/
























































































































Author: Баланис Константин А. ИоанидисПонайотис И.
Tags: электротехника общая радиотехника мобильная связь беспроводная связь мир электроники смарт-антенны
ISBN: 978-5-94836-312-7
Year: 2012




Text
It
МИН ТОРГ
РОССИИ
(^гщиаиисти рАфиазлекйфаННага (с<ш*глекса (ftfce умели
оирНитй серию. tcHut «rftufc рлдиаглекмфаНики» ja, тиусииельНий otntiofc
НщгНой и (нехНигеасой лшнергту^с па aefrefcrfUbtt HattfeaJUeHufaPt
fixiythimufr Науки и «нехНалагий рл$иазле(ст^Ншси. *}1</бли(суемш
6- серии tcHmu aoffcbtfrom aofpefi^uflarfU со&р&м&ННъй cffio&eH* %Н<гНий,
саособс(п&ц& Н<гугНа-(пехНигеасали^ nfimfteccy & рЛфиаэлеЫфаННои
ар(Ш1ни<жЯНос*пи, сощЬащгНоиа «нехМлагигеасага отЫигбаНи^ и
noftomo&ce Необходимых tcaffio&.
*Осфекто£ ^enafimcuteHmcL рауиаглеЫфьННой прллшислеННоони
(4tuHaficwmofi'Ui *Р£{0
ТЕХНОСФЕРА
Рекламно-издательский центр
РЕДАКЦИОННЫЙ СОВЕТ СЕРИИ КНИГ
«МИР РАДИОЭЛЕКТРОНИКИ»
Якунин Александр Сергеевич, директор Департамента радиоэлектронной промышленности
Минпромторга РФ - председатель редсовета
Члены совета:
Авдонин Борис Николаевич, ген. директор ОАО ЦНИИ «Электроника», д.т.н., профессор, г. Москва
Акопян Иосиф Григорьевич, ОАО «МНИИ «Агат», д.т.н., профессор, г. Москва
Анцев Георгий Владимирович, ген. директор ОАО «НПП «Радар ММС», г. Санкт-Петербург
Белый Юрий Иванович, ген. директор НИИП им. В.В.Тихомирова МО, г. Жуковский
Боев Сергей Федотович, ген. директор ОАО «РТИ», д.э.н., профессор, г. Москва
Борисов Юрий Иванович, первый заместитель председателя военно-промышленной комиссии
при правительстве РФ, д.т.н., профессор, г. Москва
Букашкин Сергей Анатольевич, ген. директор РГНПО «Автоматика», д.т.н., профессор, г. Москва
Бушуев Николай Александрович, ген. директор ФГУП «НПП «Алмаз», д.э.н.,
профессор, к.ф.-м.н., г. Саратов
Васильев Андрей Георгиевич, д.ф.-м.н., профессор, г. Москва
Верба Владимир Степанович, ген. директор ОАО «Концерн радиостроения «Вега»,
д.т.н., профессор, г. Москва
Верник Петр Аркадьевич, ген. директор компании «Золотой Шар», г. Москва
Вилкова Надежда Николаевна, ген. директор ЗАО «МНИТИ», к.т.н., д.э.н., профессор, г. Москва
Гуляев Юрий Васильевич, директор института радиотехники и электроники
им. В.А. Котельникова, академик РАН, г. Москва
Козлов Геннадий Викторович, ОАО «Концерн ПВО «Алмаз-Антей», д.т.н., профессор, г. Москва
Комяков Алексей Владимирович, ген. директор ФГУП «НПП «Полет» г. Нижний Новгород
Красников Геннадий Яковлевич, ген. директор ОАО «НИИМЭ», академик РАН, г. Зеленоград
Мальцев Петр Павлович, директор Института СВЧ полупроводниковой электроники РАН, д.т.н.,
профессор, г. Москва
Меныциков Владислав Владимирович, ген. директор ОАО «Концерн ПВО «Алмаз-Антей»
г. Москва
Минаев Владимир Николаевич, ген. директор ОАО «Системы управления»,
д.т.н, профессор, г. Москва
Муравьев Сергей Алексеевич, советник директора Департамента Радиоэлектронной
промышленности Минпромторга России, к.т.н., с.н.с, г. Москва
Немудров Владимир Георгиевич, директор ФГУП «НИИ микроэлектронной аппаратуры
«Прогресс», д.т.н., профессор, г. Москва
Попов Владимир Васильевич, ген. директор ОАО «Светлана», к.т.н., г. Санкт-Петербург
Сигов Александр Сергеевич, ректор Московского государственного института радиотехники,
электроники и автоматики (технического университета), академик РАН, г. Москва
Турилов Валерий Александрович, ген. директор ОАО «КНИИТМУ», к.т.н., доцент, г. Калуга
Федоров Игорь Борисович, президент Московского государственного технического университета
имени Н.Э.Баумана, академик РАН, г. Москва
Чаплыгин Юрий Александрович, ректор Московского государственного института электронной
техники (ТУ МИЭТ), член.-корр. РАН, г. Зеленоград
Шахнович Илья Владимирович, шеф-редактор РИЦ «Техносфера», г. Москва
Шубарев Валерий Антонович, ген. директор ОАО «Авангард», д.т.н., профессор, г. Санкт-Петербург
redsovet_knigi@electronics.ru
радиоэлектроники
Константин А. Баланис
Панайотис И. Иоанидес
Введение в смарт-антенны
Перевод с английского
К. В. Юдинцева
под редакцией
В.В. Попова,
М.Д. Парнеса
ТЕХНОСФЕРА
Москва
2012
УДК 621.396.67 Издание осуществлено при поддержке
ББК 32.84 ЗАО «Светлана-Электронприбор»
Б20
Б20 Баданис Константин А., Иоанидес Панайотис И.
Введение в смарт-антенны
Москва: Техносфера, 2012. - 200 с., ISBN 978-5-94836-312-7
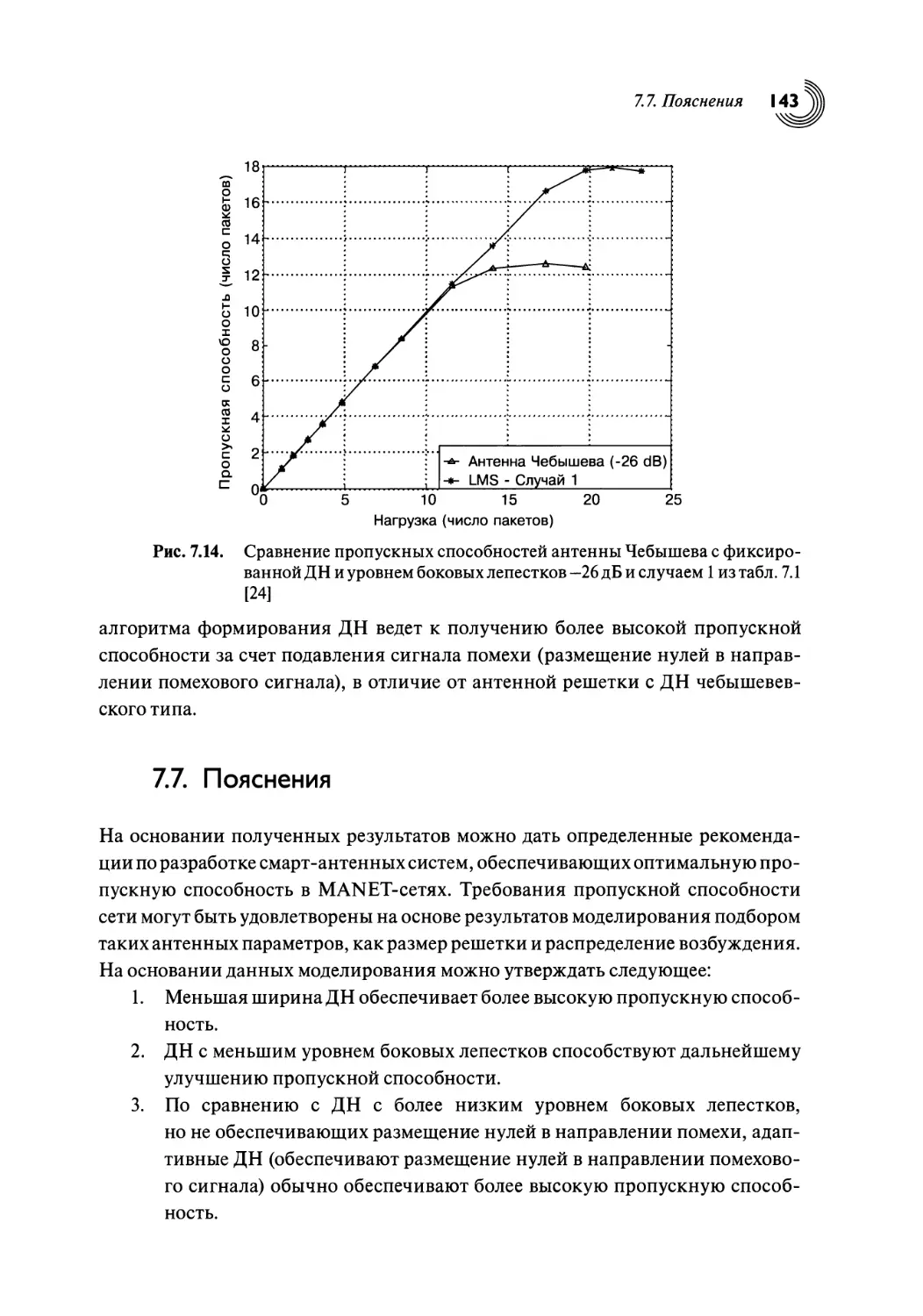
По мере увеличения спроса на системы подвижной связи возникает
необходимость в увеличении зоны обслуживания, пропускной способности и более
высокого качества передачи данных. Интеллектуальные (смарт) антенные системы
предлагают эффективное решение проблем, имеющихся у сегодняшних систем
беспроводной связи.
Цель данной книги — дать читателю максимально развернутое представление
по системным аспектам смарт-антенн: приведен обзор принципов смарт-систем с
включением ряда областей, имеющих большое влияние на них, исследуется
вопрос, как взаимодействие и интеграция последних может влиять на
специализированные сети мобильной связи MANET (Mobile Ad - hoc Network), приводятся
общие принципы и главные преимущества использования
пространственно-временной обработки, особенно систем с несколькими входами и выходами MIMO
(Multi-Input-Multi-Output).
Издание станет ценным справочником для студентов и аспирантов, инженеров,
IT-директоров и руководителей соответствующих подразделений, а также всех
специалистов, работающих в области беспроводной связи.
УДК 621.396.67
ББК 32.84
Original English language edition published by Morgan and Claypool publishers
Copyright © 2011 Morgan and Claypool Publishers
All Rights Reserved Morgan and Claypool Publishers
©2012, ЗАО «РИЦ «Техносфера», перевод на русский язык,
оригинал-макет, оформление
ISBN 978-5-94836-312-7
ISBN 978-159829176-6(англ.)
Содержание
Содержание 5
Краткое содержание 8
Ключевые слова 8
Предисловие редакторов перевода 9
Глава 1. Вступление 11
Глава 2. Обзор мобильной связи 14
2.1. Общее описание 14
2.2. Обзор сотовой связи 15
2.3. Эволюция систем мобильной телефонной связи 16
2.4. Структура 18
2.5. Радиосистемы сотовой связи: концепции и эволюция 20
2.5.1. Всенаправленные системы и многократное использование канала 20
2.5.2. Секционирование сот. 22
2.5.3. Секционированные системы 22
2.6. Регулирование мощности 24
2.6.1. Эффективность использования выделенного частотного спектра 25
2.7. Схемы коллективного доступа 27
2.7.1. Множественный доступ с разделением частот FDMA 27
2.7.2. Множественный доступ с временным разделением каналов TDMA 28
2.7.3. Множественный доступ с кодовым разделением каналов CDMA 29
2.7.4. Ортогональное частотное разделение каналов OFDM
с мультиплексированием 31
Глава 3. Антенные решетки и способы разнесенного приема 33
3.1. Антенные решетки 33
3.2. Классификация антенн 34
3.2.1. Изотропные излучатели 34
3.2.2. Всенаправленные антенны 34
3.2.3. Направленные антенны 35
3.2.4. Фазированные антенные решетки 36
3.2.5. Адаптивные антенные решетки АР 36
3.3. Методы разнесенного приема 38
Глава 4. Смарт-антенны 46
4.1. Вступление 46
4.2. Необходимость в смарт-антеннах. 46
4.3. Обзор 48
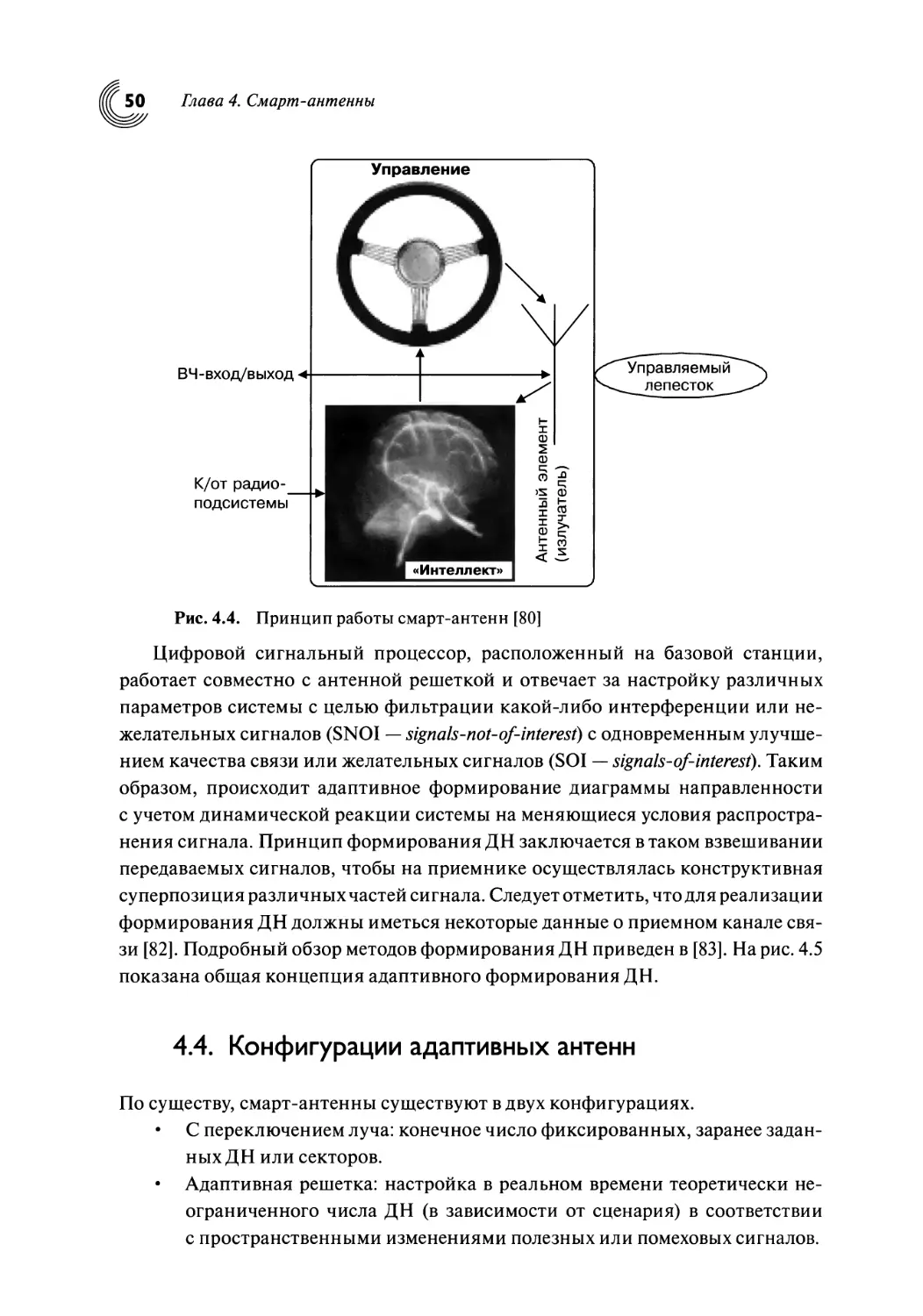
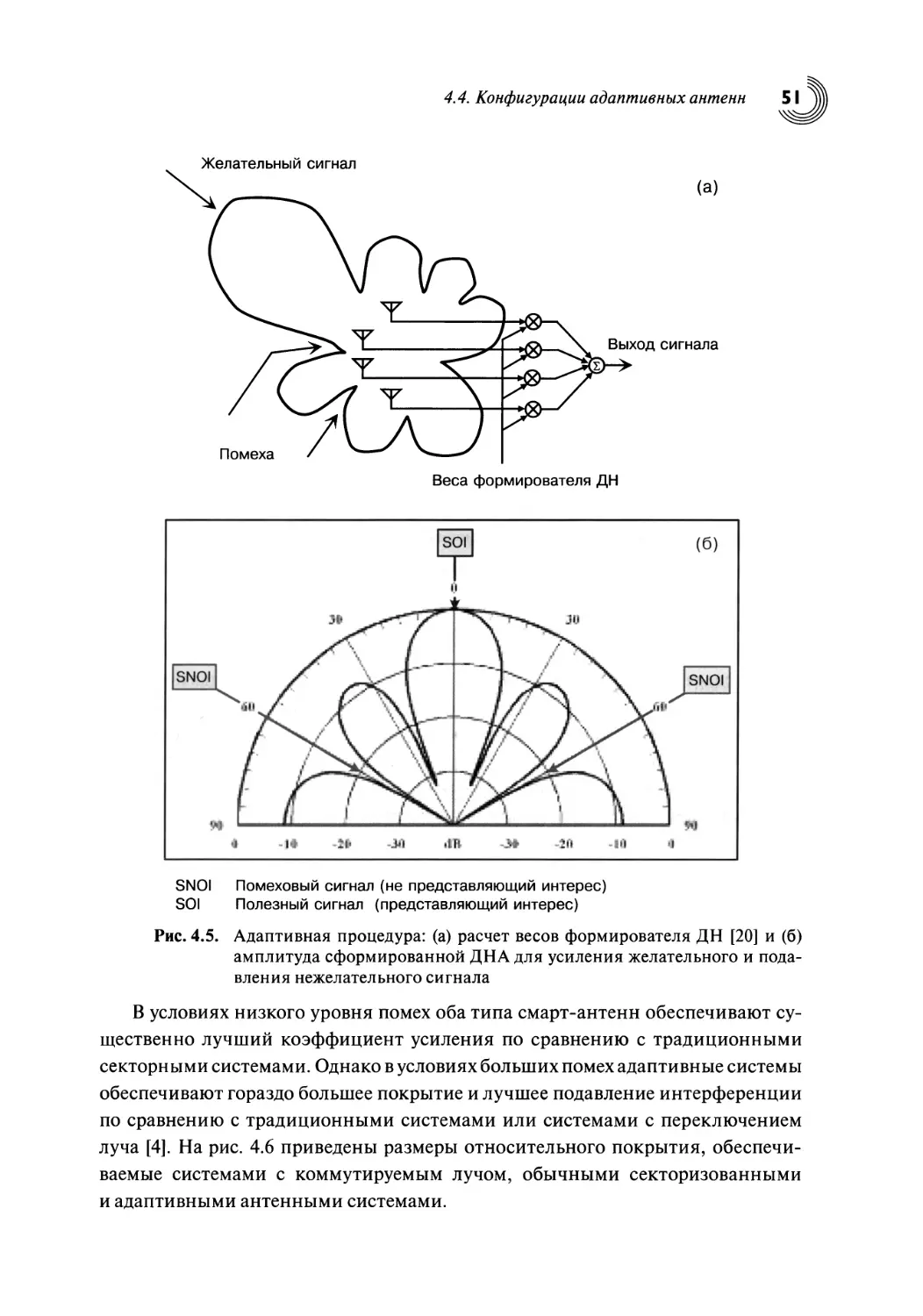
4.4. Конфигурации адаптивных антенн 50
4.4.1. Антенны с коммутацией луча. 53
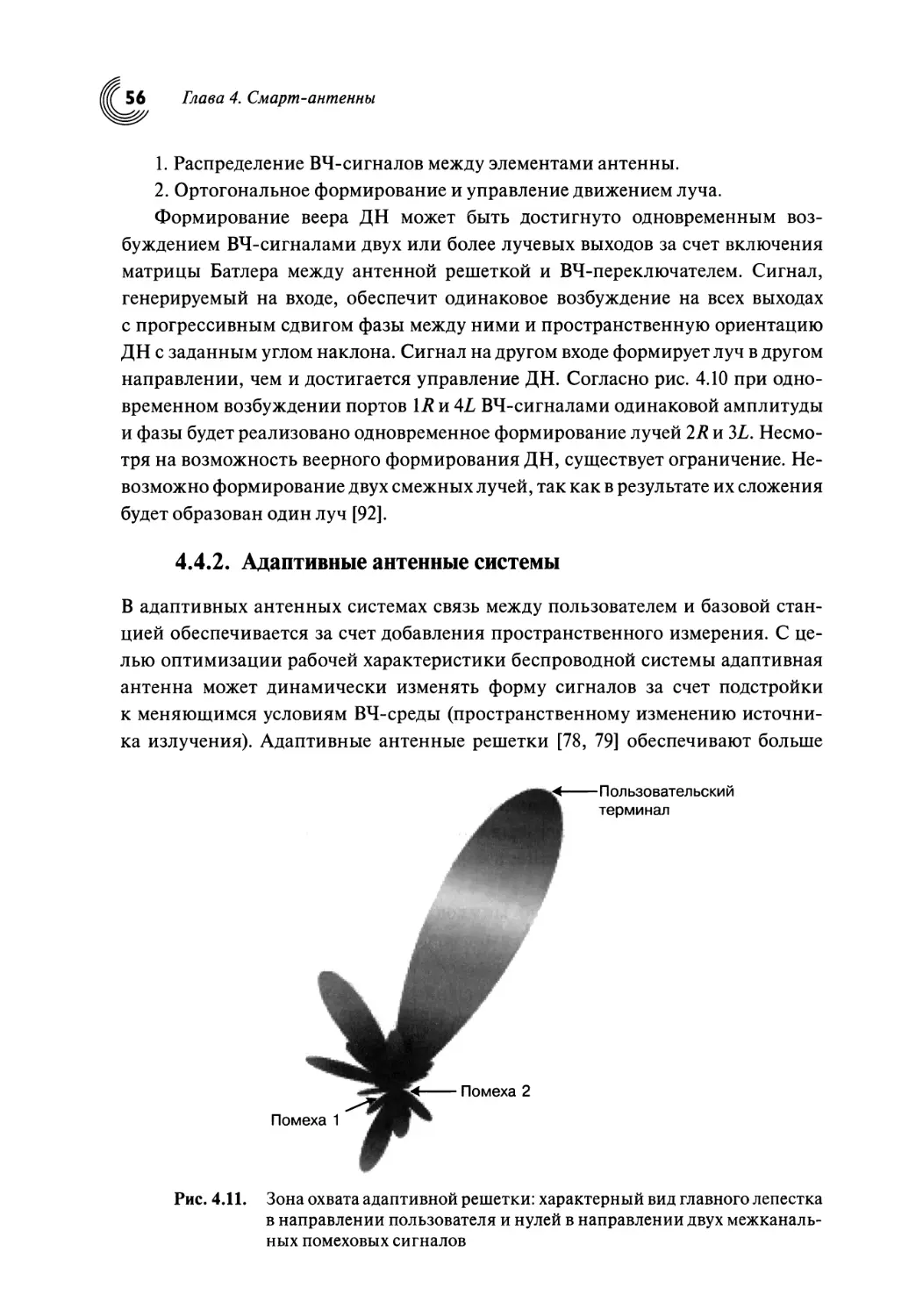
4.4.2. Адаптивные антенные системы 56
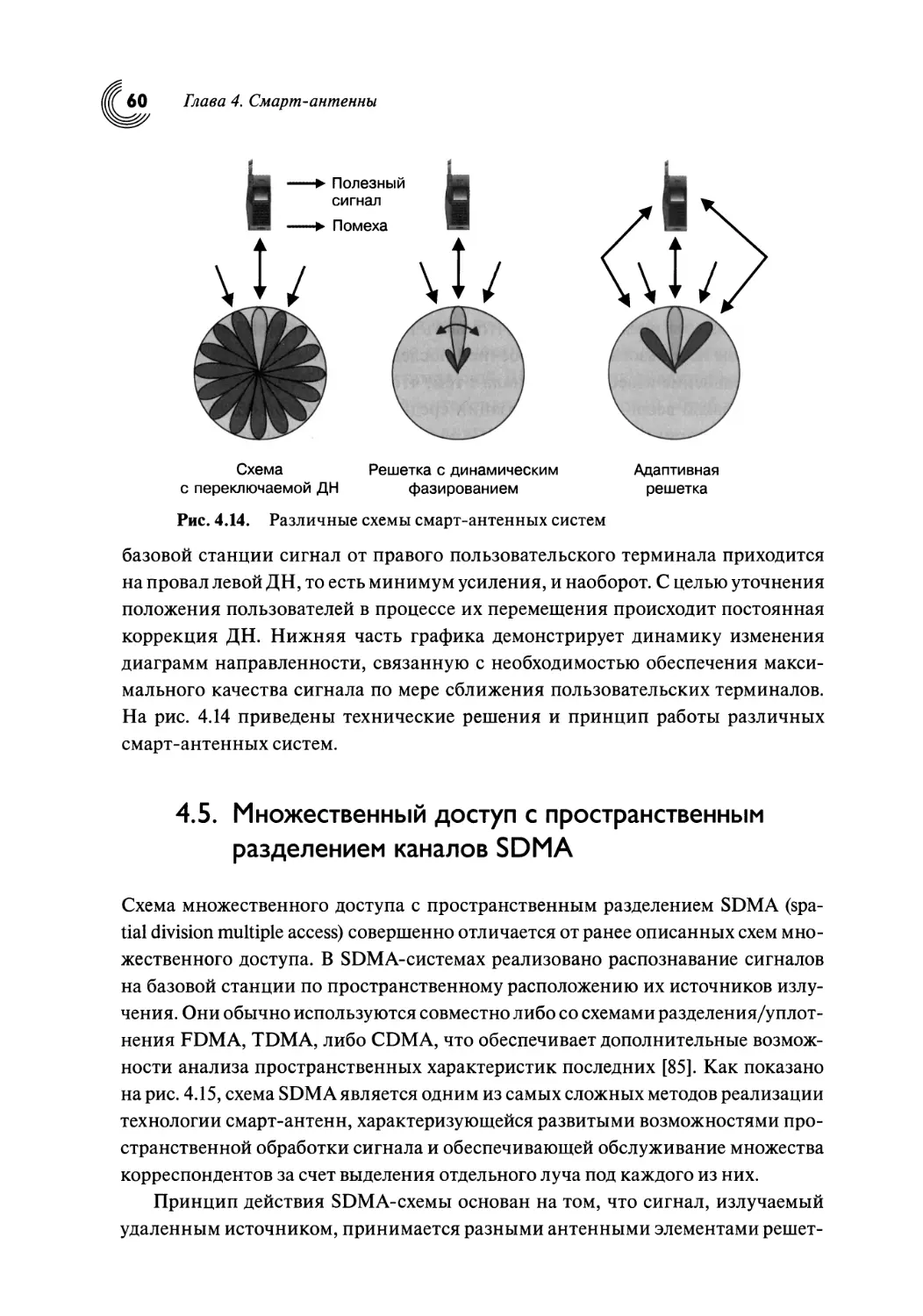
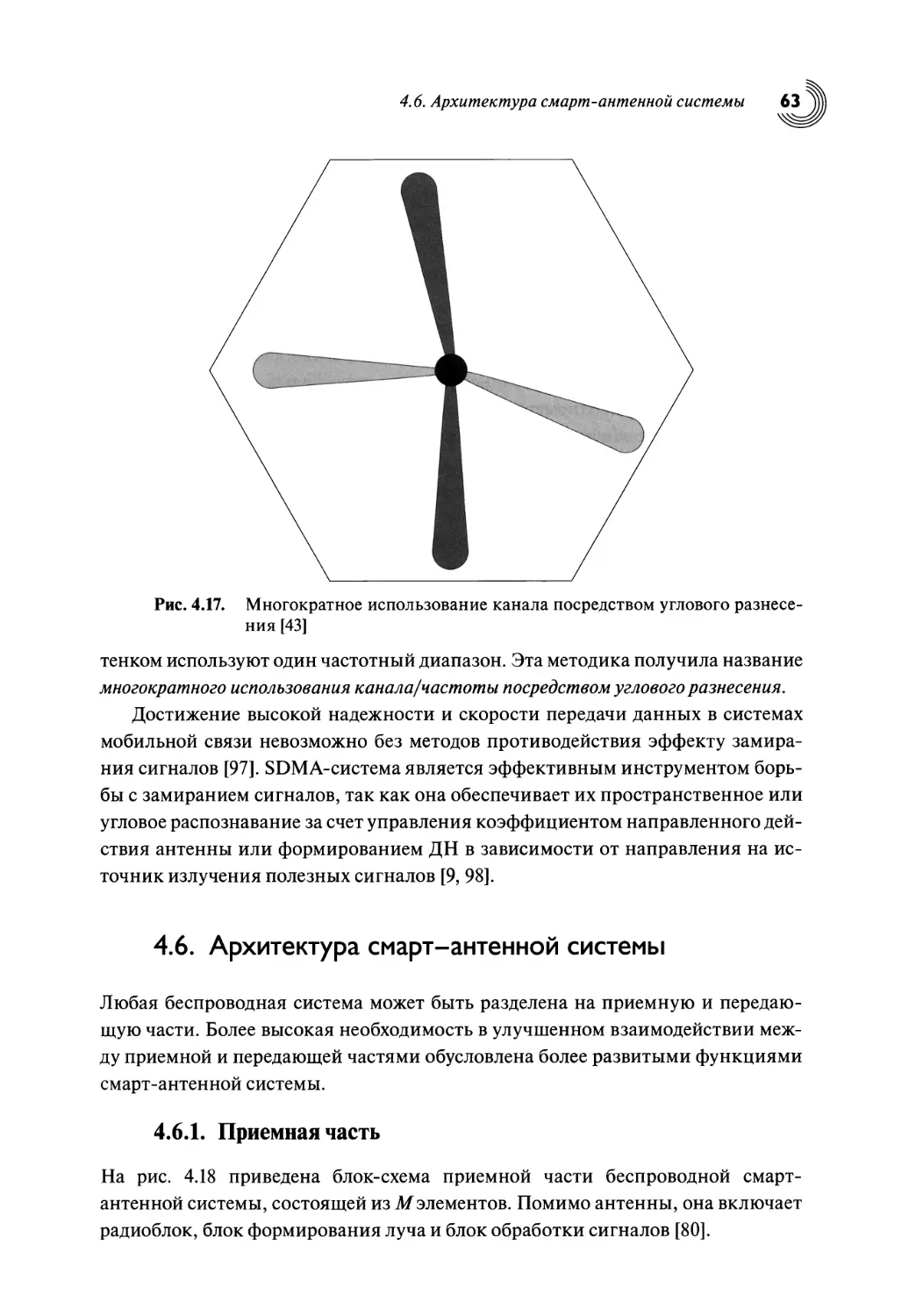
4.5. Множественный доступ с пространственным разделением каналов SDMA 60
4.6. Архитектура смарт-антенной системы 63
4.6.1. Приемная часть. 63
4.6.2. Передающая часть. 66
6 Содержание
4.7. Преимущества и недостатки 68
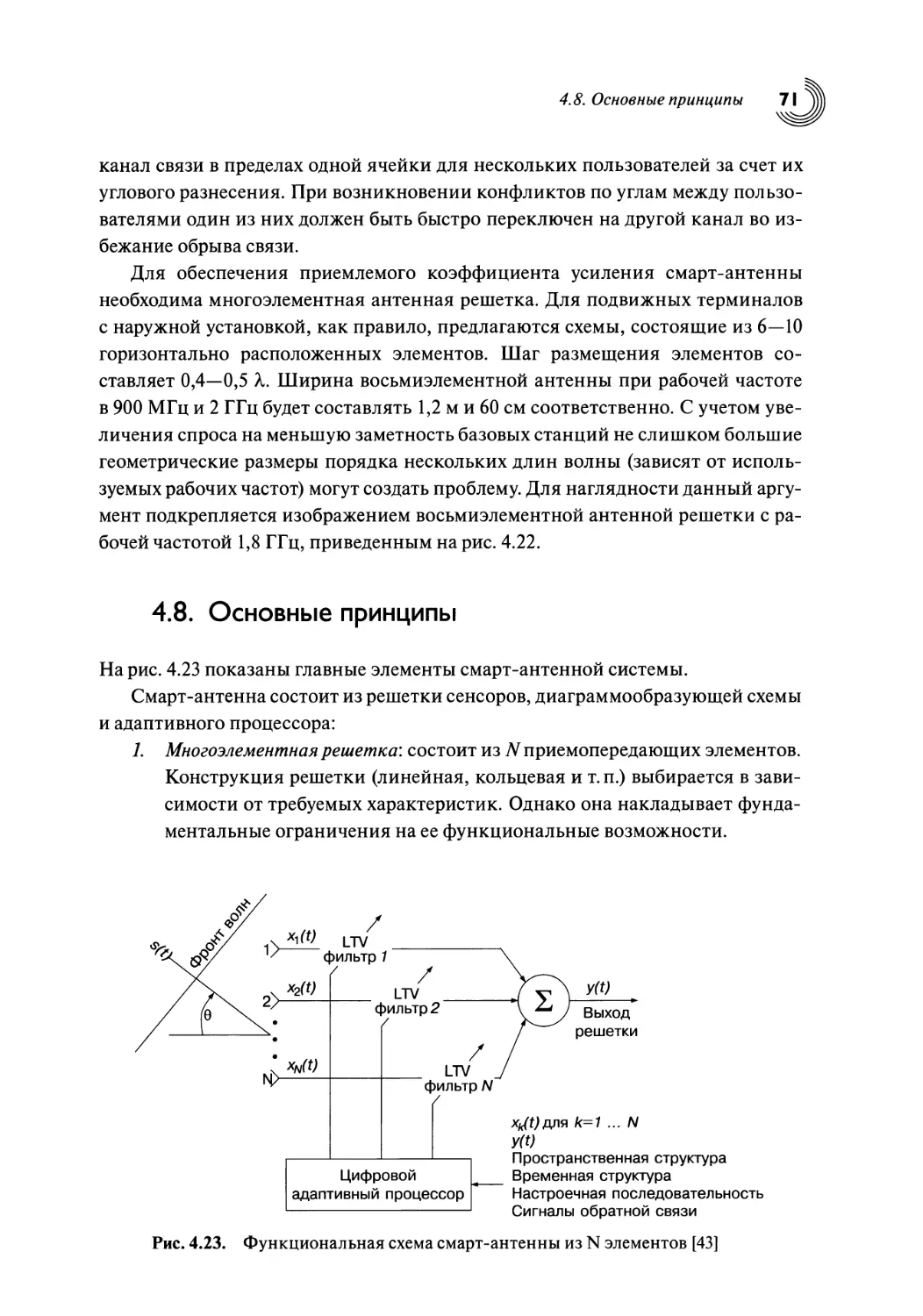
4.8. Основные принципы 71
4.9. Эффекты взаимной связи 80
Глава 5. Определение направления на источник сигнала. Основные положения 84
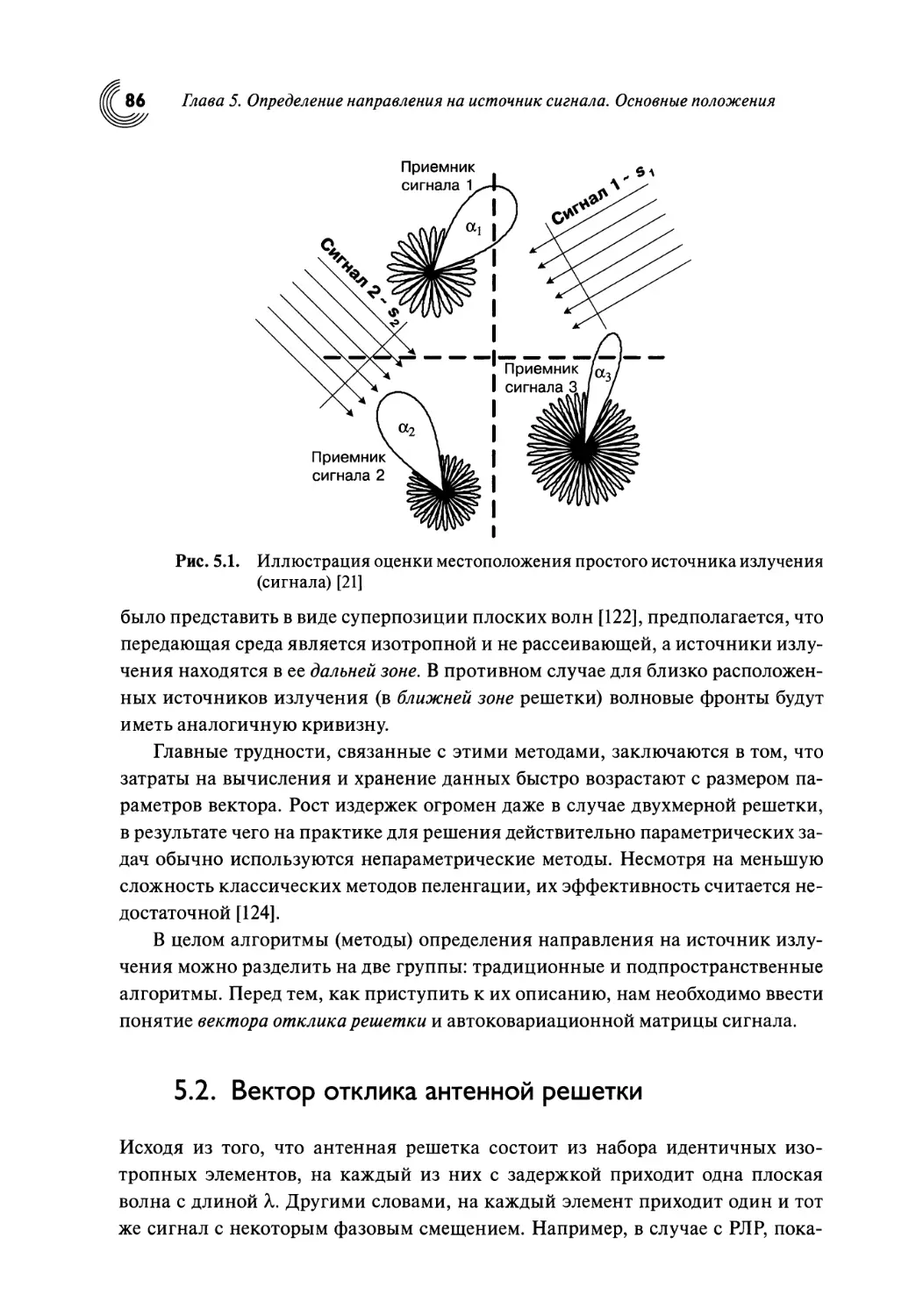
5.1. Введение 85
5.2. Вектор отклика антенной решетки 86
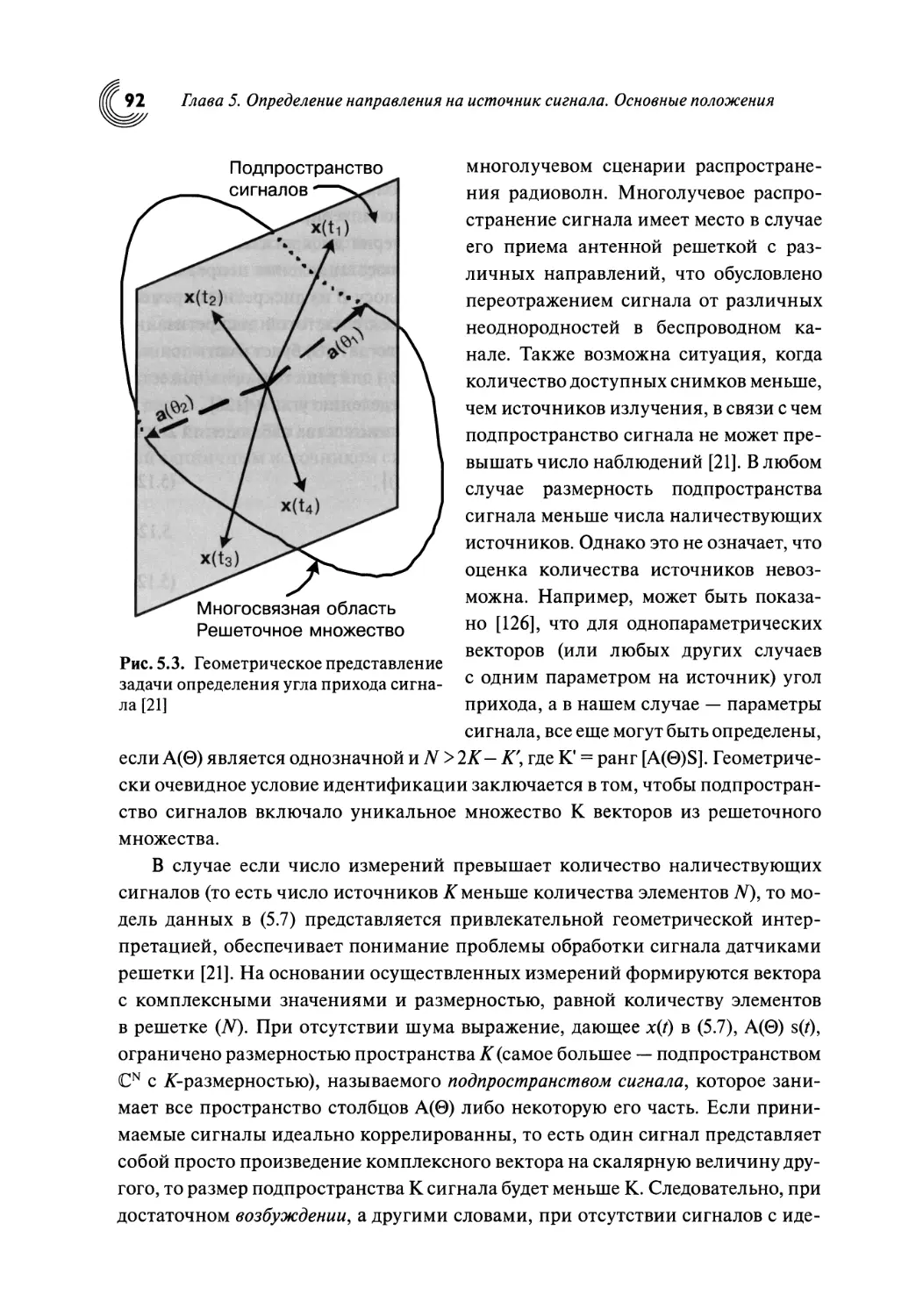
5.3. Модель принятого сигнала. 88
5.4. Подпространственная модель данных 91
5.5. Автоковариационные матрицы сигнала. 93
5.6. Традиционные методы определения направления прихода сигнала 95
5.6.1. Стандартный метод формирования ДН 95
5.6.2. Метод наименьшей вариации Кейпона. 96
5.7. Подпространственный подход оценки угла прихода сигнала 97
5.7.1. Алгоритм MUSIC 97
5.7.2. Алгоритм ESPRIT 100
5.8. Однозначность оценки углов прихода 103
Глава 6. Принципы формирования ДН 105
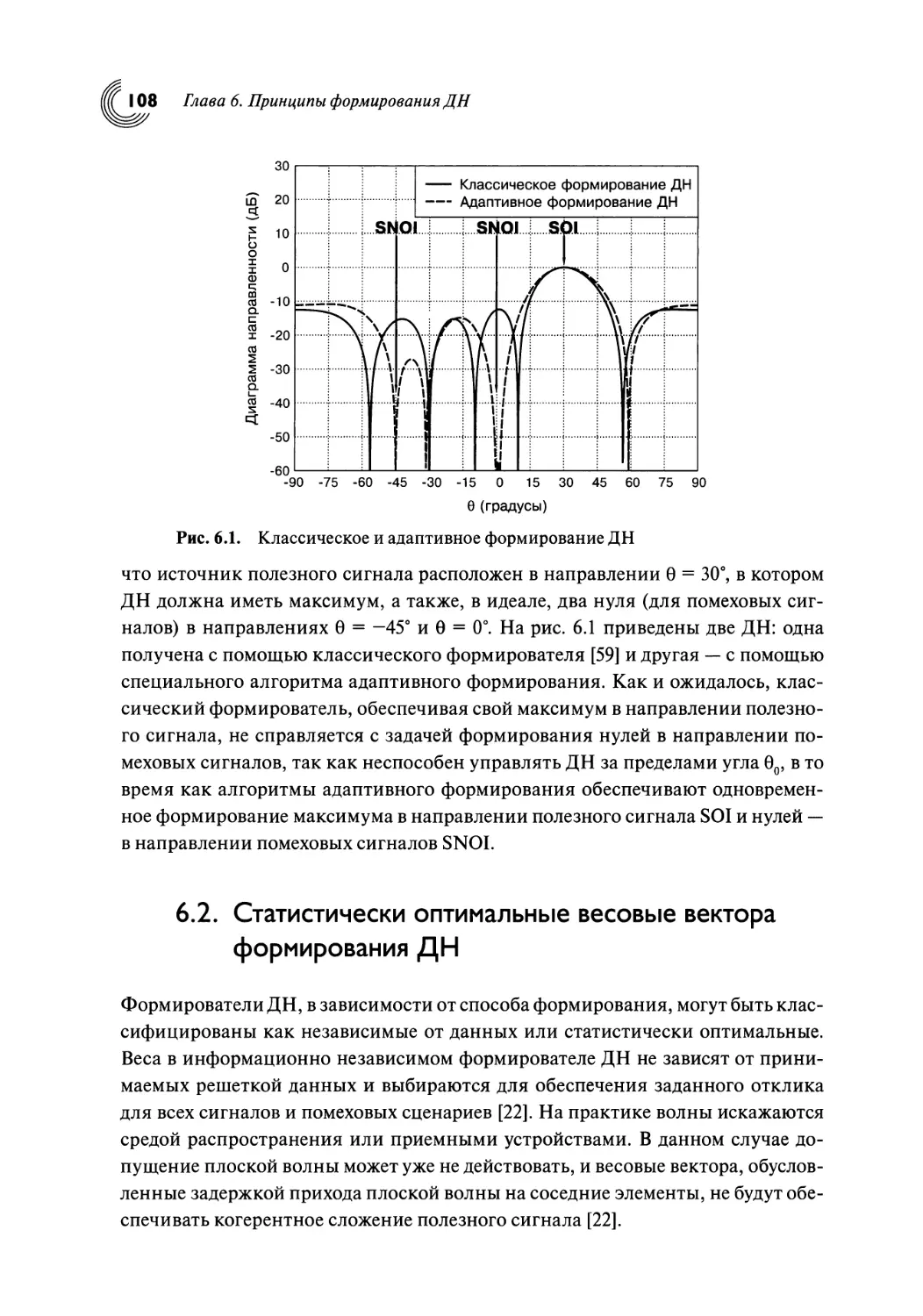
6.1. Классическое формирование ДН 107
6.2. Статистически оптимальные весовые вектора формирования ДН 108
6.2.1. Формирователь луча с максимальным SNR 109
6.2.2. Устройство подавления боковых лепестков и формирователь ДН
с максимальным SINR ПО
6.2.3. Минимальная среднеквадратическая ошибка MMSE 111
6.2.4. Прямое обращение матрицы DMI 113
6.2.5. Минимальная вариация с линейным ограничением LCMV 114
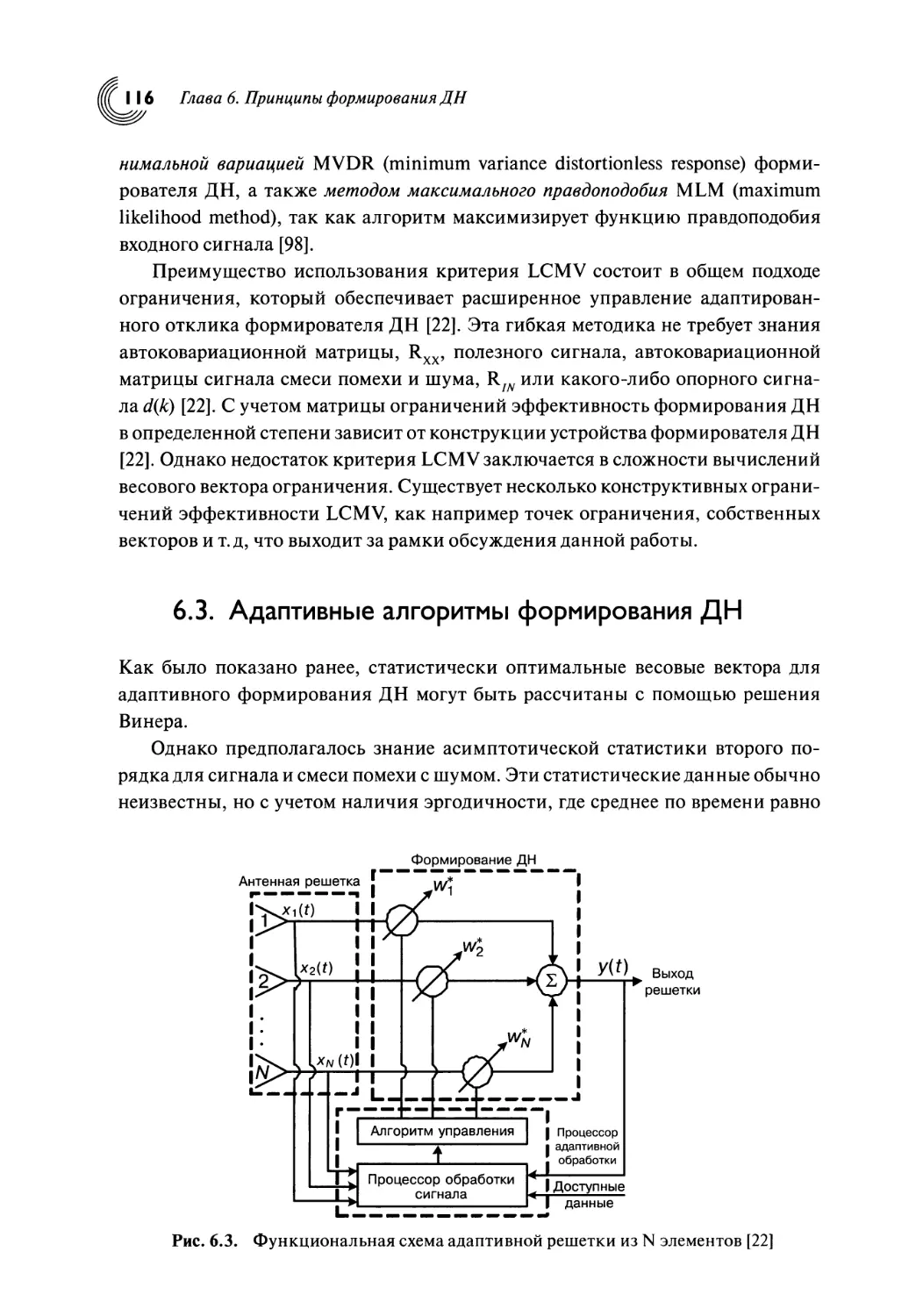
6.3. Адаптивные алгоритмы формирования ДН 116
6.3.1. Алгоритм наименьшего среднеквадратичного отклонения LMS 117
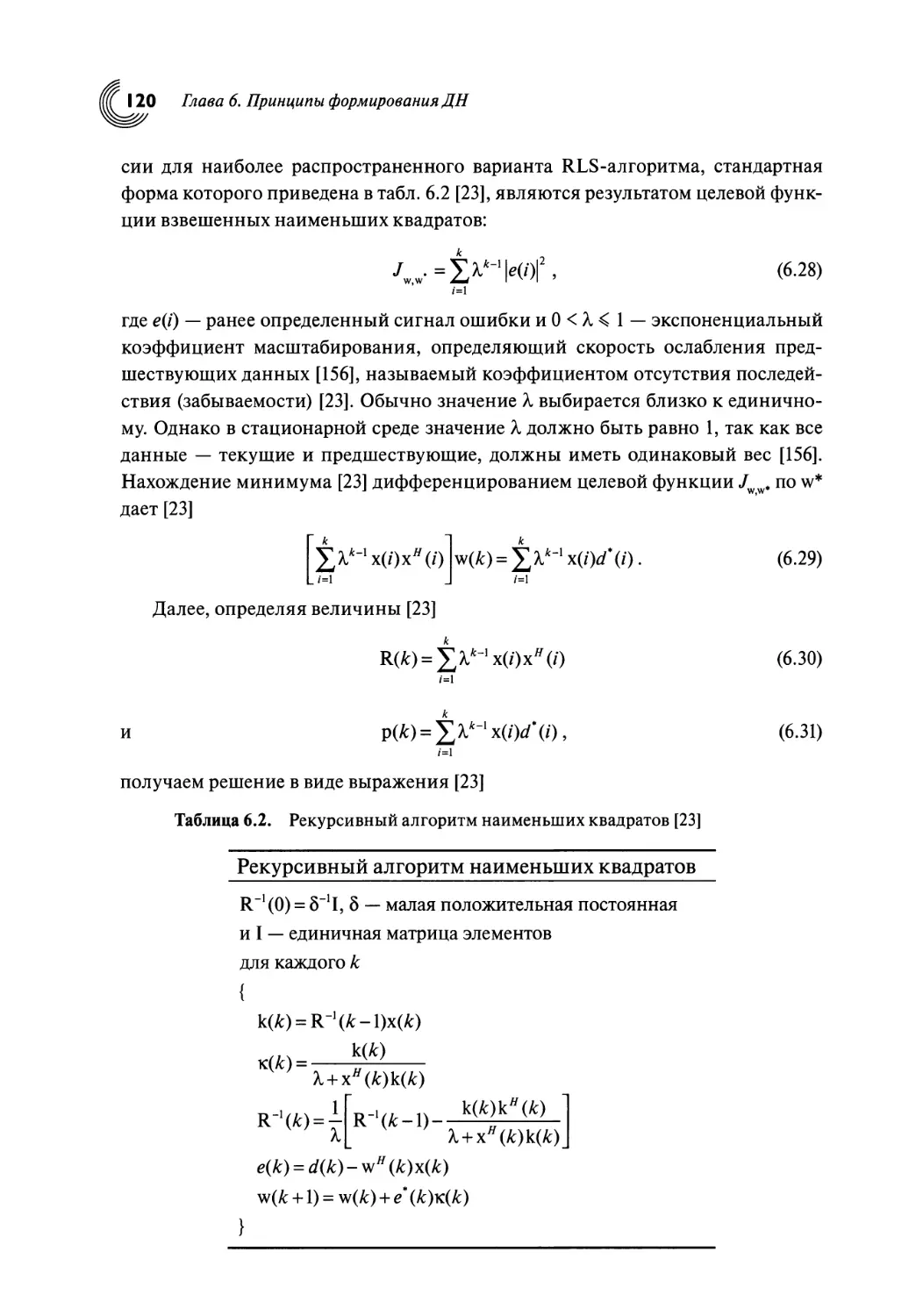
6.3.2. Рекурсивный алгоритм наименьших квадратов RLS
(Recursive Least-Squares) 119
6.3.3. Алгоритм для сигналов с постоянной амплитудой СМ
(Constant-Modulus) 121
6.3.4. Алгоритм аффинной проекции АР (Affine-Projection) 123
6.3.5. Квазиньютоновский алгоритм QN (Quasi-Newton) 124
Глава 7. Интеграция и моделирование смарт-антенн 126
7.1. Обзор 126
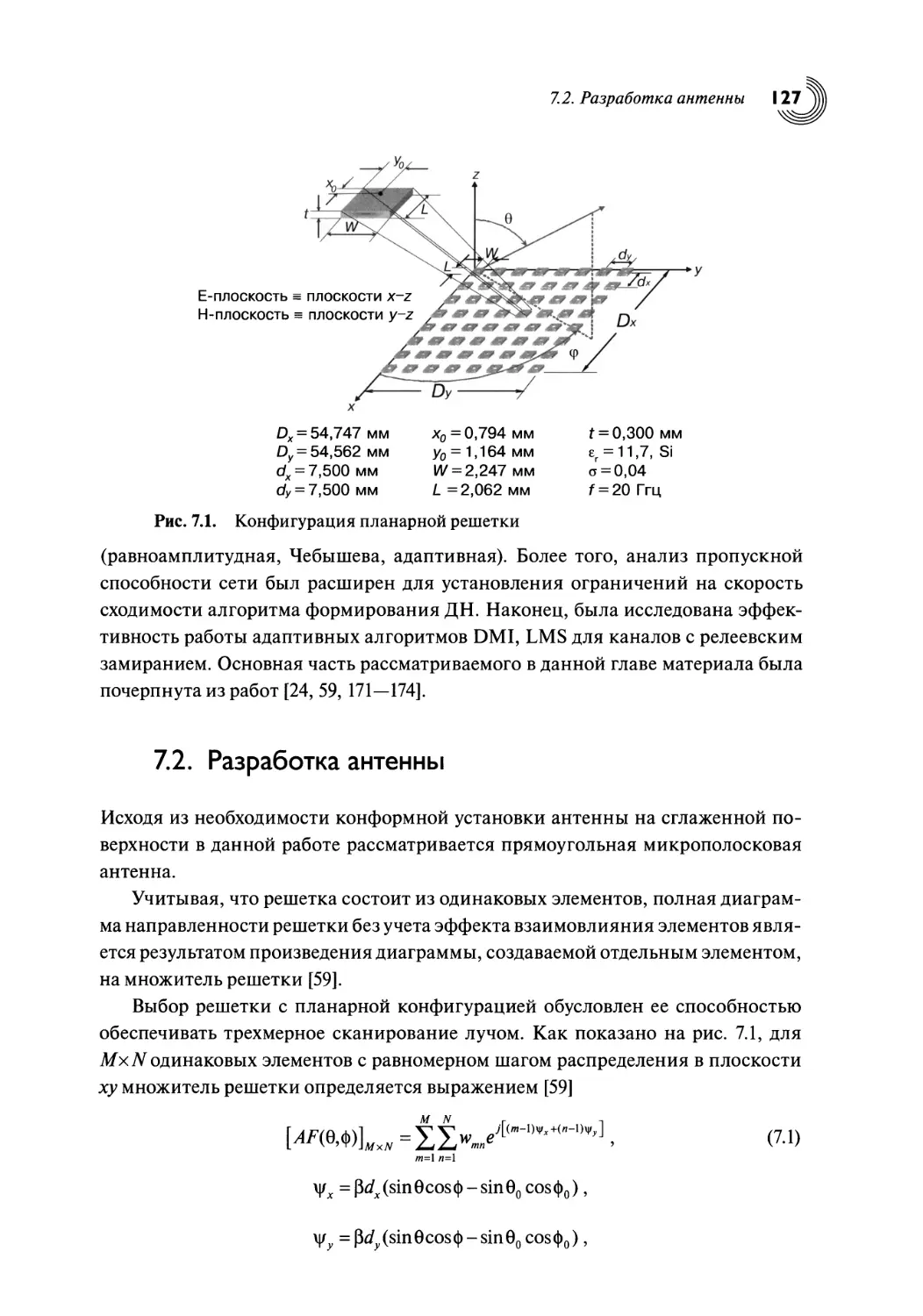
7.2. Разработка антенны 127
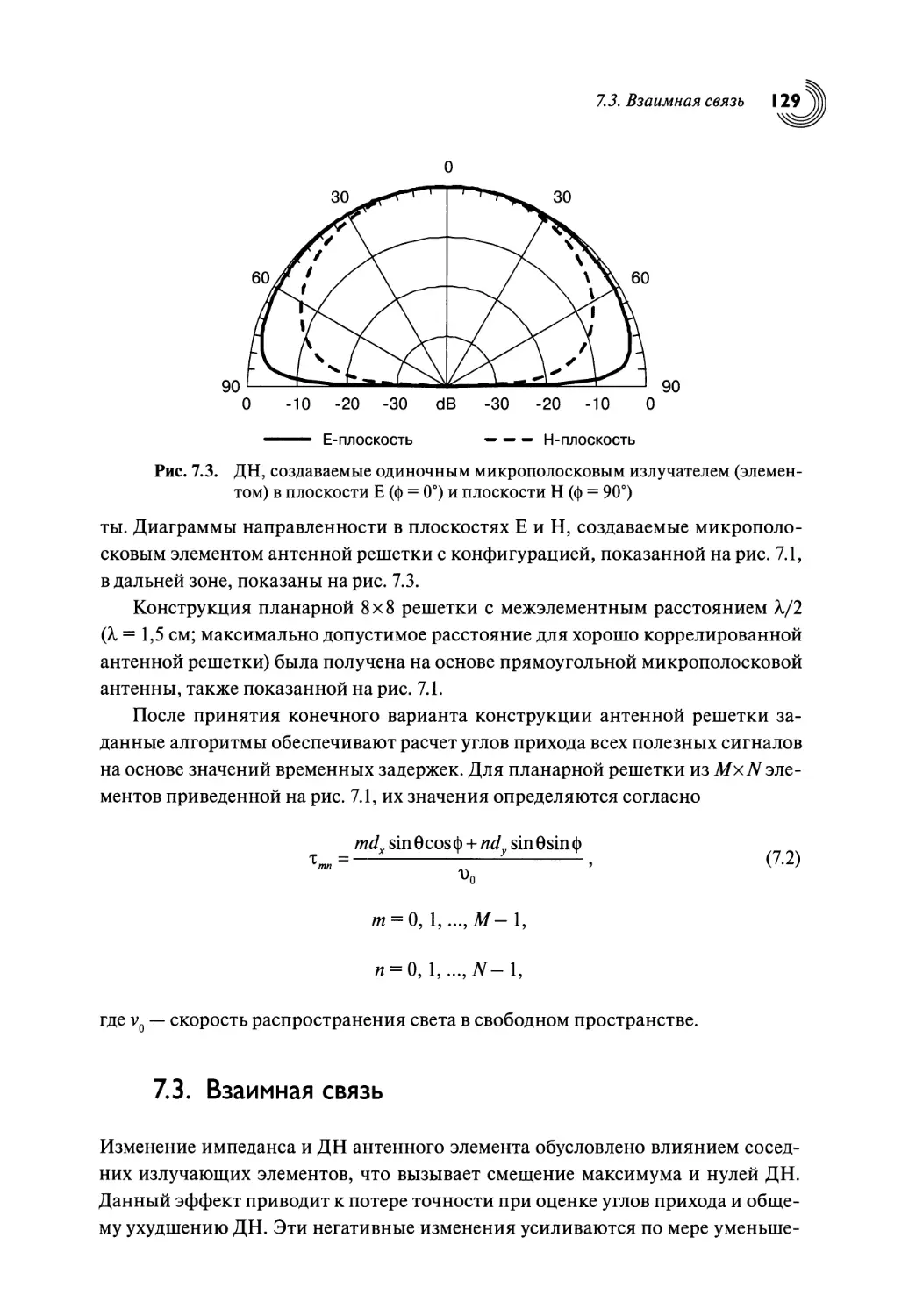
7.3. Взаимная связь 129
7.4. Адаптивные алгоритмы обработки сигнала 130
7.4.1. Направление прихода 130
7.4.2. Адаптивное формирование ДН 132
7.4.3. Формирование ДН и сложение разнесенных сигналов в каналах
с релеевским замиранием 133
7.5. Решетчатое кодирование для адаптивных решеток ТСМ
(trellis-coded modulation) 135
7.6. Смарт-антенные системы для MANET-сетей 137
7.6.1. Протокол 138
7.6.2. Моделирование 139
Содержание 7
7.7. Пояснения 143
Глава 8. Пространственно-временная обработка 145
8.1. Вступление 145
8.2. Модели сигнала и дискретного пространственно-временного канала 151
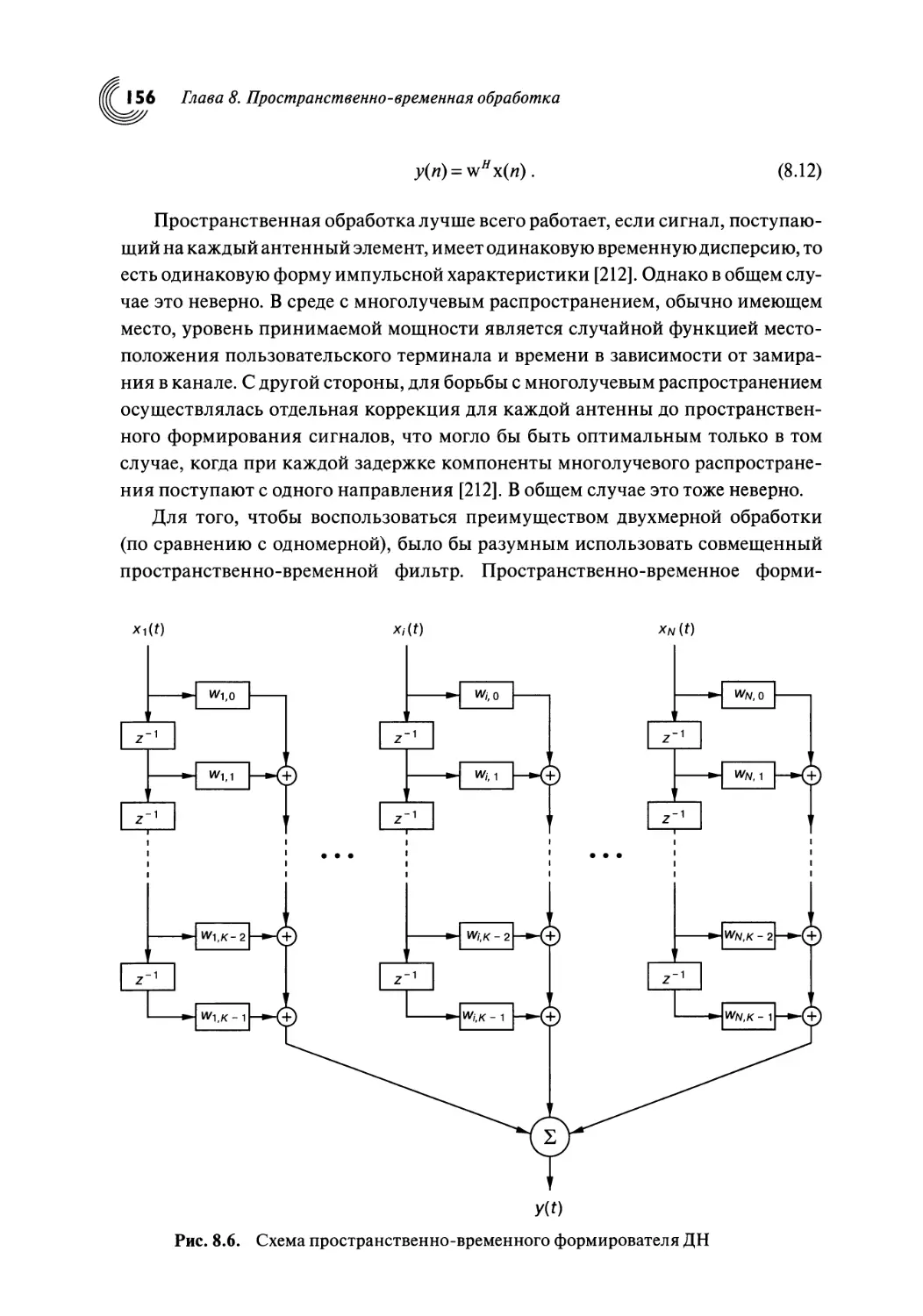
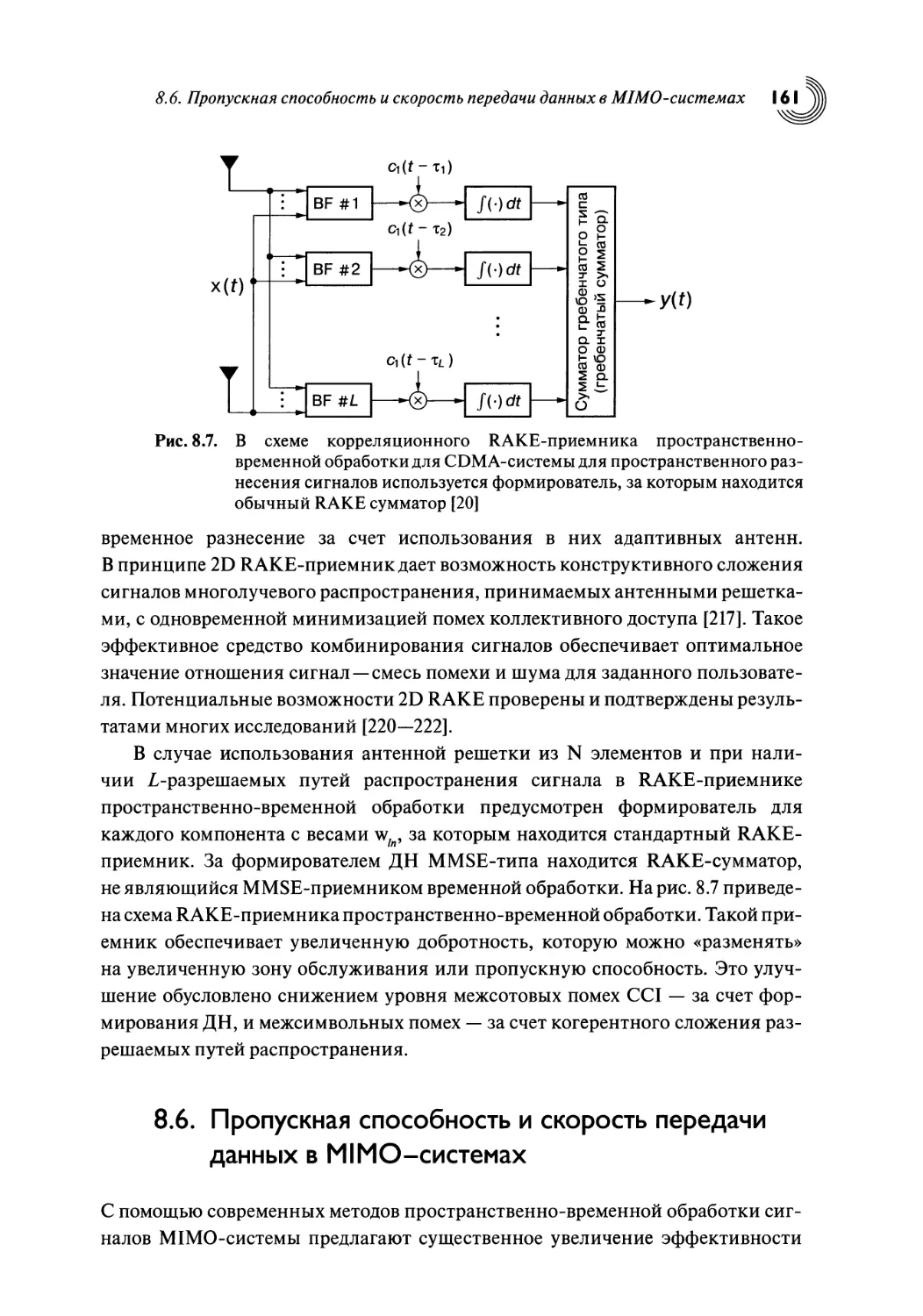
8.3. Пространственно-временное формирование луча. 155
8.4. Подавление межсимвольных и внутриканальных помех 157
8.4.1. Подавление межсимвольных помех ISI 158
8.4.2. Подавление внутриканальных помех CCI 159
8.4.3. Одновременное подавление межсимвольной и внутриканальной помехи 159
8.5. Пространственно-временная обработка для DS-CDMA 160
8.6. Пропускная способность и скорость передачи данных в МШО-системах 161
8.6.1. Ограничения скорости передачи для одного пользователя 163
8.6.2. Предел скорости передачи при коллективном использовании канала 163
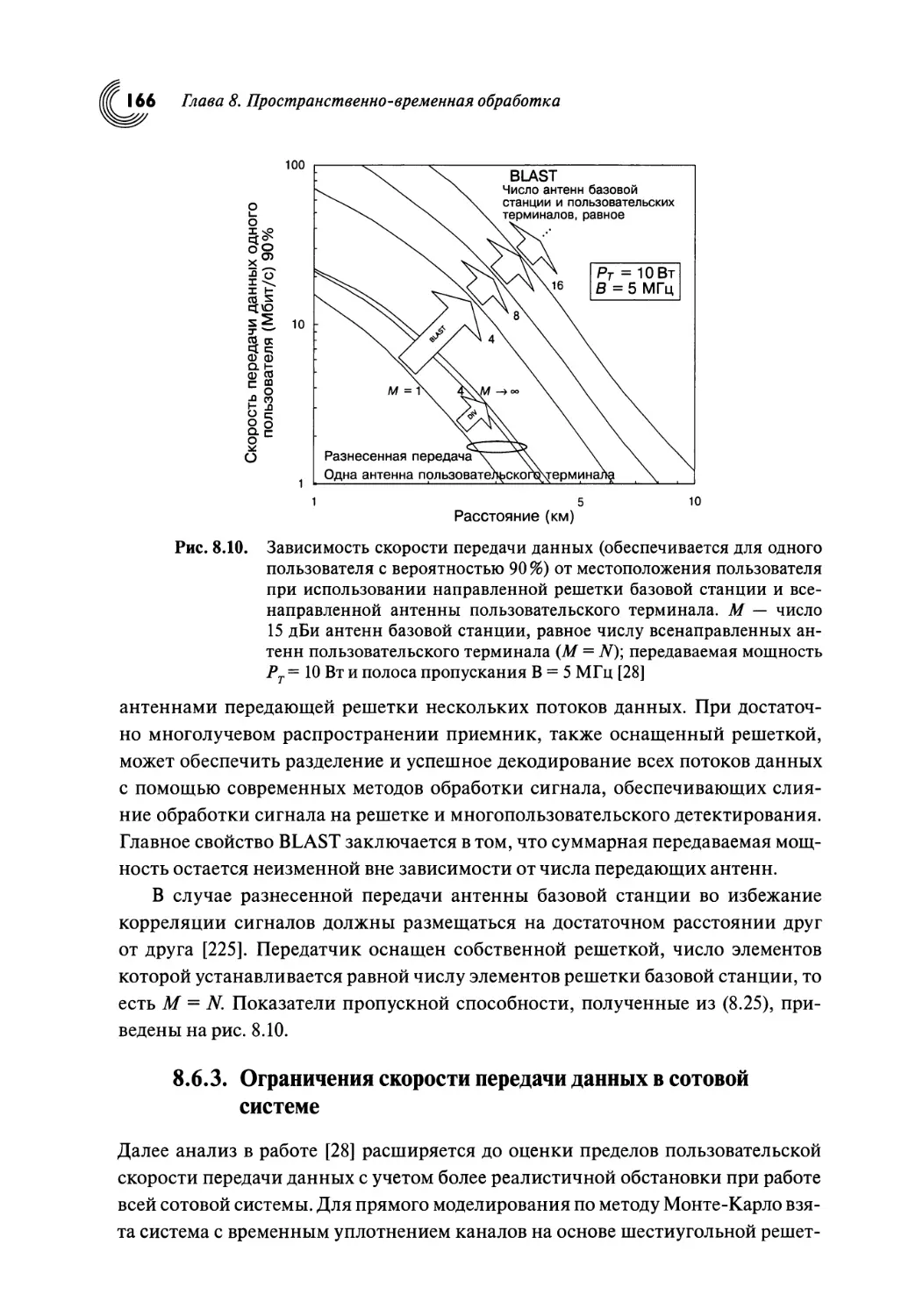
8.6.3. Ограничения скорости передачи данных в сотовой системе 166
8.6.4. МШО-системавсетях\¥ЦШ 168
8.7. Заключение 172
Глава 9. Коммерческая доступность смарт-антенн 173
Глава 10.Заключение 180
Благодарности 181
Литература. 182
Предметный указатель. 196
Краткое содержание
По мере увеличения спроса на системы подвижной связи, возникает
необходимость в увеличении зоны обслуживания, пропускной способности и более
высоком качестве передачи данных. Таким образом, необходимо более
эффективное использование выделенного частотного спектра. Интеллектуальные
(смарт) антенные системы предлагают эффективное решение проблем,
имеющихся у сегодняшних систем беспроводной связи, и способны обеспечить более
эффективное использование радиоспектра и каналы надежной
высокоскоростной передачи данных. Цель данной книги состоит в том, чтобы дать читателю
максимально развернутое представление по системным аспектам смарт-антенн.
Фактически техника смарт-антенных систем включает ряд важных областей,
таких как индивидуальное проектирование антенных решеток, алгоритмов
обработки сигналов, пространственно-временная обработка, моделирование
беспроводного канала и кодирование и быстродействие радиосетей. В данной
книге дается обзор принципов смарт-систем с включением ряда областей,
имеющих на них большое влияние, а также исследуется вопрос, как взаимодействие
и интеграция последних могут влиять на специализированные сети мобильной
связи MANET (Mobile Ad-Hoc Network). Кроме того, приводятся общие
принципы и главные преимущества использования пространственно-временной
обработки особенно систем с несколькими входами и выходами MIMO (Multi-
I nput- Mult i- Output).
Ключевые слова
Адаптивные решетки, антенны с коммутируемым лучом, фазированная
решетка, SDMA, взаимная связь, направление прихода сигнала, адаптивное
формирование луча, канальное кодирование, MANET, пропускная способность сети,
пространственно-временная обработка.
Предисловие редакторов перевода
Константин Баланис, профессор Аризонского университета, известен как автор
одной из самых удачных книг по теории антенн, рекомендованных в качестве
учебного пособия в университетах США и Европы1. Предлагаемая новая книга
представляет собой введение в технику и теорию нового поколения
современных антенных решеток, оснащенных процессорной обработкой сигнала.
Начало таких работ было сделано в военной технике, но достижения
военной электроники и технологии находят свое применение и в гражданских
приложениях. Можно назвать и обратную ситуацию, когда новые схемы из
гражданской промышленности активно развились и воплотились в целое направление
военной электроники. Так, например, было с первой фазированной антенной
решеткой, созданной в США русским ученым С. А. Щелкуновым, с помощью
которой была решена проблема замирания радиосигналов (фединг). Антенна
содержала решетку излучателей, управляемые фазовращатели и сумматор
радиосигнала. В последующие десятилетия это направление — фазированные
антенные решетки — активнейшим образом стало использоваться в военных
радарах и системах связи. Сейчас эти идеи возвращаются в аппаратуру широкого
применения: мобильные телефоны, системы беспроводного доступа в интернет
и так далее. Первая монография, посвященная адаптивным антенным
решеткам2, вышла на русском языке в 1991 г. Ее автором был ведущий специалист по
антенной технике в СССР — А. А. Пистолькорс. Предлагаемый читателю
перевод книги К. Баланиса посвящен современным разделам антенной техники —
адаптивными антенным решеткам, или смарт-антеннам.
«Смарт-антенна» — это американский технический жаргон. К сожалению,
мы не нашли подходящего русского эквивалента этому термину и, таким
образом, вводим этот технический термин и в русскую техническую литературу.
В монографии К. Баланиса излагаются основы построения смарт-антенн. В ней
дан обзор практически всех работ, опубликованных за рубежом. Прекрасная
библиография из 232 источников поможет заинтересованным инженерным
и научным работникам быстро освоить достижения в этой области антенной
техники, используемые алгоритмы управления сигнальными процессорами
в антенных системах и их математическое обеспечение.
Создание ФАР в середине прошлого века дало огромный толчок к
развитию высокочастотной элементной базы: фазовращателей, аттенюаторов, мало-
1 Constantine A. Balanis, «Advanced Engineering Electromagnetics», John
Wiley & Sons, Inc., 1, 1989.
2 А. А. Пистолькорс, О. С. Литвинов, «Введение в теорию адаптивных
антенн» М.: Наука, стр. 200, 1991
Предисловие редакторов перевода
габаритных усилителей, ферритовых устройств и т.д. Для широкого внедрения
смарт-антенн потребуются эти же устройства, но уже в интегральном
исполнении, а также сигнальные процессоры, которые являются, пожалуй, основной
частью адаптивных антенных решеток. Внедрение таких антенн в различные
системы связи, как наземные, так и спутниковые, позволит достичь нового
качественного и количественного уровня в скорости передачи цифровых данных,
борьбы с пассивными и активными помехами, что в условиях все более сложной
эфирной обстановки становится очень актуальным.
В России пока немного компаний занимается проектированием базовых
станций, интернет-терминалов и мобильных телефонов и, видимо, у этой
книги не будет массового читателя. Но, как это уже неоднократно было в
технике, достижения из гражданских систем могут внедряться и в военные станции,
оборудование для полиции, для систем глобального позиционирования,
везде, где используются антенные решетки. Активность российских инженеров,
поддержка государством наукоемких областей позволяют надеяться на то, что
отечественная гражданская электроника выйдет в скором времени на
международный рынок. В различных исследовательских центрах России ведутся
разработки базовых станций WiMaX, навигационной системы ГЛОНАСС, систем
беспроводного доступа в интернет. Эта книга станет подспорьем в
проектировании современных антенн для этих радиосистем.
Парнес Михаил Давидович, Попов Владимир Васильевич
ГЛАВА I
ВСТУПЛЕНИЕ
В последние годы наблюдается существенное развитие беспроводных
технологий широкополосного доступа, направленных на улучшение качества услуг
беспроводного интернета и систем сотовой связи [1]. Из-за этого в будущем
предвидится огромный рост нагрузки на линии мобильной и персональной связи [2].
Он обусловлен как ростом количества пользователей, так и появлением услуг
высокоскоростной передачи данных. Такая тенденция наблюдается для систем
второго поколения и наверняка перейдет на системы третьего поколения. Рост
объема передаваемой информации потребует как от производителей
оборудования, так и поставщиков услуг обеспечения достаточно высокой пропускной
способности сетей [3]. Так как предел пропускной способности обусловлен
рядом ограничивающих факторов излучающей среды, решение данной задачи
становится критически важным для поставщиков услуг [4].
Главной причиной уменьшения пропускной способности являются
межканальные помехи, обусловленные ростом количества пользователей. К другим
факторам снижения производительности системы и ее пропускной
способности относятся интерференционное замирание и задержки в распространении,
обусловленные отражением сигнала от зданий и рельефом местности, а также
мобильностью пользователей. Вопрос пропускной способности обострился
в 90-х годах, когда Интернет дал возможность получать данные по запросу
(котировки акций, новости, метеосводки, электронная почта и т.д.) и
обмениваться информацией в реальном времени. Это привело к увеличению
использования эфирного времени и количества абонентов и, таким образом, к насыщению
пропускной способности системы.
Операторы мобильной связи стали искать новые способы максимального
увеличения эффективности использования выделенных частотных спектров
своих сетей и увеличения рентабельности [5]. В настоящее время во всем мире
ведутся исследования, направленные на улучшение производительности
беспроводных систем. Внедрение современной технологии смарт-антенн (SA)
беспроводной связи обещает реализацию высокоэффективных сетей с
максимальной пропускной способностью, улучшение качества услуги и расширение
зоны покрытия [6]. Смарт-антенны в последние годы пользуются заслуженным
вниманием [6—11] в связи с тем, что они могут повысить пропускную
способность (очень важный фактор в городских условиях и плотно заселенных
районах) за счет динамической отстройки от помехи с одновременной фокусиров-
Глава 1. Вступление
кой на необходимом абоненте [12, 13], вкупе с впечатляющими улучшениями
в области цифровой обработки сигнала.
Избирательные управляющие алгоритмы с предопределенными
критериями обеспечивают адаптивные решетки уникальной способностью к изменению
характеристик диаграммы направленности (нулей, уровней боковых лепестков,
направленности основного лепестка и его ширины). Эти управляющие
алгоритмы обязаны своим появлением сразу нескольким дисциплинам и предназначены
для использования в конкретных областях применения (например в
сейсмологии, подводных работах, воздушно-космическом пространстве и в последнее
время—в сотовой связи) [14]. Коммерческое внедрение SA обещает большой прирост
системной производительности с точки зрения пропускной способности, зоны
покрытия и качества сигнала, что в целом, в конечном итоге, приведет к
повышению эффективности использования выделенного частотного спектра [14].
По мере роста необходимости в обмене и коллективном использовании
данных, пользователи, где бы они ни находились — на работе, дома или в движении,
требуют обеспечить им возможность подключения к быстрым сетям с большой
зоной обслуживания. Более того, пользователи также заинтересованы в
возможности по желанию устанавливать соединения между всеми их
персональными электронными устройствами PED (personal electronic devices) в режиме ad
hoc (для данного случая — в пер. с латыни). Сеть такого типа получила название
самоконфигурируемой мобильной специальной сети (MANET) и начинает
появляться на основе технологии беспроводной связи Bluetooth.
Bluetooth™ представляет собой радиосвязь малого радиуса действия (10—
100 м), обеспечивающую возможность создания канала связи и обмена
данными между двумя или более устройствами [15, 16]. Так как в Bluetooth™
используется всенаправленная антенна для работы в промышленном, научном
и медицинском диапазоне ISM (industrial, scientific, and medical — нелицензи-
руемая полоса 2,4 ГГц), то она не способна обеспечить наведение на абонентов
и регулировать степень чистоты сигнала для снижения помех. Все это
ограничивает общую производительность системы, то есть пропускную способность
MANET-сетей. Кроме того, так как всенаправленная антенна излучает
энергию во всех направлениях, снижается время автономной работы персональных
электронных устройств. Следовательно, преимущества, предлагаемые
адаптивными антеннами, должны обеспечить улучшение общей производительности
MANET-сетей [17].
Существующие тенденции сосредоточены на пространственно-временной
обработке и кодировании цифрового сигнала, то есть перспективной
технологии, обещающей значительное увеличение производительности
беспроводных сетей за счет использования многоэлементных антенн для передачи
и приема [18]. Пространственно-временная обработка может рассматриваться
Вступление
в качестве эволюции традиционных методов обработки сигнала с помощью
антенных решеток и формирования диаграммы направленности. Импульсные
сигналы обрабатываются одновременно на многих датчиках с помощью
приемников пространственно-временной обработки, таким образом, улучшающих
разрешающую способность, подавление помехи и качество услуги. Реализация
сложных методов пространственно-временной обработки сигнала в системах
с многоканальным входом и выходом (MIMO) должна обеспечить значительное
увеличение пропускной способности и передачи данных в мобильных системах
и беспроводных локальных сетях.
Данная книга организована следующим образом: в главе 2 дается обзор
систем беспроводной связи, что необходимо для последующего анализа смарт-
антенных систем. Затем следует глава, посвященная антенным решеткам и
методам разнесенного приема с описанием свойств антенн и их классификации
по характеристиками излучения. В главе 4 анализируются функциональные
принципы смарт-антенн, рассматриваются их различные конфигурации и
выделяются их преимущества и недостатки, связанные с коммерческим
внедрением. В главе 5 рассматриваются различные методы определения направления
приема сигнала. Чем точнее эта оценка, тем выше производительность
адаптивной антенной системы. Глава 6 посвящена методам формирования луча, с
помощью которых достигаются желаемые ДН адаптивных антенн. В следующей
главе представлены результаты программы изучения, посвященной интеграции
антенной конструкции, адаптивных алгоритмов и пропускной способности
сети. Глава 8 посвящена способам пространственно-временной обработки
сигнала. На основании анализа фундаментальных принципов и полученных
экспериментальных данных демонстрируется громадное увеличение скорости
передачи данных и пропускной способности, обеспечиваемое МШО-системами.
В заключение в главе 9 дается краткий обзор существующих коммерческих
решений на основе адаптивных антенных систем.
Данная книга представляет собой всеобъемлющую работу по смарт-
антенным системам, в которой содержится информация, собранная из
различных источников. Авторы попытались дать в соответствующих главах данной
книги ссылки на источники, из которых был почерпнут основной материал,
послуживший отправной точкой их работы. В частности авторы
подтверждают, что большая полезная информация была извлечена из многих источников
и особенно из работ [17, 19—29]. Нам также удалось связаться почти со всеми
основными авторами указанных по ссылкам работ, заручившись их самой
благожелательной реакцией. В сущности, некоторые из них быстро
предоставили иллюстрации и данные, приведенные в этой книге. Официальная
принадлежность источников информации приведена в соответствующих позициях
(рис. и т. п.).
ОБЗОР
МОБИЛЬНОЙ
СВЯЗИ
В данной главе дается краткий обзор мобильной связи, принципов ее действия
и терминология, использующаяся в данной книге.
2.1. Общее описание
Все системы связи направлены на решение одной фундаментальной задачи:
передачу максимально возможного объема информации с минимальным
количеством ошибок [19]. Современные системы цифровой беспроводной
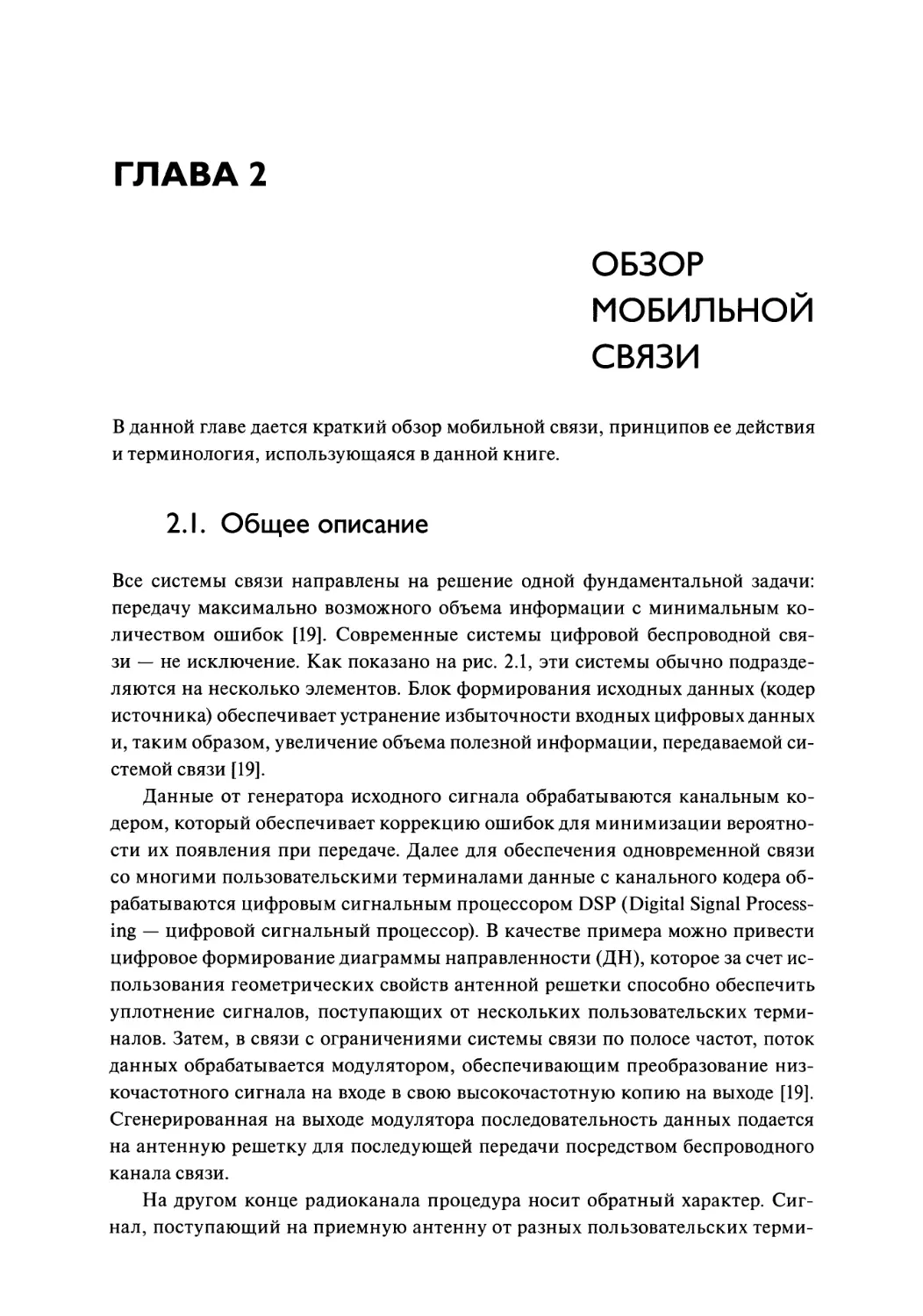
связи — не исключение. Как показано на рис. 2.1, эти системы обычно
подразделяются на несколько элементов. Блок формирования исходных данных (кодер
источника) обеспечивает устранение избыточности входных цифровых данных
и, таким образом, увеличение объема полезной информации, передаваемой
системой связи [19].
Данные от генератора исходного сигнала обрабатываются канальным
кодером, который обеспечивает коррекцию ошибок для минимизации
вероятности их появления при передаче. Далее для обеспечения одновременной связи
со многими пользовательскими терминалами данные с канального кодера
обрабатываются цифровым сигнальным процессором DSP (Digital Signal
Processing — цифровой сигнальный процессор). В качестве примера можно привести
цифровое формирование диаграммы направленности (ДН), которое за счет
использования геометрических свойств антенной решетки способно обеспечить
уплотнение сигналов, поступающих от нескольких пользовательских
терминалов. Затем, в связи с ограничениями системы связи по полосе частот, поток
данных обрабатывается модулятором, обеспечивающим преобразование
низкочастотного сигнала на входе в свою высокочастотную копию на выходе [19].
Сгенерированная на выходе модулятора последовательность данных подается
на антенную решетку для последующей передачи посредством беспроводного
канала связи.
На другом конце радиоканала процедура носит обратный характер.
Сигнал, поступающий на приемную антенну от разных пользовательских терми-
ГЛАВА 2
2.2. Обзор сотовой связи
15
Рис. 2.1. Элементы системы связи [19]
налов, преобразовывается демодулятором с понижением частоты до своего
низкочастотного эквивалента. Затем DSP осуществляет разделение сигналов,
поступающих от разных пользовательских терминалов. Канальный декодер
обеспечивает обнаружение и, по возможности, коррекцию ошибок,
обусловленных прохождением сигнала по физическому каналу связи. Вслед за этим
декодер источника распаковывает фактическую последовательность данных.
Вся процедура направлена на восстановление информации с минимально
возможным количеством ошибок, отправляемой с другого конца физического
канала связи.
2.2. Обзор сотовой связи
Эра беспроводной связи началась приблизительно в 1895 году с демонстрации
Гульельмо Маркони (англ. Guglielmo Marconi) возможности использования
радиоволн для осуществления дальней связи1. В настоящее время сотовая связь
представляет собой одно из самых востребованных и динамично
развивающихся телекоммуникационных направлений. Сегодня в процентном отношении
она занимает доминирующее положение в мире по количеству привлекаемых
абонентов. В начале этого десятилетия количество абонентов мобильной
связи превысило аналогичный показатель для стационарной связи [30]. Во
многих частях мира уровень проникновения сотовой связи уже превысил 100%-й
рубеж при все продолжающемся росте рынка. В настоящее время, согласно
1 Для российского читателя хочется отметить, что профессор А. С. Попов 7-го мая
1895 г. продемонстрировал прием радиоволн на заседании Физико-химического
общества в С.-Петербурге. Этот день признан мировой общественностью как день, когда был
сделан существенный вклад в развитие беспроволочной телеграфии. А в заявке на
американский патент Г. Маркони писал: «Я знаком... со статьями профессора Попова,
опубликованными в журнале Русского физико-химического общества в 1895 и 1896 гг.».
16
Глава 2. Обзор мобильной связи
700
2000
Р 600 g
о н
)S I
О <D
О. 500 I 1500
ь О
о \о
>° о
5 эоо |1000
1 Z
§ 200 §
^ £ 500
100
0 0
1998 1999 2000 2001 2002 2003 2004 2005 2006 1998 1999 2000 2001 2002 2003 2004 2005 2006
Год Год
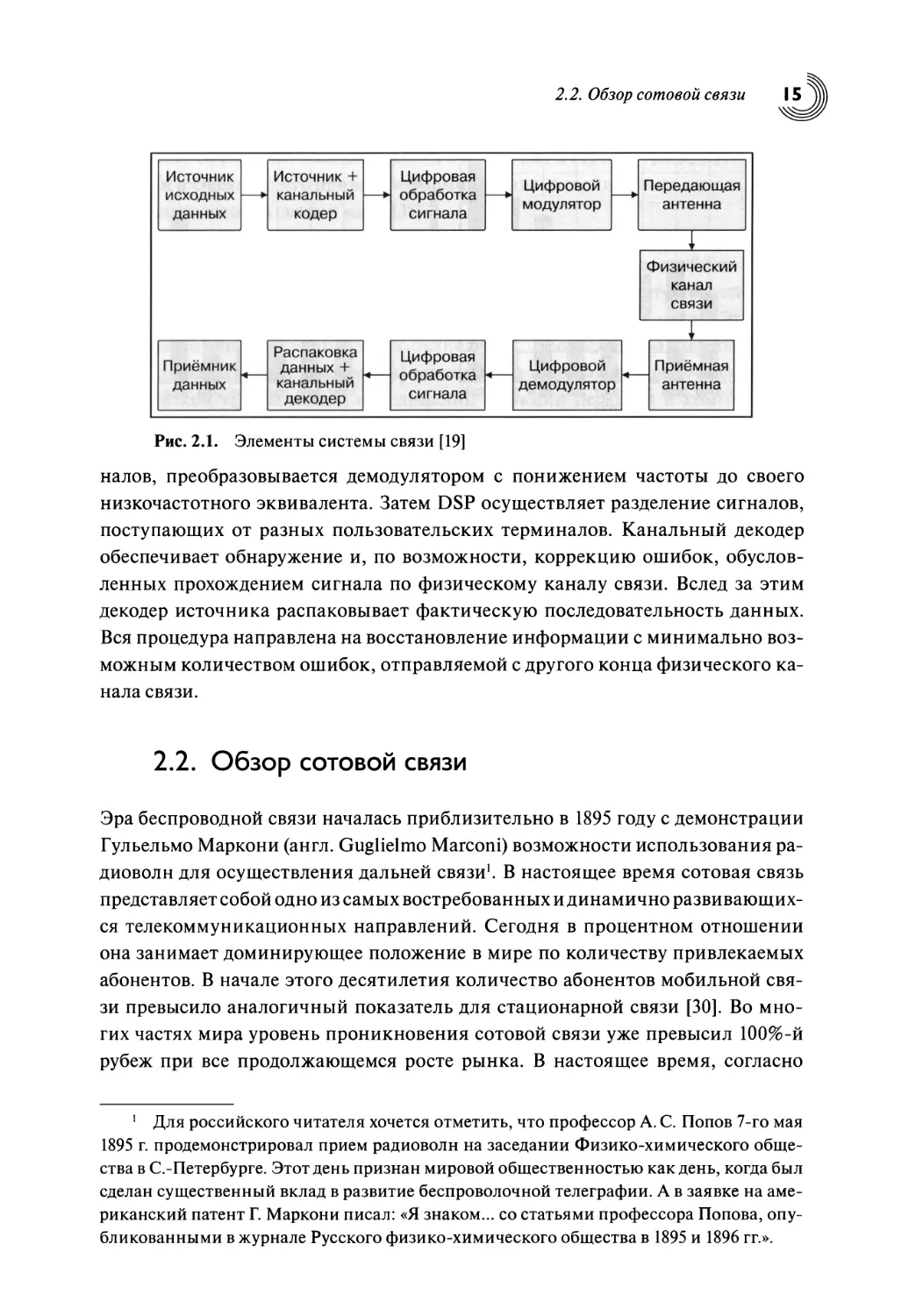
Рис. 2.2. Годовой уровень продаж сотовых телефонов (а) и подключений (б)
самым последним данным глобальной базы данных рынка сотовой связи WI
(Wireless Intelligence) [31], предоставляемым совместным предприятием,
состоящим из ассоциации GSM-операторов и компании Ovum, деятельность
которых направлена на анализ рынка и глобальной индустрии беспроводной связи,
количество новых подключений в месяц составляет 40 миллионов, что
свидетельствует о самом быстром увеличении объема рынка за всю историю
наблюдений. В целом ожидается, что рынок вырастет с 41 % в конце 2006 до 47 %
к концу 2007, то есть речь идет о достижении сотовой связью рубежной отметки
в 3 миллиарда подключений. Однако, согласно WI, количество подключений
не равно количеству пользователей сотовой связи, так как на одного
пользователя может приходиться более одного номера, причем в эти цифры могут
входить уже не используемые номера. В общем, в то время как насыщенный
Западноевропейский рынок сотовой связи находится в стадии стагнации [32],
рост числа абонентов имеет ярко выраженный характер, особенно в странах
Азии и некоторых странах Северной и Южной Америки. Компания Micrologic
Research [33] оценила годовые уровни продаж сотовых телефонов (а) и
подключений (б) в период с 1998 по 2006 гг., которые представлены соответствующими
графиками на рис. 2.2.
2.3. Эволюция систем мобильной телефонной связи
Суть сотовой связи состоит в использовании маломощных передатчиков с
возможностью многократного использования частот в заданной географической
области (зоне охвата). Однако впервые предоставление услуг коммерческой
сотовой связи было реализовано в 5 скандинавских странах с внедрением в 1981
году единого стандарта сотовой связи NMT (Nordic Mobile Telephone).
Использование систем сотовой связи как таковых началось в США с
появлением в 1981 году перспективной службы радиотелефонной связи с подвижны-
2.3. Эволюция систем мобильной телефонной связи
ми объектами (AMPS). Стандарт AMPS был принят в странах Азии, Латинской
Америки и Океании, что привело к формированию потенциально самого
большого рынка сотовой связи в мире [35].
В начале 1980-х системы мобильной телефонной связи были аналоговыми,
а не более новыми цифровыми, как в настоящее время. Неспособность
аналоговых систем экономически эффективно справляться с растущим спросом
на пропускную способность оказалась главным тормозом их развития. Это
способствовало переходу на цифровую технологию. Превосходство цифровых
систем над аналоговыми [системами] заключается в простоте передачи сигнала,
более низком уровне помех, объединении функций передачи и коммутации
и возможностях удовлетворения требованиям к пропускной способности [35].
Появившись в 1991 году, глобальная система связи с подвижными
объектами (GSM) стала одним из ведущих стандартов цифровой сотовой связи. В
настоящее время это де-факто признанный стандарт в Европе, также широко
используемый и в других частях мира.
Стандарт системы коллективного доступа с кодовым разделением каналов
(CDMA) появился в 1993 г. Изначально CDMA-стандарт относился к
протоколу обмена данными ITU IS-95, то есть ко второму поколению технологии
беспроводной мобильной связи (2G), вставшей на коммерческие рельсы в 1995 г.
Она стала одной из самых быстро развивающихся технологий беспроводной
связи в мире.
В 1999 г. «Международный союз электросвязи» выбрал CDMA в качестве
промышленного стандарта для новых систем беспроводной связи третьего
поколения (3G). Необходимость увеличения пропускной способности для
передачи голосовых данных вкупе с возможностями ускоренной передачи данных
[36] побудила многих ведущих операторов беспроводной связи заняться
созданием или модернизацией своих сетей до стандарта 3G CDMA. Для
предоставления востребованных пользователями услуг в новой версии CDMA, известной
как CDMA2000 или IS-2000, обеспечена реализация как радиоинтерфейса, так
и основной базовой сети [37]. Главное достоинство системы CDMA2000
состоит в поддержке всех современных требований, предъявляемых к 3G по работе
с мультимедийными данными и прочими услугами, предоставляемыми по IP-
адресу. CDMA2000 — идеальное решение для операторов беспроводной связи,
желающих воспользоваться преимуществом динамики нового рынка
мобильных устройств и Интернета [37].
Универсальная система мобильной связи UMTS (Universal Mobile
Telecommunications System) является преемником GSM-системы. Стандарт
радиоинтерфейса многостанционного доступа с временным разделением каналов
TDMA сменился стандартом широкополосного многостанционного доступ
с кодовым разделением каналов W-CDMA (Wideband Code Division Multiple Ac-
Глава 2. Обзор мобильной связи
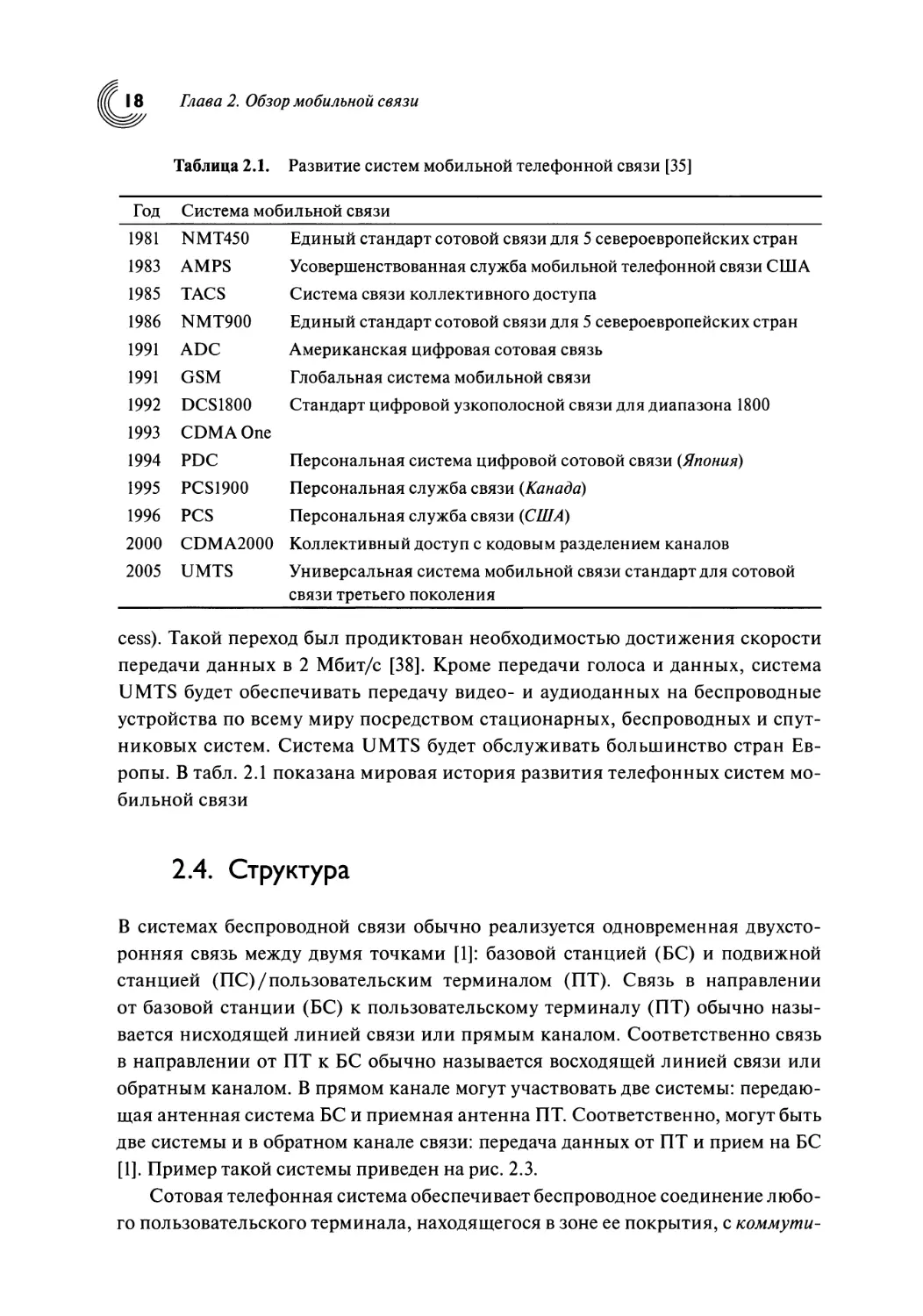
Таблица 2.1. Развитие систем мобильной телефонной связи [35]
Год Система мобильной связи
Единый стандарт сотовой связи для 5 североевропейских стран
Усовершенствованная служба мобильной телефонной связи США
Система связи коллективного доступа
Единый стандарт сотовой связи для 5 североевропейских стран
Американская цифровая сотовая связь
Глобальная система мобильной связи
Стандарт цифровой узкополосной связи для диапазона 1800
Персональная система цифровой сотовой связи {Япония)
Персональная служба связи (Канада)
Персональная служба связи {США)
CDMA2000 Коллективный доступ с кодовым разделением каналов
Универсальная система мобильной связи стандарт для сотовой
связи третьего поколения
cess). Такой переход был продиктован необходимостью достижения скорости
передачи данных в 2 Мбит/с [38]. Кроме передачи голоса и данных, система
UMTS будет обеспечивать передачу видео- и аудиоданных на беспроводные
устройства по всему миру посредством стационарных, беспроводных и
спутниковых систем. Система UMTS будет обслуживать большинство стран
Европы. В табл. 2.1 показана мировая история развития телефонных систем
мобильной связи
1981
1983
1985
1986
1991
1991
1992
1993
1994
1995
1996
2000
2005
NMT450
AMPS
TACS
NMT900
ADC
GSM
DCS1800
CDMA One
PDC
PCS1900
PCS
CDMA2000
UMTS
2.4. Структура
В системах беспроводной связи обычно реализуется одновременная
двухсторонняя связь между двумя точками [1]: базовой станцией (БС) и подвижной
станцией (ПС)/пользовательским терминалом (ПТ). Связь в направлении
от базовой станции (БС) к пользовательскому терминалу (ПТ) обычно
называется нисходящей линией связи или прямым каналом. Соответственно связь
в направлении от ПТ к БС обычно называется восходящей линией связи или
обратным каналом. В прямом канале могут участвовать две системы:
передающая антенная система БС и приемная антенна ПТ. Соответственно, могут быть
две системы и в обратном канале связи: передача данных от ПТ и прием на БС
[1]. Пример такой системы приведен на рис. 2.3.
Сотовая телефонная система обеспечивает беспроводное соединение
любого пользовательского терминала, находящегося в зоне ее покрытия, с коммути-
2.4. Структура
19
Передаваемые
данные
Процесс
передачи
М
Получаемые
данные
Процесс
получения
Р
м
Базовая станция
^
Беспроводный
канал
s
N
IJR
Процесс
передачи
Передаваемые
данные
Процесс
получения
Получаемые
данные
Подвижная станция
(подвижный
пользовательский терминал)
Рис. 2.3. Общая схема широкополосной радиосети беспроводной связи [1]
руемой телефонной сетью общего пользования (PSTN — Public Switched Telephone
Network) [39]. Она [сотовая телефонная система] включает:
Подвижные станции,
Базовые станции,
Центр коммутации подвижной связи MSC (Mobile Switching Center).
Рис. 2.4. Типичная схема базовой подвижной системы [40]
Глава 2. Обзор мобильной связи
Базовая станция является мостом между подвижными пользовательскими
терминалами и центром коммутации подвижной связи посредством обычных
телефонных и радиорелейных линий [39]. Центр коммутации подвижной
связи PSTN обеспечивает подключение всей сотовой системы к телефонной сети
общего назначения. На рис. 2.4 представлена упрощенная схема работы сотовой
телефонной системы связи.
2.5. Радиосистемы сотовой связи: концепции
и эволюция
В связи с увеличением количества служб и абонентов вопрос поддержания
необходимой пропускной способности всегда стоит остро. Для выхода на уровень
пропускной необходимости с учетом растущего числа абонентов сотовым
радиосистемам потребовались годы. Обоснование необходимости использования
адаптивных антенн в структуре сотовой системы дается в историческом
контексте эволюции сотовых радиосистем. С более подробными деталями можно
ознакомиться в работах [13, 40, 41].
2.5.1. Всенаправленные системы и многократное
использование канала
С самого начала разработчики были осведомлены, что проблема в
пропускной способности, особенно в контексте ограничения Федеральной комиссией
по связи (FCC)1 количества каналов или частот. Следовательно, для
предоставления услуги огромному количеству абонентов и достижения требуемой
пропускной способности была необходима разработка сотовой структуры. Суть
концепции заключается в том, чтобы увеличение пропускной способности
могло происходить только за счет одновременного прохождения в каждом канале
связи нескольких сеансов связи [40]. Один из способов реализации данной
концепции состоит в многократном использовании одного и того же канала связи.
Во избежание взаимных помех мобильные телефоны, использующие один и тот
же радиоканал, должны находиться на достаточном расстоянии друг от друга.
Сотовая структуризация представляет собой разбиение обширного
географического пространства на зоны обслуживания меньшего размера, называемые
сотами, на каждую из которых выделяется часть доступной полосы
пропускания (многократное использование частоты), что, соответственно, делает
возможным беспроводное подключение большего количества пользовательских
терминалов несмотря на ограниченный спектр частот [42]. Соты, как правило,
характеризуются разными размерами и сложными формами. Их форма обуслов-
1 FCC — Федеральной комиссией по связи США.
2.5. Радиосистемы сотовой связи: концепции и эволюция
Ячейка (сота)
Рис. 2.5. Типичная сотовая структура из 7 ячеек многократного использования
частоты
лена главным образом особенностями местности и рукотворных сооружений.
В зависимости от своего размера соты могут быть классифицированы на макро-
(для случая, когда базовая станция имеет достаточную мощность передачи для
охвата зон радиусом от 1 до 20 км ), микро- (радиус зоны охвата от ОД до 1 км)
и пикосоты (в помещениях) [42]. Между двумя сотами, которые используют
идентичные каналы, должно быть минимальное расстояние, называемое
расстоянием многократного использования частотного канала (защитным
интервалом). Это также известно как многократное использование канала посредством
пространственного разделения [43]. Пропускная способность системы зависит
от этого расстояния. Пример подобной структуры показан на рис. 2.5.
Каждый шестиугольник разного оттенка на рис. 2.5 представляет
небольшую географическую зону, называемую сотой, имеющую максимальный
радиус R [44]. В центре каждой соты находится базовая станция, оборудованная
всенаправленной антенной с заданной полосой частот. Базовым станциям
смежных сот присваиваются полосы частот, совершенно отличные от частот
в соседних сотах. Ограничивая зону охвата границами соты, один и тот же
частотный диапазон может использоваться для охвата разных сот, разделенных
между собой достаточно большими расстояниями (D на рис. 2.5) для удержания
уровня взаимных помех ниже пороговых уровней других сот. Выбор и
присвоение разным ячейкам базовых станций одной системы сотовой связи одинаковых
частотных диапазонов называется многократным использованием частоты или
канала [41]. Это показано на рис. 2.5 повторяющейся чередой заштрихованных
кластеров [13]; соты одного цветового тона имеют одинаковую полосу частот.
В первых установленных системах сотовой радиосвязи каждая базовая станция
Глава 2. Обзор мобильной связи
оснащалась всенаправленной антенной [4]. До пользовательского
терминала доходил очень незначительный процент от общей энергии; остальная часть
уходила в потери, и это приводило к электромагнитному загрязнению среды.
Рост числа абонентов сопровождался усилением помех и, соответственно,
снижением пропускной способности. Быстрое решение этой проблемы
заключалось в разделении соты на соты меньшего размера; такая методика называется
секционированием соты [44].
2.5.2. Секционирование сот
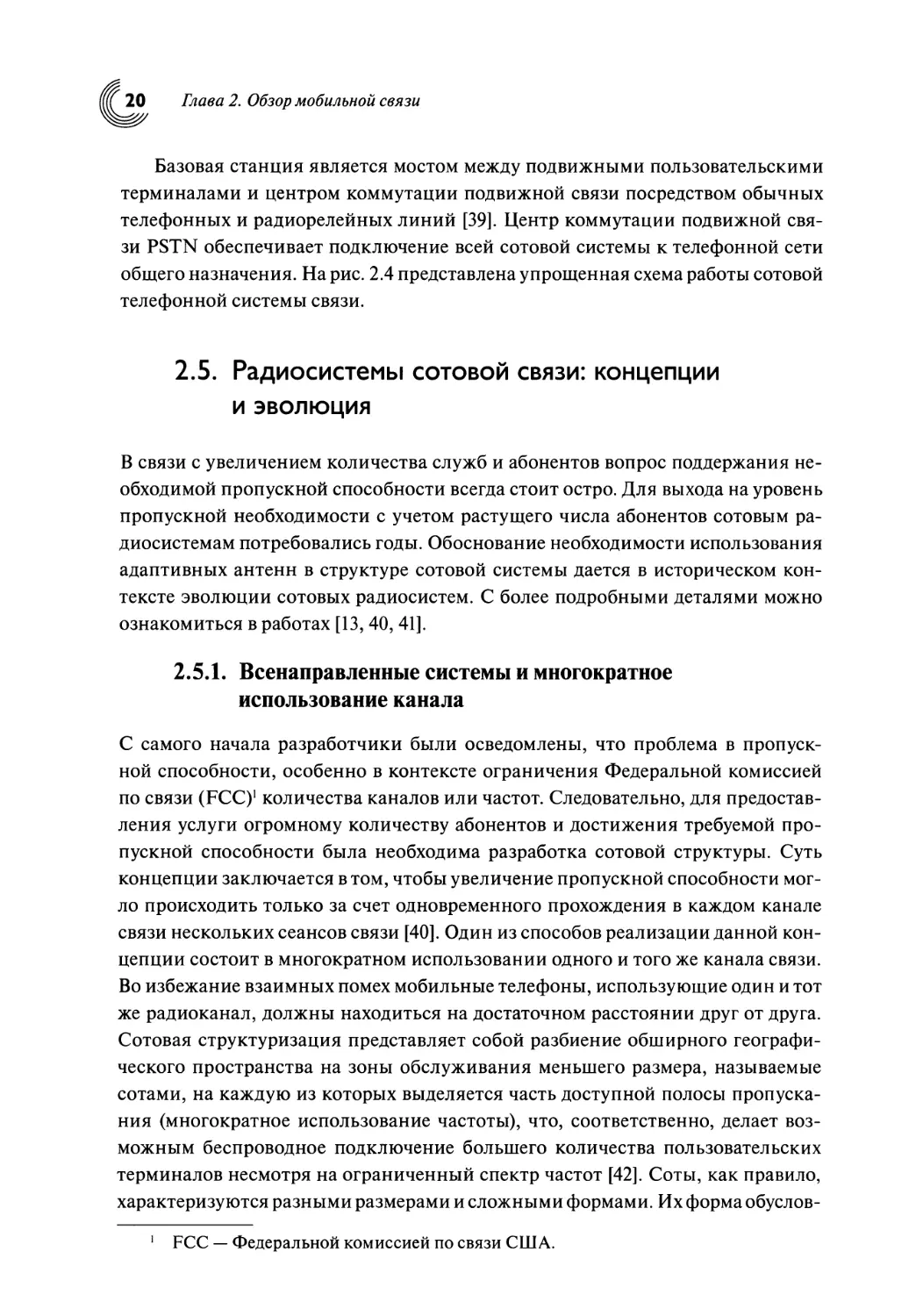
Как показано на рис. 2.6, секционирование соты [44] представляет собой
разбиение на микросоты еще меньшего размера, причем каждая со своей базовой
станцией с соответствующим уменьшением высоты антенны и мощности
передатчика. Секционирование соты улучшает пропускную способность за счет
уменьшения радиуса соты с сохранением величины отношения D/R; D —
расстояние между центрами кластеров. Недостатки метода секционирования сот
обусловлены издержками на установление новых базовых станций,
увеличением количества переадресаций (handoffs — процесс передачи связи от одной
базовой станции другой при перемещении пользовательского терминала от одной
соты к другой) и большей нагрузкой на абонентское оборудование.
2.5.3. Секционированные системы
По мере еще большего увеличения спроса на беспроводную связь количество
частот на соту становится недостаточным для обеспечения сервиса
необходимому числу абонентов. Таким образом, для обеспечения большего количества
частот на зону обслуживания потребовалась новая методика проектирования
сотовых систем. В секционированных системах традиционная зона
обслуживания разбивается на сектора, покрытие которых обеспечивается с помощью
направленных антенн одной и той же базовой станции, как показано на рис. 2.7.
Такой способ, получивший название секционирования соты [41],
заключается в замене единственной всенаправленной антенны базовой станции
несколькими направленными антеннами. С эксплуатационной точки зрения каждый
сектор рассматривается системой в качестве отдельной соты, расстояние до
которой в большинстве случаев по сравнению
^ Ячейка (сота) с использованием всенаправленной антенны
может быть приблизительно на 35% больше,
— Микроячеика *
(микросота) так как передаваемая мощность фокусируется
на участке меньшей площади [20].
Секционированные соты могут увеличить
спектральную эффективность канала за счет
Рис. 2.6. Секционирование соты
снижения помех, создаваемых в сети базовой
2.5. Радиосистемы сотовой связи: концепции и эволюция
23
Вид сбоку Вид сверху
Рис. 2.7. Схема покрытия секционированной антенной системы [20]
станцией и пользовательскими терминалами, в связи с чем они нашли широкое
применение. В настоящее время в большинстве систем коммерческого
назначения используется 3 сектора, каждый из которых имеет покрытие в 120
градусов. Для большинства узлов сотовой связи, несмотря на возможность
получения большего количества секторов, установка дополнительного оборудования
и антенн оказывается неоправданно дорогой [45]. На рис. 2.8 показана сотовая
система с секторами покрытия в 120°.
При неизменном значении радиуса соты секционирование обеспечивает
улучшение пропускной способности и уменьшение значения коэффициен-
Рис. 2.8. Сотовая сеть с секционированием на три сектора с покрытием зоны
обслуживания в 120° каждый
24
Глава 2. Обзор мобильной связи
(а) (б)
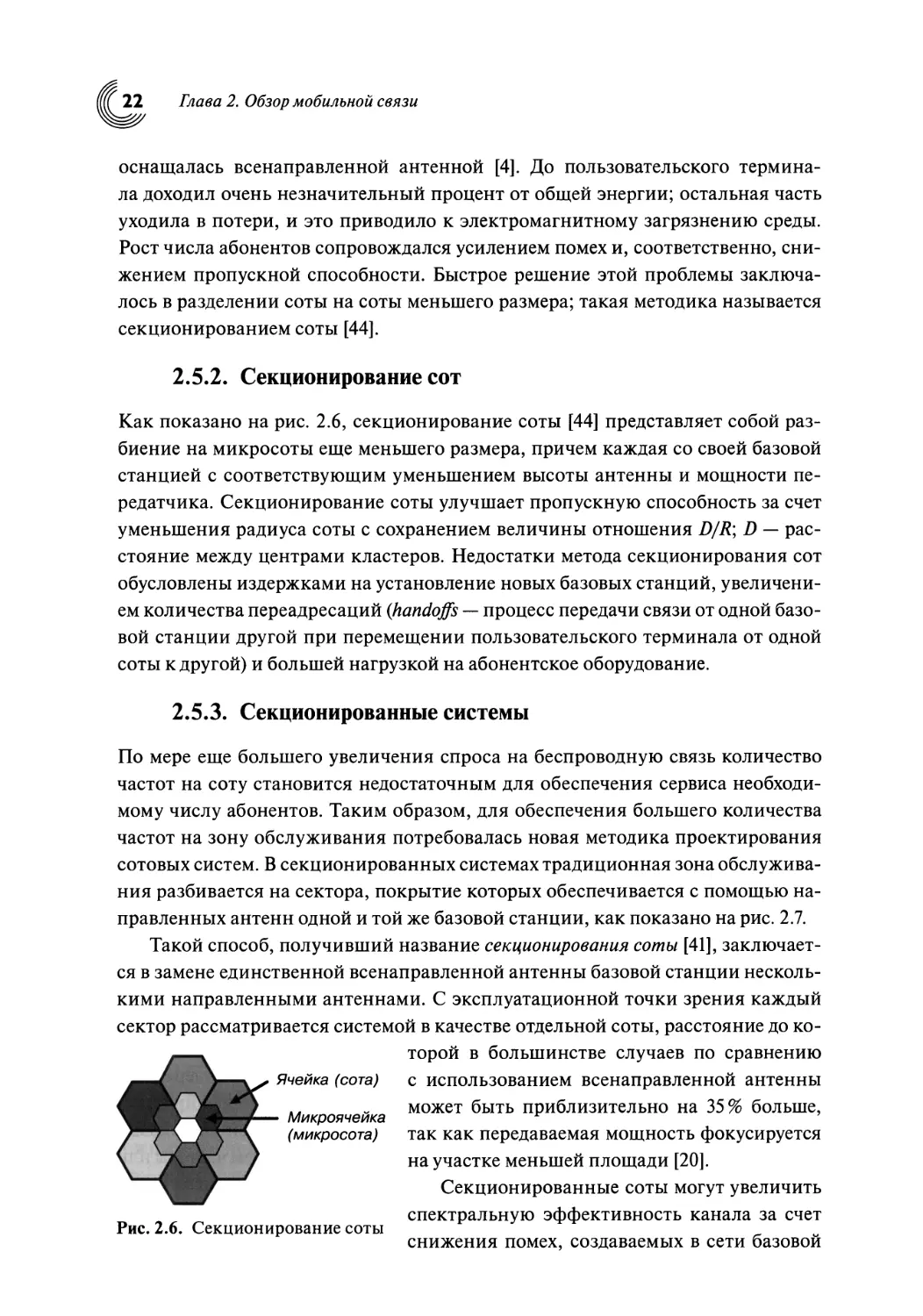
Рис. 2.9. Сравнение внутриканальной интерференции для (а) всенаправленной
и (б) секционированной систем
та D/R. Другими словами, улучшение пропускной способности достигается
за счет уменьшения количества сот и, следовательно, увеличения
многократного использования частоты. Однако, для реализации этого необходимо
снизить относительные помехи без уменьшения мощности передачи. Как показано
на рис. 2.9, в такой сотовой системе происходит уменьшение межканальных
помех, так как она обусловлена наличием двух соседних сот, а не шести, как в
случае со всенаправленной антенной [44, 46]. Увеличение числа секторов в CDMA-
системе оказалось полезным для увеличения пропускной способности узлов
сотовой связи [47]. Теоретически увеличение пропускной способности
пропорционально количеству секторов на соту [48]. За улучшение коэффициента
«сигнал/помеха» (S/Г) и пропускной способности приходится платить увеличением
числа антенн базовой станции и уменьшением эффективности транкинговой
эффективности линии [13, 46], обусловленных секторизацией канала базовой
станции. Транкинговая эффективность линии является мерой того количества
пользовательских терминалов, которое может быть обслужено посредством
заданной конфигурации фиксированного набора частот.
2.6. Регулирование мощности
Регулирование мощности передачи базовой станцией или
пользовательского терминала заключается в ее уменьшении до самого минимального уровня,
на котором возможно установление связи [45]. В связи с наличием
логарифмической зависимости между пропускной способностью беспроводного соединения
2.6. Регулирование мощности
и соотношением сигнал —смесь помехи с шумом (SINR — signal-to-interference-
and-noise ratio) приемника [49], любая попытка увеличения скорости передачи
данных просто за счет увеличения мощности обходится очень дорого. Более
того, рост мощности ведет как к усилению полезных сигналов, так и их
взаимных помех [28]. Следовательно, коль скоро система ограничивается собственной
интерференцией, увеличение мощности становится бесполезным. Так как
хорошо продуманные системы проектируются с целью достижения максимальной
пропускной способности, то главным ограничителем их рабочей
характеристики становится мощность сама по себе в виде интерференции [50]. В результате
для поддержания соединений с несколькими распределенными в пространстве
пользовательскими терминалами, функционирующих в различных условиях
[28], мощность подлежит строгому регулированию и распределению, что
является предметом активных исследований. Например, как в GSM-, так и CDMA-
системах регулировка мощности пользовательского терминала используется
как для передачи, так и для приема. В частности CDMA-системы нуждаются
в быстром и точном регулировании мощности, так как один радиоспектр
приходится на несколько пользовательских терминалов и пропускная способность
системы, таким образом, очень чувствительна к ошибкам контроля
интерференции [45].
2.6.1. Эффективность использования выделенного частотного
спектра
Еще один эффективный способ улучшения скорости передачи данных
заключается в одновременном увеличении мощности и ширины полосы частот
сигнала. Однако необходимых частотных ресурсов в спектре недостаточно. Более
того, расширение полосы пропускания сигнала за пределы его когерентной
полосы частот ведет к повышенной частотной чувствительности и деградации
качества передачи. Эффективность использования выделенного частотного
спектра, определяемая как отношение пропускной способности к ширине спектра
сигнала, является мерилом способности беспроводной системы к передаче
информации в заданном спектре радиочастот и обеспечивает еще один ключевой
показатель ее качества. С его помощью определяется размер спектра
радиочастот и количество базовых станций, необходимых для предоставления
заданной услуги конечным пользователям (например служб передачи голоса и
данных со скоростью 10 и 100 Кбит/с соответственно). Соответственно, принимая
во внимание значительный рост числа абонентов за последние годы развития
систем, эффективность использования выделенного частотного спектра
является одним из главных факторов, определяющих их экономичность.
Эффективность использования выделенного частотного спектра измеряется в бит/с на
Гц/ячейку. Она определяет общую пропускную способность каждой базовой
26
Глава 2. Обзор мобильной связи
станции (соты или сектора) при заданной ширине спектра. Необходимость
определения пропускной способности «на соту» при измерении
эффективности использования выделенного частотного спектра канала может показаться
неожиданной, но пропускная способность отдельной базовой станции сотовой
сети почти всегда гораздо меньше по сравнению с отдельной изолированной
ячейкой. Различие обусловлено возникновением в сети собственных помех.
В сотовой системе при установлении радиосвязи между пользовательским
терминалом и базовой станцией энергия радиоизлучения может
детектироваться не только в непосредственной области нахождения пользователя, базовой
станции и на воображаемой линии между ними. Для прочих находящихся
поблизости пользовательских терминалов такой избыток энергии ухудшает
качество радиоканала или делает его совершенно бесполезным с точки зрения связи.
Соответственно по мере увеличения плотности пользователей запас по
радиочастоте постепенно исчерпывается. Системы с более высокой эффективностью
использования выделенного частотного спектра обеспечивают более высокую
пропускную способность при заданной ширине спектра и поддерживают
большее количество пользователей для заданной категории обслуживания до того,
как начнется истощение ресурсов. Главные преимущества более высокой
спектральной эффективности канала:
более высокая суммарная пропускная способность (пропускная
способность сот);
более высокое качество услуги, предоставляемой пользователю;
более высокая абонентская плотность на каждую базовую станцию;
небольшие требования к спектру;
более низкие капитальные и текущие расходы при введении в
эксплуатацию.
Эффективность использования выделенного частотного спектра
различных систем может быть легко определена по формуле:
^ , , Пропускная способность канала
Спектральная эффективность канала = (2.1)
Полоса пропускания канала
Здесь суммарная пропускная способность канала действующей сети
делится на полосу пропускания канала. Для понимания расчета эффективности
использования выделенного частотного спектра рассмотрим систему PCS-1900
(GSM) со следующими параметрами: несущие 200 кГц, 8 временных интервалов
на несущую, 13,3 Кбит/с пользовательских данных на интервал, многократное
использование частоты — 7 (то есть наличие 7 канальных групп при 100%-й
загрузке сети или 1/7 пропускной способности канала на ячейку). Следовательно,
эффективность использования выделенного частотного спектра определяется
следующим образом:
2.7. Схемы коллективного доступа
SE = 8 интервалов х 13,3 — / 200 КГц/7 ячеек = 0,067 бит/с/Гц/ячейку. (2.2)
интервал
Величина спектральной эффективности, составляющая приблизительно
0,1 бит/с/Гц/соту в общем соответствует высокомобильным сотовым системам
2G и 3G, включая CDMA-системы всех типов. Это отражает тот факт, что
необходимы новые подходы [45] в связи с тем, что классические способы повышения
эффективности использования выделенного частотного спектра исчерпали свой
потенциал. Наконец, следует отметить, что приблизительное значение 0,1 бит/с/
Гц/сота представляет собой главную трудность с точки зрения предоставления
услуг следующего поколения. Без существенного увеличения эффективности
использования выделенного частотного спектра ЗО-системы ограничены
быстродействием нынешних 2С-систем. В типичной ЗО-системе с размером
блока канала передачи в 5 МГц это выльется в общую пропускную способность
соты приблизительно в 500 Кбит/с. При рекламируемом диапазоне в 144—384
Кбит/с 1—3 пользователя полностью «съедают» пропускную способность
ячейки. Это очень далеко от показателя в 250—500 абонентов на ячейку, что
необходимо для рентабельности системы и подчеркивает необходимость в новых методах
повышения эффективности использования выделенного частотного спектра.
2.7. Схемы коллективного доступа
Доступные частоты используются в мобильной связи различными способами,
что получило название схем коллективного [множественного] доступа.
Существуют следующие основные схемы множественного доступа: с разделением
частот, с временным разделением каналов, кодовым разделением каналов и
ортогональным частотным разделением каналов (FDMA, TDMA, CDMA и OFDM).
2.7.1. Множественный доступ с разделением частот FDMA
В стандартных аналоговых системах множественного доступа с разделением
частот FDMA (Frequency Division Multiple Access), как AMPS — самой широко
распространенной системе телефонной сотовой связи в Северной Америке,
различным пользовательским терминалам назначаются различные несущие
частоты. Для индивидуальных разговоров используются каналы связи с
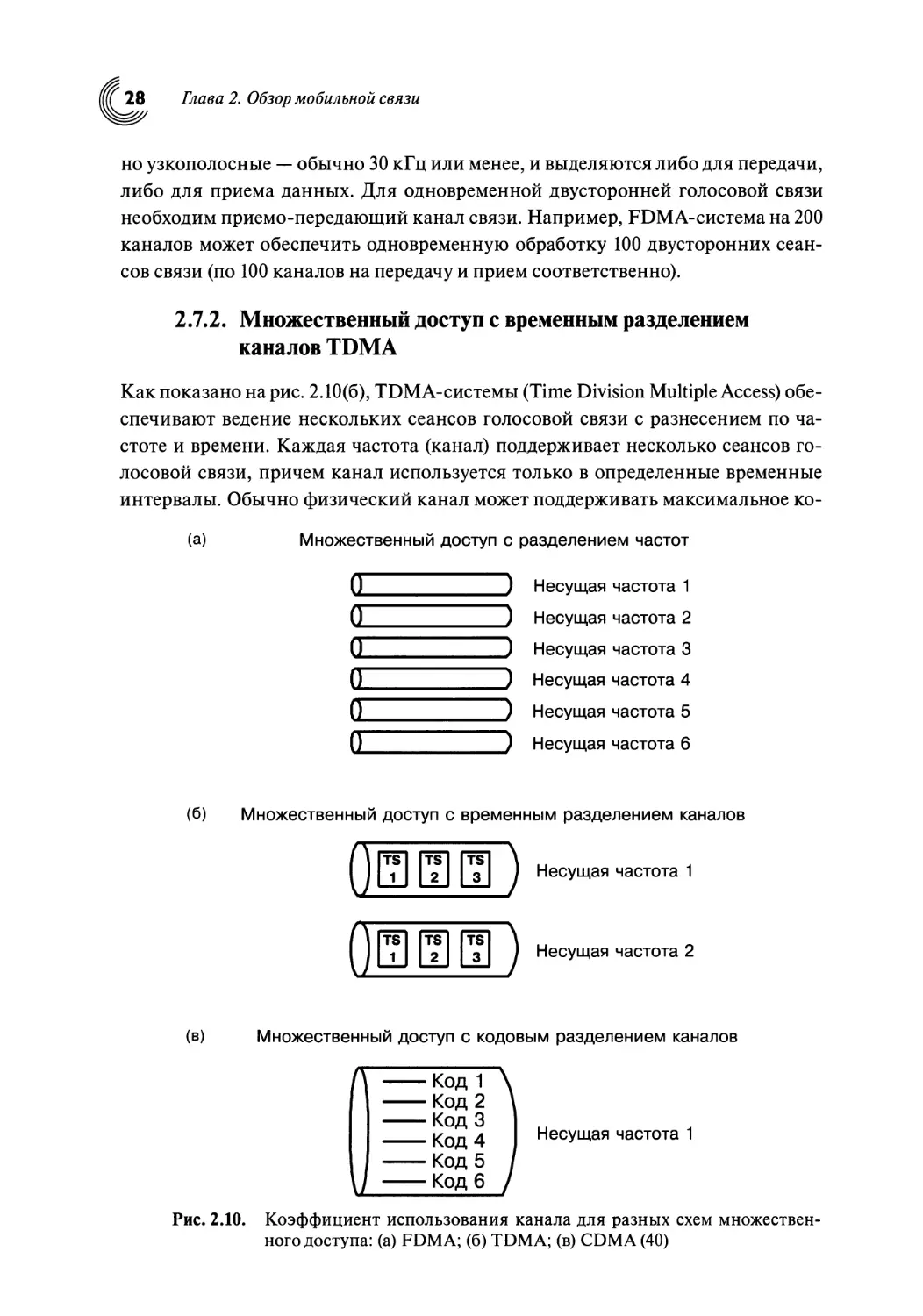
соответствующим разделением частот. Как показано на рис. 2.10(a), в системе
с FDMA-схемой доступа на шесть пользовательских терминалов выделено
шесть частот, что обеспечивает одновременное осуществление шести звонков.
Системы FDMA обеспечивают одну голосовую передачу на канал. Каждый
разговор ведется по выделенному, уникальному радиоканалу. Каналы относитель-
28
Глава 2. Обзор мобильной связи
но узкополосные — обычно 30 кГц или менее, и выделяются либо для передачи,
либо для приема данных. Для одновременной двусторонней голосовой связи
необходим приемо-передающий канал связи. Например, FDMA-система на 200
каналов может обеспечить одновременную обработку 100 двусторонних
сеансов связи (по 100 каналов на передачу и прием соответственно).
2.7.2. Множественный доступ с временным разделением
каналов TDMA
Как показано на рис. 2.10(6), TDMА-системы (Time Division Multiple Access)
обеспечивают ведение нескольких сеансов голосовой связи с разнесением по
частоте и времени. Каждая частота (канал) поддерживает несколько сеансов
голосовой связи, причем канал используется только в определенные временные
интервалы. Обычно физический канал может поддерживать максимальное ко-
(а)
Множественный доступ с разделением частот
(Е
<Е
<Е
(Е
(L
(Е
J Несущая частота 1
Э Несущая частота 2
Э Несущая частота 3
J Несущая частота 4
J Несущая частота 5
Э Несущая частота 6
(б) Множественный доступ с временным разделением каналов
Несущая частота 1
О Its] Its] Its] \
а
Несущая частота 2
(в)
Множественный доступ с кодовым разделением каналов
Код1
Код 2
КодЗ
Код 4
Код 5
Код 6
Несущая частота 1
Рис. 2.10. Коэффициент использования канала для разных схем
множественного доступа: (a) FDMА; (б) TDMA; (в) CDMA (40)
2.7. Схемы коллективного доступа
личество разговоров, каждый из которых, в свою очередь, занимает логический
«канал». Например, система, использующая такую схему, создает два TDMA-
канала с разделением каждого на три временных интервала для обслуживания
шести пользователей. Система мобильной связи GSM (Global System Mobile )
является унифицированной всеевропейской системой цифровой сотовой связи
с временным разделением каналов. В канале с полосой в 200 кГц
обеспечивается обслуживание восьми пользовательских временных интервалов на блок
данных. Подобно прочим TDMA-системам временные интервалы передачи
и приема со смещением обеспечивают возможность работы радиомодемов в
полудуплексном режиме, что уменьшает их стоимость. Сдвиг частоты при
передаче/приеме все еще дает подвижному терминалу паузу достаточной
длительности для участия в осуществлении передачи обслуживания за счет мониторинга
уровня мощности индивидуальных сигналов в соседних ячейках.
2.7.3. Множественный доступ с кодовым разделением каналов
CDMA
В схеме множественного доступа с кодовым разделением каналов CDMA
(Code Division Multiple Access) для реализации широкополосной передачи
используется передача сигналов с расширенным спектром SS (spread-spectrum).
Как показано на рис. 2.10(b), она достигается с помощью нескольких
методов, как то: псевдошумовых последовательностей PN (pseudonoise) и
скачкообразного переключения временных интервалов или частот. Одновременный
и асинхронный доступ к каналу нескольких пользователей осуществляется
за счет модуляции их передаваемых данных с помощью предварительно
заданных сигнатурных последовательностей [51].
Как показано на рис. 2.10(b), в случае использования псевдослучайных PN
шумовых последовательностей, что также известно как множественный доступ
с кодовым разделением каналов и прямым расширением спектра DS-CDMA
(Direct Sequence CDMA ), каждый пользователь системы имеет отдельный код
для передачи. Цель этого приема заключается в расширении полосы
пропускания информационной последовательности за счет ее умножения на
псевдошумовую последовательность, дающего более длинную произвольную
последовательность с одновременным уменьшением спектральной плотности сигнала
[40]. Эта новая последовательность состоит из инвертированной и неинверти-
рованной версий исходной PN-последовательности. Будучи шумоподобной, она
имеет более широкую полосу частот и при передаче менее подвержена
шумовому воздействию узкополосных помех [52]. Системы CDMA обеспечивают
помехоустойчивость и защиту от многолучевой интерференции. Кроме того, в виду
низкой вероятности перехвата данных, снижается риск несанкционированного
доступа во время их передачи.
Глава 2. Обзор мобильной связи
В CDMA-системе со скачкообразной перестройкой частоты FH-CDMA
(frequency hopping CDMA) каждый пользователь идентифицируется уникальной
последовательностью расширения для создания псевдослучайной схемы
перестройки частот, передаваемых по всей ширине полосы пропускания. Для
обеспечения идентификации пользователей эти последовательности доступны
на приемнике сигналов. Несущая частота модулированного
информационного сигнала в CDMA-системе со скачкообразным изменением частоты
является не постоянной, а изменяется по периодическому закону. Несущая частота
остается неизменной в течение временных интервалов Т, но после по истечении
каждого временного интервала она перескакивает на другую (а возможно, и на
ту же) частоту. Схема перестройки частоты зависит от кода расширения.
Набор доступных несущих частот называется адресной группой частоты
(подмножество рабочих частот, используемых для скачкообразного изменения частот).
Коэффициент использования частот FH-SS-системы существенно отличается
от DS-SS-системы. В DS-системе при передаче используется весь частотный
диапазон, в то время как в FH-системе — только небольшая его часть,
положение которой зависит от времени.
В CDMA-системе с переключением временных интервалов TH-CDMA
(time-hopping CDMA) передача информативного сигнала не имеет
непрерывного характера. Вместо этого сигнал передается короткими пакетами, временные
интервалы которых определяются кодом расширения, присвоенного
пользователю. В CDMA-системе со скачкообразным изменением временных интервалов
реализована скоростная передача пакетов данных в пределах длительностей
временных интервалов. Ось времени разделена на блоки, каждый из которых
в свою очередь разделен, например, на М временных интервалов.
Пользовательский терминал осуществляет передачу в одном из Мвременных интервалов
в пределах каждого блока. Присвоенный пользователю кодовый сигнал
определяет, какой из М временных интервалов используется для передачи. Так как
пользователь осуществляет передачу всех данных в одном, а не в М временных
интервалах, необходимая для передачи частота увеличивается в М раз.
В теории пропускная способность, обеспечиваемая тремя схемами
множественного доступа, является одинаковой и не изменяется за счет разделения
спектра на частоты, временные интервалы или коды, что показано на
следующем примере [53]. Предположим, что для передачи во всей доступной полосе
пропускания имеется шесть несущих частот. На рис. 2.10 показан коэффициент
использования канала для систем FDMA, TDMA и CDMA. В FDMA-системе
одновременно возможны шесть звонков, так как для шести пользователей
выделяется шесть частот. Как правило, для TDMA нужна большая полоса
пропускания, чем для FDMA.B системе, в которой используется данная схема, может
быть реализовано два TDMA-канала, каждый из которых разделяется на три
2.7. Схемы коллективного доступа
временных интервала для обслуживания шести пользовательских терминалов
[40]. По сравнению с двумя другими схемами, как показано на рис. 2.10(b), для
CDMA-канала, обеспечивающего с помощью шести кодов обслуживание
шести сеансов голосовой связи, необходима большая полоса пропускания.
2.7.4. Ортогональное частотное разделение каналов OFDM
с мультиплексированием
Принцип доступа на основе мультиплексирования с ортогональным частотным
разделением каналов OFDM (Orthogonal Frequency Division Multiple)
существует уже несколько десятилетий. Однако его использование в коммерческих
системах началось в прошлом десятилетии. Наиболее важными беспроводными
технологиями, в которых используется OFDM-разделение, является цифровое
аудио- и видеовещание DAB и DVB (Digital Audio Broadcasting и Digital Audio and
Video Broadcasting), беспроводные локальные сети (WLAN wireless local area
networks) и (в последнее время) беспроводной абонентский доступ (WLL — wireless
local loop) [54]. Главная концепция данного метода заключается в том, что один
поток данных со скоростью передачи Q бит/с разделяется на N потоков данных
со скоростями передачи Q/N бит/с, каждый из которых имеет свою собственную
несущую частоту. В случае OFDM-разделения выбирается прямоугольная
форма импульса, используемого для передачи. Преимущество заключается в том,
что задача формирования импульса и модуляции может быть решена с
помощью простого дискретного обратного преобразования Фурье IDFT (Inverse
Discrete Fourier Transform). Таким образом, N-e число потоков данных
объединяется с помощью быстрого обратного преобразования Фурье (IFFT), что может
S
с;
с
?
со
(К
со
т
I
СО
m
О
о.
s
2
п
о
X
1,0
0,8
0,6
0,4
0,2
0,0
-0,2
-0,4
-8-7-6-5-4-3-2-10 1 2 3 4 5 6 7 8
Нормированная частота (f х Т)
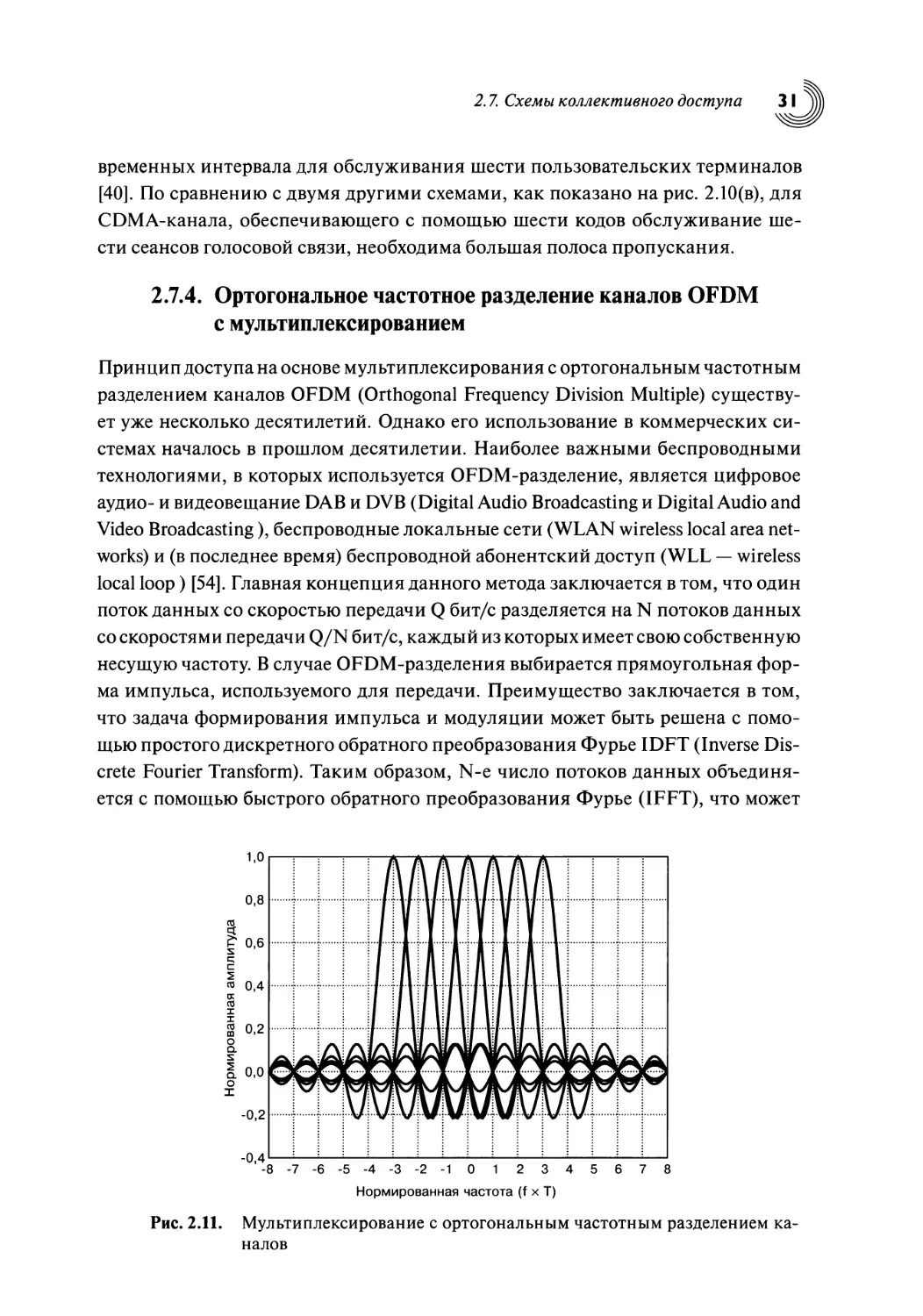
Рис. 2.11. Мультиплексирование с ортогональным частотным разделением
каналов
Глава 2. Обзор мобильной связи
быть очень легко реализовано для получения временного сигнала с
разрешением по времени для IFFT-передачи. Следовательно, для осуществления в
приемнике обратной операции необходима реализация прямого преобразования
Фурье FFT (Fast Fourier Transform). Согласно теоремам преобразования Фурье,
прямоугольная форма импульса приведет к тому, что спектр поднесущих будет
иметь вид sin(x)/x, как показано на рис. 2.11.
Допускается перекрытие частот параллельных потоков данных, которые
имеют меньшую скорость передачи. Таким образом, ширина полосы частот
модулированного символа (бита) эффективным образом уменьшается на N
с одновременным увеличением его длительности также на N. Следовательно,
селективность по частоте и межсимвольная интерференция ISI (Inter Symbol
Interference) могут быть устранены выбором соответствующего значения N.
Разнос несущих частот Af выбирается таким образом, чтобы каждая поднесущая
была ортогональна относительно всех других поднесущих; соответственно,
Af= 1/Г, где Т — длительность символа OFDM (или, если быть точнее,
эффективная длительность преобразования Фурье).
OFDM-разделение особенно хорошо подходит для передачи через канал
с дисперсией (то есть канала с частотной зависимостью). В 1993 г. Линнертц
и др. (англ. Linnertz et al) предложили множественный доступ с кодовым
разделением каналов на нескольких несущих MCCDMA (multi-carrier code division
multiple access ) [55]. Эта новая CDMA-система, основанная на
комбинированном использовании схем CDMA и ортогональной частотной модуляции OFDM,
где расширение осуществляется не во временной, как в DS-CDMA системе,
а частотной области. Каждая из М несущих частот в системе с несколькими
несущими MC-CDMA (multi-carrier CDMA) умножается на расширяющую
последовательность, являющуюся уникальной для каждого пользователя. Большое
внимание, которым пользуется данная система, обусловлено тем, что передача
и прием сигнала легко осуществимы с помощью простого устройства быстрого
преобразования Фурье FFT, причем оно обладает потенциальной надежностью
для обеспечения частотной селективности с высокой эффективностью
использования частоты [56].
АНТЕННЫЕ
РЕШЕТКИ
И СПОСОБЫ
РАЗНЕСЕННОГО
ПРИЕМА
В телекоммуникационных системах антенна представляет собой устройство,
посредством которого осуществляется передача энергии электромагнитного
излучения радиочастоты RF в свободное пространство и далее к приемной
стороне [57-59].
3.1. Антенные решетки
Для выполнения требований дистанционной связи многим применениям
необходимы антенны с очень высокой направленностью (с очень высоким
коэффициентом усиления). В общем, это реализуемо за счет увеличения электрического
размера антенны. Другой эффективный способ заключается в формировании
геометрической и электрической конфигурации из набора излучающих
элементов без необходимости увеличения размера отдельных элементов [9]. Такое
устройство, состоящее из множества излучающих элементов, называется
антенной решеткой [59].
Общее электромагнитное поле решетки определяется векторами полей,
излучаемых отдельными элементами, суммируемых соответствующим образом
по фазе и амплитуде [58, 59]. Антенные решетки могут быть одно-, двух- и
трехмерными. Анализ и синтез характеристик излучения решеток может быть
осуществлен с помощью их главных геометрических параметров. Существует как
минимум пять степеней свободы, с помощью которых может формироваться
общая диаграмма направленности антенной решетки, состоящей из
одинаковых элементов, как то [59]:
1. Общая геометрическая конфигурация решетки (линейка, круг,
прямоугольник, сфера и т.д.);
2. Относительная величина смещения между элементами;
3. Амплитудное возбуждение отдельных элементов;
ГЛАВА 3
Глава 3. Антенные решетки и способы разнесенного приема
4. Фазовое возбуждение отдельных элементов;
5. Различные ДН отдельных элементов.
3.2. Классификация антенн
В общем, в зависимости от характеристик излучения индивидуальные
антенные излучатели могут рассматриваться как изотропные, всенаправленные и
направленные. В зависимости от функциональности и принципа работы,
антенные решетки могут рассматриваться как фазированные или адаптивные [59].
3.2.1. Изотропные излучатели
Излучатель считается изотропным, если излучаемая им энергия
распространяется одинаково во всех направлениях. Несмотря на невозможность физической
реализации таких элементов, они зачастую используются для сравнения с ними
характеристик излучения настоящих антенн.
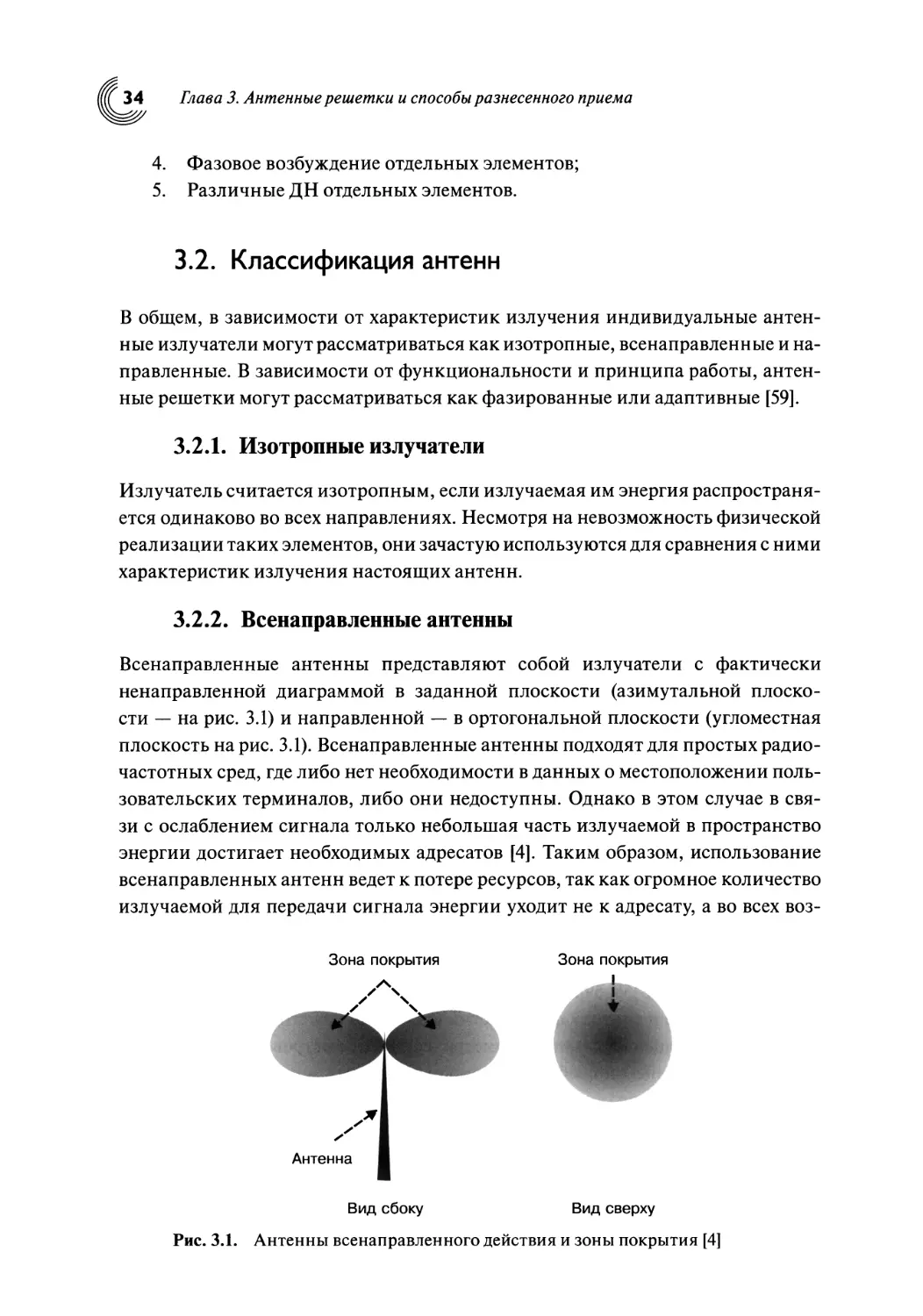
3.2.2. Всенаправленные антенны
Всенаправленные антенны представляют собой излучатели с фактически
ненаправленной диаграммой в заданной плоскости (азимутальной
плоскости — на рис. 3.1) и направленной — в ортогональной плоскости (угломестная
плоскость на рис. 3.1). Всенаправленные антенны подходят для простых
радиочастотных сред, где либо нет необходимости в данных о местоположении
пользовательских терминалов, либо они недоступны. Однако в этом случае в
связи с ослаблением сигнала только небольшая часть излучаемой в пространство
энергии достигает необходимых адресатов [4]. Таким образом, использование
всенаправленных антенн ведет к потере ресурсов, так как огромное количество
излучаемой для передачи сигнала энергии уходит не к адресату, а во всех воз-
Зона покрытия
Антенна
Вид сбоку Вид сверху
Рис. 3.1. Антенны всенаправленного действия и зоны покрытия [4]
Зона покрытия
/X.
3.2. Классификация антенн
можных направлениях. С учетом этого ограничения для преодоления факторов
среды единственный способ добиться желаемого результата при
использовании антенны всенаправленного действия заключается в увеличении мощности
передачи. Кроме того, в случае большого количества пользователей и,
соответственно, источников помех ситуация становится еще хуже, так как сигнал,
предназначаемый для одного пользователя, становится помехой для других
пользователей, находящихся в той же или смежных сотах. Более того,
одноэлементный подход не может обеспечить селективное подавление интерференции
с полезными сигналами, принимаемыми пользовательским терминалом.
Следовательно, он не располагает возможностями компенсации или минимизации
многолучевого распространения радиоволн. Принцип всенаправленного
действия напрямую и отрицательным образом влияет на спектральную
эффективность канала, ограничивая многократное использование частоты. Подобные
ограничения технологии радиовещания применительно к качеству,
пропускной способности и географического охвату, обеспечиваемым беспроводными
системами, положили начало эволюции фундаментального проектирования
антенн и роли, которую они в них [беспроводных системах] играют.
3.2.3. Направленные антенны
В отличие от антенн всенаправленного действия, излучающих энергию
равномерно во всех направлениях в горизонтальной (азимутальной) плоскости,
как показано на рис. 3.1, направленная антенна обеспечивает концентрацию
большей части энергии в определенных направлениях или секторах [59].
Свойства излучения подобных антенн описываются диаграммой направленности,
представляющей собой графическое представление зависимости излучаемой
антенной энергии, измеренной для различных углов на одинаковом
расстоянии от антенны в радиальном направлении. В ближней зоне относительная
диаграмма направленности (форма) изменяется в зависимости от расстояния
до антенны, в то время как в дальней зоне — форма ДН, в сущности, не зависит
от расстояния до антенны. Направление, в котором интенсивность излучения/
усиления таких антенн является максимальной, называется электрической
осью направленной антенны [59, 60]. Коэффициент усиления антенн в
направлении максимума ДН, как правило, гораздо больше, чем у изотропных и/или
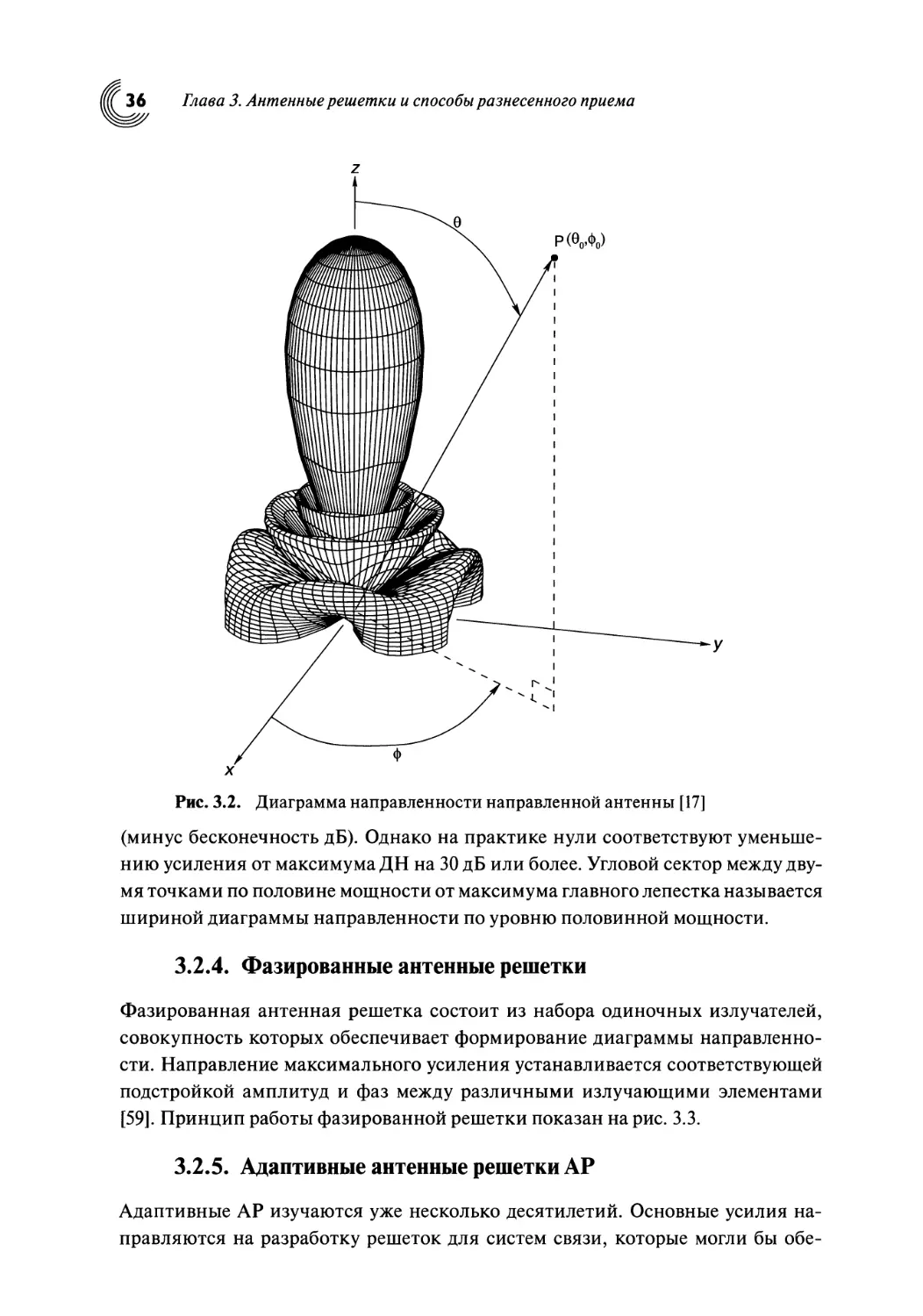
всенаправленных антенн. Диаграмма направленности направленной антенны
приведена на рис. 3.2, максимум которой соответствует углу 9 = 0°. График ДН
состоит из главного лепестка, совпадающего с электрической осью
направленной антенны, и нескольких лепестков меньшего размера, включая боковые
и задние. В направлениях между лепестками излучение либо очень слабое, либо
практически отсутствует. Оно называется минимумами или нулями ДН. В
идеальном случае интенсивность поля в направлении нулей должна быть нулевой
36
Глава 3. Антенные решетки и способы разнесенного приема
р(°А)
Рис. 3.2. Диаграмма направленности направленной антенны [17]
(минус бесконечность дБ). Однако на практике нули соответствуют
уменьшению усиления от максимума ДН на 30 дБ или более. Угловой сектор между
двумя точками по половине мощности от максимума главного лепестка называется
шириной диаграммы направленности по уровню половинной мощности.
3.2.4. Фазированные антенные решетки
Фазированная антенная решетка состоит из набора одиночных излучателей,
совокупность которых обеспечивает формирование диаграммы
направленности. Направление максимального усиления устанавливается соответствующей
подстройкой амплитуд и фаз между различными излучающими элементами
[59]. Принцип работы фазированной решетки показан на рис. 3.3.
3.2.5. Адаптивные антенные решетки АР
Адаптивные АР изучаются уже несколько десятилетий. Основные усилия
направляются на разработку решеток для систем связи, которые могли бы обе-
3.2. Классификация антенн
ПОЛЕЗНЫЙ СИГНАЛ
\
ВЫХОДНОЙ СИГНАЛ
Рис. 3.3. Концепция фазированной антенной решетки [20]
спечить помехозащищенность, надежное обнаружение сигнала и его
отслеживание [61]. Характеристики излучения таких решеток изменяются адаптивным
образом в зависимости от изменения окружающих условий и требований
излучения. Научно-исследовательские работы по адаптивным решеткам включают
как теоретические, так и экспериментальные исследования для ряда областей
их применения. Следящие системы на основе адаптивных решеток
представляют собой уже испытанную технологию, и по различным аспектам таких систем
существует обширная литература [62].
Адаптивные решетки имеют существенные преимущества по сравнению
с обычными решетками как для систем, так и для радаров. Они имеют
хорошо известные преимущества, которые заключаются в обеспечении гибкого,
быстро конфигурируемого формирования и управления ДН [62]. Однако это
зачастую обусловлено гибкостью использования элементов решетки в
адаптивном режиме, что обеспечивает возможность преодоления практически всех
конструктивных недостатков, присущих традиционным антенным решеткам
[63]. Следовательно, при разработке адаптивных решеток могут игнорироваться
традиционные задачи проектирования решеток, направленные на реализацию
низкого уровня боковых лепестков и узкой ДН. Тем не менее большой объем
проделанных работ по устранению этих недостатков адаптивных решеток
привлек к ним внимание, причем были выявлены такие серьезные проблемы, как
наличие скользящих нулей, обусловленных неправильным выбором
распределения элементов и диаграмм направленностей [64].
Непрерывная подстройка ДН адаптивной АР осуществляется посредством
обратной связи [9]. Главная задача адаптивной следящей системы заключается
в улучшении детектирования и приема полезных сигналов определенного вида
[62]. ДНА может позиционироваться в необходимом направлении посредством
фазового управления адаптивной весовой функции элементов решетки, а ее
Глава 3. Антенные решетки и способы разнесенного приема
формирование — посредством амплитудного и фазового управления другой
весовой функции по выходам элементов решетки [65]. Кроме того, адаптивные
решетки обеспечивают обнаружение и автоматическую компенсацию помех
от внешних источников, что улучшает рабочие характеристики радарной
системы без получения предварительной информации о местоположении источника
помехи [661. По сравнению с традиционными решетками адаптивные АР, как
правило, характеризуются более высокой универсальностью и надежностью.
Главная причина прогресса технологии адаптивных решеток состоит в их
способности автоматической компенсации неизвестных помех с помощью
управляемого положения нулей ДН и уменьшения уровней боковых лепестков
в направлении помех с одновременным сохранением желаемых характеристик
излучения [66]. Для получения ДН с учетом компромисса между
разрешающей способностью, усилением и низким уровнем боковых лепестков решетки
в большинстве случаев проектируются с использованием фиксированных
весовых коэффициентов. Однако универсальность антенной решетки побуждает
к использованию более сложных методик определения весовых коэффициентов
элементов решетки [65]. В частности, очень привлекательны адаптивные схемы,
обеспечивающие обнаружение и реакцию на условия среды, изменяющиеся
во времени. Как правило, адаптивные АР оснащаются процессорами обработки
сигнала, которые с помощью простого адаптивного управления могут
автоматически подстраивать значение весовых коэффициентов антенны для
максимального увеличения отношения сигнал —шум. Полезный сигнал совместно
с помехой и шумом одновременно поступает на вход приемного тракта.
Адаптивная антенна осуществляет сканирование своей ДН до
обнаружения оптимального направления (в направлении максимального соотношения
сигнал—шум). В этом случае максимум ДН идеально совпадает с направлением
на источник полезного сигнала. В принципе, с помощью алгоритмов
цифровой обработки сигналов адаптивные решетки обеспечивают прием полезного
сигнала под любым углом прихода. Однако величина получаемого на выходе
решетки отношения сигнал —смесь помехи с шумом SINR (signal-to-interference
plus-noise ratio) сильно зависит от диаграмм отдельных излучателей решетки
и расстояния между ними [61].
3.3. Методы разнесенного приема
Сложение разнесенных сигналов [67] представляет собой эффективный
способ решения проблемы замирания сигнала в радиоканалах. Если в некоторых
приемных антеннах наблюдается низкий уровень сигнала, обусловленный
замиранием или так называемым глубоким замиранием, то другие антенны это
3.3. Методы разнесенного приема
39
явление может обойти стороной в том случае, если они расположены
соответственным образом или с соблюдением должной полярности [68].
Давайте рассмотрим передачу информационной последовательности на
частоте неселективного канала. Средняя вероятность битовой ошибки ВЕР (Bit
error probability) определяется следующим выражением:
Рь=]рь(Уь)р(Уь)*Уь, (3.1)
о
где Pb(yb) — вероятность битовой ошибки как функции отношения сигнал-
шум, уьир(уь) — функция плотности вероятности (PDF) принятого отношения
сигнал—шум SNR (signal-to-noise-ratio). Рассмотрим в качестве примера
передачу информационной последовательности с двухпозиционной фазовой
манипуляцией (BPSK) посредством канала с релеевским замиранием. В этом случае
Pb(yb) задается следующим образом:
^(у*)=е№). (3-2)
где yb = a2 EJN0 — величина принимаемого отношения сигнал—шум, Еь —
значение энергии переданного бита данных. Более того, для канала с релеевским
замиранием может быть легко показано, что
Р(Уь) = -е~ьГъ, (3.3)
Ъ
где уь — среднее значение отношения сигнал—шум, определяемое по формуле
у4=§-е{а2}, (3.4)
где е{*} — значение ожидания. Подставляя Рь (у^ ир(уь) в выражение для Рь в (3.1),
мы получаем формулу для оценки средней вероятности ошибочного приема
бита:
Д=-
■-•ш <35)
Вероятности ошибочного приема битов для BPSK-модуляции посредством
каналов с релеевским и AWGN (аддитивный белый гауссов шум) замиранием,
приведены на рис. 3.4. Цифровая ошибка возникает при моделировании
характеристик любой информационной последовательности, передаваемой через
определенный радиоканал, если принятый бит не совпадает с изначально
отправленным битом данных. Частота появления ошибочных битов (BER)
представляет собой отношение количества ошибочных битов к общему количеству
Глава 3. Антенные решетки и способы разнесенного приема
1
ю-1
ю-2
а.
ю-3
ю-4
О 5 10 15 20 25 30
7b(dB)
Рис. 3.4. Вероятность ошибочного приема битов для BPSK-модуляции
посредством каналов с релеевским и AWGN (аддитивный белый гауссов шум)
замиранием
переданных бит данных [69]. Из рис. 3.4 видно, что в то время как для AWGN-
канала наблюдается экспоненциальное падение вероятности ошибки в
зависимости от величины отношения сигнал—шум, в случае канала с релеевским
замиранием она падает по обратной зависимости [70]. Следовательно, замирание
существенно ухудшает характеристики беспроводной системы связи.
Для борьбы с замиранием на приемную сторону обеспечивается подача
нескольких копий сигнала. Благодаря этому извлечение передаваемой
информации происходит с минимально возможным количеством ошибок, так как все
копии опорного сигнала обычно не затухают одновременно. Этот метод
получил название разнесенного приема и является одним из наиболее эффективных
способов борьбы с многолучевым замиранием. Существует большое количество
способов радиоприема с временным, частотным, пространственным и
поляризационным разнесением. На рис. 3.5 приведена блок-схема цифровой системы
связи разнесенного приема. Сумматор разнесенных сигналов обеспечивает
сложение сигналов, поступающих по различным каналам разнесенного приема.
Сумматор просто пользуется информацией, поступающей по каждому каналу
разнесенного приема для формирования искомой переменной [26, 70].
При использовании схемы приема с временным разнесением происходит
передача одного и того же сигнала в различные моменты времени, причем
временные интервалы разнесены как минимум на величину времени
когерентности, Г. Следовательно, замирание в разнесенных по времени каналах
происходит независимым образом, чем и достигается реализация надлежащего приема
с разнесением.
...T?!**^.v :
I V
\
\
— AWG-канал
— Релеевское замирание
5 J т
1 < :
*^; i !
1 !\.1
■ : I I ~!\
I ! IN
> < :
3.3. Методы разнесенного приема 41
Рис. 3.5. Модель цифровой системы связи с разнесением каналов [70]
В частотном разделении используется тот факт, что замирание частот,
разнесенных как минимум на ширину когерентной полосы пропускания канала
Вс, происходит практически независимо друг от друга. Таким образом, если
передача сигнала осуществляется с использованием частот, разнесенных
соответствующим образом, то на приемник поступают сигналы по нескольким
частотным каналам с независимым замиранием.
При пространственном разнесении для передачи и/или приема
используется несколько антенн. В этом случае копии передаваемого сигнала
поступают на приемник посредством пространственно разнесенных каналов [26, 70].
Было показано, что для обеспечения практической независимости
прохождения сигналов, принимаемых от антенных излучателей, через сильно
рассеивающую, а точнее однородную рассеивающую среду пространственное
разнесение (шаг размещения излучателей) должно составлять не менее половины
длины волны [71].
В разнесенных антенных системах сигналы, принятые по разным
разнесенным каналам (ветвям разнесения), демодулируются в НЧ-полосу частот с
помощью квадратурного демодулятора и обрабатываются с помощью коррелятора
или детектором с согласованным фильтром. Выходной сигнал затем подается
на устройство сложения разнесенных сигналов. Такая процедура гарантирует
медленное замирание, как правило, не изменяющееся в пределах временного
интервала. Выбор наиболее подходящей антенны существенно улучшает
работу системы [68].
Один из методов объединения (ветвей) при использовании
пространственного разнесенного приема заключается в оценке весового коэффициента
каждого разнесенного канала (ветви) с помощью комплексно сопряженной величины
своего собственного канального усиления (таким образом, что обеспечивается
максимальная вероятность уменьшения фазы, вносимой каналом). Затем вы-
Глава 3. Антенные решетки и способы разнесенного приема
ходные сигналы каждой отдельной ветви суммируются для формирования
полного сигнала. Также известный как сумматор максимального отношения MRC
(Maximum ratio combiner), данный способ является оптимальной схемой
разнесенного приема.
Несмотря на свою оптимальность, реализация MRC имеет высокую
стоимость и требует наличия точного слежения за комплексным замиранием, что
затруднительно на практике [26]. Линейное суммирование сигналов равной
мощности (EGC) является простой альтернативой MRC. Оно заключается
в синфазности сигналов, принимаемых от каждого разнесенного канала, с
использованием единичных весовых коэффициентов до сложения на сумматоре
[26]. EGC и MRC имеют очень схожие характеристики. Уровень отношения
сигнал—шум для многоканальных сигналов, объединенных с помощью EGC,
всего на 1 дБ ниже, чем у MRC [72].
При использовании схемы коммутации разнесенных каналов SC (или
коммутируемый разнесенный прием) осуществляется коммутация только того канала
(ветви), величина сигнал—шум которого превышает некое пороговое значение.
Если величина отношения сигнал—шум падает ниже заданного порогового
значения, сумматор переключается на другой канал, удовлетворяющий этому
критерию.
В еще одной схеме объединения разнесенных сигналов с автовыбором
происходит одновременное слежение за всеми каналами (ветвями) [70]. В любой
момент времени выбирается канал с наибольшим отношением сигнал—шум.
Величина принятого сигнала затем умножается на комплексно сопряженную
величину соответствующего канала (ветви). Сигнал формируется на основе
этого выходного значения.
Теперь полезно рассмотреть характеристики схемы разнесенного приема
конкретной антенной системы. Например, при использовании MRC- или
BPSK-модуляции вероятность битовой ошибки будет определяться по
следующей формуле:
чшгм _
где L — количество разнесенных каналов (ветвей) и и = Л I—=- . Для больших
значений средней вероятности ошибочного приема бита уравнение 3.6
упрощается до следующего выражения [73]:
3.3. Методы разнесенного приема
43
Таким образом, при высоких значениях отношения сигнал—шум в его
диаграмме наличествует крутизна спада, приблизительно равная — L дБ/декада.
На рис. 3.6 приведена характеристика MRC для разного числа разнесенных
каналов (ветвей) L. По мере увеличения кратности разнесения (числа
независимых копий сигнала) уменьшается частота появления ошибочных битов, что
эквивалентно существенному усилению отношения сигнал—шум для заданной
частоты появления битовых ошибок. Однако за улучшение характеристик
приходится платить более высокой ценой, сложной инфраструктурой и
дополнительным увеличением мощности передачи.
Реализация схемы поляризационного разнесения основана на
использовании различных характеристик распространения электромагнитных волн с
вертикальной и горизонтальной поляризацией [74]. Поляризационно разнесенный
прием отличается от пространственно-разнесенного приема. Его концепция
заключается в том, что в средах с многолучевым распространением сигнал,
принимаемый базовой станцией от мобильного терминала, имеет разную
поляризацию. Механизм декорреляции (ошибок) для различных поляризаций
при прохождении сигнала от мобильного терминала к базовой станции зависит
от характера многократных отражений. Обычно улучшение характеристик
передачи сигнала от мобильного терминала к базовой станции может быть
достигнуто использованием двух приемных антенн с ортогональной поляризацией
и объединением сигналов. Так как для реализации этой задачи нет
необходимости в горизонтальном разносе антенн, то их можно размещать под одним
обтекателем [75]. Поляризационное разнесение имеет свои преимущества. В данном
случае, в отличие от громоздкой аппаратуры пространственно-разнесенного
приема, поиск подходящего места не вызывает затруднений. Но
поляризационное разнесение очень эффективно только для сред с сильным эффектом
AWGN-канал
MRC-разнесение
lh4\;\l=;3\4
15 20 25
7b (dB)
Рис. 3.6. MRC-схема разнесенного приема [72]
40
44 Глава 3. Антенные решетки и способы разнесенного приема
многолучевого распространения. Однако при отсутствии сред с сильной мно-
голучевостью характеристики антенн с поляризационным разнесением могут
уступать системе с пространственно разнесенным приемом. Поляризационно
разнесенный прием приемлем для соответствующей среды с многолучевым
распространением радиоволн. До принятия решения о приемлемости
использования схемы поляризационного разнесения для заданной среды необходимо
сравнить результаты эксплуатационных испытаний поляризационного и
пространственного разнесения.
С целью уменьшения эффекта замирания в дисперсионной среде наравне
с традиционным пространственным разносом антенн рассматривается
возможность использования углового разнесения [76]. При использовании
углового разнесения антенны с узкими ДН размещаются в различных угловых
направлениях или областях. Использование узких ДН обеспечивает повышение
коэффициента усиления антенны базовой станции и угловое разрешение,
способное уменьшить уровень интерференции [77]. Более того, Перини и др. [77]
показали на практике, что эффект углового разнесения очень похож на эффект
использования пространственного разнесения, особенно в плотно заселенных
городских условиях.
Рис. 3.7 показывает три варианта реализации четырехэлементных антенн
для системы с сектором перекрытия 120 градусов.
На рис. 3.7 приведен пример пространственного разнесения элементов
с шагом приблизительно 7 А, (3,3 м, 1900 МГц). Коэффициент усиления
элемента антенны составляет 18 дБи. Ширина ДН в горизонтальной и вертикальной
плоскости составляет 65° и 85° соответственно. На рис. 3.7(6) приведены две
антенны с двойной поляризацией, причем расстояние между ними может
составлять (А/2) — для обеспечения как углового, так и поляризационного разне-
3,3 м
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
х
тт tY
о,е
5-З.С
3 м
/!
1 1
1 1
1 1
1 1
\:
!\
1 1
1 1
1 1
1 1
:/
тгг
(а)
(б)
(в)
Рис. 3.7. Варианты разнесения четырех антенных элементов: (а)
пространственное разнесение; (б) поляризационное разнесение с угловым и
пространственным разнесением; (в) угловое разнесение [20]
3.3. Методы разнесенного приема
сения при малом размере, и (IX) — для пространственного и поляризационного
разнесения. На рисунке показаны антенные элементы с наклонной линейной
поляризацией в 45°, которая имеет более широкое распространение по
сравнению с антеннами горизонтальной и вертикальной поляризации [20]. Наконец,
на рис. 3.7(b) приведена антенная решетка с плотным размещением элементов
(к/2) вертикальной поляризации.
ГЛАВА 4
СМАРТ-
АНТЕННЫ
4.1. Вступление
В действительности антенны сами по себе интеллектуальными не являются,
хотя многие предпочитают использовать термин смарт (интеллектуальные)
антенны. Антенная система становится интеллектуальной (смарт) за счет
интеграции возможностей цифровой обработки сигнала. Несмотря на кажущуюся
новизну технологии смарт-антенн, ее фундаментальные принципы не новы.
Фактически еще в 1970—80-х два специальных выпуска журнала «IEEE
Transactions on Antennas and Propagation» были посвящены адаптивным антенным
решеткам и связанной с этим техникой обработки сигнала [78, 79]. Адаптивные
антенные системы связи изначально привлекали внимание военных
заказчиков [27]. В частности эта технология используется уже много лет для
электронного подавления и противодействия радиоэлектронному подавлению со
стороны противника. В радарных системах военного назначения нечто подобное уже
использовалось во время Второй мировой войны [80]. Однако коммерческая
доступность смарт-антенн обусловлена прежде всего разработкой современных
мощных и недорогих процессоров обработки цифрового сигнала, процессоров
общего назначения и специализированных интегральных схем (ИС), а также
новейших алгоритмов обработки сигнала [17, 59].
4.2. Необходимость в смарт-антеннах
Системы беспроводной связи, в отличие от проводной, ставят ряд уникальных
задач [42].
1. Ограничение выделяемой ширины спектра ведет к уменьшению
пропускной способности.
2. Условия среды распространения радиоволн и подвижность
пользователей ведут к замиранию сигнала, как временному, так и
пространственному, а также частотному расширению спектра.
4.2. Необходимость в смарт-антеннах
Релеевское замирание
Рис. 4.1. Причины ухудшения качества беспроводной связи [81]
3. Ограниченное время автономной работы мобильных устройств
поднимает вопросы энергосбережения.
Кроме этого, в связи с многократным использованием частоты в сотовых
системах беспроводной связи необходимо как-то решать проблему
помехоустойчивости. По мере бурного развития систем беспроводной связи возможности
эффективного снижения подобных явлений изучаются уже в течение двадцати
пяти лет [42]. К их числу относятся схемы множественного доступа, канальное
кодирование и частотная коррекция, а также использование смарт-антенн.
На рис. 4.1 приведены факторы ухудшения качества беспроводной связи,
которые можно решить с помощью смарт-антенн.
Антенна систем связи представляет собой устройство/канал передачи и
приема электромагнитной энергии через внешнюю среду с помощью передатчика
и приемника соответственно [57, 59]. До настоящего момента времени
наименьшее внимание среди всех компонентов персональных систем связи уделялось
антеннам. Однако выбор способа передачи и приема электромагнитной энергии
из окружающего пространства сильно влияет на эффективность
использования частотного спектра, стоимость разработки новых сетей связи
персонального доступа и качества предоставляемой ими услуги [20]. С перспективной точки
зрения коммерческая реализация технологии смарт-антенн обещает устранить
вышеуказанные недостатки систем беспроводной связи.
Глава 4. Смарт-антенны
4.3. Обзор
Главная идея, на которой основана технология смарт-антенн, зачастую
сравнивается с интуитивно понятным принципом работы слуховой системы человека.
Определение человеком направления источника звука осуществляется в три
приема:
Человеческое ухо выступает в качестве приемного датчика звукового
сигнала.
Парные органы слуха принимают звуковой сигнал с разной задержкой,
которая обусловлена средним расстоянием между ними.
Человеческий мозг представляет собой специальный сигнальный
процессор, выполняющий огромное количество вычислений для
корреляции информации и локализации источника звука.
Давайте для лучшего понимания принципа работы смарт-антенн
представим беседу двух человек в закрытой комнате, как показано на рис. 4.2. По мере
своего перемещения по комнате слушающий человек способен определить
местоположение говорящего, так как звук поступает в орган слуха в различные
моменты времени. Мозг человека, выступая в роли сигнального процессора,
обеспечивает определение направления на говорящего человека за счет
временной разницы поступления или задержки приема звукового сигнала на левое
и правое ухо. Затем мозг обеспечивает фокусировку на источник звука
сложением звуковых сигналов, принимаемых обоими органами слуха.
Подобным образом мозг человека способен различать несколько сигналов,
поступающих с различных направлений. Таким образом, при появлении
дополнительных собеседников мозг человека способен к выделению звукового
сигнала от интересующего собеседника на фоне остальных говорящих участни-
Желаемый
источник речи
Нежелаемый
источник речи
Рис. 4.2. Слуховой канала восприятия человека [17]
4.3. Обзор
\
YY
I L_
Рис. 4.3. Двухэлементная смарт-антенна
ков. Следовательно, слушатель способен различать говорящих по звуку голоса
и поддерживать одновременно не более одного разговора, чем и достигается
искомый эффект выделения необходимого сигнала на помеховом звуковом фоне.
И наоборот, слушатель может отвечать в направлении говорящего собеседника
за счет ориентации своего передатчика/рта.
Смарт-антенные системы работают таким же образом за счет
использования двух антенн вместо органов слуха и цифрового сигнального процессора
вместо мозга, как показано на рис. 4.3. Таким образом, для получения строгой
ориентации ДН на источник полезного сигнала с одновременным
подавлением интерференции или помеховых сигналов цифровой сигнальный процессор
на основании величины временных задержек, обусловленных
интерференцией сигналов на антенных элементах, вычисляет направление на источник
излучения полезного сигнала с последующей корректировкой сигналов по фазе
и усилению.
Применяя этот же принцип к системам мобильной связи, базовая станция
выступает в роли «человеческого уха», а включенные сотовые телефоны —
в качестве улавливаемых им звуков. Принцип действия адаптивной антенной
системы показан на рис. 4.4.
Глава 4. Смарт-антенны
ВЧ-вход/выход «4
К/от радио-_
подсистемы
Управление
S
«Интеллект»
i
о
CD
>5 (D
I!
11
Управляемый
лепесток
Рис. 4.4. Принцип работы смарт-антенн [80]
Цифровой сигнальный процессор, расположенный на базовой станции,
работает совместно с антенной решеткой и отвечает за настройку различных
параметров системы с целью фильтрации какой-либо интерференции или
нежелательных сигналов (SNOI — signals-not-of-interesi) с одновременным
улучшением качества связи или желательных сигналов (SOI — signals-of-interest). Таким
образом, происходит адаптивное формирование диаграммы направленности
с учетом динамической реакции системы на меняющиеся условия
распространения сигнала. Принцип формирования ДН заключается в таком взвешивании
передаваемых сигналов, чтобы на приемнике осуществлялась конструктивная
суперпозиция различных частей сигнала. Следует отметить, что для реализации
формирования ДН должны иметься некоторые данные о приемном канале
связи [82]. Подробный обзор методов формирования ДН приведен в [83]. На рис. 4.5
показана общая концепция адаптивного формирования ДН.
4.4. Конфигурации адаптивных антенн
По существу, смарт-антенны существуют в двух конфигурациях.
С переключением луча: конечное число фиксированных, заранее
заданных ДН или секторов.
Адаптивная решетка: настройка в реальном времени теоретически
неограниченного числа ДН (в зависимости от сценария) в соответствии
с пространственными изменениями полезных или помеховых сигналов.
4.4. Конфигурации адаптивных антенн
51
Желательный сигнал
SNOI Помеховый сигнал (не представляющий интерес)
SOI Полезный сигнал (представляющий интерес)
Рис. 4.5. Адаптивная процедура: (а) расчет весов формирователя ДН [20] и (б)
амплитуда сформированной ДНА для усиления желательного и
подавления нежелательного сигнала
В условиях низкого уровня помех оба типа смарт-антенн обеспечивают
существенно лучший коэффициент усиления по сравнению с традиционными
секторными системами. Однако в условиях больших помех адаптивные системы
обеспечивают гораздо большее покрытие и лучшее подавление интерференции
по сравнению с традиционными системами или системами с переключением
луча [4]. На рис. 4.6 приведены размеры относительного покрытия,
обеспечиваемые системами с коммутируемым лучом, обычными секторизованными
и адаптивными антенными системами.
Глава 4. Смарт-антенны
Зона обслуживания,
обеспечиваемая адаптивной антенной
/
\
Среда
с малыми
помехами
радиосигнала
^^ Зона ^^
обслуживания,
обеспечиваемая
антенной с
коммутируемым лучом
Зона обслуживания,
обеспечиваемая
антенной системой
с секторизацией
Среда
с большими
помехами
радиосигнала
Рис. 4.6. Зона обслуживания, обеспечиваемая антенной с коммутируемым
лучом и адаптивной антенной [20]
Оба типа смарт-антенных систем обеспечивают значительный прирост
коэффициента усиления по сравнению с секторными системами. Среда с низким
уровнем помех в левой части рисунка представляет собой новую систему
беспроводной связи с более низкими уровнями мощности прохождения радиоволн.
Однако среда со значительным уровнем помех в правой части рисунка
представляет беспроводную систему либо с большим количеством пользователей, либо
с одним пользователем, использующую более агрессивные схемы
многократного использования частоты. При таком сценарии возможности подавления
помехи адаптивной системой обеспечивают значительно большее покрытие по
сравнению с традиционными системами или системами с переключением луча [4].
Система с
коммутируемым
лучом
Адаптивная
система
Рис. 4.7. Возможные варианты формирования ДН и нулей адаптивной системой
(справа) и с коммутируемым лучом (слева) при идентичных уровнях
полезного сигнала (светлая линия) и межканальных помех (темные
линии) [20]
4.4. Конфигурации адаптивных антенн
Теперь давайте предположим, что сигнал, представляющий интерес, и две
межканальных помехи принимаются смарт-антеннами базовой станции связи.
На рис. 4.7 показаны ДН, которые могут быть сформированы каждой антенной
конфигурацией с учетом вышеописанной ситуации.
Слева показана система с коммутируемым лучом, а справа — адаптивная
система. Интересующий сигнал представлен светлой линией. Направления
межканальных помех представлены линиями темного цвета. Обе системы имеют
очень высокий коэффициент направленного действия в направлении
максимума излучения. Однако по сравнению с адаптивными решетками с помощью
схемы с переключением лучей обеспечивается более грубое управление ДН
[84]. Адаптивная система обеспечивает более точную направленность и,
следовательно, более высокое усиление сигнала. Аналогичным образом сигналы
помехи принимаются в зоне меньшей интенсивности излучения за пределами
главного лепестка, но, опять же, адаптивная система размещает их в точках
с наименьшим усилением. Концепция использования адаптивной АР идеально
обеспечивает усиление полезного сигнала при максимальном подавлении
мешающих сигналов.
4.4.1. Антенны с коммутацией луча
Система с коммутируемым лучом представляет собой наиболее простой
вариант технологии смарт-антенн, обеспечивающей формирование множества
неподвижных лучей с повышенной чувствительностью полезного сигнала
в заданных направлениях. Как показано на рис. 4.8, такая антенная система
определяет уровень сигнала с помощью одного из нескольких неподвижных
лучей и осуществляет переключение между ними по мере перемещения сотового
телефона в зоне обслуживания.
Коммутация луча, обеспечивающего прием полезного сигнала
максимального уровня, осуществляется с помощью простой функции переключения.
Управление направленностью луча в пространстве осуществляется за счет
изменения разности фаз сигналов, принимаемых или передаваемых
антенными элементами. Вместо формирования ДН направленной антенны в системах
с коммутируемым лучом используется такое сложение выходных сигналов
нескольких антенных элементов, которое обеспечивает формирование
узконаправленных лучей (секторизация) с более высокой пространственной
селективностью по сравнению с традиционными одноэлементными решениями. Другие
литературные источники [86] определяют данную схему как фазированную
решетку или многолучевую антенну. Такая конфигурация подразумевает либо
наличие нескольких неподвижных лучей, один из которых направлен в
сторону полезного сигнала, либо одного направляемого в сторону полезного сигнала
луча (формируется исключительно изменением фазы).
54 Глава 4. Смарт-антенны
Рис. 4.8. Зона обслуживания, обеспечиваемая схемой с переключением лучей
[85]
Динамическая фазированная решетка DPA (Dynamical Phased Array) —
более обобщенный пример системы с переключаемой диаграммой. В данном
случае алгоритм определения направления DOA (direction of arrival) приема
встроен в систему [20]. Сначала определяется направление приема DOA, а затем
в соответствии с величиной угла поворота в желаемом направлении
осуществляется настройка различных параметров системы. Таким образом, хотя и за
счет усложнения антенной конструкции, реализуется максимальный уровень
мощности приемного сигнала.
Элементы антенной решетки должны быть соединены с источниками
и/или приемниками с помощью фидерных цепей. Одной из наиболее
известных диаграммообразующих многолучевых схем является матрица Батлера [87,
88]. Она представляет собой линейную схему с пассивным питанием из NxN
элементов с возможностью управления ДНА для фазированных антенных
решеток с N количеством выходов, соединенных с антенными элементами и TV
входами излучателей. С помощью матрицы Батлера обеспечивается быстрое
пространственное преобразование Фурье и N-e количество ортогональных ДН,
где 7Vдолжно быть числом в степени 2 (то есть N=2",ne Z+) [89]. Эти ДН
представляют собой линейно независимые комбинации ДН элементов решетки.
В зависимости от расстояния между элементами и их ДН, решетка с диаграм-
мообразующей схемой на основе матрицы Батлера может обеспечивать сектор
4.4. Конфигурации адаптивных антенн
О Фиксированные
фазовращатели
3-дБ
ответвитель
Рис. 4.9. Схематическая диаграмма 4x4 матрицы Батлера [90]
обзора до 360°. Управление каждым лучом может быть реализовано с помощью
специализированного передатчика и/или приемника, причем выбор
соответствующего луча осуществляется с помощью ВЧ-переключателя. Матрица
Батлера может также использоваться для управления ДН кольцевой решетки
за счет возбуждения ее лучевых портов с взвешенным амплитудным и фазовым
управлением за счет изменения равномерного фазового распределения [89].
Требуемый канал передачи/приема формируется за счет чередующихся рядов
гибридных волноводных мостов (или направленных ответвителей) и
фиксированных фазовращателей [90]. На рис. 4.9 приведена схематическая диаграмма
4x4 матрицы Батлера.
Общее количество гибридных мостов и фиксированных фазовращателей,
необходимое для создания схемы, составляет (N/2) х \og2Nn (N/2) х log2(7V— 1)
соответственно. В зависимости от того, должны ли лучи иметь симметричное
расположение относительно нормали или один из них должен быть вдоль
нормали, гибридные мосты/ответвители могут иметь сдвиг либо 90°, либо 180° [91].
Матрица Батлера обеспечивает:
1L
1R
4R
Рис. 4.10. Формирование 8 ортогональных лучей с помощью 8x8 матрицы
Батлера [90]
Глава 4. Смарт-антенны
1. Распределение ВЧ-сигналов между элементами антенны.
2. Ортогональное формирование и управление движением луча.
Формирование веера ДН может быть достигнуто одновременным
возбуждением ВЧ-сигналами двух или более лучевых выходов за счет включения
матрицы Батлера между антенной решеткой и ВЧ-переключателем. Сигнал,
генерируемый на входе, обеспечит одинаковое возбуждение на всех выходах
с прогрессивным сдвигом фазы между ними и пространственную ориентацию
ДН с заданным углом наклона. Сигнал на другом входе формирует луч в другом
направлении, чем и достигается управление ДН. Согласно рис. 4.10 при
одновременном возбуждении портов \R и 4Z ВЧ-сигналами одинаковой амплитуды
и фазы будет реализовано одновременное формирование лучей 2R и 3L.
Несмотря на возможность веерного формирования ДН, существует ограничение.
Невозможно формирование двух смежных лучей, так как в результате их сложения
будет образован один луч [92].
4.4.2. Адаптивные антенные системы
В адаптивных антенных системах связь между пользователем и базовой
станцией обеспечивается за счет добавления пространственного измерения. С
целью оптимизации рабочей характеристики беспроводной системы адаптивная
антенна может динамически изменять форму сигналов за счет подстройки
к меняющимся условиям ВЧ-среды (пространственному изменению
источника излучения). Адаптивные антенные решетки [78, 79] обеспечивают больше
< Пользовательский
терминал
< Помеха 2
Помеха 1
Рис. 4.11. Зона охвата адаптивной решетки: характерный вид главного лепестка
в направлении пользователя и нулей в направлении двух
межканальных помеховых сигналов
4.4. Конфигурации адаптивных антенн
степеней свободы, так как они располагают возможностями управления
диаграммой направленности в зависимости от изменяющихся условий ВЧ-среды;
другими словами, они могут обеспечить направленность главного лепестка ДН
на полезный сигнал (интересующий сигнал) с одновременным подавлением
сигналов помехи, поступающих с других направлений. Вкратце адаптивные
решетки обеспечивают адаптацию соответствующей ДН для каждого отдельного
пользователя.
На рис. 4.11 показана общая концепция адаптивной антенной системы.
Как показано на рис. 4.6, концепция адаптивной системы намного
превосходит возможности, присущие системам с коммутируемым лучом. Более того,
система с коммутируемым лучом не только неспособна обеспечить ориентацию
максимума главного лепестка диаграммы направленности на полезный сигнал,
но также характеризуется неспособностью полного подавления интерференции
(помеховых сигналов). Как показано на рис. 4.7, адаптивные системы могут
обеспечить большой прирост пропускной способности, что обусловлено
возможностью управления общей ДН с большей зоной обслуживания для каждого узла
сотовой связи. Адаптивные решетки способны обнаруживать и вести
источники излучения (полезные и помеховые) с динамической подстройкой ДНА,
обеспечивающей улучшенный прием при минимизации помех за счет
использования алгоритмов обработки сигнала. Функциональная блок-схема цифрового
сигнального процессора адаптивной антенной решетки показана на рис. 4.12.
DOA Направление на источник излучения
DSP Цифровой сигнальный процессор
Рис. 4.12. Функциональная блок-схема адаптивной антенной решетки
Глава 4. Смарт-антенны
После понижающего преобразования приемного сигнала в основную полосу
частот (НЧ) и в цифровую форму система находит полезный сигнал с помощью
алгоритма определения направления на источник и обеспечивает
непрерывное слежение как полезного, так и помеховых сигналов за счет динамического
изменения комплексных весовых коэффициентов (амплитуд и фаз антенных
элементов). В общем, алгоритм обеспечивает определение направлений на все
источники сигнала путем расчета всех временных задержек между антенными
элементами, и затем с помощью стоимостной функции осуществляется
расчет соответствующих весов оптимальной ДНА. Так как адаптивные решетки
характеризуются более высокой интенсивностью цифровой обработки
сигнала и необходимостью установки за каждым антенным элементом
полнофункциональной приемопередающей ВЧ-части, то их стоимость выше по сравнению
с системами с переключением луча.
Для непрерывного распознавания полезных, переотраженных и помеховых
сигналов, а также расчета направления на источники их излучения в
адаптивных решетках используются сложные алгоритмы обработки сигнала. В данном
подходе в зависимости от условий среды реализована непрерывная
подстройка уровня излучения как в направлении полезного, так и помеховых сигналов.
Существует ряд широко используемых алгоритмов определения направления
приема (на источник излучения) как то: MUSIC, ESPRIT или SAGE. Данные
алгоритмы, рассматриваемые в главе 5, построены на использовании матрицы
данных вкупе с набором «снимков» решетки, полученных за период когерентно-
Первый
пользовательский
терминал
Второй
пользовательский
терминал
Первый Второй
пользовательский пользовательский
терминал терминал
(а) (б)
Рис. 4.13. Полностью адаптивная схема пространственной обработки,
обеспечивающей одновременное обслуживание в одной ячейке двух
пользовательских терминалов на одном обычном канале
4.4. Конфигурации адаптивных антенн
сти канала. По существу пространственная обработка обеспечивает
динамическое создание различных секторов для каждого пользователя и распределение
частот/каналов в реальном масштабе времени. На рис. 4.13 показана картина
распределения лучей полностью адаптивной антенной системы,
поддерживающей обслуживание двух пользователей.
Различают два основных метода адаптивного формирования луча. Первый
метод основан на предположении, что часть полезного сигнала уже известна
посредством использования настроечной последовательности. Затем
осуществляется сравнение известного сигнала с тем, что уже принято, с последующей
корректировкой весов для минимизации среднеквадратичной ошибки между
известными и принятыми сигналами. За счет этого становится возможным
соответствующая настройка ДН для подавления помеховых сигналов. Данный
подход оптимизирует отношение сигнал—шум и применим для сред непрямой
видимости NLOS (non-line-of-sight) [93]. Так как веса корректируются в
соответствии с поступающими сигналами, помимо ослабления уровня
интерференции, происходит также уменьшение эффекта многолучевого замирания.
Во втором случае сначала осуществляется определение направлений излучения
всех сигналов, принимаемых антенной решеткой. Затем для получения
максимума в направлении полезного сигнала и нулей в направлении помеховых
сигналов осуществляется корректировка комплексных весов. В ряде практических
случаев этот метод может оказаться неэффективным, например при слишком
большом количестве источников излучения, обусловленных наличием
переотражений, что создает большую вероятность некорректной работы алгоритмов
обнаружения сигналов. Вероятность этого выше для сред непрямой видимости,
характеризующихся наличием рассеивающих неоднородностей в
непосредственной близости с пользовательскими терминалами и базовой станцией, что
ведет к увеличению угла прихода электромагнитных волн [93].
Возможность совместного использования спектра частот является еще
одним существенным преимуществом адаптивных антенных систем. В связи
с наличием возможностей точного слежения и надежного подавления помех
сразу несколько пользователей могут обслуживаться на одном стандартном
канале в пределах одной ячейки. Увеличение пропускной способности системы
обеспечивается многократным использованием как межсотовой, так и внутри-
сотовой частот. На рис. 4.13 показано, как может использоваться адаптивная
антенна для одновременного обслуживания на одном традиционном канале двух
пользователей в одной ячейке.
Левая ДН на каждом из графиков используется для связи с
пользовательским терминалом, расположенным слева, а правая — с правым. Нанесенными
линями обозначены фактические направления каждого сигнала. Следует
отметить, что по мере прохождения сигналов вдоль указанной линии в направлении
Глава 4. Смарт-антенны
* Полезный
сигнал w
► Помеха /
\t/ \1/ \\t/
Схема Решетка с динамическим Адаптивная
с переключаемой ДН фазированием решетка
Рис. 4.14. Различные схемы смарт-антенных систем
базовой станции сигнал от правого пользовательского терминала приходится
на провал левой ДН, то есть минимум усиления, и наоборот. С целью уточнения
положения пользователей в процессе их перемещения происходит постоянная
коррекция ДН. Нижняя часть графика демонстрирует динамику изменения
диаграмм направленности, связанную с необходимостью обеспечения
максимального качества сигнала по мере сближения пользовательских терминалов.
На рис. 4.14 приведены технические решения и принцип работы различных
смарт-антенных систем.
4.5. Множественный доступ с пространственным
разделением каналов SDMA
Схема множественного доступа с пространственным разделением SDMA
(spatial division multiple access) совершенно отличается от ранее описанных схем
множественного доступа. В SDMA-системах реализовано распознавание сигналов
на базовой станции по пространственному расположению их источников
излучения. Они обычно используются совместно либо со схемами
разделения/уплотнения FDMA, TDMA, либо CDMA, что обеспечивает дополнительные
возможности анализа пространственных характеристик последних [85]. Как показано
на рис. 4.15, схема SDMA является одним из самых сложных методов реализации
технологии смарт-антенн, характеризующейся развитыми возможностями
пространственной обработки сигнала и обеспечивающей обслуживание множества
корреспондентов за счет выделения отдельного луча под каждого из них.
Принцип действия SDMA-схемы основан на том, что сигнал, излучаемый
удаленным источником, принимается разными антенными элементами решет-
4.5. Множественный доступ с пространственным разделением каналов (SDMA)
Пользователь 2
Пользователь 1
Приемо-передающая
антенная решетка
Рис. 4.15. Принцип действия множественного доступа с пространственным
разделением каналов (SDMA) [20]
ки в разные моменты времени, что обусловлено пространственным разносом
первых [40]. Эта задержка используется для различения одного или групп
пользователей, находящихся в разных областях обслуживания (покрытия). Эта
схема обеспечивает возможность осуществления эффективной передачи в одной
ячейке, не влияющей на одновременную передачу в другой. Например,
традиционный стандарт мобильной связи GSM/GPRS обеспечивает возможность
осуществления приема и передачи данных одним пользователем на одном канале
базовой станции, в то время как GSM/GPRS с поддержкой SDMA —
обслуживание нескольких пользователей в одном частотном диапазоне, что соответствует
увеличенной пропускной способности системы. Пропускная способность
системы множественного доступа с кодовым разделением каналов (CDMA)
ограничивается значением соотношения сигнал—шум, a SDMA его улучшает и, как
следствие, обеспечивает доступ к сети большего количества пользователей [94].
Как показано на рис. 4.15, фильтрация в пространственной области может
обеспечить разделение спектрально и пространственно накладывающихся
сигналов, поступающих от нескольких подвижных терминалов, и одновременное
коллективное обслуживание на одной частоте и временном интервале [20] в
пределах одной радиоячейки. Это означает, что исключительно посредством
углового разнесения на одном физическом канале в пределах одной ячейки может быть
реализовано одновременное обслуживание более чем одного пользователя.
62 Глава 4. Смарт-антенны
DOA Направление на источник излучения
DSP Цифровой сигнальный процессор
Рис. 4.16. Блок-схема схемы множественного доступа с пространственным
разделением каналов [94, 95]
КакпоказанонарисА^этореализуетсянезависимойработойТУдиаграммо-
формирующих устройств базовой станции, причем каждый формирователь ДН
должен иметь свой собственный алгоритм формирования луча для управления
собственным набором весов и собственный алгоритм определения
направления на источник излучения, необходимый для определения значения
временной задержки сигнала каждого пользовательского терминала [95, 96]. Каждый
формирователь создает максимум ДН в направлении заданного пользователя
с обнулением или ослаблением сигналов от прочих пользователей. Данная
технология значительно улучшает возможности подавления помех и
многократного использования частоты, ведущих к увеличению пропускной способности
и уменьшению стоимости инфраструктуры.
Схема SDMA обеспечивает возможность обслуживания на одной частоте
в пределах одной ячейки нескольких подвижных пользовательских терминалов.
Разделение множественных сигналов приемником базовой станции будет
осуществляться до тех пор, пока величина углового разнесения будет больше
ширины приемопередающих ДН [43]. Это показано на рис. 4.17. Лучи с одинаковым от-
4.6. Архитектура смарт-антенной системы
63
Рис. 4.17. Многократное использование канала посредством углового
разнесения [43]
тенком используют один частотный диапазон. Эта методика получила название
многократного использования канала/частоты посредством углового разнесения.
Достижение высокой надежности и скорости передачи данных в системах
мобильной связи невозможно без методов противодействия эффекту
замирания сигналов [97]. SDMA-система является эффективным инструментом
борьбы с замиранием сигналов, так как она обеспечивает их пространственное или
угловое распознавание за счет управления коэффициентом направленного
действия антенны или формированием ДН в зависимости от направления на
источник излучения полезных сигналов [9, 98].
4.6. Архитектура смарт-антенной системы
Любая беспроводная система может быть разделена на приемную и
передающую части. Более высокая необходимость в улучшенном взаимодействии
между приемной и передающей частями обусловлена более развитыми функциями
смарт-антенной системы.
4.6.1. Приемная часть
На рис. 4.18 приведена блок-схема приемной части беспроводной смарт-
антенной системы, состоящей из М элементов. Помимо антенны, она включает
радиоблок, блок формирования луча и блок обработки сигналов [80].
Глава 4. Смарт-антенны
Во избежание чрезмерного усложнения блока обработки сигнала число
элементов решетки должно быть относительно небольшим (не ниже достаточного
минимума). В зависимости от пространственных возможностей антенные
решетки могут быть одно-, двух- и трехмерными. На рис. 4.19 показаны
различные возможные геометрические конфигурации адаптивных антенных решеток
[80].
Первая конструкция используется для формирования луча только в
горизонтальной (азимутальной) плоскости. Этого, как правило, достаточно для связи
на открытом пространстве, по крайней мере для ячеек большого размера. Схема
(а) представляет собой одномерную линейную решетку с равномерным
распределением элементов (шагом) Ах. Такая конструкция обеспечивает
формирование луча в одной плоскости в заданном угловом секторе. Широкое
распространение такой конструкции объясняется ее простотой [20]. Вторая конструкция
(б) представляет собой кольцевую решетку с равномерным угловым
распределением смежных элементов Аф = 2n/N, где N — число элементов. Она
обеспечивает формирование луча в любом направлении но из-за симметрии больше
подходит для формирования в азимутальной плоскости. Две последние
схемы используются для двумерного формирования луча, то есть в азимутальной
и вертикальной плоскостях. Главный вид двухмерной прямоугольной решетки
с горизонтальным и вертикальным шагом размещения Ахи Ду соответственно
представлен схемой (в). Для формирования луча в произвольном направлении
Антенна
(1)
Схема формирования луча
(2)
(3)
(М)\
Рис. 4.18. Приемная часть смарт-антенны [20]
4.6. Архитектура смарт-антенной системы
65
Ах
(а)
(в) (г)
Рис. 4.19. Различные геометрические конфигурации АР с равномерным
распределением элементов [20]
необходима конструкция с кубической или сферической геометрией
(трехмерная конфигурация). Пример (в) представляет кубическую конструкцию с
шагом размещения элементов Ах, Ау и Аг соответственно для каждого измерения
пространства.
Радиоблок состоит из цепей преобразования с понижением частоты и
(комплексного анализа сигналов) АЦП. Всего должно быть М цепей
преобразования с понижением частоты — по одной для каждого элемента решетки.
Приемные сигналы от мобильных устройств объединяются в один сигнал, который
подается на вход остальной части приемника (усилитель, канальный декодер
и т.д.).
На основании принятого сигнала блок обработки сигналов рассчитывает
комплексные веса w,, w2, ..., wM, перемножаемые на величину приемного сигнала
каждого элемента антенной решетки. Эти веса отвечают за формирование
передающей ДН. В зависимости от применения и сложности, процедура оценки
весов может быть оптимизирована с помощью одного из двух главных критериев:
1. Максимального усиления мощности принятого полезного сигнала
(например коммутируемый луч или фазированная решетка) или
2. Максимального увеличения уровня сигнал—шум за счет подавления
помех (адаптивная решетка).
Теоретически при наличии М элементов может быть обеспечена
нуллификация М— 1 источников помех, но их количество, как правило, меньше в связи
L
Глава 4. Смарт-антенны
с многолучевым характером распространения сигнала в среде с неоднородно-
стями.
Метод расчета весов находится в зависимости от типа критерия
оптимизации. При использовании схемы с коммутируемым лучом приемная часть
осуществляет заранее оценку заданных весовых коэффициентов векторов
(соответствующих множеству лучей) и выбор наилучшего из них, где критерием
является максимальный уровень сигнала. При использовании фазированной
решетки, обеспечивающей максимальный коэффициент усиления в
направлении сигнала с самым высоким уровнем, весовые коэффициенты
рассчитываются после оценки направления излучения на источник. Существующие методы
оценки направления на источник подробно описаны в главе 5. В адаптивной
схеме, требующей обеспечения максимальной величины отношения сигнал-
шум, оптимальный вектор весового коэффициента wopt (направление М) может
быть рассчитан с помощью алгоритмов оптимального суммирования и ряда
других, о чем речь пойдет в дальнейшем.
При цифровом формировании луча (после АЦП-обработки сигнала) блоки
формирования луча и обработки сигнала могут, как правило, быть
реализованы в одном устройстве — цифровом сигнальном процессоре, ЦСП. Принцип
работы адаптивной схемы представлен на рис. 4.18. Формирование луча может
осуществляться либо на высокой частоте либо на промежуточной частоте.
4.6.2. Передающая часть
Обычно адаптивный процесс применим только к обмену данными
(приема/передачи) мобильного терминала с базовой станцией. В этом случае мобильный
терминал потребляет меньшую мощность на передачу и время работы батареи
увеличивается. Однако преимущества адаптации будут очень ограниченными,
если в нисходящем канале связи (в направлении от базовой станции к
мобильному терминалу) не будет осуществляться формирование диаграммы
направленности (ДН). В принципе методы, используемые в восходящем канале связи,
могут быть перенесены и для нисходящего [канала связи] [99]. Как показано
на рис. 4.20, схема передающей части интеллектуальной антенной системы
(фазированной решетки) аналогична приемной.
Сигнал разбивается на N частей, оценивающихся в блоке формирования
диаграммы направленности с помощью комплексных весовых коэффициентов
wp w2,..., wN. Весовые коэффициенты, отвечающие за формирование диаграммы
направленности в нисходящем канале [связи], рассчитываются
соответствующим образом в блоке обработки сигналов. Радиоблок состоит из ЦАП и цепей
преобразователя с повышением частоты. На практике некоторые компоненты,
как собственно антенны и DSP, будут аналогичны компонентам, используемым
для приема. Принципиальное отличие между передающим и приемным кана-
4.6. Архитектура смарт-антенной системы
Схема, обеспечивающая
Антенна
о)*—
(2)*—
(3)*—
•
•
•
(/¥)►—
\\JKjyjiv\v\yj
И/1 | \
W2 |
(5й-
•
•
•
wN |
иоапис ,1-1,1 i
Ч -0
\ с;
X ®
X ь
X s
^^ X ®
А
Q.
Ф
1-
со
>s со
о 2
§£
00 с
^
Рис. 4.20. Передающая часть смарт-антенны [20]
лом заключается в том, что поскольку наличие смарт-антенн в абонентском
оборудовании не предусмотрено, то доступна лишь ограниченная информация
о состоянии канала. Следовательно, оптимальное формирование ДН в
приемном канале затруднительно и достижение рабочих характеристик на уровне
передающего канала для него является невозможным.
Как правило, существует два способа преодоления этого недостатка.
Первый способ заключается в создании методов, не требующих наличия
информации о состоянии канала, но обеспечивающих незначительное улучшение
характеристик. Второй способ основан на допущении наличия взаимной
направленности, то есть речь идет о том, что направление, с которого поступает
сигнал передачи, тесно связано с информацией о состоянии приемного канала.
Возможность такого допущения была подкреплена экспериментальными
результатами.
С физической точки зрения адаптивная антенна очень похожа на обычную,
но имеет встроенную электронику и управляющее программное обеспечение
(ПО). ПО работает с системой адаптивного управления приемника в реальном
времени. ПО также поддерживает интерактивную связь с управляющей
системой сотовой радиосети.
Идея реализации технологии смарт-антенн в наземных мобильных
станциях и транспортных средствах возникла совсем недавно, что обусловлено их
высокой сложностью и высокой потребляемой мощностью [69—100]. В [12, 13,
Глава 4. Смарт-антенны
27] уже был предложен ряд интеллектуальных антенных решеток для
установки на базовых станциях. Однако усилия, прилагаемые для разработки
приемников на адаптивных антенных решетках, подходящих для использования
в мобильных телефонах, на данный момент носят весьма ограниченный
характер [101—103]. В действительности реализация подобного решения в
телефонной трубке сталкивается с несколькими трудностями практического характера
[104], как то:
1. Ограниченный полезный объем конструкции мобильной трубки
препятствует реализации антенной решетки с достаточным количеством
элементов, необходимых для эффективной обработки
пространственного сигнала. Кроме того, соседство двух (или нескольких) антенн может
снизить эффективность антенной системы за счет их взаимовлияния;
2. Проблема развития всенаправленного сценария, обусловленная
перемещением мобильного устройства;
3. Стоимость и сложность реализации данной технологии в каждом
мобильном устройстве представляется гораздо большей, чем в каждой
базовой радиостанции.
Помимо этих трудностей, адаптивный алгоритм обработки сигнала в
«трубке» должен быть быстрым; однако ему [алгоритму] нужен не высокий уровень
вычислительной мощности, а простая аппаратная реализация [104]. Для
обоснования дальнейших исследований по реализации технологии
многоэлементных антенн в мобильных телефонах улучшение их рабочих характеристик
должно быть достаточно большим, чтобы компенсировать дополнительную
стоимость и потребляемую мощность [69]. Наконец, следует подчеркнуть, что
задача использования антенн с цифровым формированием диаграммы
направленности, как в спутниковых, мобильных и стационарных системах, остается
нерешенной.
4.7. Преимущества и недостатки
Внедрение технологии смарт-антенн обещает оказать большое влияние на
рабочие характеристики сетей сотовой связи. Оно также повлияет на разные
аспекты процессов планирования и введения в действие мобильных систем.
Смарт-антенны представляют большой интерес с точки зрения увеличения
пропускной способности и зоны обслуживания. В густо заселенных районах
главным источником помех является интерференция с другими
пользовательскими терминалами. Адаптивные решетки предназначены для увеличения уровня
принимаемого полезного сигнала с одновременным уменьшением уровня
помех, что обеспечивает значительное улучшение соотношения сигнал—помеха.
Непосредственное увеличение отношения сигнал—помеха может быть получе-
4.7. Преимущества и недостатки
69
(а) (б)
Рис. 4.21. (а) Традиционный кластер из 7 ячеек и (б) кластер из 3 ячеек на
основе использования технологии смарт-антенн, обеспечивающей
пониженную межсимвольную интерференцию [20]
но за счет уменьшения защитного интервала между частотами повторного
использования1. Это приведет к большому приросту пропускной способности, так
как на одну ячейку может быть выделено большее количество рабочих частот.
Это сразу скажется положительным образом на характеристиках TDMA-систем
(GSM), для которых более критично увеличение соотношения сигнал—помеха.
На рис. 4.21 приведен пример замены традиционного кластера из 7 ячеек на
кластер из 3. Это приведет к увеличению пропускной способности в 7/3 раза.
Вместо неэффективного всенаправленного излучения смарт-антенны
увеличивают зону обслуживания базовой станции за счет фокусирования энергии
только в направлении необходимых абонентов. Иными словами, смарт-антенны
характеризуются более высокой направленностью по сравнению с
традиционными секторными и всенаправленными антеннами. Таким образом,
базовые станции могут быть разнесены на большие расстояния, что теоретически
обеспечивает более экономически эффективное решение [20]. Следовательно,
смарт-антенны должны хорошо себя зарекомендовать в сельской или
малонаселенной местности, где важнее размер зоны обслуживания, а не пропускная
способность [13]. Более того, за счет обеспечения направленности на подвижный
пользовательский терминал приемных и передающих лучей осуществляется
снижение уровня межсимвольной интерференции, обусловленной
многолучевым распространением сигнала [105] в системах подвижной связи.
1 Прим. пер.: базовые станции, на которых допускается повторное использование
выделенного набора частот, удалены друг от друга на расстояние D, называемое
«защитным интервалом».
70 Глава 4. Смарт-антенны
Еще одним дополнительным и важным преимуществом смарт-антенных
систем является обеспечиваемый ею уровень безопасности работы с
персональными данными, на которых строится ведение деловой активности современного
общества. Связь, обеспечиваемая смарт-антеннами, трудна для
несанкционированного прослушивания, так как злоумышленник должен находиться в зоне
обслуживания абонента [13].
Наконец, благодаря присущей антенным системам технологии
пространственного детектирования, система будет располагать информацией о
местоположении абонентов [20]. По сравнению с существующими системами эта
информация может использоваться для гораздо более точного определения
координат пользователей. Как следствие, функция определения местоположения
может использоваться при экстремальных и любых прочих ситуациях [20].
Несмотря на наличие большого количества преимуществ, у смарт-антенн
есть и некоторые недостатки. Приемопередатчик смарт-антенной системы
гораздо сложнее, чем у стандартной базовой станции [80]. Для каждого элемента
антенной решетки необходимы отдельные приемопередающие цепи, причем
с точными алгоритмами калибровки в реальном масштабе времени. Более того,
адаптивное формирование луча требует больших объемов вычислений;
следовательно, такая базовая станция должна оснащаться очень производительными
процессорами цифровой обработки и системами управления. Безусловно,
базовые станции, использующие смарт-антенны, будут гораздо дороже
стандартных решений.
Несмотря на то, что смарт-антенны относятся главным образом к
радиотехнологии, они неизбежно будут предъявлять новые требования по управлению
ресурсами и мобильностью. В SDMА-системе реализован один физический
Рис. 4.22. Изображение 6-элементной антенной решетки с рабочей частотой
1,8 ГГц. (Изделие является собственностью компании Telia Research
АВ, Швеция) [80]
4.8. Основные принципы
71
канал связи в пределах одной ячейки для нескольких пользователей за счет их
углового разнесения. При возникновении конфликтов по углам между
пользователями один из них должен быть быстро переключен на другой канал во
избежание обрыва связи.
Для обеспечения приемлемого коэффициента усиления смарт-антенны
необходима многоэлементная антенная решетка. Для подвижных терминалов
с наружной установкой, как правило, предлагаются схемы, состоящие из 6—10
горизонтально расположенных элементов. Шаг размещения элементов
составляет 0,4—0,5 А. Ширина восьмиэлементной антенны при рабочей частоте
в 900 МГц и 2 ГГц будет составлять 1,2 м и 60 см соответственно. С учетом
увеличения спроса на меньшую заметность базовых станций не слишком большие
геометрические размеры порядка нескольких длин волны (зависят от
используемых рабочих частот) могут создать проблему. Для наглядности данный
аргумент подкрепляется изображением восьмиэлементной антенной решетки с
рабочей частотой 1,8 ГГц, приведенным на рис. 4.22.
4.8. Основные принципы
На рис. 4.23 показаны главные элементы смарт-антенной системы.
Смарт-антенна состоит из решетки сенсоров, диаграммообразующей схемы
и адаптивного процессора:
1. Многоэлементная решетка: состоит из N приемопередающих элементов.
Конструкция решетки (линейная, кольцевая и т. п.) выбирается в
зависимости от требуемых характеристик. Однако она накладывает
фундаментальные ограничения на ее функциональные возможности.
Цифровой
адаптивный процессор
y(t)
Выход
решетки
х^;для/с=Г ... N
y(t)
Пространственная структура
Временная структура
Настроечная последовательность
Сигналы обратной связи
Рис. 4.23. Функциональная схема смарт-антенны из N элементов [43]
72 Глава 4. Смарт-антенны
Нормаль к
/г
/ Ось решетки
: решетке
^оГ^
s(t)
Чувствительный
элемент 2
Чувствительный
элемент 1
*-
-*
Рис. 4.24. Линейная эквидистантная АР (ЛАР) с двумя чувствительными
элементами с падающей на них плоской ЭМ-волной
2. Диаграммообразующая схема: выходы всех чувствительных элементов
связаны с диаграммообразущей схемой и обрабатываются фильтрами
линейного временного преобразования LTV (Linear time variant),
обеспечивающими формирование диаграммы направленности. Затем
данные с выходов LTV-фильтров суммируются в общий выход y(i).
Значения комплексных весовых коэффициентов LTV-фильтров вычисляются
адаптивным процессором.
3. Адаптивный процессор: вычисляет значения комплексных весовых
коэффициентов диаграммообразующей схемы. Веса вычисляются на
основании сигналов и известных свойств системы, как то:
Сигналы, принятые элементами решетки, то естьхД/), «=1,2,..., N;
Выход адаптивной антенны, то есть y(t);
Пространственная структура решетки;
Временная структура полученного сигнала;
Сигналы обратной связи от мобильных терминалов;
Топология сети.
Принцип действия смарт-антенны может быть объяснен на простом
примере. В качестве примера рассматривается ULA-решетка (Uniform linear array),
состоящая из двух идентичных всенаправленных сенсорных элементов, как
показано рис. 4.24. Предполагается, что сигнал s(t) формируется источником
в дальней зоне смарт-антенны. Как показано на рис. 4.24, сигнал поступает
на решетку в виде однородной плоской волны. Между сенсорными элементами
1 и 2 возникает временная задержка:
Jsin0c
Ат = -
(4.1)
4.8. Основные принципы
73
где d — расстояние между элементами (шаг решетки) и \)0 — фазовая скорость.
Соответственно, зная d и измеряя Ат, угол направления 6s на источник
излучения определяется по формуле:
0С = arcsin
d0At
(4.2)
Если s(t) — узкополосный сигнал с частотой несущей fc, то временная
задержка Ат соответствует сдвигу фазы:
Л </sin0c
Ах|/ = 2тг—-—^, (4.3)
К
где Хс — длина волны соответствующей несущей частоты, то есть Хс = \)Jfc.
Очевидно, что в направлении приема сигнала, перпендикулярном нормали
решетки (05 = 0), величина временной задержки и фазового сдвига для обоих
элементов решетки будет равны нулю.
Теперь предположим, что на решетку поступает помеховый сигнал n(t) с той
же частотой^. Для примера направления приема сигналов s(t) и n(t) равны 0°
и 30° соответственно. Обозначим комплексные весовые коэффициенты
следующим образом: wl = w{ { +jwx 2hw2 = w21 +jw2 r Тогда выход решетки,
обусловленный наличием полезного сигнала s (t), задается формулой:
S(t) = s(t)[(wltl + jwl2) + (w2il + jw22)] (4.4)
= J(0[KI+w2i2) + y(wlf2+w2tl)].
Согласно (4.3) при шаге размещения элементов решетки, равном d = Х/2
и 0^ = 30°, фазовая задержка на втором элементе относительно первого равна
А\|/ = я/2. Таким образом, выходное значение, обусловленное наличием помехо-
вого сигнала n(t), задается формулой:
N(t) = n(t)[(whl +>1)2) + e-y!(w2)1 +/w2t2)] (4.5)
= "W[Kl + W2,2 ) + JK2 + W2,l )] •
Задача смарт-антенны заключается в полной компенсации помехового
сигнала n(t) и восстановлении полезного сигнала s(t). Для решения этой задачи
с помощью (4.4) и (4.5) необходимо выполнение условий:
wu+wi,2=1> (4-6а)
74 Глава 4. Смарт-антенны
w,, + w, , = 0,
Wl,l+W2,2=0>
Wl,2-W2,l=0-
(4.66)
(4.6в)
(4.6г)
Решение (4.6) дает
W1,1=W1,2=W2,1=2 И W2,2
(4.7)
или
^=-{\+j),
(4.8а)
W,
,-2<w).
(4.86)
Для каждой антенной решетки может быть определен собственный
управляющий вектор. Управляющий вектор содержит реакции всех элементов решетки
на источник с одночастотным компонентом единичной мощности [40]. Так как
реакция решетки разная в разных направлениях, управляющий вектор связан
с каждым направленным источником излучения. Однозначность связи опреде-
Нормаль
к решетке
Чувствительный
элемент
(датчик) N
Чувстви- Чувстви-
Чувствительный тельный тельный
элемент элемент элемент
(датчик) 3 (датчик) 2 (датчик) 1
i
W-
I
-W
Рис. 4.25. ULA-решетка из N элементов с шагом решетки d и падающей на них
плоской волной
4.8. Основные принципы
ляется геометрией решетки [106]. В случае решетки, состоящей из одинаковых
элементов, каждая составляющая вектора имеет единичную величину. Фаза
его я-й составляющей равна разности фаз сигналов, индуцированных на п-м
элементе и опорном элементе благодаря источнику, связанному с
управляющим вектором [40]. Обычно фаза опорного элемента устанавливается на ноль.
Этот вектор получил название пространственного, так как каждая его
составляющая отвечает за фазовую задержку, обусловленную пространственным
положением соответствующего антенного элемента. Его также принято называть
вектором отклика решетки, так как он обеспечивает измерение отклика
решетки на рассматриваемый источник сигнала [40].
Например, как показано на рис. 4.25, управляющий вектор ULA-решетки
из 7V элементов с шагом решетки d задается формулой:
а(9) =
1,е
.2nd . .,.. .\2nd .
(4.9)
После получения управляющего вектора антенной решетки ее ДН
формируется за счет подачи на каждый вход управляющего вектора соответствующего
антенного элемента управляющего сигнала с определенной амплитудой и
фазой.
Нормированная диаграмма направленности ULA-решетки из ТУвсенаправ-
ленных элементов с шагом решетки d выражается в дБ с помощью выражения:
iiwaco:'2
G(0) = lOloglo<
.(е)|2
v/Hw
-180 -150 -120 -90 -60 -30 0 30 60 90 120 150 180
е (градусы)
Рис. 4.26. Нормированная ДН для невзвешенной двухэлементной решетки
приемников
Глава 4. Смарт-антенны
ш
ш
5
I
CD
с;
о
-20
-40
-60
-80
-180 -150 -120 -90 -60 -30 0 30 60 90 120 150 180
9 (градусы)
Рис. 4.27. Нормированная ДН для взвешенной решетки из двух сенсоров
= 101og1(
1ХехР -
jlnnd sin0
w"w
(4.10)
где w — TV-мерный вектор, состоящий из комплексных весов антенных
элементов. На рис. 4.26 показана нормированная ДН двухэлементной АР без
взвешивания в диаграммообразующей схеме.
На рис. 4.27 приведена нормированная ДН двухэлементной антенной
решетки с использованием в диаграммообразующей схеме весов из выражения (4.7).
Теперь видно, что нуль диаграммы находится точно по азимуту в 30° — в
направлении помехового сигнала.
На основании этого простого примера мы видим, каким образом могут
корректироваться комплексные веса элементов АР для полной компенсации
(обнуления) помехового сигнала n(t) и получения выходного сигнала, эквивалентного
полезному сигналу s(t). Эта модель легко применима для случая ULA-решетки
с N элементами. Такая решетка может обеспечивать восстановление полезного
сигнала s(t) с полным подавлением N - 1 помеховых сигналов.
Продемонстрируем эти возможности на основе сценария, при котором на ULA-решетку из N
элементов приходит полезный сигнал и N — 1 помеховых сигналов.
Направление прихода полезного сигнала s(t) соответствует углу 05. Фазовое смещение
полезного сигнала s(t) между первым и т-ъш датчиком определяется по формуле:
AV,,«=2ic
(m-l)flfsin05
m = l,2,...,7V.
(4.11)
4.8. Основные принципы 77
Помеховые сигналы приходят с направлений, соответствующих углам 0р Э2,
..., 0^_г Фазовая задержка п-то помехового сигнала между первым и m-ым
датчиком определяется по формуле:
л,т К U = 1,2,...,7V-1
Комплексные весовые коэффициенты датчика wl = wx { +jwl 2, w2 = w2 { +jw2 2,
..., и^ = и^, +jwN2. Следовательно, полезный сигнал 5(0 на выходе антенной
решетки определяется по формуле:
S(t) = s(t)[(Wll +yvi2) + e-^ (w2J +yw2i2) + ... + e-yuv- (му, + /му2)], (4.13)
и в результате наличия я-го помехового сигнала nn(t) определяется как:
ЗД = л„(0[К, +ywu)+e-^ (w2,, +>„) + ...+
L (4.14)
+ е^"" (иу, + уиу2)], я = 1,2,..., N -1,
Общий выход решетки задан формулой:
y(t) = S(t) + N(t) = S(t) + ^N„(t). (4.15)
/1=1
Для восстановления полезного сигнала и полного подавления N — 1 по-
меховых сигналов в ULA-решетке из N элементов необходимо определить 2N
неизвестных — N вещественных и N мнимых частей N комплексных весовых
коэффициентов. Соответственно, общий выход решетки должен быть равен
полезному сигналу, то есть:
y(t) = s(t). (4.16)
Для удобства 2УУ-мерный вектор w определим как:
w = [wf,w^, (4.17)
где w, и w2 — TV-мерные вектора, состоящие из вещественной и мнимой частей
комплексных весовых коэффициентов 7Vэлементов решетки, то есть:
Wl=[Wl,PW2,P"->W^l] > (4-18)
w2=[w12,w22,...,wyv2] . (4.19)
Кроме того, определим четыре матрицы Rp R2, R3, и R4, е RNxNkslk:
78 Глава 4. Смарт-антенны
R,=
R2 =
1
1
1
"0
0
0
cos(A\|/J>2)
cos(A\|/12)
cos(A\|/„_12)
sin(Ayj2)
sin(A\|/l2)
siitfAy^)
R4 =
-R2,
cos(A\|/5jv)
cos(A\|/iyv)
COSfAy^.J
sin(A\|/5J "
sin(A\|/,„)
sin(A\|^_ltJ
(4.20)
(4.21)
(4.22)
(4.23)
Используя (4.13), (4.14), (4.15), (4.17), (4.19) и (4.23), общий выход решетки
определим по формуле:
y(0 = H?),«1(0,«2W,-.,«iV-i(0]{[R1R2]+y[R3R4]}w.
Подстановка (4.24) в (4.16) дает:
w = R"'M,
где матрица R е R2AMAf задана как:
"R, R,
R =
R3 R4J
27У-мерный вектор М может быть представлен в виде:
м=[м^,м2г]г,
где М, и М2 — N-мерные векторы. М, представляется выражением
М, =[1,0, о,., „of,
(4.24)
(4.25)
(4.26)
(4.27)
(4.28)
содержащим вещественную часть полезного сигнала s{t) с нейтрализацией
вещественных частей всех помеховых сигналов nn(t), «=1,2,..., N— 1. М2
записывается аналогичным образом:
м2=[о,о,...,о]г,
(4.29)
4.8. Основные принципы
О
-20
ш
I -40
(D
с;
о
-60
-80
-180 -150 -120 -90 -60 -30 0 30 60 90 120 150 180
6 (градусы)
Рис. 4.28. Нормированная ДН для взвешенной пятиэлементной решетки
представляя собой обнуление мнимых частей полезного сигнала s(t) и всех по-
меховых сигналов nn(t), п = 1, 2,..., N— 1.
Рис. 4.28 представляет собой более сложный случай диаграммообразующей
схемы. Здесь рассматривается ULA-решетка из пяти всенаправленных
сенсоров. Угол прихода полезного сигнала Qs = 0°, а углы прихода четырех помеховых
сигналов 0, = -75°, 02 = -45°, 03 = 30° и 04 = 60°.
Из рис. 4.26, 4.27 и 4.28 видно, что диаграмма направленности идентична
в направлении, симметричном относительно оси линейной решетки, то есть:
G(0) = G(n-Q)9 О<0<я (4.30а)
G(Q) = G(-n + Q), -7С<0<О. (4.306)
Если плоская волна падает под углом 0 или 180 — 0, то временная задержка
для каждого элемента окажется одинаковой. Это наблюдение полезно для
последующего анализа.
На данном этапе возникает вопрос: всегда ли находится решение для
комплексных весовых элементов? Ответ на этот вопрос будет положительным тогда
и только тогда, когда система из 2N уравнений, дающих решение для w,
является независимой, что эквивалентно наличию в (4.25) полноранговой матрицы
R из 2N2 элементов. Для того, чтобы это случилось, не должно быть ни одной
пары углов прихода, симметричных оси линейной решетки. Любая пара углов
прихода, симметричных относительно оси линейной решетки, снижает ранг
\\
wf Ml
Глава 4. Смарт-антенны
матрицы R в два раза (так как учитываются как вещественные, так и мнимые
части комплексных весов).
В случае если число помеховых сигналов менее N — 1, можно задать
дополнительное число требуемых нулей, что не будет иметь практического интереса,
с тем чтобы исключить возможность появления любых комбинаций пар углов
прихода, симметричных относительно оси решетки.
Сходным образом в случае если число помеховых сигналов более, чем N—1,
то возможно появление пары углов прихода, симметричных относительно оси
решетки. Число этих пар должно быть точно равно превышению общего
числа помеховых сигналов от N - 1 элементов. При меньшем числе конструкция
решетки уже такова, что не может обеспечить компенсацию всех помеховых
сигналов.
Такая гибкость решетки из N элементов, обеспечивающая управление ДН
по N— 1 точкам, называется степенью свободы решетки [40]. Для ULA-решетки
это соответствует наличию полинома со степенью N—1 для N— 1 регулируемых
коэффициентов, где первый коэффициент имеет единичное значение.
4.9. Эффекты взаимной связи
В предыдущем примере не учитывались какие-либо дефекты решетки, а также
взаимное влияние ее элементов. Однако близко расположенные возбужденные
элементы решетки начинают оказывать взаимное влияние на такие
характеристики излучения, как входное сопротивление и ДН. Эффект, известный как
взаимная связь между элементами, может иметь негативное воздействие на
рабочие характеристики смарт-антенных решеток. Взаимная связь элементов
ведет к смещению максимумов и нулей ДН; как следствие, если этот эффект
не учитывать, алгоритмы определения направления прихода сигнала
(направление на источник излучения) и формирования ДН будут давать неверные
результаты. Более того, этот негативный эффект будет усиливаться по мере
уменьшения шага размещения элементов АР [58, 59, 108]. С более подробной
информацией по эффектам взаимного влияния элементов АР и методам их
компенсации можно ознакомиться в соответствующей литературе [108—113].
Однако для иллюстрации эффектов взаимного влияния элементов на
адаптивное лучеформирование далее приводится простой пример. Взаимному
влиянию посвящен отдельный раздел 7.3 главы 7 «Интеграция и моделирование
смарт-антенн».
Рассмотрим еще раз линейную равноамплитудную ULA-антенную решетку
из двух сенсоров, показанную на рис. 4.24. Шаг решетки равен половине длины
волны (d = Х/2), и угол прихода полезного сигнала д$ = 0°. Также необходимо
обеспечить подавление помехового сигнала, падающего на решетку под углом
4.9. Эффекты взаимной связи
Полезный сигнал Помеховый сигнал
Взаимная связь
I ►У(0
Рис. 4.29. Прием двухэлементной ULA-решеткой полезного сигнала под углом
05 = 0° и помехового сигнала 0w = 30° при наличии взаимной связи
0л = 30°. Для упрощения элементы решетки считаются всенаправленными,
а падающие волны имеют синусоидальный характер. Однако на этот раз
учитывается взаимная связь излучающих элементов. На рис. 4.29 приведена
соответствующая конфигурация [59].
Сначала анализируется отклик решетки y(t) на полезный сигнал s(t), а затем
на помеховый сигнал n(t). Зная угловую частоту со0, отклик решетки y(t) на
сигнал s(t) определяем выражением [59]
y(t) = Sej^[(cu +cl2)wx +(с21 + c22)w2], (4.31)
где сп, с]2, с21 и с22 — коэффициенты взаимной связи. С помощью этих
коэффициентов описывается взаимное влияние элементов друг на друга.
Следовательно, для того чтобы выход y(t) был равен только полезному сигналу s(t),
необходимо, чтобы выполнялось условие:
(сп +cI2)w, + (с21 +c22)vv2 =1. (4.32)
82 Глава 4. Смарт-антенны
С другой стороны, отклик решетки y(t) на помеховый сигнал определяется
по формуле [59]:
y(t) = м[^°'+"/4\сич +c21iv2) + e^'+'l/4)(c12wl +cnw2)], (4.33)
где фазовое опережение и отставание +7Г/4 и —я/4 элементов 1 и 2
соответственно обусловлены приходом помехового сигнала в среднюю точку решетки.
*М)'
е(л*±*/4) = е (1±у)_
л/2
(4.34)
В силу чего выражение (4.33) может быть записано в форме:
л/2
y(t)_NeJ<°orl_{[{l + jK +(1-у>12]^ +[(1 + уХ, +(1-у>22]^2}. (4.35)
Следовательно, для того, чтобы отклик решетки обеспечивал полное
подавление помехи, необходимо, чтобы выполнялось условие:
[(1 + yXi +(l-y)c12]^i +[(1 + У>21 +(1-7>22]н>2=0.
(4.36)
Одновременное решение системы комплексных уравнений w{ и w2 в (4.32)
и (4.36) дает:
w=l( с22 с2Х +.
2\спс22 Спс21 с\\сгг спс2\
(4.37а)
УП
5
ш
S
I
о
с;
s
о
>
10
-10
-20
-30
-40
-50
м i \
шш^ Без учета эффекта взаимной
связи элементов решетки
С учетом эффекта взаимной
""" связи элементов решетки
?
It
J.f
If
1
1
1
Il
I
I
1
1
il
i
i
i
i
i
i
i
i
i
-180 -150 -120 -90 -60 -30 0 30 60 90 120 150 180
0 (градусы)
Рис. 4.30. Сравнение коэффициентов усиления решетки с учетом и без учета
эффекта взаимной связи ее элементов
4.9. Эффекты взаимной связи 83
С" С'2 -J С"+С'2 I. (4.376)
^\СПС22 С12С21 С11С22 С12С21
Следует отметить, что расчетные весовые коэффициенты, полученные выше
с учетом взаимной связи элементов, связаны с коэффициентами, в которых
эффект взаимной связи не учитывается, через выражение [59]:
w,=w,f ^ + J ^ 1, (4.38а)
\СпС22 СпС2х С\\Сп С12С21 )
Щ = Л ^ J ^ 1 (4.386)
^СПС22 СпС2Х ^п^22 С12С21 )
где Wj и w2 —расчетные весовые коэффициенты без учета эффекта взаимной
связи элементов, полученные с помощью (17).
На основании выражения в [108] предположим, что значения сп, с12, с21 и с22
заданы [17]:
сп =с22 =2,37 +у 0,34 , (4.39а)
сп=с2] =-0,13-у0,0517. (4.396)
Затем с помощью весов (17) и коэффициентов взаимной связи (41) получаем
расчетные значения весов с учетом эффекта взаимной связи элементов:
и>, = w,, +jwX2 = 0,250 +у 0,167, (4.40а)
w2 = w2l+jw22 = 0,189-у0,224 . (4.406)
На рис. 4.30 показаны ДН, рассчитанные с учетом и без учета весовых
коэффициентов в (42) и (17) соответственно.
Очевидно, что эффект взаимной связи элементов играет существенную роль
при формировании ДН. Например, при наличии взаимной связи минимум ДН
(в направлении помехи) смещается примерно на величину 0 = 32,4°, причем
на уровне приблизительно на 41,57 дБ ниже, чем у ДН в направлении полезного
сигнала, в то время как при отсутствии взаимной связи нуль находится на
отметке точно в 6 = 30° и на уровне — °° дБ.
ОПРЕДЕЛЕНИЕ
НАПРАВЛЕНИЯ
НА ИСТОЧНИК
СИГНАЛА. ОСНОВНЫЕ
ПОЛОЖЕНИЯ
Главная задача при решении многих практических проблем обработки
сигнала заключается в выделении из искаженных шумом измерений ряда
констант, от которых зависит истинный сигнал [21]. Более того, как было
показано в предыдущей главе, доведение рабочих характеристик антенной решетки
до максимума с точки зрения восстановления полезного сигнала и подавления
любых помеховых сигналов зависит от точного определения направления
прихода на нее сигналов. Аналогичная проблема, связанная с определением
направлений прихода сигналов на антенную решетку от нескольких источников
излучения, характерна для ряда применений в радиолокации, гидролокации,
электронном наблюдении и сейсмологии.
Вопросы, связанные с разрешающей способностью антенных решеток,
хорошо изучены. Причем значительная часть исследовательских усилий
направлена на определение границ рабочих характеристик для решеток с заданной
геометрией. Задача состоит в сравнении эффективности методов определения
направления прихода сигнала и диаграммообразования, обеспечиваемых
разными геометриями решеток. Теоретические исследования в основном
связаны с получением нижней границы Крамера —Pao CRLB {Cramer—Rao lower
bound) дисперсии направления на источник сигнала DOA (Direction Of Arrival)
для известной геометрии решетки. CRLB дает дисперсию нижней границы
несмещенной оценки параметра или вектор параметра [ПО]. Подробные данные
по оценке CRLB для различных сценариев, а также соответствующие выводы
приведены в [114].
При оценке направления на источник сигнала CRLB обеспечивает
независимую от алгоритмов метрику сравнения решеток, так как в специальных
алгоритмах могут использоваться особые свойства геометрий определенного типа,
в связи с чем результаты сравнения характеристик с использованием любого
алгоритма заданного типа не могут считаться убедительными. В исследователь-
ГЛАВА 5
5.1. Введение
ских работах Мессера и др. [115], а также Миркина и Сибула [116] приведены
выражения CRLB для оценки значений угла места и азимута единичного
источника излучения с помощью произвольной двухэлементной антенной решетки.
Нильсен [117], Голдберг и Мессер [118] также получили решение для
определения направления на единичный источник и CRLB-выражения для трехмерной
антенной решетки с произвольной геометрией, в то время как Догандич и Нехо-
рай [119] — CRLB-выражения для определения расстояния, скорости и
направления единичного источника излучения. Также известно, что CRLB зависят
только от «момента инерции», обусловленного геометрией решетки. Более того,
Балланс и Шеффер [120], Буян и Шултейс [121] получили CRLB-выражения для
системы с двумя источниками сигнала. Насколько нам известно, в
опубликованных материалах пока нет никаких свидетельств о существовании решений
CRLB-выражений для систем с тремя или большим количеством источников
сигнала.
5.1. Введение
В этой главе будут рассмотрены алгоритмы определения направления на
источник сигнала, которые напрямую связаны с принятыми сигналами. Сбор
данных осуществляется с помощью приемных элементов решетки, и задача
заключается в установлении местонахождения точечных источников излучения,
которые могут быть ими зарегистрированы. С математической точки зрения
такие задачи моделируются с помощью функций Грина для частного
дифференциального оператора, отвечающего за физическое описание
распространения излучения от источников к приемным элементам [122]. Несмотря на то, что
большинство так называемых алгоритмов пеленгации высокого разрешения
(например MUSIC [123], методы максимального правдоподобия,
авторегрессивного моделирования и т.д.) представлены в контексте оценки одного угла
направления на источник излучения (например только азимута), общие
правила определения азимута/угла места относительно просты. Могут также быть
включены такие дополнительные параметры, как частота, угол поляризации
и дальность при условии того, что известен отклик решетки как функция этих
параметров. Простой случай такого применения, где в качестве искомого
параметра выступает направление на источник излучения, представлен на рис. 5.1,
где сигналы от двух источников приходят на решетку из трех приемных
элементов, находящихся в одной плоскости. ДН каждого приемного элемента
указывают на их относительную чувствительность к направлению волны. Для того,
чтобы задачу в контексте заданного применения можно было решить
аналитически, необходимо сделать несколько целесообразных допущений. Для того,
чтобы падающее на антенную решетку электромагнитное излучение можно
Глава 5. Определение направления на источник сигнала. Основные положения
Рис. 5.1. Иллюстрация оценки местоположения простого источника излучения
(сигнала) [21]
было представить в виде суперпозиции плоских волн [122], предполагается, что
передающая среда является изотропной и не рассеивающей, а источники
излучения находятся в ее дальней зоне. В противном случае для близко
расположенных источников излучения (в ближней зоне решетки) волновые фронты будут
иметь аналогичную кривизну.
Главные трудности, связанные с этими методами, заключаются в том, что
затраты на вычисления и хранение данных быстро возрастают с размером
параметров вектора. Рост издержек огромен даже в случае двухмерной решетки,
в результате чего на практике для решения действительно параметрических
задач обычно используются непараметрические методы. Несмотря на меньшую
сложность классических методов пеленгации, их эффективность считается
недостаточной [124].
В целом алгоритмы (методы) определения направления на источник
излучения можно разделить на две группы: традиционные и подпространственные
алгоритмы. Перед тем, как приступить к их описанию, нам необходимо ввести
понятие вектора отклика решетки и автоковариационной матрицы сигнала.
5.2. Вектор отклика антенной решетки
Исходя из того, что антенная решетка состоит из набора идентичных
изотропных элементов, на каждый из них с задержкой приходит одна плоская
волна с длиной X. Другими словами, на каждый элемент приходит один и тот
же сигнал с некоторым фазовым смещением. Например, в случае с РЛР, пока-
5.2. Вектор отклика антенной решетки
87
занной на рис. 5.2, относительные фазы также равномерно распределены, где
\|/ = —a sin О — относительный сдвиг фазы между соседними элементами.
А,
Вектор относительных фаз, называемый управляющим (УВ), также
упоминался в предыдущей главе. В обобщенном случае это вектор отклика антенной
решетки ARV (array response vector) на падающую плоскую волну. Он является
суммой управляющего вектора и отклика каждого элемента решетки на
падающую волну. Общее нормированное выражение для вектора отклика трехмерной
решетки из N элементов имеет следующий вид:
Wl=Wl,l+/W1.2 =
а-УР'1
адф)е-
С2(9,ф)е-^
<7„(0,ф)е-^]
(5.1)
где (3 — векторное волновое число падающей плоской волны ((3 = [sin 0 cos ф, sin 0
sin ф, cos 0] в декартовской системе координат), г. = [х., у., z} —
пространственный радиус-вектор /-го элемента решетки, G.(0, ф) — коэффициент усиления /-го
элемента в направлении (0, ф), где 0 и ф — угол места и азимут соответственно.
Для случая решетки изотропных излучателей вектор отклика решетки
упрощается до управляющего вектора:
а(0,ф) = [е-уРг1,е-уРг2,...,е-ур^]Г.
(5.2)
У
А
\
\
\
\
\
\ \ ^ Направления
v \ ч ^ ч волнового вектора р
4 \ N \
Фронты падающих
плоских волн
(0,0) (1,0) (2,0) (3,0)
а1\|/
э2\|/ р3\|/
(А/ - 1,0) Местоположение элемента
q{N - 1)ц Относительная фаза
Рис. 5.2. Вектор отклика ULA [19]
88
Глава 5. Определение направления на источник сигнала. Основные положения
В работе Чеймберса и др. [125] нижняя граница Крамера—Pao CLRB для
азимута и угла места с учетом дисперсии оценки направления на источник
излучения для произвольной трехмерной антенны определяется по формуле:
l + ASNR AV»
2N(ASNRf АУтАУц-АУ^
CRLB(6)= - г (5.3а)
CRLB(8)= 1 + ^*2 AV* ,, (5.36)
2N(ASNR?AVmAVH-AVy
где ASNR — отношение сигнал/шум антенны и
5.3. Модель принятого сигнала
Предположим, что антенная решетка из N элементов принимает сигналы,
передаваемые некоррелированными источниками численностью К.
Предполагается, что отклик решетки на каждый сигнал является функцией только
одного углового параметра (0). Для анализа будет использоваться традиционная
модель данных узкополосного канала. По существу модель предполагает, что
по мере прохождения радиосигнала через решетку в виде волновых фронтов
его огибающая остается неизменной [21]. Термин узкополосный канал
используется исходя из удовлетворяющегося в большинстве случаев предположения,
что огибающая изменяющегося радиосигнала будет запаздывать, когда
ширина полосы частот сигнала или приемных элементов меньше рабочей частоты.
Это допущение может также распространяться на широкополосные сигналы
при условии, что решетка имеет приблизительно плоскую частотную
характеристику по ширине полосы частот сигнала и время прохождения сигнала
через решетку по сравнению с взаимной шириной полосы является малым.
Согласно этой модели принятые сигналы могут быть представлены
суперпозицией сигналов от всех источников и линейно добавленного шума с
помощью выражения
5.3. Модель принятого сигнала
к=\
где х(0 е С^ — комплексный НЧ сигнал, эквивалентный полученному
сигнальному вектору на антенной решетке в момент времени t, или
x(t) = [x{(t),x2(t),...,xN(t)]T, (5.6)
sk(t) — приходящая в момент / от к-то источника плоская волна в направлении
Qk, а(0Л) е CN — вектор отклика решетки в данном направлении и n(0 е CN —
аддитивный шум. Следует отметить, что комплексный вектор п(/) содержит
либо детектируемый вместе с полезными сигналами шум, либо шумы,
генерируемые аппаратурой [126]. Единичное наблюдение х(/) решетки часто называют
мгновенной копией в момент t. Выражение 5.5 может быть записано в матричном
представлении как
х(0 = А(в)8(/) + п(0, (5.7)
где А(0) е CNxK — матрица отклика решетки, параметризованная по
направлению на источник принимаемого сигнала DOA (то есть каждый столбец которой
является вектором отклика решетки на каждый источник сигнала) или
А(е) = [а(е1),а(92),...,а(9^)], (5.8)
в — вектор для всех источников принимаемого сигнала или
0=[e15e2,...,ejr, (5.9)
s(/) е Ск — вектор принимаемого сигнала по амплитуде и фазе от каждого
источника сигнала в момент времени t или
s(t) = [Sl(t),s2(t),...,sK(t)]T. (5.10)
Обычно s(0 принято называть полезной частью сигнала х(0-.Три наиболее
важные характеристики (5.7) заключаются в том, чтобы матрица А(0) не
зависела от времени в пределах интервала наблюдения, модель была билинейной
в А(0) и s(0, а шум — аддитивный [21].
Множество векторов отклика решетки, соответствующих всем возможным
направлениям приема в (5.7) А(0), также принято называть решеточным
множеством AM (Array manifold). Проще говоря, каждый элемент а.. (/ = 1, 2, ..., N,
j = 1, 2, ..., К) AM, А(0) указывает на отклик /-го элемента на сигнал,
принимаемый су-го направления. Для большинства алгоритмов, которые были разра-
90
Глава 5. Определение направления на источник сигнала. Основные положения
ботаны для оценки направления на источник сигнала, необходимо, чтобы для
заданного вектора матрица отклика решетки А(0) была точно известна в [127].
Это обычно достигается прямой калибровкой в полевых условиях или с
помощью аналитических средств с использованием информации о положении и
отклике каждого датчика (например как это делается в случае с линейной
антенной решеткой).
Соответствующее решеточное множество А(0) будет считаться
однозначным, если любое множество однозначных векторов К < N ъ многосвязной
области А(6) образует линейно независимое множество. Например, как показано
на рис. 5.2, элемент из такого решеточного множества линейной антенной
решетки, состоящей из одинаковых сенсоров (вектор отклика решетки,
создаваемый единичным источником сигнала), пропорционален
1
<а А.
а(9,) =
а К
j^-(N-\)d sinQk
(5.11)
где X — длина падающей волны; d — расстояние между соседними элементами.
Для угловых значений прихода 6 е [—я/2, тс/2] (имеющего значение для заданной
геометрии) очевидно, что решеточное множество (AM) сохраняет однозначность
при условии d < Х/2. В случае, когда ожидаемое или обусловленное
эксплуатационными соображениями максимальное азимутальное отклонение бокового
излучения составляет 6 < я/2, волновое поле должно быть дискретизировано
таким образом, чтобы d < —
1
2 sine.
. При большем расстоянии между сенсорами
возможно существование таких пар углов 0. и 0., где 0. Ф 0., что а(0.) = а(0.). Условие
d
этого равенства будет выполняться при sin©,. = п +—sin©,., где п е Z,п Ф 0. В
подобных случаях отклик решетки на приход сигнала с направления, заданного
углом 0., будет неотличим от сигнала, поступающего с направления, заданного
углом 0..
Равномерная дискретизация волнового поля подразумевает, что
дискретизация всех задержек происходит по меньшей мере один раз, и, следовательно,
не должно возникать неоднозначных областей, так как корреляционная
функция точно известна [125]. Несмотря на то, что структура дискретизации
обеспечивает удобный метод расчета ДН за счет использования структуры,
подлежащей обработке с помощью БПФ, она не обязательно должна быть равномерной
[125]. На самом деле возможны случаи, когда она является лишней или нежела-
5.4. Подпространственная модель данных
тельной. Здесь следует отметить, что расстояние между элементами линейной
решетки должно быть менее половины длины волны, соответствующей самой
высокой частоте полосы приемника, что можно интерпретировать как
пространственный аналог хорошо известного критерия дискретизации Найкви-
ста (англ. Nyquist), который делает возможным восстановление непрерывного
по времени волнового фронта, занимающего полосу В из дискретных
временных интервалов в случае, если последние берутся с частотой дискретизации
не менее, чем 2В. Если А(0) однозначно nN>K, тогда А(0) будет иметь полный
ранг К. Схожим образом знание вектора моды а(9.) для решеточного множества
с принятой неоднозначностью равносильно определению угла 0. [126].
Далее мы можем сформировать матрицы для множества наблюдений L > К.
X = [x(l),x(2),...,x(Z)], (5.12а)
S = [s(l),s(2),...,s(Z)] и 5.126)
N = [n(l),n(2),...,n(I)], (5.12в)
где X и N е CN+L и S е CK+L, и далее записать
X = A(0)S + N. (5.13)
5.4. Подпространственная модель данных
Игнорируя шум в (5.13), каждое наблюдение принятого сигнала А(0) S
ограничивается ^Г-мерным подпространством С^, заданным ^колонками А(0).
Рис. 5.3 — иллюстрация этой идеи для частного случая с двумя источниками
(К = 2) и четырех мгновенных снимков (наблюдений) (L = 4). Каждый из двух
источников имеет связанный с ним вектор отклика а(0^) из решеточного
множества, и четыре снимка х(^),..., х(/4) лежат в двумерном подпространстве,
образованном этими векторами. Положение отдельных векторов зависит от волновых
форм сигнала в каждый момент времени. Следует отметить, что многосвязная
область решетки пересекается с подпространством сигнала только в двух
точках, каждая из которых соответствует отклику одного из сигналов [21].
Несмотря на то, что L > К, подпространство сигнала, тем не менее, может
иметь размерность менее, чем К. Это происходит в случае, если матрица
сигналов выборки S имеет ранг менее К. Эта ситуация может возникнуть, например,
когда один из сигналов является линейной комбинацией других сигналов.
Такие сигналы принято называть когерентными или полностью
коррелированными сигналами, которые чаще всего характерны для сенсоров решетки при
92
Глава 5. Определение направления на источник сигнала. Основные положения
Подпространство многолучевом сценарии распростране-
сигналов* *ч> ния радиоволн. Многолучевое
распространение сигнала имеет место в случае
его приема антенной решеткой с
различных направлений, что обусловлено
переотражением сигнала от различных
неоднородностей в беспроводном ка-
I \ нале. Также возможна ситуация, когда
\ \ количество доступных снимков меньше,
чем источников излучения, в связи с чем
подпространство сигнала не может
превышать число наблюдений [21]. В любом
случае размерность подпространства
сигнала меньше числа наличествующих
источников. Однако это не означает, что
оценка количества источников
невозможна. Например, может быть
показано [126], что для однопараметрических
векторов (или любых других случаев
с одним параметром на источник) угол
прихода, а в нашем случае — параметры
сигнала, все еще могут быть определены,
если А(0) является однозначной и N > 2К— К\ где К' = ранг [A(0)S].
Геометрически очевидное условие идентификации заключается в том, чтобы
подпространство сигналов включало уникальное множество К векторов из решеточного
множества.
В случае если число измерений превышает количество наличествующих
сигналов (то есть число источников ^меньше количества элементов N), то
модель данных в (5.7) представляется привлекательной геометрической
интерпретацией, обеспечивает понимание проблемы обработки сигнала датчиками
решетки [21]. На основании осуществленных измерений формируются вектора
с комплексными значениями и размерностью, равной количеству элементов
в решетке (N). При отсутствии шума выражение, дающее x(t) в (5.7), А(0) s(0,
ограничено размерностью пространства К (самое большее — подпространством
CN с А-размерностью), называемого подпространством сигнала, которое
занимает все пространство столбцов А(0) либо некоторую его часть. Если
принимаемые сигналы идеально коррелированны, то есть один сигнал представляет
собой просто произведение комплексного вектора на скалярную величину
другого, то размер подпространства К сигнала будет меньше К. Следовательно, при
достаточном возбуждении, а другими словами, при отсутствии сигналов с иде-
Многосвязная область
Решеточное множество
Рис. 5.3. Геометрическое представление
задачи определения угла прихода
сигнала [21]
5.5. Автоковариационные матрицы сигнала
альной корреляцией подпространство сигнала имеет размерность К. Так как
предполагается, что шумовая энергия присутствует во всем наблюдаемом
пространстве, выражение (5.7) часто называется низкоранговым сигналом в модели
данных полнорангового шума.
Эта геометрическая картина в совокупности ведет к точной
параметрической оценке задачи, представляя ее в виде пересечения подпространств. Так как
существует много применений, для которых подходит метод данных на основе
подпространства, было разработано большое количество методик, основанных
на работе с подпространством для его использования [21].
5.5. Автоковариационные матрицы сигнала
Перед тем как приступить к рассмотрению алгоритмов оценки угла прихода
сигнала, нам сперва необходимо определить два широко применяемых
термина: автоковариационная матрица принятого R^ и полезного сигнала R^,
соответственно задаваемых с помощью следующего выражения:
Rxx=E{x(t)xH(t)}, (5.14)
Re=e{s(0s*(0}, (5.15)
где Н — операция над эрмитовой матрицей (или комплексно-сопряженная
транспозиция) и е{-} — операция математического ожидания над аргументом. В
действительности ожидаемая величина не может быть получена в точности, так как
для этого необходим бесконечный промежуток времени и на практике должны
использоваться оценки как усредненное значение ряда мгновенных «снимков»,
сделанных за конечный промежуток времени достаточной продолжительности:
»-=«т^:Хх(Гя)хя(/я). (5.16)
Аналогичная аппроксимация применяется для Rss. Исходя из типичного
предположения некогерентности приемных сигналов исходная
ковариационная матрица Rss является положительно определенной [128]. Кроме того, шум,
как правило, представляется в виде стационарного Гауссовского
стохастического процесса. Данное предположение подкрепляется тем фактом, что при
существовании множества источников шума их распределение, согласно
центральной предельной теореме, будет Гауссовым [129]. Также исходя из наличия белого
Гауссова шума дальнейший анализ обнаружения направления на ИИ
(источник излучения) сильно упрощается.
Глава 5. Определение направления на источник сигнала. Основные положения
Если кроме этого считать, что он некоррелирован с сигналами и для
последующих выборок сигналов, то выражение (5.14) может быть записано в виде:
R^ = A(0)RS5 Ая (0) + г{п(/)пя (*)} = А(в)Яя Ая (0) + а,2,1, (5.17)
где с2п — дисперсия шума и X нормировано таким образом, что det (X) = 1.
Зачастую исходят из упрощающего предположения для пространственно белого
шума (то есть Е = I, где I — единичная матрица).
Допущения об известности отклика решетки и ковариации шума
практически никогда не оказываются действительными. Отклик решетки может
существенно отличаться от результата последней калибровки в зависимости
от погодных условий, поглощающих и отражающих особенностей
окружающей среды [130]. Более того, калибровочные измерения сами по себе зависят
от ошибок усиления и фазы. В случае аналитически калиброванных решеток,
состоящих из одинаковых элементов, включая ориентацию, могут возникнуть
ошибки из-за того, что элементы в действительности не являются полностью
тождественными и неизвестно их точное расположение. Эффективность
работы того или иного алгоритма может существенно ухудшаться в зависимости
от того, насколько фактический отклик антенной решетки отличается от
номинального значения [130].
Так как область среды вокруг решетки может быть нестационарной
(зависящей от времени), то требование на наличие известной статистики по шуму
на практике оказывается трудноудовлетворяемым. Кроме этого, зачастую
невозможно обеспечить учет немоделируемых шумов, вносимых
распределенными источниками, переотражения и шума, вносимого антенной опорой, и
нежелательного перекрестного искажения в канале. Получение статистических
данных по шуму затрудняется тем фактом, что искомые сигналы наблюдаются
зачастую одновременно с шумом и интерференцией. Когда для оценки
направления прихода сигнала используются методы подпространства сигналов,
зачастую исходят из предположения, что при переходе от канала к каналу величина
шума (шумового поля) является изотропной, независимой и одинаковой для
всех каналов, что отличается от действительности [130]. При большом
значении коэффициента сигнал—шум отклонение величины шума для таких
предположений не является критичным, так как его вклад в статистику принятого
решеткой сигнала мал. Однако при низких значениях коэффициента сигнал-
шум может наблюдаться существенное ухудшение работы алгоритма.
5.6. Традиционные методы определения направления прихода сигнала
95
5.6. Традиционные методы определения направления
прихода сигнала
Принято считать, что существует два стандартных метода: традиционного
формирования луча и наименьшей дисперсии Кейпона (англ. Саропе) [13].
5.6.1. Стандартный метод формирования ДН
Стандартный метод формирования ДН также называется методом обработки
с вводом относительных временных задержек и суммированием — так
называемый метод Бартлетта. Его суть заключается в сканировании интересуемого
углового сектора (обычно с помощью дискретной выборки); тогда направление
с наибольшей отдаваемой мощностью будет соответствовать оценке
направления (угла) прихода полезного сигнала. Точнее говоря, по мере инкрементного
изменения угла обзора 0 рассчитывается вектор отклика решетки а(Э) и
отдаваемая мощность лучеформирователя (формирователь ДН антенны)
измеряется по формуле
PcsF(*)=*"T™m. (5-18)
CBF ая(0)а(0)
Эту величину еще принято называть пространственным спектром, и
истинной оценкой DOA является угол 0, который соответствует пиковому значению
спектра выходной мощности.
Этот метод принято считать методом Фурье, так как он представляет собой
естественное расширение классического спектрального Фурье-анализа с
четырьмя различными вырезающими функциями [131, 132]. Фактически при
использовании линейной АР из изотропных элементов пространственный спектр
в (5.18) является пространственным аналогом классической периодограммы
(графика спектральной функции) при использовании анализа временных рядов.
Следует отметить, что при использовании анализа временных рядов другим
типам решеток соответствуют нелинейные схемы выборок. Что касается
периодограммы, то пространственный спектр имеет порог разрешения. То есть решетка
из нескольких элементов неспособна к формированию ни узких, ни острых
пиков и, следовательно, неспособна хорошо отличать близко расположенные друг
к другу источники сигналов [13]. Если быть точнее, если разнесение фазы
колебаний, менее чем 2n/N, то с помощью данного метода падающие волны не могут
быть отличены. Например, при использовании иЬАиз пяти элементов с шагом
размещения d = Х/2 величина порогового разрешения будет составлять 23° [133].
Плохое разрешение является существенным недостатком этого метода. В связи
96
Глава 5. Определение направления на источник сигнала. Основные положения
с этим были рассмотрены другие способы с использованием весовых векторов
w, обеспечивающих меньшие пороги разрешения.
5.6.2. Метод наименьшей вариации Кейпона
Метод наименьшей вариации Кейпона также известен как метод свободного
от искажений обзора с наименьшей вариацией MVDL (minimum variance
method). Метод MVDL представляет собой попытку преодоления проблемы низкого
разрешения, свойственной методу обработки с вводом относительных
временных задержек и с помощью суммирования, и обеспечивает существенное
улучшение характеристики [17]. В этом методе выходная мощность минимизируется
с условием ограничения, что усиление в необходимых направлениях остается
единичным. Решая оптимизационную задачу ограничения для весового
вектора [13, 124], мы получаем выражение
w- /-а(9) , (5.19)
a"(0)R>(0)
для пространственного спектра Кейпона
capon v „ a"(0)R^a(0)
Опять же оценкой истинного направления прихода сигнала является угол
0, который соответствует пиковому значению этого спектра. По сравнению
со стандартным методом формирования луча CBF, для метода MDVL,
характеризующегося в большинстве случаев более высоким разрешением, необходимо
только дополнительное обращение матрицы.
В общем, стандартные алгоритмы оценки направления прихода
сигнала обеспечивают несколько важных преимуществ. Расчет
пространственного спектра мощности (энергетического спектра) для одного диапазона углов 0
не мешает использовать алгоритм для последующего расчета спектра для
другого диапазона углов 0 с использованием тех же данных. Пространственные
характеристики данных по всем направлениям компактно выражаются через
Кхх и рассчитываются только один раз. Таким образом, метод характеризуется
отсутствием временных провалов чувствительности, в течение которых
переходные сигналы, находящиеся вдали от направлений на постоянно
излучающие источники, могут появляться случайным образом и в связи с этим
оказываться недетектируемыми [134]. Другое преимущество заключается в том, что
при электронном, а не механическом управлении ДН скорость сканирования
заданной области пространства ограничивается скоростью вычислений, а не
механической скоростью.
5.7. Подпространственный подход оценки угла прихода сигнала
5.7. Подпространственный подход оценки угла
прихода сигнала
Другая главная группа алгоритмов оценки DOA получила название методов
подпространства. С геометрической точки зрения принятые векторы сигналов
образуют векторное пространство сигнала, размерность которого равна
количеству элементов решетки N Пространство принятого сигнала может быть
разделено на две части: подпространство сигнала и подпространство шума.
Подпространство сигнала представлено колонками А(0) [21], причем ортогональное
ему подпространство известно как подпространство шума. В алгоритмах под-
пространственной обработки эта ортогональность используется для
определения углов прихода сигналов.
5.7.1. Алгоритм MUSIC
В пределах класса так называемых алгоритмов обработки сигналов
подпространства очень широко исследовался метод MUSIC (multiple signal classification)
[123, 135]. Согласно результатам детального исследования рабочих
характеристик на основе сотен сеансов моделирования, осуществленных в Lincoln
Laboratories при МИТ1, наиболее перспективным и главным кандидатом на
дальнейшие исследования и аппаратную реализацию был признан метод MUSIC [136].
По большей части популярность алгоритма MUSIC обусловлена его
применимостью. Например, он применим к решеткам с произвольной, но известной
конфигурацией и откликом, а также для оценки нескольких параметров на
источник (например азимута, угла места, расстояния, поляризации, и т.д.).
Однако за расширенную применимость приходится платить необходимостью знать
отклик решетки на все возможные комбинации параметров источника; то есть
отклик должен быть либо измерен (калибровка) и записан, либо должна
существовать возможность его аналитического описания, как, например, в случае
с методом root-MUSIC [123, 137]. Кроме того, при использовании метода MUSIC
необходимо априорное знание пространственной статистики второго порядка
для полей фонового шума и помех. Как было показано ранее, в реальности эти
допущения никогда не удовлетворяются.
Алгоритм MUSIC был разработан Шмидтом (англ. Schmidt) [123, 126] с
учетом того, что отклик решетки на необходимый сигнал является ортогональным
по отношению к подпространству шума. Сначала подпространства сигнала
и шума идентифицируются с помощью спектрального разложения
ковариационной матрицы принятого сигнала. Затем рассчитывается пространственный
спектр MUSIC, на основании которого определяются углы направления на ис-
Массачусетский институт технологии (примечание переводчика).
Глава 5. Определение направления на источник сигнала. Основные положения
точник излучения. Сперва определим внутри алгоритма, что в общем
решеточное множество представляется множеством
Л = {а(е,):е,.е0} (5.21)
для интересующей области в пространстве углов искомых направлений.
Решеточное множество считается однозначным и известным для всех значений угла
0, что обеспечивается аналитически или посредством некоторой
калибровочной процедуры. Задача состоит в применении к принятым сигналам
подходящих методов для извлечения области 0 из диапазона 0.
При отсутствии шума в выражении (5.7) наблюдение x(t) сводилось бы
полностью к подпространству Ск с размерностью К, определенному областью А(0).
Определение углов направлений на источник излучения для случая без шума
заключается просто в нахождении ^однозначных элементов Л,
пересекающихся с этим подпространством [130]. При наличии шума необходимо
использование другого подхода, так как наблюдения становятся «полноранговыми». Суть
метода MUSIC и других методов подпространства состоит в том, чтобы в
первую очередь оценивать основное подпространство наблюдений (обзора) с
последующим нахождением элементов Л, которые в некотором смысле
расположены ближе всего к этому подпространству.
Оценка подпространства, как правило, достигается путем
спектрального разложения автоковариационной матрицы принятых данных Rxx. Ковари-
антная матрица Rss источника излучения как условие применимости метода
MUSIC должна быть полноранговой, то есть К' = К. Используя модель в (5.17)
с учетом белого шума1, то есть е{п(^)пя(/)} = а^1, разложение матрицы R^ даст
такие собственные значения А, , что XI >Х2 > ... > Х„ > ХУА_, = А,„,, = ... = Хм = с2„
п1 К л+1 К+2 N п
и соответствующие собственные вектора матрицы R^ — ел е CN, л = 1, 2, ..., N
Кроме того, может быть легко показано, что R^ может быть записана в
следующей форме [138]:
R„ = Ik е. е? = ЕЛЕ" = ЕЛЕ? = Е„Л„Е„" =
/7=1 \J.ll)
= Е Л Ef + 02ЕЕ" = Е А Е? + G2 I
s s s п п п s s s п
где Е = [ер е2,..., е„], Е5 = [ер е2,..., еД Еп = [ек+р qk+v ..., ej, Ап = diag {Xv Xv ..., XN},
As=As-c2nl. Можно считать, что собственные вектора Е = [E5,EJ образуют
ортонормированный базис (то есть ЕЕЯ= ЕЯЕ = I). Созданные за счет К
векторы Е определяют сигнальное подпространство, а ортогональное дополнение,
Предположение о пространственном белом шуме в данном случае не требуется;
использование произвольной шумовой автоковариации <з2п = X является логичным, при
условии, что X известно.
5.7. Подпространственный подход оценки угла прихода сигнала
99
-45 -30 -15 0 15
6 (градусы)
90
Рис. 5.4. Пространственный спектр алгоритма MUSIC
создаваемое вектором Еп, определяет шумовое подпространство. С детальным
анализом свойств собственной структуры автоковариационных сигнальных
матриц Rxx и Rss можно ознакомиться в работе [126]. После определения
подпространств углы прихода полезных сигналов могут быть оценены
вычислением пространственного спектра интересуемой области с помощью алгоритма
MUSIC [21]:
1 MUSIC
(в)=
ая(0)а(0)
ая(0)£,Аяа(е)
(5.23)
Следует отметить, что а(6) — векторы отклика решетки, вычисленные для
всех углов 0 в пределах интересуемой области. Так как искомые вектора А(0)
отклика решетки ортогональны подпространству шума, то пиковые значения
пространственного спектра, полученные с помощью метода MUSIC,
соответствуют оценке углов прихода полезных сигналов. В связи с недостатками
выведения R^ собственные значения шумового подпространства не будут точно
равны о]. Они, тем не менее, формируют группу вокруг величины о2п и могут
быть отличены от собственных значений сигнального подпространства.
Разделение становится более выраженным по мере увеличения количества выборок
(в идеале оно достигает бесконечности), используемых при оценке R^.
Продемонстрируем эффективность данного алгоритма на примере ULA
из 8 элементов (N = 8) с шагом их расположения d = Х/2. Будем считать, что
в дальней зоне решетки находятся четыре некоррелированных источника
излучения (ИИ): 6, = +60°, 62 = +15°, 03 = —30°, и 04 = —75°. Более того, делается
допущение о наличии некоррелированного пространственно белого Гауссова
шума с нулевым средним и единичной дисперсией (с2п = 1). В общей сложно-
100
Глава 5. Определение направления на источник сигнала. Основные положения
сти делается 500 наблюдений (L = 500). На рис. 5.4 показан спектр, полученный
с помощью метода MUSIC. Так как пики пространственного спектра точно
соответствуют углам направления на ИИ, то эффективность работы алгоритма
считается отличной.
В заключение необходимо отметить, что алгоритм MUSIC обеспечивает
асимптотически несмещенную оценку параметра даже для нескольких
падающих волновых фронтов, так как Rss и Еп измерены асимптотически
идеально [139].
5.7.2. Алгоритм ESPRIT
Несмотря на существенные преимущества производительности метода MUSIC,
за них приходится платить существенными издержками на вычисление
(исследование пространства параметров) и хранение данных калибровки решетки.
Более того, несмотря на концептуальную простоту даже для одномерной
оценки с помощью метода MUSIC (в частности определение направления на ИИ),
существует ряд недостатков. Главным образом, проблемы для случая конечных
измерений обусловлены тем фактом, что так как известно число ^-сигналов,
поиск направлений прихода сигналов (углы 0р 02,..., 6^) должен
осуществляться одновременно за счет максимизации соответствующего функционала, а не
поочередного получения оценок, характерного при определении пиков спектра
с помощью метода MUSIC. Однако по сравнению с одномерными
исследованиями, многомерные исследования характеризуются огромной вычислительной
нагрузкой. Уменьшение вычислительной нагрузки, обеспечиваемой
одномерным исследованием К-параметров, происходит в обмен на использование
метода выборок конечного объема для среды с несколькими источниками излучения
[122]. Более того, эффективность метода MUSIC серьезно падает для сценариев
с низким отношением сигнал—шум или при наличии близко расположенных
источников излучения (то есть при таких измерениях обнаруживается
несколько пиков). Тем не менее следует подчеркнуть, что несмотря на свои недостатки,
метод MUSIC зарекомендовал свое превосходство над прочими, более ранними
методиками [136].
Метод ESPRIT (Estimation of Signal Parameters via Rotational Invariant
Techniques) похож на метод MUSIC в том, что в нем корректно используется лежащая
в основе модель данных. Помимо выполнения большинства основных
требований, предъявляемых к произвольным решеткам из сенсоров, метод ESPRIT
обеспечивает существенное сокращение упомянутой ранее вычислительной
нагрузки и издержек на хранение данных. Это реализуется наложением
ограничения на структуру матрицы датчиков с целью обеспечения инвариантности
смещения, то есть сенсоры представляют собой согласованные пары с
одинаковыми векторами смещения [122]. Такие условия реализуются или могут быть
5.7. Подпространственный подход оценки угла прихода сигнала
101
Подрешетка#1
Подрешетка#2
(а)
Подрешетка#2
Подрешетка#1
(б)
Рис. 5.5. Геометрия решетки сенсоров в методе ESPRIT: (а) одна решетка
состоит из двух перекрывающихся решеток, а другая (б) — из двух
идентичных и неперекрывающихся решеток [140]
реализованы во многих практических случаях. Кроме того, с точки зрения
эффективного получения сигнальных параметров по сравнению с прочими
методами, включая MUSIC, метод ESPRIT также менее чувствителен к дефектам
решетки [137]. Таким образом, несмотря на то, что метод ESPRIT применим для
решения разнообразного круга задач, дальнейшее рассмотрение будет
сосредоточено на вопросе оценки направления прихода сигнала. Этот метод
обеспечивает одновременную оценку нескольких источников и направлений прихода
сигнала [140].
Для большинства алгоритмов, разработанных для оценки углов прихода
сигналов, необходимо чтобы матрица отклика решетки А(0) была полностью
известна для заданного параметрического вектора 0. Обычно это достигается
с помощью аналитических средств с использованием информации о
положении и отклике каждого отдельного датчика (как, например, это делается в
случае с ULA) или непосредственной калибровкой в полевых условиях (в условиях
эксплуатации). Вместо этого, как показано на рис. 5.5, известное выражение,
являющееся алгоритмом ESPRIT [140, 141], допускает, что N-элементная
решетка состоит из двух идентичных смещенных TV-элементных подрешеток, где
N'< N< 27V'. Отдельные элементы каждой подрешетки могут иметь
произвольные коэффициенты направленного действия (КНД) и фазовые отклики при
условии, что в каждой паре подрешеток имеются аналогичные двойники [124].
Предполагается, что элементы в каждой паре идентичных датчиков или дуплете
102
Глава 5. Определение направления на источник сигнала. Основные положения
разнесены на фиксированный вектор смещения D. Как показано на рис. 5.5(a),
подрешетки могут перекрываться для определенных специальных
конфигураций решеток, то есть элемент решетки может быть членом обоих подрешеток
(N < 2N). Как показано на рис. 5.5(6), для подрешеток, не имеющих общих
элементов, N = 2N.
Допущение метода ESPRIT о наличии ротационно инвариантных
подрешеток ведет к получению А(0) особой формы. При применении приведенной
на рис. 5.5 конфигурации выход решетки моделируется с помощью выражения:
х(/) =
АД0)
А2(0)
s(0 +
n2(t)_
(5.24)
где А, (0), А2(0) е CNxK обозначается многосвязная область каждой подрешетки
соответственно, a n1(0?n2(0G(Cyv xl — шумы, принятые каждой решеткой
соответственно. Далее если матрицы выборки NxN, с помощью которых элементы
всей решетки распределяются между двумя подрешетками, обозначить через Jj
hJ2,
*Ч — [}n' '^N'x(N-N') J >
*Ч = \yN'x(N-N') '*N' J '
(5.25a)
(5.256)
где 1^, — единичная матрица N'xN'h 0n, n_n1 — нулевая матрица, то легко
увидеть, что решетка, состоящая из двух идентичных подрешеток, удовлетворяет
выражению [142]:
JA(0) =
LJ2j
А(0) =
А,(в)
А,(0)Ф_
(5.26)
где Ф — единичная диагональная матрица с диагональными элементами ф.,
заданными выражением [142]
ф,.=ехр{-Дг-0}, 1 = 1,2,..., К,
(5.27)
где р. — векторное волновое число для плоского фронта падающей волны /-го
узкополосного источника излучения и D — вектор смещения между двумя
подрешетками. Как показано на рис. 5.5, исходя из линейности всей решетки
2л
и ориентации D в направлении я/2 (а не —я/2) p.* D упрощается до sinG,.,
к
где X — длина волны узкополосного сигнала, 0. — угол прихода сигнала /-го
источника. Как видно из (5.26), в методе ESPRIT решеточное множество целиком
не используется. Следовательно, необходимой к использованию информаци-
5.8. Однозначность оценки углов прихода
103
ей является отклик подрешетки и структура смещения решетки. Так как Aj(0)
должна быть полноранговой (К< Л^для всех 0), число разрешаемых источников
при использовании алгоритма ESPRIT ограничено N
Структура (5.26) используется методом ESPRIT следующим образом.
Если собственные вектора, соответствующие К самым большим собственным
значениям ковариационной матрицы Rxx принятого сигнала, представлены
Es е CNxK и если нет пар коррелированных сигналов, то можно легко показать,
что [142]
А, (в)
А1(0)Ф
Т,
(5.28)
что для полноранговой матрицы Т е С . Определяя Aj(0) и подставляя в
нижнюю часть (5.28), получаем [142]:
Е1Т1ФТ = Е1Ч/,
(5.29)
где матрица *F = Т_1ФТ уже определена (или *F = ТФТ-1). Таким образом, так как Ф
и ¥ связаны преобразованием подобия, собственные значения Ч* должны быть
равны диагональным элементам Ф. Более того, колонки Т являются
собственными векторами Ф [122]. Это соотношение является фундаментальным для
метода ESPRIT и его характеристик. Следовательно, если N"> Kw D = \D\ < X/2,
углы прихода сигнала могут быть определены однозначно на основании
собственных значений оператора *F, отображающего Е{ на Е2 по формуле
^sin
argjvi/J
2я
D
/=o,i,..., js:,
(5.30)
где \|/. — каждое собственное значение матрицы ¥. Следует отметить, что данный
результат не зависит от фактического значения А(0) (пока она остается
полноранговой) и, таким образом, для оценки углов прихода отпадает необходимость
в калибровке решетки [124].
5.8. Однозначность оценки углов прихода
При условии, что число некоррелированных сигналов меньше количества
сенсоров, и при неограниченном поступлении данных большинство
предшествующих методов определения направления на источник излучения могут
обеспечить точное и однозначное решение задачи. Однако при слишком
большом количестве сигналов или при ограниченном количестве данных любой
Глава 5. Определение направления на источник сигнала. Основные положения
алгоритм определения направления прихода может выдать ошибку или
полностью не справиться с задачей [134]. В работе [143] Вэкс и Зискинд добились
получения максимального количества сигналов, при которых углы прихода могут
быть определены однозначным образом. Они показали, что возможность или
невозможность однозначного определения направлений прихода сигналов
зависит от определенных условий: решеточного множества, числа сенсоров, числа
сигналов и ранга автоковариационной матрицы принятых сигналов. В
зависимости от жесткости условий однозначность для любой возможной принятой
последовательности данных либо гарантируется, либо характеризуется единичной
вероятностью. В обоих случаях должно быть известно решеточное множество,
а вектора отклика решетки, соответствующие N однозначным направлениям
прихода сигнала, должна быть линейно независимыми для всех их возможных
вариантов.
Согласно самому строгому условию однозначность гарантируется в случае,
если число К сигналов меньше, чем среднее количество N сенсоров и ранга
сигнальной автокорреляционной матрицы [143]:
7V + rank{R }
К< ±-*±. (5.31)
Например, в случае некоррелированных сигналов и ранга {R55} = 7V (5.31)
просто указывает на известное условие К < N. Однако эффект коррелированных
сигналов направлен на уменьшение ранга Rss и в конечном итоге —
максимального числа источников, которые могут быть локализованы. Например, если все
сигналы полностью коррелированные, то есть если есть ранг {RM} = 1, то число
однозначно определенных источников сокращается до L < (М + 1)/2. По всей
видимости, в случае многолучевого распространения (среды) сильное условие
в (5.31) является очень ограничивающим. Если вместо гарантированной
однозначности может быть приемлема однозначность с единичной вероятностью, то
будет достаточным более слабое условие [143]:
К< 2ra^V М. (5.32)
2rank{R55} + l
Кроме того, это условие для случая некоррелированных сигналов
устанавливает К < N, хотя для полностью коррелированных сигналов устанавливает
уточненный предел К <-N .
ПРИНЦИПЫ
ФОРМИРОВАНИЯ
ДН
Улучшение приемной характеристики антенной решетки на основе известного
или определенного направления сигнала осуществляется с помощью методов
пространственной обработки сигнала. Некоторые из этих методов
пространственной обработки принято называть формированием луча потому, что они
могут обеспечить формирование ДН решетки в зависимости от требований,
предъявляемых беспроводной системой. Диаграмма направленности по
мощности Р(0) от произвольного точечного источника излучения для заданной
одномерной линейной решетки определяется выражением [59, 125]
P(e) = ja(x)Q-mxe)dx, (6.1)
где а(х) — амплитудное распределение вдоль решетки, (3 — фазовая постоянная,
d(x, 6) — относительное расстояние, которое падающий фронт волны с углом
прихода 6 должен пройти между равномерно расположенными по длине
решетки точками, расстояние между которыми равно х. За управление ДН в
заданном угловом направлении отвечает главным образом экспоненциальный член.
Интеграл (6.1) может применяться для двух- и трехмерных конфигураций [59].
По существу уравнение (6.1) представляет собой преобразование Фурье для
а(х) по длине решетки и является основой методов формирования ДН [125].
На практике использование амплитудного распределения а(х), необходимого
для определения диаграммы направленности по мощности Р(9), является
затруднительным [59]. Следовательно, в большинстве случаев реализация (6.1)
осуществляется на основе использования дискретных источников путем
суммирования по конечному количеству элементов [59]. Таким образом, несмотря
на возможные изменения общей формы ДН решетки, электронное
сканирование лучом может осуществляться за счет управления относительной фазы
между элементами. В этом и состоит главный принцип фазирования решетки
и формирования ее ДН.
Главная задача пространственного формирования ДН заключается в том,
чтобы одновременно обеспечить максимум в направлении полезного сигнала SOI
(signal-of-interesf) и в идеальном случае создать «нули» в направлениях прихода
ГЛАВА 6
106 Глава 6. Принципы формирования ДН
помеховых сигналов SNOI (signals-not-of-interesf). Характер этого процесса
непрерывно изменяется в зависимости от прихода SOI и SNOI. Сигнальный процессор
решетки должен обеспечивать автоматическую подстройку на основе
полученных данных — весового вектора w = [wp w2,..., wN], соответствующего
комплексной амплитуде возбуждения для каждого элемента антенны. Обычно
огибающие сигналов и соответствующие весовые коэффициенты удобно представлять
в комплексной форме [62]. Это соотношение представлено выражением
r(/) = Re[x(0e^r], (6.2)
где сос —угловая частота и х(0 — комплексная огибающая реальной
составляющей принятого сигнала г(/). Поступающий (принимаемый) сигнал
взвешивается с помощью ДН решетки, и ее выход определяется выражением
y(t) = Rt
Х^(/К(/)е^ = Re[w"(0x(/)e^], (6.3)
где п — число элементов антенны и v/H(t)x(t) — огибающая комплексного сигнала
y(t). Так как обработка сигнала в любой современной электронной системе
осуществляется дискретным по времени образом, весовой коэффициент w
обеспечивает линейную комбинацию дискретных выборок для формирования выхода
одиночного сигнала, согласно выражению
у(к) = ^:х„(к) = *нх(к), (6.4)
/1=1
где к — индекс дискретного времени рассматриваемой выборки принятого
сигнала. Принцип формирования ДН применим как для непрерывных, так
и дискретных сигналов. Следовательно, каждый элемент приемной антенной
решетки имеет необходимую электронную часть для преобразования
принятого сигнала с понижением частоты и осуществления аналого-цифрового
преобразования (АЦП) для цифрового формирования ДН. В дальнейшем с целью
упрощения анализа в этой главе будет рассматриваться только дискретная
обработка и огибающие эквивалентных комплексных низкочастотных сигналов.
Для расчета оптимальных весовых коэффициентов, удовлетворяющих
нескольким критериям или ограничениям, различные адаптивные алгоритмы
уже разработаны. После вычисления весового вектора w, отвечающего за
формирование ДН, фильтр пространственных частот для всех направлений
представляется диаграммой излучения антенны (диаграммой направленности) с
помощью выражения
/>(e) = |w"(e)a(e)|2. (6.5)
6.1. Классическое формирование ДН I
В выражении (6.5) Р(0) представляет собой среднюю выходную мощность
пространственного фильтра при поступлении отдельного сигнала единичной
мощности под углом 0 [134]. При наличии соответствующего контроля
величины и фазы w главный лепесток ДН будет направлен на источник полезного
сигнала, а нули (в идеальном случае) — в направлении помеховых сигналов.
6.1. Классическое формирование ДН
При классическом формировании ДН вес формирователя полагается равным
вектору отклика решетки на полезный сигнал. По сравнению с любым вектором
такой же величины ДН антенна, сформированная с помощью весового
вектора wb = а(90), имеет максимальное усиление для любого заданного направления
0О. Это происходит потому, что wb обеспечивает регулирование фаз
поступающих на каждый антенный элемент сигналов с заданного направления 0О таким
образом, что происходит их синфазное сложение (конструктивное сложение).
Так как все элементы диаграммообразующего весового вектора
представляют собой фазовые сдвиги единичной величины, то систему принято называть
фазированной решеткой. Искомый с помощью этого метода отклик может быть
подтвержден математически с помощью неравенства Коши — Шварца:
^я(0)а(0о)|2<|^||2||а(0о)||2 (6.6)
для всех векторов w, причем с сохранением равенства в том и только том случае,
если w пропорционален а(0о) [134]. В отсутствие неоднозначности решетки
эффективная диаграмма направленности в (6.5) имеет глобальный экстремум для
угла 0О. Несмотря на то, что классический формирователь ДН является
идеальным выбором для направления максимума диаграммы излучения на полезный
сигнал, что обусловлено возможностью представления комплексного весового
вектора w в аналитическом виде, он не обеспечивает дополнительную
возможность размещения нулей в направлении любых наличествующих источников
помех [59]. Это становится очевидным при анализе выражения (6.5), в котором
из всей интересуемой области, ограниченной угловой областью, управление
формой ДН может быть достигнуто только в направлении, заданном углом 0О.
Таким образом, для удовлетворения всех требований необходимо применение
более совершенного метода пространственной обработки.
Для наглядной демонстрации этого принципа рассмотрим шестиэлемент-
ную линейную решетку ULA из всенаправленных элементов, расположенных
на расстоянии половины длины волны друг от друга. Предположим, что
существует три некоррелированных источника одинаковой мощности,
обеспечивающих передачу сигналов в направлении решетки. Кроме того, будем считать,
108
Глава 6. Принципы формирования ДН
Классическое формирование ДН
Адаптивное формирование ДН
-90 -75 -60 -45-30-15 0 15 30 45 60 75 90
6 (градусы)
Рис. 6.1. Классическое и адаптивное формирование ДН
что источник полезного сигнала расположен в направлении 6 = 30°, в котором
ДН должна иметь максимум, а также, в идеале, два нуля (для помеховых
сигналов) в направлениях 0 = -45° и 0 = 0°. На рис. 6.1 приведены две ДН: одна
получена с помощью классического формирователя [59] и другая — с помощью
специального алгоритма адаптивного формирования. Как и ожидалось,
классический формирователь, обеспечивая свой максимум в направлении
полезного сигнала, не справляется с задачей формирования нулей в направлении
помеховых сигналов, так как неспособен управлять ДН за пределами угла 0О, в то
время как алгоритмы адаптивного формирования обеспечивают
одновременное формирование максимума в направлении полезного сигнала SOI и нулей —
в направлении помеховых сигналов SNOI.
6.2. Статистически оптимальные весовые вектора
формирования ДН
Формирователи ДН, в зависимости от способа формирования, могут быть
классифицированы как независимые от данных или статистически оптимальные.
Веса в информационно независимом формирователе ДН не зависят от
принимаемых решеткой данных и выбираются для обеспечения заданного отклика
для всех сигналов и помеховых сценариев [22]. На практике волны искажаются
средой распространения или приемными устройствами. В данном случае
допущение плоской волны может уже не действовать, и весовые вектора,
обусловленные задержкой прихода плоской волны на соседние элементы, не будут
обеспечивать когерентное сложение полезного сигнала [22].
6.2. Статистически оптимальные весовые вектора формирования ДН I
Сопоставление произвольно искаженного сигнала с произвольными
характеристиками может быть реализовано только статистически за счет
использования матричного взвешивания входных данных, адаптирующегося к
характеристикам принятого сигнала [62]. Такой случай принято называть статистически
оптимальным формированием ДН. Тогда выбор весовых векторов базируется
на статистике принятых данных. Веса выбираются с целью оптимизации
отклика формирователя ДН таким образом, чтобы выход решетки содержал
минимальные шумовые составляющие и сигналы, поступающие с направлений,
отличных от направления на источник полезного сигнала [144].
Любое возможное ухудшение рабочей характеристики может быть
обусловлено отклонением фактических условий эксплуатации от идеальных, что может
быть минимизировано с помощью дополнительных методов, накладывающих
определенные ограничения [22]. В связи с появлением интереса к
использованию в мобильной связи методов обработки сигнала, используемых в антенных
решетках, обусловленного возможностью обнаружения мобильных терминалов
в любой области ячейки, статистически оптимальные формирователи ДН
обеспечивают возможность подстройки к статистике различных абонентов.
Существуют различные критерии определения статистически оптимальных весов
формирователя ДН, некоторые из которых рассмотрены в этой главе.
6.2.1. Формирователь луча с максимальным SNR
Формирователь ДН с максимальным отношением сигнал—шум по сути
является модифицированным вариантом классического формирователя ДН. При
наличии шума весовой вектор w, обеспечивающий максимальную величину
отношения сигнал—шум, задается выражением [19]
w_^ = R;>(e0), (6.7)
где Rm — ковариационная матрица шума. При известной ковариационной
матрице этот весовой вектор формирователя ДН обеспечивает выход с
максимальным отношением сигнал—шум. При наличии пространственно белого
шума, то есть когда шумовая ковариация является кратной единичной матрице
I, формирователь ДН с максимальным отношением сигнал—шум становится
эквивалентным классическому формирователю ДН [19]. Так как при
вычислении весового вектора формирователя ДН, как и в случае классического
формирователя ДН, учитывается только направление прихода полезного сигнала,
формирователь ДН с максимальным отношением сигнал—шум будет работать
удовлетворительно только для сценария, в котором учитывается один источник
сигнала, но не может обеспечить удовлетворительную работу при наличии
источников помеховых сигналов [19].
110
Глава 6. Принципы формирования ДН
6.2.2. Устройство подавления боковых лепестков
и формирователь ДН с максимальным SINR
В случае обслуживания коммуникационной системой более чем одного
пользователя зачастую помимо шума необходимо обеспечивать подавление помехо-
вых сигналов с использованием соответствующих методов обработки сигнала.
Это реализуется с помощью нескольких интуитивно понятных методов, как
например с помощью устройства подавления сигналов MSC (the multiple side
lobe canceller), принимаемых с боковых лепестков ДН [144]. Суть работы MSC
состоит в том, что сначала вычисляются весовые вектора традиционного
формирователя ДН для каждого источника сигнала, причем результирующий
вектор формирователя ДН становится их линейной комбинацией таким образом,
что полезный сигнал сохраняется при подавлении всех составляющих помехи
[19]. Метод для решетки с частной геометрической конфигурацией ULA был
уже рассмотрен в предыдущей главе с целью демонстрации принципа действия
смарт-антенн. Однако у MSC есть некоторые ограничения. Например, при
наличии большого числа помеховых сигналов оно не может обеспечить их
удовлетворительного подавления, что может привести к существенному усилению
шумового компонента [144]. Эти ограничения могут быть сняты с помощью
формирователя ДН, обеспечивающего максимальную величину выходного
отношения сигнал— смесь помехи с шумом (SINR).
Учитывая, что выход формирователя ДН определяется по формуле [19]
^ = w"x = w"(s+i+n) = j;5+.y/;v, (6.8)
где все принимаемые решеткой компоненты в наблюдаемый момент времени
являются Nx 1 комплексными векторами и классифицируются следующим
образом: s — составляющая полезного сигнала с углом прихода 0О, i = ^/=ls,. ~~ со~
ставляющая помехи (исходя из наличия /числа соответствующих источников)
и п — составляющая шума. В (6.8) мы также отделяем взвешенный выход
отклика решетки на полезный сигнал ys = w"s от суммарного отклика решетки
на сигнал смеси помехи и шума^ = wH(i + п).
В результате выходная мощность взвешенного сигнала решетки
определяется как [22]
8{|J;J2J = W//8{SS//}W = W//R55W, (6.9)
где Rss — автоковариационная матрица векторов сигнала, и выходная мощность
взвешенного сигнала смеси помехи и шума определяется как [22]
e{l^l2}=w//e{li+nl2}w=w//R^w' (6Л0)
6.2. Статистически оптимальные весовые вектора формирования ДН
III
где R/;v — автоковариационная матрица векторов n + i. Таким образом,
взвешенный выход SINR может быть определен как [22]
mA?'w. (б.п)
При соответствующей факторизации R/yvH ряде преобразований выражения
SINR задача максимизации может быть приведена к задаче разложения по
собственным векторам. Тогда выражение для w, обеспечивающего максимизацию
отношения SINR, будет иметь вид [22]:
w_^=R;>(0o). (6.12)
Это статистически оптимальное решение максимизации выходного
отношения SINR в среде «помеха плюс шум». Однако оно требует больших
вычислительных ресурсов для инверсии R/yv, что может оказаться проблематичным при
большом количестве элементов антенной решетки [19].
6.2.3. Минимальная среднеквадратическая ошибка MMSE
Опорный сигнал может быть сформирован при достаточности данных о
полезном сигнале. Опорные сигналы необходимы для определения
оптимального весового вектора wMSE = [wp w2, ... wN]T. Это осуществляется посредством
минимизации среднеквадратического отклонения опорных сигналов и
выходов антенной решетки из TV элементов [145]. Идея использования
опорного сигнала в адаптивной антенной системе впервые была предложена Уидроу
в работе [145], где он описал несколько методик, основанных на
формировании пилот-сигнала. В одной из предложенных методик реализован двухре-
жимный процесс подстройки, в котором передатчик осуществляет отправку
пилот-сигнала и фактических данных в режиме чередования. Приемная часть
«знала» пилот-сигнал и использовала его в качестве требуемого отклика для
адаптивного алгоритма LMS, который рассмотрен далее в этой главе.
Функция подстройки при передаче фактических данных отключается, и значения
весовых коэффициентов «плавают» до очередного включения пилот-сигнала.
Несмотря на то, что подобная адаптивная антенна, по всей вероятности,
никогда не была создана, эта концепция сама по себе дала необходимый толчок
аппаратной реализации [146].
С точки зрения формирования ДН опорный сигнал генерируется в виде
периодической передачи настроечной последовательности, априорно
известной приемной части, которую принято называть временным опорным сигналом.
Следует отметить, что информацию о направлении прихода полезного сигнала
принято называть пространственным опорным сигналом. Временной опорный
112
Глава 6. Принципы формирования ДН
л/^>44
Цепь автоматической
подстройки весовых
коэффициентов
-©
Рис. 6.2. Опорный сигнал адаптивной антенны
сигнал имеет принципиальное значение в среде с замиранием, что обусловлено
отсутствием информации об угле прихода [70]. Как было показано Комптоном
[147], опорный сигнал адаптивной решетки не обязательно должен быть
точной копией полезного сигнала, хотя именно это и происходит в большинстве
случаев. В целом его можно и не знать, но он должен быть коррелирован с
полезным и не коррелирован с любой возможной помехой. Комптон идет дальше
с описанием нескольких экспериментальных антенных систем,
предназначенных для использования с сигналами с расширенным спектром, где
последовательность/код расширения обеспечивает необходимое разделение полезного
и помехового сигналов. Учебный материал по адаптивному формированию ДН
с самогенерирующимися опорными сигналами можно найти в работе [146].
На рис. 6.2 представлена блок-схема адаптивной системы, работающая с
использованием опорных сигналов. В каждый момент времени к ошибка е(к)
между опорным сигналом d(k) и взвешенным выходом решетки у(к) определяется
выражением
e(k) = d(k)-y(k) = d(k)-wHx(k).
(6.13)
Величина среднеквадратического отклонения может быть выражена
следующим образом:
rinei/ .},
w L w,w j '
mine
где /ww*= \e (k)\2 — вещественная целевая функция весового вектора w, для
которой должно быть найдено решение (w* сопряжен с w). Максимальная скорость
6.2. Статистически оптимальные весовые вектора формирования ДН
ИЗ
3/w^
изменения J „ задана —-— [83, 148]. Для получения значимого результата
w'w dw *
целевая функция должна иметь явную зависимость от сопряженной части
весового вектора [23]. Обычно это просто означает переход преобразования к
сопряженному преобразованию (или Эрмитову оператору). С более подробной
информацией по этой теме можно ознакомиться в работах [83, 148].
Следовательно, имеем
а/ . d\[d(k)-v<Hx(kj\H[d(k)-vHx(k)t
-^- = — ±± J-l = -2e\k)x(k). (6.14)
dw dw
Для минимизации целевой функции положим (6.14) равным нулю. Кроме
того, полагая, что ожидаемое значение соответствует минимуму/ww# получаем
2R„w-2rja/=0 (6.15)
где R^ =е[ххя} — автоковариационная матрица сигнала и rxd = еЬи/*} —
ковариационный вектор опорного сигнала. Таким образом, весовое решение для
оптимальной среднеквадратической ошибки задается выражением
wMse=R^ (6-16)
и обычно называется решением Винера—Хопфа. Недостаток данного метода
заключается в том, что формирование точного опорного сигнала базируется
на недостаточных данных в приемнике [22].
6.2.4. Прямое обращение матрицы DMI
При априорном знании полезного и помехового сигналов выражение (6.16)
обеспечивает самое прямое и наиболее быстрое решение для расчета оптимальных
весов. Однако сигналы точно не известны, так как среда их распространения
постоянно меняется. Таким образом, для того, чтобы удовлетворять новым
требованиям, обусловленным изменяющимися условиями, блок обработки сигналов
должен обеспечивать непрерывную коррекцию весового вектора [98].
Соответственно необходимость коррекции весового вектора без наличия
предварительной информации ведет к оценке ковариационной матрицы Rxx и вектора
взаимной корреляции rxd в конечный интервал наблюдения. Следует отметить,
что это блочно-адаптивный подход, в котором оценка статистики
осуществляется с помощью пространственных блоков данных решетки [70]. Адаптивность
достигается посредством окна передачи длиной, скажем, L символов. Оценки
R х и rxd могут быть получены следующим образом:
I 14 Глава 6. Принципы формирования ДН
Rxx=\fJx(i)xH(i), (6.17а)
Ь=|Хх(/у*(0 (6.176)
где N] и N2 — такая нижняя и верхняя граница интервала наблюдения
соответственно, что N2 = Nx + L — \. Таким образом, весовой фактор определяется
выражением
wMse=R^ (6.18)
Преимущество метода заключается в том, что он по сравнению с любым
адаптивным методом обеспечивает более быструю сходимость, скорость которой
не зависит от уровня мощности сигнала. Однако существуют две главные
проблемы, связанные с обращением матрицы. Во-первых, возросшую сложность
вычислений не так-то легко преодолеть с помощью интегральных схем, и, во-
вторых, использование расчетов конечной точности и необходимость обращения
большой матрицы может привести к неустойчивости численного решения.
6.2.5. Минимальная вариация с линейным ограничением
LCMV
В критерии минимальной среднеквадратической ошибки фильтр Винера
обеспечивает минимизацию среднеквадратической ошибки без наложения
ограничений на решение (то есть весовые коэффициенты). Однако возможно, будет
полезным или даже необходимым создание фильтра, который бы обеспечивал
минимизацию среднеквадратического критерия с учетом специального
ограничения. LCMV (Linearly Constrained Minimum Variance) ограничивает отклик
формирователя ДН таким образом, что сигналы, поступающие из исследуемой
области, проходят через решетку только с определенной фазой и усилением
[149]. Однако здесь необходимы данные или предварительная оценка отклика
решетки а (0О) на полезный сигнал с углом прихода 0О. Его весовые
коэффициенты подбираются таким образом, чтобы обеспечить минимизацию
ожидаемого значения выходной мощности/дисперсии с учетом ограничений отклика.
То есть [22]
min{w"R wj subject to Сяду = §*,
w L J
где С e CNxK имеет К линейно независимых ограничений и g е С*х1 — вектор
ограниченного отклика.
6.2. Статистически оптимальные весовые вектора формирования ДН
115
Ограничения обеспечивают сохранение полезного сигнала с
одновременной минимизацией вклада помеховых сигналов и шума в выход решетки,
поступающих с любых направлений, кроме исследуемого [22]. Для решения этой
задачи оптимизации с ограничением необходимо использование векторного
множителя Лагранжа b е Ск. Полагая, что выражение F(v/) = w^R^w — функция
стоимости, a G(w) = C"w — g* — функция ограничения, получаем выражение
следующего вида [22]:
Я(w) = -/,(w)^-b//G(>v) = -w//R;cyw+bя(Cяw-g*). (6.19)
F(w) имеет свой минимум в точке w, для которой действует ограничение
G(w) = Ся\у — g* = 0, то есть когда #(w) минимальна. Следовательно, для
нахождения точки минимума в уравнении (6.19) мы берем производную по w и
приравниваем ее к нулю, что дает [22]:
wopt=-R^Cb. (6.20)
Подставляя wopt обратно в уравнение ограничения, имеем [22]
b = -[C"R^C]"'g, (6.21)
где наличие [Ся R^ С] обусловлено тем фактом, что Rxx положительно
определенный и С — полноранговый. Следовательно, оценка минимальной вариации
с линейным ограничением для весового вектора [22] будет иметь вид
wopl=R^[CR^C]"'g'. (6.22)
В частном случае возникает необходимость в принудительном
формировании постоянной ДН в главном направлении; это может быть выражено в сжатой
математической форме [150]:
min{w//Rxxw} subject to w//a(0o) = g*,
где g — комплексный скаляр, ограничивающий отклик на выходе до а(90). В этом
случае LCMV определяется по формуле [22]
О(90)
a"(G0)R>(e0)
WoPt = 8 пн,ь 4p-io/Q ч ' (6-23)
Для частного случая, когда g =1 (то есть для единичного коэффициент
усиления), оптимальное решение (6.23) называется откликом без искажений с ми-
I 16 Глава 6. Принципы формирования ДН
нимальной вариацией MVDR (minimum variance distortionless response)
формирователя ДН, а также методом максимального правдоподобия MLM (maximum
likelihood method), так как алгоритм максимизирует функцию правдоподобия
входного сигнала [98].
Преимущество использования критерия LCMV состоит в общем подходе
ограничения, который обеспечивает расширенное управление
адаптированного отклика формирователя ДН [22]. Эта гибкая методика не требует знания
автоковариационной матрицы, Rxx, полезного сигнала, автоковариационной
матрицы сигнала смеси помехи и шума, RJN или какого-либо опорного
сигнала d{k) [22]. С учетом матрицы ограничений эффективность формирования ДН
в определенной степени зависит от конструкции устройства формирователя ДН
[22]. Однако недостаток критерия LCMV заключается в сложности вычислений
весового вектора ограничения. Существует несколько конструктивных
ограничений эффективности LCMV, как например точек ограничения, собственных
векторов и т. д, что выходит за рамки обсуждения данной работы.
6.3. Адаптивные алгоритмы формирования ДН
Как было показано ранее, статистически оптимальные весовые вектора для
адаптивного формирования ДН могут быть рассчитаны с помощью решения
Винера.
Однако предполагалось знание асимптотической статистики второго
порядка для сигнала и смеси помехи с шумом. Эти статистические данные обычно
неизвестны, но с учетом наличия эргодичности, где среднее по времени равно
Антенная решетка
Формирование ДН
Выход
решетки
Рис. 6.3. Функциональная схема адаптивной решетки из N элементов [22]
6.3. Адаптивные алгоритмы формирования ДН I
математическому ожидаемому, они могут быть получены из имеющихся данных
[22]. Для нестационарных каналов распространения сигнала, например систем
беспроводной сотовой связи, статистические данные изменяются со временем
по мере перемещения мобильного терминала и источников помех внутри
ячейки. Для слежения за подвижным объектом в условиях нестационарной среды
распространения сигнала необходима рекурсивная коррекция весового
вектора, с тем чтобы обеспечивалась адаптивная подстройка луча с
пространственной фильтрацией на его изменяющиеся во времени угловые координаты, чем
и обеспечивается оптимальная передача/прием полезного сигнала [22].
Проблема нестационарной статистики обычно решается путем определения
весовых векторов с помощью адаптивных алгоритмов, обеспечивающих
подстройку к изменяющимся условиям среды.
На рис. 6.3 показана характерная схема адаптивной антенной системы
на основе N-элементной антенной решетки с процессором обработки сигнала
адаптивной решетки с корректирующим алгоритмом управления. Полученные
антенной решеткой выборки данных подаются в блок обработки сигнала,
который вычисляет значение весового вектора с помощью заданного алгоритма
управления.
Существует два класса требований к адаптивным антенным решеткам: для
установившегося и переходного состояния соответственно. Оба класса зависят
от того, достигли ли весовые коэффициенты установившихся значений в
стационарной среде или корректируются в ответ на изменения среды
распространения сигнала. Полагая, что опорный сигнал для адаптивного алгоритма
получается с помощью априорно известного в приемнике временного опорного
сигнала во время фактической передачи данных, адаптивная коррекция
весовых коэффициентов может быть продолжена посредством направленной
обратной связи или с помощью весовых коэффициентов, которые были получены
в конце периода настройки (весов) [70]. Подстройка весового вектора к
нестационарной среде для каждой выборки может осуществляться с помощью ряда
адаптивных алгоритмов, включая некоторые уже рассмотренные.
По большей части текстовый материал и таблицы, прилагаемые к описанию
приводимых ниже адаптивных алгоритмов 1—2 и 4—5, заимствованы из работы
[23] (стр. 9-15).
6.3.1. Алгоритм наименьшего среднеквадратичного отклонения
LMS
Вероятно, наиболее широко распространенным адаптивным алгоритмом
фильтрации, используемым в ряде систем связи, является алгоритм LMS (Least
Mean-Square) [150, 151]. Он приобрел популярность благодаря низкой
вычислительной сложности и высокой устойчивости [23]. Он включает новые измерения
118
Глава 6. Принципы формирования ДН
и обеспечивает линейную итерационную минимизацию среднеквадратичного
отклонения/ошибки [62, 83, 145]. Алгоритм LMS обеспечивает изменение
весового вектора w вдоль направления расчетного градиента на основе метода
наискорейшего отрицательного спуска [152]. Сходимость наискорейшего спуска
будет гарантироваться квадратичными характеристиками функции
среднеквадратичного отклонения/ошибки £s|e(/:)| [ со всего лишь одним минимумом.
При индексе адаптации к, с учетом заданной функции среднеквадратичного
отклонения, е||е(£)| [ = еш(А;)-м>ях(&)| > алгоритм LMS обеспечивает
коррекцию весового вектора согласно выражению [22]
w(Jfc +1) = w(k) - ^^^- = w(k) + ^ (к)х(к), (6.24)
2 3w
где скорость изменения целевой функции /ww„ = \е(к)\2 была получена ранее
в (6.14) и \i — скалярная константа, отвечающая за скорость сходимости и
стабильность работы алгоритма. Для гарантии стабильности с точки зрения
среднеквадратичного отклонения длина шага jlx должна умещаться в интервале [22]
0<Ц<-^-, (6.25)
max
где А,тах — максимальное собственное значение Rxx. Также при переводе на
суммарную мощность вектора х [22]
Xmax< trace^ }, (6.26)
N
где след матрицы {RXX} = X8{X/2} есть °бщая входная мощность. Следователь-
но, условием удовлетворительного решения сходимости в среднем весового
вектора с наименьшим среднеквадратичным отклонением будет [22]
0<|1<^ , (6.27)
I*2}
Таблица 6.1. Алгоритм наименьшего среднеквадратичного отклонения [22]
Алгоритм наименьшего среднеквадратичного отклонения
для каждого к
{
e(k) = d(k)-v/H(k)x(k)
w(k + l) = w(k) + Ve\k)x(k)
6.3. Адаптивные алгоритмы формирования ДН I
где N — число элементов решетки. Псевдокод для LMS-алгоритма приведен
в табл. 6.1 [23]. NLMS-алгоритм [150, 153, 154], представляющий собой
нормированный вариант LMS-алгоритма, также называемый в технической
документации [155] проектирующим алгоритмом (РА), получается путем подстановки
вместо длины шага в (6.24) нестационарной длины шага (ы/||х(А:)||2, где 0 < jn < 2 [154].
Существенный недостаток использования алгоритмов LMS и NLMS
заключается в их медленной сходимости для сигналов цветного шума на входе [23].
LMS-алгоритм является членом семейства алгоритмов стохастического
градиента, так как мгновенная оценка градиентного вектора является случайным
вектором, который зависит от вектора входных данных х(к) [156]. На каждый
шаг (итерацию) он требует около 2N операций умножения комплексных чисел,
где N — число весовых коэффициентов (элементов), используемых в
адаптивной решетке. Характеристики сходимости (алгоритма) LMS напрямую зависят
от собственной структуры Rxx [22]. Его сходимость может оказаться медленной
при большом разбросе собственных значений. При существенном различии
собственных значений ковариационных матриц время сходимости алгоритма может
оказаться чрезвычайно большим и сильно зависящим от данных [62].
Следовательно, в зависимости от разброса собственного значения, LMS-алгоритму может
не хватить временных ресурсов для сходимости весового вектора к статистически
оптимальному решению, и адаптация в реальном масштабе времени к
нестационарной среде окажется неосуществимой задачей [22]. Кроме того, при
использовании LMS-алгоритма предполагается достаточность данных о полезном
сигнале, что необходимо для формирования последовательностей опорного сигнала.
Однако получение этих данных может оказаться весьма затратным при
использовании беспроводных систем связи, особенно в условиях быстрого затухания [22].
В случаях, когда скорость сходимости LMS-алгоритма является недостижимой,
в качестве приемлемой альтернативы могут служить другие алгоритмы.
6.3.2. Рекурсивный алгоритм наименьших квадратов RLS
(Recursive Least-Squares)
В отличие от LMS-алгоритма [150, 157], в котором для коррекции весового
вектора используется метод наискорейшего спуска, адаптивный алгоритм
наименьших квадратов аппроксимирует решение Винера напрямую с помощью
метода наименьших квадратов без дополнительных затрат на аппроксимацию
процедуры оптимизации [144]. В методе наименьших квадратов весовой вектор
w(A:) подбирается таким образом, чтобы обеспечивалась минимизация целевой
функции, состоящей из суммы квадратов ошибки за интервал времени, то есть
рекурсивная минимизация решения наименьшего из квадратов LS (least-square)
[23]. С другой стороны, в методе наискорейшего спуска весовой вектор
выбирается для минимизации математического ожидания квадратов ошибки. Рекур-
120
Глава 6. Принципы формирования ДН
сии для наиболее распространенного варианта RLS-алгоритма, стандартная
форма которого приведена в табл. 6.2 [23], являются результатом целевой
функции взвешенных наименьших квадратов:
^=1^Ио|2
(6.28)
где e(i) — ранее определенный сигнал ошибки и 0 < X < 1 — экспоненциальный
коэффициент масштабирования, определяющий скорость ослабления
предшествующих данных [156], называемый коэффициентом отсутствия
последействия (забываемости) [23]. Обычно значение X выбирается близко к
единичному. Однако в стационарной среде значение X должно быть равно 1, так как все
данные — текущие и предшествующие, должны иметь одинаковый вес [156].
Нахождение минимума [23] дифференцированием целевой функции /ww, по w*
дает [23]
2>*-'х(ох*(1)
Далее, определяя величины [23]
w(k) = %Xk'lx(i)d'(i).
R(*) = £a,*-'x(i)x*(i)
и p(k) = j^Xk-lx(i)d'(i),
1=1
получаем решение в виде выражения [23]
Таблица 6.2. Рекурсивный алгоритм наименьших квадратов [23]
Рекурсивный алгоритм наименьших квадратов
R-1(0) = 8_11, 8 — малая положительная постоянная
и I — единичная матрица элементов
для каждого к
(6.29)
(6.30)
(6.31)
k(k) = R-\k-l)x(k)
к(к) =
к(к)
Х + хн(к)к(к)
R"'(A:) = t
R-'Ofc-l) —
к(к)кн(к)
Х+хн(к)к(к)
e(k) = d(k)-wH(k)x(k)
w(k + l) = w(k) + e'(k)K(k)
6.3. Адаптивные алгоритмы формирования ДН I
v/(k) = R-\k)p(k). (6.32)
Рекурсивная реализация является результатом выражений
R(k) = XR(k -1) + х(к)хн (к) (6.33)
и p(k) = Xp(k-l) + x(k)d\k). (6.34)
Обращение R~\k) может быть получено рекуррентно через R_1(A: — 1) с
помощью вспомогательной теоремы обращения матрицы1 [151], что, таким образом,
позволяет избежать прямого обращения R(A:) для каждого момента времени к.
Важное свойство RLS-алгоритма заключается в том, что им задействует-
ся информация, содержащаяся во входных данных вплоть до момента
времени начала его работы. В результате обеспечиваемая им скорость сходимости
на порядок величины выше по сравнению с простым LMS-алгоритмом. Такое
увеличение производительности, однако, достигается за счет существенного
увеличения вычислительной сложности. Необходимое число операций
умножения над комплексными числами при использовании RLS-алгоритма за один
цикл составляет 4/V2 + 47V+ 2, где N — число весовых коэффициентов
адаптивной решетки. Другие недостатки его реализации заключаются в потенциальной
расходимости в среде конечной точности и проблемах стабильности, ведущих
к потере симметрии и положительной определенности матрицы R~l(k) [23].
6.3.3. Алгоритм для сигналов с постоянной амплитудой СМ
(Constant-Modulus)
Многие сигналы в канале связи с частотной или фазовой модуляций FM,
например с частотной манипуляцией без разрыва фазы CPFSK или импульсно-
амплитудной модуляцией РАМ (pulse amplitude modulation), имеют постоянную
комплексную огибающую [159]. Это свойство обычно принято называть
свойством сигнала с постоянной амплитудой. При использовании сигналов такого
типа можно воспользоваться преимуществом предварительного знания этой
характеристики для того, чтобы задать алгоритм адаптации,
обеспечивающий устойчивый режим отклика решетки [160]. Одним из наиболее известных
алгоритмов подобного типа является алгоритм выравнивания для сигналов
1 Если А, В, Си D-матрицы с размерностями пхп, пхт, тхт итхп
соответственно, то при условии существования обратных матриц указанным квадратным матрицам
[А + BCD]-1 = А-1 - А_1В [DA_1B + С-1]-1 DA"1. С доказательством леммы можно
ознакомиться в работе [152]. В частном случае, известном как единичная матрица Вудбери,
матрица В является пх 1 вектором-столбцом и, С — единичным скаляром и D — 1 х п —
-1 А —^ liii^ А "'
вектором-строкой иг. Тогда |A+uur 1 =А-1 —;— [158].
L J l + uy A 'u
122
Глава 6. Принципы формирования ДН
с постоянной амплитудой СМ. Он подходит для передачи модулированного
сигнала по каналу беспроводной связи, так как шум и помехи искажают СМ-
характеристику полезного сигнала [159]. Сигнал, проходящий по каналу с
частотной избирательностью, практически гарантированно утрачивает свойство
постоянства амплитуды. Таким образом, СМ обеспечивает косвенное
измерение качества отфильтрованного сигнала. Он обеспечивает коррекцию весового
вектора адаптивной решетки с целью минимизации изменения сигнала на
решетке. После схождения алгоритма обеспечивается размещение ДН в
направлении прихода полезных сигналов, а нулей — в направлении помех. В общем,
СМ-алгоритм осуществляет поиск весового вектора ДН, который
минимизирует целевую функцию вида
^=«{Иг-1Г}-
(6.35)
Семейство целевых функций описывается уравнением (6.35). Сходимость
алгоритма зависит от коэффициентов р и q уравнения (6.35). Так называемая
частная целевая (/?, q) СМ-функция зависит от выбора коэффициентов/? и q.
Наиболее популярны целевые СМ-функции (1.2) и (2.2). Задача СМ-формирования
ДН состоит в восстановлении выхода решетки у(к) к сигналу с постоянной
огибающей. Коррекция весового вектора методом наискорейшего спуска
обеспечивается с помощью следующего рекурсивного равенства:
w(* + l) = w(*)-nV .(/м),
(6.36)
где ц — параметр размера шага длины. При использовании (1,2) СМ-функции
градиентный вектор задается выражением [156]
V .(/12) = ^1 = е
х(к)
У(к)-
т_
\у{к)\
(6.37)
Пренебрегая операцией математического ожидания в (6.37), мгновенную
оценку градиентного вектора можно записать в следующем виде:
Vw.w-U2w)=xw
У(к)-
У(к)
\у(к)[
(6.38)
и, таким образом, результирующий весовой вектор с помощью выражения (6.38)
задается выражением
w(A: + l) = w(£)-|i.
У(к)-
У(к)
\у(к)\
х(к) = w(k)+ \ie'(k)x(k),
(6.39)
6.3. Адаптивные алгоритмы формирования ДН I
Таблица 6.3. Алгоритм выравнивания для сигналов с постоянной амплитудой
[23]
Алгоритм выравнивания для сигналов с постоянной
амплитудой
для каждого к
{
y(k) = w"(k)x(k)
т=Жт
w(£ + l) = w(^) + ii/(yt)x(A:)
}
где е (к) =у(к)/\у(к)\ — у(к). Близкое сходство алгоритмов СМ и LMS
обнаруживается при сравнении. Член у(к)/\у(к)\ в алгоритме СМ играет такую же роль, что
и полезный сигнал d(k) в алгоритме LMS.
Однако при использовании LMS-алгоритма передаваемый передатчиком
к приемнику опорный сигнал d(k) должен быть известен им обоим. Для
формирования сигнала ошибки СМ-алгоритм не нуждается в опорном сигнале
на приемнике [156]. Прочие свойства алгоритма выравнивания для сигналов
с постоянной амплитудой рассматриваются в работе [161]. Псевдокод алгоритма
СМ (1,2) приведен в табл. 6.3.
6.3.4. Алгоритм аффинной проекции АР (Affine-Projection)
Хорошо известно, что нормированный LMS-алгоритм зачастую сходится
быстрее, чем обычный LMS-алгоритм и во многих случаях может быть
эффективной заменой RLS-алгоритма [23]. Примерами таких алгоритмов низкой
сложности можно назвать бинормированный алгоритм минимальной
среднеквадратичной ошибки с повторным использованием данных BNDRLMS (Ыпог-
malized data-reusing least mean-square) [162], нормированный алгоритм с
повторным использованием новых данных NNDR (normalized new data-reusing) [163]
и алгоритм аффинной проекции (АР) [164—166]. Данные исследований
показывают, что идея повторного использования предшествующих и текущих данных
при коррекции коэффициента имеет перспективу с точки зрения достижения
компромисса между скоростью сходимости и вычислительной сложностью
алгоритма [23]. Для осуществления коррекции в алгоритме BNDRLMS
используются парные данные (текущие + предшествующие). Взаимосвязи между рядом
алгоритмов повторного использования рассмотрены в работе [167]. Алгоритм
аффинной проекции можно рассматривать как обобщенный нормированный
алгоритм повторного использования пар данных произвольного количества.
Глава 6. Принципы формирования ДН
Таблица 6.4. Алгоритм аффинной проекции (АР)
Алгоритм аффинной проекции
для каждого к
{
e(k) = d(k)-XT(k)w'(k)
t(Jfc) = [ХЯ(А:)Х(А:) + 5l]~' e'(Jfc)
w(k + l) = w(k) + \iX(k)t(k)
}
Он обеспечивает коррекцию вектора коэффициентов таким образом, что
новое решение представляет собой (линии) пересечения Р гиперплоскостей,
определяемые Р — 1 парами предшествующих данных и настоящих данных
{x(i),d(0}i=k_P+l- Критерий оптимизации, используемый для получения
алгоритма аффинной проекции (АР), задается выражением
w(/r +1) = argmin||w - w(£)|| subject to d(k) = XT(k)w\
где
d(k) = [d(k),d(k-l),...9d(k-P + l)]H и (6.40a)
X(k) = [x(k),x(k-l),...,x(k-P + l)]. (6.406)
Корректирующие уравнения алгоритма аффинной проекции, решаемые
в (6.3.4) как задача минимизации, приведены в табл. 6.4 [23]. Для контроля
стабильности, сходимости и величины конечной ошибки вводится длина шага ц,
где 0 < jli < 2 [165]. Улучшение устойчивости обеспечивается диагональной
матрицей 81, обеспечивающей упорядочивание обратной матрицы в алгоритме
аффинной проекции, где 8 — малая положительная постоянная и I —
единичная NxN матрица [23].
6.3.5. Квазиньютоновский алгоритм QN (Quasi-Newton)
Быстрая сходимость RLS-алгоритма зависит от оценки обратной
корреляционной матрицы R-1(£)5 которая ради стабильности алгоритма должна оставаться
симметричной и неотрицательно определенной [23]. Однако реализация
конечной точности может сделать матрицу R-1(£) неопределенной [168]. В связи
с этим необходимо упомянуть квазиньютоновский алгоритм, обеспечивающий
сравнимую скорость сходимости, что и у RLS-алгоритма, при гарантированной
стабильности даже при высокой корреляции входного сигнала и арифметиче-
6.3. Адаптивные алгоритмы формирования ДН
Таблица 6.5. Квазиньютоновский алгоритм [23]
Квазиньютоновский алгоритм
для каждого к
{
e(k) = d(k)-v/"(k)x(k)
t(k) = R-l(k-l)x(k)
x(k) = x"(k)t(k)
R-,(k) = R-l(k-l) + ^-—^t(k)tH(k)
х(к)
w(k + l) = w(k) + a^-^-t(k)
х(к)
}
ских операций с фиксированной точкой над короткими словами [168,169].
Коррекция весового вектора с помощью алгоритма QN осуществляется с помощью
выражения
w(k + l) = v/(k) + n(k)h(k), (6.41)
где ц(к) — длина шага, получаемая посредством строго линейного поиска,
и h(k) — направление коррекции, задаваемое выражением
э/ .
h(k) = -R-\k-l)—^, (6.42)
aw
где целевая функция в очередной раз /ww„ = |е(А;)|2. Длина шага определяется с
помощью строгого линейного поиска [168]:
р{к) = —ц J . (6.43)
Коррекция R~l(k - 1) критически важна с точки зрения цифровой динамики
алгоритма QN, причем разные аппроксимации ведут к различному поведению
QN-алгоритмов [23]. Как видно из [168 ], для аппроксимации R-1(£ — 1), которая
остается устойчивой и неотрицательно определенной даже при сильно
коррелированных входных сигналах и арифметике с короткими словами, алгоритм QN
может быть реализован в виде, представленном в табл. 6.5 [23]. Положительная
постоянная а в табл. 6.5 служит для контроля скорости сходимости и
рассогласования. Сходимость весового вектора в среднем и среднеквадратическом будет
гарантирована при 0 < а < 2 при условии, что R_1(A: — 1) является неотрицательно
определенной [168—170].
ГЛАВА 7
ИНТЕГРАЦИЯ
И МОДЕЛИРОВАНИЕ
СМАРТ-АНТЕНН
В отличие от большинства работ по смарт-антеннам, посвященных отдельным
рубрикам (конструированию антенных решеток, обработке сигнала, алгоритмам
передачи и пропускной способности сети), данную главу можно рассматривать
как работу, посвященную изучению интегрированного проектирования
антенных решеток, разработке алгоритмов обработки сигнала (для оценки угла
прихода и адаптивного формирования ДН), мерам по борьбе с затуханием, влияющим
на пропускную способность сети [24, 171—174]. В частности в данной работе
рассматриваются проблемы влияния конструктивных особенностей антенн на
пропускную способность. Кроме того, рассмотрены компромиссные вопросы для
разнесенного приема и адаптивного формирования ДН, а также канальное
кодирование с точки зрения улучшения эффективности системы.
7.1. Обзор
Главная цель данной главы, а также работ [24, 171—174] состоит в
разработке смарт-антенн для MANET-сетей, работающих на частоте 20 ГГц. Эта
задача оказалась непростой при выборе элементов, согласующихся с геометрией
устройства и архитектурой решетки, обеспечивающих как азимутальное, так
и угломестное управление диаграммой направленности. В результате это
привело к выбору планарной конфигурации из двумерных микрополосковых
излучателей. Кроме того, число излучающих элементов подбиралось таким
образом, чтобы при невысоких затратах и сложности разрабатываемых аппаратных
средств удовлетворялись требования по ширине ДН.
Для анализа средней пропускной способности сети для MANET-устройств,
сопряженных со смарт-антеннами, был предложен протокол канального
доступа. Предложенный протокол был разработан на основе спецификации ШЕЕ
802.11 WLAN управления доступом к среде TDMA в беспроводных локальных
сетях [175].
Согласно полученным данным, пропускная способность сети оказалась
зависимой как от числа элементов планарной антенной решетки, так и ее типа
7.2. Разработка антенны 127
Е-плоскость = плоскости x-z
Н-плоскость = плоскости y-z
Dx = 54,747 мм х0 = 0,794 мм t = 0,300 мм
Оу = 54,562мм у0 = 1,164мм ег = 11,7, Si
dx = 7,500 мм W = 2,247 мм а = 0,04
dy = 7,500 мм L = 2,062 мм f = 20 Ггц
Рис. 7.1. Конфигурация планарной решетки
(равноамплитудная, Чебышева, адаптивная). Более того, анализ пропускной
способности сети был расширен для установления ограничений на скорость
сходимости алгоритма формирования ДН. Наконец, была исследована
эффективность работы адаптивных алгоритмов DMI, LMS для каналов с релеевским
замиранием. Основная часть рассматриваемого в данной главе материала была
почерпнута из работ [24, 59, 171—174].
7.2. Разработка антенны
Исходя из необходимости конформной установки антенны на сглаженной
поверхности в данной работе рассматривается прямоугольная микрополосковая
антенна.
Учитывая, что решетка состоит из одинаковых элементов, полная
диаграмма направленности решетки без учета эффекта взаимовлияния элементов
является результатом произведения диаграммы, создаваемой отдельным элементом,
на множитель решетки [59].
Выбор решетки с планарной конфигурацией обусловлен ее способностью
обеспечивать трехмерное сканирование лучом. Как показано на рис. 7.1, для
MxN одинаковых элементов с равномерном шагом распределения в плоскости
ху множитель решетки определяется выражением [59]
М N
[лр(т}МхК=1^У[(т-^+<"-1)ъ], (7.1)
т=\ л=1
¥х =Prfx(sin9cos(|>-siri80cos(|>0),
\|/ =Р^ (sin0cos(|)-sin9ocos(|)o),
128
Глава 7. Интеграция и моделирование смарт-антенн
где (3 — фазовая постоянная, wmn — комплексное возбуждение отдельных
элементов и (0О, ф0) — азимут и угол места, определяющие направление излучения
максимальной мощности. Для размещения максимума главного лепестка в
направлении полезного сигнала, а «нулей» — в направлении помех и шума в
адаптивных алгоритмах как раз осуществляется коррекция угловых координат wmn
иш .
Главный лепесток ДН остронаправленных смарт-антенных систем может
обеспечить более точное разрешение SOI полезного сигнала и режекцию шума
и помех SNOI. Несмотря на привлекательность такой схемы для смарт-антенных
систем, у нее есть и недостаток, обусловленный необходимостью большого
количества элементов, что увеличивает стоимость аппаратной реализации. Более
того, для решеток большего размера необходимо большее количество
обучающих последовательностей, что в конечном итоге влияет на пропускную
способность. Таким образом, соответствующее компромиссное решение приходится
искать в зависимости от требований к пропускной способности, причем
выяснилось, что планарная решетка из 64 антенных элементов (8 х 8) обеспечивает
пропускную способность MANET-сети.
Данная микрополосковая решетка предназначена для работы на частоте
20 ГГц. В качестве материала подложки используется кремний с
диэлектрической постоянной 11,7 с тангенсом угла диэлектрических потерь 0,04. Толщина
подложки составляет 0,3 мм, входное сопротивление — 50 Ом. Конечные
физические размеры прямоугольной микрополоски, полученные с помощью пакета
Ensemble®, приведены на рис. 7.1, причем проверка правильности схемы
представлена на рис. 7.2 зависимостью величины потерь на отражение (Sn) от часто-
- -5
-15
-20
-25
19
1 1 1 1
1 » ^ 0,74 ГГц 9^
I J \-10дБВ\Л//
[ ! \о,25 ГГц 1
! П7 :
: у
I * « i
| » « i
| » « i
| » ♦ i
1 t t i
19.5
20
Частота (ГГц)
20.5
21
Рис. 7.2 Потери на отражение (Sn) микрополоскового излучателя, показанного
на рис. 7.1
7.3. Взаимная связь
129
Е-плоскость
— — — Н-плоскость
Рис. 7.3. ДН, создаваемые одиночным микрополосковым излучателем
(элементом) в плоскости Е (ф = 0°) и плоскости Н (ф = 90°)
ты. Диаграммы направленности в плоскостях Е и Н, создаваемые
микрополосковым элементом антенной решетки с конфигурацией, показанной на рис. 7.1,
в дальней зоне, показаны на рис. 7.3.
Конструкция планарной 8x8 решетки с межэлементным расстоянием Х/2
(Х= 1,5 см; максимально допустимое расстояние для хорошо коррелированной
антенной решетки) была получена на основе прямоугольной микрополосковой
антенны, также показанной на рис. 7.1.
После принятия конечного варианта конструкции антенной решетки
заданные алгоритмы обеспечивают расчет углов прихода всех полезных сигналов
на основе значений временных задержек. Для планарной решетки из
MxNэлементов приведенной на рис. 7.1, их значения определяются согласно
mdx sin 9 cos ф + nd sin 0 sin ф
(7.2)
/и = 0, 1, ...,M-1,
« = 0,1,...,7V-1,
где v0 — скорость распространения света в свободном пространстве.
7.3. Взаимная связь
Изменение импеданса и ДН антенного элемента обусловлено влиянием
соседних излучающих элементов, что вызывает смещение максимума и нулей ДН.
Данный эффект приводит к потере точности при оценке углов прихода и
общему ухудшению ДН. Эти негативные изменения усиливаются по мере уменыие-
130
Глава 7. Интеграция и моделирование смарт-антенн
ния расстояния между излучающими элементами [59,108—113]. Следовательно,
если их не учитывать в адаптивных алгоритмах, то это приведет к ухудшению
рабочих характеристик системы. Однако эффект взаимного влияния может
быть скомпенсирован с помощью матрицы взаимной связи МСМ (mutual
coupling matrix) [108—ИЗ].
Для компенсации эффекта взаимной связи элементов используется матрица
взаимной связи С, которая обеспечивает коррекцию весовых коэффициентов
решетки, работающей в режиме передачи или приема [113]. Выражение для
матрицы взаимной связи задается с помощью [108]
C = ZI(Z + ZII)"1 (7.3)
или [ПО]
C' = (Z,+ZI)(Z + ZII)-1. (7.4)
Они связаны посредством С = [(ZA + ZL)/ZL]C. В уравнениях выше I —
единичная матрица, Z — матрица полных сопротивлений и ZL — импеданс
нагрузки (то есть 50 Q). Данные выражения обеспечивают описание взаимного
влияния отдельных антенных элементов, которые необходимы для их компенсации
с помощью алгоритма адаптивного формирования ДН.
7.4. Адаптивные алгоритмы обработки сигнала
В этой работе для оценки углов прихода сигналов был выбран унитарный
алгоритм ESPRIT [176]. После определения углов прихода осуществляется
формирование комплексных весовых коэффициентов возбуждения с помощью
адаптивного формирователя ДН. Проводится анализ эффективности работы
формирователя в каналах с аддитивным белым гауссовым шумом (AWGN) и
каналах с релеевским замиранием сигнала.
7.4.1. Направление прихода
После приема антенной всех сигналов со всех направлений последние
определяются с помощью алгоритма расчета направлений поступающих сигналов
на основе временных задержек, обеспечиваемых антенной решеткой с
помощью выражения (7.2). Затем алгоритм расчета углов прихода передает эту
информацию формирователю ДН для размещения ее максимума в направлении
полезного сигнала, а нулей — в направлении источников помех.
Одним из наиболее популярных алгоритмов определения угловых координат
источника полезного сигнала, используемого в ULA, является алгоритм ESPRIT.
7.4. Адаптивные алгоритмы обработки сигнала I
С некоторыми наиболее свежими материалами по этой теме можно
ознакомиться в работах [124, 176, 177]. Упомянутый ранее исходный вариант алгоритма
ESPRIT [122] построен на использовании одной инваринтности, что достаточно для
оценки углов прихода с помощью линейной решетки (только в одной плоскости),
а не одновременного определения координаты по азимуту и углу места, что
необходимо в случае планарных решеток. Достаточно скоро после появления первой
версии алгоритма ESPRIT в работе [178] было получено соотношение для
множественной инвариантности. В методе MI-ESPRIT (multiple invariance )
используется множественная инвариантность вдоль одного пространственного
измерения. Он основан на подпространственном аппроксимирующем представлении
выражения для оценивания направления прихода сигнала [179]. Недостаток
алгоритма MIESPRIT обусловлен тем, что в нем применяется минимизация
комплексной нелинейной целевой функции с использованием итерационного
метода Ньютона. В работе [124], в которой для получения субоптимального решения
задачи подпространственной аппроксимации использовались приближенные
выражения, метод MI-EPSPRIT, необходимый для расчета угловых координат
источника сигнала, является модификацией линейного случая определения
направлений прихода. Представленный позднее в работе [176] унитарный алгоритм
ESPRIT расчета направлений прихода сигналов для случая равноамплитудной
прямоугольной решетки, устраняет нелинейную оптимизацию и обеспечивает
получение аналитического решения для азимута и угла места. Алгоритм в [124]
и двухмерный унитарный алгоритм ESPRIT предназначены для расчета угловых
координат источника сигнала (азимут, угол места), при этом они не
обеспечивают хорошего алгоритма для расчета базиса для подпространства сигналов.
Они просто предлагают использовать неструктурированное разложение
матрицы данных на собственные значения. В работе [180] Стробах пришел к выводу,
что для более точного оценивания подпространства сигналов может
использоваться ее структура, что в свою очередь привело к более точному оцениванию
направлений прихода. Алгоритм, в котором для оценивания направлений прихода
используется эквиротационная стековая структура подпространства сигналов,
получил название ES-ESPRIT (equirotational stack) [181].
В унитарном алгоритме ESPRIT для планарной решетки угловые
координаты рассчитываются на основе сохраненных векторных данных и расчете базиса
подпространства сигналов. Затем с помощью двух уравнений вида
К^Е/Т.^Е, и КиЕ^=К„2Е5 (7.5)
получается решение методом наименьших квадратов. Базис подпространства
сигналов содержится в колонках Е5, причем К-матрицы являются
разреженными матрицами, которые зависят от геометрической симметричности и размера
матрицы. Матрицы *Р и Ч^ размерностью dxd являются вращательными опера-
132 Глава 7. Интеграция и моделирование смарт-антенн
Таблица 7.1. Сигналы, использованные для проверки смарт-антенной системы
[69]
Направление
прихода сигнала
Случай 1
Случай 2
Сигнал/шум
% Фо
0° 0°
30° 45°
Сигнал/шум + помеха
°, Ф,
45° 0°
60° 45°
торами вращательного соотношения инвариантности и решениями (7.5).
Значения азимутальных углов Фз получаются из собственных значений *F и углов
места Gs из собственных значений xFi). С более подробной информацией по этим
алгоритмам можно ознакомиться в [176].
Унитарный алгоритм ESPRIT, используемый для этой конфигурации,
является алгоритмом оценивания направления приема. Выяснилось, что
использование сигналов табл. 7.1 в качестве входных в методе ESPRIT обеспечивает точную
работу при наличии шума и взаимного влияния элементов, см. табл. 7.2 [70].
7.4.2. Адаптивное формирование ДН
На основании данных о направлении приема адаптивный прием
рассчитывает соответствующие комплексные веса, что обеспечивает размещение главного
лепестка ДН в направлении полезного сигнала, а нулей — в направлении шума
и помех. В смарт-антеннах [144,182] используется несколько общих адаптивных
алгоритмов, причем они различаются свойствами сходимости и
вычислительной сложностью. DMI-алгоритм является самым простым, в котором веса
рассчитываются на основании оценки ковариационной матрицы [157]. Точность
оценки этой матрицы возрастает по мере увеличении числа принимаемых
выборок данных, что обеспечивает более точный расчет весов.
Таблица 7.2. Результаты моделирования работы алгоритма ESPRIT [69]
Случай 1
Случай 2
Случай 1
Случай 2
Описание
Без шума
Без шума
AWGN:jbi = 0,a2 = 0,l
AWGN: \i = 0, а2 = ОД
Сигнал/шум
во
0,000°
30,000°
0,030°
30,004°
Фо
45,000°
44,955°
Сигнал/myiv
в.
45,000°
60,000°
44,945°
60,060°
[ + помеха
Ф,
0,000°
45,000°
0,000°
44,973°
Случай 1 Взаимное влияние из- 0,0508° 44,509° 0,0133°
лучающих элементов
Случай 2 Взаимное влияние ИЗ- 30,138° 45,719° 61,072° 45,460°
лучающих элементов
AWGN — Аддитивный белый гауссовский шум
7.4. Адаптивные алгоритмы обработки сигнала I
Выбор адаптивного алгоритма LMS для формирования ДН в данном
проекте обусловлен его невысокой сложностью [157]. На основании геометрических
характеристик решетки (рис. 7.1) принимаемый ею сигнал задается в
матричной форме с помощью выражения
L
х = х</+^х/+хя, (7.6)
где х^ — матрица полезного сигнала, х. — /-ая матрицапомехового сигнала ихя-
матрица аддитивного шума с независимыми и одинаково распределенными
комплексными гауссовскими элементами с нулевыми средними и дисперсией
0,5 на комплексное измерение, L — число источников помех. Пусть sd и s.
обозначены как источники полезного сигнала и помехи соответственно, причем их
мощность нормирована до единичного значения, то есть е{^} = 1 и ejs,.} = 1.
Следовательно, вектор принятого сигнала может быть записан в форме
х-ё^Ш^"- <77)
где и^ и и. — матрицы распространения полезного сигнала и /-го помехового
сигнала соответственно; р^ и р. — соотношение сигнал/шум для принятого сигнала
и /-го источника помехи. Следует отметить, что для получения заданного
соотношения сигнал/шум мощности принятых полезных сигналов нормируются.
LMS-алгоритм вычисляет комплексные веса wk с помощью итерационного
выражения [157], представляя входные сигналы в виде вектора-столбца хк:
w*+i=w* + ^x,(^-x[w,) (7.8)
где dk — выборка полезного сигнала fc-итерации и \х — длина шага
адаптивного алгоритма. В выражении (7.8) длина шага |ы, связанная со скоростью
сходимости, является показателем скорости, с которой алгоритм LMS достигает
устойчивого состояния. Чем меньше длина шага, тем больше время сходимости
LMS-алгоритма, тем длиннее необходимая настроечная последовательность
алгоритма, что, таким образом, сужает полосу пропускания. Следовательно,
длина шага \х имеет очень большое значение для пропускной способности, о чем
речь пойдет далее.
7.4.3. Формирование ДН и сложение разнесенных сигналов
в каналах с релеевским замиранием
На данном этапе исследуется эффективность адаптивных антенных решеток
в каналах с замиранием. Рассматривается полученная с помощью критерия
MMSE оптимальная схема суммирования, согласно которой осуществляется
Глава 7. Интеграция и моделирование смарт-антенн
взвешивание и суммирование сигналов, принятых несколькими антеннами,
причем таким образом, что обеспечивается максимальное отношение сигнал —
смесь помехи с шумом. Для сложения сигналов использовалась оптимальная
схема суммирования, предложенная в [183, 184]. Схема была реализована с
помощью LMS-алгоритма [185]. В процессе передачи фактических данных
коррекция весовых коэффициентов осуществляется на основании оценки
ошибочных двоичных данных, используемых в качестве опорного сигнала, то есть
LMS-алгоритм работает в режиме слежения.
Для моделирования канала с замиранием использовалась гауссовская
модель [68] с низкочастотным фильтром первого порядка. Длина настроечной
последовательности была снова установлена на 60 символов, периодически
передающихся через каждые 940 символов фактических данных (то есть 6,4%
трафика на служебные сигналы). Характеристика LMS-алгоритма для канала
с равномерным релеевским затуханием приведена на рис. 7.4.
По частоте двоичных ошибок видно, что при наличии одного источника
помех с равномерным спектром мощности и допплеровском уширении канала
в 0,1 Гц характеристика системы ухудшалась приблизительно на 4 дБ, в
отличие от случая без источников помех. При более быстром замирании в канале
о
\о
S
3
о
о
m
о
н-
о
со
J-
Сигнал-шум [дБ]
Рис. 7.4. Частота двоичных ошибок для канала с релеевским замиранием
со значениями допплеровского уширения 0,1 Гц и 0,2 Гц для сигналов
из табл. 7.1. Длина настроечной последовательности составляет 60
символов, передача которой осуществляется через каждые 940 символов
фактических данных [24]
7.5. Решетчатое кодирование для адаптивных решеток ТСМ I
(trellis-coded modulation)
отмечалось ухудшение работы LMS-алгоритма. Например, для случая доппле-
ровского уширения канала в 0,2 Гц по сравнению с 0,1 Гц при частоте двоичных
ошибок Ю-4 характеристика системы ухудшилась на 4 дБ. Минимальная частота
двоичных ошибок BER наблюдалась при отношении сигнал—шум более 18 дБ.
При сравнительно более быстром замирании в присутствии источника
помехи с равной мощностью наблюдается существенное ухудшение характеристики
системы, указывающее на то, что производительность адаптивного алгоритма
сильно зависит от скорости замирания. Более того, если скорость сходимости
LMS-алгоритма является недостаточно высокой для отслеживания отклонений
в канале с быстрым замиранием, то следует использовать адаптивные
алгоритмы с более высокой скоростью сходимости.
7.5. Решетчатое кодирование для адаптивных
решеток ТСМ (trellis-coded modulation)
Для дальнейшего улучшения производительности систем в адаптивных
решетках [187—189] используются ТСМ-схемы [186]. В данном случае исходные
разрядные данные преобразуются в канальные символы с помощью ТСМ-схемы,
а их чередование — с помощью псевдослучайного чередователя, что
необходимо для обеспечения последовательной декорреляции сигналов и
предотвращения появления ошибок при пакетной передаче. Фактический сигнал передачи
формируется за счет периодической вставки настроечной последовательности
в последовательность данных. Принятый адаптивной решеткой сигнал состоит
из ослабленного затуханием полезного сигнала и ряда помеховых сигналов плюс
аддитивный белый гауссов шум (AWGN). Сигналы от каждого антенного
элемента суммируются в приемнике с помощью LMS-алгоритма. Как было
показано в предыдущем разделе, при передаче последовательности данных
используется обратная связь. Комбинированный выход приемника в момент времени
к определяется как rk =wf хк, где wknxk — весовой вектор и вектор сигнала,
принятого в момент времени к соответственно. После устранения чередования,
для расчета евклидовой метрики m(rk, sk) = Re(r^, s*k) для всех возможных
переданных символов §к используется последовательность выходов сумматора {гк}.
Набор метрик ветвления m(rk, sk): Sk е Xq затем подается в декодер Витерби.
Был рассмотрена схема квадратурной фазовой модуляции (QPSK) с
решетчатым кодированием на основе 8-уровневого решетчатого кодера [70]. На рис. 7.5
сравниваются характеристики ТСМ QPSK-системы для канала с релеевским
затуханием и некодируемой BPSK-системы для AWGN-канала для двух
случаев, приведенных в табл. 7.1. Полезный и помеховые сигналы считаются
идеально синхронизированными, что можно рассматривать в качестве наихудшего
136 Глава 7. Интеграция и моделирование смарт-антенн
о
VD
S
3
о
X
л
I
т
S
о
ш
СС
ее
I-
о
Отношение сигнал-шум [дБ]
Рис. 7.5. Частота двоичных ошибок для двоичной (BPSK) и квадратурной
фазовой модуляции (QPSK) с решетчатым кодированием соответственно
на основе 8-уровневого решетчатого кодера в AWGN-канале для случая
1втабл.7.1[24]
сценария. Также принимается допущение, что помеховые и полезный сигналы
имеют одинаковую мощность. Длина настроечной последовательности для
моделирования также равна 60 символам, за которой следуют блоки данных по 940
символов в каждом. Выяснилось, что применение LMS-алгоритма в
адаптивной решетке может обеспечить подавление одного источника помех без потери
производительности как для AWGN-канала, так и канала с релеевским
замиранием. Однако прежде всего впечатляет тот факт, что при частоте двоичных
ошибок 10~5 производительность ТСМ-системы для канала с релеевским
замиранием оказалась даже лучше, чем некодированная BPSK-система для AWGN-
канала, приблизительно на 1,5 дБ.
Эта же система была проанализирована для канала с релеевским
замиранием, и данные по двоичным ошибкам для допплеровского уширения
величиной 0,1 и 0,2 Гц для обоих случаев приведены в табл. 7.1. Использовалась
настроечная последовательность длиной 60 символов, передача которой
осуществлялась периодически через каждые 940 символов фактических данных,
при скорости передачи символов 100 Гц и емкостью перемежителя в 2000
символов. Эта схема сравнима с некодированной BPSK-модуляцией, имеющей
такую же спектральную эффективность. На рис. 7.4 приведены данные по
частоте двоичных ошибок при использовании некодированной BPSK-схемы для
того же канала. Оказалось, что при допплеровском уширении 0,2 Гц и нали-
7.6. Смарт-антенные системы для MANET-cemeu
о
VO
3
о
X
о
03
о
ь-
о
со
Т
Отношение сигнал-шум [дБ]
Рис. 7.6. Частота двоичных ошибок при использовании QPSK-модуляции с
решетчатым кодированием для канала с релеевским затуханием и
значений допплеровского уширения 0,1 и 0,2 Гц для обоих случаев,
приведенных в табл. 7.1. Передача настроечной последовательности длиной
60 символов осуществляется через блоки данных длиной 940 символов
[24]
чии одного источника помех существует некий неустранимый минимальный
уровень частоты двоичных ошибок, который, тем не менее, по сравнению
с некодируемой BPSK-модуляцией оказался ниже. На основании этого
можно сделать вывод, что кодирование с помощью ТСМ-схемы имеет некоторое
преимущество в дополнение к тому, что обеспечивается пространственным
разнесением.
7.6. Смарт-антенные системы для MANET-сетей
MANET-сети характеризуются отсутствием фиксированной сетевой
инфраструктуры и случайным перемещением узлов, как показано на рис. 7.7.
В MANET-сетях передача пакетов данных осуществляется за один прием,
причем использование для связи направленных лучей способствует снижению
помех и, как следствие, увеличенной емкости. Для внедрения смарт-антенн
в MANET-сети их узлы должны обеспечивать возможность оценивания
направления на искомый узел. В работах [190] и [191] для решения этой проблемы
предлагается использовать ряд подходов на основе GPS или определении на-
138
Глава 7. Интеграция и моделирование смарт-антенн
Рис. 7.7. Типичная топология MANET-сети [24]
правления максимальной принимаемой мощности. Однако смарт-антенны
делают возможным определение поступающих сигналов с помощью таких
методов оценивания направления прихода сигнала, как MUSIC и ESPRIT [122, 123]
или алгоритмов LMS формирования ДН.
Предложенный в этой работе МАС-протокол обеспечивает возможность
обмена настроечными последовательностями между узлами до передачи данных.
Начиная работу, когда антенны находятся в изотропном режиме, узлы
переходят в режим направленного действия к моменту завершения действия
настроечного интервала. Передача данных начинается с переходом антенн в режим
направленного действия. В связи с этим антенны должны уметь работать как
во всенаправленном (изотропном), так и направленном режиме.
7.6.1. Протокол
Предложенный протокол канального доступа построен на низком уровне
помех, создаваемых узлами с антеннами направленного действия, в связи с чем
соседние узлы получают доступ к каналу, если мощность детектируемого
сигнала находится ниже определенного порогового значения. Как видно из рис. 7.8,
протокол был разработан на основе спецификации IEEE 802.11 MAC [192]
управления доступом к среде TDMA, с подробностями которого можно
ознакомиться в [193]. Следует подчеркнуть, что использование настроечных пакетов ведет
к потерям при передаче данных. Необходимая длина настроечного пакета будет
больше при низкой скорости сходимости алгоритмов формирования ДН, что
ведет к уменьшению пропускной способности сети. Пропускная способность
также зависит от таких антенных характеристик, как размер решетки и
распределение возбуждения. В следующем разделе приведены некоторые данные
моделирования, проливающие свет на то, как MANET-сети могут зависеть от этих
параметров.
7.6. Смарт-антенные системы для MANET-сетей I
MAC-протокол
(на основе спецификации IEEE 802.11)
SRC Узел источника Режим всенаправленного
DEST Узел получателя действия
RTS Запрос посылки Режим направленного
CTS Готовность к посылке действия
RXTRN Настроечный пакет для узла получателя Режим ожидания
TXTRN Настроечный пакет для узла источника (нерабочий режим)
АС К Сигнал подтверждения
Рис. 7.8. Предложенный протокол канального доступа [24]
7.6.2. Моделирование
Главная задача моделирования заключается в получении качественного
анализа улучшения пропускной способности MANET-сетей, в которых используются
смарт-антенны. Моделирование также используется при изучении
зависимости пропускной способности от различных ДНА и длины настроечных пакетов.
Далее идет описание оцениваемых при моделировании параметров:
Средняя пропускная способность сети (G ) определяется как среднее
avg
число успешно переданных в сети пакетов за длительность пакета.
Средняя нагрузка (Lav) определяется как среднее отношение
сформированных в сети пакетов к длительности пакета.
Средняя задержка пакетов (Г )—среднее время, затрачиваемое натранс-
avg
портировку пакета по сети от узла-источника к узлу-получателю.
Как показано на рис. 7.9, была выбрана децентрализованная сеть,
состоящая из 55 равномерно распределенных узлов.
Сеть моделировалась с помощью специализированного программного
пакета компании OPNET Technologies Inc, использующегося для изучения,
проектирования и разработки сетей и протоколов связи. Исходя из наличия на
каждом узле пуассоновского распределения нагрузки, мобильность моделировалась
за счет случайного изменения положения через каждые два пакета. В табл. 7.10
приведены используемые при моделировании значения для пакетов различной
длины и временных интервалов, указанных в протоколе. Длина всех пакетов
была нормирована к полезной нагрузке или длине пакета данных. С целью ана-
Глава 7. Интеграция и моделирование смарт-антенн
лиза эффективности протокола для разных настроечных последовательностей
была принята переменная длина пакетов TXTRN и RXTRN.
Для выбора оптимальной конструкции антенны с точки зрения
обеспечения высокой пропускной способности сети осуществляется ее оценка для
антенн с разными ДН. Длина настроечного пакета подбирается так, чтобы она
составляла 10 % от длины пакета данных. Средняя пропускная способность
сети измеряется для планарных решеток с размерами 8х8и4х4с чебышев-
ским и равномерным распределением возбуждения соответственно. На рис. 7.11
приведена характеристика зависимости Gavg от Zavg для ДН разных антенн.
Уровень боковых лепестков антенной решетки Чебышева составляет -26 дБ [59].
Ни антенна с чебышевским, ни антенна с равноамплитудным распределением
не обеспечивает создание нуля ДН в направлении помехового сигнала SNOI.
Выяснилось, что пропускная способность в случае с решеткой 8x8 выше, чем
с решеткой 4x4, а также что антенны Чебышева обеспечивают несколько более
высокую пропускную способность по сравнению с равноамплитудными
антеннами. Это можно отчасти объяснить более узкими ДН решеток (по сравнению
с решетками 4x4) и более низким уровнем боковых лепестков решеток
Чебышева (по сравнению с равноамплитудными решетками) [59]. В обоих случаях
более узкие ДН и низкий уровень боковых лепестков ведут к снижению помех
от соседних каналов.
Оценка пропускной способности сети при использовании настроечных
пакетов различной длины осуществляется с целью определения оптимальных
алгоритмов формирования ДН, обеспечивающих ее повышение (пропускной
способности). Предполагается, что каждый узел оснащен 8x8 элементов пла-
нарной решеткой из микрополосковых излучателей с чебышевским
распределением возбуждения (уровень боковых лепестков — 26 дБ). На рис. 7.13 и 7.13
приведены кривые зависимости Gavg по Z,avg и Т по Lavg соответственно для случаев,
600 м
1000 м
Рис. 7.9. Используемая для моделирования модели сеть [24]
7.6. Смарт-антенные системы для MANET-cemeu
Параметры моделирования протокола MAC
Длина используемых пакетов:
Управляющие пакеты
DIFS
SIFS
RTS
CTS
АСК
TXTRN
RXTRN
DATA 1
0.023 L
0.004 L
0.011 L
0.011 L
0.011 L
Регулируется
Регулируется
L
6%
Регулируемый
параметр ^
Пакеты формирования ДН
Полезная нагрузка (данные)
100%
Рис. 7.10. Используемые при моделировании протокола длины пакетов и
временных интервалов [24]
когда длина настроечного пакета составляет 6%, 10% и 20% от длины пакета
данных при использовании антенны Чебышева (уровень боковых лепестков
—26 дБ). Очевидно, что с увеличением размера настроечного пакета происходит
уменьшение пропускной способности сети и быстрый рост величины задержек
пакетов. Кроме того, из этих рисунков видно, что пропускная способность сети
выше, когда вместо всенаправленных антенн используются смарт-антенны.
Далее пропускная способность анализируется по ДН, сформированной
с помощью алгоритма LMS. Полученная таким образом пропускная
способность сравнивается на рис. 7.14 с пропускной способностью, обеспечиваемой
ДН стандартной антенны Чебышева (уровень боковых лепестков —26 дБ),
которая не обеспечивает размещение нулей в направлении помехи SNOI. На
основании этого рисунка можно сделать вывод, что применение адаптивного LMS-
ю
9
8
-ь- Равномерное распределение 4x4
-*- Чебышевское распределение 4x4
-е- Равномерное распределение 8x8
-*- Чебышевское распределение 8x8
о
о
I
\о
о
о
о
с
о
к
я
I
о
>
с
о
Q.
с
4 6 8
Нагрузка (число пакетов)
10
12
Рис. 7.11. Кривые зависимости пропускной способности от нагрузки для ДН
различных антенн [24]
Глава 7. Интеграция и моделирование смарт-антенн
о
о
т
VO
о
о
о
с
о
и:
I
&
с:
о
Q.
П.
25
Рис. 7.12.
5 10 15 20
Нагрузка (число пакетов)
-а— Длина настроечной последовательности - 6%
—*— Длина настроечной последовательности - 10%
—|— Длина настроечной последовательности - 20%
—*— Длина всенаправленного действия
Кривые зависимости пропускной способности от нагрузки для
разных настроечных интервалов [24]
ш
О
03
с
о
5
S
14
12
10
« 6
о.
.4
20
25
0 5 10 15
Нагрузка (число пакетов)
—•— Размер настроечной последовательности - 6%
—*— Размер настроечной последовательности - 10%
-а- Размер настроечной последовательности - 20%
-V- Режим всенаправленного действия
Рис. 7.13. Кривые зависимости величины задержки от длины настроечного
интервала
7.7. Пояснения
143
О
О
X
VD
О
О
О
С
о
т
СО
Z
с:
о
а
п.
]-*- Антенна Чебышева (-26 dB)
■ LMS - Случай 1
5 10 15 20
Нагрузка (число пакетов)
25
Рис. 7.14. Сравнение пропускных способностей антенны Чебышева с
фиксированной Д Н и уровнем боковых лепестков —26 дБ и случаем 1 из табл. 7.1
[24]
алгоритма формирования ДН ведет к получению более высокой пропускной
способности за счет подавления сигнала помехи (размещение нулей в
направлении помехового сигнала), в отличие от антенной решетки с ДН чебышевев-
ского типа.
7.7. Пояснения
На основании полученных результатов можно дать определенные
рекомендации по разработке смарт-антенных систем, обеспечивающих оптимальную
пропускную способность в MANET-сетях. Требования пропускной способности
сети могут быть удовлетворены на основе результатов моделирования подбором
таких антенных параметров, как размер решетки и распределение возбуждения.
На основании данных моделирования можно утверждать следующее:
1. Меньшая ширина ДН обеспечивает более высокую пропускную
способность.
2. ДН с меньшим уровнем боковых лепестков способствуют дальнейшему
улучшению пропускной способности.
3. По сравнению с ДН с более низким уровнем боковых лепестков,
но не обеспечивающих размещение нулей в направлении помехи,
адаптивные ДН (обеспечивают размещение нулей в направлении
помехового сигнала) обычно обеспечивают более высокую пропускную
способность.
144 Глава 7. Интеграция и моделирование смарт-антенн
Кроме того, так как между пропускной способностью и длиной
настроечного пакета существует некий компромисс, предлагаемые методы
моделирования облегчают задачу выбора подходящей длины настроечного пакета,
не жертвуя при этом частью пропускной способности сети. Настроечный
интервал устанавливает верхнюю границу на скорость сходимости при
формировании ДН и алгоритмы оценивания направлений прихода, что необходимо
учитывать при их разработке (алгоритмов). Согласно полученным результатам
наблюдается существенное падение пропускной способности сети, если длина
настроечного интервала превышает 20 %; следовательно, быстрые алгоритмы
формирования ДН исключительно важны с точки зрения высокой пропускной
способности сети.
Применение смарт-антенных систем в М ANET-сетях обеспечивает широкие
возможности увеличения пропускной способности. Увеличение пропускной
способности специальной сети может быть реализовано с помощью
пространственного разнесения смарт-антенн и разработки эффективных протоколов
канального доступа. Однако разработка таких протоколов предусматривает
тщательное рассмотрение системных аспектов технологии смарт-антенн. В этой
работе для обеспечения связи между устройствами MANET-сети с помощью
смарт-антенн предлагается протокол канального доступа. Данный протокол
создан на основе MAC-протокола стандарта беспроводной связи IEEE 802.11
[175,195] для среды множественного доступа с временным разделением каналов
(TDMA). Протокол подразумевает использование смарт-антенн и
обеспечивает уменьшение помех от соседних каналов, что способствует увеличению
пропускной способности сети.
Наконец, было показано, что в каналах с медленным замиранием
эффективность DMI- и LMS-алгоритмов является сравнимой. Однако для каналов
с быстрым замиранием LMS-алгоритмы не так эффективны. Следовательно,
в таких случаях алгоритм DMI целесообразно использовать в режиме
обнаружения, LMS — в режиме слежения. Более того, эффективность системы повысится
при совместном использовании ТСМ-кодирования с разнесением антенн.
ГЛАВА 8
ПРОСТРАНСТВЕННО-
ВРЕМЕННАЯ
ОБРАБОТКА
Пространственно-временная обработка STP (Space-time processing) является
одной из наиболее исследуемых технологий беспроводной связи, так как она
предлагает решение таких проблем, как помехи, полосы пропускания и
дальности действия [25]. В этой главе дается описание общих принципов STP и ее
основных преимуществ.
8.1. Вступление
Чтобы воспользоваться богатой структурой радиоканала с пространственно-
временным разделением для систем, состоящих из нескольких антенных
элементов, применяется адаптивная пространственно-временная обработка
сигналов. Метод STP применим как для приемной, так и передающих частей — или
для обеих сразу. На рис. 8.1 представлены схемы связи, зависящие от числа
антенн, используемых в приемных или передающих узлах. Они применимы как
для передающей, так и приемной стороны. В зависимости от числа антенн
канал может быть одиночного SI (single input) или множественного входа MI
(multiple input) — для передачи, или одиночного SO (single output) и множественного
выхода МО (multiple output) соответственно.
Когда пространственно-временная обработка применяется только на одном
конце (стороне), то такой метод обычно принято называть методом смарт-
антенн. При использовании STP как в передающей, так и приемной стороне
принято говорить об использовании метода многоканального входа —
многоканального выхода MIMO (multiple input, multiple output). Смарт-антенны и MIMO-
технологии являются наиболее перспективными направлениями развития
беспроводной связи, способными обеспечить преодоление ограничений
пропускной способности, обусловленных перегрузкой сетевого трафика, в
высокоскоростных широкополосных беспроводных сетях будущего [25].
Недавно было показано, что при наличии релеевского замирания и
одинаковом количестве передающих и приемных антенн, а также наличии в
приемнике информации о коэффициенте усиления пары, состоящей из передающей
Глава 8. Пространственно-временная обработка
и приемной антенны, пропускная способность многоантенного канала связи
возрастает практически линейным образом с увеличением числа антенн [195,
196]. Для получения такого прироста пропускной способности были
разработаны различные схемы пространственно-временного уплотнения [197, 198].
На рис. 8.2 интуитивно понятным образом показано, каким образом MIMO-
системы обеспечивают улучшение пропускной способности. На рис. 8.2(a)
изображена передающая система с несколькими антеннами, расположенными
на базовой станции, и одной — на мобильном терминале. Излучение
мобильного терминала имеет всенаправленное действие, а базовая станция способна
обеспечить адаптивную настройку ДН и ее фокусировку на мобильный терминал
с одновременной режекцией помех за счет соответствующего размещения
нулей. На практике полезный и помеховый сигналы могут поступать с различных
направлений и, следовательно, вид фактической ДН может оказаться
совершенно иным и не отражать процесс фокусировки с помощью пространственной
фильтрации [1]. На рис. 8.2(6) изображена MIMO-система, в которой как базовая
станция, так и мобильный терминал оснащены несколькими антеннами,
обеспечивающими одновременную беспроводную передачу нескольких потоков
данных. Каждая антенна мобильного терминала обеспечивает передачу
отдельного потока данных, излучаемых всенаправленно. Антенна базовой станции
способна формировать несколько лучей, обеспечивающих выбор и прием
потоковых данных. На основании данного примера очевидно, что по сравнению
с традиционной системой, пропускная способность была существенно
увеличена, чем и обусловлен повышенный интерес к МШО-системам [28].
В связи с тем, что алгоритмы пространственной обработки требуют
больших объемов вычислений, а также тем, что карманные устройства
характеризуются ограниченной емкостью аккумулятора и возможностями обработки,
Передача
Передача
<
<
MIMO
>
>
Прием
Прием
SISO Одноканальный вход - одноканальный выход
MISO Многоканальный вход - одноканальный выход
SIMO Одноканальный вход - многоканальный выход
MIMO Многоканальный вход - многоканальный выход
Рис. 8.1. Схема связи [194]
8.1. Вступление 147
X
*т
Базовая
станция
Нули режекции помех
(а)
Мобильный
терминал
Базовая
станция
Мобильный
терминал
Нули режекции нежелательных
сигнальных потоков
(б)
Рис. 8.2. Передающие антенные системы: (а) базовая станция с несколькими
антеннами и мобильный терминала с одной антенной и (б) MIMO-
система с несколькими антеннами на базовой станции и мобильном
терминале [1]
почти все разработки STP-технологии были привязаны к оборудованию
базовых станции и точек доступа. Однако с постепенным развитием технологии
устройств с пониженным энергопотреблением и появлением новейших
методик пространственно-временной обработки эта технология также становится
применимой к мобильным устройствам.
Технология смарт-антенн привлекательна прежде всего тем, что она
обеспечивает увеличение спектральной эффективности, дальности действия
и надежности работы беспроводных сетей. Смарт-антенные системы обычно
представляют собой антенные решетки, размещаемые только на одном конце
связи. Как правило, на передающей стороне это MISO-системы
(многоканальный вход, одноканальный выход), а на приемной — SIMO-системы
(многоканальный вход, многоканальный выход). В большинстве традиционных
антенных систем формирование ДН обеспечивается за счет фокусировки энергии
передаваемого сигнала в определенном направлении (обычно в направлении
приемника) с целью увеличения отношения сигнал—шум принятого сигнала.
Остронаправленные ДН также обеспечивают снижение уровня помех,
улучшение отношения сигнал — смеси помехи с шумом и, таким образом, более
высокую эффективность спектрального распределения. Другие схемы смарт-антенн
улучшают качество передачи за счет улучшенного коэффициента усиления
обеспечиваемых разнесением нескольких передающих антенн.
При использовании нескольких антенных элементов вероятность потери
передаваемого сигнала уменьшается экспоненциально с числом декоррели-
148 Глава 8. Пространственно-временная обработка
рованных сигналов (или антенн). В используемых в настоящее время
беспроводных сетях LAN (WLAN) типа SIMO (или MISO) схема разнесения
работает по принципу переключающей, обеспечивающей выбор из двух антенн той,
у которой максимальное отношение сигнал—шум. MIMO-системы могут
воспользоваться во благо многолучевым распространением сигнала, обычно
вредным в системах беспроводной связи, обеспечивая пользователю более высокую
скорость передачи данных.
Разнесенные смарт-антенные системы не обеспечивают увеличение
максимальной скорость передачи данных или существенное увеличение дальности
действия — они просто улучшают качество канала связи и эффективность
использования спектра. По сравнению с обычными смарт-антеннами MIMO-
системы, в которых антенные решетки устанавливаются как в приемной, так
и передающей части, обеспечивают гораздо более высокую пропускную
способность [25].
В среде с многолучевым замиранием прежде чем сигнал доходит до
приемника, происходит его многократное переотражение от таких различных неод-
нородностей, каковыми являются стены, здания, деревья и рельеф местности.
При работе в средах с высокой неоднородностью антенная MIMO-схема вкупе
с пространственно-временной обработкой обеспечивает одновременную
передачу независимых потоков данных с помощью всех передающих антенн в одном
частотной диапазоне.
Например, для предоставления возможности одновременного
доступа нескольких пользователей беспроводная MIMO-система стандарта
802.11, состоящая из четырех передающих и четырех приемных антенн,
обеспечивает четырехкратное увеличение пропускной способности вплоть до
216 Мбит/с (4x54 Мбит/с) [25]. Такая MIMO-схема называется
пространственным объединением SM {spatial multiplexing). Улучшение производительности
MIMO-систем может быть реализовано двумя путями, в зависимости от
условий среды, в которой находится мобильный терминал.
Для увеличения скорости передачи данных при наличии благоприятных
условий в канале и отношения сигнал—шум применяется метод
пространственного объединения SM [25]. В этом случае часть степеней свободы приемника
(в зависимости от алгоритма STP могут использоваться все степени свободы)
используется для извлечения нескольких сигналов, а не для реализации
разнесенного приема как способа борьбы с замиранием. Однако для реализации
разнесенного приема и увеличения коэффициента направленного действия
АР при работе на больших расстояниях используются несколько передающих
и приемных антенн. В зависимости от условий среды переключение между
режимом разнесенного действия и режимами пространственного объединения
осуществляется с помощью алгоритма адаптации соединения, который, как
8.1. Вступление
149
правило, используется в процессоре контроллера доступа к среде MAC {media-
access controller). Полноценная работа подразумевает возможность адаптации
к окружающей среде.
В зависимости от условий среды распространения и используемого метода
STP-обработки, N-кратная MIMO-система (где N — число антенн в приемной
и передающей части) может обеспечить N-кратное увеличение пропускной
способности по сравнению с SISO-системой (single-input, single-output — однока-
нальный вход, многоканальный выход). При когерентном сложении сигналов
в приемной части с использованием таких методов, как технология сложения
при максимальных отношениях MRC (maximal ratio combining), среднее
значение отношения сигнал—шум принимаемого сигнала возрастает на 10 • loglO(TV),
где N — число приемных антенн [25]. Очевидно, что по сравнению со схемой
из 4 антенн характеристика улучшается на 6 дБ. На рис. 8.3 приведены области
применения и преимущества STP.
MIMO-системы, обеспечивающие подавление помеховых сигналов,
больше выигрывают при большем количестве приемных, а не передающих антенн.
Например, если N — число передающих антенн в Ml МО-системе, то для
обнуления пространственной помехи, создаваемой одним пользователем,
использующим N независимых потоков данных, предпочтительное число приемных
антенн будет составлять 2N. Каждый помеховый объединенный поток данных
рассматривается MIMO-приемником, обеспечивающим подавление помех,
в качестве отдельной помехи. Следовательно, для устранения помехи исполь-
Пространственно-
временная обработка
Смарт-антенны
MISO/SIMO
Усиление КНД
решётки
Ослабление
помех
Прием с
пространственным
разнесением
Объединение
1 \ 1 X 1 / 1
Зона
обслуживания
(км2/на базовую
станцию)
Качество канала
связи (частота
двоичных ошибок,
вероятность
нарушения связи)
Пропускная
способность
(Эрлан г/Гц/на
базовую станцию)
Скорость
передачи
(бит/сек/Гц/на
базовую
станцию)
Рис. 8.3. Пространственно-временная обработка; области применения и
преимущества [25]
150
Глава 8. Пространственно-временная обработка
зуется N антенн, а остальные N антенн — для извлечения полезных потоков
данных и получения усиления при разнесенном приеме.
Способ совмещенной пространственной и временной обработки
(детали в работе [27, 194]) был изначально разработан для ослабления
межканальных помех в беспроводных сетях общего доступа. Как выяснилось позднее,
пространственно-временная обработка также может использоваться для
улучшения отношения сигнал—шум, ослабления эффекта многолучевого
распространения, разнесенного приема и увеличения коэффициента усиления
решетки. В частности, в последние годы большое внимание привлекает вопрос
слепой пространственно-временной обработки сигнала [199—200].
Основополагающие работы в этом направлении принадлежат Тонгу и др., 1994 [201] —
слепая коррекция с использованием статистики второго порядка, и Мулену
и др. [202] — подпространственные методы слепой обработки сигнала (см.
также [203, 204]). Талваром [205, 206] было предложено элегантное проекционное
решение проблемы слепой обработки нескольких пользовательских сигналов
для ISI-свободного канала, а Ван дер Вином [200] — для канала с задержкой
распространения. Исследование размерности кодирования для слепой
многоканальной обработки по-прежнему представляет перспективную область
исследований.
Первый случай коммерчески успешного внедрения малоразмерной
многоантенной технологии отмечен в Японии — мобильные телефоны
персональной цифровой сотовой связи NTT Docomo и 3G Foma, а также в сегодняшних
системах беспроводной связи стандарта 802.11, где приемной стороной
используются две антенны разнесенного приема. Как было показано ранее, этот
метод не обеспечивает ни увеличения максимальной скорости передачи
данных, ни существенной дальности действия. Однако это является очевидным
доказательством того, что технология многоантенных систем постепенно
выходит на потребительский рынок. Самая большая проблема STP-технологии
заключается в том, чтобы сделать ее доступной. В связи с этим необходимо
обеспечить рентабельный способ внедрения алгоритмов обработки сигнала
и аппаратной части. Решения, которые смогут обеспечить одновременную
реализацию этих условий на технологическом уровне, являются
предпосылкой появления высокоэффективной технологии для систем беспроводной
связи настоящего и будущего. Далее предлагается анализ пространственно-
временного сигнала и моделей каналов, обеспечивающий необходимые
средства исследования основных принципов и специальных преимуществ
пространственно-временной обработки и формирования ДН. Наконец, в
данной главе сведены результаты нескольких исследований, демонстрирующие
существенные преимущества, которые могут быть получены от широкого
внедрения МШО-систем.
8.2. Модели сигнала и дискретного пространственно-временного канала I
8.2. Модели сигнала и дискретного
пространственно-временного канала
Для того, чтобы перейти к пространственно-временной обработке,
необходимо рассмотреть дискретную модель канала. Это реализуется посредством
пространственной и временной дискретизации принятого сигнала. Прежде всего
рассматривается случай передачи модулированного сигнала от одного
пользователя в среде с многолучевым распространением (за счет его переотражений).
Цифровая модуляция осуществляется в передатчике. Этот процесс состоит
в преобразовании НЧ-сигнала в высокочастотный, после чего он готов для
передачи. Обычно линейная модуляция цифровой последовательности {Ik}
обеспечивается функцией формирования импульсов g(t) таким образом, что
подлежащий передаче НЧ-сигнал s(t) имеет следующую общую форму:
s(t)=^Ikg(t-kT), (8.1)
*=-оо
где Т— период символа (сигнала). Источником точек данных Ik может быть
любая совокупность сигналов (множества векторов). Например, при двукратной
фазовой модуляции (BPSK) возможными символами данных являются две {±1}.
При использовании других методов модуляции, как например квадратурной
фазовой (QPSK) или квадратурной амплитудной (QAM), последовательность Ik
является комплекснозначной, так как сигнальные точки имеют двумерное
представление. Для беспроводной передачи в системе GSM используются двоичные
(бинарные) сигналы и гауссовская манипуляция с минимальным частотным
сдвигом GSMK (Gaussian Minimum Shift Keying) [207] (см. гл. 6).
Фундаментальная функция канала в обработке сигналов и системах связи
состоит в установлении соотношения между сигналом передачи и его
принятым вариантом [133]. Для исходного (немодулированного сигнала) s(t)
принятый сигнал x(t) может быть выражен через свертку импульсной характеристики
канала h(t, т) и s(t) как
*(/) = J2h(x,t)s(t - x)di + n(t). (8.2)
Импульсная характеристика А(т, /) есть функция как временной задержки
т, вносимой каналом связи с наличием многолучевого распространения, так
и длительностью времени /. Более того, в выражении (8.2) учитывается
аддитивный белый шум n(t). Что касается шума, то несмотря на возможность
прочих допущений, предлагаемых в [71, 72, 208], использование аддитивного шума
безоговорочно является наиболее широко распространенным допущением.
Глава 8. Пространственно-временная обработка
Предыдущее выражение для одиночной приемо-передающей антенны
непосредственно расширяемо для многоантенного случая. Канал связи,
образуемый N приемными и М передающими антеннами, может быть описан с
помощью матрицы Н(т, t) из NxMкомплексных импульсных характеристик полосы,
занятой сигналами модуляции несущей. Импульсная характеристика канала
связи междуу-ой передающей и i-ой приемной антеннами обозначается
элементом матрицы Я (т, t). То есть каждая приемная антенна наблюдает за шумовым
наложением от М передаваемых сигналов, искажаемых при распространении
в канале многолучевого распространения с замиранием. Следовательно, для
описания такой многоэлементной антенны МЕА (Multi-Element Antenna) или
MI МО-канала необходимо иметь NM импульсных характеристик. В каждый
момент времени каждая строка Я-матрицы — [Hv H.v ..., Н.м] представляет
собой характеристику канала от М-передающих элементов к одному приемному
элементу, а каждая строка Н [Н{ , Н2,..., HN] — характеристику канала от
одного передающего элемента к TV-приемным. Последнее также принято называть
пространственно-временной сигнатурой, создаваемойу-ой передающей
антенной на приемной антенной решетке [209]. В принципе любая модель канала
связи, точно учитывающая размерность пространства, может использоваться для
изучения корреляционных свойств двух пространственно разнесенных антенн
и получения коэффициентов Н. канала связи [133]. Работа [210] представляет
собой отличный обзор по данной тематике.
В случае МЕА и исходя из того, что каналы между антенными парами
являются независимыми и некоррелированными, Nx 1 вектор принятых сигналов х(/)
*(/) = \°° H(x,/M/-T)dT + n(0 , (8.3)
1 I
1 \"н^-^ ~~-"' / ^—©-►xi
\П/\М ^к^ ' ^^
S* ' ЧНд,2 \ / ,* ' ©-**2
N \ / у
w .
/ / ч ч
Нш/ ,'
_«j i'_ -i^jU
to ' HNM ' ©—+*N
Рис. 8.4. Беспроводный канал связи, состоящий из М передающих и N
приемных антенн [70]
8.2. Модели сигнала и дискретного пространственно-временного канала I
где s(/) — Мх 1 вектор сигналов передачи и n(t) — вектор помех такой же длины.
Схема МЕА-канала показана на рис. 8.4.
Необходимо подчеркнуть, что здесь используется непрерывное
представление сигналов и импульсных характеристик, являющееся естественным
результатом выведения физической модели канала на основании законов
электромагнетизма [133]. Однако в большинстве систем беспроводной связи настоящего
и, скорее всего, будущего будет по большей части использоваться цифровая
обработка сигнала. При разработке приемной части и алгоритмов
детектирования таких систем дискретное представление времени представляется более
удобным. При дискретизации принятого сигнала с периодом Г могут
использоваться выражения х(п) = х(пТ) и
х(п)= JT HOfc,/i)s(fl-Jfc) + n(n). (8.4)
Следует отметить, что в (8.4) матрица Н является дискретным аналогом
матрицы Н в (8.3), так как в дальнейшем будут рассматриваться дискретизиро-
ванные аналоги передаваемого сигнала и помехи, обозначаемые s(n) и п(я)
соответственно. Такая система обозначений принята в большинстве литературных
источников, хотя и ведет появлению некоторых искажений. В узкополосных
системах, в которых частотная характеристика канала считается равномерной,
основная часть принимаемой энергии поступает практически одновременно,
и модель может быть упрощена к виду
x(n) = H(n)s(n) + n(n). (8.5)
В этом случае модель канала сводится к наличию комплексных матриц,
состоящих из комплексных скаляров, связывающих принятые каждым
элементом сигналы с соответствующим сигналом, переданным каждой антенной
посредством простой матрицы преобразования, описывающей общее поведение
канала связи.
Далее, если предполагается наличие стационарного канала, то его
временной зависимостью можно пренебречь, то есть Н.
Для такой матрицы узкополосного MIMO-канала в соответствующей
литературе предлагаются различные способы нормирования, где наиболее
распространенной является евклидова или, что тоже самое, фробениусова норма [211]:
/ N М Г
«H||2=JxiN2.
Для случая с равномерным релеевским замиранием простая модель канала
может быть представлена в виде равномерно распределенных по кругу вокруг
Глава 8. Пространственно-временная обработка
мобильного терминала рассеивателей. На рис. 8.5 показан круг рассеивания
с ориентацией мобильного терминала и базовой станцией. На основании этой
модели элементы матрицы канала в (8.5) формируются показанным далее
образом. Исходя из равномерного распределения Р рассеивателей S ,р = 1, 2,..., Р
на диске с радиусом R, расположенных вокруг мобильного терминала,
канальный коэффициент Н.. связующийу'-ю передающую су-ой приемной антенной,
определяется с помощью выражения
Я,
:1лехР
Р=\
-УуК^+^^)
(8.6)
где DBj^Sp и Ds м. — расстояние оту-ой антенны базовой станции до рассеива-
теля/? и от последнего до /-ой антенны мобильного терминала соответственно.
Кроме того, и до а — коэффициента рассеяния рассеивателя /?,
представляющего собой случайную нормально комплексную величину с нулевым средним
и единичной дисперсией.
Для широкополосных сигналов (их полоса частот шире когерентной полосы
канала) должен использоваться другой подход. По сути, точная модель должна
учитывать копии одного и того же сигнала, поступающего в приемник в
различные моменты времени. Исходя из нулевого времени прохождения сигнала
каждый принятый сигнал зависит от последующих сигналов, переданных в
интервал времени от L — 1 предыдущих периодов дискретизации до текущего
периода. Представим эту модель с помощью выражения
х(п) = H(n)s(n) + п(я),
(8.7)
где матрица Н есть NxML и вектор s — MLx 1. Введенный параметр L отвечает
за поглощение почти всей энергии поступающего с различными задержками
сигнала и задается, как было указано ранее, отношением распределения
задержек (временная дисперсия канала) к длительности символа (L= Т /Т).
Рис. 8.5. Геометрия канала [133]
8.3. Пространственно-временное формирование луча \ 5 5
Матрица Н может быть записана в виде
Н =
fill
h21
Ki
h12 .
h22 .
bN2 •
•• h1A/]
•• Ъ2М
•• Км\
(8.8)
где каждый элемент h.. есть вектор-строка длиной L, содержащий импульсные
характеристики от передающейу'-й антенны к приемнойу-ой антенны от
текущего до L — 1 предыдущих моментов времени согласно выражению
U = L У>' &'.я-1' *' *' U,n-(L-l) J '
Аналогичным образом вектор s может быть записан в блочной форме как
s = [s„s2,...,sA/f. (8.9)
где s. — вектор-столбец длиной L, содержащий все переданные у-ой антенной
символы от текущего до L — 1 предыдущих моментов времени, согласно
выражению
Sy = \_Sj,n > Sj,n-\» '' •' Sj,n-(L-l) J *
Еще одна полезная форма представления принятого сигнала х(п) из (8.7):
м ^
x(«) = ^HySy(/2) + n(/l),
У=1
(8.10)
где матрицей Н. размерностью NxL обозначается характеристика канала,
создаваемая у-ой передающей антенной и N приемными антеннами для L ISI-
символов согласно выражению
Hy=[hfy,h^.,...,h;.]r, у = 1,2,..., Л/.
(8.11)
8.3. Пространственно-временное формирование
луча
В предыдущих главах было рассмотрено только пространственное
формирование, при котором на элементах приемной антенны (каждой антенне
присваивается один комплексный весовой коэффициент) к Nx 1 вектору сигналов
применяется только Nx 1 пространственный вектор w с результирующим выходом
Глава 8. Пространственно-временная обработка
y(n) = wHx(n).
(8.12)
Пространственная обработка лучше всего работает, если сигнал,
поступающий на каждый антенный элемент, имеет одинаковую временную дисперсию, то
есть одинаковую форму импульсной характеристики [212]. Однако в общем
случае это неверно. В среде с многолучевым распространением, обычно имеющем
место, уровень принимаемой мощности является случайной функцией
местоположения пользовательского терминала и времени в зависимости от
замирания в канале. С другой стороны, для борьбы с многолучевым распространением
осуществлялась отдельная коррекция для каждой антенны до
пространственного формирования сигналов, что могло бы быть оптимальным только в том
случае, когда при каждой задержке компоненты многолучевого
распространения поступают с одного направления [212]. В общем случае это тоже неверно.
Для того, чтобы воспользоваться преимуществом двухмерной обработки
(по сравнению с одномерной), было бы разумным использовать совмещенный
пространственно-временной фильтр. Пространственно-временное форми-
xi(0
1
"
'
Z"1
'
W1,0
'
Z"1
И/1,1
\
Л
'
р
'
1
Z"
1
г
-1
\
'
S
J
'
X/
1
(t)
'
Z"1
'
'
Z"1
^ W; n
^l W; 1
I
-4
1
'
p
'
I
I
I
l
xN(t)
*H И/л/, о
W/V.1
<J>
'
z"
'
I
-1
1
'
s
J
'
Рис. 8.6. Схема пространственно-временного формирователя ДН
8.4. Подавление межсимвольных и внутриканальных помех I
рование является обобщенным случаем пространственного формирования.
Предполагается, что число отсчетов сумматора равно К Каждый отсчет,
обозначаемый w(/), / = 0, 1, ..., К — 1, является Nx 1 весовым вектором,
определенным выше. Выход пространственно-временного формирователя определяется
выражением [26]
y(n) = ^wH(i)x(n-i) (8.13)
/=0
или в матричной форме [26]
У(п) = \¥яХ(л), (8.14)
где W и Х(п) — KNx 1 векторы
W = [wH(0),wH(l),...,wH(K-l)]H и (8.15а)
Х(п) = [хТ(п)У(п-1),...,хТ(п-К + 1)]Т. (8.156)
На рис. 8.6 представлена схема пространственно-временного
формирователя ДН.
8.4. Подавление межсимвольных и внутриканальных
помех
Разработанные модели обеспечивают необходимый аппарат, чтобы
продемонстрировать высокие возможности пространственно-временной обработки,
обеспечивающей одновременное подавление межсимвольных ISI (InterSymbol)
и внутриканальных помех CCI (Co-Channel Suppression ). С целью упрощения
данного исследования предлагается похожая концепция системы с Q
совмещенными пользовательскими каналами, под каждый из которых выделена
собственная антенна, а не одного пользовательского канала с М передающими
антеннами, в то время как антенная решетка базовой станции по-прежнему
состоит из iV-элементов. Согласно принятой модели сигналы, принятые
^элементами за интервал с # временными отсчетами оту-го источника передаваемого
сигнала, могут быть представлены в форме KNx 1 пространственно-временного
вектора [26]:
Х.(П)=Н£;(П)+К;(П), (8.16)
где S.(n) = Sj(n), s.(n - 1),..., Sj(n - К- L + 2)Tn H. есть KNx (К+ L - 1) канальная
матрица, заданная [26]
Глава 8. Пространственно-временная обработка
Н! =
Ну
О
о
о
Ну,л-1
о
о
о
Hj,n-K+l
(8.17)
где О — Nx 1 — вектор-колонка с нулевыми элементами.
Матрица Н имеет блочную структуру Теплица (равное число
диагональных элементов), получаемую из линейной, не зависящей от времени операции
свертки над символьной последовательностью [26]. Исходя из ограниченной
по времени беспомеховой обстановки, выход с линейного пространственно-
временного сумматора, обусловленного наличием у-го источника, задается
выражением [26]
yy(if) = WftfySy(/i)
(8.18)
При наличии Q пользовательских каналов передачи в направлении базовой
станции из N элементов выход пространственно-временного приемника может
быть обобщен с помощью выражения
^ = £wf#.S.(A2).
У=1
(8.19)
8.4.1. Подавление межсимвольных помех ISI
В общем линейный фильтр W. предназначен для выравнивания канала с целью
компенсации влияния межсимвольных помех нау-го пользователя в отсутствие
внутриканальных помех [26]. Учебный материал по коррекции канала
можно найти в [71, 213]. Для подавления межсимвольных помеху-го канала связи
(пользователя связи) свертка между W. и канальными характеристиками
должна удовлетворять следующему так называемому условию обращения в нуль
незначащих коэффициентов (в матрице)
Wf#,=[0,0,... ,0,1,0,... ,0,0].
(8.20)
Местоположением элемента «1» обозначена задержка комбинированной
импульсной характеристикой канального эквалайзера. С алгебраической
точки зрения в Я. должно быть больше строк, чем колонок, то есть для
существования таких решений должно выполняться условие KN> (К+ L—\) [26].
Следовательно, для реализации подавления межсимвольных помех крайне необходимо,
чтобы пространственно-временной фильтр имел большое количество
временных отсчетов К (степеней свободы).
8.4. Подавление межсимвольных и внутриканальных помех I
Совершенно очевидно, что число временных отсчетов К должно, как
минимум, быть равно числу различимых помех многолучевого распространения.
8.4.2. Подавление внутриканальных помех CCI
Задача подавления внутриканальных помех в сотовых системах связи
состоит в определении и усилении полезного сигнала у-го канала
(пользователя) и (в идеале) одновременном устранении всех прочих. Это может быть
реализовано за счет установления ортогональности между характеристикой
пространственно-временного сумматора и канальной характеристикой прочих
пользователей, подлежащих режекции [26].
Это может быть представлено с помощью следующего математического
выражения [26]:
УН?Н=0Т, длявсех f*j e[l,2,...,Q], (8.21)
где 0 — вектор-столбец (К+ L — 1) х 1 нулевых значений. В (8.21) необходимо
найти решения для (Q — l)(K + L— 1) скалярных уравнений. В очередной раз,
число неизвестных равно KN (размер W). Одновременно с этим, приемник должен
улавливать энергию, передаваемую заданным пользователем таким образом, что
W"# Ф 0Г. Это условие, требующее, чтобы Н и {#,) не занимали одно и то же
j j j i j j /*j
подпространство колонки, удовлетворяется с помощью очевидного допущения,
что полезный сигнал и помеха не поступают с одного направления [27].
8.4.3. Одновременное подавление межсимвольной
и внутриканальной помехи
Для полного восстановления сигнала, передаваемого заданным пользователем
в условиях наличия ISI и CCI, необходимо обеспечить как выравнивание, так
и разделение каналов. Выход пространственно-временного сумматора,
удовлетворяющего выражениям (8.20) и (8.21), записывается в виде [26]
W/#=[0,0,..., 0,1,0,...,0,0], (8.22)
где Н = [ЯР..., #._,, Hj, Hj+l,..., #Q] есть матрица KNx Q(N+ L— 1). Для
решения проблемы устранения ISI и CCI в матрице многопользовательского канала
Я должно быть больше колонок, чем строк, то есть KN > Q(N + L — 1). В
очередной раз необходимо подчеркнуть, что смарт-антенны должны обеспечивать
достаточное число степеней свободы [26]. В идеальном случае, если глобальная
матрица канала И является заполненной столбцевой матрицей полного
ранга, то восстановление канала заданного пользователя реализуемо посредством
пространственно-временного формирования ДН.
160 Глава 8. Пространственно-временная обработка
На практике, однако, такое идеальное одновременное подавление ISI и CCI
помех ограничено наличием шума и отсутствием идеальной синхронизации. В
соответствующей литературе предлагаются алгоритмы пространственно-временной
обработки для подавления CCI и ISI в нестационарных каналах. Например, в
работе [214] предложен алгоритм пространственно-временной обработки для
подавления СО и ISI для систем GSM/DCS. За счет оптимизации подходящей целевой
функции для разделяемых пространственно-временных каналов осуществляется
комбинированное оценивание временного канала для приемника с
декодированием Витерби и весовых коэффициентов формирователя ДН.
8.5. Пространственно-временная обработка для DS-
CDMA
По сравнению с более ранними системами множественного доступа, как
например, с временным разделением каналов TDMA или частотным FDMA,
системы многостанционного доступа с разделением каналов и прямым
расширением спектра DS-CDMA благодаря присущей им преимуществам занимают
достаточно существенную часть рынка и являются перспективной технологией
[215]. Однако, они сталкиваются с фундаментальными трудностями при
наличии обстановки, когда принятые сигналы имеют разную энергию (сигналы
из ближней и дальней зоны соответственно); датчик стандартного типа не
способен обеспечить надежную демодуляцию слабых сигналов, так как происходит
подавление сигналов с меньшей энергией сигналами с большей [216, 217].
Адаптивные антенные решетки обеспечивают альтернативные способы
решения проблемы в ближней зоне. Зависимость помехоустойчивости и
пропускной способности канала связи заданного пользователя от прочих пользователей
сети, системного сопротивления от близкого и далекого расположения могут
быть существенно уменьшена за счет направления максимума ДН и уменьшены
уровня суммарной мощности помех коллективного доступа MUAI (multiuser
access interference) [217].
Помимо устранения проблемы ближней—дальней зоны, антенные решетки
также увеличивают пропускную способность CDMA-систем за счет подавления
помех. Это обусловлено тем, что пропускная способность системы
ограничивается помехами, а не полосой пропускания, как это имеет место в случае TDMA-
системы [218, 219], причем снижение минимального уровня шума системы
посредством пространственно избирательной передачи и приема ведет к прямому
увеличению пропускной способности [220].
В последнее время растет интерес к 2D RAKE-приемникам
(корреляционный приемник), обеспечивающим комбинированное пространственно-
8.6. Пропускная способность и скорость передачи данных в МШО-системах
L_
ClU-Ti)
x(f)t
BF#1
Ci(f-T2)
f()dt
BF#2
-©-
f(-)dt
: BF#L
Ci(f-TL)
—0—
/<•)<*
P i
(0 2
3" >>
1 О
т
Q. X
О 0)
CO 0)
2 Q.
2 Ъ
-y(0
Рис. 8.7. В схеме корреляционного RAKE-приемника пространственно-
временной обработки для CDMA-системы для пространственного
разнесения сигналов используется формирователь, за которым находится
обычный RAKE сумматор [20]
временное разнесение за счет использования в них адаптивных антенн.
В принципе 2D RAKE-приемник дает возможность конструктивного сложения
сигналов многолучевого распространения, принимаемых антенными
решетками, с одновременной минимизацией помех коллективного доступа [217]. Такое
эффективное средство комбинирования сигналов обеспечивает оптимальное
значение отношения сигнал— смесь помехи и шума для заданного
пользователя. Потенциальные возможности 2D RAKE проверены и подтверждены
результатами многих исследований [220—222].
В случае использования антенной решетки из N элементов и при
наличии Z-разрешаемых путей распространения сигнала в RAKE-приемнике
пространственно-временной обработки предусмотрен формирователь для
каждого компонента с весами w/n, за которым находится стандартный RAKE-
приемник. За формирователем ДН MMSE-типа находится RAKE-сумматор,
не являющийся MMSE-приемником временной обработки. На рис. 8.7
приведена схема RAKE-приемника пространственно-временной обработки. Такой
приемник обеспечивает увеличенную добротность, которую можно «разменять»
на увеличенную зону обслуживания или пропускную способность. Это
улучшение обусловлено снижением уровня межсотовых помех CCI — за счет
формирования ДН, и межсимвольных помех — за счет когерентного сложения
разрешаемых путей распространения.
8.6. Пропускная способность и скорость передачи
данных в Ml МО-системах
С помощью современных методов пространственно-временной обработки
сигналов MIMO-системы предлагают существенное увеличение эффективности
162
Глава 8. Пространственно-временная обработка
использования выделенного частотного спектра за счет использования
пространственного разнесения как в передающей, так и приемной стороне. Перед
завершением этой главы было бы полезным рассмотреть и сравнить выражения
для пропускной способности и скоростей передачи в каналах SISO/MIMO.
В MIMO-системе высокоскоростной поток двоичных сигналов разделяется
в передатчике на независимые двоичные последовательности с их последующей
одновременной передачей с помощью нескольких антенн. Затем осуществляется
кодирование каждого подпотока в канальные символы. В большинстве случаев
скорость передачи данных устанавливается одинаковой для всех передатчиков,
хотя для каждого из подпотоков может устанавливаться и адаптивный режим
модуляции [20]. Так как используется один спектр частот, то при передаче
происходит смешивание сигналов в беспроводном канале. Для создания
независимых путей распространение должно обеспечивать достаточно хорошее
пространственное и/или поляризационное разнесение приемных и передающих
антенн. После определения матрицы смешения с помощью настроечных
символов для получения увеличенной скорости передачи сигнала осуществляется
рекомбинация отдельных двоичных потоков. Такая схема передачи, по
сравнению с логарифмическим ростом эффективности использования выделенного
частотного спектра, характерным для более традиционных систем на основе
обычного или разнесенного приема, обеспечивает ее линейное увеличение.
Такое существенное увеличение эффективности заключается в том, что потоки
Рис. 8.8. Принципиальная MIMO-схема на основе трех передающих и трех
приемных антенн, обеспечивающая трехкратное увеличение пропускной
способности [23]
8.6. Пропускная способность и скорость передачи данных в МШО-системах
163
данных, поступающие в приемники от передатчиков, являются слабо
коррелированными, что обусловлено наличием сильно рассеивающей среды. Основные
функции MIMO-системы показаны на рис. 8.8.
8.6.1. Ограничения скорости передачи для одного пользователя
Пропускная способность канала является мерой передачи максимально
возможного количества информации через канал связи и ее приема с
пренебрежимо малой вероятностью возникновения ошибок. При наличии одной
передающей и одной приемной антенн предел максимальной скорости передачи данных
для одного пользователя может быть представлен с помощью универсального
выражения Шеннона:
[bits/s], (8.23)
где РТ — общая мощность излучения, а2 — мощность белого гауссова шума
в пределах ширины полосы пропускания канала В и |Л|2 — коэффициент
усиления по мощности (мгновенной) канала. Это выражение просто дает верхний
предел пропускной способности канала, причем, исходя из наличия
нереалистичных условий только часть его является доступной, и полоса пропускания
всей системы выделена под одного пользователя, в то время как прочие
пользователи неактивированы при полностью устраненных помехах [28].
При разнесенной передаче антенные решетки используются только с
передающей стороной. В этом случае антенны базовой станции должны быть
разнесены1 на достаточное расстояние во избежание корреляции сигналов.
Верхняя граница скорости передачи данных задаётся по формуле
C = Blog2(l + ^^\hm\2) [bits/s], (8.24)
где hm — характеристика канала связи для каждой некоррелированной антенны
базовой станции на одну антенну оконечной станции.
8.6.2. Предел скорости передачи при коллективном
использовании канала
При использовании на передающей и/или приемной стороне нескольких
антенн и отсутствии в канале передачи мгновенной информации уравнение
Шеннона может быть обобщено [133, 196]:
1 Необходимая величина разноса зависит угла расхождения и составляет порядка
5—10 длин волны.
C = Blog2
1 "т ы2
п1' '
Глава 8. Пространственно-временная обработка
C = Blog2
det|l„+-^yHH*
Mo
= Р0^^) Ns/s], (8.25)
где IN— единичная матрица, \h\2 заменятся на ННяи РТ/с2 — на р (для удобства),
п = min (Af, N), где Хк — собственные значения ННЯ. Элементами матрицы Н
представлены hnm независимые канальные коэффициенты между М
передающими и 7V приемными антеннами. Следует отметить, что это выражение
предполагает, что доступная мощность передачи Рт равномерно распределена между
Мпередающими антеннами. Это практичный подход для случаев, когда в
передатчике нет данных о канале. Общая пропускная способность
широкополосного MIMO-канала определяется выражением
D L-1
C = yIlog2
L 1=0
det I„+-^-H,Hf
N MS ' '
[bits/s] (8.26)
для L параллельных каналов с плоской частотной характеристикой.
Привлекательность и возможности MIMO-систем хорошо демонстрируется с помощью
(8.25), рассматривая в качестве примера идеальный случай Н = 1^ (то есть
равного числа передающих и приемных антенн и идеальных параллельных связей
между ними; не пересекающимися).
Из (8.25) получаем [196]:
C = £JVlog2[l + -£-j-+— р если N-^oo. (8.27)
В отличие от (8.23), увеличение пропускной способности имеет линейный,
а не логарифмический характер, причем с ростом отношения сигнал—шум, что
свидетельствует о существенном преимуществе использования параллельной
передачи. Однако любое потенциальное преимущество многоканальности,
предлагаемое многоэлементными антеннами МЕА, должно быть тщательно
взвешено, так как компоненты сигнала с многолучевым распространением
могут сильно влиять друг на друга [196].
С целью демонстрации беспрецедентного уровня производительности,
обеспечиваемого одновременным применением антенных решеток на базовых
станциях и терминальных устройствах, мы, с разрешения авторов, приводим
частичные данные из работы [28]. В ра боте [28] главным критерием качества
является идея о скорости непрерывающейся передачи, то есть величина С,
имеющая определенную (высокую) вероятность. Для обоснования результатов своей
работы ее авторы взяли за основу 90%-ю вероятность непрерывной работы, то
есть исходили из того, что в 10 % блоков пакетной передачи могут содержаться
ошибки. Такой эксплуатационный критерий может считаться приемлемым для
8.6. Пропускная способность и скорость передачи данных в МШО-системах
100
РТ = 10 Вт
В = 5 МГц
Разнесенная передача М-антеннами
базовой станции
Одиночная антенна
пользовательского терминала
Расстояние (км)
Рис. 8.9. Зависимость скорости передачи данных (обеспечивается для одного
пользователя с вероятностью 90%) от местоположения пользователя
при использовании направленной решетки базовой станции и всена-
правленной антенны пользовательского терминала. М — число 15 дБи
антенн базовой станции; передаваемая мощность РТ = 10 Вт и полоса
пропускания В = 5 МГц [28]
многих применений, хотя они могут быть и иными. Авторы решили
ограничиться изучением только передающей части сотовой системы, состоящей из
достаточно больших ячеек с разделением каждой на сектора по 120°. Они также
исходили из следующей обстановки распространения сигнала: наличия
локальной рассеивающей области вокруг каждого терминала и ее отсутствия
в районе базовой станции. Анализ проводился в 2 ГГц частотном диапазоне
с доступной полосой пропускания В = 5 МГц. Полная передаваемая мощность
была установлена равной Рт = 10 Вт. Усиление каждой антенны базовой станции
составляет 15 дБи, а терминал подвижной связи обеспечивается одной
антенной всенаправленного действия. Наконец, для учета зависимого от расстояния
компонента использовалась общепринятая модель COST231, базирующаяся
на модели Окумуры—Хаты (англ. Okumura—Hata) [50]. На рис. 8.9 приведены
данные для одиночной антенны при использовании Мантенн базовой станции.
Несмотря на отсутствие фундаментального ограничения на размер решетки, ее
расширение за пределы М ~ 3, 4 мало что дает из-за убывающей
эффективности при добавлении в уже существующий канал с разнесением дополнительных
ветвей разнесения.
Затем уделяется внимание системам, оснащенными как передающими, так
и приемными решетками. На основе этой модели был предложен класс
многоуровневых пространственно-временных структур, получивший название
BLAST [224]. В BLAST реализована схема одновременного излучения разными
Глава 8. Пространственно-временная обработка
BLAST
Число антенн базовой
станции и пользовательских
терминалов, равное
РТ = 10 Вт
В = 5 МГц
Расстояние (км)
Рис. 8.10. Зависимость скорости передачи данных (обеспечивается для одного
пользователя с вероятностью 90 %) от местоположения пользователя
при использовании направленной решетки базовой станции и все-
направленной антенны пользовательского терминала. М — число
15 дБи антенн базовой станции, равное числу всенаправленных
антенн пользовательского терминала (М = N); передаваемая мощность
Рт = 10 Вт и полоса пропускания В = 5 МГц [28]
антеннами передающей решетки нескольких потоков данных. При
достаточно многолучевом распространении приемник, также оснащенный решеткой,
может обеспечить разделение и успешное декодирование всех потоков данных
с помощью современных методов обработки сигнала, обеспечивающих
слияние обработки сигнала на решетке и многопользовательского детектирования.
Главное свойство BLAST заключается в том, что суммарная передаваемая
мощность остается неизменной вне зависимости от числа передающих антенн.
В случае разнесенной передачи антенны базовой станции во избежание
корреляции сигналов должны размещаться на достаточном расстоянии друг
от друга [225]. Передатчик оснащен собственной решеткой, число элементов
которой устанавливается равной числу элементов решетки базовой станции, то
есть М = N. Показатели пропускной способности, полученные из (8.25),
приведены на рис. 8.10.
8.6.3. Ограничения скорости передачи данных в сотовой
системе
Далее анализ в работе [28] расширяется до оценки пределов пользовательской
скорости передачи данных с учетом более реалистичной обстановки при работе
всей сотовой системы. Для прямого моделирования по методу Монте-Карло
взята система с временным уплотнением каналов на основе шестиугольной решет-
8.6. Пропускная способность и скорость переданы данных в МШО-системах
Таблица 8.1. Параметры системы [28]
Разделение каналов
Временное
Секторов на ячейку
Антенны базовой станции
Антенны пользовательских терминалов
Повторное использование частоты
Показатель степени распространения
Логарифмически нормальное затенение
Замирание
Регулирование мощности
Адаптация скорости
Отношение сигнал—шум для 90 % охвата
зоны обслуживания
3
С идеальной 120° секторизацией
Всенаправленного действия
Общее
3,5
8 дБ
Релеевское (независимое для каждой
антенны)
Нет
Да
>25дБ
ки из 19 ячеек: центральная ячейка, в которой осуществляется сбор статистики,
окружена двумя рядами подверженных помехам ячеек. В пределах одной ячейки
пользователи распределены равномерно таким образом, чтобы обеспечивалась
взаимная ортогональность и помехи возникали исключительно в другой ячейке.
Каждая ячейка разделена на сектора в 120°, причем пользователь связан с
сектором, обеспечивающим прием самого сильного сигнала. Наконец, по аналогии
с Зв-системами используется адаптация по скорости передачи с отсутствием
регулирования мощности. Параметры моделирования приведены в табл. 8.1.
10 100
С (Мб/с/сектор)
юоо
Рис 8.11. Суммарные распределения пропускной способности для системы как
с передающими решетками, так и приемно-передающими решетками
[28]
168 Глава 8. Пространственно-временная обработка
На рис. 8.11 приведены показатели суммарного распределения пропускной
способности системы (в мегабит/с/сектор) по всем ячейкам как только для
передающих решеток, так и для приемо-передающих решеток. Результаты также
можно интерпретировать как пиковые нагрузки (Мб/с), когда пропускная
способность целиком выделяется для одного пользователя. Использование только
передающих решеток дает небольшой выигрыш в нижней части
распределения, соответствующей пользователям, находящимся в областях с сильной по-
меховой обстановкой. Выигрыш в средней и пиковой пропускной способности
пренебрежимо мал с увеличением числа передающих антенн. Однако
использование дополнительных приемных антенн обеспечивает существенное
увеличение пропускной способности и скоростей передачи данных для отдельных
пользователей.
8.6,4. MIMO-система в сетях WLAN
Широчайшее распространение беспроводных WLAN-сетей в наши дни делает
привлекательным использование нескольких антенн в передающей и
принимающей сторонах, что обеспечивает получение качественных каналов связи с еще
более высокими скоростями передачи данных. Многоантенная технология
может быть реализована в таких сетях, WLAN-терминалами каковых являются
портативные или карманные компьютеры. Работа этих устройств базируется
на стандарте беспроводной связи IEEE 802.11, причем в настоящее время идет
работа над новым стандартом WLAN — HiperLAN/2. Различные варианты
обеих систем предлагают скорость передачи более 50 Мб/с с использованием одной
оконечной антенны пользовательского оборудования. Однако для реализации
этой задачи необходимо обеспечивать очень хорошие отношения сигнал—шум.
Использование нескольких антенн в абонентском оборудовании может
обеспечить дальнейшее увеличение скорости передачи [226] и снизить требования
по величине отношения сигнал—шум. Более того, обеспечиваемая скорость
установления соединения (доступа пользователя) может оказаться достаточной
для возможности скачивания больших файлов.
Обе упомянутые беспроводные системы имеют модификации для работы
в полосе частот 5 ГГц. Характеристики распространения на этой частоте очень
подходят для радиоЬАМ, так как обеспечивается возможность обслуживания
большого числа пользователей по низкой цене. Эти системы также можно
использовать как в помещении, так и на улице и, следовательно, в центрах
повышенной активности, например на территории образовательных учреждений
или аэропортах. С разрешения авторов работы [29] здесь приводятся данные
измерений и по моделированию пропускной способности соединений
беспроводных WLAN, работающих на частоте 5,8 ГГц. Измерения проводились в
типичных офисных условиях исследовательского центра Telia, Мальме, Швеция.
8.6. Пропускная способность и скорость передачи данных в МШО-системах
Цель данного исследования состояла в определении, насколько сильным может
быть рассеивание сигнала внутри обычного офисного помещения и насколько
возможно увеличение скорости передачи.
План общего расположения предусматривал наличие офисных комнат,
открытых участков и коридоров. Большая часть пространства была разделена
стенами и отчасти стеклянными перегородками. Передатчик был установлен
в одном из офисных помещений, а приемник — на открытом участке
пространства. Анализируемый канал связи представлял собой обычную обстановку без
прямой видимости с расстоянием между передатчиком и приемников в 10—15 м.
Измерения проводились на несущей частоте 5,8 ГГц в полосе частот приемника
и передатчика 400 МГц. Измерение комплексных импульсных характеристик
осуществлялось путем передачи псевдошумовой последовательности и
корреляции в приемнике с помощью такой же синхронной псевдошумовой
последовательности. Измерения проводились на синтезированной апертурной решетке
с использованием одной приемной и одной передающей антенны типа моно-
поля. Передающая антенна устанавливалась в различных точках, расстояние
между которыми не превышало 300 мм, что составляло 6Х (из семи положений
в данной работе использовалось три). Приемная антенна перемещалась по
рельсам между 21 различным положениям относительно каждого из 7 положений
передатчика с помощью шагового двигателя (расстояние между двумя
соседними положениями составляло 13 мм, или четверть длины волны). Это
соответствует пространственным измерениям области размером 5Х. Для каждой
из комбинации положений передачи и приема было сделано 20 выборок. Все из-
VD
О
О
а
L
[
-
-
i 1 i
О 1 Передающий элемент - IID
••+• 1 Передающий элемент - измеренное значение
-а- 2 Передающих элемента - IID
-х- 2 Передающих элемента - измеренное значение
-$- 3 Передающих элемента - IID
-*- 3 Передающих элемента - измеренное значение
и
jf ***
/У **
// *
>>я"
sx Ф
ххЪ * ©
XX* Ф
^4г е
. ф
I
ф
***
. ф
А
А
\
...ф
-\
А
20 40 60
Отношение сигнал—шум (дБ)
Рис. 8.12. Пропускная способность для различных отношений сигнал—шум
при использовании 3 приемных элементов и одного, двух и трех
передающих элементов соответственно [29]
170 Глава 8. Пространственно-временная обработка
— 1 Передающий элемент - измеренное значение
— 2 Передающих элемента - измеренное значение
— 3 Передающих элемента - измеренное значение
2 4 6 8 10 12 14 16 18 20
Число приемных элементов
Рис. 8.13. Пропускная способность как функция числа приемных элементов
при наличии одного, двух и трех передающих элементов
соответственно, при отношении сигнал—шум 20 дБ [29]
мерения проводились при постоянных условиях ночью с очень низким уровнем
помех измерения [29].
На рис. 8.12 показаны графики зависимости пропускной способности
от различных отношений сигнал—шум при использовании трех приемных
элементов и одного, двух и трех передающих элементов. Увеличение пропускной
способности действительно является существенным с ростом числа
передающих элементов. В качестве эталонной также приведена расчетная кривая для
независимого и одинаково распределенного гауссова канала IDD (independently
and identically distributed), что указывает при этих условиях на низкую
корреляцию между элементами канальной матрицы Н. Дальнейшие результаты были
получены для отношения сигнал—шум в 20 дБ, величина которого была
зафиксирована на уровне 20 дБ.
Увеличение числа приемных и передающих антенн также ведет к
увеличению пропускной способности, что отражено на рис. 8.13. Пропускная
способность растет при увеличении числа передающих элементов до М = 3. Однако
с дальнейшим увеличением числа элементов на приемной стороне ее рост
оказался меньшим. Как и ожидалось, зависимость роста пропускной способности
при М > N имеет логарифмический характер в связи с увеличением отношения
сигнал—шум, обусловленного усреднением уровня помех по каналам.
Последнее соображение в [29] касается расстояния между элементами
приемной решетки. Было принято решение использовать три передающие антен-
о
о.
с:
8.6. Пропускная способность и скорость передачи данных в MIMO-системах
I? 22\
L .......
,...■••■■ ^ ^ - -'
••■^'•" "" ^—
^ ''у^
. > ^ .х^
.->' '/^
■'•' ' /
/ / /
'</
' V
:/ //
/у
//
■V
Измеренный канал Д =Х/4
Измеренный канал Д =Х/2
— Измеренный канал Д =Х
IID канала неизвестен
••■■^-»
-
-
-
Число приемных элементов
Рис. 8.14. Зависимость пропускной способности от числа элементов
приемной решетки для разных расстояний между элементами. Отношение
сигнал—шум 20 дБ и в передающей решетке используются три
элемента
-О- IID канала неизвестен - 3 передающих элемента
-в- Измеренный канал - 3 передающих элемента
—¥- IID канала неизвестен - 2 передающих элемента
-»- Измеренный канал - 2 передающих элемента
Рис. 8.15.
12 3 4 5 6 7 8
Расстояние между элементами приемника А =Х/4
Зависимость пропускной способности от расстояния между
элементами приемника при сравнении измеренного канала с
моделированным HD-каналом. Два и три приемных элемента используются
совместно с тремя передающими элементам при величине отношения
сигнал—шум 20 дБ [20]
172
Глава 8. Пространственно-временная обработка
ны, и эксперименты проводились для разного числа элементов в связи с
увеличением расстояния между ними.
Полученные данные по пропускной способности приведены на рис. 8.14.
На рис. 8.15 показана зависимость пропускной способности от расстояния
между элементами при использовании двух и трех приемных и трех передающих
элементов. Полученные экспериментальные данные свидетельствуют о том,
что увеличение пропускной способности незначительно при увеличении
расстояния между элементами более чем на одну длину волны А = А,. После
сопоставления увеличения пропускной способности с данными моделирования
случайных IID-каналов, что дает статистический верхний предел пропускной
способности канала, был сделан вывод о том, что в данной экспериментальной
модели некоррелированность каналов начинает давать себя знать, если
расстояние между элементами составляет около 2А,.
8.7. Заключение
В данной главе сделана попытка показать огромное улучшение пропускной
способности и скоростей передачи, обеспечиваемых методами пространственно-
временной обработки, необходимыми для удовлетворения растущих
потребностей систем связи будущего. Главный упор на основании соответствующих
данных, взятых из работ [28, 29], был сделан на применении MIMO-систем.
Несмотря на все более широкое использование антенных решеток, можно смело
утверждать, что только их одновременное использование на базовой станции
и пользовательских терминалах может обеспечить преимущества
использования многомерных сигнальных пространств и, в конечном итоге, невероятный
рост пропускной способности и скоростей передачи данных [28]. Для
наглядной аргументации приводятся данные моделирования сотовых систем и
беспроводных WLAN-сетей. Полученные результаты свидетельствуют о
возможности создания высокоскоростных беспроводных систем связи.
Однако для извлечения преимуществ, обещаемых MIMO-системами,
необходимо преодолеть ряд проблем. Прежде всего, успех новых концепций до их
широкого внедрения должен гарантироваться правильным выбором антенной
конструкции и геометрических характеристик. Например, современная
тенденция миниатюризации размера сотовых телефонов не оставляет достаточно
места для размещения нескольких близко расположенных антенн.
КОММЕРЧЕСКАЯ
ДОСТУПНОСТЬ
СМАРТ-АНТЕНН
Интеллектуальные (смарт) антенные системы призваны снять чрезмерную
и несбалансированную нагрузку с сотовых узлов связи. Так как нагрузка может
существенно колебаться по времени в пределах сети и на отдельных узлах
сотовой связи, то поставщикам услуг для удовлетворения требований пропускной
способности и других критериев эффективности важно обеспечить наличие
эффективной инфраструктуры и запас по частоте.
Несмотря на тот факт, что смарт-антенны появились в еще начале 1950-х,
их коммерческое внедрение началось только в настоящее время благодаря
развитию и удешевлению технологий цифровой обработки сигнала, процессоров
общего назначения (и специализированных интегральных микросхем), а также
современных алгоритмов обработки.
За последние годы увидели свет несколько публикаций по этой теме, причем
исследованием MIMO-систем начинает интересоваться все большее количество
компаний. Было создано несколько компаний, деятельность которых
направлена на коммерциализацию MIMO-систем, помимо того, что соответствующими
исследованиями занимается и ряд более крупных компаний. В работе [94] автор
хорошо объясняет основные причины, почему системы на основе смарт-антенн
до сих пор не получили широкого применения. Эти слова дословно
повторяются и в данной работе [94]:
«Для того, чтобы алгоритмы обработки, используемые в смарт-антенных
системах могли работать в реальном масштабе времени, DSP и CPU
должны иметь достаточно высокую производительность, чтобы
справляться с возрастающим объемом необходимых вычислений. Это
представляло большую проблему в конце 90-х, в особенности для
низкобюджетных решений. Однако вычислительные мощности с тех пор возросли
настолько, что стала возможной реализация смарт-антенных систем
на основе использования недорогих процессоров».
«Предлагаемые смарт-антенными системами преимущества должны
перевешивать дополнительные издержки их применения. На заре
развития современных систем сотовой связи одна базовая станция
обеспечивала обслуживание большой территории, и в увеличении пропускной
ГЛАВА 9
174
Глава 9. Коммерческая доступность смарт-антенн
способности необходимости не возникало. Сегодня, когда в иных
случаях возникает необходимость использования сот очень малого
размера (микро-, пико-), а частотный ресурс просто бесценен, предлагаемая
смарт-антеннами дифференциация в ряде случаев оправдывает
дополнительные расходы. По мере увеличения спроса на пропускную
способность и/или дальность действия смарт-антенных систем и уменьшения
стоимости их установки, обусловленных их постоянным
совершенствованием, ожидается постепенный рост их использования».
«Число людей, действительно понимающих принцип действия смарт-
антенн, ограничено. С каждым годом оно растет, в особенности
благодаря финансированию университетских исследований и коммерческим
проектам, хотя экспертов в этой области можно пересчитать по пальцам.
Главная проблема заключается в отсутствии университетских курсов
обучения по смарт-антеннам».
«Лица, отвечающие за принятие решений в телекоммуникационной
промышленности, настроены очень скептически в отношении смарт-
антенн, что обусловлено, во-первых, неполным пониманием данного
вопроса и, во-вторых, тем, что данные системы не зарекомендовали еще
себя на коммерческом поприще. Эти сомнения успешно развиваются
результатами экспериментальных испытаний, проводимых
университетами».
Успешная коммерциализация интеллектульных антенных смарт-систем
удалась компании ArrayComm, специализирующейся на современных
беспроводных решениях, из Сан-Хосе, Калифорния, соучредителем и президентом
которой является изобретатель сотового телефона — Мартин Купер. Компания
запатентовала интеллектуальную антенную смарт-систему под именем Intelli-
Cell и в настоящее время установила 275000 базовых станций IntelliCell в США,
Японии, Китае, Тайване, Австралии, Южной Африке, Таиланде, Среднем
Востоке и Филиппинах. IntelliCell представляет собой законченную адаптивную
смарт-антенну, обеспечивающую динамическую коррекцию сигналов,
передаваемых и принимаемых заданным пользователем исключительно за счет
точной фокусировки луча, что обеспечивает качественный канал для
предоставления услуг голосовой связи и обмена данными. Данная технология обеспечивает
сопровождение подвижной «цели» с пониженным уровнем радиопомех,
предоставляя пользователям максимальное качество связи [45].
Решение компании ArrayComm — система IntelliCell построена на
использовании решетки из обычных антенн, обеспечивающей непрерывное
сканирование ВЧ-среды. Сканирование обеспечивает возможность сопровождения
и когерентного сложения сигналов на пользовательском терминале. Работа
системы характеризуется пониженным уровнем передаваемой мощности и, как
Коммерческая доступность смарт-антенн I
следствие, более низкими помехами, предоставляя пользователю, таким
образом, услугу очень высокого качества. Базовая станция, ядром которой является
система IntelliCell, представляет собой блок стандартных антенн числом от 4
до 12, связанных с современной аппаратурой обработки поступающих на
базовую станцию или передаваемых ее сигналов. Это увеличивает зону
обслуживания, улучшает качество сигнала и снижает уровень сетевых помех в каналах
приема и передачи.
Компании ArrayComm удалось показать на примере собственной системы
IntelliCell возможность существенного увеличения пропускной способности
и размера зоны обслуживания; по сути дела, по сравнению со стандартной
системой, она обеспечивает троекратное увеличение пропускной способности
и вплоть до двукратного для зоны обслуживания — в зависимости от
используемого радиоинтерфейса.
Более того, применение технологии компании ArrayComm в базовых GSM-
станциях обеспечило шестикратное увеличение пропускной способности
по сравнению со стандартными GSM-сетями и повторное использование
частоты с коэффициентом 1 без использования скачкообразного изменения
частоты. Увеличение дальности действия усовершенствованной системой Intell-
Cell базовой станции означает использование меньшего числа узлов сотовой
связи и снижение расходов. В ней используются усилители меньшей мощности,
что увеличивает надежность и снижает затраты.
Такая модернизация сулит огромные дивиденды операторам GSM-сетей
сотовой связи, желающим извлекать максимальную прибыль из свой
инфраструктуры и средств, вложенных в частотный ресурс. Согласно
утверждениям менеджмента компании, стоимость их оборудования будучи всего на 15%
дороже стандартного, обеспечивает увеличение пропускной способности от 3
до 7 раз. На рис. 9.1 показана смарт-антенна производства компании
ArrayComm Inc.
(а) (б)
Рис. 9.1. (а) Интеллектуальная антенная смарт-решетка из 12 элементов,
разработанная компанией ArrayComm Inc. и (б) схема коллективного
доступа TD-SD компании ArrayComm [45]
176
Глава 9. Коммерческая доступность смарт-антенн
Как было уже сказано выше, коллективный доступ с пространственным
разделением каналов представляет собой модернизированную версию схем
коллективного доступа TDMA, FDMA и CDMA. Включение в эти схемы
доступа пространственного измерения создает еще один метод идентификации
пользователей. Это означает, что вместо обслуживания одного пользователя
в течение одного временного интервала, частоты или кода, это же
оборудование может обеспечить обслуживание нескольких пользователей за счет
идентификации каждого пользователя с помощью уникальной пространственной
сигнатуры, присвоенной каждому из них [45]. На рис. 9.1 (б) показана схема
комбинированного коллективного доступа с временным и пространственным
разделением каналов, используемого в сети на основе системы IntelliCell. Более
подробную информацию о ArrayComm и соответствующих продуктах можно
получить в [45, 227].
В г. Редмонде, штат Вашингтон, располагается еще одна компания,
занимающая коммерческим распространением смарт-антенн, — Metawave
Communications. Компания предлагает операторам беспроводной связи, арендаторам
вышек радиосвязи и изготовителям сетевого оборудования дешевые технические
решения, обеспечивающие максимальное увеличение пропускной
способности, улучшение качества и эффективности работы беспроводных сетей
стандарта CDMA, GSM и 3G. Технические решения компании Metawave
используются в 14 из 20 основных рынков США и пяти регионах Мексики.
Смарт-антенная система этой компании запатентована под именем
Spotlight, и на октябрь 2002 количество установленных базовых станций в США,
Центральной и Южной Америках и России составляло цифру 430. Для
распределения нагрузки в системе Spotlight используется секторизация. Другими
словами, это не полностью интеллектуальная смарт-антенная система, а смарт-
антенна с переключаемыми лучами, обеспечивающая нормализацию нагрузки
в сотовых узлах связи и снижающая потери переадресации. Модернизация
базовых станций с помощью системы Spotlight обходится дешевле, так как в
отличие от полностью адаптивных систем, она менее требовательна с точки зрения
цифровой обработки сигнала.
Базовые станции на основе системы Spotlight обеспечивают 50%-й прирост
пропускной способности в трехсекторных и более 90 % — в шестисекторных
узлах связи стандарта CDMA. С более подробной информацией о компании
Metawave и ее продукции можно ознакомиться в [227, 228]. Компания заявляет
о трехкратном увеличении пропускной способности при использовании
адаптивного формирования ДН. Функциональная схема системы Spotlight показана
на рис. 9.2.
Еще одно изделие компании получило название SmartCell. Это решение
представляет собой направленную смарт-антенну посекторного исполнения
Коммерческая доступность смарт-антенн
177
Рис. 9.2. Функциональная схема системы Spotlight [228]
для использования в сетях персональной системы связи, которая предоставляет
возможность операторам беспроводной связи формировать зону обслуживания
сотового узла связи таким образом, чтобы обеспечивались преимущества
повышенного быстродействия, пропускной способности и зоны обслуживания.
Система SmartCell состоит из набора панелей фазированной антенной
решетки с модулем «персональной настройки», с помощью которого осуществляется
формирование ДНА, оптимального для заданного сектора. Выбор оптимальной
секторной антенны, «прошитой» в модуле персональной настройки,
осуществляется с помощью специального программного обеспечения, установленного
Рис. 9.3. Использование стандартных или настраиваемых ДН для
удовлетворения топологии рабочего сектора
178
Глава 9. Коммерческая доступность смарт-антенн
на тыльной стороне каждой антенной панели. С помощью сменного модуля
персональной настройки встроенные средства формирования зоны обслуживания
ячейки обеспечивают создание оптимальной ДНА в ответ на изменяющиеся
условия ВЧ-среды [228]. Эта технология предоставляет операторам возможность
формирования зоны обслуживания ячейки, в которой бы обеспечивались
максимальное быстродействие, пропускная способность и в целом качество связи,
что не под силу стандартному антенному оборудованию. Определение
оптимальной ДНА осуществляется на основе собранных сетевых данных и
результатов измерений подвижной лаборатории. Оптимальная ДН вносится в модули
персональной настройки, монтируемые на задней поверхности каждой
антенной панели. Принцип работы SmartCell проиллюстрирован на рис. 9.3.
В средах со сложной ВЧ-обстановкой при отсутствии главного сервера
технология формирования зоны обслуживания ячейки помогает увеличить
ведущую роль сетевого сервера для снижения уровня засорения радиоэфира пилот-
сигналами, снижения средней передаваемой мощности в прямых и обратных
соединениях и колебаний мощности передачи. SmartCell идеально подходит
для сложных ВЧ-сред, в которых топологическая схема сети и распределение
(а) (б)
(в)
Рис. 9.4. Смарт-антенна, разработанная компанией ASCOM AR&T: (а)
отдельный антенный элемент, (б) карта PCMCIA с установленной антенной
решеткой и (в) подключение смарт-антенны к ноутбуку [229]
Коммерческая доступность смарт-антенн I
нагрузки создает серьезные радиотехнические проблемы. С изменением
ситуации операторы способны обеспечить соответствующее изменение ДН антенн.
Технология SmartCell поддерживает все основные радиоинтерфейсы, включая
CDMA, GSM, TDMA, CDMA2000 и W-CDMA.
Смарт-антенны прошли большой путь развития не только для систем
сотовой связи, но и для персональных электронных устройств. Несмотря на то, что
их коммерческая доступность тормозилась высокой ценой, научно-технические
исследования уже принесли многообещающие результаты. Компания ASCOM
AR&T из г. Берн, Швейцария, разработала 3-элементную смарт-антенну для
5—6 ГГц LAN, имеющую достаточный размер для установки в мобильных
пользовательских терминалах. Антенны устанавливаются на PCMCIA-карте.
Каждый элемент представляет собой модуль изогнутых щелевых антенн, каждая
из которых характеризуется независимым федингом. Наконец, для снижения
себестоимости формирование ДН осуществляется на высоких частотах.
Быстродействие данного устройства согласно результатами тестирования
оказалось гораздо выше, чем у всенаправленной антенны стандарта Bluetooth™ [229].
С помощью других экспериментальных исследований в области смарт-антенн
для беспроводных LAN [230, 231] были получены похожие результаты.
Разработка компании показана на рис. 9.4.
Наконец, следует отметить, что по мере роста пользовательского спроса
на более высокую пропускную способность/дальность действия и уменьшения
расходов на разработку подобных систем, обусловленных непрерывным
прогрессом в данной области, ожидается дальнейший рост использования
антенных смарт-систем.
ГЛАВА 10
ЗАКЛЮЧЕНИЕ
В этой книге были рассмотрены и проанализированы различные системные
аспекты современных систем связи на базе технологии смарт-антенн. Анализ
был начат с рассмотрения сегодняшних систем связи с акцентом на их слабые
стороны и проблемы, которые необходимо решить для того, чтобы
удовлетворить постоянно растущему спросу на более высокую скорость передачи данных
и пропускную способность беспроводных сетей связи нашего времени.
Для лучшего понимания технологии смарт-антенн целая глава была
посвящена рассмотрению свойств антенных элементов и решеток, а также
классификации антенн в соответствии с их характеристиками излучения. Главный анализ
антенных смарт-систем был проведен в последующих главах, в которых были
рассмотрены принципы их работы, предложены различные конфигурации, а также
исследованы преимущества и недостатки их коммерческого внедрения. Затем
были рассмотрены методы обработки сигнала смарт-антенн. В частности были
детально описаны фундаментальные характеристики направления прихода,
необходимые для выбора конструкции решетки, отвечающей за правильное
формирование ДНА. В следующей главе представлены результаты работ,
направленных на интеграцию различных аспектов антенных смарт-систем, исследование
антенной конструкции, алгоритмов адаптивного формирования ДНА и их
влияние на частоту двоичных ошибок канала связи и его пропускную способность.
Впоследствии были рассмотрены уникальные преимущества методов
пространственно-временной обработки, их истоки и применение. В главе также
рассмотрены привлекательные стороны MIMO-систем, включая
экспериментальные данные, — современных и перспективных с точки зрения получения
больших скоростей передачи данных и пропускных способностей технологий.
В заключение дан краткий обзор работ по коммерческому внедрению смарт-
антенн. Метод временной обработки, достигнув очень высокого уровня
развития, превратился в зрелую технологию, хотя этого самого по себе еще
недостаточно. Однако при совместном использовании с методом пространственной
обработки в перспективе он может удовлетворить растущий спрос на каналы
высокоскоростной и надежной связи, очень востребованной быстро
увеличивающимся населением. Лучше всего подкрепить данный аргумент словами
Эндрю Витерби — пионера в области распространения систем беспроводной связи:
«Пространственная обработка остается наиболее перспективной, а может быть,
даже и последней вехой эволюции систем множественного доступа» [232].
Благодарности
Авторы этой работы приносят искреннюю благодарность авторам
исследований, на основании которых она была создана, сотрудничество и широко
оказанную нам помощь советом и информацией. В частности авторы хотят
выразить свою признательность проф. J. R. Mosig и A. Skrivervik и их аспиранту
I. Stevanovic из Ecole Polytechnique Federate de Lausanne, Швейцария; проф.
R. D. Murch и К. В. Letaief из научно-технического университета Гонконга;
г-ну J. Balterseefrom из технологического университета г. Аахен, Германия; д-ру
P. Н. Lehne и д-ру М. Pettersen из отдела исследований и разработок компании
Telenor, Форнебю, Норвегия; проф. Steven Blostein и его бывшим студентам
J. Chou и W. Y. Shiu из университета Queen's, г. Кингстон, Онтарио, Канада; проф.
Arogyaswami Paulraj из Стэнфордского университета и д-ру Constantinos Papadias
из компаний Bell Labs и Technologies; проф. A. Lee Swindlehurst из университета
Brigham Young; д-ру Stefan Werner из Хельсинского технологического
университета, Финляндия; д-ру P. Van Rooyen — учредителю и техническому директору
компании Zyray Wireless, г. Сан-Диего, штат Калифорния; д-ру Reinaldo Valen-
zuela, д-ру Angel Lozano и д-ру Farrokh R. Farrokhi из научно-исследовательского
отдела по беспроводной связи компаний Bell Labs и Lucent Technologies; В. Otter-
sten и R. Stridh из Королевского технологического института, Стокгольм,
Швеция; проф. G.T. Okamoto из университета Санта-Клара; George Telecki и
Brendan Codey из John Wiley and Sons — междисциплинарный отдел; и наших коллег
проф. A. S. Spanias, Т. М. Duman и J. М. Саропе и аспирантов — д-ра Bellofiore,
J. Foutz, R. Govindarajula, и д-ра I. Bahceci из государственного университета
штата Аризона. Заранее приносим извинения за возможность того, что не
привели имя какого-либо автора.
Литература
[I] R. D. Murch and К. B. Letaief, «Antenna systems for broadband wireless access»,
IEEE Commun. Mag., Apr. 2002.
[2] P. N. Fletcher and P. Darwood, «Beamforming for circular and semicircular array
antennas for low-cost wireless LAN data communication systems», IEEE Proc. Mi-
crow. Antennas Propagat., vol. 145, no. 2, pp. 153-158, Apr. 1998. doi:10.1049/ip-
map:19981658.
[3] J.-A. Tsai and B. D.Woerner, «Adaptive beamforming of uniform circular arrays
UCA for wireless CDMA system», in Record of the Thirty-Fifth Asilomar
Conference on Volume Signals, Systems and Computers, vol. 1, Nov. 2001, pp. 399—403.
doi:full text.
[4] «Smart antenna systems», International Engineering Consortium. [Online].
Available: www.iec.org/online/tutorials/smart antennas.
[5] «Smart antennas», CDMA Development Group, 2004. [Online]. Available: http://
www.cdg.org/technology/cdma technology/smart antennas/index.asp.
[6] M. Chryssomallis, «Smart antennas», IEEE Antennas Propagat. Mag., vol. 42,
no. 3, pp. 129-136, June 2000. doi:10.1109/74.848965.
[7] S. Andersson, M. Millnert, M. Viberg, and B.Wahlberg, «A study of adaptive arrays
for mobile communication systems», in IEEE International Conference on
Acoustics, Speech, and Signal Processing, vol. 5, 1991, pp. 3289—3292.
[8] G. V. Tsoulos, G. E. Athanasiadou, M. A. Beach, and S. C. Swales, Adaptive
Antennas for Microcellular and Mixed Cell Environments with DS-CDM A. Netherlands,
Kluwer, 1998, ch. 7,Wireless Personal Communications, pp. 147—169.
[9] R. Kohno, «Spatial and temporal communication theory using adaptive antenna
array», IEEE Personal Commun. Mag., vol. 51, Feb. 1998.
[10] T. S. Rappaport, Smart Antennas Adaptive Arrays, Algorithms, Wireless Position
Locations Selected Readings. Piscataway, NJ: IEEE, 1998.
[II] G.V. Tsoulos, Adaptive Antennas for Wireless Communications. Piscataway, NJ:
IEEE, 2001.
[12] A. O. Boukalov and S. G. Haggman, «System aspects of smart-antenna technology
in cellular wireless communications — an overview», IEEE Trans. Microw. Theory
Tech., vol. 48, no. 6, pp. 919-929, June 2000. doi:10.1109/22.846718 160
INTRODUCTION TOSMART ANTENNAS.
[13] J. С Liberti and T. S. Rappaport, Smart Antennas for Wireless Communications:
IS-95 and Third Generation CDMA Applications. Upper Saddle River, NJ:
Prentice Hall PTR, 1999.
[14] G.V. Tsoulos, «Smart antennas for mobile communication systems; benefits and
challenges, IEEE Commun. Eng. J., vol. 11, no. 2, pp. 84-94, Apr. 1999.
[15] W.-S. Wang, «Bluetooth: A new era of connectivity», IEEE Microw. Mag., vol. 3,
no. 3, pp. 38-42, Sept. 2002. doi:10.1109/MMW.2002.1028360.
[16] M. Bravo-Escos, «Networking gets personal», IEE Rev., vol. 48, no. 1, pp. 32-36,
Jan. 2002. doi:10.1049/ir:20020104.
[17] S. Bellofiore, «Smart antenna systems formobile platforms», Ph. D. dissertation,
Arizona State University, Dec. 2002.
Литература I
[18] Е. G. Larsson, P. Stoica, and G. Ganesan, «Space—time Block Coding for Wireless
Communications». Cambridge: Cambridge University Press, June 2003.
[19] J. Y.-L. Chou, «An investigation on the impact of antenna array geometry on
beamforming user capacity», Master's thesis, Queen's University, Kingston,
Ontario, Mar. 2002.
[20] I. Stevanovic, A. Skrivervik, and J. R. Mosig, «Smart antenna systems for mobile
communications», Ecole Polytechnique Federate de Lausanne, Lausanne, Suisse,
Tech. Rep., Jan. 2003. [Online]. Available: http://lemawww.epfl.ch.
[21] A. Paulraj, B. Ottersten, R. Roy, A. Swindlehurst, G. Xu, and T. Kailath, «Sub-
space Methods for Direction of Arrival Estimation». Amsterdam: North-Holland,
1993, vol. 10, ch. 16, pp. 693-739.
[22] W. Y. Shiu, «Noniterative digital beamforming in CDMA cellular communications
systems», Master's thesis, Queen's University, Kingston, Ontario, Nov. 1998.
[23] S. Werner, «Reduced complexity adaptive filtering algorithms with applications to
communications systems», Ph. D. dissertation, Helsinki University of Technology,
Helsinki, Finland, Oct. 2002.
[24] S. Bellofiore, J. Foutz, J. Govindarajula,. Israfil Bahgeci, C. A. Balanis, A. S. Span-
ias, J. M. Capone, and Т. M. Duman, «Smart antenna system analysis, integration
and performance for mobile ad-hoc network (MANETs)», IEEE Trans. Antennas
Propagat., vol. 50, no. 5, p. 571-581, May 2002.
[25] P. Van Rooyen, «Advances in space—time processing techniques open up mobile
apps», Nov. 2002. [Online]. Available: http://www.eetimes.com/in focus/ mixed
signals/OEG20021107S0021.
[26] A. J. Paulraj, D. Gesbert, and C. Papadias, «Encyclopedia for Electrical
Engineering». New York: Wiley, 2000, ch. Antenna arrays forWireless Communications,
pp. 531-563. REFERENCES 161.
[27] A.J. Paulraj and C.B. Papadias, «Space—time processing for wireless
communications», IEEE Signal Process. Mag., vol. 14, no. 6, pp. 49—83, Nov. 1997.
doi: 10.1109/79.637317.
[28] A. Lozano, F. R. Farrokhi, and R. A. Valenzuela, «Lifting the limits on high speed
wireless data access using antenna arrays», IEEE Commun. Mag., vol. 39, no. 9,
pp. 156- 162, Sept. 2001. doi: 10.1109/35.948420.
[29] R. Stridh and B. Ottersten, «Spatial characterization of indoor radio channel
measurements at 5 GHz», in First IEEE Sensor Array and Multichannel Signal Proces-
ing Workshop, Cambridge, Massachusetts, USA, Mar. 2000. [Online]. Available:
http://www.s3.kth.se/radio/4GW/public/Papers/RickardStridhSAM2000.pdf.
[30] International Telecommunications Union (ITU). [Online]. Available: http:// www.
itu.int/home.
[31] http://www.wirelessintelligence.com.
[32] Alexander Resources. [Online]. Available: http://www.alexanderresources.com/
reports/Report2/Summary.htm.
[33] Micrologic Research. [Online]. Available: http://www.mosmicro.com.
[34] Micrologic Research. [Online]. Available: http://www.mosmicro.com/Cell_Exec.
pdf.
[35] International Engineering Consortium. [Online]. Available: http://www.iec.org/
online/tutorials/gsm/topicOl.html.
[36] Qualcomm Corporation. [Online]. Available: http://www.qualcomm.com/cdma.
184 Литература
[37] Ericsson. [Online].Available:http://www.ericsson.com/cdmasystems/3gcdma2000.
html.
[38] «Air Interface Fundamentals: UMTS and W-CDMA», Award Solutions. [Online].
Available: http://www.awardsolutions.com/training/elearning_pdfs.
[39] T. Rappaport, «The wireless communications revolution: Past, present, & future»,
Virginia Tech, Tech. Rep., Aug. 1997. [Online]. Available: http://www.mprg.org/
Tech_xfer/ppt/vtl25th.pdf.
[40] L. С Godara, «Applications of antenna arrays to mobile communications. Part I:
Performance improvement, feasibility, and system considerations», in Proc. IEEE,
vol. 85, pp. 1031-1060, July 1997. doi:10.1109/5.611108.
[41] P. M. Shankar, Introduction to Wireless Systems. New York: Wiley, 2002.
[42] M.C. Vanderveen, «Estimation of parametric channel models in wireless
communications networks», Ph. D. dissertation, Stanford University, Department of
Scientific Computing and Computational Mathematics, Nov. 1997.
[43] J. Baltersee, «Smart Antennas and Space-Time Processing», Aachen University of
Technology, Institute for Integrated Signal Processing Systems, Tech. Rep., May
1998.
[44] V.K. Garg and J.E. Wilkes, «Wireless and Personal Communications Systems».
Upper Saddle River, NJ: Prentice Hall PTR, 1996. 162 INTRODUCTION TOS-
MART ANTENNAS.
[45] «Intellicell: Bringing Wireless to Life», Arraycomm, 2003. [Online]. Available:
http://www.arraycomm.com.
[46] B. Pattan, «Robust Modulation Methods & Smart Antennas in Wireless
Communications». Upper Saddle River, NJ: Prentice Hall PTR, 2000.
[47] T. I. Song, D. J. Kim, and С. H. Cheon, «Optimization of sectorized antenna beam
patterns for CDMA2000 systems», in 3G Mobile Communications Technologies,
Conference Publication, No. 471 Third International Conference on 3G Mobile
Communication Technologies, 2002. (Conf. Publ. No. 489), May 2002, pp. 428-
432.
[48] X. Yang, S. Ghaheri, R. Niri, and R. Tafazzoli, «Sectorization gain in CDMA
cellular systems», in Third International Conference on 3G Mobile Communication
Technologies, 2002. (Conf. Publ. No. 489), 2000, pp. 70-75.
[49] Т. M. Cover and J. A. Thomas, «Elements of Information Theory». New York:
Wiley- Interscience, Aug. 1991.
[50] D. Cox, H. Arnold, and P. Porter, «Universal digital portable communications: A
system perspective», IEEE J. Select. Areas Commun., vol. 5, no. 5, pp. 764—773,
June 1987. doi:10.1109/JSAC.1987.1146603.
[51] S. Hara and R. Prasad, «Overview of multicarrier CDMA», IEEE Commun. Mag.,
vol. 35, pp. 126-133, Dec. 1997. doi:10.1109/35.642841.
[52] D. Huff, «Direct Sequence Spread Spectrum Tutorial». [Online]. Available: www.
eas.asu.edu/$\sim$apapand/applet/TF JAVA/applet/DSSS tutorial.doc.
[53] W.C.Y Lee, «Overview of cellular CDMA», IEEE Trans. Veh. Technol., vol.40,
pp. 291-302, 1991. doi:10.1109/25.289410.
[54] M. Engels, Wireless OFDM Systems: How to Make Them Work?, M. Engels, Ed.
Dordrecht Kluwer, 2002.
[55] [Online]. Available: http://www.wireless.per.nl:202/telelearn/ofdm/
Литература I
[56] Z. Li, «Performance of multicarrier ds-cdma systems using mutually orthogonal
complementary sets of sequences», University of Florida, Tech. Rep., 2000.
[Online]. Available: http://www.tec.ufl.edu/$\sim$zbli/report.pdf.
[57] M. Cooper and M. Goldburg, «Intelligent antennas: Spatial division multiple
access». Wireless, Anual. Revw. of Commun., pp. 999—1002, 1996, ArrayComm
Inc., San Jose, CA.
[58] С A. Balanis, «Antenna theory: A review», in Proc. IEEE, vol. 80, no. 1, Jan. 1992,
pp. 7-23. doi:10.1109/5.119564.
[59] С A. Balanis, Antenna Theory: Analysis and Design, 3rd ed. New York:Wiley,
2005.
[60] P.-J. Wan, «Capacity expansion: Sectorized cellular systems». [Online]. Available:
http://www.csam.iit.edu/$\sim$wan/lecture05.pdf REFERENCES 163.
[61] R.T. Compton Jr., R. Huff, W.G. Swarner, and A. A. Ksienski, «Adaptive arrays
for communication systems: An overview of research at the ohio state
university», IEEE Trans. Antennas Propagat., vol. AP-24, no. 5, pp. 599-607, Sept. 1976.
doi:10.1109/TAP.1976.1141413.
[62] R. A. Monzingo and T. W. Miller, Introduction to Adaptive Arrays. Scitech
Publishing Inc., Oct. 2003, Mendham, NJ. ISBN 1-891121-24-3.
[63] I. Gupta and A. Ksienski, «Dependence of adaptive array performance on
conventional array design», IEEE Trans. Antennas Propagat., vol. 30, no. 4, pp. 549-553,
July 1982. doi:10.1109/TAP.1982.1142867.
[64] A. Ishide and R. T Compton Jr., «On grating nulls in adaptive arrays», IEEE Trans.
Antennas Propagat., vol. 28, no. 4, pp. 467-475, July 1980.
[65] S. P. Applebaum, «Adaptive arrays», IEEE Trans. Antennas Propagat., vol. AP-24,
no. 5, pp. 585-598, Sept. 1976. doi: 10.1109/TAP. 1976.1141417.
[66] Z. Fu, «Adaptive arrays antenna systems», Ithaca, NY 14850, USA. [Online].
Available: http://people.cornell.edu/pages/zf24/Adaptive arrays.htm.
[67] D.G. Brennan, «Linear diversity combining techniques», in Proc. IRE, vol. 47,
1959, pp. 1075-1102. doi:10.1109/JRPROC.1959.287136.
[68] G. L. Sttiber, Principles of Mobile Communication. Dodrecht: Kluwer, 2001.
[69] S. W. Kim, D. S. Ha, and J. H. Kim, «Performance gain of smart dual antennas at
handsets in 3G CDMA system», in CDMA International Conference, vol. 2, Nov.
2000, pp. 223-227.
[70] Israfil Bahgeci, «Trellis- and turbo-coded modulation for multiple antennas over
fading channels», Master's thesis, Arizona State University, Aug. 2001.
[71] J. G. Proakis, Digital Communications, 4th ed. New York: McGraw-Hill, 2001.
[72] W. С Jakes, Microw. Mobile Communications. New York:Wiley, 1974.
[73] S. Glisic and B. Vucetic, Spread Spectrum CDMA Systems for Wireless
Communications. Boston, MA: Artech House, 1997.
[74] Z. Zhao, S. Stapleton, and J. K. Cavers, «Analysis of polarization diversity scheme
with channel codes», Department of Engineering Science, Simon Fraser
University, Burnaby, ВС, Canada, V5A 1S6, Tech. Rep., 1999.
[75] [Online]. Available: http://www.wirelessreview.com/ar/wireless_space_vs_polar-
ization.
[76] «Application of Angular Diversity Systems and Discussion of Antenna Pattern
Measurements». [Online]. Available: http://www.nsma.org/recommendation/
wgl6-89-06.pdf.
186 Литература
[77] P. L. Perini and C. L. Holloway, «Angle and space diversity comparisons in
different mobile radio environments», IEEE Trans. Antennas Propagat., vol. 46, no. 6,
pp. 957- 1000, June 1998. doi:10.1109/8.686760 164 INTRODUCTION TOS-
MART ANTENNAS.
[78] «Special issue on adaptive antennas», IEEE Trans. Antennas Propagat., vol. 24,
no. 5, Sept. 1976.
[79] «Special issue on adaptive processing antenna systems», IEEETrans. Antennas
Propagat., vol. 34, no. 3, Mar. 1986.
[80] P. H. Lehne and M. Pettersen, «An overview of smart antenna technology for
mobile communications systems», IEEE Communications Surveys, vol. 2, no. 4,
pp. 2—13, Fall Quarter 1999. [Online]. Available: www.comsoc.org/livepubs/sur-
veys/public/4q99issue/pdf/Lehne.pdf.
[81] J.H. Winters, «Smart antennas for wireless systems», IEEE Personal Commun.
Mag., vol. 5, no. 1, pp. 23-27, Feb. 1998. doi:10.1109/98.656155.
[82] A. Scherb, V. Ktihn, and K.-D. Kammeyer, «Comparison of intelligent code
acquisition for sectorized multi-antenna CDMA in downlink mode», University
of Bremen, Department of Communications Engineering, Otto-Hahn- Allee,
D-28359 Bremen, Germany, Tech. Rep., 2003. [Online]. Available: http://www.
ant.uni-bremen.de/whomes/scherb/puplications/1180757472.pdf.
[83] D. H. Johnson and D. E. Dudgeon, Array Signal Processing: Concepts and
Techniques. Englewood Cliffs, NJ: Prentice-Hall, 1992.
[84] A. R. Lopez, «Performance predictions for cellular switched beam inelligent ant-
nna systems», IEEE Commun. Mag., vol. 34, no. 10, pp. 152-154, Oct. 1996.
doi:10.1109/35.544336.
[85] T. Thrassyvoulou, «Adaptive beamforming: Using a complex bounding ellipsoid
algorithm with gradient projections», Master's thesis, Arizona State University,
Aug. 2003.
[86] J. H. Winters, WTEC Panel Report on Wireless Technologies and Information
Networks, Chapter 6, Smart Antennas. International Technology Research
Institute, Baltimore, MD, July 2000.
[87] J. Butler and R. Lowe, «Beam-forming matrix simplifies design of electronically
scanned antennas», Electron. Des., vol. 9, no. 8, pp. 1730—1733, Apr. 1961.
[88] Y.T. Lo and S.W. Lee, Antenna Handbook. New York: Van Nostrand Reinhold
Company Inc., 1988.
[89] С. В. Dietrich, Jr., «Adaptive arrays and diversity antenna configurations for
handheld wireless communication terminals», Ph.D. dissertation, Virginia Polytechnic
Institute and State University, Blacksburg, VA, Feb. 2000.
[90] N. C.T. Desmond, «Smart antennas for wireless applications and switched beam-
forming», The University of Queensland, Brisbane, Australia, Tech. Rep., Oct.
2001.
[91] J. R. James and P. S. Hall, Handbook of Microstrip Antennas. London: Peregrinus
on behalf of Institution of Electrical Engineers, 1989. REFERENCES 165.
[92] T.S.N. Chan, «Butler matrix feed configuration for phased array», University of
Queensland, Department of Electrical and Computer Engineering, Brisbane,
Australia, Tech. Rep., Oct. 1994.
[93] Т. Do-Hong and P. Russer, «Signal processing for wideband array
applications», IEEE Microw., vol. 5, no. 1, pp. 57-67, Mar. 2004. doi:10.1109/
MMW.2004.1284944.
[94] G. Okamoto, «Developments and advances in smart antennas for wireless
communications», Santa Clara University, Tech. Rep., 2003. [Online]. Available: www.
wmrc.com/businessbrieflng/pdf/wireless_2003/Publication/okamoto.pdf.
[95] F. Shad, T. D. Todd, V. Kezys, and J. Livta, «Dynamic slot allocation (dsa) in
indoor sdma/tdma using a smart antenna basestation», IEEE/ACM Trans.
Networking, vol. 9, no. 1, pp. 69-81, Feb. 2001. doi:10.1109/90.909025.
[96] С Ung and R. H. Johnston, «A space division multiple access receiver», in IEEE
International Symposium on Antennas and Propagation, vol. 1, pp. 422—425,
2001.
[97] M. Ghavami and R. Kohno, «A new broadband uniform accuracy DOA
estimator», Accepted for publication in the European Transactions on
Telecommunications, 2002. [Online]. Available: http://www.csl.sony.co.jp/ATL/papers/ghp3.pdf.
[98] J. Litva and T. Lo, Digital Beamforming in Wireless Communications. Boston,
MA: Artech House Publishers, 1996.
[99] V. Viopio, «Adaptive antennas», HUT Radio Laboratory, Tech. Rep., 1998.
[100] J. S. Thompson, P. M. Grant, and B. Mulgrew, «Smart antenna arrays for CDMA
systems», IEEE Pers. Commun. Mag., vol. 3, no. 5, pp. 16—25, Oct. 1996.
doi:10.1109/98.542234.
[101] R. G. Vaughan, «On optimum combining at the mobile», IEEE Trans. Veh. Tech-
nol., vol. 37, pp. 181-188, Nov. 1988. doi:10.1109/25.31122.
[102] S. С. K. KoandR. D. Murch, «On optimum combining at the mobile», IEEETrans.
Antennas Propagat., vol. 49, pp. 954-960, June 2001. doi:10.1109/8.931154.
[103] J. S. Colburn, Y. Rahmat-Samii, and M.A. Jensen, «Diversity performance of
dual antenna personal communication handsets», in Proc. IEEE Antennas
Propagat. Soc. Int. Symp. Dig., July 1996, pp. 730-733. doi:full text.
[104] ТА. Denidni, D. McNeil, and G.Y. Delisle, «Experimental investigations of a
new adaptive dual-antenna array for handset applications», IEEE Trans. Veh.
Technol., vol. 52, pp. 1417-1423, Nov. 2003. doi:10.1109/TVT.2003.816646.
[105] L. C. Godara, «Applications of antenna arrays to mobile communications. Part II:
Beam-forming and direction-of-arrival considerations», in Proc. IEEE, vol. 85,
Aug. 1997, pp. 1195-1245. doi: 10.1109/5.622504.
[106] L. С Godara and A. Cantoni, «Uniqueness and linear independence of
steering vectors in array space», J. Acoust. Soc. Am., vol. 70, pp. 467—475, 1981.
doi:10.1121/1.386790 166 INTRODUCTION TOSMART ANTENNAS.
[107] [Online]. Available: http://mathworld.wolfram.com.
[108] I. J. Gupta and A. A. Ksienski, «Effect of mutual coupling on the performance of
adaptive arrays», IEEE Trans. Antennas Propagat., vol. AP-31, no. 5, pp. 785—
791, Sept. 1983. doi:10.1109/TAP.1983.1143128.
[109] H. Steyskal and J. S. Herd, «Mutual coupling compensation in small array
antennas», IEEE Trans. Antennas Propagat., vol. 38, no. 12, pp. 1971—1975, Dec. 1990.
doi:10.1109/8.60990.
[110] T. Svantesson, «Direction finding in the presence of mutual coupling», Thesis
for the degree of Licentiate of Engineering, Chalmers University of Technology,
188 Литература
School of Electrical and Computer Engineering, Department of Signals and
Systems, Goteborg, Sweden, Tech. Rep., 1999.
[Ill] T. Su and H. Ling, «On modeling mutual coupling in antenna arrays using
coupling matrix», Microw. Opt. Technol. Lett., vol. 28, no. 4, pp. 231—237, Feb. 2001.
doi:10.1002/1098-2760(20010220)28:4<231::AID-MOP1004>3.0.CO;2-P.
[112] H.T. Hui, «Improved compensation for the mutual coupling effect in a dipole
array for direction finding», IEEE Trans. Antennas Propagat., vol. 51, no. 9,
pp. 2498-2503, Sept. 2003. doi:10.1109/TAP.2003.816303.
[113] Z. Huang, С A. Balanis, and С R. Birtcher, «Mutual coupling compensation in
UCAs: Simulations and experiment», IEEE Trans. Antennas Propagat., vol. 54,
no. 11, pp. 3082-3086, Nov. 2006. doi:10.1109/TAP.2006.883989.
[114] S.M. Kay, Fundamentals of Statistical Signal Processing, Volume I: Estimation
Theory. Prentice Hall PTR, Upper Saddle River, NJ, Mar. 1993.
[115] H. Messer, Y. Rockah, and P.M. Schultheiss, «Localization in the presence of
coherent interference», IEEE Trans. Acoust., Speech, Signal Process., vol. 38,
no. 12, pp. 2025-2032, Dec. 1990. doi: 10.1109/29.61530.
116] A.N. Mirkin and L.H. Sibul, «Cramer-Rao bounds on angle estimation with a
twodimensional array», IEEE Trans. Signal Process., vol. 39, no. 2, pp. 515-517,
Feb. 1991.doi:10.1109/78.80843.
117] R. O. Nielsen, «Estimation of azimuth and elevation angles for a plane wave sine
wave with a 3-D array», IEEE Trans. Signal Process., vol. 42, no. 11, pp. 3274—
3276, Nov. 1994. doi:10.1109/78.330396.
118] J. Goldberg and H. Messer, «Inherent limitations in the localization of a
coherently scattered source», IEEE Trans. Signal Process., vol. 46, no. 12, pp. 3441—
3444, Dec. 1998. doi:10.1109/78.735321.
119] A. Dogandzic and A. Nehorai, «Cramer-Rao bounds for estimating range,
velocity, and direction with an active array», IEEETrans. Signal Process., vol. 49,
no. 6, pp. 1122-1137, June 2001. doi:10.1109/78.923295 REFERENCES 167.
120] W. P. Ballance and A. G. Jaffer, «The explicit analytic Cramer-Rao bound on
angle estimation», in 22nd Asilomar Conference on Signals, Systems and
Computers, vol. 1, Oct. 31-Nov. 2 1988, pp. 345-351. doi:full text.
121] A. Bhuyan and P. M. Schultheiss, «Estimation of source separation with an array
of arbitrary shape», in International Conference on Acoustics, Speech, and
Signal Processing, vol. 5, 3-6 April 1990, pp. 2771-2774.
122] R. Roy and T. Kailath, «ESPRIT-estimation of signal parameters via rotational
invariance techniques», IEEE Trans. Acoust. Speech Signal Process., vol. 37,
no. 7, pp. 984-995, July 1989. doi:10.1109/29.32276.
123] R.O. Schmidt, «A signal subspace approach to multiple emitter location and
spectral estimation», Ph.D. dissertation, Stanford University, 1981.
124] A.L. Swindlehurst and T. Kailath, «Azimuth/elevation direction finding using
regular array geometries», IEEE Trans. Aerosp. Electron. Syst., vol. 29, no. 1,
pp. 145-156, Jan. 1993.doi:10.1109/7.249120.
125] С Chambers, T.C. Tozer, K.C. Sharman, and T. S. Durrani, «Temporal and
spatial sampling influence on the estimates of superimposed narrowband signals:
when less can mean more», IEEE Trans. Acoust. Speech Signal Process., vol. 44,
no. 12, pp. 3085-3098, Dec. 1996.
Литература I
126] R. Schmidt, «Multiple emitter location and signal parameter estimation», IEEE
Trans. Antennas Propagat, vol. 34, no. 3, pp. 276-280, Mar. 1986. doi:10.1109/
TAP.1986.1143830.
127] A. Swindlehurst, «Alternative algorithm for maximum likelihood DOA
estimation and detection», IEE Proc. Radar Sonar Navig., vol. 141, no. 6, pp. 293-299,
Dec. 1994. doi:10.1049/ip-rsn:19941366.
128] С P. Mathews and M. D. Zoltowski, «Eigen-structure techniques for 2-D angle of
arrival with uniform circular arrays», IEEE Trans. Signal Process., vol. 42, no. 9,
pp. 2395-2407, Sept. 1994. doi:10.1109/78.317861.
129] A. Papoulis and S. U. Pillai, Probability, Random Variables, and Stochastic
Processes, 4th ed. New York: McGraw-Hill, Dec. 2001.
130] A.L. Swindlehurst and T. Kailath, «A performance analysis of subspace-
based methods in the presence of model errors. Part I: The MUSIC
algorithm», IEEE Trans. Signal Process., vol. 40, no. 7, pp. 1758-1774, July 1992.
doi:10.1109/78.143447.
131] M. S. Bartlett, «Smoothing periodograms from time series with continuous
spectra», Nature, vol. 161, pp. 686-687, 1948.
132] P. Stoica and R. Moses, Introduction to Spectral Analysis. Upper Saddle River,
NJ: Prentice-Hall, 1997. 168 INTRODUCTION TOSMART ANTENNAS.
133] T. Svantesson, «Antennas and propagation from a signal processing perspective»,
Ph. D. dissertation, Chalmers University of Technology, School of Electrical and
Computer Engineering, Department of Signals and Systems, Goteborg, Sweden,
June 2001.
134] S. V. Schell and W. A. Gardner, Handbook of Statistics. Amsterdam:
North-Holland, 1993, vol. 10, ch. 18, pp. 755-817.
135] G. Bienvenu and L. Kopp, «Principle de la goniometrie passive adaptive», in Proc.
T erne Colloque GRESIT, Nice, France, 1979, pp. 106/1-106/10.
136] A.J. Barabell, J. Capon, D.F. Delong, J.R. Johnson, and K. Senne,
«Performance Comparison of Superresolution Array Processing Algorithms», Lincoln
Laboratory, M.I.T., Tech. Rep. TST-72, 1984.
137] R. H. Roy, «ESPRIT—estimation of signal parameters via rotational invariance
techniques», Ph.D. dissertation, Stanford University, 1987.
138] A.L. Swindlehurst and T. Kailath, «A performance analysis of subspace-based
methods in the presence of model errors. Part II: Multidimensional
algorithms», IEEE Trans. Signal Process., vol. 41, no. 9, pp. 2882-2890, Sept. 1993.
doi:10.1109/78.236510.
139] L. J. Gleser, «Estimation in a multivariate «errors in variables» regression model:
Large sample results», Ann. of Stat., vol. 9, no. 1, pp. 24—44, 1981.
140] A. Paulraj, R. Roy, and T. Kailath, «Estimation of signal parameters via
rotational invariance techniquesl-ESPRIT», in 19th Asilomar Conference on Circuits,
Systems and Computers, San Jose, CA, Nov. 1985, pp. 83-89. doi:full text.
141] R. Roy, A. Paulraj, and T. Kailath, «ESPRIT-a subspace rotation approach to
estimation of parameters of cisoids in noise», IEEE Trans. Acoust. Speech Signal
Process., vol. 34, no. 5, pp. 1340-1342, Oct. 1986. doi:10.1109/TASSP.1986.1164935.
142] A. Swindlehurst, «DOA identifiability for rotationally invariant arrays», IEEE
Trans. Signal Process., vol. 40 , Issue: , July, no. 7, pp. 1825-1828, July 1992.
doi:10.1109/78.143455.
190 Литература
[143] M. Wax and I. Ziskind, «On unique localization of multiple sources by passive
sensor arrays», IEEE Trans. Signal Process., vol. 37, no. 7, pp. 996-1000, July
1989. doi:10.1109/29.32277.
[144] B. D. Van Veen and К. M. Buckley, «Beamforming: A versatile approach to spatial
filtering», IEEE ASSP Mag., vol. 5, pp. 4-24, Apr. 1988. doi:10.1109/53.665.
[145] B. Widrow, P. E. Mantey, L. J. Griffiths, and В. B. Goode, «Adaptive antenna
systems», Proc. IEEE, vol. 55, no. 12, pp. 2143-2159, Aug. 1967.
[146] R. Gooch, B. Sublett, and R. Lonski, «Adaptive beamformers in communications
and direction finding systems», in 24th AsilomarConference on Signals, Systems
and Computers, vol. 1, 1990, pp. 11-15. REFERENCES 169.
[147] R.T. Compton, Adaptive Antennas: Concepts and Performance. Upper Saddle
River, NJ: Prentice Hall PTR, Jan. 1988.
[148] M. H. Hayes, Statistical Digital Signal Prcessing and Modelling. New York:
Wiley, 1996.
[149] O. L. Frost, «An algorithm for linearly constrained adaptive array processing»,
Proc. IEEE, vol. 60, no. 8, pp. 926-935, Aug. 1972.
[150] S. Haykin, Adaptive Filter Theory. Englewood Cliffs, NJ: Prentice Hall PTR,
1996.
[151] P. S.R. Diniz, Adaptive Filtering: Algorithms and Practical Implementations.
Boston, MA: Kluwer, 1997.
[152] G.H. Golub and С F.V Loan, Matrix Computations, 3rd ed. Baltimore, MO:
Johns Hopkins University Press, Nov. 1996.
[153] J. Nagumo and A. Noda, «A learning method for system identification», IEEE
Trans. Automat. Contr., vol. 12, no. 3, pp. 282-287, June 1967. doi:10.1109/
TAC.1967.1098599.
[154] D.T.M. Slock, «On the convergence behavior of the LMS and the normalized
LMS algorithms», IEEE Trans. Signal Process., vol. 41, no. 9, pp. 2811-2825,
Sept. 1993. doi:10.1109/78.236504.
[155] G. С Goodwin and S. K. Sin, Adaptive Filtering Prediction and Control.
Englewood Cliffs, NJ: Prentice Hall PTR, 1984.
[156] Z. Rong, «Simulation of adaptive array algorithms forCDMAsystems», Master's
thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, Sept.
1996.
[157] B. Widrow and S.D. Stearns, Adaptive Signal Process.. Englewood Cliffs, NJ:
Prentice Hall PTR, 1985.
[158] S.M. Kay, Fundamentals of Statistical Signal Process., Volume II: Detection
theory. Prentice Hall PTR, Upper Saddle River, NJ, Jan. 1998.
[159] J. H. Reed, Software Radio: A Modern Approach to Radio Engineering. Upper
Saddle River, NJ: Prentice Hall PTR, 2002.
[160] K. Phillips, Z. Ни, K. Blankenship, Z. Siddiqi, and N. Correal, «Implementation
of an adaptive antenna array using the TMS320C541», Texas Instruments, Tech.
Rep., Apr. 1999.
[161] J. Treichler and B. Agee, «A new approach to multipath correction of constant
modulus signals», IEEE Trans. Acoust., Speech, Signal Process., vol. 31, no. 2,
pp. 459-472, Apr. 1983. doi:10.1109/TASSP.1983.1164062.
[162] J. Apolinario Jr., M. L.R. Campos, and P. S.R. Diniz, «Convergence analysis
of the binormalized data-reusingLMSalgorithm», IEEE Trans. Signal Process.,
Литература I
vol. 48, no. 11, pp. 3235-3242, Nov. 2000. doi:10.1109/78.875480 170
INTRODUCTION TOSMART ANTENNAS.
[163] B. A. Schnaufer, «Practical techniques for rapid and reliable real-time adaptive
filtering», Ph.D. dissertation, University of Illinois at Urbana-Champaign, Ur-
bana-Champaign, IL, USA, 1995.
[164] S.L. Gay and S. Tavathia, «The fast affine projection algorithm», in
International Conference on Acoustics, Speech, and Signal Process., vol. 5, May 1995,
pp. 3023- 3026.
[165] S.G. Sankaran and A. A. L. Beex, «Convergence behavior of affine projection
algorithms», IEEE Trans. Signal Process., vol. 48, no. 4, pp. 1086—1096, Apr.
2000.doi:10.1109/78.827542.
[166] D. Т. M. Stock, «The block underdetermined covariance (BUC) fast transversal
filter (FTF) algorithm for adaptive filtering», in 26th Asilomar Conference on
Signals, Systems and Computers, vol. 1, Oct. 1992, pp. 550-554.
[167] M. L. R. de Campos, J. Apolin&rio Jr., and P. S. R.Diniz, «On normalized data-
reusing and affine projection algorithms», in 6th IEEE International Conference
on Electronics, Circuits and Systems, ICECS '99, vol. 2, Pafos, Cyprus, Sept.
1999, pp. 843-846. doi:full text.
[168] M.L.R. de Campos and A. Antoniou, «A new quasi-Newton adaptive filtering
algorithm», IEEE Trans. Circuits Syst. II, vol. 44, no. 11, pp. 924-934, Nov. 1997.
doi:10.1109/82.644046.
[169] M. L. R. de Campos, «Development and analysis of fast and robust Newton-type
adaptation algorithms», Ph. D. dissertation, University of Victoria, British
Columbia, Canada, 1995.
[170] M. L. R. de Campos and A. Antoniou, «Analysis of a quasi-Newton adaptive
filtering algorithm», in 3rd IEEE International Conference on Electronics, Circuits
and Systems, ICECS '96, vol. 2, Rhodes, Greece, Oct. 1996, pp. 924-934.
[171] S. Bellofiore, С A. Balanis, J. Foutz, and A. S. Spanias, «Smart-antenna systems
for mobile communication networks. Part 1: Overview and antenna design», IEEE
Antennas Propagat. Mag., vol. 44, no. 3, pp. 145-154, June 2002. doi:10.1109/
MAP.2002.1039395.
[172] S. Bellofiore, С A. Balanis, J. Foutz, and A. S. Spanias, «Smart-antenna systems
for mobile communication networks. Part 2: Beamforming and network
throughput», IEEE Antennas Propagat. Mag., vol. 44, no. 4, pp. 106—114, Aug. 2002.
doi:10.1109/MAP.2002.1043158.
[173] S. Bellofiore, С A. Balanis, J. Foutz, and A. S. Spanias, «Smart antennas for
wireless communications», in IEEE Antennas and Propagation Society International
Symposium, vol. 4, July 2001, pp. 26-29. REFERENCES 171.
[174] S. Bellofiore, C.A. Balanis, J. Foutz, and A. S. Spanias, «Impact of smart antenna
designs on network capacity», in IEEE Antennas and Propagation Society
International Symposium, vol. 3, June 2002, pp. 210—213.
[175] IEEE Std. 802.11, Nov. 1997, IEEE Standard for Wireless LAN Medium Access
Control (MAC) Physical Layer (PHY) Specifications.
[176] M.D. Zoltowski,M. Haardt, and С P. Mathews, «Closed-form 2-D angle
estimation with rectangular arrays in element space or beamspace via unitary
ESPRIT», IEEE Trans. Signal Process., vol. 44, no. 2, pp. 316-328, Feb. 1996.
doi:10.1109/78.485927.
192 Литература
[177] P. Strobach, «Two-dimensional equirotational stack subspace fitting with an
application to uniform rectangular arrays and ESPRIT», IEEE Trans. Signal
Process., vol. 48, no. 7, pp. 1902-1914, July 2000. doi:10.1109/78.847777.
[178] A. L. Swindlehurst, B. Ottersten, R. Roy, and T. Kailath, «Multiple invariance
ESPRIT», IEEE Trans. Signal Process., vol. 40, no. 4, pp. 867-881, Apr. 1992.
doi:10.1109/78.127959.
[179] M. Viberg and B. Ottersten, «Sensor array processing based on subspace
fitting», IEEE Trans. Signal Process., vol. 39, no. 5, pp. 1110-1121, May 1991.
doi:10.1109/78.80966.
[180] P. Strobach, «Bi-iteration multiple invariance subspace tracking and adaptive
ESPRIT», IEEE Trans. Signal Process., vol. 48, no. 2, pp. 442-456, Feb. 2000.
doi:10.1109/78.823971.
[181] P. Strobach, «Equirotational stack parameterization in subspace estimation and
tracking», IEEE Trans. Signal Process., vol. 48, no. 3, pp. 712-722, Mar. 2000.
doi:10.1109/78.824667.
[182] J. Razavilar, F. Rashid-Farrokhi, and K. J. R. Liu, «Software radio architecture
with smart antennas: a tutorial on algorithms and complexity», IEEE J. Select.
Areas Commun., vol. 17, no. 4, pp. 662-676, Apr. 1999. doi: 10.1109/49.761043.
[183] J. H. Winters, «Optimum combining in digital mobile radio with cochannel
interference», IEEE J. Select. Areas Commun., vol. 2, no. 4, pp. 528-539, July 1984.
doi:10.1109/JSAC.1984.1146095.
[184] J. H. Winters, «Optimum combining for indoor radio systems with multiple users»,
IEEE Trans. Commun., vol. 35, no. 11, pp. 1222-1230, Nov. 1987. doi:10.1109/
TCOM. 1987.1096697.
[185] J. H. Winters, «Signal acquisition and tracking with adaptive arrays in wireless
systems», in 43rd IEEE Vehicular Technology Conference, May 1993, pp. 85-88.
doi:full text.
[186] G. Ungerboeck, «Channel coding with multilevel/phase signals», IEEE
Trans. Inform. Theory, vol. 28, no. 1, pp. 55-67, Jan. 1982. doi:10.1109/
TIT.1982.1056454.
[187] Israfil Bah^eci and Т. M. Duman, «Combined turbo coding and unitary space-
time modulation», IEEE Trans. Commun., vol. 50, no. 8, pp. 1244-1249, Aug.
2002. 172 INTRODUCTION TOSMART ANTENNAS.
[188] Israfil Bahgeci, T. M. Duman, and Y. Altunbasak, «Antenna selection for multi-
pleantenna transmission systems: performance analysis and code construction»,
IEEE Trans. Inform. Theory, vol. 49, no. 10, pp. 2669-2681, Oct. 2003.
[189] Israfil Bahgeci, T.M. Duman, and Y. Altunbasak, «A turbo coded multiple
description system for multiple antennas», in Global Telecommunications
Conference, vol. 7, Dec. 2003, pp. 4011-4015.
[190] A. Nasipuri, S. Ye, J. You, and R. Hiromoto, «A MAC protocol for mobile ad
hoc networks using directional antennas», in Wireless Communications and
Networking Conference, vol. 3, Sept. 2000, pp. 1214-1219.
[191] K. Young-Bae, V. Shankarkumar, and N. H. Vaidya, «Medium access control
protocols using directional antennas in ad hoc networks», in Nineteenth Annual
Joint Conference of the IEEE Computer and Communications Societies (INFO-
COM 2000), vol. l,Mar. 2000, pp. 13-21.
[192] «IEEE Standard for Wireless LAN Medium Access Control (MAC) Physical
Layer (PHY) Specifications, IEEE Std. 802.11», Nov. 1997.
[193] R. Govindarajula, «Multiple access techniques for mobile ad hoc networks»,
Master's thesis, Arizona State University, 2001.
[194] A. J. Paulraj and E. Lindskog, «A taxonomy of space-time processing for wireless
networks», IEE Proc. Radar Sonar Navig., vol. 145, no. 1, pp. 25—31, Feb. 1998.
doi:10.1049/ip-rsn:19981807.
[195] I. E. Telatar, «Capacity of multi-antenna Gaussian channels», Bell Laboratories,
Lucent Technologies, Tech. Rep., Oct. 1995. [Online]. Available: http://mars.
bell-labs.com/papers/proof.
[196] G. J. Foschini and M. J. Gans, «On limits of wireless communications in a fading
environment when using multiple antennas», Wirel. Pers. Commun., vol. 6, no. 2,
pp. 311- 335, Mar. 1998. doi:10.1023/A:1008889222784.
[197] V. Tarokh, N. Seshadri, and A. R. Calderbank, «Space-time codes for high
data rate wireless communication: performance criterion and code
construction», IEEE Trans. Inform. Theory, vol. 44, no. 2, pp. 744-765, Mar. 1998.
doi:10.1109/18.661517.
[198] A. Stefanov and Т. M. Duman, «Turbo-coded modulation for systems with
transmit and receive antenna diversity over block fading channels: system model,
decoding approaches, and practical considerations», IEEE J. Select. Areas
Commun., vol. 19, no. 5, pp. 958-968, May 2001. doi: 10.1109/49.924879.
[199] S. Talwar, «Blind space—time algorithms for wireless communications», Ph. D.
dissertation, Stanford University, Scientific Computing and Computational
Mathematics, Jan. 1996. REFERENCES 173.
[200] A.-J. van der Veen, S. Talwar, and A. Paulraj, «A subspace approach to blind
space—time signal processing for wireless communications», IEEE Trans. Signal
Process., vol. 45, no. 1, pp. 173-190, Jan. 1997. doi:10.1109/78.552215.
[201] L. Tong, G. Xu, and T. Kailath, «Blind identification and equalization based on
secondorder statistics», IEEE Trans. Inform. Theory, vol. 40, no. 2, pp. 340-349,
March 1994. doi:10.1109/18.312157.
[202] E. Moulines, P. Duhamel, J. Cardoso, and S. Mayrargue, «Subspace methods
for blind identification of multichanel FIR filters», IEEE Trans. Signal Process.,
vol. 43, no. 2, pp. 516-525, July 1995. doi:10.1109/78.348133.
[203] H. Liu, G. Xu, L. Tong, and T. Kailath, «Recent developments in blind
channel equalization: From cyclostationarity to subspaces», Signal Process. (Elsevier
Press), vol. 50, pp. 83-89,1996. [Online]. Available: http://danube.ee.washington.
edu/downloadable/hliu/survey tong2.pdf doi:10.1016/0165-1684(96)00013-8.
[204] L. Tong and S. Perreau, «Multichannel blind identification: From subspace to
maximum likelihood methods», Proc. IEEE, vol. 86, no. 10, pp. 1951—1968, Oct.
1998.doi:10.1109/5.720247.
[205] S. Talwar, M. Viberg, and A. Paulraj, «Blind estimation of multiple co-channel
digital signals using an antenna array», IEEE Signal Process. Lett., vol. 1, no. 2,
pp. 29-31, Feb. 1994. doi:10.1109/97.300310.
[206] S. Talwar and A. Paulraj, «Recursive algorithms for estimating multiple co-
channel digital signals received at an antenna array», in Proc. Fifth Annual IEEE
Dual-Use Technologies and Applications Conference, May 1995.
[207] R. Steele and L.Hanzo, Eds., Mobile Radio Communications, 2nd ed. New York:
Wiley, Oct. 1999.
[208] S. R. Saunders, Antennas and Propagation for Wireless Communication Systems.
New York: Wiley, Sept. 1999.
[209] A.J. Paulraj, D. A. Gore, R. U. Nabar, and H. Bolcskei, «An overview of MIMO
communications a key to gigabit wireless», Proc. IEEE, vol. 92, no. 2, pp. 198—
218, Feb. 2004. doi:10.1109/JPROC.2003.821915.
[210] R. B. Ertel, P. Cardieri, K. W. Sowerby, T. S. Rappaport, and J. H. Reed,
«Overview of spatial channel models for antenna array communication systems», IEEE
Pers.Commun. Mag., vol. 5, no. 1, pp. 10-22, Feb. 1998. doi:10.1109/98.656151.
[211] A. G. Burr, «Channel capacity evaluation of multi-element antenna systems using
a spatial channel model», in Proc. of AP 2000, Davos, Switzerland, Apr. 2000.
[212] W. Schuttengruber, A. F.Molisch, and E. Bonek, «Tutorial on smart antennas for
mobile communications», Vienna University of Technology, Tech. Rep., 2001.
[Online]. Available: http://www.nt.tuwien.ac.at/mobile/research/smart antennas
tutorial 174 INTRODUCTION TOSMART ANTENNAS.
[213] S. U. Qureshi, «Adaptive equalization», Proc. IEEE, vol. 73, pp. 1349-1387, Sept.
1985.
[214] D. Giancola, U. Girola, S. Parolari, A. Picciriello, and U. Spagnolini, «Space-
time processing for co-channel interference rejection and channel estimation in
GSM/DCS systems», in Proc. International Symposium on Sygnals, Systems,
and Electronics (ISSSE), Pisa, Italy, Sept. 1998, pp. 152-155.
[215] J.C. Liberti, Jr. and T.S. Rappaport, «Analytical results for capacity
improvements in CDMA», IEEE Trans. Veh. Technol., vol. 43, no. 3, pp. 680-690, Aug.
1994.doi:10.1109/25.312781.
[216] M. K. Varanasi and B. Aazhang, «Optimally near-far resistant multiuser detection
in differentially coherent synchronous channels», IEEE Trans. Inform. Theory,
vol. 37, no. 4, pp. 1006-1018, July 1991. doi:10.1109/18.86994.
[217] J. Ramos, M. D. Zoltowski, and H. Liu, «Low-complexity space-time processor
for DS-CDMA communications», IEEE Trans. Signal Process., vol. 48, no. 1,
pp. 39-52, Jan. 2000. doi:10.1109/78.815477.
[218] A. F. Naguib, A. Paulraj, and T Kailath, «Capacity improvement with base-
station antenna arrays in cellular CDMA», IEEE Trans. Veh. Technol., vol. 43,
no. 3, pp. 691-698, Aug. 1994. doklO.l 109/25.312780.
[219] A.J. Viterbi, CDMA: Principles of Spread Spectrum Communication. Reading,
MA: Addison-Wesley, Apr. 1995.
[220] B. Suard, A. Naguib, G. Xu, and T. Kailath, «Performance analysis of CDMA
mobile communication systems using antenna arrays», in Proc. ICASSP, vol. VI,
Apr. 1993, pp. 153-156.
[221] H. Liu and M.D. Zoltowski, «Blind equalization in antenna array CDMA
systems», IEEE Trans. Signal Process., vol. 45, no. 1, pp. 161—172, Jan. 1997.
doi:10.1109/78.552214.
[222] B. H. Khalaj, A. Paulraj, and T. Kailath, «2D RAKE receivers for CDMA
cellular systems», in IEEE Global Telecommunications Conference (GLOBECOM),
vol. 1, 28 Nov.-2 Dec. 1994, pp. 400-404.
Литература I
[223] D. Gesbert, L. Haumonte, H. Bolcskei, R. Krishnamoorthy, and A. Paulraj,
«Technologies and performance for non-line-of-sight broadband wireless access
networks», IEEE Commun. Mag., vol. 40, no. 4, pp. 86—95, Apr. 2002.
[224] G.D. Golden, C.J. Foschini, R.A. Valenzuela, and RW. Wolniansky,
«Detection algorithm and initial laboratory results using V-BLAST space—time
communication architecture», IEEE Electron. Lett., vol. 35, no. 1, pp. 14—16, Jan.
1999. doi:10.1049/el:19990058.
[225] D. Chizhik, F. Rashid-Farrokhi, J. Ling, and A. Lozano, «Effect of antenna
separation on the capacity of BLAST in correlated channels», IEEE Commun. Lett.,
vol. 4, no. 11, pp. 337-339, Nov. 2000. doi:10.1109/4234.892194 REFERENCES
175.
[226] V. P. W. Wolniansky, G. J. Foschini, G. D. Golden and R. A. Valenzuela, «V-Blast:
An architecture for realizing very high data rates over the rich-scattering wireless
channel», Proc. URSI International Symposium on Signals, Systems, and
Electronics (ISSSE '98), Pisa, Italy, Sept. 1998, pp. 295-300. doi:full text.
[227] P. Mannion, Communication Systems Design. Paul Miller, June 2002, ch. Smart
Basestations Maximize Capacity, pp. 15—20.
[228] «Metawave Communications», 2002. [Online]. Available: http://www.metawave.
com.
[229] «ASCOM AR&T». [Online]. Available: http://www.ascom.ch.
[230] J. Lu and T. Ohira, «Smart antennas at wireless mobile computer terminals and
mobile stations», in IEEE AP-S International Symposium and USNC/URSI
National Radio ScienceMeeting, Boston, MA: July 8—13 2001.
[231] G.T. Okamoto, Smart Antenna Systems and Wireless LANs. Dordrecht,
Netherlands: Kluwer, 1999.
[232] R. H. Roy, «An overview of smart antenna technology: the next wave in
wireless communications», in IEEE Proc. Aerospace Conference, vol. 3, Mar. 1998,
pp. 339-345.
Предметный указатель
ADC 18
AMPS 18
CDMA One 18
CDMA2000 18
CM (Constant-Modulus) 121
DCS 1800 18
Direct Matrix Inversion 113
FDMA 27
GSM 18
LCMV (Linearly Constrained Minimum
Variance) 114
LMS 117
MANET 12
MIMO-система в сетях WLAN 168
MMSE 111
NMT900 18
NMT450 18
OFDM 31
PCS 18
PCS 1900 18
PDC 18
QN (Quasi-Newton) 124
RLS (Recursive Least-Squares) 119
SDMA 60
TACS 18
TCM (TRELLIS-CODED
MODULATION) 135
TDMA 28
UMTS 18
AP (Affl ne-Projection) 123
Адаптивное формирование ДH 132
Адаптивные алгоритмы:
обработки сигнала 130
формирования Д Н 116
Адаптивные антенные системы 56
Адаптивный процессор 72
Алгоритм:
ESPRIT 100
MUSIC 97
аффинной проекции 123
для сигналов с постоянной
амплитудой 121
квазиньютоновский 124
наименьшего
среднеквадратичного
отклонения 117
рекурсивный наименьших
квадратов 119
Антенны:
всенаправленные 34
направленные 35
с коммутацией луча 53
Антенные решетки 33
адаптивные (АР) 36
фазированные 36
Вектор отклика антенной
решетки 86
Вектор отклика решетки 75
Взаимная связь 129
Всенаправленные системы 20
Диаграммообразующая схема 72
Защитный интервал 21
Изотропные излучатели 34
Классификация антенн 34
Коммутируемый разнесенный
прием 42
Матрица Батлера 55
Матрицы сигнала
автоковариационные 93
Метод наименьшей вариации
Кейпона 95
Метод формирования ДН
традиционный 95
Методы разнесенного приема 38
Минимальная вариация с линейным
ограничением 114
Предметный указатель 197
Минимальная среднеквадратическая
ошибка 111
многократное использование
канала 20
Множественный доступ:
с временным разделением
каналов 28
с кодовым разделением
каналов 29
с разделением частот 27
Модели сигнала 151
Модель данных
подпространственная 91
Модель принятого сигнала 88
Направление прихода сигнала 130
Низкоранговый сигнал 93
Ограничения скорости передачи
данных:
передачи данных в сотовой
системе 167
передачи данных для одного
пользователя 162
Однозначность оценки углов
прихода 103
Опорный сигнал:
временный 111
пространственный 111
Подавление помех 157
внутриканал ьных CCI 159
межсимвольных ISI 158
одновременное 159
Подпространство сигнала 92
Пропускная способность 126
Пропускная способность в MIMO-
системах 161
Пространственная фильтрация 146
Пространственно-временная
обработка 145
для DS-CDMA 160
Прямое обращение матрицы 113
Регулирование мощности 24
Решетчатое кодирование для
адаптивных решеток 135
Секционирование сот 22
Секционированные системы 22
Скорость передачи данных в MIMO-
системах 161
Смарт-антенн:
моделирование 126
разработка 127
Смарт-антенны 46
Смарт-антенные системы для
MANET-сетей 137
Статистически оптимальные весовые
вектора формирования ДН 108
Схемы коллективного доступа 27
Узкополосный канал 88
Формирование ДН
классическое 107
Формирование луча
пространственно-временное 155
Формирователь ДН с максимальным
SINR 110
Формирователь луча с
максимальным SNR 109
Элементы системы связи 15
Эффективность использования
выделенного частотного
спектра 25
Эффекты взаимной связи 83
Список сокращений
ADC — Американская цифровая сотовая связь
AMPS — Усовершенствованная служба мобильной телефонной связи США
АР (Affine-Projection) — Алгоритм аффинной проекции
CDMA (Code Division Multiple Access) — Коллективный доступ с кодовым
разделением каналов
CM (Constant-Modulus) — Алгоритм для сигналов с постоянной амплитудой
DCS 1800 — Стандарт цифровой узкополосной связи для диапазона 1800 МГц
DMI (Direct Matrix Inversion) — Прямое обращение матрицы
DOA (direction of arrival) — Направление прихода сигнала
DPA (Dynamical Phased Array) — Динамическая фазированная решетка
DS-CDMA (Direct-sequence CDMA) — Система многостанционного доступа
с разделением каналов и прямым расширением спектра
ESPRIT — Алгоритм определения направления
FDMA (Frequency Division Multiple Access) — Система множественного доступа
с разделением частот
GSM (Global System for Mobile communications) — Глобальная система связи
с подвижными объектами
LCMV (Linearly Constrained Minimum Variance) — Критерий минимальной
вариации с линейным ограничением
LMS (Least Mean-Square) — Алгоритм наименьшего среднеквадратичного
отклонения
MANET (Mobile Ad-hoc Network) — Специализированная сеть мобильной связи
МЕА (Multi-Element Antenna) — Многоэлементная антенна
MIMO (Multi-Input-Multi-Output) — Система с несколькими входами и выходами
MMSE (Minimum Mean Square Error) — Минимальная среднеквадратическая ошибка
MLM (Maximum Likelihood Method) — Метод максимального правдоподобия
MUSIC — Алгоритм определения направления
MVDR (Minimum Variance Distortionless Response) — Отклик без искажений с
минимальной вариацией
NMT — Единый стандарт сотовой связи для североевропейских стран
OFDM (Orthogonal Frequency Division Multiple) — Доступ на основе
мультиплексирования с ортогональным частотным разделением каналов
PCS — Персональная служба связи
PDC — Персональная система цифровой сотовой связи
QN (Quasi-Newton) — Квазиньютоновский алгоритм
RLS (Recursive Least-Squares) — Рекурсивный алгоритм наименьших квадратов
SAGE — Алгоритм определения направления
SDMA (spatial division multiple access) — Схема множественного доступа с
пространственным разделением
SINR (signal-to-interference and-noise ratio) — Соотношение сигнал—смесь помехи
с шумом
SNR (signal-to-noise ratio) — Соотношение сигнал—шум
TACS — Система связи коллективного доступа
ТСМ (Trellis-Coded Modulation) — Решетчатое кодирование для адаптивных решеток
TDMA (Time Division Multiple Access) — Система множественного доступа с
временным разделением
ULA (Uniform Liner Array) — Линейная решетка с равноамплитудным
распределением
UMTS — Универсальная система мобильной связи стандарт для сотовой связи
третьего поколения
WLAN (Wireless Local Area Net) — Локальная беспроводная сеть
АР — антенная решетка
ДН — диаграмма направленности
Производство книг на заказ
Издательство «Техносфера»
тел. (495)234-01-10
e-mail: knigi@technosphera.ru
Реклама в книгах:
• модульная
• статьи
Подробная информация о книгах на сайте
www.technosphera.ru
Константин А. Баланис,
Панайотис И. Иоанидес
Введение в смарт-антенны
Компьютерная верстка - С.С. Бегунов
Корректор - Н.А. Шипиль
Дизайн книжных серий - СЮ. Биричев
Дизайн - А.А. Давыдова
Выпускающий редактор - О.Н. Кулешова
Ответственный за выпуск - С А. Орлов
Формат 70x100/16. Печать офсетная.
Гарнитура Ньютон
Печ.л. 12,5. Тираж 1500 экз. Зак. № 681
Бумага офсет. №1, плотность 65 г/м2.
Издательство «Техносфера»
Москва, ул. Краснопролетарская, д. 16, стр.2
Отпечатано в ООО «Чебоксарская типография №1»
г.Чебоксары, пр. И. Яковлева, 15