров А.А., Хорол Д.М., Оптимальное измерение
параметров оптического сигнала на фоне пространственных помех //
Автоматика и телемеханика. 1975. № 3. С. 47-51.
5. Козубовский С.Ф. Корреляционно-экстремальные системы. Киев:
Наукова думка. 1977. 223 с.
6. Матвеев А.Н. Оптика. М.: Высшая школа. 1985. 352 с.
7. Mostafavi Н., Smith F.V. Image correlation with geometric distortion.
Part II. Effect of local accuracy // IEEE Trans. On Aerosp. and Electr.
Syst. 1978. V. AES-14. № 3. P. 494-501.
8. Репин В.Г., Тартаковский Г.П. Статистический синтез при априор-
ной неопределенности и адаптация информационных систем. М.:
Сов. радио. 1977. 432 с.
9. Куприянов А.И., Шустов Л.Н. Радиоэлектронная борьба. Основы
теории. М.: Вузовская книга. 2009. 798 с.
10. Лютин В.И. Алгоритм автоматического слежения при наблюдении
объектов в различных физических полях // Радиотехника. 2001. №
10. С. 99-102.
И. Амиантов И.Н. Избранные вопросы статистической теории связи.
М.: Сов радио. 1971. 416 с.
12. Аоки М. Оптимизация стохастических систем. М.: Наука. 1971.424 с.
13. Беллман Р. Динамическое программирование. М.: Изд-во ино-
странной литературы. 1960. 400 с.
14. Калинков А.К, Юхно П.М. Контроль эффективности помех по тра-
екторным признакам // Радиотехника. 2002. № 10. С. 82-85.
15. Бойко Ю.В., Бойцов В.М., Бочкарёв А.М., Opdu М.В. Методы инте-
грации датчиков изображений различной физической природы //
Зарубежная радиоэлектроника. 1995. № 2-3. С. 54-58.
16. Перетягин Г.И. Исследование алгоритма обнаружения объектов на
многозональном изображении // Автометрия. 1993. № 6. С. 84-67.
17. Данилов С.Н., Данилов Е.С. Интеграция датчиков слежения на ос-
нове обработки информации с использованием карты помех // Ра-
диотехника. 2005. № 6. С. 76-80.
18. Юхно П.М. Алгоритм комплексной обработки тепловизионных
изображений // Радиотехника. 2006. № 6. С. 54-57.
19. Юхно П.М. Предельные возможности траекторно-спектральной
фильтрации имитирующей помехи // Информационный конфликт в
спектре электромагнитных волн. Приложение к журналу «Радио-
техника». 1994. С. 84-87.
628
ЛИТЕРАТУРА
20. Лютин В.И. Алгоритмы совместного различения и синхронизации
при приеме сигналов дискретной информации // Обработка инфор-
мации в системах связи: Труды учебных институтов связи. Л.: ЛЭ-
ИС. 1981.
21. Донцов А.А., Юхно П.М. Синтез и анализ алгоритмов адаптивного
управления помехами // Радиотехника. 2003. № 10. С. 97-101.
Глава 7
1. Wolf I., Thomas I. On the recognition of signal patterns in noise // IRE-
Conv. Rec. 1961. №4. P. 155-161.
2. Белоглазов ИН., Тарасенко В.П. Корреляционно-экстремальные
системы. М.: Сов. радио. 1974. 392 с.
3. Иванов В.П., Курт В.И., Овсянников В.А., Филиппов В.Л. Модели-
рование и оценка современных тепловизионных приборов. Казань:
Изд-во НПО ГИПО. 2006. 595 с.
4. Юхно П.М. Краевые эффекты в измерителях сдвигов изображений //
Радиотехника. 2001. № 10. С. 96-98.
5. Егоров ИВ., Юхно П.М. Влияние однородного коррелированного
яркостного шума на ошибки совмещения изображений // Автомет-
рия. 1988. № 1.С. 105-107.
6. The Infrared and Elektro - Optical Systems Handbook. V. 5. Passive
Electro-Optical Systems / Campana Stephen B., editor. SP1E Optical
Engineering Press. Bellingham. Washington. 1993. 362 p.
7. Юхно П.М. Квазиоптимальная оценка пространственных параметров
поля изображения // Прием пространственно-временных сигналов на
фоне помех: Сб. статей. Воронеж: Изд-во ВГУ. 1981. С. 69-77.
8. Криксунов Л.З. Справочник по основам инфракрасной техники. М.:
Сов. радио. 1978. 400 с.
9. Молебный В.В. Оптико-локационные системы. М.: Машинострое-
ние. 1981. 184 с.
10. Кривицкий Б.Х. Автоматические системы радиотехнических уст-
ройств. М.: Госэнергиздат. 1962. 664 с.
И. Якушенков Ю.Г. Теория и расчет оптико-электронных приборов.
М.: Логос. 2004. 472 с.
12. The Infrared and Elektro - Optical Sustems Handbook. V. 1. Sources
and Radiation/G.J.Zissis, editor. SPIE Optical Engineering Press. Bel-
lingham. Washington. 1993. 383 p.
13. Козинцев В.И., Белов М.Л., Орлов B.M., Городничев В.А., Стрелков
Б.В. Основы импульсной лазерной локации / Под ред. В.Н. Рожде-
ствина. М.: Изд-во МГТУ им. Н.Е. Баумана. 2006. 510 с.
14. Gilbert A.L., Giles М.К., Flachs G.M., Rogers R.B., Yee Hsun U. A real
time tracking System // Optical engineering. 1979. V. 18. № 1. P. 47-56.
629
ЛИТЕРАТУРА
15. Артюх С.Н., Юхно П.М., Евстпафеев А.С., Одинцов ОД. Основные
направления развития станций оптико-электронного подавления
для индивидуальной защиты объектов бронетанковой техники //
Актуальные проблемы защиты и безопасности: Труды 11-й Все-
российской научно-практической конференции. Т. 3. СПб.: НПО
Спецматериалов. 2008. С. 136-139.
16. Артюх С.Н., Юхно П.М. Воздействие модулированных помех на
частотно-фазовые ИК-координаторы // Актуальные проблемы за-
щиты и безопасности: Труды 10-й Всероссийской научно-
практической конференции. Т. 3. СПб.: НПО Спецматериалов.
2007. С. 107-113.
17. Ишанин Г.Г., Панков Э.Д., Андреев А.Л., Полъщиков Г.В. Источни-
ки и приемники излучения. СПб.: Политехника. 1991.240 с.
18. Карлов Н.В. Лекции по квантовой электронике. М.: Наука. 1984.
322 с.
19. Переносной лазерный прибор оптико-электронного противодейст-
вия ПАПВ. http://www.bnti.ru/des.asp?itm=4668
20. Pekny W., Lang P., Hao Tran, Griffith G., Meyer R., Rippert T., Davis
M., Agard I. Directional infrared countermeasure (DIRCM) update //
Proceeding of the 3 International AOC Electronic Warfare Conference.
Zurich, Switzerland. 2000. May 21-24. 8 p.
21. Бутузов В. Лазер на защите воздушных судов // Военный парад.
2010. №6. С. 50-51.
22. Боеприпас подавления оптико-электронных средств. Патент
RU2121643,1998.
23. Утемов С.В. Эффективность защиты подразделений бронетанко-
вой техники от ПТУР наземного базирования с помощью забрасы-
ваемых источников оптических помех // Актуальные проблемы за-
щиты и безопасности: Труды 8-й Всероссийской научно-практи-
ческой конференции. Т. 3. СПб.: НПО Спецматериалов. 2005.
С. 87-92.
24. The Infrared and Elektro - Optical Systems Handbook. V. 6. Active
Electro-Optical Systems / Clifton S. Fox, editor. SPIE Optical Engineer-
ing Press. Bellingham. Washington. 1993. 326 p.
25. Мусъяков М.П., Миценко И.Д., Ванеев Г.Г. Проблемы ближней ла-
зерной локации. М.: Изд-во МГТУ им. Н.Е. Баумана. 2000. 295 с.
26. Sijan A. Development of Military Lasers for Optical Countermeasures
in the Mid-IR // Proc, of SPIE. V. 7483. 2009. P. 748304-1.
27. Зуев B.E., Кабанов M.B. Оптика атмосферного аэрозоля. Л.: Гидро-
метеоиздат. 1887. 255 с.
28. Olsson G., Blomberg A., Dygeus G., Lonneborg S., Olsson O. Electron-
ic warfare - an essential component in the future battlefield // Proceed-
630
ЛИТЕРАТУРА
ing of the 3 International AOC Electronic Warfare Conference. Zurich.
Switzerland. 2000. May 21-24. 9 p.
29. Гайденков А.В., Епатко И.В., ЗлобинВ.Е. Корреляционный алго-
ритм автоматического сопровождения наземных целей. // Радио-
техника. 2003. № З.С. 3-12.
30. Гуменюк Г.И., Евдокимов В.И., Ребриков В.Д. Защита боевой тех-
ники на марше постановкой маскирующих аэрозольных завес //
Вопросы оборонной техники. Сер. 16. Вып. 3-4. 2004. С. 75-77.
31. Thibeault Е, Fortin J., Pelletieri G. Testing and development methods
for laser decoys // Journal of battlefield technology. V. 9. №3. 2006.
P. 13-18.
32. Козирацкий Ю.Л., Сербов Д.А., Паринов M.JI. Математическая мо-
дель координатора управляемого средства доставки с лазерной
пассивной системой наведения на излучение опорного источника //
Радиотехника. 2009. № 5. С. 115-117.
33. Steinvall О. Laser countermeasure capabilities.// Proceeding of the 3 In-
ternational AOC Electronic Warfare Conference. Zurich, Switzerland.
2000. May 21-24. 19p.
34. Evans R., Moroz S. Laser decoy system for small ground platforms //
NRL Rewiev. Electronic and electromagnetic. 2009. P. 162-163.
35. DHY322 Laser Countermeasure. http://defense-
update.com/products/d/dhy322LASERcm.htm
36. «Каштан-3». Комплекс, равных которому нет.
http://2000.net.ua/2000/derzhava/ekspertiza/36251
37. Филин С.А., Молохина Л.А. Средства снижения заметности (По па-
тентным материалам). М.: ИНИЦ Роспатента. 2003. 215 с.
38. Сергеев Д. Средства маскировки в армиях стран НАТО // Зарубеж-
ное военное обозрение. 1986. № 2. С. 39-42.
39. РПМ «Накидка» для защиты от разведки и высокоточного оружия.
http://www.niistali .ru/security/2010-07-05-08-58-15?start= 1
40. Устройство индивидуальной защиты летательного аппарата от
управляемых ракет с оптическими головками самонаведения. Па-
тент RU2378603, 2008.
41. Андрющенко М.С., Егоров А.С., Ребриков В.Д. Адаптивная система
широкополосных шумовых генераторов для защиты бронеобъектов
от ВТО с радиометрическими головками самонаведения и само-
прицеливания // Актуальные проблемы защиты и безопасности:
Труды 9-й Всероссийской научно-практической конференции. Т. 3.
СПб.: НПО Спецматериалов. 2006. С. 121-123.
42. Наноматериалы для маскировки военной техники и защиты инфор-
мации. http://www.dfnc.ru/Nanomateriali-dlya-maskirovki-voennoy-
tehni ki -i -zashiti -i nform atsi i
631
ЛИТЕРАТУРА
43. Израиль научился делать танки невидимыми.
http://lenta.ru/news/2010/06/02/eltics/
44. Тайна эльфийского плаща раскрыта.
http://www.sunhome.ru/} oumal/117849
45. Кильдишев А. В., Шалаев В.М. Трансформационная оптика и мета-
материалы // Успехи физических наук. 2011. Т. 181. № 1. С. 59-70.
46. Плащ-невидимка: оптическая маскировка объектов.
http://forum.myword.ru/index.php7/topic/7891 -plash-nevi di mka-
opti cheskaj a-maski rovka-obektov/
47. Станция оптико-электронного подавления «КВАДРОС»
КМ-01 В. http://www.quadros.com.ua/
48. The Infrared and Elektro - Optical Systems Handbook. V. 7. Counter-
measure Systems / D. Pollock, editor. SPIE Optical Engineering Press.
Bellingham. Washington. 1993. 646 p.
49. Старченко A.H. Перспективы создания индикаторов лазерного из-
лучения кругового и секторного обзора на матричных приемниках
излучения // Актуальные проблемы защиты и безопасности: Труды
8-й Всероссийской научно-практической конференции. Т. 3. СПб.:
НПО Спецматериалов. 2005. С. 131-136.
50. AN/VVR-1 laser warning receivers у stem. Проспект фирмы GOO-
DRICH, США.
51. Messervy S.L. US army aircraft survivability equipment // Proceeding of
the 3 International AOC Electronic Warfare Conference. Zurich.
Switzerland. 2000. May 21-24. 12 p.
52. Алешин А., Азаров Б. Средства обнаружения источников лазерного
излучения // Зарубежное военное обозрение. 1995. № 2. С. 53-57.
53. «Спектр-Ф», корабельная станция обнаружения лазерного излуче-
ния. http://www.arms-
expo.ru/050050052054124049052054051057.html
54. Волков ВТ Приборы ночного видения для обнаружения бликую-
щих элементов, http://www.bnti .ru/showart.asp?aid=638&lvl=63 8
55. В. Crepy. Multifunction laser source for ground and airborne applica-
tions. http://www.cilas.com/cilas/multifunction-laser-source-for-ground-
and-airbome-applications.pdf
56. Червяков А., Зеленюк Ю., Костяшкин Л., Тарасов В., Груздев В.
Оптико-электронная станция сопровождения целей для зенитных
ракетно-артиллерийских комплексов // Военный парад. 2005. № 3.
С. 88-90.
57. Волков ВТ. Подъемные мобильные приборы ночного видения //
Специальная техника. 2005. № 6. С. 24.
58. Star SAFIRE 380-HD. http://www.gs.flir.com/uploadedFiles/GS/data-
sheets/A_A4 StarSAFIRE 3 80-HD.pdf
632
ЛИТЕРАТУРА
59. «Стингер» промахнется, http://nvo.ng.ru/armament/2002-05-
31/6_stinger.html
60. Проспект УОМЗ.
http ://uomz .ru/downl oad/Katal ogspecRU SENGweb .pdf
61. Фу Вей. Подавление оружия с лазерным наведением.
http ://www.dtic.mil/cgibin/GetTRDoc?Location=U2&doc=GetTRDoc .р
df&AD=ADA323948
62. Система оптико-электронного подавления ЗРК.
http://warcyb.org.ru/news/sistema_optiko_ehlektronnogo_podavlenija_z
rk/2010-06-24-50
63. Шифрин КС. Рассеяние света в мутной среде. Л.-М.: Энергоиздат.
1951.288 с.
64. Давыдов В. Вопросы защиты систем вооружения противовоздуш-
ной обороны от высокоточного оружия сегодня стоят во главе угла
// Воздушно-космическая оборона. 2005. № 2(21). С. 18.
65. Щербинин Р. Системы индивидуальной защиты летательных аппара-
тов от ПЗРК // Зарубежное военное обозрение. 2005. № 12. С. 37-42.
66. Корр С. Thermal Imagin sensor. // NCW 101, part 6.
http://www.ausairpower.net/SP/NCW-l 01 -6.pdf
67. Донсков Ю.Е., Татарчуков В.А., Загорудько А.В. О способах боево-
го применения комплекса групповой защиты в общевойсковом бою
// Военная мысль. 2006. № 11. С. 43-46.
68. TOW 2 Wire-Guided Anti-Tank Missile, www.army-technology .com
69. Thibeault E., Fortin J., Pelletier G. Testing and development methods
for laser decoys // Journal of battlefield technology. 2006. V. 9. № 3. P.
19-26.
70. Гуменюк Г. Евдокимов В. Ребриков В. Системы наведения противо-
танковых ракетных комплексов и противодействие им // Защита и
безопасность. 2006. № 2. С. 34-39.
71. FIM-92A Stinger Weapons System: RMP & Basic.
http://www.fas.org/man/dod-101 /sy s/land/stinger.htm
72. Левшин E.A. Математическая модель авиационного боеприпаса с
лазерным наведением // Информатика: проблемы, методология,
технологии: Сб. материалов VI международной научно-
методической конференции. Воронеж: ВГУ. 2006. С. 239-243.
73. Козирацкий Ю.Л., Козирацкий А.Ю., Гревцов А.И., Кулешов П.Е.,
Нагалин А.В., Прохоров Д.В. Обоснование возможности создания
некогерентных источников излучения в дальнем ИК-диапазоне
длин волн // Радиотехника. 2008. № 5. С. 98-102.
74. ULCAS ultra-lightweight camouflage system.
http://www.saabgroup.com/Templates/Public/Pages/PrintAHTabs.aspx?
pageld=479
633
ЛИТЕРАТУРА
75. Innovative Semi-Active Laser (SAL) Signal Processing Techniques in
Noisy Environments http://www.dodsbir.net/sitis/archivesdis-
play_topic.asp?Bookmark=42657
76. Signal Processing Algorithms In Laser Decoy System And Realization
http://www.globethesis.com/?t=2208360308967025
77. ЯнгК., ВангЗ., СунК. Theoretical Design of Combined Laser Decoy for
Warship Protection // Electro-optics & Passive Countermeasure. China.
2005. № 6.
78. Steinvall O. Review of laser sensing devices and systems // Proc, of
SPIE. 2005. V. 5989.
79. Способ формирования сигнала управления исполнительным эле-
ментом оптико-электронной следящей системы. Патент
RU2371732, 2008.
80. IRradiation-seekermissilejammer. Патент US6359710, 1980.
81. Гуменюк Г.А., Евдокимов В.И., Жартовский Г.С., Красильников
Б.А., Овчинников Ю.С., Ребриков В.Д. Бортовой излучатель ИК по-
мех с телескопическим механизмом выдвижения. // Актуальные
проблемы защиты и безопасности: Труды 7-й Всероссийской науч-
но-практической конференции. Т. 2. СПб.: НПО Спецматериалов.
2004. С. 293-296.
82. Комплекс оптико-электронного подавления «Штора-1».
http ://btvt .narod .ru/4/shtora 1 /shtora 1 .htm
83. Аэрозолеобразующий состав. Патент RU2326815, 2007.
84. Учебник сержанта войск радиационной, химической и биологиче-
ской защиты. М.: Минобороны РФ. 2004. 660 с.
85. Корабельный комплекс выстреливаемых помех ПК-10.
http://warfare.ru/rus/?lang=rus&catid=333&linkid=2409&title=koraber
nyy-kompleks-vystrelivaemykh-pomekh-pk-10
86. ТДА-2К, дымовая машина, http://www.arms-
expo.ru/050056056057124049052057048056.html
87. Military decoy - Inflatable Military Decoy Camouflage Dummy Target.
http://www.shapeintl.com/military-decoy/military.php
88. Пиротехнические патроны инфракрасного излучения ППИ-26-2-1,
ППИ-26-2-1М.
http ://www.russi anarms.ru/forum/index.php/topic,775 5.0.html?PHPSES
SID=au3mfqlt5k43f8tgjm4uf73qO
89. C-17 Globemaster III Counter Measure Systems.
http://www.globemaster.de/c-17/fl are.html
90. Шведский легкий танк-невидимка CV90120. http://topwar.ru/10825-
shvedskiy-legkiy-tank-nevedimka-cv90120.html
91. Корабельный комплекс выстреливаемых помех ПК-16.
http://warfare.ru/rus/?lang=rus&catid=333&linkid=2408&title=koraber
nyy-kompleks-vy streli vaemykh-pomekh-pk-16
634
ЛИТЕРАТУРА
92. Laser-modulated aerosol infrared decoy. PatentUSHI522, 1996.
93. Израиль создал новые тепловые ловушки для вертолетов Cobra,
http ://1 enta.ru/news/2011/01/27/fl ares/
94. Withington T. Keeping naval predators at bay // Armada Internationale.
2007. V. 31. № 6. P. 24-28. http://www.thefreelibrary.com/ Keep-
ing+naval+predators+at+bay .-a0173229596
95. Decoy Projectiles.
http://warfare.ru/rus/?lang=rus&rmkid=1722&catid=267
96. Комплексы оптико-электронного противодействия.
http://www.rom-room.com .ua/koep/
97. Missile Approach Warning System (MAW-300). http://defence-
guide.com/airforce/military-products-and-services/missile-approach-
wami ng-system-maw-300
98. Saab’s UV based MAW 300.
http://products.saabgroup.com/pdbwebnew/GetFile.aspx?PathType=Pro
ductFiles&FileType=Files&Id=7867
99. Эффективность «ложных целей», http://www.oborona.ru/includes/
periodics/defense/2011/0720/13186858/detail.shtml
100. Березовский А. Высокоточные боевые элементы.
http://rbase.new-factoria.ru/pub/b_al/index.shtml
101. Евстафьев Д. РБК-500 СПБЭ-Д.
http://www.airwar.ru/weapon/ab/rbk500.html
102. LITENING targeting pod.
http://en.wikipedia.org/wiki/LITENING_targefmg_pod
103. Summary of Mil-Handbook-828.
http://www.fas.org/man/dod-101/sys/smart/mil-hdbk-828.htm
104. Гуменюк Г.А., Евдокимов В.И., Ребриков В.Д. Защита бронетанко-
вой техники от управляемых кассетных боевых элементов // Защи-
та и безопасность. 2005. № 4. С. 28-30.
105. Манчук Б., Демлер А. Разработка снарядов - постановщиков лож-
ных целей // Военный парад. 1997. № 1. С. 34-36.
106. Веселого АГ. Электродинамика веществ с одновременно отрица-
тельными с и р II Успехи физических наук. 1967. № 92. С. 23-27.
Глава 8
1. Гуменюк Г А., Евдокимов В.И., Ребриков В.Д. Развитие комплексов
индивидуальной защиты бронетанковой техники от высокоточного
оружия // Актуальные проблемы защиты и безопасности: Труды
8-й Всероссийской научно-практической конференции. Т. 3. СПб.:
НПО Спецматериалов. 2005. С. 108-110.
2. Борисов Е.Г Синтез комплекса групповой защиты объектов как
сложной технической системы // Актуальные проблемы защиты и
635
ЛИТЕРАТУРА
безопасности: Труды 10-й Всероссийской научно - практической
конференции. Т. 3. СПб.: НПО Спецматериалов. 2007. С. 125-130.
3. AN/VLQ-7 Stingray .http://www.fas.org/man/dod-
101/sys/l and/sti ngray.htm
4. Гуменюк Г.А., Евдокимов В.И., Колмаков Д.Г., Ребриков В.Д. К во-
просу о создании высокомобильного комплекса групповой защиты
танковых подразделений от массированных ударов высокоточного
оружия и средств воздушного нападения // Актуальные проблемы
защиты и безопасности: Труды 10-й Всероссийской научно-
практической конференции. Т. 3. СПб.: НПО Спецматериалов.
2007. С. 122-125.
5. Донсков Ю.Е., Татарчуков В.А., Загорудъко А.В. Защита тактиче-
ских формирований в операции: методический аспект // Военная
мысль. 2006. № 4. С. 42-46.
6. Калинков А.К., Юхно П.М. Идентификация атакуемой цели по тра-
екторным признакам // Радиотехника. 2009. № 6. С. 65-68.
7. Штора по израильски, http://armor.kiev.ua/ptur/armor/arpam.html
8. Multifunction Self Protection System (MUSS).
http://defense-update.com/products/rn/muss.htm
9. KBCM. Проспект фирмы GIAT, Франция.
10. US Army Active Defense Program.
http://defense-update.eom/products/i/iaaps.htm
11. US Army Active Defense Program.
http://defense-update.eom/products/c/CICM.htm
12. Суворов C. Т-90-гордость отечественного танкостроения // Техника
и вооружение. 2006. № 1. С. 38-43.
13. Апресов С., Хлопотав А. Выжигатель: самоходные лазерные ком-
плексы // Популярная механика, 2011. Январь.
http .7/www.popmech .ru/arti cl e/83 52-vyizhigatel/
14. Екшимбаев С. ФГУП «НПО «Астрофизика»»: 40 лет на переднем
крае науки // Моя Москва. 2009. № 4-5.
15. AN/AAQ-24(V) Directional Infra-Red CounterMeasures (DIRCM).
Large Aircraft IR CounterMeasures (LAIRCM) systems // Jane’s Radar
And Electronic Warfare Systems. 2010. Aug 05.
16. Шведский легкий танк-невидимка CV90120.
http://www.belvpo.com/7298.html
17. Opticalelectronic countermeasures complex «Kashtan-З». Проспект
фирмы Progress, Украина.
18. Легкий танк CV 90-120 компании HYGGLUNDS.
http://btvt.narod.ru/4/cv90120/cv90_l 20.htm
19. Multifunctional Self-protection System (MUSS) (International), Land-
based active and passive countermeasures systems and defensive aids suites
(DAS) // Jane’s Radar And Electronic Warfare Systems. 2009. Jan 26.
636
Предметный указатель
Адаптивная маскировка........553
Адаптивное управление........419
Активно-импульсный
обнаружитель..................564
Аномальная ошибка............202,
263, 320
Аэрозольная завеса............525
- активно-пассивная.........461
База источников помех....99, 287
Боевые элементы
точного наведения........21, 490
Боевые элементы точного
прицеливания.............21, 490
Боеприпасы оптического
действия......................524
Вероятность
- обнаружения..............177
— оценка сверху............191
— оценка снизу.............186
- перенацеливания..........158
- срыва слежения......154, 156
- увода....................158
Виды защиты от ВТО............574
Высокоточное оружие............20
Высокоточные средства
поражения......................20
Дальность ослепления.....287,483
Дискриминационная
характеристика...........105, 143
Дымовая
- граната..................534
- машина...................536
- шашка....................535
Закон увода..............124, 159
Забрасываемый источник
оптических помех..............529
Идентификация
- атакуемого объекта.......587
- косвенная...........332,404
- прямая...................331
ИК-координатор
- пространственно
протяженных целей..........490
- точечных целей..........486
Инверсно-сопряженная
система........................91
Индикатор лазерных
излучений.....................557
Имитационная модель
- контура командного
наведения...................135
- контура самонаведения....102
Классификация
- аэрозольных завес.........525
- информации о характеристиках
средств поражения..........616
- комплексов оптико-элект-
ронного подавления.........574
- координаторов целей........31
- преднамеренных помех.......38
- систем наведения...........35
- средств создания помех.....41
Кодирование излучения лазера-
целеуказателя.................469
Комплекс
- групповой защиты..........575
- взаимной защиты..........574
- индивидуальной защиты....574
- объектовой защиты........577
- оптико-электронного
подавления..................574
- тактический лазерный......600
Комплексирование
информации....................384
Контроль эффективности
помех.........................404
Контур командного
наведения.....................129
Контур самонаведения
-линейный....................87
- нелинейный................102
Координатор....................31
- автокорреляционный........436
- взаимно
корреляционный..........33, 436
- комбинированный............35
- корреляционный.......33, 435
- светоконтрастный.....34, 443
637
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
- с комплексированием
информации.................35
- с последовательным
анализом...................33
Корреляционный отклик....241,301
Коэффициент
световозвращения............564
Ложная цель.................537
- детальная...............538
-лазерная.................542
-тепловая.................539
Маскировочные комплекты.....548
Маскирующая способ-
ность ......................532
Метод статистических
эквивалентов................143
Метод (наведения)
- по кривой погони..........472
- пропорциональная
навигация..................88
-трехточка................487
Навигационная постоянная....88,
96, 114
Обнаружение пространственных
объектов
- в аппликативной смеси
с фоном.....................178
- в пространственно-временном
шуме.......................219
- в мультиспектральном
режиме.....................226
Ограничение
- на базу помехи..........289
- на ресурс помехи.....244, 275
- на энергетику помехи.....243,
249, 276
— двухстороннее...........249
— двухстороннее
несимметричное............251
— одностороннее...........243
- перегрузки.......... 103, 285
Оптико-электронное подавление... 20
Оптимизируемый функционал....47,
244, 249, 261, 263, 269, 279, 284, 289,
295
Параметр
- обнаружения...............210
- формы....................205
638
Пеленгатор
- активный.................564
-тепловой.................561
- ультрафиолетовый.......562
Пенное покрытие.............550
Перенацеливание
- головки самонаведения....158
- контура самонаведения..102
Пленочное покрытие..........551
Поиск.......................197
Помеха
- адаптивная...............403
- аддитивная..........39, 204
- активная имитирующая....134,
496
- активно-пассивная
(комбинированная)......41, 528
- аппликативная...........40
- возмущающая.............39
- декоррелирующе-
дифференцирующая..........317
- дифференцирующая.......313
-засветочная...............39, 166
- имитирующая........39, 311
— оптимальная........260, 270
— лазерно-аэрозольная.....462
- маскирующая..............39, 242
— неравнояркая..........456
— неравнояркая нестацио-
нарная ....................457
— оптимальная..........244
— равнояркая...........449
- мерцающая...........115, 118
— малобазовая...........98
— пространственная.....101
- мультипликативная.......40
- оптимальная
— в среднем................295
— контуру самонаведе-
ния.......................284
— малобазовая...........99
- ослепляющая.............38
- прерывистая.........175, 484
-поражающая............38, 170
- с боковых направлений..481
- уводящая по углу.......119
Преднамеренные оптические
помехи.......................20
предметный указатель
Примитивы..................212
Промах
- конечный.................35, 70
- накопленный..............99
- мгновенный..............116
Пространственно-временной
шум........................219
ПЧХ канала формирования
изображений................58, 62
Радиоэлектронная борьба.....19
Радиоэлектронное подавление.20
Радиоэлектронное поражение..19
Разделимая обработка
наблюдений.................223
Разрешение парной цели...109, 141
Рефлексивный подход........327
Селекция (фильтрация)
- пространственная.........370
- спектральная........360, 508
- траекторно-пространст-
венная.....................376
Синтез
- измерителей координат....339
- помех
— адаптивных..............403
— непараметрический.......48, 238
— параметрический....47, 300
- технический..............50, 579
- устройств помехозащиты...359
- функциональный......43, 580
Смесь сигнала и помехи (фона)
- аддитивная...............177
- аппликативная............178
Сопряженная(ый)
- весовая функция.......91, 94
- передаточная функция.....91
- переходный процесс.......94
- система уравнений.......290
Способ оптико-электронного
подавления.................573
Средства
- создания помех активные..513
- информационного
обеспечения...............556
- исполнительной разведки..21
- маскировки..............544
- снижения заметности......41
Срыв слежения...............154
Станция некогерентных помех
- заградительных............516
- прицельных..............518
Суммарно-разностная
обработка................148, 469
Типизация условий
обстановки..................581
Трансформационная оптика....555
Угол разрешения.............109
Уравнение
- Стратоновича обобщенное...334
- Фоккера-Планка-Колмого-
рова......................154
Условно-устойчивая система..141
Устройство автоматического норми-
рования сигнала.............173
Флуктуационная
характеристика..............144
Флюгерная головка
самонаведения...............472
Формирование
изображений..................52
Функция
- когерентности среды....54, 62
-лучевой интенсивности.70, 74
- прозрачности...........243
— оптимальная..........246, 248,
250, 252, 253, 261, 263, 267, 269
Характеристики обнаружения
- ансамблевые...............222
- выборочные..............222
Частотно-фазовый
дискриминатор...............281
Четырехквадрантный
фотоприемник................147
Энергетический центр.........77
639
Научное издание
Павел Михайлович Юхно
ПРЕДНАМЕРЕННЫЕ
ОПТИЧЕСКИЕ ПОМЕХИ
ВЫСОКОТОЧНОМУ ОРУЖИЮ
Монография
Изображение на обложку взято из открытых источников
Редактор Г.Н. Чернышева
Корректор И.В. Бровко
Верстка СИ. Яковлева
Изд. № 89. Сдано в набор 19.09.2016
Подписано в печать 3.04.2017. Формат 60x90 1/16
Бумага офсетная. Гарнитура Таймс
Печать офсетная
Печ. л. 40,0. Тираж 500 экз. Зак. № 1560.
Издательство «Радиотехника»
107031, Москва, К-31, Кузнецкий мост, д. 20/6
Тел./факс: (495)621-48-37; 625-78-72, 625-92-41
E-mail: info@radiotec.ru; www.radiotec.ru
Отпечатано с предоставленных готовых файлов
в полиграфическом центре
ФГУП Издательство «Известия»
127254, Москва, ул. Добролюбова, д. 6
Телефон: (495) 650-38-80
izv-udprf.ru
Т Рассмотрены вопросы анализа и с и н тета|п|Геэднаа^1№Т<т?|>хЖп т и ч е с к и х
f помех ИК-, телевизионным, теплови-^Шя^ЩВд^^еЯВ^мГсистемам
Т1аведения высокоточного оружия. Втхервт^ пвЪв^^^сяК результаты
непараметрического синтеза преднамеренна?? помех измерителям
координат целей и системам ^ведения, статистического синтеза
устройств помехозащиты от преднамеренных помех, синтеза помех в
условиях неполной информации о системах высокоточного оружия.
Для специалистов, связанных с разработкой средств и комплексов
создания помех высокоточному оружию с оптико-электронными
системами наведения. Может быть полезна специалистам в области
радиоэлектронных систем наведения, а также преподавателям и
студентам соответствующих специальностей.